/




















































































































































Автор: Дудникова Е.Г.
Теги: химическая технология химическая промышленность химия теория автоматического управления
Год: 1987
Похожие




Текст
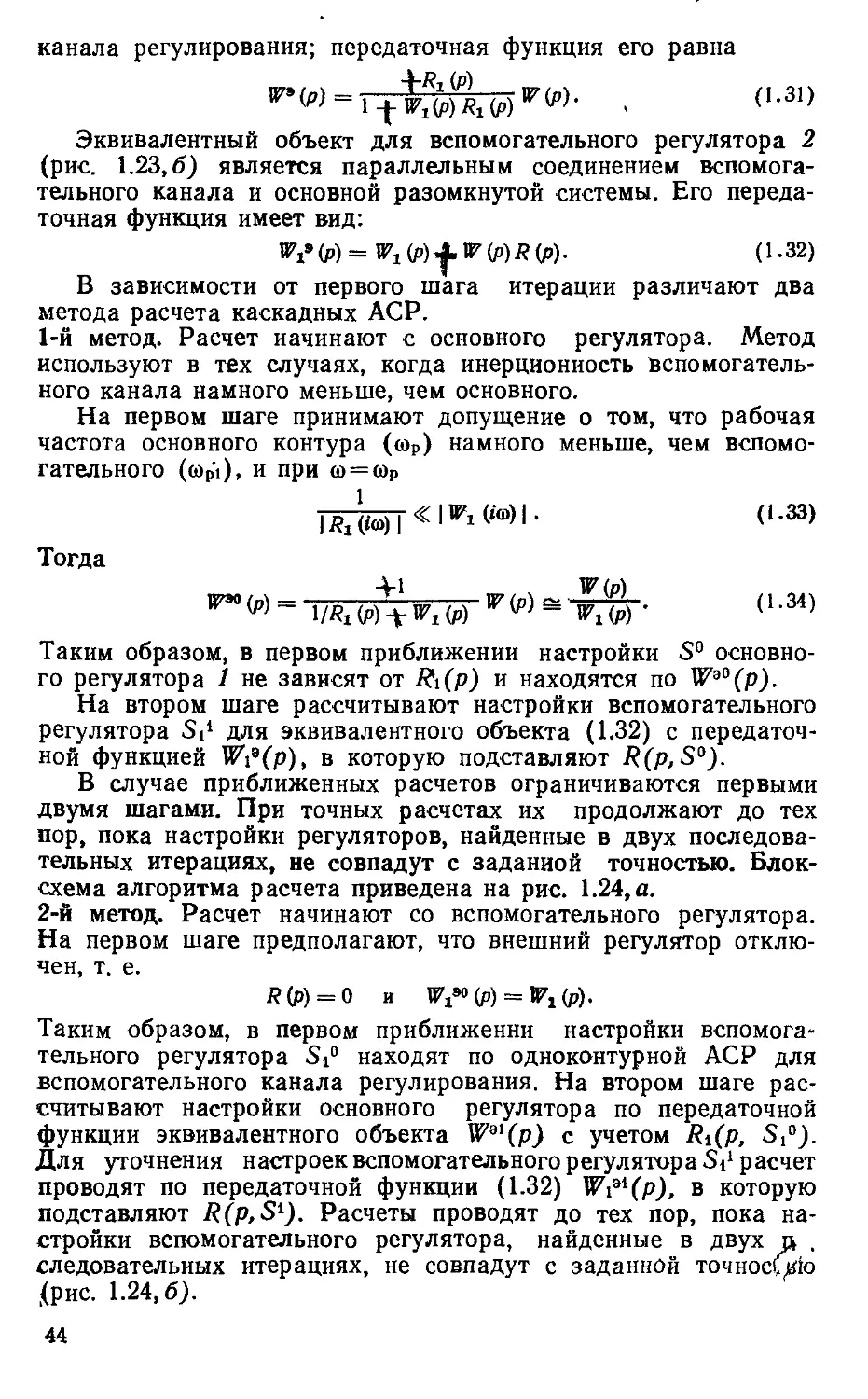
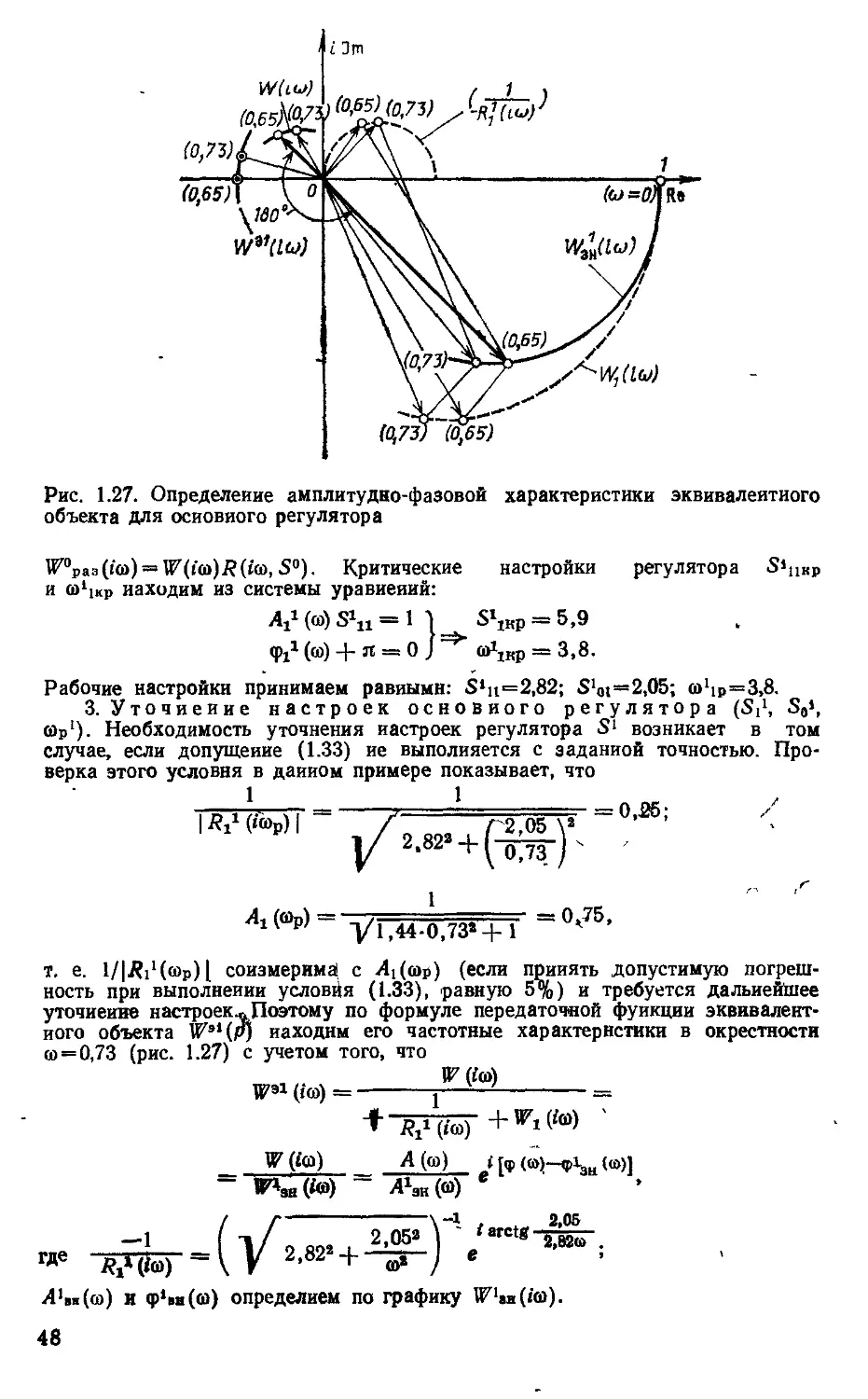
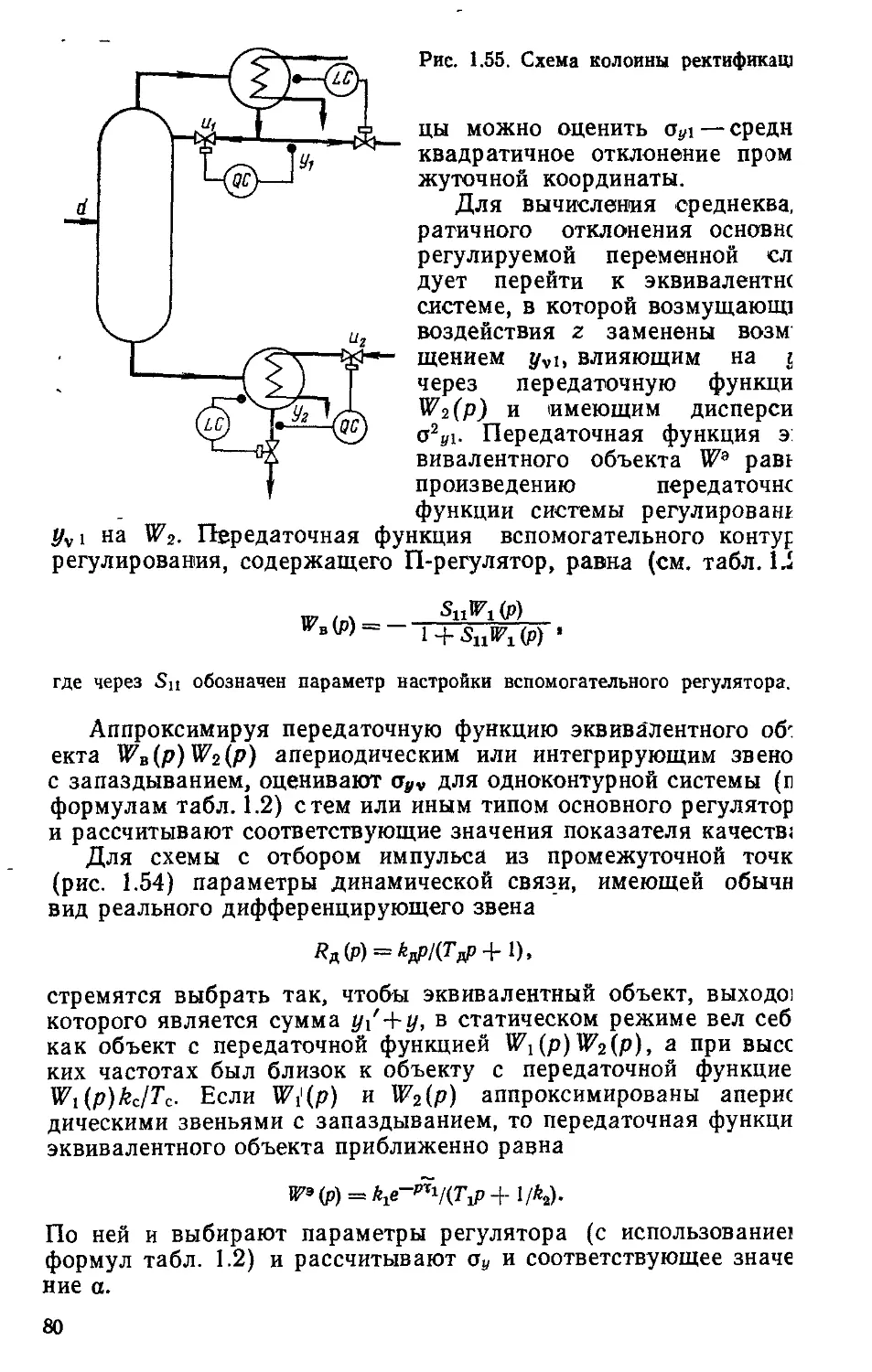
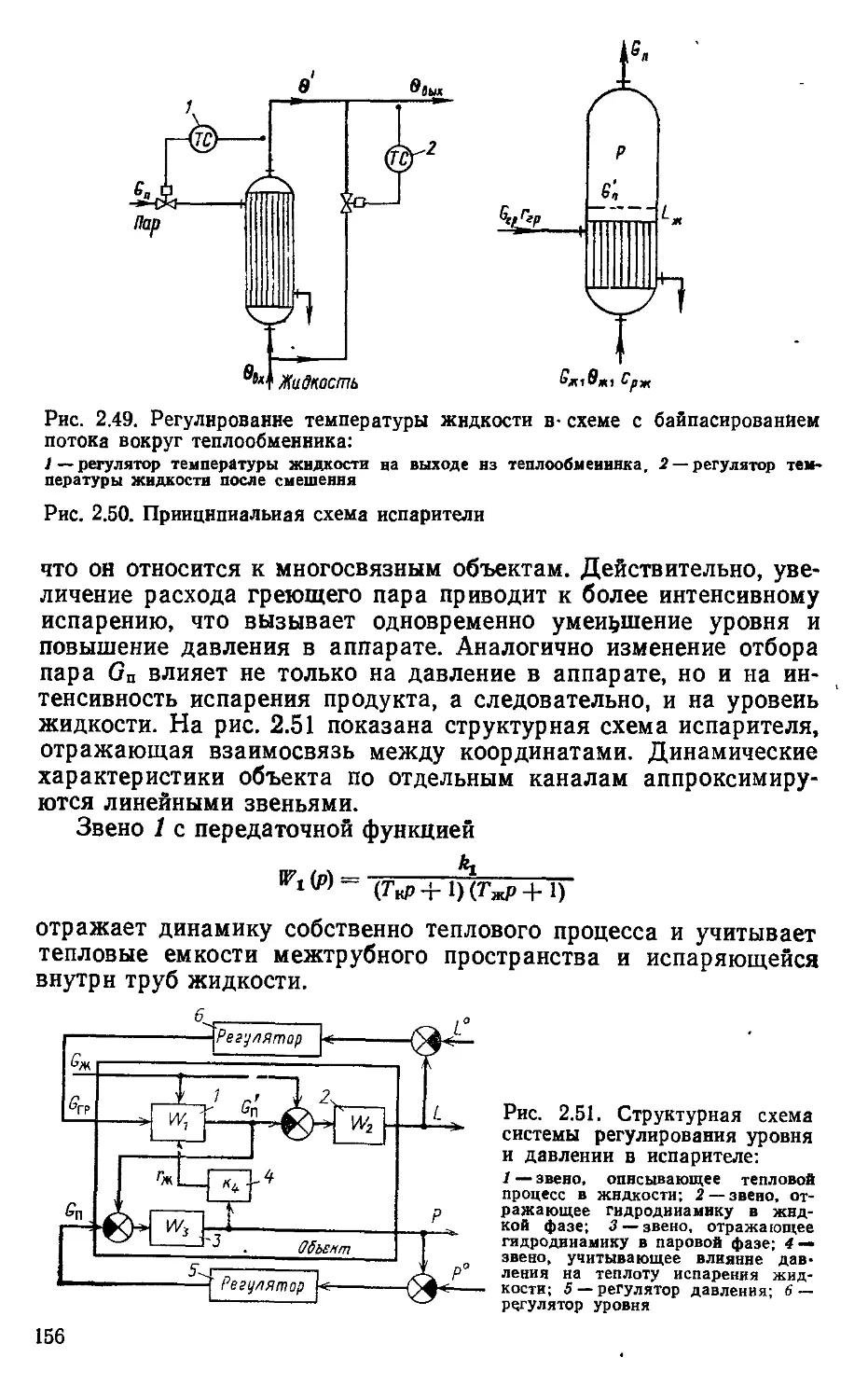
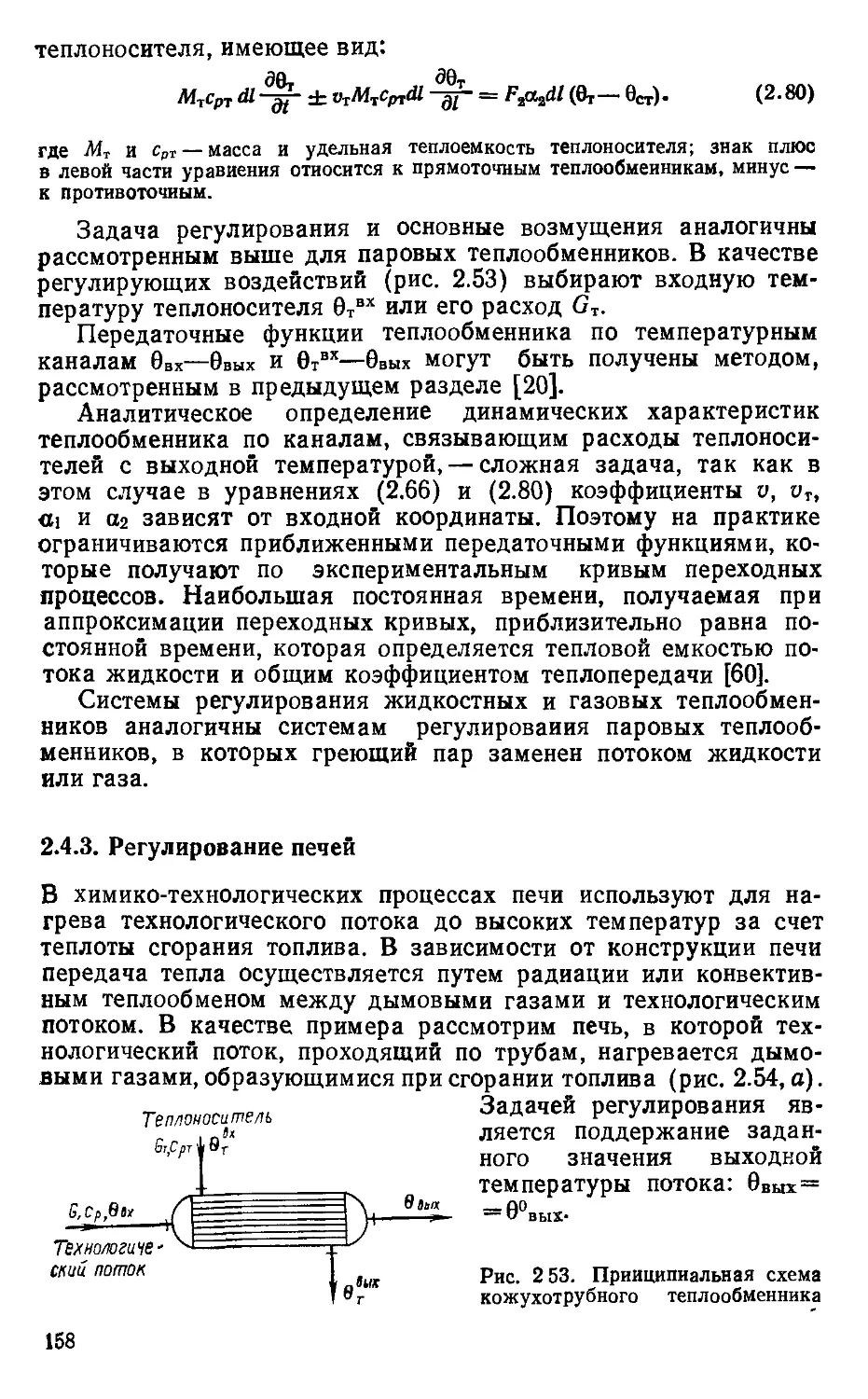
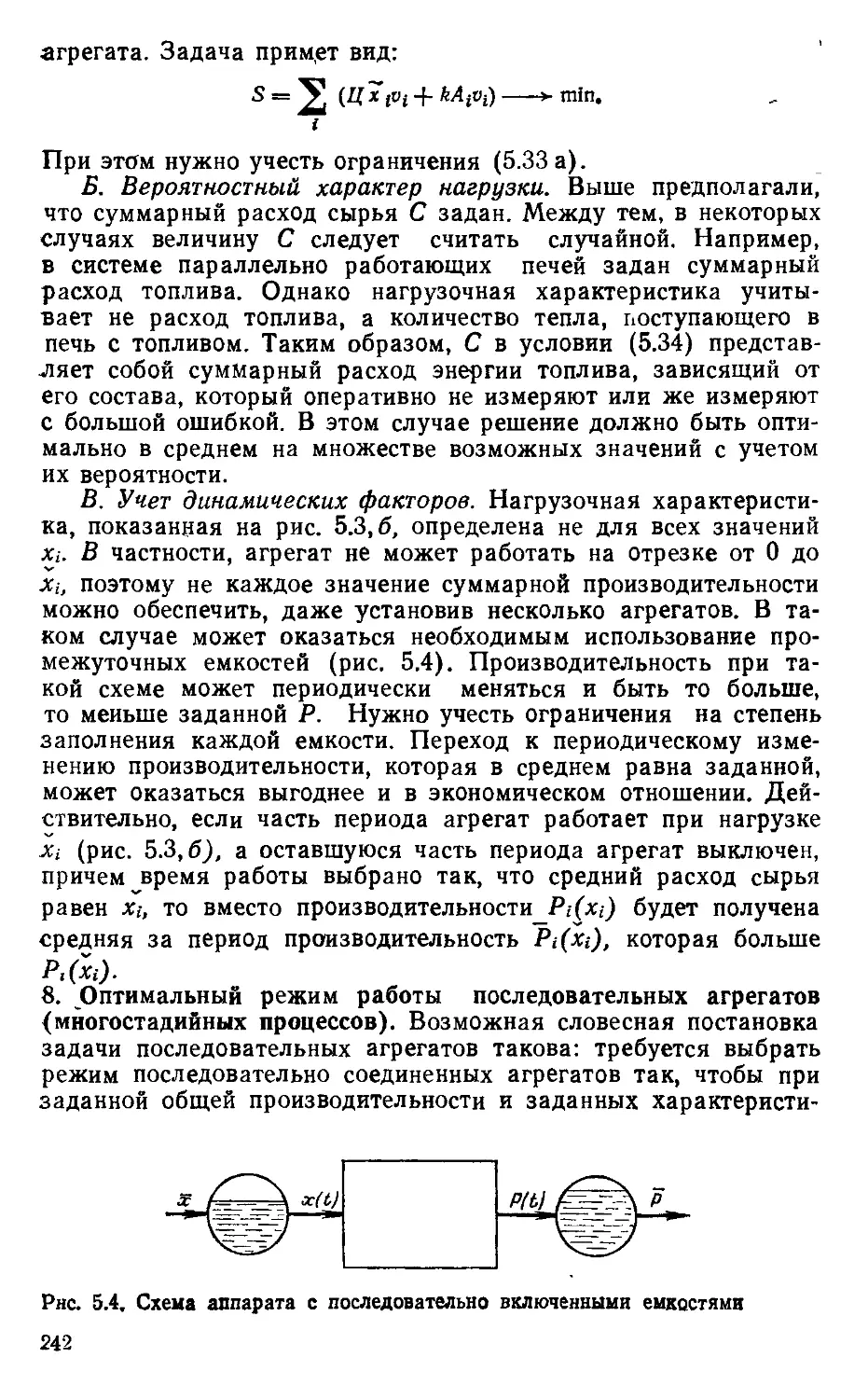
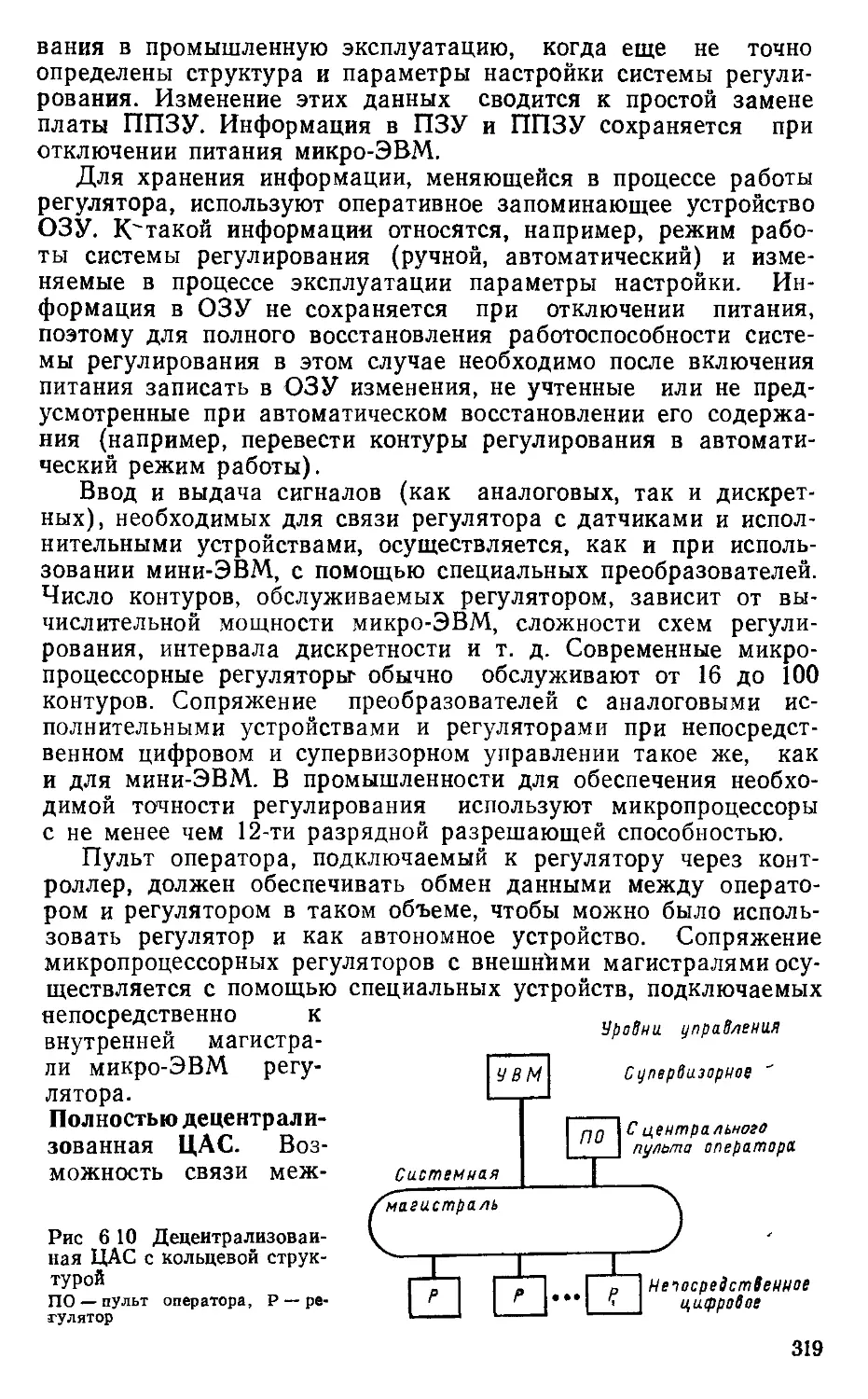
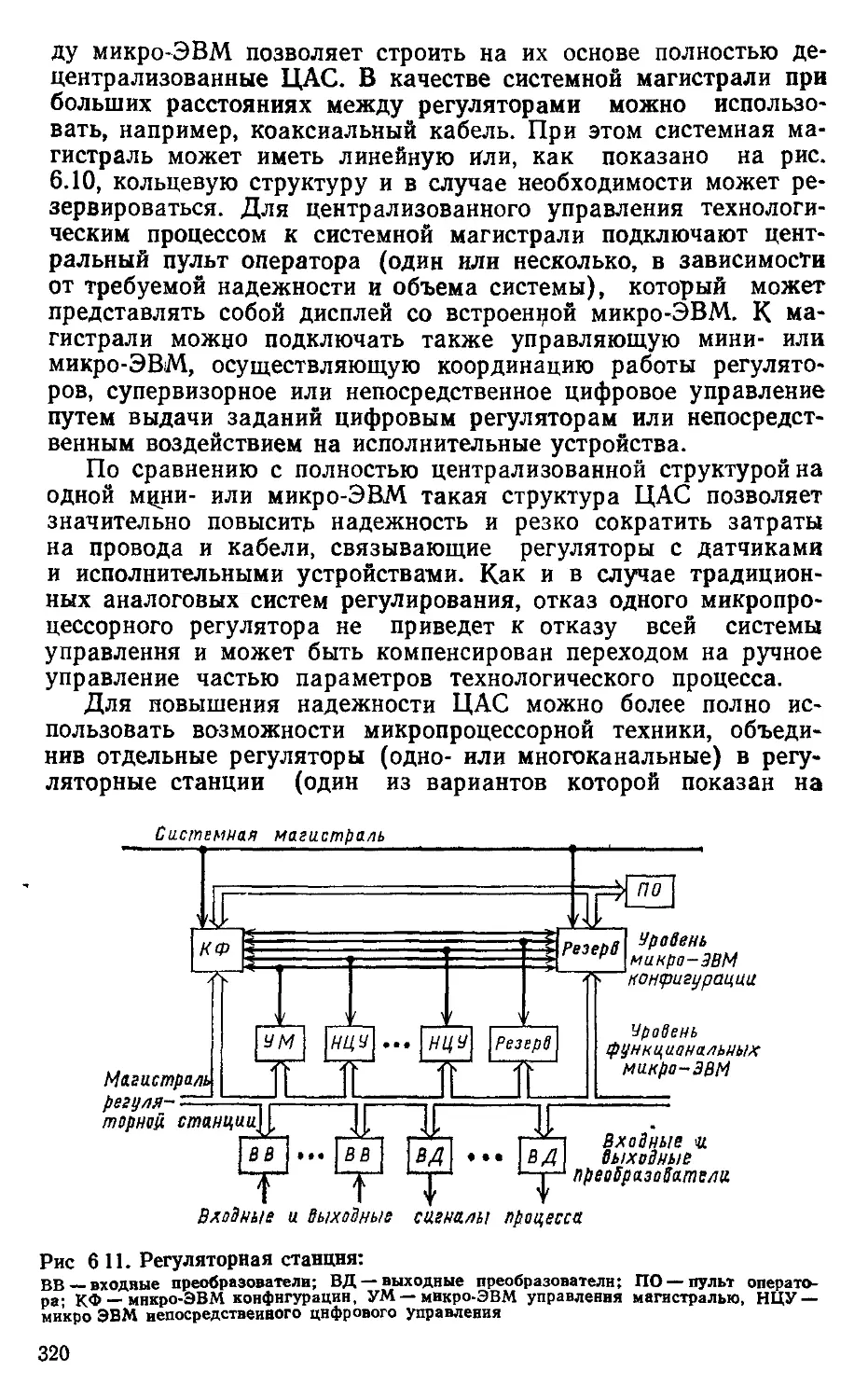
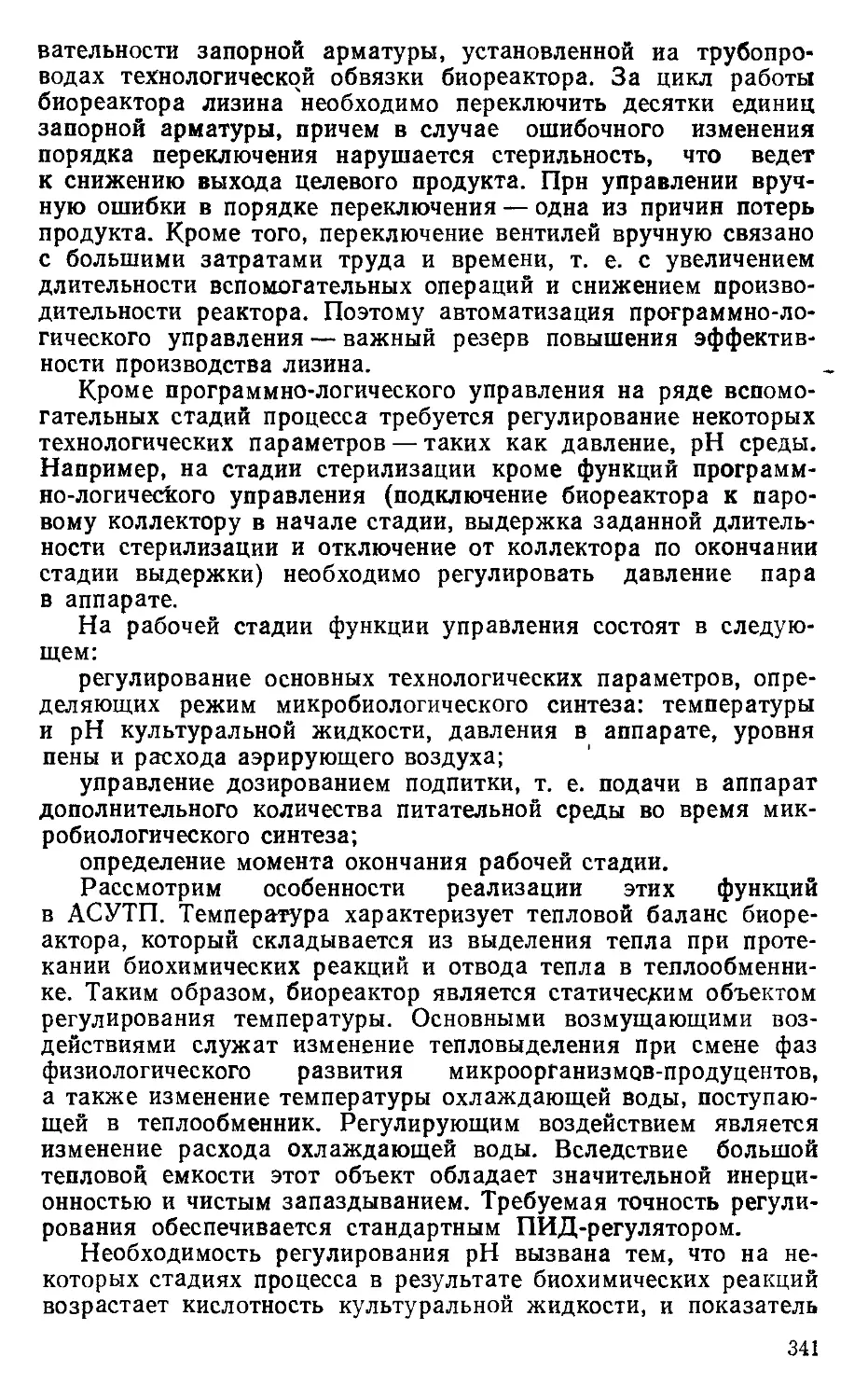
/ для
' высшей
школы
Автоматическое
управление в химической промыоленноет i
A22.
Автоматическое управление в химической промышленности
Под ред. засл, деятеля науки и техники РСФСР д. т. н„ проф. Е. Г. ДУДНИКОВА
Допущено Министерством высшего и среднего специального образования СССР в качестве учебника для студентов высших учебных заведений, обучающихся по специальности «Автоматизация и комплексная механизация химико-технологических процессов»
Москва «Химия» 1987
6П7.1
А18
УДК 66—52:66(075)
Авторы: Е. Г. ДУДНИКОВ, А. В. КАЗАКОВ, Ю. Н. СОФИЕВА, А. Э. СОФИЕВ, А. М. ЦИРЛИН
Рецензенты: к. т. н. Г. И. Лапшенков, к. т. н. А. В- Беспалов
УДК 66—52:66(075)
Автоматическое управление в химической промышленности: Учебник для вузов. Под ред. Е. Г. Дудникова. — М.; Химия, 1987. 368 с.
Описана методика построения систем управления технологическими процессами. Уделено внимание информационным и управляющим функциям автоматизированных систем, программному обеспечению и техническим средствам, включая управляющие вычислительные машины. Даны характеристики конкретных систем, работающих в химической промышленности.
Для студентов по специальности «Автоматизация и комплексная механизация химико-технологических процессов».
Табл. 8. Ил. 200. Библиогр. список 61 название.
2801010000-046
А050(01)-87 46 87
© Издательство «Химия», 1987 г.
СОДЕРЖАНИЕ
Введение........................................ 6
Часть 1. Локальные системы автоматического регулирова-
ния технологических процессов..................19
Глава 1. Основы построения и расчета систем автоматического регулирования технологических объектов.......................................19
1.1. Общие положения............................................
1.2. Расчет настроек регуляторов в одноконтурных АСР . . . .
1.3. Расчет настроек регуляторов в многоконтурных АСР . . . .
1.3.1. Комбинированные АСР ....................
1.3.2. Каскадные АСР........................
1.3 3. АСР с дополнительным импульсом по производной из промежуточной точки .............................................
1.3.4. Взаимосвязанные системы регулирования . . . . ,
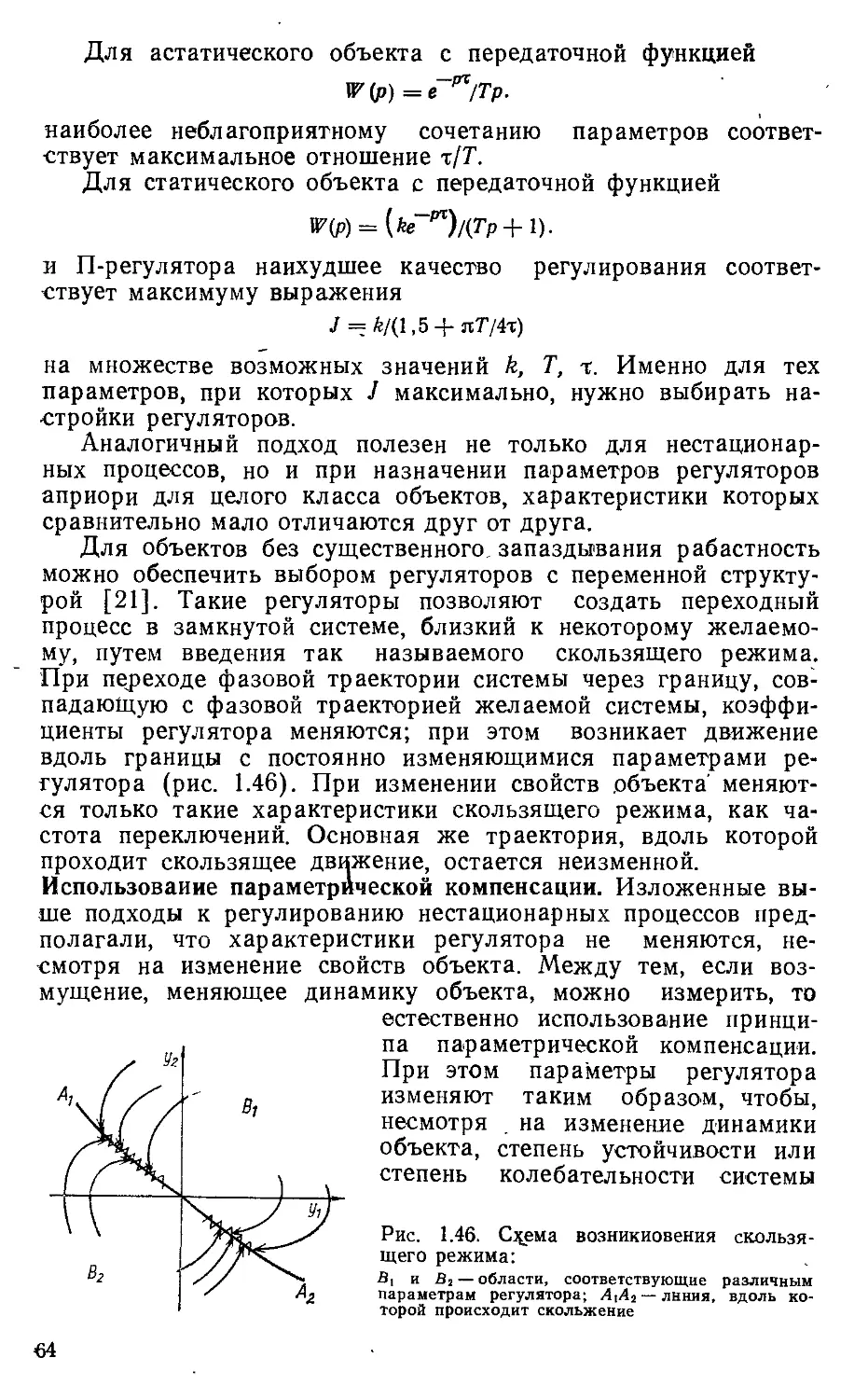
1.4. Системы регулирования объектов с запаздыванием и нестационарных объектов ...................................................
1.4.1. Регулирование объектов с запаздыванием...............
1.4.2. Регулирование нестационарных объектов................
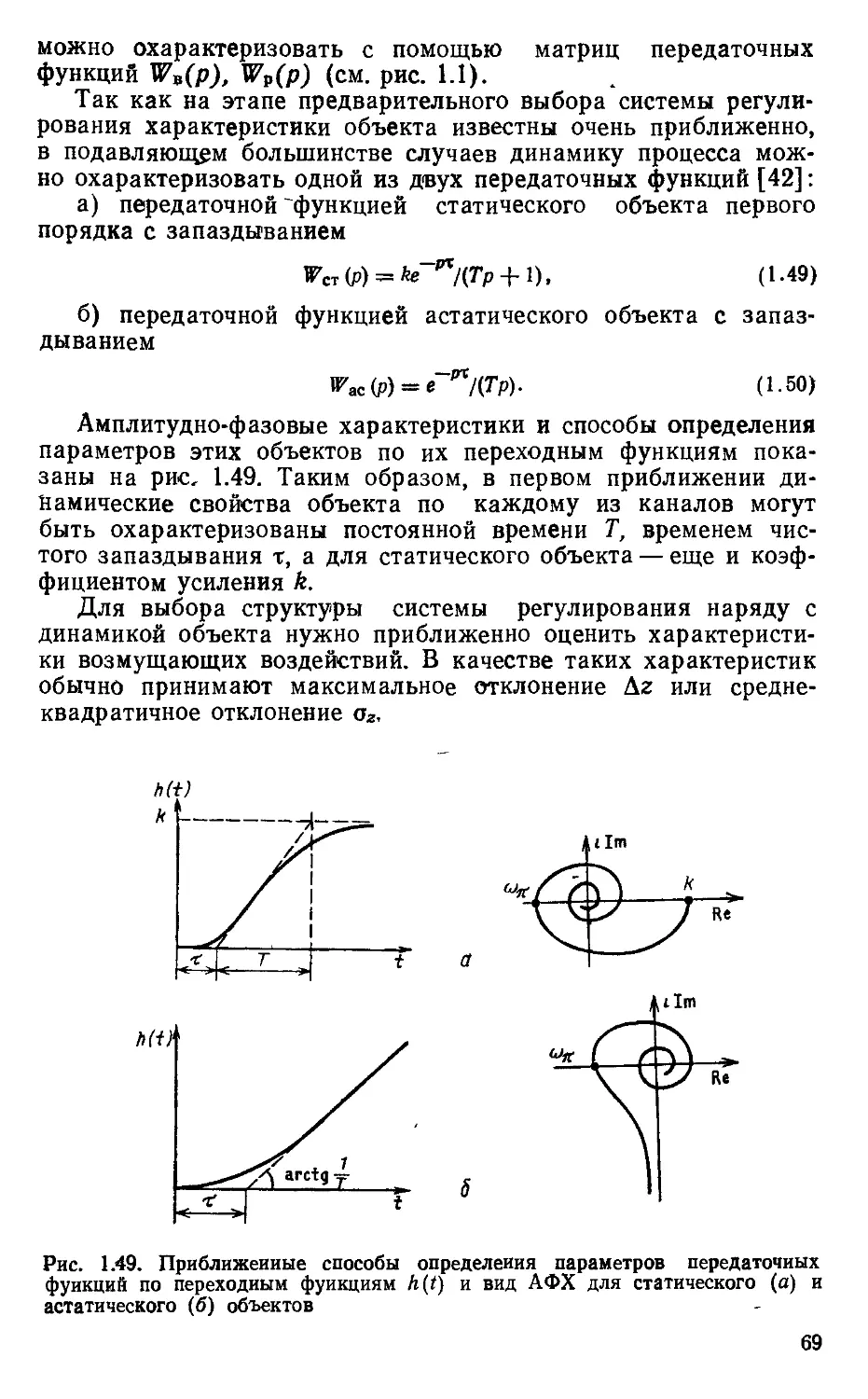
1.5. Предварительный выбор структуры и оценка параметров системы регулирования ..................................................
1.6. Оптимальная фильтрация и прогнозирование случайных процессов. Оптимальное оценивание состояния объекта........................
19
26
30
31
41
50
51
63
68
82
Глава 2. Автоматизация типовых технологических процессов ... 95
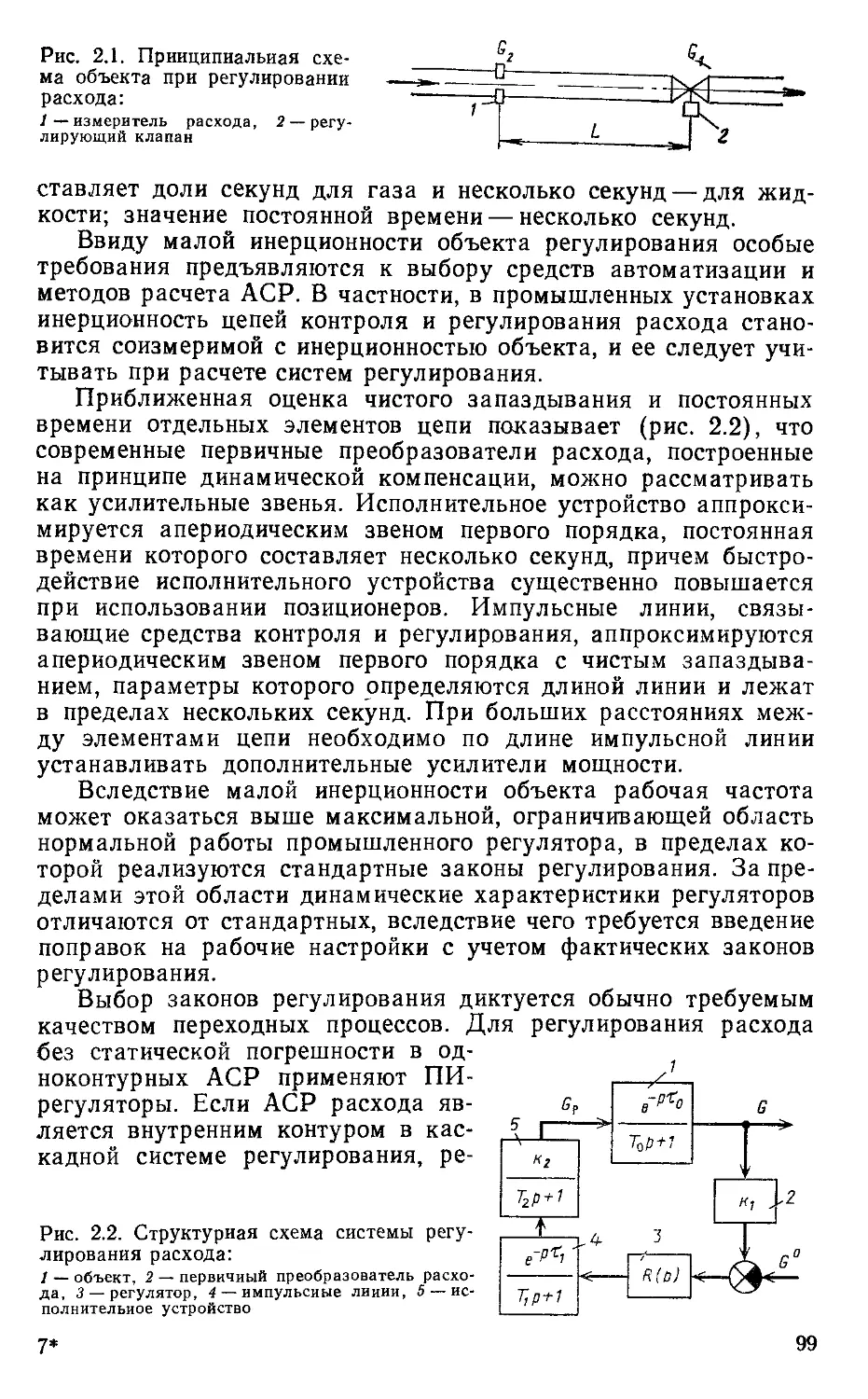
2.1. Последовательность выбора системы автоматизации .... 95
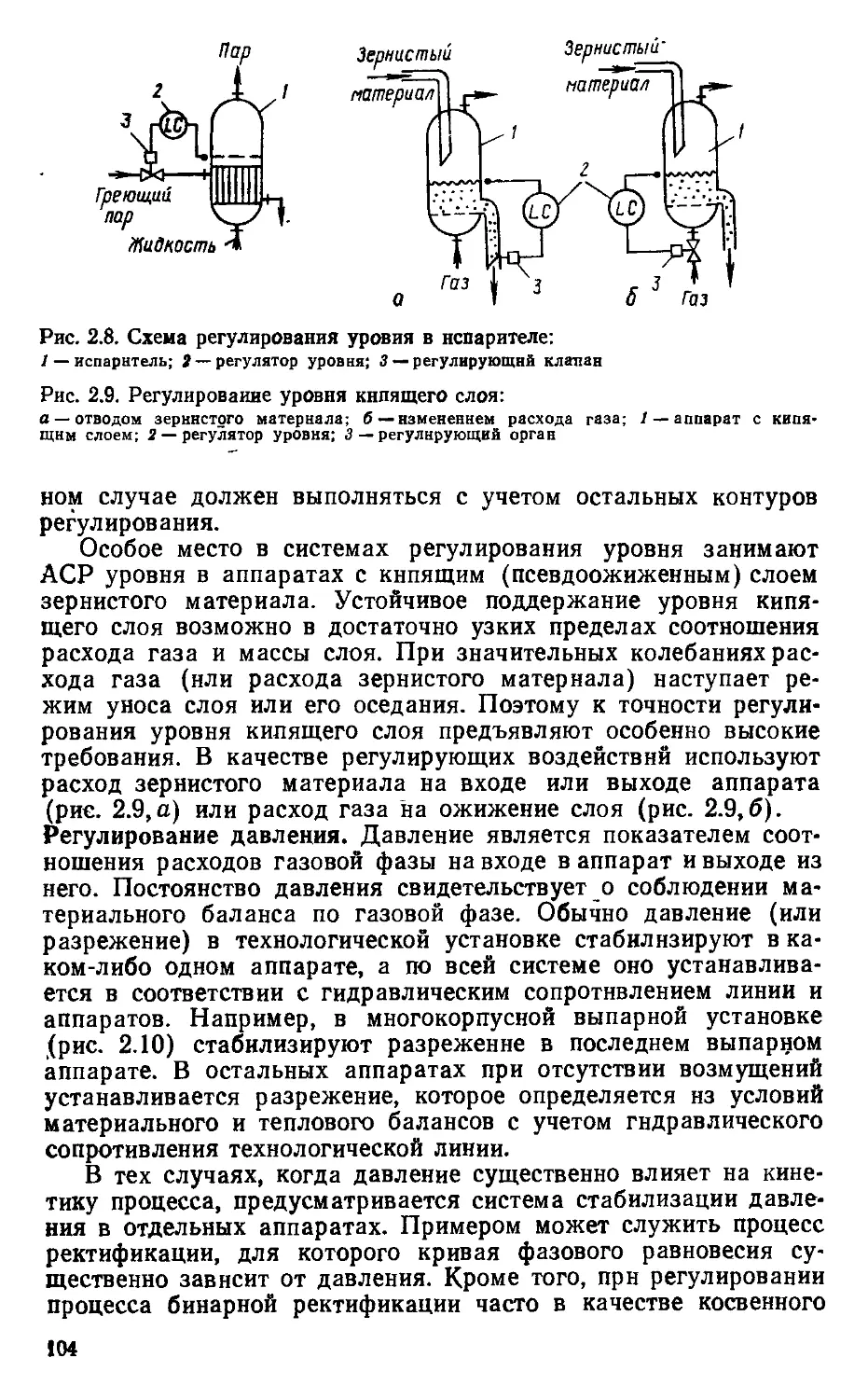
2.2. Регулирование основных технологических параметров .... 98
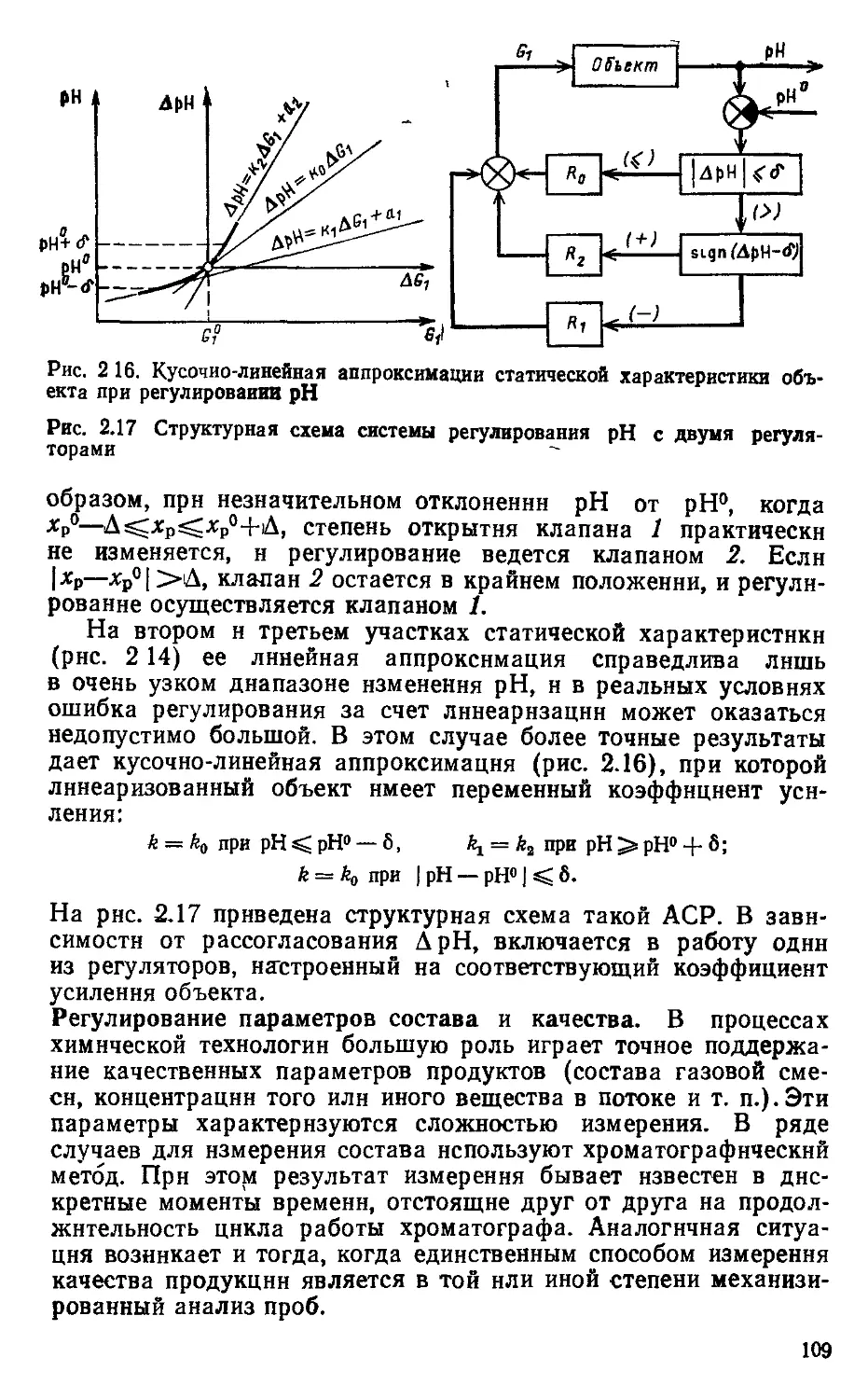
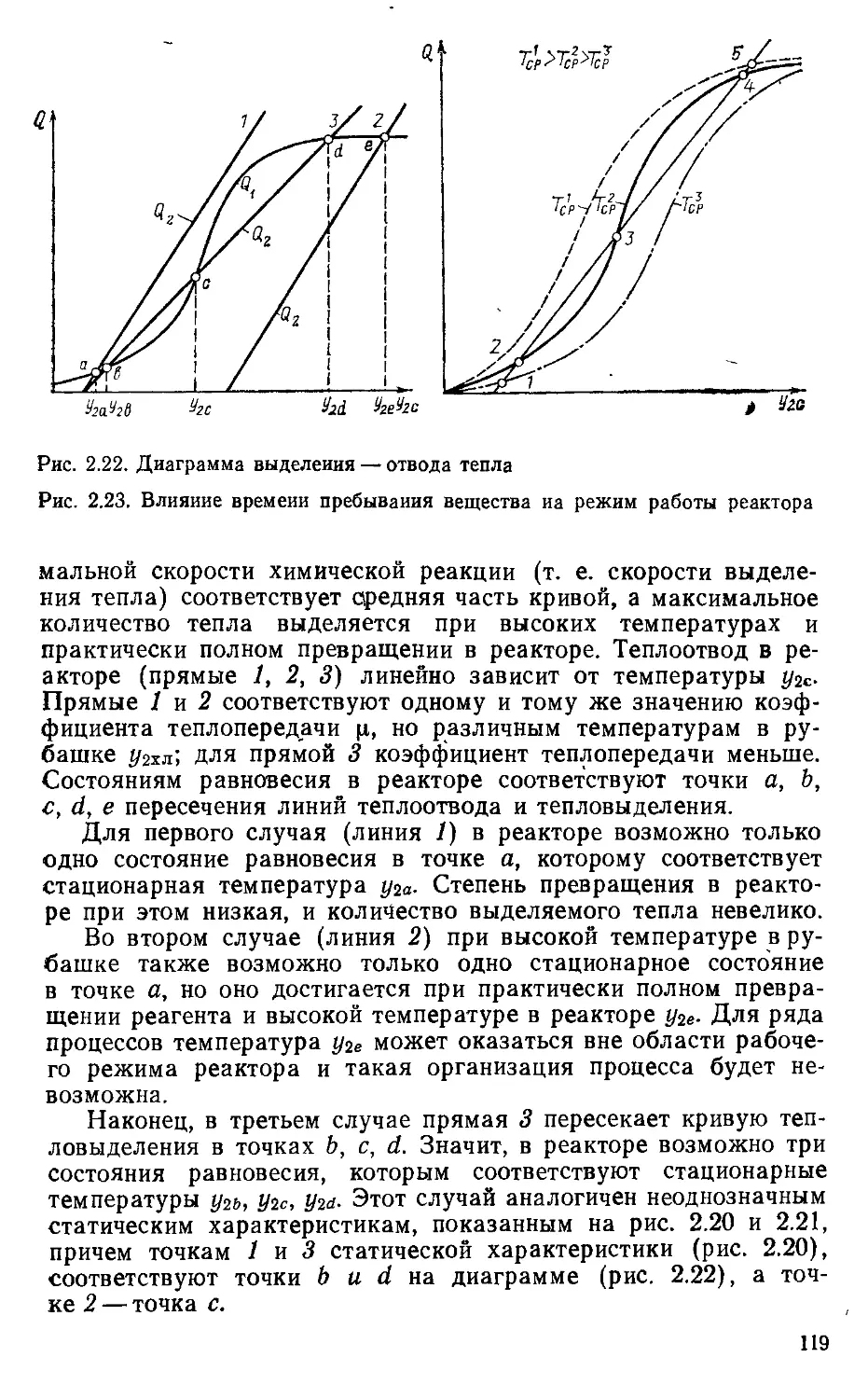
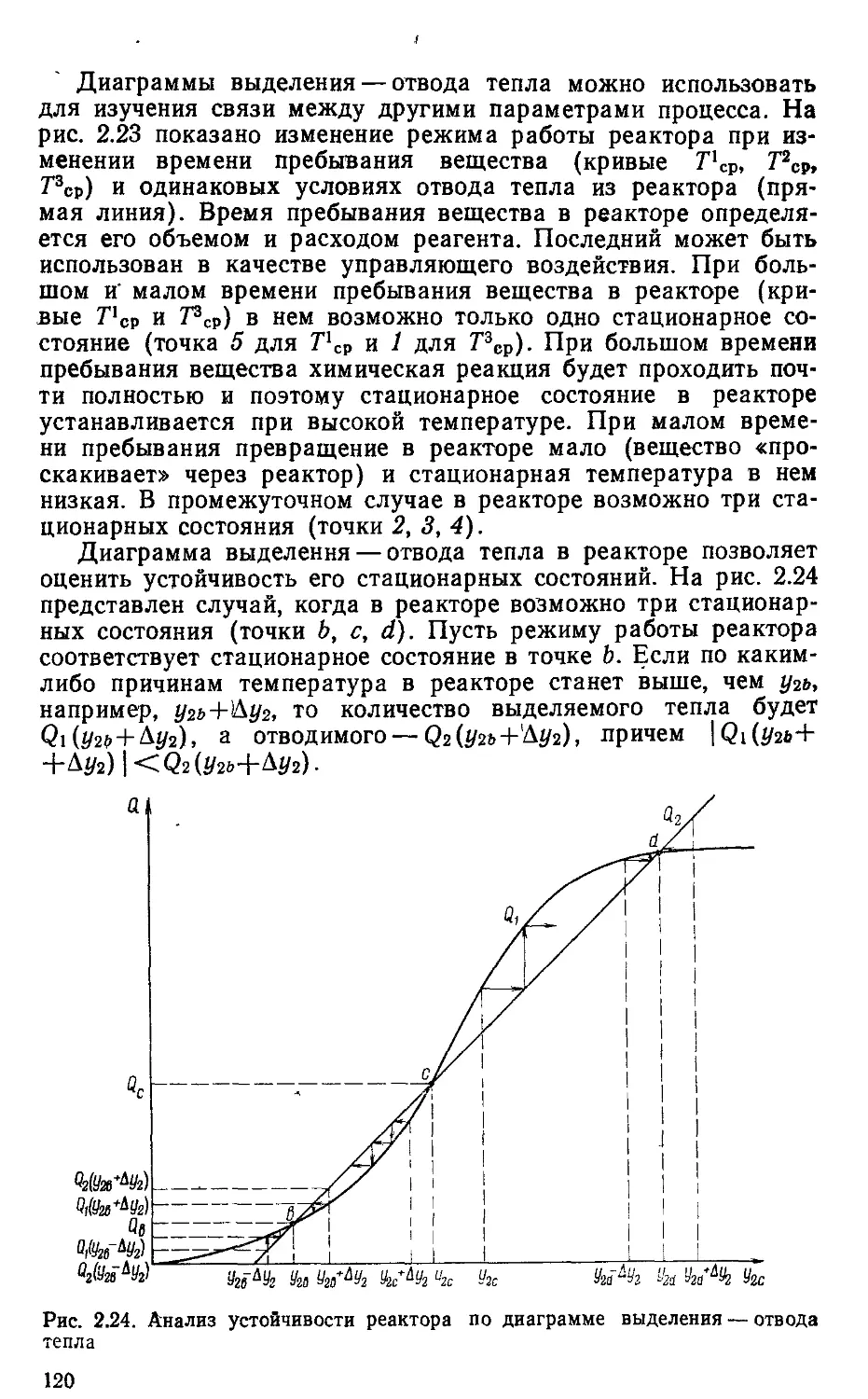
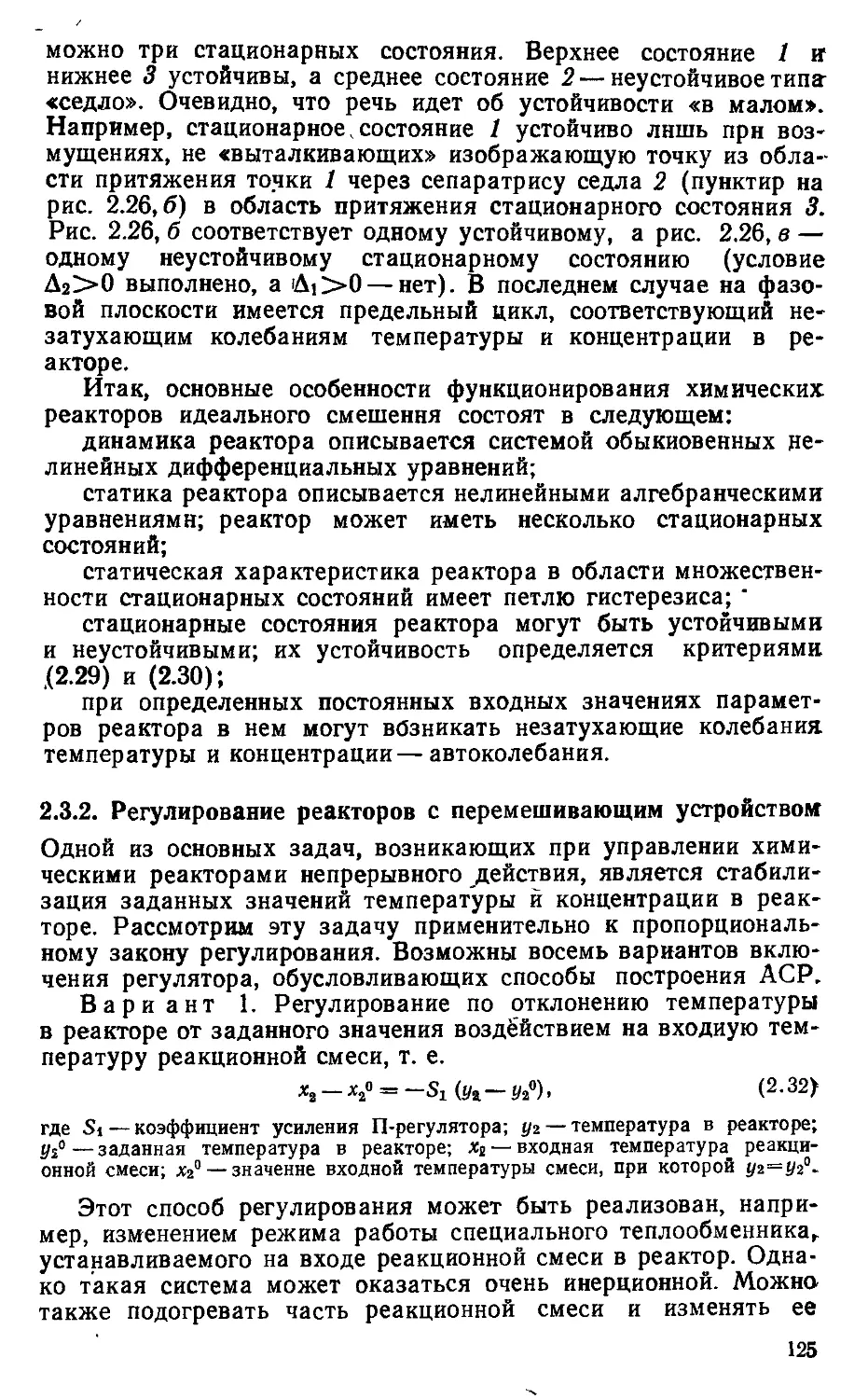
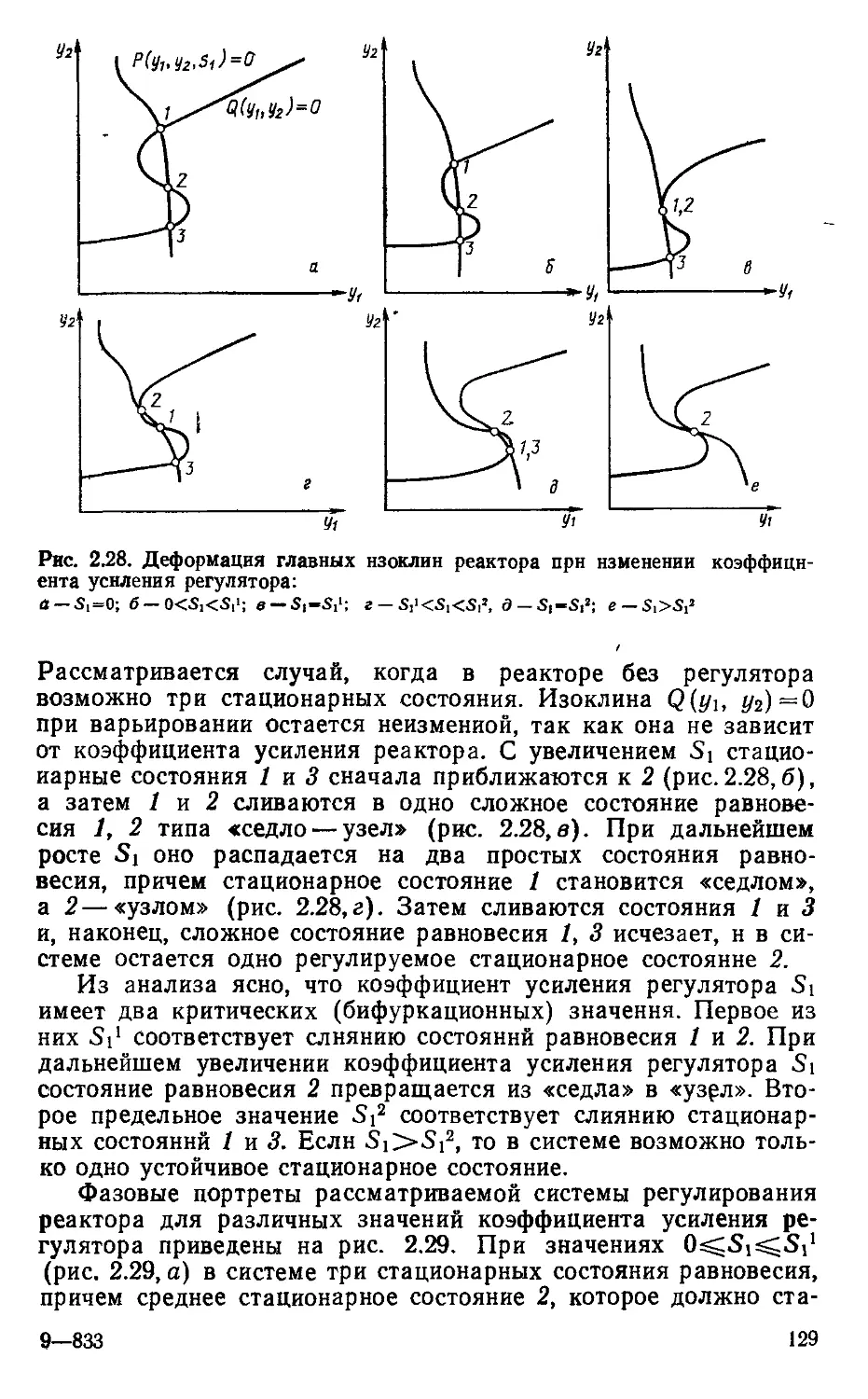
2.3. Регулирование процессов в химических реакторах................НО
2.3.1. Устойчивость реакторов с перемешивающим устройством 113
2.3.2. Регулирование реакторов с перемешивающим устройством 125
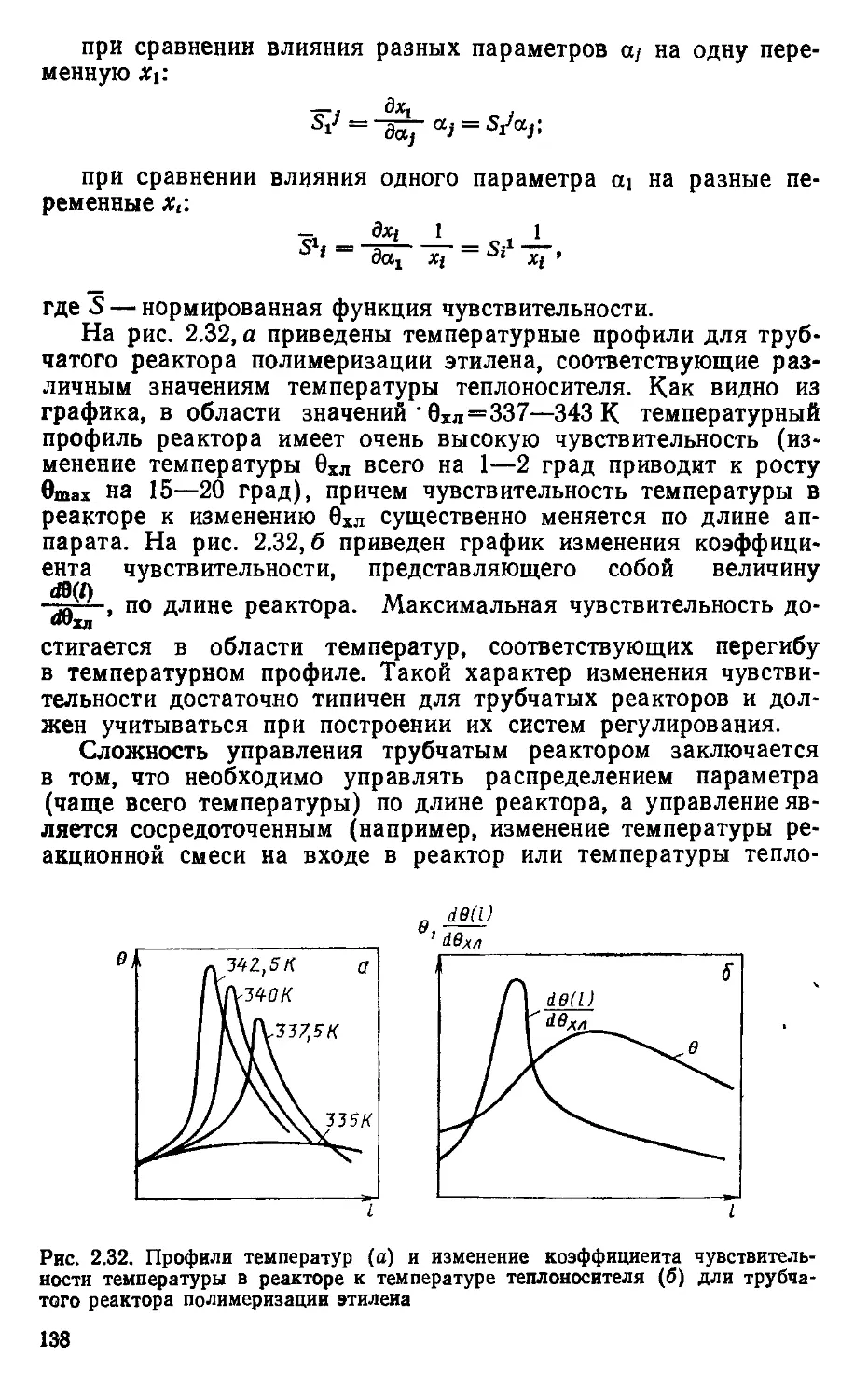
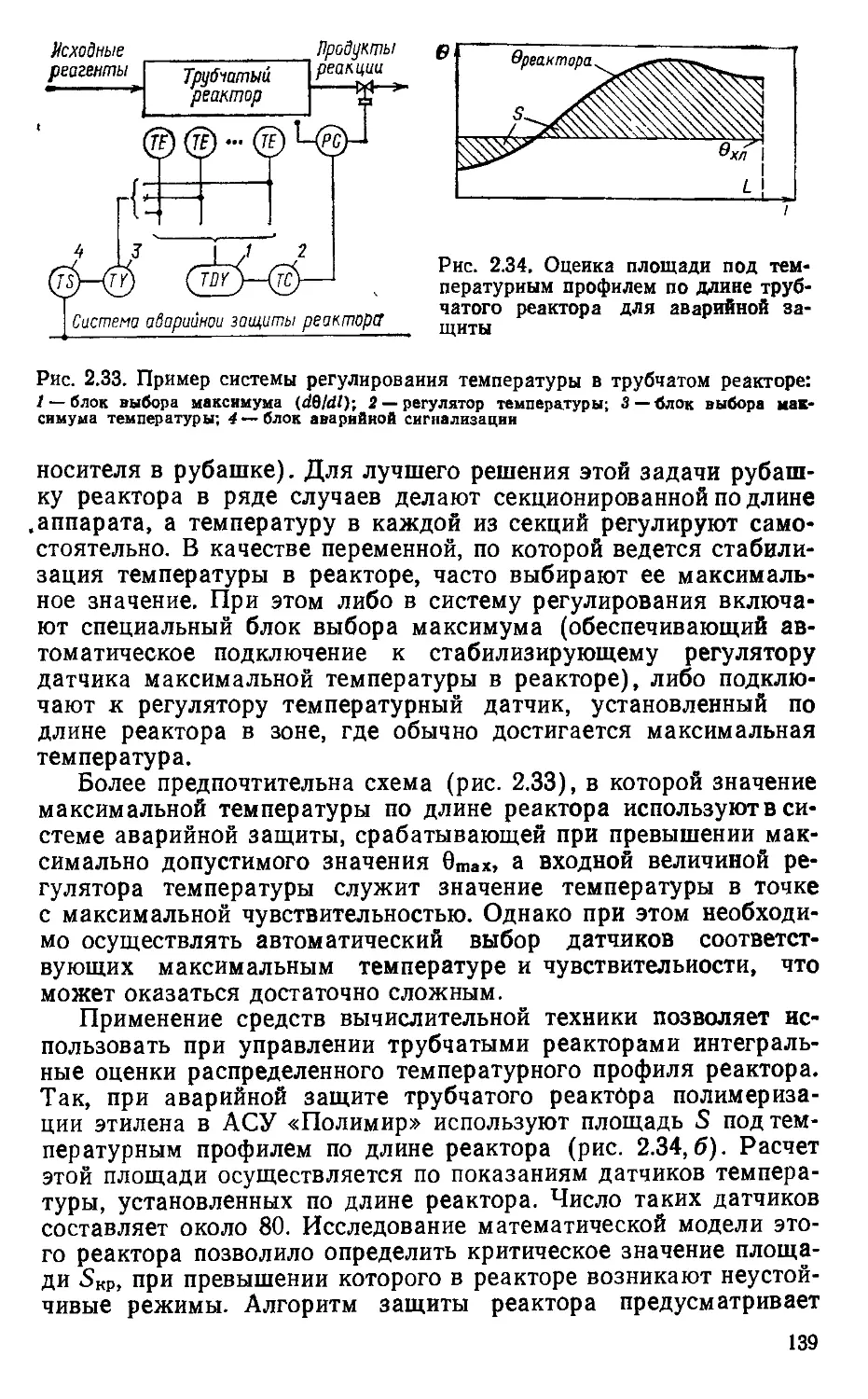
2.3.3 Особенности регулирования трубчатых реакторов . . . 133
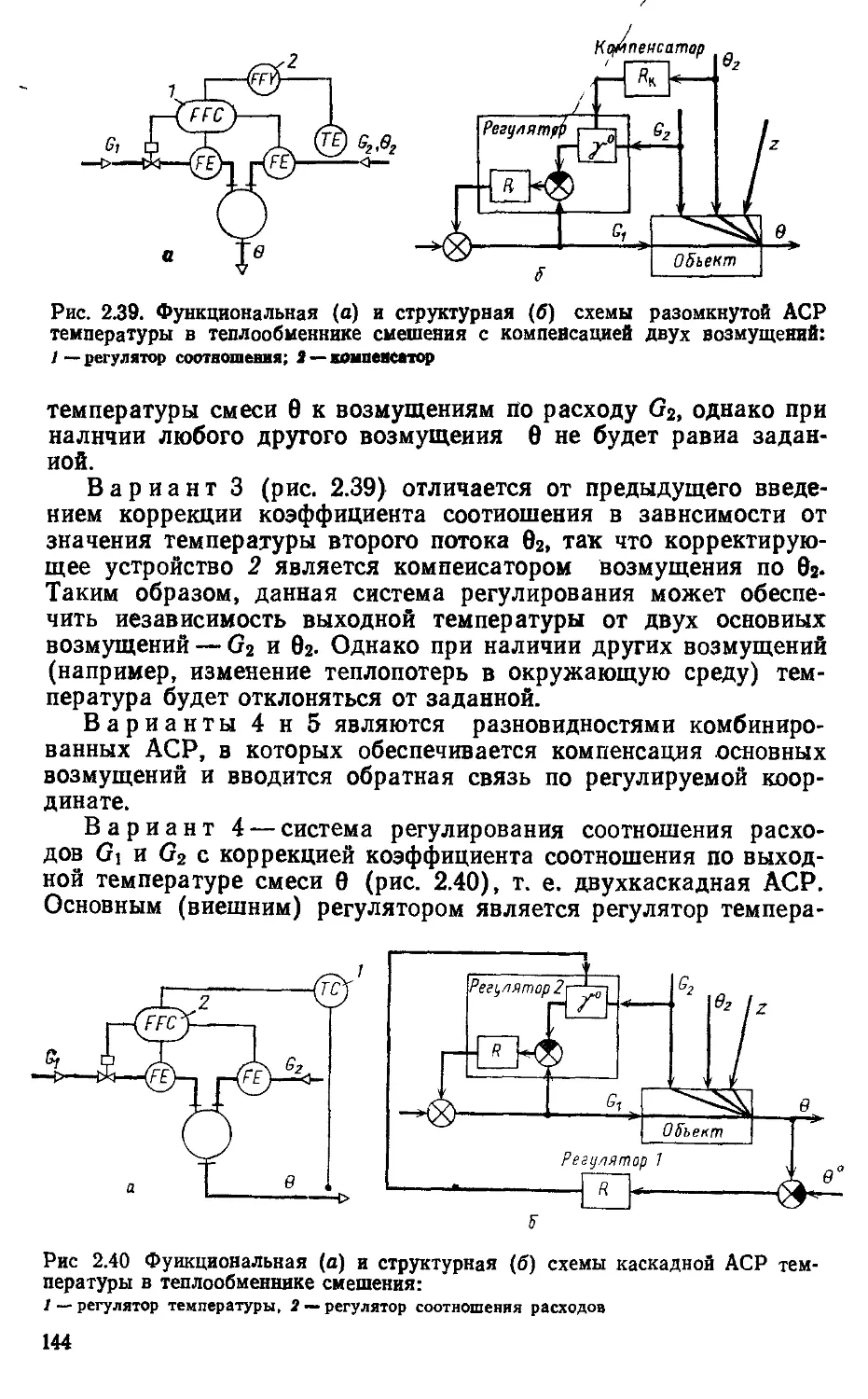
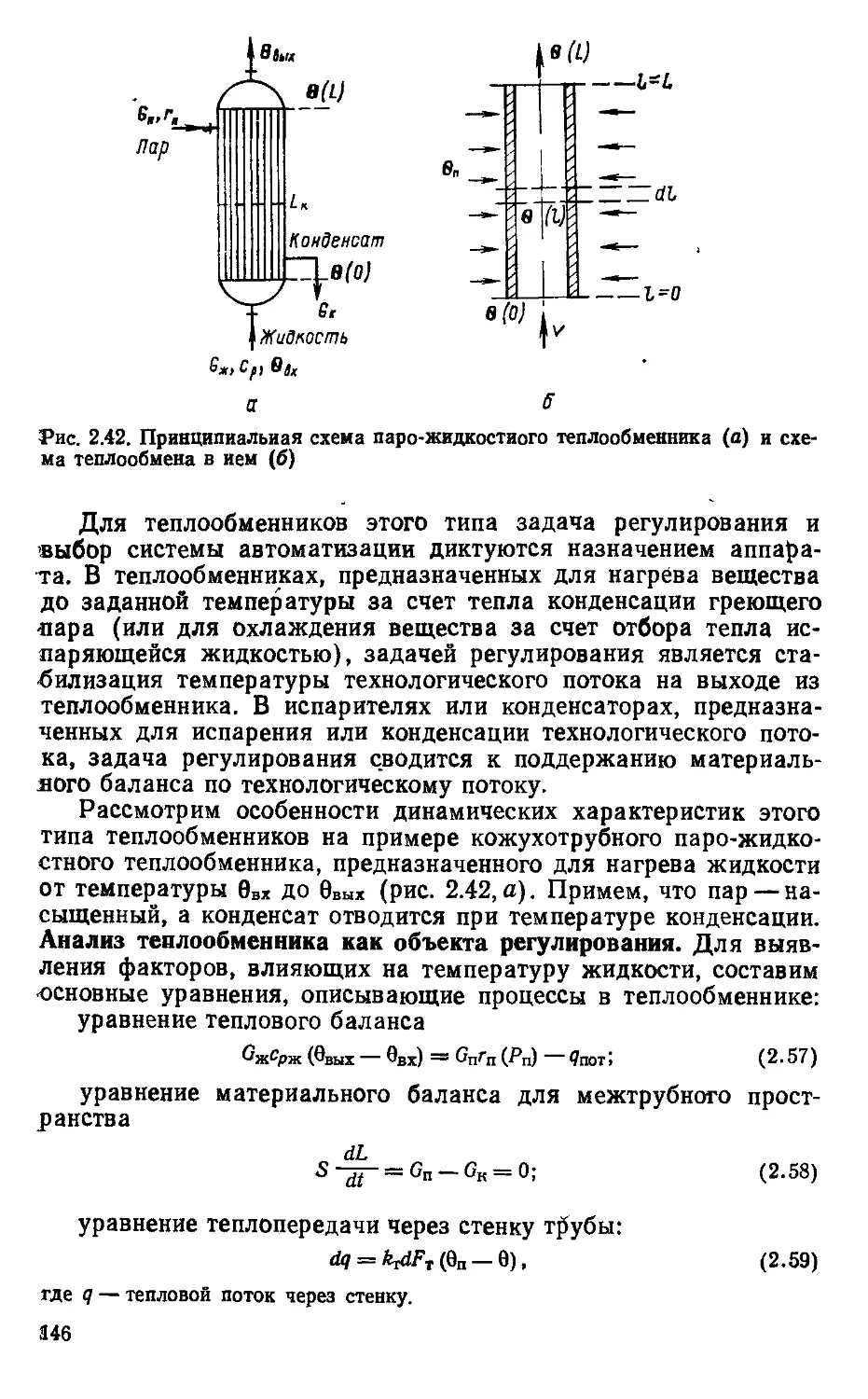
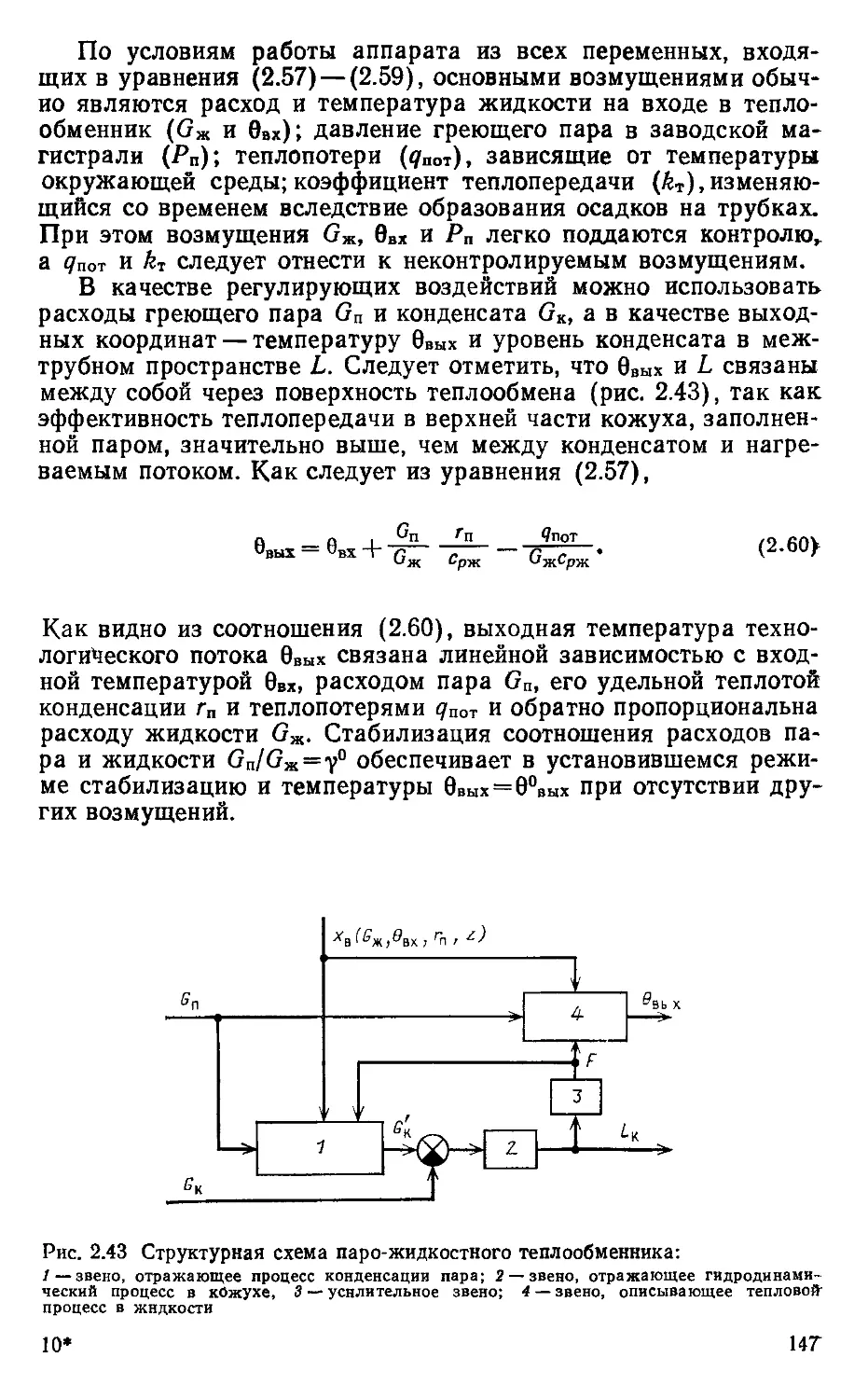
2.4. Регулирование тепловых процессов........................140
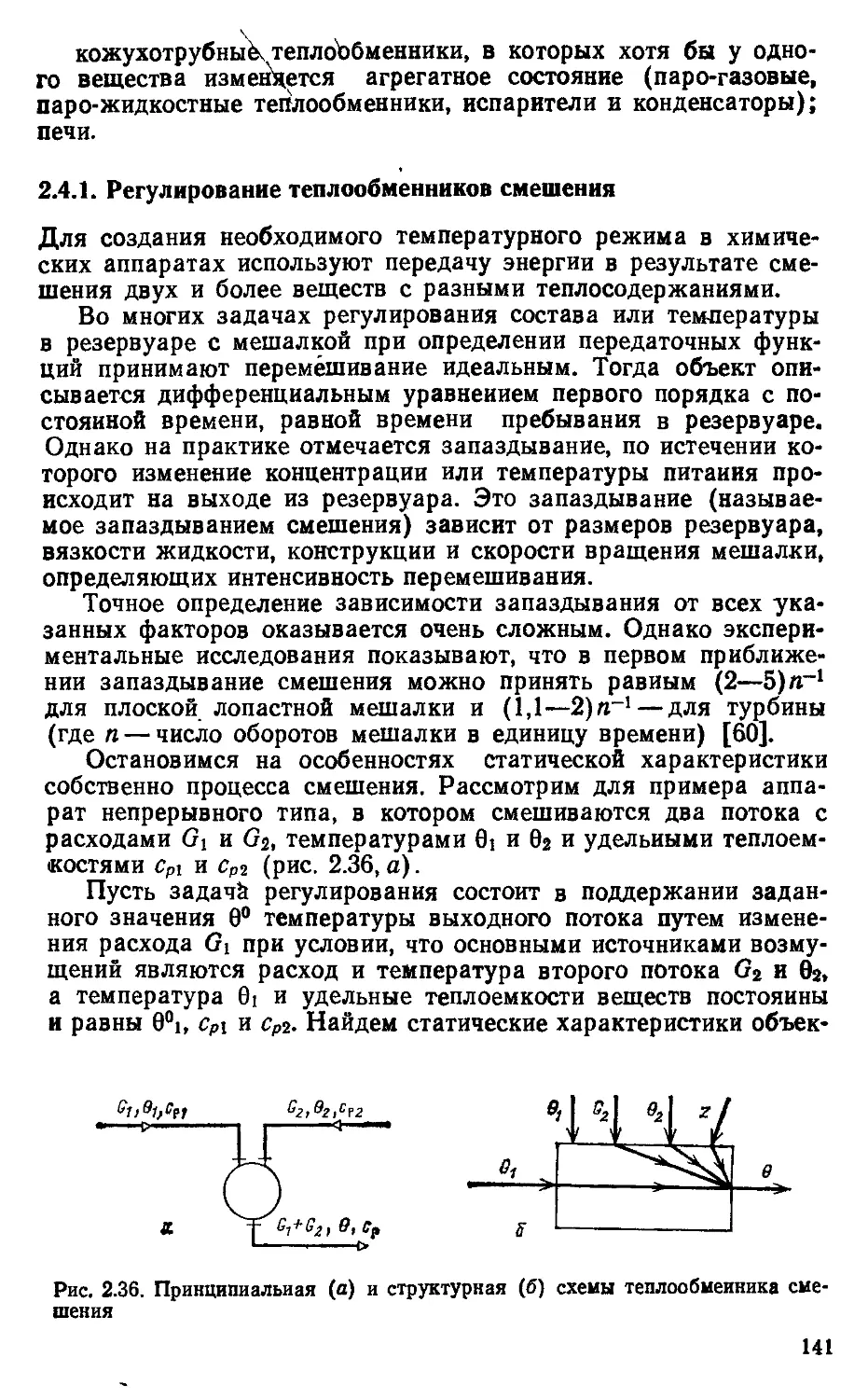
2.4.1. Регулирование теплообменников смешения............141
2.4.2. Регулирование кожухотрубных теплообменников . . . 145
2.4.3. Регулирование печей ...................................158
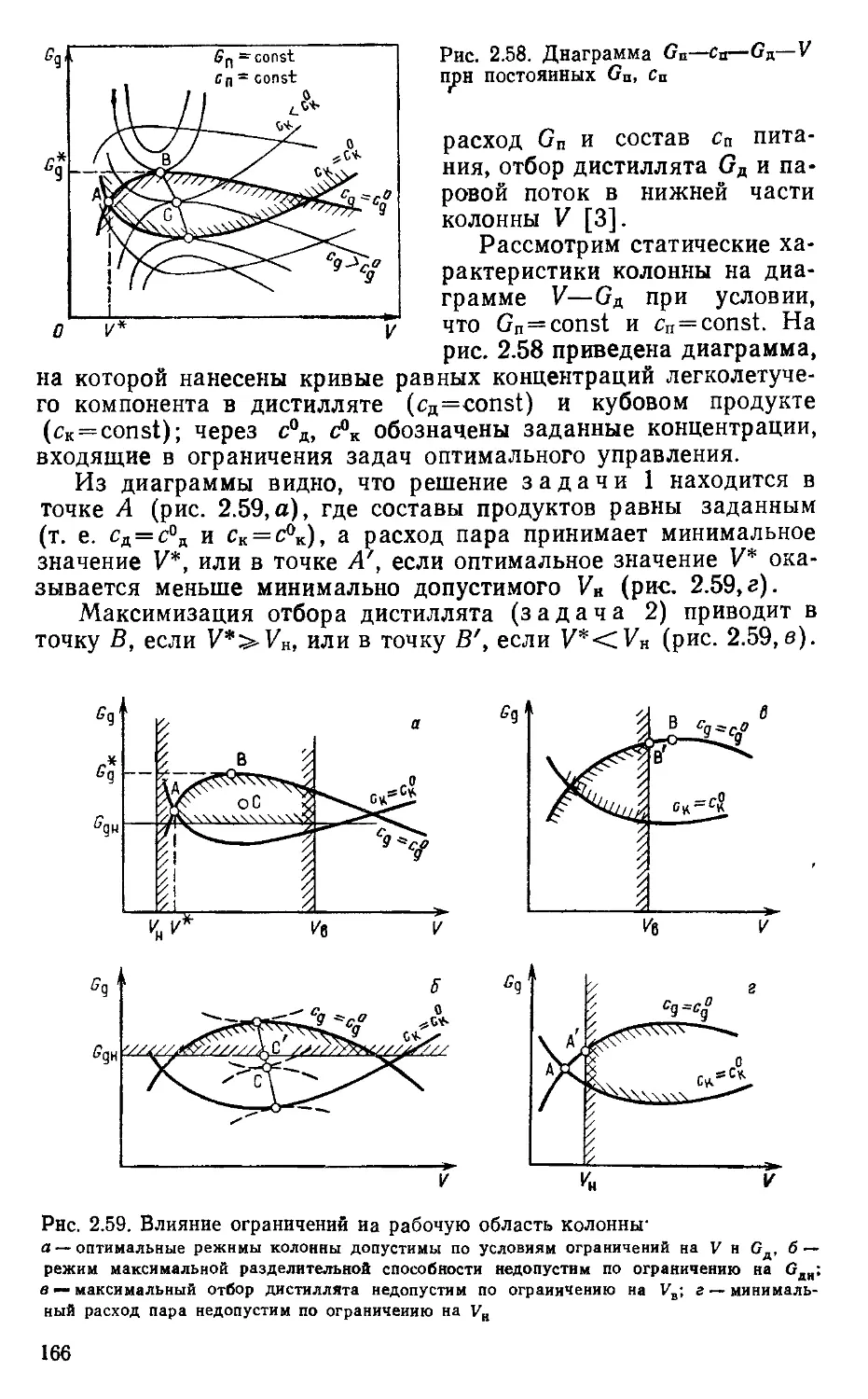
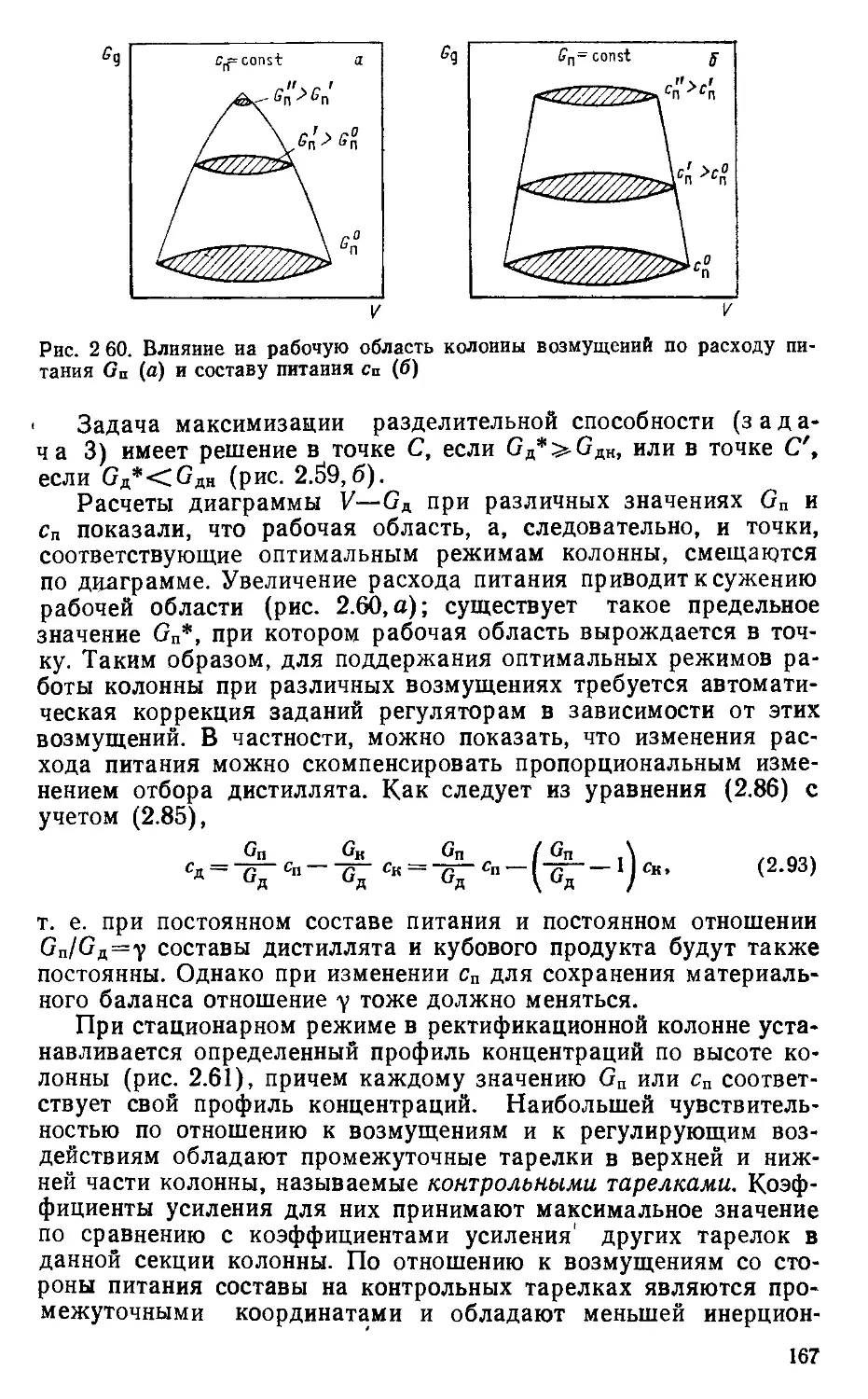
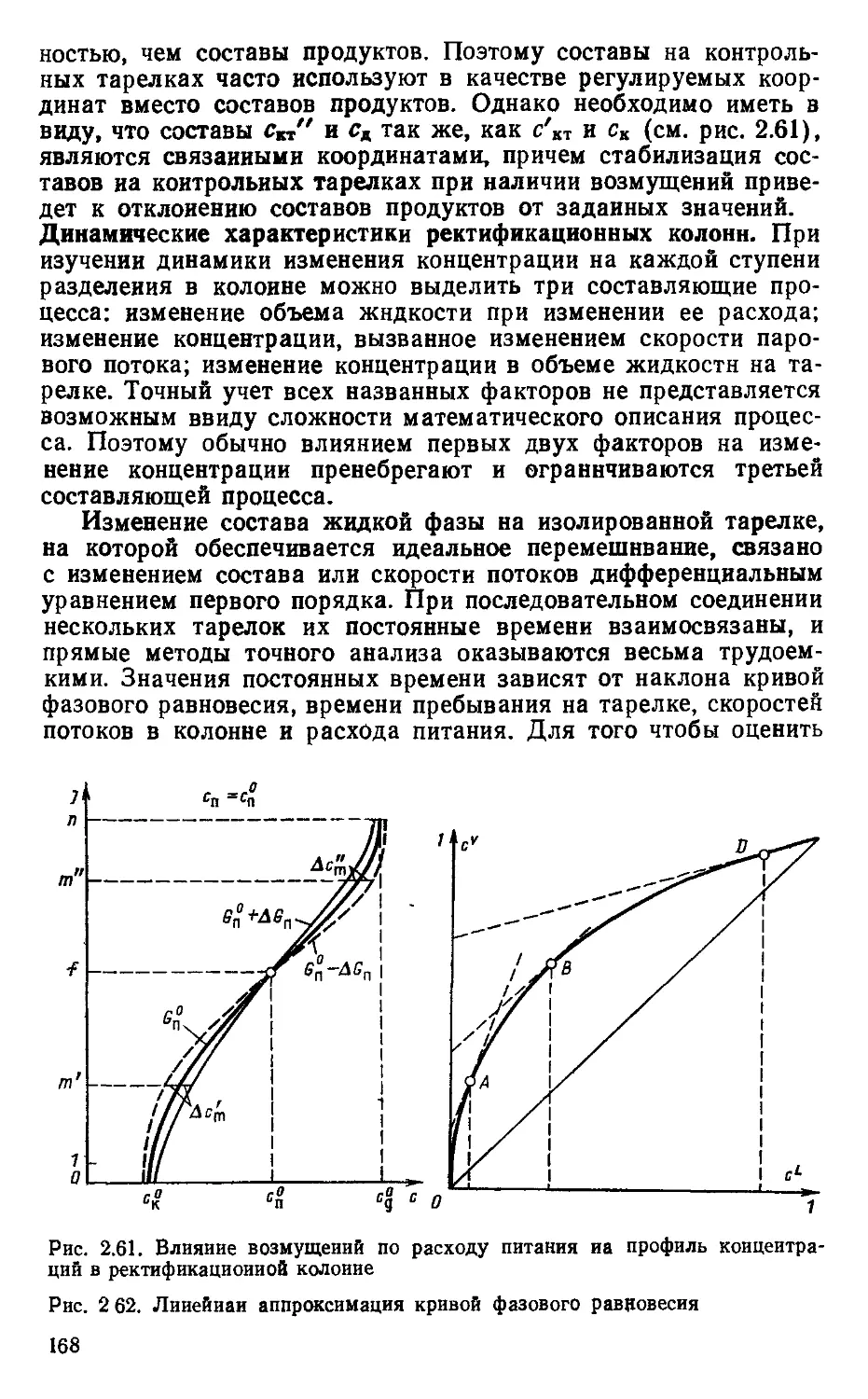
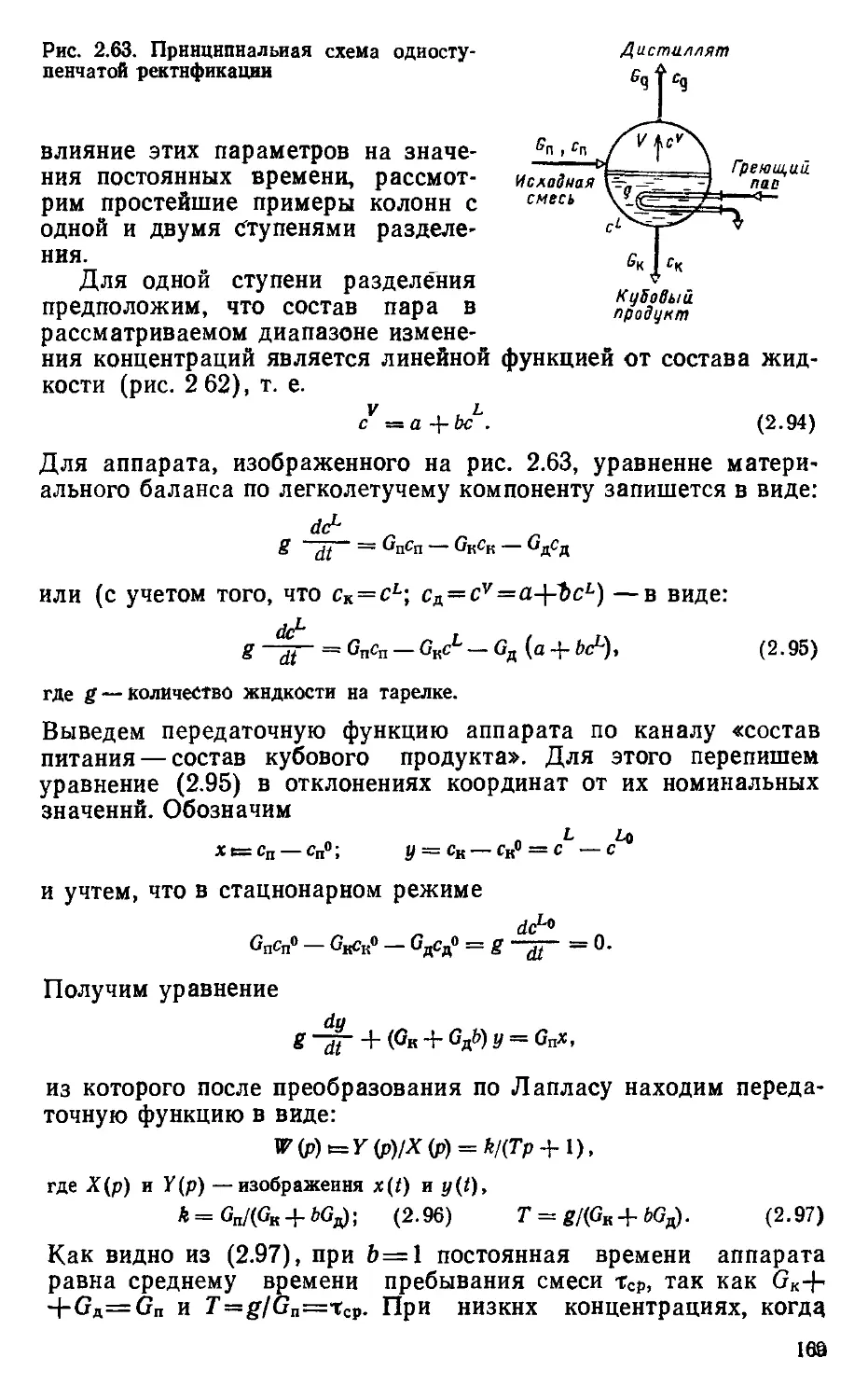
2.5. Регулирование массообменных процессов...................161
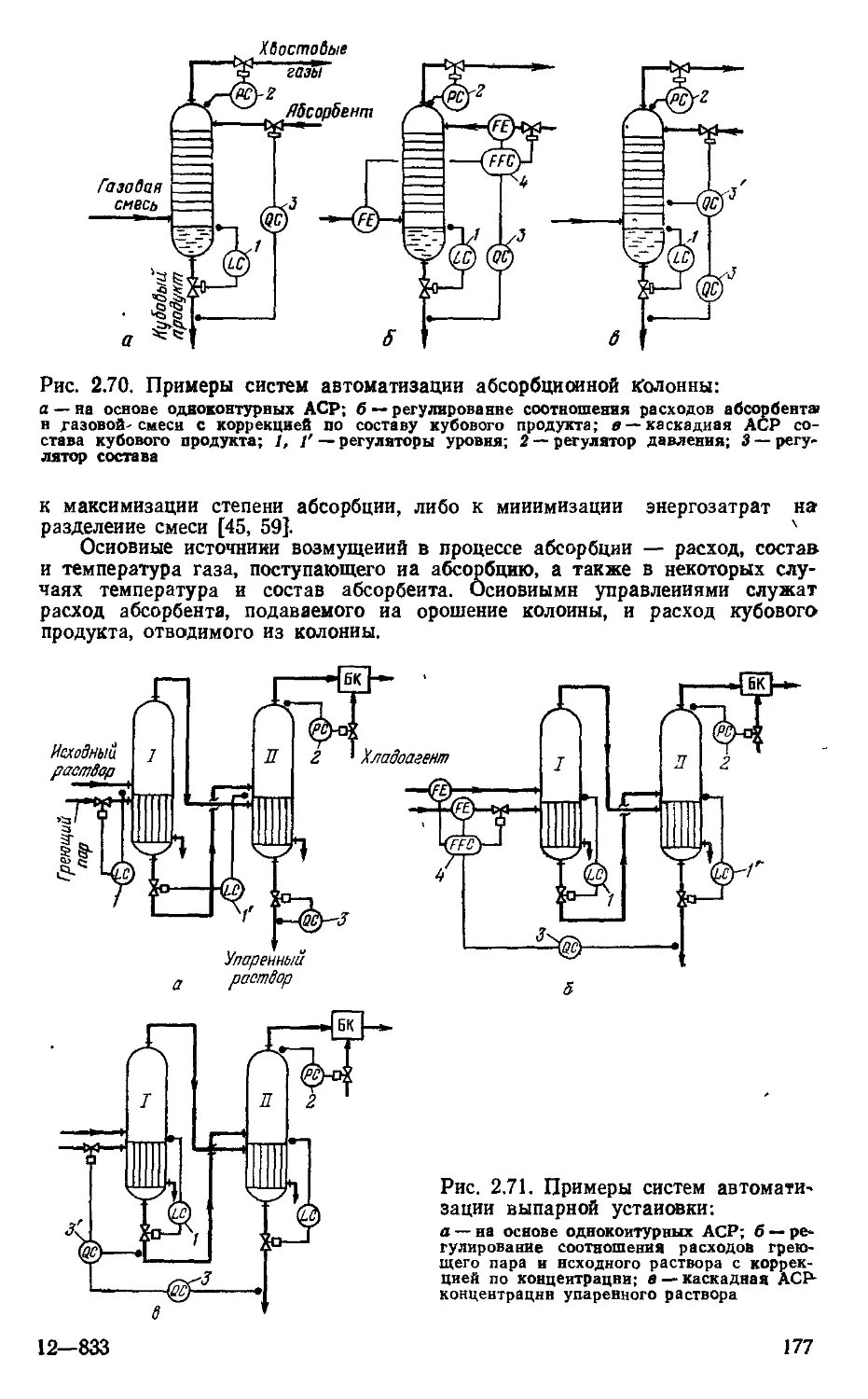
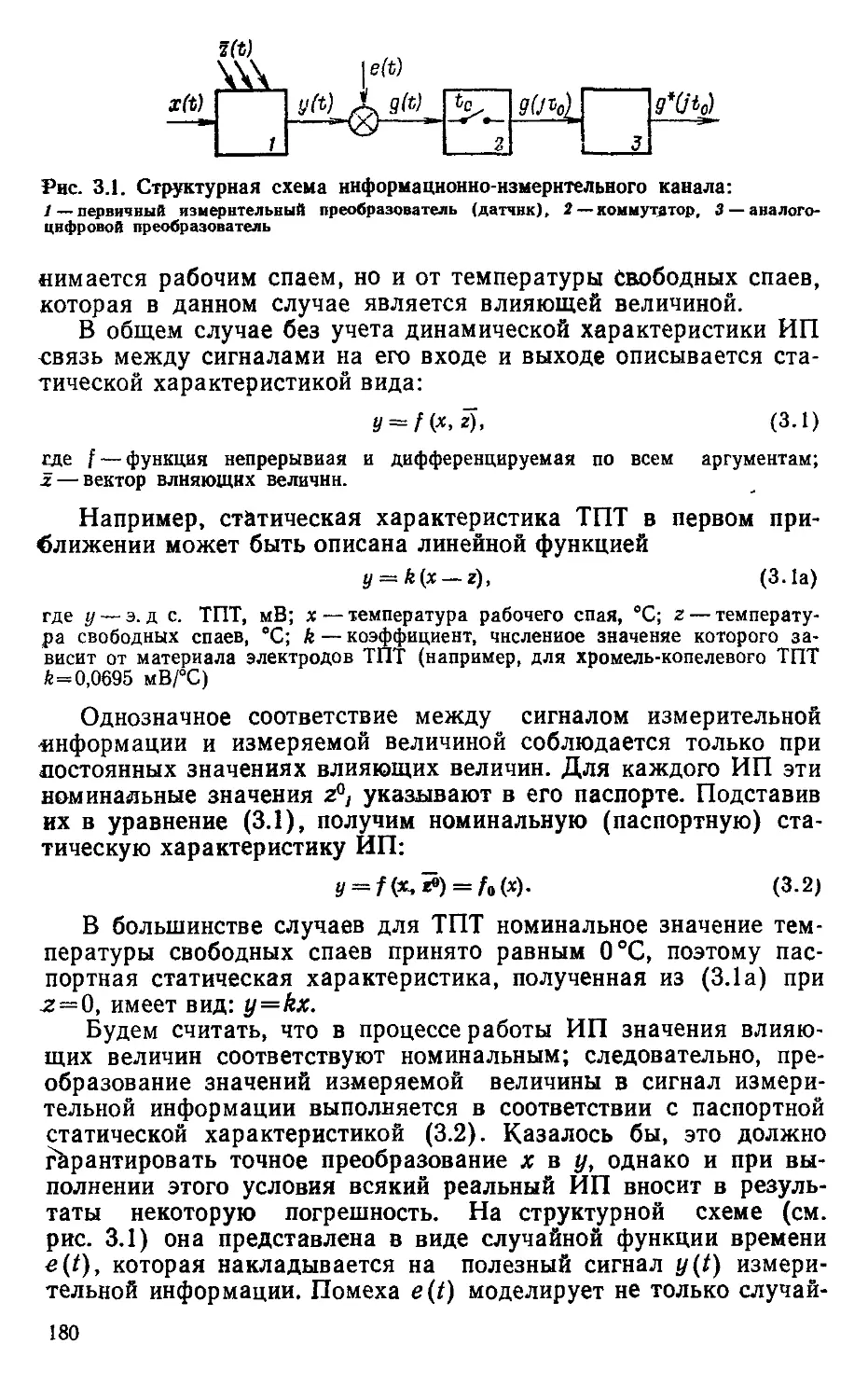
2.5.1. Автоматизация ректификационных установок .... 163
2 5 2. Автоматизация абсорбционных и выпарных установок . . 176
Часть 2. Математическое обеспечение систем управления технологическими процессами........................................179
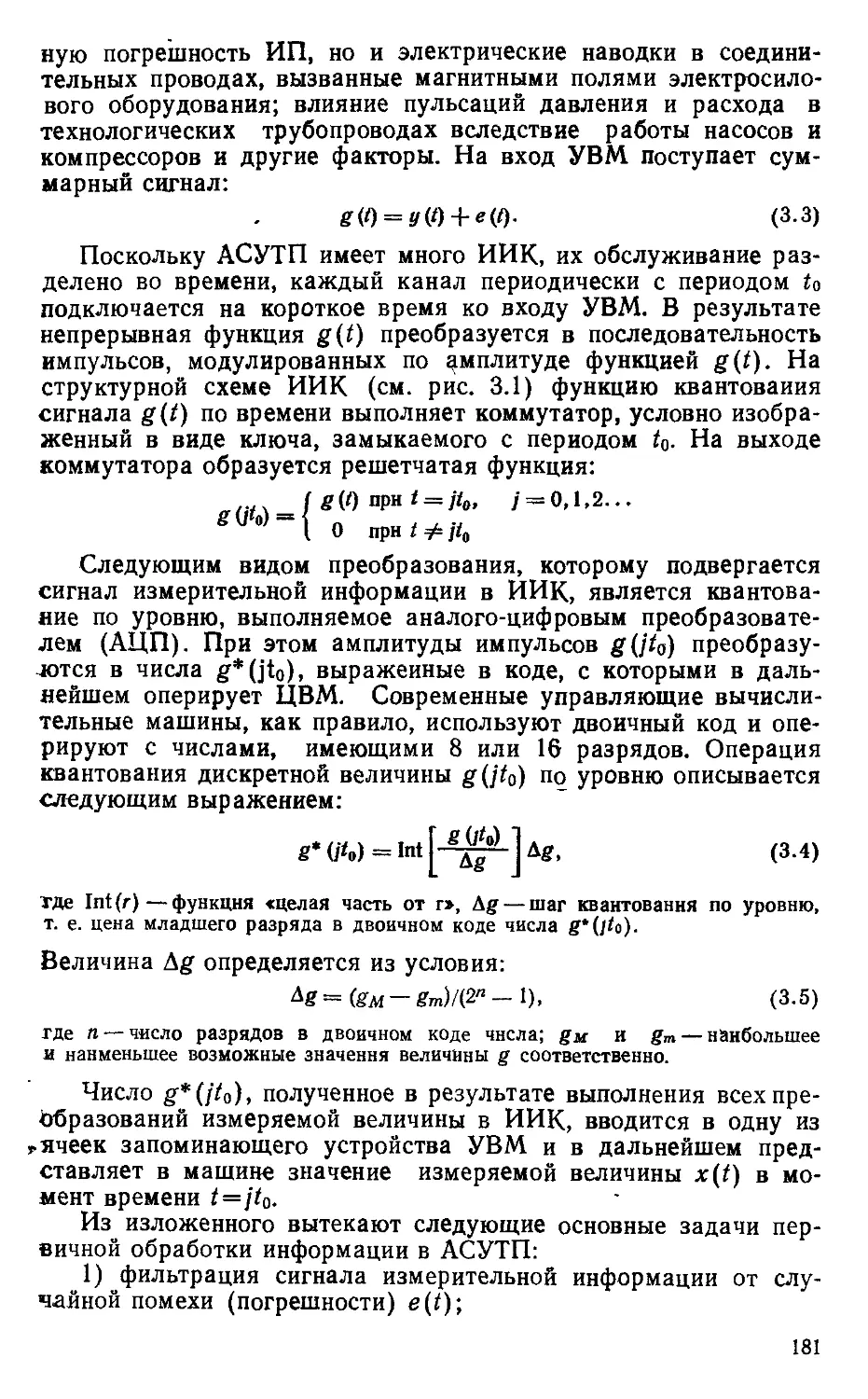
Глава 3. Алгоритмы первичной обработки информации в АСУТП 179
3.1. Задачи первичной обработки информации........................179
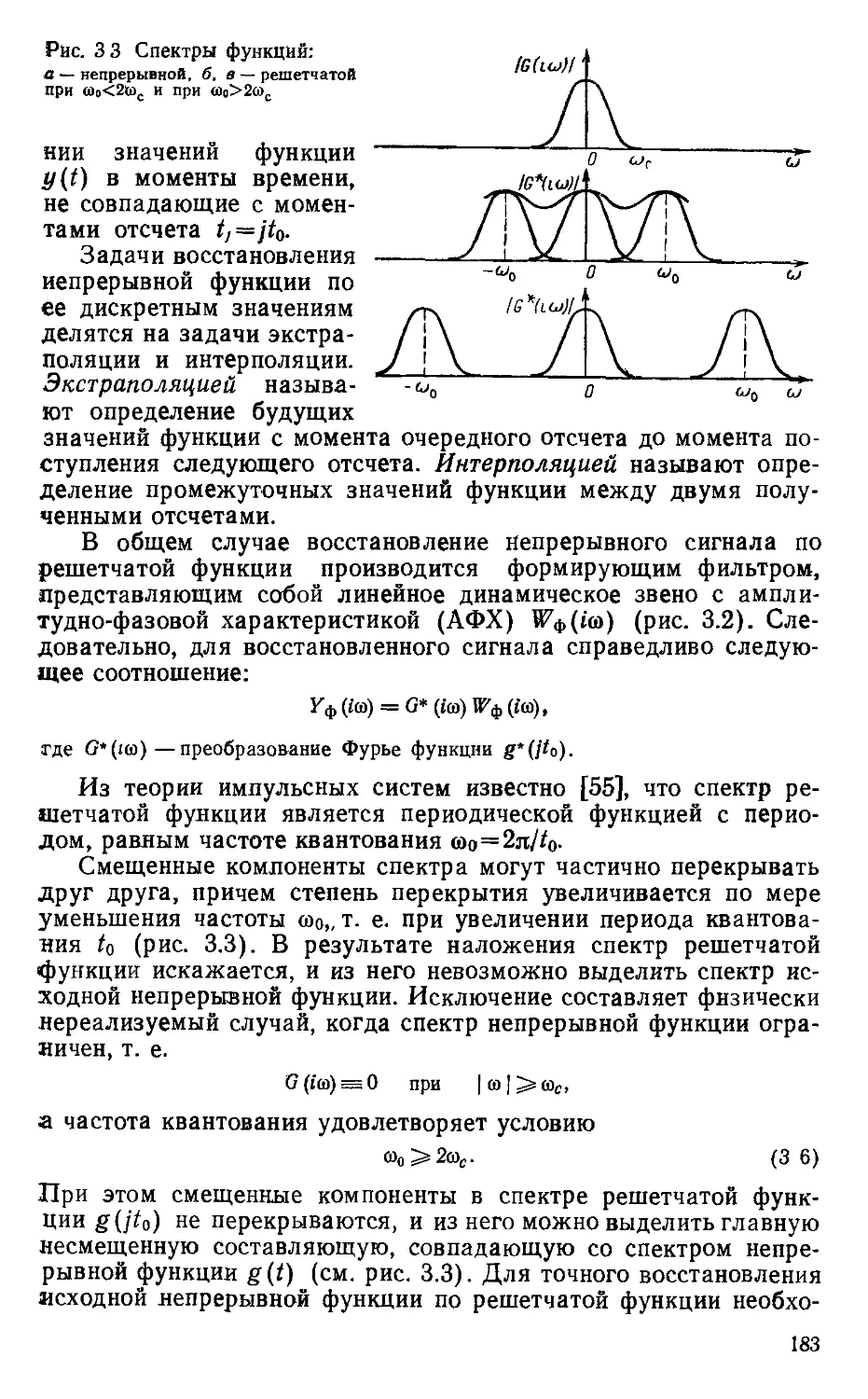
3.2. Выбор разрядности представления информации в УВМ и частоты опроса измерительных преобразователей. Интерполяция и экстраполяция сигнала................................................... 182
3.3. Фильтрация измеряемых величин от помех......................190
3.4. Аналитическая градуировка измерительных преобразователей и коррекция результатов измерений ................... 197
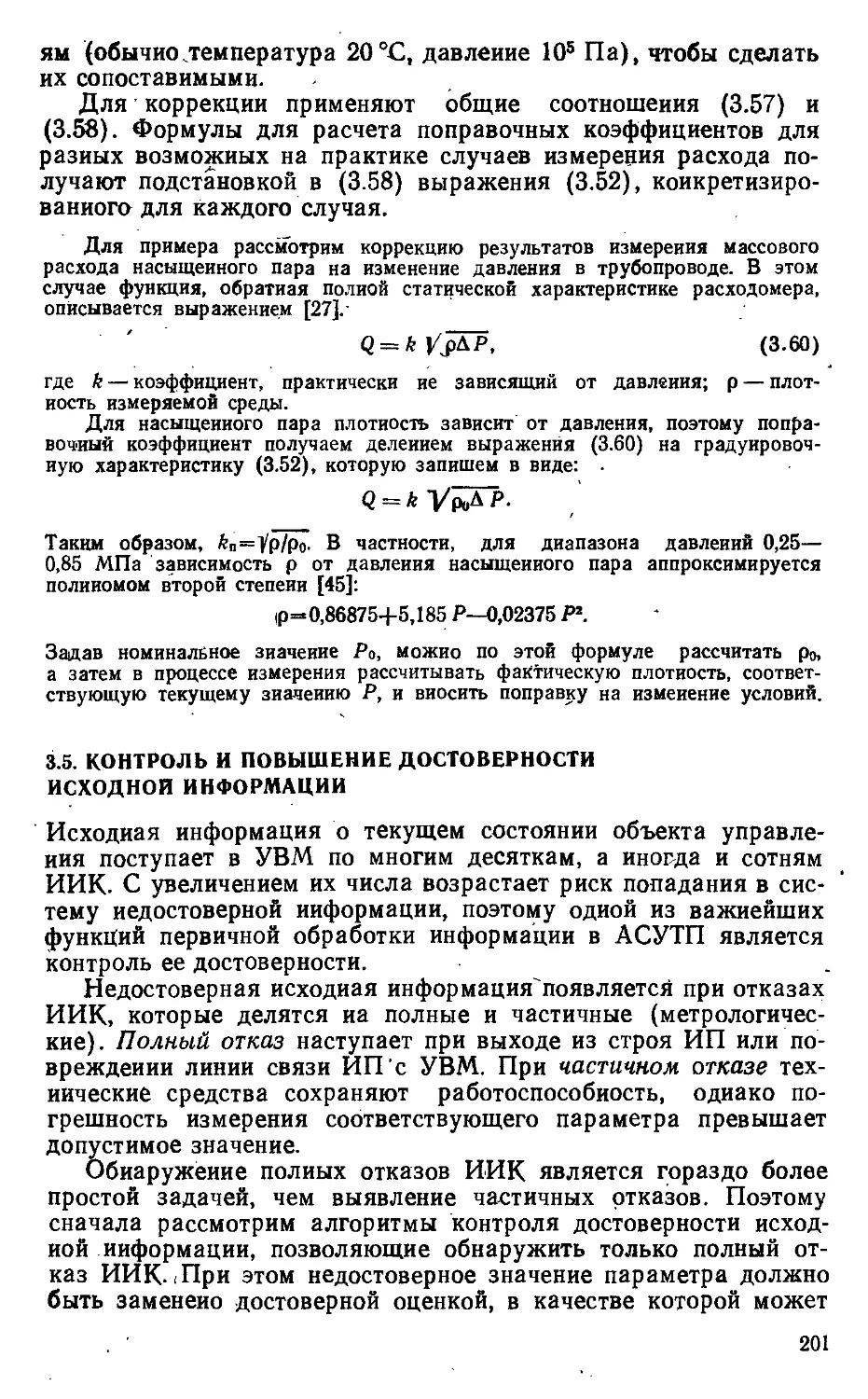
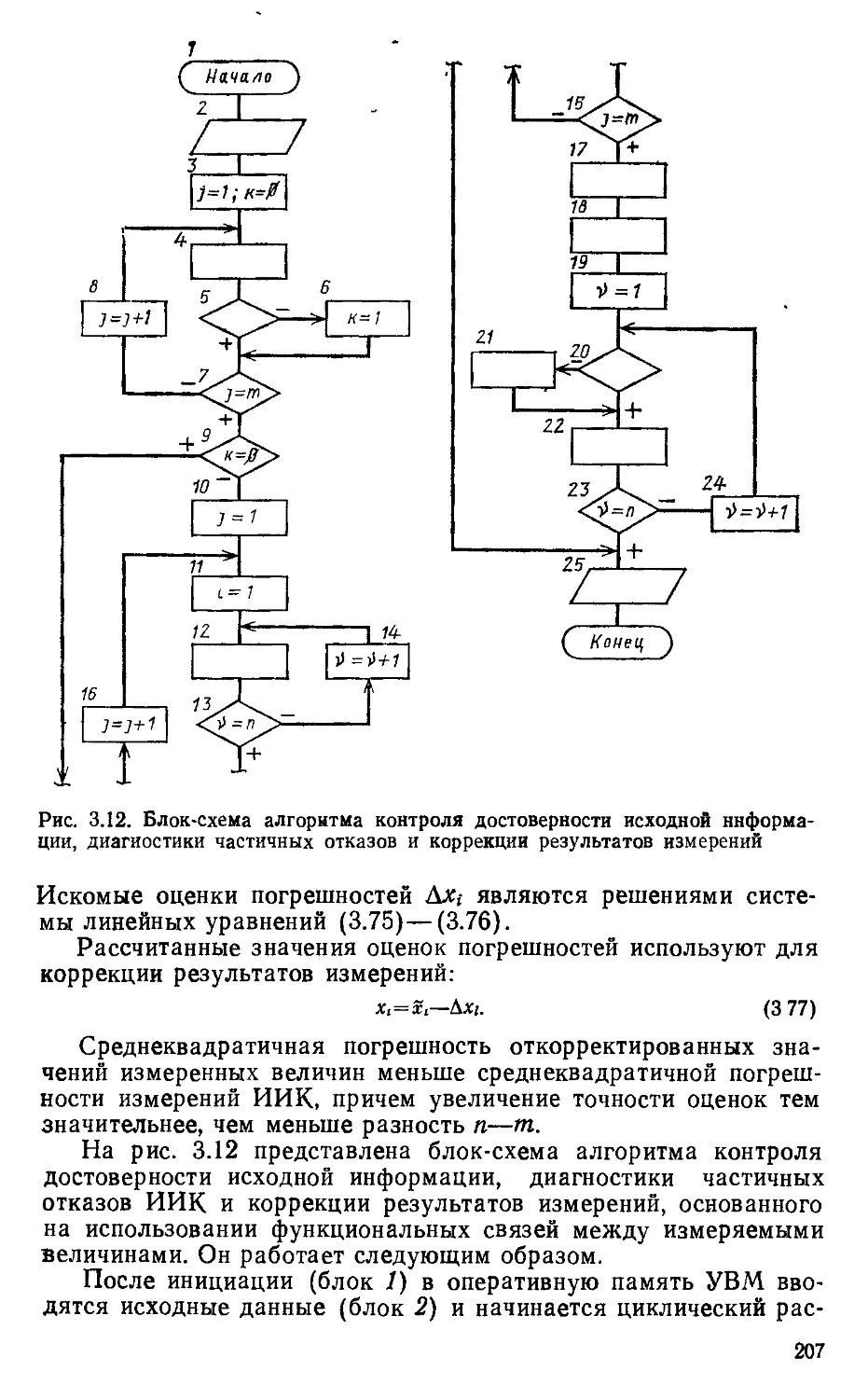
3.5. Контроль н повышение достоверности исходной информации . . 201
Глава 4. Вычисление обобщенных показателей процесса 210
4.1. Типовые задачи вычисления неизмеряемых величин и обобщенных показателей.......................................................210
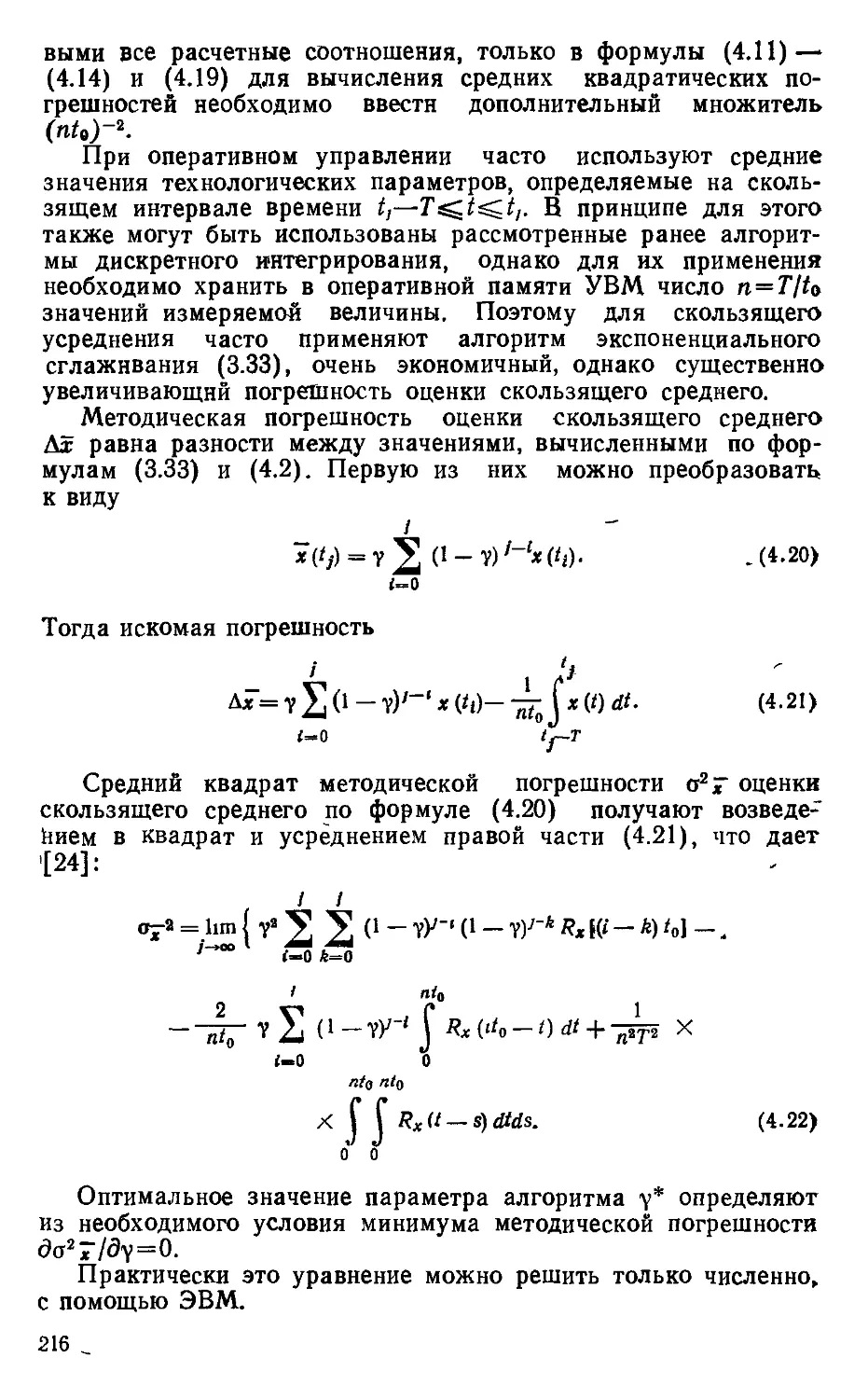
4.2. Вычисление интегральных и усредненных значений измеряемых величин ............................................................212
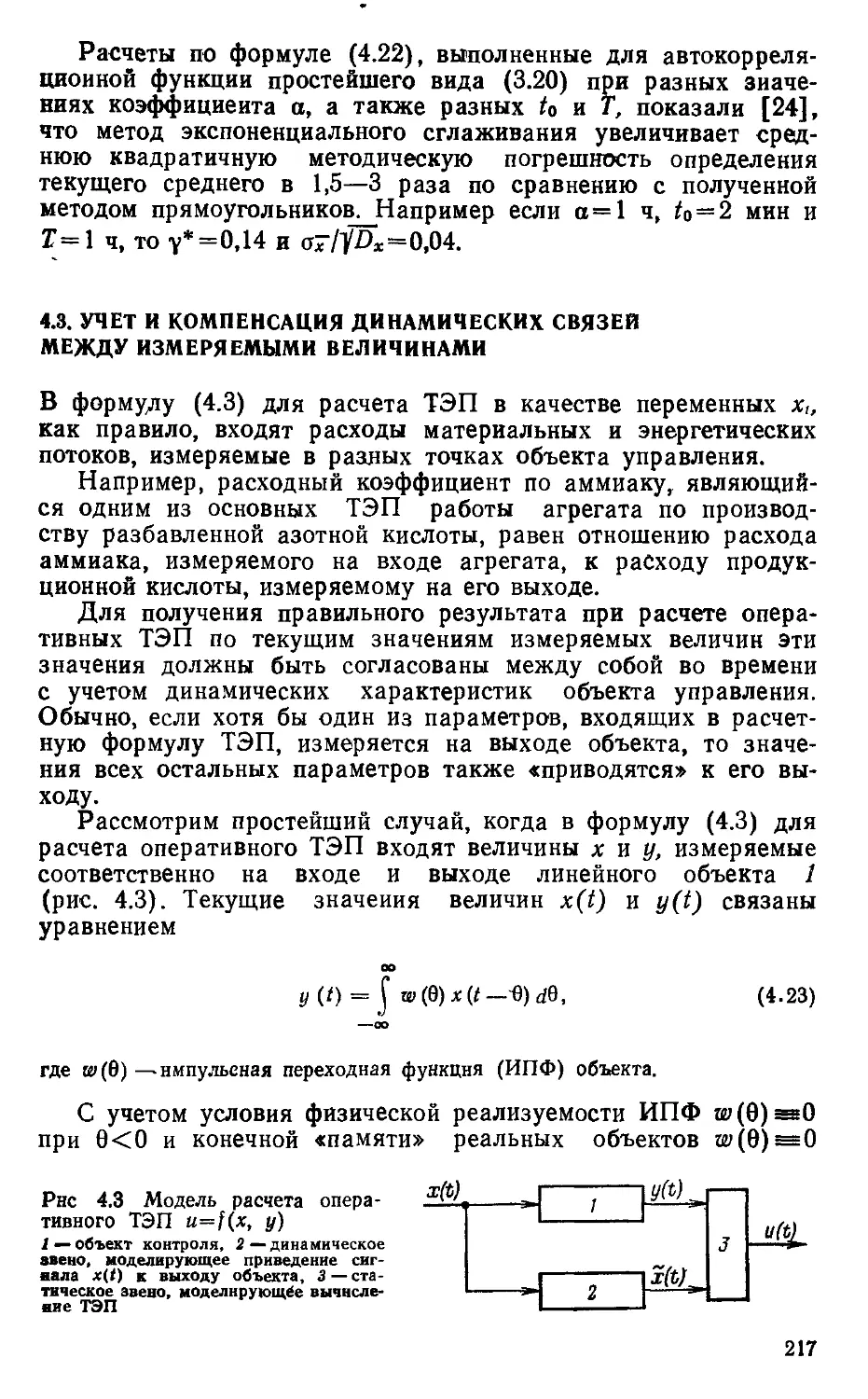
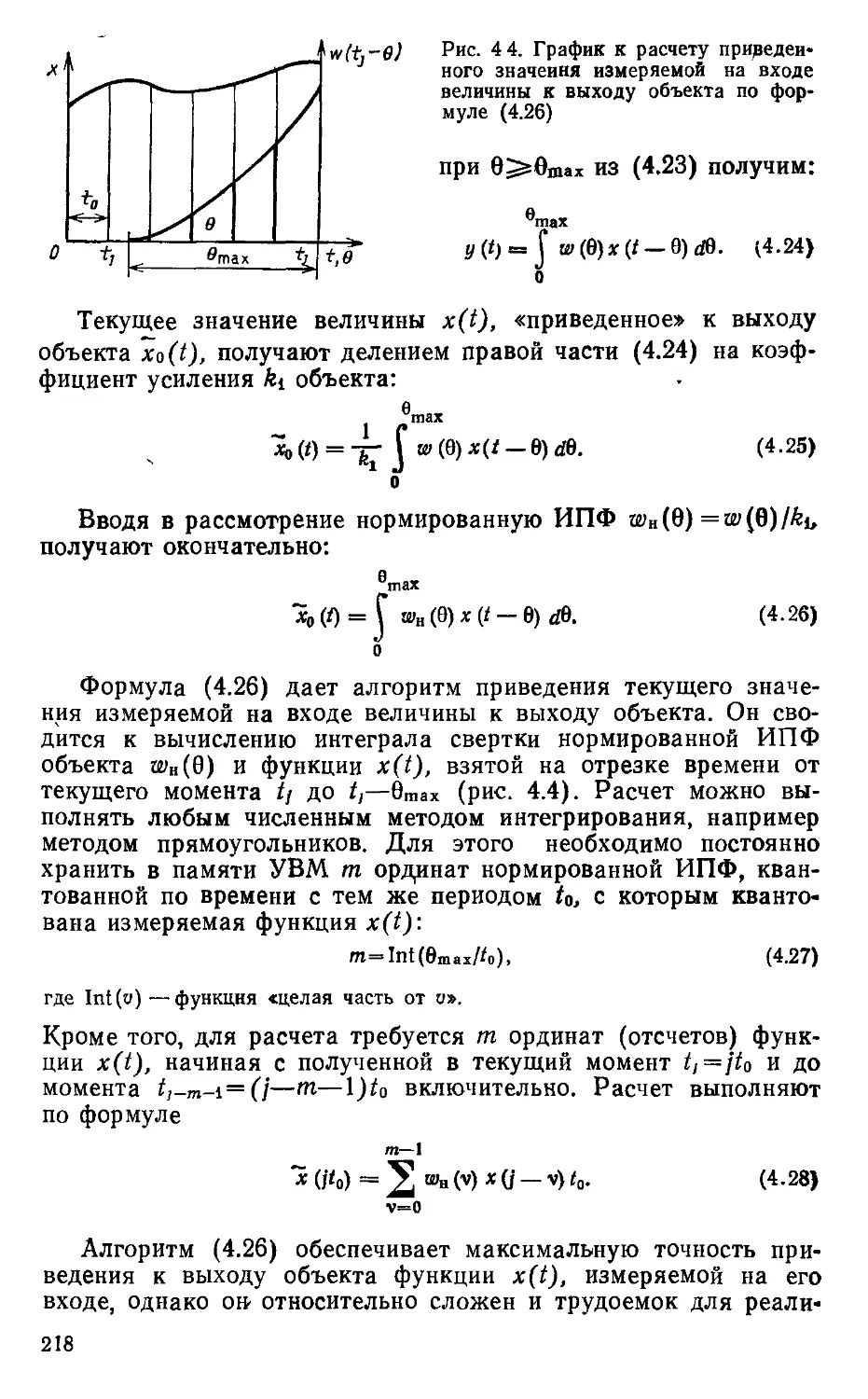
4.3. Учет и компенсация динамических связей между измеряемыми величинами .........................................................217
4.4. Вычисление неизмеряемых величин по уравнениям регрессии (косвенные измерения).................................................222
4.5. Автоматическая расшифровка хроматограмм......................224
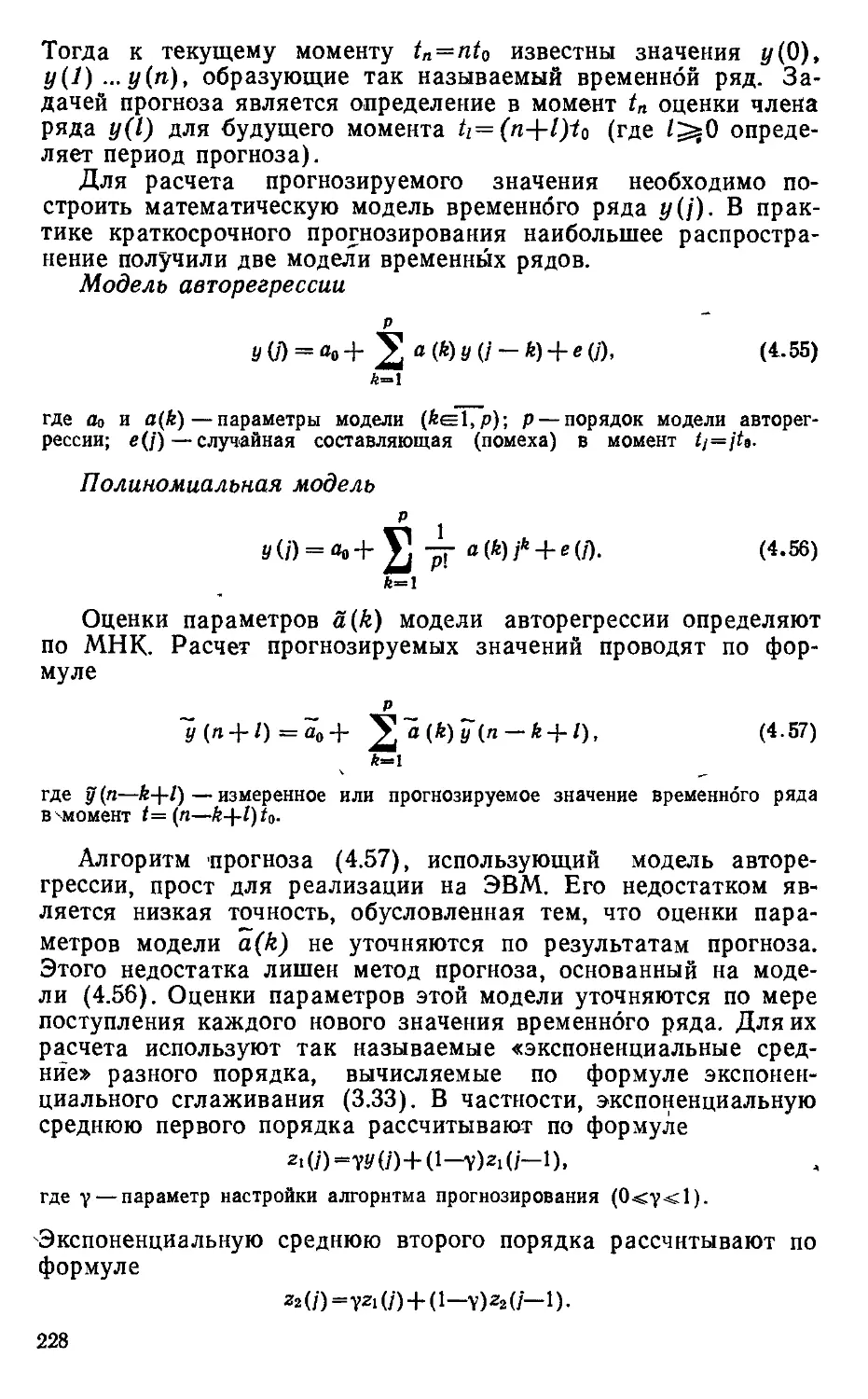
4.6. Прогнозирование показателей процесса....................... 227
Глава 5. Оптимальное управление технологическими процессами 230
5.1. Формирование критериев оптимальности.........................230
5.2. Типовые постановки задач оптимального управления технологическими процессами..................................................235
5.3. Декомпозиция и агрегирование оптимизационных задач . . . 244
5.4. Управление технологическими процессами с параллельной структурой ..............................................................252
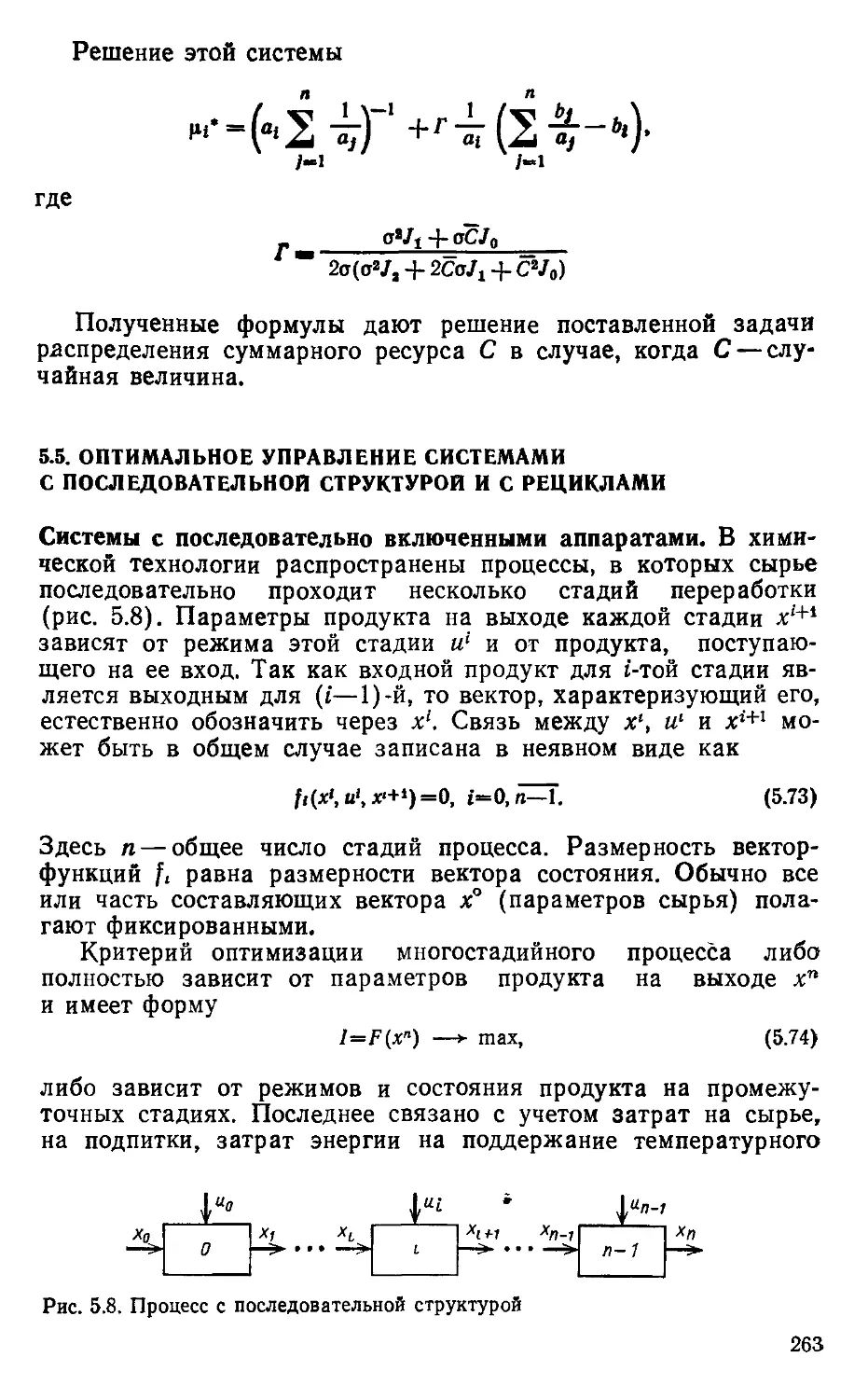
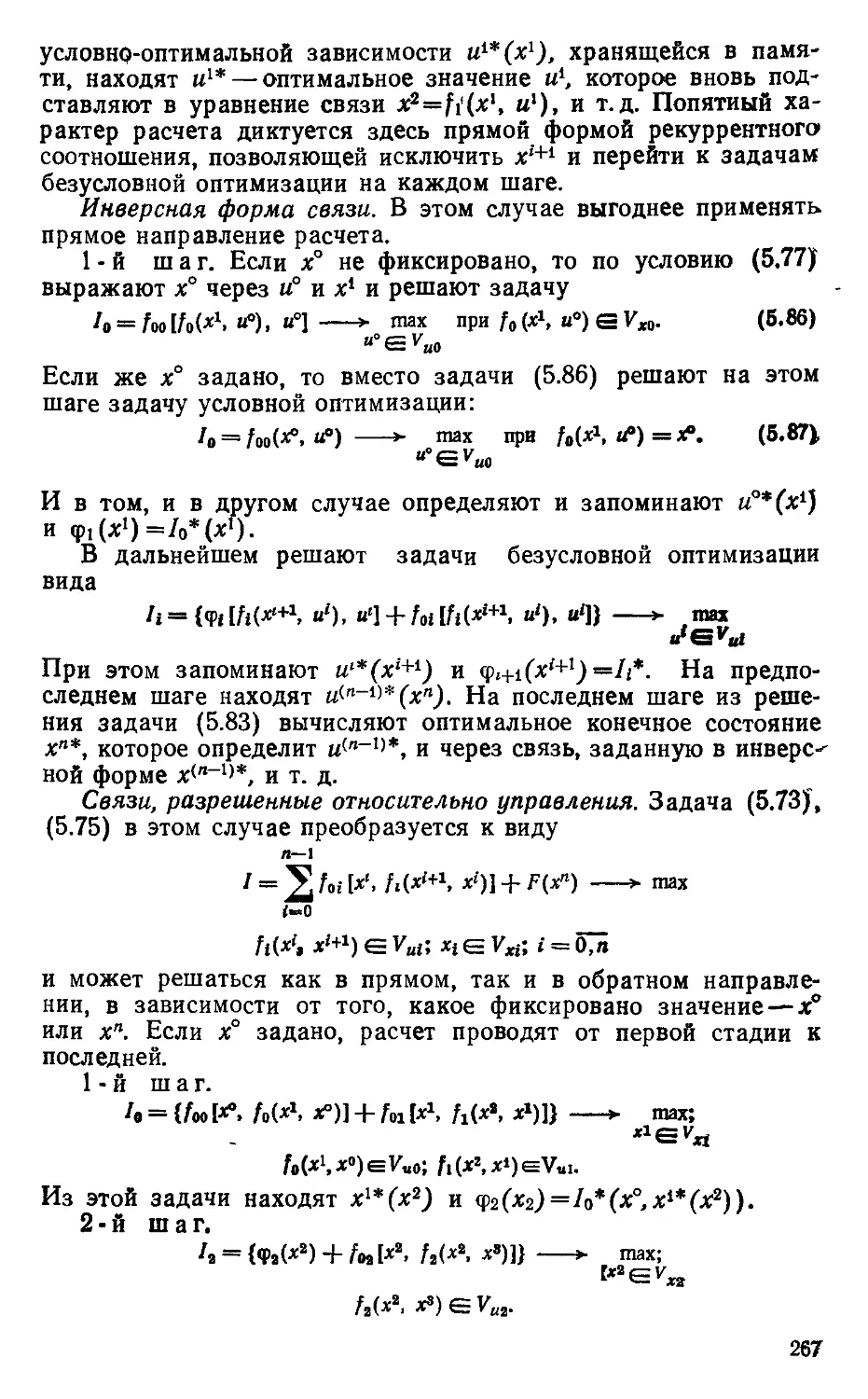
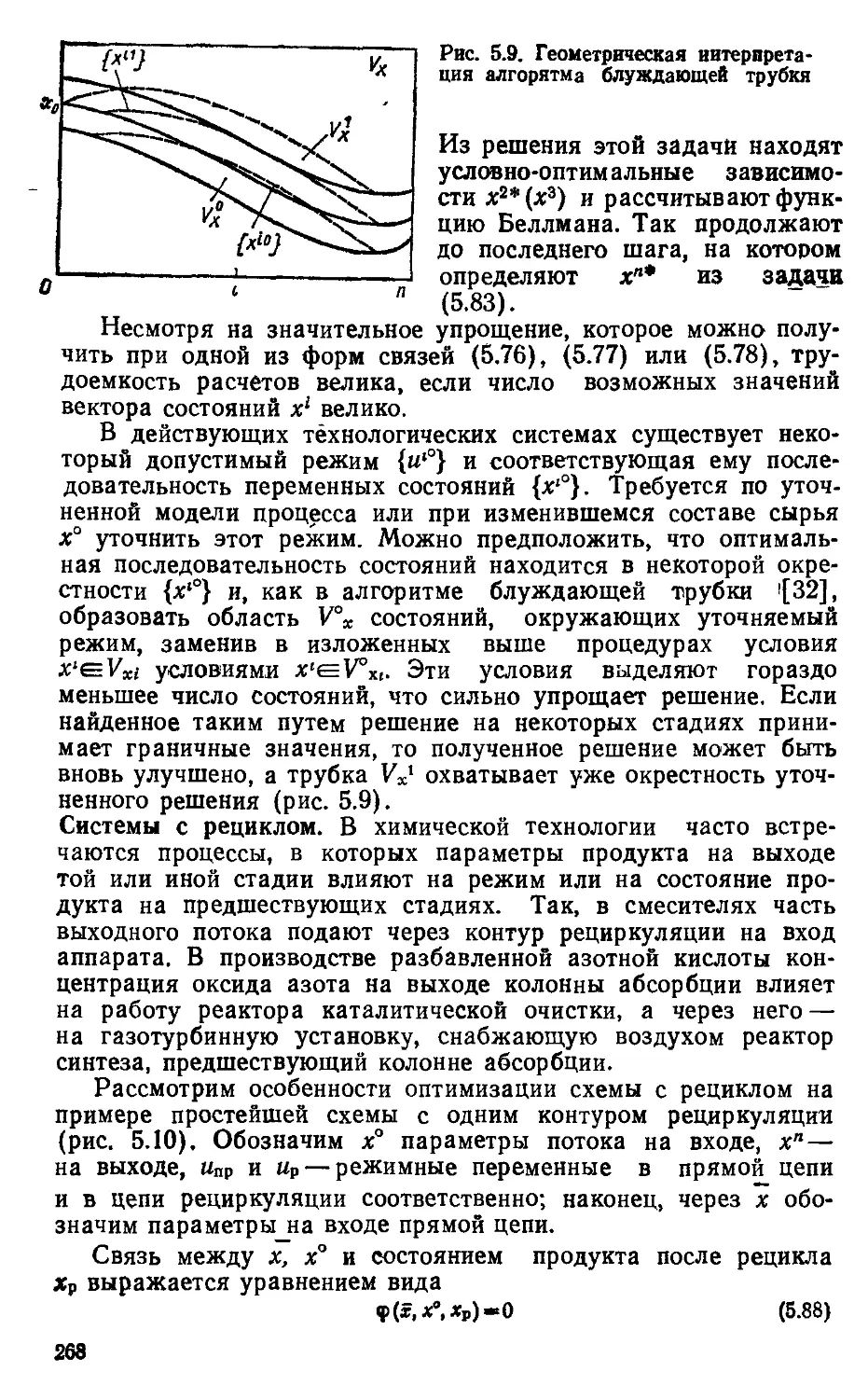
5.5. Оптимальное управление системами с последовательной структурой и с рециклами................................................... 263
5.6. Способы упрощения решения задач оптимального управления технологическими процессами..........................................270
5.7. Оптимальное управление периодическими процессами . . 281
5.8. Уточнение модели управляемого объекта по данным текущих измерений ........................................................... 294
Часть 3. Техническое и программное обеспечение систем управления технологическими процессами . . 300
Глава 6. Техническое обеспечение систем управления................300
,6.1. Управляющий вычислительный комплекс.........................300
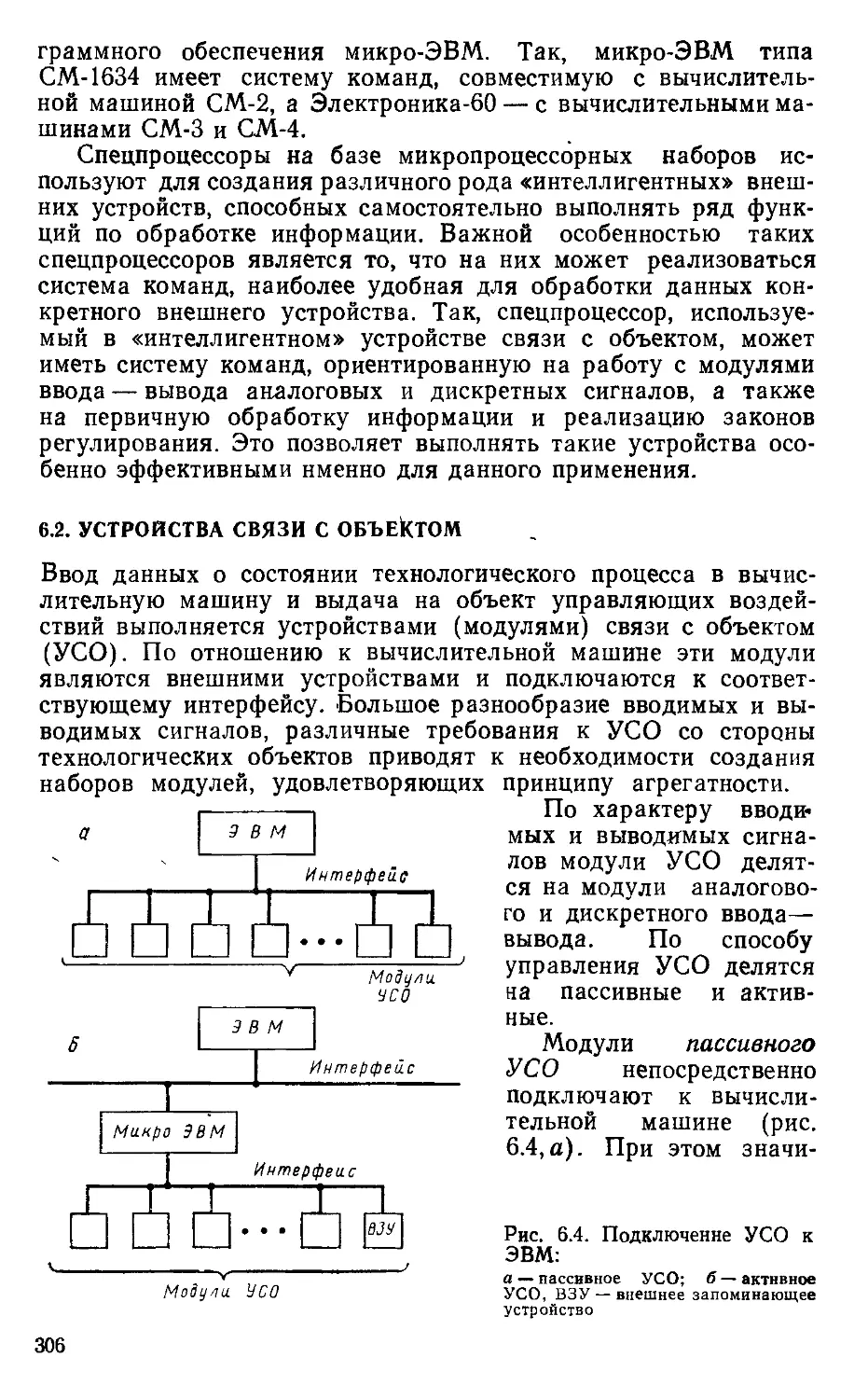
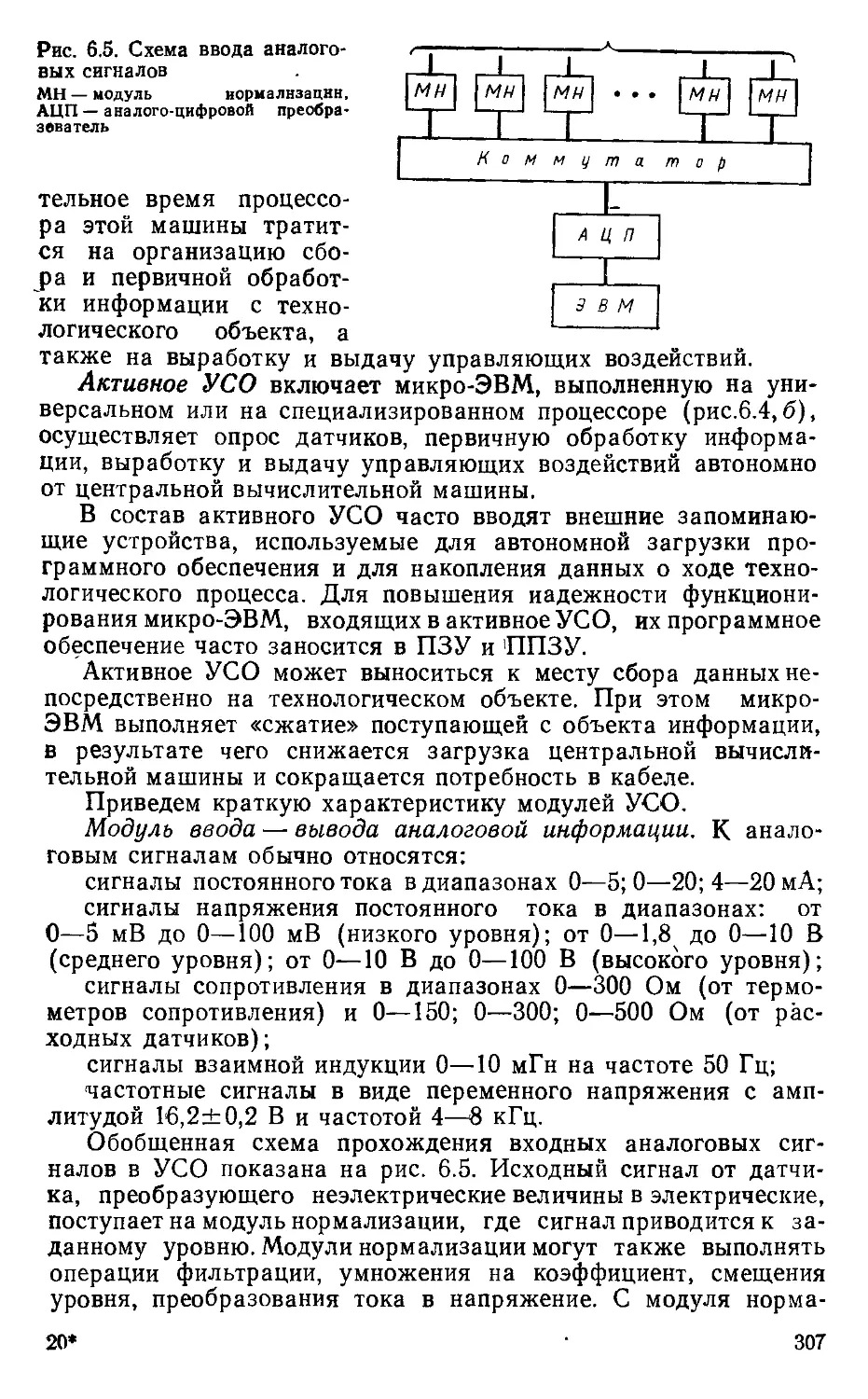
6.2. Устройства связи с объектом..................................306
6.3. Устройства связи с оперативным персоналом....................308
6.4. Архитектура управляющих вычислительных комплексов . . . 310
6.5. Системы непосредственного цифрового управления .... 314
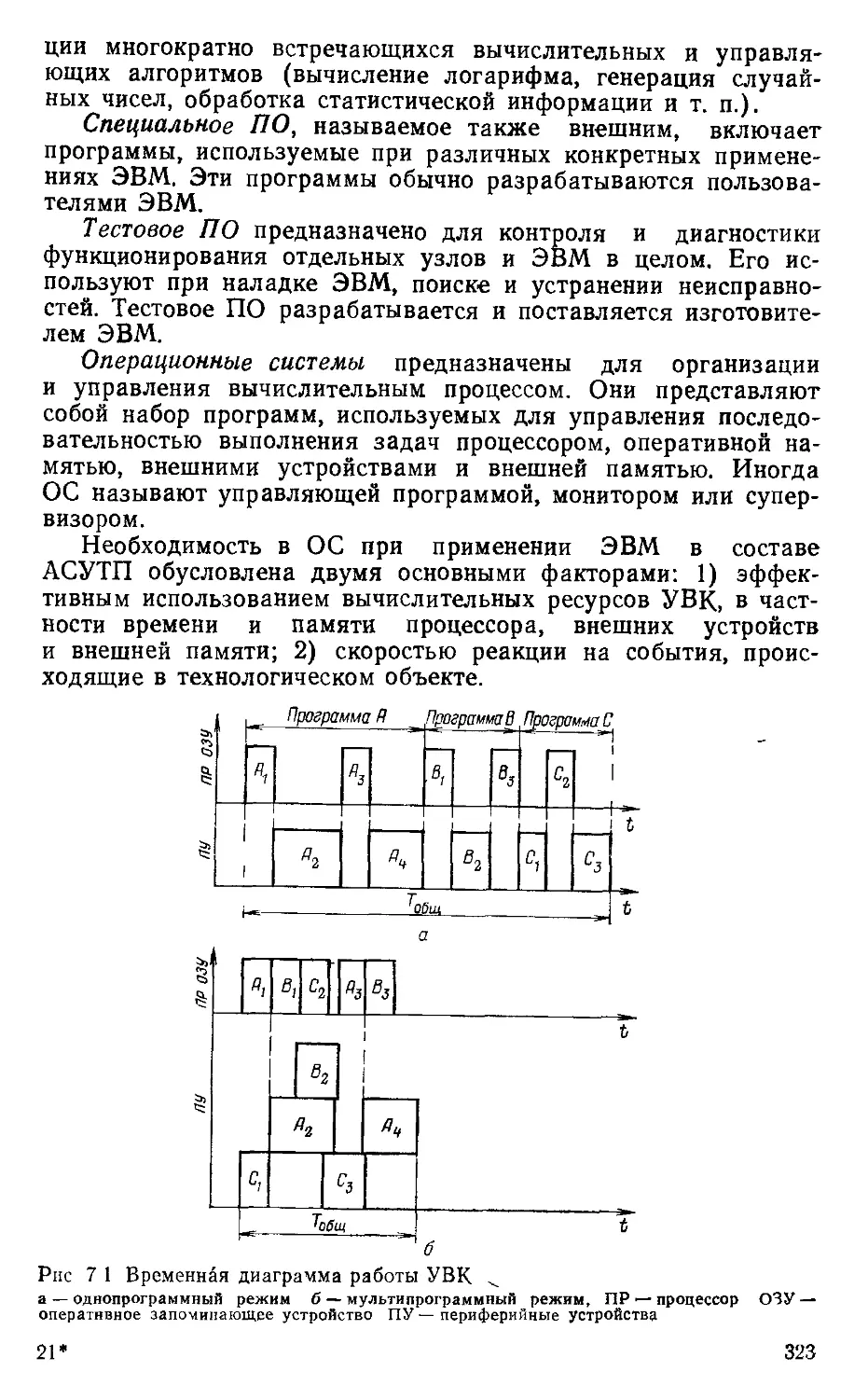
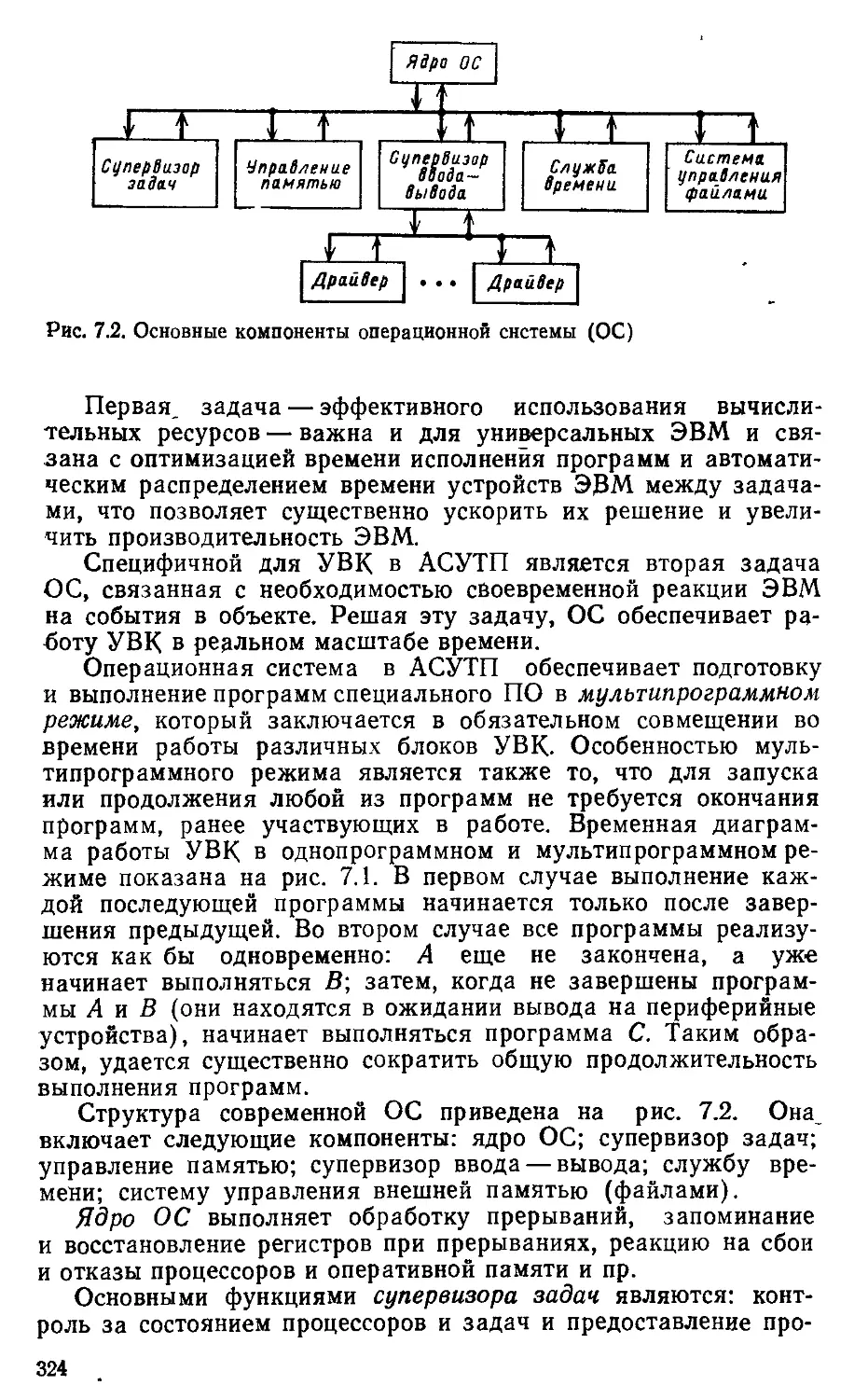
Глава 7. Программное обеспечение систем управления................322
7.1. Основные понятия.............................................322
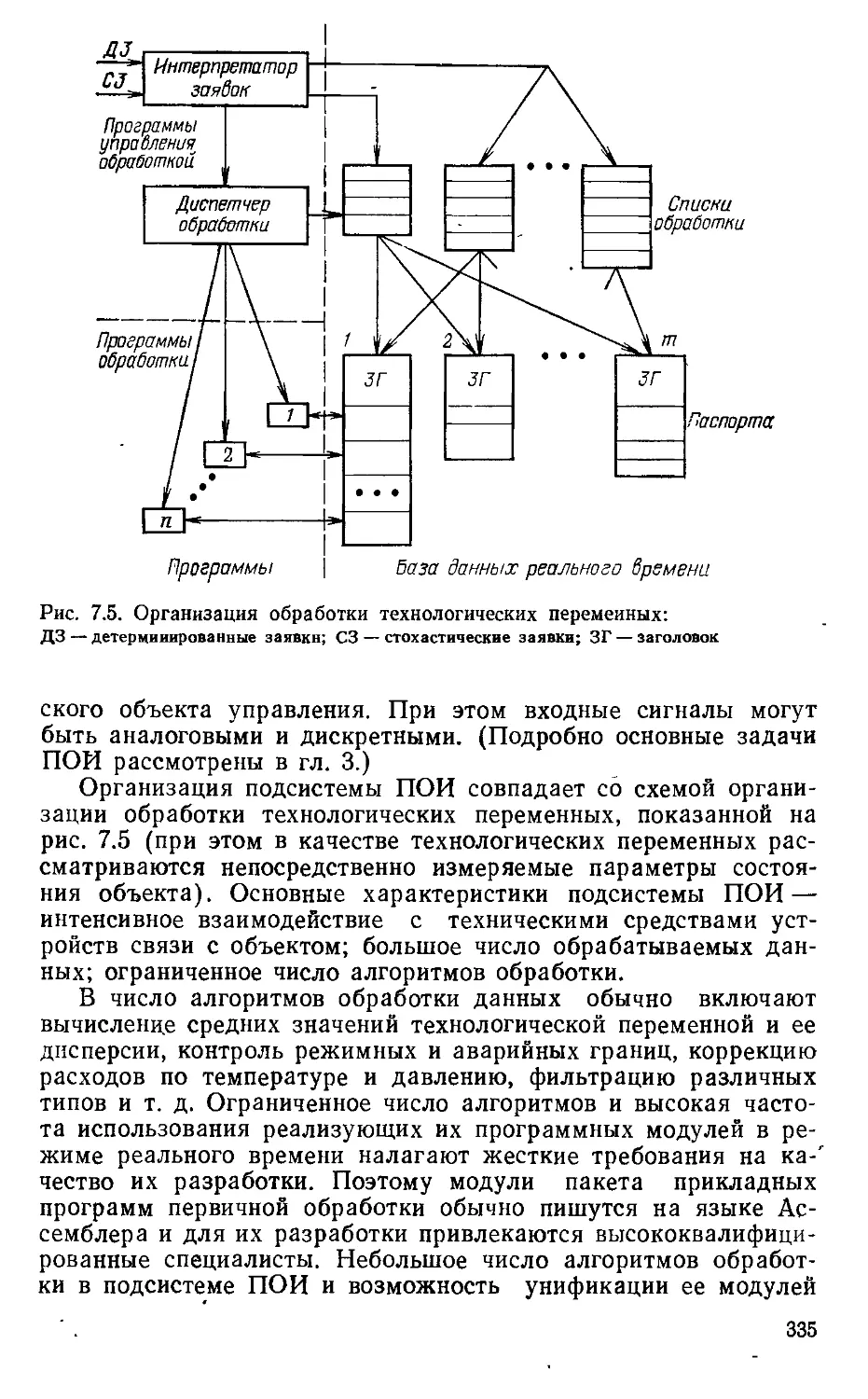
7.2. Специальное программное обеспечение АСУТП 330
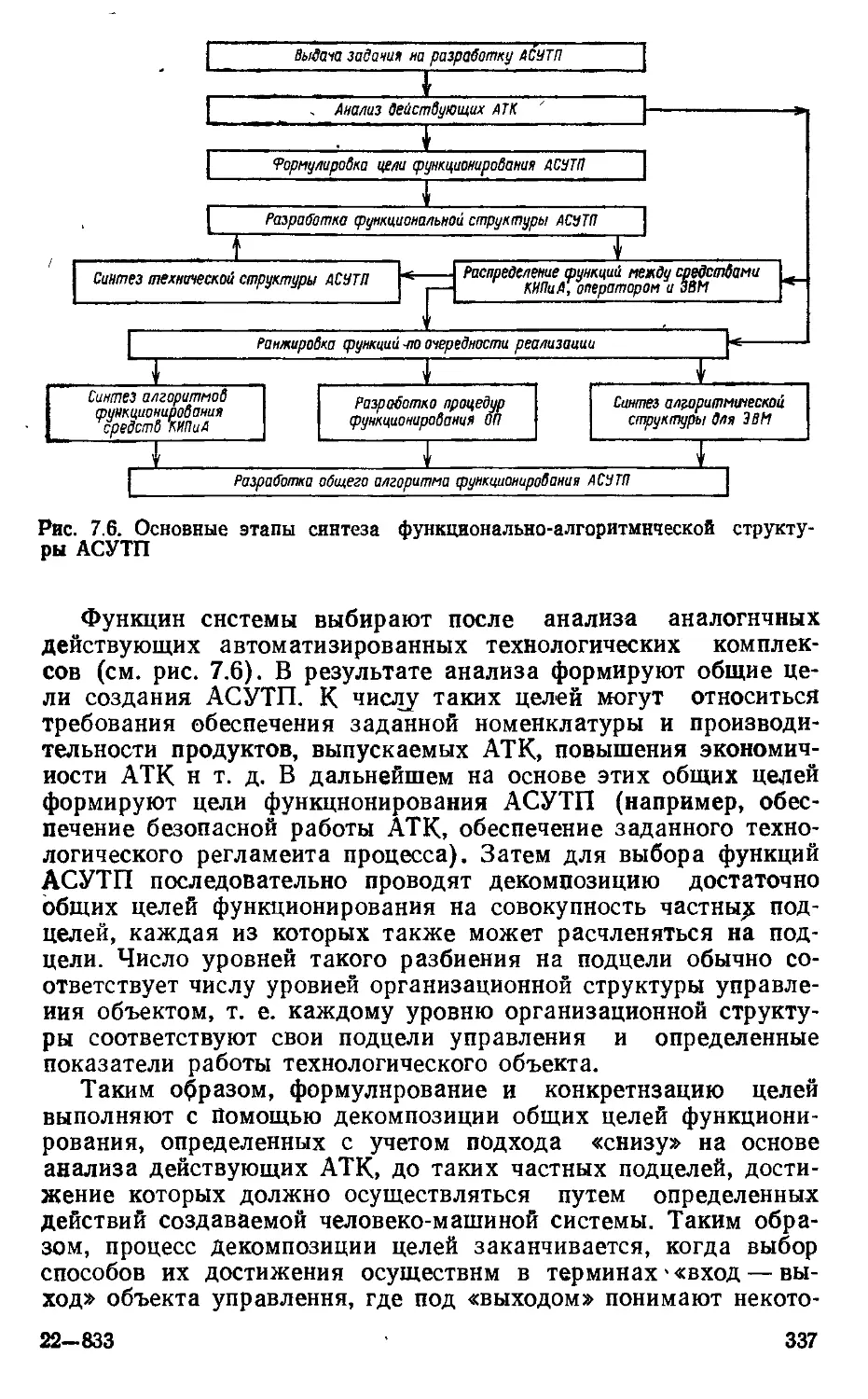
7.3. Разработка функционально-алгоритмической структуры АСУТП 336
Глава 8. Примеры систем управления в химической промышленности 340
8.1. АСУТП микробиологического синтеза лизина в биореакторах периодического действия.........................................340
8.2. Автоматизированная система управления установкой «Полимир-50» (АСУ «Полимир»)...............................................349
Библиографический список..........................................361
Предметный указатель..............................................364
ВВЕДЕНИЕ
«Основными направлениями экономического и социального развития СССР на 1986—1990 годы и на период до 2000 года* предусмотрено получение всего прироста выпуска промышленной продукции за счет роста производительности труда. Выполнение этого задания возможно только при условии ускоренного внедрения достижений научно-технического прогресса, технического перевооружения и реконструкции производства. В связи с этим предусмотрено «внедрять автоматизированные системы в различные сферы хозяйственной деятельности, и в первую очередь, в проектирование, управление оборудованием и технологическими процессами. Поднять уровень автоматизации производства примерно в 2 раза».
Активное развитие работ по автоматизации технологических процессов в нашей стране началось в 50-е — 60-е годы. Благодаря целенаправленной технической политике уровень автоматизации в химической промышленности был существенно повышен.
В 60-е годы основное внимание было уделено созданию локальных систем, обеспечивающих автоматизацию простейших функций управления технологическими процессами: централизованный контроль, противоаварийную защиту, регулирование (стабилизацию или изменение по заданной программе) основных технологических параметров. В 60-е и последующие годы все вновь строившиеся и реконструированные химические производства с непрерывными технологическими процессами были оснащены системами автоматизации.
К середине 60-х годов определились основные направления развития химической технологии, которые сохраняются и в настоящее время: интенсификация технологических процессов, проведение их в режимах, близких к критическим, применение агрегатов большой единичной мощности.
Совсем недавно производственная мощность в 500—600 тыс. т аммиака в год соответствовала производительности крупного завода, который располагался на площади 20—30 га и требовал труда примерно 1000 человек. В настоящее время агрегаты производительностью 450 тыс. т в год размещаются иа площади менее 3 га и обслуживаются штатом, составляющим менее 100 человек. Производительность труда возросла в 10 раз, а себестоимость продукции снизилась в 8 раз по сравнению с показателями старого производства. Создаются агрегаты производительностью 1 млн. т в год и более.
Вместе с тем на старом производстве каждая стадия технологического процесса осуществлялась в нескольких параллельно работающих аппаратах, 6
так что выход из строя одного из них не приводил к серьезным нарушениям в целом. В агрегатах большой единичной мощности отсутствуют резервное оборудование и промежуточные емкости, поэтому выход из строя какого-либо аппарата при нарушении в нем технологического режима вызывает аварийную остановку всего агрегата. Стоимость каждой такой остановки при производительности 450 тыс. т аммиака в год составляет сотни тысяч рублей. Отсюда видно, насколько важно обеспечить высокое качество управления агрегатами большой единичной мощности.
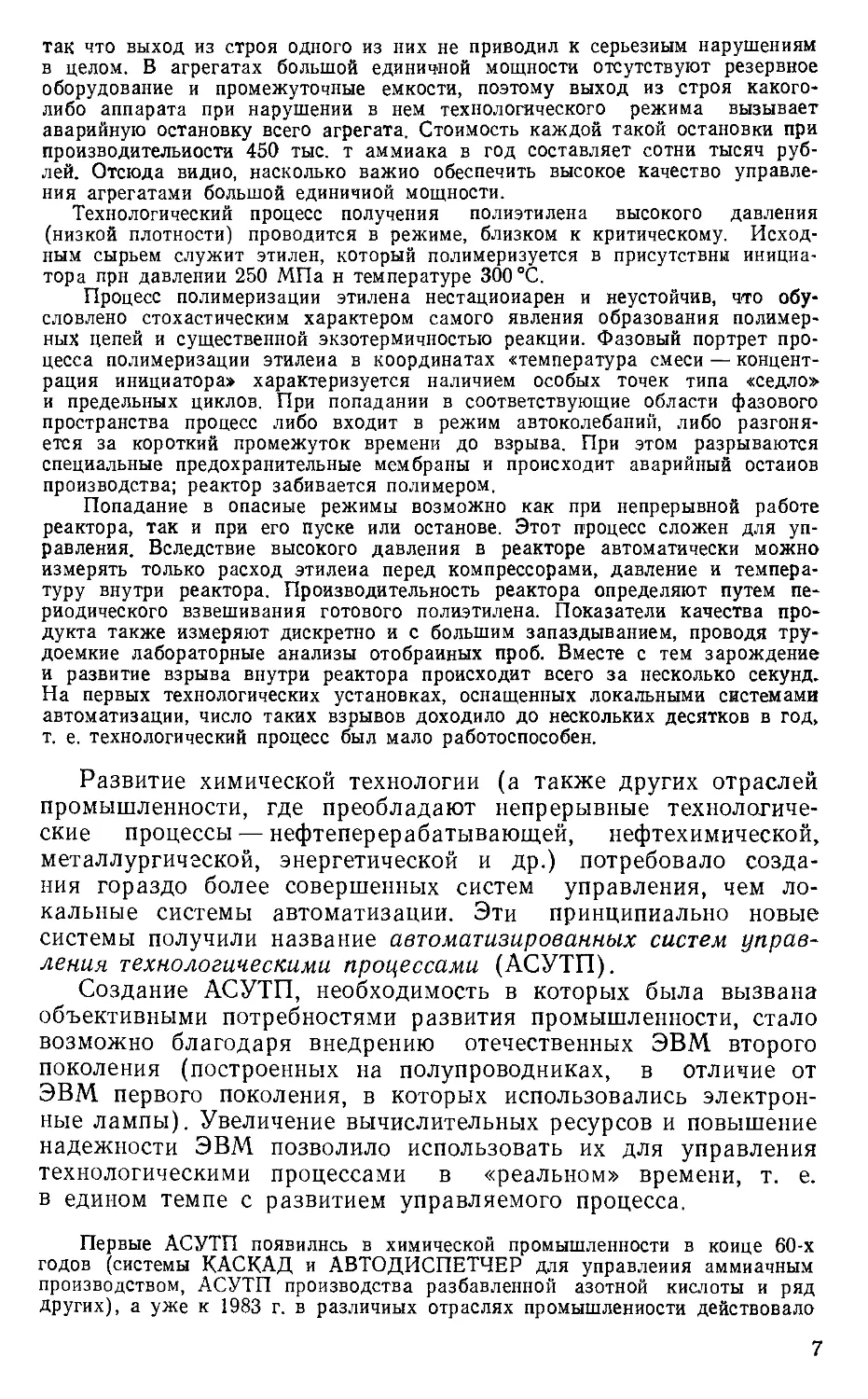
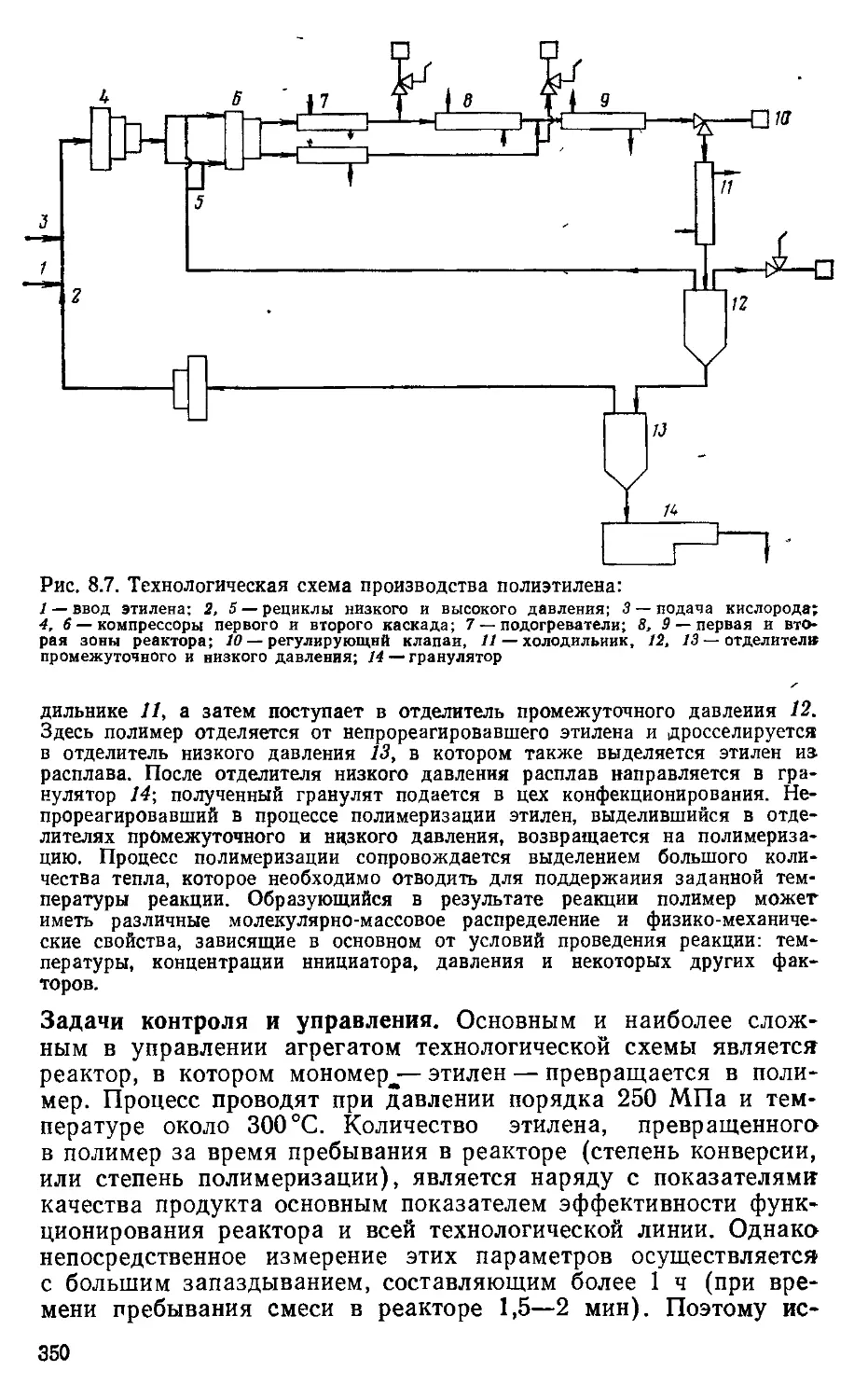
Технологический процесс получения полиэтилена высокого давления (низкой плотности) проводится в режиме, близком к критическому. Исходным сырьем служит этилен, который полимеризуется в присутствии инициатора при давлении 250 МПа н температуре 300 °C.
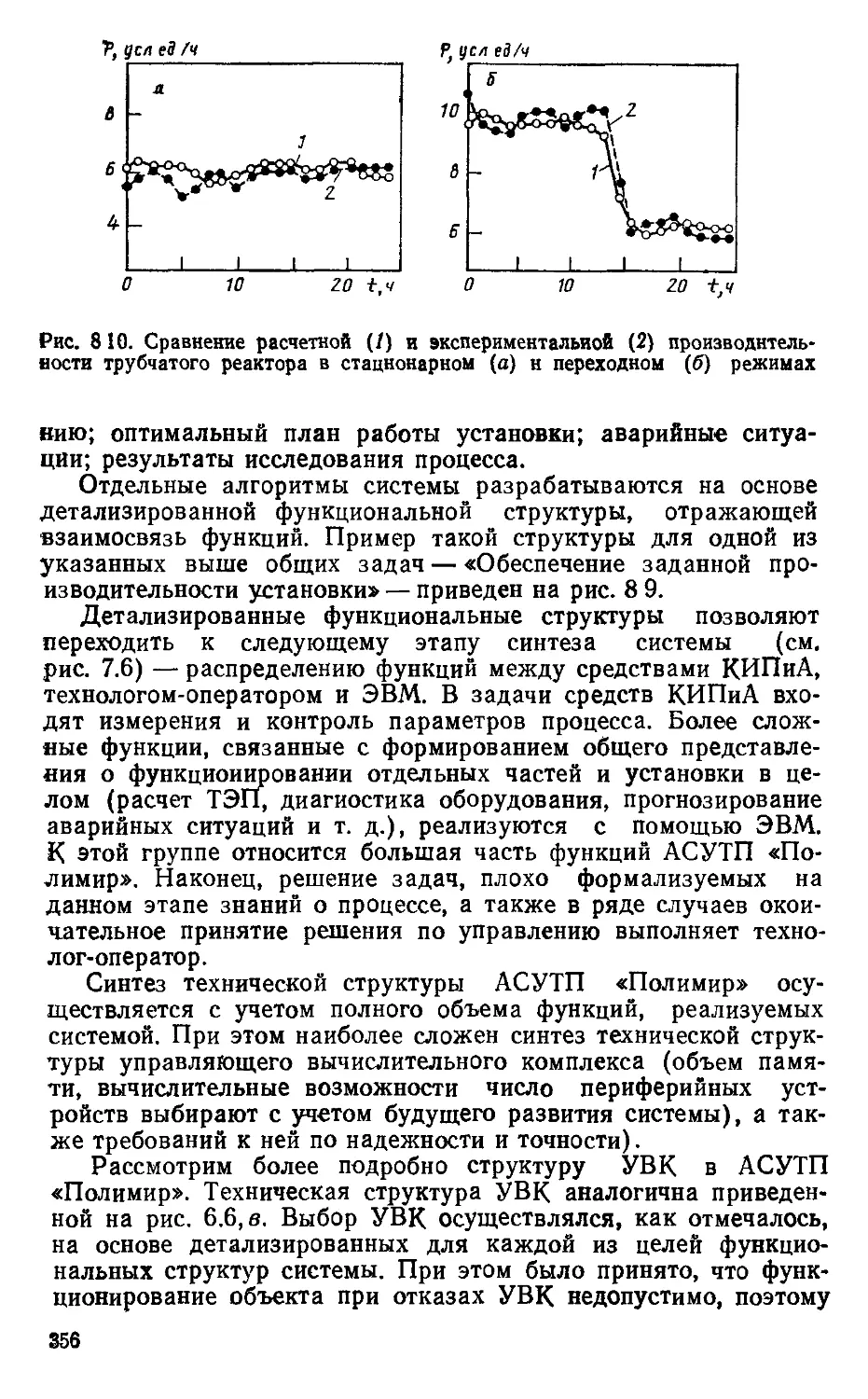
Процесс полимеризации этилена нестационарен и неустойчив, что обусловлено стохастическим характером самого явления образования полимерных цепей и существенной экзотермичностью реакции. Фазовый портрет процесса полимеризации этилена в координатах «температура смеси — концентрация инициатора» характеризуется наличием особых точек типа «седло» и предельных циклов. При попадании в соответствующие области фазового пространства процесс либо входит в режим автоколебаний, либо разгоняется за короткий промежуток времени до взрыва. При этом разрываются специальные предохранительные мембраны и происходит аварийный останов производства; реактор забивается полимером.
Попадание в опасные режимы возможно как при непрерывной работе реактора, так и при его пуске или останове. Этот процесс сложен для управления. Вследствие высокого давления в реакторе автоматически можно измерять только расход этилена перед компрессорами, давление и температуру внутри реактора. Производительность реактора определяют путем периодического взвешивания готового полиэтилена. Показатели качества продукта также измеряют дискретно и с большим запаздыванием, проводя трудоемкие лабораторные анализы отобранных проб. Вместе с тем зарождение и развитие взрыва внутри реактора происходит всего за несколько секунд. На первых технологических установках, оснащенных локальными системами автоматизации, число таких взрывов доходило до нескольких десятков в год, т. е. технологический процесс был мало работоспособен.
Развитие химической технологии (а также других отраслей промышленности, где преобладают непрерывные технологические процессы — нефтеперерабатывающей, нефтехимической, металлургической, энергетической и др.) потребовало создания гораздо более совершенных систем управления, чем локальные системы автоматизации. Эти принципиально новые системы получили название автоматизированных систем управления технологическими процессами (АСУТП).
Создание АСУТП, необходимость в которых была вызвана объективными потребностями развития промышленности, стало возможно благодаря внедрению отечественных ЭВМ второго поколения (построенных на полупроводниках, в отличие от ЭВМ первого поколения, в которых использовались электронные лампы). Увеличение вычислительных ресурсов и повышение надежности ЭВМ позволило использовать их для управления технологическими процессами в «реальном» времени, т. е. в едином темпе с развитием управляемого процесса.
Первые АСУТП появились в химической промышленности в конце 60-х годов (системы КАСКАД и АВТОДИСПЕТЧЕР для управления аммиачным производством, АСУТП производства разбавленной азотной кислоты и ряд других), а уже к 1983 г. в различных отраслях промышленности действовало
