/







Текст
Министерство общего и профессионального образования РФ
ИРКУТСКИЙ государственный
ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
ПРОЕКТИРОВАНИЕ
Методические указания, по выполнению курсовог о проекта
по курсу
«Основы теории радиотехнических систем»
Иркутск, 1999 г.
УДК 621.396
Проектирование радиолокационных станций. Методические указания./
Б.О.Вугмейстер. ИрГТУ. 1999.
Методические указания предназначены для студентов, обучающихся по
специальности «Радиотехника». Содержат сведения, позволяющие произвести
расчет технических характеристик некогерентной импульсной РЛС
обнаружения по заданным тактическим характеристикам. Приводятся краткие
указания по конструированию и электрическому расчету функциональных узлов
некогерентной РЛС.
1 ПРОЕКТИРОВАНИЕ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ
1.1 Состав радиолокационной станции
Радиолокационные станции ( РЛС ) объединяют в группы: по назначению (обна-
ружение, управление движением и контроль траекторий объектов и т.д.), мобильности (
стационарные, передвижные ), месту установки ( наземные, корабельные, самолетные и
т, д.), способу получения сигнала ( активные, с активным ответом, пассивные ).
Наиболее универсальный характер носят РЛС обнаружения. К ним предъявляют-
ся повышенные требования в отношении максимальной дальности действия, помехоза-
щищенности и пропускной способности.
Задачи, решаемые РЛС обнаружения:
1) обзор заданной области пространства;
2) обнаружение на фоне помех сигналов, отраженных от целей;
3)определение координат и (в случае применения оконечных устройств с вычис-
лителями) параметров движения обнаруженных целей.
Информация об обнаруженных целях может выдаваться потребителю путем
1) воспроизведения радиолокационной обстановки на экране визуального индика-
тора ( например, индикатора кругового обзора (ИКО) или видеотерминала ЭВМ);
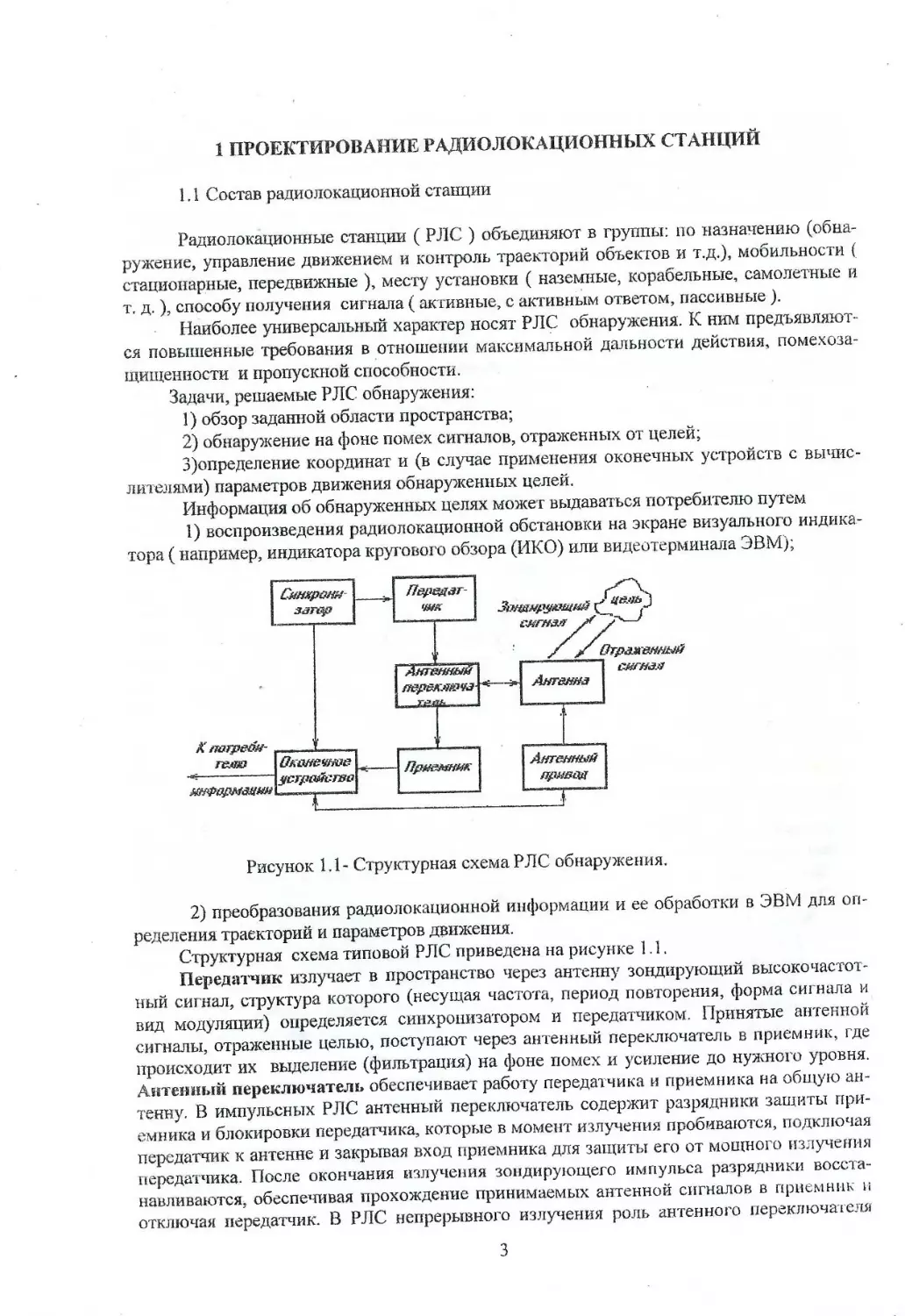
Рисунок 1.1- Структурная схема РЛС обнаружения.
2) преобразования радиолокационной информации и ее обработки в ЭВМ для оп-
ределения траекторий и параметров движения.
Структурная схема типовой РЛС приведена на рисунке 1.1.
Передатчик излучает в пространство через антенну зондирующий высокочастот-
ный сигнал, структура которого (несущая частота, период повторения, форма сигнала и
вид модуляции) определяется синхронизатором и передатчиком. Принятые антенной
сигналы, отраженные целью, поступают через антенный переключатель в приемник, где
происходит их выделение (фильтрация) на фоне помех и усиление до нужного уровня.
Антенный переключатель обеспечивает работу передатчика и приемника на общую ан-
тенну. В импульсных РЛС антенный переключатель содержит разрядники защиты при-
емника и блокировки передатчика, которые в момент излучения пробиваются, подключая
передатчик к антенне и закрывая вход приемника для защиты его от мощного излучения
передатчика. После окончания излучения зондирующего импульса разрядники восста-
навливаются, обеспечивая прохождение принимаемых антенной сигналов в приемник и
отключая передатчик. В РЛС непрерывного излучения роль антенного переключателя
3
играет развязывающее устройство типа направленного ответвителя или циркулятора.
Антенна обеспечивает направленное излучение и прием сигналов. Для обнаружения це-
лей диаграмма направленности антенны ( ДНА ) перемещается ( сканирует ) в пределах
заданной зоны обзора. При наличии на определенном направлении цели, отраженный
сигнал, отфильтрованный и усиленный в приемнике, поступает в оконечное устройст-
во, служащее для обнаружения сигнала и выделения из него полезной информации.
Связь оконечного устройства с блоком управления ДНА ( антенным приводом ) обес-
печивает измерение направления на цель, а связь с синхронизатором дает опорный сиг-
нал для отсчета дальности ( времени запаздывания ) и радиальной скорости (доплеров-
ского сдвига несущей частоты отраженного сигнала). Полученная информация выдается
в аналоговой (сигналы высвечиваются на экране индикатора кругового обзора) или циф-
ровой форме (заносится в память ЭВМ и/или воспроизводится на терминале ЭВМ ).
1.2 Тактике - технические характеристики РЛС.
Характеристики РЛС, определяющие возможности ее практического использова-
ния, называются тактическими характеристиками РЛС. Основные из них: назначение
РЛС, зона обзора, время обзора, параметры качества обнаружения цели, определяемые
координаты и параметры движения цели, погрешности их измерения, разрешающая спо-
собность, помехозащищенность, надежность.
Назначение РЛС - определяется кругом задач, решаемых данной РЛС ( РЛС обна-
ружения, управления, метеорологическая, навигационная и т.д.).
Зона обзора - область пространства, в котором РЛС выполняет свои задачи (обна-
ружение целей и измерение их координат) с заданными параметрами (вероятностямипра-
вильного обнаружения и ложной тревоги, погрешностями измерения координат и др.).
Эта зона периодически просматривается РЛС, осуществляющей радиолокационное на-
блюдение. Границы зоны обзора определяются секторами обзора по азимуту 0 и углу
места 0,
а также максимальной DMaKC
и минимальной DM„H дальностями. РЛС обнаруже-
ния часто имеют круговой обзор по азимуту ( 0
=360° ) и 0^=30° - 40°. Минимальный
угол места ограничивается условиями формирования диаграммы направленности в вер-
тикальной плоскости, связанными с отражением радиоволн от земной поверхности, и со-
~0 ~*0
ставляет десятые доли градуса для сантиметрового диапазона и 2 - 3 для станции деци-
метрового и метрового диапазонов. Величина максимального угла места обусловлена не-
обходимостью сопровождения высоколетящих целей на малых дальностях. Максималь-
ная дальность действия наземных РЛС обнаружения воздушных целей определяется
дальностью радиогоризонта, которая при высотах полета цели Н=10 - 12 км не превыша-
ет в сантиметровом диапазоне волн 300 - 350 км.
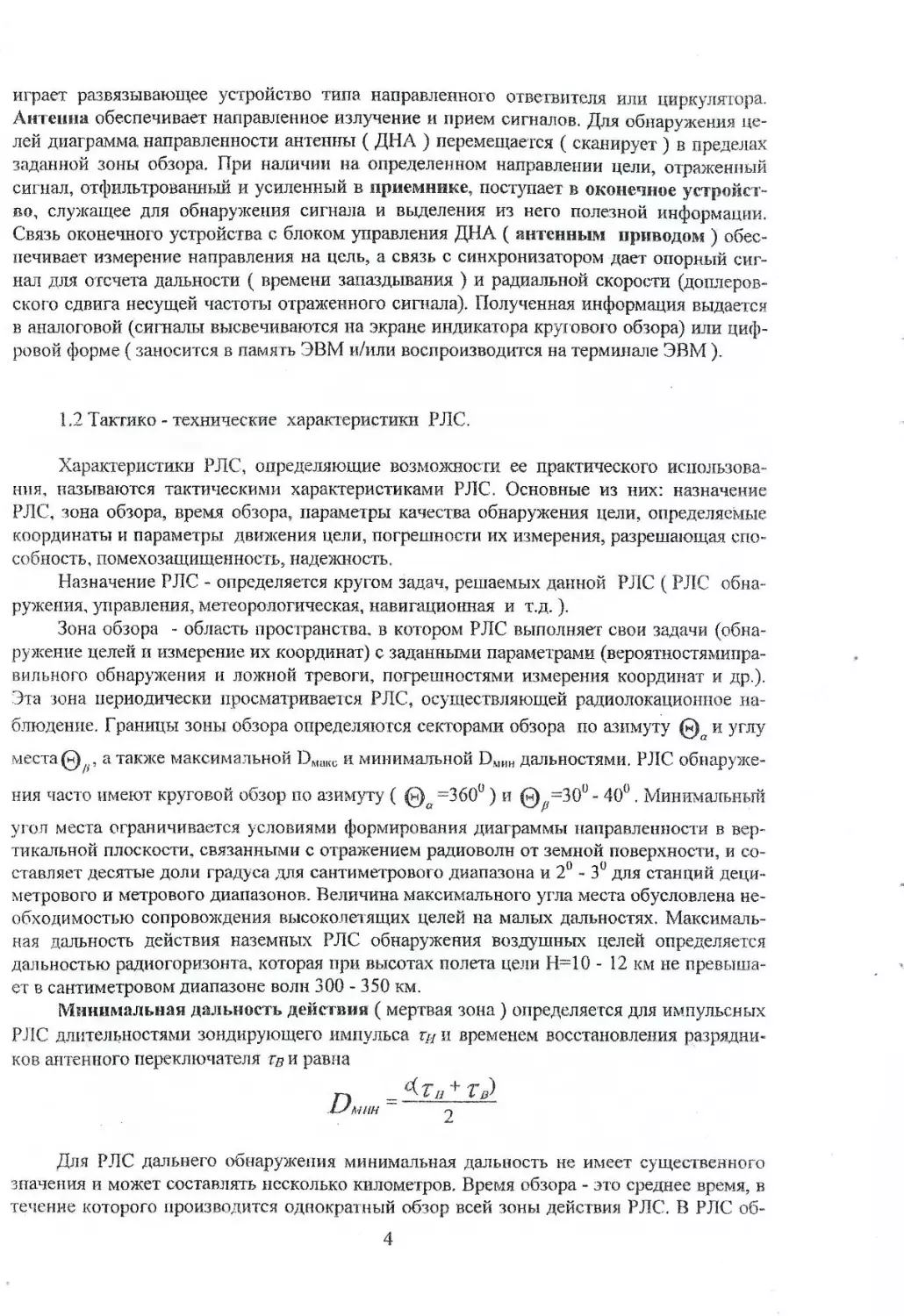
Минимальная дальность действия ( мертвая зона) определяется для импульсных
РЛС длительностями зондирующего импульса г# и временем восстановления разрядни-
ков антенного переключателя гв и равна
Для РЛС дальнего обнаружения минимальная дальность не имеет существенного
значения и может составлять несколько километров. Время обзора - это среднее время, в
течение которого производится однократный обзор всей зоны действия РЛС. В РЛС об-
4
наружения с круговым обзором время обзора равно периоду вращения антенны ТО153 = Тд.
Выбор периода вращения, с одной стороны, определяется скоростью перемещения цели и
ее маневренностью, а с другой - требующейся надежностью обнаружения отраженных
сигналов и точностью измерения их параметров, зависящими от числа импульсов, при-
нимаемых от каждой цели за один период обзора.
Для наземных РЛС обнаружения воздушных целей, работающих в режиме кругово-
го обзора, скорость вращения антенны составляет от 4 до 12 об/мин ( Тобз = 15 - 5 с ), в
судовых и самолетных РЛС она может достигать 20 - 30 об/мин.
Критерий обнаружения. В РЛС обнаружения наиболее часто используется крите-
рий Неймана-Пирсона, обеспечивающий наибольшую вероятность правильного обнару-
жения цели в разрешаемом элементе пространства за один обзор - Рпо при фиксирован-
ном значении вероятности ложной тревоги за один обзор Рлто . Вероятность правильного
обнаружения в разрешаемом элементе пространства за один обзор задается обычно в
пределах от 0,5 до 0,99 при вероятности ложной тревоги для всей зоны обзора Рлто = I О'
- 10‘3.
Разрешающая способность станции характеризует возможность раздельного ра-
диолокационного наблюдения близко расположенных целей и измерения параметров ка-
ждой цели. Разрешающая способность по дальности определяется минимальным
(ADmhh) расстоянием между двумя неподвижными целями, расположенными в одном
радиальном направлении относительно РЛС, при котором сигналы от них еще фиксиру-
ются станцией раздельно. Разрешающая способность по азимуту определяется мини-
мальной разностью между азимутами двух равноудаленных относительно РЛС целей
А <амш,, при которой их сигналы еще фиксируются раздельно.. Для РЛС обнаружения в
зависимости от конкретного назначения разрешающая способность по дальности задает-
ся в пределах от 100-200 м до 2-3 км, а по азимуту от десятых долей градуса до 2 ° - 3 °.
Определяемые параметры цели и погрешности их измерения. Возможности
практического использования РЛС зависят от определяемых ею координат цели, и по-
грешностей их измерения. Так, например, для определения местоположения наземных и
надводных целей достаточно измерить только две координаты ( дальность и азимут ), в
то время как при наблюдении за воздушными целями требуется измерение трех коорди-
нат. Измерение параметров цели всегда сопровождается погрешностями - систематиче-
скими и случайными. Систематические погрешности обычно не оговариваются, так как
они должны быть своевременно учтены и скомпенсированы. Точность измерения любого
параметра цели характеризуется среднеквадратическим значением случайной погрешно-
сти измерения этого параметра.
В РЛС обнаружения задаются среднеквадратические погрешности измерения даль-
ности у и азимута . Высокая точность измерения координат цели и параметров ее
движения не является главной задачей РЛС обнаружения, поэтому считается, что станция
обнаружения обладает достаточной точностью, если среднеквадратическая погрешность
измерения дальности у п не превышает 0,5 - 1,0 км, а азимута у - 1° - 1,5°.
Пропускная способность определяется максимальным числом целей, координаты
которых могут одновременно определяться оконечным устройством РЛС.
Помехозащищенность. Работа РЛС может происходить в условиях воздействия
различною рода естественных и преднамеренно создаваемых противником (организо-
ванных) помех. Кроме того, работе РЛС могут мешать излучения других радиотехниче-
ских устройств и, в частности, других РЛС, работающих в том же частотном диапазоне.
Способность радиолокационной станции выполнять свои функции при воздействии на
нее внешних помех называют помехоустойчивостью. Наиболее эффективные помехи
5
удается, создать, если известны основные характеристики излучаемых сигналов РЛС.
Возможность их определения зависит от скрытности работы РЛС. Помехозащищенность
является характеристикой, которая учитывает как скрытность, так и помехоустойчивость
РЛС.
Надежность. Под надежностью понимается свойство станции сохранять свои так-
тико-технические характеристики в заданных пределах при определенных условиях экс-
плуатации. Надежность ГЛС характеризуется вероятностью безотказной работы в тече-
ние установленного времени, или частотой отказов, или средним временем исправной
работы станции.
С тактическими характеристиками РЛС связаны непосредственно определяющие их
технические характеристики РЛС. Основными техническими характеристиками являют-
ся: несущая частота колебаний (или длина волны), параметры сигнала (ширина спектра,
длительность, период повторения, вид модуляции, излучаемая мощность), чувствитель-
ность приемного устройства, характеристики антенны (ширина диаграммы направленно-
сти, размеры раскрыва, количество и уровень боковых лепестков), метод и скорость об-
зора пространства, тип оконечного устройства, габариты и масса станции, потребляемая
мощность. Совокупность тактических и технических параметров РЛС образуют ее такти-
ке - технические характеристики (ТТХ). Однако, связь между техническими характери-
стиками и тактическими требованиями не однозначна. Одни и те же тактические требо-
вания можно удовлетворить различными техническими средствами. Задача проектиров-
щика и состоит в том, чтобы найти наиболее эффективные и экономичные решения.
6
2 ЗАДАНИЕ НА ПРОЕКТИРОВАНИЕ НЕКОГЕРЕНТНОИ ИМПУЛЬСНОЙ
РЛС ОБНАРУЖЕНИЯ
2.1 Цель и содержание курсового проекта.
