/
















































































































































































Текст
В. Л. МОРГАЧЕВ
ПОДЪЕМНО-
ТРАНСПОРТНЫЕ
МАШИНЫ
Допущено Министерством высшего
и среднего специального образования СССР
в качестве учебного пособия
для машиностроительных техникумов
БИБЛИОТЕКА
Иввноасиоге
Швргетн четкого
МХЯШСуиа
ИЗДАТЕЛЬСТВО «МАШИНОСТРОЕНИЕ»
Москва 1964
УДК 621.870+621,86(075,3)
В учебнике рассмотрены конструкции современ-
ных подъемно-транспортных машин, грузозахва-
тывающих приспособлений и транспортирующих
устройств. Приведены типовые расчеты элементов
машин и устройств.
Учебник предназначен для учащихся машино-
строительных вечерних и заочных техникумов.
Рецензенты инж. Асвадуров Д. С., инж. Тулакин А. А.
ОГЛАВЛЕНИЕ
Стр.
Введение ..... ................................................. 5
Глава 1
ПОДЪЕМНО-ТРАНСПОРТНЫЕ МАШИНЫ ПЕРИОДИЧЕСКОГО ДЕЙСТВИЯ
§ 1. Элементы грузоподъемных машин..............................12
Гибкие подъемные н тяговые органы..................12
Блоки и барабаны............................................22
Грузозахватные устройства...................................35
Вопросы и задания...................................... 57
§ 2. Приводы...................................................,58
Ручной привод ............................................. 58
Механический привод.........................................64
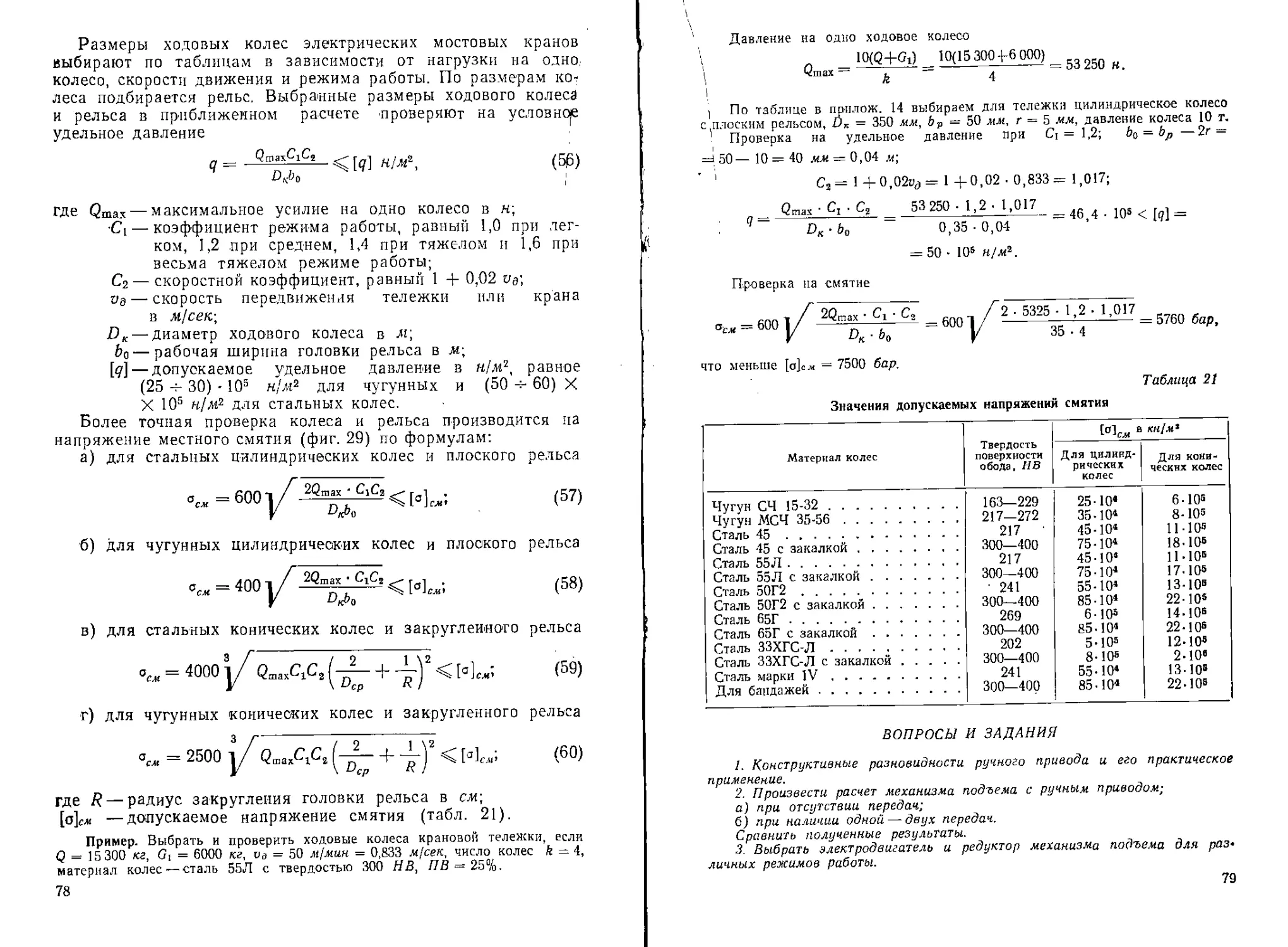
Крановые рельсы и ходовые колеса ........ 72
Вопросы и задания................................... . . 79
§ 3. Остановы <и тормоза .....................80
Остановы............................... ...................80
Колодочные тормоза..........................................87
Ленточные тормоза..........................................106
Центробежные тормоза.......................................121
Грузоупорные тормоза.......................................125
Вопросы ,и задания........................................132
§ 4. Простые грузоподъемные устройства............. 132
Вопросы и задания ".......................................158
§ 5. Поворотные краны......................................158
Стационарные поворотные краны с вращающейся колонной , . 159
Стационарные поворотные краны с неподвижной колонной , , 165
Поворотные краны разных конструкций 169
Вопросы ,и задания .......................................177
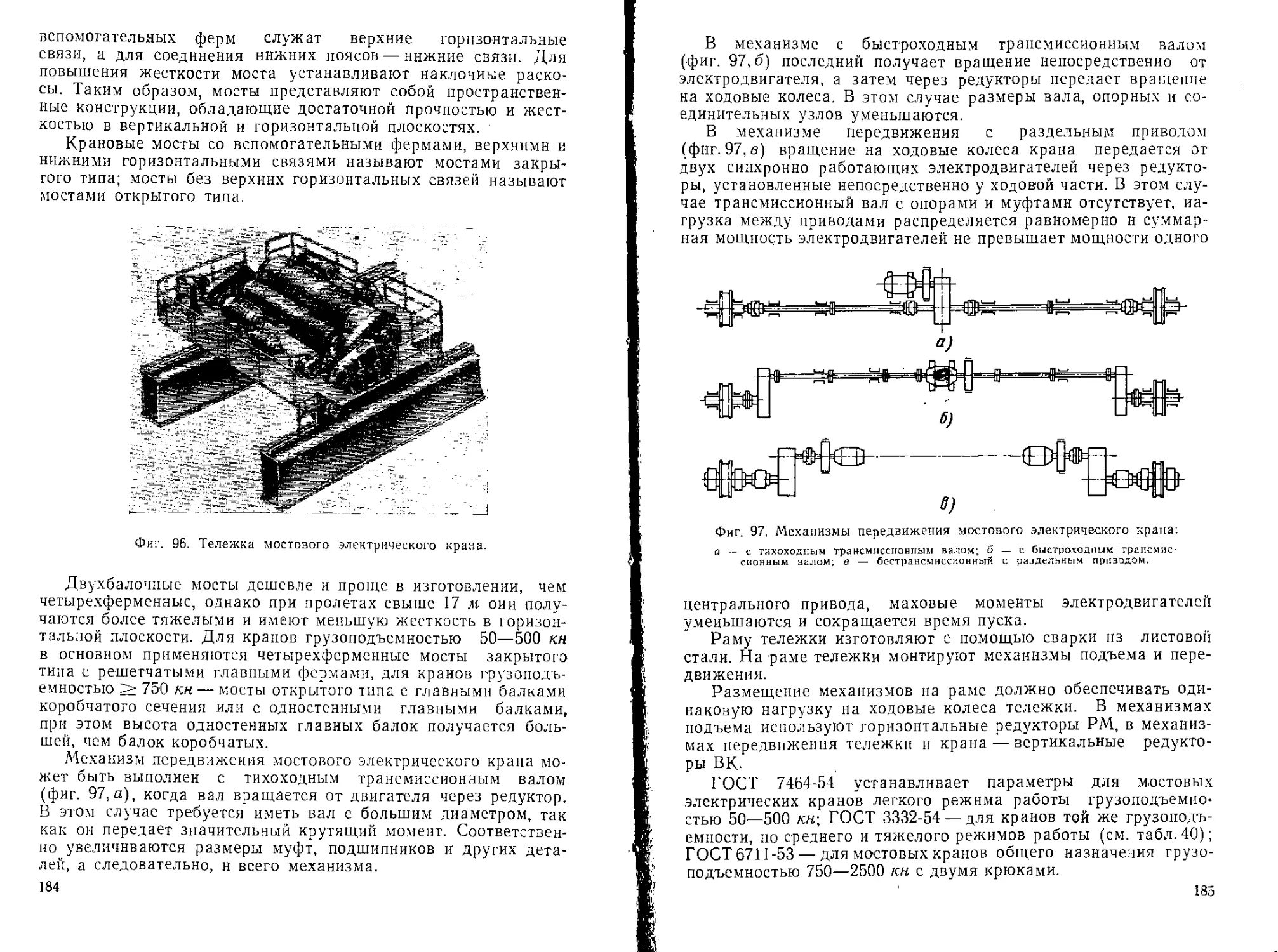
§ 6. Мостовые краны........................................177
Мостовые краны с ручным приводом...........................178
Мостовые краны с электроприводом ..........................180
Вопросы и задания...................188
3
Глава 2
ТРАНСПОРТНЫЕ УСТРОЙСТВА НЕПРЕРЫВНОГО ДЕЙСТВИЯ
§ 7. Транспортные устройства с гибкими тяговыми органами . . ,189
Ленточные конвейеры......................................1^9
Вопросы и задания ... ...................219
Пластинчатые конвейеры . . . ........................219
Вопросы и задания ..................................- 229
Скребковые конвейеры.....................................229
Вопросы и задания.................................«... 238
Элеваторы................................................239
Вопросы и задания ......................................253
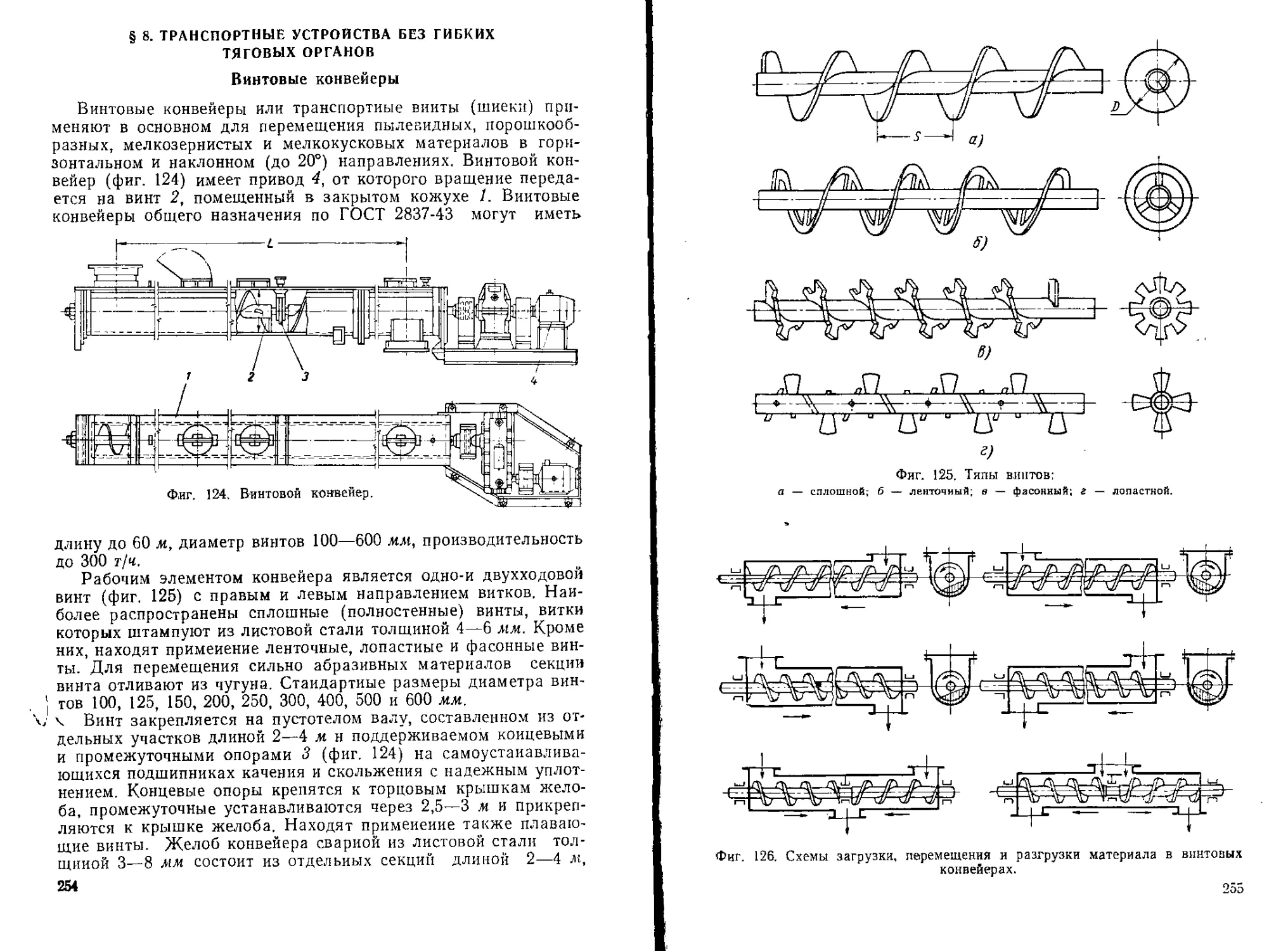
§ 8. Транспортные устройства без гибких тяговых органов .... 254
Винтовые конвейеры ......................................^54
Вопросы и задания.......................................260
Качающиеся конвейеры.....................................260
Вопросы и задания.......................................267
§ 9. Подвесные канатные дороги...............................267
Вопросы и задания.......................................278
§ 10, Пневматические и гидравлические транспортные устройства . . 278
Вопросы ,и задания . 290
Приложения ..................................................291
Литература ..................................................343
ВВЕДЕНИЕ
Подъемно-транспортные машины используют на предприятиях
черной и цветной металлургии, в машиностроительной, электро-
технической, горнорудной и других отраслях промышленности,
отличающихся большими грузооборотами.
Максимальная механизация и автоматизация основных и вспо-
могательных процессов производства имеет огромное значение
в деле создания материально-технической базы коммунизма.
В Программе Коммунистической партии Советского Союза, при-
нятой XXII съездом КПСС, записано: «На основе развития маши-
ностроения в первом десятилетии осуществится комплексная ме-
ханизация в промышленности, сельском хозяйстве, строительстве,
на транспорте, в коммунальном хозяйстве. Комплексная меха-
низация приведет к ликвидации ручных погрузочно-разгрузоч-
ных работ и исключит тяжелый труд при выполнении основных
и вспомогательных производственных операций»
Массовость и непрерывность межцеховых и внутрицеховых
грузопотоков может быть обеспечена правильным выбором не-
обходимых подъемно-транспортных средств, работающих на вы-
соких скоростях и обладающих большой грузоподъемностью,
рациональной расстановкой их на технологических линиях, вы-
полнением правил технической эксплуатации и обслуживания,
своевременным проведением ремонтов, соблюдением правил тех-
ники безопасности и охраны труда.
На протяжении всей истории развития техники русскими и
советскими изобретателями, инженерами и учеными внесен
огромный вклад в создание и совершенствование подъемно-
транспортных машин, устройств и приспособлений.
В 1668 г, на звонницу Московского Кремля был поднят «царь-
колокол» массой свыше 130 т (8000 пудов). Колокол поднимали
1 Программа Коммунистической партии Советского Союза. М., Госполит-
издат, 1962, стр. 70.
5
на деревянном срубе, поочередно наращиваемом с четырех сто-
рон, используя рычаги, полиспасты и деревянные вороты. В ка-
честве противовесов служили платформы, подвешенные на цепях
и нагруженные камнями. Девять месяцев продолжался этот
подъем.
В 1703 г. на Петрозаводском чугунолитейном заводе впервые
началось промышленное применение подъемных машин.
В 1734 г. построена машина грузоподъемностью 1640 кг
(100 пудов) с ручным приводом. С помощью этой машины попе-
ременно в двух бадьях поднимали чугун от доменных печей к по-
грузочной площадке.
В 1752 г. в Сибири на Чагирском руднике был разработан
проект «спуска с горы в анбар руды» тележками, которые двига-
лись по внутризаводским путям с помощью канатного привода
от водяного колеса.
В 1764 г. механик Е. Г. Кузнецов близ Нижнего Тагила по-
строил многоковшовый цепной водоподъемник, переоборудован-
ный затем им же для подъема руды и породы.
В 1769—1770 гг. в Петербург был доставлен гранитный моно-
лит массой 1200 т для постамента под памятник Петру I. Его пе-
редвигали при помощи полиспастов и кабестанов на бронзовых
шарах, уложенных между двумя деревянными брусьями, имев-
шими канавки, обшитые металлическими листами. Такие опоры
стали прототипами подшипников качения.
В 1793 г. на Петровском железоделательном заводе «машин-
ный ученик» Ф. Борзой спроектировал и ввел в эксплуатацию
стреловой .поворотный кран, а крестьянин Д. Петров в 1812 г.
в городе Моршанске осуществил передвижку здания на катках
и установил его на новом основании.
Огромное значение для прогресса в технике имело изобрете-
ние паровой машины. Впервые такую машину построил русский
теплотехник Иван Иванович Ползунов (1728—1766). Усовершен-
ствованные в дальнейшем рабочие машины нуждались в новом
паровом двигателе. Завершением процесса создания универсаль-
ного парового двигателя явилось изобретение в начале 80-х го-
дов XVIII в. второй паровой машины английского механика
Джемса Уатта (1736—1819).
С появлением парового двигателя механизация подъемно-
транспортных работ стала развиваться значительно быстрее.
В 1812 г. в Кронштадтском порту была введена в экоплуата-
6
цию многочерпаковая землечерпалка с паровым приводом, изго-
товленным на Ижорском заводе. В 1821 —1824 гг. крепостные
Нижне-Тагильских заводчиков Демидовых Черепановы построи-
ли свою паровую машину,
В 1828—1830 гг. в Петербурге при помощи блоков и кабеста-
нов осуществлена транспортировка и установка 46 колонн Иса-
акиевского собора. Масса каждой колонны равна 100 т.
В 1832 г. в Петербурге под руководством руссокого подряд-
чика В. А. Яковлева с применением кабестанов установлена
Александровская колонна массой 600 т.
В 1839 г. член Петербургской Академии наук Б. С, Якоби
(1801 —1874) построил первый магнитоэлектрический двигатель
и испытал его для вращения гребного винта небольшого речно-
го бота, доказав этим возможность практического использова-
ния электрических двигателей.
В 1860—1861 гг. на золотых приисках Восточной Сибири
Г. Лопатин ввел в работу стационарные и передвижные ленточ-
ные конвейеры.
В 1872 г. вышел из печати первый «Курс подъемных машин»
русского ученого проф, И, А. Вышнеградского (1831 —1895).
В 1873 г. М, Коузов получил привилегию (заявочное свиде-
тельство) на изобретение и осуществление на сибирских золотых
приисках пластинчатого конвейера с тяговыми цепями.
В 1888 г. русский инженер-электрик М. О. Доливо — Добро-
вольский (1862—1919) создал первый трехфазный генератор пе-
ременного тока мощностью 3 кет, от которого он привел в дей-
ствие свой первый трехфазный асинхронный электродвигатель,
получивший с тех пор широкое распространение в том числе и в
подъемно-транспортных машинах.
В 1898—1900 гг. в России был освоен выпуск различных ти-
пов подъемно-транспортного оборудования на Брянском, Кра-
маторском и Коломенском машиностроительных заводах, а
позднее на Невском, Путпловском и Сормовском.
Великая Октябрьская социалистическая революция положи-
ла основу новой эпохи в истории развития науки и техники.
Уже к 1930 г. в Советском Союзе производство подъемно-
транспортных машин было организовано более, чем на 140 за-
водах; из них около 50 заводов изготовляли транспортные уст-
ройства непрерывного действия. В годы первых пятилеток оте-
чественными предприятиями подъемно-транспортного машино-
строения был освоен выпуск всех основных типов машин и уст-
ройств для механизации производственных процессов в различ-
ных отраслях народного хозяйства, В 1958 г, объем производст-
ва подъемно-транспортного оборудования увеличился по срав-
нению с 1913 г. более чем в 40 раз, а по сравнению с 1940 г,
примерно в 4,5 раза. В СССР выпускаются подъемно-транспорт-
ные машины большой мощности и высокой производитель-
ности.
В настоящем учебнике дается краткое описание конструкции
и работы грузоподъемных устройств и более подробно изла-
гается методика их расчета, выбора и проверки.
Материал, относящийся к подъемно-транспортному оборудо-
ванию, но изучаемый в других предметах, например, электрообо-
рудование подъемно-транспортных машин, расчет домкратов,
расчет металлоконструкций мостовых кранов, мостовые краны
специального назначения, в данном учебнике не рассматри-
ваются.
Все расчеты в учебнике произведены п) Международной си-
стеме единиц СИ (ГОСТ 9587-61).
ГЛАВА 1
ПОДЪЕМНО-ТРАНСПОРТНЫЕ МАШИНЫ
ПЕРИОДИЧЕСКОГО ДЕЙСТВИЯ
Грузоподъемные и транспортные устройства при всем их
многообразии трудно поддаются точной классификации с уче-
том конструктивных, технологических и прочих особенностей
каждой подъемно-транспортной машины. Однако подъемно-
транспортные устройства имеют и общие признаки.
По отношению к промышленному предприятию эти машины
составляют:
1) внешний транспорт, доставляющий на предприятие сырье,
топливо ,и другие материалы и вывозящий с предприятия гото-
вую продукцию и полуфабрикаты, а также отходы производ-
ства; он может быть железнодорожный, водный, автомобильный
и др,;
2) внутренний транспорт, осуществляющий все грузоподъ-
емные и транспортные операции на территории предприятия,
межцеховой, предназначенный для обслуживания технологиче-
ской связи между отдельными цехами, и внутрицеховой—для
обслуживания технологических процессов между участками
цеха.
По характеру транспортных операций подъемно-транспорт-
ные машины разделяются на:
1) машины периодического действия, условно называемые
грузоподъемными машинами и предназначенные для подъема
груза и передачи его в пределах цеха на небольшие расстояния
(мостовые и поворотные краны, а также другие устройства, у
которых обратный ход, как правило, холостой);
2) машины непрерывного действия, именуемые иначе тран-
спортными устройствами, для перемещения массовых штучных
и сыпучих грузов (конвейеры, шнеки и др.).
По роду установки эти машины могут быть передвижными
(мостовые краны, тельферы и др,) и стационарными (напольные
и настенные лебедки, стационарные поворотные краны и др.).
Кроме того, их можно различать по типу привода. Машины с
ручным приводом обладают сравнительно небольшой грузо-
подъемностью и высотой подъема; к ним относятся ручные
9
тали и лебедки, винтовые и реечные домкраты. Машины с элек- \
трическим, гидравлическим или пневматическим приводом и с
приводом от двигателей внутреннего сгорания, имеют значи-
тельные грузоподъемности и высокие рабочие скорости; к ним
относятся электрические мостовые краны, гидравлические дом- ij
краты с электроприводом и др.
Подъемно-транспортные машины разделяются также по но-
минальному режиму работы на машины легкого (Л), среднего
(С), тяжелого (Т), весьма тяжелого (ВТ) и весьма тяжелого
непрерывного действия (ВТН) режима работы.
Режим работы механизма характеризуется показателями,
приведенными в табл, 1. i
Коэффициент использования номинальной грузоподъемно-
сти
ь __ Qcp
R;P Q
где QCp — средняя (в течение года) величина массы подними- 1
емого груза;
QH0,{ — номинальная грузоподъемность механизма,
Коэффициент использования механизма в течение года
где 4 — число дней работы механизма в году.
Коэффициент использования механизма в течение суток
где tc— число часов работы механизма в сутки. J
Относительная продолжительность включения механизма И
ПВ% = 100,
где tq—суммарное время работы механизма в течение цикла;
T4 — общая продолжительность цикла работы механизма.
Кроме того, большое значение имеют число включений меха-
низма в 1 ч (среднее за смену) и температура окружающей сре-
ды (воздуха).
По характеру и количеству движений и по обслуживаемой
площади подъемно-транспортные машины разделяются на:
1) машины с одним движением — перемещение груза в вер-
тикальном, наклонном или горизонтальном направлениях при
площади обслуживания, определяемой габаритом груза (дом-
краты, подвесные тали и др.);
2) машины с двумя движениями — подъемом и горизонталь- ;
ным переносом груза при площади обслуживания в виде поло-
сы (подвижные тали, тельферы и др.);
10
Таблица 1
Классификация механизмов грузоподъемных устройств
с машинным приводом по режимам работы (Госгортехнадзор СССР)
Номинальный режим работы Коэффициент использования ПЕ s % Число включений в час (среднее за смену) Температура окру- жающей среды в °C Наименование и назначение механизма (типичные случаи)
по грузоподъ- емности k гр по времени
в течение года k2 в течение суток kc |
Л 1,00 0,75 0,50 0,25 0,10 Нерегу- лярная редкая работа 0,25 0,50 1,00 0,33 0,67 1,00 15 15 25 60 25 Механизмы подъема и пере- движения ремонтных кранов и кранов машинных залов, меха- низмы передвижения строитель- ных и портальных кранов, пере- грузочных мостов и башен ка- бельных кранов; лебедки проти- воугонных захватов и другие редко работающие механизмы
с 1,00 0,75 0,50 0,25 0,10 1,0 0,5" 0,5 1,0 1,0 0,67 0,33 0,67 1,00 1,00 15 25 25 40 60 120 25 Механизмы подъема и пере- движения кранов механических и сборочных цехов со средне- серийным производством и кра- нов ремонтно-механических це- хов; механизмы поворота строи- тельных кранов; электротали
т 1,00 1 00 0,75 0,50 0,25 1,00 1,00 0,75 1,00 1,00 0,67 0,33 0,67 1,00 1,00 25 49 40 40 60 240 25 Механизмы кранов технологи- ческих цехов и складов на заво- дах с крупносерийным производ- ством; механизмы подъема строи- тельных кранов; механизмы подъема и передвижения грузо- вой тележки кабельных кранов
ВТ 1,00 0,75 0,50 0,25 0,10 1,0 1,0 1,0 1,0 1,0 1,0 1,0 1,0 1,0 1,0 40 60 60 60 60 300 45 25 45 Механизмы кранов технологи- ческих цехов и складов метал- лургического производства1, ме- ханизмы грейферных и магнит- ных кранов металлургического производства; механизмы подъе- ма и передвижения тележек перегрузочных мостов
втн 1.° 1,0 1,0 1 1 60 80 | 720 45 60 Механизмы подъема и пере- движения моста кранов с лапа- ми и клещевых кранов; меха- низмы подъема, замыкания грей- фера и поворота кранов, обслу- живающих порты и железнодо- рожные узлы
1 За исключением крапав. указанных в графе режима ВТН,
II
3) машины с двумя движениями — подъемом и поворотом
груза при площади обслуживания в виде кольца или его части
(стационарные поворотные краны с постоянным вылетом
стрелы);
4) машины с тремя движениями — подъемом, горизонталь-
ным перемещением и поворотом груза при площади обслужива-
ния в виде круга или сектора (стационарные поворотные кра-
ны с переменным вылетом стрелы);
5) машины с тремя движениями — подъемом груза и гори-
зонтальным его перемещением в двух взаимно перпендикуляр-
ных направлениях и площадью обслуживания в виде прямо-
угольника (мостовые краны общего назначения, передвижные
кран-балки с тельфером и т. д.);
6) машины с более чем тремя движениями — подъемом гру-
за, горизонтальным его перемещением в двух взаимно перпен-
дикулярных направлениях, наклоном или поворотом груза и
площадью обслуживания в виде прямоугольника (мостовые
крайы специального назначения — литейные, клещевые, загру-
зочные и др.; площадью обслуживания остается прямоугольник);
7) машины с неопределенной обслуживаемой площадью
(плавучие, автомобильные, железнодорожные краны и краны
на гусеничном ходу).
§ 1. ЭЛЕМЕНТЫ ГРУЗОПОДЪЕМНЫХ МАШИН
Гибкие подъемные и тягоные органы
Стальные проволочные канаты (тросы) являются наиболее
распространенными гибкими грузоподъемными и тяговыми ор-
ганами в подъемно-транспортных машинах. Канатная проволо-
ка с пределом прочности на растяжение апч= (1,3 д- 2,0) Гн1м?
получается при многократном холодном волочении высокоугле-
родистой и высокомарганцовистой горячекатаной светлой про-
волоки диаметром 5—8 xtxt с промежуточной термической и хи-
мической обработкой.
При работе на открытом воздухе и в сырых помещениях
применяются канаты из оцинкованной в горячем состоянии
стальной проволоки, при этом канат вследствие отпуска метал-
ла теряет примерно 10% своей прочности.
Для специальных канатов используется нержавеющая леги-
рованная сталь с пределом прочности апч = (2,1 д- 2,6) Гн/м2.
Органическим сердечником для канатов, работающих в нор-
мальных температурных условиях, служит пенька, а при эк-
сплуатации в горячих цехах — асбест; в некоторых случаях сер-
дечник может быть металлическим.
По направлению свивки различают канаты односторонние,
когда направление свивки проволок в пряди совпадает с на-
правлением свивки прядей в канат, и крестовые, отличающиеся
12
противоположным направлением свивки проволок в прядях я
прядей в канате.
Кроме этого, свивка всех канатов может быть правая и ле-
вая. Свивка считается правой, когда пряди каната направле-
ны снизу вверх направо, и левой, когда пряди направлены сни-
зу вверх налево.
Канаты односторонней свивки отличаются от крестовых по-
вышенной гибкостью и меньшим удельным давлением между
Фиг. 1, Поперечные сечения канатов различных конструкций,'
а — ЛК-36 X 25 + I ос; б - ТЛК-Р6 X 27 + 1 ос; в — ТК 6 X 19 + I ос; г — ЛК-0 6 X
X 19 Ч- I ас; д — ЛК-Р 6 X 19 + 1 ос; е — пеньковый обыкновенный; ж — пеньковый
отворотный.
проволоками вследствие большей контактной площади их со-
прикосновения. К недостаткам таких канатов следует отнести
способность к раскручиванию под нагрузкой. Поэтому в мосто-
вых кранах наибольшее применение имеют канаты с крестовой
свивкой.
В последние годы Одесский и другие канатные заводы вы-
пускают нераскручивающиеся канаты, свитые из предваритель-
но деформированных проволок, при этом каждые проволока и
прядь заранее получают форму, соответствующую их положе-
нию в канате, в связи с чем нагрузка на отдельные проволоки
распределяется равномерно и канат обладает большей гиб-
костью.
13
В зависимости от назначения каната количество прядей в
нем может быть 6, 7, 8, 18 и 34, а число проволочек в каждой
пряди 7, 12, 13, 16, 17, 19, 24, 25, 27, 30, 31, 36, 37 и 61.
По конструкции стальные канаты делятся на канаты про-
стые, с точечным касанием, типа ТК (фиг. 1, в), имеющие про-
волоки одинакового диаметра, канаты комбинированные, линей-
ного касания, типа ЛК-3 (фиг. 1, а), ЛК-0 (фнг. 1, а) и ЛК-Р
(фиг. 1, б), состоящие из проволок разного диаметра, канаты
комбинированные, с точечным и линейным касанием, типа
ТЛК-0 и ТЛК-Р (фиг. 1, б), изготовленные из проволок разного
диаметра.
Канаты типа ТК отличаются повышенной жесткостью по
сравнению с канатами других конструкций.
Технические условия (ТУ) на изготовление стальных про-
волочных канатов установлены ГОСТ 3241-55.
Характеристика стальных проволочных канатов, наиболее
применимых для кранов общего назначения, приведена в при-
лож. 1.
Стальные проволочные канаты, как изделия стандартные,
выбирают по разрывному усилию согласно «Правилам устройст-
ва и безопасной эксплуатации грузоподъемных кранов» [6].
В общем случае для выбора каната по ГОСТ необходимо
определить расчетное разрывное усилие на одну ветвь кана-
та Sip.*
~ Vl
где ka— коэффициент запаса прочности каната, табл. 4;
St — наибольшее рабочее усилие натяжения одной ветви
каната в н.
Таблица 2
Характеристика полиспастов унифицированных мостовых
электрических кранов ВНИИПТ/ИАШ
Грузолодъем- Количество несущих ветвей каната Грузолодъем- Количество несущих ветвей каната
ность в т Главный подъем Вспомога- тельный подъем ность в т Главный подъем Вспомога- тельный подъем
5 10 4 4 — 50 10 10 4
15 3 6 2 75 15 8 6
20 5 8 4 100 20 10 8
30 10 6 4 125 20 12 8
14
По найденному значению 8[Р выбирается подходящий по
табличному разрывному усилию и конструкции канат.
Для механизмов подъема кранов рекомендуется следующий
порядок выбора стальных проволочных канатов.
По заданной грузоподъемности, пользуясь табл. 2, выбира-
ют систему подвески груза.
Фиг. 2. Схемы подвески груза:
а — на четырех ветвях; б — на шести ветвях.
Затем определяют максимальное усилие на одну несущую
ветвь каната (фиг. 2) по формуле
s (0 + 0)10, (1)
Zfrtn
где Si — максимальное усилие на одну несущую ветвь кана-
та в я;
Q — заданная масса грузоподъемности в кг\
G — масса крюковой подвески в кг;
ZK— принятое по табл. 2 число несущих ветвей каната;
т|п— к. п. д. сдвоенного полиспаста с учетом жесткости
каната, выбираемый по табл. 3.
Расчетное разрывное усилие определяют по формуле
Slp~k3StH, (2)
где 81р — расчетное разрывное усилие на одну ветвь в я;
k3 —коэффициент запаса прочности каната выбирается
по табл. 4.
15
Таблица 3
Коэффициенты полезного действия сдвоенных полиспастов
Число несущих ветвей Количество вращающихся блоков Кратность полиспаста кп К- п- Д-
подшипников качения подшипн ЯКОВ скольжения
4 2 2 0,98 0,94
6 4 3 0,96 0,92
8 6 4 0,94 0,90
10 8 5 0,92 0,88
12 10 6 0,91 0,85
Примечани е. Кратностью полиспаста Кп называется отношение числа несущих Z
ветвей каната к числу ветвей . сходящих с барабана Z^. Кп =
Таблица 4
Наименьшее допускаемое значение коэффициента запаса
прочности по нормам Госгортехнадзора
Наименование канатов ^3
Грузовые и стрелочные для приводов 4,5
ручного
машиннного при режиме работ: 5,0
легком
среднем . 5,5
тяжелом 6,0
Стреловые, выполняющие функции растяжек 3,5
Грейферные, для грейферов с раздельным 'приводом от двух двигателей (принимая, что масса грейфера с грузом равномер- но распределена на все канаты) 6,0
Грейферные для грейферов с приводом от одного двигателя, а также грейферов одноканатных и моторных 5,0
Оттяжки мачт и опор:
постоянно действующих кранов 3,5
временно действующих кранов (со сроком до одного года) з,о
Канаты лебедок, предназначенных для подъема людей .... 9,0
По разрывному усилию, пользуясь таблицами в прилож. 1,
выбирают канат нужной конструкции, при этом расчетное раз-
рывное усилие не должно превышать разрывного усилия кана-
та. В кранах общего назначения в основном применяют сталь-
ные проволочные канаты с пределом прочности на растяжение
(150 + 180) • 107 н/м2.
16
2ST/3
* В качестве расчалок и оттяжек, а также для подъема не-
больших по массе грузов устройствами с ручным приводом при-
меняют пеньковые канаты. Пеньковые канаты выпускаются
бельнымн и смольными. Бельные канаты более гибки и удобны
в работе, но при размокании теряют свою прочность и поддают-
। ся загниванию. Смольные канаты лучше противостоят гниению
V и находят применение на монтажных работах.
) По конструкции пеньковые канаты делятся на тросовые
' (обыкновенные, фиг. 1, е), получаемые при скручивании трех
прядей, изготовленных из канатной пряжи, и кабельтовые (от-
воротные, фиг. 1, ж), получаемые при скручивании в противо-
положном направлении трех обыкновенных канатов.
Пеньковые канаты стадартизованы по ГОСТ 483-55 и выби-
раются по разрывному усилию с коэффицинтом запаса прочно-
сти kg = 8.
Диаметры барабанов и блоков D6 назначаются в зависимо-
0 сти от диаметра выбранного пенькового каната d*:
I D6 = 10^.
I Пример. Выбрать стальной проволочный канат по ГОСТ 2688-55 для ме-
I ханизма подъема крюковой тележки мостового электрического крана, у ko-
i' торого грузоподъемность Q = 15 т, масса подвески G = 300 кг, режим рабо-
ты — средний, блоки смонтированы на подшипниках качения,
! По табл. 1 для Q = 15 т принимаем число несущих ветвей ZK = 6; по
табл. 3 к. п, д. полиспаста т|п = 0,96; по табл, 4 коэффициент запаса проч-
ности k3 = 5,5 при ПВ = 25%.
Максимальное усилие на одну ветвь каната
= (Q + GH0 = (15000 + 300) Ю_2656О „
6-0,96
Расчетное разрывное усилие
1 5lj0 = = 5,5 26 560 = 146 080 н.
А По таблицам прилож. 1 выбираем канат типа ЛК-Р 6 X 19 + 1ос с раз-
рывным усилием 150 500 я при пределе прочности оПч = 170-Ю7 н/я2, диа-
о метр каната = 16,5 мм.
Действительный запас прочности каната
, Spa3p • ZKvn _ 150 500 • 6 0,96
п т ’ ——‘ D . О О 4
(Q + GJ-IO (15 000 + 300) • 10
Сварные цепи применяют в качестве грузоподъемных и тяго-
вых органов. Цепи изготовляют из мягкой малоуглеродистой
,}i прутковой стали Ст. 2 и Ст. 3 (ГОСТ 380-60) с пределом проч-
пости на растяжение апч = (37-ъ45) 107 н/м2 при помощи куз-
нечно-горновой или электрической контактной сварки.
По длине звеньев цепи делятся на короткозвениые (фиг. 3,6)
с длиной звена l^5d, шириной b = 3,5d, и длиннозвенные
(фиг. 3, а), имеющие I > 5 dt где d — диаметр прутка, из которо-
го изготовлена цепь.
По правилам Госгортехнадзора [6] для подъема грузов при-
меняют короткозвениые цепи по ГОСТ 2319-55.
Короткозвенные цепи различают калиброванные и некалиб-
роваииые. У калиброванных цепей форма и размеры всех
звеньев имеют небольшие установленные техническими условия-
ми отклонения; для иекалиброванных цепей пределы отклонения
значительно расширены. Калиброванные цепи работают на бло-
Ф.иг. 3. Цепи сварные:
а — длннн оз венные; б — хороткоэ венные-. в, г — соединительные звенья;
д, е — концевые звенья.
ках и барабанах, имеющих специальные гнезда для укладки
звеньев, некалиброваиные цепи наматываются на гладкие бара-
баны.
Техническая характеристика сварных калиброванных цепей
приведена в прилож. 2,
Сварные цепи выбирают по разрушающей нагрузке с учетом
соответствующего коэффициента запаса прочности /гц , преду-
смотренного нормами Госгортехнадзора:
3 — в механизмах с ручным приводом для калиброван-
ных и некалиброванных цепей;
— в устройствах с механическим приводом для не-
калиброваиных цепей;
—в устройствах с механическим приводом для калиб-
рованных цепей;
5 — для чалочных цепей с крюками на концах;
k., 6 — для чалочных обвязочных цепей, подвешиваемых
к крюкам механизмов подъема.
18
По заданной грузоподъемности Q определяют максимальное
расчетное усилие натяжения цепи
ku • Q 10
S
расч
(3)
где — число рабочих ветвей цепи, равное обычно 2;
т]б — к. п. д. цепного блока, принимаемый равным 0,96.
По таблицам в прилож. 2 выбирают размеры звена так, что-
бы величина указанного разрушающего усилия была не меньше
максимального расчетного усилия натяжения цепи.
Соединение коицор цепи в случае обрыва ее или наращива-
ния производится соединительными звеньями (фиг. 3 в, г), а
крепление цепей к элементам грузоподъемных устройств осу-
ществляется концевыми звеньями (фиг. 3, д, е).
Пример. Выбрать сварную калиброванную цепь для ручной тали грузо-
подъемностью Q = 1 т. Груз подвешен на двух ветвях. Коэффициент запаса
прочности = 3.
Расчетное натяжение цепи
- 10 _ 3 1000 • 10
расч~ 2-0,96
= 15 600 н.
По таблицам в прилож. 2 выбираем цепь с разрушающим усилием
16 000 н, у которой d = 7 мм, t — 21 мм, Ь = 24 мм.
Фактический запас прочности цепи
_^разр'^ц _ 16 000 • 2 0,96__з 07
4 К)(2~ Ю - 1000
Пластинчатые цепи применяются как грузоподъемные орга-
ны в ручных талях и в электрических подъемных механизмах
большой грузоподъемности при условии движения груза в на-
правляющих и с малыми скоростями. Цепи избирают из плас-
тин, соединяемых валиками. Формы и размер пластин зависят
от условия работы и загруженности цепи.
На принципе транспортно-технологического потока, предло-
женного в 1958 г. канд. техн, наук Л. Н. Кошкиным, инженер
А. С. Шпанов разработал автоматические роторные линии для
сборки втулочно-роликовых цепей. После наладки и испытания
моделей была изготовлена серия роторных линий.
Пластинчатые грузовые цепи изготовляют из углеродистых
конструкционных сталей марок 40^ 45 и 50 (ГОСТ 1050-60)
В зависимости от нагрузки на цепь крепление пластин на ва-
ликах осуществляется тремя способами (фиг. 4): с расклепкой
без шайб, с расклепкой на шайбах, на шплинтах.
При использовании пластинчатых, цепей применяют специ-
альные блоки (звездочки), так как на барабаны такие цепи на-
матываться не могут.
19
Расчет грузовых пластинчатых цепей производится так же,
как и сварных цепей, при этом коэффициент запаса прочности
принимают:
k-ц = 5 при скорости движения цепи v = 0,25 jk/cck;
k4 = 6, если'скорость цепи v = 0,5 м/сек;
1гц = 8, когда цепь движется со скоростью v = 1 м/сек;
= 10, когда работа цепи сопровождается рывками и виб-
рацией.
Фиг. 4. Цепи грузовые пластинчатые:
а — с расклепкой без шайб; б — с расклепкой на шайбах; в — на шплинтах.
Размеры элементов грузовых пластинчатых цепей выбирают
по ГОСТ 191-52 (см. прилож. 2).
Пример. Произвести расчет пластинчатой цепи механизма подъема ко-
лонны с кабиной крановой завалочной машины грузоподъемностью Q = 5 т.
Колонна с кабиной подвешена на четырех ветвях Z4 = 4, огибающих две
звездочки, и поднимается со скоростью v = 6 м/мин (0,1 м/сек).
Принимаем коэффициент запаса прочности = 5, к. п. д. звездочек
Ъв = 0,92,
Определяем максимальное расчетное усилие натяжения цепи
Spa„ = g • 10 - 5 • 5000 10 = 68 000 к.
А ?j33 4 - 0,92
По таблицам в прилож. 2 выбираем грузовую пластинчатую цепь с раз-
рушающим усилием 80 000 к, у которой t = 40 мм, С — 25 мм, S = 3 мм,
b = 28 мм, число пластин в одном звене 4, I = 58 мм, d\ = 14 мм, масса
1 пог. м цепи 5 кГ, пластины соединяются на валиках с расклепкой без шайб.
Действительный запас прочности цепи I
, Зразр Z^t3e 80 000 . 4 . 0,92
.-------------------------------= 5,9.
10Q 10 5000
Наибольшее применение в грузоподъемных устройствах име-
ют стальные проволочные канаты, обладающие положительными
качествами — гибкостью и упругостью, легкостью и дешевизной
20
изготовления, плавностью и бесшумностью в работе, малым соб-
ственным весом, высокими скоростями подъема и безопасностью
при эксплуатации. Безопасность работающих канатов обуслов-
лена постепенным износом и обрывом проволочек, что можно
всегда определить при осмотрах. Поверхностный износ стальных
канатов допускается до 40%. По нормам Госгортехнадзора [6]
предельное число обрывов проволочек на шаг свивки, при ко-
тором канат бракуется, даио в табл. 5.
Таблица 5
Нормы выбраковки стальных канатов
Первоначальный коэффициент запаса прочности каната на растяжение для кранов я подъемных механизмов Конструкция каната и свивка
6Х19+1ос 6Х374-1ОС 6x61-|-1 ос 18Х194-1ос
Крестовая Односто- ронняя R га со О Односто- ронняя Крестовая Односто- ронняя Крестовая Односто- ронняя
Число обрывов проволочек на длине одного шага свивки, при котором канат бракуется
До 6 Свыше 6 до 7 ... » 7 » 8 . . . 12 14 16 6 7 8 22 26 30 11 13 15 36 38 40 18 19 20 36 18 38 19 40 20
Примечание. На грузоподъемных кранах и механизмах, транспортирующих расплавленный или раскаленный металл, кислоты, взрывчатые, огнеопасные и ядовитые вещества, канаты бракуются при числе проволочек на одном шаге свивки, в 2 раза меньшем указанного в таблице.
К недостаткам стальных проволочных канатов следует от-
нести вытяжку при эксплуатации, необходимость в блоках и ба-
рабанах больших размеров, сравнительно небольшой срок служ-
бы. На срок службы стальных канатов влияет соблюдение пра-
вил эксплуатации, периодичность и качество смазки. Очистка и
смазка канатов при эксплуатации в нормальных условиях дол-
жна производиться не реже одного раза в декаду.
Грузовые пластинчатые цепи по сравнению с цепями сварны-
ми обладают большей плавностью и надежностью в работе, име-
ют более высокую грузоподъемность, для иих ие требуется звез-
дочек больших размеров.
Недостатками пластинчатых цепей являются гибкость только
в одной плоскости, что не дает возможности наматывать их иа
барабан, большая сила собственной тяжести, высокая стоимость
изготовления, сравнительно малые скорости движения (до
0,75 м/сек), быстрый износ в пыльных и влажных условиях.
В процессе эксплуатации за пластинчатыми цепями требуется
тщательный уход и проверка степени износа звеньев цепи, вали-
ков, втулок, роликов, своевременная и качественная смазка.
21
Сварные цепи характеризуются высокой гибкостью, просто-
той конструкции и изготовления, небольшими размерами блоков
и барабанов, меньшей подверженностью воздействиям темпера-
туры и коррозии. К отрицательным качествам сварных цепей от-
носятся малая грузоподъемность, небольшие скорости движения
(на блоке до 0,1 м^сек, на барабане до 1 м/сек), возникновение
наклепа и большого износа звеньев в местах сопряжения, недо-
статочная плавность н возможность внезапного обрыва под на-
грузкой.
Для удаления наклепа в работающих сварных цепях их ре-
комендуется периодически подвергать отжигу.
По правилам Госгортехнадзора [6] ии один гибкий тяговый
орган не может быть дойугцен к использованию, если он не име-
ет паспорта и сертификата.
Блоки и барабаны
Блоки для стальных проволочных канатов. В подъемных
механизмах, имеющих в качестве гибких тяговых органов сталь-
ные канаты, применяют блоки с гладкими ручьями. Во избежа-
ние заклинивания каната и связанного с ним износа стеики
ручья, блоки выполняют с уширением наружу (фиг. 5).
Фиг. 5. Блоки канатные:
а — литой; б — сварной,
Материалом штампованных блоков диаметром до 350 мм
служит сталь марки Ст.З по ГОСТ 380-60. Блоки больших диа-
метров отливают для тяжелого режима работы из сталей марок
25Л и 35Л по ГОСТ 977-58, для среднего режима нз чугуна мар-
ки СЧ 28-48 и для легкого режима из чугуна марок СЧ 12-28 и
СЧ 15-32 - по ГОСТ 1412-54.
Малые блоки обычно имеют сплошные диски без ребер. Бло-
ки больших диаметров (свыше 400 мм) отливают с ребрами или
22
со спицами крестообразного поперечного сечения (фиг. 5, а).
Блоки могут быть изготовлены и сварными (фиг. 5, б).
При переходе через блоки каиат, кроме растяжения, допол-
нительно подвергается изгибу. Правильное определение разме-
ров блока способствует уменьшению напряжений от изгиба и
повышению срока службы каната.
Согласно нормам Госгортехнадзора’[6] диаметр рабочих бло-
ков определяется по формуле
D61 (е — 1) dK мм,
(4)
где — диаметр блока, измеренный по дну ручья для каната;
dK — диаметр каната в мм;
е— коэффиицент, зависящий от режима работы механиз-
ма и назначения каната (табл. 6).
Таблица 6
Наименьшие допускаемые значения коэффициента е
по' нормам Госгортехнадзора [6]
Тип грузоподъемной машины Тип привода Режим работы е
Грузоподъемные машины всех типов, за исключением стреловых кранов, электрических талей и лебедок Ручной Машинный Легкий Средний Тяжелый 18 20 25 30
Краны стреловые Ручной Машинный Легкий Средний Тяжелый 16 16 18 20
Тали электрические — — 20
Грейферные лебедки грузоподъемных машин (за исключением стреловых кранов и электрических талей) — — 30
Грейферные лебедки стреловых кранов — — 20
Блоки грейферов — — 18
Лебедки для подъема грузов или людей Ручной —* 16
Диаметр уравнительного блока берется равным 60% от диа-
метра рабочего блока. Размеры блоков даны в таблицах прило-
жений 3, 4 и 5.
23
Блоки насаживают на оси, вращающиеся в подшипниках ка-
чения или скольжения. От способа установки блоков и размера
подшипников зависят размеры ступицы блока, которые рассчи-
тываются для каждого отдельного случая. Однако длину ступи-
цы блока на подшипниках скольжения обычно принимают рав-
ной
1С = (1,5-т-2,0)й?о мм,
где (Д— диаметр оси блоков в лш.
Диаметр оси блоков определяется из расчета на изгиб
где Л1Ц — изгибающий момент в опасном сечении оси блоков в
н • лк;
[cr]u — допускаемое напряжение на изгиб в н/м2.
Для неподвижных осей
[Ди = 1000' 105 н/м2 из сталей марок Ст. 4 и 20;
[о]и = 1200-105 н/м2 из сталей марок Ст. 5, 30 и 40.
Для вращающихся осей
[cr]u = 700'105 н/м2 из сталей марок Ст. 4 и 20;
[cr]u = 800 ‘ 105 н/м2 из сталей марок Ст. 5, 30 и 40.
Внутренний диаметр ступицы блока di равен наружному
диаметру подшипника, а внешний диаметр ступицы блока d%
принимают в пределах
d2 = (l,5-5-l,8)di.
Ступицу блока с втулкой скольжения и ось блока проверяют
иа удельное давление
7 = < [(?] «Д2, (6)
где — нагрузка иа один блок в н;
1С— рабочая длина ступицы блока в ти;
dQ— диаметр оси блоков в м;
[д] — допускаемое удельное давление в н/л12, зависящее от
материала втулок и режима работы механизмов
(табл. 7).
Таблица 7
Значения допускаемых удельных давлений
Механизм и режимы работы [<?] в н[м*
Сталь по бронзе Сталь по чугуну!
Механизмы с ручным приводом . . . ISO - 105 70 105
Механизмы с машинным приводом: легкий и средний режим .... 150 105 60 • 105
тяжелый режим работы .... 100 105 40 105
24
Пример. Определить размеры блока верхней обоймы полиспаста меха-
низма подъема .(см. фиг. 2, Д), если Q = 15 т, G = 300 кг, Zк = 6, Si =
= 26 560 н, dK= 16,5 jkjm, ПВ = 25%, е = 25. Определяем нагрузку на блок
Збл = 2S! = 2 26 560 = 53 120 н.
Определяем диаметр блока
йбл = (е — 1)4 = (25 — 1) 16,5 = 396 мм.
По таблице в прилож. 5 принимаем В$_.г = 400 леи, d0 = 60 мм, 1С = 70 м.и.
Производим проверку удельного давления втулки и оси блоков
а = -53J20_ = J26 . Ю» < [(?] = 150 IO» К/Л2,
4 dQlc 0,06.0,07 m
Размеры ручья блока выбираем по таблице в прилож. 5.
Фиг. 6. Блоки для сварных цепей:
а — без отбортовки; б — с отбортовкой.
Блоки для сварных цепей находят применение в ручных
лебедках и талях как тяговые колеса, передающие крутящий
момент через червячную или зубчатую систему зацепления на
рабочий блок для подъема груза. Сварные калиброванные цепи
имеют звенья одинаковой формы и размера, расположенные по-
следовательно в двух взаимно перпендикулярных плоскостях —
горизонтальной и вертикальной. Для укладки горизонтальных
звеньев на ободе блока имеются гнезда, соответствующие раз-
мерам звеньев цепи (фиг. 6). Кроме того, блоки для сварных
цепей могут иметь высокую отбортовку. Вследствие больших со-
противлений при огибании блока цепью к. п. д. блока г|б = 0,93.
Блоки дл.я сварных цепей отливают по точным моделям из
серого чугуна марок СЧ 15-32 и СЧ 18-36 по ГОСТ 1412-54, в
особых случаях блоки изготавливают из стали марки 20Л.
Размеры цепного блока зависят от принятого числа гиезд на
блоке и от размеров цепи — шага н диаметра прутка.
25
При г<6 и 16 мм диаметр блока определяется по фор-
муле
где t — шаг звеньев цепи в мм\
d — диаметр прутка цепной стали в мм\
z — число гнезд на блоке.
Наименьшее число гнезд принимается z = 4 -=- 6. Минималь-
ное количество гнезд берется в особых случаях, так как при
этом цепь быстрее подвергается износу.
При числе гнезд г^-Эи диаметре прутка d 16 мм второе
слагаемое под корнем изменяется настолько мало, что им мож-
но пренебречь, и формула (7) примет вид
D = —-— мм. (8)
90 V }
sin —
г
В табл. 8 даны значения sin —.
г
Таблица 8
„ - 90
Значения sin---------------------
z
2 , 90 sin • Z Z . 90 sin 2 z . 90 sin Z z . 90 sin Z 2 t 90 Sin z
4 0,5000 12 0,1305 21 0,0747 30 0,0523 39 0,0403
4 0,3827 13 0 1205 22 0,0712 31 0,0506 40 0 0393
5 0,3090 14 0 1120 23 0,0682 32 0,0491 45 0,0349
6 0,2588 15 0,1045 24 0,0654 33 0,0476 50 0,0314
7 0,2225 16 0,0980 25 0,0628 34 0,0463 60 0,0262
8 0,1951 17 0,0923 26 0,0604 35 0,0448 70 0,0224
9 0,1736 18 0,0872 27 0,0581 36 0,0436 80 0,0196
10 0,1564 19 0,0826 28 0,0561 37 0,0424 90 0,0175
11 0,1423 20 0,0785 29 0,0541 38 0,0413 100 0,0156
л;.и.
ручных талях и ле-
качестве рабочего
Пример. Определить диаметр блока для сварной калиброванной цепи, у
которой t — 21 мм, d = 7 мм. Принимаем г = 14, тогда
D = —-----= —— -- 187 5
90 0,112
sin —
z
Звездочки для пластинчатых цепей. В
бедках грузоподъемностью свыше Ют в
гибкого органа применяют пластинчатые цепи, тяговыми колеса-
ми для которых являются звездочки (фиг. 7). Звездочки изго-
товляют из сталей марок Ст. 4, Ст. 5, 20 и 25Л.
26
По внешнему виду звездочка напоминает зубчатое колесо.
Число зубьев звездочки зависит от грузоподъемности меха-
низма:
z = 6 -е- 7 — минимально допустимое число зубьев;
z~^> 8 при грузоподъемности до 3000 кг;
z^>- 9 при грузоподъемности от 3000 до 20 000 кг;
z 10 при грузоподъемности свыше 20 000 кг.
В зависимости от типа цепи зубья звездочки располагаются
на ободе в один и два ряда. Для специальных зубчатых пла-
стинчатых цепей звездочки вы-
полняются с уширенными зу-
бьями и поперечными пазами
на зубьях по окружности обо-
да для удержания цепи на
звездочке. К- п. д. одной звез-
дочки равен 0,95.
Размер ступицы звездочки
зависит от диаметра вала и
принимается в тех же преде-
лах, что и для канатных бло-
ков и блоков для сварных ка-
либрованных цепей.
Форма и размеры зуб.а
звездочки для пластинчатых
цепей определяются в зави-
симости от назначения и ха-
4-Д
Фиг. 7. Звездочка для грузовой пла-
стинчатой цепи.
звездочки для цепей приводных
рактеристики цепи и принято-
го числа зубьев звездочки.
ГОСТ 591-61 предусматри-
вает построение профиля зуба
пластинчатых втулочных и втулочно-роликовых.
Методика расчета и построения профиля зуба звездочки для
грузовых пластинчатых цепей установлена ГОСТ 590-54. По-
строение профиля зуба звездочки для грузовых пластинчатых
цепей производится по формулам:
t
диаметр начальной окружности £)0 =------;
180
sin —‘
диаметр вспомогательной окружности = Do — 0,2/;
радиус впадины зуба г = 0,53fZi;
радиус головки зуба /? = t—г-,
диаметр наружный = Do +
диаметр окружности впадин зубьев Den = Dq — t/f,
180
диаметр венца наибольший DCH = t ctg •—— 1,2 в\
z
ширина основания зуба В = 0,9 с;
ширина вершины зуба Bt — В—0,16t,
27
где t — шаг Цепи;
dj —диаметр средней части валика цепи;
с —расстояние между внутренними пластинами цепи;
b — ширина пластины цепи;
z •— число зубьев звездочки.
180
Значение sin '— дано в табл. 9.
г
Таблица 9
180
Значения sin —
z
2 . 180 sin Z Z . 180 sin z г . 180 sin 2 z , 180 sin z z , 180 sin z
6 0,5000 11 0,2817 16 0,1951 21 0,1490 26 0,1205
7 0,4339 12 0,2588 17 0,1838 22 0,1423 27 0,1161
8 0 3827 13 0,2393 18 0,1736 23 0,1362 28 0,1120
9 0,3420 14 0 2225 19 0,1646 24 0 1305 29 0,1081
10 0,3090 15 0,2079 20 0 1564 25 0,1253 30 0,1045
Пример. Определить размеры звездочки для грузовой пластинчатой це-
пи, у которой t = 40 льи, с = 25 мм, di = 14 мм, & = 28 мм, задаемся 2=16.
Диаметр начальной окружности
i 40
До — “—:—- — —— -- 205 мм.
° . 180 0,1951
sin ——
г
Диаметр вспомогательной окружности
DO = D— 0,2* =205— 0,2 • 40= 197 мм.
A U 1 1
Радиус впадины зуба
г - 0,53d, - 0,53 . 14 = 7,42 мм.
Радиус головки зуба
R = * — г = 40 — 7,42 = 32,58 мм.
Диаметр наружный
DH = D0 + l,2di = 205+ 1,2 14 = 221,8 мм.
Диаметр окружности впадин зубьев
Dgn = Dq — dx = 205 — 14 = 191 мм.
Диаметр венца наибольший
Dc„= *ctg—— 1,26 = 40 • 4,511 — 1,2 28 = 146,84.«.и.
z
Ширина основания зуба
В = 0,9с = 0,9 • 25 = 22,5 мм.
Ширина вершины зуба
В1 = В — 0,16* = 22,5 — 0,016 - 40 = 16,1 мм.
Литые барабаны имеют значительно большую массу, чем
сварные, и дороже в изготовлении, особенно при индивидуаль-
28
ном производстве; поэтому применение их целесообразно при
выпуске унифицированных механизмов подъема.
Сварные барабаны имеют меньшую массу, чем литые, на
35—40%. Для изготовления барабанов диаметром до-400 лш
используют цельнотянутые стальные трубы. Барабаны больших
размеров изготовляют из стальных катаных листов.
По правилам Госгортехнадзора [6] укладка каната на бара-
бане допускается только в один ряд. Для этого на поверхности
барабана нарезается винтовая канавка, односторонняя, если с
барабана сходит одна ветвь каната, и двусторонняя при двух
ветвях, сходящих с барабана. Гладкие канатные барабаны на-
ходят применение в механизмах с ручным приводом, в механиз-
мах небольшой грузоподъемности с машинным приводом и
имеют по концам отбортовку.
Установка канатных барабанов показана на фиг. 8 и 9.
На гладких барабанах канат укладывется в несколько слоев и
изнашивается быстрее. Наличие винтовой каиавки увеличивает
площадь соприкосновения каната с барабаном и уменьшает их
износ. Нарезка на барабане может быть нормальная (фнг. 9, б)
и глубокая (фиг. 9, в). У нормальной каиавки шаг меньше, чем
у глубокой, поэтому на практике ей отдается предпочтение
вследствие того, что барабан с нормальной канавкой получается
меньшей длины, чем с глубокой.
Канатные барабаны крепятся шпонками на валах и осях, вра-
щающихся в подшипниках качения. Для удобства монтажа и
смазки подшипники устанавливают снаружи барабана. В ред-
ких случаях барабаны монтируют на невращающихся осях.
При этом подшипники запрессовывают в ступицы барабана, что
затрудняет обслуживание опор. Вал (ось) барабана может
иметь три или две опоры.
Установка барабана на трехопорном валу затрудняет мон-
таж и демонтаж механизма и при значительных грузоподъемно-
стях весьма громоздка, вследствие чего она рекомендуется при
грузоподъемности до 10—15 т.
Передача вращения на барабан осуществляется при помощи
зубчатых венцов, от выходного вала редуктора, через зубчатые
муфты и др.
Открытые зубчатые передачи встречаются иа механизмах
подъема устаревших конструкций, в лебедках небольшой грузо-
подъемности и грузоподъемных устройствах с ручным приводом.
Наиболее совершенной и надежной является разработанная
ВНИИПТМАШем схема передачи вращения от выходного вала
редуктора иа барабан при помощи зубчатой муфты (фиг. 9, а),
которая за счет установки сферической опоры дает возможность
компенсировать перекосы.
Канат иа барабане крепится (фиг. 10, а) нажимными болта-
ми, накладками (планками) (фиг. 10, б, а) или клином (фиг.
10, в). Нормативы для крепления канатов и профили канавок
29
Фиг. 8. Установка канатного барабана на двухопорном валу (Уралмаш-
завод).
Фиг. 9. Установка канатного барабана на двухЪпорной оси с зубчатой
муфтой (Сибтяжмаш):
а — общий вид; б — нормальная канавка барабана; в — глубокая канавка бара-
бана.
30
Фиг. 10, Крепление каната к барабану:
а __ нажимными болтами: б, г — накладками Сплаиками); в — клиновое.
31
канатных барабанов унифицированных крановых тележек
ВНИИПТМАШ даиы в табл. 10.
Таблица 10
Нормативы крепления канатов к барабанам ВНИИПТМАШ
(см. фиг. 10, б)
d& в мм Установочные размеры в мм Размеры болта в мм Накладка (планка), размеры в мм Число креплений
К Z 'о а с d е ь
4,8—6,2 28 19 8 20 25 8 9 2 25 1
7,7-8,7 34 25 10 30 35 10 11 4 35 1
11—13 52 35 16 45 45 16 17 5 45 1
15—18 53 43 18 50 50 18 19 7 50 I
19,5—21,5 58 53 22 60 70 20 24 8 55 1
23—26 78 60 22 60 80 25 24 10 60 1
28—31 78 70 27 75 90 30 29 12 65 1
32 5—36 100 85 30 100 120 35 32 14 90 2
Профили канавок канатных барабанов (см. фиг. 9, б, в) размеры в мм
** Я Нормаль- ная канавка Глубокая канавка dK А Нормаль- ная канавка Глубокая канавка
ц <. с» Г >. С1 Ц с’ Г
4,8 3,5 7 2 9 4,5 1 19,5 Н,5 22 5 27 13,5 2
6,2 4 8 2 11 5,5 1,5 24 13 5 27 6 31 16 2,5
8,7 5 11 3 13 6,5 1,5 26 14 5 29 8 35 18 2,5
11 7 13 3 17 8,5 1,5 28 15,5 31 8 35 18 2,5
13 8 15 4 19 9,5 1 5 32,5 18 37 10 — —
15,5 9 17 5 22 11 2 34,5 19 38 10 41 22 3
17,5 10 20 5 — — — 39 21 42 12 50 24,5 3,5
При расчете барабана определяют его диаметр D$, толщину
стенки б, шаг нарезки t, радиус каиавки г, длину I и производят
проверку барабана на сжатие и на совместное действие изгиба
и кручения (фиг. II).
Диаметр барабана принимают равным диаметру рабочего
блока:
D6 = Dtu мм-
Толщина стенки б чугунного барабана равна 0,02 Ds + (6 —
-т-10) мм, но не менее 12 мм, стального барабана (1 ч- 1,2)с/к мм.
Шаг нарезки t = dK + (2 ч- 3) мм. Радиус канавки г = (0,53 -е-
-т- 0,54) dK мм.
Общая длина барабана складывается из длины его участков
/ ~ Н“ Н ^0 ММ. (9)
32
Длина нарезной части на половине барабана
1Н = (2Ж + Z3 + Zp) t мм,
где ZK — 2 ~ 3 — число витков, необходимых для крепления ка-
ната на барабане;
Zj = 1,5 -г- 2 — число запасных витков при нижнем положе-
нии груза; суммарное число витков равно ZK + Z3 =
= 4 + 5.
Число рабочих витков
Zp=-^-
2~D6
LK = ZKH м,
где Z«—количество несущих ветвей каната;
И — заданная высота подъема груза в м.
Тогда
7 Z*H
Р 2г.% '
Так как — = — = kn,
2 z6
то
Z₽ = -^- и I„ = (5+-^-к
тсД; \ itjDfj J
Длина гладкой концевой части барабана
/, = (2н-3)/.
2 В, Л, Моргачев
33
Расстояние между нарезками на барабане
h = 0 4»
где Zga — число блоков на нижней обойме полиспаста;
1с — длина ступицы блока.
Полная длина барабана
; = 2[5-^-V + 2.3/+(Ze4-l)/c =
= (16 + ^-р + (7бл-1)/сЛ. (10)
Проверка стенки барабана на сжатие
а = С W/H2, (1 1)
где Si — усилие на одну ветвь каната в н;
[<т]&ис — допускаемое напряжение на сжатие в н.!м2.
При расчетах принимается:
[cr]c™ = 800- 105 н/jif2 для чугуна СЧ 15-32;
[сг]сзи ~ WOO -105 н/;и2 для сталей 25Л и 35Л;
[п]сда: = 1ЮО 105 н/м2 для сталей Ст. 3 и Ст. 5.
При проверке барабана на совместное действие изгиба и кру-
чения определяют изгибающий момент по формуле
Крутящий момент определяют по формуле
= 2S, = Sj (D(. + d J н. м.
Приведенный момент
Момент сопротивления изгибу кольцевого сечения
Ги = 0,10^(1— а4) ж» при а = ^-,
где D3 = Ds — 2 6 внутренний диаметр барабана в м.
С достаточной точностью момент сопротивления изгибу оп-
ределяется по формуле
0,8 (Об — 6)26 М
Суммарное напряжение от изгиба и кручения
= (12)
w и
Пример. Определить и проверить размеры канатного барабана, изготов-
ленного из чугуна марки СЧ 15-32, если задано: натяжение ветви каната
34
Si = 26 560 н, диаметр каната dK= 16,5 мм, кратность полиспаста kn = 3,
число блоков крюковой подвески Z^ = 3, длина ступицы блока /с = 70 мм,
высота подъема Н = 10 м.
Диаметр барабана
Dg= D^t = 400 мм = 0,4 м.
Толщина стенки барабана
S = 0,02Dtf+ (6 4- 10) = 0,02 • 400+ (6 -j- 10)= 18 мм =0,018 м.
Шаг нарезки барабана
f = + + (2 -? 3) = 16,5+ (2 -г 3) =20 мм = 0,02 м.
Длина барабана
/„ 2VM , 2 - 3 - Ю00\ п
'=(16+^7Н(^-1)И16+ттгд?)'2+
+ (3— 1) . 7=141,4 СМ - 1,414 м.
Принимаем / = 1400 мм = 1,4 м.
Проверка стенок барабана на сжатие производится по формуле
S, 26560
стсж = — =--------- = 740 10& н/м3 < Га]™ = 800 - 105 н/м3.
сж Ы 0,018-0,02 1 7
Изгибающий момент
I . 1 Л
MU = S1— = 26 560 18592 н-м.
Крутящий момент
Л1К = 3\ (Dtf+ dK) = 26 560(0,4 + 0,0165) = 11100 н-м.
Приведенный момент
Л1.,_ = у Д2 + Л12 = У 18 5923+ 11 1003 = 21 700 н- jh.
h {J г И 4 Л г *
Момент сопротивления изгибу
Wu = 0т 1D§ (1 — а*) = 0,1 - 0,43(1 — 0,94) = 2220 • 10"6 jw3.
Суммарное напряжение
Ввиду незначительной величины суммарного напряжения можно ограни-
читься только проверкой барабана на сжатие.
Грузозахватные устройства
Грузоподъемные крюки кованые (фиг. 12, а, б) однорогие
и двурогие изготовляют из стали марки 20 (ГОСТ 1050-60).
Крюки однорогие для механизмов с ручным приводом (ГОСТ
6626-53) изготовляются грузоподъемностью в пределах 0,25—
20 т. Для механизмов с машинным приводом однорогие крюки
(ГОСТ 6627-53) изготовляются грузоподъемностью в пределах
0,25—75 т, двурогие — в пределах 5—75 т.
