/















































































































































































































































































































































































































































Автор: Маковеева М.М. Шинаков Ю С.
Теги: электротехника электрическая связь радио связь радиосвязь связь с подвижными объектами
ISBN: 5-256-01562-1
Год: 2002


Текст
М.М. МАКОВЕЕВА
Ю.С ШИНАКОВ
СИСТЕМЫ СВЯЗИ
с подвижными
ОБЪЕКТАМИ
Рекомендовано Минсвязи России в качестве учебного
пособия для студентов вузов связи, обучающихся по
специальности 201200 «Средства связи с подвижными
объектами»
МОСКВА
«РАДИО и СВЯЗЬ»
2002
УДК 621.396
ББК 32.88
Л/116
Федеральная программа поддержки книгоиздания-России
Маковеева М.М., Шинаков Ю.С.
М 16 Системы связи с подвижными объектами: Учеб, пособие для вузов. -
М.: Радио и связь, 2002.-440 с.: ил.
ISBN 5-256-01562-1.
Рассмотрены основы теории и общие принципы построения систем свя-
зи с подвижными объектами, функциональные схемы устройств, станций и
систем, способы формирования цифровых сигналов (речи и данных), совре-
менные методы модуляции и демодуляции. Изложены основы проектирова-
ния сотовых сухопутных систем подвижной связи, частотно-территориаль-
ного планирования сотовых сетей. Приведены основные характеристики со-
временных подвижных систем связи различных стандартов. Рассмотрены
принципы построения и основы расчета сети соединительных цифровых ра-
диорелейных линий, а также систем спутниковой связи.
Для студентов, обучающихся по специальностям 201200 «Средства свя-
зи с подвижными объектами» и 201100 «Радиосвязь, радиовещание и теле-
видение». Будет полезна специалистам, занимающимся эксплуатацией и
развертыванием систем и сетей подвижной связи.
, ББК 32.88
Учебное издание
Маковеева Майя Михайловна
Шинаков Юрий Семенович
СИСТЕМЫ СВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ
Учебное пособие для вузов
Редактор Н. Г. Давыдова
Художественный и технический редактор И. Л. Ткаченко
Корректоры С. Б. Позднякова, Т. В. Дземидович
Компьютерная верстка Ю. Н. Рысева
ИБ № 2985
ЛР № 010164 ОТ 29.01. 97 Г.
Подписано в печать с оригинал-макета 15.02.2002 г. Формат 60x90 1/16 Гарнитура
Ариал. Печать офсетная. Уел. печ. л. 27,5. Тираж 3000 экз
Изд. № 24280. Зак. тип. № 21.
Издательство «Радио и связь», 103473, Москва, 2-й Щемиловский пер., д. 4/5
Типография издательства «Радио и связь»,
103473, Москва, 2-й Щемиловский пер., д. 4/5
ISBN 5-256-01562-1 © Маковеева М.М., Шинаков Ю.С., 2002
ПРЕДИСЛОВИЕ
В последние два десятилетия мы являемся свидетелями бурно-
го развития систем и сетей связи с подвижными объектами общего
пользования. В первую очередь здесь следует назвать системы и
сети персональной связи, сотовые наземные системы общего
пользования, спутниковые системы связи. В течение первого деся-
тилетия с начала 80-х годов были разработаны, практически по-
строены и введены в коммерческую эксплуатацию аналоговые сис-
темы первого поколения. Принято считать, что первая сотовая сеть
связи общего пользования начала работать в Японии в 1979 г
Коммерческая эксплуатация аналогичной сети в скандинавских
странах начата в 1981 г., в США-% 1983 г.
В течение 90-х годов было создано и введено в эксплуатацию
второе поколение цифровых систем и сетей связи с подвижными
объектами. По прогнозам ведущих производителей оборудования
для подвижной связи число мобильных телефонов в мире к 2004 г
превысит число стационарных; в 10 странах это уже произошло. В
настоящее время ведутся активные исследования и разработки
технологии аналогичных систем третьего и четвертого поколений,
которые войдут в нашу жизнь в этом тысячелетии.
Характерной особенностью систем второго и третьего поколе-
ний является стремление разработчиков обеспечить потребителю
максимально широкий набор услуг, начиная от передачи очень ко
ротких цифро-буквенных сообщений и даже просто звуковых сиг
налов вызова до передачи движущихся изображений и предостан
ления возможности мобильного доступа к обширным базам данных
в глобальном масштабе. Эта цель может быть успешно достигнута
при одном обязательном условии: системы и сети должны обла
дать большой пропускной способностью, обеспечивать передачу
цифровых данных с высокой скоростью вплоть до нескольких ме-
габит в секунду. Это означает, что разработчики подобных систем
должны обеспечить практическую реализацию потенциальных ве -
можностей используемых в технике связи физических явлений .
принципов.
Учебно-методическое объединение вузов по подготовке дипло-
мированных специалистов по направлению 654400 - «Телекомму-
никации» открыло новую специальность 201200 - «Средства связи
с подвижными объектами» лишь недавно. Первый выпуск инжене-
ров по этой специальности состоялся в МТУСИ в 2000/01 учебном
году. Однако очень быстро эта новая специальность стала попу-
лярной среди абитуриентов вузов. Это обусловлено в первую оче-
редь потребностями телекоммуникационного рынка России, на ко-
тором с начала 90-х годов стали активно предлагаться системы и
сети связи с подвижными абонентами и, как следствие этого, су-
щественно возросла потребность в специалистах для проектиро-
вания, технического обслуживания и эксплуатации таких систем и
сетей.
В учебном плане новой специальности предусмотрены: дисци-
плины федерального компонента «Основы теории систем связи с
подвижными объектами» и «Системы и сети связи с подвижными
объектами». Цель данного учебного пособия состоит в том, чтобы в
краткой и доступной форме изложить основы теории и техники бес-
проводных систем общего пользования. Техника этих систем в
настоящее время представляет собой одно из наиболее быстро
развивающихся направлений телекоммуникаций в мире. Техниче-
ские принципы проектирования, практического построения, иссле-
дования и оптимизации таких систем излагаются в данном пособии
в форме, при которой основное внимание уделяется общим фун-
даментальным понятиям и техническим достижениям, т.е. тем
элементам современной техники телекоммуникаций с подвижными
абонентами, которые в значительной мере определяют структуру
этих систем и качество выполнения ими основного функционально-
го назначения.
В гл. 1 изложены общие принципы построения систем связи с
подвижными объектами, дана их классификация, функциональные
схемы, определены основные термины.
Последующий материал авторы условно разделили на две час-
ти. Основы теории систем связи с подвижными объектами изложе-
ны в гл. 2-5, принципы построения систем и сетей связи с подвиж-
ными объектами - в гл. 6-11. Эти части соответствуют программам
двух основных специальных дисциплин.
В гл. 2 приведены краткие сведения о современных методах
цифрового представления и способах передачи речевых сигналов,
которые в настоящее время представляют собой основной тип ин-
формации, передаваемой в системах связи с подвижными объек-
4
тами. В гл. 3 рассматриваются наиболее важные методы цифровой
модуляции, используемые в современных системах подвижной
связи. Основное внимание при этом уделяется способам обеспе-
чения спектральной эффективности, одной из важнейших характе-
ристик радиоинтерфейса этих систем. Способы вычисления спек-
тров соответствующих радиосигналов и некоторые дополнитель-
ные сведения о спектрах сигналов современных систем сотовой
связи изложены в гл. 4. В гл. 5 приведены краткие сведения о спо-
собах статистического синтеза оптимальных алгоритмов демоду-
ляции этих сигналов; эти методы синтеза в настоящее время яв-
ляются основой построения приемников современных цифровых
систем связи с подвижными объектами.
В гл. 6 и 7 изложены основы энергетического расчета и частот-
но-территориального планирования наземных систем подвижной
связи, а в гл. 8 и 9 - наиболее важные технические характеристики
распространенных стандартов подобных систем. Для соединения
базовых станций в настоящее время широко применяются цифро-
вые радиорелейные линии. Элементы расчёта таких линий рас-
смотрены в гл. 10.
Спутниковая связь занимает особое место в системах подвиж-
ной связи. В связи с созданием глобальной информационной ин-
фраструктуры значение спутниковой связи повышается. В гл. 11
содержатся сведения, необходимые для. проектирования систем
спутниковой связи различного назначения.
Принципы построения систем подвижной связи третьего поко-
ления активно обсуждаются на протяжении нескольких последних
лет. Основные проблемы, которые при этом приходится решать,
изложены в гл. 12, которая даёт общее представление о возмож-
ных направлениях развития и ближайших перспективах систем и
сетей связи с подвижными объектами.
Эта книга, как и техника беспроводной связи, использует сведения
из многих технических дисциплин. Совсем непросто ограничиться пе-
речислением каких-либо базовых дисциплин, которые могли бы по-
служить основой для всех проблем, рассматриваемых в книге. Поэто-
му, чтобы с единых позиций изложить многие существенно разные
проблемы, наиболее важные фундаментальные понятия и результаты
излагаются в первую очередь и активно используются в последующих
разделах, так что читатель при чтении книги может их рассматривать
как основы беспроводной связи. Этот подход позволяет надеяться, что
данную книгу можно рассматривать и как учебник и как пособие в прак-
тической работе инженера.
5
Книга предназначена для студентов старших курсов, проходя-
щих подготовку по специальности 201200 - «Средства связи с под-
вижными объектами», а также для бакалавров и магистров по на-
правлению телекоммуникаций (550400) и соответствует основным
разделам программ обязательных специальных дисциплин соот-
ветствующих государственных образовательных стандартов.
Книга написана на основе лекций, читаемых авторами студентам
Московского технического университета связи и информатики, специа-
лизирующимся в области теории и техники систем связи с подвижными
объектами. Главы 1, 6-11 написаны М. М. Маковеевой, 2-5, 12 -
Ю. С. Шинаковым. Авторы несут консолидированную ответствен-
ность за отбор материала и форму его изложения.
Авторы выражают признательность рецензентам книги, замеча-
ния и пожелания которых способствовали улучшению содержания
книги и формы изложения материала.
6
ВВЕДЕНИЕ
В настоящее время информационный сектор является самым
динамичным в мировой экономике. В свою очередь, в информаци-
онном секторе наиболее быстро развивается мобильная связь.
Международный Союз Электросвязи (МСЭ) в отчёте «Развитие мо-
’бильной связи в мире в 1999 г.» отмечает, что из 185 стран - чле-
нов ООН в 1990 г. только 59 стран (около 32 %) имели мобильные
сотовые сети, в то время как в 1999 г. таких стран насчитывалось
уже 167 (более 90 %). Говоря о мобильной связи, мы в первую оче-
редь имеем в виду сотовую связь.
В общем случае, согласно классификации по рекомендациям
МСЭ, подвижные службы и службы радиоопределения разделяют
на:
• сухопутную подвижную службу, за исключением подвижных
систем электросвязи общего пользования IMT-2000;
• систему IMT-2000;
• морскую и авиационную подвижные службы;
• службу радиоопределения;
• подвижные спутниковые службы и спутниковые службы радио-
определения.
Сухопутная подвижная служба охватывает:
• беспроводные телефоны и беспроводные системы связи;
• сотовые сухопутные подвижные системы электросвязи
(ССПСЭ);
, • системы транкинговой радиосвязи.
В марте 1994 г. на Первой всемирной конференции по развитию
электросвязи, проводимой МСЭ, была заявлена идея создания гло-
бальной информационной инфраструктуры (ГИИ) для формирования
глобального информационного сообщества (ГИС). «Улучшить жизнь
каждого человека, дав ему новые услуги. Создать необходимую ин-
фраструктуру для экономического роста» - так определены основ-
ные цели создания ГИИ. Для ГИИ сформулированы общие принципы
концепции, выделены главные направления развития и сделаны оп-
ределённые шаги по реализации. Созданы региональные и глобаль-
ные сообщества и инфраструктуры. В развитых странах образуются
7
национальные информационные структуры с чёткой ориентацией на
развитие ГИС. Россия все задачи развития телекоммуникаций увя-
зывает с ГИИ. В июле 2000 г. Россия присоединилась к Хартии гло-
бального информационного сообщества.
Спутниковая связь играет важную роль в со5дании ГИИ. Для по-
строения глобальной сети электросвязи могут быть задействованы
все спутниковые системы связи, пригодные для предоставления
услуг электросвязи конечным пользователям. Это фиксированные
и подвижные спутниковые службы, широкополосные и узкополос-
ные, глобальные и региональные, существующие и запланирован-
ные. Все они могут быть объединены в рамках глобальной персо-
нальной подвижной спутниковой связи. Ведущую роль здесь играют
спутниковые сети, предназначенные для глобального или регио-
нального охвата абонентов, использующих портативные перенос-
ные терминалы.
Интеграция систем подвижной, спутниковой и стационарной
связи позволяет реализовать концепцию МСЭ «Международная
подвижная связь-2000», которая называется по ее английской аб-
бревиатуре IMT-2000, где цифра 2000 совпадает как с годом нача-
ла внедрения проекта, так и с частотным диапазоном, выделенным
для IMT-20Q0.
Сотовые сухопутные подвижные системы электросвязи подраз-
деляют по поколениям. Первое поколение - это системы аналого-
вых стандартов. Второе поколение представлено системами циф-
ровых стандартов. Наконец, IMT-2000 рассматривается сегодня как
стандарт подвижной системы электросвязи третьего поколения.
Примеры стандартов приведены в табл. В.1.
Таблица В.1.
Стандарт Полное наиме- нование стан- дарта Диапазон час- тот, МГц Г од ввода
Аналоговые стандарты
NMT 450 Nordic Mobile Telephony 450 1981
AMPS Advanced Mobile Phone System 800 1983
TACS Total Access Communication System 900 1985
8
Стандарт Полное наиме- нование стан- дарта Диапазон час- тот, МГц Год ввода
NMT-900 Nordic Mobile Telephony 900 1986
Цифровые стандарты
GSM-900 Global System for Mobile Communication 900 1991
D-AMPS Advanced Mobile Phone Service 800 и 1800 1991
DCS-1800 Digital Cellular System 1800 1992
PDC Personal Digital Cellular 800/ 900 и 1500 1994
CDMA Code Division Multiple Access 800 и 1800 1995
Для нашего времени характерно широкое распространение сис-
тем второго поколения и начало развития систем третьего поколе-
ния, системы первого поколения постепенно снимаются с эксплуа-
тации.
На рис В. 1 представлена классификация сетей подвижной связи
Российской Федерации в соответствии с документом «Основные
положения развития Взаимоувязанной сети связи РФ на перспек-
тиву до 2005 года». В РФ сети подвижной связи общего пользова-
ния являются частью Взаимоувязанной сети связи (ВСС). В них
включены наземные и спутниковые сети подвижной связи общего
'пользования, с помощью которых абонентам сети предоставляют-
ся* различные услуги электросвязи, включая связь с абонентами
телефонной сети общего пользования (ТФОП). Абоненты получают
.доступ в свою сеть с помощью подвижных абонентских термина-
лов, которые будем называть абонентскими станциями (АС), по
радиоканалу между АС и базовой станцией (БС). Так организована
^сеть доступа. Между БС создается транспортная сеть с помощью
радиолиний или кабельных линий связи. Сети доступа и транс-
фертные сети вместе образуют сеть подвижной связи.
Взаимодействие с ТФОП возможно на любом иерархическом
Уровне: местном, внутризоновом и междугородном.
9
Рис. В1. Классификация сетей подвижной связи Российской Федерации
Наземные сети подвижной связи рассматриваются как основа
сетей подвижной связи общего пользования. В тех регионах РФ,
где возможен доступ одновременно в обе сети (наземные и спутни-
ковые), абоненту преимущественно предоставляется канал связи
через наземную сеть, а при выходе из зоны обслуживания назем-
ной сети - через спутниковую сеть.
Спутниковые сети подвижной связи в первую очередь должны
предоставлять услуги международной и междугородной связи. При
этом спутниковые сети также могут поддерживать внутризоновую и
местную связь. Спутниковые сети подвижной связи РФ классифи-
цированы по видам используемых орбит искусственных спутников
Земли (ИСЗ).
Наземные сети разделяют на федеральные и региональные. На
основе аналогового стандарта NMT-450 и цифрового стандарта
10
GSM-900, которые были приняты в качестве федеральных, в РФ
организованы две федеральные сети. Абоненты этих сетей могут
связываться друг с другом через ТФОП.
Нижняя строчка рис. В.1 отражает классификацию сетей по ме-
тоду территориального планирования. Федеральные стандарты
используют сотовый принцип деления территории.
Региональные сети рассматриваются как дополнение или вре-
менное замещение федеральных сетей, но при условии, что они не
будут сдерживать развитие последних. Каждая региональная сеть
обслуживает только своих абонентов.
В качестве региональных выступают сотовые сети стандартов
AMPS/D-AMPS , радиальные и радиально-зоновые сети, включая
транкинговые. Несколько радиальных линий связи можно объеди-
нить через центральную коммутационную станцию в радиально-
зоновую структуру. Транкинговая сеть организуется на базе специ-
альных систем радиосвязи, обеспечивающих многостанционный
доступ к небольшому числу радиоканалов с ограниченным выходом
в ТФОП либо без выхода в эту сеть, и используется в первую оче-
редь для обслуживания абонентов ведомственных сетей.
К региональным наземным сетям относятся также сети персо-
нального радиовызова (СПРВ). Персональный радиовызов (пей-
джинг) - это услуга электросвязи, заключающаяся в односторонней
передаче коротких сообщений на ограниченной территории по ра-
диоканалу. Региональные СПРВ должны включаться в ТФОП на ме-
стном уровне. Региональные СПРВ могут быть объединены в феде-
ральные. Существуют стандарты для общеевропейской СПРВ.
В рассматриваемую классификацию сетей подвижной радиосвязи
не включены беспроводные телефоны и беспроводные системы элек-
тросвязи - сухопутные подвижные службы, обеспечивающие связь в
радиусе нескольких сотен метров. В беспроводных системах исполь-
зуется микросотовая и пикосотовая структура. Одна из основных об-
ластей их применения - это организация сети доступа для расширения
возможностей сотовой региональной и федеральной сети.
Сотовые структуры принято классифицировать по размерам сот:
макросотовые с радиусом R >500м, микросотовые с радиусом
100 м < R < 500м и пикосотовые, для которых радиус R < 100 м.
Согласно концепции развития в России сотовых систем подвиж-
ной связи общего пользования на период до 2010 г., приоритетным
направлением развития являются федеральные сети. Предполага-
ется, что региональные аналого-цифровые сети стандарта AMPS/
D-AMPS будут существовать только до 2010 г.
11
Основные услуги, предоставляемые абоненту в сетях подвиж-
ной связи, подразделяются на два типа: транспортные услуги и ус-
луги связи.
Конкретно набор возможных услуг любого типа определяется стан-
дартом. Так, транспортные услуги для систем второго поколения, как
правило, включают: передачу речи; синхронную, асинхронную и пакет-
ную передачи данных со скоростью не выше 9,6 кбит/с и др.
В системах второго поколения пользователю могут быть пре-
доставлены основные и дополнительные услуги связи. Основные
услуги связи: телефонная связь, экстренные вызовы, передача ко-
ротких сообщений, факсимильная связь. Услуга экстренного вызо-
ва позволяет устанавливать абонентской станции речевую связь с
ближайшим центром экстренной службы. К дополнительным услу-
гам связи относятся: услуги по распознаванию номера; переадре-
сация и перенаправление вызова; услуги завершения связи (вызов
на удержании, вызов с ожиданием и т.п.); конференц-связь; услуги
по учету стоимости переговоров; услуги группового соединения;
услуги по ограничению вызовов и др.
В условиях конкурентной борьбы за абонента операторы круп-
ных сетей стараются внедрять новые услуги. В последнее время
была введена такая услуга, как подключение абонента на условиях
предоплаты, услуга WAP - доступ в сеть Интернет непосредствен-
но с мобильного терминала.
Качественную передачу информационных сигналов в сетях под-
вижной связи обеспечивает ее собственная система управления.
Информация, служащая для управления системой, называется
сигнальной информацией. В качестве эталонной системы для пе-
редачи сигнальной информации используется эталонная модель
OS1 (Open System Interconnection - открытая система взаимных со-
единений). В этом контексте открытой называется система, которая
может взаимодействовать с другими в соответствии с заранее оп-
ределенными протоколами. Модель задает набор стандартных
процедур, устанавливающих правила обмена сигнальной инфор-
мацией между терминалами, процессорами, сетями. Благодаря
взаимному использованию этих процедур каждая система оказыва-
ется открытой для других систем.
Для управления сетями подвижной связи используют систему
общеканальной сигнализации ОКС 7, которая разработана и раз-
вивается в соответствии с эталонной моделью OSI. Система ОКС 7
содержит подсистему сетевых услуг и подсистемы пользователя,
различные для разных стандартов.
12
ГЛABA 1
ОСНОВЫ ПОСТРОЕНИЯ СИСТЕМ СВЯЗИ
С ПОДВИЖНЫМИ ОБЪЕКТАМИ
1.1. Общие принципы построения сотовой сухопутной
подвижной системы электросвязи
Основные понятия. Главные элементы сотовой сухопутной
Подвижной системы электросвязи (ССПСЭ) - это центр коммутации
(подвижной службы (ЦКПС), а также станции (БС и АС). Все БС со-
единены со своим ЦКПС стационарными линиями связи (кабель-
KbiMH, радиорелейными и др.), а все ЦКПС сети - стационарными
(линиями с транзитными коммутаторами ТФОП и обмениваются
^информацией по общему каналу сигнализации ОКС 7.
Сотовые сухопутные подвижные системы электросвязи строят
(на основе частотно-территориальных планов (ЧТП). При составле-
нии ЧТП обслуживаемую территорию разделяют между базовыми
станциями. Если на БС используется всенаправленная антенна, то
'граница территории, которую обслуживает одна БС, - окружность, в
Центре которой располагается БС (рис. 1.1,а). Границы трех сосед-
них окружностей пересекаются в одной точке. Соединив точки пе-
фесечения окружностей, уточним границы территории, которую об-
служивает каждая БС. Получается шестиугольник - сота.
Итак, сота - это территория, обслуживаемая одной БС при все-
направленных антеннах. Каждая БС поддерживает радиосвязь с
^абонентскими станциями, находящимися в своей соте. Во избежа-
ние взаимных помех соседние БС работают на разных частотах.
(Каждой соте присваивается частотная группа и для всей ССПСЭ
Доставляется частотно-территориальный план.
Основой ЧТП является кластер. Кластер образован совокупно-
стью соседних сот, в которых используются разные частотные
Группы. Частотные группы внутри кластера не повторяются. Число
«таких сот в кластере называется его размерностью. Все частотные
^каналы системы делят между БС, входящими в один кластер.
|£=рНа рис. 1.1 показаны фрагменты сотовых структур, построен-
ных на базе кластера размерностью 3 (Л/кл = 3). Цифрами на рис.
£1?1,а обозначены частотные группы.
13
Рис. 1.1. Сотовые структуры:
а — регулярная; б — секторная
Сотовая структура может быть двух типов:
• регулярная, использующая всенаправленные антенны
(рис. 1.1,а);
• секторная на основе направленных антенн (рис. 1.1,6).
В качестве направленных антенн на БС используются секторные
антенны. Получили распространение секторные антенны с шириной
главного лепестка ДНА (а), равной 60, 90 или 120°. На рис. 1.1,6 пока-
заны соты с секторными антеннами при а = 120°. В этом случае сота
делится на три сектора А, В, С. В каждом секторе устанавливается
своя БС, причем в центре соты. Каждая БС работает на своей частоте.
Частотные группы обозначены 1А, 1В,....
Как правило, в центре соты устанавливается несколько антенн.
Это может быть три передающие антенны, две - шесть приемных
(для разнесенного приема) и две антенны радиорелейных линий
(РРЛ). Место размещения БС получило название «сайт» (от англ,
site - местоположение).
При шестиугольной соте удобно использовать кластер размер-
ностью 7. В этом случае можно выбрать разные частотные группы
в одной центральной соте и шести пограничных сотах. На рис. 1.2
приведен фрагмент ЧТП для сети с использованием кластера раз-
мерностью 7. Точки соответствуют местам установки базовых
станций. Цифрами обозначены номера частотных групп. Утолщен-
ными линиями выделен центральный кластер. Пунктиром показаны
пути прихода интерференционных помех на АС, которая находится
на границе соты 1 центрального кластера, от БС, работающих на
совпадающих частотах. ЧТП составляют так, чтобы уровень ин-
терференционных помех не превышал допустимых значений, что
позволяет многократно повторять кластер и реализовать достоин-
ства сотовых систем. Например, если в подвижной системе ис-
14
пользуется 119 частотных каналов (Л/ч = 119) и кластер размерно-
стью 7 (A/„ = 7), то число частотных каналов, содержащихся в час-
тотной группе в одной соте, определяется по формуле N4K = N4/NKn =
= 119/7= 17.
Основное достоинство любых сотовых систем - эффективное
использование выделенной полосы частот за счет многократного
повторения кластера на территории. Такой подход позволяет об-
служивать большое число абонентов при ограниченном частотном
ресурсе спектра.
В зависимости от радиуса соты г0 различают макросоты с
г0 > 0,5 км, микросоты с го<0,5 км и пикосоты, радиусом несколько
десятков метров. Макросоты предназначены для обслуживания
абонентов в быстро передвигающемся транспорте, микросоты и
пикосоты целесообразны при медленном перемещении абонентов.
Микросоты были реализованы впервые в системах беспроводных
телефонов. Пикосоты служат для обслуживания абонентов в го-
родских районах с большой плотностью населения и в закрытых
зонах (подземные гаражи, вокзалы, универмаги).
Рис. 1.2. Фрагмент ЧТП с Л/кл = 7:
М1-М6 - мешающие базовые станции с частотной группой 1
1S
Область обслуживания ЦКПС разделяется на зоны обслужива-
ния. Например, в стандарте NMT-450 область обслуживания одно-
го ЦКПС содержит 16 зон, в каждой зоне находится до 128 БС, все-
го в области обслуживания одного ЦКПС может быть до 1024 БС.
Адрес (номер) зоны обслуживания базовая станция непрерывно
передает по каналу управления. Этот номер принимается абонент-
ской станцией и записывается .в ее память. АС оценивает прини-
маемый сигнал и при необходимости инициирует процедуру обнов-
ления информации о своем местоположении, которое определяет-
ся с точностью до зоны, а не до соты. Деление на зоны уменьшает
время поиска абонентской станции.
Ведение абонента. При включении АС выполняется определе-
ние ее местоположения и выделение для нее рабочих частот. При
пересечении станцией границы соты сеть передает абонента дру-
гой БС, при этом на АС производится автоматическая смена рабо-
чих частот. Ведение абонента включает несколько функций. Одна
из них - эстафетная передача АС от одной БС к другой при движе-
нии абонента с включенной АС. Другая функция - переключение
частотных каналов внутри одной соты, например, при поражении
сигнала рабочего канала помехой. Наконец, при перегрузке соты
ЦКПС может передавать абонентскую станцию другой БС, имею-
щей свободные частотные каналы. Процедура «ведение абонента»
часто называется процедурой эстафетной передачи (ПЗП). Ее на-
зывают также хэндовер или хэнд-офф (от англ, handover или амер,
hanhd-off). Решение о выполнении ПЭП обычно принимает ЦКПС
на основании результатов измерений, сделанных на АС и БС. На
станциях измеряются уровни принимаемых сигналов, отношение
сигнал-шум в канале и другие параметры. Эти результаты переда-
ются на ЦКПС по каналам управления. Измеренные параметры
используются также для регулирования мощности АС.
Роуминг. Если АС находится вне области обслуживания своего
ЦКПС, то при ее включении выполняется процедура роуминга. Эта
процедура предусматривает определение местоположения АС вне
«собственной» зоны обслуживания и предоставление абонентской
станции каналов связи при перемещении абонентов в пределах
сети. Роуминг возможен между ЦКПС сети и между странами. Ро-
уминг бывает автоматический и заказной.
Каналы трафика и управления. В ССПСЭ предусмотрены две
основные категории каналов:
• каналы трафика (или линейные каналы), предназначенные для
передачи речи и данных (англ, аббревиатура ТСН);
• каналы управления, которые используются для сигнализации и
16
^правления, включая ведение абонента (англ, аббревиатура ССН).
f Наличие каналов для ведения абонента отличает ССПСЭ от
Неподвижных систем радиосвязи с сотовой структурой, например
!от цифровых радиорелейных линий (ЦРРЛ) со структурой «точка -
Умного точек».
Рис. 1.3. Фрагмент сети, в которой БС соединены
цифровыми радиорелейными линиями
Передача сигналов между БС и ЦКПС. Все БС соединены со
Своим ЦКПС стационарными линиями связи. На рис. 1.3 показан
фрагмент сети, в которой БС соединены с помощью ЦРРЛ. На каж-
дой БС установлена всенаправленная антенна для связи с АС и
Йве направленные антенны РРЛ. Частоты ЦРРЛ обозначены
&2 Функциональные схемы систем связи с подвижными
объектами
Функциональная схема ССПСЭ аналогового стандарта. На-
помним, что ЦКПС является одним из основных элементов
ССПСЭ. В ССПСЭ аналоговых стандартов в состав ЦКПС включе-
Еы,опорный регистр местонахождения (ОРМ) и визитный регистр
местонахождения (ВРМ). Регистрами называют базы данных, кото-
рые содержат основные сведения об абонентах и оборудовании. В
jQPM хранятся основные сведения об абонентах, постоянно заре-
гистрированных в области обслуживания данного ЦКПС. Под ос-
новными сведениями подразумеваются те данные о статусе и ме-
стоположении абонента, которые позволяют послать вызов и пре-
17
Рис. 1.4.Функциональная схема ССПСЭ аналогового стандарта
доставить соответствующие услуги. При перемещении АС в об-
ласть обслуживания другого ЦКПС основные сведения об этом
абоненте временно записываются в ВРМ этого ЦКПС и хранятся до
тех пор, пока там находится эта АС.
На функциональной схеме ССПСЭ аналогового стандарта (рис.
1.4) для каждой АС можно указать опорный центр коммутации
(ЦКПС-О), в ОРМ которого зарегистрирована рассматриваемая АС.
Когда эта АС оказывается в зоне обслуживания любого другого
ЦКПС, сведения о ней записываются в ВРМ. Все такие центры
коммутации для рассматриваемого абонента являются ЦКПС визи-
тера (ЦКПС-В).
Центр коммутации подвижной службы обеспечивает соедине-
ние между абонентами сети, а также выход в ТФОП; отслеживает
местоположение АС в своей области обслуживания; управляет
процедурой эстафетной передачи АС, а также переключением час-
тотных каналов при нарушении связи из-за помех или неисправно-
стей; выполняет функции центра эксплуатации и технического об-
служивания сети; начисляет оплату абонентам. На рис. 1.4. показа-
на установленная линия связи между абонентами сети ТФОП и
ССПСЭ. В ТФОП показаны местный коммутатор (МК) и транзитные
коммутаторы (ТК); ТА - телефонный аппарат. В варианте 1
(сплошные линии) вызов к АС проходит по линии ТА, МК, ТК1, ТК2,
ЦКПС-О, ЦКПС-В, БС, АС.
В ССПСЭ предусмотрена шлюзовая функция (Gateway). ЦКПС,
обладающий такой функцией, обозначен ЦКПС*. Шлюзовая функ-
ция - специальный принцип маршрутизации вызова через бли-
жайший ЦКПС, который теперь становится шлюзовым. Этот ЦКПС*
опрашивает ЦКПС-О по каналам ОКС 7 и находит самый короткий
путь для установления связи (линия связи обозначена пунктиром).
Шлюзовую функцию реализуют, как правило, все ЦКПС.
Функциональная схема ССПСЭ цифрового стандарта. Рас-
смотрим ССПСЭ стандарта GSM (рис. 1.5). Схема содержит под-
систему базовых станций (ПБС); сетевую подсистему (СПС) и под-
18
систему эксплуатации и технического обслуживания (ПЭТО), а так-
же АС. В АС входит абонентское оборудование (АО) и абонентский
идентификационный модуль (АИМ) (SIM-карта). Пока не установ-
лен этот модуль, не выполняются соединения АС с вызывающим и
вызываемым номером. Подсистема базовых станций содержит:
базовые приемопередающие станции (БПС); контроллер БС (КБС)
и оборудование транскодирования (ТКО). В составе СПС показаны:
ЦКПС, ОРМ, ВРМ, центр аутентификации (ЦА), регистр идентифи-
кации оборудования (РИО). ПЭТО содержит центр эксплуатации и
технического обслуживания (ЦЭТО) и центр управления сетью
(ЦУС). Подсистема базовых станций выполняет функции радиосвя-
зи. Все БС в зоне ПБС соединены линиями связи с контроллером.
Каждая БПС обслуживает одну соту. Содержит несколько приемо-
передатчиков (до 16) - по одному для каждого частотного канала.
Каждой БПС стандарта GSM доступны все 124 частотных канала, что
позволяет реализовать метод скачкообразной перестройки частоты в
стандарте GSM. Один из способов переключения частоты состоит в
переключении модулирующего сигнала на входе передатчика. В этом
случае число частот, используемых для скачкообразной перестрой-
ки, определяется числом приемопередатчиков БС.
Контроллер БС управляет несколькими БПС. Основное назна-
чение контроллера - правильное распределение радиоканалов
между БС и АС и определение необходимости их переключений
при передвижении. Другая его задача - управление конфигурацией
БПС и загрузка программного обеспечения. Контроллер обеспечи-
вает передачу вызова на АС, контролирует соединения, выполняет
Рис. 1.5. Функциональная схема ССПСЭ стандарта GSM
19
согласование скоростей передачи для речи, данных и сигналов
вызова, кодирование и декодирование сигналов. Количество
приемопередатчиков, которые может обслужить один контроллер,
может быть более 100. Оборудование транскодирования включа-
ется между КБС и ЦКПС и служит для согласования скоростей
цифровых потоков. В ТКО образуется стандартный первичный
цифровой поток (ПЦП) из цифровых сигналов базовых станций.
ТКО может размещаться вместе с КБС. Как известно, ПЦП обра-
зуют 32 сигнала, каждый со стандартной скоростью 64 кбит/с. Но-
минальная скорость передачи ПЦП В, = (30 + 2)-64 = 2048 кбит/с.
В стандарте GSM скорость передачи сигнала в одном речевом
канале B1GSM =13 кбит/с. В транскодере с помощью добавочных
битов эта скорость увеличивается до величины В1ТК0= 16 кбит/с.
Таким образом в полосе одного канала стандартной ИКМ пере-
дают сигналы четырех речевых каналов, всего речевых каналов в
транскодере Л/тко = 30 • 4 = 120. Оставшиеся два стандартных
цифровых канала занимает сигнальная информация. Например,
один канал - информация ОКС 7 и один канал - информация
управления по протоколу Х.25.
Сетевая подсистема выполняет соединение неподвижных и под-
вижных пользователей с помощью коммутационных средств и баз
данных. В системе стандарта GSM функционально разделены ЦКПС
и регистры ОРМ и ВРМ. ЦКПС обеспечивает включение подвижного
абонента в общие и выделенные сети связи (через выходы 1, 2, 3).
Кроме того, центр выполняет коммутацию радиоканалов, а также
обеспечивает непрерывность связи при перемещении АС. Как пра-
вило, один ВРМ присоединен к одному ЦКПС. Этот регистр - база
данных, временно содержащая информацию о подвижных пользова-
телях, находящихся на территории, которой он управляет. ВРМ по-
зволяет правильно определить местоположение АС. Данные о ме-
стоположении АС постоянно обновляются. В СПС входят: ЦА - база
данных, используемых при аутентификации абонента (ключи и алго-
ритмы аутентификации и др.) и РИО - база данных, содержащая
сведения о подвижных устройствах, позволяющие предотвращать
несанкционированное использование АО (угон, кража).
Сотовая сухопутная подвижная система электросвязи стандар-
та GSM территориально разделяется на зоны действия ЦКПС, ко-
торые, в свою очередь, делятся на зоны действия контроллеров
БС, называемые зонами местоположения (ЗМ). ЦКПС отслеживает
местоположение АС с помощью регистров. ВРМ позволяет вызы-
вать АС, пока она находится в зоне действия, определенного кон-
20
^троллера. Когда АС перемещается в ЗМ другого контроллера, он ее
^регистрирует, и в ВРМ записывается новый адрес ЗМ.
I: Входящие вызовы поступают к ЦКПС* - центру коммутации, об-
ладающему шлюзовой функцией, который по номеру вызываемого
«абонента находит его ОРМ. Последний обращается к ВРМ, кото-
рый «находит» АС. Шлюзовой ЦКПС* имеет интерфейс с внешними
^сетями связи. Здесь, как и в случае аналоговых систем, шлюзовую
(функцию можно установить для каждого ЦКПС. Все ЦКПС в сети
[соединены линиями связи (ВОЛС, РРЛ, спутниковыми). На рис. 1.5
[они показаны двойными линиями.
Подсистема эксплуатации и техобслуживания построена по ие-
фархическому принципу и состоит из центра эксплуатации и техни-
Шёского обслуживания (ЦЭТО) и центра управления сетью (ЦУС).
ШЭТО позволяет выполнять дистанционный контроль, управление
Цементами сети и конфигурацией сети, техническое обслужива-
гние; целостность и обновление сети, сбор данных по трафику, за-
|рузку программного обеспечения. Пунктирные линии на рис. 1.5
(Называют основные блоки схемы, которые обслуживает ЦЭТО.
ЦУС организуют для сетей большой площади. Он служит для
надзора за сетью в целом, за анализом характеристик и т.п.
^Система стандарта GSM подчиняется принципам эталонной
Додели OSI. Она имеет три общих внутрисистемных интерфейса:
аВХрадиоинтерфейс Um между БС и АС, 2) интерфейс А между
fflknc и ПБС, 3) интерфейс Abis между БПС и КБС. Положение внут-
рисистемных интерфейсов отражено на рис. 1.6. В данном контек-
&тё интерфейс - это точка соединения реально существующих уст-
ройств. Благодаря данным интерфейсам оператор системы может
Соединять аппаратуру разных производителей. Информационные
Еогоки, проходящие через один интерфейс, могут принадлежать
различным протоколам.
ИФ'Кроме этих внутрисистемных интерфейсов система GSM имеет
интерфейсы между сетью и внешним оборудованием и интерфей-
Еы для выхода во внешние сети: в сети подвижной связи общего
ДОльзования, в ТФОП, в цифровые сети с интеграцией служб
ЦЕ|СИС) и др.
В/Функциональная схема ССПСЭ стандарта DCS-1800 аналогич-
ga-'рассмотренной схеме стандарта GSM. Функциональная схема
кистемы стандарта D-AMPS отличается от схемы стандарта GSM
дрлько тем, что имеет всего один общий интерфейс - радиоинтер-
крейс.
gj-функциональная схема транкинговой системы связи.
Йермин «транкинг» предполагает свободный доступ к частотному
21
Рис. 1.6. Интерфейсы стандарта GSM:
а - радиоинтерфейс (7т; б -интерфейс Abis; в -интерфейс А
ресурсу. Транкинговая система - это система, в которой абонентам
предоставляется канал связи на основе многостанционного досту-
па к ограниченному числу радиоканалов. Транкинговые системы
могут иметь ограниченный выход в ТФОП или не иметь его. Тран-
кинговые системы проще ССПСЭ, а следовательно, и дешевле.
Кроме того, в них предоставляется меньшее, чем в ССПСЭ, число
услуг. В частности, в достаточно простых вариантах систем нет ро-
уминга; не поддерживается непрерывность соединения при смене
зоны обслуживания и др. Так же, как и в ССПСЭ, технические ха-
рактеристики транкинговых сидтем определяются стандартом. Сис-
темы современных цифровых стандартов, например TETRA, по
своим возможностям близки к системам стандарта GSM. Транкин-
говые системы предназначаются для корпоративных пользовате-
лей, например таких служб, как скорая помощь, такси, милиция.
Транкинговые системы связи являются базой для построения
радиально-зоновых сетей подвижной связи. Известно много стан-
дартов транкинговых систем. На их основе можно реализовать сети
с разнообразной архитектурой - от самых простых с одним-двумя
радиоканалами до сложных, предназначенных для обслуживания
больших территорий с большим числом абонентов и выходом в
сети общего пользования.
На функциональной схеме базового варианта транкинговой
системы (рис. 1.7) с одним модулем управления базовой станцией
(УБС) показаны: базовые приемо-передающие станции (БПС); кон-
троллер базовой станции (КБС); терминал управления локальной
сетью (УЛС). Абонентские станции сети подразделяются на ста-
ционарные и подвижные радиостанции.
Функции БПС: передача и прием, пространственно разнесен-
ный прием, шифрование сигналов, управление радиоканалами,
управление выходной мощностью АС. Каждое из двух других уст-
22
КБС — УЛС
Рис. 1.7. Функциональная схема транкинговой системы
с одним модулем УБС
ройств схемы (КБС и модуль УБС) выполняет функции коммутации
для нескольких БС, служит для выхода во внешние сети, позволяет
подключать терминалы техобслуживания, диспетчерские пульты.
На рис.1.7 и 1.8 цифрами обозначены выходы: 1 - в ТФОП, 2 - в
цифровую сеть с интеграцией служб (ЦСИС), 3 - в сеть с коммута-
цией пакетов (СКП), 4 - в учрежденческую АТС (УАТС), 5 - другие.
Контроллер обладает большими возможностями в сравнении с
модулем УБС. Он позволяет организовать работу с несколькими
модулями УБС, например, с использованием конфигурации «звез-
да» (рис. 1.8). В такой схеме КБС организует централизованную
базу данных. В больших сетях устанавливают центральный КБС.
Транкинговые системы связи отличает распределенная систе-
ма коммутации. Ее иерархия снизу вверх: модуль УБС, КБС, цен-
тральный КБС.
Терминал управления локальной сетью служит для контроля за
состоянием системы, внесения изменений в базу данных абонен-
тов и др. В состав УЛС входит диспетчерский пульт, предназначен-
ный для обмена информацией между диспетчером и пользовате-
Рис. 1.8. Функциональная схема транкинговой системы с конфигурацией
«звезда»
23
лями сети. Пульт подключается кабелем к КБС. Часто пульт ис-
пользуется для передачи широковещательной информации.
Радиальные системы и радиально-зоновые сети. Радиаль-
ная система подвижной связи имеет одну Е^С, называемую цен-
тральной. Для получения зоны обслуживания максимально возмож-
ной площади антенна центральной БС устанавливается на высоких
опорах, а мощность передатчика выбирается максимально допусти-
мой. Центральная БС обеспечивает выход абонентов в ТФОП.
Отдельные радиальные системы посредством центральной
коммутационной станции могут быть объединены в радиально-
зоновые сети. Такие сети обслуживают ограниченную территорию,
часто вдоль транспортных магистралей. Соединение абонентов в
сети устанавливается как автоматически, так и через оператора.
Сеть должна поддерживать такие автоматические соединения, как
соединение двух своих абонентов, выход абонента в ТФОП на ме-
стном уровне, соединение с центральным диспетчером, соедине-
ние диспетчера с группой абонентов (циркулярная связь). Через
центрального диспетчера возможен выход в междугородную теле-
фонную сеть.
Функциональная схема системы персонального радиовы-
зова. СПРВ обеспечивает одностороннюю передачу коротких со-
общений на ограниченной территории по радиоканалу. Эта услуга
электросвязи известна также под названием «пейджинг». Инфор-
мация для передачи может поступать через различные сети. На-
пример, широко распространены системы, в которых диспетчер
сети получает речевую информацию по телефону из ТФОП. Ос-
новные технические характеристики радиоинтерфейса СПРВ опре-
деляются форматом кодов сигналов радиовызова.
В зависимости от используемых радиоканалов различают
СПРВ со специально выделенными радиоканалами и системы с
каналами, полученными при уплотнении существующих вещатель-
ных радиоканалов.
Существует множество форматов кодов СПРВ. С 1992 г. в Ев-
ропе широкое признание получил цифровой формат ERMES
(European Radio Messaging System). Этот общеевропейский фор-
мат позволяет организовать общую сеть персонального радиовы-
зова для всех стран и общеевропейский роуминг. Функциональная
схема СПРВ на базе ERMES (рис. 1.9) содержит базовые станции
(БС); контроллер зоны обслуживания (КЗО); контроллер сети;
центр эксплуатации и технического обслуживания (ЦЭТО). Цифра-
ми 1.1,..., 1.6 обозначены интерфейсы, которые должны отвечать
определенным протоколам взаимодействия.
24
Выход
а сеш
Рис. 1.9. Функциональная схема системы персонального радиовызова
Вызовы могут поступать из различных сетей общего пользова-
ния, например ТФОП, ЦСИС и др. Взаимодействие обеспечивают
сетевые протоколы 1.6 и протокол 1.5 - «методы доступа». Не-
сколько контроллеров СПРВ соединяются между собой через ин-
терфейс 1.4. Контроллер сети распределяет вызовы между зонами,
затем КЗО подает их на радиопередатчики БС. КЗО не только рас-
пределяет вызовы между передатчиками, но также выполняет опе-
ративные статистические вычисления.
Радиопередатчики БС могут работать, как в синхронном режи-
ме, так и последовательно во времени. Абонент получает звуковой
сигнал - уведомление о вызове и читает текст сообщения на дис-
плее абонентского приемника. В простейших СПРВ это может быть
только код вызывающей стороны, и абонент получает сообщение
по ТФОП, позвонив адресату. Виды и объем сообщений разделя-
ются по категориям обслуживания. Категория 1 (самая низкая)
обеспечивает только передачу вызова; категория 6 (самая высо-
кая) - передачу вызова с большим объемом сообщений до не-
скольких десятков килобитов.
Стратегия развития СПРВ в России предполагает создание ие-
рархической структуры, расширение зон обслуживания от отдель-
ных городов до регионов, образование региональных СПРВ, а так-
же федеральной сети РФ.
Беспроводные телефоны и беспроводные системы элек-
тросвязи. БПТ - это сухопутные подвижные службы, обеспечи-
вающие связь в радиусе 50...200 м. Одно из широко известных
применений - беспроводная телефония домашнего пользования. В
беспроводных системах электросвязи (БПСЭС) используются мно-
гие принципы построения ССПСЭ. Основные отличия объясняются
тем, что в основе территориального планирования БПСЭС лежат
микросотовая и пикосотовая структуры. При столь малых размерах
25
сот частотное планирование приводит к низкой эффективности ис-
пользования спектра. Поэтому вместо планового распределения
частотных каналов устанавливается процедура автоматического
адаптивного распределения каналов. Основные элементы систе-
мы: абонентская портативная станция (АПС); фиксированная ра-
диостанция (ФРС), которая также называется радиопорт или УАТС.
ФРС соединена с УАТС кабелем или радиоканалами. Между АПС и
ФРС поддерживается радиосвязь. УАТС выполняет функции цен-
тра коммутации. Существует ряд стандартов на БПСЭС. С 1992 г.
начал применяться цифровой стандарт DECT (Digital European
Cordless Telecommunications). Современная беспроводная система
DECT часто используется как средство для расширения возможно-
стей сотовой сети. Например, системы стандартов DECT и GSM
могут вместе работать в общей ССПСЭ.
Функциональная схема спутниковой системы подвижной
связи: Спутниковая система подвижной связи (ССПС) содержит:
космический сегмент, земной сегмент, линии радиосвязи и або-
нентские терминалы (АТ). Космический сегмент образуют ретранс-
ляторы на ИСЗ. В земной сегмент входят базовые земные станции
(БЗС), центр управления сетью (ЦУС) и центр управления полетом
(ЦУП). ЦУС планирует использование ресурсов спутника в системе,
распределяет ресурсы ретрансляторов ИСЗ между БЗС, обеспечи-
вает БЗС данными для слежения за ИСЗ. Он же планирует трафик.
Центр управления полетом контролирует орбиты ИСЗ, обраба-
тывает телеметрию, формирует команды, передает на ЦУС сведе-
ния о состоянии и ресурсе ИСЗ. Как правило, центры подключены к
одной из БЗС и не имеют собственного радиотехнического обору-
дования. Вся телеметрия и управление выполняются через БЗС по
радиоканалам. БЗС также называют станциями сопряжения или
шлюзовыми станциями. Все соединения между абонентами спутни-
ковой системы выполняются через БЗС. Для этого в схеме БЗС
предусмотрены интерфейсы. Часто БЗС соединяются линиями
связи с ЦКПС ССПСЭ.
Линии радиосвязи подразделяются на мобильные, фидерные,
межспутниковые, командные и телеметрические. Мобильные - это
линии радиосвязи с абонентскими терминалами. На рис. 1.10 это
линия 1 «вверх» и линия 2 «вниз». Линии радиосвязи с БЗС назы-
ваются фидерными. На рис 1.10 это линия 3 «вверх» и линия 4
«вниз». В некоторых спутниковых системах связи организованы
межспутниковые линии между соседними ретрансляторами на од-
ной орбите и на соседних орбитах. Командные и телеметрические
линии как правило совмещены с фидерными.
26
Рис. 1.10. Функциональная схема спутниковой системы подвижной связи
Абонентские терминалы подразделяют на портативные, перево-
зимые и стационарные. По техническим возможностям это может
быть однорежимный терминал, который может работать только в
спутниковых системах подвижной связи, двухрежимный и многоре-
жимный. Двухрежимный позволяет работать как в указанной сети,
так и в ССПСЭ определенного стандарта, например GSM. Многоре-
жимный абонентский терминал позволяет работать в спутникб&ых
системах подвижной связи и в ССПСЭ нескольких стандартов.
Принципы дуплексного разделения каналов. Дуплексный
режим работы обеспечивают следующими методами, которые при-
нято называть по их английской аббревиатуре:
• FDD - дуплекс с частотным разделением каналов,
• TDD - дуплекс с временным разделением каналов.
Дуплексное частотное разделение каналов применяют в
ССПСЭ. где согласно плану частот для пинии вверх (передача от
АС к БС) и линии вниз (передача от БС к АС) назначены разные
полосы частот.
Дуплексное временное разделение каналов использует одну и
ту же несущую частоту на линиях вверх и вниз и временное разде-
ление этих каналов. В этом режиме не требуется спаренный диа-
пазон частот, что позволяет более эффективно распределять ка-
налы. Трафик на линиях может быть асимметричным (например,
доступ в Интернет). Признано, что абонентский терминал при TDD
проще, чем при FDD. Режим TDD используется в транкинговых и
спутниковых системах.
1.3. Стандарты ССПСЭ
Стандарт определяет основные технические характеристики
системы; параметры частотного плана, мощность передатчиков БС
й АС. минимальное и максимальное значения радиуса соты, метод
27
многостанционного доступа (МД), число каналов трафика на одной
РЧ несущей, метод модуляции, скорость передачи в радиоканале,
структуру линейного канала (алгоритмы кодирования и битовая
скорость), скорость передачи данных» параметры канального коди-
рования для речевого канала (применяемый код и увеличение ско-
рости передачи), структуру каналов управления, возможность урав-
нивания задержки распространения, ведение абонента, междуна-
родный роуминг, возможность работы многих операторов в одной
области обслуживания. Некоторые из этих параметров приведены
в табл. 1.1. В данном разделе подробно обсуждаются частотные
планы стандартов.
Таблица 1.1
Основные технические параметры стандартов GSM-900, DCS-1800 D-AMPS 800 МГц (a) 1,8 ГГц (6) CDMA 800 МГц (a) 1,8 ГГц (6) WCDMA
Полоса пере- даваемых час- тот БС, МГц 935... 960 (GSM) 1805... 1880 (DCS1 869... 894 1930... 1990 869... 894 1930...1990 1930... 1990
То же для АС 890...915 (GSM) 1710...1785 (DCS} 824...849 1850...1910 824...849 1850...1910 1850...1910
Разнос частот, МГц 45 (GSM) 95 (DCS) 45(a) 80(6) 45(a) 80(6) 80
Расстояние между РЧ не- сущими, КГц 200 30 1250 5000
Общее число РЧ дуплексных каналов 124 (GSM) 374 (DCS) 823 (a) 1985(6) 20(a) 47(6) 12
Максимальная ЭИИМ БС. Вт; пик несущей 300 (GSM) 30 (DCS) 300 (a) 1000 (6) He опре- делена (a) 1034 (6) He опре- делена
Номинальная мощность пе- редачи АС, Вт 8; 1 (GSM) 1; 0,125 (DCS) 9,3; 0,0004 0,2; 0.01 0,25
28
Основные технические параметры стандартов GSM-900, DCS-1800 D-AMPS 800 МГц (а) 1,8 ГГц (6) CDMA 800 МГц (а) 1,8 ГГц (6) WCDMA
Радиус ячейки, км: минимальный максимальный 0,5 35 0,5 20 Не опре- делен 50 Не опре- делен 20
Метод много- дистанционно- го доступа МДВР МДВР МДКР МДКР
Число каналов трафика на одной несущей: первоначально в проекте 8 16 3 6 61 122 125 253
Модуляция гммс тг/4 4ФМ КФМН ОФМН 64-ортого- нальная КФМН ОФМН
Скорость пере- дачи в радио- канале, кбит/с 270,833 48,6 9.6 или 14,4 на канал, до 921,6 на несущую 64
'Алгоритм коди- рования речи RPE-LPT VSELP CELPc перемен- ной ско- ростью АДИКМ
Скорость пере- дачи данных, кбит/с До 9.6 2,4; 4,8; 9,6; ДО 28,8 До 13,3 До 64
Возможность уравнивания задержки рас- ..пространения, мкс 20 60 (а) 41.2 (б) Ограниче- но кодом Ограниче- но кодом
^Взаимодейст- . вие с сущест- вующей ана ло- товой системой Нет Да с AMPS Да с AMPS Нет
29
Частотные присвоения для систем радиосвязи в международ-
ном масштабе координирует МСЗ. Европейская конференция ад-
министраций почт и связи (англ, аббревиатура СЕРТ) проводит
подготовительную работу в интересах европейских стран. На осно-
вании этих решений национальные администрации обеспечивают
конкретные присвоения. В России такую работу проводит Государ-
ственная комиссия по радиочастотам (ГКРЧ) при Минсвязи России.
Частотные планы стандарта NMT-450. Основной частотный
план стандарта NMT-450 показан на рис. 1.11,а. Полоса частот
приема (передачи) системы составляет 4,5 МГц, что позволяет ор-
ганизовать 180 речевых каналов. Для каждого речевого канала от-»
водится полоса частот шириной 25 кГц, из которых 9 кГц - защит-
ный частотный интервал и 16 кГц - ширина спектра ЧМ сигнала.
Частота сдвига, определяемая как разность частот передачи и
приема для каждого речевого канала равна 10 МГц. Основной план
содержит 180 частотных каналов. Каналы нумеруются подряд: 1, 2,
3.....180 (для основного плана). Для канала 1 средняя частота
приема базовой станции = 453000 +12,5 = 453012,5 кГц.
Для канала с номером z основного плана средняя частота
приема базовой станции, выраженная в мегагерцах,
f = F, + 0,025 (z-1),
1* *
средняя частота передачи, выраженная в мегагерцах,
f2t =10 + ^+0,025(2-1).
В системе используется также дополнительный частотный план
(рис. 1.11,6 ). Он позволяет организовать еще 179 частотных кана-
лов с номерами 181...359, причем несущие речевых каналов ос-
новного и дополнительного плана сдвинуты на частоту, равную по-
ловине ширины полосы канала (на 12,5 кГц). Для канала с номером
z дополнительного плана средняя частота приема базовой стан-
ции, выраженная в мегагерцах,
f\z= Fy +0,0125 (2z-1).
Для увеличения пропускной способности организуют системы с
перемежающимися каналами, которые используют сразу основной
и дополнительный планы.
Предусмотрена еще одна возможность увеличения пропускной
способности системы путем использования плана частот с увели-
ченным числом частотных каналов, в котором полоса частот, отво-
30
Прием БС Передача БС
Рис. 1.11. Планы частот стандарта NMT-450:
а - основной; б - дополнительный
димая на один канал, составляет 20 кГц и общее число частотных
каналов - 225.
Соседние частотные каналы в соте должны быть разнесены не
менее, чем на 175 кГц. Обычно все частотные каналы плана делят
на группы, так что в группу с номером G объединены каналы с но-
мерами G, G + N, G + 2N, ... , где N- размерность кластера. На од-
ной БС может быть организовано до 16 частотных каналов, из ко-
торых 15 - каналы трафика и 1 - канал управления. По нему БС
постоянно передает сигнал-идентификатор канала вызова, позво-
ляющий АС определять свое положение, а также сигналы пейджин-
га для АС. После того, как АС ответит по этому каналу, ей предос-
тавляется один из каналов трафика для переговоров. Для любой
БС канал трафика может быть в одном из следующих состояний:
«свободный», «занятый» и «холостой». Свободный используется
для инициирования вызова со стороны АС. Радиопередатчик этого
канала всегда включен. Для ведения переговоров предоставляется
«занятый», он же используется для вызова со стороны всех БС.
Его радиопередатчик включается только на время сеанса связи.
«Холостой» канал - тот, который не используется в данный мо-
мент. Его радиопередатчик выключен.
Частотные планы цифровых стандартов GSM-900 и DCS-1800.
В диапазоне 900 Мгц для ССПСЭ отведена полоса частот 890...960
МГц. В этом диапазоне работают системы стандарта NMT-900 и
системы стандарта GSM-900, по частотным планам, показанным на
рис.1.12,а и 1.12,6. В аналоговом стандарте NMT-900, полоса час-
тот, отведенная для одного речевого канала, такая же, что и в
NMT-450. Полоса частот приема (передачи) увеличена до 25 МГц,
что позволяет организовать 1000 речевых каналов
В цифровых стандартах GSM-900 и DCS-1800 полоса частот, от-
31
веденная на один частотный канал, составляет 200 кГц. Согласно
плану частот стандарта GSM-900 (рис. 1.12,6), в этом стандарте
124 частотных канала. Полоса частот,«занимаемая стандартом
для приема (или передачи), составляет 25 МГц. Сдвиг между час-
тотами приема и передачи в каждом канале 45 МГц. В канале с
номером z средняя частота приема базовой станции, выраженная
в мегагерцах,
f1z = 890 + 0,2 z,
средняя частота передачи, выраженная в мегагерцах,
f2z = 935 +0,2 z.
Для увеличения пропускной способности системы цифрового
стандарта применяют МДВР. В стандарте GSM-900 в одном час-
тотном канале работают восемь каналов связи, что позволяет по-
лучить общее число каналов связи NCB = 8Nf = 992 , где Nf - чис-
ло частотных каналов по плану. Как видно, пропускные способно-
сти аналогового стандарта NMT-900 и цифрового стандарта GSM-
900 практически совпадают.
Полоса частот стандарта DCS-1800 (рис. 1.12,в), отведенная
для приема ( или передачи), составляет 75 МГц. Сдвиг между час-
тотами приема и передачи в каждом канале 95 МГц. В канале с но-
мером z средняя частота приема базовой станции, выраженная в
мегегагерцах,
f1z = 171O + O,2z,
средняя частота передачи, выраженная в мегагерцах,
f2z =1805 + 0,2 z
Общее число частотных каналов Nf = 374 . В стандарте DCS-
1800, так же как и в стандарте GSM-900, в одном частотном канале
работают восемь каналов связи, что позволяет получить общее
число каналов связи NCB - 8Nf = 2992 .
Частотные планы стандартов AMPS и D-AMPS. Северо-
Американские стандарты - аналоговый AMPS и цифровой D-AMPS -
совместимы. Название D-AMPS применяется по отношению к не-
скольким цифровым стандартам (спецификациям). Каждая после-
дующая спецификация полностью совместима и способна к взаи-
модействию с более ранними поколениями. Так, AMPS и D-AMPS
IS-54 имеют одинаковые частотные планы и одинаковые аналого-
вые каналы управления.
32
Рис. 1.12. Частотные планы стандартов:
а - NMT-900; б - GSM-900; в - DCS-1800
Каналы трафика в D-AMPS - цифровые. Существуют совме-
щенные аналого-цифровые системы, в которых поддерживаются
одновременно как аналоговый AMPS, так и цифровой D-AMPS
стандарты. В этом случае на БС имеются аналоговые и цифровые
приемопередатчики. Существуют двухмодовые АС, которые могут
использовать как аналоговый, так и цифровой канал.
Стандарт D-AMPS IS-136 полностью цифровой. Работает в час-
тотных диапазонах 800 и 1800 МГц. Совместим с предшествующи-
ми спецификациями D-AMPS.
При введении AMPS в США была предусмотрена возможность
одновременной работы на любой территории двух операторов: А
и 6. Поэтому в основном плане частот частотные каналы разде-
лены на два блока: А и В. Полоса, отведенная на один частотный
канал, составляет 30 кГц. В основном плане частот AMPS/D-
AMPS (рис.1.13,а) полоса, отводимая для приема (или передачи),
составляет 20 МГц. Сдвиг между частотами приема и передачи в
каждом канале 45 МГц. Позже основной план был расширен
(рис. 1.13,в) для частот приема (передачи) со стороны нижних
частот на 1 МГц и со стороны верхних - на 6 МГц, из которых
2 МГц пока резервные.
33
Рис. 1.13. Планы частот AMPS/D-AMPS
а - основной; б - расширенный
В канале с номером z средняя частота приема базовой
станции, выраженная в мегагерцах, определяется выражениями:
Л1г = 825 + 0,03 z при z < 799;
f1z =825 + 0,03(z-1023) при-991 <z<, 1023.
В канале с номером z средняя частота передачи базовой
станции, выраженная в мегегерцах, определяется выражениями;
f2z = 870 + 0,03 z при z < 799;
f2z = 870 + 0,03( z -1023) при 991 < z £ 1023.
В частотном плане нет каналов с номерами 799 < z < 991. Всего
в стандарте AMPS 832 частотных канала, а в стандарте D-AMPS за
счет применения МДВР каналов в три раза больше, т.е. 2496.
Распределение частот расширенного плана между оператора-
ми показано на рис. 1.14. Буквой R обозначены резервные полосы
частот. Частотный план каждого из двух операторов подразделяет-
ся на 21 группу, содержащую 15 каналов трафика и один канал
управления. Канальным группам присваиваются номера 1А, 2А, ЗА,
4А, 5А, 6А, 7А; 1В, 2В....7В; 1С, 2С, ... 7С. Разделение каналов на
группы задается в виде карт распределения каналов, в которых
записываются номера каналов по группам. В заголовке карты запи-
сывают номера групп.
34
Частота, МГц 825 835 845 846,5 849 851
Прием БС А А В А В R
Номер 1 333 666 716 799
канала 991 1023
Передача БС А А в А В R
Частота, МГц 869 670 880 890 891,5 894 896
Рис. 1.14. Распределение частот между операторами
в стандарте AMPS/D-AMPS
Фрагменты таких карт для основного плана частот представле-
ны в виде табл. 1.2 (для системы А ) и табл. 1.3 (для системы В). В
группу входят каналы трафика с номерами Zk -к + 2М при
/ =0;1; 2;...15, где к - номер первого канала трафика в группе, за-
писанный в первой строке табл. 1.2 и во второй строке табл. 1.3.
В группах 5С, 6С и 7С по 14 каналов трафика. Обычно использует-
ся частотная карта с указанием номеров всех каналов.
Таблица 1.2
1А 2А 7А 1В 7В 1С ... 4C 5С ес. 7C
1 2 7 8 14 15 18 19 20 21
22 23 28 29 35 36 39 40 41 42
274 275 280 281 287 288 291 292 293 294
295 296 301 302 308 309 312 — —
313 314 319 320 324 325 330 331 332 333
Структура частотного плана ориентирована на наиболее рас-
пространенные технические решения: кластер с размерностью 7;
число частотных каналов в соте Nlc = 45; в БС можно объединять
до 16 частотных каналов. В этом случае в одной соте выбираются
канальные группы ;А + ;В + jC, где целое число j одинаковое для
трех групп, например, 1А +1В + 1С. Частотный разнос между со-
седними каналами в одной соте Составляет F = 7-30 = 210 кГц. Если
в соте требуется большее число каналов, то разнос между ними
35
можно уменьшить до 90 кГц, например, выбрав канальные группы
1А+1В + 1С + 4А + 4В + 4С.
Таблица 1.3
1А 2А 7А 1В 7В 1С 4С 5С ес 7С
334 335 340 341 347 348 351 352 353 354
355 356 361 362 368 369 372 373 374 375
•
649 650 655 656 662 663 666 — — —
Цифровые стандарты находят все большее распространение;
благодаря своим достоинствам. Как известно, цифровые системы
потенциально обладают большей помехозащищенностью в срав-
нении с аналоговыми. В данном случае, при одинаковом качестве
приема, в цифровых ССПСЭ можно обеспечить меньшее допус-
тимое отношение сигнал-интерференция, чем в аналоговых. Со-
гласно параметрам систем GSM допустимое отношение сигнал-
интерференция на входе Приемника фс_и= 9 дБ; для NMT-450
О’с_и= 15 дБ. Следовательно, в цифровой системе GSM допусти-
мая мощность интерференционной помехи на входе приемника
больше, чем в аналоговой системе NMT-450. Поэтому в цифровых
системах можно использовать кластеры с меньшей размерностью,
что, в свою очередь, повышает частотную эффективность цифро-
вых систем.
Заметим, что в ССПСЭ стандарта GSM обеспечено самое ма-
лое допустимое значение ф._и среди систем второго поколения.
Это достигнуто за счет определенных технических решений. Для
сравнения в стандарте D-AMPS ф...и = 16 дБ.
Еще одно важное свойство цифровых систем заключается в
том, что в них применимы технические решения, обеспечивающие
информационную безопасность, а именно аутентификацию и сек-
ретность абонентов, секретность перемещений абонентов и сек-
ретность передаваемой информации.
Цифровые системы различного назначения, такие как ССПСЭ,
БПСЭС, СПРВ и ССС, могут быть объединены в единую сеть связи
с интеграцией служб (ЦСИС) и работать с использованием интел-
лектуальных сетей.
36
1.4. Эффективное использование ресурсов
ретранслятора
Использование полосы частот. Частотный спектр - это огра-
ниченный ресурс. Поэтому его эффективное использование - одна
Йз основных задач при проектировании любой системы радиосвязи.
В? Для традиционных аналоговых радиосистем «точка - точка»
спектральная эффективность, как правило, определяется числом
ггелефонных каналов в стволе. Ширина полосы частот ствола
обычно стандартизована. Эталонная ширина полосы равна 28 МГц
Цця магистральной радиорелейной линии (РРЛ) и 36 Мгц для спут-
шковой системы связи. Поэтому фактически спектральная эффек-
тавность определена как число телефонных каналов в определен-
Ирй; полосе частот.
Вдо-Для традиционных цифровых радиосистем «точка - точка»
спектральная эффективность [у^, (бит/с)/Гц] определяется выра-
жением
Ксп=Вб/П, (1.1)
где Вб - скорость передачи битов; П = (1,1...1,2)Вб - ширина по-
лосы частот ствола.
В цифровых системах на один телефонный канал приходится
значительно большая полоса частот, чем в аналоговых системах.
При использовании стандартной ИКМ один телефонный канал пе-
редается со скоростью 64 кбит/с и требует минимальной полосы
частот 64 кГц.
Для повышения спектральной эффективности применяют мно-
гоуровневую и многопозиционную модуляцию. В этом случае поло-
са частот системы /7= 1,2 Вс, где символьная скорость
В = Вб
с iog2MM ’
’Ми - число уровней (позиций) модуляции.
Для традиционных цифровых радиосистем «точка - точка» с
^„-уровневой модуляцией спектральная эффективность
Yen = вб;П «1одг Мм. (1.2)
В традиционных системах спектральная эффективность оцени-
вает эффективность использования полосы частот радиоканала,
который обслуживает только одного пользователя на всей терри-
тории, где проходит данная линия радиосвязи. Этот пользователь,
37
как правило, передает многоканальный телефонный сигнал. Рабо-
та нескольких радиолиний в общих полосах частот возможна при
условии решения проблемы электромагнитной совместимости
(ЭМС). Интерференционная помеха от другой радиолинии рас-
сматривается как внешняя помеха. Проблема ЭМС решается глав-
ным образом за счет избирательности остронаправленных антенн
и значительного территориального разнесения трасс.
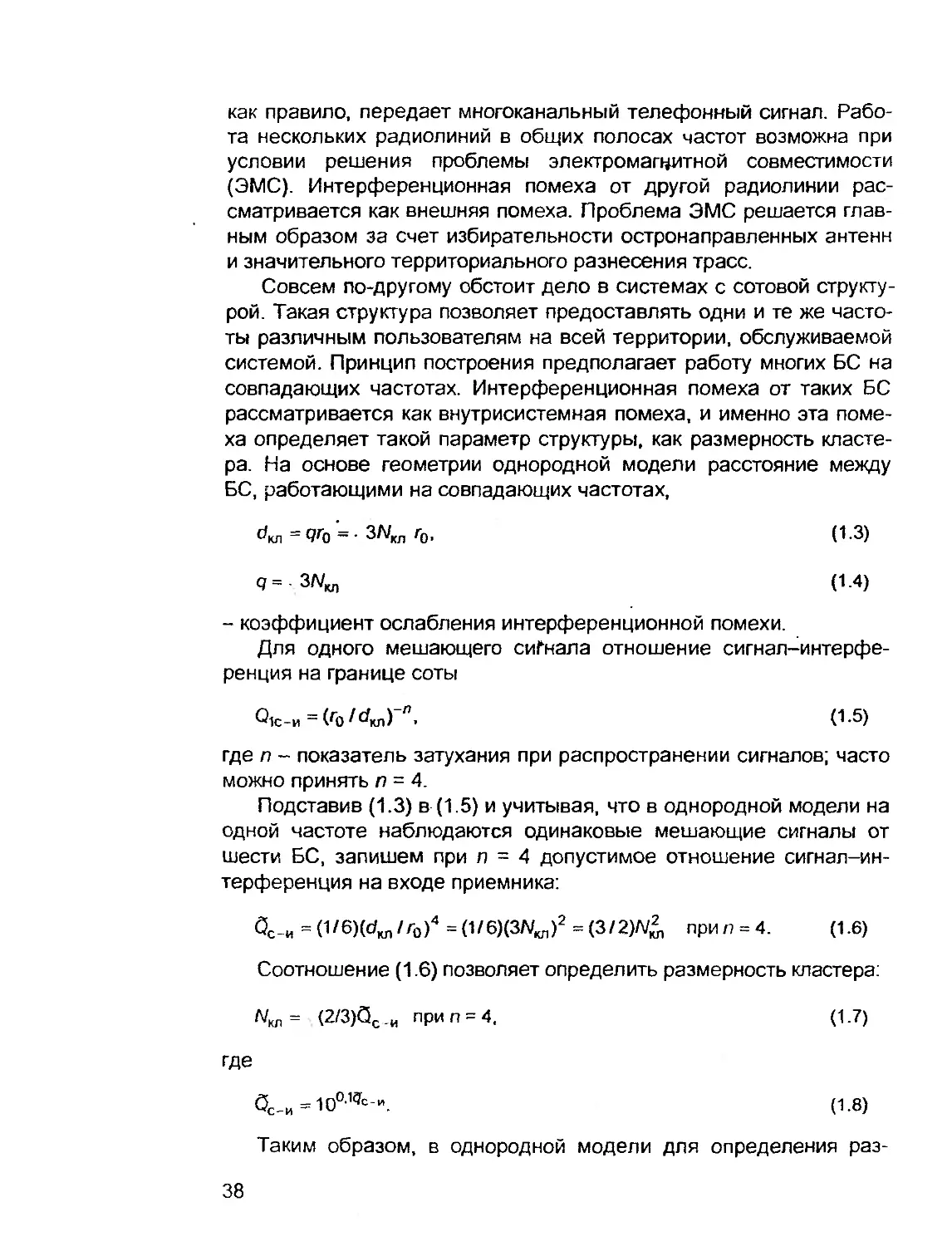
Совсем по-другому обстоит дело в системах с сотовой структу-
рой. Такая структура позволяет предоставлять одни и те же часто-
ты различным пользователям на всей территории, обслуживаемой
системой. Принцип построения предполагает работу многих БС на
совпадающих частотах. Интерференционная помеха от таких БС
рассматривается как внутрисистемная помеха, и именно эта поме-
ха определяет такой параметр структуры, как размерность класте-
ра. На основе геометрии однородной модели расстояние между
БС, работающими на совпадающих частотах,
Фл ~ г0. (ТЗ)
q=3WKn (1.4)
- коэффициент ослабления интерференционной помехи.
Для одного мешающего сигнала отношение сигнал-интерфе-
ренция на границе соты
а1с-и=('Ь/сГкл)-п, (1.5)
где п - показатель затухания при распространении сигналов; часто
можно принять л = 4.
Подставив (1.3) в (1.5) и учитывая, что в однородной модели на
одной частоте наблюдаются одинаковые мешающие сигналы от
шести БС, запишем при л = 4 допустимое отношение сигнал-ин-
терференция на входе приемника:
Ос-и = (1/6)^ /г0)4 = (1 )2 = (3/2)А/^ при л = 4. (1.6)
Соотношение (1.6) позволяет определить размерность кластера:
А/кл = (2/3)0с при п = 4, (1.7)
где
Ос-И =Ю0-19си. (1.8)
Таким образом, в однородной модели для определения раз-
38
мерности кластера необходимо знать только допустимое отноше-
ние сигнал-интерференция, которое, в свою очередь, определяет
система (стандарт). Теперь можно найти число частотных каналов
в соте:
n^NflN^. (1.9)
Величина п, получила названия «радиоемкость соты» и «ка-
нальная эффективность». Именно по значению канальной эффек-
тивности можно оценить, насколько эффективно данный стандарт
использует выделенную полосу частот.
В цифровых системах с сотовой структурой для повышения ка-
нальной эффективности применяют многостанционный доступ; в
системах второго поколения - многостанционный доступ с времен-
ным разделением (МДВР). При МДВР число каналов связи в соте
пса = п/^МД. (1-Ю)
где Кмд - число каналов связи, организованных за счет МДВР в од-
ном частотном канале.
Ин тегральная эффективность сотовой системы
Yx - A: /(^sSc), (1-11)
щеПъ - используемая полоса частот системы, Гц; Sc - площадь
соты, м; Ас - телефонная нагрузка в соте, Эрл (см. § 7.2). Интеграль-
ная эффективность оценивается количеством эрлангов на 1 Гц в од-
ном квадратном метре.
Итак, для оценки того, насколько эффективно в системе ис-
пользуется спектр, применяют для традиционных цифровых систем
показатель спектральной эффективности (1.1) и (1.2), а для систем
с сотовой структурой показатели канальной эффективности (1.9) и
(1.10) и интегральной эффективности (1.11).
Применение многостанционного доступа (МД). Под МД по-
нимают такой режим работы системы, при котором имеет место
одновременная работа нескольких станций через общий ретранс-
лятор. МД сначала использовался только в спутниковых системах
связи. Позже МД стали применять на местных и внутризоновых
РРЛ. Можно считать, что благодаря МД появились ЦРРЛ «точка -
много точек».
Применение МД позволяет обеспечить эффективное использо-
вание ресурсов ретранслятора: частотного, временного, энергети-
ческого. Различают МД с частотным разделением (МДЧР), с вре-
менным разделением (МДВР) и с кодовым разделением (МДКР).
В общем случае в сети с МД через общий ретранслятор могут ус-
39
танавливаться дуплексные соединения по принципу «каждый с ка-
ждым» и поддерживаться одновременно несколько линий связи
для каждого абонента сети в течение одного сеанса связи.
В ССПСЭ нет ретранслятора в традиционном понимании. Або-
ненты имеют АС и поддерживают связь между собой через БС. Ре-
жим МД относится только к БС. Для каждой АС в течение данного
сеанса связи поддерживается лишь одна линия связи.
При МДЧР полоса частот ретранслятора делится между стан-
циями системы, как показано на рис. 1.15. На этом рисунке обозна-
чено: Пр - полоса частот ретранслятора; А, - полоса частот, отво-
димая для /-й станции; К - число станций в системе с МД, / = 1, 2,
3...К; ДА, - защитный частотный интервал.
Рис. 1.15. К пояснению принципа МДЧР
При МДЧР сигнал ретранслятора описывается такими парамет-
рами, как скважность q = Лр/^fv и пик-фактор суммарного сиг-
I
нала. Используются две модели суммарного сигнала. При большом
числе каналов сигнал с МДЧР представляют как гауссовский шум с
равномерной спектральной плотностью в полосе частот ретрансля-
тора. При малом числе каналов применяют четырехсигнальную
модель. Сигнал с МДЧР рассматривается как аддитивная сумма
нескольких независимых немодулированных гармонических коле-
баний, частоты которых выбраны так, что продукты перекрестной
модуляции различных порядков не совпадают по частоте и могут
быть разделены фильтрами. Например, это синусоидальные коле-
бания с частотами f0; f0+ F, f0 + 2F, f0 + AF.
Минимальное число гармонических колебаний, при котором в
ретрансляторе образуются все характерные взаимные помехи,
равно трем, четвертый сигнал - калибровочная синусоида. При
этом средняя мощность суммы четырех этих синусоид должна
быть равна средней мощности суммарного сигнала, а их амплиту-
ды должны быть одинаковы.
Каждая система связи, использующая МДВР, имеет свою струк-
туру опорных и информационных пакетов. Для определенности на
40
Емс. 1.16,а представлен кадр системы Интелсат. В ССПСЭ сохра-
1яются те же принципы (особенности структур МДВР для каждого
тандарта будут обсуждены в гл. 8). При МДВР используется вре-
ЕУченное разделение сигналов, передаваемых на одной несущей.
Зрганизуется кадр передачи. Такой кадр на ретрансляторе обра-
|уют принятые сигналы и затем он передается по линии «вниз».
Длительность кадра выбирают по определенным принципам, как
|равило, кратной периоду дискретизации в кодере. Так, при исполь-
зовании стандартной ИКМ период дискретизации равен 125 мкс и в
[ряде спутниковых систем, например в Интелсат, выбрана длитель-
ность кадра 2 мс. В ССПСЭ стандартная ИКМ со скоростью пере-
гдачи 64 кбит/с для одного телефонного канала не используется,
[поскольку в этом случае требуется слишком широкая полоса частот
ща один речевой канал.
к В спутниковых системах с МДВР назначают центральные
^опорные) и периферийные земные станции (ЗС). Между всеми ЗС
распределяется такой ресурс ретранслятора, как длительность
дадра (Тк). Кадр делят на окна. В каждом окне передается инфор-
мационный пакет одной ЗС. Центральные станции (основная и ре-
зервная) излучают опорные пакеты - соответственно ОП1 и ОП2.
Периферийные ЗС передают пакеты ИП1-ИПЛ7. Между окнами
^предусмотрен защитный временной интервал (ЗВИ). Часть пакета,
^называемую интервалом управления, отводят для передачи сигна-
лов синхронизации, а также сигналов контроля и управления сис-
темой. Для того чтобы удерживать пакет ЗС на своем месте кадра,
^предусмотрена кадровая синхронизация системы. Синхросигнал
передают либо вместе с информационным (в общем пакете), либо
^отдельно, как это имеет место в системах с выделенной синхрони-
зацией.
Сигналы кадровой синхронизации передает ведущая земная стан-
ция в ОП1. Опорный пакет служит для установки начала кадра и для
управления системой кадровой синхронизации. Структура ОП
(рис. 1.16,6) включает интервал управления и информационную часть.
Г" Центральная ЗС (или БС) передает в ОП сигналы ядровой
синхронизации (КС); сигналы синхронизации модемов(В{<Н - вос-
становление когерентной несущей) и тактовой синхронизации (ТС),
а также служебные сигналы.
Информационные пакеты (рис. 1.16,в) содержат преамбулу и
информационную часть. Структура преамбулы в основном повто-
ряет структуру интервала управления опорного пакета, а информа-
ционная часть делится в соответствии с числом передаваемых ка-
налов на субпакеты №1, №2,...,№ п.
41
a — структура кадра; б—структура ОП; в —- структура ИП
Каждый ИП присваивается определенной передающей ЗС, а
каждый субпакет (для ее определенного корреспондента) - прием-
ной ЗС. В общем случае в преамбулу могут быть введены сигналы
опознавания, указывающие адреса ЗС, но часто адресность обес-
печивается системой кадровой синхронизации. Различаются два
основных режима работы системы кадровой синхронизации: пер-
вичное вхождение и стационарная работа.
Кодовое разделение сигналов основано на применении шумо-
подобных сигналов (ШПС). Основная характеристика ШПС - база
сигнала
Вшпс = шпс/®б • О-12)
где ДРШпс ~ ширина спектра ШПС.
База сигнала характеризует расширение спектра ШПС (расще-
пленного сигнала) в сравнении со спектром модулирующих им-
пульсов.
Для получения ШПС выполняется прямое расширение спек-
тра частот с помощью псевдослучайной последовательности
(ПСП) по схеме рис. 1.17. Информационный импульсный сигнал с
выхода АЦП сначала модулирует по фазе импульсную последо-
вательность генератора ПСП (ГПСП) в фазовом модуляторе ФМ1,
затем составной сигнал поступает на ФМ2 - модулятор СВЧ пе-
редатчика. УСПд - устройство синхронизации передатчика. Сиг-
налы (U) в точках а,б,в схемы и фаза СВЧ сигнала <р в точке г по-
казаны на рис. 1.18.
ФМ1
ФМ2
Рис. 1.17. Функциональная схема формирования ШПС
Импульсная последовательность генератора ПСП имеет сле-
дующие параметры: Гпсп - период повторения ПСП; т0 - длитель-
ность бита ПСП; Л/псп - число битов ПСП. Выбирается период по-
вторения ПСП равным длительности бита передаваемого инфор-
мационного сигнала: Гпсп = Т. В радиоканале модулированный по
фазе ШПС получил расширение спектра по сравнению с модули-
рующим сигналом в Л/псп = 77т0 раз.
Используя определенный ансамбль ортогональных сигналов
ПСП, можно каждому абоненту присвоить соответствующий (або-
нентский) ансамбль сигналов (или кодовых последовательностей).
Рис. 1.18. Диаграммы сигналов передатчика
43
Это дает возможность исключить интерференционные помехи
между сигналами при приеме. Поскольку сигналы от разных АС су-
щественно различаются по форме, возможно их разделение. На
БС передаваемые сигналы снабжены адресом АС назначения.
Для приема используется корреляционный приемник (рис 1.19).
Схема приемника содержит типовые блоки: смеситель (СМ), УПЧ,
демодулятор (Д), регенератор (Р), ГПСП, для синхронизации кото-
рого предназначено устройство синхронизации приемника (УСПр).
Коррелятор вычисляет корреляционные функции для последова-
тельности радиоимпульсов. Примеры автокорреляционных функ-
ций (АКФ) даны на рис. 1.20, где R(r) - АКФ.
В системе с МДКР выбирают ПСП с определенными взаимо-
корреляционными функциями (ВКФ). Важны также простота реали-
зации устройств формирования сигналов. Поэтому преимущест-
венно используются линейные ПСП. Для расширения объема ан-
самбля сигналов применяют составные ПСП, сформированные на
основе М-последовательностей и функций Уолша.
Метод МДКР получил распространение в последние годы, в пер-
вую очередь в мобильных наземных и спутниковых системах. Основ-
ные достоинства его сводятся к тому, что во-первых, он позволяет
выполнять эффективное управление радиоресурсами системы. Во-
вторых, при расширении спектра «сигнала уменьшается спектральная
плотность его мощности, что уменьшает помеху, создаваемую этим
сигналом. Это очень важно для любой системы, но особенно акту-
ально для глобальных спутниковых систем, которые могут создавать
помеху на всей территории Земли, видимой с ИСЗ.
Применение методов МД в ССПСЭ. В соте одновременно ра-
ботают несколько АС, причем каждая АС работает со своим пере-
датчиком и своим приемником на БС. Имеет место мультиплекси-
рование сигналов в антенне. Этот классический вариант работы по
частотному плану часто приравнивают к МДЧР.
Рис. 1.19. Функциональная схема приема сигналов МДКР
44
Рис. 1.20. Модулирующий импульс (а), его авторреляционная функция (б)
и АКФ ПСП (в)
Метод МДВР всегда используют в ССПСЭ цифровых стандар-
тов. Только применяя МДВР, можно обеспечить значение каналь-
ной эффективности в соте, сопоставимое с таковым в системах
аналоговых стандартов. Использование МДВР позволяет увели-
чить число каналов связи в системе по сравнению с числом час-
тотных каналов (например, для стандарта GSM - в 8 раз).
Метод МДКР применяется в системах второго поколения, про-
гнозируется его широкое распространение в системах третьего по-
коления.
Совместное использование МДВР и МДКР в системах третьего
поколения позволит значительно увеличить емкость системы
45
ГЛАВА2
ПРИНЦИПЫ ЦИФРОВОЙ ПЕРЕДАЧИ
АНАЛОГОВЫХ СИГНАЛОВ
2.1. Вероятностные характеристики речевого сигнала
Речевым сигналом будем называть электрическое колебание на
выходе электроакустического преобразователя (микрофона) при
действии на этот преобразователь акустической волны, создавае-
мой голосом человека. В дальнейшем рассмотрим это колебание
на конечном или бесконечном интервале времени [f0, t0 + 7], где t0 -
момент начала наблюдения, а Г - длина интервала наблюдения.
Мгновенные значения данного колебания, зарегистрированные на
интервале наблюдения в испытании с номером к, обозначим сим-
волом t/w(0, t0 < t < t0 + T, и назовем реализацией речевого сигнала.
Если же рассматривается одна из возможных реализаций (любая),
то верхний индекс (к} будем опускать и писать u(t), tQ<t<t0+ Т.
Представляется достаточно очевидным, что человек, слушающий
речь говорящего человека, не может наверняка предсказать то, что
скажет последний через полминуты, через минуту и т.д. Следова-
тельно, мгновенные значения речевого сигнала не могут быть пред-
сказаны точно. Вместе с тем мы также знаем, что речевой сигнал
конкретного человека обладает вполне определенными свойствами
(признаками), позволяющими узнавать говорящего, не видя его. На
языке теории случайных процессов это можно выразить следующей
фразой: речевой сигнал конкретного человека имеет статистические
(усредненные) свойства, которые оказываются устойчивыми во вре-
мени (голос знакомого можно узнать после многолетней разлуки).
Непредсказуемость и наличие статистической устойчивости
свойств являются наиболее важными причинами того, что речевой
сигнал приходится рассматривать как случайный процесс. Нельзя
описать речевой сигнал даже одного человека какой-либо детерми-
нированной функцией времени. Одно слово или одна фраза отобра-
жается как одна реализация электрического колебания; даже одна и
та же фраза может быть произнесена по-разному и, следовательно,
46
будет представлена разными реализациями. Невозможно пересчи-
тать все разные реализации речевого сигнала даже одного человека.
С точки зрения слушающего появление той или иной фразы (или со-
ответствующей ей реализации речевого сигнала) можно рассматри-
вать как случайное событие. Поэтому при решении многих задач
теории и техники связи полезно хотя бы мысленно представить ре-
чевой сигнал как множество (совокупность, ансамбль) всех разных
его реализаций на интервале наблюдения и какой-либо способ зада-
ния вероятностей появления этих реализаций при проведении на-
блюдений над этим сигналом. Таким образом, мы вынуждены рас-
сматривать речевой сигнал как случайный процесс. Поэтому в даль-
нейшем будем обозначать речевой сигнал L/(t), t0 < t < t0 + Г, если
речь идет о речевом сигнале как о случайном процессе.
Подчеркнем, что три разных обозначения, введенные выше, в
дальнейшем будут активно использоваться.
Итак, мы вынуждены признать, что речевой сигнал математиче-
ски можно описать только как случайный процесс. Математическое
описание или математическая модель этого сигнала необходимы
для того, чтобы наилучшим способом (с максимально необходи-
мым качеством при минимально возможных требованиях к обору-
дованию передачи) передавать эти сигналы в системах и сетях
связи с подвижными объектами.
Мы полагаем, что общие способы описания случайного процес-
са читателю знакомы, например, в объемах учебников (1, 2]. В [1]
также можно найти некоторые начальные сведения о речевом сиг-
нале как о случайном процессе. В этом параграфе приведем до-
полнительные сведения о вероятностных характеристиках речевых
сигналов, которые являются необходимыми для правильного по-
нимания принципов передачи этого одного Лз важнейших сигналов
в системах связи с подвижными объектами:
На рис.2.1,а и б соответственно приведены типичные реализа-
ции речевого сигнала для двух частных случаев: при произнесении
гласного звука Я (вокализованная речь, гласный звук, для этого
фрагмента примем обозначение Г) и при произнесении шипящего
звука Ш (невокализованная речь, согласный звук, для этого фраг-
мента принимаем обозначение С). Масштаб времени по оси абсцисс
на этих рисунках одинаков, длительность интервала наблюдения
составляет 20 мс. Визуальное сравнение этих реализаций позволяет
сделать следующий вывод: разные звуки представляются реализа-
циями речевого сигнала, скорость изменения мгновенных значений
которых может существенно различаться, шипящие звуки представ-
ляются реализациями с быстрыми изменениями мгновенных значе-
ний, гласные звуки - более гладкими реализациями.
47
Рис. 2.1. Реализации речевого сигнала для гласных и согласных звуков:
а - фрагмент реализации звука Я; б - фрагмент реализации звука Ш
На рис. 2.2 приведена реализация речевого сигнала при про-
изнесении фразы «На трех китах». Длительность интервала на-
блюдения здесь составляет 1044 мс. Этот рисунок иллюстриру-
ет еще одну особенность речевого сигнала - наличие пауз в
разговоре представляется нулевыми отрезками в реализации
речевого сигнала. В действительности обычно речевой сигнал
формируется при наличии фонового акустического шума, кото-
рый также приходится описывать как случайный процесс, дис-
персия которого, однако, значительно меньше дисперсии рече-
вого сигнала. Реализация фразы «На трех китах» произнесена
при наличии окружающего акустического шума. Таким образом,
на интервалах наблюдения достаточно большой длительности
реализации речевого сигнала состоят из сегментов (отрезков)
активной речи и пауз или фонового шума.
Отмеченные три особенности реализаций речевого сигнала
оказываются важными для экономного и эффективного пред-
ставления речевого сигнала при его передаче по современным
цифровым системам и сетям передачи. Практическое использо-
вание этих особенностей будет проиллюстрировано в этой гла-
ве далее.
Описание речевого сигнала как случайного процесса фактически
означает построение вероятностной модели этого процесса.
48
Рис.2.2. Реализации речевого сигнала при наличии сегментов активной
речи и пауз
Задача построения данной модели является очень важной как
для теории, так и для техники передачи таких сигналов по цифровым
системам передачи. Несмотря на то, что к настоящему времени
имеется много вариантов решений, эта задача остается актуальной
и в настоящее время. Здесь мы ограничимся только некоторыми по-
лезными результатами, которые будут использованы в последующих
разделах книги. Для читателя, желающего более глубоко ознако-
миться с имеющимися результатами и их использованием в технике
систем связи с подвижными объектами можно рекомендовать [3].
Наиболее точной математической моделью речевого сигнала
является нестационарный случайный процесс с меняющимися во
времени дисперсией и формой спектральной плотности мощности.
Такая модель обеспечивает возможность построения наиболее
эффективных систем передачи этих сигналов. Однако и эта модель
и получающиеся наилучшие системы передачи оказываются тех-
нически достаточно сложными даже для современных возможно-
стей цифровой микропроцессорной техники. Поэтому современные
системы передачи построены на основе более простой и менее
точной вероятностной модели речевого сигнала как стационарного
случайного сигнала. В этом случае приходится Ограничиваться ве-
роятностными характеристиками сигнала, которые являются фак-
тически усредненными характеристиками нестационарной модели.
Второе существенное упрощение модели речевого сигнала состоит
в том, что стационарный процесс, выбираемый в качестве модели
этого сигнала, принимается гауссовским, хотя на самом деле это
не так. Это вынужденное решение принято потому, что только для
гауссовских процессов удалось найти эффективные решения мно-
гих задач экономного цифрового представления и передачи.
Известно (1, 2], что вероятностная модель стационарного гаус-
совского процесса (7(f) полностью определяется его математиче-
ским ожиданием
49
гщ = \utW(ut;t)dut =M{U(t)} (2.1)
-O0
и ковариационной функцией
К(т)= f Iu' ~^]lui^-m^W(ut.utJ,x;t,t + i)dutdut+, = а1 2Я(т), (2 2)
— СО
— DO < Т < +со.
Здесь введено несколько важных обозначений, на которые обя-
зательно следует обратить внимание: W(ut;f) - одномерная плот-
ность вероятности случайного процесса U(t) для момента времени
t; W(u„ ut.t; t, f+т) - двумерная плотность вероятности значений это-
го процесса для двух моментов времени t и t + т; Я(т) - коэффици-
ент корреляции или нормированная ковариационная функция этого
процесса; о2 - дисперсия процесса. Для стационарного процесса
эти функции не зависят от времени, т.е.
( о
W(ut;t) = г• - extf
у2то2 I 2g
= W(ut),
1 1
W(ut,ut+x-t.t + t)= —- exp< - x
2n,o2[1-R2(T)] [2g2[1-R2(t)]
X|(uf -mt)2-R(x)(ut -mt)(ut+x -m,) + (uf+t -m,)2J.
(2.3)
(2.4)
Совместная плотность вероятности гауссовского процесса для
трех, четырех и так далее моментов времени также может быть
записана в виде формулы, аналогичной (2.4), если известны мате-
матическое ожидание т, и ковариационная функция К(т). Последо-
вательность таких многомерных распределений и является полной
вероятностной моделью процесса. Зная эти распределения (любой
размерности!), можно решить любую задачу, в которой приходится
рассматривать этот случайный процесс.
Для речевого сигнала практически всегда можно принять, что ма-
темагическое ожидание равно нулю, поскольку полезная информация
речи содержится в отклонениях разного знака акустического давления
от его среднего значения, так что электрический сигнал, получаемый в
результате преобразования этого давления, обычно имеет среднее
значение, равное нулю. Поэтому для процесса U(t) в дальнейшем бу-
дем полагать, что mt = 0 на всем интервале наблюдения. Тогда един-
ственной функцией, которая полностью определяет математическую
модель речевого сигнала, является ковариационная функция Л.'(т).
Ковариационная функция характеризует скорость изменения
мгновенных значений процесса во времени. Поэтому эта функция
дает описание процесса во временной области. В теории и технике
передачи сообщений широко используется описание сигналов и в
частотной области. Основной характеристикой любого случайного
процесса в частотной области является спектральная плотность
мощности, которую можно определить как прямое преобразование
Фурье ковариационной функции:
S(<o) = |к(т)е_'2яЛЛ = с2 ^RWe~12:lfxdT, -m<f<+m. (2.5)
——СО
Справедливо и обратное преобразование Фурье для этой пары
функций:
+оо
Х(т) = js(f)ei2’ftdf,
' —СО
- со < f < + со.
(2.6)
Из последних двух равенств следует, что спектральная плот-
ность мощности также дает полное вероятностное описание гаус-
совского случайного процесса, поскольку позволяет найти ковариа-
ционную функцию и, следовательно, распределение любой раз-
мерности. Эти две функции являются важнейшими вероятностны-
ми характеристиками речевого сигнала.
В математической статистике разработаны различные способы
экспериментального измерения вероятностных характеристик слу-
чайных процессов, если имеется возможность записывать и обра-
батывать реализации этих процессов на интервалах наблюдения
достаточно большой длительности. Эти способы могут быть ус-
пешно применены для речевого сигнала, в результате обработки
реализаций которого находят оценки одномерной плотности веро-
ятности, ковариационной функции и спектральной плотности мощ-
ности. Оценки затем обычно аппроксимируют подходящими мате-
матическими выражениями, получая в результате математические
модели, которые могут быть использованы при решении любых за-
дач. Для речевого сигнала таких оценок и аппроксимирующих их функ-
ций построено очень много. Здесь приведены лишь наиболее часто
используемые модели [3]:
• для одномерной плотности вероятности
W(u) =
0.6
ср <2
ехр
.2 И 0,4 ( и2 )
+ еХР " 2
°р J ап'<2 2сп>
Ор = 1,56с, сп = 0,15с,
(2.7)
51
где ор, оп - среднее квадратическое значение речевого сигнала
для сегмента речи и сегмента паузы соответственно;
• для коэффициента корреляции
/?(т) = e'a^cos2nf0T, о к 1200с1, Го = 5ООГц; (2.8)
• для спектральной плотности мощности
S(w)= 2аа2
________1_______
а2 + 4л2(Г + Г0)2
_______1_______
+ а2 + 4л2(г_Го)2
(2-9)
а-1200 с'1, Го =500 Гц.
Графики этих функций представлены на рис. 2.3, 2.4, 2.5.
Рис. 2.3. Одномерная плотность вероятности речевого сигнала
(Ор = 1,56; стп = 0,16; о = 0,6ор + 0,4ап = 1)
Негауссовская плотность вероятностей (2.7) является смесью
экспоненциального (первое слагаемое) и гауссовского (второе сла-
гаемое) распределений. Первое слагаемое можно рассматривать
как аппроксимацию соответствующей плотности сигнала активной
речи, а второе слагаемое - плотности фонового шума. Коэффици-
енты 0,6 и 0,4 фактически являются вероятностями того, что в
наудачу взятый момент времени сегмент речевого сигнала принад-
лежит активной речи или паузе. Численные значения параметров
смеси выбраны таким образом, чтобы средняя (на большом интер-
вале времени) дисперсия ст речевого сигнала была равна 1. На-
помним, что площадь между графиком плотности вероятности и
52
осью абсцисс равна 1; из рис. 2.3 следует, что вероятность того,
что мгновенное значение речевого сигнала по модулю превысит
значение umax = За пренебрежимо мала (равна площади под "хво-
стом" плотности и не превышает 0,05).
Рис. 2.4. Коэффициент корреляции речевого сигнала
(а =1200 с’1, 7о=5ООГц)
На рис. 2.4 можно указать интервал корреляциитк = 2,0-10~3с
речевого сигнала, вне которого модуль коэффициента корреляции не
превышает значения 0,1, и интервал высокой корреляции
твк =0,2 -10-3 с , на котором коэффициент корреляции оказывается
более 0,7.