около 2500 АСУТП, построенных на базе управляющих ЭВМ (УВМ) В настоящее время ежегодно вводится в эксплуатацию около 400 новых АСУТП. Такое положение объясняется двумя причинами. Первая состоит в высокой экономической эффективности применяемых в химической промышленности АСУТП, которые прежде всего создавались для новых высокопроизводительных агрегатов и производств с непрерывными технологическими процессами. Вторая причина высоких темпов внедрения АСУТП в химическую промышленность заключается в том, что часть новых технологически прогрессивных производственных процессов практически нереализуема без АСУТП (например, полимеризация этилена при высоком давлении).
Совокупность технологического оборудования и реализуемого на нем технологического процесса является технологическим объектом управления (ТОУ). Человеко-машинную систему, обеспечивающую автоматизированный сбор и обработку информации, необходимой для оптимального управления в различных сферах человеческой деятельности, называют автоматизированной системой управления (АСУ).
АСУТП называют АСУ для выработки и реализации управляющих воздействий на ТОУ в соответствии с принятым критерием управления — показателем, характеризующим качество работы ТОУ и принимающим определенные значения, в зависимости от используемых управляющих воздействий. Совокупность совместно функционирующих ТОУ и АСУТП образует автоматизированный технологический комплекс (АТК).
АСУТП отличаются от локальных систем автоматизации более совершенной организацией потоков информации; практически полной автоматизацией процессов получения, обработки и представления информации; возможностью активного диалога оперативного персонала с УВМ в процессе управления для выработки наиболее эффективных решений; более высокой степенью автоматизации функций управления, включая пуск и остановку производства.
От систем управления автоматическими производствами типа цехов и заводов-автоматов (являющихся высшей ступенью автоматизации) АСУТП отличается значительной степенью участия человека в процессах управления. По мере технического совершенствования технологических объектов и развития АСУТП эти различия уменьшаются. В настоящее время переход к более полной автоматизации тормозится несовершенством технологических процессов (наличием немеханизированных технологических операций, низкой надежностью технологического оборудования и т. п.), недостаточной надежностью средств автоматизации и вычислительной техники, трудностями математического описания задач, решаемых человеком в АСУТП, и другими причинами. Сформированы основные представления об АСУТП, их функциях и принципах построения; созданы документы, регламентирующие порядок их разработки, производства, внедрения и эксплуатации. Каждая АСУТП характеризуется целью управления, функциональной, технической и организационной структурами.
При построении АСУТП необходимо обеспечить разумное сочетание цели ее функционирования (задаваемой критерием управления) и множества взаимосвязанных функций, достаточного для достижения главной цели.
Глобальная цель управления ТОУ с помощью АСУТП состоит в поддержании экстремального значения критерия управления при выполнении всех условий, определяющих множество допустимых значений управляющих воздействий. Прямое решение такой задачи оптимального управления возможно лишь для относительно простых ТОУ. В большинстве же случаев приходится производить декомпозицию глобальной цели управления на ряд частных целей; для достижения каждой из них требуется решение более простой задачи управления меньшей размерности.
Функцией АСУТП называют действия системы, направленные на достижение одной из частных целей управления'. Частные цели управления, как и реализующие их функции, находятся в определенном соподчинении, образуя функциональную структуру АСУТП. Элементами этой структуры являются отдельные функции, связи между которыми указывают порядок их выполнения. Функции АСУТП делятся на информационные, управляющие и вспомогательные.
К информационным функциям относятся те, цель которых — сбор, преобразование и хранение информации о состоянии ТОУ, представление этой информации оперативному персоналу или передача ее для последующей обработки. Основными информационными функциями являются: первичная обработка информации о текущем состоянии ТОУ; обнаружение отклонений технологических параметров и показателей состояния оборудования от установленных значений; расчет значений не-измеряемых величин и показателей (косвенные измерения, расчет ТЭП, прогнозирование и т. д.); оперативное отображение и регистрация информации, обмен информацией с оперативным персоналом; обмен информацией со смежными и вышестоящими АСУ.
Управляющие функции обеспечивают поддержание экстремального значения критерия управления в условиях изменяющейся производственной ситуации. Они делятся на две группы: первые служат для определения оптимальных управляющих воздействий, при которых поддерживается оптимальный (или близкий к нему, т. е. рациональный) режим технологического процесса; ко второй группе относятся функции, обеспечивающие реализацию этого режима путем формирования управляющих воздействий на ТОУ. Управляющие функции второй группы соответствуют традиционным функциям локальных систем автоматизации — регулированию (стабилизации или программному регулированию) и программно-логическому управлению технологическими процессами.
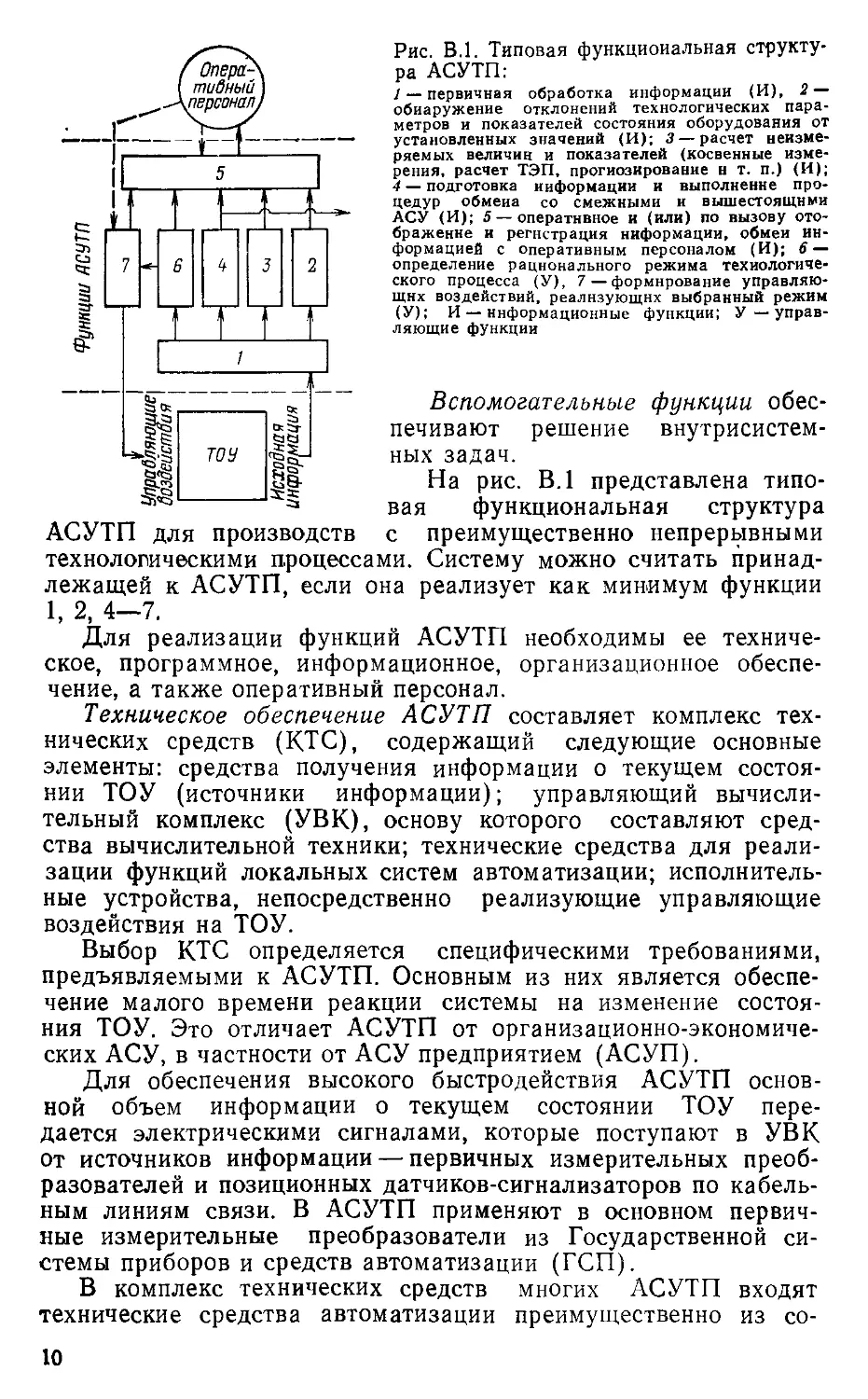
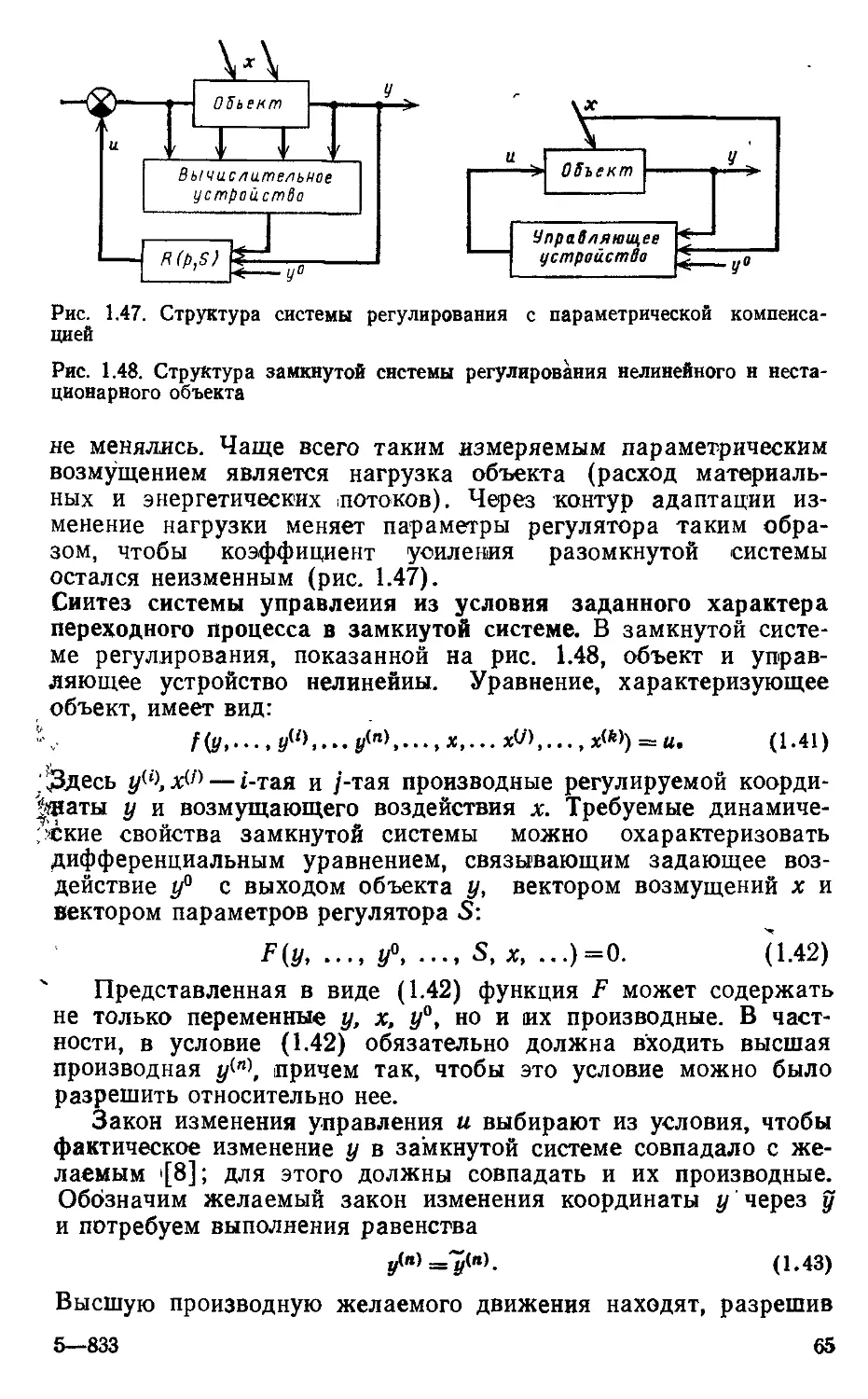
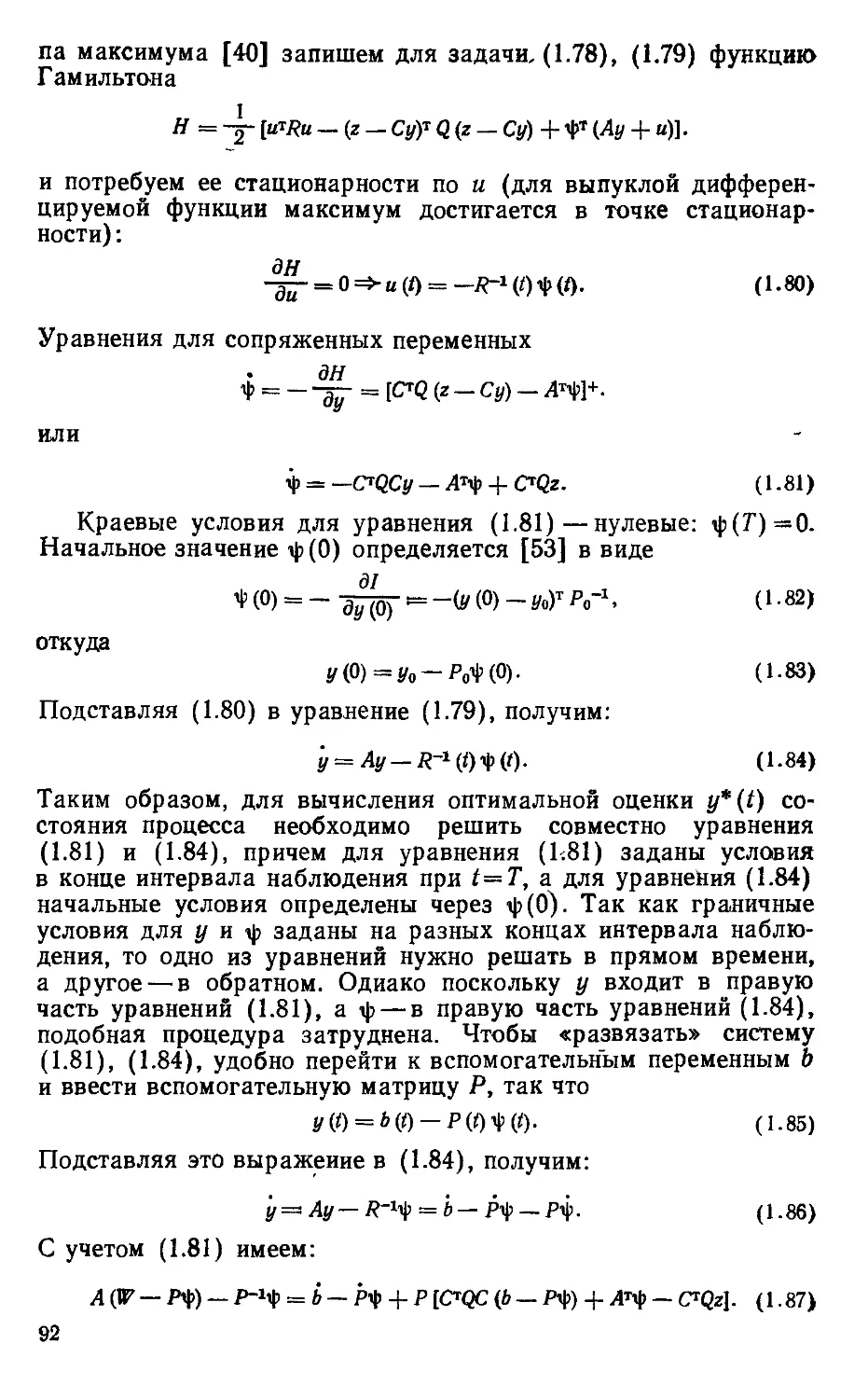
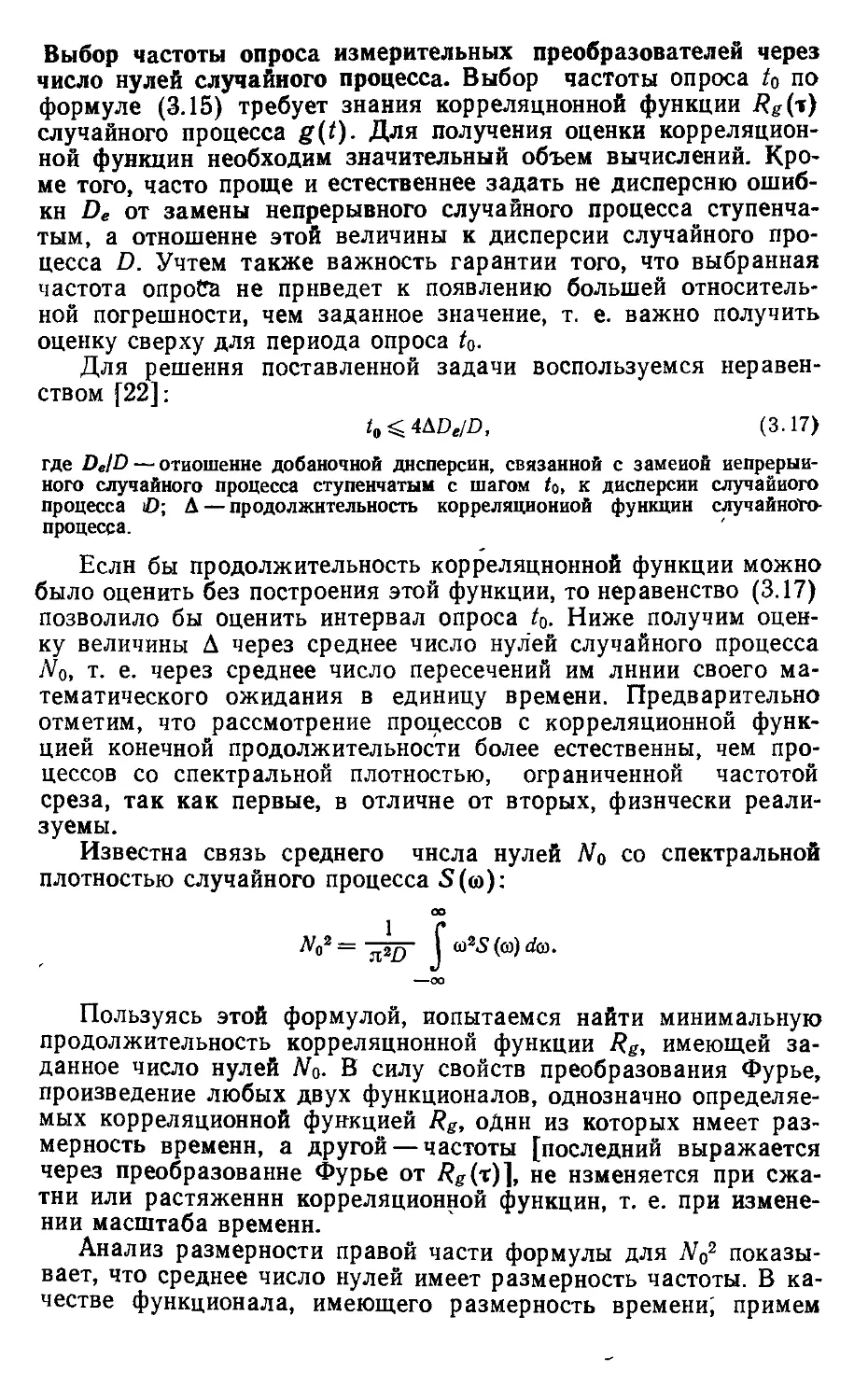
Рис. В.1. Типовая функциональная структура АСУТП:
1 — первичная обработка информации (И), 2 — обнаружение отклонений технологических параметров и показателей состояния оборудования от установленных значений (И); 3 — расчет неизменяемых величин и показателей (косвенные измерения, расчет ТЭП, прогнозирование н т. п.) (И); 4 — подготовка информации и выполнение процедур обмена со смежными и вышестоящими АСУ (И); 5 — оперативное и (или) по вызову отображение и регистрация информации, обмен информацией с оперативным персоналом (И); d — определение рационального режима технологического процесса (У), 7 — формирование управляющих воздействий, реализующих выбранный режим (У); И — информационные функции; У — управляющие функции
Вспомогательные функции обеспечивают решение внутрисистемных задач.
На рис. В.1 представлена типовая функциональная структура
АСУТП для производств с преимущественно непрерывными технологическими процессами. Систему можно считать принад-
лежащей к АСУТП, если она реализует как минимум функции
1, 2, 4—7.
Для реализации функций АСУТП необходимы ее техническое, программное, информационное, организационное обеспе
чение, а также оперативный персонал.
Техническое обеспечение АСУТП составляет комплекс тех-
нических средств (КТС), содержащий следующие основные элементы: средства получения информации о текущем состоянии ТОУ (источники информации); управляющий вычислительный комплекс (УВК), основу которого составляют средства вычислительной техники; технические средства для реализации функций локальных систем автоматизации; исполнительные устройства, непосредственно реализующие управляющие воздействия на ТОУ.
Выбор КТС определяется специфическими требованиями, предъявляемыми к АСУТП. Основным из них является обеспе
чение малого времени реакции системы на изменение состояния ТОУ. Это отличает АСУТП от организационно-экономических АСУ, в частности от АСУ предприятием (АСУП).
Для обеспечения высокого быстродействия АСУТП основной объем информации о текущем состоянии ТОУ передается электрическими сигналами, которые поступают в УВК от источников информации — первичных измерительных преобразователей и позиционных датчиков-сигнализаторов по кабельным линиям связи. В АСУТП применяют в основном первичные измерительные преобразователи из Государственной системы приборов и средств автоматизации (ГСП).
В комплекс технических средств многих АСУТП входят технические средства автоматизации преимущественно из со
става электрической ветви ГСП, служащие для реализации функций локальных систем автоматизации (регулирования, прогр'аммно-логического и дистанционного управления).
Специфическим компонентом КТС является УВК, в состав которого входят собственно вычислительный комплекс (ВК), устройства связи ВК с объектом (УСО) и с оперативным персоналом. В первых АСУТП использовали специализированные УВМ; из них наиболее известными были машины УМ-1. Первые УВМ представляли собой изделия с фиксированными составом и техническими возможностями. В дальнейшем были созданы агрегатные комплекты управляющей вычислительной техники, из которых можно компоновать УВК различного состава и вычислительной мощности, в соответствии с особенностями конкретной АСУТП.
Первым и до сих пор наиболее распространенным типом технических структур АСУТП является централизованная. В системах с централизованной структурой вся информация, необходимая для управления АТК, поступает в единый центр — операторский пункт, где установлены практически все технические средства АСУТП, за исключением источников информации и исполнительных устройств и где находится оперативный персонал. Такая техническая структура наиболее проста и имеет ряд очевидных эксплуатационных достоинств. Недостатками ее являются необходимость избыточного числа элементов для обеспечения высокой надежности функционирования АСУТП и большие затраты дефицитного кабеля. Она целесообразна для сравнительно небольших по мощности и компактных АТК с умеренными требованиями к надежности.
В связи с внедрением микропроцессорной техники все большее распространение получает распределенная техническая структура АСУТП, т. е. расчлененная на ряд автономных подсистем — локальных технологических станций, территориально распределенных по технологическим участкам объекта управления. Каждая локальная подсистема представляет собой однотипно выполненную централизованную структуру, ядром которой является управляющая микро-ЭВМ. Локальные подсистемы через свои микро-ЭВМ объединены в единую систему сетью передачи данных с высокой пропускной способностью. К сети подключается необходимое для управления АТК число терминалов для оперативного персонала; программное обеспечение АСУТП связывает все элементы распределенной технической структуры в единое целое, обладающее рядом достоинств:
возможностью получения высоких показателей надежности за счет расщепления АСУТП на семейство сравнительно небольших и менее сложных автономных подсистем и дополнительного коллективного резервирования каждой из этих подсистем через сеть; применение более надежных средств микроэлектронной вычислительной техники;
большой гибкостью при композиции и модернизации технического и программного обеспечения, возможностью легкого наращивания вычислительных возможностей АСУТП;
экономией дефицитного кабеля.
Ряд функций АСУТП, связанных в основном с локальным регулированием и управлением, реализуется аппаратурно. Большинство же функций реализуется программно, т. е. путем соответствующей обработки информации в УВК. Поэтому важнейшим компонентом АСУТП является ее программное обеспечение (ПО), т. е. совокупность программ, обеспечивающих реализацию функции АСУТП и заданное функционирование КТС. Программное обеспечение делится на общее и специальное. Общее ПО поставляется в комплекте со средствами вычислительной техники и обеспечивает организацию функционирования КТС. Специальное ПО разрабатывается при создании АСУТП и включает программы, реализующие ее информационные и управляющие функции. Для разработки специального ПО используют один из языков программирования высокого уровня (обычно «Фортран-IV»), а в общем ПО предусматривается транслятор с этого языка на машинный язык УВМ (подробнее см. гл. 7).
Программное обеспечение создается на базе математического обеспечения (МО), под которым подразумевают совокупность математических методов, моделей и алгоритмов для решения задач и обработки информации с применением вычислительной техники. Для реализации информационных и управляющих, функций АСУТП создают специальное МО, в состав которого, в частности, входят алгоритмы сбора, обработки и представления информации; алгоритмы управления с математическими моделями соответствующих объектов управления; алгоритмы локальной автоматизации.
Создание специальных МО и ПО требует больших затрат труда и средств; доля их в общей стоимости АСУТП непрерывно возрастает. Если для первых АСУТП соотношение затрат на КТС и МО с ПО равнялось примерно 15: 1, то в современных системах оно приближается к 1 :2.
Все взаимодействия как внутри АСУТП, так и с внешней средой представляют собой различные формы информационного обмена (т. е. передачу и прием информации в виде различных сигналов, данных, сообщений, тестов и т. д.). Для того чтобы рационально осуществлять такой обмен, необходима детальная регламентация этого процесса, например система классификации и кодирования технологической и технико-экономической информации, принятых форм массивов данных и документов и т. д. Кроме этого, необходимы сами массивы данных и документов (в том числе нормативно-справочная информация), в совокупности обеспечивающие при эксплуатации АСУТП возможность выполнения всех ее функций. Правила обмена информацией и сама информация, циркулирующая
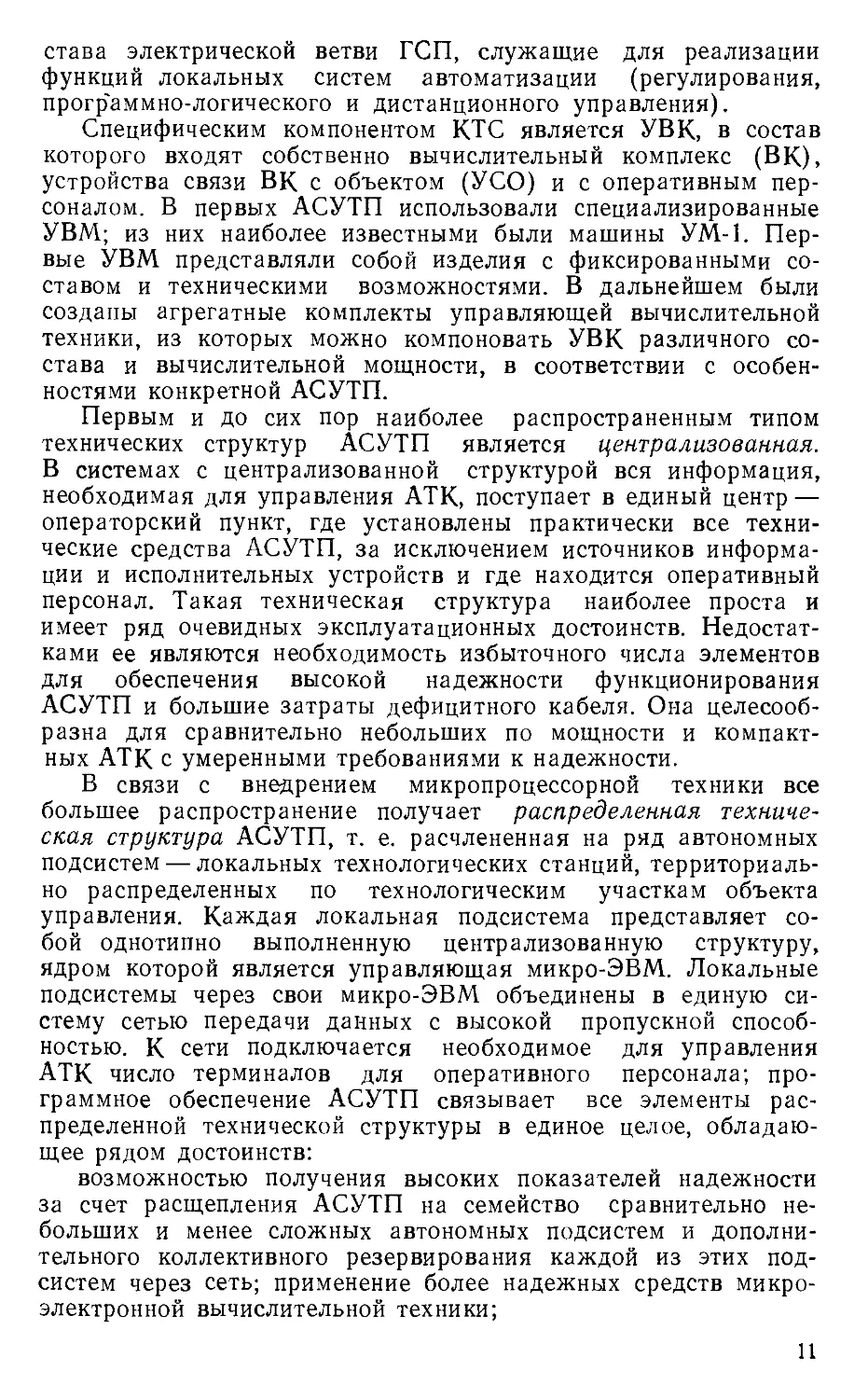
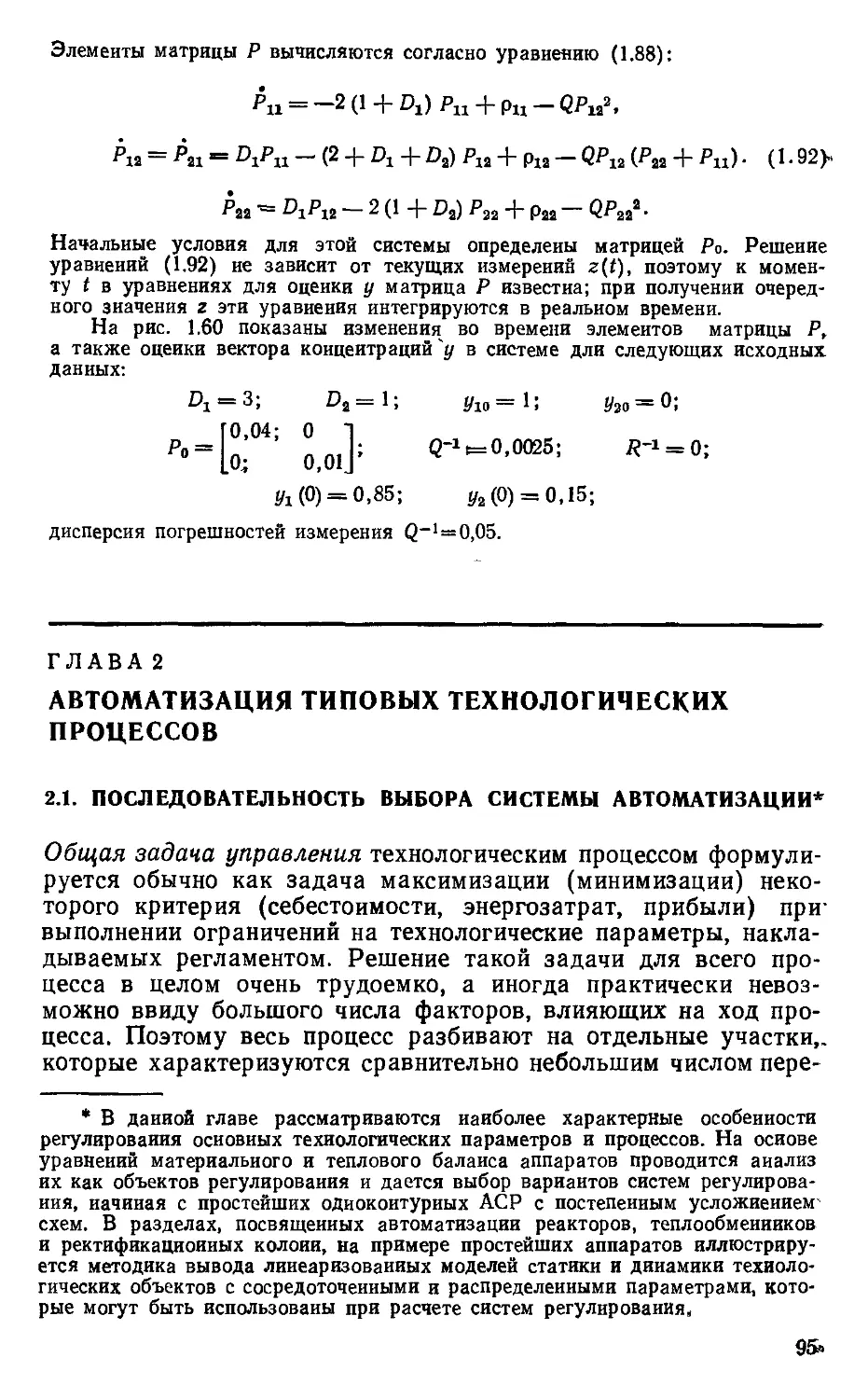
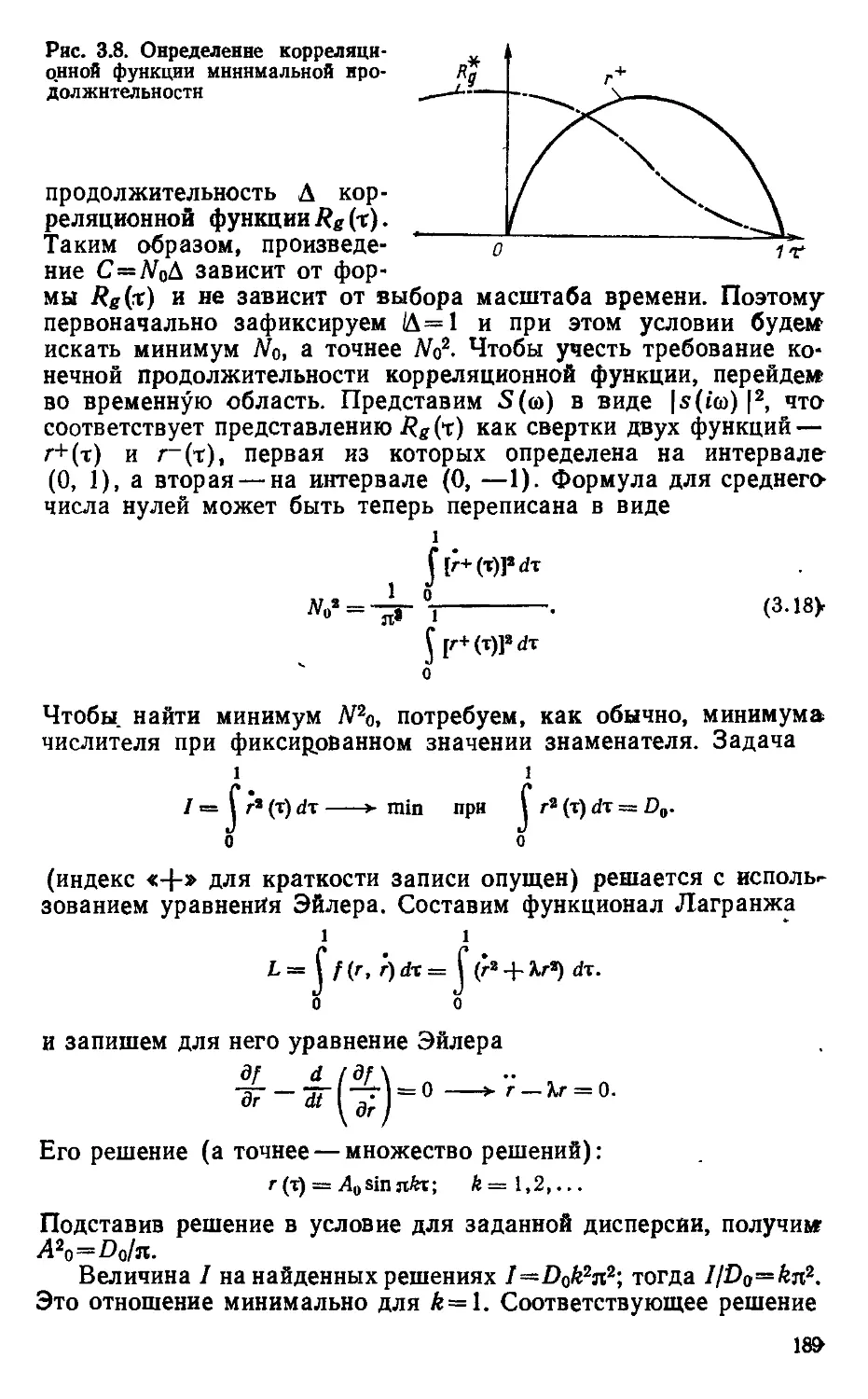
Рис. В.2. Техническая структура КТС АСУТП для работы в супер-визорном режиме (а) и режиме непосредственного цифрового управления (б):
ТОУ — технологический объект управ-ления; ИИ —источники информации, УСО — устройства связи с объектом; ВК — вычислительный комплекс;
УСОП — устройства связи с оперативным персоналом; УВК — управляющий вычислительный комплекс, ОП — оперативный персонал; ТСА — технические средства автоматизации для реализации функций локальных систем, ИУ — исполнительные устройства
в АСУТП, образуют информационное обеспечение АСУТП, которое в переведенном на машинный язык виде составляет содержание базы данных системы.
Организационное обеспечение АСУТП представляет собой совокупность описаний функциональной, технической и организационной структур системы, инструкций и регламентов
для оперативного персона-
ла, обеспечивающую заданное функционирование АСУТП. Последнее характеризуется активным взаимодействием между людьми и программными и техническими средствами АСУТП. Поэтому организация оптимальных форм этого взаимодействия является одной из основных проблем разработки и эксплуатации АСУТП. Оперативный персонал АСУТП состоит из технологов-операторов, осуществляющих управление ТОУ, и эксплуатационного персонала, обеспечивающего функционирование АСУТП (операторы ЭВМ, программисты, эксплуатационный персонал по обслуживанию других видов аппаратуры КТС). Состав оперативного персонала конкретной АСУТП и взаимоотношения между отдельными работниками определяются организационной структурой системы [47]'. Упрощенная схема взаимодействия основных компонентов АСУТП изображена на рис. В.2.
Оперативный персонал АСУТП может работать в контуре управления или вне его. При работе в контуре управления оперативный персонал реализует все функции управления или часть их, используя рекомендации пег рациональному управлению ТОУ, выработанные КТС. Такой режим функционирования АСУТП называют информационно-сове-
тующим.
Если оперативный персонал работает вне контура управления, он задает АСУТП режим работы и осуществляет контроль за его соблюдением. В этом случае, в зависимости от состава КТС, АСУТП может функционировать в комбинированном режиме*, при котором производится автоматическое изменение уставок и параметров настройки локальных автоматических систем регулирования, или в режиме непосредственного цифрового управления (НЦУ), при котором УВК непосредственно воздействует на исполнительные устройства, изменяя управляющие воздействия на ТОУ.