2* 35
Однорогие и двурогие крюки куют или штампуют и подвер-
гают отжигу. В настоящее время, учитывая высокий технологи-
ческий уровень литейного производства и средств контроля ка-
чества литья, возможно изготовление литых крюков, не усту-
пающих по прочности и надежности кованым крюкам.
При проектировании грузоподъемных устройств размеры од-
норогих и двурогих кованых крюков выбирают по таблицам
прилож. 6 и 7.
Материалом пластинчатых крюков (фиг. 12, в, г) служит ли-
стовая сталь марки 20 (ГОСТ 1050-60) или сталь марки Ст, 3
(ГОСТ 380-60). Толщина пластин не должна быть менее 20 мм.
Пластины соединяются заклепками. Для предохранения пла-
Фнг. [2. Грузоподъемные крюки:
а — однорогий кованый; б — двурогий кованый; в — однорогий пластинчатый;
г — двурогий пластинчатый
стии от износа в зев крюка вставляется смеииый вкладыш. Од-
норогие пластинчатые крюки грузоподъемностью 37,5—175 т и
выше, как правило, работают попарно и применяются в литей-
ных кранах для транспортирования ковшей с жидким металлом.
Двурогие пластинчатые крюки грузоподъемностью 100—350 т
применяют для кранов общего назначения с подъемом груза за
стропальные приспособления.
Размеры пластинчатых крюков выбирают по ГОСТ 6619-53
(см. прилож. 8).
Пластинчатые крюки дешевле в изготовлении и надежнее в
работе. На всех грузоподъемных крюках ставится клеймо заво-
да-изготовителя, В процессе эксплуатации грузоподъемные крю-
ки ежемесячно подвергаются тщательному осмотру.
Грузоподъемные скобы (петли) применяют при грузоподъ-
емности 100 т и выше. Встречаются скобы и меиьшей грузоподъ-
емности, в частности, для транспортирования длинных балок,
рельсов и т. д. Груз подвешивается к скобам с помощью стро-
пов.
36
Различают грузовые скобы глухие цельнокованые (фиг. 13, а)
и составные шарнирные (фиг. 13, б). Материалом скоб служит
сталь марки Ст. 3 (ГОСТ 380-60),
Скобы не являются стандартными изделиями и в каждом
частном случае подлежат проектному расчету. При расчете глу-
хой скобы определяется внутренний диаметр упорной резьбы из
расчета на растяжение
Q Ю . . , , , .. /4Q . 10
ар = --[а]р н/м2, откуда а0 = 1/ -------м, (13)
V
4
где Q — грузоподъемность в кг;
[о]р — допускаемое напряжение
Полученный размер диаметра
дартного (табл. 11)
на растяжение в h/jh2.
резьбы округляется до стан-
Таблица Ц
1. Резьба трапецеидальная
одноходовая нормальная
по ГОСТ 9484-60
2. Резьба упорная
нормальная одноходовая
по ГОСТ 10177-62
Наружный диаметр 0 JWJH Внутренний диаметр в мм Шаг резьбы в мм
120 102 16
(125) 107 16
130 112 16
(135) 117 16
140 122 16
150 132 16
160 142 16
170 152 16
180 158 20
190 168 20
200 178 20
210 188 20
220 198 20
230 208 20
240 214 24
Наружный диаметр н мм Внутренний диаметр в мм Шаг резьбы а мм
100 79,174 12
(110) 89,174 12
120 92 232 16
(130) 102,232 16
140 112,232 16
(150) 122 232 16
160 132,232 16
(170) 142,232 16
180 145,290 20
(190) 155 290 20
200 165 290 20
220 185,290 20
250 208,348 24
280 238,34ёуЯ зпой
300 258,3481.7 inr&i
ЧМ-
Необходимая высота гайки определяется из расчёта витков
резьбы на смятие по формуле .туюш] — 1 эд‘!
ЗП !:/Н':>Т
\ 4 4 / t юн nii.”wi
откуда 4Qf • 10 я (d2 — d^) [ctJcjk Cl: и! I1 i n i; 11 (14) it
где t — шаг резьбы в м;
d — наружный диаметр резьбы в м;
.' а
л.л/гяог’/пш; — Jo] огл
8|7
d0 — внутренний диаметр резьбы в м;
— допускаемое напряжение на смятие, равное (300 ~
-4-400) 105 нМ
Гайка должна иметь стопорные приспособления.
Наклонные стержни (тяги) рассчитывают на растяжение
Q 10 /2 Е? Q • 10 о
о» = —----- < н/м2, откуда г = —-------м2, (15)
р 2cosaF Р 2cosa(a]p
где F — площадь поперечного сечения тяги в м2;
a — угол наклона тяги задается в пределах 15—30°.
Фиг. 13. Грузоподъемные скобы (петли):
а — глухая; б — шарнирная.
Поперечина испытывает напряжения изгиба и сжатия.
Изгибающий момент
М = + Р*х; Pj = -^-tga или М =
u g । Л ' -Л g О И
н-м.
где I — расчетная длина поперечины в м\
Pi — горизонтальная составляющая системы сил в н.
х — расстояние от центра тяжести сечения поперечины до
точки пересечения нейтральных линий (величина кри-
визны поперечины) в м.
Напряжение изгиба в поперечине
„ ми
a
10Q(-— -4- Ж tg Ot
X
< [°L н/м2,
и
2ГН
где [о]м — допускаемое напряжение изгиба, равное 800 105 н/м2.
38
Определяется необходимый момент сопротивления изгибу
1о«({+^«) 10Q(Z+3xtga)
lv = ------------- = ------------- Лз- « IJ
“ 2[aJa 6 [a]u
Для эллипса
Уи^0,1(Мм»,
где а и b — большая и меньшая оси эллипса в м.
Для прямоугольника со скругленными кромками
W„ ” ~Д м3 ПРИ отношении— = 1,4-=- 1,7.
6 ь
Для квадрата
По полученному значению момента сопротивления изгибу
подбирают эллипс, прямоугольник или квадрат необходимого
размера и производят проверку поперечины на совместное дей-
ствие изгиба и сжатия.
Напряжение изгиба
Л4 if Г 1 f П
< [а] нм2,
и \ и
Напряжение сжатия
Р
Gyir = — С РЬж Н/М2
LJfC I 1 *
где Fi = лаЬ — площадь сечения эллипса в м2.
Суммарное напряжение
= °<£ + аеж < [°L М/-«3- (I8)
Размер резьбовой части шарнирной скобы определяется так
же, как и глухой скобы. В шарнирной скобе поперечина крепит-
ся к четырем тягам.
Минимальная площадь поперечного сечения тяги
р _ О- ' 10 м2
4 cos a[a]p
где [о]р — допускаемое напряжение на растяжение, равное
1200- 105 н/м2.
Поперечина рассчитывается на изгиб и сжатие как балка на
двух опорах.
Изгибающий момент
10Q/ , 10Q , 10Q ( I , , \ п.
^ = —^CT--yL^tga = -~(y Н-Л. (19)
39
Напряжение изгиба
о = Ми him2.
It т«у * J Ы •
* и
Необходимый момент сопротивления изгибу
Wu = м*.
[°1И
(20)
10Q
—— м,
Дальше расчет ведется так же, как и для поперечины глухой
скобы.
Оси шарниров поперечины рассчитывают на срез по четырем
сечениям:
— 10<2 _ WQ __ 10Q
'СР v.d\
4---L
4
где di -—диаметр оси в м;
[т]ер —допускаемое напряжение на срез, равное (250 -t-
пн 300) X Ю5 н/м2.
Верхняя ось срезается по двум сечениям
-ср —
10Q
2F
10Q _ 10 - 2 • Q
НЬр н]м2,
2~г
откуда
, , / 10 -2Q
- = ]/
где d2 — диаметр верхней оси в м.
Толщина проушин поперечины определяется нз расчета на
удельное давление
„ 10Q . 2 , 10Q
а = —— XI [о] н/м2 и Ьг ~ ——м,
2Mi ' 2^[<?]
(21)
где Ь] —толщина проушины в м;
[<?] — допускаемое удельное давление, равное (300 — 350) X
X 105 н/л12.
Толщина проушины стержня определяется из формулы
Ляме:
_ 10Qfoa + ^
4 cos ctb^dy {D2 — d2)
откуда
10Q(lX + ^)
--------------M
4 cos аг?! (Д2 — [а]СЛ(
где b2 — толщина проушины в м;
D = 2^i •— наружный диаметр проушины в ль;
1о]сл( —допускаемое напряжение, равное 1000- 105 н/м2.
40
Правильность полученной толщины проушины можно про-
верить на деформацию разрыва
10Q
= ~А-----—7V н/лЛ
4 COS СС&2 (Я — Й1)
Пример. Рассчитать глухую скобу на грузоподъемность, если Q = 150 т,
I = 650 мм, а = 30°, х = 70 мм.
Внутренний диаметр резьбы
4Q • 10 4 • 150 000 • Ю п „ 1сс t
х - .- —- _—---------— — = 0,155 м =. 155 мм.
к [с]р 3,14 - 800 • 105
По ГОСТ 9484-60 (табл. 11) выбираем резьбу трапецеидальную, у кото-
рой do = 153 м.и, d = 180 леи, t = 20 мм.
Высота гайки
4Q/• 10
р-^о) [=Ь,
Принимаем высоту
Площадь тяги
10Q
do
4 . 150000 • 0,02 -10
— ------------------—— = 0,177 м = 177 мм.
3,14 (0,182 — 0,1582) 300 • 105
гайки Я = 200 мм.
10-150000
F =------~г— —----------„„-------— = 0,0108 л2= 10 800 мм3•
2cosa[<j]p 2 • 0,866 • 800 10й
Площадь тяги равновелика площади квадрата со стороной 104 мм.
Момент сопротивления изгибу поперечины
10QG + 3xtga) 10 150 000 (0,65 -I- 3 - 0,07 • 0,577)
" 1
6[з]и 6 • 800 • 10s
= 0,0024 м3 = 24 . 10s мм3.
Принимаем прямоугольную поперечину со скругленными кромками и от-
а
ношением1.6, т. е. а — 1,6 Ь, тогда момент сопротивления изгибу будет
Я -
равен
a-b (1 6m 2,56 • Ь3
= ~----= 24 - 105 Л1.И».
“66 6
Из этой формулы определяем необходимую толщину поперечины
, 6 - 24 - 105 17й ,
b - - _________=178 мм.
2,56
Принимаем b = 180 л.и, тогда высота поперечины а = 1,6 180 = 290 мм.
1 Напряжение изгиба
Л1
=„ = -= = [»!„ = 800 • 105«Л1'=.
Напряжение сжатия
lOQtga 10 150000 - 0,577 оо ,
а ж .---------------------------- = 83 105 hIm^
2Г 2-0,29-0,18
Суммарное напряжение
gc"= -Р асж = 800 - 10Б + 83 • 10s = 883 10s < [=]й = 1000 • 105 н/м2.
Пример. Произвести расчет шарнирной скобы грузоподъемностью Q =
— 100 т, / = 750 мм, а = 20°, х = 80 мм.
41
Внутренний диаметр резьбы
dQ = 1 f IQj 1° = i f JjJ22_222jJ2 = о, 127.«= 127 мм
У яИр У 3,14 - 800 - 10s
По ГОСТ 10177’62 (табл. 11) выбираем упорную резьбу, у которой
rf0 ~ 145,29 им, d = 180 мм, t = 20 мм.
Высота гайки.
„ 4Qi • 10 4.100 000-0,02.10 п ло
И ~ ---------------------------------------------— 0,08 м = 80 мм.
тс (d2-d0«) [с]СЛ£ 3,14 (0,182 — 0,14532) 300 Ю5
Принимаем Н = 120 и .и.
Площадь сечения тяги
10Q 10-100 000
F = ----------= --------------— = 0,0033 м2 = 3300 мм?
4 cos а [а]р 4 • 0,94 - 800 • 105
Принимаем плоскую тягу с размерами 110 X 35 мм.
Момент сопротивления изгибу поперечины
_ IOQQ+ 2х tg а) _ 10-100 000 (0,75 + 2 0,08 0,364) _
и~ 4 ~ 4 • 800 105 '
— 0,00253 и9 = 253 - 104 м.иа.
Принимаем поперечину эллиптического сечения, у которой отношение
п
~= 1,4 и а = 330 мм, b = 240 мм, действительный момент сопротивления
изгибу
Гц = 0,1а26.= 0,1 - 0,33г -0,24 = 0,0026 мэ = 26 10* ммэ.
Напряжение изгиба равно 800 X 105 н/.м2, т. е. не превышает допускаемо-
го напряжения.
Напряжение сжатия в поперечине
$сж ’
lOQtga 10-100 000-0,364
2тгс& = 2-3,14-0,33.0,24 = 8 ’ !°5 «М2-
Действительное максимальное напряжение
сс = a(i + ссж = 800 . Ю5 + 8 • 10s = 808 - 105 < 1000 - 105 н/м2.
Диаметр оси поперечины
л Г 10Q , / 10-100 000 л 11Ч 11Q
“1 = 1/ -—= 1 / -------------—---= 0,113 м — 113 мм
У я П}ср ЗД4-250-105
Принимаем диаметр оси d2 = 120 м.м.
Диаметр верхней оси
/2Q . 10 = Г 2 . 100 000 - 10
У 3,14-250- 105
= 0,16 м = 160 мл<.
Толщина проушины поперечины
L 10Q 10-100 000
_ _= . —.. . .
2d, [£/] 2 - 0,12 300 - 105
= 0,139 м = 139 л<м.
Принимаем толщину проушины поперечины Ь2 = 140 мм.
42
Толщина верхних проушин стержней
10Q (D2 + rf|) 10 - 100 000(0,323+0,162)
о 9 — ------------------- — ------------------------------- “
4cosc«/2(D2-4)[aU „4 - 0,94 • 0,16(0,32* —0,16*)800 - 10=
- 0,032 и = 32 мм.
Принимаем толщину 62 = 55 мм.
Толщина нижних проушин стержней
10Q (D2 + d2A 10 • 100 000 (0,24а + 0,122)
---------------- —— ---------------------- —-
4cos<xd,(D2-d2)[a)„-----------------------------------4-0,94-0,12(0,24=-0,12*)800. 10=
— 0,046 м -- 46 мм.
Принимаем толщину &2 = 60 мм.
Проверяем проушины стержней на разрыв
10Q _______10 . 100 000______
°"= 4 cos ей.; (D-d,) “4.0,94 -0,055(0,24 - 0,12)“
= 400 • 10s<[a]p = 1200-105 н/м2.
Подвески для крюков и скоб (см. прилож. 9) являются сое-
динительным звеном между несущими ветвями канатов и крю-
ком или скобой механизма подъема. Когда груз висит на одной
ветви, канат непосредственно соединяют с кольцом крюка при
помощи, коуша. Конец каната соединяется с основной ветвью
вплетением проволок или зажимами. Кроме того, для крепления
конца каната могут служить клиновые замки и конические втул-
ки (фиг. 14).
Инженер Б. Димков (Болгарская Народная Республика)
разработал новый вид коуша в четырех вариантах (фиг. 14, е,
лс, з, и). В I и II вариантах свободный конец каната установ-
ленной длины пропускается через центральное направляющее
отверстие скобы, огибает профилированное кольцо, приваренное
к скобе, выводится через второе отверстие и прижимается при
помощи гаек затяжными клиньями с односторонним уклоном 8°.
В III варианте конец каната произвольной длины прижима-
ется вставным камнем при помощи затяжных клиньев, в IV ва-
рианте камень прижимается к канату болтами- В последних двух
’вариантах возможно изменение длины троса. Во всех вариан-
{ ' тах при зажиме конца троса он удерживается силами трения,
возникающими при охвате криволинейных поверхностей. Расче-
ты показывают, что новый вид коуша по сравнению с обычным
коушем с зажимами имеет примерно в 5,8 раза больше удержи-
вающую силу трения.
При двух и более несущих ветвях каната применяют типовые
крюковые подвески с блоками.
Крюковые подвески могут быть нормальными и укорочен-
ными. В нормальной подвеске (фиг. 15, а) блоки подвижной
43
обоймы полиспаста насаживают на подшипниках качения или
втулках скольжения на ось. Крюк закрепляется на шариковой
опоре в траверсе. Шариковые опоры выбирают по табл. 12. Ось
Фиг. 14. Способы крепления конца каната:
а — е конической втулке; и — клиновое; в — па коуше с оплеткой; в. й — при по-
мощи зажимов; е, ж, з, и — на коуше ицж. Б, Димкова,
блоков и траверсы крюка соединяют серьгами и закрепляют ри-
гелями.
Таблица 12
Шариковые опоры для грузоподъемных крюков
Грузоподъем- ность в т Размеры в мм Предельная нагрузка в т
d. d2 d3 D2 D Л> «
5 50 52 75 92 100 36 75 7,5
7,5 60 62 85 106 115 41 89 9
10 70 72 95 120 130 44 95 ll,6
15 80 82 110 136 145 50 110 15,8
20 90 93 125 155 165 57 125 20,6
25 100 103 140 172 185 64 140 26
30 115 120 160 200 215 74 160 35 5
40 125 130 175 220 220 79 175 41,5
50 130 135 185 240 250 101 185 58
60 150 155 205 260 270 106 205 67,4
75 170 175 230 285 300 111 230 77,5
44
Продолжение табл. 12
Упорные однорядные подшипники средней серии по ГОСТ 6874-54
№ подшипника Размеры в мм Коэффициент работоспособ- ности Масса а кг
d. ° ft. d, j
8305 25 52 18 25 2 39 000 0, 18
8306 30 61 21 30,2 50 000 0,27
S307 35 68 24 35,2 62 000 0,39
8308 40 78 26 40,2 78 000 0,55
8309 45 85 28 45,2 90 000 0,69
8310 50 95 31 50,2 108 000 1 00
8311 55 105 35 55,2 140 000 1,34
8312 60 НО 35 60,2 140 000 1,43
8313 65 115 36 65,2 158 000 1,57
8314 70 125 40 70,2 182 000 2, Ю .
8315 75 135 44 75,2 210 000 2,70
8316 80 140 44 80,2 210 000 2,90
8317 85 150 49 85,2 250 000 3 70
8318 90 155 50 90,2 260 000 3,90
8320 100 170 55 100,2 280 000 5,10
8322 110 190 63 110,2 350 000 7,90
8324 120 210 70 120,2 420 000 10,90
В укороченной подвеске (фиг. 15, б) ось блоков и траверса
крюка изготовляются как одно целое, при этом крюк должен
быть удлиненным. Укороченные подвески применимы при четном
числе блоков в подвижной обойме.
Оси блоков изготовляют из сталей марок Ст. 5, Ст. 6, 40
и 45 с допускаемыми напряжениями изгиба [о]и = (1200-4-
4- 1400) • 105 н/лс2. Ось блоков рассчитывают на изгиб; усилия,
передаваемые блоками на ось, принимаются сосредоточенными
(фиг. 16). Расчетная длина оси зависит от количества блоков н
может быть определена по формуле
= i- lc + 26i 4- 62 мм, (23)
где /о —длина оси блоков в мм;
i — число блоков на оси;'
1С—-длина ступицы блока в'мм;
61 •—толщина кожуха в лиц
<32 — толщина серьги в мм.
Значениями 6] и 62 задаются.
В каждой серьге возникает опорная реакция, величина кото-
рои равна —- н, где Q — грузоподъемность в кг; G —
масса крюковой подвески в кг.
Изгибающие моменты в опасных сечениях осей равны:
при одном блоке на осн
(24)
45
при двух блоках
Ми-^ mQ + G)== 1Q(Q + G) ('-'°- —-М н-м\ (25)
2 \ 2 2 / \ 4 4 /
при трех блоках
'М„ = _10_<9 + 0) 10 (Q + Д) < = ,0 (Q + G) (А _ kp (26)
Фиг. 15. Крюковые подвески:
а — нормальная на подшипниках скольжения; б — укороченная на подшипниках
качения.
при четырех блоках
М W + G)/% W(Q + g)z =
и 2 \2 2 ) 4 с
= 10(Q + G)(A--A.) н-м- (27)
при пяти блоках
м = 1Q(Q + G) 10 Ю (Q + G) \Q(Q + G)t _
и 2 2 5 с 5 с
= 10(Q + G)(-^----н м-. (28)
46
Q+&
Фиг. 16. Схема к расчету оси блоков.
47 *
при шести блоках
м lo:(Q + Q / 1С \ Ю (Q + G) 2/ 10 (Q + G) z =
и 2 \ 2 2 J 6 с 6 с
= 10(Q + G) (7—-jO н-м. (29)
Из уравнения напряжения изгиба определяется диаметр оси
блоков dQ:
%
Мм
= < [о] Н/Л12
Wa 0,1^
откуда
t/(l —
Полученное значение dc округляется до нуля или пяти.
При установке блоков оси на подшипниках скольжения про-
изводится проверка на удельные давления
(Q -р G) 10 г , § zqo\
Я = Т, < [<?] н/Л42. (30)
ta^lc
Допускаемые удельные давления:
[г/] = 60-105 н/л12 для антифрикционного чугуна;
[</] = 150- 105 н-Ди2 для бронзы.
Если блоки устанавливают на подшипниках качения (табл.
12), то последние выбирают по коэффициенту работоспособно-
сти при расчетной долговечности не менее 5000 ч.
Серьга рассчитывается на растяжение. Ширина серьги при-
нимается равной (фиг. 17, в)
b = (1,8 -г- 2,0) dQ мм.
Толщина серьги определяется по формуле
„ _ (Q + G) 10 . (Q + G) Ю
|^|л И О о --------- Л1г
Р 2(&-</0)Ч 2(&-d0)[5]p
(31)
где [а]/? — допускаемое напряжение растяжения для стали мар-
ки Ст. 3, равное 1000 • 105 н/м2.
Размеры серьги и оси проверяются на удельные давления
q = _(2Д1^22_^(7] = (300-з-350) • Ю5 н/м2.
Траверса крюка рассчитывается на изгиб (фиг. 17, б). Рас-
четная длина траверсы равна расчетной длине оси блоков, т. е.
1Т = /0- По заданной грузоподъемности и массе крюка выбирает-
ся упорный подшипник под крюк (фиг. 17, а) по допускаемой
статической нагрузке (табл. 12). Ширина траверсы В принима-
ется несколько больше диаметра шариковой опоры D-.
В = J (5 —15) мм.
48
Диаметр отверстия d2 в траверсе под шейку крюка
d2 = di + (2 -н 5) мм,
где d\ — диаметр шейки выбранного крюка в мм.
к
а
Фиг. 17. К расчету траверсы крюка и серьги:
а — формы траверс; б — расчетная схема траверсы; в — серьга; г — шариковые опоры
под крюки.
Изгибающий момент в опасном сечении
Ми = ^.*-=^И-н.м.
“ 2 2 4
Момент сопротивления изгибу
U7 = . (в ~ h' M3t
и 6
Напряжение изгиба
Ма 3Q - 1т 10 г 1 . 2
с„ = —i < [а] нм2.
Нужная высота траверсы
Г 3Q/r10
h = 1 / ---—•—— м.
У 2(B-d,)Hu
Материал траверсы — сталь марок Ст. 4, 15 или 20 с допус-
каемым напряжением (изгибу [о]« = (600 1000) • 105 н/м2.
(32)
49
1
ч
t
Диаметр цапф траверсы определяется из расчета на изгиб
= н.м- и? =о,1 •
и 2 \ 2 / и
Ми _ 10Q (25х + Ы н/лл
= =-----~Т—• % leJ« н/м >
Wu 0t4rf3
откуда
3 / 1QQ (2»! + 6а)
V 0,4 [g]„ 5
(33)
Диаметр цапфы принимается примерно равным диаметру j
оси блоков d4 = dQ или несколько меньше, но не должен превы-
шать высоты траверсы, т. е. h.
Подвеска укороченного типа для удлиненного крюка рассчи-
тывается аналогично.
Пример. Произвести расчет нормальной крюковой подвески если Q = •
= 15 т, G = 300 кг, I = 3, 1С = 80 мм = 0,08 м, приняты подшипники скольже-
ния, материал оси блоков — сталь Ст. 5, для которой [g]u == 1000 X 10s н/м2.
Расчетная длина оси блоков на опорах скольжения
Zq = I lc + $2 = 3 • 80 + 23j + Зд мм;
принимаем Zo « 280 мм = 0,28 м.
Изгибающий момент в оси блоков
Мц= Ю (Q + G) -----4") = Ю (15 000’+300) —= 6630 н-м. 1
\ 4 3 / \ 4 3/
Диаметр оси блоков
db = 1 Г Ми . = \/---------^2------= 0,0873 м = 87,3 мм.
V 0,1 [з]ц V 0,1.1000.10»
принимаем d0 = 100 мм.
При наличии подшипников качения в качестве материала оси блоков £
принимаем сталь 40 с [с]и « 1000 X 105 н/м2, Zc = 70 мм. Тогда Zo = 3 70 + '
+ 26] + мм;
принимаем /0 = 240 мм = 0,24 <и.
Изгибающий момент
Mw = Ю (Q + G) (у — y'j = 10(15 000+ 300) — =5610 н-м.
Диаметр оси блоков
3 -- 3 rf-------------
d0 = i/ = 1 /--------=0,083 JH = 83 MM,
У 0,1 Ma V o,i • looo • 10»
принимаем dz = 90 мм.
Диаметр оси уравнительного блока принимаем равным 100 мм.
Выбираем для блоков по два однорядных радиальных шарикоподшипни-
ка 218+, у которых d = 90 мм, D = 160 мм, В = 30 мм, допускаемая радиаль-
ная нагрузка на один подшипник 4200 кг.
50
[ Производим проверку оси блоков на подшипниках скольжения:
10 (Q + G) _ 10(15 000 4-300) _
idolc ” 3-0,1-0,08 “
1 = 64 - 10s < [g] = 100 • 10s н/м2 (для бронзы).
Ширина и толщина серьги
; b = l,8r/0 = 1,8 - 100 = 180 мм = 0,18 м;
; 10 (Q + G) 10 (15 000 + 300)
---—— ----- — - 0 01 м - 10 мм.
2 2(b — d0) [о]р 2(0,18 — 0,1) 1000 . 105
Ji Проверим серьгу и ось блоков на удельное давление
; iqw + ff). 10(15000 + 300) = о о |fl5
Г 4 2dl}Z2 2-0,1.0,01
£ Принимаем толщину серьги 6s = 22 мм.
Прежде чем рассчитывать траверсу, выбираем по таблицам прилож. 6
> однорогий кованый крюк, имеющий d] — 85 мм. Подшипник № 8317
у (табл. 12) имеет размеры: d = 85 мм, D = 150 мм, hi — 49 мм, допускаемая
осевая статическая нагрузка 28 000 кг.
j Ширина траверсы
В = О + (5 4- 15) = 150+ 10 = 160 мм.
Диаметр отверстия под шейку крюка
' d2 = dr + (2 ~ 5) = 85 + 3 = 88 л.и.
Расчетная длина траверсы
* 1Т =, 10 = 240 мм = 0,24 м.
Изгибающий момент
10 QIt Ю - 15 000 - 0,24
Ми - - —— ---— —----------------= 9000 н-м.
4 4
Высота траверсы
h = ] / 6М" = "| /-________- ' 9000 =0,096 ж =96,ИЛ;
И (В —^)[а]„ Г (0,16 — 0,088)800- 106
принимаем h = 100 мм, диаметр цапфы траверсы = 90 мм.
Захватные устройства для штучных и сыпучих грузов. Важ-
I иым требованием, предъявляемым к грузозахватным приспособ-
лениям, является уменьшение затрат времени на захват и осво-
бождение груза.
При массовом транспортировании однотипных штучных и сы-
пучих грузов необходимо применение универсальных и специа-
лизированных грузозахватных устройств, отвечающих требова-
ниям прочности конструкции, надежности в работе, удобства в
обслуживании и соблюдения правил техники безопасности. Наи-
более желательно использование грузозахватных приспособле-
|» ний полуавтоматического и автоматического действия или с ди-
станционным управлением.
51
При переносе штучных грузов широко применяют канатные
и цепные стропы с крюками, кольцами, петлями, зажимами и
другими элементами захвата (фиг. 18, а). Для транспортирова-
ния пакетов листов, сортового металла и т. д. используют лапы
и подвески различных конструкции (фиг. 19, о). Длинномерные
и крупногабаритные изделия переносят при помощи подвесных
4
траверс. Клещевые захваты служат
штучных грузов — слитков, поковок,
и 19, б, в ).
для транспортирования
валов и т. д. (фиг. 18, в
Таблица 13
Характеристика подъемных электромагнитов завода «Динамо» им, Кирова
I Тип электромагнита Наружный диаметр электромагнита в мм Высота расположения] подвесной упряжки в мм Размеры кольца для подвески в Ai.w Мощность генератора в кет Ток электромагнита при горячей катушке в а Масса электромаг-* ннта в кг Грузоподъемность в кг
Высота Ширина 1 Болванка или плита с га б Чугуныыс чушкн Стальные стружки
М-21 785 825 175 100 3,5 8,6 460 6000 180 200 80
М-31 1000 925 200 120 5,5 15 820 9000 300 250 НО
М-41 1170 1165 250 140 И 30 1670 16000 500 600 200
ПМ-1 1000 420 г — 1,5 4,9 700 — — — —
ПМ-3 2000 420 — — 3 9,7 1300 — — — —
52
Для погрузочно-разгрузочных операций с металлическими из-
делиями применяют также грузовые электромагниты (фиг. 18, 0).
Форма электромагнита зависит от формы и размера груза.
На заводе «Динамо» им. Кирова изготовляют грузовые электро-
магниты (табл. 13) круглой формы (тип М) для подъема метал-
лического лома, чушек и т. д. и прямоугольной формы (тип ПМ)
для транспортирования прокатных балок, рельсов, труб.
Для транспортирования листовой немагнитной стали целесо-
образно применение вакуумных грузоподъемных приспособле-
ний с присосками. Металлические присоски имеют кольцевой
герметизирующий борт из жаростойкой резины или пластмас-
сы (неопрена) и закрепляются на траверсе, которая навешива-
ется на крюк мостового крана. Создание вакуума внутри чашек
присосок достигается эжектированисм нлн откачиванием возду-
ха. При эжектировапии создается разрежение (0,7—0,85) бар
при давлении эжектирующего воздуха 3,15 бар. При откачива-
нии воздуха ротационным вакуум-насосом разрежение в чашках
достигает 90%. Работа вакуумных грузоподъемных приспособ-
лений автоматизирована- Такими приспособлениями переносят
листы длиной до 30 м массой до 18—20 т.
53
1660----------------
Фиг. 20. Скоба с электрическим механиз-
мом поворота.
Для транспортирования тяжеловесных рулонов листов и по-
ворота их на 90 или 180° применяют разработанную Гипромезом
скобу с электрическим механизмом поворота (фиг. 20). Скоба
навешивается на крюк 3 крана, при этом крюк должен быть за-
стопорен от вращения.
Поворот рулона 6 осу-
ществляется с помо-
щью электродвигате-
ля 1 через планетар-
ный редуктор 2, чер-
вячный редуктор 4 и
подвеску 5.
Мелкокусковые и
сыпучие материалы
переносят в ковшах,
бадьях, кюбелях и
других емкостных со-
судах (фиг. 18, б, ?).
Особую группу гру-
зозахватных устройств
составляют грейферы.
Для захвата сыпучих
материалов применя-
ют двухчелюстиые, для
захвата крупных ку-
сков, металлических
отходов и т. д. — мно-
гочелюстные грейфе-
ры (фиг. 21). Грейфе-
ры подвешивают к
подъемному механиз-
му на одной или двух
ветвях каната. Одно-
каиатные грейферы яв-
ляются сменными гру-
зозахватными приспо-
соблениями и навеши-
ваются на крюки подъ-
емных механизмов, ис-
пользуемых для пере-
мещения как штучных
грузов, так и сыпучих материалов. Одноканатные грейферы не
имеют своего привода и управляются вручную.
Наибольшее применение находят двухканатные грейферы с
механическим управлением. Двухканатиый грейфер имеет два
механизма, установленные на тележке мостового крана: меха-
низм подъема и опускания и механизм замыкания и размыкания
челюстей. Схема работы двухканатного грейфера показана
54
Фиг. 21. Грейферы:
и — двухчелюстный; б — многочелюстныЙ.
55
на фиг. 22. С барабана 2 механизма подъема грейфера сходна
одна ветвь каната, которая огибает блок 4 и соединяется с верх-
ней траверсой 5. Вторая ветвь каната идет с барабана 1 меха-
низма замыкания челюстей через блок 3 иа нижнюю траверсу 8.
Челюсти 7 грейфера шарнирно соединены с траверсой 8 и через
тяги 6 — с траверсой 5. При вращении обоих барабанов по часо-
вой стрелке грейфер в раскрытом состоянии опускается на мате-
риал. Для замыкания челюстей и захвата материала барабан 1
г)
Фиг. 22. Схема работы двухчелюстного грейфера:
а — опускание грейфера; б — замыкание челюстей; в — подъем грейфера
с грузом; г — высыпание груза.
вращается против часовой стрелки при неподвижном барабане 2.
После замыкания челюстей в работу подключается барабан 2 и
происходит подъем грейфера.
Для раскрытия челюстей и высыпания материала останавли-
вают барабан 1. Барабан 2 при помощи каната продолжает
поднимать траверсу 5 и челюсти под действием силы тяжести
греГгфера и материала раскрываются.
С целью уменьшения нагрузки иа канат замыкания на тра-
версах грейфера устанавливают полиспасты (см. фиг. 21).
Отношение собственной массы грейфера к массе заполняю-
щего его груза называется коэффициентом использования соб-
ственной массы, который принимается в пределах 0,8—1,2.
Кроме рассмотренных безмоторных грейферов, применяют
также моторные грейферы, у которых привод механизма замы-
кания челюстей монтируется па раме. В случае надобности мо-
торный грейфер подвешивают на крюк грузоподъемного меха-
низма и используют для переноса сыпучих грузов. Управление
моторным грейфером полностью механизировано и осуществля-
ется из кабины крановщика.
56
В двухчелюстном моторном грейфере (фиг. 23, а) вращение
от электродвигателя 3
передается через червячный редуктор 2
на канатный барабан 1.
Многочелюстный моторный грей-
фер (фиг. 23, б) имеет раму 7, в ко-
торой смонтированы два вала 4. К
валам жестко присоединены пять
пар клещей и две пары рычагов с
пазами 3. Рычаги пазами связаны с
цапфами гаек /. Винт 2 с правой и
левой нарезками получает враще-
ние от электродвигателя 6 через ре-
дуктор 5. При вращении винта 2
гайки 1 расходятся или сходятся,
заставляя замыкаться или размы-
каться челюсти грейфера.
6)
Фиг. 23. Моторные грейферы;
а — двухчелюстпый; б — многочелюстный.
ВОПРОСЫ И ЗАДАНИЯ
1. Описать признаки классификации подъемно-транспортных машин.
2. Дать определение режимов работы и загруженности грузоподъемных
устройств в цехе.
3. Ознакомиться по месту работы с конструкциями стальных канатов,
сварных и пластинчатых цепей.
4. Составить сравнительную таблицу «Распределения мест» между гиб-
кими тяговыми органами по их отличительным свойствам и особенностям
работы.
57
5. Выбрать и сравнить канаты и цепи различных конструкций- на одина-
ковую грузоподъемность.
6. Подсчитать на практике действительные коэффициенты запаса прочно-
сти канатов и цепей.
1. Описать конструкции блоков и барабанов для канатов и цепей.
8. Проверить соответствие размеров блоков и барабанов диаметрам
стальных канатов.
9. Назвать типы грузозахватных устройств.
10. Описать способы подвешивания различных грузозахватных приспо-
соблений.
§ 2. ПРИВОДЫ
При расчете крановых механизмов и деталей подъемно-
транспортных машин учитывают три основных расчетных
случая действующих внешних нагрузок.
Расчетный 'случай А, когда на кран действуют нормальные
нагрузки рабочего состояния. К нормальным относятся на-
грузки, которым подвергается кран в рабочем состоянии при
номинальном грузе и нормальных условиях работы (собствен-
ной массе крапа, номинальной массе груза и массе грузоза-
хватных устройств, инерционных нагрузках при пуске и тор-
можении в нормальных для данного механизма условиях ра-
боты, средней ветровой нагрузке, нормальном состоянии под-
крановых путей).
Расчетный случай Б, когда на кран действуют максималь-
ные нагрузки рабочего состояния. К максимальным относятся и
нагрузки, которым подвергается кран в рабочем состоянии при
номинальном грузе с учетом максимальных дополнительных
и возможных случайных нагрузок (собственной массе крана,
номинальной массе груза и массе грузозахватных устройств,
инерционных нагрузках при резких и внезапных пусках и тор-
можении, максимальной ветровой нагрузке рабочего состояния,
неблагоприятном состоянии и уклоне подкрановых путей).
Расчетный случай В, когда на кран действуют максималь-
ные нагрузки нерабочего состояния. К максимальным нагруз-
кам нерабочего состояния относятся нагрузки, которым под-
вергается крап в нерабочем состоянии на открытом воздухе
(собственной массе элементов крана, максимальной ветровой
нагрузке нерабочего состояния, нагрузке от снега и обледене-
ния, максимальном уклоне подкрановых путей).
Ветровые нагрузки на мостовые, башенные, козловые пор-
тальные и другие краны, работающие на открытом воздухе,
выбираются согласно с ГОСТ 1451-42.
Ручной привод
Ручной привод применяется в устройствах, обеспечивающих
сравнительно небольшую высоту подъема груза, или переме-
щение его на незначительное расстояние при временных гру-
зоподъемных операциях нли в случае невозможности исполь-
58
зо,вания механического привода. С этой целью на лебедках
используют рукоятки, иа домкратах — трещотки, на подвесных
талях, подвижных кошках и ручных мостовых кранах — тягот
вые колеса.
Простейшим ручным приводом является рукоятка, обычно
свободно насаживаемая одним концом на квадратный хвосто-
вик приводного вала (фиг. 24, а) перед началом работы
и снимаемая после прекращения ее. К другому концу рукоят-
ки крепится стержень-ручка длиной 200—250 мм для одного
рабочего и 400—500 мм для двух рабочих. На ручку надевает-
ся защитная трубка для предохранения от травмирования
рук лри работе. Усилие одного рабочего при расчетах припи-
Фиг. 24. Ручной привод:
а — рукоятка; б — трещотка.
мается 100—300 н в зависимости от продолжительности рабо-
ты. В случае, если усилия двух рабочих на одной рукоятке
недостаточно для подъема или перемещения груза, на другом
конце вала ставят вторую рукоятку под углом 120—180° к пер-
вой. Диаметр стержня ручки d в месте крепления к рукоятке
определяется из расчета на изгиб. Учитывая возможность пе-
редачи массы рабочего на ручку рукоятки, изгибающий момент
можно принимать равным = Р1\ Н'М.
Напряжение изгиба и диаметр стержня ручки определяется
по формулам
з /“—'--
о = —— = «С [□],, н/м2; d = 1/ —— м, (34)
" 0,ld3 L 1и У 0,1 1а]и V 7
где [о]и — допускаемое напряжение для стали Ст. 3, равное
(600 800) • 105 н/м2.
59
Ширину рукоятки b и толщину 6 в опасном сечении рассчи-
тывают на* совместное действие изгиба и скручивания.
Изгибающий момент, момент сопротивления и напряжение
изгиба определяют по формулам
М.,=Р1н-м; =
и “6
6Р/
/?63
[а]„ Н/М2.
Скручивающий момент и напряжение от скручивания
Мк = ^н-м-, WK = -b2S
к 2 к 9
Мх 9Ph т ,а
WK 4625 к
Суммарное напряжение
°с= + Н/М*-
(35)
Обычно принимают диаметр втулки рукоятки de = (1,8-5-
~2,0)di мм, длину втулки 1в = (1,0 —l,5)rfi мм, ширину руко-
ятки b = Зб мм. Тогда формула (35) преобразуется следую-
щим образом:
6Р/ 2Р1 9Р1г Ph
<з„ —-----=------; тг = -— = —-;
“ 36-62 63 к 4(3-6)26 463
Толщина рукоятки
(36)
В практике сечение плеча рукоятки b X б выбирают в пре-
делах 35 X 10 ~ 60 X 20 мм, сторону квадрата хвостовика
в пределах 23-е30 мм и длину втулки 1в = 40-е60 мм.
Трещотка (фиг. 24, б) представляет собой прямую рукоят-
ку /, к которой крепится собачка <3. Собачка находится в за-
цеплении с храповиком 2 и прижата к нему пластинкой 4.
В собранном виде трещотка надевается квадратным отверсти-
ем храповика на квадратный конец вала. При повороте
рукоятки на некоторый угол собачка проскальзывает по зубь-
ям храповика, при обратном повороте собачка, упираясь в зуб
60
храповика, поворачивает вал на угол поворота рукоятки. На-
ходят применение трещотки с перекидными собачками на дву-
стороннее действие.
Длина рукоятки трещотки с надетым на нее отрезком тру-
бы достигает 800—1000 мм. Рукоятка трещотки рассчитыва-
ется на изгиб.
Подвесные тали, подвижные кошки, ручные мостовые кра-
ны расположены на таком расстоянии от пола, что применение
рукояток и трещоток на них практически невозможно. В этих
случаях в качестве ручного привода применяют тяговые ко-
леса.
Тяговое колесо закрепляется на валу шпонкой, получает
вращение через бесконечную сварную калиброванную цепь от
усилия рабочего и передает крутящий момент на приводной
вал. Тяговое колесо имеет такую же конструкцию, как блок
для сварной калиброванной цепи (см. фиг, 6), но с большим
числом гнезд в ручье. Диаметр тягового колеса определяется
аналогично определению диаметра цепного блока.
Простым грузоподъемным устройством без передач служит
ворот, у которого барабан и рукоятка закреплены на одном
валу (фиг. 25, а). В этом случае имеет место следующее ра-
венство моментов относительно оси вращения:
lOQ-Af = P0Zt] н-м,
где Q — масса груза в кг;
Д— радиус барабана в м;
— усилие на рукоятке в н;
Z — длина рукоятки в м;
ц — к. и. д. ворота, равный 0,85—0,9 при Q = до 3 т,
0,75—0,85 при Q - 3 -:15 т и 0,65—0,75 при Q > 15 т.
Усилие на рукоятке
= (37)
Скорость подъема груза
v, ------- м сек,
г 30 '
где п6 = пр = 30 об/мин — практически возможное число обо-
ротов рукоятки.
Возьмем лебедку с одной зубчатой передачей и определим
усилие на рукоятке при тех же значениях Q, R н I (фиг. 25, б).
В этом случае равенство моментов будет
10Q7? = = 73/тр, н-м,
ri
где ц =— —.передаточное число зуочатои пары;
г 1
/?1 и б — радиусы начальных окружностей зубчатой па-
ры В Л1.
61
Усилие на рукоятке
(38)
Скорость подъема груза
~Rnn I
v, — —— м /сек.
г 30 h
При наличии двух зубчатых передач (фиг. 25, в)
10 QR = Pfy = Pfyiji, нм'> р> = -Л- « (39)
Г1 Гг Ц
Соответственно при трех зубчатых передачах
10Q/? - «*; Рз = -т- н- (4°)
И 4zaz3
При любом числе передач
10QR = PAU, нм; Рп = Д- н. (41)
Ц 1общ
Из приведенных расчетов видно, что с увеличением числа
пар передач и передаточного чнсла соответственно при посто-
янных значениях Q, R и I усилие на рукоятку уменьшается
обратно пропорционально общему передаточному числу и, на-
оборот, при постоянном значении усилия Р во столько же раз
Фиг. 25. Схемы к расчету передач с ручным приводом:
а — без зубчатой пары; б — с одной зубчатой парой; в — с двумя зубчатыми парами.
повышается грузоподъемность Q. Скорость подъема груза
уменьшается обратно пропорционально передаточному числу
механизма при постоянной скорости вращения рукоятки.
Можно рекомендовать следующий порядок проектного рас-
чета грузоподъемных механизмов с ручным приводом:
1) выбрать схему подвески груза (без полиспаста или с
полиспастом);
2) по заданной грузоподъемности выбирать гибкий тяго-
вый орган (канат или цепь);
62
3) определить размеры барабана, рабочих, уравнительных
и приводных блоков;
4) определить момент от груза на барабане и момент вра-
щения рукоятки;
5) определить передаточное число механизма, по которому
рассчитываются размеры передач;
6) произвести расчет рукоятки.
Пример. Произвести расчет механизма подъема ручной лебедки, если Q =
= 1000 кг, I = 400 мм, /1 = 350 мм, q = 0,8, Р = 2 X 200 = 400 н для двух
рабочих, пр = 20 об/мин.
Груз подвешивается на одной ветви каната.
Выбираем канат, принимая запас прочности k3 = 5.
Расчетное разрывное усилие
Slp = ЮАЭ - Q = 10 - 5 • 1000 = 50 000 «.
По таблицам в прилож. 1 .выбираем канат типа ТК 6 X 19 -I- I ос, у ко-
торого dK = 11 мм, разрывное . усилие 55900 н при пределе прочности
Ьпч = 150 107 н/м2.
Диаметр барабана при е = 18
Dg = (а — I) dK — (18 — I) • Ия; 200 мм =0,2 м.
Моменты от груза на барабане и от усилия на рукоятке:
D6 Л 0,2
Мб= 1000-у-= 1000 н-м;
Мр = Р1^ 400 • 0,4 = 160 н-м.
Передаточное число
Л4б 1000
11 — — —- 7,8.
160 * 0,8
Для цилиндрической пары при ручном приводе допускается 6 = 8 — 10.
Определяем размеры рукоятки
л •?/ Pli 400-0,35 п л„7 „7
а = 1/ —' - = 1/ -------—----= 0,027 м — 27 мм;
V 0,1 [0]и V 0,1 • 700 • 10б
принимаем диаметр рукоятки d — 30 мм;
. 3 f~2Pi 3 г2 . 400 - 0,4 п П17 „ .7
о — 1/ ----= Л/ —---------= 0,017 м = 17 мм;
V [°]« V 700 • 105
принимаем толщину рукоятки б = 20 мм, ширину рукоятки b = 36 = 3 - 20 =
= 60 мм.
Диаметр ведущего вала, на который надевается рукоятка,
рассчитывается на кручение
I "I f Мр _______ / 1 60 р, QQ
“ V 0,2 [т]~ “ V 0,2 • 250 • 105' — 0,032 М — 32 ММ,
где [т]к • - пониженное допускаемое напряжение для стали Ст. 5,
равное (250 = 300) -105 н/м2.
Принимаем диаметр вала d\ = 35 мм.
63
Размеры втулки рукоятки
1в = (1,5-s- 1,8) = (1,5 н- 1,8)35 - (52,5-е-63) мм;
de = (1,8 -ь 2,0) dy = (1,8 -н 2,0) 35 = (63 -ъ 70) мм.
Принимаем 1в = 60 мм, de = 70 лсм.
Скорость подъема груза
о =з -1 ~ 3,14 * 0,2 • 2,56 — = 0,027 м!сек
г 6 'б 60 ’ 60
при числе оборотов барабана
п6~ - р = — 2,56 об/мин.
Механический привод
Преобладающим приводом подъемно-транспортных машин
безусловно является механический. В качестве механического
привода грузоподъемных и транспортных устройств применяют
паровые машины на паропутевых железнодорожных кранах,
компрессоры в пневматических подъемниках, гидравлические
насосы в гидравлических домкратах и кранах, двигатели внут-
реннего сгорания на автомобильных кранах, электрические
двигатели на лебедках, тельферах, мостовых кранах и др.. Наи-
более широко применяются электрические двигатели перемен-
ного и постоянного тока, обладающие по сравнению с приво-
дами других типов следующими преимуществами:
1) дешевизной электрической энергии и возможностью пе-
редавать ее на любое расстояние;
2) простотой устройства и экономичностью в работе;
3) постоянной готовностью к работе;
4) высокими мощностями и к. п. д.;
5) удобным и простым по конструкции включением, выклю-
чением и реверсированием;
6) возможностью регулирования числа оборотов и тормо-
жения;
7) возможностью автоматического управления;
8) улучшенными санитарными условиями труда обслужи-
вающего персонала.
В грузоподъемных кранах используют закрытые асинхрон-
ные электродвигатели МТ переменного тока с фазовым рото-
ром и электродвигатели МТК с короткозамкнутым ротором.
В кранах, работающих на постоянном токе, применяют элект-
родвигатели МП и КПДН. Характеристика крановых электро-
двигателей приведена в прилож. 10 и 11, к. п. д. крановых ме-
ханизмов— в табл. 14.
64
Всесоюзным научно-исследовательским институтом подъем-
но-транспортного машиностроения разработана и испытана
конструкция нового малогабаритного асинхронного электродви-
гателя переменного тока мощностью 0,27 и 0,4 кет с коротко-
замкнутым ротором и встроенным двухколодочным тормозом
Фиг. 26. Электродвигатель ВНИИПТМАШ с встроен-
ным тормозом.
(фиг. 26). В статоре 10 установлены основной ротор Р, поса-
женный на вал 6, вращающийся в подшигпни'ках качения 4,
и вспомогательный ротор 1, закрепленный на трубе 3 с зубча-
Таблица 14
К- п. д. крановых механизмов
Элементы механизмов и механизмы К- п. д. при подшипниках
качения скольжения
Открытые зубчатые передачи: 0,95—0,96 0,93—0,95
цилиндрические
конические . 0,93—0,95 0,92—0,94
Закрытые зубчатые цилиндрические передачи: 0,96—0,98 0,93—0,95
при густой смазке
при жидкой смазке в масляной ванне 0,97—0,98 0,95—0,97
Червячные передачи: 0,50- -0,75
при однозаходяом червяке
при двухзаходном червяке 0,75- -0,80
Блоки и барабаны для стальных канатов . . 0,96—0,98 0,94—0,96
Зубчатые муфты 0, 99
Механизмы подъема груза: 0,80—0,85 0,70—0,80
с цилиндрическими передачами . . .
с червячной передачей 0,65- -0,70
Механизмы передвижения тележек и кранов: 0,80—0,90 0,75—0,85
с цилиндрическими передачами . . .
с червячной передачей 0,65- -0,75
Механизмы поворота: 0,75—0,85
с зубчатыми передачами 0,70—0,80
с червячными передачами 0,50- -0,70
3 В. Л. Моргачев
65
той нарезкой на конце, которая входит в зацепление с зубча-
тым сектором 8. Зубчатый сектор жестко соединен с ло-
пастью 7. Лопасть связана с упорами колодок то-рмоза. При
включении электродвигателя оба .ротора стремятся вращаться
в одном направлении. Вспомогательный ротор / поворачива-
ет трубку 3 в подшипниках скольжения 2, при этом зубчатый
сектор 8 доходит до своего упора, а лопасть 7 через упоры
тормоза размыкает колодки тормозного шкива 5. При выклю-
чении электродвигателя пружины замыкают колодки тормоза,
вал 6 останавливается, а лопасть 7 с зубчатым сектором 8
и труба 3 с вспомогательным ротором 1 занимают первона-
чальное положение.
Грузоподъемные машины имеют механизмы, подъема пере-
движения и поворота груза.
Мощность двигателя механизма подъема определяется по
формуле
= 2212+Д^вт. (42)
где Q — грузоподъемность в ка;
G — масса грузозахватного устройства в кг;
V, —скорость подъема груза в установившемся режиме
в м/сек;
т] — к. п. д. механизма (табл. 14).
По найденному значению мощности выбирается нужный
электродвигатель и определяется передаточное число, по кото-
рому подбирается редуктор с передаточным отношением:
___ пдв
1п_>
где пдв—число оборотов вала выбранного электродвигателя
В минуту;
п5 — число оборотов барабана в минуту;
60 v.Kn
пб = ——об/мин;
~D6
здесь Кп—кратность полиспаста;
D6— диаметр барабана в лд
На механизмах подъема устанавливают горизонтальные ре-
дукторы серии РМ (прилож. 12) и серии ЦД.
При выборе электродвигателей и редукторов необходимо
учитывать режим работы механизма.
Выбранный электродвигатель проверяется иа фактическую
кратность пускового момента
г — '^п <' .ь
где Мп—фактический крутящий момент на валу электродви-
гателя в период пуска механизма подъема в н-м;
66
•—н-м.
Ъ7Ып
кг;
Mctn—статический крутящий момент на валу электродви-
гателя от массы поднимаемого груза в н-лц
i|?^—кратность максимального момента электродвигателя.
Фактический крутящий момент на валу электродвигателя
в период пуска механизма определяется по формуле
м = , 6
" 2K„in, 375,-Х^ ‘
где Q — грузоподъемность механизма в
Dq — диаметр барабана в м;
Лп —кратность полиспаста;
in —передаточное число выбранного редуктора;
q — к. п. д. механизма;
Пдв — скорость вращения вала электродвигателя в об[мин;
GD2 — маховой момент на валу электродвигателя в н>м2;
6м = 1,1 -ь 1,25 — коэффициент, учитывающий маховые мо-
менты деталей механизма;
tn—время пуска механизма, принимаемое в зависимости
от скорости подъема груза ог, в сек (tn 5 иг),
Статический крутящий момент на валу электродвигателя
определяется по формуле
Пример. Выбрать электродвигатель и редуктор механизма подъема, если
Q = 15 т, G = 300 кг, ПВ = 25%, К» = 3, vs = 0,25 м/сек, De = 0,4 м, ток по*
ременный, q = 0,85.
Потребная мощность двигателя
„ I0(Q + G)^ 10(15 000-1- 300)0,25
—
1
= 45 000 ет — 45 кет.
0,85
По таблицам в прилож. 10 выбираем электродвигатель МТ 62-10, у кото-
рого при ПВ — 25% Ндв — 45 кет, = 577 об/мин, кратность максималь-
ного момента = 3,2, масса 945 кг, маховой момент (GD2) = 175 н м2.
Число оборотов барабана
60 - щ • Ка
«и =' ’ п
60 - 0,25 -3
—————— =35,8 об/мин.
3,14-0,4
Передаточное число механизма
tn
п >в 577
— = ——=16,2.
ng 35,8
По таблицам в прилож. 12 выбираем редуктор Р М-650, У1 исполнения с
передаточным числом £г1= 15,75, числом оборотов ведущего вала, равным-
600 об/мин при ПВ = 25%, подводимой к редуктору мощностью 47,5 Квт И
массой редуктора 878 кг.
3* 67-
Проверяем выбранный электродвигатель на фактическую кратность пус-
кового момента при 1п = 8 * иг = 8 • 0,25 = 2 сек:
IOQD6 WQD2on<)e (GD2)
6 _ М„ _ + ЗтафД,, +8j 375?,,
“ мст \0QD6
10 . 15000 • 0,4 10 • 15 000 - 0,4з. 577 „ 175 • 577
—-----------!— _1_-------------!-------- 4 1 15 ---
= 2 • 3 • 15,75 • 0,85 375 • 3^ -15,752 • 2 • 0,85 ’ 375-2 _
10 -15 000-0,4
2 - 3 • 15,75 • 0,85
= 1,22 < 6Ja = 3,2.
При движении крановой тележки или моста крана мощ-
ность двигателя затрачивается на преодоление сил трения
в цапфах ходовых колес W(( и сил трения качения колес по
рельсам
Эти два вида сил трения вызывают основное сопротивление
движению тележки или крана. Кроме основного сопротивления
движению, создается дополнительное сопротивление от трения
реборд колес о рельсы и неровностей путей Wd.
Общая сила сопротивления передвижению W будет равна
сумме всех сил сопротивления:
= + «. (43)
Предварительно определяют моменты сил трения в цапфах
ходовых колес и качения колес по рельсам.,
Таблица 15
Размеры ходовых колес мостовых кранов (ориентировочные)
Грузоподъем' ^ноеть в т Тележка крана Мост крана
диаметр колеса в мм диаметр цапфы в мм диаметр колеса в лсж диаметр цапфы В Л-И
5—10 200—250 60—70 600—800 80—100
15—20 250—350 70—100 700—900 100—120
20—50 400—500 90—120 700—900 120—150
Момент сил трения в цапфах ходовых колес
= + (44)
где Рц — сила трения в цапфах в н;
du—диаметр цапфы, выбираемый по табл. 15, в см;
Q — масса груза с подвеской в кг;
Gj — масса тележки или крана в ка;
f — коэффициент трения в цапфах по табл. 16.
68
Таблица 16
Коэффициент трения в подшипниках ходовых колес
Подшипники скольжения Подшипники качения
открытого типа букса с жидкой смазкой шариковые и роли- ковые конические
0, 10 0,08 0,015 0,02
Момент сил трения при качении колес по рельсам Мк воз-
никает вследствие упругой деформации в месте контакта обоих
тел, отчего сила реакции рельс на колеса несколько смещается
в сторону направления движения на величину р., которая
и принимается за коэффициент трепня качения:
Л1К — Ю (Q 4- р. «-л. (45)
Значение ц выбирается в табл. 17.
Таблица 17
Коэффициенты трения качения колес по рельсам р. в см
Тип рельса Диаметр ходового колеса D* в мм
200—300 400—500 | 600—700 800 900—1000
Плоский 0,03 Для С 0,05 г а л ь н ы х 0,06 колес 0,07 0,07
С выпуклой головкой Р и КР 0,04 0,06 0,08 0,10 0,12
Плоский 0,04 Для ч 0,06 /гунны) 0,08 г колес 0,09 0,09
С выпуклой головкой Р и КР 0,05 0,07 0,09 0,12 0,14
Общий момент сил трения при передвижении будет равен
Ч = М„ + = 10 1(Q +G,) f 4 + (Q + <;>) и] =
= W (Q + G,)1^±^-h-m. (46)
Основная сила сопротивления движению
W = 10 (Q + G,) ,dlt + 2'" Н, (47)
где DK — диаметр ходового колеса в м (см. табл. 15).
Величина дополнительных сопротивлений расчетным путем
практически неопределима, она учитывается коэффициентом
дополнительных сопротивлений, выбираемым по табл. 18.
69
Таблица 18
Значения коэффициентов дополнительных сопротивлений ko
Ходовые колеса Механизм Привод механизма Подшипники ходо- вых колес
Конические Крановые мосты Центральный Качения и сколь- жения 1,2
Цилиндрические Раздельный Качения | 1,5
Центральный i Скольжения 1.8
Крановые тележки
Качения 2,5
Тогда формула для определения сил сопротивления пере-
движению тележки или крана с цилиндрическими колесами
примет вид
fda И- 2iJ> _
Г = AJO(Q + G.) 1 и н. (48)
Соответственно сила сопротивления передвижению мосто-
вого электрического крана с коническими ходовыми колесами
на подшипниках качения определяется по формуле
W = й„10 (Q + GJ ,dr‘’ + ^ Н' (49)
О ip
где dCp —средний диаметр подшипника качения в м\
Dcp—средний диаметр конического колеса в At.
Формулы для определения сил сопротивления передвиже-
нию тележек н крановых мостов выведены для кранов, рабо-
тающих в закрытых помещениях.
Выбор мощности электродвигателя производится с учетом
времени его пуска которое принимается:
in = 2 ч- 4 сек для механизмов передвижения краповых те-
лежек;
tn — 5 -т- 8 сек для механизмов передвижения мостовых
кранов.
Определяем величину сил инерции
где g — ускорение силы тяжести, равное 9,81 м/сек2-,
Vg — скорость движения в м/сек.
Определяем усилие, необходимое для передвижения тележ-
ки или крана с учетом сил инерции:
Р„ = Г + (1,2-4-1,3)PU н, (51)
где 1,2—1,3 — коэффициент, учитывающий дополнительные си-
лы инерции ротора двигателя, муфт л зубчатых
передач^
70
Необходимая пусковая мощность
Nn = —• вт. (52)
Необходимая мощность двигателя с учетом среднего коэф-
фициента перегрузки фг = 1,5:
N = -^ вт. (53)
Фс
Мощность двигателя при установившемся движении
Ndl = вт. (54)
Из сравнения мощностей N и Nge выбирается нужный
электродвигатель и определяется передаточное число меха-
низма
$__ п<’>в
где пдв —скорость вращения вала двигателя в об/мин;
' пк — скорость вращения ходового колеса в об/мин;
= 60об/мин. i = ^DK . (55)
~DK 60 • vd
здесь va — скорость движения тележки или крана в м!сек;
Z\—диаметр ходового колеса в м.
По передаточному числу выбирается вертикальный редук-
тор (см. прилож. 13).
Пример. Выбрать электродвигатель и редуктор механизма передвижения
крановой тележки, если масса груза с подвеской Q = 15 300 кг; масса те-
лежки G] = 6000 кг, скорость движения = 0,833 м/сек, ПВ = 25%, ток
трехфазиый, колеса стальные цилиндрические на роликовых подшипниках
качения, рельс плоский.
По таблицам выбираем DK — 350 мм, dt{ — 90 мм, f = 0,015,
р = 0,03 см = 0,0003 м, kg — 2,5, tn = 3 сек, фс = 1,5.
Сила сопротивления передвижению
-4- 2ц,
W = 10йй (Q + Gx) =
= 10 • 2,5 (15 300 4- 6 000) 0,015 ~ °’09 + 2 :.0’0003 = 3040 н.
0,35
Величина сил инерции
= 10 (Q + 61) . Уд _ 10 (15 300+ 6000) 0,833 =
11 S tn 9,81 3
Усилие для передвижения тележки при пуске двигателя
Pn = IF + (1,2-н 1,3)= 3040 + 1,2 6040 = 10300 н.
71
Необходимая пусковая мощность
А = = J0300 -0,833 = g 530 вт = g 53 квт^
П 0,9
Необходимая мощность с учетом перегрузки
N =. = -9’- = 6,35 кет.
Фг 1,5
Мощность двигателя при установившемся движении
аг Wv(l 3040-0,833 оопп qqo
— ------!--“ 2820 вт = 2,82 кет.
tj 0>9
По таблицам в прилож. 10 выбираем электродвигатель
МТ-12-6, у которого Пдв — 3,5 кет, пдд =910 об/мин, крат-
ность максимального момента гр = 2,5, масса 109 кг. Пусковая
мощность двигателя Nqb ip = 3,5-2,5 = 8,75 кет, что незначи-
тельно отличается от Nn — 9,53 кет.
Передаточное число механизма передвижения
-Dx/ifo _ 3,14 0,35 • 910 _ 20
п ~ 60 - vd ~ 60 0,833 ~
По таблицам в прилож. 16 выбираем редуктор ВК-400,
у которого при ПВ = 25% подводимая мощность равна 5,8 кет
при 1000 об[мин, исполнение Ш, i = 21.
Действительная скорость движения тележки
у, = 0,833 = 0,8 м]сек.
0 21
Крановые рельсы и ходовые колеса
Опорами и направляющими для ходовых колес крановых
тележек и мостовых крапов служат прокатные профили, ука-
занные в табл. 19.
Подкрановые квадраты, полосы и брусья делают из стали
Ст.5. Рельсы крановые и железнодорожные изготовляют из
бессемеровской или мартеновской стали НБ-62. Подкрановые
квадраты, полосы и брусья крепят к балкам заклепками или
сваркой.. Рельсы закрепляют на подкрановых балках болтами,
заклепками, лапками, винтовыми стяжками, скобами и элект-
росваркой (фиг. 28).
Размер подкрановых рельсов зависит от размеров ходовых
колес. ВНИИПТМАШ рекомендует указанные в табл. 20 раз-
меры подкрановых рельсов в зависимости от типоразмеров
крановых универсальных ходовых колес.
Ходовые колеса крановых тележек и мостов кранов изго-
товляют с цилиндрическими и коническими поверхностями
72
Таблица 19
а. Подкрановый квадрат (фиг. 27, а)
а в мм Масса 1 пог. м в кг Площадь поперечно- го сечения в см3 Примечание
40 12.5 ] о Нормальная длина
5 0 19,5 25 4 м, наибольшая
60 28,0 36 длина 6 л<
70 38,5 49
80 50.0 64
1 ио 78,5 100
б. Рельс полосовой (фиг. 27, б)
Размеры в лги Масса 3 пог. м в кг Примечание
b а 1 С
80 40 I 5 25 На ибол ьшая дли на 8 м.
90 50 1 5 35 нормальная длина 5 м
в. Подкрановый брус (фиг. 27, в)
Размеры в мм Масса 1 пог. м в кг Площадь поперечного сечения в см- Примечание
6 а Rt Г
100 85 15 6 65 82,5 Нормальная длина 5 jk,
120 85 14 6 79 100,0 наибольшая длина 8 м
140 85 13 6 92 117,0
г. Рельсы крановые специального профиля по ГОСТ 4121-62 (фиг. 27, г)
Тип рельса Размеры в мм Площадь поперечного сечения в см2 Масса I 1 пог. м । в кг
ь &г=Й hi 7? h | Rt S 1 r n |r.
КР70 70 76,5 120 32.5 24 400 23 38 28 6 6 1,5 67,30 52,70
КР80 80 87,0 130 35 26 400 26 44 32 8 6 1.5 81,13 63 52
КРЮ0 1 00 JOS 150 40 ,4 30 450 30 50 38 8 8 2 113,32 88.73
КР120 1 20 129 1 70 45 35 500 34 56 44 8 8 2 150,44 117,89
д. Железнодорожные рельсы узкой колеи по ГОСТ 6368-52 (фиг. 27, д)
Тип рель- са Размеры в мм Уклон П лощадь поперечного сечения в см2: Масса 1 пог. м в кг
А в| С D 1 а т L 1 b h
Р 1 5 9 1.5 76 37 7 119,5 13,4 47 100 6 51,75 1:2 19,16 15
Р18 90 80 40 10 20,9 5 46,5 100 7 5 1 1:1,8 23,07 18
Р24 107 92 5 1 10,5 126,3 6.3 45,5 90 7 61.5 1:4,5 32.70 26
е. Рельсы для железных дорог широкой колеи (фиг. 27, е)
Тип рель- са Р размеры в лги Площадь поперечного сечения в см3 Масса 1 пог. м в кг Примечание
Р 1" Н а ь С
Р38 25 33 135 59.5 56 1 1 0 160 12,5 49 , 1 38,416 ГОСТ 3542-47
Р43 25 33 140 62,5 56 1 10 160 12,5 57,0 44,653 ГОСТ 7173-54
Р50 27 35 1 52 68,5 66 150 140 13.5 65,8 51,514 ГОСТ 7174-54
73
Фиг. 27. Крановые рельсы:
подкрановый квадрат; б — рельс полосовой; в — подкрановый брус; а — рельс крановый специального профиля;
сы железнодорожные узкой колеи; е — рельсы железнодорожные широкой колеи
I
а
74
(с конусностью 1 : 10) катания. На тележках и кранах приме-
няют цилиндрические двухребордные колеса. На мостовых
кранах с числом ходовых колес не более четырех и больших
пролетах (свыше 18 ж) желательно устанавливать комические
одноребордные колеса. В этом случае при перекосах моста
конические ходовые колеса за счет изменения окружных ско-
ростей на поверхностях катания способствуют выравниванию
крана. Для уменьшения п устранения сил сопротивления от
трения реборд о рельсы находят применение безребордные
# е)
Фиг. 28. Крепление рельсов к подкрановым балкам:
а — болтовое с приваренными уголками; б — болтовое о вертикальными прокладками;
ь. г — заклепочное; d — болтовое с накладками (лапками); г — крючьями;
ж — скобами.
ходовые крановые колеса с направляющими роликами сбоку
рельсов.
Материалом ходовых колес для механизмов с ручным при-
водом и для мостовых электрических кранов при скорости
движения не выше 30 м/мин и давлении на одно колесо не
более 5 т служит серый чугун СЧ 15-32 и МСЧ-34-56
Таблица 20
Подкрановые рельсы
Параметры Колесо
КУ200 КУ30о| КУ40б[ КУЭОо) КУ60б| КУ700 КУ800| КУ900
Основной рельс с за- кругленной голов- кой Заменяющий рельс плоский, шириной PI5 Р18 Р24 Р38 Р38 КР70 Р43 КР70 Р43 КР80 Р50
в мм 40 50 60 80 80 90 90 100
7
с твердостью 'Поверхности катания (160—270)НВ. Для крано-
вых тележек ходовые колеса с DK 300 мм изготовляют из
стали 45, с DK = 300-е-500 мм - из сталей 50Г2 и 65Г,
с DK > 500 мм при нормальном режиме работы — из стали
55Л, с > 500 мм при тяжело груженных колесах применя-
ют сталь 23ХГСЛ. Ходовые колеса подвергаются термообра-
(200—^5° П0ЛУчения твеРДости рабочей поверхности катания
оЦилиндрические колеса передвигаются по рельсам с плос-
кой, конические по рельсам с закругленной головкой (фпт. 29).
Оси и валы ходовых колес кранов изготовляют из сталей
Ст. 5, 30 и 45.
По конструкции ходовые колеса выполняют со сменными
бандажами и цельнокатаными. Практика эксплуатации мосто-
вых кранов показала высокую стойкость цельнокатаных двух-
ребордных цилиндрических колес из стали 65Г.
Ходовые крановые колеса могут быть ведущими и ведомы-
ми. Передача крутящего момента па ведущие колеса осущест-
вляется по-разио1му. Если ведущее ходовое колесо посажено
на неподвижную ось на втулках скольжения или подшипниках
качения, то к его ободу крепится болтами зубчатый венец,
принимающий окружное усилие от шестерни (фиг. 30, с).
В том случае, когда ведущее колесо закреплено шпонкой
на вращающемся валу, применяют стандартные отъемные бук-
сы на подшипниках качения. Вал колеса при этом получает
вращение от приводного вала через муфту (фиг. 30, б). Ведо-
мые колеса соответственно устанавливают на неподвижных
и подвижных осях. Основные размеры крановых ходовых ко-
лес и отъемных букс даиы в прилож. 18—21.
Наиболее практична установка ходовых колес на буксах,
гак как в этом случае улучшаются условия работы колес,
упрощается их монтаж и демонтаж и облегчается контроль за
состоянием подшипников.
По правилам Госгортехнадзора [6], на тележках мостовых
электрических кранов устанавливают двухребордные ходовые
колеса., Одноребордные колеса применяют на монорельсовых
тележках. Практика эксплуатации мостовых кранов показыва-
ет. что ходовые колеса крановых тележек имеют незначитель-
ный износ реборд. В связи с этим применение однорсбордных
ходовых колес на крановых тележках нельзя не признать це-
лесообразным.
Переход с двухребордных цилиндрических колес на одно-
ребордные конические уменьшает затраты времени и расход
металла на их изготовление.
Центральное конструкторское бюро ВНИИПТМАШ
в 1959 г. для мостовых электрических кранов общего назна-
чения разработало ряд новых конструкций тележек с одиоре-
бордпыми коническими ходовыми колесами.
76
Фиг. 29. Профили обода катания колес.
Фиг. 30. Установка ведущих ходовых колес:
а — па неподвижной оси; б — на вращающемся валу в буксах.