Следует отметить, что на рис. 2.5 изображен график физической
(односторонней) спектральной плотности мощности речевого сигнала,
которая определена только для положительных значений частоты и
равна .удвоенному значению математической (двусторонней) спек-
тральной плотности, определяемой формулой (2.9). На этом рисунке
также можно указать верхнюю граничную частоту fB » 3400 Гц , выше
которой значения спектральной плотности пренебрежимо малы1. Мож-
но считать, что в полосе частот от 0 до 4 сосредоточена основная до-
ля мощности речевого сигнала (более 95%).
Дисперсия о2 речевого сигнала обычно характеризует мощность
этого сигнала, которая может существенно изменяться при изменении
’ Эту частоту трудно определить однозначно. Указанное значение обычно при-
нимается по соглашению.
53
Рис. 2.5. Физическая спектральная плотность мощности речевого сигнала
(а = 1200 с'1, f0 = 500 Гц)
условий передачи (тихий или громкий голос, шепот, крик и т.д.).
При проектировании систем передачи речевого сигнала вводят
ограничения на эти изменения и определяют.динамический диа-
пазон О, дБ:
D = 10lg(o2ax/o<n). ' (2.Ю)
2.2. Цифровое представление и восстановление
речевого сигнала
Дискретизация и равномерное квантование. Все системы
связи с подвижными объектами второго поколения являются циф-
ровыми. Поэтому речевой сигнал, являющийся аналоговым сигна-
лом, в таких системах передается с помощью методов цифровой
модуляции. Соответствующая укрупненная структурная схема ли-
нии передачи представлена на рис. 2.6.
На входе и на выходе цифровой линии передачи в этой схеме
должен быть цифровой сигнал. Поэтому между «Источником речево-
го сигнала» и этой линией должен быть преобразователь «Аналого-
вый сигнал -> Цифровой сигнал» (АЦП).
Так как «Получателю речевого сигнала» должен быть представ-
лен сигнал в аналоговой форме, то между линией и получателем
также должен быть преобразователь «Цифровой сигнал -> Аналого-
вый сигнал» (ЦАП).
54
Рис. 2.6. Типичная схема цифровой линии передачи речевого сигнала:
ИРС - источник речевого сигнала; АЦП - аналогово-цифровой преобра-
цователь; ЦЛП - цифровая линия передачи; ЦАП - цифро-аналоговый
преобразователь; ПРС - получатель речевого сигнала
Эти два преобразователя являются важными элементами совре-
менных и будущих систем связи с подвижными объектами. Рассмот-
рим некоторые теоретические основы современных методов реше-
ния соответствующих задач, которые наиболее часто применяются
на практике.
Обычно преобразование аналогового сигнала U(t) в цифровой
(7ц(0 осуществляется в два этапа. На первом этапе выполняется
дискретизация по времени, в результате которой формируются от-
счеты i = .... -1,0,+1,... аналогового сигнала в дискретные мо-
менты времени с интервалом дискретизации 4 - = At. На втором -
квантование по уровню каждого отсчета, в результате которого не-
прерывная случайная величина Ц(,) преобразуется в дискретную
случайную величину С/д((,) с конечным числом возможных значений
{иак, к = 1,2,...,N} и распределением вероятностей
и\
Рк = P{UR(ti) = uRk} = Й«,1 ifdu, (2.11)
u
где - уровни квантования; ивк = (ик + 1/м)/2 - выходные уровни;
&и = ик - ик_1, ~ шаг квантования.
Квантование называют равномерным, если шаг квантования не
зависит от его номера к. При квантовании фактически происходит
замена аналоговой случайной величины Щ) дискретной случайной
величиной Цд((,) с ошибкой квантования e(Q = U(t,) - При
квантовании в соответствии с правилом (2.11) ошибка квантования
принимает значения из интервала [-Д1//2, +Д1//2] и является непре-
рывной случайной величиной, для которой обычно принимают рав-
номерное распределение на указанном интервале. В этом случае
ее среднее значение /И{е(/,-)} = 0 , а дисперсия о2 =(Дг/)2/12.
Уменьшая шаг квантования, дисперсию ошибки квантования можно
уменьшить до необходимого значения.
Интервал дискретизации д( обычно выбирается в соответствии
с теоремой отсчетов Котельникова [1], согласно которой частота
55
дискретизации Гд > 2fB = 2 • 3400 = 6800 Гц, где fB - верхняя гранич-
ная частота. Основными параметрами квантователя, устройства,
выполняющего операцию квантования, являются число N выход-
ных уровней и их значения ивк, шаг квантования*Ди. Значения этих
параметров стараются выбрать таким образом, чтобы при прочих
равных условиях минимизировать значение дисперсии al ошибки
квантования. Обычно выходные уровни представляются кодовыми
словами с л двоичными символами из алфавита А={0,1}, т.е. в
цифровой форме. Поэтому случайная последовательность
(ЗД), /=...,-1,0, + 1,...| является цифровой. Квантователь с ко-
довыми словами длиной п может иметь N = 2Л выходных уровней.
Часто последовательность квантованных отсчетов речевого
сигнала представляют в виде
илЪ) = иЪ) + е(Ъ). (2.12)
что позволяет ошибку квантования рассматривать как аддитивный
шум. В этом случае можно ввести еще один полезный параметр
квантователя, который называют отношением сигнал-шум кван-
тования (ОСШК, дБ):
ОСШК = 101д(ст2/ст2). » (2.13)
В частности, для первого стандарта цифровой передачи речево-
го сигнала были приняты следующие значения основных парамет-
ров преобразователя «Аналоговый сигнал Цифровой сигнал»:
п = 8, fB = 8 кГц. Получающийся при этом поток битов имеет ско-
рость 64 кбит/с. Для этих значений получена формула, связываю-
щая ОСШК, дБ, и число битов в кодовом слове [4]:
ОСШК = 6,02л+ а . (2.14)
где a = 4,77 для максимального значения и a - 0 для среднего зна-
чения этого отношения. Из этого равенства следует, что добавле-
ние каждого нового бита в кодовое слово улучшает отношение сиг-
нал/шум квантования на 6 дБ.
При проектировании систем передачи речевого сигнала вводят
ограничения на его возможные мгновенные значения, полагая, что
up,^i) = up,N ПРИ U(t,)>uN и (7д((,) = лд1 при U(tj)<u0. Передача
речевого сигнала по цифровой линии осуществляется путем по-
следовательной передачи кодовых слов, получаемых с выхода
квантователя. Такие системы передачи получили название систем
с импульсно-кодовой модуляцией (ИКМ) [1].
56
Пример. Пусть источник сигнала формирует последовательность независимых
случайных отсчетов с плотностью вероятности
(и/32, О s и < 8,
W{u) = { (2.15)
[О в противном варианте.
Средняя мощность такого сигнала определяется равенством’
«ft/} = fu2 “ du = 32.
1 ’ ° 32
Предположим далее, что входные уровни квантователя выбраны равными
{0,2,4,6,8}, а выходные уровни квантователя - равными абсциссам центров интер-
валов квантования (1,3,5,7}. Таким образом, уровни квантования расположены
равномерно в диапазоне возможных значений сигнала. В этом случае средняя
мощность ошибки квантования
( ,1 2 , 4 ,
М\е ] = ((и - 1)zlV(u)du + f (и - 3)zW(u)du +
О 2
6 J 8
+ J(u - 5) W(u)du + J (u - 7)z W{u)du = 0,333.
4 6
Теперь можно вычислить отношение сигнал-шум квантования:
(M{U2}\ ( 32 А
ОСШК = 101g z = 101g - = 19,82 дБ.
{М{е}) V 0,333 )
Так как распределение мгновенных значений сигнала не явля-
ется равномерным, то равномерное распределение уровней кван-
тования не является оптимальным.
Неравномерное квантование. Мощность ошибки квантования
можно уменьшить, если вместо равномерного использовать нерав-
номерное расположение уровней квантования. Чтобы пояснить/, как
найти наиболее эффективное расположение уровней квантования,
введем обозначение для характеристики квантователя следующим
образом:
Тогда дисперсию шума квантования можно записать в виде
+со т
Се = ^tu-fKB(u)]2W(u,ti)du='^ j[i/-uAft]2W(u,r,)du. (2.16)
-X. ’ *=1 ик_,
Из этого равенства следует, что для уменьшения дисперсии
шума квантования уровни квантования необходимо располагать
1 Мощность Р = г? R = и2, если R = 1 Ом.
57
более плотно в тех местах, где плотность вероятности речевого
сигнала имеет наибольшие значения. Уменьшение шага квантова-
ния приводит к уменьшению максимального значения ошибки
квантования. Там, где плотность вероятности .принимает меньшие
значения, шаг квантования можно увеличить, сохранив общее чис-
ло Л/ уровней квантования неизменным. Если плотность вероятно-
сти W(u,t,) известна, то можно найти оптимальное расположение
уровней квантования, которое обеспечивает минимальное значе-
ние дисперсии шума квантования при фиксированном значении N
[4]. Можно рекомендовать читателю самостоятельно вычислить
OCLUK для сигнала с плотностью вероятности (2.15) и квантователя
с входными уровнями {0; 4; 6; 7; 8} и выходными уровнями {2; 5; 6;
5; 7; 5}.
На практике неравномерное квантование осуществляется с помо-
щью последовательности преобразований, представленных на рис.
2.7 [5]. Здесь речевой сигнал сначала подвергается низкочастотной
фильтрации в фильтре низкой частоты с частотой среза fmax = 3,4 кГц
(для уменьшения помех из-за наложения спектров при дискретиза-
ции [1]). Затем осуществляются дискретизация и равномерное
квантование при большом числе разрядов п = 12. Наконец, выпол-
няется цифровая компрессия (сжатие диапазона мгновенных зна-
чений), при которой число разрядов в выходных словах снижается
до 8. Если биты каждого кодового олова выдаются на выход преоб-
разователя последовательно, то выходной поток битов имеет ско-
рость 64 кбит/с.
Компрессия осуществляется с помощью нелинейного безинер-
ционного преобразования v = fKOMn (и), где и - значение сигнала на
входе компандера, a v - соответствующее значение на выходе. В
современных системах связи с подвижными объектами наиболее
часто используются два закона компандирования: A-закон и и-закон.
Сжатие по A-закону определяется следующим нелинейным преоб-
разованием:
4пах = 3.4 кГц /о=8кГц л = 12
Рис. 2.7. Неравномерное квантование речевого сигнала:
ИРС - источник речевого сигнала; НЧФ- низкочастотная фильтрация;
РК - равномерное квантование; ЦК - цифровая компрессия
(компандирование)
58
Au
1 + In A
1 + ln(Ai/)
1 + lnA
при 0 < и <
1
при д < и < 1,
(2-17)
где А - параметр сжатия с типовыми значениями 86 (Северная
Америка) и 87,56 (Европа) для семибитовых речевых преобразова-
телей [3]. Максимальное значение и здесь должно быть нормиро-
вано к 1.
р-закон сжатия имеет вид
°-и-1- (218)
1п(1 + р)
где р - положительная постоянная с возможными значениями из
интервала от 50 до 300 [4]. Максимальное значение и здесь также
должно быть нормировано к 1.
Общим для обоих законов сжатия является то, что функция пре-
образования является линейной или близка к линейной и имеет наи-
большую производную при малых значениях аргумента и (речевого
сигнала) и является примерно логарифмической или логарифмиче-
ской при больших значениях. При восстановлении значений речево-
го сигнала в приемнике осуществляется декомпрессия с помощью
функций, обратных законам (2.17) и (2.18), что эквивалентно нерав-
номерному расположению уровней квантования.
Конечно, очень важно обеспечить передачу речевого сигнала с
требуемым качеством при минимально возможной скорости потока
битов на выходе преобразователя «Аналоговый сигнал —» Цифро-
вой сигнал». Поэтому было приложено много усилий, чтобы найти
такой оптимальный способ кодирования речевого сигнала. Здесь
мы приведем один важный теоретический результат для более
простого сигнала в виде последовательности независимых гаус-
совских величин с нулевым математическим ожиданием и диспер-
сией ст2, который известен как теорема кодирования К. Шеннона:
минимальное число битов на один отсчет при заданном значении
дисперсии ое2 ошибки представления определяется равенством
^’гр(°е) —
2 1од2(ст2 / о2),
0, ст2 > о2.
0<ст2<о2,
(2.19)
которое обычно называют нижней границей Шеннона для скорости
кодирования.
59
Следует отметить, что в соответствии с этой формулой при се2 > о2
требуемая скорость передачи равна нулю, те. ничего передавать
не нужно.
Формулу (2.19) можно записать иначе, выразцв дисперсию
ошибки квантования в децибелах через остальные величины:
10lg(4) = 10lg(2~2R,pc>2) = -2Rrp10lg(2) +10 lg(a2) = -6Rrp +101д(а2). (2.20)
Аналогичных соотношений для речевого сигнала не найдено.
Адаптивное квантование. Как уже отмечалось ранее, речевой
сигнал является нестационарным случайным процессом. Наиболее
простым признаком этого служит изменчивость дисперсии речевого
сигнала во времени. Результаты статистических измерений свиде-
тельствуют о том, что диапазон (2.10) возможных значений диспер-
сии может составлять 40 дБ и более. Очевидно, если не принять
каких- либо мер, то на интервалах времени, на которых уровень
сигнала низкий, относительная ошибка квантования 5(0 = е((,)/о
может иметь значительно большую дисперсию, чем на интервалах
с высоким уровнем сигнала. В результате качество цифровой пе-
редачи речевого сигнала существенно снижается.
Один из возможных способов устранения этого недостатка со-
стоит в том, чтобы применять адаптивное квантование, как это по-
казано на рис. 2.8. В этом случае шаг квантования изменяется в
соответствии с изменением текущего значения дисперсии сигнала.
Такой способ передачи речевого сигнала получил название
адаптивной ИКМ. Следует отметить, что в этом случае кроме кодо-
вых слов, представляющих цифровые отсчеты сигнала, необходимо
передавать значения оценок текущей дисперсии речевого сигнала,
которые являются фактически масштабирующими множителями.
Поскольку дисперсия сигнала изменяется сравнительно мед-
ленно, нет необходимости передавать значения ее оценок с той же
Рис. 2.8. Адаптивное квантование речевого сигнала
60
частотой, что и значения речевого сигнала. Обычно последова-
тельность отсчетов сигнала разбивается на блоки, для каждого
блока формируется только одна оценка текущей дисперсии.
На практике наиболее часто используется так называемая
адаптивная блочная ИКМ, предусматривающая следующие преоб-
разования. Отсчеты n-разрядного АЦП разбиваются на блоки по
Л/б„ отсчетов. В каждом блоке находится отсчет с максимальным
значением модуля. Для этого отсчета определяется номер к мак-
симального значащего разряда, который записывается в виде еще
одного двоичного кодового слова с т разрядами, представляющего
собой масштабирующий множитель. Все более старшие разряды
всех отсчетов данного блока будут нулевыми и их нет необходимо-
сти передавать. Поэтому все Л/бл отсчетов данного блока передают-
ся кодовыми словами только с к разрядами; к этим кодовым сло-
вам добавляется кодовое слова масштабирующего множителя. Ре-
зультирующая битовая скорость в такой системе передачи
R = fn(k+mlN6n). (2.21)
На практике часто используют следующие значения указанных
здесь параметров [3]: 4 = 8 кГц, л = 10...13, fc = 6...8, Л/бп = 8...16,
т = 6...8. Средняя скорость передачи при этом оказывается равной
32 .. 56 кбит/с при прочих равных условиях.
Векторное квантование. Рассмотренные выше способы не-
равномерного и адаптивного квантования принято называть ска-
лярными, поскольку кодированию по очереди подвергается каждый
отсчет речевого сигнала независимо от остальных отсчетов. Полу-
чающиеся при этом скорости кодирования расположены достаточ-
но далеко от границы Шеннона. Дальнейшего приближения скоро-
сти кодирования к границе можно добиться с помощью векторного
квантования, которое широко используется в цифровых сотовых
системах связи. Сущность его состоит в том, чтобы не квантовать
отдельные отсчеты сигнала последовательно один за другим, а
преобразовывать одновременно несколько отсчетов сигнала (блок)
в совокупность кодовых слов. Более высокая эффективность тако-
го преобразования (более низкая битовая скорость) по сравнению
со скалярным квантованием достигается за счет учета статистиче-
ской зависимости между отсчетами сигнала.
Задачу векторного квантования можно сформулировать следую-
щим образом. На входе квантователя формируется вектор
U(() = {6/(f,_W(in), ЦЦ~л/6п+1 отсчетов речевого сигнала с Л/6л
61
вещественными компонентами Uy,U2....(JNen, имеющими совм
плотность вероятности W[i/vi/2,...,uw ). При векторном квантов;
вектор Ufy превращается в другой вектор той же размерив
но с цифровыми компонентами URbUa2,...,UдЛ/бп. Такое преобразс
ние можно обозначить символом Q(-) и назвать оператором
ного квантования, так что Ц, (4) = Q{U (4)}- Эти обозначения М
наглядно проиллюстрировать для Л/бл = 2. В этом частном
пространство возможных значений входного вектора является
мерным и представляет собой плоскость. При квантовании это.:)
странство разделяют на ячейки, как показано на рис. 2.9.
Здесь произвольно выбраны ячейки СЛ в форме шестиугольн
кроме крайних ячеек, которые не ограничены. Общее число f
L = 37. В каждой ячейке выделен черной точкой вектор U^, комп
ты которого представляются кодовым словом из л = Под2П бит^
мые скобки обозначают ближайшее большее целое число). Эти^е
торы являются выходными для данного L-уровневого векго
квантователя. Все входные векторы U(4), попадающие в ячей
заменяются вектором U^.
Квантование вектора UffJ с Л/бл компонентами в вектор ид(
же размерности сопровождается ошибкой квантования е(
= U(4) - UB(4), которая теперь также является вектором. О
используемая мера искажения в этом случае - среднее зна1
квадрата нормы вектора ошибки:
Рис. 2.9. Ячейки при векторном квантовании двумерных векторов’
62
2
‘ W(u)du,
(2.22)
(2.23)
. W6n
- плотность вероятности входного вектора (совместная плот-
вероятности всех компонентов этого вектора);
rW6n
й в, случае скалярного квантования можно минимизировать
скажений D путем выбора формы ячеек Ск при известной
сти W(u). Представляется очевидным, что размеры ячеек
й уменьшаться в тех областях, где плотность И/(и) принима-
большие значения и, наоборот, увеличиваться там, где ее
ия малы.
^минимизации искажений требуется выполнение двух усло-
ервое условие состоит в том, что оптимальный векторный
ватель должен реализовать правило ближайшего соседа,
е можно записать следующим образом:
2 2
) = идЛ если и - идЛ <u— Upj , j*k, 1<j<L. (2.24)
у '*
рое условие заключается в том, что выходной вектор идА для
Ск должен быть выбран так, чтобы минимизировать среднее
ис искажений в этой ячейке:
г W(u)du.
(2.25)
жой выходной вектор назван центроидом ячейки Ск.
Йедует отметить, что число вычислений при векторном кванто-
]?растет экспоненциально с параметром размерности входно-
Ктора Л/бл, который называется размерностью векторного кван-
‘еля. Поэтому векторное квантование применяется в низкоско-
ых кодерах, когда скорость следования кодируемых величин
;ика.
63
Более высокую эффективность векторного квантования по
сравнению со скалярным можно проиллюстрировать на следую-
щем примере [6}. Пусть компоненты UA и U2 квантуемого вектора
являются случайными величинами с равномерной плотностью ве-
роятности;
, „ (1/(аЬ), g С,
И/(Щ."2)= п . (2.26)
[О для других значении аргументов,
где С - прямоугольная область, показанная на рис. 2.10. Для дан-
ного примера важно, что область повернута на 45° относительно
горизонтальной оси. При скалярном равномерном квантовании с
шагом Ав требуемое число выходных уровней для каждой компо-
ненты одинаково и равно
= L2 = (а + b) / - 2 Ли. (2.27)
Следовательно, при скалярном кодировании этого вектора с
двумя компонентами потребуется число битов, определяемое вы-
ражением
RCK = log2 L. + log2 L2 = 2log2 a + b = log2 (a + b? (2.28)
2 Ли 2(Ли)2
Рис. 2.10. Область возможных значений двумерного вектора и ячейки
при векторном проектировании
64
Очевидно, что такое квантование эквивалентно векторному
квантованию, при котором площадь квадрата, изображенного на
рис. 2.10 пунктирной линией, покрывается прямоугольной сеткой с
ячейками в виде квадратиков со стороной Ди. Но на большей части
этого квадрата плотность вероятности квантуемых величин равна
нулю, так что такое квантование является расточительным, по-
скольку число ячеек оказывается неоправданно завышенным и
приходится использовать достаточно длинные кодовые слова.
Скорость можно уменьшить, сохранив при этом точность преоб-
разования. Для этого достаточно покрыть только область С ячей-
ками в виде квадратиков со стороной дд; при этом стороны ячеек
должны быть параллельны границам области. Общее число таких
ячеек, т.е. общее число уровней векторного квантования, теперь
станет равным
LB = ab/ (Ли)2. (2.29)
и требуемая скорость
RB = iog2 te = iog2 ?b 2. (2.30)
Таким образом, разность скоростей (2.28) и (2.30) указанных
скалярного и векторного методов квантования равна
«ск-«е=1од2(а9+а<2 (2.31)
При а = 4Ьэта разница оказывается равной 1,64 бит/вектор. Следова-
тельно, данный метод векторного квантования на каждом отсчете
экономит 0,82 бита.
Техническая реализация векторного квантования сопровожда-
ется задержкой отсчетов сигнала во времени, поскольку для опре-
деления выходных слов необходимо накопить весь блок входных
отсчетов. Все возможные выходные слова векторного квантовате-
ля (их число конечно) хранятся в кодовой книге. Для каждого вход-
ного вектора отсчетов осуществляется поиск в кодовой книге такого
выходного вектора, который оказывается наиболее близким к
входному. Векторное квантование может обеспечить меньшую
ошибку даже для сигнала с независимыми отсчетами. Выигрыш по
сравнению со скалярным квантованием может существенно воз-
расти, если входные отсчеты в группе сильно коррелированы.
Адаптивная дифференциальная импульсно-кодовая моду-
ляция. Еще один способ использования сильной корреляции меж-
65
ду соседними отсчетами речевого сигнала реализуется при приме-
нении адаптивной дифференциальной импульсно-кодовой модуля-
ции (АДИКМ). При сильной корреляции дисперсия разности D(f,) =
= U(t,) - значений соседних отсчетов намного меньше дис-
персии самих отсчетов U(f,). При применении АДИКМ в цифровую
форму переводятся приращения D(0, i = .... -1,0,+1,.... которые в
точке приема используются для восстановления значений отсчетов
путем суммирования, т.е. (}(fj) = (}(^_1) + D(?,); здесь угловая скобка
над символом обозначает оценку соответствующей величины,
сформированную в приемнике. Так как дисперсия ошибки кванто-
вания при заданном числе битов на один отсчет пропорциональна
дисперсии квантуемой величины, то при той же длине кодового
слова дисперсия ошибки квантования приращений значительно
меньше дисперсии ошибки квантования отсчетов. В результате
можно либо повысить точность представления отсчетов при фик-
сированной длине кодового слова, либо при той же точности за-
метно уменьшить длину кодового слова и, следовательно, требуе-
мую скорость передачи [1].
На практике АДИКМ реализуется с применением различных ал-
горитмов предсказания: вместо кодирования разности соседних
отсчетов кодируется разность между значением очередного отсче-
та и предсказанным его значением. 8ту разность обычно называют
ошибкой предсказания, значение которой переводится в цифровую
форму и передается по линии связи. Предсказание основывается
на знании ковариационной функции речевого сигнала.
На рис. 2.11 представлена упрощенная структурная схема коде-
ра АДИКМ, которая используется в системе беспроводного теле-
фона стандарта СТ2. Основным элементом кодера является адап-
тивный квантователь, который преобразует входные отсчеты в че-
тырехбитовые кодовые слова. Шаг квантования зависит от дина-
мического диапазона входных отсчетов квантователя и изменяется
во времени в зависимости от изменений динамического диапазона
отсчетов ошибки предсказания. Практически эта адаптация обес-
печивается путем нормирования отсчетов сигнала ошибки с помо-
щью масштабного множителя YftJ, значение которого определяет-
ся на основании предсказания динамического диапазона очередно-
го отсчета на входе квантователя.
Данное предсказание основывается на двух величинах: быстрой
компоненте для быстро изменяющихся значений ошибки предска-
зания и медленной компоненте для медленно изменяющихся зна-
чений этого сигнала.
66
Рис. 2.11. Схема кодера АДИКМ с предсказанием
Эти компоненты складываются с определенными весами, в ре-
зультате давая текущее значение единственного масштабного
множителя. Другим важным элементом кодера является адаптив-
ный предсказатель, который формирует оценку предсказания
на основе предшествующих восстановленных значений
отсчетов речевого сигнала. Оценка получа-
ется путем суммирования предсказанного значения (7пр(?,и вос-
становленного цифрового значения ошибки предсказания ЦД.,).
Следует заметить, что данный кодер управляется сигналами
двух петель обратной связи: оценкой предсказания (7np(f-) значе-
ния очередного отсчета речевого сигнала U(t) и оценкой ?(ff ) оче-
редного значения масштабного множителя квантователя. Обе
оценки формируются в конечном счете исключительно из значений
четырех битового сигнала /(t,), передаваемого по линии связи. В
декодере приемника выполняются обратные преобразования. Та-
ким образом, кодер АДИКМ и декодер АДИКМ управляются одина-
ковыми сигналами.
Поэтому для восстановления отсчетов речевого сигнала в при-
емнике по линии связи кроме отсчетов нормированной ошибки
предсказания /((,) необходимо передавать текущее значение шага
квантования (или нормирующего множителя). Шаг квантования пе-
редается также в цифровой форме; частота следования этих зна-
67
чений обычно намного ниже частоты следования отсчетов речево-
го сигнала.
Пример. При адаптивной ИКМ частота отсчетов значений речевого сигнала
принята равной 6 кГц и каждый отсчет представляется кодовым словом из 6 бит.
Значение шага квантования пересчитывается каждые 10 мс и передается кодовым
словом из 5 бит. Вычислим битовую скорость передачи такого кодера и максималь-
ное и среднее значения ОСШК этой системы передачи. Число информационных
битов, создаваемых кодером за 1 с, равно 8000-8 = 64000 бит/с. В течение каждой
секунды необходимо передать 100 пересчитываемых значений шага квантования,
т е. дополнительно необходимо передавать 100-5 = 500 бит/с. Следовательно,
эффективная скорость передачи равна 64000 + 500 = 64500 бит/с. Значение ОСШК
зависит только от числа битов, используемых для квантования отсчетов пере-
даваемого сигнала; в соответствии с (2.14) пиковое значение этого отношения
равно 6,02-л + 4,77 = (6,02-8)+4,77 = 52,93 дБ; среднее значение равно 6,02-л =
= (6,02-8) = 48,16 дБ. Переход к АДИКМ позволяет снизить число битов на один
передаваемый отчет ошибки предсказания до четырех, а эффективную
скорость передачи до 8000-4+500 = 32500 бит/с.
К настоящему времени разработаны и стандартизованы эффек-
тивные алгоритмы АДИКМ, обеспечивающие скорость кодирования
32 кбит/с, т.е. в два раза ниже стандартной скорости при ИКМ при
том же качестве передачи речи. Эти алгоритмы нашли широкое
применение в беспроводных системах стандартов СТ2 и DECT.
Кодирование речевого сигнала в частотной области. Кодиро-
вание в частотной области позволяет* учесть особенности воспри-
ятия речи человеком и также приводит к эффективным алгоритмам
кодирования. В кодерах этого класса речевой сигнал подвергается
полосной фильтрации несколькими узкополосными фильтрами, ко-
торые выделяют несколько частотных компонентов; затем эти ком-
поненты квантуются и кодируются отдельно с учетом некоторых кри-
териев восприятия сигналов каждой полосы. Достоинством такой
схемы кодирования является возможность динамического изменения
числа используемых битов и их перераспределения между разными
частотными компонентами при их кодировании.
Квантование является нелинейной операцией, сопровождаемой
возникновением широкополосной помехи. Ухо человека неодина-
ково воспринимает различные участки спектра помехи квантова-
ния, имея экспоненциально убывающую чувствительность с ростом
частоты. Поэтому можно существенно повысить качество кодиро-
вания в узких полосах частот. При полосовом кодировании спектр
речевого сигнала делится на 4 или 8 полос с помощью набора
фильтров, сигнал каждой полосы переносится на нулевую частоту,
дискретизируется по времени в соответствии с теоремой отсчетов
68
Котельникова (частота дискретизации при этом намного ниже час-
тоты дискретизации исходного сигнала) и кодируется с различной
точностью в соответствии с принятым критерием восприятия. Спо-
собы деления спектра сигнала на полосы могут быть разными. На-
пример, полосы выбираются так, чтобы обеспечить равные вклады
в значение критерия разборчивости. Этот критерий приводит к де-
лению полосы, указанному в табл. 2.1 [4].
Таблица 2.1
Номер полосы частот речевого сигнала Полоса частот, Гц Количество битов
1 200... 700 4
2 700...1310 3
3 1310...2020 2
4 2020... 3200 1
Другой способ разбиения состоит в том, чтобы выбрать все поло-
сы равными и сигнал каждой полосы кодировать с разным числом
битов, пропорциональным значимости соответствующей полосы для
восприятия речи. Часто используется октавный ряд полос, наилуч-
шим образом соответствующий свойствам восприятия уха человека.
Применяются различные алгоритмы обработки частотных ком-
понентов речевого сигнала. Один из очевидных способов состоит в
том, чтобы спектр каждого узкополосного сигнала путем преобра-
зования частоты перенести к нулевой частоте, как это обычно де-
лается при однополосной модуляции. Такое преобразование по-
зволяет понизить частоту дискретизации и реализовать другие
преимущества кодирования низкочастотных сигналов.
На рис. 2.12 представлен пример возможной реализации коди-
рования речевого сигнала в частотной области. Входной сигнал s(t)
фильтруется набором фильтров, имеющих полосы пропускания
AQ„ с нижней и верхней частотами среза соответственно (о1л и ю2л.
Сигнал s„(f) с выхода фильтра с номером п умножается на гармо-
нический сигнал cos((o,„0; получающееся колебание подается на
вход фильтра низкой частоты с полосой пропускания (О, AQ„). Сиг-
нал гл(() на выходе этого фильтра является низкочастотной версией
сигнала s„(t) и может быть представлен в следующем виде:
rn(t) = (sn(f)cos(o.1nf)]®/»л(0. (2.32)
где знак ® обозначает операцию свертки.
69
Рис. 2.12. Функциональная схема многополосного кодека
речевого сигнала
Сигнал r„(f) дискретизируется с частотой дискретизации 2ДОП,
кодируется и путем мультиплексирования с другими аналогичным
образом закодированными узкополосными сигналами вставляется
в общий цифровой поток. В приемнике этот поток демультиплекси-
руется в отдельные каналы, сигналы которых декодируются и пе-
реносятся в соответствующие полосы частот, в результате чего
формируется оценка сигнала r„(f) канала с номером п.
Пример. Рассмотрим схему многополосного кодирования, в которой полоса
частот речевого сигнала разбивается на четыре полосы с граничными частотами,
указанными в табл. 2.1. После переноса каждой полосы частот к нулевой частоте
сигналы на выходе низкочастотных фильтров дискретизируются в соответствии с
теоремой отсчетов со следующими частотами:
для подполосы 1 2 (700 - 200) = 1000 отсчет/с;
для подполосы 2 2 (1310 - 700) = 1220 отсчет/с;
для подполосы 3 2 (2020 -1310) = 1420 отсчет/с;
для подполосы 4 2 (3200 - 2020) = 2360 отсчет/с.
В соответствии с табл. 2.1 отсчеты разных подполос кодируются с разным чис-
лом битов на один отсчет. В результате общая скорость кодирования равна
1000 4 + 1220-3 +1420 2 + 2360 • 1 = 12860 бит/с.
Кодирование речевого сигнала на основе линейного пред-
сказания. Этот способ кодирования предусматривает обработку
сигнала во временной области и характеризуется двумя особенно-
70
стями. Во-первых, соответствующие алгоритмы кодирования ока-
зываются достаточно сложными в вычислительном отношении,
поскольку используется адаптивное предсказание будущих значе-
ний сигнала. Во-вторых, для передачи речевого сигнала по каналу
связи при предварительной обработке из отсчетов сигнала выде-
ляются существенные признаки речевого сигнала, которые в значи-
тельной мере определяют его разборчивость и идентифицируе-
мость при восстановлении в приемнике. Этот способ наиболее по-
пулярен и часто используется в современных системах связи с
подвижными абонентами, поскольку обеспечивает приемлемое ка-
чество передачи речевого сигнала при очень низких скоростях.
Система кодирования на основе линейного предсказания моде-
лирует голосовой тракт человека с помощью фильтра низкой час-
тоты со следующей передаточной функцией:
к
H(z) = G/ Jl + '£bkz~k ,
< J
(2.33)
где G - коэффициент усиления фильтра; z"’ представляет собой
операцию задержки на один такт.
При моделировании речевого сигнала возбуждением этого
фильтра является либо последовательность импульсов с частотой
следования, равной частоте основного тона сегмента сигнала, ли-
бо белый шум, в зависимости от того, представляет ли обрабаты-
ваемый сегмент вокализованный или невокализованный звук. Зна-
чения коэффициентов этого фильтра вычисляются для каждого
передаваемого сегмента сигнала по алгоритму, который мы пояс-
ним ниже. При обработке используется линейное предсказание
аналогично тому, как это делается при АДИКМ. Однако, в отличие
от последней, вместо передачи по каналу связи квантованных зна-
чений ошибки предсказания в данном случае передаются только
специальным образом выбранные статистические параметры этой
ошибки. К таким параметрам обычно относят коэффициент усиле-
ния, частоту основного тона, тип сегмента (вокализованный или
невокализованный звук). Зная значения этих параметров, можно
сформировать в приемнике достаточно хорошую оценку сигнала
возбуждения фильтра синтеза речевого сигнала. Синтезирующий
фильтр также имеет вид (2.33), а в качестве значений его коэффи-
циентов при синтезе очередного сегмента сигнала подставляются
оценки этих коэффициентов, вычисленные в кодере и переданные
по каналу связи. Соответствующая функциональная схема кодера
на основе линейного предсказания представлена на рис.2.13.
Линейное предсказание текущего значения сигнала s„ основыва-
ется на предположении, что это значение может быть представлено
71
Рис. 2.13. Функциональная схема кодирования речевого сигнала
на основе линейного предсказания
с небольшой ошибкой как линейная комбинация р предшествующих
его значений, где р обычно выбирают из интервала от 10 до 15:
р
$п ~ ^к^л-к + ЕЛ.
к=1
(2-34)
здесь £л - ошибка предсказания.
Оценки коэффициентов в этом выражении вычисляются по ко-
нечной выборке наблюдаемых значений речевого сигнала в каж-
дом сегменте и выбираются так, чтобы минимизировать значение
суммы квадратов ошибок:
w N ( р А
°=Ёел = Ё Еак5л-к
/7=1 /
(2.35)
где следует положить а0 = -1. Обычно эта ошибка вычисляется для
сегментов длиной 10 мс, а значение N оказывается равным
80... 100.
Для получения минимального значения D необходимо прирав-
нять нулю частные производные этой функции по переменным ат:
ю N р р N
~ ^2sn_m iaksn-k ~ ' ак J~'lsn-msn-lt =0 (2.36)
Сат л=1 к=0 к=0 л=1
Значения внутренней суммы зависят только от наблюдаемых
значений отсчетов сигнала, и их можно рассматривать как оценки
ненормированных коэффициентов корреляции Rm_k речевого сиг-
72
нала для данного сегмента, т = 1,...,р. Следовательно, систему
уравнений (2.36) можно записать следующим образом:
р
= гл = 1,2............р. (2.37)
к=о
Поскольку а0 = -1, то систему (2.37) можно записать в более
удобной матричной форме:
р
К=1
р
Ър2-как ~R2* {2.38)
К=1
р
Rp-ksk ~ Rp<
*=1
или в форме 91а = R с очевидными векторными обозначениями.
Решение этой системы осуществляется путем обращения матрицы
'Л, в результате чего оценку вектора коэффициентов а можно запи-
сать в виде:
а = , (2.39)
где 'Л"’ есть матрица, обратная для матрицы 91. К настоящему вре-
мени предложено достаточно много алгоритмов, обеспечивающих
высокую скорость вычисления оценок (2.39).
Полученные значения коэффициентов фильтра предсказания
должны передаваться по линии связи. Однако для обеспечения
приемлемой точности восстановления значений речевого сигнала в
приемнике оказалось необходимым использовать от 8 до 10 бит
для цифрового представления каждого коэффициента. Поэтому
вместо этих коэффициентов обычно передают так называемые ко-
эффициенты отражения С(/с), значения которых имеют меньший
динамический диапазон и требуют для кодирования всего 6 бит на
каждый коэффициент. Например, если порядок фильтра предска-
зания р = 10, то общее число битов, выделяемых для одного сег-
мента, равно 72, включая по 6 бит для кодирования значений ко-
эффициента усиления и периода основного тона. Можно подсчи-
тать при этом, что если значения параметров фильтра будут пере-
считываться каждые 15 или 30 мс, то результирующая скорость
окажется равной 4800 или 2400 бит/с.
73
Кодирование коэффициентов отражения С(к)‘ к = 1,...,р, может
быть улучшено дополнительно путем применения неравномерногс
квантования, когда до кодирования значения этих коэффициентов
подвергаются нелинейному преобразованию, которое .уменьшает
чувствительность коэффициентов отражения к ошибкам квантова-
ния. В качестве такого преобразования обычно выбирают обрат-
ный гиперболический тангенс или так называемое логарифмиче-
ское отношение площадей
LAR(k) = ta nh~1 [C(k)] = Ig
1 + С(А)
1-С(К)
(2.40)
Различные способы кодирования, использующие алгоритмы ли-
нейного предсказания, отличаются друг от друга методами восстанов-
ления ошибки предсказания (сигнала возбуждения) в приемнике.
Представленная на рис. 2.13 схема кодирования наиболее популярна.
Однако для ее реализации требуется, чтобы передатчик оценивал пе-
риод частоты основного тона, что не является простой задачей. Более
того, фазовая когерентность между гармоническими компонентами
последовательности импульсов возбуждения приводит к появлению
резкого жужжащего звука в синтезированной речи. Существуют спосо-
бы кодирования, свободные от этого недостатка, и обеспечивающие
высокое качество цифровой передачи речи даже при суммарной ско-
рости 4,8 кбит/с. Однако их вычислительная сложность оказывается
достаточно высокой (более 500 млн операций умножения и сложения
в секунду). Тем не менее достижения в области цифровой обработки
сигналов и интегральной микроэлектроники обеспечили возможность
реализации этих сложных алгоритмов кодирования в реальном време-
ни. Например, системы с кодовым разделением каналов (технология
CDMA) стандарта IS-95 используют кодирование с переменной скоро-
стью от 1,2 до 14,4 кбит/с.
Использование ошибки предсказания в качестве возбуждающе-
го процесса при синтезе речевого сигнала в приемнике можно осу-
ществить несколько иначе, чем это было сделано при АДИКМ. На-
пример, после формирования оценок параметров фильтра пред-
сказания (или соответствующих им коэффициентов отражения) и
параметров сигнала возбуждения (коэффициента усиления, перио-
да основного тона, решения вокализованный/невокализованный
звук) для очередного сегмента речевого сигнала в передатчике
синтезируется оценка этого сегмента речи и вычитается из исход-
ного сегмента с тем, чтобы сформировать остаток - ошибку пред-
ставления. Сигнал остатка квантуется, кодируется и передается по
линии связи вместе с параметрами линейного предсказания.
74
В приемнике остаточный сигнал ошибки представления складыва-
ется с сигналом, восстановленным по оценкам параметров пред-
сказания, в результате чего получают синтезированный в приемни-
ке аппроксимирующий сегмент речевого сигнала. Качество синтеза
речи здесь улучшается благодаря добавлению сигнала ошибки.
Соответствующая функциональная схема такого кодера представ-
лена на рис. 2.14.
Следует подчеркнуть, что при кодировании данных, формируе-
мых кодером речи, разные биты, представляющие различные па-
раметры модели предсказания, имеют разную значимость с точки
зрения качества восстановления речи в приемнике. Поэтому при
кодировании для этих групп битов обычно предусматриваются раз-
личные уровни защиты.
Пример. Кодирование речи осуществляется сегментами длительностью 20 мс,
которые на выходе кодера представляются блоками по 260 бит трех типов. Первые 50
бит каждого блока, относятся к первому типу и рассматриваются как наиболее важ-
ные. Эти биты защищаются от ошибок в канале передачи путем применения цикличе-
ского кода с 10 проверочными символами и последующего сверточного кодирования
со скоростью 1/2. Следующие 132 бита относятся к типу 2 и кодируются только цикли-
ческим кодом с пятью проверочными символами. Последние 78 бит типа 3 от ошибок
не защищаются. Найдем общую скорость передачи по каналу связи.
Число битов типа 1, передаваемых на каждом интервале времени длительно-
стью 20 мс. равно (50 + 10)-2 = 120. На этом же интервале времени необходимо
передать 132 + 5 = 137 бит второго типа и 78 бит третьего типа. Следовательно,
общее число бит, подлежащих передаче на интервале времени 20 мс, оказывается
равным 120 + 137+78 = 335.
Рис. 2.14. Функциональная схема кодера с линейным предсказанием и
возбуждением сигналом ошибки предсказания:
1 — ошибки представления; 2 — коэффициент усиления; период основно-
го тона; решение: вокализованный/невокализованный звук;
3 — оценки параметров фильтра предсказания.
ВСР — выделение сегмента речи; ОПМП — оценка параметров модели
предсказания; СОСР — синтез оценки сегмента речи; К— кодирование;
ПБ — поток битов
75
2.3, Кодирование речи в современных системах связи
с подвижными абонентами
Выбор способа кодирования. Выбор кодера речевого сигнала
для системы связи с подвижными абонентами является важным
этапом проектирования системы. Поскольку для каждой системы
выделяется ограниченная полоса частот, всегда желательно ис-
пользовать кодер с минимальной скоростью или, что эквивалентно,
с максимальным коэффициентом сжатия речевого сигнала при его
цифровом представлении и при заданном качестве его передачи.
Снижение битовой скорости кодера позволяет уменьшить ширину
полосы частот в радиоканале, которую приходится выделять для
передачи сигнала одного абонента, и, следовательно, максимизи-
ровать общее число одновременно обслуживаемых абонентов в
выделенной полосе частот системы. Задача выбора кодера явля-
ется также достаточно сложной, поскольку при ее решении прихо-
дится искать компромисс между качеством передачи речи, завися-
щим от способа сжатия, сложностью алгоритмов сжатия, а значит,
и общей стоимостью системы, и емкостью всей сети. Другие крите-
рии выбора, которые также должны рассматриваться, включают
время задержки из-за кодирования прр передаче от точки к точке,
требования к источникам питания, особенно для портативных або-
нентских станций, совместимость с существующими стандартами и
устойчивость закодированной речи к ошибкам в канале передачи.
Особенно важным является последнее требование, поскольку ка-
налом передачи в таких системах обычно является радиоканал, в
котором сигналы подвержены многим нежелательным эффектам
(замираниям, затенениям, доплеровскому расширению спектра).
В зависимости от используемого метода кодирования речевого
сигнала различные речевые кодеки имеют разную устойчивость по
отношению к ошибкам в канале передачи. Например, при одной и
той же вероятности ошибки на бит АДИКМ с скоростью 40 кбит/с
обеспечивает намного лучшее качество передачи речи, чем лога-
рифмическая ИКМ со скоростью 56 кбит/с [4]. При этом следует
отметить, что снижение скорости передачи не обязательно сопро-
вождается повышением устойчивости к ошибкам передачи. Более
того, если речевой сигнал представляется меньшим числом битов,
то это сопровождается увеличением информации, содержащейся о
сигнале в каждом бите, и, следовательно, необходимо повышать
защищенность битов от ошибок. В некоторых типах низкоскорост-
76
ных кодеров имеются биты, несущие критическую информацию;
поэтому при ошибках в их приеме искажения речевого сигнала мо-
гут оказаться просто неприемлемыми.
При применении низкоскоростных кодеров речи стараются оп-
ределить важность каждого бита, сгруппировать биты в зависимо-
сти от чувствительности качества передачи к ошибкам при их пе-
редаче и для каждой группы обеспечить разные уровни защиты от
ошибок путем использования разных корректирующих кодов.
Выбор речевого кодера должен осуществляться также с учетом
размера соты в планируемой системе. Если размер соты сравни-
тельно мал, так что в системе обеспечивается достаточно высокая
спёктральная эффективность за счет повторного использования
частот, может оказаться допустимым простой высокоскоростной
кодер. Например, в беспроводных телефонных системах стандар-
тов СТ2 и DECT, которые предусматривают использование очень
малых сот (микросот) кодеры АДИКМ со скоростью 32 кбит/с обес-
печивают приемлемое качество передачи речи даже без канально-
го кодирования. Сотовые системы с намного большими сотами и
более сложными условиями распространения в радиоканалах
должны снабжаться кодами, корректирующими ошибки в канале
передачи, и, следовательно, низкоскоростными кодерами речи.
Например, в спутниковых системах размеры сот очень большие, а
доступные полосы частот очень малые. Чтобы обеспечить разум-
ное число одновременно обслуживаемых абонентов, приходится
ограничиваться скоростью речевого кодера порядка 3 кбит/с [4].
Способ множественного доступа в системе также оказывает за-
метное влияние на выбор кодера речи. В цифровой сотовой систе-
ме США с временным разделением каналов (стандарт IS-54) ем-
кость существующей аналоговой системы стандарта AMPS была
увеличена втрое благодаря использованию речевого кодера со
скоростью 8 кбит/с [4]. В системах с технологией кодового разделе-
ния каналов (CDMA) каждому абоненту доступна значительно бо-
лее широкая полоса частот радиоканала. В этих системах вполне
могут быть использованы низкоскоростные кодеры речи и коррек-
тирующие коды с большой исправляющей способностью.
Способ модуляции в системе также оказывает существенное
влияние на выбор кодера речи. Например, применяя спектрально-
эффективный метод модуляции, можно ослабить ограничения на
скорость кодера речи, и наоборот. В табл. 2.2 приведен список не-
которых типов кодеков (кодер+декодер) речи, используемых в со-
временных цифровых системах подвижной связи.
11
Таблица 2.2
Стандарт системы под- вижной связи Используемый кодек речи
Метод кодирова- ния * Скорость, кбит/с
GSM RPE-LTP 13
CD-900 SBC 16
IS-54 VSELP 8
IS-95 CELP 1,2; 2,4; 4,8; 9,6
СТ-2 ADPCM 32
DECT ADPCM 32
DCS-1800 RPE-LTP 13
Примечание.
RPE-LTP Regular Pulse Excited Long Term Prediction (долговременное предсказание с возбуждением регулярной последовательностью импульсов);
SBC Sub-Band Coding (кодирование сигналов подполос);
VSELP Vector Sum Excited Linear Prediction (линейное предсказание с возбуждением векторной суммой);
CELP Code Excited Linear Prediction (линейное предсказание с кодо- вым возбуждением);
ADPCM Adaptive Differential Pulse Code Modulation (адаптивная диффе- ренциальная имдульсно-кодовая модуляция, АДИКМ)
v Кодек речевого сигнала в системах стандарта GSM. Кодек
речевого сигнала, используемый в пан-Европейском стандарте
GSM цифровой сотовой связи, имеет длинное название: Regular
Pulse Excited Long Term Prediction (RPE-LTP), т.е. долговременное
предсказание с возбуждением регулярной последовательностью
импульсов. Кодер создает битовый поток со скоростью 13 кбит/с и
был выбран после многочисленных экспертных оценок. Этот кодер
вобрал в себя достоинства двух способов кодирования: RELP
(Residual Excited Linear Prediction - линейное предсказание с воз-
буждением остатком) и MPE-LTP (Multi-Pulse Excited Long-Term
Prediction - долговременное предсказание с импульсным возбуж-
дением), предложенных ранее Францией и Германией соответст-
венно. Преимущество RELP-кодека состоит в том, что он обеспечи-
вает хорошее качество речи при сравнительно низкой сложности.
Однако качество речи при использовании этого кодека ограничива-
ется помехой, создаваемой при восстановлении высокочастотных
компонентов речевого сигнала и ошибками при передаче битов по
каналу связи. MPE-LTP-кодек обеспечивает очень хорошее качест-
во речи при высокой сложности и не очень чувствителен к ошибкам
в канале передачи. Благодаря модификации RELP-кодека с целью
78
введения в него некоторых элементов MPE-LTP-кодека скорость
нового кодека была снижена с 14,77 до 13,0 кбит/с без потерь каче-
ства передачи речи. Наиболее важным введенным элементом бы-
ла петля долговременного предсказания.
Кодек GSM является довольно сложным и предъявляет доста-
точно высокие требования к источникам питания. Функциональная
схема его кодера приведена на рис. 2.15 и содержит четыре основ-
ных блока обработки каждого сегмента речевого сигнала: предва-
рительной обработки, кратковременного анализа (предсказания),
долговременного анализа и формирования сигнала возбуждения в
виде регулярной последовательности импульсов. На вход кодера с
частотой следования 8 кГц поступают отсчеты речевого сигнала в
виде 13-битовых кодовых слов ИКМ.
В первом блоке последовательность отсчетов подвергается
предискажениям (фильтрации фильтром высоких частот, в резуль-
тате чего подавляется постоянная составляющая сигнала и увели-
чивается уровень высокочастотных компонентов), разбивается на
сегменты длительностью 20 мс; отсчеты каждого сегмента умно-
жаются на значения временного окна Хемминга.
Во втором блоке по 160 отсчетам сегмента вычисляются значе-
ния оценок (2.39) параметров фильтра линейного предсказания
при р = 8 (число оцениваемых параметров или порядок фильтра) и
значения сигнала ошибки предсказания е„ (точнее, предсказания на
один такт или кратковременного предсказания). В действительно-
сти вычисляются коэффициенты отражения, а для передачи по ли-
нии связи по формуле (2.40) вычисляются логарифмические отно-
шения площадей LAR(/c), к = 1,2.8. LAR-параметры имеют раз-
ные динамические диапазоны и разные плотности, распределения
вероятностей; поэтому каждый из этих коэффициентов кодируется
с разным числом битов.
В третьем блоке отсчеты ошибки е„ линейного кратковременно-
го предсказания подвергаются дополнительной обработке. Для
этого группа из 160 отсчетов ошибки предсказания £„ разбивается
на четыре кадра по 40 отсчетов. Для каждого кадра с номером
j = 0, 1, 2, 3 вычисляется взаимная корреляция с предшествущими
значениями восстановленной ошибки предсказания гп,
п = -120,-119, ...,-1, для значений задержек от 40 до 120, т.е. с
отсчетами вне текущего кадра; определяется задержка Оу, при
которой взаимная корреляция оказывается максимальной, для по-
лученного значения задержки вычисляется значение нормирующе-
го множителя (коэффициента усиления) Gy, равного отношению
максимального значения взаимной корреляции к сумме квадратов
79
40 значений ошибки г'п, соответствующих задержке Dj. Получен-
ные значения задержки Dj и коэффициента усиления Gj кодиру-
ются и передаются по линии связи.
В четвертом блоке обработки формируется сигнал возбужде-
ния. Отсчеты ошибки каждого кадра взвешиваются и разделя-
ются на три подпоследовательности, каждая из которых рассмат-
ривается как кандидат сигнала возбуждения. Для каждой подпос-
ледовательности оценивается энергия; подпоследовательность с
наибольшей энергией принимается в качестве остатка долговре-
менного предсказания. Отсчеты этой подпоследовательности воз-,
буждения нормируются на значение наибольшего отсчета Х^,
квантуются и передаются при скорости 9,6 кбит/с. В канал переда-
ется также номер Л/7 выбранной подпоследовательности Х„ (набор.
W=0,--.,3;/ = 0,...,12).
Каждые 260 бит с выхода кодера, соответствующие сегменту’,
речевого сигнала длительностью 20 мс, упорядочиваются в зави-'
симости от важности битов в группы по 50, 132 и 78 бит. Биты пер-,
вой группы называются битами типа la. Следующие 132 бита назы-’
ваются битами типа I6; последние 78 бит - битами типа II. Так как
биты типа la оказывают наибольшее влияние на качество переда-
ваемого речевого сигнала, они защищаются от ошибок в канале
передачи с помощью циклического кода с дополнительными про-
верочными символами. Биты обоих типов 1а и 116 кодируются свер^
точным кодом, обеспечивающим обнаружение и исправление otuvij
бок при передаче.
Рис. 2.15. Функциональная схема кодера речевого сигнала GSM
80
Менее важные биты типа II передаются без Дополнительного коди-
рования.
Таким образом, на выходе кодера формируются три набора па-
раметров:
' 1) параметры кратковременного линейного предсказания LAR(k),
k= 1,2,....8;
| 2) параметры долговременного предсказания Djt Gjt j = 0,1,2,3,
j — номер кадра ;
3) параметры сигнала возбуждения NJt X/j), j = 0,..,3, / = 0....12.
Порядок следования параметров на выходе кодера и число би-
тов, которыми они кодируются, приведены в табл 2.3.
На рис. 2.16 представлена функциональная схема декодера
GSM, в котором выполняются операции, обратные операциям ко-
дера. По принятой подпоследовательности Хл остатка гп синте-
зируется сигнал возбуждения. Оценки задержек и коэффициентов
усиления декодируются и используются для синтеза сигнала дол-
говременного предсказания.
Таблица 2.3
Параметры на вы- ходе кодера Порядок следова- ния па- раметров Обозна- чения парамет- ров Число битов Номера битов в группе
1 LAR(1) 6 Ь1-Ь6
2 LAR(2) 6 Ь7-Ы2
Логарифм отношения 3 LAR(3) 5 ЫЗ-Ы7
площадей 4 LAR(4) 5 Ы8-Ь22
5 LAR(5) 4 Ь23-Ь26
6 LAR(6) 4 Ь27-Ь30
• У. 7 LAR(7) 3 Ь31-Ь33
8 LAR(8) 3 Ь34-Ь36
Первый кадр
^Задержка 9 7 Ь37-Ь43
'Усиление 10 2 Ь44-Ь45
Позиция подпоследо- 11 N, 2 Ь46-Ь47
, вательности
Максимальное значе- 12 ^Imax 6 Ь48-Ь53
ние
1-й отсчет 13 ^(0) 3 Ь54-Ь56
2-й отсчет 14 Xi(i) 3 Ь57-Ь59
13-й отсчет 25 X,(12) 3 Ь90-Ь92
81
Параметры на вы- ходе кодера Порядок следова- ния па- раметров Обозна- чения парамет- ров Число битов Номера битов в группе
Второй кадр
Задержка 26 7 Ь93-Ь99
Усиление 27 2 Ы00-Ы01
Позиция подпосле- 28 Ч 2 Ы02-Ы03
довательности Максимальное значе- ние 29 у z'1max 6 Ы04-Ы09
1-й отсчет 30 Х2(0) 3 Ы10-Ы12
2-й отсчет 31 Х2(1) 3 Ы13-Ы15
13-й отсчет 42 Х2(12) 3 Ы46-Ы48
Третий кадр
Задержка 43 02 7 Ы49-Ы55
Усиление 44 б2 2 Ы56-Ы57
Позиция подпосле- 45 ч 2 Ы58-Ы59
довательности Максимальное значе- ние 46 ^1тах 6 Ы60-Ы65
1-й отсчет 47 х3(0) 3 Ы66-Ы68
2-й отсчет 48 Х3(1) 3 Ы69-Ы71
13-й отсчет 59 4(12) 3 Ь202-Ь204
Четвертый кадр
Задержка 60 7 Ь204-Ь211
Усиление 61 <5з 2 Ь212-Ь213
Позиция подлосле- 62 Ч 2 Ь214-Ь215
довательности Максимальное значе- 63 у zx1max 6 Ь216-Ь221
ние
1 -й отсчет 64 4(0) 3 Ь222-Ь224
2-й отсчет 65 4(1) 3 Ь225-Ь227
13-й отсчет 76 4(12) 3 Ь258-Ь260
82
сигнала
Рис.2.16. Функциональная схема декодера речевого сигнала GSM:
ФДП - фильтр долговременного предсказания; ФКП — фильтр
кратковременного предсказания
Сигнал кратковременного предсказания восстанавливается с ис-
пользованием принятых оценок коэффициентов отражения. В ре-
зультате восстанавливаются отсчеты переданного сегмента речево-
го сигнала, которые дополнительно обрабатываются в фильтре ин-
терполяции и высокочастотной коррекции, на выходе которого полу-
чают реализацию принятого сегмента речевого сигнала.
2.4. Оценка качества передачи речевого сигнала
Способы оценки качества передачи речи обычно подразделяют-
ся на объективные и субъективные. Объективные критерии осно-
вываются на значениях некоторых статистических параметров, ко-
торые позволяют судить о степени отличия принятого по каналу
связи речевого сигнала от переданного. Примерами таких пара-
метров могут служить:
• средняя квадратическая ошибка;
• отношение сигнал-шум; /
• искажения спектра; '
• индекс артикуляции.
Объективные критерии обычно оказываются полезными на на-
чальном этапе разработки и моделирования способа кодирования
речи, но они не обязательно приводят к конечным оценкам качест-
ва речи, которые являются важными для восприятия человека. Для
слушателя обычно не столь важно качество сигнала; для него бо-
лее естественной оценкой является усредненное субъективное
восприятие речи.
Субъективные критерии оценки качества передачи речи основы-
ваются на статистической обработке субъективных оценок качества
достаточно большого числа слушателей-экспертов. Причем эти оценки
существенно зависят от возраста и пола диктора, скорости произнесе-
ния фраз и многих других обстоятельств. Тесты при получении субъек-
тивных оценок стараются планировать при различных условиях, ими-
83
тирующих реальные условия жизни человека, такие как посторонний
шум, фоновая речь многих других людей и т.д. Количественные ре-
зультаты этих тестов отображают усредненное качество, уровень уси-
лий слушателя, разборчивость, естественность звучания.
Разборчивость характеризует возможность для слушателя
идентифицировать произносимые диктором слоги, слова или фра-
зы. Количественно разборчивость характеризуется процентом пра-
вильно идентифицированных элементов речи. Разборчивость
функционально связана с другими показателями качества речи,
например с отношением сигнал-шум, и достаточно полно характе-
ризует качество передачи речи в целом.
Наиболее часто используемым тестом на разборчивость является
диагностический тест на рифмы. В этом тесте каждая произносимая
фраза состоит из двух слов, образующих рифму и отличающихся ма-
лым числом звуков. Например, фраза «дом-том» состоит из двух слов,
отличающихся только одним согласным звуком. При последователь-
ном произнесении таких рифмованных фраз подсчитывается процент
Q правильно понятых. Численные значения результатов такого теста
разбивают на группы, каждой из которых приписывают оценку качества
речи. Например; при значениях от 100 до 96 - «превосходно», 95-86 -
«хорошо», 85-80 - «посредственно», 79-70 - «недостаточно», менее
70 - «плохо». Однако такой критерий качества речи не очень удобен
для сравнения различных кодеков речи.
Более подходящим и часто используемым способом ранжирования
различных методов кодирования речи является вычисление средней
экспертной оценки (СЭО). Методика вычисления СЭО регламентирова-
на рекомендациями Европейского института стандартов в области Теле-
коммуникаций (ETSI-T) при оценке качества передачи речи в телефон-
ных сетях. В соответствии с этими рекомендациями выделены пять упо-
рядоченных уровней, каждый из которых связан со стандартизирован-
ным описанием: «плохой», «слабый», «допустимый», «хороший», «пре-
восходный». В табл. 2.4 приведен список этих уровней.
Таблица 2.4
Описание уровня Оценка Степень усилий при восприятии
Превосходный 5 Без усилий
Хороший 4 Нет ощутимых усилий
Допустимый 3 Умеренные усилия
Слабый 2 Значительные усилия
Плохой 1 Теряется восприятие при фи- зически возможных усилиях
84
Оценки от 5 до 4 при применении к полосел/астот 200...3400 Гц ре-
комендованы для телефонных сетей; значения от 4 до 3,5 считаются
допустимыми в таких приложениях, как голосовая почта и подвижная
связь; значения от 3,5 до 2,5 допустимы для синтезированной речи.
Наиболее сложные условия использования кодеков речевого
сигнала оказываются в тех случаях, когда уже закодированную
речь необходимо передать от АС к БС, затем демодулировать с
целью получения аналогового речевого сигнала, который далее
снова кодируется для повторной передачи в форме цифрового сиг-
нала по беспроводной линии. Такая передача, обычно называемая
тандемной, сопровождается размножением битовых ошибок, пер-
воначально возникших в приемнике первой БС. Здесь требуются
более значительные затраты для организации связи от одной АС к
другой АС, поскольку такая линия содержит по меньшей мере два
источника независимых помех.
В общем случае значение СЭО качества речевого сигнала па-
дает при снижении скорости кодека. В табл. 2.5 приведены значе-
ния СЭО для некоторых типов кодеков, используемых в современ-
ных цифровых системах [4]. На значения СЭО могут оказывать за-
метное влияние различия в культурном уровне экспертов, в глубине
их знаний языка и т.д. [3].
Таблица 2.5
Тип кодера Значение СЭО
64 кбит/с; ИКМ 4,3
14,4 кбит/с; QCELP 13 4,2
32 кбит/с; АДИКМ 4.1
8 кбит/с; ITU-CELP 3,9
8 кбит/с; CELP 3,7
13 кбит/с; GSM 3,54
9,6 кбит/с; QCELP 3,45
4,8 кбит/с; CELP 3,0
2,4 кбит/с; LPC 2,5
Примечание.
QCELP Qualcom Code Excited Linear Predictor (кодер на основе линейного
предсказания с кодовым возбуждением фирмы Qualcom);
ITU-CELP International Telecommunication Union - Code Excited Linear Predictor
(Международный союз электросвязи - кодер на основе линейного
предсказания с кодовым возбуждением);
GSM Global System Mobile (глобальная система подвижной связи);
LPC Linear Predictive Coder (кодер на основе линейного предсказания).
85
Список литературы к главе 2
1. Зюко А.Г., Киевский Д.Д., Коржик В.И., Назаров М.В. Теория электри-
ческой связи: Учебник для вузов. - М.: Радио и связь, 1998. - 433 с.
2. Баскаков С.И. Радиотехнические цепи и сигналы. Учебник для ву-
зов. - М.: Высшая школа, 1988. - 448 с.
3. Шелухин О.И., Лукьянцев Н.Ф. Цифровая обработка и передача
речи / Под ред. О.И.Шелухина. - М.: Радио и связь, 2000. - 454 с.
4. Rappoport Th. S. Wireless Communications (Principles and Practice). -
New York: IEEE Press, 1996. - 641 p.
5. Рекомендация G.711.
6. Прокис Дж. Цифровая связь /Пер с англ, под ред. Д.Д.Кловского. -
М.: Радио и связь, 2000. - 797 с.
86
ГЛАВАЗ
СПЕКТРАЛЬНО-ЭФФЕКТИВНЫЕ МЕТОДЫ ЦИФРОВОЙ
МОДУЛЯЦИИ
3.1. Цифровая модуляция
Центральной проблемой при построении любой системы связи
является выбор и техническая реализация способов введения пе-
редаваемой информации в физический переносчик в точке переда-
чи и выделения этой информации в точке приема. Эта наиболее
тонкая задача известна как проблема модуляции и демодуляции.
В данной главе приводятся краткие сведения о некоторых совре-
менных методах цифровой модуляции, используемых в настоящее
время в системах связи второго поколения наиболее широко рас-
пространенных в мире и в России стандартов GSM, D-AMPS, IS-95, и
отсутствующие в доступной для студентов вузов литературе на
русском языке. Источники этих сведений указаны в списке литера-
туры, которые могут оказаться полезными для тех читателей, кото-
рые владеют английским языком и могут получить доступ к этим
источникам.
Практически во всех современных системах связи с подвижными
объектами используются методы цифровой модуляции и цифровая
обработка сигналов при демодуляции. Такие системы принято назы-
вать цифровыми системами передачи в отличие от аналоговых сис-
тем, в которых реализованы аналоговая модуляция и аналоговая
демодуляция. Современные достижения радиоэлектроники обеспе-
чивают возможность реализовать в передатчике и приемнике систе-
мы связи достаточно сложные алгоритмы цифровой обработки элек-
трических сигналов. В результате качество передачи практически
любых сообщений в цифровых системах оказывается выше, чем ка-
чество передачи этих сообщений с помощью аналоговых систем
связи. Например, оказалось возможным передавать сообщения в
присутствии шума и помех с большей точностью или передавать
больше сообщений при прочих равных условиях.
Цифровые системы передачи обладают двумя важнейшими
особенностями:
87
• любые сообщения представляются в цифровой форме, т.е. в
виде последовательностей битов =... при любом
значении индекса / символ а, принимает значения из алфавита {о, 1};
• передатчик системы формирует и передает по очереди в канал
передачи конечное число сигналов {sm(t), т = 1, 2,..., М], разли-
чающихся по форме, которые принято называть канальными симво-
лами', для длительности канального символа примем обозначение
Ткс; один канальный символ «переносит» один бит или большее
число битов, подлежащих передаче; еслич М = 2, то систему переда-
чи называют двоичной; если М > 2 , то систему называют /И-ичной.
Таким образом, передача последовательностей сообщений
цифровыми системами осуществляется путем преобразования их в
последовательность битов, которые преобразуются в последова-
тельность канальных символов.
Число используемых канальных символов М и их форма в раз-
ных системах различны; они известны в точке приема. Поэтому
основная функция приемника, точнее его демодулятора, в цифро-
вой системе передачи состоит в том, чтобы оценить, какой из воз-
можных символов (сигналов) был передан передатчиком на оче-
редном интервале времени длительностью Ткс.
Проблема оценивания (различения сигналов) возникает потому,
что системы передачи должны проектироваться таким образом,
чтобы передатчик излучал, а приемник правильно принимал ка-
нальные символы с минимально возможной энергией. Критическим
местом в системе передачи, в котором энергия канальных симво-
лов оказывается наименьшей, является вход приемника. Энергия
принимаемого символа Ес здесь должна быть не менее некоторо-
го порогового значения Епор, которое определяется заданным по-
роговым значением отношения сигнал-шум (ОСШ) рпор2.
До формирования канальных символов подлежащие передаче
биты обычно сначала преобразуются в последовательность положи-
тельных и отрицательных электрических импульсов длительностью
Тс прямоугольной формы', для которой принимаем обозначение v(t);
последовательность полученных таким способом импульсов назы-
вают модулирующим сигналом. Преобразование последовательно-
В дальнейшем мы покажем, что форма этого импульса обычно достаточно
сложная и выбирается так. чтобы минимизировать межсимвольные искажения и
повысить спектральную эффективность системы.
88
сти битов в последовательность электрических импульсов осущест-
вляется по следующему правилу: 0 => bv(t), 1 => -bv(t), где b > 0 -
амплитуда импульса. При этом модулирующей сигнал
u(O = £W-/Tc). (3.1)
/
В этом равенстве суммирование осуществляется по всем воз-
можным значениям индекса /, а множитель Ь, может принимать
значения +Ь или -Ь.
На рис.3.1 представлены примеры реализаций сигналов при
цифровой модуляции: последовательность переданных битов {а,},
последовательность электрических импульсов модулятора прямо-
угольной формы и разной полярности {б,}. восстановленная в при-
емнике последовательность электрических импульсов демодулято-
ра |б(| и, наконец, последовательность принятых битов |а,|
Здесь не представлены канальные символы. Угловой скобкой над
символами обозначены их оценки.
Следует отметить два важных обстоятельства: искажение фор-
мы сигнала и его временную задержку при прохождении через ка-
нал передачи. Искажения формы сигнала обусловлены двумя фак-
торами:
• наличием в передатчике и приемнике специальных устройств
формирования и обработки электрических сигналов;
• наличием помех в канале передачи.
89
В передатчике обычно предусматриваются специальные уст-
ройства для получения нужной формы импульсов модулирующего
сигнала, при которой поток канальных символов имеет допусти-
мое значение внеполосных излучений.
Основным элементом приемника является демодулятор, оце-
нивающий наилучшим образом каждый принимаемый символ; при
этом важна не форма принимаемого канального символа, которая
в точке приема известна, а его номер т. Задержка восстанов-
ленного сигнала по отношению к передаваемому обусловлена как
временем распространения радиоволн, так и, главным образом,
дополнительными задержками электрических сигналов в элемен-
тах системы передачи, обеспечивающих формирование и обра-
ботку этих сигналов.
Помехи в канале передачи вызваны тепловым шумом элемен-
тов приемника и внешними источниками излучений естественного и
искусственного происхождения. Особенно здесь отметим излуче-
ния передатчиков, работающих на соседних частотных каналах,
внеполосные излучения которых попадают в полосу частот систе-
мы передачи. Эти помехи принято называть помехой соседнего
канала.
В современных цифровых сивтемах передачи вводятся доволь-
но жесткие ограничения на уровень внеполосных излучений, кото-
рые удается выполнить лишь применением сложных методов гене-
рирования канальных символов специальной формы с помощью
цифровых устройств. Возможны также помехи от передатчиков,
работающих в той же полосе частот, но использующих другие
формы канальных символов; такие помехи часто называют внут-
рисистемными.
Наличие шума и помехи затрудняет принятие правильных ре-
шений в приемнике о том, какой из М канальных символов был
передан на очередном временном интервале. При малом уровне
помех и, следовательно, большом отношении сигнал-помеха де-
модулятор приемника ошибается очень редко, т.е. вероятность
ошибки при приеме одного символа мала и составляет, напри-
мер, 10“3 или меньше. В результате цифровая система передачи
при больших значениях отношения сигнал-шум обеспечивает
почти точное воспроизведение потока переданных битов в точке
приема; это означает практически точное воспроизведение ис-
ходного сигнала, что невозможно при использовании аналоговых
систем передачи.
90
Если отношение сигнал-шум оказывается не очень большим, то
демодулятор приемника ошибается чаще, появляются неверно
принятые символы. Полезным параметром, часто используемым
для характеризации качества цифровой системы передачи, явля-
ется вероятность ошибки при приеме^одного символа
Рс = ^{Принят символ sn | Передан символ sm}, п т , (3.2)
или вероятность ошибки на бит
Рв = ^{Принят бит со значением d | Передан бит со значением е),
с/е {0,1},е е {0,1} и d * е . (3.3)
На рис. 3.1 неверно принятый бит отмечен серым фоном.
Например, современные системы беспроводной связи допуска-
ют наличие одной ошибки на 1000 бит передаваемой информации;
можно принять, что допустимая вероятность ошибки при приеме
одного бита в этом случае равна 10“3. При этом ухо человека еще
способно идентифицировать голос абонента, т.е. слушающий узна-
ет голос говорящего. В то же время многие информационные сис-
темы предъявляют значительно более жесткие требования к циф-
ровой системе передачи, допуская, например, лишь одну ошибку
при передаче 100 000 000 бит, т.е. рб = 1СГ8.
Модуляция - это процесс кодирования информации, получае-
мой от источника информации, в форму, наиболее удобную для
передачи по каналу связи. В общем случае этот процесс преду-
сматривает перенос основной полосы частот модулирующего сиг-
нала ЛЕ в область высоких частот. Получающийся в результате
модуляции радиосигнал s[t; u(t)] занимает радиополосу шириной
2ЛЕ , центральная частота которой f0 намного выше верхней гра-
ничной частоты fB спектра модулирующего сигнала. Как правило, в
качестве переносчика информации используется гармоническое
колебание s(t) = Acos(27if0t + <р), основными параметрами которо-
го, доступными для модуляции, являются амплитуда А, частота fQ
и фаза <р.
В данной главе основное внимание будет уделено методам
цифровой модуляции, которые используются в современных сис-
темах связи с подвижными объектами или планируются к исполь-
зованию в будущем. Некоторые из этих методов предусматрива-
ются существующими стандартами, а некоторые лишь обсужда-
ются с целью включения в стандарты систем нового поколения.
91
3.2. Фазовая модуляция
М-ичные системы модуляции. При фазовой модуляции мгно-
венное значение фазы радиосигнала отклоняется.от фазы немо-
дулированного несущего колебания на величину, зависящую от
мгновенного значения модулирующего сигнала:
s[/, w(/)] = A cos[2nf0t + q>[u(t)]} = Re[/4 exp{j<p[u(t)]} exp{j2nf0t}]. (3.4)
Из этого выражения следует, что передаваемая информация,
содержащаяся в модулирующем сигнале u(t), закодирована в ком-
плексной огибающей
Д(0 = Дехр{/<р[и(0]} (3.5)
передаваемого сигнала s[f, u(t)]. Понятие комплексной огибающей
является очень важным как для теории, так и для техники цифро-
вой связи и будет играть существенную роль в последующем изло-
жении.
При цифровой фазовой модуляции фаза переносчика может от-
личаться от текущей фазы немодулированного несущего колебания
на конечное число разных значений. В простейшем случае двоич-
ной фазовой манипуляции (ФМ-2) в качестве таких значений обыч-
но выбирают 0° и 180°. В современных системах часто используют
большие наборы фазовых углов, чтобы представлять в одном ка-
нальном символе сразу несколько битов передаваемых данных.
Например, можно использовать четыре разных фазовых угла: 45°,
135°, -45°, -135° для представления возможных значений после-
довательности из двух битов (ФМ-4). Возможные значения трехби-
тового слова можно представить группой из восьми разных фазо-
вых углов (ФМ-8), четырехбитового слова - группой из 16 фазовых
углов (ФМ-16) и т.д.
Двоичная фазовая манипуляция. Простейшей формой цифро-
вой фазовой модуляции является ФМ-2. Этот способ часто исполь-
зуется в системах с прямым расширением спектров, в которых моду-
лирующий сигнал является псевдослучайной двоичной последова-
тельностью. При ФМ-2 в зависимости от значения модулирующего
сигнала отклонение фазы сигнала от фазы немодулированного не-
сущего колебания равно либо 0°, либо 180°. Так, если для фазомо-
дулированного сигнала (ФМ сигнала) принять общее описание (3.4),
(3.5), то-для ФМ-2 сигнала должны выполняться равенства:
<р[л(/)] = 0 при u(f)s1, <p[u(OJ = л при u(t) = -1; 0 < t < Тс.
92
Комплексная огибающая этого сигнала не изменяется на ука-
занном интервале времени и может принимать следующие два
значения:
A(t) = A при u(t) = \ A(t) = -A при u(0 = -1; 0<t<Tc. (3.6)
Полезным и наглядным оказывается графическое представле-
ние возможных значений этой огибающейна комплексной плоско-
сти. Для рассматриваемого здесь сигнала комплексная огибающая
принимает всего два значения, указанные на рис. 3.2. Такое изо-
бражение обычно называют сигнальным созвездием.
На рис. 3.3 представлены временные диаграммы модулирующе-
го сигнала и радиосигнала. Основная особенность радиосигнала
здесь состоит в том, что его текущая фаза имеет разрывы в мо-
менты изменения полярности модулирующего сигнала.
Эти «скачки» фазы на 180° являются основной причиной того,
что спектральная плотность мощности ФМ-2 сигнала в радиока-
нале оказывается существенно отличной от нуля в недопустимо
широкой полосе частот. Поэтому в таком виде ФМ-2 сигналы прак-
тически не используются. Для уменьшения занимаемой ими поло-
сы частот они подвергаются фильтрации.
Трудно осуществить фильтрацию этих сигналов после модулято-
ра на высокой частоте, поскольку потребовались бы узкополосные
высокодобротные фильтры для каждой частоты несущего колеба-
ния. Число таких частот в современных цифровых системах связи с
подвижными объектами может достигать нескольких десятков. По-
этому операция фильтрации практически всегда выполняется над
модулирующим сигналом до модуляции. Соответствующий фильтр
является низкочастотным и единственным, хотя обычно и достаточ-
но сложным. Однако современные достижения радиоэлектроники
обеспечивают его реализацию, а большое число частотных каналов
в этом случае можно получить, если использовать несущее колеба-
ние с набором соответствующих частот. Такой фильтр будем назы-
вать фильтром основной полосы.
Мнимая
часть
А
Действительная часть
Рис.3.2. Сигнальное созвездие ФМ-2 сигнала
Рис. 3.3. Временные диаграммы модулирующего сигнала (а) и ФМ-2
радиосигнала (б)
Однако при уменьшении полосы частот, занимаемой радиосиг-
налом, путем фильтрации приходится учитывать возникающую при
этом проблему межсимвольной интерференции, которая будет
обсуждаться позднее. ,
На рис. 3.4 представлена упрощенная функциональная схема
передатчика, формирующего ФМ-2 радиосигнал. Здесь после мо-
дулятора добавлены усилитель мощности радиосигнала и узкопо-
лосный высокочастотный фильтр. Основное назначение фильтра
состоит в том, чтобы ослабить излучение передатчика на частотах,
кратных основной частоте несущего колебания; опасность таких
излучений обусловлена нелинейными эффектами в усилителе
мощности, которые, как правило, имеют место и усиливаются при
попытке увеличения эффективности этого усилителя. Часто дан-
ный фильтр используется одновременно и для приемника - он по-
давляет сильные сторонние сигналы вне полосы частот полезных
радиосигналов до преобразования частоты «вниз».
Квадратурная фазовая модуляция. При ФМ-2 один каналь-
ный символ переносит один передаваемый бит. Однако, как уже
отмечалось выше, один канальный символ может переносить
большее число информационных бит. Например, пара следую-
щих друг за другом битов может принимать четыре значения:
{0 0}, {0 1}, {1 0},{1 1}.
94
радиосигнала
Если для передачи каждой пары использовать один канальный
символ, то потребуется четыре канальных символа, скажем
{so(f),Si(t),S2(O»s3(O} . так что М = 4. При этом скорость передачи
символов в канале связи оказывается в два раза ниже, чем ско-
рость поступления информационных битов на вход модулятора и,
следовательно, каждый канальный символ теперь может занимать
временной интервал длительностью Ткс - 2ТС. В частности, при
фазовой модуляции в качестве канальных символов можно вы-
брать следующие радиосигналы:
sz(t) = s[f, <р, (f)] = A cos[2nf0f + = Re[d ехр{;ф,(г)}ехр{;2л^0г}],
О < t < 2ТС ,
где ф/f) = л(2/+1)/4 - отклонение фазы радиосигнала с номером i от
фазы немодулированного несущего колебания; /,(f) = Аехр{/ф/(f)} -
комплексная амплитуда этого сигнала на интервале времени
[О, 2Тс]для / = 0, 1,2, 3.
В дальнейшем вместо четырех канальных символов или четы-
рех радиосигналов будем говорить о единственном радиосигнале,
комплексная амплитуда которого может принимать четыре указан-
ных значения, представленных на рис. 3.5 в виде сигнального со-
звездия.
Каждая группа из двух битов представляется соответствующим
фазовым углом, все фазовые углы отстоят друг от друга на 90°.
Можно отметить, что каждая сигнальная точка отстоит от действи-
тельной или мнимой оси на 45°.
Данный способ модуляции может быть реализован следующим
образом Последовательность передаваемых битов 0, 1, 1, 0, 0, 1.
0, 1, 1, 1, 0, 0, . разбивается на две подпоследовательности не-
четных 0, 1, 0, 0. 1, 0, ... и четных 1, 0, 1, 1, 1, 0, ... битов.
95
+135°
(-1. +1) О
Мнимая
часть
+ 45°
О (+1. +D ’
-135°
(-1,-1) О
—-------------->.
Действительная
часть
-45°
(+1.-1)
Рис. 3.5. Сигнальное созвездие ФМ-4 радиосигнала
Биты с одинаковыми номерами в этих подпоследовательностях
образуют пары, которые удобно рассматривать как комплексные
биты; действительная часть комплексного бита есть бит нечетной
подпоследовательности, а мнимая часть - бит четной подпоследо-
вательности. Полученные таким способом комплексные биты пре-
образуются в комплексную последовательность прямоугольных
электрических импульсов длительностью 2ТС со значениями +1 или
-1 их действительной и мнимой частей, которые используются для
модуляции несущего колебания ехр{/'2л^0(}. В результате получа-
ется ФМ-4 радиосигнал.
Рассмотрим один комплексный бит. Обозначим символом / зна-
чение электрического импульса, полученное из действительной
части этого бита (это значение бита нечетной подпоследователь-
ности), а символом Q - значение электрического импульса, полу-
ченное из мнимой части этого же комплексного бита (это значение
соответствующего бита четной подпоследовательности). Отметим,
что / и Q могут принимать значения +1 или -1. Очевидно, что
можно записать следующие равенства:
/ с«(2.ад=]
0 si„(2rf„0 . Q|°>P»240-exp(-;2«W1
Тогда можно сформировать сигнал
s(f) = / cos(2nf0f) + Q sin(2nfof) =
1
= 2 [(/ - /Q) exp{)2nf0t} + (/ + jQ) exp{-j2nf0t}.
96
Если теперь ввести обозначения
I + jQ = y/l2+Q2e^, I - jQ = 7/2+О2е'Л>. <p = arctgfQ/1),
TO
S(f) = - I2 + Q2 [ехр(/2лГо( - <p) + e*PW/W + <p)j
(3.7)
= J2 + Q2 cos(2nf0f - <p).
Таким образом, меняя значения / и Q, можно получить ампли-
тудную и фазовую модуляцию. В частности, если принять, что / и Q
могут принимать значения +1 или -1, то ашшитуда этого сигнала
постоянна и равна -J2 , а фаза <р принимает значения +45°, -45°,
+135°, -135°. В результате для комплексной амплитуды высокочас-
тотного сигнала с такой модуляцией можно записать
Д(0 = ^2А ехр[/ — (2/ +1)], / = 0,1,2,3, на интервале 0 < t < 2ТС. (3.8)
4
Приведенные выше равенства позволяют формировать сигналы
ФМ-4 с помощью устройства, функциональная схема которого при-
ведена на рис. 3.6.
Рис.3.6. Функциональная схема устройства формирования
ФМ-4 радиосигнала
На вход первого блока поступают информационные биты, кото-
рые преобразуются в последовательность прямоугольных импуль-
сов положительной и отрицательной полярности длительностью Тс.
Эта последовательность в демультиплексоре разбивается на две
подпоследовательности импульсов с нечетными и четными номе-
рами, которые направляются в синфазную и квадратурную ветви
соответственно. Импульсы с нечетными номерами в синфазной
97
ветви задерживаются на время Тс. Далее длительность импульсов
каждой подпоследовательности увеличивается до значения 2ТС,
после чего осуществляется перенос на частоту f0 в каждой ветви.
Сложение результатов перемножений завершает процесс форми-
рования ФМ-4 радиосигнала.
Для характеризации некоторых свойств модулированных сигна-
лов часто используют так называемые диаграммы фазовых перехо-
дов, которые представляют собой графические изображения траек-
торий перемещений сигнальных точек в сигнальном созвездии при
переходе от одного передаваемого канального символа к другому.
Для ФМ-4 сигнала такая диаграмма представлена на рис. 3.7.
На этой диаграмме сигнальная точка с координатами (+1.+1)
расположена на линии, образующей угол +45° с осями координат, и
соответствует передаче символов +1 и +1 в квадратурных каналах
модулятора. Если следующей парой символов будет (-1.+1), кото-
рой соответствует угол +135°, то из точки (+1.+1) к точке (-1,+1)
можно провести стрелку, характеризующую переход фазы радио-
сигнала от значения +35° к значению +135°.
Полезность этой диаграммы можно проиллюстрировать на сле-
дующем примере. Из рис. 3.7 следует, что четыре фазовые траек-
тории проходят через начало координат. Например, переход из
точки сигнального созвездия (+1, +1) в точку (-1, -1) означает из-
менение мгновенной фазы высокочастотного несущего колебания
на 180°. Поскольку на выходе модулятора обычно устанавливают
узкополосный высокочастотный фильтр, то такое изменение фазы
сигнала сопровождается существенным изменением значений оги-
бающей сигнала на выходе этого фильтра и, следовательно, во
всей линии передачи. Непостоянство значений огибающей радио-
сигнала по многим причинам является нежелательным в цифровых
системах передачи.
Рис. 3.7. Диаграмма фазовых переходов для ФМ-4 радиосигнала
98
ФМ-4 радиосигнала со смещением
Квадратурная фазовая модуляция со смещением. Уже отме-
чалось, что при фазовой модуляции возможны изменения мгновен-
ных значений фазы высокочастотного несущего колебания на
+180°, в результате чего могут возникнуть значительные изменения
значений огибающей радиосигнала. Эти изменения оказываются
не столь значительными для сигналов с квадратурной фазовой мо-
дуляцией со смещением. Функциональная схема устройства фор-
мирования такого радиосигнала изображена на рис. 3.8. Этот спо-
соб формирования сигнала практически полностью аналогичен
квадратурному способу формирования ФМ сигнала, однако с той
лишь разницей, что подпоследовательность в квадратурной ветви
сдвигается во времени (задерживается) на время Тс или, что экви-
валентно, на половину длительности канального символа. Для
реализации этого способа достаточно незначительно модифициро-
вать функциональную схему, представленную на рис. 3.6, так, как
это показано на рис. 3.8, необходимо удалить элемент задержки на
время Тс в синфазной ветви. При таком изменении квадратурная
подпоследовательность канальных символов окажется задержан-
ной на время Тс относительно синфазной подпоследовательности.
На рис. 3.9 представлены временные диаграммы последова-
тельностей информационных битов и соответствующих канальных
символов для этой функциональной схемы. Основное отличие этих
диаграмм от аналогичных диаграмм в функциональной схеме
рис. 3.7 состоит в том, что теперь изменения уровней сигнала в
квадратурных каналах на выходе расширителей не могут происхо-
дить одновременно. В результате на диаграмме фазовых перехо
дов для данного метода модуляции отсутствуют траектории, про
ходящие через начало координат. Это означает, что мгновенная
фаза радиосигнала не имеет скачков на +180° и, следовательно,
огибающая этого сигнала не имеет глубоких провалов, как это име
по место при квадратурной ФМ-4.
99
Рис. 3.9. Временные диаграммы при формировании ФМ-4 радиосигнала
со смещением
Диаграмма фазовых переходов ФМ-4 радиосигнала со смеще-
нием представлена на рис. 3.10.
Мнимая
часть
+135°
А
-135°
>О+45°
Вещественная
часть
*О -45°
Рис. 3.10. Диаграмма фазовых переходов ФМ-4
радиосигнала со смещением
100
Мнимая часть
+135° q
I +90°
О
+180°
—О
Вещественная
часть
-135° °
о
-90° I
О
-45°
Рис. 3.11. Сигнальное созвездие для ФМ-^ радиосигнала
ФМ-8 сигналы. Поток информационных битов, поступающих на
вход модулятора, можно разбивать на группы по 3, 4 бита и т.д.,
формируя затем ФМ-8, ФМ-16 сигналы и т.д. На рис. 3.11 изобра-
жено сигнальное созвездие для ФМ-8 радиосигнала.
Для этого способа модуляции необходимо иметь восемь ка-
нальных символов, начальные фазы которых отличаются от мгно-
венной фазы немодулированного несущего колебания на угол,
кратный 45°. Если амплитуды всех канальных символов одинаковы,
то сигнальные точки располагаются на окружности. Возможные
значения вещественных и мнимых частей комплексных амплитуд
этих символов при этом пропорциональны коэффициентам / и Q,
принимающим значения из множества
Г 2 2]
- 2г,-1, 0, + 1,+ ‘ . (3.9)
Не совсем простым является вопрос об установлении соответст-
вий между точками сигнального созвездия и тройками информаци-
онных битов. „Этот процесс обычно называют_сигнадьйь/м кодирова-
нием. В табл. 3.1 приведен пример такого соответствия, который яеГ”
ляётся возможнымТ'но не наилучшим, поскольку”для установления
наилучшего соответствия необходимо сначала определить способ
демодуляции такого сигнала в присутствии помехи, а затем вычис-
лить вероятность ошибки при приеме либо одного канального сим-
вола, либо одного информационного бита. Наилучшим можно на-
звать тот способ сигнального кодирования, при котором вероятность
ошибки оказывается наименьшей. В последующих главах мы рас-
смотрим такой вариант сигнального кодирования, который является
наилучшим при некоторых дополнительных условиях.
101
Таблица 3.1
Значения на- чальной фазы при ФМ-8 Значения коэффициентов Группы из трех информационных символов (битов)
/ Q
0° 1 0 0 1 1
+ 45° -.2/2 2/2 00 1
+ 90° 0 1 000
+ 135° -.2/2 2/2 1 00
+ 180° -1 0 1 0 1
-135° - 2/2 -2/2 1 1 1
-90° 0 -1 1 1 0
-45° -.2/2 -- 2/2 0 1 0
На рис. 3.12 приведена функциональная схема устройства фор-
мирования ФМ-8 радиосигнала. Основными здесь являются уст-
ройства, аналогичные соответствующим устройствам уже рассмот-
ренных ранее модуляторов: демультиплексор распределяет вход-
ной поток информационных битов длительностью Тс на три под-
последовательности, элементы задержек выравнивают во време-
ни эти подпоследовательности, е расширители увеличивают дли-
тельность каждого символа до значения длительности канального
символа Ткс = ЗГС. Сигнальное кодирование в этом случае сводит-
ся к вычислению значений синфазной и квадратурной компонент
комплексной огибающей ФМ-8 радиосигнала. Эта операция выпол-
няется сигнальным кодером, в состав которого входит транскодер,
имеющий два цифровых выхода с L-битовыми словами, которые в
цифро-аналоговых преобразователях (ЦАП) преобразуются в ана-
логовые величины с требуемыми значениями (3.9).
Рис. 3.12. Функциональная схема устройства формирования ФМ-8
радиосигнала
102
л/4-квадратурная относительная фазовая модуляция. При
квадратурной ФМ-4 и ФМ-4 со смещением максимальное измене-
ние мгновенной фазы радиосигнала равно 180° и 90° соответст-
венно. В настоящее время достаточно широко используется я/4-
квадратурная относительная фазовая модуляция, при которой
максимальный скачок фазы равен 135°, а все возможные значения
мгновенной фазы радиосигнала кратны значению л/4. Ни одна тра-
ектория фазовых переходов для этого способа модуляции не про-
ходит через начало координат. В результате огибающая радиосиг-
нала имеет меньшие провалы по сравнению с квадратурной фазо-
вой модуляцией. Функциональная схема устройства формирования
такого радиосигнала представлена на рис. 3.13.
Рис.3.13. Функциональная схема устройства формирования радиосигнала
с л/4-квадратурной относительной фазовой модуляцией
Последовательность информационных битов (а,, / = 1,2,. |
разбивается на две подпоследовательности: нечетных
{a2i-b ' = 1 2,...} и четных {а2/, i = 1, 2,...} битов, из которых биты
выбираются парами. Каадая новая пара таких битов определяет
приращение фазы несущего колебания на величину д<р; в соответ-
ствии с табл. 3.2.
Таблица 3.2
Значения информационных битов Приращение фазы несущего колеба- ния (Дер,-)
а2/-1 а2г
0 0 л/4
1 0 Зл/4
1 1 -Зл/4
0 1 —л/4
10?
Если ввести обозначение (р,^ для отклонения фазы радиосиг-
нала от фазы немодулированного несущего колебания на преды-
дущем интервале, то новые значения отклонения фазы этого сиг-
нала и комплексной амплитуды на текущем интервале определятся
равенствами:
Ф,- = <p/-i + Дф/, А, = Де;,р'.
В результате значения вещественной и мнимой частей ком-
плексной огибающей этого сигнала на текущем интервале времени
длительностью 2ТС оказываются равными:
= А СОБ(ф,-) = А С08(ф,_1 + Дф, ) -
= А СО8(ф,_1) СО8(Лф;) - Д 81Г1(ф,-_1) 81П(Дф,) = (3.10)
= //_1 со5(Дф,) - Qj_] 51п(Дф,-);
Qi = А 51П(ф,-) = А sin(<p,_1 + Дф,) =
= Л81П(ф;_1)сО8(Дф/)+ ДС08(ф,_1)81П(Дф,) = (3.11)
= СОБ(Дф; ) + /;_, 5!П(Дф, ).
Равенства (3.10), (3.11) можно записать в более наглядной
форме для значений комплексных амплитуд канальных символов
на двух соседних интервалах с номерами (/-1) и /:
А = А ехр{/ф,} = А ехр(Лф,_А + Дф;]} =
= А ехрОф;,,} ехрО'Дфм) = А-1 ехр{/Дф,}.
Из последнего равенства следует, что возможные значения фа-
зы на интервале с номером / зависят от значения фазы радиосиг-
нала на интервале с номером (/- 1). В соответствии с табл. 3.2 но-
вые значения кратны тг/2.
На рис. 3.14,а изображено созвездие возможных сигнальных то-
чек для интервала с номером /, если (р,., = кп.Г2; аналогичное со-
звездие для случая, когда ф, _ А = кп.12 + л/4, представлено на
рис.3.14,б. Общее созвездие сигнальных точек для данного спосо-
ба модуляции изображено на рис. 3.14,в и получается путем нало-
жения рис. 3.14,а и рис. 3.14,6 друг на друга. На рис.3.14,в не ука-
заны стрелками направления переходов, поскольку для каждого
перехода возможны направления в обе стороны.
Важно также подчеркнуть, что при данном способе модуляции
каждая новая пара информационных битов определяет не полную
фазу несущего колебания, а лишь приращение этой фазы для ин-
тервала с номером i относительно полной фазы комплексной оги-
бающей на интервале с номером (/ - 1). Такие методы модуляции
называются относительными.
104
Рис. 3.14. Сигнальные созвездия радиосигнала с л/4-квадратурной отно-
сительной модуляцией
3.3. Частотнаяуиодуляция
Сигналы с постоянной огибающей. Ранее рассматривались
методы модуляции, в которых фаза несущего колебания изменя-
лась скачком от одного возможного значения к другому в соответ-
ствии с изменением значения модулирующего сигнала. Отмеча-
лось, что при таких изменениях фазы возможны значительные из-
менения амплитуды радиосигнала, которые приводят к заметному
снижению как средней мощности радиосигнала, так и спектральной
эффективности системы связи. Следует также отметить, что нахо-
дят применение многопозиционные методы модуляции, в которых
отдельные значения мгновенной фазы представляют группы ин-
формационных битов, что позволяет снизить скорость передачи
канальных символов.
Вместо разбиения интервала возможных значений мгновенной
фазы несущего колебания на небольшие интервалы и переходов
между ними скачками можно переходить от одного значения фазы
к другому плавно по какому-либо закону. Если это сделать таким
образом, чтобы сигнальная точка оставалась на окружности радиу-
сом единица, то можно получить радиосигнал с постоянным значе-
нием амплитуды.
Многие современные системы связи с подвижными объектами
используют методы модуляции, которые обеспечивают формиро-
вание радиосигнала с постоянным значением амплитуды несущего
колебания при меняющихся значениях модулирующего сигнала.
Известно несколько таких методов модуляции, которые обеспечи-
вают системам связи ряд следующих положительных свойств.
• возможность использования усилителей мощности класса С
без риска расширения полосы занимаемых частот в радиоканале;
105
известно, что усилители этого класса являются наиболее эконо-
мичными с точки зрения потребляемой энергии при прочих равных
характеристиках;
• низкий уровень внеполосных излучений, достигающий значе-
ний от -60 до -70 дБ, что позволяет уменьшить защитный частот-
ный интервал между соседними частотными каналами;
• возможность использования простых устройств демодуляции,
содержащих устройства ограничения уровня принимаемого сигна-
ла, что упрощает проектирование приемных устройств и обеспечи-
вает устойчивый прием в условиях значительных замираний при-
нимаемого сигнала.
Для методов модуляции с постоянным уровнем несущего коле-
бания, при всех их достоинствах, все же необходима большая по-
лоса частот в радиоканале по сравнению с линейными методами
модуляции. Поэтому эти методы следует использовать в тех случа-
ях, когда энергетическая эффективность системы связи более
важна, чем спектральная.
Напомним, что мгновенная частота любого узкополосного коле-
бания
s(f) = -A(Ocos[2nf0f + <p(f)]
может быть определена как производная по времени полной мгно-
венной фазы;
[2nf0t + ф(0] = 2я/0 + ~ q>(t) = ш(0 = + Q(t).
at at
Поэтому фазовую модуляцию с непрерывным гладким измене-
нием фазы можно рассматривать как частотную модуляцию.
В этом случае частота несущего колебания является параметром,
значение которого должно изменяться в зависимости от значения
модулирующего сигнала.
Двоичная частотная манипуляция. При двоичной частотной
манипуляции частота несущего колебания с постоянной амплиту-
дой может иметь два возможных значения и изменяется скачками в
соответствии со значениями модулирующего сигнала. В зависимо-
сти от того, каким образом изменения частоты вводятся в переда-
ваемое высокочастотное колебание, получающийся частотно-
модулированный сигнал (ЧМ сигнал) будет иметь либо разрывную,
либо непрерывно изменяющуюся мгновенную фазу между двумя
соседними битами. В общем случае ЧМ сигнал можно представить
следующим образом:
106
s(f) = <Acos[(2nf0 + 2пДА)]/, 0<t<Tc (при передаче 1).
s(f) = ^cos[(2x/q - 2лД/)Н, 0<t<Tc (при передаче 0),
где 2лДГ определяет смещение частоты от её номинального значе-
ния.
Очевидный способ формирования ЧМ сигнала состоит в том,
чтобы коммутировать выходные сигналы двух независимых гене-
раторов двух гармонических колебаний в соответствии со значе-
ниями модулирующего сигнала. В этом случае формируемый ра-
диосигнал будет иметь разрывную фазу в момент переключения;
такие сигналы обычно называют ЧМ сигналами с разрывной фазой,
которые можно представить следующими выражениями;
s(f) = Acos(2nfBf + ч>!), 0 < t < Тс фри передаче 1), (3.1 За)
s(t) = 4cos(2nfHf + <р2). О < t < Тс ./г1ри передаче 0). (3.136)
Разрывность фазы здесь является нежелательным свойством
радиосигнала, приводящим к расширению спектра в радиоканале.
Поэтому такой способ модуляции не используется в современных
системах связи с подвижными объектами.
Более общий метод формирования ЧМ сигнала заключается в
том, что используется один генератор несущего колебания, мгно-
венная частота которого изменяется в соответствии с изменениями
модулирующего сигнала. Этот способ модуляции аналогичен мето-
ду формирования ЧМ сигнала при аналоговом модулирующем сиг-
нале, однако в этом случае модулирующий сигнал является циф-
ровым и принимает всего два возможных значения. Для такого ра-
диосигнала можно записать
t
s[t;u(t)] = Acos[2itf0t ь ч>(‘)] = Acos[2nfrjt+ kf |и(т)Л]. (3.14)
-co
Важно отметить, что при разрывном модулирующем сигнале
u(t) отклонение фазы <p(f) от фазы несущего колебания пропор-
ционально интегралу от u(f) и, следовательно, является непре-
рывной функцией.
На рис. 3.15 представлена функциональная схема устройства
формирования ЧМ сигнала при двоичном модулирующем сигнале.
Основным элементом этого модулятора является генератор гармо-
нического несущего колебания, частота которого может управлять-
ся напряжением модулирующего сигнала (ГУН - генератор, управ-
ляемый напряжением).