Как правило, АСУТП разрабатывают для вновь строящихся или реконструируемых производств. При этом автоматизируемый ТОУ может либо существенно отличаться от действующих прототипов (например, при разработке агрегатов, мощность которых значительно превышает мощность существующих), либо быть близким к ним. В каждом из этих случаев организация и содержание работ по созданию АСУТП имеют свои особенности, однако общая их последовательность остается неизменной и складывается из следующих пяти стадий**: техническое задание (ТЗ), технический проект (ТП), рабочий проект (РП), внедрение АСУТП и анализ ее функционирования.
На стадии ТЗ основным этапом являются предпроектные научно-исследовательские работы (НИР), обычно выполняемые научно-исследовательской организацией совместно с предприятием-заказчиком. Главная задача предпроектных НИР — изучение технологического процесса как объекта управления. При этом определяют цель и критерии качества функционирования ТОУ, технико-экономические показатели объекта-прототипа, их связи с технологическими показателями; структуру ТОУ, т. е. входные воздействия (в том числе контролируемые и неконтролируемые возмущающие воздействия и управляющие воздействия), выходные координаты и связи между ними; структуру математических моделей статики и динамики, значения параметров и их стабильность (степень стационарности ТОУ); статистические характеристики возмущающих воздействий.
Наиболее трудоемкая задача на этапе предпроектных НИР — построение математических моделей ТОУ, которые в дальнейшем используют при синтезе АСУТП. При синтезе локальных АСР обычно используют линеаризованные модели динамики в виде линейных дифференциальных уравнений 1— 2-го порядка с запаздыванием, которые получают обработкой экспериментальных или расчетных переходных функций по разным каналам воздействия. Для решения задач оптимального управления статическими режимами используют конеч
* Для обозначения этого режима часто применяют термин супервизор-ный.
** ГОСТ 20913—75. АСУТП. Стадии создания.
ные соотношения, полученные из уравнений материального и энергетического баланса ТОУ, или уравнения регрессии. В задачах оптимального управления динамическими режимами используют нелинейные дифференциальные уравнения, полученные из уравнений материального и энергетического баланса, записанных в дифференциальной форме.
При выполнении предпроектных НИР применяют методы анализа систем автоматического управления, изучаемые в дисциплине «Теория автоматического управления», и методы построения математических моделей, которые излагаются в курсе «Моделирование на ЭВМ объектов и систем управления».
Результаты, полученные на этапе предпроектных НИР, используют на этапе эскизной разработки АСУТП, в ходе которого выполняются следующие работы:
выбор критерия и математическая постановка задачи оптимального управления ТОУ, ее декомпозиция (при необходимости) и выбор методов решения глобальной и локальных задач оптимального управления, на основе которых в дальнейшем строят алгоритм оптимального управления;
разработка функциональной и алгоритмической структуры АСУТП;
определение объема информации о состоянии ТОУ и ресурсов ВК (быстродействие, объем запоминающих устройств), необходимых для реализации всех функций АСУТП;
предварительный выбор КТС, прежде всего УВК;
предварительный расчет технико-экономической эффективности АСУТП.
Центральное место среди работ этой стадии занимает математическая постановка задачи оптимального управления ТОУ.
Остальные задачи данного этапа (кроме расчета техникоэкономической эффективности) относятся к системотехническому синтезу АСУТП, при выполнении которого широко применяют метод аналогий. Накопленный опыт разработки АСУТП для ТОУ различной степени сложности позволяет перевести разработку ряда функций и алгоритмов из категории научных работ в категорию технических, выполняемых проектным путем. К их числу относятся многие информационные функции (первичная обработка исходной информации, расчет ТЭП, интегрирование и усреднение и др.), а также типовые функции локальных систем автоматизации, реализуемые в АСУТП программным способом (сигнализация, противоаварийная блокировка, регулирование с использованием типовых законов при НЦУ и др.).
Завершающим этапом эскизной разработки АСУТП является предварительный расчет технико-экономической эффективности разрабатываемой системы. Выполняют его специалисты по экономике, однако исходные данные для них должны под
готовить специалисты по автоматизации, поэтому рассмотрим некоторые узловые моменты.
Основным показателем экономической эффективности АСУТП служит годовой экономический эффект от ее внедрения, который рассчитывают по формуле
Э = (С2 S2) — (Cj — Sj) Еи (Ks — Ki),
где Ci и Ct — годовые объемы реализации продукции в оптовых ценах До и после внедрения АСУТП, тыс. руб.; St и S2 — себестоимость продукции до и после внедрения системы, тыс. руб; Ki и Кг — капитальные затраты на АТК до и после ввода в действие АСУТП, тыс. руб; — нормативный отраслевой коэффициент эффективности капитальных вложений в средства автоматизации и вычислительную технику, руб/руб.
Основными источниками экономической эффективности систем автоматизации химико-технологических процессов обычно являются прирост объема реализации продукции и(или) снижение ее себестоимости. Улучшение этих экономических показателей чаще всего достигается за счет уменьшения расхода сырья, материалов и энергии на единицу продукции благодаря более точному поддержанию оптимального технологического режима, повышению качества продукции (сортности и, соответственно, цены), увеличению производительности оборудования за счет сокращения потерь рабочего времени из-за неплановых остановок процесса, вызванных ошибками управления и др. На этапе предпроектных НИР должны быть выявлены резервы производства, которые могут быть использованы благодаря применению системы автоматизации.
Например, если при использовании локальной системы автоматизации технологический агрегат простаивает в среднем 20% планового рабочего времени, из которых 1/4 вызвана ошибками оперативного персонала из-за несвоевременного обнаружения предаварийных ситуаций, то применение АСУТП, реализующей функции прогноза и анализа производственных ситуаций, может устранить эти потери. Тогда объем выпускаемой продукции в натуральном исчислении возрастет на 5%, что приведет к увеличению объема реализации и снижению себестоимости продукции (эти расчеты производятся по простым методикам, которые здесь не рассматриваются).
Накопленный опыт автоматизации химических производств показал, что резервы экономической эффективности, которые могут быть использованы благодаря автоматизации технологических процессов, обычно составляют от 0,5 до 6%. При этом чем лучше отработана технология, тем, как правило, меньше резервы.
Однако не все выявленные (потенциальные) резервы экономической эффективности могут быть использованы после внедрения АСУТП. Фактическая эффективность оказывается меньше потенциальной из-за неидеальности АСУТП, которая проявляется, в частности, в неполной адекватности математической модели ТОУ, по которой рассчитывается оптимальный режим, в погрешностях измерения выходных координат объекта, которые также влияют на точность определения опти
мального режима, в отказах элементов технического и программного обеспечения, из-за которых снижается качество выполнения отдельных функций и АСУТП в целом и т. д. Реальный эффект обычно составляет от 25 до 75% потенциального, причем, как правило, чем больше потенциальный эффект, тем в меньшей степени он реализуется. Основным показателем технико-экономической эффективности АСУТП является срок окупаемости системы, который определяется по формуле
Пн = (*2 - ^)Л(С2 - S2) - (Сх - Sj)].
Он должен быть не больше нормативного, который для химической промышленности равен 3 годам.
Завершающей стадией первого этапа создания АСУТП является разработка технического задания на проектирование системы, .которое должно включать полный перечень функций, технико-экономическое обоснование целесообразности разработки АСУТП, перечень и объем НИР и план-график создания системы.
При разработке нетиповых АСУТП на первый этап приходится примерно 25% общей трудоемкости, в том числе на предпроектные НИР—15%. При тиражировании АСУТП первая стадия может быть исключена или значительно уменьшена.
Следующим этапом создания нетиповой АСУТП является разработка технического проекта, в ходе которой принимаются основные технические решения, реализующие требования технического задания. Работы на этом этапе выполняют научно-исследовательская и проектная организации. Основным содержанием НИР является развитие и углубление предпроектных НИР, в частности, уточнение математических моделей и постановок задач оптимального управления, проверка с помощью имитационного моделирования на ЭВМ работоспособности и эффективности алгоритмов, выбранных для реализации важнейших информационных и управляющих функций АСУТП. Уточняются функциональная и алгоритмическая структуры системы, прорабатываются информационные связи между функциями и алгоритмами, разрабатывается организационная структура АСУТП.
Очень важным и трудоемким этапом на стадии ТП является разработка специального программного обеспечения системы. По имеющимся оценкам, в 70-х годах трудоемкость создания специального ПО была близка к общему объему предпроектных НИР и составляла 15% от общих трудозатрат на создание АСУТП.
На стадии ТП окончательно выбирают состав КТС и выполняют расчеты по оценке надежности реализации важнейших функций АСУТП и системы в целом. Общие затраты труда на проектирование составляют примерно 30% от затрат на создание АСУТП.
На стадии внедрения АСУТП производятся монтажные и пуско-наладочные работы, последовательность и содержание которых изучаются в соответствующем курсе. Трудозатраты на этой стадии составляют около 30% от общих затрат на систему.
При разработке головных образцов АСУТП, подлежащих в дальнейшем тиражированию на однотипных ТОУ, важное значение имеет анализ функционирования системы, в ходе некоторого проверяют эффективность решений, принятых при ее создании, и определяют фактическую технико-экономическую эффективность АСУТП.
* * *
Учебник написан в соответствии с типовой программой курса АТПО, завершающего обучение студентов ВУЗов по специальности «Автоматизация и комплексная механизация химико-технологических процессов». Основное его содержание составляют принципы построения и методы разработки систем автоматизации химико-технологических процессов различной степени сложности — от простейших автоматических систем регулирования (АСР) технологических параметров (составляющих основу локальных систем автоматизации) до сложных автоматизированных систем управления технологическими процессами (АСУТП) с использованием вычислительной техники.
Книга написана коллективом авторов под руководством д. т. н., проф., засл, деятеля науки и техники Е. Г. Дудникова. Авторы благодарны д. т. н., проф. В. С. Балакиреву за участие в подготовке и обсуждении рукописи и полезные советы. Авторы выражают искреннюю признательность рецензентам Г. И. Лапшенкову и А. В. Беспалову за ценные замечания, способствовавшие улучшению качества книги.
Часть 1
ЛОКАЛЬНЫЕ СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ТЕХНОЛОГИЧЕСКИХ
ПРОЦЕССОВ
ГЛАВА 1
ОСНОВЫ ПОСТРОЕНИЯ и РАСЧЕТА СИСТЕМ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ТЕХНОЛОГИЧЕСКИХ ОБЪЕКТОВ
1.1. ОБЩИЕ СВЕДЕНИЯ
Один из этапов проектирования систем регулирования технологических процессов — выбор структуры системы и расчет оптимальных параметров регуляторов. И структура системы, и параметры регуляторов определяются свойствами технологического процесса как объекта регулирования.
Любой технологический процесс как объект регулирования (рис. 1.1) характеризуется следующими основными группами переменных.
1. Переменные, характеризующие состояние процесса (совокупность их будем обозначать вектором у). Эти переменные в процессе регулирования необходимо поддерживать на заданном уровне или изменять по заданному закону. Точность стабилизации переменных состояния может быть различной, в зависимости от требований, диктуемых технологией, и возможностей системы регулирования. Как правило, переменные, входящие в вектор у, измеряют непосредственно, но иногда их можно вычислить, используя модель объекта по другим непосредственно измеряемым переменным. Вектор у часто называют вектором регулируемых величин.
2. Переменные, изменением которых система регулирования может воздействовать на объект с целью управления. Совокупность этих переменных обозначают вектором хр (или и) регулирующих воздействий. Обычно регулирующими воздействиями служат изменения расходов материальных потоков или потоков энергии.
3. Переменные, изменения которых не связаны с воздействием системы регулирования. Эти изменения отражают влияние на регулируемый объект внешних условий, изменения характеристик самого объекта и т. п. Их называют возмущающими воздействиями и обозначают вектором хв или z. Вектор возмущающих воздействий, в свою очередь, можно разбить на
Рис. 1.1. Структурная схема объекта регулированвя
две составляющие — первую можно измерить, а вторую — нельзя. Возможность измерения возмущающего воздействия позволяет ввести в систему регулирования дополнительный сигнал, что улучшает (как показано ниже, в разд. 1.2) возможности системы регулирования.
Например, для изотермического химического реактора непрерывного действия, регулируемыми переменными /являются температура реакционной смеси, состав потока на выходе из аппарата; регулирующими воздействиями могут быть изменение расхода пара в рубашку реактора, изменение расхода катализатора и расхода реакционной смеси; возмущающими воздействиями являются изменения состава сырья, давления греющего пара, причем если давление греющего пара нетрудно измерить, то состав сырья во многих случаях может быть измерен с низкой точностью или недостаточно оперативно.
Анализ технологического процесса как объекта автоматического регулирования предполагает оценку его статических и динамических свойств по каждому из каналов от любого возможного управляющего воздействия к любому возможному регулируемому параметру, а также оценку аналогичных характеристик по каналам связи регулируемых переменных с составляющими вектора возмущений. В ходе такого анализа необходимо выбрать структуру системы регулирования, т. е. решить, с использованием какого регулирующего воздействия следует управлять тем или иным параметром состояния. В результате во многих случаях (отнюдь не всегда) удается выделить контуры регулирования для каждой из регулируемых величин, т. е. получить совокупность одноконтурных систем регулирования.
Важным элементом синтеза АСР технологического процесса является расчет одноконтурной системы регулирования. При этом требуется выбрать структуру и найти числовые значения параметров регуляторов. Как правило, используют следующие типовые структуры регулирующих устройств (типо
вые законы регулирования): пропорциональный (П)регулятор (R(p) =—Si); интегральный (И)регулятор (R(p) =—So/p)‘, пропорционально-интегральный (ПИ) закон регулирования (R(p) =—Si—Solp и, наконец, пропорционально-интегрально-дифференциальиый (ПИД) закон (R(p)=—Si—So/p—Szp). При расчете системы проверяют возможность использования наиболее простого закона регулирования, каждый раз оценивая качество регулирования, и если оио не удовлетворяет требованиям, переходят к более сложным законам или используют так называемые схемные методы улучшения качества.
В теории автоматического регулирования разработаны различные методы расчета АСР при заданных критериях качества, а также методы оценки качества переходных процессов при заданных параметрах объекта и регулятора. При этом наряду с точными методами, требующими больших затрат времени и ручного труда, разработаны приближенные методы, позволяющие сравнительно быстро оценить рабочие параметры регулятора или качество переходных процессов (метод Циглера — Ни-кольса для расчета настроек регуляторов; приближенные формулы для оценки интегрального квадратичного критерия ит. п.).
Широкое внедрение вычислительной техники для проектирования систем управления (СУ) и реализации самонастраивающихся СУ практически сняло ограничения, связанные с трудоемкостью методов расчета АСР. В настоящее время создаются пакеты прикладных программ для расчета АСР, позволяющие использовать алгоритмы, основанные на точных методах. При этом приближенные методы обычно применяют для выбора начальных значений переменных в итеративных методах расчета сложных систем регулирования или на начальной стадии проектной разработки системы автоматизации сложных технологических объектов (см. разд. 1.4).
В данном пособии использованы различные методы расчета АСР, в зависимости от решаемых задач. Наиболее сложные из них иллюстрируются графоаналитически, что облегчает усвоение методики расчета.
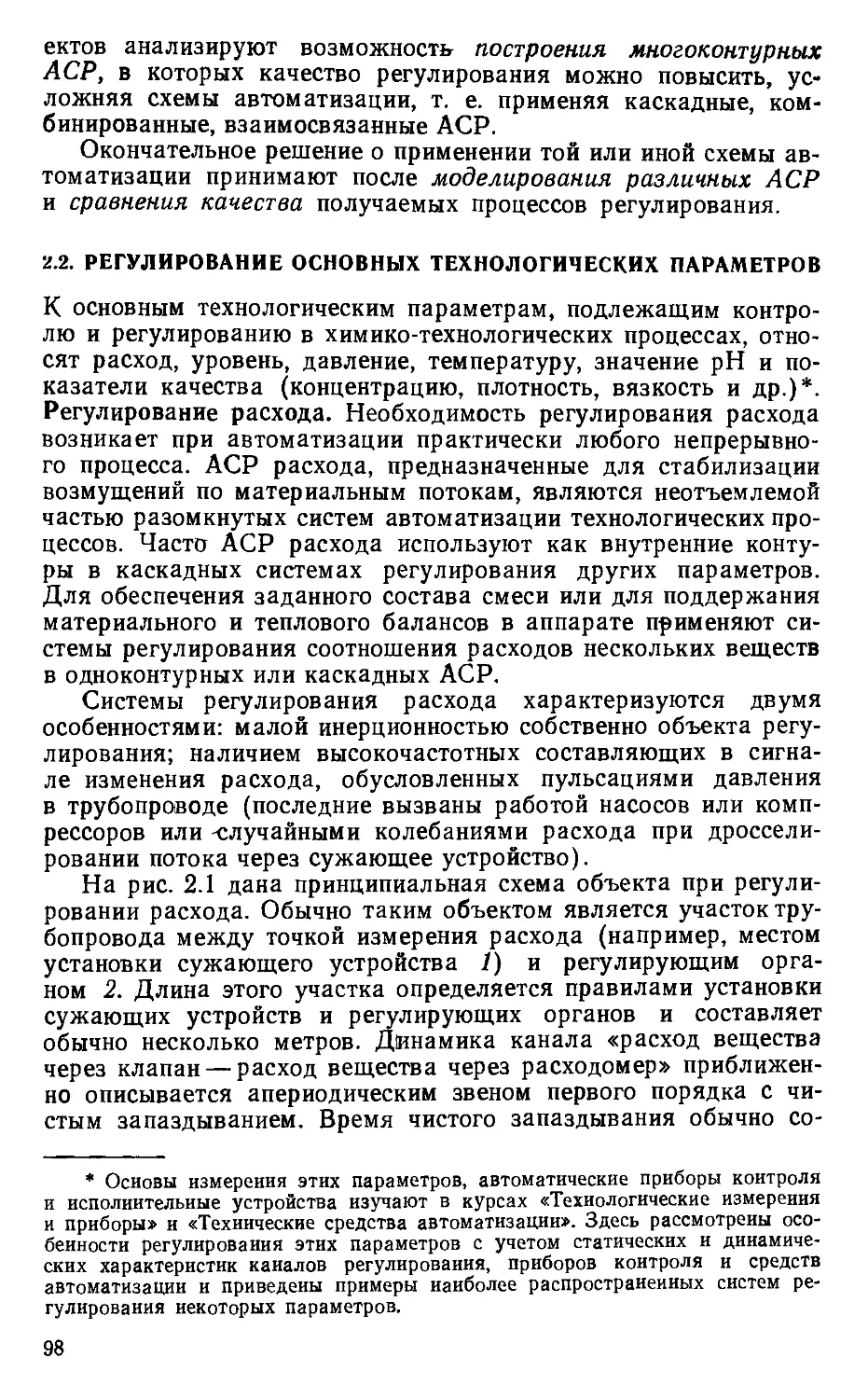
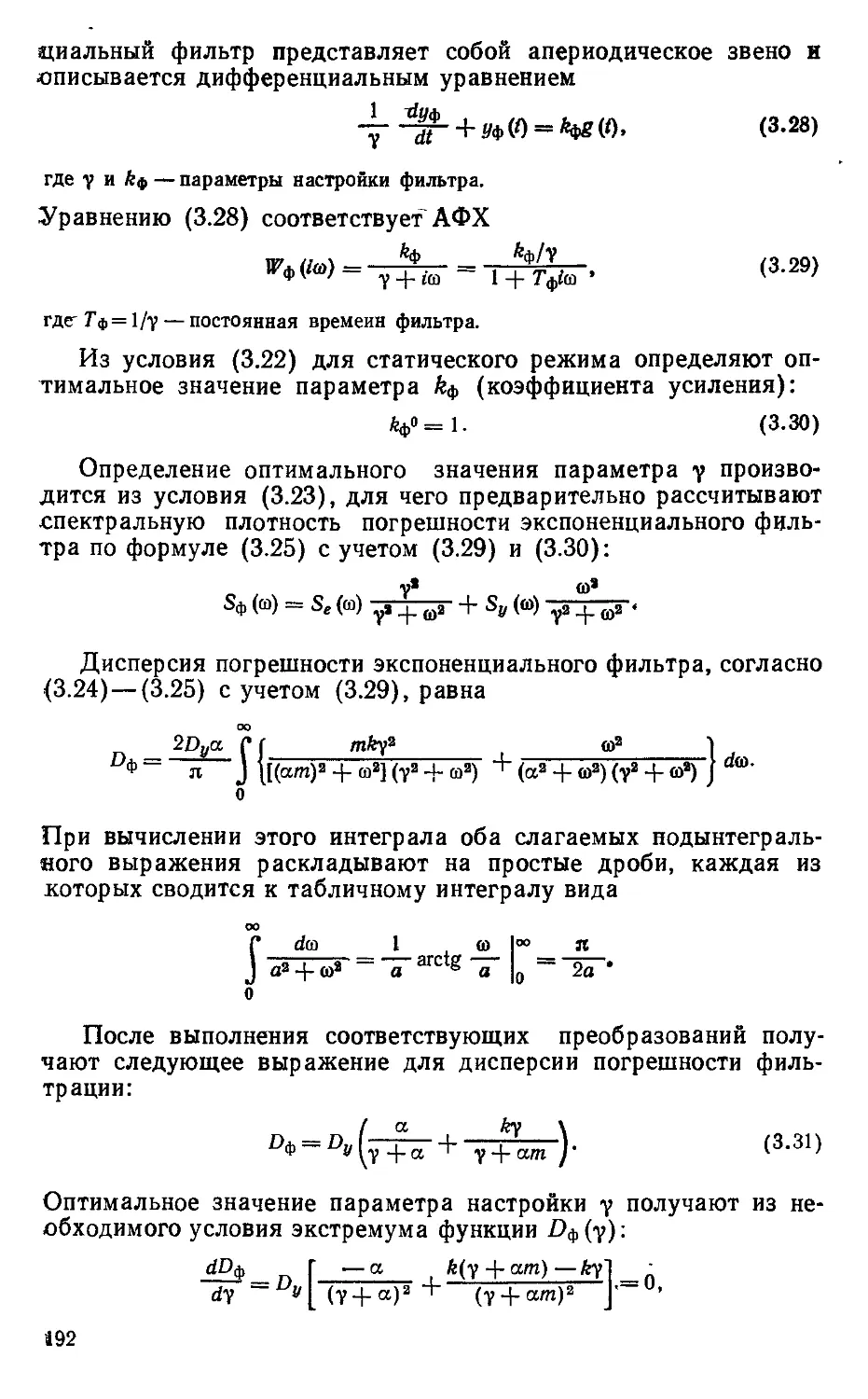
На рис. 1.2 показана блок-схема алгоритма синтеза одноконтурной системы регулирования. Инженерные методы расчета одноконтурных систем изложены в разд. 1.2 и 1.3; в разд. 1.3 рассмотрен случай, когда разбить систему регулирования на одноконтурные без усложнения структуры системы не удается и необходимо учитывать существенное влияние каждого из регулирующих воздействий на несколько регулируемых переменных.
Алгоритмы предварительного выбора структуры АСР и формулы для приближенного выбора параметров регуляторов и приближенной оценки качества регулирования рассмотрены в разд. 1.5. В разд. 1.6 изложены способы помехоустойчивого измерения параметров, характеризующих состояние процесса, а также методы прогноза этих параметров.
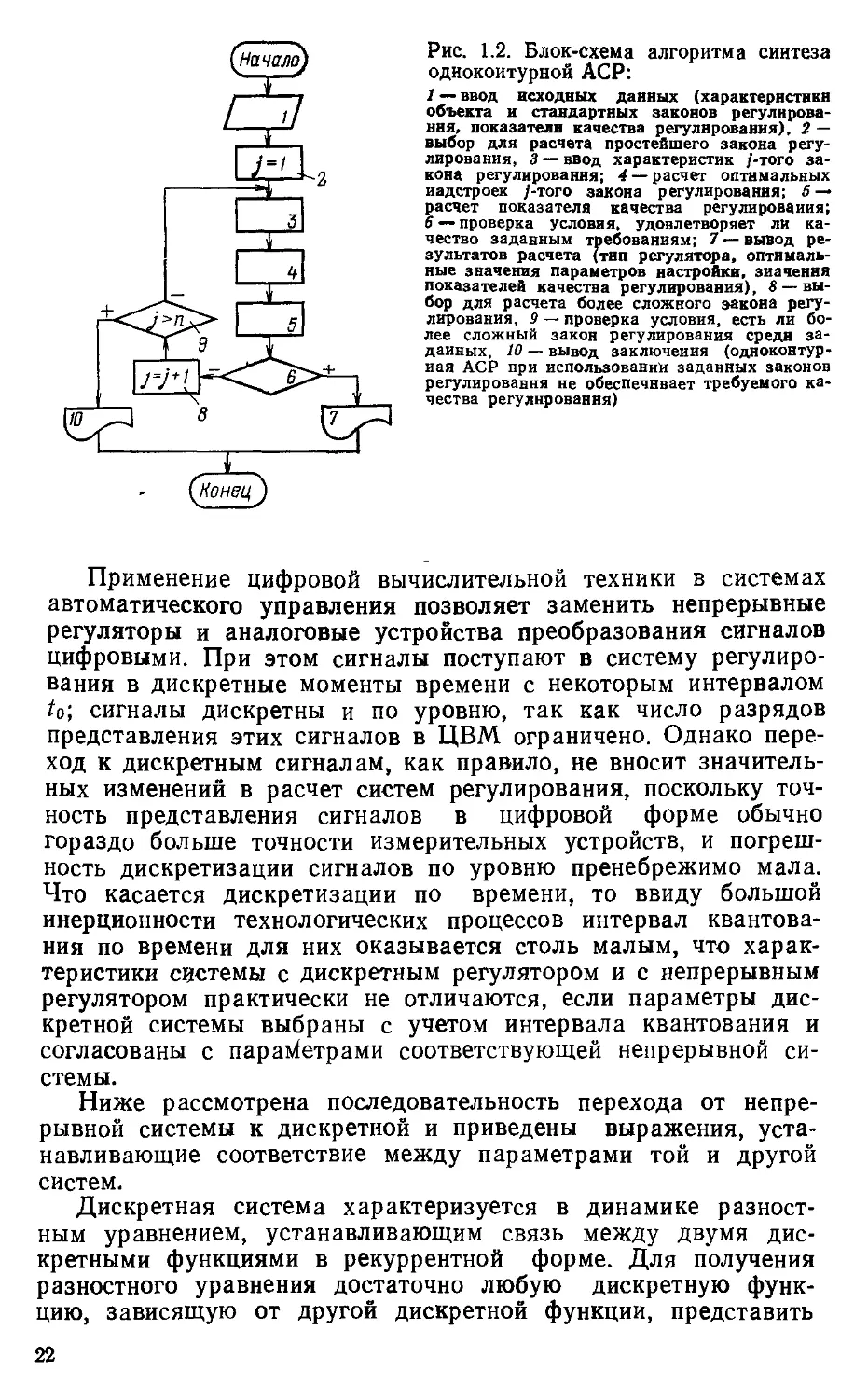
Рис. 1.2. Блок-схема алгоритма синтеза одноконтурной АСР:
1 — ввод исходных данных (характеристики объекта и стандартных законов регулирования, показатели качества регулирования). 2 — выбор для расчета простейшего закона регулирования, 3 — ввод характеристик /-того закона регулирования; 4 — расчет оптимальных надстроек /-того закона регулирования; 5 — расчет показателя качества регулирования; 6 — проверка условия, удовлетворяет ли качество заданным требованиям; 7 — вывод результатов расчета (тип регулятора, оптимальные значения параметров настройки, значения показателей качества регулирования), 8— выбор для расчета более сложного закона регулирования, 9 — проверка условия, есть ли более сложный закон регулирования средн заданных, 10 — вывод заключения (одноконтурная АСР при использовании заданных законов регулирования не обеспечивает требуемого качества регулирования)
Применение цифровой вычислительной техники в системах автоматического управления позволяет заменить непрерывные регуляторы и аналоговые устройства преобразования сигналов цифровыми. При этом сигналы поступают в систему регулирования в дискретные моменты времени с некоторым интервалом to; сигналы дискретны и по уровню, так как число разрядов представления этих сигналов в ЦВМ ограничено. Однако переход к дискретным сигналам, как правило, не вносит значительных изменений в расчет систем регулирования, поскольку точность представления сигналов в цифровой форме обычно гораздо больше точности измерительных устройств, и погрешность дискретизации сигналов по уровню пренебрежимо мала. Что касается дискретизации по времени, то ввиду большой инерционности технологических процессов интервал квантования по времени для них оказывается столь малым, что характеристики системы с дискретным регулятором и с непрерывным регулятором практически не отличаются, если параметры дискретной системы выбраны с учетом интервала квантования и согласованы с параметрами соответствующей непрерывной системы.
Ниже рассмотрена последовательность перехода от непрерывной системы к дискретной и приведены выражения, устанавливающие соответствие между параметрами той и другой систем.
Дискретная система характеризуется в динамике разностным уравнением, устанавливающим связь между двумя дискретными функциями в рекуррентной форме. Для получения разностного уравнения достаточно любую дискретную функцию, зависящую от другой дискретной функции, представить 22
в рекуррентной форме. Линейное разностное уравнение порядка п имеет вид:
у (/) 4- <ЧР U — О 4-F<w(7—я) =
= О) + ^ix(/—О 4* • + —n). (1-1)
Здесь аргумент jt0 заменен индексом /. Если известны текущие значения входа x(j) и п предшествующих значений входа и выхода x(j—1), x(j—n), y(j—1) y(j—n), то выходной сигнал при любом j можно вычислить с помощью рекуррентной формулы
У (/) = — (ЧУ (7 — 1)-ОпУЦ— я) +
4* (7) 4* bix (j— 1) 4- • • • 4- bnx (j — я).
Другой способ построения разностных уравнений состоит в дискретизации дифференциальных уравнений. При этом производные заменяют разностями на основе следующих соотношений (здесь использованы левые разности):
непрерывная функция
первая производная
dx (/) х (/) — х (t — f0)
—-г— = Игл ----г------,
at to->O
вторая производная
dx (I) dx (I — /0)
d2x (I) dt dl
—775— = hm ----------1,
dti *o
и т. д.;
дискретная функция
разность первого порядка
Дх(/) = х(/) — x(j— 1), разность второго порядка
Д*х (j) = Дх (/) - Дх (/ - 1) = х (j) - 2х (j - 1) + х (j - 2)
И т. д.
Пример. Дифференциальное уравнение первого порядка имеет вид:
Заменяя производную разностью при интервале квантования ta, получим выражение
to y(i)—y(i—^=-f~x(!)>
откуда
У (/) = У (J — 0 4- у-х(/).
Если использовать разности высших порядков вплоть до-n-го, то разностное уравнение (1.1) можно представить в виде, аналогичном дифференциальному уравнению:'
°п&пу (/) + an-iA""1» (У) Ч-Ь О1Д» (/) + ад (/) =
= ЬпД"-* (/) + 6n-iAn-1x (У) Н + М* (У) + М (/) •
Описанные способы аппроксимации дифференциальных уравнений разностными дают удовлетворительные результаты только в тех случаях, когда период квантования to мал по сравнению с наименьшей постоянной времени объекта. В системах управления промышленными технологическими объектами это условие обычно выполняется вследствие большой инерционности объектов и высокого быстродействия современных управляющих вычислительных машин, позволяющих реализовать опрос всех контуров регулирования с малым периодом.
Применение средств вычислительной техники для управления значительно расширило возможности реализации различных законов управления и регулирования, структура и параметры которых определяются в результате оптимизации системы управления. Однако наиболее распространены в системах непосредственного цифрового управления алгоритмы, разработанные как аналоги непрерывного ПИД-регулятора. Это позволяет использовать накопленный опыт работы с аналоговыми регуляторами и применять хорошо известные правила выбора параметров.
Простейший способ получения алгоритма управления по ПИД-закону состоит й переходе от интегро-дифференциального уравнения непрерывного регулятора к разностному уравнению (в соответствии с изложенными выше правилами).
Если уравнение ПИД-регулятора записать в виде (рис. 1.3) t
Г f de 1
Хр (О = — I $18 (0 + So j 8(П) dri + S2-^-1,
0
то при интегрировании по методу прямоугольников для периода квантования to получим разностное уравнение
(1-2)
Полученный алгоритм, называемый позиционным, неудобен для реализации в УВМ, так как для формирования управляющего воздействия требуется, кроме текущего значения сигнала ошибки помнить все предыдущие значения — от е(0) до е(/—1).
Позиционный алгоритм можно модернизировать, сделав его /-1
рекуррентным. Для этого обозначим ^e(v) через E(j).
Рис. 1.3. Структурная схема одноконтурной АСР
Рис. 1.4. Пример АФХ и РАФХ разомкнутой системы Очевидно, что
/-2
V=0
Тогда алгоритм (1.2) примет вид:
*Р (/) = ~{*18 (/) + *о I* (/ -1) + е (/ - 1)1 +
+ Я2[е(/)-8(j-1)1), ' (1-3)
где 7Ci=Si; Ko=Soto; Kz^Szfto.
Чтобы вывести рекуррентный («скоростной») алгоритм, по которому текущее значение управления хР(7) вычисляется как сумма предыдущего значения xP(j—1} и поправки Дхр(7), запишем выражение для хР(]—1):
*р(/—1) = —
^0
U е(г_1)_е(/_2)
S1e(/-1) + So<o2ie(v)+S2 -------- ----
v=0
Вычитая это выражение из (1.3), получим:
Д^р(/) = -{«1[е(/)-8(/-1)Ц-ЗД8 0'-1) +
4—Г-[в (/)-2в (/-!)+8 (/-2)])
*0 )
или окончательно:
А^р (/) = — [Со8 (/) + CjB (/ — 1) + С2е (j — 2)], (1-4)
где C0 = S1 + S2//ft; Cj = Sgt о—Si— 2 ; Ca = Sz/tP-
При этом рекуррентный алгоритм- для ПИД-регулятора за> пишется в виде:
*р (/) = Лр (/ — О — ^о6 (/) — С^в (/ — 1) — С2в (/ — 2). (1.4а)
При малых значениях периода квантования tQ переходные процессы в дискретной и непрерывной АСР практически совпадают, поэтому выбор параметров настроек дискретных регу
ляторов проводят по тем же соотношениям, что и непрерывных. Например, для ПИД-регулятора параметры настроек Ki, Ко, Ki или Со, Ci, С2, при малых значениях t0 можно вычислить по Si, So, S2, используя формулы (1.3) или (1.4), в зависимости от выбранного алгоритма; значения же настроек непрерывного регулятора находят одним из рассмотренных ниже методов (см. разд. 1.2 и 1.4). Для дискретных П- и ПИ-регу-ляторов можно воспользоваться теми же формулами (1.3), (1.4), полагая в них равными нулю коэффициенты So и S2 для П-ре-гулятора или S2 — для ПИ-регулятора.
1.2. РАСЧЕТ НАСТРОЕК РЕГУЛЯТОРОВ В ОДНОКОНТУРНЫХ АСР
При определении настроек регуляторов в качестве показателя оптимальности системы регулирования обычно выбирают интегральный критерий качества (например, интегральный квадратичный критерий) при действии на объект наиболее тяжелого возмущения с учетом добавочного ограничения на запас устойчивости системы. В практических расчетах запас устойчивости удобно характеризовать показателем колебательности системы; его значение для систем, имеющих интегральную составляющую в законе регулирования, определяется максимумом амплитудно-частотной характеристики замкнутой системы регулирования.
В дальнейшем под оптимальными будем понимать настройки регулятора, обеспечивающие заданную степень колебательности т* процесса регулирования при минимуме интегрального квадратичного критерия /кв.
Среди инженерных методов расчета настроек регуляторов одни являются более точными, но трудоемкими для ручного счета, другие — простыми, но приближенными. Подробно эти методы изложены в различных пособиях и монографиях [19,23, 42—49]. Наиболее распространенными способами, отражающими методику точного и приближенного расчета настроек, являются метод расширенных частотных характеристик (РЧХ) и метод незатухающих колебаний (Циглера —Никольса). Метод РЧХ. По этому методу расчетные формулы для настроек регуляторов получают из условия, аналогичного критерию Найквиста: если разомкнутая система имеет степень колебательности не ниже заданной, то замкнутая система будет обладать заданной степенью колебательности в том случае, когда расширенная амплитудно-фазовая характеристика (РАФХ) разомкнутой системы №Pc(m, ico) проходит (рис. 1.4) через точку (1, iO), т. е.
1ГрС (tn, i®) = 1, (1.5>
где IFpc (tn, ito) = (tn, ito) R(tn, i®, S);
(tn, i®) = A06 (m, ®) е‘ф°б ;
R (tn, ito, S) = Ap (tn, a, S) (m’ S).
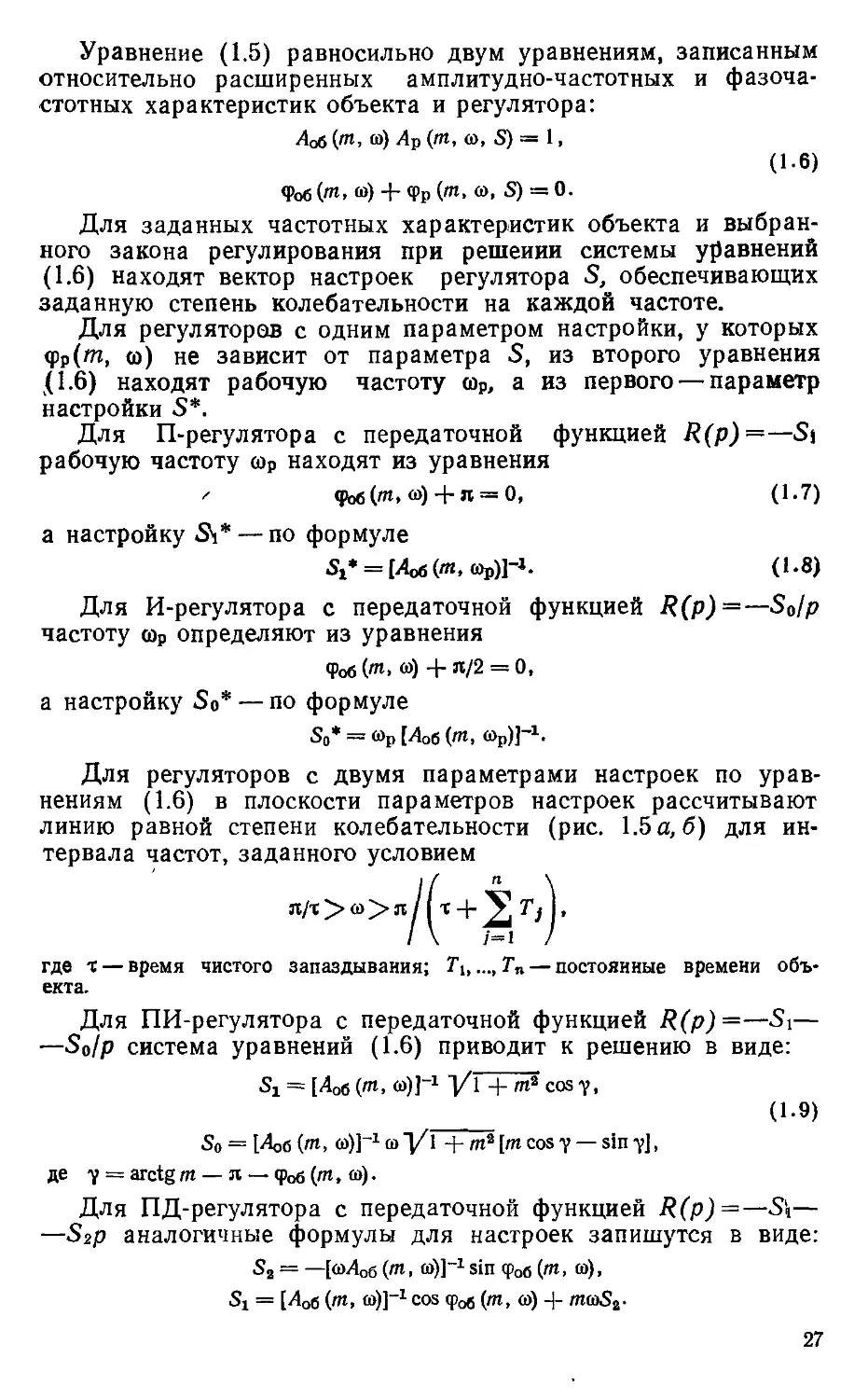
Уравнение (1.5) равносильно двум уравнениям, записанным относительно расширенных амплитудно-частотных и фазочастотных характеристик объекта и регулятора:
Лоб (т, to) Др (т, to, S) = 1,
(1-6)
Фоб (т, <0) + фр (т, to, S) = 0.
Для заданных частотных характеристик объекта и выбранного закона регулирования при решении системы уравнений (1.6) находят вектор настроек регулятора S, обеспечивающих заданную степень колебательности на каждой частоте.
Для регуляторов с одним параметром настройки, у которых Фр(щ, со) не зависит от параметра S, из второго уравнения (1.6) находят рабочую частоту <ор, а из первого — параметр настройки S*.
Для П-регулятора с передаточной функцией R(p)=—Si рабочую частоту <йр находят из уравнения
' Фоб(т> ®) + л = 0, (1.7)
а настройку <S4* — по формуле
Si* = [Лоб (tw, top)]-1. (1 -8)
Для И-регулятора с передаточной функцией R(p)=—S0/p частоту (ор определяют из уравнения
Фоб (т, to) + л/2 = О,
а настройку So* — по формуле
So* = top [Лоб (tw, Фр)]"1,
Для регуляторов с двумя параметрами настроек по уравнениям (1.6) в плоскости параметров настроек рассчитывают линию равной степени колебательности (рис. 1.5 а, б) для интервала частот, заданного условием
I / п \
л/т>to>л/[ т + Г; |, I \ i—i /
где т — время чистого запаздывания; Т\.Тп — постоянные времени объ-
екта.
Для ПИ-регулятора с передаточной функцией R(p)=—Si— —So/p система уравнений (1.6) приводит к решению в виде:
Si = [Аоб ф)]"1 V1 + т* cos
_____ (1-9)
So = [Лоб (m, to)]-1 to Д/I + tn21"1 cos у — sin y], де у = arctg/n — л — фоб (tn> to).
Для ПД-регулятора с передаточной функцией R(p) =—S't— —S2P аналогичные формулы для настроек запишутся в виде:
S2 — —роАоб (tn, to)]-1 sin фоб (tn, to),
Si = [Лоб (m, to)]-1 cos (tn, to) 4- zntoS2.
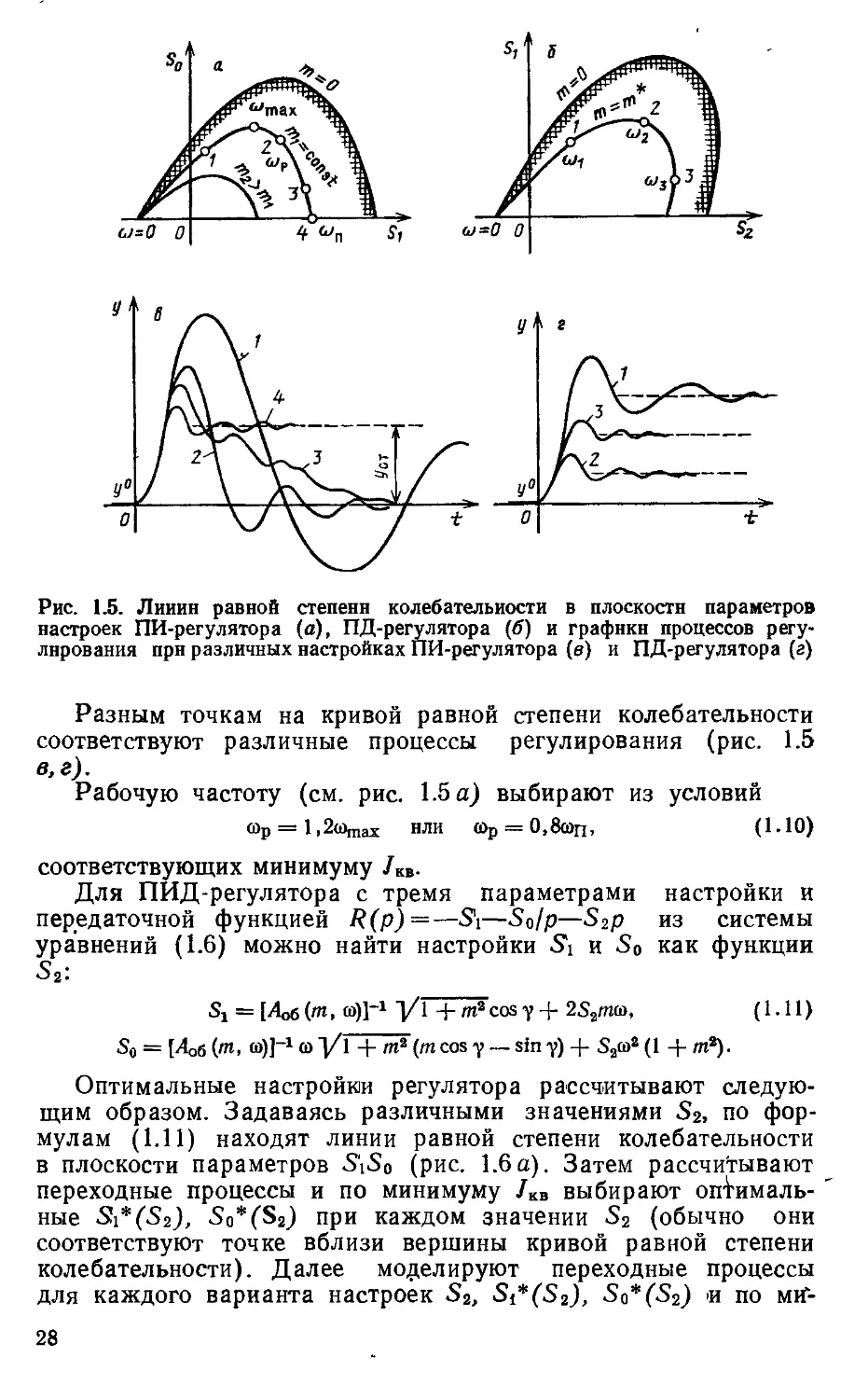
Рис. 1.5. Линии равной степени колебательности в плоскости параметров настроек ПИ-регулятора (а), ПД-регулятора (б) и графики процессов регулирования прн различных настройках ПИ-регулятора (в) и ПД-регулятора (г)
Разным точкам на кривой равной степени колебательности соответствуют различные процессы регулирования (рис. 1.5 в, г).
Рабочую частоту (см. рис. 1.5 а) выбирают из условий
<0р = 1,2<отах или сор = 0,8о>п, (1-1°)
соответствующих минимуму JKB.
Для ПИД-регулятора с тремя параметрами настройки и передаточной функцией R(p)=—Si—S0/p—S2p из системы уравнений (1.6) можно найти настройки Si и So как функции S2:
Sj = [Лоб (tn, to)]-1 V) + tn2 cos у + 2Saffito, (1-H)
So = [Лоб (m, to)]-1 to + m2 (tn cos у — sin y) + S2to2 (1 -|- m2).
Оптимальные настройки регулятора рассчитывают следующим образом. Задаваясь различными значениями S2, по формулам (1.11) находят линии равной степени колебательности в плоскости параметров S'iS0 (рис. 1.6 а). Затем рассчитывают переходные процессы и по минимуму /кв выбирают оптимальные Si*(S2), S0*(S2) при каждом значении S2 (обычно они соответствуют точке вблизи вершины кривой равной степени колебательности). Далее моделируют переходные процессы для каждого варианта настроек S2, Si*(S2), S0*(S2) и по мй-
Рис. 1.6. Линии равной степени колебательности в плоскости SiS0 для ПИД-регулятора (а) и графики процессов регулирования при различных настройках регулятора (б)
нимуму JKB выбирают оптимальное значение S2* и соответствующие ему Si*, So*. На рис. 1.66 приведены примеры процессов регулирования при различных значениях настроек ПИД-регулятора.
Метод незатухающих колебаний. В соответствии с этим методом расчет настроек ПЙ- или ПЙД-регуляторов проводят в два этапа: 1 — расчет критической настройки пропорциональной составляющей SiKp(So = S2=0), при которой АСР будет находиться на границе устойчивости, и соответствующей ей <окр; 2 — определение по SiKP и шКр оптимальных настроек Sli*, So*, S2*, обеспечивающих степень затухания ф~0,8—0,9.
Уравнения для расчета SiKp и соответствующей ей частоты (йкр получают из уравнений (1.7), (1.8) при т = 0:
<Роб(®) + л = 0; 51Кр = [Доб(шКр)]-1. (1-12)
Оптимальные настройки ПИ- и ПИД-регуляторов находят по следующим формулам:
для_П-регулятора
S1* = 0,5S1Kp; (1.13)
для ПЙ-регулятора^ -
S1* = 0,45S1Kp;
(1-14)
So*/Si* = 0,19<Окр или So* = O,O86S1Kpa>Kp: для ПИД-регулятора
Si* = 0,6S1Kp;
So*/Si* = 0,32юкр или So* = O.192S1Kp<oKp;
(1-15) = 0,785/Юкр или S2* = O^riS/P/WKp.
Метод Циглера — Никольса лежит в основе многих методов настройки дискретных ПИД-регуляторов. В частности, если
рекуррентный алгоритм управления, соответствующий аналоговому ПИД-закону, имеет вид
/-1
ХР (j) = _/С18 (/) - /Со 2 6 м - [8 (/) - 8 (/ - 1)].
v=0
то для больших значений периода квантования Jo параметры настройки /01*, Ко*, Ki* могут быть найдены по следующим формулам [23]:
для П-регулятора
/С1* = 0,5/С1кР; (1.16)
для ПИ-регулятора
Kf = 0,45/С/р — 0,5/Со*;
Ко*==О,54/С1кР-^2-, если т^О,25/о; (1J7)
1 кр
для ПИД-регулятора
/С1* = 0,6^кр —0,5^*;
/Со»= 1,2^кр-йЛ-, если т=#0,25;о. (1.18)
1 кр
з тКХ)
*2* = 1о-*1крдг-
В уравнениях (1.16) — (1.18) KJP и Тир — коэффициент при П-составляющей закона управления и период колебаний выходной координаты, соответствующие режиму незатухающих колебаний АСР.
1.3. РАСЧЕТ НАСТРОЕК РЕГУЛЯТОРОВ В МНОГОКОНТУРНЫХ АСР
Удовлетворительное качество регулирования в простейшей одноконтурной системе с использованием стандартных законов регулирования можно обеспечить лишь при благоприятных динамических характеристиках объекта. Однако большинству промышленных объектов химической технологии свойственны значительное чистое запаздывание и большие постоянные времени. В таких случаях даже при оптимальных настройках регуляторов одноконтурные АСР характеризуются большими динамическими ошибками, низкой частотой регулирования и длительными переходными процессами. Для повышения качества регулирования необходим переход от одноконтурных АСР к более сложным системам, использующим дополнительные (корректирующие) импульсы по возмущениям или вспомогательным выходным координатам. Такие системы кроме обычного стандартного регулятора содержат вспомогательные
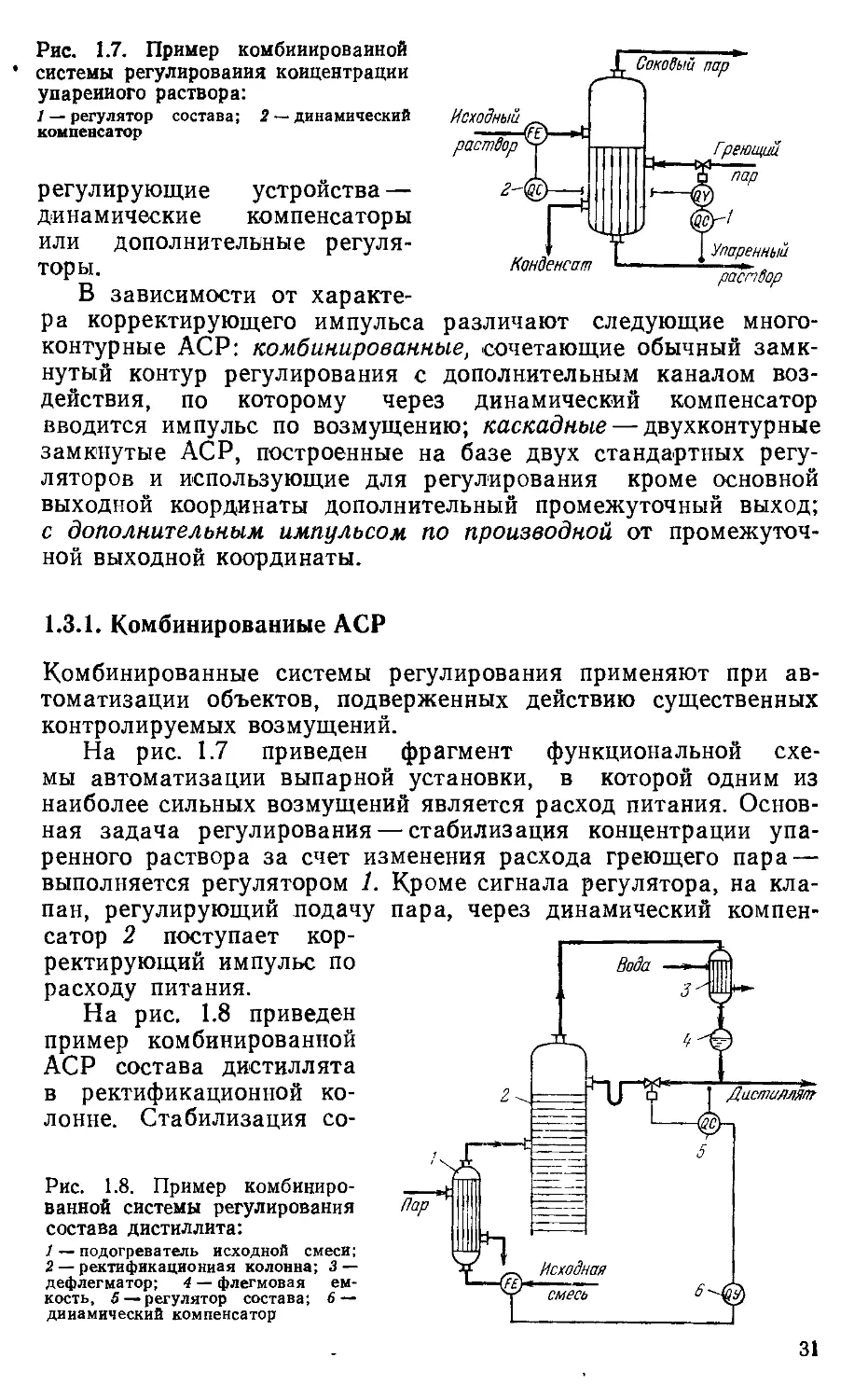
Рис. 1.7. Пример комбинированной
• системы регулирования концентрации упаренного раствора:
1 — регулятор состава; 2 — динамический компенсатор
Исходный раствор
Конденсат
Соковый пар
Греющий, пар
/
Упаренный раствор
различают следующие много-
регулирующие устройства — динамические компенсаторы или дополнительные регуляторы.
В зависимости от характера корректирующего импульса
контурные АСР: комбинированные, сочетающие обычный замкнутый контур регулирования с дополнительным каналом воздействия, по которому через динамический компенсатор вводится импульс по возмущению; каскадные — двухконтурные замкнутые АСР, построенные на базе двух стандартных регуляторов и использующие для регулирования кроме основной выходной координаты дополнительный промежуточный выход; с дополнительным импульсом по производной от промежуточной выходной координаты.
1.3.1. Комбинированные АСР
Комбинированные системы регулирования применяют при автоматизации объектов, подверженных действию существенных контролируемых возмущений.
На рис. 1.7 приведен фрагмент функциональной схемы автоматизации выпарной установки, в которой одним из наиболее сильных возмущений является расход питания. Основная задача регулирования — стабилизация концентрации упаренного раствора за счет изменения расхода греющего пара — выполняется регулятором 1. Кроме сигнала регулятора, на кла
пан, регулирующий подачу пара сатор 2 поступает корректирующий импульс по расходу питания.
На рис. 1.8 приведен пример комбинированной АСР состава дистиллята в ректификационной колонне. Стабилизация со-
Рис. 1.8. Пример комбинированной системы регулирования состава дистиллита: 1 — подогреватель исходной смеси; 2 — ректификационная колонна; 3 — дефлегматор; 4 — флегмовая емкость, 5 —регулятор состава; 6 — динамический компенсатор
через динамический компен-
става дистиллята обеспечивается регулятором 5 путем изменения подачи флегмы на орошение колонны. Для повышения качества регулирования в системе предусмотрена автоматическая коррекция задания регулятору 5 в зависимости от одного из основных возмущений в процессе — расхода разделяемой смеси. Корректирующий импульс "на задание регулятору поступает через динамический компенсатор 6.
Рассмотренные примеры иллюстрируют два способа построения комбинированных AGP. Как видно из структурных схем (рис. 1.9 и 1.10), обе системы регулирования обладают общими особенностями: наличием двух каналов воздействия на выходную координату объекта и использованием двух контуров регулирования — замкнутого (через регулятор 1) и разомкнутого (через компенсатор 2). Отличие состоит лишь в том, что во втором случае корректирующий импульс от компенсатора поступает не на вход объекта, а на вход регулятора.
Введение корректирующего импульса по наиболее сильному возмущению позволяет существенно снизить динамическую ошибку регулирования при условии правильного выбора и расчета динамического устройства, формирующего закон изменения этого воздействия.
Основой расчета подобных систем является принцип инвариантности: отклонение выходной координаты системы от заданного значения должно быть тождественно равным нулю при любых задающих или возмущающих воздействиях.
Для выполнения принципа инвариантности необходимы два условия: идеальная компенсация всех возмущающих воздействий и идеальное воспроизведение сигнала задания. Очевидно, что достижение абсолютной инвариантности в реальных системах регулирования практически невозможно. Обычно
Рис. 1.9. Структурные схемы комбинированной АСР при подключении выхода компенсатора на вход объекта:
а —исходная схема; б — преобразованная схема; / — регулятор; 2 — компенсатор
Рис. 1.10. Структурные схемы комбинированной АСР при подключении выхода компенсатора на вход регулятора:
а —исходная схема; б—преобразованная схема; 1 — регулятор; 2 — компенсатор
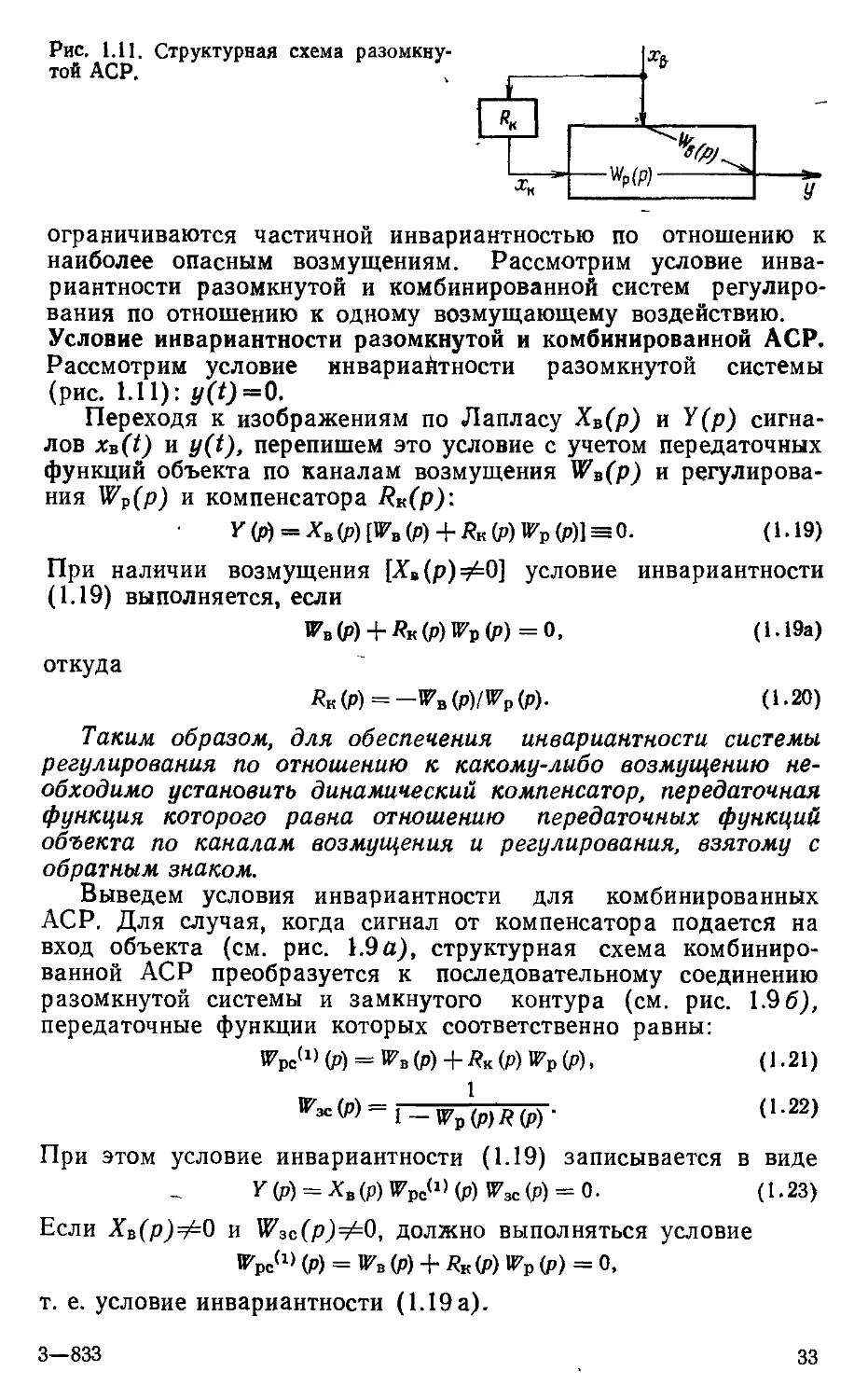
Рис. 1.11. Структурная схема разомкнутой АСР.
ограничиваются частичной инвариантностью по отношению к наиболее опасным возмущениям. Рассмотрим условие инвариантности разомкнутой и комбинированной систем регулирования по отношению к одному возмущающему воздействию.
Условие инвариантности разомкнутой и комбинированной АСР. Рассмотрим условие ннвариайтности разомкнутой системы (рис. 1.11): у(0=0.
Переходя к изображениям по Лапласу Хв(р) и Y(p) сигналов xB(t) и y(t), перепишем это условие с учетом передаточных функций объекта по каналам возмущения WB(p) и регулирования Wp(p) и компенсатора RK(p):
У(р) = Хв(р)[Гв(р) + Як(р)Гр(р)] = О. (1.19)
При наличии возмущения [Хв(р)=#0] условие инвариантности (1.19) выполняется, если
^в(Р) + /?к(р)^р(Р)=0, (1.19а)
откуда
RK(P) = -W3(p)/Wp(p). (1.20)
Таким образом, для обеспечения инвариантности системы регулирования по отношению к какому-либо возмущению необходимо установить динамический компенсатор, передаточная функция которого равна отношению передаточных функций объекта по каналам возмущения и регулирования, взятому с обратным знаком.
Выведем условия инвариантности для комбинированных АСР. Для случая, когда сигнал от компенсатора подается на вход объекта (см. рис. 1.9а), структурная схема комбинированной АСР преобразуется к последовательному соединению разомкнутой системы и замкнутого контура (см. рис. 1.9 6), передаточные функции которых соответственно равны:
й7рс(1)(р) = 1Гв(р) + рк(р)1Гр(р), (1.21)
= 1 - (р)Я (р) (1 •22)
При этом условие инвариантности (1.19) записывается в виде
Г(р) = Хв(р)й7рс(1)(р)й73с(р) = 0. (1.23)
Если Хв(р)=#0 и Wзсбрдолжно выполняться условие 1Грс(1> (р) = Гв (р) + Rv (Р) 1Гр (р) = о,
т. е. условие инвариантности (1.19а).
При использовании комбинированной системы регулирования (см. рис. 1.10 а) вывод условий инвариантности приводит к соотношениям (см. рис. 1.10 6):
Грс<2> (Р) = Гв (Р) + Як (Р) Я (р) Гр (р), (1 -21а)
= 1 — Гр(р)Я(р)’ (1 •22а>
Y (р) = X, (р) Грс<2) (р) Гзс (р) = 0. (1.23а>
Если Хв(р)=И=0 и ^зс(р)¥=0, должно выполняться условие
Грс<2> (р) = Гв (Р) + Як (Р) я (Р) Гзс (Р) = О, откуда
Як (Р) = (p)/[R (р) Гр (р)]. (1.20а>
Таким образом, при подключении выхода компенсатора на вход регулятора передаточная функция компенсатора, полученная из условия инвариантности, будет зависеть от характеристик не только объекта, но и регулятора.
Условия физической реализуемости инвариантных АСР. Одной из основных проблем, возникающих при построении инвариантных систем регулирования, является их физическая реализуемость, т. е. реализуемость компенсатора, отвечающего условиям (1.20) или (1.20 а).
В отличие от обычных промышленных регуляторов, структура которых задана и требуется лишь рассчитать их настройки, структура динамического компенсатора полностью определяется соотношением динамических характеристик объекта по каналам возмущения и регулирования и может оказаться очень сложной, а при неблагоприятном соотношении этих характеристик — физически нереализуемой.
«Идеальные» компенсаторы физически нереализуемы в следующих двух случаях.
1. Если время чистого запаздывания по каналу регулирования больше, чем по каналу возмущения. В этом случае идеальный компенсатор должен содержать звено упреждения, так как если
Яв (р) —рг вр (р) —рг
Wb - Лв (р) е и - Лр (р) е
то с учетом (1.10)
Як(р) = -
Вв (р) Ар (р) -р (тв-тр) Ав (р) Вр (р)
При тр>тв,
Тк — Тв — Тр < 0.
2. Если в передаточной функции компенсатора степень полинома в числителе больше, чем степень полинома в знаменателе. В этом случае компенсатор должен содержать идеальные дифференцирующие звенья. Такой результат получается при
Рис. 1.12. Принципиальная схема химического реактора с перемешивающим устройством.
1 — измеритель температуры, 2 — регулирующий клапан; 3 — измеритель расхода
определенном соотношении поряд-ков дифференциальных уравнений, описывающих каналы возмущения и регулирования. Пусть
W'b (р) = Вв (р)!{Аъ (р)] и
(Р) = Вр (Р)/Мр (р)],
где Вв(р), Ав(р), Вр(р), Ар(р) — полиномы степеней тБ, пв, т.р и пр соответственно.
Тогда
р , . _ Вв (р) Лр (р) _ Вк(р)
КК(Р)-- Лв(р)Вр(р)---------Лк(р)
и
тК Шв ПР J Лк = пв 4" Л!р.
Таким образом, условие физической реализуемости инвариантной АСР заключается в том, чтобы выполнялись соотношения
тв>тр и mB + «p<nB + mp. (1-24)
Пример. Рассмотрим систему регулирования температуры в химическом реакторе с перемешивающим устройством, в котором протекает экзотермическая реакция (рис. 1.12). Пусть основной канал возмущения — «расход реакционной смеси — температура в реакторе» — аппроксимируется двумя апериодическими звеньями первого порядка, а канал регулирования — «расход хладоагента — температура в реакторе» — тремя апериодическими звеньями первого порядка:
Wb= (Лр-ННТ^Ч-!) ’ (р> = (TjP+I)(T^+l)(ТзР+1) ’
где 7\, Тг, Тг—’Наибольшие постоянные времени основных тепловых емкостей реактора, термометра и охлаждающей рубашки.
Для построения инвариантной системы регулирования необходимо ввести компенсатор с передаточной функцией
^K(P) = -V- (ТаР + 1),
«р
который физически нереализуем, так как в данном случае нарушается условие (1,24), и компенсатор должен содержать идеальное дифференцирующее звено.
Техническая реализация инвариантных АСР. При практической реализации разомкнутых и комбинированных АСР обычно добиваются приближенной инвариантности системы по отношению к рассматриваемому возмущению в наиболее опасном диапазоне частот. При этом реальный компенсатор выбирают из числа наиболее легко реализуемых динамических звеньев, параметры которых рассчитывают из условия близости частот
ных характеристик идеального [7?к(г©)1 и реального [йк(1<о)] компенсаторов в этом диапазоне частот:
RK (ia>) RK (to) при а>н<а><а>в. (1-25)
Прн такой постановке задачи условие приближенной инвариантности примет вид
| Y (to) |«0, сон^со^сов, (1.26)
причем в разомкнутой АСР
| У (to) | = | Хг (to) | • | Грс(1) (to) |, (1.27)
а в комбинированной системе регулирования
IУ (to)I = I Хв (to) | • 1Fpc(1’ (to) 1Г3с (to) | . (1.28)
Как видно из (1.17), диапазон [<вн, «>в] в разомкнутой АСР определяется частотным спектром сигнала возмущения |Хв(7<о)|. В химико-технологических процессах сигналы, как правило, являются низкочастотными, и их мощность, в основном, сосредоточена в диапазоне [0, <ов], т. е. (рис. 1.13)
®в
J | ХЕ (to) | 2 <to = (0,95 -=- 0,99) j* | ХЕ (to) | 2 d&. о о
Комбинированную АСР можно рассматривать как двухступенчатый фильтр для сигнала возмущения, состоящий из разомкнутой АСР и замкнутого контура, который является фильтром для определенных частот. Характерной особенностью замкнутой системы регулирования является наличие пика на амплитудно-частотной характеристике на рабочей частоте <в₽ (рис. 1.14), в окрестности которой он обладает наихудшими фильтрующими свойствами. Поэтому чаще всего условие приближенной инвариантности (1.25) для комбинированных А*СР записывается для двух частот: <о=О и <в = ир. При этом компенсация возмущения на нулевой частоте обеспечивает инвариантность системы в установившихся режимах, если Азс(<о) ¥=0 при <о=0 (например, при использовании П-регулятора в замкнутом контуре), или если |Xb(i<o) |‘—изо при ®=0 (например, при ступенчатых возмущениях).
На рис. 1.15 и 1.16 качественно показаны спектры ошибки регулирования в одноконтурной АСР с пропорциональным регулятором (рис. 1.15) и в частично JXe(tw)| инвариантной комбинированной
АСР (рис. 1.16).
Выбор структуры реального компенсатора диктуется частотны-
Рис. 1 13. Частотный спектр сиг-
° ш нала возмущения
Рис. 1.14. Амплитудно-частотные характеристики замкнутой системы с пропорциональным (а) и пропорционально-интегральным регулятором (б)
ми характеристиками идеального компенсатора в диапазоне частот [0, Ир]. Обычно компенсаторы выбирают как комбинацию простейших линейных звеньев: апериодического первого порядка и реального дифференцирующего. В табл. 1.1 приведены динамические характеристики наиболее распространенных типов компенсаторов.
Таким образом, расчет комбинированной частично инвариантной АСР включает следующие этапы:
1) расчет настроек регулятора и определение рабочей частоты в одноконтурной системе регулирования;
2) вывод передаточной функции идеального компенсатора из условия инвариантности и анализ его реализуемости;
3) выбор реального компенсатора и определение его параметров из условия приближенной инвариантности в наиболее существенном для системы диапазоне частот.
Рассмотрим примеры расчета комбинированных систем регулирования.
Рис. 1 15 Амплитудно-частотная характеристика (а) и спектр выходного сигнала (б) в одноконтурной системе регулирования с П-регулятором
Рис. 1 16 Амплитудно-частотные характеристики (а) и спектр выходного сигнала (б) в комбинированной системе регулирования с П-регулятором
Таблица 1.1. Динамические характеристики типовых компенсаторов
Тип и динамические характеристики компенсатора
График VP(i(B)
Апериодическое звено 1-го порядка k
W) = t>H
k
Л(ю) у
ф(св) = — arctgT’w
Реальное дифференцирующее звено
W(P) = т^+i
Л(®)=ТлЙгт=Г
<р(а>) = л/2— arctgT^co Интегро-дифференцирующее звено
= k ЛИ-!
А(СВ) = k
" 1 Г 1
<р(а>) = arctgTjW — arctgT2co
Неминимальио-фазовое звено
1—Тр ^(Р) = kl-\-Tp
А (о>) = k
ф(со) = —2 arctgTcB
Пример 1. Динамические характеристики объекта по каналам возмущения и регулирования описываются передаточными функциями
= ^р(р)=7~рг- (Ь29)
В комбинированной АСР используется П-регулятор с передаточной функцией R(p)=— St. Требуется рассчитать настройки регулятора, выбрать компенсатор и определить его параметры из условия инварнантностн на нулевой и рабочей частотах.
Решение Определяем настройки регулятора по методу Циглера пи-кольса. Из системы уравнений
Ар (ш) Sj — 1 1
фр (®) + л = О J
где лр(ш)=
Фр (а>) — —1,42(в — arctg(в,
Рис. 1.17. Частотные характеристики компенсаторов (к примеру 1): а — реальный компенсатор — апериодическое звено 1-го порядка; б —реальный компенсатор — интегро-днфференцирующее звено
определяем критическую частоту а>кр и критический коэффициент усиления регулятора SiKp, при которых замкнутая система регулирования будет находиться на границе устойчивости:
<вкр=1,54; S!Kp= 1,835.
Рабочую частоту <ор принимаем приближенно равной ©кр, а оптимальную настройку регулятора равной Sr=0,5 Sikp=0,917.
Передаточная функция компенсатора из условия инвариантности (1.20) с учетом (1.19) имеет вид:
р+ 1
-/?к(р) = 0,5 ! е~°’1Р' (Ь3°)
Так как компенсатор с передаточной функцией (1.30) не содержит звеньев с отрицательным чистым запаздыванием и степень полинома числителя не превосходит степени полинома знаменателя, идеальный компенсатор физически реализуем. Однако техническая реализация такого устройства достаточно сложна, поскольку оно включает звенья чистого запаздывания, реальное дифференцирующее и апериодическое звено 1-го порядка. Поэтому целесообразно подобрать реальный компенсатор более простой структуры.
Для выбора типа реального компенсатора построим частотные характеристики идеального компенсатора в диапазоне частот (0, <оР]. Из уравнении (1.30) при p=ia> получим:
амплитудно-частотная характеристика
Дк(а>)— 0,5 1,21(024- 1 ’
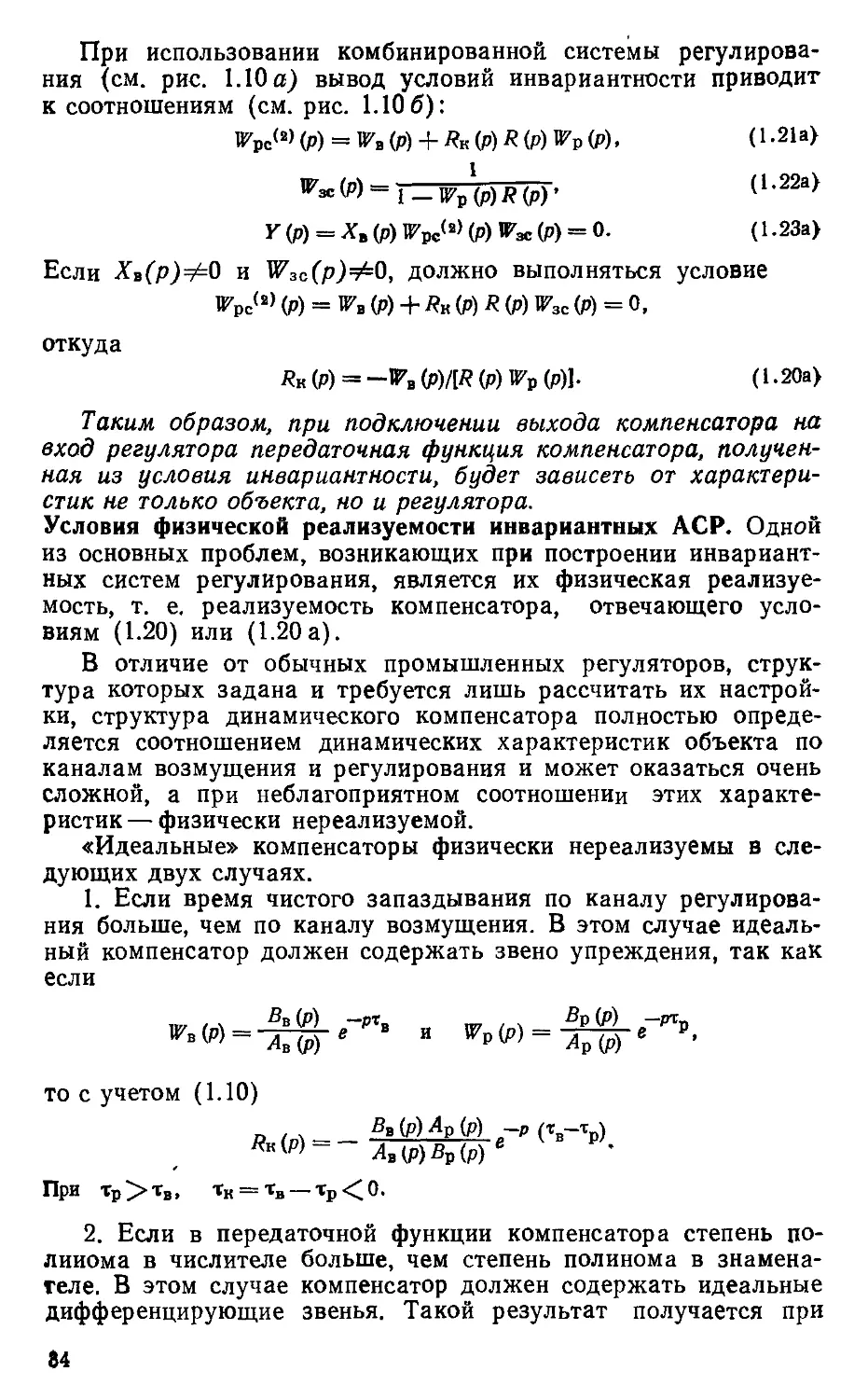
Рис 1.18. Частотные характеристики компенсаторов (к примеру 2)
фазо-частотная характеристика
Фк (<о) = —0,1<о + arctg со — arctg 1, Lu>.
При со=О и <о=1,54
Лк(0) = 0,5; Фк(0) = 0;
Лк (1,54) = 0,48; фк (1,54) = —0,197.
Так как в интервале <о [0; 1,54] годограф 2?к(«о) проходит в четвертом квадракте, в качестве реального компенсатора можно выбрать апериодическое звено 1-го порядка или интегро-дифференцирующее звено В первом случае (рис. 1 17а) система уравнений (см табл 11)
Ак (V1,54«7’а + 1)-1 = 0,48, где Ак = А (0) = 0,5.
—arctg 1,54Т = —0,197
не имеет точного решения. Если принять приближенно Г=0,145, то <рк(1,54) = =—0,219 и Лк (1,54) =0,49.
Для интегро-днфференцирующего звена (рис 1 176) параметры Т\ и Т2 находим из системы уравнений
0,5 (У(1,548Т1а + 1) (1,54аТг« + I))"1 = 0,48, arctg 1,547'1 — arctg 1,54Т2 = —0,197.
Получаем 0,066, Т2~0,2
Пример 2. Передаточные функции объекта и регулятора имеют вид:
0,5е“1>4/’ е_р Sn
(р) = р j ; Fp(р) = р । ; 7?(р) = — ~р~-
*
Расчет комбинированной системы регулирования, аналогичный рассмотренному в примере 1, приводит к следующим результатам
Оптимальные настройки регулятора и рабочая частота равны соответственно Sr= 1,09, S0*=0,42; <ор=2,02
Идеальный компенсатор — звено чистого запаздывания, так как
Рабочая частота иа годографе Лк(la) находится в четвертом квадранте (фк (2,02)=—0,81], поэтому в качестве реального компенсатора выбираем устройство с передаточной функцией вида (см табл. 1.1)
L 1—Тр
—Лк (р) = «К J'p | 1 •
Параметры kK н Т находим из условий
Ак = 0,5; —2arctg2,02T = —0,81.
Отсюда Г=0,21 Частотные характеристики «идеального» и реального компенсаторов показаны иа рис. 1.18.
1.3.2. Каскадные АСР
Каскадные системы применяют для автоматизации объектов, обладающих большой инерционностью по каналу регулирования, если можно выбрать менее инерционную по отношению к наиболее опасным возмущениям промежуточную координату и использовать для нее то же регулирующее воздействие, что и для основного выхода объекта.
В этом случае в систему регулирования (рис. 1.19) включают два регулятора — основной (внешний) регулятор, служащий для стабилизации основного выхода объекта у, и вспомогательный (внутренний) регулятор, предназначенный для регулирования вспомогательной координаты yt. Заданием для вспомогательного регулятора служит выходной сигнал основного регулятора.
Выбор законов регулирования определяется назначением регуляторов:
для поддержания основной выходной координаты на заданном значении без статической ошибки закон регулирования основного регулятора должен включать интегральную составляющую;
от вспомогательного регулятора требуется прежде всего быстродействие, поэтому он может иметь любой закон регулирования (в частности пропорциональный как наиболее простой и достаточно быстродействующий).
Сравнение одноконтурных и каскадных АСР показывает, что вследствие более высокого быстродействия внутреннего контура в каскадной АСР повышается качество переходного процесса, особенно при компенсации возмущений, поступающих по каналу регулирования (как будет показано ниже, при
Рис. 119 Структурная схема каскадной АСР
переменную накладывается
Рис. 1.20. Каскадная система регулирования температуры (2) с коррекцией задания регулятору расхода пара (1)
этом инерционность эквивалентного объекта благодаря внутреннему контуру снижается по сравнению с инерционностью основного канала регулирования).
Если по условию ведения процесса на вспомогательную ограничение (например, температу
ра не должна превышать предельно допустимого значения или
соотношение расходов должно лежать в определенных пределах), то на выходной сигнал основного регулятора, который является заданием для вспомогательного регулятора, также накладывается ограничение. Для этого между регуляторами устанавливается устройство с характеристиками усилительного звена с насыщением.
Примеры каскадных АСР технологических объектов. На рис. 1.20 приведен пример каскадной системы стабилизации температуры жидкости на выходе из теплообменника, в которой вспомогательным контуром является АСР расхода греющего пара. При возмущении по давлению пара регулятор 1 изменяет степень открытия регулирующего клапана таким образом, чтобы поддержать заданный расход. При нарушении теплового баланса в аппарате (вызванном, например, изменением входной температуры или расхода жидкости, энтальпии пара, потерь тепла в окружающую среду), приводящем к отклонению выходной температуры от заданного значения, регулятор температуры 2 корректирует задание регулятору расхода 1.
В химико-технологических процессах часто основная и вспомогательная координаты имеют одинаковую физическую природу и характеризуют значения одного и того же технологического параметра в разных точках системы (рис. 1.21).'
На рис. 1.22 показаны фрагмент технологической схемы, включающий подогреватель реакционной смеси и реактор, и система стабилизации температуры в реакторе. Регулирующее воздействие — расход пара — подается на вход теплообменника. Канал регулирования, включающий два аппарата и
Рис. 1.21. Структурная схема каскадной АСР с измерением вспомогательной координаты в промежуточной точке
Рис. 1.22. Каскадная система регулирования температуры (4) в реакторе (/) с коррекцией задания регулятору температуры (3) на выходе теплообменника (2)
трубопроводы, является сложной динамической системой с большой инерционностью. На объект действует ряд возмущений, поступающих в разные точки системы, — давление и энтальпия пара/ темпе
ратура и расход реакционной
смеси, потери тепла в реакторе и т. п. Для повышения быстродействия системы регулирования применяют каскадную АСР,
в которой основной регулируемой переменной является температура в реакторе, а в качестве вспомогательной выбрана температура смеси между теплообменником и .реактором.
Расчет каскадных АСР. Расчет каскадной АСР предпола-
гает определение настроек основного и вспомогательного регуляторов при заданных динамических характеристиках объекта по основному и вспомогательному каналам. Поскольку настройки основного и вспомогательного регуляторов взаимозависимы, расчет их проводят методом итераций.
На каждом шаге итерации рассчитывают приведенную одноконтурную АСР, в которой один из регуляторов условно относится к эквивалентному объекту. Как видно из структурных схем на рис. 1.23, эквивалентный объект для основного регулятора 1 (рис. 1.23 а) представляет собой последовательное соединение замкнутого вспомогательного контура и основного
Рис 1.23. Структурные схемы эквивалентной одноконтурной системы регулирования с основным (а) и вспомогательным (б) регулятором:
вверху — эквивалентная одноконтурная схема; внизу — преобразование каскадной АСР к одноконтурной
канала регулирования; передаточная функция его равна
Эквивалентный объект для вспомогательного регулятора 2 (рис. 1.23,6) является параллельным соединением вспомогательного канала и основной разомкнутой системы. Его передаточная функция имеет вид:
1Г1’(р) = 1Г1(р)^.1Г(р)Л(р). (1.32)
В зависимости от первого шага итерации различают два метода расчета каскадных АСР.
1-й метод. Расчет начинают с основного регулятора. Метод используют в тех случаях, когда инерционность вспомогательного канала намного меньше, чем основного.
На первом шаге принимают допущение о том, что рабочая частота основного контура (сор) намного меньше, чем вспомогательного (<0Р1), И ПрИ (0 = (0р
(1-33)
Тогда
’Г90(₽):= (L34)
Таким образом, в первом приближении настройки S0 основного регулятора 1 не зависят от 7?i(p) и находятся по Wa0(p).
На втором шаге рассчитывают настройки вспомогательного регулятора S? для эквивалентного объекта (1.32) с передаточной функцией IFi8(p), в которую подставляют R(p, S°).
В случае приближенных расчетов ограничиваются первыми двумя шагами. При точных расчетах их продолжают до тех пор, пока настройки регуляторов, найденные в двух последовательных итерациях, не совпадут с заданной точностью. Блок-схема алгоритма расчета приведена на рис. 1.24,а.
2-й метод. Расчет начинают со вспомогательного регулятора. На первом шаге предполагают, что внешний регулятор отключен, т. е.
Я(р) = О и Г1’»(р) = Г1(р).
Таким образом, в первом приближении настройки вспомогательного регулятора Si° находят по одноконтурной АСР для вспомогательного канала регулирования. На втором шаге рассчитывают настройки основного регулятора по передаточной функции эквивалентного объекта Wal(p) с учетом Ri(p, Si°). Для уточнения настроек вспомогательного регулятора S? расчет проводят по передаточной функции (1.32) Wial(p), в которую подставляют R(p,Si). Расчеты проводят до тех пор, пока настройки вспомогательного регулятора, найденные в двух а . следовательиых итерациях, не совпадут с заданной то ч носило (рис. 1.24,6).
Рис 1 24 Блок-схемы алгоритмов расчета каскадных АСР-
а — при условии высокого быстродействия внутреннего контура по сравнению с внешним; б — при условии отключения внешнего регулятора в начальном приближении
Пример. Рассчитать настройки регуляторов в каскадной АСР, если передаточные функции объекта по основному и вспомогательному каналам н передаточные функции регуляторов соответственно равны.
0,5е-4р е“°.4р
W№ 7 '4рТГ; .Л1 °0 = 1.2Р+ 1 :
• Iу1 1 1
Л (pj=-Sx-(Р) = —su 3s-.
Дли расчета одноконтурных АСР используем метод Циглера — Ни-кольса
Из сравнения W(p) и Wi(p) видно, что инерционность вспомогательного канала намного меньше, чем основного (Ti<t), поэтому расчет каскадной АСР проводим по 1-му методу.
Рис. 1.25. Определение частотных характеристик эквивалентного объекта для основного регулятора в начальном приближении:
а — амплитудно-частотных, б — фазо-частотных; в — амплитудно фазовых
1. Расчет настроек основного регулятора (St°, So0, <Вр°). Следуя выражению (1 34), находим передаточную функцию эквивалентного объекта
W3a (р) =
0,5 (1,2р + 1) 4р+1
g-a.ep
и его частотные характеристики (рис. 1.25):
IF90 (ко) = Ao (ш) е!ч,0(а\
Л (со) „г1/ 1.2W + 1 .
где 4<Ца>)_ -0,5 4а(в»+1 >
<р° (со) = <р (со) — фг (щ) = —3,6а> + arctg 1,2а> — arctg 4<о.
Критическую настройку П-регулятора S°up и критическую частоту <о°кр находим из системы уравнений
Д°(<о)31°=1; <р°(а>) + л = 0,
откуда S°1Kp = 4,64; о^кр = 0,73.
Рабочие настройки ПИ-регулятора принимаем равными:
а>р0 = о,73; Si® = 2,23; So° = 0,31. Тх
2. Расчет настроек вспомогательного регулятора . (Shi, S*oi, Передаточная функция эквивалентного объекта (1.32) имеет вид: *
HV1 (Р) = «^(р) t W ip) R ip, S°) =
- e-o,4P С/ о.бе^Р [ _ , 0,31 \
~ -l,2p +1 "V 4p-f-l (+2’23f' p ]•
Частотные характеристики Wri31(to>); Д^ы); cpi1 (<в) находим графическим способом (рис. 1.26) путем сложения годографов IPi(ia>) и W^paaOco), где
Рис. 1.26. Определение амплитудно-фазовой характеристики эквивалентного объекта для вспомогательного регулятора
I Эт
Рис. 1.27. Определение амплитудно-фазовой характеристики эквивалеитиого объекта для основного регулятора
1Г°Ра.ч(1<о) = S°). Критические настройки
и шЧкр находим из системы уравнений:
А/ («,) S1!! = 1 j S\KP = 5,9
Ф11 (®) + л = О J ®\кр = 3,8.
регулятора S*11Kp
Рабочие настройки принимаем равными: 3*ц=2,82; 31о1=2,05; <b1ip=3,8.
3. Уточнение настроек основного регулятора (Si1, So1, Ир1). Необходимость уточнения настроек регулятора S1 возникает в том случае, если допущение (1.33) не выполняется с заданной точностью. Проверка этого условия в данном примере показывает, что
1____________1___________________
I 1 “ /„ оП,",
]/ 2*82 +(_блз") " -
А1 (<Вр) = 1/1,44-0,ТЗ^ТГ = °’75’
т. е. 1/I/?!1 (ир) I соизмерима; с Л^шр) (если принять допустимую погрешность при выполнении условйя (1.33), равную 5%) и требуется дальнейшее уточнение настроек.^ Поэтому по формуле передаточной функции эквивалентного объекта 1Г31(р) находим его частотные характеристики в окрестности и = 0,73 (рис. 1.27) с учетом того, что
w j-------------=
_ ^(to)____________Л (и) t (®)-ч>1зн (®)]
- Пая (to) ~ Л!«(О) 6
2,05* Г 'агс‘в“£ёйГ е
Л*вя(и) и ф*»н(ш) определием по графику 1Г1ав(1<в).
Л81 (<в) S? = 1 1 S\RP = 4,15 Ф81 (ш) + л = О J о^кр = 0,65
и
Критические и рабочие настройки регулятора 1 находим из условий S11= 1,99;
So1 = 0,247; (Op1 = 0,65.
Сравнение S^Sp, So1) и S°(Si°,Sa°) показывает, что | S1 — S° | = V(l,99 — 2,23)a+ (0,247 — 0,31)a = 0,25, I S1 — S° [ 0,25 •
jS° | - 2,25 '==u'11’
t. e. начиная с n. 2 необходимо повторить расчет.
Результаты расчетов по итерациям сведены в таблицу. Их анализ показывает, что в рассмотренном примере рабочие частоты регуляторов в каскадной АСР незначительно отличаются от соответствующих частот в одноконтурных системах регулирования. При этом включение регуляторов в каскадную систему приводит к повышению рабочей частоты основного регулятора и снижению рабочей частоты вспомогательного (см. рис. 1.28, а, б). Эта особенность каскадных АСР учитывается при выборе частотного диапазона, что позволяет сократить объем вычислений при расчетах частотных характеристик эквивалентных объектов.
Каскадная АСР
Параметры настроек
Одноконтурная АСР
начальное приближение
первое приближение
второе приближение
шаг 1 шаг 2 шаг 3
шаг 4 | шаг 5
Основной регулятор
<Вп 0,508 0,73 0,65 0,63
S? 2,17 2,23 1,99 2,05
So 0,21 ’ 0,31 ' 0,247 0,246
Вспомогательный регулятор
(Ppi 4,3 3,8 3,8
Su 2,52 2,82 ' 2,1
S01 - 2,07 2,05 1,52
Окончательный вывод об кадной АСР по сравнению с
эффективности применения кас-одноконтурной делают на основе
Рис. 1.28. Графики процессов регулирования:
а — вспомогательной координаты (основной регулятор отключен); б — основной координаты в одноконтурной АСР (/) н в каскадной АСР (2)
сравнительного анализа результатов моделирования переходных процессов. Для рассмотренного примера на рис. 1.28 приведены графики процессов регулирования в одноконтурной и каскадной АСР при единичном ступенчатом возмущении по каналу регулирования. Как видно из сравнения кривых 1 и 2, динамическая ошибка регулирования в каскадной АСР снизилась почти в пять, а интегральный квадратичный критерий— почти в девять раз.
1.3.3. АСР с дополнительным импульсом по производной из промежуточной точки
Такие системы обычно применяют при автоматизации объектов, в которых регулируемый технологический параметр (например, температура или состав) распределен по пространственной координате (как в аппаратах колонного или трубчатого типа). Особенность таких объектов состоит в том, что основной регулируемой координатой является технологический параметр на выходе из аппарата, возмущения распределены по длине аппарата, а регулирующее воздействие подается на его вход. При этом одноконтурные замкнутые АСР не обеспечивают должного качества переходных процессов вследствие большой инерционности канала регулирования.
Подача на вход регулятора дополнительного импульса из промежуточной точки аппарата дает опережающий сигнал, и регулятор включается в работу прежде, чем выходная координата отклонится от заданного значения.
Для того чтобы обеспечить регулирование без статической ошибки, необходимо, чтобы в установившихся режимах дополнительный импульс исчезал. С этой целью вспомогательную координату пропускают через реальное дифференцирующее звено, так что входной сигнал регулятора равен e = y-|-y/i—У° (рис. 1.29,а). В установившихся режимах, когда у\ =0, при 8 = 0, У = У°.
Эффективность введения дополнительного импульса зависит от точки его отбора. Выбор последней определяется в каж-
Рис. 1.29. Структурные схемы АСР с дополнительным импульсом по производной из промежуточной точки:
а —исходная схема; б — преобразованная к схеме каскадной АСР
дом конкретном случае динамическими свойствами объекта и условиями его работы. Так, измерение yi в начале аппарата равносильно дополнительному импульсу по возмущению, которое поступает по каналу регулирования. При этом дифференцирующее устройство играет роль динамического компенсатора возмущения. Измерение на выходе объекта равно-
сильно введению производной от основной координаты. Для каждого объекта можно выбрать оптимальное место отбора дополнительного импульса, при котором качество регулирования оказывается наилучшим.
Расчет подобных систем регулирования аналогичен расчету каскадных АСР после соответствующих преобразований. В приведенной каскадной АСР на рис. 1.29,6 роль внешнего регулятора играет звено с передаточной функцией /?д_1(р), а внутреннего — последовательно соединенные регулятор и дифференциатор, так что передаточные функции для приведенных регуляторов соответственно равны:
где Sj — Tg/T); «о—1/Тх;
Ъ (Р) = Rn(p)R(p) = т^_ ! (-Sj-
SiP + So
Т2 1 1
гх р+ Т1
На достаточно высоких частотах, для которых выполняется условие слагаемым 1/7) можно пренебречь. Тогда
формула для Ri(p) примет вид:
(SiP + So) /— S01 \
Та----------Г11+ Р Г
'Г Р
_ 7\ _ Т,
где 51х — <$х ; S01 — So •
1 а 1 а
1.3.4. Взаимосвязанные системы регулирования
Объекты с несколькими входами и выходами, взаимно связанными между собой, называют многосвязными объектами (рис. 1.30, а). При отсутствии перекрестных связей, когда каждый вход влияет лишь на один выход, многосвязные объекты распадаются на односвязные (рис. 1.30,6), регулирование которых рассмотрено ранее. Однако подавляющее большинство химико-технологических процессов является сложными многосвязными объектами, а их системы регулирования оказываются взаимосвязанными.
Динамика многосвязных объектов описывается системой дифференциальных уравнений, а в преобразованном по Лапла-
Рнс 1 30. Схемы объектов с несколькими входами и выходами: а — со взаимосвязанными коодинатами, б — односвязиые объекты
су виде — матрицей передаточных функций
W'u (Р) win(p)
Vf2i(p) W22. w2n(p)
^mi (p) &тп (p)
(1.35)
где W'm(p) —передаточная функция по каналу ху—Уь.
Для односвязных объектов WIK(p)=Q при /=#&, и матрица (1.35} превращается в диагональную.
Существует два различных подхода к автоматизации многосвязных объектов: несвязанное регулирование отдельных координат с помощью одноконтурных АСР; связанное регулирование с применением многоконтурнЫх систем, в которых внутренние перекрестные связи объекта компенсируются внешними динамическими связями между отдельными контурами регулирования.
Каждый из этих методов обладает своими преимуществами и недостатками.
При несвязанном регулировании, если учитывают только основные каналы регулирования, расчет и наладку регуляторов проводят как для одноконтурных АСР. Этот метод можно применять в тех случаях, когда влияние перекрестных связей намного слабее, чем основных. При сильных перекрестных связях фактический запас устойчивости системы регулирования может оказаться ниже расчетного. Это приводит к низкому качеству регулирования, а в худшем случае — к потере устойчивости
Рис. 1.31. Схема объекта с двумя взаимосвязанными координатами
Рис- 1.32. Структурная схема несвязанного регулирования объекта со взаимосвязанными координатами
вследствие взаимного влияния контуров регулирования.
Чтобы предотвратить возможность взаимного раскачивания, одноконтурные АСР следует рассчитывать с учетом внутренних связей
й других контуров регулирования.
Это существенно усложняет расчет системы, но гарантирует заданное качество регулирования в реальной системе.
Связанные системы регулирования включают кроме основ-
ных регуляторов дополнительные динамические компенсаторы. Расчет и наладка таких систем гораздо сложнее, чем одноконтурных АСР, что препятствует их широкому применению в промышленных системах автоматизации.
Рассмотрим методы расчета многосвязных систем регулирования на примере объекта с-двумя входами и двумя выходами (рис. 1.31).
Системы несвязанного регулирования. Структурная схема системы представлена на рис. 1.32. Выведем передаточную функцию эквивалентного объекта в одноконтурной АСР с регулятором /?1. Как видно из рис. 1.33, а, такой объект состоит из основного канала регулирования и связанной с ним параллельно сложной системы, включающей второй замкнутый контур регулирования и два перекрестных канала объекта.
Рис 1.33. Преобразование системы регулирования двух координат к эквивалентным одноконтурным АСР:
л — эквивалентный объект для первого регулятора, б — эквивалентный объект для вто ( рого регулятора
Рис. 134 Амплитудно-частотные характеристики одноконтурных АСР при отсутствии перекрестных связей в объекте
Передаточная функция эквивалентного объекта имеет вид:
^1Э (р) = (р) + (р) 1__(ру R? (р) 4^21 (р) • (1.36)
Второе Слагаемое в правой части уравнения (1.36) отражает влияние второго контура регулирования на рассматриваемую систему и по существу является корректирующей поправкой к передаточной функции прямого канала.
Аналогично для второго эквивалентного объекта (рис. 1.33,6) получим передаточную функцию в виде
^2* (Р) — ^22 (Р) + ^21 (Р) J (ру (ру ^12 (Р) • (1'37)
На основе формул (1.36) и (1.37) можно предположить, что если на какой-то частоте модуль корректирующей поправки будет пренебрежимо мал по сравнению с амплитудно-частотной характеристикой прямого канала, поведение эквивалентного объекта на этой частоте будет определяться прямым каналом.
Наиболее важно значение поправки на рабочей частоте каждого контура. В частности, если рабочие частоты двух контуров регулирования юР1 и юР2 существенно различны (например, юР1»соР2, как на рис. 1.34), то можно ожидать, что взаимное влияние их будет незначительным при условии
I ^П2 (,<ЙР1) I I ^11 (,<ЙР1) | >
^21 («>Р1) ^12 (®Р1)
где 11ГП8 (1®Р1) | - |R2-X(topi)_F22(l®pl)l ’
Наибольшую опасность представляет случай, когда инерционность прямых и перекрестных каналов приблизительно одинакова. Пусть, например, Wu(p) = Wi2(p) = W2i(p) = = W22(p) = W(p). Тогда для эквивалентных объектов при условии, что Ri(p)=R2(p)=R(p), получим:
передаточные функции
ПГ^.Л ГГ.ЛХ ________”^(P)
W (p)-F(p)+ i_W{pyR{py - \_WipyRipy>
частотные характеристики
IP(ia>)- i _ w ((C0) R (to) •
На границе устойчивости, согласно критерию Найквиста, получим:
079 = 1 или = 1 >
откуда W (to) R (i<n) = 0,5; | R (i<n) | = 0,5/1W (йп) | .
Так, настройка П-регулятора, при которой система находится на границе устойчивости, вдвое меньше, чем в одноконтурной АСР.
Для качественной оценки взаимного влияния контуров регулирования используют комплексный коэффициент связанности
/Сев (ico) =
Г12 (ico) F21 (tm) (to) Г22 (to) ’
который обычно вычисляют на нулевой частоте (т. е. в установившихся режимах) и на рабочих частотах регуляторов юР1 и <1)р2. В частности, при <о=0 значение Ксв определяется отношением коэффициентов усиления по перекрестным и основным каналам:
^Ссв (0) = ^12^21/(^11^22) •
Если на этих частотах Асв~0, объект можно рассматривать как односвязный; при АСв> 1 целесообразно поменять местами прямые и перекрестные каналы («перекрестное» регулирование); при 0<Асв<1 расчет одноконтурных АСР необходимо вести по передаточным функциям эквивалентных объектов (1.36) и (1.37).
Системы связанного регулирования. Автономные АСР. Основой построения систем связанного регулирования является принцип автономности. Применительно к объекту с двумя входами и выходами понятие автономности означает взаимную независимость выходных координат yi и у2 при работе двух замкнутых систем регулирования.
По существу, условие автономности складывается из двух условий инвариантности: инвариантности первого выхода yi по отношению к сигналу второго регулятора хР2 и инвариантности второго выхода у2 по отношению к сигналу первого регулятора xPi:
У1 (/ > *Рг) = 0 > У г (/ > ^pi) = 0; УС Xpj, ХР2.
При этом сигнал xPi можно рассматривать как возмущение для у2, а сигнал хР2 — как возмущение для yi. Тогда перекрестные каналы играют роль каналов возмущения (рис. 1.35). Для компенсации этих возмущений в систему регулирования вводят динамические устройства с передаточными функциями Ra(p) и T?2i(р), сигналы от которых поступают на соответствующие каналы регулирования или на входы регуляторов.
По аналогии с инвариантными АСР передаточные функции компенсаторов R.iz(p) и R?i(p), определяемые из условия автономности, будут зависеть от передаточных функций прямых и перекрестных каналов объекта н в соответствии с выражениями (120) и (1.20, а) будут равны:
О (Р) . п _ ^21 (Р) ,< ооу
Я12(р)-— W22(p) • ^2l(P)~ Wu(p) ’ (L38>
П z„4_ У12<Р) p _ ^21 (P) ,, on .
Rli(p^~~W22(p)R2(p)’ Rn(P>- (₽)/?!(₽)• (r38a)
Так же, как в инвариантных АСР, для построения автономных систем регулирования важную роль играет физическая реализуемость и техническая реализация приближенной автономности.
Условие приближенной автономности записывается для реальных компенсаторов с учетом рабочих частот соответствующих регуляторов:
R12 (to) = R12 (to) при ® = 0;®=®P2;
- Z?21 (to) = /?21 (to) при ® = 0; ® = ®Р1.
В химической технологии одним из самых сложных многосвязных объектов является процесс ректификации. Даже в простейших случаях — при разделении бинарных смесей — в ректификационной колонне можно выделить несколько взаимосвязанных координат (рис. 1.36). Например, для регулирования процесса в нижней части колонны необходима стабилизация минимум двух технологических параметров, характеризующих материальный баланс по жидкой фазе и по одному из компонентов. Для этой цели обычно выбирают уровень жидкости в кубе и температуру под первой тарелкой, а в качестве регулирующих входных сигналов — расход греющего пара и отбор
Рис. 1.35. Структурные схемы автономных АСР:
а — компенсации воздействия от второго регулятора в первом контуре регулирования; б — компенсации воздействия от первого регулятора во втором контуре регулирования;
a — автономной системы регулирования двух координат
Рис. 1.36. Пример системы регулирования объекта с несколькими входами и выходами:
1 — ректификационная колонна, 2 — кипятильник, 3 — дефлегматор; 4 — флегмовая емкость; 5 — регулятор температуры; 6, 9 — регуляторы уровня; 7 т- регулятор расхода; 8 — регулятор давления
этого — уровень жидкости и состав па-
кубового продукта. Однако каждое из регулирующих воздействий влияет на оба выхода; при изменении расхода греющего пара изменяется интенсивность испарения кубового продукта, а вследствие
ра. Аналогично изменение отбора кубового продукта влияет не только на уровень в кубе, но и на флегмовое число, что Приводит к изменению состава пара в нижней части колонны.
Для регулирования процесса в верхней части в качестве выходных координат можно выбрать давление и температуру пара, а в качестве регулирующих входных параметров—подачу хладоагента в дефлегматор и флегмы на орошение колонны. Очевидно, обе входные координаты влияют на давление и температуру в колонне в ходе тепловых и массообменных процессов.
Наконец, рассматривая систему регулирования температуры одновременно в верхней и нижней частях колонны подачей соответственно флегмы и греющего пара, также получим систему несвязанного регулирования объекта с внутренними перекрестными связями.
1.4. СИСТЕМЫ РЕГУЛИРОВАНИЯ ОБЪЕКТОВ С ЗАПАЗДЫВАНИЕМ И НЕСТАЦИОНАРНЫХ ОБЪЕКТОВ
1.4.1. Регулирование объектов с запаздыванием
Большинство технологических объектов характеризуется наличием чистого запаздывания в каналах регулирования. Запаздывание, возникающее при протекании потока вещества по длинным трубопроводам, носит название транспортного запаздывания. Запаздывание возможно и в результате использования в системе регулирования периодически действующих приборов или*регуляторов— таких, как газовый хроматограф или цифровая вычислительная машина, включенная в цепь обратной связи.
Рис. 1.37. Переходные функции миогоемкостиых объектов (/) и их аппроксимация (2) одиоемкостным (а) или двухъемкостиым (б) звеном с приведенным запаздыванием т:
Т — постоянная времени
Многоемкостной объект с близкими по величине постоянными времени (например, тарельчатые аппараты) или объекте распределенными параметрами (трубчатые или насадочные аппараты) характеризуется переходными функциями с затянутым начальным участком (рис. 1.37), когда выходная координата практически не изменяется. В этом случае говорят о приведенном (эффективном) запаздывании, которое находят путем аппроксимации объекта одно- или двухъемкостным звеном с чистым запаздыванием.
Из-за значительного чистого запаздывания в объекте автоматизации существенно снижается качество регулирования при использовании обычных промышленных регуляторов.
Даже при оптимальных настройках регуляторов качество процессов регулирования тем хуже, чем больше и само запаздывание, и его отношение к постоянной времени объекта т/7. Очевидно, на интервале 2т, пока регулирующее воздействие еще не сказывается на выходе объекта, процесс регулирования совпадает с переходной функцией объекта. При этом динамическая ошибка регулирования не может быть меньше, чем значение выхода апериодического звена при /=2т. Если, например, т=Т, то 1/(2т) = 1/ап(7,)«0,63 i/max, где i/max — установившееся значение выхода объекта (рис. 1.38).
В практике регулирования объектов с запаздыванием принято считать, что если отношение т/7 превышает 0,2, то при-
Рис. 1.38. Графики процессов регулирования при различных значениях отношения т/Т:
a~x~Q,2 Т; б — Х=Т\ / — переходная функция объекта; 2 —процесс регулирования
Рис. 1.39. Процесс регулирования звеиа чистого запаздывания ПИ-регулятором
У Утах
менение обычной непрерывной АСР со стандартным регулятором не обеспечит удовлетворительного качества регулирования. В предель-
ном случае — для усилительного
звена с чистым запаздыванием (т. е. Т=0)—динамическая ошибка принимает максимально возможное значение — kx (где х — ступенчатое возмущение). Максимальный эффект, который может обеспечить в этом случае идеальная система регулирования,— сведение к нулю ошибки регулирования за время 2 т. Реальный ПИ-регулятор, настроенный на заданную степень затухания переходного процесса, может справиться с этой задачей за время, приблизительно равное (5—6)т (рис. 1.39).
Примерно такой же эффект дает импульсное регулирование, когда регулятор подключают к объекту периодически (с периодом /о>т) на небольшой отрезок времени. При этом на объект подается регулирующее воздействие, пропорциональное ошибке. Оно остается постоянным до следующего момента включения регулятора, когда проявится эффект от предыдущего воздействия. При правильном выборе интервала to можно добиться
некоторого уменьшения времени переходного процесса, однако значения интегральных критериев качества остаются прибли-
зительно такими же, как и при непрерывном регулировании. На рис. 1.40 приведены структурная схема и графики переходных процессов в импульсной АСР.
В тех случаях, когда к качеству переходных процессов в системе регулирования предъявляют высокие требования, целесообразно использовать специальные регуляторы или алгорит-
Рис. 1.40. Структурная схема АСР-и графики переходных процессов при импульсном регулировании звена чистого запаздывания;
/ — объект; 2 —регулятор; 3 — импульсный элемент
Объект
Рис. 1.41. Структурная схема АСР с регулятором Смита
мы, обеспечивающие компенсацию чистого запаздывания. Примером такого регулятора является регулятор Смита [44]. Он представляет 'собой замкнутую систему, состоящую из обычного регулятора и мо-
дели объекта, включенной в линию обратной связи к регулятору (рис. 1.41). Уравнение модели объекта выводится из условия, чтобы желаемая передаточная функция объекта по каналу регулирования не содержала звена чистого запаздывания. Представим истинную передаточную функцию объекта в
виде произведения
W (Р) = Го (р) е“РТ.
Здесь W0(p)=B(p)/A(p)—дробно рациональная функция. Тогда желаемая передаточная функция будет равна W0(p)-Условие компенсации запаздывания запишется в виде равенства
Г0(р)е-₽т + Гм(р) = Г0(р),
откуда
Гм(р) = Г0(р)(1-е~рт)- (1-39)
В этом случае характеристическое уравнение разомкнутой системы имеет вид:
1-Го(р)/?(р) = О.
Следовательно, при одних и тех же параметрах настройки регуляторов запас устойчивости АСР с регулятором Смита выше, чем обычных АСР. Это означает, что при одинаковом запасе устойчивости АСР( например, при одной и той же степени затухания переходных процессов) для регулятора Смита можно
Рис. 1 42. К расчету настройки П-регулятора для объекта без запаздывания (S°i = 0,5/A°) н с запаздыванием (5'1=0,5/А1):
а — фазо-частотные характеристики объекта, б — амплитудно частотные характеристики
Рис. 1.43. Графики переходных процессов в АСР:
1 — с ПИ-регулятором, 2 — с регулятором Смита
принять более высокую рабочую частоту и больший коэффициент усиления, что обеспечит лучшее качество регулирования (рис. 1.42). Для сравнения на рис. 1.43 приведены процессы регулирования одного и того же объекта ПИ-регулятором и регулятором Смита.
К недостаткам регулятора Смита, кроме сложности его структуры и аппаратурной реализации, относится высокая чувствительность к параметрам настройки модели. Ошибки в настройке модели, вызванные неточностью априорных знаний о характеристиках объекта или нестационарностью его свойств, могут привести не только к ухудшению качества переходных процессов, но и к потере устойчивости системой регулирования. Поэтому практические рекомендации по выбору систем регулирования объектов с чистым запаздыванием заключаются в следующем*:
использование специальных регуляторов с компенсацией запаздывания целесообразно лишь при отношении т/Г>0,5— 0,7;
при изменении параметров объекта более чем на 20% от номинальных значений требуется-коррекция настроек параметров модели;
при наличии высокочастотных возмущений в объекте использование регуляторов с компенсацией запаздывания нецелесообразно;
реализация регуляторов с компенсацией запаздывания программным способом наиболее эффективна при использовании ЭВМ в режиме супер визор ного или непосредственного цифрового управления (см. гл. 7).
В ряде случаев динамические характеристики объекта таковы, что наилучший (в отношении качества переходных процессов) способ регулирования неэкономичен, поэтому в статическом режиме регулирующее воздействие должно отсутствовать либо иметь минимально возможное значение. Пусть по каналу с передаточной функцией Wi(p) (рис. 1.44) объект обладает меньшим запаздыванием, чем по каналу с передаточной функцией W2(p). Чтобы в статическом режиме регулирующее воздействие Xpj было равно нулю, а динамические характеристики системы были близки к характеристикам системы с объектом,
* М. Хаджийски. Проектираие иа системи за управление иа техиологични обектн. Ч. I. София, Технике. 1982. _
Рис. 1 44. Структурная схема АСР с двумя регулирующими воздействиями
Рис 1 45. Схема регулирования температуры перегретого пара в паровом котле:
1.2 — регуляторы температуры
имеющим передаточную функцию Wi(p) используют АСР с двумя регулирующими воздействиями — по каналам xPi и хР2. При этом регулятор 1 должен осуществлять П-закон регулирования, а регулятор 2 — ПИ- или ПИД-закон. Задача регулятора 2 состоит в ликвидации статической ошибки регулирования. При этом у(со)=0 и, следовательно, равно нулю регулирующее воздействие xPi. Регулятор 1 настраивают по характеристикам объекта с передаточной функцией Wi(p), а регулятор 2 —по характеристике эквивалентного объекта Wa(p). Чтобы получить эту характеристику, нужно учесть, что
Г(р) = У1(р) + У2(р) и Г1(р) = Г(р)/?1(р)Г1(р).
Таким образом
Уг (Р) = У (Р)[1-^(Р) Гхф)].
В свою очередь
y2(p) = XP2(p)W'2(p).
Тогда
jps ____У_(Р)_______(Р).---- /1 4Q\
*р2(р) “1-*!(?)BW (
Примером системы с двумя регулирующими воздействиями может служить система регулирования температуры перегретого пара в паровом котле (рис. 1.45). Регулятор 1 меняет расход воды, впрыскиваемой в коллектор пароохладителя. Однако в статическом режиме расход воды Gt должен быть минимальным. Регулятор 2 меняет расход хладоагента G2 через поверхностный теплообменник. Как будет показано в разделе 2.3, динамика объекта по каналу G2—0п значительно хуже, чем по каналу Gt—0П, но экономичность регулирования гораздо выше.
1.4.2. Регулирование нестационарных объектов
Многие технологические процессы, (в производстве лаков и красок, в микробиологической и пищевой отраслях промышленности), проводят в нестационарных условиях. Для некоторых процессов нестационарность обусловлена изменением характеристик аппарата вследствие изменения его нагрузки, образования накипи на трубах, старения катализатора и т. п. Иногда процессы проводят в нестационарных (обычно циклических) режимах с целью повышения их эффективности [54]. Во всех этих случаях линеаризованная математическая модель процесса нестационарна, а правые части дифференциальных уравнений содержат координату времени в явной форме.
В случае нестационарных процессов предъявляют особые требования к построению систем стабилизации их параметров. Например, в процессах биосинтеза температура должна поддерживаться на заданном оптимальном уровне изменением расхода охлаждающей воды. По мере роста концентрации биомассы вязкость среды растет, а от нее сильно зависят коэффициенты теплопередачи. Таким образом, передаточная функция объекта регулирования температуры в начале и в конце процесса существенно различны. Систему регулирования необходимо рассчитать таким образом, чтобы обеспечить удовлетворительное качество переходных процессов для всех возможных значений параметров линеаризованной модели. Рассмотрим некоторые особенности построения таких систем.
Обеспечение рабастности систем регулирования. Термин «ра-бастность» означает малую чувствительность систем регулирования к изменению тех или иных свойств управляемого процесса. Обеспечить рабастность можно различными способами. Одним из них является такой выбор настроечных параметров регуляторов, чтобы при некоторых средних характеристиках процесса степень устойчивости замкнутой системы т] (минимальное расстояние корней ее характеристического уравнения от мнимой оси) была максимальна. Поскольку для системы регулирования опасна потеря устойчивости, такой выбор настроек позволяет надеяться на удовлетворительное качество регулирования при колебаниях параметров передаточной функции объекта.
Другим способом обеспечения рабастности — более надежным, но и более трудоемким — является выбор настроек регуляторов, оптимальных по отношению к наиболее неблагоприятному сочетанию параметров процесса. Если процесс можно приближенно охарактеризовать передаточной функцией апериодического или нейтрального объекта с запаздыванием, то, зная диапазон изменения коэффициента усиления, постоянной времени и времени запаздывания, можно выбрать такое сочетание этих параметров, для которого оценка среднеквадратичной ошибки регулирования максимальна.
Для астатического объекта с передаточной функцией W (р) = ё-’К/Тр.
наиболее неблагоприятному сочетанию параметров соответствует максимальное отношение т/7'.
Для статического объекта с передаточной функцией r(p) = (fe~pT)/(7’P+l).
и П-регулятора наихудшее качество регулирования соответствует максимуму выражения
J = k/(l ,5 + лТ/4т)
на множестве возможных значений k, Т, т. Именно для тех параметров, при которых J максимально, нужно выбирать настройки регуляторов.
Аналогичный подход полезен не только для нестационарных процессов, но и при назначении параметров регуляторов априори для целого класса объектов, характеристики которых сравнительно мало отличаются друг от друга.
Для объектов без существенного, запаздывания рабастность можно обеспечить выбором регуляторов с переменной структурой [21]. Такие регуляторы позволяют создать переходный процесс в замкнутой системе, близкий к некоторому желаемому, путем введения так называемого скользящего режима. При переходе фазовой траектории системы через границу, совпадающую с фазовой траекторией желаемой системы, коэффициенты регулятора меняются; при этом возникает движение вдоль границы с постоянно изменяющимися параметрами регулятора (рис. 1.46). При изменении свойств .объекта' меняются только такие характеристики скользящего режима, как частота переключений. Основная же траектория, вдоль которой проходит скользящее движение, остается неизменной.
Использование параметрической компенсации. Изложенные вы-
ше подходы к регулированию нестационарных процессов предполагали, что характеристики регулятора не меняются, несмотря на изменение свойств объекта. Между тем, если возмущение, меняющее динамику объекта, можно измерить, то
естественно использование принципа параметрической компенсации. При этом параметры регулятора изменяют таким образом, чтобы, несмотря . на изменение динамики объекта, степень устойчивости или степень колебательности системы
Рис. 1.46. С^ема возникновения скользящего режима:
В1 и В2 — области, соответствующие различным параметрам регулятора; AjA2— линия, вдоль которой происходит скольжение
Рис. 1.47. Структура системы регулирования с параметрической компенсацией
Рис. 1.48. Структура замкнутой системы регулирования нелинейного и нестационарного объекта
не менялись. Чаще всего таким измеряемым параметрическим возмущением является нагрузка объекта (расход материальных и энергетических потоков). Через контур адаптации изменение нагрузки меняет параметры регулятора таким образом, чтобы коэффициент усиления разомкнутой системы остался неизменным (рис. 1.47).