77
Размеры ходовых колес электрических мостовых кранов
выбирают по таблицам в зависимости от нагрузки на одно,
колесо, скорости движения и режима работы. По размерам ко-
леса подбирается рельс. Выбранные размеры ходового колеса
и рельса в приближенном расчете проверяют на условнее
удельное давление
QmaxCifi, . J J н/м^
DKb0 I
где Qmax — максимальное усилие на одно колесо в н;
•С\ — коэффициент режима работы, равный 1,0 при лег-
ком, 1,2 при среднем, 1,4 при тяжелом и 1,6 при
весьма тяжелом режиме работы;
С2 — скоростной коэффициент, равный 1 + 0,02 Vq;
vd — скорость передвижения тележки или крана
в м}сек,\
DK — диаметр ходового колеса в л;
Ьа — рабочая ширина головки рельса в м;
к] — допускаемое удельное давление в н/м2, равное
(25 -е 30) - 105 н/м2 для чугунных и (50 -н 60) X
X Ю5 н/м2 для стальных колес.
Более точная проверка колеса и рельса производится на
напряжение местного смятия (фиг. 29) по формулам:
а) для стальных цилиндрических колес и плоского рельса
=600-1/ 2^ах-С1Сг<[ (57)
V
б) для чугунных цилиндрических колес и плоского рельса
а„ = 4001/(58)
в) для стальных конических колес и закругленного рельса
3 Г I а 1X2
«„ = 40001/ + -L) <[□]„; (59)
If X иср к /
г) для чугунных конических колес и закругленного рельса
3 Г / 9 1X2
а„ = 2500 1/ hr-+ « ) (60)
где — радиус закругления головки рельса в см;
[о]Сл — допускаемое напряжение смятия (табл. 21).
Пример. Выбрать и проверить ходовые колеса крановой тележки, если
Q = 15 300 кг, G1 = 6000 кг, ид = 50 м/мин = 0,833 м[сек., число колес k = 4,
материал колес—сталь 55Л с твердостью 300 НВ, /7В = 25%.
78
Давление на одно ходовое колесо
\ Q|||„ = JOW+CO = 10(153^6000) =
\ 4max k 4
I
। По таблице в прилож. 14 выбираем для тележки цилиндрическое колесо
с .плоским рельсом, DK = 350 мм, Ьр = 50 льи, г = 5 -ил, давление колеса 10 т.
’ Проверка на удельное давление при Cj = 1,2; Ьй = Ьр —2r —
=i 50— 10 = 40 мм = 0,04 m;
’ C2= 1 +0,02ud = 1 +0,02 0,833= 1,017;
-QaxJ^^^o. 1,2.1,017
1 n L 0,35 0,04
• 60
= 50 • 10s н/м2.
Проверка на смятие
/2Qmax • Cl C.
DK b0
л 5325 -1,2- 1,017
У 35-4
= 5760 бар,
что меньше [о]с.и = 7500 бар.
Таблица 21
Значения допускаемых напряжений смятия
Материал колес Твердость поверхности обода, НВ [О1с<к в кн/м*
Для цилинд- рических колес Для кони- ческих колес
Чугун СЧ 15-32 163—229 25-10* 6-105
Чугун МСЧ 35-56 217—272 35-10* 8-105
Сталь 45 217 45-10* 11-105
Сталь 45 с закалкой 300—400 75-10* 18-105
Сталь 55Л 217 45-10* 11-10®
Сталь 55Л с закалкой 300—400 75-10* 17-105
Сталь 50Г2 241 55-10* 13-Юв
Сталь 50Г2 с закалкой 300—400 85-10* 22-106
Сталь 65Г 269 6-10s 14-105
Сталь 65Г с закалкой 300—400 85-10* 22-105
Сталь ЗЗХГС-Л 202 5- 10s 12-105
Сталь ЗЗХГС-Л с закалкой 300—400 8- 10s 2-10в
Сталь марки IV 241 55-10* 13-10»
Для бандажей 300—400 85-10* 22-Ю8
ВОПРОСЫ И ЗАДАНИЯ
1. Конструктивные разновидности ручного привода и его практическое
применение.
2. П роизвести расчет механизма подъема с ручным приводом;
а) при отсутствии передач;
б) при наличии одной — двух передач.
Сравнить полученные результаты.
3. Выбрать электродвигатель и редуктор механизма подъема для раз*
личных режимов работы.
79
4. Выбрать электродвигатель и редуктор механизма передвижения для
различных режимов работы.
5. Назвать типы крановых рельсов и описать способы крепления рельсов;
к балкам.
6. Описать конструкцию и установку крановых ходовых колес. I
§ 3. ОСТАНОВЫ И ТОРМОЗА
Остановы ।
Приспособления, обеспечивающие удержание груза на за-
данной высоте при отсутствии тормоза, называются останова-
ми. Остановы дают возможность свободного вращения передач
грузоподъемного устройства в сторону подъема и препятствуют
обратному вращению. Опускание груза производится после
отключения останова, при этом остановы не могут изменять
скорости его опускания. По конструкции и принципу работы
остановы различают зубчатые, роликовые и фрикционные.
В отличие от остановов тормоза дают возможность свобод-
ного вращения валов в обоих направлениях, удерживают груз-
на высоте, регулируют скорости опускания груза и останавли-
вают механизмы подъема и передвижения.
Остановы зубчатые (храповики или храповые остановы)
служат для удержания груза. По конструкции зубчатые оста-
новы могут быть с внешним, внутренним и торцовым зацепле-
нием. Наиболее распространены в талях, лебедках и других
грузоподъемных механизмах храповики с внешним зацепле-
нием. Устройство и принцип действия храпового останова не-
сложны (фиг. 31). При вращении храповика на подъем груза
собачка проскальзывает по зубьям храпового колеса; при об-
ратном вращении собачка упирается в зуб храповика, останав-
ливает и удерживает груз. Храповое колесо рекомендуется
80
устанавливать на быстроходном валу механизма, где крутя-
щий момент наименьший. Собачка крепится на оси и прижи-
вается к зубьям храповика пластинчатой пружиной.
: При проектировании храпового останова необходимо опре-
делить размеры храпового зубчатого колеса, собачки и оси.
На зуб храповика действует окружное усилие
Р=™*- н
D
где Л4К—крутящий момент иа валу храповика в н • м;
D—наружный диаметр храпового колеса в м, определя-
емый по формуле D = zm;
здесь z — число зубьев храповика, равное 6—8, для храповых
механизмов домкратов, трещоток, талей; 12—20 для
самостоятельных храповых остановов и 16—25 и бо-
лее для тормозов с храповиком, например, на ле-
бедках;
т — модуль зацепления храпового колеса в м.
Под действием окружного усилия зуб изгибается. Величина
изгибающего момента
Ми = Ph. н-м,
где h — m— высота зуба в м.
Подставляя значение Р и h, получаем
л, 2МК 2МК
=——т —- н-м.
li zm г
(61)
(62)
Момент сопротивления изгибу в опасном сечении зуба
Обычно b = фт м\ х = 1,5 т м, где ф — коэффициент шири-
ны зуба (табл. 22).
Таблица 22
Значения величин ф, [Q] и [о]((
м Материал храпового колеса 4 М в н/м 1 1 [ст]й в н/лг
СЧ } "° Г0СТ |412-54 1,5—6 15-Ю9 3 107
Сталь ® ЛП } "° Г0СТ 977 58 ' 1,5—4 3-ю& 8-Ю7
Сталь Ст. 3 по ГОСТ 380-60 .... 1—2 35-Ю9 10-Ю7
|Сталь 45 по ГОСТ 1050-60 4-Ю5 12-Ю7
Заменив Ь и х, получим
Ч 2’25- = 0,3756m3 м3.
" 6 '
(63)
81
Напряжение изгиба
а = =
Величина модуля
2Л4--- = 5,34< н/м2
0,375<pm32 фт3г
(64)
При внутреннем
колеса равен
tn = 1,75 \/~ -^к- ж
Г 4 [<j]u
зацеплении модуль храпового зубчатого
(65)
(66)
, . , 3Z Мк
т = 1,11 / —— м,
V 4 («]«
где [о]и — допускаемое напряжение изгиба по табл. 22.
Ширина зуба проверяется на линейные удельные давления
q = -^<[<71 н!м, (67)
b
где [#]— допускаемое линейное удельное давление по табл. 22.
Размеры собачки проверяются на совместное действие изгиба
и сжатия, когда она упирается в верхнюю кромку зуба. Мате-
риал собачек — сталь. Ширина выступа собачки
ММ.
; h ! (2 4)
Напряжение изгиба в поперечном
й.Л?
= Р1 н-м', Wu = -у- лг‘; а,
сечении собачки
н/м\ (68)
М? к
где и hi— толщина и высота собачки в опасном сечении в м;
I— расстояние от основания выступа собачки до цент-
ра тяжести опасного сечения в м.
Напряжение сжатия
н^-
Суммарное напряжение в опасном сеченин
, GPl . Р Р / 6/
°C °U °CJW 9 Т , , , , ( ,
М? Mi Mi Mi
(69)
Желательно придавать собачке меньшую кривизну, так как
при ударах собачки о выступ зуба увеличивается изгибающий
момент и напряжения изгиба вызывают большее опасение, чем
напряжения сжатия.
82
Ось собачки рассчитывается на изгиб
откуда
Af„ PC г 1 / 1
с.. — - ---= [дП нм2,
“ Wu Ojd3 w
8Z Pc
/------- M,
/ o.ih
(71)
где [o]!t = 500 * 105 н/л;2 для сталей марок 35 и 45.
Размеры зубьев храповых колес и концов собачек (фиг. 31)
приведены в табл. 23.
Таблица 23
Размеры зубьев храповиков и концов собачек
т в мм 6 8 10 12 14 16 18 20 22 24 25 30
Y 1 । Храповик 2 От 6 до 30 включительно
1 18,85 25,13|31,42 37,70 43,98 50,27)56,55162,83 69,12 75,40 81,68 94,25
а h г 6 4,5 1,5 8 6 1,5 10 7,5 1,5 12 9 1,5 14 10,5 1,5 16 12 1,5 20 15 1,5 20 15 1,5 22 16,5 1,5 24 18 1,5 26 19,5 1,5 30 22 5 1,5
Собачка <21 6 4 2 8 4 2 10 6 2 12 6 2 14 8 2 14 8 2 16 12 2 18 12 2 20 14 2 20 14 2 22 14 2 25 16 2
Пример. Определить размеры храпового останова электрической лебедки
с ленточным тормозом, если Q = 1000 кг, De = 0,25 м, z = 30, [ст]и =«
= 800 • 105 н/м2, гр = 2, [q] = 300 10э н/м.
Крутящий момент на валу барабана, на котором закреплено храповое
колесо:
lOQDo 10 1000 0,25 , _
Мк = - — - = --------------5—- = 1250 н-м.
к 2 2
Модуль зацепления
гф[а]д l’75 V 30-2-800-10^
м = 11 мм.
Принимаем по табл. 23 модуль т = 12 мм.
Размеры храпового колеса
D — гт = 30 12 = 360 мм; h = т'== 12 мм;
b = фпг = 2 - 12 = 24 ми; а = 1,5m -- 1,5 12=18 мм.
Окружное усилие храпового колеса
2М^ __ 2 х 1250 =
D ~ 0,36
83
Проверка ширины зуба на удельное давление
q = — = = 290 10а < [q] = 300 103 н/м.
ч ь 0,024 т
Ширина выступа собачки
б2 = б ' (2 = 4) 24 3 27 мм.
Принимаем высоту собачки в опасном сечении hi = 0,8Xft ==
— 10 мм.
Толщина собачки Ф] = Ь — 4 = 24 — 4 = 20 мм.
Расстояние от центра тяжести сечения до основания собачки
принимаем I = 0,5 • hi = 0,5 *10=5 мм.
Проверка собачки на совместное действие .изгиба и сжатия
Р f 61 \ 6950 / 6-0,005 \
Mi X Al / 0.02 - 0,01 \ 0,01 J
= 1500 - 105 >[а]и = 500 Ю5 н/ж2.
Принимаем т = 18 мм, тогда D = 30 18 = 540 мм, Л = 16 мм, b =
= 36 мм, а -- 27 мм, bi = 32 jmae, b2 = 40 мм, /ц = 12 мм, I — 6 мм.
Повторно определяем окружное
перечном сечении собачки
D
усилие и суммарное 'напряжение в по-
2500
——~ = 4630 н;
0,54
4630
Р / 61
. —-
6-0,006 \
"‘“M1U1 1 0,032-0,012 \ 0,012 + J =
= 482 105 Н/М2<
Из примера видно, как отрицательно сказывается на напря-
жении собачки изгиб, в то время как напряжение сжатия равно
р 4630 . 2
=-----= —--------—— = 120 10 нм.
сж bfa 0,032-0,012
Диаметр оси собачки при плече С = 25 мм = 0,025 м:
— з
л / Рс
4630 • 0,025 п
-—-----------=0,03 м;
0,1 450 105
Г 1 Lula
Принимаем d = 30 мм.
К недостаткам храпового механизма необходимо отнести то,
что при остановке груза выступ собачки ударяет о торец зуба,
особенно в том случае, когда собачка находится у кромки зуба,
и храповое колесо поворачивается в обратном направлении поч-
ти на величину шага.
Существенным недостатком зубчатых остановов являются
щелчки собачки при соскакивании с головок зубьев колеса. Для
устранения этого недостатка применяют храповые остановы
с бесшумными собачками, один из вариантов которых показан
на фиг. 32. На ступицу 1 зубчатого диска надевается разрезной
84
хомут 2, сила прижатия которого к ступице регулируется пружи-
ной 3. Хомут соединен серьгой 6 с собачкой 5. При работе ме-
ханизма на подъем хомут увлекается силами трения в направле-
нии вращения диска и выводит собачку из зацепления с зубья-
ми до упора 4. При обратном вращении под действием сил тре-
ния хомут также поворачивается и вводит собачку в зацепление.
Роликовые остановы (фиг. 33), в отличие от зубчатых, спо-
собствуют бесшумной работе механизма, не вызывают ударной
нагрузки при остановке груза и ие вызывают изгиба вала. Роли-
ковый останов имеет неподвижно закрепленный корпус 1. Внуг-
Фиг. 32. Бесшумный зубчатый оста-
нов.
Фиг. 33. Роликовый останов.
ри корпуса на валу посажена втулка 2. В пазах втулки нахо-
дятся ролики 3, а в гнездах — отжимающие спиральные пружин-
ки 4. При вращении вала в направлении подъема груза (на
фиг. 33 против часовой стрелки) ролики, сжимающие пружинки,
находятся в уширенной части пазов и не препятствуют враще-
нию диска. При обратном вращении ролики под действием сил
трення и пружинок перемещаются в суженную часть пазов, за-
клиниваются и вызывают остановку и удержание груза на вы-
соте.
Упрощенный расчет роликового останова производится в
следующем порядке.
Определяется сила нормального давления на ролик
з г—
D _ ! 65 7 м (72)
Dfz у ? 1
где Мк — крутящий момент на валу в н-м;
D — внутренний диаметр корпуса в м;
f — коэффициент трения, равный 0,06;
z —количество роликов обычно равное 3—6.
85
Определяется длина ролика
1 N 2МК
I = — =-----*— м,
[?] Dfz[q]
где {?] = 450 • 103 н/м — допускаемое линейное удельное давле-
ние.
Диаметр ролика определяется из соотношения
l = и </=(0,5 — 1)/.
(73)
(74)
Угол между плоскостью втулки и касательной к точке ролика
с корпусом (угол заклинивания) определяется из формулы
2а + d
cos a —
D-d
где а — расстояние между осью вращения и плоскостью втулки,
которое можно вычислить по формуле:
о = -~ — d — (1-: 2) ММ,
где (1-5-2) мм— зазор между роликом и корпусом.
Обычно a = 4 -е 8°.
Тогда формула для определения угла заклинивания примет
вид
cos a -
2 Л--й-(1^2) +d
D—d
D—d
(75)
При этом между величиной угла а и коэффициентом трения f
должно быть неравенство
Производится проверка на смятие корпуса по контактной
ш.ощадке с роликом
°КОрп = 0,591/нМ2-
у I D • d
(76)
Проверяется на смятие ролик по месту контакта с втулкой
Ърол = 0,59 \/ [oJgm н]м\
у I d
(77)
где Е — модуль упругости материала рассчитываемой детали;
корпус и втулку изготовляют из стали 15Х или 20Х, ро-
лики— из стали 40Х с цементацией и закалкой;
[(тки = 20 - 108 н/м2 — допускаемые контактные напряжения.
86
Выбор роликового останова (табл. 24) производят по фор-
муле
*г 100 • IVioo „
Naan ==-----; - (78)
л • k v '
где jVaon — допускаемая для роликового останова мощность
в вт,
— передаваемая мощность прн 100 об!мин в вт;
п—-действительное число оборотов в минуту;
k — коэффициент запаса, равный 1,5—2.
Таблица 24
Основные размеры роликовых остановов
в вт D в мм d в мм i в ММ Z а°
184 102 12,7 19 4 7
368 127 15,9 23,8 4 7
736 152 19 29,4 4 7
1104 178 22,2 33 3 4 7
1472 203 25,4 38,1 4 7
Колодочные тормоза
Согласно правилам Госгортехнадзора [6], все грузоподъемные
и транспортные устройства должны иметь тормозные приспособ-
ления, Тормоза обеспечивают остановку механизмов, удержание
груза на высоте и регулирование скорости при опускании груза.
По назначению тормоза разделяются на стопорные для оста-
новки груза и спускные для ограничения скорости. По конструк-
ции они могут быть колодочные, ленточные, конические, пластин-
чатые и др. По принципу действия тормоза могут быть автомати-
ческие и управляемые, а по взаимному действию тормозных по-
верхностей — открытые и закрытые. Кроме того, по величине
хода якоря электромагнита они разделяются на длинноходовые
и короткоходовые.
Устанавливать тормоза следует на валах с меньшим крутя-
щим моментом.
Все тормозные устройства должны иметь тормозной момент,
удовлетворяющий условиям работы механизма, обеспечивать на-
дежную работу при плавном торможении и быстром размыка-
нии, обладать простотой конструкции и прочностью деталей при
минимальных размерах, допускать быструю, точную и устойчи-
вую регулировку и замену изношенных деталей, не допускать
»возникновения высоких температур между поверхностями тре-
ния в процессе торможения.
Простейшим является открытый одноколодочный тормоз
(см. фиг. 38). Тормозной шкив 4 этого тормоза жестко закреп-
лен на валу. К поверхности шкива внешней силой прижимается
колодка /, покрытая тормозным материалом 2 и прикрепленная
87
к рычагу 3. Под действием внешнего усилия между колодкой
и шкивом возникает сила трения.
Одноколодочный тормоз прост по устройству, имеет малые
габариты, Он применяется при небольших коутящих моментах
в грузоподъемных механизмах легкого режима работы и с руч-
ным приводом. Недостатком такого тормоза является односто-
роннее воздействие колодки на шкив, повышающее давление
на опоры вала, что может вызвать его изгиб, а также изменение
Фяг. 34. Двухколодочный тормоз с грузовым замыканием
и длинноходовым электромагнитом.
величины нажимного усилия в зависимости от направления вра-
щения шкива.
Б подъемно-транспортных машинах в основном применяются
закрытые двухколодочные тормоза (фиг. 34). На двух верти-
кальных рычагах 2 шарнирно закрепляются колодки 1. К гори-
зонтальному рычагу 8 крепятся тормозной груз 9, якорь электро-
магнита 7 и вертикальная тяга 6. К треугольнику 5 присоедине-
ны верхние концы правого рычага и тяги, а также регулировоч-
ная винтовая стяжка 3, соединенная с верхним концом левого
рычага. При выключенном электромагните груз действует на
горизонтальный рычаг, который через вертикальную тягу пово-
рачивает треугольник по часовой стрелке, и колодки прижима-
ются к шкиву 4. При включенном электромагните якорь подни-
мает рычаг с грузом и поворачивает треугольник против часовой
стрелки, заставляя колодки отходить от шкива.
На тормозах мостовых электрических кранов применяются
длинноходовые плунжерные электромагниты КМП и КМТ (П —
постоянного, Т — трехфазного тока), короткоходовые клапанные
электромагниты МП постоянного тока, а также однофазные
электромагниты МО-A и МО-Б.
S8
Техническая характеристика тормозных электромагнитов
приведена в таблицах прилож. 23—26.
Фиг. 35. Двухколодочиый тормоз с пружинным
замыканием и короткоходовым электромагнитом.
Грузовое замыкание тормозов имеет ряд существенных недо-
статков, из которых основными являются удары при замыкании;
и шарниров, при износе которых
значительное число рычагов
создается «мертвый» ход
рычажной системы, изменя-
ется сила нажатия колодок
на шкив, повышается время
торможения, затрудняется
регулировка тормоза.
В настоящее время рас-
пространено пружинное за-
мыкание тормозов (фиг.
35), в которых отмеченные
выше недостатки сведены до
минимума. Однако тормоза
с пружинным замыканием
колодок неприменимы при
диаметре шкива свыше
Фиг. 36. Двухколодочный тормоз
с электрогидравлическим толкателем.
300 мм, так как при этом сильно возрастает масса и размеры
электромагнита; короткоходовые электромагниты переменного
тока невозможно применять при частых включениях (свыше
300 в час), тормоза с клапанными электромагнитами требуют
частой и точной регулировки. Наиболее совершенными являются
тормоза с электрогидравлическим толкателем (фиг. 36) вместо
тормозного электромагнита.
89
Фиг. 37. Электрогидравлический толкатель.
90
Электрогидравлический толкатель приводятся в действие от
электродвигателя. Действие электрогидравлического толкателя
передается на колодки тормоза через систему рычагов. Электро-
гидравлический толкатель (фиг. 37) имеет цилиндр 3, внутри
которого находится поршень 6, закрепленный на двух направ-
2. Под поршнем помещен центро-
ляющих подвижных штоках
бежный насос, крыльчат-
ка 7 которого получает
вращательное движение
от электродвигателя 1 че-
рез промежуточный вал
4. При вращении крыль-
чатки давлением жидко-
сти поршень поднимает-
ся, возвратные пружины
5 сжимаются и направля-
ющие штоки, соединен-
ные вверху с рычажной
системой тормоза, отво-
дят колодки от шкива.
При выключенном элек-
тродвигателе давление
под поршнем падает и
под действием усилия
Фиг. 38. Схема к расчету одноколо-
дочного тормоза.
сжатой пружины и собственной силы тяжести поршень опуска-
ется, происходит замыкание тормоза.
Электрогидравлические толкатели способствуют плавному и
быстрому включению и выключению тормозов, создают постоян-
ную силу нажатия тормозных колодок на шкив, допускают зна-
чительное число включений (до 600 в час).
Установка электрогидравлических толкателей производится
только в вертикальном положении, отклонение от вертикали до-
пускается не более 10°.
Расчет одиоколодочного тормоза (фиг. 38) начинают с оп-
ределения необходимого тормозного момента
Мт = kTMK н-м,
(79)
где for — коэффициент запаса торможения, по нормам Госгор-
технадзора [6], равный 1,5 при легком, 1,75 при сред-
нем и 2,0 прл тяжелом режиме работы;
Мк — крутящий момент на валу, на котором закреплен тор-
мозной шкив в н • м.
По величине тормозного момента выбирается тормозной
шкив диаметром Dw и шириной Вш.
Расчетное окружное усилие на тормозном шкиве
Р =___Л н.
91
Основное условие торможения
н,
(80)
где F — сила трения в н;
N — сила нормального давления колодки на шкив в н;
f — коэффициент трения рабочих поверхностей по табл. 25.
Таблица 25
Коэффициенты трения трущихся поверхностей
и допускаемые удельные давления
Наименование материалов f [Д в н/м*
Для сухих поверхностей Для сма- занных поверх- ностей Для стопор- ных тормозов Для спускных тормозов
Чугун по чугуну 0,15 0,06 20 Л О5 15Д05
Сталь по чугуну 0,15 0,06 20 ДО5 15Д05
Лента тормозная асбестовая типа А по чугуну и стали 0,37 0,16 4 ДО5 2 ДО5
Лента тормозная асбестовая типа Б по чугуну и стали 0,35 0,16 4-106 2Д05
Лента вальцованная по чугу- ну и стали 0,42 0,12 4Д05 3-106
Дерево по чугуну 0,30 — 4 ДО5 ЗЛО5
Дерево по стали 0,25 —
Кожа по чугуну и стали . . 0,20 — — —
Бронза по чугуну 0,17 — — —
Бронза по стали 0,16 —. —- —
Бронза по бронзе 0,18 — — —
Сталь по текстолиту .... 0,15 — -— •—
Сталь по фибре 0,17 — — —
Сталь по стали 0,15—0,18 0,06 4-Ю5 2 ДО5
Чугун по стали 0,16—0,20 0,06 — —
Гетинакс ФК-24А по чугуну чнмх 0,28—0,32 — (10ц-12) -105 —
Подставив значения F и Р в формулу (80), получим
дгс > __ 2kTMK
1
н.
Необходимая величина силы нормального давления будет
равна
.. 2/г Мк
N = _________I____ н.
(81)
92
Для определения усилия Л на конце тормозного рычага со-
ставим сумму моментов относительно шарнира Л (фиг. 38):
2Л1. = 0, Kb — Na = 0- % =-О?-= 1!^?-н, (82)
где а н Ъ— размеры рычага в м задаются.
Рабочая часть колодки и шкива проверяется на удельное
давление-
q = «/м2.
Рк
Рабочая площадь колодки
F = _5.P«l В а .и2 (83)
к 360 ш "
где а—угол обхвата шкива колодкой, равный 60—120°.
Удельное давление
2kTMK -360 720 kr Мк г , . „
о =----------------= —-— -----------— < а] н/м2,
D fitD В а тс О2 В fa
ш1 иг ш iL,tuDiulu‘
(84)
где [<?] — допускаемое удельное давление в н/м2 по табл. 25.
Расчет двухколодочного грузового тормоза с длииноходовым
электромагнитом (фиг. 39). Определяется тормозной момент
Мт = krMK н-м.
По тормозному моменту, пользуясь таблицей в прилож. 27,
выбирают тормоз с соответствующими размерами шкива и ры-
чагов, электромагнит н груз определенной массы.
По таблице прилож. 24 выбирают тормозной электромагнит
КМТ или по таблице прилож. 26 электромагнит КМП с соот-
ветствующей характеристикой.
Затем проверяют соответствие массы тормозного груза при
данных размерах величине тормозного момента выбранного тор-
моза.
Из основного условия торможения определяется сила нор-
мального давления колодки на шкив
F>Ph; F = 2N[h’
DM
2^>2^ZL h; /85)
вызывается горизонтальной со-
Сила нормального давления
ставляющей силой Т, т. е. усилием замыкания:
2 Ма = 0; Tb = Na н-м; Т = — = -та
а ' > b DMfb
h.
93
Сила Т возникает от действия реакции силы Z вертикальной
тяги
УМ =0; Tc- Zd н-м- Z = Т-с- -~zae- н. (86)
e d DJbd v 7
Реакция силы Z, в свою очередь, является результатом воз-
действия масс тормозного груза Сг, рычага Gp и якоря электро-
магнита вя.
Фиг. 39. Схема к расчету двухколодочного тормоза
с грузовым замыканием 'и длинноходовым электро-
магнитом.
Необходимая масса тормозного груза с учетом потерь в ры-
чажной системе определяется из формулы
2 Ме — 0; Zd = 10 {GJ -f- G;J( + Gpe) н .и,
откуда
или
G, = [Zd J------------СЖ — GP(A кг
г I \ ю я /
Мга • с
DMfb^\O
G!t/(— Gpej кг,
где q — к. п. д. рычажной системы, равный 0,9—0,95.
Для тормоза механизма подъема должно быть
(6г)та5 >
Для тормоза механизма передвижения
(G;)Ta6 <
(87)
94
Производится проверка тормозного электромагнита. Подъ-
емная сила магнита Рм определяется из суммы моментов отно-
сительно шарнира С;
Р„К = Ю(GJ, + G„K + Gpe) н-м-
Р„ = — (G1 + Сяк + ЗД и. (88)
При этом должно быть
(^м)таб
Ход якоря электромагнита проверяется по формуле
h = 2,2s мм, (89)
я ackx
где k\ — коэффициент использования рабочего хода якоря, рав-
ный 0,8—0,85;
е — максимально допустимый отход колодки от шкива по
табл. 26.
Таблица 26
Установочные зазоры между колодкой и шкивом
Диаметр тормозного шкива в мм . . . 100 200 300 400 500 600 700 800
Установочный зазор в м 0,6 0,8 1 1,25 1,25 1,5 1,5 1,75
Наибольшие зазоры для колодочных тормозов
Диаметр шкива в мм 100 120— 150 200— 250 300— 350 400— 500 600—1000
Зазор в мм 0.8 1,3 1,6 2 2,5
Для нормальной работы тормоза необходимо
(^я)Гдб ^Я‘
Расчет заканчивается проверкой удельного давления между
колодкой и шкивом
/V = Л1_ н- р = в Л Л12;
DMf к 360 ш
ч = у-= • < I” н/л2' (90)
где а — рекомендуемый угол обхвата шкнва колодкой, равный
60—90°;
'[(?] — допускаемое удельное давление между шкивом и ко-
лодкой по табл. 25 в н/м2.
95
Пример. Произвести расчет двухколодочного грузового тормоза с длин-
ноходовым электромагнитом механизма подъема груза, если выбранный
электродвигатель имеет = 30 кет, nlia = 574 об/мин, ПВ = 25%, ток пе-
ременный, а = 60°, лепта тормозная вальцованная, f = 0,42.
1. Крутящий момент
30
Мк = 9750= 97о0 =510 н-м.
Тормозной момент при ПВ = 25% и kT = 1.75;
Мт = krMK ~ 1,75 510 = 893 н-м.
2. По таблицам прилож. 27 выбираем тормоз We 8, у которого
Ош х Вш = 500 X 120 мм. тормозной момент Л1т = 950 н м. электромаг-
нит КМТ-104, масса груза 12 кг, масса тормоза с электромагнитом 182 кг.
3. Из таблиц прилож. 24 выписываем характеристику электромагнита
КМТ-104: тяговое усилие якоря магнита Рм = 700 н, масса якоря = 20 кг,
максимальный ход якоря Ня — 50 мм.
Размеры рычагов тормоза: а = 210 мм, b = 420 мм, С = 85 мм, d =
= 145 мм, К = d + Pj = 295 мм, I = d + Р\ + s = 435 мм, е — 0,31 11 220 мм.
4. Проверка массы тормозного груза при значениях величин: f = 0,42,
Т) — 0,95, Gp — 8 кг,
1 / Мтас
1__/ 950 0,21 - 0,085
0,435 V 0,5 0,42 0,42 - 0,95 • 10 ~
20 . 0,295 — 8 0,22) = 29 кг.
Получили <?г > (Сг)твб, поэтому необходимо или увеЛИЧЙ1ТЪ массу груза
до 29 кг, или переставить его на большее расстояние. Принимаем массу гру-
за Gs = 29 кг.
5. Проверка электромагнита на тяговое усилие и ход якоря
Р.» = “7" (G?1 + G*K + М = 7Г77Г <29 ‘ °>435 + 20 °-295 + 8 ‘ °-22) =
Л U,2У0
= 690 н < (PM)Tafh
Ь -К „ 420-295
Ля = 2’2'£ а ск, = 2’2'2 210 • 85 • 0,8 = 4б’5 ММ < (^Таб'
Выбранный электромагнит удовлетворяет условиям работы.
6. Проверка колодок и шкива на удельное давление
360Л4г 360 950____
r^BJa = 3,14 0,52 • 0,12 • 0,42 • 60
= 1,44- 105 < [?j = з . jo» н/м2.
Расчет двухколодочного пружинного тормоза с длинноходо-
вым электромагнитом (фиг. 40). Тормозной момент определяет-
ся по формуле
Мт = н-м.
По тормозному моменту выбирается тормоз, пользуясь
табл. 27 (фиг. 41).
96
Фиг. 40. Схемы к расчету двухколодочного тормоза с пружин-
ным замыканием и длин но ходовым электромагнитом;
а — при замкнутом тормозе; б — при открытом тормозе.
Фиг. 41. Основные размеры двухколодочно-
го тормоза с пружинным замыканием и
длин неходовым электромагнитом.
4 В. Л. Моргачев
97
Таблица 27
Техническая характеристика и габаритные размеры
колодочных пружинных тормозов (фиг. 41)
Диаметр шкива в мм Ширина колодки в л:м Тормозной момент в н-м Усилие на колодку н н Удельное давление в н/м* Масса тормоза без электромаг- нита в кг
400. 500 180 200 1100 2000 7950 12000 1,4 1,5 Ю5 105 132 162,5
Размеры и мм
Л, L н h а b с
650 760 700 810 778 922 320 400 245 320 585 720 80 80 195 230
Сила нормального давления
Усилие замык-ания пружины с учетом потерь в рычажиоЙ
системе
2^ = 0; Na = Pwbn-M и н. (91)
Сила реакции иа вертикальной тяге
2Я = 0; Pnpc = ZdH-M и 2 = ----(92)
Подъемная сила электромагнита при растормаживании
%Мс=0; РМК= Zd + (Gpe + G„K) Ю н-м;
Рм^-^г [Zd + (G„e + G„K) 10] =
Л
-Я\пг- + (й’е + <5'Л)101н-
X L Duifbb J
(93)
Ход якоря электромагнита
h,t = 2,2е ——— мм.
а ‘ ску
По значениям величин Рм и h* выбирается электромагнит
КМП или КМТ.
Удельное давление между колодкой и шкивом
360Л4т
[£?I Н/М2.
98
Пример. Расчет двухколодочного пружинного тормоза с длинноходовым
электромагнитом для механизма подъема, если N дв = 45 кет, п^0 =
= 577 об/мин, ПВ = 40%, = 2, f = 0,35 (для ленты тормозной асбестовой)»
а = 90°, ток переменный.
1. Крутящий и тормозной моменты:
Мк = 9750 = 9750 = 760 н м;
к 577
Мт = kTMK = 2 - 760 = 1520 нм.
2. Из-табл. 27 выписываем характеристику тормоза: Мг= 2000 н-м,
X Вш = 500 X 200 мм, а = 320 мм, rfi = 230 мм, b = 720 мм, с = 80 мм,
принимаем d = 200 мм, k = 500 мм, е = 0,5К = 250 мм.
3. Сила нормального давления
Мт
'DMf
2000
N -
„ „„ = 11 400 н.
0,5-0,35
4. Усилие пружины
Р —
г пр —
Na
Ь
11 400-0,32
-— --------- = 4800 н.
0,72
5. Усилие на вертикальной тяге
с 4800 0,08
Z = ~-Г— =------—г—= 1760 «.
Uj 01 Zu
6. Тяговое усилие электромагнита с принятыми массами якоря йя =
30 кг и рычага Gp = 10 кг:
Рм = -^[Zd + (Gpe + СЯК) 10] =
Л
= -уу [1760 0,2 4- (10 0,25 + 30 0,5) 10] = 1050 н.
7. Ход якоря электромагнита
ЬК 720 . 500
Ья = 2 2е ----- = 2 2 1,5 -----------—---= 55 мм.
я ’ a-cKi 320 80 - 0,85
8. По таблице в прилож. 24 выбираем электромагнит КМТ-6, у которого
Рм = 1150 н, Ия = 60 мм, Ся = 33 кг.
9. Проверка колодок и шкива на удельное давление
360Л4г 360-2000
а —----------= -------------------------=
х&Ма 3,14. 0,52-0,2. 0,35-90
= 1,45 - Ю5< ]?] = 2 Ю5 н/м2.
Расчет двухколодочиого пружинного тормоза с клапанным
электромагнитом МО (фиг. 42). Тормозной момент определяет-
ся по формуле
Мт = Кт^к н'м*
По таблицам в прилож. 28 в соответствии с тормозным мо-
ментом выбирается тормоз.
4* 99
Сила нормального давления определяется из условия тормо-
жения
Усилие на штоке тормоза, необходимое для растормажи-
вания:
Л/л Мта
%ма = о- Na = Ptubfl н-м и Рш = н. (94)
ft?]
Усилие рабочей пружины для электромагнита МО-Б опре-
деляется с учетом момента от собственного веса якоря
2= 0; Рпрс = Ршс 4- Рвс Ц- Мя н-м
и
^р = Л« + Р.+ -^м- <95)
где Рв — усилие 20—80 н вспомогательной пружины, необходи-
мое для отвода от шкива колодки, закрепленной на
холостом (неприводном) рычаге.
Фиг. 42. Схема к расчету двухколодочного пружин-
ного тормоза с клапанным электромагнитом МО.
Жесткость рабочей ЖР и вспомогательной Же пружин опре-
деляется по формулам
Жр = н/мм и Жв = — н/мм,
Др Дв
где Др = Ав— осадка пружин в мм\
* А 6
Ар = = г ’ v
100
Момент электромагнита при растормаживании
I ч = 0; Мя + Мм + Рвс -Ркрс = 0
и
= РПрС — Рвс — Мя н-м. (96)
При этом (Мм)таб > Лк.
Угол поворота якоря электромагнита
3° = 2^4--!^-’ (97)
где Ки — коэффициент износа и деформации обкладок и рычаж-
ной системы, равный 1,5—2,0.
При этом должно быть
(3°иб>3°.
Проверка колодок и шкива на удельное давление произво-
дится по формуле
36ОЛ4Т
<7 = —-г—- < [<?] «/«’.
Проверка двухколодочного пружинного тормоза с клапан-
ным электромагнитом МО-Б на работоспособность
(98)
Пример. Произвести расчет двухколодочного пружинного тормоза с
клапанным электромагнитом МО-Б для механизма передвижения тележки,
если N,jg = 3,5 кет, Пдв = 910 об/мин, ПВ = 40%, kT — 2, f = 0,42.
1. Крутящий и тормозной моменты:
= 9750—7^-= 9750—= 37,5 н-м;
: tlde 910
Мт = ктМк = 2 37,5 — 75 н-м.
2. По таблицам в прилож. 28 выбираем тормоз ТКТ-200, у которого
Мт = 160 н-м, при ПВ = 40%, е = 0,5 -г- 0,8 мм, момент якоря электромаг-
нита Мл = 3,6 н • м, h% = 2,5 4- 3,8 мм, электромагнит МО-200Б с ₽ = 5,5° и
=40 н м. Размеры тормоза:
= 170 jh.m, b = 340 мм, с = 40 леи.
3. Сила нормального давления
Мг
N = ---
4. Усилие на штоке
а — 70°, X BUi = 200 X 90 леи, а —
160
0,2 • 0,42
1900 -0,17
0,34 0,95
1000 н.
5. Усилие рабочей пружины
Л'Г 3 6
Рпр = + Рв + -Г- = 1000 + 40 + -т-тт- = ИЗО н.
v U кН «
101
6. Жесткость пружин при осадке
Ь 340
До — Дв — £--= 0,6 —--— 1.2 мм-
р в а ’170
Рпр ИЗО Ра 40
Жр = у— = у ~ ~ 942 н/мм; Жв = — уу = 33,3 н/мм.
7. Момент электромагнита при растормаживании
Мм = Рпрс — Мя — Рвс = ИЗО 0,04 — 3,6 — 40 0,04 = 40 н-м = (M,v)maS.
8. Угол поворота якоря при е = 0,6 мм
р — 2кие
180
= 2 1,5 • 0,6
340
170 40
180
3,14
= 5,15°.
9. Проверка на удельное давление
™МТ________________________________360 160______
’= = 3,14 - 0,2*. 0,09-0,42-70
= 1,73 - 105 < [</] = 2 105 н/м2.
10. Проверка тормоза на работоспособность
5 5
МмРрад&1 ~ 40
о/, □
We 1900 • 0,008
-----------гт—' = 1»?
т) 0,9
X 0,8 = 3 н-м;
We
Расчет двухколодочиого пружинного тормоза с клапанным
электромагнитом МП (фиг. 43).
Фиг. 43. Схема к расчету двухко-
лодочного пружинного тормоза с
клапанным электромагнитом МП.
Тормозной момент опреде-
ляется по формуле
Мт ~ k?Mк н-м.
По таблицам в прилож. 29
в соответствии с тормозным
моментом выбирается тормоз
и электромагнит.
Сила нормального давле-
ния
Мт
N = ——
Dull
н.
102
Усилие на штоке тормоза
д/д Мта
= Ма=РшЬЪн-м и Рш =н. (99)
&7) ВШ[Й7]
Усилие на штоке должно быть меньше или равно тяговому
усилию электромагнита
р < р
Усилие замыкающей пружины
Р„=Рш + Р.н. (100)
где Рв —усилие вспомогательной пружины, равное 20—80 н.
Жесткость пружин
Ь ^пр
А = А = s — < Л мм; Ж„ =------ н/мм;
tip
Жв = н/мм.
Проверка тормоза на равенство работ
PJiA>^H-M, (101)
где k\ — коэффициент использования хода
0,8—0,85.
Проверка на удельное давление
360 Мт
q = — —о < [д] н/м2.
^DMBJa
якоря, равный
Пример. Расчет двухколодочного пружинного тормоза с электромагни-
том МП по данным предыдущего примера.
1. Тормозной момент.
М-р = krMh = 2-37,5 — 75 н м.
2. По таблицам в прилож. 29 выбираем тормоз ТКП-200, у которого
Мг = 130 н м, Ош х Вш — 200 X 90 мм, е = 0,5 + 0,8 мм, b = 300 мм,
а = h— 20 = 150 мм, hM = 2,5 4- 3,6 мм, электромагнит МП-200, Ня = 3 зси,
Рм = 800 н.
3. Сила нормального давления
Dtuf 0,2-0,42
и.
4. Усилие на штоке
тормоза
Уа 1550-0,15
-- = - —----= 815 н Рм,
bri 0,3-0,95
5. Усилие пружины
Рпр = + = 8154- 35 = 850 н.
103
6. Характеристика пружин
b 130
4р-4« = * а = °-8 iso
р
г пр
850
6 - 530 н/мм;
= 1,6 л(,м < Ня — 3 мм;
Р„ 35
Mti = --- = — -22 н/мм.
Дъ 1,о
7. Проверка на равенство работ
Ns
Pm^i = 800 • 0,003 0,85 = 2,04 н-м > —
1550 • 0,0008
0,9
1,38 н-м.
8. Проверка па удельное давление колодок и шкива
360 • Мт 360 130
’ = = 3,14. 0,2». 0,09. 0,42-70
= 1,41- 105< [<7] = 2 Ю5 н/м*.
Расчет двухколодочного пружинного тормоза с электрогид-
равлическим толкателем (фиг. 44). Тормозной момент опреде-
ляется по формуле
М-р = &тЛ4к н- Ju,
По таблицам в прилож. 30 выбирается тормоз.
Фиг. 44. Схема к расчету двухколодочиого тор-
моза пружинного с электрогидравлическим
толкателем.
Сила нормального давления определяется по формуле
мт
ад
104
Необходимое усилие пружины при замкнутом тормозе без
учета массы штока с поршнем определяется последовательно
через усилия в рычажной системе с учетом к. п. д.:
Na
= Na^Tb н-м; Т^~±н;
л n j n ?с Na-с М-т^с /1ПО
уМв — 0; Тс = P„ndri н-м; PnD =-------= ------= —— н. (102)
0 пр 1 ' пр d-n bd-q DJbdri v ’
При этом должно быть
Рпр пр)таб-
Усилие толкателя при размыкании тормоза
Рпа • d Мта - с „ „
УМ. = 0; ртК = РпЛ н-м- рт = -^— = —I--------------н. (103)
‘ 1 - пр к DJbKr, '
Ход штока толкателя
= 2,2г —< (hM)ma6 мм.
а - cki
Удельное давление между колодками и шкивом
36ОМГ
[q 1 н/м2.
Пример. По данным примера расчета двухколодочного пружинного тор-
моза с длинно ходовым электромагнитом произвести расчет двух колодочного
пружинного тормоза с электрогидравлическим толкателем.
I. Тормозной момент Мт = 1520 н-м.
2. По таблицам в прилож. 30 выбираем тормоз ТКТГ-400, у которо-
го Мт= 1500 н-м, а — 250 мм, Ь — 525 мм, с = 22 мм, d = 75 мм, k =
= 04-0,5 •£ = 210 леи, 8=1,5 мм; толкатель Т-75, усилие толкателя Р т=
= 750 н, Иш — 80 мм, масса 178 кг, k\ = 0,85, т] = 0,95; Dm X Вш = 400 X
X 185 мм, Вк= 180 мм, а — 70°, f = 0,35, количество пружин 2, усилие каж-
дой пружины Рпр = 840 4- 1000 н.
3. Сила нормального давления
4. Усилие пружин
Na - с 10 700 • 25 - 2,2
Рпп =--------= —--------------4- - 1570 н.
р bd-ri 52,5-7,5-0,95
Согласно таблице прилож. 30, на тормозе устанавливаются две пружины
с усилием каждой 840—1000 н. Таким образом,
Рпр< 2 (Рnp)ma6i
5. Усилие толкателя
Na с 10 700 25 2,2
Рт= ЬКъ = 52,5.21 -0,95 560 W<(PrW‘
105
6. Ход штока толкателя
hM = 2,2s — = 2,2 - 1,5
а-сК!
525 210
250 • 22,0 • 0,85
— 78 ММ < (^ш)таб-
7. Удельное давление
360Мт
4 = —г—;
360' 1500___________
43,14 0,4= . 0,18 0,35 • 70
= 2,5 105 < [Q] = 4 105 н/л3.
Ленточные тормоза
В ленточных тормозах шкивы обхватываются стальной лен-
той. К внутренней поверхности ленты приклепывается, крепится
Фиг. 45. Схема к расчету простого
ленточного тормоза.
винтами или приклеивается
фрикционный материал.
Концы ленты прикрепляют-
ся к рычажной системе уп-
равления тормозом. Управ-
ление тормозом педальное,
рукояточное и электромаг-
нитное. В ленточных тормо-
зах угол обхвата шкива лен-
той достигает величины
360°.
Ленточные тормоза на-
ходят применение на глав-
ных подъемах литейных мо-
стовых электрических кра-
нов, на стреловых поворот-
ных кранах, в строительно-
монтажных лебедках и т. д.
Они просты по конструкции,
имеют небольшие габаритные размеры, способны развивать зна-
чительные тормозные моменты с увеличением угла обхвата.
Недостатками ленточных тормозов являются изгибающие
усилия-на вал шкива из-за натяжения концов ленты, неравно-
мерное распределение удельных давлений и износа тормозного
материала, зависимость величины тормозного момента от на-
правления вращения шкива в простом ленточном тормозе, боль-
шое усилие замыкания в реверсивном тормозе.
Простой ленточный тормоз (фнг. 45). Тормозной момент про-
стого ленточного тормоза определяется по формуле
Aly = k-pM к н - м,
По тормозному моменту подбирается диаметр шкива из
табл. 28.
106
Таблица 28
Примерные величины диаметров шкивов в зависимости от тормозных моментов
Расчетный тормозной момент в н•м . . . 700—860 1400—1600 1800—2100 2850—4000 6400—8000
Диаметр шкива в мм Ширина ленты в мм 200—250 70 300—350 90 400—450 90 500—700 ИО 800—1000 150
Расчетное окружное усилие
2МГ
Р =--------------------------- н.
Из теории гибкой ленты по Эйлеру:
натяжение в набегающем конце
Т = tef<t н;
натяжение в сбегающем конце
4 Т
t =----н\
е^
окружное усилие на шкиве P = T^t н.
Выразим ветви окружное усилие через натяжение набегающей Р = Т т .= (Ю4)
откуда Т----—— н. (105) — 1
Выразим окружное усилие через натяжение сбегающей ветви
P = tef* — t = t(efa— 1) я, (106)
откуда
t= ' и, (107)
е/а — 1
где е — основание натуральных логарифмов; •
f — коэффициент трения по табл. 25;
ос — угол обхвата шкива пентой в рад.
Приведенные выше формулы применимы для ленточных
тормозов со сплошной фрикционной обкладкой внутри.
Для удобства расчетов численные значения величин efa да-
ны в табл. 29.
107
Таблица 29
Значения величин
Угол обхвата х Коэффициент трения f
в град в рад 0,1 0,15 0.2 0,25 0,3 0,35 0,4
90 1,57 1,18 1,27 1,37 1 48 1,62 1,75 I,9
135 2,36 1,28 1,42 I,6 1,8 2,2 2,3 2,5 >
180 3,14 1,37 1,6 1,87 2,2 2,6 3 3,5
225 3,93 1,48 1,8 2,25 2,7 3,25 4 4,75
270 4,71 1,6 2,05 2,57 3,25 4Д 5,2 6,6
315 5,5 1,73 2,2 3 3,8 5,2 6,58 8,3
360 6,28 1,87 2,57 3,5 4,8 6,6 8,2 —
Для определения тягового усилия электромагнита возьмем
сумму моментов сил относительно шарнира А (фиг. 45):
при замкнутом тормозе
t • а = (Gpb 4- GKc G2d) 10 н-м;
при открытом тормозе
Рмс = (Gpb + Gjtc + Gzd) 10 н- м,
следовательно,
t а == Рмс н-м,
а необходимое тяговое усилие с учетом к. п. д. рычажной систе-
мы г| = 0,9 -5- 0,95 будет равно
Рм = 4г « (108)
Ход якоря электромагнита
1,2еа-^- мм, (109)
где а — угол обхвата в рад;
—--- передаточное число рычага, равное 3—6 (иногда до
, Ю—15);
1,2 — коэффициент, учитывающий износ тормозной обклад-
ки и шкива;
е — радиальный зазор между лентой и шкивом берется
в зависимости от диаметра шкива:
Диаметр шкива в мм 100—200
Зазор в мм........... 0,8
300 400—500 600—800
1,0 1,25—1,5 1,5
108
Длина плеча с для обеспечения нормального отхода ленты
от шкива
с = kJi.. мм, ( ПО)
1 я га '
где ki — коэффициент использования хода якоря, равный
0,8—0,85.
По найденным значениям Рм и йя выбирается электромагнит.
Необходимая масса тормозного груза
Gpb Gяс
сг = -12------------ кг. (111)
В случае реверсирования механизма масса груза равна
Та—Gpb - влс
(? = ------------ кг.
г d
При вращении тормозного шкива против часовой стрелки на-
тяжения на концах ленты поменяются местами и величина необ-
ходимого тормозного груза возрастает. По этой причине исполь-
зование простого ленточного тормоза на реверсивных механиз-
мах не рекомендуется и часто его называют тормозом одно-
сторонним.
Ширина ленты Вл (фиг. 46) определяется из расчета на ус-
ловное удельное давление
q = <[g] н/м2 и В =—м, (112)
4 вшвл L7J л D,u [Q]
где Т — натяжение набегающего конца ленты в н;
йш— диаметр тормозного шкива в At;
J09
(g] — допускаемое удельное давление между обкладкой
ленты и поверхностью тормозного шкива в н/м2 по
табл. 30;
Вл — ширина ленты в м по табл. 28.
Таблица 30
Допускаемые удельные давления для ленточных тормозов
Материал трущихся поверхностей И в н{мъ
стопорный тормоз ^спускной тормоз
Стальная лента по чугунному или стальному шкиву 15 • 106 10 . 105
Лента тормозная асбестовая по стальному или чугунному шкиву (4ч-6) - I05 (24-3) 106
Вальцованный, прессованный и формованный фрикционный материал по металлическому шкиву (44-8) 105 (34-4) 105
Дерево по чугунному шкиву (44-6) . 105 (3 4-4) 105
Толщина ленты б определяется по формулам
^^7вГ-ДУ?<[0|"н/А!,;
8 =--------------- м,
(НЗ)
где i — количество заклепок в одном ряду;
—диаметр заклепки, равный 4—10 мм\
(о]р — допускаемое напряжение на растяжение ® н/м2\
[о]р = 700 • 105 н/м2 для ленты из стали Ст. 3;
[<дЬ — 800 105 н/м2 для ленты из стали Ст. 4, 20 и 25;
[о]р = 1000- 105 н/м2 для ленты из стали Ст. 5, 30 и 35 (нор-
мализованных) ;
(о]р == 1200 -105 н/м* для ленты из сталей Ст. 6, 40 и 45 (нор-
мализованных).
Рекомендуется принимать следующие размеры тормозных
лент:
Ширина ленты В в мм .
Толщина ленты 6 в мм
25—30 40—50 50—80 100 140—200
3 3—4 4—6 4—7 6—8—10
Число заклепок для крепления ленты определяется
мулам:
односрезных заклепок на набегающем конце
по фор-
*4 [чс ’
(Н4)
110
односрезных заклепок на сбегающем конце 4/ (115)
Не
двухсрезных заклепок на набегающем конце 2Т z = ; [т]с (116)
двухсрезных заклепок на сбегающем конце 2/ z — г irdf [т]с (117)
Заклепочное соединение проверяется на смятие по форму-
лам для набегающего конца
°еж = ~~~ ' [° L-и н /л£2; (1 18)
zdib
для сбегающего конца
асм = --— СН™ (ПЭ)
z^s
[т]с и [Фкн в формулах (114) — (119) —допускаемое напряже-
ние среза и смятия, принимаемые:
[т]с = 500- 105 н/.я2 для стали Ст. 2;
[т]с = 600 • 105 н/.я2 » » Ст. 3;
[oU =1100- Ю5 н/м2 » » Ст. 2;
[Фкн = 1300 105 н/м2 » » Ст. 3.
Диаметр пальца для крепления набегающего конца ленты
рассчитывается на срез по двум сечениям (фиг. 48):
Т 9Т
< Н dn = 1/ м. (120)
nd2 V * Нс
Диаметр винта регулировочной стяжки определяется по
формуле
ор =---< [а]р н/м2; de=]/~~M, (121)
Г PIP
4
где de — внутренний диаметр винтовой стяжки в М;
[о]Р — допускаемое напряжение для сталей марок Ст. 3 и
Ст. 4, равное (700 -г- 800) 105 н/м2.
Ш
Проверка тормоза на работоспособность
_ МтгСС ef* д_ 1
р J1
м
DJw efSL — 1
Пример. Рассчитать простой ленточный тормоз
ки с храповым остановом, если грузоподъемность
рабана De = 250 Л4Л<, ПВ = 15%, kT = 1,5.
В этом случае применение простого ленточного
1. Крутящий
(122)
для электрической лебед-
Q = 1000 кг, диаметр ба-
тормоза допустимо.
По табл. 28
Расчетное
2.
и тормозной моменты;
D* 0,25
Мк = Q —- 10 = 1000- ’ 10= 1250 н-м;
9 2
i'd , -
Мт = = 1.5 • 1250 = 1875 н-м, Иf
принимаем диаметр шкива Dul = 450 леи. О-
окружное усилие
2МГ
Р =------ =
Рщ.
3.
= 5,2:
Натяжение на концах ленты
Pef*
Т =-------;
е/а-1
Р
t =------
е/а-1
2 • 1875 „ .
-^- = 8330 H.tlWrf |
при а = 270° = 4,7 рад, f = 0,35, efa
= ^00 k;
5,2 — 1
8330."
5,2—1 =
4. Принимаем a = 80 мм, d — 7,5a = 7,5 • 80 = 600 мм, b = 0,5rf = 300 мм,
C = 500 мм, T| = 0,95, e = 1,25 мм.
Тяговое усилие и ход якоря электромагнита
1980 • 80
«1 “ 500 -0,95
с 500
й = 1,2«а— = 1,2- 1,25- 4,7 — - 44 0 мм,
я , а 80
По таблице в прилож. 24 выбираем электромагнит KMT-ЗА, у которого
Рм = 350 н, Ь.я = 50 мм, масса якоря бя = 11,2 кг.
Длина плеча крепления электромагнита
а 80
с = klhfl = °-8 ‘ 50 ~ j 25 ."4~7 = 530 ММ'
принимаем с = 500 мм, Gp = 4 кг.
5. Масса тормозного груза
‘~ia — Gpb — Gslc 1980 8—4 - 30-11,2 - 50
6. Ширина ленты, покрытой асбесто^ыь[ тормозным материалом:
2Т- 2 X 10 300^ ‘ ’ "
Вл =---------= ----------------= 0.091 м = 91 мм;
л DM[ql 0,45.-5-106
112
1
принимаем ширину ленты = 90 мм, i = 3, d\ = 6 мм и определяем толщи-
ну ленты
Г
-----------1° 300 _j--------= о 0017 м = 1,7 мм;
(0,09 — 2 • 0,006) 800 105
S =------—-------
(ВА ^1) [а]р
А О'*
принимаем о = q мм
3. Количество двухсрезных заклепок для крепления ленты
2Т______________2 10 300 __ з'
Z= Ttt/2 [7]с = 3J4 -0,0062.600 105 ~ ’
Принимаем по Три заклепки на каждом конце ленты.
8. Проверка заклепочного соединения на смятие
Т 10 300
= "t а~оп~л о ало " = 1910 ' 105 к^2 > ^ги-
zdjS 3 • 0,006 0,003
асм —
Так как действительное напряжение больше допускаемого, увеличиваем
число заклепок до i = 5, тогда
Т
10 300
5 X 0,006 • 0,003
= 1140 - Ю5< kU нМ2.
9. Диаметр пальца для крепления ленты
2 • 10 300
3,14 - 600 10й
= 0,0105 м - 10,5 мм;
принимаем dn = 15 мм.
10. Диаметр винтовой стяжки из стали Ст.З
4 10 300
3,14 700 • 10s
= 0,0137 м — 13,7 мм.
Принимаем резьбу MI6 по ГОСТ 9150-59.
11. Проверка тормоза на работоспособность
РМНЯ = 350 • 0,05 = 17,5 н-м;
2Мтеа 2 1875 • 0,00125 - 4,7
^(^а-1)^ = 0,45(5,2- 1)0,95-0,85
В суммирующем ленточном тормозе (фиг. 47) концы лент
крепятся на одинаковом расстоянии от оси качания горизон-
тального рычага, вследствие чего сохраняется равенство момен-
тов сил относительно шарнира А при изменении направления
вращения тормозного шкива, и величина груза остается посто-
янной. Такой ленточный тормоз называется иначе двусторонним
или реверсивным.
Ввиду того, что при растормаживании оба конца способст-
вуют отходу ленты, ход якоря электромагнита у суммирующего
ленточного тормоза при равных условиях будет вдвое меньше
хода якоря электромагнита простого ленточного тормоза.
ИЗ
Тормозной момент суммирующего ленточного тормоза
Мт = kTMK н-м.
Согласно тормозному моменту, выбирается диаметр шкива
по табл. 28.
Расчетное окружное усилие
2МТ
р = —-
Dm
Натяжение концов ленты определяется по формулам Эйлера:
1
р
t =
Фиг. 47. Схема к расчету суммирую-
щего ленточного тормоза.
(Т 4-1) а = Рмсц Р.
н.
н.
Тяговое усилие электро-
магнита:
при заьгкнутом тормозе
ЕЛ1а =0; Та 4- ta = (Т 4-
+ /) а (Gpb + Ояс 4-
4- 10 н • м\
при открытом тормозе
SM а = 0; Рж • C7j = (Gpb 4-
4- GfiC 4- Ged) 10 н • м\
= (Г 4.0 g
А
н.
(123)
Ход якоря электромагнита
= 0,6еа — мм.
а
По значениям величин Рм и выбирается электромагнит.
Длина плеча крепления электромагнита
, . 2с
с = kjix--------------------------мм.
е • а
Масса тормозного груза
вг =
а — Gpb—GHc кг.
(124)
(125)
(126)
Ширина ленты
О 2Т
Вл =---------м.
Рш [?1
(127)
114
Толщина ленты
6 = ——---------м.
{Вл-1<к)\с\р
Расчет и проверка крепления ленты производится так же,
как и для простого ленточного тормоза.
Проверка тормоза на работоспособность по формуле
PMh, >------н м, (129)
где а — угол обхвата шкива лентой в рад.
Пример. Рассчитать суммирующий ленточный тормоз механизма подъема
крановой тележки, если Nge = 45 кет, пвв = 577 об1мин, ПВ = 25%, Кт = 1,75,
ток переменный.
1. Крутящий и тормозной моменты:
V, 45
Мк = 9750 - — = 9750 —- = 760 н
Vae 577 /
Мт = kTMK = 1,75 • 760 = 1330 н-м.
По табл. 28 принимаем диаметр тормозного шкива DM = 300 мм.
2. Расчетное окружное усилие
2МГ 2 • 1330
Р =------= ——-------- 8870 я.
0,3
3. Усилия натяжения на концах ленты при а « 270° = 4,7 рад, f = ОД
ef® = 5,2:
Pefa 8870-5,2 Р 8870
" = 11 000 н; I =.-----= т-------= 2150 я.
</а—1 5,2—1
5,2— 1
(128)
электромагнита при а = 40 мм, d = 700 мм, Ъ
1,5 мм‘.
__ (т + *)а (11 000 + 2150)0,04
Рм~ ст; ~ 0,55-0,9
4. Усилие и ход якоря
350 мм, с = 550 мм, е —
= 1090 я;
с 550
Ня — 0,6$а — = 0,6- 1,5 • 4,7 ——— = 58 мм,
я ' а * 40
По таблицам прилож. 24 выбираем электромагнит КМТ-6, у которого
Рм = 1150 я, = 60 мм, G# = 33 кг.
Длина плеча крепления электромагнита
2« Л 2 40
с — kihx ---=0,8-60 —;-------— = 544 мм.
е • а 1,5 • 4,7
Принимаем длину плеча с = 550 жж,
5. Масса тормозного груза
массу рычага Gp = 6 кг.
' (T+Qa
10
Gpb G яс
1 Г (11 000 + 2150) 40 „
— -------------------— 6 350— 33 • 550 =46,2 кг.
00 10
115
6. Размеры ленты с вальцованным тормозным материалом
2Г 2 • 11 000
В- =-------- - —~—-—— = 0,092 м = 92 мм;
DM [Q1 0,3 - 8 • Ю5
Г 11000
S =------------- =--------------------——- -- 0,0022 м = 2,2 мм;
(Вл — idx) [о]р (0,09 — 2 - 0,006)700 10s
принимаем ширину ленты В4 = 90 мм, толщину 6 = 3 мм.
7. Количество двухсрезных заклепок
2Т 2 I1000 _
Z~ irrff [х] = 3,14 . 0,0062 500 • Ю5 -
Принимаем г = 5.
8. Проверка крепления на смятие при d\ = 6 лии = 0,006 л:
Ссм —
Т 11 000
zdr§ ~ 5 0,006 -0,003
[a]rJi == 1300 IO®
= 1220 . 105
9. Диаметр пальца
2 11 000
3,14 - 500 10s
= 0,012 м.
Принимаем d-n. = 20 мм.
10. Диаметр винтовой стяжки
4Т Г 4 • 11 000
я Г М4 • 700 • 105
= 0,014 м = 14 мм.
Принимаем по ГОСТ 9150-59 резьбу М18.
11. Проверка тормоза на работоспособность
РМНЯ = 1150 0,06 = 69 н • м;
Мтеа ef* + l 1330-0,0015-4,7 5,2ц- 1
~ 0,3-0,8-0,9 ’ 5,2—1
На механизмах мостовых электрических кранов большой
грузоподъемности применяются двухленточные тормоза КХЛ и
ТЛП с пружинным замыкателем 5 (фиг. 48) и короткоходовым
электромагнитом 4 постоянного тока. В таких тормозах стальная
лента 2 разделена на две одинаковые части и покрыта внутри
тормозным материалом. Концы лент крепятся к рычажной систе-
ме 3 управления тормозом и к шарниру 1,
Достоинства двухленточных тормозов:
а) значительная величина развиваемых тормозных момен-
тов (до 8850 н лс);
б) большой угол обхвата шкива лентой (до 320°);
в) небольшой ход якоря электромагнита 4, способствующий
быстрому срабатыванию тормоза.
Конструктивные и эксплуатационные недостатки двухленточ-
ных короткоходовых тормозов:
116
а) неодинаковое натяжение лент ввиду практической невоз-
можности точного изготовления и регулирования их;
б) установка равного зазора между шкивом и лентами тре-
бует передвижки всего тормоза;
в) при замене рабочей пружины 5 нужна разборка тормоза;
Фиг. 48. Двухленточный тормоз.
г) недолговечность работы шарнирных соединений и ры-
чагов;
д) интенсивный износ тормозной обкладки у концов ленты;
е) неполное использова-
ние усилия замыкающей
пружины и тягового усилия
электромагнита;
ж) необходимость очень
точного монтажа тормоза.
Тормоза с осевым нажа-
тием. Конусные (коничес-
кие) тормоза с осевым на-
жатием на тормозные по-
верхности (фиг. 49) приме-
няют в грузоподъемных уст-
ройствах с ручным и меха-
ническим приводами, напри-
мер в талях и тельферах.
Конусная муфта 2 тормоза
посажена на шпонке и вра-
щается вместе с валом 1.
Фиг. 49. Схема к расчету конусного
тормоза с осевым нажатием.
Тормозной конический шкив
3 сидит на валу 1 свободно
и не вращается. При вклю-
ченном электромагните 6 рычаг 5 растягивает пружину 4 и отво-
дит конус 3 от муфты 2. При выключении электромагнита пру-
117
жина сжимается и прижимает конус к поверхности муфты. Для
увеличения коэффициента трения рабочая поверхность конуса
покрыта фрикционным материалом.
Тормозной момент конического тормоза определяется по
формуле
= krMK н м.
Конструктивно принимают размеры наружного £)н и внутрен-
него De диаметров, при этом DH = (1,2 4- 1,6)Р0.
Средний диаметр конуса
D{p = м.
Окружное расчетное усилие
^ср
Из условия торможения определяется сила нормального дав-
ления
2/Иг , 2МТ
F^PH- F = Nfn; — я; У-—— н,
1 Dcp Dcpf
где F—сила трения на поверхности конуса в н;
f — коэффициент трения на рабочих поверхностях прини-
мается по табл. 25;
№ — суммарная сила нормального давления в н.
Условием отсутствия заклинивания конических поверхностей
, должно быть соотношение
tg₽> l,2f,
где (3 = 15 ч- 25° — угол конусов.
Требуемое осевое усилие К
К 2МТ sin 9
—— = sin р; К =2V. sin'3=- —---- я. (130)
У Dcpf
Усилие пружины, необходимое для замыкания тормоза:
„ „ Кд- 2MTasinP
SMa = 0; Ка = Р„рЬ н-м; Р„р = -!^.^-----т----!-
b Dcpfb
Тяговое усилие электромагнита при -q = 0,9 -ь 0,95:
Рпр 2Afrasinp
Рм = — Г —--------
Ход конуса для растормаживания hK:
— == sin 3; hK = —-— мм; d = (1 -:- 2) мм.
hK sinp
h. (131)
(132)
118
Ход якоря электромагнита
кя = hK~- мм. (133>
а
По величинам Рм и Ля выбирается электромагнит.
Коническая поверхность испытывает удельное давление
q= н/м\
где fey]— допускаемое удельное давление принимается по
табл. 31.
Таблица 31
Допускаемые удельные давления для тормозов с осевым нажатием в н,!м‘г
Материал трущихся поверхностей Без смазки С густой смазкой В масляной ванне
Металл по металлу Тканые и плетеные фрикционные ма- териалы по металлу Прессованные, вальцованные и фор- мованные фрикционные материалы по металлу (2 13) - 105 (2 4-3) - 105 (44-6) • 105 (34-4) • 105 (4-~6) • 10в (64-10) • 10в (64-8)-Ю5 (64-8). 106 (104-12)-106
Из расчета на удельное давление определяется необходимая
ширина конуса
В = =_____*____. == -р м. (134>
лгРсррД тг£ср (?] sin р nDep [<?] sin £ Dcpf xDcpf[q]
Уточняются размеры диаметров конуса:
DH = Dcp\ В sin р;
D9 = В)ср — В sin р.
Пластинчатые (дисковые) тормоза. В пластинчатом тормозе
(фиг. 50) диски 3 посажены на шпонки или шлицы вала 4 и вра-
щаются вместе с ними. Диски 2 на скользящих шпонках ил»
шлицах соединяются с неподвижным корпусом (коробкой) 1.
Под действием осевого усилия между дисками создаются силы
трения. Момент от сил трения должен быть больше крутящего
момента; при этом условии наступает торможение.
Необходимый тормозной момент дискового тормоза опреде-
ляется по формуле
Мт = ктМк н • м.
Внутренний диаметр De назначается конструктивно в зависи-
мости от диаметра вала d(f. Ориентировочно его можно прини
мать
Од = (1д ф" h(U At,
где hw— высота шпонки или шлица в At.
119
Наружный диаметр дисков DH = (1,2-ь2,5) De м. При этом
должно быть
Dn— Dg 0,12 м.
Средний диаметр дисков
Диски изготовляют из стали и бронзы, чередуя их между со-
бой при сборке тормоза. Толщина дисков 5—6 мм. Металличе-
ские диски должны работать обязательно в масляной ванне.
При сухом трении бронзовые диски заменяют стальными с об-
Фиг. 50. Пластинчатый (дисковый) тормоз с осевым
нажатием.
лицовкой из фрикционного материала на рабочих поверхностях.
Толщина фрикционной облицовки 3—5 мм.
Расчетное окружное усилие
2МГ
Р = Т
н.
DcP
Необходимое осевое усилие определяется из условия тормо-
жения
„ р 2МТ
Kfz>P н', ---- н,
fz Dcpfz
где f — коэффициент трения принимается по табл, 25;
z— число пар трущихся поверхностей.
Осевое усилие может передаваться на диски при помощи
пружин и грузов, работающих с тормозными электромагнитами,
пневматических и гидравлических устройств и т. д.
Сила нажатия пружины
2МТ
РпР = К Н. (136)
Dcpfz
Тяговое усилие электромагнита с учетом к. п. д. = 0,9-=-0,95:
_ Рпр 2МТ
‘ М —
*1
(135)
н.
---------rt.
Dcpfz
(137)
120
Ход якоря электромагнита выбирается с таким расчетом,
чтобы осевой зазор между металлическими дисками при размы-
кании был не менее 0,2 мм, а между дисками с фрикционной об-
кладкой не менее 0,75 мм.
Проверка дисков на удельное давление производится по фор-
муле
(138)
4
4
Центробежные тормоза
Центробежные тормоза, называемые также скоростными,
служат только для регулирования скорости опускания груза, не
допуская ее возрастания выше заданной величины. Центробеж-
Фиг. 51. Центробежный тормоз с замыкающими грузами.
ные тормоза устанавливают на быстроходном валу привода.
Кроме центробежного регулятора скорости, механизм подъема
должен иметь обычный стопорный тормоз. Наибольшее приме-
нение нашли центробежные тормоза с замыкающими грузами и
пластинчатые (дисковые) скоростные тормоза.
На быстроходном валу механизма подъема центробежного
тормоза с замыкающими грузами (фиг. 51) на шпонке крепится
шкив 7 стопорного тормоза. К ободу шкива на осях 4 свободно
посажены грузы 9 с тормозными вкладышами 3. Вторыми сво-
ими концами грузы шарнирно соединены тягами 5 с регулировоч-
121
ной втулкой 6. Втулка 6 спиральной пластинчатой пружиной 7
связана со ступицей 8 тормозного шкива /. Все детали центро-
бежного тормоза закрыты неподвижным кожухом 2.