В процессе выполнения курсового проекта студент должен получить представления
об особенностях проектирования и практического использования РЛС, ознакомиться с
техническими и эксплуатационными ограничениями, которые необходимо учитывать при
проектировании, овладеть методикой выбора и расчета основных технических парамет-
ров РЛС, обеспечивающих заданные тактические характеристики, иметь представление о
структуре РЛС в целом и ее отдельных узлов, овладеть навыками проектирования (разра-
ботка структурной схемы, принципиальной схемы или конструкции) отдельных узлов
РЛС обнаружения.
2.2 Исходные данные к проекту и порядок его выполнения.
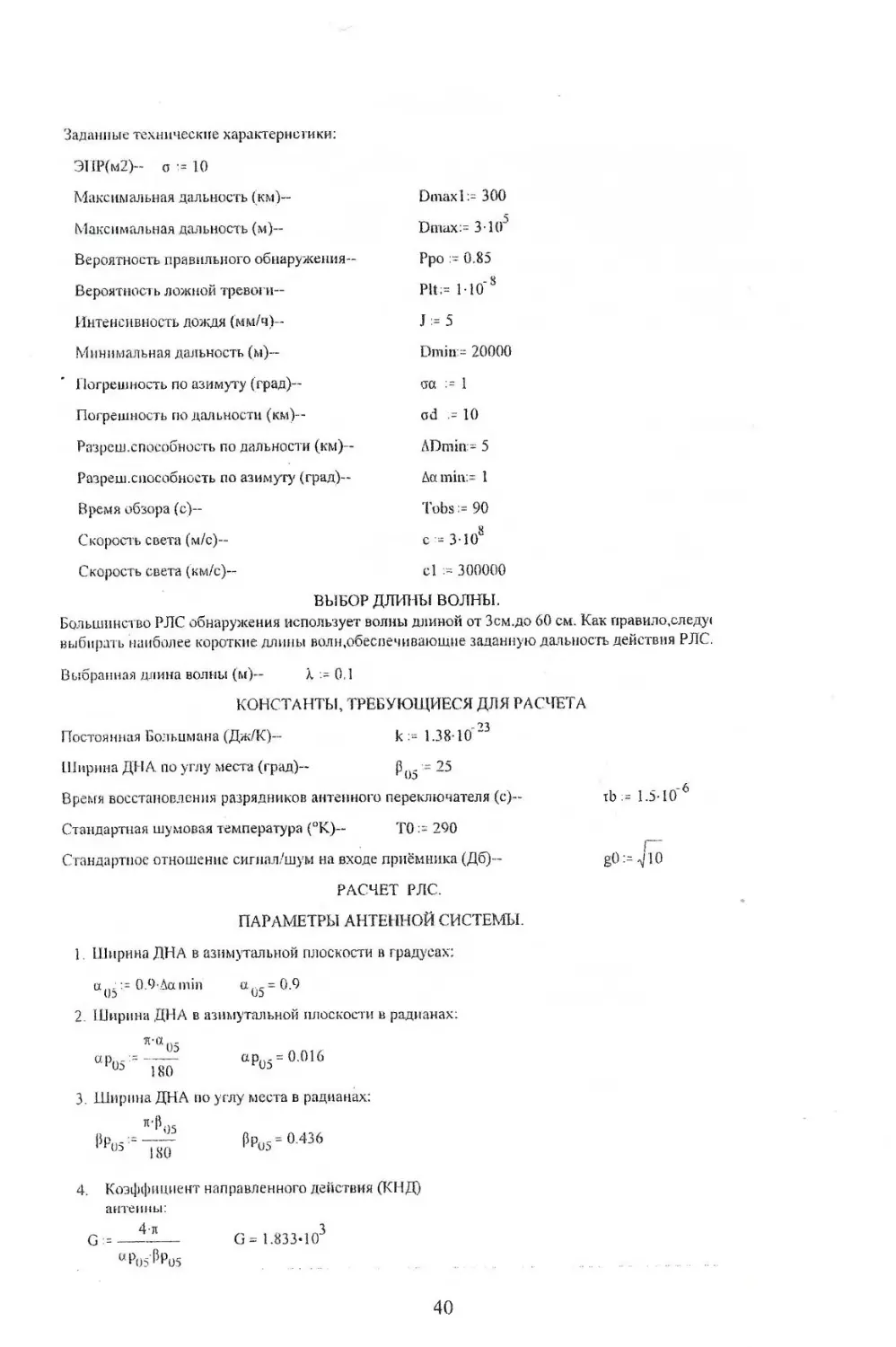
Задание. Определить основные технические характеристики РЛС с зоной обзора,
определяемой секторами поиска по азимуту и по углу места 0/5 .которая должна об-
наруживать воздушные цели со средней ЭПР [м2], находящиеся на высотах до 20 км и
дальностях до DMaKC [км] с вероятностью правильного обнаружения за время обзора в раз-
решаемом элементе пространства не меньше Рпо при допустимом уровне ложных тревог
за один обзор РЛ[0 и условиях дождя с интенсивностью J [мм/час]. РЛС должна опреде-
лять наклонную дальность -Du азимут - а со среднеквадратическими погрешностями
не более ст^ [км] по дальности и аДград] по азимуту. Разрешающая способность по
дальности - ADM1in [км], по азимуту - ДаМ1|Я [град]. (Количественные значения
®а,0Д,сгд, DMaKC, Рпо, Рдто, К сг^, , A DMHH, Дбт,Дмнн, задание на разработку одного из
функциональных узлов и дополнительные технические требования задаются руководите-
лем).
Порядок выполнения. По заданным тактическим характеристикам РЛС необхо-
димо:
I. Определить (выбрать или рассчитать):
1. Несущую частоту (длину волны).
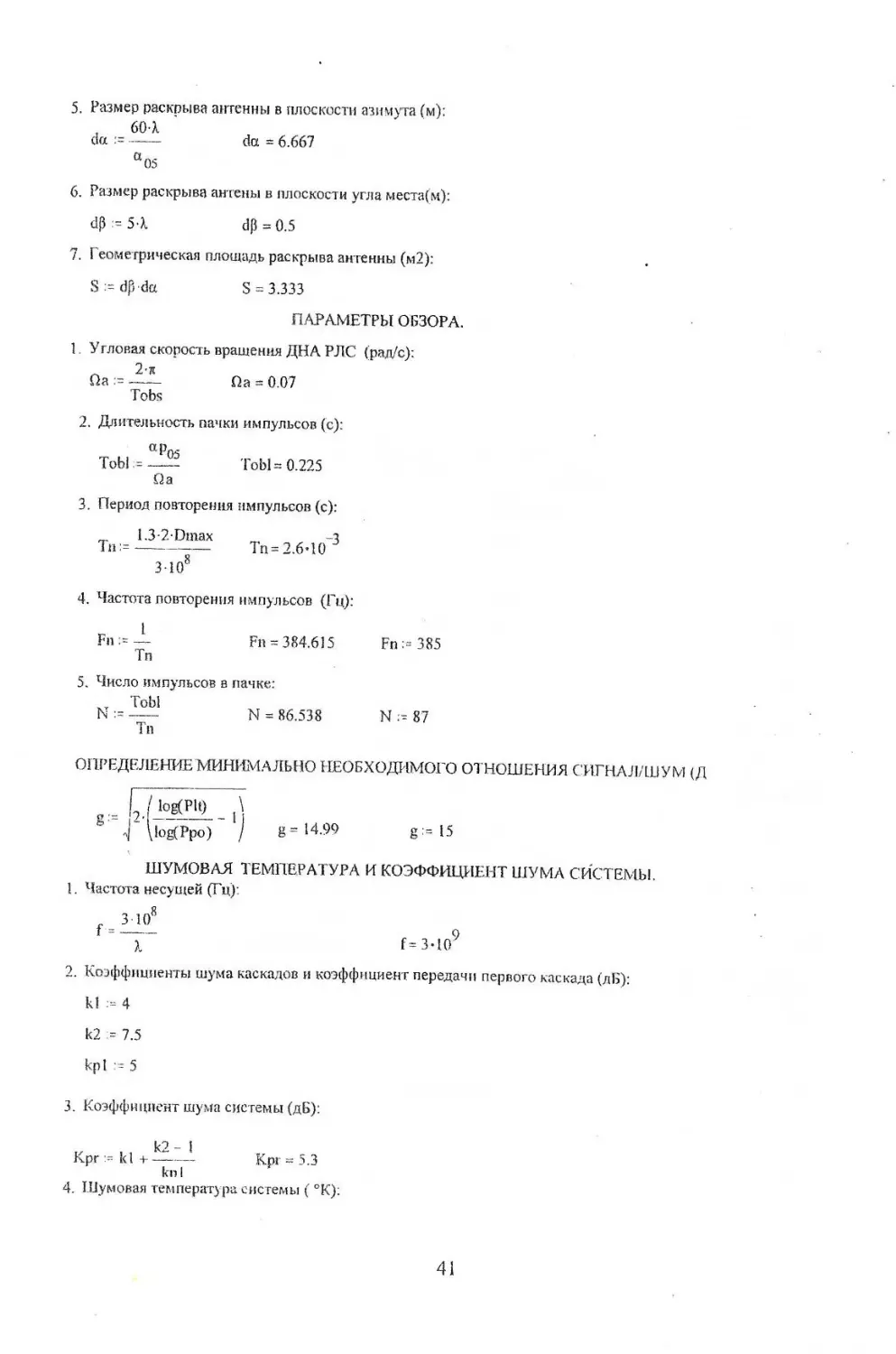
2. Параметры антенной системы: ширину диаграммы направленности, коэффициент
направленного действия, эффективный раскрыв, геометрическую площадь антенны и ее
размеры в плоскостях азимута и угла места.
3. Параметры обзора: время обзора (или скорость вращения антенны), время облу-
чения (длительность пачки), частоту повторения и число импульсов в пачке.
4. Число элементов разрешения в зоне обзора, вероятность правильного обнару-
жения и ложной тревоги для одного элемента разрешения.
5. Минимально необходимое (пороговое) отношение снгнал/шум.
6. Коэффициент шума приемника и его чувствительность.
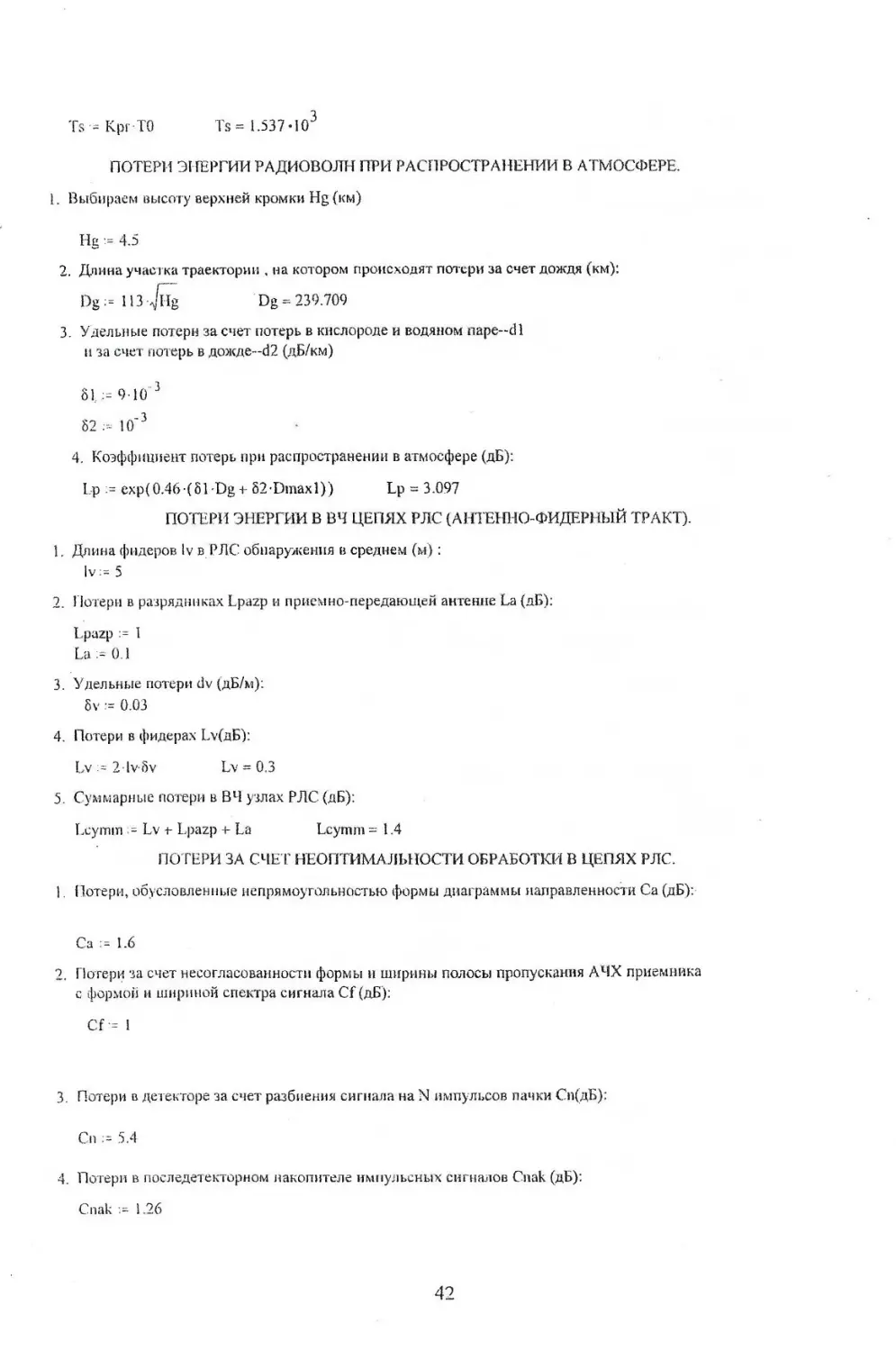
6. Потери энергии радиоволн при распространении в атмосфере .
7. Потери энергии в высокочастотных узлах РЛС.
8. Потери за счет неоптимальности обработки в цепях РЛС.
9. Параметры зондирующего сигнала: энергию, длительность, пиковую и среднюю
мощности, вид модуляции.
10. Среднеквадратические погрешности измерения дальности и азимута.
Примечание. В процессе расчета целесообразно использовать методику последова-
тельного приближения и уточнения определяемых параметров. Неудачный первоначаль-
7
ный выбор отдельных технических параметров может не обеспечить в дальнейшем за-
данных тактических требований. Поэтому необходимо на отдельных этапах расчета
уточнять ранее выбранные параметры (длину волны, параметры антенны, параметры
сигнала) и производить повторный расчет с целью получения наиболее рационального
варианта решения.
II. В соответствии с полученными в разд. I результатами составить подробную
структурную схему РЛС с указанием основных технических параметров ее узлов.
III. - На основании проведенного в разделе I расчета разработать (по согласованию с
руководителем) технические требования к одному из узлов РЛС и разработать его конст-
рукцию или составить его структурную схему, принципиальную схему и произвести ее
расчет.
Пояснительная записка оформляется на стандартных листах бумаги. Иллюстратив-
ный материал пояснительной записки (схемы, рисунки) выполняются на миллиметровке
или (если студент использует графический редактор) стандартных листах. Графическая
часть включает в себя чертежи: структурной схемы РЛС и структурной схемы, принци-
пиальной схемы или конструкции одного из узлов РЛС.
Оформление пояснительной записки (обозначения и наименования величин, графи-
ческий материал) должно удовлетворять требованиям ГОСТ, стандарта ИрГТУ и требо-
ваниям кафедры радиоэлектроники и ЭРМ к оформлению курсовых проектов.
Для расчета технических характеристик РЛС студенты могут пользоваться ЭВМ;
рекомендуется вести расчет с использованием программного пакета Mathcad. В прило-
жении приводится образец расчета, выполненного в пакете Mathcad. (версия Mathcad
6.0).
3 ВЫПОЛНЕНИЕ ОТДЕЛЬНЫХ ЭТАПОВ ВЫБОРА И
РАСЧЕТА ТЕХНИЧЕСКИХ ХАРАКТЕРИСТИК
РЛС
3.1 Исходное выражение для расчета
В РЛС обнаружения обычно используются импульсные зондирующие сигналы, по-
зволяющие наиболее просто обеспечить получение высоких значений пропускной спо-
собности, разрешающей способности и точности измерения координат. Отраженные от
цели сигналы поступают на вход приемника в виде последовательности (пачки) импуль-
сов, энергия которых накапливается (интегрируется) и сравнивается с выбранным по оп-
ределенному критерию (чаще всего Неймана - Пирсона) порогом обнаружения.
РЛС обнаружения в соответствии с видом сигналов и способами их обработки под-
разделяются на когерентные, некогерентные и РЛС со смешанной обработкой.
В когерентных РЛС, использующих последовательность радиоимпульсов с посто-
янной или изменяющейся по определенному закону начальной фазой, производится син-
хронное детектирование и гюследетекторная обработка видеоимпульсов. Когерентные
РЛС обеспечивают наиболее эффективное обнаружение отраженных сигналов, а также
выделение движущихся целей на фоне отражений от неподвижных объектов.
В наиболее простых и распространенных некогерентных РЛС используются после-
довательности радиоимпульсов со случайными начальными фазами. Накопление (сум-
мирование) отраженных сигналов в таких РЛС производится после амплитудного детек-
тора.
В РЛС со смешанной обработкой, использующих фазоманипулированные сигналы,,
производится когерентная обработка отдельных импульсов и некогерентное (последетек-
торное) накопление импульсов пачки.
Проектирование РЛС обычно начинают с оценки энергетических показателей В
соответствии с наиболее часто встречающимся на практике принципом, когда по задан-
ным тактическим характеристикам определяют и рассчитывают технические параметры
РЛС, в курсовом проекте должны быть определены основные параметры зондирующего
сигнала: энергия, длительность, форма огибающей и вид модуляции.
Оптимальным обнаружителем радиолокационных сигналов на фоне флуктуацион-
ных помех типа “белый шум’’ со спектральной плотностью Nu является согласованный
фильтр с пороговым устройством. Отношение сигнал/шум - q на выходе согласованного
фильтра при прямоугольной форме огибающей пачки отраженных сигналов равно:
где Есвх - энергия сигнала на входе фильтра, Дж; Рсих -мощность сигнала на входе
фильтра, Вт; г и - длительность импульса, с; N - число накапливаемых импульсов.
Мощность сигнала па входе приемника РЛС без учета потерь энергии радиоволн
при распространении определяется основным уравнением радиолокации:
где Рл,- импульсная мощность передатчика РЛС, Вт; G - коэффициент направленно-
го действия (КНД) антенны; Л - длина волны излучаемого сигнала, м; о,- среднее зна-
чение эффективной площади рассеивания (ЭПР) цели, м2; D- дальность до цели, м.
С учетом потерь энергии, некогерентиости пачки отраженных сигналов и неопти-
мальности обработки сигналов в цепях РЛС удвоенное отношение мощности сигнала к
9
мощности шума на входе порогового устройства обнаружителя (выходе накопителя) бу
дет:
444,47., (W^444»QP
(3.1)
где 4 и Ьаф - коэффициенты, учитывающие потери энергии сигнала при распро-
странении в атмосфере и в антенне - фидерном тракге РЛС соответственно, С„рр - коэф-
фициент, учитывающий потери за счет некогерентности сигналов и неоптимальности их
обработки в цепях РЛС.