Синтез системы управления из условия заданного характера переходного процесса в замкнутой системе. В замкнутой системе регулирования, показанной на рис. 1.48, объект и управляющее устройство нелинейны. Уравнение, характеризующее объект, имеет вид:
/(у,..., ...х,... х(/>,..., x<ft)) = u. (1.41)
\3десь — i-тая и j-тая производные регулируемой координаты у и возмущающего воздействия х. Требуемые динамические свойства замкнутой системы можно охарактеризовать дифференциальным уравнением, связывающим задающее воздействие у° с выходом объекта у, вектором возмущений х и вектором параметров регулятора S:
F(y, ..., у°, ..., S, х, ...)=0. (1.42)
' Представленная в виде (1.42) функция F может содержать не только переменные у, х, у°, но и их производные. В частности, в условие (1.42) обязательно должна входить высшая производная у<п), причем так, чтобы это условие можно было разрешить относительно нее.
Закон изменения управления и выбирают из условия, чтобы фактическое изменение у в замкнутой системе совпадало с желаемым {8]; для этого должны совпадать и их производные. Обозначим желаемый закон изменения координаты у через у и потребуем выполнения равенства
у<») =])(»). (1.43)
Высшую производную желаемого движения находят, разрешив
уравнение (1.42) для желаемой системы относительно у^:
= F(y,yO,S,x). (1.44)
Управление, обеспечивающее выполнение равенства (1.43), можно найти, подставив в уравнение объекта (1.41) вместо производной y(n> ее желаемое значение. Получим
и = f (у..t/f"-1), F, х,..., =
= f(y.....yb'-V.yo.S.x.....x<*>). (1.45)
При этом управление становится функцией переменных у, .... У(п~*\ х, x(fc\ S, у°, у(п~1У>. Все эти переменные рас-
сматривают как измеряемые, В этом случае получают алгоритм управления в форме синтеза. Далеко не всегда производные выходной координаты (а также возмущающие воздействия и их производные) можно измерить; однако при невысоком порядке объекта подобный подход оказывается эффективным, а зачастую позволяет найти удовлетворительный приближенный алгоритм управления, не использующий измеренных значений всех переменных, входящих в уравнение (1.45). Методика использования изложенного подхода показана ниже на примере.
Пример. Управление реактором идеального смешения. Уравнение, характеризующее динамику изотермического реактора смешения, имеет вид:
Vy = G(x-y) + K(y)V, (1.46)
где у — концентрация в объеме аппарата и на выходе его; х — концентрация во входном потоке; G и V — соответственно расход через реактор и объем реактора; К(у)—скорость реакции, зависящая от концентрации.
Пусть управляющим воздействием является расход G через аппарат. Уравнение (1.46) нелинейно, так как в него входят нелинейная функция К (у) и произведение G(x—у). Зададим характер желаемого переходного процесса в замкнутой системе уравнением
У + СИУ = а^-
Согласно этому уравнению, желаемый переходный процесс представляет собой экспоненту, имеющую декремент затухавия at и стремящуюся к значению агу^ау. Отметим, что порядок высшей производной как в уравнении объекта, так и в уравнении желаемой системы одинаков, что является необходимым условием применимости изложенного подхода.
Желаемое значение высшей производной
~уЫ = ед0 — агу
подставляем в уравнение объекта (1.46). Получим
V (а^уо — сцу) = G (х — у) + К (y)V, откуда управляющее воздействие
V
G=--------[а# — а1У — К(у)]. (1.47)
Л — у
Таким образом, для выработки управления необходимо вводить в вычислительное устройство все переменные, фигурирующие в правой части равен
ства (1.47), знать уравнение кинетики процесса, т. е. функцию К (у). При этом объект может быть и иестациоиариым, иапример рабочий объем V может медленно меняться; функции К(у) может содержать зависящие от времени коэффициенты и т. д. Если же скорость изменения V соизмерима с у, это надо учесть при записи уравнения (1.47), что приведет к изменению закона управления, синтезированного с помощью изложеииого подхода
На первый взгляд, желаемое уравнение системы можно задать произвольно, и найденный закон управления обеспечит сколь угодно высокое качество переходных процессов. Подобное представление создается вследствие того, что при синтезе не учитывались ограничения на множество возможных значений управления. Так, в примере с химическим реактором G не может быть отрицательным и не может превышать некоторого предельного значения. Эти ограничения можно учесть путем выбора at и аг в желаемом уравнении с учетом диапазона изменения х и у°.
В ряде случаев множество допустимых управлений может состоять из отдельных фиксированных значений и. В этом случае полезно учесть, что для выполнения равенства между фактической и желаемой кривыми изменения у равенство между их высшими производными может быть выполнено лишь в ' среднем на каждом достаточно малом (по сравнению с длительностью переходного процесса) отрезке времени. Это значит, что управление может меняться, принимая, например, лишь два фиксированных значения, одно из которых больше, а другое меньше рассчитанного по формуле (1.47), но так, чтобы среднее значение совпало с расчетным. Формально это будет означать замену управления и выражением
и (0 = у (0 + »mln [1 — у (0], (1.48)
в котором функция у удовлетворяет неравенству O^y^l. Равенство (1.48) нужно подставить в условие (1.45) и разрешить его относительно у- Найденная функция покажет, в течение какого времени в окрестности момента t управляющее воздействие должно принимать максимально возможное значение.
В системах с переменной-структурой управляющим воздействием нужно считать параметры регулирующего устройства, которые обычно принимают два значения, переключаясь между -«ими так, чтобы поведение системы было ближе к желаемому. Такие системы близки к системам, синтезированным на основе 'Изложенного выше подхода. Режим с быстрыми переключениями .(скользящий) является для них типовым.
.регулирование циклического режима. При циклическом режиме работы переменные, характеризующие состояние процесса, периодически изменяются. Простейшим примером циклического процесса может служить регенеративный теплообмен, когда Насадка поочередно контактирует с горячим и холодным потоками, передавая тепло от одного потока к другому.
Система регулирования таких процессов должна стабилизировать фазу и амплитуду колебаний переменных. Регулятор (обычно импульсный) получает информацию периодически с интервалом, равным периоду колебаний, и меняет форму или интенсивность управляющих воздействий, представляющих собой периодические функции.
В регенеративном теплообменнике, например, регулируемой величиной является средняя за цикл температура нагреваемого потока. Ее значение поступает на вход регулятора периодически, с интервалом То, равным продолжительности цикла. При этом регулятор изменяет средний расход греющего потока.
1.5. ПРЕДВАРИТЕЛЬНЫЙ ВЫБОР СТРУКТУРЫ
И ОЦЕНКА ПАРАМЕТРОВ СИСТЕМЫ РЕГУЛИРОВАНИЯ
При проектировании систем регулирования технологических процессов необходимо выбрать структуру системы и дать предварительную оценку параметров регуляторов. Сведения о динамических свойствах процесса зачастую получают по данным о действующих объектах аналогичного типа или на основе аналитического описания отдельных элементов процесса. После того, как система регулирования установлена и технологический процесс запущен, параметры регуляторов (а иногда и структуру системы) приходится уточнять.
Выбор структуры АСР и параметров регуляторов целесообразно проводить в такой последовательности:
оценить динамические свойства объекта, интенсивность помех и требования к качеству регулирования; все эти сведения являются исходными данными для последующих расчетов;
оценить связи между Переменными в статическом режиме, выяснить возможность создания системы регулирования, установить число статически независимых управляющих воздействий и регулируемых параметров;
выбрать параметры регуляторов и оценить качество регулирования для различных законов регулирования в одноконтурных системах;
предварительно выбрать способ улучшения качества регулирования.
Предварительная оценка характеристик процесса регулирования. Характеристики объекта, как правило, нелинейны, однако в системах стабилизации большая часть переменных меняется в сравнительно узкой области. Поэтому будем считать (см. раздел 1.1), что введенные выше вектора у, и, г представляют собой отклонения соответствующих переменных от их средних значений, а характеристики объекта в окрестности заданного номинального режима могут быть линеаризованы. В линейном приближении связи между возмущающими воздействиями г, регулирующими воздействиями и и выходными переменными у
можно охарактеризовать с помощью матриц передаточных функций Wv(p), Wp(p) (см. рис. 1.1).
Так как на этапе предварительного выбора системы регулирования характеристики объекта известны очень приближенно, в подавляющем большинстве случаев динамику процесса можно охарактеризовать одной из двух передаточных функций [42]:
а) передаточной 'функцией статического объекта первого порядка с запаздыванием
Тст(р) = йе-'п/(Тр+1), (1.49)
б) передаточной функцией астатического объекта с запаздыванием
lFac(p) = e~'rt/(Tp). (1.50)
Амплитудно-фазовые характеристики и способы определения параметров этих объектов по их переходным функциям показаны на рис, 1.49. Таким образом, в первом приближении динамические свойства объекта по каждому из каналов могут быть охарактеризованы постоянной времени Т, временем чистого запаздывания т, а для статического объекта — еще и коэффициентом усиления k.
Для выбора структуры системы регулирования наряду с динамикой объекта нужно приближенно оценить характеристики возмущающих воздействий. В качестве таких характеристик обычно принимают максимальное отклонение Az или среднеквадратичное отклонение ог.
Рис. 1.49. Приближенные способы определения параметров передаточных функций по переходным функциям h(f) и вид АФХ для статического (а) и астатического (б) объектов
Рис. 1.50. Схема куба ректификационной колонны с кипятильником
Наконец, нужно оценить необходимую точность стабилизации каждой из составляющих у. По технологическим условиям процесса эта точность может быть охарактеризована предельно допустимым
отклонением Ду, либо среднеквадратичной ошибкой ау. Если известно только одно из этих значений, второе можно найти из соотношения
(1-51)
Аналогично для Az и аг имеем: Az~3oz.
Исходные данные для выбора структуры системы удобно свести в таблицу вида 1.4 (стр. 81), где в первой строке приведены выходные переменные и требования к их точности; в первом столбце приведены управляющие и возмущающие воздействия и их характеристики; во внутренних клетках таблицы записаны параметры, характеризующие динамику объекта по каналу от соответствующего управляющего или возмущающего воздействия к выходной координате.
Проиллюстрируем выделение различных групп переменных на примере куба ректификационной колонны с выносным кипятильником (рис. 1.50). Куб колонны представляет собой емкость, заполненную кубовой жидкостью с концентрацией ключевого компонента ск; уровень жидкости L. Жидкость находится при температуре кипения; из выносного теплообменника в колонну поступает паро-жидкостная смесь, сепарируется, и паровой поток подается в верхнюю часть колонны, а жидкость стекает обратно в куб. В свою очередь, из нижней части колонны жидкость отбирается, часть ее направляется в кипятильник, а часть — в сборник готового продукта. Расход жидкости в сборник обозначим G, давление в колонне Р, расход пара в колонну V, расход греющего пара в кипятильник GrP, энтальпию пара qrp, поток флегмы из верхней части колонны в куб Сфл.
Выходными переменными являются концентрация и температура в кубе, а также уровень L; управляющими воздействиями могут быть расход греющего пара в кипятильник и расход целевого продукта G. Возмущениями являются расход флегмы, давление в колонне, энтальпия греющего пара. При этом по емкости куба и номинальным значениям расходов потоков можно оценить постоянные времени; по статическим зависимостям, в частности по кривым равновесия, связывающим концентрацию и температуру в статическом режиме, можно найти коэффициенты усиления. Динамические свойства кипятильника можно оценить по результатам анализа подобных аппаратов
и по имеющимся приближенным аналитическим моделям. Аналогичную оценку можно дать предельным и среднеквадратичным отклонениям Де и ас, AL и aL.
Анализ статических связей между переменными. Цель такого анализа — выявление статически независимых управляющих воздействий и регулируемых параметров.
Связи между различными переменными могут возникать вследствие выполнения условий материального и теплового баланса, действия тех или иных физико-химических законов.
Например, при регулировании уровня в емкости массовые расходы поступающей и отводимой жидкости в статическом режиме должны быть равны, а уровень в емкости должен быть постоянным. Таким образом, только один из двух расходов является независимым. Если на входе в емкость и на выходе из нее имеется несколько потоков, то условие соблюдения материального баланса уменьшает число независимых расходов на единицу. В кубе ректификационной колонны концентрация и температура жидкости при постоянном давлении связаны в статическом режиме однозначной зависимостью, так как кубовая жидкость находится в состоянии кипения.
Связи между выходными переменными возникают еще и потому, что в системе регулирования часть из них вычисляют, используя значения других переменных. Например, массовый расход газа рассчитывают, используя его объемный расход, температуру, давление и т. п.
При выборе структуры системы регулирования ограничением является следующее правило: переменные, подлежащие стабилизации, следует выбирать таким образом, чтобы они были статически независимы друг от друга, т. е. чтобы в статическом режиме" ни одна из них не определялась значениями других.
Так, в кубе ректификационной колонны нельзя регулировать температуру 0 и концентрацию с с помощью двух регуляторов. В качестве регулируемых переменных может быть выбран уровень и одна из величин — с или 0.
Нарушение указанного правила приводит к статической переопределенное™ системы. Даже если задания регуляторам согласованы со связью между переменными, т. е. условия У1 = У°1 и У2 = У°2 удовлетворяют объективно существующей связи
система окажется неработоспособной, ибо неизбежные ошибки в задании y°t и у°2 приведут к тому, что равенство f(y°i, у°2) — = 0 не будет выполнено. Последнее означает, например, что емкость, у которой стабилизированы расходы на входе и выходе, постепенно переполнится или опустеет, несмотря на то, что стабилизаторам расходов установлены одинаковые задания. Поэтому стабилизировать можно лишь один расход и не-
Рис. 1.51. Изменение вектора регулируемых переменных под действием управлений для статически неуправляемого объекта зависимый от него в статическом режиме уровень в емкости.
Для того чтобы технологический процесс был статически управляем, нужно, чтобы число независимых было не меньше числа стабилизи-если размерность вектора и окажет-
управляющих воздействий руемых переменных (т. е.
ся меньше размерности статически независимых составляющих вектора у, то некоторые составляющие у невозможно будет скомпенсировать изменением и).
Однако и в том случае, когда размерность и больше размерности у, объект может оказаться статически неуправляемым, если матрица К. коэффициентов усиления, связывающих в статике векторы у и и, имеет неполный ранг.
В статике в линейном приближении векторы и и у связаны соотношением у—Ки, где К. — матрица коэффициентов усиления передаточных функций Wu. Для объекта, астатического по некоторому каналу, в матрице К. коэффициент усиления полагают сколь угодно большим.
Матрица К имеет неполный ранг, если нельзя выделить ни одного определителя той же размерности, что и у, отличного от нуля. Геометрически это означает, что изменения вектора у, связанные с изменениями управлений, лежат в пространстве У в некоторой плоскости, и только те возмущения, которые вызывают отклонения у вхэтой плоскости, могут быть скомпенсированы управляющими воздействиями.
Пример. Пусть связь между векторами у и и имеет форму
Уз I = 1 31 I “1 I
Уз I 2 6 I I и2 I
что соответствует равенствам
У1 = “1 + 3«2; у2 = 2«1 + 6«2
Изменения управляющих воздействий вызывают только такие изменения yi и уг, при которых ДУ1/ДУ2=О,5. Таким образом, вектор у может в результате изменения и меняться вдоль прямой MN или прямых, параллельных ей Если в результате действия возмущений зиачеиия yt и уг оказались равными Ум и Уза (рис. 1.51), то изменением и нельзя возвратить вектор у в начало координат.
У1 I I ^11^12^13
Уз • I ^21^22^23
Если размерность у равна двум, а размерность и — трем, связь между у и и в статике имеет форму
«1
«2 •
«3
Объект статически управляем, если хотя бы один из определителей
д = I
I ^21^28
^12^18
^22^23
д8 _
отличен от нуля.
Анализ статики объекта по каналам возмущений позволяет в ряде случаев уменьшить число регулируемых переменных. Связь между составляющими у и возмущениями г в статике имеет форму
f/v = kvjZj >
i
где kvl— коэффициенты усиления по каналам возмущения. Если выполнено неравенство
21 kvi IДг; <
/
то возмущающие воздействия не вызывают статического отклонения уч, большего, чем это допустимо. Динамические же отклонения yv, как следует из передаточных функций (1.49),
Таблица 1.2. Формулы для приближенного выбора параметров регуляторов и оценки среднеквадратичной погрешности регулирования
Передаточная функция объекта регулирования
Тип регулятора ke ^/(Tp+l) e~pt/Tp
П-регулятор *i—4 x
k ffz аУ~ Si
"y—^x+ks^
ПИ-регуля- o 0,9/ st T \ = v + °>5) St T 51 = 0,9-1- —
тор So = O,2S<on So = O,2T/t2
„ koz
”y- ks0T+i аУ- S0T
ПИД-регу-лятор 1,2/ st T \ = 4 т +0’5) я T
So = 0,3251Шя T So = 0,45 T2
s, S« = 0,75—— 2 шя Ss = 0,45T
Gz
' kS0T+l ^y- S0T
Рис 1.52. Зависимость произведения <оят от отношения Т/т н пример расчета:
т=2=>7’/г«=0,5=>(олТ1=2,3=:>а>л“1,5
(1.50), заведомо меньше Ду. Таким образом, нет необходимости в специальном регуляторе для стабилиза
ции yv.
После синтеза системы регулирования следует проверить, не приведут ли изменения управляющих воздействий к существенным отклонениям уч в результате взаимосвязанности ка-
налов регулирования.
Выбор параметров регуляторов и оценка качества регулирования. При выборе параметров передаточных функций типовых промышленных регуляторов:
пропорционального (TI-) R(p) =—Sb интегрального (И-) R(p) =—So/p, пропорционально-интегрального (ПИ-) R(p) =—S°/p—Si, пропорционально-интегрального с импульсом по производной (ПИД-) R(p) =— So/p—Si—S2p
широко используют приближенные формулы (см. раздел 1.2), основанные на методике Циглера — Никольса. Формулы, связывающие настройки регуляторов So, Sb S2 с характеристиками объекта, собраны в табл. 1.2. В этой таблице для статического объекта через соя обозначена частота, на которой АФХ объекта пересекает отрицательную действительную полуось (имеет фазовый сдвиг, равный л). Она является корнем уравнения
®ят arctg Т<йп — л.
(1.52)
и лежит в пределах п/2т <оя л/т.
Удобно находить соя по кривой, изображенной на рис. 1.52.
В табл. 1.2 приведены верхние оценки ау для среднеквадратичного отклонения регулируемой величины при возмущающем воздействии, имеющем дисперсию o2z. Эти оценки получены следующим образом. Для замкнутой системы с ПИ- и ПИД-регуляторами, настройки которых выбраны по формулам табл. 1.2, амплитудно-фазовая характеристика приближенно запишется в виде
IFзс (/со) = , j . .
Sq (Т/и 4-1) I io) 4-11
Известно, что при воздействии на систему случайного процесса со спектральной плотностью Sz(a>) среднеквадратичная
ошибка выходной координаты у может быть подсчитана как
ОО
/ 1 с \^2
= I — j S2 (со) Лзс2 (со) , (1.53)
о
где Азе —АЧХ замкнутой системы.
На этапе предварительного выбора структуры системы регулирования спектральная плотность s2(co) неизвестна, но можно оценить ее дисперсию, связанную со спектральной плотностью, выражением
оо
V j* S2 (<o)dco = <т22.
b
Для оценки ву сверху воспользуемся тем, что при заданной о2 среднеквадратичное отклонение у максимально, когда вся энергия возмущающего сигнала сосредоточена на той частоте, на которой функция Лзс(со) максимальна. Обозначим эту частоту сор (она близка к рабочей частоте замкнутой системы) и примем
Sz (со) = ms/b (со — шр).
Подставляя это выражение в формулу (1.53), получим оу = = ОгЛзс(<Ор_).
Для П-регулятора модуль АФХ замкнутой системы достигает максимума на частотах, близких к нулю, и равен для статического объекта
Лзс (Ир) W Лзс (0) = */(1 + *31).
а для астатического объекта
Лзс (Ир) ~ Лзс (0) = 1/Si-
В системах с ПИ- и ПИД-регуляторами при выборе настроек по табл. 1.2 частота <ор оказывается приблизительно равной (S0k/T)i/2; тогда
k
Лзс (Ир) ~ j _|_ ks<)T .
Эти величины и использованы для получения оценки среднеквадратичной погрешности.
Если возмущающих воздействий несколько, оценку для ау можно подсчитать по тем же формулам, подставив
<4 = [2 (^ПР)2]1/2-i
(1-54)
Здесь стпр27 — среднеквадратичные значения возмущений, приведенные ко входу предполагаемого канала регулирования.
Приведение осуществляется по формуле
/ JI (ito) | • Ло \V*
<ЪП₽ = I ’Лё-------------- I . (!•»)
У р 1Гр (4<о) [» dco J х о 7
в которой WB) и Wp — частотные характеристики объекта соответственно по каналам возмущения и регулирования. Для статического объекта с передаточной функцией Ц7Ст(р) =k/(Tp-{-+ 1)е-₽т
00
J | Гст (Йо) | « dto = лй2/2Т, о
it формула (1.55) примет вид:
^ПР = аг;-^-1/7^}. (1-56)
где ks, kp и Тв, Тр — коэффициенты усиления и постоянные времени по каналам возмущения и регулирования.
Оценка возможностей использования одноконтурных АСР. Для выбора локальных контуров регулирования удобно результаты расчетов свести в таблицу, характеризующую возможности использования тех или иных каналов регулирования. Длякаж< дого из управляющих воздействий uv и регулируемых переменных у, при тех или иных типовых законах регулирования в таблицу вносят отношение a, v рассчитанной оценки ау, к допустимому отклонению. Если это отношение оказывается больше единицы, или если между управлением uv и переменной нет связи, ставят прочерк. Таким образом, если прочерки стоят в какой-либо строке, это значит, что данное управляющее воздействие неприменимо. Если же прочерки стоят во всех клетках некоторого столбца, это значит, что данный параметр нельзя стабилизировать с требуемой точностью с помощью одноконтурных АСР. Такие строки и столбцы на данном этапе исключаем из рассмотрения.
Наиболее простой закон регулирования — пропорциональный, поэтому в первую очередь проверяем возможность использования П-регулятора. Показателем качества регулирования в этом случае служит наибольшее из двух чисел — alv (отношение среднеквадратичной ошибки к максимальному допустимому ее значению) или 0; v — отношение статической ошибки регулирования k
— 1 4- Дг . (Е57)
к допустимому отклонению Аг/,.
Таблица 1.3. Показатели качества регулирования в одноконтурных АСР с П-регулятором
Управ ляющее воздействие 1 Регулируемы* параметр | Управ-ляющее воздействие Регулируемый параметр
VI Уз УЗ УЗ м У1 УЗ Уз Уз Уз
«! — 0,9 0,2* — — «„ — 0,6 0,5 0,7 0,65 «а — 0,7 — 0,4* 0,3 „ _ о,4 — 0,8 0,45 «з — 0,8 0,6 0,45 0,5 _ 0 3, _ 0 45 0 2, «4 — — 0,4 — — и& — — 0,8 — — й9 — 0,6 0,7 — 0,8
При подсчете статической ошибки регулирования значения каждого из возмущений Az; приводят ко входу канала регулирования из условия
Az;nPfe = Azjkj. (1.58)
и в формулу (1.57) подставляют наибольшее приведенное статическое возмущение. Такой подход правомерен, потому что вероятность статического отклонения одновременно нескольких возмущающих воздействий от номинальных значений на предельную величину очень мала.
При выборе контуров регулирования каждой из регулируемых переменных у, нужно сопоставить одно из управляющих воздействий uv. При этом необходимо учесть, что одно и то же управление нельзя использовать для регулирования двух или более величин. Критерием правильности выбора контуров регулирования может служить наибольшее значение показателя качества для выделенных контуров. При оптимальном выборе это значение должно быть возможно меньше.
Рассмотрим пример выбора одноконтурной АСР с П-регу-ляторОм (табл. 1.3). В отличие от показателей качества отдельных контуров регулирования введем показатель качества АСР процесса:
П = шах [ajv, 0jVJ.
/.v
Требуется так выбрать управления для каждой из переменных yh чтобы, во-первых, значение П оказалось минимальным и, во-вторых, каждое управление было использовано лишь для одной регулируемой величины.
Поставленная задача относится к так называемым задачам о назначениях, для решения которых при большой размерности у и и имеется целый ряд алгоритмов, ориентированных на использование ЦВМ. Однако при небольшой размерности этих векторов приемлемое решение можно найти с использованием следующей процедуры.
1-й шаг. Выбирают начальное приближение искомого решения. Для этого временно отбрасывают второе из приведенных
требований и для каждого ys находят управление, обеспечивающее минимальное значение показателя качества одноконтурной АСР с регулятором данного типа (в табл. 1.3 соответствующие числа отмечены звездочкой). Максимальное из отмеченных значений П* (в табл. 1.3 оно равно 0,4 и соответствует контуру г/4~ыг) заведомо не превосходит Птш- Одиако может оказаться, что одно и то же управление сопоставлено нескольким регулируемым переменным (в табл. 1.3 оказалось, что ив используется для регулирования у2 и у5). Если такой ситуации не возникло, найденное решение удовлетворяет условиям задачи, и П* = = Пщ|п.
2-й шаг. Для регулируемых переменных, которым оказалось сопоставлено одно управление, ищут подходящее среди «свободных» управлений, т. е. управление, которое на первом шаге не сопоставлено ни одной из переменных у, и для которого показатель качества минимален. В рассматриваемом примере для у2 и ув находят «свободное» управление «7, которое при регулировании у2 может обеспечить показатель качества 0,4. Так как это значение не превосходит 'П*, задача решена, ибо показатель качества системы не ухудшился, а все ограничения выполнены.
Таким образом, структура системы определяется соответствиями у2~м7; у3~«i; и2; уъ~из, а Птт=0,4.
Прочерк в первом столбце табл. 1.3 говорит о том, что параметр у\ нельзя регулировать при использовании одноконтурной системы с П-регулятором. Для всех подобных переменных на следующем этапе составляют таблицу показателей качества при использовании ПИ-регулятора и аналогичным образом выбирают контуры регулирования. Затем, если необходимо, выбирают контуры регулирования с ПИД-регуляторами. Если в некоторых столбцах таблицы стоят прочерки по всем управлениям для всех типов регуляторов, значит, необходимо использовать дополнительные средства улучшения качества регулирования. Предварительный выбор схемных методов улучшения качества регулирования. Среди методов повышения качества регулирования за счет усложнения структуры систем регулирования наиболее распространены следующие:
1) введение импульса по возмущению; 2) введение динамической компенсации в системах взаимосвязанного регулирования; 3) использование каскадных АСР; 4) введение в АСР импульса по значению промежуточной координаты.
Подробно каждый из этих способов и выбор параметров корректирующих устройств изложены в разделе 1.2. Здесь мы остановимся только на возможностях предварительной оценки полезности использования схемных методов повышения качества при выборе структуры системы.
Введение в систему регулирования импульса по возмущению целесообразно в том случае, если показатель качества а при выборе любого из типовых законов регулирования для данного
параметра оказался больше единицы, причем в формуле (1.54) для расчета среднеквадратичной величины приведенного возмущения доминируют одно или два возмущающих воздействия, которые доступны прямому или косвенному измерению. Такое введение полезно и тогда, когда одно из доступных измерению возмущений имеет значительное статическое отклонение Дх. При правильном выборе характеристик динамического компенсатора (см. разд. 1.2) их влияние существенно уменьшается, и соответствующие слагаемые в уравнении (1.54) можно исключить. Показатель качества регулирования при этом уменьшится (если он станет меньше единицы, соответствующее значение можно подставить в таблицу и использовать при дальнейшем анализе).
В системах с взаимосвязанными параметрами регулирующие воздействия влияют не только на «собственную», но и на другие регулируемые переменные, являясь для них дополнительными возмущениями, которые следует учитывать при расчете показателей качества регулирования аир. Если вклад этих возмущений в среднеквадратичную ошибку значителен и показатель качества регулирования больше единицы, нужно ввести динамические компенсаторы, т. е. перейти к системе автономного регулирования.
Если после компенсации влияния возмущений для регулирования некоторых параметров нельзя использовать одноконтурную систему (т. е. соответствующие таблицы остались незаполненными), целесообразно оценить возможности каскадной АСР (рис. 1.53). В этой системе (см. разд. 1.2.2) вспомогательный регулятор поддерживает на заданном уровне промежуточный параметр yvi, а основной регулятор меняет задание вспомогательному так, чтобы стабилизировать регулируемую величину
При использовании каскадной АСР возмущающие воздействия z, влияющие на yv через изменение уу i, гасятся во внутреннем контуре. Требования к статической ошибке поддержания yv\ обычно невысоки, и во вспомогательном контуре может быть использован П-регулятор с параметром настройки 5ц, найденным по приближенным формулам (табл. 1.2) для объекта с передаточной функцией Wi(p). С помощью той же табли-
Рис. 1.53. Структура каскадной АСР
Рис. 1.54. Структура АСР с импульсом из промежуточной точки
Рис. 1.55. Схема колонны ректификат
цы можно оценить Oyi — средн квадратичное отклонение пром жуточной координаты.
Для вычисления среднеква, ратичного отклонения основнс регулируемой переменной сл дует перейти к эквивалентнс системе, в которой возмущающ! воздействия z заменены возм щением yvi, влияющим на j через передаточную функци W2 (р) и имеющим дисперси о2й1. Передаточная функция э Бивалентного объекта Ws равь произведению передаточнс функции системы регулирована
yv 1 на W2. Передаточная функция вспомогательного контур
регулирования, содержащего П-регулятор, равна (см. табл. 1.J
W (р)__—Sii^i.Cp)—
bW~ l + S^Cp)’
где через Sn обозначен параметр настройки вспомогательного регулятора.
Аппроксимируя передаточную функцию эквивалентного об' екта WB(p) W2(p) апериодическим или интегрирующим звено с запаздыванием, оценивают ayv для одноконтурной системы (г формулам табл. 1.2) с тем или иным типом основного регулятор и рассчитывают соответствующие значения показателя качеств;
Для схемы с отбором импульса из промежуточной точк (рис. 1.54) параметры динамической связи, имеющей обычн вид реального дифференцирующего звена
/?д(Р) = Ш7’дР+1)>
стремятся выбрать так, чтобы эквивалентный объект, выхода которого является сумма У\'+у, в статическом режиме вел себ как объект с передаточной функцией (р)W2(p), а при высс ких частотах был близок к объекту с передаточной функцие Wt(p)kc/Tc. Если W{(p) и W2(p) аппроксимированы аперис дическими звеньями с запаздыванием, то передаточная функци эквивалентного объекта приближенно равна
1Гэ(р) = й1е-^/(Т1р+1А)-
По ней и выбирают параметры регулятора (с использование! формул табл. 1.2) и рассчитывают ау и соответствующее значе ние а.
Таблица 1.4. Предварительные сведения о динамике регулируемого объекта
Выходные переменные и их характеристики
01 - Уз
Ajh-0.15; <ту1==0,45 Л02-О.16; 0^2=0.45
Входные переменные
Управление Лц= 12,8; Ти = 16,7; ЙИ = 6,6; Т12 = 10,9;
«1 Tjj = 1 т12 = 7,0
«2 Л21 = —18,9; Т21 = 21,0; *22 = -19,4; Т22'=14,4;
Возмущение т21 = 3 т2а = 3
Дг=0,16 *21 = 3,8; Тг1 = 14,9; *22 = 4,9; Тг2=14,9;
«,=0,28 Ъ1 = 8> т22 = 3,4
Примечани г — в кг/мнн е Т, X — в мин.; у — в мольных ДОЛЯХ, U] — в кмоль/мин, «2—в кг/мин„
Пример. Проиллюстрируем последовательность применения изложенной, методики на примере выбора системы регулирования для колонны ректификации смеси метанол — вода [43 ] Схема колонны показана на рис. 155. Регулируемыми величинами являются мольные концеитрацни метанола в дистилляте н кубовой жидкости yi и уг, а также уровни жидкости в кубе' и в дефлегматоре Контуры регулирования уровней можно рассматривать в первом приближении независимо от концентраций Будем полагать [43], что регулирование уровня в дефлегматоре осуществляется изменением расхода верхнего продукта, а в кубе — нижнего. Далее будем рассматривать только регулирование состава. Управляющими воздействиями являются поток пара на входе в кипятильник и2 и поток флегмы, направляющийся в колонну ui; возмущением—поток разделяемой смеси.
Характеристики динамики колонны и требования к качеству регулирования можно свести в таблицу (табл. 1.4).
Определитель матрицы коэффициентов усиления
I 12,8; 6,61
*=1-18,9: -19,4 | = -123’6’
т. е. ие равен нулю, и следовательно, объект статически управляем.
Максимальные отклонения yi и уг в статическом режиме при отсутствии регуляторов равны
ДУ1 = 3,8-0,16 = 0,61 >0,15; Лу2 = 0,16-4,9 = 0,78 >0,16.
Таким образом, установка регуляторов необходима.
Расчет настроек регуляторов по приближенным формулам табл. 1 2 дает следующие значения.
У правляю-щее воздействие Закон регулирования Регулируемые переменные
01 02
«1 п пи ПИД S] = 1,06 S0=0,30; Sj=0$5 So=O,48; S^l.27; S2=0,60 Si=0,26 So=O,O12; Si=0,23 So=0,019; ^-(Wl; S2=0,86
«2 п пи ПИД Si=—0,32 So=—0,032; S^—0,29 So=—0,051; Sj=—0,38, S2 0,52 Si=—0,22 So=—0,023; St=—0,20 So=—0,037, Si=—0,26; S2=— 0,342
Для приведения возмущающих воздействий ко входу каждого из каналов регулирования нужно учесть, что возмущение, приведенное к выходу у\, складывается из влияния возмущения z и воздействия второго контура регулирования по перекрестному каналу, аналогично — для возмущения контура регулирования у2. Поэтому, строго говоря, нужно решить совместно систему уравнений
2 я . 2 ^21^22 2 ___~2 ________^11________
О я-а 2 2 Тя + а У2 k\2T21 ’ а У1 - а « Л (Лц501Тп + I)2 ’
- . Л Л2- . *212Л1 2Г22
° 22 2 2 Тя Л»иТ12 ’ ayi-°n n(*22S02T22+I)2 ’
относительно ау1 и ау2 В этих уравнениях o% — эквивалентные дисперсии возмущений, приведенных к выходу соответствующего канала регулирования Однако при первом просчете можно упростить задачу, заменив в уравнениях для az/ дисперсии o2yi и а2у2 их максимально допустимыми значениями. Расчет при таком допущении приводит к следующим значениям <rznp о>пр = = 0,16 и <rznp=0,13 при выборе и{ для регулирования yi и и2 — для регулирования у2, огпр=0,12, а2пр=0,34 при выборе И] для регулирования у2 и и2—для регулирования yt (первыми указаны приведенные ко входу канала регулирования yi среднеквадратичные значения возмущений)
Подсчитав оценки качества регулирования для П-регулятора, сведем их в таблицу вида
U й &2 U У1 №
ац=0,31 С112== 1,3 ^2t=0,71 Ct22= 1,0
₽11=0,26 ₽12=1,» «2 ₽21=0,54 ₽22= 1
Из расчетов следует, что концентрацию кубового остатка у2 нельзя регулировать с использованием П-регулятора ни по одному из каналов При использовании для регулирования у2 ПИ-регулятора по каналу получим а>1, а по каналу ы2—а=0,78. Таким образом, простейшей схемой регулирования колонны разделения смеси метанол — вода является схема с использованием П-регулятора (меняющего расход флегмы для поддержания .концентрации дистиллята), ПИ-регулятора (Меняющего расход пара в куб для поддержания концентрации в нем). При повышении требований к качеству регулирования эту схему придется усложнить
1.6. ОПТИМАЛЬНАЯ ФИЛЬТРАЦИЯ И ПРОГНОЗИРОВАНИЕ СЛУЧАЙНЫХ ПРОЦЕССОВ. ОПТИМАЛЬНОЕ ОЦЕНИВАНИЕ СОСТОЯНИЯ ОБЪЕКТА
Юдин из способов формирования требуемого управляющего воздействия— синтез такой линейной системы (формирующего устройства), реакция которой на заданный входной сигнал совпадает с желаемым сигналом m(t) или мало от него отличается. Способ решения такой задачи позволяет понять существо методов оптимальной фильтрации и прогнозирования стационарных случайных процессов.
Обозначим импульсную характеристику формирующего устройства w(t). Для физически реализуемой системы эта характеристика удовлетворяет требованию
ю(/) = 0 при /<^0. (1.59)
Рис. 1.56 Расщепление желаемого т
сигнала m(t) на т+(7) и т_(Г)
/ । Ч,.
t
Первоначально предположим, что сигналом на входе формирующего устройства является d-функция. Тогда его выходом является характеристика ®(7); она должна минимизировать-квадратичное отклонение
оо
7 = J(m(0 —щ(/))2<й. (1.60)
—- оо
Если функция т(7) равна нулю при 7<"0, то решение задачи очевидно: w*(t)
Если m(t) отлична от нуля при 7<0, то импульсная характеристика, минимизирующая (1.60), должна быть равна m(f) лишь при 7>0 и обращаться в нуль при отрицательных значениях t. На рис. 1.56 показаны такая функция т (7) и оптимальная импульсная характеристика.
Таким образом, во временной области решение задачи очевидно. Несколько сложнее решить ее, если условия заданы в частотной области. Например, задано преобразование по-Фурье ЛГ(гю) функции т (7) и требуется найти амплитудно-фазовую частотную характеристику ^(гсо) формирующего устройства. Для определения нужно представить M(ia)
в виде суммы двух слагаемых:
М (ia) = М+ (/со) + М_ (йа). (1.61)
Первому слагаемому соответствует оригинал т+(7), равный нулю при отрицательных значениях 7, а второму—при положительных. Разложение (1.61) называют расщеплением. Равенство в частотной области запишется следующим об-
разом:
IF* (/со) = Л1+(7ш). (1.62)
Если функция М (iat) дробно-рациональная, то разложение (1.61) можно выполнять, не переходя к оригиналам, а воспользовавшись тем, что для функции f(7), равной нулю при 7<0 и стремящейся к нулю при 7-х», преобразование Лапласа F(р) имеет все полюсы в левой полуплоскости комплексного переменного. Наоборот, функция, равная нулю при 7>0, имеет преобразование Лапласа с полюсами в правой полуплоскости.
Пример. Пусть
.... , /со ссо
М = со2 4- 1 = (ио+ 1)(/со — 1)’
Преобразование Лапласа получим из преобразования Фурье заменой /а иа р'
р АВ
М(р)= =v+T +7^Т-
В первом из этих слагаемых полюс р°=—1,так что это М+, во втором полюс .рацеи +1, это М-. Коэффициенты А и В определим, приведя последнее равенство к общему знаменателю и учитывая, что числитель полученного выражения должен равняться р:
Ар 4- А + Вр — В — р.
Из условий равенства коэффициентов при одинаковых степенях р получим’ Л-|-В=1, А—В=0. Отсюда Л=В=0,5.
Таким образом
= 2(fa>+i) =
Обобщим задачу синтеза формирующего устройства, предполагая, что на его вход подается сигнал g(t) и требуется так подобрать импульсную характеристику и»(/), чтобы выход устройства y(t) минимально отличался от желаемого сигнала m(t).
Если g(t)=O при t<0, задача сводится к предыдущей, так как при t<.0 р(^)=0; при £>0 нужно сформировать y(t) равным В частотной области
Г* (/®) = G (Z®) IF* (i®) = Af+ (i®),
•откуда
W* (iai) = M+ (i®)/G (i®).
Если g(t)^=O при t<ZO, поступим следующим-образом. Отбросим условие физической реализуемости и запишем в частотной области условие равенства желаемого сигнала и сигнала на выходе формирующего устройства:
G(i®)IF(f®) = Af(i®). (1.63)
Преобразуем это равенство к такой форме, чтобы оригинал слагаемого, зависящего от W(ia), обращался в нуль при t<ZO. Для этого представим G(ia) в виде
G (i®) = G+ (i®) G~ (i®).
Здесь первому сомножителю соответствует оригинал, равный нулю при t<ZO, второму — при t>0. Такое представление называют факторизацией. Поделим обе части равенства (1.63) на G~{i&). Получим:
G+ (i®) IF (i®) = М (toj/G- (I®). (1-64)
Согласно условию физической реализуемости, оригинал функции W(ia) и, следовательно, произведения G+(im) W(ia), должен обращаться в нуль при £<0; при выбором wможем добиться равенства функций времени, соответствующих левой и правой частям выражения (1.64). Таким образом, наи-64
Рис. 1.57. Схема, иллюстрирующая постановку задачи оптимальной фильтрации
лучшему выбору соответствует условие
Л m Г М (to) 1 G+(to)IF(to) = |^=y-£.
Индекс «плюс» в нижней части квадратной скобки соответствует расщеплению дроби M[G~ на два слагаемых:
М Г М 1 Г М 1
G~ G~ j+ + [ G~ J_"
Оригинал первого равен нулю при К.0, второго — при t>0. Окончательно получим:
IF* (to) =
I- ( Af(to) ] G+ (to) [ G" (to) ]+'
Таким образом, учет требований физической реализуемости формирующего устройства осуществляют в частотной области с помощью двух операций — факторизации и расщепления. Факторизацию используют для того, чтобы множителем при W(ioj) оказалась функция, которой во временной области соответствует оригинал, равный нулю при t<X>. Операция расщепления соответствует во временной области разбиению оригинала на два слагаемых, одно из которых определено для другое — для t<ZO-
Оптимальная фильтрация и прогнозирование случайных процессов. Пусть на вход линейной системы (фильтра) подается случайный сигнал g(t), равный сумме полезного сигнала y(t) и помехи e(t). Для y(t) и e(t) известно, что это случайные стационарные процессы со спектральными плотностями Sy(®) и Se(©). Требуется найти такую характеристику фильтра W(ias), чтобы сигнал y(t) на его выходе минимально в среднеквадратичном смысле отличался от желаемого сигнала (рис. 1.57). В свою очередь, желаемый сигнал тем или иным способом связан с полезным сигналом. Если, например, m(t)=y(t), то задача фильтра заключается в выделении сигнала из его смеси с помехой. Если m(t)—dyldt, фильтр реализует помехоустойчивое дифференцирование y(t). Если m(t) =y(t+x), осуществляется помехоустойчивый прогноз полезного сигнала. В общем случае связь между y(t) и m(t) удобно задать в частотной области в виде
М (to) = Ц7ЭТ (to) Y (to).
При этом частотная характеристика оператора связи далеко не
всегда физически реализуема. Для задачи выделения полезного сигнала №3T(ia») = 1; для задачи дифференцирования
=йо; для задачи прогноза №Эт(1ш) = е‘“’. Физически реализуема характеристика эталонного оператора только в первом из этих трех примеров.
Критерием оптимальности поставленной задачи является среднеквадратичная величина ошибки е между желаемым сигналом и сигналом у на выходе фильтра. Обозначая для краткости чертой операцию усреднения, запишем:
/="ё2= (т—у)2=т2+у2—ту—ут.
В частотной области среднеквадратичная ошибка запишется в форме
оо
1=иг f Se
—00
Здесь Se(co)— спектральная плотность ошибки, которая выражается через спектральную плотность сигнала g(t) на входе фильтра, его частотную характеристику и взаимную спектральную плотность входного и желаемого сигналов:
Se (а) = Sm (со) + S~ (со) — 3^ (to) — 3-^ (to) =
= Sm (со) + Sg (со) | W (i(0) | 2 — Sgm (to) W (—to) — Sgm (—to) W (to).
Условие минимума этого выражения по Ш'(гсо) с учетом того, что | IF(ie)) |2= W(ia) №(—icd), а производная dW(—ia>)f /dW(ia) =—1, приводят к равенству
Sg (со) W (lai) = Sgm (to). (1.65)
При этом требование физической реализуемости фильтра никак не учитывалось. Произведение Sg(m) №((ш) равно, как известно, взаимной спектральной плотности сигналов на входе и выходе фильтра Sgy(i(o).
Таким образом, амплитудно-фазовую характеристику фильтра без учета физической реализуемости следует выбирать так, чтобы взаимная спектральная плотность сигнала на входе и выходе фильтра была равна взаимной спектральной плотности входного и желаемого сигналов. Для некоррелированных сигнала y(t) и помехи e(t) спектральная плотность входного сигнала
Sg(co) = Sif(co) + se(co).
Взаимная спектральная плотность g(t) и m(t) может быть выражена через характеристику эталонного оператора Гэт (i'cd) :
Sym (to) = Sy (co) H%T (to).
Таким образом, АФХ оптимального фильтра, найденная без
учета физической реализуемости, имеет вид:
ХР /:,л — Sgm (*m) _ $у (м) Гэт (to) .,
w(l )- Sg(®) - SF(®) + Se(®) • (1,66)
Если оказывается, что найденная таким образом характеристика реализуема, она дает оптимальное решение. Однако знать эту характеристику полезно и тогда, когда она не реализуема, так как при подстановке ее в 8е (и) вычисленное значение среднеквадратичной ошибки дает тот нижний предел, меньше которого эта ошибка заведомо быть не может.
Перейдем к учету условий физической реализуемости. Аналогично задаче синтеза формирующего устройства преобразуем равенство (1.66) так, чтобы зависящее от W слагаемое имело оригинал, равный нулю при £<0. Для этого проведем факторизацию 8g (со):
Sg (to) = Sg+ (to) Sg" (to).
Оригинал первого сомножителя отличен от нуля при t^O, а второго — при t<ZO- В силу симметрии 8/(<о) функции Sg+ и Sg~ удовлетворяют равенству
Sg- (to) = sg+ (—to).
Разделив обе части этого равенства на Sg~, получим:
Sg+ (to) W (to) = Sgm (to)/Sg~ (to) (1.67)
Левая часть этого равенства для физически реализуемой функции W(ia) имеет оригинал, равный нулю при /<0, а при выбором W можем сформировать нужную функцию. Наилучшему выбору W соответствует совпадение оригиналов от левой и правой частей равенства (1.67) при t^O. После расщепления правой части равенства (1.67).
Sgm Sgm I Г Sgm
Sg Sg J+ [ Sg
где знак «плюс» соответствует функции, оригинал которой отличен от нуля лишь при t^O, получим для выбора W условие
[Sgm (t®) "I Sg-(to)']/
Отсюда
'•«wIW' <1'68)
Пример. Решить задачу об оптимальном выделении сигнала у из смеси с помехой е, если спектральные плотности Sy и S, имеют вид
sy (®) = i ш2 ; s4 (®) = 1,
а корреляция полезного сигнала и помехи отсутствует.
Рис. 1.58. Импульсная характеристика физически нереализуемого фильтра
Без учета физическое реализуемости фильтра его частотная характеристика примет форму
т / ч _ Sm(e>)_________-Sy (g>) 1
НК(«О)- Sg((0) - + - 2-J-®8 •
Соответствующая импульсная характеристика показана иа рис. 1.58 Чтобы учесть физическую реализуемость, проведем факторизацию Sg:
2 + <о2 ( 1/2 -f- to \ / 1/2*— to \
sg - se + Sy = j _|_ m2 = ( 1 + Д 1 — i® ) = sg+sg •
и расщепление Sgm/Sg~:
(t®) 1 , ico * A В
$g~ (to) ~ (1 -f- ®2) (]/2 — tco) 1 + to + Д/2*— to
= [Sgm/Sg J+ + [Sgm/Sg ]-.
Для определения А я В имеем уравнения
ЛУ24-В^=1, Л — В = 0, откуда
л = s = 1 + у2 ; [Sgm/vl+=(i + VThi + ««) *
Теперь получим
(1 + -|/2} (V2 + to) '
Оптимальным физически реализуемым фильтром оказалось апериодическое звено с оптимально найденными коэффициентом усиления и постоянной времени (экспоненциальный фильтр, см. разд. 3 3).
Обобщение задачи оптимальной фильтрации. Рассмотренная выше задача оптимальной фильтрации была обобщена в самых разных направлениях. Остановимся на одном из таких обобщений, связанным с тем, что ошибка системы для разных частот имеет различный вес. Этот фактор можно учесть, введя в критерий оптимальности весовую функцию, в результате чего он примет вид:
оо
IH = J Se (ш) И (a) da. (1.69)
—оо
Чем больше весовая функция Я(ю) на некоторой частоте, тем меньше ордината спектральной плотности ошибки, соответствующая оптимальному решению. Примером критерия, имеюще
го вид (1.69), служат обобщенные интегральные критерии, где наряду с дисперсией ошибки е учитывается дисперсия ее производных. Так, минимизация выражения
I = е2 + ув2 эквивалентна минимизации интеграла оо
1ц = J Se(co) I 1 + iwy I 2 d®.
Весовая функция 1+у2®2 на высоких частотах возрастает, поэтому спектр ошибки для оптимального фильтра окажется низкочастотным.
Полученную выше формулу для расчета АФХ оптимального фильтра нетрудно распространить на случай функционала (1.69). Для этого нужно записать условие стационарности функционала 1н по W. Очевидно, это условие будет отличаться от равенства (1.65) только тем, что левая и правая его части будут содержать в качестве множителя функцию Нш. Получим:
Sg (т) IF (fo) Н (®) = Sgm О») Я (®). (1.70)
Для расчета оптимальной физически реализуемой АФХ фильтра проведем, как и выше, факторизацию Sg и Н, после чего поделим левую и правую части равенства (1.70) на произведение Sg~H~. Получим:
w V 0“)я+ 0“) = —s7(toj— •
Для оптимального физически реализуемого фильтра оригиналы левой и правой частей этого условия должны совпадать при /^0. После расщепления правой части равенства придем к оптимальному решению в форме
.________1 Г Sgm (ta>) Н+ (im) 1
W (‘“) - H+(id,) sg+(ia>) [ Sg~ (to) (E7,)
Оптимальное оценивание состояния объекта. В задаче оптимальной фильтрации предполагались известными спектральные плотности полезного сигнала и помехи, которые могут быть найдены посредством статистической обработки реализаций этих стационарных и эргодических процессов. При этом мы не предполагали известным механизм генерации этих сигналов. Между тем, если полезный сигнал представляет собой вектор-функцию у, характеризующую состояние технологического процесса, то приближенно известна его математическая модель; часть составляющих вектора состояния или некоторые зависящие от него переменные можно измерять и по результатам текущих измерений уточнять оценку у; сигнал, а в некоторых случаях и помехи, нельзя считать стационарными процессами.
Рис. 1 59. Структура системы оценивания
Расчет функции y(t) при таких предположениях называют оцениванием состояния-, если же в момент t нужно рассчитать у(/+т), то имеем задачу оценивания с прогнозом состояния. Схема, иллюстрирующая постановку задачи оценивания, приведена на рис. 1.59. Предполагаются известными модель объекта: статистические характеристики сигналов е, g и т), характеризующие ошибки и случайные возмущения в модели, ошибки при измерении входных воздействий и при измерении переменных состояния соответственно; функция z(t) и вектор у^. Требуется оценить вектор у в момент t или (£+т). Основы теории оценивания развиты в работах Калм'ана и Бьюси [23].
Для систем регулирования модель объекта можно линеаризовать. Поэтому рассмотрим синтез алгоритма оценивания для линейных систем. Модель системы в векторно-матричной форме записи имеет вид (1.72), а модель измерений — вид (1.73):
у = Ау-\-е (1.72); z = Су + т). (1-73)
Начальные условия уравнения (1.72) случайны:
F(O) = Fo + g- (1-74)
В уравнениях (1.72) — (1.74) y(t)—«-мерный вектор состояния; z(t)—/-мерный вектор измеряемых выходов; е(/)—«-мерный вектор случайных возмущений; ц (/)—/-мерный вектор случайных ошибок измерений; g— случайная составляющая начальных условий; А — квадратная матрица («Х^); С — прямоугольная матрица (/Х«).
Требуется по наблюдениям за процессом z(t) найти такую оценку состояния процесса y(t), при которой достигает минимума критерий
1 = 4" (°)— ро-1 (°) ~ уА + т
+ 4" J {1У - АуТ Р (0 й - + [г - С^Т Q W [г - 0/1} (1 • 75)
о
Здесь Т — интервал, в течение которого проводят наблюдения. Первое слагаемое в (1.75) представляет собой квадратичную 90
форму разности между начальным значением оценки у(0) и начальным состоянием процесса уо. Подобные же квадратичные формы, оценивающие погрешность модели и измерений, содержатся в подынтегральном выражении функционала. Матрицы Лг1, 7? и Q определяют весовые коэффициенты, оценивающие важность той или иной составляющей ошибки. Пусть e(t), —случайные процессы типа белого шума, не коррелированные друг с другом и со случайным вектором а их средние значения равны нулю. В качестве матрицы Ро берут матрицу ковариаций случайной помехи £ оценки начального состояния:
= IF = [Уо — У (0)] [Уо — I/(0)Г-
Здесь черта, как и ранее, соответствует операции взятия математического ожидания. В этом частном случае, когда составляющие вектора g не коррелированы друг с другом, матрица Ро диагональная, и ее элементами являются дисперсии отдельных составляющих вектора g. Аналогично матрицы весовых коэффициентов Р(/) и Q(t) обратны матрицам ковариации процессов e(t) и т| (/):
Р-1 (0 6 (I — т) = е (0 е (т),
Q-X(i)6(i-T)=»Ti(0nW- О-76)
По диагоналям этих матриц стоят корреляционные функции отдельных составляющих процессов e(t) и т] (/),а на остальных местах — взаимнокорреляционные функции двух разных составляющих этих процессов. Элементы ковариационных матриц случайных ошибок отражают неопределенность наших знаний. Чем больше эта неопределенность, тем с меньшим весом входит соответствующее слагаемое в критерий I.
Для решения задачи о минимуме 1 удобно ввести новую переменную
u(i) = у — Ау. (1-77)
и переписать критерий I в форме
/ = 4” IF (°) - ро-1 W +
т
+ 4-J {«(0т Р (0 и (0 + (г - Су)т d{t)(2-Cy)}dt. (1.78)
о
При этом необходимо учесть связь (1.77) между у и и:
у = Ау+и. (1-79)
Функцию z(t) можно наблюдать; минимум ищется по у(0) ну. Поставленная задача выпукла, поэтому ее решение существует и является единственным. В соответствии с процедурой принци
па максимума [40] запишем для задачи, (1.78), (1.79) функцию Гамильтона
Н = 4- [iP7?« - (г - Су? Q(z — Су) + ф1 (Ау + «)].
и потребуем ее стационарности по и (для выпуклой дифференцируемой функции максимум достигается в точке стационарности) :
дн
-5Г = 0=>И(0 = -т?-1(04>(0. (1-80)
Уравнения для сопряженных переменных
• дН
Ф = —= [^<2 (г-Су)- 4ч|>1+.
или
=—OQCy — + OQz. (1.81)
Краевые условия для уравнения (1.81)—нулевые: ф(7’)=0. Начальное значение ф (0) определяется [53] в виде
д!
о-82)
откуда
У(0)=Уо-РоФ(0). (1.83)
Подставляя (1.80) в уравнение (1.79), получим:
y = Ay-R-^(t)^it). (1.84)
Таким образом, для вычисления оптимальной оценки y*(t) состояния процесса необходимо решить совместно уравнения (1.81) и (1.84), причем для уравнения (L81) заданы условия в конце интервала наблюдения при t=T, а для уравнения (1.84) начальные условия определены через ф(0). Так как граничные условия для у и ф заданы на разных концах интервала наблюдения, то одно из уравнений нужно решать в прямом времени, а другое — в обратном. Одиако поскольку у входит в правую часть уравнений (1.81), а ф — в правую часть уравнений (1.84), подобная процедура затруднена. Чтобы «развязать» систему (1.81), (1.84), удобно перейти к вспомогательным переменным b и ввести вспомогательную матрицу Р, так что
y(t) = b(f)-P(t)^(t). (1.85)
Подставляя это выражение в (1.84), получим:
Ау— Р-1Ф = Ь— Рф — Рф. (1.86)
С учетом (1.81) имеем:
A (F— Рф) — Р-!ф = Ь — Рф + Р [ООС (Ь — Рф) + Л^ф — CPQz]. (1.87)
Подберем теперь вспомогательную матрицу Р так, чтобы в (1.87) сумма слагаемых, содержащих ф, обратилась в нуль. Эта сумма равна
ф (—Р — POQ.CP + РА' + R-1 + АР').
Условие ее равенства нулю приводит к дифференциальному уравнению для матрицы Р:
+ + — PC'QCP. (1.88)
Если матрица Р удовлетворяет уравнению (1.88), то из равенства (1.87) вытекает уравнение для расчета вектора b(t):
b = Ab-f-PC'Q(z — Cb). (1.89)
Начальные условия для уравнений (1.88), (1.89) следует из начальных условий (1.82) для ф. Действительно, требование
У (0) = Уо - Роф (0) = &0 - Р (0) ф (0). окажется выполненным, если
b(0)t=yo; Р(О) = Ро. (1.90)
Уравнения (1.88) и (1.89) не содержат в правых частях никаких других переменных, кроме Р, b и наблюдаемого вектора z. Они могут быть проинтегрированы в прямом времени от t=O до t=T. Это позволяет выразить ф(/) через y(t) в соответствии с (1.85), найти y(T)=b(t) и переписать уравнение (1.86)ввиде
у=Ау-)-В~1Р~1(у—Ь).
Решение этого уравнения в обратном времени определит искомую оценку y(t).
Однако полученная оценка может быть найдена лишь для тех моментов t, которые лежат внутри интервала наблюдения (0, Т). Часто требуется оценить вектор, состояния в момент Г или даже прогнозировать его значение на т вперед. В первом случае оценка вытекает непосредственно из условия ф(Т)=0^ т. е. у (t) (где t — текущий момент времени, совпадающий с концом интервала наблюдения) получается из решения уравнения (1.89) заменой в нем b(t) на y(t):
‘y = Ay + PC^Q(z-Cy)-r y(0) = yo. (1.91)
Здесь матрица Р определяется уравнением (1.88).
Прогнозирующую оценку у(1+т) получают из уравнения (1.91) интегрированием его до момента f+т. При этом начиная с момента t до /+т матрицу Q(/), определяющую веса погрешностей измерения, полагают равной нулю (измерения отсутствуют, их неопределенность сколь угодно велика), т. е. на участке
Рис. 1.60. Изменение во времени элементов матрицы Р(а), истинных составляющих вектора у и составляющих его оценки ~у (б)
от t до t+r уравнение (1.91) упрощается и принимает вид: у— =Ау. Аналогично на интервале (/, f+т) упрощается уравнение (1.88) для подсчета элементов матрицы Р.
Пример (43]. Процесс в проточном химическом реакторе с непрерывным перемешиванием характеризуется системой дифференциальных уравнений
У1 *= (1 + ®i) У1 + £1 (0 > У1 (0) = Ущ + £1о •
Уг *= — (1 "I" О2) Уг + £а (0 > Уг (0) = Уго ”Ь £ао-
Измеряется с ошибкой ц только концентрация уг:
zt=i/a(O + T](O-
'Случайные возмущения 5/, обусловленные неконтролируемыми изменениями расходов, температур, состава сырья и т. п., имеют среднее значение, равное нулю, валяются белыми шумами (т. е. их автокорреляционные функции представляют собой 6-функции). Матрица ковариаций их известна:
д-i [Pii' Р12]
LPai> Paa 1
где p;>'=B;2(f); po=£i(0£i(0> т. e- диагональные элементы представляют собой дисперсии случайных возмущений, a pia=pai — коэффициенты их взаимной корреляции. Процессы не обязательно стационарны, и матрица R~l 'может зависеть от t.
Аналогичные предположения сделаем о случайной функции r](f) и векторе |0:
^77j-==Q-X(O; РЙ = Г“°’ М.
Uaio> “aao I
Здесь Рцо = ?2io> Pijo = £io£jo & Рjio’
Уравнение для оценки вектора y(t) по результатам текущих измерений иа интервале (0, t) примет вид уравнения (1.89), в котором y(t) = b(t):
У1 = ~(1 + 01) У1 + Рц (0 Q (0 (2 — Уг) •
Уг = Ojf/i + (1 + D2) у2 + Рц (0 Q (0 (г — Уг) •
Элементы матрицы Р вычисляются согласно уравнению (1.88):
Ри = —2 (1 + Ри + Р11 - QPM2,
Рц ~ — (2 + + ^а) Ла + Рта — Ф^та (^аа + ^хх) • (1 • 92>
Paa •= DjPij — 2 (1 + Da) Р2а + раа — QPaaa.
Начальные условия для этой системы определены матрицей Ро. Решение уравнений (1.92) не зависит от текущих измерений z(t), поэтому к моменту t в уравнениях для оценки у матрица Р известна; при получении очередного значения г эти уравнения интегрируются в реальном времени.
На рис. 1.60 показаны изменения во времени элементов матрицы Р, а также оценки вектора концентраций 'у в системе дли следующих исходных данных:
D1 = 3; Da=l;
[0,04; 0 1 ’ “ [0; 0,01]:
У1 (°) = 0,85;
Ую — 1! Уао —
0,0025; 7?-i = 0;
у2 (0) = 0,15;
дисперсия погрешностей измерения Q-1 = 0,05.
ГЛАВА 2
АВТОМАТИЗАЦИЯ ТИПОВЫХ ТЕХНОЛОГИЧЕСКИХ ПРОЦЕССОВ
2.1. ПОСЛЕДОВАТЕЛЬНОСТЬ ВЫБОРА СИСТЕМЫ АВТОМАТИЗАЦИИ*
Общая задача управления технологическим процессом формулируется обычно как задача максимизации (минимизации) некоторого критерия (себестоимости, энергозатрат, прибыли) при-выполнении ограничений на технологические параметры, накладываемых регламентом. Решение такой задачи для всего процесса в целом очень трудоемко, а иногда практически невозможно ввиду большого числа факторов, влияющих на ход процесса. Поэтому весь процесс разбивают на отдельные участки,, которые характеризуются сравнительно небольшим числом пере-
* В дайной главе рассматриваются наиболее характерные особенности регулирования основных технологических параметров и процессов. На основе уравнений материального и теплового баланса аппаратов проводится анализ их как объектов регулирования и дается выбор вариантов систем регулирования, начиная с простейших одноконтурных АСР с постепенным усложнением' схем. В разделах, посвященных автоматизации реакторов, теплообменников и ректификационных колони, на примере простейших аппаратов иллюстрируется методика вывода линеаризованных моделей статики и динамики технологических объектов с сосредоточенными и распределенными параметрами, которые могут быть использованы при расчете систем регулирования,
менных. Обычно эти участки совпадают с законченными технологическими стадиями, для которых могут быть сформулированы свои подзадачи управления, подчиненные общей задаче управления процессом в целом.
Задачи управления отдельными стадиями обычно направлены на оптимизацию (в частном случае, стабилизацию) технологического параметра или критерия, легко вычисляемого по измеренным режимным параметрам (производительность, концентрация продукта, степень превращения, расход энергии). Оптимизацию критерия проводят в рамках ограничений, задаваемых технологическим регламентом. На основании задачи оптимального управления отдельными стадиями процесса формулируют задачи автоматического регулирования технологических параметров для отдельных аппаратов.
Важным этапом в разработке системы автоматизации является анализ основных аппаратов как объектов регулирования, т. е. выявление всех существенных входных и выходных переменных и анализ статических и динамических характеристик каналов возмущения и регулирования. Исходными данными при этом служат математическая модель процесса н (как первое приближение) статическая модель в виде уравнений материального и теплового балансов. На основе этих уравнений с учетом реальных условий работы аппарата все существенные факторы, влияющие на процесс, разбиваются на следующие группы.
Возмущения, допускающие стабилизацию. К ним относят независимые технологические параметры, которые могут испытывать существенные колебания, однако по условиям работы могут быть стабилизированы с помощью автоматической системы регулирования. К таким параметрам обычно относятся некоторые показатели входных потоков. Так, расход питания можно стабилизировать, если перед аппаратом имеется буферная емкость, сглаживающая колебания расхода на выходе из предыдущего аппарата; стабилизация температуры питания возможна, если перед аппаратом установлен теплообменник, и т. п. Очевидно, при проектировании системы управления целесообразно предусмотреть автоматическую стабилизацию таких возмущений. Это позволит повысить качество управления процессом в целом. В простейших случаях на основе таких систем автоматической стабилизации возмущений строят разомкнутую (относительно основного показателя процесса) систему автоматизации, обеспечивающую устойчивое ведение процесса в рамках технологического регламента.
Контролируемые возмущения. К ним условно относят те возмущения, которые можно измерить, но невозможно или недопустимо стабилизировать (расход питания, подаваемого непосредственно из предыдущего аппарата; температура окружающей среды и т. п.). Наличие существенных нестабилизи-руемых возмущений требует применения либо замкнутых по основному показателю процесса систем регулирования, либо
комбинированных АСР, в которых качество регулирования повышается введением динамической компенсации возмущения.
Неконтролируемые возмущения. К ним относятся те возмущения, которые невозможно или нецелесообразно'измерять непосредственно. Первые — это падение активности катализатора, изменение коэффициентов тепло- и массопередачи и т. п. Примером вторых может служить давление греющего пара в заводской сети, которое колеблется случайным образом и является источником возмущения в тепловых процессах. Выявление возможных неконтролируемых возмущений — важный этап в исследовании процесса и разработке системы управления. Наличие таких возмущений требует, как и в предыдущем случае, обязательного применения замкнутых по основному показателю процесса систем автоматизации.
Возможные регулирующие воздействия. Это материальные или тепловые потоки, которые можно изменять автоматически для поддержания регулируемых параметров.
Выходные переменные. Из их числа выбирают регулируемые координаты. При построении замкнутых систем регулирования в качестве регулируемых координат выбирают технологические параметры, изменение которых свидетельствует о нарушении материального или теплового баланса в аппарате. К ним Относятся: уровень жидкости — показатель баланса по жидкой фазе; давление — показатель баланса по газовой фазе; температура — показатель теплового баланса в аппарате; концентрация— показатель материального баланса по компоненту.
Анализ возможных регулирующих воздействий и выходных координат объекта позволяет выбрать каналы регулирования для проектируемых АСР. При этом' в одних случаях решение определяется однозначно, а в других имеется возможность выбора как регулируемой координаты, так и регулирующего воздействия для заданного выхода. Окончательный выбор каналов регулирования проводят на основе сравнительного анализа статических и динамических характеристик различных каналов. При этом учитывают такие показатели, как коэффициент усиления, время чистого запаздывания, его отношение к наибольшей постоянной времени канала т/Г (см. разд. 1.4).
На основе анализа технологического процесса как объекта регулирования проектируют систему автоматизации, обеспечивающую решение поставленной задачи регулирования. Начинают с проектирования одноконтурных АСР отдельных параметров: они наиболее просты в наладке и надежны в работе, поэтому широко используются при автоматизации технологических объектов-.
Однако при неблагоприятных динамических характеристиках каналов регулирования (большом чистом запаздывании, большом отношении т/Т) даже в случае оптимальных настроек регуляторов качество переходных процессов в одноконтурных АСР может оказаться неудовлетворительным. Для таких объ
ектов анализируют возможность построения многоконтурных АСР, в которых качество регулирования можно повысить, усложняя схемы автоматизации, т. е. применяя каскадные, комбинированные, взаимосвязанные АСР.
Окончательное решение о применении той или иной схемы автоматизации принимают после моделирования различных АСР и сравнения качества получаемых процессов регулирования.
2.2. РЕГУЛИРОВАНИЕ ОСНОВНЫХ ТЕХНОЛОГИЧЕСКИХ ПАРАМЕТРОВ
К основным технологическим параметрам, подлежащим контролю и регулированию в химико-технологических процессах, относят расход, уровень, давление, температуру, значение pH и показатели качества (концентрацию, плотность, вязкость и др.)*. Регулирование расхода. Необходимость регулирования расхода возникает при автоматизации практически любого непрерывного процесса. АСР расхода, предназначенные для стабилизации возмущений по материальным потокам, являются неотъемлемой частью разомкнутых систем автоматизации технологических процессов. Часто АСР расхода используют как внутренние контуры в каскадных системах регулирования других параметров. Для обеспечения заданного состава смеси или для поддержания материального и теплового балансов в аппарате применяют системы регулирования соотношения расходов нескольких веществ в одноконтурных или каскадных АСР.
Системы регулирования расхода характеризуются двумя особенностями: малой инерционностью собственно объекта регулирования; наличием высокочастотных составляющих в сигнале изменения расхода, обусловленных пульсациями давления в трубопроводе (последние вызваны работой насосов или компрессоров или -случайными колебаниями расхода при дросселировании потока через сужающее устройство).
На рис. 2.1 дана принципиальная схема объекта при регулировании расхода. Обычно таким объектом является участок трубопровода между точкой измерения расхода (например, местом установки сужающего устройства /) и регулирующим органом 2. Длина этого участка определяется правилами установки сужающих устройств и регулирующих органов и составляет обычно несколько метров. Динамика канала «расход вещества через клапан — расход вещества через расходомер» приближенно описывается апериодическим звеном первого порядка с чистым запаздыванием. Время чистого запаздывания обычно со-
* Основы измерения этих параметров, автоматические приборы контроля и исполнительные устройства изучают в курсах «Технологические измерения и приборы» и «Технические средства автоматизации». Здесь рассмотрены особенности регулирования этих параметров с учетом статических и динамических характеристик каналов регулирования, приборов контроля и средств автоматизации и приведены примеры наиболее распространенных систем регулирования некоторых параметров.
Рис. 2.1. Принципиальная схема объекта при регулировании расхода:
1 — измеритель расхода, 2 — регулирующий клапан
ставляет доли секунд для газа и несколько секунд — для жидкости; значение постоянной времени — несколько секунд.
Ввиду малой инерционности объекта регулирования особые требования предъявляются к выбору средств автоматизации и методов расчета АСР. В частности, в промышленных установках инерционность цепей контроля и регулирования расхода становится соизмеримой с инерционностью объекта, и ее следует учитывать при расчете систем регулирования.
Приближенная оценка чистого запаздывания и постоянных времени отдельных элементов цепи показывает (рис. 2.2), что современные первичные преобразователи расхода, построенные на принципе динамической компенсации, можно рассматривать как усилительные звенья. Исполнительное устройство аппроксимируется апериодическим звеном первого порядка, постоянная времени которого составляет несколько секунд, причем быстродействие исполнительного устройства существенно повышается при использовании позиционеров. Импульсные линии, связы
вающие средства контроля и регулирования, аппроксимируются
апериодическим звеном первого порядка с чистым запаздыванием, параметры которого определяются длиной линии и лежат в пределах нескольких секунд. При больших расстояниях между элементами цепи необходимо по длине импульсной линии
устанавливать дополнительные усилители мощности.
Вследствие малой инерционности объекта рабочая частота может оказаться выше максимальной, ограничивающей область нормальной работы промышленного регулятора, в пределах которой реализуются стандартные законы регулирования. За пределами этой области динамические характеристики регуляторов отличаются от стандартных, вследствие чего требуется введение поправок на рабочие настройки с учетом фактических законов
регулирования.
Выбор законов регулирования диктуется обычно требуемым качеством переходных процессов. Для регулирования расхода
без статической погрешности в одноконтурных АСР применяют ПИ-регуляторы. Если АСР расхода является внутренним контуром в каскадной системе регулирования, ре-
Рис. 2.2. Структурная схема системы регулирования расхода:
/ — объект, 2 — первичный преобразователь расхода, 3 — регулятор, 4 — импульсные линии, 5 — исполнительное устройство
'2
4
1
4 «-насос
Рис. 2.3. Схемы регулирования расхода после центробежного (а) и поршневого (б) насосов: / — измеритель расхода; 2 — регулирующий клапан; 3 — регулятор;
гулятор расхода может осуществлять П-закон регулирования. При наличии высокочастотных помех в сигнале расхода применение регуляторов с дифференциальными составляющими в законе регулирования без предварительного сглаживания сигнала может привести к неустойчивой работе системы. Поэтому в промышленных АСР расхода применение ПД- или ПИД-регуляторов не рекомендуется.
В системах регулирования расхода применяют один из трех способов изменения расхода:
дросселирование потока вещества через регулирующий орган, устанавливаемый на трубопроводе (клапан, шибер, заслонка);
нзмененне напора в трубопроводе с помощью регулируемого источника энергии (например, изменением числа оборотов двигателя насоса или угла поворота лопастей вентилятора);
байпасирование, т. е. переброс избытка вещества иа основного трубопровода в обводную линию.
Регулирование расхода после центробежного насоса осуществляется регулирующим клапаном, устанавливаемым на нагнетательном трубопроводе (рис. 2.3,а). Если для перекачивания жидкости используют поршневой насос, применение подобной АСР недопустимо, так как при работе регулятора клапан может закрыться полностью, что приведет к разрыву трубопровода (или к помпажу, если клапан установлен на всасе насоса). В этом случае для регулирования расхода используют байпасирование потока (рис. 2.3,6).
Регулирование расхода сыпучих веществ осуществляется изменением степени открытия регулирующей заслонки на выходе из бункера (рис. 2.4, а) или изменением скорости движения ленты транспортера (рис. 2.4,6). Измерителем расхода при этом может служить взвешивающее устройство, которое определяет массу материала на ленте транспортера.
Регулирование соотношения расходов двух веществ можно осуществлять по одной из трех схем, описанных ниже.
1. При незаданной общей производительности расход одного вещества (рнс. 2.5, a) Gt, называемый -«ведущим», может меняться произвольно; второе вещество подается при постоянном соотношении у с первым, так что «ведомый» расход равен yGi.
Рис. 2.4. Схемы регулирования расхода сыпучих веществ:
а — изменением степени открытия регулирующей заслонки; б — изменением скорости движения транспортера; / — бункер; 2— транспортер; 3—регулятор; 4 — регулирующая заслонка; 5 — электродвигатель
Иногда вместо регулятора соотношения используют реле соотношения и обычный регулятор для одной переменной (рис. 2.5,6). Выходной сигнал реле 6, устанавливающего заданный коэффициент соотношения у, подается в виде задания регулятору 5, обеспечивающему поддержание «ведомого» расхода.
2. При заданном «ведущем» расходе кроме АСР соотношения применяют и АСР «ведущего» расхода (рис. 2.5, в). При такой схеме в случае изменения задания по расходу G\ автоматически изменится и расход G2 (в заданном соотношении с Gt).
3. АСР соотношения расходов является внутренним контуром в каскадной системе регулирования третьего технологического параметра у (например, температуры в аппарате). При
Рис. 2.5. Схемы регулирования соотношения расходов:
а, б — при незадаииой общей нагрузке, в — при заданной общей нагрузке; а — при заданной общей нагрузке и коррекции коэффициента соотношения по третьему параметру; 1,2 — измерители расхода; 3 — регулятор соотношения; 4, 7 — регулирующие клапаны; 5 — регулятор расхода, 6 — реле соотношения, 8 — регулятор температуры; 9 — устройство ограничения
этом заданный коэффициент соотношения устанавливается внешним регулятором в зависимости от этого параметра так что G2=y(y)G\ (рис. 2.5,г). Как отмечалось выше, особенность настройки каскадных АСР состоит в том, что на задание внутреннему регулятору устанавливают ограничение хрн^хр$:хрв. Для АСР соотношения расходов это соответствует ограничению YhCY^Yb- Если выходной сигнал внешнего регулятора выходит за пределы [хрн, хрв], то задание регулятору соотношения остается на предельно допустимом значении у (т. е. ун или ув). Регулирование уровня. Уровень является косвенным показателем гидродинамического равновесия в аппарате. Постоянство уровня свидетельствует о соблюдении материального баланса, когда приток жидкости равен стоку, и скорость изменения уровня равна нулю. Следует отметить, что «приток» и «сток» здесь являются обобщенными понятиями. В простейшем случае, когда в аппарате не происходят фазовые превращения (сборники, промежуточные емкости, жидкофазные реакторы), приток равен расходу жидкости, подаваемой в аппарат, а сток — расходу жидкости, отводимой из аппарата. В более сложных процессах, сопровождающихся изменением фазового состояния веществ, уровень является характеристикой не только гидравлических, но и тепловых и массообменных процессов, а приток и сток учитывают фазовые превращения веществ. Такие процессы протекают в испарителях, конденсаторах, выпарных установках, ректификационных колоннах и т. п.
В общем случае изменение уровня описывается уравнением вида
S = GBX — GBb]X ± Go6, (2-1)
где S — площадь горизонтального (свободного) сечення аппарата; Овх, Овых—расходы жидкости иа входе в аппарат и выходе нз него; Goe — количество жидкости, образующейся (или расходуемой) в аппарате в единицу времени
В зависимости от требуемой точности поддержания уровня применяют один из следующих двух способов регулирования:
1) позиционное регулирование, при котором уровень в аппарате поддерживается в заданных, достаточно широких пределах: Lh^Z-^Lb. Такие
системы регулирования устанавливают на сборниках жидкости или промежуточных емкостях
Рис. 2.6. Пример схемы позиционного регулирования уровня.
1 — насос, 2 — аппарат, 3 — сигна-лизатоР уРовня; 4 — РегулятоР уровня, 5, 6 — регулирующие клапаны
Рис. 2 7 Схемы непрерывного регулирования уровня:
а — регулирование «на притоке*, б — регулирование «на стоке*, в — каскадная АСР, / — регулятор уровня, 2 — регулирующий клапан, 3, 4 — измерители расхода, 5 — регулятор соотношеиия
(рис. 2.6). При достижении предельного значения уровня происходит автоматическое переключение потока на запасную емкость;
2) непрерывное регулирование, при котором обеспечивается стабилизация уровня на заданном значении, т. е. L = L°.
Особенно высокие требования предъявляются к точности регулирования уровня в теплообменных аппаратах, в которых уровень жидкости существенно влияет на тепловые процессы. Например, в паровых теплообменниках уровень конденсата определяет фактическую поверхность теплообмена. В таких АСР для регулирования уровня без статической погрешности применяют ПИ-регуляторы. П-регуляторы используют лишь в тех случаях, когда не требуется высокое качество регулирования и возмущения в системе не имеют постоянной составляющей, которая может привести к накоплению статической погрешности.
При отсутствии фазовых превращений в аппарате уровень в нем регулируют одним из трех способов:
изменением расхода жидкости на входе в аппарат (регулирование «на притоке», рис. 2.7,а);
изменением расхода жидкости на выходе из аппарата (регулирование «на стоке», рнс. 2.7,б);
регулированием соотношения расходов жидкости на входе в аппарат и выходе из него с коррекцией по уровню (каскадная АСР, рис. 2.7,в); отключение корректирующего контура может привести к накоплению ошибки при регулировании уровня, так как вследствие неизбежных погрешностей в настройке регулятора соотношения расходы жидкости на входе и выходе аппарата не будут точно равны друг другу и вследствие интегрирующих свойств объекта [см. уравнение (2.1)] уровень в аппарате будет непрерывно нарастать (или убывать).
В случае, когда гидродинамические процессы в аппарате сопровождаются фазовыми превращениями, можно регулировать уровень изменением подачи теплоносителя (илн хладоагента), как это показано на рис. 2.8. В таких аппаратах уровень взаимосвязан с другими параметрами (например, давлением), поэтому выбор способа регулирования уровня в каждом конкрет-
Рис. 2.8. Схема регулирования уровня в испарителе:
/ — испаритель; 3 — регулятор уровня; 3 — регулирующий клапан
Рис. 2.9. Регулирование уровня кипящего слоя:
а — отводом зернистого материала; б —изменением расхода газа; 1 — аппарат с кипящим слоем; 2 — регулятор уровня; 3 — регулирующий орган
ном случае должен выполняться с учетом остальных контуров регулирования.
Особое место в системах регулирования уровня занимают АСР уровня в аппаратах с кипящим (псевдоожиженным) слоем зернистого материала. Устойчивое поддержание уровня кипящего слоя возможно в достаточно узких пределах соотношения расхода газа и массы слоя. При значительных колебаниях расхода газа (нли расхода зернистого материала) наступает режим уноса слоя или его оседания. Поэтому к точности регулирования уровня кипящего слоя предъявляют особенно высокие требования. В качестве регулирующих воздействий используют расход зернистого материала на входе или выходе аппарата (рис. 2.9, а) или расход газа на ожижение слоя (рис. 2.9,6). Регулирование давления. Давление является показателем соотношения расходов газовой фазы на входе в аппарат и выходе из него. Постоянство давления свидетельствует о соблюдении материального баланса по газовой фазе. Обычно давление (или разрежение) в технологической установке стабилизируют в каком-либо одном аппарате, а по всей системе оно устанавливается в соответствии с гидравлическим сопротивлением линии и аппаратов. Например, в многокорпусной выпарной установке (рис. 2.10) стабилизируют разрежение в последнем выпарном аппарате. В остальных аппаратах при отсутствии возмущений устанавливается разрежение, которое определяется нз условий материального и теплового балансов с учетом гидравлического сопротивления технологической линии.
В тех случаях, когда давление существенно влияет на кинетику процесса, предусматривается система стабилизации давления в отдельных аппаратах. Примером может служить процесс ректификации, для которого кривая фазового равновесия существенно зависит от давления. Кроме того, при регулировании процесса бинарной ректификации часто в качестве косвенного
показателя состава смеси используют ее температуру кипения, которая однозначно связана с составом лишь при постоянном’ давлении. Поэтому в продуктовых ректификационных колоннах обычно предусматривают специальные системы стабилизации давления (рис. 2.11).
Уравнение материального баланса аппарата по газовой фазе записывается в виде:
dP
V di =/(®вх— ОВых ± боб), (2.2)
где V — объем аппарата; GBI н GB1ix— расход газа соответственно подаваемого в аппарат н отводимого из него; Goe — масса газа, образующегося (нлн расходуемого) в аппарате в единицу времени.
Как видно из сравнения уравнений (2.1) и (2.2), способы регулирования давления аналогичны способам регулирования уровня. В рассмотренных выше примерах АСР давления регулирующими воздействиями выбраны расход несконденсировав-шихся газов, отводимых из верхней части колонны (т. е. GBHx, рис. 2.11) и расход охлаждающей воды в барометрический конденсатор, который влияет на скорость конденсации вторичного пара (т. е. на G06, рис. 2.10).
Особое место среди АСР давления занимают системы регулирования перепада давления в аппарате, характеризующего гидродинамический режим, который существенно влияет на протекание процесса. Примерами таких аппаратов могут служить насадочные колонны (рис. 2.12,а), аппараты с кипящим слоем (рис. 2.12,6) и др.
Регулирование температуры. Температура^является показателем термодинамического состояния, системы и используется каквы-
Рис. 2.10. Регулирование разрежения в многокорпусной выпарной установке: •
I, 2 — выпарные аппараты; 3 — барометрический конденсатор; 4 — регулятор разрежении; 5 — регулирующий клапан
Рис. 2.11. АСР Давления в ректификационной колонне: 1 — колонна; 2 — дефлегматор; 3 — флегмовая емкость; 4 — регулятор давления; 5 — регулирующий клапан
Рис. 2.12. Схема регулирования перепада Давления:
а — в колонном аппарате с насадкой; б — в аппарате с кипящим слоем; / — аппарат, 2 — регулятор перепада давления. 3 — регулирующий клапан
ходная координата при регулировании тепловых процес-сов. Динамические характеристики объектов в системах регулирования температуры
зависят от физико-химических параметров процесса и конструкции аппарата. Поэтому общие рекомендации по выбору АСР температуры сформулировать невозможно, и требуется анализ каждого конкретного процесса.
К общим особенностям АСР температуры можно отнести значительную инерционность тепловых процессов и промышленных датчиков температуры. Поэтому одна из основных задач при проектировании АСР температуры — уменьшение инерционности датчиков.
Рассмотрим, например, динамические характеристики термометра в защитном чехле (рис. 2.13, а). Структурную схему термометра можно представить как последовательное соединение четырех тепловых емкостей (рис. 2.13,6): защитного чехла 1, воздушной прослойки 2, стенки термометра 3 и собственно рабочей жидкости 4. Если пренебречь тепловым сопротивлением каждого слоя, то все элементы можно аппроксимировать апериодическими звеньями 1-го порядка, уравнения которых имеют вид:
MjCPj = (®j-l — ®/) aj2^i2 (9j fy+1) >
/ = 1,4; 08 = 0
или
Tj + 9j = fyify-i +
где
_ MjCpj_________
] — aj2^]2 ’
(2-3) b___________________h_______________aiiFjv____
l1 оС/гЛ/а
М/ — масса соответственно чехла, воздушной прослойки, стенки и жидкости; Ср/ — удельные теплоемкости; ац, aj2—коэффициенты теплоотдачи; Fa, Гц — поверхности теплоотдачи.
Как видно из уравнений (2.3), основными направлениями уменьшения инерционности датчиков температуры являются:
повышение коэффициентов теплоотдачи от среды к чехлу в результате правильного выбора места установки датчика; при этом скорость движения среды должна быть максимальной; при прочих равных условиях более прдпочтительна установка термометров в жидкой фазе (по сравнению с газообразной), в конденсирующемся паре (по сравнению с конденсатом) и т. п.;
уменьшение теплового сопротивления и тепловой емкости защитного чехла в результате выбора его материала и толщины;
уменьшение постоянной времени воздушной прослойки за счет применения наполнителей (жидкость, металлическая стружка); у термоэлектрических преобразователей (термопар) рабочий спай припаивается к защитному чехлу;
выбор типа первичного преобразователя; например, при выборе термометра сопротивления, термопары или манометрического термометра необходимо учитывать, что наименьшей инерционностью обладает термопара в малоинерционном исполнении, наибольшей — манометрический термометр.
Регулирование pH. Системы регулирования pH можно подразделить на два типа, в зависимости от требуемой точности регулирования. Если скорость изменения pH невелика, а допустимые пределы ее колебаний достаточно широки, применяют позиционные системы регулирования, поддерживающие pH в заданных пределах; рНн^рН^рНв. Ко второму типу относятся системы, обеспечивающие регулирование процессов, в которых требуется точное поддержание pH на заданном значении (например, в процессах нейтрализации). Для их регулирования используют непрерывные ПИ- или ПИД-регуляторы.
Общей особенностью объектов при регулировании pH является нелинейность их статических характеристик, связанная с нелинейной зависимостью pH от расходов реагентов [60]. На рис. 2.14 показана кривая титрования, характеризующая за-
Рис. 2.13. Принципиальная (а) и структурная (б) схемы термометра: 1 — защитный чехол; 2 — воздушная прослойка, 3 — стейка термометра; 4 — рабочая жидкость
б
Рис. 2.14. Зависимость величины pH от расхода реагента
Висимость pH от расхода кислоты Gt. Для различных заданных значений pH на этой кривой можно выделить три характерных участка: первый (средний), относящийся к почти нейтральным средам, близок к линейному и характеризу
ется очень большим коэффициентом усиления; второй и третий
участки, относящиеся к сильно щелочным или кислым средам, обладают наибольшей кривизной.
На первом участке объект по своей статической характеристике приближается к релейному элементу. Практически это означает, что при расчете линейной АСР коэффициент усиления регулятора настолько мал, что выходит за пределы рабочих настроек промышленных регуляторов. Так как собственно реакция нейтрализации проходит практически мгновенно, динамиче
ские характеристики аппаратов определяются процессом смешения и в аппаратах с перемешивающими устройствами достаточно точно описываются дифференциальными уравнениями 1-го порядка с запаздыванием. При этом чем меньше постоянная времени аппарата, тем сложнее обеспечить устойчивое регу-
лирование процесса, так как начинают сказываться инерционность приборов и регулятора и запаздывание в импульсных ли-
ниях
Для обеспечения устойчивого регулирования pH применяют специальные системы. На рис. 2.15, а показан пример системы регулирования pH с двумя регулирующими клапанами. Клапан 1, обладающий большим условным диаметром, служит для грубого регулирования расхода и настроен на максимальный диапазон изменения выходного сигнала регулятора [хрн, хрв] (рис. 2.15,6, кривая 1). Клапан 2, служащий для точного регулирования, рассчитан на меньшую пропускную способность и настроен таким образом, что при хр=Хр°+'Д он полностью открыт, а при хр=хр°—Д— полностью закрыт (кривая 2). Таким
Рис. 2.15. Пример системы регулирования pH:
а — функциональная схема; б — статические хаРактеристнки клапанов, 7, 2-"регулирующие клапан, 3 — регулятор pH
Рис. 2 16. Кусочио-линейная аппроксимации статической характеристики объекта при регулировании pH
Рис. 2.17 Структурная схема системы регулирования pH с двумя регуляторами
образом, при незначительном отклонении pH от pH0, когда Хр°—Д^Хр^хр°+Д, степень открытия клапана 1 практически не изменяется, н регулирование ведется клапаном 2. Если |хр—хр°|>-Д, клапан 2 остается в крайнем положении, и регулирование осуществляется клапаном 1.
На втором н третьем участках статической характеристики (рнс. 2 14) ее линейная аппроксимация справедлива лишь в очень узком диапазоне изменения pH, и в реальных условиях ошибка регулирования за счет линеаризации может оказаться недопустимо большой. В этом случае более точные результаты дает кусочно-линейная аппроксимация (рис. 2.16), при которой линеаризованный объект имеет переменный коэффициент усиления:
k — k0 при pH< pH0 — б, = k2 при pH>pH0 + б;
k = kg при | pH — pH0 ] < 6.
На рнс. 2.17 приведена структурная схема такой АСР. В зависимости от рассогласования ДрН, включается в работу один из регуляторов, настроенный на соответствующий коэффициент усиления объекта.
Регулирование параметров состава и качества. В процессах химической технологии большую роль играет точное поддержание качественных параметров продуктов (состава газовой смеси, концентрации того или иного вещества в потоке и т. п.).Эти параметры характеризуются сложностью измерения. В ряде случаев для измерения состава используют хроматографический метод. При этом результат измерения бывает известен в дискретные моменты времени, отстоящие друг от друга на продолжительность цикла работы хроматографа. Аналогичная ситуация возникает и тогда, когда единственным способом измерения качества продукции является в той или иной степени механизированный анализ проб.
Xf It)
Рис. 2.18. Блок-схема АСР параметра качества продукта: /—объект, 2— анализатор качества; 3 — вычислительное устройство, 4 — регулятор
Дискретность измерения может привести к значительным дополнительным запаздываниям и снижению динамической точности регулирования. Чтобы уменьшить нежелательное влияние задержки измерения, используют модель связи качества продукта с переменными, которые измеряют непрерывно. Эта модель может быть достаточно простой; коэффициенты модели уточняют, сравнивая рассчитанное по ней и найденное в результате очередного анализа значение качественного параметра (алгоритмы такого уточнения изложены в разд. 5.8). Таким образом, одним из рациональных способов регулирования качества является регулирование по косвенному вычисляемому показателю с уточнением алгоритма его расчета по данным прямых анализов. В промежутках между измерениями показатель качества продукта может быть рассчитан экстраполяцией ранее измеренных значений.
Блок-схема системы регулирования параметра качества продукта показана на рис. 2.18. Вычислительное устройство в общем случае непрерывно рассчитывает оценку показателя качества x(f) по формуле
*(0 = Л(»(0) + ^((*-*г)> У«г), У(h-i),• • > в которой первое слагаемое отражает зависимость х от непрерывно измеряемых переменных процесса или величин, динамически с ними связанных, например производных, а второе — от выхода экстраполирующего фильтра.
Для повышения точности регулирования состава и качества применяют приборы с устройством автоматической калибровки. В этом случае система управления производит периодическую калибровку анализаторов состава, корректируя их характеристики.
2.3. РЕГУЛИРОВАНИЕ ПРОЦЕССОВ В ХИМИЧЕСКИХ РЕАКТОРАХ
Химический реактор является основным аппаратом в технологической схеме получения практически любого химического продукта. Работой реактора в значительной мере определяется производительность установки в целом, качество и себестоимость получаемых продуктов.
Упрощенная структурная схема реактора представлена на рис. 2.19. Скорость химической реакции определяется уравнениями кинетики и взаимодействием гидродинамических, массо
обменных и тепловых процессов в аппарате, от которых зависит концентрация реагентов и условия протекания реакции. В свою очередь, химические превращения в реакторе приводят к изменению тепловых и гидродинамических процессов в нем. Этим взаимосвязям соответствуют перекрестные связи в структурной схеме реактора. Наличие таких внутренних обратных связей может приводить к возникновению неустойчивых режимов, автоколебаниям параметров процесса, изменению качества получаемого продукта и должно учитываться при построении систем автоматизации химических реакторов.
Химические реакторы отличаются разнообразием протекающих в них реакций, принципов действия и конструкций. Так, по фазовому состоянию реагентов различают гомогенные реакции, протекающие в газовой, жидкой или твердой фазах, и гетерогенные, протекающие в диффузионной или кинетической областях. Реакции могут быть некаталитическими и каталитическими, иметь разный порядок, различаться типом механизма (необратимые, обратимые, последовательные, параллельные), а также условиями проведения (изотермические, неизотермические, при постоянном давлении, адиабатические, неадиабатические и т. д.). Предполагается, что в изотермических реакторах теплообмен через стенку идеальный, и тепло, выделяемое в результате химической реакции или поглощаемое в ходе реакции, мгновенно отводится от реагирующей смеси, так что температура в реакторе не изменяется. При полном отсутствии теплообмена через стенку реактора в нем протекает адиабатический процесс.
Весьма важным является разделение реакторов по режиму их работы на периодические и непрерывные. Если в ходе реакции в аппарат не подаются реагенты и из него не выводятся продукты реакции, процесс в нем называют периодическим. Реакторы непрерывного действия — это аппараты, в которых
Расход и состав продуктов реакции
Рис. 2.19 Структурная схема химического реактора
осуществляются непрерывная подача реагентов и непрерывный отвод реакционной смеси.
Задачи управления непрерывными и периодическими реакторами существенно различны. Для первых характерны задачи стабилизации параметров на заданных значениях в стационарном режиме, для вторых — проведение процесса по заданной программе (например, изменение температуры в реакторе по определенному закону). Собственно стационарный процесс в таком реакторе невозможен.
В зависимости от гидродинамики процесса различают два крайних режима работы реакторов: идеальное (полное) смешение и идеальное вытеснение (поршневой режим). В первом случае считается, что поступающая реагирующая смесь мгновенно перемешивается со всем содержимым реактора. При этом концентрации реагентов и температуры во всех точках аппарата в любой момент времени одинаковы и равны концентрации и температуре, в выходном потоке. Диффузионный поток вещества и передача тепла внутри реактора теплопроводностью отсутствуют, а режим идеального смешения достигается в результате интенсивного перемешивания мешалками. Реакторы с мешалкой широко распространены в химической промышленности.
В случае идеального вытеснения предполагается поршневое течение реагирующей смеси в аппарате, когда полностью отсутствует перемешивание вдоль потока и каждый элементарный слой в реакторе независим от соседних. В то же время градиенты концентраций и температуры в направлении, перпендикулярном движению потока, отсутствуют. Такой режим обычно предполагается в трубчатых реакторах.
Химические реакции разделяются на экзотермические (с выделением тепла) и эндотермические (с поглощением тепла). Более сложными для управления являются экзотермические процессы, когда сравнительно небольшое изменение температуры в реакторе может приводить к значительным изменениям степени конверсии. В некоторых случаях это может вызвать даже неустойчивость процесса, если изменение количества выделяемого при реакции тепла не может быть скомпенсировано соответствующим изменением скорости отвода тепла. Неустойчивость процесса может приводить к взрывам и аварийной остановке реактора*.
Некоторые промышленные процессы целесообразно осуществлять в режимах, близких к неустойчивым, так как они могут соответствовать более высокой производительности процесса. Реализация работы реактора в неустойчивой области может быть обеспечена с помощью автоматической системы регулирования. В тех случаях, когда такая система не справляется
* Анализ устойчивости работы химических реакторов приведен в монографиях А. Ариса [4], Б. В. Вольтера и И. Е. Сальникова [12], Д. Перлмуттера [38], здесь анализ ведется по методике, предложенной в монографии [12].
с быстрым изменением температуры, должна срабатывать специальная система автоматической защиты, останавливающая развитие процесса отключением подачи сырья или сбросом реагирующей смеси из реактора.
2.3.1. Устойчивость реакторов с перемешивающим устройством
Пусть в реакторе непрерывного действия с мешалкой осуществляется экзотермическая химическая реакция первого порядка. Выделяющееся в результате реакции тепло частично отводится с потоком выходящего продукта, а частично — охлаждающей водой в рубашке реактора. Наиболее сложной задачей обычно является управление температурой в реакторе. Основными возмущениями являются изменение качества сырья, изменение условий теплоотдачи вследствие, например, отложения продуктов реакции на стенках аппарата, колебания расхода реакционной смеси в реакторе и т. д.
Построение математической модели реактора. Составим математическую модель процесса при условии идеального перемешивания в реакторе. Модель реактора представляет __собой уравнения материального и теплового балансов. Так как сделано допущение об идеальности перемешивания в реакторе, то концентрация смеси в аппарате и ее температура в каждой точке одинаковы, и уравнения балансов можно записывать для реактора в целом.
Уравнение материального баланса:
(Скорость накопления вещества в реакторе) = (Количество вещества, поступающего в реактор в единицу времени) — (Количество вещества, выходящего из реактора в единицу времени) — (Скорость расходования вещества в результате химической реакции).
Уравнение тепдового баланса:
(Скорость накопления тепла в реакторе) = (Количество тепла, поступающего с веществом в реактор в единицу времени) — —(Количество тепла, уходящего с веществом из реактора в единицу времени) + (Скорость выделения тепла в результате химической реакции)—(Количество тепла, отводимого из реактора через его стенку в единицу времени).
В случае, когда в реакции участвует несколько различных компонентов, уравнения материального баланса составляют отдельно по каждому компоненту. В дальнейшем для простоты рассмотрен случай, когда в реакции участвует один реагент.
Формально уравнение материального баланса записывается в следующем виде:
de
V -^r=Gc0— Gc — rV (2.4)
или
<2-5>
8—833
ИЗ
где с — концентрация реакционной смеси в реакторе и иа выходе из него; Со —входная концентрация реагента; V —объем реактора; G —объемная скорость подачи реагента; г — скорость химической реакции; Тор — время пребывания смеси в реакторе; /* — время.
Уравнение теплового баланса можно записать в следующем виде:
d9
CppV = Gcpp90 — Gcpp9 + (-ДД) rV - aF (9 - 91Л); (2.6)
ИЛИ
dQ 1 . (-АЯ) aF „ „
~ Tcp (0o-0)+ cpp r~ cppV <0 —9^>> <2-7>
где cp — удельная теплоемкость реакционной смеси; р — плотность реакционной смеси; 9—температура реакционной смеси в реакторе; 9о — температура смеси иа входе в реактор; (—ДЯ) — тепловой эффект химической реакции; а — коэффициент теплопередачи; F — поверхность теплообмена; 9хЛ —температура охлаждающей смеси.
Скорость химической реакции г, согласно закону действующих масс, зависит от концентрации реагентов, порядка реакции и температуры процесса по закону Аррениуса. Для рассматриваемого случая реакции первого порядка имеем:
г = kc exp (—E/R&),
где k— константа скорости химической реакции; Е— энергия активации; 7? — универсальная газовая постоянная.
Уравнения (2.5) и (2.7) описывают поведение реактора непрерывного действия. Для периодического реактора расход смеси G=0, и математическая модель будет иметь вид:
de dd г aF
'di*'=~r' <2>8) ~dF '^7"(9 — 9хл)- <2’9)
Для непрерывного реактора, работающего в адиабатическом режиме (при отсутствии теплоотвода через стенку реактора) математическая модель имеет вид:
de 1
~dT = Тср’^0~с) ~г’ (2Л0)
d9 1 г
-1Г = —(е0_9) + (-ДН)—. (2.11)
Для реактора, работающего в изотермическом режиме (dG[dt=O), математическая модель представляет собой уравнение материального баланса типа (2.4).
Приведенные модели описывают поведение реактора в переходных режимах. В установившемся состоянии скорости изменения концентрации и температуры в реакторе равны нулю. Это условие используют для нахождения стационарных состояний реактора. Однако аналитически найти координаты состояний равновесия по модели статики реактора не удается, так как 114
уравнения модели нелинейны. Поэтому для определения стационарных состояний в большинстве случаев используют различные графические способы или расчеты на ЭВМ.
Методы нахождения стационарных состояний. Рассмотрим наиболее распространенные графические методы определения стационарных состояний [12].
Построение статических характеристик реактора
Запишем в качестве примера уравнение статической характеристики, связывающей входную температуру в реакторе 0о и температуру в стационарном состоянии 0С, т. е. найдем 0О= = f(0c). Для упрощения записи приведем предварительно модель (2.5), (2.7) к безразмерной форме, как это предложено в монографии Б. В. Вольтера и И. Е. Сальникова [12]. С этой целью введем безразмерные комплексы р и р,, безразмерные концентрации г/1, Xi, температуры г/г, х2, у2хл и безразмерное время ti
Ga.FR (-ЬН)
₽= Vk : ц “ CppVk ; У1 ~ ЕСрр с;
R(-\H) R я R п
*1 ~ ЕСрр с°: У2~ Е 9’ Е 9°’
Угхл — £ 6хл‘> =
Комплекс р характеризует безразмерный расход (время пребывания) вещества в реакторе; комплекс р, — безразмерный коэффициент теплопередачи через стенку реактора; у\ — безразмерная концентрация в реакторе; Xi — безразмерная концентрация на входе в реактор; у2— безразмерная температура в реакторе; хг — безразмерная температура на входе в реактор; ?/2хл — безразмерная температура в рубашке реактора. Тогда модель (2.5) и (2.7) запишется в следующем виде:
= —У1е~1^2 + Р (xi — У1) = Р (У1’ УгЬ (2-12)
= у^Уг + ₽ (х2 — »/2) — р(у2 — У2хл) = <2(У1,Уг)- (2-13)
Рассмотрим адиабатический реактор, р,=0. Для стационарного состояния, когда концентрация и температура в реакторе неизменны, =0. Отсюда:
—У1св-1^2С + ₽ (^i — Ухе) = 0, (2.14)
У1се 2С + Р (х2 У2с)~О- (2.15)
Для нахождения статической характеристики x2=f(y2c) выразим значение концентрации в стационарном состоянии из 8* Н5
уравнения (2.14):
Лс = ₽*1/(р + е‘1/Уа0)- (2.16)
Подставляя соотношение (2.16) в уравнение (2.15) и выражая х2=1(У2с), получим уравнение статической характеристики реактора:
х3 = УЖ-Х11(1 + &11У*). (2.17)
Вид этой статической характеристики для определенного значения входной концентрации реагента Xi приведен на рис. 2.20. Проследим по ней изменение положения точки равновесия (стационарного состояния) при изменении температуры на входе в реактор.
При входной температуре х2' в реакторе установится температура у12с- Если повышать температуру на входе, соответственно будет меняться стационарное состояние реактора. Так, температуре х22 соответствует равновесная температура в реакторе У22с, т. е. по мере повышения х2 от х2’ до х22 стационарная температура в реакторе повышается от г/Чс до у22с. При этом предполагается, что изменение х2 происходит достаточно медленно, в реакторе сохраняется стационарный режим и отсутствуют большие возмущения, которые могли бы перевести процесс в другое стационарное состояние. Если входная температура становится несколько больше, чем х23, то стационарных состояний, близких к у32с, больше нет, температура в реакторе скачкообразно возрастает до значения, соответствующего точке В на статической характеристике ув2с.
При дальнейшем повышении входной температуры от х23 до %24 поведение реактора будет соответствовать правой ветви статической характеристики, и температура в нем будет возрастать от у32с до у42с- Если снижать входную температуру, то обратный «перескок» с правой ветви статической характеристики на левую произойдет уже не в точке В, а в точке С, т. е. при более низкой входной температуре, чем х23, при которой произошел резкий разогрев смеси. В точке С происходит резкое снн-
Рис. 2.20. Статическая характеристика реактора
Рис. 2.21. Статическая характеристика реактора при различных значениях входной концентрации реагента _
жение температуры в реакторе до значения, соответствующего точке D.
Результаты проведенного анализа показывают, что температуры в реакторе, соответствующие ветви АС
статической характеристики,
не реализуются. Другой интересной особенностью статики реактора является наличие петли гистерезиса в статической характеристике: резкий разогрев смеси («зажигание» реакции) в реакторе при росте входной температуры происходит в т. Л (переход в т. В), а падение температуры («гашение» реакции) при снижении входной температуры — в т. С (переход в т. D). Это явление, связанное с нелинейностью характеристик реактора, необходимо учитывать при построении его системы управления,
в частности при построении системы пуска реактора.
В диапазоне температур от х£ до х23 при одной и той же входной температуре в реакторе возможны три стационарных состояния. Так, входной температуре х25 соответствуют три возможных стационарных состояния реактора (температуры Угс5-1, Z/2C5-2, г/гс5-3) - Явление множественности стационарных состояний химического реактора также связано с нелинейностью его характеристик и существенно влияет на выбор его системы регулирования, так как при больших возмущениях реактор может переходить из одного состояния равновесия в другое. Эти
стационарные состояния реактора различаются степенью конверсии, достигаемой в реакторе, и, следовательно, его производительностью. Нижнее стационарное состояние г/гс5-1 соответст-
вует случаю, когда реакция протекает медленно и производительность реактора мала. Верхнее стационарное состояние #2с5-3, соответствующее почти полному превращению реагентов, чаще всего находится вне рабочего допустимого диапазона изменения температур в реакторе. Среднее стационарное состояние г/2с5-2, как отмечалось, не реализуется при изменении вход: иой температуры х2. Ниже будет показано, что оно всегда соответствует неустойчивому режиму работы реактора и поэтому не может быть реализовано без применения АСР.
Вид статической характеристики x2=f(i/2c) существенно зависит от начальной концентрации реагента хь На рис. 2.21 представлены три статические характеристики для различных значений хь причем xi’>xi2>xi3. При больших входных концентрациях реагента Xi1 статическая характеристика неоднозначна даже для низких температур на входе в реактор (малых значений х2), и единственность стационарного состояния воз
можна только при очень высоких входных температурах. Область отрицательных значений х2 не имеет физического смысла, поэтому показана пунктиром. Уменьшение входной концентрации реагента Xi2 приводит к смещению неоднозначности статической характеристики в область более высоких входных температур. В этом случае единственность состояния равновесия возможна либо при невысоких температурах, когда реакция практически не идет, либо, наоборот, при очень высоких температурах на входе, соответствующих практически полному превращению реагентов. При низкой входной концентрации реагента Xi3 в реакторе во всем диапазоне изменения входной температуры соответствующее стационарное состояние будет единственным.
Исследование статической характеристики реактора позволило определить возможное число его стационарных состояний и выявило наличие гистерезиса в процессе. Анализ этой характеристики позволяет выбирать значения входных параметров процесса (температуры, концентрации) при управлении реактором.
Построение диаграммы выделения — отвода тепла в реакторе
Для определения стационарных состояний может быть также использовано построение диаграммы отвода — выделения тепла в реакторе, предложенной Н. Н. Семеновым, которая дает необходимое (но не достаточное) условие устойчивости состояния равновесия реактора. Построим эту диаграмму по математической модели реактора (2.12), (2.13). Подставив значение г/ic из уравнения (2.12) в уравнение (2.13), получим: "1»4г=#“0 r at at
₽%i/( 1 + ₽е1/Угс) — [₽ toe — х2) + р. toe — Угхл)] = 0. (2.18)
Первый член в левой части определяет количество тепла, выделяющегося в результате реакции, второй член — отвод тепла из реактора с веществом р (г/2с—х2) и через стенку реактора ц(у2с—У2хл)- Очевидно, равновесие в реакторе будет достигнуто, когда количества отводимого Qi и выделяющегося Q2 тепла будут равны между собой. Представим графически зависимости Qi и Q2 от температуры г/2с:
Qi = f toe) = М1 + ), (2.19)
Q2 = ф tec) = ₽ toe — х2) — и toe — S/гхл). (2.20)
Зависимость Qi от г/2с нелинейна, a Q2 от г/2с — линейна.
На рис. 2.22 показано три различных случая теплоотвода при одной и той же кривой выделения тепла Qb По форме кривой Qi=f(l/2c), характеризующей изменение количества тепла в реакторе при изменении в нем температуры, видно, что макси-
Рис. 2.22. Диаграмма выделения — отвода тепла
Рис. 2.23. Влияние времени пребывания вещества иа режим работы реактора
мальной скорости химической реакции (т. е. скорости выделения тепла) соответствует средняя часть кривой, а максимальное количество тепла выделяется при высоких температурах и практически полном превращении в реакторе. Теплоотвод в реакторе (прямые 1, 2, 3) линейно зависит от температуры yzc-Прямые 1 и 2 соответствуют одному и тому же значению коэффициента теплопередачи ц, но различным температурам в рубашке у2хл; для прямой 3 коэффициент теплопередачи меньше. Состояниям равновесия в реакторе соответствуют точки а, Ь, с, d, е пересечения линий теплоотвода и тепловыделения.
Для первого случая (линия /) в реакторе возможно только одно состояние равновесия в точке а, которому соответствует стационарная температура г/2а. Степень превращения в реакторе при этом низкая, и количество выделяемого тепла невелико.
Во втором случае (линия 2) при высокой температуре в рубашке также возможно только одно стационарное состояние в точке а, но оно достигается при практически полном превращении реагента и высокой температуре в реакторе г/2е. Для ряда процессов температура г/2е может оказаться вне области рабочего режима реактора и такая организация процесса будет невозможна.
Наконец, в третьем случае прямая 3 пересекает кривую тепловыделения в точках Ь, с, d. Значит, в реакторе возможно три состояния равновесия, которым соответствуют стационарные температуры у^ь, У 2с, Уъч- Этот случай аналогичен неоднозначным статическим характеристикам, показанным на рис. 2.20 и 2.21, причем точкам 1 и 3 статической характеристики (рис. 2.20), соответствуют точки b и d на диаграмме (рис. 2.22), а точке 2 — точка с.
Диаграммы выделения — отвода тепла можно использовать для изучения связи между другими параметрами процесса. На рис. 2.23 показано изменение режима работы реактора при изменении времени пребывания вещества (кривые Лер, Лер, Рср) и одинаковых условиях отвода тепла из реактора (прямая линия). Время пребывания вещества в реакторе определяется его объемом и расходом реагента. Последний может быть использован в качестве управляющего воздействия. При большом и‘ малом времени пребывания вещества в реакторе (кривые Л ср и ЛсР) в нем возможно только одно стационарное состояние (точка 5 для ЛСР и 1 для Лер). При большом времени пребывания вещества химическая реакция будет проходить почти полностью и поэтому стационарное состояние в реакторе устанавливается при высокой температуре. При малом времени пребывания превращение в реакторе мало (вещество «проскакивает» через реактор) и стационарная температура в нем низкая. В промежуточном случае в реакторе возможно три стационарных состояния (точки 2, 3, 4).
Диаграмма выделения — отвода тепла в реакторе позволяет оценить устойчивость его стационарных состояний. На рис. 2.24 представлен случай, когда в реакторе возможно три стационарных состояния (точки Ь, с, d). Пусть режиму работы реактора соответствует стационарное состояние в точке Ь. Если по каким-либо причинам температура в реакторе станет выше, чем у2ь, например, у2ь+&Уг, то количество выделяемого тепла будет Qi (г/2^ + Лг/2), а отводимого — Qityzb+'kyz), причем |Qi(z/2*+ +^2) | < Q2 (Угь-ЬЛУг)
Рис. 2.24. Анализ устойчивости реактора по диаграмме выделения — отвода тепла
Поскольку теперь отводится тепла больше, чем выделяется, температура в реакторе будет снижаться и возвращаться к значению у2Ь. При снижении температуры по сравнению с у2ь, т. е. при у2ь—куъ, количество выделяемого тепла Qi (у2ь—Ду2) будет больше, чем отводимого Qi(y2b—&у2), и, следовательно, температура в реакторе будет расти до точки Ь, где Qi = Q2- Таким образом, стационарное состояние реактора в точке b является устойчивым.
Аналогичный анализ для точек d и с показывает, что точка d соответствует устойчивому, а точка с—неустойчивому стационарному состоянию реактора, так как в последнем случае даже при незначительном отклонении от состояния равновесия температура в реакторе будет либо увеличиваться до точки d (при отклонении у2с-\-Ду2), либо уменьшаться до точки b (при отклонении у2с—&у2).
Анализ устойчивости по диаграмме выделения — отвода тепла дает необходимое, но не достаточное условие устойчивости. Кроме того, следует иметь в виду, что речь идет об устойчивости «в малом» (т. е. при небольших отклонениях от стационарного состояния). Если, например, реактор работал в нижнем стационарном состоянии (точка Ь), и под действием возмущений температура в реакторе выросла до значения, большего, чем у2с, то после снятия возмущения режим в реакторе не вернется в точку Ь, а придет к верхнему стационарному состоянию (точка d). Возникновение неустойчивости в реакторе связано с наличием внутренней положительной обратной связи при осуществлении экзотермических процессов: скорость реакции с ростом температуры в реакторе экспоненциально увеличивается, что приводит к увеличению количества выделяемого тепла реакции и, в свою очередь, вызывает рост температуры в аппарате, и т. д.
На основании изложенного выше можно получить аналитическую запись критерия устойчивости стационарного состояния, вытекающего из анализа диаграммы выделения — отвода тепла: для устойчивости, стационарного состояния необходимо, чтобы наклон линии тепловыделения в точке стационарного состояния был меньше, чем наклон линии теплоотвода, т. е. при изменении температуры скорость тепловыделений была меньше, чем скорость теплоотвода:
. (2.21)
Учитывая выражения для Qi и Q2, имеем:
dq, ^х,е1У^
* " л. G+n/M
о
dy2 =Р-Н-
(2.23)
После подстановки выражений (2.22) и (2.23) в (2.21) получим:
(₽ —Ю>
У\с (1 + ре1/У2с)2
(2.24)
Построение главных изоклин
Определить число и координаты стационарных состояний реактора можно построением главных изоклин системы [12]. Уравнения изоклин для плоскости yi, у2 соответствуют уравнениям статики реактора. Действительно, уравнение (2.14) соответствует значению dy\ldt=Q, т. е. изоклинам горизонтального наклона, а уравнение (2.15) получаем из условия dy2ldt=Q, т. е. оно является уравнением изоклин вертикального наклона. Примерный вид этих изоклин для одного и трех стационарных состояний реактора представлен на рис. 2.25. Стационарным состояниям реактора соответствуют точки пересечения изоклин
Особенности динамики и устойчивость режимов работы химических реакторов. По динамическим характеристикам химические реакторы очень разнообразны: в одних протекают быстрые процессы (полимеризация этилена под высоким давлением, синтез аммиака и др.), постоянные времени по основным каналам управления составляют от 10 до 200 с. Другие реакторы (например, полимеризации стирола) весьма инерционны, их постоянные времени составляют десятки минут. Существенной особенностью химических реакторов, значительно затрудняющей их автоматизацию, является нелинейность характеристик, в результате которой возникают множественность стационарных состояний в реакторе и неустойчивые режимы работы.
Рис. 2.25 Определение числа стационарных состояний реактора с помощью главных изоклин: а — три стационарных состояния, б — одно стационарное состояние
Часто на практике целесообразно вести процесс в неустойчивом режиме. При этом достигаются наилучшие показатели, так как скорость реакции в низкотемпературном режиме слишком мала, а проведение процесса в высокотемпературном режиме невозможно ввиду очень высокой температуры реагирующей среды. Проанализируем стационарное состояние реактора и найдем необходимые и достаточные условия его устойчивости [4, 12, 38]. Математическая модель динамики реактора идеального перемешивания при осуществлении в нем необратимой реакции первого порядка имеет вид (2.12), (2.13). Соответствующие уравнения статики получаются при dy\ldt=Q\ dy2ldt=f}.
Исследуем устойчивость стационарного состояния с координатами у\с, У2с, применяя первый метод Ляпунова, позволяющий изучить устойчивость «в малом» нелинейной системы по ее линейному приближению. Линеаризуя системы разложением в ряд Тейлора и переходя к уравнениям в отклонениях от стационарного состояния, получим:
= aAyi +(2-25) = c&yi4-d&&, (2.26)
где Д{/1=^1—j/ic; Д^2=#2—Угс; a, b, с, d — коэффициенты линейных членов разложения Р(У1,У2) и Q(yt,yz) в ряд Тейлора в окрестности точек ytc, Угс, т. е. координат исследуемого на устойчивость стационарного состояния:
У1=У1С
У2=У2С
-1/У
= —е 2С —Р;
»1=Ф1С
У2=У,С
-1/У уке *
У22С
-1/У
= е 2С:
dQG/j, t/г) дУъ
Х/1=У1С
У2=У2С
У2=У2С
_1/У2С
Уке R
= 72---------Р — Н'
У 2С
Характеристическое уравнение для системы (2.12), (2.13) имеет вид:
z2 4- Дгг 4~ Д2 = 0,
где Д,=—(a+d); &2=ad—bc.
Тогда в соответствии с критерием устойчивости Рауса — Гурвица условия устойчивости для системы (2.12), (2.13) записываются следующим образом:
д2 = (ай_&С)>0, (2.27) Д1 = -(«4-^)>0. (2-28)
д<2<У1>Уг)
С= дУ1
d =
Рис. 2.26. Фазовые^ портреты режимов работы реактора: а три стационарных состояния реактора, б — одно устойчивое стационарное состояние; в — одно неустойчивое стационарное состояние
Подставляя в Аг и Д1 значения коэффициентов разложения а, Ь, с, d, получаем условия устойчивости стационарного состояния реактора:
-1/у
Ла = ИР + Р2 + е~1,У2С (Н + Р) - —Jr —> 0; (2.29)
У 2С
-1/У „
—л/у fj 2®
Д1 = « 2С~Т--------------+ ц + 2р>0. (2.30)
У 2С
С помощью неравенств (2.29), (2.30) легко определить, устойчиво или нет конкретное стационарное состояние системы. При равенстве Аг и Ai нулю получим границу устойчивости реактора, зная которую, можно выбирать режим работы реактора таким образом, чтобы обеспечивалась его устойчивость.
Физическую интерпретацию условия устойчивости (2.29) можно получить после преобразования его к виду (с учетом (2.16)):
Р%е1/У2с
(Р-Ю>
{Ас (ре1/Уас + О8
(2.31)
Это выражение совпадает с условием (2.24), по которому для устойчивости стационарного состояния требуется, чтобы при изменении температуры скорость теплоотвода была больше скорости тепловыделения в реакторе. Выполненный анализ показал, что для устойчивости стационарного состояния реактора необходимо одновременное выполнение условий (2.29) и (2.30).
