/





































































































































































































Автор: Шувалов В.П. Захарченко Н.В. Шварцман В.О.
Теги: электротехника электрическая связь радиотехника электросвязь
ISBN: 5-256-00852-8
Год: 1990




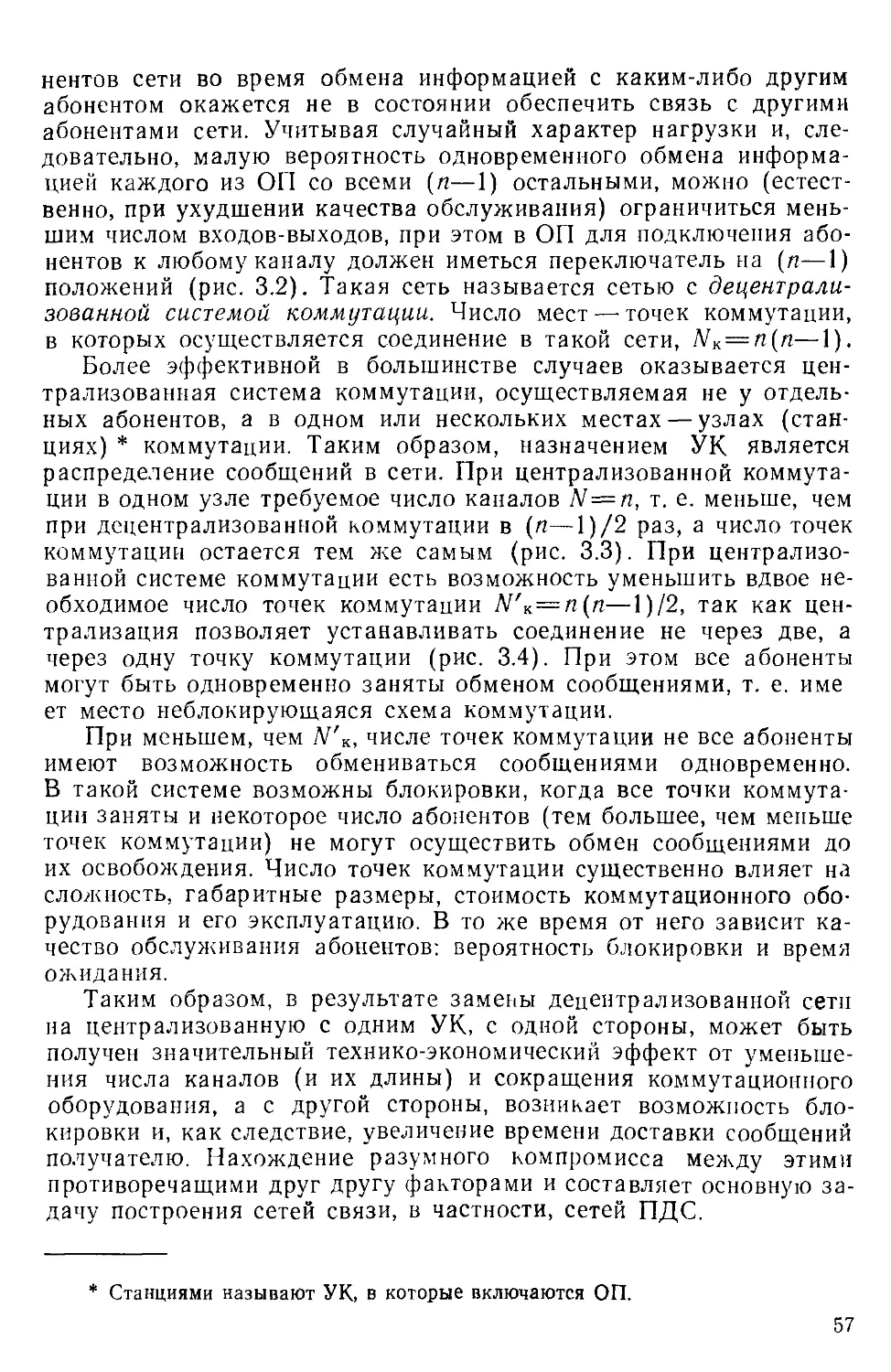
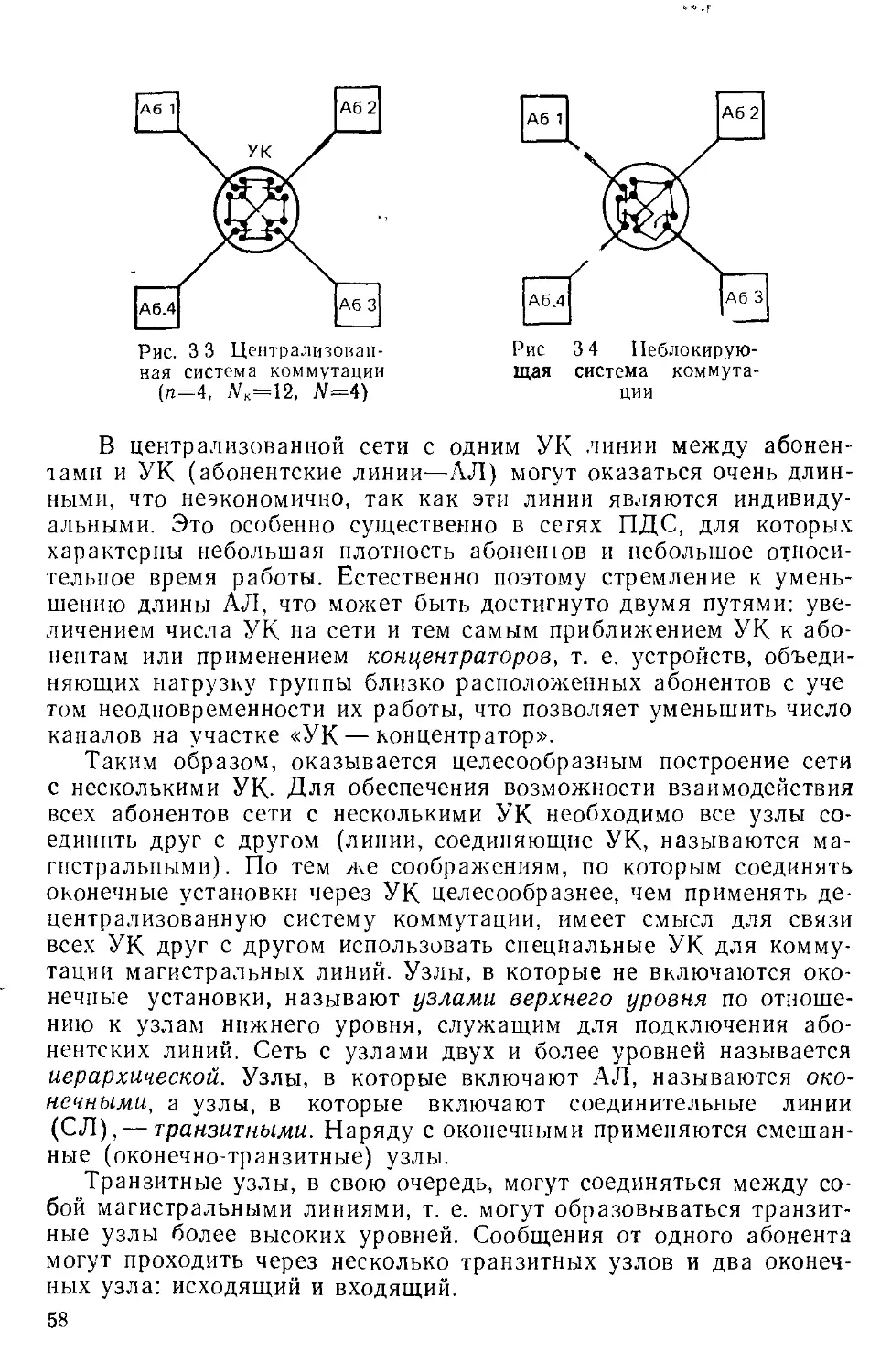
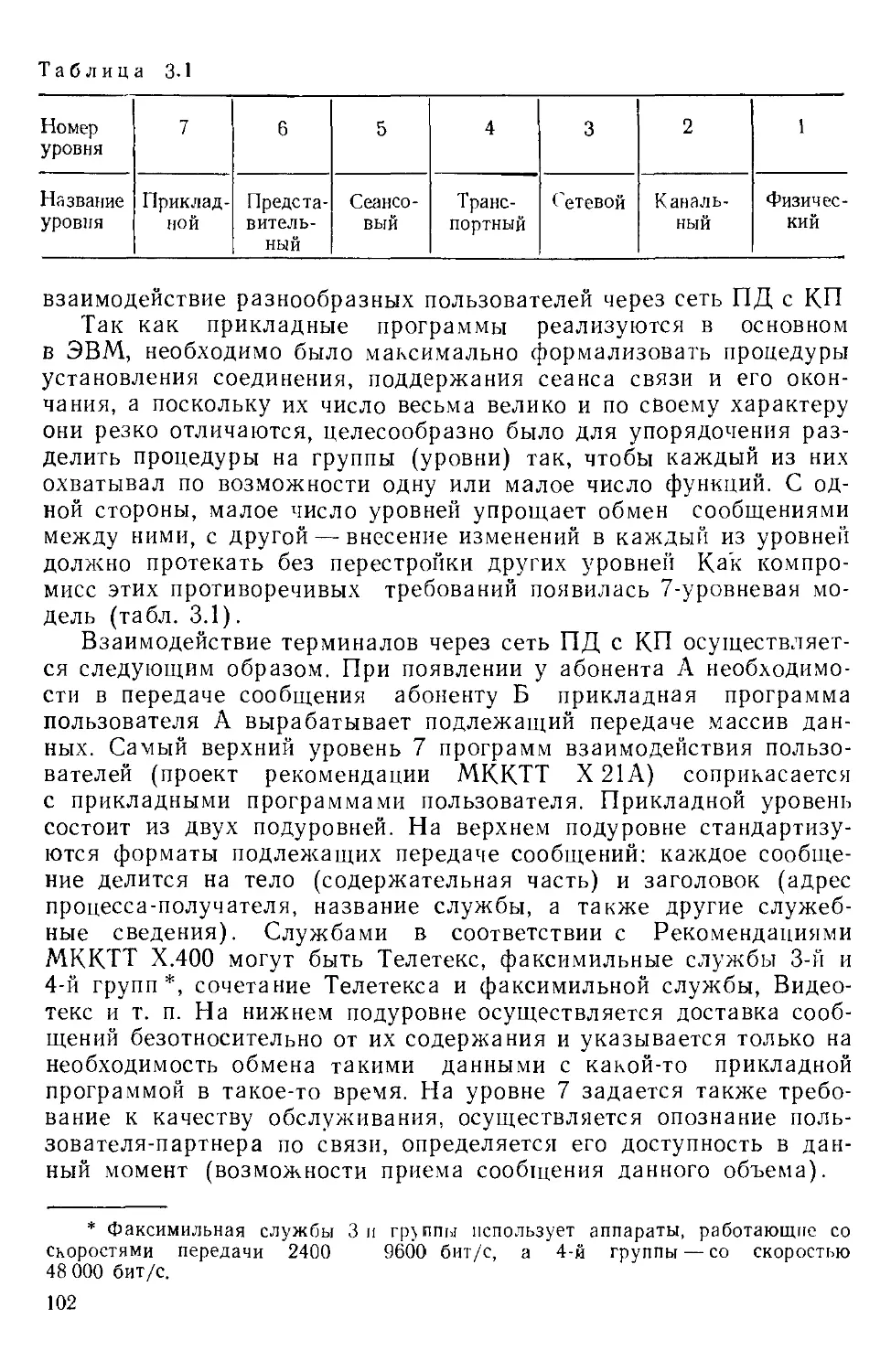
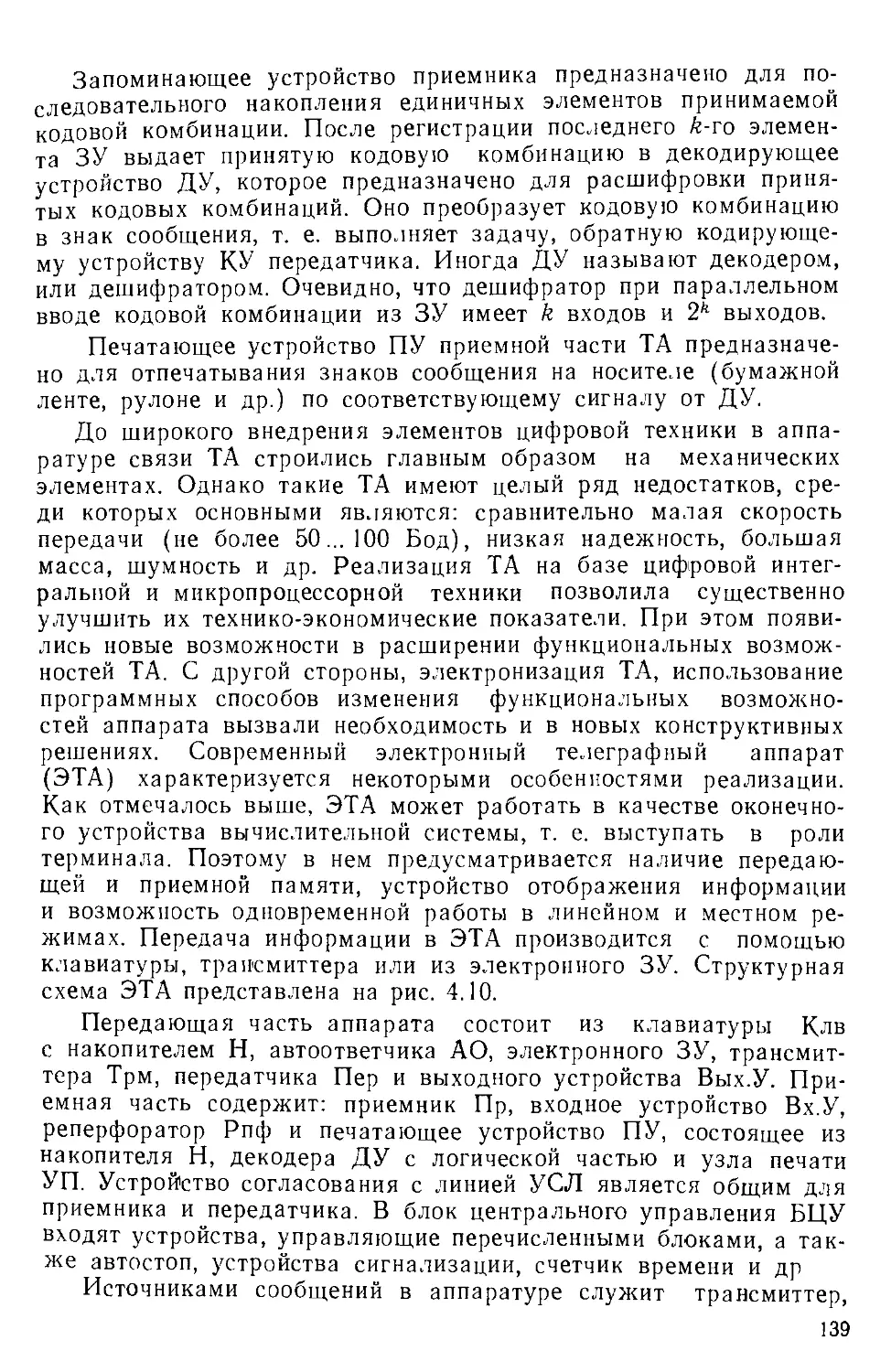
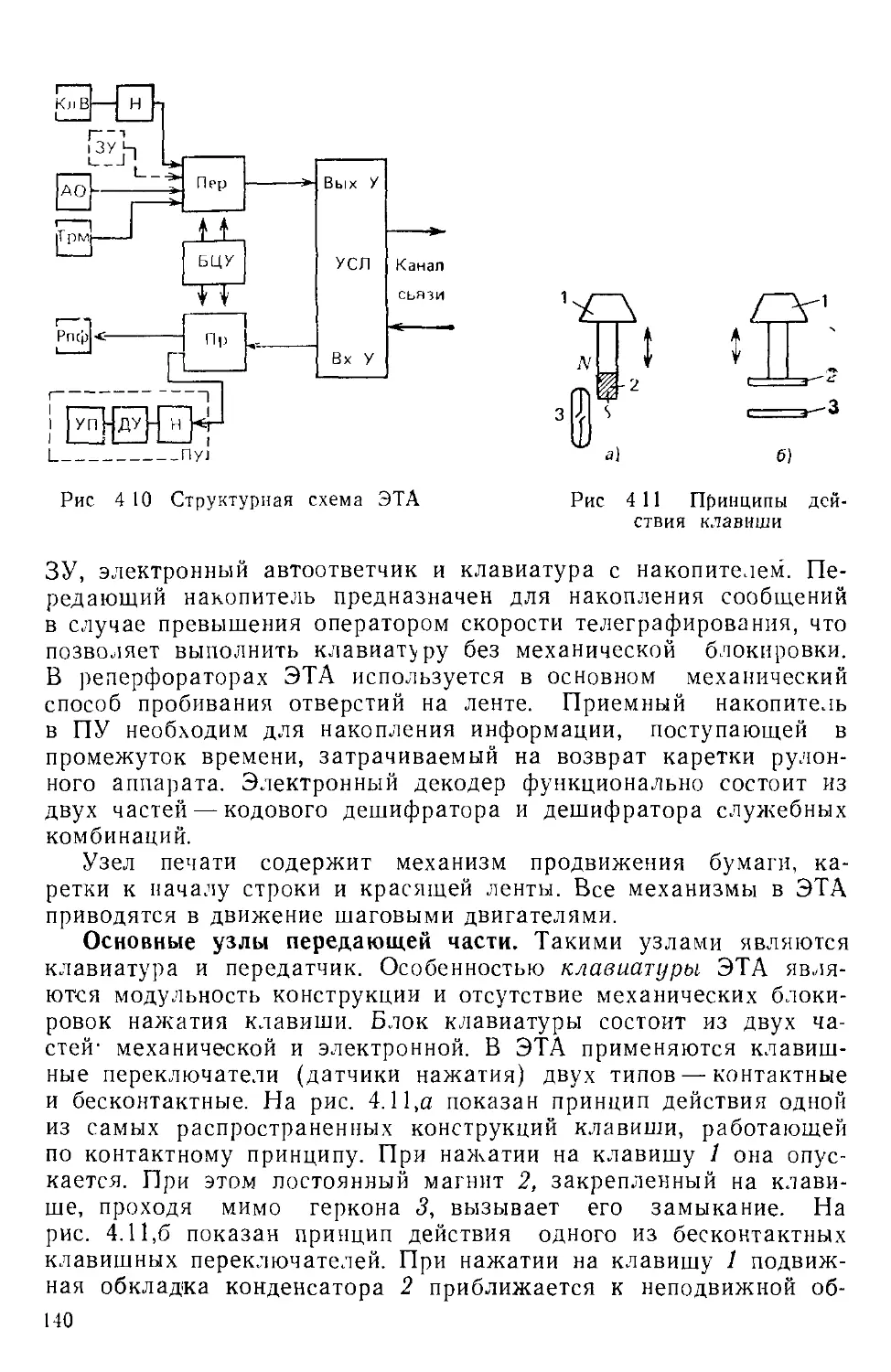
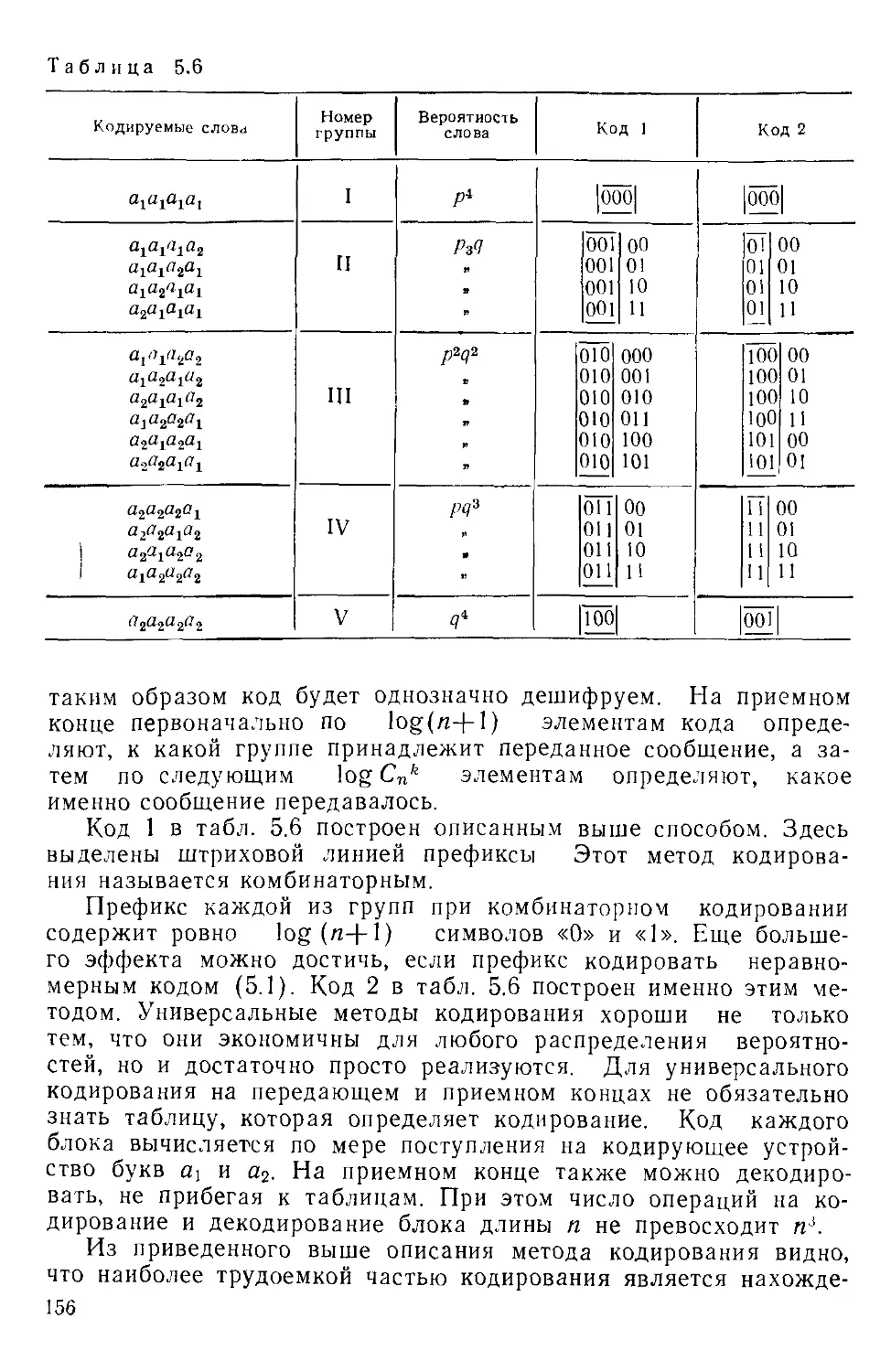
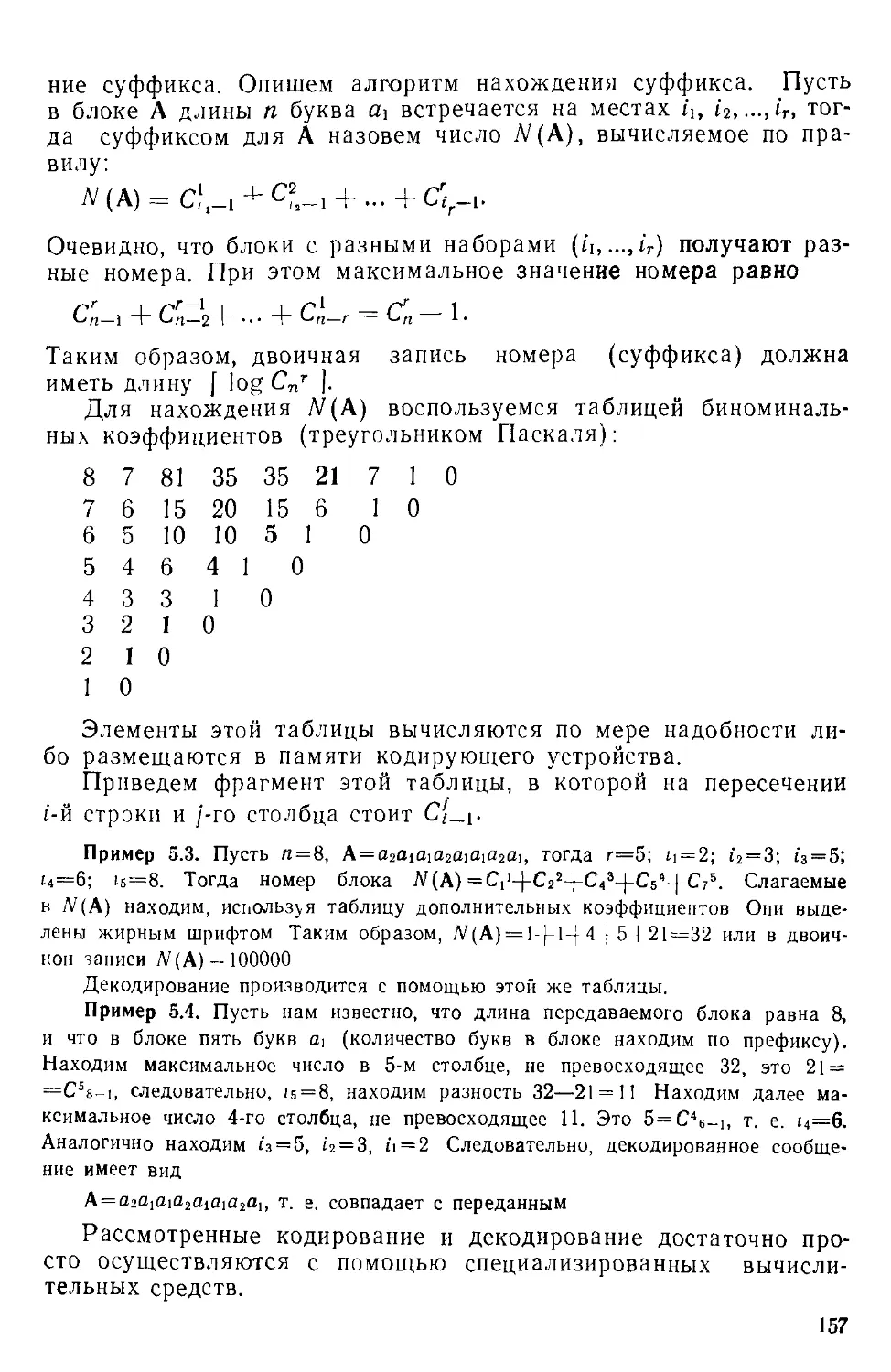
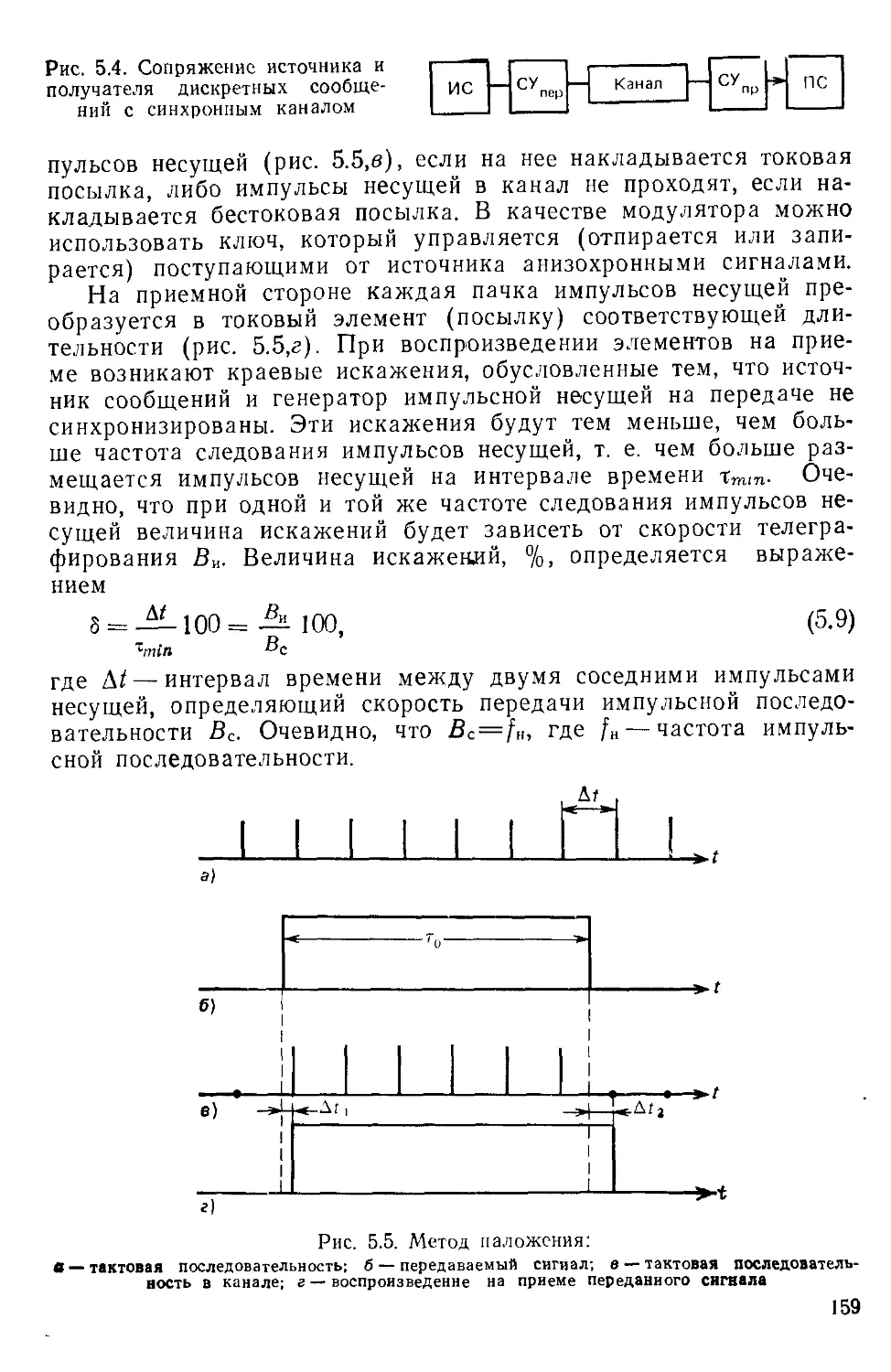
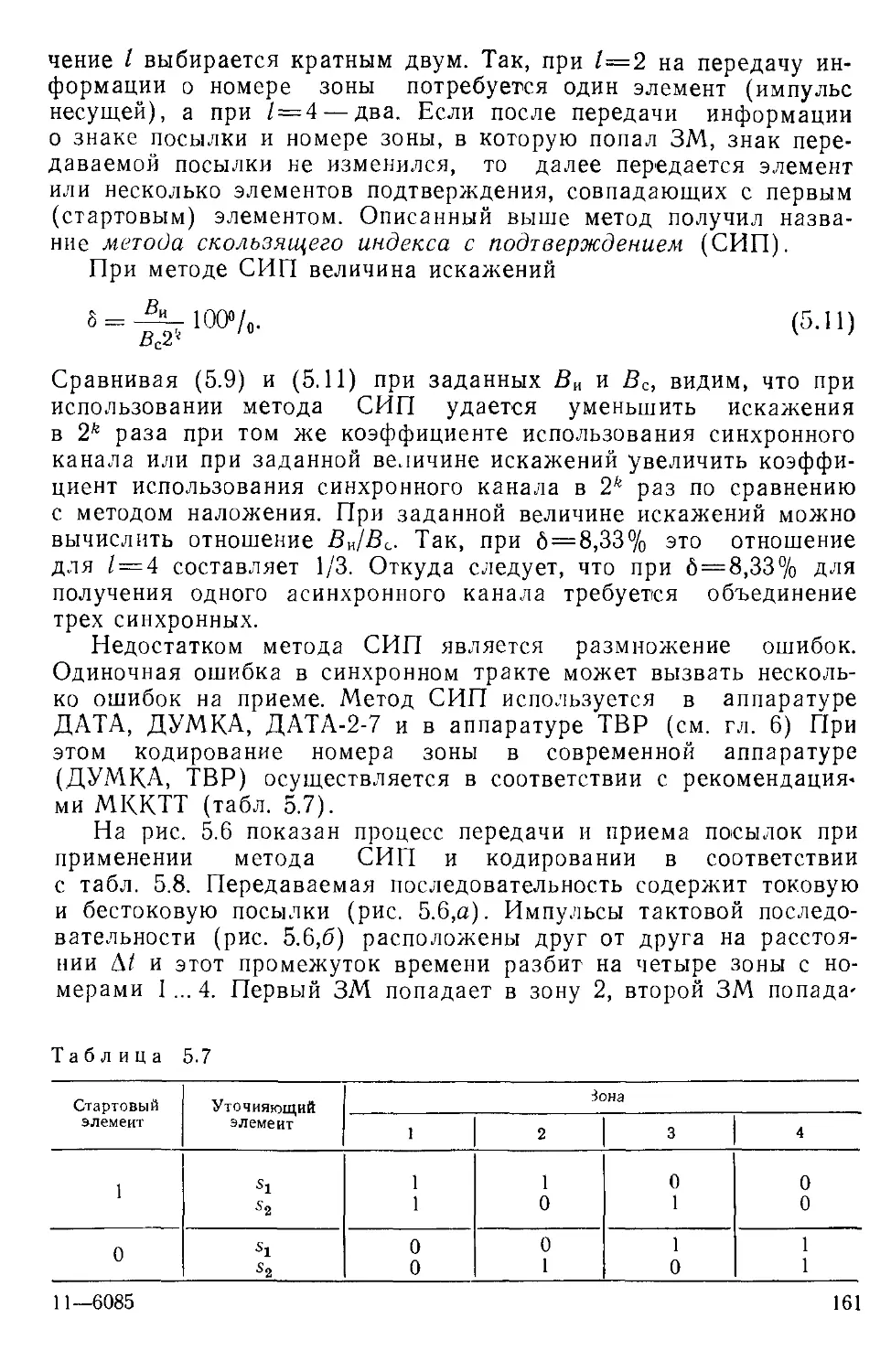
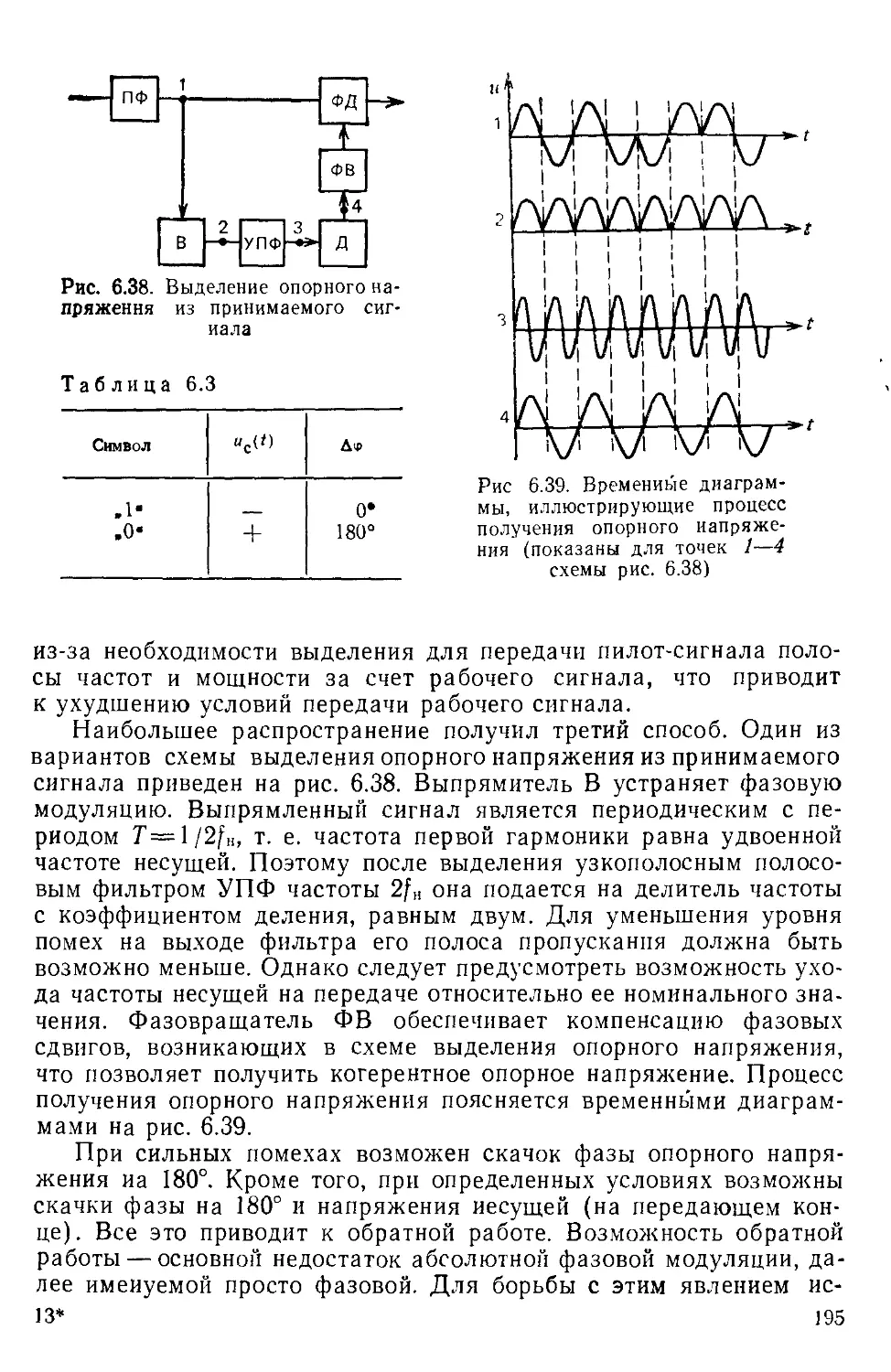
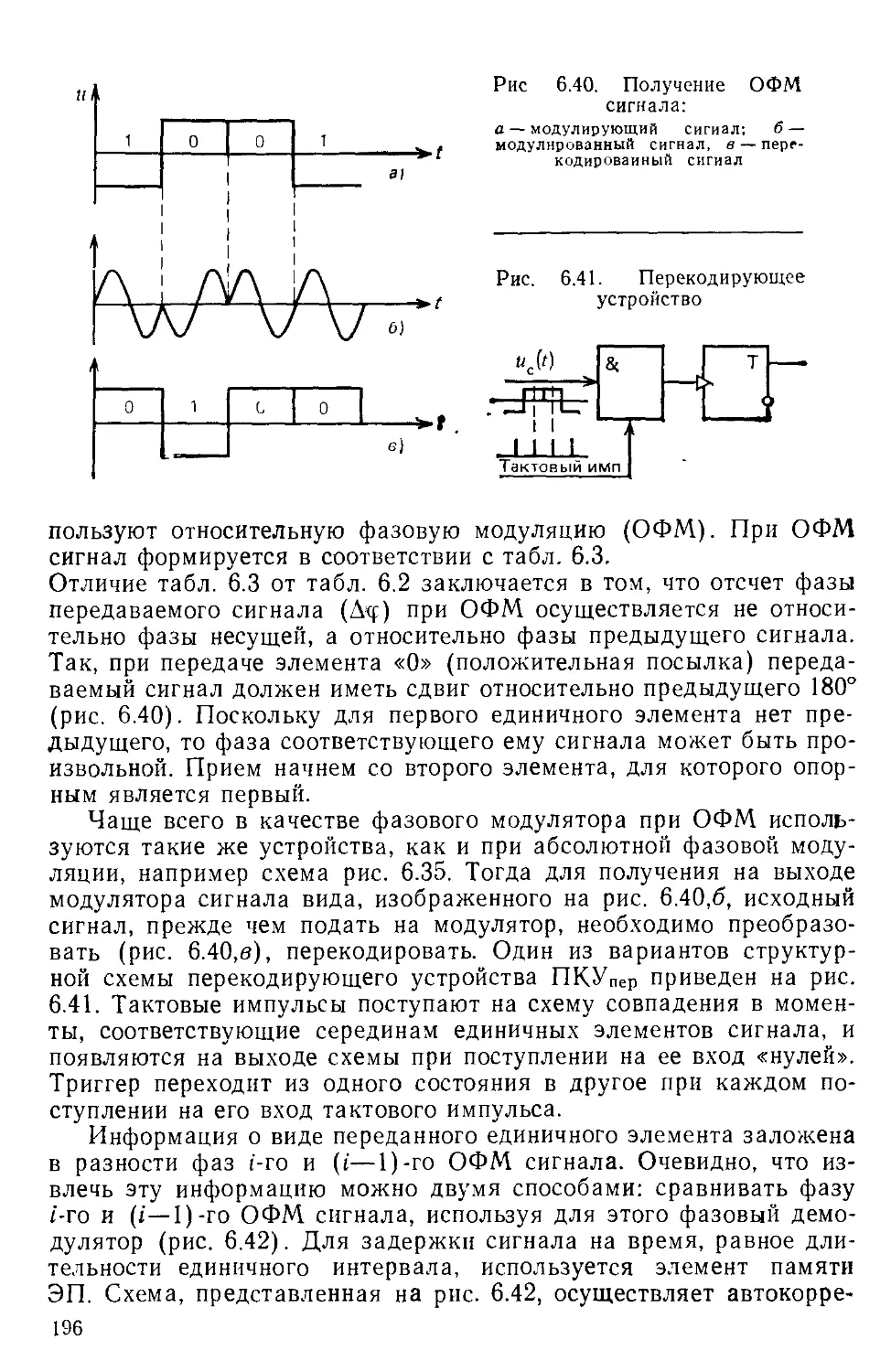
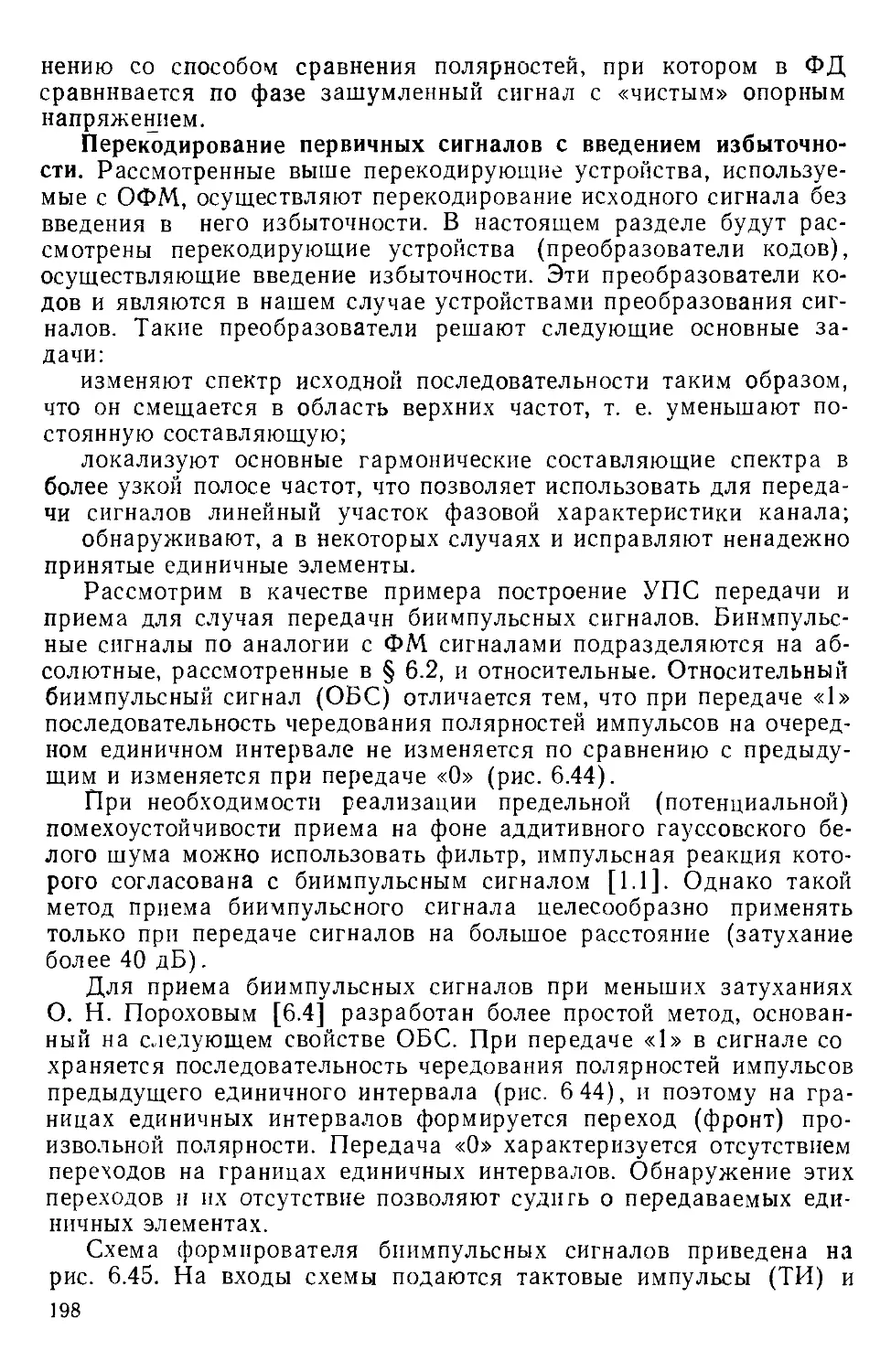
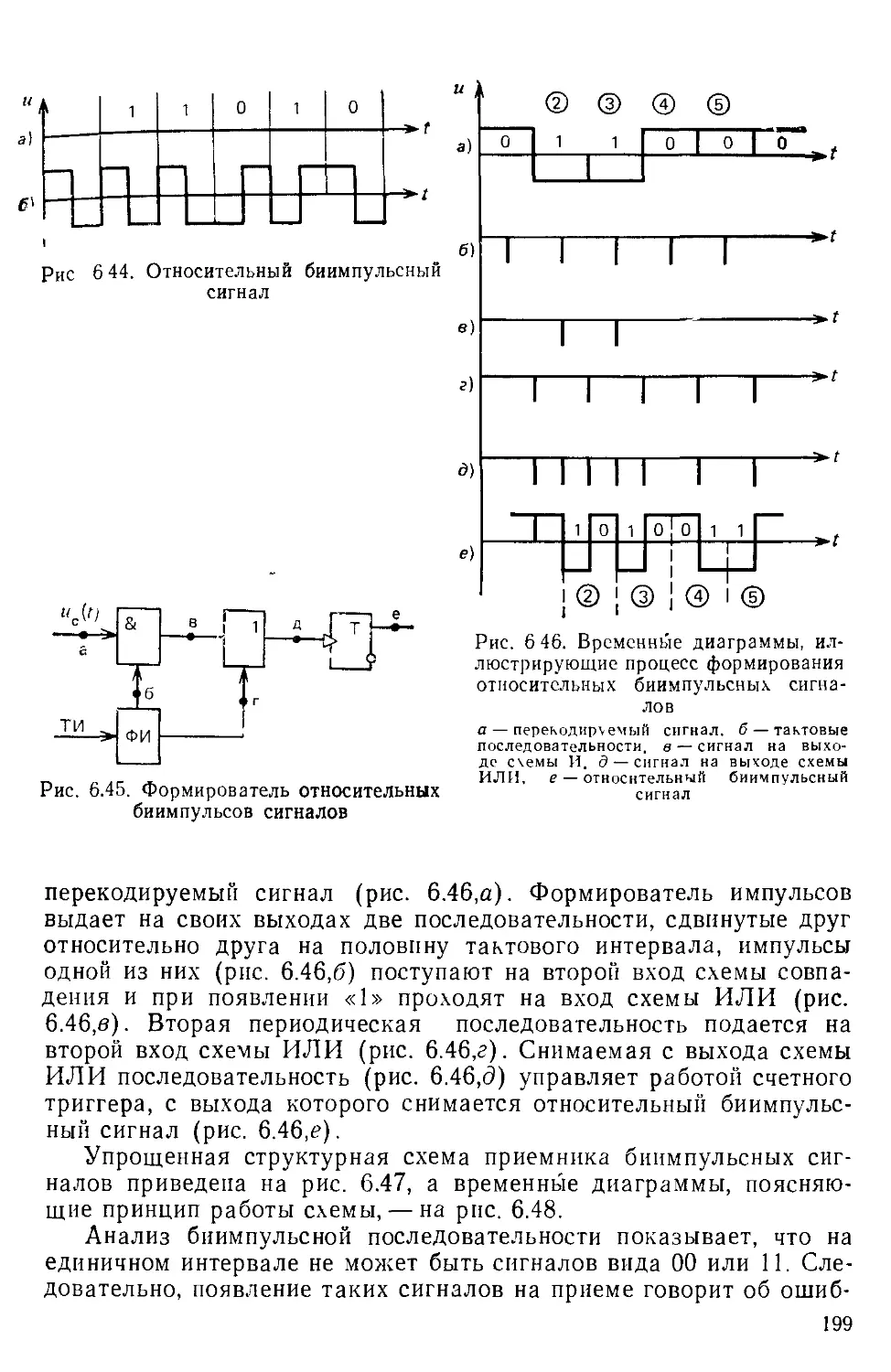
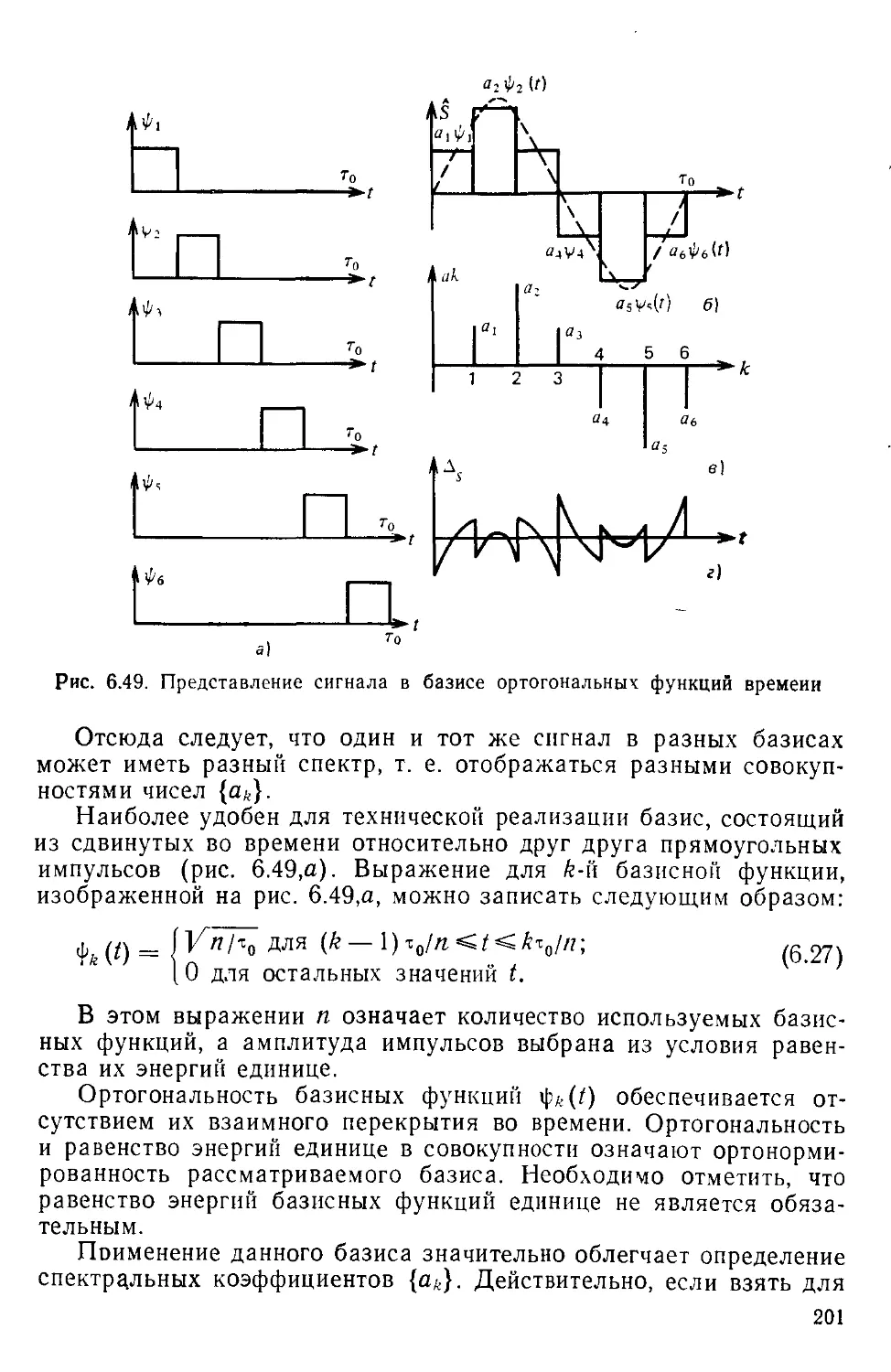
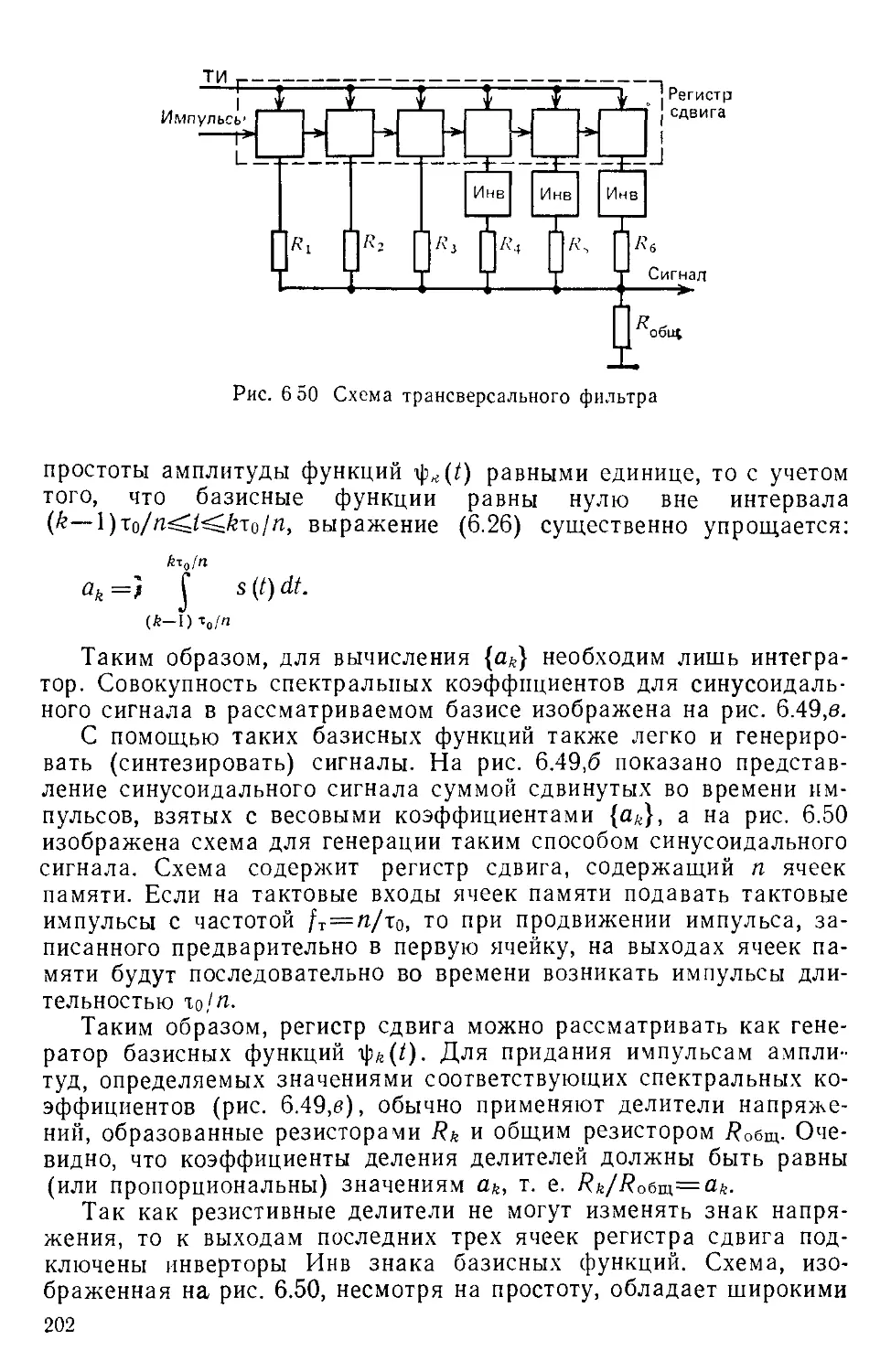
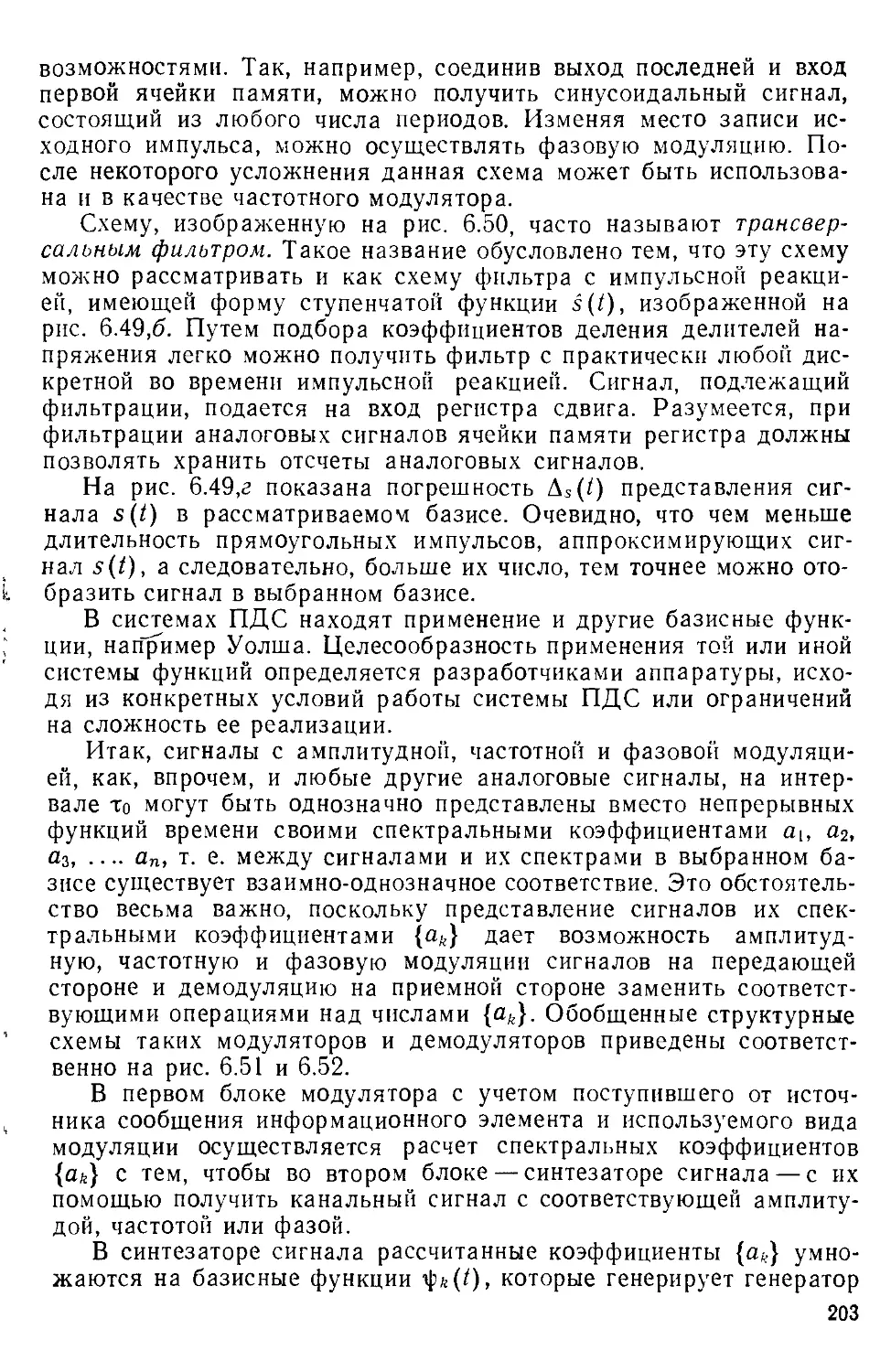
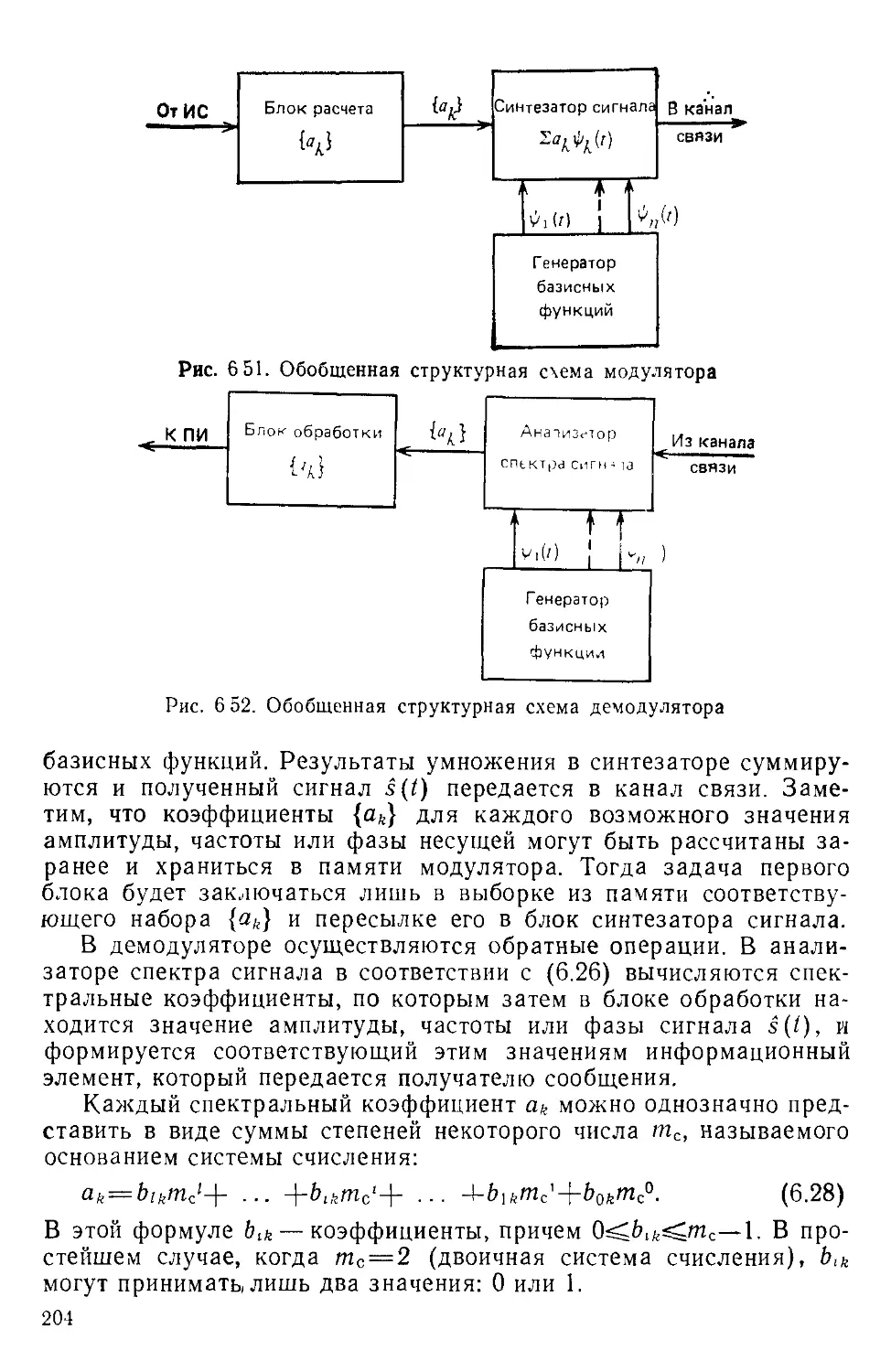
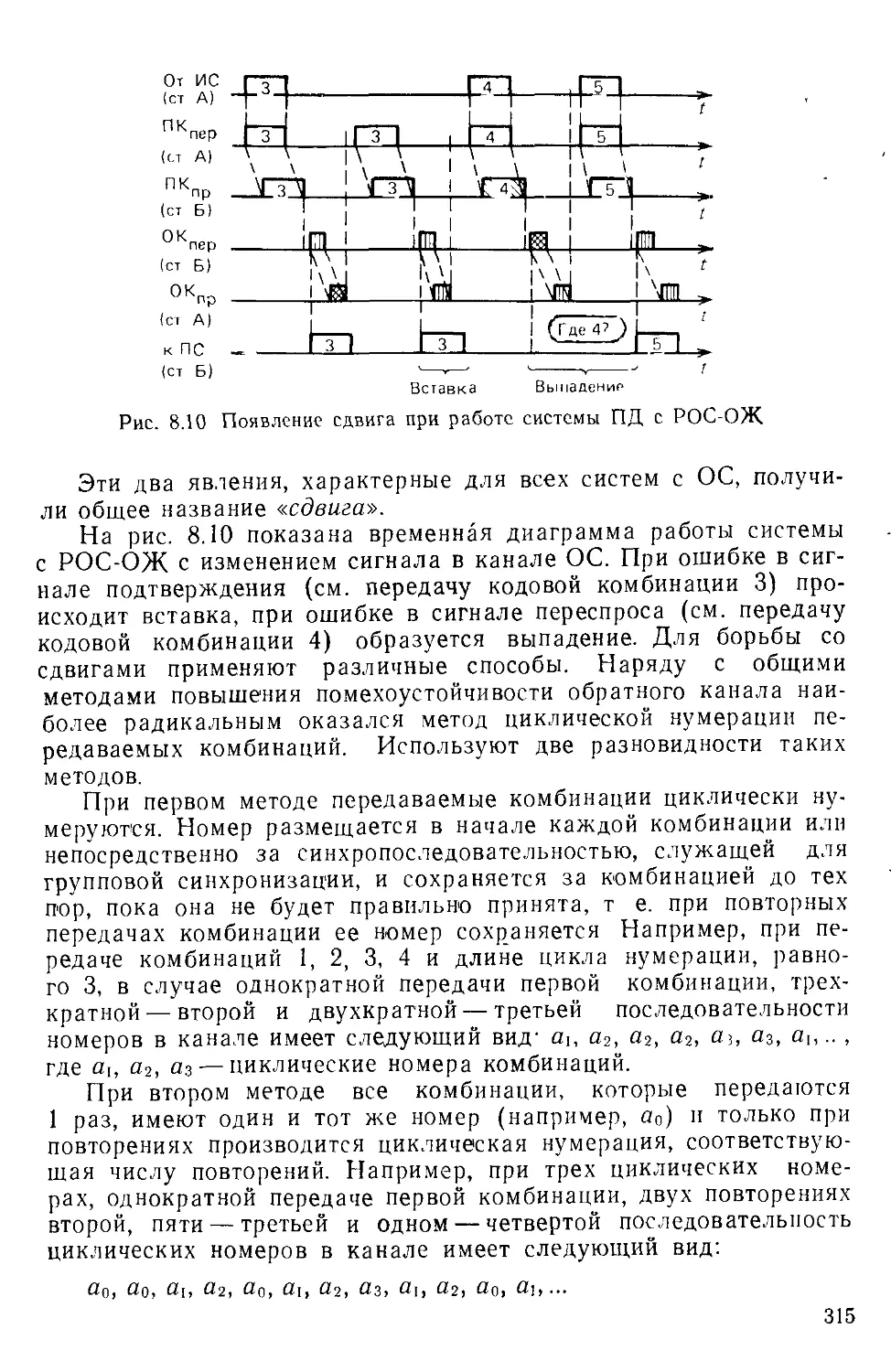
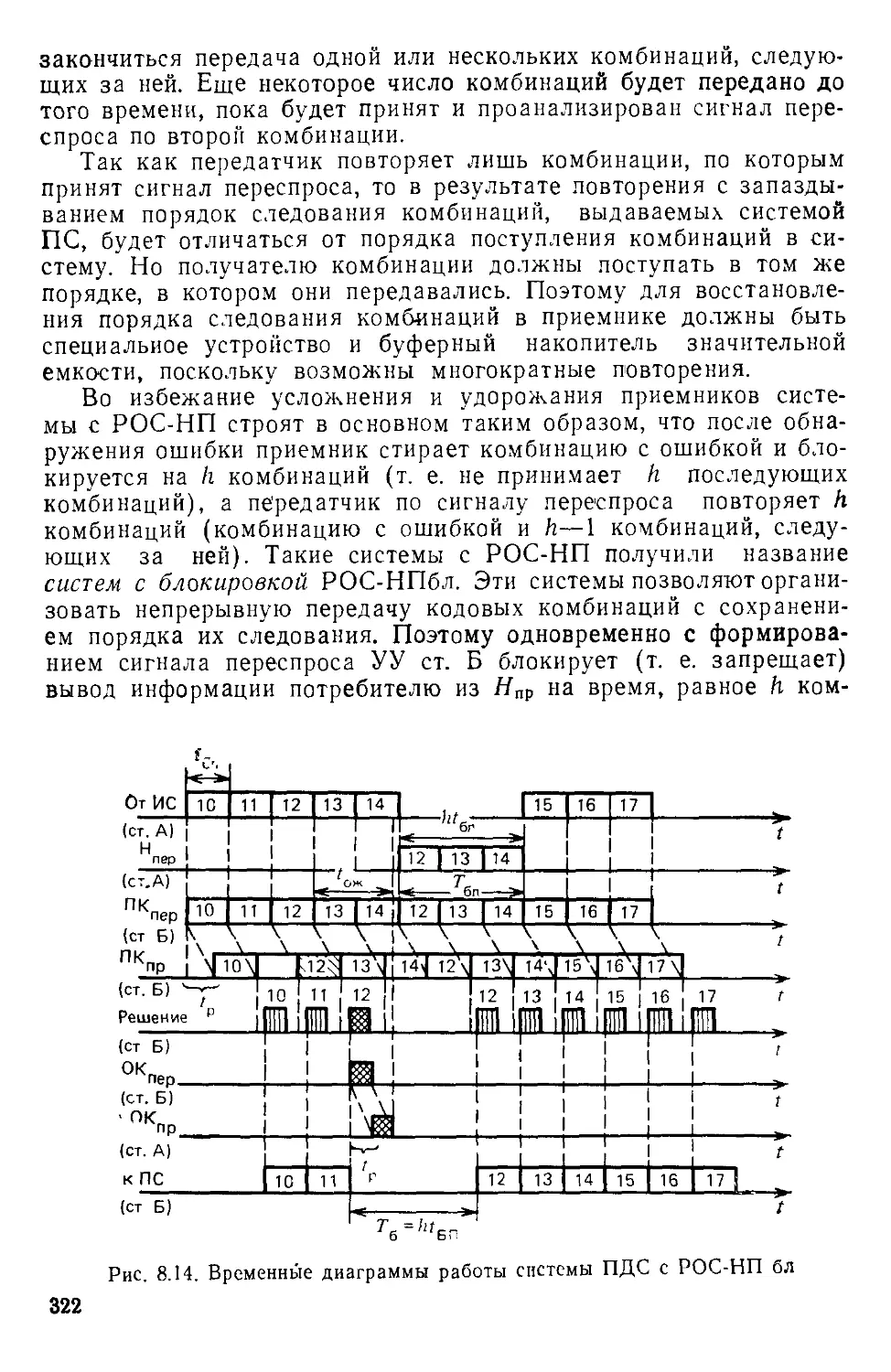
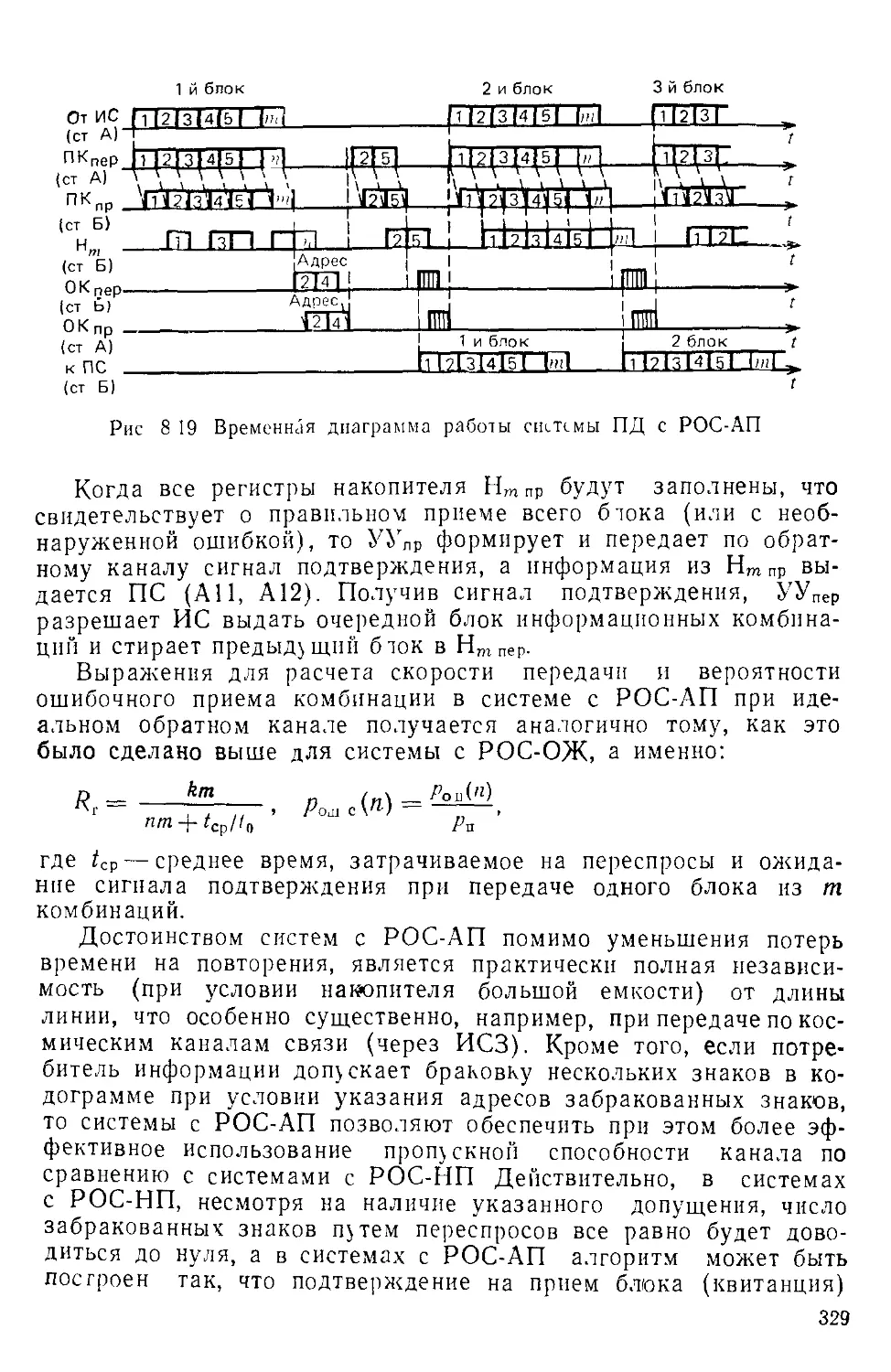
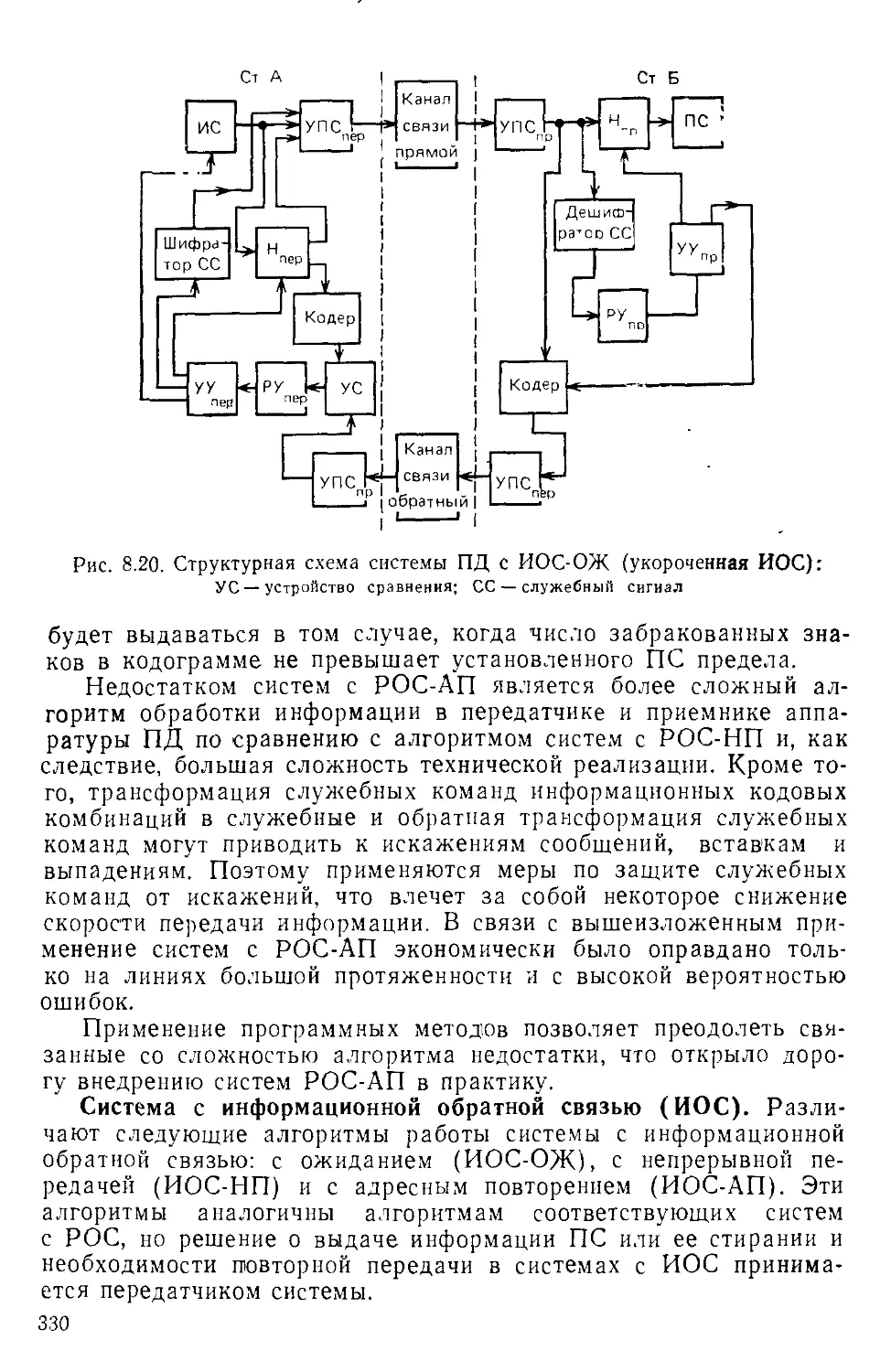
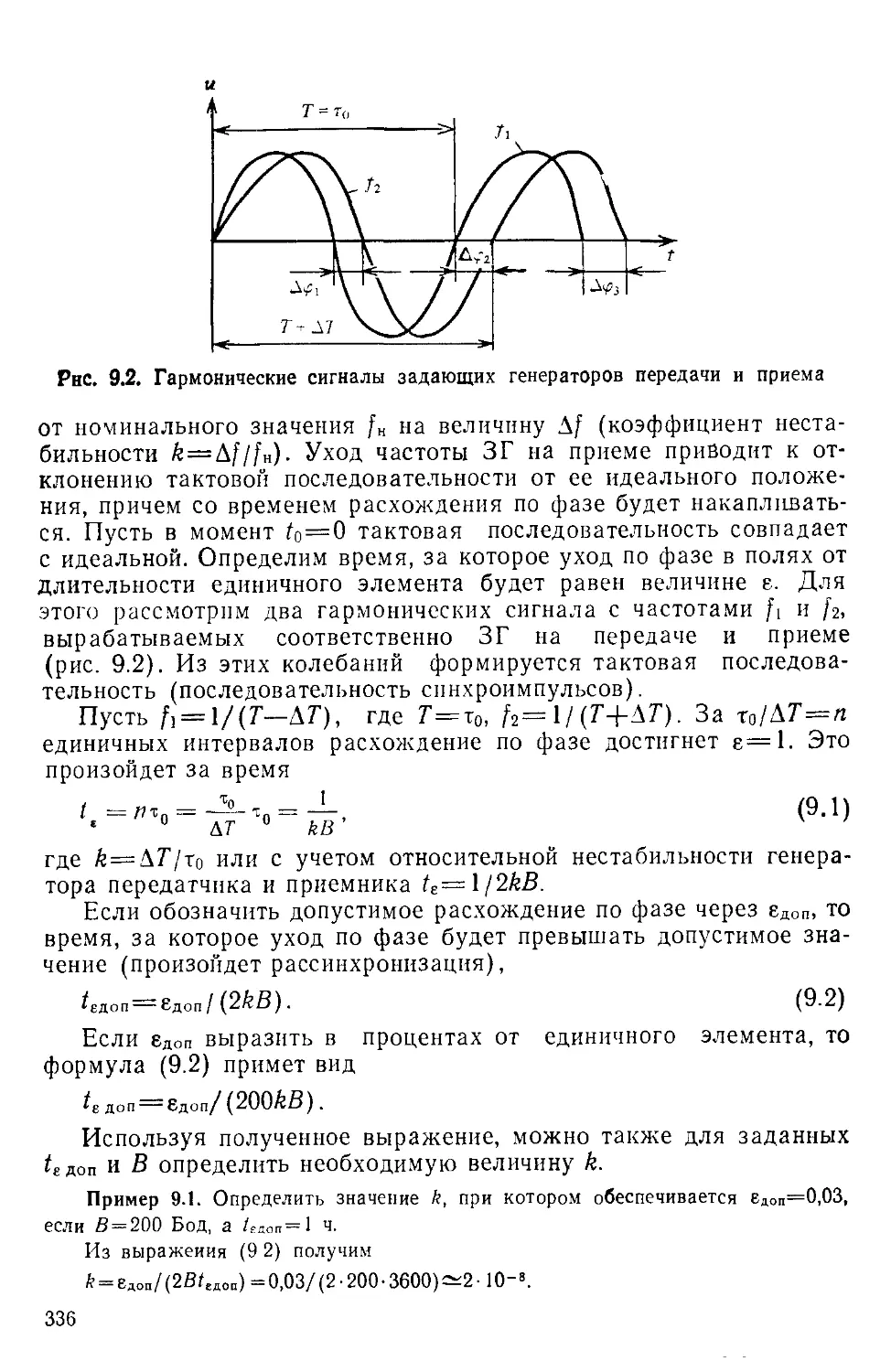
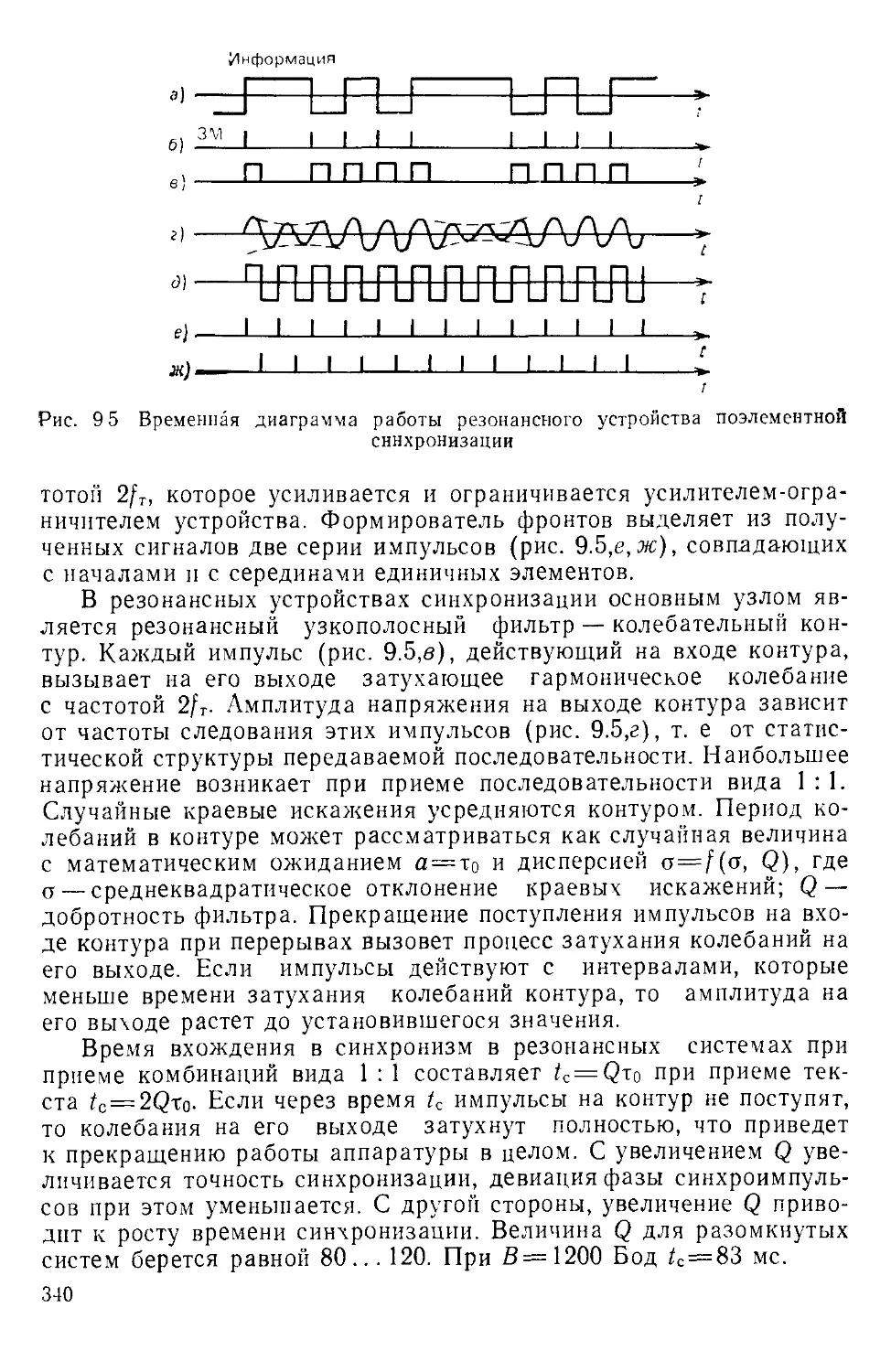
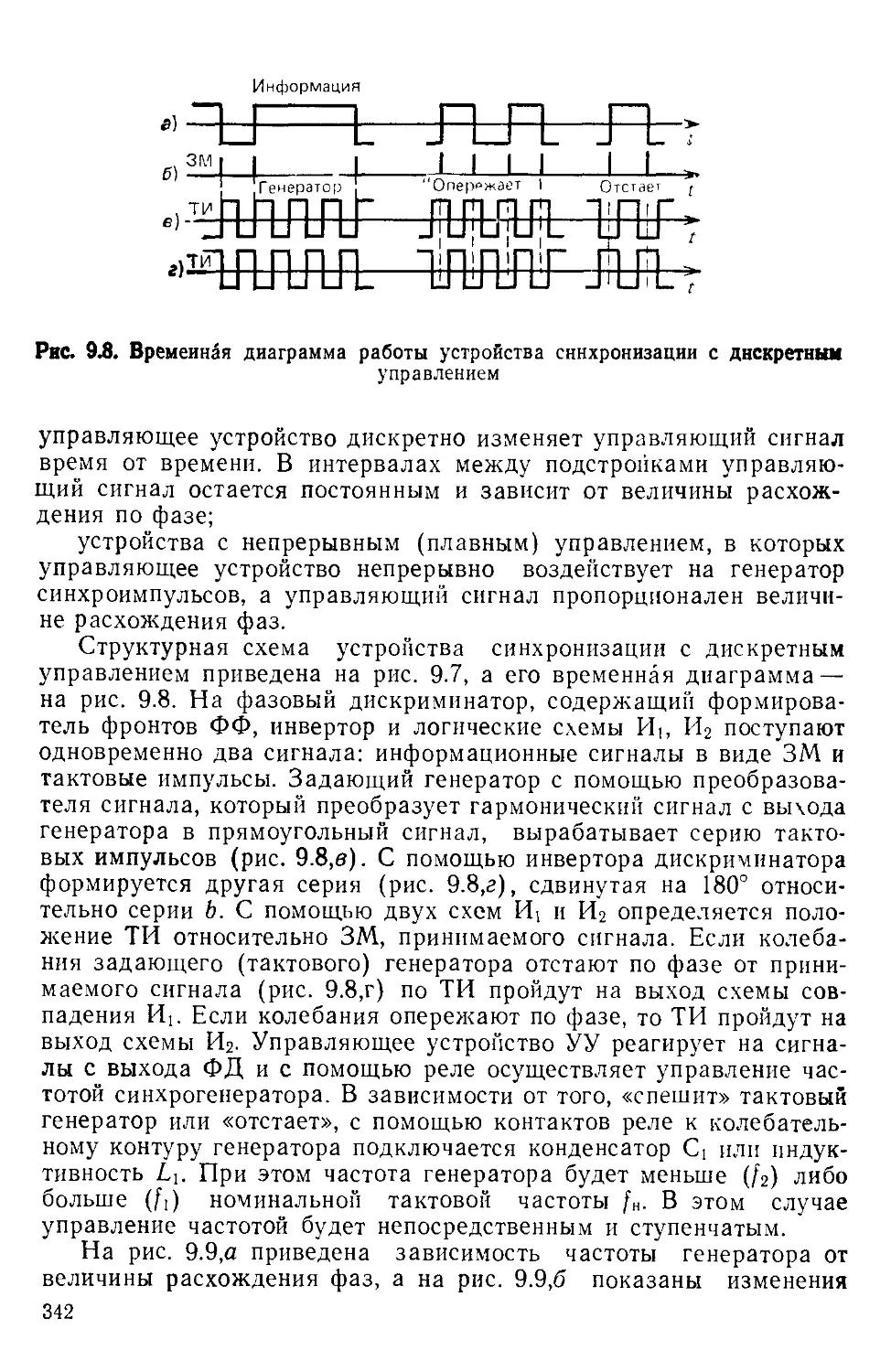
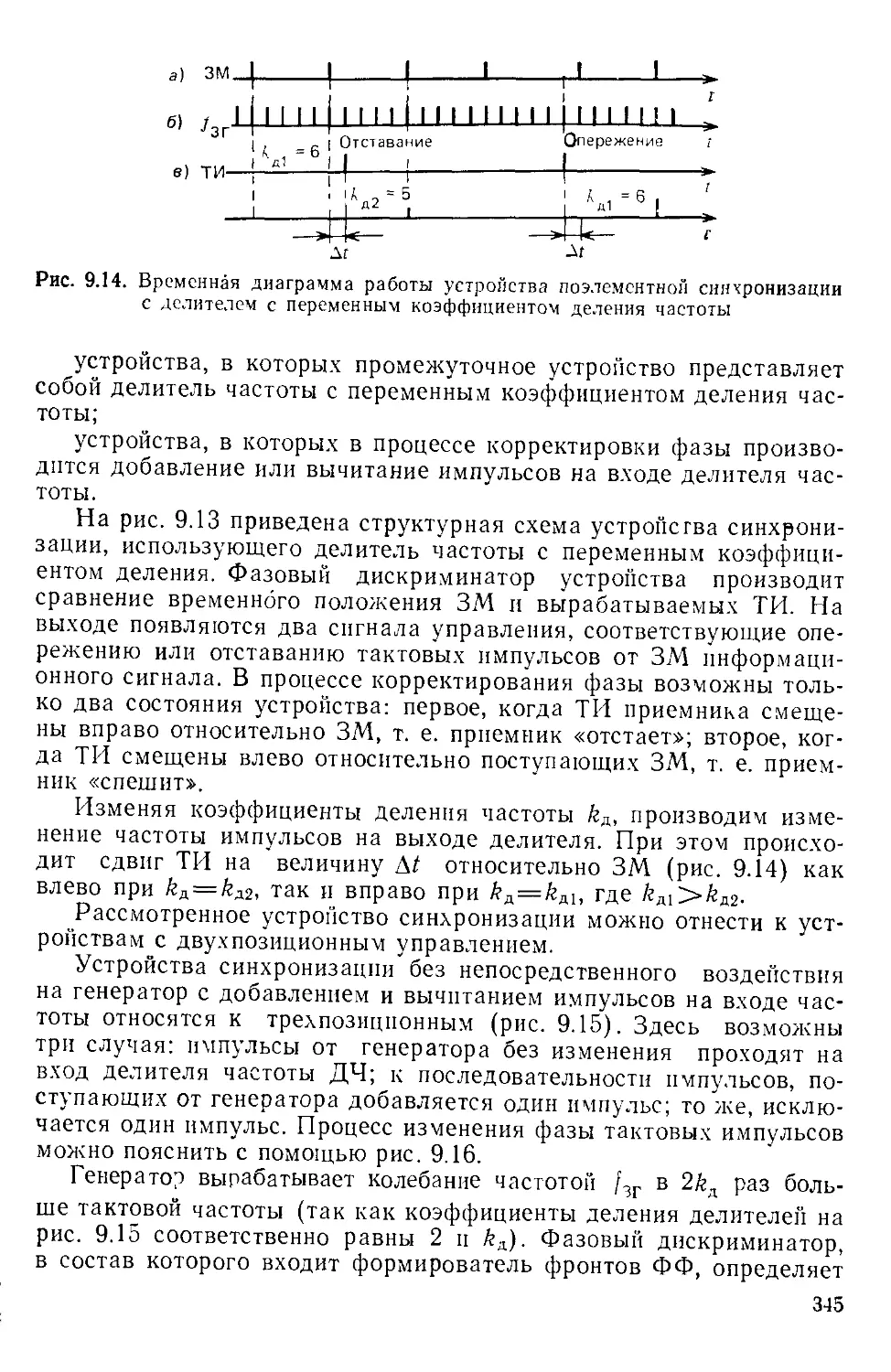
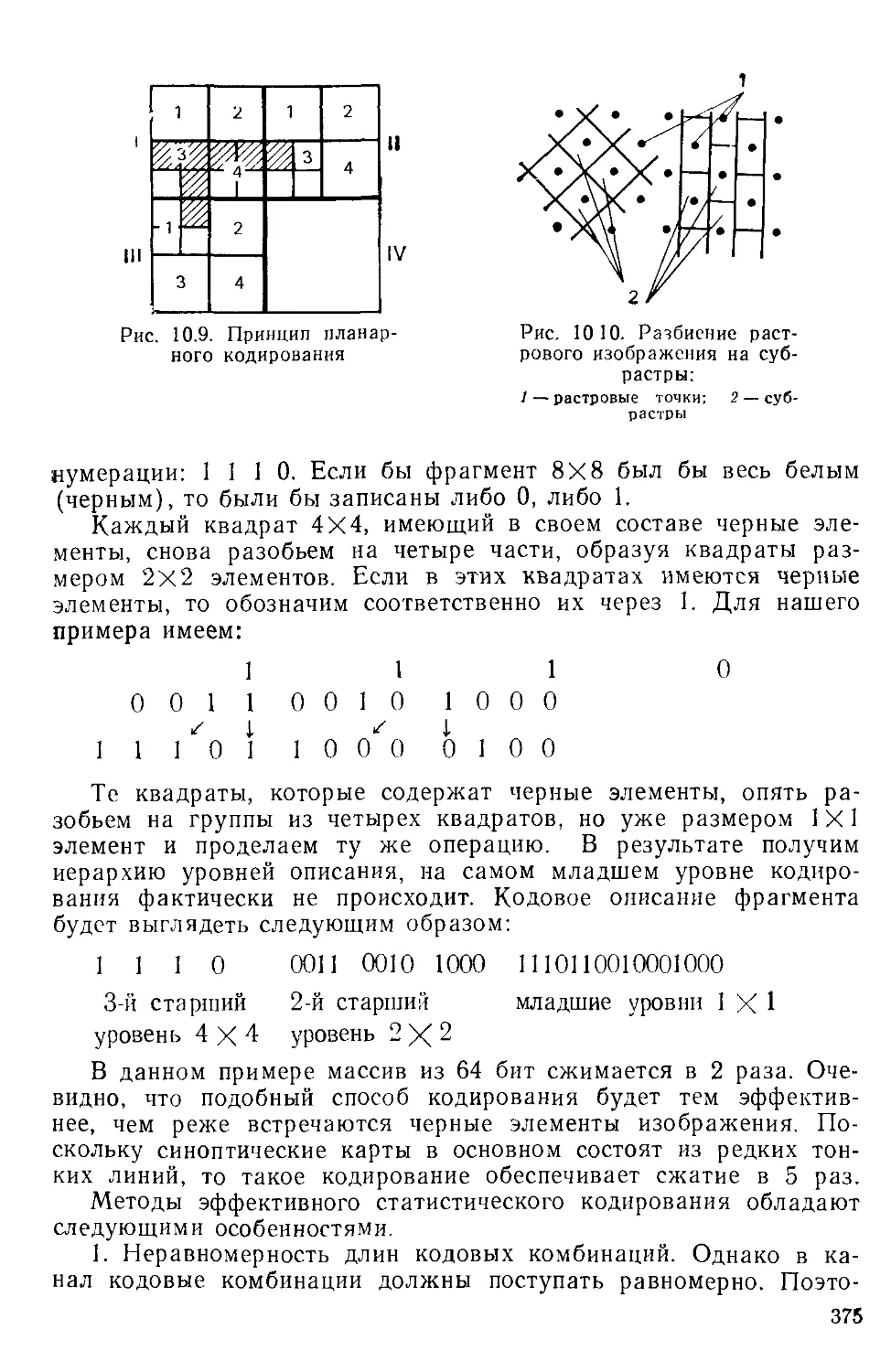
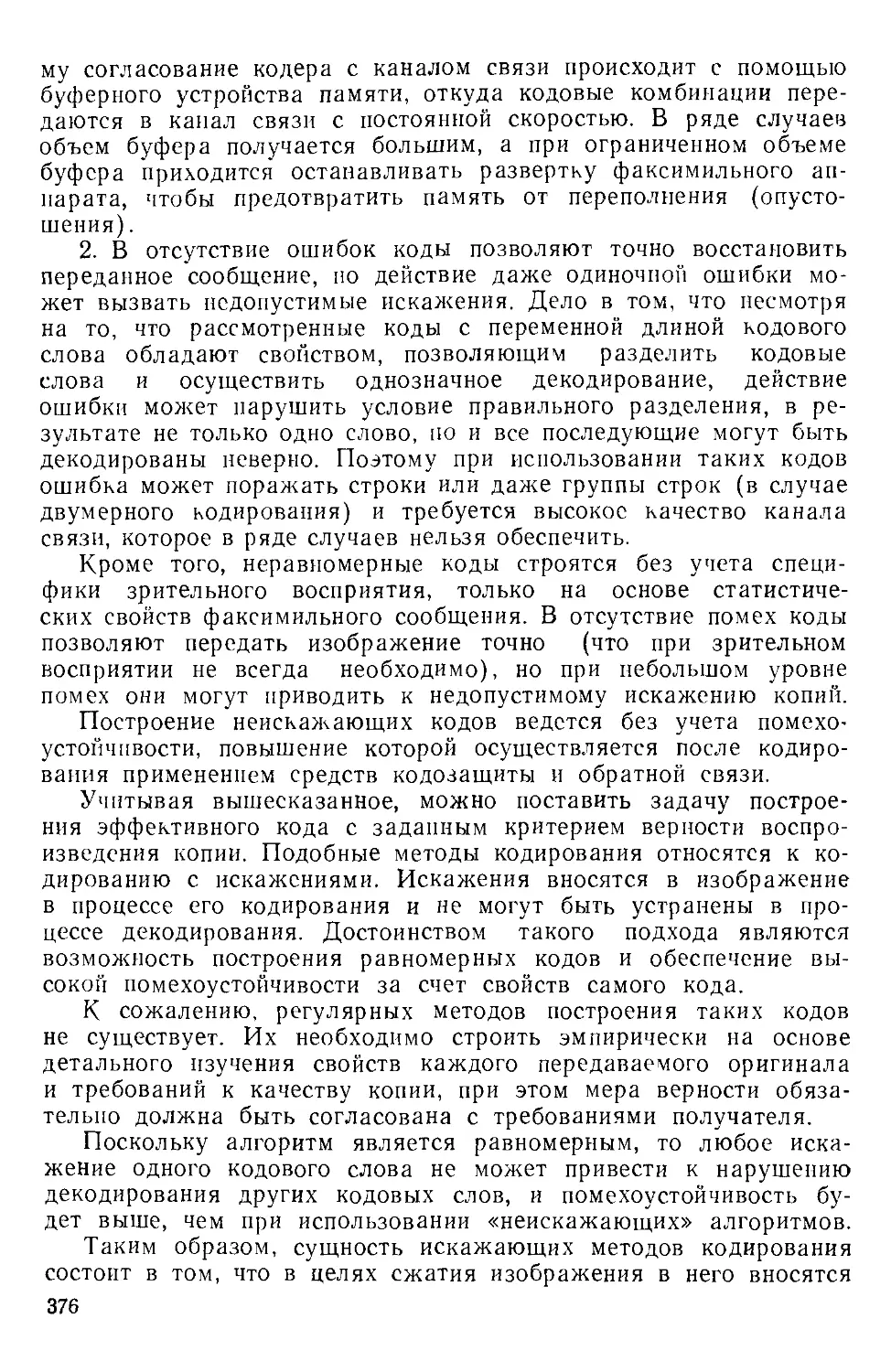
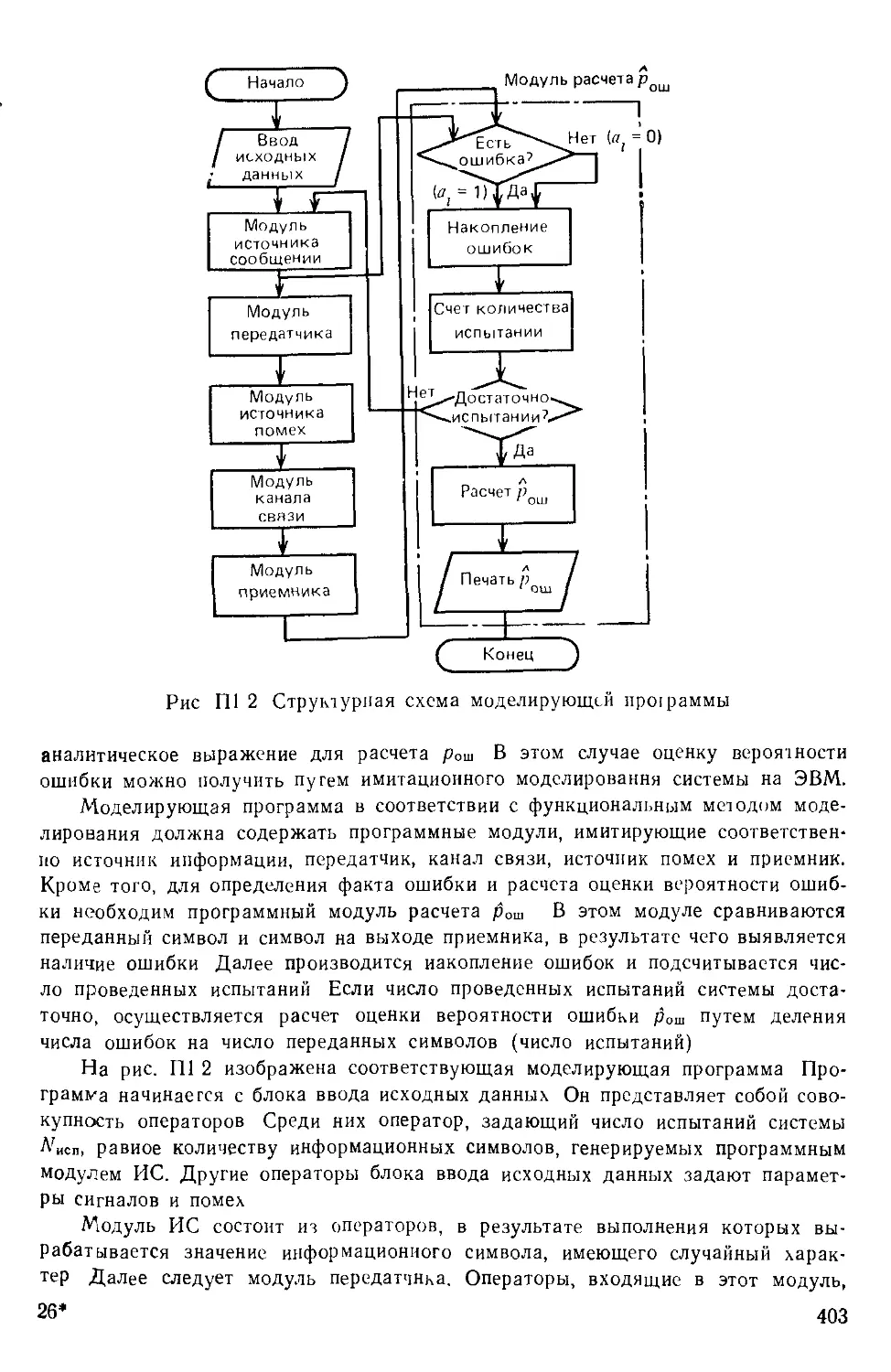
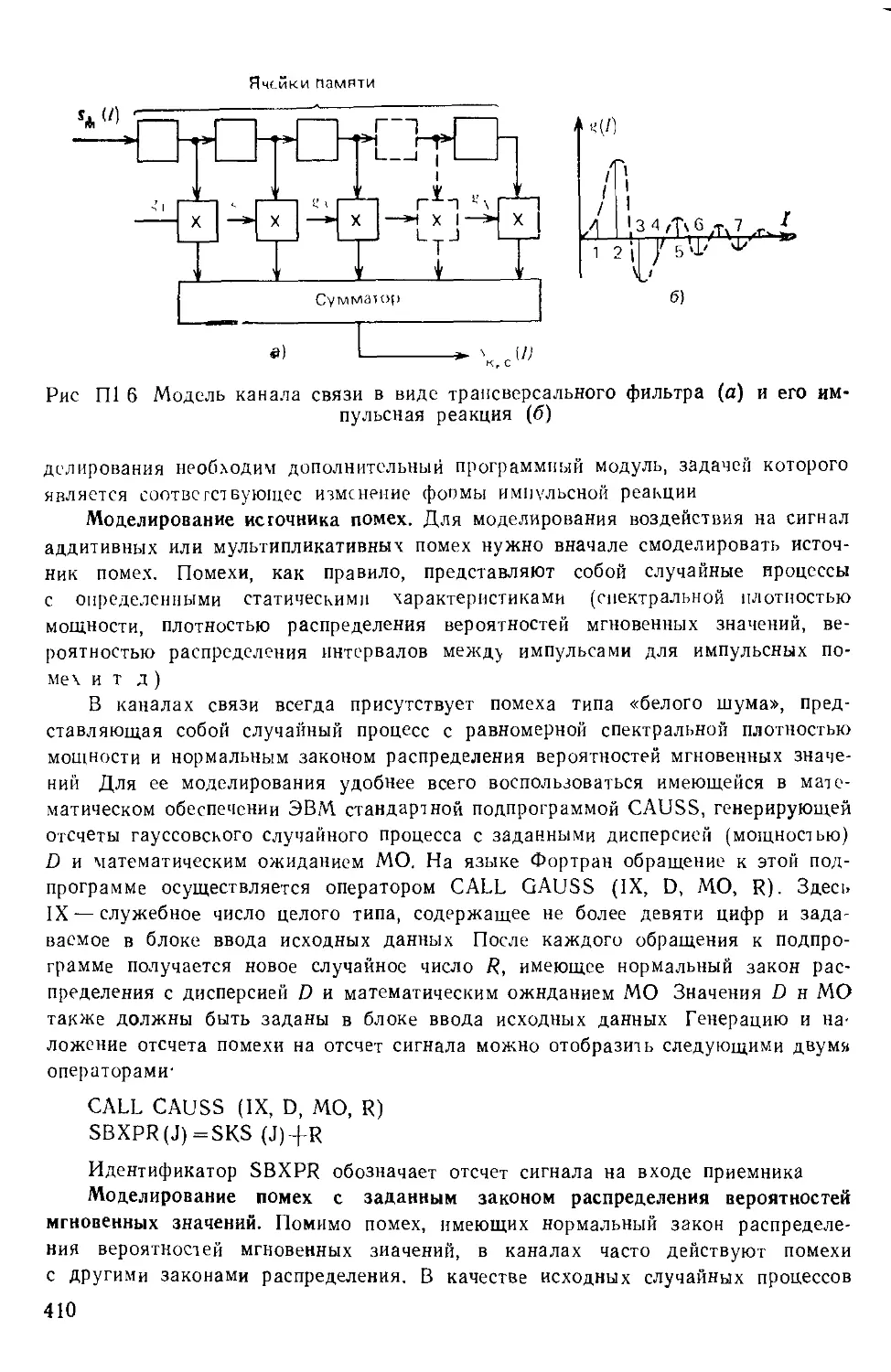
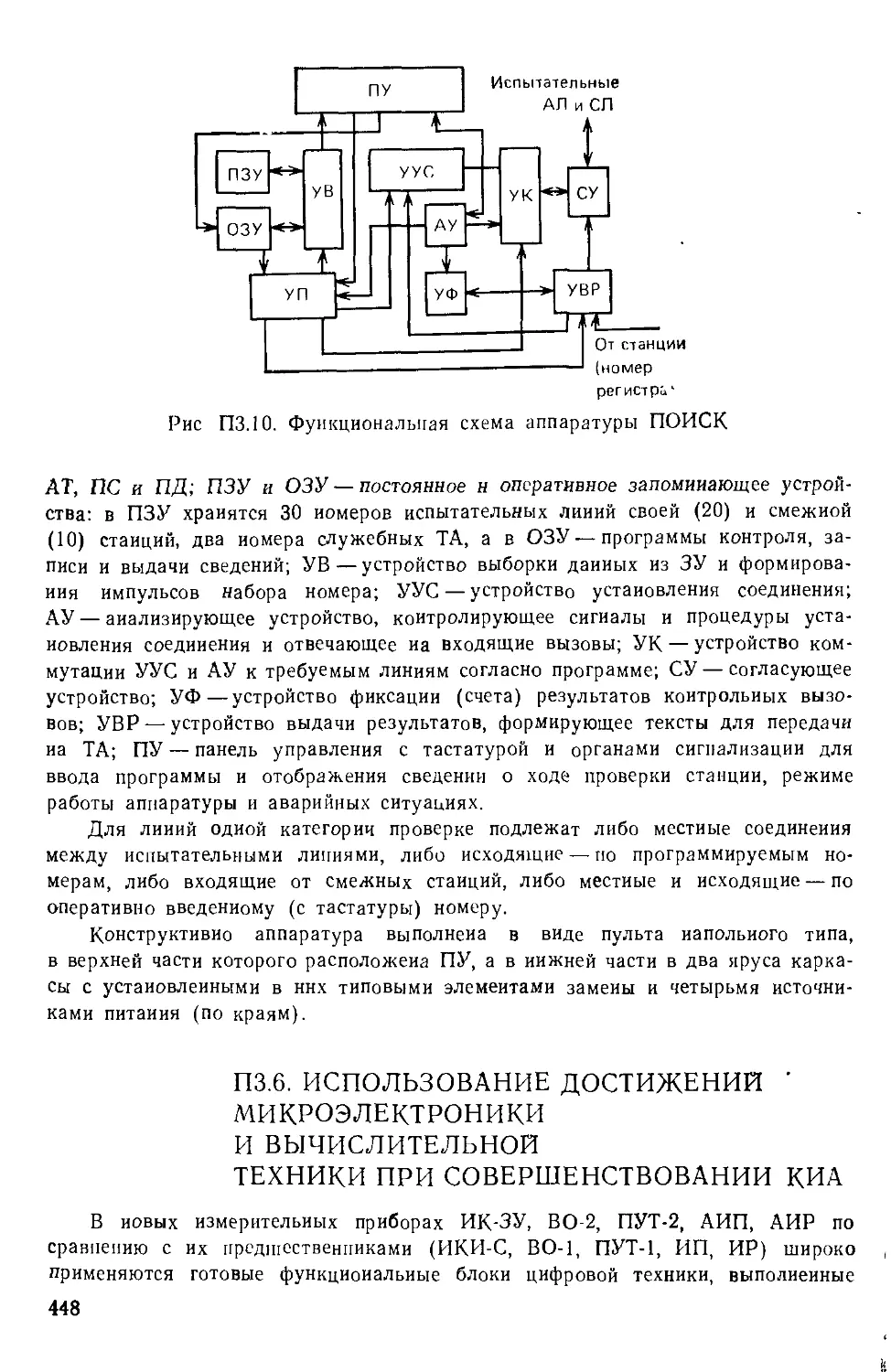
Текст
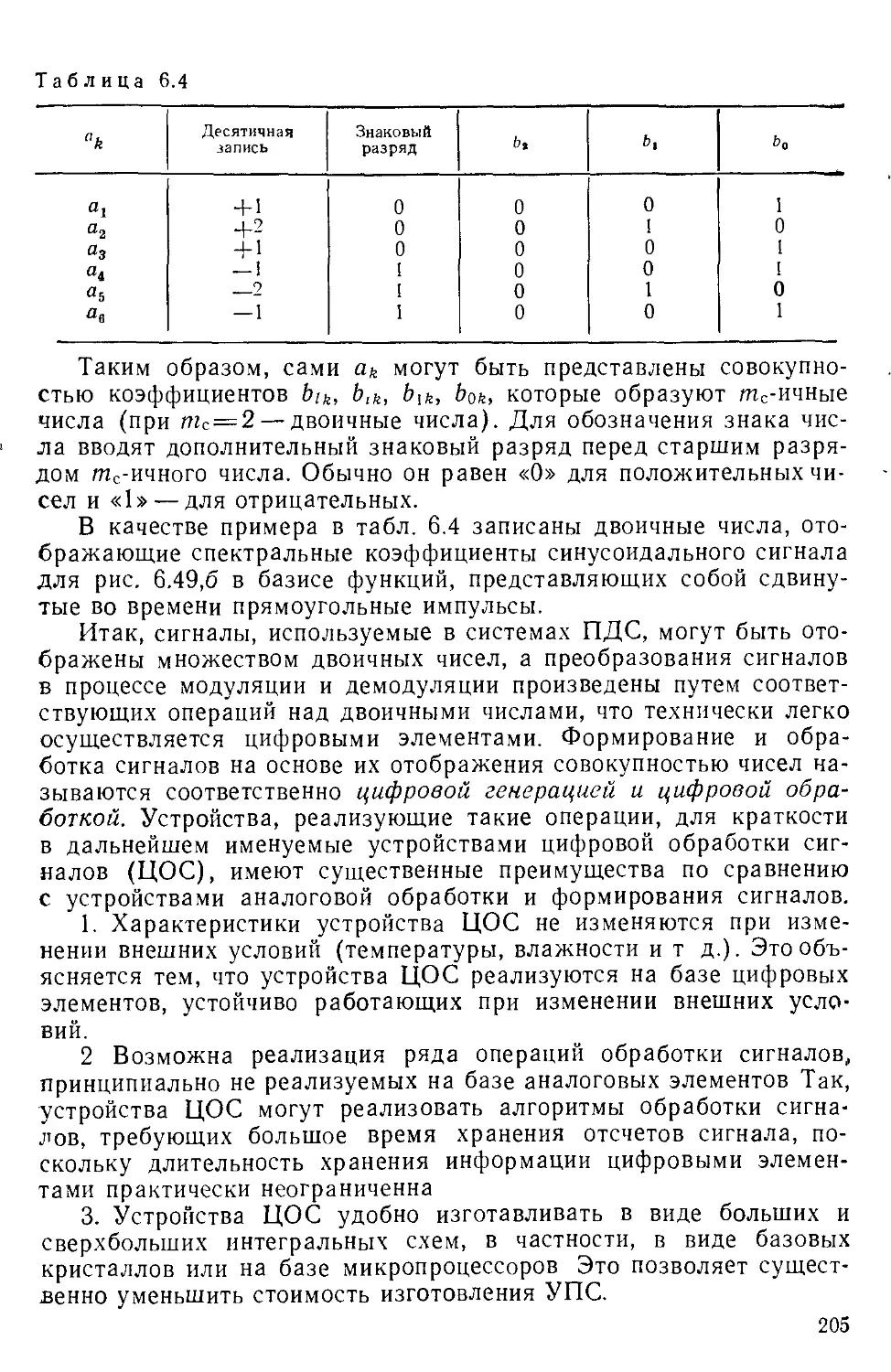
ПЕРЕДАЧА
ДИСКРЕТНЫХ
СООБЩЕНИЙ
Учебник
для высших
учебных
заведений
ББК 32.88
П27
УДК 621.394(075.8)
Авторы. В. П. ШУВАЛОВ, Н В. ЗАХАРЧЕНКО, В О. ШВАРЦМАН,
С. Д. СВЕТ, Г. И. СКВОРЦОВ, В. В. ЛЕБЕДЯНЦЕВ
Рецензенты. Д. Д Кловский, В А. Игнатов
Редакция литературы по радиотехнике и электросвязи
„ 2303040000-190
П -----------------94-91
046(01)-90
ISBN 5-256-00852-8.
(g) Шувалов В. П., Захарченко Н. В.,
Шварцман В. О. н др., 1990
ОСНОВНЫЕ ОБОЗНАЧЕНИЯ
А — алфавит передаваемых символов
а, — символ алфавита
В — скорость телеграфирования (модуляции)
С—пропускная способность канала
D(-), а2 — дисперсия случайной величины или процесса
do — кодовое расстояние
f — частота
g(-) — импульсная характеристика четырехполюснтка
И(А) —энтропия источника с алфавитом А
I(а.) — количество информации, которое приходится на один символ ai
К(а>) —амплитудно-частогная характеристика четырехполюсника
т — основание кода
(n, k)—длина кодовой комбинации (блока) и ее информационной части
/’(•), рх, Рх — вероятность события, укатанного в скобках или обозначенного
индексом; строчные буквы (р) относятся к единичным элементам,
прописные (Р) к кодовым комбинациям, последовательностям
элементов. Так, рош— вероятность ошибочного приема единично-
го элемента, Рп (t)—вероятность /-кратной ошибки в кодовой
комбинации длины п
Р — скорость передачи информации
S([) —спектральная плотность сигнала
s(t) — сигнал
t — текущее время, кратность ошибки
W'(.v)—плотность распределения случайной величины х
О — величина краевых искажений
ц — исправляющая способность приемника
То —длительность единичного элемента (единичный интервал)
г
Ф (г) = -у— I e~x,,2dx—функция Крампа
И J
О
со — угловая частота
ср — фазовый сдвиг
<р(со)—фазочастотная характеристика четырехполюсника
ф(/) —базисная функция
Конкретный смысл обозначений уточняется индексами и поясняется в тексте.
Матрицы и векторы обозначены полужирным шрифтом. Прямая черта над бук-
вой или формулой означает усреднение. Значок «Д» над символом означает
оценку, выдаваемую демодулятором, декодером или фильтром.
ОСНОВНЫЕ СОКРАЩЕНИЯ
АЛ — абонентская линия
АЦ — амплитудная модуляция
АП — абонентский пункт, абонетская панель
ЛТ — абонентский телеграф
АФХ1 — амплитудно-фазовая модуляция
АЧХ — амплитудно-частотная характеристика
Вр _временное разделение
ГВП— групповое время прохождения
ГО — городское отделение
Д — демодхлягор
ДКС — детектор качества сигналов
ДОФМ — двукратная относительная фазовая модуляция
ЕС — единая серия
ЗИ— значащий интервал
ЗМ — значащий момент
ЗП — значащая позиция
ИПТ — импульсы постоянного тока
ИС —источник сообщении
КАМ — квадратурная амплитудная модуляция
КК, КН, КП, КС — коммутация каналов, с накоплением, пакетов, сообщений
КОА — каналозбразующая аппаратура
КПТ — канал постоянного тока
М — модулятор
МККТТ — Международный Консультативный комитет по телефонии и теле-
графии
МПД — мультиплексор передачи данных
МП — микропроцессор
МСИ — межсимвольная интерференция
ОЗУ — оперативное запоминающее устройство
ООД — оконечное оборудование данных
ОП — оконечный пункт
ОС — отделение связи
ОФМ — относительная фазовая модуляция
ПД — передача данных
ПДС — передача дискретных сообщений
Пер — передатчик
Пр — приемник
ПС — получатель сообщений
ПФ — полосовой фильтр
ПШК — первичный широкополосный канал
РДК — расширенный дискретный канал
РУС — районный узел связи
СУ—согласующее устройство
ТА — телеграфный аппарат
ТО — техническое обслуживание
ТТ — тональный телеграф
ТЧ — (канал) тональной частоты
УВВ—устройство ввода-вывода
УВОН— устройство выделения опорного напряжения
УЗО — устройство защиты от ошибок
УК —узел коммутации
УО — усилитель-ограничитель
УПС — устройство преобразования сигналов
УС — устройство синхронизации
ФД —фазовый детектор
ФМ — фазовая модуляция
ФНЧ — фильтр нижних частот
ФЧХ — фазочастотная характеристика
ПКС — центр коммутации сообщений
ЧМ — частотная модуляция
ЧТ — частотное телеграфирование
ПРЕДИСЛОВИЕ
Техника передачи дискретных сообщений (ПДС) играет все
большую роль в жизни человеческого общества. Без нее немыс-
лимо создание современных автоматизированных систем управле-
ния для различных отраслей народного хозяйства, в том числе и
для отрасли «связь». Применение техники ПДС позволяет обес-
печить лучшее использование дорогостоящей высокопроизводитель-
ной вычислительной техники путем создания вычислительных
сетей и сетей передачи данных. Дальнейшее развитие телеграф-
ной сети общего пользования позволяет удовлетворить растущие
потребности населения в обмене информацией, а развитие сети
абонентского телеграфа и передачи данных — потребности про-
мышленных предприятий в оперативной связи. Внедрение по-
следней несомненно будет способствовать повышению эффектив-
ности работы предприятий, а следовательно, и делу перестройки,
осуществляемой в стране. Именно поэтому знание теории и техни-
ки ПДС является неотъемлемой частью системы подготовки инже-
неров электросвязи, в какой бы подотрасли связи им ни пришлось
работать.
Настоящий учебник написан в соответствии с программой по
курсу «Передача дискретных сообщений» (специальность 2305).
Он может оказаться полезным студентам других специальностей,
а также специалистам, которые по роду своей деятельности свя-
заны с разработкой и эксплуатацией техники ПДС.
Помимо традиционных разделов, которые входили в учебники
по курсам «Теория передачи дискретной информации», «Передача
дискретной информации» и другие, издававшиеся в прошлые годы,
этот учебник содержит разделы по моделированию систем ПДС,
использованию средств вычислительной техники в сетях и си-
стемах ПДС. Впервые рассматриваются вопросы эффективного ко-
дирования, которое все шире используется в документальной элек-
тросвязи. Традиционные разделы (методы и устройства преобра-
зования сигналов, факсимильная связь и др.) претерпели
существенное изменение и излагаются с учетом последних дости-
жений в области техники связи.
Материал учебника базируется на знании таких курсов, как
«Теория электрической связи», «Многоканальная электросвязь»,
«Высшая математика» и др. При написании учебника авторами
5
использован опыт преподавания курса «Передача дискретных со-
общений», сделана попытка достаточно просто и понятно изложить
основные вопросы ПДС, по возможности, без привлечения гро-
моздкого математического аппарата. Необходимую детализацию
отдельных разделов курса предполагается дать в учебных посо-
биях, часть из которых уже подготовлена к изданию.
Предисловие, введение, главы 1, 2, 5, 6 (кроме § 6.5), § 7.1,
7.7, 7.8 и 8.1 — написаны В. П. Шуваловым; главы 3, 8 (кроме
§ 8 1) и заключение — В. О. Шварцманом; главы 4 и 9 — Н. В. За-
харченко; глава 10 и § 7.2—7.6 — С. Д. Светом; приложения 2, 3—
Г. И. Скворцовым; § 65 и приложение 1 — В. В. Лебедянцевым.
ВВЕДЕНИЕ
История развития телеграфной связи. С незапамятных времен
человечество пыталось решить проблему передачи информации на
расстояние за возможно более короткое время и с минимальными
ошибками. Так, еще в IV веке до н. э. в Древней Греции суще-
ствовал водяной телеграф, сущность которого заключалась в том,
что на возвышении (на расстоянии прямой видимости) устанав-
ливались два сосуда, в которых на поплавке покоилась линейка
с нанесенными на ней знаками. Уровень воды в сосудах определял
положение линейки по отношению к указателю (стрелке), а это,
в свою очередь, определяло вид передаваемого знака. В каждом
из сосудов было отверстие, закупоренное пробкой. Назовем один
сосуд с линейкой передатчиком, другой — приемником. По коман-
де с передающей стороны на передаче и на приеме вынималась
пробка. Вода начинала вытекать и после достижения поплавком
определенного уровня, при котором стрелка указывала на линейке
нужный знак, по команде с передающей стороны отверстия заты-
кались. Условием правильной «передачи» информации в данной
системе было условие синхронности и синфазности работы пере-
датчика и приемника, т. е. одинаковая скорость истечения воды
из сосудов на передаче и приеме и одновременность открывания
и закрывания отверстий.
Несмотря на то, что водяной телеграф давно стал достоянием
истории, принципы передачи информации, заложенные в нем, ис-
пользуются до сих пор. Так, в современных системах ПДС также,
хотя и другими методами, приходится решать задачи синхрони-
зации и фазирования (см. гл. 9).
Ни водяной, ни другие виды телеграфа, созданные в древно-
сти, не могли решить задачу передачи сообщений в плохих погод-
ных условиях. Не смогли решить эту проблему и различные раз-
новидности семафорного телеграфа, который появился в конце
XVIII столетия. Первый проект семафорного телеграфа был пред-
ложен французским механиком Клодом Шаппом. Первая линия
семафорного телеграфа между Парижем и Лиллем (длиной
225 км) была введена в эксплуатацию в 1794 г. Семафорные те-
леграфы прослужили человечеству свыше 50 лет. В процессе их
эксплуатации были заложены основы телеграфной службы, раз-
работаны способы составления телеграфных кодов и шифров, по-
7
явились специальности телеграфиста и телеграфного инженера
(впервые звание телеграфного инженера было присвоено фран-
цузским правительством Клоду Шаппу, который ввел термин «те-
леграф» *).
Первые успехи в электротехнике в XIX веке сопровождались
попытками создания электрического телеграфа, для которого не
были страшны никакие погодные условия. В 1832 г. русский уче-
ный и изобретатель член-корр. Академии наук П. Л. Шиллинг
успешно провел испытания первого в мире пригодного для прак-
тики электромагнитного телеграфного аппарата. Для него был
разработан пятиэлементный код, который можно считать прообра-
зом используемого в настоящее время телеграфного кода МТК-2.
Русский приоритет в области электротелеграфии закрепил физик
и электротехник академии Б. С. Якоби, изобретатель первого в
мире пишущего телеграфного аппарата с электромагнитом в при-
емнике (1841 г.). В 1850 г. Б. С. Якоби сконструировал первый
буквопечатающий аппарат. Значение работ П. Л. Шиллинга и
Б. С. Якоби заключается в том, что они разработали фундамен-
тальные основы электромагнитной телеграфии — первого сред-
ства электросвязи и первого приложения знаний об электричестве
и магнетизме к практической деятельности человека, т. е. основы
электротехники.
Рост телеграфной нагрузки в мире потребовал создания вы-
сокопроизводительных телеграфных аппаратов, способных обеспе-
чить по физическим цепям передачу сообщений одновременно от
нескольких источников. Одним из таких получивших широкое рас-
пространение аппаратов стал аппарат французского инженера-
изобретателя Бодо (1845—1903 гг.). Эти аппараты начали при-
меняться у нас в стране с 1904 г., и им была суждена долгая
жизнь: различные модификации этих аппаратов применялись у
нас до конца сороковых годов XX века.
В 1866 г. была осуществлена прокладка кабеля через Атлан-
тический океан. Европа и Америка оказались связанными теле-
графом. Начиная с этого года, телеграфные линии начали опу-
тывать все страны и континенты. В 1895 г. (7 мая) А. С. Поповым
было продемонстрировано первое устройство для приема электро-
магнитных волн. Этот день вошел в историю как день изобретения
радио В марте 1896 г А С. Попов передал без проводов на рас-
стояние 250 м телеграмму всего из двух слов «Генрих Герц», а
уже в 1900 г. радиотелеграфная связь была использована на прак-
тике при снятии с мели броненосца «Генерал-адмирал Апраксин»
и при спасении рыбаков, унесенных в море. Царское правительство
не сумело вовремя оценить изобретение своего соотечественника
А. С. Попова и использовать его на благо России.
В переводе с греческого «Телеграф» означает «далеко пишу».
8
После Октябрьской революции 1917 г. все виды связи общего
пользования были национализированы и подчинены Народному
комиссариату почт и телеграфов, первым наркомом которого был
В. К. Подбельский.
Молодое советское правительство уделяло большое внимание
развитию средств связи, в том числе телеграфной. В заключитель-
ном слове на заседании Всероссийского Центрального Исполни-
тельного Комитета 29 апреля 1918 г. В. И. Ленин подчеркнул,
что «социализм без почты, телеграфа, машин — пустейшая фра-
за» х.
За короткое время советские ученые и инженеры провели ра-
боту по повышению эффективности оборудования связи — были
созданы шести- и девятикратные модификации аппарата Бодо [1].
В начале 30-х годов появились первые советские телетайпы (те-
леграфные аппараты с клавиатурой пишущей машинки и старт-
стопным принципом работы). Их создателями были А. Ф. Шорин
(1930 г.) и А. И. Тремль (1931 г). Впоследствии эти телетайпы
были заменены более совершенным стартстопным аппаратом
СТ-35, разработанным Н. А. Волковым, Н. Г. Гагариным и С. И.Ча-
совиковым. Этот аппарат в видоизмененном и улучшенном ва-
рианте применяется для телеграфной связи и в настоящее время.
В эти же годы началась разработка аппаратуры, предназна-
ченной для организации по двум проводам нескольких телеграф-
ных связей. Широкое распространение в такой аппаратуре получил
способ «частотного телеграфирования» (телеграфирования пере-
менными токами различной частоты), изобретателем которого яв-
ляется русский ученый Г. И. Морозов (1869 г.). Первая отечест-
венная трехканальная аппаратура, основанная на принципах «ча-
стотного телеграфирования», созданная В. А. Дубовиком, К. В. Шу-
мятским, Г. В. Добровольским и др , была применена в 1930 г.
впервые на линии Москва — Ленинград. Первая отечественная
аппаратура тонального телеграфирования для организации в диа-
пазоне тональных частот 18 телеграфных каналов была изготов-
лена в 1940 г. В дальнейшем было создано много разновидностей
каналообразующей аппаратуры (КОА) с частотным и временным
разделением каналов (ТТ-12/17, ТТ-17П, ТТ-24, ТТ-48, ЧВТ-2,
ЧВТ-11 и др-), которые успешно эксплуатировались в стране. На
основе этой аппаратуры, телеграфных аппаратов и узлов комму-
тации в стране была создана телеграфная сеть общего пользо-
вания.
Наличие большого числа каналов тонального телеграфирова-
ния позволило в конце 40-х годов перейти к новому методу орга-
низации телеграфной связи, обеспечивающему диалоговый режим
между абонентами и сокращающими время прохождения сообще-
ний от отправителя к получателю. Таким методом явилось або-
* В. И. Ленин. Поли, собр соч. — Т. 63. — С. 272.
9
нентское телеграфирование. При этом у каждого абонента уста-
навливается стартстопный аппарат и вызывной прибор, а на
местном телеграфе — коммутационная станция.
Наряду с телеграфной связью в стране получила распростра-
нение фототелеграфная связь, обеспечивающая передачу на рас-
стояние неподвижных изображений. Первая линия фототелеграф-
ной связи Москва — Берлин была открыта в 1927 г. На рубеже
30-годов была опробована идея передачи газет фототелеграфным
способом из Москвы в Ленинград.
Сегодня в нашей стране гражданами и учреждениями ежегод-
но подается более полумнллиарда телеграмм, это почти столько
же, сколько за год подают телеграмм все остальные жители зем-
ного шара. Для передачи таких объемов информации использу-
ются сотни тысяч стартстопных телеграфных аппаратов, миллио-
ны километров телеграфных каналов, соединяющих десятки тысяч
предприятий связи через автоматические коммутационные станции.
По сети абонентского телеграфирования ежесуточно осуществляет-
ся более 100 тыс. документальных переговоров. Нашли применение
в стране и методы передачи неподвижных изображений (факси-
мильная связь) — создана сеть пунктов приема газетных полос,
которая является самой разветвленной в мире. Из Москвы регу-
лярно передается более полутора десятков центральных газет бо-
лее чем в 50 крупных городах страны. В год более 15 млрд, газет,
печатаемых с фотокопий, поступает к читателям в тот же день,
что и москвичам. И это в таких отдаленных городах, как Хаба-
ровск, Владивосток, Новосибирск и др. Широкое внедрение вы-
числительной техники привело к появлению нового вида электро-
связи — передачи данных. Техника передачи данных позволяет
обеспечить передачу информации (данных) для обработки на
ЭВМ и передачу абонентам обработанных на ЭВМ данных. Этот
вид электросвязи по сравнению с телеграфной отличается более
высокими требованиями к скорости и верности передачи инфор-
мации. Сегодня документальные виды электросвязи, к которым
относится телеграфия, передача данных и факсимильная связь,
стали одним из важнейших катализаторов повышения эффектив-
ности труда в сфере управления.
Теоретической основой документальной электросвязи является
теория ПДС, в создание и развитие которой существенный вклад
внесли советские ученые В. А. Котельников, А. Г. Зюко, Д. Д. Киев-
ский, Л. М. Финк и многие другие.
Задачи и содержание курса «Передача дискретных сообщений».
Этот курс относится к числу специальных дисциплин для студен-
тов, обучающихся по специальности «Автоматическая электро-
связь». Задачей курса является ознакомление студентов с прин-
ципами передачи дискретных сообщении и построения сетей и си-
стем документальной электросвязи.
10
В основу архитектоники учебника положены следующие прин-
ципы. Сначала излагаются общие вопросы построения систем и
сетей ПДС (гл. 1—3), затем принципы построения различных
устройств, обеспечивающих связь между источником и получате-
лем сообщений — оконечных (гл. 4), устройств преобразования
сигналов (гл. 6), кодирования (гл. 7), синхронизации (гл. 9). Во-
просы сопряжения источников сообщений с дискретным каналом
рассмотрены в гл. 5. Глава 8 посвящена вопросам реализации
адаптивных систем, а гл. 10 — принципам факсимильной связи.
В приложении 1 рассматриваются вопросы моделирования систем
ПДС, приложении 2 — принципы использования в технике ПДС
средств вычислительной техники, приложении 3 — вопросы кон-
троля на сетях и системах ПДС.
Глава 1. СИСТЕМЫ ПЕРЕДАЧИ
ДИСКРЕТНЫХ СООБЩЕНИЙ
1.1. ОСНОВНЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ
Информация, сообщение, сигналы. Под термином «информация»
понимают различные сведения, которые поступают к получателю.
Академия наук СССР рекомендует следующее определение: инфор-