Вычисленное с помощью выражения (3.1) отношение сигнал/шум должно быть
не менее некоторого значения которое необходимо для обнаружения цели на мак-
симальной дальности {D~DxiliK^ с заданными вероятностями правильного обнаружения
Рпо и ложной тревоги Рлто. Величина минимального отношения сигнал/шум нахо-
дится расчетным путем или по графикам характеристик обнаружения как функция Р(1о и
Р
А ЛПР
Величина No в общем случае определяет суммарный уровень собственных шумов
РЛС и внешних флуктуационных помех. В техническом задании действие внешних ис-
точников не оговорено, в расчете учитывается только влияние собственных шумов сис-
темы. Спектральную плотность собственных шумов РЛС - N() определяют по теореме
Найквиста через шумовую температуру всей системы - Тшс, которая в свою очередь мо-
жет быть определена через шумовую температуру антенны - Тан и эффективные шумовые
температуры фидерной линии - Т-,ф и приемника - 7',,,г:
где к- 1,38*10 '' - постоянная Больцмана, Дж/К; - шумовая полоса системы,
Гц; Рш - мощность шума на входе системы, Вт.
На предварительных этапах расчета спектральную плотность собственных шумов
РЛС на входе приемника можно оценить с достаточной для практических целей точно-
стью по формуле
• 4 ~ « KkuinvK (3.3)
где кщс И к/лир - коэффициенты шума системы и приемника соответственно, То= 290
К - стандартная шумовая температура, °К.
Требуемая с учетом указанных выше условий энергия зондирующею сигнала мо-
жет быть определена из выражения (3.1) для заданных D макс Р1Ю.РлТО и о , по формуле
— Рр — /%44й4/^
иТи~ TN&Vcp
2 NG2 А2 (У э
(3.4)
Соотношение (3.4) связывает основные тактические характеристики РЛС обнару-
жения - дальность действия D MitKC и эффективность обнаружения, определяемую задан-
ными Р но и Р.тго; по которым находится требуемое qMHt), с техническими параметрами РЛС
и условиями распространения и обработки сигналов.
После подстановки в (3.4) численных значений к ,яг и То с учетом принятой па
практике смешанной системы единиц получим для случая влияния только собственных
шумов РЛС расчетный вариант формулы (3.4)
10
А,[Ж]=Л1*]г,,[.] = — t3'Di
где DMaKC [км] - максимальная дальность, км; Л [см] - длина волны, см; <т, [м"] -
среднее значение ЭПР цели, м.
3.2 Предварительный выбор длины волны
Выбор длины волны производится с учетом противоречивых требований, опреде-
ляемых дальностью действия РЛС, разрешающей способностью и точностью измерения
угловых координат и ограничениями в размерах антенной системы. Рекомендуется пред-
варительно принять к рассмотрению несколько значений А, которые па последующих
этапах будут проанализированы и уточнены.
В радиолокации используются волны от десятков микрометров до 10-15 метров.
Наиболее часто используют диапазоны волн порядка 3 и 1-1,5 м, 50-60, 25-30, 8-12, 3 и
1,2 см и некоторые участки миллиметрового диапазона.
С увеличением длины волны уменьшаются потерн (затухание и рассеяние) элек-
тромагнитной энергии в атмосфере, т.е. может быть увеличена дальность действия РЛС.
С другой стороны, растут размеры антенных систем и резко уменьшается ЭПР неболь-
ших объектов, размеры которых сравнимы с длиной волны. При работе на длинах волн
короче 3 см заметно возрастает поглощение в атмосфере и уменьшается максимальная
мощность излучения. Поэтому большинство РЛС обнаружения использует волны длиной
от 3 до 60 см.
При неизменных габаритах антенны с уменьшением длины волны уменьшается
ширина диаграммы направленности, т.е. улучшаются разрешающая способность по углу
и точность определения угловых координат.
С уменьшением длины волны улучшаются условия генерации коротких импульс-
ных сигналов передатчика, но одновременно ухудшается чувствительность приемника
вследствие увеличения коэффициента шума (шумовой температуры) его входных цепей
Как правило, следует выбирать наиболее короткие длины волн, обеспечивающие
заданную дальность действия РЛС.
3.3 Параметры антенной системы
В РЛС кругового обзора используются антенные системы, имеющие ДНА узкую в
азимутальной плоскости и широкую в плоскости угла места («плоский луч»). Ширина
ДНА по углу места Д.5 выбирается из условия перекрытия заданной зоны обзора по углу
места 0 „. Ширина ДНА в азимутальной плоскости а 05 определяется заданной разре-
шающей способностью по азимуту А« ыин и обычно принимается равной ширине диа-
граммы направленности по точкам половинной мощности (а 05 — Аа мии).
При секторном обзоре ширина ДНА по азимуту и углу места определяется анало-
гично изложенному выше.
Коэффициент направленного действия (КПД) антенны:
И
где а(|5 и Д()5 (а "5,Д "5) - ширина ДНА по точкам половинной мощности в азиму-
тальной и угломестной плоскостях в радианах (а05,Д()5) или градусах (а „5).
КДН антенны 6" и ее эффективная площадь раскрыва при а “у5 иД "5, не пре-
вышающих единиц градусов (игольчатых диаграммах направленности) связаны между
собой соотношением:
где ра = 0,5 - 0,9 - коэффициент использования площади раскрыва антенны, зави-
сящий от распределения тока на раскрыве; Sa - dad.f- геометрическая площадь раскры-
ва антенны; daidp - размеры раскрыва антенны в плоскостях азимута и угла места соот-
ветственно.
Для параболической антенны ширина ДНА в градусах и размер апертуры антенны
связаны соотношением (для азимутальной плоскости):
где коэффициен т К может принимать значения от 60 до 70,
Максимально допустимые размеры антенны для РЛС кругового обзора ограничены
ветровыми и/или динамическими нагрузками и не превышают 8-10м. Минимальные раз-
меры определяются типом фидерных устройств и облучателя антенны, частично экрани-
рующими ее раскрыв. Для получения диаграммы направленности в вертикальной плос-
кости шириной Р 05« 25° т 30° размер раскрыва в этой плоскости на практике берется
равным dp - (5 4-10)2. Для неподвижных антенн (антенные решетки с секторным обзо-
ром) ограничений размера нет; размер определяется в основном конструктивными осо-
бенностями решетки.
3.4 . Параметры обзора
При круговом обзоре угловая скорость вращения ДНА, РЛС Qa [рад/с], скорость
вращения антенны па [об/мин] и время (период) обзора Д«7[с] связаны соотношением:
i)
— Лр
60 4
Период обзора Tnfa (или скорость вращения пЯ) выбираются, исходя из противоре-
чивых требований быстродействия РЛС и вероятности обнаружения отраженных сигна-
лов и точности измерения их параметров. Время облучения цели за один обзор (длитель-
ность пачки импульсов):
J-,__°" 05 2 дет () 5 а 0 5
~~Q., " ЗбОсГ 360 обг
Период TfZ или частота повторения а импульсов в пачке определяются усло-
виями однозначного отсчета дальности ;
Л'.ТАГ
12
о
где с = 3 х 10 м/с -скорость распространения электромагнитных волн в свободном
пространстве.
Число импульсов в пачке:
При последовательном обзоре по угловым координатам (секторном обзоре) иглооб-
разный луч антенны шириной <р0,5 перемещается по азимуту с постоянной угловой скоро-
стью Q (°/с) и скачком- по углу места.
Число импульсов в пачке
Число импульсов в пачке обычно от 5 до 100. При малом числе импульсов ухудша-
ются вероятность обнаружения и точность измерения координат. Увеличение числа им-
пульсов в пачке достигается увеличением времени обзора.
3.5 Определение минимально необходимого (порогового) отношения сигнал / шум.
Минимально необходимое отношение сигнал/шум - 2м)ц| определяется заданными
значениями вероятностей правильного обнаружения Рпо и ложной тревоги Pjno за один
обзор и зависит от характера флюктуаций ЭПР цели - а э. При расчете задается среднее
значение ЭПР цели - сг э и характер ее изменений, определяемый формой цели , ее дина-
мическими свойствами и положением в пространстве. Радиолокационные цели обычно
представляются комбинацией большого числа отражателей различных типов, вследствие
чего отраженный сигнал является результатом интерференции сигналов, отражаемых от-
дельными элементами цели. При перемещении цели в пространстве или изменении ее
ракурса по отношению к РЛС возникают флуктуации фазы и амплитуды результирую-
щего отраженного сигнала.
Если цель представляет собой совокупность большого числа независимых отража-
телей, среди которых находится один доминирующий (блестящая точка), то плотность
распределения значений амплитуд сигнала, отражаемого такой целью, описывается
обобщенным законом Релея (закон Релея- Райса):
где Кгаи Vtim - амплитуды суммарного сигнала и сигнала, отражаемого “ блестящей
точкой соответственно ; сгА~ дисперсия амплитуд суммарного сигнала; 10 - функция
Бесселя первого рода нулевого порядка от мнимого аргумента.
Распределение (3.8) соответствует отражению от небольших самолетов ( су ,< 5м”)
обтекаемой формы. Для большинства средних и крупных самолетов (сгэ> Юм”) харак-
терно наличие большого числа независимых отражающих элементов и отсутствие “бле-
стящих точек" (0). Плотность распределения амплитуд сигналов, отражаемых таки-
ми самолетами, описывается простым законом Релея
а сами цели такого вида получили название релеевскнх.
13
Для небольших обтекаемых самолетов , имеющих “блестящую точку“, а также дру-
гих целей, имеющих аналогичную форму, из (3.8) можно получить плотность распреде-
ления ЭПР WZ((T.() =
ехр(-л) ехр
(3.10)
ч
где сг-> - результирующая ЭПР цели, аэ - среднее значение результирующей ЭПР
/ И /
цели; п- ' отношение ЭПР стабильно отражающего элемента (блестящей
точки) о* эо к среднему значению ЭПР для всех случайных отражателей .
Для средних и крупных самолетов, не имеющих “блестящих точек” (п=0), т.е. для
релееевских целей , плотность распределения ЭПР подчиняется экспоненциальному за-
кону
^(aj =
При л<=1 отличие распределения (3.10) от простой экспоненциальной функции
(3.11) невелико. С ростом пу кривой W(tr,) появляется максимум и начинает преобла-
дать влияние стабильной составляющей сигнала. Когда п становится больше единицы .
кривая W (сгэ) приближается к нормальному закону распределения с максимумом при
=1. При л»1 преобладающее значение приобретает сигнал стабильно отражаю-
щего элемента. Он значительно превышает суммарный сигнал случайных отражателей и
определяет ЭПР цели ст., ~ cr.,t, « сг3.
В зависимости от характера движения цели флуктуации амплитуд отраженных сиг-
налов могут быть: 1) относительно медленными , при которых значения амплитуд от об-
зора к обзору статистически независимы, но в пределах пачки отраженных сигналов по-
стоянны - “дружные “ флуктуации и 2) относительно быстрыми, при которых значения
амплитуд отраженных сигналов статистически независимы в пределах пачки. В зависи-
мости от характера цели на практике встречаются, как правило, следующие случаи:
- медленные “ дружные” флуктуации с распределением (3.9):
- медленные флуктуации с распределением (3.8);
Характер флуктуаций амплитуд отраженных сигналов, определяемый плотностью
распределения вероятностей ЭПР цели - W (а,), а. также характеристиками РЛС и дина-
микой цели ( “дружные” или независимые в пределах пачки флуктуации),определяет, в
то же время , и структуру оптимального обнаружителя, и методику расчета его рабочих
характеристик.
В задании на проектирование вероятность правильного обнаружения - Рпо являет-
ся вероятностью обнаружения цели в рассматриваемом разрешаемом элементе простран-
ства, а вероятность ложной тревоги - Рлто представляет собой вероятность ложной трево-
ги за обзор, т. е. за время Т(^3.В то же время методика расчета рабочих характеристик и
определения минимально необходимого отношения сигнал/шум длиш в большинстве мо-
нографий и справочных пособий разработана для случая обнаружения цели при фикси-
рованном уровне ложных тревог в пределах разрешаемого элемента пространства Рет
при однократной проверке на превышение порота обнаружения выходным напряжением
оптимального фильтра в точке временной шкалы, соответствующей разрешаемому эле-
менту пространства. Число разрешаемых элементов пространства - к связано с заданны-
ми величинами разрешающих способностей по дальности Д азимуту Д«л/да, и уг-
14
лу места ДДА„да максимальной Д/аАч;и минимальной D^.H дальностям, и секторами обзора
@аи соотношением
так как обычно DMtUi« £>MitKC
Вероятности ложной тревоги за обзор Рсто и в одном элементе разрешения Рлт свя-
заны выражением
РЛТО=1-(1-Рлт)А' .
При Рлт «1 Vl к» 1 вероятность ложной тревоги в разрешаемом элементе про-
странства при однократной проверке
Минимально необходимое (пороговое) отношение сигнал/шум - qxtm определяется
при оптимальной обработке структурой отраженного сигнала и вероятностями правиль-
ного обнаружения - Рпо в разрешаемом элементе пространства.
Минимально необходимое (пороговое) отношение сигнал/шум
обеспечивающее заданные вероятности правильного обнаружения - Р1Ю и ложной
тревоги - Р.п, определяется по рабочим характеристикам обнаружителей (оптимальных
приемников), соответствующим заданным моделям отраженных сигналов.
Для расчета характеристик обнаружения необходимо определить плотность вероят-
ностей огибающей аддитивной смеси сигнала и шума W/( V) и плотность вероятностей
шумового напряжения (флуктуационной помехи) на выходе согласованного фильтра
W0(V). Тогда вероятности правильного обнаружения Р110 и ложной тревоги РЯ( в разре-
шаемом элементе пространства, т.е. вероятности превышения в момент времени ( r(J+ t())
выходным напряжением согласованного фильтра У порогового уровня Vlh будут соот-
ветственно определяться выражениями
09
е/у
Как известно, в момент времени (т0 + to) оз ношение сигнал/шум на входе согласо-
ванного фильтра максимально и равно
[Кс- uu.STD + О Iкич
q = ]l^ = V~~N~
V ° вых V Т
где VmciUArD + t0) и cr,;,v - амплитуда сигнала в момент времени + /„) и дис-
персия шума на выходе оптимального фильтра соответственно; - задержка сипишь.,
отраженного от цели, находящейся на расстоянии Д t0 задержка сигнала в согласованном
фильтре.
Для большинства малых (то, < 5 — 10л-г) и некоторых типов средних самолетов
(ст = 10 -20л/2) обтекаемой формы, имеющих "блестящую точку”, отношение ЭПР с га-
15
бильно отражающего элемента (блестящей точки) а ю к среднему значению ЭПР случай-
ных отражателей a lv лежит в пределах = п - 0,5 - 30,
/ ®эх
Вероятность правильного обнаружения Рпо, ложной тревоги Рлт и среднее значение
минимально необходимого отношения сигнал/шум - qww наиболее характерных для
средних и крупных воздушных целей сигналов со случайной начальной фазой и “друж-
но” флуктуирующей по закону Релея (3.9) амплитудой могут быть вычислены аналитиче-
ски. Для таких сигналов величины Р№ и Рш соответственно равны
I '//
г /7
Л /
1
Рт = ехр[-*%]. (3.13)
Исключая из (3.12) с помощью (3.13) параметр s0 (относительный порог обнаруже-
ния), получим
по лг Vх • 1 1 /
Разрешив (3.14) относительно q, получим выражение, позволяющее определить
для сигналов со случайной начальной фазой и “дружно” флуктуирующей по закону Релея
амплитудой (релеевских целен) среднее значение минимально необходимого (порогово-
го) отношения сигнал/шум по заданным вероятностям правильного обнаружения - Р1К) и
ложной тревоги - Рлт
__2
У мни
f-1).
/Л7
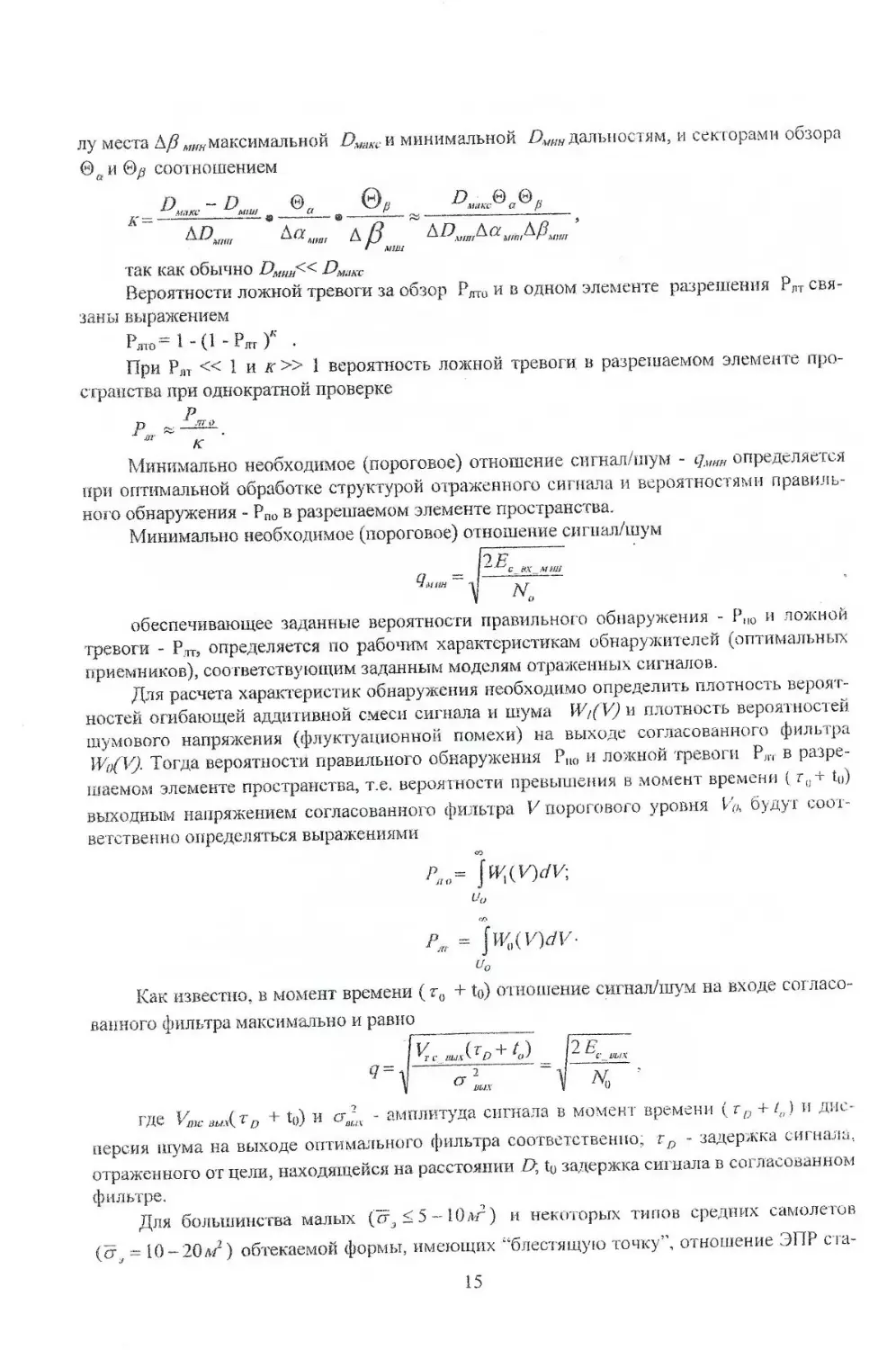
На рисунке 3.1 представлены характеристики обнаружения сигналов с “блестящей
точкой”, рассчитанные в [11].