Усилия пластинчатой спиральной пружины рассчитаны так.
что при нормальной скорости вращения вала центробежный
тормоз не включается. При достижении валом определенного
числа оборотов грузы 9 под действием центробежных сил начи-
нают расходиться, поворачиваясь вокруг осей 4, через тяги 5,
преодолевая усилие пружин 7, и прижимают тормозные вклады-
ши 3 к внутренней поверхности неподвижного кожуха 2. При
этом происходит притормаживание ведущего вала.
К недостаткам центробежного тормоза с грузовым замыка-
нием относятся одностороннее действие, невозможность останов-
ки механизма, быстрый износ вкладышей вследствие малой по-
верхности трения, трудность регулировки на определенную ско-
рость, понижение скорости опускания груза с уменьшением его
силы тяжести.
При проектировании центробежного тормоза важно, чтобы
центр тяжести всех замыкающих грузов совпадал с центром
вала и чтобы центр тяжести каждого груза был по возможности
удален иа максимальное расстояние от оси вала и оси пальца.
Масса одного замыкающего груза определяется из расчета ок-
ружного усилия
где Мк — крутящий момент на тормозном валу, в rt-At;
DT — диаметр поверхности трения в м.
Сила трения от тормозных вкладышей
F = iNf «, (139)
где i — число вкладышей (соответствует количеству грузов);
ДО — сила нормального давления в н;
/—коэффициент трения принимается по табл. 25.
Сила нормального давления определяется из основного ус-
ловия торможения
F>Ph; N (140>
' Dt Drif
Окружная скорость центра тяжести груза
где г — расстояние от центра тяжести груза до оси вала в лг;
п — скорость вращения вала в об/мин.
122
Центробежная сила от одного груза
даЗ _ 106я2г2п2 тгЗ 3,14» ~ 1 .
gr302 Н ПрИ g 981 100 ’
(141)
/ и \ 2
р 6 = 1О(?Л Hrri «•
4 300 )
Сумма моментов относительно оси пальца
Рцбс = Na + Nfb + Kk = N(a + fb) + &k н м.
Подставляем в формулу значения РЦб и У:
10Gr f-M2 с = (а + fb) + Kkn- м.
\ 300 / Drif
Определяем массу одного груза
/ 300 \2 1 2МК
\ п / Юг DTif
— +f----- + Х----
\ С с )' с
(142)
Рекомендуемые соотношения размеров плечей
а b / 1 1\ k 3
—. = __ =------:--и = —
с с \ 8 12 ) с 2 '
Общее усилие пружины
г/< = 150-н 250 н.
Усилие пружины на один груз
„ 150 4- 250
Д =---------- Н
где i — число грузов, равное 2—3,
Число оборотов вала определяется из формулы (142):
л = 3001/—+ f +/(А1 об/лшм. (143)
У Gr 10 [ Drif \ с с } с J '
Для плавного спуска нужно 150 об/мин.
На валу 1 центробежного пластинчатого тормоза (фиг. 52)
на шпонке посажен диск 2. На ступице этого диска на шлицах
закреплен диск 4. Между вращающимися дисками 2 и 4 распо-
ложен неподвижный храповой диск 3. Пружина 6, упираясь в
торцы втулки 7 и ступицы диска 2, стремится раздвинуть диски
2 и 4, удаляя их от диска 3. При вращении вала 1 грузы 5 под
действием центробежных сил расходятся и через рычаги сбли-
жают вращающиеся диски, между которыми зажимается не-
подвижный диск.5. При сжатых дисках на рабочих поверхно-
стях возникают силы трения. Момент сил трения препятствует
повышению скорости вращения вала. При установившейся ско-
рости крутящий момент на валу должен быть равен моменту
сил трения иа поверхностях дисков.
123
Окружное усилие на вращающихся дисках центробежного
пластинчатого тормоза определяется по формуле
p = = (144)
Dcp
где Dcp == —- —-средний диаметр дисков в м.
Размеры дисков назначаются по тем же зависимостям, что
и в расчете пластинчатого (дискового) тормоза с осевым нажа-
тием.
Фиг. 52. Центробежный пластинчатый тормоз.
Сила нормального давления из основного условия торможе-
ния
F > Р н; F = zNf н- zNf > -4М* -и; =------Мк н, (145)
где z — число пар трущихся поверхностей дисков;
f — коэффициент трения принимается по табл. 25;
АГ —сила нормального давления между поверхностями
дисков в н.
Центробежная сила одного груза определяется по фор-
муле (141):
Рцб = 106/' ( —— У н.
Ц \ 300 )
Осевое усилие на ступице диска 2 от действия центробежных
сил всех грузов с учетом силы сжатия пружины
ЕМ„ = 0; P„6ia = Pocb + РпрЬ н-мн Рос = !№- — Р„р =
ь
= lOGr? fy2—)2 — — Рпрн, (146)
\ 300 / ь
где РОс — осевое усилие в н;
i — число грузов, равное 2-—6;
124
a = 2b — плечи рычага в м;
г— расстояние от центра тяжести груза до оси враще-
ния вала при зажатых дисках в м.
Тормозной момент, создаваемый на поверхностях дисков:
Л4г = Р„г/^. н.м.
(147)
При установившейся скорости Мк = Мт и Д' Рос, т. е.
-----------------= 10GH (—V — - Р„р н,
(D« + Z)e) 2/ и требуемое усилие пружины ( 300 J ь
== lOGrt f— Р 300 V- Н48) / ь (DH + D.) zf
Грузоупорные тормоза
Грузоупорные тормоза, называемые также автоматическими
спускными тормозами, работают только под действием силы тя-
жести груза и применяются в механизмах с ручным и машин-
ным приводом (в талях, лебедках и кранах). На принципе дей-
ствия грузоупорных тормозов построены безопасные рукоятки.
По принципу действия грузоупорные тормоза делятся на две
группы:
1) тормоза с размыкающимися рабочими поверхностями при
постоянной массе опускаемого груза, или тормоза с переменным
осевым давлением;
2) тормоза с неразмыкающимися рабочими поверхностями
при постоянной массе опускаемого груза, или тормоза с постоян-
ным осевым давлением.
К тормозам с размыкающимися рабочими поверхностями от-
носятся дисковые грузоупорные тормоза (фиг. 53). На валу 1
этого тормоза шпонкой закреплен диск 2. Диск 4 изготовлен
за одно целое с шестерней, сидящей на резьбе вала и передаю-
щей вращение через зубчатые передачи на грузовой барабан.
Между дисками 2 и 4 свободно посажено на вал храповое ко-
лесо 3 зубчатого останова. При вращении вала 1 на подъем
шестерня, оставаясь неподвижной под действием усилия, пере-
даваемого на нее. от груза на барабане, перемещается по резьбе
влево и замыкает диски 2 и 4 с храповым колесом 3. После за-
мыкания рабочих поверхностей начинает вращаться диск 4 с
шестерней и храповым колесом 3, которое проскальзывает сво-
ими зубьями по собачке. Происходит подъем груза. При оста-
новке механизма груз удерживается храповым остановом в виду
того, что рабочие поверхности тормоза остаются замкнутыми,
125
так как момент от груза на барабане не меняет своего направле-
ния при подъеме, удержании и опускании.
При вращении вала /'на спуск шестерня вместе с диском 4
начинает перемещаться по резьбе вправо и размыкать поверхно-
сти трения. Храповое колесо 3 при опускании груза не вращает-
ся, удерживаемое на месте собачкой. При отходе диска 4 вправо
момент сил трения на тормозе уменьшается и шестерня начи-
нает вращаться. Происходит свободное опускание груза пол
действием собственной силы тяжести.
При свободном опускании груза угловая скорость диска 4
меньше угловой скорости вала /. Если скорости диска 4 и ва-
Фиг. 53. Дисковый грузоупорный тормоз
с размыкающимися поверхностями.
ла / уравняются, происходит непрерывное скольжение между
трущимися поверхностями дисков и храпового колеса, и груз
опускается с постоянной скоростью. При этом момент на шестер-
не Мш, передаваемый на нее моментом от груза на барабане,,
уравновешивается моментом сил трення в резьбе Мр и моментом
сил трения на рабочих поверхностях тормоза Л4Т, т. е.
Мш = Мр + н м.
Момент от груза на барабане дискового грузоупорного тор-
моза определяется по формуле
Ms = z6S - z& 1Q(Q + G) . Г)б = 1Q(Q + G) Qg =
2 2 zK 2
71,1
= 10(Q + C) M (149)
где z6— число ветвей каната, сходящих с барабана;
— максимальная сила натяжения одной несущей вет-
ви каната в н\
Об — диаметр барабана в м;
126
<2 - - грузопод'Ьемность механизма в кг;
G — масса подвески в кг;
т]п — к. п. д. полиспаста по табл. 3;
гк — число несущих ветвей каната;
kn = — — кратность полиспаста.
Момент на шестерне
= 10(Q н . Л (150)
i iknrin 2
где i — передаточное число от барабана до вала;
т] — к. п. д. участка механизма от барабана до «ала.
Момент на резьбе вала
Л1Р = Кtg (а 4-р) м -лг, (151)
где К—осевое усилие, возникающее на тормозе, в я;
dc—средний диаметр резьбы в лг;
а — угол подъема трапецеидальной резьбы, равный
15—20°;
р — приведенный угол трения резьбы при работе в масля-
ной ванне, равный 2—3° и определяемый по формуле
где р —угол профиля трапецеидальной резьбы, равный 30°;
f— коэффициент трения между витками резьбы вала и
гайки в масляной ванне, причем f = 0,07 для стального
вала и бронзовой гайки; f = 0,06 для стального вала и
чугунной гайки.
Для готовой конструкции угол подъема резьбы
, at
а = arc tg---,
iTt/c
где а — число заходов резьбы на валу, равное 2—4;
t — шаг резьбы в м.
Тормозной момент на трущихся поверхностях
= я-At, (152)
где К — осевое усилие в н;
f — коэффициент трения между рабочими поверхностя-
ми (табл. 25);
г —число пар трущихся поверхностей, равное 1—2;
DCp — средний диаметр дисков в At, определяемый по фор-
муле
Х-/ £ п -» -- ,
2
127
Внутренний диаметр дисков De назначается конструктивно
в зависимости от наружного диаметра резьбы вала dH, причем
dH.
Наружный диаметр дисков принимается равным
= (1,2 ч-1,6) Д
Зазор между трущимися поверхностями должен быть 0,5—
0,8 мм.
Запас торможения должен быть
kT~-^- 1,2 ч-1,3.
Мш
При несоблюдении данного условия необходимо повторить
расчет, изменив значения Dcp и а.
Зависимость между моментами тормоза
мш == МР+ Мт = Д’ A-tg(« +р) + Kfz^~ н
Из этой формулы определяется осевое усилие К
запаса торможения:
= krM^
-TLlg(a+p) “1ч 1 cp
Удельное давление между рабочими поверхностями
тормоза
в’
м. (153)
с учетом
н.
(154)
дисков
4К
(155)
ЩМщ.
Я =
к
4 4
где [^ — допускаемое удельное давление в н/м2 (по табл. 31).
Проверка резьбы винта и гайки на смятие производится по
формуле
°см = —- -—< №« н/м-, (156)
где dH и de — наружный и внутренний диаметры резьбы в лс;
п—число витков резьбы в гайке;
[ст]с.н— допускаемое напряжение на смятие в н/м2, при-
чем [о]СЛ( = 80 • 105 н/м2 для стального винта и
бронзовой гайки, [о]СЛ( = 50 * 105 н/м2 для сталь-
ного винта и чугунной гайки.
Тормоза с неразмыкающимися рабочими поверхностями при-
меняют в грузоподъемных механизмах с несамотормозящей чер-
вячной передачей (ручных талях и лебедках). По конструктив-
128
ному оформлению поверхностей трения эти тормоза можно раз-
делить на конические грузоупорные и дисковые грузоупорные.
Конический грузоупорный тормоз с червячной передачей
(фиг. 54) изготовлен как одно целое с червяком и конусом 3, по-
верхность которого входит в коническую расточку чашки 1,
имеющей снаружи зубчатый венец храпового останова. На сво-
ей оси закреплена собачка 2. При вращении рукоятки на подъ-
ем груза под действием осевого усилия червяка на конических
поверхностях возникает момент сил трения, в результате чего
вместе с конусом вращается чашка, зубья которой скользят по
собачке. Поднятый груз удерживается на высоте с помощью хра-
повика.
При опускании груза чашка 1 неподвижна, а коиус 3 вращает-
ся; при этом необходимо преодолеть момент сил трения в тор-
мозе, что приводит к износу рабочих конических поверхностей.
При расчете конического грузоупорного тормоза должны
быть известны параметры подъемного механизма и червячной
пары.
Момент от груза на барабане определяется по формуле (149):
kn'^n 2
Момент, передаваемый от груза на червяк, можно определить
по формуле
М,, = Зк H.Mi (157)
К/ ^ч^пЛп, 2
где i4 и —передаточное число и к. п. д. червячной пары.
5 В. Л. Моргачев 12Э
Окружное усилие червячного колеса, являющееся
усилием червяка:
к = 2М* = 1QCQ + G) Об н
Рк ^nr,n DK
осевым
(158)
где DK — диаметр начальной окружности червячного колеса в л.
Сила нормального давления на поверхностях трения
StП р
Угол конусности р определяется из условия отсутствия закли-
нивания конусов:
tg3>l,2f,
где f - коэффициент трения по табл. 25.
Тормозной момент на конических поверхностях
= = н м, (159)
2 sin р 2
где Dcp — средний диаметр конуса в м.
Внутренний диаметр конуса зависит от наружного диамет-
ра червяка dH, причем
D >d .
Наружный диаметр конуса принимается в пределах
D, = (1,2-н 1,6) D,.
Средний диаметр конуса
Г) __ Рн + Рд
ср 2
Запас торможения должен быть
kT = 1,2-5- 1,3.
мч
Если kT > 1,2-5-1,3, необходимо повторить расчет, изменив
размеры диаметров конуса.
Ширина конической поверхности определяется из расчета на
допускаемое удельное давление
q = < Ы н/м2‘ В = —---------------------- at. (160)
^DcpB кРср I?) ~Dcp (fl sin р
Уточненные размеры диаметров конуса:
DH = Dcp + B sin Р; De = Dcp — В sin p.
Под действием осевого усилия тормоз постоянно замкнут,
и тормозной момент больше момента от груза, передаваемого на
червяк. Поэтому при опускании груза на рукоятке или тяговом
130
колесе должен действовать момент, преодолевающий разность
моментов на тормозе и червяке:
Мр = Мт - Мч -- kTM,t — Мг - (kr — 1) Мп н- м. (161)
С целью уменьшения момента на рукоятке, а следовательно,
и усилия рабочего коэффициент запаса торможения принимает-
ся в пределах К = 1,2ч-1,3.
В дисковом грузоупорном тормозе (фиг. 55) торможение про-
исходит за счет сил трения, возникающих на рабочих поверхно-
стях диаков от действия осевого усилия червяка. На валу 1 чер-
вяка шпонкой крепятся диски 2 и 4, между которыми располо-
жен храповой диск 3 зубчатого останова. Диск 3 свободно поса-
жен на ступицу диска 4. При подъеме груза все диски враща-
ются и собачка проскальзывает по зубьям храповика. Поднятый
груз удерживается храповым остановом. При опускании груза
храповой диск 3 остается неподвижным и диски 2 и 4 скользят
по поверхностям диска 3.
Для расчета дискового грузоупорного тормоза необходимо
иметь размеры подъемного устройства и червячной передачи.
Момент на барабане, от действия силы тяжести груза опре-
деляют по формуле
Грузовой момент на червяке
дл в 10 (Q + б) т],( D6
kn'f]n,i4 2
5
131
Осевое усилие в тормозе
2мг - = |0’ н
DK * , -^пгУ1 Рк
Момент сил трения на поверхностях дисков
Мт = zftfbr-~ Н-М,
где z — число пар трущихся поверхностей.
Внутренний диаметр дисков назначается конструктивно, на-
ружный принимается равным Ьн = (1,2-ъ 1,6) ~Ьв и средний
Г) __ Рн 4- Рв
Ср 2 . -
Запас торможения kT — 1,2-5-1,3.
Проверка дисков на удельное давление
<1 = ~, ,х <1^ н/м~-
Момент на рукоятке или тяговом колесе по формуле
Мр = Ppl == Рр~~ (kT — 1) Мч н-м.
Усилие рабочего
р = (kT - 1)М„ = 2 (kT 1) М.
Р I
Н,
D
где I и D — длина рукоятки и диаметр тягового колеса в
(161):
м.
ВОПРОСЫ и ЗАДАНИЯ
1. Особенности устройства и работы остановов.
2. Конструкции колодочных тормозов.
3. Конструкции ленточных тормозов.
4. Типы тормозных электромагнитов.
5. Показать расчетом влияние величины зазора между шкивом и тормоз-
ными поверхностями на работу колодочных и ленточных тормозов.
6. Будет ли разница в торможении при замене двухколодочного тормоза
ленточным при одинаковых параметрах тормозов?
7. Привести примеры новых тормозных материалов.
8. Сравнить устройство и принцип действия тормозов с осевым нажатием
и грузоупорных тормозов.
§ 4. ПРОСТЫЕ ГРУЗОПОДЪЕМНЫЕ УСТРОЙСТВА
Блоки являются простейшими грузоподъемными приспособ-
лениями, Различают блоки неподвижные для изменения направ-
ления тянущего усилия и подвижные для выигрыша в силе и
выигрыша в скорости (в пути). В неподвижном блоке
132
(фиг. 56, а) путь, проходимый силой, равен высоте подъема
груза
— Н м.
Величина силы Si при подъеме груза несколько больше силы
тяжести груза за счет сопротивлений в блоке, а именно:
SL = .t0Q (162)
где т] —1к. п. д. блока.
Фиг. 56. Грузоподъемные блоки:
а — неподвижный для изменения направления силы; б — подвиж-
ный для выигрыша н силе; в — подвижный для выигрыша в пути.
Величина, обратная к. п. д., называется коэффициентом
сопротивления блока
8 = — . (163)
Тогда
Sj = 10Qe н.
Коэффициент сопротивления зависит от типа подшипников,
рода смазки и жесткости гибкого тягового органа. Для цепных
и канатных блоков на подшипниках скольжения и с густой смаз*
кой принимают ц = 0,94-е-0,96 и е = 1,06<-1,04.
Для блоков на подшипниках качения ц — 0,97 —0,98 и е -
= 1,03-1,02.
В подвижном блоке для выигрыша в силе (фиг. 56, б) сила
тяжести груза распределяется на две ветви, из которых тянущая
ветвь испытывает большее усилие натяжения при подъеме груза:
S , = —— я; S, --- = Cn<3_ = J23L н. (164)
2 2 ' 1 , 2т, 2 ' ’
133
Путь, проходимый тянущей ветвью, в 2 раза больше высо-
ты подъема груза
/zj = 2 Н м.
В подвижном блоке для выигрыша в пути (в скорости)
(фиг. 56, в) усилие натяжения в тянущей ветви каната в 2 раза
больше силы тяжести поднимаемого груза с учетом сопротивле-
ния в блоке:
<31 = — ; s, = ю ((? + <?,) = ю |'q + ^-) =
= 10Q fl + —) = I0Q(l 4-е) н. (165)
\ 71 1
Путь h{ силы вдвое меньше высоты подъема груза Н:
= — jh.
1 2
Одинарные блоки применяют при подъеме небольших по
массе грузов, подвешенных не более, чем на двух несущих вет-
вях каната. Для подъема грузов с числом несущих ветвей боль-
ше двух применяется система подвижных и неподвижных бло-
ков, называемая полиспастом.
Полиспасты могут быть простые и сдвоенные. Они применя-
ются в основном для выигрыша в силе. Простые полиспасты бы-
вают неподвижные и подвижные. В простом неподвижном поли-
спасте (фиг. 57, а) тянущая ветвь каната сходит с верхнего бло-
ка неподвижной обоймы. Для неподвижного простого полиспа-
ста усилие тянущей ветви будет равно
5 =.iQW + g)s=io(Q + '7)^ 66
и 7 7z 2 v '
где Q — масса груза в кг;
G — масса подвижной обоймы полиспаста в кг;
— число несущих ветвей каната;
Т1 и е— к. п. д. и коэффициент сопротивления блока;
z— число блоков полиспаста.
Путь, проходимый силой:
hH в zK ‘Н м,
В простом подвижном полиспасте 1фиг._57, бД тянущая
ветвь каната сходит с нижнего блока подвижной обоймы и од-
новременно является несущей ветвью. В этом случае '
10 (Q 4-<?) _10(Q4-6)^
(?к 4” 1) 2к 4- 1
hn = (zK 4- 1)'Я-м, (167)
134
а
Простые полиспасты (фиг. 57) используют при такелажных
и других случаях с приме-
работах, в натяжных устройствах
нением ручных лебедок и т. д.
Применение простых полиспа-
стов в грузоподъемных механиз-
мах весьма ограничено ввиду их
громоздкости, возможного раска-
чивания груза за счет расположе-
ния ветвей каната в одной плос-
кости, неизбежного горизонталь-
ного перемещения груза при
подъеме и опускании его подвиж-
ным полиспастом, так как канат
передвигается по всей длине ба-
рабана, имеющего односторон-
нюю нарезку.
На грузоподъемных лебедках
электрических мостовых кранов
устанавливают сдвоенные поли-
спасты, представляющие два па-
a)
5)
раллельно работающих простых
полиспаста, блоки которых Объ- фиг- 57- Простые полиспасты:
единены В подвижную И непо- а ~ непо^вия<ный; б - подвижный.
движную обоймы (фиг. 58).
В этом случае оба конца каната, сходящих с подвижной обоймы,
закрепляют на одном или двух барабанах с правой и левой на-
резками. При этом число тянущих ветвей каната удваивается,
V б)
Фиг, 58. Сдвоенные полиспасты:
д — на восьми несущих ветвях каната; б — на десяти несущих ветвях каната.
135
перехода с одной половины
!
Фиг. 59. Канатная таль.
уменьшается нагрузка на несущие ветви, что позволяет приме-
нять канаты, блоки и барабаны меньшего диаметра, обеспечи-
вается строго вертикальное движение груза и устойчивое его
положение.
В сдвоенных полиспастах один из блоков (центральный на
обойме с нечетным числом блоков) при подъеме и опускании
груза ие вращается; он является своеобразным балансиром для
полиспаста на другую и одновре-
менно позволяет равномерно рас-
пределять нагрузку на несущие
ветви, выравнивать длину ветвей
каната прн вытяжке и предотвра-
щать перекос подвески подвиж-
ной обоймы полиспаста. Такой
блок называется уравнительным.
Ввиду того, что на уравнительном
блоке канат не подвергается пов-
торным перегибам, диаметр урав-
нительного блока принимается
равным 0,6 от диаметра рабочих
блоков.
Усилие натяжения тянущей
ветви сдвоенного полиспаста
= (168)
Ып
где Q —масса поднимаемого
груза в кг;
G — масса крюковой подвес-
ки в кг;
zK—число несущих ветвей
каната.
Путь тянущей ветви
hy = Н =. kn Н м. (169)
Из формул (168) и (169) вид-
но, что с возрастанием числа не-
сущих ветвей, при прочих равных
условиях, нагрузка на ветвь
каната уменьшается и соответственно возрастает путь движе-
ния тянущей ветви и понижается скорость подъема груза.
Ручные тали представляют группу подъемных механизмов,
отличающихся несложностью конструкций и компактностью.
Канатная ручная таль (фиг. 59), в отличие от простого поли-
спаста, имеет по несколько блоков на осях верхней неподвижной
и нижней подвижной обойм. Гибким тяговым органом в подав-
ляющем большинстве случаев является пеньковый канат.
136
Грузоподъемность канатной тали определяется по формуле
Q=-^PPzKy]n, (170)
где Рр — усилие рабочего на тянущую ветвь в н\
zK и т)п — число несущих ветвей и к. п. д. полиспаста.
Канатные тали применяют сравнительно редко при легких
строительно-монтажных работах.
В шестеренных талях (фиг. 60) вращение на рабочую звез-
дочку передается через систему зубчатых шестерен от усилия
на бесконечную сварную калиброванную цепь, надетую на тяго-
вое колесо. Рабочим органом служит сварная калиброванная
или пластинчатая цепь, огибающая верхнюю рабочую и нижнюю
грузовую звездочки. Груз подвешивается на крюк, обоймица
Фиг. 60. Шестеренная таль:
а — разрез; б — общий вид.
которого крепится к оси нижней звездочки. Удержание груза на
высоте осуществляется размыкающимся дисковым грузоупор-
ным тормозом с храповым остановом.
Техническая характеристика шестеренных талей (ГОСТ 2799-54)
Грузоподъемность в кн....................................(0,25—10) 9,81
Число несущих ветвей цепи ........................... , 1—4
Высота подъема груза в ж ..................................... 3
Тяговое усилие на цепи механизма подъема в н............... (22-? 55) 9,81
Скорость подъема груза в м/мин...........................2,65—0,13
Масса в^кг............................................... 25—280
В червячной тали (фиг. 61) система зубчатых шестерен за-
менена червячной передачей. В остальном ее принцип работы
137
Фиг. 61. Червячная таль.
138
не отличается от шестеренной тали. Груз удерживается на высо-
те грузоупорным дисковым или коническим тормозом с неразмы-
каемымп рабочими поверхностями и храповым остановом.
Техническая характеристика червячных талей
Червячная таль
со сварными калиб-
рованными цепями
(ГОСТ 1107-62)
Грузоподъемность в кн.............(1,0-1-12,5)9,81
Усилие на тяговой цепи в н........(35—75)9,8!
Скорость подъема груза в м/мин . . 0,15—1,2
Масса в кг........................ 32—410
Червячная таль
завода «Красный блок»
с пластинчатыми
цепями
(1-5-10) 9,81
(33 4-65)9,81
0,11-0,6
41—520
В тех случаях, когда, кроме подъема груза, требуется его
горизонтальное перемещение, таль подвешивается к подвижной
кошке (фиг. 62). По ГОСТ 47-54 подвижные кошки типа А гру-
зоподъемностью (1 5) X 9,81 кн оборудованы ручным меха-
низмом передвижения, кошки типа Б грузоподъемностью (0,5 +
1) X 9,81 кн не имеют механизма передвижения и перемеща-
ются по балке за счет усилия толкания.
Лебедки широко применяются в строительных, монтажных,
ремонтных и погрузочно-разгрузочных работах для подъема,
•опускания и перемещения грузов. Они различаются по типу
привода на ручные и механические, по виду гибкого тягового ор-
гана на канатные и цепные, по роду передач на зубчатые, чер-
вячные, фрикционные, ременные и комбинированные, по спо-
собу установки на стационарные (напольные, настенные, пото-
лочные, подвесные) и передвижные (переносные).
Лебедка состоит нз станины (рамы), привода, барабана,
звездочки, остановочных н тормозных устройств. Барабаны ле-
бедок не имеют нарезок, укладка каната на барабан допускает-
ся в несколько слоев.
Ручные лебедки снабжены храповыми остановами, безопас-
ными рукоятками и ленточными нли грузоупорнымн тормозами.
Ручные лебедкн устанавливают на полу или крепят к стене и
называют соответственно напольными (фиг. 63, а) и настенными
(фиг. 63, б). В настенных лебедках небольшой грузоподъемности
применяют несамотормозящиеся червячные передачи, в осталь-
ных случаях — зубчатые передачи.
Грузоподъемность лебедки, а следовательно, н ее размеры
зависят от передаточного числа привода.
Крутящий момент на грузовом барабане нлн звездочке
Мг=^^- н-м, (171)
2^л
где .$! — максимальное усилие натяжения ветви гибкого тягово-
го органа, сходящего с барабана нли звездочки, в н;
Dd — диаметр барабана или звездочки в м\
— к. п. д. блоков.
139
Крутящий момент на валу рукоятки
Мр = Рр1 н-м,
(172)
где Рр — усилие на рукоятку, принимаемое для одного рабоче-
го в пределах 100—300 н в зависимости от продолжи-
тельности работы;
I— длина рукоятки в ж.
Фиг. 63. Лебедки с ручным приводом:
а — напольная; б — настенная.
Передаточное число привода
i = —— ,
где т] = 0,6 — к. п. д. для лебедки с червячной передачей, рав-
ный 0,6, для лебедки с зубчатыми передачами — 0,8.
Для изменения передаточного числа в ручных лебедках ча-
сто устанавливают сменные пары зубчатых шестерен. С измене-
нием передаточного числа изменяется скорость движения груза,
усилие на рукоятке и грузоподъемность.
140
В ручных лебедках количество зубчатых пар не превышает
трех н передаточное число одной пары не больше 6. Если пере-
даточное число привода получается большим, в расчет прини-
мается усилие двух рабочих. В табл. 32 даны характеристики
ручных лебедок. :
Лебедки с механическим приводом используют как индиви-
дуальные самостоятельно действующие подъемно-транспортные
устройства и как механизмы более сложных грузоподъемных
машин. Наиболее распространенным в механических лебедках
является привод с электродвигателем переменного тока, обла-
Фиг. 64. Электрическая лебедка.
дающим несомненными преимуществами перед двигателями
внутреннего сгорания, пневматическими двигателями и др.
В электрических лебедках (фиг. 64) вращение от электродви-
гателя передается через клиноременную передачу на вал фрик-
ционной муфты. Включение фрикционной муфты показано на
фиг. 65.
Таблица 32
Ручные лебедки (ГОСТ 7014-63)
Марка Тяговое усилие каната в кн I Диаметр каната в мм Диаметр бара- бана з мм Число слоев на- вивки, не более Канатосмкость в м Число рукояток Размер рукоятки в мм Число скоростей Габаритные раз- меры в мм (без рукояток) Масса лебедки в кг
1 Длина 1 Ширина 1 Высота
ЛР-1,25 1-9,81 11 180 5 100 2 400 2 600 700 800 180
ЛР-3,2 3,2-9,81 16,5 260 5 100 2 400 2 780 750 1000 320
ЛР-5 5,0 21,0 340 6 150 2 400 2 970 950 1020 520
ЛР-8 8-9,81 27,5 450 6 200 2 400 2 1370 1150 1220 1000
141
Фиг. 65. Фрикционное включение барабана электриче-
ской лебедки.
Фиг. 66. Электрическая лебедка
ВНИИПТМАШ.
142
На неподвижной оси 1 свободно посажен канатный барабан 4
с фрикционной муфтой. На одном конце барабана к фланцу
крепится зубчатый венец 3 храпового останова. Гладкая цилин-
дрическая расточка на другом конце барабана обхватывается
тормозной лентой 5. Управление тормозом педальное и рычаж-
ное или автоматическое совместно с фрикционом. При включе-
нии фрикционной муфты тормоз размыкается. Включение фрик-
циона производится за счет поворота рычага, закрепленного на
втулке 2, н смещения втулки по резьбе и барабана вправо.
Втулка упирается в ступицу барабана, смещает его вправо, н
колодки 6 фрикционной муфты заклиниваются в кольцевой вы-
точке обода барабана.
В электрических лебедках ВНИИПТМАШ (фнг. 66) откры-
тые передачи заменены стандартным редуктором РМ, отсутст-
вуют фрикционы и храповые остановы. Выходной вал редукто-
ра соединяется с валом барабана зубчатой муфтой. Соединение
вала двигателя с ведущим валом редуктора осуществляется уп-
ругими втулочно-пальцевымн илн специальными зубчатыми
муфтами. Остановка лебедки н удержание груза производится
двухколодочным тормозом с электрогидравлическнм толкателем.
Тормозной шов установлен на первом валу редуктора.
Мощность электродвигателя лебедки определяется по фор-
муле
АГ». = вт, (173)
где S] — тяговое усилие каната в н;
vK.— скорость наматывания каната в м/сек:
ц— к. п. д. передачи от двигателя к барабану.
Число оборотов барабана
п = . об/мин,
где D6 — диаметр барабана в м.
Передаточное число механизма
у _______________________ пдв
где — скорость вращения вала двигателя в об/мин.
По передаточному числу выбирают редуктор или рассчиты-
вают открытые зубчатые передачи. Характеристика электриче-
ских лебедок дана в табл. 33.
Наряду с обычными лебедками, у которых гибкий тяговый
орган наматывается на барабан, применяются лебедки с фрик-
ционным барабаном, называемые шпилями (фиг. 67) и кабе-
станами.
143
Барабаны таких лебедок располагаются горизонтально нли
вертикально, В таких лебедках один конец каната или сварной
цепи 1 крепится к транспортируемому грузу, затем гибкий рабо-
чий орган делает несколько витков на барабане 2 и при переме-
щении груза выбирается вручную (фиг. 67, б) или вспомогатель-
а) б)
Фиг. 67. Лебедки с фрикционными барабанами (шпили) :
а — с цилиндрической передачей; б — с червячной передачей.
ной лебедкой 3 (фиг. 67, а). За счет натяжения между канатом
(цепью) и барабаном создаются силы трения. Число витков на
барабане постоянное.
Таблица 33
Электрические лебедки
Тип электролебедки Грузоподъем- ность в КН Скорость а м/мин Диаметр ба- рабана в мм Диаметр ка- ната в мм Канатоем- кость в я Размеры в s Высота Мощность в кет Число оборо- тов в минуту (U Ч (и я * и я аз _ £2
Длина 1 Ширина
ВНИИПТМАШ 1,5-9,81 49 300 13 220 1400 1350 1000 13,5 975 1030
в 3-9,81 43 475 17,5 260 1500 1475 1210 23 720 1950
5-9,81 39 525 24 260 1950 1730 1250 32 725 3440
» 10-9,81 34 600 32,5 220 2550 2270 1400 64 585 5375
Л-Ю01 1-9,81 8,2 168 11 75 930 813 920 4,5 1440 287
Л-3-50 3-9,81 30 300 17,5 260 1515 1460 836 16 720 1426
ПЛ-5-50 5-9,81 29,8 426 22 450 1775 1563 793 22 720 1861
Л-7,5 7,5-9,81 31 500 26 130 1586 1521 379 30 975 2252
Центроэнерго- монтаж 0,5-9,81 13 270 8J 125 940 410 450 4,3 1450 248
в 1,5-9,81 16,5 219 13 212 1120 1116 653 5 910 725
» 3-9,81 16,5 325 19,5 262 1550 1400 ИЗО 11 715 1353
» 5-9,81 14,1 377 |24 1 259 1700 1540 1070 16 720 1800
с
Домкраты. Для подъема груза на небольшую высоту н под-
держания его при ремонтных, монтажных и выверочных работах
применяют домкраты. Отличительными особенностями домкратов
144
являются необходимость установки их под грузом, незначительная
скорость подъема и малогабаритность, так как они ие имеют
элементов грузоподъемных устройств (канатов, блоков, бараба-
нов). При помощи домкратов обеспечивается плавный подъем
грузов и точное удержание их на заданной высоте. В том случае+
когда высота подъема домкрата недостаточна, подъем груза
осуществляется в несколько приемов с подкладкой под груз
опорной клетки из шпал. При помощи домкратов возможно про-
Фиг. 68. Винтовые домкраты:
а — с рукояткой; б — с трещоткой.
изводить как вертикальный подъем груза, так н горизонтальное
его перемещение. Привод домкратов может быть ручной и элек-
трический. Грузоподъемность домкратов определена ГОСТ
1682-56.
По конструктивным особенностям различают трн вида дом-
кратов: винтовые, реечные и гидравлические.
Винтовой домкрат (фиг. 68) имеет пустотелый конический
корпус 5, в верхнюю часть которого закреплена гайка 4 с трапе-
цеидальной или прямоугольной резьбой. В гайку входит винт 6
с головкой 2, к которой шарнирно крепится опорная чашка 1.
Головка винта имеет отверстия для ломика (воротка) 5, кото-
145
рым пользуются при повороте винта на любой угол. В стеснен-
ных условиях применяют домкраты с трещотками (фиг. 68, б).
Прн необходимости горизонтального передвижения груза
после его подъема применяют салазковые винтовые домкраты
(фиг. 69). Перемещение груза производится вращением горизон-
тального винта /, гайка 2 которого соединена с вертикальным
винтовым подъемником н передвигается по вращающемуся вин-
ту в сторону, опираясь нижннми плоскостями на направляю-
щие.
Для повышения скорости подъема груза применяют винтовые
домкраты двойного действия. Винты этих домкратов имеют
разно направленные нарезки. При вращении трещоткн наруж-
ный пустотелый винт вывинчивается из своей гайки, запрессо-
ванной в корпус домкрата, и заставляет одновременно вывин-
чиваться внутренний винт, гайка которого закреплена в верхней
части наружного вннта.
146
Винтовые домкраты имеют к. п. д. = 0,3 -* 0,4. Такой низкий
к. п. д. объясняется применением самотормозящих винтовых пе-
редач, которые не дают возможности произвольно опускаться
грузу.
Таблица 34
Винтовые домкраты
Показатели Бутылочные домкраты с воротком Домкраты с трещоткой
Грузоподъем- ность в кн Высота подъема в мм .... Наименьшая вы- сота в мм . . Масса в кг . , Диаметр винта в мм .... Число обслужи- вающих рабо- чих 3-9,81 130 300 6,5 35 1 5-9,81 300 510 17 45 1 10-9,81 330 560 28 60 2 15-9,81 350 610 38 66 2 5-9,81 300 510 21 50 1 10-9,81 330 585 37 2 15-9,81 350 610 48 2 20-9,81 290 670 92 2
В табл. 34 приведены характеристики вертикальных винто-
вых домкратов с винтами одинарного действия.
Реечный домкрат (фиг. 70) имеет корпус 7, внутри которого
помещена односторонняя прямозубая рейка 6 с опорной чаш-
кой 4 наверху и лапой 8 внизу. Подъем или опускание груза
происходят за счет передачи усилия на зубья рейки через си-
стему шестерен 5 при вращении безопасной рукоятки /. На
валу рукоятки закреплено храповое колесо 2. Собачка 3 храпо-
вого останова крепится к корпусу домкрата. Лапой поднимают
низко расположенные грузы, под которые невозможно подвести
домкрат опорной чашкой; прн этом грузоподъемность домкрата
несколько уменьшается.
При подъеме груза собачка проскальзывает по зубьям хра-
повика, а прн остановке удерживает груз. Опускание груза
происходит под действием собственной силы тяжести, когда со-
бачка выведена из зацепления с храповым колесом.
На реечных домкратах, имеющих устройства для самотормо-
жения, необходимо устанавливать безопасные рукоятки. Длина
рукоятки принимается равной 200—250 мм, передаточное число
одной зубчатой пары 4—6 и число зубьев малых шестерен 4—5.
К. п, д. реечного домкрата при одной зубчатой паре равен
0,85, при двух зубчатых парах — 0,7.
В реечных домкратах с односторонней нарезкой в зацепле-
нии с шестерней находится только один зуб рейки. При конст-
руировании это необходимо учитывать и соответственно увели-
чивать размеры зубьев рейкн.
147
Для более равномерного распределения усилий на зубья
рейки применяют реечные домкраты с двусторонней нарезкой.
Подъем н опускание груза прн этом осуществляется от червяка
с правым и левым направлением витков на червячные колеса и
связанные с ними шестерни, которые входят в зацепление с зубь-
ями рейки. Груз удерживается на высоте самоторможением в
Фиг. 70. Реечный домкрат с односторонней рейкой.
червячных передачах, ввиду чего к. и. д. такого домкрата ни-
же, чем у реечного одностороннего.
Кроме рассмотренных зубчато-реечных применяются также
рычажно-реечные домкраты грузоподъемностью до 10-9,81 кн.
В табл. 35 приведена характеристика реечных домкратов с од-
носторонней зубчатой нарезкой.
При подъеме значительных грузов на небольшую высоту
применяют гидравлические домкраты. В частности такие дом-
краты применяются при смене ходовых колес мостовых элек-
трических кранов для удержания на заданном уровне машин и
станков, прн монтаже и выверке и т. д.
148
Реечные домкраты
Таблица 35
Максимальная грузоподъемность в кн. Сечение рейки в леи Высота подъема груза в juju ... . Высота домкрата наименьшая в мм Наименьшая высота лапы в мм . . Число обслуживающих рабочих . . Масса домкрата в кг 3-9,81 60x34 350 700 50 1 35 5-9,81 65x36 400 800 55 1 45 8-9,81 70x40 375 850 70 2 57 10-9,81 75х 45 375 850 75 2 73
Характерными особенностями гидравлических домкратов
являются их высокий к. п. д. (0,75—0,8), плавность хода, точ-
ность остановки, самоторможение, незначительная скорость и
Фиг. 71. Гидравлический домкрат с -ручным приводом.
высота подъема, компактность, высокое давление жидкости в
цилиндре, большая грузоподъемность. Различают гидравличе-
ские домкраты периодического действия с ручным приводом и
непрерывного действия с механическим приводом.
Гидравлический домкрат с ручным приводом показан на
фиг. 71. При вращении рукоятки 7 этого домкрата влево вокруг
осн 6 толкатель 5 перемещает плунжер 8 вправо. В это время
при закрытом нагнетательном клапане 4 жидкость через откры-
тый всасывающий клапан 10 поступает в цилиндр нагнетатель-
ного насоса. При повороте рукоятки 7 вправо плунжер переме-
щается влево, всасывающий клапан закрывается, открывается
нагнетательный клапан, и жидкость поступает под поршень 1
рабочего цилиндра 2, поршень поднимается вместе с грузом.
Для опускания груза нужно поставить рукоятку 7 в правое край-
нее положение, при этом игла плунжера отжимает шарик кла-
149
пана 4 влево, а выступ 9 плунжера открывает клапан 10, и
жидкость из рабочего цилиндра поступает в резервуар 3. Ско-
рость опускания груза можно регулировать за счет изменения
величины открывания клапанов 4 и 10. Прн подъеме груза по-
ворот рукоятки 7 вправо ограничен. Для предупреждения утечки
жидкости в кольцевых проточках рабочего цилиндра 2 устанав-
ливают кожаные манжеты. По мере подъема груза между
заплечиками поршня 1 и корпусом цилиндра 2 ставят подклад-
ки, предотвращающие самопроизвольное опускание груза в
Фиг. 72. Гидравлический домкрат с электриче-
ским приводом:
а — общий вид; б — последовательность работы.
случае прорыва манжет. Кроме рассмотренной системы опуска-
ния поршня с грузом применяют также спускные вентили. Дав-
ление в рабочем цилиндре домкрата определяется по мано-
метру.
В табл. 36 приведена характеристика гидравлических дом-
кратов с ручным приводом завода «Ленинская кузница».
Гидравлический домкрат непрерывного действия с механиче-
ским приводом н последовательность его работы изображены
на фиг. 72. Жидкость плунжерным насосом 4 подается в над-
поршневое пространство. Под давлением жидкости поршень 2
остается неподвижным; поднимается цилиндр 3 вместе с грузом,
резервуаром н насосом. При подъеме цилиндра возвратные пру-
жины 1 сжимаются. Если прн крайнем верхнем положении ци-
линдра под него подвести опоры и открыть спускной вентиль, то
150
под действием усилия пружин поршень поднимется вверх и вы-
теснит жидкость в резервуар.
Под поршень вновь подводят опоры и цикл работы повто-
ряется без перестановки домкрата.
Таблица 36
Гидравлические домкраты завода «Ленинская кузница»
Грузоподъем- ность в кн . Высота подъ- ' ем а н лм । Масса в кг Диаметр поршня дом- крата в мм Диаметр плунжера насоса в мм Рабочее дав- ление в бар Усилие на рукоятке в н Количество обслуживаю- щих рабочих Скорость подъема в мм/мин
50-9,81 180 120 130 17 400 600 4 12
75-9,81 180 150 155 17 400 600 4 8
100-9,81 180 180 180 17 400 600 4 6
150-9,81 180 270 220 17 400 600 4 4
200-9,81 180 330 250 17 400 600 4 3
В табл. 37 приведена характеристика гидравлических дом-
кратов «Перпетуум» с механическим приводом.
Таблица 37
Гидравлические домкраты «Перпетуум»
Грузоподъем- ность в кн Высота подъема в мм Масса в кг Диаметр поршня дом- крата в ММ Диаметр плунжера насоса в мм Рабочее дав- ление в бар Усилие на i рычаге в н Количество обслуживаю- щих рабочих М и Е * О 41 ~-- Осе
50-9,81 120 125 120 17 500 700 4 13
100-9,81 170 350 160 17 500 700 4 8
200’9,81 220 700 225 17 500 700 4 4
300-9,81 220 1400 275 17 500 700 4 2,5
Прн подъеме или перемещении крупногабаритных грузов, по
массе значительно превышающих грузоподъемность одного гид-
равлического домкрата, применяют специальные батареи гид-
равлических подъемников, работающих одновременно от одного-
насоса с электрическим приводом. Так, с помощью батареи гид-
роподъемников были восстановлены доменные печи завода-
«Азовсталь» в послевоенные годы.
Большую практическую ценность прн подъеме особо тяже-
лых сооружений (кораблей с камерами при шлюзовании, строи-
тельство жилых домов методом подъема этажей, разведение-
мостов на судоходных реках и т. д.) представляют гидравличе-
ские «прессы-верхолазы» или «ползучие домкраты», схема ра-
боты которых показана на фиг. 73. Ползучий домкрат имеет
15Ь
рабочие цилиндры 4, верхнюю 3 и нижнюю 5 захватывающие
обоймы с вспомогательными гидравлическими толкателями 2 и
эксцентриковыми рычагами с клиньями для захвата опорных
колонн 1. При закрепленной на колонне нижней обойме мощные
гидравлические домкраты поднимают верхнюю зажимную обой-
му, и вспомогательные гидравлические толкатели прижимают
клинья к колонне (положение Д). После этого подтягивается
нижняя захватывающая обойма (положение 5), закрепляется
на колонне и цикл работы повторяется. За один цикл ползучий
Фиг. 73. Схема работы ползучего домкрата.
домкрат перемещается вверх илн вниз на 340—350 мм. Управле-
ние работой одного или одновременно нескольких прессов-вер-
холазов полностью автоматизировано.
Наряду с гидравлическими домкратами для плавно-
го подъема и опускания сравнительно небольших по мас-
се грузов применяют пневматические подъемники с вертикаль-
ным расположением цилиндра.
Верхний конец штока вертикального подъемника крепится к
поршню, помещенному в цилиндр диаметром 100—200 мм; к
нижнему концу штока шарнирно прикрепляется крюк. На ниж-
ней части цилиндра расположена золотниковая воздухораспре-
делительная коробка с рычагами управления. Полость цилиндра
сообщена с выпускной трубой. К верхней крышке цилиндра при-
креплена скоба для подвешивания подъемника к неподвижному
крюку пли к передвижной тележке.
Грузоподъемность пневматических подъемников 4,2—17,6 кн
при давлении воздуха 7 бар, высота подъема (ход поршня)
152
1200—-1800 мм, собственная масса 56—130 кг, длина 2250—
2420 мм.
Рассмотрим расчет гидравлического домкрата (см. фиг. 72).
Если к рукоятке домкрата приложено усилие Рр, то усилие на
плунжере Рп буает равно
P„ = PpjLT1h, (174)
где Lui— длина рычага и толкателя в см-,
1] = 0,75 -г- 0,85 — к. п. д. домкрата.
Давление рабочей жидкости под плунжером, передаваемое в
цилиндр:
Р-°^ = 22£гЪАбар, (i75)
nd2 r.d2 I
4
где Р71 —усилие на плунжере в н;
d — диаметр плунжера в см.
Грузоподъемность домкрата Q:
(176)
Площадь поршня домкрата
е tcD2 Q 9
F = ---- = —- СЛ12,
4 ,р
откуда диаметр поршня будет равен
D -, см. (177)
Г *Р
При заданной грузоподъемности, длинах рычага и толкате-
ля, диаметрах поршня и плунжера требуемое усилие на руко-
ятке определяется по формуле
7’р=1,1-10-^Д-Д- «, (178)
где 1,1 — коэффициент, учитывающий потери на тренне в уплот-
няющих кожаных манжетах.
Толщина стенкн цилиндра 6С определяется по формуле рас-
чета толстостенных сосудов, работающих под давлением:
i
2
/ [СТЬ + °’004р
V [ст]р-0,013р
СМ,
(179)
где [сг]р — допускаемое напряжение при растяжении для сталь-
ных цилиндров.
153
Объем рабочей жидкости, подаваемый плунжером в единипу
времени:
V = hzv. см3/мин, (180)
4
где d — диаметр плунжера в см;
h — величина хода плунжера в см;
z = 30 — возможное число рабочих ходов рукоятки в минуту;
а — коэффициент, учитывающий утечку жидкости через уп-
лотнения, равный 0.9—0,95.
Фиг. 74. Электрическая таль:
а — кинематическая схема; б — электрический механизм передвижения.
Скорость подъема поршня с грузом
V.; 4V 4 rd2 . d2 , . /1О1,
и = -—— = —— =----------------лга = •—~hz& см/мин. (181)
-О2 тгО2 еО2 4 О2 '
4
Время подъема груза на высоту Н
1=”.
D-
----Hhza мин.
С/2
(182)
Электрические тали (фиг. 74) нашли широкое применение во
многих отраслях народного хозяйства как для подъема, так и
для передвижения грузов. Электрическая таль представляет со-
бой компактный подъемный
механизм, подвешиваемый к
неподвижной конструкции
или к тележке, не имеющей
механического привода.
Прикрепленную к тележке с
механическим приводом
электрическую таль называ-
ют тельфером (фиг. 75). Хо-
довыми колесами тележка
тельфера опирается на ниж-
нюю полку двутавровой
балки.
Электрические тали ВНИ-
ИПТМАШ серии ТВ изго-
товляются грузоподъем-
ностью 2,5—50 км. Тали для
подъема груза массой 0,25—
0,5 т крепятся к беспривод-
ным тележкам. Тали боль-
шей грузоподъемности обо-
рудуются тележками с элек-
трическим приводом (фиг.
74, б).
Тали, работающие в
складских помещениях,
Фиг. 75. Электрический тельфер,
снабжают дисковым стопор-
ным тормозом. Прн необходимости дополнительно может быть
установлен грузоупорный тормоз. В талях серии ТВ применяют-
ся торцовые электродвигатели переменного тока. Питание элект-
родвигателей производится при помощи кабелей или троллеев с
токоприемниками. Управление двигателями кнопочное с пола.
Механизм подъема располагается вдоль тележки.
Электрические тали ТЭ (фиг. 76, б) выпускаются грузоподъ-
емностью 1,5—7,5 /сн. Тали для грузов массой 0,15—0,25 т не
имеют механического привода передвижения, однако они могут
быть оборудованы специальными электротягачами (фиг. 76. а),
имеющими тяговое усилие 260 н и скорость передвижения
20 м/мин. При грузоподъемности свыше 2,5 кн электрический
двигатель встраивается внутрь барабана и вращается вместе
155
с ним, что улучшает охлаждение двигателя, уменьшает габариты
и массу тельфера.
Тали грузоподъемностью 5—50 кн имеют два тормоза: сто-
порный п спускной. В них предусматривается установка двух-
скоростных двигателей, позволяющих уменьшать скорость подъ-
ема в 3—4 раза. Механизм подъема может располагаться вдоль
и поперек пути. В механизмах передвижения тележек тормоз
устанавливается при скоростях свыше 30 м/мин (0,5 м/сек).
Характеристика электрических талей серии ТЭ дана в
табл. 38, тельферов типа ТВ —в табл. 39.
Кроме электрических, применяются также пневматические
тали, обладающие плавным регулированием скорости подъема
груза. Они крепятся к тележкам с ручным приводом передвиже-
ния. Грузоподъемность пневматических талей 2,5—50 кн, ско-
рость подъема 3—11 м/мин, высота подъема 3—4 м, давление
воздуха 4—6 бар.
Тали и тельферы передвигаются по монорельсовым путям.
Двутавровая балка специальными подвесками крепится к на-
стенным кронштейнам или к перекрытию здания. В случае раз-
ветвления подвесного пути переход с одного монорельса иа дру-
гой производится при помощи подвижного рамного стрелочного
155
I
/
Таблица 38
Электрические тали ТЭ
Модель Марка Грузо- подъем- ность в кн Высота подъема в М Скорость подъема им/мин Скорость передви- жения в м!мин Число ветвей каната Масса в кг
1 ТЭ-0,15 0,15-9 81 6 2
II ТЭ-0.25 0,25-9,81 2 54
III ТЭ-0,5 0,5-9,81 2 96
IV ТЭ-’.О 1 0-9 81 2 195
V ТЭ-2,0 2,0-9,81 6; 12; 18; 8 20 2 275
V! ТЭ-3 0 3,0-9,81 2 435
VII ТЭ-5,0 5 0-9,81 4 780
VIII ТЭ-7,5 7 5-9,81 12; 18; 24 4 —
Таблица 39
Техническая характеристика тельферов (ГОСТ 3472-54)
Марка Грузоподъемность в кн Высота подъема груза в м Скорость в м]мин Диаметр каната в мм Эл ектродвигатели Масса в кг
Подъема груза Передвижении тель- фера Для подъе- ма груза Для передвиже- ния тельфера
Мощность в кет Число оборо- тов в минуту) Мощность в к вт Число оборо- тов в минуту Количество тележек
ТВ-0,25 2.5 6 8 Ручное 4,8 0,45 960 1 74
ТВ-0,5 5 6 8 Ручное 6,2 0,85 940 — -—- 1 91
ТВ-112 10 12 8 30 8,7 2,4 960 0,65 1410 2 580
ТВ-121 10 6 8 20 8,7 2,4 960 0,65 1410 1 490
ТВ-212 2-9,81 12 8 30 11 3,5 960 0,65 1410 2 620
ТВ-221 • 2-9 81 6 8 20 11 3,5 960 0,65 1410 1 550
ТВ-301 3-9,81 6 8 30 13 4,0 900 1,5 1450 1 880
ТВ-395 3-9,81 25 8 30 13 4,0 900 1,7 1450 2 1325
ТВ-306 3-9,81 20 8 30 13 5,0 905 1 7 1450 2 1260
ТВ-308 3-9,81 30 8 30 13 4,0 900 1,7 1450 2 1800
ТВ-501 5-9,81 6 8 30 13 5,6 910 1 5 1450 2 1250
ТВ-504 5-9 81 20 8 30 13 7,5 900 1,7 1450 2 1630
ТВ-505 5-9,81 30 8 30 13 7,5 900 1,7 1 1450 2 1820 ।
перевода с электрическим или ручным приводом. Упрощенная
схема рампой стрелки на два направления показана на
фиг. 77, а. На подвижной тележке закреплены прямолинейный 3
и криволинейный 4 участки двутавра (стрелки). Тележка пере-
двигается тяговыми канатами 5 и фиксируется в крайних поло-
жениях деревянными упорами 2. Рамная стрелка переводится
до подхода тали или тельфера.
157
Применяются также рамные и круговые стрелки на три на-
правления.
При двух пересекающихся путях переход с монорельса па
монорельс осуществляется поворотным кругом, схема которого
Фиг. 77. Стрелочные переводы:
а •— рамный; б — поворотный.
изображена на фиг. 77,6. К поворотному кругу 5 крепится под-
вижная часть двутавра 2, опорные катки 4 и зубчатое коническое
колесо 3, приводимое во вращение от ручного привода со свар-
ной тяговой цепью 1 (на второй проекции привод не показан).
Поворотный круг вращается вместе с талью или тельфером,
ВОПРОСЫ И ЗАДАНИЯ
/. Применение блоков а качестве грузоподъемных устройств.
2. Отличительные особенности простых и сдвоенных полиспастов.
•3. Устройство и работа ручных талей.
4. Применение ручных и электрических лебедок.
5. Типы домкратов. Как определить усилие на рукоятке домкрата?
6. Показать практическое применение электрических талей и тельферов.
§ 5. ПОВОРОТНЫЕ КРАНЫ
Поворотные краны представляют группу подъемно-транспорт-
ных машин, при помощи которых груз, кроме подъема и гори-
зонтального или наклонного перемещения, может поворачивать-
ся вокруг вертикальной оси колонны крана.
По способу установки поворотные краны делятся на стацио-
нарные и передвижные; по типу привода — на ручные и с меха-
158
ническим приводом (электрическим, гидравлическим, пневмати-
ческим или с двигателями внутреннего сгорания); по способу
установки колонны — с вращающейся и неподвижной колонной;
по расположению опор — с внешней верхней опорой и без внеш-
ней верхней опоры; по изменению вылета стрелы — с постоянным
и переменным вылетом.
Вылетом стрелы называется расстояние между вертикальной
осью крина и осью грузовой подвески. В отличие от длины стре-
лы, являющейся величиной постоянной, вылет стрелы может из-
меняться за счет наклона ее в вертикальной плоскости, либо за
счет перемещения по стреле грузовой тележки. С изменением
вылета стрелы соответственно изменяются грузоподъемность,
высота подъема и обслуживаемая площадь.
Поворотные краны различных конструкций используются на
строительстве, при монтажных и ремонтных работах, в цехах
металлургической и металлообрабатывающей промышленности,
на железнодорожном транспорте и т. д.
Стационарные поворотные краны с вращающейся колонной
Стационарный поворотный кран с вращающейся колонной и
постоянным вылетом стрелы показан на фиг. 78. Колонна крана3
монтируется в верхней 7 и нижней 1 опорах на подшипниках ка-
чения или скольжения (фиг. 79). С колонной и между собой же-
стко соединены тяга 6 (фиг. 78) и укосина 2. Для повышения
жесткости остова крана дополнительно крепятся раскосы 5.
Колонна крана клепаная или сварная из прокатных швелле-
ров. В некоторых случаях для колонны используют трубы.
К верхней части колонны крепится цапфа, к нижней — пята.
Тяга и укосина изготовляются также из двутавров или швелле-
ров, уголков и листовой стали.
На площадке 4 установлен электрический механизм подъема.
Применение ручного или механического привода поворота кра-
на зависит от его грузоподъемности и режима работы. Место
установки механизма поворота диктуется конструктивными осо-
бенностями крана. На фиг. 80 показаны различные механизмы
поворота клапанов.
Рассмотренная схема поворотного крана не является единст-
венной. Существует много разнообразных конструкций ферм по-
воротных кранов. В каждом частном случае при выборе кон-
структивного оформления поворотного крана нужно руководст-
воваться условиями его работы, возможностью технического об-
служивания, удобством ремонта и соблюдением правил техники
безопасности.
Стационарный поворотный кран с переменным вылетом стре-
лы имеет горизонтально прикрепленную к колонне двойную тя-
гу, на которой устанавливается грузоподъемная тележка или
тельфер.
159
Фиг, 78. Стационарный поворотный кран с вращающейся колон-
ной и постоянным вылетом стрелы.
а) 6)
Фиг. 79. Верхние и нижние опоры поворотного
крана:
а — на подшипниках скольжения; б — на подшипниках
качения.
160
Изменение вылета достигается горизонтальным перемещени-
ем тележки с грузом от отдельного привода. Тяговое усилие от
привода на тележку передается замкнутым гибким органом —
канатом или цепью. Тельфер имеет свой механизм передвиже-
ния. Изменение вылета в данном случае на высоту подъема гру-
за не влияет.
Я)1 г)
Фиг. 80. Механизмы поворота кранов:
й — С ручным приводом; б — с электрическим приводом; в — канатный; г — с цсвоч
ным зацеплением.
Независимо от типа привода механизм поворота кранов мо-
жет быть двух исполнений:
1) неподвижный, когда привод монтируется на площадке,
не связанной с колонной крана, и колонна вращается вместе с
посаженным на нее зубчатым колесом (фиг. 81),
2) подвижный, когда привод устанавливается на площадке,
прикрепленной к колонне крана, и колонна вращается вместе с
приводом; при этом концевая шестерня обкатывается по наруж-
ному или внутреннему зацеплению неподвижно закрепленного
венца (фиг. 80,а, б).
Вращение колонны может осуществляться также с примене-
нием канатной или цепной передачи (фиг. 80,в).
Крапы небольшой грузоподъемности не имеют специального
механизма поворота; они поворачиваются вручную за ферму или
груз.
В механизмах поворота кранов большой грузоподъемности,
когда зубчатый венец достигает значительных размеров, приме-
6 В. Л. Моргачев 161
няют наружное или внутреннее цевочное зацепление (фиг. 80, г).
Цевочное колесо представляет собой согнутый в кольцо швеллер,
в отверстия полок которого через равные расстояния (шаг за-
цепления) вставлены валики (цевки), выполняющие роль зубьев.
Цевочное колесо обычно закрепляется неподвижно и зубчатая
шестерня с наименьшим числом зубьев 21 — 10 ч- 13 обкатыва-
Фиг. 81, Схема к расчету стационар-
ного поворотного крана с вращаю-
щейся колонной и постоянным выле-
том стрелы.
ется по нему. Передаточное
число цевочного зацепления
i = 8 4-16.
Размеры цевочного коле-
са рассчитываются из усло-
вий износа и прочности.
Диаметр стальной цевки
из условий износа определя-
ется по формуле
d = 0,124 1/ — см,
у Ф
где Р — окружное усилие в
цевках в ка*
ф — коэффициент длины
зуба, равный 2—3.
Обычно диаметр цевки,
равный толщине зуба веду-
щей шестерни с шагом t, ра-
вен d = 0,475 t, откуда шаг
зацепления
0,475 '
Длина рабочего участка цевки, равная ширине зубчатой ше-
стерни:
b = tyd.
Расчетная длина цевки I определяется из условий прочности
на изгиб
u 0,1 . d3 0,4d3 2 J
z = 0,4d3 [п]ц 5
Р ' 2 ’
где [о]и—-допускаемое напряжение изгиба для материала цевок.
Необходимое число цевок при диаметре цевочного коле"
са
162
Преимуществами цевочного зацепления являются простота
конструкции, меньшая стоимость изготовления, значительные
передаточные числа, удобства при монтаже, эксплуатации и
ремонте.
В большинстве механизмов поворота кранов с электрическим
приводом применяется червячный редуктор, включающий в себя
фрикционную муфту, при помощи которой регулируется величи-
на передаваемого момента и устраняются удары н сотрясения
крана при пуске и остановке механизма.
Мощность двигателя механизма поворота крана затрачива-
ется на преодоление сопротивлений от сил трения в опорах, вет-
ровых нагрузок и сил инерции.
На боковые опоры колонны действует горизонтальное усилие
Н (фиг. 81):
ХЛ1Я - 0; 10[(Q + G)a -f- GKb] — Hh = 0 н-м,
откуда
Н = Ю[(р+О)а + ад н> (183)
где Q — масса поднимаемого груза (грузоподъемность) в ка;
G — масса подвески в ка;
а — вылет стрелы в м;
G4—ориентировочная собственная масса крана, равная
(0,8 -г 1,2) Q, в кг-
b— расстояние от центра тяжести крапа до оси вращения
в м;
h — высота колонны в м.
Вертикальная нагрузка на пяту
^(Q + G-l-GJg- н. (184)
По значениям величин Я и W рассчитывают металлоконструк-
ции крана, определяют размеры подшипников скольжения или
выбирают подшипники качения.
Суммарный момент сопротивления повороту крана от сил тре-
ния слагается из трех моментов:
а) момента сопротивления повороту от сил трения на боковой
поверхности верхней цапфы диаметром dx-.
Мтр1 = 10Я/-^- н-.м\
б) момента сопротивления повороту от сил трения на боко-
вой поверхности нижней цапфы диаметром d2:
м„р, = нм;
163
6*
в) момента сопротивления повороту от сил трения в пяте под
действием вертикальной нагрузки W-
при сплошной пяте диаметром d3
мт, = iouz/A- н-м-,
О
при кольцевой пяте среднего диаметра dcp
Мтр, = н-м;
при шариковой пяте диаметром dtu
Мтр, = ЮНД-^- К- Л,
где f — коэффициент трения, принимаемый равным 0,08—0,1 для
подшипников скольжения и 0,01—0,02 для подшипников
качения.
Суммарный момент сопротивления повороту от сил трения
Мтр — Л4тР1 -f- Л1тРз н- м. (185)
Момент сопротивления повороту крана от ветровой нагрузки
Мвет = ЮрДЛЛ 4-^>) н-м, (186)
где рд—давление ветра, принимаемое для кранов, устанавли-
ваемых в прибрежных районах 'больших рек и морей,
равным 400 кн/м2, и для кранов, устанавливаемых в
прочих местах, •— 250 кн/м'2;
Гк—подветренная площадь крана в з/2;
b — расстояние от центра тяжести крана до оси враще-
ния в м;
Рг—подветренная площадь груза в 312;
а — максимальный вылет стрелы в м.
Суммарный момент сопротивления повороту крана от сил
инерции в период пуска слагается из трех моментов:
а) момента от сил инерции массы груза
Мин -- 10-^-а2-^— н-м;
1 g tn
б) момента от сил инерции массы крана
Мин - I0SZ — — Ю^й2 — н-м;
tn g tfi
в) момента от сил инерции вращающихся деталей привода
Мш, = (1,1^ 1.15)
где Q — масса поднимаемого груза (грузоподъемность
крана) в кг;
164
g ~ ускорение силы тяжести в м/сек2;
а — максимальный вылет стрелы в м-,
tn—-время пуска в условиях равноускоренного дви-
жения, принимаемое при наличии ветра 4—
10 сек и при отсутствии ветра 3—5 сек\
С, — масса крана в кг;
Ь — расстояние от центра тяжести крана до оси вра-
щения в Л1;
GXD2— маховой момент ротора электродвигателя в н-л4;
nt)e—скорость вращения ротора электродвигателя в
об/мин;
—угловая скорость вращения крана при заданном
числе об/мин колонны пк в рад.
Момент сопротивления повороту крана от сил инерции
MUfi = MUH1 + MUHs -F МиНз н-м. (187)
Полный момент сопротивления повороту крапа
Л4Л- = Мтр 4- N[eem -|- н- м. (188)
Потребная мощность электродвигателя механизма поворота
крана при пк об/мин колонны и к. п.д, tj:
,, Мкпк
Nde = —вт.
97,5т,
По найденному значению jV^ выбирается электродвигатель в
определяется передаточное число механизма поворота
- _. ft-de
По передаточному числу производится выбор редуктора и
расчет открытых зубчатых, цевочных и других передач.
Стационарные поворотные краны с неподвижной колонной
Колонна такого поворотного крана неподвижно закрепляется
в сварной или литой фундаментной ленте. Плита анкерными
болтами крепится к фундаменту. К цапфе верхней части колон-
ны па подшипниках крепится траверса тяги. Укосина соединена
нижним концом с роликовой коробкой специальной конструк-
ции, вращающейся вокруг колонны. Внутри опорной коробки па
осях свободно посажены вертикальные цилиндрические или боч-
кообразные ролики—-2 в кранах без противовесов и 4 в кранах
с противовесами. В некоторых кранах применяют многоролико-
вые опоры с сепараторами.
Колонну изготовляют из стали Ст.З с допускаемым напряже-
нием изгиба [о]и = (700 н- 900) • 10s н/м2 и Ст. 4, Ст. 5 и 40, для
которых [о]„ = (1000 н- 1200) 10° н/м2.
165
В поворотных кранах с неподвижной колонной дополнитель-
но рассчитывают следующие элементы (фиг. 82):
I- Фундаментные (анкерные) болты. Усилия на фундамент-
ные болты определяются из равенства суммы моментов
= 10[(Q4-G)(a —£)4-(?Д& —е)~ад —Р2е = 0; (189)
р [(Q + G)\a - е) + (У- е}- GHe] 10
~е
Для крана с противовесом
[(Q 4- G) (а ~ е) + GK (b - е) - GKe -Gnp (с± е)) Ю
Р =------------------------------------------н, (190)
где GH — масса неподвижных частей крана (колонны и плитови-
ны) в кг.
Фиг. 82. Схема к расчету стационарно-
го поворотного крана с неподвижной
колонной и постоянным вылетом стрелы.
Сила растяжения одного болта с учетом предварительной за-
тяжки
Р, = (1,11,2)Т-я.
166
Внутренний диаметр резьбы болта det
4Рг 2Р . 2
°р =• ~г- = —Г [с]р н/м ’
rzd~ r.d^
d = 1/ М, (191)
где [о]р — допускаемое напряжение, равное (1200-5-1400) X
X Ю5 н/м2.
Внутренний диаметр резьбы болта для обеспечения работо-
способности при ветровой нагрузке принимается равным не ме-
нее 24 мм.
2. Масса фундамента. Под нагрузкой в краие создается опро-
кидывающий момент относительно ребра фундамента В — В:
Vb = 0; (Q + G)(a — k)GK(b~k)~GHk~ = 0.
Теоретическая масса фундамента
(j^ = (Q ~Н б) (д — fe) + (6 — fe) — GHk (192)
Для крана с противовесом
(Q±G)(a-k)+GK(b-k)-GHk-Gnp(c+k)
Сф = ------------------------------------ кг. (193)
Действительная масса фундамента для обеспечения устойчи-
вости крана с учетом ветровой нагрузки
@Фд = (2 -н 3) Сф кг.
Нагрузка от массы крана на грунт
Й7 = (Q -j- G GK 4- GH -р СПр 4- G^j)g н. (194)
Давление от силы тяжести крана на грунт при равномерном
распределении нагрузки
q = < [<?] н/м2, откуда Рф = м2, (195)
Рф WJ
где Рф —площадь основания фундамента в м2;
[^ — допускаемое удельное давление на грунт, принимае-
мое в пределах:
для песка влажного ............................. 1,5-105 н/и2
» суглинка ................................... 2,5-I05 »
» глины плотной и плотно слежавшегося сухого песка 3 • 105 »
» известняка ................. ........................(15-8-25)-105 я
» гранита.............................................. (30 4-40)-105 »
Фундамент обычно изготовляют с квадратным основанием;
сторона основания фундамента
2k —УРф м,
167
3. Опорная коробка. Каждый ролик опорной коробки
ось воспринимают усилие
.. #
7V =------н,
2 cos а
и его
(196)
где а—-угол между направлениями сил, равный 30°.
Диаметр оси ролика рассчитывают из условной работы на
изгиб
а
а
ми
Wu
С [а]ц «/-и2;
N • 0,5/
0, Id®
^0
(197)
где I — длина образующей ролика в м;
[о]м— допускаемое напряжение, равное (800-> 1000) • 105 н/л(2.
Диаметр ролика определяется из расчета па удельное дав-
ление
Z [g] 2Z [g] cos а
(198)
где dp — диаметр ролика в м;
[д]—допускаемое удельное давление, равное 75-105 н/м2 для
термически не обработанной стали и 125-105 н/м2 для
термичееки обработанной стали.
Соотношение между диаметрами ролика и оси
dp = (2,5 -н 5) d0.
При расчете мощности двигателя механизма поворота момент
сил трения в цапфе определяется, как указано выше, для пяты.
Момент сил сопротивления вращению катков роликовой коробки
вокруг колонны определяется так же, как при качении колеса
по рельсу. Сила сопротивления вращению катков
Wc = 2tV + 2ц- н. (199)
dp
Момент сил сопротивления
М = ~= 2Д/ н. Л(1 (200)
с 2 d„ 2 v 7
где DK — диаметр колонны в месте установки роликовой ко-
робки в м;
f и ц— коэффициенты трения по табл. 16 и 17.