мация — это сведения, являющиеся объектом передачи, распреде-
ления, преобразования, хранения или непосредственного исполь-
зования. Это могут быть сведения о результатах измерения, на-
блюдения за каким-либо объектом и т. п. В дальнейшем нас будут
интересовать лишь вопросы, связанные с информацией как объ-
ектом передачи.
Сообщение является формой представления информации. Одно
и то же сведение может быть представлено в различной форме.
Например, сведение о часе приезда вашего приятеля может быть
передано по телефону или же в виде телеграммы. В первом слу-
чае имеем дело с информацией, представленной в непрерывном
виде (непрерывное сообщение). Будем считать, что это сообще-
ние вырабатывается некоторым источником — в данном случае
источником непрерывных сообщений. Во втором случае информа-
ция представлена в дискретном виде (дискретное сообщение). Это
сообщение вырабатывается источником дискретных сообщений.
При передаче сведений по телеграфу информация заложена в
буквах, из которых составляются слова, и цифрах. Очевидно, что
на конечном отрезке времени число букв или цифр, называемых
в дальнейшем символами, является конечным. Это и является от-
личительной особенностью дискретного, или счетного, сообщения.
В то же время число различных возможных значений звукового
давления, измеренное при разговоре, даже на конечном отрезке
времени будет бесконечным. В дальнейшем будем рассматривать
только вопросы передачи дискретных сообщений.
Информация, содержащаяся в сообщении, передается получа-
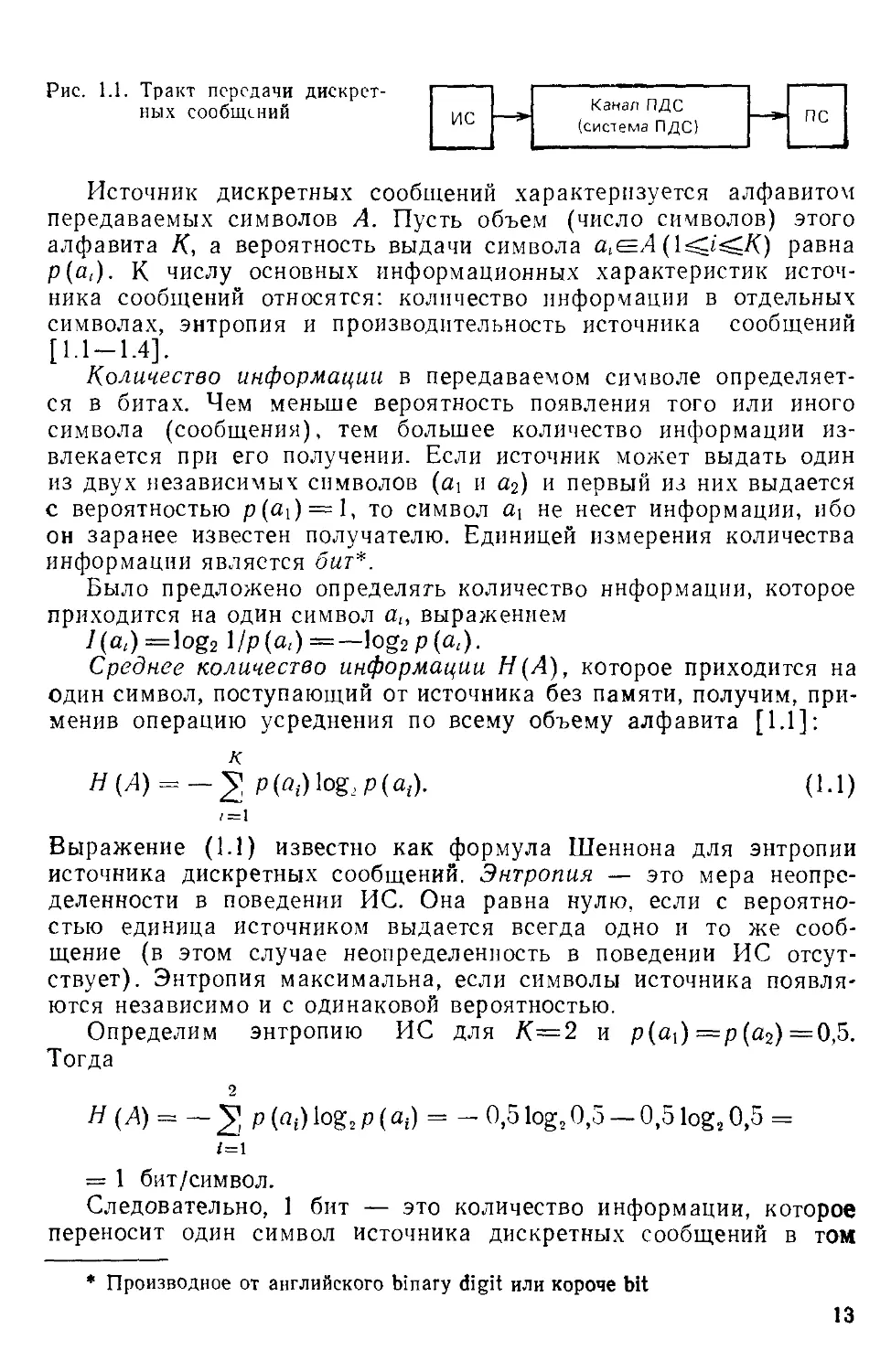
телю по каналу передачи дискретных сообщений (рис. 1.1). Рас-
смотрим основные характеристики тракта передачи, в состав ко-
торого входят источник (ИС) и получатель (ПС) дискретных со-
общений.
12
Рис. 1.1. Тракт передачи дискрет-
ных сообщений
ИС
Канал ПДС
(система ПДС)
Источник дискретных сообщений характеризуется алфавитом
передаваемых символов А. Пусть объем (число символов) этого
алфавита К, а вероятность выдачи символа а^А равна
р(щ). К числу основных информационных характеристик источ-
ника сообщений относятся: количество информации в отдельных
символах, энтропия и производительность источника сообщений
[1.1-1.4].
Количество информации в передаваемом символе определяет-
ся в битах. Чем меньше вероятность появления того или иного
символа (сообщения), тем большее количество информации из-
влекается при его получении. Если источник может выдать один
из двух независимых символов (Я1 и я2) и первый из них выдается
с вероятностью р(Я1) = 1, то символ а\ не несет информации, ибо
он заранее известен получателю. Единицей измерения количества
информации является бит*.
Было предложено определять количество информации, которое
приходится на один символ я,, выражением
7(a;)=log2 1/р(я,)=— 1о»2р(я;).
Среднее количество информации И (А), которое приходится на
один символ, поступающий от источника без памяти, получим, при-
менив операцию усреднения по всему объему алфавита [1.1]:
7/(Л) = — P(ai)log2p(at). (1.1)
,=1
Выражение (1.1) известно как формула Шеннона для энтропии
источника дискретных сообщений. Энтропия — это мера неопре-
деленности в поведении ИС. Она равна нулю, если с вероятно-
стью единица источником выдается всегда одно и то же сооб-
щение (в этом случае неопределенность в поведении ИС отсут-
ствует). Энтропия максимальна, если символы источника появля-
ются независимо и с одинаковой вероятностью.
Определим энтропию ИС для 7С=2 и р(а{) = р (я2) =0,5.
Тогда
2
// (Л) = — 2 Р («г) logг Р (at) = - 0,5 log2 0,5 — 0,5 log2 0,5 =
z=i
= 1 бит/символ.
Следовательно, 1 бит — это количество информации, которое
переносит один символ источника дискретных сообщений в том
* Производное от английского binary digit или короче bit
13
s(t) V')
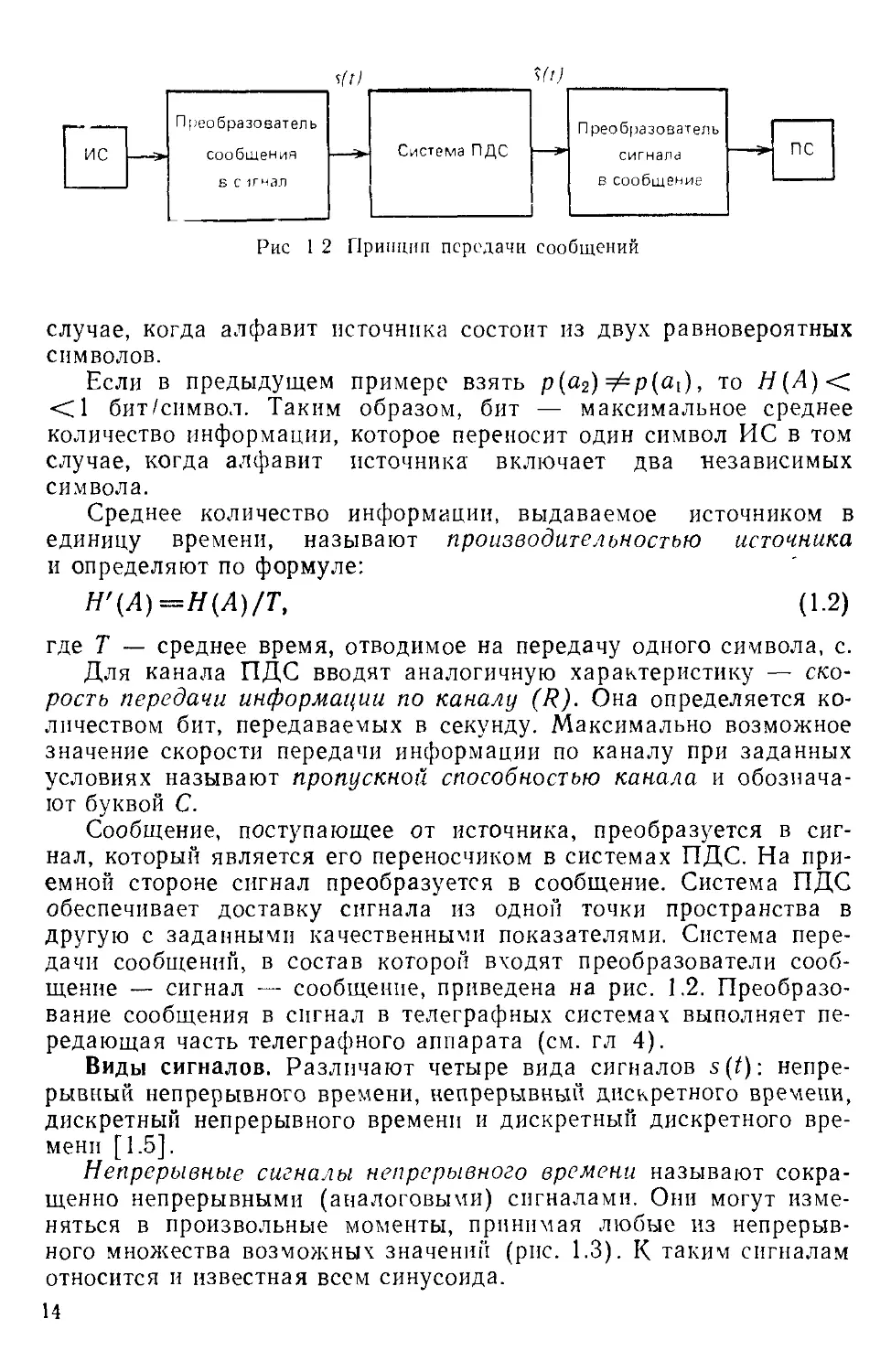
Рис 1 2 Принцип передачи сообщений
случае, когда алфавит источника состоит из двух равновероятных
символов.
Если в предыдущем примере взять р(«г) ¥=p(«i), то Н (Л) <
<1 бит/символ. Таким образом, бит — максимальное среднее
количество информации, которое переносит один символ ИС в том
случае, когда алфавит источника включает два независимых
символа.
Среднее количество информации, выдаваемое источником в
единицу времени, называют производительностью источника
и определяют по формуле:
Н'(А)=Н(А)/Т, (1.2)
где Т — среднее время, отводимое на передачу одного символа, с.
Для канала ПДС вводят аналогичную характеристику — ско-
рость передачи информации по каналу (R). Она определяется ко-
личеством бит, передаваемых в секунду. Максимально возможное
значение скорости передачи информации по каналу при заданных
условиях называют пропускной способностью канала и обознача-
ют буквой С.
Сообщение, поступающее от источника, преобразуется в сиг-
нал, который является его переносчиком в системах ПДС. На при-
емной стороне сигнал преобразуется в сообщение. Система ПДС
обеспечивает доставку сигнала из одной точки пространства в
другую с заданными качественными показателями. Система пере-
дачи сообщений, в состав которой входят преобразователи сооб-
щение — сигнал — сообщение, приведена на рис. 1.2. Преобразо-
вание сообщения в сигнал в телеграфных системах выполняет пе-
редающая часть телеграфного аппарата (см. гл 4).
Виды сигналов. Различают четыре вида сигналов s(t): непре-
рывный непрерывного времени, непрерывный дискретного времени,
дискретный непрерывного времени и дискретный дискретного вре-
мени [1.5].
Непрерывные сигналы непрерывного времени называют сокра-
щенно непрерывными (аналоговыми) сигналами. Они могут изме-
няться в произвольные моменты, принимая любые из непрерыв-
ного множества возможных значений (рис. 1.3). К таким сигналам
относится и известная всем синусоида.
14
Рис 1 3 Непрерывный сигнал
Рис 1 4 Непрерывный сигнал
дискретною времени
Непрерывные сигналы дискретного времени могут принимать
произвольные значения, но изменяться только в определенные, на-
перед заданные (дискретные) моменты Ц, /г, ^з, (рис. 1.4).
Дискретные сигналы непрерывного времени отличаются тем,
что они могут изменяться в произвольные моменты, но их вели-
чины принимают только разрешенные (дискретные) значения
(рис. 1.5).
Дискретные сигналы дискретного времени (сокращенно дис-
кретные) (рис. 1.6) в дискретные моменты времени могут прини-
мать только разрешенные (дискретные) значения.
Сигналы, формируемые на выходе преобразователя дискрет-
ного сообщения в сигнал, как правило, являются по информацион-
ному параметру дискретными, т. е. описываются функцией дискрс!-
ного времени и конечным множеством возможных значений. В тех-
нике передачи данных такие сигналы называют цифровыми сиг-
налами данных (ЦСД). Параметр сигнала данных, изменение
которого отображает изменение сообщения, называется представ-
ляющим (информационным) [1.6]. На рис. 1.7 изображен ЦСД,
представляющим параметром которого является амплитуда, а мно-
жество возможных значений представляющего параметра равно
двум (u—U\ и ы=0). Часть цифрового сигнала данных, отли-
чающаяся от остальных частей значением одного из своих пред-
ставляющих параметров, называется алиментам ЦСД.
Фиксируемое значение состояния представляющею параметра
сигнала называется значащей позицией. Момент, в который про-
исходит смена значащей позиции сигнала, называется значащим
Рис 1 5 Дискретный сигнал не-
прерывною времени
15
Рис 1 7 Цифровой сигнал данных
(ЗМ). Интервал времени между двумя соседними значащими мо-
ментами сигнала называется значащим (ЗИ)
Минимальный интервал времени то, которому равны значащие
интервалы времени сигнала, называется единичным (интервалы
а—б, б—в и другие на рис 1 7). Элемент сигнала, имеющий дли-
тельность, равную единичному интервалу времени, называется
единичным (е э )
Термин единичный элемент является одним из основных в тех-
нике передачи данных. В телеграфии ему соответствует термин
элементарная посылка [1 7]
Различают изохронное и анизохронные сигналы данных Для
изохронного сигнала любой значащий интервал времени равен еди-
ничному интервалу или их целому числу. Анизохронными назы-
ваются сигналы, элементы которых могут иметь любую длитель-
ность, но не менее чем xomm Другой особенностью анизохронных
сигналов является то, что они могут отстоять друг от друга во
времени на произвольном расстоянии
Структурная схема системы ПДС. Понятие дискретное сооб-
щение является более общим, нежели понятие сообщение данных
или телеграфное сообщение Соответственно и более общим яв-
лятся понятие системы ПДС Структурная схема системы ПДС
изображена на рис. 1 8 Источник и получатель сообщений вместе
с преобразователем сообщения в сигнал в состав системы ПДС
не входят
Символы а,^А от ИС поступают в виде кодовых комбинаций,
которые состоят из единичных элементов (посылок) Кодовая ком-
бинация характеризуется основанием кода т и числом единичных
Рис 1 8 Структурная схема системы ПДС
16
элементов, составляющих кодовую комбинацию (длиной кода п),
отображающую передаваемый символ а,. Основание кода харак-
теризует возможное число различимых значащих позиций посту-
пающего от ИС сигнала
В технике ПДС наибольшее распространение получили коды
с основанием 2 Такие коды часто называют двоичными, или би-
нарными. Основными причинами широкого использования двоич-
ных кодов являются простота реализации, надежность элементов
двоичной логики, малая чувствительность к действию внешних
помех и т. д Поэтому в дальнейшем во всех случаях (если это
не будет оговорено особо) рассматриваются двоичные коды При-
мером двоичного кода является Международный телеграфный код
№ 2 (МТК-2), в котором каждому переданному символу соответ-
ствует пятиэлементная кодовая комбинация
Используя пятиэлементные комбинации, можно организовать
передачу только 32 символов. Вспомним, что русский алфавит со-
стоит из 32 букв, кроме того, имеются цифры и желательно обес-
печить передачу латинских букв, знаков препинания и т. п По-
этому в коде МТК-2 одна и та же пятиэлементная кодовая ком-
бинация используется до 3 раз в зависимости от режима переда-
чи, который определяется так называемым регистром. В коде
МТК-2 три регистра русский, латинскии и цифровой Прежде чем
вести передачу конкретных знаков, передатчик сообщает прием-
нику с помощью специального служебного знака тот регистр, в ко-
тором будет вестись последующая передача Тогда в зависимости
от регистра каждая пятиэлементная кодовая комбинация, посту-
пившая от ИС, может иметь одно из трех значений Так, комби-
нация 11101 в русском регистре означает букву Я, в цифровом — 1,
в латинском — Q Такой подход позволяет значительно расширить
объем передаваемых символов при том же числе элементов в ко-
довой комбинации (в рассмотренном примере за счет использо-
вания трех регистров число различных передаваемых символов
возрастает примерно в 3 раза)
Набор символов, предусмотренный кодом МТК-2, является до-
статочным для написания телеграмм, а в некоторых случаях даже
для передачи данных. Как правило, для передачи данных требует-
ся использовать больше символов В связи с этим был разработан
семиэлементный код МТК-5, рекомендованный МККТТ Он полу-
чил название стандартного кода передачи данных (СКПД). Код
имеет два регистра
Коды МТК-2 и МТК-5 в технике ПДС называются первичными
кодами
Сообщение, поступающее от ИС, в ряде случаев содержит из-
быточность. Последнее обусловлено тем, что символы а,^А, со-
ставляющие сообщение, могут быть статистически связаны. Это
позволяет часть сообщения не передавать, восстанавливая его на
приеме по известной статш|тУ<4€ской связи Так, кстати, посту-
2—6085 17
пают при передаче телеграмм, исключая из текста союзы, пред-
логи, знаки препинания, поскольку они легко восстанавливаются
при чтении телеграммы на основании известных правил построе-
ния фраз и слов. Конечно, избыточность в принимаемой телеграм-
ме позволяет легко исправить часть искаженных слов (правиль-
но их прочитать). Однако избыточность приводит к тому, что за
заданный промежуток времени будет передано меньше сообще-
ний и, следовательно, менее эффективно будет использоваться
канал ПДС. Задачу устранения избыточности на передаче в си-
стеме ПДС выполняет кодер источника, а восстановление приня-
того сообщения — декодер источника. Часто кодер и декодер ис-
точника включают в состав ИС и ПС. Более подробно вопросы
устранения избыточности рассматриваются в гл. 5.
С целью повышения верности передачи используется избыточ-
ное кодирование, позволяющее на приеме обнаружить или даже
исправлять ошибки. В процессе кодирования, осуществляемого
кодером канала, исходная кодовая комбинация преобразуется и
в нее вносится избыточность. На приемном конце декодер канала
выполняет обратное преобразование (декодирование), в резуль-
тате которого получаем комбинацию исходного кода. Часто кодер
и декодер канала называют устройствами защиты от ошибок
(УЗО).
С целью согласования кодера и декодера канала с непрерыв-
ным каналом связи (средой, в которой, как правило, передаются
непрерывные сигналы) используются устройства преобразования
сигналов (УПС), включаемые на передаче и приеме. В частном
случае — это модулятор и демодулятор. Совместно с каналом
связи УПС образуют дискретный канал, т. е. канал, предназначен-
ный для передачи только дискретных сигналов (цифровых сигна-
лов данных).
Различают синхронные и асинхронные дискретные каналы.
В синхронных дискретных каналах — каждый единичный элемент
вводится в строго определенные моменты времени. Эти каналы
предназначены для передачи только изохронных сигналов. По
асинхронному каналу можно передавать любые сигналы — изо-
хронные, анизохронные. Поэтому такие каналы получили название
прозрачных, или кодонезависимых. Синхронные каналы являются
непрозрачными, или кодозависимыми.
Дискретный канал в совокупности с кодером и декодером ка-
нала (УЗО) называется расширенным (РДК). Если применитель-
но к дискретному каналу рассматривается передача единичных
элементов, принимающих значение «О» или «1» и алфавит «источ-
ника», работающего на дискретный канал, можно считать рав-
ным 2, то применительно к РДК рассматривается передача ко-
довых комбинаций длиной п элементов и при использовании дво-
ичного кода число возможных комбинаций равно 2“. Следователь-
но, алфавит «источника», работающего на РДК, можно считать
18
равным 2п, отсюда и название «расширенный» *. В технике пере-
дачи данных РДК называют каналом передачи данных.
Дискретный канал характеризуется скоростью передачи инфор-
мации, измеряемой в битах в секунду (бит/с). Другой характери-
стикой дискретного канала является скорость телеграфирования
В, измеряемая в бодах. Она определяется числом единичных эле-
ментов, передаваемых в секунду. В технике ПД вместо термина
скорость телеграфирования используется термин скорость моду-
ляции.
Пример 1 1. Рассчитаем скорости телеграфирования В и передачи информа-
ции R в дискретном канале. Длительность единичного элемента то=1О мс, каж-
дый информационный элемент несет 1 бит информации и пусть на каждые семь
информационных элементов приходится одни проверочный.
Скорость телеграфирования 5=1/т0 и, следовательно, 5=1/0,01 = 100 Бод.
Скорость передачи информации будет определяться числом информационных эле-
ментов, переданных в секунду, т. е. 5 = 5-7/8=100-7/8 = 87,5 бит/с.
При определении эффективной скорости учитывается, что не
все комбинации, поступающие на вход канала ПД, выдаются по-
лучателю. Часть комбинаций может быть забракована. Кроме того,
учитывается, что не все элементы, передаваемые в канал, несут
информацию (см. гл. 8).
Другой характеристикой дискретного канала является вер-
ность передачи единичных элементов. Она определяется через
коэффициент ошибок по элементам
^ош = Нош/N пер,
т. е. отношением числа ошибочно принятых элементов иош к об-
щему числу переданных Лгпер за интервал анализа.
Для характеристики канала ПД используются следующие па-
раметры — коэффициент ошибок по кодовым комбинациям и эф-
фективная скорость передачи информации. Коэффициент ошибок
по кодовым комбинациям характеризует верность передачи и
определяется отношением числа ошибочно принятых кодовых ком-
бинаций к числу переданных в заданном интервале времени.
Способы передачи и обработки сигналов в системах ПДС. В си-
стемах ПДС дискретные сигналы могут передаваться последо-
вательно или параллельно. При последовательной передаче еди-
ничные элементы следуют в канале поочередно. При параллель-
ной передаче единичные элементы объединяются в группы. Эле-
менты, составляющие группу, передаются одновременно (обычно
в разной полосе частот) по отдельным каналам. При заданной
* В соответствии с [1 6| элемент алфавита называется символом. Таким
образом, символами являются «0» п «1» для двоичного дискретного канала и
кодовые комбинации применительно к РДК. В современной литературе по теории
кодирования чаще всего под термином символ принято понимать элемент кодо-
вой комбинации, т. е «0» пли «1». Именно в такой интерпретации и б^дет
использоваться этот термин в гл. 7
2‘ 19
скорости передачи последовательные системы (одночастотные) от-
личаются рядом преимуществ по сравнению с параллельными
(многочастотными): лучшее использование мощности передатчика,
некритичность к нелинейности канала, простота в реализации
и т. п. [1.8].
Различают синхронную и асинхронную передачу дискретных
сигналов. При синхронной передаче дискретного сигнала его ЗМ
находятся в требуемом постоянном фазовом соотношении с ЗМ
любого другого передаваемого сигнала сообщения. При асинхрон-
ной передаче дискретного сигнала его ЗМ могут находиться в лю-
бых фазовых соотношениях с ЗМ любого другого сигнала.
В соответствии со структурной схемой (см. рис. 1.8) на при-
емной стороне сначала в УПС определяется вид элемента («О»
или «1»), затем из элементов формируются кодовые комбинации,
декодирование которых позволяет определить символы передан-
ного сообщения. Такой метод приема в теории передачи дискрет-
ных сообщений получил название поэлементного. Рассматривая
в общем виде задачу определения вида переданного элемента, ее
можно свести к задаче сравнения принятого сигнала с эталоном.
В качестве эталонов обычно выбираются сигналы, совпадающие
по форме с переданными. Когда речь идет о двоичных сигналах,
то достаточно иметь один или два эталона.
Кодовая комбинация представляет собой составной сигнал, со-
стоящий из элементарных двоичных сигналов. Такой составной
сигнал можно обрабатывать на приеме целиком, сравнивая его
со всеми эталонами. Однако в данном случае число эталонов будет
чрезвычайно велико и равно числу возможных (разрешенных)
кодовых комбинаций. Поэтому, хотя прием в целом и обеспечивает
большую верность [1.1], однако вследствие сложности реализации
он нашел ограниченное применение.
Для обеспечения правильного приема переданных символов в
технике ПДС приходится решать различные задачи синхрониза-
ции. Синхронизация есть процесс установления и поддержания
определенных временных соотношений между двумя или несколь-
кими процессами. В технике связи, в частности, часто приходится
решать задачу установления и поддержания определенных фазо
вых соотношений между сигналами, вырабатываемыми на переда-
че и приеме. Так, на приеме для правильного воспроизведения
элементов кодовых комбинаций необходимо уметь правильно от-
делить один элемент от другого. Для этого могут использоваться
различные методы поэлементной синхронизации (см. гл. 9). В со-
ответствии с [1.6] поэлементной называется синхронизация пе-
реданного и принятого дискретных сигналов, при которой уста-
навливаются и поддерживаются требуемые временные соотноше-
ния между ЗМ переданных и принятых элементов этих сигналов.