В качестве примера на рис. 2.26 приведены фазовые портреты для химического реактора, описываемого системой (2.12), (2.13). Рис. 2,26, а соответствует случаю, когда в реакторе воз
можно три стационарных состояния. Верхнее состояние 1 и нижнее 3 устойчивы, а среднее состояние 2 — неустойчивое типа-«седло». Очевидно, что речь идет об устойчивости «в малом». Например, стационарное , состояние 1 устойчиво лишь прн возмущениях, не «выталкивающих» изображающую точку из области притяжения точки 1 через сепаратрису седла 2 (пунктир на рис. 2.26,6) в область притяжения стационарного состояния 3. Рис. 2.26, б соответствует одному устойчивому, а рис. 2.26, в — одному неустойчивому стационарному состоянию (условие Д2>0 выполнено, a Ai>0— нет). В последнем случае на фазовой плоскости имеется предельный цикл, соответствующий незатухающим колебаниям температуры и концентрации в реакторе.
Итак, основные особенности функционирования химических реакторов идеального смешения состоят в следующем:
динамика реактора описывается системой обыкновенных нелинейных дифференциальных уравнений;
статика реактора описывается нелинейными алгебраическими уравнениями; реактор может иметь несколько стационарных состояний;
статическая характеристика реактора в области множественности стационарных состояний имеет петлю гистерезиса; ‘
стационарные состояния реактора могут быть устойчивыми и неустойчивыми; их устойчивость определяется критериями ,(2.29) и (2.30);
при определенных постоянных входных значениях параметров реактора в нем могут возникать незатухающие колебания температуры и концентрации—автоколебания.
2.3.2. Регулирование реакторов с перемешивающим устройством Одной из основных задач, возникающих при управлении химическими реакторами непрерывного ^действия, является стабилизация заданных значений температуры й концентрации в реакторе. Рассмотрим эту задачу применительно к пропорциональному закону регулирования. Возможны восемь вариантов включения регулятора, обусловливающих способы построения АСР.
Вариант 1. Регулирование по отклонению температуры в реакторе от заданного значения воздействием на входную температуру реакционной смеси, т. е.
х2 — х2° = —Si (уг—у2°), (2.32)
где Si — коэффициент усиления П-регулятора; уг — температура в реакторе; Уг°—заданная температура в реакторе; Xi — входная температура реакционной смеси; Хг° — значение входной температуры смеси, при которой уг=Уг°~
Этот способ регулирования может быть реализован, например, изменением режима работы специального теплообменника,, устанавливаемого на входе реакционной смеси в реактор. Однако такая система может оказаться очень инерционной. Можно также подогревать часть реакционной смеси и изменять ее
входную температуру, изменяя соотношения холодного и горячего потоков, поступающих в реактор.
Вариант 2. Регулирование по отклонению температуры в реакторе от заданного значения воздействием на входную концентрацию реакционной смеси:
= (2.33)
где Xt — входная концентрация реакционной смеси; Х[° — значение входной концентрации реакционной смеси, при которой У2=Уг°.
При реализации этого способа регулирования наиболее сложным является изменение концентрации реакционной смеси на входе в реактор. Обычно это выполняется изменением расхода реагента, подаваемого в небольшом количестве (например, инициатора в реакторе полимеризации этилена).
Вариант 3. Регулирование по отклонению концентрации реакционной смеси в реакторе от заданного значения изменением входной температуры реакционной смеси, т. е.
Xj — х2° = (уг — у^), (2.34)
где yi — концентрация в реакторе; t/i°—заданная концентрация в,реакторе. Реализация этого способа регулирования достаточно сложна, так как датчики для измерения текущей концентрации в реакторе обычно отсутствуют или же это измерение имеет большое запаздывание.
Вариант 4. Регулирование по отклонению концентрации реакционной смеси в реакторе от заданного значения воздействием на входную концентрацию реакционной смеси:
x1-x1o = -s1('/1-'/1°)- (2.35)
Вариант 5. Регулирование по отклонению температуры в реакторе от заданного значения изменением времени пребывания (объемной скорости потока):
р —р° = —Si(y2 —Л)- (2.зб)
где р — время пребывания в реакторе (объемная скорость потока); 0° — значение времени пребывания (объемной скорости потока), при котором */2=1/2°.
Вариант 6. Регулирование по отклонению концентрации реакционной смеси от заданного значения воздействием на время пребывания (объемную скорость потока) в реакторе:
p_po = _S1(p1_p1o). (2.37)
Вариант 7. Регулирование по отклонению температуры в реакторе от заданного значения воздействием на температуру теплоносителя в рубашке реактора:
Угхл — 4/°гхл = —Si (у2 — Уа°) > (2.38)
где Угхл—температура в рубашке реактора; у°2хл — значение температуры в рубашке реактора, при которой У2=У^-
Рнс. 2.27. Диаграмма выделения — отвода тепла для регулируемого реактора: пунктиром показана линия отвода тепла для нерегулируемого реактора
Эта система регулирования может быть реализована, например, путем изменения давления кипящего хладоагента,
находящегося в рубашке реак-
тора. Использование такого способа регулирования позволяет
изменять теплоотвод от реактора при изменении в нем температуры (рис. 2.27).
Вариант 8. Регулирование по отклонению концентрации в реакторе от заданного значения воздействием на температуру теплоносителя в рубашке реактора:
0ахл — 0°2хл — Si (У1 — У1°) (2.39)
Реализация такой системы регулирования связана с трудностями измерения концентрации вещества в реакторе.
Как уже отмечалось, одной из наиболее сложных задач является реализация работы реактора в неустойчивом без регулятора режиме. Для упрощения анализа будем рассматривать приведенные выше варианты пропорционального регулирования режимных параметров реактора.
Уравнения замкнутой системы регулирования получаются при совместном рассмотрении математической модели реактора и регулятора. В качестве примера приведем запись уравнений, описывающих поведение системы регулирования, соответствующей варианту 1. Эти уравнения получаются из уравнений реактора (2.12), (2.13) и регулятора (2.32). Подставляя значение х2 в уравнение (2.13), получим:
= —yie-Ws + Р (Xj - У1),
(2.40)
= У1е~11у2 + р 1—Sj (02 — 02°) + *2° —021 — 11 (02 — 02Хл). (2.41)
После линеаризации системы уравнений (2.40), (2.41) имеем:
^- = а01 + *02- (2-42) ^-^cyi + dy2, (2.43)
где а — —е 2С — Р; Ь = ——ъ—е 2С;
0 2е
с = d e~1/i>2C - SxP - Р - Ц.
Условия устойчивости стационарного состояния записываются в виде:
Д2 = (ad — М>0; Д1 = —(« + <0>0;
или
д2 = I [-е~1,Угс - р) (е~1!Ух - SiP - Р - Й -
1\ / \ У 2С /
Д1 = /'е“1/У2с + 2р + Sip + ц - е"1/У2с) >0. (2.45)
\ У 2С )
Анализ выражений (2.44), (2.45) показывает, что если стационарное состояние нерегулируемого реактора (Si=0) неустойчиво (не выполнено условие Д2>0 или Ai>0), то выбором соответствующего значения настройки регулятора можно обеспечить его устойчивость, когда оба условия (2.44) и (2.45) будут выполнены. Влияние введения регулятора на устойчивость стационарного состояния реактора можно проследить по диаграмме тепловыделение — теплоотвод в реакторе (см. рис. 2.27). С введением регулятора температуры положение линии теплоотвода изменяется таким образом, что ее наклон становится больше наклона кривой тепловыделения, и условие устойчивости стационарного состояния выполняется.
Для анализа регулируемого химического реактора удобно также использовать построение главных изоклин (как при определении числа стационарных состояний реактора). Рассмотрим в качестве примера вариант 2 регулирования работы реактора, когда регулятор температуры при ее отклонении воздействует на входную концентрацию реакционной смеси. Модель системы получим из уравнений реактора (2.12), (2.13) и регулятора (2.33):
+ Р[Xj0 Sj (у2 — — У1] = P (Hit Ун Si)> (2.46)
= УтГ^г + P (x2 — %) — p. (y2 — г/21л) = Q (ylt y2). (2.47)
Приравняв нулю правые части уравнений (2.46), (2.47), получим уравнения главных изоклин для замкнутой ACPf
р (&, */a,Si) = 0, (2.48) <2(л,«/а)=0. (2.49)
Поскольку физический смысл имеют только положительные значения концентрации у\ и температуры у%, рассматриваем первую четверть фазовой плоскости у\, у2- При 5] = 0 получаем главные изоклины реактора без регулятора. Влияние изменения коэффициента усиления регулятора Si на взаимоположение и вид главных изоклин замкнутой системы показано на рис. 2.28.
Рис. 2.28. Деформация главных изоклин реактора при изменении коэффициента усиления регулятора:
а — 31=0; б — 0<31<3|‘; в —Si-Si1; г — SP^cS,2, д — 5,-Si2; е — 31>3?
Рассматривается случай, когда в реакторе без регулятора возможно три стационарных состояния. Изоклина Q(t/1; t/2)=0 при варьировании остается неизменной, так как она не зависит от коэффициента усиления реактора. С увеличением 3] стационарные состояния 1 и 3 сначала приближаются к 2 (рис.2.28,б), а затем 1 и 2 сливаются в одно сложное состояние равновесия 1, 2 типа «седло — узел» (рис. 2.28,а). При дальнейшем росте Si оно распадается на два простых состояния равновесия, причем стационарное состояние 1 становится «седлом», а 2—«узлом» (рис. 2.28, г). Затем сливаются состояния 1 и 3 и, наконец, сложное состояние равновесия 1, 3 исчезает, н в системе остается одно регулируемое стационарное состояние 2.
Из анализа ясно, что коэффициент усиления регулятора Si имеет два критических (бифуркационных) значения. Первое из них Si1 соответствует слиянию состояний равновесия 1 и 2. При дальнейшем увеличении коэффициента усиления регулятора Si состояние равновесия 2 превращается из «седла» в «узрл». Второе предельное значение З]2 соответствует слиянию стационарных состояний 1 и 3. Если 3] >3]2, то в системе возможно только одно устойчивое стационарное состояние.
Фазовые портреты рассматриваемой системы регулирования реактора для различных значений коэффициента усиления регулятора приведены на рис. 2.29. При значениях O^Si^Si1 (рис. 2.29, а) в системе три стационарных состояния равновесия, причем среднее стационарное состояние 2, которое должно ста-
Рис. 2.29. Фазовые портреты регулируемого реактора: в — при 0<3i^S|'; б — при S1I<S1<SIS; в—при
билизироваться регулятором, неустойчиво. Увеличение коэффициента усиления регулятора до значения, большего, чем Sp, приводит к тому, что стабилизируемое состояние равновесия 2 становится устойчивым «узлом» (рис. 2.29,6). Однако приэГом оно устойчиво лишь «в малом», т. е. при значительных возмущениях возможен «срыв» реакции на низкотемпературный режим (точка 3). Наконец, при дальнейшем увеличении коэффициента усиления регулятора до значений, больших Si2, в системе возможно только одно устойчивое стационарное состояние (рис. 2.29,в). При Si>Si2 система устойчива «в большом».
Возможность стабилизации неустойчивого стационарного состояния с помощью пропорционального регулирования при других способах включения регулятора можно проанализировать одним из изложенных методов. Результаты такого анализа сведены в таблицу (см. табл. 2.1). Знак плюс означает возможность стабилизации неустойчивого режима, минус—невозможность этого. Как видно из таблицы, способ включения регулятора оказывает существенное влияние на возможность стабилизации неустойчивого стационарного состояния. Для вариантов 3 и 6 при любых значениях коэффициента усиления регулятора
Таблица 2.1. Возможные способы построения АСР химического реактора
Вариант включения регулятора Уравнение регулятора Изменение условий устойчивости АСР
д* А*
1 Xs — Х2°= — S^ — у20) + +
2 Ч —*1°= — StiPi — у2°) — +
3 х2 — xj = — SiCp! — у?) — —
4 xl — x.t>= — S^ — yf) + ——
5 -St(ya-yt°) + +
6 3-3°= — —
7 У%ХЛ— У2°ХЛ— —$1(Уг У2°) + +
8 Угхл — Угхл — — — Уг) — +
не удается обеспечить устойчивость стационарного состояния. Для вариантов 2 и 8 устойчивость стационарного состояния может быть обеспечена только в том случае, если без регулятора выполнено условие Ai>0, так как включение регулятора не влияет на выполнение этого условия. Регулирование входной температуры, времени пребывания смеси или температуры хла-доагента по температуре в аппарате (варианты 1, 5, 7) позволяют обеспечить стабилизацию стационарного состояния реактора при соответствующем выборе коэффициента усиления регулятора. В варианте 4 стабилизация стационарного состояния с помощью П-регулятора возможна только в случае, когда для исходного состояния равновесия выполнено условие Ai>0.
Выше было рассмотрено влияние П-регулятора на устойчивость стабилизируемого состояния равновесия. Анализ показывает, что управление с использованием воздействия по производной в добавление к П-регулированию позволяет обеспечить устойчивость системы и повышает ее быстродействие; при управлении по интегралу от отклонения в неустойчивом стационарном состоянии добиться устойчивости замкнутой системы невозможно. При использовании ПИ-регулятора введение интегральной составляющей приводит к дополнительным ограничениям на допустимое (из условий устойчивости) значение коэффициента усиления пропорциональной части, уменьшая возможность обеспечения устойчивости замкнутой системы. Однако (как известно из курса теории регулирования), включение интегральной составляющей в закон управления позволяет устранить статическую ошибку в переходном процессе, которая всегда имеется при использовании П-регулятора.
Рис. 2.30. Каскадные (двухконтурные) системы регулирования температуры в реакторе:
а — по температуре в рубашке; б — по давлению кипящего хладоагента в рубашке; в — отруктурная схема; 1 — реактор; 2 — регулятор температуры в реакторе; 3 — регулятор температуры в рубашке; 4 — регулирующий орган; 5 — регулятор давления паров хладоагента; 6 —регулятор уровня хладоагента
Рис. 2.31. Трехкоитуриая схема регулирования реактора полимеризации стирола:
Wi— W4 — передаточные функции объекта; Ri—R, — передаточные функции регуляторов температуры теплоносителя в рубашке реактора <J?i. Ла). регулятора температуры в реакторе (/?»), регулятора степени конверсии мономера (Л4)
На устойчивость замкнутой системы существенно влияет также запаздывание в регуляторе или импульсных линиях. Даже небольшое запаздывание может привести к тому, что стабилизация неустойчивого стационарного состояния окажется невозможной.
Выше были рассмотрены простые одноконтурные схемы регулирования работы химического реактора. В ряде случаев для улучшения качества переходного процесса при построении систем управления реактором используют каскадные схемы регулирования. Примеры их приведены на рис. 2.30. На рис. 2.30, а дана каскадная схема регулирования температуры в реакторе 1 при осуществлении в нем экзотермической реакции. Регулятор 2 температуры в реакторе изменяет задание регулятору 3 температуры в рубашке реактора. Таким образом, в системе имеется два контура регулирования (рис. 2.30,в): внутренний (вспомогательный), обеспечивающий стабилизацию температуры в рубашке, и внешний (основной), поддерживающий заданную температуру в реакторе._
На рис. 2.30,6 показана* каскадная схема регулирования, в которой изменение температуры в рубашке реактора осуществляется регулированием давления кипящего хладоагента (регулятор 5). Уровень конденсата в рубашке стабилизируется регулятором 6.
В практике автоматизации химических реакторов используют и более сложные системы — трех-, а иногда и четырехконтурные. На рис. 2.31 приведена структурная схема трехконтур-нон системы регулирования реактора полимеризации стирола. Основной задачей управления реактором является поддержание заданной степени превращения, стабилизация требуемой для этого температуры полимеризационной массы и температуры теплоносителя.
Реактор полимеризации стирола характеризуется очень большой инерционностью. Длительность переходных процессов, связанных с изменением температуры теплоносителя, составляет б—10 мин, с изменением температуры полимеризующейся массы в реакторе—1,5—2 ч, с изменением степени конверсии — 10—20 ч. Ввиду указанных особенностей динамики реактора и различий в динамических характеристиках по разным каналам управления для стабилизации режима работы реактора используют трехкаскадную схему регулирования. Регуляторы и Rz
поддерживают требуемую температуру теплоносителя, поступающего в рубашку реактора; регулятор Лз—температуру полимеризующейся массы в аппарате, корректируя задания регулятором /?1 и J?2; регулятор осуществляет стабилизацию заданной степени конверсии в реакторе изменением задания регулятору R3.
К типичным задачам управления работой непрерывного химического реактора относятся также регулирование соотношения потоков реагентов, поступающих в реактор, и стабилизация заданного значения pH в реакторе (см. разд. 2.2).
2.3.3. Особенности регулирования трубчатых реакторов
Трубчатые реакторы обычно используют для проведения газофазных высокоэкзотермических процессов. Они позволяют обеспечить более высокую степень конверсии, чем реакторы смешения, так как значительная часть тепла, выделяющегося при реакции, отводится через стенку реактора. Математическая модель трубчатого реактора более сложна для исследования,чем модель реактора полного смешения, так как в трубчатом реакторе параметры процесса изменяются по пространственным координатам. Наиболее простую модель трубчатого реактора получают, предполагая режим идеального вытеснения в аппарате. В этом случае динамическая модель реактора описывается дифференциальным уравнением в частных производных (по времени и длине реактора), а модель статики — дифференциальным уравнением в обыкновенных производных (по длине реактора).
Описывающие динамику трубчатого реактора уравнения материального и теплового баланса соответственно имеют вид:
-^r+v^- = -r(0,c), (2.50)
ср dt* Я- Сри ~ г (0“~ Охл)> (2.51)
где с — концентрация реагента; v — линейная скорость смеси в реакторе; I — координата по длине реактора; (—ДН)—тепло реакции; г(0, с)—скорость реакции, ср — удельная теплоемкость смеси; 0 — температура в реакторе; 0гл—температура теплоносителя в рубашке реактора; kt — коэффициент теплопередачи через стенку реактора.
Уравнение (2.50) отражает изменение концентрации, уравнение (2.51)—изменение температуры по длине трубчатого реактора. Скорость движения смеси v по длине реактора предполагается постоянной. Радиальные градиенты скорости v, концентрации с и температуры 0 отсутствуют, а последние две величины меняются по длине реактора и во времени. Изменение концентрации (2 50) полностью определяется скоростью химической реакции, а изменение температуры (2 51) происходит в результате выделения тепла химической реакции и вследствие теплопередачи через стенку реактора. Для полного описа-
ния поведения реактора задаются граничные условия: значения температуры и концентрации на входе в реактор и начальные распределения температуры и концентрации.
Модель статики трубчатого реактора получают из уравнений (2.50), (2.51) приравнением нулю производных по времени:
de
(2.52)
d0 dl — ( г (0, с) — k-f (0 — 0хл) • (2.53)
Анализ устойчивости математической модели трубчатого реактора идеального вытеснения (2.50), (2.51) показывает, что неустойчивые режимы в нем невозможны (т. е. для любых граничных условий существуют определенные устойчивые профили температуры и концентрации по длине реактора), причем решение системы (2.50), (2.51) единственно. Это означает, что фиксированному набору параметров системы (скорости потока v, температуре хладоагента 0ХЛ, коэффициенту теплопередачи kT, значениям кинетических констант) при заданных граничных условиях однозначно соответствуют определенные стационарные профили температуры и концентрации, так что множественность состояний равновесия (как в реакторе смешения) для модели идеального вытеснения невозможна.
Параметрическая чувствительность трубчатых реакторов. В трубчатых реакторах возможны режимы, при которых велика параметрическая чувствительность реактора, т. е. незначительные колебания параметров процесса v, 0ХЛ, &т или начальных значений концентрации с(0) и температуры 0(0) приводят к существенным изменениям температурного профиля по длине реактора. При этом максимальная температура в реакторе может оказаться значительно больше предельно допустимой и будет соответствовать аварийному режиму работы реактора.
Основной задачей, рассматриваемой при исследовании чувствительности, является анализ влияния малых изменений конструктивных параметров и внешних условий на режим работы технологических аппаратов. Кроме того, в ряде случаев ставятся задачи синтеза реакторов, процесс в которых малочувствителен к внешним возмущениям. Чувствительность переменной Xi по параметру а/ выражается в виде dxt[daj = Sj‘ (где S/— чувствительность i-той переменной по j-му параметру).
Параметры могут характеризовать как собственные свойства исследуемой системы (например, коэффициент теплопередачи в реакторе), так и действующие на нее внешние возмущения или управления. Если объект описывается системой алгебраических уравнений, то исследование чувствительности каких-либо переменных к изменению параметра заключается в частном дифференцировании модели объекта по данному параметру. Если модель объекта представляет собой систему обыкновенных дифференциальных уравнений [как, например, модель статики труб-134
чатого реактора (2.52), (2.53)], то чувствительность по параметру изменяется по длине реактора и определяется как предел отношения:
= н xi(a1.....ctj+Да....ак, I),,, aj,,дл, I)
Да-о д«
где л,(«!,..., а/,..., а*, I)—решение системы дифференциальных уравнений при определенных начальных условиях и фиксированных значениях параметров a; */(аь..., а/+1Да,... ..., а*„ I) — решение системы дифференциальных уравнений при тех же начальных условиях и приращении параметра а, на Ла.
Чувствительность S/‘(Z) показывает отклонение указанных решений друг от друга в каждой точке по длине реактора.
В качестве параметров а, по которым исследуют чувствительность при анализе химических реакторов, могут быть выбраны кинетические константы, входящие в уравнение скорости реакции г (6с); конструктивные параметры реактора (например, его диаметр); начальные значения режимных переменных (температура и концентрация); коэффициент теплопередачи (&т); температура хладагента (6хл) и т. п.
К основным задачам, при решении которых могут использоваться методы теории чувствительности для химических реакторов, относятся: идентификация математических моделей реакторов; оптимальное проектирование реакторов; контроль и управление процессом в реакторе.
При идентификации математических моделей реакторов исследование чувствительности позволяет выявить параметры, в наибольшей степени влияющие на точность модели. В качестве параметров, по которым анализируется чувствительность, в этом случае используют константы. Они должны быть найдены в результате идентификации по экспериментальным данным — например, энергия активации Е или предэкспонеициальный множитель k в уравнении скорости реакции, коэффициент теплопередачи kT и т. д. Исследование функций чувствительности по этим параметрам
дс{1) 50(0 dc(t) de (0 5с (Q 50(0
дЕ ’ дЕ ’ dk ’ dk ’ dk^ * 5йт
позволяет классифицировать параметры по степени их влияния на режимные переменные (концентрацию с и температуру 0), сформулировать требования к точности идентификации различных констант и соответственно к объему необходимых экспериментальных данных. Исследование чувствительности позволяет также в ряде случаев упростить математическую модель, исключив из нее члены, незначительно влияющие на решение.
В задачах оптимального проектирования реакторов функции чувствительности определяются при варьировании конструктив-
яых параметров (диаметра аппарата, места расположения точек дополнительного ввода сырья и т. п.). Это позволяет правильно выбрать геометрию реактора и соответствующий режим его работы.
При контроле процесса в реакторе исследование параметрической чувствительности позволяет выбрать место установки датчиков, соответствующих максимальной чувствительности объекта (максимальному коэффициенту усиления), которые используют в системе регулирования (см. ниже — регулирование температуры в трубчатом реакторе полимеризации этилена).
Чувствительность технологических переменных (температуры, концентрации) следует учитывать также в задачах оптимального управления. Так, оптимальный режим работы агрегата может оказаться вблизи от его границы устойчивости или в области высокой параметрической чувствительности процесса. Тогда малейшие изменения переменных или параметров могут приводить к аварийным режимам работы реактора. В задачах оптимального управления учет параметрической чувствительности может осуществляться либо путем дополнительных ограничений на чувствительность или на допустимые значения самих переменных при оптимизации процесса, либо включением ограничений на чувствительность (с определенным коэффициентом) в целевую функцию оптимальной задачи.
Рассмотрим задачу расчета функций чувствительности для трубчатого реактора, модель статики которого представляет собой систему дифференциальных уравнений типа (2.52), (2.53). Для получения уравнений чувствительности запишем в общем виде модель статики реактора с начальными условиями:
^[~ = fi(x, а, ха); Xi(P) = xia-, i = 1,2,..., п. (2.52а) где х — фазовые переменные процесса (температуры, концентрации); х0 — значения этих переменных на входе в реактор; а — параметры технологического процесса и реактора, по которым может исследоваться чувствительность (входные параметры процесса, размеры реактора, параметры управления и т. п.); fi — нелинейные функции, вид которых определяется химической реакцией, проходящей в реакторе; I — длина реактора.
Параметры а, входящие в уравнения (2.52а), могут принимать значения из некоторого интервала аМин<1а<аМакс, причем для всех значений а в этом интервале выполняются требования существования и единственности решения (2.52а). В частном случае уравнений (2.52), (2.53), при 1=2, х\ = с; хг=0.
Уравнения для вычисления функции чувствительности i-тых переменных процесса (х,) по /-тым параметрам («,) получаем дифференцированием (2.52а) и начальных условий по параметру «/:
д (d.Xj\ _ dfi dxt dft dxn dft
да/ \ dl dxj да/ + * ’' + дхп да/ ‘ да/ '
Изменяя порядок дифференцирования и записывая обозначения функций чувствительности S/ (где i — иомер переменной, / — номер параметра), получим:
Т = + ••• + дХп Sf+ daj> (2.526)
Начальные условия для системы линейных дифференциальных уравнений (2.526) получаем дифференцированием по параметру а/ начальных условий системы (2.52а):
При исследовании чувствительности к изменению начальных условий xt (0) система уравнений чувствительности будет иметь вид:
d / дх( \ dfj dXj dft dxn dft
dl ( dxj (0) ) dx1 dxj (0) + dxn dxj (0) "** dXj ’
(2.52b)
где ~g^(jj=>S>/0 — чувствительность i-той переменной по /-му
начальному условию. Начальные условия для системы уравнений (2.52в) будут:
dxj [ 0 при Z #=/ ^7(0)=Ь при/ = /.
Вычисление функций чувствительности сводится к интегрированию систем линейных дифференциальных уравнений (2.526) или (2.52в) с переменными коэффициентами, называемых уравнениями чувствительности. Так как эти уравнения получены в предположении, что уже найдено решение основной системы (2.52), (2.53), после получения которого осуществляется дифференцирование по параметру а, на практике при анализе чувствительности химических реакторов решают совместно систему уравнений (2.52а), (2.526), (2.52в). При анализе чувствительности решения по различным параметрам существенно упрощается, поскольку по какому бы параметру или начальным условиям ни исследовалась чувствительность, правые части соответствующих уравнений (2.526), (2.52в) будут одинаковы, отличаясь лишь значениями свободных членов.
Для удобства сравнительной оценки чувствительности решения к различным параметрам используют нормированные чувствительности различного вида:
при сравнении относительного изменения переменной х,-при относительном изменении параметра а;:
—. , а» дхг
siJ=siJ_L=-^
Ч_. xt '
при сравнении влияния разных параметров а/ на одну переменную xt:
— . дх,
Sji = да} ai =
при сравнении влияния одного параметра си на разные переменные х(:
д “ 5ах xt “ 51 xt ’
где S — нормированная функция чувствительности.
На рис. 2.32, а приведены температурные профили для трубчатого реактора полимеризации этилена, соответствующие различным значениям температуры теплоносителя. Как видно из графика, в области значений ' 0ХЛ =337—343 К температурный профиль реактора имеет очень высокую чувствительность (изменение температуры 0ХЛ всего на 1—2 град приводит к росту вшах на 15—20 град), причем чувствительность температуры в реакторе к изменению 0ХЛ существенно меняется по длине аппарата. На рис. 2.32, б приведен график изменения коэффициента чувствительности, представляющего собой величину
, по длине реактора. Максимальная чувствительность достигается в области температур, соответствующих перегибу в температурном профиле. Такой характер изменения чувствительности достаточно типичен для трубчатых реакторов и должен учитываться при построении их систем регулирования.
Сложность управления трубчатым реактором заключается в том, что необходимо управлять распределением параметра (чаще всего температуры) по длине реактора, а управление является сосредоточенным (например, изменение температуры реакционной смеси на входе в реактор или температуры тепло-
Рис. 2.32. Профили температур (а) и изменение коэффициента чувствительности температуры в реакторе к температуре теплоносителя (б) дли трубчатого реактора полимеризации этилеиа
Рис. 2.33. Пример системы регулирования температуры в трубчатом реакторе: / — блок выбора максимума (d0/dZ); 2 —регулятор температуры; 3 —блок выбора мак-симума температуры; 4 —блок аварийной сигнализации
Рис. 2.34. Оценка площади под температурным профилем по длине трубчатого реактора для аварийной защиты
носителя в рубашке). Для лучшего решения этой задачи рубашку реактора в ряде случаев делают секционированной по длине .аппарата, а температуру в каждой из секций регулируют самостоятельно. В качестве переменной, по которой ведется стабилизация температуры в реакторе, часто выбирают ее максимальное значение. При этом либо в систему регулирования включают специальный блок выбора максимума (обеспечивающий автоматическое подключение к стабилизирующему регулятору датчика максимальной температуры в реакторе), либо подключают к регулятору температурный датчик, установленный по длине реактора в зоне, где обычно достигается максимальная температура.
Более предпочтительна схема (рис. 2.33), в которой значение максимальной температуры по длине реактора используют в системе аварийной защиты, срабатывающей при превышении максимально допустимого значения 0тах, а входной величиной регулятора температуры служит значение температуры в точке с максимальной чувствительностью. Однако при этом необходимо осуществлять автоматический выбор датчиков соответствующих максимальным температуре и чувствительности, что может оказаться достаточно сложным.
Применение средств вычислительной техники позволяет использовать при управлении трубчатыми реакторами интегральные оценки распределенного температурного профиля реактора. Так, при аварийной защите трубчатого реактора полимеризации этилена в АСУ «Полимир» используют площадь S под температурным профилем по длине реактора (рис. 2.34,6). Расчет этой площади осуществляется по показаниям датчиков температуры, установленных по длине реактора. Число таких датчиков составляет около 80. Исследование математической модели этого реактора позволило определить критическое значение площади Skp, при превышении которого в реакторе возникают неустойчивые режимы. Алгоритм защиты реактора предусматривает
Рис. 2.35. Адаптивная система регулирования качества полимера в трубчатом реакторе полимеризации этилена
сравнение текущего значения площади S с SKP. При ^SKp происходит срабатывание системы защиты реактора от аварий.
Важнейшими задачами являются стабилизация качества получаемых продуктов и управление производительностью химических реакторов. Решение этих задач в значительной мере сдерживается отсутствием соответствующих датчиков. Однако применение средств вычислительной техники для контроля и управле-
ния химическими реакторами позволяет использовать различные косвенные показатели, по которым с помощью моделей рассчитывают производительность реактора и показатели качества продукта, используемые при управлении процессом. Так, в АСУ «Полимир» (см. гл. 8) математическую модель реактора используют для контроля текущей производительности реактора. В этой же системе качеством получаемого в трубчатом реакторе полимера управляют с помощью специальной адаптивной системы регулирования (рис. 2.35), в которой качество полимера определяется по математической модели реактора на основе измерения входных параметров в реакторе (расход смеси, температура по длине реактора и др.). Модель для расчета основного показателя качества получаемого полимера — индекса расплава — представляет собой регрессионное уравнение, коэффициенты которого периодически уточняют по данным лабораторных анализов, вводимых в управляющий вычислительный комплекс.
2.4. РЕГУЛИРОВАНИЕ ТЕПЛОВЫХ ПРОЦЕССОВ
Передача тепловой энергии является неотъемлемой частью большинства химико-технологических процессов. Теплообменные аппараты как объекты автоматизации можно подразделить на следующие основные группы:
теплообменники смешения;
кожухотрубные теплообменники с неизменяемым агрегатным состоянием веществ (теплообменники типа «газ — газ», «жидкость — жидкость», «газ — жидкость»);
кожухотрубные. теплообменники, в которых хотя бы у одного вещества изменяется агрегатное состояние (паро-газовые, паро-жидкостные теплообменники, испарители и конденсаторы); печи.
2.4.1. Регулирование теплообменников смешения
Для создания необходимого температурного режима в химических аппаратах используют передачу энергии в результате смешения двух и более веществ с разными теплосодержаниями.
Во многих задачах регулирования состава или температуры в резервуаре с мешалкой при определении передаточных функций принимают перемешивание идеальным. Тогда объект описывается дифференциальным уравнением первого порядка с постоянной времени, равной времени пребывания в резервуаре. Однако на практике отмечается запаздывание, по истечении которого изменение концентрации или температуры питания происходит на выходе из резервуара. Это запаздывание (называемое запаздыванием смешения) зависит от размеров резервуара, вязкости жидкости, конструкции и скорости вращения мешалки, определяющих интенсивность перемешивания.
Точное определение зависимости запаздывания от всех указанных факторов оказывается очень сложным. Однако экспериментальные исследования показывают, что в первом приближении запаздывание смешения можно принять равным (2—5)п-1 для плоской лопастной мешалки и (1,1—2)п-1—для турбины (где п — число оборотов мешалки в единицу времени) [60].
Остановимся на особенностях статической характеристики собственно процесса смешения. Рассмотрим для примера аппарат непрерывного типа, в котором смешиваются два потока с расходами Gi и Gs, температурами 01 и 02 и удельными теплоемкостями сР1 и сР2 (рис. 2.36, а).
Пусть задача регулирования состоит в поддержании заданного значения 0° температуры выходного потока путем изменения расхода Gi при условии, что основными источниками возмущений являются расход и температура второго потока G2 и 02, а температура 01 и удельные теплоемкости веществ постоянны и равны 0°i, сР1 и сР2. Найдем статические характеристики объек-
СГ 2
Рис. 2.36. Принципиальная (а) и структурная (б) схемы теплообменника смешения
та по каналу регулирования Gj—0 и каналам^озмущения 62—О и 02—0 (рис. 2.36,6). Для этого запишем Уравнение теплового баланса:
4~ G202Cp2 — (Gj 4" G2) 0^р. где Ср = (GjCpi 4- Gicp2)/(G1 4- G2).
Отсюда
g______. ^2%СРЗ
^icpi 4- G2Cp2 G1cpl 4- G2cP2
(2.54)
Как видно из (2.54), характерной особенностью теплообменников смешения является нелинейность статических характеристик по каналам, связывающим расход любого вещества с температурой смеси 0, и линейность характеристик по температурным каналам 01—0 и 02—0.
При условии малых отклонений координат объекта от их заданных значений можно провести линеаризацию зависимости (2.54) и найти приближенно коэффициенты усиления объекта по каждому каналу.
Обозначим заданные значения входных и выходных координат через Gi°, G2°, 02° и разложим функцию (2.54) в ряд Тейлора в малой окрестности Gj0, G2°, 02°:
„ „ / 00 \» / ао \о / ае \® „
е==е° + ("аЗГ) (Gi-Gi0) + (-a^) (G2-G.°)4-[-ae7j (е2-е20).
где
' 06 \° _ G2Wp2(01°-02°).
( асх ) - (GScpi + GJCpJ* 1
' 00 \° _ ОЛР1СР2(02О-01О).
0G2 ) (G^Cpi -J- GJ’Cp^)* >
( 00 \° _ G2»CP2
\ 002 ) 4- G2°cp2
(2.55)
Переходя к отклонениям у=в—0°, xp=Gj—G°b xbi = G2—G°2, Хв2 = 02-0°2,
получим уравнение статической характеристики в виде:
У = ЙрХр 4“ 4“ ^2^В2 » (2 • 56)
/ ао у / ае у / ае у
где йр = dQi ) ; “i-ydGt ] ’ *« “Д ао2 ) ’
Анализ зависимостей (2.55) показывает, что даже при обычных возмущениях, наблюдаемых на практике, ошибка в результате линеаризации может оказаться существенной. Например, при увеличении расхода G2 на 30% по сравнению с заданным коэффициент усиления kp может измениться на 5—25%, a ki—> на 25—40% от расчетных, в зависимости от соотношения расходов Gj и G2. Стабилизация отношения G^G^—^ позволяет умень-142
Рис. 2.37. Функциональная (а) и структурная (б) схемы замкнутой одноконтурной АСР температуры в теплообменнике смешения
шить влияние этой нелинейности, так как
G1 +-G,
а "1 ~П______.______"Z -1/3___________91°СР1 , ^2°СР2
°= + “ 1 + т°ср14- сР2 •
( СР1 + СР2 Д2 СР1 + СП СР1 + уО СР2
И при отсутствии других возмущений, кроме G2, будет обеспечиваться постоянство выходной температуры.
Наличие других источников возмущения, кроме G2, потребует введения коррекции у0, например, в зависимости от значения выходной температуры 0 (см. пример каскадной АСР, рис. 2.40).
Рассмотрим_несколько вариантов систем автоматизации теплообменников смешения и проведем их сравнительный анализ по качеству процессов регулирования.
Вариант 1. Задача стабилизации выходной температуры смеси 0 решается применением одноконтурной замкнутой системы регулирования, в которой регулирующим воздействием является расход Gi (рис. 2.37). Использование регулятора с интегральной составляющей в законе регулирования (ПИ- или ПИД-регулятор) гарантирует поддержание заданного значения 6 в установившемся режиме, однако качество переходного процесса может оказаться неудовлетворительным при большой инерционности канала регулирования и сильных возмущениях.
Вариант 2 включает систему регулирования соотношения расходов Gi и G2 (рис. 2.38). Это разомкнутая система регулирования, способная обеспечить инвариантность регулируемой
Рис. 2.38. Функциональная (а) и структурная (б) схемы разомкнутой АСР температуры в теплообменнике смешения
Рис. 2.39. Функциональная (а) и структурная (б) схемы разомкнутой АСР температуры в теплообменнике смешения с компенсацией двух возмущений: 1 — регулятор соотношения; 2 — компенсатор
температуры смеси 0 к возмущениям по расходу G2, однако при наличии любого другого возмущения 0 не будет равна заданной.
Вариант 3 (рис. 2.39) отличается от предыдущего введением коррекции коэффициента соотношения в зависимости от значения температуры второго потока 02, так что корректирующее устройство 2 является компенсатором возмущения по 02-Таким образом, данная система регулирования может обеспечить независимость выходной температуры от двух основных возмущений — G2 и 02. Однако при наличии других возмущений (например, изменение теплопотерь в окружающую среду) температура будет отклоняться от заданной.
Варианты 4 н 5 являются разновидностями комбинированных АСР, в которых обеспечивается компенсация основных возмущений и вводится обратная связь по регулируемой координате.
Вариант 4 — система регулирования соотношения расходов Gi и G2 с коррекцией коэффициента соотношения по выходной температуре смеси 0 (рис. 2.40), т. е. двухкаскадная АСР. Основным (внешним) регулятором является регулятор темпера-
Рис 2.40 Функциональная (а) и структурная (б) схемы каскадной АСР температуры в теплообменнике смешения:
1 — регулятор температуры. 2 — регулятор соотношения расходов
Рис. 2 41. Функциональная (а) и структурная (б) схемы комбинированной
АСР температуры в теплообменнике смешения:
1 — регулятор температуры, 2 — компенсатор
туры 1, а вспомогательным (внутренним) —регулятор соотношения 2, осуществляющий компенсацию возмущения по расходу 62-
Вариант 5 — система регулирования температуры смеси с коррекцией по двум возмущениям — G2 и 02, т. е. комбинированная АСР. Динамический компенсатор 2 (рис. 2.41) в данном случае должен содержать вычислительное устройство для расчета корректирующей поправки на задание по выходной температуре регулятору 1 в зависимости от расхода и температуры второго потока.
Из рассмотренных примеров систем автоматизации наилучшее качество регулирования обеспечат два последних варианта. При этом в случае приборной реализации систем предпочтительнее четвертый вариант, который легко выполняется на серийных промышленных регуляторах. При использовании ЦВМ или микропроцессорной техники реализация любой из этих систем не представляет затруднений.
2.4.2. Регулирование кожухотрубных теплообменников
Рассмотрим теплообменники с изменяющимся агрегатным состоянием веществ. Особенность этих теплообменников как объектов регулирования состоит в том, что при постоянном давлении и отсутствии переохлаждения образующегося конденсата (или перегрева образующегося пара) температура жидкой и паровой фаз одинакова и по ней нельзя судить об интенсивности процесса испарения или конденсации. В этом случае основным показателем процесса теплообмена является уровень жидкой фазы.
Постоянство температуры в той части теплообменника, где происходит конденсация или испарение вещества, позволяет рассматривать ее как звено с сосредоточенными параметрами. Ту часть теплообменника, в которой происходит лишь нагрев или охлаждение вещества и температура изменяется по длине теплообменника, следует рассматривать как звено с распределенными параметрами.
a
Рис. 2.42. Принципиальная схема паро-жидкостиого теплообменника (а) и схема теплообмена в ием (б)
Для теплообменников этого типа задача регулирования и ’выбор системы автоматизации диктуются назначением аппарата. В теплообменниках, предназначенных для нагрёва вещества до заданной температуры за счет тепла конденсации греющего •пара (или для охлаждения вещества за счет отбора тепла испаряющейся жидкостью), задачей регулирования является стабилизация температуры технологического потока на выходе из теплообменника. В испарителях или конденсаторах, предназначенных для испарения или конденсации технологического потока, задача регулирования сводится к поддержанию материального баланса по технологическому потоку.
Рассмотрим особенности динамических характеристик этого типа теплообменников на примере кожухотрубного паро-жидкостного теплообменника, предназначенного для нагрева жидкости от температуры 0ВХ до 0ВЫХ (рис. 2.42,а). Примем, что пар — насыщенный, а конденсат отводится при температуре конденсации. Анализ теплообменника как объекта регулирования. Для выявления факторов, влияющих на температуру жидкости, составим •основные уравнения, описывающие процессы в теплообменнике:
уравнение теплового баланса
Ожсрж (Овых — 0Вх) — GnTп (?п) — <7пот> (2.57)
уравнение материального баланса для межтрубного пространства
dL
S-^- = Gn-GK = 0; (2.58)
уравнение теплопередачи через стенку т^убы:
dq = ktdFT^a — 0), (2.59)
где q — тепловой поток через стенку.
По условиям работы аппарата из всех переменных, входящих в уравнения (2.57) — (2.59), основными возмущениями обычно являются расход и температура жидкости на входе в теплообменник (Gx и 0вх) > давление греющего пара в заводской магистрали (Рп); теплопотери («/пот), зависящие от температуры окружающей среды; коэффициент теплопередачи (&т), изменяющийся со временем вследствие образования осадков на трубках. При этом возмущения G», 0Вх и Рп легко поддаются контролю,, а Цпот и k-r следует отнести к неконтролируемым возмущениям.
В качестве регулирующих воздействий можно использовать расходы греющего пара Gn и конденсата GK, а в качестве выходных координат — температуру 0ВЫх и уровень конденсата в межтрубном пространстве L. Следует отметить, что 0ВЫх и L связаны между собой через поверхность теплообмена (рис. 2.43), так как эффективность теплопередачи в верхней части кожуха, заполненной паром, значительно выше, чем между конденсатом и нагреваемым потоком. Как следует из уравнения (2.57),
д ____ д I ГП ?ПОТ
ВЫХ ВХ 0ж Срж бжСрж
(2.60>
Как видно из соотношения (2.60), выходная температура технологического потока 0ВЫх связана линейной зависимостью с входной температурой 0Вх, расходом пара Gn, его удельной теплотой конденсации г„ и теплопотерями qnoT и обратно пропорциональна расходу жидкости Gx. Стабилизация соотношения расходов пара и жидкости Gn/Gx=y° обеспечивает в установившемся режиме стабилизацию и температуры 0ВЫх = 0°Вых при отсутствии других возмущений.
Рис. 2.43 Структурная схема паро-жидкостного теплообменника:
/—звено, отражающее процесс конденсации пара; 2 —звено, отражающее гидродинамический процесс в кОжухе, 3 — усилительное звено; 4 — звено, описывающее тепловой процесс в жидкости
Линеаризуем зависимость (2.60) в окрестности заданного режима и приведем ее к виду:
У == 4“ В2 4“ ^в*вЗ 4" ^4*84»
(2.61)
где у — Овых ®®вых»
Хр — Gn — Gn°;
*si = G« —бж°:
^82 = бвх — 0вх° >
*ВВ = гп — Г°п> ^♦ = 9-9°;
, / дввых V _ гпо
Р dGn j О°жсрж ’
. /а0вых\° -(W + q9
дбж ) (Gjk0)4 срж ’
, дбвых .
*2= ЗОвх -1:
, ! d°*° Y G"°
\ агп J Ож° Срж ’
. _ 7 а%Ы1 \° _ -1
* \ ) Gjk° Срж
Как видно из соотношений (2.61), коэффициенты усиления линеаризованной модели зависят от входных координат. В частности, коэффициент усиления по каналу регулирования Ар прямо пропорционален удельной теплоте конденсации пара г°п и обратно пропорционален G°x. Например, при увеличении <3Ж на 30% kp' уменьшается на 23%, а при уменьшении (?ж на 30% Ар увеличивается на 43°/о- Поэтому при больших возмущениях по Gx и гп фактическое качество переходных процессов может значительно отличаться от расчетного, что следует учитывать при выборе настроек регуляторов.
Нахождение динамических характеристик теплообменника. Динамические характеристики по каналу регулирования Gn—0вых могут быть выведены на основе структурной схемы, представленной на рис. 2.44, а. Звено 1 соответствует процессу изменения давления пара в межтрубном пространстве Р„ при изменении расхода пара Gn и описывается дифференциальным уравнением
Рнс. 2 44. Структурная схема паро-жндкостного теплообменника по каналу регулирования Gn—0„ых (а) и по каналу возмущения 0ах—0»ых (б)
первого порядка, которое после линеаризации имеет вид:
Ti^~ + yi=kixP< (2-62)
где i/i=Po—Рп0, x₽=Go—Gn°; 7-1=2УуРЛ/?0п0; £i=2|7V/₽; V — объем кожуха; р — расходный коэффициент клапана на линии конденсата; R — универсальная газовая постоянная.
Звено 2 — усилительное звено, отражающее зависимость температуры пара 0П от его давления. Его передаточную функцию
Fa(p) = fea = (|^_y (2.63)
находят по диаграмме состояния пара при Рп=Р°п.
Передаточная функция межтрубного пространства с учетом (2.62) и (2.63) имеет вид:
Гк (р) = V, (р) (р) = ^Л/(Лр + О- (2.64)
Звено 4 учитывает инерционность выходной камеры для технологического потока и аппроксимируется апериодическим звеном первого порядка:
^4 (Р) = 1/(Лр + 1)- (2.65)
Наибольшие трудности представляет анализ динамических характеристик звена 3, отражающего связь между температурой пара в межтрубном пространстве 0П и температурой жидкости на выходе из трубок (на входе в камеру) 0 (L). При выводе передаточной функции звена 3 примем следующие'допущения: температура жидкости распределена по длине трубок, а в попе-, речном сечении потока градиент температуры отсутствует; теплопроводность стенки трубки такова, что стенку можно рассматривать как звено с сосредоточенными координатами; тепловой емкостью пленки конденсата и теплопотерямн пренебрегаем; теплофизические параметры жидкости и стенки постоянны.
Уравнение теплового баланса для потока жидкости на элементарном участке трубы dl имеет вид (рис. 2.42, б):
ае - ае
dl Qf + ^жсрж div Qi = (Ост — 6) dl
«ЛИ ае ае гж “Ь^ж —бет 61 (2.66)
•где Тж=Л1жсрж/(/:'1а1); Мж — масса жидкости, приведенная к 1 м потока; срж — удельная теплоемкость жидкости; <Xi — коэффициент теплоотдачи иа внутренней поверхности трубы; F\ — внутренняя поверхность теплообмена; о — скорость жидкости.
Уравнение теплового баланса для стенки имеет вид:
Л1стсст dl = F2a2 (0п — ест) dl — FjOj (Ост — 6) dl
7'ст 4" бет (I 4" х)— 6п4-х0, (2.67)
Af^cr 1®1
где / ст =—f——; х = г „ ; AfCT—масса I м стенки; Сет—удельная * 2®2 * 2®2
теплоемкость стенки; аз — коэффициент теплоотдачи на наружной поверхности трубы; F2 — наружная поверхность теплообмена.
В уравнениях (2.66), (2.67) перейдем к отклонениям переменных от их заданных значений и обозначим
Уз = 0 — > У 2 = 0CT — 0СГ° > X = 0п — 0п° •
Для получения передаточной функции звена по дифференциальным уравнениям в частных производных применим преобразование Лапласа по t, обозначив изображения входных и выходных координат x(t, I), yzit), ya(t, I) соответственно через Х(р, I), У2(р) и У3(р, /). После преобразования по Лапласу уравнения (2.66), (2.67) примут вид:
TxpY3 + vTx-^- + У3 = У2, (2.68}
Т„рУ2 + У2 (1 + X) = У3х + X. (2.69)
Исключив из уравнений (2.68) и (2.69) У2, получим обыкновенное дифференциальное уравнение первого порядка, коэффициенты которого являются функциями комплексного переменного: t’fl(p>“^aL + r» = 6(P)*’ (2.70)
где
, ,________ТЖ(Тстр 1 4~ х)_______
(7'жР 4~ 1) (ТстР + 1 + х) — х
______________Тж___________
Тжр + 1—х/(Тстр + 1 + X) * (2.70а)
Ь (₽) = (7’жР + 1) (7’стР + 1 + х) - х • <2-70б>
Решение уравнения (2.70) при граничном условии У3(р, /)=6 для Z=0 и при X(l) =const имеет вид:
Уз (Р, о = х (р) Ь (р) [ 1 - ехр ( — |_ \ vv
(2.71)
Учитывая, что нас интересует значение температуры на выходе из трубки, т. е. при /=А, получим:
Fs(p,L) = X(p)6(p)(l_e~T7«'), Где т = Д/г.
W3(p)= Y^)L} — b(p) (^1 — g °(P>/ (2.72)
Выражение для b(p) можно представить в виде произведения простейших сомножителей:
*(₽) = (T^+iXTsP+l)- (2'73)
Эквивалентные постоянные времени Т2 и Т3 оказываются близкими по значению к ТСт и Тж, причем наибольшая постоянная времени лежит в интервале [Тж, Тж+Тст].
Коэффициент 1/а(р) приближенно аппроксимируется линейным двучленом: 1/а(р) »р+а'.
Тогда
а(р) —X<j>+a') ..—IP
е = е = Ье
(2-74)
— а'х где Ь' = е
При этом формула для передаточной функции Ws(p) принимает вид:
1 — Ь'е~хр
И7з^ = (7'2р+1)(7'3р+1)' <2>75>
Общая передаточная функция теплообменника по каналу Gn— ввых будет равна
W(p) = WR(p)Ws(p)W4(p).
Пример [60]. Найдем передаточную функцию IF«(p) для паро-водяного теплообменника, выполненного из медных трубок наружным диаметром 19 мм, толщиной стенки 1,07 мм н длиной 2,44 м. Скорость воды о = =0,305 м/с; средняя температура воды 65 °C.
Для одной трубки:
Л=0,053 мг/м; F3=0,060 м1 2/м; Мж=0,223 кг/м; Л4Ст=0,53 кг/м; <Xi= =764 Дж/(мг-с-К); аг=3500 Дж/(м2.с-К).
Рассчитаем постоянные времени, х и время чистого запаздывания по формулам (2.66), (2.67), (2.72):
Тж = 23,4 с, 7’ст=0,97 с; х=0,19; т=8 с.
По формулам (2.70а), (2.706) с учетом (2.73) н (2.74) получим:
23,4 1
а(р)~ , , 0,19 ~ р +0,043 ;
23,4р+1 — 0>э7р^ 11Э
1 1
*(Р)= (23,4р+1)(0,97р+ 1,19) — 0,19 ~ (27,63р + 1) (0,82р + 1) *
Передаточную функцию окончательно получим в виде:
1__g-е (р+о,о43) 1__0,71е“8р
W = .(27,63?+ 1)(0,82р+ 1) = (27,63р+ 1)(0,82р+ 1) "
Приведенный пример иллюстрирует важную особенность промышленных кожухотрубиых теплообменников — малые значения теоретических постоянных времени и времени чистого запаздывания, характеризующих собственно процесс теплообмена (секунды и доли секунд). Для парогазовых теплообменников эти показатели еще меньше, так как скорость газа на порядок выше скорости жидкости, а масса газа в трубках и, следовательно, ее тепловая емкость существенно меньше, чем жидкости.
Как отмечалось выше, ввиду малой инерционности объекта предъявляются особые требования к выбору и расчету системы контроля и регулирования. Поскольку постоянные времени промышленных измерителей температуры могут составлять десятки секунд и минуты, при автоматизации теплообменников желательно применять малоинерциониые измерители, а при расчете системы регулирования необходимо учитывать инерционность измерительного устройства, регулирующего клапана и импульсных линий.
Динамические характеристики теплообменника по каналу 0(0)—0(L) определяются уравнением (2.70) при условии, что температура пара постоянна и равна 0°п, т. е. Х—0, а температура жидкости на входе в трубки (при 1—0) является входной координатой. Тогда уравнение (2.70) и граничные условия запишутся в виде:
dY„
^(р)-^+У8 = °; К3(0) = 6(0). (2.76)
Решение уравнения (2.76) дает:
Г L 1
Уз р) = У3 (0, р) exp I — I,
t У, (L, р) L 1
откуда Fs(p)=j^- =ехр[-т^г].
Если тепловая емкость стенки пренебрежимо мала, то с учетом соотношения (2.74) получаем передаточную функцию усилительного звена с запаздыванием:
_ (2.77)
Полную передаточную функцию теплообменника по каналу возмущения 0ВХ—0ВЫХ получим на основе (2.74) с учетом входной и выходной камер (см. рис. 2.44,6):
Им (р) = W1 (р) (р). (2.78)
Наиболее сложен анализ динамики изменения температуры жидкости при колебаниях ее расхода Ож вследствие нелинейной зависимости между этими координатами. Действительно, коэффициенты дифференциальных уравнений (2.66), (2.67) оказываются функциями от входной координаты, а именно: скорость движения жидкости пропорциональна ее расходу, а коэф-152
Рнс. 2.45. Схема одноконтурной замкнутой АСР температуры жидкости в парожидкостном теплообменнике
фициент теплоотдачи связан с G® нелинейной зависимостью. После линеаризации уравнений (2.66), (2.67) при определенных упрощениях можно вывести приближенную передаточную функцию по каналу — бвых- Она имеет вид:
1^в(р) = *2 (1 — (2-79)
Приведенный анализ динамических ха-
рактеристик теплообменника имеет в основном методическое значение — как пример вывода передаточной функции объекта
с распределенными координатами. В практических расчетах АСР обычно ограничиваются экспериментальными кривыми переходных процессов или приближенными передаточными функциями, в которых учитывают лишь наибольшие постоянные времени и чистое запаздывание в теплообменнике.
Рассмотрим несколько вариантов систем регулирования выходной температуры технологического потока в паровых теплообменниках на примере парожидкостного теплообменника.
Вариант 1. Одноконтурная замкнутая АСР (рис. 2.45) при использовании ПИ- или ПИД-регулятора гарантирует регулирование температуры без статической ошибки, однако при
сильных возмущениях по расходу или температуре жидкости качество переходного процесса может оказаться неудовлетворительным.
Вариант 2. Введение динамической компенсации возмущений по Gx или вВх оказывается нецелесообразным, так как теоретические компенсаторы с передаточными функциями (рис. 2.46)
Р /„ч (р)
«ki(p)-------Гр(р) -
fei* (7кР + I) (T.j> + I) (TsP + 1) (Т4Р + 1) ftp (1—b'e )(Т4р+1)2
^?К2 (Р) —
^B2 (Р) “ W'pCP) ~
^2 0 е ) (7КР + 1) (Т2р + 1) (ТзР 1) (Т4р 1) kl(l-b'e-pX)
физически нереализуемы, а использование приближенных компенсаторов может оказаться неэффективным. Поэтому на практике ограничиваются статической компенсацией этих возмущений. Примером таких систем является каскадная АСР соотношения расходов Ga/Gx с коррекцией по 0ВЫХ (рис. 2.47).
Вариант 3. Каскадная система регулирования температуры (или давления) в межтрубном пространстве с коррекцией
ЗЗДЗНИЯ ПО 0вых (рис. 2.48) будет эффективной при сильных возмущениях по давлению или температуре греющего пара. Температура (или давление) в кожухе в данном случае играет роль промежуточной координаты, которая быстрее реагирует на эти возмущения, чем выходная температура жидкости.
Вариант 4.'Если требуется высокое качество регулирования, целесообразно применение схемы с байпасированием технологического потока вокруг теплообменника и последующим смешением нагретого и холодного потоков. В этом случае появляется дополнительное управляющее воздействие — распределение потоков Oi и Gz. На рис. 2.49 показан пример системы автоматизации такого теплообменника. Регулятор температуры 1
Рис. 2.46. Структурные схемы паро-жидкостного теплообменника:
о —по каналам 0вх—0ВЫХ и <3П-0ВЫХ; б —по каналам Сж—0ВЫХ и СП-0ВЫХ; а —по каналу 0П—0(L)
Рис. 2.47, Каскадная АСР температуры жидкости в паро-жидкостном теплообменнике (с регулятором соотношения расходов во внутреннем контуре)
выполняет вспомогательную функцию— стабилизацию температуры 0"; главная задача — регулирование температуры жидкости после смешения — возлагается на регулятор 2. В такой системе качество регулирования 0ВЫх определяется динамикой второго контура, в котором объект представляет собой практически безынерционное звено, так как при малом объеме камеры смешения постоянная времени процесса смешения практически равна нулю (см. разд. 2.3).
Особенности автоматизации испарителей и конденсаторов. Как указыва
лось выше, задача автоматизации этих аппаратов состоит в поддержании материального баланса по технологическому потоку; при этом в качестве выходной координаты обычно выбирают уровень жидкости в аппарате. Рассмотрим для примера автоматизацию испарителя (рис. 2.50). Задачей регулирования является стабилизация уровня АЖ=Л°Ж. К основным возмущениям можно отнести расход бш и температуру 0Ш жидкости, температуру греющего пара 0гр и теплопотери q\ к регулирующим воздействиям — расход греющего пара Grp и отбор испаренного продукта Gn; к выходным координатам — уровень жйдкости Ьж и давление в аппарате Р.
Анализ процессов, протекающих в испарителе, показывает,
Рис. 2.48. Функциональная (а) и структурная (б) схемы каскадной АСР температуры жидкости в паро-жидкостном темплообмениике (с регулятором температуры конденсата во внутреннем контуре):
/ — регулятор температуры жидкости; 2 — регулятор температуры конденсата в кожухе
в' 6цш
Рис. 2.49. Регулирование температуры жидкости в- схеме с байпасированием потока вокруг теплообменника:
1—регулятор температуры жидкости на выходе из теплообменника. У —регулятор температуры жидкости после смешения
Рис. 2.50. Принципиальная схема испарители
что он относится к многосвязным объектам. Действительно, увеличение расхода греющего пара приводит к более интенсивному испарению, что вызывает одновременно уменьшение уровня и повышение давления в аппарате. Аналогично изменение отбора пара Gn влияет не только на давление в аппарате, но и на интенсивность испарения продукта, а следовательно, и на уровень жидкости. На рис. 2.51 показана структурная схема испарителя, отражающая взаимосвязь между координатами. Динамические характеристики объекта по отдельным каналам аппроксимируются линейными звеньями.
Звено 1 с передаточной функцией
^(р)- (Tkp+dGW+I)
отражает динамику собственно теплового процесса и учитывает тепловые емкости межтрубного пространства и испаряющейся внутри труб жидкости.
Рис. 2.51. Структурная схема системы регулирования уровня и давлении в испарителе:
1 — звено, описывающее тепловой процесс в жидкости; 2 — звено, отражающее гидродинамику в жидкой фазе; 3 —звено, отражающее гидродинамику в паровой фазе; 4 — звено, учитывающее влияние дав* ления на теплоту испарения жидкости; 5 —регулятор давления; 6 — регулятор уровня
Рнс. 2.52. Примеры систем автоматизации испарителей:
а—-на основе одноконтурных АСР; б —с использованием каскадной АСР уровня; в —с использованием комбинированной АСР уровня; 1 — регулятор давления; 2 — регулятор уровня; 3 — регулятор соотношения расходов; 4 — вычислительное устройство
Звенья 2 и 3 с передаточными функциями
^2 (Р) = i/C^) и (р) = хцт^ + 1)
учитывают гидродинамику процессов в жидкой и паровой фазах. Усилительное звено 4 отражает зависимость теплоты испарения жидкости от давления в аппарате.
Рассмотрим несколько вариантов систем регулирования испарителей и конденсаторов.
Вариант 1 (рис. 2.52,а) включает два замкнутых контура регулирования: регулятор 5 стабилизирует давление в аппарате, частично компенсируя возмущения по каналу Р—гж—G'n—Lx-, регулятор уровня 6 обеспечивает поддержание материального баланса в аппарате по технологическому потоку.
Вариант 2 (рис. 2.52,6) отличается от предыдущего применением каскадной системы регулирования соотношения расходов греющего пара и жидкости GTVIGx=y с коррекцией у по уровню жидкости. Регулятор соотношения 3 вводит статическую компенсацию возмущений по расходу жидкости, поэтому данная система регулирования предпочтительнее прн сильных возмущениях по этому технологическому параметру.
Вариант 3 (рис. 2.52,в) служит примером системы регулирования, в которой расход греющего пара рассчитывается в вычислительном устройстве 1 по контролируемым возмущениям (Ож, 0Ж, 0гр) и корректируется регулирующим устройством 2 при отклонении уровня от заданного значения.
Рассмотрим кожухотрубные теплообменники с неизменяемым агрегатным состоянием веществ. Динамические характеристики этой группы теплообменников описываются системой дифференциальных уравнений & частных производных, включающей уравнения (2.66), (2.67) и уравнение теплового баланса для
теплоносителя, имеющее вид:
M-jCpt dl Qt ± VtMTCprdl (вт— 0ст)- (2.80)
где Л4Т и срт —масса и удельная теплоемкость теплоносителя; знак плюс в левой части уравнения относится к прямоточным теплообменникам, минус — к противоточным.
Задача регулирования и основные возмущения аналогичны рассмотренным выше для паровых теплообменников. В качестве регулирующих воздействий (рис. 2.53) выбирают входную температуру теплоносителя 0ТВХ или его расход GT.
Передаточные функции теплообменника по температурным каналам 0ВХ—0ВЫХ и 0ТВХ—0ВЫХ могут быть получены методом, рассмотренным в предыдущем разделе [20].
Аналитическое определение динамических характеристик теплообменника по каналам, связывающим расходы теплоносителей с выходной температурой, — сложная задача, так как в этом случае в уравнениях (2.66) и (2.80) коэффициенты и, ит, <ii и аг зависят от входной координаты. Поэтому на практике ограничиваются приближенными передаточными функциями, которые получают по экспериментальным кривым переходных процессов. Наибольшая постоянная времени, получаемая при аппроксимации переходных кривых, приблизительно равна постоянной времени, которая определяется тепловой емкостью потока жидкости и общим коэффициентом теплопередачи [60].
Системы регулирования жидкостных и газовых теплообменников аналогичны системам регулирования паровых теплообменников, в которых греющий пар заменен потоком жидкости или газа.
2.4.3. Регулирование печей
В химико-технологических процессах печи используют для на
грева технологического потока до высоких температур за счет теплоты сгорания топлива. В зависимости от конструкции печи
передача тепла осуществляется путем радиации или конвективным теплообменом между дымовыми газами и технологическим потоком. В качестве примера рассмотрим печь, в которой технологический поток, проходящий по трубам, нагревается дымовыми газами, образующимися при сгорании топлива (рис. 2.54, а).
Задачей регулирования является поддержание заданного значения выходной температуры потока: 0вых= — 0°ВЫХ-
Рис. 2 53. Принципиальная схема кожухотрубного теплообменника
Рис 2.54 Принципиальная (а) и структурная (б) схемы печи для нагрева технологического потока
Поскольку температура дымовых газов практически одинакова во всем объеме печи, а температура технологического потока 0 изменяется по длине трубы от 0ВХ до 0ВЫХ, в первом приближении динамические характеристики печи по каналу 0П—0ВЫХ можно принять аналогичными характеристикам парового теплообменника, в котором греющий пар заменен дымовыми газами. Поэтому рассмотрим подробнее особенности печей, связанные с регулированием процессов горения.
Уравнение теплового баланса для нагреваемого потока запишется в виде:
бср (0Вых 0и) = ^дсрд (®г — %) • (2.81}
Температура в зоне горения 0Г определяется из уравнения теплового баланса для процесса горения
бтфг (Рт^рт 4“ бвСдВ) Ор — СтСртбт — (2.82}
Отсюда
а Чт + Срт&г + ?9>В0В о,.
где GT, Gb, G„, G— расходы топлива, воздуха, дымовых газов и нагреваемого потока сРт, сРв, СрЯ, ср — удельные теплоемкости веществ; 0Т, 0В, 0вХ~ входные температуры топлива, воздуха, нагреваемого потока; 0Д, 0,ых — выходные температуры дымовых газов и нагреваемого потока; y=GB/GT — коэффициент соотношения расходов воздуха и топлива.
Из уравнения (2.81) с учетом (2.83) находим формулу для определения выходной температуры:
Й — О °ДСРД й °т(У+ 1)Срд й Й1
«вых - 0вх — 0п + Gcp (Срт + ?Срв) Ют + СрТ9т + УСрвбв!-
Если 0Т = 0В, то
0ВЫХ = 0ВХ--(Г — 0П (1 + Y) с<?т+ 0В (2.84}
-_________Сд_____
Ср (Срт уСрв)
Анализ печи как объекта регулирования приводит к структурной схеме, показанной на рис. 2 54,6. Основными возмуще-
ниями приняты расход и температура технологического потока G и 0вх, температура воздуха 0В, коэффициент теплопередачи kT и теплопотери q\ основными регулирующими воздействиями — расход и состав горючей смеси, т. е. расходы топлива и воздуха. К выходным координатам, кроме температуры выходного потока 0вых и дымовых газов 0П, отнесена концентрация кислорода в дымовых газах cos. По ней оценивают интенсивность процессов горения, поскольку температура в зоне горения, определяемая формулой (2.83), соответствует условиям сгорания топлива с теоретически необходимым количеством воздуха, а на практике печи и топки работают при избытке воздуха, необходимом для полного сгорания топлива. Температура горения связана с расходом воздуха экстремальной зависимостью: 0Г падает как при избытке воздуха по сравнению с теоретически необходимым, так и при его недостатке, поэтому ее нельзя использовать в качестве показателя интенсивности процесса горения.
Помимо технологических требований к режимным параметрам печей накладываются ограничения из условий взрывобезо-пасности и требований охраны труда и защиты окружающей среды. В частности, коэффициент соотношения расходов воздуха и топлива у должен удовлетворять ограничению Кроме того, для предотвращения попадания дымовых газов в атмосферу в печах поддерживается разрежение.
Рис. 2.55. Примеры систем автоматизации печей:
а — на основе одноконтурных АСР; б —с использованием комбинированной АСР температуры; г, в — с использованием каскадной АСР температуры
Рассмотрим примеры систем автоматизации печи, обеспечивающих выполнение задачи регулирования и указанных ограничений.
Вариант 1 (рис. 2.55,а) представляет систему из трех контуров регулирования. Регулятор 1 стабилизирует выходную температуру технологического потока на заданном значении; регулятор 2 обеспечивает подачу воздуха иа горелки в заданном соотношении у0 к расходу топлива; регулятор 3 поддерживает заданное разрежение в печи изменением отвода дымовых газов. Эта система автоматизации удовлетворяет всем указан-. ным требованиям, одиако вследствие большого запаздывания качество переходных процессов может оказаться неудовлетворительным.
Варианты 2 и 3 позволяют уменьшить влияние возмуще- . ний по расходу нагреваемого вещества G за счет применения комбинированной АСР температуры 0ВЫх (рис. 2.55,6) или каскадной системы регулирования соотношения расходов топлива и нагреваемого вещества с коррекцией по выходной температуре (рис. 2.55,а).
Вариант 4 (рис. 2.55,г) включает каскадную систему регулирования температуры 0ВЫх, в которой, температуру дымовых газов в печи используют как промежуточную координату. Вспомогательный контур регулирования 0П (регулятор 4) позволяет повысить качество регулирования при возмущениях по каналу регулирования (например, по q? или 0В).
Для регулирования процесса горения здесь используют также каскадную АСР, в которой задание регулятору соотношения 2 корректируется регулятором состава дымовых газов 5, обеспечивающим стабилизацию cos. Для введения ограничения иа у° корректирующий сигнал от регулятора 5 подается на нелинейный блок 6, а затем на регулятор 2.
2.5. РЕГУЛИРОВАНИЕ МАССООБМЕННЫХ ПРОЦЕССОВ
В химической технологии для разделения веществ широко используют массообменные процессы: абсорбцию, экстракцию, ректификацию, адсорбцию и сушку. Несмотря на разнообразие этих процессов и способов их аппаратурного оформления, все они подчиняются единым закономерностям и как объекты автоматизации обладают рядом общих особенностей.
В процессе массообмена участвуют минимум три вещества: распределяющее вещество, составляющее первую фазу; распределяющее вещество, составляющее вторую фазу; распределяемое вещество, переходящее из одной фазы в другую (рис. 2.56, а). Основное уравнение массопередачи
dM — kud-Fb., определяет количество вещества dM, переходящего из одной
НИИ (б)
фазы в другую через поверхность массообмена dF при движущей силе процесса Д и коэффициенте массопередачи kM.
Движущая сила процесса определяется разностью между рабочими с и равновесными сР концентрациями: Д = с—ср.
Из уравнения материального баланса массообмена между потоками с расходами Gi и с начальными и текущими концентрациями Сю, Ci и с2о, с2 (рис. 2.56, б)
Gj (cio — ci) = б2 (с2о — с2) выводится уравнение рабочей линии процесса массопередачи с2 = act + Ь, где а = GjG^-, Ь ~ (О8с20 — G1c10)/Gs.
для противоточного взаимодействия фаз.
Зависимость между равновесными концентрациями в фазах Ci, С2р (или Сг, CiP) может быть линейной, т. е. C2P=A2Ci (или С1Р=Л2С2) (при абсорбции, экстракции) или нелинейной (например, при ректификации). Однако для всех процессов коэффициенты этих уравнений существенно зависят от режимных параметров (давление, температура) и наличия примесей. Промышленные аппараты проектируют для определенных значений режимных параметров и составов исходных веществ, при которых установка обеспечивает заданное качество разделения. В реальных условиях случайные возмущения приводят к нарушению материального и теплового балансов в аппарате, изменению давления и температуры и в конечном итоге — к отклонению составов получаемых продуктов от расчетных. Поэтому одна из основных задач регулирования массообменных процессов — стабилизация режимных параметров с целью поддержания материального и теплового балансов в аппарате при различных возмущениях.
Общей особенностью массообменных процессов в промышленных условиях является их большая энергоемкость, поэтому система автоматизации должна способствовать снижению энергозатрат на разделение при условии обеспечения заданного качества продуктов.
Большинство массообменных процессов проводят в аппаратах колонного типа, диаметр которых в промышленных условиях 162
достигает нескольких метров, а высота — нескольких десятков метров. Приведенные постоянные времени и запаздывание в таких аппаратах составляют минуты и десятки минут, а одноконтурные системы регулирования характеризуются большой динамической ошибкой и большой длительностью переходных процессов. Для повышения качества переходных процессов в системах автоматизации массообменных установок широко используют комбинированные АСР, вводящие коррекцию по наиболее сильным возмущениям, и каскадные АСР, использующие дополнительные сигналы из промежуточных точек аппаратов.
Наибольшие сложности при регулировании массообменных процессов чаще всего возникают из-за отсутствия автоматических приборов для непрерывного контроля состава получаемых продуктов. В этих случаях регулирование состава ведут по косвенным параметрам — температуре кипения смеси, ее плотности и т. п. При этом возникают дополнительные сложности, связанные с компенсацией влияния возмущающих факторов на взаимосвязь между косвенным параметром и составом.
2.5.1. Автоматизация ректификационных установок
Ректификационные установки служат для разделения жидких однородных смесей на составляющие вещества (или группы веществ) в результате противоточного взаимодействия смеси паров и жидкой смеси [39]. Рассмотрим особенности ректификационной установки как объекта автоматизации на примере установки для разделения бинарной смеси с концентрацией в ней легколетучего компонента сп на дистиллят и кубовую жидкость с концентрациями легколетучего в них сд и ск. Примем следующие обозначения (рис. 2.57): Gn, Сд, GK, Grp, GT, GXJI, ОфЛ —расходы питания, дистиллята, кубового продукта, греющего пара в кипятильник, теплоносителя в подогреватель питания, хладоагента в дефлегматор, флегмы; ггр— энтальпия греющего пара; 9т, Охл — температуры теплоносителя и хладоагента; срт, срхл — удельные теплоемкости теплоносителя и хладоагента; Рк — давление в колонне; LK, £фЛ — уровень в кубе колонны и во флегмовой емкости.
Постановка задачи управления. Поскольку затраты на ректификацию являются одной из самых существенных составляющих в себестоимости продукции, задача автоматизации ректификационных установок часто ставится как задача оптимального управления, которой подчиняются задачи автоматического регулирования отдельных параметров. В зависимости от назначения ректификационной колонны используют различные критерии оптимальности [3].
Для продуктовых колонн, предназначенных для получения одного целевого продукта (например, дистиллята), ставятся следующие задачи:
Рис. 2.57. Принципиальная схема ректификационной установки:
1 — ректификационная колонна; 2 — подогреватель питания, 3 — кипятильник, 4 — дефлегматор; 5 — флегмовая емкость
задача 1 — минимизации энергозатрат (т. е. Grp) на получение целевого продукта заданной концентрации при ограничении на производительность по этому продукту: Сд=тсод, бд>
задача 2 — максимизации производи
тельности по целевому продукту (например, бд) при ограничении на его состав и энергозатраты: сл=с°л, Grp^Grp, в.
Для промежуточных колонн, в которых происходит предварительное разделение смеси на две фракции, ставится задача 3 — максимизации разделительной способности колонны
т| = сд—ск при ограничении на производительность по целевому продукту и на энергозатраты (например, GA>GAH, Grp<Grp,B).
Для выявления факторов, влияющих на качество процесса разделения, запишем уравнения материального и теплового баланса установки. Материальный баланс по потокам разделяемой смеси и продуктов описывается уравнением:
Gn = Од + GK
(2.85)
Уравнение материального баланса по легколетучему компоненту имеет вид:
бпсп — бдСд GrCk- (2.86)
Уравнение теплового баланса для кипятильника:
бгр^гр = VrK + <?i> (2.87)
где V—паровой поток в нижней части колонны; гк—удельная теплота испарения кубовой жидкости.
Уравнения материального баланса для куба колонны
* dlK
Зк-3/5- = Ож-(У + Ок)(=°, (2.88)
где бж — поток жидкости в нижней части колонны; SK — площадь горизонтального сечения куба колонны;
и для'флегмовой емкости
5фл-^=Их-(Сфи + Сд)=0, (2.89)
где Vi — паровой поток в верхней части колонны; 5фЛ—площадь горизонтального сечеиия флегмовой емкости.
Уравнения теплового баланса для подогревателя питания:
Gncpn (V - 6п) = GTCpT (0ТВХ - 0ТВЫХ) + <?2, (2.90)
и для дефлегматора:
У1Г1 = ОхлСрхл (0хлвых - 0хлвх) + <?а- (2-91)
Уравнение материального баланса по газовой фазе в верхней части колонны:
dPK
=/(Ух — Си — Од — бфд) = 0. (2.92)
Проанализируем переменные, входящие в систему уравнений (2.85)—(2.92), и выделим основные возмущения, возможные регулирующие воздействия и выходные координаты.
Поскольку исходная смесь поступает в ректификационную установку из предыдущих аппаратов технологической линии, колебания расхода, состава и температуры питания являются основными возмущениями в процессе ректификации. К возможным источникам возмущений следует отнести также энтальпию греющего пара, теплоносителя и хладоагента, а также потери тепла в окружающую среду (qi, q2, qs). Из перечисленных возмущений стабилизируют обычно только температуру питания 0°п; расход питания Gn контролируют; состав питания контролируют' в редких случаях, когда имеются автоматические анализаторы состава; остальные возмущения, как правило, не контролируют.
К регулирующим воздействиям можно отнести расходы греющего пара Grp, теплоносителя GT и хладоагента Ох-Л, отборы дистиллята Ga и кубового продукта GK, расходы флегмы Сфл и инертных газов GH.
Концентрация продуктов сд и ск, уровень в колонне LK и флегмовой емкости £фЛ, давление в колонне Рк являются выходными координатами процесса.
Как видно из математической модели (2.85) — (2.92), ректификационная установка является сложным объектом с большим числом взаимосвязанных координат. Для выбора наилучших каналов регулирования необходимо провести сравнительный анализ статических и динамических характеристик установки по различным каналам.
Статические характеристики ректификационных колонн. Для однозначного определения состояния системы требуется задание четырех независимых переменных. Чаще всего ими являются
Рис. 2.58. Диаграмма Gn—сп—-бд—V при постоянных Gn, сп
расход Gn и состав сп питания, отбор дистиллята 6Л и паровой поток в нижней части колонны V [3].
Рассмотрим статические характеристики колонны на диаграмме V—Ga при условии, что Gn = const и сп = const. На рис. 2.58 приведена диаграмма,
на которой нанесены кривые равных концентраций легколетучего компонента в дистилляте (<^=const) и кубовом продукте (ск = const); через с°д, с°к обозначены заданные концентрации, входящие в ограничения задач оптимального управления.
Из диаграммы видно, что решение задачи 1 находится в точке А (рис. 2.59,а), где составы продуктов равны заданным (т. е. сд = с°д и ск = с°к), а расход пара принимает минимальное значение V*, или в точке А', если оптимальное значение V* оказывается меньше минимально допустимого VH (рис. 2.59,г).
Максимизация отбора дистиллята (задача 2) приводит в точку В, если V*>VH, или в точку В', если V*<VH (рис. 2.59,в).
Рнс. 2.59. Влияние ограничений иа рабочую область колонны-
а — оптимальные режимы колонны допустимы по условиям ограничений на V н 6Д, б — режим максимальной разделительной способности недопустим по ограничению на бдн; в — максимальный отбор дистиллята недопустим по ограничению на VB; г —минимальный расход пара недопустим по ограничению на Ун
Рис. 2 60. Влияние иа рабочую область колонны возмущений по расходу питания Gn (а) и составу питания сп (б)
Задача максимизации разделительной способности (з а д а-ча 3) имеет решение в точке С, если бд*>бдн, или в точке С', если бд*<бдН (рис. 2.59,6).
Расчеты диаграммы V—бд при различных значениях Gn и сп показали, что рабочая область, а, следовательно, и точки, соответствующие оптимальным режимам колонны, смещаются по диаграмме. Увеличение расхода питания приводит к сужению рабочей области (рис. 2.60,а); существует такое предельное значение Gn*, при котором рабочая область вырождается в точку. Таким образом, для поддержания оптимальных режимов работы колонны при различных возмущениях требуется автоматическая коррекция заданий регуляторам в зависимости от этих возмущений. В частности, можно показать, что изменения расхода питания можно скомпенсировать пропорциональным изменением отбора дистиллята. Как следует из уравнения (2.86) с учетом (2.85),
Gn Gn / Gn \
СД = —Q СИ ~п СК " Сп-----1“7? -- 1|Гк» (2.93)
ид ид ид \ °д /
т. е. при постоянном составе питания и постоянном отношении Gn/GA=y составы дистиллята и кубового продукта будут также постоянны. Однако при изменении сп для сохранения материального баланса отношение у тоже должно меняться.
При стационарном режиме в ректификационной колонне устанавливается определенный профиль концентраций по высоте колонны (рис. 2.61), причем каждому значению Gn или сп соответствует свой профиль концентраций. Наибольшей чувствительностью по отношению к возмущениям и к регулирующим воздействиям обладают промежуточные тарелки в верхней и нижней части колонны, называемые контрольными тарелками. Коэффициенты усиления для них принимают максимальное значение по сравнению с коэффициентами усиления' других тарелок в данной секции колонны. По отношению к возмущениям со стороны питания составы на контрольных тарелках являются промежуточными координатами и обладают меньшей инерцион
ностью, чем составы продуктов. Поэтому составы на контрольных тарелках часто используют в качестве регулируемых координат вместо составов продуктов. Однако необходимо иметь в виду, что составы скт" и сл так же, как с'кт и ск (см. рис. 2.61), являются связанными координатами, причем стабилизация составов иа контрольных тарелках при наличии возмущений приведет к отклонению составов продуктов от заданных значений.
Динамические характеристики ректификационных колонн. При изучении динамики изменения концентрации на каждой ступени разделения в колонне можно выделить три составляющие процесса: изменение объема жидкости при изменении ее расхода; изменение концентрации, вызванное изменением скорости парового потока; изменение концентрации в объеме жидкости на тарелке. Точный учет всех названных факторов не представляется возможным ввиду сложности математического описания процесса. Поэтому обычно влиянием первых двух факторов на изменение концентрации пренебрегают и ограничиваются третьей составляющей процесса.
Изменение состава жидкой фазы на изолированной тарелке, на которой обеспечивается идеальное перемешивание, связано с изменением состава или скорости потоков дифференциальным уравнением первого порядка. При последовательном соединении нескольких тарелок их постоянные времени взаимосвязаны, и прямые методы точного анализа оказываются весьма трудоемкими. Значения постоянных времени зависят от наклона кривой фазового равновесия, времени пребывания на тарелке, скоростей потоков в колонне и расхода питания. Для того чтобы оценить
Рис. 2.61. Влияние возмущений по расходу питания иа профиль концентраций в ректификационной колонне
Рис. 2 62. Лииейиаи аппроксимация кривой фазового равновесия
Рис. 2.63. Принципиальная схема одноступенчатой ректификации
влияние этих параметров на значения постоянных времени, рассмотрим простейшие примеры колонн с одной и двумя ступенями разделения.
Для одной ступени разделения предположим, что состав пара в рассматриваемом диапазоне измене
ния концентраций является линейной функцией от состава жидкости (рис. 2 62), т. е.
= a+bcL. (2.94)
Для аппарата, изображенного на рис. 2.63, уравнение материального баланса по легколетучему компоненту запишется в виде:
лЛ
§ dt =
или (с учетом того, что ск = с£; сл = су=a+~bcL) —в виде:
ё = бпсп — GKc^—0д(а4-&с£’)» (2.95)
где g — количество жидкости на тарелке.
Выведем передаточную функцию аппарата по каналу «состав питания — состав кубового продукта». Для этого перепишем уравнение (2.95) в отклонениях координат от их номинальных значений. Обозначим
„ „ L хе=сп —сп°; У = ск — ск0 = с —с
и учтем, что в стационарном режиме
dcL°
Gncn° — GkCk0 — бдСд0 = ё — °-
Получим уравнение
dti
ё + (Рк + бд&) у = GnX,
из которого после преобразования по Лапласу находим передаточную функцию в виде:
Г(р)&У(р)/Х(р) = й/(Тр + 1),
где Х(р) и У(р) —изображения x(t) и y(t),
k=G„/(GK + bG„); (2.96) Т = g/(GK + bG£. (2.97)
Как видно из (2.97), при Ь=1 постоянная времени аппарата равна среднему времени пребывания смеси тср, так как GK-J--|-GA=Gn и Т—g’/Gn=Tcp. При низких концентрациях, когда
Рис 2 64. Принципиальная схема двухступенчатой ректификации
6>1 (см. рис. 2.62), постоянная времени меньше времени пребывания, а при высоких концентрациях, когда &<1, постоянная времени становится больше тср.
Для колонн с несколькими ступенями разделения сохраняется такая же качественная зависимость между наклоном кривой фазового равновесия и постоянными времени, как и для однотарельчатой колонны, хотя сама зависимость гораздо сложнее.
Рассмотрим колонну с двумя ступенями разделения (рис. 2.64). Как и в предыдущем примере, предположим, что зависимость между концентрациями легколетучего компонента в жидкой и паровой фазах описывается уравнением (2.94). Тогда уравнения материального баланса (в которых бж обозначено через L) для тарелок запишутся в виде
Si = Gncn — GKcK -|- Lc2l — Vc^ ’
(2.98) dcj' v ,
' dt = VC1 ~~GrcR’
а с учетом того, что Civ=ai+&1c1L; cA = c2v = a2-j-b2c2L— в виде
dcL
gi = Gncn — GrC^ + Lc2l — V (ai + *iciL),
(2.99) de L
= V (aj 4- b^L)—Lc2l — Од 0*2 + b2c2L)-
После перехода к отклонениям л L Lq L Lq
Х = СП —Сп°; </i = q — С1 ; Уг = са — са
полечим систему уравнений:
Si & = Gnx — 6«У1 + Ly2 — УЬУ1«
(2.100) df/2
ёг ~м~ = УЬУ1 — ^у2 — йлЬу2.
Преобразование уравнений (2.100) по Лапласу приводит к уравнениям в изображениях вида:
gyPY1 = G„X - G^ + LY 2 - VbYx;
(2.101) g.2pY.2= VbYl — LYi — GJ>Yt
или
(7^+1)^ = ^ + ^;
(7^+ 1)Га= *21К1Э где
Л = gi (GK + 6V)-1; = Gn (GK + 6V)-1;
T2 = g2 (L + 6Сд)-1; *81 = Vb (L + «?„)-!.
Решение системы уравнений (2 101) относительно Vt и У2 приводит к следующим выражениям:
„ , , Gn (ёгР + L + bG„)
Г1(р)~ teiP + GK + bV) (g2p + L -t- bGR) - bLV X(p)’ <2-102*
G„V6
Гг(Р)~ (ё1Р + Ск + ЬУ)(82Р+1 + ЬСл)-ЬЬУ X <₽>’ <2‘ 103>
в которых полиномы преобразуются к произведению простейших сомножителей с приведенными постоянными времени Та, Тъ, Тс-При этом передаточные функции получаются в виде:
IK’ /nA —-ZjjW___. (ТсР Ч~ 0 /о
Х(Р) - (Тар + \)(ТьР + 1)’ (2-104>
У г (Р) k2
W’aW- х(р) ~ (Tap+^iTbp+l)’ <2-105>
причем наибольшая постоянная времени в знаменателе передаточных функций (обозначим ее через Та) приблизительно равна среднему времени пребывания тср (при д=1).
Увеличение наклона линии фазового равновесия, как и для однотарельчатой колонны, приводит к уменьшению постоянных времени и коэффициентов усиления колонны. Если b близко к единице, то наибольшая постоянная времени примерно равна общему объему жидкости в колонне, деленному на расход питания. Увеличение флегмового числа уфЛ = /70д приводит к изме
нению главным образом меньших постоянных времени Ть и Тс. При очень высокой кратности орошения Ть и Тс стремятся к нулю, и переходные процессы в колонне при изменении состава питания будут описываться дифференциальными уравнениями первого порядка с постоянной времени Та-
Общие выводы о влиянии параметров Ь, уфЛ и Gn могут быть применены к колоннам с большим числом тарелок. При очень больших значениях флегмовых чисел реакции всех тарелок примерно одинаковы. При малых'значениях флегмового числа начальные участки переходных процессов на различных тарелках будут отличаться значением чистого запаздывания. Экспериментальное изучение переходных характеристик колонн показало, что при изменении состава питания состав на тарелках, расположенных около тарелки питания, начинает изменяться немедленно, и кривая переходного процесса хорошо аппроксимируется уравнением первого порядка [60]. Состав смеси в нижней и верхней частях колонны начинает изменяться с запаздыванием, превышающим время пребывания на тарелке в рп раз, где п — число тарелок между вводом питания и верхом (или низом) колонны; р — коэффициент, который зависит от числа тарелок и лежит в пределах от 0,5 до 1 при п>10.
Примеры систем автоматизации ректификационных установок. Вариант 1. Простейшая система автоматизации ректификационной установки включает шесть одноконтурных АСР
Рис. 2.65. Система автоматизации ректификационной установки, построенная На одноконтурных АСР отдельных технологических параметров:
/ — регулятор температуры верха колонны; 2 — регулятор температуры питания, 3-* регулятор уровня в кубе колонны, 4 — регулятор уровня во флегмовой емкости, 5—» регулятор давления в колонне; 6 — регулятор расхода греющего пара; 1а — регулятор расхода дистиллята, ба — регулятор температуры низа колонны
Рис. 2.66. Система автоматизации ректификационной установки со статической компенсацией возмущений по расходу питания и с каскадной АСР температуры верха колонны:
1 — регулятор температуры верха колонны; /а — дифференциатор; 2 — регулятор температуры питания; 3, 4— регуляторы уровня; 5 —регулятор давления; 6 — регулятор соотношения
{рис. 2:65), каждая из которых выполняет одну из рассмотренных выше задач регулирования. В целом эта система обеспечивает стабилизацию состава дистиллята и поддержание материального и теплового балансов в установке. Основным регулятором, стабилизирующим состав дистиллята (при разделении бинарной смеси при постоянном давлении), является регулятор температуры верха колонны 1, воздействующий на отбор дистиллята. Регулятор температуры 2 стабилизирует температуру питания. Регуляторы уровня 3 и 4 обеспечивают поддержание баланса в системе по жидкой фазе, а регулятор давления 5—по паровой фазе. Регулятор расхода 6 стабилизирует подачу греющего пара в кипятильник.
Если задачей регулирования является стабилизация состава кубового продукта, то расход греющего пара задается регулятором температуры низа колонны 6а, а расход дистиллята стабилизируется регулятором 1а. Одновременное регулирование составов (или температур) верха и низа колонны обычно Не применяют, так как эти координаты связаны между собой, и их одновременное регулирование по обратной связи может привести к снижению запаса устойчивости системы.
Несмотря на простоту, рассматриваемая система автоматизации обладает рядом недостатков. Так, стабилизация расхода греющего пара без учета реальной обстановки в системе обычно приводит к перерасходу пара, поскольку регулятору расхода устанавливается завышенное задание с учетом возможных колебаний энтальпии греющего пара, переохлаждения флегмы и других возмущений в процессе.
Отсутствие компенсирующих воздействий по возмущениям со стороны питания приведет к большим динамическим ошибкам регулирования составов продуктов, так как регулятор состава (или температуры) на конце колонны получит сигнал об отклонении регулируемой координаты от заданного значения лишь после того, как изменится состав жидкости по всей высоте колонны.
Использование температуры продукта для регулирования его состава имеет еще один существенный недостаток: колебания температуры при изменении состава соизмеримы с ее колебаниями при изменении давления в аппарате и часто оказываются соизмеримы с погрешностью контрольно-измерительного прибора. Например, при разности температур кипения чистых продуктов 20 °C (например, 0К = 100 °C; 0Д=8О°С) и допустимых коле-
Рис 2 67 Система автоматизации ректификационной установки с компенсацией возмущений по расходу и составу питания и температуре греющего пара
1, 6 — регуляторы расхода, 2 — регулятор температуры, 3, 4 — регуляторы уровня. 5 — регулятор давления, 7 — вычислительное устройство
Рис 2.68. Пример системы регулирования верха тарельчатой ректификационной колонны:
1 — регулятор расхода дистиллята; 2 — регулятор соотношения расходов флегмы н дистиллята, 3 —регулятор состава дистиллята; 4 —регулятор давления во флегмовой емкости, 5 — регулятор уровня во флегмовой емкости
баниях состава продукта ± 1 % соответствующие колебания температуры составят ±0,2 °C. В то же время для потенциометра со
шкалой 0—150 °C и классом точности 0,5 погрешность измерения составит 0,75 °C. На практике при разделении близкокипящих смесей веществ сколько-нибудь ощутимые колебания температуры можно наблюдать только в средней части каждой секции колонны. Эту особенность следует учитывать при выборе класса точности и шкалы вторичного прибора, а также места отбора импульса по температуре.
Вариант 2 (рис. 2.66) отличается от первого использованием регуляторов 6 соотношения расходов греющего пара и питания (или расходов флегмы и питания), обеспечивающих минимизацию энергозатрат на разделение. Кроме того, для регулирования температуры продукта применяют каскадную АСР с дополнительным импульсом по производной от температуры на контрольной тарелке (регуляторы 1 и 1а), что позволяет уменьшить динамическую ошибку регулирования.
Вариант 3 (рис. 2.67) является примером системы автоматизации, которая может быть реализована с применением средств вычислительной техники. Здесь расходы дистиллята и греющего пара регулируются регуляторами 1 и 6, задания которым корректирует вычислительное устройство 7 в зависимости ют расхода и состава питания и энтальпии греющего пара с учетом динамических характеристик колонны. Эта АСР должна обеспечить приближенную инвариантность системы по отношению к контролируемым возмущениям. Однако наличие неконтролируемых возмущений (например, переохлаждение флегмы) приведет к нарушению режима в колонне и отклонению состава продукта от заданного.
Рассмотренные системы не исчерпывают всего многообразия способов и систем регулирования, применяемых для ректификационных установок. Так, на рис. 2.68 показана схема регулирования давления в колонне отводом инертных газов из флегмовой емкости. Регулирование соотношения расходов флегмы и дистиллята с коррекцией по составу дистиллята обеспечивает стабилизацию состава продукта в результате изменения флегмового числа. Производительность колонны по дистилляту поддерживается регулятором расхода 1, а уровень во флегмовой
Рис. 2.69. Пример системы автоматизации насадочной ректификационной колонны:
1 — регулятор состава; 2, 3 — регуляторы уровня; 4 — регулятор давления; 5 — регул»-тор перепада давления
емкости регулируется изменением подачи хладоагента в дефлегматор.
В насадочных ректификационных колоннах одним из основных регулируемых параметров является перепад давления, обеспечивающий заданный гидродинамический режим в аппарате. Обычно перепад давления регулируют изменением подачи греющего пара в кипятильник (регулятор 5 на рис. 2.69).
2.5.2. Автоматизация абсорбционных и выпарных установок
На примере процесса ректификации была рассмотрена общая методика анализа массообменных установок как объектов автоматизации и последовательность выбора систем регулирования. Другие массообменные процессы, отличаясь кинетикой, конструкцией аппаратов и другими характерными особенностями, имеют много общего с процессом ректификации. Поэтому не будем останавливаться иа анализе этих процессов (см. [7, 29, 45, 58, 59]), а ограиичимси лишь рассмотрением примеров автоматизации некоторых из них.
Абсорбционные установки являются промежуточными стадиями в технологическом процессе, поэтому задача оптимального управлении ими подчиняется общей задаче управления процессом в целом. Чаще всего — это задача минимизации технологической составляющей себестоимости готового продукта, характеризующей стадию абсорбции. В зависимости от конкретных условий работы абсорбционной установки такая задача сводится либо
Рис. 2.70. Примеры систем автоматизации абсорбционной Колонны:
а — яа основе одноконтурных АСР; б — регулирование соотношения расходов абсорбент» н газовой'смеси с коррекцией по составу кубового продукта; в —каскадная АСР состава кубового продукта; 1, 1' — регуляторы уровня; 2 — регулятор давления; 3 — регулятор состава
к максимизации степени абсорбции, либо к минимизации энергозатрат на разделение смеси [45, 59]. 4
Основные источники возмущений в процессе абсорбции — расход, состав и температура газа, поступающего на абсорбцию, а также в некоторых случаях температура и состав абсорбента. Основными управлениями служат расход абсорбента, подаваемого на орошение колонны, и расход кубового продукта, отводимого из колонны.
Рис. 2.71. Примеры систем автоматизации выпарной установки:
а — на основе одноконтурных АСР; б — регулирование соотношения расходов греющего пара и исходного раствора с коррекцией по концентрации; а — каскадная АСР-концентрацнн упаренного раствора
Для поддержания материального баланса по газовой и жидкой фазам в колоннах предусматривается стабилизация давления и уровня в кубе.
На рис. 2.70 показаны примеры систем автоматизации абсорбционной установки. Система автоматизации, построенная иа одноконтурных АСР (рис. 2.70, а), обеспечивает поддержание материального и теплового балансов в установке (регуляторы уровни 1 и давления 2) и стабилизацию состава продукта (регулятор 3). Введение корректирующего сигнала при возмущениях по расходу питания через регулятор соотношения расходов 4 (рис. 2.70, б) позволит частично компенсировать эти возмущения и повысить качество регулирования. На рис. 2.70, в показан пример каскадной АСР, в которой в качестве вспомогательной регулируемой переменной выбран состав на контрольной тарелке.
Процесс выпаривания можно проводить в однокорпусной выпарной установке (простое выпаривание) илн в многокорпусной установке (многократное выпаривание). В последнем случае достигается уменьшение энергозатрат в результате использования вторичных паров в качестве греющего пара во втором и последующих корпусах.
Задача регулировании процесса выпаривания состоит в стабилизации концентрации упаренного раствора иа выходе из последнего выпарного аппарата. Основными источниками возмущения служат колебания расхода и концентрации исходного раствора, энтальпия греющего пара и теплопоте-ри в окружающую среду. При этих условиях в качестве основного управляющего воздействия для процесса выпаривания выбирают изменение расхода греющего пара. Для поддержания материального и теплового балансов предусматриваются стабилизация уровня во всех аппаратах изменением расхода раствора иа выходе из аппаратов (регулирование «иа стоке»), а также стабилизация давления (разрежения) изменением подачи хладоагента в конденсатор.
Если исходный раствор поступает на выпаривание из промежуточной емкости, в качестве регулирующего воздействия может быть выбран расход упаренного раствора, который будет устанавливаться в зависимости от выходной концентрации раствора. Регулирование уровня в этом случае должно проводиться изменением подачи раствора в каждый из аппаратов (регулирование «на притоке») или расхода греющего пара.
На рис. 2.71 приведены примеры систем автоматизации двухкорпусиой установки: построенной на основе одноконтурных АСР (а), комбинированной АСР (б) и каскадной АСР (в).
Часть 2
МАТЕМАТИЧЕСКОЕ ОБЕСПЕЧЕНИЕ СИСТЕМ
УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ
ПРОЦЕССАМИ
ГЛАВА 3
АЛГОРИТМЫ ПЕРВИЧНОЙ ОБРАБОТКИ
ИНФОРМАЦИИ В АСУТП
3.1, ЗАДАЧИ ПЕРВИЧНОЙ ОБРАБОТКИ ИНФОРМАЦИИ
Основным видом информации о состоянии объекта управления в АСУТП являются текущие значения технологических параметров, которые преобразуются автоматическими измерительными устройствами в сигналы измерительной информации. После приведения к стандартной форме эти сигналы вводятся в УВМ и представляют в ней значения соответствующих параметров в определенный момент времени.
Однако формируемый таким образом массив исходной информации! не пригоден для непосредственного использования при решении задач управления, так как требуется его предварительная обработка, которую принято называть первичной*. Для того чтобы сформулировать задачи первичной обработки информации (ПОИ) в АСУТП, необходимо рассмотреть последовательность преобразований, которым подвергается измеряемая величина в типовом информационно-измерительном канале (ИИК), схема которого представлена на рис. 3.1**.
Измеряемая величина х(1), которую обычно считают стационарной случайной функцией времени, воздействует на вход измерительного преобразователя (ИП), на выходе которого формируется сигнал измерительной информации y(t). Принцип действия большинства ИП таков, что их выходной сигнал зависит не только от значения измеряемой величины, но и от ряда других величин Zj, которые называют влияющими.
Например, термоэлектрический преобразователь температуры (ТПТ) преобразует измеряемую величину — температуру — в сигнал измерительной информации — э.д.с. Однако этот сигнал зависит не только от измеряемой температуры, которая воспри-
* В отличие от вторичной переработки, которой исходная информация подвергается в алгоритмах контроля и управления.
** В состав ИИК входит также модуль нормализации, который на рис. 3.1 не показан, так как не требует решения дополнительных задач ПОИ.
Рис. 3.1. Структурная схема информационно-измерительного канала:
1—первичный измерительный преобразователь (датчик), 2— коммутатор, 3 — аналого-цифровой преобразователь
«имается рабочим спаем, но и от температуры Свободных спаев, которая в данном случае является влияющей величиной.
В общем случае без учета динамической характеристики ИП связь между сигналами на его входе и выходе описывается статической характеристикой вида:
у = /(х, г), (3.1)
где f — функция непрерывная и дифференцируемая по всем аргументам; z — вектор влияющих величин.
Например, статическая характеристика ТПТ в первом приближении может быть описана линейной функцией
У = k(x — г), (3.1а)
где у~ э. д с. ТПТ, мВ; х—температура рабочего спая, °C; г — температура свободных спаев, °C; k — коэффициент, численное значеняе которого зависит от материала электродов ТПТ (например, для хромель-копелевого ТПТ 6=0,0695 мВ/°С)
Однозначное соответствие между сигналом измерительной информации и измеряемой величиной соблюдается только при достоянных значениях влияющих величин. Для каждого ИП эти номинальные значения z°z указывают в его паспорте. Подставив их в уравнение (3.1), получим номинальную (паспортную) статическую характеристику ИП:
s = (()t,?) = (0(x), (3.2)
В большинстве случаев для ТПТ номинальное значение температуры свободных спаев принято равным 0°С, поэтому паспортная статическая характеристика, полученная из (3.1а) при z = 0, имеет вид: y=kx.
Будем считать, что в процессе работы ИП значения влияющих величин соответствуют номинальным; следовательно, преобразование значений измеряемой величины в сигнал измерительной информации выполняется в соответствии с паспортной статической характеристикой (3.2). Казалось бы, это должно гарантировать точное преобразование х в у, однако и при выполнении этого условия всякий реальный ИП вносит в результаты некоторую погрешность. На структурной схеме (см. рис. 3.1) она представлена в виде случайной функции времени е(/), которая накладывается на полезный сигнал y(t) измерительной информации. Помеха e(t) моделирует не только случай
ную погрешность ИП, но и электрические наводки в соединительных проводах, вызванные магнитными полями электросилового оборудования; влияние пульсаций давления и расхода в технологических трубопроводах вследствие работы насосов и компрессоров и другие факторы. На вход УВМ поступает суммарный сигнал:
еЩ = уЦ) + еЩ. (3.3)
Поскольку АСУТП имеет много ИИК, их обслуживание разделено во времени, каждый канал периодически с периодом to подключается на короткое время ко входу УВМ. В результате непрерывная функция g(t) преобразуется в последовательность импульсов, модулированных по амплитуде функцией g(t). На структурной схеме ИИК (см. рис. 3.1) функцию квантования сигнала g(t) по времени выполняет коммутатор, условно изображенный в виде ключа, замыкаемого с периодом t0. На выходе коммутатора образуется решетчатая функция:
,.м ( s{t) при t = jta, / = 0,1,2...
I О при t #= jt9
Следующим видом преобразования, которому подвергается сигнал измерительной информации в ИИК, является квантование по уровню, выполняемое аналого-цифровым преобразователем (АЦП). При этом амплитуды импульсов g(jto) преобразуются в числа g*(jt0), выраженные в коде, с которыми в дальнейшем оперирует ЦВМ. Современные управляющие вычислительные машины, как правило, используют двоичный код и оперируют с числами, имеющими 8 или 16 разрядов. Операция квантования дискретной величины g(jt0) по уровню описывается следующим выражением:
g*(jf0)=Int|-^^Ag, (3.4)
тде Int(r)—функция «целая часть от r>, Ag— шаг квантования по уровню, т. е. цена младшего разряда в двоичном коде числа g*(jt<i).
Величина Ag определяется из условия:
bg=(gM-gm)K2n-l), (3.5)
где п — число разрядов в двоичном коде числа; gM и gm — наибольшее и наименьшее возможные значения величины g соответственно.
Число g*(jto), полученное в результате выполнения всехпре-Ъбразований измеряемой величины в ИИК, вводится в одну из тячеек запоминающего устройства УВМ и в дальнейшем представляет в машине значение измеряемой величины x(t) в момент времени t=jt0.
Из изложенного вытекают следующие основные задачи первичной обработки информации в АСУТП:
1) фильтрация сигнала измерительной информации от случайной помехи (погрешности) e(t);
2) восстановление значения измеряемой величины x(t) по сигналу измерительной информации y(t)',
3) коррекция восстановленных значений измеряемой величины с учетом отклонения условий измерения от номинальных;
4) восстановление значений измеряемой величины x(t) при jto<Zt<Z т. е. интерполяция и экстраполяция.
Кроме того, необходимо оценить влияние квантования сигнала измерительной информации по времени и по уровню на точность его представления, а также рассмотреть методы контроля и повышения достоверности исходной информации в АСУТП.
3.2. ВЫБОР РАЗРЯДНОСТИ ПРЕДСТАВЛЕНИЯ ИНФОРМАЦИИ
В УВМ И ЧАСТОТЫ ОПРОСА ИЗМЕРИТЕЛЬНЫХ ПРЕОБРАЗОВАТЕЛЕЙ. ИНТЕРПОЛЯЦИЯ И ЭКСТРАПОЛЯЦИЯ СИГНАЛА
В современных УВМ наибольшее распространение получил режим обработки данных с фиксированной запятой [48]. При этом погрешность представления исходной информации, вызванная квантованием по уровню, не превышает по абсолютной величине единицы младшего разряда, определяемой соотношением (3.5). Если задана допустимая относительная погрешность квантования по уровню 6к, то необходимое число разрядов определяется из условия
Обычно и>8, так что относительная погрешность квантования по уровню не превышает 0,4%, т. е. является пренебрежимо малой по сравнению с погрешностью измерительного преобразователя.
При разработке АСУТП важен выбор периода t0 квантования по времени сигналов измерительной информации. Эта задача решается с учетом двух противоречивых соображений С одной стороны, увеличение периода t0 снижает загрузку УВМ операциями сбора и первичной обработки исходной информации. В результате большая доля вычислительных ресурсов системы может быть использована на решение задач контроля и управления более высокого уровня. Это соображение особенно важно> для микропроцессорных АСУТП. С другой стороны, при увеличении периода /0 возрастает погрешность определения действительного значения измеряемой величины y(t) по решетчатой функции g*(jto). Эта погрешность проявляется при восстановле-
t Рис 3 2 Схема восстановления непре-
G*(lw)
рывной функции г/ф(/) по решетчатой: функции g*(]t0)
Рис. 3 3 Спектры функций: и •— непрерывной, б, в — решетчатой при (0o<2wc и при (0о>2шс нии значений функции y(t) в моменты времени, не совпадающие с моментами отсчета /;=/70.
Задачи восстановления непрерывной функции по ее дискретным значениям делятся на задачи экстраполяции и интерполяции. Экстраполяцией называют определение будущих
значений функции с момента очередного отсчета до момента поступления следующего отсчета. Интерполяцией называют определение промежуточных значений функции между двумя полученными отсчетами.
В общем случае восстановление Непрерывного сигнала по решетчатой функции производится формирующим фильтром, представляющим собой линейное динамическое звено с амплитудно-фазовой характеристикой (АФХ) ^(tco) (рис. 3.2). Следовательно, для восстановленного сигнала справедливо следующее соотношение:
Уф (ito) = G* (ito) Ц7ф (ito),
где G*(tco)—преобразование Фурье функции g*(jto).
Из теории импульсных систем известно [55], что спектр решетчатой функции является периодической функцией с периодом, равным частоте квантования соо=2л//о.
Смещенные компоненты спектра могут частично перекрывать друг друга, причем степень перекрытия увеличивается по мере уменьшения частоты а>0„ т. е. при увеличении периода квантования tQ (рис. 3.3). В результате наложения спектр решетчатой функции искажается, и из него невозможно выделить спектр исходной непрерывной функции. Исключение составляет физически нереализуемый случай, когда спектр непрерывной функции ограничен, т. е.
G(ico) = 0 при |со[^сос, а частота квантования удовлетворяет условию
<о0>2(вс. (3 6)
При этом смещенные компоненты в спектре решетчатой функции g(jt0) не перекрываются, и из него можно выделить главную несмещенную составляющую, совпадающую со спектром непрерывной функции g(t) (см. рис. 3.3). Для точного восстановления исходной непрерывной функции по решетчатой функции необхо-
димо использовать \ идеальный нереализуемый фильтр с АФХ '“I?"* о.?)
( 0 при | <в | > <ot.
Действительно, погрешность восстановления, очевидно, равна еф(0 = Уф(0 —?(0.
или в преобразованном по Фурье виде —
£ф (to) = 1Гф (to) G* (to) — G (йа). (3.8)
Для идеального фильтра (3.7) при выполнении условия (3.6) справедливо равенство
Гф’ (to) G* (to) = G (to). (3.9)
и, следовательно
£ф (to) = Гф’ (to) G* (to) — G (to) = 0.
Соотношение (3.6) составляет содержание теоремы Котельникова— Шеннона, которая определяет необходимые условия передачи без искажения информации, содержащейся в непрерывном сигнале при его квантовании по времени и последующем восстановлении. »
Если для восстановления используют фильтр с АФХ ^(i<a), отличающейся от (3.7), то даже при выполнении условия (3.6) точное- восстановление исходной непрерывной функции невозможно. Погрешность восстановления получим, применив обратное преобразование Фурье к выражению (3.8) с учетом (3.9):
оо
еф(0 = ^- J[^(to)-^’(to)]G*(to)e,<B'dw. (3.10)
—СО
Таким образом, погрешность восстановления зависит от свойств исходной функции g(t), периода квантования t0 [эти два фактора определяют G*(i<»)] и АФХ формирующего фильтра №ф(йо).
Рассмотрим наиболее распространенные методы экстраполяции и интерполяции.
Метод ступенчатой экстраполяции (экстраполятор нулевого порядка) состоит в том, что значение восстанавливаемой функции уф(О для любого момента времени (/-ННо прини-
мают равным g*(jt0) рис. 3.4):
«) = ( ^ °7о) при /7° ^ < (' + 1 > , з ш
I 0 приЛ><>(/+1К. (ЗЛ1>
Сигнал, восстановленный по алгоритму (3.11), можно, очевидно рассматривать как сумму двух направленных в разные стороны скачков с амплитудой g*(jto), один из которых сдвинут по времени на tot
УФ (0 = g* tfo) [1 (0 - 1 (t - <„)], t > jta.
Рис. 3.4. Ступенчатая экстраполяция функции g(t)
Рнс. 3.5. Частотные характеристики фильтров:
пунктир — идеального; сплошная лнння — экстраполятора нулевого порядка
Следовательно, АФХ экстраполятора нулевого порядка равна: 1Гф (1ш) = (1 — e~la/°)/ico. (3.12)
Это выражение можно преобразовать, используя тригонометрическую форму комплексного числа
—iidtQ . , . . . ...
е = cos (tot0) — i sin (<в/0).
и тригонометрические функции кратных углов:
, —ИВ/о \ Г . / ГО/р ) . . / ))
1—е = 2sinl—g-11 sin I -g-l +1 cos I —11.
Подставляя полученное выражение в (3 12) и учитывая, что , Г , ( Ш*0 \1 п ш*о arctg |ctg^— jJ=-2"------------------------2"’
полечим
(и^о ) , ( arfo \
~2~} 2~)
И'фэ («0) = Го (<в/0/2) е
Погрешность экстраполяции обусловлена различием ампли-тудно-фазОвых характеристик идеального фильтра (3.7) и экстраполятора нулевого порядка (рис. 3.5). Для расчета погрешности ступенчатой экстраполяции из частотной области удобно перейти к рассмотрению сигналов y^(t) и g(f) (см. рис. 3.4). Погрешность экстраполяции, очевидно, равна
еэ(0 = £(М>) —g(0 при jta <<<(/+ V)t0. (3.13)
Перейдем в этом выражении к новой переменной x—t—jt0, которая может изменяться в пределах от 0 до /о', тогда (3.13) можно записать в виде: e3(^l=g(0)—g(x).
Если g(t) является стационарной случайной функцией, то математическое ожидание погрешности e3(t) при усреднении по множеству интервалов т; = (—jt0, j = 0,1,2... равно нулю, так как
в силу линейности операции определения математического ожидания
М (еэ) = М {g (0) - g (т)) = М {g (0)} - М {g (т)} = О,
где М — знак математического ожидания
Дисперсия погрешности экстраполяции равна:
De (г) = М {[g (0) - g (т)]*} = М {[(g (0) - Mg) - (g (т) - =
= 2[tfg(0)-7?g(T)l, (3.14)
где Я«(т)—автокорреляционная функция случайного процесса g(Z).
Из формулы (3.14) следует, что дисперсия погрешности экстраполяции зависит от т и достигает наибольшего значения при т—*t0. Усредняя De (т) по т в пределах от 0 до to, окончательно получим:
to
De = 2 p? (0) - J 7?g (т) drj. (3 15)
о
Это выражение позволяет рассчитать дисперсию погрешности экстраполяции по заданному периоду квантования /0 и автокорреляционной функции Rg. Его же можно использовать для определения периода квантования to, если задано наибольшее допустимое значение среднеквадратичной погрешности экстраполяции ое* и известна автокорреляционная функция Rg(r). Для этого удобно использовать графо-аналитический метод (рис. 3.6).
По графику функции Rg(r) определяют такое значение т=А>» при котором удвоенная средняя высота заштрихованной фигуры АВС (т. е. удвоенный отрезок ДЕ) будет равна заданному значению (ae*)2=De. Если ИИК содержит звено чистого запаздывания т0 (например, ввиду необходимости транспортиро-
Рнс 3.6. К расчету среднеквадратичной погрешности экстраполяции Рис. 3.7. Линейная интерполяция функции g(t) 186
вания пробы от технологического потока до чувствительного элемента ИП), то для расчета среднеквадратичной погрешности экстраполяции можно использовать формулу (3.15) с заменой в ней пределов интегрирования: нижнего на то, а верхнего — на (^о+то).
Наряду с ИП непрерывного действия в АСУТП применяют и датчики дискретного действия, например хроматографы. Они осуществляют квантование по времени измеряемой величины с собственным периодом tg, который обычно значительно выше периода опроса t0. В этом случае результирующий период квантования по времени в данном ИИК определяется из условия
Gig = to Ini ( T7 I Г
Для оценки погрешности экстраполяции можно использовать выражение (3.15) с заменой в нем /0 на tg.
Линейная интерполяция (рис. 3.7) является простейшим методом интерполяции, в основе которого лежит кусочно-линейная аппроксимация функции g(t) на интервале значений /То<7< < (/+1) Io-
Уравнение прямой, проходящей через точки g(jto) и ^П/'-НКо], можно записать в виде:
УФ (!) = [g Go) т - g (0) (т - /0)]//с> (3.16)
где т = / — /70, 0<т</0.
Погрешность линейной интерполяции
МО = Уф (О — g(0-
Подставляя в это выражение значение уф(1) из формулы (3.16), возводя его в квадрат и усредняя по множеству интервалов, а затем по т в пределах от 0 до to, получаем выражение для дисперсии погрешности линейной интерполяции:
2 = — (/„)].
В литературе описаны и другие, более сложные методы интерполяции и экстраполяции [24], однако на практике их применяют редко. Современные УВМ обеспечивают достаточно высокую частоту опроса ИИК, поэтому обычно удается обеспечить требуемую точность восстановления измеряемых величин, используя простейший метод ступенчатой экстраполяции. Обычно среди десятков и даже сотен ИИК можно выделить несколько групп параметров, близких по частотным спектрам. Тогда можно выбрать общий период опроса для каждой группы датчиков. Например, в производстве разбавленной азотной кислоты опрос группы датчиков, контролирующих малоинерционный процесс контактного окисления аммиака, проводится с периодом 15 с, а опрос датчиков на инерционном процессе абсорбции — с периодом 2 мин.
Выбор частоты опроса измерительных преобразователей через число нулей случайного процесса. Выбор частоты опроса to по формуле (3.15) требует знания корреляционной функции Rg(i) случайного процесса g(t). Для получения оценки корреляционной функции необходим значительный объем вычислений. Кроме того, часто проще и естественнее задать не дисперсию ошибки De от замены непрерывного случайного процесса ступенчатым, а отношение этой величины к дисперсии случайного процесса D. Учтем также важность гарантии того, что выбранная частота опроса не приведет к появлению большей относительной погрешности, чем заданное значение, т. е. важно получить оценку сверху для периода опроса to.
Для решения поставленной задачи воспользуемся неравенством [22]:
t0^^DelD, (3.17)
где DJD — отношение добаночной дисперсии, связанной с заменой непрерывного случайного процесса ступенчатым с шагом to, к дисперсии случайного процесса iD; Д — продолжительность корреляционной функции случайного-процесса.
Если бы продолжительность корреляционной функции можно было оценить без построения этой функции, то неравенство (3.17) позволило бы оценить интервал опроса t0. Ниже получим оценку величины Д через среднее число нулей случайного процесса No, т. е. через среднее число пересечений им линии своего математического ожидания в единицу времени. Предварительно отметим, что рассмотрение процессов с корреляционной функцией конечной продолжительности более естественны, чем процессов со спектральной плотностью, ограниченной частотой среза, так как первые, в отличие от вторых, физически реализуемы.
Известна связь среднего числа нулей No со спектральной плотностью случайного процесса S(<a):
СО
—оо
Пользуясь этой формулой, попытаемся найти минимальную продолжительность корреляционной функции Rg, имеющей заданное число нулей No. В силу свойств преобразования Фурье, произведение любых двух функционалов, однозначно определяемых корреляционной функцией Rg, один из которых имеет размерность времени, а другой — частоты [последний выражается через преобразование Фурье от /?я(т)], не изменяется при сжатии или растяжении корреляционной функции, т. е. при изменении масштаба времени.
Анализ размерности правой части формулы для N02 показывает, что среднее число нулей имеет размерность частоты. В качестве функционала, имеющего размерность времени; примем
Рис. 3.8. Определение корреляционной функции минимальной нро-должнтельностн
продолжительность Д корреляционной функции Rg(x). Таким образом, произведение C—No^ зависит от фор-
мы Rg(x) и не зависит от выбора масштаба времени. Поэтому-первоначально зафиксируем Д=1 и при этом условии будем искать минимум No, а точнее No2. Чтобы учесть требование конечной продолжительности корреляционной функции, перейдем во временную область. Представим S(<») в виде |$(»о) |2, что соответствует представлению Rg(x) как свертки двух функций — г+(т) и г_(т), первая из которых определена на интервале (О, 1), а вторая — на интервале (0, —1). Формула для среднего-числа нулей может быть теперь переписана в виде
1
Jk+COPdr
- 1 о___________
Na 1
J [г+ (т)]2 dx о
(3.18>
Чтобы, найти минимум №о, потребуем, как обычно, минимума числителя при фиксированном значении знаменателя. Задача
1 1
I = J гг (т) dx-► min при J г2 (т) dx — Do.
о о
(индекс <+» для краткости записи опущен) решается с использованием уравнения Эйлера. Составим функционал Лагранжа
1 1
L = J/(r, r)dx = J(r2 +V2) dx.
о о
г — Кг = 0.
и запишем для него уравнение Эйлера dr~dt [дг)~
Его решение (а точнее — множество решений): г(т) == Zosin nfer; k—l,2,...
Подставив решение в условие для заданной дисперсии, получим A2o=Do/n.
Величина / на найденных решениях I~D0k2n2; тогда I/D0=kn2.
Это отношение минимально для k=l. Соответствующее решение
г+(т) показано на рис. 3.8. Там же нанесена корреляционная функция имеющая при заданном среднем числе нулей
минимальную продолжительность.