107
u{f)
ГУН
Полосовой
фильтр
s[U(Q]
Усилитель
Рис. 3.15. Функциональная схема устройства формирования ЧМ сигнала с
непрерывной фазой
Поток информационных битов сначала преобразуется в моду-
лирующий сигнал u(t) — последовательность прямоугольных им-
пульсов положительной и отрицательной полярности, амплитуды
которых выбираются такими, чтобы обеспечить требуемое значе-
ние индекса частотной модуляции
(3.15)
где /-С=1/ГС обычно называют частотой манипуляции. Начальная
фаза несущего колебания в каждом канальном символе в данном
случае не определена; поэтому данный модулятор формирует не-
когерентный ЧМ сигнал. Полосовой фильтр ослабляет возможные
внеполосные гармонические колебания, которые могут появиться
из-за нелинейности динамической характеристики усилителя.
На рис. 3.16 тонкими линиями изображена фазовая решетка ЧМ
сигнала с непрерывной фазой. Жирной ломаной линией здесь пред-
ставлена возможная фазовая траектория - отклонения мгновенной
фазы сигнала от текущей фазы немодулированного несущего коле-
бания. Эта траектория соответствует последовательности импульсов
положительной и отрицательной полярности модулирующего сигна-
ла, указанной на этом же рисунке вдоль оси времени.
Отрезки траектории с положительным значением производной
этой траектории по времени соответствуют более высокой частоте
несущего колебания fB = f0 + Af, а отрезки с отрицательным значе-
нием производной - более низкой частоте fH = f0 - Af по сравнению
с частотой немодулированного несущего колебания. Можно найти и
значение этого смещения, поскольку для такого сигнала можно за-
писать следующее представление:
s[f; u(OJ = Acos[2nf0f + 2~kf t/(r)dr] = /lcos[2n/of + 2nkfbJ], 0 < t < Tc,
108
Рис. 3.16. Фазовая решетка и фазовая траектория ЧМ сигнала
с непрерывной фазой
где является значением модулирующего сигнала на первом
временном интервале длительностью Тс и может принимать значе-
ния +1 или -1. Вычисляя производную по времени от текущей фа-
зы сигнала, получаем
+ 2nkfM = 2л(/о + kfbj,
at
так что сдвиг частоты Af = kfb^. При = +1 частота несущего ко-
лебания равна fB = f0 + kf при £^=-1 имеем fB = fQ - /<^|Ь1|.
В результате fB -fH = 2kf'fy', и индекс частотной модуляции
Лчм
£в -/н _ ИМ
£"с
(3.16)
В момент времени f = Тс отклонение фазы радиоси-нала от фа-
зы немодулированного несущего колебания д<р1 = 2nkfb{Tc; в ре-
зультате ЧМ сигнал с непрерывной фазой на втором интервале
Тс < t < 2ТС можно записать следующим образом:
з(Г) = A cos[2nf0t + 2nkfbJc + 2nkf b2 (t - Tc)], Tc < t < 2TZ .
109
Теперь очевидно, что на /-м интервале этот сигнал можно пред-
ставить выражением
(3.17)
для i = 1, 2, 3,...
Частотная манипуляция с минимальным сдвигом. Манипу-
ляция с минимальным сдвигом (ММС) может рассматриваться как
фазовая или как частотная модуляция с непрерывной фазой. Ос-
новная особенность этого способа модуляции состоит в том, что
приращение фазы несущего колебания на интервале времени,
равном длительности Тс одного символа, всегда равно + 90° или
-90° в зависимости от знаков символов модулирующего сигнала.
Например, фаза несущего колебания в начале очередного импуль-
са модулирующего сигнала равна <р0; далее, фаза несущего коле-
бания, линейно нарастая к концу этого импульса, достигает значе-
ния qo+9O°, или, линейно убывая, к концу импульса достигает
значения <ро-9О°. Поскольку на интервале каждого очередного
импульса модулирующего сигнала мгновенная фаза несущего ко-
лебания, отклоняясь от фазы немодулированного гармонического
колебания, изменяется линейно, увеличиваясь или уменьшаясь, то
мгновенная частота такого радиосигнала будет изменяться скачка-
ми. Таким образом, ММС сигнал является частным случаем ЧМ
сигнала с непрерывной фазой.
Сигнал с ММС может быть сформирован с помощью квадратур-
ной схемы, которая лишь незначительно отличается от приведен-
ных в предыдущих разделах. Последовательность символов
{t>„ / = 1, 2, ...}, принимающих значения +1 или -1, разбивается на
две подпоследовательности нечетных / = 1, 2, ...} и четных
{b2„ i = 1, 2, ...} символов. Из этих подпоследовательностей форми-
руются квадратурные компоненты модулирующего сигнала
U/(0 = 2b2<-iv[f-(2'-1)7'cl. UQ(0 = Xfc2'v[f-(2')rc]. (3.18)
где
*'Н°
О < t < 2ТС,
вне этого интервала.
(3.19)
110
Теперь сформируем сигнал в соответствии со следующим пред-
ставлением:
s(/)= A[u,(f)cos( )cos(2nf0Z) n/Q(?)sin( )sin(2;rf0f)]. (3.20)
*-'C c
Здесь f0 - частота несущего колебания; функции cos(-^-) и
27"с
sin(-^~) на интервале длительностью 2ГС имеют полуволну и фак-
2^с
тически сглаживают прямоугольную форму импульсов квадратур-
ных компонентов модулирующего сигнала.
Покажем, что сигнал (3.20) является ЧМ сигналом с постоянной
огибающей и непрерывной фазой. Действительно, так как слагае-
мые в правой части равенства (3.20) являются квадратурными ком-
понентами с несущими колебаниями cos(2nf0f) и sin(2nfoO, то
значение огибающей этого сигнала в произвольный момент вре-
мени можно определить равенством
As(f) = . А2и,2(0сО52(^ ) + A2uQ2(t)sin2(£ ) = А.
поскольку в соответствии с (3.18) и (3.19) для любого момента вре-
мени u/2(f j = uQ2(f) = 1.
Отклонение фазы сигнала (3.20) от фазы несущего колебания
на любом интервале времени длительностью Тс является линей-
ным, приращение фазы на этом интервале равно 90°. Чтобы убе-
диться в этом, достаточно определить общую фазу этого сигнала
на произвольном интервале времени (/ -1)ТС <f </Тс. Учитывая
постоянство огибающей, узкополосный сигнал (3.20) можно запи-
сать следующим образом:
s(f) = Acos[2nf0f + Ф(Г)]. (3.21)
В этом случае для отклонения фазы Ф(/) на первом интервале
на основании (3.20) имеем
Auq (0sin( ‘f )
Ф(/) = arctg[ с ] = arctg[u,(r)uQ(Otg( " )]. 0<t<Tc. (3.22)
Au,(t)cos( ‘ ) c
c
11
Из (3.18) следует, что произведение U/(/)t/Q(f) для любого мо-
мента времени на рассматриваемом интервале имеет постоянное
значение, равное либо +1, либо -1. Поэтому можно записать для
первого интервала
Ф(0 =
nt
2ГС
nt
2ТС
для u,(t)uQ(f) = b_tb0 = +1,
для ut (t)uQ (f) = b_,b0 = -1.
(3.23)
В зависимости от значения произведения символов b_^b0 при
t = Тс значение приращения фазы будет равно либо +90 , либо -90°.
Поэтому для сигнала (3.20) на первом интервале можно использо-
вать следующее представление:
s(f) = Acos[2nf0f + b_)b0 у ], 0 < t < Тс .
27с
Эти рассуждения можно повторить для второго интервала вре-
мени, получив аналогичное представление
s(t) = Acos[2nf0t + b^bo " + bob, Tc<t<2Tc. (3.24)
2 z/c
Из (3.24) становится очевидным рекуррентное соотношение
между представлениями сигнала (3.20) на последовательности
временных интервалов длительностью Тс, что позволяет сразу за-
писать общее представление этого сигнала на произвольном ин-
тервале:
s(t) = Zlcos{2nV + ” £ькщЬЛ + Ь/-2Ь/-1 1)7с-).
с.
(3.25)
(i-\)Tc<t<iTc.
Это представление аналогично представлению (3.17); следова-
тельно, сигнал (3.20) действительно является ЧМ сигналом с не-
прерывной фазой.
Из (3.25) следует, что ММС сигнал, сформированный квадра-
турным модулятором, обладает следующей особенностью: знак
приращения фазы на очередном временном интервале определя-
ется не только очередным символом, передаваемым на этом ин-
тервале, но и значением предшествующего символа. Поэтому при
демодуляции такого сигнала в приемнике необходимо учитывать
эту взаимосвязь между соседними канальными символами.
112
a,
Tc
Демульти-
плексор
cos (nf/(2/c)]
Расшири-
тель
импульса
Расшири-
тель
импульса
sin[Trf/(27-c)]
t sin(2 Tifat)
Рис. 3.17. Функциональная схема устройства
формирования ММС сигнала (3.25)
На рис. 3.17 представлена функциональная схема устройства,
обеспечивающего формирование ММС сигнала в соответствии с
его представлением (3.25). Поток информационных битов поступа-
ет на вход демультиплексора, в котором разбивается на две под-
последовательности - нечетных и четных битов. Каждая подпос-
ледовательность преобразуется в последовательность положи-
тельных или отрицательных прямоугольных импульсов. Далее им-
пульсы обеих подпоследовательностей расширяются до длитель-
ностей 2ТС, перемножаются на гармонические полуволны квадра-
турных каналов и переносятся на высокую частоту.
На практике часто используется несколько иной способ фор-
мирования ММС сигнала; соответствующая функциональная схе-
ма представлена на рис.3.18. Перемножение несущего гармони-
ческого колебания с cos[Tcf/(27"с)] приводит к двум гармоническим
сигналам с частотами fQ + 1/(47"с) и f0 -1/(47"с) и связанными фа-
зами. Эти сигналы разделяются узкополосными фильтрами и
комбинируются так; чтобы сформировать соответственно син-
фазную и квадратурную компоненты несущего колебания, кото-
рые далее перемножаются с подпоследовательностями щ(() не-
четных и t/Q(f) четных символов.
Сигналы с ММС применяются в настоящее время в спутниковой
связи, в военных системах связи и управления и в диапазоне очень
низких частот для гидроакустической связи. Поскольку длитель-
ность импульсов в квадратурных каналах увеличена в два раза, то
спектральная плотность мощности этих сигналов занимает значи-
тельно меньшую полосу частот, в результате чего эти сигналы об-
ладают хорошей спектральной эффективностью.
113
Рис. 3.18. Функциональная схема устройства формирования ММС сигнала
Гауссовская частотная модуляция с минимальным сдвигом.
ММС сигнал имеет постоянную огибающую и занимает меньшую
полосу частот, чем сигнал с обычной частотной манипуляцией. Од-
нако для многих приложений спектр ММС сигнала все еще остает-
ся достаточно широким. Основная причина этого состоит в том, что
его фазовые траектории хотя и непрерывны, но являются ломаны-
ми линиями, так что их первая производная по времени оказывает-
ся разрывной. Сглаживание»этих фазовых траекторий является
одним из возможных путей дальнейшего уменьшения ширины
спектра ММС сигнала. Достигается данный эффект использовани-
ем дополнительной фильтрации модулирующего сигнала до его
переноса на высокую частоту.
На рис. 3.19 представлена функциональная схема устройства
формирования сигнала с гауссовской модуляцией с минимальным
сдвигом (ГММС сигнал). Новым элементом в данной схеме являет-
ся гауссовский фильтр низкой частоты (ГФНЧ) с импульсным откли-
ком и амплитудно-частотной характеристикой, определяемыми
следующими равенствами:
2к252 р
In 2
(3.26)
(3.27)
где В - ширина полосы пропускания фильтра на уровне -3 дБ.
На выходе ГФНЧ отклик на каждый импульс подпоследователь-
ности определяется как свертка прямоугольного импульса на входе
и импульсной характеристики фильтра:
114
Рис. 3.19. Функциональная схема устройства формирования
ГММС сигнала
'+Гс
г(0 = и(0*д(0= J д(т)Л= 2
t
Здесь
t
erf(f) = 2 Jexp {- t2 }cfr .
л о
+ erf
(3.28)
(3.29)
При BTC = 1 длительность импульсного отклика фильтра при-
мерно равна длительности одного импульса на входе фильтра и
сглаживание формы импульса оказывается незначительным. При
уменьшении полосы пропускания В отклик на одиночный импульс
приближается к гауссовской кривой и имеет более компактный
спектр; в результате фазовые траектории не имеют изломов.
Если полоса В неограниченно увеличивается, то форма отклика
приближается к форме одиночного импульса. В пределе при
ВТС = со можно считать, что фильтр отсутствует, а схема форми-
рует ММС сигнал.
При практическом построении устройства формирования ГММС
сигнала основные операции формирования сигнала могут быть вы-
полнены с помощью цифровых элементов, которые на рис.3.19 об-
ведены пунктирной линией; только преобразование частоты вы-
полняется аналогсзыми устройствами. Наиболее сложным эле
ментом этой схемы является гауссовский фильтр низкой частоты
Обычно он реализуется как цифровой фильтр с конечной импульс
ной характеристикой. Значительная доля операций при этом може!
быть выполнена специализированным процессором.
Таблица
cosf)
ФНЧ1,
ЦАП
ФНЧ2,
cos(2n/of)
V(0
s(f)
Таблица
sin(")
ФНЧ10 —► ЦАП
ФНЧ2а
Рис. 3.20. Элементы устройства формирования ГММС сигнала
Гауссовская ММС обеспечивает достаточно высокую спектраль-
ную эффективность системы связи и широко используется в со-
временных системах связи с подвижными объектами. В частности,
в системах сотовой связи стандарта GSM при ВТС - 0,3 и в систе-
мах цифровой бесшнуровой связи европейского стандарта DECT
при ВТС = 0,5. Эта функциональная схема устройства формирова-
ния ГММС сигнала используется также в системах связи стандарта
PCS-1900.
На рис.3.20 более детально представлены некоторые элементы
данного устройства. Пунктирной линией обведены аналоговые уст-
ройства.
В современных системах связи предусматриваются серьезные
меры для обеспечения устойчивой связи в сложных условиях рас-
пространения радиоволн (движение передатчика и приемника,
препятствия на пути распространения радиоволн). К таким мерам в
первую очередь следует отнести медленные скачки по частоте в
течение сеанса связи и управление мощностью, излучаемой пере-
датчиками. Способы реализации этих мер можно проиллюстриро-
вать, если ввести незначительные изменения в схему, представ-
ленную на рис. 3.19. Эти изменения показаны на рис. 3.21.
Команды управления мощностью формируются специальной сис-
темой, которая контролирует уровень сигнала на входе приемника.
Медленные скачки по частоте осуществляются с частотой в несколь-
ко сотен герц. Для стандарта GSM эта частота равна 217 Гц.
3.4. Комбинированные методы модуляции
Квадратурная амплитудная модуляция. При М-ичной фазо-
вой модуляции, рассмотренной в § 3.2, амплитуда и частота не-
сущего колебания в течение сеанса связи остаются постоянными.
116
Рис. 3.21. Функциональная схема устройства формирования ГММС
сигнала, включающая элементы управления излучаемой мощностью
и частотой несущего колебания
Изменяется только начальная фаза каждого канального символа.
При квадратурной амплитудной модуляции (КАМ) изменяются
значения амплитуды и начальной фазы каждого канального сим-
вола. Если число возможных значений этих параметров дискретно
и конечно, то этот тип модуляции также является цифровым. Один
канальный символ сигнала при таком способе модуляции можно
представить следующим равенством:
sm (О = Ат cos(2nf0t + Фт) = Re[An ехр{/Фт} ехр(2я^}]. (3 30)
(/-1)ГС<^/ТС,
в котором Ат = Атехр{]Фт} является комплексной амплитудой
этого канального символа, т - При построении сигнально-
го созвездия этого сигнала удобнее использовать вещественную и
мнимую части комплексной амплитуды:
зт (0 = Ami C0^2nf0t + Фт) = Ат соз(Фт )cos(2nf0t)+ Ат 31л(Фт )х
х sin(2nf0r) = ат cos(2nf0f)+ bm sin(2nfot), (i -1) <t< iTc.
где am и bm - координаты m-й точки сигнального созвездия КАМ
сигнала.
На рис. 3.22 представлено сигнальное созвездие КАМ-16. Необхо-
димо отметить, что разные канальные символы этого сигнала имеют
разную энергию; расстояние между разными сигнальными точками
также оказывается различным. В результате вероятность перепутыва-
ния символов в приемнике для разных символов оказывается разной.
117
О о о о О о о О а
о о О О О о о о
Рис. 3.22. Сигнальное созвездие
/W-ичного КАМ сигнала (М = 16)
Один канальный символ такого сигнала может переносить
m = log2 М информационных битов. В частности, при М = 16 имеем
т = 4. Поэтому если по-прежнему считать, что длительность одного
бита равна Тс, то длительность одного канального символа КАМ сиг-
нала равна Ткс ~тТс. Следовательно, при формировании этого
сигнала поток информационных битов должен группироваться в бло-
ки по m битов. Каждому блоку должен быть поставлен в соответст-
вие один канальный символ. Установление такого соответствия на-
зывается сигнальным кодированием.
На рис. 3.22 сигнальное созвездие имеет форму квадрата или
квадратной решетки, в узлах которой располагаются сигнальные
точки. Это не единственно возможная форма сигнального созвез-
дия и не всегда лучшая. Сигнальные созвездия могут иметь форму,
например, креста, круга, что часто оказывается необходимым при
больших значениях М. В современных системах связи значения
этого параметра могут превышать 1024.
При больших значениях М задавать множества возможных ко-
ординат сигнальных точек проще с помощью целых чисел, нумеруя
сигнальные точки от начала координат. Например, для квадратной
сигнальной решетки, изображенной на рис.3.22, можно ввести обо-
значения а(П1П и 6mjn для координат точек ближайших к началу ко-
ординат. Тогда если все соседние точки имеют одинаковые рас-
стояния между собой вдоль каждой оси, то координаты остальных
точек можно выразить через значения координат ближайших точек
с помощью соотношений:
а* = +fcamin , b, = ±lbmn,
где индексы к и I принимают целочисленные значения. Например,
для созвездия рис.3.22 значения индексов принадлежат множеству
118
{-3, -1, +1, +3}. Совокупность всех точек этого сигнального созвез
дия может быть задана с помощью матрицы
(-3.+3) (-1+3) (*1+3) (З.+З)
{к.1}= (-3.+1) (-3,-1) (-1+1) (-1-1) (+1+1) (+1-1) (3.+1) (3,-1)
.(-3,-3) (-1-3) (+1-3) (3.-3)
На рис. 3.23 представлена функциональная схема устройств.'
формирования КАМ сигнала. Эта схема имеет практически те же
элементы, что и устройство формирования ФМ-8 сигнала, изобра
женное на рис. 3.12. Отметим лишь, что вопрос сигнального коди-
рования в данном случае, как и в случае ФМ-8, не является про
стым и здесь пока не рассматривается.
Ширина спектра этого сигнала примерно такая же, как и М-ичного
ФМ сигнала. Однако данный способ модуляции может обеспечить
меньшую вероятность ошибки на бит передаваемой информации и
поэтому иногда оказывается бопее предпочтительным. Следует, од
нако, отметить, что так как КАМ сигнал не имеет постоянной ампли
туды, то применение этого способа модуляции сопровождается пс
вышением требований к линейности канала передачи.
/И-ичная частотная модуляция. Для М-ичной частотной моду
ляции передаваемые канальные символы определяются выраже-
ниями
sm(f) = A cos
л
Тс
(n0+m)t
(i - 1)ГС <t<iTc, m = \ 2, ...,M ,
(3.32)
где fQ =п0/(27"с) для некоторого целого числа п0. М передаваемых
канальных символов имеют одинаковую энергию и одинаковую дли-
тельность; частоты символов отстоят друг от друга на 1/(2Тс) Гц, что
обеспечивает попарную ортогональность всех символов.
Рис. 3.23. Функциональная схема устройства формирования
М-ичного КАМ сигнала
119
Один символ /W-ичного ЧМ сигнала может переносить
т = log2 М информационных битов. Функциональная схема соот-
ветствующего устройства в основном аналогична схеме, приведен-
ной на рис. 3.23, и представлена на рис. 3.24. »
3.5. Модуляция с расширенным спектром
Псевдослучайные последовательности и псевдослучайные
сигналы. Рассмотренные ранее в этой главе способы модуляции
характеризуются одним общим свойством - стремлением миними-
зировать ширину спектра соответствующего радиосигнала. Поэто-
му эти способы можно назвать узкополосными. Целесообразность
построения и использования таких способов модуляции обуслав-
ливается тем, что выделяемые полосы радиочастот для систем
связи очень ограничены, а любой разработчик стремится в выде-
ленной ему полосе разместить как можно больше частотных кана-
лов. Напротив, модуляция с расширенным спектром приводит к
использованию полосы частот, на несколько порядков превышаю-
щих ширину спектра при узкополосной модуляции. Конечно, такая
система связи будет иметь очень низкую спектральную эффектив-
ность, если она будет использоваться одним абонентом. Однако
широкополосную модуляцию могут использовать несколько або-
нентов и для них может быть выделена одна и та же полоса частот.
Способы модуляции с расширенным спектром можно построить
таким образом, что при одновременной работе нескольких абонен-
тов в одной и той же полосе частот их взаимное влияние будет не-
значительным. Число таких абонентов можно увеличивать до не-
которого предела, в результате чего оказывается, что спектральная
эффективность таких систем оказывается значительно выше эф-
фективности систем с узкополосной модуляцией.
Рис. 3.24. Функциональная схема устройства формирования
/W-ичного ЧМ сигнала
120
Системы, использующие радиосигналы с расширенным спек-
тром, обладают и другими привлекательными свойствами, которые
оказываются очень полезными для систем связи с подвижными
абонентами. Например, качество функционирования таких систем
практически не снижается при появлении даже относительно мощ-
ных узкополосных помех, ширина спектра которых значительно
меньше ширины спектра полезного сигнала. Основная причина
этого состоит в том, что узкополосная помеха поражает лишь не-
значительную часть спектра полезного радиосигнала; такую помеху
можно подавить соответствующим узкополосным заграждающим
фильтром без существенных потерь передаваемой информации.
Важным для систем подвижной связи является также отсутствие
необходимости решать проблему распределения частот между
различными абонентами, поскольку все абоненты используют одну
и ту же полосу частот. Для узкополосных методов модуляции ре-
шение задачи частотного планирования обязательно.
Еще одним полезным свойством систем с расширенным спек-
тром радиосигналов является сохранение их работоспособности
в условиях многолучевого распространения радиоволн, когда ка-
чество передачи в узкополосных системах оказывается практиче-
ски неприемлемым. Здесь следует подчеркнуть, что большинство
каналов передачи в системах подвижной связи являются много-
лучевыми и, следовательно, для них характерны частотно-
селективные замирания, когда суммарная мощность совокупности
спектральных компонентов в относительно узкой полосе частот
может существенно снижаться. Для узкополосных систем это
приводит к существенному снижению мощности принимаемого
сигнала, в то время как мощность широкополосного сигнала на
входе приемника уменьшается незначительно, так как при пере-
даче она была распределена в широкой полосе. Более того, ока-
зывается, что во временной области разные лучи обычно имеют
разную временную задержку, поскольку распространение проис-
ходит по разным путям, имеющим разную длину. При использова-
нии сигналов с расширенным спектром такие лучи можно разде-
лить и обеспечить их совместную демодуляцию, что эквивалент-
но увеличению мощности принимаемого сигнала и, следователь-
но, повышению качества передачи.
Сигналы с расширенным спектром являются псевдослучайны-
ми, т.е. имеют свойства, аналогичные свойствам случайного про-
цесса или шума, хотя формируются по вполне детерминированным
алгоритмам. Обычно форма сигнала определяется псевдослучай-
ной последовательностью, которая чаще всего является бинарной
121
с элементами 0 и 1 и обладает свойствами, схожими со свойствами
случайной бинарной последовательности. Например, если на лю-
бом конечном интервале число нулей примерно равно числу еди-
ниц, то автокорреляционная функция.такой последовательности
близка к автокорреляционной функции случайной бинарной после-
довательности, в частности имеет малые значения коэффициента
корреляции между сдвинутыми друг относительно друга копиями
одной и той же последовательности и т.д.
Псевдослучайные последовательности обычно формируются с
помощью логических цепочек, реализующих детерминированные
алгоритмы. На рис. 3.25 приведен пример такой цепи, которая со-
держит регистр сдвига из последовательно соединенных элементов
с двумя устойчивыми состояниями и некоторую логическую схему в
цепи обратной связи. Двоичная последовательность символов 0 и 1,
хранящаяся в регистре, смещается вправо по регистру при подаче
очередного тактового импульса; символ из последней ячейки регист-
ра выдается на выход в качестве очередного символа последова-
тельности; символы всех или некоторых ячеек регистра подаются в
логическую цепь обратной связи, в которой формируется символ об-
ратной связи, передаваемый в первую ячейку регистра.
Рис. 3.25. Генератор псевдослучайной последовательности
Период следования тактовых импульсов т0 определяет дли-
тельность элементарного символа последовательности. Если ло-
гическая цепь обратной связи содержит только элементы типа «ис-
ключающее ИЛИ», которые и применяются наиболее часто, данное
устройство называется генератором линейной псевдослучайной
последовательности (ПСП). В этом случае значение очередного
символа на выходе цепи обратной связи определяется следующим
рекуррентным соотношением:
ал = с1ал_-, ® с2ап_2 Ф... фстап_т
(3.33)
122
где символ ® обозначает суммирование по модулю 2, а коэффи-
циенты с и символы а принимают значения 0 или 1. Логическая
цепь обратной связи в этом случае представляет собой сумматор
по модулю 2.
Начальное состояние ячеек регистра и структура логической це-
пи обратной связи полностью определяют последующее состояние
ячеек регистра. Если принять некоторое состояние регистра сдвига
за исходное, то через Л/ тактов это состояние вновь будет иметь
место. Если при этом регистрировать последовательность симво-
лов на выходе ячейки с номером I, то длина этой последовательно-
сти будет равна Л/. На последующих N тактах эта последователь-
ность вновь повторится и т.д.
Число N называется периодом последовательности. Значение
N при фиксированной длине т регистра зависит от числа ненуле-
вых весовых коэффициентов с и расположения соответствующих
отводов в регистре. Например, из равенства (3.33) следует, что ес-
ли в какой-то момент времени состояние всех ячеек регистра ока-
зывается равным 0, то все последующие элементы последова-
тельности на выходе регистра будут нулевыми. Существует 2т -1
разных ненулевых состояний регистра сдвига. Следовательно, пери-
од линейной ПСП, формируемой регистром сдвига с т ячейками, не
может превышать 2т -1 символов. ПСП с периодом 2т -1, форми-
руемые регистром сдвига с линейной обратной связью, называются
последовательностями максимальной длины или, более коротко, М-
последовательностя ми.
Устройство, функциональная схема которого представлена на
рис. 3.25, можно назвать цифровым автоматом. Если формируемая
им последовательность описывается уравнением (3.33), то такие
автоматы принято задавать характеристическим многочленом
f{x) = с^х™ + Clxm-1 + с2хт~2 +... + ст^х' + ст , (3.34)
с с0 = 1 и ст =1. Значение вектора с = [с0 q c2...cm] полностью
определяет структуру автомата формирования ПСП: если коэффи-
циент с, = 0 , то это означает, что выход ячейки с номером / к цепи
обратной связи не подключен; при q = 1 / -й выход подключен. На-
пример, пусть т = 7 и с-|= [1010011 1],
с2 = [1 1 0 0 0 0 0 1], т.е. характеристические многочле-
ны соответствующих двух последовательностей имеют вид
123
Z,(x) = 1 • х7 + O x6 +1 • х5 + 0- х4 + 0 • х3 +1 • х2 +1 • х1 +1 =
= х7 + х5 + х2 + х1 +1;
f2(x) = 1 х7 +1-x6+0-x5+0-x4+0-x3+ 0 • x2+0-x1+1 =
= x7 +x6 +1.
Цифровой автомат, формирующий /W-последовательность с ха-
рактеристическим многочленом Щх), имеет отводы с выходов ячеек
2, 5 и 6, а с характеристическим многочленом f2(x) - ячейки 6. Обе
последовательности имеют максимальную длину N = 2 7 -1 = 127.
В табл. 3.3 указаны значения коэффициентов ст всех характери-
стических многочленов, которые описывают последовательности
максимальной длины для т = 7 [3]. Как следует из таблицы, для
данной длины регистра сдвига имеется всего 18 разных характери-
стических многочленов и, следовательно, 18 разных двоичных по-
следовательностей максимальной длины. Все остальные характе-
ристические многочлены с другими наборами коэффициентов опи-
сывают последовательности, период которых меньше 127.
Таблица 3.3
Номер много- члена Значения коэффициентов характеристических многочленов
с0 с. с2 С3 С4 С5 с6 С7
1 1 0 0 0 0 0 1 1
2 1 0 0 0 1 0 0 1
3 1 0 0 0 1 1 1 1
4 1 0 0 1 0 0 0 1
5 1 0 0 1 1 1 0 1
6 1 0 1 0 0 1 1 1
7 1 0 1 0 1 0 1 1
8 1 0 1 1 1 0 0 1
9 1 0 1 1 1 1 1 1
10 1 1 0 0 0 0 0 1
11 1 1 0 0 1 0 1 1
12 1 1 0 1 0 0 1 1
13 1 1 0 1 0 1 0 1
14 1 1 1 0 0 1 0 1
15 1 1 1 0 1 1 1 1
16 1 1 1 1 0 0 0 1
17 1 1 1 1 0 1 1 1
18 1 1 1 1 1 1 0 1
124
Каждая из последовательностей табл. 3.3 и вся их совокупность
обладают свойствами, аналогичными свойствам случайных бинар-
ных последовательностей, в которых каждый очередной символ
принимает значения 0 или 1 с равной вероятностью и независимо
от значений предшествующих символов.
Известно достаточно большое число способов формирования
псевдослучайных последовательностей, статистические свойства
которых хорошо изучены. Новые результаты здесь получают
вплоть до настоящего времени.
На основе псевдослучайных последовательностей формируют
псевдослучайные сигналы, которые нашли широкое применение в
системах подвижной связи. Наиболее простой и часто используе-
мый способ формирования можно описать следующим равенством:
W-1
Р(0 = ^2ак ~ " кто) (3.35)
Л=0
где ак, к = 0,1,2,..., N -1 - символы псевдослучайной последова-
тельности, принимающие значения 0 или 1, коэффициенты
(2ак-1) здесь принимают значения +1 или -1, а функция q(t)
определяет форму элементарного символа псевдослучайного сиг-
нала р(?). Длительность этого сигнала равна Тс = Г\к0.
: На рис. 3.26 и рис. 3.27 представлены примеры графиков нор-
мированных автокорреляционных и взаимной корреляционной
функций псевдослучайных сигналов, сформированных на основе
последовательностей с характеристическими многочленами 5 и 10
из табл. 3.3, которые вычислялись по следующим формулам:
1 Гс 1 Гс
[р,(ор,а-т)< rv(t)= fp,(?)p,a-T)6f. (з.зб)
Е> о E'Ei о
Тс
Здесь Ej = Jpz1 2 * * * * * В(f)dt - энергия соответствующего сигнала,
о
При вычислении функций (3.36) было принято, что
q(t) представляет собой прямоугольный импульс с амплитудой 1 и
длительностью т0.
В силу нормировки максимальные значения автокорреляцион-
ных функций каждого сигнала равны 1. Максимальное значение
модуля. взаимной корреляционной функции не превышает 0,2, а
среднеквадратическое ее значение равно 0,064, и для данного
125
класса псевдослучайных сигналов при любом значении N может
быть оценено как 1/>/л7 = 1/-/127 =0,087. По оси абсцисс на этих
рисунках отложены значения нормированного времени п = t/r0.
Рис. 3.26. Автокорреляционные функции двух псевдослучайных сигналов,
формируемых на основе ^-последовательностей (т = 7, N = 127)
Рис. 3.27. Взаимная корреляционная функция двух псевдослучайных сиг-
налов, формируемых на основе ^-последовательностей (т = 7, N = 127)
Пример. В цифровой сотовой системе второго поколения стандарта IS-95 (США)
применяются две М-последовательности для идентификации базовых станций, кото-
рые полностью определяются следующими характеристическими полиномами:
126
Г,(х) = х15 + х13 +x9+x8+x7tz5+1, (3.37)
/2(х) = х,5+х12+х11 + х,° tx6 + x5 + x'’ ‘ х3 i 1. (3.38)
Обе ПСП имеют период N = 215 - 1 = 32757 символов, длительность элемен-
тарного символа т0 = 1/1228800 мкс. Так что длительность периодов этих ПСП
оказывается равной Л/-т0 - 32757 0,8138 -10 6 =0,026666... с.
Подвижные абоненты в данной системе идентифицируются также с помощью
"М-последовательности, которая определяется следующим полиномом:
f - V42 л. V35 л. V33 4- V31 4 к27 4- к26 = „25 , „22 , у21 ,
»2\Х) = Х 4-X +л 4-X +л 4-Х 4-Х ФХ 4-Х 4- (3 39)
. v19 18 . 17 у16 10 , 7 6 5 у3 2 I .,
гл г X т X гл гл т л гл гл IX T- X + л + I.
Период этой последовательности N = 2п -1 = 43980 -1012 символов. При дли-
тельности элементарного символа т0 = 0,8138 мкс, длительность периода соот-
ветствующего псевдослучайного сигнала равна
№0 = 43980 • 1012 • 0,8138 • 10’6 = 3,5791 • 106 с = 977,9069 ч.
Прямое расширение спектра. Ранее в этой главе были рас-
смотрены методы цифровой модуляции, которые в настоящее
время наиболее часто применяются в системах связи с подвижны-
ми объектами. Одно важное свойство этих методов можно сфор-
мулировать следующим образом: ширина спектра модулирующего
сигнала, а значит, и радиосигнала, определяется главным образом
.скоростью передачи информации. При модуляции с расширенным
спектром ширина спектра модулирующего сигнала уже не связана
Так жестко с используемой скоростью передачи информации. В на-
стоящее время применяют в основном два способа расширения
спектра: прямое расширение спектра и расширение скачками по
частоте.
Прямое расширение спектра осуществляется путем перемноже-
ния информационного сигнала иИНф(0 на псевдослучайный сигнал
r(t), формируемый из псевдослучайной последовательности в те-
чение всего сеанса связи. В результате модулирующий сигнал
w(0 = ^„«(W). (3.40)
Далее радиосигнал формируется так, как это было описано в
предшествующих разделах этой главы для каждого способа моду-
ляции.
Например, при фазовой модуляции комплексная амплитуда ра-
диосигнала представляется равенством (3.5), которое для фазовой
модуляции с расширенным спектром принимает вид
127
A(t) = Aexp{j<p[u(O]} - Аехр{/ф[иинф(Пг(О]}
(3.41)
Радиосигнал (3.4) представляется выражением
s[f, и(0] = A cos{2nfof + <p[tz(Z) ]} = A cos{2nf0t + <р[иикф<Г )r(Z]} =
= Re[/\ ехр{)(р[иинф (f)r(t)]} exp{;2nfof}].
В результате функциональная схема устройства, формирующе-
го ФМ-2 сигнал с расширенным спектром, лишь незначительно бу-
дет отличаться от функциональной схемы аналогичного устройст-
ва, формирующего ФМ-2 радиосигнал для исходного информаци-
онного сигнала, которая представлена на рис. 3.4. Схема устройст-
ва, формирующего ФМ-2 сигнал с расширенным спектром, изобра-
жена на рис. 3.28. Необходимо подчеркнуть, что здесь Гс - дли-
тельность канального символа, которая при ФМ-2 совпадает с дли-
тельностью одного символа информационного сигнала, а т0 -
длительность элементарного символа расширяющего псевдослу-
чайного сигнала. Если эти символы имеют одинаковую прямо-
угольную форму, то отношение
Тс /т0 = В (3.43)
обычно называют коэффициентом расширения спектра или базой
сигнала с расширенным спектром. »
Кроме того, следует обратить внимание на то, что назначение
фильтра основной полосы в этой схеме остается прежним - сфор-
мировать модулирующий сигнал с требуемой формой спектральной
плотности мощности. Однако теперь на входе фильтра сигнал
имеет в В раз более широкий спектр, так что и радиосигнал (3.42)
имеет в В раз более широкий спектр, чем обычный ФМ-2 радио-
сигнал.
Рис. 3.28. Функциональная схема устройства, формирующего ФМ-2 сигнал
с расширенным спектром
128
По многим причинам длительность т0 выбирают так, что база
(3.43) оказывается целым числом; типичные значения коэффици-
ента расширения в современных системах от нескольких десятков
до нескольких сотен. Элементарные символы псевдослучайного
сигнала обычно являются прямоугольными импульсами со значе-
ниями +1 и -1.
Поскольку ширина спектра последовательности прямоугольных
импульсов примерно обратно пропорциональна длительности од-
ного импульса, то вместо (3.43) часто используют отношение полос
частот, которые занимают сигнал с расширенным спектром и ис-
ходный информационный сигнал:
В = дЯрс / ЛЕинф . (3.44)
На рис. 3.29 представлены графики спектров двух радиосигна-
лов сотовых систем стандартов AMPS, GSM и IS-95. Сигнал с рас-
ширенным спектром используется только в системе стандарта IS-
95. Заштрихованная фигура здесь изображает форму спектральной
плотности мощности радиосигнала одного канала передачи. Пере-
дача информации по двум каналам осуществляется одновременно.
В первых двух стандартах спектры разных каналов не перекрыва-
ются и используется частотное разделение каналов при приеме
(МДЧР или FDMA1); радиосигналы системы стандарта IS-95 пере-
даются в одной и той же полосе частот, но их форма различна; в
приемнике это различие используется для разделения каналов
(МДКР или CDMA2). Следует обратить внимание еще на одно свой-
ство сигналов с расширенным спектром, которое иллюстрируется
рис. 3.29, поскольку ширина спектра радиосигнала одного канала
при кодовом разделении значительно больше ширины спектра сиг-
налов при частотном разделении каналов, то при одинаковой излу-
чаемой мощности этих радиосигналов спектральная плотность
мощности сигнала IS-95 оказывается намного меньше.
Перечислим некоторые свойства сигналов с прямым расшире-
нием спектра, наиболее важные с точки зрения организации мно-
жественного доступа в системах связи с подвижными объектами.
• Множественный доступ. Если одновременно несколько або-
нентов используют канал передачи, то в канале одновременно при-
сутствуют несколько сигналов с прямым расширением спектра.
1 FDMA - Frequency Division Multiple Access (множественный доступ с частотным
разделением каналов).
2 CDMA - Code Division Multiple Access (множественный доступ с кодовым разделе-
нием каналов).
129
30 кГц
пп
AMPS
Рис. 3.29. Ширина спектра радиосигналов в сотовых системах стандартов
AMPS, GSM, IS-95
Каждый из этих сигналов занимает всю полосу канала. В приемни-
ке сигнала конкретного абонента осуществляется обратная опера-
ция - свертывание сигнала этого абонента путем использования
того же псевдослучайного сигнала, который был использован в пе-
редатчике этого абонента. Эта операция концентрирует мощность
принимаемого широкополосного сигнала снова в узкой полосе час-
тот, равной ширине спектра информационных символов. Если вза-
имная корреляционная функция между псевдослучайными сигна-
лами данного абонента и других абонентов достаточно мала, то
при когерентном приеме в информационную полосу приемника
абонента попадет лишь незначительная доля мощности сигналов
остальных абонентов. Сигнал конкретного абонента будет принят
верно.
• Многолучевая интерференция. Если псевдослучайный сиг-
нал, используемый для расширения спектра имеет идеальную ав-
токорреляционную функцию, значения которой вне интервала
[-т0,+ т0] равны нулю, и если принимаемый сигнал и копия этого
сигнала в другом луче сдвинуты во времени на величину, большую
2т0, то при сворачивании сигнала его копия может рассматривать-
ся как мешающая интерференция, вносящая лишь малую долю
мощности в информационную полосу.
• Узкополосная помеха. При когерентном приеме в приемнике
осуществляется умножение принятого сигнала на копию псевдо-
случайного сигнала, используемого для расширения спектра в пе-
редатчике. Следовательно, в приемнике будет осуществляться
операция расширения спектра узкополосной помехи, аналогичная
той, которая выполнялась с информационным сигналом в передат-
чике. Следовательно, спектр узкополосной помехи в приемнике
будет расширен в В раз, где В - коэффициент расширения, так
что в информационную полосу частот попадет лишь малая доля
мощности помехи, в В раз меньше исходной мощности помехи.
130
• Вероятность перехвата. Так как сигнал с прямым расшире-
нием спектра занимает всю полосу частот системы в течение все-
го времени передачи, то его излучаемая мощность, приходящая-
ся на 1 Гц полосы, будет иметь очень малые значения. Следова-
тельно, обнаружение такого сигнала является очень трудной за-
дачей.
<• Кроме перечисленных свойств, эти сигналы имеют и другие
специфические свойства, одни из которых можно считать достоин-
ствами (+), а другие - недостатками (-).
(+) Генерирование необходимых псевдослучайных сигналов мо-
жет быть обеспечено простыми устройствами (регистрами сдвига).
(+) Операция расширения спектра может быть реализована
простым умножением или сложением цифровых сигналов по моду-
лю два.
(+) Генератор несущего колебания является простым, так как
необходимо генерировать гармоническое несущее колебание толь-
ко с одной частотой.
. .(+) Может быть реализован когерентный прием сигнала с пря-
мым расширением спектра.
«- (+) Нет необходимости обеспечивать синхронизацию между
абонентами системы.
... (-) Выравнивание и поддержание синхронизации между генери-
руемым в приемнике и содержащемся в принимаемом сигнале
'.псевдослучайными кодами является трудной задачей. Синхрониза-
ция должна поддерживаться с точностью до малой доли длитель-
ности элементарного символа.
Правильный прием информации обеспечивается только
при высокой точности временной синхронизации, когда ошибка
"составляет малую долю длительности элементарного символа,
.что ограничивает возможность уменьшения длительности этого
.символа и, следовательно, возможность расширения полосы
лишь до 10...20 МГц. Таким образом, существует ограничение на
увеличение коэффициента расширения спектра.
.... (-) Мощность сигнала, принимаемого от близких к БС абонен-
тов, намного превышает мощность сигнала далеких абонентов.
Следовательно «близкий» абонент постоянно создает очень мощ-
ную помеху «далекому» абоненту, часто делая прием его сигнала
невозможным. Эта проблема «близкий-далекий» может быть ре-
шена применением системы управления мощностью, излучаемой
АС; цель управления - обеспечить одинаковую среднюю мощность
сигналов разных пользователей на входе приемника БС. Однако
131
обеспечение такого управления оказывается очень трудной зада-
чей из-за задержек во времени в петле обратной связи, неточности
оценивания уровней принимаемых сигналов, ошибок при передаче
команд управления, снижения скорости передачи,информации.
Расширение спектра скачками по частоте. При таком способе
расширения спектра радиосигнала частота несущего колебания
изменяется скачками во времени, принимая конечное число разных
значений. Последовательность ее значений можно рассматривать
как псевдослучайную последовательность, которая формируется в
соответствии с некоторым кодом. Значение частоты постоянно на
интервале времени длительностью т0 и изменяется скачком на
следующем аналогичном интервале, принимая значения из некото-
рого множества lf. Спектр соответствующего радиосигнала при
этом оказывается достаточно широким, однако имеет совершенно
иной вид по сравнению со спектром при прямом расширении.
Можно полагать, что переключения осуществляются между частот-
ными каналами, центральные частоты которых являются элемен-
тами множества lf, а занимаемые ими полосы частот содержат
практически всю энергию сигнала с узкополосной частотной моду-
ляцией. Каждую такую полосу частот называют мгновенной поло-
сой, эти полосы не перекрываются и покрывают общую полосу
частот сигнала со скачущей частотой. Информация от одного ис-
точника передается при конкретной последовательности значений
частоты несущего колебания, которая известна только тому прием-
нику, который должен принять эту информацию.
На рис. 3.30 для каждого интервала времени длительностью т0
заштрихованы полосы частот, занимаемые сигналами с расширен-
ным спектром. Из этого, рисунка следует, что для любого момента
времени сигнал с прямым расширением спектра занимает всю по-
лосу частот, в то время как сигнал с расширением скачками часто-
ты занимает лишь незначительную часть полосы частот системы,
положение которой изменяется скачками во времени. Предполо-
жим. что оба сигнала излучаются с одинаковой мгновенной мощно-
стью. Тогда на первом интервале времени длительностью т0 эта
мощность распределяется во всей полосе частот AFpc, а для сиг-
нала с расширением скачками частоты - только в заметно более
узкой первой полосе AF0 . Следовательно, для сигнала с прямым
расширением значение спектральной плотности мощности в малой
полосе будет значительно меньше значения спектральной плотно-
сти мощности в этой полосе для сигнала с прыгающей частотой.
132
Рис. 3.30. Мгновенные спектры сигналов с расширением скачками частоты
(а) и прямым расширением (б)
Однако передатчик с прямым расширением спектра излучает
мощность в первой полосе в течение всего времени передачи, в то
время как в системе с расширением скачками по частоте данная
полоса занимается на значительно меньшее время. Поэтому сред-
ние по времени значения излучаемой в этой полосе частот мощно-
сти для обеих систем будут одинаковы.
Если в системе с расширением спектра скачками по частоте для
каждого момента времени используется только одна узкая полоса
частот шириной ДГ0, то соответствующий способ модуляции назы-
вают одноканальным. Интервал т0 называется длительностью или
периодом скачков частоты. Для данного способа модуляции коэф-
фициент расширения спектра
В = А/Грс 1 AF0 • (3.45)
На рис. 3.31 изображена структурная схема передатчика, обес-
печивающего формирование сигнала с расширенным спектром
скачками частоты несущего колебания.
Синтезатор частот управляется генератором псевдослучайного ко-
да и обеспечивает быстрое переключение частоты несущего колеба-
ния. Если период скачков частоты т0 много меньше длительности
информационного символа Тс, то скачки называют быстрыми. В этом
случае частота несущего колебания изменяется несколько раз в тече-
ние передачи одного символа, так что один бит передается на разных
частотах. Если Гс « т0, то скачки частоты называют медленными,
несколько символов передаются на одной и той же частоте.
133
Рис. 3.31. Структурная схема передатчика при расширении спектра
скачками частоты
Полоса частот, занимаемая сигналом на одной частоте, зависит
не только от ширины спектра информационного символа, но и от
формы переключающего сигнала и изменения частоты при перехо-
де с одной частоты на другую. Если период скачков намного боль-
ше длительности информационного символа (случай медленных
скачков), то мгновенная полоса фактически определяется шириной
спектра информационного символа. Если имеет место обратное
соотношение Гс » т0, так что частота скачков намного выше ши-
рины спектра последовательности информационных символов, то
мгновенная ширина спектра на каждом значении частоты несущего
колебания практически полностью определяется формой переклю-
чающего сигнала. Если фронты этого импульсного сигнала очень
крутые, то скорость изменения частоты от одного значения к дру-
гому велика и мгновенная полоса будет достаточно широкой, что
приводит к ограничению числа возможных значений частоты в по-
лосе лЕрс всей системы. Если же мы обеспечим изменение часто-
ты достаточно плавным, то мгновенная полоса на каждом значении
частоты несущего колебания будет равна примерно Тск~^, где Тск -
период скачка. Один из возможных способов обеспечить плавное
изменение частоты состоит в том, чтобы плавно уменьшать мощ-
ность излучаемого сигнала перед переключением частоты с после-
дующим плавным увеличением мощности после переключения
частоты.
Охарактеризуем теперь некоторые свойства сигналов с расши-
ренным спектром скачками по частоте с точки зрения их использо-
вания в системах с множественным доступом.
134
• Множественный доступ. При быстрых скачках частоты один
информационный символ передается на нескольких частотах. Если
большая часть частот из множества lf используется для передачи
информации единственному абоненту, то принимаемая мощность
полезного сигнала будет намного больше помех на этих частотах и
соответствующих им временных интервалах и сигнал будет принят
верно. При медленных скачках несколько информационных симво-
лов передаются на одной частоте. Если вероятность передачи в
той же полосе сигналов другим абонентам достаточно мала, сигнал
рассматриваемого абонента будет принят верно на большей части
временных интервалов скачков частоты На интервалах, в которых
передаются сигналы другим абонентам, можно использовать кор-
ректирующие коды, чтобы восстановить данные на этих интерва-
лах времени.
• Многолучевая интерференция. При быстрых скачках частоты
частота несущего колебания изменяется несколько раз за время
передачи одного информационного символа. Эффекты многолуче-
вости на разных частотах часто можно считать независимыми. По-
этому можно ожидать, что на одних частотах уровень принимаемо-
го сигнала может возрастать, в то время как на других частотах мо-
гут оказаться глубокие замирания, и наоборот. В приемнике отклики
на разных частотах усредняются, что обеспечивает уменьшение
влияния многолучевых замираний. При этом обычно используется
некогерентное сложение сигналов с разных частот, что дает неко-
торое улучшение качества приема.
• Узкополосная помеха. Предположим, что узкополосный ме-
шающий сигнал попал в одну из мгновенных полос сигнала с рас-
ширенным спектром. Если множество lf содержит Nf частот, то
рассматриваемый абонент будет использовать занятую помехой
полосу в среднем 11 Nf процентов времени. Следовательно, такая
помеха будет подавлена примерно в Nf раз.
• Низкая вероятность перехвата. При передаче сигнала с бы-
стрыми скачками частоты используется та же плотность мощности
на 1 Гц занимаемой полосы, что и при узкополосной передаче без
скачков частоты. Но частота, на которой будет передана очеред-
ная доля энергии сигнала, неизвестна, а длительность передачи на
одной частоте очень мала. Следовательно, хотя такой сигнал легче
, обнаруживается, чем сигнал с прямым расширением, все же его
.-прием по-прежнему остается трудной задачей.
. Кроме перечисленных выше свойств, сигнал с расширением
:спектра скачками частоты имеет ряд других специфических
135
свойств, которые можно рассматривать либо как преимущества
(+), либо как недостатки (-).
(+) Синхронизация для таких сигналов заметно проще, чем для
сигналов с прямым расширением спектра. Обычно расширение
спектра скачками частоты достигается не за счет высокой частоты
скачков, а за счет использования достаточно большого их числа
(большого множества lf ) при относительно больших значениях
периода скачков 7}, который обычно намного больше длительно-
сти т0 элементарного символа сигнала с прямым расширением.
Следовательно, система со скачками частоты допускает большие
значения ошибок синхронизации.
(+) Различные мгновенные полосы частот, которые могут быть
заняты элементами сигнала с прыгающей частотой, не обязатель-
но должны быть соприкасающимися, поскольку не возникает ника-
ких проблем при построении синтезатора частот, обеспечивающего
быстрый переход от одной частоты к другой, не обязательно при-
надлежащей соседней полосе. С учетом более устойчивой синхро-
низации это свойство обеспечивает возможность использования
сигналов со значительно большим расширением спектра.
(+) Вероятность передачи многими пользователями одновре-
менно в одной и той же полосе мала. Сигнал, излучаемый АС, на-
ходящейся далеко от БС, тем не менее будет принят одновремен-
но с сигналом от другой близкой к БС абонентской станции, так как
их сигналы с большой вероятностью будут передаваться на разных
частотах. Следовательно, проблема «близкий-далекий» для дан-
ных систем решается намного лучше, чем для систем с прямым
расширением.
(+) Поскольку системы с быстрыми скачками частоты допускают
больший коэффициент расширения спектра, то подавление узко-
полосных помех в таких системах оказывается более эффектив-
ным, чем в системах с прямым расширением спектра.
(-) Необходимо синтезировать довольно сложный синтезатор
частот.
(-) Быстрые изменения уровня сигнала при переключении час-
тоты приводят к увеличению мгновенной полосы частот. Чтобы из-
бежать этого, приходится уровень сигнала уменьшать перед и уве-
личивать после переключения.
(-) Требует усилий когерентная демодуляция сигнала, поскольку
трудно сохранить необходимые фазовые соотношения при пере-
ключениях частот.
136
Рис. 3.32. Структурная схема передатчика при расширении спектра
скачками по времени
Расширение спектра при скачках по времени. При расшире-
нии спектра передаваемого сигнала скачками по времени излуче-
ние осуществляется на коротких интервалах времени длительно-
стью Тск, положения которых на оси времени определяется псев-
дослучайным кодом. Ось времени делится на кадры, в каждом кад-
ре выделяется М временных окон. В течение одного кадра абонент
передает информацию только в одном из М окон, номер которого
определяется кодовым сигналом, выделенным данному абоненту.
Так как абонент должен передать всю информацию в течение од-
ного временного окна, то полоса частот для передачи должна быть
увеличена в М раз, т.е. в данном случае коэффициент расшире-
ния спектра равен М. Структурная схема передатчика системы с
расширением скачками по времени представлена на рис. 3.32.
Здесь Тс — длительность информационного символа; Тпер — дли-
тельность передачи информации одного кадра, которая в М раз
меньше длительности кадра.
На рис. 3.33 изображена плоскость «время-частота», на которой
указаны полоса частот, занимаемая спектром сигнала абонента, и
два кадра передачи длительностью Тк, в которых показаны вре-
менные окна, используемые абонентом для передачи информации
этих кадров. Из рисунка видно, что при передаче занимается вся
полоса частот системы в каждом кадре, но в течение очень корот-
кого интервала времени, который в разных кадрах находится в
разных временных окнах.
Для систем связи с подвижными объектами важными являются
свойства рассматриваемых здесь сигналов при их применении для
организации множественного доступа.
• Множественный доступ. Все абоненты используют всю по-
лосу частот системы. Данный способ расширения спектра умень-
137
Рис. 3.33. Расширение спектра скачками по времени
шает вероятность использования двумя абонентами одной и той
же полосы частот одновременно, так как разным абонентам назна-
чаются разные псевдослучайные коды. Если же иногда два або-
нента используют для передачи одно и то же окно, то корректи-
рующие коды обеспечат требуемую достоверность передачи ин-
формации.
Если между абонентами имеет место синхронизация и назна-
чаемые коды таковы, что в каждом временном окне передачу осу-
ществляет только один абонент, то данная схема расширения
спектра приводит к традиционной системе с временным разделе-
нием каналов, в которой, однако, используемое абонентом в каж-
дом кадре временное окно не фиксировано, а изменяется от кадра
к кадру.
• Многолучевая интерференция. При данном способе расши-
рения сигнал передается за более короткое время. То есть ско-
рость передачи более высокая и, следовательно, при наличии двух
лучей соседние символы будут перекрываться так же, как в обыч-
ной системе с временным разделением каналов. Поэтому данный
способ расширения спектра не обеспечивает каких-либо преиму-
ществ в борьбе с многолучевостью.
• Узкополосная помеха. Уменьшение времени приема при дан-
ном способе расширения спектра обеспечивается в М раз. Следо-
вательно, во столько же раз обеспечивается уменьшение времени
воздействия помехи на приемник и уменьшается ее средняя мощ-
ность.
• Вероятность перехвата. Частота, на которой абонент пере-
дает информацию, постоянна. Однако интервалы времени переда-
138
чи неизвестны и малы. Поэтому при наличии многих абонентов,
одновременно передающих информацию, приемнику перехвата
трудно выделить начало и конец передачи одного абонента и ре-
шить, какая информация предназначается каждому абоненту.
Кроме указанных свойств, сигналы с расширением спектра скач-
ками по времени обладают рядом других специфических свойств,
некоторые из которых можно считать полезными для систем связи с
подвижными абонентами (+), а некоторые - нежелательными (-).
(+) Техническая реализация передатчика и приемника при дан-
ном способе модуляции проще, чем при расширении спектра скач-
ками по частоте.
(+) Средняя мощность передатчика может быть незначительной,
что очень полезно при наличии ограничений на эту мощность и при
отсутствии жестких ограничений на пиковую мощность. Передача
при данном способе осуществляется очень короткими временными
интервалами при значительной мощности излучения.
(+) Проблема «близкий-далекий» для данного способа не явля-
ется существенной, так как «далекая» АС большую часть времени
осуществляет передачу информации в тех временных окнах, в ко-
торых «близкая» АС не излучает.
(-) Значительное время вхождения в синхронизм с псевдослу-
чайным кодом БС и малые интервалы времени, в течение которых
АС может корректировать синхронизацию.
(-) Если имеют место временные окна, в которых передачу осу-
ществляют несколько абонентов, то теряется большое число бит
передаваемой информации, так что приходится использовать коды
с хорошей корректирующей способностью и глубокое перемежение.
Список литературы к главе 3
1. Rappoport T.S. Wireless Communications (Principles and Practice). -
New-York. IEEE Press, 1996. -641 p.
2. Феер К. Беспроводная цифровая связь. Методы модуляции и
расширения спектра I Пер. с англ, под ред. В. И. Журавлева. - М.: Радио и
связь, 2000. - 520 с.
3 Варакин Л. Е. Системы связи с шумоподобными сигналами. - М.:
Радио и связь, 1985. - 384 с.
139
ГЛА ВА4
СПЕКТРЫ РАДИОСИГНАЛОВ
4.1. Спектральная плотность мощности
Радиоканал является обязательным элементом любой системы
связи с подвижными объектами. Важнейшим параметром радиока-
нала является занимаемая им полоса радиочастот Af При прочих
равных условиях (скорость передачи информации, качество пере-
дачи и т.д.) систему считают тем лучше, чем меньше полоса час-
тот, занимаемая одним радиоканалом. Современные системы свя-
зи с подвижными объектами и тем более системы будущих поколе-
ний имеют или будут иметь несколько радиоканалов, размещаемых
в полосе частот системы ДА Отношение &F/M = А/чк определяет
число частотных радиоканалов системы, которое является одним
из полезных технических параметров системы.
Хорошо известно, что полоса радиочастот, требуемая для одного
радиоканала, определяется формой спектра радиосигнала, который
должен быть передан по данному каналу. Представляется также
очевидным, что форма спектра радиосигнала зависит как от свойств
модулирующего сигнала, так и от вида используемой модуляции. По-
этому при проектировании систем связи с подвижными объектами
вопросам выбора формы модулирующего сигнала и способа моду-
ляции уделяется особое внимание. За последние годы здесь полу-
чено много новых результатов, которые уже реализованы в совре-
менных системах связи с подвижными объектами, либо планируются
к использованию в системах будущих поколений. Технической базой,
обеспечившей возможности этой реализации, служат современные
достижения микроэлектроники и теории цифровой обработки элек-
трических сигналов, которые практически снимают проблему слож-
ности соответствующих устройств. В настоящее время можно пола-
гать, что почти всегда могут быть найдены способы построения таких
устройств, если только эти устройства обеспечивают улучшение тех-
нических характеристик системы связи.
Важно подчеркнуть, что термин «форма спектра радиосигнала»
является не совсем простым по крайней мере по двум причинам.
140
Во-первых, формы наиболее привлекательных модулирующих сигна-
лов оказываются достаточно сложными, в результате чего процесс
вычисления их спектров оказывается непростым. Во-вторых, модули-
рующие сигналы приходится рассматривать как специфические слу-
чайные процессы, поскольку они отображают случайные последова-
тельности битов, передаваемые в цифровых системах по радиокана-
лам. Поэтому более правильным является термин «спектральная
плотность мощности» модулирующего сигнала или радиосигнала, ко-
торый и будет применяться в дальнейшем в этой главе. Для краткости
иногда будем использовать и термин «спектр». Пояснение физическо-
го смысла спектральной плотности мощности для произвольного ста-
ционарного случайного процесса можно найти в [1]. В этом параграфе
мы ограничимся лишь основными соотношениями.
Будем рассматривать модулирующий сигнал общего вида на
достаточно больших интервалах времени. Для этого сигнала в ка-
честве его математической модели мы вынуждены использовать
случайный процесс U(t) с вещественными значениями, реализации
которого доступны наблюдению, регистрации и обработке на всей
оси времени (-оо<Г<+оо). Обычно можно считать, что этот процесс
является стационарным и его математическое ожидание
постоянно и равно нулю, что выполняется для всех модулирующих
сигналов. В этом случае ковариационная функция процесса U(t)
определяется равенством
+ео +оо
К(т) = + т)} = Jdut Jufuf+TW(uf,uftt;T) duf+T,
—Ж —л
— СО < т < +О0,
где функция W(ut,ut+X,x) - совместная плотность вероятности зна-
чений процесса U(f) в два момента времени: t и t + т. Для стацио-
нарных процессов эта функция зависит только от разности рас-
сматриваемых моментов времени.
Если процесс является эргодическим [1], то вместо (4.1) можно
применить иное определение ковариационной функции:
К(т)= lim — + . -х.<т<+оо, (4.2)
т~>+« 2Т у
которое часто используется для практического вычисления кова-
риационной функции процесса u(t) по одной единственной реали-
зации этого процесса, полученной на достаточно большом
141
интервале времени. Здесь верхний индекс к указывает на номер
реализации.
Спектральная плотность мощности случайного процесса C/(t)
теперь может быть найдена как прямое преобразование Фурье ко-
вариационной функции:
S(co) = p<(r)e y<'Tdr. -оо<(о<+со.
(4.3)
Следует обратить внимание, что функция S(co) определена как
для положительных, так и для отрицательных значений угловой
частоты со.
Реальный физический спектр процесса U(t), который может
быть получен с помощью таких физических приборов, как спек-
троанализаторы, определяется как
О для со < О,
G(w) = S(o) для со = О,
(4.4)
2S(co) для со > 0.
В § 2.1 можно найти примеры ковариационной функции и спек-
тральной плотности мощности для речевого сигнала, который яв-
ляется аналоговым модулирующим сигналом. В данной главе нам
предстоит изучить аналогичные характеристики для цифровых мо-
дулирующих сигналов.
Поскольку ковариационная функция К(т) является веществен-
ной симметричной относительно нуля функцией, то спектр (4.3)
также является вещественной и симметричной относительно точки
w = 0 функцией. Для.всех модулирующих сигналов в системах свя-
зи с подвижными объектами это свойство сохраняется. Физические
спектры этих сигналов существенно отличны от нуля в окрестности
нулевой частоты; их значения уменьшаются с ростом частоты о>,
но, к сожалению, не становятся равными нулю. Т.е. спектры реаль-
ных модулирующих сигналов не ограничены и отличны от нуля на
всей оси частот 0 < а < +х. Тем не менее при проектировании сис-
тем связи с подвижными объектами необходимо ввести понятие
лсгссъё’/емсгс MCEynncv'-cmero сиг-ага. Однако
т. :-. - - Т~.
-no--=cv= Тхзг-~ га чйх
можно сформулировать следующим образом. в качестве ширины
Лоп основной полосы спектра (4.4) принимается интервал частот,
142
на котором сосредоточено 95 % мощности модулирующего сигна-
ла, т.е
jG(/jdf = 0,95 \G(f)df . (4.5)
о о
или, что эквивалентно,
Аоп б то
|s(f)df = 0,95 [S(f)df (4.6)
-Aon
При любом способе модуляции спектр модулирующего сигнала
переносится в область высоких радиочастот. Если для радиосиг-
нала использовать обозначение s[t;t/(t)], введенное в гл. 3, то оче-
видно, что подводимый к излучающей антенне сигнал передатчика
является узкополосным случайным процессом, для которого могут
быть использованы определения, аналогичные приведенным вы-
ше, с той лишь разницей, что спектр этого сигнала сосредоточен
около частоты w0 ици 4) несущего колебания. Ширину спектра это-
го радиосигнала будем определять соотношениями, аналогичными
(4.5) или (4.6):
% + Af / 2 +-30
jGs(f)df = 0,95 jGs(f)df,
о
f0+<V/2 '
Jss (f)df + Jss (f)df = 0,95 Jss(f)df.
-f0-<V/2 f0-^'2 -«
Следует обратить внимание еще на одно важное понятие -
мощность внеполосного излучения, которую обычно определяют
выражением
fo^Af/2 оо
APS = jGs(f)df + jGs(f)df. (4.8)
0 f0 + Af/2
Часто используемой мерой ширины спектра сигнала является
полоса частот, на которой спектральная плотность мощности пре-
вышает половину максимального значения, те. значение спектра
на граничных частотах на 3 дБ ниже его максимального значения.
Иногда используют и более жесткое определение ширины спектра -
это полоса частот между нижней и верхней граничными частотами,
какими, что только 0,5 % мощности сигнала попадает в область вы-
Йе верхней границы и 0,5 % ниже нижней границы; так что 99 %
143
мощности сигнала попадает в полосу частот, которая принимается
в качестве ширины спектра.
Конкретизируем эти общие понятия для некоторых сигналов со-
временных систем связи с подвижными объектами.
4.2. Спектральная плотность мощности
синхронных случайных последовательностей
Равенство (3.1) представляет собой запись одной реализации
синхронной последовательности электрических импульсов извест-
ной формы v(f), отличных от нуля на конечном интервале времени
[О, Гс] и следующих друг за другом с периодом Тс . Значения ко-,
эффициентов bj однозначно определяются значениями переда-
ваемых битов. В цифровых системах передачи потоки передавае-
мых битов приходится рассматривать как случайные, следователь-
но, и последовательности этих коэффициентов следует рассмат-
ривать как случайные. Для большинства современных цифровых
систем связи в качестве адекватной вероятностной модели этих
потоков можно ввести случайную последовательность веществен-
ных чисел {В,, / = 0, ±1, ±2,... }, где В, - дискретная случайная
величина, принимающая с равными вероятностями только два зна-
чения: +Ь или -Ь, элементы В,- и Ву этой последовательности
при / # j независимы. В результате получаем следующее пред-
ставление для синхронной случайной последовательности:
U(f) = ^6Mf-/Tc). (4.9)
Математическое ожидание этого модулирующего сигнала тож-
дественно равно нулю для любого момента времени t. Ковариаци-
онная функция
K(f, f + г) = М{ U(t)u(t + г)} = M{u(t) U(t + г)} =
= М-
£ B,v(t - iTc )£ BjV(t +1 - iTc)
i j
= B,Bj}v(f - ;TC) v(f +1 - jTc) =
i j
= £ M{s/}v(f - iTc)v(t + 7-iTc} =
(4.10)
= b2^v(t-iTc)v(t + x-iTcY
144
В последнем равенстве следует учитывать, что функция v(f) от-
IB^нa от нуля только на интервале времени 0<t<Tc. Из (4.10)
щует, что ковариационная функция синхронной последователь-
;ти зависит от начала отсчета времени и, следовательно, моду-
>ующий сигнал (4.9) не является стационарным случайным про-
псом. Однако функция (4.10) является периодической по пере-
чной t при фиксированном значении т и равна нулю при |т| > Тс.
я таких периодически нестационарных процессов часто исполь-
от усредненную на периоде ковариационную функцию
р<(^+*М = 62”
I ' 'с
jv(f)v(f + т) dt для 0 < т < Тс,
о
Тс
Гv(t)v(t + т) dt для - Тс < т < 0.
(4.11)
Йз (4.11) следует, что форма ковариационной функции, а следова-
тельно, и спектральная плотность мощности модулирующих сигналов
в цифровых системах передачи полностью определяются используе-
мой формой u(f) одного символа. При линейных способах модуляции
(двоичная ФМ, квадратурная ФМ, квадратурная ФМ со смещением,
л/4-квадратурная относительная ФМ, многопозиционные ФМ и КАМ),
которые рассматривались в гл. 3, форма спектра радиосигнала полно-
стью определяется формой спектра модулирующего сигнала.
Как мы уже отмечали в § 4.1, при построении систем связи с
подвижными объектами всегда стремятся использовать радиосиг-
налы с возможно меньшей шириной спектра. Теперь очевидно, что
форма спектра радиосигналов при таких способах модуляции оп-
ределяется формой одиночного символа.
Рассмотрим частный случай, когда форма символа v(f) являет-
ся прямоугольной:
для 0 < t < Тс,
вне этого интервала
Тогда
(4.12)
кы=б2;
Тс*
|v(/)v(f+ т)<Л = Тс-т для 0<т<Тс,
о
Тс
Jv(f)i/(f + т) dt = Тс -!т для -Тс<т<0.
145
Таким образом.
(4-13)
Спектральную плотность мощности модулирующего процесса
(4.9) при форме символа (4.12) вычисляем как преобразование
Фурье (4.3):
S(co) = |к(т)е_*”Л = b2 | 1-М е 'w,cfr = Ь2ТС . (4.14)
-тД Гс) (ыТс/2Г
Радиосигнал при двоичной ФМ можно представить в виде
s[(; U(t)] = U(t) cos(co0f). (4.15)
Поэтому спектральная плотность мощности радиосигнала может
быть получена непосредственно из спектра модулирующего сигнала:
Ss(<°)=(s(“ - «о)+ sl- (®+й’о)]' =
= fe27c fsin2[(«-co0)Tc/2] + sin2[-(w + coo)7-c /2]1 (4 16)
2 [(со-сооХ/г]2 [-((о+ио)гс/г]2 j
а физический спектр ФМ-2 радиосигнала в рассматриваемом слу-
чае имеет вид
Gs (со) = Ъ2ГС
sin2[(co-<o0)Tc/2]
[(<о-соо)Гс/2Р
(4-17)
О < СО < +ОТ .
С целью последующего сравнения спектров для различных спо-
собов модуляции и увеличения диапазона возможных значений при
построении соответствующих графиков введем нормировку спектра
на его максимальное значение и используем логарифмический
масштаб по оси ординат:
Gs(f)=ioig(^P4^
I [2п(Т-/о)Тс/2]2
sin2[n(/--f0)Tc]
. Н'-Ш2
= 10!д.
sin2[n(f-f0)/R6]
[л(Г-/оМ]2 .
(4.18)
146
Здесь также введено обозначение скорости передачи информа-
ции /?б = 1/Гс, так как при ФМ-2 за время Тс секунд передается
1 бит. Произведение (f-f0)rc = (f 4))^б является безразмерным
и часто используется при построении графиков спектров для раз-
личных способов модуляции.
На рис. 4.1 представлены графики функций v(t), К(т) и G s(f)
для рассматриваемого примера.
Рис. 4.1. Нормированная спектральная плотность мощности ФМ-2
радиосигнала при прямоугольной форме элементарного символа:
а — форма символа; б- ковариационная функция модулирующего сигнала;
в — спектр радиосигнала
Подчеркнем, что в соответствии с (4.18) максимальные значе-
ния боковых лепестков спектра убывают как 1/(f — f0)2. Первый бо-
ковой лепесток на 13 дБ ниже основного лепестка на частоте несу-
щего колебания, второй - на 18 дБ и т.д. Т.е. спектральная плот-
ность мощности убывает сравнительно медленно при отклонении
147
от частоты несущего колебания. Поэтому мощность внеполосных
излучений для этого способа модуляции при прямоугольной форме
элементарного символа достаточно велика, что является недостат-
ком данного типа радиосигнала.
В качестве ширины физического спектра ФМ-2 радиосигнала
часто принимают ширину основного лепестка между ближайшими
нулями, которая равна Af = 2 /Тс. В этой полосе содержится при-
мерно 95% мощности этого сигнала.
4.3. Спектральная плотность мощности сигнала
с квадратурной фазовой модуляцией
В § 3.2 (см. формулу (3.7) и рис. 3.6) для сигнала с квадратурной
фазовой модуляцией получено следующее представление:
s[r;C/(r)]= /(f)cos(o0r)+Q(f)sin(o0f), (4-19)
где функции
/(0=Sfi2»-i9(f-/27’c). Q(0=Efi2i^-Z27c) (4.20)
/ i
принято называть синфазной и квадратурной компонентами моду-
лирующего сигнала; импульс g(t) теперь имеет длительность в два
раза большую длительности импульса v(f). Последовательность
{Вг/’-ъ ' = 0, +1, ± 2,...} содержит нечетные, а последовательность
{Bi,, i = 0, ± 1, ± 2,...} - четные символы исходной последователь-
ности {В(-, i = 0, ± 1, ± 2,...}. Здесь, как и в предыдущем параграфе,
будем полагать, что элементы исходной последовательности яв-
ляются дискретными случайными величинами, принимающими с
равной вероятностью значения b или -Ь; элементы с разными
значениями индексов независимы.
Каждое слагаемое в (4.20) имеет вид, аналогичный виду ФМ-2
сигнала, и отличается только тем, что теперь длительность одного
символа равна 2ТС. Следовательно, для этих слагаемых можно
использовать равенства (4.11), (4.12) и (4.13), если в них заменить
v(f) на g(t) и Тс на 2ГС. В результате можно получить выражения
для спектральных плотностей мощности каждого из этих слагае-
мых. В частности, для случая, когда g(t) является прямоугольным
импульсом с длительностью 2ТС и амплитудой 1, форма спек-
тральной плотности мощности этих слагаемых аналогична (4.17) с
очевидной заменой Тс на 2ТС:
148
Gs(<o)=2b2rc
sin2[(o>-<o0)rc
[(co-WoKf
(4.21)
В соответствии с (4.19) ФМ-4 радиосигнал является суммой двух
аналогичных сигналов. Обратим внимание на то, что эти слагае-
мые не содержат одинаковых информационных символов и, сле-
довательно, являются независимыми случайными процессами.
Спектральная плотность мощности суммы таких процессов будет
равна сумме спектральных плотностей слагаемых. Поэтому для
частного случая прямоугольного импульса g(f) вместо (4.18) для
ФМ-4 сигнала можно записать следующее выражение для норми-
рованной спектральной плотности мощности:
Gs (f)=10lg-
sin2[2n(f-f0)rc]
M-/b)rc]2
sin2[n(f-f0)2//?6]
[n(f-f0^IR6Y
(4.22)
График этой функции-представлен на рис. 4.2, на котором пунк-
тирной линией изображен также график спектра ФМ-2 сигнала. Ши-
рина спектра ФМ-4 сигнала в два раза меньше ширины спектра ФМ-2
сигнала при той же скорости передачи информации. Однако скорость
убывания боковых лепестков остается такой же.
Аналогичным образом можно получить спектральную плотность
мощности сигнала с квадратурной фазовой модуляцией со смеще-
нием, которая рассматривалась в § 3.2. Для этого сигнала также
справедливо представление (4.19), в котором квадратурная со-
ставляющая модулирующего сигнала сдвинута по времени относи-
тельно синфазной составляющей на Тс:
/(f)=Se2l-^-/2Tc). Q(0=£B2,g(f-rc-2/Tc). (4.23)
/ i
Однако временная задержка квадратурной составляющей не
изменяет форму ее спектральной плотности мощности. Следова-
тельно, спектр сигнала с квадратурной фазовой модуляцией со
смещением будет аналогичен спектру ФМ-4 сигнала.
Аналогичные соотношения можно получить для ФМ-8 сигналов,
сигналов с я/4-квадратурной относительной фазовой модуляцией,
сигналов с многопозиционной КАМ.
Рассмотренные в этом параграфе примеры спектров сигналов
позволяют сформулировать следующие общие выводы для линей-
ных методов модуляции:
• форма спектра радиосигнала существенно зависит от формы
элементарного импульса; следовательно, некоторые требования к
форме спектра сигнала можно обеспечить подбором формы этого
импульса;
149
Рис. 4.2. Нормированная спектральная плотность мощности ФМ-4 радио-
сигнала при прямоугольной форме элементарного символа (спектр ФМ-2
радиосигнала изображен пунктирной кривой)
• переход к многопозиционной модуляции, при которой один ка-
нальный символ переносит не один, а несколько информационных
битов, позволяет уменьшить ширину спектра и, следовательно, по-
высить спектральную эффективность системы передачи.
Отметим здесь, что в определенной степени эти выводы оста-
ются справедливыми и для нелинейных методов модуляции.
4.4. Способы выбора формы элементарного символа
Межсимвольная интерференция и фильтры Найквиста. Ес-
ли элементарный сигнальный импульс прямоугольной формы про-
ходит по каналу передачи с ограниченной полосой пропускания, то
его форма на выходе канала будет заметно отличаться от прямо-
угольной: импульс растягивается во времени. В результате сосед-
ние импульсы на выходе канала будут перекрываться. При приеме
на очередном символьном интервале остатки от предшествующих
символов накладываются на значения принимаемого символа,
создавая межсимвольную помеху, которую принято называть мем-
символьной интерференцией (МСИ). Эта помеха приводит к уве-
личению вероятности ошибки при демодуляции сигнала. Первый
очевидный путь уменьшения этой межсимвольной помехи состоит
в том, чтобы увеличить полосу пропускания канала передачи. Од-
нако для систем связи с подвижными объектами очень важно при
прочих равных условиях минимизировать занимаемую полосу ра-
150
диочастот, максимально возможно подавить внеполосные излуче-
ния. Уровень излучений в полосе соседнего частотного канала
должен быть на 40... 80 дБ ниже мощности сигнала в используемом
частотном канале. Технически достаточно сложно получить тре-
буемую форму спектра сигнала в передатчике на радиочастоте.
Поэтому в современных системах связи эту задачу формирования
спектра радиосигнала решают путем выбора соответствующей
формы элементарного импульса, т.е. в полосе частот около нуля,
которую принято называть основной полосой. В настоящее время
известно несколько используемых типов формы элементарного
импульса, которые обеспечивают уменьшение как мощности меж-
символьной интерференции, так и ширины спектра радиосигнала.
Впервые проблему уменьшения МСИ при ограниченной полосе
пропускания канала рассматривал Найквист. Он обратил внимание
на то, что МСИ можно полностью исключить, если общий отклик
системы (включая передатчик, канал и приемник) построить таким
образом, чтобы при каждом отсчете мгновенного значения сигнала
в приемнике значения всех символов, кроме текущего, были равны
нулю. Если обозначить символом h(t) общий импульсный отклик
всей системы, то это требование можно записать в виде следую-
щего ограничения на функцию h(t):
|4 24)
где Тс - длительность интервала времени, на котором передается
очередной канальный символ. Условию (4.24) при минимальной
ширине спектра удовлетворяет функция
h(t) = 5,п(^/гс) (4.25)
Rf/ 1С
график которой изображен на рис. 4.3. Спектр этого импульса пря-
моугольный с шириной 1/(2Тс). Однако этот импульсный отклик
соответствует физически нереализуемой системе (отклик отличен
от нуля при отрицательном значении аргумента), его трудно ап-
проксимировать. Эта функция имеет огибающую 1/(, медленно
убывающую с ростом f, и большие значения производных в окре-
стностях нулей. Таким образом, незначительные отклонения мо-
ментов отсчетов, обусловленные ошибками тактовой синхрониза-
ции, будут приводить в заметным МСИ. Для уменьшения значений
отсчетов от соседних импульсов желательно иметь огибающую ти-
па 1/I2 или даже с большим значением показателя степени.
151
t/Tc
Рис. 4.3. Импульсный отклик идеального
формирующего фильтра Найквиста
Найквист также доказал, что любой фильтр с передаточной
функцией //(/), имеющей постоянное значение в полосе частот от
нуля до fc > 1/(27^) и являющейся сверткой с произвольной четной
функцией Z(f), равной нулю вне этой полосы, удовлетворяет усло-
вию (4.24), т.е.
"(0 = П(Шс)МП. (4.26)
где Z(f) - Z(-f) и Z(f) = 0 для f > fc,
Л ft |f|<L,
1IV i t — прямоугольная функция. (4.27)
|0, |7|>7С,
Преобразование Фурье для (4.26) приводит к следующему им-
пульсному отклику фильтра Найквиста
sinGrt£7e)20_ (428)
nt
которая обеспечивает устранение МСИ. Передаточная функция
формирующего фильтра Найквиста представлена на рис. 4.4.
‘МП
Рис. 4.4. Передаточная функция
реализуемого фильтра
Найквиста
-1/(2Тс) 0 1/(2Тс)
152
Обычно предполагается, что искажения, вносимые каналом,
могут быть скомпенсированы в приемнике специальными устрой-
ствами, которые называются эквалайзерами. Поэтому сквозная
передаточная функция H(f) всей системы передачи представля-
ется как произведение передаточных функций фильтров пере-
датчика и приемника. При этом наиболее подходящими будут
фильтры с передаточной функцией ^H(f) как в передатчике, так
и в приемнике.
Целесообразность использования таких фильтров объясня-
ется тем, что в этом случае фильтр приемника будет согласо-
ванным с сигналом передатчика и, следовательно, будет обес-
печивать максимальное значение отношения сигнал-помеха в
моменты отсчетов; кроме того, будут выполняться требования
подавления МСИ при минимально возможной ширине полосы
пропускания.
В заключение отметим, что при использовании изложенного
здесь подхода к решению проблемы уменьшения требуемой поло-
сы частот и подавления межсимвольных искажений получающаяся
длительность элементарного символа оказывается заметно боль-
ше длительности Тс интервала времени, который первоначально
выбирался для канального символа. Этот подход к формированию
спектров сигналов широко используется в современных системах
связи с подвижными объектами.
Формирующий фильтр для систем с кодовым разделением
каналов. Схема формирования радиосигнала в передатчике под-
вижной станции системы стандарта IS-95 представлена на рис. 4.5.
Здесь используется квадратурная фазовая модуляция со смеще-
нием. Формирующие фильтры или фильтры основной полосы уста-
новлены в квадратурных ветвях модулятора передатчика.
1(f)
Фильтр
основной
полосы
Рис. 4.5. Схема формирования радиосигнала системы стандарта IS-95
cos(t->,r)
sin(<->./)
153
Фильтры основной полосы, формирующие элементарный им-
пульс и, следовательно, определяющие форму спектральной плот-
ности мощности радиосигнала передатчика этой системы, должны
удовлетворять требованиям, которые представлены графически на
рис. 4.6 в виде маски для амплитудно-частотной характеристики.
В полосе пропускания 0 < f < fn модуль нормированной переда-
точной функции не должен отклоняться от номинального значения
О'дБ более, чем на ±5! = 1,5 дБ, и должен быть меньше или равен
82 = -40 дБ в полосе задержания. Численные значения остальных
параметров: 7п=590 кГц, f3=740 кГц. Частота следования эле-
ментарных символов в канале связи системы стандарта IS-95 рав-
на 1,2288 Мгц, так что длительность интервала
Тс =(1/1.2288)-10-^0,8138 мкс. Полоса пропускания этого
фильтра на уровне -3 дБ равна примерно 625 кГц.
Если h{t) есть импульсный отклик формирующего фильтра, то в
соответствии со стандартом iS-95 он должен удовлетворять сле-
дующему неравенству:
min У [ab(/<rs - r)-/bWF *0,03 . (4.29)
а-т к=о
где значения коэффициентов hQ(k) заданы в табл. 4.1, а
Т$ = 203,451.... нс - шаг дискретизации, равный четверти длитель-
ности сигнального интервала Тс.
Рис. 4.6. Маска для модуля передаточной функции
формирующего фильтра
154
Таблица 4.1
к hQW к hoik] к ho(k)
0,47 -0,025 8,39 0,037 16,31 -0,013
1,46 -0,034 9,38 -0,022 17,30 -0,143
2,45 -0,036 10,37 -0,061 18,29 -0,212
3,44 -0,017 11,36 -0,051 19,28 -0,141
4,43 0,022 12,35 0,007 20,27 0,095
5,42 0,065 13,34 0,084 21,26 0,441
6,41 0,091 14,33 0,127 22,25 0,786
7,40 0,082 15,32 0,095 23,24 1.0
Следует иметь в виду, что для к < 48 значения h(k) = /7(4 7 - к) и
h(k) = 0 при к >48. График функции /70(/с) изображен на рис. 4.7.
Из этого рисунка видно, что длительность импульсной характери-
стики более чем в 10 раз превышает длительность элементарного
символа Тс й системе данного стандарта. Ее значения в точках,
кратных Тс, близки к нулю.
В передатчике базовой станции стандарта IS-95 используется
квадратурная фазовая модуляция без смещения. Поэтому схема фор-
мирования радиосигнала здесь аналогична схеме, представленной на
рис. 4.5, в которой отсутствует блок задержки в квадратурном канапе.
Рис. 4.7. Импульсная характеристика формирующего фильтра в системе
стандарта IS-95
155
В приемниках АС и БС выполняются операции, обратные опе-
рациям при формировании радиосигналов: принимаемый сигнал
перемножается с опорными гармоническими колебаниями, в ре-
зультате чего выделяются квадратурные компоненты, которые по-
даются на входы фильтров, аналогичных формирующим фильтрам
в передатчиках. На выходах этих фильтров берутся отсчеты мгно-
венных значений выходных сигналов с периодом Тс.
Аналогичные формирующие фильтры предусматриваются новым
стандартом IS-2000 (США), который разрабатывался для систем ново-
го поколения с более высокими скоростями передачи информации.
Изменяются лишь некоторые численные значения параметров для
режимов работы системы с большими значениями коэффициента
расширения спектра. В частности, для системы с частотой следования
элементарных символов 3-1,2288 МГц длительность интервала
Гс = [1/(3-1,2288)]-10~6 = 0,2713 мкс, граничные частоты полосы
пропускания fn =1,7164 МГц и полосы задержания f3 =1,97 МГц.
Формирующий фильтр с характеристикой в виде приподня-
того косинуса. Такой фильтр используется в системах связи с
подвижными объектами наиболее часто. Он относится к классу
фильтров, которые удовлетворяют условиям Найквиста. Переда-
точная функция фильтра приподнятого косинуса определяется
следующим равенством:
Н(7) =
Тс. 0<7<(1-а)/(2Тс)
Ml + cosP^ff-1-0
2 [ а 2ТС
0, f >(1 + а)/(2Тс),
(1 - a)/(2Tc) < f < (1 + a)/(2Tc) (4.30)
где ot называют коэффициентом скругления, который принимает
значения из интервала от 0 до 1. Для некоторых значений этого
параметра графики функции (4.30) изображены на рис. 4.8. При
a = 0 частотная характеристика является прямоугольной и имеет
минимальное значение занимаемой полосы частот. Импульсный
отклик этого фильтра можно получить путем вычисления обратного
преобразования Фурье от передаточной функции (4.30):
40 =
cos(naf /Гс)
1-4a2(t/Tc)2
sin(nf/rc)
л(/Гс
(4.31)
Из этого выражения следует, что значения импульсного отклика
(4.31) при пересечении нулевого уровня значительно меньше анало-
гичных значений импульсного отклика (4.28); скорость убывания здесь
характеризуется функцией I//3 при f > Гс.
156
Рис. 4.8. Модуль передаточной функции формирующего фильтра
приподнятого косинуса
На рис. 4.9 приведены графики функции (4.31) для некоторых зна-
чений параметра скругления а.
Как следует из рис. 4.8 и рис. 4.9 с увеличением значения пара-
метра а ширина полосы частот, пропускаемых фильтром, также
растет, а значения импульсного отклика на соседних временных
интервалах уменьшается.
Это означает, что увеличение значения а уменьшает чувстви-
тельность приемника к ошибке тактовой синхронизации, но увели-
чивает полосу занимаемых частот.
Спектральные плотности мощности ФМ-2 сигналов при прямо-
угольной форме элементарного символа и при использовании
формирующего фильтра приподнятого косинуса изображены на
рис.4.10. Из этого рисунка очевидно, что в полосе частот шириной
1,5/7С сосредоточена вся мощность радиосигнала, сформирован-
ного фильтром приподнятого косинуса.
При практическом применении полученного результата необхо-
димо учитывать, что передаточная функция (4.30) реализуется по-
следовательным соединением формирующего фильтра передатчи-
ка и согласованного фильтра приемника. Поэтому общая переда-
точная функция должна быть расщеплена поровну между этими
фильтрами. В результате передаточная функция каждого фильтра
должна быть равна 7^7) •
157
1
0,8
0.6
0.4
I 0.2
0
-0.2
-0.4
-5 -4 -3 -2 -1 0 1 2 3 4 5
t/Tc
Рис. 4.9. Импульсный отклик формирующего фильтра
приподнятого косинуса
При построении этих фильтров можно усекать импульсную ха-
рактеристику без существенных отклонений от теоретической кри-
вой. Обычно используется интервал ±6ТС относительно точки
f = 0. В идеальном случае передаточная функция формирующего
фильтра передатчика Hnep(f) = Л/н^)е~72’’/?0, а фильтра приемника
Нпр(^)~ ”лер (0. гДе *о _ время задержки, выбираемое из условия
физической реализуемости фильтра.
Реализация осуществляется с применением цифровой обработ-
ки сигналов в основной полосе частот. Для уменьшения сложности
соответствующих устройств часто формирование дискретных от-
счетов сигнала выполняется сразу для некоторой группы битов с
применением табличного способа считывания. Например, предпо-
ложим, что двоичные импульсы основной полосы должны форми-
роваться фильтром приподнятого косинуса при значении а = 1/2.
Если модулятор каждый раз запоминает три бита, то возможны во-
семь разных форм сигнала, которые могут появиться случайно для
такой группы. Если для каждого бита необходимо сформировать от-
клик на интервале ±6ГС, то дискретные отсчеты суммарного сигнала
для этой группы должны быть сформированы на интервале 14ТС.
Спектральная эффективность, которую может обеспечить фильтр
приподнятого косинуса, может быть достигнута только в случае со-
хранения точной формы огибающей сигнала на радиочастоте.
158
(f- fonc
Рис.4.10. Спектральные плотности мощности ФМ-2 сигналов
Это требование не всегда легко выполняется, поскольку требу-
ются линейные усилители мощности в передатчике, коэффициент
полезного действия которых невелик. Небольшие искажения фор-
мы огибающей могут привести к драматическому возрастанию за-
нимаемой полосы частот передаваемым сигналом. Если не осуще-
ствлять надлежащий контроль, то это может привести к значитель-
ному возрастанию помех для соседних частотных каналов. Воз-
можные способы разрешения данного противоречия активно ис-
следуются в настоящее время.
Формирующий фильтр с гауссовской характеристикой. Для
формирования сигнала основной полосы не обязательно исполь-
зовать метод Найквиста. Один из таких методов, который применя-
ется достаточно часто, состоит в том, чтобы использовать гауссов-
ский формирующий фильтр. Этот фильтр оказывается особенно
полезным при модуляции радиосигнала с минимальным сдвигом
частоты или при других нелинейных методах модуляции, которые
допускают использование эффективных нелинейных усилителей. В
отличие от формирующих фильтров Найквиста, которые имеют
усеченные импульсные отклики с нулевыми значениями в моменты
отсчетов соседних символов, гауссовский фильтр имеет гладкий
импульсный отклик, нигде не пересекающий нулевой уровень. Га-
уссовский фильтр имеет следующую передаточную функцию:
Н(/) = ехр{-и2/2}. (4.32)
159
Значение параметра а можно определить через значение поло-
сы пропускания фильтра на уровне -3 дБ. Действительно, при
f = BI2
откуда а =
1,1774
В
(4-33)
Импульсный отклик гауссовского фильтра
h(t) = — exp-
а
-4'2
а
(4.34)
В выражение (4.34) можно явным образом ввести произведение
ширины полосы В гауссовского фильтра и длительности Тс эле-
ментарного символа. Для этого достаточно в показатель экспонен-
ты вместо а подставить его представление из (4.33):
(4.35)
На рис. 4.11 изображены графики функции (4.35) для некоторых
значений произведения ВТС при а = 1,0 .
Гауссовский фильтр обеспечивает возможность формирования
достаточно узкой занимаемой полосы ^астот (хотя и несколько боль-
шей полосы, формируемой фильтром приподнятого косинуса). Его пе-
редаточная функция быстро убывает с ростом частоты. Этим обеспе-
чивается низкий уровень внеполосных излучений. Фильтр относитель-
но малочувствителен к искажениям формы импульсного отклика. Все
эти свойства фильтра являются привлекательными для его примене-
ний при реализации методов модуляции в условиях использования
нелинейных усилителей и наличия искажений формы импульсов при
передаче. Следует отметить, что гауссовский фильтр не удовлетворя-
ет условиям Найквиста и приводит к более высоким уровням межсим-
вольных искажений. Так что экономия занимаемой полосы сопровож-
дается повышением вероятности ошибок при приеме. Таким образом,
здесь возможно увеличение одной величины при уменьшении другой.
Гауссовский формирующий фильтр может оказаться полезным в
тех случаях, когда важнейшим фактором при построении системы
является стоимость, которую желательно снизить даже за счет не-
которого увеличения вероятности ошибки по сравнению с требуе-
мым номинальным значением.
160
t/Tc
Рис. 4.11. Импульсный отклик гауссовского формирующего фильтра
4.5. Спектры сигналов с постоянной огибающей
Двоичная частотная модуляция. Многие реальные системы
связи с подвижными объектами используют нелинейные методы
модуляции, при которых огибающая радиосигнала не изменяется
во времени при изменениях значений модулирующего сигнала. Ме-
тоды модуляции с постоянной огибающей имеют ряд преимуществ
по сравнению с линейными методами модуляции:
• допускают применение эффективных усилителей с режимом С
без увеличения занимаемой радиосигналом полосы частот:
• обеспечивают очень низкий уровень внеполосных излучений
(от -60 дБ до -70 дБ);
• допускают использование ограничителей при демодуляции ра-
диосигнала, что существенно упрощает приемники и обеспечивает
высокую устойчивость качества приема по отношению к флуктуаци-
ям уровня сигнала, обусловленным релеевскими замираниями.
Однако спектры сигналов с постоянной огибающей обычно за-
нимают большую полосу частот, чем спектры сигналов с линейной
модуляцией. В тех случаях, когда спектральная эффективность
оказывается более важным свойством, чем энергетическая эффек-
тивность, модуляция с постоянной огибающей может оказаться
менее предпочтительной.
Способы формирования сигналов с двоичной частотной моду-
ляцией были рассмотрены в § 3.3. Так как мгновенные значения и
комплексная огибающая этих сигналов являются нелинейными
161
функциями от модулирующего сигнала, то вычисление спектраль-
ной плотности мощности для них не является простой задачей.
Чаще всего спектры этих сигналов получают путем усреднения по
времени результатов экспериментальных измерений. В общем
случае можно считать, что спектр ЧМ сигнала содержит спектраль-
ные линии на частотах f0 , fQ ± n/\f, где п - целое ’положительное
число. Известно, что при наличии разрывов фазы при переходе от
одного бита к другому значения спектра убывают пропорционально
1/f2, а при обеспечении непрерывности фазы - пропорциональны
1/(4 при отклонении частоты от частоты несущего колебания.
Для приближенной оценки требуемой полосы частот можно вос-
пользоваться следующей рекомендацией [3J:
B^2&f + 2BUt (4.36)
где Ви - ширина спектра модулирующего сигнала. Если использу-
ются прямоугольные элементарные импульсы и ширина спектра
Ви определяется как интервал до первого нуля спектра, т.е.
Ви = 1/Тс,го
B*2faf+MTC). (4.37)
Если используется формирующий фильтр приподнятого косину-
са с параметром скругления а, то требуемая полоса радиочастот
уменьшается и становится равной
B^2rf + (Ua)lTc. (4.38)
Частотная модуляция с минимальным сдвигом. Частотная
модуляция с минимальным сдвигом является специальным случа-
ем частотной модуляции с непрерывной фазой, когда индекс час-
тотной модуляции (3.15) h = 0,5. При таком значении индекса рас-
стояние 2л/ между возможными значениями частоты радиосигна-
ла оказывается минимально возможным, при котором два каналь-
ных сигнала с разными значениями частоты несущего колебания
оказываются ортогональными при их когерентном приеме.
Модуляция с минимальным сдвигом является спектрально-
эффективным методом модуляции и очень привлекательным для
применения в системах связи с подвижными объектами. Соответ-
ствующие радиосигналы обладают такими полезными свойствами
как постоянство огибающей, сравнительно малые требуемые поло-
сы радиочастот, хорошее качество приема (достаточно низкая ве-
роятность ошибки) и возможность самосинхронизации. Как показа-
162
но 8 § 3.3, модуляцию с минимальным сдвигом можно рассматри-
вать как специальную форму относительной квадратурной фазовой
модуляции, в которой прямоугольные элементарные символы за-
менены полуволной синусоидального колебания:
д(!)=
I Tit I
cos
(27с J
О, t > Тс
(4.39)
Спектральная плотность мощности соответствующего радио-
сигнала (ММС сигнала) может быть вычислена как прямое преоб-
разование Фурье от ковариационной функции этого сигнала так, как
это было сделано для ФМ-2 сигнала. Однако вычисления для дан-
ного сигнала оказываются достаточно громоздкими. Поэтому здесь
приведем окончательный вид нормированной спектральной плот-
ности мощности этого сигнала [3J:
г л2
_ 16 cos2n(7 + 7О)ГС ) 16
л2 1,16727с2 J г?
„cosl-ntf - f0)Tc
1,16Л2ГС2
(4.40)
График функции (4.40) представлен на рис. 4.12 вместе с гра-
фиком спектра радиосигнала с квадратурной фазовой модуляцией
(КФМ) с прямоугольной формой элементарного символа.
Рис. 4.12. Спектральные плотности мощности
ММС, КФМ и ОКФМ сигналов
163
Из этого рисунка следует, что боковые лепестки спектра ММС
сигнала намного меньше боковых лепестков спектров КФМ сигна-
лов и сигналов с относительной квадратурной фазовой модуляцией
(СЖФМ). 99 % мощности ММС сигнала содержится в полосе
б = 1,2/7"с, в то время как для КФМ и ОКФМ сигналов аналогичная
доля мощности содержится в полосе В = 8 / Тс. Более быстрое
убывание значений спектра ММС сигнала обусловлено использо-
ванием более гладкого элементарного символа вместо прямо-
угольного. Основной лепесток спектра ММС сигнала шире основно-
го лепестка спектра КФМ и ОКФМ сигналов.
Для уменьшения внеполосных излучений рассматриваемые
здесь сигналы обычно подвергаются дополнительной полосной
фильтрации. Поскольку ММС сигнал не имеет разрывов фазы при
переходе от одного бита к другому, то значения огибающей этого
сигнала в моменты этих переходов не уменьшаются до нуля, а
остаются примерно постоянными даже на выходе полосового
фильтра. Любые небольшие флуктуации огибающей ММС сигнала
могут быть устранены введением жесткого ограничения без увели-
чения уровня внеполосного излучения. Так как огибающая ММС
сигнала остается постоянной, то для усиления могут быть исполь-
зованы эффективные нелинейные усилители. Непрерывность фа-
зы ММС сигнала оказывается очень полезным свойством в тех
случаях, когда приходится применять цепи со значительной реак-
тивной нагрузкой. Дополнительно к этим привлекательным свойст-
вам ММС сигнала следует добавить также простоту устройств син-
хронизации и демодуляции. Перечисленные достоинства ММС сиг-
нала обусловили его широкое применение в системах связи с под-
вижными объектами.
Гауссовская частотная модуляция с минимальным сдвигом.
Гауссовскую частотную модуляцию с минимальным сдвигом
(ГММС) можно рассматривать как результат модификации модуля-
ции с минимальным сдвигом. С целью дополнительного подавле-
ния боковых лепестков спектра ММС сигнала последовательность
прямоугольных импульсов модулирующего сигнала пропускается
предварительно через гауссовский формирующий фильтр, обеспе-
чивающий формирование основной полосы. Формирование гаус-
совской формы элементарного импульса обеспечивает сглажива-
ние фазовой траектории ММС сигнала, которая является линейно-
ломаной кривой, вследствие чего частота ММС сигнала изменяется
скачками. При гладких фазовых траекториях частота несущего ко-
лебания изменяется плавно. В результате уровни боковых лепест-
ков спектра оказываются существенно меньше.