па
Рисунок 3 1 - Характеристики обнаружения сигналов с “блестящей точкой”для двух
значений п (п - 8- сплошная линия, п - 16- пунктир), случайной начальной фазой и
“дружно” (флуктуирующей но закону Релея- Райса амплитудой.
16
3.6 Шумовая температура и коэффициент шума системы
Источником внутренних помех для РЛС являются тепловые процессы, имеющие
постоянную спектральную плотность в пределах полосы пропускания приемного устрой-
ства. Для оценки собственных шумов РЛС производится пересчет тепловых шумов, воз-
никающих в различных точках системы, к входу системы. При таком пересчете исполь-
зуются не реальные, а эквивалентные, т.е. эффективные шумовые температуры и весовые
коэффициенты - коэффициенты, шума, показывающие отношение уровня шума, изме-
ренного на выходе рассматриваемого четырехполюсника (узла РЛС) при температуре ис-
точника сигнала 290*К, к мощности шума, которая была бы на его выходе, если бы ис-
точник сигнала на его входе являлся единственным источником шума.
Шумовая температура системы 7]ж-(3.2) определяется через шумовую температуру
антенны Тон и эффективные шумовые температуры приемного фидера Т_>ф и приемника
ТЯП{Ь которые , в свою очередь определяются через коэффициенты шума приемного фи-
дера КШф и приемника К шпр, множитель потерь приемного фидера ЬфПр и стандартную
шумовую температуру - T<f= 290 К.
Коэффициент шума приемного фидера в большинстве случаев близок к единице,
поэтому с достаточной для практических расчетов точностью можно считать
Па начальных стадиях проектирования шумовую температуру антенны принимают
равной стандартной Тан~ Ту= 290°К, а потери в приемном фидере -достаточно малыми
х 1). Тогда шумовая температура системы
(РфПр
Т!ЦС-Кш^ Кшпр^ (3.17)
что и было использовано в формуле (3.3).
Формула (3.17) показывает, что коэффициент шума системы на начальных этапах
проектирования может быть принят равным коэффициенту шума приемника
где К/д^К/д?,....К/дл -коэффициенты шума каскадов приемника (усилителя радиочас-
тоты, смесителя, гетеродина, УПЧ и т.д.), .кп-1~ коэффициенты передачи по мощ-
ности соответствующих каскадов приемника.
Так как (3.18) основной вклад в коэффициент шума приемника вносит его первый
(входной) каскад, при предварительных расчетах коэффициент шума приемника прини-
мают равным коэффициенту шума его входного каскада
&шпр “ &ш!-
Коэффициент шума супергетеродинного приемника без усилителя радиочастоты
(УРЧ) определяется шумовыми свойствами смесителей. Для кристаллических смесителей
коэффициент шума Кшси- 8-12 дБ. В радиолокационных приемниках с малошумящими
УРЧ на металлокерамических триодах, лампах бегущей волны (ЛБВ) , параметрических
усилителях, усилителях на туннельных диодах и других СВЧ усилителях коэффициент
шума может быть снижен до 1 -2 дБ.
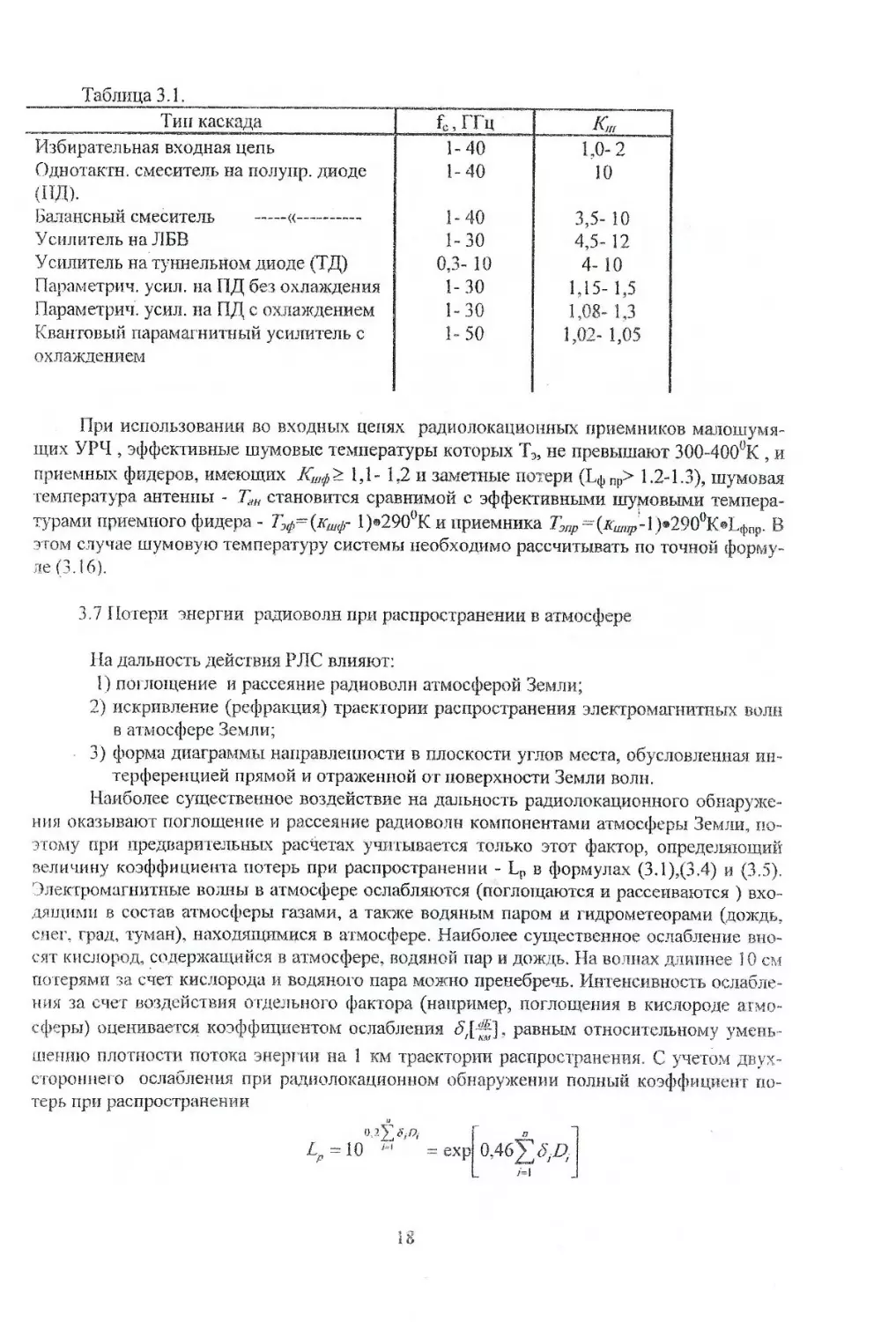
В таблице 3.1 приведены коэффициенты шума и диапазон рабочих частот для неко-
торых типов первых каскадов приемника.
17
Таблица 3.1.
Тип каскада
Избирательная входная цепь
Однотакта, смеситель на полупр. диоде
(ИД).
Балансный смеситель ------«-------
Усилитель на ЛБВ
Усилитель на туннельном диоде (ТД)
Параметрич. усил. на ПД без охлаждения
Параметрич. усил. па ПД с охлаждением
Квантовый парамагнитный усилитель с
охлаждением
fc, ГГц
кппмииг|гч1м<т1Ш1 win ww^iujiaiujcwen
1-40
1-40
0,3- 10
1-30
1-30
1- 50
3,5- 10
4,5- 12
4- 10
1,15-1,5
1,08- 1,3
1,02- 1,05
При использовании во входных цепях радиолокационных приемников малошумя-
щих УРЧ , эффективные шумовые температуры которых Тэ, не превышают 300-400пК , и
приемных фидеров, имеющих КШф> 1,1- 1,2 и заметные потери (Гфпр> 1.2-1.3), шумовая
температура антенны - Т1Ш становится сравнимой с эффективными шумовыми темпера-
турами приемного фидера - ТЭф=(кшф- 1>290°К и приемника 73л/,=(АШ(/р-1)®29ОоК®]_фпр. В
этом случае шумовую температуру системы необходимо рассчитывать по точной форму-
ле (3.16).
3.7 Потери энергии радиоволн при распространении в атмосфере
Па дальность действия РЛС влияют:
1) поглощение и рассеяние радиоволн атмосферой Земли;
2) искривление (рефракция) траектории распространения электромагнитных волн
в атмосфере Земли;
3) форма диаграммы направленности в плоскости углов места, обусловленная ин-
терференцией прямой и отраженной от поверхности Земли волн.
Наиболее существенное воздействие на дальность радиолокационного обнаруже-
ния оказывают поглощение и рассеяние радиоволн компонентами атмосферы Земли, по-
этому при предварительных расчетах учитывается только этот фактор, определяющий
величину коэффициента потерь при распространении - Lp в формулах (3.1),(3.4) и (3.5).
Электромагнитные волны в атмосфере ослабляются (поглощаются и рассеиваются ) вхо-
дящими в состав атмосферы газами, а также водяным паром и гидрометеорами (дождь,
снег, град, туман), находящимися в атмосфере. Наиболее существенное ослабление вно-
сят кислород, содержащийся в атмосфере, водяной пар и дождь. На волнах длиннее 10 см
потерями за счет кислорода и водяного пара можно пренебречь. Интенсивность ослабле-
ния за счет воздействия о тдельного фактора (например, поглощения в кислороде атмо-
сферы) оценивается коэффициентом ослабления 8,[~], равным относительному умень-
шению плотности потока энергии на 1 км траектории распространения. С учетом двух-
стороннего ослабления при радиолокационном обнаружении полный коэффициент по-
терь при распространении
£„ = 10 Д| = ехр
где 61 - удельные потери за счет отдельно рассматриваемого фактора, дБ/км; Д -
длина участка траектории, на котором происходят потери за счет рассматриваемого фак-
тора, км.
Потери в кислороде атмосферы и водяном паре происходят на всей траектории, по-
этому для этих факторов Do2^Dh2o = D ,Ю1КС. Потери за счет дождя происходят на участках
траектории Dg<DMaKC, зависящих от высоты цели и от высоты верхней кромки дождевых
туч Hg. При дожде, идущем на всей дальности обнаружения, наиболее интенсивные по-
тери энергии будут для целей, появляющихся из-за горизонта, т.к. для них участок траек-
тории, на котором происходят потери из-за дождя - Dg. максимален и равен
РДа'м] = = 113 ДХЙ ’
где R3= 6370 км - радиус Земли, Hg -высота верхней кромки дождевых туч, км.
При слабом дожде ( J = 1 мм/ч) верхняя кромка дождевых туч Hg~ 6-8 км; при дож-
де средней интенсивности ( J =4 мм/ч) - //у=4-5 км; при сильном дожде (J =16 мм/ч) -
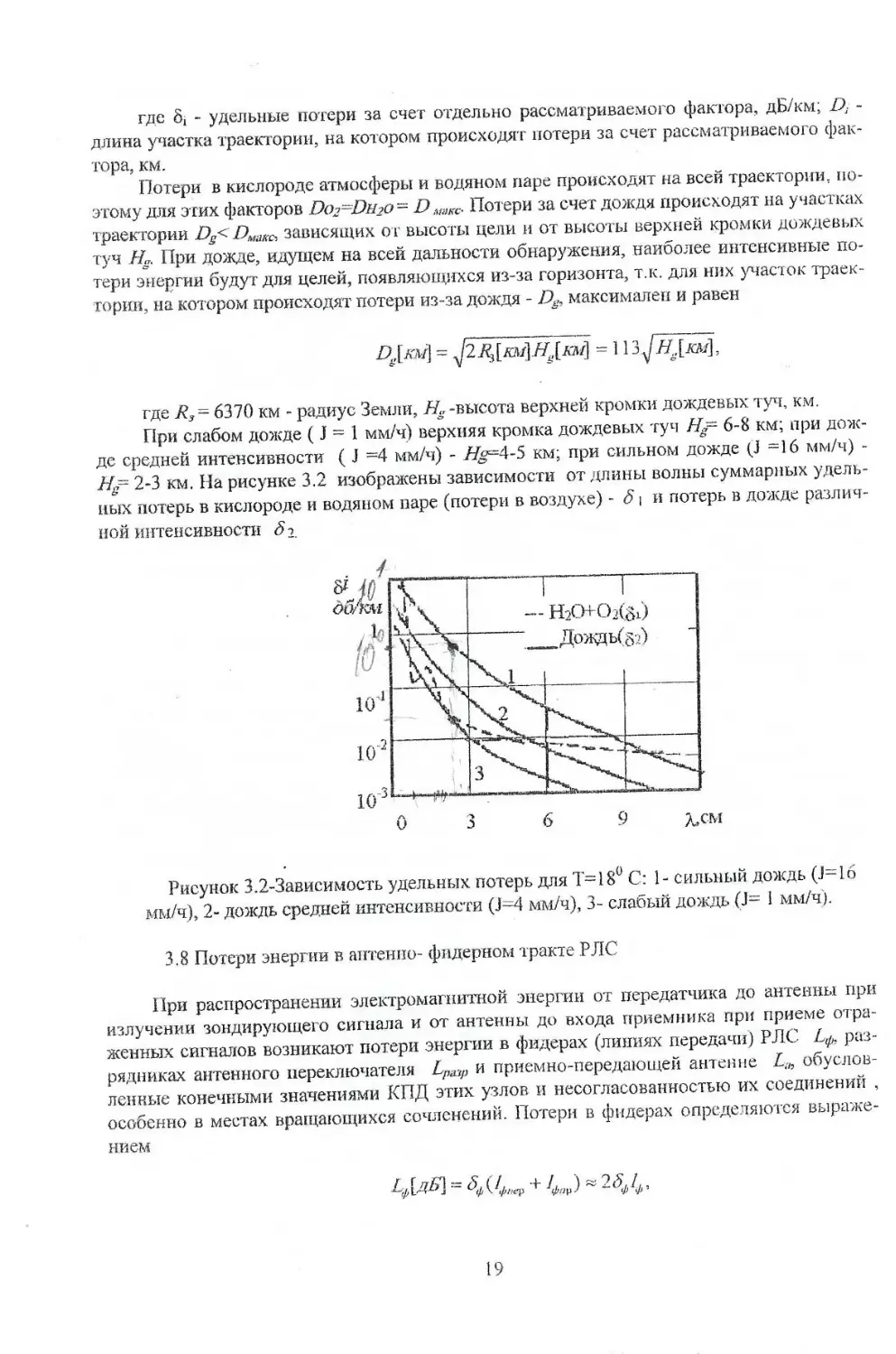
Hg~ 2-3 км. На рисунке 3.2 изображены зависимости от длины волны суммарных удель-
ных потерь в кислороде и водяном паре (потери в воздухе) - 8 i и потерь в дожде различ-
ной интенсивности 8
Рисунок 3.2-Зависимость удельных потерь для 1-18° С: 1- сильный дождь (J-16
мм/ч), 2- дождь средней интенсивности (J=4 мм/ч), 3- слабый дождь (J= 1 мм/ч).
3.8 Потери энергии в аптенно- фидерном тракте РЛС
При распространении электромагнитной энергии от передатчика до антенны при
излучении зондирующего сигнала и от антенны до входа приемника при приеме отра-
женных сигналов возникают потери энергии в фидерах (линиях передачи) РЛС Ьф; раз-
рядниках антенного переключателя Lpa3p и приемно-передающей антенне Д7, обуслов-
ленные конечными значениями КПД этих узлов и несогласованностью их соединений ,
особенно в местах вращающихся сочленений. Потери в фидерах определяются выраже-
нием
19
где <5ф~ удельные, потери , дБ/м; 1фПер> !флр - длина фидера от передатчика до антенны
и от антенны до приемника соответственно, м (обычно принимают 1фтр=1флр-1ф)’
Удельные потери зависят ст типа используемых в РЛС фидеров ( волноводы, коак-
сиальные и полосковые линии) и от длины волны А. Чаще всего в качестве фидеров ис-
пользуют волноводы , у которых удельные потери минимальны и составляют в среднем :
при 2 = (25-30) см - 0.01 дБ/м; при А =( 8-12 см3 - 0.03 дБ/м и при Я=3см -0.15 дБ/м. В
среднем можно считать 1ф = 5-Юм. Потери в разрядниках составляют (в зависимости ст
типа разрядников) Lpa3p= 1-2 дБ. Наименьшими потерями обладают антенны РЛС, имею-
щие высокий КПД (0.95-0.99). В среднем можно считать £/= 0,1-0,15 дБ.
Суммарные потери в высокочастотных узлах РЛС (антенно-фидерном тракте)
£^[дБ] = Д»[дБ] + С^ДдБ] + ДДдБ]
3.9 Потери энергии при обработке сигнала в цепях РЛС
3.9.1. Потери, обусловленные непрямоуголыюстыо фермы диаграммы направлен-
ности. учитывают уменьшение суммарной энергии пачки импульсов, модулированных по
закону, пропорциональному квадрату ДИЛ (за счет' двукратного ее использования при
передаче и приеме), по сравнению с суммарной энергией пачки импульсов с прямоуголь-
но)! огибающей, пропорциональной максимальному значению КНД антенны G, исполь-
зуемому в формулах (3.1) ,(3.4) и (3.5). Коэффициент потерь - Са зависит от числа им-
пульсов в пачке и режима сканирования, можно принять Са= 1,6 дБ.
3.9.2. Потери за счет несогласованности формы и ширины полосы пропускания
ЛЧХ приемника с формой и шириной спектра сигнала.