168
Пример, Определить размеры фундаментных болтов и массу фундамента
для крана с неврашающейся колонной, если Q = 2 т, G = 50 кг, Gv = 1700 кг,
GH = 300 кг, а = 2000 мм, Ь — 500 мм, е = 300 мм, k = 750 .иль
1. Усилие на фундаментные болты
? _ [(Q G) (я - е) + GK (b — e) — G„e] 10
“ 2е
_ [(2000 4- 50) (200 — 30) Н- ПОР (50 — 30) — 300 • 30] 10 _
= ' 2 • 30 — и.
Внутренний диаметр резьбы болта
Г 2Р , / 2 • 62 250
dR - I / -------= 1/ ------------------- = 0,0182 м = 18,2 мм,
V V 3,14 • 1200 • 10s
принимаем диаметр резьбы болта М24.
2. Масса фундамента с двойным запасом устойчивости
n (Q Ч- G) (а - fe) 4- GK (b — k) — GHk
G&> = 2 -
(2000 + 50) (200 — 75) 1700 (50 — 75) — 300 • 75
— 2-------------------------------------------------— 4830 кг.
75
Площадь основания фундамента
Еф = (2ky = (2 • 0,75)2 = 2,25 .и2.
Давление крана с фундаментом на грунт
W • 10 (2000 + 50 4- 1700 4- 300 4- 4830) 10
= 2,25
105< [у] н}мг.
Поворотные краны разных конструкций
Краны с подъемной стрелой. Изменение вылета стрелы пово-
ротного крана может достигаться не только передвижением гру-
зовой тележки, но и изменением угла наклона стрелы (укосины).
Такими являются поворотные краны с подъемной стрелой, назы-
ваемые деррик-кранами. Оии разделяются на жестконогие, ван-
товые и вантовожестконогие.
Жестконогие стационарные стреловые краны (фиг. 83) в ос-
новном обслуживают складские площадки. Мачта крана 4 ре-
шетчатой конструкции шарнирно устанавливается в опоре 6
фундамента.
В верхней части мачты смонтирована муфта с проушинами 2,
от которых к фундаменту идут две жесткие решетчатые ноги
(подкосы) 1. Стрела 7 шарнирно крепится к мачте над поворот-
ным кругом 5. Верх стрелы удерживается канатами, соединен-
ными со стреловой лебедкой. Тяги стрелового полиспаста соеди-
нены с оголовком мачты 3. При вращении поворотного круга
вместе с мачтой и стрелой поворачивается стреловой полиспаст,
а муфта и подкосы остаются неподвижными. Наличие жестких
подкосов ограничивает угол поворота стрелы в пределах 270°.
169
170
Механизмы подъема груза, поворота крана и изменения вы-
лета стрелы монтируются на отдельной раме.
Техническая характеристика жестконогого стационарного
деррик-крана треста «Донбассэнергомонтаж»
Грузоподъемность при вылете стрелы 5,6—10 м в кп ... , 60
Грузоподъемность при вылете стрелы 10—20,5 м в кн ... 30
Максимальная высота подъема груза в м ......... 21
Угол поворота крана в град..........................270
Диаметр каната грузового полиспаста в мм ........ 13
Диаметр каната стрелового полиспаста в мм...........15,5
Диаметр каната для поворота крана в мм..............13
Масса крана без каната и лебедок в т .......... 8,3
Жестконогие передвижные краны смонтированы иа общей
раме с салазками. Их применяют в строительно-монтажных ра-
ботах на укладке перекрытий, прогонов и т. д.
Передвижные краны отличаются небольшой грузоподъемно-
стью и высотой подъема. Кран грузоподъемностью 7,5—20 кн
имеет максимальную высоту подъема груза 9 м, угол поворота
стрелы 170° (проектный институт «Промстальконструкция»).
Вантовые мачтово-стреловые краны (фиг. 84) применяются
на монтажных и других работах. Мачта крана 2, состоящая из
нескольких решетчатых секций, нижней частью устанавливается
в шаровой опоре. Для удержания мачты вместо жестких подко-
сов применяют ванты 5, которые одним концом через натяжной
полиспаст крепятся к 'барабану лебедки, а другим—к конусно-
му диску (пауку) 4, свободно сидящему на верхней оси мачты.
К мачте прикрепляют одну или две стрелы 3 на разных высо-
тах. Одна из стрел может дополнительно иметь клюв 6. Каж-
дая стрела имеет свои механизмы подъема груза и наклона
стрелы. Механизм поворота крана общий. Поворотный круг 1
крана крепится к мачте. При включенном механизме поворота
вращается мачта со стрелами, а конусный диск с вантами оста-
ется неподвижным.
Вантово-жестконогий кран соединяет в себе конструкции ван-
тового и жестконогого деррик-крана.
Вантовые деррик-краны устанавливают илн стационарно на
фундаменте, или на стальной опорной балке с салазками для
перемещения. Все механизмы н аппаратура управления нахо-
дятся в машинном отделении рядом с опорной балкой.
Техническая характеристика вантовых двухстреловых кранов
с клювом
Грузоподъемность в кн‘.
основной стрелы................................... 100—250
дополнительной стрелы..........................30 —50
клюна.......................................... 50
Высота подъема в м:
основной стрелы................................... 11—30,3
дополнительной стрелы..........................25,6—39
клюва.................., ..................... 24—36,8
171
Техническая характеристика вантового крана с одной стрелой
и клювом
Грузоподъемность в кн:
основного крюка.................................. 400
вспомогательного крюка............................ 150
Высота подъема минимальная в .и:
основного крюка.................................... 32
вспомогательного подъема .......................... 40
Велосипедные краны (фиг, 85), в отличие от ранее рассмот-
ренных поворотных кранов, устанавливают на двухколесные те-
лежки /, передвигающиеся вручную или механическим приво-
дом 2 по рельсу. Колонна крана 6 сварная или клепаная. Вело-
сипедные краны могут быть с вращающейся и неподвижной ко-
лонной, с постоянным и переменным вылетом стрелы, с ручным
и электрическим механизмом поворота 7. Для устойчивости в
верхней части крана крепятся ролики 5, передвигающиеся в
направляющих. Для предохранения крана от опрокидывания при-
меняют противовесы 3. Механизм подъема 4 имеет электриче-
ский привод.
Велосипедные краны используют в таких местах, где невели-
ки проходы и высота и нельзя применить другие краны, напри-
мер, на складах, на разливочных площадках мартеновских це-
хов.
Разновидностью велосипедного крана является не вращаю-
щийся передвижной консольно-велосипедный кран (фиг. 86),
применяемый в разливочном пролете мартеновского цеха для
постановки и уборки сталевыпускных желобов и других работ.
Тележка 4 перемещается по ферме 3. Кран передвигается на
двух вертикальных катках, из которых один соединен с приво-
172
дом 1. От опрокидывания кран удерживается двумя горизон-
тальными верхними и двумя нижними роликами 2. Управление
краном осуществляется из кабины 5.
Техническая характеристика велосипедных кранов
Грузоподъемность в кн.................................До 100
Вылет стрелы в м......................................До 7
Скорость подъема груза в м/мин .......................8—12
Скорость передвижения крана в м/мин...................40—80
Скорость передвижения тележки в м/мин.................20—40
Скорость вращения колонны в об/мин.................. 1—3
Высота подъема груза в .и.............................До 16
Большую группу кранов, широко применяемых на промыш-
ленных предприятиях, железнодорожном транспорте, строитель-
стве и др., представляют передвижные поворотные краны на
тележках ю электрическим, пневматическим, гидравлическим
приводом или с двигателем внутреннего сгорания. В зависимости
от назначения и характе-
ра грузовых операций пе-
редвижные поворотные
краны оборудуются крю-
ками, электромагнитами,
грейферами и другим
сменным рабочим обору-
дованием.
Передвижные пово-
ротные краны могут быть
автомобильные (фиг. 87),
самоходные на пневмоко-
лесном или гусеничном
(фиг. 88) ходу, а также
железнодорожные (фиг.
89).
Фиг. 87. Автомобильный кран.
173
174
Привод механизма подъема груза, подъема и поворота стре-
лы может быть электрический самостоятельный индивидуальный
или общий групповой с отбором мощности от главного дизель-
ного или дизель-генераторного двигателя. Все механизмы и узлы
вращающейся части кранов монтируются на поворотных плат-
формах, которые представляют собой литые, клепаные или свар-
ные стальные плиты. Поворотная платформа вращается на опор-
ных катках или роликах. Для обеспечения устойчивости во вре-
мя работы автомобильные и железнодорожные краны снабжа-
ются выносными опорами (аутригерами).
Техническая характеристика автомобильных
и пневмоколесных кранов
Грузоподъемность с выносными опорами в кн.7,5—250
Грузоподъемность без выносных опор в кн...2,5—75
Длина стрелы в .и.........................7,35—25
Вылет стрелы в .и......................... 4—20
Высота подъема груза в .и................. 3—25
Скорость подъема в м/мин..................3.5—18
Скорость вращения в об/мин ............ 0,5—3
Скорость движения в км/ч..................2,3—30
Общая масса крана в т .............. 6,8—45,2
Техническая характеристика гусеничных кранов
Грузоподъемность в кн ..... ......... 3,5—500
Длина стрелы в м ..................... 10—45
Вылет стрелы в ...................... 3,7—27,4
Высота подъема груза в м ............... 3,7—44
Скорость подъема в м/мин ................. 1,4—30
Скорость вращения в об/мин ................ 0,5—4,75
Скорость движения в км/ч -....,...... 0,7—3
Общая масса крана со стрелой в т ............. 19,5—78
Техническая характеристика паровых железнодорожных кранов
Грузоподъемность в кн .................... 13—450
Длина стрелы в м..........'.......... 11,3—30
Скорость подъема груза в м/мин .............. 6—26,4
Скорость вращения в об/мин ................ 2—2,65
Скорость передвижения v, км/ч........ 4,3—10
Общая масса крана в т , . 29—112,5
Техническая характеристика дизельных и дизель-электрических
железнодорожных кранов
Грузоподъемность в кн ................... 10—250
Длина стрелы в м . . ..........'..... 10—45
Вылет стрелы вл....................... 3,5—25
Высота подъема груза вл............... 5—44,5
Скорость подъема в м/мин .... ........ 9,5—29,25
Скорость вращения в об/мин ................ 1,18—3
Скорость движения в км/ч .............. ... 2—25
Общая масса крана со стрелой в т ............. 39,5—75
Ходовая часть кранов включает в себя элементы подвижной
единицы железных дорог — жесткую раму, опирающуюся на ко-
лесные пары и имеющую стандартные железнодорожные упряж-
175
ные и тормозные приборы, и площадку для балласта. Крутящий
момент от двигателя на ведущие колеса передается через цеп-
ную (в двухосных кранах) или зубчатую (в четырех- и шести-
осных кранах) передачи. С отключенным приводом в составе
поезда они передвигаются со скоростью до 80 км/ч. В этом слу-
чае под раму крана для большей устойчивости подводят под-
ставные ходовые тележки, а противовесы кранов большой гру-
зоподъемности перевозят иа отдельной платформе.
В последних конструкциях большинства передвижных стрело-
вых поворотных кранов применяют дизель-электрические много-
моторные приводы. Отказ от использования группового привода
и переход на индивидуальные приводы механизмов упрощает
кинематическую схему крана, дает возможность избавиться от
фрикционных муфт, ленточных тормозов и сложных рычажных
устройств системы управления. Применение низколегированной
стали для изготовления стрелы уменьшает ее массу, что имеет
большое значение для устойчивости стреловых передвижных
кранов. Мощность индивидуального привода соответствует тре-
буемой мощности данного механизма, тогда как в групповом
приводе мощность, передаваемая отдельному механизму, обыч-
но бывает завышена.
Безопасная работа передвижных поворотных кранов гаранти-
руется их устойчивостью при самых неблагоприятных условиях
нагружения. Различают устойчивость крана в рабочем состоянии
с грузом (грузовую устойчивость) и в нерабочем состоянии без
груза (собственную устойчивость). Коэффициентом устойчивости
крана называется отношение восстанавливающего момента Мд
к опрокидывающему моменту Моп :
fe_
Моп '
По нормам Госгортехнадзора [6], коэффициент устойчивости
крана При определении коэффициента устойчивости пе-
редвижных поворотных кранов влияние захватных приспособле-
ний за рельсы не учитывается.
Коэффициент грузовой устойчивости подсчитывается при наи-
большем грузе на максимальном вылете и перпендикулярном на-
правлении стрелы относительно ребра опрокидывания 1
(фиг. 89). При этом опрокидывающий момент от массы груза
Моп = I0Q------н-м,
где Q — масса поднимаемого краном груза в кг;
а — максимальный вылет стрелы в л:;
К— колея краиа в м.
176
Восстанавливающий момент от собственной массы крана с
учетом ветровой нагрузки, инерционных и центробежных сил
М, = I-— 'I + 6,-5—6r(fr--5-Y|~
о I \ 2 J 2 * \ 2/1
— — M„ нм, <
где Gn—масса противовеса в кг;
с—расстояние от центра тяжести противовеса до оси
вращения крана в я;
GK— масса крана с механизмами в кг;
Gc — масса стрелы в кг;
b — расстояние от центра тяжести стрелы до оси враще-
ния крана в м;
МееЯ1— момент от ветровой нагрузки в н-м;
Ma!i— момент от сил инерции в н-м.
Мц — .момент от центробежных сил в н-м.
Коэффициент собственной устойчивости подсчитывается без
груза при наименьшем вылете стрелы относительно ребра опро-
кидывания 2. При этом опрокидывающий момент от массы про-
тивовеса
Моп — 10 Gn^c-—н-м.
Восстанавливающий момент от собственной массы крана с
учетом ветровой нагрузки
мв = юГс i + М н-м,
а К 2 \ 2 / ’
где Ь\ — расстояние от центра тяжести поднятой стрелы до оси
вращения крана в м.
В некоторых случаях при определении коэффициента устой-
чивости передвижных поворотных кранов учитывается негори-
зонтальность рельсового пути, если она возможна,
ВОПРОСЫ И ЗАДАНИЯ
1. Что значит «длина стрелы» и «вылет стрелы»? Способы изменения вы-
лета стрелы.
2. Влияние изменения вылета стрелы на работу поворотного крана.
3. Разновидности конструкций поворотных кранов.
4. Назвать поворотные краны, кроме указанных в § 5 и определить пло-
щадь их обслуживания.
5. Конструкция опор поворотных кранов.
6. Механизмы вращения поворотных кранов.
§ 6. МОСТОВЫЕ КРАНЫ
Мостовые краны относятся к наиболее распространенным
внутрицеховым подъемно-транспортным машинам. Широкое
применение мостовые краны получили ввиду их универсально-
177
сти, возможности использования различных грузозахватных при-
способлений н конструктивного соответствия требованиям транс-
портировки в промышленных зданиях.
Независимо от назначения мостовой кран имеет мост с меха-
низмом передвижения и тележку с механизмами передвижения
н подъема. Различают мостовые краны с ручным и с электриче-
ским приводом.
Мостовые краны с ручным приводом
Мостовые краны с ручным приводом применяют в тех слу-
чаях, когда производительность, а также скорости подъема и пе-
редвижения не играют особой роли.
В соответствии с ГОСТ 7075-54 ручные мостовые краны из-
готовляют однобалочиымн грузоподъемностью 10—100 кн и про-
летом 5—11 м и двухбалочными грузоподъемностью 50—200 кн
и пролетом 14—17 м. Высота подъема груза с помощью ручных
кранов не превышает 10—12 м.
Однобалочный ручной мостовой кран изображен на фиг. 90.
Главной (несущей) балкой моста краиа является двутавро-
вая балка 4, жестко соединенная с концевыми балками /, изго-
товленным из швеллеров. В концевых балках на осях посажены
ходовые колеса 2 механизма передвижения крана. Вращение на
ходовые колеса передается вручную от сварной калиброванной
цепи через тяговое колесо 5 и трансмиссионный вал 6. Для
большей жесткости концевые балки соединены с главной балкой
раскосами 3.
Тележкой крана служит ручная шестеренная или червячная
таль 7, подвешенная к подвижной кошке, которая передвигается
по нижней полке двутавровой балки.
В двухбалочном кране мост выполнен в виде рамы из двух
двутавровых балок, закрепленной к концевым балкам. Для при-
дания мосту крана жесткости в вертикальной и горизонтальной
плоскостях к главным балкам иногда крепят шпренгели и решет-
чатые фермы. Механизм передвижения двухбалочного ручного
крана по конструкции не отличается от механизма передвижения
ручного однобалочного мостового крана.
В двухбалочных ручных мостовых кранах грузоподъемностью
50—100 кн для подъема груза и передвижения его вдоль моста
применяют ручные тали, закрепленные на сварной раме с руч-
ным механизмом передвижения. На мостовых двухбалочных
ручных кранах грузоподъемностью 150—200 кн устанавливают
тележки с канатным барабаном и ручным1 приводом механизма
подъема и передвижения, Рама тележки опирается на 4 колеса,
из которых 2 являются приводными. Для повышения к. п.д. хо-
довая часть крана и тележкн монтируется на подшипниках ка-
чения, а открытые зубчатые передачи заменяются редукторами
с картерной смазкой.
178
Фиг, 90. Однобалочный ручной мостовой кран:
общий вид крапа; б — вид е торца; в — схема механизма передвижения крапа.
179
Мостовые краны с электроприводом
Простым мостовым краном с электроприводом является
электрическая кран-балка. Грузоподъемным1 устройством кран-
балки служит электрический тельфер.
В передвижных кран-балках (фиг, 91) главной несущей яв-
ляется двутавровая балка 2, опирающаяся иа концевые балки 1.
Жесткость мосту придается шпренгелями или решетчатыми
фермами 4. На мосту устраивается площадка для установки
привода механизма передвижения кран-балки 3. Механизм пе-
редвижения состоит из электродвигателя, редуктора, трансмис-
сионного вала и двух приводных ходовых колес, Для передви-
Фиг. 91, Электрическая кран-балка с тельфером,
ження кран->балкн устанавливают четыре двухребордных цилинд-
рических колеса 5.
Грузоподъемность электрических кран-балок 10—50 кн, про-
лет 5—17 м, скорость передвижения 50—80 м[мин. При скорости
передвижения кран-балки до 50 Mi мин механизмом управляют
с пола при помощи подвесной кнопочной коробки; при скорости,
превышающей 50 м/мин, управление переносят в кабину 6, при-
крепленную к мосту кран-балки.
Применяют также подвесные кран-балки грузоподъемностью
10 и 20 кн с ппевмоколесным приводом передвижения (фиг, 92).
Такая кран-балка опирается четырьмя парами поддерживающих
роликов 4 на нижние полки двух двутавров 5. К каждому дву-
тавру снизу примыкает ведущий пневматический скат 6 диамет-
ром 450 мм, получающий вращение от электродвигателя 1 мощ-
ностью 0,6 кет и числом оборотов 1460 в минуту через планетар-
ный редуктор 2 с передаточным числом 74,53, что сообщает кран-
балке скорость передвижения 28 м[мин.
Регулирование нажатия приводного колеса к двутавру осу-
ществляется гайками 3.
Мостовые электрические краны по назначению делятся на
краны общего и специального назначения.
180
Фиг, 93, Мостовой электриче-
ский кран.
181
Мостовые электрические краны общего назначения (фиг. 93)
применяют в цехах промышленных предприятий. В зависимости
от грузоподъемности и условий работы они могут иметь на одной
тележке один или два (фнг. 94) крюка для подъема груза.
В случае двойного подъема крюк большей грузоподъемности
называют главным, меньший — вспомогательным. Барабаны
главного и вспомогательного подъемов получают вращение от
отдельных электродвигателей через редукторы. В некоторых мо-
Фиг. 94. Крановая тележка с двумя крюками.
стовых кранах для повышения производительности устанавли-
вают две одинаковые тележки.
Каждый из механизмов подъема или передвижения крана
оборудован индивидуальным электрическим приводом и снабжен
тормозом и концевым выключателем. Питание электродвига-
телей осуществляется при помощи троллеев и токоприем-
ников.
Аппаратура управления механизмами мостового крана со-
средоточена в кабине машиниста.
Мост электрического крана состоит из двух главных балок,
жестко соединенных с концевыми балками. Главные балки вос-
принимают основную нагрузку при работе крана и поэтому дол-
жны обладать достаточной прочностью и жесткостью как в вер-
тикальной, так и в горизонтальной плоскостях.
Основные параметры моста крана:
А* —пролет крана, расстояние между рельсами, по кото-
рым передвигается кран, в Л1;
182
Вк — база крана, расстояние между осями колес (при двух
ходовых колесах на одной стороне крана), или между
осями тележек ходовой части крана (при числе колес
больше двух на одной стороне), в м;
Кт— колея тележки (расстояние между рельсами крановой
тележкн) в м;
Н — высота главной балки в ж.
Главные балкн под-
вергаются изгибу от си-
лы тяжести тележки с
грузом и собственной си-
лы тяжести. Для умень-*
шення прогиба главным
балкам с пролетом L >
> 17 м прн изготовлении
придают небольшой стро-
ительный подъем. Конце-
вые балки мостовых кра-
нов сваривают из листов.
Высота концевой балки
зависит от высоты глав-
ной балки и обычно при-
нимается равной 40—
60% от высоты главной
балкн. Главные балки мо-
стовых электрических
кранов выполняют в виде
сплошных одностенных
балок из прокатных
или сварных двутавров
(фиг. 95, а), сплошных
двухстенных балок короб-
чатого сечения (фиг. 95, в)
и решетчатых ферм
из сортового проката
(фиг. 95, б).
По верхнему поясу главных балок уложены рельсы для пе-
редвижения тележки (фиг. 96). На продольных галлереях кра-
новых мостов устанавливают механизм передвижения крана и
гроллеи электродвигателей тележкн. Крановые мосты со сплош-
ными главными балками называют балочными, а мосты с решет-
чатыми главными балками (фермами)—решетчатыми. Решет-
чатые мосты выполняют с двумя главными и двумя вспомога-
тельными вертикальными фермами, в силу чего их называют
четырехферменными.
Балочные мосты изготовляют как со вспомогательными фер-
мами, так и без них. Для соединения верхних поясов главных и
183
вспомогательных ферм служат верхние горизонтальные
связи, а для соединения нижних поясов — нижние связи. Для
повышения жесткости моста устанавливают наклонные раско-
сы. Таким образом, мосты представляют собой пространствен-
ные конструкции, обладающие достаточной Прочностью и жест-
костью в вертикальной и горизонтальной плоскостях.
Крановые мосты со вспомогательными фермами, верхними и
нижними горизонтальными связями называют мостами закры-
того типа; мосты без верхних горизонтальных связей называют
мостами открытого типа.
Фиг. 96. Тележка мостового электрического крана.
Двухбалочные мосты дешевле и проще в изготовлении, чем
четырехферменные, однако при пролетах свыше 17 м оии полу-
чаются более тяжелыми и имеют меньшую жесткость в горизон-
тальной плоскости. Для кранов грузоподъемностью 50—500 кн
в основном применяются четырехфермеиные мосты закрытого
типа с решетчатыми главными фермами, для кранов грузоподъ-
емностью > 750 кн — мосты открытого типа с главными балками
коробчатого сечения или с одностенными главными балками,
при этом высота одностенных главных балок получается боль-
шей, чем балок коробчатых.
Механизм передвижения мостового электрического крана мо-
жет быть выполнен с тихоходным трансмиссионным валом
(фиг. 97, а), когда вал вращается от двигателя через редуктор.
В этом случае требуется иметь вал с большим диаметром, так
как он передает значительный крутящий момент. Соответствен-
но увеличиваются размеры муфт, подшипников и других дета-
лей, а следовательно, н всего механизма.
184
В механизме с быстроходным трансмиссионным валом
(фиг. 97,6) последний получает вращение непосредственно от
электродвигателя, а затем через редукторы передает вращение
на ходовые колеса. В этом случае размеры вала, опорных и со-
единительных узлов уменьшаются.
В механизме передвижения с раздельным приводом
(фнг. 97, в) вращение на ходовые колеса крана передается от
двух синхронно работающих электродвигателей через редукто-
ры, установленные непосредственно у ходовой части. В этом слу-
чае трансмиссионный вал с опорами и муфтамн отсутствует, на-
грузка между приводами распределяется равномерно н суммар-
ная мощность электродвигателей не превышает мощности одного
Фиг. 97, Механизмы передвижения мостового электрического крапа;
о — с тихоходным трансмиссионным валом; б — с быстроходным трансмис-
сионным валом; а — бестрансмиссионный с раздельным приводом.
центрального привода, маховые моменты электродвигателей
уменьшаются и сокращается время пуска.
Раму тележки изготовляют с помощью сварки нз листовой
стали. На раме тележки монтируют механизмы подъема и пере-
движения.
Размещение механизмов на раме должно обеспечивать оди-
наковую нагрузку на ходовые колеса тележки. В механизмах
подъема используют горизонтальные редукторы РМ, в механиз-
мах передвижения тележки и крана — вертикальные редукто-
ры ВК.
ГОСТ 7464-54 устанавливает параметры для мостовых
электрических кранов легкого режима работы грузоподъемно-
стью 50—500 кн; ГОСТ 3332-54 —для кранов той же грузоподъ-
емности, но среднего и тяжелого режимов работы (см. табл. 40);
ГОСТ 6711-53 — для мостовых кранов общего назначения грузо-
подъемностью 750—2500 кн с двумя крюками.
185
Таблица 40
Мостовые электрические краны общего назначения среднего и тяжелого
режимов работы с одним и двумя крюками (ГОСТ 3332-54)
Груэо- подъем- Пролеты Высота подъема крюков в м Скорость в м /мин База ежки в м
Подъем главного крюка ПОМО- 1 > крюка О Передвиже- ния крана
ность В м О то о х® Ей t- О й _ go крана в м о
в кк 3 s га 2 ю о н
5 S X о л II 7 £ й «К О CJ |[ 7 о;
ей Б § со txj ч ч
СЙ В t: t: С в t: Ь;
50 16 10 20 40 80 120 3,5—5,0 1,4
100 11—32 16 — 8 20 40 80 120 4,4—5,0 2,0
150 16 — 8 20 — 40 80 120 4,4—5,0 2,0
150/30 16 18 8 20 20 40 80 120 4,4—5,0 2,0
200/50 10,5—32 12 14 8 20 20 40 80 120 4,4—5 0 2,0
300/50 12 14 8 20 20 40 80 100 5.1 2,5
500/100 12 14 8 20 20 40 80 100 5,25 2,5
Техническая характеристика мостовых кранов
по ГОСТ 6711-53
Грузоподъемность в кн:
главного крюка...................................... 750—2500
вспомогательного крюка.......................... 200—300
Пролет крана в я....................................10,5—31,5
Высота подъема в я:
главного крюка.................................... 16—32
вспомогательного крюка ......................... 18—34
Скорость подъема в я/яин-.
главного крюка......................................0,4—4,5
вспомогательного крюка.............................. 6—7,5
Скорость передвижения в я/яин-.
моста крана....................................... 20—85
крановой тележки............................... 12—45
В отдельных случаях для производства монтажных работ на
строительстве гидроэлектростанций используют мостовые краны
грузоподъемностью 4500—5000 кн,
В 1956—1958 гг. ВНИИПТМАШ провел обследование на раз-
личных заводах страны однотипных мостовых электрических кра-
нов общего назначения грузоподъемностью 50—500 кн с целью
определения долговечности деталей крановых механизмов,
Обследование показало, что канаты типа 6 X 37 4- 1 и 6 X
X 19 + 1 с диаметрами 17,5 и 26 мм на грейферных кранах име-
ют срок службы в 1,7 раза меньше, чем на кранах с крюковой
подвеской, средний эксплуатационный период канатов которых
принято считать 5 мес.
Наибольшая долговечность канатов крюковых тележек ока-
залась равной примерно 12 мес. Срок службы стальных тормоз-
186
ных шкивов механизмов подъема равен 9 мес., а тормозных об-
кладок 3—7 мес. Из этого следует сделать вывод о том, что при
конструировании необходимо предусмотреть повышение долго-
вечности шкивов в 2—3 раза, а обкладок в 10—15 раз. Средний
период работы ходовых колес моста крана равен 5,5—6 мес,,
крановых тележек 13 мес. Работоспособность редукторов РМ
составляет 20—26 мес., редукторов ВК 24 мес.
Практика эксплуатации электрических мостовых кранов тя-
желых режимов работы показывает такие недостатки их кон-
струкций, как перекос ферм мостов и заклинивание ходовых
колес в результате недостаточной величины базы мостов и жест-
кости ферм, а также малых зазоров между ребордами колес и
головками рельсов.
Для устранения указанных недостатков необходимо для грей-
ферных, магнитных и других электрических кранов со специаль-
ными подвесками грузоподъемностью 100, 150/30, 200/50 и
300/100 кн принимать размер базы мостов равным 5,6 м, жестко
соединять главные и концевые балки; в решетчатых фермах
уголки следует заменить швеллерами, что приведет к повыше-
нию жесткости моста и снижению его веса на 4,2%; следует
применить ходовые колеса с самоцентрирующейся поверхностью
катания, что улучшит условия работы подшипников качения
букс, или увеличить на кранах общего назначения зазор между
ребордами колес и головками рельсов до 50 мм, принять высоту
реборды равной высоте головки рельса, но не менее 40 мм.
С целью дальнейшего обеспечения повышения производитель-
ности металлургического оборудования, обслуживаемого грей-
ферными, магнитными и другими электрическими кранами с
различными подвесками указанной выше грузоподъемности, не-
обходимо повысить скорость движения мостов до 130 м/мин, те-
лежек до 60 MjMUH и главных подъемов до 65 м[мин. Для надеж-
ной работы всех механизмов крана общего назначения следует
применять двухколодочные тормоза с короткоходовыми электро-
магнитами переменного тока, отказавшись от использования по-
стоянного тока, как более дорогостоящего. На мостовых кранах
специального назначения нужно устанавливать тормоза с элек-
трогидравлнческими толкателями. Необходимо также отказать-
ся от многотипности ходовых колес мостовых электрических кра-
нов, оставив всего лишь четыре размера колес диаметрами 700,
800, 900 и 1000 мм для механизмов передвижения мостов.
В настоящее время для изготовления металлоконструкций
подъемно-транспортных машин начинают применять алюминие-
вые сплавы, допускаемые напряжения которых близки к допу-
скаемым напряжениям стали (табл. 41).
Применение алюминиевых сплавов в конструкциях мостовых
кранов снижает массу последних иа 50—55%, уменьшает давле-
ние на ходовые колеса на 25—30%, уменьшает мощность элек-
тродвигателей и т. д.
187
Алюминиевые сплавы хорошо обрабатываются, обладают вы-
сокой коррозионной стойкостью, не дают искр при ударе, что бы-
вает особо важным при работе во взрывоопасных условиях.
Таблица 41
Сравнение допускаемых напряжений для клепаных конструкций
из упроченного алюминиевого сплава марки AlMgSi (с минимальным
пределом прочности 32-Ю7 н/м2 и Пределом текучести 25-107 н/м2)
и стали марки St 37 (близкой к стали Ст. 3 кп) по данным ГДР
Вид напряжения Допускаемые напряжения в н/мг
При действии основных нагрузок При действии основных п дополнительных нагрузок
1 Алюминиевые i Стальные конструкции конструкции Алюминиевые конструкции Стальные конструкции
Растяжение, изгиб . . Сжатие Срез 1500-Ю^ 1500-Ю^ 900-105 1600-10-» 1400-Ю5 920-105 1700-105 1700-105 1020-105 1800-105 1600105 1040-105
Отечественное краностроение развивается по пути проекти-
рования и изготовления блочных унифицированных кранов с
созданием максимальных удобств работы крановщика. В по-
следние годы ведутся работы по внедрению дистанционного
управления механизмами кранов. В унифицированных мостовых
электрических кранах ВНИИПТМАШ, УЗТМ., Сибтяжмаш и дру-
гих заводов широко используются стандартные узлы: электро-
двигатели, редукторы, тормоза, зубчатые муфты, ходовые коле-
са на отъемных буксах с подшипниками качения, крюковые под-
вески, централизованная система смазки и т. д. Применение стан-
дартных узлов серийного производства значительно снижает
себестоимость кранов.
Унификация предполагает типизацию основных размеров и
параметров кранов, что дает возможность взаимозаменяемости
узлов, улучшения условий эксплуатации, обслуживания и ремон-
та крановых механизмов, уменьшения общей массы кранов, по-
вышения надежности и работоспособности кранов в целом, со-
гласно требованиям Госгортехнадзора.
ВОПРОСЫ И ЗАДАНИЯ
1. Определить мощность для механизма подъема и механизма передви-
жения ручного мостового крана.
2. Привести примеры практического применения ручных мостовых кра-
нов и электрических кран-балок.
3. Элементы мостового электрического крана и его параметры.
4. Определение скорости подъема и скорости передвижения мостового
электрического крана.
5. Перспективы развития подъемно-транспортного машиностроения.
ГЛАВА 2
ТРАНСПОРТНЫЕ УСТРОЙСТВА
НЕПРЕРЫВНОГО ДЕЙСТВИЯ
Наряду с грузоподъемными машинами периодического дейст-
вия в различных отраслях народного хозяйства (в горнодобы-
вающей промышленности, па обогатительных фабриках, в цехах
металлургических предприятий, машиностроения, приборострое-
ния и др.) для массового перемещения штучных и сыпучих гру-
зов широко применяют транспортные устройства непрерывного
действия — конвейеры, элеваторы, подвесные канатные дороги,
транспортирующие трубы и т, д. Применение транспортных
устройств непрерывного действия, т. е. конвейеризация производ-
ства в системе комплексной механизации, ликвидирует ручной
труд на транспортных операциях, устанавливает наиболее эф-
фективный темп производства, повышает производительность и
дает возможность автоматизировать процесс производства.
В решении задач, поставленных партией и правительством
перед советским народом по созданию материально-технической
базы коммунизма, все более важную роль играет перевод произ-
водства на поточную линию с применением транспортных уст-
ройств непрерывного действия.
§ 7 ТРАНСПОРТНЫЕ УСТРОЙСТВА С ГИБКИМИ ТЯГОВЫМИ
ОРГАНАМИ
Ленточные конвейеры
По конструктивному оформлению и месту установки разли-
чают передвижные и стационарные ленточные конвейеры. Пе-
редвижные ленточные конвейеры (ГОСТ 2103-60) на колесном
ходу изготовляют длиной 10, 15 и 20 м с прорезиненной лентой
шириной 400 и 500 мм. Кроме передвижных, применяются пере-
носные (без колес) конвейеры длиной 5 м. Скорость движения
ленты указанных конвейеров равна 1—4 MjceK.
Стационарные ленточные конвейеры делятся на конвейеры
общего назначения (ГОСТ 10624-63), применяемые преимущест-
189
венно на предприятиях перерабатывающей промышленности,
строительстве и др, и конвейеры специального назначения, ис-
пользуемые в горнодобывающей промышленности и при пере-
работке зерновых продуктов.
Независимо от назначения внешнее очертание трассы лен-
точного конвейера характеризуется геометрической формой пути
Фиг. 98. Геометрические схемы ленточных конвейеров:
а — горизонтальный; б — наклонный; в — с двумя перегибами; г — го-
ризонтально-наклонный с промежуточной перегрузкой; д — горизонталь-
ный с передвижной разгрузочной тележкой; е — горизонтальный с пе-
редвижным загрузочным бункером.
190
движения груза (фиг. 98). По этому признаку ленточные кон-
вейеры бывают горизонтальные, наклонные, горизонтально-на-
клонные, с несколькими перегибами и др.
Стационарный ленточный конвейер (фнг. 99) имеет прочную
и жесткую станину (раму) 5, изготовленную из сортового про-
ката, приводной 5 и холостой (натяжной) 1 барабаны, закреп-
ленные в своих опорах на раме, привод, 'Состоящий из электро-
двигателя и редуктора, ленту 3, огибающую приводной и холо-
стой барабаны, роликовые опоры 4, служащие направляющими
при движении ленты и предупреждающие излишнее провисание
ее, загрузочные 2, перегрузочные и разгрузочные 6 приспособ-
ления, очистное устройство 7.
Грузонесущим (рабочим) и тяговым органом конвейера яв-
ляется прорезиненная лента (фиг. 100). Основой леиты служит
хлопчатобумажная ткань—бельтинг марок Б-820, ОПБ-5 и
ОПБ-12 и уточно-шнуровая ткаиь, которые образуют слои
ленты /, соединенные между собой вулканизированной рези-
ной 2.
Изготовляются также ленты с основой из синтетических тка-
ней — капрона и анида.
В высокпрочных лентах шириной 900 и 1200 мм между слоя-
ми (прокладками) завулкаиизированы стальные тросики 6 диа-
метром 4,2 и 5,1 мм. Поверхность ленты покрыта слоем резины
(обкладкой) торщиной 1—1,5 мм на нерабочей ее стороне 4 и
1,5—10 мм на рабочей стороне 3.
Для стационарных ленточных конвейеров установлены сле-
дующие размеры ширины лент в мм: 300, 400, 500, 650, 800, 1000,
1200, 1400, 1600, 1800 и 2000.
191
Конструктивно ленты делятся на четыре типа (фиг. 100):
тип A-I—послойные нарезные ленты, состоящие из отдель-
ных полос ткани, с усиленными бортами и двусторонней обклад-
кой;
2 3 4
ТТ111ГП1ТП н/м 111TTTJ Н IjL innii
хатш ГТ11! 1111111111 п 1111111111 н I ] 1 ш (11111111 и । /| инн ш i~i й
в)
р)
Фиг. 100. Поперечные сечения прорезиненных лент:
а — тип А-I; б — тип А-2; в, г — тип В; д — теплостойкая:
е — с основой из стальных тросов.
тип А-2— послойные нарезные ленты с бортами без усиления
н с двусторонней обкладкой;
тип А-3 — послойные нарезные леиты с односторонней об-
кладкой;
тип В — послойио-завернутые и спнрально-завернутые ленты.
В условиях высоких температур (до 100° С) применяют теп-
192
лостойкне леиты с асбестовой прокладкой 5 (фиг, 100,3) при
низких температурах (до — 45°С) применяют ленты из морозо-
стойкой резииы.
Число прокладок ленты, зависящее от ее ширины н типа, ука-
зано в табл. 42 (ГОСТ 20-62).
Таблица 42
Число прокладок конвейерной ленты
Ширина лен- ты В ММ Лента типа А-1 Лента типа А-2 Лента типа А-3 Лента типа В
ОПБ-5 ОП Б-1 2 Уточно- шнуровая ткань В-820 Уточно- шнуровая ткань В-820 Б-820
зоо — — «— 3—4 — 3—4 3—4
400 — — — 3—5 — 3—4 3—4
500 — — -- 3—6 — 3—4 3-4
650 3—5 3—5 3—5 3—7 3—5 3—5 3—5
800 3—6 3—6 3—6 4—8 3—6 3—5 3—5
1000 4—8 4-8 4-8 5—10 4—8 3—6 3—6
1200 5—9 5—9 5—9 6—10 5-9 — —
1400 6—10 6—10 6—10 7—10 6—10 — —
1600 7—10 7—10 7—10 — 7—10 —
1800 8—12 8—12 8—12 * 8—12 — —
2000 9—12 9—12 9—12 — 9—12 — —
Необходимое число прокладок ленты i л определяется из рас-
чета на растяжение
с н/м, откуда i = ~макс, (201)
ВЛл k
где k — коэффициент запаса прочности ленты на растяже-
ние, равный 9, при I л — 2 3; 9,5 прн 1Л = 4 -ь 5;
10 при = 6 8; 10,5 при = 9 -ь 11; 11 при
/л= 12 ч- 14;
SMaKC — максимальное усилие натяжения ленты, равное уси-
лию натяжения набегающей ветви, на приводном
барабане в н;
Вг — ширина ленты в At;
—предел прочности на разрыв 1 м ширины одной про-
кладки, равный 55* 103 н/м для бельтинга Б-820;
115* 103 н/м' для бельтинга ОПБ-5 и ОПБ-12;
119- Ю3 н/м для уточно-шиуровой тканн;
180 103 н/м для капрона К-4-3; 300 • 103 н/м для
капрона К-12-3 и анида А-12-3.
7 В. Л. Моргачев
193
При повышенном угле наклона конвейера применяют спе-
циальные ленты с выступами, ребрами или поперечными пере-
городками. Используют также ленты с отбортовкой.
Кроме того, находят применение стальные ленты из сталей
марок 40Г, 65Г и нержавеющей стали цельнокатаные шириной
350—800 jtut или продольно сшитые шириной до 4 м и толщи-
ной 0,8—1,2 мм для транспортирования грузов с температурой
до 300° С и скоростью до 1 Mjcex, иногда применяют шарнирно-
звеньевые и сетчатые проволочные ленты.
Угол наклона ленточного конвейера зависит от материала
и типа ленты, а также от характера транспортируемого груза
(табл. 43).
Таблица 43
Наибольшие допускаемые углы наклона ленточных конвейеров
Наибольшие допускаемые углы наклона 0
в град и подъем fl на 10 пог<м в м для лент
Транспортируемый груз Прорезиненной желобчатой рабочей поверхностью Плоской стальной (цельнопро- катной) глад- кой
с гладкой с рифленой
0 h 0 h 0 ft
Брикеты угольные . 15 2,7 27 5,10 10 1,76
Гравий округлый сортированный 15 2,7 ’— — 10 1 76
Зерно 18 3,25 ’— <— 13 2,31
Земля формовочная выбитая . . . 24 4,45 34 6,75 16 2,87
Земля формовочная влажная гото-
вая 26 4,88 35 7,00 19 3,44
Камень дробленый рядовой .... 18 3,25 30 5,77 12 2,13
Кокс рядовой 18 3,25 30 5,77 13 2,31
Опилки древесные свежие .... 27 5,09 34 6,75 20 3,64
Известь порошкообразная .... 23 4,24 27 5,10 19 3,44
Песок сухой мелкий ....... 16 2,87 30 5,77 13 2,31
Песок влажный 26 4,88 35 7,00 20 3,64
Руда крупная 100 .мл/) . , , 18 3,25 30 5 77 12 2,13
Руда дробленая (а < 60 м.м) , , 20 3,64 30 5,77 10 1,76
Уголь каменный орешковый . . . 17 3,05 20 3,64 10 1,76
Уголь каменный рядовой 18 3,25 27 5,10 13 2,31
Уголь каменный штыб 22 4,04 30 5,77 16 2,87
Цемент 20 3,64 27 5,10 14 2,49
Шлак каменноугольный влажный . 22 4,04 28 5 32 16 2,87
Щебень мелкий 22 4,04 30 5,77 12 2,13
Лента получает тяговое усилие при вращении огибаемого
ею приводного барабана. Условие отсутствия скольжения гиб-
кой ленты по рабочей поверхности барабана выражается фор-
мулой Эйлера:
S„6<S,Z’«. (202)
194
где Sh6 и Sc6 —усилия натяжения набегающей и сбегающей
ветвей ленты на приводном барабане в н;
е— основание натуральных логарифмов;
f — коэффициент треиия между поверхностями
ленты и барабана;
а — угол обхвата барабана лентой в рад.
Окружное усилие на приводном барабане, равное тяговому
усилию конвейера, определяется по формуле
Р — Sh6 — Sc6 н.
Так как
ТО
Р = Sh6 --= S„„ ^=1. н. (203)
Или
р = S, - Sc6 = S(6 (</“ - 1) и. (204)
Как показывают расчеты, величина тягового усилия зависит
от натяжения ленты, коэффициента трення и угла обхвата.
Значения коэффициента трения f и величины е^я даны в
табл. 44.
Значения f и
Таблица 44
Характеристика рабочей
поверхности и условия
работы барабана
efa для углов обхвата а град (рад)
Чугунный или стальной
барабан и очень влаж-
ная атмосфера; грязно
Барабан с деревянной или
резиновой футеровкой
и очень влажная ат-
мосфера; грязно . . .
Чугунный или стальной
барабан и влажная ат-
мосфера; грязно . . .
Чугунный или стальной
барабан и сухая атмос-
фера; пыльно ....
Барабан с деревянной фу-
теровкой и сухая ат-
мосфера; пыльно . .
Барабан с резиновой фу-
теровкой и сухая ат-
мосфера; пыльно . ,
0,1
0,15
0,20
0,30
0,35
0,40
1,37 1,44 1,52 1,69
1,60
1,87
2,56
3,00
3,51
1,73
2,08
3,00
3,61
4,33
1,87
2,31
3,51
4,33
5,34
2,19
2,85
4,81
6,25
8,12
1,87 2,02 2,32 2,57
2,57
3,51
6,59
2,87 3,51
4,04 5,34
8,17 12,35
9,02 11,62 18,78
4,17
6,6
16,9
12,35 16,41 28,56 43,4
7*
195
Для увеличения угла обхвата на однобарабанном приводе
ставят отклоняющие барабаны н прижимные ролики или при-
меняют двухбарабанный привод (фиг. 101). Делается это глав-
ным образом на конвейерах тяжелого типа большой протяжен-
ности.
Прижимные ролики отрицательно влияют иа стойкость лен-
ты и поэтому их применяют сравнительно редко. Наиболее рас-
пространен однобарабаиный привод, состоящий из электродви-
Фиг, 101. Схемы огибания
лентой приводных
барабанов:
а — однобарабанного; 6 —
однобарабанного с прижим-
ным роликом; в, г — двух-
барабанных: д — одноба-
рабанного с прижимной
лентой.
.гателя и редуктора. Схемы приводов ленточных конвейеров по-
-казаны на фиг. 102. На передвижных и стационарных ленточных
.конвейерах легкого типа применяют электробарабаны, т. е. ба-
рабаны с встроенными электродвигателями и редукторами
(фиг. 103). Барабаны изготавливают литыми из чугуна СЧ 12-28
<и сварными из листовой стали Ст. 3. Повышение коэффициента
трения достигается постановкой обкладок на приводном бара-
бане из прорезиненной ленты или деревянных планок.
В опытных конструкциях барабан покрывался рифленой ре-
зиной, а также резиной, наклеенной па поверхность барабана
196
Фиг. 102. Схемы приводов ленточных конвейеров:
а — с цилиндрическим редуктором; б — с коническо-цилиндрическим ре-
дуктором; в — с редуктором и цепной передачей; г — с электробарабаном;
д — с дифференциальным редуктором; е — многодвигательяый.
Фиг. 103. Кинематическая схема электробарабана ВНИИПТМАШ.
197
холодным способом. Для центрирования ленты приводные ба-
рабаны выполняют обычно выпуклыми на величину 1,5—4 мм.
Диаметр барабана зависит от числа прокладок ленты
D^k6iA мм,
(205)
где k6 — коэффициент, учитывающий назначение барабана и
тип ленты, принимается по табл. 45.
Таблица 45
Значения коэффициента kt-;
Назначения барабана Величина коэффициента для лент с прокладками из
бельтинга - 820 бельтинга ОПБ уточно-шну- ровой ткани синтетической ткани
Приводные 125—150 160—200 170—200 160—180
Концевые и натяжные 100—125 140—160 160—170 125—150
Отклоняющие .... 80—100 125—140 125-140 90—100
Полученную величину диаметра барабана округляют до
ближайшего стандартного размера: 250, 320, 400, 500, 630, 800,
1000, 1250 и 1600 мм. Выбранный размер приводного барабана
проверяют на удельное давление
р 360 р
Ууд = kD = кйаВл Н^''
где Р— наибольшее окружное усилие на барабане в н;
а — угол обхвата в град;
Вг —ширина ленты в м;
куэ] — допускаемое удельное давление прорезиненной лен-
ты на поверхность барабана, равное (1600—3500) X
X Ю5 н/м2.
Длина барабана принимается на 100—200 мм больше ши-
рины ленты. Для тросовых прорезиненных лент диаметр бара-
бана
krdT мм,
где kT —коэффициент, зависящий от назначения барабана и
равный 500—250, причем для приводных барабанов
принимается большее его значение, для натяжных и
отклоняющих — меньшее;
dT — диаметр троса в основе ленты в мм.
Натяжные устройства способствуют устранению вытяжки
ленты, уменьшают провисание ее между опорными роликами и
создают необходимые силы сцепления ленты с барабанами.
На ленточных конвейерах устанавливают винтовые и грузовые
198
натяжные устройства — тележечные и вертикальные. При вин-
товом устройстве, применяемом на конвейерах длиной до 50 м,
концевой (натяжной) барабан смонтирован с осью на подвиж-
ных опорах, перемещающихся по направляющим рамы при за-
тяжке двух винтов (фиг, 104,а). При грузовом тележечном
устройстве (фиг. 104,6) барабан монтируется на тележке, сое-
диненной канатом с грузом. Вертикальное грузовое устройство
для конвейеров длиной более 80—100 м (фиг. 104, в) устанав-
Фиг, 104. Натяжные устройства ленточных конвейеров:
а — винтовое; б — грузовое тележечное; в — грузовое вертикальное.
ливается на нерабочей ветви ленты и состоит из двух отклоняю-
щих барабанов и натяжного барабана с грузом в направляю-
щих. Винтовое натяжное устройство требует периодической
подтяжки вручную, в то время как грузовые натяжные устрой-
ства, хотя и являются более громоздкими, не требуют этого.
Для ленточных конвейеров большой длины и высокой произво-
дительности применяют устройства со специальной натяжной
лебедкой.
Опорами ленты в конвейерах, предназначенных для переме-
щения крупных штучных грузов, служат сплошные деревянные
или металлические листовые настилы, а в конвейерах для тран-
спортирования сыпучих и мелких штучных грузов — ролики.
Настилы придают ленте плоскую форму, способствуют возмож-
ности увеличить угол наклона конвейера, обеспечивают плавное
движение груза, но они быстрее изнашивают ленту и требуют
большего расхода мощности.
Роликовые опоры монтируют на подшипниках качения с
различными уплотнениями, нз которых наиболее практичными
199
являются лабиринтные. Для изготовления роликов используют
цельнотянутые стандартные трубы диаметрами 108 мм для лент
шириной 400—650 мм, 159 мм при ширине ленты 800—1600 м.и
и 194 мм для лент шириной 2000 мм. На вспомогательных и
передвижных конвейерах с шириной леиты до 400 мм устанав-
ливают ролики диаметрами 63, 76 и 89
Для поддержания рабочей ветви леиты в зависимости от ее
ширины применяют однороликовые (фиг. 105) или двух-, трех-
и пятироликовые опоры. Для нерабочей ветви применяют одно-
роликовые опоры. Кроме стальных, осваиваются роликовые опо-
ры из пластмасс. Общая длина роликовой опоры должна быть
200
на 100—200 мм больше ширины ленты. Одно- и двухроликовые
опоры поддерживают ленту в плоском состоянии; трех- и пяти-
роликовые опоры с углом наклона боковых роликов 20° прида-
ют ленте желобчатую форму, что способствует повышению
Фиг. 106. Специальные роликовые опоры:
а — амортизирующая; б — дисковая; в — спиральная;
г — центрирующая.
производительности конвейера. Для стальных лент применяют
опоры из спиральных пружин.
Для смягчения ударов материала о ленту в месте загрузки
конвейеров устанавливают амортизирующие опоры, ролики ко-
торых покрыты резиновыми кольцами (фиг. 106, а). На холостой
ветви ленты конвейера применяются дисковые (фиг. 106, б) и
спиральные (фиг. 106, в) очистные ролики. Для устранения
201
бокового смещения ленты при работе конвейера через 4—5 обыч-
ных роликовых опор устанавливают центрирующие роликовые
опоры на вращающихся вертикальных осях (фиг. 106, г).
Рекомендуемые расстояния между роликами рабочей ветви
ленточного конвейера приведены в табл. 46.
Таблица 46
Максимальные расстояния между роликовыми опорами на рабочей ветви
ленточного конвейера
Объемная масса транспортируемого груза в т/ж' Расстояние в м при ширине ленты В в м
0,4 0,5 0,65 0,8 1.0 1.2 1.4 1,6-2,0
7 < I . . 1,6 1.5 1,4 1,4 I.3 1,3 1,2 1,1
7 = 14-2 1,4 1,4 1,3 1.3 1,2 1.2 1.1 1,0
7 >2 1,3 1,3 1,2 1,2 1,1 1,0 1.0 1,0
В местах загрузки расстояния между опорами уменьшают-
ся, а на холостой ветви увеличиваются примерно в 2 раза. Раз-
меры и масса роликовых опор даны в прилож. 31.
Для очистки ленты при работе применяются одинарные и
двойные скребки из протекторной резины или вращающиеся
щетки из капроновых нитей, устанавливаемые у разгрузочного
барабана. У концевого барабана устанавливают плужковые
приспособления для очистки внутренней поверхности ленты.
Предохранительными устройствами, предотвращающими са-
мопроизвольное движение ленты с грузом в обратном направле-
нии при неожиданных остановках наклонных конвейеров, слу-
жат храповые, роликовые и ленточные остановы и электромаг-
нитные тормоза.
Опорная конструкция (станина) ленточного конвейера вы-
полняется в виде отдельных секций, сваренных из прокатных
профилей. Секции опираются на стойки и соединяются между
собой болтами, заклепками или электросваркой. В станине за-
крепляются роликовые опоры, барабаны и привод. Высота
станины принимается в пределах 400—500 мм, высота ленты
над уровнем пола 750—850 мм, ширина станины принимается
на 300—400 jhjh больше ширины ленты при расстоянии между
стойками 2000—3500 мм.
Загрузку сыпучих и кусковых материалов на конвейер про-
изводят из бункеров через течки (фиг. 107, а), устанавливаемые
под таким углом наклона, чтобы скорость движения материала
при попадании на ленту соответствовала -скорости движения са-
мой ленты, во избежание скольжения и износа. Кроме этого,
ленту необходимо предохранять от ударов крупных кусков.
В этом случае целесообразно нижнюю плоскость течки выполнять
в виде решетки, что дает возможность мелкому материалу созда-
202
вать на ленте предохранительный слои. Загрузку штучных гру-
зов можно производить по наклонным лоткам.
Разгрузку сыпучих и штучных грузов, как правило, произво-
дят через концевой барабан и приемные лотки, или течки. В слу-
чае необходимости разгрузки конвейера в промежуточной его
части используют лотки (фиг. 107, б), односторонние и двусто-
ронние плужковые сбрасыватели и разгрузочные передвижные
барабанные тележки (фнг. 107, в).
Фиг. 107. Загрузочные и разгрузочные приспособления:
а — загрузочная течка; б — разгрузочный лоток; в — передвижная разгрузочная
двухбарабанная тележка.
Производительность ленточных конвейеров измеряется в т/ч
или в л*3/ч. При этом принимается равномерное распределение
материала на ленте по всей рабочей длине конвейера с погонной
нагрузкой q кг/м. Материал перемещается лентой со скоростью
v м/сек. Тогда производительность конвейера Q будет равна
Q = = qv кг/сек = = 3,6^ т/ч. (207)
Из формулы (207) видно, что производительность конвейера
зависит от погонной нагрузки и скорости движения ленты
(табл. 47).
203
Таблица 47
Рекомендуемые скорости движения ленты конвейера
Группы насыпных грузов Примеры характерных грузов Скорость v в м/сек прн ширине ленты В, в мм Л
о 500 и 650 । 1 000 [—ооя 1 1200—1600
Неабрззивные и мало- абразивные грузы, кро- шение которых не пони- жает их качества Абразивные мелко- и среднекусковые грузы (а < 160 juju) Абразивные крупно- кусковые грузы (а >160 мм) Хрупкие грузы, кро- шение которых понижает их качество Мучнистые, сильно пы- лящие грузы Зерновые грузы Уголь рядовой, соль, песок, торф фрезерный Гравий, руда, шлак, щебень Горная порода, руда, камень '' Кокс, уголь сор- тированный, древес- ный уголь Мука, цемент, апатит Рожь, пшеница 1-1,6 1—1,25 1—1,25 1,5— 2,0 1,25—2 1—1,6 1—1,6 1—1,6 0,8- 2—3 1,6—3 1,6-2 1—1,6 1,25— 1,6 1,25 ; 2—4 2—4 2—3 1,6—2 1,6—2
Погонная нагрузка будет зависеть от площади поперечного
сечения материала на ленте F в м2 и насыпной маосы материала
у в т/м3:
q = lOOOFy кг/м. (208)
Подставляя значение q в формулу (207), получим
Q = ЗбООЛсу т/ч (209)
или
Q = 3600Fo м2/ч.
(2Ю)
На величину площади поперечногосечення материала влияет
ее форма, т. е. геометрическое очертание. Мелкозернистый мате-
риал под действием толчков при движении плоской ленты при-
нимает форму параболического сечения (фиг. 108, а), у которого
ширина слоя Ь = (0,8-ь0,9) • Вл ~ 0,85 Вл, высота h = —b я и
12
площадь
F = Л bh = — — Ь2 = — (0,85Вл)2 я2.
3 3 12 18 V л
204
Производительность конвейера с плоской лентой
i Q = 3600Ft/Y = 3600 — (0,85В!)2 'JY = 14532t)y т/ч. (211)
18
Для желобчатой ленты площадь поперечного сечения мате*
риала удваивается и производительность конвейера
Q = 290В2оу (212)
При заданной производительности Q т/ч и скорости движения
материала v м/сек определяется ширина ленты: для плоского
конвейера
Q лг
[145tiY
для желобчатого конвейера
м.
в = 1 /
У 29017
В расчетах плоских ленточных конвейеров для кусковатого
материала площадь поперечного сечения условно принимают
параболической или в форме равнобедренного треугольника
(фиг. 108, б) с основанием b = 0,8 м и углом при основании
Фиг. 108. Расположение на ленте насыпных грузов:
а — параболическое; б — треугольное.
= 0,35 р* . Средний угол естественного откоса материала
ре= 40-е45° (табл. 48) и угол при основании треугольника
Ро = 15°.
Площадь поперечного сечеиия материала на плоской лейте
F = = А — 1g 15° = 1°-8^3 tg 15° = 0,16В® tg 15* м\
Производительность плоского конвейера при tg 15° = 0,27
Q = 3600FoY = 3600 • 0,16В20,27уу = 155B^Y т/ч, (213)
205
Таблица 48
Характеристика насыпных грузов
Наименование грузов Объемная масса в т[м* Угол есте- ственного откоса в покое ре в град Средние величины ' коэффициентов трения в состоянии покоя f
по стали 1 по резине
Антрацит мелкий, сухой . . . 0,8—0,95 45 0,84 —
Гипс мелкокусковой I 2—1,4 40 0,78 0,82
Глина сухая мелкокусковая . 1,0—1,5 50 0,75
Гравий (округлый) 1.5—1,9 30—45 1,0 —
Земля грунтовая сухая . . . 1,2 30—45 1,0 1
Земля формовочная выбитая . 1,25— 1,30 30—45 0,71 0,61
Зола сухая 0,4—0,6 40—50 0,84 —
Известняк мелкокусковой . . 1,2—1,5 40—45 0,56 —.
Кокс 0,36—0,53 35—50 1,0 —
Мука пшеничная 0,45—0 66 50—55 0,65 0,85
Овес 0,4—0,5 28—35 0,58 0,50
Опилки древесные 0,16—0,32 39 0,8 0,65
Песок сухой 1,4-1,65 30—35 0.8 0,56
Пшеница 0,65—0,83 25—35 0,6 0,5
Руда железная 2,1—2,4 30—50 1,2 —
Торф сухой кусковой .... 0,33—0,5 32—45 0,6 —
Уголь каменный рядовой . . 0,65—0,78 30—45 0,8 0,6
Цемент сухой 1 0—1 3 40 0,65 0,64
Шлак каменноугольный . . . 0 6—0,9 35—50 '.<> 0,66
Щебень сухой 1.8 30—45 0,74 0,6
Для желобчатой ленты площадь поперечного сечения матери-
ала складывается из площадей треугольника и трапеции. Как
показывает практика, для нормальной трехроликовой опоры с
углом наклона боковых роликов 20° эти площади примерно рав-
ны. Тогда производительность желобчатого конвейера
Q = 310B^Ym/4. (214)
Из формул (213) и (214) при известных значениях произво-
дительности и скорости движения определяется ширина ленты.
Выведенные формулы производительности .справедливы для
ленточных конвейеров с углом наклона р = 0-5-10°. С увеличе-
нием угла наклона конвейера производительность соответствен-
но уменьшается;
QH = т/ч,
где QH — производительность наклонного конвейера в т/ч-}
ф — коэффициент, учитывающий угол наклона конвейера
и равный 1,01 при р = 0-ь10°; 0,95 при р = 10^-15°;
0,9 при р = 15-ь 18° и 0,85 при р = 20-ь 22°.
Q — производительность горизонтального конвейера в т/ч.
206
Полученная ширина ленты проверяется на кусковатость
Дрэкспортируемого материала:
Для рядового материала с наибольшим размером кусков ан
! Вл > 2ан + 200 мм\
Для сортированного материала со .средним размером кусков ас
i Вл Ъ,3ас + 200 мм.
I Окончательная принятая ширина ленты округляется до бли-
жайшей стандартной величины.
При транспортировании штучных грузов погонная нагрузка
q определяется из соотношения
G
q = — кг/м,
где G — масса одного груза, в кг;
t — расстояние между грузами, в м.
Производительность ленточного конвейера в этом случае
Q = 3,6^о — 3,6 v т/ч. (215)
Если одновременно друг на друга укладывается по т грузов;
то производительность конвейера
т/ч, (216)
Ширина ленты для штучных грузов выбирается с таким рас-
четом, чтобы при расположении груза на ленте по обе стороны
оставалось по 50—100 мм. Скорость движения ленты в этом слу-
чае обычно принимают равной 0,5—1,0 м/сек.
В формулах (203) и (204) тяговое усилие конвейера Р вы-
ражено через усилия натяжения набегающей и сбегающей
See ветвей ленты на приводном барабане, коэффициент трений f
и угол обхвата а.
Для определения числа прокладок 1Л ленты по формуле
(201) необходимо знать усилие натяжения набегающей ветви
SK6, равное максимальному усилию натяжения ленты 5лакс.
Из формулы (203)
S„e = P—------ «.
Тяговое усилие конвейера Р определяется по формуле
ВНИИПТМАШ
Р = 10[ш((? + дд)Вг ±qH] тгтгт3т^тъ н, (217)
где w — коэффициент, учитывающий условия работы конвейе-
ра, принимается по табл, 49;
207
Таблица 49 I
*
Значения коэффициента сопротивления w
Характеристика работы конвейера | г и? ।
Ролики иа подшипниках качения 1 Работа в чистом сухом помещении, без пыли Работа в отапливаемом помещении, где имеется неболь- шое количество абразивной пыли и нормальная влаж- ность воздуха Передвижные и переносные конвейеры при хороших усло- виях работы Работы в неотапливаемом помещении и на открытом воз- духе; возможно большое количество абразивной пыли, повышенная влажность и другие факторы, вредно влия- ющие на работу подшипников Очень тяжелые условия работы, очень пыльная атмосфера 0,02 1 1 0,025,' 0,03 । i 0,04 0,04—0,06
Для роликов на подшипниках скольжения . 0,05—0,06
q— погонная масса материала на ленте в кг/м;
qd — погонная масса движущихся частей конвейера (роли-
ков и ленты) в кг!м\ в приближенных расчетах можно
принимать qe в зависимости от ширины ленты ВЛ:
ВА в мм . . 400 500 650 800 1000 1200 1400 1600 1800 2000
qd в кг]м . 30 38 50 65 95 130 165 200 270 340
Ьг— горизонтальная длина конвейера в м\
Н— высота подъема груза в м\ если на конвейере установ-
лен плужковый сбрасыватель, то вместо Н в формулу
подставляют Н ± 3,6 здесь Вл — ширина ленты в м;
знак + ставится при движении ленты вверх, знак —
при движении ленты вниз;
«1, т2, т3, пи, m5 — коэффициенты, учитывающие конструктив-
ные признаки конвейера и принимаемые по табл. 50.
Более точно погонная масса движущихся частей конвейера
определяется по формуле
G с
Чд = Яр + ?.< + = + + 2qA кг/м, (218)
*р ^х
где Gp и Gx — массы вращающихся частей роликовых опор
рабочей и холостой ветви ленты в кг (при-
лож. 31);
tp и /х—шаг роликовых опор рабочей и холостой ветви
В Л4;
дл — погонная масса ленты в кг/м, приближенно оп-
ределяемая по формуле
qл = 1,1В г -4- 4 + S2) кг!м\ (219)
208
Таблица 50
Значение коэффициентов mlt т2> т3, mit ть для конвейеров
с барабанами на подшипниках качения
Коэффп - । циент Отличительные признаки конвейера Числовые значения коэффици е н тон
Длина в м. <15 . 15-30 30—150 150 и более 1,2—1,5 1,1-1,2 1,05—1,1 1,05
т2 Прямолинейный или имеющий изгиб трассы, направ- ленный выпуклостью вниз Имеет перегиб трассы, направленный выпуклостью вверх: головной части средней части хвостовой части I 1,06 1,04 1,02
пгц Головной однобарабанный привод Промежуточный привод I 1,06—1,08
Хвостовая натяжная станция Вертикальная натяжная станция, имеющая г барабанов 1 1—0,02 г
т5 Без сбрасывающей тележки С моторной сбрасывающей тележкой: двухбарабанный привод конвейера однобарабанный привод конвейера 1 1,2 1,3
Здесь Вл— ширина ленты в м;
& — толщина одной прокладки ленты, равная 1,25 и
1,5 мм для бельтинга Б-820; 1,9 и 2,3 мм для бель-
тинга ОПБ-5 и ОПБ-12; 2,0 и 2,3 мм для уточно-
шнуровой хлопчатобумажной ткани; 0,9 и 1,25 мм
для капрона К-4-3; 1,4 и 1,8 мм для капрона К-12-3
и анида А-12-3 (меньшие значения даны для про-
кладок без резиновой прослойки, большие — для
прокладок с резиновой прослойкой);
1Л — число прокладок ленты;
61 и д2 — толщина верхней (рабочей) и нижней (опорной)
обкладок ленты в мм (табл. 51).
Толщина обкладок зависит от характеристики транспор-
тируемого материала м времени одного оборота ленты Т =
2L
= — сек. (табл. 51).
Определив тяговое усилие конвейера Р, находят величину
натяжения набегающей ветви Shg и по ней вычисляют необхо-
димое число прокладок леиты.
209
Таблица 51 1
Рекомендуемая толщина обкладок прорезиненной^ленты
Характеристика транспортируемых грузов и их примеры Размеры кусков а в мм Толщина верхней рабочей’ обкладки 6, в мм прн величине времени одного кругооборота ленты — сек О Толщина опорной обкладки в мм
до 25 25—50 50—100 100—200 более 200
Неабразивные и малоабразивные: древесная стружка, древесный уголь, круглый гравий Менее 10 10—60 60—160 Более 160 2,0 2.0 3,0 3,0 1,5 2,0 2,0 2,0 1,5 2,0 2,0 2,0 1,5 2,0 2,0 2,0 1,5 2,0 2,0 2,0 1.0
Штучные грузы в мягкой таре: мешки, кули, тюки — 2,0 2,0 1.5 1.5 1,5
Среднеабразивные: песок, каменная соль, каменный уголь, антрацит, щебень, цемент Менее 10 10—60 60—160 Более 160 3.0 3,0 3,0 4,5 з,о з.о 3,0 4,5 з,о 3,0 3,0 4,5 2,0 з,о з,о з,о 2,0 2,0 3,0 3,0 1,5
Штучные грузы в жесткой таре: ящики, бочки, корзины — 3,0 3,0 з,о з.о 2,0
Сильноабразивные: руда, кварц, гранит, стекло (битое) Менее 10 10—60 60—160 Более 160 4,5 6,0 7,5 10 4,5 6,0 7,5 10 4,5 4,5 7,5 10 4,5 4,5 6,0 7,5 з,о 4,5 6,0 7,5 2,0
Бестарные штучные грузы с ост- рыми кромками — 4,5 4,5 4,5 р,5 з,о
Установочная мощность электродвигателя привода конвейе-
ра зависит от тягового усилия и скорости движения ленты
N = k3 — вт, (220)
*1
где k3 — коэффициент запаса мощности, равный 1,2—1,25;
Р — тяговое усилие конвейера в н;
v — скорость движения ленты в м/сек;
г] = т|л|Т|б — общий к. п. д. привода (здесь Щм — к. п. д. пе-
редаточного механизма, принимаемый по табл. 52).
210
Таблица 52
Средние значения к. п. д. т|ж
Элементы приводного механизма К. и. д. при подшипниках валов
скольжения качения
Зубчатая передача цилиндрическая с фрезерованным
зубом, закрытая в редукторе с масляной ванной 0,95 0,98
То же, коническая 0,94 0,97
Зубчатая передача цилиндрическая с фрезерованным
зубом, открытая с густой смазкой 0,93 0,96
То же, коническая 0,92 0 95
Червячная передача однозаходная в редукторе . . 0 60 0,65
То же, двухзаходная 0,72 0,77
То же, трехзаходная 0,80 0,85
Цепная передача, открытая, цепь роликовая . . . 0,92 0,95
Клиноременная передача 0 93 0,96
Уравнительная муфта 0,97 0,99
Зубчатая муфта 0,98 0,99
К п. д. приводного барабана г]б определяют по формуле
ВНИИПТМАШ
Че = , ' -----г., (221)
1 + w6(2kc — 1)
где we — коэффициент сопротивления барабана на подшипни-
ках качения, равный 0,01—0,015;
kc — коэффициент, учитывающий трение и угол обхвата
здесь е— основание натуральных логарифмов;
f — коэффициент трения;
а — угол обхвата шкива лентой.
По найденной мощности N выбирают электродвигатель, поль-
зуясь прнлож. 10 или 32, а затем определяют передаточное чис
ло привода
/ __
1п »
%
где Пдв — число об/мин выбранного электродвигателя;
Пб—число об/мин приводного барабана;
60о -,
ns = ----- об мин,
здесь v — скорость движения ленты в м/сек.
D—диаметр барабана в м.
По передаточному числу выбирают редуктор, пользуясь при-
лож. 33.
211
Мощность двигателя ленточного конвейера в основном рас-
ходуется на перемещение материала, на преодоление сил сопро-
тивления разгрузочных приспособлений, на преодоление сил тре-
ния в опорах барабанов и роликов, на преодоление сил трения
при движении ленты по роликам и т. д. Поэтому в практических
расчетах тяговое усилие ленточных конвейеров (горизонтальных
н наклонных) принимают как сумму сил сопротивлений от мас-
сы ленты и массы груза иа прямолинейных участках с учетом ко-
эффициента дополнительных сопротивлений на криволинейных
участках
Р = к!^л+^г) н, (222)
где №л — сила сопротивления от массы ленты в н;
Wa— сила сопротивления от массы груза в н;
k — коэффициент дополнительных сопротивлений иа бара*
банах.
Фиг. 109. Схема к тяговому расчету ленточного конвейера.