164
До гауссовского фильтра каждый элементарный символ зани-
мает один временной интервал Тс, предоставляемый для передачи
одного бита. На выходе гауссовского фильтра каждый такой эле-
ментарный символ растягивается на несколько битовых интерва-
лов. Однако, так как формирование импульса не приводит к суще-
ственному отклонению фазовой траектории ГММС сигнала от соот-
ветствующей фазовой траектории ММС сигнала, то когерентная
демодуляция этого сигнала может быть выполнена также, как и
демодуляция ММС сигнала, а некогерентная демодуляция - как
демодуляция простого ЧМ сигнала. Для практических приложений
особенно полезны два свойства ГММС сигнала - хорошие энерге-
тическая и спектральная эффективности.
Предварительная гауссовская фильтрация приводит к увеличе-
нию межсимвольной интерференции. Однако опыт широкого при-
менения этого типа модуляции свидетельствует о том, что сниже-
ние качества передачи не столь серьезно, если произведение по-
лосы пропускания фильтра (на уровне 3 дБ) на длительность бито-
вого интервала ВТС > 0,5.
Этот способ модуляции позволяет за счет незначительного уве-
личения вероятности ошибки при передаче информации получить
очень хорошую спектральную эффективность и постоянство оги-
бающей радиосигнала.
Передаточная функция и импульсный отклик гауссовского фор-
мирующего фильтра выражаются равенствами (4.32) и (4.34). Па-
раметры этого фильтра полностью определяются требуемыми зна-
чениями полосы пропускания В и длительностью битового интер-
вала. Фазовая траектория ГММС сигнала формируется в соответ-
ствии со следующим равенством:
f
ч/(Д= |У(т)®й(т)Л, (4.41)
где (7(т)®Л(т) - свертка модулирующего сигнала с импульсной ре-
акцией гауссовского фильтра, определяющая форму выходного
сигнала этого фильтра.
Если модулирующий сигнал представляет собой последова-
тельность положительных и отрицательных прямоугольных им-
пульсов, то поскольку свертка является линейной операцией, сиг-
нал на выходе фильтра является суммой откликов фильтра на по-
следовательность прямоугольных импульсов. Отклик гауссовского
фильтра на воздействие в виде одиночного прямоугольного им-
пульса определяется выражением
165
exp-
2102
2
71 e2T2dT =
2 In 2
1
2
1
2
f 1
I exp- -
J - л
2
71 B2t2
2ln2
J 6л
(erf -
[ I -,2ln2
f ( OT
J BTn
(erf - c
I '2in2
t +erf
t
Tr
+ erf
Bn
2ln2
Bn
2ln2
BTcn
-, 2ln2l Гс
Bn
2 In 2
Bn
-.2 In 2
= g(t)>
2 exp:
dz =
(4.42)
t
c
где
X
erf(x)= jexp|-zz}cfz . (4.43)
71 о
Из (4.42) следует, что форма импульса g(f) на выходе форми-
рующего гауссовского фильтра полностью определяется значени-
ем произведения ВТС ширины В поУюсы пропускания фильтра на
уровне 3 дБ и длительности Тс битового интервала. На рис. 4.13
приведены графики импульса (4.42) для некоторых значений этого
произведения. Отметим, что полоса пропускания гауссовского
фильтра В здесь определена по двухсторонней передаточной
функции. Если использовать полосу пропускания физической ам-
плитудно-частотной характеристики, то значение В, а следователь-
но, и все указанные на рис. 4.13 значения произведения ВТС необ-
ходимо уменьшить в два раза. Элемент фазовой траектории, опре-
деляемый как интеграл от импульса g(t), при используемых на прак-
тике значениях произведения ВТС будет близок по форме к кривой
гауссовской функции распределения.
Поскольку рассматриваемая здесь модуляция является нели-
нейной, то получение аналитического выражения для спектральной
плотности мощности ГММС сигнала является трудной задачей.
Обычно представление о форме этого спектра получают путем мо-
делирования. Результаты такого моделирования представлены на
рис. 4.14 для различных значений произведения ВТС.
166
tsrc
Рис. 4.13. Форма элементарного импульса на выходе
гауссовского формирующего фильтра
На этом же рисунке приведен и спектр ММС сигнала, который
является частным случаем ГММС сигнала при ВТС =со. Из рисунка
следует, что при уменьшении значения произведения ВТС уровень
боковых лепестков спектра очень быстро уменьшается.
Рис. 4.14. Спектральная плотность мощности ГММС сигнала
167
Например, при ВТС =0,5 максимальное значение второго лепе-
стка более чем на 30 дБ ниже максимального значения главного
лепестка, в то время как второй лепесток спектра ММС сигнала
лишь на 20 дБ ниже основного лепестка. Однако уменьшение про-
изведения ВТС приводит к нежелательному росту вероятности
ошибки при демодуляции таких сигналов из-за росТа межсимволь-
ных искажений, возникающих в гауссовском фильтре. Хорошо из-
вестно, что увеличение скорости перемещения подвижных абонен-
тов также сопровождается нежелательным ростом вероятности
ошибки при приеме. Поэтому до тех пор, пока приращение вероят-
ности ошибки из-за гауссовского фильтра меньше приращения ве-
роятности ошибки из-за быстрого перемещения абонента, приме-
нение гауссовской модуляции с минимальным сдвигом можно счи-
тать оправданным.
В табл. 4.2 указаны значения занимаемых полос частот, содер-
жащих заданный процент мощности ГММС сигнала для разных
значений произведения ВТС (3J.
Таблица 4.2
8TC Относительные значения полос частот, содержащих указанный процент мощности
90,0 % 99,0 % 99,9 % 99,99 %
0.2 0.52 0.79 0.99 1.22
0,25 0.57 0,86 1,09 1.37
0.5 0.69 1.04 1.33 2.08
CO 0.78 1,20 2.76 6.0
Известно также (3], что уменьшение вероятности ошибки из-за
межсимвольной интерференции при гауссовской фильтрации ока-
зывается минимальным при значении ВТС - 0,5887. Для сохране-
ния вероятности ошибки на прежнем уровне, имеющем место при
отсутствии межсимвольной помехи, необходимо увеличить мощ-
ность сигнала всего на 0,14 дБ.
Список литературы к главе 4
Зюко А.Г., Кловский Д.Д., Коржик В.И., Назаров М.В. Теория элек-
трической связи. Учебник для вузов. - М.: Радио и связь, 1998. - 433 с.
Прокис Дж. Цифровая связь / Пер. с англ, под ред. Д.Д. Кловского. -
М.: Радио и связь, 2000. - 797 с.
Rappaport T.S. Wireless Communications (Principles and Practice). -
New-York: IEEE Press, 1996. - 641 pp.
168
ГЛABА5
ОПТИМАЛЬНЫЕ МЕТОДЫ ДЕМОДУЛЯЦИИ ЦИФРОВЫХ
СИГНАЛОВ
5.1. Методы синтеза оптимальных алгоритмов
демодуляции сигналов
Демодуляция есть процесс выделения информационного сим-
вола основной полосы из принимаемого несущего колебания.
В этом смысле процесс демодуляции является обратным процессу
модуляции. Наиболее часто используемые в системах связи с под-
вижными объектами способы модуляции были рассмотрены в гл. 3.
В этой главе приведем краткие сведения об основных соответст-
вующих способах демодуляции. Все методы демодуляции полезно
разделить на два больших класса:
1) когерентная демодуляция, для применения которой необхо-
димо знать в точке приема (в приемнике) истинные значения час-
тоты и начальной фазы высокочастотного несущего колебания;
2) некогерентная демодуляция, для применения которой необ-
ходимо знать истинное значение частоты высокочастотного несу-
щего колебания при отсутствии информации о начальной фазе.
При практической реализации любых способов демодуляции
принимаемый высокочастотный сигнал обычно фильтруется поло-
совым фильтром, усиливается и переносится на некоторую проме-
жуточную частоту (супергетеродинный прием). Этот сигнал на про-
межуточной частоте имеет точно такую же спектральную плотность
мощности, как и исходный радиосигнал на входе приемника.
В дальнейшем будем полагать, что подобные операции выполнены
и на входе устройства демодуляции имеет место несущее колеба-
ние промежуточной частоты.
Для каждого способа модуляции существует достаточно много
способов демодуляции. Они отличаются друг от друга преобразо-
ваниями входного несущего колебания, которые необходимо вы-
полнить для выделения информационных символов, сложностью
их практической реализации, качеством демодуляции при различ-
ных условиях приема. Качество демодуляции при конкретных усло-
169
виях приема является, пожалуй, наиболее важной-характеристикой
любого Способа демодуляции. Поэтому этот термин необходимо
конкретизировать прежде всего.
В данной книге ранее рассматривались только способы цифро-
вой модуляции, когда передатчик на каждом интервале длительно-
стью Ткс излучает в канал передачи один из М канальных симво-
лов, каждый из которых может переносить несколько битов. Поэто-
му основная задача, которая должна быть решена при демодуля-
ции несущего колебания на очередном интервале времени дли-
тельностью Ткс - принять решение о том, какой именно из М воз-
можных символов присутствует на данном интервале. Такая фор-
мулировка задачи демодуляции молчаливо вводит два очень важ-
ных предположения:
1) в точке приема предполагаются известными моменты начала
и окончания каждого очередного канального символа, т.е. работа
приемника точно синхронизирована с работой передатчика; можно
сказать, что в этом случае имеет место идеальная тактовая син-
хронизация приемника и принимаемого несущего колебания;
2) решение о канальном символе, содержащемся в принимае-
мой реализации несущего колебания, выносится после того, как
получена и доступна обработке вся реализация несущего колеба-
ния на очередном интервале времени длительностью Ткс.
Такой способ принятия решений наиболее часто используется
в системах связи с подвижными объектами, хотя и не является са-
мым лучшим. Все последующее изложение проведем именно для
этого способа.
Есть еще одно условие, при котором должна выполняться де-
модуляция и о котором "в явной форме до сих пор мы не говорили:
демодуляции подвергается высокочастотное несущее колебание,
которое поступает на вход приемника с выхода канала передачи.
В канале передачи сигнал, излученный передатчиком, может под-
вергнуться существенным преобразованиям, о которых в точке
приема могут быть, а могут и отсутствовать необходимые сведе-
ния. При обсуждении вопросов демодуляции в данной главе чаще
всего будем полагать, что все необходимые сведения о преобразо-
ваниях сигнала в канапе передачи известны. Что это за сведения
и в какой форме они должны быть представлены, станет ясным
после того, как мы определим показатель качества демодуляции
и сможем указать оптимальный алгоритм демодуляции, обеспечи-
вающий для выбранного показателя качества экстремальное зна-
чение.
170
Простейшими и не совсем реальными предположениями о пре-
образованиях несущего колебания в канале передачи являются
следующие:
• форма несущего колебания в канале передачи не изменяется;
• на вход приемника кроме несущего колебания поступает поме-
ха;
• процесс на входе приемника является аддитивной смесью не-
сущего колебания и помехи.
Теперь можно более аккуратно сформулировать задачу демоду-
ляции. Сначала обычно находят алгоритм демодуляции, т.е. те
преобразования реализации процесса на входе демодулятора, ко-
торые необходимо выполнить для принятия решения об информа-
ционном символе. Затем рассматривают различные способы прак-
тической реализации полученного алгоритма.
Итак, при предположениях, сформулированных выше, для про-
цесса на входе демодулятора на очередном интервале времени с
номером i справедливо следующее представление:
Х(/)= sm(0+ Е(0. (/ - 1Кс < t < /Ткс • (51)
sm(t) форма несущего колебания, в которой закодирован инфор-
мационный символ с номером m; ^(t) - помеха; значение индекса т
неизвестно и принадлежит множеству возможных значений 3 =
{0,1,2,..../W-1}. Для цифровых систем передачи типична ситуация,
когда в длинной последовательности каждый из информационных
символов встречается примерно одинаковое число раз, причем по-
явление одного из них на текущем интервале времени никак не
влияет на возможность появлений любого информационного симво-
ла на следующем интервале. Поэтому мы можем считать, что всегда
справедливо еще одно следующее предположение:
индекс т в (5.1) является случайной величиной, которая при получе-
нии реализаций процесса X(fj принимает значения из множества воз-
можных значений с одинаковой вероятностью рт - 1 / М.
Помеха ^(() в системах связи с подвижными абонентами может
иметь разнообразные свойства, которые определяются типом сис-
темы, условиями ее функционирования, технологией организации
множественного доступа и т.д. Однако для целей данного раздела
можно ограничиться простейшей моделью, которую введем как оче-
редное предположение при формулировке задачи демодуляции:
аддитивная помеха £(?) является гауссовским белым шумом с одно-
сторонней спектральной плотностью мощности No.
С точки зрения абонента прием будет тем лучше, чем меньше
171
будет неправильных решений о переданных информационных
символах. Количественно это можно представить средней вероят-
ностью ошибки на один канальный символ или средней вероятно-
стью ошибки на бит, которые мы определили в начале предыдущей
главы. Для простоты здесь принимаем первую величину.
После выбора показателя качества демодуляции мЪжно ввести
определение оптимального алгоритма демодуляции, которое за-
пишем как очередное условие решаемой задачи:
в качестве критерия оптимальности алгоритма демодуляции принима-
ем минимум средней вероятности ошибки при принятии решений о
принятых символах.
Теперь введем некоторые новые обозначения, с помощью кото-
рых задачу демодуляции можно сформулировать математически
корректно. Обозначим символом 5[X(f)] алгоритм демодуляции или
правило выбора решения о принятом информационном символе.
В соответствии с условиями демодуляции функция 5[Х(Г)] должна
быть определена так, чтобы множество ее значений совпадало с
множеством 3, а множество значений ее аргумента должно совпа-
дать с множеством всех возможных реализаций случайного про-
цесса X(f), (/- 1)ТКС <t <iTKC. Поскольку любая реализация процес-
са X(f) является функцией времени, а каждый элемент множества
3 - вещественным числом, то 5[X(f)] - функционал.
Очевидно, что можно ввести много функций 5[X(f)] с указанными
свойствами, которые отличаются друг от ^руга тем, что при одной и
той реализации процесса X(t) они принимают разные значения. По-
этому, если эти функции использовать в качестве правил выбора
решений при демодуляции, то они будут обеспечивать разные зна-
чения средней вероятности ошибки. В соответствии с указанным
выше критерием оптимальности необходимо найти ту функцию
5[Х(0]. которая обеспечит наименьшее значение средней вероят-
ности ошибки при приеме информационных символов. Построение
такой функции называют синтезом оптимального алгоритма де-
модуляции. Здесь мы должны решить эту задачу для случая, когда
в точке приема выполняются сделанные выше предположения.
Решение данной задачи на основе теории потенциальной поме-
хоустойчивости В.А. Котельникова можно найти в [1, § 5.1, 5.2]. Мы
ограничимся лишь кратким описанием оптимального алгоритма
демодуляции, которое послужит основой обсуждения проблем де-
модуляции в системах связи с подвижными объектами в после-
дующих разделах книги. Решение основывается на очень важной
статистике - условном функционале отношения правдоподобия:
172
Л MO I sml = e*P'
2
Wo
l\c 1
N jsm2(f)df
O-IFkc . ° (<-1 Ткс
(5.2)
Это выражение записано при предположении (гипотезе), что
в реализации x(f) процесса (5.1), полученной на очередном интер-
вале времени (/- 1)ТКС <t<iTKC, несущее колебание содержит ин-
формационный символ с номером т. Для этого предположения
удобно ввести специальное обозначение - гипотезу Нт . Значение
этого функционала можно вычислить для разных гипотез Нт,
т = 0,1,2.М -1; чем больше значение этого функционала, тем бо-
лее правдоподобным представляется утверждение, что справед-
лива гипотеза Нт, т.е. что в этой реализации содержится инфор-
мационный символ с номером т.
Оптимальный алгоритм демодуляции теперь можно описать сле-
дующим образом: для реализации x(f) процесса (5.1), полученной на
очередном интервале времени (/-1)7"кс <( </7"кс,вычисляются зна-
чения функционала отношения правдоподобия л{х(() | sm}, для ка-
ждой гипотезы Нт , т.е. для каждой возможной формы несущего ко-
лебания. Решение о форме несущего колебания, содержащейся в
этой реализации, принимается в соответствии со следующим прави-
лом: гипотеза считается справедливой, если
л{х(0|зЛ} = гпахл{х(Г)|$,п}. (5.3)
В соответствии с правилом (5.3) выбирается максимально прав-
доподобная гипотеза; поэтому этот метод синтеза правила выбора
решения при демодуляции обычно называется методом макси-
мального правдоподобия.
Примечание. Отметим, что з выражение (5.3) не входят априорные вероятно-
сти гипотез Нт, которые при рассматриваемых здесь условиях одинаковы и равны
Р{Нт} = ММ для всех т. Теория потенциальной помехоустойчивости В.А. Котель-
никова предлагает другой критерий принятия решения: при полученной реализации
х(() процесса (5.1) в качестве справедливой принимается та гипотеза, апостериор-
ная вероятность которой наибольшая. Этот метод синтеза алгоритма демодуляции
называют методом максимума апостериорной вероятности. Однако и этот метод
при равновероятных гипотезах приводит к алгоритму (5.3).
Итак, равенство (5.3) определяет алгоритм демодуляции, опти-
мальный по выбранному выше критерию оптимальности. Теперь не-
обходимо решить вопрос о практической реализации этого алгорит-
173
ма.' Очевидно, что при реализации важным является вопрос о вы-
числительной сложности алгоритма, под которой обычно понимают
число математических операций, которые необходимо выполнить
над реализацией x(f), чтобы принять одну из возможных гипотез. По-
этому равенство (5.3) желательно записать в црзможно наиболее
простой с вычислительной точки зрения форме. Один из вариантов
такой формы записи можно получить следующим образом.
Запишем равенство (5.3) с указанием явных выражений для ле-
вой и правой частей:
ехр
2
Л/о
11 КС
= max ехр-
2
Wo
'4с
fx(0sm(0df- '
J (Vo
(»-ПГю
('-П^кс
Поскольку показатели экспонент являются вещественными чис-
лами, а экспонента является строго возрастающей функцией, то
при выборе решения можно сравнивать показатели этих экспонент;
в этом случае оптимальное правило выбора решения можно запи-
сать в более простой форме:
'4(С
Jx(ow)tf-2 ]4('и=
f a (5-4)
= maxj ГхСОЗлДОЛ- .! is,2 (t)dt .
mJ 2 J
Вторые слагаемые в обеих частях этого равенства представля-
ют собой ожидаемые значения энергий соответствующих сигналов.
Значения этих энергий в рассматриваемой задаче можно считать
• известными.
Равенство (5.4) можно записать в виде совокупности нера-
венств:
'4с '4с
j (t)dt - > j x(t)srn(t)dt - ?Em (5.5)
('-’)4.c (' — 1)4c
для всех т * m.
Это правило дополнительно упрощается, если несущее колеба-
ние при любых информационных символах имеет одинаковую
энергию, т.е если Ет = Е при любых значениях пт.
Jx^ (?)<«> Jx(f)sm(f)df (5.6)
(*"Wkc
для всех m т.
Наконец, если М ~ 2, то правило выбора решения можно сфор-
мулировать следующим образом: в качестве справедливой прини-
мается гипотеза Нъ если
^кс ^кс
> jx(f)s0(f)dt. (5.7)
(,_1)LrC ('“ЧТи;
в противном случае принимается гипотеза Но.
Выражения (5.5) - (5.7) определяют правило выбора решения
при демодуляции в рассматриваемых условиях. Каждое из этих
выражений записано, пожалуй, в наиболее простой с вычислитель-
ной точки зрения форме для соответствующего частного случая.
Поэтому теперь перейдем к обсуждению вопроса о практической
реализации полученного оптимального алгоритма демодуляции.
Из (5.5) следует, что для полученной реализации x(f) случайного
процесса X(t) на входе демодулятора необходимо вычислить кор-
реляционные интегралы. В [1] достаточно подробно изложены два
технических способа этих вычислений - с применением коррелято-
ров или согласованных фильтров. Здесь мы воспроизведем только
первый из них, наиболее подходящий для последующего изложения,
поскольку оба способа эквивалентны. Соответствующая функцио-
нальная схема демодулятора представлена на рис. 5.1.
Заметим, что на каждом очередном интервале времени ,интег-
рирование начинается при нулевых начальных условиях интегра-
тора. Это означает, что после получения отсчетов на выходе инте-
граторов интеграторы должны быть переведены в нулевое состоя-
ние с помощью устройств, которые на данном рисунке не показаны.
Кроме того, здесь молчаливо предполагается, что форма канально-
го символа выбрана таким образом, что можно пренебречь влия-
нием возможных перекрытий соседних по времени канальных сим-
волов. В реальных системах подобные перекрытия возможны из-за
наличия формирующих фильтров, и их следствием являются меж-
символьные искажения. Однако, как правило, параметры этих
фильтров выбираются таким образом, что влияние межсимволь-
ных искажений действительно оказывается пренебрежимо малым
175
Рис. 5.1. Функциональная схема реализации алгоритма демодуляции с
применением корреляторов
Возможна и иная интерпретация полученного алгоритма демо-
дуляции, которая особенно полезна будет в дальнейшем при ана-
лизе качества демодуляции. Для пояснения этой возможности рас-
суждения начнем с записи алгоритма в виде (5.4). Дополним левую
и правую части этого равенства до полных квадратов путем добав-
ления одного и того же слагаемого
/Ткл.
1 Г 7
2 JX т
(»-1)Гкс
В результате вместо (5.4) можно записать
г = тах
т
или, после сокращения множителя 1/2 и изменения знака с после-
дующей заменой операции поиска максимального значения на опе-
рацию поиска минимального значения,
^кс ^кс
J[x(f) - (ttfdt = min J(x( t) - sm (t)dt]2
(<-l)TKC m !(i-1)TKC
(5-8)
Обратим внимание на то, что произвольной функции s(t),
О < f < Т , с интегрируемым квадратом в функциональном простран-
176
стве Гильберта ставится в соответствие вектор s , длина которого
называется нормой этой функции. Обратимся к равенству (5.8) и
предположим для примера, что М = 4. Каждому сигналу sm(t),
(i-< * -'Тск поставим в соответствие вектор sm пространства
Гильберта с нормой [jsm||, которые пока расположим произвольно
так, как это представлено на рис. 5.2. Кроме того, на этом же рисунке
изобразим вектор х, представляющий в пространстве Гильберта
реализацию x(t), (/ - 1)гкс < t < iTtc , процесса (5.1) с нормой
Заметим, что интегралы в обеих частях равенства (5.8) также
можно интерпретировать как квадраты норм функций
zm(t) = x(t)-sm(t), (/-1)ТКС <t<iTKC , которые в пространстве Гиль-
берта можно представить как вектор, равный разности двух векто-
ров: х - sm . Чем меньше длина
,(<-1Ккс
вектора х - sm , тем ближе вектор х к вектору sm. Теперь можно
указать новую интерпретацию полученного выше алгоритма демо-
дуляции: решение принимается в пользу того сигнала, который
оказался ближайшим к полученному вектору х.
Если каждый сигнал на рис. 5.2 представить точкой, обозначаю-
щей конец соответствующего вектора, то приходим к сигнальному
созвездию, изображенному на рис. 5.3. Такой способ графического
представления сигналов уже был использован в гл. 3 при описании
методов модуляции. Реализация наблюдаемого процесса при этом
также представляется точкой. Полученное выше правило выбора
решения при демодуляции теперь можно сформулировать следую-
щим образом: решение принимается в пользу того сигнала, изобра-
жающая точка которого на сигнальном созвездии оказалась бли-
жайшей к точке полученной реализации.
177
Рис.5.2. Векторное представление
сигналов и реализации наблюдае-
мого процесса в пространстве
Гильберта
Рис. 5.3. Сигнальное созвездие и
точка реализации наблюдаемого
процесса в пространстве Гильберта
Часто такое графическое представление сигналов и наблюдае-
мой реализации в метрическом пространстве используется при
технической реализации данного алгоритма демодуляции: демоду-
лятор должен вычислять расстояния (метрики) от полученной точки
х до всех точек сигнального созвездия и среди полученных метрик
находить минимальную.
5.2. Синтез оптимальных алгоритмов демодуляции
сигналов с памятью
В предыдущем параграфе мы рассмотрели проблему демоду-
ляции последовательности сигналов без памяти, когда каждый
очередной канальный символ не был связан с предшествующими.
В этом случае методы синтеза, изложенные в § 5.1 приводят к оп-
тимальным алгоритмам демодуляции. При этом показателем каче-
ства демодуляции была выбрана средняя вероятность ошибки, а
критерием оптимальности - минимум средней вероятности ошибки.
Как следует из гл. 3, в современных системах связи с подвижными
объектами широко используются методы модуляции, при которых
между канальными символами имеет место существенная инфор-
мационная связь. В этом случае посимвольная демодуляция, не
учитывающая наличие такой связи, уже не является оптимальной
и, следовательно, необходимо построение иных алгоритмов демо-
дуляции, учитывающих ее наличие..
178
Зависимость сигналов на не перекрывающихся символьных ин-
тервалах вводится специально с целью получения желаемой фор-
мы спектральной плотности мощности сигналов в канале передачи.
Такая зависимость возникает при кодировании данных источника
информации до модулятора. Здесь мы рассмотрим сигналы с ли-
нейной модуляцией с памятью [2].
На рис. 5.4 приведены графики двух типов модулирующих сиг-
налов, отображающих одну и ту же последовательность битов ис-
точника {а,,/ = 1,2,...}.
Рис. 5.4. Модулирующие сигналы
Сигнал щ(1) принимает значения в соответствии со следующим
правилом:
+1 при а, = 1.
-1 при а,- = О,
(5.9)
т.е. его значение на очередном символьном интервале полностью
определяется значением информационного символа источника на
этом же интервале. Такой модулирующий сигнал соответствует
двоичной ФМ без памяти. Сигнал u2(f) отображает в соответствии
с правилом (5.9) не исходную последовательность битов, а резуль-
тат ее предварительного кодирования в соответствии со следую-
щим алгоритмом:
bi=ai®b^b (5.10)
179
т е. его значение на текущем символьном интервале определяется
значением информационного бита а, на этом интервале и значе-
нием символа на предшествующем интервале. Следовательно,
последовательность символов {b„ i - 1,2,...} обладает «памятью»
на один символ. В этом случае можно говорить, что модулирующий
сигнал u2(t) обладает памятью на один символьный интервал. Для
дальнейшего изложения полезно ввести новый параметр L, значе-
ние которого определяет память модулирующего сигнала. В рас-
сматриваемом здесь примере L - 1; в системах связи с подвижны-
ми объектами применяются сигналы с L > 1.
Преобразование (5.10), в котором символ © обозначает суммиро-
вание по модулю 2, называют дифференциальным кодированием.
Предположим, что мы используем модуляцию, которая может
быть определена следующей диаграммой соответствий между зна-
чением модулирующего сигнала u2(t) на символьном интервале
и формой канального символа s(f):
t/2(f)s+l«+s(0; = (5.11)
т.е. модулятор формирует противоположные сигналы.
Рассмотрим устройство, состоящее из последовательного соеди-
нения двух блоков - дифференциального кодера и модулятора.
Входными символами этого устройства являются биты (а,, / = 1,2,...},
а выходными - канальные символы = 1,2,...}; выходной сим-
вол b кодера на каждом интервале является внутренним парамет-
ром, значение которого полностью определяет состояние этого уст-
ройства. Выходной сигнал на очередном символьном интервале за-
висит не только от значения входного сигнала на этом интервале, но
и от состояния устройства на предшествующем интервале.
Функционирование такого устройства удобно описывать с по-
мощью решетчатой диаграммы, которая приведена на рис. 5.5.
Здесь по горизонтальной оси откладываются номера символьных
интервалов, а по вертикальной - состояния устройства. В данном
случае устройство на каждом шаге к может иметь одно из двух со-
стояний Ьк = 0 и = И (указаны светлыми кружками). Предпо-
ложим, что исходное состояние устройства Ьо = 0 (черный кружок).
На первом интервале (шаге) на вход устройства поступает символ
а! = +1, новое состояние устройства становится равным
by = а^@Ьй = 1©0 = 1, на выход устройства выдается канальный
символ « +s(f)». На диаграмме переход на первом шаге из состояния
180
О в состояние 1 указан сплошной стрелкой, около которой указан
символ +s(f). На втором символьном интервале на вход устройства
поступает символ а2 = 0 , выход кодера Ь2 = а2 © Ь, = 0© 1 = 1 (состоя-
ние устройства не изменилось - черный кружок на шаге 2), на вы-
ход устройства выдается канальный символ +s(f). На диаграмме
переход при втором шаге также обозначен сплошной стрелкой и
символом +s(f) около нее. На третьем символьном интервале на
вход устройства поступает бит а3 = +1, устройство переходит в со-
стояние Ь3 = а3 © Ь2 = 1® 1 = 0 (черный кружок на шаге 3), так что на
выход выдается символ -s(t). Подобные вычисления можно про-
должить аналогичным образом, получив на диаграмме соответст-
вующую траекторию.
Рис.5.5. Решетчатая диаграмма алгоритма формирования сигнала л2(0
Нетрудно выделить правило, которому можно следовать при
анализе подобного устройства с помощью решетчатой диаграм-
мы. Состояние устройства не меняется, если на вход поступает
последовательность нулей; при этом на выход выдаются каналь-
ные символы +s(t), если состояние Ь~+1, и символы -s(/), если
состояние Ь = 0 (мы двигаемся по горизонтальным линиям). Со-
стояние устройства меняется на противоположное каждый раз,
когда на вход поступает бит +1 (на диаграмме переход происхо-
дит по диагоналям); при этом на выход выдается символ +s(f),
если мы попадаем в состояние b = +1, и символ -s(t), если со-
стояние на этом шаге b = 0.
Решетчатая диаграмма удобна тем, что она позволяет изобра-
зить на одном рисунке все возможные траектории с указанием
входных и выходных символов и значений параметра состояния
устройства. Для сигнала л2(0 такой вид диаграммы изображен на
рис. 5.6. Здесь для краткости использованы обозначения o|±s и
11 ±s для значений очередных входного бита и выходного символа
при попадании траектории в очередной узел диаграммы.
181
Рис. 5.6. Решетчатая диаграмма алгоритма формирования
модулирующего сигнала с памятью
Если входная последовательность битов известна, то на этом
рисунке легко можно построить соответствующую траекторию, ко-
торая однозначно определит как выходные символы, так и значе-
ния состояний устройства на каждом шаге.
Найдем алгоритм максимального правдоподобия демодуляции
последовательности канальных символов, наблюдаемых на фоне
гауссовского белого шума и сформированных при модулирующем
сигнале с линейной модуляцией с памятью (5.11). Алгоритм макси-
мального правдоподобия, полученный в § 5.1, теперь не будет оп-
тимальным, поскольку он получен для последовательности незави-
симых символов. Таким образом, формировать решения о каждом
канальном символе можно было независимо от остальных симво-
лов на основе реализации наблюдаемого процесса на соответст-
вующем интервале времени. Здесь мы знаем, что последователь-
ность принимаемых символов обладает памятью и, следовательно,
оптимальный алгоритм должен использовать эту дополнительную
информацию. Поэтому приходится рассматривать сразу всю по-
следовательность символьных интервалов.
Предположим, что реализация процесса (5.1) регистрируется
и доступна обработке на конечном числе символьных интервалов:
X(f) = s,(i) + 5(0. 0-1)Ткс<г<.Ткс- /’ = 1,2,....л, (5.12)
где канальный символ з,(Г) на i-м интервале может иметь вид +s(t)
или -s(f). При этом память последовательности этих символов ха-
рактеризуется решетчатой диаграммой, показанной на рис. 5.6.
Один из возможных способов обработки такой длинной реализа-
ции, содержащей последовательность символов, состоит в том,
чтобы использовать обычный коррелятор для получения последо-
вательности отсчетов на выходе коррелятора на соответствующей
последовательности символьных интервалов:
182
zt = jx(f)s(t)df, i = \2„..,n.
(i-ЦТкс
(5.13)
Так как для наблюдаемого процесса справедливо представле-
ние (5.1), то вместо (5.13) можно записать
/Ткс fTKC 'Лс
z, = |x(0s(0cff= |{5,(О + с(г)к(ОЛ = |s;(f)s(Odf +
(>-1)Ткс (>-1)Ткс (>-1)Ткс
(5-14)
+ jc(O$(f)ctf = ±E + n/.
(/-1)ГЮ
где Е - энергия принимаемого канального символа, знак перед Е
определяется канальным символом +s(f) или ~s(t), передаваемым
на /-м интервале; и, - гауссовская случайная величина с нулевым
математическим ожиданием и дисперсией
9 1
= 2 N0E.
причем м|ц,|ц| = о при />/, поскольку значения шума на разных
сигнальных интервалах независимы. Следовательно, условные
плотности вероятности статистики z, для двух возможных сигналов
на этом интервале имеют вид
w(z,|+s) =
1
2~-<уц
ехр
(z,---E)2
2л2
(5.15)
w(z,|-s) = exp
. 2ЛСУ,,
(z/+-E)2
Предположим теперь, что на рассматриваемой последователь-
ности символьных интервалов имеется последовательность ка-
нальных символов ^\f)^\f)r..,s^(f)}= В силу независи-
мости статистик (5.14) при несовпадающих значениях индексов со-
вместная плотность вероятности совокупности {z1,z2,...,zn} равна
произведению их плотностей:
183
w(z,.z2...zn |s(^) = n^ ls'W =
(z,--#>)2
2g2
(5.16)
. 2яс2
где S/W = V
exp-
13 соответствии с методом максимального правдоподобия в ка-
честве принятой последовательности необходимо выбрать такую
последовательность символов которая
обеспечивает максимальное значение совместной плотности (5.16)
при фиксированной последовательности (zy, z2,...,zn} = z. Очевид-
но, что максимальное значение, этой плотности достигается на той
последовательности s(d), на которой евклидово расстояние
(5.17)
оказывается минимальным. Таким образом, необходимо найти
последовательность s(d), каждый символ которой может прини-
мать одно из двух возможных значений. Общее число таких по-
следовательностей равно 2п, так что с ростом значения п слож-
ность вычислений очень быстро возрастает, если использовать
простой перебор. Однако существует последовательный алго-
ритм Витерби, вычислительная сложность которого значительно
меньше.
Алгоритм Витерби обеспечивает последовательный поиск на
решетке элементов максимально правдоподобной последова-
тельности. Последовательность соответствующих операций по-
ясним с помощью решетки, изображенной на рис. 5.7 и являю-
щейся аналогом решетки рис. 5.6. Эта диаграмма полезна для
описания более сложного устройства, содержащего кодер симво-
лов, модулятор и коррелятор. Входными символами являются
биты, а выходными - значения отсчетов на выходе коррелятора
при отсутствии шума. По этой диаграмме легко определяются вы-
ходные символы устройства, если задана последовательность
входных битов.
184
0|— -./£ 0|—/£ 0|--,)Ё 0|--./ё 0|-7Ё OI-/E 01--JH
0 Г.------------Q-----------(J-------------------------------------------0----------г,----
\ 1|-7н \ ц-/ё\ 11--./ЁХ 1|-7ё\ H-Vh\ iI- jh \
\ X / х / \ / X / \ / \ /
\ /\ /\ /\ /\ /\ /\
1|+7Ё/ 11 + -/Ё/ ll+'j'E / 1|+'/£ / ll+VE/ 1I+-JE / 1| + л/£/
1 О Ъ--------------------К-----------У----------К----------Н---------------------------
о|+-)Ё о|+7Ё о|+•;'£ o|+Ve o|+Vs о|+-./Ё
t=Ttc ! = 2ТК Г=ЗТкс /=471с t=5T„- Г=6ТкС I =7Тк::
Рис. 5.7. Решетчатая диаграмма последовательного алгоритма
формирования демодулирующего сигнала с памятью
Предположим, что поиск начинается из состояния 0. В момент
времени t = Ткс с выхода коррелятора поступает отсчет zy, в мо-
мент t = 2ТКС - отсчет z2 В момент времени t = 27кс имеем на вы-
ходе коррелятора последовательность отсчетов {z,, z2}. Эти отсче-
ты могли быть получены при любой возможной последовательно-
сти битов на входе устройства на первых двух символьных интер-
валах. Таких последовательностей четыре. Две из них к моменту
времени t = 2ГКС приводят к состоянию 0, а две другие - к состоя-
нию 1. На решетке эти последовательности отображаются сиг-
нальными путями, а состояния - узлами, в каждый из которых вхо-
дят два сигнальных пути и выходят два сигнальных пути. В узел 0
приводят пути:
• 0 -»0|- Е -»0|- Е, т.е. последовательность битов на входе
устройства {о, О} и последовательность математических ожиданий
отсчетов на выходе коррелятора Е, - е|;
• 0 -> 1|+ Е-> l|- Е, т.е. последовательность битов на входе
устройства {"1,1} и последовательность математических ожиданий
отсчетов на выходе коррелятора {+ Е,- е|.
Аналогичным образом в узел 1 приводят пути:
• 0—»1|+ Е ->0|+- Е , т.е. последовательность битов на входе
устройства {1, 0} и последовательность математических ожиданий
отсчетов на выходе коррелятора (+ . Е, + е| ;
• 0 —> 0|— Е -> 1|+ Е , т.е. последовательность битов на входе
устройства {0,1} и последовательность математических ожиданий
отсчетов на выходе коррелятора (- Е, + Е}.
185
Из этих четырех путей необходимо выбрать один, который ми-
нимизирует евклидово расстояние (5.17) при п = 2.
Вычислим евклидовы метрики для двух путей, входящих в узел 0:
D(z1,z2;0,0) = (z1+- Е^+(z2 + е)2,
D(z,.z2;1,1) = (z1-.e)2 +(z2+ е)2.
Алгоритм Витерби сравнивает значения этих двух метрик и от-
брасывает путь, имеющий большее значение метрики. Путь
с меньшим значением метрики запоминается; этот путь называют
«выжившим» при t = 2ГКС.
Аналогичным образом вычисляются евклидовы метрики для
двух путей, входящих в узел 1:
D(z1,z2;t0) = (z1- eJ+(z2- El (5j9)
D(z1,z2;0,1) = (z1 + -.e)2+(z2- e)2.
Значения этих метрик сравниваются, путь с большим значением
метрики отбрасывается, а с меньшим значением метрики запоми-
нается.
Таким образом, при t = 2ТКС из четырех возможных остаются
только два выживших пути: один в узле 0, а другой в узле 1. Для
дальнейшего изложения примем, что вьркившими являются пути
{О, О) для узла 0 и {1,0} для узла 1. Исключение путей с большими
значениями метрик не нарушит оптимальность полученной в конце
такой процедуры последовательности решений, так как значения
всех метрик неотрицательны, а отбрасываются наибольшие.
После получения отсчета z3 при t = ЗГКС вычисляются значения
метрик двух путей, входящих в узел 0:
D(z1t z2, z3; 0,0, 0) = (z.| +• е)2 +(z2 + -.tf +(z3+-.e)2,
D(zi. z2> z3^ 1.0. 1) = (Z1~ + (z2--.e)2 + (z3 +'
(значения этих метрик сравниваются и путь с большим значением
метрики отбрасывается) и двух путей, входящих в узел 1:
D(z.,z2,z3;0,0,1) = (z1 + EJ2 +(z2 +- eJ +(z3-- E'f,
O(z1,z2.z3;1, 0,0) = (z1- Ep +(z2- e)2 +(z3- e)2
(значения этих метрик сравниваются и путь с большим значением
метрики отбрасывается). Вновь остаются только два выживших пути,
186
в качестве которых при I = 3 Гкс примем {о, 0,1} для узла 1 и {1,0,1}
для узла 0. Эти вычисления повторяются при поступлении каждого
нового отсчета с выхода коррелятора. Например, при t - 4ТКС могут
оказаться выжившими следующие пути: {0, 0, 1, 1} для узла 0 и {0, 0, 1,
0} для узла 1. Обратим внимание на то, что первые символы этих
путей одинаковы. Вероятность такого события с ростом длины пути
будет стремиться к 1. Таким образом, в результате последователь-
ной обработки отсчетов с выхода коррелятора формируются два
выживших сигнальных пути, на основе которых необходимо при-
нять решение относительно каждого конкретного символа.
При рассматриваемом способе модуляции в соответствии
с (5.10) память’ L = 1. Если вычисления повторяются и число шагов
увеличивается, то можно заметить, что выживающие пути на про-
шлых шагах начинают сближаться в вероятностном смысле. Обыч-
но такое сближение оказывается достаточным для принятия реше-
ния о каждом переданном символе с задержкой более 5L. Однако
следует иметь в виду, что сближение имеет место только в вероят-
ностном смысле и, следовательно, задержка в сближении может
оказаться значительно больше. При практическом применении ал-
горитма Витерби решения о переданном символе обычно прини-
мают с задержкой 5L символов. Поэтому выжившие последова-
тельности запоминают на 5L символьных интервалах. Получаю-
щиеся при этом решения, конечно, не являются решениями строго
максимального правдоподобия, однако потери в качестве оказы-
ваются незначительными.
Рассмотрим правило выбора решения о переданных символах
для решетки, изображенной на рис. 5.7. Здесь L = 1 и, следова-
тельно, задержка в решении будет равна 5 символьным интерва-
лам. Предположим, что для момента времени / = 6ТКС мы имеем
два выживших пути с метриками
Do (zt, z2, z3, z£, z5, z3; o21 b3, b4, b5, b6)
и
D,(z„ z21 z3, z4, z5, z6; b'y,b'2,b3,b'4,b'5,b'6 ).
На этом шаге с вероятностью, близкой к 1, значения символов
by и Ь\ будут одинаковыми, т.е. обе выжившие последовательно-
сти будут иметь общую первую ветвь, и проблемы с принятием ре-
шения относительно символа by не возникает. Если by * by, то
в качестве решения о значении символа может быть принято зна-
чение этого символа в последовательности с меньшей метрикой
Евклида. После чего первая ветвь в каждой последовательности
’ Память - это число символов предварительного кодирования, влияющих на
значение очередного символа
187
исключается. На следующем шаге t ~ 7ТКС новые две метрики DQ(z2,
z3, zM z5, zfy z7; b2, b3, bA, Ь5, b6, b7) и D,(z2, z3, z4, z5, ze, z7;
Ьз, b4, bj, Ьё, by). используются для вынесения решения о зна-
чении символа Ь2. Эти вычисления повторяются на каждом шаге
при поиске по решетке. Задержка в вынесении решений при демо-
дуляции равна 5 символьным интервалам.
Отметим, что последовательный алгоритм демодуляции Витер-
би легко обобщается на /W-позиционные методы модуляции, для
которых решетка содержит М состояний и в каждый узел входят
два сигнальных пути и два выходят.
5.3. Оптимальная демодуляция сигналов
с непрерывной фазой
Рассмотрим проблему демодуляции сигналов, в которых обес-
печивается непрерывность фазы несущего высокочастотного коле-
бания. Это сигналы с фазовой или частотной модуляцией с памя-
тью. Общее описание таких сигналов было дано в гл. 3. Фаза не-
сущего колебания такого сигнала на интервале времени
(/ -1)ТС < t < iTc определяется равенством
/-1
<p(f, Ь) = + МдУ - (/ - 1)ГС ]. (5.20)
где h — индекс частотной модуляции; b = {..., Ь,_,, Ь,} - последова-
тельность символов модулирующего сигнала; /Л = +1 — информа-
ционный символ;
0, если t < 0,
q(() = -(/Tc, еслиО<£<Гс,
1, если t > 0.
(5.21)
Форма функции q(0 обычно определяется как интеграл от им-
пульса g(t):
9(0= Jgr(T)cfr.
(5.22)
Если g(t) - 0 для t > Тс, то сигнал называют сигналом с модуля-
цией с непрерывной фазой (МНФ сигналом) с полным откликом.
188
Применяя различные формы импульса g(t) и разные значения ин-
декса модуляции h, можно получить большое число разных МНФ сиг-
налов. В гл. 3 для случая прямоугольного импульса приведены приме-
ры фазовых траекторий таких сигналов, которые начинаются при t = О
й являются кусочно-линейными. Более гладкие фазовые траектории
получают путем выбора импульсов без разрывов, таких как класс им-
пульсов приподнятого косинуса или класс гауссовских импульсов.
Совокупность разных фазовых траекторий для разных последо-
вательностей информационных символов называют фазовым дере-
вом. Фазовые деревья со временем растут, неограниченно расширя-
ясь. Однако фаза несущего колебания однозначна только в интерва-
ле от 0 до 2л. Если значения фазовых траекторий определить по мо-
дулю 2л в диапазоне (-л, + л), то фазовое дерево будет выглядеть
так же, как решетчатые диаграммы, которые были использованы в
§ 5.2. Такое изображение фазовых деревьев называют фазовой ре-
шеткой. На рис. 5.8 и рис. 5.9 изображены фазовое дерево и фазо-
вая решетка для МНФ сигнала с двоичной частотной модуляцией
(ЧМНФ сигнала) для случая прямоугольного импульса g(t) с индек-
сом модуляции h = 1/2. Для этого сигнала значения информационно-
го символа lk = bkbk_i, где Ьк = 1, если передаваемый бит ак = 0,
и Ьк = -1, если ак = 1 (см. § 3.3), что указывает на то, что данный
способ модуляции является нелинейным с памятью.
Для импульсов без разрывов фазовые траектории имеют более
сложную форму. В этом случае удобнее на фазовой решетке отобра-
жать только финальные значения фазы в моменты времени t = iTc.
Опишем алгоритм демодуляции МНФ сигналов общего вида,
для которых импульс g(t) может быть определен на интервале,
длительность которого больше длительности одного канального
символа: д(Г) = 0 при t < 0 и t > LTKC. Для этих сигналов примем
также, что фазовая функция q(t} = 0 при t < 0 и q(t) - 1/2 при t > LTKC.
Здесь L — целое положительное число. Для таких сигналов с по-
стоянным индексом модуляции h фаза несущего колебания будет
определяться равенством
/ i-L /
<р(/;1) = 2л/7^/Лд(/-/(Гм:) = л^/Л+2л/7 ^/Ад(/-/<ДС) =
к=1 Л=1 А=1-Г+1 ' ' '
= 9/ + WJi-L+lJi-L+2.li-vh). । = {-М}. 'Лс < t< U - 1)ГКС.
Если h = mlр и тир- взаимно простые положительные целые
числа, то МНФ сигнал можно представить фазовой решеткой.
189
Рис. 5.8. Фазовое дерево ЧМНФ сигнала с h = 1/2
Рис. 5.9. Фазовая рэшатка ЧМНФ сигнала с h - 1/2
Возможное число значений слагаемого Э/ представляет собой
совокупность финальных состояний фазы. Эта совокупность зависит
от значений h: если гл четно, то имеется р финальных значений фа-
зы, которые в совокупности составляют множество
190
0=L м 2nm Jp-Wl. (5 24)
I Р Р Р J
если т нечетно, то имеется 2р финальных значений фазы, кото-
рые в совокупности составляют множество
е = (о, , 2п/77. ..(2р "1)лт ! . (5.25)
I р р Р J
Если L = 1, то либо (5.24), либо (5.25) - единственный набор
финальных фаз фазовой решетки. Если L > 1, то финальные зна-
чения фазы будут зависеть не только от последнего информацион-
ного символа, но и от L - 1 предшествующих. Дополнительные со-
стояния определяются значениями второго слагаемого в (5.23):
..Ii-bli)=2nh ^lkq(t-kTKC) =
(5.26)
= 2лЛ '^lltq(t-kTKC)+2Tthliq(t-iTKC), (i-1)ГКС <t <iTK.
k=i-L+1
Первое слагаемое здесь определяет доли фазы, зависящие от
предшествующих информационных символов /М1, lj_2.. Воз-
можные значения этого слагаемого образуют коррелированный
вектор состояний. Второе слагаемое - доля фазы, определяемая
последним информационным символом.
Оказалось удобным текущее состояние модулятора МНФ сигна-
ла в момент времени t = (i - 1)ТКС задавать с помощью вектора
= - ./i-w}.
(5-27)
где первый элемент определяет текущее значение финальной фа-
зы, а предшествующие информационные символы можно рассмат-
ривать как вектор состояния модулятора, который однозначно оп-
ределяет долю фазы, обусловленную наличием памяти сигнала.
Таким образом, число возможных значений состояния МНФ сигна-
ла общего вида в момент времени t = (/ - 1)ГКС равно
pML 1 при четном т,
2pML~^ при нечетном т.
(5 28)
При таких обозначениях состояние модулятора в момент вре-
мени f = /Ткс будет определяться вектором
191
Ф/+1 - h’ h-У.........h-L+z}-
(5.29)
где 9/+1 = 9, + n/7/,_t+1.
Пример. Построим диаграмму состояний для двоичного МИФ сигнала с индек-
сом модуляции h = 3/4 и L = 2. Поскольку т = 3 - нечетное число, то число фи-
нальных значений фазы равно 2р = 8 и их значения образуют множество
„ л J + 2 ч- 3
с> = < О, + я, ± п, + л, л
14 4 4
Следовательно, для данного сигнала
Ф, = {»,./,_,}. 9, е е {+1.-1}.
т.е. для каждого значения фазы имеются два состояния, обусловленные памятью
сигнала. Общее число состояний сигнала равно 16:
Если для модулятора в момент времени t = (/ - 1)ТКС значение финальной фазы
сигнала равно 9, = ли предшествующий информационный символ /,_1 = -1, то
4
для момента времени t = iTKC финальная фаза принимает значение
1 13 2 (21
9,., = л + лМ, = -л— л = - л , и новое состояние Ф.-^, = (— л,/, >. Множества
11 4 '4 4 4 ,+1 ( 4 J
состояний и некоторые диаграммы переходов этого МНФ сигнала для двух момен-
тов времени изображены на рис. 5.10 (переходы изображены не все).
На рис. 5.11 на решетке состояний изображен путь, соответствующий последо-
вательности (1, -1, -1, +1, +1, +1, -1).
Чтобы нарисовать фазовое дерево данного сигнала, необходимо знать форму
сигнального импульса g(t). На рис. 5.12 изображено фазовое дерево МНФ сигнала
для случая, когда этот импульс является прямоугольным и имеет длительность
2 Ткс , а начальное состояние принято равным (0,1).
Метод максимального правдоподобия вновь можно использовать
для синтеза оптимального алгоритма демодуляции МНФ сигнала. По-
скольку решетку состояний для этого класса сигналов оказалось воз-
можным построить, то для его демодуляции на фоне гауссовского бе-
лого шума можно использовать алгоритм Витерби. Для этого необхо-
димо уметь вычислять метрики различных путей.
192
t = (i-1)TKC
t ~ 'Л<с
Рис. 5.10. Состояния МНФ сигнала с h = 3/4 и L - 2
По аналогии с равенством (5.2), определяющем логарифм
функционала отношения правдоподобия для демодулируемого
сигнала на интервале (/ - 1)ТКС < t < iTKC, запишем корреляционный
интеграл для МНФ сигнала, учитывая память этого сигнала:
'Лс Я^~
Zj(l)= jx(f)cos[cj0f+<p(/j)]c/f = z/_1(l)+ jx(f)cos[<DOf + e,+9(f;l)]df. (5.30)
0 (/"ЯТ^с
Первое слагаемое в этом выражении может представлять мет-
рики разных путей до момента времени f = (/ - 1)ТКС. Второе сла-
гаемое
G (t ) = j х(/)соз[ы0/ + 0, + 9(f;
0_1)/кс
(5.31)
определяет прирост метрики на интервале (/-1)ТКС -
При /W-позиционной модуляции и памяти сигнала L имеются М
разных последовательностей I = {/,, ...,информационных
символов и р или 2р финальных значений фазы 0,. Следовательно,
193
Рис. 5.11. Пример пути сигнальной точки по решетке состояний
МНФ сигнала с h = 3/4 и L = 2
необходимо вычислять pML (или 2pML) статистик г,(';0,) на ка-
ждом сигнальном интервале; каждая такая статистика является
приростом метрик соответствующих* последовательностей, вы-
живших до момента t = (i - 1)ТКС. Число выживших путей разно
pML~} (или 2рМЬ1).
Для каждой выжившей последовательности (выжившего пути)
необходимо вычислить М новых значений статистики в,) и
приращений соответствующих метрик; последние суммируются со
значениями метрик выживших путей. В результате получают
pML'yM = pML (или 2pML~*M = 2pML) новых значений метрик
для продолженных pML (или 2pML) новых путей. Теперь из каж-
дых М продолженных путей, являющихся окончаниями одного вы-
жившего пути и сливающихся в соответствующем узле решетки,
выбирают один с наименьшим значением метрики, который прини-
мается в качестве выжившего на этом шаге, а остальные М -1 от-
брасывают. В результате снова получают pML~^ (или 2pML~') пу-
тей, выживших к моменту t = /Ткс.
194
Рис. 5.12. Фазовое дерево для МНФ сигнала с h - 3/4 и L = 2
Для построения устройства демодуляции данного класса сигна-
лов статистику (5.31) полезно записать в несколько ином виде* вос-
пользовавшись известным разложением косинуса суммы:
#Ткс
(l;0,) = Jx(f)cos[«0f + 0, + S(f; l)] dt =
(5.32)
;,кс "кс
Jx(f)cos(ca0f)cos[o, + 9(t; l)]df - |"x(/)sin(coof)sin[6, + 9(f;l)]dt
Разбивая интервалы интегрирования на непересекающиеся ма-
лые интервалы длительностью Тс,, на которых медленно меняю-
щаяся функция под интегралом практически не меняет своего зна-
чения, вместо (5.32) запишем:
лт0
r,(l;0,) = ^cosfO,- + Э(кГ0;|)] |x(/)cos(<»cf)df - £sin[0, + 9(/сГ0;!)]х
* (fc-П’о к
х Jx(<)sin(<o0f)cff к Jcosfo,- + 9(f;l)]yc(/)cff + Jsinfo, + 9(f;l)] ys(f)<#.
(Л-1)Т0 U-1)TKc
где
195
(t) =
р(т)
t-T0
cos
sin
(o0f)df.
Преобразования в соответствии с (5.33) могут быть выполнены
в устройстве, общая функциональная схема которого представлена
на рис. 5.13.
Конкретизируем полученные здесь общие выражения для дво-
ичного (М = 2) МНФсигнала с h = 3/4 и L-2. Решетка состояний
этого сигнала приведена на рис. 5. 9. Финальная фаза 9,- для те-
кущего момента времени t = (i-1)TKC принимает значения из мно-
жества 0 = {О, + (1/4)л, + (2/4)л, + (3/4)п,л), т.е. число разных зна-
чений фазы 9,- равно р = 8.
При L = 2 на значение фазы сигнала на текущем интервале
оказывает влияние кроме текущего информационного символа /,
предшествующий символ 1,^. Поэтому число выживших путей к
моменту времени t = (/ - 1)ГКС равно =8-22-1 = 16 и равно
числу состояний в решетке рис.5.10. Значение фазы на текущем
интервале (/-1)ТКС < t < /Ткс определяется равенством (5.23), кото-
рое для рассматриваемого здесь случая принимает вид
<p(f; I) = 2^^lkq(t - кТхс ) = 9; + 9(f; /,_v I,). (/ - 1)TKC < t < /Ткс. (5.34)
Здесь изменение фазы на рассматриваемом интервале опреде-
ляется функцией
Рис. 5.13. Функциональная схема устройства вычисления
корреляционных статистик при демодуляции МНФ сигнала
196
) = 2п*{/, _lQ[, -(/ - 2)7КС]+ liQ[t -(i -1)7Д
(/-1)TKC <Г</7КС. ' ' '
Значение фазы сигнала в момент времени f = (/ -1)ТКС равно
<р[(' ~ 1)7кс; П = э,- + 2nhli_yq(TKC ) (5 36)
и полностью определяется значением финальной фазы в этот мо-
мент и значением информационного символа 1,^. В соответствии
с рис. 5.10 таких пар (состояний решетки) всего 16. Каж-
дой паре соответствует свой выживший путь на решетчатой диа-
грамме.
Подставляя (5.35) в (5.34), а затем полученный результат - в (5.33),
получаем явное выражение для корреляционных статистик на ин-
тервале (/ - 1)ТКС < t < iTKC:
r,-(l; 0,-) = Jcos[0, + 9(f;l)]yc(f)df + Jsin[o; + 9(f;l)]ys(f)<# =
('-1)7кс (,-1)Тю
#"Gcc
= Jcos[G, + 2nh{l^.q[t-(i -2)7КС] + /,Q[f-(/- 1)TKC]}]yc(0cff + (5.37)
(/~1)ГКС
^кс
+ Jsin[O, + 2Tth{lj^q[t - (j - 2)7KC]+ /,<;[/ - (/ - 1)7KC]}]ys(f)c/f.
('-ПГкс
Для каждого состояния (З,-,/,_]) решетки сигнала необходимо
вычислять две статистики (5.37) при /, = +1 и /; = -1. В рассматри-
ваемом здесь случае таких статистик всего pML = 8 22 = 32, что
определяет размерность выходной шины устройства на рис. 5.13.
Полученные статистики передаются в декодер Витерби, где для
каждого состояния (Зр/ущ) строятся два исходящих из этого со-
стояния продолжения пути, определяются пути с меньшей метри-
кой, остальные отбрасываются. Выживших на этом интервале вре-
мени вновь будет pML~] = 8-22-1 =16 путей, соответствующих 16
новым состояниям решетки.
В (5.37) осталось определить только функцию о(*), для которой
в приведенном примере пока были введены лишь следующие ог-
раничения: q(f) = O при f<0 и р(?)=1/2 при ' > LTKC = 2ТКС.
197
В соответствии с (5.22) форма функции q(t) на интервале
О < t < 2ТКС полностью определяется выбираемой формой им-
пульсного сигнала д(1), который в данном примере должен быть
отличен от нуля на двух символьных интервалах. »
В заключение отметим, что приведенные в этом разделе соот-
ношения могут быть использованы для получения алгоритмов мак-
симального правдоподобия для демодуляции МНФ сигналов, для
которых память L может иметь значения больше 2 при произволь-
ной форме импульсной функции g(t). В частности с системах стан-
дартов GSM и DCS-1800 используются МНФ сигналы с L = 3 и им-
пульсной функцией в виде гауссовской кривой, которая была опре-
делена в главе 3. Этот же способ модуляции применяется в систе-
мах стандарта DECT.
5.4. Демодуляция сигналов с п/4-квадратурной
относительной фазовой модуляцией
Данный способ модуляции описан в разделе 3.6. Для демодуля-
ции таких сигналов часто используют дифференциальные алго-
ритмы, которые очень удобны для практической .реализации. При
малых скоростях передачи в каналах с быстрыми релеевскими за-
мираниями дифференциальные алгоритмы обеспечивают доста-
точно низкий уровень вероятности ошибки на бит, поскольку не
требуют фазовой синхронизации. Известно несколько алгоритмов
демодуляции сигнала с п/4-квадратурной фазовой модуляцией. Все
они обеспечивают примерно одинаковую вероятность ошибки на
бит и отличаются только некоторыми особенностями технической
реализации. Рассмотрим только один из них, который применяется
в сотовых системах стандарта D-AMPS [3].
В соответствии с изложенным в § 3.6 сигнал с я/4-квадратурной
фазовой модуляцией на очередном символьном интервале может
быть представлен следующей вещественной функцией времени:
= соз(с>£)1 + ф,), v-1)/KC<f</TKC, (5.3b)
где ф,- = cpj-j * Дф, и приращение фазы сигнала Д<р, по отношению
к фазе на предыдущем символьном интервале содержит информа-
цию о передаваемых битах.
На входе демодулятора в приемнике сигнал наблюдается на
фоне шума, так что обработке подвергается наблюдаемый процесс
198
X(r) = s(f; <р,- + y)+£(f). (' - 'Kc 5 ,TKC .
(5.39)
где 4/ - смещение фазы сигнала из-за замираний в канале. Обычно
можно считать, что это смещение практически не меняется на ин-
тервале времени, длительность которого составляет два символь-
ных интервала.
Функциональная схема дифференциального демоДулятора это-
го сигнала представлена на рис. 5.14. На выходе интеграторов в
квадратурных каналах для полезной компоненты выходного про-
цесса можно записать:
'Tf , , J2cos(o>0t)
J cos(ro0f + ф, + V) м
J 2sm(co00
-•Икс
7c cos(<p,- + V)] = Гиг,-
7кс sin(<p, + ф) u [z,
(5.40)
Здесь опущены также слагаемые, обусловленные гармоническими
колебаниями с удвоенной частотой. Две последовательности ста-
тистик и/,, и z(. обрабатываются в дифференциальном декодере
в соответствии со следующими алгоритмами:
X/ = WjWj^ + ZjZj^ , у,- = ZjW,^ - WjZj^ .
(5.41)
Подставив в эти равенства статистики (5.40), получим с точно-
стью до постоянного множителя:
х,- = cos(<p,- + ly^ccsftp,., + ф)+ sin(<p, + u/)sin(<p,-_1 + ф) =
( X (5.42)
= COS(<p,
у, = sin(<p,- + ф)сОб(<г>,_1 + 4/)-COs(<p; + U/)sin(<p(_1 +• ф) =
= Sln(<p, -(p.-i)
(5.43)
199
Значения статистик х, и у,- с выхода декодера поступают на
схемы принятия решений в соответствии со следующими алгорит-
мами:
/с = 0, если х, > 0, или /с = 1, если х, < 0; (5.44)
♦
ls = 0, если у, > 0, или fs = 1, если у, < 0; (5.45)
/с и /s определяют принятые значения пары битов, переданных на
i -м сигнальном интервале.
Здесь важно подчеркнуть, что частота опорного колебания
в приемнике должна быть точно равна частоте принимаемого ко-
лебания. В противном случае появляется изменяющаяся разность
фаз этих колебаний, что ведет к увеличению вероятности ошибки
при демодуляции.
Список литературы к главе 5
1. Зюко А.Г., Кловский Д.Д., Коржик В.И., Назаров М.В. Теория элек-
трической связи. Учебник для вузов. - М.: Радио и связь, 1998. - 433 с.
2. Прокис Дж. Цифровая связь / Пер. с англ, под ред. Д.Д.Кловского. -
М.: Радио и связь, 2000. - 797 с.
3. Rappaport T.S. Wireless Communications (Principles and Practice). -
New York: IEEE Press, 1996. - 641pp.
200
ГЛАВА 6
ЭНЕРГЕТИЧЕСКИЙ РАСЧЕТ СОТОВЫХ СУХОПУТНЫХ
ПОДВИЖНЫХ СИСТЕМ ЭЛЕКТРОСВЯЗИ СИСТЕМ
6.1. Расчет трасс при поднятых антеннах
Линии радиосвязи, входящие в состав ССПСЭ и спутниковых
систем связи, обычно работают в диапазонах ультравысоких час-
тот (УВЧ) и сверхвысоких частот (СВЧ) и соответственно в диапа-
зонах дециметровых и сантиметровых волн. Параметры радиока-
нала, определенные при распространении радиоволн в свободном
пространстве, могут быть использованы для расчета радиолинии
при высокоподнятых антеннах. Последнее имеет место, когда для
передающей и приемной антенны соответственно выполняется
условие
hy » к и h2 » к,
/ц, h2 - высота антенны; к - рабочая волна..
На таких трассах уровень мощности сигнала на входе приемника
Рсвх=Ро^.п + и(О.
где
Р0(Гг) =рп+д1+д2-(®сз+а1 + а2) (6.1)
- уровень мощности сигнала в точке приема при распространении
в свободном пространстве; рп~ уровень мощности передатчика;
и д2 - коэффициент усиления передающей и приемной антен-
ны соответственно, выраженный в децибелах; а1 и а2 - потери в
фидере передающей и приемной антенны соответственно;
асв ~ )2 " ослабление свободного пространства; г - протяжен-
ность трассы; к - рабочая длина волны; v(f) - множитель ослаб-
ления поля свободного пространства.
Множитель ослабления позволяет учесть влияние земной по-
верхности и тропосферы на поле в точке приема. Во-первых, зем-
201
пая поверхность может создавать отраженную волну. Во-вторых,
неровности рельефа могут экранировать поле прямой волны. На-
конец, кривизна земной поверхности и неровности рельефа огра-
ничивают расстояние прямой видимости — дальность радиогори-
зонта, которая определяется выражением
c/pr « 3,57(. ft, +, h2) (6.2)
(здесь d выражено в километрах, Л, и Л2 - в метрах).
Влияние тропосферы обычно разделяют на три составляющие.
Во-первых, слоистые неоднородности тропосферы могут создавать
отраженную волну. Во-вторых, искривляется траектория прямой
волны, из-за изменения диэлектрической проницаемости тропо-
сферы по высоте. Наконец, гидрометеоры поглощают и рассеива-
ют энергию сигнала на частотах выше 10 ГГц.
При расчете т^-ссы строят профиль пролета (рис. 6.1), на ко-
тором наносят линию прямой видимости АВ, определяют самую
высокую точку профиля С и ее координату ф и находят просвет
Нс- расстояние от самой высокой точки профиля до линии пря-
мой видимости. Пунктиром на рис 6.1 нанесена линия земной по-
верхности.
Ряс. 6.1. Профиль
пролета
Просвет на трассе изменяется под воздействием атмосферной
рефракции. С учетом рефракции просвет
+ АНф).
где &Н(д} = -0,25с'~д'<(1 - к) - приращение просвета под воздейст-
вием атмосферной рефракции; к - d, / d - и относительная коор-
дината точки С; д -dvJd'n - градиент диэлектрической проницае-
мости е воздуха.
Случайная величина д имеет нормальное распределение со
средним значением д и стандартным отклонением од . Численные
значения величин д и <зд для различных климатических районов
мира приведены в справочной литературе [6].
Относительный просвет
p(ff) = H(9)/H0, (6.3)
где Hq = - dX А(1 - kj/3 - радиус первой полузоны Френеля.
> По значению относительного просвета трассы классифицируют
йа закрытые при р(р)<0; полуоткрытые при 0 < р(д) <1 и откры-
тые при р(р)>1.
у-. Как правило, на открытых трассах для радиоканала применяют
двухлучевую модель. В таком случае поле в точке приема опреде-
ляется интерференцией двух лучей: прямого (1) и отраженного от
точки С (2). Множитель ослабления
- V = . 1 + Ф2 - 20cos[p2(g)n/3] . р(д) > 1, (6.4)
где Ф - модуль коэффициента отражения; V= IO005*10.
При случайном изменении диэлектрической проницаемости
воздуха множитель ослабления может принимать максимальное
Значение Vmax = 1 + Ф, когда прямая и отраженная волны склады-
ваются в фазе, и минимальное значение У^^-Ф при
р(р) = -.6л, л = 1,2,3..., когда эти волны противофазны. При
этом возникают быстрые замирания сигнала, которые называют-
ся интерференционными. При отражении от гладкой плоской по-
верхности модуль коэффициента отражения Ф -> 1. Неровная
поверхность в зоне формирования отраженного луча ( например,
лес) определяет диффузный характер отражения, т.е. Ф^О, и
отраженный от земной поверхности луч практически отсутствует.
Однако при зтом луч, отраженный от слоистых неоднородностей
тропосферы, может вызывать интерференционные замирания.
Выражение (6.4) получило название интерференционной фор-
мулы для множителя ослабления. Она применяется для открытых
трасс.
При увеличении градиента диэлектрической проницаемости про-
свет на трассе уменьшается, и трасса может стать полуоткрытой и
даже закрытой (д < 0 ). Препятствие экранирует поле основной вол-
ны. Множитель ослабления уменьшается.
203
.Рис. 6.2. Трасса с препятствием сферическим (а) и клиновидным (б)
Возникают рефракционные замирания из-за экранирующего дей-
ствия препятствия.
Это медленные замирания. На закрытых трассах множитель
ослабления зависит от формы и размеров препятствия, которые
принято оценивать с помощью параметра препятствия щ харак-
теризующего радиус кривизны препятствия р. При Н = 0 трассу
называют касательной. Поле в точке приема на такой трассе соз-
дает огибающая препятствие (дифрагирующая) волна. Дифраги-
рующая вокруг сферического препятствия (д -> о) волна практи-
чески на всем пути распространяется в непосредственной близо-
сти от земной поверхности (рис. 6.2,а). Поглощение энергии вол-
ны будет значительно больше, чем для волны, огибающей клино-
видное препятствие (рис.6.2,б). В этом случае ц -»<х>. Поэтому и
значения множителя ослабления для таких трасс будут отличать-
ся друг от друга. Для реальных превятствий 0<р <<х>. Множи-
тель ослабления на закрытых трассах определяется дифракци-
онной формулой:
ид = и0(1-Нс/Н0), (6.5)
где v0 - множитель ослабления на касательной трассе, дБ (рис. 6.3).
График для определения множителя ослабления на реальных
трассах приведен на рис. 6.4.
Рис. 6.3. Множитель ослабления на
касательной трассе
204
6.2. Основные характеристики радиоканала
в системах подвижной связи
Рассмотрим прием немодуг.ированного гармонического колеба-
ния. Схема рассматриваемой модели приведена на рис. 6.5. Плос-
кость XY расположена горизонтально. Абонентская станция дви-
жется вдоль оси X со скоростью \/АС. Волна Р, принимаемая на АС,
приходит под углом аР.
При движении АС возникает доплеровский сдвиг частоты несу-
щей Дсор = рУдс cosap, где волновое число
Р = 2тг/Х . (6.6)
Передавалось гармоническое колебание, но на АС будет принят
сигнал, который имеет случайные AM и ФМ. Его эффективная по-
лоса частот П = 2ДюОтах = 2р V АС.
Рис. 6.5. Пространственная модель
приема немодулированного гармо-
нического колебания
Спектральная плотность мощности сигнала на входе приемника
определяется рядом факторов, в том числе и диаграммой направлен-
ности антенны (ДНА). Если передавать волны с вертикальной поляри-
зацией, то можно выбрать антенны, которые не вносят искажений в
структуру поля. В этом случае вектор электрического поля направлен
по оси Z и сигнал будет приниматься без искажений вертикальной
штыревой антенной АС. Петлеобразные антенны, ориентированные
по оси X или по оси У, можно использовать для приема магнитных
компонентов поля. Типовой вариант, принятый на практике, - это вер-
тикально-поляризованные волны и антенна - вертикальный вибратор.
Общие характеристики замираний. В системах подвижной ра-
диосвязи обычно БС можно рассматривать как станцию с высокопод-
нятой антенной, в то время как антенна АС находится на уровне го-
родской застройки. В городе практически нет прямой видимости между
БС и АС.
Принимаемый на АС сигнал
s(f) = U(t)emt', (6.7)
где L/'O - его огибающая и 'P(f) ~ фаза.
Типичная осцилограмма принимаемого сигнала приведена на
рис. 6.6. Наблюдаются глубокие замирания и квазипериодический
характер минимумов. Принимаемый сигнал зависит как от времени
(f), так и от местоположения АС (/). Поэтому использована двойная
ось абсцисс. При движении АС пространственные замирания сиг-
нала воспринимаются как временные.
Для характеристики сигнала часто используется понятие «мас-
штаб замираний» - расстояние по трассе между минимумами (или
максимумами) огибающей сигнала. Сигнал (6.7) в точке приема пре-
терпевает быстрые замирания (БЗ) и медленные замирания (М3).
Причина БЗ - многолучевая структура сигнала и интерференция лу-
чей, причина М3 - затенение первой полузоны Френеля радиосигна-
ла на трассе за счет особенностей рельефа и городской застройки.
На основании результатов измерений уровня сигнала для несу-
щих с частотами от 50 до 11 200 Мгц в литературе [1 - 4] сделаны
следующие выводы относительно многолучевой структуры сигнала:
»Попе в любой точке создают несколько горизонтально пере-
мещающихся плоских волн со случайными амплитудами и углами
прихода; электромагнитное поле есть результат интерференции
большого числа плоских волн, при этом его лучевая структура хотя
и случайна, но сохраняется неизменной, и любые направления
прихода волн в горизонтальной плоскости равновероятны.
206
Рис. 6.6. Осциллограмма сигнала, принимаемого АС
• Плоские волны поступают от стационарных рассеивателей,
Главным образом от окружающих зданий.
• Отраженные волны статистически независимы.
Напряженность поля, создаваемая в каждой точке наблюдения
отраженной волной, зависит от многих характеристик отражающей
поверхности, таких как ее форма и электрические свойства, неод-
нородность поверхности, ориентация в пространстве и др. Эти ха-
рактеристики принимают случайные значения. Поэтому напряжен-
ность поля в точке наблюдения рассматривается как случайная
комплексная величина, распределение которой близко к нормаль-
ному закону. Распределение огибающей такого сигнала подчиняет-
ся закону Релея.
Таким образом, справедливы следующие предположения о па-
раметрах многолучевого сигнала: распределение огибающей сиг-
нала подчиняется закону Релея; фазы отраженных волн равномер-
но распределены на интервале О...2я; амплитуды и фазы отра-
женных волк статистически независимы.
Полагая, что сигнал (6.7) претерпевает быстрые и медленные
замирания, представим его огибающую
г: U(t) = Uu(t)V6{t). (6.8)
где t/M(t) - медленная огибающая сигнала, которая меняется по
закону медленных замираний; V6(t) - множитель ослабления БЗ.
Переходя к уровням, вместо (6.8) запишем
и(О = им(О + Иб(О.
(6.9)
t/M(f) = 20lgl/M(f).
(6.W)
207
В точке приема при усреднении сигнала по быстрым замирани-
ям находим по (6.8) для определенного момента времени t| мед-
ленную огибающую сигнала
(1+Т
Цит(М=21г pm (6.11)
/,-т
где 2Т — интервал усреднения по времени, определяемый как ин-
тервал, на котором наблюдается от 40 до 80 случаев глубоких за-
мираний. Величина (6.11) получила еще одно название: «локаль-
ное среднее по времени».
Поскольку М3 учитывают тот факт, что огибающая сигнала в
точке приема существенно зависит от местоположения АС, опре-
деляют усреднением сигнала ло оси расстояний (см. рис. 6.6) ло-
кальное среднее по местоположению:
/1+г
\u(l)dl, (6.12)
/,-L
где 2L = 40/. - интервал усреднения по местоположению.
Характерный масштаб БЗ МБЗ = (0,5...3)Л. или МБЗ =20... 100 см
на частоте 900 МГц (X = 33,3 см). На интервале усреднения по ме-
стоположению наблюдается до 80 случаев глубоких быстрых зами-
раний:
2L * 40/. = 40МБЗ /(0.5...3) = (8О...13)Мбз.
Представим медленную огибающую из (6.10):
М0 = имм + М0. (6.13)
vM(f)- множитель ослабления М3; - медианное значение оги-
бающей , которое получают как результат усреднения по быстрым
и медленным замираниям; имм также называют «долгосрочная
медиана».
Функции vM(f) и иб(() показаны на рис. 6.7. Первая определяет
медленные изменения уровня сигнала во времени относительно ме-
дианного уровня имм, вторая - быстрые колебания уровня сигнала
относительно vM(f). По определению медианное значение может
превышаться в течение 50 % времени наблюдения. Нормированное
медианное значение им(50%) = 0 дБ (см. на рис. 6.6).
208
Природа БЗ и М3 различна и их влияние принято рассматривать
раздельно. При этом полагают, что М3 возникают только из-за из-
менения местоположения АС. В таком случае vM(f) - vM(/) и вме-
сто (6.13) можно записать медленную огибающую сигнала в виде
uM(r,/) = uML7-(r,50%, 50%) + (/), (6.14)
где г - расстояние между БС и AC; umLT(г, 50%, 50 %) = имм - ус-
редненное медианное значение уровня огибающей, ожидаемое в
50 % точек на расстоянии г от БС (усреднение по местоположе-
нию L = 50 %) и в течение 50 % времени наблюдения (медиана по
времени Т - 50 %).
В результате, принимая во внимание (6.13) и (6.14), вместо (6.9)
получаем на расстоянии г от БС уровень огибающей сигнала
и (r.l,t)^uuLT(r,50%, 50%) + vM(/) +v6(f). (6.15)
В соответствии с (6.15) запишем уровень мощности на входе
приемника АС, превышаемый в L % точек, расположенных на рас-
стоянии г от БС, и в течение Т % времени наблюдения:
рпр(г,Б,Г) = рм17-(г,50%, 50%)+Др(Б)+Др(Т), (6 16)
где рМ[_т(г,50%, 50%) = рм - усредненное медианное значение
уровня мощности, ожидаемое в 50 % точек, расположенных на
расстоянии г от БС, и в течение 50 % времени наблюдения; Лр(Б)
и Ар(Т) - отклонение значения уровня мощности от усредненного
медианного значения в заданном проценте точек приема (Б) и для
заданного процента времени наблюдения (Т) соответственно.
Статистические характеристики быстрых замираний. На-
помним, что причина БЗ - интерференция горизонтально переме-
щающихся плоских волн со случайными амплитудами и фазами
Рис. 6.7. К пояснению множителей ослабления БЗ и М3
2U9
Радиус района активных замираний составляет около 100 Л. Это
означает, что в создании отраженных сигналов на входе приемника АС
активно участвуют только сигналы, отраженные от зданий, располо-
женных в радиусе 5?ai<r = 100Х = 100 -0,33 = 33 м при f = 900 МГц.
Центром района активных замираний является АС и этот район
перемещается вместе с АС.
Плотность распределения БЗ подчиняется закону Релея:
2 ( 2 А
w(x)= \ expj- х2 |, (6.17)
оу \ j
где случайная величина х - огибающая сигнала, приходящего на
АС; оу - дисперсия квадратурных составляющих напряженности
поля; 2oq = р - средняя мощность сигнала. Поскольку рассматри-
ваются только БЗ, то в (6.12) переменная х = v6(f) и средняя мощ-
ность сигнала нормированы, так чтор = 2о^ = 1.
При замираниях огибающей сигнала по закону Релея инте-
гральная функция распределения огибающей
W(x < А) = 1 - ехр
(6.18)
а интегральная функция распределения мощности сигнала
И/(у <Р) = 1-ехр(-Р/Р),
где Р - текущее значение мощности сигнала.
Среди статистических характеристик второго порядка интерес
представляют: среднее число пересечений заданного уровня в
единицу времени и средняя длительность замираний. Среднее
число пересечений заданного уровня в единицу времени зависит от
скорости движения АС. Воспользуемся графиком множителя ос-
лабления БЗ (рис. 6.8) и введем случайную функцию z(f) = v6(f).
Рис. 6.8 К определению числа пересечений уровня
210
Для определения среднего числа пересечений заданного уровня Z
случайной функцией z(f) вычисляется ее производная dz = kzl-t.
где величины Az; т показаны на рис. 6.8. При вычислениях функ-
ция z{t) предполагается стационарной и определяется совместная
йлотность распределения функции z(()n ее производной.
8 результате получают математическое ожидание числа пере-
сечений заданного уровня сигнала
n(Zw) = pVkc Z,v exp(-Z^), (6.19)
,2л
;Тдё ZN=Z 2ау - нормированный уровень сигнала относительно
его среднеквадратического значения; р и УАС см. в (6.6).
Для вычислений вместо (6.19) удобно записать
n(ZN) = nonZt (6.20)
где
n0 = PVAC/-2n. (6.21)
и nz ~ZNexp{-Z^) (рис. 6.9).
Среднее время, в течение которого случайная величина нахо-
дится ниже уровня Z или нормированного уровня Z,v, определяет
среднюю длительность замираний
Рис. 6.9. Математическое ожидание числа пересечений
нормированного уровня
211
T3=w(y <ZN)ln(ZN).
(6.22)
Подставив в (6.22) аналитические выражения для функций в
числителе (6.18) и знаменателе (6.19), запишем
Тз = 1 [exp(Z„) -1] = ТО TZ ,
где
2л
то =
Г Уде
1
' TZ = z
*-N
[exp(Z,j)-l] (рис. 6.10).
Например, если АС работает в диапазоне 900 МГц и движется со
скоростью УАС= 30 км/ч = 8,33 м/с, то по (6.16) п0= 62,7 Гц. Для задан-
ного уровня, например ZN- -10 дБ, находим по рис. 6.9 nz= 0,3. Под-
ставив эти значения в (6.20), вычислим n(Zw) = 62,7 0,3 = 18,7 ~ 20 Гц,
или 20 пересечений уровня в секунду.
Уровню ZN= -10 дБ соответствует значение интегральной функ-
ции распределения W(y <0,01) = 0,09. По (6.22) средняя длитель-
ность замираний
т3 = W(y < ZN)ln(ZN) = 0,09/20 = 4,5 мс.
Численные значения параметров быстрых замираний по закону
Релея приведены в табл. 6.1.
Итак, в большинстве случаев плотность распределения оги-
бающей сигнала при быстрых замираниях определяется законом
Релея. Наряду с этим встречаются трассы, на которых сигнал на
Рис. 6.10. К определению длительности замираний
212
Таблица 6.1
Нормированный уровень сигнала Zn, дБ Интегральная функ- ция распределения (вероятность непре- вышения уровня) Статистические харак- теристики второго по- рядка
nz tz
10 0,9999 0,00014 7142,14
0 0,63 0.36788 1.71
-10 0,09 0,28593 0,31476
-20 0,01 0,1 0,1
-30 0.001 0,03157 0,03168
входе приемника создают один прямой луч с большой амплитудой
и несколько отраженных лучей с малыми амплитудами. В этом слу-
чае обобщенный закон Релея (он же Релея-Райса) определяет
плотность распределения огибающей сигнала
x2+Uo\ f
2o(J J 12аЩ
(6.23)
где случайная величина х = U - огибающая сигнала; Uo - оги-
бающая прямой волны; /0( ) - модифицированная функция Бессе-
ля. При Uo = 0 закон Релея-Райса вырождается в закон Релея.
Экспериментальные исследования флюктуаций амплитуды сиг-
нала в диапазоне 50 ... 20 ГГц подтвердили, что быстрые замира-
ния огибающей сигнала хорошо описываются законами Релея и
Релея-Райса при разнообразии типов городской застройки. Однако
часть опубликованных результатов измерений показывает, что в
ряде случаев уровень сигнала в городе подчиняется более глубо-
ким замираниям. Наиболее глубокие замирания наблюдаются око-
ло передающего пункта. Полагают, что это явление связано с ин-
терференцией двух-трех волн примерно одинаковой и относитель-
но большой амплитуды и носит локальный характер. Для описания
плотности распределения огибающей применим закон Накатами с
параметром т = 0.5...0,6. Существует и другое объяснение приро-
ды глубоких замираний - с помощью модели однократно и двукрат-
но (повторно) рассеянных волн. Влияние повторных волн заметно,
только пока велика их амплитуда, т. е. около передающего пункта.
Экспериментально установлено, что в районах с примерно посто-
янной плотностью застройки около половины времени наблюдения
замирания, при которых уровень сигнала на 9... 10 дБ ниже среднего
213
уровня сигнала. Глубина замираний может достигать 24 ..35 дБ, при
этом она не меняется с частотой. Кроме того, установлено, что дли-
тельность быстрых замираний обратно пропорциональна частоте
сигнала и при изменении направления движения АС от перпендику-
лярного к трассе до радиального меняется в два раза.
Статистические характеристики медленных замираний.
Медленные замирания сигнала наблюдаются при движении АС и
фактически являются пространственными замираниями.
При зысокоподнягых антеннах БС медленные замирания сигна-
ла при движении АС вдоль улицы отражают картину теневых зон,
создаваемых близко расположенными зданиями. Эксперименталь-
но (на частоте 88 МГц) было установлено два масштаба медлен-
ных замираний: 15...20 м и 80...90 м. Первый масштаб сопоставим
со средним размером «освещенных» зон, обусловленных просве-
тами между зданиями; второй масштаб - со средней длиной зда-
ния, и отражает характерное чередование для города «освещен-
ных» и «теневых» зон. Выше был определен интервал усреднения
по местоположению. На практике его выбирают равным 20...30 м.
Таким образом, медленные замирания - это пространственные
изменения медленной огибающей сигнала, усредненные по участ-
кам трассы 20...30 м. Для описания медленной огибающей исполь-
зуется локальное среднее по местоположению (6.12).
Установлено, что плотность распределения (пространственная)
медленной огибающей подчиняется* логарифмически-нормальному
закону со стандартным отклонением, зависящим от рельефа мест-
ности и характера городской застройки. Логнормальный закон озна-
чает, что по нормальному закон распределена не величина 6(f), а ее
логарифм с любым основанием. Нормальный закон распределения
w(x) = 1 exp -
п 9-Г
(х-Х)2
2с2
(6.24)
где случайная величина х, ее среднее значение X и дисперсия о2
выражены е- децибелах.
В рассматриваемом случае записываем случайную величину
х =им(г,/) - 20igU(r,/) и определяем ее среднее значение Х =
= г/м^т(г,50 %, 50 %); о2 = с2 - дисперсия по местоположению.
Нормальный закон распределения плотности вероятностей опреде-
ляет мкожитсло ослабления медленных замираний v„(f), дБ. Нор-
мальный закон распределения применим также к Др [см. (6 16)].
Значения дисперсии по местоположению для медленных зами-
раний, полученные экспериментально различными авторами, при-
ведены в табл. 6.2 [3] и 6.3 [4, результаты Окамуры]. Кроме того,
для американского континента в работах Уильяма К. Ли [1, 2] при-
нимается of = 8 дБ. Для ДМ диапазона волн графики и формулы
для определения дисперсии по местоположению (применительно к
ТВ) опубликованы в [5].
Таблица 6.2
Характер местности of .дБ
Центральные районы города 4.5
Пригород 0,5... 1
Города с пересеченным рельефом местности до 10
Таблица 6.3
Характер мест.-.ости of , дБ, при f, ГГц: j
0,5 1 2 11 i
Город 6 6,5 7,3 8 ]
Пригород 7,5 8,9 9 10 ;
6.3. Модели предсказания уровня принимаемого
радиосигнала
Существует ряд моделей для прогнозирования уровня радио-
сигнала в системах подвижной радиосвязи. В городских условиях
практически нет прямой видимости между антеннами БС и АС, и
! мощность принятого сигнала оказывается значительно ниже, чем в
> свободном пространстве. Дополнительнее ослабление в городе на
частоте 900 МГц в среднем составляет 20 ... 30 дБ при протяжен-
ности трассы 1 ... 10 км. Это ослабление вызвано в основном от-
ражением и рассеянием энергии сигнала на крупных строениях.
Рельеф местности существенно влияет на уровень сигнала. Из-
вестны два основных метода для учета его влияния: детерминиро-
ванный и статистический. Первый позволяет рассчитать множитель
ослабления по конкретному профилю пролета. Он широко исполь-
зуется для энергетических расчетов в линиях связи по схеме «от
точки к точке», например в радиорелейных линиях. В этом случае
медианное значение мощности сигнала в точке приема - это то,
которое превышается в течение 50 % времени наблюдения (на-
пример, месяца). В сотовых системах, где БС должна обеспечить
215
связь на территории соты, часто применяют статистический метод,
при котором параметры рельефа, (высота препятствий, их форма и
взаимное расположение, наклон местности и т.п.) считаются слу-
чайными величинами. Характер рельефа местнбсти в соте оцени-
вают параметрами, усредненными на участках трассы протяженно-
стью 5 ... 10 км.
Выбор энергетических параметров в сотовых системах радио-
связи должен обеспечить уверенный прием в зоне обслуживания
БС. В точках приема на границе соты уровни сигнала будут различ-
ными вследствие неодинакового влияния застройки и рельефа ме-
стности. Поэтому в сотовых системах радиосвязи путем усредне-
ния по двум параметрам: по времени и по местоположению (по
числу точек приема) определяют усредненную медианную мощ-
ность сигнала (УММС). УММС - это такое значение, которое не
превышается в течение 50 % времени наблюдения и в 50 % точек
приема, находящихся на расстоянии г от передающей станции.
Понятие уровня УММС было определено в (6.16). Для дальнейших
расчетов обозначим зту величину как
РМ(О = PmLt(6 50 %, 50 %). (6.25)
Модель Окамуры. Основана на экспериментальных результа-
тах, полученных Окамурой. Сначала определяется ослабление
сигнала при распространении для квазигладкой местности. Трасса
протяженностью несколько километров, на которой средняя высота
неровностей не превышает 20 м, определена в модели Окамуры
как «квазигладкая».
В модели Окамуры приняты базовые значения высоты антен-
ны АС НАС = 3 м и эффективной высоты антенны БС
ЯБС = 200 м , причем последняя определяется над средним уров-
нем квазигладкой поверхности. Для квазигладкой местности уро-
вень УММС
Рм(г) = р0 (Г, г)- a„(f, г) + Н, (fiec, г) + Н2 (ЛАС. f), (6.26)
где aM(f ,r) - дополнительное ослабление сигнала в городе (ме-
дианное значение), определенное для квазигладкого городского
района при базовых высотах антенн БС и AC; г) - коэф-
фициент «высота - усиление антенны БС», учитывающий, что вы-
сота антенны БС может отличаться от значения 200 м;
H2(h АС> О ~ коэффициент «высота - усиление антенны АС»,
учитывающий влияние реальной высоты антенны АС .
216
Рис. 6.11. Медианное ослабление сигнала на городских трассах
протяженностью г
Уровень мощности сигнала pQ(f . г) может быть рассчитан по
(6.1). Все остальные величины в (6.26) Окамура получил экспери-
ментально, и они представлены в литературе в виде графиков. До-
полнительное ослабление сигнала в городе ам(7,г) показано
графически на рис. 6.11.
Экспериментально установлено (рис.6.12), что влияние высоты
антенны БС зависит от расстояния между АС и БС и практически
не зависит от частоты в диапазоне 200 ... 2000 МГц. На рис. 6.12
номера кривых соответствуют трассам: (1) 70 км < г < 100 км;
(2) г= 40 км; (3) г= 20 км; (4) 1 км г< 10 км; (5) r= 1 км; (6) г= 100 км;
(7) г - 70 км; (8) г = 10 км; (9) г~ 20 км; (10) г- 40 км.
При г < 10 км мощность принимаемого сигнала изменяется про-
порционально квадрату высоты антенны, а при г > 30 км - пропор-
ционально кубу высоты, так что
Н^с- г) = 20lg[Г7БС /Рбс] при г< 10 км; (6.27а)
Hdht,c-г) = 301д [ЛБС /НБС] при г > 30 км. (6.276)
При г > с/РГ уровень сигнала на входе приемника определяет
дифракционная составляющая электромагнитного поля.
217
При этом чем выше установлены антенны БС, тем больше уро-
вень принимаемого сигнала. Как правило, высота антенны БС со-
ставляет десятки — сотни метров, высота антенны АС - несколько
метров. На практике дальность радиогоризонта равна примерно 25
км и 50 км при высоте антенны БС соответственно 50 м и 200 м.
Рис. 6.13. Коэффициент «высота - усиление АС»
Экспериментально установлено (рис. 6.13), что влияние высоты
антенны АС не зависит от протяженности трассы, поскольку эти ан-
тенны расположены ниже уровня городской застройки. На рис. 6.13
кривая 1 соответствует крупному городу, кривая 2 - среднему городу
при f = 400 МГц и кривая 3 - среднему городу при f = 2 ГГц. Кроме
того, при < 3 м влияние антенны АС одинаково на всех частотах
и не зависит от характера застройки.
Экспериментальные данные позволяют записать
H2(bAc.O = l0lg[hAC/НАС]. (6.28)
При установке антенны АС выше трех метров значение коэф-
фициента /Т2(Л АС, становится зависимым от характера застрой-
ки. Для среднего города этот коэффициент зависит от частоты. При
/7ас>3 м для среднего города имеем:
W2(^AC.O = 20lg[/?AC/пАС] при f =400МГц;
^2(ЬАС.О = ЗО1д[/7дс/йдИ nPMf =2000МГц.
Для крупных городов коэффициент «высота - усиление антенны
АС», не зависит от частоты и при hAC>3 м остается справедливым
соотношение (6.28).
Модель Окамуры позволяет для местности, которая не относит-
ся к квазигладкой, введением поправочных коэффициентов в
(6.26), рассчитывать ожидаемый уровень медианной мощности
сигнала с учетом характера местности:
PmZ’T) ~ Рм(0 + ^Zx > (6.29)
где KZcmp - поправочный коэффициент для пригородной зоны и от-
крытой местности; К2~ - поправочный коэффициент для трассы с
наклоном; KZ3U - поправочный коэффициент для участка «земля-
море». KZr - поправочный коэффициент для холмистой местности.
В пригородной зоне потери сигнала при распространении мень-
ше, чем в городе, поскольку в ней ниже здания и меньше препятст-
вий-. Как установил Окамура, эти потери уменьшаются с ростом
частоть!, т.е. коэффициент KZa„p растет. Его значения можно опре-
делить по табл. 6.4.
Таблица 6.4
f, МГц ^Z откр- ДБ ।
Пригород Открытая местность ;
400 8 24 |
1000 10 30 !
219
Рис.6.14. К определению угла наклона местности
Под трассами с наклоном подразумевают трассы, на которых
рельеф плавно понижается (или повышается) на расстоянии 5 км и
более. Для нее определяют средний угол наклона Y (рис. 6.14, а).
Угол считается отрицательным, если АС расположена на нижнем
участке трассы (рис. 6.14, б). В этом случае дополнительный рост
или потери мощности сигнала при его распространении нужно учи-
тывать с помощью коэффициента (рис. 6.15).
Рис.6.15. Коэффициент, учитывающий влияние наклона местности:
1 - г > 60 км; 2 - г > 30 км; 3 - г < 10 км
Мощность сигнала возрастает, если трасса пересекает водную
поверхность. Коэффициент Кгн зависит от отношения Ь - г в /г, где
гд - протяженность трассы над водой. Кривая 1 на рис. 6.16 опре-
деляет KZh для случая, когда водная поверхность ближе к приемной
станции, кривая 2 - к передающей.
Рис.6.16. Коэффициент
«земля-море»
220
При распространении сигнала над холмистой поверхностью по-
тери распространения увеличиваются по сравнению со случаем
квазигладкой местности. Значение KZi (рис. 6.17,6) зависит от Дб -
средней высоты неровностей, которая может быть определена по
рис. 6.17,а как разность между высотами 6(90 %) и 6(10 %). Здесь
6(90 %) и 6(10 %) - значения высот местности на трассе протяжен-
ностью около 10 км, превышаемые в 90 % и 10 % точек профиля
соответственно.
Значения Дб определяют по табл. 6.5. Условие квазигладкой
местности нарушается при Дб > 20 м.
Таблица 6.5.
Тип местности Дб, м Тип местности дб, м
Слегка холми- стая равнина 20 . .. 40 Горы 150 ... 300
Холмистая рав- нина 40 . . 80 Высокие горные массивы 300 ... 700
Холмы 80 .. 150 Очень высокие горные массивы Свыше 700
Влияние расстояния. В общем случае при удалении АС от БС
мощность сигнала, принятого на АС, уменьшается по закону
Рис. 6.17. К оценке влияния холмистой местности:
а - к оценке поверхности, б - поправочный коэффициент для АС
(1 - у вершины холма; 2 - промежуточное положение; 3 - у основания
холма)
221
Рм = K0{R'){r / R*Yn.
(6.30)
где
Рм = ioOJ₽«('');
(6.31)
п - показатель затухания; R* = 1 км - эталонная длина трассы;
KQ (R*) = PM(R*).
Для свободного пространства л = 2. В городских условиях ос-
лабление сигнала гораздо больше, и показатель затухания, полу-
ченный на основании обработки результатов измерений Окамуры,
зависит от расстояния до АС и высоты антенны БС, как показано
на рис. 6.18.
Рис. 6.18.Показатель
затухания:
1—40 км < /-<100 км;
2-1км <г<15км
Если расстояние между БС и АС не превышает 15 км, то показа-
тель степени п = 4 при малой высоте антенны БС; при больших
высотах п « 2,5, т.е. приближается к значению для свободного
пространства. Если же г > 40 км, то уровень сигнала резко падает с
увеличением расстояния.
В большинстве задач принимают п = 4 в условиях городской за-
стройки. В таком случае вместо (6.30) запишем для УММС
Рм(г) = /<0г'4,
(6.32)
где
Кй = ^«(1).
(6.33)
- медианная мощность сигнала на расстоянии 1 км от БС. которую
можно рассчитать по (6.26) и (6.31), либо (6.29) и (6.31); г - рас-
стояние между БС и АС, выраженное в километрах.
Влияние рабочей частоты. Итак, сигнал в городе испытывает
большее ослабление, чем в свободном пространстве. С ростом
рабочей частоты эта тенденция усиливается. В данной задаче
удсбно представить УММС как
222
Рис. 6.19. К определению
показателя т
PM(f) = KFri2+m\
где KF - коэффициент пропорциональности, значение которого
можно определить при энергетическом расчете аналогично Ко; т -
показатель, установленный экспериментальным путем.
Для свободного пространства т = 0. В остальных случаях он
определяется по рис. 6.19, где кривые 1-3 были получены при
разных значениях частоты: 1 при f = 1...2 ГГц; 2 при f - 0,5...1 ГГц;
3 при f = 100 МГц. При г - 1...10 км значение т практически опре-
делят частота, при г > 10 км ослабление сигнала с ростом частоты
увеличивается и зависит от г .
Экспериментальные результаты Окамуры распространяются на ди-
апазон расстояний 1... 100 км и диапазон частот от 100 МГц до 3 ГГц.
Модель Окамуры-Хата. Результаты экспериментальных изме-
рений Окамуры положены в основу модели Хата. Эмпирические
зависимости, используемые в модели Окамуры в виде графиков, в
этой модели представлены в виде аппроксимирующих их формул
Согласно этой модели вместо (6.26) представим уровень УММС как
рм(О = рг, + gt+g2- -а2 - I6 34')
где aMX(f, г, ЬБС, hAC) - суммарное ослабление радиосигнала при
распространении для модели Хата при статистическом учете па-
раметров местности (а выражено в децибелах, г - в километрах):
• для города
амх( • г' ^бс- ^дс ) - X + Blgr ;
• для пригородной зоны
амх(^.в ^бс.^’ас') - А + Bigr-С;
• для открытой местности
а.мх( f • ht>c- '-ас) -A + Blgr-D.
(6.35)
(6.36)
(6.37)
223
Здесь аппроксимирующие коэффициенты:
А = A(f, h, ,h2) = 69,55 + 26,16 !g(f) -13,82 lg(hBC) - a(hAC);
В = ВфБС) = [44,9-6,551д(^с)];
С = C(f) = 2Пд(/728)2] + 5,4;
О = D(0 = 4,78(lgf)2 -19.33 lg(f) + 40,94;
о(/?ДС) _ параметр, учитывающий влияние высоты антенны АС.
Для крупных городов этот параметр слабо зависит от частоты од-
нако используются две аппроксимирующие формулы:
а(ЛАС) = 8,28[lg(1,54hAC )]2 -1,1 при f> 200 МГц,
a(hAC) = 3,2[!д(11,75ЪАС)]2 - 4,97 при f> 400 МГц;
для средних и малых городов этот параметр зависит от частоты:
«Фас) = 0.11gf ~0.7)hAC - (1,56lg/ -0,8).
В формулах для аппроксимирующих коэффициентов принято: f -
частота излучения БС, МГц; ДБС и /?АС - высоты установки антенн
БС и АС, м. Модель Хата применяют при изменении значений па-
раметров в пределах, указанных в табл. 6.6.