При Д=1 величина Стш оказывается равной единице. Следовательно, если фиксировано среднее число нулей No, то минимальная ПрОДОЛЖИТеЛЬНОСТЬ КОрреЛЯЦИОННОЙ фуНКЦИИ Amin=l/A^0-
Возвращаясь к неравенству (3.17) и подставляя вместо А значение Атщ, получим оценку сверху для интервала опроса:
. ^,Л Ре 4 De
4Дт1п £) — до р • (3.19)
Пример. Пусть относительная дисперсия, связанная с дискретностью опроса датчиков, не должна превышать пяти процентов. По формуле (3.19) имеем для оценку
4
доо 0,05 = 0,2/7V0.
Для получения Na определяют среднее значение случайного процесса, выбирают реализацию такой длины, чтобы случайный процесс пересекал линию среднего значения приблизительно 100 раз, и подсчитывают отношение числа пересечений к длине реализации: No—N(T)/T.
Если число пересечений в точности равно 100, то, обозначив соответствующую продолжительность реализации через Тюо, получим:
0,2Т10о < 100 = 0,002Т1оо.
Таким образом, на реализации длиной Тюо нужно 500 раз отобрать показания измерительного преобразователя
3.3. ФИЛЬТРАЦИЯ ИЗМЕРЯЕМЫХ ВЕЛИЧИН ОТ ПОМЕХ
Фильтрацией называют операцию выделения полезного сигнала измерительной информации y(t) из его суммы с помехой e(t) (см. рис. 3.1). Обычно методы фильтрации основаны на различии частотных спектров функций y(t) и e(t): как правило, помеха бывает более высокочастотной. Для выполнения дальнейших выкладок примем следующие допущения:
1) функция y(t) является стационарным случайным процессом с известными статистическими характеристиками—математическим ожиданием Му, дисперсией Dy и автокорреляционной функцией, описываемой следующим выражением:
Лу(т) = Руё~ “|т|, а = const; (3.20)
2) помеха e(t) также является стационарным случайным процессом, некоррелированным с полезным сигналом y(t)-, для нее известны статистические характеристики Afe = O, De=kDy-.
Re(y) = kDye~ma\x\ (3.21)
где k и m — константы (обычно й<1, т>1).
В результате фильтрации получают оценку г/ф(/) сигнала измерительной информации, к которой предъявляют следующие требования:
она должна быть несмещенной, т. е. должна удовлетворять условию
М {«/Ф (0) = Му- (3.22)
среднеквадратичная погрешность оценки должна быть минимальна, т. е.
М {(//ф (1)-у (О]2}-> min. (3.23)
Оценку г/ф (() будем рассматривать как выходной сигнал линейного динамического звена — фильтра с АФХ 1Гф(Й0), на вход которого поступает выходной сигнал ИИК g(t) =у(0+е(0-
В разд. 1.5 сформулирована общая задача синтеза линейного оптимального фильтра и получены выражения для АФХ идеального (нереализуемого) и физически реализуемого фильтров. Однако синтез оптимального реализуемого фильтра является сложной задачей и, кроме того, требует достаточно точного задания характеристик полезного сигнала и помехи. Поэтому на практике обычно ограничиваются так называемым параметрическим синтезом фильтров, т. е. задают структуру функции 1Гф(и®), а ее параметры определяют из условий (3.22) и (3.23).
Расчет дисперсии погрешности фильтрации обычно выполняют в частотной области, используя выражение
СО
Рф = j* 5Ф (со) das. (3.24)
О
Спектральную плотность функции бф(() рассчитывают по формуле
«Ф (и) = Se (со) | (ico) | а + Sy (со) | Гф (ico) - 1 | 2. (3.25)
Функции Se(tt>) и Зу(а>) являются спектральными плотностями сигналов е(/) и у(/), которые получают в результате преобразования по Фурье автокорреляционных функций (3.20) и (3.21):
(3-26) и 5е(Ю)=^/+юа. (3.27)
На практике применяют несколько простых алгоритмов фильтрации, рассмотренных ниже. Следует отметить, что в АСУТП некоторые методы фильтрации могут осуществляться как аппа-ратурно (с использованием специальных аналоговых устройств), так и программно. Поэтому для каждого такого метода фильтрации изложен аналоговый и дискретный варианты реализации. Экспоненциальный фильтр*. В аналоговом варианте экспонен-
* Название фильтра обусловлено тем, что импульсная характеристика апериодического звена описывается экспоненциальной функцией.
циальный фильтр представляет собой апериодическое звено и описывается дифференциальным уравнением
+ = (3-28)
где у и fej — параметры настройки фильтра.
Уравнению (3.28) соответствует АФХ
где Гф=1/у— постоянная времени фильтра.
Из условия (3.22) для статического режима определяют оптимальное значение параметра кф (коэффициента усиления):
йф°=1. (3.30)
Определение оптимального значения параметра у производится из условия (3.23), для чего предварительно рассчитывают спектральную плотность погрешности экспоненциального фильтра по формуле (3.25) с учетом (3.29) и (3.30):
у»
5ф (со) = Se (со) ша + Sy (со) ш2 •
Дисперсия погрешности экспоненциального фильтра, согласно (3.24) — (3.25) с учетом (3.29), равна
2Dya (* f mfey2 со2 ]
= ~ J ([(ат)2 + со2] (у2 + со2) + (а2 + со2) (у2 + со2) J О
При вычислении этого интеграла оба слагаемых подынтегрального выражения раскладывают на простые дроби, каждая из которых сводится к табличному интегралу вида
ОО f dco 1 со |°° я
J а2 + со2 ~ а ак & а |0 — 2a ’ О
После выполнения соответствующих преобразований получают следующее выражение для дисперсии погрешности фильтрации:
Оф = Ог/(Г^ + у^Г). (3.31)
Оптимальное значение параметра настройки у получают из необходимого условия экстремума функции £)ф(у):
ЛРф _ Г —a fe(y 4-am)— fey] _ •
dy С/( (y-|-a)2 (y-f-am)2 ' ’
откуда
1/fen —tn v° = a— ?—, ' 1 — Д/km
(3.32)
Таким образом, функция Оф (у) имеет единственную точку стационарности, тип которой зависит от знака второй производной при 7=7°. Можно показать, что при выполнении условия
km > 1 (3.32а)
особая точка является минимумом функции Оф (у), а при выполнении условия km<Z\ в точке у=у° функция Оф (у) достигает максимума. Таким образом, если сочетание характеристик полезного сигнала и помехи соответствует случаю (3.32а), то оптимальное значение параметра настройки определяется по формуле (3.32). Если это условие не выполняется, то оптимальным является наибольшее допустимое значение параметра у.
При программной реализации экспоненциального фильтра дифференциальное уравнение (3.28) заменяют разностным уравнением вида
уНО)—УФ(/—0]-Еуф(/—!)«= ?(/).
где / — номер цикла расчета.
Отсюда получают следующее рекуррентное соотношение для вычисления сглаженного значения г/ф(/) в очередном /-том цикле расчета:
Уф(/)=У£(/) + (1—У)Уф(/—1). (3-33)
К достоинствам алгоритма экспоненциальной фильтрации относятся малая трудоемкость расчетов и малый объем памяти УВМ, в которой должна храниться величина у и обновляемая в каждом цикле расчета величина г/ф(/—1).
Фильтр скользящего среднего в аналоговом варианте реализует вычисление среднего значения функции g(t)
Рнс. 3.9. Фильтр скользящего среднего' а — структурная схема, б —схема фильтрации
13—833
193
на интервале времени от t—Тф до t (рис. 3.9,6):
t
УФ W = yj f 8 (0) dd, (3.34)
где Тф —параметр настройки фильтра (время усреднения).
Преобразуем правую часть выражения (3.34), представив его в виде:
t t
Jg (0) dO = Jg (0) d0— j* g (0) dO.
<-Тф a 6
Отсюда видно, что фильтр скользящего среднего представляет собой параллельное соединение двух интегрирующих звеньев, одно из которых последовательно соединено со звеном запаздывания (рис. 3.9а). Поэтому амплитудно-фазовая характеристика фильтра описывается выражением
Гф (ia) = (1 — e-tor*)/(ia Тф), которое аналогично по структуре выражению (3.12) и может быть преобразовано к виду
«7ф (гео) = 2 sin е 1'2~/(шТф). (3.35)
Решая совместно (3.24) — (3.27) и (3.35), можно получить выражение для дисперсии погрешности £>ф фильтра скользящего среднего и определить оптимальное значение Т°ф параметра настройки из необходимого условия минимума функции Оф(Тф). Получаемое при этом выражение очень громоздко, неудобно для практического использования. На его основе рассчитаны номограммы [24], по которым для заданных значений a, tn, k можно определить Т°ф.
При программной реализации фильтра скользящего среднего расчет сглаженного значения Уф(/) в очередном j-том цикле проводится по формуле
N
Уф(1) ~ । — +о] ’ (3.36)
s=0
где #=Тф/?о — параметр настройки фильтра.
Для расчета по формуле (3.36) требуется хранить в памяти УВМ (7V-J-1) значение функции g(jto).
Статистические фильтры. Статистическими называют фильтры, которые в аналоговом варланте представляют собой параллельное соединение (п+1) цепочек, состоящих из усилительного зве-
на и звена чистого запаздывания. Передаточная функция такого фильтра
п
П7ф (р) = J] bf , bj — const, j — 0,1.. ,п. (3.37)
1=о
Статистический фильтр нулевого порядка. Это простейший среди фильтров данной группы. Его передаточная функция получается из формулы (3.37) при #=0, т. е. это просто усилительное звено, выходной сигнал которото
РФ(О=6оЯ(О- (3.38)
При непосредственном использовании формулы (3.38) сглаженная функция y0(t) будет являться смещенной оценкой полезного сигнала y(t), т. е. ее математическое ожидание не будет равно mg. Действительно, усредняя левую и правую части (3.38) с учетом (3.3) ите=0, получим:
ф (/)]= ЬуТПу^^ТПу.
Для получения несмещенной оценки к правой части (3.38) необходимо прибавить постоянный член а, удовлетворяющий условию botfiy^ct^^triyf
откуда
а=ти(\—Ьй).
Таким образом, формула (4.38) приобретает вид
У Ф (О “ bog (ty 1—^о), (3.39)
где Ьо — параметр настройки фильтра
Погрешность фильтрации, согласно (3.22) и (3.39) с учетом (3.3), равна
еф(О=&ое(О—М. (3.40)
где г/(О=У(О —т(У) —центрированная функции y(t).
Возводя левую и правую части формулы (3.40) в квадрат и усредняя, получим следующее выражение для среднего квадрата погрешности фильтрации:
Оф2=&о20«+(1—b0)Dv. (3 41)
Оптимальное значение параметра настройки Ьо, полученное из необходимого условия минимума функции £>ф (&0), равно
boD=Dyl (Dy-\-De).
Ему соответствует минимальная среднеквадратичная погрешность фильтрации:
min Дф=£)«/( 14-й). (3.42)
Как видно из (3.42), статистический фильтр нулевого порядка 13* 195
при оптимальной настройке снижает случайную погрешность сигнала измерительной информации в (1+fc) раз.
При программной реализации статистического фильтра нулевого порядка расчет сглаженных значений производится по формуле:
Уф (#о)=&о£(/М+(1—Ьо)ту.
Статистический фильтр первого порядка. Его передаточную функцию получают из (3.37) при #=1:
^ф(Р)=^о+^ где bo, bi, т — константы.
Во временной области уравнение этого фильтра имеет следующий вид:
yi>(t)=bog(t)+big(t—т). (3.43)
Усредняя левую и правую части этого выражения и учитывая (3.3), получим: М[уф(Г)]= (Ь0-\-Ь1)ту.
Для выполнения условия несмещенности оценки Уф(0, т. е. условия M[y$(t)]=my, коэффициенты Ьо и bi, очевидно, должны удовлетворять соотношению &i = I—bQ, с учетом которого формула (3.43) приводится к виду:
Уф(0=6°£(0 + (1— bD)g{t—т), (3.44)
где Ьо и т — параметры настройки статистического фильтра первого порядка.
Погрешность фильтрации e$(t), согласно (3.3), (3.21) и (3.44), равна
еф (0 = Ьоу (0+(1 —Ь0)у (<—т) 4-Ьов (t)+(1—Ьо) е (t—т)+ту, (3.45)
а дисперсия погрешности
Дф= (1—2Ьо) (Ь,+Ое)+2Ьо(1— (3.46)
Оптимальное значение параметра настройки Ьо получаем из условия =0;
W> — — Ду + 2 2[^(т) + /?в(т)-
В большинстве случаев статистические фильтры реализуются программно, поэтому второй параметр настройки т совпадает с периодом to квантования по времени функции g(t).
Сравнительный анализ фильтров по совокупности показателей (точности, трудоемкости, потребному объему памяти УВМ и др.) показал [24], что для аналогового варианта целесообразно использовать экспоненциальный фильтр, а для программной реализации — экспоненциальный или статистический фильтр первого порядка.
3.4. АНАЛИТИЧЕСКАЯ ГРАДУИРОВКА ИЗМЕРИТЕЛЬНЫХ ПРЕОБРАЗОВАТЕЛЕЙ И КОРРЕКЦИЯ РЕЗУЛЬТАТОВ ИЗМЕРЕНИЙ
В метрологии градуировкой называют операцию, с помощью» которой делениям шкалы измерительного прибора придают оп-ределенные численные значения, выраженные в единицах измерения определяемой величины [271. Аналогичный сйысл вкладывают в понятие аналитической градуировки ИП: это операция определения (восстановления) значения х измеряемой величины по сигналу у измерительной информации на выходе ИП (см. рис. 3.1). Операцию аналитической градуировки выполняют с использованием градуировочной характеристики ИП, представляющей собой функцию, обратную его номинальной статической характеристике (3.2):
хтЧ°-ЧУ), (3-47)
где хт — значение измеряемой величины, соответствующее по градуировочной характеристике ИП значению у сигнала измерительной информации.
Градуировочная характеристика или номинальная статиче-скаяхарактеристика приводится в паспорте ИП в виде аналитической функции или таблицы соответствия значений хг/ и у,.
Рассмотрим несколько примеров ИП, для которых известно аналитическое выражение характеристики fo или fo~l. Гидростатический уровнемер жидкости преобразует значение измеряемого уровня L в перепад давлений ДР между точками отбора импульсов (в самой нижней точке аппарата и над уровнем жидкости):
ДР=61рЬ, (3.48)
где р — плотность жидкости, кг/м3; L — уровень жидкости, м; ky — масштабный коэффициент, зависящий от выбора единиц измерения величины ДР (например, если ДР выражено в МПа, то fci = 10-5).
Перепад ДР линейно преобразуется дифманометром в стандартный электрический сигнал у (например, 0—10 В иа весь диапазон измерения). Таким образом, статическая характеристика данного ИП описывается уравнением
y=kxktpL, (3.49)
где kz=y']&P* — коэффициент усиления дифманометра; у* — значение выходного сигнала дифманометра, соответствующее верхнему пределу измерения ДР* (для упрощения выкладок предполагается, что нижиим пределом измерений является нуль).
Номинальную статическую характеристику получают из (3.49) при номинальном значении плотности p=po=const:
y=KL, где К=А1^2р0=сопз1.
Ей соответствует градуировочная характеристика:
Lr=ylK. (3.50)
Для комплекта pH-метра, состоящего из чувствительного элемента и преобразователя э. д. с. чувствительного элемента в стандартный электрический сигнал, статическая характеристика описывается уравненвем [2]
»=М£я+(50+ае)(рН-рНя)], (3.51)
где £я, рНя, So и а — константы, значения которых зависят от типа электродов чувствительного элемента; 0 — температура анализируемого раствора, *С; k3=y*/pH*— коэффициент усиления комплекта pH-метра; у* — значение выходного сигнала преобразователя, соответствующее верхнему пределу из-мерения pH*.
Номинальную статическую характеристику pH-метра получают из (3.51) яри номинальном значении температуры 0о=2О°С:
0=Л1+Л2рН,
где Л1=Й8[£Я—рНи(Зо4-а0о)]; Лг=63(5о+аОо).
Ей соответствует градуировочная характеристика
у—А, А. 1
рнг = ~лГ=-лГ+Х^
Номинальная статическая характеристика расходомера переменного перепада давления'опнсывается следующей нелинейной функцией:
У=<22/*2, где у — стандартный выходной сигнал дифманометра (который рассматривается как линейный преобразователь перепада давления на сужающем устройстве в выходной сигнал у); k — коэффициент, зависящий от условий измерения; Q — измеряемая величина, т. е. объемный расход потока через сечение трубопровода.
Ей соответствует градуировочная характеристика
Q'-ktW, (3.52)
где k0 — градуировочное значение коэффициента k.
Если градуировочная характеристика ИП задана аналитически, то операция аналитической градуировки сводится к выполнению расчета по формуле (3.47).
Для многих ИП с нелинейной градуировочной характеристикой последнюю определяют экспериментально и вносят в паспортные данные в виде графика или таблицы соответствия значений хг и у,. В частности, в виде таблицы задают градуировочные характеристики наиболее массовых ИП, применяемых в АСУТП химических’ производств — термопреобразователей сопротивления (ТС) и термоэлектрических преобразователей температуры (ТПТ). При табличном представлении градуировочной характеристики применяют способ аналитической градуировки, заключающийся в аппроксимации табулированной градуировочной характеристики аналитическим выражением, которое s дальнейшем используют для вычисления значений хг. Чаще всего в качестве аппроксимирующей функции используют многочлен т-й степени:
т
xr=2a^v- <з-5з>
V—0
коэффициенты а» которого определяют по методу наименьших квадратов, т. е. из условия
т
2 ~ 2 * ™п-
/ v=.O “
Например, слабо нелинейные градуировочные характеристики ТС и ТПТ с достаточно высокой точностью аппроксимируются полиномами не выше третьей степени. В частиостн, градуировочная характеристика хромель-копе-левого ТПТ в диапазоне температур 0—600 °C аппроксимируется следующим полиномом второй степени [45]:
хг=3,014-13,75 у—0,03 У2,
где хг — значение температуры, °C; у — э. д. с. ТПТ, мВ. Максимальная относительная погрешность аппроксимации табличных данных не превышает 0,5%.
Вычисления по формуле (3.53) целесообразно выполнять па так называемой схеме Горнера:
т
2 =((••• (ату + ат^)у + ... + Oj) у + а0.
V—0
Блок-схема алгоритма, реализующего вычисление по схеме Горнера, представлена на рис. 3.10.
Операция аналитической градуировки ИП позволяет определить действительное значение х измеряемой величины по сигналу у измерительной информации только в том случае, если х преобразовано в у в соответствии с номинальной статической характеристикой ЙП (3.2), т. е. при выполнении условия
2=2®. (3.54)
Действительно, в этом случае
ХТ=fo~l (У) = fo-'Уо (X) ]=Х.
Однако в производственных условиях невозможно стабилизировать значения всех влияющих величин на номинальном уровне, что приводит к нарушению условия (3.54). При этом
xp=fo-1[f(x,z»+Az)]^x, (3.55)
где Az — вектор' отклонений влияющих величии от номинальных значений.
Возникает так называемая дополнительная погрешность измерения, которая, очевидно, равна:
Ахг=/о-1(у)—х.
Если известна полная статическая характеристика ИП (3.1) и вектор Az, можно рассчитать погрешность Ахг и внести соответ-^ ствующую поправку к расчетному значению хг, полученному по градуировочной характеристике.
Истинное значение х при нарушении условия (3.54) находят при расчете по функции, обратной полной статической характеристике ИП:
х=/-1(у). (3.56) .
Его можно найти, умножая значение хТ, полученное по формуле (3.47), на некоторый поправочный коэффициент kn:
x=xrk„ (3.57)
Откуда с учетом (3.56) и (3.47) получим:
f-1
*-^(0
(3.58)
где y = f(x, 2« + Az).
В качестве примера найдем выражение для расчета поправочного коэффициента для гидростатического уровнемера. Статическую характеристику (3.49) гидростатического уровнемера преобразуем так, чтобы сделать явной ее зависимость от температуры жидкости, которая является главной влияющей величиной. Для этого заменим плотность р соотношением, описывающим ее зависимость от температуры В при небольших отклонениях от номинального значения 0»: -
р-ро[1+₽(0о-0)], (3.59)
где р — температурный коэффициент объемного расширения жидкости. После подстановки (3.59) в (3.49) получим полную статическую характеристику в виде
У=Л1Л2Ро[1-|-Р(0о—0)]t.
Обратная ей функция:
г____________I__________
[1+Р(0о_0)] >
Поправочный коэффициент найдем, согласно (3.58), делением этого выражения на градуировочную характеристику (3.50):
1 ka = i + p(eo_0) •
Особенно часто в АСУТП корректируют результаты измерения расходов, поскольку обычно их используют для расчета .-----------. технико-экономических показателей
Qначало) производства. В подавляющем боль-
I шинстве случаев расход газов, пара
egGi— и жидкости, транспортируемых по
y,s,n трубопроводам, измеряют с по-
мощью расходомеров переменного перепада давления [27]. При использовании стандартных сужающих устройств расходомеры этого типа градуируют расчетным путем, т. е. для определенных номинальных условий измерения (температура, давление и т. д.) рассчитывают градуировочную. характеристику расходомера. Коррекцию измеренных значений расхода производят при отклонении условий измерения от номинальных, а также с целью приведения результатов к единым услови-
Рис. 3.10. Блок-схема алгоритма вычисления полинома по схеме Горнера
ям (обычно температура 20°C, давление 105 Па), чтобы сделать их сопоставимыми.
Для коррекции применяют общие соотношения (3.57) и (3.58). Формулы для расчета поправочных коэффициентов для разных возможных на практике случаев измерения расхода получают подстановкой в (3.58) выражения (3.52), конкретизированного для каждого случая.
Для примера рассмотрим коррекцию результатов измерения массового расхода насыщенного пара на изменение давления в трубопроводе. В этом случае функция, обратная полной статической характеристике расходомера, описывается выражением [27].-
Q = (3.60)
где k — коэффициент, практически не зависящий от давления; р — плотность измеряемой среды.
Для насыщенного пара плотность зависит от давления, поэтому поправочный коэффициент получаем делением выражения (3.60) на градуировочную характеристику (3.52), которую запишем в виде: •
Таким образом, £п=Ур/р0. В частности, для диапазона давлений 0,25— 0,85 МПа зависимость р от давления насыщенного пара аппроксимируется полиномом второй степени [45]:
ip=0,86875+5,185 Р—0,02375 Р2.
Задав номинальное значение Ро, можно по этой формуле рассчитать ро, а затем в процессе измерения рассчитывать фактическую плотность, соответствующую текущему значению Р, и вносить поправку на изменение условий.
3.5. КОНТРОЛЬ И ПОВЫШЕНИЕ ДОСТОВЕРНОСТИ
ИСХОДНОЙ ИНФОРМАЦИИ
Исходная информация о текущем состоянии объекта управления поступает в УВМ по многим десяткам, а иногда и сотням ИИК. С увеличением их числа возрастает риск попадания в систему недостоверной информации, поэтому одной из важнейших функций первичной обработки информации в АСУТП является контроль ее достоверности.
Недостоверная исходная информация'появляется при отказах ИИК, которые делятся иа полные и частичные (метрологические). Полный отказ наступает при выходе из строя ИП или повреждении линии связи ИП с УВМ. При частичном отказе технические средства сохраняют работоспособность, однако погрешность измерения соответствующего параметра превышает допустимое значение.
Обнаружение полных отказов ИИК является гораздо более простой задачей, чем выявление частичных отказов. Поэтому сначала рассмотрим алгоритмы контроля достоверности исходной информации, позволяющие обнаружить только полный отказ ИИК. <При этом недостоверное значение параметра должно быть заменено достоверной оценкой, в качестве которой может
Рис. 3.11. Блок-схема алгоритма допус-кового контроля достоверности исходной информации
быть использовано предыдущее достоверное значение этого параметра или его значение, усредненное за некоторый интервал времени, предшествующий моменту обнаружения отказа ИИК. Последний способ применяют для наиболее ответственных параметров, например, расходов, значения которых используют при расчете ТЭП.
Алгоритм допускового контроля параметра. Он основан на том, что при работе объекта значения
каждого из контролируемых технологических параметров Xi не
могут выходить за определенные границы:
Соответственно при исправном ИИК должен быть ограничен и сигнал измерительной информации yt, поступающий в УВМ по этому каналу:
У1.<укуг (3.61)
Контроль достоверности по этому алгоритму заключается в проверке выполнения условия (3.61) для каждого значения сигнала измерительной информации, поступившего при очередном опросе ИИК. Блок-схема алгоритма представлена на рис. 3.11. Он работает следующим образом.
После инициации работы алгоритма (блок 1) и ввода исходных данных (блок 2) организуется цикл проверки ИИК, каждому из которых присвоен свой номер г (блок 3); в блоке 4 проверяется условие (3.61), при выполнении которого проверяется условие окончания работы алгоритма (блок 5). Выполнение условия г=п (где п — число контролируемых ИИК) останавливает работу алгоритма. Если это условие не выполняется, счетчик номера ИИК увеличивается на 1 (блок 3), и цикл повторяется. Если при проверке в блоке 4 условие (3.61) не выполняется, то в блоке 6 недостоверное значение уг (До) заменяется достоверным значением г/4(/—1)М того же сигнала, полученным в предыдущем цикле опроса ИИК. Затем на печать выводится сообщение о том, что обнаружен отказ i-того ИИК (блок 7), и работу алгоритма продолжает блок 5.
Этот алгоритм применим не только для стационарных процессов, но и для нестационарных, например периодических. В этом случае граничные значения yit и у,* в условии (3.61)
дхг dt
являются не константами, а функциями времени, отсчитываемого от начала процесса.
Алгоритм допускового контроля скорости изменения сигнала измерительной информации основан на том, что скорость изменения любого технологического параметра хг ограничена условием
<ос I х*г —- хг | , (3.62)
где <0с—частота среза функции xr(t); хг — среднее значение этой функции.
Соответственно должна быть ограничена и скорость изменения сигнала измерительной информации yr(t)
(3.63)
где Vr' — максимальное возможное значение
Контроль достоверности по данному алгоритму заключается в проверке выполнения условия (3.63), причем оценку производной dyildt рассчитывают по формуле
dyr ~ Уг(/7о) —Уг[(7 — 1)^о] di ~ ta
Контроль достоверности исходной информации по условиям (3.61) и (3.63) часто совмещается. Тогда в блок-схему алгоритма на рис. 3.11 между блоками 4 и 5 вводится еще один блок, осуществляющий проверку выполнения условия (3.63). При нарушении этого условия инициируется блок 6.
Алгоритмы контроля достоверности исходной информации, с помощью которых выявляются частичные отказы ИИК, основаны на использовании информационной избыточности, которая всегда имеется в АСУТП. Избыточность прежде всего может быть создана искусственно при проектировании АСУТП за счет аппаратурной избыточности, например резервирования ИИК для контроля наиболее важных технологических параметров.
Другой вид информационной избыточности в АСУТП обусловлен тем, что информация о действительном значении некоторого технологического параметра содержится не только в измеренном значении этого параметра, но и в измеренных значениях других параметров, связанных с ним устойчивыми зависимостями, например, уравнениями материального баланса.
При разработке алгоритмов контроля достоверности исходной информации на основе информационной избыточности принимают следующие допущения:
1) маловероятно одновременное появление в пределах рассматриваемой структуры более чем одного источника недостоверной информации;
2) маловероятно одновременное изменение. характеристик двух независимых источников информации, при котором соотношение между ними остается неизменным;
3) маловероятен выход за допустимые пределы показателя, зависящего от нескольких независимых величин, при нормальной вариации последних.
Алгоритмы, применяемые при аппаратурном резервировании ИИК. Эти алгоритмы используют сигналы измерительной информации yv, полученные в результате преобразования одной измеряемой величины с помощью п ИП, так что v=l,2,... п.
Если п>3 и погрешности ИП близки друг к другу, то определение частичного отказа ИИК производится по нарушению условия
I ?/v—71 VS Т7п - (3.64)
где у — среднее значение c=const — наибольшее допустимое значение
модуля разности у у и у, величина с может быть принята равной (2—3) о, где о — среднеквадратичная погрешность ИП.
Важное практическое значение имеет случай, когда один из параллельных ИИК можно принять за эталонный, поскольку его погрешность существенно меньше, чем у других. В этом случае признаком частичного отказа v-ro ИИК является нарушение условия
I У» — Уз I < cv> v = 1,2.п — 1, (3.65)
где с? = (2—3)ov—допустимая погрешность v-ro ИИК; Ov—среднеквадратичная погрешность v-ro ИИК.
Разновидностью данного алгоритма является метод тестовых (калиброванных) сигналов, позволяющий контролировать исправность ИИК без ИП. Метод заключается в том, что ИП на время отключают и вместо него к входу ИИК подключают источник тестового сигнала, для которого с высокой точностью известно значение у3. Если сигнал yv на выходе проверяемого ИИК удовлетворяет условию (3.65), то канал признают исправным; его нарушение является признаком частичного отказа.
Если п = 2 и погрешности обоих ИИК близки, то признаком частичного отказа одного из них может служить нарушение условия:
|У1—^2|<с, где с~4о.
При этом невозможно определить отказавший ИИК без привлечения дополнительной информации.
Алгоритмы, использующие связи между измеряемыми величинами. Эти алгоритмы широко применяют для контроля достоверности исходной информации и диагностики частичных отказов ИИК. При этом связи могут быть функциональными (например, уравнения материального и энергетического баланса) или вероятностными. В последнем случае они описываются регрессионными уравнениями.
Рассмотрим общую методику контроля достоверности результатов измерения п величин, связанных т уравнениями вида
ff(Xt, х2,.... х„)=0, /=1, 2,...,т. (3.66),
Будем считать, что заданы функции f/(x) и дисперсии о,2 погрешностей измерения, которые являются случайными величинами с нормальным законом распределения и нулевым математическим ожиданием.
Уравнения (3.66) выполняются только при подстановке в них истинных значений х, измеряемых величин. Если же значения измеряемых величин известны с погрешностями Ах,-, т. е.
й=х,+Ах/,
то при их подстановке функции f, (х) не равны нулю:
/,(7+дГ)=/А (3.67)
где I/ — погрешность выполнения /-го уравнения связи (3.66), вызванная погрешностями измерения.
Функции (х) обычно являются непрерывными и дифференцируемыми по всем аргументам, поэтому их можно разложить в ряд Тейлора по степеням величин Ах,:
я _
/у(7+Д7) = /у(Г)+^ _^Axi + ... (3.68)
i=l 1
Поскольку при частичных отказах ИИК погрешности Ах,- малы, можно не принимать во внимание нелинейные члены ряда (3.68), содержащие в качестве сомножителей величины высших порядков (Дх)*, где k = 2,3,.... Тогда с учетом (3.66) из (3.68) получим:
п
dJl£L A Xi (3.69)
i=l ‘
Подстановка уравнения (3.69) в (3.67) дает:
п
S aji&Xi = ljt (3.70)
i=l
dfi W ,
где aji = —4-— = const.
На практике расчет параметров ац проводят, используя не истинные, а измеренные значения х,-, так что '
~ д/;(х + Дх)
=------tet
(3.71)
Система уравнений
п
2 aji&Xi = lj, (3.72)
1-1
является линеаризованной математической моделью объекта управления или некоторой его части. Она служит для расчета оценок погрешностей Ах/, которые используют при контроле достоверности исходной информации и диагностике частичных отказов ИИК.
Метод расчета погрешностей Дх, зависит от соотношения между числом измеряемых величин п и числом уравнений связи т.
Прн п=т значения Ах, определяют одним из численных методов решения системы т линейных уравнений (3.72). При п>т можно попытаться уменьшить число рассчитываемых оценок погрешностей с п до т. Для этого результаты измерений q=n—т параметров следует заранее рассматривать как достоверные. Если такое допущение правомерно, задача сводится к рассмотренному выше варианту.
" В общем случае при п>т оценки погрешностей Ах, определяют, решая оптимизационную задачу
Pi (Л*!)2-* min (3.73)
i=al
при выполнении соотношений (3.70). Весовые коэффициенты позволяющие учесть различие в классе точности ИП, рассчитывают по формулам [24]
Pi-ki&i, = (3-74)
fc=i
где const, а<— среднеквадратичная погрешность i-того ИП.
Для решения задачи нелинейного программирования (3.73) используют метод неопределенных множителей Лагранжа. Составляют функцию Лагранжа:
L = У р, (Дх,)2 + 2 (S а>гДх* ~ Z>) ’ t-i /=1 г-i
где X,=const — множители Лагранжа.
Для нее записывают необходимые условия оптимальности -^-=0 в виде следующей системы уравне-
ний:
2р|Дх, +2^2 aji ~ °’1 е1,п • (3.75)
/-1 *=1
У] aji^xt = lj, (3.76)
i=l
Рис. 3.12. Блок-схема алгоритма контроля достоверности исходной информации, диагностики частичных отказов и коррекции результатов измерений
Искомые оценки погрешностей Ах,- являются решениями системы линейных уравнений (3.75)—(3.76).
Рассчитанные значения оценок погрешностей используют для коррекции результатов измерений:
х,=х,—Дх,. (3 77)
Среднеквадратичная погрешность откорректированных значений измеренных величин меньше среднеквадратичной погрешности измерений ИИК, причем увеличение точности оценок тем значительнее, чем меньше разность п—т.
На рис. 3.12 представлена блок-схема алгоритма контроля достоверности исходной информации, диагностики частичных отказов ИИК и коррекции результатов измерений, основанного на использовании функциональных связей между измеряемыми величинами. Он работает следующим образом.
После инициации (блок /) в оперативную память УВМ вводятся исходные данные (блок 2) и начинается циклический рас-
чет погрешностей If уравнений связи по формуле (3.67), для чего служат блоки 4, 7 и 8. В блоке 5 рассчитанные значения сравниваются с наибольшими допустимыми значениями
Н/МЛ (3.78)
Если условие (3.78) выполняется для всех уравнений связи, то все результаты измерения признают достоверными, т. е. Ж,=Хг, и работа алгоритма заканчивается, так как логическая переменная k сохраняет свое первоначальное значение Л=0.
Нарушение условия (3.78) хотя бы для одного уравнения связи служит признаком наличия частичных отказов. При этом в блоке 6 логическая переменная k приобретает значение 1, и после окончания цикла расчета погрешностей If уравнений связи алгоритм переходит к расчету оценок Дх,- погрешностей измерений (блоки 10—25). Он начинается с циклического вычисления оценок коэффициентов ац линеаризованных уравнений связи в _ блоках 10—16. Коэффициенты рассчитываются по формуле (3.71) в блоке 12. В блоке 17 формируется матрица коэффициентов ctfi системы линейных уравнений (3.72) и матрица-столбец погрешностей lt. -Если расчет выполняется для случая п=т, то на этом работа блока 17 заканчивается. Для случая п>т матрица, формируемая блоком 17, дополняется строками, соответствующими уравнениям (3.75).
Блок 18 предназначен для решения одним из численных методов системы линейных уравнений (3.72) или (3.75) — (3.76). Эта часть алгоритма требует основных затрат машинного времени и оперативной памяти ЭВМ. В результате работы блока 18 получают оценки погрешностей измерений Дх,-.
В блоках 19—23 производится диагностика частичных отказов ИИК, для чего оценки Дх? сравнивают с наибольшими допустимыми значениями погрешностей измерений Дх,*:
|Дх,|<Дх,‘. (3.79)
Нарушение условия (3.79), которое проверяется в блоке 20, является признаком частичного отказа i-того ИИК; сообщение об этом формируется блоком 21. В блоке 22 рассчитывается откорректированное значение х,- измеряемой величины по формуле (3.77). Блок 25 служит для вывода результатов расчета, после чего работа алгоритма завершается. Исходными данными для работы алгоритма являются массивы следующих величин: измеренных значений параметров х,-; допустимых погрешностей I* уравнений связи; допустимых погрешностей Дхг* измерений; весовых коэффициентов р,- (если п>т).
Пример. Рассмотрим контроль достоверности результатов измерения расходов азотной кислоты, поступающей с производства на склад. Производство состоит из трех параллельно работающих агрегатов. На выходе каждого из них измеряется расход qi (tel,3) продукционной кислоты. Затем кислота поступает в коллектор, в котором измеряется общий расход Поскольку расход qt является одним из основных отчетных параметров производства, для его измерения используют расходомер более высокого 208
класса точности, чем для измерения расходов qt— q<t. Исходные данные для алгоритма контроля достоверности исходной информации следующие:
измеренные значения параметров xi=12,l т/ч; ^2=11,6 т/ч; х3=12,4 т/ч; £«=34,5 т/ч;
допустимая погрешность выполнения уравнения связи /*=1,5 т/ч;
допустимые погрешности измерения отдельных параметров Дх1*=Дх2*= =Дх3*=0,45 т/ч; Дх4*=0,65 т/ч;
среднеквадратичные погрешности измерения <Ti=0,3 т/ч; аг=0,2 т/ч; а3= =0,35 т/ч; а4=0,33 т/ч.
Действуем в соответствии с блок-схемой на* рис. 3.12.
1. Определим погрешность I выполнения уравнения связи между измеряемыми параметрами, которое в данном случае имеет вид:
91+92+92—94 = 0 (3.80}
/=12,1 + 11,6+12,4—34,5=1,6 т/ч.
2. Проверка условия (3.78) приводит к выводу, что средн результатов, измерения х/ имеются недостоверные.
3. Исходное уравнение (3.80) является линейным, следовательно, коэффициенты линеаризованного уравнении (3.70) совпадают с коэффициентами уравнения (3.80):
Д?1+Д?2+Д<72—Д<7*= 1,6.
Для дальнейшего формирования системы уравнений (3.75) — (3.76) необходимо рассчитать весовые коэффициенты р,-. Запишем условие (3.74) для заданных значений а,:
I 1 1 1 ' 1 \
М 0,За + 0,22 + 0,352 +о,332J ~ *’
откуда £=0,0187; pi=0,208; р2=0,468; р3=0,153; р4=0,172.
Теперь запишем систему уравнений (3.75)—(3.76):
2-0,208 Д?1+Л—0:
2-0,468 Д?г+Х=0;
2-0,153 Д?Н-Л,=0;
2-0,172 Д?3—1=0;
' Д<71+Д?2+Д<73—Д?4= 1,6.
Ее решениями являются следующие значения оценок погрешностей измерений:
Д^1=0,399; Д<?2=0,177; Д?а=0,542; Д94=—0,482.
4. Проверим выполнение условия (3.79). Как легко убедиться, оно не выполняется только дли параметра qa, нз чего следует вывод о частичном отказе этого ИИК.
В заключение рассчитаем откорректированные оценки значений измеряемых величин:
91= 11,701 т/ч; 92= 11,423 т/ч; 93= 11,858 т/ч; 94 =34,982 т/ч.
При этих значениях удовлетворяется уравнение связи (3.80).
Изложенный выше алгоритм можно использовать не только для определения частичных отказов ИИК, но и для более глубокой диагностики погрешностей измерения. Для этого подвергают статистической обработке расчетные значения погрешностей Дхь поручаемые в последовательных циклах работы алгоритма. Оценка математического ожидания случайной вели
чины Ах, за N циклов расчета характеризует систематическую погрешность измерения i-того ИИК:
Axi^TW = 4’E^^ 07а),
7-1
где 1а — период, с которым выполняются расчеты по алгоритму контроля достоверности исходной информации.
По формуле
</7а ) — Лесист (ЛГ)1а
' N—1 '
рассчитывают оценку среднеквадратичной погрешности измерения.
ГЛАВА 4
ВЫЧИСЛЕНИЕ ОБОБЩЕННЫХ ПОКАЗАТЕЛЕЙ ПРОЦЕССА
4.1. ТИПОВЫЕ ЗАДАЧИ ВЫЧИСЛЕНИЯ НЕИЗМЕРЯЕМЫХ ВЕЛИЧИН И ОБОБЩЕННЫХ ПОКАЗАТЕЛЕЙ
Оценки текущих значений технологических параметров, которые получаются в результате первичной обработки сигналов измерительной информации, поступающих в УВМ от автоматических датчиков, являются основным видом исходной информации для различных алгоритмов контроля и управления, реализуемых АСУТП. Ниже рассмотрены методы расчета различных величин, не доступных непосредственному измерению, но необходимых для эффективного управления, а также методы вычисления обобщенных показателей технологического процесса, зависящих от нескольких измеряемых величин.
В АСУ непрерывными химико-технологическими процессами наиболее распространены задачи вычисления следующих величин и показателей:
интеграла от текущего значения измеряемой величины на заданном интервале времени, а также среднего значения измеряемой величины;
заданной функции от значений нескольких измеряемых величин;
величины, связанной регрессионной зависимостью с несколькими измеряемыми величинами;
концентрации одного или нескольких компонентов многокомпонентной смеси по реализации выходного сигнала автоматического хроматографа (хроматограмме);
прогнозируемых (будущих) значений измеряемой величины или расчетного показателя.
Охарактеризуем кратко каждую из этих задач. Вычисление интеграла от текущего значения измеряемой величины обычно связано с определением суммарного количества некоторого вещества или энергии, поступающих в объект или выходящих из него за определенный заданный интервал времени Т. При этом измеряемой величиной x(t) является расход (мощность) соответствующего потока, а искомая (суммарная) величина определяется соотношением
т
Sx(T) = $x(t)dt. (4.1)
О
К вычислению величины SX(T) сводится также задача расчета среднего значения х измеряемой величины x(t) на интервале времени
т
х(Т) = -т- §x(t)di = y-Sx(T). (4.2>
о
Особенность вычисления величины SX(T) в данном случае связана с тем, что в памяти УВМ представлены дискретные значения функции x(t). В разд. 4.2 изложены некоторые методы дискретного интегрирования и усреднения измеряемых величин, получившие наибольшее применение в АСУТП.
Задача вычисления показателя и, который является задан-ной функцией от нескольких измеряемых величин x/(tel,n)
u=f(xi, х2,.... хп), (4.3}
чаще всего связана с определением технико-экономических показателей (ТЭП). В зависимости от назначения ТЭП делятся на отчетные (характеризующие работу объекта управления в среднем за определенный достаточно длительный период времени) и оперативные (характеризующие текущий режим работы объекта). При вычислении отчетных ТЭП используют усредненные значения измеряемых величин xt(T), входящих в формулу (4.3). Этот расчет не имеет особенностей.
Специфической для АСУТП является задача расчета оперативных ТЭП, так как при этом необходимо учитывать наличие динамических связей между точками измерения различных технологических параметров, входящих в расчетную формулу показателя. Методы учета и компенсации динамических связей между измеряемыми величинами х((/) при расчете оперативных ТЭП изложены в разд. 4.3.
Химико-технологические процессы, как правило, сопровождаются изменением химического состава и физико-химических свойств перерабатываемых веществ, которые необходимо контролировать для эффективного управления этими процессами. Однако промышленность выпускает очень ограниченную номенклатуру автоматических анализаторов состава и свойств веществ, поэтому весьма актуальной является задача «косвенного измерения» качественных параметров на основе регрессионной связи их с измеряемыми величинами. В разд. 4.4 изложена методика построения уравнений регрессии для косвенных измерений.
Одним из наиболее распространенных автоматических анализаторов состава сложных газовых смесей является хроматограф. В отличие от газоанализаторов, выходной сигнал которых однозначно зависит от концентрации определяемого компонента, реализация выходного сигнала хроматографа — хроматограмма требует специальной математической обработки для определения по ней концентрации отдельных веществ. Методика расшифровки хроматограмм на ЭВМ изложена в разд. 4.5.
В разд. 4.6 изложена задача прогнозирования будущих значений измеряемой величины на основе ее значений, известных к моменту выполнения прогноза.
4.2. ВЫЧИСЛЕНИЕ ИНТЕГРАЛЬНЫХ И УСРЕДНЕННЫХ ЗНАЧЕНИЙ ИЗМЕРЯЕМЫХ ВЕЛИЧИН
При вычислении интеграла (4.1) чаще всего используют методы прямоугольников и трапеций.
Метод прямоугольников (рис. 4.1) основан на аппроксимации непрерывной функции x(t) кусочно-постоянной функцией, как при использовании экстраполятора нулевого порядка (см. разд. 3.2). При этом оценку величины SX(T) с учетом по
Рис 41. Дискретное интегрирование по методу прямоугольников
Рис. 4.2. Дискретное интегрирование по методу трапеций
грешностей измерения определяют по формуле
Sn(T) = t0^}, (4.4)
/-0 где
®/=х,4-Ах;; (4 5)
jCy=x(/fo)—значение параметра ж в момент ti = jto, /еО,п—1; Дх/— погрешность измерения параметра х в момент t,; п=ТЦ»— число периодов отсчета величины x(t) иа отрезке времени интегрирования Т.
Рекуррентная формула для вычисления оценки Sn в темпе с поступлением отсчетов х, имеет вид:
З'п(/)=3'п(/—l)+x/io, Q<i<n-1, S'n(0)=0. (46)
Погрешность оценки ASn равна разности между результатами расчета Sx(T) по формулам (4.4) с учетом (4.5) и (4.1):
п-1 т
= <4-7)
/=0 о
В правой части полученного выражения можно выделить инструментальную составляющую А5ПИ, зависящую только от погрешностей измерения Axz:
п—1
Д^пи = Дху. (4.8)
/=0
Остаток правой части выражения (4.7) описывает методическую составляющую А5ПМ погрешности оценки ASn, определяемую численным методом интегрирования и называемую методической погрешностью:
п— 1 т
Д5пм=^2 xi- $x(f)dt. (4.9)
/=0 о
Среднюю квадратичную погрешность оценки ASn получают возведением в квадрат и усреднением выражения (4.7). С учетом (4.9) получают
n—1 л—1
о2п = М ф0 J AS™ ]’} = 'Ml{(2 Ч )*} + /-о /=о
п—1
+ 2/^4 {AS™ 2ах/ } 4- М { ASa™|. (4.10)
/=0
Первое слагаемое в правой части уравнения (4.10) есть средний квадрат инструментальной составляющей погрешности оценки. В силу линейности операций суммирования и вычисле
ния математического ожидания их можно поменять местами. Тогда
а’пи = й. 2 2 М ИМ = 2 2 {tk ~ (4‘1 °
/-0 /-0 А-0 ’
где ^?дх(<)—автокорреляционная функция погрешности измерения.
Формула (4.11) упрощается,- если погрешность измерения не изменяется в пределах интервала времени интегрирования Т, т. е. если Ах/ = Ахл при любых / и k от 0 до (п—1). В'этом случае
а2т=‘ЛАх(0)=а»Лх, (4.12)
где одх — средняя квадратичная погрешность измерения.
Кроме того, если автокорреляционная функция погрешности измерения затухает за время to. т. е. /?ax(O=0 при t^to, то
О при / #= k а2дх ПРИ i = k-
В этом случае
Ц2пп=fit о2 Ц2 Дх •
(4.13)
Второе слагаемое в правой части выражения (4.10) равно нулю, так как погрешности измерений Ах; можно считать независимыми от значений X/, т. е. инструментальная и методическая составляющие погрешности оценки не коррелированы.
Последний член в правой части выражения (4.10) описывает средний квадрат методической погрешности о2Пм дискретного интегрирования по методу прямоугольников. Формула для расчета <т2Пм, полученная возведением в квадрат и последующим усреднением правой части (4.9), имеет вид [34]:
л—1 л—1 л—1 Т
а2™ = <2о2 2 Rx ~tk} ~ 2<0 2 f Rx {ti ~ s)ds +
1=0 kS> 1=0 о
т т
+ J J Цх (t — s) dt ds, о о
(4-14)
где Ях(т) —автокорреляционная функция процесса x(f).
Если период опроса to превышает время затухания автокорреляционной функции Rx(r), т. е. A’xCrjsO при т^о, то формула (4.14) упрощается:
to A) s
П2пм = n{ioRx G) — 2«<о J %Х (т) 4т + 2 J ds § Rx (т) 4т. (4.14а)
0 оо
Метод трапеций (рис. 4.2) основан на аппроксимации непрерывной функции x(t) кусочно-линейной функцией, как в
методе линейной интерполяции (см. разд. 3.2). Оценку величины S(T) по этому методу рассчитывают по формуле:
п—1 _
$г(Т) = <0 Х°^—)• (4-15)
/=1
В рекуррентной форме алгоритм вычисления оценки ST в темпе с поступлением измеренных значений х, описывается формулой
ST (/) = (/ - О + «о ( ; 1 < / < п; 5г(0) = 0. (4.16)
Формулу погрешности оценки AST получают аналогично формуле (4.7), как разность правых частей (4.15) и (4.1) с учетом (4.5). Ее можно представить в виде:
, Д5гвД5ти4-Д^тм, (4*17)
где AS™ — инструментальная составляющая погрешности, которая совпадает о (4.8); ДХтм — методическая составляющая погрешности ДЗт, которая описывается выражением
п-1 т
= /о (S xi + - [ х (0 di. (4:18)
7=1 о
Среднюю квадратичную методическую погрешность дискретного интегрирования по методу трапеций о2тм получают возведением в квадрат и последующим усреднением правой части (4.18). Сопоставление полученного при этом выражения с формулой (4.14) показывает, что методическая погрешность при использовании метода трапеций уменьшается по сравнению с полученной методом прямоугольников на величину
/2
До»м = а2пм — о2™ = — [^(0) _ Rx (Т)], (4.19)
В большинстве случаев RX(T)=O. Поэтому
Д<Тм2=/о2/?Д0)/2. (4.19 а)
Как показывают расчеты [24], заметное (примерно на 10%) уменьшение погрешности дискретного интегрирования при переходе от метода прямоугольников к методу трапеций происходит только при п=С10, когда существенное влияние на результат расчета оказывают крайние члены выборки измеренной величины (первый и последний). Поэтому на практике в большинстве случаев применяют метод прямоугольников как более простой и экономичный.
Расчет среднего значения измеряемого параметра x(t) на заданном интервале как следует из формулы (4.2),
сводится к вычислению интегрального значения SX(T), для чего может быть использован любой из описанных выше методов дискретного интегрирования. При этом остаются справедлн-
выми все расчетные соотношения, только в формулы (4.11)—> (4.14) и (4.19) для вычисления средних квадратических погрешностей необходимо ввести дополнительный множитель (nt0)~I 2 * * * *.
При оперативном управлении часто используют средние значения технологических параметров, определяемые на скользящем интервале времени tI—T^.t^.tl. В принципе для этого также могут быть использованы рассмотренные ранее алгоритмы дискретного интегрирования, однако для их применения необходимо хранить в оперативной памяти УВМ число n = T/to значений измеряемой величины. Поэтому для скользящего усреднения часто применяют алгоритм экспоненциального сглаживания (3.33), очень экономичный, однако существенно увеличивающий погрешность оценки скользящего среднего.
Методическая погрешность оценки скользящего среднего Ах равна разности между значениями, вычисленными по формулам (3.33) и (4.2). Первую из них можно преобразовать к виду
_ /
*(0) = ?2 -(4.20)
1=0
Тогда искомая погрешность
' 1 А
дг= у 2 (1 - у)>-‘ х iti)- J х (t) dt. (4.21)
i=0 tf~T
Средний квадрат методической погрешности о2г оценки скользящего среднего по формуле (4.20) получают возведением в квадрат и усреднением правой части (4.21), что дает [24]:
oj-a = hm 1
I I
2 2(1 - (1 - ?)У'А Rx ® ~A) /oJ - -i-0 k=0
I nta
2 v . (• 1
— nto Y 1 — Y)7 * J Rx (^o — t) dt + X i-0 0
ntg nto
X j* J Rx(t — s)dids.
d о
(4.22)
Оптимальное значение параметра алгоритма у* определяют из необходимого условия минимума методической погрешности дсг2Г/ду=0.
Практически это уравнение можно решить только численно, с помощью ЭВМ.
Расчеты по формуле (4.22), выполненные для автокорреляционной функции простейшего вида (3.20) при разных значениях коэффициента а, а также разных to и Т, показали [24], что метод экспоненциального сглаживания увеличивает среднюю квадратичную методическую погрешность определения текущего среднего в 1,5—3 раза по сравнению с полученной методом прямоугольников^Например если а=1 ч, ^0 = 2 мин и Т=1 ч, то у*=0,14 и сг7/УДс=0,04.
4.3. УЧЕТ И КОМПЕНСАЦИЯ ДИНАМИЧЕСКИХ СВЯЗЕЙ МЕЖДУ ИЗМЕРЯЕМЫМИ ВЕЛИЧИНАМИ
В формулу (4.3) для расчета ТЭП в качестве переменных х1г как правило, входят расходы материальных и энергетических потоков, измеряемые в разных точках объекта управления.
Например, расходный коэффициент по аммиаку, являющийся одним из основных ТЭП работы агрегата по производству разбавленной азотной кислоты, равен отношению расхода аммиака, измеряемого на входе агрегата, к расходу продукционной кислоты, измеряемому на его выходе.
Для получения правильного результата при расчете оперативных ТЭП по текущим значениям измеряемых величин эти значения должны быть согласованы между собой во времени с учетом динамических характеристик объекта управления. Обычно, если хотя бы один из параметров, входящих в расчетную формулу ТЭП, измеряется на выходе объекта, то значения всех остальных параметров также «приводятся» к его выходу.
Рассмотрим простейший случай, когда в формулу (4.3) для расчета оперативного ТЭП входят величины х и у, измеряемые соответственно на входе и выходе линейного объекта 1 (рис. 4.3). Текущие значения величин x(t) и y(t) связаны уравнением
у (i) = j w(Q)x(t — ^)d9, (4.23)
—со
где ш(0) — импульсная переходная функция (ИПФ) объекта.
С учетом условия физической реализуемости ИПФ ш(0)эО при 0<О и конечной «памяти» реальных объектов а>(0)==О
Рнс 4.3 Модель расчета оперативного ТЭП u=f(x, у)
Г —объект контроля, 2 —динамическое звено, моделирующее приведение сигнала х(<) к выходу объекта, 3 — статическое звено, моделнрующёе вычисление ТЭП
Рис. 4 4. График к расчету приведен* ного значения измеряемой на входе величины к выходу объекта по формуле (4.26)
при Э^Ощах из (4.23) получим:
y(0 = j w(&)x(t — 0)d0. (4.24) о
Текущее значение величины x(t), «приведенное» к выходу объекта Xo(t), получают делением правой части (4.24) на коэффициент усиления kt объекта:
Л
1 гаах
*о(О = -^" J w(Q)x(t — 0)d0. (4.25)
о
Вводя в рассмотрение нормированную ИПФ аун(О) =w(B)/kif получают окончательно:
0шах
*0 (0 = J (6) X (t — 6) с(0. (4.26)
0
Формула (4.26) дает алгоритм приведения текущего значения измеряемой на входе величины к выходу объекта. Он сводится к вычислению интеграла свертки нормированной ИПФ объекта а>н(0) и функции x(t), взятой на отрезке времени от текущего момента tj до t} 9max (рис. 4.4). Расчет можно выполнять любым численным методом интегрирования, например методом прямоугольников. Для этого необходимо постоянно хранить в памяти УВМ т ординат нормированной ИПФ, квантованной по времени с тем же периодом to, с которым квантована измеряемая функция x(t):
HlsInt(0maxAo), (4.27)
где Int (v) — функция «целая часть от о».
Кроме того, для расчета требуется т ординат (отсчетов) функции x(t), начиная с полученной в текущий момент t)=jt0 и до момента —tn—1)/0 включительно. Расчет выполняют
по формуле
т-1
(}t0)=2w* wх (i—(о- и • 28>
V=0
Алгоритм (4.26) обеспечивает максимальную точность приведения к выходу объекта функции x(t), измеряемой на его входе, однако он относительно сложен и трудоемок для реали
зации, особенно на микро-ЭВМ. Поэтому на практике широкое распространение получили несколько упрощенных алгоритмов, рассмотренных ниже.
Обозначим через Xk(t) текущее значение функции x(t), приведенное к выходу объекта по А-му упрощенному алгоритму. Тогда текущая методическая погрешность /г-го алгоритма равна:
е*(О“«*(О-2о(О. (4.29)
Из сопоставления (4.24) и (4.25) следует*, что
МО =17 НО- z (4.30)
поэтому
е*(0 = М0—-^-«/(0. (4.31)
Если Xk(t) является несмещенной оценкой xo(t), то с учетом (4.30) можно записать:
1
М = М{хо(0) = тх — -^-ту, (4.32)
где —символ операции определения математического ожидания
функции z(t); тх и mv — математические ожидания функции x(t) и y(t). С учетом (4.32) выражение (4.31) можно преобразовать следующим образом:
МО = [хА(0 — тх] — -^-[у(0 — mJ = М0~ у (t), (4.33)
где Xt(i) и y(t) — центрированные функции £л(0 и y(t).
Дисперсия Dk методической погрешности А-го приближенного алгоритма приведения равна:
Dk = М J °xk (0 - уф]’) == М {xft« (/)} - ~ М (хк (/) y(t)} +
1 О 2 1
+ k\ м (Уг ==D^k~~k?Dy' х к х к х
Из (4.30) следует, что Dy=kl2Dx. Поэтому окончательно получим
2
= — ~k^К*ьУ (0) "Ь ®Л> (4.34)
где D~xkH Dx — дисперсия функций хк(0 н х(0; #~aJt)—взанмнокорреля-цнонная функция процессов хк(Г) и y(t).
* Соотношение (4.30) справедливо только для принятой расчетной модели связи величин х и у, схематично представленной иа рнс. 4.3. В общем случае выходная величина у формируется в зависимости от нескольких входных величии, и тогда формула (4.30) неприменима.
Первым из приближенных алгоритмов приведения рассмотрим алгоритм 1, по которому приведенное значение функции рассчитывают по формуле
x}+b, (4.35)
где а, Ь и т — параметры алгоритма.
Для обеспечения несмещенности оценки xi(t) должно выполняться условие
M{xt(t)}=mx. (4 36)
Найдем математическое ожидание для правой части (4.35):
M{ax(t—х) +b}=amx+b.
Подставив полученное выражение в условие (4.36), определим значение параметра Ь, обеспечивающее несмещенность оценки
b=mx(l—a). (4.37)
Чтобы определить оптимальные значения параметров а и т, необходимо рассчитать дисперсию методической погрешности алгоритма (4.35) по формуле (4.34). С этой целью требуется найти для данного алгоритма дисперсию и значение взаимнокорреляционной функции ^«,^(0). Согласно определению, можно записать:
О^ = М {1Гг (0-mJ2},
Яу%(°) = м Ш (0 — туУ Й (0 — •
После подстановки в эти выражения значения функции xrft) из формулы (4.35) с учетом (4.37) получим:
= а2Л1 {[х (/ — т) — mJ2} = a2Dx,
(°) = о М {[р (0 — ту] [х (/ — т) — mJ} = aRyx (т).
Подстановка полученных выражений в (4.34) дает:
2а
Di = a*Dx—j^- Ryx (т) + Dx. (4.38)
Оптимальные значения параметров а и т алгоритма приведения (4.35) получают из условий минимума дисперсии Dt. Для т оптимальным, очевидно, является значение, доставляющее абсолютный максимум функции RyX(x):
т*=argmax 7?к*(т). (4 39)
Оптимальное значение параметра а находят из необходимого условия минимума функции Dt по этому параметру, т. е. из условия dDilda=Q. В результате получают
Р-ЫГУКЫЫ. (4.40)
Минимальное значение днсперснн методической погрешности приведения по алгоритму (4.35), получаемое после подстановки в формулу (4.38) оптимальных значений параметров т* из (4.39) и а* из (4.40), равно:
min Dx = dJ1- (4-41>
Другие приближенные алгоритмы приведения представляют собой частные случаи алгоритма (4.35).
Алгоритм 2 отличается от (4.35) тем, что в нем временной сдвиг т=0, т. е.
хг(1)=ах(1)+Ь. (4 42)
В этом случае значение параметра Ь, обеспечивающее несмещенность оценки Xi(t), подчиняется условию (4.37). Оптимальное значение второго параметра алгоритма определяют по-формуле (4.40), в которой т*=0, так что
а‘=/?Ух(0)/(^Ох). (4.43>
Минимальная дисперсия методической погрешности приведения в этом случае возрастает по сравнению с P*i на величину 4
Алгоритм 3 отличается от (4.35) тем, что а = 1 и в силу (5.37) Ь=-0. Поэтому
хз(0 =x(t—т). (4 45>
Оптимальное значение единственного параметра этого алгоритма определяют по формуле (4.39). Минимальная дисперсия методической погрешности этого алгоритма равна:
minD3=2[Z>x—/?»х(т*)/^1]. (4 46>
Алгоритм 4 отождествляет приведенное к выходу объекта значение параметра х с измеренным его значением:
Зч(О=х(О- (4 47>
Дисперсия погрешности в этом случае максимальна и равна:
D4=2[Dx—RyxWfkt]. (4.48>
Оценим точность различных алгоритмов приведения на примере простейшего объекта — апериодического звена с ИПФ
w (0) = -А- е~в!Т , (4.49>
на входе которого измеряется функция x(i), представляющая собой стационарный случайный процесс с автокорреляционной функцией
/?хх(т)=Ожв-“х. (4.50>
Взаимнокорреляцнонную функцию 7??х(т) [50] рассчитываем по формуле
Ryx W = J Rxx (r — t)w (t) dt.
0
Подставляя в нее выражения (4.49) и (4.50), выполняя интегрирование и группируя члены, получим:
Ryx W = аТ—1 [ 1 -|-аТ е ~е )•
Координату точки максимума этой функции найдем из условия dRyx (т) dr
Выполняя дифференцирование и промежуточные преобразования, получим
г* = £ Т In (1 +2"Г- j У (аТ — 1) при аТ > 1.
Примем для определенности а=1 ч и Т=2 ч. Тогда
4 т*=0,81 ч; RyX (0) = RyX(x*)-= g krDx.
•Согласно (4.48), (4.46) и (4.41), имеем:
4 „ . „ 10 5
Z?4 — 2 Dx; min D3 — g Dxt min — g Dx.
Таким образом,ч в данном случае дисперсия методической погрешности -при использовании алгоритма 3 уменьшается по сравнению с полученной по алгоритму 4 на 16%, а при использовании алгоритма 1 она уменьшается еще в два раза. Следовательно, для приведения параметров к выходу объекта наиболее целесообразно использование алгоритма 1.
-4.4. ВЫЧИСЛЕНИЕ НЕИЗМЕРЯЕМЫХ ВЕЛИЧИН ПО УРАВНЕНИЯМ РЕГРЕССИИ (КОСВЕННЫЕ ИЗМЕРЕНИЯ)
Ввиду отсутствия надежных автоматических датчиков измерение многих технологических параметров в производственных условиях производится путем лабораторных анализов периодически отбираемых проб. Результаты анализов обычно поступают с большим запаздыванием, что затрудняет их использование при оперативном управлении технологическим процессом.
Вместе с тем в ряде случаев удается выявить связь между определяемой величиной и и одним или несколькими технологическими параметрами, поддающимися автоматическому измерению. Как правило, эта связь является стохастической, т. е. описывается уравнением регрессии
u=F(x, Б),
где й=Л4{и/х}—• условное математическое ожидание величины и от вектора измеряемых величин х; b — вектор параметров уравнения регрессии.
Определение структуры функции F(x, b) и ее параметров производится методами регрессионного анализа. Чаще всего встречаются линейные уравнения регрессии
*
«=6о+26'х<' (4-51>
1=1
К этой же форме могут быть приведены некоторые уравнения другой структуры путем замены переменных или иных преобразований. Например,, полиномиальное уравнение вида
к « = &о + 2 biyi i=l
приводится к форме (4.51) заменой переменных xi=y‘, iel,k.
Уравнении вида
*
У = во1Ъ?'
1=1
преобразуются к линейной форме (4.51) логарифмированием с последующей подстановкой й=1п V; &o=lnflo; x<=lnz,-.
Значения параметров уравнения линейной регрессии определяют по методу наименьших квадратов, т. е. из условия
к
6 = argminAl|[«— (б0 — 26‘*г)К}‘ i-i
Методика расчета Б подробно изложена в литературе [24]г поэтому отметим только основные ее этапы и некоторые особенности.
Значения параметров рассчитывают по формулам:
bt=\Lt\l\L\, ieT*;
k bg = mu— ^bjtnx^ »=1
где mu и mxt—оценки математических ожиданий величин и и хг, |L|— определитель, составленный из корреляционных функций измеряемых величин Rxtxj(ty при i, |£./1—определитель, полученный из |L| заменой
i-того столбца столбцом, составленным из нзаимнокоррелиционных функций Rx tu (0).
Адекватность уравнения регрессии экспериментальным данным проверяют по критерию Фишера, а значимость отдельных коэффициентов — по критерию Стьюдента.
Экспериментальные данные для построения уравнения регрессии получают, производя синхронные измерения значений' величины и и вектора х. Затем эти данные используют для
расчета оценок Rxixt (0) и 7?Я(И(0), характеризующих степень линейной связи соответствующих величин.
Однако в общем случае все величины, участвующие в расчетах, измеряют в разных точках объекта, т. е. они разделены динамическими каналами. Оценки величин Rxiut®), полученные без учета и компенсации динамических каналов, определяют не истинную степень линейной связи и с х1г а степень линейной связи этих величин, фиксируемых в одни и те же моменты времени, которая обычно значительно слабее '[24]. Поэтому для повышения точности результатов косвенных измерений при построении уравнения регрессии рекомендуется учитывать динамические связи между величинами и и xi. При этом могут быть использованы любые методы приведения, изложенные в разд. 4.3.
Примером использования уравиеиия множественной линейной регрессии может служить метод косвенного измерения одного из показателей качества полиэтилена — так называемого индекса расплава — по значениям технологических параметров, измеряемых в процессе грануляции [13].
Индексом расплава, характеризующим реологические свойства полиэтилена; а также в некоторой степени его молекулирную массу, называют количество расплава полиэтилена, выдавленное из грузового пластомера через стандартное отверстие в течение 10 мни при температуре 190 °C. Длительность полного цикла анализа составляет 15—20 мин, что исключает возможность использования результатов для автоматического регулирования. Разработанный метод косвенного измерения состоит в следующем.
В процессе работы гранулнтора измеряют текущие значения давления Р, температуры 0 и крутящего момента AfKP на валу шнека, связанные с индексом расплава Р регрессионным уравнением
f=33,4 — 0,066 Мкр — 0,69 Р — 0,035 0. (4.52)
Подстановка измеренных значений в уравнение (4.52) позволяет рассчитать оценку текущего значения показателя F. Алгоритм косвенного измерения индекса расплава использован в составе математического обеспечения АСУТП «Полимир».
4.5. АВТОМАТИЧЕСКАЯ РАСШИФРОВКА ХРОМАТОГРАММ
Хроматографы являются наиболее распространенным типом автоматических анализаторов состава многокомпонентных газовых, паровых и жидкостных смесей, применяемых в АСУ ТП химической и других отраслей промышленности. Хроматограф работает следующим образом [27]1 Проба анализируемого таза дозатором подается в колонку, через которую продувается газ-носитель из баллона. Поток газа-носителя захватывает про-бу, которая в процессе движения через слой насадки, заполняющей колонку, постепенно разделяется на компоненты. На выходе колонки установлен детектор, чувствительный элемент которого преобразует концентрацию бинарной смеси, состоящей из газа-носителя и одного из компонентов анализируемой смеси, в электрический сигнал. Последний после усиления регистрируется прибором как функция времени, отсчи-
Рис 4.5. Хроматограмма: / — хроматографический пик, ния; Aj и SJ — амплитуда н пика
2 — нулевая ли-площадь /-того
тываемого от начала анализа. Полученный при этом график называют хроматограммой (рис. 4.5).
Каждому компоненту на хроматограмме соответствует пик; последовательность расположения пиков характеризует качественный состав анализируемой смеси, а параметры пиков — содержание соответствующих компонентов. Для определения по хроматограмме концентрации отдельных компонентов ее подвергают специальной математической обработке, основные задачи которой и применяемые для их решения алгоритмы рассмотрены ниже.
При обработке хроматограмм на ЦВМ в общем случае необходимо [18]:
1) определять период квантования по времени выходного сигнала детектора;
2) осуществлять фильтрацию полезного сигнала детектора от высокочастотной помехи, образование которой обусловлено как принципом действия детектора, так и особенностями хроматографического анализа;
3) проводить коррекцию нулевой линии хроматограммы, дрейф которой является характерной помехой при хроматографическом анализе;
4) обнаруживать пики по изменению выходного сигнала детектора;
5) рассчитывать концентрацию определяемых компонентов по параметрам соответствующих пиков.
Выбор периода квантования по времени выходного сигнала детектора производится на основе частотного спектра его полезной составляющей по методике, изложенной в разд. 3.2. Обычно период должен быть таким, чтобы за время прохождения одного пика проводилось 20—30 отсчетов выходного сигнала детектора.
Фильтрация высокочастотной помехи, наложенной на полезный сигнал детектора, обычно выполняется методами текущего среднего или экспоненциального сглаживания, рассмотренными в разд. 3.3.
Коррекция нулевой линии хроматограммы, дрейф которой можно рассматривать как проявление низкочастотной помехи, наложенной на полезный сигнал, производится методами экстраполяции и интерполяции (см. разд. 3.2). Простейшим является метод ступенчатой экстраполяции (рис. 4.6, а), при котором для очередного /-того пика уровень нулевой линии при-15—833 225
a
Рис. 4.6. Коррекция нулевой линии хроматограммы методом ступенчатой экстраполяции (а) и линейной интерполяции (б)
Рис. 4.7. Хроматографический пик и его производная
нимают равным значению выходного сигнала детектора в момент начала пика. При относительно небольшой скорости дрейфа нулевую линию можно аппроксимировать линейным уравнением (рис. 4.6,6):
0о“во-|-О10, где уо — значение выходного сигнала детектора, от которого отсчитывают ординаты хроматографического пика в момент времени 0 от начала цикла анализа; ао и ai— параметры аппроксимирующей функции.
Значения параметров До и Д1 рассчитывают по точкам хроматограммы, расположенным между пиками (например, точки Л и В на рис. 4.6,6). Возможна также кусочно-линейная или нелинейная аппроксимация нулевой линии.
Обнаружение хроматографического пика может производиться как по текущему значению выходного сигнала детектора, так и по его производной (рис. 4.7). Простейший алгоритм заключается в проверке условия
У—(4.53) где у — текущее значение выходного сигнала детектора; у о — значение выходного сигнала, соответствующее нулевому уровню; Ai — пороговое значение, задаваемое в зависимости от уровня помехи, наложенной иа полезный сигнал.
Выполнение условия (4.53) служит признаком обнаружения пика, а первый момент времени tn, когда оно зафиксировано, принимают за начало пика. Соответственно момент tK, когда впервые после ta зафиксировано нарушение условия (4.53), принимают за конец пика.
Для повышения надежности обнаружения пика условие (4.53) можно применить совместно с условием (см. рис. 4.7) dyldt^l^ (где А2 — пороговое значение для производной выходного сигнала детектора по времени).
Селекция пиков конкретных компонентов среди всех пиков хроматограммы для анализируемой смеси с известным качественным составом сводится к определению их порядкового номера.
Для вычисления концентрации компонентов при расшифровке хроматограмм наибольшее распространение получил так называемый метод нормированных площадей, при котором концентрацию /-того компонента с, считают пропорциональной площади S, соответствующего пика:
н
cj = kjS3/ kjS}, (4.54)
/=1
где k/ — масштабный коэффициент; N — число пиков иа хроматограмме.
Для расчета площадей пиков могут быть использованы любые численные методы интегрирования, например методы прямоугольников и трапеции (см. разд. 4.2).
Расчет по формуле (4.54) требует определения площадей всех пиков, имеющихся на хроматограмме. Вместе с тем при использовании хроматографа в качестве датчика АСУ ТП обычно требуется определение концентрации не всех, а лишь одного, двух или трех ключевых компонентов. Это позволяет прервать цикл анализа после выделения из хроматографической колонки ключевых компонентов, сокращая тем самым его продолжительность. В подобных случаях целесообразнее применять другой метод расчета, согласно которому концентрация компонента пропорциональна амплитуде соответствующего пика.
В последние годы благодаря все более широкому распространению микропроцессоров промышленность осваивает производство автоматических хроматографов, укомплектованных специализированными вычислительными устройствами. Эти устройства производят обработку хроматограмм, используя изложенные выше алгоритмы, а также обеспечивают хранение результатов анализов и передачу их по запросу УВМ, которая осуществляет централизованный контроль и управление технологическим процессом. При этом УВМ освобождают от расчетов по обработке хроматограмм, и ее вычислительные ресурсы могут быть эффективнее использованы для решения более сложных задач управления технологическим объектом.
4.6. ПРОГНОЗИРОВАНИЕ ПОКАЗАТЕЛЕЙ ПРОЦЕССА
Прогнозирование значений показателей, от которых зависит стратегия управления технологическим объектом, является одной из информационных функций АСУТП.
Рассмотрим величину y(t), значения которой определяются (измеряются или вычисляются) периодически с периодом to.
Тогда к текущему моменту tn = nt0 известны значения г/(0), у(1) ... у(п), образующие так называемый временной ряд. Задачей прогноза является определение в момент tn оценки члена ряда у(1) для будущего момента ti=(n-\-l)10 (где /^0 определяет период прогноза).
Для расчета прогнозируемого значения необходимо построить математическую модель временного ряда y(j). В практике краткосрочного прогнозирования наибольшее распространение получили две модели временных рядов.
Модель авторегрессии
р
У (Л = «о + 2 a (k) у (j - k) + е (j), (4.55)
А=1
где Оо и a(k)—параметры модели (£е1,р); р — порядок модели авторегрессии; е(/)—случайная составляющая (помеха) в момент t1=jta.
Полиномиальная модель
р
</(/) = «о + 7Г а (fe) >k + е W- (4-56)
k=i
Оценки параметров a (k) модели авторегрессии определяют по МНК. Расчет прогнозируемых значений проводят по формуле
р
~у (п.1) = аа2 a (k)y (п — k +1), (4.57)
*=1
где у (и—— измеренное или прогнозируемое значение временного ряда В'момент t=(n—k^-l)ta.
Алгоритм прогноза (4.57), использующий модель авторегрессии, прост для реализации на ЭВМ. Его недостатком является низкая точность, обусловленная тем, что оценки параметров модели a(k) не уточняются по результатам прогноза. Этого недостатка лишен метод прогноза, основанный на модели (4.56). Оценки параметров этой модели уточняются по мере поступления каждого нового значения временного ряда. Для их расчета используют так называемые «экспоненциальные средние» разного порядка, вычисляемые по формуле экспоненциального сглаживания (3.33). В частности, экспоненциальную среднюю первого порядка рассчитывают по формуле
21(7)=ТУ(/) + (1-'У)21(/— 1).
где у — параметр настройки алгоритма прогнозирования (0<у<1).
Экспоненциальную среднюю второго порядка рассчитывают по формуле
Z2(/)=V21(/) + (l-Y)22(7-l).
В общем случае для экспоненциальной средней r-го порядка расчетное соотношение имеет вид:
Zr(/)=?zr_1(/) + (l-Y)Zf(/-l). (4.58)
Для вычисления экспоненциальных средних необходимо задать их начальные значения z,(0), г=1, 2 ..., которые в простейшем случае могут быть приняты равными начальному значению временного ряда «/(0). Большое влияние на результаты прогноза оказывает выбор значения параметра у. Если желательно, чтобы прогноз базировался в основном на последних значениях временного ряда, следует выбирать значение yv близкое к единице.
Оценки параметров модели (4.56) рассчитывают по специальным формулам. В частности, для линейной модели расчетные формулы имеют вид:
— — V
Оо = 2Z1 (/) — г2 (/); а (1) = [*i (/) — г2 (/)].
Соответственно для квадратичной модели они имеют вид
So=3[z1(/)—^(/)]+Zs(/); !
«0) = 2(ГЬ^ К6~О’)-2 (5-4?)г2(/) + (4-Зу)г,(/)];
аз (2) — 0_y)2 lzi 0) 2г2 (]) + z3 (/)].
Модели более высокой степени применяют редко.
Расчет прогнозируемого значения по модели (4.56) выполняют по формуле
Н л + Z) = До («) 4-Д1 («)'+••• + ТГ «₽(«) 1р> (4 • 59)
где а*(л) —оценка параметра a(k), вычисленная с учетом всех известных членов временного ряда, включая последний у(п).
Алгоритм прогнозирования по методу экспоненциального сглаживания работает следующим образом. При поступлении очередного значения временного ряда у(п) вычисляют экспоненциальные средние Sr(r—1, 2, ...) по формуле (4.58), затем рассчитывают оценки параметров прогнозирующей функции по соответствующим формулам и определяют прогнозируемое значение у (п+1) по формуле (4.59).
Пример. В периодическом процессе микробиологического синтеза лизина (см. разд 81) необходимо контролировать концентрацию в биореакторе основного компонента питательной среды — сахаров. Ввиду отсутствия автоматических датчиков измерение этого параметра осуществляют путем лабораторных анализов, выполняемых с интервалом 8 ч.
Для прогнозирования изменений концентрации сахаров на 8-часовой отрезок времени после выполнения очередного анализа можно использовать линейную полиномиальную модель (4 56). Ниже приведены «истинные» зна
чения концентрации, полученные методом имитационного моделирования на ЭВМ процесса биосинтеза лизина и результаты прогноза при следующих значениях параметров алгоритма: у=0,7; zi(0) = 155; z2(0) = 160.
Время t, ч 0 8 16 24 32 40 48 56
<Истинная» кон- 130 106 79 59 40 30 18 9
центрация у (ft,
г/л __
Прогноз y(t), г/л — 107,7 82,9 54 36,3 26,7 15,3 6,7
ГЛАВА 5
ОПТИМАЛЬНОЕ УПРАВЛЕНИЕ
ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
5.1. ФОРМИРОВАНИЕ КРИТЕРИЕВ ОПТИМАЛЬНОСТИ
При решении оптимизационных задач с помощью ЭВМ очень важно точно их сформулировать. Для формулировки задачи необходимо ввести обозначения искомых переменных и исходных данных, записать в этих обозначениях критерий оптимальности, который в результате решения должен принять минимальное или максимальное значение, и выписать набор условий, определяющих множество допустимых решений. Такими условиями являются связи между искомыми переменными; пределы, в которых может выбираться каждая из них; требования к характеру искомых функций (гладкость, непрерывность и т. д.).
Любой технологический процесс характеризуется рядом показателей— таких как производительность G, вектор К., определяющий качество выходного продукта, показатель, надежности процесса Р, капиталовложения М, затраты на обслуживание So. Каждый такой показатель определенным образом характеризует процесс. При формулировке задачи оптимизации часть этих показателей может быть введена в критерий оптимальности, а остальные должны учитываться при формировании ограничений, определяющих множество допустимых решений. При этом в ряде случаев нужно учесть и неопределенность условий функционирования, связанную с неконтролируемыми изменениями состава сырья, состояния внешней среды и т. п.
Способы формирования сводного критерия оптимальности. Обозначим через Iv v-тый показатель функционирования процесса и будем для простоты считать, что в результате оптимизации желательно любой из т таких показателей (частных критериев) увеличить. Если некоторые из показателей, например капиталовложения М, нужно уменьшить, то соответствующий
им частный критерий Iv примем равным — М. Через и обозначим параметры процесса и системы управления, подлежащие оптимальному выбору, и будем первоначально считать задачу полностью детерминированной, полагая, что значение каждого из частных критериев становится известным при задании иг Таким образом, каждой точке и° в пространстве U параметров^ соответствует точка Г в пространстве / критериев (рис. 5.1), Ясно, что оптимальное решение по одному критерию 1\ приводит в точку/*1 (рис. 5.1, б) и не совпадает с оптимальным решением по критерию /г (точкой 1*2). Чтобы найти оптимальное решение и*, можно пойти по пути формирования из частных критериев /v свободного критерия /. Приведем несколько способов получения I.
Свертка частных критериев с весовыми коэффициентами. Весовые коэффициенты у„ учитывают относительную важность того или иного критерия и устанавливаются путем экспертизы
m
/ = 2 ?v/v----max> (5.
v=l и
где
tn
Tv>0; J] yv= 1. (5.2)
v=i
Значения частных критериев /v при использовании свертки (5.1) должны быть либо безразмерными, либо иметь одинаковую размерность.
Отметим, что геометрически применение критерия (5.1) приводит к выбору на множестве / такого вектора /*т, у которого максимальна проекция на прямую у, такую, что квадраты ее направляющих косинусов равны yv (рис. 5.1,6); в частности, cos2ai=yi.
Использование нормативных показателей. Пусть для каждого из частных критериев известно некоторое нормативное значение 1уВ, например среднее значение Iv для действующих аппаратов, аналогичных оптимизируемому. Тогда отношение iv = /v//vH характеризует степень совершенства процесса с точ-
Рис. 5.1. Схема формироиаиия критерии оптимальности: а — пространство управляющих параметров, б — пространство критериев
ки зрения v-ro показателя. Обозначим минимальное по v значение iv через i*v. В этом случае критерием оптимизации может быть величина i»v, так что
»,v = min (Zv/Zvh) ------► max.
V и
(5.3)
При использовании такого критерия можно быть уверенным, ✓что степень совершенства по любому показателю будет не ниже, чем величина imax,v, полученная в результате решения задачи (5.3). Практически часто оказывается, что увеличение одного из показателей iv приводит к уменьшению другого^ В этом случае использование критерия (5.3) даст такое оптимальное решение и*, для которого два или несколько значений й окажутся одинаковыми и равными imax,v.
Приближение к «идеалу». Пусть известны решения т задач оптимизации вида
Zv
max; v = 1, т и
(5.4)
В результате найдены предельные значения I* v каждого из частных критериев оптимальности без учета остальных. В пространстве критериев точку I* с координатами Z*v называют идеалом (рис. 5.1,6}. Когда решения u*v задач (5.4) не одинаковы, идеал не принадлежит множеству I достижимых значений критериев. Однако можно на втором этапе решения по-ставить задачу определения такого достижимого критерия / и соответствующего ему допустимого решения и, для которых расстояние от идеала было бы минимальным, например:
т
I*
v
min и
ИЛИ
1 _ таху» (Zv* — Zv («)) V JV
min и
Справедливый компромисс. Выбор решения в задаче с несколькими частными критериями представляет собой компромисс, так как увеличение одного показателя приводит к уменьшению другого. При справедливом компромиссе стремятся к тому, чтобы в точке и* сумма относительных изменений всех показателей была равна нулю. Таким образом, в точке и* должно быть выполнено равенство
т
2 dZv(«’)/Zv(u’) = O,
V—1
(5.5)
которое можно переписать в следующем виде:
2 « [In Iv (U)]u=u. = i 2 !n /, (u) = о. (5.6)
V=1 V—1
Равенство (5.6) является необходимым условием максимума произведения величин Jv(u). Действительно, если
r = fl/v(u) (5.7)
V=.l
достигает максимума, то максимален и логарифм этого выражения
m In 7 = 2 In/v(«)-V=1
Таким образом, справедливый компромисс соответствует сводному критерию (5.7), равному произведению частных критериев.
Оптимальность по Парето. Выбор каждого из приведенных выше способов получения сводного критерия субъективен или основан на некоторых дополнительных предположениях. Между тем, оптимальное решение в задаче с несколькими критериями можно определить иначе, чем в задаче с одним критерием. В этом случае нет необходимости во введении сводного критерия оптимальности I. Такой подход был предложен в 1904 г. итальянским экономистом В. Парето.
Оптимальным по Парето решением ип является любое решение, если среди допустимых решений не найдется такого и°, для которого
/v(«°) > Д («п); v=l,m, (5.8)
причем хотя бы для одного значения v неравенство (5.8) строгое. Иными словами, ип оптимально, если нельзя улучшить ни одного из частных показателей, не ухудшая при этом хотя бы одного из остальных.
Оптимальным по Парето решениям соответствует на рис. 5.1,6 та часть границы множества / (выделена жирной линией), для которой любое направление, образующее с осью абсцисс угол, меньший либо равный л/2, выводит за пределы множества I.
Легко показать, что любой из приведенных выше способов образования сводного критерия I приводит к получению одного из решений, оптимальных по Парето. В том случае, когда граница множества I, соответствующая оптимальным по Парето решениям, выпукла, все эти решения можно получить из задачи о максимуме сводного критерия (5.1) при изменении весовых коэффициентов у? в пределах условий (5.2).
Экономическая оценка эффективности процесса. Формирование критерия оптимальности в экономических терминах является одним из самых распространенных способов увязки частных критериев. Приведем наиболее часто используемые экономические критерии.
Себестоимость С определяют как отношение суммарных затрат к производительности процесса:
C=(Se+S»+So+Si)/G, (5.9)
Затраты на сырье Sc обычно пропорциональны производительности G, зависят от коэффициента т] использования сырья, его стоимости So и стоимости отходов Sot:
So = G[Sc—(1~-t|)Sot].
Стоимость отходов может быть отрицательной, если затраты на извлечение их из выходного потока больше, чем стоимость отходов в чистом виде. Коэффициент использования сырья т, зависит от режима и управления процессом.
Затраты на энергию Sa включают затраты на электрическую и тепловую энергию, охлаждающую воду и т. п. Их также часто принимают пропорциональными производительности.
Затраты на обслуживание и управление So определяются зарплатой персонала и включают постоянную составляющую и составляющую, пропорциональную G.
Амортизационные отчисления 8ф зависят от стоимости оборудования, стоимости его капитального и текущего ремонтов в соответствии с выражением
8ф=(Ф4-Р—Л)/Т,
где Ф и Р—стоимость основных фондов и суммарная стоимость ремонта за плановый срок Т службы оборудования; Л — ликвидационная стоимость оборудования, отслужившего положенный срок.
Критерий себестоимости (5.9) стремятся минимизировать при ограничениях на производительность G и характеристики продукции. Эти последние факторы можно ввести и непосредственно в критерий, если в качестве его взять прибыль
П=О(Ц-С), (5.10)
где Ц — цена продукции, зависящая от ее качества.
В ряде случаев прибыль П относят к суммарным затратам на получение продукции или к стоимости оборудования Ф. Получают безразмерные показатели нормы прибыли
Ре = П/ОС-(Ц—С)/С
или нормы рентабельности Рф = П/Ф.
Даже в тех случаях, когда экономические критерии не используют для постановки оптимальных задач, их анализ позволяет разобраться в том, какой экономический смысл имеет тот или иной технологический показатель (качество продукции, производительность ит п.).
Учет неопределенных факторов в критериях оптимальности. В ряде задач на результаты оптимального решения влияют случайные факторы. Например, в условия задачи может входить нагрузка аппарата, прогнозируемая на планируемый период. При этом прогноз носит статистический характер. Обозначим через § случайный фактор, для которого известен либо диапазон его возможных значений Vg либо плотность распределения p(g). В качестве критерия оптимальности в первом случае естественно принять выражение I(u, g0), в котором go — такое значение geV , для которого функционал I(u*, g0) минимален. Выбор решения из условия
Т= min/(и, g) --> max (5.11)
гарантирует, что при другом значении g значение I* будет не ниже, чем I. Если же известна плотность распределения случайного фактора, то в качестве критерия оптимальности может быть использовано среднее по g значение функционала I, т. е.
Т = [ Р (g) I (и, g) dg -> max. (5.12)
17 U
ч
Существует класс задач, в которых связь между управляющими воздействиями и зависящими от них переменными состояния процесса носит статистический характер. Например, при измельчении продуктов от режимов работы мельниц зависит характер плотности распределения размеров частиц после дробления. Обозначая управляющие переменные через и, а размер частиц через х, можно записать плотность распределения как р(х, и). Пусть В(х) — функция, оценивающая качество той или иной фракции частиц, ее ценность для последующего использования; Хтах — предельней размер частиц после измельчения. Тогда критерий оптимальности примет форму, аналогичную (5.12):
*тах
Т = f В(х) р {х, и) dx---> max.
о “
5.2. ТИПОВЫЕ ПОСТАНОВКИ ЗАДАЧ ОПТИМАЛЬНОГО УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
1. Пуск и останов единичного агрегата. С ростом производительности агрегатов задача оптимального автоматизированного управления процессами пуска и останова приобретает все большее значение как в отношении потерь продукта, зависящих от длительности этих процессов, так и в отношении безаварийности их проведения. Эта задача часто состоит в переводе объекта из фиксированного начального состояния в фиксированное конечное за минимальное время при выполнении ограничений, гарантирующих безопасность пуска и останова.
Например, при пуске барабанного котлоагрегата скорость изменения температуры металла труб пароперегревателя в местах заделки этих труб в барабан котла должна быть ограничена ввиду возникающих здесь термических напряжений.
Формализуем задачу пуска аппарата, введя обозначения: х — вектор переменных, характеризующих состояние аппарата; и — вектор управляющих переменных.
Критерием оптимальности служит продолжительность пуска: т
I = Т = J dt -► min. (5.13) -
о
Условия, определяющие множество допустимых решений, представляют собой следующую совокупность:
ограничений, наложенных на каждую из составляющих вектора хим
xv < xv xv, v = 1, tn (5.14а)
“j w/max> /=1,Щ (5.146)
условий, определяющих состояние процесса в конце и в начале пуска
х(О)=Хо, х(Г)=хг; (5.15)
связей между переменными состояния и управляющими Воздействиями, которые в большинстве случаев имеют форму обыкновенных дифференциальных уравнений
xv = f4 (х, и), v= 1 ,m. (5.16)
Ограничения на каждую из переменных состояния могут зависеть от других переменных. Такие ограничения можно привести к виду
Fk(x(ty) >0, V ZG(0, Т]> k= 1,2, ... (5.17)
Часто существуют ограничения на общий ресурс управляющих воздействий за весь интервал пуска:
т
' 5 <Рн(«(Ч) dt — Ьц = 0, р.= 1,2, ... (5.18)
о
Таким образом, задача пуска аппарата, останова и перевода с одного режима на другой (5.13) — (5.17) представляет собой вариационную задачу оптимального управления, усложненную ограничениями (5.17) на переменные состояния н условиями (5.18) на управляющие воздействия.
2. Пуск системы взаимосвязанных агрегатов. В том случае, когда рассматривают задачу пуска не единичного агрегата, а системы взаимосвязанных агрегатов, резко возрастают размерности векторов состояния и управления и, что самое главное,'
Рис. 5.2. Граф, соответствующий пуску производства: сплошные линии — критический путь; пунктир — логические операции
добавляются логические условия, отражающие тот факт, что некоторый аппарат можно запускать только после того, как переменные состояния связанных с ним аппаратов достигнут определенных значений.
В ряде случаев последовательность пуска производства можно изобразить в форме графа, каждому узлу которого соответствует операция, заключающаяся в окончании того или иного этапа пуска, а каждому ребру — продолжительность соответствующего этапа. Подобный граф позволяет выявить этапы пуска, лимитирующие ускорение пуска всего производства (критический путь). Этапы пуска производства, лежащие на критическом пути, нужно оптимизировать, чтобы ускорить пуск производства в целом (рис. 5.2).
Все операции пуска делятся на логические (изменение заданий регуляторам, переключение запорных органов и т. п.), контрольные (контроль параметров состояния оборудования, проверка работы схем защиты и т. п.) и собственно операции включения агрегата.
3. Оптимизация статического установившегося режима. Большую часть времени аппараты работают в установившемся режиме. Этот режим может быть статическим (когда все переменные, характеризующие его, неизменны во времени) или циклическим (когда все переменные или часть из них периодически изменяются).
В статическом режиме при каждом значении вектора внешних воздействий (состав сырья, параметры окружающей среды и т. п.) нужно найти такие управления, чтобы показатель эффективности работы аппарата был максимален. Используя те же обозначения, что и в задаче пуска (5.13) — (5.18), получим
fo(x,u)--► max (5.19)
при ограничениях (5.14), (5.17) и связях между # и и, определяемых статическими характеристиками аппарата
fv(x, «)=0, v=bm. (5.20)
Ограничения типа (5.18) также существуют во многих случаях. В этой задаче х и и — уже не вектор-функции, как в задаче пуска, а векторы. Если функции, определяющие задачу, непрерывны по совокупности переменных, то задача оптимизации статического режима представляет собой задачу математического программирования.
4. Оптимизация циклического установившегося режима. Для более широкого класса режимов — циклических — критерием оптимальности является среднее значение функции fo за период цикла Т:
т
1= — J )0(х, и) di -► max. (5.21)
о
Связи между переменными состояния х и управляющими воздействия и характеризуют динамику процесса и имеют форму (5.16), ограничения (5.14) остаются в силе, а интегральные ограничения на управления задаются в среднем за цикл:
т
~Т~ — &ц = 0;ц=1, г. (5.22)
о
Они могут соответствовать ограничениям на средний расход сырья, электроэнергии и т. п.
Краевые условия для дифференциальных уравнений (5.16) в циклическом режиме, как правило, не фиксированы, однако ввиду непрерывности переменных состояния и их периодичности справедливы равенства
xv(T)=xv(0); v=Tm, (5.23)
что эквивалентно требованиям
т
J fv (х, и) di = 0; v = 1, /п. (5.24)
о
В этой задаче, кроме законов изменения управляющих переменных и связанных с ними переменных состояния, нужно еще оптимально выбрать длительность цикла Т. Часто форму изменения управляющих воздействий задают с точностью до нескольких параметров. Например, считают их синусоидальными. Тогда нужно найти амплитуды и средние значения управляющих переменных, а также фазовые сдвиги между ними.
5. Оптимизация режима в аппарате периодического действия. В аппаратах периодического действия сырье периодически загружают в аппарат, а готовый продукт периодически выгружают из него. Продолжительность цикла, а также закон изменения управляющих воздействий за время цикла подлежат оптимальному выбору.
Пусть функция fQ(x, и) определяет, как и выше, мгновенную продуктивность процесса, учитывая скорость образования полезного продукта, затраты на управление и т. п. Обозначим 0 продолжительность загрузки и выгрузки, а Т — продолжитель- -ность работы аппарата в каждом цикле. Учтем также, что загрузка и выгрузка связаны не только с затратами времени, но и с затратами трудовых и материальных ресурсов на сырье, регенерацию катализатора и т. п. Величину этих затрат, которые обычно не зависят от длительности цикла, обозначим А. Тогда критерий оптимальности задачи запишется в виде
т
1= u)dt — xj --► max. (6.25)
о
Максимум этого выражения нужно найти при условиях (5.16), записанных в форме дифференциальных уравнений, и при фиксированных значениях переменных состояния
xv(O)=Xvo; v=l,m. (5.26)
Что касается конечных значений этих переменных xv(T), то, как правило, некоторые из них фиксированы, а остальные свободны:
xv(T) =Xvt', V=l,4; fe<m.
Условия типа (5.14) и (5.17) также могут иметь место. Выбору подлежат управляющие воздействия u(t) и рабочее время цикла Т.
6. Календарное планирование работы аппарата. В предыдущих задачах предполагалось, что собственные характеристики аппарата и условия, в которых он работает, неизменны. В действительности же и те, и другие могут изменяться во времени. Например, по некоторому закону могут меняться заданная производительность или поставки сырья. Как правило, эти изменения происходят значительно медленнее, чем переходные процессы в аппарате, поэтому связи между состояниями х и управлениями и задают в квазистатической форме:
fv(x,«,0“0; v=Tm. (5 27)
Производительность аппарата по тому или иному продукту для каждого момента t должна лежать в заданном интервале:
Рд(0<ф|л(ж,«)<1°ц(0; Н=1.2,... (5.28)
Если в схеме имеются емкости, то на уровень в них наложены ограничения:
Ht^Hi(t}^Hl
Ht=hi(x, и, f), i-17, (5 29)
где Hi и Hi — максимальный и минимальный уровни в i-той емкости;
hi(x,u,t)—разность потоков, втекающих в i-тую емкость и вытекающих из нее в момент t.
Если через Т обозначить интервал планирования, то критерием оптимальности может служить интегральная эффективность аппарата за этот интервал:
т
1 = J /о (х, и, 0 dt -► max. (5.30)
о
Существенно усложняется задача календарного планирования, когда за время Т нужно в одном аппарате выпускать последовательно несколько различных продуктов. В этом случае появляются добавочные целочисленные управления Оц, принимающие значение 1, когда ji-тый продукт выпускается, и значение 0, когда он не выпускается:
М0 = 1; М0М0 = 0; н**-
Второе из условий означает, что в каждый момент времени выпускается только один из продуктов. В условия (5.28) целочисленные управления войдут в качестве множителей при Фи, рц и рм. Если заданы объемы производства с* по каждому продукту, то
т
j и’ 0^ = сщ и = 1'2> •• (5.31)
Учет потерь времени и материальных затрат, обусловленных переходом с производства продукции одной марки" на продукцию другой, еще более усложняет формулировку и решение задачи календарного планирования.
7. Оптимальный режим работы параллельных агрегатов; распределение нагрузок. Задача формулируется следующим образом: требуется выбрать нагрузку каждого из агрегатов и состав работающих агрегатов, включенных параллельно (рис. 5.3, а), если общая нагрузка (суммарный расход сырья) задана, а общая производительность должна быть максимальна.
Рнс 5 3 Система параллельных агрегатов
а —структура, б — зависимость нагрузки агрегата от расхода сырья
Для каждого из агрегатов известна нагрузочная характеристика— зависимость производительности Р, от расхода сырья xt (рис 5.3,6). Общее число агрегатов обозначим п, а суммарную производительность — Р. Тогда критерий оптимальности запишется в виде
Р = J] Pi ► max. м
(5.32}
Запишем ограничения на множество допустимых решений:
Xi—0 или xkxkxi. (5.33)
Первое из этих условий относится к случаю, когда агрегат выключен, второе — к случаю, когда он работает. Условия (5.33) удобно переписать, исключив слово «или», но введя добавочную целочисленную переменную vt, равную 1, когда i-тый агрегат включен, и нулю, когда он выключен. Перепишем х, в виде Xi = vtxt. Тогда условия (5.33) соответствуют ограничениям на множество значений переменных х и о:
x/<x«xz; о/={0,1); i=l,п. (5.33а}
Заданию суммарной нагрузки по сырью соответствует требование
ггхг = С (5.34}
i=]
С учетом целочисленных переменных критерий оптимальности перепишется в виде
P = ---* max- (5.32а>
Его нужно максимизировать при условиях (5.33 а), (5.34). Наличие целочисленных переменных значительно усложняет решение этой задачи.
Рассмотрим некоторые варианты постановки задачи распределения.
А. Минимизация затрат. Пусть задан не суммарный расход сырья, а суммарная производительность Р. Нужно выбрать такие состав и нагрузки действующих агрегатов, чтобы суммарные затраты S были минимальны. При этом затраты, связанные с i-тым агрегатом, определяются в общем случае'не только затратами на сырье Uxt (где Ц — стоимость 1 м3 сырья), но и амортизационными отчислениями, зависящими от стоимости агрегата At и коэффициента амортизационных отчислений k. Величина Л( может включать и стоимость обслуживания i-ro
агрегата. Задача прим,ет вид:
S = 2 (Цх^с^-kAiVt)----► min.
i
При этом нужно учесть ограничения (5.33 а).
Б. Вероятностный характер нагрузки. Выше предполагали, что суммарный расход сырья С задан. Между тем, в некоторых случаях величину С следует считать случайной. Например, в системе параллельно работающих печей задан суммарный расход топлива. Однако нагрузочная характеристика учитывает не расход топлива, а количество тепла, поступающего в печь с топливом. Таким образом, С в условии (5.34) представляет собой суммарный расход энергии топлива, зависящий от его состава, который оперативно не измеряют или же измеряют с большой ошибкой. В этом случае решение должно быть оптимально в среднем на множестве возможных значений с учетом их вероятности.
В. Учет динамических факторов. Нагрузочная характеристика, показанная на рис. 5.3,6, определена не для всех значений xi. В частности, агрегат не может работать на отрезке от 0 до Xi, поэтому не каждое значение суммарной производительности можно обеспечить, даже установив несколько агрегатов. В таком случае может оказаться необходимым использование промежуточных емкостей (рис. 5.4). Производительность при такой схеме может периодически меняться и быть то больше, то меньше заданной Р. Нужно учесть ограничения на степень заполнения каждой емкости. Переход к периодическому изменению производительности, которая в среднем равна заданной, может оказаться выгоднее и в экономическом отношении. Действительно, если часть периода агрегат работает при нагрузке Xi (рис. 5.3,69, а оставшуюся часть периода агрегат выключен, причем время работы выбрано так, что средний расход сырья равен Xi, то вместо производительности^,(xi) будет получена средняя за период производительность Pi(xi), которая больше Pt(Xi).
8. Оптимальный режим работы последовательных агрегатов (многостадийных процессов). Возможная словесная постановка задачи последовательных агрегатов такова: требуется выбрать режим последовательно соединенных агрегатов так, чтобы при заданной общей производительности и заданных характеристи-
Рнс. 5.4. Схема аппарата с последовательно включенными емкостями
ках конечного продукта затраты на его получение были минимальны.
Введем обозначения: xt+i— вектор, характеризующий состояние продукта на выходе i-ro аппарата; и/ — режимные переменные i-ro аппарата, они являются управляющими воздействиями. Каждый из агрегатов (стадий процесса) характеризуется затратами, которые зависят от типа агрегата, от векторов Ui и Xi (параметры потока на входе в i-тый аппарат). Обозначим эти затраты fo(xi, щ).
Минимуму суммарных затрат соответствует критерий вида
п
/ = /о(хг, иг, 0 ► min. (б.36)
1-1
На переменные xi, и, наложены условия двух типов: автономные ограничения
xi^V/; i—\,n
и ограничения, связывающие состав продукта на выходе каждого агрегата (каждой стадии) с составом на входе и режимными переменными:
x«+i)v=fv(xi, Ui, i): <=1л: V=l,m. (5.36)
Подчеркнем, что в левой части этих равенств фигурирует v-тая составляющая вектора xi+i, а в функцию fv входят в общем случае все составляющие вектора xi.
Для многих задач оптимизации последовательно включенных агрегатов в химической технологии начальное состояние xt нельзя считать фиксированном. Состав сырья может изменяться в некоторых пределах, причем эти изменения не всегда можно контролировать. В таком случае управляющие переменные и, можно выбирать либо оптимально в среднем на всем множестве изменения вектора xi, либо (как было сказано в разд. 5.1) они должны быть оптимальны для самого неблагоприятного состава сырья.
9. Согласование работы периодически- и циклическидействую-щих аппаратов. Производительность аппаратов периодического действия и аппаратов, работающих в циклическом установившемся режиме, периодически изменяется. В том случае, когда эти аппараты работают параллельно на общего потребителя, возникает задача такого выбора сдвигов между моментами начала циклов, при котором отклонение текущей производительности от ее среднего значения минимально.
Для формализации задачи введем обозначения: fi(t—х,)— периодическая с периодом Т функция, выражающая зависимость производительности i-ro аппарата, от времени; xi— время сдвига начала цикла i-ro аппарата по отношению к началу цикла первого аппарата (ti=0).
Оценивая отклонение от средней производительности функционалом
Т N
I = J [2 fl V - Ti) - Л*Г dt -> min, (5.37)
приходим к задаче выбора вектора т с составляющими тг, минимизирующего (5.37). Величина М равна
n т о Рассматривая задачу оптимизации агрегата периодического действия, считали продолжительность цикла параметром, подлежащим оптимальному выбору. Если же несколько аппаратов работают параллельно, то продолжительность цикла каждого из них нельзя выбирать независимо. Часто требуется, например, чтобы между остановкой одного агрегата для выгрузки и началом выгрузки следующего агрегата прошло некоторое время т, так как загрузку и выгрузку нескольких агрегатов производит одно устройство с ограниченной производительностью. Аналогичная ситуация возникает в системе параллельно действующих аппаратов с периодической регенерацией катализатора. Критерий оптимальности в этом случае представляет собой сумму функционалов ви'да (5.25), в каждом из которых величины Т, 0, А, как и функция f0, имеют индекс номера аппарата. В задачу следует добавить условие
| (А4-7<+0<)—(tv -f-7v +®v) I>-т; v=/=l, (5 38)
где н ty — моменты начала циклов для i-ro н v-ro аппаратов.
Методы оптимизации широко используют не только для оптимального управления технологическими процессами, но и для оптимального проектирования устройств переработки информации, алгоритмов идентификации объектов, алгоритмов автоматической стабилизации. Подобные задачи рассмотрены в разд. 1.5; 3.2; 3.3.
5.3. ДЕКОМПОЗИЦИЯ И АГРЕГИРОВАНИЕ ОПТИМИЗАЦИОННЫХ ЗАДАЧ
Размерность вектора искомых переменных в задачах оптимального управления технологическими аппаратами (тем более технологическими комплексами) столь велика, что решение этих задач при ограниченных возможностях управляющих машин становится нереальным. Поэтому стремятся свести решение одной задачи большой размерности к последовательному решению нескольких задач малой размерности, т. е. осуществить декомпозицию.
При уменьшении размерности задач часто прибегают также к агрегированию, т. е. замене группы переменных исходной задачи одной переменной — агрегатом. После расчета оптимальных значений агрегатов выбирают исходные переменные так, чтобы значения зависящих от них агрегатов оказались равными оптимальным.
Прежде чем изложить способы декомпозиции в задачах управления, поясним смысл декомпозиционного подхода. Пусть характер функции многих переменных f(xlt Хт) таков, что максимум по любой из переменных xt не зависит от значений других переменных. Тогда задача оптимизации по пг переменным распадается на пг задач оптимизации по одной переменной. Решение такой совокупности задач настолько же проще исходной, насколько проще решить пг уравнений, с одним неизвестным по сравнению с решением системы уравнений с пг неизвестными. Столь благоприятная ситуация может встретиться лишь в исключительном случае. Однако если из пг переменных задачи можно составить k комплексов (k<m)—таких, что оптимальное значение каждого комплекса z определяется независимо, то, найдя первоначально z*v (где v=l,k) из задачи с k переменными, можно затем снизить размерность задачи до пг—k с учетом уравнений
zv (x)=zv‘; v=l,k.
Например, задачу об оптимальной траектории системы тел можно свести к расчету оптимальной траектории центра масс этой системы и к задаче оптимальной ориентации каждого тела относительно центра масс. Аналогично задачу об оптимальном режиме производства можно свести к расчету оптимального планирования усредненных показателей этого производства и к задаче реализации найденных показателей путем выбора режима каждого агрегата.
Рассмотрим основные структуры оптимизационных задач, позволяющие провести декомпозицию.
1. Переменные исходной задачи распределены между агрегированными переменными zv:
z2(x2)......2k (xk)) -----> max
Mzi(xl)> ••• . zft(xft))>0, /=Тщ,
(5.39)
Вектор xv имеет размерность rv, так что общее число пере-k
менных в задаче (5.39) равно т==^ rv.
V=I
Решение задачи может быть проведено в два этапа: определение k агрегированных переменных из условия
fo(zi,z2.Zk) —► max при f/(zi.z*)>0, /=1,п; (5 40)
нахождение корней уравнений
M*v)=zv*. (5-41)
принадлежащих области допустимых значений переменных исходной задачи Vx.
Если система (5.41) имеет несколько допустимых решений, то решение задачи (5.40) не единственно; если же все решения системы (5.41) не оказываются допустимыми по ограничениям на переменные то либо нужно ввести в агрегированную задачу (5.40) ограничения на г, соответствующие ограничениям x<=Vx, либо (когда это сделать сложно) выбрать из числа допустимых векторов х ближайший к решению системы (5.41), подставить его в функции fo и f} и оценить, существенны ли уменьшение значения f0 и нарушение ограничений fy^0.
Отметим, что переход от ограничений на исходные переменные к ограничениям на агрегированные переменные требует решения 2k задач вида
гу(х*) --> шах при xv S Vx, 1
-- [
Zv (х*) -► min при xv e Vx, v = 1 ,k )
из которых находят верхнюю zv и нижнюю zv границы для агрегированных переменных.
Как правило, исходная задача не имеет форму (5.39), и для декомпозиции прибегают к различным приемам, связанным с параметризацией решения.
2. Снятие ограничений с введением параметра в критерий оптимальности. Пусть декомпозиции задачи мешает наличие ограничений вида
F/(x)=0; /=1Л (5.43>
в которые могут входить все составляющие х. Отбросив ограничения (5.43), придет к задаче с расширенным множеством допустимых решений. Такая расширенная задача допускает декомпозицию, ее решение обозначим через х. Оно вовсе не обязано удовлетворять условиям (5.43). Чтобы’ сохранить возможность декомпозиции и в то же время получить допустимое решение, в критерий оптимальности fo вводят дополнительные слагаемые, зависящие от функций Fj и от некоторого вектора параметров X. Выбором последнего стремятся добиться, чтобы решение задачи на расширенном множестве оказалось допустимым по ограничениям (5.43).
Поясним этот способ на примере задачи k k
fo = 2 (*v) -----► та» при f = 2 Zv = °’ S Vjev‘ (6'44*
V=1 V=1
Если бы условия
k
Р=2м*’)=о (5.45)
v=l -•
не было, то задача (5.44) распадалась бы на k задач малой размерности:
zov (*v) -► шах при xv GjVjfv, v =
Чтобы удовлетворить условию (5.45), построим задачу с видоизмененной целевой функцией
R = 2o’v(x'>) + Ф (Ft X) -► пнх при xv €= Vjv, v = l.fe. (5.46)
V
При этом функция Ф должна быть такой, чтобы задача (5.46) допускала декомпозицию, т. е. функция R аддитивно зависела бы от zv и zOv; с другой стороны, при выполнении условий (5.45) R должна либо совпадать с fo, либо монотонно расти с ростом f0. Только в этом случае решение, допустимое по условиям (5.45) и обеспечивающее максимум R, обеспечивало бы в то же время максимум f0. В задаче (5.46) это требование выполнено при выборе Ф в форме
0 = A,F = X 2 zv(xv). V
Задача (5.46) примет вид: k
R = (zov (xV) + Xzv (%v)] -* max при xv £= Vv. (5.47)
V=1
При любом фиксированном значении X задача (5.47) распадается на k задач малой размерности. Подставив их решения xv*(K) и соответствующие значения г*зависящие от X, в условия (5.45), можно найти такое значение X*, при котором z* у удовлетворяют (5.45). При этом х*(Х*)— искомое решение (5.44).
К сожалению, гарантировать, что такое значение X* найдется, можно не всегда. Это можно, например, для выпуклых задач, у которых целевая функция f0 выпукла вверх и, кроме того, выпукло множество допустимых решений. Чтобы расширить класс задач, допускающих декомпозицию, на невыпуклые задачи, предложено [36] модифицировать функцию R введением дополнительного слагаемого
В-----(5.48)
v
в котором множитель а>0, a — векторы, имеющие ту же размерность, что и xv. Ясно, что добавление к R слагаемого
(5.48) не препятствует декомпозиции; функция же fo=fo+B(a,x, Р)
для достаточно большого а при любом выпукла по х. При фиксированных а и ₽’ задача (5.42) распадается на подзадачи вида
Fv = zov (xv) - a (xv - Pv)a + Xzv (xv) -►
---> max при xv e Vv, v=\,k.
Практически слагаемое (5.48) добавляют к R только после того, как выясняется, что без добавления этого слагаемого X ^додобрать не удалось. Это выясняется в вычислительном процессе, когда малые изменения X вызывают резкое изменение вектора х*(%); при этом величина также испытывает
скачок, меняя знак и оставаясь далекой от нуля. В этом случае назначают первоначально а>0, а р = 0 в выражении для В (5.48). Затем на каждой следующей итерации выбирают по формуле
pvW+l) _ + ,
в которой у имеет порядок 0<у^2. Когда хУ—>xv*, величина pv также стремится к хУ*, а дополнительное слагаемое (5.48) исчезает.
3. Декомпозиция за счет сечения множества допустимых решений с последующей параметризацией. Пусть структура задачи такова, что определить максимум на некотором сечении d множества D гораздо проще, чем на самом D, причем множество таких сечений покрывает все множество D. Введя параметр а, значение которого выделяет конкретное сечение d(a), можно решить семейство задач на множествах d(a), получив при некотором а—а* решение исходной задачи. Приведем несколько характерных структур.
а) Пусть х1, х2 и у — векторы, a Vlf V2, Vy — множества их допустимых значений. При фиксированном у=у° задача
fo(x‘, t/)=foi(^’, t/)+fo2(^2.y) —>- max, x'<=Vi(y)-, x2<=Vt(y)-, y<=Vy. (5.49)
распадается на две подзадачи меньшей размерности:
foi(x>,«/’) —> max при x’eVi ((/“), foafx2, t/°) —»- max при jfeVt(t/°). (5.50)
Их решение позволяет найти зависимости x'*(z/°), х2*(у°) и f*oi(y°)- Максимум по у° их суммы достигается при у=у*. Подстановка этого векторй в х**(у°) и х2*(у°) вместо у° определяет решение исходной задачи (5.49). Параметром, определяющим сечение множества D, является в данном случае вектор у°.
б) Рассмотрим задачу
fo(x,y) —>- max при yeD, x&V.
Множество V здесь предполагается просто организованным, так что при фиксированном у=у° задача
fo*(y°) —► max/y°eD.
легко разрешима. Например, -задача (5.51) может быть задачей линейного программирования, для которой имеются эффективные вычислительные алгоритмы. Получив fo*(y°), определяют оптимальное значение у* из условия
1о(У°) —*• max/y°<=D.
в) Рассмотрим задачу (5.44) и зафиксируем значения zv на уровне y°v. Тогда задача (5.44) распадается на k задач малой размерности:
/ov = zov (xv) -► max при zv (xv) = y°v; xv S Vy; v = 1 ,k.
В результате их решения получают f*Ov (У*?) и x*v(y°v). На втором этапе решают задачу координации, т. е. определе-& ния у :
k k
2 (У'»9') —*max п₽и 2 yv°=°-
V=1 V=1
Эту задачу можно решить с использованием функции Лагранжа, т. е. преобразовать к форме
k
R = 2 ^’»v + ^v°] —* max>
V=1
причем множитель к заведомо найдется, если функции f*ov выпуклы.
Матрицы смежности и декомпозиция оптимизационных задач. Возможность и подход к декомпозиции оптимизационных задач определяются тем, какие из переменных входят в те или иные условия задачи, т. е. от ее структуры. Структуру задачи условной оптимизации
fo(x) —> max при /z(x)>0; j=l,n; x<^Vx; x=(xi, ...,xm) (5 52)
удобно характеризовать матрицей, каждая строка которой соответствует одной из функций fl(j = O,n), а каждый столбец — одной из переменных x((i=l,m). Элемент, стоящий на пересечении /-той строки и i-ro столбца такой матрицы, равен 1, если х-тая переменная входит в /-тое условие, и равен 0 — если не входит. Построенную таким образом матрицу называют матрицей смежности; она имеет (п-Н) строку и tn столбцов.
Построим матрицы смежности для нескольких характерных структур оптимизационных задач.
Рис. 5.5. Матрицы смежности.:
а — для задачи с автономными ограничениями; б —для задачи, декомпозируемой аа счет модификации критерия оптимальности; в—для задачи, декомпозируемой с использованием фиксации переменных у\ г — преобразованная к диагональной форме с горизонтальным и вертикальным окаймлениями
\ Z
1. Задача с автономными ограничениями. Задача с ограничениями, наложенными на каждую из составляющих вектора х, может быть записана в форме
fo(*i,.... *т) —>- max при i=l,m (5.53)
Соответствующая матрица, если отбросить первую строку, оказывается диагональной (рис. 5.5, а). На рис. 5.5 клетки Матрицы, в которых стоят единицы, заштрихованы.
Не всегда условие, имеющее индекс i, зависит от хг, но матрицы смежности допускают эквивалентное преобразование, не нарушающее их соответствия оптимизационной задаче. При таких преобразованиях можно переставлять строки (кроме нулевой) и столбцы матрицы. Перестановка строк соответствует перенумерации условий, а перестановка столбцов — перенумерации переменных. Задачу с автономными ограничениями с помощью подобных перестановок всегда можно привести к форме, соответствующей диагональной матрице смежности.
2. Задача, в которой часть ограничений наложена на совокупность переменных. Пусть в задаче (5.52) часть функций с 250
индексами 0,1, ..., г может зависеть от всех или почти всех переменных, а остальные ограничения наложены на каждую из переменных автономно. Матрица смежности такой задачи показана на рис. 5.5,6.
С использованием модифицированной функции /? [см., например, (5.46)], в которую войдут ограничения с индексом от 1 до г, рассматриваемая задача может быть сведена к задаче с автономными ограничениями, но с дополнительными параметрами X в целевой функции. Таким образом, матрица смежности, имеющая диагональную форму с горизонтальным окаймлением, характерна для задач, решение которых целесообразно проводить методами, основанными на введении неопределенных параметров в модифицированную целевую функцию.
3. Задача, в которой часть переменных входит во все ограничения. Обозначим переменные, входящие во все или почти все функции ft в задаче (5.52), через y=(xt, .... хг). Остальные переменные входят только в одну из этих функций. Матрица смежности подобных задач может быть приведена к форме рис. 5.5, в. Ее называют диагональной с вертикальным окаймлением. При фиксированном значении лектора у задача превращается в задачу типа (5.53), а ее матрица смежности после отбрасывания первых г столбцов оказывается диагональной.
Таким образом, для задач, имеющих матрицу смежности диагонального вида с вертикальным окаймлением, целесообразно использовать методы декомпозиции, основанные на сечении множества допустимых решений путем фиксации части составляющих вектора искомых переменных.
4. Общая задача оптимизации сложных систем. В общей задаче оптимизации сложных технологических систем, которая имеет большое число переменных и наложенных на них ограничений, часто оказывается, что матрица смежности сильно разрежена (имеет много нулей). Эту матрицу стремятся преобразовать путем перестановок строк и столбцов к диагональной форме с вертикальным и горизонтальным окаймлением (рис. 5.5, г). На рис. 5.5, г в заштрихованных клетках стоят в основном единицы, а в незаштрихованных — только нули. Множество индексов переменных, входящих в большинство функций, обозначено Jo; множество индексов условий, содержащих большинство переменных, обозначено /о. __
При декомпозиции задачи переменные, входящие в Jo (связующие переменные), фиксируют, а из функций, входящих в Jo, составляют модифицированную целевую функцию R(x, К). Задачу о максимуме R решают при фиксированных значениях связующих переменных. При поиске максимума R по тем переменным, которые входят в множество Ji, учитывают только ограничения, индексы которых составляют множество h. Таким образом учитывают соответствующий заштрихованный диагональный блок.
Преобразование разреженных матриц большой размерности к блочно-диагональной форме (рис. 5.5, г) проводят с использованием ЦВМ.
Таким образом, общая схема решения оптимизационных задач с использованием декомпозиции состоит из двух этапов: 1) переход к более простой задаче, решение которой зависит от некоторого параметра, и доказательство того, что существует такое значение параметра, при котором это решение совпадает с решением исходной задачи; 2) расчет нужного значения параметра. Эта схема будет использована далее при характеристике решения некоторых задач оптимального управления.
5.4. УПРАВЛЕНИЕ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
С ПАРАЛЛЕЛЬНОЙ СТРУКТУРОЙ
В разд. 5.2 была рассмотрена задача выбора состава и нагрузок параллельно включенных агрегатов. Здесь приведем решение этой задачи при тех или иных допущениях и возможности реализации такого решения в автоматизированных системах.