По расчетной схеме (фиг. 109) видно, что нормальные со-
ставляющие от массы ленты 2дл cos 0 будут вызывать силы тре-
ния в опорах роликов и силы трения при движении ленты по ро-
ликам
Wt = L2qA cos Зцд 10 = 2^ЛАгшх10 н, (223)
где L — длина конвейера в м;
дл— погонная масса ленты в /сг/м;
Р— угол наклона конвейера в град;
— L cos р — горизонтальная длина конвейера в м;
— коэффициент учитывающий сопротивление холостого
хода.
Мощность холостого хода конвейера
Nx = WAv = 2qAL2wxvlO вт.
212
Обозначим С — ^д™-х- тогда
102 ’
Nx = CLsvlQ вт. (224)
При установке роликовых опор на подшипниках качения ко-
эффициент С принимается в зависимости от ширины ленты Вл:
Bt в юи . . , 500 650 800 100 1200
С . ...... 0,018 0,023 0,028 0,038 0,048
Касательные составляющие от массы ленты qA sin |3 взаимно
уравновешиваются.
Нормальная составляющая от массы груза q cos £ также соз-
дает силу сопротивления в роликовых опорах и трение ленты по
роликам
wH = /л/cos Зщ, 10 = Д,д,10 н, (225)
где w3 = 0,054 — коэффициент, учитывающий сопротивления,
возникающие при перемещении материала.
Необходимая для этого мощность
ЛС = w„v = qLwev\0 em.
п> П- г с t
Из формулы (207) q = .
Подставив их значение q и ыг в формулу мощности NH, по-
лучим
1г QZ»^0т054v 10 л г/л т
= у—g — = ОД SQL; em. (226)
Касательная составляющая от груза создает силу сопро-
тивления подъему груза
Wn = ± Lq sin 310 = ± qH}Q н, (227)
где Н — L sin р — высота подъема груза в м\
Р — угол наклона конвейера в град.
Знак плюс берется при движении груза вверх, знак минус —
при движении груза вниз.
Мощность, затрачиваемая на подъем груза:
Nn =+ W„V = ± lOqHv =-- + = ± 2.78QH em.
Суммарная мощность, необходимая для перемещения ленты
с грузом;
2V0 = k(Nx + + Nn) = k (CL;V\Q + 0,15Q^ ± QH- 2,78) em.
(228)
Коэффициент k зависит от длины конвейера L и принимается
равным 1,25 при L < 15 м\ 1,1 при L = 16ч-30 л<; 1,05 при L =
— 30-е45 м н 1,0 при L > 45 я.
213
Если ленточный конвейер имеет сбрасывающее устройство,
то к суммарной мощности добавляют мощность, расходуемую на
промежуточную разгрузку материала.
Для плужкового сбрасывателя
— С&ВЛ вт, (229)
где G — коэффициент, равный 7,5;
Q—производительность конвейера в т/ч;
Вл— ширина ленты в м.
Для двухбарабанной самоходной разгрузочной тележки
Мс = O,275jVo + 5Q + 400 вт, (230)
где jVo — суммарная мощность по формуле (228);
Q — производительность в т/ч.
Мощность двигателя с учетом мощности .на разгрузку
Ы = k:l—> +N-^ ет, (231)
TiM
где ka—коэффициент запаса, равный в пределах 1,2—1,25;
три—к. п. д. привода.
По мощности N выбирается электродвигатель, определяется
передаточное число и подбирается редуктор.
По выбранной мощности электродвигателя N и скорости
движения ленты v находится окружное усилие барабана
Р = ~ «. (232)
и
Зная величину окружного усилия, коэффициент трения меж-
ду лентой и барабаном и угол обхвата, можно найти усилие на-
тяжения набегающей ветви ленты
s^ = p~— н-
— 1
По усилию натяжения набегающей ветви определяются раз-
меры ленты —ширина и число прокладок.
Более точным является определение усилия натяжения лен-
ты методом расчета по точкам при обходе замкнутого контура
конвейера в направлении движения ленты _(см. фиг. 109).
За исходную принимается точка /, усилие натяжения ленты
в которой соответствует усилию натяжения сбегающей ветви;
S1 — ^сб Н’
усилие натяжения в точке 2
S2-St 4-Г!_2 н. (233)
Сила сопротивления на прямолинейном участке 1—2 равна
214
силе сопротивления холостой ветвн с учетом сил трения в опо-
рах от силы тяжести роликов
^1-2 = w,= (7л + 7Х) ЛА10 « (234>
где дл и qx — погонная масса ленты и масса роликовых опор на
холостой ветви в кг/м\
wx — коэффициент сопротивления на холостой ветви,
равный 0,03—0,04:
Усилие натяжения ® точке 3
S3 = $2 4- U^2—з (235)
Сила сопротивления на криволинейном участке 2—3
Г 2-з = (0,04-h0,05)S2.
Тогда
S3 = (1,04 — 1,05) S2 н (236)
или
S3 = S1 -1- W1—2 + W2—з я. (237)
Усилие натяжения в точке 4, равное усилию натяжения на-
бегающей ветви;
S4 = SH6 - S3 -|- 1^3—4 — S[ -|- U7 [_2 -ф W2—3 + W3—4 Н. (238)
Сила сопротивления на прямолинейном участке 3—4 равна
силе сопротивления груженой ветвн с учетом сил трения в опо-
рах от массы роликов
^3-4 = w£ = [(9 4- Ял-I- Яр) LeWs ± (<?4- ?₽)#!10 (239)
где qp — погонная масса роликов рабочей ветви в кг(м.
Окончательно получаем
S«6 = Sc6 4* 1—2 + &2—з 4~ ^з—4 = Sc^ 4- 1—4 я> (240)
В формуле (240) неизвестны 5иб и Scg. Для определения их
значений используют формулу Эйлера;
SH6-Sc6ef-H. (241)
Решая совместно уравнения (240) и (241), находят усилия
натяжений набегающей SH6 и сбегающей Scs ветвей ленты.
Для сбегающей ветви
Sc6e'‘ = Sa + Wt_t или Sc6 (/“-!) =
= ^-4 И = 1Г,_4 н. (242)
Для набегающей ветви по формуле (241)
_ «А
—« <243)
е7 — 1
По усилию натяжения SHs производится расчет ленты.
215
Тяговое усилие ленты конвейера (окружное усилие бараба-
на) Р с учетом сопротивления на приводном барабане
= (°-04 0,05)
Р - - Scs + Г4_1 = Sc6 + Wi_4 - Sc6 + F4_i = h. (244)
Формула (244) показывает, что тяговое усилие ленты равно
суммарной силе сопротивления на всех участках конвейера при
обходе контура по характерным точкам.
Нужно отметить, что приведенный метод расчета по точкам
является трудоемким для ленточных конвейеров со сложной
трассой,
В Советском Союзе серийно выпускаются конвейеры с ши-
риной ленты 400—2000 мм и скоростью движения груза до
3,25 м/сек. Производительность ленточных конвейеров составля-
ет до 1000 мР/ч каменного угля и до 4000 т/ч руды. Суммарная
мощность привода одного конвейера до 1140 кет. Разрабатыва-
ются конструкции ленточных конвейеров производительностью
до 10000 т/ч для открытых разработок. Осваиваются ленточно-
канатные конвейеры производительностью 500 т/ч, длиной транс-
портирования 800 м, высотой подъема 86 м, шириной ленты
1200 мм, скоростью движения ленты 1,8 м/сек, а также ленточ-
но-цепные конвейеры производительностью 300 т/ч, длиной
600—2000 м и шириной ленты 1000 мм. При проектировании
конвейеров основной задачей является разработка прочных,
гибких и долговечных лент.
Всесоюзным научно-исследовательским институтом подъем-
но-транспортного машиностроения разработаны конструкции
конвейеров с погруженной лентой (фиг. ПО) транспортирования
хорошо сыпучих сухих пылевидных, порошковых, зернистых и
мелкокусковых материалов.
Перфорированная или сплошная прорезиненная, стальная
или проволочная лента 3, помещённая в герметически закрытый
желоб 5, огибает приводной 6 и натяжной 1 барабаны. Материал
нз загрузочной воронки 2 попадает на нижнюю или верхнюю
рабочую ветвь ленты. Разгружается материал плужковым сбра-
сывателем 4. Длина конвейера 30—40 м, производительность до
20 т/ч, максимальный угол подъема груза 10—12°.
В Чехословакии изготовляют ленты с перлоновыми проклад-
ками с разрывным усилием одной прокладки по ширине ленты
160 • Ю3 и 300-103 н/м.
Перлоновая лента гибка в поперечном направлении, что дает
возможность повысить угол наклона боковых роликов до 40°.
Это позволяет значительно увеличить количество материала на
ленте.
В ГДР выпускают конвейеры с шириной ленты 300—-3000 мм,
скоростью движения груза 0,42—5,24 м/сек (на вскрышных ра-
216
ботах до 7 м/сек), производительностью до 3800 мг/ч при угле
наклона боковых роликов 20—30°.
Имеется в эксплуатации ленточный конвейер производитель-
ностью 200 т/ч при ленте длиной 319 м. Конвейер имеет восемь
разгрузочных участков и заменяет девять обычных ленточных
конвейеров с перегрузочными станциями. Управление конвейер-
ной установкой дистанционное.
Фиг, 110. Конвейеры с погруженной лентой:
а — с нижней рабочей ветвью; б — с верхней рабочей ветвью,
Пример. Произвести расчет ленточного конвейера и производительностью
Q = 400 т/ч сортированной железной руды с насыпной массой у = 2 т/м3
и средним размером кусков ас = 160 льм. Длина конвейера /, = 80 м, угол
наклона fJ = 18°, разгрузка материала через концевой (приводной) барабан.
Работа в отапливаемом помещении с нормальной влажностью и небольшим
количеством абразивной пыли.
Барабан и ролики — на подшипниках качения, привод — головной одно-
барабанный, натяжное устройство — винтовое.
Принимаем конвейер с желобчатой лептой и скоростью движения груза
v = 1,3 м/сек. (табл. 47).
217
Ширина ленты из формулы (214) с учетом угла наклона
= ™__________= 0,74Л.
SlOcrtv \/ 310 • 1,3 • 2 • 0,9
Ширина ленты из проверки на кусковатость
Вл = 3,Зас 4- 200 = 3,3 . 160 4- 200 = 728 мм.
Выбираем стандартную прорезиненную ленту шириной Вл = 800 лш.
Тяговое усилие конвейера находим по формуле ВНИИПТМАШ, предва-
рительно приняв 0,025 (коэффициент условий работы но табл. 49);
ке/м при Вл = 800 мм (погонная масса движущихся частей конвей-
ера); тп\ = 1,1; т2 = 1; = 1; т4 = 1; m5 = 1 (табл. 50).
Погонная масса материала по формуле (207):
Q 400
а = „ -• = ——т —: 86 кг/м.
4 3,6о 3,6- 1,3
Горизонтальная длина конвейера
Lz = L cos р = 80 0,95 — 76 м.
Высота подъема груза
Н = L sin р = 80 0,308 = 25 м.
Тяговое усилие
Р = 10 (q 4- qd) L> + qH\ • = 10 [0,025 • (86 4- 65) 76 -|-
4-86 25] 1,1 = 26 800 н.
Усилие натяжения набегающей ветви ленты на приводном барабане при
коэффициенте трения f = 0,3, угле обхвата а = 210° и значение = 3
(табл. 44), по формуле (203):
е/а 3
Знб = Р -------Г = 26 800 Ч-----Г = 40 200 «•
eJ — 1 3 — 1
Число прокладок ленты при SMaKC — $нб = 40 200 н, пределе прочности
<ТдЧ=115-10® н/м, коэффициенте запаса А=9,5, ширине Вл=800 мм=0,8 м:
. &$макс__________________________9,5 • 40 200 __
'* ' Випч “ 0,8 • 115 - Юз" > ’
принимаем 1Л = 5.
Диаметр приводного барабана по формуле (205) при kg ~ 125:
Z) > = 125-5 = 625 мм;
принимаем D = 630 мм.
Диаметр натяжного барабана при kg = 100:
D k^iA = 100-5 =500 мм.
Длина барабанов
£б=Дл4-(100 -н 200) мм = 800 4- 150 = 950 мм.
Проверка приводного барабана и леиты иа удельное давление по фор-
муле (206):
360Р 360 • 26 800
qA = — = - -----= 29 000 < 35000 н/м3.
4 кЬаВл 3,14.0 63.210-0,8
218
Для леиты шириной В.г = 800 мм диаметр роликов равен 159 м, об-
щая длина роликовой опоры 910 мм (прилож. 31).
При к.п.д. одной зубчатой пары, равном 0,97 (табл. 52), к.п.д. двухступен-
чатого редуктора Г|Л = 0,972 = 0,94.
К.п.д. приводного барабана по формуле (221)
1
1 4- w6 (2kc— 1)
1 4-0,01
= 0,98.
Общий к. п. д. привода
т) = = 0,94 - 0,98 = 0,92.
Мощность двигателя по формуле (220):
.. , Pv 1 а 26 800 *1,3 лплпл лил
N = k,— = 1,2 --------— = 45 400 ет - 45,4 кет.
0,92
По таблицам в прилож. 10 выбираем асинхронный электро-
двигатель МТ-63-10, у которого при тяжелом режиме работы
N = 48 к.вт, пдв = 581 обугли.
Скорость вращения приводного барабана
60у 60 1,3 оп А
=----=----------— = 39,4 об мин.
6 jtD 3,14-0,63
Передаточное число привода
1=2^. = = 14,7.
" пб 39,4 *
По таблицам в прилож. 33 выбираем двухступенчатый ре-
дуктор ЦДШ-650 с передаточным числом in = 14,06.
Действительная скорость движения ленты
vd = 1,3 7 1,36 м/сек.
д ' 14,06
ВОПРОСЫ И ЗАДАНИЯ
1. Конструктивные разновидности ленточных конвейеров.
2, Типы и материал лент.
3. Конструкции барабанов и роликовых опор.
4. Показать примером влияние форм роликоопор на производительность
ленточного конвейера при прочих равных условиях.
5. Особенности тягового расчета конвейера по точкам.
6. Ознакомиться с конструкциями ленточных конвейеров и условиями их
работы на предприятии.
Пластинчатые конвейеры
Пластинчатый конвейер (фиг. 111) имеет сварную или кле-
паную раму 7, на концах которой установлены ведущие 2 и ве-
домые 3 звездочки. Привод конвейера электрический, натяжное
устройство 4 винтовое.
219
Тяговым органом являются цепи (фиг. 112): ПВ— пластин-
чатые втулочные; ПВР — пластинчатые втулочно-роликовые;
ПВК—пластинчатые втулочно-катковые -с гладкими катками,
ПВКГ — пластинчатые втулочно-катковые с гребнями на кат-
ках (ГОСТ 588-54). Для пластинчатых конвейеров выбираются
цепи шагом 100—630 мм. Характеристика тяговых пластинчатых
цепей дана в табл. 53.
Пластинчатые тяговые цепи по прочности делятся на катего-
рии: I —высокой; II — повышенной; III — нормальной и IV —
пониженной прочности.
Тяговых цепей в конвейере бывает, как правило, две, но
применяются конвейеры и с одной цепью. К цепям крепятся
Таблица 53
Разрушающие усилия пластинчатых тяговых цепей по категориям прочности
(ГОСТ 588-54)
1 „ Диаметр ; валика в лии 1 „ . Разрушающее усилие в « для категория прочности цепей Диаметр валика в мм Разрушающее усилие в н для категории прочности цепей
I И Ш IV I II III IV
9 108 000 62 000 49 000 37.000 24 562 000 323 000 256 000 194 000
1Г 150 000 86 000 68000 52 000 30 790 000 454 000 369 000 274 000
13 209 000 120 000 95 000 72 000 36 1 190 000 680 000 540 000 410 000
16 277 000 159 000 126 000 96 000 44 1 680 000 1 000 000 790 000 М 1
20 400 000 230 000 182 000 138 000 55 2 620000 1 500 000 1 190000 —
220
Фиг, 112. Тяговые Цепи:
а — тип ГТВ; б — тип ПВР; в — тип ПВК; г — тип ПВКГ-
221
металлические или (реже) деревянные пластины, составляющие
рабочую часть конвейера — настил (фиг. 113).
На пластинчатых конвейерах без бортов перемещаются
штучные грузы: конвейеры с неподвижными бортами, закреп-
ленными на раме, и с пластинами, имеющими отбортовку, пред-
назначены для транспортирования сыпучих и кусковых матери-
Фиг. 113. Настилы пластинчатых конвейеров:
а, б, в — плоские безбортовые; г — плоский бортовый; д — волнистый
бортовый; е, ж — глубокие бортовые.
алов. Пластины конвейера могут быть плоскими, волнистыми
или коробчатыми. Волнистые и особенно коробчатые настилы
позволяют устанавливать конвейер под углом до 30°. Конвейеры
с плоским металлическим настилом применяются для переме-
щения тяжелых штучных и кусковых грузов в холодном и горя-
чем состоянии (руда, агломерат, отливки, поковки и т. д.). Ха-
222
рактерными особенностями пластинчатых конвейеров являются
их высокая производительность (до 2000 т/ч и более), значи-
тельная длина (до 2000 ж), большая собственная масса, слож-
ность конструкции, трудность в обслуживании и ремонте, повы-
шенный расход энергии, сравнительно малая скорость движения
груза. Основные размеры пластинчатых стационарных конвейе-
ров общего назначения определены ГОСТ 2035-54.
В отличие от ленточных пластинчатые конвейеры имеют бо-
лее жесткий настил Т'менъшую скорость движения в пределах
0,2—0,6 м/сек.. В связи с этим угол прн основании принимается
ро = 0,4, Ре = 17° и ширина слоя материала Ь = 0,85 Вн. Тогда
на пластинчатом конвейере без бортов площадь поперечного се-
Ф.иг. 114. Поперечное сечение материала на настиле:
а, б — без бортов; в — с неподвижными бортами; г — с подвижны-
ми бортами.
чения материала, имеющая форму треугольника (фиг, 114,6),
будет равна
F~ — = AAtgp0-- (Q’85£Matgi7° =0,183*0,31 м2.
2 2 2 ‘ 4
Производительность горизонтального конвейера без бортов
определяется по формуле (209):
Q = ЗбООЗЪу = 3600 0,183* 0,3 lay = 2003«оу т/ч. (245)
По заданной производительности Q и скорости движения v
определяют необходимую ширину настила
(246)
Если насыпной груз расположен по параболе (фиг. 114, а),
то ширину слоя материала принимают b — Вн— 0,1 м и высоту
h = — в.
6
223
В этом случае площадь поперечного сечения материала
F = 7bh =Т(В“~°’1)Т = V (Я.-0-1)2
Производительность конвейера
Q = 3600Foy - 3600 | (Вм — 0,1 )2 • иу =
= 400 (Вн — Д Vpvym/ч. (247)
Необходимая ширина настила
Вн = 1/ + 0,1 = 0,05 1/ + 0,1 м. (248)
у 400ат у try
При транспортировании штучных грузов производительность
пластинчатого конвейера определяется по формулам (215) и
(216):
Q = 3,6 v т/ч и Q - 3,6 v т/ч.
Для пластинчатых конвейеров с бортами и заполнением ма-
териала ие выше бортов (ф|иг. 114, в) производительность равна
Q — 3600BHh6vyb т/ч. (249)
Ширина иастила при заданной производительности, скорости
и высоте борта he'.
где ф — коэффициент заполнения, равный 0,65—0,75.
Если материал насыпается «горкой» (фиг. 114, а), то пло-
щадь поперечного сечения складывается из площадей треуголь-
ника и прямоугольника
F = ?тр + Рпр = 0,18В2 tgp0 + ВЛ? Л2.
Производительность пластинчатого конвейера с бортами при
he — 0,4 • Вн .ч, 4? = 0,7 и ро = 17° (tg ро — 0,31)
Q = 3600/^у = 3600 (0,18В*Н0,31 + Вк0,4Вк • 0,7) иу =
= 1200B«t)ym/4. (251)
Ширина настила
Я =-|/--Q--= 0,03 д/ —ле. (252)
у 1200ут у ит
Полученная по формулам (246), (248), (250) и (252) необхо-
димая ширина настила проверяется на крупность кусков:
224
Вн = 1,7 ан + 200 мм — для рядового материала с наибольшим
размером ан;
Вн = 2,7 ас + 200 мм — для сортированного материала со сред-
ним размером ас.
Для штучных грузов принимается ширина пластин на 100—
150 мм больше максимального размера груза.
Окончательно размеры пластин выбираются в соответствии
со стандартными размерами настила:
Ширина........... 400, 500, 650, 800, 1000, 1200, 1400, 1600 л<л<;
Высота бортов , , , , 100, 125, 160’ 200, 250 и 320 мм.
Установка пластинчатых конвейеров под углом соответствен^
но приводит к снижению их производительности
QH = cpQ m/ч,
где — производительность .наклонного конвейера в т/ч-
<р—коэффициент, учитывающий угол наклона (3.
Фиг. 115. Расчетная схема пластинчатого конвейера.
При р = 0-ь 10° ф = 1,0 для настилов с бортами и без бортов.
При р = 10-ь20° ф = 0,95 для настилов с бортами и ф = 0,9
для настилов без бортов.
При р>20° ф = 0,9 для настилов с бортами и ф = 0,85 для
настилов без бортов.
Усилия натяжения в ветвях цепей и силы сопротивления и а
участках пластинчатого конвейера определяют методом обхода
по точкам (фиг. 115).
Усилие натяжения в исходной точке 1
Sx = Sc6 = 2000 -г- 3000 н. (253)
Усилие натяжения в точке 2 с учетом силы сопротивления на
прямолинейном участке /—2
S2 = + (254)
8 В. Л. Моргачев 225
Сила сопротивления иа участке /—2, равная силе сопротив-
ления холостой ветви, вызывается только силой трения от нор-
мальной составляющей q0 cos (3, так как наклонные составля-
ющие силы от массы настила <?□ sin (3 на холостой и груженой
ветвях взаимно уравновешиваются.-
Wi-2 = Wx ~ 10g0cospLw = 10до£,ш н, (255)
где (/о — погонная масса иастила в ка/л;
Ls—горизонтальная длина конвейера в jw;
w — коэффициент сопротивления движению, равный 0,1 —
0,12 для катковых и 0,20—0,25 для скользящих цепей.
Погонная масса .настила приближенно определяется по фор-
муле
<70 = 60 • Вн -р кг/м, (256)
где Вн — ширина настила в м;
kH— коэффициент, зависящий от типа настила.
При Вн — 0,4 -:-0,5 м, kH = 40 для легкого, kH = 60 для сред-
него и kH = 80 для тяжелого настила.
При Вн = 0,65л-0,8 м, ku — 50 для легкого, Ан = 70 для сред-
него и = НО для тяжелого настила.
При Вн>0,8 м, kH = 70 для легкого, kH = 100 для среднего и
Ам = 150 для тяжелого настила.
Усилие натяжения в точке 3 с учетом силы сопротивлений
натяжных звездочек
53 = 52 + = S. + W, + rrt3 я. (257)
Сила сопротивления на натяжных звездочках принимается
Г„3 = Г2_3 = 0,152 н. (258)
Усилие натяжения набегающей ветви в точке 4 с учетом си-
лы сопротивления от сил трения нормальной составляющей силы
тяжести груза и силы тяжести иастила, а также наклонной со-
ставляющей от силы тяжести груза
= S3 -f- №г = 5i + Wx -j- W пз -]- h. (259)
Сила сопротивления груженой ветви на участке 3—4
1^3-4 = = 10 [(<7 4- q0) cos $LW ± q sin $L] = 10 [qL?W +
+ ЯйЬг№±дН}= Ю[(? + ?о)4- W+qH] h. (260)
Тяговое усилие на приводных звездочках
₽ = S„6-Sdi+«7MH, (261)
где —сила сопротивления на приводных звездочках, рав^
ная 0,05 (Sh6 + 5сб) н.
Подставляя в формулу (261) значение Sh6 из формулы
(259), получим
P = Sce + Wt + W„3 + Wl-Sc6 + Wa3 = SW н. (262)
226
Тяговое усилие равно сумме сил сопротивлений на всех
участках конвейера. При разгрузке на промежуточном участке
учитывается сила сопротивления от плужкового сбрасывателя
по формуле (229),
Потребная мощность двигателя по формуле (220):
дг __ k3-^-em.
По найденной мощности выбирается электродвигатель, опре-
деляется передаточное число и подбирается редуктор.
Если пластинчатый конвейер имеет две тяговые цепи, то уси-
лие на одну цепь берется по соотношению
S, = (0,6 ч-0,7) и.
Максимальное расчетное усилие на цепь с запасом прочно-
сти кц = 6 ч-8:
SBac = н. (263)
По максимальному усилию выбирается цепь (табл. 53),
Тяговое усилие можно определить приближенно, как сумму
сил сопротивлений груженой и холостой ветви с учетом коэффи-
циента сопротивлений на звездочках k3e = 1,1ч-1,15:
Р k38 (Гг + Wx) = k3S (qL.w + qtL w ± qH +
+ q0Lew) 10 = k38 [q (L,w 4- H) + 2p0L,co] 10 h. (264)
Усилие натяжения набегающей ветви
SHs = ? + *^сб (265)
Дальнейший расчет ведется, как показано выше.
Потребная мощность на валу приводных звездочек также
может быть найдена ориентировочно по формуле
No = 2,4^опАг 3Q (0,11Д, ± Н) emt (266)
где qo — погонная масса настила в кг/м-,
v — скорость движения цепей в м.1сек.\
— горизонтальная длина конвейера в .и;
Q — производительность в т/ч;
Н—высота подъема груза в л?.
Знак плюс в формуле (266) берется при движении груза
вверх, знак минус — при движении груза вниз.
Мощность электродвигателя
/V = k3 — вт. (267)
Ъм
Пример, Произвести расчет тяжелого пластинчатого конвейера с под-
вижными бортами для транспортирования железной руды, если Q — 400 т/ч, ,
v = 0,15 м!сек, L = 20 м, у = 2 т/.и3, = 0,7, р = 103, ан = 500 мм. Материал [
загружается «горкой», движется вверх и разгружается в конце. Цепь вту-
лочнокатковая.
227
8*
Необходимая ширина настила по формуле (252)
Вн = 0,03 О- =0,03 400 . = 1,1 м.
у? 0,15-2
Проверка настила на кусковатость
Вп > 1,7ан + 200 = 1,7 500 + 200 = 1050 мм.
Принимаем Вн = 1200 alm. hg = 320 мм.
Погонная масса материала по формуле (207):
Q 400 .
а = — - = —---------= 740 кг м.
ч 3 6щ 3,6.0 15
Погонная масса настила по формуле (256):
qQ = 60В„ + kt, — 60 • 1,2 4- ЮО = 172 кг/ж.
Коэффициент сопротивления движению катковых цепей w = 0,12.
Коэффициент сопротивления на звездочках w3e = 1,15.
Горизонтальная длина конвейера
L, = L cos р = 20 • 0,985 = 19,7 м.
Высота подъема груза
Н = Lsinp = 20 0,174 = 3.5 м.
Тяговое усилие по формуле (264):
Р = 4e[g(Lzay + Я) + 2д0£гау1 10= 1,15 [740 (19,7 • 0,12 +
+ 3,5) + 2 • 172 • 19,7 • 0,12] 10= 59000 к.
Мощность электродвигателя при Г|л=0,8 по формуле (220):
», , Pv , с,- 59 000 • 0,15 1 о олл loo
N = ka - = 1,25 —-----------?— = 13 800 ет -- 13,8 кет.
’ 0,8
Мощность на валу приводных звездочек по формуле (266):
Af0 = 2,4^4 + 3Q (0,114 + Н) = 2,4 . 172.0,15 . 19,7 +
+3-400 (0,11 • 19,7 + 3,5) = 8000 ет = 8 кет.
Мощность электродвигателя по формуле (267):
N = ka = 1 25 —— = 12,5 кет.
0,8
Расчет, произведенный по формуле (220) и (267), показал примерно
одинаковое значение мощности электродвигателя, необходимого для данно-
го конвейера. По таблицам прилож. 32 выбираем электродвигатель АО-73-8,
у которого У — 14 кет, пдв = 730 об/мин.
Усилие натяжения набегающих ветвей цепи определяем по формуле (265):
Sh6 = Р + Sc6 = 59 000 + 2000 = 61 000 н.
Усилие на одну ветвь цепи
Sti = 0,68мб = 0,6 • 61 000 = 36 600 н.
228
Максимальное расчетное усилие на одну ветвь цепи с запасом прочности
А’ч = 7 определим по формуле (263):
Spac = = 7 • 36600 = 2^6,200 н.
По табл. 53 выбираем пластинчатую тяговую цець с разрушающим уси-
лием 256 000 н по III категории, диаметром валика 24 мм и шагом 250 мм.
Скорость вращения ведущей звездочки при числе граней z = 6:
60и 60-0,15 с е- .
П,в -------- •---’—• = О об МИН.
3 zt 6 - 0,25
Передаточное число привода
I ЗДс = = 121,7.
пзь 6
По таблицам в прилож. 33 выбираем редуктор ЦТШ-1250, у которого
in — 120, передаваемая мощность 15 кет при 750 об1мин ведущего вала.
Действительная скорость движения цепи
оЙ = 0,15 121 ’7 = 0,152 м!сек. 4
а 120
ВОПРОСЫ И ЗАДАНИЯ
1. Устройство пластинчатого конвейера.
2. Типы цепей, применяемых s пластинчатых конвейерах.
3. Конструкции настилов пластинчатых конвейеров.
4. Практическое применение пластинчатых конвейеров.
5. Произвести расчет пластинчатого конвейера для транспортирования
штучных грузов.
Скребковые конвейеры
Скребковые конвейеры (фиг. 116) служат для транспортиро-
вания сыпучих, зернистых и кусковых грузов. Тяговым органом
конвейера являются пластинчатые цепи 2 типа ПВКГ с шагом
200, 250, 320 и 400 мм, сварные калиброванные цепи и стальные
проволочные канаты. К тяговым органам крепятся рабочие эле-
менты— скребки 3 прямоугольные, трапецеидальные или диско-
вые, изготовленные из листовой стали толщиной 3—8 мм. Число
тяговых органов зависит от ширины скребков. При ширине до
400 мм скребки средней своей частью крепятся к одной ветви
цепж или каната; при большей ширине скребки прикрепляют по
концам к двум ветвям.
В конвейере, изображенном на фиг. 116, а, материал переме-
щается по верхнему или нижнему 6 желобу или по обоим жело-
бам одновременно. Сопротивление движению создается за счет
сил трения о нижнюю и боковые стенки желоба. Для уменьше-
ния сил трения применяют скребковые конвейеры с боковыми
подвижными стенками, соединенными с внутренними звеньями
пластинчатых цепей (фиг, 117).
229
Фиг. 116. Скребковые конвейеры:
высокими скребками; б — с погруженными скребками.
230
Характеристика скребковых лент дана в табл. 54.
Таблица 54
Скребковые ленты
Размеры скребков в мм Площадь скребка в ж® Шаг цепи в мм Погонная масса цепей со скреб- ками в кг >м
ширина высота hc
Бе з боковых стенок
450 200 0,09 250 49
600 250 0,15 320 64
800 250 0,20 320 72
1000 320 0,32 320 108
1200 400 0,48 320 190
С боковыми стенками
600 250 0,15 320 83
800 250 0,20 320 88
1000 320 0,32 320 130
Желоб скребкового конвейера изготовляют секциями из
стального листа толщиной 4—6 мм, или из дерева. Величина
зазора между скребками и стенками желоба должна составлять
3—6 мм. Разгрузку материала с конвейера можно производить
как в концах конвейера, так и на промежуточных участках через
люки нижней стенки, перекрываемые задвижками 5 (фиг. 116).
Вращение на вал приводных звездочек 4 передается от электро-
двигателя через редуктор и предохранительную муфту предель-
ного момента. Натяжение цепей осуществляется винтовым на-
тяжным устройством 1.
В конвейерах с открытыми желобами высота скребков обыч-
но равна высоте боковых стенок или несколько меньше их. В та-
ких конвейерах каждый скребок перемещает определенную пор-
цию материала.
Применяются также конвейеры с закрытыми желобами, у ко-
торых высота скребков меньше высоты боковых стеиок. Скребки
таких конвейеров перемещают материал сплошным слоем.
Конвейеры с погруженными скребками (фиг. 116, б) имеют
плоские прямоугольные н круглые или контурные U, Н, Z и L-
образные скребкн, прикрепляемые к тяговым цепям. Такие кон-
вейерь! могут иметь сложную по очертанию трассу. Они позво-
ляют перемещать материал в горизонтальном, наклонном и вер-
тикальном направлениях со скоростью 0,1—0,25 м/сек. Для кон-
вейеров с U-образными контурными скребками трестом «Союз-
проммеханизация» рекомендованы следующие размеры прямо-
угольных желобов в мм: 100 X 80, 125 X 100, 160 X 125, 200 X
X 125, 250 X 160, 320 X 200 и 400 X 250.
В конвейерах с круглыми скребками диаметр трубы берется
равным 100—225 мм, скребки изготовляются из резины или
231
из чугуна с резиновыми бандажами. Скорость движения цепи
такого конвейера принимают равной 0,1—0,32 л/сек; радиус из-
гиба трубы на поворотных участках 1—3 м.
Угол наклона скребковых конвейеров бывает в пределах 30°
(реже 40°), длина конвейера 50—60 м (иногда до 100 л), про-
изводительность до 150 т/ч.
Разновидностью скребковых конвейеров являются волочил-
ки, предназначенные для транспортирования штучных грузов по
Л-Zl
Фиг. 117. Скребковые ленты:
а — без подвижных боковых стенок; б — с подвижными боковыми стенками.
гладкому или роликовому настилу. На волочилках к тяговым
цепям вместо скребков крепятся поперечины.
Производительность скребкового конвейера с открытым же-
лобом определяется по формуле
Q = 3600Гпу!кр т/ч, (268)
где F — площадь поперечного сечения желоба в л2;
v — скорость движения скребков принимается равной 0,1-—
0,5 м/сек для конвейеров общего назначения и 0,5—
1,1 м/сек для подземных конвейеров;
у —насыпная масса материала в т/л3;
ф-—коэффициент заполнения желоба, равный 0.5—0,6 для
мелких хорошо сыпучих грузов и 0,7—0,9 для тяжелых
кусковых грузов;
ф,— коэффициент, учитывающий угол наклона конвейера
(табл, 55).
232
Значение коэффициента ф
Таблица 55
Характеристика транспортируемого груза Коэффициент ф при угле наклона конвейера в град
0 10 20 30 35 40
Легкосыпучин пылевидный, порошко- образный и мелкокусковой груз . 1 0,85 0,65 0,5
Плохосыпучий, средне- и крупнокус- ковой груз 1 1 0,85 0,75 0,6 0,5
Площадь поперечного сечения желоба при заданной произ-
водительности и скорости движения
F=l/-----------= 0,0171/ -Q м2. (269)
у Зб00и7фср у щфф
По полученному значению F в табл. 54 выбирают размеры
скребков: ширину Вс и высоту h.c. Шаг скребков принимают
равным или кратным шагу цепи. Ширина скребка (желоба)
проверяется на кусковатость груза.
Для рядового материала:
Вс ^2ан мм при двухцепном конвейере;
Вс> (3 -ь 3,5)ан мм при одноцепном конвейере.
Для сортированного материала:
Вс (3 4- 4)ас мм при двухцепном конвейере;
Вс (5-: 7)lzc мм при одноцепном конвейере.
Усилия натяжения в ветвях тягового элемента и силы сопро-
тивления на участках скребкового конвейера определяют мето-
дом расчета по точкам (фиг. 115). Наименьшее усилие натяже-
ния цепи принимается:
Si = SC6 = 3000 4- 10 000 н для конвейеров с высокими скреб-
ками;
5i = SC6 = 500 4- 1000 н для конвейеров с низкими скреб-
ками.
Усилие натяжения в точке 2 с учетом силы сопротивлений
холостой ветви на участке 1—2-.
, 52 = 5Х -р W1—2 н.
Сила сопротивления на участке 1—2 определяют по форму-
ле (255):
U^i_2 = Wx = 10(70 cos $Lw = 1ОдоЛгш «,
где go — погонная масса цепи со скребками в кг/м берется из
табл. 54 или определяется из соотношения
<7о = (270)
д— погонная масса материала, равная —-—кг/м;
233
kH — коэффициент, равный 0,6- 0,8 для двухцепных и 0,5—
0,6 для одноцепных конвейеров;
w— коэффициент сопротивления движению цепи, равный
0,1—0,13 для катковых и 0,25—0,4 для безкатковых це-
пей.
Усилие натяжения в точке 3
S3 = S2 + Г2_3 н.
Сила сопротивления на ведомых звездочках
Г2_3 = 0,1 • Sa «.
Усилие натяжения цепи в точке 4 с учетом силы сопротивле-
ний груженой ветви
S4 = Sk6 = Sa -ф U^3—4 н.
Сила сопротивления иа участке 3—4 от трения материала и
сопротивления цепи
И^3_4 ~№г = [(qf cos $L q0 cos $Lw) ± q sin 10 =
= [(qf + <7o^)±qH]\(} h, (271)
где f — коэффициент трения материала по желобу (табл. 48).
Тяговое усилие на приводных звездочках
Р = SH6— 4~ ^4—1
Сила сопротивления на приводных звездочках
^4—1 = 0,05 (5нб -ф Srf) н.
Мощность электродвигателя
N = k3 вт,
где т] — к. п. д. привода, равный 0,8—0,85;
k3 — коэффициент запаса мощности, равный 1,2—1,25.
Цепь выбирается по максимальному расчетному усилию с за-
пасом прочности k4 = 6 -г- 8:
SPac=^ (0,6^ 0,7) Sh6 н.
Тяговое усилие на валу приводных звездочек можно опреде-
лить приближенно по формуле (264):
Р = &зв (^г + №*) = [(qf cos 3£ q^ cos [iLw q sin 3Z, +
+ (?0 cos 3 • Lay)] 10 = k3B [q (fL: tf) -F 2^фда] 10 (272)
где k3ti — коэффициент сопротивления на звездочках, равный
1,1 — 1,15.
234
Потребная мощность на валу приводных звездочек прибли-
женно определится по формуле
М. = ± - 2-72<? ± Я) вт' <273)
О,367 0,367
где Q — производительность в т/ч;
L? — горизонтальная длина конвейера в .и;
kj0 — коэффициент, учитывающий тип цепи и производи-
тельность скребкового конвейера (табл. 56); •
И — высота подъема груза в м.
Таблица 56
Значение коэффициента
Характеристика конвейера Производительность конвейера в т/ч
4.5 9 18 17 36 45
Конвейер с роликовыми цепями . . Конвейер с безроликовыми цепями . 2 25 4,2 1,7 з,о 1,3 2,25 1,1 1,9 1,05 1,7 0,7 1,6
Знак плюс в формуле (273) принимается при подъеме, знак
минус — при опускании груза.
Мощность электродвигателя определяют по формуле (267):
ДО = k3 вт.
’l
По найденной мощности выбирают электродвигатель, опре- ,
деляют передаточное число и выбирают редуктор.
Для конвейеров с погруженными скребками производитель-
ность определяется по формуле
Q = ЗбОО/оуср т/ч, (274)
где F — площадь поперечного сечения желоба в м2;
v — скорость движения цепи (в пределах 0,1—0,3 м/сек);
у — насыпная масса материала в т/м3;
Ф—коэффициент, учитывающий угол наклона конвейера и
характеристику груза.
Для горизонтальных и пологонаклонных конвейеров при
₽ - 18°:
ф. = 0,9 для кусковых, мелкокусковых, зернистых и по-
рошкообразных грузов (каменный уголь, песок);
Ф = 0,8 для пылевидных грузов (цемент).
Для крутонаклонных и вертикальных конвейеров:
Ф = 0,8 для кусковых и мелкокусковых грузов;
Ф = 0,6 для зернистых и порошкообразных грузов;
Ф = 0,45 для пылевидных материалов.
В горизонтальных и пологонаклонных конвейерах с погру-
женными скребками транспортируемый материал заполняет
235
желоб почти по всему поперечному сечению. В связи с этим бо-
ковые стенки желоба испытывают давление материала, что при
работе конвейера вызывает дополнительное сопротивление от
сил трения материала о стенки.
Из гидростатики известно, что полная сила давления ма-
териала на стенку высотой hc м и длиной L м находится по
формуле
Pc = ±kh*LylQ н, (275)
где k = tg2 ^45°——коэффициент, учитывающий подвиж-
ность материала в зависимости от угла внутреннего тре-
ния pi, который в практических расчетах принимается
равным углу естественного откоса ре;
у — насыпная масса материала в кг/л3.
Для наклонного под углом р конвейера давление на стенку
in, ] khz L7IO
R = -^?Z,ylO = -------
2 2 cos2 p
н.
(276)
Сопротивление от сил трения материала о вертикальные
стенки желоба
kh2r Lyf 10
Wc = 2Pcf = H,
COS2 P
(277)
где f — коэффициент трения материала о стенки.
Тяговое усилие на валу приводных звездочек конвейера бу-
дет складываться из снл сопротивлений груженой и холостой
ветвей и сопротивления от сил трения
P = k33(Wz + Wx + Wc) н.
(278)
Подставляя в формулу (278) значение сопротивлений из фор-
мул (272) и (277), получим
kh2 Lyf
Р = k3e [q (fLz ± Н) + 2<70Лгщ + с
10 «, (279)
COS2 Р J
где k3e = 1,2 — 1,3 — коэффициент, учитывающий сопротивле-
ния на звездочках и дополнительные со-
противления от неровностей желоба и др.
Мощность двигателя с учетом коэффициента запаса k3 =
= 1,2 н- 1,25:
Дг A Pv
N = k3 -— вт.
236
Мощность двигателя горизонтального и пологонаклонного
конвейера с погруженными скребками определяют по формуле
М = А [300(1 4- BL) v + 3Q (Н + 1,80 «п, (280)
где k — коэффициент дополнительных сопротивлений, равный
1,15—1,25 для горизонтальных и пологонаклонных
конвейеров и 1,2- 1,3 для конвейеров, состоящих из
горизонтальных и пологонаклоиных участков;
т; — к. п. д. привода, равный в пределах 0,8—0,85;
В— ширина желоба в ж;
Ьг —горизонтальная длина конвейера в ж;
г?— скорость движения цепи в ж/се«;
Q — производительность конвейера в т/ч;
И— высота подъема груза в ж;
f — коэффициент трения материала о желоб.
Натяжение и выбор цепи производят так же, как и для
скребковых конвейеров открытого типа.
В ГДР горизонтальные конвейеры с погруженными скребка-
ми изготовляют длиной до 60 ж, шириной скребков 160—
1000 жж, средней производительностью до 380 ж3/ч.
Пример. Произвести расчет скребкового конвейера производительностью
Q = 150 т/ч каменного рядового угля с наибольшей крупностью кусков ан =
= 400 мм. Длина конвейера L — 50 м, скорость движения скребков v =
= 0,7 м/сек. угол наклона конвейера р — 12° вверх, насыпная масса угля
у = 0,8 т/м3, коэффициент трения f = 0,6, коэффициент заполнения желоба
ф = 0,8, рабочая ветвь верхняя.
Площадь поперечного сечения желоба по формуле (269) при коэффициен-
те ф = 1: ___ __________________________
Г = 0,017|/ AL =о 017.1/ --------*29------=0,31 м\
k сг/фср ’ V 0,7 . 0,8 0,8 . 1
По табл. 54 принимаем размеры скребка Ве = 1000 мм, hc = 320 мм,
F = 0,32 №, шаг цепи =320 мм, погонная масса цепей со скребками
q0 = 108 кг/м.
Проверка ширины скребка на кусковатость материала
Вс 2 • ан — 2 • 400 — 800 мм.
Принимаем две тяговые катковые цепи с шагом скребков tc = 2f„ =
= 2'320 = 640 мм. Коэффициент сопротивления катковых цепей w = 0,13;
усилие натяжения цепи в точке 1 Si = SC6 = 4000 н.
Погонная масса материала '
О 150 лп /
q=—— - ------------=60 кг/м.
3,6ц 3,6 0,7
Горизонтальная длина конвейера /
Ьг = Lcosp = 50-0,978 = $ м.
Высота подъема груза
Н = L sin р = 50-0,208 = 10,4 м.
Сила сопротивления на холостой ветви
Гх= Ю IO-108-49-0,13 = 6880 н.
237
Усилие натяжения в точке 2
S2 = 4- = 40004-6880 = 10 880 н.
Сила сопротивления на ведомых звездочках
Г2_3 = 0,1 -Si = 0,1-10 880 1090 н.
Усилие натяжения в точке 3
53 - + —+о_3 = 10880 + 1090= 11 970 н.
Сила сопротивления нагруженной ветви определяют по формуле (271):
1Рг = [10(7-/ + 70и)Лг + <?Я] =[(60-0,6+108-0,13) 49 + 60-10,4] 10= 30 740 к. [
г
Усилие натяжения в точке 4
S4 = = S3 + IF, = 11 970 + 30 740 = 42 710 я
Сила сопротивления на ведущих звездочках
^4-1 = 0,05 (Sw?+ Sc6) = 0,05 (42 710 + 4000) = 2340 н.
Тяговое усилие на ведущих звездочках
Р = Sk6— S^+F4_! = 42 710 —4000+2340 = 41 050 я. i
Тяговое усилие на валу приводных звездочек определяют приближенно
по формуле (272):
Р = k3e (1Г2 + IFV) = 1,1 (30 740 + 6880) = 41 500 я.
Разница в значениях тягового усилия незначительна. >
Максимальное расчетное усилие на одну ветвь цепи
Spac = М0’6 °-7) ‘ SH(7 = 7-0,7-42 710 = 209 000 я. *
По табл. 53 выбираем цепь с разрушающим усилием 256 000 я, 111 катего-
рии прочности, с диаметром валика 24 мм, шагом t4 = 320 мм.
Мощность электродвигателя .
Р v 41 500-0,7 !
др _ а----- _ 1 о——..... =40 000 а/л=40 кет.
3 т, ’ 0,85
По таблицам в прилож. 32 выбираем электродвигатель АО-93-8 мощно-
стью 40 кет и числом оборотов 735 в минуту.
Число оборотов ведущей звездочки прн числе граней г = 7
„ 60 • и 60-0,7 io -ye г /
пзе=—-— ....-’ = 18,75 об/мин.
z - t 7-0,32
Передаточное число привода
+ = . 735 = 39,2.
«зв 18,75
По таблицам в прилож. 33 выбираем редуктор ЦДШ-1000 с передаточ-
ным числом 40,17, передаваемой мощностью 39,8 кет при 750 об/мин ведуще
го вала.
ВОПРОСЫ И ЗАДАНИЯ
1. Устройство и принцип работы, скребковых конвейеров.
2. Особенности конвейеров с погруженными скребками.
3. П рактическое применение скребковых конвейеров и волочилок.
4. П роизвести расчет волочилки.
238
Элеваторы
Элеваторами (нориями) называются устройства непрерывно-
го действия, применяемые для транспортирования грузов в
вертикальном или крутонаклонном (более 60° к горизонтали)
направлениях (фиг. 118). В качестве гибких тяговых элементов
элеваторов применяют текстильные прорезиненные леиты
(ГОСТ 20-62) шириной 150, 200, 250, 300, 400 и 500 мм, ила-
стинчатые втулочные, втулочно-роликовые и втулочно-катковые
а) 6)
Ф:иг. 118. Кинемати-
ческие схемы элева-
торов:
а — с расставленными
ковшами, с загрузкой
зачерпыванием и цен-
тробежной разгрузкой;
б — с сомкнутыми ков-
шами, с загрузкой за-
сыпанием и самотечной
направленной разгруз-
кой; в — с центральной
разгрузкой.
цепи (для наклонных элеваторов) с шагом 100, 125, 160, 200,
250, 320, 400, 500 и 630 мм, сварные калиброванные термически
обработанные цепи (ГОСТ 2319-55) с диаметром стержня 16—
25 мм.
Рабочими органами элеваторов служат сварные или штампо-
ванные стальные ковши типа Г — глубокие (фиг. 119, а), с поло-
гообрезанной передней кромкой и цилиндрическим днищем, для
хорошо сыпучих и сухих мелкокусковых грузов, М — мелкие
(фиг. 119, в) с крутообрезанной передней кромкой и цилиндри-
ческим днищем для влажных и плохосыпучих материалов и
ОБН — остроугольные (фиг. 119, б) с боковыми направляющи-
ми кромками, плоской передней стенкой и остроугольным дни-
щем для абразивных и хрупких кусковых материалов. Для об-
легчения зачерпывания материала к передним стенкам ковшей
239
Размеры ковшей элеваторов
прикрепляют зубчатые накладки (фиг. 119, г). При транспор-
тировании мокрых и влажных грузов применяют ковши трапе-
цеидальной формы (обезвоживающие элеваторы) с отверстиями
в стенках (фиг. 119, д).
Фиг. 120. Крепление ковшей к тяговым элементам элеватора:
а — к прорезиненной ленте; б — крепежный элеваторный
болт; в —к одной цепи; г — к двум цепям.
Крепление ковшей к тяговым элементам показано иа фиг. 120.
Ковши шириной 160—250 мм крепятся задней стенкой к одной
цепи (фиг. 120, в). Ковши большей ширины прикрепляются
задней или боковыми стенками к двум цепям (фиг. 120, г).
К прорезиненным лентам ковши крепятся задней стенкой
241
(фиг. 120, а) специальными элеваторными болтами (фиг. 120, б).
Ширина ленты берется на 40—50 мм больше ширины ковша.
Расположение ковшей на цепях и ленте может быть рас-
ставленное (фиг. 118, а) и сомкнутое (фиг. 118, б) в зависимо-
сти от назначения элеватора и способов загрузки и разгрузки
материала. Размеры ковшей даны в табл. 57.
Вращение иа вал приводного барабана и звездочек пере-
дается от электродвигателя через редуктор (фиг. 121). Привод
располагается в верхней (разгрузочной) части элеватора. Диа-
метр приводного барабана зависит от числа прокладок ленты
1Л и обычно принимается равным Ь = (125 4- 150) С мм, а затем
согласуются со стандартными размерами ГОСТ 2036-53, кото-
рый рекомендуется принимать D равным 250, 320, 400, 500, 630,
800, 1000 или 1250 мм. Число зубьев приводных звездочек бе-
242
рется равным 6, 8, 10, 12, 13, 14, 16 или 20 при скорости враще-
ния 4,75-г75,5 об/мин. Скорость движения ковшей ленточных
элеваторов общего назначения v = 0,8 -ь 2,0 м/сек, шаг ковшей
на ленте / = (2,2 -е- 3) А, где А —высота ковша в мм, высота
подъема Я = до 30 м, производительность до 100 т/ч, скорость
ковшей в цепных элеваторах и = 0,4 — 1,6 м/сек. Привод элева-
тора оборудуется стопорным приспособлением (тормозом и хра-
повым или роликовым остановом).
Натяжение ленты и цепей осуществляется винтовым или гру-
зовым устройством, расположенным на опорах вала ведомого
барабана или звездочек. Размеры ведущих и ведомых (натяж-
ных) барабанов и звездочек берутся одинаковыми.
Загрузку в элеватор пылевидных, сыпучих и мелкокусковых
малоабразивных материалов производят зачерпыванием
(фиг. 118, а). Загрузка крупнокусковых и абразивных материа-
лов производится засыпанием в сомкнутые ковши (фиг. 118, б)
при скорости движения не более 1 м/сек.
Разгрузка ковшовых элеваторов производится в верхней их
части. На характер разгрузки влияет скорость движения ков-
шей. В быстроходных элеваторах при скорости движения ленты
или цепей и=1-т-2 м/сек (для зерна и муки до 3 м/сек) ковши
опоражниваются за. счет действия центробежных сил на мате-
риал при огибании тяговым органом приводного барабана или
звездочек (фиг. 118, а). В это время на материал действуют
сила тяжести груза G и центробежная сила F;
я, (281)
где G — масса материала, находящегося в ковше, в кг;
g — ускорение силы тяжести в м/сек2;
v — скорость движения центра тяжести материала в м/сек;
R — расстояние от оси приводного вала до центра тяжести
материала в м.
Для нормальной центробежной разгрузки принимают вели-
чину центробежной силы F, равной 2/з силы тяжести G, т, е.
F = . — = - • G . 10 н, (282)
9,81 R 3 1 '
откуда радиус
R = 0,153d2 м (283)
и скорость движения ковшей
о = л/ = 2,56 УН м/сек. (284)
243
„ г. Rn .
Так как скорость v — —-—м/сек, то
оО
= 2 56 VR или = 6,53/?.
зо ’ 900
Отсюда
90^53 ^600 (285)
3,!42/z2 /г2
где п— скорость вращения приводного вала в об/мин.
По формулам (284) и (285) определяют соотношения между
радиусом вращения груза R, скоростью движения ковшей v и
числом оборотов приводного вала п.
Центробежная разгрузка применяется только для быстро-
ходных вертикальных л/дточных и цепных элеваторов с расстав-
ленными ковшами при перемещении легко высыпающихся не-
крупных материалов.
У тихоходных вертикальных и наклонных ленточных и цеп-
ных элеваторов с сомкнутыми ковшами при скорости движения
v = 0,4 ч- 0,8 м/сек и транспортировании тяжелых абразивных и
хрупких грузов имеет место самотечная направленная разгруз-
ка (фиг. 118, б). В этом случае материал выпадает на заднюю
стенку впереди расположенного ковша и скатывается по ней
между направляющими бортами в разгрузочный рукав.
В специальных двухцепиых вертикальных элеваторах с
расставленными ковшами при скорости движения v = 0,6ч-
ч- 0,8 м/сек и транспортировании трудиовыгружаемых грузов
наблюдается самотечная свободная центральная разгрузка ма-
териала (фиг. 118, в).
Тяговые элементы с ковшами, приводные н холостые бара-
баны и звездочки элеватора заключены в кожух из листовой
стали толщиной 2—4 мм. Секции кожуха, изготовляемые высо-
той 2-2,5 м, соединяют между собой болтами и усиливают для
жесткости уголками. Нижняя загрузочная часть кожуха назы-
вается башмаком, верхняя — головкой.
Основные параметры вертикальных ковшовых элеваторов
общего назначения определены ГОСТ 2036-53 (см. прилож. 34
и 35).
Для транспортирования штучных (тарных) грузов применя-
ют полочные (фиг. 122, б) и люлечные (фиг. 122, а) цепные эле-
ваторы. Их полки жестко крепятся к двум цепям, в связи с чем
разгрузка и загрузка элеватора производятся только в конеч-
ных пунктах. Люльки подвешиваются к одной или двум цепям
шарнирно, что дает возможность загружать и разгружать эле-
ватор в любом месте.
Чехословацкая промышленность выпускает ленточные и цеп-
244
ные ковшовые элеваторы с ковшами шириной 90—900 мм. Шаг
ковшей таких элеваторов 160—900 мм, диаметр барабанов 400—
1250 мм, диаметр звездочек 400—1000 мм, диаметр блоков для
сварных калиброванных цепей 450—710 мм, скорость движения
ковшей 0,315—2,5 м/сек.
Фиг. 122. Элеваторы для штучных грузов:
а — люлечный; б — полочный.
Выбор типа элеватора, формы и типа ковшей, коэффициента
заполнения ковшей и скорости движения тягового элемента ре-
комендуется производить в зависимости от характеристики пе-
ремещаемого материала по табл. 58.
Производительность ковшового элеватора определяют по
формуле (207):
Q = 3,6 -у-цуф т/ч, {286}
где Q — погонная масса материала, равная ~~ уф, в кг/м',
io — емкость ковша в л;
/ — шаг ковшей в /к;
и—'Скорость движения ковшей в м/сек-,
у-- -насыпная масса материала в т/м3-,
ф — коэффициент заполнения ковшей.
245
Данные для выбора ковшовых элеваторов
Таблица 58
Характерис- тика насыпных грузов Примеры типичных грузов Тип элеваторов Тип совшей Средний коэффици- чгг напол- нения ков- шей Ф Скорость v в м/сек
ленты | цепи
Пылевидные, хорошо сы- пучие Угольная пыль Тихоходный со свободной самотечной разгрузкой Г 0,85 — 0,6—0,8
Цемент, мука фосфоритная Быстроходный с центробеж- ной разгрузкой Г 0,75 1,25—1 ,8 —
Зернистые и мелкокусковые (а<60 лои) малоабразив- ные Древесные опилки, су- хая глина в комьях, ка- менный уголь, торф фрезер- ный То же г 0,7—0,8 1,25—2.0 I ,25—1,6
То же, сильно- абразивные Гравий» руда» шлаки Тихоходный с самотечной направленной разгрузкой БНО 0,7—0,85 0,8—1,0 0,8—1,0
Песок» зола, земля» порода Быстроходный с центробеж- ной разгруз- кой Г 0,7—0,8 1 ,6—1,8 —
Средне- и крупнокус- ковые мало- абразивные (д>60 лои) Каменный уголь Тихоходный с самотечной направленной разгрузкой БНО 0,6—0,8 — 0,6—0,8
Кускозой торф Быстроходный с центробеж- ной разгруз- кой Г 0,5—0,7 — 1,25—1,4
То же, силь- ноабразивные Щебень, руда» шлаки Тихоходный с самотечной направленной разгрузкой БНО 0,6—0,8 — 0,5—0,8
Кусковые хрупкие, не допускающие крошения Древесный уголь» кокс Тихоходный с самотечной направленной разгрузкой БНО 0,6 0,6—0,8 0,6—в, 8
Плохосыиучис пылевидные и зернистые, влажные Земля, песок влажный, мел в порошке влажный Быстроходный с центробеж- ной разгрузкой м 0,2—0,6 1.25—1 ,8 1.25—1,6
Химикаты влажные, торфяные очесы Тихоходный со свободной самотечной разгрузкой м 0.4-0,6 — 0,6—0,8
246
По заданной производительности и скорости движения нахо-
дят погонную емкость ковшей
(287)
t 3,6076 4
По табл. 57 выбирают емкость, шаг и размеры ковшей.
Фиг. 123. Расчетные схемы элеваторов:
а — вертикального; б — наклонного.
Вылет ковша проверяют по крупности кусков:
для сортированного материала I = (4 -t- 5) ас мм;
для рядового материала I = (2 4- 2,5) ан мм.
Рассмотрим методику определения усилий натяжения в вет-
вях тягового элемента и сил сопротивлений по участкам для
ленточного вертикального элеватора при загрузке ковшей зачер-
пыванием (фиг. 123, а).
Наименьшее усилие натяжения ленты в точке 1 принимается
Sj = 1000 : 2000 н.
Усилие натяжения в точке 2 с учетом сил сопротивлений на
ведомом барабане и от зачерпывания материала
+ + н.
Сила сопротивления на барабане
Г1-2 = (0,05:- 0,07) Si н.
247
Тогда
S2 = (1,05 1,07) Si + U?3 = КЛ + U?3 H.
Сила сопротивления при зачерпывании принимается пропор-
циональной погонной нагрузке от силы тяжести груза
= Ktfg н,
где работа, необходимая для зачерпывания одного кило-
грамма материала, принимается в пределах 40—50 н X
X лс//сг;
Q /
q— погонная масса материала, равная , в кг/м;
g — ускорение силы тяжести в м/сек2.
Подставив значения Si и W3 в исходную формулу, получим
5, = ^ + ^ «- (288)
Усилие натяжения набегающей ветви в точке 3
Sh6 = S3 = S2 + r{2_3) н. (289)
Сила сопротивления на участке 2—3 создается массой груза
и массой ковшовой ленты
и?2_3 = 10(? - H±qQH) = 10(7 + 7о)Я н.
Погонная масса ленты выбирается по таблице нли прибли-
женно определяется по формуле
7о = k'Q кг/м, (290)
где k'— коэффициент, выбираемый по табл. 59;
Q — производительность элеватора в т/ч.
Таблица 59
Приближенные значения коэффициентов k’ и k±
Прои вводите л ь- ность Q в т/ч Типы элеваторов
Ленточные Одноцепные | Двухцепные
Типы ковшей
Глубокие и мелкие С бортовы- ми направ- ляющими Глубокие и мелкие С бортовы- Глубокие ми направ- и мелкие ляющимк | С бортовы- ми направ- ляющими
До 10 10—25 25—50 50—100 Свыше 100 0,6 0,5 0,45 0,40 0,35 0,6 0,55 0,5 1,1 0,8 0,6 0,5 1,1 0,85 од 1,2 1,0 0,8 0,6 1,1 °,9
Коэффициент 1,6 1,1 1,3 0,8 1,3 0,8
248
Окончательно получаем
Sw6 = 4- 4- (я 4" 7о) Н ' Ю w- (291)
Усилие натяжения в точке 4 сбегающей с приводного бара-
бана ветви
+ н. (292)
По усилию натяжения набегающей ветви SH6 определяется
необходимое число прокладок ленты й с учетом ослабления ее
по ширине отверстиями под крепежные болты (201):
_ kSH6
Рабочая ширина леиты
Вг = В, — м,
где П[ — наибольшее количество отверстий под болты в одном
ряду;
d - - диаметр болта в м.
Тяговое усилие на приводном барабане
, Р ' $нб — $сб 4" 3—4 м-
Сила сопротивления на приводном барабане IF3-4 = 0,05 Рн.
Тогда
р = Sh6-Sc6 н. /293)
0,95 7
Мощность двигателя
.. , Pv
N — k3 — etn.
Ti
По мощности выбирают электродвигатель, определяют пере-
даточное число приводного механизма и подбирают редуктор.
Расчет наклонного ленточного элеватора ведется так же, как
и наклонного ленточного конвейера.
Расчет ценного наклонного элеватора с загрузкой ковшей
засьшанием (фиф 12376)"имеет некоторые особенности. '
' Минимальное усилие натяжения цепи в точке 1 принимается
= 3000-4000 н.
Усилие иатяжеиия в точке 2 с учетом силы сопротивления на
ведомых звездочках
S2 = Sx + IFj-2 н,
так как IFi-2 = 0,1 -Si,
то
S2 -= 1,15х н. (294)
Усилие натяжения набегающей ветви в точке 3 по формуле
(265):
$нб - 53 = 53 4~ W е н.
249
Сила сопротивления груженой ветви
= [(? + Яч) Lew ± qH] 10 н.
Окончательно усилие натяжения в точке 3
S3 = Shq = 1,1 4~ [(? 4~ ?о) q • H} 10 h. (295)
Усилие натяжения сбегающей ветви в точке 4 определяется
по формуле
Sc6 = = SL U/4 — q^LgW - Юн.
Цепь выбирают по максимальному расчетному усилию, поль-
зуясь формулой (263):
Spac ~ kySy Н,
Тяговое усилие на приводных звездочках при W3-4 =
= 0,05 (S-нб 4~ 5сб) н
Р = Sw6 — Sc6 4* Wз—4 н.
По тяговому усилию определяют мощность, выбирают элек-
тродвигатель и редуктор.
Мощность электродвигателя ленточного и цепного элевато-
ров ориентировочно определяют по формуле
M = fe3 2’72QH (1,15 4-fe' • fe4u) вт, (296)
где k3 — коэффициент запаса мощности, равный 1,2—1,25;
Q — производительность в т/ч;
Н — высота подъема груза в м\
т] — к. п. д. привода;
kf и k4 — коэффициенты, выбираемые по табл. 58;
v — скорость движения ковшей в м/сек.
Производительность полочных и люлечных элеваторов опре-
деляют по формулам (215) или (216).
Пример 1. Произвести расчет вертикального ковшового элеватора произ-
водительностью Q = 55 т/ч для транспортирования сухого каменного угля
крупностью ас = 30 мм, насыпной массой у = 0,7 т/м3 на высоту Н = 20 м.
По табл. .58 принимаем быстроходный ленточный элеватор с загрузкой
зачерпыванием и с центробежной разгрузкой, с глубокими цилиндрическими
ковшами при скорости ленты о = 1,8 м/сек и коэффициенте заполнения ков-
шей (р = 0,8.
Погонная емкость ковшей по формуле (287):
г0 Q 55
t~ З.&ф!» “ 3,6-1,8.0,7 • 0,8 =15-2y!/At
По табл. 57 выбираем погонную емкость, равную 15,6 л/м, емкость ковша
г‘о = 7,8 л, шаг ковшей t = 500 jhjh, ширину ковша В = 350 мм, вылет ковша
I = 180 jhjh, высоту ковша h = 200 мм.
Проверяем вылет ковша по крупности материала
I = (4 4- 5) ас = 5 • 30 = 150 jhjh.
250
Ширина ленты
В г = В + 50 = 350 4- 50 = 400 мм.
Погонная масса ленты с ковшами определяется по формуле (290):
q0 = k'Q ~ 0,45 - 55 = 24,8 кг 1м.
Погонная масса материала
Принимаем минимальное усилие натяжения ленты в точке 1
St = 1.800 н.
Усилие натяжения набегающей ветви ленты в точке 3 приводного бараба-
на определяем по формуле (291):
= Ml + Аа? + (? + ?о) * 10= 1,07 • 1800 + 45 • 8,5 +
+(8,5 + 24,8)20 10 = 8970 я.
Усилие натяжения сбегающей с приводного барабана ветви ленты в точке
4 по формуле (292);
Sc6 = Sl + q0H . 10= 1800 + 24,8 20 • 10 = 6760 я.
Ковш шириной В = 350 jhjh прикрепляется к ленте шестью болтами диа-
метром d = 8 .AMf, наибольшее количество болтов в одном ряду Л1 = 4.
Рабочая ширина ленты
Bi = Вл—rtjd = 400 — 4 8 = 368 jhjh = 0,368 jh.
Число прокладок ленты из хлопчатобумажного бельтинга Б-820 с преде-
лом прочности Спч 55 ’ 103 н/м при коэффициенте запаса прочности 6 = 9,5
_ kSH6 _ 9,5 • 8970 _ 4
*А ~ Bian4 ~ 0,368 - 55 103 “ ’ ‘
Принимаем ленту с числом прокладок 1Л = 5.
Расстояние от оси приводного барабана до центра тяжести материала
в ковше по формуле ,(283):
Я = 0,153оа = 0,153 • 1,82 = 0,495 jh = 495 jhjh.
Примерный диаметр барабана
/ / \ / 180\
D = 2 R — — = 2 495 — — = 810 лм<.
\ 2 / 2
Диаметр барабанов по числу прокладок ленты
Г>> (125 ~ 150) i = 150 • 5 = 750 Ды*.
Принимаем барабан диаметром D = 800 jhjh.
Длина барабана
Ьб = В + 150 = 400 + 150 = 550. мм.
Тяговое усилие на приводном барабане по формуле (293):
п__ $но
“ 0,95
8970 — 6760
0,95
=',2320 я.
251
Мощность двигателя
Ре 2320 -1,8 _ „
N = k3----= 1,2----------- = 6260 вт — 6,26 кет.
7} 0,8
По таблицам прилож. 32 выбираем асинхронный электродвигатель АО
62-6 мощностью N = 7 кет при п^д = 980 об/мин.
Скорость вращения барабана
60о 60 • 1,8
«о —
Передаточное число
_ = 43 об/мин.
тс • D 3,14-0,8
привода
nq# 980
п = - ---------- 22,8.
«б 43
100
По таблицам прилож. 33 выбираем редуктор ЦДШ-500 с передаточным
числом in = 23,34, передаваемой мощностью 12,2 кет при числе оборотов ве-
дущего вала 1000 в минуту.
Действительная скорость движения ленты
22,8
v(> = 1,8-----= 1.76 м/сек.
23,34
Пример 2. Произвести расчет наклонного ковшового элеватора для пере-
мещения кокса крупностью ак = 150 jhjh с углом наклона элеватора р = 70’,
высотой подъема Н = 24 м, производительностью Q = 100 т/ч при насыпной
массе кокса у = 0,6 т/зе3.
По табл. 58 принимаем тихоходный цепной элеватор с сомкнутыми ков-
шами с загрузкой засыпанием и самотечной направленной разгрузкой при
скорости движения цепей v — 0,7 м/сек, коэффициенте заполнения ковшей
ф — 0,7 с ковшом типа ОБН.
Погонная емкость ковшей
in Q __
— =----------------------------------- — 113 3 л/м.
t 3,6о7ф 3,6 • 0,7 - 0,5 -0,7 ’
По табл. 57 выбираем погонную емкость, равную 134 л/м, емкость ковша
е‘о = 67 л, ширина ковша В = 750 jhjh, высота Л = 490 мм, вылет I = 350 мм,
шаг ковшей t — 500 мм.
Проверяем ковш на кусковатость материала />-2,5-150 = 375 лип. При
ширине ковшей В >350 jhjh берем двухцепной элеватор с цепями типа ПВК,.
Погонная масса цепей с ковшами
q0 = k'Q = 1,1 100 = 110 кг/м.
I Погонная масса материала
Q
q — ---У = 40 кг/м.
3,6и 3,6-0,7
Усилие натяжения цепи в точке 1 принимаем
Si = 3500 н.
Усилие натяжения набегающей на приводную звездочку ветви цепи в
точке 3 по формуле (295) при w = 0,2, tg 70° = 2,747 и горизонтальной длине
24
-—— — 8,73
2,747
100
И
tgV
Ls =
= 1,1 • Sj + [(q + q0) Law + qH] 10 = 1,1 . 3500 +
+ [(40+ 110)8,73 • 0,2 + 40 • 24] 10= 16 070 н.
252
Усилие натяжения сбегающей с приводной звездочки ветви цепи в точке 4
Scg=Sl^qaL^w • 10 = 3500+ НО • 8,73 -0,2- 10 = 5420 н.
Расчетное максимальное усилие на одну ветвь цепи
Spac = £ЧО,65 - SHa6 = 7 • 0,65 16070 = 73 ООО «.
По табл. 53 выбираем цепь с разрушающим усилием Spas = 86000 н по 11
категории прочности при диаметре валика, равном 11 мм.
Тяговое усилие на приводной звездочке
Р = SH6^ Sc$ + 0,05 (SHg + Sc6) =
= 16 070 — 5420 + 0,05 (16 070 + 5420) = 11 730 н.
Мощность двигателя
Р V 11 730 • 0 7
N — + -------= 1 2 -------------— ~ 12 300 вт — 12.3 кет.
3 7] ' 0,8
Мощность двигателя по приближенной формуле (296) при kr = 1,1 и =
= 0,8 (по табл. 59):
N = ks
ОН - 2,72
----(1,15 + А'М =
100 • 24 - 2,72
= 1,1-------------—
0,8
(1,15+ 1,1 • 0,8 0,7) = 15700 вт = 15,7 кет.
По таблицам в прилож. 32 выбираем асинхронный электродвигатель АО
73-8 мощностью М = 14 кет при числе оборотов = 730 в минуту.
Ско-рость вращения приводных звездочек при числе граней г = 7 и шаге
цепи t = 0,5 м
60у
Пзв = zi
60 - 0,7
—— g = 12 об/мин.
Передаточное число привода
Пл» 730
—~ =-------— 60 83
пзв 12
гп —
По таблицам в прилож. 33 выбираем редуктор ЦТШ 1100 с передаточным
числом in = 62,8, передаваемой мощностью 16 кет при числе оборотов веду-
щего вала 750 в минуту.