Для правильного приема кодовых комбинаций недостаточно
обеспечить правильный прием единичных элементов. Так, последо-
20
Стоп Старт 1 2 3 4 5 Стоп
О То 2*0 3-0 4т0 5т0 6т0
Старт 1 2
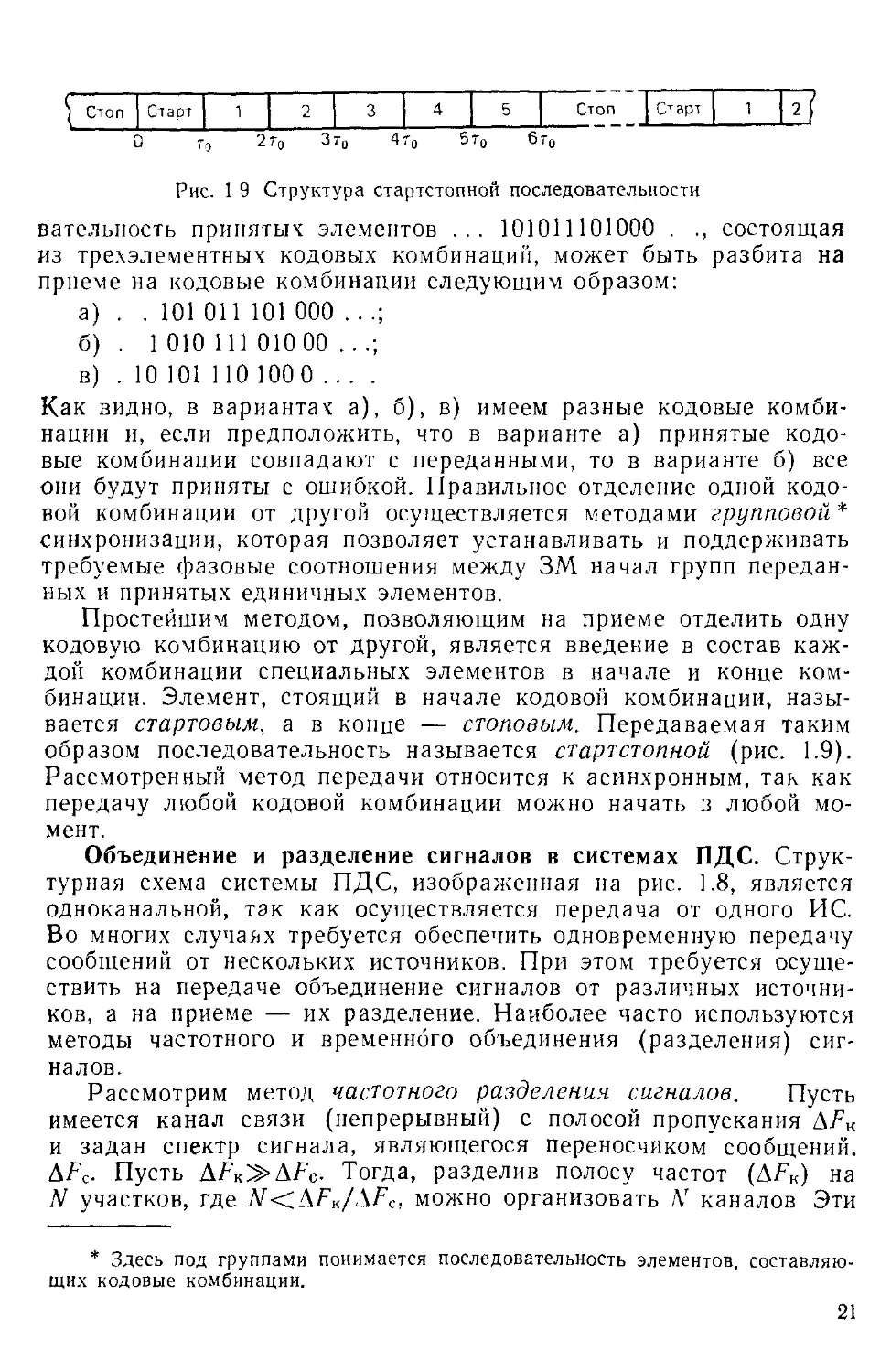
Рис. I 9 Структура стартстопной последовательности
вательность принятых элементов ... 101011101000 . ., состоящая
из трехэлементных кодовых комбинации, может быть разбита на
приеме на кодовые комбинации следующим образом:
а) . . 101 ОН 101 000 . . .;
б) . 1 010 111 010 00 ...;
в) . 10 101 110 1000 ... .
Как видно, в вариантах а), б), в) имеем разные кодовые комби-
нации и, если предположить, что в варианте а) принятые кодо-
вые комбинации совпадают с переданными, то в варианте б) все
они будут приняты с ошибкой. Правильное отделение одной кодо-
вой комбинации от другой осуществляется методами групповой*
синхронизации, которая позволяет устанавливать и поддерживать
требуемые фазовые соотношения между ЗМ начал групп передан-
ных и принятых единичных элементов.
Простейшим методом, позволяющим на приеме отделить одну
кодовую комбинацию от другой, является введение в состав каж-
дой комбинации специальных элементов в начале и конце ком-
бинации. Элемент, стоящий в начале кодовой комбинации, назы-
вается стартовым, а в конце — стоповым. Передаваемая таким
образом последовательность называется стартстопной (рис. 1.9).
Рассмотренный метод передачи относится к асинхронным, так как
передачу любой кодовой комбинации можно начать в любой мо-
мент.
Объединение и разделение сигналов в системах ПДС. Струк-
турная схема системы ПДС, изображенная на рис. 1.8, является
одноканальной, так как осуществляется передача от одного ИС.
Во многих случаях требуется обеспечить одновременную передачу
сообщений от нескольких источников. При этом требуется осуще-
ствить на передаче объединение сигналов от различных источни-
ков, а на приеме — их разделение. Наиболее часто используются
методы частотного и временного объединения (разделения) сиг-
налов.
Рассмотрим метод частотного разделения сигналов. Пусть
имеется канал связи (непрерывный) с полосой пропускания &FK
и задан спектр сигнала, являющегося переносчиком сообщений.
AFC. Пусть AFK>AFC. Тогда, разделив полосу частот (AFK) на
N участков, где jV<АТ’к/ДТ’с, можно организовать Д' каналов Эти
* Здесь под группами понимается последовательность элементов, составляю-
щих кодовые комбинации.
21
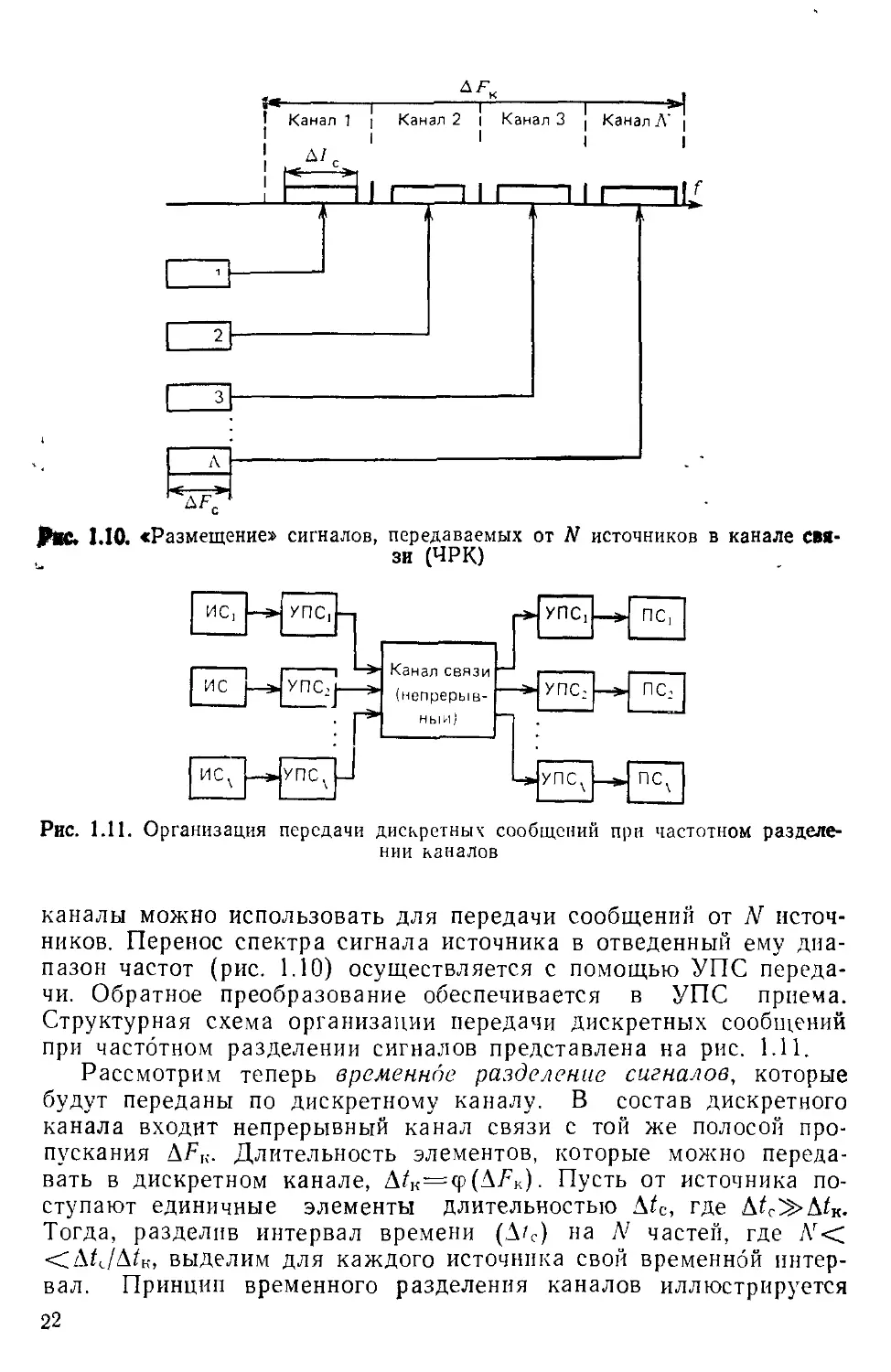
₽ЯС. 1.10. «Размещение» сигналов, передаваемых от У источников в канале свя-
зи (ЧРК)
Рис. 1.11. Организация передачи дискретных сообщений при частотном разделе-
нии каналов
каналы можно использовать для передачи сообщений от jV источ-
ников. Перенос спектра сигнала источника в отведенный ему диа-
пазон частот (рис. 1.10) осуществляется с помощью УПС переда-
чи. Обратное преобразование обеспечивается в УПС приема.
Структурная схема организации передачи дискретных сообщений
при частотном разделении сигналов представлена на рис. 1.11.
Рассмотрим теперь временное разделение сигналов, которые
будут переданы по дискретному каналу. В состав дискретного
канала входит непрерывный канал связи с той же полосой про-
пускания ДУК- Длительность элементов, которые можно переда-
вать в дискретном канале, Л/К=<Р (ЛУк). Пусть от источника по-
ступают единичные элементы длительностью \tc, где Д^С^>А^К.
Тогда, разделив интервал времени (Ас) на N частей, где Лг<
<АС/АД, выделим для каждого источника свой временной интер-
вал. Принцип временного разделения каналов иллюстрируется
22
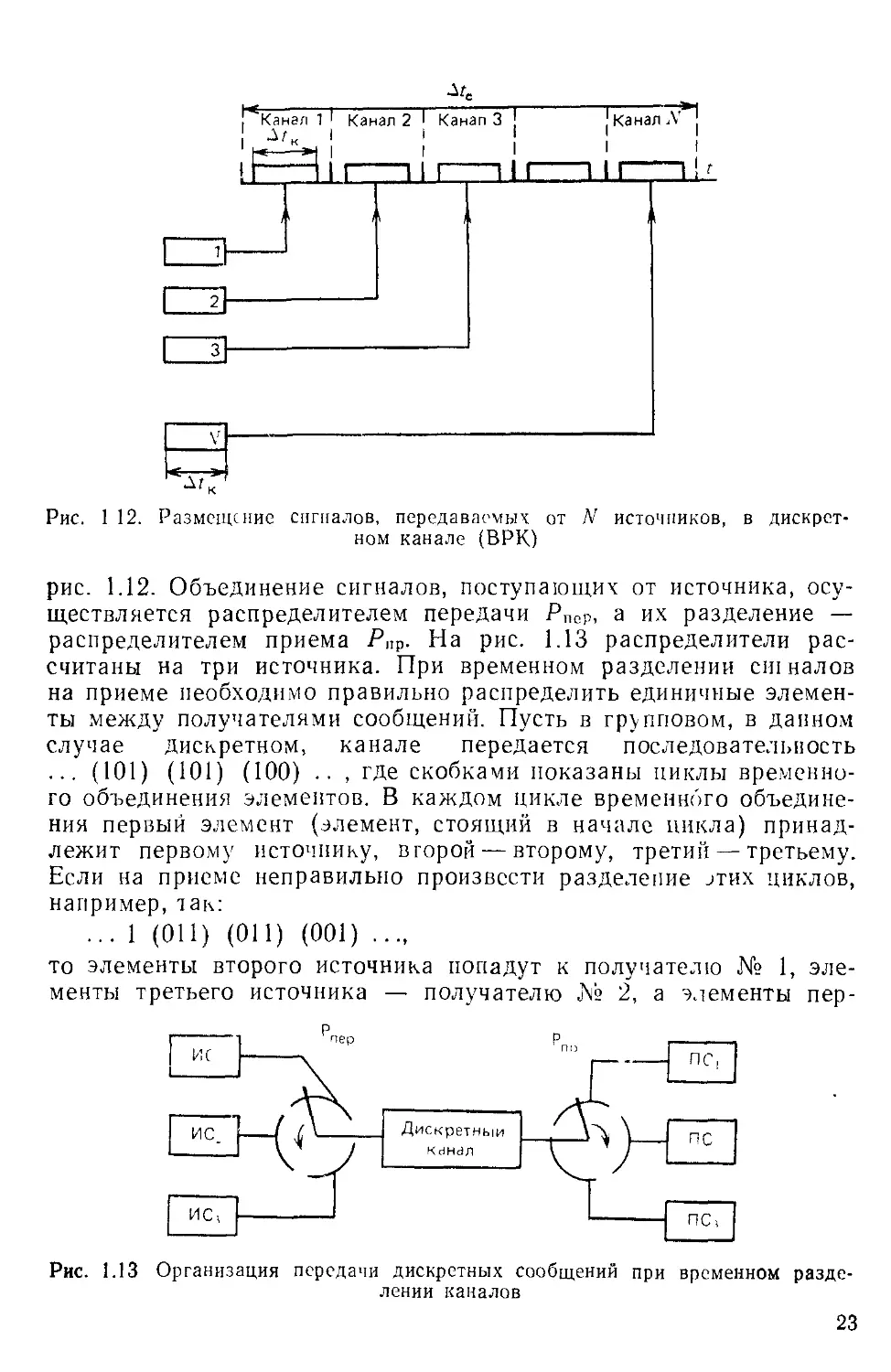
Рис. 1 12. Размещение сигналов, передаваемых от N источников, в дискрет-
ном канале (ВРК)
рис. 1.12. Объединение сигналов, поступающих от источника, осу-
ществляется распределителем передачи Рпер, а их разделение —
распределителем приема Рпр. На рис. 1.13 распределители рас-
считаны на три источника. При временном разделении сшналов
на приеме необходимо правильно распределить единичные элемен-
ты между получателями сообщений. Пусть в групповом, в данном
случае дискретном, канале передается последовательность
... (101) (101) (100) .. , где скобками показаны никлы временно-
го объединения элементов. В каждом цикле временного объедине-
ния первый элемент (элемент, стоящий в начале цикла) принад-
лежит первому источнику, второй — второму, третий — третьему.
Если на приеме неправильно произвести разделение этих циклов,
например, так:
... 1 (011) (011) (001) ....
то элементы второго источника попадут к получателю № 1, эле-
менты третьего источника — получателю № 2, а элементы пер-
Рис. 1.13 Организация передачи дискретных сообщений при временном разде-
лении каналов
23
вого источника — получателю № 3. Такая ситуация крайне неже-
лательна. Правильное разделение циклов временного объединения
на приеме обеспечивается устройствами цикловой синхронизации
(см. гл. 9).
Понятие о цепях стыка. Основными функциональными частями
системы ПДС являются (см. рис. 1.8) канал связи, УПС и УЗО.
Источник сообщений! и получатель являются оконечными точ-
ками системы, и поэтому в технике ПДС называются обобщенно —
оконечным оборудованием данных (ООД). В качестве ООД могут
быть использованы различные оконечные устройства ввода (вы-
вода) данных и ЭВМ. В качестве отдельных устройств ввода (вы-
вода) данных могут служить устройства записи (считывания) на
различные носители (перфоленту, магнитную ленту, магнитные
диски и т. д.). Ввод (вывод) данных в (из) ЭВМ в настоящее
время осуществляется через специальное устройство согласования
с каналами — мультиплексор передачи данных (МПД). Мульти-
плексор позволяет объединить низкоскоростные потоки информа-
ции, поступающие от нескольких пользователей в один высоко-
скоростной поток. Благодаря этому ЭВМ, работающая в режиме
разделения времени, обслуживает одновременно необходимое ко-
личество удаленных абонентов. Кроме концентрации потоков ин-
формации МПД выполняет и ряд других функций:
устанавливает связь с ЭВМ и выдает соответствующие сигна-
лы о готовности ЭВМ к работе;
устанавливает связь с абонентами и выдает соответствующий
сигнал о готовности абонента к работе;
организует выбранный порядок обслуживания абонентов;
проводит дополнительные подготовительные операции, исходя
из специфики работы абонента (выдержка необходимых времен-
ных интервалов, выяснение пароля и т. п.);
ведет частичную обработку передаваемой информации;
формирует сообщение абоненту;
отключает оборудование абонента от ЭВМ и т. п.
Из приведенного неполного перечня функций МПД ясно, что он
разгружает ЭВМ от выполнения связных задач (частично или
полностью). Поэтому МПД с расширенными функциональными
возможностями называются часто связными процессорами. Таким
образом, МПД (концентратор, связной процессор) осуществляет
взаимодействие между сетью связи (системами ПДС) и ЭВМ.
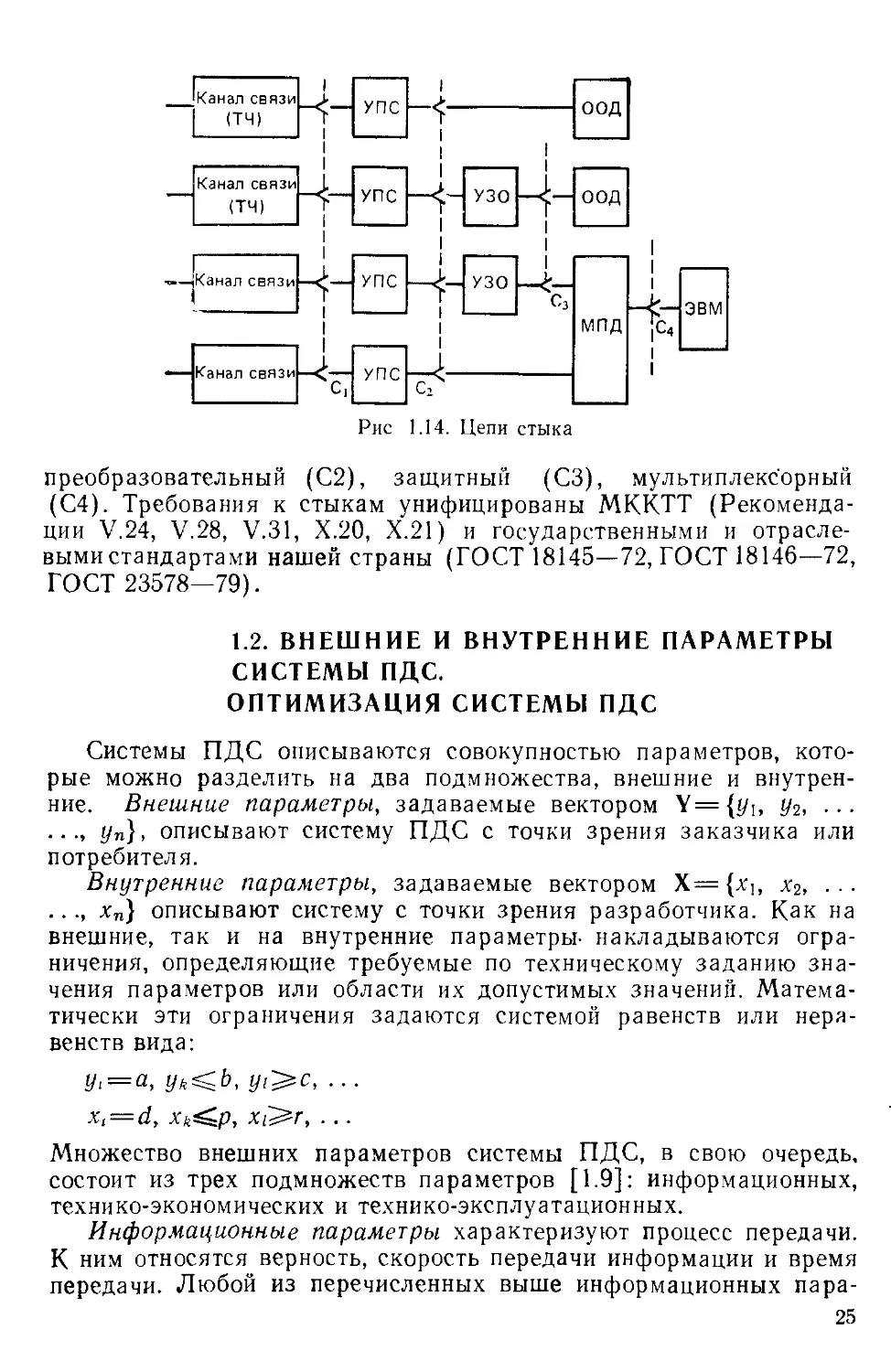
На рис. 1.14 представлены фрагменты систем ПДС, имеющих
различный состав оборудования. Видно, что имеются характерные
места соединения отдельных устройств системы ПДС между со-
бой: канала связи и УПС; УПС и ООД или УПС и УЗО; УЗО и
ООД или УЗО и МПД; МПД и ЭВМ. Такие места соединения
называются стыком устройств передачи сигнала данных, или про-
сто стыком. В зависимости от характера соединяемых устройств
стыки получили наименование (см. рис. 1.14): канальный (С1),
24
преобразовательный (С2), защитный (СЗ), мультиплексорный
(С4). Требования к стыкам унифицированы МККТТ (Рекоменда-
ции V.24, V.28, V.31, Х.20, Х.21) и государственными и отрасле-
выми стандартами нашей страны (ГОСТ 18145—72, ГОСТ 18146—72,
ГОСТ 23578—79).
1.2. ВНЕШНИЕ И ВНУТРЕННИЕ ПАРАМЕТРЫ
СИСТЕМЫ ПДС.
ОПТИМИЗАЦИЯ СИСТЕМЫ ПДС
Системы ПДС описываются совокупностью параметров, кото-
рые можно разделить на два подмножества, внешние и внутрен-
ние. Внешние параметры, задаваемые вектором ¥={(/!, у2, ...
..., уп}, описывают систему ПДС с точки зрения заказчика или
потребителя.
Внутренние параметры, задаваемые вектором Х= {х,, х2, ...
..., хп} описывают систему с точки зрения разработчика. Как на
внешние, так и на внутренние параметры- накладываются огра-
ничения, определяющие требуемые по техническому заданию зна-
чения параметров или области их допустимых значений. Матема-
тически эти ограничения задаются системой равенств или нера-
венств вида:
У: = а, yk^b, yi^c, ...
xt — d, xk^Zp, xi^r, . ..
Множество внешних параметров системы ПДС, в свою очередь,
состоит из трех подмножеств параметров [1.9]: информационных,
технико-экономических и технико-эксплуатационных.
Информационные параметры характеризуют процесс передачи.
К ним относятся верность, скорость передачи информации и время
передачи. Любой из перечисленных выше информационных пара-
25
метров представляет собой результат сравнения сигналов (симво-
лов) $ и $ (на входе и выходе системы): (/,=ф, (s, s), где вид
функционала Ф, определяет конструктивный способ задания па-
раметра (/,. Так верность передачи определяется вероятностью
полного совпадения принятого символа с переданным. Следова-
тельно, yi = p(s=s).
Вероятность нарушения равенства s=s определяет вероят-
ность ошибки. Чтобы учесть задержку, с которой получатель при-
нимает информацию, вводят параметр /зад, называемый временем
задержки. Это интервал между моментами 4(s) выдачи сообще-
ния источником и /г(«) его регистрации получателем. Отсюда у2=
= 4ад==^(5)— tl(s).
К технико-экономическим параметрам системы ПДС относят-
ся: стоимость, габаритные размеры, масса. Количественно оценку
стоимости системы ПДС целесообразно связать с ее основной
функцией — передачей информации. В качестве такой оценки
целесообразно принять стоимость передачи 1 бит информации. Эта
характеристика определяется полной стоимостью приведенных го-
довых затрат на систему и складывается из капитальных расхо-
дов на изготовление аппаратуры и расходов на ее эксплуатацию.
К технико-эксплуатационным параметрам относятся среднее
время безотказной работы, температурный диапазон работы, ме-
ханические характеристики и т. п. К числу внутренних параметров
относятся, в частности, характеристики используемой элементной
базы, характеристика помех и такая важная характеристика как
сложность. Различают алгоритмическую п структурную сложность.
Рассмотрим более подробно эти понятия.
Систему можно рассматривать как некоторое вычислительное
устройство, алгоритм работы которого определяет последователь-
ность операций, выполняемых над входным сигналом для преоб-
разования его в выходной сигнал. Отсюда алгоритмическую слож-
ность можно оценить числом логических и арифметических опе-
раций и объемом памяти запоминающих устройств, необходимых
для обеспечения преобразования.
Структурная сложность определяется числом базовых узлов,
необходимым для построения надежно функционирующей системы.
Сложность базового узла принимается равной единице. В качест-
ве базовых могут приниматься узлы, выпуск которых освоен про-
мышленностью, например триггеры, операционные усилители и
другие интегральные микросхемы.
Внешние и внутренние характеристики системы связаны опре-
деленными зависимостями. При этом в общем случае каждый из
внешних параметров проектируемой системы ПДС может быть
представлен в виде функции его внутренних параметров:
г/е=Л(Х1, х2, ..., xn), i=l, I. (1.3)
26
Система уравнений (1.3) называется уравнениями связи и задает
математическую модель проектируемой системы ПДС.
Рассмотрим задачу поиска наилучшей системы ПДС. Эта за-
дача оказывается чрезвычайно сложной прежде всего из-за огром-
ного числа внешних и внутренних характеристик системы. Поэто-
му успех оптимизации ”, как правило, зависит не только и даже
не столько от точности математической модели системы, сколько
от удачно выбранного критерия оценки системы как показателя
ее качества. Чаще из множества параметров системы выбирается
один критерий (показатель), который считается наиболее важным,
при этом на другие показатели накладываются ограничения, т. е.
задача сводится к нахождению условного экстремума.
Если система ПДС не содержит в своем составе кодека (ко-
дера и декодера), то ее оптимизация обычно сводится к оптими-
зации модема — выбору модема, обеспечивающего минимальную
вероятность неправильного приема при ограничениях на слож-
ность реализации или стоимость модема. Если в составе систе-
мы ПДС имеется и кодек, то за счет введения избыточности
можно получить сколь угодно малую вероятность неправильного
приема. Однако на практике это достигается иеной существен-
ного снижения скорости* ** передачи информации. Поэтому при ре-
шении задачи оптимизации системы ПДС в данном случае стре-
мятся к достижению требуемой или максимальной скорости пе-
редачи информации при выполнении ограничений на вероятность
неправильного приема и сложность (стоимость) системы.
Наиболее общим показателем системы ПДС является инфор-
мационная эффективность Т), которая определяется как отношение
скорости передачи информации к пропускной способности канала
r^ = R/C и характеризует степень использования канала. Следует
отметить, что такой ранее упомянутый показатель, как стоимость
передачи 1 бит информации и показатель информационной эф-
фективности тесно связаны друг с другом. Рассмотрим эту связь
на примере решения задачи выбора показателя т), при котором
обеспечивается минимальная стоимость передачи 1 бит информа-
ции. Значение пропускной способности канала и ограничение на
вероятность ошибки полагаем заданными. Если при заданном зна-
чении С выбрать R^C, то реализация кодека и модема сущест-
венно упрощается и соответственно уменьшается их стоимость.
* Выбор параметров системы, обеспечивающих ее оптимальность, называется
оптимизацией системы, а сами параметры — оптимальными. Определение струк-
туры оптимальной системы и отыскание оптимального значения ее параметров
составляет задачу оптимального проектирования
** В соответствии с теоремой К Шеннона [1 1] можно обеспечить скорость
передачи информации, сколь угодно близкую к пропускной способности канала
Однако, как известно, при этом будет очень высокой стоимость системы ПДС
вследствие ее сложности.
27
Рис. 1 15 Зависимость стоимости системы ПДС
от информационной эффективности t.
Однако стоимость передачи 1 бит информации, которая в данном
случае определяется в основном стоимостью непрерывного кана-
ла, будет весьма велика.
С ростом т) = /?/С стоимость передачи 1 бит информации па-
дает за счет лучшего использования непрерывного канала. При
т]=Лопт обеспечивается минимальная стоимость передачи 1 бит
информации. При ц>Цопт начинает сказываться резкое увеличе-
ние стоимости модема и кодека и S начинает расти. Типичная за-
висимость S от ц приведена на рис. 1.15.
Очевидно, что оптимальное значение ц зависит от уровня раз-
вития техники. В последние годы наблюдается существенное сни-
жение стоимости схемотехники, в то же время стоимость каналов
связи, используемых для ПДС, снижается незначительно. Отсюда
вытекает актуальность задачи поиска методов передачи, при ко-
торых обеспечивается наилучшее использование пропускной спо-
собности канала связи.
При оптимизации рекомендуется использовать [1.10] также
показатели удельной скорости — скорости, отнесенной к одному
из параметров канала. К ним относятся показатели y=R/AFK и
P = /?/(Pc/jV0), где AFk — полоса пропускания канала; Рс — сред-
няя мощность сигнала; No — спектральная плотность шума в ка-
нале. Показатели у и Р называют соответственно частотной и
энергетической эффективностями системы ПДС. Показатель р ис-
пользуется при оптимизации систем, для которых первостепенное
значение имеют энергетические показатели, в частности, космиче-
ских и спутниковых систем связи. В этих системах необходимо
обеспечить наилучшее использование мощности при заданной вер-
ности передачи. В системах проводной связи важнейшим показа-
телем является показатель частотной эффективности у При этом
необходимо добиться наилучшего использования полосы частот ка-
нала при заданной верности передачи.
Иногда при оптимизации систем делаются попытки применить
обобщенный показатель качества
Q —<p(<7i, ?2, • qn), (1.4)
где п — число учитываемых параметров системы; дг—г-й показа-
тель качества системы (например, f-й внешний параметр систе-
28
мы). Широко используется оценка в виде линейной функции
<2 = 2 Ун,
1=1
где — весовые коэффициенты, учитывающие значение и вес
i-й компоненты и определяемые методом экспертных оценок
п
[1.11]. Обычно на накладывается ограничение вида 2 = 1.
<=1
Оценка вида (1.4) привлекательна тем, что она выражается одним
единственным числом и в то же время учитывает все существен-
ные параметры системы. Однако эта оценка обычно слишком фор-
мализована, что является ее недостатком.
В заключение заметим, что процесс оптимизации систем ПДС
является сложной задачей. Как правило, данный процесс пред-
ставляет собой многошаговую процедуру, причем на каждом из
шагов осуществляется оптимизация составных частей системы:
кодера, модулятора, демодулятора, декодера. При этом оптими-
зация на каждом шаге должна осуществляться таким образом,
чтобы обеспечить оптимизацию в целом.
Часто оптимальная система оказывается чрезвычайно сложной
с точки зрения реализации. В то же время небольшие откло-
нения от оптимума, как правило, вполне обеспечивают требо-
вания задания на разработку системы и при этом достигается
приемлемая сложность системы. Поэтому в инженерной практике
в большинстве случаев речь идет о проектировании систем, близ-
ких к оптимальным, последние же служат ориентиром, к показа-
телям которых следует стремиться.
КОНТРОЛЬНЫЕ ВОПРОСЫ
1 Дайте определения понятиям «информация», «сообщение», «сигнал»
2 . Как измеряется количество информации? Определить энтропию источника,
вырабатывающего независимые символы а, и аг, если p(ai)=0,3. Сравнить по-
лученное значение с вариантом, когда р(а,) =р(а2)=0,5.
3 Какой сигнал называется цифровым сигналом данных (ЦСД)’ Что такое
единичный интервал, единичный элемент, значащий момент ЦСД?
4 Какой параметр является представляющим (информационным) при ампли-
тудной модуляции?
5 Чем отличаются изохронные сигналы от анизохроииых?
6 Поясните определения- непрерывный, дискретный и расширенный дискрет-
ный каналы.
7 . Чем отличается канал постоянного тока от дискретного канала^
8 . Определить скорость телеграфирования в бодах и скорость передачи
информации R в бит/с, если длительность единичного элемента то = 2О мс, пе-
редача осуществляется кодовыми комбинациями длиной гг=1О, число информа-
29
ционных элементов <’ = 8. Число значащих позиций передаваемого сигнала равно
двум
9 . Какие функции выполняют устройства поэлементной синхронизации’
10 К чему приводит нарушение групповой синхронизации’
11 . К чему приведет нарушение цикловой синхронизации в двухкаиальной
системе с временным разделением каналов. Проиллюстрируйте свои соображения
рисунком.
12 Дайте оценку сверху числа каналов, которое можно организовать в по-
лосе ДГк = 3100 Гц, если ширина спектра сигнала ДГс=Ю0 Гц и используется
частотное разделение каналов.
13 Дайте оценку сверху числа каналов, которое можно организовать в син-
хронном дискретном канале, предназначенном для передачи двоичных сигналов
длительностью ДЦ=0,4 мс, если длительность единичных элементов, поступаю-
щих от источника, Д1с = 20 мс.
14 Поясните назначение цепей стыка Cl, С2, СЗ, С4.
15 . Какие параметры (внутренние или внешние) описывают систему с по-
зиций заказчика (потребителя)’
16 Перечислите известные вам критерии оптимизации систем ПДС. Ка-
ковы их достоинства и недостатки’
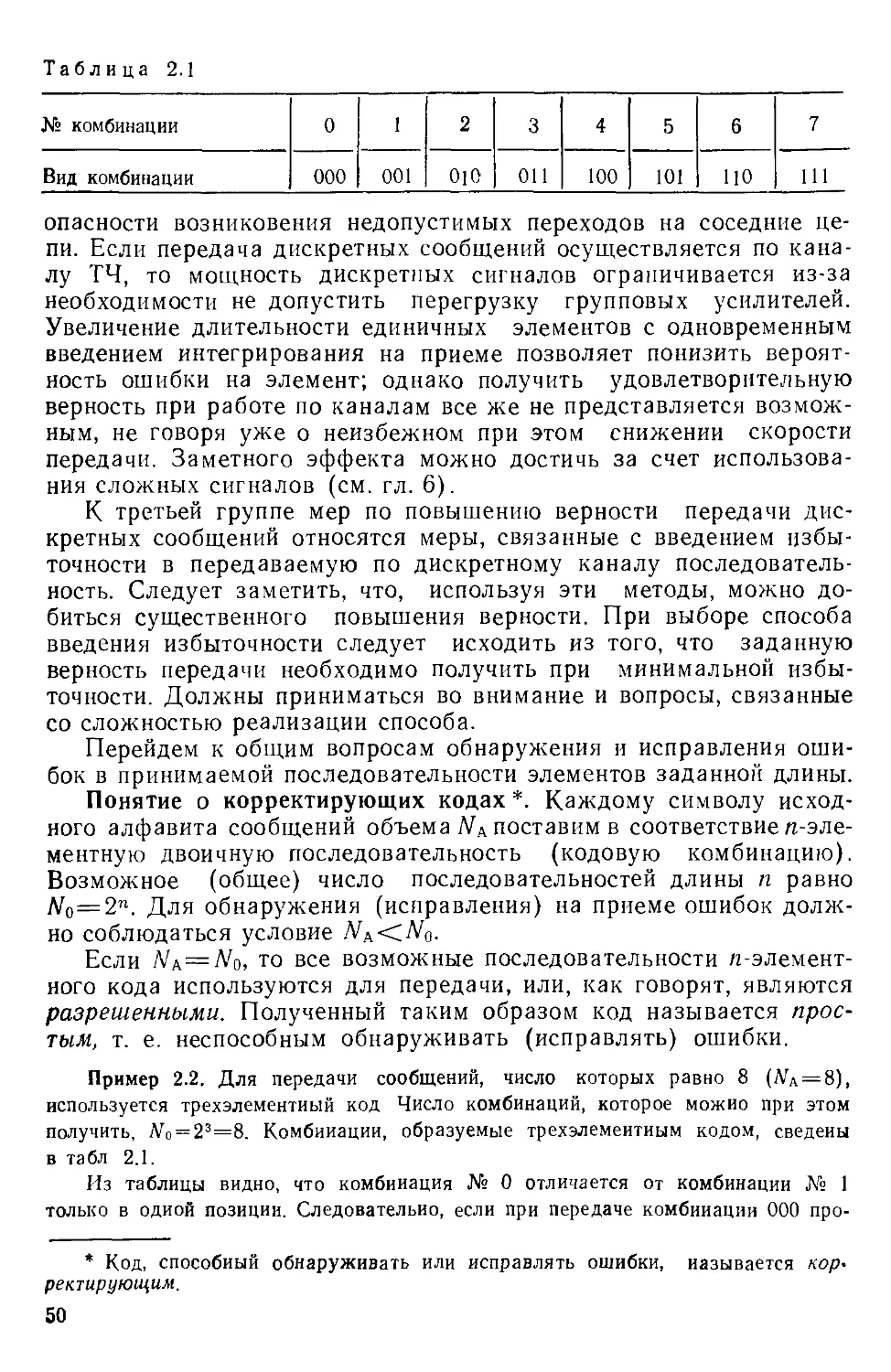
Глава 2. СИСТЕМЫ ПЕРЕДАЧИ
ДИСКРЕТНЫХ СООБЩЕНИЙ.
ХАРАКТЕРИСТИКИ КАНАЛОВ
2.1. НЕПРЕРЫВНЫЙ КАНАЛ
Канал электросвязи — это совокупность технических средств и
среды распространения сигналов, обеспечивающая при подключе-
нии абонентских устройств передачу сообщений от источника
к получателю.
Сети ПДС, как и другие вторичные сети, организуются на
базе каналов первичной сети ЕАСС. Для передачи дискретных
сообщении используются каналы связи, образуемые в системах
передачи с разделением по частоте и времени, а также физические
цепи проводных линии связи (воздушных, кабельных, волоконно-
оптических и т. д). В настоящем параграфе рассматриваются
только такие каналы, при поступлении на вход которых непре-
рывного сигнала на его выходе сигнал также будет непрерывным.
Такне каналы, как было отмечено выше, называют непрерывными.
Они всегда входят в состав дискретного канала. Непрерывными
каналами являются, например, стандартные телефонные каналы
связи (каналы тональной частоты — ТЧ) с полосой пропускания
0,3 ... 3,4 кГц, стандартные широкополосные каналы с полосой
пропускания 60 ... 108 кГц, физические цепи и др.
30
Наиболее распространенным способом задания непрерывных
каналов является описание их с помощью операторов преобразо-
вания входных сигналов и задание действующих в них помех.
При малой мощности входных сигналов справедливо положение
о линейности канала. Тогда модель канала может быть представ-
лена в виде линейного четырехполюсника [2.1], для которого вход-
ной и выходной сигналы связаны интегралом Дюамеля.
S(O= (2.1)
— 00
где s(l) — выходной сигнал; $(т) — входной сигнал; g(t, t—x) —
импульсная характеристика четырехполюсника, представляющая
собой реакцию системы на входной сигнал в виде дельта-функции
На небольших интервалах времени канал можно считать ста-
ционарным, т. е. g(ti, ti)=g(t2—6) зависит лишь от разности
аргументов (t2—6)=т*.
Канал можно также задать комплексной частотной характе-
ристикой, связанной с g(r*) преобразованием Фурье:
со
К = j g (г*) = I К I е_;<₽ (ш), (2.2)
о
где |7<(/ю) | =К(со) и <р(ш) = argK(/w) —соответственно амплитуд-
но-частотная (АЧХ) и фазочастотная (ФЧХ) характеристики ка-
нала *.
Для идеального канала имеем |A(j(o) | =const и линейную фа-
зочастотную характеристику ср(со). Обычно измеряется не ФЧХ,
а групповое время прохождения т (со) =dq> (со)/da. Для идеально-
го канала — канала с линейной фазочастотной характеристикой
т(со) =const.
На выходе непрерывного канала всегда действуют гауссовские
помехи. К таким помехам, в частности, относится тепловой шум.
Эти помехи неустранимы. Модель непрерывного канала, вклю-
чающая в себя четырехполюсник с импульсной характеристикой
g(t, т) и источник аддитивных гауссовских помех £(/), представ-
лена на рис 2.1.
Более полная модель должна учитывать другие типы аддитив-
ных помех, нелинейные искажения сигнала, а также мультиплика-
тивные помехи [2 I]. Такая модель непрерывного канала пред-
ставлена на рис. 2.2. Здесь: х(-) — амплитудная характеристика
безынерционного нелинейного четырехполюсника, моделирующего
нелинейные преобразования сигнала в канале; ц(/) — мультипли-
кативная помеха, закон композиции сигнала з(/) с которой имеет
вид s* (0 = ц(Оз(0; £1(0 — аддитивные гауссовские шумы,
* В общем случае АЧХ канала является функцией не только частоты, но и
времени и записывается в виде А(со, /)
31
s (?)
Рис 21. Модель линейного не-
прерывного канала с аддитив-
ным шумом
£2(0 — аддитивные импульсные помехи; £3(0 — аддитивные со-
средоточенные по спектру помехи.
Перейдем к краткой характеристике перечисленных выше
помех.
Сосредоточенные по спектру, или гармонические, помехи пред-
ставляют собой узкополосный модулированный сигнал. Причинами
возникновения таких помех являются снижение переходного за-
тухания между цепями кабеля, влияние радиостанций и т. п.
Импульсные помехи — это помехи, сосредоточенные по вре-
мени. Они представляют собой случайную последовательность им-
пульсов, имеющих случайные амплитуды и следующих друг за
другом через случайные интервалы времени, причем вызванные
ими переходные процессы не перекрываются во времени. Причины
появления этих помех: коммутационные шумы, наводки с высоко-
вольтных линий, грозовые разряды и т. п. Нормирование импульс-
ных помех в канале ТЧ производится путем ограничения времени
превышения ими заданных порогов анализа.
Флуктуационная помеха характеризуется широким спектром и
максимальной энтропией, и поэтому с ней труднее всего бороться.
Однако в проводных каналах связи уровень флуктуационных по-
мех достаточно мал и они при малой удельной скорости передачи
информации практически не влияют на коэффициент ошибок.
Мультипликативные помехи обусловлены случайными измене-
ниями параметров канала связи. В частности, эти помехи прояв-
ляются в изменении уровня сигнала на выходе демодулятора.
Различают плавные и скачкообразные изменения уровня. Плав-
ные изменения происходят за время, которое намного больше, чем
т0; скачкообразные — за время, меньшее т0. Причиной плавных
изменений уровня могут быть колебания затухания линии связи,
вызванные, например, изменением состояния погоды, а в радио-
каналах — замирания. Причиной скачкообразных изменений уров-
ня могут быть плохие контакты в аппаратуре, несовершенство экс'
плуатации аппаратуры связи, технологии измерений и др.
Снижение уровня более, чем 17,4 дБ ниже номинального, на-
зывается перерывом. При перерыве уровень падает ниже порога
чувствительности приемника и прием сигналов фактически пре-
Рис. 2 2 Модель непрерывного канала с различными видами искажений, шумов
и помех
32
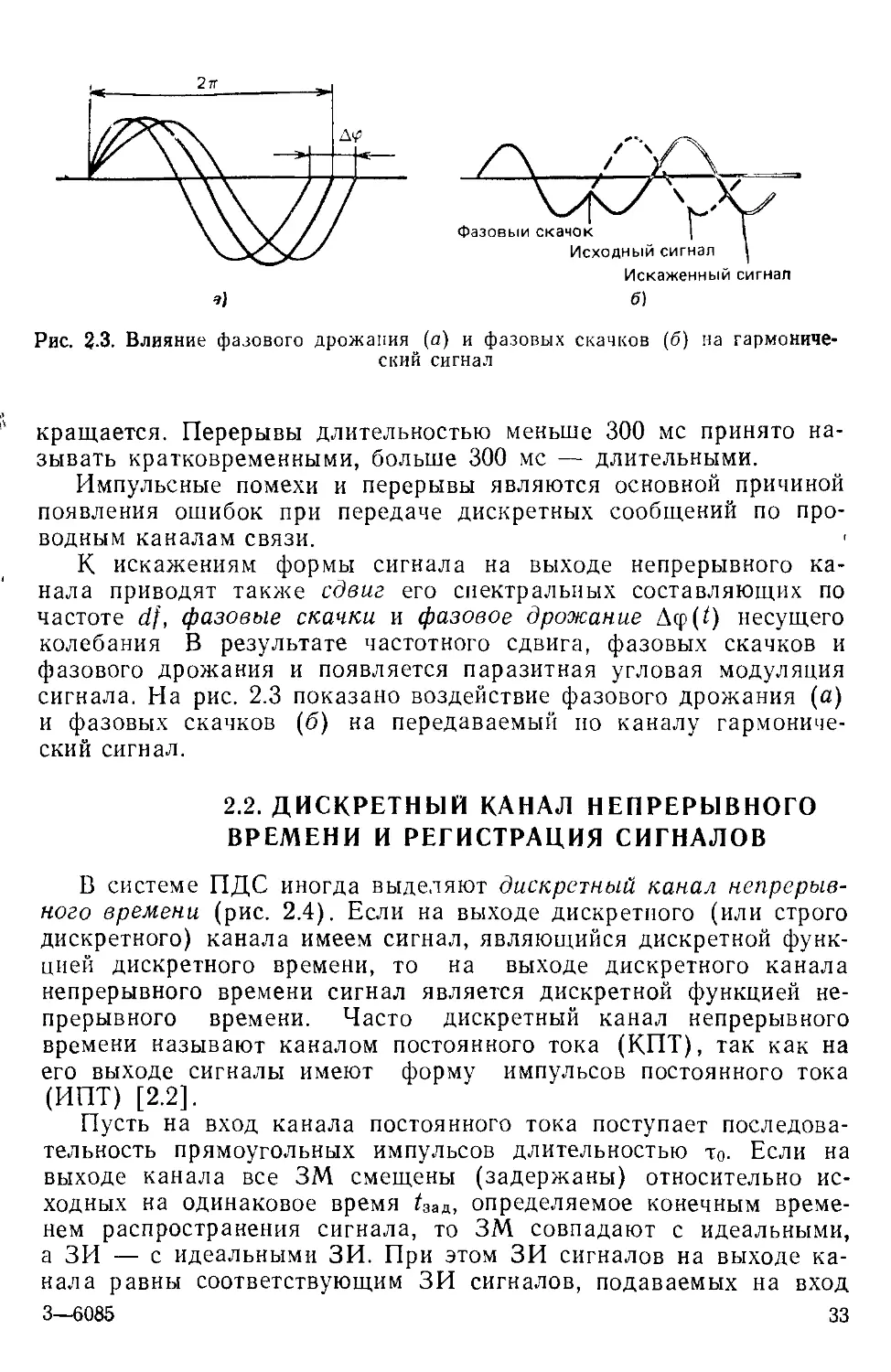
Рис. 2-3. Влияние фазового дрожания (а) и фазовых скачков (б) на гармониче-
ский сигнал
Искаженный сигнал
6)
кращается. Перерывы длительностью меньше 300 мс принято на-
зывать кратковременными, больше 300 мс — длительными.
Импульсные помехи и перерывы являются основной причиной
появления ошибок при передаче дискретных сообщений по про-
водным каналам связи.
К искажениям формы сигнала на выходе непрерывного ка-
нала приводят также сдвиг его спектральных составляющих по
частоте df, фазовые скачки и фазовое дрожание Дср(/) несущего
колебания В результате частотного сдвига, фазовых скачков и
фазового дрожания и появляется паразитная угловая модуляция
сигнала. На рис. 2.3 показано воздействие фазового дрожания (а)
и фазовых скачков (б) на передаваемый по каналу гармониче-
ский сигнал.
2.2. ДИСКРЕТНЫЙ КАНАЛ НЕПРЕРЫВНОГО
ВРЕМЕНИ И РЕГИСТРАЦИЯ СИГНАЛОВ
В системе ПДС иногда выделяют дискретный канал непрерыв-
ного времени (рис. 2.4). Если на выходе дискретного (или строго
дискретного) канала имеем сигнал, являющийся дискретной функ-
цией дискретного времени, то на выходе дискретного канала
непрерывного времени сигнал является дискретной функцией не-
прерывного времени. Часто дискретный канал непрерывного
времени называют каналом постоянного тока (КПТ), так как на
его выходе сигналы имеют форму импульсов постоянного тока
(ИПТ) [2.2].
Пусть на вход канала постоянного тока поступает последова-
тельность прямоугольных импульсов длительностью то. Если на
выходе канала все ЗМ смещены (задержаны) относительно ис-
ходных на одинаковое время /зад, определяемое конечным време-
нем распространения сигнала, то ЗМ совпадают с идеальными,
а ЗИ — с идеальными ЗИ. При этом ЗИ сигналов на выходе ка-
нала равны соответствующим ЗИ сигналов, подаваемых на вход
3—6085 33
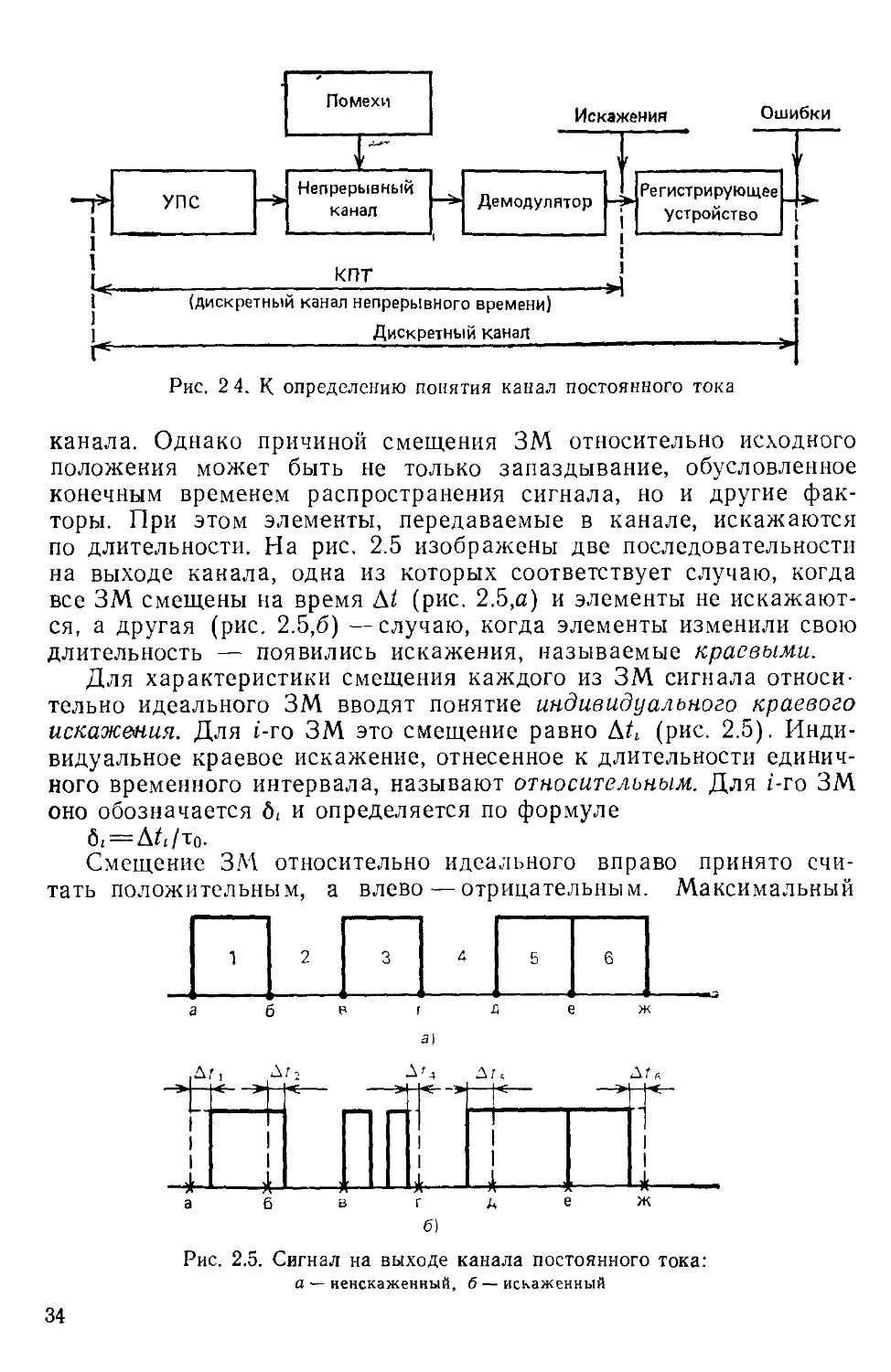
Рис. 2 4. К определению понятия канал постоянного тока
канала. Однако причиной смещения ЗМ относительно исходного
положения может быть не только запаздывание, обусловленное
конечным временем распространения сигнала, но и другие фак-
торы. При этом элементы, передаваемые в канале, искажаются
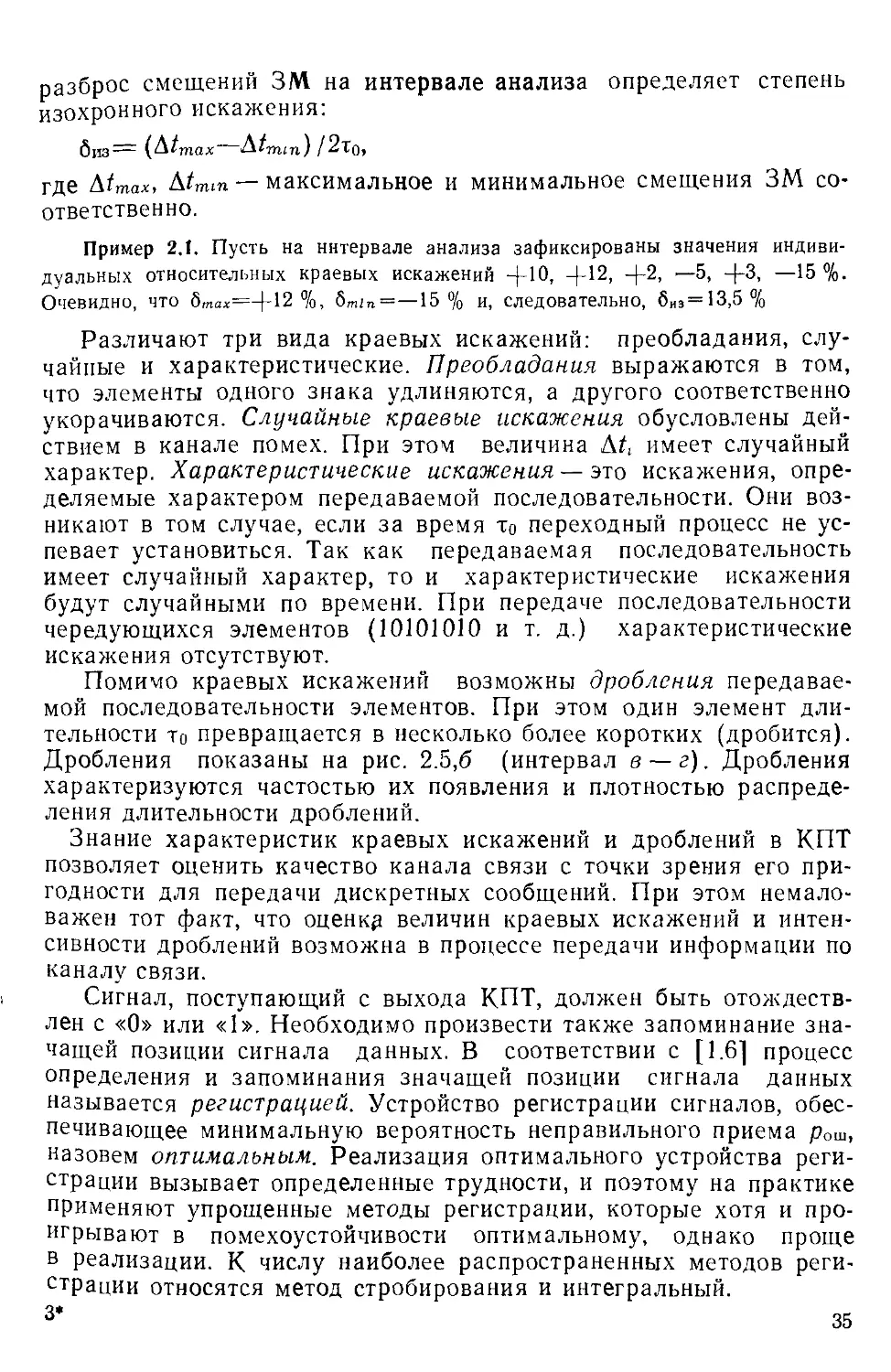
по длительности. На рис. 2.5 изображены две последовательности
на выходе канала, одна из которых соответствует случаю, когда
все ЗМ смещены на время Д/ (рис. 2.5,а) и элементы не искажают-
ся, а другая (рис. 2.5,6) —случаю, когда элементы изменили свою
длительность — появились искажения, называемые краевыми.
Для характеристики смещения каждого из ЗМ сигнала относи-
тельно идеального ЗМ вводят понятие индивидуального краевого
искажения. Для i-ro ЗМ это смещение равно Д/, (рис. 2.5). Инди-
видуальное краевое искажение, отнесенное к длительности единич-
ного временного интервала, называют относительным. Для i-ro ЗМ
оно обозначается 6, и определяется по формуле
б,=Д^/т0.
Смещение ЗМ относительно идеального вправо принято счи-
тать положительным, а влево — отрицательным. Максимальный
a б р г Д е ж
Рис. 2.5. Сигнал на выходе канала постоянного тока:
а — неискаженный, б — искаженный
34
разброс смещений ЗМ на интервале анализа определяет степень
изохронного искажения:
ёиз= (Л^тах ЛЛшп) /2то,
где \tmax, Ытт — максимальное и минимальное смещения ЗМ со-
ответственно.
Пример 2.1. Пусть на интервале анализа зафиксированы значения индиви-
дуальных относительных краевых искажений —[-10, —[-12, -1-2, —5, —[-3, —15 %.
Очевидно, что битах——[-12 %, —15 % и, следовательно, 6из = 13,5 %
Различают три вида краевых искажений: преобладания, слу-
чайные и характеристические. Преобладания выражаются в том,
что элементы одного знака удлиняются, а другого соответственно
укорачиваются. Случайные краевые искажения обусловлены дей-
ствием в канале помех. При этом величина Af, имеет случайный
характер. Характеристические искажения — это искажения, опре-
деляемые характером передаваемой последовательности. Они воз-
никают в том случае, если за время то переходный процесс не ус-
певает установиться. Так как передаваемая последовательность
имеет случайный характер, то и характеристические искажения
будут случайными по времени. При передаче последовательности
чередующихся элементов (10101010 и т. д.) характеристические
искажения отсутствуют.
Помимо краевых искажений возможны дробления передавае-
мой последовательности элементов. При этом один элемент дли-
тельности то превращается в несколько более коротких (дробится).
Дробления показаны на рис. 2.5,6 (интервал в —г). Дробления
характеризуются частостью их появления и плотностью распреде-
ления длительности дроблений.
Знание характеристик краевых искажений и дроблений в КПТ
позволяет оценить качество канала связи с точки зрения его при-
годности для передачи дискретных сообщений. При этом немало-
важен тот факт, что оценку величин краевых искажений и интен-
сивности дроблений возможна в процессе передачи информации по
каналу связи.
Сигнал, поступающий с выхода КПТ, должен быть отождеств-
лен с «О» или «1». Необходимо произвести также запоминание зна-
чащей позиции сигнала данных. В соответствии с [1.6] процесс
определения и запоминания значащей позиции сигнала данных
называется регистрацией. Устройство регистрации сигналов, обес-
печивающее минимальную вероятность неправильного приема рош,
назовем оптимальным. Реализация оптимального устройства реги-
страции вызывает определенные трудности, и поэтому на практике
применяют упрощенные методы регистрации, которые хотя и про-
игрывают в помехоустойчивости оптимальному, однако проще
в реализации. К числу наиболее распространенных методов реги-
страции относятся метод стробирования и интегральный.
3* 35
При регистрации методом стробирования вид принимаемого
элемента («О» или «1») определяется на основании анализа знака
импульса постоянного тока (сигнала на выходе КПТ) в середине
единичного интервала. Любое смещение момента регистрации от-
носительно середины единичного интервала приводит к увеличению
вероятности неправильной регистрации сигнала.
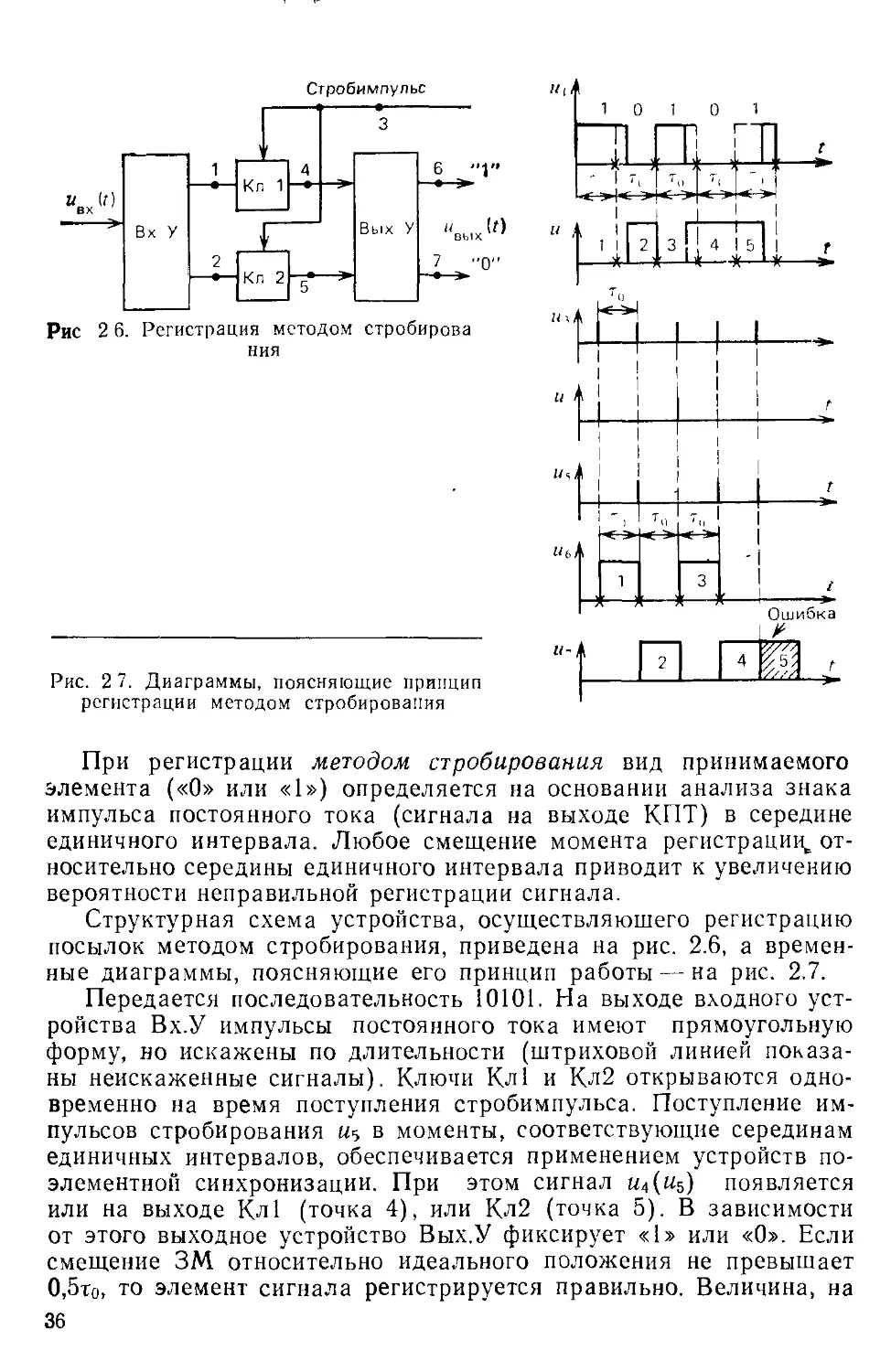
Структурная схема устройства, осуществляющего регистрацию
посылок методом стробирования, приведена на рис. 2.6, а времен-
ные диаграммы, поясняющие его принцип работы — на рис. 2.7.
Передается последовательность 10101. На выходе входного уст-
ройства Вх.У импульсы постоянного тока имеют прямоугольную
форму, но искажены по длительности (штриховой линией показа-
ны неискаженные сигналы). Ключи Кл1 и Кл2 открываются одно-
временно на время поступления стробимпульса. Поступление им-
пульсов стробирования в моменты, соответствующие серединам
единичных интервалов, обеспечивается применением устройств по-
элементной синхронизации. При этом сигнал ц4(ц5) появляется
или на выходе Кл1 (точка 4), или Кл2 (точка 5). В зависимости
от этого выходное устройство Вых.У фиксирует «1» или «0». Если
смещение ЗМ относительно идеального положения не превышает
О,5то, то элемент сигнала регистрируется правильно. Величина, на
36
Рис 2 8 Регистрация интегральных методов
которую допускается смещение ЗМ, не вызывающее неправильный
прием, определяет исправляющую способность приемника (или
телеграфного аппарата). В нашем случае исправляющая способ-
ность (теоретическая) равна О,5то или 50%. Из рис. 2.7 видно, что
из-за смещения ЗМ относительно идеального положения на вели-
чину, превышающую О,5то, пятый элемент принимается непра-
вильно.
При интегральном методе регистрации решение о виде приня-
того элемента выносится на основе анализа сигнала «вых, опреде-
ляемого выражением
to
«вых = — f «вх (0$,
то J
0
где «вч(0 — сигнал на входе регистрирующего устройства (выходе
КПТ). Этот сигнал является дискретной функцией непрерывного
времени.
Интегрирование осуще-
ствляется на интервале, со-
ответствующем неискажен-
ному элементу. Пусть
ивх(0 принимает на интер-
вале анализа как значения
«вх(0 = 0, так как «вх(0 =
=И. Тогда решение о приеме
«1» должно выноситься, если
Ubmx ^1/2. Очевидно, что
ошибка при передаче «1»
будет в том случае, когда
«вых 1, 2.
Интегральный метод ча-
сто реализуется на основе
многократного стробирова-
ния сигнала uBX(t) в W точ-
ках. Схема, поясняющая
принцип действия такого
устройства регистрации, при-
ведена на рис. 2.8. Сигнал
«1 (0 (точка 1) управляет
КЛЮЧОМ Кл. При откры-
(2-3)
Рис. 2.9 Диаграммы, поясняющие принцип
регистрации интегральным методом
37
том ключе, когда нвх(0 = Ь тактовые импульсы «5 (0 (стробим-
пульсы) проходят на вход счетчика Сч. За время действия неиска-
женной токовой посылки «1(0 (на интервале т0) на выходе Кл
(точка 3) появляется N тактовых импульсов. Если на выходе Кл
на единичном интервале появится W/2-j-l и более стробимпульсов,
то можно сделать вывод о том, что принята «1». Емкость счетчика
достаточно взять равной 7V/2-J-1. В конце единичного интервала,
определяемого с помощью устройства поэлементной синхрониза-
ции, показания счетчика считываются, и он обнуляется. Временные
диаграммы, иллюстрирующие работу схемы, приведены на рис. 2.9.
Здесь неправильно регистрируется вторая посылка.
Сравним помехоустойчивость методов стробирования и интег-
рального при действии краевых искажений Поскольку при реги-
страции методом стробирования посылка регистрируется в середи-
не, то допускается смещение любого из ЗМ на величину, не превы-
шающую О,5то. При регистрации интегральным методом суммарное
смещение границ не должно превышать 0,5tq. Очевидно, что по-
следнее условие выполняется с меньшей вероятностью, т. е.
Рошк>Рошк, гДе Рош к, Рош.к —соответственно вероятности непра-
вильного приема при краевых искажениях и регистрации интег-
ральным методом и методом стробирования.
Если краевые искажения б подчиняются гауссовскому закону
№(8) = —L-e“(5±fl)/(2’2), (2.4)
|/2тссг
где а — математическое ожидание 6; о2 — дисперсия б, то вероят-
ность ошибки при регистрации методом стробирования [2, 3]
Рош К= 0,75 — 0,5 Ф (z) — 0,25 [Ф (z)]2, (2.5)
Z
2 f* х ® /2
где Ф(г) = е dx — функция Крампа;
|/ 2л J
о
z = (|л — а)/а. (2.6)
При регистрации интегральным методом
Р(ош к= 0,75-0,5 Ф(г//2)— 0,25 ^(z/]/^)]2. (2.7)
В формуле (2.6) п— исправляющая способность приемника; а —
математическое ожидание смещения границы элемента; о—средне-
квадратическое отклонение смещения.
При выводе формул (2.5) и (2.6) предполагалось, что элемент
сигнала ограничен с обеих сторон ЗМ, а
W. (8) = z8) = 1 е-(5+й)’Л2^)
где U7J6), Ц72(б)—плотность распределения краевых искажений
для левого и правого ЗМ элемента сигнала соответственно.
38
В качестве примера приведем методику вывода (2.5). Элемент
сигнала регистрируется неправильно в том случае, если левая или
правая граница сместятся во внутрь посылки на величину, превы-
шающую исправляющую способность приемника. Вероятности этих
событий обозначим соответственно pi и р2. Неправильная реги-
страция имеет место также в том случае, если обе границы одно-
временно сместятся на величину, большую ц Вероятность этого
события в предположении независимости смещения границ элемен-
тов определим как р^р2. Очевидно, что
Р1 = f e-(S~u)'(2l!)d8 = 0,5 [1 - Ф (?)],
и
-ц
Рг = 17=- f е-<’+о>/(2^8 = 0,5[1-Ф(г)].
V 2по J
— 00
Учитывая, что Рош.к = Pi + Р2 — PiP2, получим (2.5).
Рассмотрим действие дроблений. Будем считать, что на еди-
ничный интервал приходится только одно дробление. Обозначим
длительность дробления /др. Очевидно, что все дробления могут
быть подразделены на две группы /ДР<то/2 и £дР^То/2. Если
^др<то/2, то при интегральном методе прием будет правильным,
так как искажается менее половины ИПТ. Если ^ДР>то/2 и при
этом искажено более половины ИПТ, то при интегральном методе
регистрации будет неправильный прием. Однако поскольку иска-
жено более половины посылки, то будет искажена и ее середина.
Следовательно, будет неправильный прием и при регистрации ме-
тодом стробирования. Таким образом, если при регистрации мето-
дом стробирования неправильный прием возможен как в случае,
если /Др<т0/2, так и при /дР>ти/2, то при интегральном — только
при ?дРТэт0/2. Поэтому Рошд>Рошд, где Рош Д, рош ф — соответст-
венно вероятности ошибки при действии дроблений для случаев
регистрации методом стробирования и интегральным методом. Ве-
роятность ошибки будет тем больше, чем чаще появляются дроб-
ления, а также чем больше средняя длительность дробления и
дисперсия длительности дробления [2.3]. При совместном дейст-
вии краевых искажений и дроблений вероятность ошибки прибли-
женно может быть определена по формуле
Рош ~ Рош.д + рош.к-Рош.лРош к-
В последние годы ведется поиск простых в реализации, но до-
статочно эффективных (близких по помехоустойчивости к опти-
мальным) методов регистрации. Предложен ряд методов, среди
39
ГФ
— -К—«-----------к-----
а б в г
Рис 2 10 К регистрации по-
сылок многоиитервальным
методом
Рис 2 1J Регистрация по
сыток стартстопной ком-
бинации принятая идеачь-
ная стартстопная последо-
ватечьность (а) и соответствующая ей последовательность стробимпульсов (б),
стартстопная последовательность со смещенным в сторону отставания стопстарт
ным переходом (о) и соответствующая ей постедовательпость стробимщльсов (г)
которых рассматриваемые ниже многоинтервальный и интегриро-
вания с весовой функцией
Особенность многоинтервального метода заключается в отказе
от обязательной обработки сигнала на единичном интервале т0
Интервал обработки, на котором осуществляется регистрация ин-
тегральным методом, выбирается в зависимости от характера ис-
кажения ИПТ Алгоритм выбора интервала обработки заключает-
ся в следующем Если поступает посылка, содержащая две грани-
цы (два ЗМ), причем каждая из границ смещена относительно
идеального положения не больше, чем на заданное предельное
значение, то посылка интегрируется в интервале времени, ограни-
ченном этими двумя границами Если же смещение границы (обе-
их границ) превышает предельное значение, то граница (границы)
заменяются тактовым импульсом (импульсами), вырабатываемы-
ми системой поэлементной синхронизации В случае, когда в по-
ступающем элементе сигнала (посылке) нет границы (границ),
т е поступают подряд несколько одинаковых посылок, то по-преж-
нему отсутствующая граница заменяется тактовым импульсом
Когда в интервал времени, ограниченный предельными смещения-
ми границ (интервал фиксации границ /ф), попадает несколько
границ (появляются ложные границы), то интегрирование сигнала
начинается (кончается) при появлении первой поступившей гра-
ницы
На рис 2 10 для примера показана искаженная посылка Реги-
страция посылки обычным интегральным методом производится
в интервале а — г (соответствующем случаю неискаженного прие-
ма посылки) При этом захватываются предыдущий и последую-
щий элементы При многоинтервальном способе интегрирование
осуществляется в интервале б—в, что позволяет лучше использо-
вать энергию сигнала
40
Вероятность ошибки можно также уменьшить, применяя реги-
страцию с весовой функцией. Если известен характер искажений
различных участков на длительности единичного элемента, то от-
счет необходимо производить с различным весом там, где искаже-
ния появляются реже, вес необходимо увеличить и наоборот Опи-
санные ранее методы регистрации — интегральный и стробирова-
ния — можно рассматривать как частный случай метода
регистрации с весовой функцией При интегральном методе вес
берется одинаковым на всем интервале регистрации То, а при стро-
бировании средняя часть берется с весом 1, а все остальные части
с весом 0 (не учитываются)
Понятие «изохронное искажение» относится к изохронным сиг-
налам При рассмотрении стартстопных сигналов пользуются по-
нятием старт стопных искажений. Для пояснения сущности этого
понятия рассмотрим принцип регистрации стартстопных сигналов
методом стробирования Для регистрации посылок, входящих в со-
став стартстопного сигнала, необходимо обеспечить поступление
стробимпульсов в моменты, соответствующие серединам единич-
ных интервалов принимаемых посылок Стартстопнын сигнал отно-
сится к асинхронным сигналам с известной структурой Момент его
появления на приеме непредсказуем, поэтому необходимо осущест-
вить привязку вырабатываемых в приемнике стробимпульсов
к стартстопному переходу Очевидно, что смещение стартстопного
перехода относительно его идеального положения в сторону отста-
вания или опережения на величину Д/с вызовет и смещение мо-
ментов регистрации относительно середины единичных интервалов
регистрируемых посылок на ту же величину Д/с (рис 2 11) При
этом ухудшаются условия регистрации посылок — уменьшается на
величину смещения стробимпульсов исправляющая способность
приемника
Помимо смещения относительно идеального положения старт-
стопного перехода возможны смещения ЗМ регистрируемых посы-
лок Отсюда следует необходимость введения такою понятия иска-
жений, которое бы позволило учесть влияние на качество приема
как искажений стартстопного перехода, так и регистрируемых по-
сылок Величину искажений будем определять путем сравнения
принятой стартстопной последовательности (рис 2 12,а) с эталон-
ной При этом стопстартный переход эталонной последовательно-
сти во времени совместим со стопстартным переходом принятой
последовательности (рис 2.12,6) Смещение местоположения при-
нятой последовательности относительно соответствующего ЗМ
эталонной последовательности в долях (или процентах) от дли-
тельности единичного интервала будем называть индивидуальным
стартстопным искажением Величина индивидуальных стартстоп-
ных искажений для 2-го ЗМ (рис 2 12,6) определяется как 6ст2=
= Д^/(2т0) = (Д^+Д/2*)/2т0, где Д/с — смещение стартстопного
перехода принятой последовательности относительно идеального
41
Рис 2 12. К определению понятия «стартстопные искажения»
а — принятый стартстопный сигнал; б — эталонный стартстопный сигнал
положения; — смещение 2-го ЗМ относительно идеального
положения. Под идеальным будем понимать такое положение ЗМ,
при котором последовательность принята без искажений. На рисун-
ке идеальное положение ЗМ обозначено штриховой линией. Таким
образом, при вычислении индивидуальных стартстопных искаже-
ний естественным образом учитывались смещения как стартстоп-
ного перехода, так и ЗМ, для которого вычисляются индивидуаль-
ные искажения и, следовательно, учитывается влияние на качество
приема посылок искажения стартстопного перехода. Максимальное
индивидуальное стартстопное искажение, полученное на заданном
интервале измерений, называется стартстопный искажением.
2.3. ДИСКРЕТНЫЙ КАНАЛ. СТАТИСТИКА
ОШИБОК В ДВОИЧНОМ ДИСКРЕТНОМ
КАНАЛЕ
Случайный процесс возникновения ошибок в дискретном кана-
ле будет полностью описан, если заданы: входной (А) и выходной
(А) алфавиты символов, а также совокупность переходных вероят-
ностей вида р (а/а), где а= (щ, а-2, аз,.. ,,alt...) — произвольная
последовательность символов входного алфавита и at^A — символ
на входе канала в i-й момент времени а=(йь й2, йз,.. .,а„ ...)—
соответствующая а последовательность символов из выходного ал-
фавита, а й,еА — символ на выходе канала в i-й момент; р(а/а) —
42
Рис. 2 13 Диаграмма
переходов в двоичном
канале
Рис. 2.14. Эквивалентная схе-
ма дискретного симметричного
канала
условная вероятность приема последовательности а при условии,
что передана последовательность а.
Число задаваемых переходных вероятностей с увеличением
длины входных и выходных последовательностей растет. Так, если
используется двоичный код и выходной алфавит равен входному,
то при последовательности длины п общее число задаваемых пере-
ходных вероятностей будет равно 22п. Очевидно, что уже при и=20
задание переходных вероятностей в виде таблицы хотя и возмож-
но, но вряд ли целесообразно.
Рассмотрим некоторые математические модели ошибок в дис-
кретном канале, позволяющие достаточно просто рассчитать пере-
ходные вероятности р(а/а) для любых последовательностей конеч-
ной длины п
Дискретный канал без памяти. Если в любой момент вероят-
ность появления символа на выходе дискретного канала зависит
только от символа на входе канала для всех пар символов на вхо-
де и выходе, то такой канал называется каналом без памяти. При-
мером дискретного канала без памяти может служить двоичный
симметричный канал (ДСК), граф которого изображен на
рис. 2.13. Каждый символ последовательности а на входе с неко-
торой фиксированной вероятностью q воспроизводится на выходе
канала правильно (q = p (0/0) =р (1 /1)), и с вероятностью рош=
= р(1/0) = р(0/,1) = 1— q — неправильно.
Для ДСК легко вычисляется вероятность получения любой по-
следовательности символов на выходе при заданной последова-
тельности на входе. Например, для последовательности длины 3
имеем Р(000/001) =qq(\— q) =q2polu.
Симметричный канал можно представить как канал, к которо-
му подключен источник ошибок (рис. 2.14). Этот источник выдает
случайную последовательность ошибок (...,et-i, et, el+1,...). Каж-
дая позиция е, складывается с соответствующей позицией а, в дво-
ичном канале по модулю 2(6, —п,®^). Там, где в последователь-
ности ошибок {е,} стоит 1, передаваемый символ изменится на
обратный, т. е. в принятой последовательности {6,} будет ошибка.
Например, если а,— 1, е,— 1, то 61 = а1Фе,= 1Ф1 = 0. Переходные
43
вероятности для стационарного симметричного канала принимают
вид
Р ({&} / {а.}) = Р (I {аJ) = Р ({еJ),
т. е. канал полностью описывается статистикой последовательно-
сти ошибок {е,}, где еге{0, 1}. Последовательность ошибок дли-
ны п иногда называют вектором ошибок длины п. Этот вектор
имеет единицы только на позициях, соответствующих неправильно
принятым символам. Число единиц (/) в векторе ошибок называют
его весом.
На практике при приеме последовательности длины п нас час-
то интересуют вероятности отсутствия и наличия в ней одной, двух
и т. д. ошибок. Для ДСК эти вероятности легко вычисляются.