Максимальное отношение сигнал/шум на входе порогового устройства обнаружи-
теля будет в том случае . когда результирующая частотная характеристика приемника
РЛС согласована со спектром сигнала. В РЛС частотная характеристика системы практи-
чески определяется формой и шириной результирующих частотных характеристик УПЧ
приемника и устройств додетекторной обработки сложных сигналов (если они использу-
ются). Результирующая частотная характеристика РЛС, как правило, не согласована со
спектром сигнала , что ведет к ухудшению отношения сигнал/шум по сравнению с согла-
сованной фильтрацией. Это ухудшение оценивается коэффициентом С^. Ширина поло-
сы пропускания УПЧ - A/yn, определяющая в большинстве случаев ширину полосы про-
пускания системы в целом , обычно превышает оптимальное значение
Даже при оптимальном значении ширины полосы пропускания УПЧ, определяемом
(3.19), будут иметь место потери , зависящие от степени соответствия формы огибающей
сигнала и амплитудно-частотной характеристики фильтра (УПЧ приемника). Величина
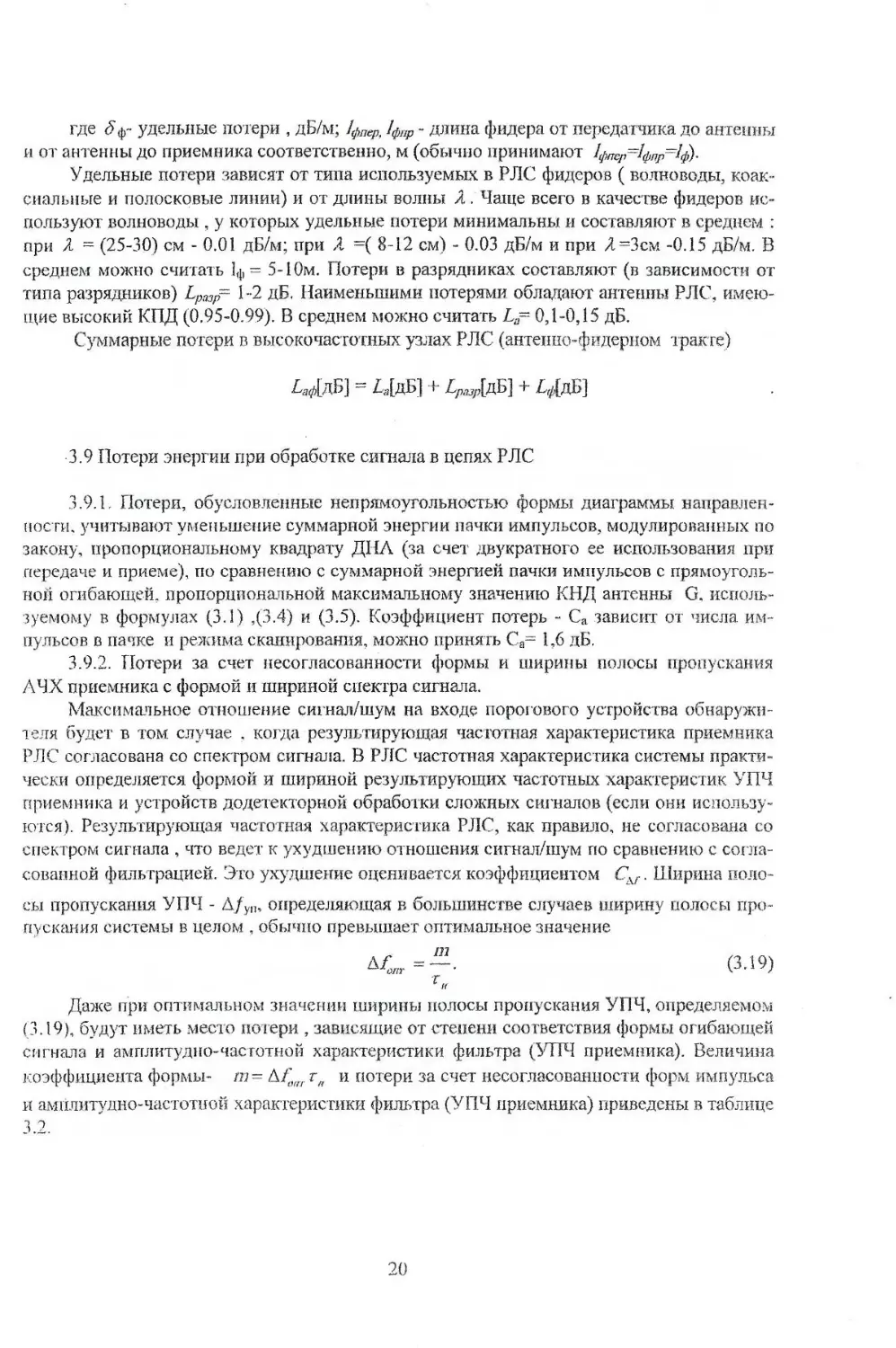
коэффициента формы- т= kfgrrr тя и потери за счет несогласованности форм импульса
и амплитудно-частотной характеристики фильтра (УПЧ приемника) приведены в таблице
3.2.
20
Таблица 3.2
Форма Фильтр щ=Д^ггйпри отсче- Потери рассогла-
импульса (УПЧ приемника) те г и ДГ и опт на уровне 0.5 по напряжению(- 6дБ) со- ва- ния С^дЬ}
Гауссова Гауссов полосовой Полосовой с частотной 0,44 0
характеристикой 0,72 0,49
Г ауссов полосовой 0,72 0,49
5 резонансных конту- 0,67 0,50
Прямо- ‘угольная ров с одинаковой на- стройкой
2 резонансных конту- ра с одинаковой на- стройкой 0,61 0,56
Однополосный фильтр 0,40 0,88
1 Полосовой с прямо- угольной частотной характеристикой 1 1 'ТГ 1р / 0,85
1 Прямо- угольная с внутри- и_вых0,5 = 1,04
импульс- ной ЛЧМ с девиацией Г ауссов полосовой аде дли- тельность сиг- нала на выходе 0,6
W фильтра сжатия
Ширина полосы пропускания УПЧ с учетом доплеровского смещения спектра от-
раженного сигнала, нестабильности частоты гетеродина и частоты передатчика
(3.20)
где Дф ==
С^Ф
Мцц
- требующаяся для обеспечения заданной разрешающей способно-
сти по дальности ДДида,ширина спектра зондирующего сигнала, ^=0,8 - 1,37 - коэффи-
циент, зависящий от формы огибающей и структуры зондирующего сигнала (на началь-
ных этапах проектирования, когда еще неизвестны ни форма огибающей, ни структу ра
зондирующего сигнала, обычно принимают X^rl), FVwkc~ доплеровское смещение часто-
ты отраженного сигнала, соответствующей максимальной скорости воздушных целей
Гл/алт-
Скорость воздушных целей VM!iKC не превышает величины 1000 м/с. Суммарная
нестабильность частот генератора высокой частоты (1 '134), гетеродина приемника и рас-
стройки частоты принимаемых импульсов относительно центральной частоты фильтра
УПЧ
S ^.определяется их относительными нестабильностями
и средними зна-
чениями частот Основной вклад в нестабильность вносит ГВЧ. У магнетронных ге-
нераторов, чаще всего используемых в качестве ГВ1!, относительная нестабильность
~ 1(TJ -10"1. Коэффициент стабилизации системы АПЧ Лдп~10 - 20. Таким об-
разом, при предварительных расчетах ширина полосы пропускания У114 может быть оп-
ределена как
(3.21)
Различие оптимального (3.19) и практически используемого (3.21) значений полос
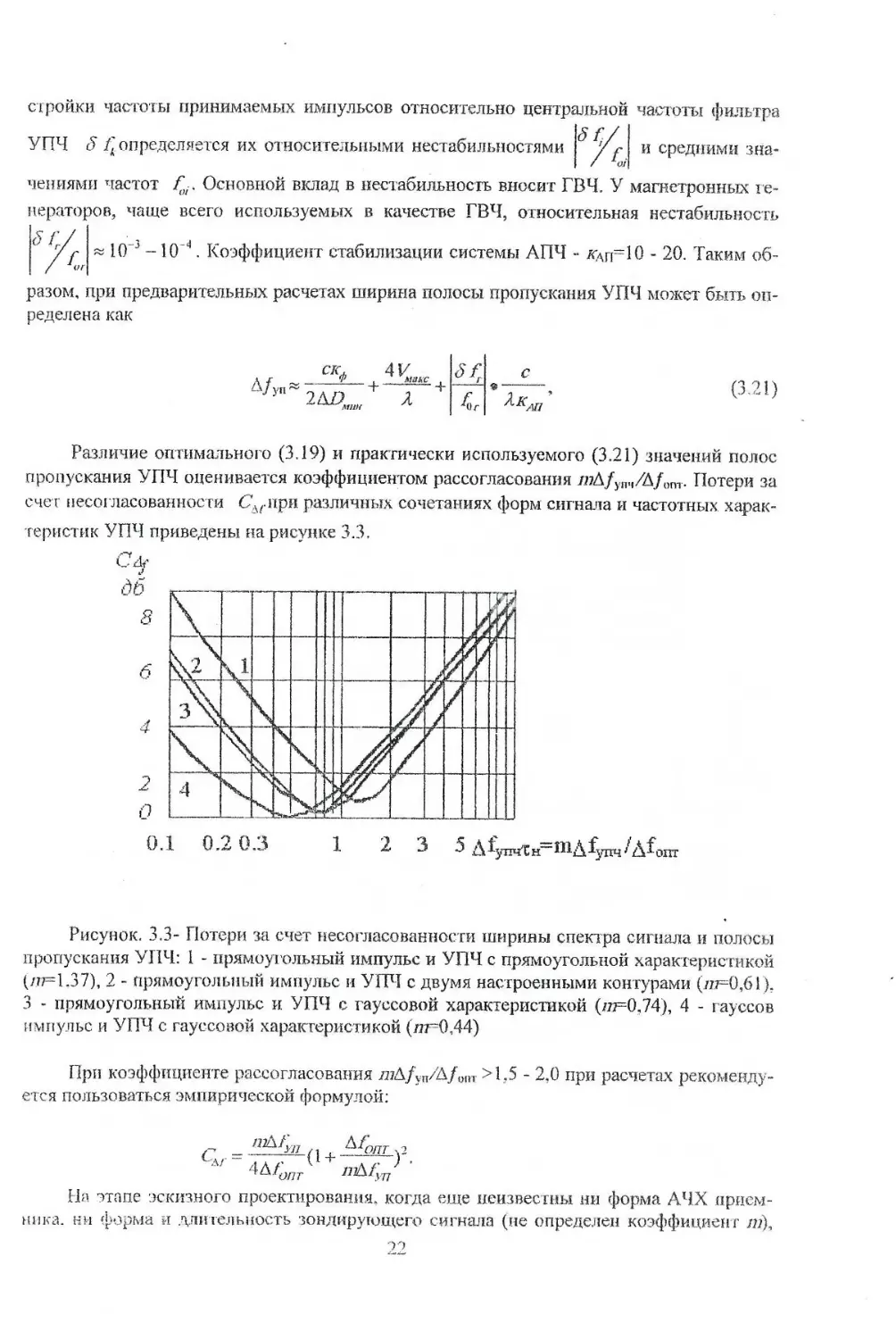
пропускания УПЧ оценивается коэффициентом рассогласования щД/упч/Д/0Пт. Потери за
счет несогласованности С ,гпри различных сочетаниях форм сигнала и частотных харак-
теристик УПЧ приведены на рисунке 3.3,
0.1 0.2 0.3 1 2 3 5 Д1;та.Сн=тД WAfanr
Рисунок. 3.3- Потери за счет несогласованности ширины спектра сигнала и полосы
пропускания УПЧ: 1 - прямоугольный импульс и УПЧ с прямоугольной характеристикой
(/77=1.37), 2 - прямоугольный импульс и УПЧ с двумя настроенными контурами (//7=0,61),
3 - прямоугольный импульс и УПЧ с гауссовой характеристикой (/?т=0,74), 4 - гауссов
импульс и УПЧ с гауссовой характеристикой (/77=0,44)
При коэффициенте рассогласования л/Д/уп/А/шп >1.5 - 2.0 при расчетах рекоменду-
ется пользоваться эмпирической формулой:
На. этапе эскизного проектирования, когда еще неизвестны ни форма АЧХ прием-
ника. ни форма и длительность зондирующего сигнала (не определен коэффициент т).
значение коэффициента Сдгможно принять равным 1,0 - 2,0 дБ, что соответствует рас-
ширению полосы пропускания УПЧ в 1,5 - 2,0 раза по сравнению с шириной спектра
сигнала, определяемой заданной разрешающей способностью по дальности (3.20).
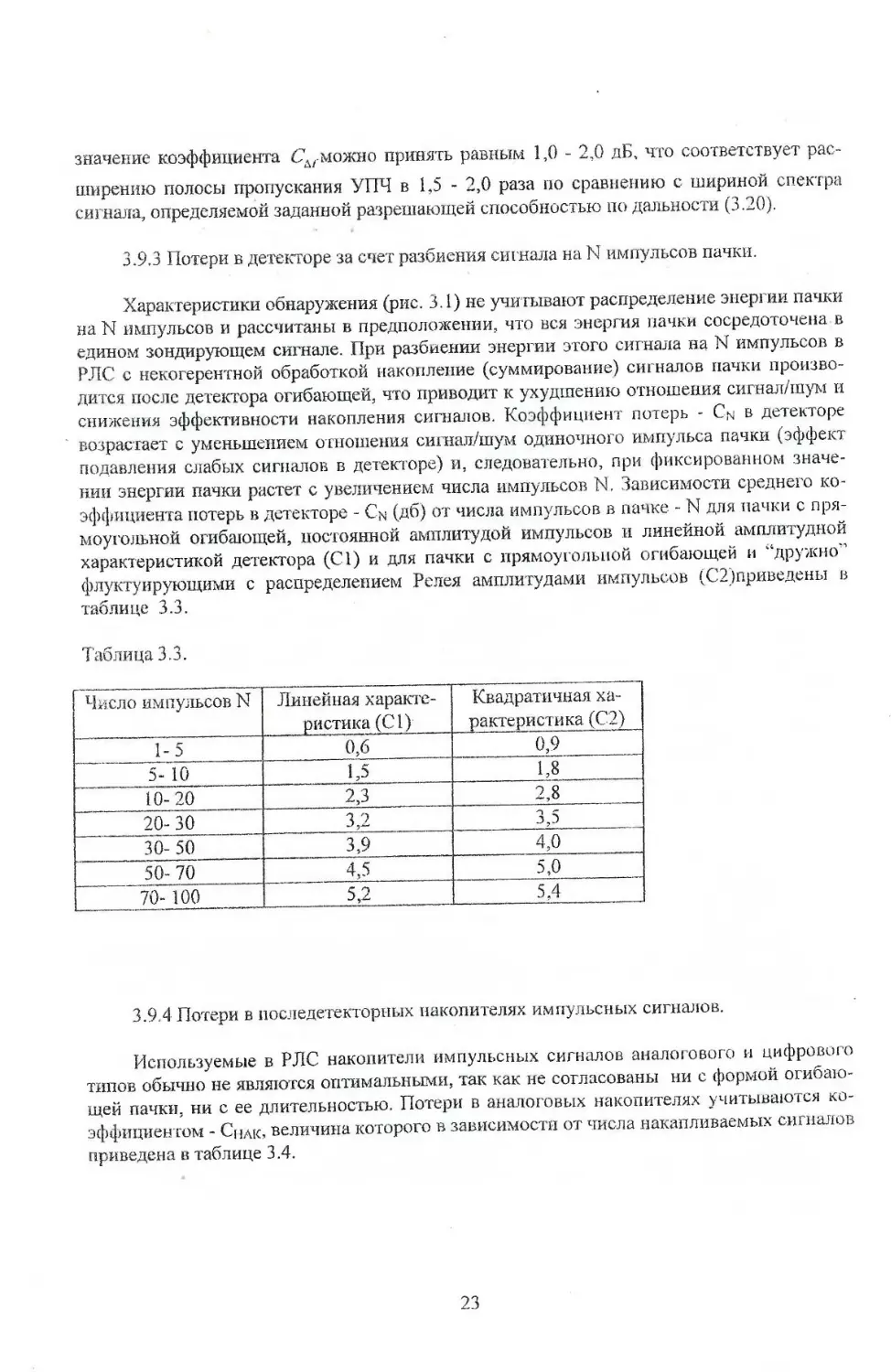
3.9.3 Потери в детекторе за счет разбиения сигнала на N импульсов пачки.
Характеристики обнаружения (рис. 3.1) не учитывают распределение энергии пачки
на N импульсов и рассчитаны в предположении, что вся энергия пачки сосредоточена в
едином зондирующем сигнале. При разбиении энергии этого сигнала на N импульсов в
РЛС с некогерентной обработкой накопление (суммирование) сигналов пачки произво-
дится после детектора огибающей, что приводит к ухудшению отношения сигнал/шум и
снижения эффективности накопления сигналов. Коэффициент потерь - в детекторе
возрастает с уменьшением отношения сигнал/шум одиночного импульса пачки (эффект
подавления слабых сигналов в детекторе) и, следовательно, при фиксированном значе-
нии энергии пачки растет с увеличением числа импульсов N. Зависимости среднего ко-
эффициента потерь в детекторе - Си (дб) от числа импульсов в пачке - N для пачки с пря-
моугольной огибающей, постоянной амплитудой импульсов и линейной амплитудной
характеристикой детектора (С1) и для пачки с прямоугольной огибающей и "‘дружно”'
флуктуирующими с распределением Релея амплитудами импульсов (С2)приведены в
таблице 3.3.
Таблица 3.3.