Таблица 6.6
Параметр Область применения модели Хата
Основная Расширенная
Рабочая частота, МГц От 150 до 1500 Совпадает с основной
Протяженность трас- сы, км От 1 до 20 До 80
Высота антенны SC, м От 30 до 200 От 1,5 до 400
Высота антенны АС. м От 1 до 10 Совпадает с основной
Область использования модели Хата меньше области исполь-
зования модели Окамуры. Аппроксимирующие выражения по мо-
дели Хата совпадают с результатами Окамуры с точностью до 1 дБ
в пределах основной области и с меньшей точностью в пределах
расширенной области.
Для предсказания уровня сигнала на трассах короче 1 км суще-
ствуют другие модели. Этот вопрос будет рассмотрен ниже
224
Модель Ли «от зоны к зоне». В моделях Ли местность класси-
фицируют по следующим признакам:
• по инфраструктуре, сформированной человеком (характер за-
стройки): открытая территория, пригородная зона, городская за-
стройка;
• по естественным свойствам (характер трассы): гладкая, хол-
мистая, трасса над водной поверхностью, трасса через лиственные
леса.
Модель Ли «от зоны к зоне» создана на основании анализа резуль-
татов измерений уровня сигнала (локального среднего), опубликован-
ных разными авторами для зон с различным характером застройки.
Согласно этой модели на входе приемника АС уровень УММС
Рм<Г) = Рл + С(1-^1д?'+«2 +«3 +0-4 +а5-
(6.38)
где Г - протяженность трассы, выраженная в милях (миля = 1,6 км);
рл - уровень УММС в точке, отстоящей от БС на 1 милю, изме-
ренный при стандартных энергетических параметрах аппаратуры;
у - наклон кривой потерь распространения, дБ/декада, который
численно равен ослаблению сигнала при увеличении длины трассы
в 10 раз; ava5- поправочные коэффициенты; вводятся в случае,
когда технические параметры радиоинтерфейса отличаются от
стандартных параметров модели (см. табл. 6.7).
Таблица 6.7
Энергетический параметр Стандартное зна- чение параметра Поправочный коэффициент
Уровень мощности пере- датчика БС (две) Рбс -40 дБм «1=Рбс - 40
Высота антенны БС (й,) 100 футов (30 м) а2= 20 !д(.-т1 //?*), ' ъ; = 30 м
Коэффициент усиления антенны БС (gj) 6 дБ «з = ffi -6
Высота антенны АС (/?2) 10 футов (3 м) а 4 = 10 fg(ft2 / ft2), h2 = 3 м
Коэффициент усиления антенны АС (д2) ОдБ «5- 92
225
Рис. 6.20. Изменение уровня УММС по Ли
Таким образом, в оснозе модели Ли лежат два эксперименталь-
ных параметра модели: рл и у, определенные при стандартных
качениях энергетических параметров аппаратуры. Стандартные
качения энергетических параметров аппаратуры модели даны в
с5л. 6.7
Для определения параметров модели исподьзованы результаты
□мерений мощности сигнала на разных трассах (рис. 6.20), полу-
'S.-i.-iaie при стандартных значениях энергетических параметров
:.ппгратуры, указанных в табл. 6.7. Измерения выполнены для диа-
:ззс.ча частот стандарта AMPS. Параметры модели Пи для раз-
1йчных трасс приведены в табл. 6.8.
Таблица 6.8
Номер трзесы Наямэиоваг.ие трассы рп,д5м у, дь/декада
1 Открытая -49 43,5
2 Типовая пригородная -51,7 3£,4
3 Филадельфия -70 35,8
4 Токио -84 30,5
5 Ные-Исок Сити -77 48
6 Свободное пространство -45 20
’26
Вычислим поправочные коэффициенты, записанные в табл. 6.7:
а 2 =2019/7, -29,54;
а 4 = 201g Л2 -4,77.
(6.39а)
(6.396)
При подстановке в (6.38) протяженности трассы, выраженной в кило-
метрах, следует ввести поправку
Z, = у lg(r 1,6) = у !gr -0,204у.
(6.39в)
Подставив (6.39а -6.39в) в (6.38), находим
PM(D = Рл " 80’31 + Рбс- y |9Г~ 2019/7, + 101gh2 +ffi+c2. (6.40)
Р *л = Рл + 0.204у.
(6.41)
Определим по табл 6.8 параметры трассы «типовая пригород-
ная» и по (6.41) уровень мощности сигнала на расстоянии 1 км от БС:
Рл=-61,7 + 7,84 =-53,86 дБм. Подставив это значение и у = 38,4 в
(6.40), получим
Рм(г) = Рбс -134,31-38,4 lg г+ 20ig Л, 10 lg/72 + 9, + g2.
Окончательно в модели Ли для трассы «типовая пригородная»
принят наклон у = 40 дБ/декада и указана контрольная точка г =
= 10 миль, в которой принят уровень мощности сигнала -100 дБм.
Расчетная формула для трассы «типовая пригородная»
Рм(г) = Рбс - 132,7-40:gr + 23'g.C +10 lgh2 + g, + g, (6.42)
(расстояние выражено в километрах, а высоты антенн - в метрах).
Физический смысл слагаемых в (-3.42) поясняется в табл. 6.9.
Таблица 6.9
Слагаемое формулы Физический смысл
Рве -132,7 Уровень мощности сигнала на расстоянии 1 км от БС при стандартных условиях, дБм
40 1g г Учитывает влияние сформированной струк- туры (у = 40 дБ/декада для трассы «типовая пригородная»)
201g/7. Фактор «высота — усиление антенны БС», учитывающий влияние профиля трассы
г. = 101дл2 ? д, 4 д2 Фактор, учитывающий отклонение техниче- ских параметров от стандартных
227
Зависимость от расстояния. Для трассы «типовая пригород-
ная» (6.42) представляют в виде
Рм(г) = кл -401g г, (6.43)
где /сл = рБС -132,7 + 20lg Л1 +10 lgй2 + + 9г _ уровень мощности
сигнала в точке приема на расстоянии 1 км от БС, дБм. Соответст-
вующая мощность сигнала
Кл = 10°’14
Мощность сигнала в точке приема на трассе «типовая приго-
родная», выраженная в милливаттах,
Р«(г)=КпгЦ. (6.44)
Аналогично (6.44 ) можно записать выражение для мощности
сигнала в точке приема на трассе любого типа:
Рм(г) = К7Лг’п. (6.45)
где Kzn - мощность сигнала в точке приема на расстоянии 1 км от
БС, для трассы с заданным (Z) типом застройки; п = 0,1у - показа-
тель затухания, зависящий от типа застройки.
При расчете реальных трасс следует сравнить рассматривае-
мую территорию с подходящей структурой в табл. 6.8. Поскольку
все пригородные зоны похожи, то для них используют (6.42). Для
городов показатели затухания существенно отличаются. Так, для
Токио п-3, а для центральной части Нью-Йорка п = 5. В модели Ли
указано, что в случае необходимости для конкретных трасс могут
быть проведены достаточно простые измерения уровня сигнала на
расстоянии 1 миля и 10 миль от БС. В каждой точке должно быть
выполнено по 5 - 7 измерений и их результаты усреднены. Локаль-
ные средние значения могут быть подставлены в (6.38).
Сопоставив (6.44) и (6.32), отметим, что совпали законы зависимо-
сти мощности принимаемого сигнала от протяженности трассы, полу-
ченные в модели Окамуры и в модели Ли.
Влияние дополнительных факторов на уровень сигнала.
Результаты расчета уровня принимаемого сигнала должны быть
скорректированы с учетом дополнительных факторов. Это отно-
сится ко всем моделям. К дополнительным факторам относятся:
ориентация улиц и близость лесных массивов. Особенно важно
учитывать влияние дополнительных факторов вблизи БС, на участ-
ках трассы короче 1 км. При удалении от БС влияние дополнитель-
ных факторов нивелируется за счет хаотичности городской за-
стройки и снижения среднего уровня сигнала.
228
При радиальном расположении городских улиц относительно
БС возможно возникновение волноводного эффекта, в результате
которого принимаемый сигнал может усилиться. Принятые на АС
сигналы, направления распространения которых параллельны на-
правлениям улиц, имеют уровень мощности на 10 ... 20 дБ выше,
чем сигналы, приходящие с других направлений. На частотах ниже
1 ГГц этот эффект значительно ослаблен.
На распространение сигналов в лесной зоне влияют параметры
деревьев (размер ствола, размер ветвей, плотность листвы, рас-
стояние между деревьями, высота и др.). В тропических районах с
очень густыми лесами сигнал может не проходить через лесной
массив, он распространяется только за счет огибания верхушек
деревьев и отражения от них. Некоторые сосновые леса сильно
поглощают энергию сигнала, поскольку размеры иголок соответст-
вуют примерно половине длины волны сигнала.
Однако в ряде экспериментальных исследований было показа-
но, что среднее погонное ослабление сигнала в листве для разных
лесных массивов в данном географическом районе можно считать
одинаковым для трасс длиннее 1 км. Поэтому для учета влияния
листвы можно принять следующие положения.
» Потери в листве учитывают с помощью коэффициента погон-
ных потерь, который измеряется в децибелах на декаду либо в де-
цибелах на метр для коротких участков леса.
• Потери на участке через лиственный лес пропорциональны
множителю Дл = f~4 , тогда как потери в свободном пространстве -
множителю Aq = f 2 . Следовательно, наличие леса на всей трассе
приводит к увеличению потерь вдвое по сравнению с потерями з
свободном пространстве.
• Теоретически общие погонные потери могут достигать
60 дБ/декада (табл. 6.10).
Таблица 6.10
Общие погон- ные потери . Составляющие общих погонных потерь
В свободном пространстве За счет за- стройки В листве
60 дБ/ декада 20 дБ/ декада 20 дБ/ декада 20 дБ/ декада
Потери в листве (выраженны в дециоелах)
ал =. 2,22 ,
'л 20 (ior,-r,)’
(6.46)
229
где R-i - расстояние от БС до начала лесного массива; гл - протя-
женность лесного массива.
Из (6.46) видно, что чем ближе БС к началу лесного массива,
тем сильнее ослабление сигнала в листве. Это положение под-
тверждается на практике. Поэтому следует избегать расположения
БС вблизи лиственных массивов. Антенны БС должны быть под-
вешены выше верхушек деревьев. Если вблизи леса находится АС,
лесной массив может рассматриваться как препятствие, и допол-
нительные потери могут быть рассчитаны по дифракционной фор-
муле.
Модель Ли «от точки к точке». Эта модель позволяет предска-
зать уровень сигнала с учетом профиля трассы (рельефа и пара-
метров застройки). При этом предлагается разделять трассы по
профилю рельефа местности на открытые и закрытые, подобно
тому как это делают для трасс РРЛ. Только в отличие от РРЛ на
открытой трассе в системах подвижной связи, как правило, нет
прямой видимости между антеннами БС и АС, поскольку линию
прямой видимости перекрывают городские строения. Поэтому та-
кую трассу будем называть трассой с открытым рельефом.
В этой задаче удобно представить (6.40) в виде
Рм(г) = Рм(-о, ) - у 1g (г г0) г- 201д(Д,эфф , (6.47)
где г0 - эталонное расстояние, л, - фактическая высота антенны
БС; - эффективная высота антенны БС для конкретного уча-
СТ Ко ГрЗССЪГ,
pJ/оЛ) --- Р -80.31 + рБС + р, + д2 + 1О!д/72 (6.48)
— уровень мощности сигнала на эталонном расстоянии г0 от БС
при фактической высоте антенны 5С, дБм.
В (6.47) выделен коэффициент «высота — усиление антенны
БС», позволяющий рассчитать изменение коэффициента усиления
антенны БС при изменении профиля трассы:
Ли. = 20 !g "1зфф (6.49)
Напомним, что в моделях «от зоны к зоне» эффективная высота
антенны БС определяется над средним уровнем квззигладкой по-
верхности. Для модели «от точки к точке» эффективная высота ан-
тенны БС зависит от рельефа трассы и может изменяться при
движении АС.
220
Трассы с открытым рельефом. Для определения эффективной
высоты антенны на профиле трассы выполняют следующие по-
строения (рис. 6.21). Определяют потенциальную точку z отраже-
ния радиоволн от земной поверхности, для чего соединяют антенну
БС с зеркальным изображением антенны АС. Точка пересечения
этой линии с земной поверхностью и есть z. Строят плоскость от-
ражения от Земли, как касательную к профилю трассы в точке z.
Продолжают ее до пересечения с высотой антенны БС. След этой
плоскости - линия аЬ. Из рисунка находим эффективную высоту
антенны БС = 13 м), и по (6.49) Ад, = 201д(фэфф/30) =
= 20!д( 13/30) - -7,3 дБ. Эффективная высота антенны меньше ре-
альной, и соответственно уменьшился уровень сигнала в точке
приема.
Так же можно определить вторую потенциальную точку отраже-
ния на этой плоскости z*, соединив антенну АС с зеркальным изо-
бражением антенны БС относительно плоскости ab. Из двух потен-
циальных точек отражения рекомендуется рассматривать ту, кото-
рая ближе к АС, поскольку значительная часть отраженной от нее
энергии может попасть к АС. При нахождении точки z следует пом-
нить, что при построении профиля трассы используют разные гори-
зонтальный (Г) и вертикальный (В) масштабы. Например, если для
высот масштаб 1:10 000, а для расстояний - 1:100 000, то коэффи-
циент отношения масштабов Г/В составляет ум = 0.1. Угль: падения
и отражения на чертеже профиля в системе координат с различ-
ными масштабами равны только в случае, когда плоскость отраже-
ния горизонтальна.
На рис. 6.22 эффективная высота антенны увеличилась. В этом
случае Ад, = 201д(Л1эфф/30) = 201д(47/30) = 3,9 дБ.
Рис. 6.21. К определению эффективной высоты антенны БС
Рис. 6.22. К определению эффективной высоты антенны для АС на холме
Эффективная высота антенны БС будет меняться при движении
АС, хотя реальная высота остается постоянной. Соответственно
будет меняться уровень сигнала в точке приема.
Необходимость учитывать эффективную высоту антенны вместо
реальной иллюстрирует рис. 6.23. На рис. 6.23,а высота Н » h2 и
длина подстилающей поверхности / соизмерима с длиной автомо-
биля. В этом случае на приемник АС приходит только одна прямая
волна 1 и условия распространения такие же, как в свободном про-
странстве. Ситуация на рис. 6.23,6 отличается только тем, что зна-
чительно увеличилась длина /, так что может быть указана потен-
циальная точка отражения от подстилающей поверхности. На при-
емник АС приходят два сигнала: прямой 1 и отраженный 2. По-
скольку расстояние г обычно составляет несколько километров, а
высоты антенн порядка З...ЗО м, то угол скольжения 0 очень мал.
При этом фаза коэффициента отражения около 180°. В случае, ко-
гда имеет место зеркальное отражение, могут возникать глубокие
замирания сигнала на приеме.
Рис. 6.23. К учету эффективной высоты антенны при малых (а) и больших
(б) размерах подстилающей поверхности
Эфф
232
Рис. 6.24. К определению эффективной высоты антенны БС для АС на
склоне холма
На местности с большим уклоном (рис. 6.24) сигнал, приходящий
на АС, будет слабым, поскольку рельеф местности ослабляет пря-
мую волну. Эффективная высота антенны становится очень малой.
Изменение эффективной высоты антенны БС при перемещении
АС иллюстрирует рис. 6.25. Участки трассы с разным наклоном обо-
значены латинскими буквами. Пунктирные линии на рис. 6.25,а -
плоскости отражения.
Изменение уровня принимаемого сигнала показано на рис. 6.25,6;
сплошной линией - при расчете по модели от точки к точке; пунктир-
ной - от зоны к зоне.
Если на трассе имеет место зеркальное отражение, то модуль
коэффициента отражения Ф = 1, при диффузном отражении (рас-
сеянии) Ф < 0,5. Характер отражения зависит от типа подстилаю-
щей поверхности.
Рис. 6.25. Изменение эффективной высоты антенны (а) и уровня мощности (б)
233
Дня систем с фиксированными станциями, например РРЛ, при
расчете трасс над водной поверхностью используется двухлучевая
модель (рис. 6.26,а), а при расчете подобных трасс для систем
подвижной связи - трехлучевая модель Ли (рис. 6.26,6). При этом
предполагается, что волны 2 и 3 складываются в противофазе и
компенсируют друг друга Уровень сигнала такой же как в свобод-
ном пространстве.
Рис. 6.26. Модели для учета влияния водной поверхности, двухлучевая (а)
и трехлучевая (б)
Влияние городской инфраструктуры. На уровень сигнала
влияет плотность застройки. При плотной застройке уровень сигна-
ла снижается. При плотной застройке различают варианты:
• Прямая видимость между антеннами БС и МС (рис. 6.27,а).
Уровень радиоволн, отраженных зданиямщмал, в сравнении с ос-
новным сигналом. Замирания сигнала подчиняются закону Райса.
• Линия прямой видимости перекрыта строениями (рис. 6.27,6).
Замирания сигнала подчиняются закону Релея.
В этих двух случаях средняя мощность принимаемого сигнала
не одинакова. Однако различия малы, если мощность отраженных
волн значительна. В обоих случаях потери распространения со-
ставляют примерно ло дБ на декаду.
Закрытые трассы. На них линия прямой видимости перекрыта
препятствиями рельефа местности - холмами, из-за чего имеют
место дифракционные потери. Последние рассчитывают, применяя
теорию дифракции радиоволн на препятствии клиновидной формы.
Выполняют построения, как показано на рис.6.28.
По профилю трассы определяют три параметра: г, - расстояние
от БС до вор липы холма, г2 - расстояние от вершины холма до АС;
Ьх - высоту холма с клиновидной вершиной. И вычисляют параметр v:
v =--/>„ /I + I . (6.50)
/'.Ы| Г2 )
Рис.6.27. К пояснению влияния плотности застройки
Высота препятствия в расчете может принимать отрицательное
значение (рис.6.29). Зто означает, что трасса открытая и нет ди-
фракционных потерь.
Теоретически следует в (6.50) подставлять значения величин
г *1 и г *2. Однако, учитывая разную размерность масштабов по
осям х и у на рис.6.28, считают, что г = г, и г *2 s г2
Дифракционные потери 8д.,ф('-') = 20lgY(v) выражаются в деци-
белах Известно аналитическое представление величины Y(i') че-
рез интегралы Френеля. В инженерной практике пользуются гра-
фическим представлением 1ДИф(ч), а также следующими выраже-
ниями, аппроксимирующими эти графики:
Рис.6.28. К пояснению определения
параметров препятствия
235
Рис.6.29. Пример трассы
без дифракционных потерь
<-ДИф(у) = ОдБ. v>1, (6.51а)
Цдиф ('”) =20 lg (0,5 + 0,62v), 0 < V < 1 ; (6.515)
Оиф (v) =20 lg [0,5exp(0,95v)l -1 < v < 0; (6.51 в)
Одиф (v)=20lg^0,4- 0,1184-(0,1v + 0,38)2 -2,4 < v <-1; (6.51г)
Одиф (V) =20 lg^-°’2v25 }, V < -24 . (6.51 д)
На касательной трассе /?х =0, l~RVi(^(v) = 6 дБ.
Двойная дифракция. Это случай, когда на трассе имеется не-
сколько холмов. Здесь может возникнуть двойная или даже более
сложная дифракция. Для расчета значения потерь используются
модели Буллингтона, Эпштейна и Питерсона и др. На рис. 6.30 по-
казаны построения по модели Пиквинарда. Для чего строят тре-
угольники АСВ и СОВ. Находят высоты холмов С и D: ЬЭффс и
ЛЭффО. Определяют дифракционные потери отдельно для каждого
холма. ОдИфс и БдМф£>. Общие потери Дцйф(и) = 1-эффс + Дзффд.
Универсальная модель Ли. Для модели Ли «от точки к точке»
в качестве основной принята формула (6.47), которая может быть
распространена на следующие случаи-
1. Открытая трасса. Используют формулу (6.47).
2. Закрытая трасса. Дополнительно учитывают дифракционные
потери. Кроме того, эффективная высота антенны БС на закрытой
236
трассе совпадает с фактической, так что в (6.47) полагают
201д(/?1Эфф //?i) = 0.
Уровень медианной мощности сигнала на закрытой трассе
Рм(г) = РмС'оФр- у lg (г Пэ) + *-диф(у) • (6 52)
Дополнительные сведения по расчету дифракционных потерь
приведены в [1, 6].
3. Пролет БС - АС над водной поверхностью.
Потери рассчитывают по формулам свободного пространства.
Расчет трассы от точки к точке на основе модели Хата. В
этом случае профиль трассы разделяют на участки в зависимости
от рельефа местности и характера застройки. Для трасс с откры-
тым рельефом расчет выполняется по (6.34) - (6.37), в которых
вместо реальной высоты антенны БС используется эффективная
высота для данного участка трассы. На открытых участках трассы в
токе / уровень УММС
₽м(б) = ₽п + 01 + 02 - а1 - а2 - амх(^ •,г/. ^1эфф> ^Ас) • (6.53)
где /?1Эфф- эффективная высота антенны БС для конкретного участ-
ка трассы. Порядок ее определения рассмотрен выше на примере
модели Ли.
На закрытых участках трассы к суммарным потерям распро-
странения в (6.34) добавляют дифракционные потери Уровень ме-
дианной мощности сигнала на закрытых трассах
р,/п = рп +д, +д2-а,-а2~aMX(f ,r, h5C, hAC) - бдиф(у), (6.54)
где (-ДИф(у) - дифракционные потери, определяемые по (6.51) в
зависимости от параметра (6.50).
Модели для коротких трасс. В рассмотренных выше моделях
исходной величиной для расчета является значение мощности сиг-
нала, определенное на расстоянии 1 км от БС. Выбор такой опор-
ной точки обусловлен тем, что на более коротких трассах,
во-первых, АС может попасть в зону тени, во-вторых, следует учи-
тывать дополнительные факторы.
По мере приближения АС к БС. увеличивается угол места для
антенны АС, как показано на рис. 6.31,а, где р - угол места.
Антенны БС имеют либо круговую, либо секторную ДНА в гори-
зонтальной плоскости. Однако для того чтобы получить возможно
больший коэффициент усиления антенны, формируется узкая ДНА
в вертикальной плоскости.
237
Рис. 6.31. К пояснению ослабления сигнала при малых углах места:
а - угол места на коротких трассах, б - ДНА в вертикальной плоскости
D. дБ
Например, на рис. 6.31,6 приведена ДНА в вертикальной плос-
кости для всенаправленной антенны - диполя с коэффициентом
усиления 6 дБ, При больших углах места АС попадает в теневую
зону ДНА и принимает сигнал вне главного лепестка ДНА. Из гео-
метрии трассы определим р = arctgf(/7,-/72)/r] и по рис. 6.31,6 най-
дем дополнительное ослабление сигнала за счет ДНА: ар = 0(0)
при р = 6. Примерные результаты расчета при г - 160 м записаны в
табл. 6.11. Видно, что значение дополнительного затухания велико,
и с ним необходимо считаться.
Таблица 6.11
, м ТО -1 О, W ар, дБ
30 9.6 5
60 21,45 15
90 29,2 20
Инфраструктура вокруг БС практически определяет уровень сиг-
нала в точке приема з зоне радиусом до 1 км. Высокие здания мо-
гут создавать дополнительные отраженные сигналы большой мощ-
ности, поскольку мощность прямого сигнала около БС велика. Ко-
гда АС выезжает из этой зоны, влияние соседних с БС строений
нивелировано.
Ориентация дорог рядом с БС (радиальная или круговая дорога,
вдоль пути распространения сигнала или поперек) определяет разброс
уровня медианной мощности принимаемого сигнала д = 10...20 дБ.
Модель Уолфишг-Икегами признана самой лучшей для пред-
сказания уровня сигнала в малых сотах. Эта модель основана на
238
'физическом представлении поля в точке приема в виде двух со-
ставляющих: когерентной и рассеянной (рис. 6.32,а). Когерентная
составляющая определяется волной, дифрагирующей вокруг
строений вдоль дороги со стороны БС. Рассеянный компонент соз-
дают волны, которые образуются в результате переизлучения
строениями падающей на них волны от БС. Рассеянный компонент
приходит с направлений, не совпадающих с направлением на БС и
даже противоположных этому направлению. Медианное ослабле-
ние сигнала будет зависеть от геометрических соотношений на
трассе, показанных на рис. 6.32,6, где обозначено, ft, и h2 - высоты
установки антенн БС и АС, как это и было выше; ft0 - средняя вы-
сота застройки; Aft, = ft2- ft0 - высота антенны БС над слоем город-
ской застройки; Z- У2 + X2 - длина трассы для дифрагирующей
волны; У = ft0 - ft2; X ~ W72; W - ширина улицы; 60 = arctg(X7Y) -
угол дифракции.
Медианное ослабление радиосигнала при распространении на
коротких трассах
амк = а, + а2 + а3 . (6.55)
где а, = асв — ослабление когерентной волны для точки дифракции;
а2 - дополнительное ослабление когерентной волны, зависящее от
угла дифракции на трассе протяженностью Z; а3 - дополнительное
ослабление уровня сигнала за счет рассеянного компонента
Расчетные формулы для модели Уолфиша-Икегами получены
при параметрах: расстояние между БС и АС от 0,02 м до 5 км в
диапазоне частот 800 ..2000 МГц, высота антенн БС ft, = 4..50 м,
высота антенн AC ft, - 1...3 м; высота близлежащих к БС зданий до
80 м. Имеем:
з, = 32,4 + 20lgr + 20!д7, (5.55)
a, = -16,9 + 10lgf+ 101дУ- lOIgkv + Lv, (6.57)
где (_<р — составляющая потерь, зависящая от ориентации улиц от-
носительно направления прихода сигнала:
Ц = -10 + 0,0354<р при 0< ц> <35°;
L,r, = 2,5 + 0,075(<? - 35°) при Э5:< р <55’; (6.58)
Ц, ~ 4,0 + 0,114(<р - 55’) при 55°< <90°;
Ф - угол между направлением улицы и направлением прихода сиг-
нала.
239
Рис. 6.32. К определению сигнала в соте:
а - физическое представление: б - геометрическое соотношение
В табл. 6.12 приведены результаты расчетов по (6.58). Как ви-
дим, диапазон изменения значений потерь от ориентации улиц со-
ставляет 18 дБ.
Таблица 6.12
<Р, град 0 10 28 35 45 55 90
-10 —7 0 2,5 3,25 4 8
Дополнительное ослабление уровня сигнала за счет рассеянной
компоненты
а3 = Ко (Дб,) + К, (Дб,) + К2 (Дб,) + К3 {f) lg f - 9 lg d.
(6.59)
где d~ среднее расстояние между кварталами;
К0(Лб,) = 54 при А/?, > 0;
Ко( Д/?п) = 54 - 0,8 Аб, при Дб, < 0 и г > 0,5 км;
240
K0(&hi) = 54- 0,4 гД/i, при Aftj < 0 и г < 0,5 км.
^(Д/?,) = 181д(1 + д/?,) при Д/д > 0;
= 0 при Д/д < 0;
К2(Ы\) = 18 при Д/д > 0;
/<2(Д/д) = 18 - 15ДЛ,/Л0 при Д/д < 0;
/<з(/) =-4 + 1,5(/7925 - 1) для крупного города;
/<3(/) = -4 + 0,7(7/925 - 1) для города средних размеров и приго-
рода с умеренными лесопосадками.
В рабочих формулах (6.56) - (6.59) и в формулах их коэффици-
ентов следует подставлять частоту в мегагерцах, протяженность
трассы в километрах, остальные параметры модели (Д/д, /?0, d, W)
в метрах. Эти формулы позволяют определить медианные потери
как для трасс, на которых антенна БС расположена над городской
застройкой (Д/д > 0), так и для трасс, на которых антенна БС рас-
положена на уровне крыш или ниже этого уровня (Л/д < 0).
При проектировании малых сот необходимы сведения о кон-
кретных участках городских трасс. В ряде случаев можно восполь-
зоваться статистическими данными для города. В F3] так характе-
ризуются районы современной городской застройки: плотность за-
стройки 90 зданий на 1 км2; средняя длина здания 80... 105 м; ширина
15 м; этажность от 5 до 14; просветы между зданиями 15...20 м;
средняя дальность прямой видимости в слое городской застройки
170 м. Застройку можно считать однородной для районов, где нет
больших площадей и парков.
Карты радиопокрытия. В моделях «от точки к точке» исполь-
зуются конкретные профили пролетов. Эти модели обладают
большей точностью предсказания, чем модели «от зоны к зоне».
Они предпочтительны для сетей с зонами обслуживания 15 км и
менее. Модель «от точки к точке» используется при создании ком-
пьютерных программ для генерации карт покрытия зоны сигналом,
карт интерференции, карт для описания процесса эстафетной пе-
редачи и т.п.
При создании компьютерной модели характер местности и за-
стройку учитывают в пределах первой зоны Френеля вдоль трассы.
Для каждой БС создают растровую карту радиопокрытия, содер-
жащую информацию об уровне сигнала в любой точке региона. Шаг
карты А задается оператором. Обычно выбирается в городе Д = 60 м
и в сельской местности Д = 120 м (2 - 3 угловые секунды по широ-
те). Такая дискретизация обеспечивает достаточную точность. Она
также позволяет сопоставлять результаты расчетов и измерений.
241
Точность привязки для измерений 30... 100 м. На основе карт ра-
диопокрытия отдельных БС строят общую карту радиопокрытия
полной зоны обслуживания и определяют для каждой БС зону при-
оритетного обслуживания.
Расчетная карта радиопокрытия позволяет получить лишь при-
ближенные характеристики системы. Реальные значения коэффи-
циентов распространения сигнала в отдельных районах могут су-
щественно отличаться от коэффициентов, принятых для моделей.
Поэтому наряду с расчетными составляют измерительные карты
радиопокрытия. Для этого обычно на перевозимой АС проводят из-
мерения мощности радиосигнала в каждом из частотных каналов и
качества голосовой связи. С помощью GPS-приемника все измере-
ния привязывают к географическим координатам. Мощность радио-
сигнала измеряют сканирующим приемником. Для каждого частотно-
го канала результат усреднения нескольких последовательных от-
счетов (15-20) записывается в память компьютера. При измерении
качества голосовой связи регистрируются номер обслуживающей БС
и текущий коэффициент ошибок в цифровом канале, а также все со-
бытия (вызов, хэндовер и др.). Затем результаты измерений сорти-
руют по их принадлежности к БС и выполняют усреднение данных,
полученных при большом числе объездов района.
По этим результатам САПР формирует для каждой БС измери-
тельные карты покрытия, которые используются для анализа и ка-
либровки моделей предсказания. Каждый отсчет измерительной
карты - это среднее значение мощности принимаемого сигнала в
данной точке.
Калибровка модели предсказания заключается в подборе зна-
чений поправочных коэффициентов, обеспечивающих минималь-
ное среднеквадратическое отклонение между предсказанным и из-
меренными значениями уровня мощности сигнала. Поправочные
коэффициенты kz = 13 дБ для Москвы [7] по сравнению с рассчи-
ТЭННЫАЛИ ПО «модели ЛЭТа
6.4. Тепловые шумы и интеферекционные помехи
Чувствительность приемника. Чувствительность приемной ус-
тановки характеризует ее возможность принимать слабые радио-
сигналы. Для оценки чувствительности используют минимально
допустимое значение либо напряженности поля радиосигнала в
антенне, либо мощности радиосигнала на входе приемника. Соот-
ношение между этими параметрами установлено при следующих
допущениях:
242
• приемная антенна АС - диполь;
• антенна и входная часть приемника согласованы;
• сопротивление входной цепи приемника RH - 50 Ом.
На антенне наводится напряжение
U = E/Jn. (6.60)
где Е — напряженность поля радиосигнала, В/м.
При согласовании сопротивлений антенны и входной цепи при-
емника мощность сигнала на входе приемника
РС = Е2/(4ЕН). (6.61)
Подставив (6.60) в (6.61), получим
Рс=Е2/.2/(4л2Ен). (6.62)
Уровень мощности сигнала на входе приемника, выраженный в
децибелах по отношению к 1 мВт,
() \ 1
рс = 201дЕ_ + 101д! ' + 101д +аР+а£, (6.63)
W 4РН
где Е_- напряженность поля, мкВ/м; аР = 30 дБ - коэффициент,
учитывающий изменение размерности мощности (переход от Вт к
мВт); аЕ - -120 дБ - коэффициент, учитывающий изменение раз-
мерности напряженности поля (переход от В/м к мкВ/м);
1Olg[1/(4EH)j = 10ig[1/f4-50)J = 23 дБ.
Подставив указанные численные значения в (6.63), получим, что
уровень мощности, дБм, определяется следующими выражениями,-
Г - '2
рг =20!gE_.~ 113+101g; Н , (6.64)
V-J
pz = 20lgE. - 73,4 : 20lgif(6.65)
где f - несущая частота, МГц.
Тепловые шумы и зона покрытия. На входе приемного уст-
ройства АС действуют собственные тепловые шумы (ТШ) и внеш-
ние помехи. Внешние помехи подразделяют на индустриальные и
шумы излучения. Полагают, что такие внешние помехи в пределах
шумовой полосы приемника имеют равномерный спектр, и их оце-
нивают с помощью собственного коэффициента шума.
Тепловые шумы приемника. Мощность тепловых шумов прием-
ной установки, пересчитанных ко входу приемника,
Рт1 = N^kT0F1, (6.65)
243
где Л/т1 - коэффициент шума приемника ; к - постоянная Больцма-
на; То - температура входной цепи, К; П - эффективная ширина
шумовой полосы приемника.
Уровень мощности теплового шума
рт1 =101дРт1 = 1О1д(Л/т1кТоЛ) = пт1 +1О1д(/<Го) + 101д/7, (6.67)
где
пт1 =1О1дЛ/.„ (6.68)
10 ?д(/с7"0) - -174 дБм/Гц при То = 290 К.
Подставив указанные численные значения в (6.67), запишем для
уровня мощности теплового шума, дБм:
рт1 = пт1 -144 +101g П, (6.69)
где П выражено в килогерцах. Типичное значение коэффициента
шума приемника пт1 = 7 . 9 дБ для частот 800... 1000 Мгц.
Индустриальные шумы. Это внешние помехи от систем, зажи-
гания автомобилей, промышленного оборудования, шумовые излу-
чения высоковольтных линий и др. В рассматриваемых диапазонах
частот преобладают шумы от систем зажигания автомобилей. Для
шумов индустриального происхождения коэффициент шума nl2 мо-
жет быть найден по графикам на рис. 6.33 [1] в зависимости от ме-
стности: для деловой части города (с высокой плотностью застрой-
ки и высокими зданиями) - график А; для жилой части (с меньшей
плотностью застройки и менее высокими зданиями) - график В; для
сельской местности - график С. Всем трем местностям соответст-
вует одинаковый наклон графиков, равный примерно 28 дБ/декада.
Расстояние между соседними кривыми около 6 дБ.
Рис. 6.33. К оценке
индустриальных шумоз
244
Рис. 6.34. К оценке шумов от ПАТ
На рис. 6.34 представлена зависимость усредненного значения
коэффициента шума, создаваемого системами зажигания (пт авт), от
плотности автомобильного трафика (ПАТ), измеряемой числом
транспортных единиц в час (ТЕ/ч).
Шумы излучения. Создаются энергией, излучаемой БС и АС.
Несмотря на то, что уровень этого излучения жестко ограничен и
весьма мал, с этими шумами приходится считаться на тех террито-
риях, где системы подвижной связи широко распространены. Со-
гласно [2] на некоторых территориях США для шумов излучения
принимают коэффициент шума лт3 = 2...3 дБ для БС и лу3 - 3...4 дБ
для АС.
Сложение тепловых шумов. Приняв во внимание, что мощности
ТШ от независимых источников суммируются, запишем результи-
рующий коэффициент шума лт, дБ:
nT = 101g(Л/т1 + Л/т2) = 10 lg(10°'1Пт1 +10°-1л’2). (6.70)
Например, при лт1 = 9 дБ и п<2 - 5 дБ по (6.70) получаем ят = 10,5 дБ.
Далее можно вычислить по (6.67) уровень мощности теплового шу-
ма на входе приемника.
Отношение сигнал-шум на входе приемника
<7с-ш(г) = РсШ)~ Рт
(3.71)
На границе зоны покрытия должно выполняться условие
Qc-tu(Q>) — -UJ ^C-IU '
(6.72)
где г0 - радиус зоны покрытия; ^с_ш - допустимое значение отно-
шения сигнал-шум, указанное в технических параметрах аппарату-
ры; Ас_ш = 10 дБ - энергетический запас. Значение д<._ш может
245
быть указано в нормативных документах или выбрано оператором
системы
На основании (6.71) и (5.72) записываем минимально допусти-
мый уровень сигнала на границе зоны покрытия:
Рс(-'о)Рт + Qc-ш + дс ш (6.73)
Подставив (6.73) в (6.65), вычисляют напряженность поля на
границе зоны покрытия
2OlgE(ro) = рт + <7С..Ш н Дс.ш + 73,4 - 20lgf . (6.74)
Пример. Для системы стандарта D-AMPS имеем: f = 850 МГц, П = 30 кГц;
<7С_Ш ~ ’3 ДЬ. Находим по (5.69) р„ = пг, - 144 + 101дЛ = 9 - 144 + 14,8 = -120,2 дБм.
Приняв результирующий коэффициент шума л, - 11 дБ, получим уровень мощности
ТШ на входе приемника р, = -118 дБм.
Сначала положим Дс _ ш = 0. Минимально допустимый уровень сигнала на гра-
нице зоны покрытия рс(г0) = Рт + <7С_Ш = -100 дБм . Формула (6.55) приобретает вид
рс = 20lg£ - 132, дБм, при f = 850 МГц. Следовательно, напряженность поля на
границе зоны покрытия Е = 32 мкВ/м.
Федеральная комиссия по связи США установила границу зоны покрытия по
уровню 39 мкВ/м, что соответствует = 7 дБ
Интерференционные помехи на совпадающих частотах.
В ССПСЭ на вход приемника АС поступают: полезный сигнал от ее
БС и мешающие сигналы от других БС сети: Когда несущие часто-
ты полезного и мешающих сигналов совпадают, то возникают ин-
терференционные помехи на совпадающих частотах. Такие помехи
создают БС соседних кластеров. На рис. 1.2 был показан фрагмент
ЧТП размерностью N = 7. Рассмотрим воздействие сигнала и ин-
терференционных помех на АС, расположенные в центральной
соте №1. Помехи создают БС, обозначенные М1-М6. Наиболее
неблагоприятный случай соответствует минимальному уровню при-
нимаемого сигнала, т.е. положению АС у границы соты. На рис. 1.2
показаны пути прихода мешающих сигналов к этой АС.
Мощности сигналов, приходящих на АС, представим в виде
(6.30) при = 1 км. Для полезного сигнала г = г0, а для J-ro ме-
шающего сигнала г = гг Полагая, что энергетические параметры БС
з сети одинаковы, получаем отношение медианной мощности
J-ro мешающего сигнала к медианной мощности полезного сигнала
Пу =(О''<5)-Л. (6.75)
При нескольких мешающих сигналах на АС воздействует сум-
марная помеха, для которой может быть рассчитана медианная и
246
средняя мощности. По определению отношение сигнал-
интерференция
Ос-и=Рмо/РСмС. (676;
где Ры0(г0) - медианная (или средняя) мощность полезного сигнала;
Реме ~ медианная (или средняя) мощность суммарного мешающего
сигнала (СМС). Расчетные соотношения для нее получены в § 7.1.
Интерференционные помехи от соседних и ближайших ка-
налов. В системах подвижной связи используются понятия «час-
тотный план» (ЧП) и «частотно-территориальное планирование»
(ЧТП). Частотный план присваивается стандарту и определяет
распределение частот приема и передачи между каналами. На
рис. 1.11-1.13 были приведены частотные планы для ряда стан-
дартов. Частотные каналы, расположенные в таком плане рядом,
называются ближайшими.
Частотно-территориальное планирование выполняют для кон-
кретной территории, на которой развернута ССПСЭ. Для ЧТП ука-
зывается размерность кластера; распределение частотных групп
между сотами; расположение сот на территории; число каналов в
каждой частотной группе, присвоенной соте; номинальные значе-
ния частот каналов в такой группе. На БС к одной антенне могкег
быть подключено несколько (до 16) канальных приемопередатчи-
ков. Во избежание взаимных помех не допускается работа пере-
датчиков ближайших каналов через общую антенну БС.
Каналы, работающие на общую антенну, называются соседни-
ми. Как правило, для каждого стандарта рекомендуется наимень-
ший частотный разнос между соседними каналами Fc< = М ЛР„ где
М - целое число; &FK - ширина полосы частот одного канала. На-
пример, для NMT-450 F„ = 7 AFK - 175 кГц, для GSM F,K = 3AFK ~
= 600 кГц; для D-AMPS FC( = 21 AF, = 630 кГц. При таких значениях
F,K а общих устройствах сложения (разделения) сигналов передат-
чиков (приемников) обеспечивается необходимая развязка по со-
седнему каналу. Указанные значения могут быть уменьшены за
счет тщательного планирования.
Нз АС интерференционную помеху от ближайшего канала созда-
ют передатчики соседних сот. Избирательность по этим каналам
обеспечивает полосовой фильтр приемника АС. На рис. 6.35 показа-
на типовая АЧХ такого фильтра. Здесь обозначено f0 - центральная
частота канала; f,. f2, f3 - несущие соседних каналов; F-расстройка;
/7Ф - ширина полосы пропускания фильтра по уровню минус 3 дБ;
?Ф - ослабление филогра относительно уровня на краю полосы.
247
Рис. 6.35. К оценке помех
от ближайших каналов
Типовой фильтр за пределами полосы пропускания вносит зату-
хание уф = 24 дБ на октаву (т.е. при увеличении расстройки в 2 раза).
Интерференционная помеха по соседнему каналу может возни-
кать на БС в ситуации, когда АС1 находится на границе соты, а АС2
около БС (рис. 6.36). Положим, что передатчики на обеих АС излу-
чают одинаковую мощность. Тогда при приеме сигнала от АС1 со-
гласно (6.75) отношение сигнал-помеха р = (R^IR2)~n, где R, -
расстояние до ёй АС при / = 1 или 2. Если эти расстояния отлича-
ются в 10 раз, то 101g р = -40 дБ, и если допустимое значение от-
ношения сигнал-помеха ф = 20 дБ, то фильтр приемника БС дол-
жен обеспечивать ослабление помехиа$ = ф -10!дР. В нашем
примере аф =60 дБ. Это соответствует параметру расстройки
фильтра п = Эф / уф = 60/24 = 2,5. Минимальней частотный разнос
между соседними каналами А = 0,577^2" = 2,82/Тф. Эту проблему
обычно разрешают двумя путями: выбирают приемник с высокой
избирательностью и обеспечивают регулировку мощности излуче-
ния АС.
Рис. 6.36. К объяснению помехи по
соседнему каналу
248
Абонентская станция, находящаяся около БС, может создавать
помехи приему сигнала от удаленной АС из-за перегрузки усилите-
ля приемника. Точка насыщения типового усилителя соответствует
максимальному входному уровню сигнала рс нас ~ -55 дБм. Если
уровень сигнала превышает это значение, то возникают нелиней-
ные продукты. Когда их частоты попадают в полосу пропускания
соседнего канала, они создают помехи. При приеме в соседнем
канале сигнала от удаленной АС значение отношения сигнал-по-
меха может оказаться ниже допустимого.
Примеры показывают, что при составлении ЧТП необходимо
учитывать изменение положения АС. Оптимальный ЧТП должен
адаптироваться к таким изменениям. Однако в существующих ре-
альных системах, как правило, этого нет.
Список литературы к таре 6
1. Уильям К. Ли. Техника подвижных систем связи. - М.: Радио и
связь, 1985. - 392 с.
2 William C.Y. Lee. Mobile Cellular Telecommunications. Analog and
Digital Systems. Second Edition. - International Editions, 1995. - 664 p.
3. Пономарев Г.А., Куликов A.H., Тельпуховский E. Д. Распростра-
нение УКВ в городе. - Томск: МП «Раско», 1991. - 222 с.
4. Связь с подвижными объектами в диапазоне СВЧ / Под ред.
У.К. Джейкса. - М.: Связь. 1979. - 520 с.
5. Локшин М.Г., Шур А.А., Кокорев А.В., Краснощеков Р.А. Сети теле-
визионного и звукового ОВЧ ЧМ вещания. - М.: Радио и связь, 1988. -143 с.
6. Справочник по радиорелейной связи / Н.Н. Каменский, А.М. Мо-
дель, Б.С. Надененко и др. под ред. С.В. Бородича - М.: Радио и связь,
1961.-416 с.
7. Милованов Д.А., Сушков В.С. Автоматизация проектирования систем
сотовой подвижной радиосвязи /' ЕЗестчих связи, 1993. - Ns 3. - С. 58-66.
249
Г Л А В A 7
ОСНОВЫ ЧАСТОТНО-ТЕРРИТОРИАЛЬНОГО
ПЛАНИРОВАНИЯ
7.1. Интерференционные помехи и методы их снижения
Модель сети. Рассмотрим интерференционные помехи на сов-
падающих частотах, определяющиеся топологией сети.
В однородной модели сети все БС имеют одинаковые значения
эквивалентной изотропной излучаемой мощности (ЭИИМ), антенны
с круговой ДНА и одинаковыми высотами. Энергетические пара-
метры всех АС также одинаковы. Поляризация радиоволн и усло-
вия распространения на всей обслуживаемой территории приняты
одинаковыми. Сеть, построенная на базе регулярной сотовой
структуры (рис. 7.1), представляет собой геометрически правиль-
ную сетку, в которой БС расположены на параллельных прямых
АЗ, CD,..., з вершинах одинаковых равносторонних треугольников,
называемых узлами (точки а, с, Ь). У каждой БС своя территория об-
служивания -- круГрадиусом г0. Границы территорий трех соседних
БС пересекаются в одной точке t. В равностороннем треугольнике
scb вез углы равны (а - 60°).
На рис. 7. 1 а-. - .-0; ас = со = зЬ ~ гэ since = г0 - 3. cz = ct + to = r0 + rox
x ssr.a -
Ззлишем основные параметры модели сети:
» расстояние между узлами (соседними БС)
(7.1а)
• расстояние между параллельными прямыми
h -1,5 г0;
(716)
• смещение узлов, расположенных на соседних параллельных
линиях, относительно друг друга
Ас! = /2 = ('0 3)/2;
• расстояние от БС до границы соты
г, = Ad.
(7.1 в)
(7.1г)
Рис. 7.1. Фрагмент однородной модели
Площади трех соседних окружностей перекрываются. Соседние
БС работают на разных частотах, минимальная размерность кла-
стера NKn - 3. Такая структура имеет минимальную площадь пере-
крытия, равную 21 % площади треугольника acb.
Соединив точки пересечения окружностей, получают шестиуголь-
ник, получивший название соты. Такие соты обеспечивают сплошное
покрытие территории без перекрытия зон. Если в сотовой сети ис-
пользовать семь частот, то все БС в пограничных сотах будут рабо-
тать на разных частотах. Для выбора частот в соседних кластерах в
сети применяют определенные правила, благодаря которым полу-
чают минимальные интерференционные помехи на совпадающих час-
тотах. Эти правила поясним на примере кластера размерностью 7
Узлы сети на рис. 7.2,а обозначены точками, а цифры означают но-
мер соть! в кластере. Соединив три ближайших узла (БС) с одинако-
выми частотами, получим треугольник совмещенного канала, два
смежных треугольника образуют ромб совмещенного канала (РСК),
внутри которого нет базовых станций с одинаковыми частотами. Мо-
дель однородной сети состоит из примыкающих друг к другу РСК с
одинаковым распределением частот внутри РСК.
В модели удобно воспользоваться косоугольной системой коор-
динат (X.Y), угол между осями которой составляет 60°, совместив
начало координат с одним из узлов сети. В этой системе расстоя-
ние от начала координат до любого узла сети
d5C=- Х2 + ХУ + У2 .
(7.1д)
Каждая сторона РСК в однородной модели принадлежит п.зум
смежным ромбам, поэтому на ней может находиться только два
узла сети. Сторона ромба не может совпадать с осями X, Y. Сле-
довательно. (7.1 д) определяет также и расстояние между соседни-
ми узлами сети.
Рис. 7.2. Модель однородной сети:
а-а = 2ий = 2, 6-а = 1 и 6 = 3
В качестве единицы масштаба в этой системе координат можно
принять нормированное расстояние между узлами О0= 1. В резуль-
тате все расстояния в модели будут определяться целыми числа-
ми. Обратившись к (7.1а), видим, что Do= 1 при
d0 - Cq - . 3-1,
(7.2)
где d0 представляет собой коэффициент пересчета масштаба.
Как известно, число узлов в РСК равно ромбическому числу, ко-
торое в модели сети получило название размерности кластера,
Nw = а2 -гаЬ+62, (7.3)
где а и о - целые положительные числа, которые не имеют общего
делителя.
Выраженное целым числом расстояние (7.1д) между узлами
ОБС =а2^а6+Ь2 = -Ч.л (7.4)
Параметры РСК на рис. 7.2,а. а = 1. о = 2, N,n~ 7; на рис. 7.2,6
показана сторона РСК с параметрами: а = 1, b = 3, N^~ 13.
Умножив (7.4) на коэффициент пересчета масштаба (7.2), полу-
чим расстояние между БС с одинаковыми частотами в соседних
кластерах
252
Йсл = °БС д0 = r0 или dKn = qrQ ,
(7.5а)
ИВ
q = -fiN^ (7.56)
^коэффициент электромагнитной совместимости (ЭМС) сети.
Поясним использование параметров моде. ,и при построении сети
;ца примере кластера с параметрами: а = 3, b - 2, М№= 19. (рис. 7.3).
Сначала нанесем сетку сот и выберем центральную соту с но-
мером 1. Затем строим кластер вокруг этой соты, присваивая но-
мера по часовой стрелке. Первый пояс получает номера 2,3,...,7,
второй - номера 8,9,...,19. Мы построили центральный кластер, его
граница выделена жирной линией. Затем определяем местополо-
жение центральной соты 1 для соседних кластеров. Проводим вер-
тикальную линию через узлы 1,2,8. Она соответствует оси Y моде-
ли. На ней откладываем нормированное расстояние а и получаем
точку S. Из этой точки под углом 60° проводим ось X, на которой
откладываем нормированное расстояние Ь. Получаем местополо-
жение БС соть! 1 для соседнего кластера. Вокруг неё строим вто-
рой кластер точно так же, как первый.
Такие построения повторяем для каждой границы центральной
соты 1. Всего получим шесть соседних БС. Таким образом, мы об-
судили размещение на территории сети базовых станций с одина-
ковыми частотными группами (1,2, 3,...,19). Затем надо поставить з
соответствии с этими номерами групп номера частотных каналов
из плана частот стандарта. По условиям ЭМС не рекомендуется в
одной частотной группе использовать соседние частоты плана.
Интерференционные помехи на совпадающих частотах По
модели сети рассчитывают расстояния до мешающих станций. Эти
расстояния необходимы для определения медианного отношения
сигнал-интерференция. Воспользуемся упрощенным рис. 7.4, где
местоположение БС - точка О, АС расположена в точке А, -
мешающие станции.
Определяем уровни сигнала и помех на АС. Наиболее неблаго-
приятный случай соответствует минимальному уровню принимае-
мого сигнала, т.е. положению АС на границе соты в точке А.
Расстояния от центра соты до мешающих станций находим по
(7.5а). Радиус внутренней окружности - это радиус соты г0. Рас-
стояние от М, до точки А
(7 6а)
Для остальных мешающих станций имеем:
253
Рис. 7.3. Построение сети с кластером размерностью 19
R2=[ V-Q TlV0; (7.56)
R3=[ Q2-<7 + lV0; (7.6s)
R4 = (q + '!)'•?; (7 e.)
R5 = R3: (7бд)
Rs = ^2 - (7-6e)
Соотношения (6.75), (6.76) и (7.6а)-(7.6е) позволяют рассчитать
медианное отношение сигнал-интерференция в однородной сети.
Структуры реальных сетей могут значительно отличаться от
структуры однородной сети. Кроме того, и условия распростране-
ния на трассах мешающих сигналов различны.
254
Рис. 7.4. Местоположение
мешающих станций
Для них рассчитывают реальное отношение сигнал-
интерференция на основе (6.76). Рекомендуется вести расчёт от-
дельно для каждой трассы и затем суммировать мощности интер-
ференционных помех. В таких случаях з (6.75) записывают реаль-
ное отношение сигнал-интерференция для каждого J мешающего
сигнала
дЛ_и=-1О1др; =1О1д(р’/го (7.7)
где * означает, что используются реальные значения; kj - поправка
на условия распространения сигналов на реальной трассе.
Повышение отношения сигнал-интерференция с помощ=ю
антенн БС. В однородных сотовых структурах на БС устанавлива-
ют всенаправленные антенны. Такая антенна представляет собой
вертикальный вибратор (штырь) длиной около 2,2 м с нижним кре-
плением. Диаграмма направленности такой антенны в горизон-
тальной плоскости - равномерная. Коэффициент усиления антен-
ны получают путем формирования ДНА в вертикальной плоскости.
3 табл. 7.1 приведены примерные значения параметров антенны.
Таблица 7.1
Коэффициент усиления антенны, дБ 6 7 9 :
Ширина ДНА в вертикальной плоскости, град 14 12 6,5
Для уменьшения интерференции используются направленные
секторные антенны. В этом случае вертикальный вибратор антенны
имеет уголковый рефлектор в виде металлической сетки либо пло-
скостной рефлектор. Ширина главного лепестка диаграммы направ-
255
пенностй антенны в горизонтальной плоскости составляет а = 120° в
трехсекторной структуре и а = 60° в шестисекторной структуре
Выбор секторной сотовой структуры (см. рис. 1.3) является эф-
фективным способом повышения отношения сигнал-интерферен-
ция.
На рис. 7.5 заштрихованы секторы, в которых используются
одинаковые частотные каналы при секторных антеннах, причем
для БС с номером 1 выбраны трехсекторные антенны, а для БС с
номером 4 - шестисекторные. Отметим, что рис. 7.5 - только ил-
люстрация, но не руководство к построению кластера. Расчёт от-
ношения сигнал-интерференция выполняют для АС в точке В, по-
скольку эта АС находится в самом неблагоприятном положении.
Фрагменты ЧТП при Л/кл = 7 с пользованием секторных антенн с
шириной ДНА а - 120° и а = 60° показаны на рис. 7.6,а и 7.6,6. Сек-
торы сот, в которых использованы одинаковые частоты, выделены
утолщенными линиями.
При а = 120° число мешающих сигналов сократилось до двух, а
расстояния между мешающими БС и АС определяются по формулам:
R-i = (р } 0 7)г0,
(7.8а)
Рис. 7.5. К пояснению учёта мешающих сигналов при секторной структуре
256
Рис. 7.6. Фрагменты кластера (Л/ет = 7) с секторной структурой
120° (а) и 60° (б)
/?6 = qr0.
(7.86)
При а = 60° остается один мешающий сигнал. При. этом рас-
стояние между АС на краю соты и мешающей БС
R6 = R-, (7.9)
Используя (7.8а), (7.86) и (7.9), можно по (6.75). (6.76) и (7.7)
найти усредненное медианное отношение сигнал-интерференция.
Замирания сигналов не учтены. Результаты расчетов этих величин
представлены в табл. 7 2, где М - число секторов в соте; М, - наи-
меньшее требуемое число частотных каналов в кластере.
Ещё одним эффективным способом увеличения отношения сиг-
нал-интерференция является применение антенн со специально
сформированной диаграммой направленности. В реальных усло-
виях в каждой соте необходимый уровень излучаемого сигнала за-
висит от направления излучения. В некоторых направлениях требу-
ется сильный сигнал, в других - сигнал не нужен.
Таблица 7.2
Л'кл Коэф- фициент ЭМС q М = 1 м-=з ДТ = 6
<7с-и> Д5 4U. ДЬ N, <7с-и. ДБ Nf
4 3.46 - - 20 12 26 24
7 4.6 14,27 7 24,5 21 29 42
257
Рис. 7.7. К вычислению угла О
Часто возникает задача сохранить энергию сигнала внутри не-
большой территории, например, вдоль дороги. В этом случае при-
меняют такой способ, как поворот ДНА в вертикальной плоскости,
для этого обычно антенну наклоняют.
По рис. 7.7, который повторяет рис. 7.6,а, можно рассчитать
угол, под которым (на совпадающих частотах) антенна станции М.
освещает сектор центральной соты кластера:
Если М, создает недопустимо большую помеху в центральной
соте, можно попытаться уменьшить уровень сигнала от М, в преде-
лах угла 8. Этого можно достичь, наклонив по часовой стрелке ан-
тенну (вертикальный вибратор) к плоскости горизонта. Главный
лепесток диаграммы направленности наклоненной антенны в гори-
зонтальной плоскости (рис. 7.8) приобретает выемку, что снижает
ус:,эзв: «о оигнзлэ в гсззпоэд направлении и повышзет отношение
сигнал-интерференция в центральной соте. Угол наклона обозна-
чен 0. Наклон (по часовой стрелке) 0 « 10° соответствует тому, что
выемка направлена на БС центральной соты. Наклон .позволяет
увеличить отношение сигнал-интерференция на несколько децибе-
лов. При этом уровень полезного сигнала в соте со станцией М. на
небольшой площади будет снижен.
В [1] рассмотрен такой пример. Когда 0 =10°, то уровень помехи,
создаваемой данной БС в главном направлении в горизонтальной,
плоскости, уменьшается за счёт выемки в ДНА на величину Д„ = 4 дБ.
Уровень полезного сигнала, приходящего на АС, зависит от угла
места антенны этой АС. Последний определяется расстоянием до
258
Рис. 7.8. Диаграмма направленности наклоненной антенны
в горизонтальной плоскости
АС, высотой антенны БС и рельефом. Если АС находится на глаз-
ном направлении и угол места равен 1°, то уровень принятого на
АС полезного сигнала из-за выемки в ДНА уменьшается на величи-
ну Дс = 3,5 дБ. В этом случае при наклоне антенны на главном на-
правлении получают незначительный выигрыш S = Av - дс ~ 0,5 дБ.
Когда на трассе нет проблемы интерференции, то можно повернуть
антенну «вверх» (против часовой стрелки) и увеличить зону покрытия.
Зонтичная антенна позволяет ограничить зону покрытия и
уменьшить излучение в другие соты. Конструкция антенны показана
на рис. 7.9,а. Желаемая ДНА в вертикальной плоскости достигается за
счет установки чад вертикальным вибратором * диска-отражателя 2
Размер диска определяет угол наклона ДНА. Это широкополосная ан-
тенна. Для расширения полосы частот антенны используется кониче-
ский элемент 3. Для увеличения коэффициента усиления антенны ус-
танавливается несколько дисков с конусами (рис. 7.9,5). ДНА в верти-
кальной плоскости «наклоняется» и её «наружная» часть приобретает
форму зонтика (рис 7.9,в) Такая ДНА позволяет снизить мощность
интерференционной помехи в соседнем кластере при оптимальном
выборе высоты установки антенны и получить выигрыш в величине
отношения сигнал-интерференция
59
a - конструкций антенны с одним диском; б - конструкция антенны с не-
сколькими дисками; в - диаграммы направленности зонтичной антенны в
вертикальной плоскости
В табл. 7 3 для кластера размерностью 7 (q = 4.6) и сот радиу-
сом г0 = 3,2 км приведены значения углов: v'2 — в направлении мак-
симума ДНА на границу соты и ту, - з направлении на БС соседне-
го кластера (при одинаковых частотах). При этом разность в усиле-
нии антенны для этих точек составляет 3 дБ. Коэффициент усиле-
ния антенны 11 дБ.
Таблица 7.3
h„ м ,град ЧЦ, град
30 0,54 0,12
90 1,63 0,35
150 2,71 0,59
260
Рис. 7.10. Эффективная модель 1 кластера для секторной структуры
при а = 120°
Эффективные модели кластеров. Выбор таких .моделей по-
зволяет уменьшить число частотных групп на территории при
уменьшении числа мешающих сигналов. Применение эффектив-
ных моделей кластеров является одним из способов увеличения
отношения сигнал-интерференция.
Эффективная модель 1 кластера в секторной структуре при
а - 120° представлена на рис. 7.10. Кластер включает девять групп
частотных каналов. На АС приходят три мешающих сигнала. Для
сравнения: в классической трёхсекторной структуре (рис. 7.6,а) при
Л/кл = 7 используется 21 частотная группа и на АС приходят два
мешающих сигнала.
Эффективная модель 2 (рис. 7.11) применяется б шестисектор-
ных сотах Кластер включает 12 групп частотных каналов. Каждая
частота дважды повторяется в пределах модегч, состоящей из че-
тырех типов БС (выделена на рисунка утолщенной линией). На АС
приходят три мешающих сигнала. Для сравнения: з классической
структуре (рис. 7.6.<5) при NKn = 7 на АС приходят два мешающих
сигнала, однако используются 42 частотные группы.
Геометрические параметры моделей 1 и 2 приведены в табл. 7.4.
Статистические характеристики мощности сигнала. Рас-
смотренные модели предсказания уровня сигнала (см. гл. 6) позво-
ляют определить усредненное медианное значение уровня мощно-
сти, ожидаемое в 50 % точек на расстоянии гот БС и в течение 50 %
времени наблюдения (6.25). При проектировании систем опреде-
ляют вероятность установления связи на заданной территории.
261
Таблица 7,4
•Мешающая станция Расстояние от мешающей станции до АС
Эффективная модель 1 Эффективная модель 2
м ф = 3,606 т0 , ф = 4,359 г0
•Ч Ф = 4 г0 Ф = 4 г0
м3 Ф = Ф <U3 = Cty
В этой задаче случайная величина
х = Рм = Рпр (т Т. t>C) (7.10)
изменяется по закону медленных замираний, т.е. распределена по
нормальному закону (6.24). Поскольку для нормального закона сов-
падают среднее значение и медиана, то в (6.24) X = рм(г) и
о2 = <т?, причем дисперсия по местоположению может быть вы-
брана из табл. 6.2 и 6.3. Вероятность того, что значение случайной
величины превышает пороговое, показывает интегральная функ-
ция распределения
м
F(x > М) = 1- jw(x)<* = 1 -Flw) = P(-sV), (7.11)
Рис. 7.11. Эффективная модель 2 кластера для секторной структуры
при а = 60°
262
где М - пороговое значение случайной величины;
(UV) = (1/ 2п) [exp(-f2/2)cff,
функция Лапласа;
И/ = (М-Х)/о
(7.12а)
(7.125)
- аргумент функции Лапласа.
По (7.11) и (-7 12) можно вычислить, например, вероятность того,
что сигнал на входе приемника превышает чувствительность при-
ёмника. В такой задаче М = рс - уровень пороговой мощности, ар-
гумент функции Лапласа
Wc = (М - X) / G = [рс - pnp(r.L.5O)j / CL: (7.13)
Замечание 1
В (7.12) все величины должны быть выражены в децибелах.
В этом случае совпадают численные значения и о2.
Статистические характеристики мощности суммарного ме-
шающего сигнала (СМС). Все мешающие сигналы независимы, а
их совокупность образует СМС. Медианная (по времени) мощность
каждого из сигналов (полезного и мешающих) изменяется по закону
медленных замираний, т.е. распределена по логарифмичзски-
нормальному закону
J (1пу-1пУм)2
I 2(1пВ)2
где случайная величина у = 10о,1₽м; уровень определен согласно
(7.10); Ум и S - ме
зе значение и среднекэадрати
клонение случайной величины у;
In В = a = 1пЮ'Э"с = 0,23 а (7.15',
- параметр среднеквадратического отклонения.
При логарифмически-нормальном законе распределения дис-
персия случайней величины у
Dp = В2 = Y2 ехр(а2)[ехр(а2)-1], (7.16а)
и среднее значение
уср = Умехр(0,5а2).
(7.166)
Замечание 2
Ниже будем рассматривать статистические характеристи-
ки по местоположению медианной (по времени) мощности.
Будем называть ее мощность. Определения, относящиеся к
статистике сигнала, будут касаться только параметров рас-
пределения по местоположению.
Мощность СМС подчиняется тому же закону распределения
(7.14), что и её слагаемые. Параметры закона распределения для
суммы логарифмически-нормальных случайных величин рассчиты-
вают по известным формулам:
• дисперсия суммы
ОсуМ = ]Гов: (7.17а)
/=1
• среднее значение суммы
т
УСрсум=£^ср), ; (7.176)
7 = 1
• параметр среднеквадратического отклонения
»медианное значение суммы
сум = ^ср.сум expy" 0,5uCyMj, (7. •
где DP и Уср/- - дисперсия и среднее значение каждого слагаемого.
Выбрав R* = 1 км, на основании (6.31) и (6.75) и замечания 2,
запишем для J-ro мешающего сигнала медианную мощность
P«j = K0RJn = KQrQ~”(Rj !royn = Рм0(г0)р7,, (7.18)
где PK,,-.(r:) — медианная мощность полезного сигнала (была опре-
делена в (6.30) и (6.31) как Рм). В нашем контексте полезный сиг-
нал имеет индекс J = О и р0 = 1.
264
Согласно (7.15) и (7.166) средняя мощность любого сигнала
pcpj = P«o('b)PJ exp[0,5(0.23cv)2].
или
Pcpj = рм Ob )Рj exp(o,O265cf). (7.19)
Подставив в (7.176) t = Pcp Jt запишем среднюю мощность СМС:
^смс ср = Рмо (го )Рсмс exp(o.0265of ), (7.20)
где
Рсмс = ХРл (7.21)
Вычислим по (7.16а), а которой Ум = PMj, дисперсию мощности J-
го сигнала:
dpj = рмо(го)Pj ехр(0,23о£ )2 ехр[(0,23с>L)2 - 1]. (7.22)
Подставив (7.22) в (7.17а), получим дисперсию мощности СМС:
DcyM = рм ('Ь) ехр(С,053о2) ехр[(С,053с>2) - . (7.23)
1
Подставив (7.23) и Уср.сум = Рсмсср из (7.20) в (7.17в), получим
параметр среднеквадратического отклонения
Подставив з (7.17г) Ycp су?. = Рсмс ср из (7.20) и a^M=a£MC из
(7.24), получим медианную мощность СМС
рс.мсм = pMo(r0)PcMi^xp(0,0265of )exp(-0,5cJMflj.
Для мощности СМС можно определить по (7.15) среднеквадра-
тическое отклонение и дисперсию:
асмс =18-9асмс-
2 „ ? ('2э)
0,5асмс ~ 0.02S5oqMc.
265
Расчетное выражение для медианной мощности СМС имеет
вид:
РсмСм = ^мо(го)Псмс exp|o,O265(<jf - «емс)] (7-26)
Выражения (7.26)-(7.24) и (7.21) позволяют найти медианную
(по местоположению) мощность СМС. Определение медианной
мощности полезного сигнала Рм0(г0) рассмотрено в гл. 6, диспер-
сия по местоположению выбирается из табл. 6.2 и 6.3.
Статистические характеристики отношения сигнал-
интерференция. После того как по (7.26) была рассчитана мощ-
ность СМС, можно определить уровень медианной мощности СМС:,
'iOlgPcMCiu = ^О1дРмО(го) + 1О(дрсмс +0,115(cf — сгеглс)-
Выше найдены медианные мощности полезного сигнала и СМС.
Поэтому на основании (6.76) запишем медианное отношение сиг-
нал-интерференция:
Чо и = Ю1дрмо(с) - -OigPCMCM . (7.27)
где медианные мощности распределены по логарифмически-
нормалыюму закону, следовательно их уровни имеют нормальнее
распределение.
Поскольку каждое из слагаемых подчиняется нормальному за-
кону распределения случайных величин, то и медианное отноше-
ние сигнал-интерференция дс.и, дБ. имеет нормальное распреде-
ление Дисперсия отношения
ob=of + c£MC- (7.28)
Логарифмируя (7.26), получаем
lOigPcMCM = + 1о’дР«с ~о^лс}.
и подстазив это выражение в (7.27), получаем
Рс-ь - -Ю’ЭРсмс ~Э,115(с7 - «смс)- (7.29)
Используя (7.11) и (7.12), можно вычислить вероятность того,
что медианное значение отношения сигнал-интерференция пре-
вышает пороговое:
P'Qc -и > Мс_и) = 1 - Р(И/с_и), (7.30а)
Ыр-И — (^с-и и
(7.306)
Мс.и - допустимое отношение сигнал-интерференция. Как правило,
его значение указано в параметрах стандарта.
7.2. Принципы территориального планирования систем
Определение зоны уверенного приема. Для однородной сети
с регулярной структурой граница зоны уверенного приема - это
окружность. Задача сводится к определению радиуса такой окруж-
ности. В свою очередь, значение радиуса зависит от того, как
сформулировано условие уверенного приема.
В общем виде условие уверенного приема
Рпр(т.Д50) > рс. (7 31)
где определение величины в левой части дано в (7.10); рс — уро-
вень пороговой мощности сигнала на входе приемника с учетом
энергетического запаса Дс_ш (см. § 6.4).
Предположив, что условие (7.31) должно выполняться на грани-
це соты в 50 % точек окружности, запишем
Рм(г0/ “ Рс-
Представив левую часть в соответствии с (6.31) и (6.30), полу-
чим
p.(R*)-l0nig(r-.'«*) = Дс,
откуда
рЖП/’с
го=10 'ол R-
(7.32;
Таким образом (7.32) определяет мзкоиглально-дог.устимое
значение радиуса соты при условии, что нз ее границе медиан-: •
мощность сигнала превышает пороговое значение в 50 % точек.
Принимая во внимание, что медианная мощность сигнала подчи-
няется логарифмически-нормальному распределению, а ее уро-
вень - нормалоному, отметим, что вероятность выполнения (7.31)
определяется функцией Лапласа (7.11), аргумент которой согласно
(7.12) определяется выражением
ИЛ =[3c-Pr.p(r,L,50)]/OL.
(7.33а)
Отсюда получим
267
ppp(r,L,50) = -Wlgl + pc. (7.336)
Полагая, что мощность сигнала подчиняется (6.30), запишем ее
уровень
pnp(r.L.5O) = к0 - 10n ig (г! R*), (7.33в)
где
к0 = 1О1дКо(Я’) = pM(R*). (7.33г)
Подставив (7.33в) в (7.33а) и положив R* = 1 км, запишем
WL = (Рс-*Ь + Юл 1дг)/щ. (7.33д)
Подставив (7.33а). в (7.336), для территории, на границе которой
медианный уровень сигнала превышает пороговый с заданной ве-
роятностью, определим ее радиус из соотношения
Ш /R') = Wt-°L *k° Рс , (7.34)
I и Л
и вероятность выполнения неравенства (7.31)
7.L = (7.35)
По (7.34) при R* = 1 км получим радиус территории вокруг БС, на
границе которой медианная мощность сигнала превышает порого-
вое значение в L процентах точек:
0.1И4!Гс]
rL = 10 чл-гс. (7.36)
Алгоритм расчета этой величины:
1. Найти средний уровень медианной мощности сигнала соглас-
но (6.30) и (6.31).
2. Рассчитать радиус соты для L = 50 % по (7.32а и б).
3. Определить вероятность выполнения неравенства (7.31)
yL =0,01L%. Согласно (7.35) получили функцию Лапласа от эргу-
мента с л оэтивопо ложным знаком.
4. По таблицам Лапласа по значению функции определить ее
аргумент(-l/ZJ. Изменить знак аргумента, если необходимо и по-
лученное значение подставить в (7.36).
Согласно (7.36) уменьшение радиуса территории при увеличе-
нии вероятности устойчивой связи на ее границе зависит также от
отношенияе = /л, выраженного в децибелах. Пример расчета
дан в табл. 7.5.
268
Таблица 7.5
1 ®’% Н-И4) rjro при £= 1 дБ rL>r0 при £= 2 дБ
Г 50 0 0 1 1
г I75 0,50 -0,68 0,855 0,67
эо 0,75 -1,29 0,74 0,71
^Площадь территории вокруг БС, где медианная мощность сиг-
|||§па превышает пороговое значение с вероятностью хц = 0.01L%.
Представим (7.35) в виде
/ xt = 0,5 - 0,5 erf (WL / - 2), (7.37а)
Jge. erf (Z) - табулированная функция ошибок.
Относительная площадь уверенного приема ct^=S1/S =
;==S1 !{kRq) где S-,- площадь внутри круга радиусом Ro, для ко-
.торой выполняется условие уверенного приема (7.31);
= JZt(S)dS/(~R02), (7 375)
Где Xt(S) ~ вероятность того, что уровень принимаемого сигнала
превышает пороговое значение в области интегрирования; dS -
область интегрирования, для которой выполняется (7.31).
? В реальных условиях иногда приходится разделить всю область
интегрирования на малые части, для которых можно оценить веро-
ятность, а затем провести суммирование по этим частям.
' Для модели однородной сети, подставив (7.37а) в (7.376), получим
ла
а. =0,5- 1 ierf(lV, / 2Y'dr.
Ro J ~
Подставив в это выражение WL из (7.33г) и введя обозначения
t Юл
ь =
2
запишем
(7.386)
269
1 - Г г )
«z. = 0.5 - J erfj a ; big kfr.
о V <^qJ
В [2], где вычислен такой интеграл, получено
„ J , . 2ab +1 (. cab + i\
aL = 0.5| 1 + eii(a) + exp 1-erf-
I. b к b )
(7-39)
(7.40)
Разность величин в числителе (7.38а) определяет вероятность
превышения среднего значения медианного уровня мощности сиг-
нала. При vL = 0,5 имеем рс= kQ и а = 0 и по (7.40) относительная
площадь территории уверенного приема, на границе которой ме-
дианная мощность сигнала равна пороговой мощности приема
и определяется выражением
а 50 =0.5-1-0.5 ехр
Ь2
( П
U~erftJ
(7-41)
Например, при хь = 0,5, п - 3 и о = 9 дь вычисляем: а = 0;
b - 2,36; иж = 0,71. Это означает, что на 71 % территории вокруг БС
уровень принимаемого сигнала превышает пороговый, а на грани-
це соты медианное значение мощности сигнала равно пороговому.
Результата! вычисления по (7*40) приведены на рис. 7.12.
Параметром кривых является значение вероятности превышения
медианной мощностью сигнала порогового значения на границе соты.
Размеры сот и телефонный трафик. Вызовы, поступающие от
абонентов сети, в теории телетрафика представляют как некое
множество, изменяющееся в течение дня. Объем оборудования
должен быть достаточным для тога, чтобы обслуживать вызовы в
период максимальной активности абонентов, называемый часом
наибольшей нагрузки (ЧИН)
Продолжительность разговорного времени е ЧНН, в течение ко-
торого все абоненты данной сети (или фрагмента сети) желают
использовать предоставляемое оборудование, называется посту-
пающей (ожидаемой) телефонной нагрузкой или поступающим
трафиком и измеряется в эрлангах:
-А - ^'вТёр
где Кв - интенсивность поступления вызовов (максимальное число
вызовов в час); Тср = Тс"р / 60 - время занятия канала связи абонен-
Т-’Л 'ср -
3 мин - средняя продолжительность разговора
Рис. 7.12. К определению площади уверенного приема в соте
Для модели с постоянной длительностью занятия канала можно
определить телефонную нагрузку как среднее число активных ка-
налов
А = рл/зб
(7.42)
где Nsq - числе абонентов сети; В = 0,03 ... 0,1 Эрл (для квартир-
ных телефонов) - средняя длительность занятия канала или ак-
тивность одного абонента в ЧНН.
Число каналов связи, необходимое для обслуживания телефон-
ной нагрузки, определяется с учетом собственных характеристик
телефонных вызезоз и физической взаимосвязи между источчи"а-
ми вызовов каналами связи. Оно зависит также от поведения при
перегрузках абонента и оборудования. В системе с отказами вызо-
вы, принятые при наличии свободных каналов, обслуживаются не-
медленно. Вызов, поступивший в момент, когда все каналы заняты,
блокируется, покидает систему немедленно и не возвращается.
При такой стратегии вероятность отказов самая малая в сравнении
с другими алгоритмами предоставления каналов Вероятность того,
что все каналы заняты, или вероятность отказов определяет фор-
мула Эрланга
N ।
• мсв-
о
' отк
(7.43)
где А = Ад - допустимая телефонная нагрузка, Л/св - число кана-
лов связи. При расчетах пользуются таблицами Эрланга.
В системе с ожиданием абоненты, вызовы которых блокирова-
ны, становятся в очередь и ждут обслуживания в порядке поступ-
ления вызовов Предполагается, что они не покидают очередь. Вы-
271
зовы занимают канал долгое время. Следовательно, вероятность
блокировки значительно больше, чем в первом случае. Известны
выражения для расчета вероятности блокировки и вероятности
задержки. При такой стратегии вероятность отказов самая большая
в сравнении с другими алгоритмами предоставления каналов.
Сотовые системы подвижной связи наиболее точно описывают-
ся системой с отказами, а системы с диспетчером - системой с
ожиданием. Между этими системами существует много промежу-
точных вариантов, например, система с ограничением времени
ожидания, система с приоритетом .
Формула Эрланга определяет необходимое число каналов свя-
зи В системах с МДВР число частотных каналов
= NCB лаб ,
где лаб - число абонентов, использующих совместно частотный
канал. Для систем существующих стандартов лаб= 8 для GSM,
лаб = 3 для D-AMPS. В аналоговых стандартах нет МДВР, поэтому
лаб “
Для секторных структур число каналов связи в одном секторе
=^СЗ/(Л/КЛ/ИС), (7.44)
гдеАф - число секторов в соте.
При проектировании часто приходится находить допустимое
число абонентов БС при заданном частотном плане (выделенном
числе частотных каналов). Обычно известно число частотных ка-
налов в соте (из частотного плана) и допустимая вероятность отка-
зов. Тогда на основании (7.43) находят допустимую телефонную
нагрузку, и по ( 7.42) - максимальное возможное число абонентов в
соте
Телефонный трафик, который может обслуживать одна БС, за-
висит от числа частотных каналов, выделенных для этой БС в пла-
не частот, и от возможного числа приемопередатчиков на ней. Как
правило, к одной антенне подключают не более 16 канальных ра-
диопередатчиков. Это определяется антенным мультиплексором,
емкостью соединительной линии между БС и контроллером, а так-
же другими причинами.
При большой плотности абонентое они сосредоточены на не-
большой территории, поэтому приходится использовать маленькие
соты. В результате следует рассматривать реальный телефонный
трафик как один из факторов, определяющих радиус соты. По-
272
IjgibKy реальный трафик в городе неравномерен, то топология
йль'ной сети будет существенно отличаться от однородной.
£в реальных сотовых системах связи используются следующие
щели:
i»B деловом центре города организуют соты меньших размеров,
/мере приближения к окраине размеры сот увеличиваются.
В деловом центре города применяют секторные антенны, вне
:нтра - всенаправленные.
• Концентрическая модель кластера с центральной круговой co-
il. и периферийными кольцевыми сотами (рис.7.13). Места установ-
ись БС обозначены стрелками. В таком кластере все частотные груп-
jmjsi могут повторяться в каждом кольце. Развязка между ними обес-
печивается из-за пространственной избирательности антенн. Углы
шежду главными направлениями излучения антенн с одинаковыми
Кастотами составляют около 120°.
.Для увеличения трафика системы можно увеличить либо число
частотных каналов в каждой соте, либо число сот, уменьшив их раз-
меры. Например, можно установить две передающие антенны (и бо-
лее), удвоив число передатчиков, следовательно и число частотных
.каналов в соте. Аналоговые стандарты имеют дополнительный час-
тотный план, позволяющий удвоить число частотных каналов.
А . Эффективным приемом увеличения трафика являе~ся динами-
ческое распределение каналов в системе. В таком случае любой ка-
нал может быть использован в любой зоне обслуживания. Соответ-
ствующее программное обеспечение должен иметь ЦКПС Алгоритм
распределения вызовов составляется на основании некоторой стра-
тегии, которая должна оптимизировать параметры системы с учетом
ограничений на повторное использование частотных каналов. На-
пример, поиск свободного канала путем перебора всех каналов сис-
темы. Свободными считаются все каналы, которые не используются
на территории, отстоящей от данной соты на расстояние с!м, (см.
7.5а). Если обнаружится несколько свободных каналоз. го определя-
ется «оптимальный» по заданным критериям.
. Рис. /.13. Концентрическая модель кластера
273
Примеры таких критериев: расстояние до других сот, исполу
зующих этот же канал, частотные разнесения между каналамиg
данной соте; частость использования этого канала, или случай^
ный выбор.
Отметим, что проблемы увеличения емкости трафика - это про-
блемы не только частотного плана или обслуживаемой территории
(размеров сот), но также и программного обеспечения системы, и
коммутации, и эстафетной передачи (хэндовера). Все это позволя-
ет говорить об ограничениях на размеры малых сот.
Деление сот. В тех случаях, когда емкость БС полностью ис-
черпана, для повышения пропускной способности системы прибе-
гают к делению территории сот. Это обеспечивает эффективное
использование частотного ресурса в реальных условиях. Различа-
ют постоянное и динамическое деление.
При постоянном разделении на территории существующей соты
устанавливают одну или несколько новых БС. Решение о делении
территории соты и об установке новой БС принимают на основании
оценки таких системных параметров, как частотный план, необхо-
димее число каналов связи, энергетические параметры аппарату-
ры, особенности местности и др. Принятое решение должно обес-
печить требуемый трафик. Рекомендуется предварительно прове-
рить работу системы с новой конфигурацией в часы самого низкого
трафика. Обычно требуется делить только несколько сот в систе-
ме. Как правило, выбирают новый радиус соты rn ~ С.5г0. Тогда
площадь новой соты SH =0,25So может быть получена двумя пу-
тями, как показано на рис. 7.14. Предпочтителен вариант с сохра-
нением местоположения сайта.
Поскольку чувствительность радиоприемника сохраняется, то
ПОРОГОВОЙ МОЩНОСТо СИГНЗЛЗ Н8 ГрЗНИЦО НОВОЙ СОТЬ! Н8 ЯЗМвНЯвТСЯ,
что позволяет уменьшить мощность передатчика БС пропорцио-
нально отношению Q = (г0 / гн)'4 -16 или q - 10igQ = 12 дБ.
Коэффициент ЭМС сети (7.55) остался бы прежним, с-сли бы
раздалили все соты (на модели). Реально разделение сот сопро-
вождается изменением мощности сигналов и коэффициента ЭМС
сети. Это сопровождается несбалансированной ситуацией в отно-
шении соседних сот. Поэтому для сохранения значения коэффици-
ента ЭМС з системе следует делить и соседние соты, что может
оказаться неподходящим решением по другим показателям. Чтобы
сохранить примерно то же значение параметра ЭМС, определен-
ные частотные каналы следует использовать как барьер.
2.7-4
Рио. 7.14. Варианты деления сот с сохранением внешней границы (а) и с
сохранением сайта (б)
Они должны присваиваться только тем сотам, которые разме-
щаются между маленькими и большими сотами, чтобы предотвра-
тить интерференционную помеху от больших сот в малые. Реаль-
ное значение ЭМС определяют по геометрии реальной сети.
Динамическое разделение выполняется программными средст-
вами. В системах используются алгоритмы динамического разде-
ления сот, которые «организуют» маленькие соты з моменты скач-
ков нагрузки (алгоритм используется в таких ситуациях, как фут-
больный стадион после игры, крупные автомобильные пробки и
т.п.). В системе можно предусмотреть небольшие «холостые» БС. б
нормальной ситуации не активные, которые могут быть оперативно
задействовань! Алгоритм динамического разделения должен обес-
печить передачу этим БС части частотных каналов как от сот, на
территории которых они расположены, так и от соседних сот, а
также передачу свободных каналов плана частот и другие резервы
При делении сот приходится учитывать ограничения на размеры
малых сот, определяемые двумя проблемами:
1 Проблема р.эдиопокрытия состоит в том, что при приближе-
нии АС к БС увеличивается угол места для АС и вероятность попа-
дания АС в зону радиотени. Ограничения связаны с точностью
управления радиопокрытием по территории и с возможностью точ-
ного определения местоположения АС.
2 . Проблема переключающего процессора на ЦКПС состоит в
том, что в маленьких сотах хэндовер должен происходить более
часто, чем в больших, и выполняться более точно. Это требует ус-
тановки процессора с большой емкостью. Решение данной про-
блемы оказывается более сложным, чем предыдущей
275
Особенности построения системы в районах с невысоким
трафиком. В регионах с малой плотностью населения меньше по-
тенциальных абонентов, поэтому основная проблема при развер-
тывании систем подвижной связи - снизить затраты. Это сельские
территории, поэтому антенна может быть установлена ниже, чем в
городе, но обеспечивать такое же покрытие территории, как и вы-
сокая антенна в городе. Здесь применяется более дешевая аппа-
ратура, поэтому размер соты определяет ограничение по тепловым
шумам, но нет проблем с обеспечением трафика и проблемы ин-
терференции. Основные приемы, обеспечивающие снижение за-
трат:
1. Использование существующих высоких башен и зданий в ка-
честве антенных опор, чтобы получить максимальный радиус по-
крытия на данной территории.
2. Если нет подходящих высоких зданий, то установка недорогих
опор высотой 15 ... 25 м.
3. Организация передвижных БС. Поскольку трафик вдоль дороги
и в поселке будет меняться в течение суток, то такие БС (одна-две)
можно перемещать, например, дважды в сутки, поддерживая два-
три сценария трафика.
4. Установка ретрансляторов и пассивных рефлекторов для
расширения зоны покрытия.
На территориях с невысоким телефонным трафиком основная
проблема - обеспечение трафика вдоль дороги. Очевидно, что на
дороге БС можно располагать дальше друг от друга, чем в городе.
Целесообразно применять всенаправленную антенну, когда обслу-
живается не только дорога, но и прилегающие территории. Рас-
стояние между БС обычно выбирается из условия прямой видимо-
сти между антеннами. Поэтому, хотя прилегающая территория -
пригородного типа, можно использовать при расчетах параметры
модели для открытой местности. Можно представить два крайних
случая на дороге: большой автомобильный трафик и легкий авто-
мобильный трафик. В первом случае можно ожидать больших теп-
ловых шумов искусственного происхождения.
Когда обслуживается только дорога, устанавливаются две на-
правленные антенны «спина к спине», например волновой канал
или рупорная. Это позволяет дополнительно увеличить расстояние
между БС примерно на величину
, /lOlgAg Л
др = сП 9 -1
к 20 )
где d - типичное расстояние между БС в городских услозиях; дд -
276
трйращение коэффициента усиления направленной антенны отно-
огельно стандартного значения в модели, дБ; 20 дБ/ декада - по-
йери свободного пространства.
Ретрансляторы. Они предназначены для обеспечения радио-
укрытия в теневых зонах, как правило, в районах с невысоким
Графиком. Решение об использовании ретрансляторов всегда
должно поддерживаться экономической целесообразностью. На
©140.7.15 показано, как можно использовать ретрансляторы (Р)
^роль автодороги, чередуя их с БС. При этом трафик распределя-
ется между соседними БС. Каждая БС обычно обслуживает две
соседние соты с разными частотами.
Затемненные соты на рис.7.15 и 7.16 отражают чередование
Частот.
t 'Другие возможные варианты использования ретрансляторов -
gfo устранение «белых пятен» при радиопокрытии (рис. 7.16,а) и
расширение зоны покрытия (рис. 7.16,6) в районах, где нужны не-
большие сети, а также на этапе развертывания сети. На антенной
'опоре ретранслятора Р устанавливается узконаправленная антен-
на, всенаправленная антенна и усилитель. Сигнал, принятый от БС
на 'узконаправленную антенну, будет усилен и переизлучен всена-
правленной антенной к АС. Из-за отсутствия частотного сдвига в
ретрансляторе существует опасность самовозбуждения и интер-
ференции между колебаниями, создаваемыми БС и ретранслято-
ром. Поэтому очень важно правильно выбрать местоположение
ретранслятора, чтобы обеспечить развязку между верхней и ниж-
ней антеннами.
Зо избежание интерференционных и нелинейных помех усили-
тель ретранслятора должен иметь невысокий коэффициент усиле-
ния при радиусе зоны действия ретранслятора 0,5 . 3 км. Рас-
стояние между БС и ретранслятором должно быть по возможности
как можно меньше, чтобы избежать излучения мощности БС на
большую территорию и снизить мощность передатчика БС.
Рис. 7.15. Схема установки базовых станций и ретрансляторов
вдоль дороги
277
Рис. 7.16. Расширение зоны радиопокрытия за счет ретрансляторов
Ретрансляторы подразделяют на диапазонные и канальные.
Первые работают во всей полосе частот частотного плана систе-
мы. вторые усил'/£?..от сигналы нескольких частотных каналов
з. гззонн bis ретрансляторы у сигил ззют все П рИ НЯТЫ0 СИГНЭ Л Ь-.
включ ’я интерференционные помехи.
При энергетическом расчете участка с ретранслятором состав-
ляют уравнения передачи для двух участков:
♦ уровень мощности сигнала на входе приемника АС (рис.7.17):
-с: = /’пБС + 9l - Li" (?А - £’Г Рр2) “ Г " 52 ; (7.45)
т уровень мощности сигкзло НЗ БХОД6 ПрИОгЛНИКН оС
р,? •= РпАС + 9? - -2 (9д + р?1 + Ст>2/ - С- +• Pj (7.46).
где о., ,-с и Рпас “ УГ^зень мощности передатчика SC и АС соотзет-
сгзё.-гно; д* и д2 - коэффициенты усиления антенн БС и АС при
передаче, <7i и д2 - коэффициенты усиления антенн БС и АС при
приеме; дА - коэффиц- ент усиления усилителя А, дР1 и др, - ко-
эффициенты усиления узконаправленной антенны WA1 при передаче
и ппиеме; дР2 и §р2 - коэффициенты усиления всенаправленной ан-
тенны ‘АА2 при передаче и приеме; L* и L2 - ослабление сигнала в
27S
радиоканале на участке БС - ретранслятор и на участке ретранс-
лятор - АС соответственно.
Значения потерь L, и L2 можно рассчитать в соответствии с
вобранной моделью расчета, например, применив универсальную
формулу или формулы модели Хата. Эти формулы в явном виде
определяют зависимость принятого сигнала от высот антенн, что
актуально в данной задаче. Высоты антенн определяются по чер-
тежу. как показано на рис. 7.17. При больших просветах потери на
участке - это ослабление сигнала в свободном пространстве.
Пассивные ретрансляторы (ПР). Используют ПР для того,
чтобь! изменить направление распространения радиоволн, напри-
мер, чтобы обойти препятствие . ПР разных типов широко приме-
няют в РРЛ. На трассах систем подвижной связи применяют ПР
отражающего типа, выполненные в виде металлической пластины
(или сетки). Линейные размерь: пластины должны быть много
больше длины волны. ПР должен быть установлен достаточно да-
леко от антенну передатчика и приемника, чтобы выполнялись ус-
ловия:
• протяженность участка 1 между антенной БС и ПР
°’i > 25Эфф 1 / а : 28Эфф / А ,
» протяженность участка 2 между ПР и антенной АС
а2 28^*2 ' ? 23Эфф / /.,
где 8Эфф-| и 8,±.а2 - эффективные площади раскрыва передаю-
щей антенны БС и приемной антенны АС; 8Эф+. - эффективная
площадь ПР.
Полагаем, ко гол;-э, падающая на пластину 1 под углом 0, испы-
тывает зеркальное отражение (рис. 7.18,а). Диаграмма направленно-
сти ПР имеет ’.т-юго лепестков, но основная доля энергии заключена
з главном лепестке Его ось составляет с пластикой угол. 0. Пс-зо-рс-т
направления распространения сигнала на угол 2ч> = 180" - 2Р.
Рис. 7.1 /. К расчету учасгка с ретранслятором
Рис. 7.18. Трасса с пассивным ретранслятором:
а - поворот направления; б - схема расчета
Поле вторичного излучения пластины будет эквивалентно полю
синфазной антенны с коэффициентом усиления
Gnp = , (7.47а)
gnp =10lgG„p; (7.476)
5Эфф равна проекции действительной площади пластины 1 на
плоскость фронта падающей волны.
Схема для энергетического расчета представлена на рис.7.18,6.
Полагая, что коэффициент отражения от пластины разек еди-
нице, запишем энергетические соотношения в условиях прямой
видимости.
Суммарное ослабление сигнала между передатчиком и прием-
ником при распространении сигнала в свободном пространстве на
трассе без ПР
Ly-Зсв (дч + Эг)-
Суммарное ослабление сигнала между передатчиком я прием-
ником на трассе с ПР в условиях прямой видимости
‘-пр ~ ' kPl г &'г.р/ ^"2 " V^np + •
Дополнительные потери при установке .ПР
ЛL = L| + L2 - асз - 2дГр. (7.48)
В условиях прямой видимости
Ц=(4лф/Х)2, С2 =(4лс/2/,\)2. L’=(4пс//).)2, с/ = ф+с/2,
где знак * означает, что в этих формулах записаны сами величины,
а не их уровни.
280
Учитывая эти соотношения и (7.47), определим выражение для
^дополнительных потерь при установке ПР.
AL’ = (4тгщ / а)2(4пс/2 /1)2(7 /4пф2[)4 /(4п5эфф)2]. (7.49)
Мощность сигнала на входе приемника при установке ПР
рс. пр = РсО 1 = РсоЦ1Р • (7-50)
£де Рс0 - мощность сигнала на входе приемника в отсутствие ПР;
УПР=1/-Л£.’ (7.51)
В- множитель ослабления поля свободного пространства на участке
Ъ ПР.
Из (7.49) и (7.51) находим
vnp = • (752)
Ирр = 20 i'c Vpp.
Чтобы уменьшить потери при установке ПР, следует применять
ПР больших резмеров и выбирать точку установки ближе к антенне
передатчика (но не в середине трассы)
Например, при л = 30см и отражающей пластине эффектисная
площадь которой SnP = 2,5 - 2,5 м2 имеем 3 / /2 = 69,5 Положим
_d =10 км, d-t = 1 юл и d2 = 3 км. Получим vnF = -32,7 дБ. При а =
.= 10 км и cft = с'2 получим уПр = -4t5 дБ.
-• На трассах с ПР ожидаются очень малые значения множителя
ослабления. Практическое использование ПР может быть оправ-
дано только высоким экономическим эффектом для конкретных
условий.
Обратимся к рис. 7.18,6 и рассмотри:’ вариант, когда на участке
1 имеет место распространение в условиях свободного простран-
ства, а на участке 2 - в условиях городе 3 этом случае:
• плотность потока мощности около ПР
л=
4 nd 2
• мощность сигнала, принимаемая ПР,
Pci = П^эфф1 U-53)
• мощность, переизлучаемая ПР,
281
или при подстановке (7 47а) и (7.53)
(7.54).
Закон изменения мощности на участке 2
( ~п
Рс(г) = Х0(Я’)^] .
(7.55)
где R* - расстояние до зыоранной исходной точки модели
Положим
R' ~ тк,
(7.56)
где .*?» ~ целое число. Полагаем, что на расстоянии R' < тк от ПР
ослабление сигнала определяется по формулам для свободного
пространства. В точке, отстоящей от ПР на расстояние R* ~ тк ,
мощность принимаемого сигнала
Вычисляем коэффициент К0(/5?Х), используя (7.576), (/.57а) и
(7.54);
PnG1G2Sl^-p
О\2/.2(471.Т?)2
(7.59)
Подставив (7 bS) з (7.58), запишем
,;2 р г q2 -j2
р ' d1 Pn^l^Z ^эфф13 ^2
"" df Агв d?dj.
В результате мощность сигнала, принимаемого АС,
- Р:оЧ1Р>
(7.60)
где Д;е - ослабление сигнала в свободном пространстве на пол-
ной трассе протяженностью d;
$3фф^
, Л7
d1^2
- множитель ослабления поля на трассе с ПР.
Уровень мощности сигнала, принимаемого на АС,
Рс4 = Рс0 + 201g [5эффтс/ / (фо j)
(7.61)
(7-62)
Можно выбрать т = 1, поскольку эта величина была введен.?
для удобства анализа. Для конкретной трассы можно определить
более точно. Сравнив (7.61) и (7.52) отмечаем, что в условиях
гороД’.-кои застрО/.'. /оозснь поля на трассе с нн падает горазд-?
быстрее по срзв:-.-.- : э ос случаем, когда антенна ПР поднята вы-
соко над городом.
Связь в туннеля;.. Для поддержания связи в туннелях, подзем-
ных гаражах и других подобных сооружениях используют «излучаю-
щий фидер». Зго круглом волновод, вдоль которого прорезана щель.
В круглом волноводе распространяется волна ТЕ.,.' Поскольку вол-
новод со щелью постоянно открыт, то энергия волны будет пе-
реливаться через эту щель. Такой волновод излучает часть прово-
димой им мощности, значение которой будет зависеть от размеров
щели. , .ь. о< а у. ла <р-^ \рис /. ш,а ). оагухание сигнала ь
волноводе зависит от отношения у = Di7... где D - диаметр попе-
речного сечения. Потери мощности в волноводе зависят от двух па-
раметров <р0 и у . Это так называемые «транспортные потери».. ДНА
волновода имеет два главных направления «вперед» и «назад» под
углом ср0 к оси (рис. 7.19,6). Боковые лепестки ДНА не нарисованы.
На частотах ниже 1 ГГц используется коаксиальный кабель. Для
> этого з оплетке кабеля делают зигзагообразные щели. На практике
коаксиальный кабель более удобен, чем волновод. Он позволяет
поддерживать связь на расстоянии до 400 м.
Рис. 7.19. Поперечное сечение волновода со щелью (а) и его диаграмма
направленности (6)
Для увеличения дальности связи ставят усилители - бустеры.
Как правило, по соображениям противопожарной безопасности ог-
раничена выходная мощность усилителя до 500 мВт.
Ослабление сигнала на участке между выходным усилителем и
приемником АС
Z. = Z-1 + Z-2(°)
где Ц =а^1ф - транспортные потери в линии; а-^ =0,05 ... 0,1 дБ/м
- погонный коэффициент потерь; /ф - длина фидера; L2(d) =
= ctg(s) + AL(d) - потери участка радиосвязи длиной d;
ao(s) = -1Olg[pAC(s)/P0],
где PAC(s) - мощность, принимаемая АС, имеющей координату z
вдоль кабеля и находящейся на расстоянии s = 1,5 м от кабеля; Рф -
мощность, излучаемая кабелем в точке с координатой z.
На расстоянии d > s потери участка радиосвязи в туннеле возрас-
тают на величину hUd) = kL^d) - 10lg(d/1,5); на открытом участке
(условно, в поле) AL(d) = ALn(d) = 20 lg(d /1,5).
Излучающий кабель предназначен для замкнутых пространств,
но его можно использовать также на открытых плоских территори-
ях. Сигнал на открытом участке будет затухать пропорционально
квадрату расстояния. Такой сигнал меньше подвержен замирани-
ям, чем сигнал радиоинтерфейса.
Составляющие потерь взаимозависимы. Например, потери на
участке радиосвязи L2(d) можно регулировать, меняя размеры и
угол щели. Тогда транспортные потери L, не могут устанавливать-
ся независимо от ^(d). Интенсивное излучение в определенном
направлении можно сформировать периодическим размещением
щелей вдоль кабеля Поле можно распределять через точки стыков
отрезков или через бустеры, а также регулируя фазы сигнала около
бустера. Транспортные потери будут меняться с температурой,
уменьшаясь при низких температурах.