Обозначим Рп (0 вероятность того, что среди п принятых символов
имеется t ошибок в любом сочетании, а через Pn*(t) —вероятность
одного заданного сочетания ошибок веса I. Тогда Pn(t) найдется
как сумма Pn*(t) для всех возможных последовательностей оши-
бок веса t. Следовательно,
^(0 = РоШ(1-Ро,Г\
Р„ (0 == спРп (0 = СпРош (1 — Рош)П 1 >
Каналы с памятью. Канал, в котором каждый символ выходной
последовательности зависит как от соответствующего символа на
входе, так и от прошлых входных и выходных символов, называ-
ется каналом с памятью. Большинство реальных каналов является
каналами с памятью. Одной из причин появления памяти является
межсимвольная интерференция, возникающая из-за ограничения
полосы пропускания канала связи. В этом случае каждый символ
на выходе канала частично зависит от нескольких следующих друг
за другом символов на входе (зависимость эта определяется им-
пульсной характеристикой канала). Другой причиной могут быть
перерывы в канале, длительность которых значительно превышает
длительность единичного элемента. В период действия перерыва
вероятность неправильного приема резко возрастает и появляется
последовательность ошибок, называемая пакетом.
В общем случае для канала с памятью можно ввести понятие
«состояние канала». Тогда каждый символ последовательности на
выходе канала будет статистически зависеть как от соответствую-
щего символа на входе, так и от состояния канала в данный мо-
мент. Под состоянием канала в заданный момент можно понимать,
например, вид последовательности входных и выходных символов
вплоть до заданного момента. Так, отражается, в частности, влия-
ние межсимвольной интерференции.
44
Различают каналы с памятью по входу и каналы с памятью по
выходу. Если выходной символ статистически зависит от входных
символов а„ а(-ь ..at-k, то такой канал называется каналом
с памятью по входу. Такой канал характеризуется переходными
вероятностями вида р^/а^ at_b a,-?,...), i= — 1, 0, 1, 2,... Тео-
ретически память канала бесконечна. Практически число симво-
лов, влияющих на вероятности правильного и ошибочного приема
символа, ограничено. Память канала может быть определена как
число символов N, начиная с которого справедливо равенство ус-
ловных вероятностей
p(ai/alt а^,.. .,ai-N)=p(al/al, а4-|,..., а,-^) (2.8)
для всех js^l.
Последовательность входных символов a,_i,..., a^N можно
представить как состояние канала сг-\ в (i—1)-й момент. Тогда
канал будет характеризоваться совокупностью переходных вероят-
ностей вида p(fi.i/at, сг-1).
Если выходной символ а, статистически зависит от нескольких
предыдущих выходных символов, то такой канал называется кана-
лом с памятью по выходу. Переходные вероятности для такого
канала записываются в виде
p(at/ai, at-i, а,_2,.. .,ah-N) =р(а,/а;, c,-i), (2.9)
где выходные символы й,-ь.. .,а^^ можно представить как состоя-
ние канала c,-i в (i—1)-й момент.
Задание канала с памятью с использованием переходных веро-
ятностей вида (2.8) или (2.9) было бы чрезвычайно громоздким.
Так, если для канала с межсимвольной интерференцией память по
входу ограничивается пятью символами, то число состояний кана-
ла будет равно 32. В общем случае, если память только по входу
или только по выходу ограничивается в двоичном канале Af симво-
лами, то число состояний равно 2ЛГ. Как видно, число состояний
растет по экспоненциальному закону в зависимости от длины па-
мяти N. Следует заметить, что некоторые реальные каналы имеют
память в десятки, сотни и даже тысячи символов!
Состояния каналов можно различать по вероятности ошибки
в каждом из состояний. Изменения вероятности ошибки можно
в свою очередь связать с физическими причинами — появлением
перерывов, импульсных помех, замираний и т. д. Такой канал
можно задать совокупностью переходных вероятностей вида
P(at, а/а,, G-i), c^L, где L — конечное множество состояний
канала.
Если предположить, что имеется статистическая независимость
между символом at и состоянием с( при условии, что заданы а, и
предыдущее состояние с,-,, то можно записать:
P(< а/а„ Ci-i)=p(&i/at, c,-i)р(а/c,-i).
45
Источники ошибок
Рис 2 15 Эквивалентная схема
дискретного симметричного кана-
ла при описании его моделью на
основе цепей Маркова
Рис 2 16 Диаграммы переходов
при описании дискретного сим-
метричного канала моделью Гиль-
берта:
а—из одного состояния в другое;
б — возможные исходы передачи в со-
стоянии 2
В этом случае необходимо задать переходные вероятности для
состояний канала и вероятности переходов p(d,/аг, с,-1)
для символов для каждого состояния канала. Таким образом, ка-
нал имеет конечное множество состояний, переходные вероятности
для которых не зависят от времени. Ошибки в каждом состоянии
возникают независимо с постоянной вероятностью. Последователь-
ность состояний является простой цепью Маркова. (Простой цепью
Маркова называется случайная последовательность состояний,
когда вероятность того или иного состояния в i-й момент полно-
стью определяется состоянием ct~i в (i—1)-й момент). Эквивалент-
ная схема такого канала представлена на рис. 2.15.
Для описания простой цепи Маркова необходимо задать пере-
ходные вероятности p(cilct-i) того, что система в i-й момент пе-
рейдет в состояние с, при условии, что в (i—1)-й момент она нахо-
дилась в состоянии Ci-i, и вероятности ошибок в каждом из
возможных состояний рОш(1). В рассмотренной модели канала
с памятью состояния канала статистически не зависят от входных
и выходных символов. Достоинством такой модели является то,
что достаточно большую память канала можно описать относи-
тельно малым числом состояний. Увеличивая число состояний,
можно более точно описать реальный канал. Однако сложность
использования модели в расчетах будет существенно возрастать
с увеличением числа состояний.
Простейшей моделью, основанной на применении математиче-
ского аппарата марковских цепей является модель источника оши-
бок, предложенная Гильбертом. Согласно этой модели канал мо-
жет находиться в двух состояниях — хорошем (состояние 1) и
46
плохом (состояние 2). Первое состояние характеризуется отсутст-
вием ошибок. Во втором состоянии ошибки появляются с вероят-
ностью Рош(2)-
Если при передаче элемента а, канал находится в состоянии 1,
то при передаче следующего элемента а,-и канал будет находиться
в том же состоянии с вероятностью рц и в состоянии 2 — с веро-
ятностью Pi2—l—Pu- Если же при передаче элемента at канал
находился в состоянии 2, то при передаче элемента a,+i он мо-
жет находиться в том же состоянии с вероятностью р-22 и в состоя-
нии 1 — с вероятностью P2i = l— Р22- Матрицу переходов из состоя-
ния в состояние обозначим Р:
Р== Рп Р^
Pzi Р22
Если рц и р22 достаточно велики, но не равны между собой, то
наблюдается тенденция к сохранению возникшего состояния 1 или
2, что имитирует канал с пакетами ошибок.
На графе (рис. 2.16,а) состояния канала изображены в виде
кружков. Направленные стрелки обозначают переходы из одного
состояния в другое, число на каждой стрелке указывает вероят-
ность перехода. Для канала, взятого в качестве примера, в состоя-
нии 2 возникают ошибки с вероятностью 0,4 (рис. 2.16,6).
Канал, представленный графом на рис. 2.16,а, имеет тенденцию
пребывать в том состоянии, в котором он находится. Большую
часть времени канал находится в хорошем состоянии (состоя-
ние 1), когда рош=0. С вероятностью 10-s канал переходит в пло-
хое состояние, когда около 0,4 элементов на выходе канала будут
ошибочными. Состояние 1 длится в среднем в течение приема 105
элементов, а состояние 2— десяти элементов. Вероятность того,
что канал в момент передачи данного элемента будет находиться
в том или ином состоянии, зависит от состояния, в котором канал
находился при передаче предыдущего элемента. Например, веро-
ятность того, что канал будет находиться в момент приема данного
элемента в хорошем состоянии, равна 1 —10 5, если он в момент
приема предыдущего элемента находился в хорошем состоянии, и
10', если он находился в плохом состоянии.
Вероятность появления того или иного состояния определяется
из системы уравнений:
Р1+Рг=1; p2p2\-\-piPu:==P\',
p2p22-\-plpl2 = P2,
где pi, р2 — соответственно вероятности того, что канал находится
в СОСТОЯНИИ 1 ИЛИ 2. Отсюда Pl=P2l/(pi2+p2l), P2 = Pl2l (Р12+Р21).
Средняя вероятность ошибки в канале, описываемом моделью Гиль-
берта, определяется выражением
п _ п _ Аг „(2)е
ГОШ - Р2Р0Ш - Рош-
"12 ~Г Р21
47
Среднее число элементов на интервале времени, соответствующем
плохому состоянию канала (средняя длина пакета ошибок), опре-
деляется по формуле
^2 = 2 = + ^AaPsi + ЗР22Р21 + ••• = I/P21.
г=1
где р2 (i) = р221Ри — вероятность того, что возникшее плохое состо-
яние канала будет распространяться на i переданных элементов.
Аналогично можно определить и среднюю длину интервала между
ошибками:
i=i
где рг (г) = pir‘p12— вероятность того, что хорошее состояние канала
будет длиться в течение времени передачи I элементов.
Для выбора кодов необходимо знать вероятность появления
t ошибок в кодовой комбинации длиной п элементов, которая мо-
жет быть найдена по формуле
I
где Р(2) (i, п) — вероятность того, что число элементов в кодовой
комбинации, переданных за время плохого состояния канала, рав-
но i; Pn(jli) — с‘п [Рош1? [1—Рош] ‘-1 —вероятность появления t
ошибок в кодовой комбинации при условии, что число элементов
кодовой комбинации, переданных за время плохого состояния ка-
нала, равно I.
Полагая, что в кодовой комбинации длиной п элементов воз-
можно появление только одного пакета ошибок, получим
Р(2) (1, п) = р2р21рпп3[2рц + р21 (п — 1)];
P(Z) (i, fl) = р^РгГ'рн-'-2 [2р,, + (га — i — 1) рп], 2 < i < п — 2;
P(Z) (п — 1, п) = 2p2p2ipn222; Р(2) (п, п) = р2р22Х-
Рассмотренная модель описывается тремя параметрами: Рош»
Pi2, Р21, которые могут быть найдены экспериментально.
Еще более простая модель источника ошибок, для описания
которой достаточно двух параметров рош и а, где а — коэффициент
группирования ошибок, предложена в [1.4J. Исследуя статистику
ошибок в каналах связи, авторы обратили внимание на то, что гра-
фик функции Рп (£>1) =ф (га) в логарифмическом масштабе по
48
обеим осям представляется в виде прямой линии. Исходя из этого
можно записать
Pn(t^l)=povlnl-a, 0<а<1.
Для канала без памяти а=0; при а=1 все ошибки сосредоточены
в виде одного пакета.
Вероятность появления в комбинации ошибок кратности t и
более может быть приближенно определена по формуле
Рп(^)~(п/0'-аРош, /<0,Зп.
Описанные выше модели дискретного канала используются для
вычисления характеристик систем ПДС. Поэтому при выборе той
или иной модели следует прежде всего исходить из требуемой точ-
ности расчетов. Разумеется, если имеется несколько моделей, обес-
печивающих приемлемую точность, следует выбирать ту из них,
которая позволит уменьшить время, требуемое для вычислений,
т. е. наиболее простую.
2.4. РАСШИРЕННЫЙ ДИСКРЕТНЫЙ КАНАЛ
Методы повышения верности. Основной причиной ошибок явля-
ются помехи в непрерывном канале, а также его неидеальность.
Причиной ошибок могут быть также неправильные действия пер-
сонала, осуществляющего как эксплуатацию различных участков
канала связи, так и самой аппаратуры ПДС.
Условно разобьем методы повышения верности на три группы
[1.4]. В первую группу включим меры эксплуатационного и про-
филактического характера, направленные на улучшение качествен-
ных показателей канала связи: повышение стабильности работы
генераторного оборудования, резервирование электропитания си-
стем передачи, выявление неисправного оборудования и его эле-
ментов и своевременная их замена, повышение культуры техниче-
ского обслуживания и, в частности, принятие специальных мер
предосторожности при проведении измерительных и профилакти-
ческих работ на каналах во время передачи дискретных сообщений
и т. п. Опыт показывает, что указанные мероприятия позволяют
уменьшить коэффициент ошибок в среднем в 5 раз.
Ко второй группе мероприятий относятся мероприятия, направ-
ленные на увеличение помехоустойчивости передачи единичных
элементов. Речь идет о таких мерах, как повышение отношения
сигнал-помеха за счет увеличения амплитуды, длительности или
спектра частот полезного сигнала, применение более помехоустой-
чивых методов модуляции и сложных сигналов, более совершен-
ных методов обработки сигналов на приеме и т. п. Применение
большинства из перечисленных методов наталкивается на серьез-
ные трудности. Так, сколько-нибудь существенно увеличить ампли-
туду сигналов, передаваемых по физической линии, нельзя из-за
4—6085 49
Таблица 2.1
№ комбинации 0 1 2 3 4 5 6 7
Вид комбинации ООО 001 010 он 100 101 по 111
опасности возниковения недопустимых переходов на соседние це-
пи. Если передача дискретных сообщений осуществляется по кана-
лу ТЧ, то мощность дискретных сигналов ограничивается из-за
необходимости не допустить перегрузку групповых усилителей.
Увеличение длительности единичных элементов с одновременным
введением интегрирования на приеме позволяет понизить вероят-
ность ошибки на элемент; однако получить удовлетворительную
верность при работе по каналам все же не представляется возмож-
ным, не говоря уже о неизбежном при этом снижении скорости
передачи. Заметного эффекта можно достичь за счет использова-
ния сложных сигналов (см. гл. 6).
К третьей группе мер по повышению верности передачи дис-
кретных сообщений относятся меры, связанные с введением избы-
точности в передаваемую по дискретному каналу последователь-
ность. Следует заметить, что, используя эти методы, можно до-
биться существенного повышения верности. При выборе способа
введения избыточности следует исходить из того, что заданную
верность передачи необходимо получить при минимальной избы-
точности. Должны приниматься во внимание и вопросы, связанные
со сложностью реализации способа.
Перейдем к общим вопросам обнаружения и исправления оши-
бок в принимаемой последовательности элементов заданной длины.
Понятие о корректирующих кодах *. Каждому символу исход-
ного алфавита сообщений объема поставим в соответствие и-эле-
ментную двоичную последовательность (кодовую комбинацию).
Возможное (общее) число последовательностей длины п равно
Дф=2п. Для обнаружения (исправления) на приеме ошибок долж-
но соблюдаться условие .УА<У0.
Если Nn=N0, то все возможные последовательности л-элемент-
ного кода используются для передачи, или, как говорят, являются
разрешенными. Полученный таким образом код называется прос-
тым, т. е. неспособным обнаруживать (исправлять) ошибки.
Пример 2.2. Для передачи сообщений, число которых равно 8 (ЛГА = 8),
используется трехэлементиый код Число комбинаций, которое можно при этом
получить, 1У0 = 23=8. Комбинации, образуемые трехэлемеитиым кодом, сведены
в табл 2.1.
Из таблицы видно, что комбинация № 0 отличается от комбинации № 1
только в одной позиции. Следовательно, если при передаче комбинации ООО про-
* Код, способный обнаруживать или исправлять ошибки, называется кор-
ректирующим.
50
изойдет ошибка в третьем элементе, то получим комбинацию 001—комбинацию
№ 1, т. е. произойдет ошибка, которую невозможно ни исправить, ии обнару-
жить
Степень различия комбинаций характеризуется расстоянием
Хемминга. Расстояние Хэмминга для любых двух кодовых комби-
наций определяется числом несовпадающих в них разрядов. На-
пример, две написанные ниже друг под другом комбинации не
совпадают в двух разрядах (помечены штрихом)
НО
Поэтому хэммингово расстояние d—2. Иначе, расстояние Хеммин-
га определяют как вес суммы по модулю 2 (ф— условное обозна-
чение суммы) этих кодовых комбинаций. Весом W кодовой комби-
нации называется число входящих в нее ненулевых элементов.
Перебрав все возможные пары кодовых комбинаций, можно
найти минимальное значение d, которое будем обозначать в даль-
нейшем d0 и называть кодовым расстоянием. Для примера 2.2
do=l. Рассмотренный в примере код является простым. Любая
ошибка (даже одиночная!) при использовании такого кода приве-
дет к тому, что переданная разрешенная кодовая комбинация пе-
рейдет в другую разрешенную кодовую комбинацию. Таким обра-
зом, простой код не способен обнаруживать и тем более исправ-
лять ошибки и имеет d0=l.
Для того чтобы код мог обнаружить ошибки, необходимо со-
блюдение неравенства При этом неиспользуемые «-эле-
ментные кодовые комбинации, число которых (No—N\), будем
называть запрещенными. Они определяют избыточность кода. Оче-
видно, что появление ошибки в кодовой комбинации будет
обнаружено, если переданная разрешенная комбинация перейдет
в одну из запрещенных. В качестве разрешенных кодовых ком-
бинаций надо выбирать такие, которые максимально отличаются
друг от друга.
Пример 2.3. Алфавит передаваемых сообщений Ад = 2. Выберем из числа
комбинаций, представленных в табл. 2.2, две. Очевидно, что ими должны быть
комбинации ООО, 111 или 001 и ПО и т. д. Кодовое расстояние d0=3. Ошибки
кратности один или два превращают любую кодовую комбинацию в запрещен-
ную. Следовательно, максимальная кратность обнаруживаемых таким кодом оши-
бок равна двум (/Оош=2).
Рассматривая коды с кодовым расстоянием </0=4, d0=5 и т. д.,
можно прийти к выводу, что t0.0iU=do—1.
Исправление ошибок возможно также только в том случае,
если переданная разрешенная кодовая комбинация переходит
4* 51
в запрещенную. Вывод о том, какая кодовая комбинация переда-
валась, делается на основании сравнения принятой запрещенной
комбинации со всеми разрешенными. Принятая комбинация отож-
дествляется с той из разрешенных, на которую она больше всего
«похожа», т. е. с той, от которой она отличается меньшим числом
элементов. Так, если в примере 2.3 при передаче кодовой комби-
нации ООО получим 001, то вынесем решение, что передавалась
комбинация ООО.
Связь между do и кратностью исправляемых ошибок определя-
ется выражением tH oM=d0/2—1 для четного d0 и /Пош= (d0—1) /,2
для нечетного do [1.1].
Итак, задача получения кода с заданной корректирующей спо-
собностью может быть сведена к задаче выбора (путем перебора)
из jV0 = 2” кодовых комбинаций N.\ комбинаций с требуемым ми-
нимальным кодовым расстоянием d0. Если п достаточно мало, то
такой перебор не представляет особого труда. Но при больших п
перебор может оказаться непосильным даже для современной
ЭВМ. Поэтому на практике получили распространение методы по-
строения кодов, не требующие перебора с целью получения кода
с заданным d0 и отличающиеся приемлемой сложностью реализа-
ции (см. гл. 7).
Помехоустойчивые (корректирующие) коды делятся на блоч-
ные и непрерывные. К блочным относятся коды, в которых каждо-
му символу алфавита сообщений соответствует блок (кодовая
комбинация) из n(i) элементов, где i— номер сообщения. Если
n(i)=n, т. е. длина блока постоянна и не зависит от номера сооб-
щения, то код называется равномерным. Такие коды нашли наи-
большее применение на практике. Если длина блока зависит от
номера сообщения, то блочный код называется неравномерным.
В непрерывных кодах передаваемая информационная последова-
тельность не разделяется на блоки, а проверочные элементы раз-
мещаются в определенном порядке между информационными *.
Равномерные блочные коды делятся на разделимые и неразде-
лимые. В разделимых кодах элементы разделяются на информа-
ционные и проверочные, занимающие определенные места в кодо-
вой комбинации. В неразделимых кодах отсутствует деление эле-
ментов кодовых комбинаций на информационные и проверочные.
К таким кодам относятся коды с постоянным весом, например ре-
комендованный Международным Консультативным Комитетом по
телефонии и телеграфии (МККТТ) семиэлементный телеграфный
код № 3 с весом каждой кодовой комбинации, равным трем.
Эффективность применения корректирующих кодов. Полезный
эффект от применения корректирующих кодов заключается в по-
* Проверочные элементы в отличие от информационных, относящихся
к исходной последовательности, служат для обнаружения и исправления ошибок
и формируются по определенным правилам (см гл. 7).
52
вышении верности. Вероятность неправильного приема кодовой
комбинации Рн"п простого кода определяется как вероятность по-
явления в кодовой комбинации хотя бы одной ошибки Р„(^1).
В случае независимых ошибок — 1 — (1—р»ш)*, где рош — веро-
ятность неправильного приема единичного элемента, a k — число
элементов в комбинации простого кода (число информационных
элементов). При использовании систематических корректирующих
кодов к исходной комбинации добавляются проверочные элементы,
позволяющие исправлять или обнаруживать ошибки. Так, если код
используется в режиме исправления ошибок и кратность исправ-
ляемых ошибок <и.ош, то
л(,ип= 2 4р^(1-д)ШГ'.
1 = С.О,|1 +1
В результате применения корректирующего кода в режиме исправ-
ления ошибок вероятность ошибочного декодирования уменьшает-
ся в k„ раз:
ь _ р<п> /п("> 1
**И - г н пМ н п 1 •
Однако это достигается за счет увеличения затрат на реализацию
системы и снижения скорости передачи информации. Если в систе-
ме, использующей простой код, скорость равна /?п бит/с, то в сис-
теме, использующей корректирующий код с исправлением ошибок,
скорость R>t=R„k/п, где k/n— коэффициент, характеризующий
потери скорости вследствие введенной в код избыточности и назы-
ваемый иногда скоростью кода. Чем больше избыточность (меньше
k/n), тем меньше скорость передачи информации, т. е. тем меньше
в единицу времени передается полезной информации.
Кодирование будет экономически оправданно, если стоимость Si
устранения ошибки в единичном элементе (бите) с помощью ис-
правления ошибок меньше стоимости потерь (S2), вызванных ис-
кажением единичного элемента при передаче. Величина S2 может
колебаться в очень больших пределах. Стоимость устранения ошиб-
ки в единичном элементе определяется выражением
где Зи — стоимость системы исправления ошибок; Saon — дополни-
тельные затраты на аренду канала, обусловленные передачей по
каналу проверочных элементов; Г —время жизни системы исправ-
ления ошибок; R„— скорость передачи информации, бит/с; рош —
вероятность ошибки на элемент; ka — коэффициент, характеризую-
щий уменьшение вероятности шибки на элемент за счет исправле-
ния ошибок (/ги>1). Очевидно, что в (2.10) 77?иРош/£и
определяет число ошибочных элементов, выданных получателю за
53
время жизни системы, а рОш/йи— эквивалентную вероятность
ошибки после исправления. Экономическая эффективность за счет
исправления ошибок Д5=5г—Исправление ошибок имеет
смысл при AS>0.
Качество реальных каналов во времени меняется, и если зада-
ны требования на верность передачи, то требуется вводить такую
избыточность, которая обеспечивала бы заданную верность даже
при самом плохом качестве канала. Напрашивается мысль о це-
лесообразности изменения избыточности, вводимой в кодовую ком-
бинацию по мере изменения характеристик канала связи. Системы,
в которых меняется избыточность с изменением качества канала,
относятся к числу адаптивных. Одним из типов адаптивных систем
являются системы с обратной связью (см. гл. 8). В этих системах
между приемником и передатчиком помимо основного (прямого)
канала имеется вспомогательный (обратный) канал.
Следует заметить, что системы без обратной связи используют-
ся обычно тогда, когда нельзя организовать обратный канал или
когда предъявляются весьма жесткие требования ко времени за-
держки сообщения. Временем задержки кодовой комбинации на-
зывается время от момента выдачи ее первого элемента источ-
ником сообщений до момента получения последнего элемента
комбинации получателем сообщений.
КОНТРОЛЬНЫЕ ВОПРОСЫ
1 Какие модели непрерывного канала Вы знаете?
2. Дайте краткую характеристику гауссовских, импульсных и сосредото-
ченных по спектру помех.
3. Что такое аддитивные и мультипликативные помехи?
4. Какие модели дискретных каналов Вам известны? Дайте им краткую ха-
рактеристику.
5. Чем отличается канал постоянного тока от дискретного канала?
6 Дайге определение индивидуального краевого искажения.
7. Определить степень изохронного искажения, если на интервале анализа
зафиксированы значения индивидуальных относительных краевых искажений:
4-20, —15, -фЗО, —26, -фб, —10 %. Ответ: биз = 28 %.
8. На рис. 2 17 изображены неискаженный единичный элемент (а) и приня-
тый искаженный единичный элемент (б). Какой метод регистрации (стробиро-
вание или интегральный) обеспечит правильный прием Пояснить, почему? Для
удобства иа рис. 2.17 нанесена шкала времени.
9 Сравните по помехоустойчивости методы стробирования и интегральный
при краевых искажениях (дроблениях).
10. Сформулируйте условия выбора метода регистрации при наличии крае-
вых искажений и дроблений.
И. Как определяется величина индивидуальных стартстопиых искажений?
12. Какие существуют методы борьбы с ошибками?
54
Рис. 2.17. Сигнал на выходе канала
постоянного тока: .................. , ,
« — при отсутствии искажений; б — иска- q j 234 5 6789 10
жеииый э)
_________________I________________
0 1 2
б)
13. Сформулируйте условия, при которых код позволяет обнаруживать
(исправлять) ошибки
14. Что такое расстояние Хемминга и кодовое расстояние?
15. Какова связь между кодовым расстоянием и кратностью обнаруживае-
мых (исправляемых) ошибок?
16. Какие коды называются блочными и непрерывными? Равномерными и не-
равномерными? Разделимыми и неразделимыми?
17. Сформулируйте условие, при котором применение корректирующего кода
окажется целесообразным.
18 Заданы вероятности ошибок различной кратности для кода с числом
разрядов п=5, р5(1) = Ю-2, Р5(2)=10~3, р5(3) = 10-5, Р5(4)=5-10~5, Р5(5) =
= 10-6. Каким должно быть кодовое расстояние для того, чтобы вероятность
неправильного приема для кода с исправлением ошибок не превышала 10“4.
Глава 3. СЕТИ ПЕРЕДАЧИ
ДИСКРЕТНЫХ СООБЩЕНИЙ
3.1. НЕКОММУТИРУЕМЫЕ
И КОММУТИРУЕМЫЕ СЕТИ ПДС
Современные информационно-вычислительные сети (ИВС), авто-
матизированные системы управления (АСУ), телематические
службы (ТС) * и телеграфные службы используют в качестве
транспортной системы сети ПДС. Абоненты ИВС и ТС (ЭВМ, тер-
минальные устройства) являются источниками и потребителями ин-
формации, которая передается по системам ПДС.
Сети ПДС, относящиеся ко вторичным сетям Единой автома-
тизированной сети связи (ЕАСС), представляют собой совокуп-
ность пунктов и линий (каналов) связи и предназначены для до-
ставки сообщений, преобразованных в электромагнитные сигналы,
в соответствии с заданным адресом при условии обеспечения задан-
ных качественных показателей по времени доставки, верности и
надежности. Пункты сети разделяются на оконечные (ОП) и узлы
* По определению МККТ телематическими называются службы электро-
связи, кроме телефонных, телеграфных и передачи данных.
55
Рис. 31 Сеть некомму-
тируемых каналов
Рис 3 2 Децентрализован-
ная система коммутации
(«=4, Л\=12,
связи (УС). Оконечные пункты содержат комплекс устройств, по-
зволяющих источнику (получателю) информации осуществлять
ввод-вывод дискретных сообщений. Оконечный пункт, расположен
ный непосредственно у пользователя — абонента системы ПДС,
называется абонентским. (АП). Узлы связи осуществляют распре-
деление сообщений на сети. Различают два основных вида УС:
коммутационные и сетевые. Узлы коммутационные (УК) осуществ-
ляют кратковременные соединения входящих в узел каналов (ли-
ний), а сетевые узлы — долговременные (кроссовая коммутация)
Каналы ПДС представляют собой совокупность технических
средств и среды распространения, которая обеспечивает при под-
ключении ОП передачу с помощью электромагнитных сигналов
дискретных сообщений от ИС к их получателям.
Сети, в которых абоненты связаны друг с другом постоянно
закрепленными (арендованными) каналами, причем каждый ка-
нал используется для обмена сообщениями только между этими
абонентами, называются некоммутируемыми (рис. 3.1). Если для
передачи информации между п абонентами необходима сеть из
N = n(n—1) /2 двусторонних каналов, то такая сеть называется
полносвязной. Применение сетей данного типа экономически оп-
равдано только в тех случаях, когда имеется необходимость в не-
прерывном взаимодействии одних и тех же абонентов, передаче
между ними потоков сообщений, полностью исчерпывающих про-
пускную способность каналов, в сочетании с очень высокими тре-
бованиями ко времени установления соединения, верности и на-
дежности передачи сообщений. Поэтому такие сети находят приме-
нение в основном в сферах управления технологическими процес-
сами промышленности, на транспорте и в военном деле.
Чтобы любой из п абонентов имел возможность обменяться ин-
формацией со всеми (п—1) абонентами, каждый ОП должен
иметь (п—1) входов-выходов. В противном случае каждый из або-
56
нентов сети во время обмена информацией с каким-либо другим
абонентом окажется не в состоянии обеспечить связь с другими
абонентами сети. Учитывая случайный характер нагрузки и, сле-
довательно, малую вероятность одновременного обмена информа-
цией каждого из ОП со всеми («—1) остальными, можно (естест-
венно, при ухудшении качества обслуживания) ограничиться мень-
шим числом входов-выходов, при этом в ОП для подключения або-
нентов к любому каналу должен иметься переключатель на (п—1)
положений (рис. 3.2). Такая сеть называется сетью с децентрали-
зованной системой коммутации. Число мест — точек коммутации,
в которых осуществляется соединение в такой сети, NK = n(n—1).
Более эффективной в большинстве случаев оказывается цен-
трализованная система коммутации, осуществляемая не у отдель-
ных абонентов, а в одном или нескольких местах — узлах (стан-
циях) * коммутации. Таким образом, назначением УК является
распределение сообщений в сети. При централизованной коммута-
ции в одном узле требуемое число каналов N=n, т. е. меньше, чем
при децентрализованной коммутации в (п—1)/2 раз, а число точек
коммутации остается тем же самым (рис. 3.3). При централизо-
ванной системе коммутации есть возможность уменьшить вдвое не-
обходимое число точек коммутации N'K=n(n—1)/2, так как цен-
трализация позволяет устанавливать соединение не через две, а
через одну точку коммутации (рис. 3.4). При этом все абоненты
могут быть одновременно заняты обменом сообщениями, т. е. име
ет место неблокирующаяся схема коммутации.
При меньшем, чем N'K, числе точек коммутации не все абоненты
имеют возможность обмениваться сообщениями одновременно.
В такой системе возможны блокировки, когда все точки коммута-
ции заняты и некоторое число абонентов (тем большее, чем меньше
точек коммутации) не могут осуществить обмен сообщениями до
их освобождения. Число точек коммутации существенно влияет на
сложность, габаритные размеры, стоимость коммутационного обо-
рудования и его эксплуатацию. В то же время от него зависит ка-
чество обслуживания абонентов: вероятность блокировки и время
ожидания.
Таким образом, в результате замены децентрализованной сети
на централизованную с одним УК, с одной стороны, может быть
получен значительный технико-экономический эффект от уменьше-
ния числа каналов (и их длины) и сокращения коммутационного
оборудования, а с другой стороны, возникает возможность бло-
кировки и, как следствие, увеличение времени доставки сообщений
получателю. Нахождение разумного компромисса между этими
противоречащими друг другу факторами и составляет основную за-
дачу построения сетей связи, в частности, сетей ПДС.
Станциями называют УК, в которые включаются ОП.
57
Рис. 3 3 Централизован-
ная система коммутации
(п=4, дгк=12> дг=4)
Рис 3 4 Неблокирую-
щая система коммута-
ции
В централизованной сети с одним УК линии между абонен-
тами и УК (абонентские линии—АЛ) могут оказаться очень длин-
ными, что неэкономично, так как эти линии являются индивиду-
альными. Это особенно существенно в сетях ПДС, для которых
характерны небольшая плотность абопенюв и небольшое относи-
тельное время работы. Естественно поэтому стремление к умень-
шению длины АЛ, что может быть достигнуто двумя путями: уве-
личением числа УК на сети и тем самым приближением УК к або-
нентам или применением концентраторов, т. е. устройств, объеди-
няющих нагрузку группы близко расположенных абонентов с уче
том неодновременности их работы, что позволяет уменьшить число
каналов на участке «УК — концентратор».
Таким образом, оказывается целесообразным построение сети
с несколькими УК- Для обеспечения возможности взаимодействия
всех абонентов сети с несколькими УК необходимо все узлы со-
единить друг с другом (линии, соединяющие УК, называются ма-
гистральными). По тем же соображениям, по которым соединять
оконечные установки через УК целесообразнее, чем применять де-
централизованную систему коммутации, имеет смысл для связи
всех УК друг с другом использовать специальные УК для комму-
тации магистральных линий. Узлы, в которые не включаются око-
нечные установки, называют узлами верхнего уровня по отноше-
нию к узлам нижнего уровня, служащим для подключения або-
нентских линий. Сеть с узлами двух и более уровней называется
иерархической. Узлы, в которые включают АЛ, называются око-
нечными, а узлы, в которые включают соединительные линии
(СЛ), — транзитными. Наряду с оконечными применяются смешан-
ные (оконечно-транзитные) узлы.
Транзитные узлы, в свою очередь, могут соединяться между со-
бой магистральными линиями, т. е. могут образовываться транзит-
ные узлы более высоких уровней. Сообщения от одного абонента
могут проходить через несколько транзитных узлов и два оконеч-
ных узла: исходящий и входящий.
58
Рис. 3 5. Принципы построения сетей
а — «каждый с каждым», б — радиальный; в — радиально-узловой
Сеть, содержащая УК, называется коммутируемой. Такая сеть
при случайно изменяющемся характере потоков сообщений позво-
ляет более полно использовать пропускную способность каналов.
В силу указанных выше достоинств при передаче дискретных со-
общений применяют централизованные коммутируемые сети иерар-
хической структуры. Децентрализованные коммутируемые сети ис-
пользуются только в космических системах связи из-за сложности
реализации на искусственном спутнике Земли узла коммутации.
Узлы централизованных сетей могут соединяться по принципу:
«каждый с каждым», радиальному или радиально-узловому. При
соединении по принципу «каждый с каждым» (рис. 3.5,а) число
пучков каналов ПДС на сети получается очень большим и равно
п(п—1)/2, где п— число узлов на сети, а емкость каждого пучка
соответственно мала. Как известно, качество обслуживания абонен-
тов (число отказов или задержанных выше нормативного времени
соединений) тем хуже, чем меньше емкость пучка каналов. Однако
сети с большим числом пучков каналов обладают высокой «живу-
честью», так как при выходе из строя каналов основного направ-
ления (непосредственно связывающих данные УК) имеется боль-
шое число каналов обходных направлений, связывающих данные
узлы через другие УК.
При радиальном принципе соединения узлов (рис. 3.5,6) коли-
чество пучков каналов па сети равно (п—1), т. е. в nl'l раз мень-
ше, чем в случае соединения каждого узла с каждым. При этом и
пучки каналов становятся крупнее, так как в каждом из них объ-
единяется нагрузка к (п—1) узлу. Несмотря на указанные досто-
инства, этот принцип построения сетей обладает низкой «живуче-
стью» (имеется возможность выхода из строя всей сети при по-
вреждении центрального узла) и неприемлем для сетей, охваты-
вающих большие территории, поскольку связи между соседними
59
узлами чрезмерно удлиняются. При радиально-узловом принципе
построения сети образуются узлы различных уровней (так, на рис.
3.5,в показаны УК трех уровней). Число пучков каналов между
узлами в этом случае равно или больше, чем (п—1), но меньше,
чем п(п—1)/2.
Для обеспечения высокой «живучести» сети, сокращения длины
линий между узлами, имеющими большое взаимное тяготение, и
сохранения достаточно больших пучков каналов применяют ком-
бинированный принцип построения, при котором узлы высшего
уровня соединяются между собой по принципу «каждый с каж-
дым», а остальные узлы — с узлами высшего уровня по радиально-
узловому принципу. При этом в отдельных случаях между сосед-
ними узлами, имеющими большое взаимное тяготение, организу-
ются прямые связи. Для повышения пропускной способности сети
(уменьшения числа отказов в установлении соединений и времени
передачи сообщений), ее надежности и живучести оконечные узлы
включаются в два ближайших транзитных узла. Кроме того, при
наличии больших потоков информации отдельные оконечные узлы
соединяются друг с другом. Определение оптимального числа уз-
лов и мест их размещения на сети представляет сложную технико-
экономическую задачу, потому что при увеличении числа узлов на
сети сокращаются расстояния между ними, за счет объединения
нагрузки увеличиваются пучки каналов и, следовательно, сокра-
щается общая стоимость каналов. В то же время увеличение чис-
ла узлов приводит к росту стоимости оборудования коммутации.
3.2. ТРЕБОВАНИЯ К СЕТЯМ ПДС
Сети ПДС должны обеспечивать доставку по адресу заданного
объема сообщений за установленное время и с нормированными
качественными показателями. Требования к различным показате-
лям сети могут значительно отличаться в зависимости от того, в
каких системах и для каких целей используется передаваемая ин-
формация. Весьма важным показателем является время доставки
сообщения, т. е. время от начала ввода сообщения в ОП до окон-
чания приема сообщения в другом ОП. При передаче плановой
или статистической информации время доставки может исчислять-
ся минутами, часами и даже сутками. Время передачи большин-
ства телеграмм может достигать десятков минут и часов. При ра-
боте в режиме диалога человека с ЭВМ задержка ответа более
чем на 2 ... 3 с недопустима. Это связано с тем, что при проведе-
нии расчетов на ЭВМ в процессе научной или конструкторской ра-
боты происходят непрерывные обдумывание и удержание инфор-
мации в кратковременной памяти человека на время ожидания
ответа и этот ответ должен быть быстрым.
Еще более жесткие требования ко времени доставки сообщений
предъявляются к системам управления быстропротекающими про-
60
Рис. 3 6 Сроки доставки дискретных сообщений
цессами, доставка сообщений в которых должна быть согласована
со скоростью протекания процесса и поэтому может измеряться
долями секунды. Время доставки сообщения определенного объе-
ма в некоммутируемых сетях определяется реальной скоростью пе-
редачи по каналам, а в коммутируемых сетях зависит также от
способа и времени распределения сообщений в УК. Объемы пере-
даваемой информации и допустимые сроки их доставки для раз-
личных систем, использующих сети связи, представлены на рис. 3.6.
Требования к скоростям передачи дискретных сообщений вытека-
ют пз объемов передаваемой информации и допустимых сроков их
передачи. Скорость работы телеграфных аппаратов составляет не-
сколько десятков бит в секунду. Одна из стандартизованных ско-
ростей телеграфирования (50 бит/с) соответствует средней скоро-
сти работы оператора на клавиатуре — 400 зн./мин. Оператор вы-
сокой квалификации может работать со скоростью до 600 зн./мин,
а в отдельные моменты времени и до 800 зн./мин, что соответству-
ет скорости телеграфной передачи 100 бит/с.
Для передачи данных МККТТ рекомендует (Рекомендация Х.1)
следующие скорости: 50, 200, 300, 600, 1200, 2400, 4800, 9600 и
48 000 бит/с. При этом скорости 200 ... 300 бит/с определяются
возможностью восприятия человеком содержания печатного текста.
При беглом чтении (просмотре) возможны большие скорости. При
воспроизведении текстовой и графической информации на дисплее
применяют скорость передачи порядка 2400 бит/с. При обмене ин-
61
формацией между ЭВМ важно обеспечить столь малое время пе-
редачи, чтобы не происходило задержек в их работе. Для этого
информация передается со скоростями 4800, 9600 и 48 000 бит/с и
выше. Диапазон скоростей 200 ... 4800 бит/с характеризует и воз-
можности передачи данных по наиболее широко используемым
каналам ТЧ (в том числе и коммутируемым). Скорость 9600 бит/с
используется для передачи по некоммутируемым каналам ТЧ. Для
ПД со скоростью 48 000 бит/с используются первичные групповые
каналы систем передачи с частотным (ЧР) или временным разде-
лением каналов (ВР).
Рисунок 3.6, на котором нанесены линии, соответствующие ско-
ростям передачи 200, 4800 и 48 000 бит/с, иллюстрирует степень
удовлетворения требований различных автоматизированных систем
к передаче требуемых объемов информации в установленное
время.
Требования к верности передачи определяются назначением ин-
формации и должны соразмеряться, с одной стороны, с последст-
виями, которые влекут за собой! искажения при передаче, а с дру-
гой стороны, с затратами, которые необходимы для повышения
верности. Так, если допустимая вероятность ошибки при телеграф-
ной передаче составляет 3-Ю-5, то в некоторых системах ПД она
не должна поевышать 10~9. Верность передачи по коммутируемым
сетям зависит как от методов повышения верности, так и от систе-
мы распределения сообщений в УК. Требование к доставке сооб-
щения по заданному адресу регламентируется вероятностью за-
сылки сообщения не по адресу и вероятностью потери сообщения
в сети. Оба эти параметра в значительной степени связаны с си-
стемой распределения сообщений в УК. Из сказанного следует, что
основные характеристики коммутируемой сети ПДС (время достав-
ки, верность, вероятность доставки по адресу) в значительной сте-
пени определяются принятой на сети системой распределения со-
общений в УК.
К сетям ПДС, как и ко всем другим сетям связи, предъявля-
ются требования по надежности, живучести, экономичности и спо-
собности к дальнейшему развитию. Требование к надежности оз-
начает, что сеть должна обеспечивать длительное функционирова-
ние с поддержанием всех вышеуказанных характеристик в задан-
ных пределах. Требование к живучести означает, что сеть должна
сохранять возможность передачи сообщений для наибольшего чис-
ла абонентов при повреждениях каналов связи и узлов коммута-
ции. Экономичность сети предполагает минимизацию расходов на
ее создание и эксплуатацию при условии выполнения сетью тре-
бований абонентов. Требование возможности дальнейшего разви-
тия обусловлено тем, что потоки сообщений, передаваемые по се-
тям ПДС, возрастают, причем во многих случаях загрузку сети не-
возможно точно определить, пока сеть не начнет функционировать.
62
Показатели коммутируемых сетей в отношении надежности, жи-
вучести и экономичности в значительной степени определяются
принятой на сети системой распределения сообщений в УК.
3.3. СПОСОБЫ РАСПРЕДЕЛЕНИЯ
ДИСКРЕТНЫХ СООБЩЕНИЙ
Как уже говорилось в разд. 3.1, доставка сообщений осущест-
вляется по сетям связи путем передачи и коммутации дискретных
электромагнитных сигналов, в которые сообщения преобразуются
в ОП-источниках. Обратное преобразование происходит в ОП-по-
лучателях сообщений. Поэтому, говоря о способах передачи дис-
кретных сообщений по каналам (линиям) связи или способах ком-
мутации ^распределения) дискретных сообщений в УК, по сути
дела, понимают передачу и коммутацию (распределение) дискрет-
ных сигналов.
При передаче дискретных сигналов обычно используются мно-
гоканальные системы, каналы в которых образованы с помощью
различных методов разделения сигналов. В системах ПДС наибо-
лее широко используют следующие виды разделения сигналов:
пространственный (ПР), частотный (ЧР), синхронный временной
(СВР), комбинационный (КР) и асинхронный временной (адрес-
ный) — (АВР). Отличие систем распределения сообщений (СПР)
от систем разделения сигналов в многоканальных системах пере
дачи (СП) заключается в том, что в СП разделяются сигналы за-
крепленных друг за другом лар: источник сообщений—получатель
сообщений (ИС,—ПСг), тогда как в СПР осуществляется образо-
вание различных сочетаний ИС,—ПС, в соответствии с адресом
вызываемого ПС,, который указывает вызывающий ИС, (рис. 3.7).
Пространственное разделение является исходным, так как або-
ненты любой сети связи отличаются именно своим пространствен-
ным положением. Всякое другое разделение, кроме пространствен-
ного, связано с некоторым преобразованием. Например, частотное
разделение преобразует пространственно разделенные каналы в
каналы, разделенные по частоте (преобразование «пространство —
частота»).
В начале развития техники связи ПР сигналов сочеталось
с пространственной коммутацией. Затем появились системы пере-
дачи с ЧР и ВР, а коммутация продолжала оставаться простран-
ственной. Это приводило к тому, что в устройствах коммутации для
сопряжения систем передачи с системами коммутации приходилось
производить двойное преобразование, например «частота — прост-
ранство на входе УК» и «пространство — частота на его выходе».
Очевидно, что целесообразно избегать таких преобразований, т. е.
применять единые методы разделения и коммутации. Последнее
получило название интеграции первого рода в отличие от интегра-
ции второго рода — объединения систем передачи и коммутации
63
ИС
ПС
Рис 3 7. Принципы разделения (а) и распределения (б) сигналов
различных видов сообщений. Преобразования одного вида разде-
ления сигналов в другой позволяют строить системы передачи и
коммутации, содержащие какой-либо один из рассмотренных спо-
собов разделения и распределения. Например, может быть построе-
на чисто временная система распределения независимо от того, со
скольких направлений и каким способом разделения образованы
каналы в УК. Действительно, пусть в УК входят цепи от п направ-
лений и каждая из них содержит N каналов. При этом одним из
способов преобразования все эти nN каналов могут быть приведе
ны к одному виду разделения, например временному. Это позволит
осуществлять их чисто временное распределение.
Из многих признаков, по которым можно осуществлять распре-
деление сигналов дискретных сообщений, практическое распростра-
нение получили пространственный и временной, а также их соче-
тания. Широко применяемый в системах передачи метод ЧР не на-
шел практического применения в системах коммутации, несмотря
на наличие большого числа изобретений в этой области, так как
все предложенные реализации пока оказываются дорогими и слож-
ными. Наиболее перспективными являются системы передачи с ВР,
которым в силу вышесказанного соответствует временная комму-
тация, поэтому на новых сетях ПДС в основу интеграции положен
временной метод.
Устройства, реализующие пространственный метод распределе-
ния, прошли путь от механических и электромеханических соедини-
телей с ручным управлением до электронных соединителей с управ-
лением по записанной программе (до ЭВМ). Общим для всех этих
устройств является то, что для каждого соединения входящего и
64
в)
Условные обозначения:
□ ~ свободные отрезки
времени
□ - данные ИС^
~ адрес ИС(.
Рис. 3 8. Временные диаграммы систем с ВР (а), СВР (б), АВР (в)
исходящего каналов устанавливается свой путь в пространстве, ко-
торый не совпадает ни с одним другим путем. При этом каждая
точка коммутации в процессе соединения используется только для
данного соединения, например входящего канала I с исходящим /.
Поэтому общее число точек коммутации при большом числе вхо-
дящих (А) и исходящих (М) каналов оказывается велико-пропор-
ционально N:M. Во временных системах распределения каждая
точка коммутации используется многократно, т. е. является общей
для элементов сообщений между разными каналами, проходящими
через нее в разные интервалы времени. Это значительно сокращает
потребное число точек коммутации и позволяет значительно умень-
шить объем коммутационного оборудования (поля).
В системах с СВР для каждого ИС отводится постоянный ин-
тервал (рис. 3.8,а и б). В связи с тем, что обычно источники дис-
кретных сообщений работают нерегулярно (активные периоды ча-
сто составляют менее 10%, а иногда и менее 1% времени), в груп-
повом канале СВР остаются свободные отрезки времени.
В отличие от систем с СВР системы с АВР динамически рас-
пределяют отрезки времени в групповом канале только между
активными в данный момент ИС (рис. 3.8,а и s). В системах с СВР
признаком, по которому сигналы отдельных каналов различаются
на приеме, является их фиксированное временное положение в
групповом канале. Поскольку в системах с АВР этим признаком
воспользоваться нельзя, приходится вводить в сообщения, переда-
ваемые по каждому из каналов, специальный отличительный при-
знак — адрес.
Соответственно методам разделения различают методы синхрон-
ного и асинхронного распределения сообщений.
Синхронное временное распределение (СВРп). При таком рас-
пределении каждому каналу (входящему или исходящему) соот-
5—6085 65
Цикл 1 Цикл 2
Рис. 3.9. Принцип СВРп
ветствует определенное временное положение. Элементы сообще-
ния, соответствующие данному каналу, занимают в групповом
тракте фиксированный временной интервал. В отличие от УК с про-
странственным распределением в УК с временным распределением
точкой подключения является не канал, а линейный тракт. На вхо-
де в УД все линейные тракты объединяются в единый групповой
тракт, а на его выходе — разделяются. Процесс СВРп сводится
к изменению временного положения канала. Например, «соедине-
нию» 2-го канала с 7-м соответствует в каждом цикле прием эле-
ментов сообщения на 2-й временной позиции и их передача на 7-й
временной позиции. Это смещение во времени осуществляется пу-
тем записи сообщения во 2-й временной позиции в запоминающее
устройство (ЗУ) и ее считыванием в 7-й временной позиции (рис.
3.9). Запоминаемой частью сообщения может, например, являться
единичный элемент. Число каналов, которое может обслужить ком-
мутатор, построенный по методу СВРп, тем больше, чем короче
длительность цикла «запись—считывание» в ЗУ и чем меньше
скорость передачи данных.
Синхронная временная коммутация наиболее эффективна для
обработки изохронных сигналов. С меньшей эффективностью ее
можно применять для коммутации неизохронных сигналов.
Асинхронное временное распределение (АВРп). В основу тако-
го распределения положены те же принципы, что и в основу АВР,
но с той разницей, что при АВРп происходит переадресация ком-
мутируемых элементов: вместо адреса входящего канала коммути-
руемый элемент получает в УУ адрес исходящего канала. Узел
коммутации АВРп имеет оперативное запоминающее устройство
(ОЗУ) с числом областей, равным числу входящих каналов (за
каждым каналом закреплена своя область). В область памяти вхо-
дящего канала под управлением сигнала набора номера записы-
вается код исходящего канала. При обнаружении коммутируемого
элемента (кода адреса) в данном исходящем канале устройство
управления (УУ) дает сигнал на считывание информации из дан-
ной области памяти. Считывание осуществляется по адресу исхо-
66
дяшего канала, в котором специальным устройством формируется
коммутируемый элемент.
Самым коротким коммутируемым элементом является значащий
момент ЗМ — момент, в который происходит смена значащей по-
зиции дискретного сигнала. Поскольку в УК большой емкости при-
ходится оперировать адресами длиной до двух десятков единичных
интервалов, то, учитывая, что один ЗМ приходится в среднем на
два единичных интервала, количество обрабатываемой информации
на один передаваемый бит в УК с АВРп может быть в 10 раз
больше, чем УК с СВРп. С учетом этого в УК с АВРп приходится
ограничивать число подключаемых каналов с высокой скоростью
передачи и предоставлять им приоритет в обслуживании по срав-
нению с каналами с низкими скоростями передачи.
В отличие от синхронных УК в узлах с АВРп сигналы не только
не регенерируются, но и получают дополнительные краевые иска-
жения (по тем же причинам, что и в системах передачи с АВР).
Достоинством УК с АВРп в случае, когда коммутируемым элемен-
том является ЗМ, выступает то, что в таком УК обеспечивается
полная прозрачность коммутируемых каналов. Поэтому УК с АВРп
находят применение в системах передачи низкоскоростных неизо-
хронных сигналов при сравнительно невысоких требованиях к вер-
ности передачи, что имеет место, например, в традиционной теле-
графии.
В УК с АВРп наряду с распределением ЗМ может быть осуще-
ствлено распределение единичных элементов, однако при этом при-
мерно вдвое уменьшается пропускная способность УК и теряется
прозрачность. Еще большие ограничения прозрачности имеют ме-
сто при распределении более длинных частей сообщения: байтов,
пакетов и целых сообщений, однако во всех случаях, кроме распре-
деления ЗМ, можно путем регенерации сигналов в УК повысить
верность передачи. При распределении единичных элементов обес-
печивается передача произвольным кодом с определенной скоро-
стью. При распределении знаков (байтов) возможна передача
только определенным кодом и с определенной скоростью. При рас-
пределении сообщений и пакетов, т. е. отрезков сообщений длиной
в десятки и сотни знаков, через УК могут передаваться сообщения
(пакеты) только определенного формата.
Различные методы АВРп образуют как бы некоторый ряд, в ко-
тором один метод отличается от другого длиной распределяемого
отрезка сообщения (рис. 3.10). Методы распределения ЗМ и еди-
ничных элементов, особенно первый (рис. 3.11,а), по своим свойст-
вам близки коммутации каналов (КК), реализуемой пространст-
венным распределением (рис. 3.11,6). Таким образом, метод АВРп
является универсальным в том отношении, что позволяет осуществ-
лять коммутацию всех видов: от прозрачных каналов (на основе
распределения ЗМ) до сообщений (см. разд. 3.4).
При этом следует обратить внимание, что при АВРп стирается
5* 67
Адрес передается <1 > Адрес передается
до сообщения I в составе сообщения
Коммутация ЗМ ! КР
\ ' КС
КК Коммутация Коммутация
битое знаков
(байтов)
а)
Рис 3.11. Метод распределения ЗММ
Рис. 3.10. Методы коммутации
(а) и метод коммутации каналов (б)
принципиальное различие между системами коммутации каналов
(КК) и коммутации сообщений (КС) *, которые раньше считались
антиподами.
В зависимости от длины накапливаемой в УК части сообщения
изменяются свойства системы коммутации. При самой короткой
накапливаемой части сообщения (ЗМ) система распределения обес-
печивает наиболее полное сходство характеристик с системой КК.
При увеличении длины накапливаемой части сообщения (переход
от ЗМ к единичным элементам, байтам) происходит частичная
потеря свойств, присущих системе КК: все более утрачивается
прозрачность сквозного канала и все сильнее проявляются возмож-
ности, присущие системам с накоплением: сопряжение разных ско-
ростей, кодов, форматов и др. Следовательно, при переходе от
способа КК к способам коммутации с накоплением в системах с
асинхронной временной коммутацией (АВК) четкая граница в отно-
шении длины накапливаемой части сообщения отсутствует.
Чем длиннее распределяемый отрезок, тем большая память тре-
буется в УК и тем больше время задержки сообщения в нем. По
мере увеличения длины коммутируемого отрезка уменьшаются
удельные затраты производительности УК (на единицу информа-
ции). При коммутации коротких отрезков сообщений (до байта
включительно) практически реализуема лишь передача адреса до
* Системы КК и КС будут подробно рассмотрены далее.
68
сообщения. При более длинных отрезках возможна передача адре-
са как до сообщения, так и в его составе. Однако используется
только второй метод, так как и в этом случае оказывается возмож-
ным выбирать в каждом УК наиболее выгодное направление пере-
дачи: более короткое, менее загруженное другими сообщениями.
3.4, СИСТЕМЫ КОММУТАЦИИ В СЕТЯХ ПДС
Распределение потоков сообщений с целью доставки каждого
сообщения по адресу осуществляется в УК с помощью коммутаци-
онных устройств. Система распределения потоков сообщений в УК
получила название системы коммутации. Под коммутацией в сетях
ПДС условимся понимать совокупность операций, обеспечивающих
в УК передачу сообщений между входными и выходными устрой-
ствами (каналами) в соответствии с указанным адресом.
Известны два основных принципа коммутации: непосредствен-
ное соединение и соединение с накоплением сообщений или их
частей. При непосредственном соединении осуществляется физиче-
ское соединение входящих в УК каналов с соответствующими ад-
ресу исходящими каналами (см рис. 3.11,а). При соединении с на-
коплением сообщений сигналы из входящих в УК каналов сначала
записываются в ЗУ, откуда через определенный промежуток вре-
мени поступают в исходящие каналы (см. рис. 3.9). Необходимость
в соединении с накоплением возникает в силу разных причин. Глав-
ной из них является то, что в момент прихода сигнала по входяще-
му в УК каналу требуемый исходящий канал может оказаться за-
нятым передачей сообщений от другого источника. В таком случае
возникают альтернативные решения: первое — уведомить ИС о не-
возможности установления требуемого соединения в данный мо-
мент, второе — запомнить входящее сообщение в УК и передать его
в исходящий канал после его освобождения от передачи предыду-
щего сообщения. Заметим, что системы, построенные по первому
принципу, получили название систем с отказами, а построенные по
второму принципу — систем с ожиданием. При этом необходимо
иметь в виду, что поскольку получение ИС отказа в установлении
соединения не освобождает его от необходимости передачи сооб-
щения, то ИС оказывается вынужденным повторять попытки уста-
новления соединения до получения положительного результата.
При этом подлежащее передаче сообщение все это время хранится
в памяти ИС. Таким образом, различие между этими принципами
коммутации заключается не в том, что в первом случае запомина-
ющее устройство отсутствует, а в том, что оно находится в ИС
(в первом случае), т. е. децентрализовано, а во втором случае —
в УК, т. е. централизовано. Это различие в месте и способе хра-
нения существенным образом влияет на услуги, оказываемые або-
нентам сетей ПДС с различными методами распределения сооб-
щений (см. разд. 3.5 и 3.6).
69
Принцип непосредственного соединения реализуется в системе
КК. Но как указывалось в разд. 3.3, КК может быть реализована
и по принципу соединения с накоплением. Поэтому коммутацией
каналов называется совокупность операций при соединении кана-
лов связи для получения сквозного канала, связывающего через
узлы коммутации один ОП с другим. При этом выражение «соеди-
нение каналов» следует понимать не только в смысле физического
соединения, но и более широко — как занятие, резервирование
средств передачи и коммутации для пары взаимодействующих ОП
на время сеанса связи. Таким образом, при КК сначала организу-
ется сквозной канал передачи ДС между взаимодействующими або-
нентами через УК, а затем осуществляется передача сообщений.
Коммутацией с накоплением называется совокупность операций
при приеме на УК сообщения или его части, накопления и после-
дующей передачи сообщения или его части в соответствии с содер-
жащимся в нем (ней) адресом.
В сети с КК (рис. 3.12,а) процесс передачи состоит из следую-
щих операций:
вызывающий абонент Абп с помощью вызывного устройства
посылает по абонентской линии в узел КК заявку на соединение
с абонентом Абт, содержащую условный адрес вызываемого або-
нента;
аппаратура коммутации узла КК по полученной заявке осуще-
ствляет соединение абонентской линии Аб.линп с абонентской
линией Аб.линт, если абоненты принадлежат одному узлу КК, или
соединительной линией между узлами, к которым принадлежат
указанные абоненты (сквозной канал может быть организован че-
рез несколько промежуточных узлов КК, где осуществляется ана-
логичная коммутация);
после организации сквозного канала связи абонент Абт полу-
чает из узла КК сигнал вызова, а абонент Абп — сигнал установ-
ления соединения;
происходит передача сообщений между абонентами, при этом
обмен может быть одно- и двусторонним, так как обычно коммути-
руются двусторонние каналы связи;
после завершения сеанса передачи сообщений и получения от
абонента сигнала отбоя аппаратура коммутации узлов КК разру-
шает ранее установленные соединения каналов.
При отсутствии свободного канала или его неисправности на
любом из участков в заданном направлении (соединительная ли-
ния между узлами КК, абонентская линия между узлом КК и Аб,„)
или отсутствии свободных станционных устройств в УК соединение
абонентов не может быть установлено; узел коммутации посылает
Абп сигнал отказа в обслуживании (сигнал занятости). Для уста-
новления соединения Абп должен повторить заявку на соединение.
Такой способ обслуживания, при котором вызов (заявка на соеди-
нение), поступивший в момент отсутствия свободных линий или
70
станционных устройств, получает отказ (теряется), называется
обслуживанием с потерями.
При системе коммутации с накоплением ОП имеет постоянную
прямую связь со своим УК (иногда с несколькими) и передает на
него сообщение, которое затем поэтапно передается через узлы
коммутации другим абонентам. Известны две разновидности систе-
мы с накоплением: система коммутации сообщений (КС) и систе-
ма коммутации пакетов (КП).
71
В сети с КС (рис. 3.12,6) процесс передачи следующий:
вызывающий абонент Абл передает в УК подлежащее передаче
сообщение вместе с условным адресом абонента Абт;
в узле КС сообщение запоминается и по адресу определяется
канал, по которому оно должно быть передано;
если канал к соседнему узлу КС свободен, то сообщение немед-
ленно передается на соседний узел КС, в котором повторяется та
же операция;
если канал к соседнему узлу КС занят, то сообщение хранится
в устройствах памяти до освобождения канала;
хранящиеся сообщения устанавливаются в очередь по направ-
лениям передачи с учетом категории срочности.
Такой способ обслуживания, при котором заявка, поступившая
в момент отсутствия свободных линий или приборов, ожидает их
освобождения, называется обслуживанием с ожиданием.
В сети с КП (рис. 3.12,6) процесс передачи следующий:
вводимое в сеть сообщение разбивается на части — пакеты дли-
ной обычно до 1000... 2000 единичных элементов, содержащие
адрес ОП получателя; указанное разбиение осуществляется или
в ОП, если он содержит ЭВМ, или в ближайшем к нему УК;
если разбиение сообщения на пакеты происходит в УК, то даль-
нейшая передача пакетов осуществляется по мере их формирова-
ния, не дожидаясь окончания приема в УК целого сообщения;
если этот канал к соседнему узлу свободен, то пакет немедлен-
но передается на соседний узел КП, в котором повторяется та же
операция;
если канал к соседнему узлу занят, то пакет может небольшое
время храниться в ОЗУ до освобождения канала;
при хранении пакеты устанавливаются в очереди по направле-
ниям передачи, причем длина очереди обычно не превышает 3—4
пакетов. Если длина очереди превышает допустимую, пакеты сти-
раются из памяти ОЗУ и их передача должна быть повторена.
На рис. 3.13 показан фрагмент сети с КП. Абонентами сети яв-
ляются АП и ЭВМ. Наряду с рассмотренными выше УК пакетов
(УКП) сеть содержит разновидность УК, называемую концентра-
торами (КТ), —коммутационные узлы, осуществляющие объедине-
ние нагрузки от нескольких АП. В концентратор с одной стороны
включается большое число малонагруженных каналов (обычно
абонентских линий), а с другой — небольшое число сильно нагру-
женных каналов, идущих к УК- Как показано на рис. 3.13, пакеты,
относящиеся к одному сообщению, могут передаваться по разным
маршрутам в зависимости от того, по каком}' из них в данный
момент они с наименьшей задержкой могут прийти к адресату.
В связи с тем, что время прохождения по сети пакетов одного со-
общения может быть различным (в зависимости от маршрута и
задержек в УКП), порядок их прихода в ОП (к получателю) мо-
жет не соответствовать порядку пакетов в передаваемом сообще-
72
Рис 313 Маршруты передачи пакетов от ВЦ, и АП| к ВЦ> и АП2
нии. Способ передачи пакетов одного сообщения получателю в про-
извольном порядке, при котором упорядочение возлагается на
абонента-получателя сообщений, называется режимом передачи
датаграмм. Наряду с передачей датаграмм в сетях с КП исполь-
зуется режим виртуального соединения, при котором упорядочение
пакетов в сообщении осуществляется в УК, выдающем сообщение
ОП-получателю. В последнее время применяются исключительно
виртуальные соединения.
Обслуживание КП следует отнести к комбинированному мето-
ду: с ограниченным ожиданием и отказами.
Кроме рассмотренных выше сетей с КК, КС и КП применяют
комбинированные сети, включающие разные комбинации этих ме-
тодов коммутации.
3.5. УПРАВЛЕНИЕ В СЕТЯХ ПДС
Современные сети ПДС охватывают огромные территории
с удаленными друг от друга разнообразными ОП и УК, большим
числом систем передачи разных типов и действуют в сложных ус-
ловиях постоянного изменения потоков сообщений, состояния сис-
тем передачи, узлов коммутации. Обеспечение нормальной работы
сети и ее развития в условиях изменяющихся внешних воздействий
осуществляется системой управления. Таким образом, к перечис-
ленным в разд. 3.1 трем основным элементам сети ПДС: ОП, УК и
каналам — следует добавить четвертый — систему управления.
Именно система управления призвана объединить в одну слаженно
действующую структуру отдельные элементы сети и обеспечить
выполнение возложенных на нее задач.
Основной задачей системы управления сетью ПДС являются
обеспечение доставки сообщения по адресу в заданное время с ус-
73
тановленным качеством, включая поддержание в рабочем состоя-
нии отдельных технических средств (ОП, УК, каналов), выбор пу-
тей передачи сообщений в УК в соответствии с адресом и приори-
тетом с учетом состояния сети, преобразование сообщений в соот-
ветствии с заданным алгоритмом, управление потоками сообщений
в УК и ОП. В задачи управления входят также материально-тех-
ническое обеспечение нормальной работы и развития сетей, плани-
рование этого развития, создание правил пользования сетями и
тарификация услуг связи, регулирование отношений с абонентами.
Функции управления реализуются с помощью трех основных
процессов:
сбора сведений о заявках абонентов на обслуживание сетью,
о состоянии каналов и оборудования ОП и УК, ходе технологиче-
ского процесса, включая передачу управляющей информации от
объектов контроля к устройствам управления;
выработки решения о необходимости и возможности принятия
тех или иных мер по обеспечению оптимального функционирования
отдельных средств или сети в целом на основе имеющейся инфор-
мации о состоянии сети и в соответствии с алгоритмами системы
управления;
реализации принятого решения путем выдачи необходимых
команд и передачи сигналов управления на исполнительные орга-
ны объектов управления и (или) обслуживающему персоналу.
Из вышеизложенного следует, что система управления может
выполнять свои функции техническими средствами, действующими
по заранее заданному алгоритму, либо часть функций выполнять
техническими средствами, а часть — обслуживающим персоналом,
либо только обслуживающим персоналом. Системы первого типа
называются автоматическими, второго типа — автоматизированны-
ми. Большинство существующих систем управления в сетях ПДС
относится ко второму типу.
На принцип организации системы управления сетью ПДС на-
кладываются два противоположных требования. С одной стороны,
оптимизация работы сети в целом требует возможности воздейст-
вия из единого центра на все ресурсы на основе знания потоков
сообщений и состояния средств всей сети, т. е. так называемого
централизованного управления. С другой стороны, сложность и
большие пространственные размеры сетей, быстротечный характер
изменения потоков сообщений, высокие требования к надежности
и живучести сети и, наконец, неэффективность передачи на боль-
шие расстояния значительных потоков контрольной и управляю-
щей информации требуют децентрализации управления. Компро-
миссное решение заключается в сочетании того и другого
принципов на основе многоуровневой системы управления: центра-
лизованной в отдельных регионах и децентрализованной в масшта-
бах сети в целом.
74
функции системы управления и алгоритмы ее работы зависят
от того, является ли сеть коммутируемой или нет и какая система
коммутации принята на сети. В некоммутируемых сетях ПДС при-
менение концентрации приводит к тому, что при превышении ин-
тенсивности нагрузки некоторого предела информация будет
теряться (в системах с отказами) или накапливаться (в системах
с ожиданием). Избежать перегрузки системы можно путем управ-
ления входящими в сеть потоками сообщений, т. е. путем введения
запоминающих устройств у абонентов-источников сообщений (что
в теории передачи сигналов называется управляемым источником).
При передаче сообщений из одного узла коммутируемой сети
к другому может использоваться несколько путей, проходящих че-
рез различные УК- Порядок выбора таких путей определяется так
называемым планом распределения сообщений. План распределе-
ния сообщений определяет очередность выбора исходящих направ-
лений из данного узла ко всем остальным УК сети. План распре-
деления сообщений для сети представляет собой совокупность
планов распределения для всех узлов. Принцип, который заложен
в основу большинства используемых в сетях ПДС планов распре-
деления сообщений, следующий. Сообщения должны, как правило,
проходить по кратчайшему пути. При невозможности использова-
ния кратчайшего пути могут предусматриваться обходные пути,
причем для каждой связи предусматривается определенное число
обходных направлений, используемых в заданной очередности или
в случайном порядке. Крайним является случай передачи сообще-
ний с применением всех возможных путей. Критерием длины пути
обычно служит число транзитных участков. Необходимо иметь
в виду, что передача по обходному пути, с одной стороны, увеличи-
вает вероятность уменьшения задержки сообщений, но, с другой
стороны, более длинный путь увеличивает загрузку сети и тем са-
мым ухудшает условия доставки сообщений. Наряду с числом
транзитных участков критериями длины пути могут служить длина
пути (в километрах), надежность пути, время задержки в УК и др.
План распределения информации рассмотрим на примере фраг-
мента сети, представленного на рис. 3.14. Для передачи некоторо-
го потока сообщений из УКа в УКг можно использовать пути, со-
держащие разное число транзитных участков. Кратчайшим явля-
ется путь АГ, который принято называть направлением первого
выбора. Более длинный путь АБГ, содержащий два транзитных
участка, называется соответственно направлением второго выбора.
Аналогично определяются направления третьего и последующих
выборов. Пути выбора всех узлов фрагмента сети с УК обозначе-
ны на рис. 3.14 стрелками с цифрами. В случае совпадения по дли-
не нескольких путей, как это имеет место в рассматриваемом при-
мере для направлений ДЕГ и ДАГ, содержащих по два транзит-
ных участка, очередность выбора устанавливается произвольно
75
Рис. 3.15. Зависимость коэф-
фициента использования кана-
ла К от емкости пучка
или с учетом других факторов (длины пути в километрах, надеж-
ности пути и т. д.). Пример плана распределения сообщений в виде
матрицы распределения маршрутов для УК\ части сети (без узлов
В и Ж), изображенный на рис. 3.14, имеет следующий вид:
а
. . АБ
^А- ад].
“ад
УКк УКГ УК УК'
ь I Д Е
12 4 3
2 13 2
4 3 12
При получении на УК адреса узла, в который включен абонент-по-
лучатель сообщений, в соответствии с планом отыскивается сво-
бодный канал в направлении первого выбора и производится сое-
динение (в УК систем с КК) или передача сообщения (в УК сис-
тем с КН). Если свободные каналы в направлении первого выбора
отсутствуют, то в зависимости от принятого алгоритма обслужива-
ния сообщений данного приоритета или отыскивается свободный
канал в направлении второго выбора и т. д., или абоненту пере-
дается сигнал отказа (сигнал «Занято» в УК систем с КК), или
сообщение записывается в ЗУ (в УК систем с КН). Аналогичный
процесс повторяется во всех УК по выбранному пути передачи со-
общений.
В процессе функционирования при значительных изменениях
нагрузок или пропускных способностей ветвей и УК сети первона-
чальный план распределения сообщений может оказаться неопти-
мальным. Система управления, обеспечивающая оперативную кор-
рекцию плана распределения сообщений в соответствии с изменя-
ющейся ситуацией на сети, называется системой динамического
управления. Методы динамического управления распределения со-
общений в УК делятся на детерминированные и статистические.
В свою очередь, оба эти метода делятся на разовые и групповые.
В детерминированных методах маршруты определяются примени-
тельно к ситуации на сети в данный момент времени без учета
76
предшествующих ситуаций. Статистические методы позволяют кор-
ректировать маршруты на основе анализа накапливаемых данных
о вероятности установления соединения или о задержках в пере-
даче сообщений (пакетов) в том или другом направлении, полу-
ченных в процессе обслуживания предыдущих заявок. Разовые
методы определяют маршруты для каждой заявки в отдельности,
а групповые — для группы заявок.
При выборе того или иного метода управления стремятся по
возможности уменьшить служебную управленческую информацию,
передаваемую по сети. Важным требованием является также ис-
ключение возможности образования «петель», что может происхо-
дить в случае занятия или неисправности каналов всех направле-
ний к какому-либо УК. Если, например, при передаче сообщений
из УКА в УКБ (рис. 3.14) ветви аДБ и аьг окажутся неисправны
или перегружены, система управления должна не допускать воз-
никновения циркуляции сообщений по кольцу аАГ— аГЕ — а£д —
— аДА~аАГ И Т- Д’
3.6. СРАВНИТЕЛЬНЫЕ ХАРАКТЕРИСТИКИ
СИСТЕМ КОММУТАЦИИ
Система коммутации в значительной степени определяет свой-
ства сети в целом, в том числе и перечень возможных услуг, пре-
доставляемых абонентам. Сравним различные системы коммутации
по технико-экономическим характеристикам и перечню услуг, ко-
торые они предоставляют абонентам.
Использование каналов связи. Основным преимуществом систе-
мы КС перед КК является высокая эффективность использования
магистральных каналов, которая при КС достигает 80%, а в ЧНН
может приближаться к 100%. Такую высокую эффективность при
КС определяет наличие очереди сообщений, записанных в памяти
узлов. Наличие очередей может приводить к задержке сообщения
в сети, измеряемой минутами и даже десятками минут.
В сетях с КК загрузка каналов ограничивается допустимым
процентом отказов из-за занятости всех каналов в пучке, которая
обычно принимается равной 1...2%. В теории массового обслужи-
вания для систем с отказами между долей вызовов, получивших
отказ р0, и числом каналов в пучке А% установлены отношения,
которые иллюстрирует рис. 3.15. Например, при р0=2% соотноше-
ние между числом каналов в пучке А% и коэффициентом к их ис-
пользованию в ЧНН характеризуется следующими величинами:
JVn==2, /(=12,5%, А% = 4, /(=25%, А% = 10, /(=50%, .¥„ = 20, К=
— 65%. Поскольку каналы состоят, как правило, из нескольких
участков, вероятность отказа на составном канале (общие потери)
^о.п будет больше вероятности отказа на каждом из участков в от-
77
дельности:
л.п^1 -п о — Ро«).
i=i
где п. — число участков каналов, участвующих в соединении. По-
этому фактический коэффициент использования каналов в ЧНН
окажется меньше, чем указано выше. Так, если на каждом из че-
тырех участков сети poi = 2%, общие потери вызовов составят
Т’оп = 8%. Увеличение потерь вызовов приводит к росту повтор-
ных вызовов, вследствие чего повышается загрузка каналов и уве-
личивается вероятность отказа в соединении Поэтому ухудшение
качества обслуживания ниже известного предела приводит к лави-
нообразному возрастанию числа повторных вызовов и, как резуль-
тат, к нарушению действия сети с КК-
На сетях с КК за абонентами закрепляются оба направления
передачи — прямое и обратное (рис. 3.16,а), а обмен между або-
нентами на сетях ПДС в большей части бывает односторонним
с чередующимися периодами передачи и приема. При передаче
сообщений в одном направлении обратное направление не исполь-
зуется для передачи сообщений, что приводит к двукратному сни-
жению степени использования каналов на сетях с КК по сравне-
нию с сетями с КН (рис. 3.16,6). Эффективность использования
каналов на сетях с КК несколько снижается еще и потому, что
между узлами образуется не один пучок каналов, как на сетях
с КН (рис. 3.16,в), а несколько отдельных, более мелких пучков
(рис. 3.16,г) с разными скоростями передачи. На сетях с КП из-за
наличия постоянной очереди на передачу обеспечивается теорети-
чески столь же высокое использование каналов, как на сетях с КС.
То обстоятельство, что длина очереди на передачу в системах с КП
по сравнению с КС гораздо меньше, не ухудшает сколько-нибудь
заметно использования каналов — важно то, что очередь хотя и не-
большая, но существует. Необходимо отметить, что в системах
с накоплением сообщений в центрах коммутации есть возможность
улучшения использования магистральных каналов (рис. 3.17,а —
при КК; рис. 3.17,6 — при КН) путем повышения скорости переда-
чи по ним.
Кроме сообщений от абонентов по каналам сети передаются
служебные данные: номера абонентов, запросы и дополнительные
услуги, подтверждения о доставке и т. п. На сетях с КК основная
часть служебных данных передается лишь в начале связи, во вре-
мя установления соединения, после чего может быть передан боль-
шой объем полезных сообщений. Поэтому доля последних в общей
загрузке каналов на сетях с КК максимальна. На сетях с КС и КП
доля полезных сообщений меньше, так как служебные данные пе-
редаются с каждым сообщением (пакетом). Наименьшая доля по-
лезных сообщений будет, естественно, на сетях с КП, поскольку
длина пакетов сравнительно невелика и, кроме того, для управления
78
л)
6)
г)
Рис. 3.16. Использование двусторонних каналов при системе:
а — КК; б — КН и пучков каналов при системе, в — КН. г — КК
УК УК УК
в)
б)
Рис 3 17. Скорости передачи дискретных сообщений при:
а —КК: б —КН
79
потоками пакетов требуется передача служебных данных Напри-
мер, на действующих сетях с КП доля полезных сообщений состав-
ляет около 10 20% и предполагается ее увеличение до 30 . 40%.
Нормальное фукционирование сети с КС не зависит от нерав-
номерности суточной нагрузки, а сетей с КК и КП — существенно
зависит, что приводит к необходимости использования дополни-
тельных каналов или ограничения входящей нагрузки Следова-
тельно, число магистральных канатов зависит от шести факторов
неравномерности суточной нагрузки, наличия очередей в узлах
коммутации, двустороннего или одностороннего характера исполь-
зования канала, возможности повышения скорости передачи по
межузловым каналам, дробления пучков при КК, обусловленного
разными скоростями передачи по каналам, необходимости в пере-
даче служебных данных
Следует отметить, что приведенный анализ использования кана-
лов предполагает постоянную загрузку канала сообщениями после
установления соединения Такое условие далеко не всегда выпол-
няется Так, при обмене данными оператора АП с ЭВМ активный
период составляет 1 10% времени сеанса связи В этом случае
закрепленный канал при КК будет в паузах простаивать При КП
этого простоя может не быть, так как межузловые каналы закреп-
ляются не за абонентом, а находятся в коллективном пользовании.
Малое время установления соединения в цифровых сетях ПДС
с КК достигается путем освобождения каналов или входов ИС
(ЭВМ) или тех и других одновременно в паузах диалога Такой
режим использования сети с КК получил название быстрой ком-
мутации каналов (БКК)
Особенно эффективным является режим БКК, при котором на
время пауз освобождаются абонентские линии, входы систем обра-
ботки данных, межузловые каналы В режиме БКК за счет высо-
кого быстродействия ЭВМ в УК и высокоскоростных общих кана-
лов сигнализации (ОКС) время установления соединения состав-
ляет около 1 с, что соизмеримо с сетями КП
Существенное влияние на эффективность сети ПДС оказывает
использование абонентских линий, поскольку их удельный вес
в общей стоимости сети при малой плотности абонентов весьма
велик Система КС допускает весьма высокую загрузку абонент-
ской линии — в среднем до 0,8 Эрл (по сравнению с 0,1 0,3 Эрл
в системах с КК) Для сети с КС характерно также отсутствие за-
грузки линии повторными вызовами, возможными в сетях с КК и
КП Это иногда позволяет в сети с КС сократить число абонент-
ских линий и оконечных установок для абонентов, обладающих
высокой загрузкой В телеграфной сети общего пользования, где
загрузка оконечных установок обычно большая, последнее преиму-
щество КС оказывается очень важным В сетях с КП использова-
ние абонентских линий вдвое лучше, чем в сетях с КК, за счет
одностороннего характера передачи, но хуже, чем в сетях с КС
80
Таким образом, можно сделать вывод о том, что наилучшее
использование пропускной способности магистральных каналов и
абонентских линий обеспечивает система с КС, а наименьшее —
система с КК Улучшить использование пропускной способности
межузловых каналов в системе с КК можно, применяя многока-
нальные системы разделения сигналов с АВР и режим БКК
Преобразование скоростей, кодов, алгоритмов. Весьма важным
следствием наличия накопления сообщений или их частей в УК *
является возможность выдачи сообщений, отличающихся от при-
нятых такими признаками, как код, скорость и др В сетях с КН
каждый из абонентов независимо от скорости передачи и приня-
того в оконечной установке кода может связаться с любым другим
В сетях с КК абонентские установки в зависимости от их скорости
передачи включены в отдельные подсети
Верность передачи сообщений Сети с КН обеспечивают боль-
шую верность передачи сообщений, чем сети с КК, так как повы-
шение верности производится не в длинном сквозном канале,
а в межузловых каналах В синхронных цифровых сетях ПД с КК
благодаря регенерации сигналов во всех элементах сети (каналах,
мультиплексорах, УК) обеспечивается высокая верность передачи
(коэффициент ошибок меньше, чем 10 6 на знак), что удовлетворя-
ет подавляющее большинство пользователей
Предоставляемые сетью услуги Одна из особенностей сетей
с КС — простота организации многоадресной (циркулярной) свя-
зи В сетях с КК можно также создать многоадресные соединения,
но лишь в тех случаях, когда в оконечных установках не использу-
ется обратная связь для повышения скорости Низкое качество су-
ществующих каналов делает невозможным отказ от применения
обратной связи, поэтому осуществление многоадресной связи в се-
тях с КК весьма ограничено Кроме того, установление многоадрес-
ной связи в сетях с КК требует незанятости всех абонентов, кото-
рые должны участвовать в соединении Это условие трудно вы-
полнимо, особенно при значительном числе адресатов, поскольку
вероятность незанятости всех требуемых абонентов резко падает
с увеличением их числа
Радикальный способ уменьшения вероятности занятости або-
нентов заключается в резком снижении допустимой нагрузки або-
нентских линий (т е в реализации достаточно высоких скоростей
передачи), что может быть обеспечено в цифровых сетях ПД К то-
му же цифровые сети с КК позволяют в большинстве случаев об-
ходиться без специальных мер защиты от ошибок, что способству-
ет дальнейшему улучшению перспектив многоадресной передачи на
сетях с КК
* Сети, в которых используются УК с накоплением сообщений называют
сетями с коммутацией с накоплением (КН) К сетям с КН относятся сети с КП
и КС
6—6085 81
Характерной особенностью метода КС является легкость введе-
ния категорий срочности, различаемых по допустимому времени
доставки сообщения получателю («приоритет сообщений»). Эта
особенность — прямое следствие того, что сообщение может быть
задержано в УК значительное время. В сетях, в которых длитель-
ная задержка сообщения исключена (КК, КП), использование при-
оритетов сообщений практически невозможно. Единственная воз-
можность введения приоритетов здесь состоит в предоставлении
(или непредоставлении) соединения с УК («приоритет абонен-
тов»). Это соединение может быть предоставлено немедленно, не-
смотря на загрузку сети, за счет отказа в соединении абонентам
низшей категории. Часто используется ожидание освобождения
занятого пути в течение небольшого отрезка времени.