Число импульсов N Линейная характе- ристика (С 1) Квадратичная ха- рактеристика (С2)
1-5 0,6 0,9
5- 10 1,5 1,8
10- 20 2,3 2,8
20-30 3,2 3,5
30- 50 3 9 4,0
50- 70 4,5 5,0
70- 100 5,2 5,4
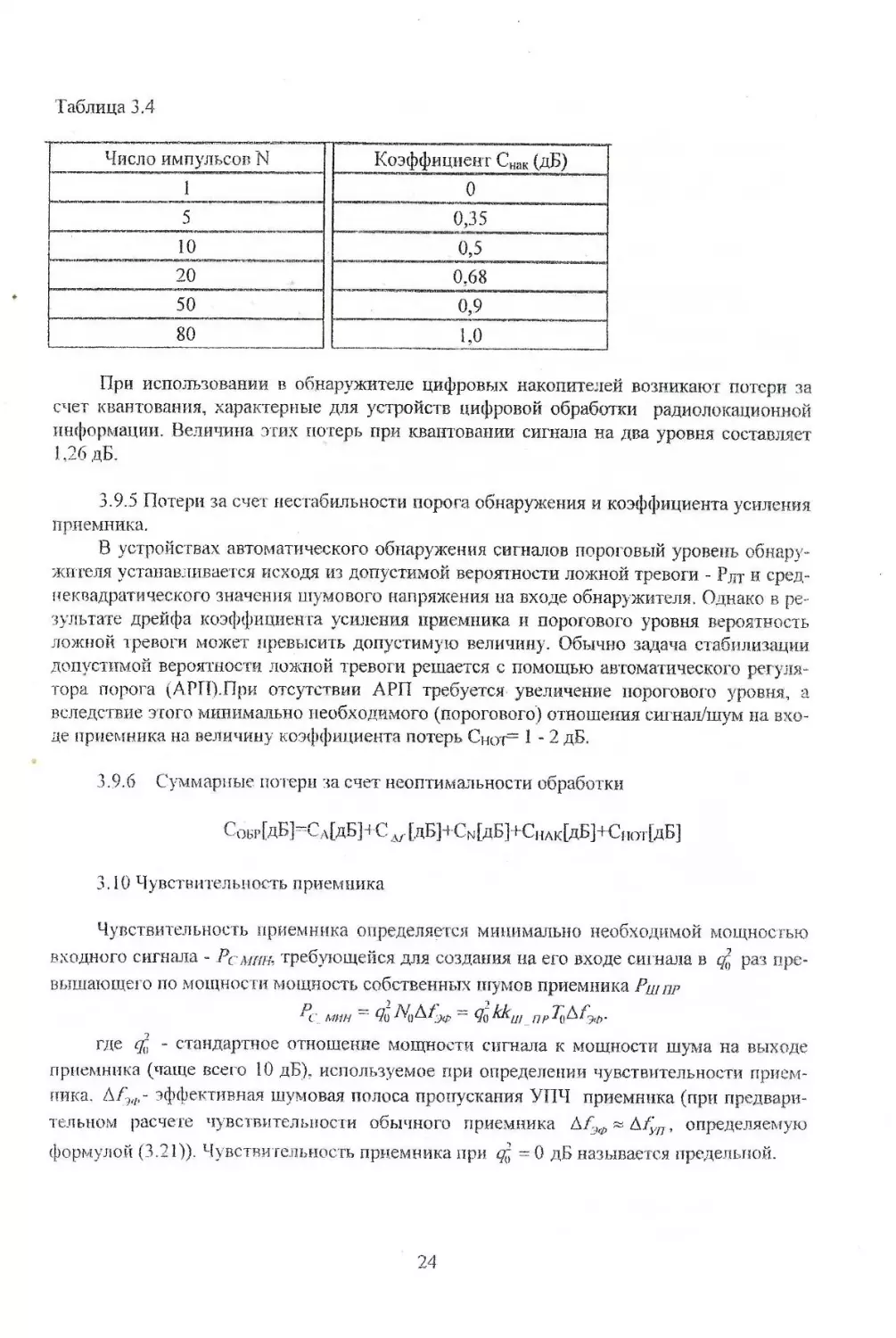
3.9.4 Потери в последетекторных накопителях импульсных сигналов.
Используемые в РЛС накопители импульсных сигналов аналогового и цифрового
типов обычно не являются оптимальными, так как не согласованы ни с формой огибаю-
щей пачки, ни с ее длительностью. Потери в аналоговых накопителях учитываются ко-
эффициентом - C[ja«, величина которого в зависимости от числа накапливаемых сигналов
приведена в таблице 3.4.
23
Таблица 3.4
При использовании в обнаружителе цифровых накопителей возникают потери за
счет квантования, характерные для устройств цифровой обработки радиолокационной
информации. Величина этих потерь при квантовании сигнала на два уровня составляет
1,26 дБ.
3.9.5 Потери за счет нестабильности порога обнаружения и коэффициента усиления
приемника.
В устройствах автоматического обнаружения сигналов пороговый уровень обнару-
жителя устанавливается исходя из допустимой вероятности ложной тревоги - Рлт и сред-
неквадратического значения шумового напряжения на входе обнаружителя. Однако в ре-
зультате дрейфа коэффициента усиления приемника и порогового уровня вероятность
ложной тревоги может превысить допустимую величину. Обычно задача стабилизации
допустимой вероятности ложной тревоги решается с помощью автоматического регуля-
тора порога (АРП).При отсутствии АРП требуется увеличение порогового уровня, а
вследствие этого минимально необходимого (порогового) отношения сигнал/шум па вхо-
де приемника на величину коэффициента потерь Снот= 1-2 дБ.
3.9.6 Суммарные потери за счет неоптимальности обработки
Собр[дБ]-Са[дБ]+СД7.[дБ]+С^дБ]+Снак[дБ]+С11о1[дБ]
3.10 Чувствительность приемника
Чувствительность приемника определяется минимально необходимой мощностью
входного сигнала - Рсмнн, требующейся для создания на его входе сигнала в раз пре-
вышающего по мощности мощность собственных шумов приемника Ршпр
МИН ~ Ял ' Vo^-Z//
где ср{. - стандартное отношение мощности сигнала к мощности шума на выходе
приемника (чаще всего 10 дБ), используемое при определении чувствительности прием-
ника. А/м>- эффективная шумовая полоса пропускания УПЧ приемника (при предвари-
тельном расчете чувствительности обычного приемника Д/^«Д^Я, определяемую
формулой (3.21)). Чувствительность приемника при = 0 дБ называется предельной.
24
3.11 Параметры зондирующего сигнала
Параметрами зондирующего сигнала являются: импульсная (пиковая) мощность Ри,
длительность ти, форма или структура сигнала (вид и характеристики модуляции).
После выбора или оценки X,G,qiVI}tH,LP, Ьаф,СиБРп кш по формулам (3.4) или (3.5)
производится расчет требующейся энергии Еи = Рити . Па энергетические характери-
стики зондирующего сигнала накладывается ряд ограничений, связанных с условиями
эксплуатации, конструктивными особенностями генераторов высокочастотного заполне-
ния и фидерных линий. В частности, значение импульсной мощности передатчика Гц ог-
раничено предельно допустимой величиной мощности - Ри доп, которая может переда-
ваться по волноводу при нормальном атмосферном давлении. В диапазоне Зсм Рцдоп со-
ставляет величину порядка 0,3 МВт, в диапазоне 10см - 3 МВт, в диапазоне 25 - 30см - (15
- 20) МВт.
Выбрав с учетом указанных ограничений импульсную мощность передатчика
Л/ - Л/ доп > найдем энергетически необходимую дли тельность зондирующего сигнала
(3.22)
Коэффициент скважности зондирующего сигнала
Средняя мощность передатчика
Длительность, форма и структура зондирующего сигнала определяют весьма важ-
ные тактические показатели системы - разрешающую способность и точность измерения
дальности и радиальной скорости.
Различают простые и сложные радиолокационные сигналы. Простые сигналы пред-
ставляют собой излучаемые РЛС одиночные импульсы с немодулированной несущей
частотой и частотой повторения - Fn. Признаком простого сигнала является примерное
равенство единице базы сигнала В (произведение ширины спектра сигнала А/(". на его
дл и тел ы ю сть г д).
В- А А ти » I,
К сложным сигналам с базой В- &fcrи »1 относят излучаемые с той же частотой
повторения - Fn кодовые группы, состоящие из л простых импульсов, с результирующей
длительностью сигнала vr = nrtf и шириной спектра АГ. =&£,, либо одиночные
импульсы с внутриимпульсной частотной или фазовой модуляцией несущей, благодаря
чему АГ» 1/ тс при гс = т u .
Если длительность зондирующего сигнала - ти, определенная по формуле (3.22),
удовлетворяет требуемой разрешающей способности РЛС по дальности
(3.23)
где Кцг- 0,8 - 1,37 - коэффициент, зависящий от формы сигнала (при предваритель-
ных расчетах принимают TC^l), и заданной точности определения дальности оD; то
можно ограничиться применением простых сигналов РЛС. При невыполнении условий
(3.23) или (3.41), а также в целях улучшения других качественных показателей (умень-
шения P/j, Q, повышения скрытности и помехозащищенности РЛС от импульсных и дру-
гих помех), необходимо использовать сложные сигналы, которые способны при больших
значениях т и одновременно обеспечивать высокие разрешающую способность и точ-
ность РЛС по дальности.
Потенциальные разрешающие способности и точность по дальности и скорости для
зондирующего сигнала оцениваются его двумерной автокорреляционной функцией
(АКФ)
j Й ( 0 t ~ г) ехр(у2я77) dt
^{r,F) =
(3.24)
где т = - тц - разница между истинным значением времени задержки тD - и
С
ожидаемых! - г,,; F-Fv - Fvo - разница между истинным значением доплеровского сме-
'IV
щения частоты Fv—-— и ожидаемым Fyo, ИО - комплексная огибающая зондирующе-
л
го сигнала (модулирующая функция), описывающая его форму и структуру.
При использовании в РЛС в качестве оптимального обнаружителя согласованного
фильтра выходное напряжение фильтра с точностью до постоянного множителя и мно-
жителя задержки совпадает' со значением автокорреляционной функции (АКФ) зонди-
рующего сигнала (3.24). В этом случае: г - текущее время, отсчитываемое от максимума
сигнала на выходе фильтра; F - расстройка между средними частотами фильтра и вход-
ного сигнала, вызванная, например, доплеровским смещением частот.
При F=const (сечение поверхности АКФ плоскостью F=const) функция Т(г,С) ха-
рактеризует огибающую сигнала на выходе фильтра с расстройкой F, а при т - const
представляет зависимость от расстройки (доплеровского смещения частоты) амплитуды
выходного сигнала в момент времени т, отсчитываемый от максимума сигнала на выхо-
де фильтра.
Сечение поверхности АКФ плоскостью, параллельной плоскости г, F на уровне
0,5 -- = 0,5 - const позволяет получить уравнение диаграммы неопределенности, с
помощью которой оценивается совместное разрешение целей по дальности и радиальной
скорости.
26
Сечения 'Р(т,О) и 4'(0,F) называются главными. Потенциальную разрешающие
способность по дальности определяет длительность огибающей Т(т,0) на уровне 0,5, а
но скорости - ширина функции ^(О,?7) на этом же уровне.
3.12 Характеристики основных типов сигналов
Простые сигналы. Так как реально используемые в РЛС импульсы (реальные сиг-
налы) не удается описать простыми функциями, то их чаще всего аппроксимируют им-
пульсами с прямоугольной или колокольной огибающей и длительностью, равной эф-
фективной энергетической длительности реального сигнала.
3.12.1 Синусоидальный сигнал с прямоугольной огибающей (прямоугольный ра-
диоимпульс)
Vmnpn0<t< ти
0 при t < 0; t > r/f;
(3. 25)
T(r,F)-
л Ft fI
при т < г ц
при т > т„
(3.26)
Длительность огибающей *Р(г,0) на уровне 0,5 при идеальной форме частотной
характеристики фильтра (оптимальной фильтрации) равна . В этом случае потенци-
альная разрешающая способность по дальности равна
аьтх 0,5
и
п
Реализовать идеальную частотную характеристику фильтра вида
нельзя, так как она должна быть бесконечно широкой.
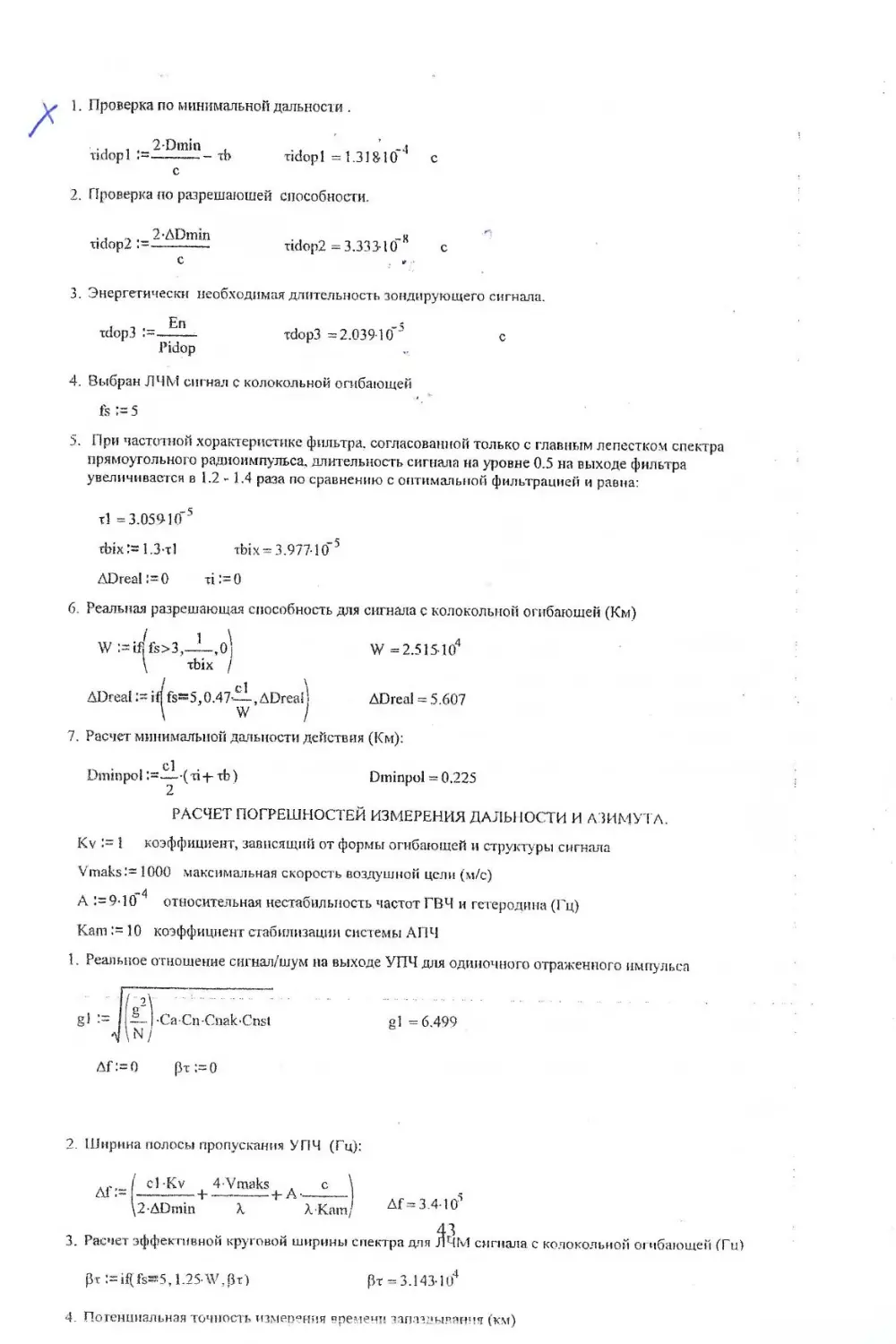
При частотной характеристике фильтра, согласованной только с главным лепестком
спектра прямоугольного радиоимпульса, длительность сигнала на уровне 0,5 на выходе
фильтра увеличивается в 1,2 - 1,4 раза по сравнению с оптимальной фильтрацией и равна
вых 0,5
(1,2-1,4>„.
(3.27)
Реальная разрешаюхцая способность
0.5
Д О, = —~ = (0,6 - 0.7) < ДР„,„.
(3.28)
3.12.2 Синусоидальный сигнал с колокольной огибающей (колокольный радиоим-
пульс)
.7
2
/>0,67
где гм)(17 - длительность импульса на уровне 0,67 от максимума. Колокольный (3.29)
и прямоугольный (3.25) импульсы равной амплитуды имеют равные энергии, если дли-
тельность колокольного импульса на уровне ехр(-я/8) = 0,67 равна длительности пря-
моугольного.
АКФ колокольного импульса
. 2
Т(т,Л = ехр[-я (“у—+ rJ.67^2)]-
4Лю.67
Длительность огибающей сигнала на выходе оптимального фильтра на уровне 0,5
определяется функцией Т(т,0) и равна
(3.30)
Разрешающая способность по дальности
Л/ I ¥ () S
ЛРР = ДРЛ = ----- = 0,94сг„()167 < ДР_.
(3-31)
Сложные сигналы. Выбирая вид модулирующей функции сложного сигнала, мож-
но получить на выходе согласованного с сигналом фильтра импульс, имеющий сущест-
венно меньшую длительность, чем входной сигнал. Такая оптимальная обработка сигна-
ла с широким спектром эквивалентна сжатию его огибающей по временной оси. В тоже
время большая длительность зондирующих сигналов, которую можно допустить при ис-
пользовании сложных сигналов, определяет более узкую, чем у простых сигналов, форму
частотной зависимости ЧТО,/*)), т. е. более высокую разрешающую способность по ско-
рости.
Таким образом, сложные сигналы дают возможность увеличивать энергию зонди-
рующего сигнала за счет увеличения его длительности и обеспечить при этом высокие
качественные показатели РЛС
3.12.3 Фазомашшулированные (ФМ) сигналы.
Фазоманипулированные сигналы являются наиболее употребительными из всех ви-
дов сложных сигналов. От других сложных сигналов они отличаются сравнительной
простотой получения зондирующего сигнала и согласованного фильтра.
Фазоманипу лированный сигнал представляет собой сигнал прямоугольной формы,
длительностью ги = лг(), состоящий из одинаковых по форме, длительности и амплитуде
элементарных прямоугольных радиоимпульсов, начальная фаза каждого из которых мо-
28
жет принимать только два значения: 0 или тг. Порядок чередования начальных фаз опре-
деляется выбранным кодом.
При согласованной обработке фазоманипулированной последовательности на вы-
ходе фильтра образуется сигнал, состоящий из центрального импульса большой ампли-
туды и симметрично расположенных боковых лепестков. Главный лепесток по форме эк-
вивалентен выходному сигналу фильтра, оптимального для составляющих сложный сиг-
нал элементарных импульсных сигналов длительностью г(1 и имеет длительность г ,
определяемую формулой (3.27) при подстановке в нее г„ = г(). Общая длительность сиг-
нала на выходе согласованного фильтра на уровне нуля амплитуды, включая боковые ле-
пестки. 2лг0.
Поскольку уровень боковых лепестков выходного сигнала достаточно мал по срав-
нению с главным, то на выходе порогового устройства (амплитудного ограничителя) вы-
деляется только главный лепесток даже в случае действия помех или наложения друг на
друга отраженных соседних сигналов. Таким образом, выходной сигнал сжимается, а его
амплитуда увеличивается в я раз ио сравнению с входным.