284
Рис. 7.20. Структура кабельной линии (а) и диаграмма транспортных по-
терь на линии без усилителей (6) и с усилителями (е)
Рис.7.20 иллюстрирует изменение транспортных потерь вдоль
кабельной линии, которая изображена на рис.7.20,а. Приняты обо-
значения : 1 - входной усилитель, 2 - бустеры, д - коэффициент
усиления бустеров, рс - уровень пороговой мощности приемника
АС. Показано изменение транспортных потерь_в кабеле без усили-
телей (рис. 7.20,6) и с усилителями (рис. 7.20,в).
Энергетические параметры линии подбирают так, чтобы сигнал
на входе приемника АС (с учетом потерь линии радиосвязи) на об-
служиваемой территории превышал пороговый уровень.
Общие проблемы проектирования систем. При проектирова-
нии систем подвижной связи решают три основные проблемы.
1. Проблема покрытия: обеспечение заданного отношения сиг-
нал-шум на определенной территории, см. (3.71) и (6.72).
- 2. Проблема интерференции: обеспечение заданного отноше-
ния сигнал-интерференция (см. (1.6) и (6.76)).
3. Проблема трафика: обеспечение требуемой телефонной на-
грузки.
Знаком ~ будем отмечать допустимые значения <?с_ш и г?с_и с
учетом принятого энергетического запаса дс,ш в отличие от реаль-
ных значений дс_ш и рс.и. Обсудим типовые ситуации для боль-
шинства сот на заданной территории.
2S5
1. <7с и > Чс и и <?С Ш> ш ~ система спроектирована пра-
вильно.
2. Qc-и < Зс-и и Qc-ш > ^с-ш - проблема интерференции.
3- Qc ^ <7С_Ш < ?с-ш * 9с-и«чс-ш - проблема покрытия.
4- Qcw< ?с-и'. 9с-ш « ?с-ш и Чс-и^с-ш - проблема покры-
тия и проблема интерференции.
Для решения этих проблем применяют ряд известных методов,
причем некоторые из них не совместимы, поскольку увеличение
отношения сигнал-интерференция сопровождается снижением от-
ношения сигнал-шум.
Проблема покрытия территории в первую очередь касается
тех систем, где определяющим является отношение сигнал-шум.
В таких системах не наблюдается интерференция как на совпа-
дающих частотах, так и по соседним или ближайшим каналам, по-
скольку такие каналы либо совсем не используются, либо исполь-
зуются в сотах, очень далеко отстоящих друг от друга. Методы для
увеличения площади покрытия включают:
• типовые методы увеличения уровня сигнала, излучаемого на
БС: увеличение мощности передатчика, применение направленных
антенн с повышенным коэффициентом усиления, увеличение вы-
соты антенн;
• типовые методы снижения собственных шумов приемной уста-
новки: использование приемников с меньшим коэффициентом шу-
ма и с меньшим значением порогового Уровня сигнала;
• специальные меры: применение разнесенного приема, тща-
тельный выбор места расположения БС, формирование специаль-
ной ДНА, использование в зонах затенения ретрансляторов-
повторителей и пассивных ретрансляторов.
Проблема интерференции решается путем уменьшения уров-
ней мошающи?< сигналов. Наиболее эффективные методы умень-
шения помех на совпадающих частотах были рассмотрены выше -
это применение секционированных антенн и применение антенн со
специально сформированной ДНА.
Снижение интерференции можно получить за счет увеличения
расстояния между SC с одинаковыми частотами в соседних класте-
рах. Однако увеличение ДКГ1 связано с увеличением размерности
кластера, что сопровождается снижением частотной эффективности.
Важную роль б решении проблемы интерференции играет пра-
вильно разработанный ЧТП. Он должен обеспечить достаточный
частотный разнос между соседними каналами з соте и между бли-
жайшими - з соседних сетах. Перспективными язляются адаптивные
286
ЧТП, которые позволяют учитывать изменение ситуации so времени,
а также гибко предоставлять каналы разного качества каждой АС. В
любой системе могут быть речевые каналы разного качества со
своими значениями <?с_и и рс.ш в каждом канале. Эти факторы
должны учитываться при назначении частотных каналов.
Наконец, применяются типовые методы снижения уровней сиг-
налов интерференции путем уменьшения мощности передатчика и
снижения высоты антенны. Однако при этом уменьшается терри-
тория покрытия. Такие способы приемлемы там, где решению про-
блемы интерференции отдается приоритет по отношению к про-
блеме покрытия территории.
Правильный выбор места расположения БС позволяет исполь-
зовать характер местности для того, чтобы уменьшить влияние
Решающих сигналов, сохранив при этом необходимую территорию
обслуживания. Модели предсказания уровня сигнала «от точки к
точке», изложенные в § 6.3, позволяют принимать соответствую-
щие решения.
Проблема трафика состоит в предоставлении необходимого
числа каналов связи на заданной территории. Для увеличения ем-
кости трафика используются следующие приемы:
1. Увеличение числа сот на ограниченной территории; достига-
ется уменьшением радиуса соты, а также секционированием сот.
2. Увеличение числа частотных каналов в соте. Как правило, БС
рассчитана максимально на 16 частотный каналов, которые рабо-
тают на общую передающую антенну. Можно установить, напри-
мер, две такие антенны и организовать 32 частотных канала в соте
и т.д. Однако, при этом сокращается частотный разнос между со-
седними (и ближайшими) каналами. Требуется тщательная прора-
ботка ЧТП. Креме того, аналоговые стандарты обычно допускают
использование дополнительного частотного плана. Число частот-
ных каналов удваивается.
3. Динамическое распределение частотных каналов между со-
тами.
4. Организация хэндовера «в очередь» вместо традиционного
порогового.
7.3. Принципы планирования систем с МДКР
Общие положения. Напомним (см. § 1.4), что кодовое разделе-
ние сигналов основано на применении ШПС. В сухопутных систе-
мах подвижной связи и в спутниковых системах распространен ме-
тод формирования ШПС на основе прямого расширения спектра
287
частот с помощью ПСП. Такой метод применен в системах стан-;
дартов CDMA и W-CDMA.
При оценке интерференционной помехи полагаем, что все]
взаимодействующие сигналы на входе приемника - это ШПС, noj
этому их воздействие на полезный сигнал можно'оценивать так жщ
как воздействие ТШ. Каналы трафика разделяют на прямые (перё!
дача от БС к АС) и обратные.
Отношение сигнал-интерференция на входе приемника АС
Qc-M = Pc/PvM (7.63)
или
Qc-и = 10lgQc_M.
где Рс - мощность полезного сигнала на входе приемника АС; -л
суммарная мощность интерференционных помех.
В соте передается несколько десятков сигналов речевых каналов;
И только один из них предназначен данной АС, остальные создают]
интерференционную помеху приему. Следовательно, рС4)<0.
Отношение сигнал-интерференция оцениваем с двух позиций.
1. Расчетное значение которое соответствует «помеховой си-
туации» в каждой соте или на определенной территории. Реальное
значение вычисляют как функцию технических параметров системы/
числа каналов, размеров сот, мощности передатчика и др.
2. Допустимое значение <7С_И, которое в системах с МДКР опре-
деляется техническими параметрами стандарта. Эти параметры'
зависят от характеристик ШПС и методов обработки речевого сиг<
нала, определяются фирмой-разработчиком и не могут быть изме-
нены проектировщиками.
Одно из условий, которое должно быть выполнено при проекта?
ровании системы, > ^с_и.
Допустимые значения параметров h и q. В системе CDMA сиг-
нал передают кадрами. Кадр - основной временной интервал систе-
мы, устанавливаемый стандартом. Для каналов трафика принята
длительность кадров 7^ = 20 мс, для каналов синхронизации -
= 26,666 мс. При приеме выполняется контроль ошибок в кад-
ре. Если коэффициент ошибок в кадре выше допустимого значе-
ния, то такой кадр стирается.
Коэффициент ошибок в кадре зависит от выбранных методов
кодирования, перемежения и модуляции. Допустимое значение оп-
ределяется в соответствии с выбранным качеством речи. Качество,
речи в стандарте оценивают по значению отношения
288
tj — — *~б
' с-и /о +4 ~ /о ’
(/.64а)
(7.646)
^с-и - Ю1д/7С_И,
Ще Еб - энергия информационного символа сигнала на 1 бит; /0 -
^ёктральная плотность мощности интерференционной помехи; % -
^ектральная плотность мощности ТШ; /0» No.
-Величина (7.646) определяет качество приема у потребителя.
|Она получила название «параметр h».
На рис. 7.21 приведены зависимости коэффициента ошибок в
|К§Дре (Лош) от параметра h с учетом применения в цифровом кана-
шфметодов повышения помехоустойчивости сигнала (перемежения
^йодирования). Поскольку обработка сигналов в прямом и обрат-
Вом каналах систем стандарта CDMA неодинакова, то и допусти-
мые значения для них различны.
|Ц^На практике допустимые значения параметра h выбираются с
^пасом на замирания и другие факторы. Их определяет разработ-
ок аппаратуры данного стандарта. Для аппаратуры фирм Motorla и
jgualcornm приняты разные допустимые значения кош. Для фирмы
^jotorla Аош = 0,01; для фирмы Qualcomm кои1 - 0,03. Поэтому ем-
Е^Фсть системы по версии Qualcomm оказывается в два раза выше,
зм по версии Motorla.
Рис. 7.21. К определению допустимого значения параметра h
289
Ориентировочно (по версии Motorla) допустимые значения для
параметра h в прямом канале Нпр с_и = 7 ... 8 дБ, в обратном канале
^обр. с-и ~ "пр. с-и + ('• •-•2) дБ.
В результате энергетического расчета обычно определяют от-
ношение сигнал-интерференция в радиоканале на входе приемни-
ка. При использовании ШПС отношение сигнал-интерференция,
пересчитанное в радиоканал, определяется выражением
Q = Н.СТТ Г)г
с“'и йшпс (л JUwJ”
(7.65а)
где Вшпс - база ШПС; q - коэффициент речевой ак-
тивности.
В стандарте CDMA применена система прерывистой передачи
речи с использованием детектора активности и вокодера с алго-
ритмом CELP и переменной скоростью преобразования аналогово-
го сигнала в цифровой. Канал на передачу открыт только на интер-
валах активности, что дает снижение интерференционной помехи.
Выполнив логарифмирование (7.65а), запишем
Рс-и = ^с-и - 9с 4 “101g п.
(7.656)
где д. - 101д(1/Вшпс) - коэффициент усиления системы.
Величина (7.656) получила название «параметр д».
В стандарте CDMA В6 = 8,6 кбит/с; ДАшпс = 1,23 МГц; q = 0,3...0,4.
Получаем Вшпс = 123 и дс = 21 дБ. При Япс си = 7 дБ и q = 0,35 по
(7.65) определяем допустимые значения параметра q: ^с_и =
-- 7 -21 -4,6 = —18,6 дБ; 0с_и = 1,38-Ю"2.
Расчет системы с однородной моделью. Однородная сотовая
структура представлена на рис. 7.22, где номера сот совпадают с
номерами БС а них. Будем полагать, что полезный сигнал создает
БС1. Наиболее неблагоприятное положение АС - на границе цен-
тральной соты 1 в общей точке трех сот 1, 2 и 3. На эту АС приходит
полезный сигнал от своей БС1. Интерференционные помехи приему
полезного сигнала создают сигналы от других речевых каналов сво-
ей БС и сигналы от передатчиков других БС. Все это - ШПС с одина-
ковым значением несущей частоты. Следовательно, их воздействие
можно оценивать так же, как воздействие теплового шума.
Будем различать: соседние соты 2 и 3; промежуточные соты 4-6
и удаленные соты 7’- 72.
290
Рис. 7.22. К расчету отношения сигнал-интерференция в системах с
МКДР с однородной структурой для прямых каналов (а) и для обратных
каналов (б)
Геометрически соотношения для модели сети позволяют вычис-
лить расстояния между АС и БС различных сот. Расстояние до БС1
fl = /q ; До БС соседних сот г2 = г3 = г0; до БС промежуточных сот г, =
= 2r0, j = 4,5,6; до БС удаленных сот 5 = 2,63 r0, j = 7... 12; значение j
соответствует номеру БС на рис. 7.22.
На основании (6.32) запишем медианную мощность сигнала
(или помехи) в одном речевом канале на входе приемника АС:
Рм(0 = ^о«;04. (7.66)
где ау- ЭИИМ БС, приходящаяся на один речевой канал в у-й соте;
ks=K0(R*)/ni. (7.67а)
где R* = 1 км.
Значение коэффициента kQ будет одинаковым во всех сотах мо-
дели, так как оно в отличие от значений коэффициента Ко не зави-
сит от энергетических параметров БС.
Прямые каналы. Для рассматриваемой АС на границе соты
(рис. 7.22,а) суммарная мощность интерференционных помех
Ртм = £= Pi + Ра + РР - Р(. (7.68)
где
Pt = koa^m, - h)r^A (7.68а)
- мощность интерференционных помех от речевых каналов БС 1;
291
ра = к0(а2т2 + a3m3)r04 (7.696)
- мощность интерференционных помех от передатчиков БС сосед-
них сот;
6
Рр=^о2«;^(2гоГ4 (7.69b)
;=4
- мощность интерференционных помех от передатчиков БС про-
межуточных сот;
12
Ру = к0 a j nij (2,63r0 )~4 (7 69г)
/=7
- мощность интерференционных помех от передатчиков БС уда-
ленных сот; т,- число речевых каналов в j-й соте.
Подставив (7.66), (7.68) и (7.69а-7.69г) в (7.63), запишем в сис-<
теме с МДКР и однородной сотовой структурой на входе приемника!
АС на границе соты отношение сигнал-интерференция
Ос_и = - - - - - а-Г^~_-2---т/-------- (7-70)
al(m1~^)r0 + (a2m2 + аЗтз)гО +Р(2Гб) +v(2,63r0)
где
6
р=Еа/тг
7=4
?=Е^
1=7
(7.71а)
(7-716)
- мощности сигналов (интерференционных помех), излучаемых
передатчиками БС промежуточно:/ и удаленных сот.
Соотношение (7.70) является основным для проектирования сис-
тем с прямым расширением спектра и с однородной моделью сети.
Запишем условие
Qc-и - Qc-и '
(7.72)
где Qc. и - минимально допустимое значение отношения сигнал-
интерференция на входе приемника в прямом канале. Определим
по (7.70) и (7.72) максимально допустимое число речевых каналов
292
в соте, где находятся АС:
№1max =L1 + l]-a^2+a3m3 _ р (2)_4_ у (263)_4
Qc-и J «1 «1 «1
(7.73а)
.ИЛИ
т1тах ~
Р2 + Р3 _00625
«1
«1
«1
(7.736)
|£Де
Pj = а;л?у
(7.74)
^'суммарная максимальная ЭИИМ сигнала, излучаемая БС в соте с
Аномером j.
Самый благоприятный случай будет иметь место, когда нет ин-
терференционной помехи от соседних сот. Тогда в (7.73а) прирав-
ниваем a2 = a3=p = y = 0 и определяем максимально допустимое
(число речевых каналов в системе:
т1тах ~ ^тах • ^тах ~ Ь +1 Qc-и]
(7-75)
Для системы с идентичными сотами = т2 -...= mt = т, а, = а2 =
&=;..= ау = а, и вместо (7.72а) получим
= 3m[l + 2’4 + 2-2.633*4].
(7.76)
Максимально допустимое число речевых каналов в каждой соте
= 0,318
(7.77)
Слагаемые в правой части (7.76) позволяют оценить соотноше-
ния между мощностями интерференционных помех от соседних
сот, промежуточных и удаленных сот соответственно. Для упроще-
ния дальнейших выкладок можно пренебречь влиянием промежу-
точных и удаленных сот, поскольку доля интерференционных ле-
мех от них значительно меньше, чем вклад от соседних сот. Если
взаимодействуют сигналы только трех соседних сот, то вместо
(7.736) можно записать
^1тах “
1
Qc-и
Р2 + Р3
«1
293
Умножив с5а части этого равенства на , получим
1 1В
+ 1| ' =Р}+Р2+Р3. (7.78а)
[Qc-и
Подобным образом можно решить это уравнение относительно
ЭИ ИМ сигнала, излучаемой БС2 и БСЗ:
Р2 =р,+р2+р3. (7.736)
^2
'3=Р1+Р2 + Р3. (7.78в)
m3
Сопоставив (7.78а), (7.785) и (7.78з), можно записать соотноше-
ние между максимальными ЭИИМ в трех соседних сотах: Р^т, -
= Р2 /т2 = Р3 !тг. Получили общий критерий проектирования, кото-
рый применим к любой системе с МДКР и прямым расширением
спектра:
Pjlmj = Рк lmk= const.
(7.79)
Этот критерий показывает, что чем больше каналов з соте, тем
выше должна быть максимальная ЭИИМ передатчика БС. Отсюда
следует, что в реальных системах необходимо применять управле-
ние мощностью передатчика, увеличивая ее при увеличении числа
речевых каналов. Альтернативное решение - уменьшение числа
речевых каналов в соте позволит уменьшить ЭИИМ и снизить ин-
терференционные помехи.
Обратные каналы. Рассмотрим действие сигнала и интерфе-
ренционных помех на приемник БС1 (рис. 7.22,6). Наиболее небла-
гоприятная ситуация соответствует положению ряда АС на общей
границе трех сот. Мешающие АС соседних сот находятся на одина-
ковом расстоянии от БС1. 6 сотах регулируется ЭИИМ передатчи-
ков АС так, чтобы мощности полезного сигнала и интерференцион-
ных помех, поступающих к приемнику БС, были одинаковы. Отно-
шение сипгэл-интерференция в обратном канале
^обр.с-и
(<7?, -1)РС + р12/П2Рс +Р-з,пз-°с '
(7.80)
гдэ Рс -- мощность сигнала или помехи, поступающая на приемник
5С1; р,к - часть общего числа каналов в сотах к, которая создает
интерференционные помехи в соте j. Для рассматриваемого слу-
чая j ~ 1, к, = 2 и /\2 = 3. Значение pjlt завися" от размеров сот, топо-
логии дорожной сети и т.п. Если нет конкретных сведений, то при-
нимают однородное распределение трафика и p/1t = 1/6, так как сота
имеет шесть границ. Применив (7.72) для обратного канала, запи-
шем на основании (7.80) неравенство для определения числа ка-
налов в соте 1:
т1 + Р12т2 + Р13т3 -
Г 1
[^обрс-и
(7.81а)
где ао6р с.и - минимально допустимое значение отношения сиг-
нал-интерференция на входе приемника в обратном канале.
Аналогично преобразуем (7.80) для определения числа каналов
в соседней соте 2:
т2 + P21m1 + Р23т3 -
1
^обр. с-и
(7.816)
и в соседней соте 3:
m3 + P31m1 + Р32т2
< 1
^обр. с-и
(7.81В)
Соотношения (7.81а)-(7.81в) позволяют рассчитать допустимое
число речевых каналов в соседних сотах в сети с однородней
структурой.
Проектирование системы. При проектировании выполняется
привязка системы выбранного стандарта к реальной территории.
Для этого следует:
• определить допустимое число речевых каналов в сотах;
» обеспечить трафик з соответствии с демографической ситуа-
цией на территории;
» определить число сот и их границы;
• рассчитать мощность передатчиков БС.
Примерная последовательность расчетов при проектировании.
1. Необходимое число речевых каналов определяет телефон-
ный трафик. Исходя из трафика устанавливают тл, т2, т3.
2. Определяют допустимое значение отношения сигнал-
интерференция [см. (7.72)1.
3. Проверяют выполнение неравенств (7.81а) - (7.81s) для со-
седних сот. Если неравенство для данной соты не выполнено, то в
ней следует уменьшить число каналов.
4. Если все три неравенства выполнены, то можно приступить к
определению необходимой мощности передатчика БС в каждой
295
соте. Полагаем, что на границе соты на входе приемника АС мощ-
ность полезного сигнала Рс > Рс, где Рс — пороговое значение,
мощности сигнала на входе приемника АС. Учитывая это, на осно-
вании (7.74) определяем для ;-й БС необходимую ЭИИМ на один
речевой канал:
а;=Рсг04;, (7.82а)
где rOj - радиус ;-й соты.
5. В однородной модели все соты имеют одинаковые размеры,
поэтому а-| = а2 =... = сху = а . В этом случае (7.82а) примет вид
а = Рс^- (7.826)
Подставив(7.82б) в (7.74), определим мощность передатчика БС
в каждой соте:
pj = mipcro (7-83)
6. Применение секторных антенн приводит к снижению числа
мешающих сигналов. При трехсекторной антенне число мешающих
сигналов в каждой соте уменьшается примерно в три раза. Точнее,
с учетом перекрытия зон обслуживания, в 2,55 раза. Соответствен-
но можно увеличить число абонентов в каждом секторе.
Расчет системы при неоднородной модели сети. Такая сото-
вая структура представлена на рис. 7.23, где номера сот совпадают
с номерами БС в них. Так же как и в предыдущем случае считаем,
что самое неблагоприятное положение АС - на границе своей соты
в общей точке трех соседних сот. На рис. 7.23,а прямоугольниками
отмечено положение таких АС в трех соседних сотах. Примем, что
эти АС имеют номера, совпадающие с номерами своих сот. Каждая
АС получает полезный сигнал от своей БС. Каждая сота имеет свой
радиус г). Радиус центральной соты ,ц = г0.
Прямые каналы. Отношение сигнал-интерференция на входе
приемника АС1 (сота 1)
алГ
qic-m - 4 ' _4 „4 (/.84а)
— 1)Ц т ГЛ^ЛЦГ^ f Г13ГЛ3Г3 -t-
Отношение сигнал-интерференция на входе приемника АС2 (на
границе соты 2)
О2с_и = 4 “2Г2 д 4 (7 846)
'цт/- 4 + а2(т2 -',)г2 + «зтзгз +,2
296
Рис. 7.23. К расчету отношения сигнал-интерференция в системах с МКДР
с неоднородной структурой для прямых каналов (а) и для обратных
каналов (6)
Отношение сигнал-интерференция на входе приемника АСЗ
Озс-и= ,_4 ’ .4 - (7.84В)
СЦГПщ +О.2^2г2 + аз(л73-,)г3 + ^2
В (7.84а) - (7.84в) /ь /2, /3 — мощности интерференционных помех,
поступающих из промежуточных и удаленных сот. Их значения ма-
лы по сравнению со значениями помех от соседних сот. Поэтому
ниже эти слагаемые не учитываем.
В правильно спроектированной системе для прямого канала
с-и ~ *->2 с-и — ^3 с-и — ’-'с и Подставим (7.85) в (7.84а), (7.846) и (7 8 1 1 а2 (г-> । а3 • г3 +1! = т. + т? i “ + а-.т, ” i |А-и i «d-1/1 ( \~4 / \“4 1 и а< r< I * Лз • —. + "1 — ГТ)-] 1 | г /7?2 ^*^3 » t Ос..и <x2Vr2' а2^г2' [ 1 ? «Я Г,Г «2(г2Г4 ~ +1 = /Г/. -i 1^2 ' 1 + п?3 QC._M j a3Vf3^ а3^^з> (7.«Ь) 4.з) и преобразуем их: -4 | ; (7.86а) ; (7.866) (7.36b) 297
Правые части (7.86а), (7.866) и (7.86в) должны быть равны друг
другу, что будет иметь место, если
(7-87)
Это уравнение показызает, какое соотношение между значе-
ниями ЭИИМ БС, приходящейся на один речевой канал в каждой
соте, должно поддерживаться в системе с неоднородной структу-
рой. Собственно значение ЭИИМ для каждой из сот определяется
пороговым значением мощности сигнала на входе приемника, со-
гласно (7.82а) и (7.826). После определения этой ЭИ ИМ (ау) и
числа каналов в соте (ту) можно рассчитать суммарную макси-
мальную ЭИИМ сигнала БС в каждой соте по (7.74).
Обратные каналы. Рассматриваем воздействие нескольких АС
на приемник БС1. Наихудший вариант расположения АС соответ-
ствует их положению у границы соты 1 станций (рис. 7.22,6). На
БС1 отношение сигнал-интерференция в обратном канале
Ообр.С-И = , т Е1Г1-4 -4 , • <7'88)
+ fc2Pl2m2r1 +e3Pl3m3r1 + обр
где е — мощность передатчика j-й АС; рук — часть общего числа
каналов в соседних сотах с номером к, которая создает интерфе-
ренционные помехи в соте с номером j = 1; 1^ - мощность интер-
ференционных помех от промежуточных и удаленных сот. Полага-
ем, что она пренебрежимо мала по сравнению с мощностью ин-
терференционных лемех от АС своей и соседних сот.
Из (7.88) получаем отношение интерференция-сигнал в соте 7:
(7.89а)
Аналогично запишем отношения интерференция-сигнал для со-
седних сот:
I =P21,77i + ('Л2 -1) т Р23/Л3 “ , (7.396)
С-и С0ТЛ2 Г-2 *2
е2
+ Р32т2
е3
В правильно спроектированной системе
должно выполняться условие
(7.89в)
для обратного канала
Озбр. С-И - Фобр. с-и
(7.90а)
Приравняв левые части соотношений (7.89а)-(7.89в), запише.м
ЬI ®обр. с-и Isom; _ Ь ^обр. с-и ] -
(7.906)
Мощность передатчика АС в речевом канале должна быть вы-
брана такой, чтобы уровень сигнала на входе приемника БС был не
ниже порогового. Следовательно, можно представить подобно
(7.82а) мощность передатчика j-й АС:
Ej =РсБС/о;- приу= 1,2,3,
(7.91)
где РсБС - пороговое значение мощности сигнала на входе прием-
ника БС. Подставив (7.91) в (7.89а), (7.896) и (7.89в), запишем:
1
^обр.с-и
I ^03
+ Pl3m3
(. г01
(7.92а)
I Р21т1| ° | +(''л2 ~^) + P23m3[ 03 ] ;
’обр.с-и] V02 J \Г02 }
г ' PSI-^ll Г°1 ] + Р32™2| +('7»3-1)-
Ъбр.С-и. V03 J \гоз}
(7.926)
(7.92в)
Кроме того, ранее было получено ограничение на максимальное
число каналов (7.75), которое в данном варианте принимает вид
I 1
<; Л
L ^обр с-и
(7.S3)
Рис. 7.24. К выбору числа каналов в
неоднородной модели
299
Полученные соотношения используются при проектировании
системы. Например, если на заданной территории выбраны радиу-
сы сот г01, г02, г03, а также для системы выбранного стандарта оп-
ределено допустимое значение отношения сигнал-интерференция
Ообр.с-и- можно по (7.92)-(7.93) рассчитать допустимые соотно-
шения'между n?1t т2, и поставить их в соответствие с парамет-
рами трафика.
Далее по (7.91) рассчитывают мощности передатчиков АС и по
(7.82а) - ЭИИМ БС на один речевой канал. Суммарная ЭИИМ сиг-
нала, излучаемая БС в соте, определяется по (7.74). Соотношения
между числом каналов в соседних сотах обычно представляют в
виде графиков (рис. 7.24).
Список литературы к главе 7
1. William C.Y. Lee. Mobile Cellular Telecommunications. Analog and
Digital Systems. Second Edition. -International Editions, 1995. -664 p.
2. Связь с подвижными объектами в диапазоне СВЧ / Под ред. У.К.
Джейкса. - М.: Связь, 1979. - 520 с.
3. Громаков Ю.А. Стандарты и системы подвижной радиосвязи. М.:
Мобильные ТелеСистемы-Эко-Трендз, - 1997. - 238 с.
4. Феер К. Беспроводная цифровая связь. Методы модуляции и рас-
ширения спектра. - М.: Радио и связь, 2000 - 520 с.
300
ГЛАВА8
ОСНОВНЫЕ ХАРАКТЕРИСТИКИ СОВРЕМЕННЫХ
ПОДВИЖНЫХ СИСТЕМ ЭЛЕКТРОСВЯЗИ
8.1. Системы аналоговых и цифровых стандартов
•Рассмотрим принципы организации каналов трафика и управле-
ния.
Системы аналоговых стандартов NMT-450 и NMT-900. Планы
частот стандартов NMT-450 и NMT-900 показаны на рис. 1.11 и рис.
1.12,а соответственно. В типовом варианте на одной БС может
быть организовано до 16 частотных каналов, из которых 15 - кана-
лы трафика и один - канал управления. БС постоянно передает по
каналу управления сигнал-идентификатор канала вызова, позво-
ляющий АС определять свое местоположение, а также сигналы
пейджинга для АС. После того как АС ответит по этому каналу, ей
предоставляется один из каналов трафика для переговоров.
В системах стандарта NMT предусмотрены три канала управле-
ния: вызова, данных и запроса на хэндовер. Два последних канала
не имеют своего радиопередатчика на БС. Канал данных использу-
ет радиоаппаратуру речевого канала и свои модем и кодек. Он ор-
ганизуется на частоте речевого канала с закрытием речи на время
не более 1,12 с. Информация управления передается в цифровой
форме. На участке от БС к АО - указания ЦКПС установить и за-
кончить вызов, изменить мощность передатчика, выполнить хэндо-
вер. На участке от АС к БС - информация об уровне сигнала, при-
нимаемого на АС. От БС информация поступает на ЦКПС, где ис-
пользуется для приема решений по хэндоверу. Канал запроса на
хэндовер организован между БС и ЦКПС для передачи результатов
измерений показателей радиоканалов.
Системы цифровых стандартов GSM-900 и DCS-1800. В пла-
не частот стандарта GSM-900 (см рис. 1.12.6) размещено 124 час-
тотных канала, а стандарта DCS-1800 (см. рис. 1.12,е) - 374 час-
тотных канала.
В цифровых стандартах для увеличения емкости используется
МДВР. Временные структуры МДВР: временной интервал (окно), кадр,
301
мультикадр, суперкадр и гиперкадр. Кадр (рис. 8.1;а) делится на 8 вреЭ
менных интервалов. Их нумеруют цифрами от 0 до 7. Длительность^
кадра МДВР Тк = 4,615 мс. Длительность окна фЛ,= TJ8 = 576,9 мкс.
С| я] S j С С
10 11 12 13 14
Кадры 1 2 3 4 5 6 7
С
50 51
В В
S)
Рис. 8.1. Временные структуры стандарта GSM:
а - кадр, б - мультикадр первого типа, в — мультикадр второго типа
На одной несущей может быть организовано восемь физических
каналов. Общее число каналов связи NCB = 8 N'f = 992
Кадры объединяются в мультикадры. Различают мультикадры
первого типа (рис. 8.1,6) и второго типа (рис. 8.1,в). Длительность
мультикадра первого типа Тм1 = 26ТК = 120 мс. Длительность
мультикадрз второго типа Тм2 = 51ТК = 235,335 мс.
Суперкадр объединяет 51 мультикадр первого типа или 26 муль-
тн кадров второго типа, длительность суперкадра Тск =6,12 с. Ги-
перкадр содержит 2048 супгркадров или 2 756 648 кадров. Длитель-
ность гиперхадра 12 533,76 с или 3 ч 23 мин. 53 с 760 мс.
Мультикадр первого типа организуется для каналов трафика и
совмещенных с ними каналов управления. Для обозначения кана-
лов трафика будем использовать аббревиатуру ТСН от их англий-
ского названия (Traffic Channel). Напомним, что по каналам трафи-
ка передают речевые сигналы. Структура мультикадра первого ти-
па для передачи речи о полной скоростью показана на рис. 8.1,5,
где Т - окна, предназначенные для каналов ТСН. Кадр № 13 (S)
этого мультикадра выделен для канала управления SACCH (мед-
ленный совмещенный канал управления). Кадр № 26 IDLE в этом
мульти кадре является холостым (<). В нем ничего не передают.
Структура мультикадра на линиях вверх и вниз одинакова со сдви-
302
Црм начала на линии вверх на три ВИ, поскольку АС не может пе-
редавать и принимать одновременно. В соте передают по восемь
Иналов трафика на каждой несущей, за исключением одной.
Мультикадр второго типа (рис. 8.1,в) организуют для каналов
управления, не связанных с каналами трафика. Более подробно
эту структуру обсудим ниже. (^ с.
Речь или данные для передачи формируются в виде пакетиро-
ванного цифрового потока. Каждый пакет передается в своем окне.
'Каждый физический канал занимает окно с одним и тем же номе-
ром в каждом временном кадре. Скорость передачи в радиоканале
Ср = N0/JTmu ~ 270,8 кбит/с, где Л/окн = 156,25 бит в пакете.
Каждый пакет имеет типовую структуру. 3 стандартах GSM-90C
M:DCS-1800 предусмотрено пять типовых структур пакетов: N3
(нормальный), FB (пакет частотной коррекции), SB (пакет синхро-
низации), DB (установочный), АВ (пакет доступа). На рис. 8.2 пока-
заны структуры пакетов и длительность элементов в битах.
КК ИНФОРМ Ф ОБП Ф ИНФОРМ КК ЗВИ
3 57 1 26 1 57 3 8.25
КК Фиксированная последовательность (все биты - “нулевые") КК ЗВИ
3 142 3 8,25
Г КК ИНФОРМ Сияхропоследова- телоность ИНФОРМ КК ЗВИ | 1 1
I 3 39 64 39 8,25 ]
| КК Синхропоследозательнссть ИНФОРМ КК ... ЗБИ
j 8 41 36 3 68,25
576,9 мкс или 156,25 бит-------------------->
Рис. 8.2. Структура типовых пакетов GSM
На рис. 8.2 обозначено: КК - концевая комбинация; ИНФОРМ -
информационная часть пакета; Ф - флаг занятия, ОБП - обучающая
последовательность; ЗВИ - защитный временной интервал. Каждый
143 пакетов содержит КК и ЗВИ и информационную часть. Концевая
303
комбинация состоит из трех битов (0, 0, 0), которые отмечают начало
и конец пакета, что необходимо для поддержания правильной
работы системы синхронизации. Длительность ЗВИ около 30 мкс
или 8,25 бит. В это время ничего не передается. Наличие ЗВИ пре-
дотвращает наложение пакетов разных АС при передвижении, по-
следних. Информационная часть пакета предназначена для переда-
чи информации в цифровом зашифрованном виде.
Пакет NB служит для передачи информации по каналам трафи-
ка и управления. Флаг занятия (1 бит) указывает, какая информа-
ция передается (0 - речевая, 1 - сигнальная).
Пакет FB используется для синхронизации несущей частоты АС.
Пакет содержит фиксированную последовательность из 142 бит, в
которой все биты - «нулевые», что эквивалентно передаче немо-
дулированирй несущей.
Пакет SB предназначен для синхронизации АС и БС. Содержит
синхропоследовательность длиною 64 бита. В пакете SB также пе-
редается информация о данной БС (ее идентификатор) и о номере
кадра в гиперкадре.
Пакет АВ передает абонентская станция при запросе доступа в
сеть. Это первый передаваемый ею пакет, когда синхронизация ме-
жду АС и БС еще не установлена. Синхропоследовательность (41
бит) позволяет БС правильно принять информационную часть пакета
(36 бит). Удлиненный ЗВИ (68,25 бита ) предотвращает перекрытие с
пакетами других АС. Длительность ЗВИ “252 мкс. Для того чтобы па-
кеты разных АС не перекрывались, время распространения сигнала
от самой удаленной АС до БС не должно превышать 252 мкс. В соте
радиусом 35 км оно составляет около Д16мкс.
Пакет DB используют для тестирования радиоканала.
Каждое окно - это физический канал. Каждый физический канал
используется для передачи информации логических каналов, кото-
рые подразделяются на каналы трафика и каналы управления.
Каналы трафика. Система может поддерживать каналы трафика
с полной (22,8 кбит/с) и с половинной скоростью (11,4 кбит/с). Разли-
чают каналы передачи речи и каналы передачи данных. В полноско-
ростном канале речевой кодек преобразует сегменты речи длитель-
ностью 20 мс в цифровую последовательность из 260 бит. Скорость
передачи речевого сигнала на выходе кодера Вг ~ 13 кбит/с. В стан-
дарте определены механизмы защиты от ошибок: сверточное и
блочное кодирование и перемежение, а также кодирование для об-
наружения и исправления ошибок. В результате длительность сег-
мента возрастает до 456 бит, а скорость передачи речевого сигна-
ла Вр = 13(456/260) = 22,8 кбит/с.
304
Далее сегмент из 456 бит делится на восемь пакетов по 57 бит,
которые подвергаются перемещению и используются при форми-
ровании кадра МДВР. Для каналов передачи речи используется
пакет NB. В нем из 156,25 бит 114 информационные, остальные -
служебные. Скорость передачи речевого сигнала для информаци-
онной части пакета NB Вка = WAIT* = (114/4,615-10'3) = 24,7 кбит/с.
Логический речевой канал организуется посредством мульти-
кадров первого типа (см. рис. 8.1,6), в котором 24 кадра из 26 зани-
мают сигналы трафика. Скорость передачи речевого сигнала в ра-
диоканале Вр = BN8(24/26) = 22,8 кбит/с.
Каналы передачи данных с полной скоростью до 9,6 кбит/с под-
•держиваются различными системами адаптации скорости переда-
чи и канального кодирования. Применяется сверточное кодирова-
ние и перемежение. Все каналы трафика могут использовать ре-
жим прерывистой передачи (передатчик выключается, когда або-
нент молчит). В речевом канале этот режим возможен при приме-
нении детектора активности речи. Такой подход экономит расход
мощности аккумуляторной батареи АС.
Каналы управления (КУ) подразделяются на три категории: ра-
диовещательные (ВССН); общие (СССН); назначенные (DCCH).
Каждая категория объединяет несколько каналов, как показано в
табл. 8.1. Для обозначения каналов принято использовать аббре-
виатуры их английских названий.
Радиовещательные КУ организуют на линии вниз (от БС к АС) и
используют для передачи основных команд по управлению переда-
чей (канал ВССН), сигналов кадровой синхронизации (канал SCH) и
сигналов для коррекции частоты (канал FCCH).
Таолица 8.1
Категория КУ Канал |
ВССН Радиовещательные Управления передачей SCCH j ।
Коррекции частоты. FCCH
Синхронизации SCH
СССН Общие Пейджинга PCH
Случайного доступа R.ACH
Разрешенного доступа AGCH
DCCH Назначенные Индивидуальные КУ SDCCH
Быстрый совмещенный FACCH
Медленный совмещенный SACCH
305
. Общие КУ обеспечивают взаимодействие станций. Их подраз-
деляют на каналы пейджинга (РСН), случайного (R.ACH) и разре-
шенного (AGCH) доступа. БС по РСН передает сигнал вызова (по-
иска) на все АС. Доступ в сеть АС запрашивает по RACH и получа-
ет разрешение от БС по AGCH. Два канала (РСН и AGCH) органи-
зуют на линии вниз и один канал случайного доступа (RACH) - на
линии вверх.
Назначенные КУ подразделяют на индивидуальные (SDCCH) и
совмещенные - быстрый (FACCH) и медленный (SACCH). Переда-
ча по назначенным каналам двухсторонняя. Индивидуальный ка-
нал служит для установления или обновления соединения, обмена
системными параметрами с сетью PLMN. После установления ре-
жима передачи по SACCH происходит обмен сигнализацией для
управления, передаются сигналы телеобслуживания. На линии
вниз - команды для установки выходной мощности передатчика
АС, на линии вверх - сведения о принимаемом сигнале (мощность,
качество и т. п.). По FACCH передают команды при хэндовере.
В группе назначенных каналов в стандарте предусмотрен сото-
вый вещательный канал, предназначенный для службы коротких
сообщений. Для этого канала может использоваться как медлен-
ный совмещенный канал управления, так и индивидуальный канал.
Логические каналы управления размещаются в физических ка-
налах следующим образом. В каждой соте выбирают одну из несу-
щих, называемую также несущая ВЪС.Ч, которую передают непре-
рывно. В каждой соте на линии вниз на этой несущей передают в
нулевом временном интервале (ВИО) сигналы радиовещательных
КУ. Эти ВИО объединяют в мультикадр второго типа (см. рис. 8.2,в).
Все ВИО обозначены первыми буквами своих каналов (F - FCCH; S -
SCH; В - ВССН и С - СССН). В канале подстройки частоты пере-
дается пакет FB, а в канале синхронизации - пакет SB. Напомним,
что з кэте-;ор-.*и радиовещательных каналов сигналь, передаются
только на линии зниз. В категории СССН два канала (РСН и AGCH)
организуют нз линии вниз, а канал RACH - на линии вверх. По-
следний занимает все ВИО в мультикадре второго типа на несущей
ВССН. 3 канате RACH передается пакет доступа. Поскольку БС
передает непрерывно несущую ВССН даже в отсутствие вызовов,
то АС могут непрерывно измерять мощность от разных БС. Сигна-
лы F, S и В передаются непрерывно. Если сигнал С не передается,
то его место занимает IDLE. При отсутствии информации на несу-
щей ВССН е ВИ1-ВИ7 передается пакет DB.
Группу дополнительных каналов управления организуют на несу-
щей ВССН б ВИ1 Для передачи сигналов совмещенных каналов из
всех ВИ1 формируется сдвоенный мультикадр второго типа (дли-
тельностью 102 ВИ). Канал SACCH передают в общем мультикадре с
каналом SDCCH (а также ТСН, см. рис. 8.1,6). Канал FACCH совме-
щен с ТСН. В пакете NB он занимает по 57 информационных битов
(из 114) в восьми последовательных кадрах (см. рис. 8.2).
Системы стандартов AMPS и D-AMPS. Согласно плану частот
(см. рис. 1.13) в этих стандартах 832 частотных канала. Следова-
тельно, столько же каналов связи в аналоговом стандарте AMPS.
Частотный план стандарта подразделяется на 52 группы, каждая из
которых содержит 15 каналов трафика и один канал управления. В
цифровом D-AMPS каналов трафика в три раза больше за счет
применения МДВР. В полосе частот канала (30 кГц) организован
кадр из шести субкадров, в которых поочередно передаются сигна-
лы трех каналов трафика (например, А, В, С). Длительность кадра
40 мс, в кадре передается 1944 бита. Структура кадра D-AMPS по-
казана на рис. 8.3, где СК А, СК В, СК С - субкадры каналов.
СК А СК в СК С СК А СК В СК С
ы. 6,67 мс ◄
Рис.8.3. Структура кадра D-AMPS
В каждом субкадре передается 324 бита, из которых 260 бит
информационные (DATA) и 64 бита - служебные. Структура суб-
кадров на линии вниз (рис.8.4,а) и на линии вверх (рис.8.4,6) раз-
личны. Цифры на рис.8.3 соответствуют числу битов.
28 12 130 12 130 12
со О I SA ! DATA CD I DATA I R i
a )
6 6 16 28 122 12 12 122
I G ! R J DATA I SYNC DATA | SA j CD DATA
6)
Рис. 8.4. Структура субкадров на линии вниз (а) и вверх (б)
В субкадрах наряду с сигналами канала трафика (DATA) переда-
ют сигналы каналов управления: SYNC - синхронизации и иденти-
фикации; SA(SACCH) - медленный объединенный канал управле-
ния; CD (CDVCC) - цифровой проверочный цветовой код; R - ре-
зервный. Сигнал CD служит для распознавания каналов разных сот.
307
• На линии вверх 12 резервных битов заняты интервалами защи-
ты начала передачи. Введение интервала G обусловлено времен-
ным разбросом прихода сигналов от движущегося абонента. Вве-
дение интервала R позволяет устанавливать мощность передатчи-
ка АС перед началом сеанса связи.
Кроме этих каналов управления, на линии вниз организуют бы-
стрый объединенный канал управления (FACCH). Он совмещен с
каналом DATA. В этом случае по прямому каналу трафика переда-
ется сообщение управления для АС в виде пакета данных. На вре-
мя передачи данных в речевом сигнале организуются кратковре-
менные паузы. Сообщение управления включает: номер нового
канала трафика при хэндовере; уровень мощности передатчика АС
на этом новом канале; цветовые коды сигнала SAT на используе-
мом и новом каналах.
Контроль параметров системы подвижной эллектросвязи со
стороны ЦКПС ведется по каналам трафика. Для этого использует-
ся сигнал SAT, представляющий собой несущую на одной из трех
частот: 5970, 6000, 6030 Гц. В течение всего разговора сигнал
SAT передается от БС к АС и обратно, а принятый БС сигнал ис-
пользуется для измерений отношения сигнал-шум и сравнения его
с пороговым значением. В случае, когда измеренное значение ока-
зывается ниже порогового, результаты измерений передаются на
ЦКПС, где служат для принятия решения о необходимости эста-
фетной передачи. Для определения новой БС, которой может быть
передана данная АС по хэндоверу, используется мобильный лока-
тор, который называется также «приемник мощности сигнала».
Каналы управления на отдельной частоте частотного плана (см.
рис. 1.13) выполняет функцию поиска (пейджинга). АС со стороны
БС (прямой) и функцию доступа АС к БС (обратный канал).
8.2. Системы с кодовым разделением каналов
Принципы кодового разделения каналов, параметры ШПС, прин-
ципы передачи и приема сигналов при МДКР рассмотрены в § 1.4.
Каналы трафика и управления. Все прямые каналы организу-
ют на одной несущей за счет применения ортогональных функций
Уолша. Обозначать объем системы Уолша принято W(N), где N -
общее число кодовых последовательностей в системе (размер
матрицы Адамара).
Так, для Североамериканской CDMA в диапазонах 800 МГц и
1,8 ГГц (см. табл. 1.1) выбрана система W(64). Эти 64 канала под-
разделяют на каналы трафика (55), а также каналы управления:
пилот-канал (1), канал синхронизации (1), каналы пейджинга (7).
308
В стандарте указывается общее число каналов и их распределе-
ние, а также номер последовательности, присвоенный определен-
ному каналу. Номер обычно записан, как WJ. Все значения ниже
приведены для этого стандарта.
В пилот-канале обычно передают последовательность W0, в ко-
торой все биты нулевые. В пилот-канале сигнал расщепляется, но
остается немодулированным. Его сигнал используется в качестве
опорного для когерентной демодуляции остальных 63 каналов, а
также для поиска новой БС, когда АС перемещается из одной облас-
ти обслуживания в другую. Скорость передачи 19<2жбит/с.
В канале синхронизации передается сигнал для установки син-
хронизации. По этому сигналу АС может определить системное
время и сдвиг пилот-сигнала БС во время первоначального вхож-
дения в систему. Работает с фиксированной скоростью 1200 бит/с.
Каналы пейджинга служат для передачи такой информации к
АС, которая не требует установления дуплексного соединения. По
этим каналам передают параметры системы связи, сигналы вызова
АС и организована служба коротких сообщений. Скорость передачи
в канале 4,8 или 9,6 кбит/с (по усмотрению оператора). Каналы
пейджинга поддерживают АС, которые могут работать как в дис-
кретном, так и в непрерывном режимах. АС в дискретном режиме
периодически включают свой приемник для приема сигналов по
каналам пейджинга. Интервал между включениями может состав-
лять от 1,28 до 163,84 с.
Каналы трафика в прямой линии работают с переменной скоро-
стью, что снижает взаимные помехи между ними. Скорость может
меняться каждые 20 мс. Поддерживается два набора скоростей:
Набор 1: 9,6; 4,8; 2,4; и 1,2 кбит/с.
Набор 2: 14,4; 7,2; 3,6; 1,8 кбит/с.
Скорости каждого набора доступны от кадра к кадру в канале
трафика. Эти скорости поддерживают службы передачи данных и
речи со скоростями как 8,5 кбит/с, так и 13,5 кбит/с. В каналах с на-
бором 1 скорость сверточного кодирования R = 1/2; с набором 2 -
R = 3/4.
В прямом канале трафика организован подканал управления
мощностью передатчика АС (обратного канала). Мощность АС по-
стоянно измеряется на БС, и в прямом канале трафика каждые
1,25 мс передается 1 бит, который указывает АС увеличить (1) или
снизить (0) на 1 дБ уровень мощности передатчика.
Обратные каналы подразделяются на каналы доступа и каналы
трафика. Деление на каналы выполняется путем назначения каж-
дой АС собственной фазы длинного кода, что дает возможность БС
309
на приеме разделить сигналы от разных АС. В отличие от прямой
линии перекрывающиеся последовательности в обратной линии не
ортогональны. Ортогональные функции также используются в об-
ратных каналах, но не для их уплотнения, а для повышения их по-
мехоустойчивости. В этом случае каждой группе из *6 бит информа-
ционного сообщения соответствует одна из 64 функций Уолша.
Каналы доступа служат для инициирования вызова, ответа на
пейджинговое сообщение, регистрации АС. Скорость передачи сиг-
нала по каналу 4,8 кбит/с.
В прямом канале адрес АС - кодовая последовательность Уол-
ша WN. В обратном канале адрес АС - фаза длинного кода.
Принципы формирования сигнала в прямом канале трафи-
ка. При передаче на БС речевой сигнал разбивается на кадры и
поступает в речевой кодек. Длительность кадра в каналах трафика
20 мс, в каналах синхронизации 26,666 мс. В схеме канала (рис.
8.5) показаны: 1 - выход речевого кодера, U1 - сверточный кодер
со скоростью R = 1/2; U2 - блок перемежения; А1 и А4 - сумматоры
по модулю 2, А1 - мультиплексор; G1- генератор псевдослучайной
последовательности (ПСП); U3 и U4 - делители цифрового потока,
а также квадратурный фазовый модулятор. Скорость передачи на
выходе речевого кодера 9,6 кбит/с, а на выходах сверточного коде-
ра и блока перемежения 19,2 кбит/с. Генератор G1 создает ПСП с
периодом повторения Гпсп = 2л2-1. Скорость цифрового потока на
выходе генератора ПСП В{ = 1,2288 Мбит/с. Для снижения скорости
служат делители цифрового потока U3 и U4. Скорость на выходе
U3 уменьшена до 19,2 кбит/с, для того, чтобы совпали скорости
цифровых потоков на входах сумматора А1. Часто применяется
другое название G1 - генератор длинного кода и другое название
делителей цифрового потока - дециматоры. Скорость цифрового
потока на выходе дециматора U4 снижается до 800 бит/с. С него
снимается сигнал 800 Гц, который используется для управления
цифровой последовательностью мультиплексора при введении
сигнала (1 бит) управления мощностью, который поступает по вхо-
ду 3
Генератор ПСП, делитель U3 и сумматор А1 выполняют функцию
скремблера. Скремблирование позволяет обеспечить скрытность
передачи. После скремблирования цифровой сигнал поступает на
мультиплексор А2. Сигнал на выходе А2 - это скремблированный
модулирующий символ плюс сигнал управления мощностью.
Шумоподобный сигнал образуется на выходе сумматора АЗ пу-
тем сложения по модулю 2 модуляционного символа с сигналом
Уолша. Этот процесс называется расщеплением.
310
Квадратурный фазовый модулятор
Рис.8.5. Функциональная схема формирования сигнала (ШПС) в прямом
канале трафика
На выходе АЗ каждый бит модулирующего сигнала расщепляет-
ся на 64 бита. Для каждого (/-го) речевого канала используется
своя функция Уолша - 1Л((64), одна из 64, что обеспечивает орто-
гональность сигналов логических каналов. Далее сигналы поступа-
ют на квадратурный фазовый модулятор. В его составе: А4 и А5 -
сумматоры по модулю 2, Z1 и Z2 - полосовые фильтры, UB1 и UB2
- фазовые модуляторы, А6 - устройство объединения сигналов, G2
- генератор СВЧ (или ПЧ) сигнала, фазовращатель на я/2. В А4 и
А5 выполняется разделение ШПС с помощью пары квадратурных
ортогональных последовательностей - пилот-тона синфазного ка-
нала / и пилот-тона квадратурного канала Q:
• ПСП пилот-тона синфазного канала
/(X) = X15 + X13 + X9 + X3 + X7 + X5 +1;
о ПСП пилот-тона квадратурного канала
Q(X) = X15 + X12 + X11 г X10 ь X5 т X5 + Х'; + X3 ; 1
Период повторения ПСП пилот-тона Тп = I Вг = 26,66 мс, или
75 повторений каждые 2 с.
Выходные сигналы модуляторов квадратурных каналов сумми-
руются в А6 и подаются на усилитель мощности (УМ), либо на пре-
образователь частоты и УМ и далее в антенну. Полоса частот из-
лучаемого сигнала 1,25 МГц. На одной несущей передается
64 канала.
Принципы формирования сигнала в обратном канале тра-
фика. Обратные каналы - зто композиция каналов доступа и кана-
лов трафика. Поскольку на обратной линии не поддерживается
синхронизация и не устанавливается системное время, то сигнал
обратного канала не может приниматься на когерентный демоду-
лятор. Модуляционные параметры для прямого и обратного кана-
лов разные. Ча АС применена 64-кратная ортогональная модуля-
ция. Используются 64 модуляционных символа - ортогональные
функции Уолша И/(64), каждая длиной 64 бита. В модуляторе блоку
из шести кодовых символов ставится в соответствие одна из функ-
ций Уолша. Пример такой замены показан в табл. 8.2. Другими
словами, в обратном канале шесть кодовых символов образуют
один модуляционный символ.
Таблица 8.2.
Кодовые символы Модуляционный символ
1 1 0 1 0 1 И/53(6<)
1 0 1 1 1 0 И/48(64)
Обратимся к функциональной схеме рис. 8.6. В каналах трафика
скорость передачи цифрового сигнала на выходе речевого кодера
U1 (точка 1) может принимать одно из значений, указанных в табл.
8.3. Этот цифровой сигнал поступает на сверточный кодер U2, в
котором г? =1/3 и число регистров К = 9. На выходе сверточного
кодера формируются кодовые символы с фиксированной скоро-
стью передачи 8С = 9,6//? = 28,8 кбит/с. Если скорость входного сиг-
нала U2 ниже, чем 9,6 кбит/с. этот сигнал будет повторен в U2 не-
сколько раз для того, чтобь! скорость на выходе кодера (точка 2)
поддерживалась постоянной.
Таблица 8.3
; Скорость передачи символов на , входе U2 , к5ит/с 9,6 Л О v 2,4 1,2
Число повторений в сверточном кодере IJ 2 Нет 2 3 /
! Скорость передач/, кодовых оимбо- ' j x-s на выходе сверточного кодера В = 9,6/8 = 28,8 кби
В каналах доступа каждый символ кода имеет фиксированную
скорость передачи 4,8 кбит/с и он передается сам и еще поэторя-
ется, т. е. передается дважды. С выхода блока перемежения (J3
сигнал поступает на модулятор U4, который называется ортого-
нальным 64-кратным модулятором. В нем кодовые символы заме-
няются на модуляционные, согласно табл.8.2.
312
Квадратурный фазовый модулятор
Рис.8.6. Функциональная схема формирования сигнала (ШПС) в обратном
канале трафика
Скорость передачи модуляционных символов Вмс =28,8-64/6 =
= 307,2 кбит/с. Модуляционные символы поступают на блок маски-
рования 115. В этом блоке выполняется маскирование избыточных
д иных, создаваемых повторителем кода при входной скорости
менее 9,6 кбит /с. Маскирующая последовательность формируется
из ПСП генератора длинного кода G1. Это 14 бит, которые являют-
ся последними битами в ПСП. Характер маскирующей последова-
тельности определяется скоростью передачи данных в кадре.
Генераторы G1 на схемах рис. 8.5 и 8.6 имеют одинаковые па-
раметры. Устройство А1 - сумматор по модулю 2 выполняет рас-
щепление модулирующих символов с помощью ПСП от генератора
длинного кода. Каждый модулирующий символ расщепляется в от-
ношении г = 8Г 8>лс =1,2288 0,3072 = 4 . Итак, каждый модулирую-
щий символ передается в виде четырех чипов ПСП.
Далее в схеме рис. 8.6 показан квадратурный фазовый модуля-
тор. Элементы структурной схемы имеют те же обозначения, что и
на рис.8.5. Принцип работы был рассмотрен выше.
Сигналы разных АС отличаются друг от друга собственной фазой
длинного к.одз, что позволяет ос, на призме разделить сигналы, при-
нимаемые от разных АС. В отличие от прямой линии перекрываю-
щиеся последовательности сигналов разных АС в обратней линии не
ортогональны. В обратном канале (на АС) ортогональные функции
Уолша используются для повышения помехоустойчивости связи, в
отличие от БС, где они применяются для уплотнения каналов.
8.3. Эстафетная передача
Общие принципы эстафетной передачи. Основным отличием
систем подвижней связи является поддержание функции ведения
313
абонента, т. е. его эстафетная передача от одной БС к другой. Этот
процесс получил название хэндовера. Различают межсотовый и
внутрисотовый хэндовер. Выполняется межсотовый хзндовер на
границе соты, когда уровень принимаемого на АС сигнала падает
до минимально допустимого значения. Результатом выполнения
хэндовера является назначение нового частотного канала для АС.
Внутрисотовый хзндовер выполняется, когда на используемом час-
тотном канале наблюдаются значительные помехи. Решение о вы-
полнении хэндовера принимает ЦКПС на основании результатов
измерений и оценки параметров сигнала.
Сначала рассмотрим классическую модель хэндовера. Для нее
параметрами являются: уровень мощности принимаемого радио-
сигнала и отношение сигнал-шум или сигнал-интерференция в
канале. Для измерения параметров сигнала обычно организуется
линия связи БС-АС-БС. Значения параметров измеряются на БС и
сравниваются с пороговыми значениями, результаты сравнения
передаются на ЦКПС, который принимает решение о выполнении
хэндовера.
Как правило для каждого из двух параметров хэндовера уста-
навливаются пороговые значения, а именно:
• Рс-ш пор - пороговый уровень мощности радиосигнала на вхо-
де приемника АС на границе зоны покрытия;
• Рс-и пор ~ пороговый уровень мощности радиосигнала, соот-
ветствующий минимально допустимому значению отношения сиг-
нал-интерференция на входе приемника АС.
Обычно для каждой из этих величин указывается по два поро-
говых значения. Верхний порог соответствует началу процедуры
хэндовера, нижний - выполнению хэндовера.
На рис. 8.7 поясняется случай, когда рс_ш пор ~ —'‘00 дБм. Внут-
ри соты есть несколько районов (выделены серым цветом), где
уровень принимаемого сигнала будет ниже порогового из-за высо-
ких строений. Говорят, что в этом районе АС попадает в дыру. Из-
менение уровня сигнала в направлении г иллюстрирует рис. 8.7,6.
Возникают ситуации, при которых хэндовер необходим, но не вы-
полним, например АС находится в «дыре», но далеко от границы
соты. Второй подобный случай, АС приближается к границе соты,
но в соседних сотах нет свободных частотных каналов В первом
случае необходимо удерживать назначенный частотный канал, по-
ка АС не покинет «дыру», после чего должен быть измерен уровень
принимаемого ею сигнала и принято решение о необходимости
хэндовера. Во втором случае возможны различные действия. Раз-
говор может быть прекращен либо новая БС должна на короткое
время переназначить один из частотных каналов
314
Рис.8.7. К пояснению хэндовера (а) и изменение уровня в направлении г
при движении АС (б)
Центр коммутации подвижной службы управляет распределени-
ем частотных каналов в соте и может пересматривать распределе-
ние частот между сотами.
Одна из основных характеристик хэндовера - вероятность за-
проса. Для ее определения составляют усредненную модель со-
ты, полагая, что вероятность вызова одинакова для всех АС. В [3]
рассмотрена модель со следующими параметрами: радиус соты
16 км, скорость АС с равной вероятностью принимает значения от
8 до 96 км/час, угловые направления движения распределены рав-
номерно в диапазоне от 0 до 360°. Запрос на хэндовер поступает,
когда АС пересекает границу соты в процессе сеанса связи Зави-
симость вероятности запроса от продолжительности сеанса связи
приведена в табл. 8.4.
Таблица 8.4
Продолжительность разговора, мин 1.76 3 6 9 12 24
Вероятность запроса 0.113 С. 18 0.426 0.593 0,58 0.906
Будет или не будет поступать запрос на хзндовер, реально за-
висит от многих дополнительных факторов и в первую очередь от
характера местности Количество запросов на хэндовер в соте за-
висит от размеров соты (табл. 8.5).
i аолица 8.о.
Радиус соты, км 16 .. 24 3,2 ... 8 1,6. 3,2
Число запросов на вызов 0,2 1 ... 2 3 . 4
Виды хэндовера Рассмотрим несколько типичных видов хэн-
довера.
315
Хэндовер по дифференциальной мощности Алгоритм этого хэн-
доее'ра построен на сравнении значений мощности сигнала, прини-
маемого одной АС от двух БС. Вычисляется Л р2 гДе Pi ~
уровень мощности сигнала, приходящего на приемник АС от своей
БС1, р2 уровень мощности сигнала, приходящего на приемник АС
от БС2, которая является кандидатом на хэндовер. Вычисленное
значение сравнивается с пороговым. Устанавливаются два значения
порога. Например, нижний порог А, = -3 дБ и верхний порог Д2 = 3 дБ.
Численные значения порога выбираются в соответствии с емкостью
процессора ЦКПС. По результатам сравнения ЦКПС принимает ре-
шения по хэндоверу (пример дан в табл. 8.6).
Таблица 8.6
Вари- ант А Решение ЦКПС Вари- ант А Решение ЦКПС
1 <-ЗдБ Хэндовер не нужен 3 О...ЗдБ Подготовка к хэндоверу
2 -3 ...ОдБ Измерения уровня 4 >ЗдБ Запрос на хэндовер
Обычно в качестве кандидатов на хэндовер рассматривается
несколько БС и по результатам сравнения выбирается одна из них.
Хэндовер с задержкой. Широко распространен хэндовер с ис-
пользованием двух пороговых уровней сигнала: нижнего £., и верх-
него L2, так что £.,>Тг. В этом случае процесс передачи АС в друп/ю
соту может быть задержан, когда нет новой БС, способной ее при-
нять. На рис. 8.8 территория в соте, внутри которой р.< L1r ограни-
чена сплошной линией, а территория, где рс< L2. - пунктирной. При
снижении уровня сигнала на АС до значения L., начинается запрос
на хэндовер, причем запрос будет повторяться несколько раз до
его исполнения с задержкой, например, г = 5 с. Если АС попала в
«дыру» или соседняя БС не имеет свободных каналов, то запрос
будет повторяться каждые 5 с. По первому порогу хэндовер выпол-
няется только после повторного запроса и только в случае, когда
на новом частотном канале уровень принимаемого сигнала боль-
ше, чем на старом. Сднзко, когда уровень сигнала упадет ниже
значения 1.2. хэндовер будет выполнен обязательно. Если и в этом
случае соседняя БС не может предоставить новый частотный ка-
нал, то разговор продолжается, до тех пор, пока приемник АС спо-
собен принять сигнал, затем прерывается. Если по обратному ка-
налу на ЕС в течение 5 с не поступает контрольный сигнал, БС вы-
ключает свой передатчик Хэндовер с задержкой позволяет снизите
среднее число запросов. Так, когда АС попадет в дыру менее, чем
на 5 с, то задержка предотвращает запрос. Также запрос не произ-
водится при кратковременных колебаниях уровня сигнала из-за
интерференционных помех. Такое снижение числа запросов облег-
чает работу коммутатора ЦКПС. Особенно заметен этот эффект,
когда процессор коммутатора ЦКПС сильно загружен, что наблю-
дается при большом телефонном трафике или когда соседние со-
ты заняты.
Другие виды хэндовера. Форсированный или принудительный
хэндовер определен как хэндовер, который должен был бы нор-
мально происходить, но был предотвращен или хэндовер, который
не должен быть, но происходит принудительно.
Управляемый хэндовер - это хэндовер с изменением его пара-
метров в сравнении с типовым вариантом. В этом случае ЦКПС
решает, что одни БС слишком перегружены вызовами, а другие -
наоборот. Тогда ЦКПС посылает указания на БС в перегруженных
сотах изменить пороговые уровни хэндовера так, чтобы хэндовер
наступал раньше по сравнению с номинальным порогом. Для дру-
гих БС может быть установлен более низкий пороговый уровень,
что позволит дольше удерживать АС в такой соте. ЦКПС также мо-
жет управлять значением задержки хэндовера. Таким образом,
временно устанавливаются новые границы между сотами.
Особенности хэндовера в системах аналоговых стандар-
тов. Процесс эстафетной передачи в системах аналоговых стан-
дартов включает следующие процедуры, запрос на хэндовер; вы-
бор БС - кандидата на хэндовер; проверка выбранной соты, ко-
манда на выполнение переключения; настройка нового частотного
канала; наконец, автоматическое переключение на новый канал.
Рис.8.8 К пояснению хэндовера
с задержкой
Для измерения отношения сигнал-шум и сигнал-интерферен-
ция в речевом канале передаются специальные пилот-сигналы
(ПС). Они представляют собой гармоническое колебание на часто-
те выше верхней частоты речевого канала. Соседним БС присваи-
ваются ПС с разными частотами.
В стандарте NMT-450 пилот-сигналы называют Phi-сигналы или
сигналы супервизора. Их номинальные частоты: ^955 Гц (ПС 1),
3985 Гц (ПС 2), 4015 Гц (ПС 31) и 4045 Гц (ПС 4). В стандарте
AMPS такие сигналы называют SAT. Их номинальные частоты:
5970 Гц (SAT 1); 6000 Гц (SAT 2) и SAT 3-6030 Гц (SAT 3).
Запрос на хэндовер и выбор кандидата на хэндовер выполняются таким образом.
Блок контроля и управления на БС1 формирует свой ПС (например, ПС 1), и он пере-
дается в речевом канале на АС, которая находится в состоянии переговоров по час-
тотному каналу № X. На АС должна быть замкнута петля пилот-сигнала. АС ретранс-
лирует ПС 1 обратно на БС1, он поступает на приемник речевого канала, который
измеряет отношение сигнал-шум в этом канале и сравнивает его с двумя пороговыми
значениями. Результат сравнения передается на ЦКПС, который принимает решение
о необходимости хэндовера. Если решение принято, то ЦКПС запрашивает значения
мощности сигнала, поступающие к этой АС от «соседних» БС, сравнивает получен-
ные значения и определяет БС, создающую самый мощный сигнал. Эта БС рассмат-
ривается как кандидат на хэндовер. Обычно формируется список из нескольких кан-
дидатов. «Соседние» БС определены в базе данных в ЦКПС. Положим, что из списка
кандидатов выбрана БС 2 и ей присвоен ПС 2.
Следующая процедура - проверка выбранной БС. ЦКПС в соте БС2 выбирает
свободный частотный канал № Y и проверяет прохождение сигнала. Для этого
ЦКПС указывает выбранному приемнику новой БС2 временно настроится на час-
тоту канала № X и сигнал ПС 1. Временно организуется линия связи БС1
(передача) - АС (петля по ПС) - БС2 (прием). Так ПС 1 позволяет оценить качество
новой линии связи.
При положительной оценке по команде ЦКПС приемник новой БС2 перестраива-
ется на частоту № У своего канала и свой сигнал ПС 2. По старому частотному кана-
лу № X ЦКПС посылает на АС команду на переключение АС на новую частоту № У и
новый ПС 2. Эта команда посылается в речевом канале в виде пакета данных. АС
подтверждает прием команды с помощью тонального сигнала. При приеме подтвер-
ждения БС направляет сообщение на ЦКПС. После этого настройка нового частотного
канала заканчивается и ЦКПС будет коммутировать see поступающие вызовы на
новую БС2.
В завершение АС выполняет команду по переключению на новый частотный
канал № У, принимает сигнал ПС 2 и посылает его обратно на БС2. Последняя
принимает от АС сигнал ПС 2 и передает на ЦКПС сообщение о том. что хэндовер
был успешным. На БС1 поступит команда на выключение передатчика, а ЦКПС
будет информирован о том, что на БС1 частотный канал № Xсвободен
Таким образом, в системах аналоговых стандартов запрос на
хэндовер формируется на основании измерений, которые были
выполнены с использованием обратного канала данных. Канал
данных не имеет своего частотного канала и организован в канале
трафика с кратковременным закрытием последнего.
318
Особенности хэндовера в системах цифровых стандартов.
В таких системах каналы управления совмещаются с каналами
трафика на основе МДВР. Одновременно с обслуживанием вызова
приемник АС может непрерывно измерять мощность сигнала,
принятого от БС соседних сот. Когда уровень сигнала в канале
трафика, принимаемого от своей БС, падает ниже порогового, АС
может послать запрос на хэндовер и указать ЦКПС, какие из сосед-
них БС могут рассматриваться как кандидаты на хэндовер. Такой
хэндовер получил название по своей английской аббревиатуре
МАНО (Mobile Assisted Handoff).
При МАНО АС посылает в рабочем канале трафика результаты
измерений уровня принятого сигнала и вероятности ошибок в тече-
ние разговора, а также уровня сигнала, поступающего от соседних
БС в любом другом радиочастотном канапе, который указан ЦКПС
(для одной БС или больше). Таким образом, ЦКПС получает более
полную информацию для принятия решения в сравнении с анало-
говыми системами. Управление в системах GSM и D-AMPS ведется
по каналам FACCH (быстрый объединенный канал управления) и
SACCH (медленный объединенный канал управления).
Особенности хэндовера в системах стандарта CDMA. При
МДКР применяют мягкий хэндовер. Там все частоты одинаковы и
размерность кластера равна 1. При мягком хэндовере происходит
не смена частот, а смена кода БС. «Привязка» к данной БС выпол-
няется по уровню ее ПС, принимаемого на АС. Как правило, на АС
поступают ПС от двух или более БС. Их уровни сопоставляются с
пороговыми значениями. Применяют динамические пороги. Иногда
в системе используют более одной частоты, тогда, если по каким-
то причинам не применим мягкий хэндовер, сначала выполняется
межсотовый жесткий, а затем внутрисотовый мягкий хэндовер.
Потеря вызова при хэндовере.Потеря определяется как пре-
рывание разговора по любой причине после того, как связь по ка-
налу трафика была установлена. Вероятность потери вызова
W
(6-D
1
где 1 < п < N - число хз.чдоверсв за время разговора для данной
АС; а,. - весовой коэффициент распределения вызовов, имеющих
указанное число хэндовероз. так что
N
^ал=1, (8.2)
о
319
где а0 - доля вызовов, которые выполняются без хэндовера;
Рп=1-Х"
(8.3)
- вероятность потери связи при прохождении вызова через проце-
дуру хэндовера п раз;
X = П - а) (1 - Р) (1 - у8) (1 - с)2 (8.4)
- вероятность того, что вызов не будет потерян при хэндовере; а -
вероятность того, что уровень мощности радиосигнала упал ниже
порогового значения, соответствующего границе зоны покрытия
Рс-ш пор (это определяющий фактор для системы с ограничением
по тепловым шумам); р - вероятность того, что уровень мощности
радиосигнала упал ниже порогового значения, соответствующего
минимально допустимому значению отношения сигнал-интерфе-
ренция на входе приемника АС рс_ипор (это определяющий фактор
для системы с ограничением по интерференции);
у - вероятность того, что не найден свободный канал трафика в
новой соте; 5 - вероятность того, что вызов вернулся в свою пер-
воначальную соту; с - вероятность того, что в момент запроса
хэндовера был занят канал связи между БС и ЦКПС.
Формула (8.4) справедлива при следующих предположениях.
1. Потери вызова по рассмотренным причинам происходят не-
зависимо друг от друга, поэтому вероятности успешного прохожде-
ния вызовов для разных причин перэмножаются.
2. Вызов будет потерян, когда в новой соте одновременно име-
ют место два независимых события: Z1 - не оказалось свободного
частотного канала и Z2 - вызов не вернулся в свою соту Совмест-
ная вероятность этих двух независимых событий
P(Z; Zj^Z;) = r(Z,)P(Z2) = ..
3. Вероятность успешного прохождения запроса нз хэндовео на
/ \ г \
участке :<он~ролпер БС (действующий) - ЦКПС AiZ3y-=n-с,]. Об-
щая цепь состоит из двух участков: КБС (действующий) - ЦКПС-
КБС ( запрашигаемый), что соответствует вероятности успешного
соединения
P(Z4) = P(Z3)P(Z3) = (1-c)2.
4 Несмотря на наличие двух порогов хэндовера, запрос всегда
посылается при падении уровня сигнала до одного из них, больше-
го по значению. Поэтому можно рассматривать два отдельных слу-
чая. система срабатывает по порогу рс_ш пор (это вариант с огра-
ничением по тепловым шумам) и по порогу рс_ИПОр (это вариант с
ограничением по отношению сигнал-интерференция. Это взаимо-
исключающие ситуации. Поэтому вместо (8.4) запишем
X = (1- р)(1-у§) (W2, (8.5)
где
р = а
(8.6а)
для варианта с ограничением по тепловым шумам и
Р = р (8.66)
для варианта с ограничением по интерференции.
В системах связи с большими интерференционными помехами
на совпадающих частотах для снижения влияния этих помех при-
ходится увеличивать размерность кластера и число сот на терри-
тории. Поэтому радиусы сот в таких системах обычно меньше, чем
в системах с ограничением по шумам.
Весовые коэффициенты распределения вызовов при хэндовере
в (8.2) выбирают на основании практики. Можно принять их при-
мерные значения по данным табл. 8.7 для переносимых АС и по
табл. 8.8 для перевозимых АС. Результаты заимствованы из [3].
Подставив в (8.1) значения весовых коэффициентов распределе-
ния =ызовов из табл. 8.7 и (8.3), запишем вероятность потери вызова.
i аблица 8.7
Число хэндоверов в соте, п 0 1 2 ! J
АС с указанным злзченигм л, % 20 60 20 ;
Весовой коэффициент распре- деления вызовов ас - 0,2 а, = 0,6 а, = 0,2 | 1
Таблица 8.8
Характер ограни- чения в системе Число хэндоверов в соте Весовой коэффициент
По значению рс_шпо₽ л = 0 Яр ~ 1
По значению Рс-ипор п = 0~ а0 = 0,8
! ~ ! 1 г- = 0.2
321
(8.7)
Рпв = 0.6 (1 - X) + 0,2(1 - X2).
В ряде задач можно (8.5) упростить, записав
X" = (1 - р) при 5 « р, у « р, £ « р. (8.8)
Тогда
Рпз = 0,2 р (5 - р) ~ р при р « 1. (8.9)
Расчет параметров р . Будем определять параметры р для со-
ты, где нет внутрисотового хэндовера. Это означает, что после ус-
тановления вызова он не может быть прерван, пока АС не попадет
на территорию с низким уровнем сигнала у границы соты. В общем
виде условие успешного хэндовера
Рс - Рс пор • (8-Ю)
где рс - уровень мощности сигнала на входе приемника, см. (6.63);
Рс пор - пороговое значение уровня сигнала, которое определяет-
ся условиями запроса хэндовера.
Условия (8.10) и (7.31) относятся к одним и тем же сигналам в
радиоканале, где плотность распределения (пространственная)
медленной огибающей подчиняется логарифмически-нормальному
закону со стандартным отклонением^ зависящим от рабочей часто-
ты и характера застройки местности. Поэтому аналогично (7.35)
запишем вероятность выполнения неравенства (8.10):
wx(pc Рспор) = 1 ~F(WX) = F(-Wx), (8.11)
где
Wx = (рс тар- к0 + 10n !g г) /о, (8.12)
- аргумент функции Лапласа при хэндовере, получен по (7.33д) при
замене
Рс=Рспор- (8'3)
Часть относительной площади соты, где условие (8.10) выполня-
ется, определяется соотношениями (7 38) - (7.40), если выполнить
замену (8.13). Та часть общей площади соты радиусом г0, в которой
условие (8.10) не выполняется, определяет искомую величину:
р = (лг02 - Зн х)/(л/г02),
322
где
SHX = jw(pc >pcrop)rdr = j(1-F(Wx)]rcfr
о о
(3.14)
- площадь территории, где хэндовер не происходит, поскольку вы-
полняется (8.10).
Более простое решение можно получить для следующей моде-
ли. В этом случае площадь соты разделяется на несколько колец
посредством концентрических окружностей (рис.8.9). Полагают, что
внутри такого кольца функция Лапласа постоянна и ее значение
определяется внешней границей кольца. Для каждого кольца (/)
парциальная площадь территории, где хэндовер не происходит,
поскольку выполняется (8.10),
S,= jF[-lVx(G)]2nrofr = FblVx(G)]As(. (8.15)
где As, = л(г2 - - площадь кольца; г,- и г,_^ - радиус внешней
и внутренней границы кольца соответственно;
£>,=тг02.
1=1
где А/х - число парциальных зон при расчете хэндовера.
Для каждой границы на рис.8.9 по аргументу (8.12) определяет-
ся функция Лапласа, которая показывает вероятность превышения
сигналом порогового значения на территории вокруг БС, внутри
этой границы. Ожидаемое пороговое значение рс пор должно быть
установлено до начала расчета, затем оно может быть скорректи-
ровано по результатам расчета.
Рис.8.9 Схема для расчета хэндовера
323
Вероятность того, что на территории кольца-уровень мощной
радиосигнала упал ниже установленного порогового значения, 'о,
рэделяется выражением
р,- =1~2^S,/(7troz). (8.16Г
1
Вычисляется разность уровней сигнала на границах кольца:
АР,. =(P,-P,+i)- (8.17)
Величина (8.17) показывает, на сколько децибел уменьшается
уровень медианной мощности сигнала на внешней границе кольца
парциальной области по сравнению с внутренней. Уровень мощно-
сти в (8.17) для трассы «типовая пригородная» определим по
(6.43):
Ар, = 40 lgr,-+1-40lgr,. откуда г, = г/+1-10 (ДЛ 4®) (8.18)
Показатель затухания у = 40 дБ/декада соответствует трассе
«типовая пригородная». Для других трасс его значение выбирают в
соответствии с табл.6.8 или на основании модели Окамуры - Хата.
При делении соты для зылолнения’расчетов можно выбрать один из следую-
щих вариантов.
Заразит 1. Равномерное деление по радиусу, например, выбрав Nx =5 В этой
задЗче as,. = т(2< - 1)л2. Необходимые параметры для расчета указаны в табл. 8.9.
Величина Рс, показывает ожидаемое значение уровня медианной мощности. Для
геймера в табл. 8.9- 8.11 принято ?с(г0) = -100 дБм.
Таблица 3.9
4 2 4 5
i г, Л 2н Зг- 5г,
0.04 С. 12 0,2 0,28 0,36
'Р,- 12 7
-72 ~о4 -91 -96 -100
4 2.92 2.15 1.54
1 1 >. '»Х/ 1 0.9381 0,9841 0.9338
324
.В табл. 8.9 также записаны вычисленные значения аргумента функции Лапласа
§5ри параметрах Pznop =-110 дБм и а, =6,5дБ
Вариант 2 Неравномерное деление по радиусу, исходя из условия :\р- = const
ЬВ этом, случае определяют параметры для расчета, указанные в табл 8.10., где при-
сяге ^5 = ЗдБ 3-(г.7’| =-100 дБм .
З.’С
f 1 2 з * 5
Г;/г0 0,5 0,596 0.707 0,841 1
AS,/(KrG2) 0,25 0,105 0,145 0,214 0,286
дБм -88 -91 -94 -97 -100
Вариант 3. Неравномерное деление по радиусу, исходя из условия Ар, = const .
Минимальный шаг выбирается в области, где хэндовер наиболее вероятен. Пример
параметров приведен в табл. 8.11.
Таблица 8.11
/ 1 2 3 4 5
Др,-, дБ 3 3 1 0.5 0,5
рс; ДБм -88 -91 -94 -95 -95,5
г,-/г0 , % 50 59,6 70,8 75 77,18
AS,- ,% 25 10,5 1-1,7 6.2 3,3 ?
/ 6 1 8 5 10 11 ;
Др,-, дБ 0,5 0,5 1 1 1 -
рс,-. дБм -ао -96,5 -97 -98 -92 -юс :
г,-/гэ . % 79.4 81.7 5 84,1 j 89,1 94.4 00
AS,-,% С .4 J.~T 3,8 3.9 j 6.6 37 Ю.9 ;
Рассмотрим хэндовер на границе между сотг.'Л' БС X / БС У (см рис. 8.9; Наи-
более вероятная область где может иметь место хэндовер. заштрихована. Эта об-
ласть с номером / = 5 Для АС, которая даижется от БС X, вероятность сохранения
связи во время переда-»/ ее от БС X равна г(Л'Л), где И4 = Wy при / = 5 . Обрат-
ная вероятность sx, =е5 -- 1 -F(-И/5). Вероятность потери связи в процессе выделе-
ния для этой АС рабочей частоты на БС У ку, = ех, = >: 5 Вероятность потери вызова
при хэндовере а области 5 ws - [1 - F(-W5)] Положим, что хэндовер может произой-
ти раньше, когда АС находится в области 4 БС X. Аналогично получим выражение для
вычисления вероятности пзтери вызова в области 4 iv4 .- [1 - )][1 - F(-Wc ]
Считаем, что е областях 3-1 хэндовера нет.
Искомый параметр р = (п г^у.
где
Хх = As5 [1 - /=( -W5)] \ Дз4 [1 - F(-Wa)] [1 - F(-W6)] + 19)
+ " ^(-^3 )]+ ASj(1 - Г (-И/2 )] + ДвтП-^-И/))].
Пример. Для расчета по (8.19) воспользуемся данными табл.8.9. Дополнитель-
но нужно определить параметры хэндовера для соты БС Y при / = 6. Положим
Др, = Дре = 4 дБ и, следовательно, = - 104 дБм, И/6 = (-104 + 110) / 6,5 =
= -0,983, F(-IV6) =/=(0,983) = 0,8372.
Подставляя в (8.19) численные значения величин из табл.8.9, получаем р =,
= 0,36-(1 - 0.9838)2 + 0,28(1 - 0,9841)(1 - 0,8372) +0,2 (1 - 0,9981) = 0.0000945 +
+ 0,0007248 + 0,00038 = 0,0012. Наконец, по (8.9) получаем рпв=0.2р(5 - р) = р =
= 0,0012 = 0.12%.
8.4. Система сигнализации по общему каналу
Эталонная модель OSI (Open System Interconnection). В этой
модели под открытой понимается система, которая может взаимо-
действовать с другими в соответствии с заранее определенными
стандартами. Модель предполагает набор стандартных процедур,
устанавливающих правила обмена сигнальной информацией меж-
ду терминалами, процессорами, сетями. Благодаря использованию
этих процедур каждая система оказывается открытой для других
систем.
Эталонная модель OSI состоит из функциональных уровней, так
что каждый уровень немедленно обеспечивает обслуживание бо-
лее высокого уровня. Каждый уровень предоставляется двум или
многим пользователям. Пользователи одного урозня, которые, как
правило, используют разные системы связи, соединяются через
тех, которые находятся на более низком уровне. Отношения между
пользователями одного уровня регулируются протоколами данного
уровня. В модели OS! семь уровней. Рассмотрим их снизу вверх.
1. Физический уровень (или звено передачи данных сигнализа-
ции) определяет правила передачи неструктурированных потоков
данных сигнализации через физическое звено связи, в терминах
OSI - правила передачи между двумя точками сигнализации. Зада-
ет физические, электрические и функциональные требования к
звену передачи данных. Выполняет установление, поддержание и
разрушение физического звена связи. Формат информации - бит.
2. Канальный уровень (или звено передачи данных сигнализа-
ции) определяет функции и процедуры, относящиеся к структуре и
передаче сигнала. Обеспечивает надежную передачу данных сиг-
нализации (ПДС) через физическое звено, поддерживает синхро-
326
низацию и качество передачи, управляет потоком данных. На этом
уровне вводится защита информации, выполняются управление
потоком сообщений, а также обнаружение и коррекция ошибок.
Блок данных на этом уровне называется сигнальной единицей
(SU - Signal Unit). Существует три типа сигнальных единиц. MSU
(Message Signal Unit) - единица сообщения, в составе которой пере-
дается информация; LSSU (Link Status Signal Unit) - сигнальная еди-
ница состояния, которая служит для контроля и управления состоя-
нием канала связи (звена сигнализации); передается при включении
системы и при восстановлении после сбоя; FISU (Fill-in Signal Unit) -
запопняющая сигнапьная единица, которая передается, когда отсут-
ствуют бпоки SU типов 1 и 2. Формат информации - блок.
3. Сетевой уровень выполняет маршрутизацию сообщений и
обслуживание системы в режиме как непосредственного физиче-
ского соединения, так и логического. Отвечает за установление,
поддержание, прекращение соединений. Формат информации -
пакетные блоки.
4. Транспортный уровень обеспечивает надежную прозрачную
(независимо от кода) передачу данных между конечными точками;
коррекцию ошибок, возникающих в каналах связи; управление по-
током. Например, на этом уровне обслуживаются все сообщения
сигнализации в телефонной сети при прохождении вызова. Формат
информации - сообщение. Этот формат сохраняется и для более
высоких уровней (5, 6 и 7).
5. Сеансовый уровень обеспечивает управление между при-
кладными системами. Устанавливает и прекращает соединения
между ними.
6. Уровень представления данных выполняет необходимые
преобразования данных, что лоззоляет использовать стандартный
прикладной интерфейс и устанавливать типовое обслуживание
(шифрование, сжатие и др.).
7. Прикладной уровень является уровнем сопряжения с пользо-
вателем. Позволяет обеспечить эксплуатацию системы связи оп-
тимальным образом. Предоставляет услуги для пользователя сре-
ды (сервер транзакций, протокол передач/ файлов, упразл-эние
сетью).
Уровни 1-3 - это уровни канала связи, с-.и могут быть опреде-
лены во всех узлах связи; уровни 4-7 - лишь на концах системы.
Построение кадра в архитектуре OS.'. На физическом уровне имеем непре-
рывный поток битов. На уровне 2 он структурируется - разделяется на сигнальные
единицы, вводится дополнительная информация’ адрес кадра, биты защиты от
ошибок и т.п. На каждом уровне добавляется заголовок, который содержит необхо-
димую дополнительную информацию Основные форматы сигнальных единиц по-
2,27
казаны на рис. 6.10, где обозначено' FL - флаг занятия; СК - проверочные биты,
SIF - сигнальное информационное поле; SiO - служебный информационный октет,
перечеркнутое поле занимают контрольные биты; LI - длина индикатора, F (FIB) -
прямей индикаторный бит; FSN - прямой порядковый номер; В (BIB) - обратный инди-
каторный бит; BSN - обратный порядковый номер; SF - поле^остояния статуса.
Флаг занятия обозначает начало и конец сигнальной единицы (начало следую-
щего кадра). Стандартный флаг занятия 01111110. Чтобы в информационном поле
не было комбинаций, совпадающих с FL, применяется вставка и исключение битоа.
При передаче после пяти последовательных единиц автоматически вставляется 0,
при приеме он исключается.
FL СК SIF SIO F FSN — В BSN FL
8 16 п х 8. п> 2 8 1 2 6 1 7 1 7 8
б)
СК
SF
6 или16 2
16
IFL СК U F FSN В BSN FL
1 8 16 2 6 4 7 1 7 8
Рис.8.10. Форматы сигнальных единиц:
а - MSU - сигнального сообщения; б - LLSU - состояния канала;
в - FISU - заполнения
Проверочные биты предназначены для обнаружения ошибок передачи. Вклю-
чают четыре поля, аналогичные используемы’.- в протоколе HDLC и предназначен-
ные для обеспечения повторных передач паке-эз при обнаружении ошибок.
Сигнальное информационное поле передает сигнальную информацию пользо-
вателя и метку маршрутизации, которая содес -г/т коды пункта отправления и пунк-
та назначения (узлы сигнализации) и код выбе за канала передачи сигнала.
Служебный информационный сктэт укззь =аат на принадлежность сигнальной
информацию конкретному пользователю, содесст параметры его адреса, нацио-
нальный и служебный индикаторы и др.
Длина индикатора указывает число байтов ••е;эду полями Li и СК.
Поле состояния статуса содержит информацию о состоянии канала. Блок из
3 бит состоит из трех значащих и пяти резерв-3к битов. Поименяется такое коди-
рсьанле значащих битов: ООО - канал на нас:-сен, 001 - нормальная настройка,
101 - занят, С > 1 - не работает и т.д.
Модель ОКО 7. Она построена на ~днципах OSi Соотношения
между уровнями этих моделей поясняет рис. 8 11. Модель ОКС 7
содержит четыре уровня и две подсистемы. Уровни 1,2, 3 протоко-
лов ОКС 7, соответствуют трем нижним уровням эталонной модели
OSi: физическому, канальному и сетезсму. Уровни 1, 2, 3 образуют
подсистему передачи сообщений МТР Вторая подсистема ОКС 7 -
это подсистема управления соединение’/ сигнализации SCCP.
328
Рис. 8.11. Уровни OS! и архитектура ОКС 7
Подсистема МТР состоит из трех уровней: МТР 1 -звено данных
сигнализации, МТР 2 -канал передачи сигнализации и МТР 3 -сеть
сигнализации. Подсистема SCCP по отношению к МТР выступает в
роли пользователя. SCCP рассматривается как четвертый уровень
ОКС 7. Подсистема МТР обеспечивает функции передачи сообще-
ний без установления соединения, a SCCP - дополнительные
функции, необходимые для реализации услуг сети, как без уста-
новления, так и с установлением соединения. Вместе подсистемы
МТР и SCCP образуют о ОКС 7 подсистему сетевых услуг NSP. ко-
торая предназначена для надежной передачи сообщений между
приложениями ОКС 7 и всеми типа,ми подсистем пользователя.
На рис.8.11 в модели ОКС 7 развернут уровень 4 - подсистема
пользователей. Показаны: TUP - подсистема телефонного пользо-
вателя для работы в сети PSTN; ISUP - подсистема пользователя
цифровой сети с интегральным обслуживанием (ISDN): ТСА? - при-
кладная подсистема возможностей транзакций (здесь «транзакция»
- соглашение о взаимодействии между протоколами на базе ком-
промиссов); ASE - прикладной сервисный элемент, выполняющий
процедуры идентификации, изменения местоположения и т.п , а так-
же управления для новых услуг подвижной связи; IN - интеллекту-
альная сеть; RM - радиомодуль; ТС ISP - прикладная сервисная
подсистема
Рассмотрим функции подсистемы передачи сообщений.
Функции звена данных сигнализации (МТР 1). Звено данных
сигнализации обеспечивает одновременную дуплексную передачу
в противоположных направлениях с одинаковой скоростью. Циф-
ровое звено данных сигнализации включает в дебя цифровые ка-
налы и оконечное оборудование, формирующее'интерфейс с сиг-
нальными терминалами. Аналоговый вариант содержит аналого-
вые каналы передачи и модемы. Каналы передачи могут быть на-
земными или спутниковыми. Типовая скорость 64 кбит/с согласно
рекомендациям МСЭ; 56 кбит/с в соответствии с предложениями
ANSI. Скорость 56 кбит/с используется с учетом параметров за-
держек сигнальных сообщений в подсистемах пользователя. Для
приложений управления телефонным вызовом допустима мини-
мальная скорость 4,8 кбит/с.
Функции канала передачи сигнализации (МТР 2) соответствуют
функциям второго уровня модели OSI. МТР 2 и МТР 1 обеспечива-
ют надежную передачу сигнальных сообщений (в виде сигнальных
единиц переменной длины) мевду двумя непосредственно соеди-
ненными пунктами сигнализации.
Обнаружение ошибок производится введением 16 проверочных битов (так на-
зываемая контрольная сумма проверки циклической избыточности CRC).
При отсутствии сигнального трафика в ОКС 7 происходит передача заполняю-
щих сигнальных единиц, тогда как в других протоколах - передача последователь-
ности флагов. В ОКС 7 это дает возможность реализовать мониторинг ошибок с
целью быстрого обнаружения поврежденных’ звеньев сигнализации и их удаления
из процесса передачи.
Предусмотрено исправление ошибок. В ОКС 7 используются два метода: базо-
вый метод защиты от ошибок ВЕСМ и метод принудительного циклического повто-
рения PCR. Они выявляют ошибки во всех трех типах сигнальных единиц: MSU,
LSSU и FISU; исправление ошибок выполняется только для MSU и LSSU.
Для исправления ошибок в базовом методе используются положительные и от-
рицательные подтверждения. При поступлении сигнала отрицательного подтвер-
ждения исправление ошибок осуществляется повторной пересылкой всех блоков
MSU, переданных к моменту получения этого сигнала, вслед за последней сиг-
нальной единицей, на которую получено положительное подтверждение.
Метод PCR основан на использовании только положительных подтверждений
циклическом повторении передачи и превентивном (упреждающем) исправлении
ошибок. Копия отосланного блока MSU сохраняется в буфере передающего око-
нечного оборудования до получения положительного подтверждения об ее успеш-
ной передаче При отсутствии сигнального трафика значащие сигнальные единицы,
для которых не поступили сигналы положительного подтверждения, отправляются
повторно.
Когда число неподтвержденных значащих сигнальных блоков (сообщений или
байтов) превышает допустимое значение, то нормальные процедуры циклического
повторения не обеспечивают исправления ошибок. Такая ситуация может возник-
нуть при высокой интенсивности трафика, из-за которой существенно снижается
скорость повторной передачи сообщений. В этом случае активизируется процедура
330
принудительного циклического повторения: передача новых MSU прекращается и
начинается повторная передача неподтвержденных значащих сигнальных единиц.
Эта процедура продолжается до тех пор, пока число неподтвержденных сообщений
не окажется ниже указанного предельного значения.
Метод PCR используется в тех звеньях сигнализации, где время распростране-
ния сигнала велико. Например, в межконтинентальных звеньях, а также во всех
звеньях сигнализации, установленных через ИСЗ. ВЕСМ в этих ситуациях не при-
годен, так как система отрицательных подтверждений вызывает сильную задержку
передачи значащих сигнальных единиц, содержащих ошибку. Недостаток метода
PCR по сравнению с ВЕСМ - менее эффективное использование полосы частот.
Поэтому звено сигнализации для PCR проектируется для значительно меньших
нагрузок, чем для ВЕСМ.
В ОКС 7 применяются два вида мониторинга ошибок.
• Контроль интенсивности ошибок в сигнальных единицах SUERM выполняется
в действующем звене сигнализации и его результаты используются для отключе-
ния звена при большой вероятности ошибок.
• Контроль интенсивности ошибок фазирования AERM используется на стадии
начального фазирования и обеспечивает отключение звена при значительных
ошибках на этой стадии.
Процедуры управления потоком инициируются при обнаружении перегрузки на
приемном конце. По обратному каналу к передающему концу поступают сигналь-
ные единицы состояния канала с указанием «занято» и задерживается информа-
ция «подтверждаю прием сигнальных единиц». При отсутствии подтверждений на
передающем конце звено сигнализации не отключается. Однако, если состояние
перегрузки продолжается слишком долго (более 6 с), то такоа звено считается по-
врежденным.
Функции сети сигнализации (МТР 3) соответствуют сетевому
уровню модели OS! и отвечают за передачу сообщений между
пунктами сигнализации. Сеть сигнализации включает конечные
пункты сигнализации (ПС), транзитные пункты сигнализации (ТПС),
а также соединяющие их каналы (рис.8.12).
В ОКС 7 выбран связный режим работы, при котором речевые и
сигнальные сообщения передаются s общем канале (16 каналов в
ОКС 7). Известны также несвязный и квазисвязный режимы. Рече-
вые и сигнальные сообщения могут быть разделены и передаются
по разным путям. Несвязный режим выбран для развивающегося
сейчас метода TMN.
Функции сети сигнализации подразделяются на две категории
(рис. 8.13): обработка сигнальных сообщений и управление сетью
сигнализации.
Рис. 8.12. Топология сети
сигнализации МТР 3
331
Рис.8.13. Функции сети сигнализации
Обработка сигнальных сообщений включает маршрутизацию,
распознавание (сортировку) и распределение сообщений. Эти
функции выполняются в каждом пункте сигнализации в соответст-
вии с меткой маршрутизации и полйми байта сигнальной информа-
ции SIO отдельных сигнальных единиц.
При приеме сигнальной единицы от уровня МТР 2 функция сор-
тировки сообщений по коду пункта назначения определяет, пред-
назначается ли принятая сигнальная единица данному пункту сиг-
нализации или адрессгана другому. Если данный пункт является
транзитным, то выполняется маршрутизация сообщения по адресу.
Если же сообщение адресовано этому ТПС, то активизируется
функция распределения сообщений, которая направляет сообще-
ние конкретному пользователю МТР: PSTN, PLMN и т д.
Обычно маршрутизация сообщения к требуемому пункту назна-
чения выполняется по нескольким звеньям сигнализации. Это
обеспечивает равномерное распределение сигнальной нагрузки по
все?/ звеньям сигнализации.
Управление сетью сигнализации предусглатривает изменение
конфигурации сети в случае отказов звеньев или пунктов сигнали-
зации и управление трафиком при их перегрузке либо блокировке.
При сбое реконфигурация сети предотвращает потери, дублирова-
ние и нарушение исходной последовательности сигнальных сооб-
щений, а также чрезмерное увеличение задержек при передаче.
Управление сетью сигнализации объединяет управление сиг-
нальным трафиком, маршрутами сигнализации и звеньями сигнали-
зации. Управление сигнальным трафиком подразумевает изменение
маршрутов сигнального трафика так, чтобы снизить трафик при пе-
регрузке определенного звена. В этом случае запускается процедура
перехода на резерв, которая направляет сигнальный трафик в одно
или несколько звеньев. После того как перегрузка снята, сигнальный
трафик будет переведен в первоначальное звено.
Функция управления маршрутами сигнализации служит для рас-
пределения информации о состоянии сети сигнализации с целью
изменения маршрутов и состоит из следующих процедур:
1. Процедура управляемой передачи. Передача сигнальной ин-
формации через данный ТПС или отказ с учетом приоритетов
пользователей.
2. Процедура запрещения передачи. ТПС сообщает соседним
пунктам сигнализации о том, что маршруты следования сообщений
к пункту назначения не должны проходить через этот ТПС. Указан-
ная процедура может активироваться, например, при отсутствии
доступных маршрутов в определенном направлении.
3. Процедура ограничения передачи выполняется в ТПС для со-
общения соседним пунктам сигнализации о транспортировке сиг-
нального трафика с данным кодом пункта назначения по маршру-
там, не проходящим через этот ТПС.
4. Процедура разрешения передачи сообщает соседним пунк-
там сигнализации о снятии состояния запрета на маршрутизацию
сообщений через данный ТПС.
5. Процедуры тестирования пучка маршрутов выполняются е
ТПС о целью проверки, может ли сигнальный трафик к конкретному
пункту назначения проходить через этот ТПС.
Функция управления звеньями сигнализации используется для
активизации новых звеньев сигнализации, восстановления отка-
завших, и вывода из рабств! действующих.
Подсистема управления соединенном счгн.злизации (SCCP).
Эта подсистема состоит из четырех Функциональных блоков (рис.
8.14). Блок управления (БУ) с установлением соединения упразля-
ет установлением и разъединением сигнальных соединений и слу-
жит для передачи данных по этим соединениям Блок управления
без установления соединения реализует передачу блоков данных
без установления соединения. Блок управления SCM обеспечивает
работу сети в случаях неисправности или перегрузки подсистемы
пользователя SUCP, либо сигнального маршрута
333
Рис. 8.14. Функциональная схема подсистемы управления соединением'
сигнализации
Блок маршрутизации принимает сообщения от МТР или иных
функциональных блоков SCCP и выполняет их маршрутизацию, а
также направляет сообщение в МТР для передачи другому пункту
сети либо передает его другим функциональным блокам SCCP. На
рис. 8.14 обозначено: NSDU - сигнальное сообщение «блок данных
услуги сети» и ОШ - ошибка маршрутизации.