Естественным следствием наличия большой памяти в узле
КС является возможность задержанной доставки сообщения,
т. е. выдачи сообщения получателю в удобное для него время
(а не во время работы отправителя). Задержанная доставка —
это услуга, полезная при организации сети на территориях боль-
шой протяженности, охватывающих ряд часовых поясов.
Память (и соответственно очереди) в УК оказывает непосред-
ственное влияние не только на загрузку каналов, но и на способ-
ность работы узла в режиме диалога. Совершенно очевидно, что
достаточно большой объем памяти приводит к появлению значи-
тельных задержек в передаче сообщений через УК. Вслед-
ствие этого узлы КС не способны передавать сообщения в ре-
жиме диалога. Наиболее близки требованиям работы в режиме
диалога узлы КК- Узлы КП задерживают сообщения в своей па-
мяти на большее время, чем узлы КК, однако суммарное время
нахождения пакета в сети (доли секунд — единицы секунд)
обычно приемлемо для диалоговой связи.
Время доставки сообщений. По сравнению с сетями с КС сети
с КК обеспечивают в принципе меньшее время передачи сооб-
щений за счет исключения времени накопления сообщений в узлах.
Однако это преимущество сетей с КК весьма относительно, если
учитывать возможность передачи сообщений между узлами КС
со скоростями, более высокими, чем скорости поступления сооб-
щений от абонентов.
Основной целью при разработке системы КП было обеспече-
ние малого времени доставки информации от ИС ее получателю.
Для работы в интерактивном режиме* время передачи пакета
по сети КП в одном направлении не должно превышать 0,5 с.
Если считать, что пакет в среднем проходит четыре УК транзи-
том, то с учетом оконечных УК цикл «запись — считывание» в ЗУ
Интерактивны» режим работы предусматривает получение абонентом отве-
та на переданное сообщение (режимы диалога, «запроса-ответа», «обратной свя-
зи» ).
82
о
а А б Б в В г
11 | | *-------
-Общее время прохождения
сообщения
О©(3)@
1—1—I—I—J
3)
I ।_1-1-U1--1
(2)'- 1111 “ J—*
О " " “-1
О' '' “
и _—Общее время------э
прохождения пакетов
— пакеты
6)
Рис. 3.18. Временная диаграмма прохождения сообщений по сети:
а —с КС, б-с КП (на рисунке- а, б, в, г —время прохождения пакетов по каналам связи
между УК, А, Б, В, Г—ьремя задержки пакетов в УК)
происходит 5 раз. Полагая, что среднее время ожидания очереди
в каждом УК равно времени передачи одного пакета, получим,
что это время, равное циклу «запись — считывание» в ЗУ, со-
ставляет 0,05 с. При длине пакета 2000 бит скорость передачи
на межузловом участке должна составлять 2000/0,05=40 кбит/с.
Обычно используется стандартизованная скорость передачи
48 кбит/с. Время передачи по сетям с КП меньше, чем по сетям
с КС. Это достигается в результате возможности передачи паке-
тов в УК КП сразу после его поступления, не дожидаясь приема
всего сообщения, как это имеет место в УК КС. Это положение
иллюстрируется рис. 3.18.
Необходимо отметить, что при КП малое время доставки дан-
ных обеспечивается для однопакетных сообщений, которые пре-
обладают в сетях ЭВМ. Для длинных сообщений скорость пере-
дачи на сетях с КП снижается за счет большой удельной доли
адресной и другой управляющей информации и перемешивания
пакетов одних сообщений с пакетами других сообщений. Поэтому
для передачи длинных сообщений более эффективными оказыва-
ются сети с КК.
Устойчивость сети к перегрузкам. Понятие устойчивости сети
к перегрузкам, вообще говоря, неоднозначно и может опреде-
ляться по-разному. Если под устойчивостью к перегрузкам пони-
мать обеспечение максимально возможной пропускной способно-
сти в условиях перегрузки, то сеть с КС наиболее устойчива
вследствие практически неограниченной памяти в узлах комму-
тации. В случаях значительной перегрузки (например, при по-
вреждениях или непредвиденном возрастании нагрузки) на сетях
с КК и КП может быть обеспечена нормальная передача сооб-
щений только для малой части абонентов, а большая часть або-
нентов будет получать отказы.
Из проведенного сравнения следует, что нет оснований проти-
вопоставлять разные системы коммутации, каждая из них имеет
рациональные области применения, определяемые характером по-
токов нагрузки на сети и требованиями абонентов. В то же время
6* 83
ни одна из систем коммутации не обеспечивает эффективного
построения сети связи для достаточно широкого класса сообще-
ний и разнообразных требований абонентов. Вследствие этого в
последнее время начали разрабатываться гибридные сети, в ко-
торых используется не одна, а две или даже три системы ком-
мутации.
Сочетание разных систем коммутации особенно целесообраз-
но на сетях, объединяющих большое число абонентов с отличаю-
щимися друг от друга величинами нагрузки, характером ее рас-
пределения во времени, объемами сообщений, используемой око-
нечной аппаратурой. На таких сетях при небольшой средней на-
грузке и передаче сообщений большими массивами в небольшое
число адресов доля потери времени на установление соединений
сравнительно невелика и предпочтительнее использовать систему
с КК- При передаче же многоадресных сообщений, необходимости
обеспечения приоритетности сообщениям высокой категории сроч-
ности и при большой загрузке абонентских установок более эф-
фективно использовать систему с КС. При передаче коротких со-
общений в интерактивном режиме наиболее целесообразна си-
стема с КП.
В качестве одного из вариантов такого совмещения рассмот-
рим сеть, построенную на основе систем КК и КП. Известно, что
при отказах порядка 1 % использование пропускной способности
каналов в системе КК не превышает 50%. Остальные 50 % про-
пускной способности могут быть использованы для передачи па-
кетов при сравнительно небольшом увеличении отказов. Длинные
сообщения в такой сети передаются методом КК, реализуемым
на основе коммутации байтов, а короткие и многоадресные —
методом КП. Последний в случае необходимости обеспечивает
также преобразование скоростей, кодов и способов передачи. До-
стоинством рассматриваемой сети является использование общего
пучка каналов для передачи сообщений всех видов.
Разрабатываются совмещенные сети ПДС, в которых пре-
дусматривается адаптивное перераспределение пропускных способ-
ностей между разными системами коммутации в зависимости от
состояния входных потоков.
3.7. СЕТЬ ТЕЛЕГРАФНОЙ СВЯЗИ
Принципы построения. Телеграфная сеть страны состоит из че-
тырех коммутируемых сетей:
сети общего пользования (ОП), по которой передаются теле-
граммы, принятые в городских отделениях связи (ГО), районных
узлах связи (РУС) или непосредственно на телеграфных узлах
и доставляемые адресатам (учреждениям, предприятиям, частным
лицам);
84
сети абонентского телеграфирования (АТ), по которой пере-
даются телеграммы или организуются телеграфные переговоры
между установленными у абонентов этой сети оконечными або-
нентскими установками;
сети международного абонентского телеграфирования «Телекс»,
по которой передаются телеграммы или организуются телеграф-
ные переговоры между оконечными установками абонентов этой
сети, находящихся в нашей стране и за ее рубежами;
международной телеграфной сети «Гентекс», по которой осу-
ществляется обмен телеграммами между предприятиями связи на-
шей страны и стран Европы.
Кроме перечисленных в состав телеграфной сети страны вхо-
дит сеть некоммутируемых (арендованных) каналов.
Телеграфная сеть является самой старой и наиболее развет-
вленной сетью низкоскоростной системы ПДС. Она построена по
комбинированному принципу, при котором узлы высшей катего-
рии соединяются по принципу «каждый с каждым», а узлы бо-
лее низкой категории — по радиально-узловому принципу. На
сети имеются узлы трех типов (рис. 3 19): главные (ГУ), рас-
положенные в Москве, столицах некоторых союзных республик
и крупных областных (краевых) центрах, где пересекаются боль-
шие потоки телеграфных сообщений; областные (ОУ), являю-
щиеся центрами областных телеграфных связей; районные (РУ),
являющиеся центрами районных телеграфных связей. Телеграф-
ный узел Москвы является центральным узлом и выполняет функ-
ции руководящего в оперативном отношении узла на телеграф-
ной сети страны. Главные узлы соединены между собой, с ОУ
зоны и в некоторых случаях с ОУ других зон по принципу «каж-
дый с каждым». Областные узлы соединяются с соответствую-
щими ГУ, в зону которого они входят, и с РУ своей зоны. Рай-
онные узлы соединены с ОУ, в зону которых они входят, и с сель-
скими и городскими отделениями *.
Телеграфная сеть страны непрерывно развивается и совершен-
ствуется. Перспективная телеграфная сеть страны в соответствии
с принципами ЕАСС будет иметь структуру, представленную на
рис. 3.20 В ее состав будут входить транзитные узлы (ТУ), око-
нечные местные станции (ОМС), коммутационные подстанции
(ПК), магистральные каналы между ТУ, ТУ и ОМС, между ОМС,
а также абонентские линии, соединяющие ГОС, РУС, ОС (от-
деление связи сельское) и абонентские установки (Аб) с ОМС
и ПК. Транзитные узлы, соединяемые по принципу «каждый с
каждым», служат для организации связи между ОМС. Путем
первого выбора является путь от одного ОП (Аб, ГОС, РУС, ОС)
* Отдельные абоненты АТ, а также городские отделения ГО включаются
непосредственно и в узлы других типов.
85
до другого через ОМ.С (показано штриховой линией на рис. 3.20).
Путь второго выбора проходит через входящий ТУ (ТУ4 на
рис. 3.20). Путь третьего выбора проходит через исходящий ТУ
(ТУ3 на рис. 3.20). И, наконец, путь четвертого выбора проходит
через оба эти ТУ (ТУ3 и ТУ4 на рис. 3.20).
Сеть общего пользования. Сеть общего пользования предус-
матривает организацию по всей стране отделений связи (ГО, РУС,
ОС), куда отправители сдают телеграммы и которые обеспечи-
вают доставку телеграмм непосредственно получателю. Телеграм-
ма может быть адресована в любой населенный пункт страны,
где имеется отделение или узел связи.
Телеграфная сеть общего пользования (Тлг ОП) прошла боль-
шой путь развития и на разных его этапах базировалась на прин-
ципах КС, КК и их сочетаний. В настоящее время сеть ОП на-
ходится на этапе перехода от комбинации принципов КК+КС
к принципу KC-j-KK с перспективой полного перехода к прин-
ципу КС. Построение сети по принципу КК+КС получило назва-
ние прямых соединений.
86
Рис. 3.21. Структурная схема системы ПС
Система прямых соединений (ПС) на Тлг ОП заключается
в предоставлении тому или иному ГО или РУС временного пря-
мого соединения через УК каналов с другими ГО или РУС. Схе-
ма телеграфной связи по системе ПС приведена на рис. 3.21.
Аппараты ГО и РУС подключаются местными соединительными
линиями к близлежащим УК, которые соединяются друг с другом
пучками магистральных каналов. Вызывные приборы аппаратов
обеспечивают посылку на узел сигналов вызова, набора номера,
отбоя, а также осуществляют автоматические включение и вы-
ключение телеграфного аппарата в соответствии с сигналами, по-
ступающими от узла.
Для передачи телеграмм по системе ПС телеграфист одного
ОП набирает на вызывном приборе номер вызываемого ОП, в ре-
зультате чего коммутационные приборы узлов автоматически
устанавливают требуемое соединение каналов между этими пунк-
тами. С трансмиттера первого оконечного пункта осуществляется
автоматическая передача предварительно отперфорированных те-
леграмм, принимаемых аппаратом другого ОП. Для образования
прямого телеграфного канала между вызывающим и вызываемым
оконечными пунктами необходимо наличие свободных маги-
стральных каналов между всеми узлами, участвующими в этом
соединении, и местной линии между последним узлом и вызывае-
мым пунктом.
Число каналов на низовой сети (от ОУ до ГО или РУС) обыч-
но мало (2 ... 3), поэтому такие каналы гораздо чаще оказы-
ваются занятыми, чем каналы магистральной сети. Если связь
первого оконечного пункта ГО1 с последним узлом коммутации
(ст. Г на рис. 3.21) может быть получена со сравнительно малой
вероятностью отказа (1 ... 5%), то на участке местной линии от
ст. Г до второго оконечного пункта ГО2 вероятность отказов мо-
жет достигать 20 . .. 30 % (при нагрузке 0,2 ... 0,3 Эрл). При
этом вызывающий пункт будет получать частые отказы и через
некоторое время повторять вызовы. В результате бесполезно
87
занимаются магистральные каналы и коммутационные приборы
узлов, замедляется прохождение телеграмм, расходуется время
телеграфистов на повторные вызовы.
Кроме того, для передачи телеграммы непосредственно в ОП
зоны другого узла необходимо знать номер, присвоенный этому
пункту. В случае адресования телеграммы в ГО связи необходи-
мо еще знать часы работы отделения, так как в ряде случаев
доставка телеграмм из него производится не круглосуточно. Как
правило, отправитель телеграмм этих сведений предоставить не
может, а иметь соответствующие справочники во всех отделениях
связи слишком неудобно. Поэтому в случае занятости местной
линии к ОП оказалось более целесообразным принимать на по-
следнем узле входящие телеграммы на реперфоратор, а затем
передавать их в оконечный пункт по мере освобождения местной
линии. Таким образом, система ПС по принципу построения яв-
ляется комбинированной: на магистральном участке она построе-
на по принципу КК, а на низовом участке осуществляется репер-
фораторный переприем, основанный на принципах КС.
На первых этапах развития сети ПС использовались, комму-
тационные узлы с декадно-шаговыми соединителями, на которых
применялась открытая нумерация. В настоящее время на сети
ПС практически принята шестизначная нумерация: три первые
цифры определяют номер узла, а последние три — номер оконеч-
ного пункта. Узлам ПС присваиваются номера 101 ... 599, ГО —
001 . . . 499, РУС — 500 ... 599. Аппараты ОП оборудованы авто-
ответчиками, с которых для подтверждения правильности уста-
новления соединения посылается текст с наименованием данного
пункта.
Помимо внутрисоюзной системы ПС существует международ-
ная Тлг ОП «Гентекс» для обмена телеграммами между теле-
графными предприятиями некоторых европейских стран. Око-
нечными пунктами являются аппараты, установленные на цен-
тральных телеграфах (ЦТ) столиц этих государств и наиболее
крупных городов. В отличие от внутрисоюзной сети ПС, «Гентекс»
является обособленной сетью, работает по системе с отказами
(без переприема телеграмм в оконечном узле), на ней принята
пятизначная нумерация с двузначным номером узла.
В отличие от сети, построенной по принципу КК+КС, в ко-
торой УК работают в основном по методу КК, в сети, построен-
ной по принципу КС+КК, основные (транзитные и часть оконеч-
ных) узлы работают по методу КС, а оконечные узлы КК служат
в качестве концентраторов нагрузки для узлов КС.
Проследим, например, путь передачи телеграммы из предприя-
тия г. Н на завод в г. М (рис. 3.22). Написанную телеграмму
курьер доставляет в ближайшее к предприятию ГО связи г. Н,
где ее принимают, оформляют и передают в областной узел свя-
зи. Здесь телеграмма сортируется по направлению и передается
88
Рис. 3.22. Путь телеграммы
Рис. 3.23. Структурная схема систе-
мы АТОЛ
в ГУ, где ее вновь сортируют по направлению и передают в ОУ,
а затем в ГО связи г. М, обслуживающее завод-адресат. Из ГО
телеграмма доставляется адресату. Из этого простого примера
видно, что вследствие узлового построения телеграфной сети ха-
рактерным является большой объем транзитной корреспонденции.
В рассмотренном примере телеграмма претерпела три переприе-
ма: в ГО г. Н она являлась исходящей, в ГО г. М — входящей,
а в остальных — транзитной. На крупных узлах сети общего
пользования транзитная нагрузка составляет до 80 ... 90 % об-
шей нагрузки. В среднем каждая передаваемая телеграмма пре-
терпевает три переприема, а в отдельных случаях — шесть-семь.
Если процесс переприема телеграмм не автоматизирован, то
в каждом пункте переприема телеграмму необходимо вручную
принять, рассортировать по направлениям и затем вручную пере-
дать. Простейшим способом ручной коммутации сообщений яв-
ляется прием телеграмм перфоратором с выдачей перфоленты,
отрыв ленты, ее сортировка по адресу и перенос ее к трансмит-
теру нужного исходящего канала. Неавтоматизированный способ
переприема требует большого парка телеграфной аппаратуры и
числа телеграфистов на каждом пункте переприема, вызывает
замедление в передаче телеграмм, связанное с внутриузловой
обработкой, и является источником появления ошибок в пере-
даваемом тексте.
Схема системы автоматизации транзита телеграмм с отрывом
и транспортировкой перфоленты (АТОЛ) представлена на
рис. 3.23. Транзитные телеграммы, поступающие в узел по вхо-
дящим каналам, принимаются на телеграфные аппараты с ре-
перфораторов РП. Телеграфист отрывает перфоленту с текстом
телеграммы, вставляет ее в прорези бланка, на котором пишет
адрес назначения, и отправляет по транспортеру на сортировку.
Сортировщик назначает телеграмму на соответствующий исхо-
дящий канал и отправляет ее по транспортеру к соответствую-
89
щему трансмиттеру ТР. Применение системы АТОЛ повышает
производительность труда по сравнению с неавтоматическим пе-
реприемом на 35 ... 40 % за счет возможности выполнения те-
леграфистом вспомогательных операций (оформление бланков,
ведение журнала) во время передачи телеграмм Система обес-
печивает высокий коэффициент использования каналов (£=0,8),
но не дает заметного выигрыша в скорости прохождения теле-
грамм через узел вследствие сохранения ручной сортировки.
Дальнейшее развитие автоматизированных систем коммутации
телеграфных сообщений идет по пути замены электромеханиче-
ских коммутационных приборов электронными устройствами и
ЭВМ. Использование в УК системы КС быстродействующих ЭВМ,
содержащих различные накопители, позволило полностью авто-
матизировать процесс переприема телеграмм. В ближайшей пер-
спективе намечается переход телеграфной сети полностью на ме-
тод КС. При этом в дополнение к станциям КС, установленным
в территориальных (транзитных) и части областных узлов (наи-
более крупных), во всех областных узлах и крупных городах бу-
дут установлены УК с КС меньшей производительности, в кото-
рые будут включены ГОС, РУС и ОС. Высвобождаемые при этом
емкости УК с КК будут использоваться для развития сети або-
нентского телеграфирования.
Сеть абонентского телеграфирования. Телеграфная связь об-
щего пользования не в полной мере удовлетворяет интересам
предприятий и учреждений, нуждающихся в оперативной связи
с получением незамедлительных обратных сообщений. Телеграм-
мы, как правило, накапливаются, прежде чем курьер предприя-
тия доставляет их в отделение связи. Процесс передачи н по-
следующей поставки телеграмм адресату также требует опреде-
ленного времени. Большое число телеграмм, доставляемых в
отделение связи к концу рабочего дня для предприятий и учреж-
дений, создает значительные пики нагрузки на сети общего поль-
зования, что приводит к замедлению прохождения телеграмм от
отправителя до адресата.
Перечисленные недостатки сети общего пользования отсут-
ствуют в сети абонентского телеграфирования (АТ), в основу ко-
торой положен принцип максимального приближения услуг теле-
графа к предприятиям и учреждениям. Это достигается установ-
кой оконечных телеграфных аппаратов непосредственно в пред-
приятиях и учреждениях. Предприятие, имеющее такой аппарат,
включенный через соединительную линию в коммутационные
станции сети АТ, становится абонентом этой сети, которому пре-
доставляются возможности:
получения по немедленной системе соединения с любым дру-
гим абонентом этой сети и ведения с ним телеграфного пере-
говори;
90
Аб установка Станция АТ
Станция АТ Аб установка
Канал
Рис 3 24 Структурная схема абонентской телеграфной связи
передачи телеграмм другим абонентам сети АТ независимо
от присутствия обслуживающего персонала у приемного аппа-
рата;
соединения со станционным аппаратом своего УК для переда-
чи сообщения абонентам, не включенным в сеть АТ (например,
абонентам сети ПС);
прием сообщений, поступивших от абонента другой сети через
местный узел коммутации.
Развитие сети АТ приводит к значительной разгрузке сети
общего пользования и в первую очередь от транзитной коррес-
понденции. При этом в существенной степени снимаются пики
нагрузки, определяющиеся телеграммами, поступившими от пред-
приятия к концу рабочего дня. Сеть АТ во многом аналогична
сети ПС, однако если в сети АТ можно мириться с занятостью
каналов и необходимостью повторных вызовов, то в сети ПС,
как указывалось, это нерационально. Поэтому в сетях АТ прин-
цип коммутации каналов строго выдерживается на всех стадиях
соединения.
Схема абонентской телеграфной связи приведена на рис. 3.24.
Оборудование оконечной установки сети АТ аналогично обору-
дованию оконечного пункта сети ПС. В качестве оконечной те-
леграфной аппаратуры в основном применяются рулонные аппа-
раты. Использование рулонных аппаратов на абонентских связях
значительно удобнее, так как нет необходимости наклеивать те-
леграфную ленту на бланк, а при отсутствии абонента сообщение
фиксируется на рулоне. Поскольку на сети АТ применяются лен-
точные и рулонные аппараты, на всех ленточных аппаратах уста-
новлены счетчики числа знаков в строке. Это устройство обеспе-
чивает при передаче с ленточного аппарата на рулонный вклю-
чение сигнализации на передающем аппарате о необходимости
пересылки знаков перевода строки и возврата каретки.
К аппарату придается устройство автоответа, позволяющее
принимать сообщение в случае отсутствия абонента. Вызывной
прибор (ВП), оборудованный номеронабирателем, вызывной и
отбойной кнопками и двумя сигнальными лампочками, позволяет
производить вызов УК (станции АТ) и автоматическое включение
аппарата по команде с узла (см. рис. 3 24). Абонентские уста-
новки соединены соединительными линиями (СЛ) с ближайшими
91
станциями АТ. Вызов узла коммутации производится нажатием
кнопки «Вызов» на ВП. Аппаратура абонентской панели (АПа)
регистрирует сигнал вызова, и УК приводится в состояние го-
товности приема адресного блока (в сети АТ — импульсов на-
бора номера). При этом на вызывной прибор посылается сигнал
«Разрешение набора номера».
Кроме АП и УК аппаратура узла включает в себя переходное
устройство (ПУ), обеспечивающее подключение к центру меж-
дугородных каналов. После установления соединения с требуе-
мым абонентом сообщение передается из одного АП в другой.
Разновидностью абонентского телеграфа является междуна-
родный абонентский телеграф «Телекс», предназначенный для
обеспечения документальной связью посольств, торгпредств, ино-
странных корреспондентов и других абонентов, передающих со-
общения в другие страны. Эта сеть объединяет до 100 стран. На
сети «Телекс» применяют систему набора номера абонентов с по-
мощью диска или клавиатуры телеграфного аппарата. В послед-
нем случае телеграфный аппарат вызывающего абонента вклю-
чается сразу же после посылки сигнала вызова. Набор номера
вызываемого абонента осуществляется путем передачи на УК
стартстопных комбинаций. Все сигналы, поступающие со станции
на аппарат абонента, также передаются стартстопными сигнала-
ми («Ответ станции», «Соединение», «Занято» и др.)
3.8. СЕТИ ПЕРЕДАЧИ ДАННЫХ
Для передачи данных используют следующие сети:
некоммутируемых (арендованных) каналов связи — каналы
ТЧ, широкополосные, телеграфной связи, цифровые;
неспециализированные для передачи данных — телефонной
сети (ТФ), телеграфной сети (АТ);
специализированные для передачи данных «сети данных об-
щего пользования».
При передаче данных по арендованным каналам Администра-
ция связи предоставляет в распоряжение абонентов только ка-
налы, к которым абоненты могут подключать собственную аппа-
ратуру передачи данных (АПД). Предоставляемые каналы могут
быть двух- или четырехпроводными и работать в режимах:
односторонней передачи сообщений;
поочередной двусторонней передачи сообщений.
В случае предоставления четырехпроводных каналов возмож-
на также двухсторонняя одновременная передача сообщений.
При передаче данных по ТФ сети сначала устанавливается
соединение между абонентами, а затем производятся переклю-
чение на АПД и передача данных Соединение абонентов и по-
следующее переключение на АПД могут осуществляться вручную
(рис. 3.25,а) или автоматически (рис. 3.25,6).
92
сер V
Рис 3 25 Структурная схема ПД по телефонной сети:
а — ручное переключение, б —автоматическое переключение
Ручное соединение обеспечивается с помощью номеронабира-
теля телефонного аппарата. После установления соединения те-
лефонными аппаратами абоненты вручную осуществляют пере-
ключение канала телефонной сети на АПД (УПС). При автома-
тическом соединении все операции, производимые обслуживаю-
щим персоналом в случае ручного соединения (снятие микроге-
лефонной трубки, ожидание ответного сигнала станции, набор
номера, получение ответа вызываемого абонента, переключение на
АПД), выполняются оборудованием обработки данных ООД с по-
мощью устройства автоматического вызова (УАВ).
Процедура автоматического установления соединения регла-
ментируется рекомендацией МККТТ V.25, а стык УАВ с ООД
осуществляется по сигнальным цепям (серии 200). Стык УПС с
ООД осуществляется по информационным цепям (серии 100) со-
гласно рекомендациям МККТТ серии V.
Поскольку телефонная сеть не предназначалась для передачи
данных, ее некоторые характеристики (неравномерность ампли-
тудно-частотной характеристики АЧХ и нелинейность фазочастот-
ной характеристики ФЧХ, кратковременные перерывы, импульс-
ные помехи и др-), не оказывающие заметного влияния на каче-
ство передачи речи, значительно снижают верность передачи дан-
ных. Верность передачи определяется в основном помехами,
возникающими в электромеханическом оборудовании городских
АТС, поэтому ее величина зависит от типа АТС: в координатных
93-
коэффициент ошибок составляет 2-10—5; в декадно-шаговых до
2-10~2. Загруженность АТС также влияет на верность передачи.
Междугородные соединения обычно имеют гораздо лучшие по-
казатели по верности (на один-два порядка). Внедрение коор-
динатных и квазиэлектронных, а затем и электронных АТС и
МТС будет способствовать значительному повышению качества
передачи данных по ТФ сети.
Для повышения верности передачи по телефонной сети до
требуемой величины применяются устройства защиты от ошибок.
До последнего времени скорость передачи данных по ТФ
сети не превышала 1200 бит/с. Согласно Рекомендации V.21
МККТТ (ГОСТ 20852—75) двусторонняя одновременная переда-
чи данных по каналам сети ТФ осуществляется со скоростями
по 200 ... 300 бит/с, а согласно Рекомендации V.23 (ГОСТ
20865—75) двусторонняя поочередная передача данных — со
скоростями 600 и 1200 бит/с. Успехи в развитии модемов
и адаптивных корректоров позволили в последнее время перей-
ти на более высокие скорости — 2400 и 4800 бит/с (в соответствии
с Рекомендациями V.26 бис и V.27 МККТТ). Современная АПД
позволяет обеспечить верность передачи данных по ТФ сети не
ниже 10“6.
Число абонентов сетей ПД во много раз меньше числа те-
лефонных абонентов (порядка 0,5 ... 2%). Для подавляющей
части абонентов ПД характерны малые объемы данных, что по-
зволяет даже при скорости передачи 1200 бит/с обеспечить дли-
тельность одного сеанса ПД не более единиц минут (сотые доли
эрланга). Столь относительно малое число абонентов ПД и ко-
роткие сеансы передачи свидетельствуют о невозможности отри-
цательного влияния передачи данных на работу телефонной сети.
При необходимости передачи по сети ТФ малых объемов дан-
ных могут использоваться многочастотные тастатурные ТА. Пе-
редача данных осуществляется манипуляцией на тастатуре после
установления соединения, а прием данных происходит на вычис-
лительном центре с помощью модема, который преобразует мно-
гочастотные сигналы от тастатурных аппаратов в дискретные со-
общения.
При передаче в интерактивном режиме паузы приводят к уве-
личению общей длительности сеанса ПД, вследствие чего в неко-
торых случаях возможно негативное влияние ПД на сеть ТФ.
Поэтому интерактивный режим передачи требует в основном по-
строения специализированных сетей ПД. Телефонная сеть не мо-
жет быть использована для передачи данных в случаях, когда:
нагрузка, создаваемая абонентом ПД, превышает присущее для
телефонных абонентов значение; абоненты ПД нуждаются в спе-
цифических услугах, не обеспечиваемых сетью ТФ (например,
в многоадресной связи); сеть не обеспечивает в нужных направ-
лениях необходимые режимы (например, автоматическое уста-
94
новление междугородного соединения); время установления со-
единения или надежность сети не удовлетворяют требованиям
абонента.
Сеть АТ и сети телеграфного типа (ПД-200, ПД-2400) явля-
ются асинхронными * сетями ПДС. В таких сетях для связи ООД
с УК используются абонентские линии (физические цепи) и ка-
налы многоканальных систем передачи. Узлы коммутации соеди-
нены между собой пучками каналов. Перед УК эти нучки рас-
щепляются на отдельные каналы. Такое расщепление позволяет
применять системы передачи как с ЧРК, так и с ВРК, а в УК
устанавливать как аппаратуру с пространственной, так и времен-
ной системой коммутации. Такая свобода в выборе аппаратуры
систем передачи и систем коммутации позволяет по мере техни-
ческих и экономических возможностей постепенно добавлять и
заменять аппаратуру на более совершенную и экономичную.
Сеть АТ, имеющая значительно меньшую емкость по сравне-
нию с телефонной и обеспечивающая работу только кодом
МТК-2 со скоростью 50 бит/с, обладает еще более ограниченны-
ми возможностями в отношении ПД:
низкая пропускная способность (5 ... 6 зн./с);
большое время установления соединения (несколько десятков
секунд);
недостаточные верность (коэффициент ошибок -~10-4) и на-
дежность.
Достоинством сети АТ для ПД является то, что она построе-
на на основе дискретных каналов, к которым может быть непо-
средственно подключено ООД. Сеть АТ быстро развивается в
количественном отношении и оснащается новым коммутационным
оборудованием, построенным на основе ЭВМ, что расширяет воз-
можности ее использования и для ПД.
Сеть ПД-200 предназначена для передачи дискретных сигна-
лов со скоростями до 200 бит/с без ограничений по коду н спо-
собу синхронизации. При ее построении используется общая с
телеграфными сетями АТ и общего пользования коммутационная
и каналообразующая аппаратура. Время установления соедине-
ния составляет примерно 40 с и будет уменьшено до 30 с. Ко-
эффициент ошибок по знакам (без УЗО)—порядка 10-3. Сеть
обеспечивает получение абонентами ряда сигналов о причинах
неустановленного соединения. Удельная нагрузка в ЧНН не
должна превышать 30 % при числе соединений в час не более
пяти. Установление соединения в сети ПД-200 осуществляется на
скорости 50 бит при стартстопном методе коррекции с 7,5 эле-
ментами на знак.
* Асинхронными называются сети, в которых отсутствует синхронизм в ра-
боте их элементов. ООД, систем передачи, УК.
95
Повышение верности передачи данных по сети ПД-200 до
10~6 обеспечивается с помощью УЗО, реализованных в ООД ЕС
ЭВМ (абонентский пункт ТАП-2, мультиплексоры передачи дан-
ных МПД-3 и МПД-10) и абонентском пункте типа АП-КК-
Таким образом, сеть ПД-200 может обеспечивать передачу
данных значительному числу абонентов с большими скоростями
и верностью, чем сеть АТ-50.
Сеть ПД-200 — первый этап развития сети ПД с коммутацией
каналов (сети ПД-КК). Второй этап базируется на внедрении
электронных УК, построенных на асинхронном принципе и обеспе-
чивающих предоставление абонентам дополнительных услуг, а для
ограниченного числа абонентов — передачу со скоростями до
2400 бит/с (ПД-2400).
Сети ПД общего пользования создаются для удовлетворения
потребностей в передаче данных тех абонентов, которых не устра-
ивают характеристики неспециализированных сетей.
В соответствии с рекомендациями МККТТ серии X на специ-
ализированных сетях используют системы с КК и КП.
Цифровая синхронная сеть данных (ЦССД) использует УК
с коммутацией каналов. Структура ЦССД представлена иа
рис. 3.26. Как видно из рисунка, она двухуровневая: первый уро-
вень соответствует транзитным узлам УК1 *, размещаемым в мес-
тах достаточно больших потоков нагрузки и соединенным по прин-
ципу «каждый с каждым»; второй уровень — это оконечные узлы
коммутации УКз, располагаемые в областных (республиканских,
краевых) центрах и городах с достаточно большой нагрузкой.
Сигналы от ООД поступают в аппаратуру канала данных
(АКД), которая выполняет функции согласования ООД с сетью.
Сигнал поступает на вход АКД по цепям стыка в соответствии
с Рекомендацией МККТТ Х.21 в виде 8-разрядных байтов. В АКД
сигналы приобретают конвертную структуру и передаются уже
в виде конвертов, состоящих из десяти битов: первый бит — ста-
тусный, второй бит служит для синхронизации, а остальные восемь
являются информационными, соответствующими одному знаку со-
общения. Использование в составе конверта статусного бита, ука-
зывающего на состояние канала (ведется передача данных или
сигналов управления), соответствует образованию отдельного вре-
менного служебного подканала и обеспечивает прозрачность сети
по последовательности битов.
Следует отметить, что наличие в конверте статусного и синхро-
низирующего битов приводит к необходимости повышения скоро-
стей передачи на выходе АКД до 0,75; 3,0; 6,0; 12 кбит/с при ско-
ростях на входе АКД соответственно 0,6; 2,4; 4,8 и 9,6 кбит/с.
* Станции коммутации данных (СКД) размещаются в УК, наряду с циф-
ровыми системами передачи ЦСП и другим оборудованием.
96
Рис 3 26 Структурная схема ССД
Сигналы от АКД по абонентским линиям поступают в мульти-
плексор передачи данных, который целесообразно располагать
в линейно-аппаратных цехах городских АТС. Далее сигналы дан-
ных в групповом потоке ЦСП со скоростью 64 кбит/с поступают
в УКг, а оттуда по междугородным СЛ в виде такого же цифрово-
го потока передаются в УКь
Передача сигналов между УК1 и УК2 может осуществляться не
только по ЦСП, но и по аналоговым системам передачи путем
использования модемов на скорости 64...128 кбит/с. Согласно
Рекомендации МККТТ Х.51 в основном потоке может быть орга-
низовано пять каналов по 12 кбит/с, каждый из которых содержит
два канала по 6 кбит/с или четыре канала по 3 кбит/с или 16 ка-
налов по 750 бит/с. Низкоскоростные сигналы (50 ... 200 бит/с)
ООД, работающих в стартстопном режиме, могут вводиться в ка-
налы со скоростью 750 бит/с методом асинхронного сопряжения.
Высокоскоростные сигналы (48 кбит/с) преобразуются в конверт-
ную форму и со скоростью 64 кбит/с передаются так же, как вы-
ходные сигналы МПД.
Принципы коммутации в ЦССД во многом совпадают с прин-
ципами коммутации в цифровых телефонных сетях (временная
коммутация и цифровое коммутационное оборудование; управляю-
щие устройства на основе средств вычислительной техники; жест-
кая синхронизация между коммутационным оборудованием и ка-
налами, подключенными к управляющим устройствам; интеграция
систем коммутации и передачи; регенерация сигналов в коммута-
ционном оборудовании). В то же время наличие некоторой специ-
фики и большого разнообразия услуг абонентам ПД приводит
к появлению других требований к УК данных по сравнению с циф-
ровыми АТС. Эти отличия таковы: 1) необходимость коммутации
каналов с различными скоростями передачи; 2) значительно мень-
шая скорость передачи данных по сравнению с телефонной переда-
7—6085 97
чей по цифровой сети; 3) коммутируемая часть сообщения имеет
формат 10-битного конверта (в АТС сообщения коммутируются
отрезками либо в 1 бит, либо в 1 байт); 4) необходимость комму-
тации сигналов абонентов, работающих стартстопным способом.
Наибольшее влияние на структуру коммутационного поля син-
хронного коммутатора данных в УК. оказывают первые две особен-
ности.
Наиболее предпочтительной структурой коммутационного поля
для коммутации данных является однозвенный временной комму-
татор; при одной и той же емкости пространственно-временной
коммутатор сложнее временного, в котором, кроме того, могут пол-
ностью отсутствовать внутренние блокировки, что очень важно при
коммутации разноскоростных сообщений.
Большое достоинство временного коммутатора—его способность
с одинаковым качеством обслуживать нагрузку, поступающую по
каналам с различными скоростями. В то же время в многоступен-
ных коммутационных полях вероятность блокировки для более вы-
сокоскоростных каналов может оказаться больше, чем для низко-
скоростных, так как возможны случаи, когда какая-либо'промежу-
точная линия, пригодная для обслуживания таких каналов, не
будет использована ввиду ее частичного занятия каналом с более
низкой скоростью.
Принципы синхронизации на магистральном участке ЦССД
аналогичны принятым в цифровых телефонных сетях. Некоторые
упрощения в ЦССД связаны с малым числом уровней коммутации
(не более двух) и относительно небольшой скоростью межстанци-
онных потоков (64 кбит/с вместо 2048 кбит/с в ТФ сетях).
Рекомендуется принцип синхронизации магистральных УК,
а также всего оборудования сети от генератора одного (главного)
узла коммутации. Для повышения живучести сети в случае выхода
из строя главной станции ведущую роль может принять на себя
одна из заранее выбранных ведомых станций.
На местном участке ЦССД также рекомендуется применять
принцип принудительной синхронизации, причем скорости рабо-
ты мультиплексоров и АКД данного участка полностью определя-
ются задающим генератором местного УК. Тактовая частота, вы-
рабатываемая в местном УК, передается по цифровому тракту
64 кбит/с в связанный с ней МПД и обеспечивает принудительную
синхронизацию его генератора. Далее на участке МПД —- АКД
предполагается непрерывная передача по абонентской линии сиг-
налов синхронизации. В качестве синхросигнала при этом исполь-
зуется последовательность битов синхронизации, предусмотренных
в формате 10-битного конверта.
Система сигнализации ЦССД служит для обмена служебными
сообщениями, необходимыми для установления соединения и разъ-
единения между абонентами и УК, а также между УК-
Сигнализация на абонентском участке сети осуществляется
98
согласно Рекомендации МККТТ Х.21, регламентирующей набор
сигналов, а также способы, форматы и последовательности их пе-
редачи при взаимодействии абонента с сетью. В сети этот прото-
кол реализуется местным УК, к которому подключена линия або-
нента.
Наличие в формате фазирующего бита позволяет довести по
АКД хронирующие сигналы сети, на основе которых АКД синхро-
низирует ООД как по битам, так и по 8-разрядным байтам.
Сигнализация на межстанционном участке осуществляется по об-
щему каналу сигнализации (ОКС), что обеспечивает время соеди-
нения на сети менее 1 с, хорошую помехозащищенность (коэффи-
циент ошибок с учетом использования УЗО 1010) и широкий набор
служебных сигналов. Эти сигналы создают большие удобства або-
нентам, информируя их о причинах невозможности установления
соединения, в результате чего уменьшается поток повторных вызо-
вов. Перечень используемых в соответствии с Рекомендациями
МККТТ Х.96 и Х.60 сигналов прохождения вызова содержит более
20 сигналов, в числе которых «Ошибка в процедуре набора», «Но-
мер изменен», «Вызов перенаправлен», «Перегрузка сети», «Пере-
грузка линий», «Перегрузка оборудования станции» и др.
Важнейшая характеристика ЦССД — полная прозрачность
в отношении последовательности битов, достигаемая благодаря
полному отделению информационного канала от служебного под-
канала, функцией которого является информирование станции или
ООД о том, используется ли основной информационный канал
в данный момент для передачи сигналов управления или собствен-
но данных *.
Применение в ЦССД цифровой коммутации с управлением от
ЭВМ и совершенных систем синхронизации позволяет сравнитель-
но несложно реализовать принципы быстрой КК, что значительно
расширяет возможности ЦССД и повышает ее экономичность.
Узлы коммутации, построенные на базе быстродействующих
ЭВМ, в сочетании с высокоскоростными ОКС позволяют обеспе-
чить очень малое время установления соединений (меньше 1 с).
Высокая помехоустойчивость цифровых систем передачи и комму-
тации обеспечивает высокую верность передачи сообщений (коэф-
фициент ошибок в канале не хуже 1 • 10~б на знак).
Важным показателем ЦССД является широкий перечень услуг,
предоставляемых абонентам в соответствии с Рекомендацией
МККТТ Х.2:
1. Прямой вызов. Позволяет абоненту получить соединение
с другим заранее выбранным абонентом без набора номера путем
нажатия соответствующей кнопки в ООД. Эта услуга позволяет
резко уменьшить время установления соединения на сети.
* Это позволяет в информационном канале передавать любую последова-
тельность битов, не опасаясь имитации служебных сигналов.
7* 99
2. Замкнутая группа абонентов. Эта услуга позволяет опреде-
ленному кругу абонентов связываться друг с другом, но препятст-
вует связи других абонентов сети с абонентами данной группы.
(Абонент может принадлежать одновременно к нескольким замк-
нутым группам.) Например, на правах замкнутой группы абонен-
тов могут быть введены ведомственные службы, подобные службе
Телекс или сети общего пользования с факсимильным методом
передачи.
3. Вызов по сокращенному адресу. Используется, когда абонент
взаимодействует с ограниченным числом абонентов (не более 100).
При вызове абонент передает в сеть не полный номер, а только
порядковый номер вызываемого абонента в списке закрепленной
за ним группы.
4. Многоадресная связь. При этой услуге предусматривается
установление многоадресной связи от одного пункта передачи
к нескольким пунктам приема. Адреса нужных абонентов вызыва-
ющий абонент указывает путем последовательного набора соответ-
ствующих номеров.
5. Перенаправление вызова. Эта услуга позволяет вызываемо-
му абоненту посылать в сеть заявку о передаче входящих к нему
вызовов на другой назначенный адрес.
6. Идентификация вызванного абонента. Эта услуга дает воз-
можность уведомить вызывающего абонента об адресе, куда был
фактически направлен вызов.
7. Идентификация вызывающего абонента. Услуга, позволяю-
щая уведомить вызванного абонента об адресе вызывающего або-
нента. Эти услуги, традиционно предусматриваемые в современных
телеграфных сетях, чрезвычайно полезны и в сетях ПД. Исполь-
зование этих услуг позволяет обеспечить практически сколь угодно
низкую вероятность засылки сообщения по ошибочному адресу
(менее 10-9), а также исключает возможность ввода несанкциони-
рованных сообщений.
8. Приоритетный вызов. Пользователи ЦССД по своей значи-
мости могут быть неэквивалентны друг другу, поэтому целесооб-
разно разделение их на две группы по приоритетам. Очень неболь-
шая группа пользователей может быть отнесена к группе приори-
тетных абонентов, тогда все остальные пользователи относятся
к обычным неприоритетным абонентам. Вызывающему приоритет-
ному абоненту при вызове им занятого абонента обеспечивается
возможность ожидания освобождения в течение короткого проме-
жутка времени, после чего, если занятый абонент не освобождает-
ся, производится его принудительное разъединение и последующее
соединение с вызывающим приоритетным абонентом.
9. Соединение при освобождении.
10. Ожидание разрешено.
Эти две услуги всегда действуют одновременно и позволяют
обеспечить соединение вызывающего абонента (он должен пользо-
100
ваться услугой «Ожидание разрешено») с вызываемым занятым
абонентом сразу после его освобождения (вызываемый абонент
должен пользоваться услугой «Соединение при освобождении»).
При этом не требуется повторного набора номера, что удобно для
пользователей (снижение вероятности отказа) и уменьшает на-
грузку на управляющий вычислительный комплекс станций ком-
мутации данных.
11. Серийное включение линий. Такое включение равносильно
замене отдельных соединительных линий пучком, что повышает их
загрузку и позволяет уменьшить их число.
12. Мультиплексный стык, т. е. соединение коммутационных
станций с высокоскоростными пользователями цифровым каналом
со скоростью передачи 48 кбит/с, что представляет большие удоб-
ства при взаимодействии ЭВМ с ЦССД.
13. Некоммутируемые каналы, т. е. возможность организации
в рамках ЦССД некоммутируемых каналов на все скорости пере-
дачи — от 50 до 48 000 бит/с.
Сеть ПД с КП. Структурная схема приведена на рис. 3.13, со-
стоит из узлов коммутации пакетов (УКП) и концентраторов (КТ),
соединенных каналами связи. Абонентами сети являются ЭВМ,
включаемые через связные процессоры, и абонентские пункты АП,
включаемые через КТ. В свою очередь, АП различают двух типов:
пакетные, обменивающиеся с сетью пакетами, и знаковые, ведущие
обмен отдельными знаками (например, стартстопно). В последнем
случае функции пакетообразования на передаче и разделения па-
кета на знаки при приеме выполняет специальный КТ. Обычно КТ
позволяет подключить несколько десятков АП и имеет несколько
выходов к УКП.
Основной целью при разработке сети с КП было обеспечение
высокой скорости доставки сообщений от источника их получателю.
Для работы в интерактивном режиме (режиме диалога) время
передачи пакета по сети с КП в одном направлении не должно
превышать 0,5 с.
Для обеспечения малых задержек в УК в сети с КП предусмат-
ривается:
нач ало передачи пакетов в исходящем УК, не дожидаясь при-
ема всего сообщения;
ада птивная система управления распределением сообщений по
сети и ограничение поступающих в сеть сообщений;
высокие скорости передачи сообщений по АЛ, идущим к тер-
минальным устройствам.
Абоненты (пользователи) ИВС и телематических служб весьма
разнообразны по требованиям, предъявляемым к сетям ПД. Для
удовлетворения этих требований МККТТ совместно с международ-
ной организацией стандартов в области вычислительной техники
(МОС) разработали Рекомендации серии Х.200, описывающие
стандартную последовательность процедур, которые обеспечивают
101
Таблица 3.1
Номер уровня 7 6 5 4 3 2 1
Название уровня Приклад- ной Предста- витель- ный Сеансо- вый Транс- портный Сетевой Каналь- ный Физичес- кий
взаимодействие разнообразных пользователей через сеть ПД с КП
Так как прикладные программы реализуются в основном
в ЭВМ, необходимо было максимально формализовать процедуры
установления соединения, поддержания сеанса связи и его окон-
чания, а поскольку их число весьма велико и по своему характеру
они резко отличаются, целесообразно было для упорядочения раз-
делить процедуры на группы (уровни) так, чтобы каждый из них
охватывал по возможности одну или малое число функций. С од-
ной стороны, малое число уровней упрощает обмен сообщениями
между ними, с другой — внесение изменений в каждый из уровней
должно протекать без перестройки других уровней Как компро-
мисс этих противоречивых требований появилась 7-уровневая мо-
дель (табл. 3.1).
Взаимодействие терминалов через сеть ПД с КП осуществляет-
ся следующим образом. При появлении у абонента А необходимо-
сти в передаче сообщения абоненту Б прикладная программа
пользователя А вырабатывает подлежащий передаче массив дан-
ных. Самый верхний уровень 7 программ взаимодействия пользо-
вателей (проект рекомендации МККТТ Х21А) соприкасается
с прикладными программами пользователя. Прикладной уровень
состоит из двух подуровней. На верхнем подуровне стандартизу-
ются форматы подлежащих передаче сообщений: каждое сообще-
ние делится на тело (содержательная часть) и заголовок (адрес
процесса-получателя, название службы, а также другие служеб-
ные сведения). Службами в соответствии с Рекомендациями
МККТТ Х.400 могут быть Телетекс, факсимильные службы 3-й и
4-й групп*, сочетание Телетекса и факсимильной службы, Видео-
текс и т. п. На нижнем подуровне осуществляется доставка сооб-
щений безотносительно от их содержания и указывается только на
необходимость обмена такими данными с какой-то прикладной
программой в такое-то время. На уровне 7 задается также требо-
вание к качеству обслуживания, осуществляется опознание поль-
зователя-партнера по связи, определяется его доступность в дан-
ный момент (возможности приема сообщения данного объема).
* Факсимильная службы 3 и группы использует аппараты, работающие со
скоростями передачи 2400 9600 бит/с, а 4-й группы — со скоростью
48 000 бит/с.
102
На уровне 6 (Рекомендации МККТТ Х.21В) происходит пред-
ставление сообщения, пришедшего с уровня 7, в вид, подлежащий
передаче по транспортной системе (преобразование кода, алфави-
та, согласование формата), и наоборот, при приеме сообщения из
сети на этом уровне оно преобразуется к виду, принятому на уров-
не 7 данного пользователя.
На уровне 5 (Рекомендации МККТТ Х.215, Х.225, Т.72*) орга-
низуется сеанс передачи сообщений, т. е. устанавливается соеди-
нение между программами, обеспечивается его поддержание с за-
данным качеством, а также разъединение; осуществляется иденти-
фикация соединения и управления диалогом.
На уровне 4 происходит разделение сообщений на блоки, тран-
спортировка блоков сообщений по сети от пользователя до пользо-
вателя («из конца в конец»), для чего организуются двусторонние
пути передачи и контролируется их состояние (например, контроль
процедурных ошибок); осуществляется адаптация к различным
свойствам (типам) транспортных сетей (Рекомендации МККТТ
Х.224, Т.70*).
На уровне 3 (Рекомендации МККТТ Х.213) организуются од-
носторонние коммутируемые (в общем случае) соединения между
взаимодействующими процессами, контролируется их состояние,
а также обеспечиваются выбор направлений передачи по сети,
контроль ошибок, возникающих в УК, управление на сети.
На уровне 2 (проект Рекомендации МККТТ Х.21.Д) организу-
ется канал данных, осуществляется управление передачей по ка-
налу (повышение верности передачи, синхронизация по байтам и
выбор типа канала — проводной, спутниковый).
На уровне 1 (проект Рекомендации МККТТ Х.21.С) организу-
ется дискретный канал, используются физические линии для одно-
временной передачи нескольких сообщений, преобразуются коды
(параллельно-последовательный), осуществляются синхронизация
по битам, контроль за состоянием физического канала.
Для нормального функционирования сети необходимо, чтобы
взаимосвязь одноименных уровней программной структуры сети
определялась стандартным сводом правил, которые охватывают
характеристики программ разных уровней и процедуры их взаимо-
действия. Эти правила получили название протоколов.
Взаимосвязь соседних слоев программной структуры в одной
ЭВМ определяется стандартами, называемыми интерфейсом. На-
личие таких стандартов позволяет при необходимости изменять
отдельные слои программного обеспечения без изменения других
слоев. Из рассмотренного описания функций семи уровней видно,
что в ИВС нет ничего принципиально нового по сравнению с ана-
Для телематических служб
103
логичными функциями традиционных видов связи, таких как теле-
фония, телеграфия, почтовая связь. При разговоре по телефонной
сети сообщение, подлежащее передаче, зарождается в мозгу чело-
века. Там же вырабатываются адрес получателя и требование ко
времени передачи (прикладная программа пользователя). Затем
человек решает, каким видом связи отправить данное сообщение —
почтой, телеграфом, по телефону, и, например, останавливается на
телефоне.
Превращение адреса абонента (должность, фамилия, учрежде-
ние и т. п.) в номер его телефона, равно как обеспечение диалога
на одном языке, являются функциями уровня 7.
После набора номера (по команде, выдаваемой уровню 3 верх-
ним подуровнем уровня 7) и проверки установления связи из кон-
ца в конец (это функция уровня 4 и выше) человек по голосу или
паролю производит идентификацию вызываемого абонента (ниж-
ний подуровень уровня 7). К уровню 7 относится и происходящий
обычно в начале разговора обмен мнениями между собеседниками
относительно возможности вызываемого абонента уделить разго-
вору определенное время (возможность приема определенной пор-
ции сведений). Сам вызов (набор номера) осуществляется в за-
данное уровнем 7 время (эту функцию по указанию уровня 5
выполняет уровень 3). К функциям уровня 5 относится и управле-
ние диалогом (попеременный разговор абонентов), а также возоб-
новление сеанса связи в случае нарушения соединения. Люди при
разговоре по телефону в условиях повышенного шума или при
долгом молчании собеседника обычно задают вопрос: «Вы слу-
шаете?» (функция уровня 4).
Кроме того, для повышения верности передачи «из конца в ко-
нец» в телефонии используются методы обратной связи: информа-
ционной — когда абонент для уверенности в правильном приеме
просит собеседника повторить сообщение, которое ему передано,
или решающей, когда собеседник, плохо разобрав полученное со-
общение, просит его повторить (это тоже функция уровня 4). При
передаче речи в цифровой форме, например с помощью вокоде-
ра, требуется обеспечить синхронизацию по байтам и повышение
верности передачи на уровне канала (что составляет функции
уровня 2), а также синхронизацию по битам (функция уровня 1).
И, наконец, при телефонных переговорах используются все другие
функции уровня 1.
Отличие телефонии от систем передачи неречевых сообщений
заключается в том, что благодаря высокому интеллектуальному
уровню телефонных абонентов (по сравнению с ЭВМ) все семь
уровней реализуются в значительной мере интуитивно. Телефон-
ные абоненты не задумываются над тем, что набирать номер мож-
но, только получив сигнал станции «Свободно», второй разговор
можно начать только по окончании первого, нельзя одновременно
говорить обоим пользователям, нужно придерживаться определен-
104
ной процедуры при наборе по междугородному телефону или меж-
дугородному автомату.
Все уровни в соответствии с их функциями можно разделить
на три группы: информационные (уровни 5—7), транспортные
(уровень 4) и передачи данных (уровни 3—1). Информационные
уровни отличает то, что они не связаны непосредственно с процес-
сом передачи сообщений, который реализуется тремя нижними
уровнями. Транспортный уровень обеспечивает более высоким
уровням функционирование, не зависящее от типа передачи дан-
ных Этот уровень необходим для информационного взаимодейст-
вия прикладных программ, проходящих в разных ЭВМ, тогда как
взаимодействие программ внутри ЭВМ может осуществляться на
сеансовом уровне 5. Кроме того, на транспортном уровне по сигна-
лам, получаемым с уровня 3, происходит исправление таких неже-
лательных явлений, как потери блоков данных, их искажения, на-
рушение порядка следования и засылка не по адресу. На данном
уровне реализуются функции ограничения нагрузки в сети. Все это
делает уровень 4 ближе к трем нижним, чем к трем верхним. Но
все же, поскольку транспортный уровень непосредственно не свя-
зан с функциями сети ПД, он выделяется в отдельную группу.
Сеть ПД обеспечивает выполнение функций только нижних
уровней. Образующийся между процессом пользователя и сетью
ПД разрыв, охватывающий четыре верхних уровня, заполняет сис-
тема телеобработки, стоящая на стыке средств семантической об-
работки данных и средств ПД (рис. 3.27).
Соответствующим образом строится оконечное оборудование:
функция телеобработки реализуется в ООД обычно программным
методом, функции уровней 2 и 3 выполняются специальным про-
граммно-аппаратным устройством (процессором связи, адапте-
ром), а функции уровня 1—в АКД. В последнее время имеется
тенденция возложить на процессор связи реализацию функций и
уровня 4.
105
1 байт
1 байт
1 байт
{иногда 2 байта)
ТУбайт
2 байта '
1 байт
Флаг
Адрес
Управление
Канальные
данные
1 й символ про-
верки кадра
2 й символ про-
верки кадра
Флаг
ЗаГОЯОВОК
'кадра
Основа
кадра
Концевик
кадра
Рис. 3 28. Структура кадра в сети с КП
Передача сообщений в се-
тях с КП регламентируется Ре-
комендацией! МККТТ Х.25. Она
предусматривает последова-
тельную передачу сообщений
по битам. Информация переда-
ется кадрами. В информацион-
ном канале передаются два ти-
па кадров: информационные и
управляющие. Первые из них
содержат пакеты, передавае-
мые уровнем 3 программной
структуры. Вторые являются
вспомогательными и служат
для передачи сведений, необхо-
димых взаимосвязанным ЭВМ
для управления информацион-
ным каналом.
Кадр состоит из не-скольких
областей, предназначенных для записи определенных данных.
Структура кадра (формат) показана на рис. 3.28. В начале и конце
кадра расположены 8-битовые псоледователыюсти — открывающий
и закрывающий флаги (01111110), отделяющие в непрерывном по-
токе данных кадры друг от друга.
Заголовок кадра содержит 8-битовое адресное поле, в котором
записывается адрес получателя сообщений, и поле управления, со-
держащее сведения о типе кадра и номерах переданного и ожида-
емого при приеме кадров. Управляющие кадры бывают двух ви-
дов:
ненумерованные, служащие для установления и прекращения
связи двух ЭВМ (11 в двух первых разрядах);
супервизорные, обеспечивающие управление передачей (сооб-
щение о готовности или неготовности к приему данных, наличие
или отсутствие ошибок в кадре, повторная передача кадра — 10
в двух первых разрядах).
Информационные кадры, используемые для передачи сообще-
ния, содержат 0 в первом разряде. Номинальная длина кадра со-
ставляет 128 октетов. Разрешены и другие длины — от 16 до 2048
октетов.
Основу имеют все информационные кадры. Она включает па-
кет, принятый с уровня 3 иерархии. Он может содержать как дан-
ные пользователя, так и сведения, используемые для управления
сетью. Размер основы кадра определяется длиной пакета. Важно
отметить, что пакет может быть закодирован любым способом, так
как специальные меры обеспечивают прозрачность информацион-
ного канала.
106
На приеме пакет извлекается из кадра путем исключения заго-
ловка и концевика. Концевик кадра содержит два 8-битовых поля
проверки кадра и закрывающий флаг. Верность данных кадра
проверяется путем образования дополнения до единицы суммы (по
модулю 2) двух слагаемых:
1) остатка от деления по модулю 2 выражения хк (х15+х14+ ...
... 4~-’с2+%1) на полином, х164-х12+*5+1, гДе — суммарное число
бит адресного, управляющего и информационного полей;
2) остатка от умножения на х16 и последующего деления по
модулю 2 содержимого адресного, управляющего и информацион-
ного полей на полином х16-4-х12+х5~Н.
Для направления кадра в информационный канал необходимо,
чтобы в передаваемой последовательности бит не было ни одного
символа, совпадающего с флагом. Это обеспечивает передающая
ЭВМ, которая просматривает последовательности бит и при обна-
ружении пяти следующих подряд единиц вставляет 0. При приеме
происходит обратная операция по извлечению нуля, записанного
после пяти единиц. Так обеспечивается прозрачность информаци-
онного канала.
3.9. УЗЛЫ КОММУТАЦИИ В СЕТЯХ ПДС
Узлы коммутации представляют собой совокупность взаимо-
связанных технических средств приема, обработки, распределения
и передачи сообщений. Назначением УК являются прием сигналов,
поступающих по входящим каналам (цепям), обработка сообще-
ний (например, перекодирование) или их частей (например, адрес-
ной части), выбор пути дальнейшей передачи сообщения или его
частей, т. е. распределение сообщений, и передача сообщений по
выбранному пути. Следует подчеркнуть, что основной является
функция распределения сообщений. Кроме того, УК выполняет еще
ряд функций: контроль за прохождением сообщений по сети, повы-
шение верности и надежности передачи, обеспечение приоритетно-
сти передачи и т. п.
Оборудование, с помощью которого УК выполняет вышеука-
занные функции, распределено в трех основных функциональных
цехах: кроссе, цехе управляющих устройств (УУ) и цехе устройств
коммутации. В кроссе устанавливается линейное оборудование,
назначением которого является обеспечение взаимодействия УК
с оконечными устройствами или другим УК (аппаратуре систем
передачи, переходные устройства и т. п.), а также устройства для
долговременных (кроссовых) соединений. Устройства коммутации
обеспечивают выполнение основной функции УК — распределение
сообщений по адресам, а устройства управления управляют рабо-
той всех элементов УК и контролируют правильность выполнения
ими своих функций. К коммутационным устройствам помимо основ-
ных, служащих для распределения сообщений, относятся устройст-
107
(J) Внешнее ЗУ
Рис. 3.29 Миоюпроцсссорный управляющий комплекс УК
ва концентрации, повышающие использование пропускной способ-
ности распределяющих устройств.
Узлы коммутации классифицируются по различным признакам:
методу коммутации, элементной базе коммутационного оборудова-
ния, виду передаваемых сообщений, степени автоматизации, месту
в сети, емкости, способу управления и др. Среди этих признаков
главными, определяющими потенциальные и реальные возможно-
сти УК, являются два первых. По реализуемым методам коммута-
ции различают УК с коммутацией каналов (УКК), коммутацией
сообщений (УКС), коммутацией пакетов (УКП) и УК с комбини-
рованными методами коммутации. По элементной базе коммута-
ционного оборудования различают УК электромеханические (на-
пример, координатные) и электронные. Узлы коммутации должны
обеспечивать возможность независимого наращивания как произ-
водительности, так и числа точек подключения, должны быть на-
дежными, экономичными и иметь гибкую конструкцию. Этим тре-
бованиям наилучшим образом отвечают УК с многопроцессорным
блочным принципом построения (рис. 3.29). Как видно из рисунка,
все компоненты УК имеют блочный характер и подключены парал-
лельно к общим шинам, что дает возможность постепенно и неза-
висимо увеличивать число блоков и рационально организовать ре-
зервирование. В качестве процессоров обычно используются мнпи-
процессоры, а в последнее время — микропроцессоры. Узлы комму-
тации на сетях ПД часто называют центрами коммутации (напри-
мер, центр коммутации каналов ЦКК), а на сетях ТГ — станциями.
Большинство существующих УКК построены на основе комму-
тационного оборудования с пространственным разделением и кон-
тактными элементами коммутации (искателями, реле, координат-
108
ними соединителями). И хотя такое оборудование успешно
эксплуатируется уже не один десяток лет, ему присущи недостат-
ки, свойственные всем электромеханическим системам: большие
габаритные размеры, низкая надежность, большой расход электро-
энергии, ограниченное число предоставляемых услуг, ограниченные
скорости передачи сообщений. Поэтому развитие техники УКК
идет по пути создания электронных станций, построенных на осно-
ве ЭВМ.
На принципе коммутации каналов построены коммутационные
станции абонентского телеграфа (АТА) и прямых соединений
(АПС). Принципы автоматической коммутации, применяемые на
станциях АТА и АПС, очень сходны с принципами, положенными
в основу АТС. Поэтому здесь эти принципы рассматриваться не
будут. По типу применяемого коммутационного оборудования стан-
ции АТА и АПС делятся на декадно-шаговые и координатные.
В декадно-шаговых станциях в качестве приборов автоматического
искания используются декадно-шаговые (ДШИ) и шаговые (ШИ)
искатели. В координатных станциях применяются многократные
координатные соединители (МКС). Оборудование станции АПС
имеет много общего с оборудованием станции АТА. Однако ввиду
применения различных систем эксплуатации на абонентской сети
и сети ПС оборудование станции АПС содержит дополнительные
коммутационные и регистрирующие приборы. Оборудование стан-
ций АТА и АПС построено таким образом, что позволяет совмест-
но использовать магистральные каналы на сетях АТ и ПС, в то же
время исключает непосредственное соединение абонентов разных
сетей. Наряду со станциями АТА и АПС применяются универсаль-
ные станции, предназначенные для работы на сетях АТ, ПС и ПД
(АТ-ПС-ПД).
Новые универсальные станции являются электронными и по-
строены на основе асинхронной временной (адресной) коммутации
(АВК). Разрабатываются универсальные электронные станции на
основе синхронной временной коммутации (СВК).
В электромеханических станциях первого поколения с ДШИ
используется принцип непосредственного управления с оконечного
устройства, в станциях второго поколения — косвенное управление
с прямым и обратным исканиями (с индивидуальными регистрами
и пересчетчиками), а в станциях с координатными соединителями
косвенное управление с обходным исканием (с помощью группо-
вых регистров и маркеров). Соединение абонентов со станцией и
друг с другом устанавливается автоматически приборами станции,
управление которыми осуществляется набором номера на номеро-
набирателе вызывного прибора. Сигналы для абонентов («При-
глашение к набору номера», «Соединение установлено», «Занято»
и др.) выдаются станцией по СЛ путем изменения величины и
полярности тока и высвечиваются на вызывном приборе абонент-
ской установки.
109
Перспективные электронные УК для телеграфии и ПД предос-
тавляются абонентам такие услуги и автоматизируют такие про-
цессы коммутации, которые трудно или невозможно реализовать
с помощью электромеханического оборудования, например, сокра-
щенный набор номера; связь по расписанию, автоматическую вы-
дачу справочных данных, в том числе счетов на оплату; автомати-
ческую конференц-связь; обработку дискретных сообщений, посту-
пающих в широком диапазоне скоростей и др. В этих станциях
широко используются элементы вычислительной техники (см. при-
ложение 2).
Электронная станция коммутации ЭСК-А. Станция построена
на принципе АВК значащих моментов. В зависимости от комплект-
ности и программы она может быть использована в качестве тран-
зитной или оконечной для телеграфной сети (при скоростях
50... 100 бит/с) и ПД (при скоростях до 2400 бит/с). Станция
ЭСК-А рассчитана на подключение 500... 16 000 каналов различ-
ных скоростей, в том числе 200 бит/с — не более 94%, до
1200 бит/с — не более 4% и 2400 бит/с — не более 2%. Структур-
ная схема станции ЭСК-А представлена на рис. 3.30. На схеме
приняты следующие обозначения: Пр, Пер — приемники и передат-
чики линейных сигналов, БВК — блоки входящих каналов, УУ —
устройства управления, АКК — адресно-кодовый коммутатор,
ОЗУ — оперативное запоминающее устройство, БИК — блок исхо-
дящих каналов, ВК — вычислительный комплекс, ПКО — пульт
контроля и отображения, УЦКС—устройство циркулярной и кон-
ференц-связи, МК — мультиплексный канал, УС — устройство свя-
зи. Вызов абонентом i (Абг) станции осуществляется изменением
стоповой полярности на стартовую. Это изменение полярности фор-
мирует на входе БВК требование на обслуживание абонента I,
которое поступает в очередь на соответствующем входе БВК. Об-
служивание вызова A6t начинается со считывания его адреса—А,
в УУ АКК. После этого УУ АКК обращается в УУ за получением
адреса свободного канала УУ — Ау. Затем УУ АКК заносит в УУ
по адресу Ау адрес вызывающего входа А,. Приняв адрес А,, УУ
формирует сигнал «Приглашение к набору», который через МК,
БИК и Пер, попадает в приемную линию Аб,. Приняв сигнал
«Приглашение к набору», Аб, посылает сигналы набора номера.
Каждый ЗМ этих сигналов обрабатывается в БВК, УУ АКК и УУ.
В результате последовательной обработки ЗМ сигнала набора
в УУ накапливаются знаки номера вызываемого абонента. По мере
накопления знаков они поочередно пересылаются в ВК, где с по-
мощью каталогов свободных линий и записанной программы про-
исходит процесс поиска свободного выхода станции (А;) к вызы-
ваемому абоненту. Затем адрес А, ВК пересылает в УУ по адресу
Ау. Управляющее устройство заносит адрес Ау в ячейку / ОЗУ
требуемого УУ АКК, после чего в сторону /-го выхода станции
ПО
формируется сигнал «Вызов». Этот сигнал через МК, БИК и пере-
датчик j поступает на /-Й выход станции.
Приняв сигнал «Вызов», абонентская установка Аб, вырабаты-
вает сигнал «Подтверждение вызова», который по адресу Ау попа-
дает в УУ. Завершающим этапом установления соединения являет-
ся посылка Аб, сигнала «Соединение установлено» и запись в ячей-
ки i и j ОЗУ управляющего устройства АКК адресов А, и А,.
В результате такой записи все ЗМ, появляющиеся при передаче
сообщения на i-м входе, через Пр,, БВК, ОЗУ управляющего уст-
ройства АКК, БИК транслируются на j-й выход и наоборот, т. е.
точка подключения i оказывается «соединенной» с точкой подклю-
чения /.
Электронная подстанция ЭСК-Б. Подстанция обеспечивает ав-
томатическую коммутацию каналов от абонентов сетей АТ и ПД и
оконечных пунктов сети ПС между собой и с СЛ к опорной стан-
ции ЭСК-А. Подстанция рассчитана на включение от 32 до 256 ка-
налов и линий и не имеет постоянного обслуживающего персонала.
Она построена на тех же принципах и обеспечивает те же качест-
венные показатели, что и ЭСК-А. Установление всех соединений
в ЭСК-Б происходит под управлением опорной станции.
Перспективные УК для синхронной сети. Указанные УК постро-
ены по принципу СВК- Их важнейшей характеристикой является
интеграция устройств передачи и коммутации. Структурная схема
синхронного временного УК представлена на рис. 3.31. Данные,
поступающие по входным линейным трактам (JIT), вначале пре-
образуются из последовательного кода в параллельный (пос/пар)
с целью снижения требований к быстродействию памяти. Затем
производится процедура дальнейшего объединения каналов дан-
ных с помощью мультиплексора М для образования единого внут-
111
I-------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------1
Рис. 3.31. Структурная схема синхронного временного УК
реннего группового коммутационного тракта ГКТ. Временные про-
межутки ВП линейных трактов, объединенных в ГКТВХ, коммути-
руются с помощью полнодоступного однозвенного коммутатора.
Этот коммутатор содержит ОЗУ, в котором входные данные запо-
минаются и хранятся до соответствующего выходного временного
промежутка, управляющую память считывания УП счит, которая
запоминает записываемый узлом временной коммутации (УВК) на
этапе установления соединения адрес ОЗУ и управляет доступом
на считывание данных из ОЗУ для осуществления коммутации, и
счетчик Сч, отсчитывающий частоту следования и фазу общего
кадра данных (под кадром данных здесь и далее подразумевается
полный цикл, состоящий из последовательности ВП, используемых
для подканалов с различными скоростями передачи).
Схема построена по методу «распределения коммутационной
памяти по временным промежуткам». Суть метода состоит в том,
что за каждым временным промежутком ГКТ в ОЗУ закрепляется
ячейка памяти. Количество ячеек ОЗУ таким образом равно об-
щему числу ВП в кадре, а поскольку некоторые каналы могут зани-
мать в кадре несколько ВП (пропорционально скорости канала),
то количество ячеек ОЗУ превышает общее число каналов.
Рассмотрим процесс коммутации. Пусть, например, скоммути-
рованы каналы А и В. Счетчик генерирует очередной номер ВП,
принадлежащий, например, каналу А. Этот номер одновременно
служит адресом для ячейки ОЗУ, в которую должен записаться
конверт данных, поступающих по каналу А в этом ВП, а также
адресом для УПсчит- Число ячеек УПсчит также равно общему чис-
лу ВП в общем кадре, т. е. каждому ВП соответствует в УПсчит
одна ячейка. В ячейке УПсчит, принадлежащей рассматриваемому
ВП, хранится адрес ячейки ОЗУ, из которой в данном ВП должен
быть считан конверт данных, направляемых затем в передающую
часть канала А. Это ячейка ОЗУ, из которой производится считы-
112
вание, принадлежит каналу В, а считываемый из нее конверт дан-
ных был записан в нее в одном из предыдущих ВП кадра или воз-
можно даже в предыдущем кадре во время одного из ВП, соответ-
ствующего каналу В, точно так, как и конверт канала А.
Таким образом во временной промежуток, соответствующий
каналу А, производится запись (3) конверта данных, поступающе-
го из приемной части этого канала в постоянно закрепленную за
данным ВП канала ячейку ОЗУ и считывание (С) в передающую
часть того же канала А конверта данных из ячейки ОЗУ, закреп-
ленной за ВП канала В. Во временные промежутки общего кадра,
соответствующие каналу В, производятся те же операции, но уже
относительно канала В, т. е. запись принятых конвертов канала В
в соответствующие ему ячейки и считывание их из ячеек ОЗУ, при-
надлежащих ВП канала А, в передающую часть канала В.
Суть такого метода временной коммутации состоит в поочеред-
но выполняемой циклической записи в ОЗУ (каждая следующая
операция записи производится по адресу, соответствующему номе-
ру следующего ВП в кадре) и ациклического считывания (каждый
следующий адрес считывания ОЗУ может быть любым в зависимо-
сти от того, с каким каналом установлено соединение). Эти две
операции выполняются в каждом ВП общего кадра, а для реали-
зации операции ациклического считывания, благодаря которому и
осуществляется коммутация, в ячейках УПСЧит, соответствующих
ВП канала А, должны храниться адреса ячеек ОЗУ, принадлежа-
щих ВП канала В, и наоборот, в ячейках ВП канала В должны
храниться адреса ячеек ОЗУ канала А.
Скоммутированные временные промежутки, объединенные
в ГКТвых, затем разделяются по времени с помощью демульти-
плексора (ДМ) и далее преобразуются из параллельного вида
в последовательный. Таким образом, в коммутационной системе,
в которой ОЗУ распределена по временным промежуткам, комму-
тация каналов обеспечивается, по существу, путем организации
отдельных соединений для каждой пары ВП этих каналов в кадре.
Современные телеграфные узлы (центры) КС (ЦКС-Т). Ука-
занные узлы строятся на базе ЭВМ. Структурная схема узла с раз-
делением нагрузки ЦКС-Т PH представлена на рис. 3.32. Она
состоит из двух одинаковых ветвей, содержащих ЭВМ, устройство
управления накопителями на магнитных дисках УУ МД, к которым
подключены накопители НМД, устройства управления накопите-
лями на магнитных лентах УУ МЛ, к которым подключены нако-
пители НМЛ, алфавитно-цифровые печатающие устройства и дис-
плеи. Обмен данными между ЭВМ ветвей осуществляется через
адаптер канал-канал АКК- Каждая из ЭВМ имеет доступ к любо-
му из НМД и НМЛ.
Сопряжение ЭВМ с каналами реализуется через устройства
сопряжения УС. В состав ЦКС-Т PH входит также оборудование
эксплуатационных служб: диспетчера СД, особо важных теле-
<8—6085 113
КСССОВТСИТСД Дисплей
Арх. КСС Рез,
Жур.
Рис 3.32 Структурная схема ЦКС Т PH
грамм СОВТ, индексации телеграмм СИТ и контрольно-справоч-
ная служба КСС.
Принцип разделения нагрузки (PH), на основе которого по-
строен ЦСК-Т PH, заключается в распределении потока входящих
телеграмм между двумя ЭВМ комплекса, каждая из которых об-
рабатывает свою часть потока независимо одна от другой. При
прекращении работы одной из машин (из-за повреждений или для
профилактики) обработка всего потока автоматически передается
на другую ЭВМ.
Основными функциями, выполняемыми ЦКС-Т, являются:
преобразование уровней сигналов входящих каналов в уровни,
необходимые для работы электронных схем узла, и обратные пре-
образования на передаче (функция 1);
регистрация ЗМ единичных элементов, принимаемых из кана-
лов связи, и их фиксация на приеме и передаче в каналы связи
(функция 2);
сборка принятых единичных элементов в кодовые комбинации
на приеме и их разборка на единичные элементы при передаче
(функция 3);
накопления сообщения в памяти на приеме и вывод сообщений
из памяти на передаче (функция 4);
анализ заголовка сообщения на приеме и его формирование
на передаче (функция 5);
определение и назначение исходящих направлений передачи
(функция 6);
организация очередности передачи сообщений по назначенным
направлениям, выбор (при необходимости) обходных направлений
(функция 7);
114
выполнение функций по архивации сообщений (дительное драз-
нение) (функция 8);
управление узлом в целом (функция 9);
управление каналами связи и сетью (функция 10);
накопление и обработка различных статистических данных, ха?
рактеризующих работу узла, каналов связи и сети (функция 11);
контроль за прохождением сообщений (функция 12) и т. п.
Основные функции узлов можно разделить на три группы.
В первую группу входят массовые операции, выполняемые над
единичными элементами и кодовыми комбинациями знаков (функ-
ция 1...4). Характерным для этой группы является то, что реги-
страция единичных элементов, принимаемых из каналов связи,
должна выполняться в произвольные моменты времени. При этом
распределение ЗМ во времени в каналах может иметь различный
характер, вплоть до совпадения ЗМ во всех каналах. Поэтому во
избежание утери части принимаемых сообщений все операции по
приему сообщений из каналов связи и передаче их для дальнейшей
обработки должны выполняться в реальном масштабе времени,
т. е. с точностью временного интервала, определяемого заданной
исправляющей способностью. На передаче узел может задержи-
вать передачу каждого сообщения в пределах контрольного срока,
установленного на обработку данной категории сообщений, однако,
будучи начатой, передача должна осуществляться без перерывов,
т. е. тоже в реальном масштабе времени. Поскольку процесс обра-
ботки кодовых комбинаций знаков непосредственно связан с опе-
рациями по обработке единичных элементов, он тоже должен вы-
полняться в реальном масштабе времени.
Вторую группу функций узлов КС (функция 5—8) составляют
более редкие, но сложные операции, производимые над сообщения-
ми. При этом частость выполнения функции 5 в узле КС, обраба-
тывающем в ЧНН до 5... 6 тыс. телеграмм, не превышает несколь-
ких раз в секунду. В то же время такие функции, как 6 и 7, в раз-
личных сетях могут существенно отличаться и изменяться в про-
цессе развития сетей. Время реализации функций второй группы
регламентируется контрольными сроками обработки сообщений
в узле.
В третью группу входят функции (8—12), непосредственно не
обеспечивающие процесс приема и передачи сообщений, которые
могут осуществляться со значительным замедлением.
На начальном этапе развития ЦКС-Т первые три функции вы-
полнялись в УС, построенном на аппаратном принципе, а осталь-
ные в ЭВМ. Когда выяснилась целесообразность разгрузки ЭВМ
от функций 4 и 5 и реализации их аппаратно в более сложном УС,
было реализовано это распределение функций между УС и ЭВМ,
что позволило ценой небольшого усложнения аппаратуры УС до-
стигнуть значительного увеличения производительности ЦКС-Т.
В настоящее время оказалось более экономичным первые пять
8* 115
Код
начала
теле-
граммы
Магист-
ральный
марш-
рутный
индекс
Поряд-
ковый
номер
Адрес-
ная
часть
Часть
отпра-
вителя
Текст
Код
конца
теле-
граммы
Подзаголовок
Заголовок
Рис, 3.33. Структура кадра в телеграфной сети с КС
функций реализовать программным методом с помощью специали-
зированной микроЭВМ — предпроцессора связи. За «большой»
ЭВМ остаются только наиболее сложные логические операции, со-
ответствующие реализации функций 6—12. Для того чтобы ЭВМ
ЦКС могла обрабатывать телеграммы, последние должны иметь
стандартные форматы (рис. 3.33).
Телеграмма состоит из следующих элементов: заголовка, текста,
кода конца телеграммы. В свою очередь, заголовок разбивается на
предзаголовок (код начала телеграммы, магистральный маршрут-
ный индекс, порядковый номер сообщения), адресную часть (код
начала адреса, приоритет, низовой маршрутный индекс) и часть
отправителя (время отправления сообщения, код отправителя, код
срочности, особые требования к передаче, например, необходи-
мость сигнализации о прохождении сообщения через узел). Такое
деление заголовка весьма условно и в разных системах могут
иметь место отклонения от приведенного выше.
Телеграммы указанной структуры из каналов связи в виде от-
дельных знаков поступают в УС с каналами. В УС происходят
преобразование уровней сигнала, регистрация битов, накопление
знаков или блоков и запись их в ОЗУ. Одновременно с записью
принятый знак анализируется процессором: находятся начало и
конец сообщения. Когда в ОЗУ собирается блок данных определен-
ной величины (различной в разных системах), накопленные дан-
ные переписываются в НМД, а ОЗУ освобождается для приема
очередного блока данных. По завершении приема полного сообще-
ния в НМД (об этом судят по знаку конца сообще-
ния) процессор проверяет правильность его порядкового номера,
определяет маршрут (прямой или обходный) и категорию срочно-
сти, управляет передачей сообщений в требуемый исходящий ка-
нал, если он свободен и нет сообщений более высокой категории
срочности. Если канал занят, сообщение ставится в очередь в по-
рядке приоритета и времени поступления в узел. Проверка индек-
са канала приема и порядкового номера сообщения производится
путем их сравнения с данными, хранящимися в соответствующих
таблицах программы.
116
Передача сообщений осуществляется в обратном порядке по от-
ношению к приему. Из НМД блоки данных переписываются в ОЗУ,
откуда кодовые комбинации через УС передаются в каналы связи.
Всеми процессами по логической обработке и коммутации со-
общений управляет ЭВМ, руководствуясь программой, записанной
в ОЗУ. Устройства НМЛ служат для журнальной записи данных
о всех входящих и исходящих сообщениях, архивной записи полно-
го текста всех обработанных узлом сообщений ш записи сообщений,
требующих справок из-за искажений адресной части. Кроме того,
в НМЛ записывают избыточные сообщения при переполнении
НМД в случае перегрузок в сети, вызванных резким увеличением
числа поступающих сообщений или поврежденшями на сети. В та-
ких случаях срочные сообщения передаются пю прямым и обход-
ным путям, а несрочные хранятся в НМЛ до получения возможно-
сти передачи.