Декомпозиция задачи и получение нагрузочных характеристик. В системе с параллельной структурой (рис. 5.6, а) имеется два вида управляющих переменных: переменные ut, изменение которых влияет только на режим i-ro агрегата; переменные xt, изменение которых, воздействуя на i-тый агрегат, вызывает, в силу условий задачи, изменение переменных в других агрегатах.
Обозначая эти две группы переменных в векторной форме через х и и, а вектор-функцию ограничений, характерных для всей системы аппаратов, через f, получим матрицу смежности этой задачи (рис. 5.6,6).
Пример. При управлении цехом разделения воздуха переменными первого типа являются флегмовые числа для каждой из параллельно действующих колонн ректификации. Переменной второго типа является про-
Рис. 5.6. Система с параллельной структурой: а — схема; б — матрица смежности
изводительность каждой колонны, так как суммарная производительность всей установки задана. На первом шаге фиксируют производительность Xi для каждой колонны и решают семейство оптимальных задач, меняя флегмовое число R, я минимизируя затраты иа разделение Получают зависимости
и А(х,)=Р,(А*, х,).
Эти условно-оптимальные зависимости (нагрузочные характеристики) и являются исходными данными для расчета на втором этапе минимума суммарных затрат при заданной суммарной производительности.
Выпуклые нагрузочные характеристики. Задача без ограничений. Обозначим через как и в разд. 5.2, зависимость производительности агрегата от расхода сырья х(. Первоначально будем предполагать, что для всех п агрегатов эти зависимости выпуклы вверх, а ограничения вида
х<2>х,^х(, i=l,п. (5 54)
на каждую из нагрузок отсутствуют. При этом считаем, что каждый агрегат включен, а выбору подлежат только значения их нагрузок. Задача такого выбора имеет форму:
п п
7=2 ----* пих ПРИ 2 Х{ — С = 0. (5.55)
4=1 4=1
Решение задачи (5.55) можно получить с использованием функции Лагранжа:
п
H = ^(Pi (X;) - ХХ()-J-ЛС. 1=1
Эта функция выпукла в силу выпуклости нагрузочных характеристик, поэтому решение задачи можно получить из системы (п-Н.) уравнений:
п ' .
dR dPi V ____
= 0 => =Л; z, Xi — С = 0; i = 1щ (5.56)
4=1
В точках, соответствующих оптимальным нагрузкам х*, наклоны всех характеристик Pi(xt) должны быть одинаковы.
Пример. Пустят А(х<)= х<. Уравнения (5.56) запишутся в форме
0;/ Уч = 21; i = Гп: 2 xi ~ С' i~l
Решая эти уравнения, получим:
п
х}* = Caf/ 2 / = Г" (5.57)
4=1
Параметры нагрузочных характеристик периодически уточняют по ре
зультатам текущих измерений, а формулы (5 57) позволяют пересчитывать оптимальные нагрузки.
Задача с ограничениями. Практически задачу распределения нужно решать с учетом ограничений (5.54), так как некоторые оптимальные нагрузки могут оказаться предельно допустимыми. В этом случае из условий локальной неулучшаемости функции Лагранжа следуют неравенства-
dP,
-т— < л, если Xi*=x,;
dR
(5.58)
> X, если xt* =Хр
Неравенства (5.58) вместе с уравнениями (5.56) могут служить скорее для проверки оптимальности некоторого распределения нагрузок, чем для расчета оптимального распределения. Ниже приведен алгоритм последовательного назначения предельных нагрузок, позволяющий решить эту задачу.
Будем называть нагрузки, подсчитанные из условий стационарности функции Лагранжа без учета ограничений (5.54), стационарными. Обозначим их х°.
1-й шаг. Рассчитаем стационарные нагрузки х°, после чего все агрегаты разобьем на три группы: недогруженные (x°<Xi), перегруженные и средние (x^xf^Xt').
Множество индексов недогруженных агрегатов обозначим J, а множество индексов перегруженных — J.
2-й шаг. Подсчитаем суммарную перегрузку А как разницу между суммой стационарных и предельных нагрузок для всех перегруженных агрегатов и аналогично рассчитаем суммарную недогрузку по всем недогруженным агрегатам:
2 = а; 2 ~ а-
iej
3-й шаг. Возможны три случая:
а) перегрузка больше недогрузки (Д>А); тогда оптимальные нагрузки перегруженных агрегатов следует назначить равными максимально возможным
найти сумму этих нагрузок и вычесть ее из заданной суммарной нагрузки:
сх = с-2*ь
i&j
оставшуюся нагрузку Ci распределить между средними и недогруженными агрегатами;
б) недогрузка больше перегрузки (Д>Д); оптимальные нагрузки недогруженных агрегатов следует назначить равными минимально возможным
х,*=х„ ief,
найти их сумму 2х,. вычесть ее из С и остаток Ci распределить
между средними и перегруженными агрегатами;
в) недогрузка равна перегрузке (Д=Д); всем недогруженным агрегатам назначают минимальные, а всем перегруженным— максимальные допустимые нагрузки; оптимальные нагрузки средних агрегатов равны рассчитанным для них стационарным х°; в этом последнем случае задача решена.
В случаях а) и б) переходит к1-му шагу, но с меньшим числом агрегатов и с меньшей суммарной нагрузкой. Так как после каждого цикла находят оптимальную нагрузку хотя бы для одного агрегата, то решение будет получено после конечного числа циклов, меньшего, чем п.
Доказательство оптимальности полученного решения сводится к доказательству того, что оно удовлетворяет условиям (5.56), (5.58).
В некЬторых случаях нужно распределить не один, а два или более видов сырья, так что нагрузка каждого из агрегатов представляет собой вектор х, с составляющими xlv(v=l,m). Теперь производительность Pt является функцией нескольких переменных, а ограничения наложены на суммарный расход каждого вида ресурса. Приходим к задаче вида
л п
I = 2 Pi(xi) -► шах при xiv — Cv = 0: v = 1 ,т.
i~l i-1
Если не учитывать ограничения на Xjv вида (5.54), то, записав функцию Лагранжа
Я = 2 ~ 2 Miv] + 5 XvCv’
i-l L v=l v—1
приходим к условиям оптимальности:
dR dPt __ _______ VI
^=° =^: ’ 2j*jv-Cv = 0 (5,59>
4=1
При учете ограничений вида
*iv < xiv С xjv; i=l,n; v=l,m
в задаче с векторным ресурсом также может быть использован алгоритм последовательного назначения предельных нагрузок. При этом первоначально распределяют первый ресурс, зафик-
сировав остальные переменные xiv (v=2,..., т) для всех i на некоторых начальных значениях. После того, как найдено оптимальное распределение первого ресурса х* фиксируют и распределяют второй ресурс. Так до m-го ресурса. Затем уточняют распределение первого ресурса и т. д. до тех пор, пока в очередном цикле значение критерия оптимальности /*+1 не будет с заданной точностью равно значению 1к, полученному в предыдущем цикле.
Использование результатов измерения параметров выходных потоков для оптимального распределения нагрузок. Во многих случаях систему оптимального распределения нагрузок можно построить как систему автоматической стабилизации параметров состояния в каждом из агрегатов на таких значениях, при которых выполнены условия оптимальности (5.56).
Обозначим- через yt = (yu, yir) вектор параметров, характеризующих состояние г-го агрегата, и предположим, что размерность этого вектора г не меньше, чем размерность т вектора ресурсов Xi. Между yi и xi имеется связь
г/;=Ф;(х() (5.60)
Если Фг (вектор-функции размерности г) таковы, что позволяют выразить Xt через yt (это возможно, если для всех допустимых значений х> матрица с элементами dOi//dxiv имеет полный ранг т), то оптимальное распределение нагрузок можно реализовать по результатам измерения вектора состояния, воздействуя на задания регуляторам, стабилизирующим значение этого вектора.
Обозначим через <plv(Xi) частные производные нагрузочных характеристик
<?Р{ , ----
^ = q>iv (xj); v=l,m.
В силу выпуклости этих характеристик функции <pIV монотонно уменьшаются с ростом каждой из составляющих х>. Заменим в <рг xt через yi и перепишем условия (5.56) в форме
Tiv (уд — <piv I*i G/i) 1 = A.v,
п
2 *iv =cv; v= l,m; ibn. (5.61)
i-i
Условия (5.61) позволяют построить систему оптимизации распределения нагрузок, основанную на измерении параметров потока на выходе каждого агрегата. При этом вычислительная машина находит по измеренным yt функции ф1у и среднее значение по всем п аппаратам для каждой из этих функций _ п~
(5ф, у)/п. Если для некоторого аппарата ф(у> (2kpiv)/n, то на-t=l i—J
грузку его xlv по v-му ресурсу нужно повысить, уменьшив на
грузку аппаратов, для которых <p(v <(2<plvj/n, так, чтобы сумма нагрузок оставалась .равной Cv,
Подобное перераспределение естественно, так как производная производительности по нагрузке <p(V характеризует «отдачу» соответствующего агрегата на единицу вложенного ресурса. Ясно, что надо нагружать агрегаты, имеющие большую «отдачу», и разгружать менее экономичные.
Особенно интересен случай, когда агрегаты одинаковы и функции <p«v зависят не от номера агрегата i,
а только от вектора tji. В этом случае из условий (5.61) следует, что при оптимальном распределении значения параметров выходного потока должны быть одинаковы.
Пример. Рассмотрим схему, состоящую из параллельных химических реакторов. Параметром выходного потока yi является концентрация целевого продукта, а нагрузкой — расход реакционной смеси xi. Между х1 и yi имеетси связь
у<=а</(х<4-Л<);
Производительность аппарата Pi(xt)=xlyl(xi); Ее производная по xi ai /, xi \ i—
Заменяя xi через концентрацию в выходном потоке yi, получим <?i(yi) = yr^iJai.
Уравнения (5.61) примут внд: =агХ, i= 1,п.
Если учесть условия
2 *=с =* 2 ai!yi ~ 2bi=с> (S,63>
4=1 4=1 4-1
можно получить решение задачи оптимального распределения в форме требований, наложенных иа выходные концентрации. Действительна из уравнения (5.62) имеем:
У1 = У Л, 1/аг/61, i = 1,п.
Подставляя в условия (5.63). получим: п п
уг=(с-2*4)/2а»бь 4-1 4-1
откуда __________________________________ п
У)* = п 1/"77- ( С + 2 а;6г )•
2 «а ' k 4-1
Рис 5 7. Агрегат с невыпуклой характеристикой: за счет невыпуклостн зависимости (а): за счет иевыпуклости множества допустимых нагрузок X/ (б)
Уточняя параметры ai и bi по результатам текущих измерений, система регулирования находит оптимальную концентрацию на выходе каждого ап» парата, учитывая состояние катализатора, рабочий объем реактора и пр. Если концентрация выше заданной, то расход реакционной смеси в соответствующий аппарат нужно увеличить Для одинаковых аппаратов yi* оказываются равными
Невыпуклые характеристики; выбор состава действующего оборудования. Невыпуклость нагрузочных характеристик сильно затрудняет решение задачи оптимального распределения, так как уравнения (5.56) выделяют не единственное решение. Причиной невыпуклостн может быть как форма зависимости Pt(xt), т. е. невыпуклость графика функции, так и невыпуклость множества значений х(, на котором определена функция (рис. 5.7). В первом случае имеется диапазон нагрузок (от х1а до Xib на рис. 5.7,а), где работа агрегата неэкономична, во втором случае в некотором диапазоне нагрузок (от нуля до Xi на рнс. 5.7,6) работа агрегата просто недопустима. Рис. 5.7,6 соответствует задаче выбора состава действующего оборудования. Точка х, = 0 является допустимой и соответствует выключенному агрегату, а отрезок i[x(, х,] — включенному.
Для анализа и решения задачи полезно построить выпуклую функцию, которая для любого х> от 0 до xt была бы не меньше, чем соответствующая нагрузочная характеристика, и возможно более близка к ней (пунктир на рис. 5 7). Такие функции называют выпуклыми оболочками Pt(xt) и обозначают Со Р,(хг).
Выпуклая оболочка нагрузочной характеристики — не просто минимальная выпуклая функция, ординаты которой для любого х, не меньше, чем Р(хг)\ она имеет и физический смысл, определяя максимальные возможности аппарата. Действительно, пусть агрегат обладает некоторой емкостью, расход продукции на выходе которой равен среднему значению Р{. Для невыпуклых характеристик (см. рис. 5.7, а), работая некоторое время с нагрузкой х1а, а оставшееся время — с нагрузкой хл, можно добиться того, чтобы средняя нагрузка оказа
лась равной х°,; при этом средняя производительность окажется равной ординате выпуклой оболочки Со P(x°t), которая больше, чем P(x°t).
Таким образом, нагрузочная характеристика определяет производительность аппарата при заданной нагрузке, а выпуклая оболочка этой характеристики — максимальную среднюю производительность аппарата при заданной средней нагрузке. Именно поэтому выше было сказано о том, что на участке от Хю до х,ъ работа агрегата неэкономична (она может быть улучшена переходом к циклическому режиму).
Выпуклыми оболочками можно воспользоваться для приближенного решения задачи распределения по следующему алгоритму:
1. Для каждого агрегата построить_ выпуклую оболочку нагрузочной характеристики Со Pt(xt)=P%(x,).
2. Распределить нагрузки между агрегатами, считая, что их характеристиками являются выпуклые оболочки Pt.
3. Если для всех найденных х* выполнены равенства
Pt(*S) = (5.64)
то решение является искомым оптимальным.
4. Если для одного или нескольких агрегатов (множество таких агрегатов обозначим через J) справедливы неравенства
Р,(хг)>Р.(*<*); fe/,
п —
то сумма %Pi(x*)=I представляет собой оценку сверху для I «1
максимальной производительности схемы.
5. Из всех агрегатов, оказавшихся внутри множества /, выберем тот, для которого разница между нагрузкой х* и нагрузкой, соответствующей равенству ординат Р» и Р„ оказалась минимальной. На рис. 5.7, а такими точками являются х1а и xtb, а на рис. 5.7, б —точки х,=0 и хг=х1С. Нетрудно показать [54], что любая ордината выпуклой оболочки может быть получена как линейная комбинация ординат нагрузочной характеристики в таких базовых точках.
Нагрузку выбранного агрегата (обозначим его индексом j) полагаем равной нагрузке, соответствующей ближайшей базовой точке.
6 Оставшуюся нагрузку вновь распределяем между остальными агрегатами; если вновь для части_ агрегатов найденные нагрузки оказались на участках, где Pt(xt)>P(x,), то повторяем п. 5, и так до тех пор, пока для всех найденных нагрузок
П у,
не будут выполнены равенства (5.64). Сумма^2Л(х,*)=Р дает оценку снизу для предельной производительности системы. Сравнивая ее с полученной в п. 4 оценкой сверху, можно судить о том, необходимо ли уточнение найденного решения. Как
правило, разность Р—Р невелика. Еели же уточнение необходимо, оно может быть проведено поисковыми методами, в которых найденное в п. 6 решение принято за начальное приближение.
Если среди найденных нагрузок оказались нулевые (точка х,=0 всегда является базовой), значит, соответствующий агрегат целесообразно держать в резерве.
Отметим, что решение задачи выбора состава оборудования с учетом затрат на обслуживание йыключенного агрегата, возможности перевода в горячий или холодный резерв, затрат времени и средств на пуск и останов и т. п. существенно сложнее. Изложенный приближенный алгоритм может быть использован для получения начального состава действующих агрегатов с последующим его уточнением.
Вероятностные ограничения в задачах распределения нагрузок. Во многих случаях внедрению систем оптимального управления препятствует недостоверность исходных данных. Это не значит, что следует отказаться от использования таких систем, а говорит лишь о необходимости учета неопределенности при постановке задачи.
В качестве примера рассмотрим задачу распределения нагрузок, в которой известен объемный расход сырья, но не известен его состав, влияющий на производительность аппарата. Например, известен расход топлива в печь, но не известна точно его теплота сжигания. Производительность же зависит' от произведения расхода на теплоту сгорания, для которого известны лишь вероятностные характеристики или же точность изменения очень низка.
Пусть известна плотность распределения р(С) количества С распределяемого ресурса. Так как величину С, а значит и Xi, нельзя замерить, то задача состоит 'в том, какую долю от общего расхода сырья подать в каждый агрегат. Критерий оптимальности представляет собой математическое ожидание суммарной производительности
I = 2 У pi <Hic) Р <с) dC —*• 111331
<-i vc
Условия задачи:
п = И 0ч = *1/С). 4=1
J Р (С) dC Ф *г/*1
(5.65)
(5.66)
(5.67)
Последнее условие означает, что вероятность попадания нагрузки каждого аппарата в интервале (xt, xt) не менее, заданной.
Введем в рассмотрение усредненные нагрузочные характеристики агрегатов:
Pi (Pi) = f Pt (PiC) P (C) dC.
(5.68)
С использованием введенных обозначений перепишем задачу (5.65) — (5.67):
И
I=2^—*тах: i=i
(5.69)
п
2 м = 1; f=l
(5.70)
Л(щ, Ф. xi, xi) >0.
(571)
Таким образом, задача с вероятностными условиями на суммарную нагрузку аналогична детерминированной задаче с тем отличием, что нагрузочные характеристики заменяют усредненными, а множество допустимых значений переменных определено не только условиями (5.70), но и неравенствами (5.71), вытекающими из (5.67). Последние условия при заданной плотности распределения р(С), величинах Ф, xt и xt полностью эквивалентны ограничениям типа х^х^х,, так как из них могут быть найдены предельные значения р(.
Применение полученных соотношений проиллюстрируем на задаче распределения нагрузок для квадратичных характеристик вида '
А(р;С)“а,(р,С)2+Ь&,С+(Ь, i=U (5.72)
Плотность распределения суммарного ресурса имеет форму усеченного нормального закона распределения:
0 при Се[С, (?],
Р(С) —Г Г tr, VI ~ у.
A exp — / LzlL 1 при С 3 [С, С].
Здесь С и о2 — среднее значение и дисперсия распределения суммарного ресурса; С и С — его предельные значения; величину А выбирают так, чтобы площадь р(С) оказалась равной единице.
Так как для учета ограничений на щ может быть использован алгоритм последовательного значения предельных нагрузок, на первом этапе будет полагать эти ограничения отсут-
ствующими. Задача примет вид:
к 2 а^+с 2 b&i +2 *]х £ М М 1-1
__ 2 п
X А ехр (С~С I dC ------► max/ V щ = 1.
\ (J J ~
1-1
Введем переменную у=(С—С)1а и перепишем выражение для критерия оптимальности:
I = Аа [S2aV 4- (aSj -f- 2aCSa) у + a
4* (So 4- CSj 4" CSJ] ® dy = Aa [SaGaJa 4* ^i(Si<T 4* 2gCS2) 4"
+ (So 4* CS, 4- C»Sa) Jo].
где
So - 2 df, S, = 2 bi^, St = 2 «it4a; 1—1 1=1 1=1
p -
J«=f t^e-^dy; K = 0,l,2;a = £n£; ₽ = £=l£;
J a a
a
/o = J^[erf(P)-erf(a)];
Ji = 4-[e“e’-e_fe];
J2 = erf0) - erf(a)] 4- “ e-»s _ e’ ₽*; “ *T £> Л
X
2 C . erf(x) = .— I e zt dt.
If J 0
Функция Лагранжа поставленной задачи запишется следующим образом:
Л
L = A [SaaV2 4- 4- 2CSa)Jx 4-g(S0 4- CSX 4-C«S2) Jo— ?2Hil-
t-1
Система уравнений, вытекающих из условий стационарности этой функции по th, примет вид:
цг(2а®/ааг 4- 4- 2С2а;а/0) 4-
Л
4- J^bi 4- aCbiJ0 = X; nt = 1; i = 1 ,п.
1=1
Решение этой системы
л л
где
Г— o^i+oCJq _ " SafaVj + SCaJj + CVo)
Полученные формулы дают решение поставленной задачи распределения суммарного ресурса С в случае, когда С — случайная величина.
5.5. ОПТИМАЛЬНОЕ УПРАВЛЕНИЕ СИСТЕМАМИ
С ПОСЛЕДОВАТЕЛЬНОЙ СТРУКТУРОЙ И С РЕЦИКЛАМИ
Системы с последовательно включенными аппаратами. В химической технологии распространены процессы, в которых сырье последовательно проходит несколько стадий переработки (рис. 5.8). Параметры продукта на выходе каждой стадии x‘+i зависят от режима этой стадии и‘ и от продукта, поступающего на ее вход. Так как входной продукт для t'-той стадии является выходным для (i—1)-й, то вектор, характеризующий его, естественно обозначить через х‘. Связь между х‘, и1 и xi+1 может быть в общем случае записана в неявном виде как
ft(x>,u>,x‘+l)=0, i=0,n^T. (5.73)
Здесь п — общее число стадий процесса. Размерность вектор-функций равна размерности вектора состояния. Обычно все или часть составляющих вектора х° (параметров сырья) полагают фиксированными.
Критерий оптимизации многостадийного процесса либо полностью зависит от параметров продукта на выходе хп и имеет форму
I=F(xn) —> max, (5.74)
либо зависит от режимов и состояния продукта на промежуточных стадиях. Последнее связано с учетом затрат на сырье, на подпитки, затрат энергии на поддержание температурного
Рис. 5.8. Процесс с последовательной структурой
режима и т. п. Критерий в этом случае имеет более общий, чем (5.74), вид:
Л—-1
/ = 2 /*(**» “О ------------► пих (5.75)
<-0
Метод решения задачи зависит от ограничений, наложенных на управляющие переменные щ и на параметры состояния х1, а также от того, в какой форме могут быть переписаны соотношения (5.73), рекуррентно связывающие переменные состояния на соседних стадиях. Когда эти соотношения могут быть разрешены относительно той или иной переменной, они принимают вид:
Х<+1=^(Х<,и9; (5.76)
(5.77)
«•=А(х(, «•+*). (5.78)
Первую форму связи (5.76) называют прямой формой рекуррентного соотношения, вторую (5.77) — инверсной, а третью (5.78) — разрешенной относительно управления. Естественно, что функции ft в выражениях (5.73) и (5.76) — (5.78) различны. Иногда связи могут быть записаны в любой из форм (5.76) — (5.78), но, как правило, переход от одной формы записи к другой достаточно труден.
Пример. Пусть f-тая стадия процесса протекает в реакторе идеального смешения; х‘ — вектор концентрации иа входе в реактор; х‘+1 — на выходе реактора, и1 — вектор, характеризующий режим процесса (температуру, давление, расход реакционной смеси, подпиток и т. п.). Связь между х'+1, х1 и и* определяет уравнение материального баланса: -
G (х<—х'+‘) = Vtri (и1, х4+‘), (5.79)
в котором G обозначен расход реакционной смеси, V — объем реактора, г — скорость реакции, отнесенная к единице объема, которая зависит от режима и концентрации в аппарате. В режиме идеального смешения концентрации внутри реактора равна концентрации на выходе. Пря нелинейной кинетике соотношение (5.79) можно разрешить относительно х':
у.
X1 = Xt+1 ri(ul, xt+1) = fi(ul, x(+1).
Таким образом, имеем инверсную форму связи.
Распространенным приемом решения задачи оптимизации многостадийных процессов является алгоритм динамического программирования, применение которого рассмотрим сначала для общего вида связей, а затем — для соотношений в форме (5.76) — (5.78).
Алгоритм динамического программирования особенно удобен, когда на каждую из составляющих векторов х* и и‘ наложены автономные ограничения:
х'еУхс в'еУ,(; /=0,п. (5.80)
В частности, условия (5.80) могут включать требования целочисленности векторов х1 и ы‘, их неотрицательности и т. п. Кроме того, метод динамического программирования не требует дифференцируемости функций F, ft, fio по входящим‘в них переменным.
Применительно к связям в неявной форме алгоритм динамического программирования сводится к следующему.
А. Расчет от начальной стадии к последней.
(5.81>
допусти-xQ*(xl),
1-й шаг. Решают задачу
/0 = /оо(*°. «“) -► max при f0(x°, W°, х1) = 0
При этом вектор х1 фиксирован. Получают для всех мых значений х1 условно-оптимальные зависимости и функцию Веллмана
Ф1 (х1) =/о[х»* (х‘), и»* (Х*)]=7о* (*‘),
определенную на множестве Vxi-
2-й шаг. Составляют новую задачу условной оптимизации:
/1 = [(^(х1) + Мх1, U1)]
max
при ^(Х1, и1, X2) =0,
(5.82J
из решения которой находят х1!И(х2), ы’*(х2), ф(х2) =/1*(хг)^ Функцию Веллмана <рг(хг) можно трактовать как предельное значение критерия оптимальности при условии, что конечное состояние процесса характеризуется вектором Xs.
Такой расчет продолжают до последнего, (п-|-1)-го шага, на котором решают задачу об оптимальном конечном состоянии:
/« = <P«(*B)+W —>
max
X «= хп
(5.83)
При этом условно-оптнмальные зависимости для всех i запоминают в памяти машины. Подставляя в эти зависимости хл*. находят из них х<л-1)* и ы<л-1)*. В свою очередь, %<"-')* позволяет найти х(л-2)* и и<л~2’* н т. д., вплоть до х°* н и0*, если это состояние не задано.
Б. Расчет от последней стадии к начальной
1-й шаг. Находят и(л-,)(хл) и х<л-1>*(хл), решая задачу условной оптимизации
In = PnW + fo(n-iy(^, «»-*) -► max
<evx« s-'evnw
при a"-*, *«)=o (5.84)
2-й шаг. На втором шаге решают задачу, аналогичную {5.84):
1п-1 - a’-1, t1'1) + Фл-Д*"-1) -► (б-85)
при }п-г(Хп~», ип-*, х"-1) = О
Здесь <ря-1 (хя-1) =1п* (х"-1)—функция Веллмана, которая, как и выше, имеет смысл предельного значения критерия оптимальности при условии, что начальное состояние процесса характеризуется вектором хя-1. Решая (5.85), находят зависимости х<я-1)*(хя-2), ы('’-2)*(хл-2), <ря-2(хя-2)=/*я-1(хя-2). Такой процесс продолжают до начальной стадии, для которой состояние х° задано либо определяется из требования максимума функции фо(х°).
Оба алгоритма, как легко заметить, основаны на декомпозиции задачи путем ее разбиения на несколько задач одностадийной оптимизации, но с параметризацией по вектору переменных состояния. Расчет затрудняют два обстоятельства: а) на каждом шаге приходится многократно решать достаточно сложную задачу условной оптимизации функции; б) требуется запомнить условно-оптимальные зависимости х<‘+1)*(х‘) и ы‘*(х9, что при больших размерностях векторов и1 и х‘ требует большого объема памяти.
Часть этих трудностей удается преодолеть, если связи (5.73) представлены в одной из частных форм (5.76) — (5.78). В этом случае на каждом шаге алгоритма удается перейти от задачи условной оптимизации к безусловной и вместо двух условнооптимальных зависимостей запоминать только одну. Рассмотрим алгоритм динамического программирования применительно к частным формам связи.
Прямая форма связи. Для такой формы связи применйм «попятный» алгоритм расчета—от последней стадии к начальной.
1-й шаг. Выразив из уравнения связи хя через хя-1, ыя-1 и подставив в 1п, получают:
un“,)]+fo(»-1)(xn-1, и»-1)}
откуда определяют и(п~^* (хя-1) и функцию Веллмана фпл(хя-,)=/я*(хя-1). Двигаясь к начальной стадии, на очередном шаге расчета решают задачу
Л = {ф»[/ы(х1-1. + и'"1)) -► , пих,
находя условно-оптимальную зависимость ы(г-1>*(хг-1) и ф(_\1(хг-1). На последнем шаге для фиксированного х° находят оптимальное управление и° из условия
4={ф1[/о(*°.«0)] + /оо(*> «“)} —> -.max
Подставим ы°* в уравнение связи (5.76), определяют х1* и по 266
условно-оптимальной зависимости ui*(x1), хранящейся в памяти, находят ы1* — оптимальное значение и1, которое вновь подставляют в уравнение связи x2=f{(x', и'), и т.д. Попятный характер расчета диктуется здесь прямой формой рекуррентного соотношения, позволяющей исключить х‘+1 и перейти к задачам безусловной оптимизации на каждом шаге.
Инверсная форма связи. В этом случае выгоднее применять прямое направление расчета.
1-й шаг. Если х° не фиксировано, то по условию (5.77) выражают х° через tf и х1 и решают задачу
4 = foo[fo(A U°), «°1-> max при f0(х1, «°) е Ух0. (5.86)
“° S ^ао
Если же х° задано, то вместо задачи (5.86) решают на этом шаге задачу условной оптимизации:
/0 = )00(х°, “°) ---------► max при fo(xl> (5.87),
И в том, и в другом случае определяют и запоминают «^(х1) И ф1(Х,)=/о*(Х1).
В дальнейшем решают задачи безусловной оптимизации вида
А == {<Pi [А(х(+1> и1), «‘] + foi[fi(xi+1. «*). “'ll -► ,max
a'S^ai
При этом запоминают u‘*(xi+i) и фн-1(х*+*)=Л*. На предпоследнем шаге находят и<п~г>*(хп). На последнем шаге из решения задачи (5.83) вычисляют оптимальное конечное состояние хп*, которое определит ы(п-1)*, и через связь, заданную в инверс--ной форме и т. д.
Связи, разрешенные относительно управления. Задача (5.73), (5.75) в этом случае преобразуется к виду
Л—1
= xz)I + ^(x") ---------> max
fi(xz, хг+х) G vui’, XI е vxi-, i = Qji
и может решаться как в прямом, так и в обратном направлении, в зависимости от того, какое фиксировано значение — х° или хп. Если х° задано, расчет проводят от первой стадии к последней.
1-й шаг.
Л> = {/оо[х°> /о(хх. х°)] + ЫА Л(*2> х1)]} -► шах;
А>(х1,х0)еУио; A(x!,x‘)eV«i.
Из этой задачи находят х1*^2) и ф2('х2)=/о*(х°,х1*(х2)). 2-й шаг.
I» = {<Ра(х2) + Zoa [х2> /а(х2> х8)]} -► max;
I'26=v„
h{x\ ^GVU1.
Рнс. 5.9. Геометрическая интерпретация алгоритма блуждающей трубкя
Из решения этой задачи находят условно-оптимальные зависимости х2*(х3) и рассчитывают функцию Веллмана. Так продолжают до последнего шага, на котором определяют хп* из задачи (5.83).
Несмотря на значительное упрощение, которое можно получить при одной из форм связей (5.76), (5.77) или (5.78), трудоемкость расчетов велика, если число возможных значений вектора состояний х1 велико.
В действующих технологических системах существует некоторый допустимый режим {ы‘°} и соответствующая ему последовательность переменных состояний {х‘°}. Требуется по уточненной модели процесса или при изменившемся составе сырья х° уточнить этот режим. Можно предположить, что оптимальная последовательность состояний находится в некоторой окрестности {х‘°} и, как в алгоритме блуждающей трубки '[32], образовать область V°x состояний, окружающих уточняемый режим, заменив в изложенных выше процедурах условия х‘еУжг условиями x‘eV°X(. Эти условия выделяют гораздо меньшее число состояний, что сильно упрощает решение. Если найденное таким путем решение на некоторых стадиях принимает граничные значения, то полученное решение может быть вновь улучшено, а трубка Vxl охватывает уже окрестность уточненного решения (рис. 5.9).
Системы с рециклом. В химической технологии часто встречаются процессы, в которых параметры продукта на выходе той или иной стадии влияют на режим или на состояние продукта на предшествующих стадиях. Так, в смесителях часть выходного потока подают через контур рециркуляции на вход аппарата. В производстве разбавленной азотной кислоты концентрация оксида азота на выходе колонны абсорбции влияет на работу реактора каталитической очистки, а через него— на газотурбинную установку, снабжающую воздухом реактор синтеза, предшествующий колонне абсорбции.
Рассмотрим особенности оптимизации схемы с рециклом на примере простейшей схемы с одним контуром рециркуляции (рис. 5.10). Обозначим х° параметры потока на входе, хп — на выходе, ыПр и ыР — режимные переменные в прямой цепи и в цепи рециркуляции соответственно; наконец, через х обозначим параметры_на входе прямой цепи.
Связь между х, х° и состоянием продукта после рецикла Хр выражается уравнением вида
ф(х,хв,хР)-0 (5.88)
Стадия рециркуляции, как и любая из последовательности стадий прямой цепи, характеризуется соотношением
fv (*р. «р, хп)=0 (5.89)
Пусть критерий оптимальности представляет собой сумму двух слагаемых, одно из которых относится к прямой цепи, а второе— к цепи с рециклом:
2-/Ир (х,...) +fa> (хп, «Р) (5.90)
Для расчета схемы разомкнем цепь рецикла (рис. 5.10) и обозначим переменные до и после размыкания хр и хР. Будем искать такое решение задачи, которое обеспечивает максимум критерия (5.90) при условиях (5.88), (5.89), связях между переменными, характеризующими прямую цепь» и дополнительном требовании
Хр—хр=0. (5.91)
Однако не будем рассматривать последнее'условие как жесткое ограничение на множество допустимых значений перемеи-.ных, а положим, что х и х независимы. При этом в условие (5.88) подставим х, а в условие (5.89) —х. Составим модифицированный критерий, равный сумме критерия (5.90) и добавочного слагаемого, зависящего от разности А между х и х, которое назовем невязкой:
У=?4-Ф[(х—х),Х]. (5.92)
При поиске максимума Т вид функции Ф и вектор параметров 1 выбирают так, чтобы при оптимальном решении равенство (5.92) было выполнено. Функцию Ф называют исчезающим слагаемым, так как
Ф[0Д]=0, Vk
В частности, в приведенном ниже алгоритме Пауэлла [56] это слагаемое имеет вид:
Ф[Д, Ь]=М*—*)—Ы*—*)2-
Последовательность расчетов такова.
1. Задают начальные приближения для fa и fa. Обычно l°i=0, Х°2>0. Решают задачу оптимизации схемы с разомкнутым рециклом, используя, например, алгоритмы, изложенные выше для последовательных схем. При найденном оптимальном по критерию (5.92) решении подсчитывают величину невязки А°.
2. Выбирают fa1 =—2%°2А° и вновь решают задачу оптимизации последовательной схемы по критерию (5.92) с fa=fa* и fa=fa°. При этом невязка А1 меньше, чем Л°. Если уменьшение невязки значительно (например, более чем вдвое), то значение fa на следующем шаге не меняют, a fa уточняют по формуле
V-fa1—гхгд*. ~ (5.93)
Рис. 5.10. Структура процесса с одним контуром рециркуляции
Если же уменьшение невязки мало, то %i пересчитывает по формуле (5.93), а значение %2 увеличивают вдвое. Так продолжают, пересчитывая каждый раз Xi по формуле
XjK+i = — 2Х2КДК
и удваивая Х2, если отношение невязки на следующем шаге к невязке на предыдущем шаге больше, чем 0,5 (невязки берут по модулю). Алгоритм завершается, когда невязка Л* станет с заданной точностью близка к нулю.
Таким образом, расчет схемы с рециклом сводится к многократному расчету последовательной схемы, состоящей из прямой цепи и контура рецикла.
5.6. СПОСОБЫ УПРОЩЕНИЯ РЕШЕНИЯ ЗАДАЧ ОПТИМАЛЬНОГО УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
Вычислительные устройства в системах управления имеют сравнительно малую память, а время, отводимое для решения оптимизационных задач, ограничено. Поэтому при решении задач оптимального управления стремядся, где это возможно, использовать упрощенные, пусть иногда и приближенные, методы. Некоторые пути для такого упрощения рассмотрены ниже.
Использование переменной состояния в качестве независимой переменной для автономных объектов. Многие объекты управления имеют характеристики, не зависящие в явной форме от времени. Дифференциальные уравнения, связывающие переменные состояния х и управляющие воздействия ц, имеют вид:
xv = fv(x, и), v = 1,2,..., п (5.94>
Такие объекты называют автономными Критерий оптимальности имеет форму: -т
I == J f0(x, u)dt -> max (5.95>
о
Отметим, что и в функцию fo время не входит в явном виде.
Для подобных объектов можно попытаться упростить задачу, приняв в качестве независимой переменной вместо t (это может быть и длина аппарата) одну из фазовых координат. Пусть для определенности такой координатой является Из первого уравнения системы (5.94) выразим dt через dxc di^dxilftfXbU)
и получим систему уравнений
Z^ = /i(x, =Fv<*>u>’ v = 2>n (5-96)
с критерием оптимальности
Х1(Т> Х1(Г)
I = j /1(х,и) dX1 = J F«(x’ ----* пих (5.97)
*1(0) *1(0)
Если величина Т в исходной задаче (5.94), (5.95) фиксирована, то к уравнениям (5.96) следует добавить условие
xi(T)
J т^-т-
Х1(0)
После такого преобразования независимой переменной размерность задачи становится на единицу меньше размерности вектора состояния, что упрощает решение. Кроме того, оптимальный закон управления зависит от Xi, что в ряде случаев лучше, чем зависимость от времени. Для того, чтобы правые части уравнений (5.96) модифицированной задачи были непрерывны, нужно, чтобы функция fi(x, и) на оптимальном решении не обращалась в нуль, т. е. из предварительного анализа задачи необходимо установить, что x)(t) на оптимальном решении меняется монотонно.
Если такой фазовой координаты не найдется, то не исключено, что можно подыскать такую функцию у(х), для которой
п
• V дУ X I ч / ч у = Li “)= Ф (*• “)
V=1
не меняет знака (не обращается в нуль). Кроме того, функцию стремятся выбрать так, чтобы после замены t на у правые части уравнений
dxv и) -—
dy ~ Ф(х. и) ’ v~ ,п
и отношение fo/ф, определяющее в модифицированной задаче критерий оптимальности, оказались возможно проще.
Подобная замена также уменьшает на единицу размерность задачи, так как одну из фазовых переменных можно выразить через у и исключить из системы соответствующее дифференциальное уравнение.
Пример. Рассмотрим задачу оптимального управления процессом теплообмена, словесная постановка которой такова- требуется найти такой закон изменении температуры нагреваемого потока, чтобы за фиксироваииое время
контакта I передавалось заданное количество тепла Q и при этом иеобра* тимое рассеяние энергии было минимальным.
Из термодинамики известно, что необратимое рассеяние энергии пропорционально повышению энтропии системы, состоящей из источника тепла и нагреваемого потока. Скорости изменения энтропии потока и источника соответственно равны
S => q (Т.Ти)/?; S„ = - 9(Т, Ти)/Ти,
где Ти — температура источника; q— тепловой поток. Приращение энтропии системы за времи t равно
t
AS = J q(T, Tu) ------------di---------► min.
о
Общее количество тепла, которое требуется передать, равно
I q(T, TJdi.
При отдаче тепла температура источника Т„ падает со скоростью, пропорциональной потоку q и обратно пропорциональной емкости источника С:
Тя= -q (Т, Тн)/С; Тя (0) = Ти» (5.99)
Управлением в задаче является температура потока Т. Найденный закон изменения T*(t) можно реализовать, меняя скорость потока либо организуя соответствующим образом гидродинамику потоков.
Заменим продолжительность контакта t едииствеииой в дайной задаче фазовой переменной — температурой источника Тк. Получим:
di=~~ q (Т, Ти) dTa'
ти~ j
AS = I — С j dTK---► min
при условиях
*><0
(5.100)
(5.101)
Модифицированная задача не содержит связей в форме дифференциальных уравнений. Дли решении задачи составим функцию Лагранжа
«(Г,
Запишем условие ее стационарности по Г:
или
Т3 + *1 dT if (Т, Ти) - 0
(5.102>
где М — постоянный множитель.
Из условия оптимальности теплового контакта (5 102) для линейного закона теплопереиоса д=о(Гв—Т) следует, что
Т*=£ТВ.
(5.103)»
Коэффициент пропорциональности k, как и Х1( находят при подстановке Т*(ТЛ) в условия (5.100), (5.101).
Когда t->-oo или Q-Ч), то k в равенстве (5.103) стремится к единице,, и процесс теплопереиоса становится обратимым (AS-4-0). Для расчета T*(t) иужио подставить Т*(ТВ) в (5.99), решить получившееся уравнение, а решение вновь подставить в Г*(ГВ).
Верхняя оценка значения задачи и ее приближение с использованием допустимых решений. Широкие возможности для упрощения решения задачи дает подход, основанный на отбрасывании тех или иных условий, определяющих множество допустимых решений D. При этом решение ищут на более широком и более простом множестве V, включающем D. Задачу,, поставленную на множестве V, называют расширенной. Критерий оптимальности в расширенной задаче определен на V. Обычно этот критерий таков, что на Di он совпадает с критерием оптимальности исходной задачи, так что решение расширенной задачи, если оно оказалось допустимым в исходной, является и ее оптимальным решением. Если же найденное решение расширенной задачи не принадлежит D, получают величину Iv*, которая является оценкой сверху для максимального значения критерия в исходной задаче Id* (для определенности считаем, что исходная задача — задача определения; максимума).
Пример. Найти такой закон изменения напряжения на входе электрической цепи u(t) (рис. 5.11), при котором тепловые потери иа сопротивлении* R были бы минимальны, а конденсатор емкостью С получил бы за время t заряд Q.
я
а tt) 1 * «с
Рис. 5.11. Схема RC-цепочки >
Критерий оптимальности имеет вид: т
/=J i2Rdt ----► min (5.104)
о
при условиях
i=(u—ue)/R, (5.105)
dO dtu
(?(0) = 0; Q(7)-Q. (5.106)
atj at
Здесь i — зарядный ток; uc — напряжение на зажимах конденсатора. Отбросим связи (5.106), оставив лишь условие
Т
j* idt = Q, (5.107)
b
вытекающее из уравнения (5.106) и его граничных условий, и рассмотрим задачу (5.104), (5.107) с расширенным множеством допустимых решений, в этой задаче управлением является уже i(t), а ие напряжение u(t), как в исходной задаче. Очевидно, что решение расширенной задачи будет
Зарядный ток не зависит от времени, а соответствующее ему значение I* равно:
j^rq^T. (5.108)
Решение исходной задачи, соответствующее найденному оптимальному зарядному току, имеет вид:
. RQ. Q .
tt«(/) = /?l* + tte=^-+-^r t.
1 1 о
Если это управление допустимо, то оио оптимально и в исходной задаче. Если же иа u(t) наложены ограничения, например вида
u(t)<QIC+RQI2T.
то оценка (5.108) не достижима и может служить лишь оценкой снизу для минимальных тепловых потерь в исходной задаче.
Тот же прием расширения множества допустимых решений лежит в основе перевода одной или нескольких фазовых координат в разряд управлений. При этом сокращается размерность вектора фазовых координат, что сильно облегчает решение. По найденному решению расширенной задачи находят обеспечивающие его законы управления, а затем стремятся аппроксимировать найденные законы изменения управляющих воздействий допустимыми по условиям исходной задачи.
Пример. Требуется найти оптимальный закон изменения во времени теплового потока q в периодическом реакторе — такой, чтобы за минимальное время I достигалась заданная концентрация Су Заданы начальная концентрация Со, связь между скоростью изменения концентрации н температурой
С=—г(С,Т); С(0)=С0; C(fj=Ct (5.109)
и между скоростью изменения температуры, тепловым потоком q и тепловым
эффектом реакции у
Т=ТГ(С, Г)+</. (5.110>
Температура ограничена условием
Tmin^T ^Тщах* (5.ШУ
Отбросим уравнение (5.110) и в получившейся расширенной задаче будем считать управлиющим воздействием температуру Т. Расширеннаи задача иа быстродействие с критерием оптимальности
Т
/ = j* di --► min
* о
и связью в форме дифференциального уравнения (5.109) может быть решен® с использованием принципа максимума. Соответствующая функция Гамильтона имеет вид:
Я=—1—Ч'г(С.Т).
Оптимальный закон изменения температуры обеспечивает для любого i максимум этой функции с учетом ограничений (5.111):
T*(i)=argmax[—Чг(1)г(С, Л]. (5.112>
т
Сопряженная переменная ф удовлетворяет условию
ОЯ fdr „ _
ф=—- = ф—. (5.113>
оь ос
Совместное решение уравнений (5.111), (5.112) и (5.113) позволяет найтв T*(t) и соответствующее этой функции значение I* критерия 1=1.
На втором этапе с учетом уравнения (5.110) стремятся реализовать T*(i) путем выбора q. Для этого перепишем (5.110) в форме равенства
д(0=Г*(0-ТГ(С*,Л).
Полученный закон изменения теплового потока может быть и нереализуем. Например, он может содержать 6-фуикции или не удовлетворять тем-или иным ограничениям на величину q. Тогда из допустимых q выбирают закон q', в каком-то смысле ближайший к q, и рассчитывают соответствующее ему допустимое решение, а также значение I критерия иа этом решении. Очевидно, что иа оптимальном решении исходной задачи значение критерия /о* удовлетворяет неравенствам Если в этих неравенствах
левая и правая части близки, то q'(t) может быть принят за искомый закон оптимального изменения теплового потока или за первое приближение к нему при численном решении исходной задачи.
То обстоятельство, что критерии оптимальности исходной и расширенной задач должны совпадать лишь на множестве допустимых решений D исходной задачи, но вовсе не обязаны совпадать на всем множестве V, дает дополнительные возможности для формирования критерия в расширенной задаче так, чтобы ее решение оказалось допустимым в исходной. На этом основан ряд методов решения задач оптимального управления .[5], [26], [56].
Метод трансформации фазового пространства. Класс задач, в которых часть составляющих вектора управления может
«быть заменена соответствующим числом фазовых координат, может быть расширен применением нелинейного преобразования фазового пространства.' Подобный метод предложен В. И. Гурманом. При этом число связей в форме дифференциальных уравнений уменьшают, и множество допустимых решений преобразованной задачи оказывается шире, чем исходной.
Рассмотрим задачу с двумя типами переменных состояния лиги двумя видами управлений и и и. Критерий оптимальности I и уравнения связей имеют вид:
г
I = fo(x> и< 2, 0 di -► max; (5.114)
о
x=fa(x,u,z,t)+f2(x,z)o; (5.115)
z=F(x,z)o; (5.116)
ueVu; 2eV2; x(O)=xo; F(x,z)^0. Особенность задачи состоит в том, что в уравнения связей линейно входит неограниченное управление v.
Предположим первоначально, что f2 = 0; тогда естественным способом решения задачи был бы следующий:
1) отбросить условие (5.116), переходя к расширенной задаче
т
/ = J fQ (х, и, z) dt --------> max
о
(5.П7)
при х = f! (х, и, г); u^Vu; zeV2;
2) решить задачу (5.117), считая «из управляющими воздействиями;
3) по условию (5.116) найти такую функцию v* (t), которая реализует найденное в п. 1 решение; эта функция может содержать 6-составляюздие; условие Гу=0 позволяет найти v*(t) по известной кусочно-непрерывной функции
В общем случае f2¥=0 и v входит в уравнения (5.115) и (5.116), однако можно попытаться сделать замену переменных
y^g(x,z), (5.118)
чтобы скорость изменения переменной у не зависела от v.
Чтобы найти функцию преобразования g, запишем выражение для скорости изменения у:
dg • dg •
У = -г- х + — г. дх дг
(5.119)
Подставим в него правые части уравнений (5.115) и (5.116)
и потребуем равенства нулю выражения, стоящего множителем при о:
ft (х' г) + (*' г) = °’ (5-120)
Это однородное линейное уравнение с частными производными позволяет найти g(x, г). Одним из решений'уравнения (5.120) является первый интеграл уравнения в обыкновенных производных
dx dz
— ----= ———. (5.121)
М*. г) Ых.г) 1
Обозначим его через с (х, z). Общим же решением уравнения (5.120) является произвольная непрерывно дифференцируемая функция 0 (с).
После того, как функция g найдена, можно выразить х через у, z и затем подставить в функционал (5.114) и в урав- -нения (5.115), (5.116); они преобразуются к виду
т
J= fa(y, и, г, f)dt -► max (5.122)
о при условиях
/); z=F(y,z)v, zeVz; keVu; x(y(0), г(О))=хо. (5.123) Если функция F^O в этой преобразованной задаче, то для ее решения может быть использован прием, основанный на переводе переменной состояния z в разряд управлений с сокращением на единицу числа дифференциальных связей.
Метод трансформации фазового пространства может быть использован и в том случае, когда управление v входит в подынтегральное выражение для I линейно. В этом случае удобно увеличить размерность вектора х, введя фазовую переменную х0, скорость изменения которой равна подынтегральному выражению в I. Сама переменная состояния х может иметь несколько составляющих. (Такой вариант задачи рассмотрен на примере процесса биосинтеза в следующем разделе).
Возможности использования метода малого параметра в задачах оптимального управления. Напомним общую схему использования метода малого параметра для решения системы дифференциальных уравнений
x=f(x,t, в); х(0)=хо. (5.124)
Наряду с системой (5.124) будем рассматривать порождающую систему, полученную из (5.124) приравниванием малого параметра е нулю:
W(zJ.O); z(0)=xo. (5.125)
Искомое решение системы (5.125), которую называют возмущенной, представляют в виде суммы решений порождающей
системы и поправки y:x=z+y. Очевидно, что поправка удовлетворяет дифференциальному уравнению
y~x—z=f(z+y, t, e)—f(z, t, 0); y(0) =0.
Разложив правую часть этих уравнений по «малым» переменным у и 8, получим:
*4 (5126>
\ дх Jq \ дв /о
Здесь (df/dx)0 — матрица производных dftjdxj, a (dfjdejo— вектор производных dfi/dz, которые вычислены при у=0, е=О и x(t) =z(t).
Если получено решение z(t) порождающего уравнения, та коэффициенты уравнения (5.126) становятся известными функциями времени. Его решение ищут в форме разложения па степеням малого параметра е
ОО
г/(Л 8) = 2j/v(0 8v, (5.127>
v-1
в котором у, (/) — неизвестные функции времени. Для их вычисления разложение (5.127) подставляют в (5.126) и приравнивают 1коэффициенты при одинаковых степенях е, что приводит к системе
• ( dt \ df \ yi = "г-1У1 + -т— ;
\ дх Jo ' дв /о
/ df \ , / d*f \ . / d*f \ / d*f \
J/а — I У% +1 I У1 +1“7‘I У1 +1 ,« I • \ дх Jo \ дх* /о \ дхдв Jo \ де,* Jo
При найденной из первого уравнения функции уД/) коэффициенты второго уравнения оказываются известными функциями времени. Решив второе уравнение, его решение вместе с y\(t) подставляют в третье, и т. д.
Пуанкаре показал, что сумма z(t) +y(t,z) при е->0 стремится к искомому решению. Применимость метода малого параметра основана на том, что решение возмущенной системы тем меньше отличается от решения порождающей системы, чем меньше е. Таким образом, в окрестности е=0 решение задачи должно непрерывно зависеть от е.
Рассмотрим управляемую систему, в которой выбором управления u(t) требуется обеспечить максимум функционала т
I = J f0 (х, и, t) dt ->- max (5.128^
о
для объекта, характеризующегося дифференциальными уравнениями
x=f(x, и, 8, t) (5.129J
при тех или иных краевых условиях.
Непрерывную зависимость решения этой задачи от параметра в можно ожидать лишь в том случае, когда управление, обеспечивающее максимум функции Гамильтона Н(х, и, t, ф, в), составленной для задачи (5.128), (5.129), мало меняется при малом изменении как е, так и фазовой траектории x(t, е), и вектор-функции сопряженных переменных ф(/, «). Гарантировать такую непрерывность по условиям задачи (5.128), (5.129), как правило, трудно. Очевидно, что для этого необходимо, чтобы максимум Н по и для любого t был единственным и его положение непрерывно зависело от х, ф и е в окрестности решения х°(/), ф°(/) порождающей задачи.
Наложим на функции /0 и f в задаче (5.128), (5.129) условие непрерывности и непрерывной дифференцируемости повеем аргументам, а /о, кроме того, будем полагать дважды дифференцируемой по х и и. Отметим, что эти условия гораздо более жесткие, чем в принципе максимума. Оптимальное решение порождающей задачи, полученной из (5.128), (5.129) приравниванием е нулю, обозначим через x°(t), а соответствующее ему значение функционала (5.128) —через /°.
Решение исходной задачи будем искать в форме разложения в ряд по степеням малого параметра.
x=x°+exi; a=u0+eu».
Разложим правую часть уравнения (5.129) в ряд Тэйлора и отбросим слагаемые второго порядка малости; получим:
/ df \ { df \ / df \
Х° + 8Xt = f (X®, И®, О, Л + I —— ) 8ХХ + I —— ) 8И, + ( —— ) 8.
\ дх Jo \ ди /о \ ds /О
Здесь производные берутся в окрестности х°, и0, 8=0 и таким образом являются известными функциями времени. Если учесть, что x°=f(x°, и°, 0, t), получим для x\{t) уравнение / df \ t df X ( df \ _ „
хх = ( _ 1 xi + | л ) ) (5.130)
\ dx Jo \ ди /о \ ds Jo
Аналогично разложим в ряд Тэйлора подынтегральное выражение в функционале I и отбросим в нем члены не второго, а третьего порядка малости; получим
где
/=/о+д/(
(5.131)
Т
М ~ у ^(dfo/dx)o-*l 4" f У) И1 + од L °
Решение задачи о максимуме А/ при условии (5.130) позволяет найти поправку к порождающему решению. Эта задача
гораздо проще исходной, так как уравнения (5.130) линейные, а функционал Д/ квадратичный. Если функции x°+exi*, u°+ +eui* с достаточной точностью удовлетворяют уравнениям (5.129) исходной задачи, это решение может быть принято в качестве искомого. В противном случае его можно вновь уточнить, действуя по той же схеме.
Уравнения с малым параметром в форме множителя при производной. Метод малого параметра в изложенной выше форме пригоден лишь в случае, когда правая часть уравнения представляет собой аналитическую функцию х, и и е. Рассмотрим ниже уравнения, имеющие форму
exv = fv (х, u). (5.132>
Если их привести к форме (5.129)
Xv = /v (х, и)/е,
то при s->0 правая часть этого выражения терпит разрыв, и методы малого параметра в традиционной форме неприменимы.
Уравнения (5.132) возникают в случаях, когда часть составляющих вектора состояния х меняется гораздо быстрее остальных. Модуль правой части дифференциального уравнения для таких «быстрых» составляющих гораздо больше, чем для «медленных». Порождающее решение в подобных задачах получают после приравнивания нулю функций fv(x, и), входящих в уравнения (5.132).
Полученные в результате этого конечные соотношения входят в задачу оптимизации наряду с дифференциальными уравнениями для «медленных» составляющих решения. Сложность при этом заключается в том, что решение порождающей задачи может не удовлетворять граничным условиям для «быстрых» переменных. Для того чтобы оно было близко к решению исходной задачи, нужно, чтобы критерий оптимальности интегрально зависел от «быстрых» переменных, а также чтобы порождающее решение было устойчивым для уравнений (5.132). Последнее означает, что при изменении управлений и «медленных» переменных «быстрые» переменные стремятся к своим равновесным значениям, удовлетворяющим уравнениям порождающей системы
fv(x, u) = 0. (5.133)
Таким образом, если часть уравнений, характеризующих оптимизируемый процесс, может быть приведена к форме (5.132), то для приближенного решения эти уравнения заменяют конечными соотношениями (5.133), решают полученную задачу, не обращая внимания на краевые условия для «быстрых» переменных xv, если в исходной задаче такие условия наложены. Полученное решение более простой задачи позволяет вы
брать хорошее начальное приближение для исходной задачи при ее решении численными методами.
Метод прогноза и коррекции в системах оптимального управления. При управлении технологическими процессами объект находится в условиях постоянных возмущений, а параметры модели никогда не бывают известны абсолютно точно. В этих условиях полезным приемом при создании системы оптимального управления является использование идеи прогноза и коррекции [10]. Будем полагать, что интервал управления [0, Г] разбит на отрезки длиной А, так что время t меняется дискретно, принимая значения 0, 1, 2,..., JV.
1-й шаг. При начальных значениях коэффициентов модели блок оптимизации рассчитывает оптимальную программу управления на интервале [0, N], и найденная программа реализуется на первом интервале [0, 1].
2-й шаг. По имеющейся модели прогнозируют фазовые траектории для рассчитанного оптимального управления и сравнивают их с реальным изменением вектора х. По результатам сравнения подстраивают коэффициенты модели.
3-й шаг. Для уточненной модели и реальных значений вектора состояния х(1) вновь решают детерминированную задачу на интервале i[l, 7VJ, найденное управление реализуют на интервале [1, 2], и т. д.
5.7. ОПТИМАЛЬНОЕ УПРАВЛЕНИЕ ПЕРИОДИЧЕСКИМИ ПРОЦЕССАМИ
Постановка задачи об оптимальном управлении периодическим процессом была приведена в разд. 5.2. Напомним ее: требуется найти такие управляющее воздействие и* (/) и продолжительность цикла Т*, чтобы достигал- максимального значения критерий
т
/ = ( f fa(x> ---»- max> (5.134)
х b
имеющий смысл средней продуктивности аппарата за цикл.
В этом критерии [о — функция, определяющая текущую продуктивность процесса и учитывающая скорость образования полезного продукта, текущие потери и т. л.; А — потери, связанные с окончанием одного и началом следующего цикла (расходы на загрузки и выгрузку, регенерацию катализатора и т. п.); 0 — потери времени, связанные с загрузкой и выгрузкой продукта. Переменные состояния х и управляющие воздействия и связаны друг с другом m условиями в форме дифференциальных уравнений
xi=fAx>u)', (5.135)
Поставленная задача представляет собой вариационную задачу оптимального управления, для ее решения могут быть ис-
Рис. 5.12, Выбор оптимальной продолжительности периодического процесса
Рнс. 5.13. Расчет оптимальной продолжительности очередного цикла периодического процесса
пользованы соответствующие методы, а также некоторые приемы, рассмотренные в разд. 5.6.
Выбор оптимальной продолжительности цикла периодического процесса. Будем полагать, что тем или иным способом найдены законы изменения управляющих воздействий и°(/) и соответствующие им изменения переменных состояния x°(t) и требуется найти лишь оптимальную продолжительность процесса Т*. Обозначим через <р (Т) интеграл, стоящий в уравнении (5.134) и вычисленный при х=х°(/) и и=и°(Г). Тогда
т
<р(Т)= J М*°(Л> uO(t))dt. о
Будем считать функцию <р (Г) известной (рис. 5.12). Тогда величина I соответствует тангенсу угла наклона к оси абсцисс прямой, проведенной из точки с координатами (—в, Л) в точку с координатами Т, <р (Г). Этот угол (а значит, и его тангенс) максимален, когда прямая касается кривой <р(Т). Соответствующее точке касания значение Т=Т* является оптимальным моментом окончания процесса.
Если функция fo°(O=fo(x°, и°) задана аналитически, то оптимальную продолжительность процесса Т* можно определить исходя из того, что в точке касания производная функции <р(7') по Т, т. е. равна тангенсу угла наклона касательной, т. е. 1(Т). Таким образом, для определения Т* имеем:
т»
(^)т»=г°о(п=^+0(!) <5-1зб>
о
Уравнение (5.136) может иметь не одно решение; в этом случае нужно выбирать решение, при котором значение I больше. Выбор оптимальной продолжительности связанных друг с другом периодических процессов. В ряде случаев нельзя выбирать продолжительность периодического процесса Т, ориентируясь
на максимальную эффективность единичного цикла, так как требуется учесть еще эффективность циклов, связанных с рассматриваемым и проводимых в том же самом или в других аппаратах. Ниже рассмотрим варианты таких задач, обозначая через р(Т) зависимость интегральной эффективности процесса от общего времени цикла Т=Т+В:
т-е р(О = J /о(х, u)dt — A. о
1. Последовательность циклов в единичном аппарате. В качестве критерия оптимальности для последовательности циклов естественно использовать продуктивность всей последовательности, получаемую как отношение общей стоимости продукта, произведенного за п циклов, к общей продолжительности этих циклов:
п п
I^PiW) /^Т>. (5.137)
i=l 1 i=l
Если функции pt одинаковы для всех циклов, задача сводится к ранее рассмотренной; однако часто нестабйльность характеристик сырья приводит к разным зависимостям Pi(T,) в каждом i-том цикле.
Пусть реализован (п—1) цикл и требуется найти оптимальную продолжительность текущего n-го цикла Тп*. В этом случае критерий (5.137) удобно переписать в форме
Ря ~Ь Рп (71 п)
Ts + Tn
max,
(5.138)
п—1 п—1
где =
i=l i=l
Этот критерий имеет ту же форму, что и критерий выбора продолжительности единичного цикла. Графическое решение задачи (5.138) показано на рис. 5.13. Оптимальному времени Тп* соответствует точка касания прямой^ проведенной из точки Тъ на оси абсцисс к кривой ps+Pn(Tn). Отношение р^Тъ представляет собой среднюю эффективность аппарата за все циклы, предшествующие рассматриваемому. Если бы Тп* находили из условия максимальной эффективности только одного n-го цикла, для его определения нужно было бы провести касательную к кривой р2 + рп(Гп) из точки Ръ на оси ординат (пунктир иа рис. 5.13). Очевидно, что если наклон этой касательной (т. е. индивидуальная оптимальная эффективность n-го цикла) окажется меньше средней эффективности предыду-
Рис. 5.14. Система периодических аппаратов с общим сливом
щих циклов, то длительность Тп* цикла, найденная по критерию (5.138), окажется меньше, чем Т*. Это естественно, так как «удачный» цикл надо проводить дольше, а «неудачный» прекратить раньше, чем при индивидуальном проведении.
Условия оптимальности критерия 1п по величине Тп имеют вид
п-1
^Pi + PnM «=1
п-1
1=1
и могут быть использованы для оперативного управления продолжительностью периодических процессов.
2. Работа группы аппаратов на общий слив. На рис. 5.14 показана группа аппаратов периодического действия, объединенных общим сливом. При этом продолжительность операции выгрузки продукта т задана и нельзя одновременно проводить выгрузку двух и более аппаратов. Поэтому моменты окончания циклов аппаратов должны отличаться не менее чем на t. Пусть известна зависимость эффективности каждого аппарата от продолжительности текущего цикла, а также моменты начала циклов в каждом из ш апцаратов. Обозначая момент начала цикла b_v-om аппарате через tv, а продолжительность цикла через Тч, приходим к задаче о максимуме суммарной эффективности
m
1 = ^1Ч(ТЧ) (5.139)
V=1
системы при условии, что для любых двух аппаратов время окончания циклов различается не менее чем на т:
|/v — Л, — Tj\>t v=/= /; v, / = T~m. (5.140)
Задача (5.139), (5.140) представляет собой задачу нелинейного программирования. Аналогичная ситуация возникает и при работе аппаратов, требующих периодической регенерации, когда процесс регенерации можно проводить лишь в одном из них.
3. Работа группы аппаратов с общим временем цикла. Пусть имеется система аппаратов, для которых по условиям производства продолжительность цикла должна быть одинакова. Будем считать, что известна зависимость продуктивности
Pt(Ti) каждого аппарата от длительности его работы и зависимость продуктивности всей системы от функций pt, т. е.
pe(T)=pc(pi(T), й(Т),...,Рт(Т)).
Значение общего времени цикла выбирают из условия
1=ре(Т)1Т —► max,
что, как легко видеть, приводит к уравнению
V дрс ( dp2. _Рс dpv \ dT ]т* у*
Согласование работы периодических и непрерывно действующих аппаратов. При наличии в одной технологической схеме периодических аппаратов и аппаратов непрерывного действия возникает задача согласования их работы таким образом, чтобы минимизировать объемы буферных емкостей и в минимальной степени нарушить режим аппаратов непрерывного действия при изменении производительности периодических аппаратов.
1. Работа нескольких периодических аппаратов на общую сеть. Пусть имеется несколько аппаратов периодического действия, работающих на общую сеть. Производительность каждого из них меняется по определенному закону fi(t—т,), в котором т, — время сдвига начала Цикла i-ro аппарата по отношению к началу цикла нулевого аппарата, так что То = 0. Будем полагать, что найден общий период Т для всех аппаратов, а функции ft дифференцируемы. Требуется так выбрать сдвиги т,, чтобы расход в общей магистрали оказался возможно ближе к среднему значению. В качестве оценки для пульсаций
ы
суммарного расхода p(t, —т,) примем величину
1=0
т
I = J (p(t, т) — M)*dt-► min. (5.142>
о
Очевидно, что средний расход М не зависит от вектора сдвигов т и.может быть найден как
* 1 г
Условия оптимальности функционала (5.142) по т имеют вид: =0; «= 1, N.
- д%{
или иначе т т т
J [р (t, т) - М] <ц = Jpfiit -xijdi-M ^ftdi = о. (5.143>
О 0 0
Здесь учтено, что p—'Sfi, а значит-4^- =——т,). Но инте-трал от производной периодической функции, вычисленный за период Т, равен нулю, и уравнения (5.143) примут вид:
Г к
i = TTN. (5.144)
о V—о
Из суммы (5.144) можно исключить i-тое слагаемое, так как
т т
о 0.
Условия оптимальности примут форму N нелинейных уравнений
J N
\hV-т<)2 М-т»)Л»0; 1=U
0 v=0,
относительно N неизвестных ti, Тг.Tn.
2. Согласование работы периодического и непрерывно действующего аппарата с промежуточной емкостью. Рассмотрим участок технологической схемы, состоящий из аппарата непрерывного действия, расход из которого равен u(t), аппарата периодического действия, расход в который задан и равен р(t), и промежуточной емкости V0. Требуется так выбрать закон изменения u(t), чтобы изменения среднего времени пребывания продукта в аппарате непрерывного действия были минимальны.
Обозначим через F(t) рабочий объем аппарата непрерывного действия, .а через F°— номинальное значение этого объема, соответствующее заданному времени пребывания 0. Расход на «ходе в аппарат непрерывного действия будем считать постоянным и равным q:
т q==~T^p^dt-о
Поскольку F(i)=qQ(i), минимальным отклонениям 0 соответствуют минимальные отклонения F от F°, и в качестве критерия оптимальности можно принять величину
т
— Fa)2dt ------► min.
о
(5.145)
Связи и ограничения, наложенные на переменные задачи, имеют вид:
и(0; (5.146)
V~u(t)—p(t)-, u>0; (5.147)
f(/)>0; O<V(O<V°. (5.148)
Задачу можно упростить, воспользовавшись тем, что закон изменения рабочего объема аппарата непрерывного действия и емкости известен с точностью до константы. Обозначая через у сумму F+ V, получим:
уV - я—р (0 •
Правая часть этого уравнения — заданная периодическая функция. Поэтому
I
У (О = Уа + J Др W dt = уй + "у (О, о
где y(t) известна.
Функционал (5.145) перепишется в виде
т
f = J > min. (5.149)
о
Расширим множество допустимых решений задачи, отбросив связь в форме дифференциального уравнения (5.147) и считая V(t) управлением, а уо— искомым параметром. Условия минимума I по у о
т
-У- = 2 f +~у (0 - V (f) - 7°) dt = О оуо J о
можно переписать в форме
т.
Y У Ху (О - V (0) dt = F°. (5.150>
о
Таким образом, начальное значение суммарного объема уо. надо выбрать так, чтобы среднее за цикл значение рабочего' объема аппарата непрерывного действия равнялось его номинальному значению. Из условия (5.150) имеем:
т т
ya = F>—Y^y(t)dt^-Y^V{t)dt. (5.151)
о о
Условия минимума (5.149) по V(t) приводят к неравенству (yo+?-f°-V)6V<0 (5.152)
где 6V— допустимая по ограничениям (5.148) вариация V(t). Из неравенства (5.152) следует:
У*У»Уо)=Уо+У(О“'^° при 0<V<V°;
V*(^o) = V° при yo+y-F^V^, (5.153)
У*(*,Уо)=О при уо+у—F®<0.
Совместное решение уравнений (5.153) и (5.151) позволяет найти tfo, V(t), а затем определить ic(t) из уравнения (5.147). Определение законов оптимального управления периодическими процессами. Покажем на примере оптимального управления процессом биосинтеза использование приемов, о которых говорилось в разд. 5.6. В процессе биосинтеза основным управляющим воздействием часто является величина и состав подпитки, подаваемой в аппарат. Продолжительность процесса Т будем полагать заданной, а искомыми величинами будут режимные переменные u(t) (температура, pH и др.) и расход питательного субстрата v для подпитки аппарата.
Задача оптимального управления запишется в форме
т
1 — ^гхр(х, s, и) di------► max, (5.154)
о
x=xp,(x,s,u)—ox/z, (5.155)
s=—хт] (x, s, u) -|-o (So—s)/z, (5.156)
z=v. (5.157)
Здесь z — рабочий объем аппарата; x, s — концентрация биомассы и субстрата в аппарате; s0 — концентрация субстрата в подпитке. Подынтегральное выражение в уравнении (5.154) определяет скорость накопления полезного продукта; ц—удельная скорость роста биомассы; т] — удельная скорости потребления субстрата.
Продемонстрируем последовательность использования метода трансформации пространства состояний.
1-й шаг. Перейдем к новым переменным yi(x, z, s) и 1/2 (х, z, s), скорость изменения которых не зависит от и. Условие независимости для каждой из этих переменных имеет вид:
,|Ю dx z ds z dz
Уравнению (5.158) соответствует система обыкновенных дифференциальных уравнений
, ---— dx = —-—ds — dz, (5.159)
х s0 — s
решение которой имеет два независимых первых интеграла Ci(x, z, s) и с2(х, z, s). Решением (5.159) является любая дифференцируемая функция от Ct и С2. Проще всего принять yi — =Ci и уг — с2, где ci и с2 — первые интегралы уравнений
dx dz ds dz
X 2 So — S 2
Отсюда
yi=С1 (X, 2) — l/jcz; y2-c2 (s, z) = l/(so—s)z.
2-й шаг. Заменяем в задаче (5.154) — (5.157) х и s через х=—tl/yiz и s=s0—IlyzZ. Расширяя задачу путем отбрасывания уравнения для z, получим преобразованную задачу:
т
I = — I —р (г, yv у2> u) di —► max, о
У1=-----И (г, yv У2, и), (5.160)
Уг = — П (г, Ук уг, и), (5.161)
!h
в которой управлениями являются z и и. Эта задача намного проще исходной. Если изменением расхода подпитки удастся реализовать оптимальный закон z*(t), то решение этой задачи является оптимальным и в исходной постановке; в противном случае оно дает оценку сверху функционала I.
Дальнейшее упрощение задачи управления периодическим процессом может быть достигнуто, если можно априори доказать, что в правой части одного из дифференциальных уравнений (5.160) или (5.161) знак не меняется. В этом случае число дифференциальных уравнений можно уменьшить на единицу. Покажем это на примере управления процессом биосинтеза пенициллина.
Кинетику процесса характеризуют моделью следующего вида:
• SX
S = ~ki — ...; s (0) = s0>
*2+s
р = —fax-, р (0) = ро-
Здесь х — концентрация биомассы; s — концентрация питательного субстрата; р — концентрация продуктов жизнедеятельности микроорганизмов (продуктов метаболизма).
Критерием оптимальности является продолжительность процесса t, которую нужно минимизировать при условии, что x(t) =х; s(t) =s.
В процессе биосинтеза концентрация питательного субстрата заведомо уменьшается, поэтому ее можно принять в качестве нового аргумента. Получим
k2 + s di = — —----ds.
kiSX
Уравнения связей в модифицированной задаче имеют вид: dx _ kids kt
dp ks
ds
k.
~~ P(^ + s), «4
. I ~7~ P (^2 + S)«
«4 *4
Критерий оптимальности
so
7 = f ~Ь- ds----------> min.
J ktsx
s
Управлениями в этой задаче являются условия проведения процесса: (температура, кислотность среды и т. п.), от которых зависят коэффициенты ki—ks.
Оценка вместимости промежуточной емкости-накопителя между аппаратами непрерывного и периодического действия; управление расходом. Рассмотрим технологическую схему, состоящую из периодически действующего аппарата, расход из которого p(tf) представляет собой заданную г^ериодическую функцию с периодом Т; непрерывного аппарата, расход в который u(t) можно изменять в заданных пределах от и+ до и—, промежуточной емкости-накопителя объемом VK. Величину Ук будем называть конструктивным объемом емкости (рис. 5.15, б).
Задачу анализа и оптимизации такой схемы можно поставить различным образом.
А. Найти такой минимальный объем Ук, при котором расход в аппарат непрерывного действия мог бы не изменяться во времени.
Б. Определить, какой минимальный объем Ук необходим, чтобы схема была работоспособна при изменениях u(t) в заданных границах; такая постановка предполагает и расчет
а 5
Рис. 5.15. Схемы последовательного соединения аппаратов периодического (1) и непрерывного (2) действия с промежуточной емкостью:
а — при оптимизации среднего времени пребывания; б — при оптимизации V к
Рис. 5.16. Изменение расчетного объема v при и(0)=0 и определение по графику этой функции оптимального значения t>(0) и минимального значения 7К
Рис. 5.17. График расхода из периодического аппарата p(t) и оценка необходимого объема VKmIn
оптимального закона изменения для которого потребный объем накопителя минимален.
Для формулировки задачи обозначим через v(t) текущий объем продукта в емкости; через р и и — средние за цикл значения расходов на входе в емкость и выходе из нее.
Очевидно, текущий объем продукта изменяется в соответствии с уравнением
v-= р—и.
(5.162)
Начальное значение этого объема и(0) подлежит оптимальному выбору, однако ввиду периодичности процесса и(Т’) =и(0), что приводит к равенству средних значений расходов р и и:
т т т
Г vdt = Г pdt — 4 udt = Т(р — и) = 0. (5.163)
ООО
Рассмотрим задачу А, в которой расход и предполагается постоянным, а в силу (5.163) этот расход должен быть равен р. Выбору в этой задаче подлежит только значение и(0), так как правая часть уравнения (5.162) оказалась заданной. Чтобы найти минимальное требуемое значение конструктивного объема, можно поступить следующим образом. Сначала задать произвольное значение и(0), например принять и(0)=0ипо уравнению (5.162) построить закон изменения рабочего объема во времени v(t) (рис. 5.16). Затем необходимо выбрать величину v (0) так, чтобы для любого t реальный закон изменения объема продукта в емкости
»(0=»(0)+»(0
был неотрицателен, а его максимальное значение оказалось возможно меньше. Ясно, что и (0)-должно быть таким, чтобы в точках минимума v(t) сумма v (0+^(0) оказалась равной нулю (откуда и(0)=—umin), а требуемая для постоянства и величина промежуточной емкости должна быть не меньше сум
мы максимальной ординаты функции v и величины v (0), т. е. не меньше, чем «размах» функции v(t):
о о
Ук = пих о (A— min v(t). teio. rj fSio, Г]
Когда расход u(t) изменяется в заданных пределах, можно первоначально, до решения задачи Б, оценить минимальную величину емкости VKmln, которая заведомо необходима для согласованной работы аппаратов. Для такой оценки достаточно иметь функцию p(t), ее среднее значение и и пределы изменения и+ и и~. Если окажется, что конструктивный объем VK меньше, чем максимальная из площадей FK, заштрихованных на рис. 5.17, никакой выбор расхода u(t) и начального объема и(0) ие обеспечит согласованной работы аппаратов. Действительно, если максимальная из площадей FK оказалась выше линии и+, то при самых благоприятных условиях, когда в момент /1+ (см. рис. 5.17) емкость пуста, в момент t2+ она должна содержать объем продукта, рав.ный площади Гк. Если же максимальная из площадей оказалась ниже линии и~, то в момент выхода ti~ из зоны допустимых значений и емкость должна быть заполнена не менее чем до FK, иначе в некоторый момент рабочий объем окажется отрицательным (расход в аппарат непрерывного действия будет меньше, чем и~). При такой оценке отбрасывали условия неотрицательности объема во все остальные моменты времени, снимая таким образом ограничения в задаче. В результате найденная оценка заведомо не превосходит минимального объема, который нужно определить в задаче Б, а может оказаться и существенно меньше.
Чтобы решить задачу Б, можно воспользоваться тем обстоятельством, что минимизации конструктивного объема VK соответствует минимальный размах функции v(t), т. е. при правильном выборе закона изменения u(t) функция и(0 должна быть возможно ближе к константе, а ее производная — возможно ближе к нулю. Потребуем, чтобы функционал
т т
I = J (V)ndt = J (р - u)ndt, (5.164)
о о
в котором п — некоторое четное положительное число, был как можно меньше при условиях
т
-у J и (0 dt == р; иг и < и+. (5.165)
о
Решив задачу (5.164), (5.165), можно путем выбора и(0) обеспечить неотрицательность v(t), как это было сделано при решении задачи А.
Отметим, что поставленная задача представляет собой аналог задачи распределения нагрузок между параллельными агрегатами, но аналог бесконечномерный. Изложенный ниже алгоритм полностью аналогичен алгоритму последовательного назначения предельных нагрузок (см. разд. 5.2).
1-й шаг. Записываем функционал Лагранжа
т
S = J[(p-«)" + b]df (5.166)
о
и решаем задачу (5.164), (5.165) без учета ограничений на предельные значения и. Условия стационарности подынтегрального выражения в функционале (5.166) по и приводят к уравнению для стационарного закона изменения расхода
Так как п и X—некоторые константы, то, обозначая Ь=(Х/ /nj'/t”-1», получим:
«с(0"=Р(0—Ь. (5.167)
Чтобы найти Ь, подставим uc(t) в условие (5.165). После интегрирования получим:
т
“ j* «с (0 dt =~р — Ь[Т, о
так что на первом шаге &о = О и «с(О=Р(О- Так как этот закон в общем случае не реализуем, переходим к его уточнению.
2-й шаг. Подсчитаем суммарную площадь uz(t), выходящую за пределы «+ (обозначим эту площадь S+), и суммарную площадь между функцией uz(t) и линией иг (обозначим ее S_). Сравним их по модулю. Если S+>S-r, то для тех моментов времени, для которых «с>п+, выбираем оптимальный зайон изменения расхода «*(()=«•*•. Если 2+<2-, то для тех моментов времени, для которых uz(t)<u~, выбираем u*(f)=ur. Обозначим через Q общую длину тех отрезков времени, на которых значение «*(/) найдено, а через Q— множество тех моментов времени, которые не входят в Q. Общая продолжительность интервалов, на которых надо доопределить u(t), равна Т—Q.
3-й шаг. Пересчитаем величину Ъ в формуле (5.167) из условия (5.165), которое с учетом назначенных на Q значений u(t) примет вид:
и+£2 + J р (0 dt — Ь(Т — О) = рТ, если й
и"й 4- у р (/) di — b(T — fi) = ~pT, если Х<2_-й
Найдя b = blt подставим это значение в (5.167). Получим уточненный закон изменения стационарного управления для всех /ей.
4-й шаг. Вновь подсчитаем суммарные площади S+ и S-, но теперь стационарное управление определяем по формулам
«c(t) = p(f) — TZ7q[“+Q + ~рт\, если^>^ ,
Й
«с (0 = Р (0 — [ и-й — J Р (0 # —~РТ ]’ если2+ < 2_-
и
Интегрирование проводим только на множестве й, так что
2+ = J <-“с ® ~~ u^+dt’ 2 = J — “с (0)+#-
о" и
5-й шаг. Сравним S+ и S-. и в зависимости от того, модуль какой из площадей больше, назначим на соответствующих отрезках времени оптимальное управление, равное и+ или и“. Из интервала (О, Т) исключим множество Й1, пересчитаем константу Ь, ис, S+, S- для оставшегося интервала и т. д.
После каждого цикла интервал неопределенности уменьшается на величину йг. Решение получено, если на очередном шаге Uc(0 окажется допустимым по ограничениям на предельный расход, а также если на очередном шаге с заданной степенью точности окажется выполненным равенство между S+ и S-. В этом последнем случае оптимальное управление и* (/) равно ис(/)для тех значений t, при которых ис(/) удовлетворяет ограничениям. Для тех t, при которых ис>и+, и* = и+, и для тех моментов времени, при которых ис<и~, оптимальное управление и* = и~.
Найденный закон изменения и* (/) соответствует наиболее «плавной» функции v(t), причем он один и тот же при любом значении п в функционале (5.164). Чтобы найти соответствующий и* конструктивный объем, подставим и* (/) в 1 уравнение (5.162), проинтегрируем полученную функцию при и = и* и, подобно тому, как это было сделано для постоянного расхода, определим и(0) и VK (см. рис. 5.15).
5.8. УТОЧНЕНИЕ МОДЕЛИ УПРАВЛЯЕМОГО ОБЪЕКТА
ПО ДАННЫМ ТЕКУЩИХ ИЗМЕРЕНИИ
При использовании управляющих устройств в реальном времени требуется в процессе управления уточнять модель объекта, чтобы по уточненной модели и при изменившихся начальных данных рассчитать новый закон оптимального управления. Особенность задачи уточнения модели по данным текущих измерений заключается в том, что в каждом такте вычислений уже
Рис. 5.18, Структура системы адаптивной идентификации объекта
имеется начальное приближение параметров модели. Для уточнения этих параметров желательно использовать результаты измерений, полученных только в текущий момент времени, ае удерживая в памяти ма-
шины результатов всех предшествующих измерений. Такие алгоритмы часто называют адаптивными алгоритмами идентификации.
Общая структура системы адаптивной идентификации приведена на рис. 5.18, где приняты следующие обозначения: x(i) и y(i)—переменные на входе и выходе объекта в момент i; y(i)—выход модели; Ь* и b — векторы параметров объекта и модели соответственно; e(i)=y(i)—y(i)—ошибка идентификации, связанная как с наличием неизмеряемой случайной помехи g(i), действующей на объект, так и с ошибкой аппроксимации истинных характеристик объекта расчетной моделью; F (е)—функция потерь, оценивающая величину ошибки. Это обычно четная функция, поскольку одинаково нежелательно иметь как положительную, так и отрицательную ошибку. Чаще всего Е(е)=е2. В силу того, что выход объекта у зависит не только от х и Ь*, но и от случайной помехи g, ошибка е представляет собой случайную величину. Расчет параметров модели b сводится к решению задачи оптимизации вида
I = M[F (e)J = M{F[у (х, Ь*) — у (х, 5)]} — min (5.168)
ь
при тех или иных ограничениях, наложенных на множество до-пустимых значений вектора коэффициентов Ь.
В уравнении (5.168) М — знак математического ожидания, вычисляемого на множестве значений случайной функции у. Естественным способом минимизации функционала / была бы замена математического ожидания М, его оценкой, подсчитанной по N наблюдениям, и вычисление коэффициентов b из условия минимума суммы
N
Iz=^F[y (0 — у(х (О, &)].
»=1
Однако при таком вычислении b пришлось бы запоминать N значений векторов y(i) и x(i) и ждать N тактов до получения оценки вектора Ь.
В адаптивных алгоритмах стремятся вычислить искомые параметры модели в виде
2>'+*=&'+Д&‘[(/(t-4-l); X(i+1)],
где 6'+* — приближение вектора коэффициентов в (i-H)-M такте; Д&‘ — поправка, зависящая от текущих измерений и от номера такта i.
Рассмотрим два способа формирования поправки А5‘.
Алгоритм стохастической аппроксимации. В этом алгоритме поправку АЬ‘ выбирают в форме
Д b‘=-y(i)^bF(b‘,y(i),x(i)), (5.169)
т. е. поправка пропорциональна градиенту по b функции F, стоящей в уравнении (5.168) под знаком математического ожи- -Дания. Такой способ выбора оправдан, если необходимо выбирать b из условия минимизации функции потерь только в i-том такте. Оказалось однако, что при определенном выборе функции y(i) выбор поправки по формуле (5.169) позволяет при i->oo получить значения Ь‘, сходящиеся к вектору Ь*. При этом сходимость следует понимать в вероятностном смысле, т. е. при i-+oo вероятность ненулевого отличия b от Ь* стремится к нулю. Условия, наложенные на y(i) требованием сходимости процесса, имеют вид:
ОО оо
2?(0 = о°» lim у (i) = 0; у2 (г) = Л4 < оо. (5.170) £=1 £-» оо 1=1
Требованиям (5.170) отвечает, например, закон изменения y(i) вида
y(i)*=ail(at+i)-, ai>0; а2>0. (5.171)
Проанализируем условия (5.170). Первое из них связано с тем, что для любого начального приближения процедур а уточнения должна привести в точку Ь*. Таким образом, сумма по-
правок S А5‘ должна быть сколь угодно велика. /=1
Второе условие необходимо для того, чтобы при t->oo поправка А6‘ стремилась к нулю. Между тем, Vz,F через у (Г) зависит от случайного вектора £(i) и не равен нулю даже при 1->ОО.
Наконец, третье условие сходимости обеспечивает тот факт,
что дисперсия суммарной коррекции, т. е. дисперсия S A6V, V=1
при i-^oo не должна быть бесконечно большой.
При произвольном выборе at и а2 в выражении (5.171) скорость сходимости алгоритмов стохастической аппроксимации часто оказывается очень плохой, поэтому важную роль играют способы оптимизации скорости сходимости.
Одним из таких способов является использование «промежуточных прокруток». Суть его заключается в том, что в памяти машины после i-ro такта запоминают результаты измере-296
ния у и х иа /-том, (i—1)-м, (i—2)-м,..., (i—г)-м тактах. И в период до (i+l)-ro такта эти измерения несколько раз «предъявляют» алгоритму (5.169) как новые. При получении y(i-+1) и x(i+l) самое старое из хранящихся в памяти машины измерений исключают, а последнее добавляют, так что в памяти машины все время хранятся результаты (г+1)-го последнего измерения.
Второй способ ускорения сходимости заключается в замене в (и'+1)-м такте функционала Т выборочным средним, так что вектор bi+l выбирается из условия минимума выражения
1 1+1
7 = t 2 Fly^~y Wv)> &г+1)1 —* min <5-172>
‘ V=1
В общем случае вычисление поправок коэффициентов из условия (5.172) нецелесообразно, так как в правую часть этого выражения входят все измерения от первого до (i+l)-ro иг кроме того, приходится вычислять матрицы вторых производных V2ftF(y(v), x(v), b), что сопряжено со значительными трудностями. Одиако в случае, когда функция F представляет собой квадрат ошибки e(i), а выход модели у линеен по искомым коэффициентам Ь, процедура расчета может быть сделана рекуррентной.
Рекуррентный метод наименьших квадратов. Пусть
п
~У] (х, &) = 2 i = т> (5-173>
z=o
а функция /7(е)=е2. Тогда выражение 1 примет форму
j <4-1 п
7 = V [у (v) — V bi^xt (v) 12---> min . (5.174)
Здесь без ограничения общности принято, что у (у)—скалярная функция, так как в векторном случае задача распадается иа m независимых подзадач относительно векторов bj.
В данном случае искомым является вектор b=(bi,..., bi,..., bn). Условие для выбора bi+i примет вид
д! 2 Ж "
2(y(v)-S^(v>)x*(v>5=0’
что эквивалеитио системе линейных уравнений п ж Ж
26fi+1 (2Xk Xi <v))=2у Xk А=о’я- <5- 17б> f=0 V—1 V=1
Чтобы перейти к рекуррентной процедуре решения системы
(5.175) относительно вектора b*’+I, удобно использовать матрич-
ную форму записи. Введем матрицу «о (!)............................xi (1).........хп (О
xi+i = ' ; '
хо 0 + 1) • • • xi (i 1). . . хп (i 4- 1)
Размерность этой матрицы в такте i+ 1 равна (п+1) X (i+1). Уравнения (5.175) в векторно-матричной форме примут вид:
[Х«+|>тХ'+']й'+1=Х«+')’У'+' (5.176)
Здесь индекс т означает транспонирование соответствующей матрицы; У‘+1=(1/(1), t/(2),..., t/(i+l)) —вектор измерений выхода объекта.
Отметим, что произведение матриц P‘+1=.X'<‘+1)7Y‘+1 представляет собой матрицу размерности (п+1) X (n+1); эта размерность не зависит от числа тактов. Перепишем систему (5.176) в форме
р/+1&г+1 = дх(<+1)ту1+1=,р/+1. (5.177)
Аналогично для г-го измерения
Рг&‘ = ДХ,тУ‘=7Х (5.178)
Чтобы выразить &‘+1 через Ь1 и результаты последнего измерения, нужно выразить матрицу Р<+1 через Р‘;
Р<+1=р.+дха+1)тдЛ<+1=рг+др( (5.179)
Здесь ДХ‘+1 = (xi(i+1),..., xn(i+1))—вектор измерений входа объекта в ((+1)-м такте (последняя строка матрицы Х,'+1). Так как ДР‘+* — произведение столбца на строку, то это также матрица размерности (п+1)Х(п+1), и операция сложения в уравнении (5.179) корректна. Матрица ДРШ зависит только от результатов текущего .измерения. Матрица Р‘ обратима только тогда, когда число тактов i больше, чем размерность п вектора входных переменных х. В этом случае из уравнения (5.177) следует:
^+i=(P«+t)-iD<+'. (5.180)
Получена обычная оценка вектора Ь‘и по методу наименьших квадратов. Чтобы привести ее к рекуррентной форме, перепишем в.виде
£)'+1=П‘+ДПг=О‘+г/(г+1)ДР+1. (5.181)
Подчеркнем, что AD‘ зависит только от последнего измерения. Из соотношения (5.178) видно, что О‘=Р1Ь1. Поэтому
&1+i= (p<+t)-i (Р<&/+дв<).
Прибавим к содержимому квадратной скобки и вычтем из него произведение ДР‘+1 Получим
Ь<+1=(р/+»)-1[Р/г>/4.дХ/+1(у(г+1)_дХ«+1)тг,<)4_др<+1г)1-]=,
= (P+’J-’fP'+^'+AX'+'eO+l)] (5.182)
В этой формуле e(t+1) =y(i+1)—AX<'+1)r&' — разница между выходом объекта, измеренным в (i+l)-M такте, и выходом модели в том же такте, если коэффициенты модели останутся теми же, что и в it-том такте. Перемножая матрицы в (5.182), получим:
йнч=^(р.+1)-1Дх.+1е(4-+1). (5.183)
Таким образом, с учетом рекуррентного вычисления матрицы Pi+1 в соответствии с (5.179) получили формулу для рекуррентного расчета коэффициентов Ь.
Наиболее трудоемкой операцией при этом оказывается обращение матрицы Р‘+1. Чтобы его не проводить, можно воспользоваться рекуррентной формулой для обратных матриц [17]. Она имеет вид
Х[1-|-ДХ>+1(Р‘)_1Д^<г+1)т]-1[(Р,')-1Д^<г+1)]т- (5.184)
и позволяет вычислить элементы обратной матрицы Р~} в (i+l)-M такте, зная эти элементы в t-том такте и результаты текущих измерений вектора входных воздействий х. Для использования формулы (5.184) нужно задать начальное приближение— матрицу (Р0)-1. Обычно в качестве начального приближения принимают (Р°)~1=МЕ, где М — достаточно большое положительное число (Л1>10), а Е— единичная матрица. Но с ростом i влияние Р° мало сказывается на результатах расчета b по формуле (5.183).
Если объект нестационарен, то результаты измерений, предшествующих текущему, с течением времени «обесцениваются». Этот факт можно учесть, введя коэффициент памяти ае(0,1] и вычисляя Р‘+1 и £)‘+1 по формулам
P'+i = а,Р‘ + ДР'+1; Di+1 = ай1 + Д1У+1.
При а=1 получим соотношения, приведенные выше (полная память, все измерения одинаково достоверны). При а = 0 память отсутствует, оценки коэффициентов зависят только от одного последнего измерения.
Пример. Пусть требуется иайтн коэффициенты b0, bi н Ь2, определяющие квадратичную зависимость производительности агрегата у от расхода х потребляемого нм сырья. Нагрузочные характеристики у(х) реальных аппаратов меняются из-за нзмеиеиня качества сырья, состояния поверхностей и т. п. Пусть
У ~ йо 4~
Уточняя коэффициенты bi, нетрудно непосредственно через них выразить оптимальные расходы сырья на каждый из параллельных агрегатов в задаче распределения ресурсов, а значит, уточнить по результатам текущих измерений оптимальное распределение.
Чтобы использовать приведенные выше зависимости, нужно принять в них вектор входных воздействий трехмерным (л—2), х0=1, х,—х, х,=х2, так что ДХ/+1=(1, x(i+l), x2(i+l)),
i i V=1 V=1
Р1 = [Х'ТХ'1 = i i i 2x (v); 2 х2 2 **(v)
1 V=1 V=1 V=1 V=1 i I 2*2(v): 2xS(v): 2**(v) v=l V=1 V=1 i i ; 2 x (v) y (v): 2 (v) y (v))T> V«1 V=1
ДЛ'+,= (У(«-Н); у(Ч-1)*(Ч-1))’,
др’+i _
1; x(i-f-l); х2(М-1) х(«4-1); х«(<+1); хЧ+П
х2 (j + 1); х*(1 + 1); X* (i + 1)
Подстановка этих выражений в соотношения (5.183) и (5.184) позволяет вычислить коэффициенты b0, bt и Ь2 в каждом t-том такте.
Часть 3
ТЕХНИЧЕСКОЕ И ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ СИСТЕМ УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
ГЛАВА 6
ТЕХНИЧЕСКОЕ ОБЕСПЕЧЕНИЕ СИСТЕМ УПРАВЛЕНИЯ*
6.1. УПРАВЛЯЮЩИЙ ВЫЧИСЛИТЕЛЬНЫЙ КОМПЛЕКС
В состав технических средств АСУ ТП входят устройства преобразования и передачи сигналов от технологического объекта, исполнительные устройства для реализации управляющих воздействий, управляющий вычислительный комплекс (УВК)**-
* Глава написана совместно с А. И. Вихтером.
** Подробно технические средства изучаются в соответствующих учебных дисциплинах, поэтому здесь ограничимся кратким рассмотрением принципов построения и особенностей управляющих вычислительных комплексов, используемых в АСУТП [48].
Управляющий вычислительный комплекс (УВК) — это совокупность технических средств, предназначенных для выработки на основе информации о состоянии объекта управляющих воздействий или выдачи рекомендаций по управлению технологическим объектом. В составе управляющих вычислительных комплексов, в соответствии с функциональным назначением, может быть выделено три группы устройств: вычислительный комплекс (ВК), устройства связи с объектом (УСО), устройства связи с оперативным персоналом.
Вычислительный комплекс предназначен для логической и математической обработки информации о технологическом объекте. Он включает одну или несколько вычислительных машин.
Устройства связи с объектом преобразуют поступающие с первичных преобразователей электрические сигналы (потенциальные, импульсные, частотные и т. д.) в цифровые для использования в вычислительных машинах. Устройства связи с объектом выполняют также обратное преобразование сигналов из цифровых в электрические, непосредственно воспринимаемые исполнительными устройствами или соответствующими преобразователями.
Устройства связи с оперативным персоналом позволяют операторам-технологам следить за ходом технологического процесса и управлять им.
Для компоновки современных УВК используют так называемый агрегатный принцип, предусматривающий возможность создания УВК различных конфигураций, в зависимости от требований технологического объекта. При этом устройства и блоки, входящие в набор УВК, обладают системой унифицированных связей, являются конструктивно законченными и содержат необходимые источники питания.
Агрегатный принцип позволяет создавать УВК с требуемыми техническими характеристиками для управления различными технологическими процессами. Он дает возможность вносить измерения в состав УВК в процессе эксплуатации, например при расширении объема задач по обработке информации или управлению процессом. Использование агрегатного принципа позволяет также повысить надежность и живучесть вычислительного комплекса (это достигается введением некоторой избыточной аппаратуры).
Структура вычислительного комплекса. Структура современных вычислительных машин может быть весьма сложной [25, 33]. Однако в любом случае она строится из блоков трех типов: оперативного запоминающего устройства (ОЗУ); процессора; блока управления вводом — выводом (каналы ввода — вывода).
Запоминающие устройства используют для хранения данных, обрабатываемых вычислительной машиной, и программ обработки этих данных. Основными параметрами, характеризующи
ми запоминающие устройства, являются емкость (количество хранимой информации) и время выборки, необходимое для получения и запоминающего устройства или записи в него данных.
Запоминающие устройства делятся на оперативные (внутренние) и внешние.
Оперативные (внутренние) запоминающие устройства (ОЗУ) применяют для хранения данных и программ, обрабатываемых процессором в данный момент времени. Они характеризуются малым временем доступа, не зависящим от местоположения требуемого элемента данных. В современных ЭВМ в качестве ОЗУ наиболее часто применяют накопители на БИС (полупроводниковые запоминающие устройства) и на ферритовых сердечниках.
Оперативное запоминающее устройство современных вычислительных машин обычно строится по агрегатному принципу. Оно комплектуется из блоков определенной емкости, в зависимости от потребностей решаемых задач. Обычно емкость блока ОЗУ составляет от 8К до 64К при максимальной емкости 64К—256К. Время выборки из ОЗУ составляет порядка 1 мкс.
С целью повышения быстродействия вычислительных машин иногда применяют сверхоперативное запоминающее устройство, используемое в качестве буфера для процессора. Время выборки данных, хранимых в таком устройстве, составляет десятки наносекунд, однако ввиду высокой стоимости их емкость обычно невелика и составляет несколько сотен байт.
Для хранения неизменяемых программ и констант часто используют постоянные запоминающие устройства (ПЗУ). Перезапись информации в ПЗУ невозможна. Применяют также запоминающие устройства, запись в которые выполняется с использованием специальных средств, и информация не может быть изменена в процессе их функционирования. Такие запоминающие устройства называют полупостоянными (ППЗУ).
Внешние запоминающие устройства. Наиболее часто в качестве внешних запоминающих устройств применяют накопители на магнитных лентах и магнитных дисках. Чтобы хранимые в них данные могли обрабатываться процессором, необходима передача этих данных в ОЗУ. Время доступа к хранимым во внешних запоминающих устройствах данным значительно больше времени доступа к данным, находящимся в ОЗУ. В то же время внешние запоминающие устройства обладают большой емкостью — от сотен К до сотен М.
Процессором называют устройство, предназначенное для выполнения логических и арифметических действий над данными согласно заданной программе. В тех случаях, когда процессор ориентирован на обработку данных специального вида, его называют спецпроцессором, в противном случае — универсальным.
Рис. 6.1. Организация универсального процессора:
РКА —регистр адреса команды; РК — ре-гистр команды, РР —рабочие регистры процессора, РОН — регистры общего назначения
Организация универсального процессора показана на рис. 6.1. В его составе можно выделить следующие элементы интерпретатор команд, выполняющий действия в соответствии с выбранной из ОЗУ командой; регистр адреса
команды, содержащий текущий адрес исполняемой команды; регистр команды, содержащий исполняемую команду; рабочие (программно-недоступные) регистры, используемые интерпретатором команд в процессе работы; регистры общего назначе-
ния, используемые программой при работе.
Основными характеристиками процессора являются: тип системы команд, быстродействие, длина слова, объем используемой памяти.
Системы команд можно условно разделить на адресные, безадресные, команды управления ходом программы, команды ввода — вывода. В большинстве современных вычислительных машин, применяемых в АСУ ТП, используют одноадресную систему команд, когда в команде может быть задан только
один адрес данных, содержащихся в ОЗУ.
Длина слова, т. е. размер минимального адресуемого эле-
мента данных, для вычислительных машин, применяемых в АСУ ТП, колеблется от 4 до 32 разрядов. Наибольшее распространение получили 16-ти разрядные мини-ЭВМ и 8- и 16-ти разрядные микро-ЭВМ. Обычно размер адресуемой памяти колеблется от 8 до 256К.
В зависимости от реализации интерпретатора команд процессоры делятся на схемные и микропрограммные. В схемных процессорах каждой команде соответствует набор логических схем, выполняющих необходимые действия. Примерами таких ЭВМ являются М-6000 и М-7000.
В случае микропрограммного процессора схемно реализуется только набор элементарных микроопераций (передача из регистра в регистр, прибавление 1 и т. п.). Из таких микрокоманд могут набираться достаточно сложные микропрограммы, содержащиеся в специальном сверхбыстродействующем ПЗУ. Примерами ЭВМ с микропрограммной реализацией процессора являются СМ-2 и СМ-4.
Основной функцией каналов ввода — вывода является организация работы с внешними устройствами вычислительной машины помимо главного процессора. Эти устройства представля-
Рис. 6.2. Организация ЭВМ с радиальной структурой:
ОЗУ — оперативное запоминающее устройство; ПР — процессор; КВВ — канал ввода — вывода; УИ — управление интерфейсом; КВУ — контроллер внешнего устройства; ВУ — внешнее устройство
ют собой спецпроцессоры с системой команд, ориентированной только на выполнение операций ввода и вывода данных. При этом
главный процессор только инициирует последовательность операций ввода — вывода, а последующая работа по передаче данных выполняется без его участия^
Каналы ввода — вывода могут обслуживать несколько внешних устройств, подключенных к вычислительной машине. В зависимости от быстродействия этих устройств, канал ввода — вывода может обслуживать либо одновременно несколько низкоскоростных устройств (мультиплексный режим), либо одно высокоскоростное устройство (селекторный режим).
В современных вычислительных машинах, применяемых в УВК, используют два типа структур: радиальную и магистральную.
Вычислительная машина с радиальной структурой показана на рис. 6.2. Особенностью радиальной структуры является то, что блоки ОЗУ непосредственно связаны только с устройствами процессорного типа (процессор и канал ввода — вывода), к которым через устройства управления вводом — выводом подключаются внешние устройства. При радиальной структуре обычно для управления вводом — выводом имеется специальное устройство — интерфейс. При наличии связи «каждый с каждым», как показано на рис. 6.2, отказ любого из блоков и устройств (за исключением процессора) не приводит к отказу вычислительной машины. В реальных УВК для повышения надежности процессор и канал ввода — вывода часто дублируются, так что отказ любого из устройств не приводит к отказу вычислительной машины. Однако для многопроцессорных вычислительных машин такое дублирование делает их структуру очень сложной и требует большого числа кабелей. Примерами вычислитель
ных машин с радиальной структурой могут •служить СМ-1 и СМ-2М.
Вычислительная машина с магистральной
Рис. 6.3. Организация ЭВМг'с магистральной структурой МГ — магистраль
структурой показана на рис. 6.3. При такой организации все устройства (ОЗУ, процессор ег блок управления вводом — выводом)-подключаются к общей магистрали, представляющей собой унифицированный набор линий для передачи данных и управляющих сигналов. Каждое из подключенных к магистрали устройств однозначно определяется своим адресом. При этом устройства могут обмениваться информацией как через процессор, так и непосредственно.
Магистральная структура вычислительных машин выглядит более простой. Отметим, что на рис. 6.3 отсутствует отдельное устройство канала ввода — вывода. Поскольку каждое из внешних устройств имеет контроллер, подключенный непосредственно к магистрали, к которой подключается также и ОЗУ, контроллеры внешних устройств обычно берут на себя часть функций канала по непосредственной передаче дайных в память. Примерами вычислительных машин с магистральной структурой являются СМ-3, СМ-4, СМ-1800 и СМ-1634.
Внешние устройства подключаются к ЭВМ через специальный блок — интерфейс, устанавливающий связь с этими устройствами. Для согласования технических и логических характеристик внешнего устройства с интерфейсом применяют контроллеры, которые могут входить в состав внешних устройств (рис. 6.2 и 6.3).
В современных вычислительных^машинах используют интерфейсы различных типов. В машинах СМ-1 и СМ-2 применяют интерфейс типа 2К; в СМ-3 и СМ-4 — типа ОШ (общая шина); в СМ-1634 — типа ЙУС;, в СМ-1800 — типа И-41. Для подключения внешних устройств, ориентированных на интерфейс одного типа, к интерфейсу другого типа применяют специальные устройства согласования.
Микропроцессоры и микро-ЭВМ. Широкое применение ,в современных управляющих вычислительных комплексах находят микропроцессоры и микро-ЭВМ [11, 41, 61]. Микропроцессором называют функционально законченное устройство для программной обработки информации, реализованное на одной или нескольких БИС. В нем содержатся БИС обработки информации и местной памяти, а также элементы интерфейса.
Микро-ЭВМ — это вычислительная машина на основе микропроцессора, к которому добавлены БИС памяти и управления вводом — выводом.
Основой для создания микропроцессоров и микро-ЭВМ служат микропроцессорные наборы. С помощью микропроцессорных наборов строят как универсальные микро-ЭВМ, так и спецпроцессоры, входящие в состав УВД. Примерами универсальных микро-ЭВМ, реализованных на основе микропроцессорных наборов, являются СМ-1634, СМ-1800 и Электроника-60.
Если микро-ЭВМ имеют систему команд, совместимую с системой команд широко распространенных мини-ЭВМ, это позволяет значительно упростить разработку про
граммного обеспечения микро-ЭВМ. Так, микро-ЭВМ типа СМ-1634 имеет систему команд, совместимую с вычислительной машиной СМ-2, а Электроника-60 — с вычислительными машинами СМ-3 и СМ-4.
Спецпроцессоры на базе микропроцессорных наборов используют для создания различного рода «интеллигентных» внешних устройств, способных самостоятельно выполнять ряд функций по обработке информации. Важной особенностью таких спецпроцессоров является то, что на них может реализоваться система команд, наиболее удобная для обработки данных конкретного внешнего устройства. Так, спецпроцессор, используемый в «интеллигентном» устройстве связи с объектом, может иметь систему команд, ориентированную на работу с модулями ввода — вывода аналоговых и дискретных сигналов, а также на первичную обработку информации и реализацию законов регулирования. Это позволяет выполнять такие устройства особенно эффективными именно для данного применения.
6.2. УСТРОЙСТВА СВЯЗИ С ОБЪЕКТОМ
Ввод данных о состоянии технологического процесса в вычислительную машину и выдача на объект управляющих воздействий выполняется устройствами (модулями) связи с объектом (УСО). По отношению к вычислительной машине эти модули являются внешними устройствами и подключаются к соответствующему интерфейсу. Большое разнообразие вводимых и выводимых сигналов, различные требования к УСО со стороны технологических объектов приводят к необходимости создания
наборов модулей, удовлетворяющих
Модули. УСО
принципу агрегатности.
По характеру вводи» мых и выводимых сигналов модули УСО делятся на модули аналогового и дискретного ввода— вывода. По способу управления УСО делятся на пассивные и активные.
Модули пассивного УСО непосредственно подключают к вычислительной машине (рис. 6.4,а). При этом значи-
Рис. 6.4. Подключение УСО к ЭВМ:
а — пассивное УСО; б — активное УСО, ВЗУ — внешнее запоминающее устройство
Рис. 6.5. Схема ввода аналоговых сигналов
МН — модуль иормалнзацнн,
АЦП — аналого-цифровой преобразователь
тельное время процессора этой машины тратится на организацию сбора и первичной обработки информации с технологического объекта, а
также на выработку и выдачу управляющих воздействий.
Активное УСО включает микро-ЭВМ, выполненную на универсальном или на специализированном процессоре (рис.6.4,б), осуществляет опрос датчиков, первичную обработку информации, выработку и выдачу управляющих воздействий автономно от центральной вычислительной машины.
В состав активного УСО часто вводят внешние запоминающие устройства, используемые для автономной загрузки программного обеспечения и для накопления данных о ходе технологического процесса. Для повышения надежности функционирования микро-ЭВМ, входящих в активное УСО, их программное обеспечение часто заносится в ПЗУ и ППЗУ.
Активное УСО может выноситься к месту сбора данных непосредственно на технологическом объекте. При этом микро-ЭВМ выполняет «сжатие» поступающей с объекта информации, в результате чего снижается загрузка центральной вычислительной машины и сокращается потребность в кабеле.
Приведем краткую характеристику модулей УСО.
Модуль ввода — вывода аналоговой информации. К аналоговым сигналам обычно относятся:
сигналы постоянного тока в диапазонах 0—5; 0—20; 4—20 мА;
сигналы напряжения постоянного тока в диапазонах: от О—5 мВ до 0—100 мВ (низкого уровня); от 0—1,8ч до 0—10 В (среднего уровня); от 0—10 В до 0—100 В (высокого уровня);
сигналы сопротивления в диапазонах 0—300 Ом (от термометров сопротивления) и 0—150; 0—300; 0—500 Ом (от расходных датчиков);
сигналы взаимной индукции 0—10 мГн на частоте 50 Гц;
частотные сигналы в виде переменного напряжения с амплитудой 16,2±0,2 В и частотой 4—8 кГц.
Обобщенная схема прохождения входных аналоговых сигналов в УСО показана на рис. 6.5. Исходный сигнал от датчика, преобразующего неэлектрические величины в электрические, поступает на модуль нормализации, где сигнал приводится к заданному уровню. Модули нормализации могут также выполнять операции фильтрации, умножения на коэффициент, смещения уровня, преобразования тока в напряжение. С модуля норма
лизации сигнал поступает на коммутатор, с помощью которого осуществляется подключение сигнала на вход аналого-цифрового преобразователя (АЦП), преобразующего входной аналоговый сигнал в цифровую форму, используемую в вычислительной машине. АЦП обычно работают в диапазоне от 0 до 5—10 В. Разновидностью АЦП являются модули аналого-цифрового сравнения, выполняющие с высокой скоростью сравнение подаваемого на вход сигнала с заданной уставкой.
Модуль ввода — вывода дискретной информации. Дискретные сигналы используют для отображения событий, двоичных по своей природе или приводимых к двоичной форме, например для сигнализации о положении клапана (открыто — закрыто) или состоянии оборудования (включено — выключено). ^Возможными дискретными сигналами являются кодовые (двух-и трехпозиционные) и число-импульсные сигналы.
Входные дискретные сигналы делятся на одиночные и повторяющиеся. Для ввода одиночных дискретных сигналов используют модули, содержащие регистр. Ввод повторяющихся дискретных сигналов выполняют модули, содержащие счетчики.
Уровни входных дискретных сигналов могут быть весьма различными.
Выходные дискретные сигналы формируются на выходе логической схемы или в результате замыкания (размыкания) контактов реле или электронного ключа. Они могут использоваться для прямого цифрового управления исполнительными устройствами или же дЛя передачи уставок регуляторам. Дискретные выходные сигналы по времени воздействия делятся на статические и динамические. В зависимости от мощности дискретные выходные сигналы делятся на маломощные (меньше 10ВА), средней мощности ~(10—50 В А) и большой мощности (50—100 ВА).
6.3. УСТРОЙСТВА СВЯЗИ С ОПЕРАТИВНЫМ ПЕРСОНАЛОМ
В процессе работы вычислительной машины в составе управ-' ляющего вычислительного комплекса с ней взаимодействуют программисты, операторы ЭВМ, оперативный технологический персонал производственной установки. Программисты и операторы ЭВМ обладают специальной подготовкой в области вычислительной техники. Для их общения с вычислительной машиной достаточно стандартных устройств, входящих в ее комплект. Технологический персонал такой подготовки не имеет, поэтому средства связи с машиной должны быть простыми и не требующими от технологического персонала сложных специальных навыков. Кроме того, для лучшего управления процессом должна быть обеспечена высокая оперативность представления информации и ее наглядность.
Для представления информации технологическому персона-
лу используются три типа устройств: индикации, регистрации, ввода команд. '
Устройства индикации выполняют функцию отображения текущего состояния технологического процесса. На них выдается вся информация, необходимая оперативному персоналу для принятия решений в данный момент. При этом особые требования предъявляются к информативности, скорости представления информации и ее наглядности.
В качестве устройств индикации в современных УВК используют в основном дисплеи различных типов. Наиболее широкое распространение получили дисплеи с электронно-лучевой трубкой. Наряду с ними все более широкое применение находят электролюминесцентные и наборные, газоразрядные панели индикации, дисплеи на жидких кристаллах. В стадии разработки находятся устройства индикации с использованием голографического эффекта.
Основными достоинствами дисплеев являются нх высокое быстродействие, относительная простота связи с ЭВМ и хорошая информативность. К недостаткам дисплеев следует отнести, в рервую очередь, ограниченные размеры экрана, не позволяющие отображать одновременно большое количество детальной информации Формирование изображенйя на дисплее требует значительных затрат машинного времени, причем эти затраты тем больше, чем более совершенное изображение позволяет получать устройство. Поэтому'непосредственное участие центральной ЭВМ в формировании изображения используется только для черно-белых алфавитно-цифровых дисплеев. Для остальных типов дисплеев в составе устройства необходимо иметь микро-ЭВМ илн специальный процессор, выполняющий формирование изображения при минимальном участии центральной ЭВМ.
Устройства регистрации. Регистрация данных в ходе технологического процесса, используемых в дальнейшем для анализа его функционирования, может выполняться на графических регистраторах, печатающих устройствах и внешних запоминающих устройствах.
Применение графических регистраторов для контроля технологических процессов имеет давние традиции. В раииих системах графические регистраторы механического и электромеханического типа монтировали непосредственно около датчиков на технологическом объекте Позже графические регистраторы с электронным управлением были сконцентрированы в помещении пульта управления.
Одновременно значительно усовершенствовались сами графические регистраторы. На смену перьевым однокаиальиым устройствам с низким быстродействием пришли многоканальные графические регистраторы с записью данных различными цветами Вместо медленной механической записи с помощью пера в современных графических регистраторах используют запись струей красящего вещества или электростатическую запись. В графические регистраторы включают электронные блоки, позволяющие вводить записываемые данные как в аналоговой, так и в цифровой форме и дающие возможность связи этих регистраторов с вычислительной машиной Подключение -графических регистраторов к вычислительной машине позволяет резко сократить их число.
Важным параметром печатающих устройств является скорость печати. В зависимости от метода печати устройства делятся на построчно-печатающие и посимвольно-печатающие. Построчно-печатающие устройства обладают большей скоро
стью, достигающей сотен строк в минуту. Посимвольно-печа-тающие устройства работают медленнее, скорость печати в них измеряется числом символов в минуту, но они обычно значительно дешевле построчно-печатающих.
С начала 70-х годов широкое применение для регистрации данных в АСУ ТП получают внешние запоминающие устройства на кассетной магнитной ленте и гибких дисках. Они позволяют запоминать большие объемы информации в достаточно компактном виде, имеют высокое быстродействие, могут быть использованы для последующего анализа с применением вычислительных машин. Носители информации внешних запоминающих устройств (мини-кассеты и гибкие диски) используются многократно.
Устройства ввода команд позволяют оперативному персоналу управлять индикацией и регистрацией данных и осуществлять управление технологическим объектом. Основное требование к устройствам ввода команд — простота работы с ними. Для ввода команд используют разного рода клавиатуры, световое перо, устройства, повволяющие указывать требуемую информацию на экране.
Применяемая в управляющих вычислительных комплексах клавиатура может быть алфавитно-цифровой, технологической и комбинированной, содержащей как алфавитно-цифровые, так и технологические клавиши.
Алфавитно-цифровые клавиатуры содержат заглавные буквы русского и латинского алфавита, цифры, знаки препинания и служебные символы. Для контроля набора алфавитно-цифровые клавиатуры обычно сопрягаются с дисплеями.
В технологических клавиатурах каждой клавише обычно соответствует некоторая функция, а не какой-либо символ. Например, вызову индикации определенной группы параметров на экран дисплея может соответствовать одна клавиша технологической клавиатуры. Технологические клавиатуры очень удобны для ввода команд, так как требуют для выполнения целой функции нажатия либо одной клавиши, либо небольшого их числа.
Использование светового пера и устройств указания на экране одинаково. На экран дисплея выводится информация о допустимых командах, и технологический персонал для- выполнения определенных действий должен указать требуемую команду на экране световым пером или указателем. Эти устройства очень просты в использовании и удобны для оперативного персонала.
6.4. АРХИТЕКТУРА УПРАВЛЯЮЩИХ ВЫЧИСЛИТЕЛЬНЫХ КОМПЛЕКСОВ
Централизованные управляющие вычислительные комплексы. В централизованных УВК одна или более вычислительных машин расположены в центральном пункте управления. Вариан-
° Г^л s FQ pgp | Jq"| |отп| | iq | jlm|
6 1звм | I36M J
L ^-'1 I BK-d ,
xfrt jJr^l I УСО I I f/CO/71 | ЧСО | Hon|
Рис. 6.6. Архитектура централизованных управляющих вычислительных комплексов:
а — одномашинный УВК; б —двухмашинный УВК; в — двухмашинный УВК повышенной надежности; УСО — устройство связи с объектом; ВК-L ВК-2 — вычислительные комплексы 1 и 2; УСОП — устройство связи с оперативным персоналом
ты архитектуры централизованных УВК показаны на рис. 6.6.
Наиболее простая структура (рис. 6.6, а) включает одну вычислительную машину. Непосредственно к ней подключаются модули УСО и устройства связи с оперативным персоналом. Отказ вычислительной машины приводит к отказу всей системы. Значительное время вычислительной машины тратится на ввод и первичную обработку информации с технологического объекта, реализацию алгоритмов управления, подготовку и выдачу данных оперативному персоналу. Такая структура может быть рекомендована для небольших технологических объектов, обладающих развитой локальной аппаратурой контроля и управления. Обычно ее применяют для реализации только информационных функций и в режиме советчика оперативному персоналу.
Структура, показанная на рис. 6.6, б, содержит две вычислительные машины, каждая из которых связана со всеми модулями УСО и устройствами связи с оперативным персоналом. В нормальном режиме, когда работают обе вычислительные машины, они делят между собой функции по обработке информации. По-прежнему сохраняется загрузка вычислительных машин управлением УСО и связью с оперативным персоналом. При отказе одной из вычислительных машин работоспособность системы сохраняется, но отказы отдельных модулей УСО и устройств связи с оперативным персоналом приводят к потере получаемой с них информации. Данная структура может быть рекомендована для работы в информационном режиме либо в режиме советчика для АСУ ТП, в которых отказ УВК может привести к необходимости останова технологического процесса. Для повышения надежности УВК особо важные модули УСО и устройства связи с оперативным персоналом дублируются (рис. 6.6, в). В случае отказа вычислительной машины работоспособность системы сохраняется, хотя возможно сокращение числа выполняемых ею функций. Отказ любого из модулей УСО или устройств связи с оперативным персоналом вызывает переход на резерв.
Применение централизованных УВК для управления технологическим процессом обычно ограничивается супервизорным управлением, заключающимся в задании уставок автоном-
ным локальным регуляторам. Использование их для непосредственного цифрового управления затруднено чрезмерной загрузкой вычислительных машин работой с датчиками и исполнительными механизмами, а также подготовкой данных для отображения оперативному персоналу.
Децентрализованные управляющие вычислительные комплексы. Децентрализованные УВК формируются из функциональных элементов, каждый из которых представляет собой централизованный УВК, называемый пунктом управления [57].
Выделяются локальные и центральный пункты управления Задачей локальных пунктов управления является управление отдельным функциональным узлом или агрегатом технологического объекта. В состав локального пункта управления обычно включают одну или несколько микро-ЭВМ, необходимые модули УСО и связи с технологическим персоналом.
Центральный пункт управления обычно оснащен одной или несколькими вычислительными машинами, а также развитыми средствами связи с оперативным персоналом. Центральный пункт управления предназначен для координации работы локальных пунктов управления, решения задач оптимизации и планирования, анализа и прогнозирования состояния объекта.
Варианты структур децентрализованных УВК приведены на рис. 6.7.
На рис. 6.7, а показан децентрализованный УВК с магистральной структурой, при которой пункты управления связаны друг с другом посредством общего канала передачи данных. Связь между пунктами управления реализуется с использованием конкретных адресов каждого из пунктов или каждой из вычислительных машин на пунктах. Магистраль в управляющих вычислительных комплексах с такой структурой реализуется с помощью одной или нескольких скрученных пар проводов коаксиального или волоконно-оптического кабеля.