Подсистема предоставляет четыре класса услуг, обозначаемых
цифрами от 0 до 3. Класс 0 - основной класс услуг, не ориентиро-
ванных на соединение. В SCCP сигнальная информация передает-
ся в виде блока данных. Блоки NSDU передаются подсистемой
МТР от исходящей к приемной подсистеме SCCP независимо, по-
этому могут поступать в пункт назначения в последовательности,
отличной от исходной. Поэтому класс 0 называется классом услуг,
не ориентированных на соединение.
Класс 1 - это класс услуг с контролем последовательности
доставки сообщений (подсистемой МТР), не ориентированных на
соединение; в дополнение к функциям класса 0 позволяет более'
высоким уровням указывать подсистеме SCCP последовательность
доставки NSDU-потоков в узел сети.
Класс 2 - основной класс услуг, ориентированных на соедине-
ние. В классе 2 происходит установление временного или постоян-
ного сигнального соединения (например, виртуального канала в
сети) при передаче NSDU-блоков в двух направлениях.
Класс 3 - класс услуг, ориентированных на соединение, с
управлением потоками. Дополнительные услуги по сравнению с
услугами класса 2: управление потоком и порядком следования;
выявление потерянных сообщений. В таком случае сигнальное со-
единение устанавливается заново и передается извещение об
этом (на более высокие уровни)
334
Подсистемы пользователя. ОКС 7 поддерживает многие под-
системы пользователя UP (User Part), использующие услуги МТР и
SCCP. Каждая подсистема состоит из функций и процедур. При-
меры подсистем: TUP - подсистема телефонного пользователя
для работы в сети PSTN; DUP - подсистема пользователя данных;
ISUP - подсистема пользователя цифровой сети с интегральным
обслуживанием (ISDN); MUP - подвижная подсистема; HUP - под-
система хэндовера; ТСАР - прикладная подсистема возможностей
транзакций; МАР - прикладная подсистема подвижной связи спе-
циально для стандарта GSM.
По мере развития систем связи появляются новые прикладные
подсистемы. Так, ISUP реализует функции подсистем телефонного
пользователя (TUP) и пользователя данных (DUP).
Обмен между двумя подсистемами пользователя (передающей
и приемной) выполняется таким образом. Туда посылается «сооб-
щение», обратно - «отклик». На каждое сообщение должен быть
получен ответ-подтверждение. Например, MUP содержит сообще-
ния для обновления данных о местоположении и статусе абонента;
вызова ромеров и др. Примеры сообщений.
1. Пара LUM - LUA: LUM - сообщение о номере 30 данной АС и
запрос о ее категории; LUA - ответ на LUM. Подтверждение об об-
новлении данных о местоположении.
2. Пара LCM - LCA. LCM - приказ стереть сведения о данном
мобильном абоненте. LCA - подтверждение выполнения LCM.
JTpoTOKonbi GSM. Архитектура протоколов взаимодействия
подсистём^СБКГприведена на рис. 8.15. Обозначения элементов
функциональной схемы те же, что на рис. 1.5. Протокол МАР - при-
кладная подсистема подвижной связи специально для выполнения
взаимодействия между функциональными узлами сетевой подсис-
темы GSM: ЦКПС, ОРМ, ВРМ и РИО, так что они могут обмени-
ваться сигнальными сообщениями в следующих случаях: регистра-
ция местоположения; стирание информации о местоположении;
отмена регистрации; обработка /управление/ поиск абонентских
служб; управление параметрами абонентов, т.е. обновление дан-
ных регистров; передача секретных данных: аутентификация и дру-
гие; эстафетная передача абонентов (хэндовер) и другие.
Рассмотрим остальные протоколы рис. 8.15. BSS АР - при-
кладная подсистема (АР) подсистемы БС (BSS). LAPD / LAPD-M -
прикладные подсистемы между БПС и КБС, а также между БС и
АС. Протокол канального доступа обозначен буквой D, мобильный
протокол — буквой М. Протокол X 25 использует подсистема экс-
плуатации и ТО (ПЭТО). Протоколы TUP и ISUP - подсистемы
пользователей при выходе в сети PSTN и ISDN
33b
Рис. 8.15. Архитектура протоколов между подсистемами стандарта GSM|
На рис. 8.15 не показана прикладная подсистема возможностей
транзакций для внутреннего применения ТСАР. Она, в частности;
по глобальному заголовку определяет получателя (ОРМ, РБР и др.)
и направляет ему сигнальную информацию.
Архитектура протоколов взаимодействия АС и ЦКПС для
стандарта GSM приведена на рис. 8.16.
Рис. 8.16. Архитектура протоколов стандарта GSM: АС - ЦКПС
Таблица 8.12
Уровни Протоколы (подсистемы) между ЦКПС и другими пользователями систем
ЦКПС - подсис- тема БС ЦКПС - ВРМ ЦКПС - ОРМ ЦКПС - ЦКПС ЦКПС - PSTN ЦКПС - ISDN
Уровень 7 Уровень 6 Уровень 5 BSS АР МАР TSAP TUP IISUP
Уровень 4 SCCP с уста- новлением соединения SCCP без установления соединения
Уровень 3 МТР
Уровень 2 МТР МТР
Уровень 1 ОКС 7 |
Сверху условно показан запрос вызова. Протоколы ЦКПС обра-
зуют иерархическую систему из семи уровней. Уровни 7, 6 и 5 - это
подсистема BSS АР, которая делится на две прикладные подсис-
темы: DTAP и BSS МАР.
Прикладная подсистема прямой передачи DTAP поддерживает
прозрачный канал между АС и ЦКПС. Информация, передаваемая
по DTAP, не анализируется в ПБС. Включает протоколы СС
(управление соединением, контроль вызова) и ММ (управление
подвижной связью). Протокол СС выполняет обработку сигнализа-
ции пользователю, включая дополнительные услуги. Протокол ММ
служит для обеспечения перемещений и аутентификации.
BSS МАР - прикладная подсистема управления ПБС. Служит
для выполнения процедур между БС и ЦКПС, которым требуется
интерпретация и обработка данных по вызовам или информация
сб управлении ресурсами Управляет выделением радиоканалов.
Уровни 4-1 - это уровни ОКС 7. Протокол RR - радиоресурсы. Вы-
полняет распределение радиоканалов. BTSM - протоколы обмена
в подсистеме БС. Уровень 1 - физический.
На рчс.8 16 показаны только протоколы в сторону АС. В табл.8.12
указаны протоколы между ЦКПС и другими пользователями систем.
Список литературы к главе 8
1. Рекомендации МСЗ-Р. Серия М. 1асти 1 - 5.Подвижные службы и
службы радиоопределения. - Женева, 1997. - 447с.
2. Громаков Ю.А. Стандарты и системы подвижной радиосвязи. - М.:
Мобильные ТелеСистемы - Эко-Трендз, 1997 - 238 с.
3. William C.Y. Lee. Mobile Cellular Telecommunications. Analog and Digital
Systems. Second Edition - international Ed.tioris, 1995. -664 p.
337
ГЛАВА9
ЦИФРОВЫЕ СИСТЕМЫ ВТОРОГО ПОКОЛЕНИЯ
9.1. Транкинговые системы
Общие положения. Основные принципы построения транкинго-
вых систем связи и их и особенности изложены в § 1.2. Примеры
функциональных схем даны на рис. 1.7 и 1.8. Отличительная осо-
бенность транкинговых систем заключается^ том, что функции
коммутации и управления базой данных распределяются по всей
сети между такими элементами, системы как модуль УБС, КБС и
ЦКБС. Это повышает надежность системы и обеспечивает быст-
рую передачу вызовов.
Модуль УБС - это интерфейс между радиооборудованием БС и
КБС. Он контролирует работу всех элементов радиосистемы. КБС
имеет базу данных об абонентах и их статусе, а также базу.данных
о сеансах связи. Наряду с выполнением соединения абонентов"се-
ти (коммутацией) КБС реализует диспетчерский контроль, коорди-
нацию работы АС, поддержку технического обслуживания системы.
ЦКБС выполняет коммутацию между КБС. На ЦКБС возложен цен-
трализованный контроль прохождения вызовов внутри системы..
Полностью управляет системой. Среди функций ЦКБС ведение
абонентской базы данных, идентификация абонента, регистрация
вызовов для ведения счетов, представление статистических дан-
ных работы системы, диагностика работоспособности.
Благодаря распределенным системам коммутации и управления
базой данных можно строить сети с разнообразной архитектурой.
Самые простые состоят из одной или нескольких БС, не связанных
между собой, с одним-двумя радиоканалами. Сложные сети нужны
для обслуживания больших территорий с большим числом абонен-
тов и выходом в сети общего пользования. Для построения сети
используются специализированные интерфейсы
• радиоинтерфейс, определяющий взаимодействие БС и АС;
• радиоинтерфейс непосредственного соединения между дву-
мя АС;
» интерфейс проводной связи для соединения «контроллер БС -
диспетчерский пульт»;
338
• межсистемный интерфейс (МСИ ) для связи между КБС раз-
личных сетей; •
• интерфейсы для подключения к учрежденческим АТС и выхода
в сети общего пользования (ТФОП, ЦСИО и СКП);
• интерфейс управления.сетью;
• интерфейс связи между' терминалом передачи данных и АС
или диспетчерским пультом. ; •
Существует ряд стандартов транкинговых систем, например
TETRA (Terrestrial-Trunked .Radio - наземное транкинговое радио).
TETRA представляет собой единый общеевропейский цифровой
стандарт. Он разработан на основе технических решений и реко-
мендаций стандарта GSM. Все примеры, приведенные ниже, даны
на основе стандарта TETRA.
. Различают следующие режимы работы системы: транкинговая
связь; связь с открытым каналом и непосредственная связь. '
В режиме «транкинговая связь» система присваивает АС канал
связи либо на время всего сеанса связи (транкинг сообщений), ли-
бо на более короткое время только одной транзакции (транкинг пе-
редач). Для следующей транзакции может быть выделен новый
канал. Существует режим «квазитранкинг передач». При этом ка-
нал освобождается с некоторой задержкой’' что позволяет упро-
стить управление.
В режиме «связь с открытым каналом» поддерживается соеди-
нение «точка - много точек» без установочной процедуры. Радио
станции работают в симплексном двухчастотном режиме.
В режиме «непосредственная связь» устанавливаются соедине-
ния между АС по радиоканалам без выхода на БС. Это могут быть
как соединения «точка - точка» так и «точка - много точек».
Каналы связи и управления. Иерархия логических кзналов
представлена на рис. 9.1. Каналы трафика делят на три группы:
1) речевые(ТСН/8); 2) речи и данных пользователя с первичной ско-
ростью 7,2 кбит/с и с непрерывным режимом передачи (ТСН I 7,2);
3) речи и данных пользователя с первичной скоростью 4.8 и 2,4 кбит/с
и пакетной передачей (ТСН / 4,8 и ТСН / 2,4).
На рис 9.1 основные каналы управления разделены по иерархи-
ческим уровням: 1) верхний уровень управления доступом к среде
(МАС); 2) нижний уровень МАС; 3) физический уровень.
Каналы верхнего уровня МАС.
ВССН - циркулярные каналы управления вниз. В их составе ка-
нал для передачи общей сетевой информации (BNCH) и канал син-
хронизации для AC (BSCH). По нему передается информация для
синхронизации АС при включении в систему и для поддержания
синхронизации в процессе работы.
339
СССН - общие каналы управления, включающие основной
(МССН) и дополнительный (SCCH) каналы управления. МССН -
канал, общий для всех АС в зоне обслуживания БС. Всегда имеет
место на первой несущей в первом пакете всех 18 кадров. SCCH
вводят в больших сетях для улучшения обслуживания.
ЕССН - расширенный канал. Является расширением МССН и
SCCH для обслуживания зон с большой нагрузкой. Формируется из
основного и дополнительного «каналов путем выделения им не-
скольких пакетов в одном кадре.
CSCCH - общий дополнительный канал. Выполняет те же функ-
ции, что и МССН, и доступен для всех АО в зоне обслуживания
данной БС
АССН - совмещенные с каналом трафика каналы управления.
Содержат быстрый совмещенный (FACCH) и медленный совме-
щенный 'SACCH) каналы управления. FACCH используется после
перехода АС на выделенный канал и по окончании сеанса связи.
SAC-CH служит для управления ,АС во время работы.
символов. Т?кзя замена нежелательна. Поэтому такой канал эргани-
3*у€Л"СЯ ; О ЛЬ. лО дПЯ П^р‘ЗД£Ч?. ~рОЧИЫХ СССОЩЗНИ»-..
Ка.чапы н-миего уровнг. !лАС:
SCS - канал сигнализации. Под разделяете». на SCH, F - полный,
SCH /НС - пслозинный на линии вниз, SCH /HU - половинный на
линии вверх. SCH/ F занижает оба полупаке а ь едчом временном
пакете Организован в двух направлениях ввеох и вниз.
Каналы обеспечения физического уровня.
ААСН - канал назначения доступа на линии вниз;
CLCH - общий канал управления мощностью и линеаризации
передатчиков на линии вверх.
При включении АС начинает поиск канала синхронизации BSCH,
по которому выполняется синхронизация и АС получает доступ к
другим каналам системы. После этого АС переходит на частоту
основного системного канала управления МССН и получает по не-
му всю служебную информацию, включая информацию для проце-
дуры случайного доступа. Последняя информация постоянно пере-
дается по каналу назначения доступа АССН.
Процедура' вызова по МССН начинается с назначения канала
управления АССН для данной АС, после чего она переходит на этот
канал. После смены частоты выполняется настройка передатчика. За-
тем продолжается процедура установления связи с использованием
канала. По окончании этой процедуры готов канал трафика. В процес-
се работы поддерживается SACCH, при необходимости - STCH.
По окончании сеанса связи в канале трафика организуется
FACCH, по которому передаются команды завершения сеанса. За-
тем АС возвращается на основной канал управления МССН.
Временные структуры МДВР. Кадр МДВР состоит из четырех
субкадров (окон). Мультикадр содержит 18 кадров, гиперкадр -
50 мультикадров. Длительность кадра 53.67 мс, мультикадра - 1,02 с.
В каждом частотном канале организованы четыре физических ка-
нала при частотном разносе между каналами 25 кГц или два кана-
ла при частотном разносе 12,5 кГц.
В окне передают пакет, содержащий 510 бит. Существует шесть
типовых пакетов: 5JUB - стандартный пакет для направления аверх
(рис.9.2,е); NDB - стандартный пакет для направления з.-тиз
(рис.9.2,б); SB - пакет синхронизации для АС (рис.9.2.з); одиноч-
ный стандартный пакет для направления вниз; одиночный пэ?:е~
синхронизации для АС пакет управления.
Стандартные пакеты предназначены для передачи информашю
каналов трафика и управления. Одиночные пакеты -для тех же цэ.тт"-
Только они используются в режимах временного разделения. наг-щ;-
мер, при временном разделении каналов между зонами в развитой
системе. Пакет управления (рис.9 2.а и д) состоит из дзух независимых
полупакетов: вверх (LB) и вниз ( СВ). LB - полупакет сигнала уг.с-аеле-
ния мощностью. Занимает только один (левый) полупакот. СВ - лолу-
пакет канала управления мощностью. Занимает один пс-лупзкет нс
может передаваться б любом из них (левом и правом).
Структуру пакета (рис. 9.2) формируют следующие поля и б.-ты
р ИНФ О1 ИНФ Л
34 4\ 216 22 216 /4./14
a) NUB
01 Ф ИНФ И2 01 И2 ИНФ Ф О1
12 2 216 14 22 16 216 2 10
NOB
01 Ф F И2 S И2 ИНФ Ф О1
12 2 80 120 38 30 216 2 10
Рис.9.2. Типовые пакеты системы TETRA
Р - бит управления мощностью; О1 - стандартная обучающая по-
следовательность; 02 - расширенная обучающая последователь-
ность; Ф - биты регулировки фазы; F - биты коррекции частоты; S -
синхропоследовательность.
Поля для передачи информации канала трафика и канала управ-
ления обозначены ИНФ и И2, причем ИНФ означает, что это поле
могут занимать биты любого из этих каналов, а И2 - только канала
управления. Одной чертой на рис. 9.2 перечеркнуты поля для пере-
ходных битов, двумя чертами - защитные временные интервалы. На
рис. 9.2 указано число битов каждого поля.
Структура одиночных пакетов совпадает в основной части со
структурой соответствующих основных пакетов.
Обучающие последовательности служат для настройки эква-
лайзера, поддержания кадровой синхронизации пакетов и переда-
342
чи информации о структуре пакета. Предусмотрены три стандарт-
ные обучающие последовательности по 22 бита и одна расширен-
ная - 30 бит. Две из них указывают, что в стандартном пакете пе-
редаются один или два логических канала.
Автокорреляционные функции сигналов обучающей последова-
тельности имеют один пик шириной один тактовый интервал и ма-
лый уровень боковых составляющих. Это позволяет надежно опре-
делить начало последовательности на приеме для поддержания
кадровой синхронизации. По виду взаимо корелляционной функции
можно уверенно различить последовательности.
Защитный временной интервал введен в одиночные пакеты для
снижения межканальных помех. Во время этого интервала несущая
не излучается. Биты регулировки фазы служат для восстановления
начальной фазы несущей. Поле из 80 бит предоставлено для кор-
рекции частоты. На этом поле формируются три радиоимпульса с
известными частотами.
Синхропоследовательность длительностью 38 бит предназначена
для кадровой синхронизации АС. Ее автокорреляционная функция
имеет узкий пик, что позволяет надежно определить начало кадра.
Системный протокол. Он определяет иерархию взаимодейст-
вия БС, АС и диспетчерских пультов. Содержит три иерархических
уровня: 1) физический (нижний); 2) канальный; 3) сетевой. Физиче-
ский уровень определяет работу интерфейса и поддерживает
три группы функций: функции управления параметрами радиоканала
(установка частоты и регулировка мощности АС и др); функции об-
работки битов и символов (определение границ физического паке-
та; поддержание тактовой синхронизации и др); функции организа-
ции пакетов (формирование физических пакетов при передаче, а
также восстановление информационных блоков и трансляция их на
уровень 2 при приеме; т.е. шифрование (дешифрование) и др.)
Канальный уровень управляет логическими соединениями и яв-
ляется границей раздела между физической средой и сетевыми про-
цедурами. Подразделяют на два субуровня (рис.9.3): МАС - управ-
ление доступом к среде и LLC - управление логическим звеном.
МАС содержит три группы функций’ 1) канальное кодирование,
(перемежение, сверточное кодирование и циклическое кодирова-
ние); 2) управление доступом к радиоканалам (кадровая синхрониза-
ция, формирование мультикадра, управление случайным доступом и
др); 3) администрирование радиоресурсов (присвоение каналов
связи, мониторинг своей зоны и сканирование соседних; управле-
ние адресами персонального, группового, общего вызовов и др).
; Состав функций определяется персонально для каждой БС и
АС что позволяет эффективно управлять радиэресурсгми без об-
ращения к сетевому уровню.
343
Рис. 9.3. Модель системного протокола i ETRA
LLC организует логические каналы типа БС-АС Поддерживает
обмен данными с более высоким уровнем.
Сетевой уровень служит для управления сетевыми ресурсами.
Подразделяется на два субуровня (см. рис.9.3). Субуровень MLE/
BLE служит для управления связью АС с БС. Это прием и передача
широковещательных сигналов, распознавание протокола, управле-
ние идентификацией, управление услугами, установление соеди-
нения в группе БС-АС. Субурозень SNAF предназначен для управ-
ления мобильностью (ММ), зыбор сети, зоны, регистрация, аутен-
тификация -а т.п.; режимом с коммутацией каналов (СМСЕ); паке-
varzz данных.
Начиная со второго уровня системный протокол по виду обслу-
живаемых данных делится на две области: 1) область управления
(C-piane), обеспечивающую обмен управляющими сообщениями с
возможностью их адресации, которую выполняет программный
управляющий модуль; 2) область пользователя (U-p!ane), которая
не имеет средств адресации и служит для транспортировки ин-
формации.
344
9.2. Беспроводные телефоны и беспроводные
системы электросвязи
Беспроводные телефоны (БИТ) и беспроводные системы элек-
тросвязи (БПСЭС) - это сухопутные подвижные службы, обеспечи-
вающие связь в радиусе несколько сотен метров. От них требуется
эффективное использование спектра; высокая абонентская ем-
кость при сохранении качества связи; информационная безопас-
ность. Гибкость работы должна быть обеспечена без усложнения
распределения частот. Характеристики оборудования должны быть
приближены к характеристикам стационарного телефона, включая
габариты, массу и стоимость оборудования.
Для построения БПСЭС используются основные принципы, при-
нятые для подвижных сотовых сухопутных систем электросвязи
(ССПСЭ). Принципиальные различия этих систем обсуждались в
§ 1.2. В БПСЭС применяется микросотовая и пикосотовая структу-
ра, радиус сот 50 ... 200 м, адаптивное распределение каналов,
для обеспечения связи - новые быстродействующие алгоритмы
переключения абонента (хэндовера). Решение о переключении
принимает АС, а не сеть, как в макросотовых системах. Кроме того,
при радиусе сот несколько сотен метров их емкость может быть уве-
личена в 5 - 20 раз по сравнению с макросотами. В цифровых
БПСЭС, как правило, разделение режимов приема и передачи про-
исходит методом с временным разделением каналов (TDD). Базо-
вые элементы системы также перечислены в § 1.2.
Остановимся на основных областях применения БПЭС.
1. Беспроводная (безшьуровая) телефония домашнего пользо-
вания.
2. Беспроводные УАТС. Для расширения сетей связи з офисах и
беспроводного удлинения линий связи.
3. Эстафетная передача абонента. Позволяет обеспечить связь
по всей области обслуживания, внутри которой поддерживается
вызов Ведение абонента может быть как в одной ячейке, так и ме-
жду соседними ячейками.
4. Беспроводные локальные сети (БЛС). Эта функция поддер-
живается в цифровых стандартах. БЛС образуют линии от терми-
налов к цифровым системам с интеграцией служб.
5. Телепойнт. В зтом случае система разрешает доступ абонен-
та к БС общественного пользования при помощи полностью стан-
дартного радиоинтерфейса, поддерживающего протоколы установ-
ления соединения, аутентификации абонента, роуминга и т.д.
6. Замена локальных кабельных сетей
345
7 Совместная работа с ССПСЭ. Беспроводная система высту-
пает как средство для расширения возможностей сотовой сети.
Например, станция доступа в поездах, морских лайнерах и т.п. че-
рез переносные устройства, соединяющиеся по радио с сотовыми
подвижными терминалами.
Таблица 9.1
Параметр стандарта СТ1 (аналоговый) СТ2 (цифровой) DECT (цифровой)
Тип дуплекса FDD TDD TDD
Тип МД МДЧР МДВР МДВР
Диапазон частот при передаче, МГЦ: фиксированная радио- станция, 959 ... 960 864,1 ... 868,1 1880... 1890
портативная радио- станция 914... 915 То же Тоже
Полоса на канал, кГц 40 100 1728
Скорость на несущую, кбит/с - 72 1152
Число речевых каналов 25 » 40 120
Мощность передатчика, мВт макс 10 макс 10 макс 250
Радиус работы, м: ; снаружи ; 100 200 200
внутри помещения i 50 40 30
Модуляция в речевом Угловая ИКМ-ЧМ с । Г зуссова
канале j фильтром | мм и
5 Г аусса |
! Области применен/* Только 1 1. 2, 4; 5; 6 | Все семь
j ’ Номера областей применения соответствуют приведенному выше списку.
I
В Европе наибольшее распространение получили системы сле-
дующих стандартов: СТ1 - первый аналоговый стандарт, введен в
1985-88 it. СТ2 - цифровой стандарт, введен в 1990 г. Начиная с
1992 г., цифровой стандарт нового поколения - DECT.
Основные параметры стандартов даны в табл.9.1.
46
Список литературы к главе 9
1. Рекомендации МСЭ-Р. Серия М. Части 1-5. Подвижные службы и
службы радиоопределения. — Женева, 1997.
2. Громаков Ю. А. Стандарты и системы подвижной радиосвязи. - М.:
Мобильные ТелеСистемы - Эко-Трендз, 1997. — 238 с.
3. Тамаркин В. М., Громов В. Б., Сергеев С. И. Системы и стандарты
транкинговой связи /. Информационно-технический центр «Мобильные
коммуникации». - М.: Фирма РКК, 1988. - 12 с.
4. Овчинников А.М., Воробьев С.В., Сергеев С.И. Открытые стан-
дарты цифровой транкинговой радиосвязи. (Сер. «Связь и бизнес»). - М.:
МЦНТИ. ООО «Мобильные коммуникации», 2000. - 166 с.
347
ГЛАВ A 10
ЦИФРОВЫЕ РАДИОРЕЛЕЙНЫЕ ЛИНИИ
10.1. Построение сетей соединительных ЦРРЛ
Введение. Современные ЦРРЛ широко используются в магист-
ральных, внутризоновых и местных сетях радиосвязи. На базе
ЦРРЛ невысокой пропускной способности строят местные сети по
принципу «точка - много точек». ЦРРЛ получили широкое распро-
странение в системах подвижной связи как соединительные линии
между БС, между контроллерами БС и ЦКПС. Кроме того, ЦРРЛ
работают в цифровых сетях с радиодоступом. Они также образуют
одно- и двухпролетные радиолинии для доступа к магистральной
ЦРРЛ или. ВОЛС. Все большее распространение получают локаль-
ные сети ЦРРЛ для передачи данных на персональные компьюте-
ры и обмена данными между пользователями, например сеть
включения пользователей з Интернет.
Принципы формирования цифровых сигналов. Различают
цифровые радиорелейные системы (ЦРРС) плезиохронной цифровой
иерархии (ПЦИ) и синхронной цифровой иерархии (СЦИ). В ЦРРС ти-
позая скорость передачи речевого сигнала на выходе аналого-
цифрового преобразователя (АЦП) 6“ кбит/с. В ЦРРС ПЦИ при фор-
мировании цифрового группового сигнала (ЦГС) используются вре-
менное разделение каналов (ВРК). непосредственное кодирование и
времэнное группеэбразовэниэ. Способ непосредственного кодирова-
ния применим для форуирования ЦГС с небольшим числом каналов
на ссноее ВРК. Согласно стандарту СЕРТ первичный цифровой поток
(ПЦЛ) получают объединением цифровых сигналов от 32 каналов
= 32., из которых N - 30 - каналы трафика и два служебных канала.
Иерархический уровень второго порядка получается путем объедине-
ния четырех ПЦП. При образовании вторичного цифрового потока
(ВЦП), третичного (ТЦП) и четверичного (ЧЦП) применяют методы
временного группообразования. Коэффициент объединения 4. При
этом временное объединение каналов выполняется путем чередова-
ния 5итс.г. отдельных каналов с добавлением дополнительных битов
для согласования скоростей потоков. В результате получают плезио-
хронные ЦГС. Каждой ступени иерархии соответствует стандартная
скорость передачи и другие параметры ЦГС (табл. 10.1).
Североамериканский стандарт составлен на основе ЦГС, кото-
рый получен непосредственным кодированием сигналов 24 кана-
лов, объединенных на основе ВРК. Коэффициент объединения 4.
Таблица 10.1
Поток Стандарт СЕРТ Североамериканский стандарт
Обозна- чение потока N/Nq Скорость передачи сигналов пци, Мбит/с Обоз- на- чение N Скорость передачи сигналов пци, Мбит/с
ПЦП Е1 30/32 2,048 DS1 24 1,544
ВЦП Е2 120/132 8,448 DS2 96 6,312
тцп ЕЗ 480/536 34,368 DS3 672 44,736
чцп Е4 1920/ 2176 139,264 DS4 - " 1
В ЦРРС СЦИ используется способ синхронного группообразо-
вания. При этом все ЦГС, имеющие разные скорости, должны быть
сформированы с помощью одних и тех же высокостабильных гене-
раторов. При СЦИ основным форматом сигнала является СТМ-1
(синхронный транспортный модуль - уровень 1). Скорость переда-
чи 155,52 Мбит/с. Параметры кадра СТМ-1: длительность 125 мкс:
скорость повторения кадра 8 кГц.
Структура кадра CTM-N представлена на рис. i 0 1. Кадр форми-
руется как массив из 2430 байт (или 2430 -8= 19 440 бит/с), 9 рядов
по 270 столбцов. Состоит из заголовка (9 • 9 = 81 байт) и области
Рис. 10.1. Структура кадра CTM-N
полезного сигнала. В кадре можно передавать поток Е4 или три по-
тока DS-3. Скорости этих сигналов ПЦИ меньше, чем. общая ско-
рость СТМ-1; Различия связаны с необходимостью компромисса
между стандартами Е и DS, а также необходимостью передавать
дополнительные сигналы. При более высоких скоростях передачи,
используя умножение числа столбцов, формируют кадры CTM-N.
Заголовок кадра СТМ-1 переносит 81 байт информации. Они
образуют три группы: 1) секционный заголовок регенератора;
2) секционный заголовок мультиплексора; 3) административный
указатель.
Иерархические скорости СЦИ (табл. 10.2) образуются с коэф-
фициентом объединения 4. Сигналы более высокого уровня иерар-
хии получают путем побайтного чередования основных сигналов
СТМ -1.
Таблица. 10.2
Уровень иерархии 1 2 3 4
Формат сигнала СТМ-1 ' СТМ-4 СТМ-16 СТМ-64
Скорость передачи, Мбит/с 155,52 622,08 2488,32 9953,28
Принципы формирования ЦГС определяют схему выделения сиг-
налов из цифрового потока. Например, для выделения сигнала одно-
го цифрового канала из третичного цифрового потока необходимо
выполнить полное разделение сигналов *ГЦП, ВЦП и ПЦП. При СЦИ
имеется прямой доступ к сигналам нижних подчиненных уровней.
Другое достоинство формата СТМ: он позволяет согласовывать по-
токи Е и DS, причем радиоканал сохраняется прозрачным для этих
потоков. Наконец, кадр СТМ-1 позволяет передавать служебную ин-
формацию (телеуправление, телесигнализация, служебная связь).
Пропускная способность радиоствола ЦРРЛ часто недостаточна
для передачи сигналов СТМ-1. В этом случае может быть сформи-
рован сигнал «субпоток СТМ-1», обозначаемый ССТМ-1, скорость
которого в три раза меньше скорости потока СТМ-1 и составляет
51,84 Мбит/с
Модель транспортной сети СЦИ. Концепция иерархического
представления транспортных сетей считается одним из основных
принципов, используемых в МСЭ [1] для сетей СЦИ. Модель сети
(рис. 10.2) содержит: сеть уровней каналов, сеть уровней трактов и
сеть уровней среды передачи Отношения между любыми двумя
смежными уровнями являются отношениями сервер/клиент Каж-
дый уровень имеет собственную пропускную способность.
350
Рис. 10.2. Модель транспортной сети СЦИ
Сеть уровней каналов обеспечивает услуги связи для пользова-
телей. Она не зависит от сети уровней трастов. Сеть уровней трак-
тов обычно используется сетями уровней каналов для различных
служб. Сеть уровней трактов не зависит от сети уровней среды пе-
редачи. Подразделяется на уровень виртуального контейнера (ВК)
низкого порядка, основанный на подчиненном модуле, и уровень
ВК высокого порядка, основанный на административном модуле.
Сеть уоовней среды передачи подразделяется на уровень сек-
ций и уровень физической среды. Уровень секций включает уро-
вень секции мультиплексирования и уровень секции регенерации.
Отметим, что сеть уровней физической среды зависит or канала
передачи, например 8ОЛС или радио. Се;<цг;я регенерации также
зависит ст среды передачи. Секция мультиплексирования может
зависеть от среды передачи с ограниченной топологией связи
«точка-точка», а ВК как низкого так и высокого порядков проекти-
руются так, чтобы они не зависели от среды передачи.
Диапазоны частот для РРЛ. Планы частот. Классические
планы частот были разработаны для аналоговых радиорелейных
систем (АРРС). С появлением ЦРРС последние стали работать по
тем же планам частот совместно с аналоговыми или вместо них
На территории России для магистральных РРЛ предназначены диа-
пазоны час гот 4 ГГц (полоса частот 3,4 ... 3,9 ГГц) и 6 ГГц
(5,67 ... 6,17). Для зоновых и местных РРЛ - диапазоны частот 2 ГГц
(полоса частот 1,7 ... 2,1 ГГц); 3 ГГц(7,9 ... 8.4); Ц ГГц(10,7 . . 11,7).
Реально в Регламенте радиосвязи для РРЛ выделено много
больше частотных диапазонов/!, 4; 2; 4; 5; 6; 7; 8; 10; 11; 12: 13; 14;
15; ...; 18; 23; 25; 26; 28; 31; 38; 55 ГГц. В каждом диапазоне частот
обычно выделена одна или несколько полос частот. Пример клас-
сического плана частот показан на рис. 10.3,а, где f0 - опорная час-
тота, И/ -ширина полосы частот. Используется две поляризации
волн - вертикальная (В) и горизонтальная (Г). Выделенная полоса
делится между широкополосными стволами, стволы нумеруются.
Частотный план устанавливает значения центральной частоты
передатчиков и приемников радиостволоз. Частоты приема для
всех стволов выбираются в одном участке спектра, например, ниже
опорной частоты, а соответствующие им частоты передачи - выше.
Так, для каждой станции РРЛ частоты приема стволов перенумеро-
ваны цифрами 1,2,...,8, а соответствующие им частоты передачи -
цифрами 1*, 2*,..., 8*. На следующей станции эти сигналы прини-
маются, а передаются они на частотах 1,2...8 и т.д. Основные па-
раметры частотного плана: XS - разнесение между средними час-
тотами соседних стволов одинаковой поляризации и одинакового
направления передачи; YS - разнесение между средними частота-
ми ближайших друг к другу стволов прямого и обратного направле-
ний передачи; ZS - разнесение между средними частотами крайних
стволов диапазона и соседней границей полосы частот плана. Мо-
гут быть разные значения ZS со стороны нижней и верхней грани-
цы. Частотный сдвиг между сигналами приема и передачи ствола
обозначен DS. Его значение является одинаковым для всех пар
частот приема и передачи в пределах данного плана частот. Как
псззздо, используются дсухчастотные планы, так что параметр DS
- Эю разнесение частот передачи радиоствола прямого и обратно-
го .'.£правле!-:ий сзязи пр/ дуплексной работе.
; '.а-тр/.мер, значения параметров для диапазона 6 ГГц: fs~ 5,92 ГГц
Г/ ьЗО Г/li ц, XS = 56 МГц, Уо - ZC МГц, DS - 2*5о ГЛГц. В хлассиче-
с.ш.т зарлЗнте используются различные поляризации волн для чэ-
ре.’-у.-с-щихся частот ствол эз. чгс определяет развязку между сигна-
г.с.соседних стволов плана как по частоте, так и по поляризации
Для повышения эффективности использования полосы выби-
рают гшан с повторны г использованием полосы частот в совме-
щенном канале (рис 1С.З, 5). Он позволяет ввести дополнитель-
ные радкостволы 1д 2д,... и реализовать раззяв?/ меаду основ-
ными и дополнительными стволами тог.вко по поляризации.
Рис. 10 3. Варианты планов частот:
а — классический; б - с повторным использованием частот;
в - со сдвинутыми частотами
Повторное использование полосы на сдвинутых частотах (рис.
10.3, в) дает возможность реализовать основную развязку по поля-
ризации и дополнительную - по частоте. Предполагается, что име-
ются защитные частотные интервалы, поскольку W1> '//S, где W1 -
ширина полосы частот, выделенная для ствола, И/S - ширина
спектра сигнала.
Классический метод деления полосы частот между радиоствола-
ми выполняется на основе выравнивания опорных частот (рис.
10.4,а) или выравнивания границ каналов (рис 10.4,6). Способ выби-
рается в зависимости от необходимого числа стволов при условии
оптимального использования полосы частот. Этет вь:бор оставляют
на усмотрение администрации связи. Одним из этих способов поло-
сы частот могут быть поделены вторично на субполосы, предназна-
ченные для Ц°РС со средней и малой пропускной способностью.
Рис. 10.4. Деление полосы частот на основе выравнивания опорных час-
тот (а) и выравнивания границ (б)
353
Современные планы частот строят на основании однородных
частотных растров. В них наращивание пропускной способности
системы выполняется путем группирования растров, так что шири-
на полос частот сохраняется кратной основным разносам. В диапа-
зонах частот 15 ГГц и выше выделены полосы частот шириной от
1 ГГц и более. В такой широкой полосе частот одновременно могут
работать несколько служб с различными характеристиками пере-
дачи сигналов и пропускными способностями. План частот должен
обеспечить возможность формировать радиостволы с различной
шириной полосы пропускания. Это достигается за счет получения
средних частот радиостволов на основе однородного базового рас-
тра. При этом все частоты плана разнесены на частотный интер-
вал, кратный растру. Предпочтительными являются растры 3,5 и
2,5 МГц. В частотных планах также используются частоты, разне-
сенные на 3,5 МГц, но размещенные между однородным растром,
т.е. со смещением на 1,75 МГц.
В качестве примера рассмотрим частотные планы для радиоре-
лейных систем, действующих в диапазонах частот 25, 26 и 28 ГГц.
Однородный частотный растр 3,5 МГц позволяет получать опорные
частоты f0 = fp + 3,5р , где: 7р - опорная частота однородного рас-
тра; /j, =24 248 МГц рекомендована для международных соедине-
ний; 1 < р < 285 для полосы частот 24,25...25,25 ГГц; 287 < р < 928
для полосы частот 25,25 ... 27,5 ГГц и 930 $ р < 1500 для полосы
частот 27,5 ... 29,5 ГГц.
Примеры частотных планов, основанных на данной рекоменда-
ции, представлены в табл. 10.3 при условии использования одной
поляризации золн. Возможные варианты планов соответствуют
различным значениям XS разнесения между средними частотами
соседних стволов. Указаны соотношения для определения несущих
частот радиостзолов, где fH - средняя частота радиоствола в ниж-
ней половине полосы частот, fs - средняя частота радиостзола з
верхней половине полосы частот; N - максимальное число ство-
лов; л = 1, 2, 3, .... /V- номер радиоствола. Сдвиг между частотами
приема и передачи в одном стволе 1008 МГц. Опорная частота
f0 = 7р -г 3,5 • 358 = 25501 МГц.
На рис 10.5 показаны примеры планов частот на основе однород-
ных растров при организации восьми стволов (а) и 253 стволов (б)
Полоса частот цифрового ствола. Теорема Найквиста о ми-
нимальной полосе частот позволяет определить минимальную ши-
рину полосы частот видеоканала и форму модулирующих импуль-
354
сов (рис. 10.6,а) для передачи цифровых сигналов без межсим-
вольных искажений (МСИ). Идеальный НЧ фильтра Найквиста
имеет линейную ФЧХ и АЧХ вида «кирпичная стена» (рис. 10.6,6) с
частотой среза
Fn = В/2 = 1/(2Т),
(10.1)
где В = Вс - символьная скорость; Т = 1 /Вс - символьный интервал
при многоуровневой или многопозиционной модуляции; при про-
стой модуляции Т = 1/Вб- тактовый интервал (см. § 1.4).
Таблица 10.3
XS, МГц /н - МГц fB, МГц N
, 112 f0 -1 008 + 112 л f0 +112л 8
56 /д — 980 + 56 л f0 + 28 + 56 л 16
28 70 — 966 + 28 л f0 +42+28 л 32
14 f0 - 959 + 14 л 70 + 49 + 14 л 64
7 f0 - 955,5 + 7 л f0 + 52,5 + 7 л 128
3,5 f0 — 953,75 + 3,5 л f0 +54,25 + 3,5 л 256
Нормированный коэффициент передачи идеального фильтра
Найквиста /<n(B) = 1 при 0<F<FN и /<ц(В) = 0 при F>FN. Ви-
деоимпульс на выходе такого фильтра Найквиста
(гЛ/Т)
(10.2)
25,445 25.557
25.501
Рис. 10.5. Примеры планов частот на оснозе однородных растров при ор-
ганизации восьми стволов (а) и 256 стволов (б)
8-112 Мгц
25.5 7 ГГц
355
Рис. 10.6. К определению полосы частот цифрового ствола:
а - АЧХ идеального фильтра Найквиста; б - АЧХ фильтра с добавочной
полосой; в - отклик на выходе идеального фильтра
На рис. 10.6,е показаны огибающие видеоимпульсов при пере-
даче последовательности 1-1-0. Теоретически в системе поддер-
живается идеальная тактовая синхронизация и тактовые импульсы
(ТИ) поступают на регенератор в моменты пересечения оси време-
ни соседними импульсами. В таком случае будет иметь место при-
ем без МСИ.
На практике реальный момент дискретизации в регенераторе не
соответстзует нулевым значениям огибающих соседних импульсов.
Ошибки з системе синхронизации, например из-за фазового дрожа-
ния или постоянного смещения, порождают МСИ. Кроме того, обыч-
но используются генераторы прямоугольных импульсов. При этом,
чтобы получить импульс вида (10.2) следует включить перед модуля-
тором амплитудно-частотный эквалайзер (фильтр).
Реально для работы без МСИ используют сглаживающий
фильтр Найквиста, АЧХ которого определяется на основании тео-
ремы Найквиста об остаточной симметрии. 3 соответствии с этой
теоремой добавление к АЧХ идеального НЧ фильтра Найквиста
наклонно-симметричной относительно частоты среза функции
удерживает на месте точки переселения оси времени импульсным
стклгкс.’л (нули' Сохранение местойзложения э~их нулей - необ-
ходимое условие передачи без МСИ.
Нзклекно-сиглметричная функция
“i'V'N ~,fL) ПРИ 0 < А < Ajj;
0,5 > о;+ F) > 0.
Изолированная АЧХ сглаживающего филь юа (рис. 10.6,6)
k^Kn(F)^F)
" | о
при 0 < F < (1 + o.'jF^:
при F > (1 + a.)FN.
Добавочная полоса частот
DF = a.FN
(ЮЗ)
где 0 < a < 1 - коэффициент спада АЧХ или коэффициент скругле-
ния импульса. Результирующая полоса частот увеличивается не
более, чем на DFmSK =F^, следовательно, не более чем вдвое.
Теореме Найквиста об остаточной симметрии соответствует
функция «приподнятый косинус», которая используется на практи-
ке. В этом случае
0,5 {1 - sin[(T / 2a)(F / FN -1)]} при (1 - a)FN < F < (1 + a)FN,
1 при 0 < F <('-o.)Fn; (Ю.4)
О при F>(1 + a)FN.
^acos ~
Отклик на выходе такого фильтра
sin(nf/F) cos(aTf/F)
^COS\‘) “ . , -г ' 9 •
ntIT 1-(2at/T)2
(10.5)
При используемых методах модуляции ширина спектра моду-
лированного сигнала увеличивается в два раза по сравнению с
шириной спектра модулирующих импульсов. Исключение могут
составлять сигналы с частотной модуляцией. С учетом добавоч-
ной полосы частот ширина полосы цифрового ствола при фазо-
вой модуляции (ФМ)
^<зм — (1.-1,2)Bgij4-a).
(10.6)
Ширина полозы частот цифрового ствола при многолозицисн-
ной фазовой модуляции (.МФМ)
Цифм = -г а) ~ 1068.(1, а)
ИЛИ
Цлфм - 1.06(8g /!од2 Мм)(1 - а).
(10.7)
где - число уровней (позиций) модуляции; Врк >ВС - скорость
передачи в радиоканале. Она выше символьной скорости из за до-
бавочных служебных битов (техобслуживания, прямого исправле-
ния ошибок и т. п.) В системах ЦРРС СЦ’Л это увеличение состав-
ляет примерно 3 %.
При одинаковой битовой скорости входного потока полоса час-
тот при 4ФМ s два раза ниже, чем при ФМ, поскольку символьная
скорость передачи в два раза ниже, чем битовая.
Ширина полосы частот цифрового ствола при многоуровневой
частотной манипуляции (МЧМ)
ПМчм я ес0 + а) + (Мм - 1)ДА,
где ДА - девиация частоты.
Спектральная эффективность при многоуровневой модуляции
показывает, сколько двоичных единиц передают в удельной полосе
частот 1 Гц. Она определяется по (1.3), а при использовании доба-
вочной полосы частот
Гсм =В6/ПФМ »log2MM/(1 + a). (10.8)
Для передачи цифровых сигналов обычно нужна гораздо более
широкая полоса частот, чем для передачи аналоговых. Требования
к минимальному значению спектральной эффективности для
ЦРРС, работающих в диапазонах частот ниже 15 ГГц, были опре-
делены из условия, чтобы ЦРРС были сопоставимы по числу те-
лефонных каналов в стволе с аналоговыми РРЛ. Поэтому в ЦРРС,
работающих в диапазонах частот ниже 15 ГГц, обычно используют
многопозиционную квадратурную амплитудную модуляцию (КАМ).
Это системы с модуляцией 16 КАМ, 32 КАМ; 64 КАМ...512 КАМ.
В диапазонах частот выше 15 ГГц, где спектр более свободен, ус-
тановлено правило усм>1 (бит/с)/Гц. Данное правило позволяет
использовать модуляцию 4 ФМ или 4 КАМ. На коротких одно-двух-
пролетных ЦРРЛ применяют также 4 ЧМ.
Архитектура ЦРРЛ для соединительных линий в ССПСЭ Та-
кие ЦРРЛ обычно предназначены для передачи цифровых потоков
со сравнительно низким трафиком по коротким пролетам между со-
седними БС, между БС и контроллерами БС, а также для подачи сиг-
налов к ЦКПС (рис. 10.7). Заметим, что необходима разная пропуск-
ная способность на различных участках сети ЦРРЛ. Предположим,
что каждая БС на рис. 10.7 поддерживает один ПЦП. Тогда на проле-
те БС 2-БС 6 необходимо обеспечить передачу одного потока Е1. На
пролетах БС 7-БС 8 нужно передавать трафик, эквивалентный cev«
ПЦП, а на пролете БС 4-ЦКПС и БС 8-ЦКПС - трафик, эквивалент-
ный восьми ПЦП. При больших трафиках применяют ВЦП и ТЦП.
Для повышения надежности, схема сети обычно составляется так,
чтобы каждая БС имела выход к ЦКПС по нескольким ЦРРЛ. Отме-
тим также, что в сети могут быть достаточно протяженные ЦРРЛ с
большим числом коротких пролетов.
Рис. 10.7. Сеть ЦРРЛ для ССПСЭ
Архитектура ЦРРС ПЦИ показана на рис.10.8. Она включает ан-
тенный модуль (AM), радиомодуль (РМ) и модуль доступа (МД).
Модули соединяются коаксиальным кабелем (КК). Антенный мо-
дуль й радиомодуль составляют наружную часть станции. Их тех-
нические параметры определяются частотным диапазоном ЦРРС и
не зависят от трафика. Эти модули могут быть конструктивно объ-
единены. Модуль доступа представляет собой интерфейс к кана-
лам трафикаГ~Устанавли^ается-еПпомещении. Технические'пара-'
метры модуля доступа не зависят от частотного диапазона и выби-
раются в зависимости от емкости трафика и конфигурации систе-
мы. Длина кабеля обычно может достигать 200 м. ЦРРС с резерви-
рованием по схеме 1 + 1 (рис. 10.9) имеет два радиомодуля, каж-
дый со своей антенной, что позволяет реализовать резервирова-
ние радиоаппаратуры и пространственное разнесение на приеме.
Основные функциональные блоки модуля доступа: интерфейс к
аппаратуре каналов трафика БС, мультиплексор/ демультиплексор
и блок коммутации. Входные ПЦП (восемь .потоков по 2,043 Мбит/с)
объединяются во ВЦП (два потока по 8,448 Мбит/с). Блок коммута-
ции подает оба этих потока к передатчику РМ1, а при аварии этого
передатчика - к РМ2. Работой блока коммутации управляет ава-
рийный сигнал (АС), который поступает по каналу внешней аварии.
Прием выполняется на две антенны и всегда вместе работают при-
емники двух радиомодулей РМ1 и РМ2. Сигналы с выходов приемни-
ков объединяются в схеме сложения (автовыбора). Для управления
работой станции и всей сети служит сервисный модуль.
Рис. 10.8. Архитектура
ЦРС-ПЦИ
Рис. 10.9. Функциональная ЦРРС ПЦИ с резервированием
к РМ1, РМ2
Два радиомодуля можно подключить к одной антенне через уст-
ройство сложения на передаче и делитель мощности на приеме и
реализовать частотное разнесение. В этом случае РМ работают на
разных частотах. Увеличив число радиомодулей, можно построить
ЦРРС с резервированием по схеме 2+1 и др.
Двухствольную ЦРРС без резервирования (2 + 0) реализуют ис-
ключив из схемы рис. 10.9 блок коммутации. Радиомодули работа-
ют на разных частотах. В этом случае можно использовать либо
две отдельные антенны, либо общую антенну и радиочастотные
фильтры.
Модули доступа позволяют получать на выходе различные ком-
бинации ПЦП и ВЦП. Например, txeMbi без мультиплексирования
дают одиночный ПЦП и одиночный ВЦП. При мультиплексировании
объединяют от двух до восьми ПЦП или два ВЦП, или, например,
ВЦП + 4 ПЦП.
Ргдиомсдуль. Это устройство содержит микроволновый блок и
модем. В модеме (р::с. 10.10) выполняется цифровая обработка
сигнала и модуляция (демодуляция). На шине соединения с моду-
лями доступа и сервиса показаны точки: 1(2) - вход (выход) кана-
лов трафика, 3 (4) - вход (выход) канала'служебной связи, 5 - по-
дача сигналов упразлэния и 6 - подача АС. Для согласования с
кабспылол соединительной пинией уста.-юзг.ены чнтерфейсы кана-
лов трсфлкг (ИНТ КТ), служебной связи (ИНТ КС) и микропроцес-
сора (ИНТ ,МС). В состав ИНТ КТ входит регенератор, а также ге-
нераторы сигнале-;:. ;-;:-:дмкгции аварийного состояния (СИАС). При
пропадании входного (выходного) сигнала трафика СИАС1 посту-
пает з когг рспьную точку 11, а информацию о потере сигнала на
выходе даст СИАС2 (в точке 12). Аварийные сигналы кз контроль-
ных точек поступают к .микропроцессору системы управления и
контроля.
Основные функции микропроцессора сисг< мы управления и
коьгрс-ля контрЭмо работоспособности блоксв и формирование
сигнала общей аварии, регистрация значения вероятности ошибок
и генерация аварийного сигнала при превышении значения вероят-
ности ошибок 10~3, управление частотой синтезатора, установка вы-
ходной мощности, управление характеристиками при мониторинге,
измерительными шлейфами и т. п. Этот микропроцессор также
поддерживает цепи контроля и управления параметрами микро-
волнового блока.
Доступ к ИНТ МС и к точке 6 обеспечивает сервисный модуль
(см. рис. 10.9). Ко всем устройствам управления и контроля радио-
модуля имеется доступ через этот терминал.
Мультиплексор объединяет в общий цифровой поток сигналы
каналов: трафика, служебной связи и АС, который поступает от
микропроцессора. Скорость передачи сигнала на выходе мультип-
лексора поддерживает система синхронизации.
В блоке модулятора выполняется типовая обработка: деление
входного цифрового потока на синфазный и квадратурный,
скремблирование, манипуляционное кодирование и фильтрация
(скругление огибающей) модулирующего сигнала. В общем случае
манипуляционное кодирование выполняет схема отображения.
Она формирует многоуровневый сигнал из синфазного и квадра-
турного потоков. При модуляции 4ФМ схема отображения физиче-
ски отсутствует, и оба этих потока поступают на модулятор. В точке
7 - модулированный сигнал ПЧ.
Принятый сигнал ПЧ демодулируется и далее проходит через
типовые устройства: регенератор, декодер, дескремблер.
На рис. 10.13 для примера показано несколько точек контроля
работоспособности устройств и подачи аварийных сигналов Они
обозначены цифрами 11. 12, 13 в кружках. Демультиплексор дает
сигнал аварии, если потеряна кадровая синхронизация (точка 13 -
контроль правильности кадра). Предусмотрены общие сигналы
аварии, внутречней - между блоками одной станции и внешней -
на пролетах.
Микроволновый блок (рис. 1С.11). Гетеродинный тракт радиопе-
редатчика содержит генератор G1 с ФАПЧ, умножитель частоты U1 и
ПФ Z1. Частота входного ФМ сигнала повышается в смесителе UZ1.
Далее модулированный СВЧ сигнал проходит через типовые блоки
радиопередатчика: фильтр боковой полосы Z2, усилитель мощности
А1, ПФ Z3, радиочастотный аттенюатор АЗ.Через ферритовый цир-
кулятор VVE2 радиосигнал поступает к антенне WA Для установки и
контроля уровня мощности используется ответвитель V-1E1. детектор
UR1 и блок управления выходной мощностью А2. Передатчик вы-
ключается посредством выключения А1 (цепь 991).
AC
Рис. 10.10. Функциональная схема модема
Рис. 10.11. Функциональная схема микроволнового блока
362
Радиоприемник выполнен по схеме с двухкратным преобразова-
нием частоты, которое происходит соответственно в смесителях UZ3
и UZ2. Первая ПЧ около 1 ГГц, вторая - 140 МГц. Двойное преобра-
зование частоты с высокой первой ПЧ обеспечивает необходимую
частотную селекцию в широкой полосе частот. На входе может быть
установлен МШУ (на схеме не показан). Усилитель первой ПЧ А6 и
ПФ Z4 размещены в радиоблоке. Аналогичные устройства для вто-
рой ПЧ - в блоке демодулятора. Гетеродинный тракт содержит мест-
ный генератор G2 с ФАПЧ, умножитель частоты U2 и ПФ
24.Управляемый переключатель А4 и ответвители WE1 и VME2 по-
зволяют замкнуть радиочастотный шлейф при измерениях.
Показаны цепи управления и контроля: 901 - выключение пере-
датчика; 902 - петля по радиочастоте; 903 - нет выходного сигнала
радиопередатчика (авария); 904 - авария генератора передатчика;
905 - авария генератора приемника; 906 - управление частотой;
907 - установка выходного уровня.
Поскольку рассматриваемые ЦРРЛ соединяют БС, то энергети-
ческие параметры микроволнового блока меняют в зависимости от
расстояния между БС. Приходится варьировать «мощность радио-
передатчика в широких пределах. Радиочастотный аттенюатор АЗ
устанавливается при необходимости значительно снизить выход-
ной уровень (на 30 ... 50 дБ). Плавный аттенюатор А2 позволяет
регулировать уровень мощности выходного усилителя примерно в
пределах 0 ... 25 дБ.
Как правило, семейство радиомодулей может работать в не-
скольких частотных диапазонах. В качестве примера рассмотрим
семейство ЦРРС LINK (ML) фирмы Ericsson. Используемые
полосы частот указаны в табл. 10.4. Общая полоса частотного диа-
пазона подразделяется на субполосы перекрытия. Каждая субпо-
лоса - это полоса частот передачи (приема) которая предоставля-
ется одному радиомодулю (при постоянном сдвиге частот приема и
передачи) Рабочая частота может перестраиваться в пределах
субполосы с дикретным шагом. Субполосе перекрытия присваива-
ется индекс, и радиомодули ЦРРС различаются по этому индексу.
В табл. 10 4 указана ширина полосы частот диапазона (ИА и даны
примерные значения субполос перекрытия (*//с). Точные значения
определяются планами частот.
Б табл. 10.5 дан самый простой план часто1-. Он имеет всего од-
ну пару индексов. Это план MIN! LSNK-26. Шаг перестройки '-'астоты
Fp= 1,75МГц. Субполоса перекрытия Wc = Fp- пт-,п -1) =
= 1,75 (511 - 255) = 448 .МГц.
363
Таблица 10.4
! M’Ni LiNK Диапазон час- тот, ГГ ц И/, МГц V7C, МГц
ML-7 7,13.. . 7,73 600 50
ML-15 14,4 .. 15,35 950 100
ML-23 21,6.. . 23,6 2000 550
ML-26 24,5 .. . 26,5 2000 500
ML-38 L 37,0 .. . 39,5 2500 280
Таблица 10.5
Индекс Частота пере- дачи, МГц Частота сдзига, МГц Частота прие- ма, МГ ц п
24 24549 + п- 1,75 1008 25557 +л -1,75 256... 511
29 25557 + п 1,75 1008 24549 + л- 1,75 256 ... 511
Система М!№ LINK-15, например, содержит 20 лар индексов,
причем используются несколько значений частоты сдвига.
10.2. Оснобь! расчета ЦР?Л
показателе качества ЦныД. В качестве эталонных целей при
прэектирсзачиг. ЦРРС используют: гипотетический эталонный
цифровой тракт (ГЭЦТ), протяженность которого L 'равна 25G0 км,
или участок (L - 50 и 230 :<м), а также гипотетическое эталонное
соединение (L = 27 500 км) Для РРЛ ГЭЦТ состоит из девяти уча-
стков по 280 км. В ГЭЦТ различают участки высокого, среднего и
локального качества. Границы между участками высокого и средне-
<“3 К-£ЧеоТск2 НЭ УТОЧНЯЮТСЯ. НорРЛЫ На ПЗрЭМвТСЫ ОПрвДвЛвИЫ по
сммутируемому каналу 64 кбит/с и указаны в рекомендациях МСЭ-Р
F. 695, F. 596 и F. 697. Принята методика пересчета в зависимости
о т скорости передачи.
Параметры цифровых каналов систем электросвязи определяют
па основе рекомендации G. 321 МСЭ-Т [2] и новой рекомендации
G.826 МСЭ-Т [3]. В рекомендации G.S21 параметры показателей ка-
чества по ошибкам получены на основании следующих событий: се-
кунда с ошибками (СО) и секунда, пораженная ошибками (СПС).
Интервал, длительностью 1 с, в течение которого наблюдаются
ошибки в одном или нескольких битах, - это СО; СПО - это интер-
вал в 1 с, в течение которого коэффициент ошибок по битам (КОБ)
превышает 10~3 Для бинарного цифрового сигнала КОБ представ-
ляет собой отношение числа битов, принятых с ошибками, к обще-
му числу битов, принятых за данный интервал времени.
В новой рекомендации G.826 определены более высокие пока-
затели качества для цифровых каналов связи. Эффективные меры
по повышению помехозащищенности ЦРРС позволяют реализо-
вать такие высокие показатели качества.
Допустимые значения показателей качества зависят от скорости
передачи и распределены международным и национальным участ-
кам ГЭЦТ. Граница между участками проходит через национальный
шлюз. Для национального тракта определены участки: доступа,
короткий и протяженный, как показано на рис. 10.12.
Рекомендация G.826 МСЭ-Т разработана для постоянной ско-
рости передачи битов, которая равна'/или превышает первичную.
Рекомендация составлена на основё^йзмерения показателей каче-
ства по ошибкам в блоках. Состояние каждого блока контролирует
код с обнаружением ошибок. Показатели качества по ошибкам по-
лучаются на основании следующих событий: блок с ошибками
(БО); новая секунда с ошибками (НСО): новая секунда, пораженная
ошибками (НСПО); фоновый блок с ошибкой (ФБО). Блок, в кото-
ром один или несколько битов являются ошибочными, называем
БО. Секунда, в течение которой наблюдаются ошибочные блоки
(один или несколько), называется НСО. Если в течение секунды
наблюдается не менее 30 % блоков с ошибками, то это НСПО. Оп-
ределение «новая» означает, что события оцениваются по блокам,
а не по битам, как раньше. Наконец, ФБО - это блок с ошибками,
не являющимися частью СПО.
Показатели качества: коэффициент секунд с ошибками
Ксо = ,?со коэффициент секунд, пораженных ошибками
Каю = фоновый коэффициент ошибок = пфбс /ДУ,
Участок доступа Короткий участок Протяженный участок
Рис. 10.12. Структура национального участка ГЭЦТ-
ОПТ - оконечный пункт тракта; МК - местный коммутатор; УС* - узел
сети (первичный, вторичный, третичный); МШ - международный шлюз
36b
где все числа в правой части определены в период готовности в
течение фиксированного интервала измерений длительностью Nz
секунд; - число секунд с ошибками; - число секунд, пора-
женных ошибками; л^ - число ФБО.
Коэффициент секунд, пораженных ошибками, вычисленный при
условии, что коэффициент ошибок по битам превышает установ-
ленное значение, представляет собой процент времени нарушения
связи или неустойчивость:
TXv™) = 100КСПО, (10.9)
где vmjn - минимально допустимое значение множителя ослабле-
ния, при котором коэффициент ошибок по битам достигает уста-
новленного значения; время наблюдения (Л/£) - месяц.
Используется также запас на замирания
Z = -vmin. (10.10)
На основе рекомендаций МСЭ-Т G.321 (составлена на основе
измерения показателей качества по битам) и G.826 (составлена на
основе измерения показателей качества по блокам) получен ряд
рекомендаций МСЭ-Р для ЦРРЛ (табл. 10.6). При этом на основа-
нии определения БО и предположения, что ошибки носят случай-
ный характер, было вычислено, что новая СПО соответствует се-
кунде, в которой КОБ не менее, чем 1,7 10 ”5.
Для реальных ЦРРС допустимое значение времени нарушения
устойчивости связи Т(у^п), %, определяется выражением
Таблица 10.6
Показатели качества ЦРРЛ Значения показателей качества согласно реко- мендациям МСЭ-Р:
F. 594, F. 634, F. 696, F- 697 F. 1092, F. 143Э
Допустимый КОБ 10~3 Указан в рекомендациях 1,7-10~5 Вычислен
Допустимая неус- тойчивость при L-гип ~ 500 км 0,054 % 0,014 %
Фоновый коэффи- циент ошибок По битам 2... 3-1О'4 По блокам 2-10’4 • (FL + BL)
366
Г(^п) =0,054 (L/2500) (10.11)
на участке высокого качества длиной L < 2500 км и выражением
Г(^п) =0,002 (Fl + Bl) (10.12)
на международном или национальном участке, где FL - коэффици-
ент расстояния; BL - коэффициент допустимого отклонения для
блоков.
Для международного участка и для протяженных национальных
участков
Fl =0,001 (L/500); (10.13)
для коротких национальных участков и линий доступа FL = 0.
В формулах (10.11) - (10.13) длина L выражена в километрах.
Для линий национального участка значения BL приведены в
табл. 10.7.
Таблица 10.7
Линии национального участка Коэффициент BL Обозначение
Протяженные 0,01 -0,02 BL = А
Короткие 0,075 - 0,085 BL = В
Доступа 0,075 — 0,085 и. са
Примечание. Должно зыполняться условие (А + В + С) < 0,175 .
Параметры и нормы на готовность. Показатели качества по
ошибкам должны, оцениваться только для тракта, который находит-
ся в состоянии готовности. Период неготовности начинается после
10 последовательных секунд, пораженных ошибками. Эти 10 с яв-
ляются частью периода неготовности. Новый период готовности
начинается после 10 последовательных секунд, не пораженных
ошибками. Эти 10 с считаются частью периода готовности. Тракт
находится в состоянии готовности только в случае, когда оба на-
правления передачи находятся в состоянии готовности. Допусти-
мые значения коэффициента готовности (/Q зависят от места
ЦРРС в сети. На участках высокого качества ,КГ = 99,5 99,9 %.
Используется также коэффициент неготовности Кн: = 100 %-К',.
367
Для участков среднего качества коэффициент неготовности в
обоих направлениях вследствие всех причин не должен превышать
значений, указанных в табл. 10.8, которые относятся'^достаточно
протяженному периоду времени, обычно более года.
Таблица 10.8
Класс качества 1 2 3 4
Коэффициент неготовности, % 0,033 0,05 0,05 0.1
Основные причины неготовности в радиорелейных системах;
отказы радиооборудования, модемов и вспомогательного оборудо-
вания, отказы в антенне или фидере, а также импульсы помех от
внешних источников, деятельность персонала также может приво-
дить к состоянию неготовности и т.п.
На состояние готовности влияет тракт распространения радио-
волн. Перерывы в работе системы вследстзие глубоких быстрых
замираний часто длятся менее 10 с, однако иногда бывают замира-
ния длительностью более 10 с, приводящие к состоянию неготовно-
сти. Чрезмерное ослабление сигнала в осадках (сильные ливни или
снегопады) длится довольно долго и вызывает состояние неготовно-
сти в системах, работающих в диапазонах частот выше 10 ГГц.
Принято считать, что на частотах выше примерно 17 ГГц преоб-
ладает ослабление сигнала в дожде, а на частотах до 10 ГГц - ис-
кажения вследстсие многолучевого распространения. Поэтому
ЦРРС следует проектировать исходя из требований на неготов-
ность при работе на частотах выше 17 ГГц :: исходя из пока? зтелей
качества по ошибкам три работе на частотах ниже примерно
10 ГГи; при работе, а диапазоне частот 10 ... 17 ГГц следует учиты-
вать оба покэзатэля. Чоказгтели качества по сшибкам и коэффи-
циент неготовности являются типичными параметрами ЦРРЛ.
Расчет замирений сипаюз. Двухлучеэзя и трехпучевзя мо-
дели рэдискэнала широко используются при анализе влияния ин-
терференционных замираний сигнала. Причина этих замираний -
сложение на приёме нескольких волн, имеющих разные пути рас-
}$росТ|..с.немия. с*;о прямэя волна и волна. осаженная ог слоистых
неоднородностей тропосферы, а также отраженная от поверхности
Земли. Влиянием последней волны можно пренебречэ для пра-
вильно спроектированной трассы. При такой модели радиокзнала
распределение у розней сигнала на входе приёмника в канале под-
чиняется закону Репея-Райса.
Интерференционные замирания подразделяют на плоские % дис-
персионные. Последние известны также как частотно-селективные
замирания (ЧСЗ). Плоские замирания определяют устойчивость ра-
боты РРЛ, ЧСЗ вызывают значительные искажения сигналов ЦРРС
Расчёт запаса на плоские замирания. При проектировании РРЛ
определяют отношение сигнал-шум, на входе приёмника в услови-
ях свободного пространства
Ло ~ Рс. вх PtN •
(10.14)
где рс вх - уровень мощности сигнала.в точке приёма при распро-
странении в свободном пространстве [см. (6.1)]; pTN - уровень
мощности теплового шума в полосе Найквиста [см. (6.67), (6.69)].
Запас на плоские замирания
^пл ~ чо 9п>
(10.15)
где - пороговое отношение сигнал-шум на входе приёмника,
дБ, определенное при максимально допустимом значении вероят-
ности ошибки в цифровом канале; в относительных единицах поро-
говое отношение сигнал-шум запишем в виде Qn = 10° .
Влияние внешних помех эквивалентно воздействию внешнего
теплового шума. Представляют
1/Ол =1/Q= +1/GU, (10.16)
где пороговые отношения сигнал-шум Q_=10o,1q" и =10олс'
соответствуют стационарной и переменной составляющим тепло-
вого шума. Вместе (10 16) можно записать
С,;- ЦКщЮ ° Щ ‘ ]. (10.i?)
Стационарная составляющая короелирована с сигналом, так
что отношение q= rpk замираниях не меняется Запас будет
компенсировать замирания переменней составляющей Поэтому е
условиях свободного пространства
Отсюда
Znn= -10!g[l0-°-1?” 10~0,‘° ]-q„ . (10.13)
В расчет принимают следующие переменные составляющие:
собственные тепловые шумы приемника; помехи на совпадающей
частоте и на других частотах. Помехи на совпадающей частоте:
кроссполяризационная помеха в совмещенном стволе: сигналы
36S
других трасс, принимаемые задним ил/ боковыми лепестками ДНА;
сигнал своей трассы, но от передал- .iKa другого пролета. Помехи
на другой частоте: кроссполяризационная помеха от соседнего
ствола; сигнал других трасс, принимаемый задним или боковыми
лепестками ДНА; внутрисистемные помехи при приёме и передаче.
Стационарные составляющие теплового шума - это помехи на
частоте несущей: эхо-сигналы в фидере; сигналы своего передат-
чика, принимаемые обратным и боковыми лепестками ДНА.
При проектировании составляется схема воздействия помех на
каждом пролёте и рассчитываются их уровни.
Вместо (10.18) часто можно пользоваться упрощенной форму-
лой:
^пл~ Рс.вх Pen + •
(10.19)
где рс п - минимальный (пороговый) уровень мощности сигнала на
входе, при которой вероятность ошибок в цифровом канале не
превышает допустимого значения (пороговое значение приёмника
указывают в технических параметрах ЦРРС); Ад - энергетический
запас на другие факторы (внешние и внутренние помехи за исклю-
чением собственных ТШ).
Пороговое значение отношения сигнал-шум зависит от метода
модуляции и способа демодуляции. В табл. 10.8 приведены теоре-
тические значения отношения сигнал-шум яри вероятности ошибок
в канале рош = Ю'6. Приняты обозначения: фтеор - отношение
сигнал-шум на входе приёмника, определенное при рош=10“6
теоретическое значение; %Teop = дтеор ~ 10!og2(/WM) ~ отношение
энергии бита сигнала к спектральной плотности теплового шума,
теоретическое значение; — минимальная необходимая ширина
полосы частот цифрового ствола г.с Найквисту; В = В5~ битовая
скорость передачи двоичных символов.
При рош=Ю-ь порогоаое отношение сигнал-шум на входе
приемника = фтеор + AQ.
Методика расчёта влияния плоских замираний. Действующие ме-
тодики МСЭ базируются на усреднённых параметрах трасс - геокли-
матических, геометрических и аппроксимирующих выражениях. Со-
временная методика включает дза этапа. Первый этап предлагается
для начального планирования, второй - для детального. На началь-
ном этапе расчёта не используется конкретный .профиль пролета.
370
Таблица 10.8
Методы модуляции и демодуляции Теоретические значения при р =10~6 ОШ nN
«Г ,ДБ б.теор <? дБ теор
,'ЧМ с детектированием ‘на дискриминаторе ЧМ 13,4 13,4 В
ЗЧМ 15,9 15,9 В
4ЧМ 20,1 23,1 В/2
ФМ с когерентным детектированием ФМ 10,5 10,5 В
4ФМ 10,5 13,5 В/2
8ФМ 14 18.8 В/3
16 ФМ 18,4 24,4 В/4
КАМ с когерентным детектированием 16 КАМ 17 20,5 В/4
32 КАМ 18,9 23,5 В/5
64 КАМ 22,5 26,5 В/6
128 КАМ 24,3 29,5 В/7
256 КАМ 27,8 32,6 В/8
512 КАМ 28,9 35,5 В/9
Аппроксимирующие формулы и коэффициенты получены на ос-
нове статистического анализа результатов измерений на 47 трас-
сах, расположенных в разных районах мира. Они действительны
при глубине замираний более 15 дБ или для значений, о?кидге.мых
в течение не более 0,1% времени худшего месяца. Параметры этих
47 трасс: протяженность 7 ... 95 км, угол наклона 0 ... 2.4 мрад,
диапазон частот 2 ... 37 ГГц. Метод рекомендован к применению во
всем мире для трасс с подобными параметрами иля з более широ-
кой области.
1. Этап предварительного планирования. Вероятность нэрушз-
ния связи из-за глубоких плоских замираний
Рпя = г-1йа-1’«» =г Ю0-12-”.
где
г = Ю~2РО,.,,
(10.20)
(10. 21)
- коэффициент частости замираний для конкретной трассы; его
значение определяется местоположением трассы й' её параметра-
ми, климатическими условиями и другими факторами;
Рол = KQ:PRC , (10.22)
- опорный коэффициент для данной трассы, который представляет
собойпроцент времени глубоких замираний для наихудшего меся-
ца; г? - протяженность пролета, км; f - несущая частота, ГГц;
К - гезклиматический коэффициент, который учитывает влияние
атмосферы и местности; коэффициент Q учитывает другие пара-
метры грассы, отличные от R и f; коэффициенты В, С учитывают
региональные эффекты
Например, для районов на территории бывшего СССР; В - 1,5 и
С = 2. Для районов северной Европы В = 1 и С = 3, для районов
северо-западной Европы В = 1 и С = 3,5.
На этале предварительного планирования Q = (1 + g)~1,4, где
е = - h2 IR - наклон трассы; h, - высоты, м, антенн над уров-
нем моря (слева и справа на пролёте).
Геоклиматический коэффициент К вычисляют в зависимости от
климатической зоны, географических координат станции и других фак-
торов. В общей методике [41 представлены полные данные для опре-
деления К Для ряда географических районов приведены эмпириче-
ские значения коэффициентов KQ, как, например, в табл. 10.9.
2. Этап детального планирования трасс выполняется с исполь-
зованием реальных профилей пролётов. На профилях указывают
Таблица 10.9
KG, % Климатические районы на территории | бывшего СССР !
Морские и прибрежные с умеренным кл^ма- ! том, а также с высокой злажностыо и темпе- j
Среднеширотные, удаленные от моря со 1 ерэднехолмистым рельефом, с умеренном климатом
-3 —. 4 O.-1Q-3 Прибрежные с равнинным рельефом и умэ~ р Энны?/» климатом j
От 7.6-10 -3 до 2-10-3 Удаленные от .-ларя с равнинным рельефом, о '^меренныйй клима rot.*
значения высот местности, измеренные через 1 км. По этим высо-
там составляется «средний профиль трассы». Необходимые рас-
чётные выражения и методы даны в [6].
Методика расчёта влияния частотно-селективных замираний.
Для расчёта вероятности нарушения связи из-за МСИ при ЧСЗ
предложено три метода: запаса на замирания; нормализованной
сигнатуры; линейной амплитудной дисперсии. Ниже рассмотрен
метод нормализованной сигнатуры.
Вероятность нарушения связи из-за дисперсионных замираний
зааисит от обеих составных частей пролета: тракта распростране-
ния радиоволн и аппаратуры. Эта вероятность определяется вы-
ражением
РД = ГрРмс^ (10.23)
где
гд = д-10-2Роп (10.24)
- вероятность глубоких ЧСЗ для конкретной трассы;
о К
Рмси=Сфт2 ”. (10.25)
'с
- вероятность ошибок из-за ГлСИ, возникающих в аппаратуре при
глубоких ЧСЗ на пролёте;
- коэффициент активности ЧСЗ, Сф и т?.; - параметры законов
распределения соответственно относительной амплитуды и за-
держки запаздывающего луча; Кн - нормализованная сигнатура;
Тс = VBC- символьный период.
Для двухлучевой модели радиоканала групповое время задерж-
ки является случайным параметром, момент второго порядка кото-
рого определяет глубину замираний. Модуляция учитывается с
помощью .
Для получения расчётных значений необходимы некоторые
предположения о распределении вероятности задержки к относи-
тельной амплитуды отраженного луча, а также о положении часто-
ты провала АЧХ. Предполагается, ч~о частота провала распреде-
лена равномерно, а запаздывание имеет либо экспоненциальное,
373
либо гауссовское распределение. Для относительной амплитуды
также принимается несколько возможных вариантов распределе-
ния: равномерное, экспоненциальное. Релея и др.
Задержка зависит от местоположения трассы и существенно
меняется от пролета к пролету. Для трасс с незначительными от-
ражениями от земной поверхности была установлена зависимость
.2
т
R
Ro
(10.27)
где Ro =50 км - протяженность опорного пролета; тт0 = 0,5... 1,5 нс -
задержка на опорном пролете; л = 1...1,5 и зависит от характери-
стик распространения.
Для расчёта конкретных трасс пользуются опорными моделями.
В качестве опорных моделей предложены варианты трасс, пред-
ставленные в табл. 10.10. В этих моделях распределение плотно-
сти вероятности задержки - экспоненциальное, п = 1,3...1,5..
Таблица 10.10
Параметры модели Модель трассы
1 (1982 г.) 2(1983 г.) 3(1985 г.)
Распределение отно- сительной амплитуды Равно- мерное Экспонен- циальное Вейбулла
сф 1.0 •2,16 4,0
тт0 нс 1 0,7 0,5
Нормализованная сигнатура не зависит от скорости передачи
символов и определяется «форматом модуляции». Понятие «фор-
мат модуляции», объединяет метод модуляции, коэффициент
скругления импульса и метод приёма, включая корректоры МСИ.
Примерные значения нормализованной сигнатуры для современ-
ных ЦРРЛ приведены в табл. 10.11. Применение адаптивных кор-
ректоров в основной полосе частот позволяет снизить значение
сигнатуры в 10 ... 20 раз.
Таблица 10.11
Вид модуляции 4 ФМ 8ФМ 16 КАМ 64 КАМ
Нормализованная сигнатура Кн 1.0 7.0 5,5 15,4
Ки при коррекции 0,2 - 0.3 0,4
374
Общее время нарушения связи. Общая вероятность наруше-
ния связи из-за интерференционных замираний
Р1=Рпп+Рд 00.23)
Используя (10.21) и (10.24), представим (10.28) по аналогии с
(10.20):
Рх = 0,01Pon10"°'1z- = 0,01Pon(l0~°-1Z"'’ + Ql0“°’1Zfl j, (10.29)
где
Z£ = lOIg^l 0_°-1Zrl" + р10~°’12д j (10.30)
-. комплексный запас на замирания; - запас на дисперсионное
замирание.
-01Z
Из (10.29) определим Рд = 0)01/=>ог.ст10 ’ д . Преобразуем левую
часть, используя (10.23) - (10.25):
Zfl = -101дРмси = 101д[СфТ2 KN !Т*\ -А (10.31)
*•’ 'О»
В соответствии с (10.9) и (10.29) ожидаемый процент времени
месяца нарушения связи
^=ГПЛ+Гд, ’ (10.32)
где Гпл(ипл) = 100Рпл - вклад плоских зЗймираний, %; T\=PR -
вклад дисперсионных замираний, %.
Специальные меры повышения устойчивости связи. Для
повышения устойчивости связи применяют: частотное, пространст-
венное и угловое разнесение, а также установку корректоров в час-
тотной области (корректор наклона амплитудной характеристики) и
во временной (адаптивный трансверсальный фильтр) и др. В таком
случае вместо (10.32) общее время нарушения связи
Д/ = + Т.а (Ю.ЗЗ)
'пл 'д
где /пл, /д- коэффициенты улучшения соответственно для плоских
замираний и ЧСЗ.
При плоских замираниях коэффициент улучшения за счёт раз-
несения можно оценить по следующим приближенным выражени-
ям: для частотного разнесения
375
/пл 4 = [O,S/pR)j(67 /г)10°'17пл ;
для пространственное о разнесения
/ПГ; пр =1,2-1C~3S2(/','^)1001(Zn'l“S9)
где f - частота, ГГц; R- расстояние, км; (ffR) - относительный
разнос частот, %; S - вертикальное разнесение антенн,
м; дд = д. - д2 , дБ; Zrn- запас, дБ.
При дисперсионных замираниях для частотного разнесения
/д ч = 5 = const и для пространственного - /д пр = (Гс .
Коэффициент улучшения при адаптивных корректорах диспер-
сионных замираний /дк = Кн /'/<н к , где Ккк — нормализованная
сигнатура для системы с корректором (см. табл. 10.11).
В ЦРРС применяют совместно пространственное разнесение и
адаптивную коррекцию. При этом результирующий коэффициент
улучшения оказывается больше, чем произведение двух отдель-
ных. Такое явление названо синергическим эффектом.
Результирующий коэффициент улучшения /д+к = /д пр/д КЕ, =
= 0.5/д пр;' д.к. гДе 4 ~ С,5 /дк - синергический параметр.
Алгоритм расчёта устойчивости ЦРРЛ..Исходные данные:
1. Энергетические параметры системы: мощность передатчика
Р„, коэффициент усиления передающей антенны д_ и коэффици-
ент усиления приёмной антенны gnp; коэффициент шума приёмни-
ка ?УТ; ослабление сигнала з фидерах ; рабочая частота.
2. Параметры модуляции: метод, символьный период Тс, сигна-
тура реальная или нормализованная Ки.
3. Параметры радиоканала для проектируемых пролётов: про-
тяженность пролёта R, опорный коэффициент трассы Роп [(10.22)
и табл.10.9)1 и Другие параметры (табл. 10.10);
4. Сведения о специальных мерах повышения устойчивости:
разнесенный приём, адаптивные корректоры и т.п.
Блок-схема алгоритма расчета представлена на рис. 10.13.
Нормы на показатели качества рассчитывают пз (10.11) — (1G.13) и
по данным табл. 10.6 и 10.7. Оценка выносится по соотношению
ТК,)^,. (10.34)
Нормы по устойчивости выполнены, если (10.34) выполняется.
376
Рис. 10.13. ьлок-схема алгоритма расчета устойчизести ЦРРЛ
Когда задача проектирования предполагает определение про-
света на пролетах, то его выбирают таким, чтобы исключить влия-
ние рефракционных замираний.
377
В общем случае при расчёте трассы осуществляют проверку вы-
волнения рекомендаций по устойчивости и по коэффициенту простоя.
Методика расчёта влияния осадков. Прогноз ослабления сиг-
нала, вызванного дождями, основан на определении значения по-
терь в дожде, которое может превышаться в течение малого про-
цента времени месяца (р = 0,01 %). Предполагается, что такое зна-
чение потерь соответствует значению интенсивности дождя, пре-
вышаемому за то же самое время. Эта концепция равной вероят-
ности не согласуется с метеорологической информацией и не
вполне удовлетворительна с теоретических позиций. Однако полу-
чаемая точность прогноза согласуется с качеством и разбросом
данных об интенсивности дождей. Методика предполагает, что из-
вестна долгосрочная статистика дождя для местности’ в которой
находится трасса. Другими словами - по крайней мере известны
значения интенсивности осадков, превышаемые в течение 0,01 %
времени месяца.
Ослабление сигнала в дожде, превышаемое в течение р = 0,01 %,
/1(0,01) = У//?эфф, (10.35)
где
у, =W“ (10.36)
- удельное затухание, дБ/км, при заданной интенсивности дождя
/д(0,01); /?эфф - эффективная длина трассы (использование эф-
фективной длины вместо реальной позволяет учесть неравномер-
ность распределения дождя вдоль реальной трассы); значения ко-
эффициентов степенной аппроксимации к, а получены для частот
1 ... 1000 ГГц [6-8].
В модели приняты такие предположения. Температура среды
20° С. Капли дождя имеют сфероидную форму и сплющены вдоль
вертикальной оси вращения. Поэтому значения коэффициентов
степенной аппроксимации будут разными для волн горизонтальной
(Г) и вертикальной (В) поляризации, т. е. приведены два значения
кг и кв для к, а также аг и ссв для а, как показано в табл. 10.12.
Значения коэффициентов на частотах, не указанных в табл. 10.12,
могут быть вычислены путём интерполяции с использованием ло-
гарифмической шкалы для частот и коэффициентов к, а также ли-
нейной шкалы для коэффициента а.
Значения коэффициентов для круговой поляризации и для ли-
нейной с учётом геометрии трассы:
к = 0,5 [кг + кв + (кг - ) cos2 0cos(2t)]; (10.37)
378
Таблица 10.12
f, ГГц аг «в
ЬйММ»--.; ?10 0,0101 0,00887 1,276 1,264
12 0,0188 0,0168 1,217 1,200
.15 0,0367 0.0335 1/154 1,128
420 0,0751 0,0691 1,099 1,065
•25 0,124 0,113 1,061 1,030
~ ; 30 0,187 0,167 1,021 1,000
35 0,263 0,233 0,978 0,963
Г 40 0,350 0,310 0,939 0,929
а = [(1/(2А)] [А’гсхг+ /свав+ (кг аг — кв ав) cos^ Q cos(2t)], (10.38)
5де 6 — угол подъема трассы (угол места); т — угол наклона поляри-
зации по отношению к горизонту; т = 45° для круговой поляризации.
К Эффективная длина трассы R3t}xp = RkTp (0,01), где ктр(0,01) =
|=1 /[1 + (R / Lo )] - коэффициент укорочения трассы; Lo =
р=35ехр[-0,015/д(0,01)] - опорное расстояние при /д< 100 мм/ч. При
|/д > 100 мм/ч принимается /д = /тах = 100 мм/ч.
Ослабление сигнала в дожде для р = 0,01 ... 1 %
А(р) = /1(0,01)0,12р~(0'546+0-043:9₽:, (10.39)
где р выражено в процентах. Эта зависимость показана на
рис. 10.14.
Для оценки интенсивности дождя пользуются экспериментальны-
ми данными метеорологии. Они характеризуют долговременное рас-
пределение осадков (усреднённых за год или за месяц) и имеют
приемлемую достоверность при обработке результатов за 5 ... 7 лет.
Рис. 10.14. Статистическое распределение ослабления сигнала в дожде
В расчётах используются значения среднеминутной интенсив-
ности осадков, усреднённые за год. При отсутствии эксперимен-
тальных данных для определённой местности грубая оценка может
быть получена на основе [8]. Согласнр этой рекомендации Земля
поделена на 15 дождевых климатических зон: А,В,С, ... ,N,P,Q. Для
каждой зоны установлено значение интенсивности осадков, пре-
вышаемое в течение 0,1 и 0,01% времени среднего года. Напри-
мер, по карте дождей составлена табл. 10.13 для Евразии. Карта
дождевых климатических зон Земли приведена, например, в [9].
Таблица 10.13
Территория ьвразии (примерные границы) Зона /д, ММ/Ч •
р = 0,01% р = 0,1%
Средняя часть с центром здоль параллели 65° с.ш., район (65°±10°) С 15 5
Северные районы, выше 70...75° с.ш. А 8 2
Юг, примерно 45...55° с.ш. Е 22 5
'/ндокитай К 42 12
Другие F.H и др.
При проектировании требуются статистические данные о рас-
пределении среднеминутной интенсивности осадков для наихуд-
шего месяца. Связь между данными для среднего года и для «наи-
худшего» месяца определяется следующим выражением:
рг = ОГеР®; В = 1 -1 - при 0.001 % < рг < 3 %,
где рг - процент времени среднего года; рм - процент времени
наихудшего -месяца; Q-, р - эмпирические коэффициенты, изме-
ренные для различных климатических зон (приведены в справоч-
нике МСЭ по метеорологии).
Для районов с относительно малыми сезонными колебаниями
интенсивности дождя G< = 2,85; р = 0,13; р, = О.Зр^;15; 1.9-10-4 <
< рм % < 7,8.
Для России (точнее, территории бывшего СССР) существует
карта районирования по интенсивности осадков, насчитывающая
29 районов [9, 1G-. Для каждого района получены кривые статисти-
ческого распределения среднемянутных значений интенсивности
380
!рсадков для наихудшего месяца в году. Осадки такой интенсивно-
сти наблюдаются от двух до четырех раз за пять лет. Для России
применима зависимость рм = /<Г(/Д)дг, где значения коэффициента
)£СГ(/Д) определены по группам дождевых районов. Эти 29 районов
разделены на четыре группы в соответствии с тем, как часто по-
вторяется «наихудший» месяц. Например, для группы № 1 - четы-
ре раза за 5 лет, для группы № 3 (Европейская часть территории
России и Сибирь) - один раз за 4-5 лет. Значения Kr\iR) для груп-
пы № 3 приведены в табл. 10.14.
Таблица 10.14
. /д,мм/ч 20 50 100
4,5 6.3 8
Выше обсуждались величины при усреднении за 1 мин. При
пересчете к другим усреднениям (за сутки, час, минуту, секунду)
Для районов с умеренным климатом в диапазоне значений
р..= 0,0001 ... 1 % получаем:
/д(т = 1 мин) к 5/д(т = сутки);
/д(т = 1мин)«(1,3-1,5)/д(т = 1 ч);
/д(т = 1 мин) « /д(т = 1 с).
Рассмотренный метод прогнозирования ослабления в осадках
ПТр'игоден для всех трасс протяженностью до 60 км и в диапазоне
^.частот до 40 ГГц. Считается, что возможна корреляция между та-
[кими замираниями на разных пролётах. В наихудшем случае может
Гбыть выполнено сложение вероятностей замираний по отдельным
Пролётам.
Ослабление сигнала в дожде влияет на готовность системы.
Список литературы к главе 10
1. Рек. F.750 МСЭ-Р. Архитектура и функциональные характеристики
радиорелейных систем для сетей, основанных на синхронной цифровой
иерархии.
2. Рек.С. 821 МСЭ-Т. Характеристики ошибок в международном циф-
ровом соединении, образующем часть сети с интеграцией служб.
3. Psk.G.326 МСЭ-Т. Параметры и нормы показателей качества по
ошибкам для международных цифровых трактов с постоянной скоростью
передачи, равной или выше первичной скорости.
3S1
4. Рек. Р. 530 МСЭ-Р. Данные о распространении радиоволн и методы
прогнозирования, необходимые для проектирования наземных систем,
работающих в пределах прямой видимости.
5. Рек. F.1CS3 МСЭ-Р. Влияние многолучёвости распространения ра-
диоволн на проектирование и работу цифровых радиорелейных систем
прямой видимости.
6. Справочник по цифровым радиорелейным системам. - Женева.
МСЗ. Бюро радиосвязи, 1996. —396 с.
7. Рек. Р. 838 МСЭ-Р. Модель удельного затухания радиоволн в дожде,
используемая в методах прогнозирования.
8. Рек. Р. 837 МСЭ-Р. Характеристики атмосферных осадков для мо-
делирования распространения радиоволн.
9. Бородич С.В. ЭМС наземных и космических служб. Критерии, усло-
вия и расчёт. М.: Радио и связь, 1990. —272 с.
10. Спутниковая связь и вещание: Справочник . — 3-е изд. /В.А. Барте-
нев, Г.В. Болотов, В.Л. Быков и др. под ред. Л.Я. Кантора. - М.: Радио и
связь, 1997. — 528 с.
382
ГЛАВА 11
СИСТЕМЫ СПУТНИКОВОЙ связи с подвижными
ОБЪЕКТАМИ
11.1 Принципы построения систем глобальной
персональной подвижной спутниковой связи
Глобальное информационное сообщество (ГИС) рассматрива-
ется сегодня как новая прогрессивная общественная формация.
Одна из основ ГИС — глобальная сеть систем связи, которая, в
свою очередь, опирается на спутниковые и наземные подвижные
системы связи. Эта сеть является основой глобальной информа-
ционной инфраструктуры (ГИИ), идея создания которой впервые
была заяалена МСЭ в марте 1994 г. Осенью 2000 г. Россия при-
соединилась к Окинавской хартии по созданию ГИС.
. Функциональная схема спутниковой системы подвижной связи
была приведена на рис. 1.10. Самая простая спутниковая линия
связи состоит из двух земных станций (ЗС) и одной космической
станции (КС) — ретранслятора на ИСЗ. Такое положение КС позво-
ляет объединять в глобальную сеть местные и национальные на-
земные системы связи. Ретранслятор на ИСЗ позволяет формиро-
вать любые «мгновенные инфраструктуры», расширяя и дополняя
наземные сети связи. С помощью ИСЗ можно организовать дейст-
вительно универсальные соединения внутри зоны обслуживания,
независимо от географического положения наземных сетей, плот-
ности населения, уровня экономического развития территории.
'"Важно, что затраты на спутниковую систему связи практически не
связаны с протяженностью линий и местоположением района. Эко-
номический эффект растет при обслуживании ^рльших территорий
и организации линий «точка - много точек». Одно из важных досто-
инств спутниковой системы - сочетание технической, экономиче-
ской и эксплуатационной гибкости. По этим причинам эти системы
занимают ведущее положение в ГИИ.
Современные КС позволяют передавать сигналы непосредст-
венно на абонентские терминалы. Используя в спутниковых систе-
мах связи несколько КС, можно сформировать на Земле глобал ь-
383
ну'ю зону обслуживания. ^Абоненту такой сети- может быть предос-
тавлен канал связи повсеместно, невзирая на границы. Так реали-
зуется концепция глобальной персональной связи. Ее девиз:
«всем, всегда, везде».
Виды орбит. В спутниковых системах связи Используются такие
орбиты, как геостационарная (GEO), наклонная высокоэллйптиче-
ская, средневысотная круговая (МЕО) и низковысотная круговая
(LEO).
Геостационарная - это круговая орбита в плоскости экватора,
высота которой около 36000 км. Сидерический период обращения
ИСЗ по такой орбите равен земным суткам, и поэтому геостацио-
нарный ИСЗ оказывается неподвижным для наблюдателя на Зем-
ле. Связь через геостационарный ИСЗ можно поддерживать посто-
янно, без временных ограничений. Это большое достоинство при
организации спутниковых систем. Поэтому ИСЗ на геостационар-
ной орбите широко используются в фиксированной спутниковой
службе (ФСС). Плохо только, что спутниковые линии связи через
геостационарный ИСЗ имеют большую протяженность. Сигнал на
трассе испытывает большое ослабление (около 200 дБ). Для прие-
ма такого сигнала в ФСС на ЗС используются узконаправленные
антенны. Кроме того, на такой протяженной трассе эхо-сигналы
становятся заметными настолько, что нельзя работать без эхо-
заградителей. Названные недостатки практически делают невоз-
можным использование геостационарных ИСЗ для непосредствен-
ной связи с абонентскими терминалами. Еще один недостаток -
зона обслуживания геостационарного ИСЗ не охватывает припо-
лярные районы.
Также невозможно поддерживать связь с любой течкой терри-
тории Земли через ИСЗ на любых наклонных круговых орбитах,
кроме полярных. Поэтому принято говорить о связи в глобальном
масштабе для определенной территории и с определенной вероят-
ностью.
Высота низкой орбиты 700 . 1400 км. При высоте около 1000
км протяженность трассы КС-ЗС уменьшается в 36 раз по сравне-
нию со спутниковыми линиями связи через ИСЗ на геостационар-
ной орбите, а ослабление си-нала - примерно на 30 дБ в случае
сохранения рабочей частоты. Прием непосредственно на абонент-
ские терминалы становится возможным. Сидерический период об-
ращения ИСЗ по низкой орбите 1 ... 2 ч. Продолжительность сеан-
са связи через один низколетящий ИСЗ составляет несколько ми-
нут и нужны десятки ИСЗ для поддержания круглосуточной связи.
Глобальная система связи нуждается в установке примерно 200 ба-
зовых земных станций (БЗС). Выбор квазиполярных орбит позво-
ляет поддерживать связь со всеми районами Земли, включая
приполярные.
Высота средневысотной орбиты выбрана равной около 10355 км
так, чтобы орбита оказалась между радиационными поясами Зем-
ли. Срок службы ретранслятора на средней орбите больше, чем
срок службы ретранслятора на низкой орбите, которая часто лежит
внутри первого радиационного пояса Земли. Наклонение средне-
высотной орбиты выбирают в пределах 45 ... 55 °. Период обраще-
ния ИСЗ около 6 ч. Продолжительность сеанса связи через один
ИСЗ составляет 1,5... 2 ч.
Для создания связи в глобальном масштабе для населенных
районов Земли в этом варианте достаточно иметь 10-12 ИСЗ. Как
правило, в зоне обслуживания одновременно видны два ИСЗ, что
позволяет каждый раз выбрать тот, для которого больше угол мес-
та. Например, в системе Одиссей рабочий угол места р ~ 30° га-
рантирован с вероятностью 0,95. ИСЗ на средней орбите видны
под большими углами места, чем на низкой. Следовательно, в пер-
вом случае, влияние экранирующего действия зданий и деревьев
при приеме на абонентский терминал будет меньше.
Глобальная система связи через средневысотные ИСЗ нужда-
ется в установке примерно десяти БЗС, что на порядок меньше по
сравнению с системой через низковысотные ИСЗ.
Технические параметры систем глобальной персональной
спутниковой связи на низких и средневысотных орбитах. Пара-
метры для нескольких типичных проектов этих систем приведены в
табл. 11.1.
Орбитальная группировка системы Глобалстар обеспечивает
постоянное двукратное покрытие территории Земли между 70-й
параллелью с.ш. и 70- параллелью ю.ш. Оценка на модели сети
показала [1], что вероятность поддержания связи р = 0,99 для рай-
онов между 40° с.ш. и 50° с.ш.; р = 0,9 для районов между 70° с.ш и
60° с.ш., а также между 40° с ш и 30° с.ш.
Обеспечение глобальности. Для поддержания глобальной связи
в системах применяется несколько способов: межспутниковая связь,
наземные волоконно-оптические линии связи между БЗС. спутнико-
вые линии связи с несколькими скачками БЗС-КС-БЗС-КС-БЗС.
При межспутниковой связи упрощается структура системы на Земле.
Существенный недостаток - национальная администрация не кон-
тролирует трафик, если не имеет национальной ЗС.
Таблица 11.1
Технические параметры систем Значения параметров для проектов
Ириди- ум Глобал- стар Одис- сей (СО Теле- дезик
Тип орбиты LEO LEO МЕО МЕО LEO
Высота орбиты, км 780 1414 10354 10355 -700
Наклонение орбиты, град -86 52 50 45 -89
Число орбитальных плоскостей 6 8 3 2 21
Число рабочих ИСЗ 66 48 12 12 288
Период обращения ИСЗ 100 мин. 114 мин. 6ч
Число лучей АФАР* 48 16 61 163 64
Число БЗС 20 200 7 12 -
Адаптивная фазированная антенная решетка.
i_____________________________________________
Для России эксплуатация сети, не имеющей национальной БЗС,
не приемлема, поскольку не позволяет реализовать требования
системы оперативно-розыскных мероприятий. В спутниковых лини-
ях связи с несколькими скачками ограничения связаны с заметно-
стью зхо-сигналов.
Диапазоны частот. Радиочастотный спектр - ограниченный
природный ресурс. Емкость геостационарной орбиты также огра-
ничена. МСЗ разработал' ряд документов, регламентирующих
доступ к этим ресурсам. Земной шар разделен на три Района, ка-
ждому из которых присвоены определенные полосы частот для
различных спутниковых служб. Район 1 - Европа, Африка, терри-
тория бывшего СССР и Монголия. Район 2 - Северная и Южная
Америка. Район 3 - Азия, Океания и Австралия. Например, в Рай-
оне 1 для ФСС выделены полосы частот 5725 ... 7075 МГц на ли-
нии вверх и 3400 ... 4200 МГц на линии вниз Часто это указыва-
ется в документах, как диапазон 6/4 ГГц. Другие распространен-
ныа диапазоны частот для ФСС в Районе 1 - это 12/11 ГГц и
14/12 ГГц.
Для глобальных спутниковых систем связи существуют свои
принципы использования радиоспектра. Для мобильных линий гло-
бальных систем нужны одни и те же полосы частот во всех стра-
нах. Для БЗС, расположенных в разных Районах, также использу-
ются общие полосы частот. 8АКР 92 и ВКР-95 выделили полосы
частот для спутниковых систем связи на низких и средневысотных
орбитах в нескольких частотных диапазонах. Эти полосы приведе-
ны в табл. 11.2. Кроме них, для межспутниковой связи в системе
Иридиум выделена полоса 23,18 ... 23,38 МГц в диапазоне Ка.
Таблица 11.2
Мобильные линии
Диапазон Направление Полоса частот, ГГц
L Вверх 1,610 ... 1,6265
Вниз 1,6138 ... 1,6265
S Вниз 2,4835 ... 2500
Фидерные линии
Диапазон Направление Полоса частот, ГГц
Ка Вверх 19,7 ... 20,1
Вниз 29,5 ... 30,0
С Вверх 5,091 ... 5,250
Вниз 6,875 ... 7,055 |
Проект Теледезик. Этот проект относится к классу «широкопо-
лосные супер LEO». Система Теледезик предназначена для пре-
доставления высокоскоростного доступа к сети Интернет, услуг
мультимедиа в интерактивном режиме и других услуг широкопо-
лосной связи. Теледезик является сетью с пакетной передачей
данных. Использует высокоскоростной асинхронный метод комму-
тации пакетов, протокол обмена ATM. Система Теледезик предпо-
лагает работу с фиксированными терминалами, а также с мобиль-
ными (авиация, морской транспорт).