Контроль за работой ЦКС-Т PH и управление им в процессе
эксплуатации осуществляется эксплуатационными службами. Дис-
петчерская служба оборудована диспетчерским! пультом (ПТД) и
дисплеями, на которых отображается техническое состояние ЦКС,
величина нагрузки в целом по узлу и по каждому направлению
связи и другие данные, необходимые для управления действием
центра. В службе СД размещены пульты ПТСП, предназначенные
для ведения служебных переговоров с ОП, и ПТЦ — для передачи
циркулярных телеграмм при отказе обеих ЭВМ. С помощью теле-
тайпа рабочего места управления (РМУ) в вычислительный ком-
плекс вводятся кодограммы, посредством которых организуются
новые и реорганизуются существующие связи ЦКС с ОП и даются
команды о выводе необходимых дополнительных сведений об от-
дельных связях и о ЦКС в целом. На рабочем месте документиро-
вания (РМД) фиксируются данные, автоматически выдаваемые
центром, о состоянии каналов и направлений связи, а также от-
дельных устройств ЦКС.
Служба СОВТ снабжена телетайпами, на которые выводятся
журнальные записи и копии особо важных телеграмм. Служба
СИТ оборудована дисплеями, с их помощью осуществляется индек-
сация телеграмм, а служба КСС имеет телета йпы рабочих мест
управления и документирования, предназначенные для работы
с текущим архивом на НМД и долговременным архивом на НМЛ.
Непрерывное круглосуточное функционирование ЦКС-Т обеспе-
чивается надежностью технических средств и математического
обеспечения и конфигурацией структуры центра.
Структура ЦКС-Т PH позволяет использовать принцип заме-
щения любого из устройств при их отказе, что важно при проведе-
нии профилактических работ на НМД и НМЛ: нет необходимости
в остановке функционирования одной из ветвей центра. Таким
образом, в случае отказа одной из ЭВМ все УС, НМД и НМЛ авто-
117
матически подключаются к исправной ЭВМ и центр продолджает
функционировать.
Построенный на базе ЭВМ ЕС-1045 ЦКС-Т PH имеет проопуск-
ную способность порядка 10 телеграмм/с, обеспечивает подк.<люче-
ние 1000 каналов со скоростями передачи 50...100... 200 БВод.
Наряду с ЦКС-Т PH на телеграфной сети эксплуатируются
ЦКС-Т, построенные по принципу параллельной работы. Вв этих
центрах каждая поступающая телеграмма обрабатывается ппарал-
лельно в двух ЭВМ. После сверки результатов обработки i теле-
грамм в каждой ЭВМ ее выдача в канал связи осуществлляется
ведущей в данный момент ЭВМ. При прекращении работы одной
из ЭВМ центр продолжает работу на исправной ЭВМ.
Производительность ЦКС-Т PH за счет использования реежима
разделения нагрузки 1,5 раза выше производительности ЦДКС-Т,
построенного по принципу параллельной работы.
Узлы коммутации пакетов. Построение УКП осуществляе^тся на
базе мини-ЭВМ. Процедуру обработки пакетов на УКП г»можно
представить в виде совокупности нескольких укрупненных э^тапов:
приема поступающих по входным каналам знаков, накопПления
принимаемых знаков и формирования из них пакетов, аналииза за-
головков пакетов по адресным и категорийным признакам, взыбора
пути последующей передачи пакетов, завершающегося опрределе-
нием номера исходящего канала и постановкой пакета в очередь
для выбранного канала и, наконец, выдача пакетов в выгодной
канал. Для нормального функционирования необходимо,, чтобы
производительность УКП была достаточной для выполнения i этапа
приема знаков по входным каналам в реальном масштабе врремени
при произвольной загрузке каналов. В противном случае» могут
возникнуть потери знаков, что недопустимо. Для обеспечен^ я этого
требования программа приема обычно имеет высший приоритет по
отношению к другим программам. Остальные этапы реализуются
программами более низких приоритетов и выполняются ncj0 мере
завершения очередного этапа обработки заголовка пакета с ; учетом
как категории срочности пакета, так и приоритета соответтствую-
щей программы.
Процессы * в мини-ЭВМ, которые реализуют процедуруу обра-
ботки пакетов в УКП, представлены на рис. 3.34. Каждому входя-
щему в УКП каналу соответствует процесс, обеспечивающий"! прием
пакета и запись его во входную очередь, расположенную 5 в той
области ОЗУ мини-ЭВМ, которая выделяется для этой целпи про-
цессом распределения памяти. Указатель адреса, определяющий
место хранения соответствующего пакета, помещается в Сочередь
указателей адресов. Процесс коммутации выбирает по Оочереди
указатели адресов входной очереди (с учетом приоритета) «и опре-
* Процесс является реализацией некоторой части программы, имеювдщей са-
мостоятельный характер.
118
Вход из канала связи
Аппаратура ввода
осуществляет автономное
хранение пакетов,
используя
указатель
Конец очереди
Память для пакетов
памятью
Входной процесс
устанавливает
/казатепи и помещает
ИХ во входную /
очередь /
Начало очереди
Список указателей
входной очереди
Начало очереди
Конец очереди
указатель
Список указателей
выходной очереди
Аппаратура вывода
использует
Выходной
процесс переме-
щает указатели из
выходнои очереди
в аппаратуру
вывода
[Процесс управления
Матрица маршрутов
Процесс коммутации
берет начало во входной
очереди, обращается за
сведениями в матрицу
маршрутов и ставит
указатель
во входную очередь
для автономного
извлечения пакетов
Выход в канал связи
Рис. 3 34 Процедура обработки пакетов в УКП
119
деляет местоположение адреса очередного пакета. После этого про-
цесс коммутации обращается к матрице маршрутов, которая со-
держит перечень исходящих каналов, расположенных в порядке их
предпочтительного использования для каждого из адресов, и поме-
щает указатели адресов пакетов в соответствующие выходные
очереди исходящих каналов. Каждому исходящему каналу соответ-
ствует процесс, который поочередно выбирает из выходной очереди
указатели пакетов и размещает пакеты в ОЗУ перед отправкой их
к следующему узлу или абоненту-получателю.
КОНТРОЛЬНЫЕ ВОПРОСЫ
1. Состав сети ПДС.
2. Назначение узлов коммутации
3 Каковы достоинства и недостатки различных принципов построения сетей?
4. Какие основные требования предъявляются к сети ПДС’
5. Какие методы распределения сигналов используются в сети ПДС?
6. Какие методы разделения сигналов используются в сети ПДС?
7. В чем заключается универсальность методов АВРп’
8 В чем заключаются достоинства и недостатки методов КК, КС и КП?
9 В чем состоят функции управления в сетях ПДС’
10. Как осуществляется распределение сообщений в сетях ПДС?
11. В чем заключается различие существующей и перспективной структуры
телеграфной сети?
12. В чем состоит различие в принципах построения и назначения телеграф-
ных сеты! ОП и АТ’
13. В чем основное различие сетей ПД синхронных и с коммутацией па-
кетов’
14 Каково назначение протоколов различных уровней в архитектуре откры-
тых систем?
15. В чем заключается различие в структуре телеграфных ЦКС-Т и
ЦКС-Т PH’
Глава 4. ОКОНЕЧНЫЕ УСТРОЙСТВА
СИСТЕМ ПДС *
4.1. АБОНЕНТСКИЕ ОКОНЕЧНЫЕ ПУНКТЫ
Общие сведения. Как известно, сеть связи представляет совокуп-
ность пунктов и линий (каналов) связи, которая решает задачу по
доставке сообщения в соответствии с заданным адресом и обеспе-
чению требуемых качественных показателей по времени доставки,
* В главе использованы материалы, представленные Б С Владишевским.
120
верности и надежности. Пункты делятся на оконечные (ОП) и уз-
лы связи. Если ОП расположен непосредственно у пользователя-
абонента, он называется абонентским (АП). Очевидно, что уста-
новка и эксплуатация АП экономически оправдана лишь при
больших объемах передаваемых данных или при необходимости
осуществления прямого диалога с корреспондентом (другим АП,
ЭВМ) в реальном масштабе времени по принципу «вопрос—ответ».
Однако существует категория пользователей, передающих сообще-
ния редко, небольшими объемами, и допускающих определенную
задержку передачи во времени. Например, к этой категории отно-
сятся частные телеграфные сообщения, передаваемые гражданами
или некоторыми организациями. Для таких пользователей в рамках
сети связи страны создана система пунктов коллективного пользо-
вания (ПКП). Для населения такими ПКП являются городские
отделения связи (ГОС) и районные узлы связи (РУС). Для орга-
низаций, передающих данные, организованы ПКП передачи дан-
ных (ПКП-ПД). Они территориально размещены на телеграф-
ных предприятиях в столицах союзных республик, областных цент-
рах и ряде городов страны. Любая организация независимо от
ведомственной принадлежности может доставить на телеграф, име-
ющий ПКП-ПД, перфоленту с заготовленными на пей данными.
Затем эти данные будут переданы адресату (организации) с га-
рантированной верностью, в установленные сроки.
Система ПКП-ПД удобна для пользователей, не имеющих соб-
ственных вычислительных средств и передающих периодически
какую-либо отчетность в центр. Особенно удобна такая система
передачи цифровой информации на начальном этапе развития ин-
формационно-вычислительных сетей.
Принципы построения, техническая база (коммутационное, ка-
нало-образующее, оконечное, контрольно-измерительное и вспомо-
гательное оборудование), общая и техническая эксплуатация,
а также организационное и оперативное управление предъявляют
специфические требования к оборудованию ОП.
Различия в требованиях к сетям ПДС (см. гл. 3) позволяют
разбить ОП (АП) на два основных вида: пункты для телеграфной
сети и для передачи данных. Прежде чем начать детальное рас-
смотрение принципов построения ОП различных видов, определим
их общую структуру (начиная с АП).
В соответствии со своим назначением АП содержат аппаратуру
ввода и вывода информации, аппаратуру согласования вводно-вы-
водных устройств с каналом связи, а также различные вспомога-
тельные устройства.
Устройство ввода служит для преобразования поступающего от
источника сообщения в форму, удобную для последующей переда-
чи через электрический канал связи. Устройство вывода преобра-
зует принятый из канала связи электрический сигнал в форму,
121
удобную для получателя. Будем обозначать эти устройства как
УВВ— устройства ввода-вывода.
Устройство согласования канала связи с другими устройствами
АП обеспечивает согласование характеристик канала связи с элек-
трическими сигналами этих устройств, осуществляя в некоторых
случаях их преобразование в соответствующую форму (например,
в форму модулированных сигналов). Такие устройства получили
наименование устройств преобразования сигналов (УПС).
Абонентские пункты телеграфной сети (АП-ТГ). Телеграфные
сети (общего пользования и АТ) имеют идентичные принципы по-
строения, общее каналообразующее и коммутационное оборудова-
ние. Едиными являются общая и техническая эксплуатация, орга-
низационное и оперативное управление, требования к качеству
передаваемой информации и, что самое главное, характер переда-
ваемых сообщений. Поэтому естественным является и однотип-
ность АП-ТГ.
Основное оборудование АП-ТГ состоит из оконечной телеграф-
ной абонентской установки (ОУТГ), где в качестве УВВ применя-
ются автоматизированный телеграфный аппарат (ТА) и вызывной
прибор, с помощью которого ТА подключается к каналу связи, как
правило, к физической линии.
В качестве телеграфных аппаратов применяются стартстопные
аппараты, имеющие приборы автоматизации — перфораторную и
трансмиттерную приставки. Телеграфные аппараты снабжаются
автоответчиками, позволяющими автоматизировать обмен служеб-
ными сигналами после установления соединения. Эти сигналы да-
ют возможность проверить правильность установления соединения,
работоспособность аппарата вызываемого абонента, а также пере-
дать телеграмму в случае, если в вызываемом АП-ТГ отсутствует
телеграфист.
С помощью вызывного прибора осуществляется посылка на
коммутационную станцию необходимых сигналов: вызов, набор
номера, отбой. Кроме того, вызывной прибор позволяет осущест-
вить автоматическое включение и выключение ТА в соответствии
с сигналами, поступающими со стороны станции. Он также обес-
печивает возможность подключения ТА к соединительной линии
(физической цепи) любого вида, т. е. вызывной прибор играет и
роль своеобразных УПС.
В СССР широкое распространение получили вызывные прибо-
ры типов УВП-2, Т-57, ВПЭ и ВПЭУ. Вызывные приборы типов
УВП-2 и Т-57 (производства ГДР) являются электромеханически-
ми, а ВПЭ и ВПЭУ — электронными. Основные характеристики
этих вызывных приборов приведены в табл. 4.1.
Как видно из табл. 4.1, электромеханические вызывные прибо-
ры обладают определенными недостатками. Так, универсальные
вызывные приборы УВП-2 и Т-57 из-за применения электромеха-
нических реле не могут работать со скоростями телеграфирования
122
Таблица 4.1
Характеристика УВП-2 Т-57 ВПЭ ВПЭУ
Скорость телеграфирова- ния, Бод 50 50 50, 100, 200 50, 100, 200
Степень краевых искаже- ний на передаче, % 9 9 2 2
Номеронабиратель Дисковый Дисковый Тас1атурный Клавиатура те- леграфного ап- парата
Наличие регенератора Нет Нет Есть Есть
более 50 Бод. Кроме того, у них велики собственные краевые иска-
жения.
Значительно лучшими характеристиками обладают электрон-
ный вызывной прибор типа ВПЭ и универсальный электронный вы-
зывной прибор ВПЭУ.
Если ОУТГ работает в сети с коммутацией сообщений, то для
подключения телеграфных аппаратов к ЦКС используются специ-
альные вызывные приборы КВП-3 и ОУКС-Т.
Контрольно-вызывной прибор КВП-3 предназначен для вклю-
чения в ЦКС телеграфных аппаратов, установленных в ОП и на
рабочих местах телеграфов по закрепленным связям. Прибор обес-
печивает работу при скоростях телеграфирования 50, 100 или
200 Бод. Синхронные искажения не превышают 2%.
Оконечная установка коммутации телеграфных сообщений
ОУКС-Т также предназначена для включения в ЦКС телеграфных
аппаратов, установленных в ОП и на рабочих местах телеграфов
по закрепленным каналам. В отличие от КВП-3 она обеспечивает
автоматизацию основных технологических процессов в ОУТГ при
его взаимодействии с ЦКС, освобождает оператора от выполнения
утомительных ручных операций, ускоряет передачу телеграмм из
ОП, повышает точность соблюдения на связях ЦКС технологиче-
ского процесса.
Установка ОУКС-Т обеспечивает работу при скоростях теле-
графирования 50 или 100 Бод с краевыми искажениями не более
2% и может работать как в дуплексном, так и полудуплексном
режимах.
Абонентские пункты передачи данных (АП-ПД). В соответст-
вии со спецификой передачи данных абонентские пункты в сетях
ПД, как правило, включают в себя три группы устройств
(рис. 4.1):
абонентское устройство, состоящее из источника (получателя)
сообщений ИС (ПС), оборудования обработки данных (ООД) и
согласующего устройства (СУ). По сути, абонентское устройство
является устройством ввода-вывода информации (УВВ);
123
Рис. 4 1 Структура абонентского пункта
аппаратуру ПД, включающую в себя УПС, УЗО и вспомога-
тельные устройства В состав вспомогательных устройств входят
устройства передачи ответно-вызывных сигналов ПВУ и аппарату-
ра обслуживания (АО) (совокупность контрольно-измерительной и
управляющей аппаратуры);
дополнительное оборудование, включающее устройство заготов-
ки и распечатки сообщения, подмотки и размотки перфолент, уст-
ройств исправления перфолент, устройств первичного кодирования.
Классификация АП-ПД осуществляется по ряду призна-ков.
По функционированию различают АП: для дистанционной ра-
боты с оператором в диалоговом режиме (интерактивные АП);
для пакетной обработки и ПД; для сбора данных.
По способу и механизмам ввода-вывода различают АП: на ос-
нове пишущей машинки и ТА, с перфоленточными устройствами,
дисплейные, смешанного типа. Абонентские пункты на основе пи-
шущей машинки и ТА являются наиболее распространенными бла-
годаря сравнительно невысокой стоимости и простоте конструкции.
Абонентские пункты с перфоленточными УВВ широко применяют-
ся в тех системах, где имеется возможность и экономическая целе-
сообразность накапливать данные на месте их возникновения с по-
следующей передачей на обработку в центральную ЭВМ. Резуль-
таты обработки могут быть переданы с большой скоростью на АП
и выведены на перфоленту с последующей их распечаткой в режи-
ме автономной работы АП. Такое применение перфоленточных АП
обеспечивает более экономичное использование канала связи и
машинного времени.
В последнее время широкое распространение получили дисплей-
ные АП, выполненные на базе электронно-лучевой трубки (ЭЛТ).
Они делятся на одиночные (с одним индикатором) и групповые
(с несколькими индикаторами, удаленными от блока управления
до сотен метров).
В системах многоцелевого назначения (сбор данных, справоч-
ные услуги, ввод и вывод данных) выгодно использовать АП
с разветвленной периферией. В составе таких АП могут одно-
временно и поочередно применяться печатающие, перфоленточные
(ПфЛ) и перфокарточные устройства, индикаторы на ЭЛТ, клавиа-
124
туры и др. В тех случаях, когда на АП возлагаются функции бу-
ферирования и предварительной обработки данных, в их состав
могут входить также накопители на магнитных лентах или дисках.
Большинство абонентских комплектов, входящих в семейство ЕС
ЭВМ, относится к этой группе устройств.
По числу одновременно работающих операторов (пользовате-
лей) АП-ПД делятся на две группы: индивидуального пользова-
ния и группового пользования. На групповых АП одновременно и
независимо друг от друга могут работать несколько пользователей.
По способу реализации функций управления и обработки дан-
ных АП подразделяются на аппаратные и программируемые. От-
личие программируемых АП от аппаратных состоит в использова-
нии МикроЭВМ. На микроЭВМ возлагаются функции защиты от
ошибок, взаимодействия с коммутируемой сетью и оборудованием
ввода-вывода информации, организации процедуры обмена инфор-
мацией абонентами, обработки данных независимо от центральной
ЭВМ и ряд других. Такие АП получили название «интеллектуаль-
ных».
Использование программируемых АП в системах телеобработ-
ки данных дает следующие преимущества:
время центральной ЭВМ предназначается только для работы,
выходящей за пределы возможностей программируемого АП;
каналы связи заняты гораздо меньшее время;
большинство функций в АП осуществляется программно, что
повышает гибкость системы.
В ЕС ЭВМ разработан ряд абонентских пунктов, различаю-
щихся также скоростью работы, способом взаимодействия с ЭВМ,
типом применяемой АПД, используемым каналом связи, методами
передачи данных, набором вводно-выводных устройств и другими
признаками.
Алгоритм работы почти во всех АП — решающая обратная
связь с ожиданием (см. гл. 8). В качестве первичного кода в ос-
новном используется семиэлементный код КОИ-7. Защита от оши-
бок осуществляется, как правило, без помощи отдельных УЗО, по-
скольку функции защиты от ошибок вместе с остальными функция-
ми возложены на устройство управления АП. Например АП-1
(ЕС-8501) позволяет осуществлять диалоговую связь с пакетной
передачей, АП-2 (ЕС-8502) и АП-КК используются для передачи и
обработки данных, АП-4 (ЕС-8504) позволяют организовать груп-
повой режим пользования и т. д.
Рассматривая возможность использования АП ЕС ЭВМ в сетях
ПД, необходимо отметить следующее. Разработанные к настояще-
му времени в системе ЕС ЭВМ абонентские пункты первоначально
создавались как периферийное оборудование, предназначенное
в основном для вычислительных комплексов, а также для передачи
по некоммутируемым телефонным и телеграфным каналам. В их
состав входит большое количество оборудования, которое для мно-
125
б)
Рис 4 2 Конфигурация абонентских пунктов АП-1, АП-2 и АП-КК
гих абонентов массовых систем ПД является лишним. Поэтому ис-
пользование АП в конкретных условиях требует учета реальных
технических и эксплуатационных требований. Для примера на
рис. 4.2 представлена типовая конфигурация абонентских пунктов
АП-1 и АП-2 (рис. 4.2,а) и АП-КК (рис. 4.2,6).
Представляет интерес для широкого круга пользователей або-
нентский пункт АП-КК. Он предназначен для заготовки и обмена
126
данными по коммутируемым и некоммутируемым четырехпровод-
ным каналам сети ПД-200. Обработка данных и управление УВВ
(РТА-80/7) осуществляется с помощью программируемою микро-
контроллера, разработанного на базе микропроцессора К.Р580.
Применение матричного корректирующего кода и РОС-ОЖ гаран-
тирует коэффициент ошибки по комбинации не более 2- 10 6 (при
коэффициенте ошибок по элементам в канале 1-10 J). Пункт
АП-КК полностью функционально совместим с АП-2 (ЕС-8502).
4.2. ВВОДНО-ВЫВОДНЫЕ УСТРОЙСТВА АП
Общие сведения. Устройства ввода-вывода информации — это
устройства, специализированные на ввод программ и исходных
’энных в цифровые вычислительные машины (ЦВМ) и вывод ре-
/льтатов вычислений из ЦВМ, а также преобразование данных из
одной формы в другую. Эти устройства не только вводят и выво-
дят сообщения, но и собирают, редактируют и накапливают их.
Входя в состав абонентских пунктов, УВВ располагаются меж-
ду источником (потребителем) сообщений и каналом ПД, ЭВМ.
К УВВ относятся также и терминальные комплекты. Терминал —
это логическое и конструктивное объединение устройств ввода и
вывода в единый комплект, позволяющий организовать диалог че-
ловека с ЭВМ непосредственно или дистанционно, через систе-
му ПД.
Устройства ввода-вывода современных вычислительных ком-
плексов относятся к группе так называемых периферийных уст-
ройств и по имеющимся данным определяют от 50 до 80% стоимо-
сти, энергопотребления, габаритных размеров, массы и других
характеристик всей системы. Устройства классифицируются по на-
значению, физической природе обрабатываемых сигналов и носи-
телей сообщений, техническим и эксплуатационным характеристи-
кам и т. д.
Общий принцип работы устройств вывода заключается в том,
что они воспроизводят сообщение путем изменения однородности
некоторой материальной среды (носителя). Для изменения одно-
родности носителя информации используются механические, элек-
тростатические, магнитные, электромагнитные, химические, акусти-
ческие и другие свойства. При этом носителем информации могут
быть не только предметы в виде перфокарт, магнитных лент, но и
любая материальная среда, например электромагнитное поле, оп-
тический диапазон которого используется широко в индикаторных
устройствах.
Принцип работы устройств ввода сообщений заключается в том,
что эти устройства специальными датчиками-преобразователями
фиксируют области изменения однородности носителя информа-
ции, кодируют их последовательностью электрических сигналов и
отправляют в ЭВМ. Устройства ввода сообщений можно разделить
127
на устройства ручного и автоматического ввода. Устройства руч-
ного ввода делятся на клавишные, зондовые и перьевые. Устрой-
ства автоматического ввода производят считывание информации
с промежуточных носителей информации. В эту группу входят
устройства ввода с так называемых машинных носителей инфор-
мации: перфолент, перфокарт, магнитных лент, магнитных дисков,
магнитных карт. Кроме этих устройств в данную группу входят
устройства ввода графической информации и читающие автоматы.
Устройства вывода можно разделить на две группы: регистри-
рующие и индикаторные. Регистрирующие — это устройства выво-
да, записывающие различного рода информацию на носитель, по-
зволяющий хранить ее длительное время без дополнительных за-
трат энергии и дающий возможность использовать его либо для
непосредственного ввода в ЭВМ с помощью устройства ввода, либо
для непосредственного использования оператором без сложной
дополнительной аппаратуры. В качестве носителя информации
используются бумаги различных видов, синтетические материалы,
а также химические и ферромагнитные пленки, нанесенные на под-
ложку. При этом все способы регистрации делятся на две группы:
изменяющие физическое состояние материала носителя без визуа-
лизации этого состояния и с визуализацией, т. е. с нанесением ви-
димого изображения на носитель информации.
Устройства вывода, регистрирующие информацию без визуа-
лизации, обычно используют магнитные способы регистрации, из-
меняющие намагниченность отдельных участков ферромагнитного
слоя, нанесенного на специальную основу. Регистрация информа-
ции с визуализацией производится путем деформации носителя
(например, пробиванием отверстия в перфоленте или перфокарте),
нанесением слоя красящего вещества на носитель (например, при
печати) или изменением вещества носителя (например, при элек-
тромеханических методах печати).
Индикаторные устройства (дисплеи) представляют информа-
цию только в виде изображения и при этом в отличие от регистри-
рующих устройств потребляют энергию представления информа-
ции. Индикаторные устройства можно разделить на две группы:
светоизлучающие (информация воспроизводится изменением ярко-
сти источников света) и светомодулирующие (информация воспро-
изводится путем изменения характеристик светоотражающей по-
верхности). Характеристики источника света, световой поток
которого модулируется в светомодулирующих устройствах, оста-
ются неизменными. Светоотражающая поверхность индикаторных
устройств является промежуточным носителем информации.
Рассмотрим более подробно принципы реализации и основные
характеристики некоторых УВВ.
Регистрирующие устройства с деформацией носителя. В этой
категории устройств вывода наиболее широко применяемыми явля-
ются ленточные и карточные перфораторы. Свое название они по-
128
Рис 4.3. Представление сообщения на 5- и 8-до-
рожечных перфолентах-
1 — расположение транспортной дорожкн (синхродо-
рожки), 1 — расположение информационных дорожек,
3— расположение одной комбинации (знака)
Рис. 4.4. Принцип рабо-
ты ленточного перфора-
тора
лучили по виду используемого носителя — бумажной ленты или
бумажной карты. Фиксация (запись) сообщения производится пу-
тем пробивки (перфорации) отверстий в носителе.
Ленточный перфоратор регистрирует сообщение на перфоленту
пробивкой круглых отверстий в соответствующих дорожках. Про-
мышленностью выпускаются 5-, 6-, 7- и 8-дорожечные перфоленты
шириной 17,4; 22,4; 25,0; 25,4 мм соответственно. На рис. 4.3,а и б
соответственно показано представление сообщения на 5- и 8-доро-
жечных перфолентах. Так как сообщение представляется в виде
кодовых комбинаций (знаков), то каждый двоичный разряд любой
комбинации занимает одну и ту же дорожку. Пробитое отверстие
соответствует 1, а непробитое — 0. Принцип работы ленточного
перфоратора показан на рис. 4.4. Перфолента 1 движется вдоль
матрицы-направляющей 2, в которой имеются отверстия 3. При
записи очередного знака с помощью перфорационного механизма
пуансоны 4 (а их число равно числу информационных дорожек)
пробивают отверстия в ленте 1, если в соответствующем разряде
комбинации должно быть зафиксировано единичное состояние. Ну-
левому состоянию соответствует отсутствие отверстия на ленте.
Продвижение перфоленты обеспечивается зубчатым роликом (звез-
дочкой) 5, который взаимодействует с транспортной дорожкой
(синхродорожкой), перфоленты. Основной параметр перфоратор-
ных устройств — скорость перфорации в зн/,с (или строк/с, где
в качестве строки принято считать один знак). Так, перфоратор
П-1 имеет скорость перфорации 12 зн./с, ПР-80 — 13 зн./с, ПЛ-80 —
80 зн./с, ПЛ-150— 150 зн./с, ЕС-7022— 150 зн./с.
Карточный перфоратор регистрирует сообщение на перфокарты
(187,3X82,5 мм) путем пробивания прямоугольных отверстий.
Скорость работы современных карточных перфораторов составляет
1 ... 50 карт/с.
Выше были рассмотрены устройства вывода, основанные на ме-
ханическом способе пробивки отверстий в носителе. Для повыше-
9—6085 129
Таблица 4.2
Характеристика Тип АЦПУ
СМ 6313 (ВНР) СМ6315 (СССР) ЕС-7030 (СССР) ЕС-7037 (СССР) ЕС-7039 (ВНР)
Скорость печати, строк/мин 253 500 600...900 800...1000 1200
Ширина строки, знаков 80 132 128 132 100
ния плотности и скорости записи применяются и другие способы
воздействия на носитель — электроискровой и лазерный. В пер-
вом случае отверстие в носителе прожигается мощной электриче-
ской искрой, а во втором — лазерным лучом.
Регистрирующие устройства без деформации носителя. Вывод-
ные устройства, основанные на нанесении красящего вещества на
носитель, наиболее широко используются в виде буквенно-цифро-
вых печатающих устройств н различных графопостроителей. В уда-
ленных и низкоскоростных АП в основном используются электри-
фицированные пишущие машинки (ПМ) и ТА, которые будут рас-
смотрены в разд. 4.3.
Для фиксации данных, выводимых из ЭВМ с относительно
большой скоростью, используются алфавитно-цифровые печатаю-
щие устройства (АЦПУ), работающие, как правило, в параллель-
ном режиме. В этом режиме печатаются одновременно (парал-
лельно) все знаки одной строки текста сообщений. Некоторые ос-
новные характеристики АЦПУ, применяемых на ВЦ ЭВМ, при-
ведены в табл. 4.2.
По принципу формирования изображения знака АЦПУ можно
разделить на знакопечатающие и знакосинтезирующие. К знакопе-
чатающим АЦПУ относятся: рычажные, со знаковой печатающей
головкой (шаровой, типа «ромашка», цилиндрической), дисковые и
барабанные, а также с печатающей цепью или лентой. К знако-
синтезирующим АЦПУ относятся печатающие устройства матрич-
ного типа.
В рычажных печатающих устройствах печатающим элементом
(ПЭ) является литерный рычаг, имеющий электромагнитный при-
вод. В печатающих устройствах с печатающей головкой печатаю-
щим элементом является головка сферической формы с нанесен-
ными на нее рельефными знаками или многолепестковый печатаю-
щий элемент типа «ромашка», на концах лепестков которого рас-
полагаются рельефные знаки. Печатающие элементы перемещают-
ся вдоль валика с бумагой и с помощью специального привода
поворачиваются к плоскости печати нужным знаком. Устройства
с литерным рычагом, печатающей головкой или многолепестко-
вым ПЭ являются последовательно печатающими.
130
Устройства барабанного типа относятся к параллельно-печата-
ющим АЦПУ. Печатающим элементом служит цилиндр с нанесен-
ными на его поверхность рельефными знаками в виде строк одина-
ковых знаков по образующим цилиндра. На каждой дорожке
цилиндра имеется полный набор знаков. Цилиндр набран из зна-
ковых колес, число которых соответствует числу позиций печати
вдоль строки. Печать осуществляется ударом специального моло-
точка, расположенного в каждой позиции печати. Таким образом,
за один оборот цилиндра печатается вся строка. После печати
строки механизм подачи продвигает бумагу на один шаг. Меха-
низм подачи бумаги имеет отдельное управление и приводит в дви-
жение бумагу за счет зацепления трением или специальными
трактами, заходящими в перфорацию на краях бумаги.
В знакосинтезирующих устройствах знак формируется из точеч-
ной матрицы, обычно состоящей из 5X7, 7X7 или 7X9 точек. Точ-
ки печатаются игольчатой головкой, в которой иглы приводятся
в движение электромагнитами. Сама же головка перемещается
вдоль строки.
Графопостроители — это устройства вывода на бумажные носи-
тели графической и текстовой информации. Они могут быть ис-
пользованы для выполнения машиностроительных и строительных
чертежей, метеорологических карт, функциональных и принципи-
альных электрических схем, а также для вывода результатов вы-
числений в виде графиков и кривых. Графопостроители являются
основным элементом любой системы машинного проектирования.
Они входят в номенклатуру только ЕС ЭВМ. Функционально гра-
фопостроители состоят из электрического двухкоординатного реги-
стрирующего построителя и интегрального устройства управления.
Запоминающие устройства. Они могут быть в равной степени
отнесены как к устройствам вывода, так и ввода. В запоминающих
устройствах используются следующие типы носителей: магнитные
барабаны, сменные пакеты магнитных дисков, гибкие магнитные
диски, магнитные ленты, кассетные магнитные ленты и др. Прин-
цип записи-воспроизведения у всех устройств одинаков и напоми-
нает работу бытового магнитофона, т. е. информация фиксируется
путем локального изменения намагниченности ферромагнитного
слоя носителя.
Основным показателем систем с магнитной записью является
плотность записи. В настоящее время в соответствии с междуна-
родными стандартами она составляет 8,16, 32 и 64 бит/мм. При
этом скорость регистрации достигает 2-106 бит/с.
В табл. 4.3 приведены обобщенные данные некоторых типов
магнитных накопителей.
Терминалы. Наиболее удобными для пользователя, ведущего
диалог с ЭВМ, являются вводно-выводные устройства, объединен-
ные в терминальный комплект. Основной комплект терминала
(рис. 4.5) состоит из устройства ручного ввода УРВ, устройства
9* 131
Таблица 43
Тип носителя Быстродействие, Мбайт/с Емкость, Мбайт
Магнитные барабаны Сменные магнитные диски Магнитные ленты Кассетные магнитные ленты Гибкие магнитные ленты 0 3 12 0,3 . 0 8 0,03 0 3 0,0005 .0,002 0,3 4...6 5...200 8 ..80 0,4 1 0,4 0,7
индикации УИ, буфера и согласующего устройства СУ Остальные
устройства являются вспомогательными, расширяющими возмож-
ность терминала
Устройство ручного ввода — это прежде всего клавиатура, с по
мощью которой оператор вводит информацию в буфер, а затем
через СУ в ЭВМ Устройство индикации представляет оператору
информацию в виде текстовых или графических сообщений. Буфер
служит для промежуточного хранения информации, согласования
скоростей и снихронизации устройства ввода-вывода терминала и
ЭВМ Устройство согласования предназначено для согласования
стыка, т е логических и физических характеристик информацион-
ных и управляющих сигналов при подключении терминала либо
непосредственно к ЭВМ, либо к АПД Кроме основного оборудо-
вания, в состав терминала могут входить устройства автоматиче-
ского ввода УАВ, печати УП, регистрации на перфо- и магнитные
носители УРН, обработки данных УОД Устройством автоматиче-
ского ввода может быть устройство ввода с магнитных и перфоно-
сителей (магнитных лент, карт и дисков, перфолент и перфокарт)
Устройством печати служат низкоскоростные, но малогабаритные
и дешевые устройства последовательной печати Устройством ре-
гистрации на носители может быть устройство вывода на перфо
ленты, реже на перфокарты, а также устройства, использующие
магнитные носители ленты, карты, диски Применение магнитных
носителей позволяет многократно использовать их и конструктивно
объединять устройства автоматического ввода и регистрации Уст-
ройство обработки данных существует во многих терминалах В за-
висимости от требований, предъявляемых к терминалу, оно либо
производит простейшие логические преобразования, либо выполни
ет более сложные функции, справиться с которыми может только
довольно мощная мини- или микроЭВМ, входящая в состав тер-
минала
Состав оборудования, входящего в терминальный комплекс, по
функциональному назначению можно разделить на четыре группы
простейшие или терминалы без памяти, с памятью, многофункцио-
нальные и интеллектуальные
Простейшими терминалами являются ТА и электрофицирован-
ные пишущие машинки (ЭПМ) В своем составе они имеют уст-
132
Рис
4 5 Структурная схема многофун-
кционального терминала
ройство ручного ввода — алфа-
витно-цифровую клавиатуру,
устройство последовательной
печати, б>фер на один знак и
цнтерфенс Это единственный
пример терминалов, используе-
мых в современных вычисли-
тельных системах, не имеющих
в своем составе отдельного
устройства индикации (в неко-
торых моделях ТА имеются
встроенные индикаторные
устройства) В состав ТА ча-
сто в виде приставок входят
УАВ с перфоленты и устройство регистрации на перфоленту (ре-
перфоратор) Таким образом, ТА — это сравнительно простой и де-
шевый терминал, выполняющий значительное число функций и
поэтому широко используемый при работе с мини- и микроЭВМ
К терминалам с памятью относятся устройства ввода-вывода
алфавитно-цифровой и графической информации на базе ЭЛТ —
дисплейный комплекс В состав такого дисплея входят устройство
ручного ввода в виде алфавитно-цифровой клавиатуры, буфер, уст-
ройство индикации на базе ЭЛТ, устройство обработки данных и
интерфейс В табл 4 4 приведены некоторые характеристики суще-
ствующих дисплеев
К многофункциональным относятся терминалы, включающие
кроме основного комплекта (рис 4 5) дополнительные устройства
Интеллектуальные терминалы — это терминалы, которые кроме
развитых диалоговых средств и средств ввода-вывода имеют мощ-
ные средства обработки данных По существу, интеллектуальный
терминал — это мини- или микроЭВМ, оснащенная развитой пери-
ферией и подключенная к ЭВМ более высокого ранга
Таким образом, терминальный комплект полностью определяет
работу абонентского пункта АП-ПД На рис 4 6 показаны вариан
ты подключения простейших терминалов к ЭВМ через канал связи
Таблица 44
Характеристика ЕС 7061 (ВНР) ЕС-7063 (ЧССР) СМ7204 (СССР)
Размер экрана, мм 150X200 150X200 240X240
Емкость экрана, знаков 960, 1024 960, 1024 1920
Число знаков в строке 64 или 80 64 или 80 80
Число строк 16 или 12 16 или 12 24
Число информационных символов кла- 64 96 96
виатуры Емкость буферной памяти байт 1024 1024 1920
133
Рис. 4 6. Варианты подключения терминалов к ЭВМ
через канал связи КС — канал связи, МПД — муль-
типлексор ПД, АПД — аппаратура ПД, ВЦ — вы-
числительный центр
ства
Рис. 4.7. Принцип рабо-
ты фотоэлектрическою
считывающего устрой-
Устройства считывания. Кроме упомянутых клавиатурных уст-
ройств ввода и устройств с использованием магнитных носителей,
большое распространение получили устройства считывания с пер-
фоносителей (перфолент и перфокарт). При этом используются
различные способы считывания: фотоэлектрические, диэлектриче-
ские и др. Фотоэлектрические устройства имеют сравнительно
несложную конструкцию, высокую надежность и быстродействие
Принцип работы ясен из рис. 4.7. С помощью источника света 1
освещается узкая полоса движущегося перфоносителя 2. Проходя
через отверстие, свет попадает на светочувствительный элемент 3
(фотоэлемент, фотодиод, фототранзистор). Число светочувстви-
тельных элементов соответствует числу дорожек носителя. Для
формирования соответствующих импульсов сигналы светочувстви-
тельного элемента проходят через усилитель-формирователь 4.
Диэлектрические устройства используют для считывания изме-
нения емкости плоского конденсатора, обкладки которого распола-
гаются с двух сторон носителя, являющегося диэлектриком этого
конденсатора. Поскольку диэлектрическая проницаемость воздуха
меньше диэлектрической проницаемости бумаги носителя, то, когда
между пластинами конденсатора находится отверстие, емкость его
уменьшается. Это изменение емкости и фиксируется. Данный ме-
тод также позволяет считывать с высокой скоростью, но очень
критичен к качеству бумаги, ее влажности и другим факторам.
Для обработки на ЭВМ графических изображений применяются
устройства ввода графической информации. Их принцип действия
в основном аналогичен принципу работы факсимильной аппарату-
ры, где производится последовательный «просмотр» всего изобра-
жения по небольшим элементам с помощью фотоэлектрического
узла (так называемый принцип сканирования).
134
Таблица 4.5
Наименование Быстродействие Передача данных Характерные типы УВВ
Низкоскоростные До 100 байт/с Один СИМВОЛ Клавиатуры, пульты, УВВ на перфоленте, дисплеи
Среднесьоростпые До 1000 байт, с Один символ, группа символов Перфолепточные и перфо- карточиые УВВ, АЦПУ графопостроители, кассет- ный накопитель на маг- нитной ленте
Высокоскоростные До 500 кбайт/с Блок, массив символов Стандартные накопители на магнитной ленте и маг- нитных дисках
Сверхбыстродей- ствующие До 500 кбайт/с Массив символов Накопители на магнитных барабанах, специальные накопители на магнитных дисках
Для непосредственного ввода информации с исходных докумен-
тов разработаны читающие автоматы, которые считывают инфор-
мацию со стилизованного текста, т. е. текста, составленного из
знаков с заданными размерами и очертаниями, расположенных на
определенном месте документа (например, такой автомат «читает»
почтовый индекс на письмах при сортировке).
Характеристики УВВ по их быстродействию представлены
в табл. 4.5.
4.3. ЭЛЕКТРОННЫЙ ТЕЛЕГРАФНЫЙ АППАРАТ
Общие положения. В пунктах возникновения (потребления)
сообщение, как правило, представляется пользователем (пользо-
вателю) в неэлектрической форме в виде записи на носителе:
бумажном бланке, перфоленте, перфокарте, магнитной ленте
и т. д. Для передачи этой информации используются в основном
каналы электрической связи. Таким образом, возникает задача
преобразования сообщения из неэлектрической формы в элект-
рические сигналы на передающей стороне и в обратном преобра-
зовании— на приемной. Как отмечалось выше, для этого исполь-
зуются оконечные устройства передачи сообщений.
Одним из самых массовых оконечных устройств является
буквопечатающий ТА. Его основное назначение—передача, при-
ем пли заготовка буквенно-цифровых сообщений. Промышленно-
стью выпускаются ТА, обеспечивающие как передачу, так и при-
ем телеграфных сообщений. При этом допускается использование
ТА только для передачи или только для приема сообщений.
В первом случае приемная часть аппарата служит для контроля
135
Устройство управления
Рис. 4.8. Структурная схема телеграфного аппарата
«своей» передачи, во втором — передающая часть не использует-
ся. Конструктивно предусмотрено также раздельное использова-
ние приемной и передающей частей ТА. При этом контроль «сво-
ей» работы отсутствует.
Обобщенная структурная схема ТА приведена на рис. 4.8. Как
видно, основными частями его являются передающее устройство,
приемное устройство и устройство управления (включая электри-
ческий привод).
Передающее устройство предназначено для преобразования
знаков сообщения пользователя в кодовые комбинации и после-
довательной передачи единичных элементов кодовых комбинаций
в виде электрического сигнала по каналу связи.
Приемное устройство решает обратную задачу — преобразовы-
вает последовательно поступающие из канала связи кодовые ком-
бинации в соответствующие им знаки сообщения, фиксируемые
на носителе. Устройство управления служит для согласования
взаимодействия отдельных узлов аппарата, синхронизации и при-
вода.
Кроме того, ТА имеют различные вспомогательные устройст-
ва, которые расширяют его функциональные возможности и об-
легчают эксплуатацию (устройства автоматики, визуализации,
сигнализации и др.).
Передающее устройство ТА включает следующие основные
узлы: вводное устройство ВУ, кодирующее устройство КУ, запо-
136
минающее устройство ЗУ, распределитель передачи Рпер, датчик
служебных сигналов ДСС, выходное устройство Вых. У.
Устройство ВУ предназначено для ввода информации в теле-
графный аппарат в виде знаков сообщений. Оно управляет КУ.
В некоторых ТА по сигналу ВУ запускается распределитель пе-
редачи. В буквопечатающем аппарате роль ВУ выполняет кла-
виатура (типа клавиатуры пишущей машинки). Ввод сообщений
с помощью клавиатуры осуществляется вручную. Возможен и ав-
томатический ввод информации либо непосредственно от источни-
ка сообщений (например, ЭВМ), либо с промежуточного носите-
ля (перфоленты, магнитной ленты и др.).
Кодирующее устройство предназначено для преобразования
знака сообщений в кодовую комбинацию, соответствующую этому
знаку. Оно может быть механическим или электронным. На вход
КУ с выхода ВУ поступает сигнал о необходимости формирова-
ния одной из У кодовых комбинаций. Число выходов КУ равно
числу элементов кодовой комбинации. Поскольку в ТА использу-
ются равномерные двоичные коды, то все кодовые комбинации
содержат одинаковое число единичных элементов, которые могут
иметь только два значения — 0 и 1. Кодирующее устройство
должно обеспечить соответствие между знаком телеграфного со-
общения и кодовой комбинацией. Единичные элементы кодовой
комбинации одновременно (параллельно) поступают на вход
ЗУ.
Запоминающее устройство передатчика предназначено для
хранения информационных единичных элементов кодовой комби-
нации на время ее передачи.
Распределитель передачи предназначен для последовательно-
го считывания из ЗУ единичных элементов кодовой комбинации
и поочередной их передачи на Вых. У. Кроме информационных
элементов кодовой комбинации, представляющих знак сообщения,
Рпер добавляет и так называемые служебные элементы, необхо-
димые для синхронизации приемного аппарата.
Служебные элементы, например стартовый, фиксирующий на-
чало комбинации, и столовый, фиксирующий конец, при старт-
стопном способе передачи вырабатываются датчиком служебных
сигналов (ДСС).
Совокупность информационных и служебных элементов опре-
деляет цикл передачи распределителя. Длительность цикла пере-
дачи можно выразить формулой 7’ц=^то+гто, где k — число ин-
формационных элементов; г — число служебных единичных эле-
ментов; то — длительность единичного элемента.
Устройство Вых.У предназначено для формирования электри-
ческих^ сигналов с определенными параметрами (амплитудой,
формой), пригодных для передачи по используемому каналу свя-
зи. В большинстве случаев формируются однополюсные единич-
137
Рис 4 9 Формирование стартстопной кодовой комбинации
ные элементы (посылки) постоянного тока прямоугольной формы
(рис. 4.9).
Приемное устройство ТА состоит из следующих основных уз-
лов: входного устройства Вх.У, устройства регистрации УР, рас-
пределителя приема Рпр, устройства синхронизации УС, запоми-
нающего устройства ЗУ, декодирующего устройства ДУ и печа-
тающего устройства ПУ.
Входное устройство приемника предназначено для преобразо-
вания поступающих с линии сигналов в вид, удобный для исполь-
зования в других узлах приемной части ТА. Проходя по каналу
связи, телеграфные сигналы подвергаются действию различного
рода помех, что приводит к изменению их формы. Поэтому Вх.У
выполняет роль формирователя, преобразуя искаженные по фор-
ме сигналы в прямоугольные посылки (единичные элементы).
Для фиксации состояния каждого принимаемого элемента
в любом приемнике дискретных сообщений, в том числе и в ТА,
имеется устройство регистрации УР. Рациональный выбор метода
регистрации для используемого канала связи (стробирование,
интегрирование или комбинированный метод) позволяет получить
минимальный коэффициент ошибки.
Приемный распределитель Рпр предназначен для поочередно-
го подключения k ячеек ЗУ к УР с целью распределения последо-
вательно поступающих k информационных единичных элементов
кодовой комбинации по k ячейкам ЗУ.
Для обеспечения правильной регистрации и правильного рас-
пределения принимаемых информационных элементов по ячей-
кам ЗУ в ТА используется устройство синхронизации УС. Оно
осуществляет тактовую и цикловую синхронизации.
Как отмечалось выше, ДСС передатчика вырабатывает слу-
жебные (стартовый и столовый) элементы, которыми отмечаются
моменты начала и конца цикла передачи. Эти служебные элемен-
ты воспринимаются УС приемника, которое, воздействуя на УР
и РПр, обеспечивает правильный выбор моментов регистрации
элементов кодовой комбинации и правильное их распределение
по ячейкам ЗУ приемника ТА.
138
Запоминающее устройство приемника предназначено для по-
следовательного накопления единичных элементов принимаемой
кодовой комбинации. После регистрации последнего /г-го элемен-
та ЗУ выдает принятую кодовую комбинацию в декодирующее
устройство ДУ, которое предназначено для расшифровки приня-
тых кодовых комбинаций. Оно преобразует кодовую комбинацию
в знак сообщения, т. е. выполняет задачу, обратную кодирующе-
му устройству КУ передатчика. Иногда ДУ называют декодером,
или дешифратором. Очевидно, что дешифратор при параллельном
вводе кодовой комбинации из ЗУ имеет k входов и 2fe выходов.
Печатающее устройство ПУ приемной части ТА предназначе-
но для отпечатывания знаков сообщения на носителе (бумажной
ленте, рулоне и др.) по соответствующему сигналу от ДУ.
До широкого внедрения элементов цифровой техники в аппа-
ратуре связи ТА строились главным образом на механических
элементах. Однако такие ТА имеют целый ряд недостатков, сре-
ди которых основными являются: сравнительно малая скорость
передачи (не более 50... 100 Бод), низкая надежность, большая
масса, шумность и др. Реализация ТА на базе цифровой интег-
ральной и микропроцессорной техники позволила существенно
улучшить их технико-экономические показатели. При этом появи-
лись новые возможности в расширении функциональных возмож-
ностей ТА. С другой стороны, электронизация ТА, использование
программных способов изменения функциональных возможно-
стей аппарата вызвали необходимость и в новых конструктивных
решениях. Современный электронный телеграфный аппарат
(ЭТА) характеризуется некоторыми особенностями реализации.
Как отмечалось выше, ЭТА может работать в качестве оконечно-
го устройства вычислительной системы, т. е. выступать в роли
терминала. Поэтому в нем предусматривается наличие передаю-
щей и приемной памяти, устройство отображения информации
и возможность одновременной работы в линейном и местном ре-
жимах. Передача информации в ЭТА производится с помощью
клавиатуры, трансмиттера или из электронного ЗУ. Структурная
схема ЭТА представлена на рис. 4.10.
Передающая часть аппарата состоит из клавиатуры Клв
с накопителем Н, автоответчика АО, электронного ЗУ, трансмит-
тера Трм, передатчика Пер и выходного устройства Вых.У. При-
емная часть содержит: приемник Пр, входное устройство Вх.У,
реперфоратор Рпф и печатающее устройство ПУ, состоящее из
накопителя Н, декодера ДУ с логической частью и узла печати
УП. Устройство согласования с линией УСЛ является общим для
приемника и передатчика. В блок центрального управления БЦУ
входят устройства, управляющие перечисленными блоками, а так-
же автостоп, устройства сигнализации, счетчик времени и др
Источниками сообщений в аппаратуре служит трансмиттер,
139
Рис 4 10 Структурная схема ЭТА
Рис 411 Принципы дсй
ствия клавиши
ЗУ, электронный автоответчик и клавиатура с накопителем. Пе-
редающий накопитель предназначен для накопления сообщений
в случае превышения оператором скорости телеграфирования, что
позволяет выполнить клавиатуру без механической блокировки.
В реперфораторах ЭТА используется в основном механический
способ пробивания отверстий на ленте. Приемный накопитель
в ПУ необходим для накопления информации, поступающей в
промежуток времени, затрачиваемый на возврат каретки рулон-
ного аппарата. Электронный декодер функционально состоит из
двух частей — кодового дешифратора и дешифратора служебных
комбинаций.
Узел печати содержит механизм продвижения бумаги, ка-
ретки к началу строки и красящей ленты. Все механизмы в ЭТА
приводятся в движение шаговыми двигателями.
Основные узлы передающей части. Такими узлами являются
клавиатура и передатчик. Особенностью клавиатуры ЭТА явля-
ются модульность конструкции и отсутствие механических блоки-
ровок нажатия клавиши. Блок клавиатуры состоит из двух ча-
стей- механической и электронной. В ЭТА применяются клавиш-
ные переключатели (датчики нажатия) двух типов — контактные
и бесконтактные. На рис. 4.11,а показан принцип действия одной
из самых распространенных конструкций клавиши, работающей
по контактному принципу. При нажатии на клавишу 1 она опус-
кается. При этом постоянный магнит 2, закрепленный на клави-
ше, проходя мимо геркона 3, вызывает его замыкание. На
рис. 4.11,6 показан принцип действия одного из бесконтактных
клавишных переключателей. При нажатии на клавишу 1 подвиж-
ная обкладка конденсатора 2 приближается к неподвижной об-
що
Рис. 4.12. Структурная схема БИС передатчика ЭТА
кладке 3. Емкость резко изменяется (увеличивается с 5 до
70 пФ), что фиксируется специальной схемой.
Для возврата клавиш в исходное положение имеется специ-
альная пружина, не показанная на приведенных рисунках.
Схема управления клавиатурой в ЭТА работает по принципу
временного сканирования состояния кодирующей матрицы, в уз-
лы которой подсоединены клавишные переключатели клавиа-
туры.
Реализацию передатчика ЭТА аппаратным способом можно
рассмотреть на примере РТА-80 (отечественного телеграфного
аппарата — модель 80). Схема передатчика реализована в виде
БИС и показана на рис. 4.12.
Кодовые комбинации параллельного кода от источника (кла-
виатуры, трансмиттера, автоответчика или ЗУ) поступают на вхо-
ды Di,..,D8 буферного регистра БР (число входных цепей опре-
деляется используемым кодом). Запись каждой кодовой комби-
нации в БР осуществляется только при наличии импульса на
входе (пусковой импульс). При этом на выходе БРС (выход, оп-
ределяющий состояние БР — свободен или занят) появляется сиг-
нал занятости (0). Далее записанная комбинация в момент, оп-
ределяемый тактовой последовательностью С, переписывается
через схему ввода в передающий регистр ПР, при этом на выходе
ПРС (выход, определяющий состояние ПР — свободен или занят)
появляется сигнал занятости (0), а на выходе БРС — сигнал сво-
боден (1), что свидетельствует о готовности БР к записи новой
комбинации. С помощью схемы выбора длины комбинации в со-
ответствии с программой, записанной в регистре команд в ПР,
формируются стартовая и стоповая посылки. Образованная таким
141
ТИ
ПФ
___
Рис. 4 13 Структурная схема БИС приемника ЭТА
образом кодовая комбинация последовательно, элемент за эле-
ментом, согласно тактовой частоте, соответствующей скор'ости
телеграфирования, поступает на схему формирования проверочно-
го элемента при кодировании с проверкой на четность (для пя-
тиэлементного кода проверочный элемент не формируется). Да-
лее кодовая комбинация через схему выхода поступает на выход
БИС. После считывания первого стопового элемента комбинации
на выходе ПРС появляется 1, сигнализирующая об освобождении
ПР. При поступлении новой комбинации процесс повторяется.
Следовательно, передатчик содержит две ступени накопителя —
БР и ПР.
Основные узлы приемной части. Такими узлами являются при-
емник и печатающее устройство. Структурная схема приемника,
реализованная аппаратным способом в виде БИС и применяемая
в аппаратуре РТА-80, приведена на рис. 4.13.
Сигнал из канала связи проходит сначала через линейный
фильтр ЛФ, необходимый для ограничения спектра приходящего
сигнала, а затем через Вх.У, предназначенное для согласования
с БИС и его гальванической развязки с каналом. Это осущест-
вляется с помощью оптоэлектронной схемы Вх.У. Затем сигнал
подается на вход интегрирующего устройства (ИУ), предназна-
ченного для защиты приемника от импульсов дроблений, приво-
дящих к ошибочному приему единичных элементов или ложному
запуску аппарата. При работе аппарата по местным коротким со-
единительным цепям (т. е. по каналам, где отсутствуют дробле-
ния) ИУ может быть выключено ключом Кл. Стартстопный триг-
гер запускается в момент появления стартстопного перехода и
устанавливается в положение, разрешающее прохождение такто-
вых импульсов ТИ через схему И] на входы стартстопного дели-
142
теля и делителя цикла. С выхода стартстопного делителя корот-
кие импульсы стробирования с частотой f, равной скорости теле-
графирования В, поступают на схему приема в моменты, соответ-
ствующие серединам принимаемых кодовых элементов. После
схемы регистрации информационные сигналы последовательно
поступают в приемный регистр. На выходе делителя цикла в кон-
це цикла приема появляется импульс сброса, который устанав-
ливает стартстопный триггер в первоначальное состояние, а так-
же переписывает комбинацию в параллельном bhjjp из приемно-
го регистра в буферный. На выходах Qi,..., Qs устанавливаются
состояния соответствующих разрядов кодовой комбинации, со-
провождаемые сигналом наличия информации НИ. При приеме
нового стартового элемента процесс повторяется.
Одним из основных факторов, определяющих качественные
показатели ТА, является применяемый способ печати. Так, ранее
широко применяемый в механических ТА ударный способ печати
(например, с помощью типового рычага, как в пишущей машин-
ке), ограничивая скорость работы, приводил к низкой надежно-
сти и большой шумности. Электронизация ТА обусловила и пере-
ход к новым более прогрессивным способам печати, в основном
мозаичного типа. Суть его заключается в том, что контур печа-
таемого знака раскладывается на растр-элементы (точки), кото-
рые и наносятся затем на бумагу. При ударном методе печати
точки образуются при соударении печатающих стержней (иго-
лок), управляемых электромагнитами, с бумагой через красящую
ленту. Это позволило в мозаичных ПУ почти на порядок увели-
чить скорость печатания по сравнению с ПУ механического типа.
В аппарате РТА-80 применяется разложение печатаемого зна-
ка типа 7X9. На рис. 4.14 показан пример формирования бук-
вы Ш мозаичным способом.
На рис. 4.15 показан принцип работы одной печатающей игол-
ки с втяжным электромагнитом. При подаче импульса тока в об-
Рис. 4.14. Формирование
буквы Ш мозаичным спосо-
бом
1 2' 3 4 5 6 7
Рис. 4.15. Принцип работы
мозаичной печатающей го-
ловки
1
143
мотку 1 электромагнита якорь 2 втягивается внутрь, сжимая пру-
жину 3. При этом печатающая иголка 4, жестко связанная с яко-
рем 2, ударяет через красящую ленту 5 по бумаге 6, лежащей на
валике 7. Образуется отпечаток точки. После прекращения дей-
ствия импульса тока, под действием сжатой пружины 3, якорь 2
возвращается в исходное положение. Печатающая головка со-
держит девять таких иголок, расположенных вертикально.
4.4. ИСПРАВЛЯЮЩАЯ СПОСОБНОСТЬ
ТЕЛЕГРАФНОГО АППАРАТА
Одним из основных параметров систем ПДС является веро-
ятность ошибочного приема символа, определяемая как отноше-
ние ошибочно принятых символов (букв, знаков) к общему чис-
лу переданных за достаточно большой промежуток времени. Оче-
видно, что ошибка кодовой комбинации определяется правильно-
стью регистрации каждого единичного элемента этой комбинации.
Способность приемного устройства верно регистрировать при-
нимаемые посылки при наличии в них искажений называется ис-
правляющей способностью регистрирующего устройства. Исправ-
ляющая способность является одной из основных характеристик
приемника оконечной аппаратуры, определяющей степень его за-
щищенности от искажений. Численно исправляющая способность
равна наибольшей величине искажений, при которой обеспечива-
ется правильная регистрация элементарных посылок (ц = дтаж).
Различают три вида исправляющей способности:
теоретическая, определяемая на основе учета параметров эле-
ментов приемника при условии идеальной поэлементной тактовой
синхронизации;
эффективная определяемая при учете влияния реальной систе-
мы синхронизации в идеальных условиях эксплуатации;
номинальная, представляющая собой минимальное значение
эффективной исправляющей способности для данного типа аппа-
ратов при стандартных условиях эксплуатации.
При сравнении оконечных устройств с различными методами
регистрации пользуются значениями теоретической исправляющей
способности. В зависимости от вида искажений, приводящих
к неверной регистрации, различают исправляющую способность
по краевым искажениям (цк) и по дроблениям (цд). Если прини-
маемый дискретный сигнал подвержен краевым искажениям, т. е.
смещениям ЗМ, то нетрудно показать, что максимально допусти-
мое смещение ЗМ при стробировании не может превышать вели-
чины от начала посылки до момента регистрации. Следовательно,
исправляющая способность при краевых искажениях и регистра-
ции методом стробирования не может превышать цСк=(то—z)/2,
где z — время регистрации. Так как в современных электронных
144
системах время регистрации z в сотни раз меньше длительности
единичного сигнала, т. е. z->0, то для них цСк->0,5то- При наличии
дроблений и регистрации в средней части ошибочный прием воз-
можен при любой длительности дробления, если оно совпадает
с моментом регистрации, поэтому исправляющая способность по
дроблениям цСд=0.
При интегральном методе регистрации и краевых искажениях
ошибочное решение о принятом единичном элементе возможно
в том случае, если оба фронта элемента сместятся к центру по-
сылки на величину, большую 0,25 то, или один из них — на вели-
чину, большую 0,5 то- Следовательно, при двусторонних краевых
искажениях исправляющая способность Р-ик = О,25то, а при односто-
ронних — Ник= O,5to.
В случае использования интегрального метода приема при
дроблениях ошибочная регистрация возможна, если длительность
дробления будет больше половины единичной посылки, т. е.
Цид:= О,5то*
4.5. РЕКОМЕНДАЦИИ МККТТ
ПО ОКОНЕЧНОЙ АППАРАТУРЕ
В соответствии с Рекомендацией 5.1 МККТТ оконечное теле-
графное оборудование, предназначенное для работы в междуна-
родной сети, должно обладать следующими характеристиками:
номинальная скорость модуляции должна быть 50, 75 или
100 Бод; разница между истинной средней скоростью модуляции
сигналов в условиях эксплуатации и номинальной скоростью не
должна превышать 4-0,75%;
степень общего стартстопного искажения сигналов, измерен-
ная на выходе оконечного передающего оборудования, не долж-
на превышать 10% при номинальных условиях эксплуатации на
максимальной скорости модуляции;
эффективная исправляющая способность оконечного оборудо-
вания, измеренная на входе линии, в частности, для сигналов, по-
ступающих от передающего аппарата с номинальным циклом пе-
редачи, равным 7 элементам или более при скорости 50 или
75 Бод, или 7,5 элементам при скорости 100 Бод, должна быть не
менее 35% при работе на скоростях 50 и 75 Бод либо 30% при
работе на скорости 100 Бод.
Для обеспечения взаимодействия рулонных и ленточных
стартстопных аппаратов МККТТ считает, что:
число знаков в строке текста рулонного стартстопного аппа-
рата должно составлять 69;
ленточный и рулонный аппараты должны быть оборудованы
двумя клавишами для передачи сигналов «Возврат каретки» и
10—6085 145
«Перевод строки», устройством для предупреждения оператора
о необходимости своевременной передачи сигналов «Возврат ка-
ретки» и «Перевод строки», чтобы предотвратить забой отпеча-
тываемых знаков.
В Рекомендации 5.8 МККТТ указано, что стандартизованная
скорость телеграфирования, рекомендуемая для стартстопных ап-
паратов, используемых на международной сети, составляет
50 Бод.
КОНТРОЛЬНЫЕ ВОПРОСЫ
1. Назначение абонентских оконечных пунктов.
2. Назовите типы н основной состав АП.
3. Каково назначение вводно-выводных устройств?
4. Классификация УВВ.
5. Что такое терминальный комплект?
6 Назовите функциональные особенности электронного телеграфного аппа-
рата.
7. Каковы достоинства мозаичной печати?
8. Что такое исправляющая способность телеграфного аппарата?
9. Сравните теоретическую исправляющую способность аппарата при раз-
личных методах регистрации.
Глава 5. МЕТОДЫ СОПРЯЖЕНИЯ ИСТОЧНИКА
ДИСКРЕТНЫХ СООБЩЕНИЙ
С ДИСКРЕТНЫМ КАНАЛОМ*
5.1. ПОСТАНОВКА ЗАДАЧИ
Пусть в нашем распоряжении имеется дискретный канал, по ко-
торому можно передавать сигналы со скоростью, не превышаю-
щей С бит/с. Необходимо обеспечить наилучшее согласование ис-
точника дискретного сигнала** с каналом. Поставленная задача
сводится к задаче наилучшего использования дискретного канала.
При этом будем полагать, что в канале нет помех и требуется
обеспечить передачу информации по каналу со скоростью, воз-
можно более близкой к предельной.
* Глава написана совместно с В. К. Трофимовым.
** Под источником дискретного сигнала будем понимать совокупность кас-
кадно соединенных устройств, с выхода последнего из которых снимается дис-
кретный сигнал, который необходимо передать. В состав источника дискретных
сигналов входит и источник дискретных сообщений.
146
Будем различать два вида источников дискретных сигналов—
без информационной избыточности и с информационной избыточ-
ностью. В первом случае ставится задача создания условий, де-
лающих возможной передачу через канал дискретного сигнала.
Будем рассматривать ситуацию, когда канал предназначен для
передачи только изохронных сигналов, в то время как сигнал,
поступающий от источника дискретных сигналов, может быть
анизохронным, стартстопным или же изохронным, но имеющим
скорость, отличную от требуемой. Во втором случае задача наи-
лучшего согласования источника с дискретным каналом будет
рассматриваться как задача устранения избыточности в переда-
ваемой последовательности сигналов или передаваемом сообще-
нии. Решение этой задачи позволит обеспечить передачу по кана-
лу максимального количества информации в единицу времени.
Процедуры, направленные на устранение избыточности в переда-
ваемом сигнале, называются эффективным или статистическим
кодированием. Рассмотрим условия, при которых применение
процедур эффективного кодирования окажется экономически оп-
равданным. Пусть для передачи информации от источника с за-
данной скоростью требуется N телеграфных каналов. Если стои-
мость 1 км канала SK и требуется обеспечить передачу информа-
ции на L км, то общие капитальные вложения в случае, когда эф-
фективное кодирование не применяется, Ki = NSKL. Использова-
ние эффективного кодирования позволяет обеспечить сжатие со-
общения за счет устранения избыточности в Z раз. При этом ка-
питательные затраты с учетом эффективного кодирования Кг—
— (N/Z)SKL. Эффективное кодирование экономически оправдано,
если суммарная стоимость кодера и декодера источника (К3)
будет удовлетворять неравенству
Процедуры, обеспечивающие устранение избыточности, рас-
смотрены в разд. 5.2—5.4. Последний раздел главы посвящен во-
просам сопряжения источника безызбыточных дискретных сигна-
лов с дискретным каналом.
5.2. ОСНОВЫ ЭФФЕКТИВНОГО
КОДИРОВАНИЯ
Сформулируем задачу статистического кодирования, которую
часто приходится решать в технике документальной электросвязи.
Пусть имеется сообщение, записанное с помощью букв некоторо-
го алфавита A—{ai, а2,...,ак}, содержащего К букв. Алфавит А
назовем входным. Требуется закодировать это сообщение, т. е.
указать правило, которое сопоставляет каждой букве алфавита
последовательность из символов «О» и «1». Выбранный код, во-
Ю* 147
Таблица 5.1
А Код 1 Код 2 Код 3
а1 1 01 0
0 10 10
«з 01 И 111
первых, должен обеспечивать возможность однозначного декоди-
рования, т. е. позволять по принятой последовательности симво-
лов «О» и «1» однозначно восстановить переданное сообщение
(букву). Во-вторых, на передачу сообщения в среднем должно
быть затрачено минимальное число нулей и единиц, что позволит
передать за единицу времени максимальное число сообщений.
Пример 5.1. Пусть Д = {а,, а2, аз}. Некоторые возможные коды для букв
алфавита А представлены в табл. 5.1.
Код 1 не является однозначно декодируемым кодом. Для доказательства
этого рассмотрим, например, двоичную последовательность 0101. Она может
быть декодирована одним из сообщений: a2aia2ai; ЧзЯз; а2таз; «зацц. Код 2 де-
кодируется однозначно, поскольку все кодовые слова этого кода имеют равные
длины и различны. Код 3 также однозначно декодируемый, поскольку никакое
его кодовое слово не является началом (префиксом) другого кодового слова.
Код, обладающий тем свойством, что никакое более короткое
слово не является началом другого более длинного слова кода,
называют префиксным. Префиксные коды всегда однозначно де-
кодируемы.
Кодовое дерево для множества кодовых слов. Наглядное гра-
фическое изображение множества кодовых слов можно получить,
установив соответствие между сообщениями и концевыми узлами
двоичного дерева. Пример двоичного дерева изображен на
рис. 5.1. Две ветви, идущие от корня дерева к узлам первого по-
рядка, соответствуют выбору между «0» и «1» в качестве перво-
го символа кодового слова: левая ветвь соответствует «0», а пра-
вая— «1». Две ветви, идущие из узлов первого порядка, соот-
ветствуют второму символу кодовых слов, левая означает «0»,
а правая — «1» и т. д. Ясно, что последовательность символов
каждого кодового слова определяет необходимые правила про-
движения от корня дерева до концевого узла, соответствующего
рассматриваемому сообщению.
Формально кодовые слова могут быть приписаны также про-
межуточным узлам. Например, промежуточному узлу второго
порядка на рис. 5.1 можно приписать кодовое слово И, т. е. пер-
вые два символа кодовых слов, соответствующих концевым уз-
лам, порождаемых этим узлом. Однако кодовые слова, соответ-
148
Узлы 3 го порядка
Рис. 5.1. Пример двоичного кодового
дерева
Рис. 5.2. Кодовые деревья для
кодов 2 (а) и 3 (б)
ствующие промежуточным узлам, не могут быть использованы
для представления сообщений, так как в этом случае нарушает-
ся требование префиксности кода.
Требование, чтобы только концевые узлы сопоставлялись со-
общениям, эквивалентно условию, чтобы ни одно из кодовых слов
не совпало с началом (префиксом) более длинного кодового сло-
ва. Любой код, кодовые слова которого соответствуют различным
концевым вершинам некоторого двоичного дерева, является пре-
фиксным, т. е. декодируемым.
На рис. 5.2 изображены кодовые деревья, соответствующие
кодам 2 и 3 (см. табл. 5.1).
Вернемся к рассмотренному ранее примеру 5.1. Пусть веро-
ятность появления в сообщении буквы ai равна 0,2; буквы а2 —
0,3; — 0,5. Тогда среднее число двоичных символов, приходя-
щихся на одну букву для кода 3 составляет 0,2-1+0,3-2+0,5Х
Х3=2,3, а для кода 2—0,2-2+0,3-2+0,5-2=2,0, т. е. код 2 в сред-
нем экономичнее кода 3.
Рассмотрим еще один код — код 4, который букве ставит
в соответствие 10; а2—11; а3 — 0. Среднее число двоичных сим-
волов, приходящихся на одну букву этого кода: 0,2-2+0,3-2+
+0,5-1 = 1,5, т. е. код 4 экономичнее и кода 3, и кода 2. Спра-
шивается, можно ли предложить код, который будет экономичнее
кода 4? Как построить самый экономичный код для данного со-
общения? Ответы на эти и многие другие вопросы дает основная
теорема кодирования, сформулированная и доказанная впервые
К- Шенноном.
Пусть буквы а„ i= 1, К, входного алфавита А порождаются
независимо с вероятностью р,, т. е. р(а1)=р!, некоторым источни-
ком сообщений. Количество информации, приходящееся на сооб-
щение* а,, равно — logsPz. Среднее количество информации в би-
Термин «сообщение» является более общим, чем «буква». Так, сообщением
может быть буква, цифра или последовательность букв и цифр. Учитывая это
далее, термины «буква» и «сообщение» будут использоваться как синонимы
149
тах на одно сообщение (букву) обозначается Н(А) и называет-
ся энтропией источника сообщений (см. гл. 1):
к
Н(А) = — 2' Pil0^Pi- (5Л)
< = 1
Энтропию Н(А) можно рассматривать как меру «неопределенно-
сти» сообщения до того, как оно было принято.
В приведенной ниже основной теореме кодирования устанав-
ливается связь между Н(А) и средним числом I символов «О» и
«1» в кодовом слове.
Теорема 5.1. Для любого однозначно декодируемого кода всег-
да выполняется неравенство 7^//(А) и существует однозначно
декодируемый код, для которого выполняется 'неравенство 7<
<Н(А) +1. Доказательство этой теоремы можно найти в [1.1].
Теорема 5.1 имеет глубокий смысл. В частности, из нее сле-
дует, что нельзя закодировать сообщение таким образом, чтобы
средняя длина кодовых слов была меньше, чем энтропия сообще-
ний. Кроме того, теорема утверждает, что существует кодирова-
ние, при котором средняя длина кодового слова немногим отли-
чается от энтропии сообщения. Покажем, что среднее число сим-
волов на сообщение можно уменьшить, если кодировать не
каждую букву в отдельности, а блоки по п букв из алфавита А.
Пусть буквы алфавита А появляются независимо с вероятностя-
ми pi,...,pK. Множество всех блоков длины п в алфавите А обо-
значим Ап. Как хорошо известно,
Н(А”)=пН(А). (5.2)
Обозначим среднее число «О» и «1», приходящихся на один
блок из п букв, взятых из алфавита А, через 1п. Тогда среднее
число символов, приходящихся на одну букву алфавита, опреде-
ляется формулой
1—lnln. (5.3)
Теорема 5.2. При любом сколь угодно малом положительном е
можно найти натуральное число N, такое, что среднее число сим-
волов на одно сообщение I при nZ>N удовлетворяет неравенству
7<tf(A)+e. (5.4)
Наоборот невозможно найти натуральное число N и одно-
значно декодируемый код, такие, чтобы выполнялось неравенство
7<Я(А). (5.5)
Доказательство. Эта теорема вытекает из теоремы 5.1. Под-
ставляя в нее 1п вместо 7, получаем
7п<Я(А") + 1. (5.6)
150
Разделив (5.6) на п и учитывая (5.2) и (5.3), получим
Н(Д)^1<Я(Л) + 1/п. (5-7)
Из неравенства (5.7) следует неравенство (5.4), если положить
п= 1/е.
В то же время неравенство (5.5) несовместимо с неравенством
(5.7). Теорема доказана.
Из теоремы 5.2 следует, что, используя кодирование блоков,
можно получить среднее число символов на сообщение (букву),
сколь угодно мало отличающееся от энтропии, но при этом уве-
личивается сложность кодирования.
5.3. МЕТОДЫ ЭФФЕКТИВНОГО
КОДИРОВАНИЯ ПРИ ИЗВЕСТНОЙ
СТАТИСТИКЕ СООБЩЕНИЙ
Метод Шеннона — Фано. Код Шеннона — Фано строится сле-
дующим образом: все имеющиеся К букв располагаются в один
столбик в порядке убывания вероятностей. Затем эти буквы раз-
биваются на две группы: верхнюю и нижнюю так, чтобы суммар-
ные вероятности этих групп были по возможности ближе друг
к другу. Для букв верхней группы в качестве первого символа
кодового слова используется «1», а для нижней — «О». Далее каж-
дую из двух полученных групп нужно разделить на две части по
возможности с близкими суммарными вероятностями; в качестве
второго символа кодового слова используется «1» или «О» в за-
висимости от принадлежности букв верхней или нижней подгруп-
пе и т. д. Данный процесс повторяется до тех пор, пока не при-
ходим к группам, каждая из которых содержит по одной-един-
ственной букве.
Пример 5.2. Пусть даны восемь сообщений (букв), имеющих следующие ве-
роятности: 0,2; 0,2; 0,15; 0,13; 0,12; 0,10; 0,07; 0,03. Построение кода Шеино-
иа — Фано даио в табл. 5.2.
Таблица 5.2
№ сообщения Вероятность появления сообщения Деление сообщений на группы Код Шеинона—Фано
1 0,20 ) }1 11
2 0,20 1 1П } 1 101
3 0,15 ) / ) И 100
4 0,13 1 I}1 он
5 0,12 / } 11 010
6 0,10 II) 001
7 0,07 П1 II } I 0001
8 0,03 М / )П 0000
151
Таблица 5.4
Таблица 5.3
Ьуква Вероят- ность Код Сообщение Вероятность Код
0,8 1 сГ <3 0,64 0,16 1 01
d. 0,2 0 1 -Н 94 Q Q < С4 о а 0,16 0,04 001 000
Если использовать равномерный код, то на кодирование данных восьми со-
общений потребуется по три двоичных символа (бита) *; при использовании же
кода Шеннона — Фано среднее число «О» и «1», приходящихся на одну букву
сообщения, составит
0,2 • 24 0,2 • 3-И15 3+0,13 3-|-0,12 • 3+0,10 • 34-0,07 • 440,03 • 4 ^2,9.
Это меньше, чем при равномерном кодировании и не очень далеко от энтропии
//(Л)^ь2,806 бит/сообщ.
Как следует из теоремы 5.2, особенно выгодно кодировать не отдельные
буквы, а сразу целые блоки по несколько букв. Рассмотрим случай, когда
имеются лишь две различные буквы а-, и аг, появляющиеся с вероятностью
p(ai)=0,8 и р(а2)=0,2 соответственно. Тогда
Н(Я) =—0,8 log2 0,8—0,2 log2 0,2=s0,722 бит/буква.
Применяя метод Шеннона — Фано к исходному двухбуквенному алфавиту, по-
лучаем простейший код (табл. 5.3). Этот код требует для передачи каждой бук-
вы одного двоичного символа (7=1), что на 38 % больше минимально возмож-
ного значения И (А) =0,722 бит/буква.
Применим метод Шеннона — Фано к кодированию всевозможных двубуквен-
ных комбинаций (табл. 5 4).
Средняя длина кодового слова здесь равна 1 • 0,64-) 2 - 0,164 3 - 0,2 = 1,56 бит.
Таким образом, на одну букву приходится 1,56/2 = 0,78 бит, что лишь на 8 %
больше значения 0,722. Еще лучший результат получим при кодировании трех
буквенных комбинаций (табл. 5.5).
Таблица 5.5
Сообщение Вероятность Код Сообщение Вероятность Код
а1а1а1 0,512 1 а1а202 0,032 00011
dyd^d^ 0,128 011 а2а1а2 0,032 00010
0,128 ОН 0,032 00001
а2а1а1 0,128 001 d‘2^‘2^2 0,008 00000
* В соответствии с [1 6] бит данных «один из символов данных, представ-
ленных в двоичной позиционной системе счисления»
152
Средняя длина кодового слова здесь равна 2,184 бнт, т. е. на одну букву
текста приходится в среднем 0,728 бит, что только на 0,83 % больше значения
Н(Л) =0,722 бит/букв.
Метод Хафмена. Более выгодным, чем код Шеннона — Фано,
является так называемый код Хафмена. Пусть буквы (сообще-
ния) входного алфавита А= (ah ак} имеют соответственно ве-
роятности р\, рг,...,р^. Предположим, что буквы в алфавите рас-
положены в порядке убывания их вероятностей*, т. е. р^ръ,...
^pK-i^pK. Тогда алгоритм кодирования Хафмена состоит в сле-
дующем:
1. Два самых маловероятных сообщения объединяем в одно
сообщение Ь, которое имеет вероятность, равную сумме вероят-
ностей сообщений ак_ь ак, т. е. рк_1+рк- В результате получим
сообщения 01, а2,ак_2, Ь, вероятности которых р2,...,Рк-2>
pK-i-|-pK. Эти сообщения вновь располагаем в порядке убывания
вероятностей.
2. Берем два сообщения, имеющие наименьшие вероятности,
объединяем их в одно и вычисляем их в общую вероятность.
3. Повторяем шаги 1 и 2 до тех пор, пока не получим единст-
венное сообщение, вероятность которого равна 1.
4. Проводя линии, объединяющие сообщения и образующие
последовательные подмножества, получаем дерево, в котором
отдельные сообщения являются концевыми узлами. Соответству-
ющие им кодовые слова можно построить, приписывая ветви, ко-
торые идут вниз, «0», а вверх — «1».
Так как в процессе кодирования сообщениям сопоставляются
только концевые узлы, полученный код является префиксным и
всегда однозначно декодируем.
Построение кода Хафмена для сообщений, появляющихся
с вероятностями 0,2; 0,2; 0,15; 0,13; 0,12; 0,1; 0,07; 0,03, изображе-
но на рис. 5.3.
Как видно из рисунка, он совпадает с кодом Шеннона — Фа-
но, рассмотренным в предыдущем разделе. Следовательно, по
экономичности коды Шеннона — Фано и Хафмена в данном кон-
кретном случае одинаковы. Это еще раз подтверждает, что код
Шеннона — Фано достаточно хорош. Однако в общем случае код
Хафмена экономичнее кода Шеннона — Фано.
Равномерное по выходу кодирование. Рассмотренные выше
методы кодирования являются оптимальными в том смысле, что
эти методы кодирования позво опот затратить в среднем наи-
* Если данное условие не выполняется, то всегда нетрудно расположить
буквы в порядке убывания их вероятностей Это н будет первым шагом алго-
ритма Хафмена.
153
11
101
100
011
010
001
0001
0000
Рис 5 3 Принцип построения кода Хафмена
меньшее число символов «О» и «1» на одно сообщение. Однако
и метод Хафмена, и метод Шеннона — Фано обладает следующи-
ми существенными недостатками:
а) если произойдет случайная ошибка, то она распространя-
ется на все последующие сообщения, т. е. возникает так называе-
мая ошибка синхронизации;
б) при декодировании, особенно при возникновении ошибки
синхронизации, нужно использовать все передаваемые сообще-
ния. Это потребует при передаче больших массивов информации
огромной памяти
Перечисленными выше недостатками не страдают так назы-
ваемые равномерные коды. Эти коды используют для кодирова-
ния каждого сообщения одно и то же число символов «О» и «1»,
поэтому, если где-то произойдет ошибка, то она будет локализо-
вана именно в этом сообщении и на другие сообщения не распро-
страняется. Опишем метод равномерного по выходу кодирования
на примере, когда буквы входного алфавита A={ai, а2} появля-
ются независимо с вероятностями р, q=l—p, причем р<1/2.
Предположим, что при кодировании допускается хотя и ма-
лая, но отличная от нуля вероятность ошибки. Рассмотрим мно-
жество Ап всех блоков длины п. Число таких блоков 2". Пусть
е>0 и Тп — это подмножество блоков из Ап таких, что для них
выполнено неравенство
\k-np\<iz-n, (5.8)
где k — число букв а\ в блоке длины п; е>0.
По закону больших чисел вероятность появления блока, при-
надлежащего Тп, больше или равна 1—р<?/(пе2). При ц-><х> эта
вероятность стремится к единице.