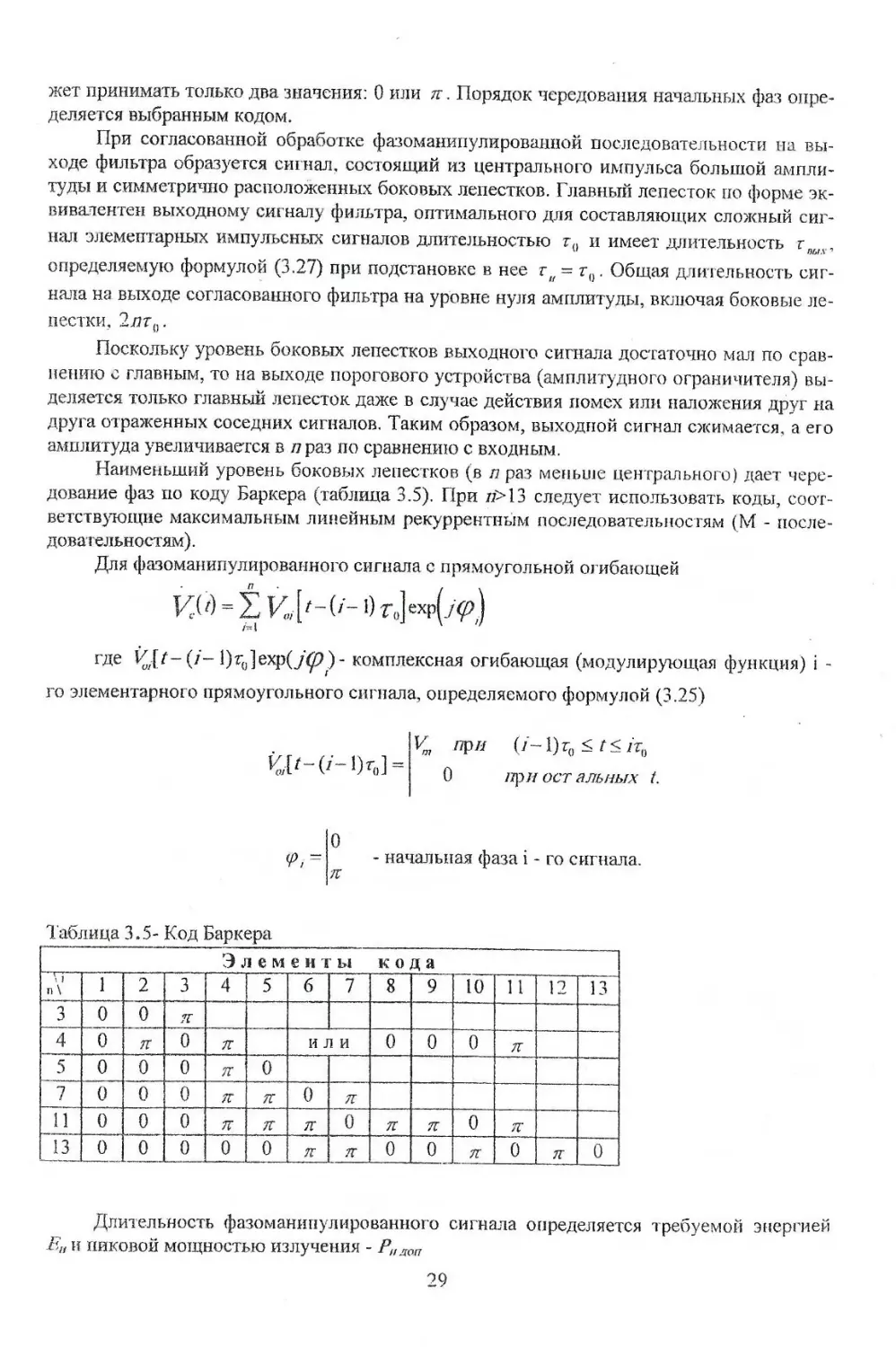
Наименьший уровень боковых лепестков (в п раз меньше центрального) дает чере-
дование фаз по коду Баркера (таблица 3.5). При л>13 следует использовать коды, соот-
ветствующие максимальным линейным рекуррентным последовательностям (М - после-
довательностям).
Для фазоманипулированного сигнала с прямоугольной огибающей
Vj^ = Z К p-t' - 0 То] ехр(_/<р)
где 1)т(,]ехр(у0)- комплексная огибающая (модулирующая функция) i -
го элементарного прямоугольного сигнала, определяемого формулой (3.25)
СП-0-|)Ы =
при
(/— 1)г0 < t<irn
при ост альных t.
- начальная фаза i - го сигнала.
Таблица 3.5- Код Баркера
Э л е м е и т ы кода
\ i п \ 1 2 4 5 6 7 8 9 10 и 12 13
3 0 0
4 0 0 И J 1 и 0 0 0 тс
5 0 0 0 0
1 0 0 0 ТС 0 тс
и 0 0 0 тс тс 0 ТС ТС 0 тс
13 0 0 0 0 - 0 тс тс 0 _0_ тс 0 ТС 0
Длительность фазоманипулированного сигнала определяется требуемой энергией
Д, и пиковой мощностью излучения - Р11Л0П
29
Реальная разрешающая способность фазоманипулированного сигнала (по главному
лепестку спектра сигнала)
СТ
\DP = = (0,6 - 0,7)сг() < Ы)и1Ш.
3.12.4 Сигналы с внутриимпульсной линейной частотной модуляцией (ЛЧМ сигна-
лы).
Использование внутриимпульсной частотной модуляции расширяет спектр им-
пульсного сигнала, а согласованная фильтрация обеспечивает сжатие импульса во вре-
менной области.
Для импульса с прямоугольной огибающей и ЛЧМ несущей справедливы следую-
щие соотношения
К„ехр[улг-----] лря 0<f<ru
Ги
0. при /<0; t> ти
где W - девиация частоты, т. е. изменение частоты несущей на интервале 0- ти.
АКФ ЛЧМ сигнала с прямоугольной огибающей
Т(т,А)
При гДУ »1 главный лепесток АКФ сигнала
^(г,Л =
(3.34)
Коэффициент сжатия ЛЧМ сигнала при тДУ» 1
= 71 + (т„1У)2 « га1У,
30
1
где =“ ' длительность главного лепестка на уровне 0,637 от его макси-
’' Ии
мального значения.
Потенциальная разрешающая способность ЛЧМ сигнала с прямоугольной огибаю-
щей
МИН
(3.36)
Для ЛЧМ сигнала с колокольной огибающей
АКФ сигнала
_ 2
^(г, F) = ехр[-?г — + (/т,я)67 + И/г)2]].
4 £ «/<>,67
(3.37)
Коэффициент сжатия сигнала при » 1
ксх = + 0,94, (3.38)
Z?WaO,5
2
1 0,94
1У~ W
где г
uOfil
- длительность выходного сигнала на уровне 0,5.
Потенциальная разрешающая способность
л
И/
С11ШХП.5
1Г/ МПИ*
W
М),6?
2
(3.39)
После окончательного выбора зондирующего сигнала и расчета его длительности и
с груктуры, определяющих ширину и форму спектра сигнала исходя из заданной разре-
шающей способности по дальности, требующейся энергии сигнала и допустимой пико-
вой мощности передатчика, необходимо: а) уточнить ширину полосы пропускания УПЧ
(3.20) и форму АЧХ УПЧ, б) потери на несогласованность ширины и формы спектра сиг-
нала с шириной и формой полосы пропускания УПЧ - Сдги скорректировать (если это
необходимо) требующуюся энергию зондирующего сигнала (3.4).
3.13 Минимальная дальность действия.
Минимальная дальность действия DMHH определяется длительностью зондирующего
сигнала г„и временем восстановления разрядников антенного переключателя та
Время восстановления разрядников антенного переключателя тв, а следовательно, и
чувствительности приемника, для различных типов разрядников составляет 1 - 2 мкс.
3.14 . Расчет погрешностей измерения дальности и азимута.
Потенциальная точность измерения какого - либо параметра сигнала характеризу-
ется минимально возможной погрешностью измерения. Потенциальная точность зависит
от отношения сигнал/помсха, характера флуктуаций амплитуды сигнала и его формы.
Реальная точность измерения всегда хуже потенциальной; на нее влияют степень согла-
сования характеристик приемного тракта с параметрами сигнала и ряд других факторов.
Потенциальная точность измерения времени запаздывания и, соответственно, даль-
ности характеризуется среднеквадратическими погрешностями измерения времени за-
держки отраженных сигналов при оптимальной обработке сигнала и оптимальной проце-
дуре оценки времени задержки.
При предварительных расчетах, т. е. на этапе эскизного проектирования, когда еще
не определены ни структурные схемы измерителей, ни процедуры оценки измеряемых
параметров, точность измерения времени задержки отраженных сигналов и дальности до
цели принято оценивать погрешностями единичного измерения времени задержки <тг1и
дальности ам при реальном среднем отношении сигнал/шум на выходе УПЧ на один
импульс д/ и оптимальной процедуре оценки времени задержки
(3.41)
где .Вт - эффективная круговая ширина спектра сигнала:
(3.42)
где Vc(t) и - модулирующая функция и ее производная соответственно;
Ус ( /’-/))- амплитудный спектр сигнала; - средняя частота спектра сигнала; сгщщ-
допустимая среднеквадратическая погрешность измерения дальности, определяемая за-
данием на проектирование.
Реальное среднее значение отношения сигнал/шум на входе УПЧ (входе измерителя
времени задержки) для одиночного отраженного сигнала при среднем значении ЭПР це-
ли (стэ = сг7) вычисляется с учетом потерь при распространении, потерь в высокочас-
тотных узлах РЛС и потерь на несогласованность ширины и формы АЧХ УПЧ приемни-
ка. и спектра сигнала
Среднее значение отношения сигнал/шум в расчете па один отраженный импульс д
должно быть меньше, чем найденное ранее минимально необходимое отношение
для случая, когда обнаружение ведется по пачке, состоящей из N отраженных сигналов,
накапливаемых в последетекторном накопителе (интеграторе).
Значения эффективной круговой ширины спектра /7 г для различных видов сигнала
определяются следующим образом.
3.14.1 Простой сигнал с прямоугольной формой огибающей и фазоманипулирован-
ный сигнал.
Импульсы с прямоугольной формой огибающей и элементарные импульсы, состав-
ляющие фазоманипулированный сигнал, теоретически имеют эффективный спектр бес-
конечной ширины (3.42), и следовательно, бесконечно малую потенциальную погреш-
ность единичного измерения времени задержки. Практически же, эффективная ширина
спектра сигнала на входе измерителя определяется шириной полосы пропускания УПЧ
приемника А/‘, которая всегда ограничена некоторым значением Д/\„, что приводит к
появлению погрешности измерения за счет конечной эффективной ширины спектра сиг-
нала на выходе УПЧ с шириной полосы пропускания
(для фазоманипулированного сигнала ти = т0).
3.14.2. Простой импульс колокольной формы
3.14.3 Сложный сигнал с внутриимпульсной ЛЧМ и прямоугольной огибающей
= 1,81 W.
3.14.4. Сложный сигнал с внутриимпульсной ЛЧМ и колокольной огибающей
1,25 Ж
При “дружных” флуктуациях амплитуд отраженных сигналов по релеевскому зако-
ну (3,9) текущее значение погрешностей измерения времени задержки и дальности до це-
ли, соответствующие текущим значениям ЭПР цели сгу, будут с вероятностью 9,37
меньше погрешностей (3.40) и (3.41).
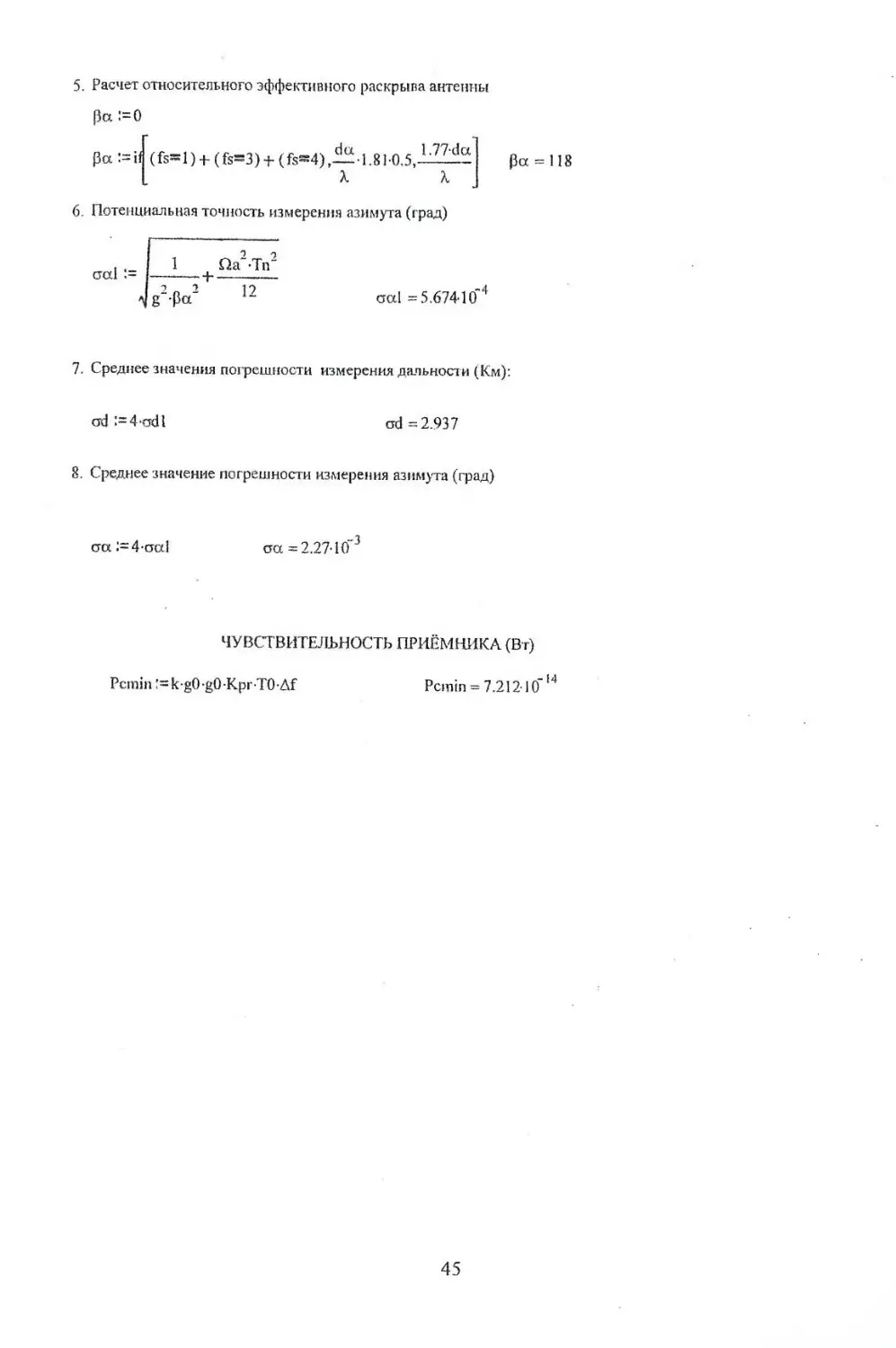
Потенциальная точность измерения азимута в РЛС, работающих в режиме кругово-
го обзора с постоянной угловой скоростью вращения диаграммы направленности О.А по
максимуму огибающей при среднем значении ЭПР цели - а .>
(3.43)
а : - заданное
угловая скорость
где Д - относительный эффективный раскрыв (апертура) антенны; о;
среднеквадратическое значение погрешности измерения азимута; Q
вращения антенны, Тп - период повторения зондирующих импульсов.
, По формуле (3.43) может быть определена и погрешность определения угла места.
При “дружных” флуктуациях амплитуд отраженных сигналов по релеевскому зако-
ну (3.9) текущее значение погрешностей измерения азимута и угла места с вероятностью
0,37 будут меньше погрешности (3.43).
При аппроксимации огибающей пачки отраженных сигналов функцией вида
sin а/а' , справедливой для равномерного распределения поля по раскрыву антенны, от-
носительный эффективный раскрыв (апертура) антенны
a -I
А ~Ра ЯЛ
= 1,81/7
При гауссовой (колокольной) аппроксимации огибающей пачки отраженных сигна-
лов
(3.45)
В формулах (3.44) и (3.45) величины da pi da представляют собой эффективный и
физический раскрывы антенны в горизонтальной плоскости, рА =4),5
0,9 - коэффициент
использования площади раскрыва.
С учетом обычно имеющегося на практике отклонения используемых в реальных
измерениях процедур оценки от оптимальных, погрешности единичного измерения даль-
ности (3.41) и азимута (3.43) при отношении сигнал/шум = qt и с/ = <ТМ1Ш соответст-
венно должны быть по крайней мере в 3 - 4 раза меньше допустимых значений и
34
4 ПОСТРОЕНИЕ ФУНКЦИОНАЛЬНОЙ СХЕМЫ РЛС И РАЗРАБОТКА ЕЕ
ОТДЕЛЬНЫХ УЗЛОВ.
За основу при построении функциональной схемы может быть взята структурная
схема типовой РЛС обнаружения (рисунок 1.1). Однако, в зависимости от вида модуля-
ции сигнала, способов его генерации и обработки, типа передатчика, приемника и око-
нечного устройства эта схема может изменяться.
При построении функциональных схем РЛС и разработке функциональных и прин-
ципиальных схем ее отдельных узлов должны учитываться следующие соображения.
Передатчик. Является наиболее крупным, тяжелым, энергоемким и дорогим узлом
РЛС. Наиболее распространенным передатчиком, используемым для генерации простых
некогерентных импульсных сигналов длительностью 0,1 - 10 мкс, является мощный авто-
генератор на импульсном магнетроне, достоинствами которого является экономичность,
малогабаритность, высокие уровни пиковой мощности и простота обслуживания. Магне-
тронные генераторы работают при высокой скважности сигналов (Q =500 - 3000), срав-
нительно малой средней мощности (Рср=0,1 - 10кВт) и имеют относительную нестабиль-
ность частоты генерируемых колебаний порядка 10'3.
Для генерации сложных ФМ или ЛЧМ сигналов и мощных (десятки мегаватт) про-
стых импульсных сигналов со стабильной частотой заполнения используют схемы с не-
зависимым возбуждением, содержащие стабилизированный задающий генератор с ам-
плитудным, фазовым или частотным модулятором и несколько каскадов умножения час-
тоты и усиления на лампах бегущей волны (ЛБВ). клистронах, амплитронах и других
СВЧ усилителях. Менее мощные СВЧ усилители используются при создании передаю-
щих модулей, работающих в активных антенных решетках.
Выбор модулятора производится с учетом требований, предъявляемых к РЛС, вида
используемых сигналов и типа высокочастотных приборов в передатчике.
В зависимости от результатов расчета технических параметров проектируемой РЛС
студенту может быть предложено разработать структурную и принципиальную схему и
конструкцию и произвести электрический расчет следующих узлов передатчика:
• оконечных устройств на магнетроне, пролетном клистроне и электронной лампе;
• модулятора со схемами непрерывного и автоматического контроля параметров
передатчика;
© схем автоматического контроля:
0 режима генератора СВЧ;
0 формы и амплитуды импульса модулятора;
0 тока выпрямителя;
0 выходной мощности генератора.
Приемник. Предназначен для усиления отраженных от целей сигналов РЛС и их
фильтрации, при которой обеспечивается максимальное различение полезных сигналов и
помех. Приемники РЛС выполняются в подавляющем большинстве случаев по суперге-
теродинной схеме. Обобщенная структурная схема радиолокационного приемника со-
держит усилитель радиочастоты (УСВЧ), наличие которого снижает коэффициент шума
и, следовательно, повышает чувствительность приемника; смеситель; 1-й гетеродин со
схемой АПЧ; усилитель промежуточной частоты со схемой автоматических регулировок;
второй (когерентный) гетеродин (при наличии аналоговой системы СДЦ или схемы сжа-
тия импульсов); амплитудный, фазовый или синхронный детекторы; видеоусилители и
аналоге - цифровые преобразователи (АЦП). Смесители радиолокационных приемников
выполняются на полупроводниковых диодах с барьером Шоттки, транзисторах или ва-
ракторах. Гетеродины - на транзисторах или туннельных диодах. В УПЧ приемника фор-
мируется его частотная характеристика за счет фильтров сосредоточенной селекции
(ФСС) и обеспечивается основное усиление и избирательность приемника. При исполь-
зовании сложных сигналов в состав УПЧ входит согласованный фильтр, осуществляю-
щий обработку (сжатие) сложного сигнала. Автоматические регулировки, используемые
в радиолокационных приемниках: 1) автоматическая подстройка частоты (АПЧ), служа-
щая для поддержания разности частот первого гетеродина и передатчика, равной проме-
жуточной частоте; 2) временная автоматическая регулировка усиления (ВАРУ), поддер-
живающая постоянной амплитуду выходных сигналов приемника вне зависимости от
дальности цели за счет соответствующего изменения во времени усиления приемника; 3)
шумовая автоматическая регулировка (ШАРУ), поддерживающая постоянный уровень
ложных тревог за счет регулировки усиления приемника по уровню его собственных
шумов; 4) быстродействующая и мгновенная автоматические регулировки усиления
(БАРУ и МАРУ), защищающие приемник от перегрузок при воздействии мощных помех
или сигналов и расширяющие его динамический диапазон.