В системе предусмотрено несколько типов ЗС: стандартный
абонентский терминал; высокоскоростной терминал базы данных
сети; БЗС, обеспечивающая выход в ТФОП. Большинство пользо-
вателей будут работать через стандартный терминал и получать
два пути соединения, обеспечивающих и на линии вверх канал со
скоростью передачи 2 Мбит/с, и на линии вниз канал со скоростью
передачи 64 Мбит/с. Для высокоскоростного терминала скорость
передачи 155,25 Мбит/с или 1,24416 Гбит/с.
Полосы частот, выделенные для Теледезика, приведены в
табл. 11.3.
387
Таблица 11.3
Линии связи в проекте Теледезик Частота, ГГц Скорость
Абонантская вверх 28,6 ... 29,1 Зависит от
Абонентская вниз 18,8Г.. 19,3 терминала
Межспутниковая 59,5 ... 60,5 и 62,5 ... 63,5 155,52 Мбит/с
Командно- телеметрическая Как абонентские
ATM технология. ATM - аббревиатура от Asynchronous Transfer
Mode - асинхронный способ доставки. ATM технология позволяет
поддерживать мультимедийный трафик на больших террит&риях,
на которых развернуты сети ATM. Через узлы сети ATM может од-
новременно передаваться информация различных цифровых сис-
тем связи, действующих на данной территории, причем как систем
общего пользования, так и корпоративных.
ATM - это высокоскоростная коммутация коротких пакетов фик-
сированной длины, называемых ячейками. Длина ячейки составляет
53 байта, из которых 5 - это поле заголовка и 48 - поле полезной
нагрузки. Потоки ячеек от различных пользователей поступают к уз-
лам сети ATM. В сети формируется общий цифровой поток на осно-
ве асинхронного мультиплексирования ячеек. Все ячейки ATM при-
надлежат заранее определенным виртуальным каналам, адреса ко-
торых указаны в заголовке ячейки. Так распределяется по ячейкам
весь трафик, подлежащий передаче через каждый узел сети.
Принцип сети ATM поясняет рис. 11.1.
01 ..0N — входные порты ATM сети; Вх. К и Вых. К - входной и выходной
контроллеры; 1...N — выходные порты
CD CD.
Между входнь-ми и выходными портами организуется информзцн
<одая магистраль, объединяющая множество одновременно дейст-
здощих путей. Функционально инфсрмацион. .«я магистраль може;
представлена как коммутатор и процессор управления. Стан-
дартный порт коммутации поддерживает скорости от 50 до 600 Мбит/с.
^ммутатор, который обслуживает более 100 портов, относится к
^ц>шим коммутаторам. Множество ячеек может одновременно
передаваться через коммутатор. Для информационной магистрали
Ц^ользуегся временное и пространственное разнесение. Общая
редкость коммутатора определяется произведением числа путей и
ширины полосы пропускания по одному пути. Теоретически в
ний предел этого произведения не огра.чичен. Практически сущ
вуют технологические ограничения.
Каждый узел сети ATM независимо от других выбирает мар-
шрут, который в данный момент времени обеспечивает минималь-
ную задержку ячейки. Доставленные к выходному порту ячейки на-
капливаются в его буфере. Последовательность приема ячеек \’с-
жет отличаться от той, что была на передаче. Адаптивный алго-
ритм маршрутизации позволяет узлу сети сделать выбор маршрута
с минимальной задержкой и восстанавливает исходную последова-
тельность принятых пакетов в терминале.
- В коммутаторе ATM переключение ячеек выполняется асин-
хронно в соответствии с адресом виргуального канала. Несколько
ячеек, одновременно поступающих от нескольких входных портов,
могут иметь один и тот же адрес выходного порта. Но только однг
ячейка поступит к выходному порту, в то время все остальные
ячейки должны быть временно размещены в буфере. Возникает
конфликтная ситуация.
Коммутатор может иметь внутренний и внешний буфер. Разре-
шение конфликта выполняется по определенному алгоритму с ис-
пользованием таких основных приемов:
• возврат: ячейка, которая не может быть пропущена немедлен-
но, возвращается во входной буфер и ожидает своей очереди:
• отклонение от прямого маршрута: для ячеек, не пропущенных
по прямому адресу, подбираются другие пути;
• потери: ячейки, которые не могут быь пропущены, сбрасыва-
ются.
Подобные технологии испокон веков применяются для сорти-
ровки загонов на железной дспоге.
Фиксированная длина ячейки упрощает реализацию коммутато-
ров ATM с высокой скоростью переключений. С одной стороны,
длина ячейки выбрана достаточно малой, так что время ожидания
в. буфере оказывается приемлемым для чувствительных к задерж-
ке служб, таких как телефония. Здесь задержка не должна превы-
шать 25 мс в канале без эхо-подавителей. Для остальных служб
приемлема задержка до 1 с. При передаче распределенных баз
данных введено ограничение времени задержки до 50 мс.
С другой стороны, формат ячейки выбран оптимальным по эф-
фективности использования канала. Эффективность снижается из-
за непроизводительных затрат емкости канала на передачу заго-
ловка. Здесь определяющим является режим передачи данных, так
как файлы данных имеют большой формат, а время ожидания для
них не является критичным. С этих позиций длина ячейки выбрана
достаточной. Таким образом, короткая фиксированная ячейка ATM
позволяет реализовать эффективные коммутаторы и поддерживать
все виды трафика.
Благодаря своим достоинствам ATM технология нашла широкое
применение в различных приложениях. Одно из таких приложений -
системы глобальной персональной спутниковой связи с коммутаци-
ей пакетов, например, Теледезик.
Поле полезной нагрузки ячейки содержит информационный сиг-
нал в цифровом виде. Это могут быть данные, кодированная речь
или видеосигнал. Пакеты формируются на ЗС, каждая из которых
представляют собой входной (выходной) порт сети ATM. Роль узла
сети ATM выполняет каждая КС. Сети, базирующиеся на негеоста-
ционарных ИСЗ, имеют динамичн/ю топологию. Сеть может адап-
тироваться к изменяющимся условиям так, чтобы обеспечить оп-
тимальное соединение между терминалами с позиции минималь-
ной задержки. Сеть комбинирует устройства коммутации цепей.
Большая орбитальная группировка позволяет поддерживать очень
высокое качество связи (на уровне ВОЛС) и дает ряд преимуществ
по емкости и надежности сети.
Эффективность систем. Одним из показателей эффективно-
сти глобальных спутниковых систем связи может служить число
каналов на мобильных линиях. Используются различные методы
разделения и многостанционного доступа. Например, в системе
Глобалстар на мобильных линиях применены следующие виды
разделения (рис. 11.2):
• Территориальное разделение. При этом АФАР каждого ИСЗ
образует на Земле 16 зон обслуживания разной конфигурации на
линиях вверх и вниз (рис. 11.2,6).
• Частотное разделение. Полоса частот шириной 16,5 МГц разде-
лена на 13 каналов по 1,25 МГц. На линии вверх это частоты
L-диапазона, а на линии вниз - частоты С-диапазона (рис. 11.2,6).
390
КС
Рис. 11.2. К пояснению разделения каналов в системе Глобалстар:
gg-диапазоны частот на КС; б - зоны обслуживания; а - планы частот на
линиях вверх и вниз
• Кодовое разделение. Применены ШПС, сформированные на ос-
нове ортогональных функций Уолша. Используемся система из
Й28 функций V^O), W(1),...,VX127). В каждом частотном канале с по-
лосой 1,25 МГц передается 127 каналов с кодовым разделением
(МДКР). Из них 55 каналов трафика, остальные каналы управления.
Й Фидерные линии работают на частотах диапазона С, указанных
в табл. 11.2. Используется разделение по поляризации, по частоте
и кодовое. На линии вверх предусмотрено восемь частотных кана-
лов по 19,9 МГц, общая полоса частот 159 МГц, на линии вниз -
^восемь частотных каналов по 22,5 МГц, общая полоса частот
>180 МГц. В каждом частотном канале передается 127 каналов
МДКР, в том числе 118 каналов трафика. Антенны фидерных линий
на КС - параболические с коэффициентом усиления д ~ 12 дВ,
граница зоны обслуживания на Земле имеет форму эллипса.
Характеристики подвижных спутниковых систем на геостацио-
нарной орбите. Один из успешных проектов на такой орбите - это
391
Инм-дрозт (Проект открыт в 1979 г.). Космические ретрансляторы раз-
мещены над каждым из мировых океанов (не менее, чем по два ИСЗ).
Атлантическим, Индийским и Тихим. В 1996 - 1998 гг. были запущены
пять ИСЗ третьего поколения. Дополнительно четыре ИСЗ второго
поколения используются как резервные. ЗС подразделяют на берего-
вые и абонентские. Береговые ЗС снабжены большой параболической
антенной диаметром 13 м. Система насчитывает сегодня- 37 берего-
вых ЗС для 29 операторов связи, и более 200 000 абонентов. На або-
нентских ЗС установлены различные антенны, своя антенна для каж-
дого стандарта. Все стандарты есть в сети: аналоговые станции (Ин-
марсат~А); цифровые (Инмарсат-В, С, М, Мини-М, D /D+, спутниковый
пейджер); Инмарсат-Аего (для авиации). Инмарсат предоставляет ка-
налы .для телефонной связи, передачи данных и др. Развитие системы
идет по направлению предоставления новых услуг. Открыта новая
система широкополосного доступа в сети ISDN (М4). Она также назы-
вается Глобальная сеть Инмарсат - GAN (скорости 56 и 64 кбит/с.).
В перспективе система В-GAN, которая будет работать со скоростями
2 :6 и 432 бит/с (по каналам с полосой 100 и 200 кГц).
Проект Марафон как национальная система мобильной связи
России был открыт в 1990 г. Предполагалось использовать пять
геостационарных ИСЗ Аркос и четыре ИСЗ на высокоэллиптиче-
ских орбитах, чтобы покрыть приполярные районы. МСЗ выделил
орбитальные позиции и частотный ресурс. Из-за отсутствия инве-
стиций возникла угроза потерять орбитальные позиции и частоты.
В 1999 г. эти частоты и орбитальные позиции были переданы част-
ной инвестиционной компании. Появился проект Марафон-М. Пла-
нируется использовать технологию арабского оператора спутнико-
вой связи Турайя сателайт. Система Турайя пока имеет только
один геостационарный ИСЗ, точка стояния 44° в.д. Антенна обра-
зует 290 узких зон покрытия. Нормально в зону обслуживания по-
падает только юг России. Предполагается сначала перенацелить
антенну, позже запустить ИСЗ на орбитальною позицию Марафон-
М. Это позволит получить зону обслуживания почти на всю Россию.
Проект общероссийской региональной системы спутниковой мо-
бильной персональной связи Садко был открыт в 2090 г. Система
предназначена для предоставления услуг связи в тех регионах, где
отсутствует доступ к сетям связи общего пог.ызовзния ВСС России, а
также сссданиэ наземных проводных или сотовых сетей связи неце-
лесообразно по экономическим показателям. Помимо традиционных
услуг, система позволит обеспечить своим абонентам со стационар-
ных терминалов оперативный доступ к сети Интернет. Предполагают,
что система будет иметь геостационарный ИСЗ о точке стояния 90,5°
в.д. (или 85° в.д.). Многолучевая антенна формирует зону обслужива-
ния практически для всей территории России, за исключением Чукотки,
Камчатки, Калининградской области и Кольского полуострова.
11.2. Зоны обслуживания и число ИСЗ
Протяженность линии связи. Расстояние между ЗС и КС ме-
няется во времени, поскольку ИСЗ движется и ЗС видит его на раз-
ных витках под разными углами места. Основные геометрические
параметры трассы показаны на рис. 11.3 на основании упрощенных
построений в плоскости, проходящей через центр Земли, точку ус-
тановки ЗС - С, ИСЗ и подспутниковую точку Р. На рис. 11.3 обо-
значено: d - наклонная дальность; h - высота орбиты; R3 - радиус
Земли; р - угол места для ЗС на границе зоны обслуживания; у -
геоцентрический угол. Угол места определяется как угол между на-
правлениями на горизонт и на ИСЗ. Геоцентрический угол опреде-
ляется между радиусами ОС и ОР.
В общем случае [2] геоцентрический угол
у = arccos (cosq>3c cos<pP cos Дл. - sin<p3C sin<pP),
где <рзс - географическая широта ЗС (имеет положительное значе-
ние для северного полушария и отрицательное - для южного); -
географическая широта подспутниковой точки Р, - разность ме-
жду географической долготой подспутниковой точки и географиче-
ской долготой ЗС, в градусах к востоку.
Рис. 11.3. К определению
геометрических параметров
трассы
Наклонная дальность
d = . R3 + (R3 + h)2 - 2F?3(R3 + P)cosy .
Угол места
P = arctg {[cos у - R3 (R3 + h)] / sin y}.
Согласно [3] геоцентрический угол
у = arccos[cosp /(1 + h-R3)] - p.
(11.1)
Зависимость наклонной дальности от угла места для круговых
орбит разной высоты из [3], показана на рис. 11.4. Максимальная
наклонная дальность dmax - - h(2R3 + h) при р = 0° и минималь-
ная наклонная дальность t/min = h при р = 90°. Более точные мето-
ды нахождения параметров линий приведены в [4, 5].
Для ЗС определяют азимут. Это угол, отсчитываемый в горизон-
тальной плоскости по часовой стрелке, между направлениями на
Северный полюс и на ЗС (на рис. 11.3 не показан).
Согласно [3] площадь зоны, обслуживаемой одним ИСЗ,
S, - S3[(1-cosy)/2]
(11.2)
где S3 - общая площадь поверхности Земли.
Рис. 11.4. Наклонная дальность трасс при круговых орбитах
394
Период обращения ИСЗ по круговой орбите. Период обра-
щения определяется в условиях невозмущенного движения спутни-
ка, когда не принимается во внимание тяготение Луны, Солнца,
тланет, влияние магнитного поля Земли и других факторов. В та-
ком случае на ИСЗ воздействует сила тяготения Земли
||т = к(тМ1г), где М = 5,97410-27 г - масса Земли и /л - масса ИСЗ;
у/кр - скорость движения по круговой орбите; г = /73 + /; - расстояние
Вт центра Земли до ИСЗ.
На ИСЗ действует также центробежная сила Сц = mV^.'r . Спут-
ник удерживается на орбите, когда эти силы уравновешиваются,
нг.ё. когда FT = F4. Отсюда скорость движения по круговой орбите,
км/с, определяется выражением
Икр = - k(M:r)=V0. /?3 7=630 -г ,
|де Vo = 7.9-105 см/с - круговая скорость гипотетического спутника,
Движущегося по круговой орбите с радиусом, равным радиусу Зем-
"ли; г~ расстояние от центра Земли до ИСЗ, км.
Период обращения ИСЗ на круговой орбите для гипотетического
^путника То = 2kR3i'V0 = 84,4 мин; для ИСЗ на круговой орбите пе-
риод обращения Т^, с, определяется по формуле
Г» = 2лг/Ик0 = 2пГ г =0,01 г3,
кр кр 630
где г выражено в километрах, или
ТКр = Т0(г/7?з)32- . (11.3)
Период обращения ИСЗ по эллиптической орбите. Земля на-
ходится в одном из полюсов эллиптической орбиты (рис. 11.5). Со-
гласно третьему закону Кеплера сидерический период обращения
ИСЗ по эллиптической орбите
T3r.r.=T(aR3)32. (11.4)
При движении по эллиптической орбите скорость ИСЗ изменя-
ется от максимальной в перигее до минимальной в апогее. Со-
гласно второму закону Кеплера VAIVn = гА/гп, где УА - скорость
движения ИСЗ в апогее и Vn — скорость в перигее. Обычно выби-
рают высокоэллиптические орбиты, для которых НА ~ 40000 км и
Нп «а 500 км.
395
Рис 11.5. Эллиптическая орбита:
А — апогей орбиты; П - перигей орбиты; Нд — высота апогея; Нц — высо-
та перигея, а ~ большая полуось орбиты, с — малая полуось орбиты; ПА
— линия апсид
Связь поддерживается на той части витка, которая находится
вблизи апогея. Выбирается наклонение орбиты / ~ 53,4°. Такое на-
клонение обеспечивает наиболее стабильное положение линии
апсид. Длительность сеанса связи примерно 12 ч.
Продолжительность и вероятность поддержания сеансов
связи. Продолжительность сеанса связи Дг, = LJVB, где L„ — длина
части витка, видимая одной ЗС в зоне обслуживания; '4 - скорость
движения ИСЗ на этой части витка. Значение Lg одинаково на всех
витках, когда ИСЗ движется по экваториальной орбите. При движе-
нии ИСЗ по наклонным орбитам 0 < Lg < Lg max. Для витка, который
не попадает в зону обслуживания LB = Э. За длительный период
наблюдения суммарная продолжительность сеансов связи
Л ж =ЕД7} .
Среднее значение вероятности связи через один ИСЗ
₽С) = АТХ Тн,
где 7", - период наблюдения. Вероятность того, что за время на-
блюдения з зоне обслуживания не появится ни один спутник
<?(1) = 1-р(1)
соли ИСЗ распределены з пространства случайно и появляются
в зоне обслуживания, независимо, то вероятность того, что ° этой
зоне чет ни одного’ИСЗ
q(n) п - р(1)]
где п — число ИСЗ, необходимое для поддержания заданной веро-
ятности связи
т= 1-д(л) = 1-[1-д(1)Г
Отсюда определяется необходимое число ИСЗ:
n = lg(1-m) 1д[1-р(1)]. (11.5)
Расчет необходимого числа ИСЗ в орбитальных группировках.
В глобальных спутниковых системах взаимное расположение ИСЗ
детерминировано. Поддерживаются заданные угловые расстояния
как между орбитальными плоскостями, так и между ИСЗ в одной
плоскости. В глобальных системах связи часто используется поня-
тие связность в глобальном масштабе. Это понятие определяет
возможность соединения абонентов, расположенных в общей или
разных зонах обслуживания. Связность означает, что между або-
нентами теоретически существует (не обязательно используется)
непрерывный или квазинепрерывный канал связи. Поэтому або-
ненты должны находиться в зоне, в которой виден по меньшей ме-
ре один ИСЗ.
Связность в глобальном масштабе поддерживается, когда число
ИСЗ в орбитальной группировке [3]
Л/исз =PQ = [4/(3 3)](-/у)2, (11.6)
где Р = 2я/(3у) - число орбитальных плоскостей; С = 2я/( . Зу) -
число ИСЗ в одной плоскости.
Формула (11.6) позволяет определить примерное число ИСЗ,
без учета особенностей структуры сети применительно к геогра-
фическим районам Земли. При однократном покрытии поверхно-
сти Земли в орбитальной группировке на низкой орбите высотой
Л1Е0 ~ 1000 км должно быть не менее 60 ИСЗ. Покрыгле считается
двукратным, если в течение 90 ... 95 % времени видны одновре-
менно два ИСЗ. На средневысотных орбитах (,\£О яг 10000 км) для
двукратного покрытия нужно 10 ... 12 ИСЗ.
11.3. Особенности распространения радиоволн
в спутниковом радиоканале
Дополнительное ослабление сигнала на трассе. Радиосиг-
нал от ЗС до КС проходит через толщу атмосферы и испытывает
397
дополнительные потери по сравнению с потерями свободного про-
странства:
адоп = аатм + апол + адр + ад (0. (11-7)
где аатм - потери, обусловленные поглощением радиоволн в спокой-
ной атмосфере (без дождя); алол - потери поляризации, обуслов-
ленные несовпадением плоскостей поляризации сигнала и антенн;
адр -потери из-за других факторов; ад(0 - потери в дожде.
В спокойной атмосфере кислород и водяные пары поглощают
энергию радиоволн. На резонансных частотах кислорода (60 и 120
ГГц) и водяных паров (22 и 165 ГГц) наблюдаются максимумы по-
глощения. Значение потерь в атмосфере (рис. 11.6) зависит от час-
тоты и от протяженности пути сигнала в атмосфере, которая, в
свою очередь, определяется по углу места.
Потери поляризации алол = ап1 + ап2, где ап1 =-201д(совф-|) -
потери, вызванные эффектом Фарадея, ап2 = -20lg(cosip2) - по-
тери из-за расхождения плоскостей поляризации передающей и
приёмной антенн; чч и Уг ~ Углы расхождения плоскостей поляри-
зации из-за названных эффектов,
Рис. 11.6. Потери из-за
поглощения радиоволн
в спокойной атмосфере
398
ф, к 2,32 1019/(f 21 - 0,91cosP).
Эффект Фарадея вызывает дополнительные потери сигнала и
Гфазовую дисперсию сигнала. Возникающие при этом искажения
^сигнала в радиоканале с фазовой дисперсией ограничивают его
^полосу пропускания. Обычно принимают допустимую ширину поло-
|ры радиоканала Д/ = ТДт, где Дт - неравномерность группового
времени запаздывания. Примерные значения ширины полосы ра-
|диоканала: Д7= 25 МГц при f = 1 ГГц и &f= 270 МГц при f = 5ГГц.
Из-за влияния эффекта Фарадея на частотах ниже 10 ГГц ис-
пользуется исключительно круговая поляризация, выше 10 ГГц
^предпочтительна линейная поляризация в связи с явлением депо-
ляризации радиоволн в дожде.
Круговая поляризация радиоволн - теоретическая абстракция.
[На: практике поляризация всегда эллиптическая. Потери из-за рас-
хождения плоскостей поляризации передающей и приёмной антенн
^возникают, когда угол между большими осями эллипсов поляриза-
ции этих антенн 0>О . Потери максимальны, когда угол между ося-
Тми поляризации 0 = 90°, и зависят от коэффициентов эллиптично-
сти эллипсов поляризации (отношение малой полуоси эллипса к
большой). При коэффициенте эллиптичности для передающей ан-
;Тенны е1 = 0,6 и для приёмной антенны е2 = 0,6 имеем an2 = 1 дБ.
Трафики для расчета значения потерь из-за расхождения плоскостей
Соляризации передающей и приёмной антенн даны в [6].
Ц . Потери возникают и из-за других факторов, например влияния
"рефракции радиоволн в тропосфере и ионосфере. Рефракция оце-
нивается по углу отклонения траектории от главного направления
ДНА. Эти углы можно вычислить и определить дополнительные
потери по ДНА. При автоматическом наведении антенн по макси-
муму сигнала эти потери исключаются. Потери могут появиться из-
за неточности наведения антенн ЗС на ИСЗ. Запишем
адр = 9(0) ~ 9(0к) = 10 lg [1 + (20н / 03 5 )2 ],
где 0Н - ошибка наведения; Оо5 - ширина ДНА по уровню 0,5.
Расчёт потерь б дожде. Модель для оценки потерь в дожде
использует понятие эквивалентной дождевой ячейки. Эта ячейка
(рис. 11.7) имеет прямоугольное сечение в плоскости трассы с
размерами: Lo - опорная длина; (Ц - h3C) - эффективная высота,
где Ьзс - высота'над уровнем моря местности, где установлена ЗС;
= - эффективная высота дождевой зоны, км Ьл = 3,0 + 0,028 о
339
Рис. 11.7. Эквивалентная дождевая ячейка
при <р < 36°, /?д = 4 - 0,075 (<р - 36) при <р > 36°); <р - географическая
широта ЗС, град. Эквивалентная дождевая ячейка может занимать
любую позицию относительно трассы с одинаковой вероятностью.
Влияние дождевой зоны должно быть определено с учётом вер-
тикальной структуры дождя, распределения температуры, геокли-
матических факторов для ЗС и т.п. Все эти факторы учтены при
введении понятия «эффективная высота дождя». По рис. 11.7 оп-
ределяют наклонную длину трассы: = (ha - /i3C)/sin р.
Для дальнейших расчетов полностью пригодна методика, фор-
мулы, графики и численные коэффициенты, используемые при
расчёте влияния дождя на трассах РРЛ, в которых следует выпол-
нить замену /?зфф = L*. Эта методика обсуждалась в § 10.2.
Деполяризация сигнагуа на трассе. Деполяризация изменяет
поляризационные свойства волны. Исходная линейная (или круго-
вая) поляризация радиоволны преобразуется в эллиптическую, и
оси эллипса поляг..зации могут поворачиваться. Основные причи-
ны деполяризации: эффект Фарадея (был рассмотрен выше) и
влияние гидрометеоров. Деполяризация радиоволн в гидрометео-
рах вызвана анизотропными свойствами капель дождя, кристаллов
льда и др. Вследствие этого между ортогональными составляющи-
ми радиоволны, прошедшей, например, через дождевой фронт,
появляются фазовые сдвиги и дифференциальное затухание.
Для эллиптически поляризованной волны эллипс поляризации
(рис. 11.8) представляет собой траекторию вектора электрического
поля радиоволны в плоскости, перпендикулярной направлению
распространения.
На рисунке обозначены полуоси Етахи Xи У- координаты ЗС; т -
угол наклона большой полуоси эллипса относительно горизонта. Раз-
личают правостороннюю поляризацию при вращении вектора по часо-
вой стрелке и левостороннюю - с обратным направлением вращения.
Частные случаи соответствуют круговой поляризации при Етп =
= Епач = t или линейной поляризации при Е^~ 0 и = Е> 0.
400
Рис. 11.8. Эллипс поляризации
Для реальных антенн эллиптичность поляризации характеризу-
ется отношением аЕ = 20 !g(£max, Ет;п). На практике считают, по-
ляризацию круговой, если аЕ < ЗдБ,и линейной при аЕ > 20 дБ.
Для оценки деполяризации используются коэффициенты кросс-
поляризационной изоляции и развязки и Ккпр). По определению
К№И - разность между уровнями мощности принятого сигнала с ос-
новной поляризацией (например, вертикальной) и сигнала с орто-
гональной (горизонтальной) поляризацией в том же «вертикаль-
ном» канале, при условии что был передан сигнал только одной
'вертикальной поляризации. Измерить К,т, практически нереально,
так как кроссполяризационную помеху нельзя отличить от шумов в
своём канале. По определению Кк.е - разность между уровнем
мощности принятого сигнала с основной поляризацией (напримео.
вертикальной) и уровнем мощности сигнала, принимаемого в орто-
гональном («горизонтальном») канале. Оба сигнала - части одного
передаваемого сигнала с вертикальней поляризацией. В большин-
стве реальных ситуаций коэффициенты кроссполяризационнсй
изоляции и развязки эквивалентны. Расчеты систем основываются
на реально измеряемом значении К^.
• Теоретически два сигнала с разной поляризацией ортогональ-
ны, если направления вращения векторов электрического поля ра-
диоволны противоположны, большие оси эллипсов поляризации
взаимно перпендикулярны и отношения большей полуоси к малой в
Этих эллипсах одинаковы.
Расчёт коэффициента кроссполяризационной развязки в дож-
ое. Основной причиной деполяризации является дождь. Хорошо
йзучена связь между интенсивностью дождя и затуханием сигнала.
Затухание сигнала зависит от потерь в объеме, активно участвую-
щем в распространении сигнала (объеме первой полузоны Френе-
ля), в то время как деполяризация определяется объемной асим-
метрией среды. Поэтому мгновенная корреляция между затухани-
401
ем на трассе и незначительна. Однако эксперименты подтвер-
ждают сильную корреляцию между статистическими параметрами
этих величин. Интенсивный дождь влияет на снижение коэффици-
ента /СКПр. Так что статистику коэффициента Ккпр можно предсказать
на основе имеющейся статистики затухания в дожде. Используется
полуэмпирическая модель расчёта, которая устанавливает связь
между потерями на трассе в дожде для заданного процента време-
ни и изменением коэффициента кроссполяризационной развязки
при деполяризации в дожде. В соответствии с этой моделью стати-
стическое распределение Ктр в дожде может быть вычислено из
следующего равновероятного соотношения:
КкпР(Р)=Ь'-и(П1д4р(р). (11.8)
где U = 15 + 301д/: и V = 12,8f0,19 при 8ГГц <20ГГц; Дкр(р)-
затухание в осадках, вычисленное в децибелах, для волн круговой
поляризации. Значения частоты выражаются в гигагерцах, значе-
ния получают в децибелах.
Для вычисления затухания в осадках на спутниковых линиях
связи используются формулы § 10.2. При этом следует обратить
внимание на особенности определения на ЗС угла наклона поляри-
зации по отношению к горизонту.
При падении гидрометеоров главные оси симметрии капель
обычно направлены по местной вертикали, поэтому угол наклона
вектора линейной поляризации или плоскости эллиптической поля-
ризации существенно влияет на результаты. Угол наклона линей-
ной или эллиптической поляризации относительно горизонта зем-
ной станции
тзс = arctg(tg<p зс/зюДл) ± Дц, (11.9) .
где ±Дд - угол поворота вектора (или плоскости) поляризации на
ИСЗ относительно плоскости экватора. Знак зависит от направле-
ния поворота. Практически принимают До = 0
Исходными величинами для расчёта служат: географические ко-
ординаты ЗС, её высота над уровнем моря и угол места, параметры
точки стояния ИСЗ, рабочая частота. По этим данным вычисляется
угол наклона поляризации (11.9). В зависимости от дождевой клима-
тической зоны для ЗС находят значение интенсивности осадков,
превышаемое в течение р = 0,01 % времени месяца: /д (0,01). По
значению рабочей частоты из табл 10.12 определяют значения ко-
эффициентов степенной аппроксимации для волн горизонтальной и
402
,Рис. 11.9. Статистическое распределение ослабления сигнала в дожде
при круговой поляризации волн на конкретной спутниковой трассе
Вертикальной поляризации. По (10.37) и (10.38) рассчитывают ко-
эффициенты к, а для круговой поляризации, выполнив замену
Ц=Р и т=тзс. Затем по (10.35) и (10.36) рассчитывают значение
исдабления сигнала в дожде, превышаемое в течение
^>= 0,01 % для данной конкретной трассы для волн круговой поля-
ризации Акр (0,01). Предположим, что в результате расчета получи-
рЛкр(0,01) = 10 дБ. Выражение (10.39/ позволяет рассчитать ста-
тистическую кривую (рис. 11.9)
Далее, путём пошагового применения рассмотренного метода
прогноза рассчитывается статистическая кривая коэффициента
Акпр(Р) Для конкретней трассы (рис. 11.10).
Рис. 11.10 Статистическое распределение коэффициента
кроссполяризационнсй развязки на конкретной спутниковой трассе
При проектировании используется график равновероятной зави-
симости коэффициента кроссполяризационной развязки от затуха-
ния в дожде (рис. 11.11), полученный на основе рис. 11.9 и 11 10.
Точки на нем определяют следующим образом. Например, если
Дкр = 10 дБ при р = 0,01 %, то из рис. 11 То находят <^(0,01) = 13 дБ.
Полученные значения наносятся на рис. 11.11. Точно так же опре-
деляются другие точки кривой.
Одновременное использование волн дзух поляризаций возмож-
но при условии, что значение коэффициента кроссполяризацион-
ной развязки не падает ниже допустимого в течение заданного
процента времени для наихудшего месяца. При этом допустимое
значение коэффициента определяется из допустимого уровня ин-
терференционной кроссполяризационной помехи.
Рассмотрим пример. Пусть требуется обеспечить коэффициент готовности
системы 99,995 %, для конкретной ЗС, для которой рассчитаны зависимости рис.
1.'< .9 и 11.10.
Допустимый процент времени превышения затухания в осадках р = 0.005 %. По
рис. 11.9 допустимое значение дополнительного затухания в дожде 4(0.005) = 12,5
дБ. По кривой рис. 11.11 находим соответствующий равновероятностный уровень
Кц-щСр) =12 дБ. Зто значение определяет ожидаемый уровень интерференционной
помехи из-за деполяризации в дожде. Далее следует убедиться, что такая помеха
допустима в системе, или принять меры к её компенсации.
' Деполяризация, обусловленная льдом. При грозах часто возни-
кает деполяризация радиоволн из-за кристаллов льда, находящих-
ся выше зоны дождя. Иногда такое явление наблюдается в обла-
ках, не сопровождаемых дождём. ’Метод прогноза включает эмпи-
рическую корректировку допустимого значения коэффициента
кроссполяризационной развязки. Обусловленное льдом изменение
кроссполяризационнсй развязки ДКЛ = Ккгр(р)(0,15 - 0,05 lg р).
Результирующее допустимое значение коэффициента кросспо-
ляризационной развязки («чистая развязка»)
Рис. 11.11. Разноеероятная кривая для
коэффициента кроссполяризациионной
разёязки трассы
^рез (р) = ^кпр (р)-лкл.
Влияние льда на «чистую развязку» падает с уменьшением про-
цента времени.
Внешние шумы. Влияние шумовой температуры неба. Радио-
излучение внешней среды носит тепловой характер. Шумы среды
определяет закон термодинамического равновесия: среда излучает
то же количество энергии на данной частоте, которое поглощает
Антенны ЗС направлены на относительно холодное небо. В об-
щем виде на антенну ЗС действует эффективная шумовая темпе-
ратура неба
Т„ = ГсредО - + Тгал 10-°-1э , (11.10)
где ТсРеВ - эффективная температура среды распространения сиг-
нала (атмосфера, облака, дождь); а - общее затухание, обуслов-
ленное средой и вычисленное в децибелах; Тг.. - эффективная
температура внеземного шума.
Сначала рассмотрим только шумы спокойной (без дождя) атмо-
сферы. Для этого случая а = аатм , где затухание сигнала в спокой-
ной атмосфере определяют по рис. 11.6. Эффективная шумовая
температура спокойной атмосферы Татм(р, f) согласно правилу
(11.10) будет изменяться в соответствии с кривыми рис. 11.6, а ее
численные значения приведены на рис. 11.12.
В дожде возрастает общее затухание, обусловленное средой, и
увеличивается эффективная температура шума согласно правилу
(11.10). Эффективная шумовая температура атмосферы с дождём
^.рез^^срИ-Ю3’), (11.11)
где Гатм ср - средняя термодинамическая температура стандартной
атмосферы; 7'атм ср « 260 К в диапазонах рабочих частот спутнике
вой системы связи при- углах места оолее 5°; ас = аа-„. + а.
Шумы внеземных (космических) источников - это фоновое изг
чение галактики, а также Солнца, Луны, планет и т.п. Эффективн
температура галактического шума (рис. 11.12) не превышает 3 К
частотах свыше 3 ГГц. Для антенны ЗС видимые угловые разме
Солнца и Луны около 0,5°, поэтому, когда ДНА значительно ш
этого значения, влияние шумов Солнца и Луны усредняется
большой области холодного неба, и ими можно пренебречь. Я
сткая температура спокойного Солнца около 10 000° при 16
Солнце нарушает связь, если попадает на главный лепесток
Вероятность такого события меньше 10~4. Точное время «засветки»
антенны ЗС обычно рассчитывают по параметрам орбиты и сооб-
щают на эту ЗС. Луна имеет яркостную температуру около 220 К и
практически не может нарушить связь. Влияние остальных источ-
ников радиоизлучения также несущественно. В результате эффек-
тивную шумовую температуру космических источников TK0Cu.(f) опре-
деляют по кривым рис. 11.12.
Влияние шумов с земной поверхности. Антенны КС ориентиро-
ваны на теплую Землю, причём угловые размеры Земли обычно
превышают ширину ДНА. В таком случае на антенну КС действует
эффективная температура излучения Земли (вместе с отраженным
от неё излучением атмосферы), которая совпадает с яркостной
температурой Земли Т3 = 290 К. Дополнительные шумы от осадков
или других источников в этом случае несущественны.
Антенны ЗС, ориентированные на геостационарные спутники,
обычно размещают так, чтобы препятствия на местности не попа-
дали в основной лепесток ДНА. Боковые лепестки также миними-
зируют для уменьшения влияния температуры Земли. В таком слу-
чае эффективная температура излучения Земли, действующего на
антенну ЗС, Т*3 = с 290 К, где с = 0,2...0,4 - коэффициент, учиты-
вающий интегральный уровень энергии боковых лепестков ДНА.
Его точное значение определяется типом антенны [6].
Однако в подвижных спутниковых системах антенный луч может
перекрываться строениями или рельефом местности. Эти препят-
ствия будут повышать шумовую Температуру антенны.
Собственные шумы антенны. Согласно правилу термодинами-
ческого равновесия, омические потери в антенне создают собст-
венные шумы, определяемые в соответствии с (11.11).
Эффективная температура собственных шумов антенны
Гс ант ~ 290 (1-103ант), где ааит - потери в материале зеркала. Эти
шумы малы, в антеннах с металлическими отражателями 7"carfI« 0,1 К
при f = 10 ГГц. Однако с ними приходится считаться при использо-
вании металлизированного стеклопластика.
При установке на антенны обтекателей на них во время дождя
образуется водяная пленка, которая увеличивает шумовую темпе-
ратуру. Так, при интенсивности дождя 10 мм/ч приращение темпе-
ратуры составляет 12 ... 20 К.
Расчётные соотношения шумовой температуры ЗС и КС.
Суммируя шумы всех источников, получаем эффективную темпе-
ратуру шумов, воздействующих на антенну ЗС в условиях спокой-
ной атмосферы
406
Рис. 11.12. Эффективная шумовая температура спокойной атмосферы
407
' 3 ~ с он;
(11.12)
При необходимости учесть влияние дождя эта формула коррек-
тируется в соответствии с (11.11).
Эффективная температура шумов, действующих на антенну КС,
КС •' 3 * Д>тм(1' -С * ^^косм^/ + 1 с ант >
(11.13)
где р * - угол места для передающей ЗС.
Отражение сигнала и влияние местных условий (затенение,
экранирование). На трассах с малыми углами места появляются
отраженные лучи, которые могут быть приняты антеннами ЗС с ши-
рокой ДНА. Такая ситуация характерна для подвижных спутниковых
систем связи. Следовательно, для них спутниковый радиоканал
должен рассматриваться как многолучевой канал с замираниями.
Отражение энергии от земной поверхности возникает в непосредст-
венной близости от ЗС. Наблюдаются также удалённые отражатели,
нал, /мер горы или большие сооружения. В наземных системах ра-
диосвязи влияние земной поверхности на параметры .многолучевого
радиоканала хорошо изучено. Полученные результаты применимы
для расчёта трасс подвижных спутниковых систем связи. МСЭ реко-
мендует следующие модели расчёта интерференционных замираний
[7]; а) для линий прямой видимости без затенения, б) в условиях
слияния придорожных деревьев, в) в горных условиях.
На трасоёх с малыми углами места деревья или здания рядом с
приёмной ЗС, а также рельеф местности могут затенять и экрани-
ровать эффективную область распространения сигнала. Граница
этой области совпадает с границей первой полузоны Френеля.
Высокие здания затеняют первую полузону Френеля и сигнал
на приемную антенну поступает вследствие дифракции. Для
оценки уоовня сигнала применима теория дифракции на клино-
видном препятстеии, т е. при р —> х (см. рис. 6.3 и 6.4). Множи-
тель ослабления -опя --’-чала на границе тени v = -6 дБ. Пара-
где G....... - угол дифракции; сч и d2 - расстояния от кромки здания
да Г'.-'., / ео уГ'Яс. । ?. |3<. iгунктивим показана .гяп.ща тени. При
сас-лпохении ЗС в области тени > 0 , вне ее 0, < 0 .
» d2 .
(11.14)
к ИСЗ
Рис. 11.13 Геометрия краевой дифракции:
а - ЗС вне зоны тени; 5 - ЗС в зоне тени
Дифракционные потери на кромке здания Lb.^P зависят от поло-
жения абонентского терминала относительно границы тени
(рис. 11.14).
Деревья ослабляют сигналы за счёт поглощения листвой и ск-
анирования стволами и ветвями. Опубликованы данные о значе-
нии затухания сигнала для отдельных деревьев разных пород в
зависимости от частоты сигнала и несколько эмпирических моде-
лей для расчета затухания [7, 8]. В среднем [7] рекомендуется при-
нять коэффициент затухания за счет деревьев около 1 дБ/м для
L-диапазона.
Потери проникновения - это затухание сигнала, проникающего
здание. Они зависят от материала стен и местоположения абонент
внутри здания. Например [7], в городе средних размеров на первом
0) ID
Рис. 11.14. Дифракционные
потери на кромке здания
этаже типичного офисного здания из стекла, бетона и камня потери
проникновения составляют 10 дБ. Уменьшение потерь с высотой
составляет 1,9 дБ на этаж.
В морских подвижных спутниковых системах связи следует учи-
тывать интерференционные замирания из-за отражения от поверх-
ности моря. Отраженные волны подразделяют на когерентную и не
когерентную составляющие. Первая возникает из-за зеркального
отражения, а вторая - из-за диффузного при волнениях моря. Для
прогноза характеристик радиоканала в этих условиях разработан
ряд моделей [7, 9].
Интерференционные замирания из-за отражения от морской
поверхности наблюдаются также в воздушных подвижных спутни:
ковых системах связи. Характеристики таких замираний для воз-
душной подвижной [7, 10] и морской подвижной систем различны^
поскольку скорость и высота передвижения самолётов много
больше, чем морских судов.
11.4. Энергетический расчет спутниковых систем связи
с подвижными объектами
Расчёт уровня сигнала на входе приёмника. Составляем
функциональную схему спутниковой линии связи (рис. 11.15). Она
состоит из участка 1 (вверх) и участка 2 (вниз), содержит передаю-:
щую ЗС1, приёмную ЗС2 и ретранслятор - КС, СВЧ передатчики
(ПД) и СВЧ приёмники (ПР), модулятор (М) и демодулятор (Д), ан-
тенны и антенно-фидерный тракт. Расчёт выполняем в предполо-
жении, что известны энергетические параметры аппаратуры, ука-
занные на рис. 11.15. Обозначения энергетических параметров со-
ответствуют обозначениям, принятым в § 6.1. Дополнительный ин-
декс ЗС присвоен параметрам аппаратуры ЗС, индекс КС - пара-.,
метрам аппаратуры КС. Расчёт выполняют отдельно для участков
вверх и вниз.
В спутниковых системах связи принято характеризовать пере-
дающую станцию значениями ЭИИМ. Уровень ЭИИМ ЗС
РЭИИМЗС = РлЗО + 9’ЗС ~ а13С • 1 -15)
Уровень ЭИИМ КС
Рэиим КС = РпКС + PlKC ~ а11<с (11-16)
Поскольку расчетные соотношения для этих участков аналогич-
ны, то запишем их только для участка вверх.
Уровень мощности сигнала на входе приёмника КС
410
Кис. 11.15. Схема для энергетического расчета спутниковых систем связи
с подвижными объектами
z л
Рвх КС = РЭИИМ ЗС + 9гкс - 1асв 1 + а2КС + ад 1) • (1117)
2
|де асз1 = с?1 /Л -|) - ослабление свободного пространства на
Участке 1; ф и Х1 - протяженность трассы и длина волны на
^астке, ад1 - дополнительное ослабление сигнала на трассе
Цверх в сравнении с потерями свободного пространства, см. (11.7).
Уровень мощности сигнала на входе приёмника ЗС2
Рвх ЗС = Рэиим КС +923C ~(асв2 + а1КС + ад2) (11.18)
2
:где acs2 = (4тг d2: X 2) - ослабление свободного пространства на
^участке 2; ад2 - дополнительное ослабление сигнала на трассе
вниз:
эд2 =агтм+апоп+адр+ад(0 + [адИфр+Ибз(0] , (11.19а)
где ад.Лфр - дифракционные потери из-за влияния местных усло-
вий (затенение, экранирование); v&(f) - множитель ослабления
поля свободного пространства в многолучевом канале из-за быст-
рых замираний; символ * означает, что слагаемые в квадратных
скобках нужно учитывать только в подвижных спутниковых систе-
мах связи для приемных ЗС с широкой ДНА при малых углах места
Расчет мощности теплового шума на входе приёмника.
Уг.езни принимаемых си; налов, как на участке 1, так и на участке 2
з-.ень малы Поэтому при расчёте отношения сигнал-шум необхо-
димо учитывать влияние шумов от всех элементов приёмной уста-
новки (рис 1 1.16).
8 соотБётстаии с правилом (1G.11) определяется суммарная
эффективная шумовая температура на входе приемника
К =Кнт1С.-°'э2 , 7J1-10 G':^) , (11.196)
де Г-мт - эффективная температура шумов, действующих на ан-
тенну, а2 - потери в приемном фидере: Т.. - эффективная шумо-
зая температура приёмника. .
Для ЗС: = Таьт зс [см. (11.12)], а2 = а23С, ТГР 70... 100 Кв
зависимости от типа МШУ.
Для КС- Т5.,т = Гант кс [см. (11.13)]. а2 -з2;{с. Ггв ~ 1500 К, по-
скольку МШУ. как правило, не устанавливают. Антенна КС направ-
лена на теплую Землю, поэтому первое слагаемое в (11.196) опре-
деляет достаточно большие шумы КС, что не позволяет реализо-
вать эффект от использования МШУ.
.Мощность тепловых шумов приемной установки, пересчитанных
ко входу приемника, для участков 1 и 2:
^кс =/-А-;:сп • (11.20а)
СтЗС (11.206)
где к = 1,38 1С г“Вт/(Гц К) - постоянная Больцмана; шке ~
еффектизнаг: шумезая температура приёмной установки КС и
--- 7V зс Д-''" ЗС: П - эффективная шумовая полоса приёмника.
Логарифмируя (11.20а), запишем уровень мощности теплового
на sxo.ae гохэмн/хз КС:
Рчс. 11.1S К расчету ЭК;1 прием-
НЭИ у ОТЗНОБКИЭ
или в децибелах относительно 1 мВт
Рткс =-199-г10!дК-кс ^ЫдГ; . (11.21а)
Из (11.206) получим уровень мощности теплового шума. дЕ'-м, на
входе приемника ЗС:
Ртзс = -199 1101gТ,зс + 1Glg/7 . (1:216)
Отношение сигнал-шум на входе приёмника. Вычисленное в
децибелах отношение сигнал-шум на входе приёмника КС
^1 = РзхКС-Р.КС- (11.22)
Собственные шумы участка вниз определяют отношение сиг-
нал-шум на входе приемника ЗС:
<?2 = Рвх зс - Рт зс (11-23)
где уровни в правой части ("11.22) вычисляют по (11.17) и (11.21а). а
в правой части (11.23) - по (11.18) и (11.216).
Уровням в левой части (11 22) и (11.23) соответствуют отноше-
нию сигнал-шум
Q(ex=i091-. (1124)
где / = 1, 2 - номер участка.
1 Суммируя мощности шумов участков вверх и вниз, получаем
1 Qp = 1 О-ЕХ +1 Q2sx , (11.2э)
где Qo = 1GJ’,£,/’ - результирующее отношение сигнал-шум на
входе приёмника ЗС; соответствующий уровень
qp = IGIgiIO"0’1” -г 1O'0J<72). (11.26)
Особенности расчета системы с шумоподобными сигнала-
ми. При определении отношений сигнал-шум на входе приёмник?
(11.22), (11.23) и (11.24) были определены мощность сигнала на
несущей, а мощность шума б полосе П (см. * 1.20а и 11.2С6). Е сис-
темах глобальной персональной спутниковой связи отдается поед-
почтение ШПС. При проектировании систем с ШПС качество связи
определяет отношение сигнал-шум, пересчитанное в радиоканал.
Например, для участка вниз
где вшпс = лРр/Вб - база ШПС, определена в § 7.3.
По данным и графикам § 7.3 можно также определить допусти-
мые значения отношения сигнал-шум для каналов с ШПС.
Особенности проектирования ФСС. Для фиксированной спут-
никовой службы допустимые значения отношения сигнал-шум оп-
ределяются на основе рекомендаций МСЭ для ГЭЦТ [11-14].
Предложены [11] четыре примерных тракта. Два из них: ГЭЦТ 3 и
ГЭЦТ 4 не соединяются с наземными сетями. Тракт ГЭЦТ 1 соеди-
нен с наземной сетью на обоих концах и может входить в состав
национального или международного участка гипотетического эта-
лонного соединения (ГЭС). Тракт ГЭЦТ 2 является частью гипоте-
тического эталонного соединения и его соединения с наземной се-
тью. Он включает в себя местный участок к терминалу пользовате-
ля. Этот ГЭЦТ 2 может входить в состав национального или меж-
дународного участка (рис. 11.17). На рис. 11.17 показано три ИСЗ.
Однако любой ГЭЦТ может иметь только один ИСЗ, тогда МЛС от-
сутствуют. Терминал пользователя и ЗС содержат аппаратуру РЧ и
ПЧ, модем, устройства коррекции ошибок, мультиплексирования.
Кроме того, терминал пользователя содержит интерфейсы с уст-
ройствами других пользователей, а ЗС - интерфейсы с наземными
сетями. Наземная сеть может стыковаться с ГЭЦТ с любой скоро-
стью цифровой передачи, в зависимости от приложения.
Показатели качества цифровых каналов в ССС те же, что и в
ЦРРЛ: коэффициент секунд с ошибками, коэффициент секунд,, по-
раженных ошибками и фоновый коэффициент ошибок. Их опреде-
ление было дано в § 10.2.
Рис. 11.17. Соединения ГЭЦТ. являющегося частью гипотетического эта-
лонного соединения с наземной частью:
ОНБ - обработка на борту, КНБ - коммутация на борту,
МЛС - межспутникозая линия связи
414
Значения этих показателей и для ЦРРЛ и для ФСС различно:, но и
те и другие определяются на основании рекомендации МСЭ-Т G.821
или МСЭ-Т G.826. На основании G.821 для ФСС рекомендованы [10]
максимально допустимые значения для коэффициента ошибок по
битам (КОБ) спутникового ГЭЦТ, работающего в полосе частот ниже
15 ГГц и входящего в состав соединения ЦСИС на скорости 64
кбит/с. Допустимые значения приведены в табл. 11.1.
Таблица 11.1
Допустимое значение КОБ 10-7 ю-6 10-3
Максимально допустимое время превышения значения КОБ, процент времени любого месяца 10 2 0,03
• В рекомендации МСЭ-Т G.826 нормы на качественные показа-
тели указаны для ошибок в блоках, а не в битах. Согласно этой ре-
комендации, блок — это группа последовательных битов, которые,
как правило, образуют внутренний контролируемый блок или кадр.
Такой подход имеет важные последствия для спутниковых систем.
В них устанавливаются скремблеры и устройства коррекции оши-
бок (помехоустойчивое кодирование), при этом ошибки на прием-
ном конце спутниковой линии группируются в пакеты. Среднее ко-
личество ошибочно принятых битов в пакете зависит, кроме всего
прочего, от схемы скремблера и скорости помехоустойчивого коди-
рования.
При проектировании спутниковой системы связи используется
зависимость допустимого значения КОБ от процентов времени
месяца. Эта зависимость называется маской вероятности ошибок
по битам. Маска должна быть составлена таким способом, чтобы
любая цифровая система, параметры которой соответствуют этой
маске, также соответствовала нормативным требованиям реко-
мендации МСЭ-Т G.826. Это преобразование, однако, не приво-
дит к получению «единственной» маски.
Для обеспечения полного соответствия требованиям рекомен-
дации МСЭ-Т G.826, в [12] предложены проектные маски для па-
раметра р,, = Рб / пак гДе р - КОБ: «пак - усредненное коли-
О
чество ошибок в пакете. На выходе спутникового ГЭЦТ. входяще-
го в состав международной линии связи, работающей на первич-
ной или более высокой скорости (до 155 Мбит/с), з течение всего
времени (наихудшего месяца) значение параметра ро не должно
превышать значений параметров проектных масок 1 и 2 Проект-
ные маски 1 для разных скоростей ци±рового потока представ-
лзиы в табл. 11.2 Проектная маска 2 рекомендована для систем
со скоростью цифрового потока 155 Мбит/с. Она записана б виде
тзЗп. 11.3, гдэ приведена и ожидаемая вероятность ошибок по би-
там три апа< - 10 Проектная маска 2 является наиболее строгой
из рассмотренных и при необходимости она может быть использо-
рр?-.г гои любых скоростях цифрового потока до 155.52 Мбит/с.
Таблица 11.2
;1ОС’.:екТ Ерсм&нм > * 3 ЛХу ДЦ5©ГС Значение параметра при скорости цифрового потока. Мбит/с Точка на рис. 11.1S
г 2.0 iTl 0 ; с* ! 1
1 | 7Ю~ 7-Ю'6 8 10z L qi i ... ! с
3 'и 3 2-1О'3 1 IU 21Э? п D ’
13 ~ П_.С 2-1 С'9 ’ -10~9 Е
Таблица 11 3
i Процент времони i ; нэмхудшего месяца ! | Ри Рб пак | 1 KOS при апак = 10 •:
: 0,2 ! * i I 1 10-^
( ; ю: ! °: 1 : 1!0-’ I мег8 i
10 । 1-10-’0 1 ( 1 СП ! г ) ! i 1 i
Общая форма маски показана на рис. 11.18.
По оси ордина--' указан процент зоемени месяца (У. %). Координа-
ты точек С, D и Е записаны в табл. 11.2 и 11.3. Далее принимают, что
ординаты точек Е и F одинаковы, а ординаты точек О v Е отличаются
б 10 раз. Координаты пороговой точки: 7'прр - время неготовности и
пороговое значение параметра ро г.го = «пак> гАе ?5 ~ порого-
еоэ значение вероятности ошибок по битам, соответствующее пе-
реходу в состояние неготовности.
Рис.
щая форма
Эти координаты подлежат определению. Абсцисса точки А опреде-
лена как 0,9 Тг,_~
В [12] рассмотрена модель, в кс"эрой принято 7"пор = 0,2 А
времени наихудшего месяца, в таком случае используется упро-
щенная маска, з которой отрезок АВС заменяется прямой АС*.
Неготовность определяется как состояние, соответствующее по-
явлению десяти последовательных секунд, пораженных ошибка-
ми, с вероятностью 0,50.
В таком случае порогу неготоаност/. соответствует коэффици-
ент секунд, пораженных ошибками /С... = 0,933. Вычисленные для
такой модели пороговые значения параметра рапор при различ-
ных скоростях цифрового потока дань: з табл. 11 4.
Таблица 11.4
Скорость, Мбит/с 1,544 2,048 6.“32 51.84 155.52 '
Ро. пор 9Ю~* 1,9 кг1 * * 1.17 -0^ 5,68 1 СТ5 1,89-10'5
Для определения усредненных значений количества ошибок а
пакете можно воспользоваться результа-ами .компьютерного моде-
лирования [14] при различных значениях скорости корректирующе-
го кода R. которые приведены в табл. *' 5. Значения аПак. пол,-
ченные при лабораторных измерениях ['41. представлены в табл
116.
; аблииа 11.5
Скорость цифрового Г?О; ОКЭ, iviOfrl: 1с Усредненное чист УКО при скозост о ошибок в пакете «пак - ! корректирующего кода •
R = 1/2 4 = 3/4 ! R - 7/8
1 5Z4 L __ _ _ _ 2,7 5,1 < 6,6 :
СО о f\i 3,4 3,8 i 8,2
с.312 2.6 5 1 ; 7,0
Si.il 2.8 • н ! ! 1 [ . ! : Г\ 1
155 52 1™- - _1 2,8 ' ъ 3 ! । i \ > 1 '' i ! ! L !
I .pic sc денные в 3t0.v с езде л з ддн-^ь т "С<?б ? ли-1’ определит.-^
норглы нэ качественные локззатег*: дал прое ггиргиа-
ния СЛС Ене зависимости ст реалз-Ю'о "зкрь-sae.v.o-'o расстояния
любому спутниковому пролету международного или национального
участка распределяется 35 % сквозных нормативных показателей
Таблица 11.6’
Скорость корректирующего кода (Я) 1/2 3/4
Усредненное количество ошибок в пакете аПак 5 10 - j
Примечание: Данные справедливы в диапазоне р6 = 10“*... 10'”
Для того чтобы выполнить рекомендации на частотах выше
10 ГГц, необходимы меры, направленные на противостояние зами-
раниям, включая кодирование с упреждающей коррекцией ошибок,
регулирование мощности, пространственное разнесение и др.
Считается, что эти рекомендации безусловно применимы для
спутниковых систем, работающих на частотах ниже 15 ГГц. Иссле-
дуется возможность применения их в системах, работающих на
более высоких частотах.
Список литературы к главе 11
1. Аносов А.С., Смирнов А.А. Система низкоорбитальной спутни-
ковой связи ГЛОБАЛСТАР // Технологии электронных коммуникаций.
1996. Т. 64.
2. Мордухович Л.Г., Степанов А.П. Системы радиосвязи. Курсовое
проектирование: Учебное пособие для вузов. - М.: Радио и связь, 1987. -
192 с.
3. Невдяев Л.М., Смирнов А.А. Персональная спутниковая связь. -
М.: ЭКО-Трендз, 1988. -215 с.
4. Машбиц Л.М. Зоны обслуживания систем спутниковой связи. - М.:
Радио и связь, 1982. -168 с.
5. Машбиц Л.М. Компьютерная картография и зоны спутниковой связи.
М.: Радио и связь, 2000. -256 с.
6. Спутниковая связь и вещание: Справочник. -3-е изд. IB.А. Барте-
нев, Г.В. Болотов, В.Л. Быков и др.; под ред. Кантора Л.Я. - М.: Радио и
связь, 1997. -528 с.
7. Справочник. Применение данных о распространении радиоволн
для прогноза канала связи Земля - космос. - Женева. МСЭ. Бюро радио-
связи, 1996. -137 с.
8. Рек. Р.681. МСЭ-Р. Данные о распространении радиоволн, необхо-
димые для проектирования сухопутных подвижных систем связи Земля-
космос.
9. Рек. Р.680. МСЭ-Р. Данные о распространении радиоволн, необхо-
димые для проектирования морских подвижных систем связи Земля-кос-
мос.
418
s, 10. Рек. P.682. МСЭ-Р. Данные о распространении радиоволн, необхо-
димые для проектирования воздушных подвижных систем связи Земг.я-
Скосмос.
11. Рек. S.521-3. МСЭ-Р. Гипотетические эталонные цифровые тракты
’для систем фиксированней спутниковой связи, использующих цифровые
^методы передачи.
12. Рек. S.522-5. МСЭ-Р. Допустимые коэффициенты ошибок по битам
Гра выходе гипотетического эталонного цифрового тракта для. систем фик-
сированной спутниковой службы, использующих для передачи телефон-
ных сигналов импульсно-кодовую модуляцию.
13. Рек. S.614-3. МСЭ-Р. Допустимые показатели качества по ошибкам
:для гипотетического эталонного цифрового тракта фиксированной спутни-
ковой службы, работающего в полосе частот ниже 15 ГГц и входящего в
‘состав международного соединения цифровой сети с интеграцией служб.
14. Рек. S.1062 МСЭ-Р. Допустимые показатели качества по ошибкам
для гипотетического эталонного цифрового тракта, работающего со ско-
ростью, равной первичной скорости, или превышающей ее.
419
ГЛ А В A 12
СИСТЕМЫ ПОДВИЖНОЙ СВЯЗИ ТРЕТЬЕГО ПОКОЛЕНИЯ
12.1. Эра мобильной сотовой связи
Мобильная сотовая связь вошла в нашу жизнь в начале
1950-х годов XX века С тех лор в технике мобильней связи про-
изошли существенные изменения, а ее популярность и объем пре-
доставляемых ею услуг возросли намного больше, чём это прогно-
зировалось. Первое поколение систем мобильной связи использо-
вало аналоговую передачу речевых сигналов. Было создано не-
сколько национальных стандартов: AMPS (Advanced Mobile Phone
Service) в США, TAGS (Total Access Communication System) в Анг-
лии, NMT (Nordic Mobile Telephones) s Швеции, Норвегии, Финлян-
дии, Дании, NTT (Nippon Telephone and Telegraph) в Японии.
Второе поколение систем мобильной связи, которое использует
цифровую передачу, было введено во второй половине 1980-х годов.
Эти системы обладали большей спектральной эффективностью,
предоставляли большее количество услуг более высокого качест-
ва, обеспечивали более совершенный поиск подвижного абонента,
чем системы первого поколения. Ко второму поколению относятся
системы глобальной мобильной связи стандарта GSM (Global
System for Mobile Communications), системы персональной сотовой
связи стандарта РОС (Personal Digital Cellular), цифровой вариант
сотовой системы мобильной связи США стандарта iS-136 (Digitai-
AMPS), сетевые системы с технологией кодового разделения кана-
лов стандарта IS-95. Основными услугами, предоставляемыми
этими системам.’,', являются передача речи и низкоскоростная пе-
редача данных.
Современные системы второго поколения будут совершенство-
ваться з направлении создания систем мобильной связи третьего
кокс ’.ения, обеспечивающих более широкий ассортимент услуг,
расширенный главным образом за счет увеличения скорости пере-
дачи информации от 100 до 200 кбит/с при коммутации каналов
и к’хе-оз. Подобные системы принято относить к поколению 2,5.
420
Системы третьего поколения будут обеспечивать даже более вы-
сокие скорости передачи, обладать большей гибкостью, предос-
тавляя одному абоненту одновременно несколько услуг, поддержи-
вать несколько классов услуг, отличающихся их качеством.
На рис 12.1 графически представлен рост числа абонентов сис-
тем первого и второго поколений наиболее распространенных стан-
дартов с 1991-го по 2002-й годы [1]. Из рисунка следует, что наи-
большее число абонентов в настоящее время пользуются услугами
систем стандарта GSM (свыше 50 % общего числа абонентов) Чис-
ло абонентов, пользующихся услугами аналоговых систем мобиль-
ной связи, последг.ле годы снижается. Доля мобильных терминалов
среди общего числа телекоммуникационных терминалов в некото-
рых странах к настоящему времени достигает 35 ... 45 %.
В табл. 12.1 приведены значения наиболее важных технических
параметров систем второго поколения (1]. Все указанные здесь
системы имеют частотное дуплексное разделение: одновременная
передача и прием ведутся в разных частотных полосах. Указанные
в таблице скорости передачи данных являются максимальными,
которые поддерживаются "соответствующими стандартами в на-
стоящее время. Реальные скорости передачи, реализуемые в ком-
мерческих системах, обычно меньше указанных. В 1998 г. системы
GSM поддерживали скоростЫ1'4,4 кбит/с, iS-13c - 9,6 кбит/с, IS-95 -
9,6 кбит/с, РОС - 9.6 кбит/с.
Рис. 12.1. Изменение числа абонентов систем ’лобильной связи пергого и
второго поколений в мире
421
Таблица 12.1
Параметры систем второго поколения GSM IS-136 IS-95 »• РОС
Тип множе- ственного доступа ТОМА ТОМА CDMA ТОМА
Тип моду- ляцим GMSK Когерентные л/4-DQPSK, 8-PSK QPSK/ O-QPSK п/4-DQPSK
Расстояние между под- несущими, кГц 200 30 - 25
Символьная скорость в канале,кГц 270,833 48,6 (п/4-DQPSK), 72,9 (8-PSK) 1228,8 42
Длина кад- ра» мс 4,515 40 20 20
Число вре- менных ка- налов в кадре 8/16 6 » 1 3/6
Полоса про- пускания линии вверх и вниз, МГц 890...915/ 935... 960, 1720... 1785/ 1805... 1880, 1930... 1990/ 1850...1910 824... 849/ 869... 894, 1930... 1990 824... 849/ 869... 894, 1930... 1990/ 1850...1910 810... 826/ 940... 956, 1429... 1453/ 1477... 1501
Тип и ско- рость рече- вого кодека» кбит/с RPE-LTP: 13; 6,5 VCELP: 8, ACELP: 7,4; 12,2 QCELP: 8, CELP: 8. CELP: 13 VCELP: 6,7
Максималь- ная скорость передачи, кбит/с 115,2...182.4 IS-136+: 43,2 IS-95A: 14.4, IS-95B: 115.2 28,8
Скачки по частоте Да Нет Нет Нет
Эстафетная передача Жесткая Жесткая Мягкая Жесткая
422
12.2. Системы третьего поколения
Основные требования. Главными стимулами разработки сис-
тем третьего поколения являются стремление обеспечить абоненту
новые услуги, требующие повышенные скорости передачи, и жела-
ние повысить спектральную эффективность систем мобильной свя-
зи с целью экономии занимаемых полос радиочастот. Работы по
созданию таких систем фактически были начаты в 1985 г., когда
МСЭ развернул дискуссии о принципах построения будущей гло-
бальной сухопутной сети телефонной связи (FPLMTS - Future
Public Land Mobile Telephone System). В настоящее время для се-
тей третьего поколения в МСЭ принято название 1ГЛТ-2000
.(International Mobile Telephone), а в Европе - UMTS (Universal Mobile
Telecommunications Services). В Европейском институте стандарти-
зации в области телекоммуникаций (ETSI) соответствующие иссле-
дования начаты в 1990 г.
Основные цели при разработке рекомендаций по радиоинтер-
фейсу для IMT-2000 были сформулированы следующим образом:
, • полное покрытие зоны обслуживания и высокая мобильность
при скорости передачи 144 кбит/с, желательно достичь скорости
384 кбит/с;
• ограниченное покрытие зоны обслуживания и ограниченная
мобильность при скорости передачи до 2 Мбит/с;
• более высокая спектральная эффективность по сравнению с
существующими системами;
• большая гибкость при введении новых услуг.
Желаемые скорости передачи данных выбраны по аналогии со
скоростями в цифровых сетях с интеграцией услуг (ISDN -
Integrated Services Digital Network). В этих сетях скорость 144 кбит/с
используется в 2В+О-канале, 384 кбит/с - в НО-канале и 1920 кбит/с-
в Н12-канале. Однако эти числовые значения еще активно обсуж-
даются. Ясно только одно - решающим здесь будет требование
рынка к коммерческим системам. На рис. 12.2 приведены возмож-
ные области применения стандартов систем второго и третьего
поколений в системе координат «скорость передачи данных - мо-
бильность».
В зависимости от назначения системы используемые техниче-
ские решения могут быть разными. Доля терминалов систем вто-
рого поколения среди общего телекоммуникационного абонент-
ского оборудования составляет от 45 % в скандинавских странах
до единиц процентов в развивающихся странах, где сотовые сис-
темы находятся в начале жизненного цикла. Поэтому представ-
ляется очевидным, что необходимость в совершенствовании со-
товых систем и разработки новых систем в разных странах суще-
ственно различна.
423
4 Сксоость передачи, кбит/с
2000 Т—--------
I “----------
Ограниченная зона
обслуживания
Большая зона
обслуживания
Низкая подвижность
Высокая подвижность
Рис. 12.2. Области применения стандартов систем
второго и третьего поколений
В результате может оказаться целесообразным построение
нескольких вариантов систем IMT-2000. Кроме того, существен-
ное влияние на принимаемые решения оказывают требования
лрегглстзенности новых технологий и технологий систем второго
поколения.
Выбор радиоинтерфейса для систем IMT-2C00. Значительные
успехи систем второго поколения стандарта GSM в европейском
регионе оказали сильное влияние на выбор технологии для систем
третьего поколения. И операторы и производители оборудования
стремились к тому, чтобы переход к третьему поколению осущест-
влялся как эволюция систем GSM, обеспечивающая плавный пе-
реход о~ второго к третьему поколению. Выбор радиоинтерфейса
фактически сводится к еыбору ширины полосы радиочастот, мето-
дов модуляции, помехоустойчивого кодирования, типов каналов,
структуры кадров, протоколов доступа, алгоритмов назначения ка-
налов и эстафетной передачи, способа выбора сот. В Европе эта
работа была сосредоточена в Европейском институте стандарти-
зации в области телекоммуникаций в рамках реализации проекта
UMTS, а соответствующая технология получила аббревиатуру
UTR.A - UMTS Terrestria! Radio Access (наземный радиодоступ сис-
темы UMTS). В январе 1398 г. работы завершились принятием
с л с-д •/ ю щ к х ос гл а ш э н и й:
• э диапазонах радиочастот, обеспечивающих возможность час-
тотного дуплексирования (FDD), система IMT-2000 использует для
организации радиодоступа широкополосную технологию множест-
венного доступа с кодовым разделением каналов VXCDMA
(Wideband Code Division Multiple Access);
. в случае использования временного дуплексирования (TDD) в
качестве технологии радиоинтерфейса IMT-2000 применяется
смешанная технология множественного доступа с кодовым и вре-
менным разделением каналов TD-CDMA (Time Division - Code
Division Multiple Access).
Несколько позже эти два режима были гармонизированы: для
них приняты одинаковыми численные значения частоты следова-
ния элементарной символов в радиоканале, длина кадра, число
временных каналов в кадре.
Эти варианты стандартов радиоинтерфейса должны обеспечи-
вать возможность работы при использовании одной несущей в ка-
ждом канале и определенный уровень совместимости с инфра-
структурным оборудованием сетей GSM. Не менее важной явля-
лась возможность создания компактных и экономичных термина-
лов, обеспечивающих два режима FDD и -TDD, и поддерживающих
заданный набор услуг.
Несколько компаний Японии представили в ETSI варианты ра-
диоинтерфейсов с использованием технологии WCDMA при дуп-
лексировании FDD и TDD.
Одновременно с усилиями европейского региона североамери-
канские компании продолжали разработку собственных стандартов
для беспроводных систем. Здесь наибольшая активность была
в двух направлениях: 1) разработка технологии UWC (Universa1
Wireless Communications - универсальная беспроводная связь),
использующая ТОМА и основывающаяся на стандарте IS-';36;
2) разработка нового стандарта cdma2000, который обеспечивал
совместимость с используемым в США и ряде других стран стан-
дартом IS-95. Это широкополосная технология с кодовым разделе-
нием каналов, которая сохраняла возможность эволюционного пе-
рехода от уже развернутых сетей cdmaOne (IS-S5) к сетям
cdma2000. Здесь предложено использовать в прямом канале (пе-
редача от БС к АС) режим с несколькими несущими. В канале с
шириной полосы 5 МГц размещаются три несущие, сигнал каждой
несущей совместим по своим параметрам с требованиями стан-
дарта IS-95. В обратном канале используется единственная несу-
щая в канале с полосой 5 МГц. Эти предложения существенно от-
личались от рекомендаций ETSI. Кроме того, разными оказались
425
значения тактовой частоты (частоты следования элементарных
символов широкополосных сигналов) и ряда других параметров.
Все это в целом приводило к несовместимости данных технологий.
Работа по поиску путей гармонизации новых стандартов были
продолжены в рамках двух партнерских объединений 3GPP
и 3GPP2 (The 3-rd Generation Partnership Project). В первое объеди-
нение 3GPP вошли производители и операторы сообщества GSM.
В состав второго партнерского объединения 3GPP2 - сторонники
эволюционного развития двух технологий сотовой связи второго
поколения, которые в настоящее время широко применяются
в США: TDMA (IS-136) и cdmaOne (IS-95).
В процессе гармонизации стандартов систем третьего поколе-
ния приняли участие многие операторы различных типов сетей
второго поколения, объединившиеся в отдельную группу. Эта груп-
па операторов предложила для систем третьего поколения три ти-
па радиоинтерфейсов на основе технологии CDMA: DS-CDMA -
широкополосная система с одной несущей, прямым расширением
спектра с помощью ПСП и частотный дуплекс; MC-CDMA - широ-
кополосная система с несколькими несущими и частотным дуплек-
сом; TD-CDMA - широкополосная система с одной несущей и вре-
менным дуплексом. Все предлагаемые типы радиоинтерфейсов
должны обеспечивать возможность взаимодействия с обеими ба-
зовыми сетями систем второго поколения: GSM и IS-136. Также
было предложено уменьшить значение тактовой частоты ПСП для
интерфейса DS-CDMA FDD с 4,096 ^о 3,84 МГц. Это приблизило
значение тактовой частоты к величине, принятой в cdma2000,
и облегчило создание терминалов с унифицированным радиочас-
тотным трактом. Данные предложения были поддержаны как 3GPP,
так и 3GPP2. В результате оказалось возможным продолжить ра-
боты по созданию гармонизированных стандартов на радиоинтер-
фейсы систем третьего поколения.
Работы успешно завершились в 1999 г. общим одобрением гар-
монизированного семейства стандартов для наземных и спутнико-
вых систем мобильной связи третьего поколения. Согласованная
модульная система взаимоувязанных стандартов наземного сег-
мента IMT-2000 изображена на рис. 12.3 [2].
В соответствии с принятым решением доступ мобильных тер-
миналов к услугам IMT-2000 может обеспечиваться посредством
одного из пяти радиоинтерфейсов, приведенных на рисунке. Три из
них используют технологию CDMA: интерфейс IMT-DS (Direct
Spreading - прямое расширение) базируется на WCDMA с понижен-
ной тактовой частотой, интерфейс IMT-MC (Multi Carriers - несколько
несущих) соответствует стандарту cdma2000 с тремя несущими.
426
Технологии^
и радиосет^
Межсетевой
роуминг^
Базовые сётй$|
Межсетевой
роуминг
Рис. 12.3. Семейство стандартов радиоинтерфейса IMT-2000
интерфейс IMT-TC (Time Code - временной код) объединяет в себе
два режима, предусматривающие возможность работы в непарной
полосе частот с временным дуплексом и в режиме TD-SCDMA син-
хронной CDMA, предложенным Китаем (комбини- розанный вари-
ант синхронной системы TDMA/CDMA). Кроме того, е состав утвер-,
жденных интерфейсов вошли: IMT-SC (Single Carrier - одна несу-
щая), базирующийся на технологии TDMA (D-AMPS) и предъяв-,
ляющий минимальные требования к частотным ресурсам; IMT-FT.
(Frequency Time - частота-время), расширяющий спектр услуг
и пропускную способность системы микросотовой связи DECT. Ос-:;
новные параметры радиоинтерфейсов приведены в’табл. 12.2 [2].
Таблица 12.2
Параметры । радиоин- герфейсов IMT-2000 IMT-DS IMT-MC ' IMT-TC IMT-SC IMT-FT
Тип базовой технологии WCDMA, UTRA, FDD cdma2000 UTRA TDD, TD SCDMA uwc- 136 i DECT EP ' I
! Метод дос- тупа DS- CDMA мс- CDMA TDMA/' CDMA TDMA MC-TDMA
Тип дуплекс- ! ного разноса FDD FDD TDD FDD FDD/ TDD
427
Э2ДИОИН - : герфойссз 1 IMT-DS’ - IMT-MC : .ж IMT-TtS Ц IMT-FT
К !
* Г к;?’ 3.34 3,6884 3,84 (UTRA), 1,28 (SCDMA) — :
. ’С *. 'Д V i . j - — c 384, ’ " 2048 1152, 2304, 3456
QTSK/ BPSK, HPSK QPSK/ BPSK QPSK/ BPSK, HPSK BOQAM, .QQQAM GFSK, л/2-DPSK, л/4-DQPSK, Tt/8-D8PSK
f ¥! (’; ! 'V ! I 10 5и,20 10 -4,6 Ю
Кзк следует из этой таблицы, при переходе к третьему поколению
суивствующие сетй радйбдоступа претерпит, радикальные измене-
ния что объясняется, в первую б^редь, необходимостью поддержки
новых высокоскоростных услуг передачи данных. В то же время чле-
ны семейства базовых сетей третьего поколения в значительной ме-'
ре основываются на существующих сетевых технологиях, которые
буду- гостег.энно эволюционировать в. направлений требований,
предъявляемых .< сетям IMT-2000. В настоящее время системы вто-
р^.с псколеяия используют отличающиеся , стандарты: GSM МАР
(Mc-ciie Application Part - часть для мобильных приложений) в Европе,
А\3;-< ' з США, SNAP в Японии. Поскольку базовые сети не являются
с.г..ео;:-'/ьэ:ощим фактором при' внедрении новых услуг IMT-2000,
г кроме того, в них инвестированы значительные средства, то имен-
но. су чествующие сети лягут в основу инфраструктуры сетей третье-
го пог.эления (рис. 12.3). Это, прежде всего^ усовершенствованные
бозос-ie сети GSM МАР и ANSI-41, а также магистральные !Рч;ети.
Вза^уодейстзие .между тремя магистральными сетями будет осуще-
стви - _.;я через межсетевой интерфейс.
Стандартный модуль идентификаций пользователя UIM (User'
:.-;е -.ыюгбол Mocul) обеспечит глобальный роуминг независимо иг
засранного метода радиодоступа или типа транспортной' сети
з о -i или ином географическом регионе. -
^^цесь полезно под4ёиркн^т^^^^несй^й йа различия в предпоч-
тениях разработчиков' ФандартЬЕбФистеМ£фетьёго поколения общим
71ля них; является стремление использовать в радиоинтёрфейсах
фистем третьего поколения технологию CDMA. Это означает, что-
CDMA признана основной технологией для стандарта IMT-2000.
12.3. Выделение частот для систем третьего поколения
Для сетей IMT-2000 МСЭ выделил два участка спектра 1885...2025
и 2110...2200 МГц в диапазоне 2 ГГц общей шириной полосы 230 МГц.
Однако в. разных регионах и в разных странах могут быть отличия в
формировании этой полосы. На рис. 12.4 представлены полосы, час-
тот, выделенные для IMT-2000 в Европе, США и Японии.
В Европе парные полосы частот 1920...1980 и 2110...2170 МГц
вьщелены для работы с,частотным дуплексом (FDD), а непарные
полосы 1900... 1920 МГц и 2010...2025 МГц - для работы с времен-
ным дуплексом (TDD); Практически аналогичные полосы для IMT-
2000 выделены в Японии. В США сложилась совершенно иная си-
туация.. Там часть диапазона частот 2 ГГц уже используется для
нужд персональных сотовых служб (PCS). Следовательно, в рамках
изначально выделенного спектра отсутствует возможность исполь-
зования для IMT-2000 унифицированных полос частот во всемирном
масштабе.
Рис. 12.4. Частотный план IMT-2000:
MSS - Mobile Satellite System (мобильная спутниковая система);
S-PCN - Satellite Personal Communication Network (спутниковая сеть пер-
сональной связи); DL — Downlink (линия вниз); UL — Uplink (линия вверх);
Sat. IMT-2000 — спутниковый сегмент
429
Диапазоны частот оказывают существенное влияние на выбор
технологии и принципы построения радиоинтерфейсов
12.4. Технологии радиоинтерфейсов
систем третьего поколения
Широкополосная CDMA. Эта технология предусматривает ис-
пользование полосы частот 5 МГц или более Имеется несколько
причин выбора такой полосы Первая является следствием основ-
ной цели, ради которой создается третье поколение повышенные
скорости передачи до значений 144 и 384 кбит/с Эти скорости мо-
гут быть достигнуты при полосе 5 МГц при приемлемой емкости
сети Даже пиковая скорость в 2 Мбит/с может быть достигнута при
некоторых дополнительных ограничениях Вторая причина состоит
в том, что необходимо учитывать дефицит свободных полос в ра-
диоспектре и, следовательно, приходится ограничиваться по воз-
можности меньшей шириной полосы занимаемых частот, особенно
в тех случаях, когда новые системы должны функционировать
в диапазонах, где уже работают системы второго поколения Тре-
тья причина при ширине полосы 5 МГц уже оказывается возмож-
ным разрешить большее число лучевых компонент, чем при узкой
полосе, в результате чего повышается качество передачи Еще
большие значения полосы частот (10, 15 и 20 МГц) рекомендуется
использовать более эффективно для поддержки более высоких
скоростей передачи
Несколько новых рекомендаций принято для систем третьего
поколения Их можно сформулировать следующим образом [2]
• предоставление услуг, трёбующих разные скорости передачи,
• пакетная передача данных,
• комплексное расширение,
• когерентный прием в линии вверх с использованием пилот-
канала, назначенного абонентом,
• дополнительный пилот-канал в линии вниз для обеспечен 1я
возможности формирования диаграмм направленности антенн,
• бесшовная эстафетная передача при смене частот,
• быстрое управление мощностью в линии вниз,
• возможно многопользовательская демодуляция
Стандартизация радиоитерфейса систем третьего поколения
для методов множественного доступа, основывающихся на техно-
логии CDMA, проводится в основном для двух типов широкополос-
ной CDMA асинхронные сети и синхронные сети В асинхронной
сети базовые станции не синхронизированы В синхронной сети
430
базовые станции синхронизированы с точностью до нескольких
микросекунд Как указывалось ранее, приняты две рекомендации
по построению асинхронной сети WCDMA, предложенные ETSI
Японией и Кореей Синхронная сеть широкополосной CDMA пред-
ложена США (cdma2000) В табл 12 3 приведены значения некото-
рых параметров разных сетей широкополосной CDMA
Таблица 12 3
Параметры сетей ши- рокополос- ной CDMA WCDMA Korea (ТТАII) Korea (TTAI) cdrna2000
Частота элемен- тарных сим- волов, МГц 1,024/ 4,096/ 8,192/ 16,384 1,024/4,096/ 8,192/16,384 0,9216/ 3,6864/ 14,7456 1,2288/ 3,6864/ 7,3728/ 11,0593/ 14,7456 (для пря- мого рас- ширения)
Интервалы между не- сущими, МГц (1,25), 5,10. 20 1,25, 5, (10), 20 1,25, 5,20 4.
Длина кадра, мс 10 10 20 20
Режим ра- боты базо- вых станций Асинхронный Асинхронный Синхронный Синхронный
Способ обеспече- ния коге- рентной демодуля- ции Коммути- руемый пи- лот-канал (UL, DL) и общий пи- лот-канал в DL UL пилот- символы, комму- тируемые с битами управления мощностью DL общий пилот канал UL пилот- символы комму- тируемые с битами управления мощностью DL общий пилот-канал UL пилот- символы коммути- руемые с битами управления мощностью, DL общий непрерыв- ный пилот- канал
Примечание UL- линия вверх DL - линия вниз
431
Широкополосная TDMA. Уже отмечалось выше, что при выборе
радиоинтерфейса для систем третьего поколения изучено несколько
способов применения технологии TDMA. На основе полученных ре-
зультатов принята рекомендация: технология TDMA будет примене-
на для эволюционного развития стандарта IS-136. Кроме того, тех-
нология TDMA является частью эволюционного развития GSM в
рамках концепции EDGE (Enhanced Data Rates for GSM Global Evolu-
tion - повышенные скорости передачи данных для глобальой эволю-
ции GSM).
Таблица 12.4
Параметры систем третьего поколения стандартов IS-136 HS HEDGE IS-136 HS (Транспорт/ Вне помещений) GSM EDGE IS-136 HS (Внутри помещений)
Метод дуплекса FDD FDD и TDD
Интервалы между несущими, кГц 200 1600
Вид модуляции B-O-QAM, Q-O-QAM. GMSK B-O-QAM, Q-O-QAM
Максимальная ско- рость передачи, кбит/с 722,2 (Q-O-QAM), 361,1 (B-O-QAM), 270,8 (GIVfSK) 5200 (Q-O-QAM), 2600 (B-O-QAM)
Коммерческая ско- рость передачи, кбит/с 521,6 (Q-O-QAM), 259,2 (B-O-QAM), 182,4 (GMSK) 4750 (Q-O-QAM), 2375 (B-O-QAM)
Длина кадра, мс 4,615 4,615
Число времен;.и.х ка- налов в кадре 8 64 (72 мкс) 16 (288 мкс)
Вид кодирования Сверточное 1/2,1/4, 1/3, 1/1 Сверточное 1/2,1/4, 1/3,1/1
Скачки по частоте В зависимости от режима В зависимости от режима
Динамическое назна- чение каналов В зависимости от режима В зависимости от режима
Примечание. Указанные здесь методы модуляции (B-O-QAM и Q-O- QAM) были предложены в начальных вариантах EDGE и UWC-136. В 1998 году эти методы заменены новым - ФМ-8 [1].
432
IS-136+ Транспорт/Вне помещений В помещениях
Рис. 12.5. Полосы частот стандарта UWC-136 систем третьего поколения
Проект UWC предусматривает эволюционное совершенствова-
ние стандарта IS-136 с целью обеспечить выполнение рекоменда-
ций стандарта IMT-2000 при начальном развертывании в полосе
1 МГц. Проект стандарта UWC-136 предусматривает достижение
этой цели путем применения более совершенного способа модуля-
ции в существующих частотных 136 каналах с полосой 30 кГц
(136+) и введения дополнительных TDMA несущих с более широ-
кими полосами частот 200 и 1600 кГц (IS-136 HS - сети внутри
и вне зданий и для транспортных средств). Частотные каналы с
полосой 200 кГц (IS-136 HS - сети вне помещений и для транспорт-
ных средств) со значениями параметров, аналогичными проекту
EDGE, обеспечивают скорости передачи информации до 384 кбит/с;
„ частотные каналы с полосой 1,6 МГц (IS-136 HS - сети внутри зда-
ний) обеспечивают скорость передачи до 2 Мбит/с. Некоторые
предложения, определяющие значения параметров стандарта IS-
136 HS, указаны в табл. 12.4 [1]. Типы полос, заданных стандартом
UWC-136, изображены на рис. 12.5 [1].
Выбор полосы 200 кГц обусловлен по крайней мере двумя при-
чинами [1]. Во-первых, выбор для стандарта IS-136 HS (Транспорт/
Вне помещений) физического слоя, аналогичного GSM, обеспечи-
вает некоторый экономический эффект благодаря более дешевому
оборудованию и более быстрому выходу на рынок. Во-вторых, при
полосе 200 кГц и методах модуляции более высокого порядка мож-
но достичь скоростей передачи 144 и 384 кбит/с с приемлемыми
зоной покрытия и емкостью сети, выполнив при этом рекомендации
IMT-2000 для терминалов пешехода и транспортного средства. При
выбранной полосе частот для IS-136 HS можно обеспечить або-
ненту скорость до 2 Мбит/с при достаточно сложном кодировании.
Длина кадра стандарта IS-136 HS (Транспорт/Вне помещений)
равна 4,615 мс, в одном кадре восемь временных каналов. Струк-
тура данных одного временного канала выбрана с учетом наличия
возможно значительного рассеяния задержки в канале передачи.
433
Рис. 12.6. Структура кадра и временные окна широкополосной TDMA
в стандарте IS-136 HS
Структуры кадра и временного канала стандарта IS-136 HS
(Внутри помещений) оптимизированы для достижения максималь-
ного радиопокрытия и максимальных скоростей передачи. Стандарт
IS-136 HS (Внутри помещений) поддерживает оба метода дуплекса
FDD и TDD. Структуру кадра иллюстрирует рис. 12.6; длина кадра
равна 4,615 мс [1].Один кадр может содержать 64 временных окна
длительностью 72 мкс или 16 временных окон длительностью
288 мкс. В режиме TDD используются те же структуры кадра и окна,
что и в режиме FDD. Любое одно из 64 окоь^ может использоваться
для предоставления услуг, требующих низкие скорости передачи
по радиоканалу. Любое одно окно из 26 окон используется для вы-
сокоскоростных услуг. Этот же рисунок иллюстрирует возможность
динамического распределения ресурсов линии между линией вверх
и линией вниз в режиме TDD.
Возможность установки нескольких скоростей в стандарте
UWC-136 обеспечивается использованием изменяемых структур
временных каналов, кодов, схем модуляции. Передача данных со
скоростями до 43,2 кбит/с может обеспечиваться применением по-
лос 30 кГц стандарта IS-136+ и многооконной структуры. В качестве
примера в табл. 12.5 указаны типы услуг и используемые для их
передачи скорости для стандарта IS-136 HS (Транспорт/Вне поме-
щений) [1]. В зависимости от требований абонента и условий пере-
дачи в радиоканале выбирается подходящая комбинация методов
модуляции, кодирования и числа временных окон в кадре. Асим-
метричные скорости передачи данных обеспечиваются назначени-
ем разного числа временных каналов для линии вверх и линии
вниз. Для услуг с пакетной передачей протокол RLC/MAC (Radio
434
Link Control - управление радиолинией / Medium Access Control -
управление доступом к среде) обеспечивает быстрый доступ к ра-
диоинтерфейсу благодаря резервированию и использованию про-
цедуры автоматического запроса повторной передачи ARQ (Auto-
matic Repeat Request). .
Стандарт IS-136 HS дпя:изменения скоростей передачи преду-
сматривает использование двух схем модуляции и разные методы
' кодирования. Кроме того могут быть использованы две . разные
длины временного окна. Контроль ошибок для услуг с пакетной пе-
редачей основывается на гибридной схеме автоматического запро-
са повторной передачи типа II.
Таблица 12.5
Тип услуги Скорость кода Тип модуляции Максимальная скорость пе- редачи, кбит/с Скорость передачи радиоин- терфейса, кбит/с
ECS-1 0,51 Q-O-QAM 65,2 33,0
ECS-2 0,63 Q-O-QAM 65,2 41,0
ECS-3 0,74 Q-O-QAM 6.5,2 48,0
ECS-4 1.0 Q-O-QAM 65,2 65,2
ECS-5 0,35 B-O-QAM 32,4 11,2
ECS-6 0,45 B-O-QAM 32,4 14,5
ECS-7 0,52 B-O-QAM 32,4 16,7
ECS-8 0,70 B-O-QAM 32,4 22,8
Основная идея состоит в том, что сначала передается часть бло-
ка закодированных данных, которая может бьггь декодирована от-
дельно. Если декодирование оказывается невозможным (имеются
ошибки), передается избыточная информация кода и вновь в прием-
нике предпринимается попытка декодирования. Это продолжается
до тех пор, пока все временные окна, содержащие данные закодиро-
ванного блока, не будут переданы один раз. После этого временное
окно, или окна, имеющие плохое качество передачи (например, низ-
кое значение отношения сигнал-интерференция), передаются по-
вторно и комбинируются в приемнике с ранее принятыми данными.
Данный тип процедуры ARQ может быть использован благодаря
435
возможности протокола RLC/MAC быстро назначать ресурсы и по-
сылать запрос на повторную передачу по обратному каналу.
Гибридная технология CDMA/TDMA. В ETSI при выборе ра-
диоинтерфейса было принято решение, чт® режим TDD будет ос-
новываться на принципах смешанной технологии TD-CDMA. Роль
технологии CDMA в схеме TD-CDMA состоит в том, чтобы обеспе-
чить мультиплексирование разных каналов внутри одного времен-
ного канала. Некоторые параметры технологии TD-CDMA перечис-
лены в табл. 12.6 [1].
Таблица 12. 6
Параметр технологии TD-CDMA Описание и значение параметра
Интервал между основными кана- лами 1,6 МГц
Частота следования элементарных символов в радиоканале 2,167 МГц
Структура временного канала 8 временных окон в 1 TDMA кадре
Метод расширения Ортогональный, 16 элементарных символов на 1 сигнальный символ
Длина кадра 4,615 мс
Концепция многих скоростей пере- дачи Разное число окон, разные коды
Тип кодирования для канала Сверточное со скоростями от 1/4 до 1; выкалывание/повторение
Способы модуляции для передачи данных QPSK/16QAM
Способы модуляции при расшире- нии спектра Линеаризованная GMSK
Способ формирования основной полосы Линеаризованная GMSK
Алгоритм приема Когерентный, основывающийся на обучающей последовательности
Другие способы разнесения Частотный/Скачки по времени для кадров или временных окон
Коэффициент расширения в TD-CDMA небольшой. Поэтому для
увеличения числа абонентов в одном временном окне приходится
предусматривать совместную демодуляцию их сигналов, чтобы из-
бавиться от внутрисотовой интерференции. Совместная демодуля-
436
ция также требуется при медленном управлении мощностью, при
котором возможны значительные изменения уровней принимаемых
сигналов. Так как совместная демодуляция является обязательным
признаком для систем третьего поколения, то ее применение в сме-
шанной технологии может оказаться более критическим по сравне-
нию с широкополосной CDMA. Однако, если число абонентов неве-
лико, сложность совместной демодуляции может оказаться не слиш-
ком чрезмерной.
Мультиплексирование на основе ортогонального разделе-
ния по частоте. Метод формирования физических каналов на ос-
нове мультиплексирования при ортогональном разделении по час-
тоте OFDM (Orthogonal Frequency Division Multiplexing) предусмат-
ривает разделение общего потока данных на несколько парал-
лельных подпотоков с заметно меньшими скоростями следования
битов, каждый из которых затем используется для модуляции сво-
ей поднесущей. Такой способ передачи в конце 50-х и начале 60-х
годов прошлого века сначала применялся в военных системах.
Принцип OFDM был запатентован в 1970 г. Работы по исследова-
нию возможностей применения принципов OFDM для цифрового
радиовещания были начаты в конце 1980 г., а соответствующие
коммерческие системы вещания вводятся в эксплуатацию в на-
стоящее время . Недавно были опубликованы результаты приме-
нения технологии OFDM в системах HIPERLAN типа II и в беспро-
водных системах с технологией ATM (Asynchronous Transfer Mode -
асинхронный способ передачи) [1].
। Активные исследования возможностей применения OFDM при
построении сотовых сетей связи с подвижными абонентами начаты
в 90-х годах прошлого века. Изучены обе возможности реализации
принципов OFDM с использованием CDMA и TDMA технологий.
Для многочастотной CDMA (MC-CDMA - Multicarrier CDMA) спектр
исходного сигнала расширяется в частотной области при передаче
путем использования расширяющего кода. Критическим для такой
передачи на многих несущих частотах является требование отсут-
ствия гладких замираний на каждой несущей частоте. Введение
технологии OFDM в системы сотовой связи с подвижными абонен-
тами обусловлено двумя следующими преимуществами, которые
приобретают при этом эти системы:
• гибкость: каждый передатчик имеет доступ ко всем поднесу-
щим, предоставленных соте;
• простая техника для выравнивания коэффициента передачи
канала: символ OFDM имеет длительность, которая намного боль-
ше чем максимальное расширение задержки в канале, что удовле-
437
творяет условию гладкости замираний в многолучевом, канале; *
следовательно,*для выравнивания канала могут быть применены ;
простые средства.'
Недостатки технологии.OFDM: большое значение, пикфактора- ;
отношения пиковой мощности излучаемого передатчиком сигнала к -*
средней излучаемой мощности; повышенная сложность приемки-1
ков при любой скорости передачи.
В табл. 12.7 приведены предложенные сотрудниками ETSI зна- •
чения некоторых параметров радиоинтерфейса системы третьего
поколения, использующего OFDM технологию. Более подробные-
сведения о возможностях и технических параметрах систем с тех- •
нологией OFDM можно найти в [3].
Таблица 12.7
Параметр радиоинтерфейса OFDM Значение параметра
Полоса одного частотного окна 100 кГц
Число поднесущих в одном частотном окне 24
Полоса частот около одной поднесущей 4,17 кГц
Период модуляции 288,8 мкс
Размер блока 24 поднесущих/ 1 символ
Длина кадра 4,615 мс
Техника телекоммуникаций достигла ^впечатляющих успехов при
разработке систем третьего поколения. Однако до введения таких
систем в коммерческую эксплуатацию еще необходимы значитель-
ные усилия в области стандартизации, управления и технической
реализации. Стандарт IMT-2000 все еще останется большим проек-
том в течение последующих нескольких лет. Все мы станем свиде-
телями того, как после успешного завершения этого проекта будут’
созданы новые возможности для дальнейшего развития технологий.
Список литературы к главе 12
1. Ojanpera Т., Prasad R. (eds.), Holma Н., Toskala A., Yamalainen S.,
Lilja H, and Eriksson T. Wideband CDMA for Third Generation Mobile
Communications. - Boston, London: Artech House, 1980. -440 p.
2. Анфилофьев C.A., Варакин Л.E., Калмыков B.B., Шинаков Ю.С.,
Ярлыков М.С. CDMA: прошлое, настоящее, будущее / Под ред.
Л.Е.Варакина, Ю.С. Шинакова - М.: МАС, 2002 г. - 345 с.
3. Van Nee R., Prasad R. OFDM for wireless multimedia communications. -
Norwood, London: Artech House, 2000. - 260 p.
438
ОГЛАВЛЕНИЕ
Предисловие.............;....................................3
Введение.......................................... ...........7
Глава 1. Основы построения систем связи с подвижными
объектами..............................:..................13
1.1. Общие принципы построения сотовой сухопутной подвижной сис-
темы электросвязи..........;..............................13
1.2 Функциональные схемы систем связи с подвижными
объектами.......................;.........................17
1.3. Стандарты ССПСЭ......................................27
1.4. Эффективное использование ресурсов ретранслятора.....37
Глава 2. Принципы цифровой передачи аналоговых сигналов......46
2.1. Вероятностные характеристики речевого сигнала........46
2.2. Цифровое представление и восстановление речевого
сигнала...................................................54
2.3: Кодирование речи в современных системах связи
с подвижными абонентами..................................76
Глава 3. Спектрально-эффективные методы цифровой
модуляции................................................ 87
3.1. Цифровая модуляция................................. 87
3.2. Фазовая модуляция...................................92
3.3. Частотная модуляция................................105
3.4. Комбинированные методы модуляции...................116
3.5. Модуляция с расширенным спектром...................120
Глава 4. Спектры радиосигналов.............................140
4.1. Спектральная плотность мощности....................140
4.2. Спектральная плотность мощности синхронных
случайных последовательностей ...........................144
4.3. Спектральная плотность мощности сигнала
с квадратурной фазовой модуляцией.......................148
4.4. Способы выбора формы элементарного символа.........150
4.5. Спектры сигналов с постоянной огибающей............161
Глава 5. Оптимальные методы демодуляции цифровых
сигналов.................................................169
5.1. Методы синтеза оптимальных алгоритмов демодуляции
сигналов................................:.................169
5.2. Синтез оптимальных алгоритмов демодуляции сигналов
с памятью.................................................178
5.3. Оптимальная демодуляция сигналов с непрерывной фазой.188
5.4. Демодуляция сигналов с тг/4-квадратурной относительной
фазовой модуляцией......................................198
Глава 6. Энергетический расчет сотовых сухопутных подвижных
систем электросвязи........................................201
6.1. Расчет трасс при поднятых антеннах.................201
6.2. Основные характеристики радиоканалав системах
подвижной связи.........................................205
6.3. Модели предсказания уровня принимаемого радиосигнала.215
6.4. Тепловые шумы и интеференционные помехи............242
Глава 7. Основы частотно-территорриального планирования......250
7.1. Интерференционные помехи и методы их снижения......250
7.2. Принципы территориального планирования систем......267
7.3. Принципы планирования систем с МДКР................287
Глава 8. Основные характеристики современных
подвижных систем электросвязи..............................301
8.1. Системы аналоговых и цифровых стандартов...........301
8.2. Системы с кодовым разделением каналов................308
8.3. Эстафетная передача................................313
8.4. Система сигнализации по общему каналу..............326
Глава 9. Цифровые системы второго поколения................338
9.1. Транкинговые системы...............................338
9.2 Беспроводные телефоны и беспроводные
системы электросвязи................................... 345
Глава 10. Цифровые радиорелейные линии.....................348
10.1. Построение сетей соединительных ЦРРЛ..............348
10.2. Основы расчета ЦРРЛ...............................364
Глава 11. Системы спутниковой связи
с подвижными объектами.....................................383
11.1 Принципы построения систем глобальной
персональной подвижной спутниковой связи................383
11.2. Зоны обслуживания и число ИСЗ.....................393
11.3. Особенности распространения радиоволн
в спутниковом радиоканале...............................397
11.4. Энергетический расчет спутниковых систем связи
с подвижными объектами..................................410
Глава 12. Системы подвижной связи третьего поколения.........420
12.1. Эра мобильной сотовой связи.......................420
12.2. Системы третьего поколения....................... 423
12.3. Выделение частот для систем третьего поколения....429
12.4. Технологии радиоинтерфейсов систем третьего поколения....430