Управление магистралью может быть централизованным, сконцентрированным в специальном устройстве управления магистралью, или децентрализованным, осуществляемым вычислительными машинами пунктов управления. Последний подход предпочтительнее, так как отказ одного устройства (в данном случае управления магистралью) не приведет к отказу системы в целом.
Децентрализованные УВК, построенные по схеме с магистралью, обладают весьма высокой надежностью, однако не рекомендуется их применение для сильно разбросанных технологических объектов, расстояние между которыми может превышать 2—3 км
Децентрализованный управляющий вычислительный комплекс с петлевой структурой показан на рис. 6.7, б. В нем имеется высокоскоростной канал связи, замкнутый в виде петли. Пункты управления подсоединяются к каналу связи посредством спе-312
I ЛПУ I
I цпу I
| лпу | |лпу |
Рис. 6.7. Архитектура децентрализованных управляющих вычислительных комплексов:
а —с магистральной структурой, б —с петлевой структурой, в —со структурой типа «звезда», ЦПУ — центральный пункт управления, ЛПУ — локальный пункт управления, УМ—управление магистралью, УП — управление петлей
циальных устройств. Сообщение, посланное одним из пунктов управления, снабжается адресом пункта-приемника и либо доходит до него, либо возвращается в пункт-передатчик.
Достоинствами петлевых УВК являются: отсутствие проблемы маршрутизации, поскольку имеется единственный путь передачи данных; легкость и быстрота установления связи между пунктами; использование цифровой передачи данных; высокая производительность.
Петлевые УВК обладают одним существенным недостатком: отказ устройства управления петлей в любом из пунктов управления может привести к отказу УВК, хотя отдельные пункты управления могут продолжать функционировать автономно. Однако применение специальных мер при конструировании устройств управления петлей позволяет-свести этот недостаток к минимуму.
Децентрализованные управляющие вычислительные комплексы со структурой типа «звезда» показаны на рис. 6.7, в. В этом случае локальные пункты управления связаны только с центральным пунктом. Между локальными пунктами нет непосредственной связи. Данная сравнительно простая структура, довольно часто встречающаяся на практике, обладает рядом существенных недостатков. Так, отказ центрального пункта управления приводит к тому, что локальные пункты становятся автономными и связь между ними теряется. Аппаратура центрального пункта управления выполняет значительную работу по обеспечению связи с локальными пунктами, в результате чего повышается загрузка вычислительных машин
центрального пункта управления. Усложняется задача маршрутизации сообщений для связи локальных пунктов управления друг с другом.
6.5. СИСТЕМЫ НЕПОСРЕДСТВЕННОГО ЦИФРОВОГО УПРАВЛЕНИЯ
Цифровое регулирование параметров технологического процесса, построенное с использованием средств вычислительной техники, позволяет качественно по-новому решать задачи управления производством [1, 16]. Основным преимуществом применения цифровых регуляторов по сравнению с традиционными аналоговыми регуляторами является возможность использования более сложных и эффективных методов управления технологическим процессом и построения иерархических систем управления с применением ЭВМ. Применение цифровых регуляторов позволяет реализовать алгоритмы практически любой сложности. К достоинствам регуляторов относятся также стабильность характеристик, высокая точность и разрешающая способность. Они могут успешно использоваться при управлении очень инерционными технологическими процессами со значительными постоянными времени и чистым запаздыванием, когда необходимо обеспечить большую постоянную интегрирования в регуляторе и осуществить операцию дифференцирования медленно изменяющихся величин.
Можно выделить три различных режима работы УВК при управлении технологическим процессом: режим советчика, су-первизорный режим и режим непосредственного цифрового управления (НЦУ).
Режим советчика используют на первом этапе внедрения УВК, когда алгоритм управления еще недостаточно отработан. Вычислительный комплекс работает при этом в разомкнутом цикле. Управление процессом реализуется через технолога-оператора, получающего «советы-указания» от УВК. При этом система работает следующим образом: через заданные интервалы времени осуществляется сбор информации с объекта управления и передача ее в УВК, где по модели проводится расчет оптимальных в определенном смысле значений для регуляторов или управляющих воздействий. Эти значения в виде рекомендаций выдаются оператору (например, на экране дисплея), который принимает окончательное решение по управлению процессом и осуществляет непосредственное изменение соответствующих уставок регуляторам на объекте. Очевидно, ограничивающим фактором в такой системе является именно участие человека, так как вследствие этого число управлений и частота их передачи к объекту не могут быть большими, и число контуров управления обычно не превышает 5—20. В то же время участие человека позволяет исключить ошибочные управления и возникновение связанных с этим аварийных ситуаций.
При супервизорном режиме управления сохраняются локальные регуляторы, а задания им изменяются непосредственно
от вычислительного комплекса с целью настройки на оптимальный технологический режим. Такая структура систем регулирования позволяет обеспечить их высокую надежность и живучесть: система остается работоспособной и при отказах вычислительного комплекса, хотя ее эффективность в этом случае снижается. Практическая реализация систем супервизорного управления требует довольно значительного аппаратурного парка: в системе сохраняются локальные аналоговые регуляторы, добавляются связи их с УВК и соответствующая аппаратура для обеспечения этой связи.
В системах непосредственного цифрового управления локальные аналоговые регуляторы отсутствуют, и сигнал от УВК поступает через соответствующие преобразователи непосредственно к исполнительным устройствам. В этом случае нет аппаратурной избыточности в системе, однако требования к надежности функционирования вычислительных средств существенно возрастают, так как их отказ будет приводить к остановке технологического процесса. Основным достоинством систем НЦУ, как отмечалось, является возможность изменения алгоритмов управления контурами путем соответствующей переделки программного обеспечения, т. е. системы достаточно гибки и могут развиваться и совершенствоваться без изменений аппаратуры, что невозможно при использовании традиционных средств регулирования. Таким образом, системы НЦУ позволяют заменить на действующем объекте часть монтажных работ программированием.
Для обеспечения работы систем НЦУ они должны выполнять надежный контроль за состоянием процесса, управление и автоматическую защиту при аварийных ситуациях. Кроме того, для оператора в системах НЦУ должна обеспечиваться возможность изменения уставок задания, контроля некоторых переменных процесса, варьирования диапазонов допустимого изменения переменных и т. д.
Для реализации этих функций должно иметься соответствующее аппаратурное (пульт технолога-оператора) и программное обеспечение. Это привело к созданию специальных программно-аппаратурных комплексов, предназначенных для контроля и управления технологическими процессами. Основные особенности таких комплексов перечислены ниже:
наличие территориально-распределенной сети микропроцессоров, реализующих контроль и управление в режиме НЦУ;
наличие специализированного пульта технолога-оператора, оснащенного видеотерминальными устройствами с клавиатурой для представления информации о ходе технологического процесса, контроля и управления;
наличие специализированного языка, ориентированного на эксплуатационный персонал технологической ^установки, позволяющего практически без участия программиста создать систему НЦУ для конкретного технологического объекта из набо
ра заданных алгоритмов управления, реализованных в виде программных блоков;
наличие средств вычислительной техники, предназначенных для реализации связи с вышестоящей системой управления.
Рассмотрим возможные структуры построения цифровых автоматических систем (ЦАС) [1].
Централизованные ЦАС на базе мини-ЭВМ. В централизованных ЦАС все функции цифрового управления возложены на одну .управляющую мини-ЭВМ, имеющую разнообразные периферийные устройства для связи с объектом управления и оператором. Входящие в нх число входные (ВВ) и выходные (ВД) преобразователи позволяют вводить в ЭВМ аналоговую и дискретную информацию, а также выдавать необходимые для непосредственного цифрового и супервизорного управления регулирующие и управляющие воздействия аналоговым исполнительным устройствам и регуляторам.
Сопряжение средств вычислительной техники с аналоговыми регуляторами и исполнительными устройствами осуществляется обычно через специальные устройства, называемые станциями управления, основным назначением которых является обеспечение перехода на ручное управление технологическим процессом при отказах элементов ЦАС. Для ЭВМ при этом нет различия между супервизорным и непосредственным цифровым управлением, так как по отношению к ней соответствую-- щие станции управления выполняют одни и те же функции. Поэтому в обоих случаях можно использовать одинаковое программное обеспечение и осуществлять обмен одной и той же информацией между периферийными устройствами ЭВМ и станциями управления. Это дает возможность реализовать на одной ЭВМ одновременно и супервизорное, и непосредственное цифровое управление, как показано на рис. 6.8.
Применение НЦУ в таких централизованных системах управления позволяет реализовать многие преимущества цифровых систем регулирования, и в первую очередь — возможность построения сложных алгоритмов управления и использования для этой цели моделей объекта. Однако в случае малоинерционных объектов, требующих малой дискретности в опросе датчиков параметров и выдаче управляющих сигналов, это сопряжено с очень большой загрузкой ЭВМ, что может вызвать заметное снижение качества регулирования. Кроме того, в силу относительно высокой стоимости мини-ЭВМ, для повышения эффективности их использования в таких системах на них обычно возлагают, кроме НЦУ, ряд других функций контроля и управления процессом. Это приводит к существенному усложнению программного, обеспечения, требует применения многозадачных операционных систем реального времени, занимающих значительные объемы памяти и машинного времени. Полная централизация при использовании мини-ЭВМ является также причиной низкой живучести подобных систем, так как отказ
Рис. 6 8. Построение цифровой автоматической системы (ЦАС) с помощью мини-ЭВМ:
а — супервизориое управление, б — режим НЦУ; ВВ — входные преобразователи; ВД — выходные преобразователи, СтУ — станции управления, Р — регулятор, УВК — управляющий вычислительный комплекс, ОУ — объект управления
даже одного из элементов системы может приводить к потере работоспособности всей системы управления.
В централизованных системах НЦУ для повышения их надежности при регулировании наиболее ответственных технологических параметров приходится предусматривать резервные аналоговые регуляторы, устанавливаемые параллельно с контуром НЦУ.
По указанным причинам в системах с мини-ЭВМ непосредственное цифровое управление используют сравнительно мало, большее распространение получили супервизориое управление и работа ЭВМ в режиме советчика.
Микропроцессорные ЦАС. Качественный скачок в развитии структуры ЦАС произошел при появлении микропроцессорных средств управления, позволяющих создавать дешевые малогабаритные устройства с высокой вычислительной способностью. Микро-ЭВМ с присущей им магистральной структурой связей стали основой децентрализованных ЦАС. Появилась возможность создания множества разнообразных структур ЦАС — от полностью централизованных до полностью децентрализованных, подобных традиционным, строящимся на аналоговых регуляторах.
Преимущества микропроцессорных ЦАС по сравнению с централизованными на базе мини-ЭВМ обусловлены функциональной и пространственной децентрализацией. Функциональная децентрализация в результате распределения задач ЦАС по отдельным микро-ЭВМ позволяет обеспечить практически любую требуемую надежность путем резервирования отдельных элементов ЦАС. Пространственная децентрализация за счет максимального приближения регулирующих и управляющих
Рис. 6.9. Микропроцессорная цифровая автоматическая система’
МП — микропроцессор, ОЗУ — оперативное запоминающее устройство, ПЗУ — постоянное запоминающее устройство;
ППЗУ — перепрограммируемое ПЗУ, СМ — устройство сопряжения с внешними магистралями, ПО — пульт оператора; КПО — контроллер ПО, ВВ — входные преобразователи, ВД — выходные преобразователи
устройств к технологическому процессу приводит к резкому сокращению затрат на кабельные линии связи.
На рис. 6.9 показана структурная схема простейшей микропроцессорной ЦАС. Основу микропроцессорного регулятора составляет микро-ЭВМ, снабженная устройствами, необходимыми для выполнения функций регулирования. Все модули регулятора (кроме пульта оператора) конструктивно оформлены в виде печатных плат, связанных между собой магистралью микро-ЭВМ. Такая структура регулятора обеспечивает гибкость системы благодаря возможности изменения числа и состава подключаемых к магистрали модулей. Например, можно изменить вид и объем памяти, входные и выходные преобразователи, тип пульта оператора с учетом удаленности его от места установки регулятора и т. д. При этом сами преобразователи и пульты оператора могут содержать микропроцессоры.
Микропроцессор (МП) выполняет те же функции, что и процессор вычислительной машины, в соответствии с программами и данными, записанными в памяти микро-ЭВМ. Программы и данные распределяются в памяти микро-ЭВМ таким образом, чтобы обеспечить сохранение постоянной информации при отказе питания микро-ЭВМ; включение регулятора в работу путем подачи питания; возможность оперативного изменения структуры и параметров настройки системы регулирования
Постоянное запоминающее устройство (ПЗУ) регулятора содержит программы и данные, которые не меняются в процессе работы регулятора и остаются постоянными в течение длительного времени его эксплуатации.
Перепрограммируемое постоянное запоминающее устройство (ППЗУ) используют для хранения данных, определяющих структурную схему и постоянные параметры настройки системы регулирования. Эти данные показывают, какие программы ПЗУ, в какой последовательности и с какой частотой следует выполнять в микро-ЭВМ для реализации требуемой структурной схемы и требуемого качества регулирования Система регулирования должна быть такой, чтобы оператор мог изменять параметры настройки. С этой целью при начальном пуске регулятора эти параметры ППЗУ переписываются в оперативное запоминающее устройство ОЗУ. Содержимое ППЗУ особенно часто может меняться в период ввода системы регулиро
вания в промышленную эксплуатацию, когда еще не точно определены структура и параметры настройки системы регулирования. Изменение этих данных сводится к простой замене платы ППЗУ. Информация в ПЗУ и ППЗУ сохраняется при отключении питания микро-ЭВМ.
Для хранения информации, меняющейся в процессе работы регулятора, используют оперативное запоминающее устройство ОЗУ. К'такой информации относятся, например, режим работы системы регулирования (ручной, автоматический) и изменяемые в процессе эксплуатации параметры настройки. Информация в ОЗУ не сохраняется при отключении питания, поэтому для полного восстановления работоспособности системы регулирования в этом случае необходимо после включения питания записать в ОЗУ изменения, не учтенные или не предусмотренные при автоматическом восстановлении его содержания (например, перевести контуры регулирования в автоматический режим работы).
Ввод и выдача сигналов (как аналоговых, так и дискретных), необходимых для связи регулятора с датчиками и исполнительными устройствами, осуществляется, как и при использовании мини-ЭВМ, с помощью специальных преобразователей. Число контуров, обслуживаемых регулятором, зависит от вычислительной мощности микро-ЭВМ, сложности схем регулирования, интервала дискретности и т. д. Современные микропроцессорные регуляторы обычно обслуживают от 16 до 100 контуров. Сопряжение преобразователей с аналоговыми исполнительными устройствами и регуляторами при непосредственном цифровом и супервизорном управлении такое же, как и для мини-ЭВМ. В промышленности для обеспечения необходимой точности регулирования используют микропроцессоры с не менее чем 12-ти разрядной разрешающей способностью.
Пульт оператора, подключаемый к регулятору через контроллер, должен обеспечивать обмен данными между оператором и регулятором в таком объеме, чтобы можно было использовать регулятор и как автономное устройство. Сопряжение микропроцессорных регуляторов с внешними магистралями осу-специальных устройств, подключаемых
ществляется с помощью непосредственно к внутренней магистрали микро-ЭВМ регулятора.
Полностью децентрализованная ЦАС. Возможность связи меж-
Рис 6 10 Децентрализованная ЦАС с кольцевой структурой
ПО — пульт оператора, Р — ре-
Уробни управления
ду микро-ЭВМ позволяет строить на их основе полностью децентрализованные ЦАС. В качестве системной магистрали при больших расстояниях между регуляторами можно использовать, например, коаксиальный кабель. При этом системная магистраль может иметь линейную или, как показано на рис. 6.10, кольцевую структуру и в случае необходимости может резервироваться. Для централизованного управления технологическим процессом к системной магистрали подключают центральный пульт оператора (один или несколько, в зависимости от требуемой надежности и объема системы), который может представлять собой дисплей со встроенной микро-ЭВМ. К магистрали можно подключать также управляющую мини- или микро-ЭВМ, осуществляющую координацию работы регуляторов, супервизориое или непосредственное цифровое управление путем выдачи заданий цифровым регуляторам или непосредственным воздействием на исполнительные устройства.
По сравнению с полностью централизованной структурой на одной мини- или микро-ЭВМ такая структура ЦАС позволяет значительно повысит^ надежность и резко сократить затраты на провода и кабели, связывающие регуляторы с датчиками и исполнительными устройствами. Как и в случае традиционных аналоговых систем регулирования, отказ одного микропроцессорного регулятора не приведет к отказу всей системы управления и может быть компенсирован переходом на ручное управление частью параметров технологического процесса.
Для повышения надежности ЦАС можно более полно использовать возможности микропроцессорной техники, объединив отдельные регуляторы (одно- или многоканальные) в регуляторные станции (один из вариантов которой показан на
Рис 611. Регуляторная станция:
ВВ___входные преобразователи; ВД —выходные преобразователи; ПО — пульт операто-
ра- КФ — мнкро-ЭВМ конфигурации, УМ —микро-ЭВМ управления магистралью, НЦУ — микро ЭВМ иепосредствеиного цифрового управления
рис. 6.11). При этом микро-ЭВМ, входные и выходные преобразователи сигналов связаны между собой посредством магистрали регуляторной станции с параллельной передачей данных так, что любая микро-ЭВМ имеет доступ к любому входному и выходному преобразователям. Такая структура регуляторной станции позволяет обеспечить высокую надежность наиболее важных функций регулирования за счет взаимного резервирования элементов внутри регуляторной станции. Однако при этом несколько увеличиваются затраты на кабельные соединения (по сравнению с затратами при полностью децентрализованной структуре ЦАС).
Регуляторные станции, как и микропроцессорные регуляторы, могут быть связаны между собой, а также с ЭВМ верхнего уровня и центральным пультом оператора системной магистралью с последовательной передачей данных, как показано на рис. 6.11.
Применение регуляторных станций позволяет использовать ЦАС в иерархических структурах. При этом по мере повышения уровня иерархии возрастает объем выполняемых вычислений и снижаются требования к надежности элементов системы. Наибольшей надежностью должны обладать регуляторные станции, непосредственно связанные с датчиками и исполнительными устройствами, а для управляющих мини- или микро-ЭВМ верхнего уровня допустима меньшая надежность, так как их отказ не приводит к выходу из строя всей системы.
В зависимости от числа регулируемых параметров технологического процесса, ЦАС может состоять из одной регуляторной станции; нескольких регуляторных станций, связанных магистралью на близком расстоянии; нескольких удаленных друг от друга групп регуляторных станций, объединенных магистралью в пространственно децентрализованную систему. При этом любая система может быть легко расширена добавлением дополнительных элементов (регуляторных станций, пультов оператора, магистралей и т. д.).
Сопряжение ЭВМ с аналоговыми регуляторами и исполнительными устройствами. Сложность современных технологических процессов, невозможность автоматизации всех операций по управлению ими, ограниченная надежность средств автоматизации и вычислительной техники требуют введения в контуры управления специальных устройств, допускающих вмешательство человека в процесс управления, например в аварийных ситуациях нли при отказе элементов ЦАС. Кроме того, квантованные по уровню и по времени управляющие и регулирующие сигналы, вырабатываемые в ЦАС выходными преобразователями ЭВМ, как правило, нельзя непосредственно использовать в качестве заданий аналоговым регуляторам при супервизорном управлении или для управления аналоговыми исполнительными устройствами, установленными на технологическом объекте. Для усиления или преобразования указанных сигналов в сигналы,
удобные для дальнейшего использования в цифровой системе, служат станции управления.
На каждый контур непосредственного цифрового или су-первизорного управления устанавливают по одной станции управления цифровых автоматических систем; часто, особенно при небольшом числе контуров, они являются единственным средством общения оператора с системой. Обычно они снабжаются также аналоговыми индикаторами, позволяющими выводить первичную информацию для оператора в традиционной форме.
ГЛАВА 7
ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ СИСТЕМ УПРАВЛЕНИЯ*
7.1. ОСНОВНЫЕ ПОНЯТИЯ
Поступающую в ЭВМ информацию, которую необходимо обработать, и результаты этой обработки в программировании называют данными. Полные, подробные и однозначные предписания по обработке этих данных называют программами.
Программным обеспечением (ПО) называют совокупность программ, обеспечивающую реализацию функций АСУТП; написание, подготовку и отладку программ; контроль работы ЭВМ.
Ввиду больших объемов и значительной сложности разработка ПО современных ЭВМ требует длительного времени, больших затрат труда и материальных ресурсов. В ряде случаев стоимость ПО может быть больше стоимости ЭВМ.
ПО можно разделить на три части: общее, специальное и тестовое.
Общее ПО, называемое также внутренним или стандартным, включает программы, организующие вычислительный процесс; языки программирования, программы подготовки и отладки; библиотеки программ для реализации многократно встречающихся операций. Общее ПО обычно разрабатывается и поставляется изготовителем ЭВМ. Оно является основой разработки и функционирования специального ПО.
В составе общего ПО могут быть выделены четыре группы программ: 1) организации и управления вычислительным процессом, называемые операционными системами (ОС)**; 2) трансляции с различных языков программирования; 3) подготовки и отладки (сюда входят редакторы, отладчики, средства документирования, загрузчики и компоновщики); 4) реализа
* Глава написана совместно с А И Вихтером.
** Используемая операционная система оказывает значительное влияние на другие группы программ общего ПО и поэтому общее ПО иногда называют операционной системой.
ции многократно встречающихся вычислительных и управляющих алгоритмов (вычисление логарифма, генерация случайных чисел, обработка статистической информации и т. п.).
Специальное ПО, называемое также внешним, включает программы, используемые при различных конкретных применениях ЭВМ. Эти программы обычно разрабатываются пользователями ЭВМ.
Тестовое ПО предназначено для контроля и диагностики функционирования отдельных узлов и ЭВМ в целом. Его используют при наладке ЭВМ, поиске и устранении неисправностей. Тестовое ПО разрабатывается и поставляется изготовителем ЭВМ.
Операционные системы предназначены для организации и управления вычислительным процессом. Они представляют собой набор программ, используемых для управления последовательностью выполнения задач процессором, оперативной памятью, внешними устройствами и внешней памятью. Иногда ОС называют управляющей программой, монитором или супервизором.
Необходимость в ОС при применении ЭВМ в составе АСУТП обусловлена двумя основными факторами: 1) эффективным использованием вычислительных ресурсов УВК, в частности времени и памяти процессора, внешних устройств и внешней памяти; 2) скоростью реакции на события, происходящие в технологическом объекте.
Рис 7 1 Временная диаграмма работы УВК
а — однопрограммный режим б — мультипрограммный режим, ПР — процессор ОЗУ — оперативное запоминающее устройство ПУ — периферийные устройства
Рис. 7.2. Основные компоненты операционной системы (ОС)
Первая задача — эффективного использования вычислительных ресурсов — важна и для универсальных ЭВМ и связана с оптимизацией времени исполнения программ и автоматическим распределением времени устройств ЭВМ между задачами, что позволяет существенно ускорить их решение и увеличить производительность ЭВМ.
Специфичной для УВК в АСУТП является вторая задача ОС, связанная с необходимостью своевременной реакции ЭВМ на события в объекте. Решая эту задачу, ОС обеспечивает работу УВК в реальном масштабе времени.
Операционная система в АСУТП обеспечивает подготовку и выполнение программ специального ПО в мультипрограммном режиме, который заключается в обязательном совмещении во времени работы различных блоков УВК. Особенностью мультипрограммного режима является также то, что для запуска или продолжения любой из программ не требуется окончания программ, ранее участвующих в работе. Временная диаграмма работы УВК в однопрограммном и мультипрограммном режиме показана на рис. 7.1. В первом случае выполнение каждой последующей программы начинается только после завершения предыдущей. Во втором случае все программы реализуются как бы одновременно: А еще не закончена, а уже начинает выполняться В; затем, когда не завершены программы А и В (они находятся в ожидании вывода на периферийные устройства), начинает выполняться программа С. Таким образом, удается существенно сократить общую продолжительность выполнения программ.
Структура современной ОС приведена на рис. 7.2. Она включает следующие компоненты: ядро ОС; супервизор задач; управление памятью; супервизор ввода — вывода; службу времени; систему управления внешней памятью (файлами).
Ядро ОС выполняет обработку прерываний, запоминание и восстановление регистров при прерываниях, реакцию на сбои и отказы процессоров и оперативной памяти и пр.
Основными функциями супервизора задач являются: контроль за состоянием процессоров и задач и предоставление про-324
цессоров задачам для выполнения в соответствии с их приоритетами*. Кроме того, супервизор обеспечивает прерывание (приостанов) задачи и освобождение процессора, если оиа переводится в состояние ожидания (например, для выполнения операций ввода — вывода или если процессор необходим задаче более высокого приоритета), и прекращение выполнения закончившейся задачи.
При управлении памятью выполняются следующие функции: занятие (освобождение) оперативной памяти; определение задачи, которая должна получить память для выполнения в соответствии с приоритетом; выделение необходимой памяти задаче; освобождение памяти при исключении какой-либо задачи.
Супервизор ввода — вывода следит за состоянием внешних устройств и распределяет их по запросам задач; выполняет обмен данными с внешними устройствами по прерываниям; освобождает внешние устройства по завершении операций ввода — вывода; контролирует работу внешних устройств и диагностирует их неисправности.
В состав супервизора ввода — вывода входят программа-диспетчер и набор программ, непосредственно осуществляющих обмен с внешними устройствами, называемых драйверами.
Служба времени осуществляет отсчет текущего времени и даты по сигналам специального устройства, называемого таймером. Она также выполняет подготовку к запуску задач по времени.
Система управления внешней памятью, входящая в состав операционной системы, используется для работы с внешними запоминающими устройствами с прямым доступом, в качестве которых обычно применяют накопители на магнитных дисках. Поверхность дисков делится на логические элементы, называемые файлами и представляющие собой последовательность данных, рассматриваемую как единое целое. Основные функции системы управления внешней памятью — распределение поверхности диска для файлов; выделение внешней памяти для файлов; открытие файлов с учетом требований задач; обмен данными с файлами; закрытие файлов и освобождение дискового пространства при уничтожении файлов.
По методам использования процессоров и оперативной памяти современные операционные системы для мини- и микро-ЭВМ могут быть разделены на следующие группы: 1) с общим полем памяти; 2) с раздельной памятью; 3) многопроцессорные; 4) распределенные.
* Выделение различным задачам процессоров и оперативной памяти осуществляется на основе приоритетов, определяющих важность данной задачи Приоритеты обозначают целыми числами. При этом говорят, что задача А имеет более высокий приоритет, чем задача В, если численное значение приоритета задачи А меньше, чем В. Задачи, входящие в состав операционной системы, всегда имеют более высокий приоритет, чем задачи пользователей.
В операционной системе с общим полем памяти задачи пользователя размещаются вместе с ее модулями. Такие операционные системы ввиду ограниченной разрядности мини- и микро-ЭВМ позволяют использовать оперативную память ограниченного размера (для 16-ти разрядных ЭВМ — не более 64К). Операционные системы с общим полем памяти используют для ЭВМ типа СМ-1, СМ-3 и многих микро-ЭВМ.
Операционные системы с разделенной памятью позволяют использовать ОЗУ большей емкости. При этом оно делится на участки, называемые иногда разделами. В операционных системах с разделенной памятью часто используют аппаратный механизм защиты памяти, не позволяющий задачам из одного раздела мешать выполнению задач в других разделах. Тем самым обеспечивается независимость задач каждого из разделов и появляется возможность отладки новых задач в составе работающей системы. Организация связи между задачами различных разделов осуществляется операционной системой.
Многопроцессорные операционные системы обеспечивают повышение производительности и живучести систем, в которых они используются. Повышение производительности достигается в результате того, что несколько задач пользователей могут выполняться одновременно различными процессорами. Большая живучесть многопроцессорных систем является результатом того, что отказ одного процессора не приводит к отказу всей системы, так как продолжают работать другие. Обычно число процессоров в мини-ЭВМ не больше двух.
Распределенные операционные системы используют для создания децентрализованных комплексов, включающих несколько мини- и микро-ЭВМ 11].
При агрегатном принципе построения управляющих вычислительных комплексов для АСУ ТП требуется аналогичный принцип построения для операционных систем. Создание операционной системы, настроенной на используемую конфигурацию технических средств с учетом требований специального программного обеспечения, называют генерацией операционной системы.
В составе общего программного обеспечения обычно поставляется некоторый набор средств, используемых при генерации операционной системы.
Генерация операционных систем позволяет не только проводить настройку на конфигурацию технических средств и требования специального программного обеспечения, но также значительно снижает их избыточность по используемой памяти и потребляемому машинному времени.
Проектирование программного обеспечения и языки программирования. При разработке программного обеспечения АСУ ТП используют два подхода: «снизу вверх» и «сверху вниз». В первом случае сначала пишут и отлаживают программы и подпрограммы самого нижнего уровня, используемые для
простейших функций обработки данных. В дальнейшем эти программы и подпрограммы используют при написании и отладке программ следующего, более высокого уровня. Потом пишут и отлаживают программы следующего уровня. Процесс продолжается до тех пор, пока не будет написана и отлажена целиком требуемая задача.
При применении'метода «сверху вниз» сначала определяют основные характеристики разрабатываемой программы, а потом постепенно уточняют и конкретизируют их. При этом разрабатываемая программа делится на модули, образующие иерархическую структуру. Сначала разрабатывают главный модуль, в процессе написания которого определяют требования к модулям нижележащего уровня. После этого разрабатывают модули второго, третьего н т. д. уровней — до тех пор, пока модули не будут исполнять простейшие функции обработки данных.
В обоих методах разработки программ важно понятие подпрограммы — модуля, обладающего именем, которое позволяет любой программе вызвать его для выполнения некоторого действия или вычисления определенных величин.
На практике ни тот, ни другой метод разработки ПО в чистом виде не используют. Обычно сначала с помощью метода «сверху вниз» строят иерархию требований к программам и подпрограммам, а затем с использованием метода «снизу вверх» выполняют написание н отладку модулей в соответствии с этими требованиями.
Исходной программой называют программу в символьной форме, написанную на одном из языков программирования. Объектной программой называют ту же программу, преобразованную в единый используемый для данной операционной системы промежуточный формат, пригодный для дальнейшей обработки загрузчиком или компоновщиком. Результирующей программой (загрузочным модулем) называют программу в формате, пригодном для загрузки в память и исполнения на ЭВМ под управлением операционной системы.
Программу, используемую для преобразования исходной программы в объектный формат, называют транслятором. В том случае, когда исходная программа написана на языке высокого уровня, транслятор называют компилятором.
Языком самого низкого уровня, используемым для современных ЭВМ, является язык Ассемблера. Для него характерны следующие отличительные черты: программа переводится из исходной формы в объектную по принципу «один оператор языка — одна команда ЭВМ»; для обозначения команд ЭВМ используются их мнемонические обозначения; адреса в программе задаются символически.
Достоинством Ассемблера является то, что написанные на этом языке программы обладают максимальной гибкостью и позволяют использовать практически все возможности ЭВМ.
Этим объясняется широкое применение языка Ассемблера в программировании, в частности для решения задач АСУТП. Недостаток языка Ассемблера состоит в сложности и трудоемкости написания программ.
Основным достоинством языков высокого уровня является возможность легкого и компактного описания решаемой задачи. Такая возможность осуществляется ввиду того, что один оператор языка высокого уровня соответствует большому числу команд ЭВМ. Перевод исходной программы на языке высокого уровня в объектный формат выполняется компилятором. Применение языков высокого уровня позволяет упростить и значительно ускорить разработку программ. Однако сложность перевода исходной программы в объектный формат приводит к тому, что получаемые при переводе программы требуют больше памяти и машинного времени, чем программы, написанные на языке Ассемблера. наиболее распространенным языкам высокого уровня, используемым в АСУТП, относится Фортран. Особенно часто Фортран применяют при программировании задач для численных расчетов. Достоинства языка Фортран — его простота и большое число различных алгоритмов и программ, написанных на этом языке за время его использования.
Из новых языков высокого уровня наибольшее распространение получил Паскаль. В этом языке учитывается ряд новых методов программирования; он прост и логичен.
Язык высокого уровня АДА был разработан с целью замены возможно большего числа специализированных и универсальных языков программирования, используемых в настоящее время. Язык АДА обеспечивает широкие возможности для написания программ, в нем учтено большинство новых методов построения программного обеспечения. Однако применение языка АДА для разработки задач пользователя в АСУТП тормозится ввиду отсутствия компиляторов, написание которых для этого языка весьма сложно.
Средства подготовки программного обеспечения. Преобразование программ из объектной формы в результирующую, загрузка результирующей программы в память и инициализация ее исполнения осуществляются специальной программой, называемой загрузчиком. При формировании результирующей программы почти всегда необходимо соединить несколько программ и подпрограмм в объектной форме. При этом загрузчик должен распределить память таким образом, чтобы все программы и подпрограммы поместились в памяти и не накладывались друг на друга, кроме специально предусмотренных случаев (общая память).
Иногда используют программы, выполняющие только распределение памяти, связывание программ и настройку величин, зависящих от положения в памяти. Результатом работы этих программ является формирование результирующей про-328
граммы в виде специального файла, называемого загрузочным модулем. Такие программы носят название компоновщиков. Для хранения загрузочных модулей обычно применяют накопители с прямым доступом. Загрузка и запуск на выполнение загрузочных модулей осуществляется средствами операционной системы.
Большое значение в составе общего программного обеспечения имеют библиотеки подпрограмм. Наличие библиотек различного назначения позволяет упростить н ускорить разработку программ пользователя. Обычно в состав библиотек входят подпрограммы для реализации наиболее часто встречающихся вычислительных и управляющих функций, численного анализа и статистики, сортировки — слияния файлов и др.
Для поиска и устранения ошибок в разрабатываемых задачах используют различные отладочные программы. Они позволяют вести отладку как в режиме непосредственного взаимодействия «человек — ЭВМ», так и в пакетном режиме. Отладочные программы можно использовать с программами на языке Ассемблера и на языках высокого уровня.
Для набора и редактирования исходных программ, а также для подготовки программной документации современные ЭВМ снабжают набором редактирующих программ различного назначения.
Программное обеспечение, обладающее очень большим объемом, немыслимо без полной и хорошо оформленной технологической документации. Поэтому в состав общего программного обеспечения включают специальные программы подготовки документации, позволяющие печатать текстовые документы с автоматическим выделением страниц, выполнять деление на абзацы, главы, пункты и подпункты, формировать и печатать разного рода таблицы и рисунки, автоматически формировать оглавление печатаемых документов.
Базы данных. Быстрый рост объемов хранимой и перерабатываемой с использованием ЭВМ информации, повышение требований к качеству этой информации, необходимость сокращения времени доступа к ней привели к созданию концепции базы данных.
Под базой данных понимают совокупность взаимосвязанных хранящихся вместе данных при наличии такой минимальной избыточности, которая допускает их использование оптимальным образом для одного или нескольких применений. При этом данные организуются таким образрм, чтобы они были независимы от программ, их использующих. Для программ определяется способ взаимодействия с хранимыми данными. Допускается добавление новых, поиск и модификация существующих данных.
Создание баз данных является весьма дорогостоящим процессом. Обычно базу данных создают для некоторого определенного набора применений. Изменение базы данных требует
переработки использующих ее программ и поэтому нежелательно. В связи с этим чрезвычайно важное свойство базы данных — возможность наращивания применений без изменения способа взаимодействия программ с нею.
Огромные объемы информации, хранящиеся в современных базах данных, не позволяют хранить ее в оперативной памяти. Большая часть данных хранится во внешней памяти. Для хранения информации, содержащейся в базах данных, в первую очередь используют устройства с прямым доступом (накопители на магнитных дисках и картах). Для долговременного хранения данных применяют накопители на магнитных лентах.
Организация взаимодействия различных задач с базой данных осуществляется с помощью системы управления базой данных (СУБД). Входящие в нее программы выполняют поиск и модификацию хранимых данных, а также уничтожение ненужной информации и в случае необходимости — расширение базы данных.
Широкое распространение сетей ЭВМ привело к необходимости создания баз данных для этих сетей. Такне базы данных в силу их рассредоточенности называют распределенными [57].
7.2. СПЕЦИАЛЬНОЕ ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ АСУТП
Специальным программным обеспечением [47] называют совокупность программ, позволяющих реализовать функции АСУТП. Разработка специального программного обеспечения весьма длительна и требует больших затрат труда и материальных ресурсов. Поэтому обычно его разрабатывают для некоторого класса технологических объектов с возможностью настройки на конкретные параметры объекта без изменения программ. Для этой цели специальное программное обеспечение делят на две части: комплекс задач реального времени; совокупность задач генерации.
Комплекс задач реального времени предназначен непосредственно для реализации функций АСУТП. Совокупность задач генерации используют для настройки комплекса задач реального времени в соответствии с требованиями конкретного технологического объекта управления.
Важнейшие требования к специальному программному обеспечению в АСУТП — быстрая реакция системы на события в технологическом процессе; возможность настройки в соответствии с параметрами технологического объекта, составом и взаимосвязью технических средств в АСУ. Наиболее полно эти требования реализуются при использовании пакетов прикладных программ. Ими называют совокупность программных модулей, предназначенных для реализации одной или нескольких функций АСУТП и связанных общим внутренним интерфейсом.
Комплекс задач реального времени. Под режимом реального времени понимают такой режим работы системы, когда она реагирует на события на технологическом объекте управления и (или) на команды оперативного персонала столь быстро, что это позволяет воздействовать на ход технологического процесса.
Для комплекса задач реального времени характерны: взаимосвязь задач по управлению и информации; функционирование в режиме реального времени;
интенсивный обмен информацией с технологическим объектом;
интенсивный обмен информацией с оперативным персоналом (операторами-технологами, начальниками смен и т. п.).
Организация комплекса задач реального времени, соответствующая этим основным характеристикам, приведена на рис. 7.3. В составе комплекса выделены подсистемы, компонуемые с использованием настраиваемых пакетов прикладных программ. Выделение подсистем выполнено по признаку близкого функционального назначения входящих в них задач. При этом учитывается используемый подсистемой математический аппарат, способ настройки соответствующего пакета прикладных программ, организация обмена данными внутри подсистемы, вид программной реализации.
Для АСУТП химико-технологических агрегатов можно выделить следующие подсистемы (рис. 7.3): ввода и первичной обработки информации; расчета комплексных показателей; представления информации; вычисления управляющих воздействий; реализации управляющих воздействий.
В качестве общего системного интерфейса, объединяющего эти подсистемы, используется база данных реального времени
Рис. 7.3. Организация комплекса задач реального времени
Рис. 7.4. Обмен информацией с базой данных реального времени:
СУБД — система управления базой данных; БДРВ—15аза данных реального временя
(рис. 7.4). Она снабжена набором программных средств,'обеспечивающих унифицированный доступ и изменение содержащейся в ней информации.
Все подсистемы, входящие в комплекс задач реального времени, имеют выход на базу данных для чтения и записи информации. Непосредственный обмен данными между подсистемами не допускается. В то же время каждая из подсистем имеет свой внутренний локальный интерфейс, в рамках которого может проводиться обмен информацией между задачами данной подсистемы. Кроме того, каждая из подсистем может в случае необходимости иметь свою локальную базу данных, используемую для реализации внутренних функций подсистемы.
Использование базы данных реального времени в качестве общесистемного интерфейса позволяет значительно упростить организацию взаимодействия между подсистемами. В комплекс задач реального времени могут быть включены новые функциональные подсистемы (например осуществляющие связь с АСУ более высокого уровня), а существующие заменены и исключены. Изменение состава функциональных подсистем не требует перепрограммирования подсистем, не подвергающихся изменению, т. е. возможно дальнейшее развитие специального программного обеспечения АСУТП.
Применение базы данных реального времени позволяет создавать как централизованные, так и децентрализованные системы. При этом изменению подвергаются только программы, входящие в систему управления базой данных, а программы функциональных подсистем не меняются.
Понятие комплекса задач означает наличие взаимосвязи между задачами по данным и управлению. Связь по данным
состоит в том, что информация, вырабатываемая одной задачей, может использоваться одной или многими другими задачами. Поскольку все они имеют выход на базу данных реального времени, то связь по данным осуществляется путем записи в нее информации (или считывания информации из нее).
Связь между задачами по управлению выражается в том, что одна задача может запускать другую, снимать ее с выполнения, приостанавливать или возобновлять ее выполнение. Для этой цели в комплексе задач реального времени используются данные типа «монитор». Данные этого типа в количестве, соответствующем числу взаимодействующих задач комплекса, содержатся в базе данных.
Интенсивный обмен информацией с технологическим объектом управления возникает ввиду необходимости обеспечить режим работы в реальном масштабе времени и, следовательно, малое время реакции системы на изменение состояния объекта. За это время (обычно не превышающее десятых долей секунды) необходимо получить данные с объекта и обработать их, а затем выдать на объект управляющие воздействия и (или) сообщить о происшедшем изменении оперативному персоналу. Элементом базы данных является технологическая переменная (давление, температура и т. д.), принимающая различные значения в процессе функционирования объекта и отображающая состояние технологического параметра. Любая технологическая переменная характеризуется мгновенным значением, единицами измерения и достоверностью. Для представления ее в базе данных используют паспорт технологической переменной.
Паспортом технологической переменной (или просто паспортом) называют структуру данных, обладающую именем и содержащую информацию, характеризующую технологическую переменную и методику ее получения. Имена паспортов должны быть различны для однозначной их идентификации. Для хранения значений (имеющих смысл для любой технологической переменной) в паспорте выделяется постоянный элемент, называемый заголовком паспорта. Для большинства технологических переменных используется изменяемый набор значений, определяемых методикой их обработки (например, границы допустимых изменений технологической переменной, ее среднее значение, дисперсия и т. п.). Для хранения данных изменяемого набора в паспорте предусмотрена последовательность элементов, называемых субблоками. Кроме самих значений переменных субблоки содержат информацию о способе получения этих значений, определяя тем самым программу обработки данной технологической переменной.
К базе данных, используемой для хранения информации (рис. 7.5), предъявляют следующие основные требования: малое время доступа к данным; удобство организации доступа ив пррграмм; надежность хранения данных [30].
Необходимость малого времени доступа к данным вытекает из требования работы системы в реальном масштабе времени. Количество и состав контролируемых технологических переменных процесса можно считать постоянным. Если необходимо изменить число контролируемых технологических переменных, используют систему генерации.
Значительное время тратится на передачу данных с внешних запоминающих устройств в оперативную память для обработки и на обратную пересылку их после обработки. В связи с этим часто используемая информация из базы данных реального времени обычно хранится в оперативной памяти, что во много раз сокращает продолжительность доступа к данным.
Значительные потери времени обусловлены поиском данных, содержащихся в базе данных реального времени. В то же время большинство программ комплекса либо постоянно обращаются к одним и тем же данным, либо изменяют состав используемых данных достаточно редко. Для решения этой проблемы применяют специальную организацию доступа к информации.
Рассмотрим использование базы данных для управления обработкой технологических переменных.
Каждая из подсистем, использующих базу данных реального времени как активный компонент, определяющий обработку технологических переменных, строится по одинаковой схеме (рис. 7.5). Заявки на обработку поступают к ведущей программе, называемой интерпретатором заявок. Эти заявки бывают двух типов: детерминированные и стохастические. Детерминированные заявки поступают регулярно по времени и имеют постоянный состав обрабатываемых технологических переменных. Для них в базу данных включаются списки обработки, определяемые при генерации. При вызове интерпретатора заявок для выполнения детерминированной заявки он получает идентификатор такого списка обработки. Стохастические заявки характеризуются нерегулярностью поступления и непредсказуемым составом обрабатываемых технологических переменных. Списки обработки при стохастических заявках формируются программой, вызвавшей интерпретатор заявок.
В соответствии со списком обработки интерпретатор заявок выполняет вызов диспетчера обработки, передавая ему идентификатор требуемого паспорта. Диспетчер обработки, в свою очередь, в соответствии со списком модулей обработки, содержащимся в последовательности субблоков, выполняет их вызов. Модули обработки выполняют элементарные операции, специфичные для каждой из подсистем (первичной обработки информации, расчета комплексных показателей, выдачи управляющих воздействий).
Подсистема ввода и первичной обработки информации (ПОИ). Эта подсистема выполняет совокупность операций, обеспечивающих ввод сигналов от датчиков, первичную обработку этих сигналов и сохранение данных, поступающих от технологиче-334
Рис. 7.5. Организация обработки технологических переменных:
ДЗ — детерминированные заявки; СЗ — стохастические заявки; ЗГ — заголовок
ского объекта управления. При этом входные сигналы могут быть аналоговыми и дискретными. (Подробно основные задачи ПОИ рассмотрены в гл. 3.)
Организация подсистемы ПОИ совпадает со схемой организации обработки технологических переменных, показанной на рис. 7.5 (при этом в качестве технологических переменных рассматриваются непосредственно измеряемые параметры состояния объекта). Основные характеристики подсистемы ПОИ — интенсивное взаимодействие с техническими средствами устройств связи с объектом; большое число обрабатываемых данных; ограниченное число алгоритмов обработки.
В число алгоритмов обработки данных обычно включают вычисление средних значений технологической переменной и ее дисперсии, контроль режимных и аварийных границ, коррекцию расходов по температуре и давлению, фильтрацию различных типов и т. д. Ограниченное число алгоритмов и высокая частота использования реализующих их программных модулей в режиме реального времени налагают жесткие требования на ка-' чество их разработки. Поэтому модули пакета прикладных программ первичной обработки обычно пишутся на языке Ассемблера и для их разработки привлекаются высококвалифицированные специалисты. Небольшое число алгоритмов обработки в подсистеме ПОИ и возможность унификации ее модулей
позволяет довольно просто выделять подсистему в отдельные ЭВМ децентрализованных систем. Это кардинально решает проблемы загрузки процессора главной ЭВМ.
7.3. РАЗРАБОТКА ФУНКЦИОНАЛЬНО-АЛГОРИТМИЧЕСКОЙ СТРУКТУРЫ АСУТП*
Одна из важнейших задач, решаемых при создании АСУТП — выбор функциональной структуры системы и оценка требуемого состава технических средств. При создании АСУ для действующих установок эту задачу часто решают на основе анализа действий оператора по контролю и управлению процессом. При этом общую задачу управления объектом в целом не рассматривают, что ограничивает возможности системы и снижает эффективность ее работы, хотя и позволяет выбрать жизненно важные для технологического объекта задачи управления. Определение требований к техническим средствам для реализации определенных таким подходом «снизу» функций АСУТП обычно приводит к заниженным, оценкам по необходимому быстродействию, памяти и составу периферийных устройств вычислительного комплекса (поскольку при этом не учитываются задачи управления объектом в целом, а также ряд перспективных функций АСУТП, определение и реализация которых осуществляется, как правило, позднее, по мере освоения системы управления).
Другой возможный подход к определению функций АСУТП предусматривает декомпозицию общей задачи управления с последующим выбором конкретных функций и алгоритмов системы, исходя из общей цели создания автоматизированного технологического комплекса (АТК) [10, 15, 52]. Такой системный подход «сверху», когда сначала формулируются общие цели создания системы, а затем решаются вопросы выбора состава функций АСУТП, позволяет эффективно организовать функционирование системы, однако обычна достаточно сложно и громоздко. Поэтому на практике наиболее рационален комбинированный путь, когда наряду с анализом функционирования объекта и функций оператора по управлению процессом (подход «снизу») учитывают общую цель функционирования АТК и результаты ее декомпозиции на.частные цели управления и определения конкретных функций и алгоритмов.
Синтез функционально-алгоритмической структуры АСУТП включают следующие основные этапы: определение функционального состава АСУТП; выбор технической структуры системы; распределение функций между человеком (оператором) и техническими средствами АСУТП; синтез алгоритмической структуры.
* Параграф написаи совместно с Гапеевым В. В.
Рис. 7.6. Основные этапы синтеза функционально-алгоритмической структуры АСУТП
Функции системы выбирают после анализа аналогичных действующих автоматизированных технологических комплексов (см. рис. 7.6). В результате анализа формируют общие цели создания АСУТП. К числу таких целей могут относиться требования обеспечения заданной номенклатуры и производительности продуктов, выпускаемых АТК, повышения экономичности АТК н т. д. В дальнейшем на основе этих общих целей формируют цели функционирования АСУТП (например, обеспечение безопасной работы АТК, обеспечение заданного технологического регламента процесса). Затем для выбора функций АСУТП последовательно проводят декомпозицию достаточно общих целей функционирования на совокупность частные подцелей, каждая из которых также может расчленяться на подцели. Число уровней такого разбиения на подцели обычно соответствует числу уровней организационной структуры управления объектом, т. е. каждому уровню организационной структуры соответствуют свои подцели управления и определенные показатели работы технологического объекта.
Таким образом, формулирование и конкретизацию целей выполняют с Помощью декомпозиции общих целей функционирования, определенных с учетом подхода «снизу» на основе анализа действующих АТК, до таких частных подцелей, достижение которых должно осуществляться путем определенных действий создаваемой человеко-машиной системы. Таким образом, процесс Декомпозиции целей заканчивается, когда выбор способов их достижения осуществим в терминахч «вход — выход» объекта управления, где под «выходом» понимают некото-
рую совокупность наблюдений за технологическим процессом, а под «входом» — управляющие воздействия на объекте. Эти действия в совокупности и составляют функции системы.
При декомпозиции целей используют следующие основные положения:
разработка функционального состава АСУТП ' проводится путем поэтапного перехода: «общие цели создания АСУТП—> г—>цели функционирования АСУТП—^частные подцели—> —^функции», т. е. осуществляется последовательная конкретизация я декомпозиция целей;
z число уровней декомпозиции соответствует принятой организационной структуре объекта управления;
декомпозиция осуществляется по принципу: «каждая нижестоящая цель является средством для достижения цели, находящейся на более высокой ступени иерархии».
Функции, реализуемые АСУТП, можно разделить на три группы: решаемые оперативным персоналом АТК; реализуемые с помощью средств КИПиА; реализуемые на ЭВМ.
Конкретное разделение функций осуществляется на основе анализа возможностей человека, средств автоматизации и вычислительной техники и рационального использования этих возможностей в рассматриваемом случае. Так, за основу может быть принята централизованная система с широким использованием традиционных средств КИПиА или распределенная система на микропроцессорных средствах. При этом также широко используют сведения об аналогичных системах, имеющихся типовых подходах (данные анализа «снизу»). Кроме того, следует учитывать особенности деятельности человека, принимающего решения по управлению, количество информаций, которое должно им анализироваться, и т. д. Методы синтеза структуры и алгоритмов для автоматически реализуемых функций разработаны наиболее полно. Частично эти задачи применительно к регулированию технологических ^процессов были рассмотрены в гл. 1 и 2.
Результаты разделения функций используют при синтезе технической структуры АСУТП. Выбор технической структуры АСУТП, в свою очередь, может оказывать влияние на состав функций системы, так как целесообразность практической реализации той или иной функции должна оцениваться с учетом стоимости технических средств, их надежности и сложности обслуживания. Кроме того, для обеспечения развития АСУТП следует предусмотреть возможность включения в состав технических средств новых устройств.
При внедрении АСУТП ее функции обычно реализуются поэтапно, что объясняется прежде всего сложностью систем управления. Кроме того, ряд функций управления может быть включен в работу только после накопления определенной информации на действующем объекте (например, управление качеством получаемого продукта). Вместе с тем реализация оп-338
ределенных задач (особенно контроля процесса и состояния технологического оборудования) еще до пуска АТК во многих случаях позволяет существенно сократить сроки ввода объекта в эксплуатацию. Поэтому при синтезе функционально-алгоритмической структуры АСУТП весьма важной задачей является ранжировка функций системы в порядке очередности их реализации.
Технические средства системы внедряются в полном объеме уже на первом этапе создания АСУТП, при этом соответственно осваиваются и простейшие функции автоматизации (автоматический контроль и регулирование отдельных параметров, сигнализация и блокировка и т. д.), реализуемые с помощью традиционных средств КИПиА или простейших цифровых систем. Более сложные функции системы, выполняемые программным путем на УВК, реализуются поэтапно.
Определение приоритета отдельных задач и очередности их внедрения выполняется с учетом следующих основных факторов: экономического эффекта от внедрения задачи; сложности и продолжительности разработки программного обеспечения задачи; стоимости разработки.
Обычно для такой ранжировки используют метод экспертных оценок, а также результаты анализа действующих АТК. Практически во всех случаях выделяют так называемый пусковой комплекс функций АСУТП, с помощью которого осуществляется контроль за ходом технологического процесса, обеспечивается диагностика аварийных ситуаций, протоколирование основных параметров процесса и т. д. Освоение пускового комплекса целесообразно выполнять до пуска технологического объекта, используя его затем при включении технологического оборудования в работу.
Заключительным этапом функционально-алгоритмического синтеза АСУТП является создание общего алгоритма функционирования. На этом этапе разрабатывают принципы взаимодействия алгоритмов отдельных задач и подсистем, определяющие временные и информационные характеристики их взаимодействия. Еще раз проверяют и уточняют практически все решения предыдущих этапов, влияющие на временные показатели работы системы. Оценивают численные методы реализации алгоритмов, выполняемых с помощью ЭВМ; окончательно определяют организационную структуру АСУТП, выбор и распределение функций между человеком и автоматами. Все эти вопросы решают с учетом функционирования системы в реальном масштабе времени.
При разработке общего алгоритма функционирования АСУТП могут быть использованы методы имитационного моделирования. Для этого должны быть заданы временные характеристики возможных запросов от объекта, графики обращения системы к объекту, продолжительность выполнения отдельных задач на ЭВМ, характеристики технических и программных
Средств, используемых в системе. Пример практического применения изложенного подхода при разработке функциональноалгоритмической структуры АСУТП рассмотрен в разд. 8.2.
ГЛАВА 8
ПРИМЕРЫ СИСТЕМ УПРАВЛЕНИЯ
В ХИМИЧЕСКОЙ ПРОМЫШЛЕННОСТИ
8.1. АСУТП МИКРОБИОЛОГИЧЕСКОГО СИНТЕЗА ЛИЗИНА В БИОРЕАКТОРАХ ПЕРИОДИЧЕСКОГО ДЕЙСТВИЯ
Синтез лизина — незаменимой аминокислоты — осуществляется микроорганизмами Brevibacterium по методу глубинного культивирования, при котором клетки — продуценты суспендированы в водном растворе питательных веществ (культуральной жидкости), насыщаемом воздухом. Основными компонентами питательной среды являются сахара мелассы (отхода свеклосахарного производства), биологически активные (ростовые) вещества и соли аммония.
Производство кормового концентрата лизина включает следующие стадии: приготовление питательной среды, выращивание посевного материала, микробиологический синтез, выпарку и сушку. Основной стадией является синтез, при котором образуется целевой продукт. Оптимальными условиями для синтеза являются температура 31 °C и кислотность среды 7,4 pH. Процесс необходимо проводить в стерильных условиях.
Периодический процесс микробиологического синтеза лизина как объект управления. В промышленных условиях для синтеза лизина применяют биореакторы периодического действия емкостью 50 и 100 м3, снабженные мешалкой, теплообменником и барботером для подачи аэрирующего воздуха, в результате чего обеспечивается интенсивное перемешивание культуральной жидкости.
Цикл работы биореактора включает следующие стадии: осмотр и промывку аппарата; его герметизацию (опрессовку); стерилизацию; загрузку исходной питательной среды; ввод посевного материала; рабочую стадию — размножение микроорганизмов и синтез целевого продукта; заключительную стадию — слив культуральной жидкости, содержащей лизин.
Общая продолжительность цикла — 80 ч, в том числе продолжительность рабочей стадии — 60 ч.
На вспомогательных стадиях основной функцией управления является обеспечение заданной последовательности выполнения операций, т. е. функция программно-логического управления. Она реализуется переключением в определенной последо-340
вательности запорной арматуры, установленной иа трубопроводах технологической обвязки биореактора. За цикл работы биореактора лизина необходимо переключить десятки единиц запорной арматуры, причем в случае ошибочного изменения порядка переключения нарушается стерильность, что ведет к снижению выхода целевого продукта. Прн управлении вручную ошибки в порядке переключения — одна из причин потерь продукта. Кроме того, переключение вентилей вручную связано с большими затратами труда и времени, т. е. с увеличением длительности вспомогательных операций и снижением производительности реактора. Поэтому автоматизация программно-логического управления — важный резерв повышения эффективности производства лизина.
Кроме программно-логического управления на ряде вспомогательных стадий процесса требуется регулирование некоторых технологических параметров — таких как давление, pH среды. Например, на стадии стерилизации кроме функций программно-логического управления (подключение биореактора к паровому коллектору в начале стадии, выдержка заданной длительности стерилизации и отключение от коллектора по окончании стадии выдержки) необходимо регулировать давление пара в аппарате.
На рабочей стадии функции управления состоят в следующем:
регулирование основных технологических параметров, определяющих режим микробиологического синтеза: температуры и pH культуральной жидкости, давления в аппарате, уровня пены и расхода аэрирующего воздуха;
управление дозированием подпитки, т. е. подачи в аппарат дополнительного количества питательной среды во время микробиологического синтеза;
определение момента окончания рабочей стадии.
Рассмотрим особенности реализации этих функций в АСУТП. Температура характеризует тепловой баланс биореактора, который складывается из выделения тепла при протекании биохимических реакций и отвода тепла в теплообменнике. Таким образом, биореактор является статическим объектом регулирования температуры. Основными возмущающими воздействиями служат изменение тепловыделения при смене фаз физиологического развития микроорганизмов-продуцентов, а также изменение температуры охлаждающей воды, поступающей в теплообменник. Регулирующим воздействием является изменение расхода охлаждающей воды. Вследствие большой тепловой емкости этот объект обладает значительной инерционностью и чистым запаздыванием. Требуемая точность регулирования обеспечивается стандартным ПИД-регулятором.
Необходимость регулирования pH вызвана тем, что на некоторых стадиях процесса в результате биохимических реакций возрастает кислотность культуральной жидкости, и показатель
Рис. 8.1. Функциональная схема автоматического регулирования биореактора /—АСР расхода аэрирующего воздуха; 2 —АСР температуры; 3—• АСР давления; 4 — АСР уровня пены; 5 — АСР показателя pH
pH снижается относительно оптимального значения. Для нейтрализации выделяющейся
кислоты в реактор пода-
ют титрующее вещество (аммиачную воду), расход которого служит регулирующим воздействием. Как объект регулирования pH биореактор является статическим и обладает сравнительно малой инерционностью и запаздыванием, поэтому стандартный ПИД-регулятор обеспечивает требуемую точность регулирования. Определен
ные технические трудности при автоматическом регулировании pH связаны с необходимостью стерилизации паром электродов* чувствительного элемента pH-метра при температуре до 140 °C.
Давление в биореакторе регулируют изменением расхода отходящих газов. Как объект регулирования давления биореактор обладает благоприятными характеристиками, поэтому требуемое качество регулирования обеспечивается стандартным ПИД-регулятором.
Особенность процесса микробиологического синтеза лизина состоит в образовании большого количества пены, которая может заполнить рабочую полость аппарата и попасть в трубопровод отходящих газов. Уровень пены регулируют подачей в биореактор специальных веществ — пеногасителей. Обычно
используют двухпозиционное импульсное регулирование, при котором в случае превышения допустимого уровня пены пеногаситель подается в аппарат отдельными дозами с выдержкой определенных интервалов времени между ними.
Таким образом, для автоматической реализации функции регулирования технологических параметров можно использовать одноконтурные АСР. Соответствующая функциональная схема автоматизации показана на рис. 8.1.
Наиболее сложными для автоматизации являются функции управления дозированием подпитки и определения момента окончания рабочей стадии.
Определение оптимального управления для периодического процесса микробиологического лизина с подпиткой. Программу дозирования подпитки и момент окончания рабочей стадии оп
* В настоящее время разработаны и подготовлены к серийному выпуску отечественные стеклииные электроды, выдерживающие 10 циклов стерилизации.
ределяют из решения следующей задачи оптимального управления периодическим процессом биосинтеза лизина с подпиткой:
₽(*рП(*р)
> max , (8.1)
‘Р Т ‘в u^D
где р и V — концентрация лизииа и объем культуральной жидкости; _/Р и /в — продолжительность рабочей и вспомогательных стадий процесса; и — вектор управляющих воздействий, которыми в общем случае являются расход и состав подпитки, а также tp; D — множество допустимых решений, за-даииое технологическими ограничениями и уравнениями математической модели процесса.
В настоящее время по производственным условиям общий объем вносимой подпитки и ее состав обычно задают, а продолжительность рабочей стадии определяют из технологического ограничения
s(/p)«s„ (8.2)
где s — концентрация сахаров в культуральной жидкости; s» — заданное значение концентрации.
С учетом этого задача (8.1) может быть сведена к следующей:
р(/р)”-->-'тах , (8-3)
LS^Di
где г — концентрация ростовых веществ в культуральной жидкости; £>i — множество допустимых значений г и s, которые рассматриваются как управляющие воздействия.
Множество Di определяется условиями
0<r<r*, Ocscs*,
а также уравнениями математической модели* периодического процесса микробиологического синтеза:
~ = ц(г)х; (8.4) ~ = q (s, г, р) х, (8.5)
Критерий (8.3) можно преобразовать с учетом уравнения (8.5). Тогда задача оптимального управления в окончательной постановке выглядит следующим образом:
1 q(s, г, p)xdt ---->• max (8.6)
J г, s
О dx при — = p(r)x.
* Модель построена в предположении, что реактор работает в режиме идеального перемешивания и скорость биохимических реакций ие ограничена условиями массопередачи кислорода иэ воздуха в культуральную жидкость.
Для ее решения запишем условия оптимальности, вытекающие лз принципа максимума Понтрягина:
Н = [9(в, г, р) + -фр. (г)] *-► max, (8.7)
rt s
— — to (S, Г, p) + Фи (г)], (8.8)
U9
Ф(Ь)-0. (8.9)
.Поскольку х>0, условие (8.7) в дальнейшем заменено условием
H/x = q(s, г, р) + фц(г) ->- max. (8.10)
г, в
В этом выражении от s зависит только первое слагаемое, поэтому требование тахН/х равносильно условию
q (s, г, р) ->- шах.
в
Зависимость q от s представлена на рис. 8.2, а, из которого следует, что оптимальная концентрация сахаров постоянна:
s°=const. (8.11)
С учетом (8.11) условие (8.10) сводится к следующему:
<p = 9(s°, г, р) + Фи (г) —► max. (8.12)
Г
Анализ общего решения дифференциального уравнения (8.8) с граничным условием (8.9) показывает, что ф(() ^0 при 0^
На рис. 8.2,6 показан характер зависимости функций р. и q от г, а на рис. 8.3 — функции <р от г.
Можно показать, что оптимальная концентрация ростовых веществ г°((), удовлетворяющая условию (8.12), является кусочно-постоянной функцией, имеющей на отрезке не
более двух интервалов постоянства:
Рис. 8.2. Кинетические зависимости процесса микробиологического синтеза лизина:
а — удельной скорости синтеза лизина q от концентрации сахаров в; б— удельных скоростей роста биомассы И (/) и синтеза лизина q (2) от концентрацвн ростовых веществ г
Рис. 8.3. Зависимость функции ч=Н[х концентрации ростовых веществ при t (/) и t>tB (2)
Момент переключения ta определяется из условия
9°=ф(^п)ц(г*), (8.14)
где q°— максимальное значение функции q, которого она достигает при s=s° г=0.
Интегрируя уравнение (8.8) в «обратном» времени на отрезке-при г°=0, получим:
ф(/п) = (ip—tB)q°.
Отсюда с учетом условия (8.14) определим момент переключения:
in Vh (г*).
Таким образом, для принятых допущений оптимальный процесс микробиологического синтеза лизина распадается на две стадии: первая — ускоренный рост биомассы, для которого необходимо поддерживать максимальную концентрацию ростовых веществ; вторая — активный синтез целевого продукта, при котором концентрация ростовых веществ должна быть равна нулю.
В реальных условиях приходится учитывать ограниченные массообменные возможности биореактора (из-за которых на стадии роста биомассы скорость процесса обычно лимитируется концентрацией растворенного кислорода), а также то обстоятельство, что уменьшение концентраций г и s может происходить только вследствие потребления соответствующих веществ в процессе микробиологического синтеза.
С учетом этих ограничений оптимальные программы (8.11) и (8.13) трансформируются к виду, представленному на рис. 8.4.
Близкий к оптимальному профиль концентрации ростовых веществ получают, если в исходную питательную среду вводится почти все их количество, рассчитанное на процесс в целом. Что касается сахаров, то задача управления, согласно (8.11), состоит в поддержании оптимальной их концентрации дозированием подпитки на отрезке 0<i<7i (см. рис. 8.4).
Алгоритм адаптивного управления импульсной подачей подпитки. В настоящее время на биохимических заводах по производству лизина подпитку вносят импульсно, подавая в биореактор за короткий промежуток времени определенную дозу раствора сахаров. В результате концентрация сахаров скачкооб-
Рис. 8.4. Оптимальные профили концентрации ростовых веществ г (/) и сахаров s (2) для периодического процесса биосинтеза лизина:
t\ —• окончание подачи сахарной подпитки; /р — окончание процесса биосинтеза
Рис. 8.5. Изменение концентрации сахаров при импульсной подаче подпитки: <п — момент подачн в биореактор дозы подпитки
।
разно возрастает до зйачения s2, которое можно рассчитать из уравнения материального баланса (см. рис. 8.5):
s2(Vi+V’n)=s1V1+snVn, (8.15)
где Vi и si — объем культуральной жидкости в биореакторе и концентрация в ней сахаров в момент внесения дозы подпитки; Vn и sn — объем дозы и концентрация в ней сахаров.
При. импульсной подаче подпитки условие поддержания оптимальной концентрации сахаров, следующее из (8.11), можно записать в виде:
| s (0 — s° | -► min, (8.16)
Где /п/ — момент подачи в реактор /-той дозы подпитки.
Если скорость потребления сахаров на небольшом отрезке времени близка к постоянной, то условию (8.16), очевидно, соответствует следующее соотношение:
S°—Si = S2—3°
Используя это выражение совместно с (8.15), определим значение «1, обеспечивающее выполнение (8.16):
* 2^ + Уд
Момент внесения дозы подпитки определяется из линейной прогнозирующей модели (4.60):
. Si-gpU)
*п — — >
«10)
где ta — время, отсчитываемое от момента tj выполнения последнего лабораторного анализа по определению концентрации сахаров в культуральной жидкости; й0(/) и Si(j)—оценки параметров прогнозирующей модели, рассчитываемые по формулам (4.58) — (4.59) с использованием результата $*(//) последнего анализа (см. пример в разд. 4.6).
Если расчетное время
^ = ^4-<п</;+1, (8.17)
то очередную дозу подпитки вносят в этот момент; в противном случае решение о времени внесения дозы подпитки принимают после получения в момент tj+i результата очередного анализа.
Момент окончания рабочей стадии процесса tP определяют по той же линейной прогнозирующей модели из условия (8.2):
So (/)!/“' (/) •
Если расчетное время удовлетворяет условию, аналогичному (8.17), его признают вероятным моментом окончания рабочей стадии процесса.
Функции АСУТП микробиологического синтеза лизина. АСУТП предназначена для автоматизированного управления процессом микробиологического синтеза лизина в биореакторах периодического действия большой единичной производительности (рабочим объемом свыше 50 м3).
Система реализует следующие функции (рис. 8.6):
первичную обработку информации и представление ее оператору (в частности, сигнализация отклонения технологических параметров от регламентных значений, индикация по вызову значений параметров и сигнализация состояния запорной и регулирующей арматуры);
расчет неизмеряемых величин;
программно-логическое управление процессом на вспомогательных стадиях;
ТОУ
Рнс. 8.6. Функциональная структура АСУТП микробиологического синтеза лнзина в биореакторах периодического действия:
/—VI — функции системы; I •— первичная обработка информации и представление ее оператору; II — регулирование технологических параметров; III — расчет неизмеряемых величии; IV — управление подпиткой и определение времени окончания рабочей стадии; V — программно-логическое управление; VI — связь с АСУТП верхнего уровня; 1 — исполнительные устройства для регулирования технологических параметров; 2 — информационно-измерительные каналы; 3 — датчики дискретных сигналов; 4 — автоматическая запорная арматура
регулирование технологических параметров иа вспомога* тельных нерабочей стадиях процесса;
управление подачей подпитки и определение времени окончания рабочей стадии;
связь с АСУТП высшего уровня.
Все функции АСУТП реализуются программно*. В состав специального математического обеспечения системы входят следующие алгоритмы:
1) первичной обработки информации, в частности изложенные в'гл. 3 алгоритмы контроля достоверности исходной информации (допусковый), фильтрации (экспоненциального сглаживания), аналитической градуировки (манометра, рН-метра, термопреобразователя сопротивления);
2) расчета Неизмеряемых величин, в частности изложенные в гл. 4 алгоритмы интегрирования методом прямоугольников и прогнозирования значений концентраций ключевых компонентов культуральной жидкости на основе полиномиальных моделей (4.56);
3) непосредственного цифрового управления по стандартному ПИД-закону регулирования;
4) программно-логического управления;
5) адаптивного управления импульсной подачей подпитки и определения времени окончания рабочей стадии.
КТС системы состоит из микропроцессорного управляющего комплекса (МПК) «Биоцикл» и стандартных технических средств автоматизации (измерительных, нормирующих и промежуточных преобразователей и вторичных приборов), размещенных в двух напольных шкафах [35].
МПК «Биоцикл» является объектно-ориентированным изделием, построенным на базе агрегатного комплекса микропроцессорных средств диспетчеризации, автоматики, телемеханики (МикроДат), который входит в состав Государственной системы промышленных приборов и средств автоматизации (ГСП). Элементной базой МикроДат служит комплект БИС серии К-580, основу которого составляет универсальный 8-ми разрядный микропроцессор. МПК «Биоцикл» по-существу является специализированным УВК> в состав которого входят микро-ЭВМ и набор периферийного оборудования для связи с ТОУ, оперативным персоналом и ЭВМ вышестоящего уровня управления. Конструктивно МПК выполнен в виде напольного шкафа, в котором на стандартных блочных каркасах установлены агрегатные модули МикроДат, а также размещены источники питания. На передней двери шкафа смонтирована лицевая панель МПК, на которой размещены средства отображения информации (цифровые индикаторы и сигнальные лампы), а также органы управления клавишного типа.
* Программное обеспечение системы написано на языке символьного кодирования — Ассемблере.
Предусмотрено два режима функционирования системы — информационно-советующий, прн котором часть функций управления выполняет оператор, воздействующий на исполнительные устройства с помощью команд дистанционного управления, и автоматический режим НЦУ. Для реализации функций управления подачей подпитки и определения времени окончания рабочей стадии используют данные лабораторных анализов, которые оператор вводит в память МПУ, после чего инициирует • работу соответствующей программы. Результаты расчета выводятся на лицевую панель МПУ в виде рекомендуемого времени выполнения соответствующей операции (подачн дозы подпитки или начала слива культуральной жидкости из аппарата).
АСУТП на основе МПК «Биоцикл» могут входить в состав распределенных иерархических АСУТП как подсистемы нижнего уровня. Для. этого предусмотрена возможность обмена информацией между МПК и УВМ вышестоящего уровня, выполняющей функции координатора,
8.2. АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ УСТАНОВКОЙ «ПОЛ И МИР-50» (АСУ «ПОЛИМИР»)
Типичным примером агрегата большой мощности является установка «Полимир-50» по производству полиэтилена методом высокого давления.
Значительный рост производительности единичного агрегата достигнут в результате увелвдения габаритов и изменения конструкции аппаратов установки, а также резкой интенсификации процесса полимеризации путем повышения давления и температуры в реакторе н применения эффективных инициаторов. Эти изменения в организации процесса привели к существенному росту количества перерабатываемой информации о ходе процесса, повысили требования к объему реализуемых функций, точности и надежности системы управления процессом н в конечном счете привели к необходимости разработки автоматизированной системы управления с применением средств вычислительной техники [14].
Полимеризация этилена осуществляется в двухзонном трубчатом реакторе под высоким давлением. При этом получают полиэтиленовый гранулят. На рис. 8.7 представлена упрощенная технологическая схема процесса.
Краткая характеристика особенностей этого процесса как объекта управления приведена во Введении.
Свежий этилен 1 поступает в установку, предварительно смешиваясь с возвратным этиленом низкого давления 2. В этилен вводят кислород 3, служащий инициатором полимеризации. Затем газ сжимают компрессором первого каскада 4 до так называемого промежуточного давления. После компрессии газ делится иа два потока, к которым подводится еще н возвратный газ промежуточного давления 5. Оба газовых потока сжимают в двух компрессорах второго каскада 6 до давления реакции, подогревают в подогревателях 7 и подводят в зоны реактора 8 и 9. Для управления температурным режимом работы реактор снабжен специальными «рубашками», по которым циркулирует горячаи вода.
В конце второй зоны реактора реакционная смесь дросселируется через специальный регулирующий клапан 10, охлаждается в продуктовом холо-
Рис. 8.7. Технологическая схема производства полиэтилена:
1 — ввод этилена; 2, 5 — рециклы низкого и высокого давления; 3 — подача кислорода; 4, 6 — компрессоры первого и второго каскада; 7 — подогреватели; 8, 9 — первая и вторая зоны реактора; 10— регулирующий клапан, И — холодильник, 12, 13—отделители промежуточного и низкого давления; 14 — гранулятор
дильнике 11, а затем поступает в отделитель промежуточного давления 12. Здесь полимер отделяется от непрореагировавшего этилена и дросселируется в отделитель низкого давления 13, в котором также выделяется этилен из. расплава. После отделителя низкого давления расплав направляется в гранулятор 14; полученный гранулят подается в цех конфекционирования. Непрореагировавший в процессе полимеризации этилен, выделившийся в отделителях промежуточного и низкого давления, возвращается на полимеризацию. Процесс полимеризации сопровождается выделением большого количества тепла, которое необходимо отводить для поддержания заданной температуры реакции. Образующийся в результате реакции полимер может иметь различные молекулярно-массовое распределение и физико-механические свойства, зависящие в основном от условий проведения реакции: температуры, концентрации инициатора, давления и некоторых других факторов.
Задачи контроля и управления. Основным и наиболее сложным в управлении агрегатом технологической схемы является реактор, в котором мономер^— этилен — превращается в полимер. Процесс проводят при давлении порядка 250 МПа и температуре около 300 °C. Количество этилена, превращенного в полимер за время пребывания в реакторе (степень конверсии, или степень полимеризации), является наряду с показателями качества продукта основным показателем эффективности функционирования реактора и всей технологической линии. Однако непосредственное измерение этих параметров осуществляется с большим запаздыванием, составляющим более 1 ч (при времени пребывания смеси в реакторе 1,5—2 мин). Поэтому ис
пользование результатов таких измерений для управления процессом сложно.
Управление реактором осуществляют изменением расходов реакционной смеси по зонам реактора, концентрации инициатора в смеси, ее входной температуры, давления в реакторе и температуры теплоносителя в рубашке реактора. Число контролируемых параметров в реакторе более 100. Основная задача стабилизации режима в реакторе — поддержание в нем заданного давления. Это достигается дросселированием газа из реактора 9 в отделитель промежуточного давления 12 (см. рис. 8.7) с помощью клапана 10.
В ряде установок производства полиэтилена высокого давления в трубчатых реакторах применяют пульсирующий режим поддержания давления в аппарате. При этом давление периодически (с периодом порядка 1 мин) резко снижают на (250-4-300)ХЮ-5 Па и затем вновь выводят на заданное значение. Продолжительность такого снижения — подъема давления составляет 10—15 с. Целью создания таких пульсаций является срыв пленки полимера, оседающей на стенках реактора и резко ухудшающей условия теплообмена, а также ликвидация возможных забивок («пробок») реактора продуктом. Такой режим работы реализуют с помощью специального управляющего устройства, называемого «главный регулятор». С помощью этого же регулятора стабилизируют давление в реакторе, реализуют достаточно жесткие требования к точности управления давлением в стационарных и переходных режимах (при пульсации давление должно точно, с большой скоростью и без перерегулирования возвращаться к заданному значению).
Температура в реакторе существенно изменяется по его длине. Она измеряется в 60—80 точках. Определенные области функционирования процесса соответствуют высокой параметрической чувствительности температуры в реакторе, когда небольшим флуктуациям параметров соответствуют значительные изменения температуры (см. рис. 2.32,а), что может привести к аварийным ситуациям. Управление температурой осуществляется изменением давления в аппарате: при превышении , -допустимого значения температуры давление в реакторе снижается, что приводит к уменьшению скорости реакции полимеризации и снижению температуры. Естественно, что такое сосредоточенное управление в ряде случаев недостаточно эффективно. Поэтому используют также алгоритмы контроля и управления процессом, учитывающие распределение температуры по длине (см. гл. 2).
Управление другими участками технологической линии в основном заключается в стабилизации на заданном значении ряда параметров, сигнализации об их отклонениях и осуществлении ряда предаварийных и аварийных защит. При этом общее число контролируемых параметров на установке достигает 2 тыс.
ш
Обеспечение диагностики оборудования и средст!
АСУТП
2.1 ,
Соблюдение оптимального плана- графика Выпуска марок продукта
31___________________
Контроль производительности
1.2
Опоеделение, Времени безотказной работы оборудования и средств
1.3___________________
Управление процессом, не приводящее к преждевременному отказу оборудования
3.2____________________
Прогноз х производительности
33 ________________
Управление процессом, обеспечивающее заданную производитепьность в стационарных ________режимах________
ЗУ_____________________
Минимизация времени переходных процессов
Рис. 8.8. Декомпозиция задачи «Обеспечение заданной производительности установки»
План-график работы установки «Полимир» включает задание по количеству и качеству (ассортименту, или марке продукта) выпускаемого полимера. При этом всегда имеются ограничения по ресурсам, определяемые внешними условиями и работой смежных производств. Кроме того, к изменениям в плане могут приводить требования заказчиков и остановы производства. Эта требует оперативной корректировки плана-графика. На установках получения полиэтилена высокого давления выпускают обычно несколько марок продукта с различными свойствами, что приводит к необходимости переходов с одного режима работы установки на другой. Каждый такой переход связан с определенными потерями: получением некоторого количества некондиционного продукта и дополнительными расходам» сырья — этилена. Избежать этих потерь полностью не удается, однако они могут быть минимизированы путем составления оптимального плана-ррйфика работы установки, устанавливающего последовательность выпуска различных марок полиэтилена и оптимальные пути переходов. К значительным потерям приводят также аварийные остановки процесса, которые могут возникать из-за нарушений технологического регламента и возможной неустойчивости процесса.
Таким образом, система управления работой агрегата по производству полиэтилена должна обеспечить выпуск заданной номенклатуры (марок) продукта при требуемой производительности и повышение эффективности функционирования процесса. Эти достаточно общие цели функционирования АТК в дальнейшем конкретизируются на примере крупнотоннажной установки «Полимир-50» в соответствии с методикой, кратко изложенной в гл. 7.
Управление процессом синтеза полиэтилена усложнено в основном возможностью протекания реакций разложения этилена в реакторе. Эти реакции протекают с высокой скоростью», сопровождаются выделением большого количества тепла, повышением давления и имеют характер теплового взрыва. Кроме того, поскольку цех синтеза представляет собой цепочку последовательно соединенных аппаратов, жестко связанных между собой по нагрузкам и параметрам процесса, то отказ какого-либо из этих аппаратов может приводить к выходу из строя всего цеха. Управление данным технологическим комплексом осуществляется из центрального пункта управления.
Анализ аналогичных действующих автоматизированных технологических комплексов показал, что современные производства полиэтилена хорошо оснащены различными контрольно-измерительными приборами и средствами автоматизации. С их: помощью обеспечивается стабилизация основных режимных параметров на заданных значениях. Однако при этом осуществляется управление лишь отдельными операциями, а не установкой-в целом, и оказывается невозможным выполнение ряда важных для крупнотоннажных агрегатов функций: переход с режима на режим, стабилизация качества продукта., пуск и останов процесса и т. д. Кроме того, изменения в системе управления, обусловленные совершенствованием технологии процесса, при использовании традиционных средств КИПиА требуют значительных капитальных затрат. Отмеченные недостатки принципиальны для «Полимир-50» как крупнотоннажного производства.
При создании АСУ «Полимир» к ней предъявляли следующие требования:
система должна быть эволюционирующей, с гибкими алгоритмической и технической структурами; это требование обусловлено необходимостью поэтапного ввода ее в эксплуатацию1 и возможными изменениями при совершенствовании технологии производства и алгоритмов управления;
система должна строиться по иерархическому принципу с декомпозицией общей задачи управления; это необходимо-для обеспечения высокой надежности управления крупнотоннажным производством;
должны максимально использоваться современные алгоритмы управления и контроля (например, построенные с помощью адаптивных математических моделей процесса), что дает основной эффект от применения АСУ;
математическое обеспечение АСУ (собственно алгоритмы и связи между ними) должно быть максимально унифицировано для возможной эволюции системы.
Указанные требования были положены в основу создания функциональной, алгоритмической и технической структур АСУ «Полимир» и структуры ее математического обеспечения.
АСУ «Полимир» построена по иерархическому принципу. В ее состав входят: 'традиционные системы автоматики, обес-
Принятие решении по управлению Анализпрйгбднбстй оборудования Расчет ТЗП
Расчет переходных режимов
Анализ причин отказов ""Прогноз производительности
Расчет текущей производительности
Прогноз аварийных ситуации
Определение границ, устойчивости
Диагностика состояния оборудования
насчет комплексных переменных
Определение марки ПЗ
Обнаружение отклонении
Представление значении переменных
Рис. 8.9. Функциональная структура реализации задачи «Обеспечение заданной производительности установки»
печивающие измерение и стабилизацию основных параметров процесса; информационно-вычислительный комплекс (ИВК), обеспечивающий централизованный сбор, обработку, представление информации и рекомендаций оператору, а также выработку управляющих воздействий на объект; технолог-оператор, выполняющий настройку процесса и принимающий решение при сложных неформализуемых ситуациях в ходе процесса.
Функционально-алгоритмическая структура АСУ. Для синтеза функционально-алгоритмической структуры, реализуемой с помощью ИВК, проведем декомпозицию целей функционирования автоматизированного технологического комплекса. При этом будем рассматривать следующие группы целей (вытекающие из сформулированных выше задач обеспечения заданной производительности, заданного качества полимера и повышения эффективности функционирования процесса): обеспечить заданную номенклатуру (качество) выпуска продукта; обеспечить заданную производительность АТК; повысить надежность функционирования АТК; повысить экономичность АТК; обеспечить гибкую связь различных организационных уровней управления; обеспечить возможность развития (эволюционируемость) АСУТП.
В соответствии с принятой методикой приведем пример последовательной декомпозиции двух первых из указанных целей (задач). Декомпозиция и конкретизация целей функционирования осуществляется, как отмечалось, с учетом организационной
структуры управления объектом. Для установки «Полимир»-можно выделить три уровня (рис. 8.8): I —управления производством полиэтилена в целом; II — управления установкой^ III — оперативного управления технологическим процессом.
Каждая из общих групп целей решается на верхнем уровне-иерархии — управления производством, подцели решаются на уровне управления установкой и, наконец, частные цели — на третьем, нижнем уровне — оперативного управления процессом. Реализация общей цели s (задачи) — «Обеспечить заданную номенклатуру (качество) продукта» — включает следующие подцели (1, 2, 3) и частные цели (в скобках):
1. Обеспечить безотказность работы АТК (обеспечить диагностику технологического оборудования и средств АСУТП; определить время безотказного пробега технологического оборудования и средств АСУТП);
2. Обеспечить оптимальный план-график выпуска марок, продукта (соблюдать оптимальный план-график выпуска марок полимера);
3. Обеспечить соблюдение технологического режима, соответствующего заданному качеству продукта (обеспечить контроль качества, прогноз качества, необходимое управление переменными в стационарных режимах; минимизировать время* переходных процессов, при которых производится некондиционный продукт).
На рис. 8.9 в качестве примера приведена структура декомпозиции рассмотренной задачи обеспечения заданной производительности установки с учетом уровней организационной структуры.
В результате такой декомпозиции всех приведенных общих, целей функционирования АСУТП формируется комплекс частных подцелей. На их основе составлена обобщенная функциональная структура системы АСУТП «Полимир». Перечень основных функций приведен ниже.
Сбор и первичная обработка информации: опрос датчиков; фильтрация; коррекция расходов; первичная проверка достоверности информации; сравнение переменных с уставками.
Расчет, анализ и принятие решений: проверка достоверности информации; анализ отклонений переменных; расчет комплексных показателей; определение марки полиэтилена (ПЭ); диагностика состояния оборудования: контроль устойчивости процесса; контроль и прогноз производительности; контроль-и прогноз качества ПЭ; прогнозирование аварийных остановов; расчет ТЭП; расчет оптимальных режимов; исследование процесса.
Представление информации: отказ КИПиА; нарушения технологического регламента; температурный профиль в реакторе; изменения переменных во времени; значения измеряемых и рассчитываемых переменных ТЭП; результаты анализа и прогнозов показателей процесса; рекомендации по управле-
Рис. 8 10. Сравнение расчетной (/) и экспериментальной (2) производительности трубчатого реактора в стационарном (а) и переходном (б) режимах
вию; оптимальный план работы установки; аварийные ситуации; результаты исследования процесса.
Отдельные алгоритмы системы разрабатываются на основе детализированной функциональной структуры, отражающей взаимосвязь функций. Пример такой структуры для одной из указанных выше общих задач — «Обеспечение заданной производительности установки» — приведен на рис. 8 9.
Детализированные функциональные структуры позволяют переходить к следующему этапу синтеза системы (см. рис. 7.6) — распределению функций между средствами КИПиА, технологом-оператором и ЭВМ. В задачи средств КИПиА входят измерения и контроль параметров процесса. Более сложные функции, связанные с формированием общего представления о функционировании отдельных частей и установки в целом (расчет ТЭП, диагностика оборудования, прогнозирование аварийных ситуаций и т. д.), реализуются с помощью ЭВМ. К этой группе относится большая часть функций АСУТП «Полимир». Наконец, решение задач, плохо формализуемых на данном этапе знаний о процессе, а также в ряде случаев окончательное принятие решения по управлению выполняет технолог-оператор.
Синтез технической структуры АСУТП «Полимир» осуществляется с учетом полного объема функций, реализуемых системой. При этом наиболее сложен синтез технической структуры управляющего вычислительного комплекса (объем памяти, вычислительные возможности число периферийных устройств выбирают с учетом будущего развития системы), а также требований к ней по надежности и точности).
Рассмотрим более подробно структуру УВК в АСУТП «Полимир». Техническая структура УВК аналогична приведенной на рис. 6.6, в. Выбор УВК осуществлялся, как отмечалось, на основе детализированных для каждой из целей функциональных структур системы. При этом было принято, что функционирование объекта при отказах УВК недопустимо, поэтому
традиционные средства КИПиА входят в состав АСУТП в таком объеме, чтобы обеспечить безаварийный останов производства в случае отказа УВК. Естественно, что это потребовало принятия специальных мер для повышения надежности прн выборе УВК. За основу была принята система, состоящая из двух вычислительных комплексов, связанных между собой с помощью устройств межмашинной связи.
Пусковой комплекс АСУ. При ранжировке выполняемых с помощью УВК функций по очередности их реализации первым был поставлен пусковой комплекс функций, объединяющий задачи, без решения которых невозможна работа объекта. Пусковой комплекс реализуется с помощью ВК-1, а на ВК-2 решаются задачи, названные вторичной обработкой информации (ВОИ), позволяющие повысить эффективность функционирования объекта (см. рис. 6 6,в). При отказах ВК-1 выполнение функций пускового комплекса автоматически переключается на ВК-2, который при этом перестает решать задачи ВОИ; тем самым обеспечивается повышенная надежность реализации функций пускового комплекса.
В состав пускового комплекса функций АСУТП «Полимир» входят: сбор и первичная обработка информации; представление информации оператору; протоколирование хода и различных показателей процесса; сигнализация о нарушениях в технологическом процессе.
Сбор и первичная обработка информации. В соответствии с этой функцией обеспечивается сбор и первичная обработка аналоговой и дискретной информации, поступающей с объекта через устройство связи с объектом (УСО). Система осуществляет следующие виды обработки: масштабирование; фильтрацию методом экспоненциального сглаживания; линеаризацию шкал датчиков, коррекцию расходов газа и пара на условия измерения; вычисление средних значений параметров за заданные интервалы времени; проверку параметров на технологическую достоверность; сравнение параметров с режимными уставками, суммирование число-импульсных сигналов.
Такие виды обработки являются достаточно общими для разных процессов (см гл. 3).
Общее количество обрабатываемых в УВК аналоговых сигналов в АСУ «Полимир» равно 500, число-импульсных сигналов (от весов и датчиков расхода электроэнергии) — 10. В системе осуществляется ввод и обработка инициативных дискретных сигналов от системы аварийной защиты и блокировки для инициирования программы протоколирования предаварийной ситуации.
Представление информации оператору включает контроль по вызову на экране дисплея группы параметров; сигнализацию на экране дисплея номеров групп, в которых произошли отклонения; индикацию на экране дисплея температурного профиля по длине реактора.
Дисплеи установлены в операторском помещении. Вызов параметров ведется по группам. Максимальное число групп равно 60, в каждой группе может быть до 10 параметров. В состав выводимой на экран информации входят: наименование технологического агрегата и номер группы; идентификатор (номер) технологического параметра -и единицы его измерения; текущее и регламентированное значения параметра; значения технологических и аварийных границ для каждого параметра; тенденция изменения параметра во времени.
Продолжительность цикла обновления информации на дисплеях составляет 5 с. Вызов той или иной группы параметров на экран осуществляется оператором с помощью клавиатуры дисплея. ~
При отклонении параметров от допустимых значений на экране дисплея высвечивается номер группы, в которой произошло отклонение. При вызове этой группы на экран дисплея отклонившийся параметр выделяется интенсивностью свечения. Проверка на допустимость отклонений осуществляется для 400 параметров.
Важной задачей контроля процесса является индикация профиля температур в реакторе на экране цветного дисплея. При этом кроме эпюры температуры реакционной смеси по длине реактора на экран автоматически выводятся в цифровой форме максимальное значение температуры в каждой из зон реактора и эпюра температуры охлаждающей жидкости в рубашке реактора. Отклонения температур выделяются цветом. Общее число индицируемых температур — 80. Продолжительность цикла обновления информации — 1 с.
Протоколирование позволяет вести полный и достоверный контроль за работой установки с помощью цифровой регистрации на печатающих устройствах. Это обеспечивает необходимую документацию о ходе процесса и освобождает операторов от трудоемкой работы по ведению записей в сменных журналах. Кроме того, предусмотрено запоминание информации на магнитных лентах и дисках.
В системе осуществляется печать следующих протоколов: производственного, фиксирующего средние часовые значения основйых параметров процесса по агрегатам и отделениям в каждой смене; этот протокол фиксирует также результаты лабораторных анализов, которые вводятся в УВК, и расчетных показателей процесса; общее число параметров в производственном протоколе — 80;
группового, в котором оператор имеет возможность протоколировать с периодом от 1 до 30 мин любую из групп параметров; запрос на протоколирование и его цикл задаются с клавиатуры дисплея;
пускового-, при пуске установки и переходе с одного режима на другой оператор может вызвать автоматическую печать пускового протокола; запрос на протоколирование и его перио-
днчность задаются с клавиатуры дисплея; число параметров в пусковом протоколе — 75;
протокола неисправности КИП-, по вызову оператора осуществляется печать всех неисправных на данный момент измерительных точек КИП; _
сменного протокола нарушений, фиксирующего все происшедшие за смену нарушения в ходе процесса по каждому из параметров; регистрируются моменты нарушения параметра и вхождения его в норму; протокол выводится автоматически в конце каждой смены; приводится сообщение о состоянии параметров к началу следующей смены;
протокола предаварийных ситуаций, служащего для выявления причин аварий и анализа процесса; реализация этой функции осуществляется путем непрерывного циклического запоминания на скользящем интервале времени текущих значений наиболее важных технологических параметров с последующим их протоколированием. При появлении инициативного сигнала об аварии на объекте через 5 с процесс циклического запоминания прекращается, и по вызову технолога-оператора с клавиатуры дисплея выводится на печать либо весь протокол, либо информация по какому-либо из агрегатов в виде последовательности значений параметров, совмещенных с временной шкалой;
протокола комплексных показателей процесса; в рамках пускового комплекса обеспечивается расчет и периодическое протоколирование обобщенных показателей процесса (ТЭП, характерные значения температурного профиля в реакторе, перепады давлений на участках технологического процесса и др.).
Кроме изложенных выше функций в рамках пускового комплекса АСУТП «Полимир» реализуются функции контроля и управления реактором полимеризации, выполняемые с помощью аналого-цифрового вычислительного устройства, названного главный регулятор. Это устройство имеет связь также с основным УВК АСУТП, что позволяет изменять задания ему по результатам расчетов в ЭВМ.
Функции вторичной обработки информации. После внедрения и освоения функций пускового комплекса выполняются задачи вторичной обработки информации [14]. Часть из них приведена на рис. 8.8, 8.9. Алгоритмы ВОИ разрабатывались на основе экспериментального и аналитического исследования объекта.
Характерная особенность внешнего программного обеспечения АСУ «Полимир» — широкое использование математических моделей процесса при разработке алгоритмов контроля и управления установкой. Применение математической модели, работающей в одном темпе с процессом, позволяет оперативно определить такие важные показатели эффективности работы установки, как производительность реактора и качество получаемого продукта. При определении этих показателей с помощью традиционных средств измерения и лабораторных ана
лизов запаздывание составляет от 1 до 4 ч, поэтому такую информацию, конечно, нельзя использовать для оперативного управления процессом. Кроме того, с помощью математической модели процесса прогнозируется «запас устойчивости» в ведении процесса (см. гл. 2).
В качестве примера рассмотрим алгоритм расчета производительности реактора на установке «Полимир-50». Оперативный расчет производительности осуществляется для каждой зоны реактора с помощью упрощенной модели процесса, представляющей собой уравнения материального баланса для мономера и инициатора:
du, . [ а, + а„Р \ ,,
<8Л8>
~ Ъ ехр( ^. ) М. (8.19>
а/ \ а3 + и j
где t/i—концентрация мономера; у2— концентрация инициатора; Р— давление; 0 — температура реакционной смеси; I — текущая длина реактора, L — длина зон реактора; щ—о», klt k2— постоянные коэффициенты.
Первоначально проводится опрос основных точек измерения по каждой зоне реактора (давление, дискретный температурный профиль по длине каждой зоны, расход инициатора, положение клапана, регулирующего соотношение расходов свежего этилена в каждую зону). Данные этих измерений используют для расчета и проверки достоверности информации. На основании измерений рассчитывают концентрации инициатора на входе в каждую зону реактора и задают начальные условия для интегрирования системы уравнений (8.18), (8.,19). Затем температурный профиль, измеренный в ряде точек по длине реактора, аппроксимируют полиномом. Коэффициенты полинома определяют методом наименьших квадратов так, чтобы минимизировать сумму среднеквадратичных отклонений значений полинома от температуры в точках измерения. Далее уравнения (8.18), (8.19) интегрируют методом Эйлера по длине каждой из зон и определяют суммарную производительность реактора по обеим зонам. Значения температуры в правых частях уравнений На каждом шаге интегрирования рассчитывают по полученному при аппроксимации полиному.
Программа расчета производительности реактора работает в составе АСУ в реальном масштабе времени. Продолжительность цикла расчета — 5 мин. Графики расчетной и экспериментально измеренной производительности (с учетом запаздывания в измерении) приведены на рис. 8.10. Результаты расчета выводятся на дисплей оператору-технологу и используются для настройки процесса на максимальную производительность (с учетом ограничений по качеству продукта).
-Программное обеспечение АСУ «Полимир». В основу построения программного обеспечения (ПО) положен агрегатный принцип, позволяющий реализовать алгоритмы контроля н управления поэтапно и при необходимости вносить изменения в функционирующие программы.
Внутреннее ПО системы построено на основе АСПО. Внешнее ПО включает программы первичной обработки информации Г(ПОИ) и программы потребителей, обеспечивающие выполнение функций АСУ. Для большей гибкости системы, как уже отмечалось, она построена по агрегатному принципу с унификацией внешних связей между отдельными ее компонентами. Система ПОИ состоит из ряда таблиц или списков, содержащих исходные данные для работы отдельных программных модулей, обрабатывающих эти таблицы (см. рис. 7.5). Данные в таблицах могут быть легко изменены. Программные модули нельзя оперативно изменять и их функции близки к функциям внутреннего программного обеспечения.
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1. Автоматизация технологических процессов пищевых производств/Под ред. £. Б. Карпниа. М.: Агропромиздат, 1985. 536 с.
2, Автоматизация и средства контроля производственных процессов: Справочник. Книга 4. М.: Недра, 1979. 624 с.
3. Анисимов И. В., Бодров В. И., Покровский В. Б. Математическое моделирование и оптимизация ректификационных установок. М.: Химия, 1975. 216 с.
4. Арис Р. Анализ процессов в химических реакторах. Л.: Химия, 1967. 328 с.
5. Балакирев В. С., Володин В. М., Цирлин А. М. Оптимальное управление процессами химической технологии. М.: Химия, 1978. 384 с.
в. Баумштейн И. П. Автоматизированные системы управления тепловыми процессами в керамической и стекольной промышленности. Л.: Стройиз-дат, 1979. 88 с.
7. Бернштейн И. М, Васильев Б. Т., Голант А. И. и др. Автоматизация управлении сернокислотным производством. М.: Химия, 1975, 248 с.
8. Бойчук Л. М. Метод структурного синтеза нелинейных систем автоматического управления М.: Энергия, 1971. 120 с.
. 9. Борзенко И. М. Методология функционально-алгоритмического синтеза АСУТП//Методические вопросы проектирования АСУ. М.: Энергоатомиэ-дат, 1984
10. Борзенко И. М. Адаптация, прогнозирование и выбор решений в алгоритмах управления технологическими объектами. М: Эиергоатомиздат, 1984. 144 с.
11. Вейцман К. Распределенные системы мини- и микро-ЭВМ. М.: Финансы и статистика, 1983. 382 с.
12. Вольтер Б. В., Сальников И. Е. Устойчивость режимов работы химических реакторов. М.г Химия, 1981. 196 с.
13. Вольтер Б В., Софиев А.Э, Шатхан Ф.А. Автоматизация производства полиэтилена. Д'!: ЦНИИТЭИприборостроеиия, 1968. 68 с.
14. Вольтер Б. В., Софиев А. Э„ Земляков Н. М. Автоматизированная система управления установкой «Полнмир-50» (АСУ «Полимир»)//Автоматизн-
роваиные системы управления технологическими процессами и производствами (на примере разработок ЦНИИКА). М., ЦНИИТЭИприборострое-иия, 1978.
15. Гапеев В. В., Софиев А. Э. Функционально-алгоритмический синтез АСУТП химико-технологических производств непрерывного действня//Ме-тодические вопросы проектирования АСУ. М.: Энергоатомиздат, 1984.
16. Галант А. И., Альперович Л. С-, Васин В. М. Системы цифрового управления в химической промышленности. М.: Химия, 1985. 256 с.
17. Грап Д. Методы идентификации систем. М.: Мир, 1979. 302 с.
18. Гуревич А. Л., Русинов Л. А„ Сягаев Н. А. Автоматический хроматографический анализ. Л.: Химия, 1980. 192 с.
19. Дудников Е. Г. Основы автоматического регулирования тепловых процессов. М.: Госэнергоиздат, 1956. 264 с.
20. Дудников Е. Г., Балакирев В. С., Кривсунов В. Н., Цирлин А. М. Построение математических моделей химико-технологических объектов. Л.: Химия, 1970. 3.12 с.
21. Емельянов С. В. Системы автоматического управления с переменной структурой. М.: Наука, 1967. 256 с.
22. Железнов Н. А. Принципы дискретизации непрерывных сигналов с ограниченным спектром//Радиотехника и электроника, 1958. № 1.
23. Изерман Р. Цифровые системы управлении. М.: Мир, 1984. 540 с.
24. Ицкович Э. Л. Контроль производства с помощью вычислительных машин. М.: Энергия, 1975. 416 с.
25. Королев Л. Н. Структуры ЭВМ и их математическое обеспечение. Мл Наука, 1974. 255 с.
26. Кротов В. Ф., Гурман В. И. Методы и задачи оптимального управлении. М.: Наука, 1973. 446 с.
27. Кулаков М. В. Технологические измерения и приборы для химических производств. М.: Машиностроение, 1983. 424 с.
28. Крамер Г. Математические методы статистики. М.: Иностранная литература, 1948. 478 с.
29. Лошашкин И. Л., Радун Д. В. и др. Автоматизация хлорных производств. М.: Химия, 1975. 268 с.
30. Мартин Дж. Организация базы данных в вычислительных системах. М.: Мир. 1980. 312 с.
31. Мейер Б., Бодуэн К. Методы программирования, т. I. М.: Мир, 1982. 356 с.
32. Моисеев Н. Н. Вычислительные методы оптимального управления. М.: Наука, 1972. 394 с.
33. Мячев А. А. Организация управляющих вычислительных комплексов. М.: Энергия, 1980, 272 с.
34. Немировский А. С. Вероятностные методы в измерительной технике. М.: Стаидартгиз, 1964. 216 с.
35. Опршико А. А., Бабаянц А. В., Ханукаев А. Я. и др. Микропроцессорный комплекс «Биоцикл» для управления периодическим процессом фермен-тации//Приборы и системы управления, 1983. № 4.
36. Островский Г. М., Бережинский Т. А., Беляева А. Р. Алгоритмы оптимизации химико-технологических процессов. М.: Химия, 1978. 294 с.
37. Панов Д. П. Оптимальное управление полупериодическим процессом ферментации. Изв. ВУЗов СССР сер. Пищевая технология, 1983. № 2.
38. Перлмуттер Д. Устойчивость химических реакторов. М.: Химия, 1976. 356 с.
39. Плановский А. Н., Николаев П. И. Процессы и аппараты химической и нефтехимической технологии. М.: Химия, 1975. 552 с.
40. Понтрягин Л. С., Болтянский В. Г., Гамкрелидзе Р. В., Мищенко Е. Ф. Математическая теория оптимальных процессов. М: Физматгиз, 1961. 376 с.
41. Прангишвили И. В. Микропроцессоры и локальные сети микро-ЭВМ в распределенных системах управления. М.: Энергоатомиздат, 1985. 272 с.
42. Ротач В. Я. Расчет настройки промышленных систем регулирования. М.: Госэвергоиздат, 1961. 340 с.
43. Рэй У. Методы управления технологическими процессами. М.: Мир, 1983; 368 с.
44, Справочник по автоматизации и средствам контроля производственных процессов. Книга 5. М.: Недра, 1967. 956 с.
45. Справочник по автоматизации и средствам контроля производственных процессов. Книга 6. М.: Недра, 1972. 696 с.
46. Справочник проектировщика автоматизированных систем управления производственными процессами/Под ред. Г. Л. Смилянского. М.; Машиностроение, 1983. 528 с.
47. Стефани Е. П. Основы построения АСУТП. М.: Энергия, 1982. 352 с.
48. Строганов Р. П. Управляющие машины и нх применение. М.: Высшая школа, 1978. 264 с.
49. Теория автоматического управления. Часть I/Под ред. А. В. Нетушила. М.: Высшая школа, 1976. 400 с.
50. Теория автоматического управления. Часть П/Под ред. А. В. Нетушила. М.: Высшая школа, 1972. 432 с.
51. Теория автоматического управления/Под ред. А. А. Воронова. М.: Высшая школа, 1986. 504 с.
52. Функционально-алгоритмический синтез АСУТП. Методические указания. МУ — 25 607—83. М.: Издательство стандартов, 1985. 168 с.
53. Цирлин А. М., Балакирев В. С., Дудников Е. Г. Вариационные методы оптимизации управляемых объектов. М/. Энергия, 1976. 372 с.
54. Цирлин А. М. Оптимальные циклы и циклические режимы. М: Энерго-атомиздат, 1985. 265 с.
55. Цыпкин Я. 3. Основы теории автоматических систем. М.: Наука, 1977. 560 с.
56. Численные методы условной оптнмизации/Под ред. Ф. Гилла и У. Мюррей. М.: Мир, 1977. 290 с.
57. Шенброт И. М., Антропов М. В., Давиденко К. Я- Распределенные АСУ технологическими процессами. М.: Энергоатомиздат, 1985. 240 с.
58. Шински Ф. Системы автоматического регулирования химико-технологических процессов. М.: Химия, 1974. 330 с.
59. Шкатов Е. Ф. Автоматизация промышленной и саивтарной очистки газов в химической промышленности. М.: Химия, 1981. 86 с.
60. Эрриот П. Регулирование производственных процессов. М.: Энергия, 1967. 480 с.
61. Юсифов С. И. Особенности архитектуры и структуры микропроцессоров и микро-ЭВМ и их классификация.//Управляющие системы и машины. 1984. № 6.
предметный указатель
Автономные АСР 56
Автономные объекты 270
Автоматизированные системы регулирования (АСР) 51 автономные 56 амплитудно-частотные характеристики 37
выбор структуры 68 сл., 81, 82 инвариантные 34 сл.
миогокоитуриые см. Многокоитур-иые АСР
одноконтурные 20 сл.
Автоматизированные системы управления технологическими процессами (АСУТП) 7 информационное обеспечение 13 математическое обеспечение 12 микробиологического синтеза лизина 340 сл.
операционные системы 324 сл. программное обеспечение 322 сл. функционально-алгоритмическая структура 9, 10, 336 сл.
техническое обеспечение 10 Автоматизированный технологический комплекс (АТК) 8
Алгоритмы адаптивной идентификации объекта 295 блуждающей трубки 268 вычисления полинома по схеме Горнера 200 диагностики частичных отказов 204 сл.
динамического программирования 264 сл.
контроля достоверности информации 202 сл
— скорости изменения сигнала 203 позиционный 24 «приведения» функции 220 сл. прогнозирования 228, 229 рекуррентный («скоростной») 25 синтеза одноконтурной АСР 22 стохастической аппроксимации 296, 297
Аппроксимация дифференциальных уравнений разностными 22 сл
Базы данных назначение 329, 330 реального времени 332 сл.
Веллмана функция 265
Взаимосвязанные АСР 51 «Влияющие» параметры 179 Возмущающие воздействия вектор 19 типы 96, 97
Вспомогательный регулятор 41
Вторичная обработка информации (ВОИ) 359 сл.
«Выпуклые оболочки» 258
Гамильтона функция 92, 275
Гистерезис 117
Горнера схема 199, 200
Декомпозиция задач оптимизации 249 сл.
Диагностика частичных отказов 204 сл.
Динамические компенсаторы 31, 34
Динамические характеристики 38
компенсаторов 38
ректификационных колони 168 сл.
теплообменников 148 сл.
химических реакторов 122 сл
Дискретиаи система 22, 23
Драйверы 325
Запаздывание приведенное (эффек-ч тивиое) 58
Запоминающие устройства 301, 302
«Идеальные» компенсаторы 34, 35
Измерительные преобразователи
аналитическая градуировка 197
выбор разрядности представления информации 182 сл.
— частоты опроса 188 сл.
Импульсное регулирование 59
Импульсы корректирующие (дополнительные) 30 сл.
Инвариантные АСР 34 сл.
Интерполяция функции 183
Интерфейс 304
Информационное обеспечение
АСУТП 13
Информационно-измерительный канал (ИИК) 179
Ииформационно-советующий режим АСУТП 13
Каскадные АСР 31
блок-схемы алгоритма расчета 45 расчет 43 сл.
структурные схемы 41, 42
температуры жидкости в паро-жидкостном теплообменнике 155
температуры в реакторе 131
— в теплообменнике смешения 144 функциональные схемы 42, 43 Квантование сигнала 181, 182 Комбинированные АСР
амплитудно-частотные характеристики 37
ииварйанТиые 34 ел.
примеры расчета 38 сл.
схемы 31, 32
Комбинированные АСР температуры в теплообменнике смешения 145
условия инвариантности 33, 34 Компенсация
динамических связей между измеряемыми величинами 217 сл.
чистого запаздывания 60
Комплекс технических средств 10
Контроль достоверности информации 201 сл.
Котельникова — Шеннона теорема 184
Коэффициент
«связанности» 55 чувствительности 138 Критерии
качества интегральный 26
оптимальности см. Критерий оптимальности управления 8 устойчивости 26, 121
Критерий оптимальности автономного объекта 270 периодических процессов 238, 281 при пуске агрегата 236
— распределении нагрузок 240 сл., 256 сл.
в расширенной задаче 273 систем с рециклом 269 способы формирования 230 сл. учет неопределенных факторов
235
циклических режимов 238 в экономических расчетах 234
Л агранжа
функционал 189
функция 255, 262
Линейная интерполяции функции 186
Линии равной степени колебательности 28, 29
Локальные системы 6
Ляпунова метод 123
Математическое обеспечение АСУТП 12
Матрица смежности 249 сл.
Метод(ы)
главных изоклин 122, 128
исследования устойчивости стационарного состояния (первый метод Ляпунова) 123
линейной йнтерполиции 186, 187 малого параметра 277 сл. нахождения стационарных состояний 115 сл.
незатухающих колебаний (Циглера — Никольса) 21, 26, 29, 30
Метод(ы) нормированных площадей 227“ прогноза и коррекции 281 прямоугольников 212 сл. расчета каскадных АСР' 43 сл. — настроек регуляторов 26 сл. расширенных частотных характе1-ристик (РЧХ) 26 сл.
ступенчатой экстраполяции (эк- . страполятор нулевого порядка) 184, 185
тестовых (калиброванных) сигиа»-й лов 204
трансформации фазового пространства 275 сл.
трапеций 214, 215 ;
улучшения качества регулирования
упрощения задач оптимизация 270 сл.
экспоненциального сглаживания 229
Микропроцессоры н микро-ЭВМ 305, 306, 317 сл.
Многоконтуриые АСР взаимосвязанные 51 сл. с дополнительным импульсом по-производной 31, 50, 51 каскадные см. Каскадные АСР комбинированные см. Комбинированные АСР
Миогосвязные объекты регулирования 51, 52
Многостадийные процессы 242, 243„ 263 сл.
Модели авторегрессии 228 полиномиальная 228 расчета оперативного ТЭП 217 Модули УСО 307, 308
Нагрузочные характеристики выпуклые 253 сл. иевыпуклые 258 сл.
Найквиста критерий устойчивости 26 Неизмеряемые величины косвенные измерения 222 сл типовые задачи вычисления 210 сл.
Несвязанное регулирование 52 сл. Нестационарные объекты 63 сл. Номинальная статическая характеристика 197, 198
Объекты управления 8 автономные 270 нестационарные 63 сл. оперативные ТЭП 211, 217 сл. эквивалентные 47
Оперативные ТЭП объекта 211».
217 лгчтп
Операционные системы AWiii
324 сл.
•Оптимальное оценивание состояийя объекта 89 сл.
Оптимальность по Парето 233
Оптимальные настройки регулятора
26
Оптимизация
календарного планирования 239, 240
параллельных агрегатов 240 сл., 252 сл. z
периодических процессов см. Оптимизация периодических процессов
последовательных агрегатов (многостадийных процессов) 242, 243, 263 сл.
пуска единичного агрегата 235, 236
— системы агрегатов 236, 237
статического режима 237
циклического режима 238
Оптимизация периодических процессов
выбор оптимальной продолжительности 282 сл.
критерий оптимальности 239, 281 совместно с аппаратами непрерывного действия 285 сл., 290 сл.
упрощение задачи 288 сл.
Организационное обеспечение АСУТП 13
Основной регулятор 41'
Отказы информационно-измерительного канала 201
Отчетные ТЭП объекта 211
Оценивание состояния 90
Оценка среднеквадратичной погрешности регулирования 73 сл.
Параметрическая компенсация 64
Параметрическая чувствительность 134 сл.
Первичная обработка информации (ПОИ) 179, 334 сл.
«Перекрестное» регулирование 55 Погрешность
линейной интерполяции 187
экстраполяции 185
Позиционное регулирование 102
Позиционный алгоритм 24 Показатель (и)
качества АСР процесса 77
колебательности системы 26
•Полные отказы ИИК 201
Построение
АСР температуры в паро-жидкостном теплообменнике 153 сл.
— химических реакторов 125 сл, главных изоклин 122, 128 диаграммы выделении — отвода тепла 118 сл.
статических характеристик реактора 115 сл.
Преобразование Фурье 188
Приближение к «идеалу» 232
Принцип автономности 55 инвариантности 32
Прогнозирование показателей процесса 227 с л. случайных процессов 82, 85
Программное обеспечение АСУТП 12 базы данных 329, 330, 332 проектирование 326 сл. состав 322 сл. -
специальное 330 сл.
средства подготовки 328, 329 языки программирования 327, 328
Процессоры 302, 303
Процессы
с параллельной структурой 240 сл., 252 сл.
с последовательной структурой (многостадийные) 242, 243,
263 сл.
с рециклом 268 сл.
Рабастность 63, 64
Разомкнутая система 25, 26
Распределение нагрузок 252 сЛ.
Расширенная задача оптимизации 273 сл.
«Расщепление» 83, 85 «Реальное» время 7 Регулирование давления 104 сл. значения pH 107 сл. массообмеииых процессов 161 сл. параметров качества 109, 110 «перекрестное» 55 позиционное 102 расхода 98 сл. связанное 52 сл.
соотношения расходов 100, 101 температуры 105 сл.
теплообменников 141 сл., 145 сл. трубчатых реакторов 133 сл. уровня 102 сл.
химических реакторов 125 сл.
Регулирующие воздействия 19
Регулятор Смита 60, 61
Режим
непосредственного цифрового управления (НЦУ) 14
реального времени 331 сл.
Рекуррентный метод наименьших квадратов 297 сл.
Рекуррентный («скоростной») алгоритм 25, 26
Рекуррентные соотношения 264
Свертка частных критериев 231 Связанное регулирование 55 сл. Системы автоматизации абсорбционной колонны 177
Системы автоматизации выпарной установки 177 испарителей 157 печей 160, 161 ректификационных установок 172 сл.
Системы непосредственного цифрового управления <НЦУ) децентрализованные 319 сл. микропроцессорные 317 сл.
функции 315 централизованные 316, 317
Системы с рециклом 268 сл.
«Скользящий» режим 64
Среднеквадратичная погрешность экстраполяции 186
Стадии создания АСУТП 14, 15
Статическая переопределеииость системы 71
Статистические фильтры нулевого порядка 195 первого порядка 196
Структурные схемы автоматизированных систем регулирования см./ Структурные схемы АСР информационно-измерительного канала 180 несвязанного регулирования 53 объекта регулирования 19, 20 паро-жидкостного теплообменника 154 печи 159 системы оценивания 90 теплообменника смешения 141 термометра 107 химического реактора 111 Структурные схемы АСР автономных 56 с двумя регулирующими воздействиями 62 с дополнительным импульсом по производной 50 замкнутой нелинейного нестационарного объекта 65 при импульсном регулировании звена чистого запаздывания 59 с импульсом из промежуточной точки 79 каскадной 79 одноконтурной 25 параметра качества продукта ПО с параметрической компенсацией 65
показателя pH 109 разомкнутой 33 расхода 99 с регулятором Смита 60 температуры жидкости в парожидкостном теплообменнике 155
Структурные схемы — в теплообменнике смешения 143 сл.
— в трубчатом реакторе 139 Ступенчатая экстраполяция функции 184, 185
Супервнзорный режим управления 14, 314, 315
Схемы ввода аналоговых сигналов 307 Горнера 199, 200 подключения УСО к ЭВМ 306 ректификации двухступенчатой 170 сл.
— одноступенчатой 169 ректификационной установки 164
Теорема Котельникова — Шеннона 184
Техническое обеспечение АСУТП 10 Технологический объект управления. (ТОУ) см. Объекты управления
Транспортное запаздывание 57
Управляющие вычислительные комплексы (УВК) 10, 11 децентрализованные 312 сл. назначение 301 режимы работы 314 структура 301 сл. централизованные 310 сл.
Уравнения линейное разностное 23, 24 регрессии 222 сл.
Эйлера 189
Условия .
автономности 55, 56 инвариантности разомкнутой и: комбиинроваиной АСР 33, 34 статической управляемости объекта 72, 73
физической реализуемости инвариантных АСР 34, 35
Устройства ввода команд 310, запоминающие 318, 319 индикации 309 регистрации 309 связи с объектом (УСО) 301,. 306 сл. --------оперативным персоналок 308 сл.
Фазовые портреты химического реактора 124, 129, 130
Файлы 325
Факторизация 84, 85
Фильтрация 82, 85 сл., 190
’Фильтры
скользящего среднего 193, 194 статистический нулевого порядка 195
— первого порядна 196 физически нереализуемый 88 экспоненциальный 191 сл.
’’функционал Лагранжа 189
Функция
Веллмана 265
Гамильтона 92, 275
Лагранжа 255, 262, 293
‘Фурье преобразование 188
Нейтрализованная техническая структура АСУТП 11
Циглера — Никольса метод (незатухающих колебаний) 21, 26, 29, 30
Циклический режим 67, 68
’Частичные отказы ИИК 201
'^Частота опроса измерительных преобразователей 188 сл.
Частотные характеристики идеального фильтра 185 эквивалентного объекта 47 экстраполитора нулевого поридк;
185
Частотный спектр сигнала возмуще инн 36
Чистое запаздывание 30, 57, 58 Чувствительность реактора 134 сл.
Эквивалентные одноконтурные АСЕ 43, 46, 47
Экономическая эффективность АСУТП 15, 16
Экспоненциальный фильтр 191 сл.
Экстраполитор нулевого порядка 185
Экстраполяция функции 183
Эйлера уравнение 189
Эффективность процесса интегральная 240 экономическая оценка 234
Языки программирования 327, 328
Учебник для вузов
Дудников Евгений Георгиевич Казаков Александр Владимирович Софиева Юлия Николаевна Софиев Александр Эльхананович Цирлин Анатолий Михайлович
АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ В ХИМИЧЕСКОЙ ПРОМЫШЛЕННОСТИ
Редактор Р. Е. Миневич
Художественный редактор Н. В. Носов Технический редактор Ю. А. Пантелеева Корректор Af. В. Черниховская
ИБ № 1746
Сдано в набор 19.01.87. Поди, в печ. 1S.04.87. Формат бумаги 60Х90’/1в. Бумага тип. № 2. Гарнитура литературная. Печать высокая. Усл. печ. л. 23. Усл. кр.-Отг. 23. Уч.-изд. л. 23,83, Тираж 10 000 экз. Заказ 833. Цена 1 р. 10 коп. Изд. № 2793.
Ордена «Знак Почета» издательство «Химия». 107076, Москва, Стромынка, 21, корп. 2.
Московская типография № 11 Союзполиграфпрома при Государственном комитете СССР по делам издательств, полиграфии и книжной торговли.
113105, Москаа, Нагатинская ул., д. 1.