Действительная
скорость движения ковшей
„ 60,83
— 0,7-------— 0,68 м/сек.
62,8
ВОПРОСЫ И ЗАДАНИИ
1. Назначение и устройство элеваторов.
2. Типы ковшей и способы крепления их к гибким тяговым органам.
3. Способы загрузки и разгрузки элеваторов.
4. Применение и конструкции полочных и люлечных элеваторов.
5. Произвести расчет полочного элеватора.
253
§ 8. ТРАНСПОРТНЫЕ УСТРОЙСТВА БЕЗ ГИБКИХ
ТЯГОВЫХ ОРГАНОВ
Винтовые конвейеры
Винтовые конвейеры или транспортные впиты (шиеки) при-
меняют в основном для перемещения пылевидных, порошкооб-
разных, мелкозернистых и мелкокусковых материалов в гори-
зонтальном и наклонном (до 20°) направлениях. Винтовой кон-
вейер (фиг. 124) имеет привод 4, от которого вращение переда-
ется на винт 2, помещенный в закрытом кожухе 1. Винтовые
конвейеры общего назначения по ГОСТ 2837-43 могут иметь
длину до 60 м, диаметр винтов 100—600 лелс, производительность
до 300 т/ч.
Рабочим элементом конвейера является одно-и двухходовой
винт (фиг. 125) с правым и левым направлением витков. Наи-
более распространены сплошные (полностенные) винты, витки
которых штампуют из листовой стали толщиной 4—6 мм. Кроме
них, находят применение ленточные, лопастные и фасонные вин-
ты. Для перемещения сильно абразивных материалов секции
винта отливают из чугуна. Стандартные размеры диаметра вин-
j тов 100, 125, 150, 200, 250, 300, 400, 500 и 600 мм.
ч Винт закрепляется на пустотелом валу, составленном из от-
дельных участков длиной 2—4 м н поддерживаемом концевыми
и промежуточными опорами 3 (фиг. 124) на самоустаиавлива-
ющихся подшипниках качения и скольжения с надежным уплот-
нением. Концевые опоры крепятся к торцовым крышкам жело-
ба, промежуточные устанавливаются через 2,5—3 м и прикреп-
ляются к крышке желоба. Находят применение также плаваю-
щие винты. Желоб конвейера сварной из листовой стали тол-
щиной 3—8 мм состоит из отдельных секций длиной 2—4 л;,
254
*7
Фиг. 125. Типы винтов;
а — сплошной; б — ленточный; в — фасонный; г — лопастной.
Фиг. 126. Схемы загрузки, перемещения и разгрузки материала в винтовых
конвейерах.
255
полукруглой или круглой формы. Величина зазора между винтом
и желобом составляет 6—10 мм, Практически загрузка и раз-
грузка винтовых конвейеров может производиться в любом ме-
сте желоба (фиг. 126).
'-j Вращение на вал горизонтального винтового конвейера пе-
редается от электродвигателя через редуктор и муфту (фиг.
127); для передачи вращения на вал наклонного конвейера до-
полнительно устанавливают конический редуктор (фиг. 127,5).
Привод располагают иа разгрузочном конце конвейера. Тяже-
лые винтовые конвейеры могут иметь два привода — по одному
иа загрузочном и разгрузочном концах.
Разновидностью винтовых конвейеров являются транспорти-
рующие трубы с гладкой внутренней поверхностью (фиг. 128,а)
и трубы, внутри которых закреплены спирали из полосовой ста-
ли (фиг. 128,5). Устанавливают такие трубы на опорных роли-
ках горизонтально и под углом 3—5°. В рабочем состоянии они
получают вращательное движение от специального привода с
электродвигателем. Загрузка и разгрузка материала произво-
дится с концов трубы. Характеристика транспортирующих труб
приведена в табл. 60.
Таблица 60
Винтовые транспортирующие трубы
Диаметр трубы 9 ЛЪИ Шаг винта S в мм Число оборотов в минуту Произво- дитель- ность Q в м3/ч Коэффициент заполн ения Ф Длин а трубы в м Перемещае- мый мате- риал
800 800 15 83 0,23 34,7
1000 700 14 115 0,25 34 2 Сода
1000 1000 20 207 0,22 108
200 75 75 2,83 0,27 —
300 120 60 8,5 0,28 —
400 160 55 10 0,28 — Цемент
500 200 40 25 0,26 —
600 240 30 30 0,25 —
К положительным свойствам винтовых конвейеров относятся
простота конструкции, высокая герметичность, удобство загруз-
ки и выгрузки, возможность выполнения технологических опе-
раций при перемещении материала (сушка, обжиг, смешивание
и др.).
К недостаткам винтовых конвейеров следует отнести высо-
кий расход энергии, сравнительно быстрый износ винтов и жело-
ба, измельчение и истирание транспортируемого материала.
Производительность винтового конвейера (шнека) определя-
ется по формуле (209):
Q = 3600 • F • v - у т/ч.
256
Фиг. 127. Приводы винтовых конвейеров:
д — горизонтального; б — наклонного.
Фиг. 128. Транспортирующие трубы:
а — наклонная с гладкой внутренней поверхностью; б — горизонтальная со спиралью
внутри.
9 В- Л. Моргачев
257
Поперечное сечение материала в желобе
где D — наружный диаметр винта в м;
ф — коэффициент заполнения сечення желоба, принимае-
мый по табл. 61;
tp —коэффициент, учитывающий угол наклона конвейера р-
(ср = 1 при р = 0°; ср = 0,9 при р = 5°; ср = 0,8 при р =
= 10°; ср = 0,7 при р = 15°; ф = 0,6 при р = 20°).
Таблица 61
Значение коэффициентов Ф, A, w и чисел оборотов винта
в зависимости от материала
Примеры насыпных Расчетные коэффи- циенты Рекомен- дуемое ЧИСЛО п
1руппа грузов грузов Ф А оборотов винта в минуту
Легкие ные Легкие и ные Тяжелые зивлые Тяжелые и неабразив- малоабразив- и малоабра- и Абразивные Зерновые продукты, мука, древесные опилки, графит . . Гипс, мел, угольная пыль, асбест, торф, сода Поваренная соль, кус- ковым уголь, глина сухая Цемент, зола, песок, глина сырая, дробле- ная руда, шлак . . 0,4 0,32 0,25 0,125 65 50 45 30 1,2 1,6 2,5 4,0 190—100 150—60 100—50 70—30
Скорость движения материала
v =----- м/сек,
60
где s — шаг винта в м (s = D для горизонтальных винтов, s =
= 0,8 D для наклонных винтов);
п— скорость вращения винта в об/мин (табл. 61),
Подставив значения F и v в исходную формулу, получим
Q = 3600 —— у = 47 D^sti^ т/ч. (297)
4 ' 60 '
По заданной производительности Q, скорости вращения т] и
шаге винта s = D можно определить требуемый диаметр винта
з /----------------------- з
Q м
D = \/ — = 0,28
У 47/г(ф?
(298)
Полученный диаметр согласуют со стандартным размером
и проверяют на крупность материала, причем для рядового гру
.за (6-н8) ан мм, для сортированного груза D (10з-
з-12) ас мм.
Наибольшее число оборотов винта определяют по формуле
где Л — эмпирический коэффициент (табл. 61).
Тяговое усилие Р на валу горизонтального винтового конвей-
ера
Р = qLw • 10 = —Lw 10 н. (300)
3,6и
Мощность двигателя
= = йз вт^
,____ 3,61)7) Т1
где — коэффициент запаса мощности, равный 1,15—1,25;
Q — производительность конвейера в т/ч;
L — длина конвейера ’(расстояние между осями загрузочно-
го и разгрузочного люков) в м;
щ — коэффициент сопротивлений, определяемый опытным
путем (табл. 61);
г| — к. п. д. привода, равный 0,8—0,85.
В наклонном винтовом конвейере дополнительно затрачива-
ется мощность для подъема груза на высоту
v k.,QLw • 2.78 . k3OH 2,78 , QL • 2,78 . , . Q. /OnQ.
/V ~ ----— — ——’— = — (ш 4- sin 3) em. (302)
По найденной мощности выбирают электродвигатель, опреде-
ляют передаточное число и подбирают редуктор.
Производительность спиральных транспортирующих труб оп-
ределяют по формуле (297).
Предельное (критическое) число оборотов, при котором прек-
ращается движение материалов вдоль трубы:
Птпах = об/мин, (303)
VD
где D — внутренний диаметр трубы в м.
Действительное число оборотов трубы принимают
и = (0,5 -г- 0,65) пП1ах об/мин.
Ориентировочная мощность двигателя
» QL.W ' 3 33 /*злл\
N = k3 —----. em, (304)
где w = 6-ъ 10 — коэффициент сопротивления, зависящий от
конструкции трубы и приводного механизма.
259
9#
Пример. Произвести расчет наклонного под углом (J = 10° винтового
конвейера для транспортирования сухой глины с наибольшим размером кус-
ков ан = 50 мм и насыпной массой у = 1,2 т/мя. Производительность конвей-
ера Q = 30 т/ч, длина L = 30 мм.
По табл. 61 выбираем коэффициент заполнения ф = 0,25, коэффициент
сопротивления w — 2,5, скорость вращения винта п = 60 об/мин. Для (} = 10°
коэффициент (р = 0,8.
Необходимый диаметр винта по формуле (298):
,7 Q
0 = 0,281/ —— = 0,28
if tll т"?
। Л 30
У 60 - 1,2 • 0,25 - 0,8
Принимаем стандартный диаметр винта D = 400 лип
Проверка размера винта на кусковатость материала
D >(6 = 8) ан = (6 4- 8) 50 = 300 4- 400 мм.
Максимальное число оборотов винта по формуле (299):
45 45
Птах = -- = 71 Об/MUH.
VD Vo,4
Так как п<птах, оставляем п = 60 об/лшн.
Мощность двигателя по формуле (302):
2,78 • k&L
jV -------б + Sin =
9 70 in . ЧГ)
—----- ’ '-----------(2,5 4-0,174) = 9850 вт = 9,85 кет.
0,8
По таблицам прилож. 32 выбираем асинхронный электродвигатель А 71-8
мощностью А = 10 кет при числе оборотов пув = 730 об/мин.
Передаточное число привода
пдв 780
-=-----=------= 12,17,
п п 60
По таблицам прилож. 33 выбираем редуктор ЦДШ-400 с передаточным
числом in = 12,64, передаваемой мощностью 10,4 кет при скорости вращения
приводного вала 750 об/мин.
ВОПРОСЫ И ЗАДАНИЯ
1. Устройство и применение винтовых конвейеров (шнеков).
2. Конструкции винтов шнеков.
3. Особенности устройства транспортирующей трубы.
4. Произвести расчет вращающейся спиральной транспортирующей трубы.
Качающиеся конвейеры
Конвейеры рассматриваемой конструкции по числу колеба-
ний в единицу времени делятся на: конвейеры качающиеся с чис-
лом колебаний до 500 в минуту и конвейеры вибрационные с
числом колебаний до 3000 в минуту.
Качающиеся конвейеры могут быть с возвратно-поступатель-
ным прямолинейным движением желоба и постоянным дав лени-
260
ем материала на желоб. Число колебаний таких конвейеров рав-
но 50—100 в минуту при амплитуде колебаний 100—300 мм
(фиг. 129). Кроме того, применяют качающиеся конвейеры с
возвратно-замкнутым криволинейным движением желоба и пе-
ременным давлением материала на желоб. Число колебаний та-
ких конвейеров равно 300—500 в минуту при амплитуде колеба-
ний 10—40 мм (фиг. 130). у
Прямолинейное движение желоб7получает при установке его
на направляющих скольжения и качения от кривошипно-шатун-
ного механизма. За счет постепенного изменения скорости, свой-
ственного кривошипно-шатунным механизмам, материал увле-
кается вперед силами трения о стенки желоба и приобретает
некоторое ускорение. При ходе назад желоб проскальзывает
под материалом, продолжающем прежнее движение по инерции.
В этом случае давление груза на желоб не изменяется, если счи-
тать толщину слоя постоянной. В таких конвейерах наблюдается
интенсивный износ желоба. Ширина желоба в таких конвейерах
принимается В = 200 э-1200 дш, глубина h = 80 э-200 мм.
Криволинейное движение* желоба^ (фиг. 130) возможно при
установке его на упругих наклоненных под углом 20—30° к вер-
тикали стойках, соединенных со стационарной или подвесной
рамой, а также при вертикальной подвеске желоба. При одно-
временном ходе желоба вперед и вверх с ускорением нормаль-
ная составляющая силы инерции повышает давление материала
на нижнюю стенку желоба. При обратном ходе желоб отрывает-
ся от материала, вследствие чего давление уменьшается. Привод
конвейера кривошипно-шатунный или эксцентриковый с элек-
тродвигателем. Длина качающихся конвейеров принимается
обычно в пределах до 50 м, их производительность до 400 т/ч.
Вибрационные конвейеры (фиг. 131 и 132) имеют высокую
частоту колебаний прн малой амплитуде в пределах 0,5—15 мм.
Колебания в этом случае создаются с помощью электромагнит-
ных, эксцентриковых или грузовых вибраторов. Желобом вибра-
ционных конвейеров, как правило, служат трубы. Электровибра-
торы крепятся к трубам снизу или сверху под углом 20—30° к
продольной оси через каждые 2—2,5 м. Корпус вибратора уста-
навливают или подвешивают на пружинных опорах. Диаметр
труб вибрационных конвейеров принимают Ь = 350, 500 и
750 мм. При этом производительность конвейеров соответствен-
но равна 50, 75 и 150 т/ч. Длина подвесных конвейеров принима-
ется в пределах до 8 м, опорных —до 30 м.
Механические эксцентриковые вибраторы (фиг. 133, в, а)
применяют в основном на опорных конвейерах длиной 50—100 м
с производительностью до 400 т/ч. Для уравновешивания качаю-
щихся масс конвейеры изготовляют двухтрубными (фиг. 132,6).
Трубы в этом случае связывают упругими пластинами и шарнир-
ными качающими рычагами, закрепленными на стойках. Эксцент-
риковый привод при этом устанавливается между трубами.
9* В. Л. Моргачев 2б 1
Фиг. 130. Качающиеся конвейеры с криволинейным движением желоба:
а — подвесной; б — опорный.
262
Для уравновешивания однотрубных вибрационных конвейеров
используют противовесы (фиг. 132, г).
Грузовые одномассовые и дебалансные (фиг. 133, а) и двух-
массовые или балансные (фиг. 133,6) вибраторы используют
на подвесных и опорных однотрубных конвейерах длиной до
30 м. При вращении грузов продольные составляющие центро-
бежных сил придают трубе колебательное движение.
Желоба качающихся и вибрационных конвейеров выполня-
ют закрытыми и открытыми, круглого, квадратного, прямоуголь-
ного, трапециевидного и полукруглого сечения.
5)
Фиг. 131. Вибрационные конвейеры;
а — подвесной; б — опорный.
Качающиеся и вибрационные конвейеры применяют для
Транспортирования пылевидных, сыпучих, кусковых и мелкоштуч-
ных грузов в горизонтальном и наклонном (до 15—20°) направ-
лениях и по вертикали (специальные вибрационные трубные
конвейеры высотой 3—8 м со спиральными желобами на внут-
ренней или наружной поверхности).
Производительность качающихся и вибрационных конвейе-
ров определяется по формуле
Q = ЗбООГауФ щ/ч,
где F — площадь поперечного сечения желоба в м2;
V — скорость движения материала, равная 0,1—0,2 м/сек
для качающихся и 0,2-:-0,3 м/сек. для вибрационных
конвейеров;
263
9*’
у — насыпная масса груза в т/ж3;
ф — коэффициент заполнения желоба, равный 0,5—0,6 для
качающихся конвейеров и вибрационных конвейеров с
трубами круглого сечения и 0,6—0,8 для вибрационных
конвейеров с открытыми желобами и прямоугольными
трубами.
г)
Фиг. 132. Схемы вибрационных конвейеров:
а — однотрубный, на пружинных подвесках, с электровибрато-
ром; б — двухтрубный, на упругих стойках, с эксцентриковым
вибратором; в — однотрубный, на упругих стойках, с электрови-
братором и уравновешивающей балкой; г — однотрубный, на уп-
ругих стойках, с эксцентриковым вибратором и уравновешивающей
балкой.
Высота h слоя материала в плоских желобах может быть
принята равной 20—30 мм для порошковых, 40—60 мм для мел-
кокусковых и 70 мм для среднекусковых грузов.
264
Максимальное число оборотов кривошипа и скорость движе-
ния груза по качающемуся конвейеру можно определить по фор-
мулам
об/мин;
v — 0,23пг/д tg а м/сек,
(305)
(306)
где г — радиус кривошипа в м;
а — угол наклона опорных стоек к вертикали, равный 20—
30°;
/а — коэффициент трения материала о желоб в движении.
Фиг. 133. Схемы механических вибраторов:
а — грузовой одномассовый; б — грузовой двухмассовый; « — эксцентриковый
с жестким шатупом; г — эксцентриковый с упругим шатуном.
Скорость движения материала в вибрационных конвейерах
определяется по эмпирической формуле
о = i kz) sin Згш cos a
м/сек,
(307)
где k\ и — эмпирические.коэффициенты (табл. 62);
P —угол наклона конвейера в град;
г —амплитуда колебания в м;
о —угловая скорость эксцентрика при п об/мин;
а —угол наклона опорных стоек к вертикали;
265
A — коэффициент
формуле
режима работы,
resins ।,
g•cosp
определяемый по
g — ускорение силы тяжести в м!сек2.
Таблица 62
Значение коэффициентов и k2
Наименование груза Характерный размер частиц а леи Эмпирические коэффициенты
Ах
Апатитовый концентрат 0,01—0,17 0,5 1,6
Опилки древесные 0,5-5 1,2 2,0
Песок кварцевый 0,2—1 0,9 1,50
Руда железная 0,4—70 1,08 1,80
Серный колчедан 0,1—7 1,0 3,7
Стружка чугунная 0,5—10 0,96 1,2
Уголь каменный , . 0,2—10 0,95 0,75
Знак плюс принимается при транспортировании материала
под уклон (вниз), знак минус — при транспортировании мате-
риала наклонно вверх.
Мощность электродвигателя определяют по формуле (302):
*т , QL - 2,72 , , • пч
N -- &3 -—~—- (ш + sin р) вт,
где k3 — коэффициент запаса мощности, равный. 1,2—1,25;
Q — производительность конвейера в т/ч;
L — длина конвейера в м;
т] — к. п. д. привода, равный 0,8—0,9;
w — коэффициент сопротивлений, равный 6—10;
0— угол наклона конвейера к горизонтали в град.
Пример. Произвести расчет горизонтального качающегося конвейера для
транспортирования мелкого сухого антрацита, если его производительность
должна быть Q = 120 т/ч, скорость движения материала v = 0,3 м[сек., на-
сыпная масса груза у =0,9 т/jh3, коэффициент заполнения открытого прямо-
угольного желоба ф = 0,6, длина конвейера L = 16 м, угол наклона стоек
а = 25°, радиус кривошипа г = 20 мм.
Площадь поперечного сечения желоба по формуле производительности
конвейера
г = —--- ---------------------= [
ЗбООиуф 3600 • 0,3 - 0,9 • 0,6
Ширина желоба при его высоте h = 200 мм
Г 0,206
В — „ - = 1 м = 1000 мм.
h 0,2
266
В данном случае проверка ширины желоба не производится, так как ма-
териал мелкий.
Максимально допустимое число оборотов кривошипа по формуле (305):
/1 „ , / 1
—— = 30 1/ ------=310 об/мин.
rtga |/ 0,02-0,466.
Действительное число оборотов кривошипа по формуле (306) при коэф-
фициенте трения в движении fa = 0,7 f = 0,7 • 0,94 = 0,66:
v 0,3
П ~ о,23rfd tgCt = 0,23 - 0,02 • 0,66 - 0,466 212 об/мин
Мощность электродвигателя
~ k3QLw -2,72
V
1 ,2 - 120 - 16 - 7 • 2,72
=---------------------- = 54 800 вт = 54,8 квт.
°,8
По таблицам прилож. 32 выбираем электродвигатель АО 94-8 мощностью
А = 55 кет при п9в = 735 об!мин.
Передаточное число клиноременной передачи
ВОПРОСЫ И ЗАДАНИЯ
Л Классификация качающихся конвейеров.
2. Конструктивные разновидности вибраторов.
3. Способы уравновешивания качающихся масс конвейеров.
4. Рассчитать качающийся конвейер с круглым желобом.
§ 9. ПОДВЕСНЫЕ КАНАТНЫЕ ДОРОГИ
Подвесные канатные дороги находят широкое применение
при транспортировании сыпучих и кусковых материалов по
сильно пересеченной местности, через водные преграды на зна-
чительные расстояния и высоту. Из числа подвесных канатных
дорог, работающих в горных условиях нашей страны, имеется
дорога, длина которой составляет 17,5 км. Она имеет несколько
пролетов длиной по 400 м. Ее производительность 130 т/ч. Одна
из канатных дорог через Волгу имеет пролет 830 м, высоту опор-
ных мачт на обоих берегах по 130 м. Через каждые 100 м проле-
та к специальной вантовой системе этой дороги подвешены ме-
таллические опорные рамы для несущих канатов и защитных
сетей. Другая подвесная канатная дорога сооружена с двумя
пролетами по 530 м и с опорной мачтой высотой 66 м на специ-
альном быке посередине реки. В условиях кавказских гор рабо-
тает канатная дорога длиной 4,5 км, имеющая высоту подъема
1,5 км и опоры высотой до 45 м. Наибольший угол наклона при
движении вагонеток составляет на одной из канатных подвес-
ных дорог 68°. Производительность подвесных канатных дорог
достигает 200 т/ч.
267
Подвесная канатная дорога (фиг. 134) состоит из привода /,
натяжного устройства 7, тяговых 3 и несущих 2 канатов, вагоне-
ток 5, опор 4, загрузочных и разгрузочных станций, а также
рельсовых обгонных путей 6.
Фиг. 134. Схема подвесной канатной дороги.
Приводная станция (фиг. 135) канатной дороги состоит из
электродвигателя, редуктора, открытой зубчатой передачи и
канатоведущих шкивов трения с максимальным окружным уси-
Ф.иг. 135. Приводные
а — одношкивная; б, в —
станции канатных дорог:
двухшкивные; г — трехшкивнзя.
лием Р = 5-104 н по нормальному ряду приводов. Приводы
снабжены рабочими н аварийными тормозными устройствами.
Натяжное устройство канатных дорог грузовое. Натяжной
шкив тягового каната закрепляется на салазках или подвижной
тележке, от которых через обводной блок перекинут канат с
грузом на конце. Обычно натяжное устройство устанавливают
268
вблизи привода. Несущий канат концом крепят к якорю. На
другом его конце через переходную муфту и обычный канат под-
вешивают груз.
Тяговыми элементами на подвесных канатных дорогах слу-
жат стальные проволочные канаты, комбинированные, линейно-
го касания, с пределом прочности проволок до 180* 107 н/м3. Не-
сущими элементами служат стальные канаты закрытой конст-
Фиг. 136. Канат закрытой конструкции .и соединительная муфта.
рукцни (фиг. 136) диаметром 30,5—70 мм. Промежуточные кон-
цы несущих канатов соединяют специальными муфтами. Харак-
теристика канатов закрытой конструкции дана в табл. 63.
Таблица 63
Канаты закрытой конструкции
Конструкция ИЗ <53 Размер прово- лок в мм Количество про- толок в шт. в- ^я g g w масса ад
а rt - о ~ g 5 о о
каната Диаметр в мм круглых зетообра них круглых а S* 03 Щ КЛИНО- ВИДНЫХ Площадх пия пров каната в По тонна; в Предел 1 иОСТИ В J Сумма рн рывное у всех про в н
По ГОСТ 30,5 4,1 5,0 19 19 596 5,0 120-107 715 000
3090-55 32,0 4 4 5,0 19 20 — 660 5,6 120-107 790 000
34 0 3 4 5 37 21 — 730 6,3 120.107 875 000
35 5 3 6 5 37 22 — 796 7,0 120- Ю7 955 000
По ГОСТ 38,5 з.з 6 19 18 17 1000 8,5 140-Ю7 1 400 000
7675-55 40,5 3,9 6 19 19 18 1135 9,6 140-1О7 1 589 000
42,5 4,1 6 19 20 19 1210 10,3 140- Ю7 1 694 000
45,0 4,6 6 19 21 20 1356 11,5 140-107 I 898 000
47,0 3,55 6 37 22 22 1460 12 5 140-107 2 044 000
Подвесная канатная дорога, имеющая тяговый и несущий
канаты, называется двухканатной. Двухканатные подвесные*
дороги кольцевого типа обладают большой производительно-
стью и наиболее распространены. Находят применение и одно-
канатные дороги, у которых функции тягового и несущего эле-
269
мента выполняет один стальной проволочный канат обычной
конструкции.
Груз по подвесным канатным дорогам перемещается в двух-
н четырехколесных вагонетках (фиг. 137). Емкость кузова двух-
колесных вагонеток равна 0,3—1,0 м3, полезная грузоподъем-
ность до 10 кн. Четырехколесные вагонетки имеют емкость ку-
зова 0,5—1,25 Л13, грузоподъемность до 20 кн. Максимальная ем-
кость кузова подвесных вагонеток 4,8 л3 при грузоподъемности
до 76 кн.
Фиг. 137. Вагонетки подвесных канатных дорог:
а — четырехколесная; о — двухколесная, с грузовым зажимным аппаратом.
Ходовая тележка вагонетки профилированными колесами
опирается на несущий канат. К ходовой тележке крепится под-
веска 2 (фиг. 137, а) с кузовом 4. Кузова вагонеток изготовляют
опрокидными, но применяются вагонетки и с открывающимся
днищем, с откидными стенками и др. В рабочем положении ку-
зов удерживается рычагами 3. При отклонении рычагов упорами
кузов опрокидывается вследствие смещения оси вращения от
средней оси вниз на 20—25 мм. Возврат кузова в исходное поло-
жение производится вручную или противовесом. С тяговым ка-
натом вагонетки сцепляют при помощи зажимных грузовых или
винтовых аппаратов.
Грузовой зажимной аппарат (фиг. 137, б) имеет две щеки —
неподвижную 5 и подвижную 6 с рычагом 7. Подвижная щека
шарнирно соединена с рамой тележки 3, а рычаг 7 связан с тя-
гой 2. К верхнему концу тяги 2 прикреплена ось 4 с двумя вспо-
270
могательными роликами. К нижнему концу тяги 2 прикреплена
подвеска кузова /. Во время движения тележки по несущему ка-
нату сила тяжести подвески с кузовом (и грузом, если вагонет-
ка заполнена) действует на тягу 2 вниз, рычаг 7 поворачивается
по часовой стрелке и прижимает подвижную щеку к неподвиж-
ной. Тяговый канат зажимается между щеками. На загрузочной
нли разгрузочной станциях ролики 4 набегают на специальные
рельсы, а рама тележки с колесами остается на несущем канате.
При набегании роликов на рельсы ось вместе с тягой 2 несколь-
ко перемещается по пазу вверх и рычаг 7, повернувшись против
Фиг. 138. Винтовой зажимной аппарат.
часовой стрелки, отводит подвижную щеку от неподвижной, и
канат освобождается.
Винтовой зажимной аппарат (фиг. 138) имеет основной
стержень / с правой винтовой нарезкой большого шага и левой
нарезкой малого шага. На нарезках расположены гайки с за-
жимными щеками. К свободному концу стержня крепится ры-
чаг с противовесом 2. При набегании противовеса иа специаль-
ные направляющие рычаг 2 поворачивается, щеки раздвигаются
и канат освобождается от зажимов. Зажимной аппарат закреп-
лен на подвеске кузова.
Опорные мачты (фиг. 139) и конструкции загрузочных и
разгрузочных станций изготовляют сварными металлическими,
реже—из железобетона и дерева. В зависимости от рельефа
местности шаг линейных опор составляет 100—300 м, высота
10—42 м, за исключением особых случаев, о которых говори-
лось выше. Нормализованная колея подвесных канатных дорог
равна 3 м. Расстояние между вагонетками принимают равным
50—150 м. На мачтах несущий канат укладывается в желоб
опорного башмака, шарнирно закрепленного на консоли, а тя-
говый канат лежит на профилированных роликах, расположен-
271
пых ниже башмаков на 1—1,25 м. При подходе тележки к мачте
тяговый канат поднимается над роликами, а при удалении те-
лежки опускается.
Загрузку вагонеток материалом производят из бункеров
при помощи питателей и затворов с электрическим или пневма-
тическим приводом. Разгружаются вагонетки за счет опроки-
дывания кузова и открывания днища или откидывания боковой
стенки. На погрузочных и разгрузочных станциях тележка ва-
гонетки переходит с несущего каната на жесткий рельсовый
обгонный путь. В этих местах устанавливают отклоняющие
башмаки с желобом для несущего каната и подвесными рель-
сами (фиг. 140). Канат отклоняется башмаком внутрь колеи и
вниз, тележка переходит с каната / на подвесной рельс 2 и с
него на обгонный путь. При переходе с несущего каната на
рельс тяговый канат автоматически освобождается от зажимов,
и вагонетка перемещается по обгонному пути для погрузки или
выгрузки и переводится на другую ветвь несущего каната. Та-
кие подвесные двухканатные дороги называются с кольцевым
движением.
Скорость передвижения вагонеток на кольцевых канатных
дорогах без автоматического обвода вагонеток вокруг шкивов
достигает 3,15 м/сек, а с автоматическим обводом без расцепле-
ния вагонетки с тяговым канатом до 1,75 м/сек.
Наряду с канатными подвесными дорогами кольцевого типа
находят применение маятниковые канатные дороги с реверсив-
ным движением вагонеток между начальным и конечным пунк-
тами. Они используются в отвальном хозяйстве горнодобываю-
щих предприятий, а также как пассажирские и спортивные до-
роги.
Особое внимание уделяется механизации и автоматизации
канатных дорог, переходу от частичной к полной автоматиза-
ции и к централизованному управлению канатными дорогами с
диспетчерского пункта.
Производительность двухканатной подвесной дороги с коль-
цевым движением вагонеток
Q = 3,6(/ц = 3,6-G ' д000 v = 3600 v т/ч.
Грузоподъемность вагонетки
(308)
ЗбООи
где Q — производительность в т/ч\
а—расстояние между вагонетками в м;
v — скорость движения вагонеток в м/сек-,
g — ускорение силы тяжести.
(309)
272
Фиг. 140, Отклоняющий башмак.
273
Потребное число вагонеток для дороги
9/
п„ = (1,15т- 1,2) -4-, (310)
где L — общая длина дороги в ж;
а — расстояние между вагонетками в и;
1,15—1,2 — коэффициент запаса вагонеток.
Число вагонеток, отправляемых в течение часа:
Q 3600 • G - v пйлл v
п„ = — —-----------~ 3600 — ваг/ч. (ЗИ)
G a-G а 4 '
Интервал между вагонетками по времени
у V
3600 - —
Практически / = 30->50 сек.
Число вагонеток, отправляемых за определенное количество
часов работы дороги в течение суток tc:
пс = п,/с = 3600 • — (313)
Число проходящих по несущему канату в течение суток ходо-
вых колес тележек при числе колес одной тележки Zj:
г = ni:zv
Нагрузка на одно колесо тележки
(?! = 1,1 (G0cos р -J- qTa) - ~~ кг, (314)
где Go — общая масса вагонетки с грузом в кг;
(3 — угол подъема дороги в град;
qT— погонная масса тягового каната, равная 1,0—2,0т
В KSjM;
а — расстояние между вагонетками в
21 — число колес тележки вагонетки.
Максимальное расчетное усилие на рабочую ветвь несущего
каната определяется по эмпирической формуле
Spac = 0,78Gpfe]/z • 10 н, (315)
где k— коэффициент запаса прочности каната без учета сил
трения каната на опорах, равный 3,5—3,75.
По максимальному расчетному усилию (табл. 63) выбираем
несущий канат закрытой конструкции.
Допускаемое рабочее усилие на несущий канат
= J Н- (316)
k
где kf — 3 — запас прочности каната с учетом сил трения на
опорах.
274
В действительности допускаемое рабочее усилие на ветвь не-
сущего каната будет равно
Spo6 = 10 (Gk + 9w- Я) ±FT н,
где GH — масса натяжного груза в кг;
qu— погонная масса несущего каната в кг/м (табл, 63);
Н — высота подъема дороги в At;
FT — сила трения на опорах несущего каната в я;
fr = (v + ’r + ’«)^-1° "• <317)
Подставив значение FT, получим
S„a6= 1o[G, + ?,W+ + н, (318)
где Лй — горизонтальная длина канатной дороги в м;
f — коэффициент трения несущего каната на опорах, рав-
ный 0,15 для канатов закрытого и 0,18 для канатов от-
крытого типа.
Требуемая масса натяжного груза для несущего каната
С« = 0,13^-?Л-0,1(4- + ?г + ?я) L-J (319)
Для нормального натяжения несущего каната необходимо
Grt>0,03Fr кг.
Как было сказано выше, максимальное окружное усилие на
канатоведущем шкиве Р = 5* 104 н.
Усилие натяжения набегающей ветви тягового каната по
формуле (203):
= Р ~
—1
где е— основание натуральных логарифмов;
f — коэффициент трения каната о шкив, равный 0,08 для
нефутерованных шкивов и 0,16 для шкивов футерован-
ных деревом или пластмассой;
а — угол обхвата шкива канатом в рад.
Наибольшее расчетное усилие на одну ветвь тягового кана-
та при коэффициенте запаса прочности kn = 6.
Spac kHSH6 Н.
По расчетному усилию, пользуясь таблицами прилож. 1, вы-
бираем канат необходимой конструкции. Диаметр канатоведу-
щего шкива зависит от диаметра каната и принимается Ди
70 • dK мм.
275
Мощность двигателя
N = k,----вт.
3 'П
По мощности выбираем двигатель и затем определяем пере-
даточное число привода.
Пример, Произвести расчет двухканатной подвесной дороги с кольцевым
движением вагонеток для перевозки руды, если производительность 180 т/ч,
скорость движения вагонеток и = 2,8 MfceK, собственная масса четырехколес-
ной вагонетки Go ~ 700 кг, шаг вагонеток а = 100 м, время работы в сутки,
/с = 20 ч, длина дороги L = 4500 м, высота подъема Н = 1500 м, насыпная
масса материала у = 2 л/м3.
Среднее значение угла подъема канатной дороги
Н 1500
sin р = ——- = ——- = 0,333, угол р— 19 30'.
L 4500
Горизонтальная длина дороги
Ьг = L cos р — 4500 • 0,943 = 4240 м.
Грузоподъемность вагонетки по формуле (309):
Q а 180 100 • 10
G — -------------—--------=18 кн
ЗбООи 3600 - 2,8
Объем кузова при коэффициенте заполнения ф = 0,9
, G 18
V = -- = ------------= 1 ж3
2.0,9*10
Потребное число вагонеток при 20% запаса их по формуле (310):
2L 2•4500
пп = 1,2——=1,20-------—-= 108.
а юо ;
Число вагонеток, отправляемых в течение часа, по формуле (311):
Q 180
п„ = —- —-----= 100 ваг /ч,
G 1,8
Интервал между вагонетками по времени, согласно формуле (312):
Число вагонеток, проходящих по дороге за время tc = 20 ч, по формуле
(313):
^ = /1,^= 100'- 20 = 2000.
Число проходящих по несущему канату ходовых колес
z - = = 2000 • 4 = 8000.
Нагрузка на одно колесо тележки при qT = 1,7 ка/jH ио формуле (314):
= 1,1 [(Ge -h G) cos 3 + qT • a] ~ =
I
= 1,1 [(700-1- 1800)0,943 -[-1,7- 100] — = 700 кг.
276
Максимальное расчетное усилие на рабочую ветвь несущего каната при
6 = 3.75 по формуле (315);
Spac = 0,780^ /7 • 10 = 0,78 - 700 • 3,75 /8000 • Ю= 1 830 000 н.
По табл. 63 выбираем закрытый спиральный канат (ГОСТ 7675-55), диа-
метр которого dK = 45 лш, погонная масса qH = 11,5 /сг/,и, предел прочности
проволок оп ч = 140 -107 н/it2, суммарное разрывное усилие всех проволок
в канате Spa3 = 1 898 000 н.
Допускаемое рабочее усилие на несущий канат при k' = 3 по формуле
(316);
0,9 • 1 830 000
3
= 549 000 н,
0 >
Сила трения на опорах несущего каната при f = 0,15 по формуле (317):
/Go \ / 2500 \
ГГ^10(^--Ь?г+^ГЛ=10П00~ + 1-7+ U,5j X
X 4240 • 0,15 = 243 000 н.
Масса натяжного груза по формуле (319):
G^ — 0,1 Spa6 — q^H—0,1FT == 0,1 • 549 000—11,5-1500—0,1 • 243 000= 13 350 кг;
G = 13350 > 0,03 • Fr = 0,03 • 243 000 = 7290 кг
« 1 j >
Принимаем окружное усилие на канатоведущем шкиве Р = 45 000 н, угол
обхвата а = 480°, коэффициент трения f = 0,16, по табл. 44 + = 3,87.
Усилие натяжения набегающей ветви по формуле Эйлера;
S
f+ 3 87
--------- = 45 000 -+-= 60 600 я
е/«_ 1 3,87—1
Расчетное усилие тягового каната с запасом прочности kK = 6:
Spac = kHSH(> = 6 60 600 = 363 600 н.
По таблицам прилож. I выбираем канат ЛК-3, 6x25+1 (ГОСТ 7665-55),
диаметр которого = 26,5 леи, погонная масса qT = 2,56 кг/л{, предел проч-
ности проволоки 160 107 н/м2 разрывное усилие каната 5раз = 370500 я.
Диаметр .канатоведущего шкива
+- 70 / = 70-26,5 = 1855 маг,
принимаем О/и = 2000 мм = 2 м.
Мощность двигателя при / = 1,15 п т) = 0,75:
Ри 45 000 2 8
N -- k3 = 1,15 ---- —!— = 193 000 вт = 193 кет.
ч 0,75
По каталогу выбираем два электродвигателя
100 кет ври пае = 1470 об/мин.
Число оборотов канатоведущего шкива
60о 60-2,8
— п —'
Передаточное число привода
- _ /а
ПШ
АО 92-4 мощностью по
„ = 26,7 об!мин.
3,14-2
И™ = 55 1
26,7
277
По таблицам з прилож, 33 для каждого из электродвигателей выбираем
редуктор ЦДШ-650, у которого in — 10,35, передаваемая мощность 102 нет
при скорости вращения ведущего вала 1500 об/мин. Передаточное число от-
крытой зубчатой пары
В заключение необходимо отметить, что рассмотренные типы
устройств непрерывного транспорта не исчерпывают их много-
образия, На предприятиях народного хозяйства страны нахо-
дят применение другие виды конвейеров — подвесные толкаю-
щие, грузоведущие, шагающие, тележечные, роликовые и др.
Проектные организации, научно-исследовательские институты,
кафедры высших технических учебных заведений изыскивают
новые, более точные, методы расчета; разрабатывают надежные
конструкции высокопроизводительных транспортных средств с
полной автоматизацией их работы и созданием наиболее бла-
гоприятных и безопасных условий труда для обслуживающего
персонала. Неоценимую помощь в совершенствовании грузо-
подъемных и транспортных машин оказывают изобретатели и
рационализаторы. При этом развитие современных устройств
непрерывного транспорта идет в следующих направлениях:
1. Перемещение грузов на большие расстояния от начально-
го до конечного пунктов без промежуточном перегрузки за
счет изготовления ленточных конвейеров длиной до 3000 м и
применения ленточно-канатных конвейеров с одно- и многодви-
гательными приводами,
2, Повышение производительности конвейеров за счет уве-
личения нагрузки на единицу длины ленты и повышения скоро-
сти движения груза,
3. Повышение надежности и долговечности работы элемен-
тов конвейеров различных конструкций,
4. Автоматизация работы конвейерных установок,
ВОПРОСЫ И ЗАДАНИЯ
1. Общее устройство подвесной канатной дороги.
2. Различие в конструкции и принципе работы одно- и двуканатных под-
весных дорог.
3. Конструкции зажимных аппаратов.
4. Опорные и отклоняющие устройства для канатов.
5. Произвести расчет одноканатной подвесной дороги.
6. Перспективы развития транспортных устройств непрерывного действия.
§ 10. ПНЕВМАТИЧЕСКИЕ И ГИДРАВЛИЧЕСКИЕ ТРАНСПОРТНЫЕ
УСТРОЙСТВА
Работа пневматических транспортирующих установок (ПТУ)
основана на способности перемещения сыпучих и штучных гру-
зов в потоке воздуха или под давлением воздуха за счет созда-
278
ния разности давлений в начале и конце трубопроводов.
В потоке воздуха (в смеси с воздухом) транспортируют пылевид-
ные, порошкообразные, мелковолокнистые и зернистые мате-
риалы в цементной, химической, литейной и других отраслях про-
мышленности. Под давлением воздуха перемещают также в
штучные грузы, которые помещают в калиброванные патроны
с уплотнениями для уменьшения утечки воздуха между патро-
ном и внутренней стенкой трубы. Такие установки применяют в
почтово-телеграфных, банковских учреждениях, библиотеках
и т. д. Разность давлений в начале и конце трубопровода, необ-
ходимая для движения груза, создается всасыванием воздуха
вакуум-насосом (эжектором) или нагнетанием его компрессо-
ром (воздуходувной машиной).
К достоинствам ПТУ относятся герметичность трубопрово-
дов, исключение потерь и выделения пыли, возможность пере-
мещения грузов по сложным трассам, способность транспорти-
рования материалов с температурой до 500° С, высокая произ-
водительность и большие расстояния перемещения, возможность
полной автоматизации транспортных операций. Производитель-
ность ПТУ в смеси с воздухом на действующих установках до-
стигает 300 т/ч при дальности транспортирования до 1800 м и
высоте подъема до 50 я и более.
По способу создания разности давления в трубопроводе
ПТУ, работающие на принципе перемещения материала в смеси
с воздухом, разделяются на всасывающие, нагнетательные и
смешанные (фиг. 141).
Разрежение в системе всасывающей установки создается
вакуум-насосом 5 (фиг. 141, а). Атмосферным давлением воз-
дух вместе с материалом засасывается через сопла 1 в трубо-
провод 2 и поступает в циклоп-разгрузитель 3, в котором за счет
резкого уменьшения скорости воздушного потока происходит
осаждение материала и выгрузка его с помощью шлюзового
затвора 6. Воздух из циклона-разгрузителя идет в фильтр 4 и
после очистки выбрасывается в атмосферу. Пыль из фильтра
удаляется шлюзовым затвором. Разность давления воздуха во
всасывающих установках составляет 0,4—0,5 бар, и дальность
транспортирования — до 100 я. Всасывающие ПТУ позволяют
забирать материал одновременно из нескольких пунктов и раз-
гружать его в одном.
В установках нагнетательного действия (фиг. 141, б) ком-
прессор 1 создает в системе давление с перепадом до 5 бар.
Сжатый воздух через воздухосборник 2 с влагоотделнтелем по-
ступает в трубу 4, в которую питателем 3 (камерным или вин-
товым) подается материал и поступает в циклон-разгружа-
тель б, а воздух через фильтр 6 выбрасывается в атмосферу.
Нагнетательные ПТУ позволяют подавать материал одновре-
менно из одного пункта в несколько пунктов на значительные
расстояния. Они находят наибольшее применение.
273
В смешанных установках (фиг. 141, в) подача материала в
трубы осуществляется всасыванием, а подача к месту разгруз-
ки— нагнетанием. Всасывающе-иагнетательные установки поз-
воляют забирать материал одновременно из нескольких пунк-
тов и подавать его в несколько мест разгрузки.
Фиг, 141, Схемы пневматических транспортирующих уста-
новок:
а — всасывающая; б — нагнетательная; в — смешанная.
В нагнетательных ПТУ для загрузки материала применяют
стационарные винтовые (фиг, 142, в) и камерные (фиг. 142, а, б)
питатели,
В винтовом питателе материал из бункера через загрузоч-
ное отверстие 1 (фиг. 142, в) поступает в полость, в которой со
скоростью до 1000 об1мин вращается винт 2 с переменным ша-
гом, создающий уплотнение материала и препятствующий про-
хождению сжатого воздуха в полость с винтом, Материал по-
280
дается впитом в смесительную камеру 4, в которую через фор-
сунки 6 поступает сжатый воздух, распыляет материал и уносит
его в трубопровод. Величина выходного отверстия винтового пи-
тателя регулируется клапаном 3, связанным рычагом 5 с про-
тивовесом. Винтовые питатели применяют в основном для
загрузки пылевидных и зернистых малоабразивных мате-
риалов.
Характеристика винтовых питателей дана в табл. 64,
Камерные питатели не имеют быстроизнашивающихся дета-
лей, дают возможность подавать материал вниз и вверх, расхо-
дуют мало энергии. Они получили более широкое применение
прн загрузке абразивных материалов.
В однокамерном питателе с выдачей материала вниз
(фиг. 142, а) к коническому днищу крепится изогнутый патру-
бок 1 со специальным плавно суживающимся переходом 3. Сжа-
тый воздух подается через патрубок 2. Для образования необ-
ходимой концентрации смеси через кольцевую форсунку 4 вво-
дится добавочный воздух.
Таблица 64
Характеристика винтовых питателей
Диаметр винта в мм Производительность в т/ч Давление воздуха в смесительной ка- мере в бар Мощность на валу винта в кет
100 8—16 1,8—2,5 14—30
150 25—35 1,8—2,5 35-50
200 35—60 1,8—2,5 60—120
250 60—130 1,8—2,5 150—240
В однокамерном питателе с подачей материала вверх
(фиг. 142, б) труба 2 введена внутрь камеры. Сжатый воздух
поступает в нижнюю часть камеры через аэрирующие пористые
плитки /, разрыхляет материал и образует смесь, которая по-
ступает в трубу 2.
Загрузка материала с помощью однокамерных питателей
производится периодически, поэтому для непрерывной подачи
материала в транспортный трубопровод применяют сдвоенные
установки (двухкамерные питатели).
Для забирания материала во всасывающих ПТУ используют
также переносные сопла (фиг. 143, а). Воздух всасывается в
сопло через кольцевое пространство 1, величина которого изме-
няется гайками 3 на винтах 2, соединенных с внешней трубой.
Переносные сопла изготовляют из стали. Длина сопел 800—
1200 мм, диаметр 45—180 мм, толщина их стенок 1,5—2,0 мм.
В качестве транспортных трубопроводов используют сталь-
ные цельнотянутые трубы диаметром 50—300 мм с толщиной
стеиок 1—3 мм для неабразивных и 10—12 мм для абразивных
1Q В. Л. Моргачев 281
282
материалов. Для транспортирования абразивных материалов
применяют также чугунные трубы.
В шлюзовом затворе (фиг. 143, д) на валу 3 вращается ло-
паствой барабан 2, концы лопаток которого хорошо притерты
к внутренним стенкам чугунного литого корпуса 1.
Цнклон-разгрузнтель (фиг, 143, г) выполнен в форме цилинд-
ра с коническими крышкой и днищем. Транспортируемая смесь
поступает в разгрузитель через циклон /, получает криволиней*
ное движение, материал отбрасывается к стенкам и теряет ско-
рость, скапливаясь внизу. Окончательная очистка воздуха перед
выбросом в атмосферу производится матерчатыми (фиг. 143, в)
или водяными (фиг. 143, б) фильтрами.
Расчет пневматических транспортирующих установок реко-
мендуется производить в такой последовательности:
1. Определить скорости витания (парения) материала и дви-
жения воздуха в зависимости от характеристики материала.
2. Определить расход воздуха и диаметр трубопровода по
заданной производительности и выбранной концентрации смеси.
3. Определить гидравлическое сопротивление и разность
давлений в трубопроводе в зависимости от трассы.
4. Выбрать компрессор (воздуходувную машину) или ва-
куум-насос и определить мощность двигателя.
Скорость витания материала veT определяется по формуле
veT = k — dM м/сек,
где k= 10-j-170—коэффициент, учитывающий размер частиц
материала; меньшие значения k соответст-
вуют меньшему размеру частиц;
у2 •— удельная масса частиц материала в тДи3;
ув = 1н-2 кг/м2 — удельная масса воздуха при нормальном
атмосферном давлении, причем берется y« = 0,8-~0,95
кг/м3 для всасывающих установок и ув = 1,6 2,0
для нагнетательных установок;
dM — размер частиц материала в пределах 0,00001 л- 0,07 м.
Скорость движения воздуха у сопла во всасывающей уста-
новке и на выбросе в нагнетательной определяется по формуле
ve = а Куз + м/сек,
где а — коэффициент, учитывающий крупность частиц мате-
риала (табл. 65);
-у2— удельная масса частиц материала в т/м3;
b — (2-у5) • Ю“5 — коэффициент, учитывающий состояние
материала (меньшие значения принимаются для сухих
пылевидных материалов);
Lnl) — приведенная длина транспортирования в м.
283
10*
Приведенная длина трубопровода
Lnp — X ^2 + h + 2 Ьк “F 2^ лг,
где S/2— сумма длин горизонтальных участков трубопровода
в М;
Slrt — сумма длин вертикальных участков трубопровода в At;
— сумма длин, эквивалентных коленам (табл. 65), в м\
— сумма длин, эквивалентных переключателям трубо-
провода при транспортировании пылевидных материа-
лов, в м.
Таблица 65
Значения размера частиц, коэффициента а и эквивалентных длин
трубопровода S /,к
Тип материала Размер частиц в мм Коэффи- циент а Эквивалентная длина SZ С? ГС в л при отношении рэднуса поворота к диаметру трубы, равном
4 1 6 | 10 20
Пылевидный 0,001 — 1 10—16 4—8 5—10 6—10 8—10
Зерновой .... 1—20 17—20 8—10112—16 16-20
Мелкокусковый 10—20 17—22 -* — |28—35 38—45
Крупнокусковый 40—80 22—25 **- — 60—80 70—90
Так как длина трубопровода во всасывающих установках ие
превышает 100 At, то слагаемым bL* обычно пренебрегают.
Во избежание увеличения сопротивления в трубопроводах и
необходимости повышать давление в системе рабочая скорость
воздуха ve принимается в 1,5—3 раза больше скорости витания
частиц материала veT (табл. 66).
Таблица 66
Скорости витания и движения воздуха с материалом и массовая
концентрация смеси
Материал Скорость витания в Л(/се/с Начальная скорость движения в м/сек Массовая концентрация смеси [х
Кальцинированная сода 8 10—18 13
Колчеданный огарок — 15—18 11,0—24,5
Костяная мука 8 14—25 20
Кремнефтористый натрий 19 29 j /
Огарковая пыль 9 14 — 15 10—12
Угольная пыль 0,14 8—15 12
Флотационный колчедан — 20—25 1,0
284
Производительность установки по массе материала со-
гласно формуле (207):
Qfl = З,6увц/Гри m/v,
где у() — удельная масса воздуха па впуске пли выпуске в кг/м3;
ив— скорость движения воздуха в м/сек;
FTp — площадь поперечного сечения условного прохода тру-
бопровода в л2;
g — массовая концентрация смеси в кг груза на 1 кг воз-
духа (табл. 66).
Большая концентрация принимается при меньшей длине и
большем давлении.
Расход воздуха
Ve = veFTP =- — = ve j^icck.
3,б7йи 4
Внутренний-диаметр трубопровода deH\
d°" m м-
Необходимая производительность компрессора VK’
Кс = мР/сек,
где kH= 1,1 —коэффициент, учитывающий утечку воздуха че-
рез неплотности в трубопроводах.
По производительности выбирается компрессор.
Необходимое давление воздуха в трубопроводе:
для нагнетательных систем
1 / 3uL_„&2
Рн = У 1 + - ± Рп бар;
для всасывающих систем
^вн
± рп бар,
где р — опытный коэффициент, принимаемый для всасываю-
щих установок в зависимости от соотношения величин
S = ------ (фиг, 144); для всасывающих установок
р = 1,5-IO"7;
ц — массовая концентрация смеси из табл. 66;
Lnp — приведенная длина трубопровода в м;
ve — скорость движения воздуха в м/сек;
deu — внутренний диаметр трубопровода в м;
рн—давление смеси воздуха с материалом па вертикаль-
ных участках длиной Я = 2Лв м.
10*
285
Давление на вертикальных участках трассы
где у' —среднее значение удельной массы воздуха на верти-
кальных участках в ка/лг3.
В нагнетательных системах знак плюс ставится при движе-
нии материала вверх, знак минус — при движении материала
вниз; во всасывающих системах, наоборот, в первом случае ста-
вится знак минус, во втором — плюс.
Фиг. 144. График зависимости коэффициента р
от величины S.
Потребная мощность двигателя нагнетательных систем
AZ, = —- кет,
д 102.71
где .4-к — теоретическая работа компрессора (воздуходувки),
отнесенная к 1 м3 всасываемого воздуха при изотер-
мическом давлении, в кгж/ж3;
— производительность компрессора в мъ[сек\
г| = 0,554-0,75 — общий к. и. д. компрессорной установки.
Теоретическая работа компрессора определяется по формул?
Ак = 23 030pQlg-^- кг-м/м*,
Ро
где Ро — атмосферное давление;
рк — давление в компрессоре;
Рг. = а ' Рр + Рт баР,
здесь а = 1,154-1,25—коэффициент, учитывающий потери дав-
ления в загрузочном устройстве;
рр — рабочее давление в начале трубопровода, pp = pH
для нагнетательных систем и рт, = р0 “ Рв — Для вса-
сывающих;
286
Рт — потери давления в подводящем воздухопроводе, рав-
ные 0,3 бар для нагнетательных и 0,02 бар для вса-
сывающих устройств.
По найденной мощности выбирают электродвигатель.
Разновидностью ПТУ являются пневматические желоба. Пнев-
матический желоб квадратного или прямоугольного поперечного
сечения изготовляют из листовой стали. Вдоль по горизонтали
желоб разделяется на две части пористыми плитами, на кото-
рых находится материал, подаваемый через загрузочные люки.
Через пористые плиты снизу равномерно подается воздух, сооб-
щающий материалу движение вниз при уклоне желоба 0,04—0,05.
Воздух, пройдя через материал и сухой фильтр, поступает в
атмосферу.
Для подъема материалов с высокой концентрацией смеси
(ц > 100) вертикально вверх применяют пневматические подъ-
емники (аэролифты).
Гидравлическое транспортирование материалов применяется
в горнодобывающей промышленности для перемещения полез-
ных ископаемых и породы (гидродобыча), па обогатительных
фабриках для подачи сырья при мокром обогащении и удале-
ния отходов, на предприятиях химической промышленности для
удаления огарков, в грануляционных установках и т. д. Механи-
ческая смесь частиц транспортируемого материала с водой (гид-
росмесь) называется пульпой.
Применение гидротранспорта обусловлено его простотой
устройства, возможностью непрерывного перемещения материа-
ла на значительные расстояния (до 10 км) по сложным трас-
сам, обеспечением высокой производительности при герметично-
сти системы и отсутствии потерь, совмещением транспортирова-
ния с промывкой, охлаждением и др.
Отрицательными сторонами гидротранспорта являются боль-
шой расход воды, высокая энергоемкость, сложное обезвожи-
вающее хозяйство, износ трубопроводов и насосов.
Применяются следующие принципиальные схемы гидравли-
ческого транспортирования материалов: а) самотечные (низко-
напорные), б) высоконапорпые и в) смешанные,
В самотечных устройствах (фиг. 145, а) пульпа перемещает-
ся по деревянным или металлическим желобам 2 с уклоном
0,02—0,06. На поворотах трассы для увеличения скорости дви-
жения крупных кусков устанавливают дополнительные сопла /,
из которых вода подается под давлением до 10 бар. Желоба
имеют прямоугольную, трапециевидную, полукруглую и круглую
форму и покрываются на внутренних рабочих участках износо-
стойкими плитками из литого камня (базальта) или чугуна. Пе-
реключающий шибер 3 направляет пульпу к центробежному
шламовому насосу (землесосу) 5, который откачивает ее по
трубам 4.
287
Схема напорного гидротранспорта с давлением воды 25—
60 бар может быть выполнена в двух вариантах. По первому
варианту (фиг, 145, б) гидросмесь, образуемая в приемном
Фиг. 145. Схемы, гидравлических транспортирующих установок:
и — самотечная (|цгзкона1<орная); й — напорная с землесосом;
d — напорная с центробежным насосом п питателем; г -- смешанная;
д — с эрлпфт-насосом.
устройстве /, всасывается землесосом 3 и по трубопроводу 4 по-
дается к месту назначения на обезвоживающее сито 6, с кото-
рого материал поступает в приемный бункер 7, а вода стекает
в отстойник 8 и откачивается насосом 5 по трубе 2 в приемное
устройство 1.
288
По второму варианту (фиг. 145, в) обычным цетробежным
насосом 2 из бассейна 1 в трубопровод 4 диаметром 200—
400 мм подается вода. Сухой материал поступает в трубопро-
вод 4 из бункера при помощи специальных питателей 3 (камер-
ных, винтовых и поршневых). Образующаяся в трубе пульпа
уносится по назначению.
При смешанном способе гидротранспорта (фиг, 145, а) пуль-
па в пределах цеха перемещается по желобу 1 и попадает в
приемник 3 эжекторного гидроэлеватора 4. В напорное сопло
гидроэлеватора насосом высокого давления 2 подается вода,
которая вместе с пульпой проходит через диффузор в трубу.
Расчет напорных гидротранспортных систем сводится в ос-
новном к следующему;
1. Определению расхода воды и диаметра трубопровода по
принятой концентрации пульпы и скорости ее движения.
2. Определению величины напора, необходимого для работы
установки, и выбору землесоса.
Концентрацией пульпы ц называется отношение объемов
жидкого материала к твердому, т, е. удельный расход воды па
1 Л!3 транспортируемого материала:
U = = 3 6,
уг
где Ve — расход воды в ж3/ч;
— объем перемещаемого материала в м3/ч.
Объем пульпы, подаваемый за 1 ч:
^л = ^ + ^ = Кг(1 -НО ^/ч.
При заданном объеме пульпы Vn м3/ч и скорости ее движе-
ния vn м/сек. находят требуемый диаметр трубопровода D:
Vn = 3600 • vn м3/ч,
о т к у д а _____ _____________
Г = 1/-±2^ — 0,021/ м.
3600п:ап у
Полученный диаметр трубопровода D проверяется на мак-
симальную крупность кусков яШах транспортируемого материала
(2,5 н- 3,0)araax.
Величина напора Нп\
где k = 1,05 -ъ 1,10 — коэффициент, учитывающий потери напо-
ра от местных сопротивлений;
/7е — потери напора на горизонтальном участке трубопро-
вода;
77в—потерн напора па вертикальном участке трубопровода.
2^9
Потери напора иа горизонтальном участке длиной L
Vn
H. L —
D
. /ало , 0.0018Х , ,
где Л = 0,03 + —-—- — коэффициент сопротивления
\ у vnDJ
движению пульпы;
D — диаметр трубопровода в я;
vn—-скорость движения пульпы в м/сек-,
g — ускорение силы тяжести в м/сек2-,
= . —удельная масса пульпы в т/л?3;
уг —удельная масса транспортируемого материала в т/м3-,
Потери напора на вертикальном участке высотой Н
где — скорость витания (гидравлическая крупность транс-
портируемого материала) в м/сек.
Знак плюс берется при транспортировании вниз, знак минус
при транспортировании вверх.
Скорость витания
ve ~ с (u “ U м/сек,
где с = 0,55 — опытный коэффициент;
d — диаметр частиц материала в см;
Уг — удельная масса материала в т/м3.
По найденной величине напора Нп выбирается землесос.
Кроме пневматических и гидравлических транспортирующих
установок, применяют гидропневматическую систему транспор-
тирования при подъеме пульпы на высоту 3—5 м. В этой систе-
ме (фиг. 145, д) пульпа, образуемая в желобе 5 при подаче
воды из трубопровода 6 и материала из бункера 2 через шибер-
ный затвор 4, поступает самотеком в правую трубу 3 U-образ-
ного эрлнфт-насоса, в нижнюю часть левой трубы 1 которого от
компрессора подается воздух под давлением 1—2 бар. Пульпо-
воздушная смесь, имеюшая меньшую удельную массу, подни-
мается в приемный бак, из которого воздух выделяется в атмос-
феру, а пульпа по наклонным желобам подается к месту назна-
чения.
ВОПРОСЫ И ЗАДАНИЯ
/. Область применения пневматического транспорта.
2. Принцип работы, всасывающей ПТУ.
3. Принцип работы нагнетающей ПТУ.
4. Принцип работы смешанной ПТУ.
5. Конструкция основных узлов ПТУ.
6. Область применения гидравлического транспорта.
7. Схемы работы гидравлических транспортных установок.
8. Ознакомиться с установками пневматического и гидравлического транс-
порта на предприятии.
ПРИЛОЖЕНИЯ
Примечание. Линейные размерности, не отмеченные в таблицах, даны в мил-
ли метрах.
ПРИЛОЖЕНИЕ 1
СТАЛЬНЫЕ ПРОВОЛОЧНЫЕ КАНАТЫ (ТРОСЫ) (см. фиг. 1)
а. Тип ТК 6X19+1 ос (ГОСТ 3070-55)
ДиП.ЧС! Р в лш Плснцлдь сечения Расчетная масса I (И) пог. .« <’ма- Разрывное усилие каната при расчетном пределе прочности па растяжение в н/лр
капа га прополок it всех ириво. |(Ж П Jfv- зашюго к;;ннтл и к г 150- 10’ 160-10» 170 10’ | 180 10’ | 19 0-10’
вн не менее
+ 5 0,31 8,60 8,15 10 900 11 600 12 400 13 100 13 800
6,2 0,4 14,36 13,6 18 200 19 400 20 700 21 900 23 100
7,7 0,5 22,34 21,17 28 400 30 300 32 200 34 100 36 000
9,3 0,6 32,26 30,57 41 000 43 800 46 500 49 300 52 000
11,0 0,7 43,89 41,59 55 900 59 600 63 400 67 100 70 800
12,5 14,0 0,8 57,34 54 33 73 100 77 900 82 700 87 500 92 300
0,9 72,50 68,7 92 200 98 500 104 500 110 500 116 500
15.5 1,0 89,49 84,8 113500 121 500 129 000 136 500 144 500
17,0 1,1 108,30 102,6 137 500 147 000 156 000 164 500 174 900
18,5 1,2 128,32 122,0 164 000 175 000 185 500 196 000 207 000
20,0 1,3 151,28 143,3 192 500 205 500 218 000 231 000 243 000
22 О 1,4 175,ьб 166,3 223 500 238 000 253 000 268 500 283 000
23,5 1,5 200,64 190, 1 255 000 272 500 289 500 306 500 323 500
25,0 1 ,<> 229 14 217, 1 291 500 311500 331 000 350 000 369 500
26,5 1,7 258,78 245,2 329 500 351 500 373 500 395 500 417 500
28,0 1,8 289,56 274,3 368 500 393 500 418 000 442 500 467 500
31,0 2,0 357,96 339,2 456 000 486500 517 000 547 000 578 000
34,0 2,2 433 20 410,5 552 000 589 000 625 500 662 500 699 500
37,0 2,4 515,28 488,2 656 500 700 000 744 000 788 000 832 000
40,5 2,6 605,34 573,6 771 500 823 000 871 000 922 000 977 500
ОТ
Продолжение прилож, 1
б. Тип ТК 6X37^ 1 ос (ГОСТ 3071-55)
Диаметр в лтм Площадь сечения всех проволочек в мм3 Расчетная масса 100 пог. JU сма- занного каната в кг Разрывное усилие каната при расчетном пределе прочности па растяжение в н]м'1
каната проволоки 160-10* 170-10’ 180-10’ 190 Ю’
в я не менее
4,8 6,1 8,7 11,0 0,22 0,28 0,34 0,4 0,5 8,44 13,68 20, 16 27,97 43,51 7 93 И 000 11 700 12 300 13 100
12,85 17 800 19 200 20 100 21 200
18,93 26 400 28 000 29 600 31 400
26,27 36 600 38 900 41 200 43 500
40,86 57 000 60 600 64 200 67 700
13,0 15,5 17,5 19,5 22,0 0,6 0,7 0,8 0,9 1,0 62,83 85 47 111,67 141 19 59,0 82 400 87 300 92 600 97 500
80,27 104 8 111 500 - 146 000 118 500 155 000 125 500 164 500 132 500 173 500
132 6 184 500 196 500 208 000 219 500
175*26 164,6 229 500 243 500 258 000 2/2 500
24,0 26,0 28,5 30,5 32,5 1J 1,2 1,3 1,4 1,5 211,98 253 04 199,1 277 500 295 000 312 500 330 000
237*7 331500 352 500 373 000 394 000
294,59 343 20 266,7 322,3 386 000 450 000 410 000 478 000 434 500 506 000 458 500 534 500
392,22 368,4 514 500 546 500 , 578 500 610 500
35,0 37,0 39,0 43 5 47,5 1,6 1 7 447,78 505,56 565,62 699,72 845,70' 420,6 587 000 624 000 660 500 697 000
474,8 662 500 704 000 746 000 /8/ и 00
1’8 2,0 О 9 531,2 657 2 741 500 914 000 788 000 971 500 832 000 1 025 000 877 000 1 085 000
794,3 1 105 000 1 175 000 1 245 000 1 315 000
Продолжение прилож. 1
в. Тип ЛК-3 6x25+1 ос (ГОСТ 7665-55)
Диаметр п мм Площадь сечения всех проволок В АЛ2 Расчетная масса 100 пог. м смазанн ого Разрывное /силис каната в целим при прочности иа растяжеЕ1ие в расчетном пределе н/мй
каната проволоки 130-10’ 140-10’ 150-10’ 160-1р’ 170-10’ 180-10’
в прядях заполне- ния н не менее
7,7 0,5 0,2 23,47 22, 14 25 900 27 800 29 900 31 800 33 900 35 800
9,3 0,6 0,24 33,88 31,96 37 400 40 200 43 100 46 000 48 900 51 700
11 0,7 0,28 46,10 43,49 50 900 54 800 58 700 79 600 66 500 70 400
12,5 0,8 0,34 60,60 57,17 66 800 72 000 77 200 99 300 87 500 92 600
14' 0,9 0,37 76,39 72,07 84 400 90 500 97 300 120 500 110000 116 500
15,5 1,0 0,40 94,02 8Я,7 103 500 111 500 119 500 144 500 135 500 143 500
17 1,1 0,42 113,27 103,03 125 000 134 500 144 000 153 500 163 500 172 500
18,5 1,2 0,45 134,54 126,9 148 000 159 500 171 000 199 000 194 000 205 500
20' 1,3 0,50 158,34 149,4 174 500 188 000 201 500 232 000 228 500 242 000
22 1,4 0,55 184,13 173,7 203 000 218 500 234 500 267 000 266 000 281 000
23,5 1,5 0,60 210,83 198.9 232 500 250 500 268 500 303 000 304 000 322 000
25 1,6 0,65 241,09 227,4 266 000 286 500 307 000 344 500 348 000 368 500
26,5 1,7 0,70 272,64 257,2 300 500 324 000 347 000 370 500 393 500 416 500
28 1,8 0 75 305 47 288,2 337 000 363 000 389 500 415 500 441 000 467 000
31 2,0 0,80 376,07 354,8 415 000 447 500 479 000 511 000 543 000 575 000
34 2,2 0,85 453,61 427,9 501 000 539 500 578 000 616 500 655 000 694 000
37 2,4 0,95 540,80 510,2 597 500 643 000 689 000 735 000 781 000 827 000
40,5 2 + 1,0 633,60 598,8 699 500 753 500 807 500 858 500 913 500 969 000
43,5 2,8 1,1 735,30 693,7 812500 871 000 935 000 998 500 1 060 000 1 125 000
46,5 з,о 1,2 846,66 798,8 935 000 1 005 000 1 075 000 1 145 000 1 215 000 1 290 000
Продолжение прилож. 1
г. Тип ЛК-Р 6x19+1 ос (ГОСТ 2688-55)
Диаметр в мм Разрывное усилие каната при расчетном*пределе
проволоки Расчетная
— Площадь
Второго слоя сечения 1 00 пог. м 150-10’ 160-10’ 170-10’ 180 10’ 19010’
каната Централь- ной (1 про- Первого большого всех про- волок смазанного каната
(6 про- размера размера в мм1 в /са
волока) волок) (6 про- (6 про- в н нс менее
волок) волок)
8,1 Я я 0,6 0,65 0,7 0,85 0,9 0,55 0,6 0,65 0,75 0,8 0 45 0 6 26,18 24 42 33 300 35 500 37 800 40 000 42 200
о" 5 0,65 31,19 29J0 39 600 42 400 45 000 47 600 50 300
О R 0,55 0 65 0,7 36,69 34,23 46 700 49 900 52 900 56 100 59 200
11,5 12,5 0,85 51,68 48,22 65 850 70 250 74 650 79 050 83 450
о’7 О'Э 58,69 54>5 74 800 79 800 84 700 89 600 94 700
13,5 15,0 16,5 17,5 19,5 0,95 1,1 1,2 1,25 1,4 0,85 1,0 1,1 1,15 1,3 0,7 0,8 0,9 0,95 1,05 0 95 64,05 59,76 81 650 87 050 92 500 97 950 103 450
1,1 1.2 1,25 1,4 86’27 104,56 80,5 97,5 109 500 133 000 117 000 141500 124 500 150 500 131 500 159 500 138 500 168 500
114’46 106,8 145 900 155 650 165350 175 100 184,800
14373 134,0 182 500 195 000 207 000 219 500 231 500
21,0 22,0 24,0 25,0 27,5 1,55 I,6 1,75 1,8 2,0 I,4 1,45 1,55 1 65 1,8 1,2 1,2 1,35 1,4 1,5 1,55 1.6 1,75 1,8 2,0 174,78 163,1 222 800 237 700 252 500 267 400 282 250
184’50 172,1 235 000 250 500 266 000 282 000 297 500
220 ,’46 2057 281 100 299 800 318 500 337 250 356000
23976 286,68 223,1 304 500 325 000 345 500 365 500 385 500
267’,4 365 500 389 500 413 500 438 500 462 500
30,5 32,0 33,0 36,0 38,5 41,0 2,2 2,3 О d 2,0 9 1 1,65 1,75 1,8 2,0 2,2 2,3 2 2 349 68 326,2 445 500 475 000 504 500 534 500 564 000
2’3 385 80 359,9 491 900 524 650 557 450 590 250 623 050
9 9 2,4 2,6 2,8 з,о 418 08 390,0 532 500 568 000 603 500 639 500 674 500
2,6 2,8 3,о 2,4 2,55 2,7 498’78 578,70 652,62 465,3 635 500 678 000 720 000 762 500 804 500
539,9 608,8 737 500 831 500 786500 884 000 835 500 939 000 884 000 994 500 930 500 I 045 000
Тип ТЛК-0 6x37+1 ос (ГОСТ 3079-55)
ч:
296
ПРИЛОЖЕНИЕ 2
ЦЕПИ (см. фиг. 3 и 4)
а. Грузовые и тяговые сварные (ГОСТ 2319-55)
Размеры звена в мм Разрушающее усилие в н Масса 1 пог. м цепи в кг
Диаметр Шаг Ширина
5 19 19 6 400 0.5
6 19 21 юооо 0,74
7 21 24 16 000 1,05
8 23 27 24 000 1,4
9 27 32 31 000 1,76
И 31 36 46 000 2,58
13 36 43 66 000 3,7
16 44 53 102 000 5,6
18 50 58 128 000 6.94
20 56 66 160 000 8,76
23 64 76 210 000 11,4
26 72 84 266000 14,51
28 80 91 312000 16,94
30 84 98 356 000 19,35
32 91 104 410 000 22,1
35 98 114 464 000 27 5
38 106 123 548 000 32 5
40 114 133 606 000 35,8
б. Грузовые пластинчатые (ГОСТ 191-63)
Размеры в мм
Тип цепи Шаг Расстояние меж- ду внутренними пластинами Пластина Валик Количество пл а- СТИН в одном ; звене 3 о е га и га £ С
толщина ширина длина наибольшая длина диаметр сред- ней части диаметр шей- 1 ки под пла- стины
25 18 2,5 15 41 35 0 10 8 2 1,4
1 35 22 2,5 16 53 52 0 13 9 4 2,7
40 25 3,0 20 62 59,0 14 11 4 3,4
50 36 3,0 30 83 78,0 22 17 4 7,0
И 60 70 45 50 4,0 5,0 38 47 104 120 97,0 114,0 26 32 22 26 4 4 10,5 17,0
80 60 5,0 51 134 146,0 36 28 6 23,0
111 100 80 8,0 63 168 214,0 45 35 6 53,0
120 110 8,0 82 208 285,0 55 45 8 89,0
140 120 8,0 120 256 342,0 60 60 10 150,0
IV 170 145 10,0 130 314 405,0 70 70 10 210,0
200 170 10,0 160 380 450,0 85 85 10 305,0
297
ПРИЛОЖЕНИЕ 3
КАНАТНЫЕ БЛОКИ УЗТМ ДЛЯ КРЮКОВЫХ обойм
D 6л D, dx ^2 d» А d2 S Число ребер п dK Масса в кг
400 | 450 450 | 510 70 130 100 ИО 70 52 250 275 60 10 4 8 14 17,5 23,1 27,1 33,2 38
500 | 560 550 | 610 95 150 120 130 80 315 340 80
600 | 680 650 | 730 105 200 140 150 90 72 390 410 480 500 ПО 130 14,5 6 Ю 19,5 21,5 25 26 62 73 98 ПО
750 | 830 160 240 160 100
800 / 930 165
900 |1005 170 270 175 ПО 90 560 150 18,5 12 30 33,5 145 190
1000 ] 1105 190 300 — 120 — 170
1100 |1225 220 330 — 130 108 — 190 210 23 8 14 34,5 39 276 338
1200 [1325 240 360 — 140
Уравнительные блоки УЗТМ
150 195 40 75 —- 45 38 16 11 5
200 260 50 95 — 60 52 м — 14 14 10
250 310 60 ПО 30 60 52 165 — 12 4 8 17,5 15
300 380 70 130 35 85 72 195 — 14 4 8 21,5 27
350 430 80 150 40 85 72 225 14 4 8 25 33
400 480 90 165 50 85 72 255 14 4 8 28 41
450 555 100 180 60 ПО 90 285 —. 16 4 10 30 63
500 605 по 195 70 ПО 90 320 —- 16 4 10 33,5 70
550 675 120 215 80 130 108 350 — 20 6 12 34,5 НО
600 725 130 230 90 130 108 390 20 6 12 39 125
Размеры профиля ручья блоков УЗТМ
а ь С h S 1 1 г г. Гп । Г’_ f л
13—17,5 52 38 8 30 12 10 5 3 1 20 3
19,5—26 72 53 10 40 14 14,5 6 3 i 28 5
28—33 5 90 68 12 52,5 16 18,5 8 4 1 34 7
298
ПРИЛОЖЕНИЕ 4
КАНАТНЫЕ БЛОКИ ЗАВОДА им. КИРОВА
Г ип Р
Гип У
Тип № про- филя d_ бл ot di dE 4, lc s Число ребер п Число отвер- стий d к Масса кг
У 1 275 325 65 120 40 60 12 4 8 4 13 8
У 2 300 365 80 140 40 90 16 4 10 4 20 18,5
У 2 300 365 130 210 30 80 16 4 10 3 17,5 16,5
У 3 400 475 150 230 40 100 18 6 10 6 21 33,5
У 4 500 580 250 350 — 120 20 6 10 6 24 72,5
р 3 610 680 230 330 90 120 18 6 12 6 21 76
р 4 750 830 230 330 150 120 20 6 14 6 24 96
р 1 380 430 130 185 60 80 12 6 8 6 13 19
р 2 500 565 180 250 85 80 16 6 10 6 17,5—20 34,5
р 5 800 890 270 360 150 120 18 6 16 6 29—32 140
У 5 500 590 190 290 — 120 20 6 12 6 29—32 80
Размеры элементов профиля блоков
№ про- филя а ь С h S г гг
1 40 30 7 25 12 8,7 4 3 15 8
2 55 40 10 32,5 16 12 5 5 20 15
3 65 48 10 37,5 18 14,5 5 5 20 15
4 70 50 12 40 20 14,5 5 7 23 15
5 80 60 12 45 20 17,5 6 7 25 15
Примечание, Тип У — уравнительные блоки,
тип Р — рабочие блоки.