Кодирование построим следующим образом. Рассмотрим мно-
жество блоков из «О» и «1», число которых равно числу элемен-
тов в Тп (число элементов в Тп обозначим Nr). Каждой после-
довательности из Тп сопоставляется свое кодовое слово, а всем
154
последовательностям, не принадлежащим Тп, ставится в соответ-
ствие одно и то же выбранное заранее кодовое слово. Ясно, что
при таком кодировании все сообщения из Тп будут воспроизво-
диться правильно, а при появлении сообщения, не принадлежаще-
го Тп, будет происходить ошибка, которая, как видим, может
быть сделана сколь угодно малой.
Среднее число символов «О» и «1», приходящихся на одну
букву алфавита А, при этом кодировании равно (logArT)/n Эта
величина эквивалентна величине 7, определяемой (5 3). Можно
показать, что при п—>-оо, величина (logMT)/n стремится к И (А),
т. е. основная теорема К. Шеннона справедлива и при описанном
выше кодировании.
При р — 0,11 для передачи сообщения из букв потребуется
п-0,499 символов «0» и «1», что примерно в 2 раза меньше, чем
п, при этом вероятность ошибки с ростом п стремится к нулю.
Рассмотренные выше методы кодирования источников нашли
свое применение в основном в факсимильной связи (см. гл. 10).
5.4. МЕТОДЫ ЭФФЕКТИВНОГО
КОДИРОВАНИЯ ПРИ НЕИЗВЕСТНОЙ
СТАТИСТИКЕ СООБЩЕНИЙ
Коды, экономичные одновременно для некоторого класса ис-
точников, называют универсальными кодами. Сформулируем по-
становку задачи универсального кодирования источников Пред-
положим, что алфавит состоит из двух букв а\ и а2, появляющих-
ся независимо с вероятностями р, q=\—р. Однако величина р
заранее неизвестна. Требуется построить код, для которого
среднее число символов «0» и «1» на одну букву алфавита при-
ближалось бы к Н(А) при любом р, Этот код строится
так Множество всех блоков длины п в алфавите А разбиваем на
группы, которые имеют одинаковые вероятности при любом р.
Таких групп будет ровно п-j-l. В нулевой группе отсутствует бук-
ва а2, она состоит из единственного блока ... а1У вероятность
п
появления которого рп. Первая группа состоит из всех блоков
длины п, содержащих одну букву а2. Эта группа состоит из Сп' =
= п блоков, вероятность каждого из которых равна рп~'-д. Груп-
па с номером k состоит из всех блоков длины п, содержащих k
букв а2 Эта группа содержит п блоков, вероятность каждого из
которых pn~h-qk.
Универсальный код для k-н группы состоит из двух частей:
префикса и суффикса. Префикс содержит Iog2(n+1) двоич-
ных знаков. Префикс указывает, к какой группе сообщений при-
надлежит кодируемый блок, суффикс содержит log Cnk дво-
ичных символов и указывает номер блока в группе. Построенный
155
Таблица 5.6
Кодируемые слови Номер группы Вероятность слова Код 1 Код 2
CZ| I Pi |ббб| ооо|
^2 01^1^1 II РзЧ 001 001 001 001 00 01 10 и 01 01 01 01 00 01 10 11
a<2aAa1a2 dy J o2a1a2a1 III p2q2 я я If я оТо 010 010 010 010 010 000 001 010 он 100 101 Tot юс 10( юс 10 101 00 01 10 11 00 01
Q2(12(12C! j 1 a23ia2°2 i a1a2a2a2 IV pq3 >1 » V он он он он 00 01 10 11 ГТ 11 11 11 00 01 10 11
(126Z26Z 2<? 2 V д 100| 001 1
таким образом код будет однозначно дешифруем. На приемном
конце первоначально по log(«+l) элементам кода опреде-
ляют, к какой группе принадлежит переданное сообщение, а за-
тем по следующим log Cnk элементам определяют, какое
именно сообщение передавалось.
Код 1 в табл. 5.6 построен описанным выше способом. Здесь
выделены штриховой линией префиксы Этот метод кодирова-
ния называется комбинаторным.
Префикс каждой из групп при комбинаторном кодировании
содержит ровно log(«4-l) символов «О» и «1». Еще больше-
го эффекта можно достичь, если префикс кодировать неравно-
мерным кодом (5.1). Код 2 в табл. 5.6 построен именно этим ме-
тодом. Универсальные методы кодирования хороши не только
тем, что они экономичны для любого распределения вероятно-
стей, но и достаточно просто реализуются. Для универсального
кодирования на передающем и приемном концах не обязательно
знать таблицу, которая определяет кодирование. Код каждого
блока вычисляется по мере поступления на кодирующее устрой-
ство букв «1 и а2- На приемном конце также можно декодиро-
вать, не прибегая к таблицам. При этом число операций на ко-
дирование и декодирование блока длины п не превосходит пл.
Из приведенного выше описания метода кодирования видно,
что наиболее трудоемкой частью кодирования является нахожде-
156
ние суффикса. Опишем алгоритм нахождения суффикса. Пусть
в блоке А длины п буква а} встречается на местах ib тог-
да суффиксом для А назовем число А (А), вычисляемое по пра-
вилу:
N (А) = С,1,—! £2 — 1 + ••• + Ctr—ь
Очевидно, что блоки с разными наборами (ti, получают раз-
ные номера. При этом максимальное значение номера равно
Таким образом, двоичная запись номера (суффикса) должна
иметь длину [ log Cnr
Для нахождения N(А) воспользуемся таблицей биноминаль-
ных коэффициентов (треугольником Паскаля):
8 7 81 35 35 21 7 1 О
7 6 15 20 15 6 10
6 5 10 10 5 1 0
5 4 6 4 1 0
4 3 3 1 0
3 2 10
2 1 0
1 0
Элементы этой таблицы вычисляются по мере надобности ли-
бо размещаются в памяти кодирующего устройства.
Приведем фрагмент этой таблицы, в которой на пересечении
i-й строки и /-го столбца стоит CL-i-
Пример 5.3. Пусть я = 8, А = a2aiaia2aiaia2ai, тогда г=5; и = 2; t2=3; !3=5;
t4=6; 16=8. Тогда номер блока N(A) = C,1-)-C22-|-C48-|-C54-|-Cz5. Слагаемые
в N(А) находим, используя таблицу дополнительных коэффициентов Они выде-
лены жирным шрифтом Таким образом, А(А) = 1-|-Ц 4 | 5 I 21=32 или в двоич-
ион записи 7V(A) = 100000
Декодирование производится с помощью этой же таблицы.
Пример 5.4. Пусть нам известно, что длина передаваемого блока равна 8,
и что в блоке пять букв а, (количество букв в блоке находим по префиксу).
Находим максимальное число в 5-м столбце, не превосходящее 32, это 21 =
=СУ. ц следовательно, is = 8, находим разность 32—21 = 11 Находим далее ма-
ксимальное число 4-го столбца, не превосходящее 11. Это 5=C46-i, т. е. 14=6.
Аналогично находим 1з=5, i2 = 3, й = 2 Следовательно, декодированное сообще-
ние имеет вид
A=a2aiaia2aiaia2“i, т. е. совпадает с переданным
Рассмотренные кодирование и декодирование достаточно про-
сто осуществляются с помощью специализированных вычисли-
тельных средств.
157
5.5. СОПРЯЖЕНИЕ ИСТОЧНИКОВ
ДИСКРЕТНЫХ СООБЩЕНИЙ
С СИНХРОННЫМ ДИСКРЕТНЫМ КАНАЛОМ
Общие положения. В последние годы все большее распростра-
нение получают системы ПДС с временным разделением каналов.
При этом групповой канал является синхронным и возникает за-
дача сопряжения источников дискретных сообщений с синхрон-
ным каналом. Задачу сопряжения выполняют устройства согла-
сования передачи и приема СУпер и СУпр (рис. 5.4). Канал, обра-
зовавшийся в результате подключения к синхронному каналу
согласующих устройств, назовем каналом ПДС.
Сигнал на выходе источника дискретных сообщений может
быть изохронным или анизохронным. Изохронные дискретные
сигналы отличаются от анизохронных тем, что для них на прие-
ме заранее известна структура и, в частности, моменты переда-
чи единичных элементов. Изохронные сигналы, поступающие от
источника, имеют длительность, кратную то, и характеризуются
скоростью телеграфирования Вн. Анизохронные сигналы -могут
иметь любую длительность, но не менее чем тт1П. При этом мак-
симальная скорость телеграфирования источника Ви=1/тт,п<С
СВс — скорости модуляции в синхронном канале.
Основными характеристиками источника дискретных сообще-
ний с дискретным синхронным каналом являются: коэффициент
использования синхронного канала ц, который будем определять
отношением Ви/Вс, и сложность аппаратурной реализации.
Согласование дискретных сигналов анизохронной структуры
с синхронным каналом. Согласующее устройство на передаче
обеспечивает преобразование исходного анизохронного сигнала
в изохронный, па приеме осуществляется обратное преобразова-
ние. Таким образом, создается асинхронный канал ПДС. За воз-
можность передавать по дискретному синхронному каналу сиг-
налы анизохронной структуры приходится расплачиваться умень-
шением коэффициента использования синхронного канала или
в многоканальных системах — уменьшением числа дискретных
асинхронных каналов по сравнению с исходным числом син-
хронных.
В технике ПДС нашли применение два метода согласования
сообщений анизохронной структуры с синхронным каналом: ме-
тод наложения и метод скользящего индекса с подтверждением.
Метод наложения — наиболее простой из известных методов
согласования сообщений анизохронной структуры с синхронным
каналом. При этом методе согласования используется импульсная
несущая, которая модулируется передаваемым сигналом, т. е.
осуществляется амплитудно-импульсная модуляция. Каждая по-
сылка (рис. 5.5,6) как бы накладывается на импульсную несу-
щую (рис. 5.5,а). В результате в канал либо поступает пачка им-
158
Рис. 5.4. Сопряжение источника и
получателя дискретных сообще-
ний с синхронным каналом
пульсов несущей (рис. 5.5,в), если на нее накладывается токовая
посылка, либо импульсы несущей в канал не проходят, если на-
кладывается бестоковая посылка. В качестве модулятора можно
использовать ключ, который управляется (отпирается или запи-
рается) поступающими от источника анизохронными сигналами.
На приемной стороне каждая пачка импульсов несущей пре-
образуется в токовый элемент (посылку) соответствующей дли-
тельности (рис. 5.5,г). При воспроизведении элементов на прие-
ме возникают краевые искажения, обусловленные тем, что источ-
ник сообщений и генератор импульсной несущей на передаче не
синхронизированы. Эти искажения будут тем меньше, чем боль-
ше частота следования импульсов несущей, т. е. чем больше раз-
мещается импульсов несущей на интервале времени тТО1И. Оче-
видно, что при одной и той же частоте следования импульсов не-
сущей величина искажений будет зависеть от скорости телегра-
фирования Ви. Величина искажений, %, определяется выраже-
нием
8 = ЮО = — 100, (5.9)
zmin Вс
где А/ — интервал времени между двумя соседними импульсами
несущей, определяющий скорость передачи импульсной последо-
вательности Вс. Очевидно, что Вс=/н, где /н— частота импуль-
сной последовательности.
Дг
ЧЕ-*-
Рис. 5.5. Метод наложения:
в — тактовая последовательность; б — передаваемый сигнал; в — тактовая последователь-
ность в канале; г — воспроизведение на приеме переданного сигнала
159
Пример 5.5. Пусть скорость модуляции импульсной последовательности
в синхронном канале Вс=5000 Бод нлн 5000 имп /с, а допустимые искажения
6=1 %. Требуется определить максимально возможную скорость телеграфиро-
вания в асинхронном канале н коэффициент использования канала Из формулы
Дс о
(5.3) имеем ^H=j^6 = 50
нала т] = 0,01.
Бод. Коэффициент использования синхронного ка-
В многоканальных системах необходима цикловая синхрони-
зация (фазирование). Обычно для передачи специальных сигна-
лов, по которым производится цикловая синхронизация, выделя-
ется специальный канал. При этом скорость телеграфирования
в синхронном канале, обеспечивающем передачу сигналов от N
источников анизохронных сигналов с искажениями не более 6 %,
Вс=Вп(АЧ-1) • 100/6. Так, при организации 12 телеграфных ка-
налов со скоростью передачи до 200 Бод и искажениями до 4°/о
скорость передачи в синхронном (групповом) канале должна
составлять Вс=200(12-|-1) 100/4 — 65' Ю4 Бод. Такая скорость те-
леграфирования принята в аппаратуре ТВУ-12.
При согласовании методом наложения токовому элементу
сигнала соответствует n=xj\t импульсов несущей, где т-—дли-
тельность посылки. При этом можно считать, что первый им-
пульс несет информацию о передаче токового элемента, осталь-
ные (л—1) импульсов являются импульсами подтверждения.
Необходимость их передачи диктуется соображениями помехо-
устойчивости и желанием передать анизохронные сигналы
с краевыми искажениями, не превышающими заданные. Коэффи-
циент использования синхронного канала при методе наложения
не превышает величины ц = 6/100.
Для организации прозрачных (кодонезависимых) каналов
с лучшим использованием пропускной способности синхронного
канала при искажениях, не превышающих заданное значение,
можно использовать метод, основанный на следующих соображе-
ниях. На приемный конец необходимо передать информацию
о знаке посылки и местоположении ЗМ. При этом местоположе-
ние ЗМ можно задать с определенной точностью, которая будет
определяться допустимыми индивидуальными краевыми искаже-
ниями Если расстояние между импульсами несущей Д^, то при
методе наложения, как известно, краевые искажения определя-
ются формулой (5.9), т. е. зависят только от Д£ и хт1П. Если раз-
бить интервал St на I зон и фиксировать попадание ЗМ в каждую
из этих зон, то можно, передавая по каналу информацию о номе-
ре зоны, уменьшить искажения в I раз, т. е.
8 = JklOOo/0. (,5.Ю)
Если передавать информацию о номере зоны двоичным кодом, то
потребуется & = log21 единичных элементов. Именно поэтому зна-
160
чение I выбирается кратным двум. Так, при 1=2 на передачу ин-
формации о номере зоны потребуется один элемент (импульс
несущей), а при 1 = 4— два. Если после передачи информации
о знаке посылки и номере зоны, в которую попал ЗМ, знак пере-
даваемой посылки не изменился, то далее передается элемент
или несколько элементов подтверждения, совпадающих с первым
(стартовым) элементом. Описанный выше метод получил назва-
ние метода скользящего индекса с подтверждением (СИП).
При методе СИП величина искажений
§ = ^-100%. (5.11)
Сравнивая (5.9) и (5.11) при заданных Ви и Вс, видим, что при
использовании метода СИП удается уменьшить искажения
в 2k раза при том же коэффициенте использования синхронного
канала или при заданной величине искажений увеличить коэффи-
циент использования синхронного канала в 2k раз по сравнению
с методом наложения. При заданной величине искажений можно
вычислить отношение ВК1ВС. Так, при 6 = 8,33% это отношение
для 1 = 4 составляет 1/3. Откуда следует, что при 6 = 8,33% для
получения одного асинхронного канала требуется объединение
трех синхронных.
Недостатком метода СИП является размножение ошибок.
Одиночная ошибка в синхронном тракте может вызвать несколь-
ко ошибок на приеме. Метод СИП используется в аппаратуре
ДАТА, ДУМКА, ДАТА-2-7 и в аппаратуре ТВР (см. гл. 6) При
этом кодирование номера зоны в современной аппаратуре
(ДУМКА, ТВР) осуществляется в соответствии с рекомендация-
ми МККТТ (табл. 5.7).
На рис. 5.6 показан процесс передачи и приема посылок при
применении метода СИП и кодировании в соответствии
с табл. 5.8. Передаваемая последовательность содержит токовую
и бестоковую посылки (рис. 5.6,а). Импульсы тактовой последо-
вательности (рис. 5.6,6) расположены друг от друга на расстоя-
нии AZ и этот промежуток времени разбит на четыре зоны с но-
мерами I ... 4. Первый ЗМ попадает в зону 2, второй ЗМ попада-
Таблица 5.7
Стартовый элемент Уточняющий элемент Зона
1 2 3 4
«1 1 1 0 0
«2 1 0 1 0
о «1 0 0 1 1
0 1 0 1
11—6085 161
, . ,____. jU-L-.---.----» i_i. Ll.—
1234 1234
г)
Рис. 5 6 Метод скользящего индекса с подтверждением;
а— передаваемый сигнал; б — тактовая последовательность, в — кодированная последова-
тельность в канале; г — воспроизведение на приеме переданного сигнала
ет в зону 3. Эти зоны на рис. 5.6,6 заштрихованы. В синхронный
канал посылается кодовая комбинация НО, в которой первый
элемент является стартовым, а два последующих уточняют ме-
стоположение ЗМ[. Для ЗМ2 в синхронный канал посылается
комбинация 010 (рис. 5.6,а) и далее следуют импульсы подтверж-
дения, совпадающие по знаку со стартовыми. На приеме
(рис. 5.6,г) регистрируется посылка в соответствии с информаци-
ей, поступающей из канала.
Согласование дискретных сигналов изохронной структуры
с синхронным каналом. Для сигналов изохронной структуры зна-
чащие моменты строго определены и необходима лишь привязка
ЗМ сигналов, поступающих от источника, и ЗМ сигналов, переда-
ваемых в синхронном канале. Для передачи изохронных сигна-
лов по синхронному каналу необходимо, чтобы скорость поступ-
ления единичных элементов была меньше частоты тактовых им-
пульсов синхронного канала либо равна ей (ВН^ВС). В случае
равенства BH~BC можно организовать только одноканальную пе-
редачу. Для организации N каналов необходимо обеспечить Ви^
^(Bc/N).
Рассмотренные ранее методы согласования сообщений анизо-
хронной структуры с синхронным каналом применимы и для со-
гласования сигнало'в изохронной структуры с синхронным кана-
лом. Однако, как было показано выше, они не позволяют эффек-
тивно использовать синхронный канал. Поэтому получили распро-
странение методы согласования, использующие информацию об
известной структуре изохронного сигнала, характеризуемого оп-
ределенной постоянной скоростью поступления единичных эле-
ментов Ви. Среди известных методов наибольшее практическое
162
Рис 5 7. Метод Стаффинга
а — последовательность от источника, б — последовательность в канале при ^н=3/4 Вс
применение получил метод стаффинга (метод вставок). Различа-
ют односторонний стаффинг, который в свою очередь может быть
подразделен на «ф-стаффинг» и «—стаффинг»; двусторонний
стаффинг (±стаффинг). Сущность этих методов проиллюстриро-
вана на рис. 5.7 («ф-стаффинг»), где показаны последовательно-
сти: передаваемая (рис. 5.7,а) и тактовая последовательность
синхронного канала (рис. 5.7,6).
Пусть в некоторый момент to ЗМ передаваемого сигнала и
тактовой последовательности совпадут. Вследствие того, что
Ви<Вс, фазовое расхождение между последовательностями че-
рез некоторое время достигает величины одного такта последова-
тельности б). Если каждому элементу сообщения а) поставить
в соответствие один элемент тактовой последовательности б), то
за время Т в последней окажется один лишний элемент. Для
обеспечения правильного приема считывание этого лишнего эле-
мента на приеме запрещается специальной кодовой комбинаци-
ей, передаваемой по специальному дополнительному каналу.
При ВИ>ВС применяют «—стаффинг». В этом случае «лиш-
ний» элемент образуется в передаваемом сообщении, поэтому он
в сопровождении специальных команд передается по дополни-
тельному каналу. При выборе Ва = Вс вследствие нестабильности
скоростей возникают ситуации, когда ВИ<ВС или ВИ>ВС, по-
этому в зависимости от сложившихся условий передачи приме-
няют как «ф-стаффинг», так и «—стаффинг». Отсюда название
«двусторонний стаффинг».
Согласование источника стартстопных сигналов с синхронным
каналом. Стартстопные сигналы относятся к сигналам известной
структуры. Они занимают промежуточное положение между изо-
хронным и анизохронными сигналами. Момент появления старт-
стопного сигнала на приеме неизвестен, но после появления старт-
стопного перехода нетрудно предсказать появление ЗМ внутри
стартстопной кодовой комбинации. Знание структуры стартстоп-
11* 163
ного сигнала упрощает задачу сопряжения источника стартстоп-
ных сигналов с синхронным каналом и позволяет существенно
повысить коэффициент использования синхронного канала по
сравнению со случаем, когда передаваемые сообщения имеют чет-
ко выраженную анизохронную структуру
Передача стартстопных сигналов осуществляется следующим
образом Поступающий от ИС стартстопный сигнал регенериру-
ется устройством, принцип действия которого аналогичен работе
приемника телеграфного аппарата Каждая стартовая посылка
отмечает начало стартстопного цикла и по стартстопному перехо-
ду формируются импульсы стробирования, соответствующие сере-
динам принимаемых информационных сигналов в данном теле-
графном знаке Например, при работе кодом МТК-2 со скоростью
50 Бод формируется семь импульсов стробирования, отстоящих
друг от друга на 20 мс, первый из которых отстоит на 10 мс от
стартстопно! о перехода Регенерированный сигнал запоминается
в промежуточных накопителях и затем считывается из них рас-
пределителем Таким образом формируется изохронный сигнал,
который может быть передан по синхронному каналу
Для передачи стартстопных сигналов со скоростью 50 Бод ко-
дом МТК-2 достаточно иметь импульсную несущую последова-
тельность, имеющую скорость 50. 51 ими /с Таким образом,
в одном и том же синхронном канале кодозависимых каналов
может быть организовано в 3 раза больше, чем кодонезависимых
с 6 — 8,33% и использованием метода СИП
КОНТРОЛЬНЫЕ ВОПРОСЫ
1 Сформулируйте задачи согласования источника дискретных сообщений
с дискретным каналом
2 В каком случае целесообразно использовать процедуры эффективного
кодирования?
3 Рассчитайте минимальное среднее число бит на букву, если алфавит со-
стоит из восьми букв с вероятностями их появления /7j=0,25; р2=О,2, р3= 0,15,
р4=0,12, р5=0,1, Рб = 0,08, р? = 0,05, р8 = 0,02
4 . Для предыдущего случая постройте коды Шеннона — Фано и Хафмена
Какой код оказался наиболее экономичным?
5 В чем состоит принцип построения универсальных кодов?
6 Нарисуйте временные диаграммы, иллюстрирующие применение метода
наложения при передаче сообщений от двух источников и использовании прин-
ципа временного разделения каналов Пусть тт,п=Ю мс, Д/=1 мс
7 Определить величину краевых искажений и коэффициент использования
синхронного канала в случае применения метода наложения (Ви=100 Бод,
Be =1000 Бод).
8 Как изменится коэффициент использования синхронного канала, если пе-
редача осуществляется методом наложения от двух источников с Ви=100 Бод?
164
Величина краевых искажений должна оставаться такой же, как и в предыдущем
примере
9 Что дает использование вместо метода наложения метода СИП Пока-
жите преимущества метода СИП на примере, когда тт(П=Ю мс, Л1 = 1 мс, а чис-
ло зон, на которое разбивается интервал Ы, равно 4
10 Ограничивается ли при методе СИП число зон, на которое можно раз-
бить интервал Л/5 Для заданных Ви и Вс определите максимальное число зон
11 Для сличая ВИ = 4/5ВС нарисуйте временные диаграммы, иллюстрирую-
щие метод стаффинга
12 Поясните, почему при поступлении от источника дискретных сигналов
стартстопной последовательности удается обеспечить лучшее использование син-
хронною канала по сравнению со случаем, когда тот же источник вырабатывает
анизохронные сигналы неизвестной структуры
Глава 6. МЕТОДЫ И УСТРОЙСТВА
ПРЕОБРАЗОВАНИЯ СИГНАЛОВ
6.1. НАЗНАЧЕНИЕ И КЛАССИФИКАЦИЯ
УСТРОЙСТВ ПРЕОБРАЗОВАНИЯ СИГНАЛОВ
Устройства преобразования сигналов служат для согласования
сигналов заданной структуры, поступающих от источника сооб-
щений, с параметрами канала связи. При этом должна обеспечи-
ваться передача с требуемыми скоростью и верностью
Различают задачи согласования спектра сигнала данных
с полосой пропускания канала; согласования уровней сигналов
данных с каналом связи и скоростей ввода-вывода информации.
Преобразование спектра сигналов данных (согласование
спектра с полосой пропускания канала) в УПС может осущест-
вляться с использованием несущей (чаще всего гармонической
и 1и импульсной) или путем такого преобразования структуры
сигналов данных, при котором обеспечивается получение требуе-
мых спектральных характеристик сигнала на выходе преобразо-
вателя В последнем случае УПС чаще всего называют преобра-
зователями кода Примером такого преобразования являются би-
импульсное и биполярное кодирование (см разд. 6 2) Особенно-
стью биимпульсного и биполярного преобразований является вве-
дение избыточности, позволяющей обнаруживать и даже исправ-
лять ошибки. Такие преобразователи кодов могут использоваться
как в качестве самостоятельных УПС систем ПДС (в частности,
при передаче сообщений по физическим линиям), так и в сочета-
нии с УПС, использующими несущие Последние обычно называ-
ют модуляторами (на передаче) и демодуляторами (на приеме)
165
Совокупность модулятора и демодулятора называют модемом.
Традиционная классификация модемов приведена в разд. 6.8.
Преобразователи кодов могут использоваться также для пре-
образования исходных сигналов данных без введения избыточно-
сти. Такие преобразователи кодов используются, например,
в УПС с относительной фазовой модуляцией. В этом случае пре-
образование сигналов данных осуществляется в два этапа: снача-
ла кодирование, а затем модуляция. На приеме соответственно
выполняются операции демодуляции и декодирования. Преобра-
зование кодов без введения избыточности может использоваться
и для формирования сигналов такой формы, при которой обеспе-
чивается существенное повышение помехоустойчивости по отно-
шению к импульсным помехам и перерывам (см. разд. 6.4).
По числу дискретных каналов, которое может обеспечить
УПС, различают одно- и многоканальные УПС. По области при-
менения различают УПС аппаратуры передачи данных и УПС,
используемые в технике телеграфной связи. Современные теле-
графные УПС позволяют обеспечить и передачу данных.
Задача проектирования УПС, как и любого другого узла ап-
паратуры ПДС, является оптимизационной задачей. При этом
отыскивается наилучший по некоторому критерию вариант пре-
образования сообщений на передаче и приеме при заданных ог-
раничениях. Такими ограничениями обычно выступают характери-
стики сообщения, канала связи и требования к характеристикам
дискретного канала. В качестве критерия оптимизации обычно
выбирается одна из характеристик дискретного канала, вероят-
ность ошибки, скорость, задержка передачи или сложность УПС.
6.2. СИГНАЛЫ, ИСПОЛЬЗУЕМЫЕ В ТЕХНИКЕ
ПДС. СВОЙСТВА СИГНАЛОВ
Общие положения. Сигналы характеризуются длительностью
Тс, шириной спектра АД и динамическим диапазоном Dc. В каче-
стве обобщенной характеристики используется объем сигнала
Vc = TcAFiDc. Длительность сигнала определяет время его суще
ствования, ширина спектра — диапазон частот, в котором сосре-
доточена основная энергия сигнала. Динамический диапазон ха-
рактеризует отношение наибольшей мгновенной мощности сигна-
ла Ртах к наименьшей Рт1П, допустимое значение которой опре-
деляется мощностью помех.
Важной характеристикой сигналов является также база v —
= 7'сА/7с. Сигналы называются узкополосными (простыми), если
v-C 1, и широкополосными (сложными), если v3>l.
Элементарные сигналы, получаемые на выходе УПС при ис-
пользовании m-позиционного кода, можно разделить на следую-
щие группы [6.1]:
166
сигналы обеспечивающие получение максималь-
ной помехоустойчивости по отношению к флуктуационным поме-
хам в детерминированных каналах. Энергия этих сигналов чаще
всего одинакова:
т т
с ,с
J s/(0^ = Q2 при а скалярное произведение js,(0X
о о
~—Q7(m—I) при i=£j; ортогональные сигналы, для
Те
кото.ых Sj (t'fSj (t)dt = 0 при i =£р,
о
биортогональные сигналы, для которых величина m всегда
четная, любому из m сигналов всегда соответствует один проти-
воположный сигнал, а остальные m—2 сигналов ортогональны;
неортогональные сигналы, для которых соблюдается условие
J si (0 sj (0 <# > О при г' /•
о
Примером сигналов, обеспечивающих максимальную помехо-
устойчивость при детерминированном неискажающем канале и
аддитивном белом шуме, являются сигналы, модулированные по
фазе, и двухполюсные сигналы постоянного тока. К ортогональ-
ным относятся сигналы двоичной частотной модуляции (ЧМ),
если частоты отрезков гармонических сигналов S\(t) и s2(Z)
кратны частоте модуляции. Биортогональные сигналы использу-
ются при двукратной фазовой модуляции, когда т = 4. Неортого-
нальные сигналы применяются при фазовой модуляции, когда
сдвиги между отдельными сигналами составляют, например 0°,
120° и 240°.
Многие задачи анализа и синтеза реальных сигналов упроща-
ются благодаря тому, что эти сигналы, как правило, сложные по
форме, можно представить в виде простых сигналов. Это удобно
для последующего анализа их прохождения через те или иные
цепи. Например, некоторый сигнал s{t) может быть представлен
в виде совокупности ортогональных составляющих (элементар-
ных сигналов):
s = i мно, (6.1)
*=0
причем бесчисленным количеством способов. Запись (6.1) назы-
вают обобщенным рядом Фурье. Интервал [Б, <г] показывает
время действия сигнала. Так как система ортогональных функций
{ф*(0}, применяемая при разложении, заранее известна, то сиг-
нал определяется набором весовых коэффициентов ak, k = 0, I,
167
2,... для этих функций. Такие наборы чисел называются спектра-
ми сигналов. Спектр сигнала, представленный в виде суммы спек-
тральных составляющих (6.1), называется дискретным.
Если для представления сигнала s(t) недостаточно дискретно-
го набора базисных функций ф*(0> а требуется несчетное мно-
жество базисных функций ф(0, /), отличающихся значением не-
прерывно изменяющегося параметра 0, то сигнал представляется
в виде интеграла
оо
s(/)= р(₽ш₽, Ш (6.2)
— оо
который называется обобщенным интегралом Фурье. Спектр та-
кого сигнала характеризуется функцией s(|3) непрерывной пере-
менной р и называется непрерывным.
Рассматривая прохождение каждой составляющей спектра
через линейную цепь с заданными характеристиками, сигнал на
выходе цепи получаем также в виде (6.1) или (6.2) с весовыми
коэффициентами а'к или s'(|3), в общем случае отличными от ак
или $(|3) и зависящими от характеристик рассматриваемой цепи.
Помимо анализа в теории ПДС приходится решать задачи
синтеза сигналов. Они могут быть двух типов: структурный син-
тез— определение формы сигналов, удовлетворяющих заданным
требованиям; параметрический синтез — определение параметров
сигналов известной формы. Если в процессе синтеза необходимо
обеспечить экстремум того или иного функционала (или функ-
ции), который характеризует качество синтеза, то синтез называ-
ется оптимальным.
На практике широко используются системы сигналов прямо-
угольной и синусоидальной форм. Прямоугольные сигналы отли-
чаются друг от друга амплитудой, длительностью, числом и ме-
стоположением импульсов прямоугольной формы на единичном
интервале то. Элементарные сигналы синусоидальной формы
представляют собой отрезки синусоидальных колебаний, отлич-
ных друг от друга по амплитуде, частоте и фазе.
Импульсы постоянного тока. Типичным примером импульсов
прямоугольной формы служат первичные телеграфные сигналы
и сигналы передачи данных, называемые также импульсами по-
стоянного тока. Они имеют вид последовательностей двух- или
однополярных прямоугольных импульсов (рис. 6.1,а).
Найдем спектр периодической последовательности однополяр-
ных импульсов с периодом Т=атц и амплитудой Uo. Такая по-
следовательность может быть представлена в виде ряда Фурье:
s(t) = а0+ tzfe sin (Ш/ -)-<pfe), (6.3)
*=i
168
tl
б)
Рис. 6.1 Последовательность импульсов (а) и ее спектр (б)
где Qi — круговая частота повторения или первая гармоника
(спектральная составляющая) сигнала s(t), Qi — 2л/Т. Коэффи-
циенты ак определяют так называемый спектр амплитуд, а <рА —
спектр фаз. При этом [1.3]
__ 2U0 sinjkQJ/2а)
к ~ k2T/2a. '
где а=Т1г$ — скважность импульсной последовательности. По-
стоянная составляющая или среднее значение сигнала s(t) за пе-
риод ао = иъ!а. Спектр амплитуд для случая а—2 представлен
на рис. 6.1,6.
Спектр периодической последовательности однополярных им-
пульсов при а = 2 содержит кроме постоянной составляющей со-
ставляющие с частотами /1 = 1/7', /з = 3/1, [з = 5Ь, = и т. д.
Разность между этими спектральными составляющими Д[=
= fi+2—fi — 2fi = 2/T .с ростом Т уменьшается, при этом сами со-
ставляющие также уменьшаются по амплитуде. При а-^оо
(7—>оо) сигнал становится непериодическим, а спектр — непре-
рывным. Вместо понятия спектра амплитуд при этом вводится
понятие спектральной плотности. Спектральная плотность опре-
деляется как отношение «амплитуды спектральной составляю-
щей» к бесконечно малой полосе частот dQ и вычисляется через
интеграл Фурье [1.1]:
s(Q)= ^s(t)e~is‘dt = s(Q)e/ip№>, (6.5)
— 00
где s(Q) —спектральная плотность амплитуд; <р(£2)—спектр фаз.
169
Зная s(Q), можно найти s(i), используя обратное преобразо-
вание Фурье:
00
s(/)= J_ Js(Q)e/a'dQ. (6.6)
— 00
Спектральная плотность амплитуд одиночного прямоугольного
импульса с точностью до множителя 2то изображена штриховой
линией на рис. 6.1,6.
Спектр периодической последовательности импульсов и оди-
ночного импульса содержит составляющие с частотой от 0 до
бесконечности, т. е. является бесконечным. Если последователь-
ность прямоугольных импульсов передается по каналу связи, ко-
торый всегда пропускает только ограниченный спектр, то форма
сигнала на выходе канала изменяется. Форму сигнала можно
определить, используя обратное преобразование Фурье (6.6).
На практике под шириной спектра сигнала обычно понимают
ту область частот, в которой сосредоточена основная энергия сиг-
нала. При этом вводится понятие эффективной ширины спектра
сигнала. На рис. 6.1,6 — это диапазон частот от 0 до 1/то, в кото-
ром сосредоточено около 90% энергии сигнала. Значит, чем мень-
ше длительность импульса (выше скорость телеграфирования
В=1/то), тем шире спектр. В частности, бесконечно короткий им-
пульс имеет бесконечно протяженный спектр с равномерной
плотностью. Таким образом, передача с более высокой скоростью
требует каналов с более широкой полосой пропускания.
При заданной длительности единичного элемента то на спектр
передаваемого сигнала оказывают влияние два фактора. Один
из них — форма импульса, которую следует тщательно выбирать
для получения хорошего (компактного) спектра сигнала. Другой
фактор — характер передаваемой цифровой последовательности,
т. е. спектр зависит от статистических характеристик передавае-
мой последовательности, и ее перекодированием спектр можно
изменить.
Для оценки искажений импульсов постоянного тока, вызван-
ных ограничением спектра, рассмотрим прохождение импульса
через идеальный фильтр нижних частот (ФНЧ). В качестве вход-
ного воздействия воспользуемся ступенчатой функцией
при t > т;
при t < т,
(6.7)
представленной графически иа рис. 6.2. Выбор такого входного
воздействия обусловлен тем, что, во-первых, его использование
упрощает математические выкладки, во-вторых, одиночный пря-
моугольный импульс конечной длительности можно представить
как последовательность двух единичных скачков напряжения
170
и
Рис 6 2 Ступенча-
тая функция
вх
одиночного импульса ка идеального ФНЧ
противоположного знака, сдвинутых во времени на величину,
равную длительности импульса (рис. 6.3). И, наконец, зная ха-
рактеристику устанавливающегося процесса при воздействии еди-
ничного скачка, с помощью теоремы свертывания можно найти
устанавливающийся процесс для произвольной формы воздейст-
вия [1.1].
Пусть на вход идеального ФНЧ с частотой среза Пгр=2л/7гр,
амплитудно- и фазочастотная характеристики которого имеют
вид (рис. 6.4):
К (Q) = (°) А'° ПрИ й<йгР’ (6.8)
I 0 при й > йгр,
<p(Q) = Q/‘o при 0<Й<оо,
где t0 — групповое время прохождения фильтра, в момент 1 = 0
подается сигнал (6.7), который может быть представлен
в виде [1.3]
/ °° \
,, ,л г, I 1 । 1 f sin а/
"зх (0 = с/01 —+— ——-dQ .
\ Л 7t S2 /
0 '
Для получения сигнала на выходе ФНЧ умножим все компонен-
ты входного сигнала на модуль коэффициента передачи фильтра
и вычтем из аргумента синуса сдвиг фаз на каждой из частот:
«вь,х (0 = + ± f . (6.9)
\ Z ТС J Ьй у
4 о
Подставив в (6.9) значение коэффициента передачи из (6.8), по-
лучим
«вых(0 = ад>|4+— f (6-Ю)
I 2 л J 42 I
\ 0 /
171
На рис. 6.5 представлен вид сигнала на выходе ФНЧ, рассчи-
танный по формуле (6.10). Время нарастания переходного про-
цесса t„ можно определить из треугольника АВС, в котором АС
является касательной в точке
ВС ~ и,кп
tg Ф Г дмв,,,х (Q 1
L dt
(6.П)
где
Учитывая (6.12), получим г‘н=1/2/7,р. Таким образом, время на-
растания обратно пропорционально граничной частоте идеально-
го ФНЧ.
Интересно отметить связь полученной формулы с так назы-
ваемым условием Найквиста, ограничивающим скорость переда-
чи двоичных сигналов сверху: Bmax=2/\FK=2F,,:,, Бод. Учитывая,
что Втах= 1/тот/и, имеем Tomzn== l/2/^rp. Следовательно, длитель-
ность единичного элемента в соответствии с условием Найквиста
должна быть не менее, чем время нарастания переходного про-
цесса, т. е то^Тн-
Вид сигнала на выходе ФНЧ зависит от его АЧХ и ФЧХ Так,
чем плавнее переход АЧХ фильтра от полосы пропускания к по-
лосе задержания, тем меньше колебательные выбросы переход-
ного процесса. Отклонение ФЧХ от идеальной приводит к удлине-
нию переходного процесса и, как следствие, к взаимному влиянию
импульсов или своеобразной помехе, называемой в литературе
межсимвольной или интерференционной [6.2].
172
Перекодирование первичных сигналов * с введением избыточ-
ности. Различают два способа введения избыточности, используе-
мые в преобразователях кодов:
1. Путем преобразования каждого единичного элемента в по-
следовательность из k сигналов, при этом основание кода на вы-
ходе преобразователя не меняется. Коэффициент избыточности
в этом случае
Xi=(/21og2m—log2m)/(/jlog2m) = l—1//г. (6 13)
2. За счет увеличения в процессе преобразования сигналов ос-
нования кода, при этом число т различных элементарных вход-
ных сигналов, действующих на входе преобразователя, меньше
числа выходных элементарных сигналов т*. Коэффициент избы-
точности в этом случае
Xi = (log2m*—log2 m)/log2m*= 1—(log2 m)/log2 m*. (6.14)
Приведем примеры перекодирования. Типичным примером пе-
рекодирования по первому способу введения избыточности явля-
ется биимпульсное. Особенностью биимпульсных сигналов, опре-
делившей их название, является наличие на любом единичном
интервале двух разнополярных импульсов. Единица исходной
последовательности (рис. 6.6,а) передается в виде 10, а 0 — в ви-
де 01 (рис. 6.6,6). Спектр биимпульсной последовательности ха-
рактеризуется отсутствием постоянной составляющей и сущест-
венным уменьшением энергии низкочастотных составляющих. Это
позволяет передавать биимпульсные сигналы по физическим ли-
ниям, а также каналам ТЧ. Избыточность биимпульспого сигнала
в соответствии с (6.13) равна 0,5.
Постоянная составляющая может быть также устранена пу-
тем преобразования первичного сигнала в биполярный псевдотро-
ичный код. При этом символ «0» передается в канал бестоковой
посылкой, а символы «1» — попеременно чередующимися по по-
лярности прямоугольными импульсами (рис. 6.6,в). Избыточ-
ность сигнала в соответствии с (6.14) равна 0,37. Псевдотроичные
сигналы используются для передачи по физической линии в ап-
паратуре ТВУ-12. Другие методы кодирования описаны в [6.3].
Модулированные сигналы. Остановимся на наиболее часто
встречающемся случае, когда в качестве несущей используется
гармоническое колебание вида
UH(0 = t/HSin((OHi‘-|-(pH), (6.15)
где UH, ин, фн — амплитуда, частота и фаза несущей.
Воздействуя на тот или иной параметр несущей (UH, «н, ф„),
получаем амплитудную, частотную или фазовую модуляцию. Все
* Рассматриваемые первичные (элементарные) сигналы полагаем равнове-
роятными
173
Рис. 6.7. Амплитудная модуляция:
а — модулирующий сигнал, б — модулированный сигнал
это методы преобразования исходного (модулирующего) спектра
частот первичного сигнала, позволяющие обеспечить передачу
информации по каналу связи с характеристиками типа полосово-
го фильтра. Перенос спектра, реализуемый в процессе модуля-
ции, позволяет также решить задачу построения многоканальных
систем с ЧРК.
Простейшим видом модуляции является амплитудная. В этом
случае частота модулируемого напряжения не меняется и оста-
ется равной (он; начальная фаза может быть различной в зави-
симости от момента начала модуляции, а амплитуда изменяется
в соответствии с законом изменения первичного (модулирующего)
сигнала.
На рис. 6.7,а показан модулирующий сигнал uc(t), принимаю-
щий значения ±1; модулированный сигнал «ам(0 для <рн = 0 и
случая, когда на длительности единичного интервала укладыва-
ется один период несущей*, изображен на рис. 6.7,6. Амплитудно-
модулированный (AM) сигнал при этом может быть записан
в виде
«ам(0 = «н[(1—«с(0)/2] sin сМ- (6.16)
* При таком соотношении тэ и периода несущей упрощается построение
временных диаграмм, обеспечивается их наглядность. На практике соотношение
1/то=ч>к/2л выполняется далеко ие всегда.
174
Для получения AM сигнала можно использовать ключ (рис. 6.8),
выполняющий функции амплитудного модулятора. Управление
отпиранием и запиранием ключа осуществляет модулирующий
сигнал ис(/), который можно представить в виде ряда Фурье:
«с (0 = 2 cos + %).
k=i
(6-17)
Подставив (6.17) в (6.16), получим
оо
«ам(0 = у sin («V + Ф„) + у У] ak sin (юн/ + <р„) cos (Q^ + ФЛ).
k=i
Полагая для упрощения выкладок <рн = 0, получаем
OQ
UAM (z) = -у sin ~ у- J] ak sin [(®Н + + <Pd -
k-1
ОО
—у- ак sin [(со„ — QJ i — фД.
fe=i
Таким образом, модулированный по амплитуде сигнал содер-
жит в своем составе спектральные составляющие с частотами
юн, (сон—Па) и (юн+На). Составляющие с частотами (сон—ПА) и
(сон-|-На) называются соответственно нижней и верхней боковой
полосой AM сигнала. Спектр AM сигнала в 2 раза шире спектра
исходного модулирующего сигнала Д-Рам = 2AFC (рис. 6.9). Струк-
турная схема тракта передачи сигналов с УПСпер и УПСпр пред-
ставлена на рис. 6.10. Спектр модулирующего сигнала ограничи-
вается ФНЧ с частотой среза Ргр. Очевидно, что, если задана ши-
рина канала связи i\FK, то надо выбрать Frp:^AFK/2. Возьмем
/7гр=AFk/2. Отсюда время нарастания переходного процесса
амплитуды будет tn=Frp/2—I/AFK. Учитывая необходимость со-
блюдения неравенства то^О, получим то^1/ААк или B^AFK.
Частотная модуляция (ЧМ) является другим способом пере-
носа спектра первичного сигнала в заданный диапазон частот, но
в отличие от AM этот способ преобразова-
ния спектра является нелинейным. При дво-
ичной ЧМ модулятор должен вырабатывать
отрезки гармонических колебаний с часто-
тами fi или /2(^2>/|), соответствующие пе-
редаче нуля и единицы. Для этого можно
использовать два переключаемых генерато-
ра (рис. 6.11). Сигнал на выходе модулятора
может рассматриваться как суперпозиция
CoSGJ.f
AM (Ч
Рис. 6.8. Амплитудный
модулятор
175
Рис. 6 10. Тракт передачи сигналов
Sin 63/
sin t
Sin
Рис. 6 11. Частотный
модулятор
Рис 6 12. Представле-
ние ЧМ сигнала как су-
перпозиции двух AM
сигналов
>\8
Ч /, +(1/т„) Ь /, I, +(1/го) f
*-----------Л/ЧМ=2Л/с + (Ь-Л)
Рис 6 13. Спектр ЧМ сигнала
176
двух AM сигналов, один из которых имеет несущую а другой
f2 (рис. 6.12). Соответственно спектр ЧМ сигнала может быть
представлен как суперпозиция спектров двух AM сигналов
Wami(0 и «лмг(0 (рис. 6.13). Отсюда при f2—fi^AFc ширина
спектра ЧМ сигнала определяется выражением
^чм = 2AFC + ()2 - f1} ~ 2bFc (1 + 1, (6.18)
т. е. ширина спектра ЧМ сигнала шире, чем у AM сигнала на ве-
личину, определяемую расстоянием между несущими и fi. Зна-
чение Д/= (/г—Л)/2 характеризует изменение частоты при пере-
даче 1 (0) относительно ее среднего значения fcp и называется
девиацией частоты. Отношение девиации частоты к скорости те-
леграфирования (скорости модуляции) называется индексом ча-
стотной модуляции-.
Учитывая отчм и соотношение ДЕС = 1/т0, перепишем (6.18) в виде
ДЕЦМ=2ДЕС(1 +тчм). Откуда следует, что чем больше индекс мо-
дуляции, тем шире при прочих равных условиях спектр ЧМ сигнала.
При индексах модуляции 1 ширина спектра ЧМ сигнала AF4M
примерно равна ширине спектра AM сигнала AFam. Время нараста-
ния переходного процесса определяется на выходе канала постоянно-
го тока из следующих соображений. Так как AF4M= 2AFC+()2—)х),
то AFc = f2F4M —()2-h)]/2. Так как ДЕК = £F4M, то AFC = [AFK —
—(/2—Очевидно, что так не, как и при AM, AFC определяет
Frp (частоту среза ФНЧ) и, следовательно, ширину канала постоян-
ного тока. Тогда
/„= Frp/2=A Fc/2 == 1 / [ Д FK— (f2-f,) J.
Учитывая необходимость соблюдения неравенства т0^н, по»
лучим
B^AFK-(f2-f1)<AFK.
Таким образом, при заданном значении AFK максимальная ско-
рость модуляции при ЧМ меньше, чем при AM.
При фазовой модуляции амплитуда и частота несущей оста-
ются неизменными, а меняется фаза. Фазомодулированный сиг-
нал при этом записывается в виде
«ФМ(0 = sin [со!1 + (1 +«с(0) Дф*], O<t<zo,
где Аф*— девиация фазы, фн = 0.
Если uc(t) принимает значения ±1, то имеем сигналы
«фм (0 = sin со,/; ифМ (0 = UH sin (со,/ + 2ДФ*).
12—6085 177
Таблица 6.1
Символ «с (О 2Д<р*
1“ —1 0°
„0“ +1 180°
и.
Де ° 180° Др = 0° Др = 180°
Др =180°
Рис 6 14 Фазовая модуляция Времен-
ные диаграммы
а—модулирующий сигнал б — несущая, в—
фазомодулироваииый сигнал
Рис 6 16 Временные диаграммы, иллю-
стрирующие процесс получения ФМ сиг-
нала
а — модулирующий сигнал, б — несущая, в —
амплитудно модулированный сигнал, г — не-
сущая, д — фазомодулированный сигнал
t'Hsin(coHf + 180)
t'^sin + 180°)
а)
Рис 6.15 Два ва-
рианта получения
ФМ сигнала
178
Для лучшего различения этих сигналов на приеме необходимо,
чтобы они максимально отличались друг от друга по фазе, т. е.
Дер* должно выбираться равным 90°. В табл. 6.1 приводится со-
ответствие между «с(0 и сдвигом фазы несущей для Лф* = 90°.
При передаче «1» сигнал по фазе совпадает с несущей, а при
передаче «0» отличается по фазе на 180°. На рис 6.14,ц показан
ФМ сигнал. Такой сигнал можно представить в виде суммы двух
AM сигналов, для получения первого из которых используется
несущая L7Hsin юнЛ а второго — t7Hsin (юн/+180°). Структурная
схема модулятора представлена на рис. 6.15,а. Другой вариант
ФМ модулятора приведен на рис. 6.15,6. Здесь модулируется по
амплитуде несущая 2t/HsincoH/ и из модулированного сигнала вы-
читается несущая t7Hsiп инТ Временные диаграммы, иллюстриру-
ющие процесс получения ФМ сигнала для рис 6 15,6, приведены
на рис. 6.16. Анализируя эти диаграммы, приходим к выводу, что
при Дф* = 90° спектр амплитуд ФМ сигнала содержит те же со-
ставляющие, что и спектр AM сигнала, кроме составляющей
с частотой сон. Амплитуда этих составляющих, в отличие от AM,
в 2 раза больше
Равенство полос частот, занимаемых AM и ФМ сигналами,
предполагает также и равенство максимально возможных скоро-
стей модуляции. Большая, чем при AM, амплитуда спектральных
12*
179
составляющих обусловливает большую, чем при AM, помехо-
устойчивость.
Современным развитием рассмотренных выше синусоидальных
сигналов является квадратурная амплитудная модуляция (КАМ)
с сигналами вида
_ I ai sl'n(0^ +" COSOV,
Si I 0 , /£[0,^
i=l, m; a„ b, — вещественные коэффициенты; coc— частота сиг-
нала.
Заметим, что o^sin coJ+^cos a>ci‘=cIsin(tt»ci‘-|-(pr), где ct —
=]/а(24-6(2, <p, = arctg(6(/a<).
Таким образом, единичные элементы сигнала являются отрез-
ками синусоид длительности то, отличающимися амплитудами и
фазами.
При условии сос = 2л/пт0, где п — целое число, множество эле-
ментарных сигналов строится как линейная комбинация двух ор-
тогональных базисных функций. Наглядным представлением и
способом задания систем сигналов с КАМ служит отображение
единичных элементов сигнала векторами с координатами (0, 0) и
(a,, bt). Точки (а,, bL) называются сигнальными. На рис. 6.17,а
изображены сигналы, выбранные в соответствии с Рекомендаци-
ей МККТТ V.29 с амплитудно-фазовой модуляцией (АФМ) для
т=16. Система сигналов КАМ является обобщением систем AM
и ФМ сигналов. Положив 6, = 0 и а,=Н=0 для всех i=l, т, полу-
чим AM сигналы, относительные точки которых лежат на одной
прямой (рис. 6.17,6). Если выполнить условие ]/al2-\-bl2 = c для
всех i=l, т, то имеем ФМ сигналы, точки которых расположены
на окружности. На рис. 6.17,в и г показаны сигналы двухкратной
(т = 4) и трехкратной (т = 8) фазовой модуляции.
6.3. ОПТИМАЛЬНЫЙ ПРИЕМ ДИСКРЕТНЫХ
СИГНАЛОВ
Пусть осуществляется передача одного из двух равновероят-
ных сигналов Si (0 и s2(t) длительностью т0, соответствующих
символам «0» и «1». Приемник по полученной смеси сигнала с по-
мехой i=l, 2, принимает решение, какой из
этих двух сигналов передавался. Известно [1.1], что оптималь-
ным в условиях флуктуационных помех и детерминированного
неискажающего канала является приемник, в котором сравнива-
ются среднеквадратические расстояния р] и р2 (в пространстве
Гильберта или Евклида) между принятым сигналом y(t) и образ-
цами Si(0, s2(t) и принимается решение о том, что передавался
180
сигнал st(i), если
р2 = J [у (0 -s2 (OF di > J [у (О - Si (OF dt = Pl. (6.19)
о 0
Таким образом, при равновероятных сигналах оптимальный
приемник воспроизводит сообщение, соответствующее тому пере-
данному сигналу, который имеет наименьшее среднеквадратиче-
ское отклонение от принятого сигнала. Для сигналов, энергии ко-
to t0
торых одинаковы, т. е. ^s1(t)dt = ^s22(t)dt, неравенство
о 6
(6.19) переписывается в виде
fs1(Z)y(O^> ^s2(0 у (t)dt. (6.20)
о 6
В этом случае условие оптимального приема можно сформулиро-
вать следующим образом. Если сигналы si(t) и s2(t) равноверо-
ятны и имеют одинаковую энергию, оптимальный приемник вос-
производит сообщение, соответствующее тому переданному сиг-
налу, взаимная корреляция которого с принятым сигналом мак-
симальна. Соотношение (6.20) задает когерентную обработку,
которая называется корреляционным приемом и реализуется
с помощью схемы (рис. 6.18), состоящей из двух перемножите-
лей, двух интеграторов и решающего устройства РУ.
Форма образцов Si(t) и s2(i) зависит от способа передачи сиг-
налов (рис. 6.19): при передаче посылками постоянного тока
Si(t) = 1, a s2(Z)=0 или —1; при передаче модулированными
сигналами s1(Z) и s2(t) представляют собой импульсы переменно-
го тока длительности то с различными амплитудами (при AM),
частотами (при ЧМ) или фазами (при ФМ).
Ошибки возникают из-за действия помехи l(t), если наруша-
ется неравенство (6.19) или (6.20). Вероятность ошибки при дей-
ствии флуктуационной гауссовской помехи с равномерным спект-
ром определяется выражением [1.1]
г
= f е“%2/^ = V [1 ~ ф (6-21)
2 [/ 2к J 2
0
г
где Ф(7) = ~= | e~**/2dZ — табличный интеграл.
|/ 2n J
о
Параметр Z зависит от отношения среднеквадратического рас-
стояния между образцами $Д/) и s2(0 (обозначаемого X) и
спектральной плотности шума No (мощности помехи Р„, прихо-
181
Рис 6 18 Структурная схема кор-
реляционного приемника
Рис 6 19 Образцы сигналов при
различных методах модуляции
дящейся на единицу полосы пропускания приемника): Z=yz/2M0,
N0 = Pn/\FK.
Среднеквадратическое расстояние между образцами Z = [Sj (t) —
о
—s2(t)]2dt, характеризую нее степень различимости сигналов s^t) из2(р,
определяет при заданном No помехоустойчивость каждого из спо-
собов модуляции. Рисунок 6.19
сигналов (образцов сигналов)
иллюстрирует различимость этих
три разных способах передачи
(степень различия характери-
зуется заштрихованной пло-
щадью). Очевидно, что сильнее
всего различаются сигналы
при ФМ, менее всего—при AM.
По этой причине параметр Z
в формуле (6.21) при AM име-
ет величину У£С/2МО; при ЧМ,
в случае ортогональных сигна-
лов, —y£c/A70; при ФМ —
УЕс/Мо, где Ес — энергия сигна-
ла на активном сопротивлении
1 Ом.
Рис. 6.20. Графики, иллюстрирующие
зависимость вероятности правильно-
го приема от отношения сигнал-шум
о для различных видов модуляции:
------когерентный прием,--------не-
когерентный прием
182
Результаты расчетов по формуле (6.21) отражены на графи-
ках рис. 6.20.
Стремление упростить реализацию приемного устройства при-
водит к использованию неоптимальных приемников, т. е. таких,
которые не обеспечивают при заданном виде помех минимальной
вероятности неправильного приема. Именно такие приемные уст-
ройства, рассматриваемые ниже, и представляют для нас наи-
больший практический интерес.
Знание же потенциальной помехоустойчивости при использо-
вании тех или иных типов сигналов позволяет оценить степень
снижения помехоустойчивости, обусловленной теми или иными
упрощениями в реализации приемника, и сделать вывод о допу-
стимости и целесообразности такого упрощения.
6.4. ПРИНЦИПЫ ПОСТРОЕНИЯ
ДИСКРЕТНЫХ КАНАЛОВ
Основными критериями при выборе метода модуляции для
УПС являются: ширина спектра сигнала и связанная с ней воз-
можная скорость передачи информации в ограниченном по спект-
ру канале связи; помехоустойчивость модулированного сигнала;
простота и надежность УПС; возможность сопряжения разраба-
тываемого УПС с УПС, находящимися в эксплуатации.
Дискретный канал с амплитудной модуляцией. Этот вид мо-
дуляции начал применяться еще на заре развития техники пере-
дачи дискретных сообщений. Основное достоинство УПС с AM —
простота реализации. Структурная схема дискретного канала
с AM приведена на рис. 6.21.
Амплитудный модулятор AM представляет собой ключ, управ-
ляемый модулирующим сигналом. Единице на входе модулятора
соответствует наличие несущей на его выходе, нулю — отсутствие.
Полосовой фильтр передачи ПФпер ограничивает спектр сигнала,
подаваемый в канал связи. Полосовой фильтр приема ПФПр вы-
деляет спектр частот данного канала, уменьшая влияние помех.
Усилитель Ус повышает уровень принимаемого сигнала. В демо-
дуляторе Д происходит преобразование AM сигнала в посылки
183
Фильтр нижних частот ФНЧ, включенный на выходе демодуля-
тора, подавляет высшие гармоники выпрямленного сигнала и ос-
татки несущей частоты. После ФНЧ включено пороговое устрой-
ство ПУ, на выходе которого посылки приобретают прямоуголь-
ную форму. Рассмотренный дискретный канал является прозрач-
ным, т. е. позволяет передавать сигналы любой структуры со
скоростью, не превышающей максимальную. Временные диаграм-
мы, иллюстрирующие прохождение сигнала в дискретном канале
с AM, представлены на рис. 6.22.
Сигнал на выходе ПУ прямоугольный, но может отличаться
вследствие действия помех от исходного по длительности, т. е.
искажен.
В качестве примера рассмотрим искажения, обусловленные
изменением уровня сигнала на входе приемника. Сигнал на выхо-
де амплитудного демодулятора (при отсутствии аддитивной по-
мехи) представлен на рис. 6.23,а. Пусть сигнал на выходе ПУ
с порогом срабатывания t?i/2 при номинальной амплитуде сигна-
ла на входе ПУ U} имеет длительность то=^—(рис. 6.23,6).
Если амплитуда сигнала на выходе демодулятора станет равной
П2>[71, то длительность сигнала на выходе ПУ увеличится до
184
Рис. 6.23 К определению искажений AM
сигнала-
fl— сигнал на выходе демодулятора; б —
сигнал на выходе ПУ
Рис. 6.24. Зависимость искажений
от изменения уровня сшнала на
входе демодулятора
значения XQ=t2'—tj. Найдем связь между изменением уровня
сигнала на входе ПУ и его длительностью на выходе ПУ. При
увеличении уровня сигнала передний фронт посылки сместится
относительно первоначального положения на время \t~AG—АЕ.
Из подобия треугольников АВС и ADE найдем АЕ=АС• ED/BC.
Отсюда Nt=AG—АС ED/BC. Так как AC=2AG, то At = AG(l —
—2ED/BC). Учитывая, что AG = tJ2\ ED=UJ2-, BC=U2, по-
лучим
-ад). (6.22)
Если при завышении уровня сигнала относительно номинального
посылка на выходе ПУ удлиняется, то при занижении этого уров-
ня она укорачивается. Очевидно, что при амплитуде сигнала на
выходе демодулятора меньше порогового значения UJ2 вместо
токовой посылки будет фиксироваться бестоковая, т. е. будет
иметь место неправильный прием.
Относительное удлинение (укорочение) посылки, %, на выхо-
де ПУ будет определяться как
S = ~ 100 = (Д/ДД,) | (1 —UJU,) | 100. (6.23)
То
График зависимости f> = <f(UJU2) приведен на рис. 6.24.
Появление искажений типа преобладаний при изменениях
уровня на входе приемника является одним из основных недостат-
ков систем ПДС с AM. Для уменьшения влияния изменения
уровня на качество приема применяется автоматическая регули-
ровка усиления, позволяющая обеспечить постоянство уровня
сигнала на входе демодулятора при плавных изменениях уровня
на входе приемника. Однако система АРУ не может отслеживать
быстрые изменения уровня сигнала.
185
Выше речь шла об искажениях сигнала. Это одна из харак-
теристик качества передачи. Вероятность неправильного приема
является другой характеристикой. Рассмотрим для примера ме-
тодику определения вероятности неправильного приема при пере-
рывах связи, задаваемых частостью их появления в единицу вре-
мени у (например, секунду) и средней длительностью перерыва
/пер. Ограничимся рассмотрением перерывов длительностью
^tq. Полная вероятность неправильного приема символа при
действии на него перерыва определяется выражением р(ош./п) =
= р(1)р(0/1)+р(0)р(1/0), где р(0/1)—вероятность регистрации
«О» при передаче символа «1»; р(1/0)—вероятность регистрации
«1» при передаче символа «О». Напомним, что «1» соответствует
передача в канал несущей, «О» — ее отсутствие. Очевидно, что
при перерыве р(1/0)=0, р(0/1) = 1. Полагая р (1) =р (0) =0,5,
получаем р(ош./п) =0,5. Оценку вероятности неправильного при-
ема символа в канале с перерывами можно найти по формуле
= 0,5М'п)/^_,
где ;V3(n) — число элементов, пораженных перерывами за в.ремя
испытания; N3 — число элементов, переданных за время испы-
тания.
Число элементов, пораженных перерывами, можно определить
следующим образом. Так как средняя длительность перерыва из-
вестна, то среднее число элементов (посылок), пораженных од-
ним перерывом, равно fn.cp/то- Число перерывов за время испыта-
ния Nn=yT, где Т—время испытаний. Тогда число элементов,
пораженных перерывами, = уТ'-'ДД? =yAM,I.ctl. Следовательно,
то
Рош = 0,5у/„ ср.
Интересно отметить, что вероятность неправильного приема
в канале с перерывами не зависит от скорости модуляции. С ро-
стом скорости модуляции увеличивается при заданном /п Ср число
пораженных перерывом единичных элементов и одновременно во
столько же раз (при заданном времени испытаний) возрастает и
число переданных элементов. Следовательно, их отношение не
меняется.
Методику расчета искажений и достоверности для других ви-
дов помех можно найти в [1.4].
Дискретный канал с частотной модуляцией. В зависимости от
вида модулирующего сигнала («1» или «0») в канал с ЧМ посы-
лаются частоты fi или f2 (f2>fi). В соответствии с рекомендация-
ми МККТТ «1» соответствует сигнал с частотой fi, а «0» — сиг-
нал с частотой f2. Приемник осуществляет классификацию прини-
маемых сигналов, определяя, какого вида передавался символ:
«0» или «1».
186
Рис. 6 25. Структурная схема дискретного канала с ЧМ
Структурная схема дискретного телеграфного канала с ЧМ
приведена на рис. 6.25. Передаваемое сообщение от источника
сообщений (телеграфного аппарата ТА[) поступает на согласую-
щее устройство СУ, которое предназначено для преобразования
однополюсных посылок в двухполюсные. Последние управляют
работой частотного модулятора М. При поступлении от СУ на
модулятор положительной телеграфной посылки на выходе мо-
дулятора появится частота f2=fcP+Af, называемая верхней ха-
рактеристической частотой. Частота fcp является средней часто-
той, а Af— девиацией (отклонением) частоты. При поступлении
на вход модулятора отрицательной посылки на его выходе появ-
ляется частота fi=fcP—Af, называемая нижней характеристиче-
ской частотой. Полосовой фильтр передачи ПФпеР ограничивает
спектр сигнала, подаваемого в канал связи. Ширина спектра сиг-
нала на выходе модулятора зависит от скорости телегра-
фирования и девиации частоты. Приблизительно AF4M =1,6 В
[1.4]. Следовательно, для скорости телеграфирования 50 Бод
AFqM —80 Гц. Ограничение спектра передаваемых частот с по-
мощью полосовых фильтров уменьшает взаимное влияние кана-
лов в многоканальной каналообразующей аппаратуре.
Полосовой фильтр приема ПФпр выделяет полосу частот теле-
графного канала, что позволяет избавиться от помех, находящих-
ся вне полосы пропускания ПФГ,Р. Далее сигнал усиливается уси-
лителем Ус. Последний компенсирует потерю энергии сигнала за
счет затухания линии. Обычно усилитель выполняет дополни-
тельную функцию — функцию ограничения сигнала по уровню
(УО). При этом удается обеспечить постоянство уровня сигнала
на входе частотного демодулятора Д при изменении уровня на
входе приемника в довольно широких пределах. В демодуляторе
импульсы переменного тока преобразуются в двухполюсные по-
сытки постоянного тока. На выходе СУПР получаем однополюс-
ные посылки, подаваемые на ТА2.
В качестве частотного модулятора может использоваться гене-
ратор с изменяемой скачкообразно в соответствии с видом моду-
лирующего сигнала частотой (рис. 6.26). В современных системах
с ЧМ наиболее часто используется схема с получением требуемых
частот с помощью делителей частоты ДЧ (рис. 6.27). Благодаря
переключению частот nf, и nf2 (во много раз превышающих тре-
буемые fi, /2), уменьшаются скачки фазы А<р и, следовательно,
187
Рис 6 26. Структурная схема частотно-
го модулятора с непосредственным воз-
действием на частоту генератора
"чмД
Рис. 6.27. Структурная
схема частотного моду-
лятора без непосредст-
венного воздействия на
частоту генератора
обеспечиваются меньшие по величине искажения ЧМ сигнала [1.4].
Демодуляторы ЧМ сигналов могут быть реализованы как на
цифровых, так и аналоговых устройствах. Следует заметить, что
последние в настоящее время применяются значительно реже. Один
из вариантов аналогового демодулятора использует представл'ение
ЧМ сигнала в виде суммы двух AM сигналов (см. разд. 6.2). Такая
схема получила в литературе название двухполосной схемы приема
по огибающей. Принцип работы такого демодулятора ясен из при-
веденной на рис. 6.28 структурной схемы и временных диаграмм
(рис. 6.29). В верхнем тракте демодулятора выделяется огибающая
сигнала с частотой /2, в нижнем — с частотой ft. В каждом из трак-
тов имеются амплитудные демодуляторы (Д[ и Д2) и фильтры
нижних частот ФНЧ. Сигналы трактов суммируются с разным зна-
ком в суммирующем устройстве Сум. Неправильный прием соот-
ветствует случаю, когда при передаче «О» уровень в момент реги-
страции в верхнем тракте (тракте приема «1») окажется выше,
чем в нижнем.
Во многих цифровых частотных демодуляторах реализуется
принцип классификации принимаемых сигналов по частоте на ос-
нове измерения длительности полупериода (периода) принимаемо-
го сигнала. На основании измерений длительности полупериода при
двухпозиционной модуляции решающее устройство отождествляет
Тракт приема "1”
Тракт приема "О"
Рис 6.28. Прием ЧМ сигнала по огибающей
188
Рис 6 29. Временные диаграммы частот-
ною демодулятора прн приеме по оги-
бающей (показаны для точек 1—8 схе-
мы рис. 6.28)
принятый полупериод с одним из
значений полярности сигнала.
Таким образом, реальный ЧМ
сигнал разбивается на элемен-
тарные отрезки сигнала, содер-
жащие полупериод несущего ко-
лебания. Определение границ
единичных элементов осуществля-
ется с точностью, не превышаю-
щей длительность одного элемен-
тарного отрезка сигнала. Разно-
видностью метода измерения
длительности полу периода (пе-
риода) принимаемого сигнала
является метод измерения разно-
сти набега фазы каждого текуще-
го несущего колебания относи-
тельно предшествующего перио-
да. Этот метод реализован в ка-
налообразующей аппаратуре то-
нального телеграфирования ТТ-12,
схема демодулятора которого
представлена на рис. 6.30.
Временные диаграммы, поясняющие принцип действия частот-
ного демодулятора, приведены на рис. 6.31. Входной сигнал (рис.
6.31 ,а) преобразуется усилителем-ограничителем У О в прямоуголь-
ные импульсы (рис. 6.31,5). В формирователе импульсов сброса
ФИС выделяются короткие импульсы, соответствующие каналам
каждого из импульсов, изображенных на рис. 6.31,5. Короткие им-
пульсы подаются поочередно на делители частоты (рис. 6.31,s иг),
устанавливая их в начальное состояние (обозначено точками на
Рис. 6.30. Демодулятор каналообразующей аппаратуры ТТ-12
189
14
пппп лппп_лп пл,,
Рис 6 31 Временные диаграммы демодулятора аппаратуры ТТ-12:
а — входной сигнал, cooiвстствующий частоie ^ср, б — то же, после ограничителя, в, г —
импульсы сброса, д е — импульсы на выходе делителей ж — импульсы на выходе ФД
рис. 6 31,д и е) Импульсы на выходе делителей при приеме сред-
ней частоты /ср изображены на рис. 6.31,с? и е В этом случае между
сигналами на выходе делителей сдвиг по фазе равен четверти пери-
ода, причем знак сдвига фаз мняется после поступления каждого
импульса сброса. Сигналы с выходов делителей поступают на вход
фазового детектора ФД (выполненного в виде сумматора по
mod 2), на выходе которого возникает последовательность импуль-
сов (рис. 6.31,ж), ширина каждого из которых зависит от соотно-
шения фаз сигналов на выходах делителей. При появлении на вхо-
де демодулятора частоты /2>/сР последовательность импульсов
становится шире, а при появлении на входе демодулятора частоты
/1</ср — уже.
Выделяя в помощь ФНЧ постоянную составляющую, имеем
Uz>U\, где U2 — постоянная составляющая, соответствующая сиг-
налу с частотой t2; Ui — постоянная составляющая, соответствую-
щая сигналу с частотой fa. Подавая постоянную составляющую на
ПУ с порогом срабатывания Псраб= (^i+H2)/2, получаем на вы-
ходе ПУ прямоугольные импульсы, соответствующие переданным
единичным элементам.
При ЧМ в канал передаются частоты fa или /2, причем переход
от одной частоты к другой происходит не скачкообразно, а плавно.
Время изменения частоты от fi до /2 называется временем нара-
190
Рис 6 32 К определению искажений от сдвш а частот
а — переходной процесс частоты б — искажение принятого элемента при сдвиге частот
стания переходного процесса Д=1 /AFK, где AFK— ширина кана-
ла. На рис. 6.32,а показан переходной процесс частоты (сплошная
линия) при передаче одиночного элемента «О» длительности т0-
Здесь же (рис. 6.32,6) показано, как воспроизводится элемент (в
данном случае «О») на выходе ПУ: если частота выше fcp=(fi +
4-/2)/2, то фиксируется элемент «О», равный по длительности то
Искажения переходного процесса частоты приводят к измене-
нию длительности сигнала на выходе ПУ, т. е к краевым искаже-
ниям. Одной из причин таких искажений является сдвиг частот.
Сдвиг частот может возникнуть, например, вследствие нестабиль-
ности генератора частотного модулятора *, несовпадения частот ге-
нераторов модулятора и демодулятора системы передачи. Так, если
частота несущей на передаче f, а на приеме f*=A=f, то имеем сдвиг
частот df= |f*—f I.
Переходный процесс при сдвиге частот на величину df показан
штриховой линией на рис. 6.32,а. Сдвиг частот приводит к появле-
нию краевых искажений типа преобладаний. В данном случае еди-
ничный элемент «О» зарегистрирован на приеме с увеличением его
длительности на 2Af. Относительная величина искажений будет оп-
ределяться выражением б= (2А//т0) 100%. Найдем зависимость
6 = ср (cZf) для заданных то, Af и АТК. Для этого рассмотрим подобие
треугольников АВС и CDE При этом имеем: АС/ВС=СЕ/DE
CF t
Отсюда АС = id = ВС —— — dt— и окончательно с учетом того.
DE 2Af у
что t = 1/AFK, получим 5 = . 1ОО°/0.
* Для уменьшения отклонения характеристических частот от номинальных
в аппаратуре используется кварцевая стабилизация несущих частот.
191
Рис. 6 33 Дискретный канал о ФМ
Таким образом, зависимость 6 = cp(df) является линейной. За-
давая величину допустимых искажений, можно определить при за-
данных В, Af, AFK допустимый сдвиг частот. Для борьбы с преоб-
ладаниями, вызванными сдвигом частот, в современной телеграф-
ной каналообразующей аппаратуре вводятся устройства автомати-
ческой регулировки преобладаний. Для этого на передаче форми-
руется контрольная частота (К.Ч) 3300 Гц. Измеряя на приеме от-
клонение частоты контрольного сигнала от номинального значения
(3300 Гц), определяется сдвиг частот рабочего сигнала (в предпо-
ложении, что сдвиг КЧ и рабочего сигнала одинаков) и компен-
сируется его влияние путем изменения порога срабатывания ПУ.
Причиной искажений могут являться также различного рода
помехи — флуктуационные, импульсные, гармонические и др. [1.4].
Достоверность приема, которая определяется вероятностью непра-
вильного приема, зависит от вида и интенсивности помех. Следует
заметить, что при перерывах связи вероятность неправильного при-
ема определяется при ЧМ так же как и при AM, т. е. р(ош./п) =
= 0,5.
Дискретный канал с фазовой модуляцией. Упрощенная схема
дискретного канала с фазовой модуляцией приведена на рис 6.33.
Назначение элементов схемы ПФПер, ПФПр, УО в этой схеме такое
же, как и в схеме системы с ЧМ. Процесс модуляции осуществляет-
ся в фазовом модуляторе М, а демодуляции — в фазовом демоду-
ляторе ФД.
Пусть на вход модулятора подаются сигналы wc(0 положитель-
ной и отрицательной полярности и модуляция осуществляется в со-
ответствии с табл. 6.2, т. е. при поступлении элемента отрицатель-
ной полярности сигнал на выходе модулятора совпадает по фазе
с несущей (Д<р = 0), а при поступлении элемента положительной
полярности («0»)—сдвинут по фазе на 180° (рис. 6 34). В ка-
честве модулятора может быть использована схема, изобра-
женная на рис. 6.35,а. Соотношение между напряжением несущей
и модулирующего сигнала ис(0 выбирается таким, что
и щ(0 управляет отпиранием и запиранием диодов. Так,
при подаче ис(0 в соответствии с рис. 6.35,а открываются диоды
192
Таблица 6.2
Символ «С(П Дф
1 0°
0 + 180°
Рис 6 34. Получение ФМ сигнала
Di и D2 и закрываются D3 и D^. Эквивалентная схема приведена
на рис. 6.35,6. Изменение полярности uc(t) приводит к изменению
направления тока, протекающего во вторичной обмотке трансфор-
матора Тр2. Эквивалентная схема приведена на рис. 6 35,в.
В фазовом демодуляторе принимаемый фазо-модулированный
сигнал сравнивается с эталонным. В качестве эталонного исполь-
зуется сигнал, называемый опорным Uo(t) и совпадающий как по
Тр2
е)
Рис 6 35 Фазовый модулятор (а) и его эквивалентные схемы (б, в)
13—6085 193
1 2 3
Принятый сигнал
1 0 1
Опорное
напряжение
1
Принятое решение
о
j V
Принятый сигнал
Го 1 1
I________________
1
' I
I
I
t
Опорное
напряжение
—I
О I
___I
Принятое решение
Рис. 6 36 Представление ФМ сиг-
налов векторами
Рис. 6.37. К явлению «обратной
работы»
частоте, так и по фазе с напряжением несущей на передаче. Оче-
видно, что если принимаемый сигнал на единичном интервале сов-
падает по фазе с опорным, то в соответствии с табл. 6.2 необходимо
вынести решение о том, что передавалась «1». Если же разность
фаз принятого и опорного сигналов 180°, то делаем вывод о том,
что передавался «0». Вследствие действия в канале помех сдвиг
по фазе между принятым сигналом и опорным напряжением будет
отличаться от 0 и 180°. На рис. 6.36 штриховой линией показано
положение векторов сигналов, которое они занимают под действи-
ем помех. Сигналы 1, 2, 4 регистрируются правильно, а сигнал 3 —
неверно. Здесь принятый искаженный сигнал отождествляется с од-
ним из двух идеальных сигналов, на который он больше всего «по-
хож». Поэтому, если сдвиг вектора по фазе относительно идеаль-
ного положения менее л/2, то решение будет правильным. При
сдвиге на л/2 вынести однозначное решение не представляется воз-
можным. Если сдвиг превышает л/2, то выносится неправильное
решение.
Одной из основных проблем при демодуляции ФМ. сигнала яв-
ляется проблема получения опорного напряжения. В качестве опор-
ного напряжения можно использовать: напряжение высокостабиль-
ного местного генератора; пилот-сигнал, передаваемый по специ-
альному каналу от передатчика; напряжение, выделяемое из рабо-
чего сигнала.
Даже при выборе достаточно стабильного местного генератора
его частота будет отличаться от частоты несущей, что приведет
к накапливанию расхождения фаз несущей и опорного напряжения.
В худшем случае сдвиг по фазе между опорным напряжением и
несущей становится равным 180° (показано штрихом на рис. 6.37),
при этом все элементы принимаются «наоборот» («0» вместо «1» и
«1» вместо «0») или, как говорят, возникает явление «обратной
работы» [1.1]. Второй способ не нашел широкого распространения
194
н
Рис. 6.38. Выделение опорного на-
пряжения из принимаемого сиг-
нала
Таблица 6.3
Символ «С(О Дф
,1" 0*
»о« + 180°
Рис 6.39. Временные диаграм-
мы, иллюстрирующие процесс
получения опорного напряже-
ния (показаны для точек 1—4
схемы рис. 6.38)
з
4
t
из-за необходимости выделения для передачи пилот-сигнала поло-
сы частот и мощности за счет рабочего сигнала, что приводит
к ухудшению условий передачи рабочего сигнала.
Наибольшее распространение получил третий способ. Один из
вариантов схемы выделения опорного напряжения из принимаемого
сигнала приведен на рис. 6.38. Выпрямитель В устраняет фазовую
модуляцию. Выпрямленный сигнал является периодическим с пе-
риодом Г—1/2/н, т. е. частота первой гармоники равна удвоенной
частоте несущей. Поэтому после выделения узкополосным полосо-
вым фильтром УПФ частоты 2Д она подается на делитель частоты
с коэффициентом деления, равным двум. Для уменьшения уровня
помех на выходе фильтра его полоса пропускания должна быть
возможно меньше. Однако следует предусмотреть возможность ухо-
да частоты несущей на передаче относительно ее номинального зна-
чения. Фазовращатель ФВ обеспечивает компенсацию фазовых
сдвигов, возникающих в схеме выделения опорного напряжения,
что позволяет получить когерентное опорное напряжение. Процесс
получения опорного напряжения поясняется временными диаграм-
мами на рис. 6.39.
При сильных помехах возможен скачок фазы опорного напря-
жения иа 180°. Кроме того, при определенных условиях возможны
скачки фазы на 180° и напряжения несущей (на передающем кон-
це). Все это приводит к обратной работе. Возможность обратной
работы — основной недостаток абсолютной фазовой модуляции, да-
лее именуемой просто фазовой. Для борьбы с этим явлением ис-
13* 195
Рис 6.40. Получение ОФМ
сигнала:
а — модулирующий сигнал: б —
модулированный сигнал, в — пере-
кодированный сигнал
J-LI.L
Тактовый имп
Рис. 6.41. Перекодирующее
устройство
пользуют относительную фазовую модуляцию (ОФМ). При ОФМ
сигнал формируется в соответствии с табл. 6.3.
Отличие табл. 6.3 от табл. 6.2 заключается в том, что отсчет фазы
передаваемого сигнала (А<р) при ОФМ осуществляется не относи-
тельно фазы несущей, а относительно фазы предыдущего сигнала.
Так, при передаче элемента «0» (положительная посылка) переда-
ваемый сигнал должен иметь сдвиг относительно предыдущего 180°
(рис. 6.40). Поскольку для первого единичного элемента нет пре-
дыдущего, то фаза соответствующего ему сигнала может быть про-
извольной. Прием начнем со второго элемента, для которого опор-
ным является первый.
Чаще всего в качестве фазового модулятора при ОФМ исполь-
зуются такие же устройства, как и при абсолютной фазовой моду-
ляции, например схема рис. 6.35. Тогда для получения на выходе
модулятора сигнала вида, изображенного на рис. 6.40,6, исходный
сигнал, прежде чем подать на модулятор, необходимо преобразо-
вать (рис. 6.40,в), перекодировать. Один из вариантов структур-
ной схемы перекодирующего устройства ПКУпер приведен на рис.
6.41. Тактовые импульсы поступают на схему совпадения в момен-
ты, соответствующие серединам единичных элементов сигнала, и
появляются на выходе схемы при поступлении на ее вход «нулей».
Триггер переходит из одного состояния в другое при каждом по-
ступлении на его вход тактового импульса.
Информация о виде переданного единичного элемента заложена
в разности фаз i-го и (i—1)-го ОФМ сигнала. Очевидно, что из-
влечь эту информацию можно двумя способами: сравнивать фазу
/-го и (i—1)-го ОФМ сигнала, используя для этого фазовый демо-
дулятор (рис. 6.42). Для задержки сигнала на время, равное дли-
тельности единичного интервала, используется элемент памяти
ЭП. Схема, представленная на рис. 6.42, осуществляет автокорре-
196
Рис 6 42. Прием по способу
сравнения фаз
Рис 6 43 Прием по способу срав-
нения полярностей
ляционный (некогерентный) прием. Иногда такой прием называ-
ют приемом «методом сравнения фаз». Очевидно, что скачок фазы
опорного напряжения на 180° вызовет одиночную ошибку, а не их
поток, как при абсолютной фазовой модуляции.