В зависимости от результатов расчета технических параметров проектируемой РЛС сту-
денту может быть предложено разработать структурную и принципиальную схему и кон-
струкцию и произвести электрический расчет следующих узлов приемника:
* усилителя радиочастоты (УСВЧ);
• 1 -го гетеродина;
• усилителя промежуточной частоты;
® схемы АПЧ 1-го гетеродина (ЧАП или ФАПЧ);
• схемы ВАРУ;
® схемы ШАРУ.
Антенные переключатели. Наличие антенного переключателя дает возможность
использовать одну и ту же радиолокационную антенну для передачи и приема. В РЛС в
основном используют газоразрядные антенные переключатели. В диапазоне малых и
средних мощностей используют ферритовые и диодные переключатели.
Студенту может быть предложено разработать конструкцию и рассчитать электри-
ческие параметры антенного переключателя.
Антенна. В наземных РЛС обзора воздушного пространства необходимо иметь по-
стоянный уровень мощности принятого сигнала независимо от угла места цели /3. Это
условие выполняется, если диаграмма направленности по мощности в угломестной плос-
кости пропорциональна со sec1/? (диаграмма типа “косеканс - квадрат”). Диаграмма тако-
го вида получается в антеннах типа усеченного параболоида, зеркала двойной кривизны,
параболического цилиндра или в сегментно - параболических антеннах. Антенны с “ко-
секанс - квадратной” диаграммой имеют КПД на 2 - 3 дБ меньше по сравнению с антен-
нами, имеющими ту же площадь раскрыва, но веерную диаграмму направленности.
•Студенту может быть предложено рассчитать параметры и разработать конструк-
цию
• параболической антенны;
® антенны с диаграммой типа «косеканс- квадрат»;
• плоской фазированной антенной решетки ( ФАР);
•фазовращателя для ФАР.
Оконечное устройство. Задачей оконечного устройства является преобразование
радиолокационной информации с целью ее дальнейшего использования, для чего произ-
водится обнаружение целей, измерение их координат и (в некоторых видах оконечных
устройств) автоматическое сопровождение по дальности (АСД) и угловым координатам
(направлению) (АСН). Обнаружение, определение координат и автоматическое сопро-
вождение могут осуществляться как в аналоговой, так и в цифровой форме. Распростра-
ненным типом оконечного устройства РЛС обнаружения является визуальный индикатор
на электронно-лучевой трубке (ЭЛТ) и аналоге- цифровой преобразователь (АЦП). На-
копителем (интегратором) сигналов в таком индикаторе является экран ЭЛТ Обнаруже-
ние сигналов и измерение координат целей производится оператором по экрану ЭЛТ-
индикатора.
Студенту может быть предложено разработать структурную и принципиальную
схему и произвести электрический расчет:
• согласованного фильтра:
О для последовательности прямоугольных радиоимпульсов:
О для ЛЧМ- сигнала;
О для фазоманипулированного сигнала;
© некогерентного накопителя сигнала;
® индикатора кругового обзора;
О схемы формирования радиально- круговой развертки.
Антенный привод. Включает в себя устройство перемещения диаграммы направ-
ленности (сканирования) антенны в пространстве и схему передачи углового положения
диаграммы направленности в оконечное устройство. В РЛС используют механическое
сканирование с помощью электропривода или электронное сканирование.
Синхронизатор служит для получения тактирующих напряжений, управляющих
работой остальных узлов РЛС.
Студенту может быть предложено разработать структурную схему синхронизато-
ра и произвести электрический расчет элементов принципиальной схемы.
Студенту также может быть предложено оценить характеристики надежности
рассчитанной им принципиальной схемы одного из узлов РЛС.
5 ЛИТЕРАТУРА
Список литературы включает издания, посвященные специфическим вопросам про-
ектирования РЛС. При выполнении курсового проекта студентам следует использовать,
кроме указанных в списке, методические пособия по расчету импульсных, радиопере-
дающих, радиоприемных и аналоговых устройств, рекомендуемые при изучении пере-
численных курсов.
1. Гришин Ю.П., Ипатов В.П., Казаринов Ю.М. и др. Радиотехнические системы:
Учебник для вузов ио спец. “Радиотехника”/ Под ред. ТО.М.Казаринова.- М.: Высш, шк.,
1990.
2. Сосулин Ю.Г. Теоретические основы радиолокации и радионавигации.: Учеб,
пособие для вузов/ М.: Радио и связь. 1992.
3. Васин В.В., Власов О.В., Григории - Рябов В.В. и др. Радиолокационные уст-
ройства (Теория и принципы построения) Под ред.В.В.Григорина - Рябова. / М.: Сов. ра-
дио, 1970.
4. Современная радиолокация (Анализ, расчет и проектирование систем)/ Пер. с
англ.; Под ред.Ю.Б.Кобзарева. - М.: Сов. радио, 1969.
5. Лезин IO.C. Введение в теорию и технику радиотехнических систем. Учеб, по-
собие для вузов/ М.: Радио и связь. 1986,
6. Сколник М. Введение в технику радиолокационных систем./ Пер. с англ. ; Под
ред. К.Н.Трофимова. - М.: Мир, 1965.
7. Справочник по радиолокации. Т.1. Под ред. М.Сколника/ Пер. с англ.; Под
общ.ред. К.Н.Трофимова. - М.: Сов. радио, 1976.
8. Справочник по радиолокации. Т.2. Под ред. М.Сколника/ Пер. с англ.; Под
общ.ред. К.Н.Трофимова. - М.: Сов. радио, 1977,
9. Справочник по радиолокации. Т.З. Под ред. М.Сколника/ Пер. с англ.; Под
общ.ред. К.Н.Трофимова. - М.: Сов. радио, 1979.
10. Финкельштейн М.И. Основы радиолокации./ М.:Радио и связь. 1983,
11. Казаринов Ю.М., Толоконников С.В. Чернявский А.Г., Шломин В.И. Проек-
тирование РЛС обнаружения: Учебное, пособие/ ЛЭТИ.-Л.Л988.
12. Давыдов П.С. и др. Авиационная радиолокация. Справочник./ М.: Транспорт.
1984.
13. Проектирование радиолокационных приемных устройств. Под ред.
М. А.Соколова./М.: Высшая школа. 1984.
14. Типовые расчеты характеристик радиолокационных и радионавигационных
систем. Учебное пособие. Под ред. М.С.Малашина./ М.: Изд-во МАИ. 1993.
15. Бернштейн Э.А.,Рудяченко Н.К. Импульсные радиопередающие устройства./
Киев. Техника. 1964.
16. Проектирование радиоприемных устройств. Под ред. А.П.Сиверса./ М,:
Сов. радио. 1976.
17. Анзенны и устройства СВЧ. Проектирование фазированных антенных реше-
ток./ М.: Радио и связь. 1994,
18. Хмель В.Ф. и др. Антенны и устройства СВЧ. Сборник задач..' Киев.Выща
школа. 1990.
19. Гуткин Л.С. Проектирование радиосистем и радиоустройств./ М. Радио и
связь. 1986.
38
ПРИЛОЖЕНИЕ А
В приложении приведен расчет технических параметров РЛС кругового обзора
для одного из вариантов задания, предлагаемого при выполнении курсового проекта.
Программа разработана студентом ИрГТУ А. Луковниковым.
Программа для расчета параметров РЛС выполнена в среде Windows 95 в пакете
Mathcad 6.0. Для разработки программы расчета своего варианта задания студенту необ-
ходимо пользоваться любым руководством по работе с программой Mathcad. например
♦ MATHCAD 6.0 PLUS./ М.: Информационно- издательский дом «Филинъ».
1997.
39
Заданные технические характеристики:
ЭПР(м2)- о = 10
Максимальная дальность (км)-
Максимальная дальность (м)—
Вероятность правильного обнаружения—
Вероятность ложной тревоги—
Интенсивность дождя (мм/ч)-
Минималъная дальность (м)-
Погрешность по азимуту (град)—
Погрешность по дальности (км)—
Разреш.способность по дальности (км)—
Разреш. способность по азимуту (град)—
Время обзора (с)-
Скорость света (м/с)--
Скорость света (км/с)-
Dmaxl:= 300
Dmax:= 3-105
Рро 0.85
Plt;= 1-108
J := 5
Dmin - 20000
oa 1
ad := 10
ADmin - 5
&amin:= 1
Tubs := 90
x
c - 310
cl 300000
ВЫБОР ДЛИНЫ ВОЛНЫ.
Большинство РЛС обнаружения использует волны длиной от Зсм.до 60 см. Как правило,следуй
выбирать наиболее короткие длины волн,обеспечивающие заданную дальность действия РЛС.
Выбранная /длина волны (м)— к := 0,1
КОНСТАНТЫ, ТРЕБУЮЩИЕСЯ ДЛЯ РАСЧЕТА
-э3
Постоянная Больцмана (Дж/К)- к 1.38*10 ~
Ширина ДНА по углу места (град)- р - 25
< Л-vX
Время восстановления разрядников антенного переключателя (с)— тЬ = 1.5*10 6
Стандартная шумовая температура (°К)— ТО 290
Стандартное отношение сигнал/шум на входе приёмника (Дб)- g0J10
РАСЧЕТ РЛС.
ПАРАМЕТРЫ АНТЕННОЙ СИСТЕМЫ.
1. Ширина ДНА в азимутальной плоскости в градусах:
an-0.9-Aamin a. ..-0.9
Оз Од
2. Ширина ДНА в азимутальной плоскости в радианах.
я-a -
ар,15 =--- ар . = 0.016
;80 оэ
3. Ширина ДНА по углу места в радианах:
Я'р..
Вр =—± Во,.-0.436
180 и;>
4. Коэффициент направленного действия (КНД)
антенны:
4-71 3
G=----------- G- 1.833-10
ap0<PPu5
40
5. Размер раскрыва антенны в плоскости азимута (м):
, 601
da := —— da = 6.667
a05
6. Размер раскрыва антенн в плоскости угла места(м):
dp:=5-X dp =0.5
7. Геометрическая площадь раскрыва антенны (м2):
S := dp da S = 3.333
ПАРАМЕТРЫ ОБЗОРА.
1. Угловая скорость вращения ДНА РЛС (рад/с):
л 2-я
Па ----- па = 0.07
Tobs
2. Длительность пачки импульсов (с):
аР05
ТоЫ .= —-
Tobi = 0.225
Период повторения импульсов (с):
1.3-2Dmax
Тп:=
3-10
Частота повторения импульсов (Гц):
Fn = 384.615
Fn := 385
N - 87
Tn
Число импульсов в пачке:
ТоЫ
N :=---
N = 86.538
ОПРЕДЕЛЕНИЕ МИНИМАЛЬНО НЕОБХОДИМОГО ОТНОШЕНИЯ СИГНАЛ/ШУМ (Д
D lo^pit) t\
J \log(Ppo) /
g= 14.99
ШУМОВАЯ ТЕМПЕРАТУРА И КОЭФФИЦИЕНТ ШУМА СИСТЕМЫ.
1. Частота несущей (Гц):
_ зло8
2. Коэффициента шума каскадов и коэффициент передачи первого каскада (дБ):
kl - 4
k2 = 7.5
kp 1 5
3. Коэффициент шума системы (дБ):
k2- 1
Kpr kl т------- Крг ~ 5.3
kn 1
4. Шумовая температура системы ( °К):
41
Ts •= Kpr-TO
Ts= 1.537-IO3 4
ПОТЕРИ ЭНЕРГИИ РАДИОВОЛН ПРИ РАСПРОСТРАНЕНИИ В АТМОСФЕРЕ.
1. Выбираем высоту верхней кромки Hg(KM)
Не := 4.5
ч**
2. Длина участка траектории , на котором происходят потери за счет дождя (км):
Dg ;= 1
13 Jug
Dg = 239.709
3. Удельные потерн за счет потерь в кислороде и водяном nape-dl
и за счет потерь в дожде—d2 (дБ/км)
81,;= 910 3
82 10‘3
4. Коэффициент потерь при распространении в атмосфере (дБ):
Гр := ехр(0.46•(б 1 -Dg + 62'Dmaxl)) Lp = 3.097
потери ЭНЕРГИИ В ВЧ ЦЕПЯХ РЛС (АНТЕН1.4О-ФИДЕРНЫЙ ТРАКТ).
L Длина фидеров lv в РЛС обнаружения в среднем (м) :
lv:= 5
2. Потерн в разрядниках Lpazp и приемно-передающей антенне La (дБ):
Lpazp := I
La - 0.1
3. Удельные потери dv (дБ/м):
5v := 0.03
4. Потери в фидерах LvfaE):
Lv:=2 lv 6v Lv - 0.3
5. Суммарные потери в ВЧ узлах РЛС (дБ):
Lcymm - Lv т Lpazp t- La Lcymm = 1.4
ПОТЕРИ ЗА СЧЕТ НЕОПТИМАЛЬНОСТИ ОБРАБОТКИ В ЦЕПЯХ РЛС.
1. Потери, обусловленные непрямоугольностью формы диаграммы направленности Са (дБ):
Са := 1.6
2. Потери за счет несогласованности формы и ширины полосы пропускания АЧХ приемника
с формой и шириной спектра сигнала Cf (дБ):
СТ- 1
3. Потери в детекторе за счет разбиения сигнала на N импульсов пачки Сп(дБ):
Сн := 5.4
4. Потери в последетекторном накопителе импульсных сигналов Спак (дБ):
Спак - 1.26
42
1. Проверка по минимальной дальности .
.., , 2-Dmin . а-4
xidopl ---------тЬ ndopl = 1.31 &10 с
с
2. Проверка по разрешающей способности.
гк
) c
3. Энергетически необходимая длительность зондирующего сигнала.
, . Еп
Pidop
тборЗ =2.039-1 (Г3
4. Выбран ЛЧМ сигнал с колокольной огибающей
5. При частотной хорактеристике фильтра, согласованной только с главным лепестком спектра
прямоугольною радиоимпульса, длительность сигнала на уровне 0.5 на выходе фильтра
увеличивается в
1.2 - 1.4 раза по сравнению с оптимальной фильтрацией и равна:
r1 = 3.059-10" 5
rbix = 3.977-10
ADreal :=0
6. Реальная разрешающая способность для сигнала с колокольной огибающей (Км)
W =2.515104
ADrealif fs=s 5,0.47*—, ADreal;
w /
7. Расчет минимальной дальности действия (Км):
ADreal = 5.607
Dm inpol
РАСЧЕТ ПОГРЕШНОСТЕЙ ИЗМЕРЕНИЯ ДАЛЬНОСТИ И АЗИМУТА.
Kv := 1 коэффициент, зависящий от формы огибающей и структуры сигнала
Vmaks’= 1000 максимальная скорость воздушной цели (м/с)
A :=9-10 относительная нестабильность частот ГВЧ и гетеродина (Гц)
Kam := 10 коэффициент стабилизации системы АПЧ
1. Реальное отношение сигнал/шум на выходе УПЧ для одиночного отраженного импульса
gl
Af:=0
gl = 6.499
., . 2’ADmin
TldopZ • — —---
W :=if.fs>3,
с
xi :=0
2. Ширина полосы пропускания УПЧ (Гц):
Af=3.4-105
3. Расчет эффективной круговой ширины спектра для ЛЧМ сигнала с колокольной огибающей (Ги)
pr :== if(fs^5,1.25-W.Br)
Pt =3.143-104
4. Потенциальная точность изменения времени запазлыванпя (км)
idop3 :=-----
Pidop
xdop3 - 2.039-10
4. Выбран ЛЧМ сигнал с кодокольйой огибающей
5. При частотной хорактеристике фильтра, согласованной только с главным лепестком спектра
прямоугольного радиоимпульса, длительность сигнала на уровне 0.5 на выходе фильтра
увеличивается в 1.2 - 1.4 раза по сравнению с отнмапыюй фильтрацией и равна:
т1 =3.059 4 0~5
Tbix-1.3 т1 tbix= 3.977-10~5
ADreal- 0 xi ~ 0
6. Реальная разрешающая способность для сигнала с колокольной огибающей (Км)
W = 2.515-104
ADreal = 5.607
7 Расчет минимальной дальности действия (Км):
Dminpol- — (Т1 -т тЬ) Dminpol- 0.225
РАСЧЕТ ПОГРЕШНОСТЕЙ ИЗМЕРЕНИЯ ДАЛЬНОСТИ И АЗИМУТА.
Kv 1 коэффициент, зависящий от формы огибающей и структуры сигнала
Vmaks:= 1000 максимальная скорость воздушной цели (м/с)
А := 9 10 относительная нестабильность частот Г8Ч и гетеродина (Гц4
Кат := 10 коэффициент стабилизации системы АПЧ
1. Реальное отношение сигнал/шум на выходе УГР-] для одиночного отраженного импульса
’Са-Св* Cnak* Cnst
gl = 6.499
Af := 0 ₽т - 0
2. Ширина полосы пропускания УПЧ (Гц):
/ cl-Kv 4-Vmaks с
Af :=-------t---------+- А—-----
\2-ADmin X 1-kain
Af=3.4-105
3 Расчет эффективной круговой ширины спектра для ЛЧМ сигнала с колокольной огибающей (Гь
рт ;= 1.25-9/,рт)
Pl =3 143-ю4
4. Потенциальная точность измерения времени запаздывания (км)
cdl :=
adl -0.734
44
5. Расчет относительного эффективного раскрыва антенны
|3а «’=0
Ра :=if (fs^l) -I- (fSs3) + (fc~4)/ <1.81 <5,12™“
X X
Ра
118
6 Потенциальная точность измерения азимута (град)
1 t О.а“-Тп'
2 п 2 12
g -Ра
аа! =5.6 7410" 4
7. Среднее значения погрешности измерения дальности (км):
oxi :=4’crdl nd =2.937
8. Среднее значение погрешности измерения азимута (град)
ста ;=4*аа1
ста = 2.27М3
ЧУВСТВИТЕЛЬНОСТЬ ПРИЁМНИКА (Вт)
Pcmin I=kgO-gO-Kpr-TOAf
Pcmin = 7.212-10
45