299
ПРИЛОЖЕНИЕ 5
КАНАТНЫЕ БЛОКИ ДЛЯ КРЮКОВЫХ ОБОЙМ
D. U.I J. 1 ' 1 Диск ir pcCpj Ма сс а в кг
число ребгр 5
150 185 30 40 70 8 6,5—9 3,4
200 235 40 50 85 — 8 — 6,5—9 6,5
250 300 40 50 85 4 10 8X10 9,5—12 9,6
300 350 40 50 85 4 10 8X10 9,5—12 II,3
350 410 50 60 105 4 12 8X10 13—16,5 17 5
400 460 60 70 120 4 12 10X12 13—16,5 23
450 520 75 90 145 4 15 10x12 17,5—21 36,5
450 535 90 100 170 4 18 10x12 22,5—28 55
500 585 100 120 185 4 18 12x14 22,5—28 67,5
500 585 140 100 250 4 18 12x14 22,5—28 73
600 700 120 140 220 4 20 14x16 28—33.5 114
600 700 160 110 280 4 Спи 20 Т ы 14x16 28—33,5 114
700 800 120 140 220 6 20 12x14 28—33 5 133
700 800 180 120 300 6 20 12X14 28—33; 5 140
Профиль блоков по ведомственному стандарту МТМ СССР Ж-13
а b h S г '
4 9—6,2 22 15 5 12 5 8 4 2,5 2 8 6
8,7 28 20 6 15 » 5 3 2 5 9 6
11 — 15 40 30 7 25 10 8,5 4 5 12 ,8
19 5 55 40 10 30 15 12 5 5 17 10
24 65 50 10 37 5 18 14,5 5 3 20 15
28 80 60 12 45 20 17 6 7 25 15
34,5 90 70 15 55 22 20 7 Я 28 20
39 НО 85 18 65 22 25 9 10 40 30
300
ОДНОРОГИЕ КОВАНЫЕ КРЮКИ
* резьбу по ГОСТ 9 150-59.
** Минимальные размеры.
30}
3 02
Для грузоподъемных механизмов с Машинным приводом (ГОСТ 6627-53)
Грузо- подъем- ность в КН а О ь h d di d* О Z /*• 1 Z, т R Ri К» R„ R* R? Ra Масса крюка в ке|
2,5 20 .14 12 18 14 12 12 30 12 20 10 3 11 11 25 8 22 28 4,5 1 0,15
5 30 22 18 26 20 16 16 45 16 24 15 5 14 14 37 10 30 35 5,5 1,5 0,45
10 40 30 24 36 25 20 20 60 20 30 20 6 20 20 50 15 40 45 6,5 2 1
20 55 40 34 52 35 30 30 85 30 46 30 8 38 28 70 20 55 60 10 2 3
30 65 50 40 62 45 40 36 100 40 56 33 9 45 40 85 22 70 80 10 2 5,4
50 85 65 54 82 55 50 48 130 50 70 42 12 60 43 110 28 85 95 12 2 11,2
100 120 90 74 115 75 70 64 180 70 90 60 14 84 62 155 36 120 125 20 2 29,5
150 150 115 90 142 90 85 80 225 85 100 75 18 104 74 190 45 150 170 22 2 55
200 170 130 102 164 105 100 90 250 100 115 80 20 120 100 220 50 170 190 30 2 84
250 190 145 115 184 120 110 100 285 НО 130 95 23 135 110 245 60 190 210 32 3 115
300 210 160 130 205 135 120 НО 310 120 140 100 25 150 120 272 60 210 230 35 5 154
500 270 205 165 260 165 150 140 405 150 175 135 35 190 140 350 65 270 300 44 5 319
750J 320 • Для ’• Мин 250 механ имальн 200 измов ые раз 320 грузопс леры. 195 дъемш 180 зстью 170 !,5 -1( 480 )0 кн р 180 езьба 205 по ГОС 160 Т 91БС 40 )-59, г 230 РУ ЗОН О; 165 ^ъемно 420 стью 1 100 50 кн 340 и выше 360 48 5 561
ПРИЛОЖЕНИЕ 7
КОВАНЫЕ ДВУРОГИЕ КРЮКИ ДЛЯ ГРУЗОПОДЪЕМНЫХ МЕХАНИЗМОВ С МАШИННЫМ ПРИВОДОМ (ГОСТ 6628-53)
6-Ь
Грузоподъем- ность в xw 1 1 а | b Ьг Л d d. d* 0 ' 1 ' Z 2 т п S Г R* R» R< Масса крюка в кг
не менее
50 70 40 20 65 55 50 48 120 50 70 50 60 30 10 12 3 75 115 9
100 100 60 30 90 75 70 64 170 70 90 70 75 35 15 16 4 105 145 25
150 115 65 32 ПО 90 85 80 200 85 100 85 85 40 15 20 5 125 160 40
200 125 75 38 120 105 100 90 220 100 115 95 90 45 18 22 5 135 180 59
250 145 85 42 140 120 ПО 100 260 110 130 115 105 45 20 25 5 160 200 86
300 160 95 48 150 135 120 НО 290 120 140 130 115 45 22 26 5 175 230 115
500 200 115 58 180 165 150 140 365 150 175 165 170 70 25 30 6 220 280 216
750 240 140 70 225 195 180 170 440 180 205 200 210 90 35 35 8 265 330 369
* Для механизмов грузоподъемностью 50- упорная (ГОСТ 9484-60). -100 кн резьба метрическая (ГОСТ 9 150-59), грузоподъемностью 150 кн и выше резьба
ПРИЛОЖЕНИЕ $
пластинчатые крюки (гост gg19-53)
Однорогие
Грузоподъем- ность в кн D d О R Ri R, В*
375 230 120 30 450 800 85 365 180
625 305 160 40 645 1000 110 477,5 260
875 390 180 45 795 1100 120 595 290
1375 430 220 60 1040 1300 150 665 370
1750 470 250 70 1155 1400 190 745 420
П р и м е ч а н и е. Радиусы Т?Е i /?в находят построением,
л hi Л 2 й.3 *• л. b й, /*2
115 2395 1750 435 800 735 120 180 335 814
150 3100 2200 600 950 860 150 275 435 1117,5
150 3455 2400 720 1250 1100 180 300 520 1365
150 4495 3100 915 1500 12001 200 400 600 1695
150 4590 3150 1000(1540 1400 220 450 700 1915
ь» dt
140 145
160 190
180 220
210 265
240 300
Масса
крюка
в кг
900
1900
2900
5250
7600
Двурогие
&з
Грузоподъем- ность в кн н л hx в В. Вь Ьх Ьа Ьз d d. О #1 R, Rt 2- a Масса крюка в кг
1000 1300 500 * 550 270 150 170 460 200 1300 160 185 20 375 175 125 230 200 275 1200
1250 1410 540 600 300 180 200 500 230 1400 180 210 20 385 200 150 250 200 315 1600
1500 1525 575 650 330 210 230 540 250 1500 200 235 30 400 225 175 270 200 350 2200
2000 1810 665 800 330 210 230 630 300 1800 220 255 30 500 250 200 315 300 400 3200
2500 2085 800 900 360 240 250 710 350 2000 250 290 30 550 275 225 355 300 450 4400
3000 2315 850 1000 360 240 260 830 400 2250 300 350 50 650 275 225 400 350 475 5900
3500 2585 1000 1050 360 240 260 970 500 2600 320 370 50 750 300 250 485 400 550 6900
ПРИЛОЖЕНИЕ 9
КОУШИ, ЗАЖИМЫ И ВТУЛКИ для СТАЛЬНЫХ
ПРОВОЛОЧНЫХ КАНАТОВ (ГОСТ 2224-43)
а. Коуши
Диаметр каната d Я Б Л(,И D В В Г S S,
3,6— 3,9 10 15 13 7 24 Z □ 2 2,5
3,9—4,7 14 20 16 8 31 3 3 3
4,7—5,5 18 25 20 9 38 3 3 3
5,5—6,6 22 30 24 10 45 4 4 4
6,6—7,8 26 35 26 12 52 5 4 5
7,8—9,5 30 45 38 14 65 6 4 6
1 9,5—II 35 50 39 16 73 6 5 6
Мч л-4^4-
11 — 13 40 55 40 20 82 7 6 7
S L —*1 13—15 45 65 52 23 98 8 7 8
1
1 । 15—17 50 70 54 25 106 9 8 9
17—18,5 55 80 65 27 122 10 9 10
18,5—20,5 60 90 76 29 137 II 10 12
20,5—22,5 65 100 87 32 152 12 10 13
22,5—24,5 70 НО 99 34 166 13 II 14
24,5—26,5 80 120 102 36 177 14 11 15
26,5—28 90 130 ЮЗ 40 190 15 12 6
28—30,5 95 140 115 42 205 16 12 18
32,5—34 105 155 127 48 230 18 14 20
36—39 ..5 170 140 54 250 21 15 22
306
Продолжение прилож. 9
б. Зажимы
Диаметр каната В Л£Л£ L с и А Б /Л Ь
4,8 6 15 30 28 15 10 5
6,2 6 15 30 28 15 12 6
8,7 10 22 50 45 25 16 8
11 10 22 50 45 25 20 10
13 12 30 60 60 35 24 12
15 12 30 75 60 45 28 14
19,5 16 35 90 70 55 30 16
24 20 40 125 90 65 34 20
28 24 55 140 НО 75 40 20
34 5 24 65 150 125 90 40 20
39 30 65 160 125 90 40 20
Г---Н
в. Клиновые втулки и клинья
Диаметр каната в мм А в L с ' 1d , 1 е 1 Л. 51 *
10—12 14 85 120 34 10 25 30 16 12 36 90 3
12—14 16 95 130 36 10 30 40 17 14 40 100 3,5
14—17 20 105 140 44 12 35 50 20 18 42 ПО 4
17—20 22 115 160 46 12 40 60 22 20 47 125 5
20—23 26 135 180 56 15 45 70 26 24 54 140 6
23—26 28 150 200 58 15 50 80 28 26 60 160 7
26—30 32 170 220 68 18 50 90 32 30 68 175 8
30—35 38 195 250 82 22 60 100 39 36 78 200 9
35—40 42 230 280 92 25 70 ПО 44 40 90 225 10
307
308
ПРИЛОЖЕНИЕ 10
ЭЛЕКТРОДВИГАТЕЛИ ПЕРЕМЕННОГО ТОКА
а. Техническая характеристика
Вели- чина Тип /7В = 15% JIB = 25% ПВ = 40% Кратность макси- мального мо м сита Маховой момент в н • м1 Масса в кг
Мощность в кет Число обо- ротов в минуту Мощность в кет Число обо- ротов в минуту Мощность в кет Число обо- ротов в минуту
1 МТК-11-6 2,7 837 2,2 883 1,8 910 2,6 1,6 80
МТК-12-6 4 852 3,5 875 2,8 907 2,6 2,5 100
2 МТК-21-6 МТК-22-6 6,2 9 880 880 5 7,5 910 905 4,2 6,3 925 922 2,9 3 3,9 5,5 130 1&3
3 МТК-31-6 13,5 896 11 920 9,5 930 3,2 10 205
МТК-31-8 9,3 657 7,5 682 6,5 693 2,9 10 205
4 МТК-41-8 13,5 665 И 685 9,5 695 3 17,8 270
МТК- 42-8 19,5 667 16 685 13 700 3.1 26 335
5 МТК-51-8 26,5 625 22 692 17,5 705 2,8 42 415
МТ К-52-8 33,5 681 28 695 22 708 2,8 55 500
1 МТ-11-6 2,7 885 2,2 885 1,8 910 2,3 1,7 90
МТ-12-6 4,2 885 3,5 910 2,5 940 2,5 2,7 109
2 МТ-21-6 6,5 5 940 4,2 950 2,9 4,1 145
МТ- 22- 6 9,5 928 7,5 945 6,3 957 2,8 5,7 163
3 МТ-31-6 13 2 944 И 953 8,8 962 з, 1 10,5 218
МТ-31-8 9,3 688 7,5 702 6,3 712 2,6 10,5 218
4 МТ-41-8 13,2 708 И 715 8,8 722 2,9 18 6 300
МТ-42-8 18' 713 16 718 13 724 3 27 365
5 МТ-51-8 26,5 716 22 723 17,5 728 3 44 435
МТ-52-8 36 720 30 725 23,5 730 3 57 510
6 МТ-61-10 36 569 30 574 24 579 з,з 130 785
МТ-62-10 55 572 45 577 36 582 3,2 175 945
МТ-63-10 72 572 60 577 48 581 2 9 220 1100
7 МТ-71-10 96 578 80 582 63 585 з,з 400 1500
МТ-72-10 120 581 100 584 80 587 з,з 480 1650
МТ-73-10 150 582 125 585 100 588 3,4 570 1850
«SajLJfUmJ- III." ГТ
Продолжение прилож. 10
б. Размеры двигателей типа МТК
Вели* чина Тип Концы вала L l2
Форма Размеры в мм
d d,
1 МТК-Н-6 МТК-12-6 МТК-21-6 МТК’22-6 МТК-31-6 Цилиндрическая Я 35 35 — 80 80 470 525 182 209,5 202 229,5 86 86 208 235,5
2 40 — 110 — 558 209,5 225 123,5 238,5
а 40 — 110 — 611 236 251,5 123,5 265
3 » 50 — 110 — 650 254,5 2/6,5 119 285,5
4 МТК’31-8 МТК-41-8 МТК-42-8 МТК-51-8 МТК-52-8 я Коническая 65 65 2М42 2М42 140 140 105 105 691 771 258 298 276 316 157 157 293 333
5 70 2М48 140 105 819 318 340,5 160,5 361
70 2М48 140 105 899 358 380,5 160,5 401
Продолжение прилож. 10
310
Вели- чина Тип Форма в И ft L, £1 L, Л ! С dt
1 МТК-11-6 Цилиндрическая 560 151 353 150 200 290 65 60 20 но 75 17
МТК-12-6 615 151 353 150 255 290 65 60 20 110 102,5 17
2 МТК-21-6 675 172 395 170 242 320 70 65 20 125,5 95 22
МТК’22-6 728 172 395 170 295 320 70 65 20 122,5 121,5 22
3 мтК’31-6 MTK-31-S » 768 193 460 190 315 360 80 80 25 140 130 22
4 МТК-4 *8 Коническая 844 230 528 225 290 440 90 90 30 165 но 26
МТК-42-8 924 230 528 225 370 440 90 90 30 165 150 26
5 МТК-51-8 » 967 255 582 250 355 500 no 100 40 190 137,5 33
МТК-52-8 1047 255 582 250 435 500 по 100 40 190 177,5 33
в. Размеры двигателей типа МТ
Продолжение прилож. 10
Вели- чина Тип Концы вала L
Форма Размеры в мм
1
1 МТ-П-6 Цилиндрическая 35 80 __ 592 334 202 86 208
МТ-12-6 45 — 80 — 647 331,5 229,5 86 235,5
2 МТ-21-6 40 НО — 682 333,5 225 123,5 238,5
МТ-22-6 » 40 — ПО — 735 360 251,5 123,5 265
3 МТ-31-6 МТ-31-8 } ’ 50 — 110 — 766 370,5 276,5 119 285,5
4 МТ-41-8 Коническая 65 2М42 140 105 835 402 276 157 293
МТ-42-8 5> 65 2М42 140 105 915 442 316 157 333
5 МТ-51-8 » 70 2М48 140 105 975 475 340,5 160,5 361
МТ-52-8 в 70 2М48 140 105 1056 515 380,5 160,5 401
Продолжение прилож. 10
4 ш ю QO со се со QO GO C^h-СЧ^Г^ — м* м* to ю щ се
4 ст» ст» ст» о о о 00 оо со со со со —< —' —< СЧ СЧ СЧ
ст» ст» S’ со со оо О 1П О СЧ ю ст» tf-L'jlOlOLC
-Г if if —< О in in 1Л Qins О if in co ID CO S’ S-
СЧ СЧ S’ CO CO CO in in if СЧ СТ» s. —< сч co if if in »"4 i-H i-4 i-Ч
Концы вала Размеры в мм < OO О in in in CO CO CO О <D CD
о о о о оо —। СЧ СЧ СЧ
« о о о о о о о о cd оо оо оо СЧ СЧ СЧ СЧ СЧ СЧ
о о о о о о С) ПО» " — —
Форма Коническая > ъ
них ! '' ОС о о о о 1 1 1 -Д СЧ СО — СЧ СО О1 Ю п S t' S НННН'Дь
Вели- чина CD ь.
-а 1” S’ СЧ СЧ СЧ СП СТ СО С) О» О» 'С ф о —< —< СЧ СЧ СЧ СЧ СЧ СО СО СО СО СО хг if if
и tn in in in in in in СЧ in —< О О О Г- S. СЧ in О О in in NOC1C4 СО —in СО S’ S’ СЧ S’ СЧ 1П СТ —< — — — — СЧ СЧ СЧ СЧ СЧ
и ш ш О О СЧ Сч" О ШШОООООСОО —< — СЧ СЧ if О О О» СТ О О CD СЧ СЧ СЧ — < — —1 — — — —' СЧ СЧ СЧ СО СО СО
* ОООО Ш О О О О О С? О in Ш in СЧ СЧ СЧ СЧ СЧ СО СО if if Ш tn in in in in
<ч OOtnin О OOOOOOOininin (DID «3 (О co Cb С» О О СЧ СЧ СЧ 1 >—R——1
U ininoo о о о о о о о о in in in to to S Г- 00 CT) CO —' —«СЧСЧСЧ1П1П1П T—( 1 R—H ’ R—H
05 ОООО О OOOOOOOOOO СТ» СТ. СЧ СЧ О О О1П Ш Ю О» О» о» СЧСЧСОеО со fifinincDcDCDSsS
U ОШСЧШ 1П О О in LQ О'О о о о о О in if ст» — cis 1ПСТ Т тг СС1ЛСТ СЧ СЧ СЧ СЧ СО СЧ СО со if if Ш CD 1П CD S’
-с о о о о о ш ш о о ш ш ш о о о tn in S- S- СТ» СЧ.СЧ in in — —< —'ООО — — — —< — СЧ СЧ СЧ СЧ СО СО СО т if if
:с COCOinin О 00 00 C4C4ifififcoe0CO Ю in О» СТ» CD СЧ СЧ ОС 00 О О О СЧ СЧ СЧ СО со СО СО М" in in in Ю S S S П □» ст»
05 —< —СЧСЧ со ОО1П1ПОО ОСО СО СО inins-ts О СО СО Ш Ш СЧ СЧ СЧ СО 00 00 — счсчСчсчеосососоеосо
C4S-OC4 of OOOOofofininOininin COCOCTlin со СООСЧОСОСОСО^—। ст» CD S’ Г— СО 00 О О —< СЧСО чь ino S’ S’ 1—Н •—Н
Форма Цилиндрическая » » » } • Коническая * 1 я в » » »
Тип , о о о о о о cdocdcdcdooooqcoooo — —'—'^—'—' Д. Л Леч-^сч — СЧ СО • СЧСО ’’-iCiClCTCO ’T’f L'jL'jntO (DSSS j i > i l » r i • i i 1 > » » i
Вели- чина — СЧ CO -T in CD S-
312
ПРИЛОЖЕНИЕ 11
СЕРИЕСНЫЕ ЭЛЕКТРОДВИГАТЕЛИ ПОСТОЯННОГО ТОКА
15% 11В= 25% пв= 4 0%
Величин;) Тип Мощность В Ы!П 1 Число оборо-। тов в минуту | Мощность 1 Н Квт 1 I Число оборо- тов в минуту Мощность в кет Число оборо- тов в минуту Маховой момент В Н Л1й Масса в кг
1 МП-11 МП-12 1,8 5,5 840 680 1,6 2,5 930 1000 1,25 2,0 1100 1020 1,5 2 107 132
2 МП-22 8 650 4,5 880 3,5 980 6,2 205
3 МП-31 МП-32 11 13 645 600 6,5 9 750 750 5 7 885 840 10 12,2 280 340
4 МП-41 МП-42 15 21 545 535 12,5 17 630 630 9,5 12,5 700 725 31 38 480 570
Основные размеры
Вели- чина Тип k <1 Р | £ 1 tn n
I МП-11 590 260 330 160 315 350 230 350 70 70
МП-12 640 285 355 160 315 350 280 350 70 70
9 МП-22 760 355,5 404,5 180 360 420 290 380 75 80
МП-31 800 365,5 434,5 225 450 505 275 480 85 90
3 МП-32 855 938 457 225 450 505 330 480 85 90
МП-41 1100 484 616 250 498 560 350 530 100 100
4 МП-42 1195 514 681 250 498 560 410 530 100 too
Величина | Tun с ° S 1 1 i
1 мп-H 20 170 280 17 60 | 28
МП-12 20 220 280 17 60 28
2 МП-22 25 230 300 17 70 | 32
3 МП-31 30 215 390 24 90 40
МП-32 30 270 390 24 90 1 40
4 МП-41 35 270 430 29 140 I —
МП-42 35 330 430 29 140 | —
J [ 13. Л. Моргачёв
313
ПРИЛОЖЕНИЕ 12
ЭЛЕКТРОДВИГАТЕЛИ ПОСТОЯННОГО ТОКА МЕТАЛЛУРГИЧЕСКИЕ И КРАНОВЫЕ (ГОСТ 184-61)
— — Номинальная мощность и скорость вращения электродвигателей при возбуждении
Обозначе- ния последовательном смешанном параллельном со стабили- зирующей обмоткой параллельном Макси- мальная допускае- мая
исполне- ний электро- дам га тс л ей закрытых при /7-3=25% и продуваемых при ПВ= 100% в квт закрытых и продувае- мых в об/мин закрытых при /7.8=25% и продуваемых прн ПВ= 100% в кат закрытых и продувае- мых в об/мин закрытых при /78=25% и продуваемых прн 778=100% в кат закрытых и продувае- мых об/мин закрытых при 778=25% и продуваемых прн НВ— 1 00% в кет закрытых н продувае- мых в об/мин скорость вращения в об/мин
12 21 22 31 32 41 42 52 62 72 82 92 102 112 21 22 31 32 41 42 52 3 4,5 6 8,5 12 17 23 33 50 75 106 150 224 300 5,5 8 12 17 23 32 42 960 900 850 770 670 630 600 630 520 470 425 405 400 400 1200 1200 1100 1000 970 900 850 3 4,5 6 8,5 12 16 21 32 46 70 100 140 5,5 8 12 16 23 32 42 Тихох 1160 1080 1050 860 800 720 675 760 610 540 490 450 Быстро 1470 1400 1310 1140 1120 1000 970 О Д н ы е 3 4,5 6 8,5 12 16 21 32 46 67 95 135 х одные 5,5 8 12 16 22 29 38 1150 1020 1090 830 760 690 640 730 610 570 480 460 1420 1490 1350 1180 1100 1020 980 3 4,5 6 8,5 12 16 21 32 46 67 95 135 5,5 8 12 16 22 29 38 1200 1050 изо 870 790 710 660 760 625 590 500 470 1460 1555 1410 1230 1160 1040 1020 3300 3200 3000 2600 2500 2200 2100 2100 1800 1600 1500 1500 1400 1400 3200 3000 2600 2500 2200 2100 2100
ПРИЛОЖЕНИЕ 13
ЭЛЕКТРОДВИГАТЕЛИ ПОСТОЯННОГО ТОКА МЕТАЛЛУРГИЧЕСКИЕ И КРАНОВЫЕ
Обозначе- ния исполне- ний электро- дам гате- лей Bi 2С 2Сг </4 d Я h L Г Масса в кг не более
ДЛЯ цилиндри- ческого вала Для коничес- кого вала
12 350 220 280 17 28 315 160 561 115 644 60 130
21 420 300 194 17 35 —- 365 180 665 170 5 774 80 198
22 420 300 239 17 35 — 365 180 710 170,5 819 80 224
31 486 390 250 24 50 — 445 225 752 173 896 110 307
32 480 390 320 24 50 — 445 225 822 173 966 110 364
41 560 430 299 29 — 65 500 250 945 209 1120 140 541
42 560 430 384 29 — 65 500 250 1030 209 1205 140 645
52 600 480 430 39 -—' 75 560 280 1106 214,5 1284 140 895
62 735 560 890 32 — 90 640 315 1305 138,5 1507 170 1482
72 815 660 940 39 — НО 720 355 1515 200 1759 210 2132
82 915 740 1154 46 — 130 815 400 1695 153,5 1962 250 3224
92 1015 810 1314 46 — 140 907 450 1802 122,5 2059 250 4316
ПРИЛОЖЕНИЕ 14
РЕДУКТОРЫ РМ (основные размеры)
Продолжение прилож. 14
РМ-250 250 100 150 540 101 230 200 238,5 174,5 —
РМ-350 350 150 200 730 132 290 260 268,5 214 —
РМ-400 400 150 250 826 133 310 270 325,5 234 —
РМ-500 500 200 300 986 148 350 330 345,5 270 —
РМ-650 650 250 400 1278 183 470 430 452 342 318
РЛ1-750 750 300 450 1448 207 510 450 472 362 362
190 160 324 345 28 20
250 200 400 470 40 25
270 250 495 490 80 25
310 300 592 6201, 80 25
410 320 697 830 85 35
430 320 745 1025 55 35
Отверстия для болит К .if Масса в кс
с коли- чество d
60 4 235 17 - 245 102
100 4 310 17 .— 280 172'
но 4 370 17 - - 375 250
130 6 240 17 .— .— 420 345
160 8 215 25 95 495 460 878
155 8 275 25 130 620 525 ИЗО
Размеры концов валов
Тип редуктора быстроходный вал Тихоходный вал
Цилиндрический С зубчатой муфтой
И । ^2 /1 | О Ц т 3 3 3 4 6 6 Z 40 48 56 56 56 56 D 126 150 174 232 348 348 л 1 D2 । Dn Е 16 16 16 16 .,6. L_ 1ь | Р
। [ РМ-250 I 30 1 55 РМ-350 , 40 7 5 РМ-400 1 40 75 РМ-500 50 85 РМ-650 1 60 1 110 РМ-750 1 60 I ПО 120 150 160 220- 290 310 60 85 85 85 108 108 55 55 80 80 НО НО 65 65 90 90 130 130 135 165 180 200 265 285 85 85 125 125 165 165 72 90 90 120 170 170 35 40 40 40 45 45 95 110 135 170 260 260 154,5 189,5 207,5 238,5 310 330 20 25 25 Зэ 40 40 35 45 45 50 68 68 50 60 60 75 95 95
““
Примечание, т и z — модуль
и число зубьев вснци муфты.
ПРИЛОЖЕНИЕ 15
РАСЧЕТНАЯ МОЩНОСТЬ РЕДУКТОРОВ
Число оборотов входного вала в минуту Режим работы НВ в % РМ-250 РМ-350 РМ-400
I 11 111 IV V VI I И Ш IV V V! 1 II Ш IV V VI
600 15 25 40 100 1 > 2 1 0,85 0,35 1,4 1,2 1 0,4 1.8 I,6 1,4 0,55 2,5 2,2 1.9 0,75 2,9 2,5 2,1 0,85 3,6 3,1 2,6 1,2 2.8 2,4 2,1 0,85 3,4 2,9 2,5 0,95 4,7 4,1 3,4 1,2 6,2 5,4 4,6 1.6 6,9 6 5,1 1,8 9,3 8, 1 6,9 2,7 4,5 3,9 з.з 1,6 5,8 5 5,3 1,9 6,3 5,5 4,7 2,5 10 8,1 6,9 3,4 10,7 9,3 7,9 3,9 И,9 10,4 8,8 5,3
750 15 25 40 100 1,5 1,3 I,1 0,4 1,7 1,5 1,3 0,5 2,2 1,9 I,6 0,7 3,1 2,7 2,3 0,9 3,6 3,1 2,6 1 4 3,5 3 1,4 3,5 3 2,6 0,95 4,1 3,6 3,1 1,1 5,8 5 4,3 1,5 7,5 6,5 5,5 2 8,2 7,1 6,1 2,3 11,2 9,7 8,3 3,4 5,2 4,5 3,8 1.9 6,6 5,7 4,9 2,2 7,6 6,6 5,6 3,1 10,4 9,1 7 7 4,2 12 10,4 8,9 4,8 13,2 И,5 9,8 6,7
1000 15 25 40 100 1,8 I,6 1,4 0,55 2,4 2,1 I,8 0,65 2,6 2,3 2 0,9 3,6 3,1 2,6 1,2 4 3,5 3 1,4 4,6 4 3,4 2 4,6 4 3,5 1,25 5,5 4,8 4 1.5 7,5 6,5 5,5 2 9,6 8,3 7,1 2,7 10,5 9,2 7,8 3,1 13,9 12,1 10,3 4,6 5,8 5 4,3 2,5 8 7 5,9 3 9,1 7,9 6,7 4,1 12,2 10,6 9 5,6 13,5 П.7 9,5 6,4 15,4 13,4 И,4 8,5
1500 15 25 40 100 2,4 2,1 1,8 0,8 2,0 2,5 2, 1 0,95 3,1 2,7 2,3 1,35 4,3 3,7 3,1 I,8 5,1 4,4 3,7 2 5,5 4,8 4,1 3 6.6 5,8 4,9 1,9 7,8 6,8 5,8 2,3 10,7 9,3 7,9 з.о 13 н,з 9,6 4,1 14,8 12,9 11 4,6 18,1 15,7 13,4 6,9 8 7 5,9 2.7 9,8 8,6 7,3 4,5 10,7 9,4 8 6,2 14,9 13 11 8,5 16 3 14,7 12,5 9,7 18,8 16 4 13,9 12,7
Продолжение прилож. 15
Л о са ь ч 3 РМ 500 РМ-650 РМ 750
Число оборе входного ва в минуту О ю tc я и К (В D.t; I 11 III IV V VI I II II! IV V VI I II III IV V VI
600 15 25 40 100 9,3 8,1 6,9 2,8 П,1 9.7 8,2 3,2 14,8 12,9 10,9 4,3 21 17,6 15 5,8 22,5 19,8 16,8 6,6 28 24,5 20,5 9,3 20,5 17,9 15,2 6,7 26 22,5 19,2 7,7 29,5 25,5 21,5 10,3 42 36 5 31 13,8 48,5 42 35,5 15,8 55 47,5 40 22 32 28 23,5 9.5 38,5 33,5 28,5 11 51 44 37,5 14,5 70 61 52 19,5 78 68 58 22,5 96 84 71 31,5
750 15 25 40 100 П,6 10,1 8.6 з,з 13,8 12 10,2 3,8 17,4 15,1 12,8 5,4 24,5 21 18,1 7,3 27,5 24 20,4 8,3 31 27 23 П.5 23,5 20,5 17,4 7.7 30 26 22 9,2 33 29 24,5 12,8 47,5 41 35 17,4 55 47,5 40,5 19,5 60 53 44,5 27,5 40 34,5 29,5 11 47,5 41 35 13,1 60 52 44,5 18,2 84 73 62 24,5 95 83 70 28 107 93 79 39
1000 15 25 40 100 14,6 12,7 10,8 4,3 18,1 15,7 13,4 5,2 24 18,1 15,4 7,2 28 24,5 20,5 9,7 31,5 27,5 23 И 35,5 31 26 15,4 28,5 25 21 10,1 36 31,5 26,5 12,3 40,5 35,5 30 ' 17 55 48 40,5 23 64 56 47 26,5 69 60 51 37 51 44 37 14,5 62 54 46 17,5 72 63 53 23,8 97 85 72 35 108 94 80 37,5 122 106 90 52
1500 15 25 40 100 18,8 16,3 13,9 6,4 23 20 17 7,8 26 22,5 19,2 10,8 37 32 27 14,6 40 34,5 29 16,6 43,5 38 32 23 36,5 32 27 15,2 44,5 38,5 33 18,4 48,5 42 36 25,5 69 60 51 34,5 80,5 70 60 39,5 85 74 63 50 65 56 48 21,5 79 69 59 26,5 86 75 63 36,5 120 104 89 49 135 118 100 56 150 130 111 71
w
ио
О
w
ПРИЛОЖЕНИЕ 17
РЕДУКТОРЫ ВК
Техническая характеристика
Редукторы ВК-350 ВК-400 ВК-475 ВК-550
Исполнения I П ш IV I П Ш IV 1 и 111 IV I н ill IV
Число 3 оборотов I -S в минуту -2 этичное число Режим эксплуатации 49. 49 30,56 14,67 10,69 85.39 41.23 Мои 21,0 ;ностьг 15.95 подводи 109, б)' 59, 92 мая к редуктор 2Q.06 у, в кюг 1 9 . С 8 126,78 68,2 8 38.9 17,72
600 750 ПВ - 15% IIВ = 25 % ПВ 40% Момент на выходном валу в н-м 0,8 07 0,6 1640 1,31 1,1 1,0 1618 2,6 2,2 1,9 1560 3,4 з,о 2,5 1524 1.1 0,9 0,8 4762 2,2 1,9 1,6 4700 4,1 3,6 3,0 4560 5,4 4,7 4,0 4200 1,4 1,2 1,0 7880 2,8 2,4 2,0 7520 6,0 5,2 4,4 6480 7,0 6,1 5,2 5460 1,7 1,5 1,3 11340 З,2 2,8 2,3 11200 6,4 5,6 4,7 10900 11,5 10,0 8,6 9200
ПВ^ 15% ПВ - 25% ПВ = 40% Момент на выходном валу в н-м 1 ,о 0,9 0,75 1630 I,6 1,4 1,2 1602 3,2 2,8 2.3 1540 3,9 3,4 2,9 1490 1,4 1,2 1.0 4746 2,7 2,4 2,0 4660 5,1 4,4 3,8 4480 6,6 5,7 4,9 4000 1,8 1,5 1,3 7800 3,4 з,о 2,5 7380 7,4 6,5 5,5 6280 8,2 7,1 6,0 5150 2 1 1,9 1,6 11 280 4 0 3,4 2,9 11 100 7,6 6,6 5,6 10 750 14,2 12,3 10,5 8600
1000 ПВ = 15% ПВ = 25% ПВ =40% Момент на выходном валу в н-м 1,3 1,2 1,0 1618 2, 1 1,8 1,6 1584 4,0 3,5 з,о 1490 4,7 4,0 3,4 1436 1,8 1,5 1,3 4720 3,6 3,1 2,6 4600 6,7 5.8 4,9 4360 8,4 7,3 6,2 3740 2,3 2,0 1,7 7680 4,4 3,8 3,2 7120 9,2 8,1 6,9 5940 9.6 8,3 7,1 4700 2,8 2,5 2,1 11 220 5,2 4,5 3,9 И 000 9,4 8 2 6,9 10 500 18,4 16,0 13,6 7760
ПРИЛОЖЕНИЕ 18
КРАНОВЫЕ КОЛЕСА (ГОСТ 3569-60)
R8
R8
В ---•
в,-------
> Г. 20
^/2
В,---
|*л/?
В----
цилиндри-
ческого
кониче-
ского
В1
цилиндри-
ческого
кониче-
ского
В,
----ча
D
В
В
Н
D
н
а. Двухребордные
160 40 - 70 15 630 100 110 130 110 120 140 150 160 180 25
200 50 60 — 80 90
710 100 1 10 130 150 1 10 120 1 40 160 150 160 180 200 30
250 60 70 — 100 ПО 20
320 60 70 80 70 80 90 100 110 120
800 110 130 150 170 120 140 160 180 170 190 210 230 40
400 80 90 100 90 Ю0 110 130 140 150 25
500 100 110 130 1 10 120 140 150 160 180 900 130 150 170 140 160 180 190 210 230
560 100 1 10 130 ПО 120 140 150 160 180 1000 150 170 160 180 210 230
160 200 б. Одноребордные 55 | 55 65 65 70 80 15 320 * в, Бе 100 зребордные
400 500 560 630 710 120
250 320 70 80 70 80 90 100 20
800 130
400 500 105 125 105 125 130 150 25
900 1 40
1000 160
322
323
ПРИЛОЖЕНИЕ 20
БУКСЫ МОСТОВЫХ ЭЛЕКТРИЧЕСКИХ КРАНОВ
1 i 1
J “
Ll 1 1 1
йЙ- 'н 1—1 Г И[("
[ п 1
>1 jl 5 - 1
'Т' О| <3
Типораз- мер буксы Подпиши |К (
ГОСТ Обоз- начение 1 и ь h и л
60/130 90/160 130/230 130/280 170/360 8338-57 5721-57 5721-57 5721-57 5721-57 312 3518 3526 3626 3634 1 1 1 50 30 30 30 70 130 160 230 280 360 31 40 64 98 120 85 105 150 185 230 180 225 335 400 490 205 255 380 455 550
м
/7 L— 2,
4 /7 з-
1 1 1 г 1 1
* : ih lilt & I
п та j « - 4-. л-1 й 1 --1 I
г . — т !< ы
hl
ГТ
Корпус
£>1 D* Ь, нс. f М нс ! более j более Ь3 не бол ее ft 2 i>4 1 Масса в кг
53 81 111 — 121 121 — 161 161 S И 16 18 20 45 55 75 80 100 50 70 85 95 115 40 55 65 80 95 5 5 IO Ю 10 30 40 50 70 100 22 25 50 60 70 18 22 32 38 38 10 23 60 115 220
VW
<< <<<<<< о о о о
<31 Со КО
о о о о
го О -1 —1 СЛ КО О 131
сл сл сл сл сл оо сл
со to о -ч ст? со
о сл сл сл о а о ко
го го го го Ч 4 L. ч 4
07 их оо сл ко оо
СЛ СЛ О О СЛ Q Ц1СЛ
СЛ СЛ 4^ 4^ со со ко >—
СО О QO СО сл Со СС>
— о го го о со сл о
оо оо сз> <зт 07 07 i-pi. 4*
Ч 4 J
Н--Ю'О 00 07 сл со
CJ Q Q3 СЛ о сл сл сл
CTJ <31 ю КО О ОО СП
сл сл сл сл сл сл СЛ U1
со со ьо to to —
КО КО 00 00 01. 00 <31 о
> — - -- ь. —»
h, и f оо -1 а> со
го со со О о СО сл
О> О> <31 <31 сл 4^ со го
СЛ сл о о (_5 ’ (_J (_J
со со со СО to t o
ко ко ко ко сл сл со
ИЛО.
S:
гч
-QSL
г
326
ПРИЛОЖЕНИЕ 23
ОДНОФАЗНЫЕ ТОРМОЗНЫЕ ЭЛЕКТРОМАГНИТЫ МО
Обозначе- ние элек- тромагнита Угол по- ворота якоря в град Момент электромагнита в н м Ход якоря в мм Момент массы яко- ря в н м Масса электро- магнита в кг
ПВ=25ч-40% ПВ=100%
МО-200А 3 40 20 2 14
МО-ЗООА 3,5 100 40 3 34
МО-1 00Б 7,5 5.5 3 3 0,5 4,4
МО-200Б 5, 5 40 20 3,8 3,6 16,5
МО-ЗООБ 5.5 100 40 4,4 9,2 70,0
Габаритные размеры
Обозначе- ние элек- тромагнита А Б в Г Д Е Ж 3 И А Л Af
МО-ЮОБ 182 107 130 143 85 18 22 37 30 58 4,5 14
МО-200Б 297 174 177 235 140 27 40 74 38 80 6,5 16
МО-ЗООБ 337 227 2 43 ЗЮ 224 40 46 104 54 1 Ю 8.5 17
МО-200 А 275 159 161 222 140 20 40 39 42 76 7 18
МО-ЗООА 347 2 1 1 216 284 224 23 46 515 58 юз 9 23
Обозначе- ние элек- тромагнита н О П Р С Т У ф X 'Л ю
МО-ЮОБ 100 9 32 7 5,5 102 44 3 1 16 128 30
МО-200Б 135 13 50 9 5,5 133 60 50 27 205 40 —
МО-ЗООБ 150 17 90 10 7 184 85 54 30 270 50 27
МО-200А 285 14 31 4 6 133 60 60 27 180 30 5
МО-ЗООА 435 18 43,5 5 9 172 85 78 30 240 30 5
327
ПРИЛОЖЕНИЕ 24
ТРЕХФАЗНЫЕ ТОРМОЗНЫЕ ЭЛЕКТРОМАГНИТЫ КМТ
-------------------—----------------------—f—
Электромагниты
Параметры О О с СО < £
g § к а? ё
— bi bi bi —
Тяговое усилие в н . . 80 100 200 350 350 700 700 1150 1400
Максимальный ход яко- ря в мм 20 40 50 50 50 50 50 60 80
Масса якоря в кг ... '2 2,7J 4,5 9,7 11,2 19,8 24,5 33 42
Масса электромагнита в кг 9 14 22 36 36 67 67 183 213
Габаритные размеры
ЭлСАТрО’ магнит А Б 1 Д Е ж 3 и 1 к д м II 0 п р С | т
кмт-юо 224 220 100 60 9 267 85 10 10 40 20 8 57 196 - 200
кмт-ю1 300 274 120 74 9|235 85 10 10 40 20 8 57 248 228 272 -i -
КМТ-102 340 310 140 96 11:288 95 15 12 57 25 10 57'270 —
кмт-юз 375 346 140 100 14 340 96 20 15 68 30 14 57 310 — 320
КМТ-104 490 450 17/5 130 17:430 148 20 20 83 40 16 53 410'365 412
кмт-6 520 580 640 220 160:206 50 868 568 180 120 30 345 50 221165, 20
КМТ-7 520 580 640 220 160 206 50 979 658 - 201 120 30 .345 50 221165’ 20
328
ПРИЛОЖЕНИЕ 25
\ ТОРМОЗНЫЕ ЭЛЕКТРОМАГНИТЫ МП
Шунтовые
Электро- магнит Ход якоря в мм Тяговое усилие в « при ИВ % Максимальный ток в а при ПВ % Тип доба- вочного сопротив- ления на 440 в Масса добавоч- ного сопро- тивления в кг Масса электро- магните! в кг
25 40 25 40
МП-100 2 250 200 0,7 0,45 Ст, 4 3,7 5
МП-200 3 2000 800 1,2 0,8 Ст, 4 3,7 14
МП-300 4 2150 1800 2,3 *1 1 4 Ст. 8 6,5 33
Сериесные
Электро- магн ит Ход якоря в Тяговое усилие в и при 60 % тмина ль по го тока; отрывное усилие при 25% поминального тока прн ПВ % Тяговое усилие в н при 40% номинального тока; отрывное усилие при 18% номинального тока прн ПВ % Масса электро- магнита в кг
15 25 40 15 25 40
МП-300 3 2500 2000 1600 1700 1300 1050 36
Габаритные размеры
Электро- магнит А Б в г Д В Ж 3 и К л м и
МП-100 118 118 10 80 44 30 М8 14 54 12 18 5 200
МП-200 168 148 14 120 80 37 М12 20 68 14 30 7 300
МП-300 220 198 20 146 92 58 М16 25 20 42 8 425
329
ПРИЛОЖЕНИЕ 26
1£ jfi
ТОРМОЗНЫЕ ЭЛЕКТРОМАГНИТЫ КМП
Шунтовые
Электро- магнит Ход якоря в мм Масса якоря в кг Тяговое усилие в н, включая массу якоря, при ПВ % Потребляемая мощность авт при ПВ % Масса электро- магнита в кг
25 40 25 40
КМП-1 20 0,7 65 45 200 140 9
КМП-2 40 1,5 115 80 350 220 15
кмп-з 60 2,8 190 140 560 330 27
КМП-4 80 7,0 370 300 760 500 45
КМП-5 100 12,3 520 400 1100 700 90
КМП-6 120 23,5 1000 720 1600 950 150
К МП-7 150 52,0 1300 1000 2150 1200 230
Сериесные
60% поминального тока 40% номинального тока
при ПВ % при ПВ %
Электромагнит 15 25 40 15 25 40
Тяговое усилие в н
КМП-4 480 370 300 320 200 120
КМП-5 650 520 400 . 450 300 190
кмп-6 1000 800 550 630 - 400 250
КМП-7 1350 1150 850 950 600- -
Продолжение прилож. J26
Габаритные размеры -
Электро- магнит Ход в мм Д В в Г Д Е Ж 3 И X Л Л! Н
кмп-1 20 110 106 114 60 97 98 243 211 47 17 10 30
КМП-2 40 135 130 130 75 — 108 102 291 256 57,5 17,5 13 40
кмп-з 60 160 154 170 88 139 112 124 358 317 81 21 16 60
КМП-4 80 192 186 224 104 155 120 124 430 380 105 25 20 25
КМП-5 100 235 224 280 122 176 156 162 517 459 133 33 25 25
кмп-6 120 270 262 330 143 187 171 162 592 519 163 43 30 30
КМП-7 150 340 328 400 180 226 198 186 697 604 213 63 35 40
Электро- магнит О П Р С Т У Ф X Ц ч Ш э ю Д
кмп-1 15 15 16 28 43 10 8 20
КМП-2 17,5 17,5 16 35 52 12 10 — — 22 — — —
кмп-з 20 20 20 45 60 15 10 95 240 358 25 — ► —
КМП-4 25 ♦ 25 30 90 15 14 55 240 330 95 20 8 50 65
КМП-5 25 30 35 ПО 18 16 70 240 398 95 20 8 60 80
КМП-6 35 34 45 130 21 20 85 240 421 95 23 10 70 105
КМП-7 40 36 50 160 25 20 ПО 240 457 95 33 10 70 140
ПРИЛОЖЕНИЕ 27
ГРУЗОВЫЕ КОЛОДОЧНЫЕ ТОРМОЗА УРАЛМАШЗАВОДА
№ тормоза Размеры шкива в мм Тормозной момент в нм Электромагнит Масса груза в кг Масса тормоза с электро- магнитом в кг
Тип Масса в кг С поло- жением электро- магнита вдоль рычага С электро- магнитом, повер- нутым на 90°
I 200x70 62 КМТ-101 14 1,8 18 39
2 250x90 80 14 1,8 1,8 44
3 130 КМТ-102 22 3,8 3,8 57
160 22 6 6 57
4 300x90 200 22 6 6 64
5 300 кмт-юз 36 8 8 81
6 400х 120 400 36 8 8 106
7 690 КМТ-104 67 12 12 144
820 67 18 18 144
8 500X120 950 67 12 14 182
9 1500 кмт-6 183 23 29 325
10 500x200 2000 183 18 18 406
2350 183 29 29 406
11 600x200 3300 КМТ-7 213 29 35 461
12 700x250 4200 213 35 40 511
332
Продолжение прилож. 27
Габаритные размеры
№ тормоза Размеры шкива D X В Ш IU В Л-И а ь L С f
1 2 200x70 150 300 160 270 295 MI6 М16 34 34 74 74 433 433
3 4 250x90 165 330 * 210 325 350 М16 М16 40 40 96 96 518 518
5 300x90 180 360 260 350 М16 40 100 518
6 7 400x120 210 420 360 435 435 М20 М20 48 48 100 130 586 758
8 9 500x120 270 540 470 530 530 М24 М24 85 85 130 160 748 1046
10 500x200 300 600 460 600 МЗО 80. 160 1031
11 600x200 350 700 544 642 МЗО 80 160 1151
12 750x250 350 700 650 695 МЗО 80 160 1161
X? тормоза Размеры шкива Du X В мм L li d Pi s
1 200X70 198 110 30 180 390 100 90 80
2 198 115 30 220 415 100 90 80
3 250x90 230 115 35 220 500 115 105 110
4 230 120 35 250 525 115 105 110
5 300x90 246 120 35 250 525 115 105 110
6 246 125 40 360 635 130 125 125
7 400x120 328 125 40 360 635 130 125 125
8 318 130 50 450 745 145 150 140
9 500X120 478 130 50 450 745 145 150 140
10 500x200 463 170 55 450 865 200 170 175
11 600x200 493 200 55 520 907 200 170 175
12 750x250 503 220 65 560 960 200 170 175
333
ПРИЛОЖЕНИЕ 29
КОЛОДОЧНЫЕ ТОРМОЗА КОНСТРУКЦИИ ВНИИПТМАШ С ЭЛЕКТРОМАГНИТАМИ ПОСТОЯННОГО ТОКА МП
Обозначение тормоза Тормозной момент в н. м при продол- жительности включения ПВ % Удельное давле- ние в н/мг 1 Момент электромагни- та в н. м при продолжи- тельности включения ПВ % Отход колодки в мм Ход штока в мм ] J Масса тормоза в кг
25 ( 40 25 ] 40
ткп-юо ТКП-200/100 ТКП-200 ТКП-300/200 ткп-зоо 20 40 160 240 600 17 32 130 200 440 '<Х' '4.,— 11 ,4-10’ 0.5-10’ 2,0-10* 0,9-Ю» 11,9-10’ 2,5 2.5 10 10 21,5 2 2 8 8 18 0,4—0,6 0.4—0.6 0.5-0,8 0,5—0.8 0,7 —1.0 W S3 to to to о mot а о 1 ! 1 1 1 W W W СП О О 12,0 26,2 34,2 66,6 85.8
Габаритные размеры
Обозначение тормоза А В D Б F Н К М
ТКП-ЮО ТКП-200/100 ТКП-200 ТКП-300/200 ткп-зоо 356 487 518 661 71 1 70 90 90 140 140 100 200 200 300 300 1 18 1 18 168 168 220 213 280 ЗЮ 37 1 42 1 259 400 424 564 590 40 60 60 80 80 65 90 90 120 120
Обозначение тормоза и, О S Т 8 h
ткп-юо ТКП-200/100 ТКП-200 ТКП-300/200 ткп-зоо 46 55 55 81 81 37 47 47 72 72 325 430 430 540 540 110 175 175 250 250 8X8 11X11 ихн 14Х 14 14X14 4 6 6 8 8 100 1 70 I 70 240 240
ПРИЛОЖЕНИЕ 30
ТОРМОЗА ТКТГ КОНСТРУКЦИИ ВНИИПТМАШ
Обозначение тормозов Тормозной .момент в и м Мак с п- мяльный отход колодок в /т.н Усилие пружины в н Количест- во пружин иа тормоз Толкатель Млссц d Аг
установоч- ное максималь- ное обозначение усилие в к установоч- ный ход в /он Предель- ный ход в мм
ТКТГ-200 300 1 640 930 1 Т-25 250 22 40 49
ТКТГ-300 800 1,5 1240 1390 1 Т-45 450 30 50 100
ТКТГ-400 1 500 1.5 840 1000 2 Т-75 750 30 80 178
ТКТГ-500 2 500 1,63 880 1000 2 Т-75 750 50 80 248
ТКТГ-600 5000 1,75 2260 2890 2 Т-160 1600 35 140 434
ТКТГ-700 8 000 1,8 1920 2890 2 Т-160 1600 55 140 605
ТКТГ-800 12 500 2,1 2200 2890 2 Т-160 1600 90 140 840
ПРИЛОЖЕНИЕ 32
АСИНХРОННЫЕ ЭЛЕКТРОДВИГАТЕЛИ
1. Асинхронные электродвигатели основного исполнения.
3 ащищенные. Станина и щиты чугунные. Короткозамкнутый ротор
Серия Мощность в кет Число оборотов в минуту Мт ах ?Мц0 м Масса в кг Маховой момент в н м*
А31-6 0.4 935 1,9 18 0,13 0,19
А32-6 0,6 930 1,9 24
А41-6 1,0 930 1,8 34 04
А42-6 1,7 930 1,8 42 0 6
А51 -6 2,8 950 1,8 72 1,7
А52-6 4,5 950 1,8 93 2 5
А61-6 7,0 970 1,8 115 3,6 4 8
А 62-6 10 970 1,8 135
А71-6 14 970 1,8 195 1’5
А72-6 20 970 1,8 220 19
А81-6 28 975 1,8 350 32
А82-6 40 975 1,8 395 41
А91-6 55 980 1,8 575 70
А92-6 75 980 1,8 645 92
А61-8 4,5 730 1,7 115 7
А62-8 7,0 730 1,7 135 9
A7I-8 10 730 1,7 195 15
А72-8 14 730 1,7 220 19
A8I-8 20 730 1,7 345 32
А82-8 28 730 1,7 390 41
А91-8 40 730 1,7 580 70
А92-8 55 730 1,7 640 92
А 031-6 0,4 935 1,9 21 0,15 0 21 0,48
АО32-6 0,6 930 1,9 27
АО41-6 1,0 930 1,8 37
АО42-6 1,7 930 1,8 45 0 67
АО51-6 2,8 950 1,8 76 2*0 2,8 6,0 7,5
АО52-6 4,5 950 1,8 98
А062-6 7,0 980 2,2 150
А063-6 Ю 980 2,2 180
АО72-6 14 980 2,2 265 23
АО73-6 20 975 2,2 300 30
Продолжение прилож. 32
Серия Мощность в кет Число оборотов в минуту Масса в кг Маховой момент в н мг
АО82-6 28 980 2,2 470 44
АО83-6 40 980 2,2 530 57
АО93-6 55 985 2,2 770 101
АО94-6 75 985 2,2 855 136
. АО62-8 4,5 735 2,0 150 10
АО63-8 7,0 735 2,0 175 13
АО72-8 10 730 2,0 265 23
АО73-8 14 730 2,0 300 30
АО82-8 20 735 2,0 465 44
А083-8 28 735 2,0 525 57
АОЭЗ-8 40 735 2,0 765 101
АО94-8 55 735 2,0 845 136
АК51-6 1,7 905 2,0 82 1,9
АК52-6 2,8 920 2,0 103 2,6
АК60-6 4,5 900 1,8 125 7,5
АК61-6 7 940 2,0 155 9,5
АК62-6 10 940 2,0 155 И
AK7I-6 14 950 2,0 230 17
АК72-6 20 950 2,0 255 21
АК81-6 28 965 2,0 390 37
АК82-6 40 965 2,2 435 46
АК91-6 55 970 2,4 645 108
АК92-6 75 970 2,4 710 135
АК61-8 4,5 690 1,9 135 9,5
АК62-8 7 700 1,9 150 11
АК71-8 10 700 1,9 230 16
АК72-8 14 700 1,9 250 20
АК81-8 20 710 1,9 380 35
АК82-8 28 710 1,9 425 44
АК91-8 40 720 1,9 630 104
АК92-8 55 720 1,9 700 130
338
339
ПРИЛОЖЕНИЕ 33
ДВУХСТУПЕНЧАТЫЕ РЕДУКТОРЫ
Передаточное число 10,35 [ 12.04 14,06
Прн числе оборотов ведущего вала в минуту
Обозначение редукторов 750 1000 1500 750 1000 1500 750 1000 1500
ЦДШ-350 ЦДШ-400 ЛХДТП-КОО ЦДШ-650 ЦДШ-850 цдш-юоо 6,6 12,7. 22,2 52,5 103,0 173,0 8,8 17,1 29,4 69,0 Мощ 13,2 25,8 43 9 102,0 юсть в 5,4 10,4 18,3 42,9 84,5 145,5 кет 7,2 14,0 24,2 57,2 111.0 10,7 21,0 36,2 84,0 4,9 9,4 16,4 38,6 76,0 130,3 6,5 12,6 21,8 51,3 100,0 9.6 18,8 32 6 75,3
Передаточное число 15,75 | 20,49 23,34
При числе оборотов ведущего вала в минуту
Обозначение редукторов 750 | 1000 1500 750 1000 1500 750 1000 1500
ЦДШ-350 ЦДШ-400 ЦДШ-500 ЦДШ-650 ЦДШ-850 цдш-юоо 4,3 ] 5,8 8 4 1 11,2 14,б1 19,5 34 4. 45,7 67*6 90,0 116,8[ 158,5 Мощи 8,6 16,9 29,0 68,9 эсть в к 3,2 6,1 10,4 25,0 48,9 84,6 4 2 8’1 13,9 33,4 65,0 113,0 6,3 12,2 21,0 49,6 2,8 5,4 9,4 22 0 43,0 74,5 3,7 7,1 12,2 29,4 57,5 99,5 5,5 10,7 18,4 43 8 85’0
Передаточное число 26,91 | 31,50 j 40,17
При числе оборотов ведущего вала в минуту
Обозначение редукторов 750 | 1000 ) 1500 | 750 | 1000 | 1500 750 1000 1500
ЦДШ-350 ЦДШ-400 ЦДШ -500 ЦДШ-650 ЦДШ-850 цдш-юоо 1 2,4 4,6 8,7 19,0 37,4 ' 64,5 3,2 6,2 10,6 25,5 49,7 86,0 Мощ 4,8 9,3 16,0 37,9 73,6 меть в 2,1 4,0 6,8 16,3 31,8 55,0 кет 2,7 5,3 9,1 21,8 42,5 73,5 4,1 7,9 13,6 32,4 62,8 109,0 1 5 2,8 4,9 11,8 22,9 39,8 2,0 3,8 6,5 15,7 30,5 52,8 2,9 5,7 9,8 23,2 45,7 78,5
ТРЕХСТУПЕНЧАТЫЕ РЕДУКТОРЫ
Передаточное число 55,5 | 62,8 | 71,9
При числе оборотов ведущего вала в минуту
Обозначение 1 1 I I I I I
редукторов 750 | 1000 1 1500 750 | 1000 1500 750 | 1000 | 1500
Мощность в кет
ЦТЩ-650 4,1! 5,5i 8,3 3 5 4,6 6,9 3,0 ! 4,0 1 6,0
ЦТШ-800 9,9 13,1 19,7 8,15 10,9 16,3 7,15 9,55 4,2
ЦТШ-1100 19,2 । 25 6 1 38,4 16,0 21,3 — 13,9 18,5 —
ЦТШ-1250 33,0 1 44,0 | 66,0 27,4 36.7 — 24,0 32,0 —
Передаточное ~ 78,9 96,4 | '120
число При числе оборотов ведущего вала в минуту
Обозначение 750 1000 1500 750 I 1000 1500 | 750 1 1000 1 1500
редукторов
Мощ ность в кет
ЦТШ-650 2,7 3,7 5,5 2,2 3 0 4,5 2,0 2,4 | 3,6
ЦТШ-800 6,5 8 7 13.0 5,3 7,1 10,5 4,5 5,7 8,5
ЦТШ-1Ю0 12 7 16,9 25,1 10 4 13,9 20,8 8,75 11,1 j 16,8
ЦТШ-1250 21 8 29,2 — 17,8 23,9 — 15,0 19,1 1 28,8
340
Ж ill 1 1 ПРИЛОЖЕНИЕ 34 ЛЕНТОЧНЫЕ ЭЛЕВАТОРЫ (ГОСТ 2036-53) . - 1 и'ис я впвдийвд | QjoiitfoBitdu EHHL'tf 165 250 300 350 450 550 250 300 350 450 550 — _ i 250 350 450 550 700
м'и" и кннэй П1ги nmair eiindiini 8§§ сч сч со ю а о о а о о ш о о о СЧ СЧ СО О" ю 200 300 400 500 650
1 ъ/1;>г я qjLDOHqiraiittfodeHod ц СО со СО тр о сч сч ю со 1 II II 1 Ю со Ь- СЧ Ю СЧ со 1П 00 СО Ю 1 1 II 1 со ю съ О to СЧ со ^СЧоО- со сч «е <о И 1 н ю о ю to со —1 СЧ т*
j/aj/n' и нлеяом кинажияУ чхэобояэ 1,0—1,6 ,1,0—1,6 0,4—0,63 1
и'М' я цагпаох звш о о о о о о П СОСО Ч'ЮШ о о а о о а о о о о со со чг Ю СО о а о о а (О о ю сч о СЧ СЧ СП ’Ф
v н угпаох члэомиз ю Ь- — О со ю о ~ сч со и- Tt ю <О <О О О о — СЧ Т-- ш 1,5 3,6 7,8 16,3 34,4
?n v я таом еинйиШ ю о о а а о СО <Д О1ПЮЮ СЧ OJ СО О' 160 200 250 350 450 о о о о о О Ю LO ю о СЧ СО Tf со
Тип ковша Глубокие Мелкие е с борто- яющими
С цилиндри- ческим днищем Остроугольны выми направл
Располо- жение ковше й Расстав- ленные ковши Сомкну- тые ковши
Способ разгрузки Центро- бежный самотеч- ный Самотеч- ный
Обозна- чение элеваторов lo а о о о о со о а io io io — —> СЧ СЧ СО О" ГОСГСС сп сп сп сп сп сп S § S S ю СЧ сч со ^5 £5 СП СП СП 6П СП 5 S Й 1с 5 odddd г; С р г; СП СП СП СП СП
341
t:
ЦЕПНЫЕ ЭЛЕВАТОРЫ (ГОСТ 2036-53) Шаг цепи R мм 100 100 100 или 200 125 или 250 100 100 100 или 200 125 или 250 025 005 091 i 160 или 320 200 или 400 250 или 500 630
Произво- дитель ’ ность В 6—-10 12—18 22—34 38—60 5—7 6—10 12—18 23—36 7—10 12—20 15-24 о со — сп сп со со сг. —• 1 1 1 1 1Л о оз о 04 со о о
Скорость движения ковшей в м/сек 0,8—1,25 7 <30 о 0,32—0,5 0,32—0,5
Шаг ковшей в мм о о о о ОО О О СО со -чГ in о о о О о о о о со со tn ООО Фот —< сч сч о о о о СЧ О о со СО -чН ш со
Емкость ковша в л •—< О СЧ 00 —> СЧ СО 0,65 1,1 2,6 7,0 т со оо —< со < о о о о СО -Ч" е- о со со со т—/
Ширина ковша в мм OOOQ (OOlflin — сч сч со О О О Q СО О Ш in —< сч сч со о о о со т т сч СО о о о о 1П о in о •чН со Г— СП
Тип ковша Г лубокие Мелкие Остроугольные с бортовыми направ- ляющими
С цилин- дрическим днищем
Располо- жение ковша Расстав- ленные ковши Сомкну- тые ков- ши
Способ разгрузки Центро- бежно- самотеч- ный 1 Самотеч- ный
Количество цепей Одноцеп- ные Двух- цепные
Обозна- чение элеваторов ЭЦГ-160 ЭЦГ-200 ЭЦГ-250 ЭЦГ-350 ЭЦМ-160 ЭЦМ-200 ЭЦМ-250 ЭИМ-350 ЭЦО-160 ЭЦО-250 ЭЦО-350 Э2ЦО-450 Э2ЦО-600 32U.O-750 Э2ЦО-900
342
ЛИТЕРАТУРА
1. Айзе н А. М., Г е л е е в Г. М„ Карповцев А. Н. Справочник по
расчету цепных передач. М., Машгиз, К)62.
2. Александров М. П. Тормоза подъемно-транспортных машин. АА
Машгиз, М., 1958.
3. Богданов Е. С., Петухов П. 3. Тормозные устройства крапов. Л
М., Машгиз, 1952.
4. БукштейнМ. А. Стальные канаты. М., Металлург из дат, 1961.
5. Васильев. Н. В. Внутр и фабричный транспорт и складское хозяй-
ство обогатительных фабрик. М., Госгортехиздат, 1963.
6. Госгортехнадзор СССР. Правила устройства и безопасной эксплуата-
ции грузоподъемных кранов, М., Металлургнздат, 1959. ’
7. Г у ф’ф йнТ е л"Ъ С о р О кий С. Ф., Уликовский Л. Г.
Транспортные и погрузочно-рагрузочные машины в химической промышлен-
ности. М., Машгиз, 1960.
8. Дьячков В. К. Машины непрерывного транспорта, М., Маш- Jc
гиз, 1961. '
9. Е в н е в и ч А, В. Грузоподъемные и транспортирующие машины на
заводах строительных материалов. М., Машгиз, 1962.
10. Коробов В. М., Соколова А. Д. Грузоподъемные машины и та-
келаж. М., Госстройиздат, 1958.
II. М а з е л ь Ю. С., Поляков А. Г. Грузозахватные приспособления. Ъ<
М., Машгиз, 1959. П
12. Павлов И. Г. Примеры расчетов кранов. М., Машгпз, 1961.
13. П а р и и п к и й А. Б., Шаба шов /А. П. Мостовые краны общего /
назначения. М., Машгиз, 1962, г- ——— ------ —z
14. Руденко Н. Ф., Александров М. П., Лысяков А. Г. Кур- ч
совое проектирование грузоподъемных машин. М., Машгиз, 1963.
15. Справочник по кранам. М., Машгиз, т. 1 и 2, 1962, т. 3, 1963.
Редактор издательства П. В. Отдельное
Технический редактор Н. Ф. Демкина
Корректор Т. М. Евсеева
Переплет художника В. Торгашова
Сдано в производство 11/V1-1964 г.
Подписано к печати 26/IX-1964 г.
Т-14717 Тираж 31800 экз.
Печ, л. 21,5 Бум. л. 10,75 Уч.-изд. л. 21
Темнлаи 1964 г., № 45 Цена 84 коп.
Формат 60 X 90716 Зак. 432
Московская типография № 12
Главполиграфпрома Государственного коми-
тета Совета Министров СССР по печати
Цветной бульвар, 30
ЗАМЕЧЕННЫЕ ОПЕЧАТКИ
Стр. Строка Напечатано Должно быть
t 6-я стерху 14—13-я с^низу ’2-я сверху 3-я сверху 11-я сверху 1 я-ой; А = 0^0,5-£ = 210 мм ЛК = 9750-^- - = Кг-М,( —ЛГ = -в-в = ° 1 — 2- (5 + )•/4- ЛЛ=« 0 —-0,5-£" = 210 мм ЛК = 9750-^-*= ЛС*8 = Кг-Мч — Мч = КМод - 0 /5—£Э
В Л. Моргачев. Заказ 432.
Мгчл»а, Б-<в, М Басманный пер
ИЗДАТЕЛЬСТВО «МАШИНОСТРОЕНИЕ»