Если для приема использовать фазовый демодулятор, на кото-
рый подается когерентное опорное напряжение, то после решаю-
щего устройства будем иметь сигнал, совпадающий (при отсутст-
вии ошибок) с перекодированным (рис. 6.40,в). Очевидно, что та-
кой сигнал нуждается в обратном перекодировании. Структурная
схема такого приемника изображена на рис. 6.43. Здесь осуществ-
ляется корреляционный (когерентный) прием, называемый иногда
приемом «методом сравнения полярностей». Опорное напряжение
подается на ФД с устройства выделения опорного напряжения
УВОН. Сравнение полярностей осуществляется в перекодирующем
устройстве приема ПКУпр- Если полярности (i—1)-го и i-ro эле-
ментов совпадают, то на выходе ПКУпр в качестве i-ro элемента
выдается «1». Если полярности (i—1)-го и i-ro элементов разные,
то на выходе ПКУпр выдается «0».
Очевидно, что i-й элемент на выходе ПКУпр будет воспроизве-
ден неправильно, если на его входе будет искажен (i—1)-й или
i-й элемент. Пусть вероятность появления неправильного элемен-
та на входе ПКУпр равна рош = Рфм > тогда вероятность непра-
вильного приема
Рофм ~ 2рФМ (1 Рфм) 3 Рфм.' (6.25)
Равенство в (6.25) имеет место только при РФМ=.О или рфМ = 0,5.
Обычно рФМ< Ю-, тогда р0ФК2рФК.
При приеме по способу сравнения фаз в ФД происходит срав-
нение по фазе двух (i-ro и (i—1)-го) зашумленных сигналов, что
приводит к увеличению вероятности неправильного приема по срав-
* Вероятность рош определяется так же, как и при абсолютной фазовой мо-
дуляции, поскольку при приеме по способу сравнения полярностей схема тракта
приема (до ПКУпп) аналогична схеме при передаче с использованием абсолют-
ной фазовой модуляции. Отсюда рОш=рФм.
197
нению со способом сравнения полярностей, при котором в ФД
сравнивается по фазе зашумленный сигнал с «чистым» опорным
напряжением.
Перекодирование первичных сигналов с введением избыточно-
сти. Рассмотренные выше перекодирующие устройства, используе-
мые с ОФМ, осуществляют перекодирование исходного сигнала без
введения в него избыточности. В настоящем разделе будут рас-
смотрены перекодирующие устройства (преобразователи кодов),
осуществляющие введение избыточности. Эти преобразователи ко-
дов и являются в нашем случае устройствами преобразования сиг-
налов. Такие преобразователи решают следующие основные за-
дачи:
изменяют спектр исходной последовательности таким образом,
что он смещается в область верхних частот, т. е. уменьшают по-
стоянную составляющую;
локализуют основные гармонические составляющие спектра в
более узкой полосе частот, что позволяет использовать для переда-
чи сигналов линейный участок фазовой характеристики канала;
обнаруживают, а в некоторых случаях и исправляют ненадежно
принятые единичные элементы.
Рассмотрим в качестве примера построение УПС передачи и
приема для случая передачи биимпульсных сигналов. Бинмпульс-
ные сигналы по аналогии с ФМ сигналами подразделяются на аб-
солютные, рассмотренные в § 6.2, и относительные. Относительный
биимпульсный сигнал (ОБС) отличается тем, что при передаче «1»
последовательность чередования полярностей импульсов на очеред-
ном единичном интервале не изменяется по сравнению с предыду-
щим и изменяется при передаче «О» (рис. 6.44).
При необходимости реализации предельной (потенциальной)
помехоустойчивости приема на фоне аддитивного гауссовского бе-
лого шума можно использовать фильтр, импульсная реакция кото-
рого согласована с биимпульсным сигналом [1.1]. Однако такой
метод приема биимпульсного сигнала целесообразно применять
только при передаче сигналов на большое расстояние (затухание
более 40 дБ).
Для приема биимпульсных сигналов при меньших затуханиях
О. Н. Пороховым [6.4] разработан более простой метод, основан-
ный на следующем свойстве ОБС. При передаче «1» в сигнале со
храняется последовательность чередования полярностей импульсов
предыдущего единичного интервала (рис. 6 44), и поэтому на гра-
ницах единичных интервалов формируется переход (фронт) про-
извольной полярности. Передача «0» характеризуется отсутствием
переходов на границах единичных интервалов. Обнаружение этих
переходов и их отсутствие позволяют судигь о передаваемых еди-
ничных элементах.
Схема формирователя биимпульсных сигналов приведена на
рис. 6.45. На входы схемы подаются тактовые импульсы (ТИ) и
198
Рис 6 44. Относительный биимпульсный
сигнал
Рис. 6.45. Формирователь относительных
биимпульсов сигналов
Рис. 6 46. Временные диаграммы, ил-
люстрирующие процесс формирования
относительных биимпульсных сигна-
лов
а — перекодируемый сигнал, б — тактовые
последовательности, в — сигнал на выхо-
де схемы И, д — сигнал на выходе схемы
ИЛИ, е — относительный биимпульсный
сигнал
перекодируемый сигнал (рис. 6.46,а). Формирователь импульсов
выдает на своих выходах две последовательности, сдвинутые друг
относительно друга на половину тактового интервала, импульсы
одной из них (рис. 6.46,6) поступают на второй вход схемы совпа-
дения и при появлении «1» проходят на вход схемы ИЛИ (рис.
6.46,в). Вторая периодическая последовательность подается на
второй вход схемы ИЛИ (рис. 6.46,г). Снимаемая с выхода схемы
ИЛИ последовательность (рис. 6.46,6) управляет работой счетного
триггера, с выхода которого снимается относительный биимпульс-
ный сигнал (рис. 6.46,е).
Упрощенная структурная схема приемника биимпульсных сиг-
налов приведена на рис. 6.47, а временные диаграммы, поясняю-
щие принцип работы схемы, — на рис. 6.48.
Анализ биимпульсной последовательности показывает, что на
единичном интервале не может быть сигналов вида 00 или 11. Сле-
довательно, появление таких сигналов на приеме говорит об ошиб-
199
Рис. 6 47. Приемник биимпульсных сиг-
налов
Рис. 6 48 Временные диаграммы, иллю-
стрирующие процесс приема относитель-
ных биимпульсных сигналов
а — принятый биимпульсный сигнал, б — по-
следовательность импульсов на выходе фор-
мирователя переходов ФП, в — тактовая по-
следовательность, г —сигнал иа выходе схе-
мы совпадения д—принятый сигнал
ках, которые легко выявляются дешифраторами биимпульсных
сигналов.
Как отмечалось выше, преобразование кодов с введением избы-
точности может осуществляться перед модуляцией. Поскольку та-
кого рода преобразование позволяет существенно уменьшить низ-
кочастотные составляющие спектра, упрощается выделение одной
боковой полосы спектра после модулятора.
Локализация основных гармонических составляющих спектра
в более узкой полосе частот в сочетании с использованием комби-
нированных методов модуляции (чаще всего амплитудной и фазо-
вой) позволяет повысить удельную скорость передачи (см. разд.
6.7).
6.5. ЦИФРОВАЯ ГЕНЕРАЦИЯ И ОБРАБОТКА
СИГНАЛОВ В УПС
Общие положения. Как было показано в разд. 6 2, сигналы, в
том числе модулированные по амплитуде, частоте и фазе, в преде-
лах единичного интервала то можно представить в виде суммы не-
которых ортонормированных функций времени ф*(0> взятых с со-
ответствующими весовыми коэффициентами ак.
Связь между сигналом s(t), представляемым рядом Фурье, ба-
зисными функциями ф*(/) и спектральными коэффициентами ак,
выражается известной формулой
ak = [ s (0 h (0 (6.26)
о
200
02^2 U)
Рис. 6.49. Представление сигнала в базисе ортогональных функций времени
Отсюда следует, что один и тот же сигнал в разных базисах
может иметь разный спектр, т. е. отображаться разными совокуп-
ностями чисел {а*}.
Наиболее удобен для технической реализации базис, состоящий
из сдвинутых во времени относительно друг друга прямоугольных
импульсов (рис. 6.49,а). Выражение для k-i\ базисной функции,
изображенной на рис. 6.49,а, можно записать следующим образом:
= [УпТч Для (k — \ )t0/n<t<kx0/n; (6 27)
[О для остальных значений t.
В этом выражении п означает количество используемых базис-
ных функций, а амплитуда импульсов выбрана из условия равен-
ства их энергий единице.
Ортогональность базисных функций ф*(0 обеспечивается от-
сутствием их взаимного перекрытия во времени. Ортогональность
и равенство энергий единице в совокупности означают ортонорми-
рованность рассматриваемого базиса. Необходимо отметить, что
равенство энергий базисных функций единице не является обяза-
тельным.
Поименение данного базиса значительно облегчает определение
спектральных коэффициентов {а*}. Действительно, если взять для
201
Рис. 6 50 Схема трансверсального фильтра
простоты амплитуды функций фД/) равными единице, то с учетом
того, что базисные функции равны нулю вне интервала
(k—ijto/n^t^kTo/n, выражение (6.26) существенно упрощается:
Ат0/п
=f j s (Оdt-
(*—I) т„/л
Таким образом, для вычисления {а*} необходим лишь интегра-
тор. Совокупность спектральных коэффициентов для синусоидаль-
ного сигнала в рассматриваемом базисе изображена на рис. 6.49,в.
С помощью таких базисных функций также легко и генериро-
вать (синтезировать) сигналы. На рис. 6.49,6 показано представ-
ление синусоидального сигнала суммой сдвинутых во времени им-
пульсов, взятых с весовыми коэффициентами {ак}, а на рис. 6.50
изображена схема для генерации таким способом синусоидального
сигнала. Схема содержит регистр сдвига, содержащий п ячеек
памяти. Если на тактовые входы ячеек памяти подавать тактовые
импульсы с частотой /Т==п/то, то при продвижении импульса, за-
писанного предварительно в первую ячейку, на выходах ячеек па-
мяти будут последовательно во времени возникать импульсы дли-
тельностью ю/п.
Таким образом, регистр сдвига можно рассматривать как гене-
ратор базисных функций ф*(/). Для придания импульсам ампли-
туд, определяемых значениями соответствующих спектральных ко-
эффициентов (рис. 6.49,в), обычно применяют делители напряже-
ний, образованные резисторами Rk и общим резистором 7?ОбЩ. Оче-
видно, что коэффициенты деления делителей должны быть равны
(или пропорциональны) значениям ак, т. е. Rk/Rw,ai = ak.
Так как резистивные делители не могут изменять знак напря-
жения, то к выходам последних трех ячеек регистра сдвига под-
ключены инверторы Инв знака базисных функций. Схема, изо-
браженная на рис. 6.50, несмотря на простоту, обладает широкими
202
возможностями. Так, например, соединив выход последней и вход
первой ячейки памяти, можно получить синусоидальный сигнал,
состоящий из любого числа периодов. Изменяя место записи ис-
ходного импульса, можно осуществлять фазовую модуляцию. По-
сле некоторого усложнения данная схема может быть использова-
на и в качестве частотного модулятора.
Схему, изображенную на рис. 6.50, часто называют трансвер-
сальным фильтром. Такое название обусловлено тем, что эту схему
можно рассматривать и как схему фильтра с импульсной реакци-
ей, имеющей форму ступенчатой функции s(t), изображенной на
рис. 6.49,6. Путем подбора коэффициентов деления делителей на-
пряжения легко можно получить фильтр с практически любой дис-
кретной во времени импульсной реакцией. Сигнал, подлежащий
фильтрации, подается на вход регистра сдвига. Разумеется, при
фильтрации аналоговых сигналов ячейки памяти регистра должны
позволять хранить отсчеты аналоговых сигналов.
На рис. 6.49,г показана погрешность ДД/) представления сиг-
нала s(t) в рассматриваемом базисе. Очевидно, что чем меньше
длительность прямоугольных импульсов, аппроксимирующих сиг-
нал s(t), а следовательно, больше их число, тем точнее можно ото-
бразить сигнал в выбранном базисе.
В системах ПДС находят применение и другие базисные функ-
ции, например Уолша. Целесообразность применения той или иной
системы функций определяется разработчиками аппаратуры, исхо-
дя из конкретных условий работы системы ПДС или ограничений
на сложность ее реализации.
Итак, сигналы с амплитудной, частотной и фазовой модуляци-
ей, как, впрочем, и любые другие аналоговые сигналы, на интер-
вале то могут быть однозначно представлены вместо непрерывных
функций времени своими спектральными коэффициентами at, а2,
а2, .... ап, т. е. между сигналами и их спектрами в выбранном ба-
зисе существует взаимно-однозначное соответствие. Это обстоятель-
ство весьма важно, поскольку представление сигналов их спек-
тральными коэффициентами {ак} дает возможность амплитуд-
ную, частотную и фазовую модуляции сигналов на передающей
стороне и демодуляцию на приемной стороне заменить соответст-
вующими операциями над числами {а*}. Обобщенные структурные
схемы таких модуляторов и демодуляторов приведены соответст-
венно на рис. 6.51 и 6.52.
В первом блоке модулятора с учетом поступившего от источ-
ника сообщения информационного элемента и используемого вида
модуляции осуществляется расчет спектральных коэффициентов
{ак} с тем, чтобы во втором блоке — синтезаторе сигнала — с их
помощью получить канальный сигнал с соответствующей амплиту-
дой, частотой или фазой.
В синтезаторе сигнала рассчитанные коэффициенты {ак} умно-
жаются на базисные функции фД/), которые генерирует генератор
203
Рис. 6 51. Обобщенная структурная схема модулятора
Рис. 6 52. Обобщенная структурная схема демодулятора
базисных функций. Результаты умножения в синтезаторе суммиру-
ются и полученный сигнал s(t) передается в канал связи. Заме-
тим, что коэффициенты {ak} для каждого возможного значения
амплитуды, частоты или фазы несущей могут быть рассчитаны за-
ранее и храниться в памяти модулятора. Тогда задача первого
блока будет заключаться лишь в выборке из памяти соответству-
ющего набора {ak} и пересылке его в блок синтезатора сигнала.
В демодуляторе осуществляются обратные операции. В анали-
заторе спектра сигнала в соответствии с (6.26) вычисляются спек-
тральные коэффициенты, по которым затем в блоке обработки на-
ходится значение амплитуды, частоты или фазы сигнала s(/), и
формируется соответствующий этим значениям информационный
элемент, который передается получателю сообщения.
Каждый спектральный коэффициент ak можно однозначно пред-
ставить в виде суммы степеней некоторого числа тс, называемого
основанием системы счисления:
ak = biktnQl-\- ... +&,*тс'+ ^-Ь^гпс'+Ьмт^. (6.28)
В этой формуле — коэффициенты, причем 0^blk^.mc—1. В про-
стейшем случае, когда тс — 2 (двоичная система счисления), bik
могут принимать, лишь два значения: 0 или 1.
204
Таблица 6.4
nk Десятичная запись Знаковый разряд ь, Ь| ьо
01 +1 0 0 0 1
а2 +2 0 0 I 0
аз + 1 0 0 0 I
— 1 I 0 0 I
а5 2 I 0 1 0
—1 1 0 0 1
Таким образом, сами ак могут быть представлены совокупно-
стью коэффициентов b[k, blk, bik, ЬОк, которые образуют тс-ичные
числа (при Шс — 2 — двоичные числа). Для обозначения знака чис-
ла вводят дополнительный знаковый разряд перед старшим разря-
дом Шс-ичного числа. Обычно он равен «О» для положительных чи-
сел и «1» — для отрицательных.
В качестве примера в табл. 6.4 записаны двоичные числа, ото-
бражающие спектральные коэффициенты синусоидального сигнала
для рис. 6.49,6 в базисе функций, представляющих собой сдвину-
тые во времени прямоугольные импульсы.
Итак, сигналы, используемые в системах ПДС, могут быть ото-
бражены множеством двоичных чисел, а преобразования сигналов
в процессе модуляции и демодуляции произведены путем соответ-
ствующих операций над двоичными числами, что технически легко
осуществляется цифровыми элементами. Формирование и обра-
ботка сигналов на основе их отображения совокупностью чисел на-
зываются соответственно цифровой генерацией и цифровой обра-
боткой. Устройства, реализующие такие операции, для краткости
в дальнейшем именуемые устройствами цифровой обработки сиг-
налов (ЦОС), имеют существенные преимущества по сравнению
с устройствами аналоговой обработки и формирования сигналов.
1. Характеристики устройства ЦОС не изменяются при изме-
нении внешних условий (температуры, влажности и т д.). Это объ-
ясняется тем, что устройства ЦОС реализуются на базе цифровых
элементов, устойчиво работающих при изменении внешних усло-
вий.
2 Возможна реализация ряда операций обработки сигналов,
принципиально не реализуемых на базе аналоговых элементов Так,
устройства ЦОС могут реализовать алгоритмы обработки сигна-
лов, требующих большое время хранения отсчетов сигнала, по-
скольку длительность хранения информации цифровыми элемен-
тами практически неограниченна
3. Устройства ЦОС удобно изготавливать в виде больших и
сверхбольших интегральных схем, в частности, в виде базовых
кристаллов или на базе микропроцессоров Это позволяет сущест-
венно уменьшить стоимость изготовления УПС.
205
4. Реализация устройств ЦОС на базе микропроцессоров дает
возможность легко изменять алгоритмы генерации и обработки
сигналов путем изменения лишь управляющей программы микро-
процессора. Это обстоятельство весьма существенно при построе-
нии адаптивных систем передачи информации.
Помимо перечисленных возможностей, которые возникают при
цифровом представлении сигналов, следует отметить еще и прин-
ципиальную возможность относительно простого применения при
цифровом формировании и фильтрации сигналов методов помехо-
устойчивого кодирования. Действительно, результат искажения по-
мехами спектральных коэффициентов сигнала можно рассматри-
вать как искажение некоторых разрядов в двоичных числах, ото-
бражающих спектральные коэффициенты сигнала при прохождении
им канала связи. Если для цифрового отображения спектральных
коэффициентов использовать кодовые комбинации некоторого по-
мехоустойчивого кода, то проблему фильтрации сигнала от помех
можно рассматривать как процедуру обнаружения и исправления
искаженных разрядов двоичных чисел, отображающих спектраль-
ные коэффициенты сигнала на входе приемника.
Представление чисел в устройствах ЦОС. Как правило, для большего удоб-
ства вычислении в устройствах ЦОС используется нормирование обрабатывае-
мых сигналов таким образом, чтобы все арифметические операции выполнялись
с числами, по абсолютному значению не превышающими единицу. Таким образом,
числа а„. обычно отображаются правильными десятичными дробями Для пере-
вода правильной десятичной дроби в двоичную систему счисления необходимо
последовательно умножить данную роль на 2 (умножать только дробные части
промежуточных результатов) до тех пор, пока дробная часть не станет равной
нулю. Затем выписать последовательно целые части полученных произведений.
Они и будут отображать разряды десятичной дроби в двоичной системе счис-
ления.
Пример 6.1. Перевод десятичной дроби а^ю =0,625 в двоичную систему
счисления (индекс 10 означает десятичную систему счисления):
0,625
X
1,250
X
^0,500
1,000
= 0,101
Для представления двоичных чисел в устройствах ЦОС используют три
основных кода: прямой, обратный и дополнительный Выбор представления за-
висит от удобства реализации той или иной арифметической операции. Код числа
содержит Z-J-1 разряд. Старший разряд, как уже отмечалось, служит для ото-
206
бражеиия знака числа, остальные I разрядов используются для представления
дробной части и называются числовыми. Прямой код удобен для выполнения
операции умножения. Правило кодирования: в знаковый разряд кода записы-
вается 0 для положительных чисел и 1—для отрицательных чисел. Числовые
разряды кода соответствуют числовым разрядам исходного двоичного числа.
Так, число 0,625(ю> = О,IОI (2> в прямом коде будет иметь вид 0,101, а (число
(—) 0,625(10)— 1,101.
Дополнительный код удобен для выполнения операций сложения и умно-
жения.
Правило кодирования положительных чисел: дополнительный код положи-
тельного числа совпадает с прямым кодом. Для отрицательных чисел: в знако-
вый разряд кода записывается 1, числовые разряды исходного двоичного числа
инвертируются и к младшему разряду прибавляется 1. Так, число (—) 0,625(to>
в дополнительном коде будет иметь вид
(—) 0,625(10) = 1,101 - 1,010
+ 1
1,01 I (дои)
Обратный код удобен для выполнения операций алгебраического сложения.
Правило кодирования положительных чисел; обратный код положительного чис-
ла совпадает с прямым кодом. Для отрицательных чисел в знаковый разряд
кода записывается 1, числовые разряды исходного кода инвертируются. Напри-
мер, число (—) О,625(1о) в обратном коде имеет вид 1 ,0I0(O6p>-
Эффекты квантования в устройствах ЦОС. Как уже отмеча-
лось выше, генерация сигналов на передающей стороне и пред-
ставление их на приемной стороне в виде суммы базисных функ-
ций фДО осуществляется с некоторой погрешностью &s(t) (см.
рис. 6.49,а). Эта погрешность, во-первых, зависит от вида и числа
функций 4>s(Q. Вторая причина погрешности связана с необхо-
димостью использования в устройствах ЦОС для представления
чисел {ak} конечного числа I двоичных разрядов, поскольку при
увеличении I растет сложность реализации, габариты и масса
устройств ЦОС. Представление чисел с помощью конечного ко-
личества числовых разрядов называется квантованием.
Операция квантования вносит в представление числа ошиб-
ку зависящую от величины
\h-ah—ak, (6.29)
где ah — число до квантования; ak — число после квантования.
Модель процесса квантования изображена на рис. 6.53. Зна-
чения Дй можно рассматривать как отсчеты некоторого шумово-
го процесса (шума квантования), сопровождающего работу уст-
ройств ЦОС. При разработке аппаратуры ПДС возникает необ-
ходимость учета влияния шума квантования на качественные
показатели устройств ЦОС, используемых в аппаратуре. Для
этого в первую очередь нужно уметь определять основные харак-
теристики самого шума квантования, которые зависят от способа
207
Рис. 6.53. Модель процесса
квантования
Рис 6.54. Примеры амплитудных характеристик квантования
квантования: с помощью округления или с помощью усечения.
При округлении произвольного числа до I разрядов исходное г-
разрядное число а/, (/<г<оо) заменяется на ближайшее /-раз-
рядное ah. Принцип округления поясняется рис 6 54,а.
Амплитудная характеристика квантователя изображена
сплошной ступенчатой линией. Высота «ступеньки» определяется
значением младшего двоичного разряда в двоичном представле-
нии ah. Это значение tzKB = 2-z называется шагом квантования.
Штриховая линия на рис. 6 54,а соответствует гипотетическому
случаю точного представления ай, которое в общем случае воз-
можно лишь при 1=оо Сравнивая изображенные на рис. 6 54,а
реальную и гипотетическую характеристики квантователя, осу-
ществляющего округление, можно убедиться в том, что ошибка
До, возникающая при округлении, удовлетворяет неравенству
—(б.зо)
Например, если значение ah находится между точками а и б, то
после его округления до ближайшего числа 2-z погрешность пред-
ставления будет положительной, однако не более половины вы-
соты ступеньки, равной 2“z-1. Если же число ah находится меж-
ду точками б и в, то после его округления до ближайшего числа
2_/ погрешность представления будет отрицательной, однако
опять не более 2~'-1.
Как показывают исследования, шум квантования обладает
следующими свойствами:
временная последовательность значений Д/< является стацио-
нарным случайным процессом;
последовательность ДЛ некоррелирована с квантуемой после-
довательностью ah-,
208
"’(до)
2l
Л»(ДУ)
Ь"(Ду)
27 - 1 Д
I Т I /
-2~‘ 0 2'1
в)
Рис. 6 55. Плотность распределения вероятностей значений шумов квантования
любые два отсчета последовательности Д/< некоррелированы,
а распределение вероятности значений Д^ является равномерным
по диапазону ошибок квантования. На рис 6 55,а изображена
<0(До) — плотность распределения Дл при квантовании методом
Скругления. В силу симметричности плотности распределения
относительно оси ординат следует, что математическое ожидание
шума округления равно нулю. Нетрудно рассчитать и дисперсию
шума округления:
“ 2~^' , 9-2? Q2
О(До)= С<о(Д0)Д0Ж= J 2;ДОМДО=^=^. (6.31)
—00 -2-/-1
При квантовании с помощью усечения до I разрядов у исход-
ного r-разрядного числа ак младшие г—I разряды отбрасывают-
ся, т. е. для представления числа ak используется ближайший
меньший по модулю уровень квантования (рис. 6.54,6). Напри-
мер, если значение ah соответствует точке а, б или в, то после
усечения оно будет представлено числом ak = 2~l. Как следует
из рис. 6.54,6, положительные числа в любом коде и отрицатель-
тельные числа в дополнительном после усечения оказываются
меньше или равными своим значениям до усечения. При этом
ошибка усечения Ду удовлетворяет неравенству
—2-г^Ду^0. (6.32)
Плотность распределения ошибки усечения для рассматривае-
мых чисел изображена на рис. 6.55,6. Из графика щ(Ду) можно
заключить, что математическое ожидание ошибки усечения равно
половине шага квантования, т. е
Ду = — 0,5Qkb—2-'-'. (6.33)
Дисперсия шума усечения, как и в случае округления для по-
ложительных чисел в любом коде и отрицательных чисел, пред-
ставленных в дополнительном коде, равна QKB2/12, в чем нетруд-
но убедиться путем расчета по формуле, аналогичной (6 31).
При усечении отрицательных чисел, представленных в пря-
мом и обратном кодах, абсолютное значение числа уменьшается,
14—6085 209
Таблица 6.5
Разрядность 1 8 10 12 14 16 18 20
Шаг квантования QKB 2—8 2“ ю 2—12 2—и 2-ie 2-ie 2—20
Дисперсия D(Afc), дБ —59 —71 —83 -95 — 107 —119 -131
следовательно, само отрицательное число после усечения стано-
вится больше. Поэтому для ошибки усечения отрицательных чи-
сел в прямом и обратном кодах справедливо неравенство: 0<С
sX Ду
Характеристика квантователя, осуществляющего усечение
как положительных, так и отрицательных чисел, представленных
в прямом или обратном кодах, изображена на рис. 6.54,в, а плот-
ность распределения ошибок усечения для этого случая — на
рис. 6 55,в. Математическое ожидание шума квантования равно
нулю, однако возрастает дисперсия шума квантования:
0—2^ Ср
D(Ay)= [ 2{-‘Дуг^У=Ч-=^. (6-34)
. ’ и О
-2-г
Таким образом, для уменьшения дисперсии шума квантования
предпочтение следует отдать округлению чисел.
В табл. 6.5 приведены значения дисперсии шума квантова-
ния в децибелах при различном количестве разрядов I, исполь-
зуемых для представления чисел. Дисперсия рассчитывалась по
формуле
Д(ДД = 101g(Q2KB/12). (6.35)
Для уменьшения шума квантования желательно выбирать I по
возможности большим. Однако увеличение разрядности чисел
приводит к усложнению технической реализации устройств ЦОС,
к увеличению габаритов, массы и потребляемой мощности. По-
этому выбор количества разрядов для представления чисел
осуществляют на основе компромисса между допустимым уров-
нем шума квантования и сложностью, габаритами, массой и по-
требляемой мощностью устройства ЦОС.
При расчете влияния эффектов квантования, например на сни-
жение помехоустойчивости демодулятора, необходимо учитывать
возможность усечения результатов арифметических операций из-
за переполнения разрядной сетки регистров памяти устройств
ЦОС. Рассмотрим в качестве примеров устройств ЦОС реализо-
ванные на базе микропроцессоров модулятор и демодулятор
ОФМ сигналов.
210
сообщения
Рис. 6.56. Структурная схема модулятора, реализованного на базе микропро-
цессора
Основы микропроцессорной реализации модуляторов УПС.
Структурная схема модулятора, реализованного на базе микро-
процессора, изображена на рис. 6.56. Микропроцессор условно
можно представить в виде двух основных частей: это собственно
обрабатывающего устройства — процессора и устройства хра-
нения информации — устройства памяти. Кроме микропроцессо-
ра в состав модулятора входят еще два устройства: ввода, обес-
печивающего сопряжение источника информации с микропроцес-
сором, и вывода, с помощью которого микропроцессор сопрягает-
ся с каналом связи. Устройства ввода и вывода подсоединены
к устройству обработки с помощью шины ввода-вывода; по этой
шине происходит обмен числами между блоками модулятора.
Модулятор работает следующим образом. Информационные
элементы от источника сообщения поступают через устройство
ввода в память микропроцессора. В памяти микропроцессора на-
ходится также управляющая программа, при выполнении кото-
рой производится расчет соответствующих формируемому сигна-
лу спектральных коэффициентов {а/,}. Эти коэффициенты в виде
двоичных чисел по шине ввода-вывода поступают в устройство
вывода, в котором осуществляется синтез сигнала s(t). Роль
устройства вывода выполняет обычно цифро-аналоговый преоб-
разователь (ЦАП). Одновременно он выполняет функции гене-
ратора базисных функций, имеющих вид сдвинутых во времени
прямоугольных импульсов, и синтезатора сигнала. Очевидно, что
быстродействие микропроцессора должно быть таково, чтобы
между моментами поступления двух информационных элементов
он мог успеть произвести определение всех спектральных коэф-
фициентов {щ}. Время, затрачиваемое микропроцессором для
расчета, в существенной степени зависит от управляющей про-
граммы, так как чем короче программа, тем быстрее она будет
выполнена.
В качестве примера рассмотрим возможный вариант алгорит-
ма управляющей программы микропроцессора, реализующего вы-
14* 211
Рис. 6.57. Структурная схема программы
микропроцессора, реализующего функции
модулятора
Рис 6 58. Структурная схема демодулятора,
реализованного на базе микропро-
цессора
сообщения
числения {ак} для сигналов с однократ-
ной ОФМ.. При этом виде модуляции
начальная фаза сигнала изменяется
по отношению к начальной фазе пре-
дыдущего сигнала на 180° при пере-
даче сигнала «.О» и не изменяется
при передаче символа «1». Инверти-
рование начальной фазы синусоидаль-
ного сигнала эквивалентно изменению
его знака, что соответствует изменению
знаков {аь}. Будем считать, что значе-
ния {иь} для сигнала с нулевой на-
чальной фазой заранее рассчитаны и
хранятся в памяти микропроцессора.
Алгоритм управляющей программы изображен на рис. 6.57. Про-
грамма работает следующим образом.
Вначале задается номер k — l первого спектрального коэффи-
циента (оператор 1). Затем выполняется условный оператор 2,
определяющий значение информационного элемента, поступивше-
го через устройство ввода в память микропроцессора. Если он
равен единице, то значение «1 пересылается из памяти в устрой-
ство вывода — в ЦАП, который двоичное число, отображающее
fli, преобразует в напряжение первого отсчета сигнала (опера-
тор 4). Если информационный элемент равен нулю, то в процес-
соре вначале происходит инвертирование знака fli (оператор 3),
а потом at пересылается в ЦАП. Помимо этого значение за-
писывается в память и замещает в ней прежнее значение at (опе-
ратор 5).
212
В следующем операторе 6 номер спектрального коэффициен-
та увеличивается на единицу и в блоке 7 осуществляется про-
верка условия — все ли спектральные коэффициенты сигнала
были пересланы в ЦАП? Если нет, то управление передается на
первый условный оператор 2 и весь процесс повторяется для
второго спектрального коэффициента, затем для третьего и так
далее до п-го коэффициента ап включительно. После этого услов-
ный оператор 7 передает управление программой условномоу опе-
ратору 8, который проверяет — закончена ли работа источника
сообщения. Если от источника сообщения поступил новоый ин-
формационный элемент, то управление передается в начало про-
граммы, если нет — работа модулятора прекращается.
Основы микропроцессорной реализации демодуляторов УПС.
Структурная схема демодулятора, реализованного на базе ми-
кропроцессора, изображена на рис. 6.58. Она отличается от схе-
мы модулятора внешними устройствами. Устройством ввода в
демодуляторе является аналого-цифровой преобразователь (АЦП),
который одновременно выполняет две функции: во-первых, опре-
деляет спектральные коэффициенты сигнала в базисе сдвинутых
во времени прямоугольных импульсов, т. е. определяет времен-
ные отсчеты входного сигнала {а/,}, и, во-вторых, представляет
их в форме двоичных чисел, реализуя при этом операции усече-
ния или округления до заданного количества разрядов I.
Демодулятор работает следующим образом. Отсчеты входно-
го сигнала, являющиеся спектральными коэффициентами {ah}
сигнала в базисе сдвинутых во времени импульсов, в виде дво-
ичных чисел с выхода АЦП через шину ввода-вывода поступают
последовательно во времени в память микропроцессора. Управ-
ляющая программа микропроцессора демодулятора производит
обработку коэффициентов {оц} входного сигнала с целью опре-
деления значения информационного элемента, переданного сиг-
налом s(t). Далее информационный элемент через устройство
вывода передается получателю сообщения.
В качестве примера рассмотрим один из возможных вариан-
тов алгоритма управляющей программы микропроцессора демо-
дулятора, реализующего прием сигналов с однократной ОФМ
методом сравнения фаз (автокорреляционный прием). Суть этого
метода приема заключается в сравнении фаз принятого и преды-
дущего элементов сигнала, хранимого в памяти демодулятора.
Если принятый и задержанный элементы сигнала имеют одина-
ковые начальные фазы, то это означает, что принятый сигнал
соответствует символу «1». В противном случае •— символу «О».
Так как принимаемые сигналы отображаются в АЦП сово-
купностью спектральных коэффициентов {aft}, представляющих
собой временные отсчеты сигналов, то сравнение сигналов в ми-
кропроцессоре будет осуществляться сравнением их временных
отсчетов. Эту операцию сравнения и вынесения решения о при-
213
Рис. 6.59. Структурная схема программы микропроцессора, реализующего функ-
ции демодулятора
нятом информационном элементе можно записать следующим
образом:
S- [>0 — информационный элемент равен 1,
akakz\ - < (6.36)
— информационный элемент равен 0.
В этом выражении ак обозначают отсчеты принятого элемента
сигнала, a aiiX — отсчеты предыдущего элемента сигнала.
При одинаковых фазах а* и имеют одинаковые знаки, по-
этому /?>0. При противоположных начальных фазах ai: и аьх
имеют противоположные знаки, следовательно, /?<0.
На рис. 6.59 изображена структурная схема управляющей
программы микропроцессора демодулятора. Программа работает
таким образом. Вначале обнуляется исходное значение R с тем,
чтобы в дальнейшем удобно было реализовать операцию накоп-
214
ления суммы (6.36) с помощью выражения /?=7?4-d*>|<dftT. В сле-
дующем операторе задается номер первого отсчета входного сиг-
нала. После этого начинается подготова к вычислению (6.36). Из
АЦП и памяти в процессор пересылаются соответственно значе-
ния dj и diT. Процессор вычисляет первое произведение 7?1==
=V?+di>|<diT. Далее отсчет dt замещает в памяти отсчет d]T.
Вследствие этого он может быть использован в дальнейшем (на
последующем единичном интервале) в качестве первого отсчета
предыдущего сигнала.
Следующий оператор увеличивает на единицу номер отсчета
принимаемого сигнала. Условный оператор 8 проверяет, закон-
чено ли накопление всех п произведений dk-dkx. Если нет, то
управление последовательно передается операторам 3 и 4, ко-
торые пересылают из АЦП и из памяти в процессор вторые спек-
тральные отсчеты а2 и а2т и т. д. Если же расчет величины 7? в
соответствии с (6.36) закончен, то выполняется условный опера-
тор 9. При этом по значению R в блоках 10 и 11 выносится ре-
шение о принятом информационном элементе. После этого зна-
чение информационного элемента передается через устройство
вывода к получателю сообщения. Далее в блоке 13 проверяется
наличие в АЦП отсчетов сигнала передающей стороны. Если
прием продолжается, то управление передается в начало про-
граммы.
При рассмотрении данного примера предполагалось, что про-
цессор работает синхронизированно с модулятором передающей
стороны.
При наличии у микропроцессора достаточного быстродействия
синхронизацию демодулятора можно осуществить, дополнив его
программу программой работы системы синхронизации.
В заключение следует отметить, что в настоящее время циф-
ровое представление и обработка сигналов широко используются
также при решении задач фильтрации, компенсации межсимволь-
ных искажений и т. и.
6.6. ОБЕСПЕЧЕНИЕ ВЫСОКОЙ УДЕЛЬНОЙ
СКОРОСТИ ПЕРЕДАЧИ СООБЩЕНИЙ
Общие положения. Полоса пропускания непрерывного канала
и уровень помех в нем определяют пропускную способность ка-
нала С. Степень использования пропускной способности канала
определяется информационной эффективностью системы ц =
=7?/С^1, где 7? — скорость передачи информации, бит/с. Чем
больше т), тем эффективнее используется капал. Обеспечение
большего значения ц (или, при заданном С, значения 7?) требует
увеличения аппаратурных затрат. Однако с ростом 7? падает стои-
мость канала связи, приходящаяся на 1 бит передаваемой инфор-
мации. Чем меньше р, тем проще реализуются УЗО и УПС, но
215
выше стоимость канала связи, приходящаяся на 1 бит переда-
ваемой информации. Соотношение R/C, обеспечивающее мини-
мальную стоимость передачи 1 бит информации, зависит от уров-
ня развития техники связи, от используемой элементной базы,
стоимости линейных сооружений и ряда других факторов. Ожи-
дать в ближайшие годы существенного снижени стоимости кана-
ла связи, в состав которого входят кабельные линии связи, не
приходится. В то же время ускоренными темпами совершен-
ствуется элементная база, резко падает ее стоимость. Это тре-
бует более эффективного использования каналов связи за счет
совершенствования АПД и, в частности, УПС.
В настоящее время основной объем дискретных сообщений пе-
редается по существующей сети стандартных каналов ТЧ. Уро-
вень аддитивных шумов в таких каналах более чем на 30 дБ
ниже уровня полезного сигнала, что теоретически позволяет пе-
редавать информацию в таких каналах со скоростью до 30000 ...
... 50000 бит/с. Однако в действительности используемая ско-
рость передачи почти на порядок ниже указанных значений. Глав-
ным фактором, ограничивающим повышение скорости в каналах
ТЧ, является высокий уровень интерференционных (межсимволь-
ных) помех, который для скоростей, приближающихся к скоро-
сти Найквиста, превосходит уровень полезного сигнала. В прин-
ципе, при заданной скорости источника R и полосе частот канала
АД, можно выбрать систему сигналов и способ передачи, при
которых межсимвольная интерференция (МСИ) практически бу-
дет отсутствовать [6.5]. Так, можно использовать N —
частотных каналов передачи с полосой АД в каждом (многоча-
стотная или параллельная система). Длительность элементарной
посылки в каждом частотном канале tOi=N/R. Если т013>Д —
длительность переходного процесса), то МСИ практически отсут-
ствует. Однако параллельные системы по всем техническим пока-
зателям уступают последовательным системам в каналах с МСИ
[1.8]. Поэтому в дальнейшем будут рассматриваться лишь после-
довательные системы передачи.
Меры борьбы с МСИ в последовательных системах распада-
ются на три самостоятельных направления:
1. Синтез оптимальных нелинейных приемных устройств для
каналов с МСИ.
2. Синтез корректоров, позволяющих скомпенсировать иска-
жения временных и частотных характеристик каналов. Это на-
правление приемлемо для каналов с малыми аддитивными по-
мехами [1.8].
3. Синтез сигналов с компактным спектром, обеспечивающих
минимальную интерференцию или отсутствие таковой [6.5].
В существующих системах без коррекции каналов относитель-
ная скорость передачи не превышает 0,3 ... 0,5 Бод/Гц, в то
время как при использовании специальных сигналов с компакт-
216
ным спектром совместно с коррекцией линейных искажений ско-
рость приближается к предельно возможной (скорости Найкви-
ста), равной 2 Бод/Гц. Дальнейшее увеличение удельной скоро-
сти передачи информации (скорости, отнесенной к 1 Гц полосы
пропускания канала связи) связано с использованием многопо-
зиционных сигналов. Применение многопозиционных сигналов по-
зволяет осуществить в стандартном телефонном канале передачу
со скоростью порядка 20000 бит/с (удельной скоростью более
6 бит/с-Гц).
Приемники, обеспечивающие минимально возможное значение
средней вероятности ошибки, когда принятый сигнал искажается
как случайными помехами, так и межсимвольной интерферен-
цией, являются нелинейными. В одном из вариантов такого при-
емника реализуется идея обратной связи по решению (вычитание
на интервале анализа из принимаемого сигнала последействия,
обусловленного символами, предшествующими анализируемому, по
которым уже принято решение) *. Широко применяется в кана-
лах с МСИ метод обработки сигналов, основанный на примене-
нии алгоритма Витерби [6.6]. Вследствие аппаратурной сложно-
сти оптимальных устройств приема в каналах с МСИ остановим-
ся подробнее лишь на использовании корректоров.
Коррекция линейных искажений. Если частотные или времен-
ные характеристики канала связи отличаются от «идеальных»
(желаемых), то говорят, что в канале присутствуют линейные
искажения [6.2]. Рассмотрим вопрос о коррекции (компенсации)
линейных искажений при оценке их возмущающего действия в
частотной области, полагая, что аддитивной помехой в канале
можно пренебречь (только в этих условиях корректоры могут
обеспечить удовлетворительные результаты).
Коррекцию искажений можно осуществить каскадным вклю-
чением в тракт передачи корректора с передаточной функцией
//(со), обеспечивающего в заданной полосе частот выполнение
условия К(со) =Е(со), где К(со), и F(<о) — переда-
точные функции канала связи, корректора и «идеального» откор-
ректированного тракта передачи соответственно. Передаточная
функция корректора реализуется с некоторой погрешностью. Обо-
значая через /Ур(со) и Ер((о) передаточные функции технически
реализованного корректора и тракта «канал-фкорректор» соответ-
ственно, получим выражение для погрешности корректирования:
е(<о) =Е((о)— ЕР(<1>),
где Ер(со) =/<(ю)/7р(со).
* Впервые этот алгоритм оптимального приема для канала; с МСИ и адди-
тивным флуктуационным шумом был предложен и реализован Д. Д. Клов-
ским [1.8].
217
В настоящее время находят широкое применение полиномные
корректоры с передаточными функциями в виде обобщенного
многочлена:
(6.37)
синтез требуемой переда-
п
ЯР(«>) = 2
k=0
где i]9a((o), 6=0,1 ... — заранее реализованные (так называемые
базисные) функции, а х/4, 6 = 0,1, ... — варьируемые параметры,
изменением которых осуществляется
точной функции корректора. Формуле (6.37) соответствует струк-
турная схема на рис. 6.60.
Вместо погрешности е(со) обычно сводят к минимуму функ-
ционал Е=Е[е(со)]. В качестве такого функционала может быть
использован, например, функционал вида
шв
Е [е («)] = J | е (со) [2 w (со) dco.
“н
(6.38)
щ(со) — вещественная неотрицательная ограниченная функция
(вес), которую в ряде случаев полагают равной единице, а о)н
и сов — верхняя и нижняя частоты полосы пропускания канала
связи.
Процесс отыскания минимума погрешности Е при вариации
параметров х0, хь ..., хп называют расчетом корректора. При ап-
паратурной минимизации Е процесс изменения параметров х0,
xi, . . ., хп называют настройкой корректора.
Стандартные каналы ТЧ имеют существенный разброс АЧХ
и ФЧХ, который, правда, должен находиться в определенных
нормированных пределах [1.3]. Можно ввести понятие усреднен-
ных характеристик канала и изготавливать корректор, рассчитан-
ный под эти усредненные характеристики стандартного канала
ТЧ. Такой корректор получил название стандартного. Естествен-
но, что возможности такого корректора — точность компенсации
АЧХ и ФЧХ — крайне ограничены.
Значительно лучших результатов можно достичь, используя
корректоры, рассчитанные и
Рис. 6 60. Структурная схема кор-
ректора
изготовленные под конкретный ка-
нал. Такие корректоры называются
индивидуальными. Естественно, что
это возможно только в случае, если
за абонентом постоянно закреплен
определенный канал. Если же при-
ходится работать с разными кана-
лами (по коммутируемой сети), то
корректор должен иметь возмож-
ность перестраиваться каждый раз
после осуществления соединения,
т. е. должен быть переменным.
218
Рис. 6.61. Структурная схе-
ма гармонического коррек-
тора
Вх
Перестройка корректора может осуществляться как вручную,
так и автоматически. Помимо требований к точности коррекции
к таким корректорам предъявляются определенные требования в
отношении скорости подстройки.
В настоящее время в технике связи в качестве переменных
корректоров широко используются гармонические корректоры, в
которых
(со) =еу'е™. (6.39)
Частотная характеристика вида (6.39) реализуется элементом за-
держки с временем запаздывания, равным т. С помощью базис-
ных функций (6.39) синтезируется суммарная комплексная частот-
ная характеристика и, следовательно, возможна одновременная
компенсация амплитудно-частотных и фазо-частотных искажений.
Наиболее распространенная схема гармонического корректо-
ра, называемого также трансверсальным фильтром, приведена на
рис. 6 61. Здесь т = 1/2/та\, где fmax — наивысшая частота синте-
зируемой характеристики. Изменяя модуль коэффициента пере-
дачи и полярность сигнала по отводам, можно моделировать ча-
стотные характеристики фазы и затухания с заданной степенью
точности.
Настройку гармонического корректора удобно производить по
временной характеристике канала связи — его импульсной реак-
ции. Для настройки в канал подается периодическая последова-
тельность узких прямоугольных импульсов. На приемном конце
производится установка коэффициентов передачи отводов кор-
ректора так, чтобы форма импульсной реакции тракта «канал-ф
-фкорректор» была как можно ближе к форме реакции идеаль-
ного четырехполюсника. Достижимая точность определяется
сложностью корректора (числом элементов запаздывания и регу-
лируемых элементов) и может быть весьма высокой.
Следует подчеркнуть, что сложность гармонического коррек-
тора существенно возрастает при больших неравномерностях ча-
стотных характеристик. Поэтому для предварительной (грубой)
коррекции перед гармоническим корректором включают коррек-
219
тор на фазовых и амплитудных контурах [6.2]. Чаще всего это
стандартный корректор.
Формирование сигналов, обеспечивающих минимизацию меж-
символьных помех. Существует множество работ, в которых рас-
сматривается данная проблема [6.2, 6.5—6.7 и др.].
В [6 5] предложен метод синтеза сигналов (определены требования на форму
сигналов), при использовании которых для передачи дискретных сообщений в ка-
нале связи не возникают переходные процессы, а следовательно, полностью
отсутствует межсимвольная помеха (МСП), которая в современных системах
связи является одним из основных факторов, ограничивающих скорость передачи
информации в системе связи. Канал связи предполагается линейным с постоян-
ными параметрами и описывается в общем случае дифференциальным уравне-
нием
dtn
an-i +• • • +aoJ/ (0- + • • • Ч~6ох (-)•
(6.40)
где x(t), О^^То — сигнал на входе канала связи; y(f), O^t — сигнал на выходе
канала связи; a*, Ьк— постоянные коэффициенты, определяемые параметрами
связи.
Канал задан импульсной реакцией g'(0> которая является решением диф-
ференциального уравнения (640) для где б(^)—дельта-функцня
Дирака. В общем случае характеристическое уравнение канала имеет корни
р* = ал±/Рл кратности тк и импульсная реакция канала в этом случае
mfe-i тк-\
g(t)^^ 3 e-“*'[^rcosW+Bftrrsin^] = 2 AkrSkrit) +
k r=0 k r=0
~^-^krgkrU)’ ^^0, (6.41)
где Akr, В— постоянные интегрирования уравнения (6.49), определяемые из
п начальных условий.
В [6 5] показано, что финитные сигналы не будут вызывать в канале связи
переходных процессов, а значит и МСП, если выполняются следующие соотно-
шения:
00 00
Jg*r(x)x(—г)^ = 0, [
о 6
00
J* gt>r (Ч *(то—Ч dz = О,
о
gi-rb) X (— Ч dz == О,
00
gkr(t) X T)dT = O,
6
(6.42)
где gkr(x) =тг cos gtr(x)—xr sin [Lt, k=l, 2, ...; r=0, 1, ... (tnk—1). Физи-
чески условия (6.42) означают, что сигнал x(t), O^Z^To, должен иметь такую
форму, чтобы стационарные отклики канала в моменты времени t=0 и (=х0
были тождественно равны нулю для каждой составляющей импульсной реакции
канала (6 41), что обеспечит полное отсутствие переходных процессов, а значит,
и МСП на интервале
220
В соответствии с интегралом Дюамеля стационарные отклики канала ykr(ty
и ykr(t), Osgi<TO, на входной сигнал x(t), Osg/sgte, по каждой составляющей
gkr(t) и gnr(t) импульсной реакции канала имеют вид:
ykr(i) = jgfcrW* (z~х) dz< Укг(() = J gfert1) x(z~z)dz- (6-43>
о о
При 1=0 и 1=тя из (6 43) получаем условия (6 42).
Соотношения (6.42) представляют собой систему из 2п уравнений относи-
тельно искомой формы сигнала х(1), OsglsgTo, который не будет вызывать МСГГ
в канале связи на интервале времени (п — порядок дифференциального
уравнения канала (6 40)). Решая указанные системы, можно получить в явном
виде выражения для функции x(t), 0^/^тя.
В качестве примера расчета формы сигналов, не вызывающих МСП при пе-
редаче дискретных сообщений в каналах связи, рассмотрим модель линейной си-
стемы, описывающей физическую цепь. При этом
g(t)=ae-at, t^O, К(/ш)=а/(а-|-/ш).
Сигналы x(t), 0=g/^T0, будем искать в виде
Xi(0 =а > +&1 sin o)ii; (П =ao-|-ai cos Ы1С 0^/<т0, й)1 = 2л/то,
(6.44)
(6.45).
где яо, ai, bi — неизвестные пока коэффициенты.
Подставляя (6.45) в (6.42) и производя необходимые вычисления (взяв инте-
гралы), получаем систему линейных уравнений относительно неизвестных яо, Я1,
&ь Решая эту систему, определяем форму сигналов (6.45):
*1 (0 = «о 1 + . sin
L WjA2 (Wj)
xi(t) — ao
1
№ (Ш1)
(6.46)-
cos WjZ
0 z To.
=a2/(a2-\-d)i2), o)i=2n/T0
Выходные сигналы канала (что просто проверить, используя интеграл Дюаме-
ля) будут состоять из вынужденных (стационарных) колебаний переходных:
процессов:
(а
1—coswjl-p— sin Qj/
0<i <t0.
й(1) = 0, z<°. z3st0;
/ 0), \
y2(t) = ях 11 —cos cOjZ —--------sin cojl 1, 0 «С t <r0,
Иг(0 = 0. z t0.
В заключение отметим следующее обстоятельство. Условия (6.42) не накла-
дывают ограничений на длительность тя сигналов x(f) Osi/siTo, а это означает,
Что нет ограничений и иа скорость модуляции В=1/тя. Следовательно, теорети-
221
чески получается, что скорость модуляции можно выбрать сколь угодно боль-
шой и при этом МСП в канале связи будет отсутствовать. Однако увеличение
скорости модуляции требует увеличения мощности входных сигналов x(t), 0^
s=^t0, при фиксированной мощности сигналов на выходе канала. Данный факт
подробно обсуждается в [6.5], а также следует из анализа формулы (6 46) для
рассмотренного примера. Таким образом, эффективность использования каналов
связи можно значительно повысить, «заплатив» за это повышением мощности
сигналов, удовлетворяющих условиям (6 42). Для простых сигналов в виде
отрезков гармонических колебаний аналогичное увеличение мощности не даст
указанного эффекта, так как при этом пропорционально будет возрастать и уро-
вень (средняя мощность) межсимвольной помехи.
Использование многопозиционных сигналов. Известно, что если
сообщение передается двоичными посылками (двоичным кодом),
то скорость передачи информации не может превышать 2AFfe бит/с
или 2 бит/с на 1 Гц полосы пропускания канала. Для повышения
удельной скорости передачи информации необходимо перейти к
многократной модуляции (многопозиционным кодам), при кото-
рой каждая элементарная посылка несет более 1 бита инфор-
мации.
Наибольшее применение многократные методы нашли при фа-
зовой модуляции. При многократной фазовой модуляции каждой
комбинации из п единичных двоичных элементов, поступивших
от источника, ставится в соответствие определенное значение
фазы отрезка несущей. Правило отображения двоичной последо-
вательности {а,} в последовательность сигналов {sz,*(£)} назы-
вается модуляционным кодом.
Так, при двукратной фазовой модуляции (ДФМ) передавае-
мая последовательность разбивается на комбинации из двух эле-
ментов. Очевидно, что число различных комбинаций длины п
равно 2'!. Для ДФМ 2"=4. Передача информации осуществляет-
ся дибитами в соответствии с модуляционным кодом, представ-
ленным в табл. 6.6.
Применительно к двукратной относительной фазовой модуля-
ции (ДОФМ) А<р соответствует сдвигу фаз между i-м и (i—1)-м
сигналами. В демодуляторе ДОФМ измеряется сдвиг фаз между
(i—1)-м и t-м сигналами и в зависимости от сдвига в соответ-
ствии с табл. 6.6 выдается одна из комбинаций. При одной и той
же скорости модуляции ДОФМ позволяет обеспечить вдвое боль-
Таблица 6.6
Комбинация 00 01 10 И
д¥° 45 135 225 315
222
О 3 - о о
0 1-0 о
Рис. 6 62. Сигналы квадратурной Рис 6 63. Дискретный сложный сигнал
амплитудной модуляции КАМ-16 для п~2
шую скорость передачи информации, чем ОФМ. Но так как при
ДОФМ минимальный сдвиг по фазе между сигналами 90°, а не
180°, как при ОФМ, вероятность ошибки при ДОФМ выше. Дву-
кратная относительная фазовая модуляция в соответствии с ре-
комендациями МККТТ применяется для передачи информации со
скоростью 2400 бит/с.
Увеличение удельных скоростей передачи до 3 бит/Гц-с и
выше может быть получено совместным использованием ампли-
тудной и фазовой модуляций, причем для сокращения спектра
сигнала в канал передается одна боковая полоса частот [6.3].
Система сигналов, используемая при передаче информации,
должна выбираться так, чтобы обеспечить минимальную вероят-
ность неправильного приема элемента при заданной средней
мощности передатчика. В наилучшей системе сигналов мини-
мальное из расстояний между парами сигналов должно быть
максимальным. Примеры решения данной задачи при действии
в канале флуктуационных помех для ансамбля из т=7, 16,
19 сигналов приведены в [6.7].
На практике при ш = 16 во многих УПС применяется так на-
зываемая квадратурная амплитудная модуляция (КАМ-16)
(рис. 6.62). Проигрыш в помехоустойчивости при КАМ по сравне-
нию с оптимальной системой сигналов приблизительно 0,5 дБ.
Отметим, что изменение свойств помехи приводит к измене-
нию структуры оптимальных систем сигналов. Для каналов, в ко-
торых имеются фазовые флуктуации (дрожание фазы), следует
выбирать сигналы, существенно разнесенные по углу. Такая си-
стема сигналов представлена на рис. 6.17. Она отвечает Реко-
мендации МККТТ V.29 и обеспечивает минимальный угол между
векторами 45°, что более чем в 2 раза превышает аналогичный
показатель системы КАМ-16.
В заключение следует отметить, что достижение высокой
удельной скорости возможно только в том случае, если УПС яв-
ляются адаптивными. Это связано с непостоянством параметров
223
канала связи во времени, а также нестационарным характером
действующих в нем мультипликативных и аддитивных помех. Для
адаптации в состав УПС включаются блоки идентификации па-
раметров канала и помех, оценки которых используются для из-
менения параметров и структуры блоков формирования и обра-
ботки сигналов.
6.7. ОБЕСПЕЧЕНИЕ ВЫСОКОЙ
ПОМЕХОУСТОЙЧИВОСТИ ПРИ ПЕРЕДАЧЕ
СООБЩЕНИЙ ПО КАНАЛАМ
С СОСРЕДОТОЧЕННЫМИ ВО ВРЕМЕНИ
ПОМЕХАМИ
Методы борьбы с сосредоточенными во времени помехами.
Сосредоточенные во времени помехи на проводных каналах свя-
зи (особенно коммутируемых) являются основными источниками
ошибок. К таким помехам относятся импульсные помехи и пере-
рывы. Структура импульсных помех описана в гл. 2. Перерыв
можно представить эквивалентной (аддитивной импульсной) по-
мехой, которая по форме совпадает с формой сигнала, переда-
ваемого во время действия перерыва и вычитается из сигнала.
Все методы борьбы с сосредоточенными во времени помехами,
используемые при передаче дискретных сигналов, можно раз-
бить на две большие группы: методы, в которых мероприятия по
уменьшению влияния помех применяются только на приеме, и
методы, в которых соответствующие меры применяются как на
приеме, так и на передаче.
Среди методов борьбы с импульсными помехами, относящихся
к первой группе, можно выделить: метод, предложенный еще в
1946 г. А. Н. Щукиным и получивший в литературе название
метода ШОУ (широкая полоса, ограничение, узкая полоса); ме-
тод подавления импульсных помех с использованием системы
мгновенной автоматической регулировки усиления; различные ме-
тоды компенсации импульсных помех [6.8]; методы оптимального
(квазиоптимального) приема в условиях действия импульсных
помех.
Для обеспечения помехоустойчивой передачи в условиях дей-
ствия сосредоточенных во времени помех необходимо каждый эле-
мент передавать по каналу сигналом, структура (форма) которо-
го заведомо отличалась бы от структуры возможных реализаций
помех Отсюда следует, что длительность используемых сигналов
(их база) должна быть возможно больше длительности (базы)
импульсных помех (перерывов), действующих в канале связи.
'Однако желательно, чтобы увеличение длительности сигнала не
сопровождалось уменьшением скорости передачи информации. Об-
шей мерой сложности структуры некоторого сигнала является его
224
база, определяемая как произведение длительности сигнала на
ширину его спектра (см. разд. 6.2). Оценка значений базы оди-
ночных импульсных помех, рассматриваемых как сигналы для
реальных каналов ТЧ с различным числом переприемных участ-
ков, показывает, что база таких помех равна 3 ... 15 [1.4]. Ана-
логичная оценка базы кратковременного перерыва связи (базы
участка сигнала, поражаемого этим перерывом) в зависимости
то длительности перерыва дает значение 3 ... 900. Таким обра-
зом, даже с учетом малого удельного веса перерывов большой
длительности база передаваемых элементарных сигналов (пере-
носчиков элементов информации) должна составлять сотни еди-
ниц. Тогда при соответствующей оптимальной обработке этих
сигналов на приеме можно реально получить высокую помехо-
устойчивость даже при полном отсутствии сигнала на приеме в
течение некоторого интервала времени.
Рассмотрим в качестве таких сигналов дискретные сигналы
с большой базой (сложные сигналы), позволяющие достаточно
просто реализовать системы ПДС и обеспечить связь без умень-
шения скорости передачи информации [6.9].
Дискретные сложные сигналы (ДСС). Определим сложный
сигнал s(Z) в виде:
N
S (0 = S С/гЫ0 ^х)> т>Т0>
Л=1
где «о(0 — импульс единичной энергии, равный ]/1/т0 при 0^
и нулю при остальных значениях t; {ch} — последова-
тельность постоянных коэффициентов, определяющих значение
&-го элемента ДСС; то — длительность элемента ДСС; т — па-
раметр, определяющий разреженность элементов ДСС (т/то = п
будем называть коэффициентом разрежения ДСС); N — число
элементов ДСС. Дискретный сложный сигнал с N—5 и {сД =
Рис 6 64 Автокорреля-
ционная функция оди-
ночного импульса дли-
тельностью То
15—6085
Зт() — 2То тр
Рис. 6 65. Автокорреляционная функция ДСС
225
фф
СФ
Рис 6 66 Система ПДС с сигналами, эквивалентными импульсу
= 1, —1, 2, 1/1 для п=2 показан на рис. 6.63. Основной харак-
теристикой сложного сигнала является его корреляционная
функция (КФ). Существуют различные типы корреляционных
функций. Нас в дальнейшем будет интересовать апериодическая
КФ, т. е. КФ одиночных (периодически не продолженных во вре-
мени) сложных сигналов. Для сигналов si (/) и $2(/) апериоди-
ческая КФ
«) = (6.47)
—оо
При si(£) =s2(i) получим автокорреляционную функцию (АКФ),
а при —взаимокорреляционную функцию (ВКФ)
Апериодическая АКФ ДСС определяется ее N отсчетами.
Л’
^(/цт)=2 0 </г — m<N, (6.48)
k=i
где m=0,l, ..., N—1. В дальнейшем будем для упрощения вме-
сто R (шт) писать Rm. Очевидно, что R_m=Rm и
ад = 2 (6.49)
m=—Л’+1
где го(-) — автокорреляционная функция (рис. 6.64,6) одиноч-
ного импульса длительностью то (рис. 6.64,а).
Автокорреляционная функция ДСС, представленного на
рис. 6.63, приведена на рис. 6.65. Помимо основного отклика
(пика), совпадающего по форме с АКФ одиночного импульса,
сигнал дает боковые лепестки. Последние желательно получить
возможно меньшей амплитуды. При этом задача синтеза слож-
ных сигналов сводится к поиску таких сигналов, у которых КФ
близка к КФ одиночного импульса. Длительность и, следователь-
226
Рис 6 67 Варианты реализации системы ПДС с сигналами, эквивалентными
импульсу
но, энергия сигнала может быть выбрана сколь угодно большой.
Такие сигналы были названы Д. Хафменом сигналами, эквива-
лентными импульсу. Эти сигналы могут быть заданы соотноше-
ниями (6.47) — (6.49). Система ПДС с сигналами, эквивалентны-
ми импульсу, представлена на рис. 6.66. Схема содержит форми-
рующий фильтр ФФ на передаче и согласованный фшльтр СФ на
приеме. Каждый элемент сигнала x(t) передается ДСС, эквива-
лентным импульсу (растягивается во времени). На приеме ДСС
«сжимается» в соответствующие элементы x(t). Если в канале
связи на такой достаточно длинный сложный сигнал будет дей-
ствовать сосредоточенная во времени помеха, то исказится или
пропадет незначительная часть элементов ДСС, что1 позволит на
приеме при определенных условиях правильно зарегистрировать
элемент сигнала x(t).
Рассмотренный метод может быть реализован в двух вариан-
тах: в первом ФФ включается на входе модулятора, а СФ — на
выходе демодулятора (рис. 6.67,а); во втором варианте ФФ вклю-
чается на выходе модулятора, а СФ перед демодулятором
(рис. 6.67,6). Помехоустойчивость при действии сосредоточенных
помех в обоих случаях одинакова. Однако техническая реализа-
ция во втором случае оказывается более сложной вследствие
необходимости обрабатывать аналоговые сигналы. Достоинством
второго варианта является то, что ФФ (СФ) можно рассматри-
вать как универсальную приставку, которая может работать с лю-
бым УПС при любом виде модуляции, обеспечивая качественную
передачу по каналам с сосредоточенными во времени помехами.
6.8. УСТРОЙСТВА ПРЕОБРАЗОВАНИЯ
СИГНАЛОВ АПД
Общие положения. Устройства пребразования (Сигналов ап-
паратуры передачи данных могут выполняться конструктивно в
одном корпусе с другими узлами АПД, однако чаще всего УПС
выпускаются в виде отдельных устройств в рамках Единой си-
15* 227
стемы ЭВМ. При этом УПС помимо своих основных функций
обычно выполняют и ряд вспомогательных: автоматическое пере-
ключение АПД в режим передачи или приема; обеспечение слу-
жебной связи операторов с помощью телефонного или телеграф-
ного аппарата без участия АПД; обеспечение блокировки АПД и
включение сигнализации при понижении при пропадании уровня
принимаемого сигнала; коррекцию АЧХ и ФЧХ канала связи;
оценку качества принимаемых сигналов.
Устройства преобразования сигналов должны обеспечивать
передачу данных с заданной верностью и краевыми искажениями
элементов, не превышающими норм, которые оговорены в соот-
ветствующих стандартах. Различают УПС, позволяющие органи-
зовать передачу данных по каналам тонального телеграфа ТТ,
каналам ТЧ, широкополосным каналам и физическим линиям.
Промышленностью выпускаются УПС, предназначенные для ра-
боты по коммутируемым и некоммутируемым каналам, обеспечи-
вающие одностороннюю или одновременно двустороннюю пе-
редачу данных по двухпроводным каналам. В УПС могут быть
использованы различные виды сигналов. В частности, может при-
меняться амплитудная, частотная или фазовая модуляция или
комбинированные виды модуляции.
В зависимости от скорости передачи данных различают УПС:
низкоскоростные (до 300 бит/с); среднескоростные, обеспечиваю-
щие передачу данных по каналам ТЧ (примерно до 9600 бит/с)
и высокоскоростные, обеспечивающие передачу данных по широ-
кополосным каналам и физическим линиям со скоростью, превы-
шающей достигнутые при передаче данных по стандартным ка-
налам ТЧ.
Функциональные преобразования, производимые с сигналами
в УПС с различными видами модуляции, во многом совпадают.
Так, в передатчике осуществляется перекодирование, модуляция
и формирование спектра передаваемых сигналов, в приемнике —
фильтрация, коррекция межсимвольных искажений, автоматиче-
ская регулировка уровня сигнала (АРУ), демодуляция, регене-
рация и обратное перекодирование. Кроме того, в УПС выраба-
тываются сигналы синхронизации передатчика и приемника.
Рассмотрим упрощенную обобщенную структурную схему
приемопередатчика УПС (рис. 6.68). На входе передатчика и вы-
хода приемника включены узлы сопряжения с ООД (стык С2).
К сигналам стыка относятся сигналы данных, синхронизации и
управления. Сигналы данных имеют вид последовательности дву-
полярных импульсов прямоугольной формы. Синхронизирующие
колебания имеют вид коротких импульсов, частота следования
которых равна скорости передачи данных. Сигналы управления
могут принимать значения «включено» (положительная поляр-
ность) и «выключено» (отрицательная полярность). На выходе
передатчика и входе приемника расположены узлы сопряжения
228
Рис 6.68. Обобщенная структурная схема приемопередатчика УПС
с каналом связи (стык С1). Для С1 регламентируются входные
и выходные сопротивления, уровень сигнала, возможные преде-
лы регулирования выходного уровня в передатчике и допустимые
изменения входного уровня приемника.
Сигнал данных, поступающий на вход передатчика, можег
представлять собой как случайную, так и детерминированную
последовательность символов, т. е. содержать периодически по-
вторяющиеся комбинации. Для работы отдельных узлов УПС
наиболее благоприятной является случайная структура сигнала.
Поэтому в УПС часто применяется скремблер Ск — узел, пре-
образующий передаваемые данные (независимо от их структуры)
к виду, близкому к случайному. На приеме включают дескремб-
лер Дек, осуществляющий обратное преобразование сигнала дан-
ных. Иногда скремблер называют перемешивателем, а дескремб-
лер — упорядочивателем.
При использовании методов передачи с числом информацион-
ных позиций т>2, например многофазной ФМ или АФМ, по-
следовательность передаваемых элементов в передатчике разби-
вается на комбинации, элементы которых передаются параллель-
ным кодом. Число элементов в комбинации определяется крат-
ностью применяемого вида модуляции. Такое преобразование
сигнала данных осуществляется в узле, называемом последова-
тельно-параллельным преобразователем Пос/Пар. Для обратного
преобразования сигнала в приемнике служит параллельно-после-
довательный преобразователь Пар/Пос. Элементы кодируются в
передатчике и декодируются в приемнике в соответствии с мо-
229
дуляционным кодом. С этой целью в передатчике включают ко-
дер Код, а в приемнике декодер Дек. Выходной сигнал кодера
преобразуется в модулированный сигнал с заданной формой
спектра в формирователе модулированного сигнала ФМС. В об-
щем случае в ФМС осуществляется формирование низкочастот-
ного (модулирующего) сигнала с заданным спектром, модуляция
(перемножение низкочастотного сигнала на несущее колебание),
формирование спектра модулированного сигнала и перенос
спектра в полосу частот канала связи.
Для грубой компенсации межсимвольных искажений сигнала,
вызванных неидеальностью частотных характеристик канала свя-
зи, на входе приемника включают предварительный корректор
ПК частотных искажений. Более тщательную коррекцию сигна-
ла осуществляют, как правило, во временной области с помощью
точного корректора ТК межсимвольных искажений. Такой кор-
ректор может быть включен как до, так и после демодулятора
сигнала.
Операциями, обратными формированию сигнала в передатчи-
ке, являются фильтрация и демодуляция принимаемого'сигнала
в приемнике. Эти операции выполняются обычно с помощью по-
лосового фильтра ПФ„Р, передаточная функция которого согла-
сована со спектром принимаемого сигнала, и демодулятора.
В большинстве УПС, предназначенных для работы по каналам
ТЧ, спектр принимаемого сигнала с помощью преобразователя
спектра ПС перед фильтрацией и демодуляцией переносят в
область более высоких частот. Эта мера позволяет упростить
реализацию процесса обработки сигнала.
Опорные колебания — несущее и тактовое, необходимые для
работы УПС, вырабатываются в блоках синхронизации передат-
чика БСпер и приемника БСпр. На входы этих блоков поступает
последовательность импульсов от высокостабильного задающего
генератора ЗГ. В БСпер необходимые частоты вырабатываются
путем простых операций с частотой ЗГ — деления, сложения.
В БСпр для получения когерентного и тактового колебаний, не-
обходимых для демодуляции и регенерации, используют под-
стройку частоты и фазы ЗГ под соответствующие параметры при-
нимаемого сигнала. Когерентное колебание используется в про-
цессе демодуляции, а тактовые импульсы применяют для
определения моментов стробирования демодулированного сигна-
ла в регенераторе Per. Информацию о переданных элементах
извлекают из регенерированного сигнала после его декодирова-
ния с помощью декодера и преобразования в последовательный
вид.
Иногда помимо основной задачи, заключающейся в обеспече-
нии передачи с заданной помехоустойчивостью единичных эле-
ментов, на УПС возлагается задача оценки качества принимае-
мых единичных элементов. Результаты этой оценки используются
230
на последующих ступенях обработки принимаемого сигнала и,
в частности, при декодировании кодовых комбинаций. Устройст-
во, осуществляющее оценку качества принимаемого сигнала, на-
зывают детектором качества сигнала ДКС.
Примеры УПС. Рекомендации МККТТ по построению УПС.
Международным консультативным комитетом по телефонии и те-
леграфии (МККТТ) выпущен ряд рекомендаций по вопросам пре-
образования сигналов при передаче данных — выбору способа
модуляции, частот и уровнен несущих, параметрам цепей и сиг-
налов на стыке между УПС и остальными устройствами АПД
и др.
В Рекомендации МККТТ V.21 задаются характеристики моде-
ма для передачи данных по каналам коммутируемой телефон-
ной сети общего пользования. Скорость модуляции до 300 Бод,
вид модуляции — частотная. Для организации одновременной
двусторонней передачи данных в двухпроводном канале ТЧ
спектр частот канала 0,3 ... 3,4 кГц с помощью фильтров делит-
ся на два подканала: № 1 и 2. По подканалу № 1, занимающему
нижнюю половину спектра, передача ведется в направлении от
вызывающего абонента к вызываемому, подканал № 2 служит
для передачи в обратном направлении. Рекомендуются несущие
частоты 1080 и 1750 Гц соответственно для подканалов № 1 и 2.
Девиация частоты составляет 100 Гц. Оба подканала являются
прозрачными, т. е. позволяют передавать данные с любой ско-
ростью, не превышающей 300 Бод, и любым кодом.
Устройства преобразования сигналов с ЧМ и скоростью мо-
дуляции до 200 (300) Бод, построенные в соответствии с Реко-
мендациями МККТТ V.21, являются самыми дешевыми и полу-
чили в мире наибольшее распространение.
В странах СЭВ в рамках Единой системы ЭВМ (ЕС ЭВМ)
выпускаются УПС (модемы) ЕС-8001 (модем-200), ЕС-8001М
(УПС-0,3 ТФ), ЕС-8002 (ТЛМ-200) и др.
В Рекомендации МККТТ V.23 задаются требования на модем,
рассчитанный на передачу со скоростью 600 и 1200 Бод (мо-
дем-1200) по коммутируемым каналам телефонной сети. Переда-
ча осуществляется поочередно в обе стороны с использованием
ЧМ. Кроме основного канала, служащего для передачи данных,
в нижней части спектра телефонного канала организуется слу-
жебный обратный канал для передачи со скоростью до 75 Бод.
Обратный канал используется для передачи сигнала запроса в
системах ПД с решающей обратной связью. Этим рекоменда-
циям удовлетворяют УПС серии ЕС ЭВМ, ЕС-8005, ЕС-8006 и др.
Модем-200 и модем-1200 имеют с каналом связи стык С1,
а с ООД — стык С2. В соответствии с Рекомендацией V.24 стык
С2 содержит цепи общего применения (ЦС-100) и цепи для взаи-
модействия с устройством автоматического вызова УАВ —
ЦС-200 (рис. 6.69).
231
-цС серии 100 ЦС серии 100
11С серии 200
Рис. 6 69. Цепи стыка
Известны Рекомендации МККТТ по построению модемов для
передачи по каналам ТЧ со скоростями 2400, 4800 и 9600 бит/с,
а также модемов, обеспечивающих высокоскоростную передачу
данных по первичным широкополосным каналам. Отметим не-
которые особенности этих модемов. Если при работе со ско-
ростью до 1200 бит/с применяется ЧМ, то для работы со скоро-
стью более 1200 бит/с уже рекомендуется использование фа-
зовой, многократной фазовой и комбинированной модуляций.Так,
в УПС-9,6, предназначенном для работы по четырехпроводным
некоммутируемым каналам ТЧ, в соответствии с Рекомендацией
V.29 используется 16-позиционная АФМ. В состав этих моде-
мов входят корректоры сигналов или каналов, часто применяется
предварительное перекодирование сигналов.
В последние годы уделяется внимание вопросам высокоско-
ростной передачи данных. Высокоскоростные УПС (модемы) мо-
гут быть использованы как непосредственно для высокоскорост-
ной передачи данных при обмене информацией между ЭВМ, так
и для передачи цифровых потоков цифровых систем по сущест-
вующей аналоговой сети — для обеспечения взаимосвязи между
цифровой и аналоговой первичными сетями В последнем случае
УПС должны обеспечивать передачу цифровых потоков со ско-
ростью 64 кбит/с по первичным широкополосным каналам
(ПШК). Современный уровень техники ПД позволяет передавать
цифровую информацию по ПШК со скоростью 128 или 144 кбит/с,
т. е. в одном ПШК можно организовать два подканала с про-
пускной способностью 64 кбит/с каждый.
В СССР первичные широкополосные каналы создаются па
базе первичных групповых трактов с групповой контрольной часто-
той 84,14 кГц. Наличие контрольной частоты и обусловленное
этим включение в тракте передачи режекторного фильтра на ча-
стоту 84,14 кГц (РФ-84,14) создает в диапазоне 82 ... 86 кГц
существенные искажения ГВП. Поэтому необходимо так сфор-
мировать спектр сигнала на передаче, чтобы обеспечить мини-
мальное влияние искажений ГВП. В частности, можно, приме
няя метод, базирующийся на биимпульсном кодировании, достиг-
нуть снижения энергии спектра сигнала на частоте 84,14 кГц.
Другим, обеспечивающим сопряжение с цифровыми каналами, яв-
ляется двухканальный вариант УПС, при котором осуществляет-
ся независимая раздельная передача двух цифровых потоков со
232
скоростью 64 кбит/с в диа-
пазонах ПШК 65 ... 82 и
86 ... ЮЗ кГц. Использо-
вание двухкаиальиого ва-
рианта с ЧРК помимо
полного устранения влия-
ния РФ-84,14 на переда-
ваемый сигнал позволяет
снизить чувствительность
к импульсной помехе в
каждом канале за счет
Рис. 6 70. Упрощенная структурная схема
УПС-ТГ
сужения полосы фильтра на входе приемника, уменьшить чувстви-
тельность к искажениям частотных характеристик ПШК (из-за уве-
личения длительности элемента сигнала), обеспечить возможность
применения более эффективных методов передачи. В частности,
в двухкапалыюм варианте, разработанном в СССР, предлагается
использование 16-позиционной КАМ, т. е. передача четырехуров-
невого сигнала на двух квадратурных несущих колебаниях с дву-
мя боковыми полосами (пространство сигналов изображено на
рис. 6.62).
Для передачи данных по физическим цепям используются
устройства преобразования сигналов телеграфного типа УПС-ТГ
и низкого уровня УПС НУ. Устройство УПС-ТГ служит для пе-
редачи данных импульсами постоянного тока. При этом так же,
как и в телеграфии, используются двухполюсные сигналы с на-
пряжением ±20 В. (Отсюда и название УПС телеграфного ти-
па.) С помощью УПС-ТГ обеспечивается сопряжение ООД с
телеграфным каналом, связь между двумя АП по физическим ли-
ниям. Упрощенная структурная схема УПС-ТГ приведена на
рис. 6 70. Передаваемые от ООД сообщения поступают на
УПС-ТГ либо непосредственно, либо через УЗО. Выходное
устройство Вых.У обеспечивает в канале связи необходимое вы-
ходное напряжение. Принимаемые из канала связи сигналы уси-
ливаются усилителем и поступают на регистрирующее устрой-
ство РУ. При работе УПС в синхронном режиме неотъемлемой
частью РУ является устройство синхронизации УС, которое обес-
печивает правильность регистрации единичного элемента. Так,
при регистрации методом стробирования УС вырабатывает
стробимпульсы в моменты, соответствующие серединам единич-
ных интервалов. При работе УПС-ТГ в асинхронном режиме РУ
служит для преобразования искаженных входных сигналов в сиг-
налы прямоугольной формы. Скорость, обеспечиваемая УПС-ТГ,
обычно не превышает 200 бит/с, поскольку при работе с боль-
шей скоростью и уровнем ±20 В возникает влияние на соседние
цепи.
В УПС-НУ используются сигналы со значительно более низ-
ким напряжением, чем УПС-ТГ, чго обеспечивает отсутствие
233
влияния на соседние цепи при высоких скоростях передачи.
В основном УПС-НУ применяются при работе по физическим це-
пям на небольшие расстояния (20 ... 30 км).
Структурная схема УПС-НУ в целом не отличается от струк-
турной схемы УПС-ТГ. Основные ее особенности обусловлены
тем, что требуется перекрыть заданное расстояние с использова-
нием малых уровней сигнала. Для этого передаваемый сигнал
соответствующим образом преобразуется (например, в биим-
пульсный сигнал) или, как говорят, перекодируется. На прием-
ном конце должны быть созданы условия для приема сигналов
очень низкого напряжения — порядка десятков милливольт.
Устройства УПС-НУ обеспечивают передачу данных со ско-
ростями от десятков до .сотен кбит/с в зависимости от алгоритма
перекодирования и расстояния, на которое необходимо передать
данные.
Оценка качества прнимаемых сигналов в УПС. В некоторых
УПСпР помимо вынесения решения о виде принятого единичного
элемента («1» или «0») одновременно оценивается и качество
принятого решения, т. е путем контроля сигнала определяется
условная вероятность неправильного (И) приема P(H/Y), где
}' — вектор параметров контролируемого сигнала. При p(H)Y)>
>Х, где X — порог, зависящий от требуемой вероятности необна-
ружения ошибки, выдается сигнал стирания. Этот сигнал может
служить сигналом отказа от принятого решения или просто мет-
кой, говорящей о том, что принятый элемент ненадежен. Отказ
от принятого решения (стирание) в сомнительной ситуации яв-
ляется эффективным средством уменьшения числа неправильных
решений. На последующих ступенях обработки сигнала и, в част-
ности, при декодировании в УЗО стертые элементы могут быть
восстановлены. Как известно [6.10], процедура восстановления
стертых элементов значительно проще процедуры исправления
ошибок и любой корректирующий код может существенно боль-
ше восстановить стираний, чем исправить ошибок.
Оценку качества принимаемых сигналов осуществляет ДКС.
Все многообразие типов ДКС можно свести к нескольким основ-
ным видам, выделив типовые узлы:
1. Устройства, осуществляющие контроль уровня сигнала или
его формы в различных точках приемного тракта (контроль до
демодулятора, после демодулятора нт д.). Контроль может про-
изводиться в одной или одновременно в нескольких точках при-
емного тракта.
2 Устройства, выполняющие контроль отдельных параметров
принимаемого сигнала с их выделением путем дополнительной
обработки сигнала
3. Устройства контроля совокупности параметров принимаемо-
го сигнала.
234
Рис 6 71 Детектор
качества сигналов с
перестраиваемым по-
рогом
Рис 6 72. Структурная схема ДКС
с выделением контролируемого пара-
метра
Контролируя качество сигнала на интервале анализа (чаще
всего равном т0), обычно исходят из того, что все необходимые
сведения о канале заданы. На практике, как правило, такими све-
дениями при контроле качества элемента сигнала мы не распола-
гаем. В этой связи задача оценки качества сигнала должна ре-
шаться в два этапа. На первом этапе — этапе обучения — опреде-
ляются требуемые для выставления порога X характеристики кана-
ла связи. По результатам оценки качества канала выносится за-
ключение о качестве сигнала. Такое решение позволяет обеспечить
заданные характеристики ДКС при переходе с одного канала свя-
зи на другой, а также в случае нестационарности канала связи.
Устройство, осуществляющее оценку качества канала, назовем
детектором качества канала ДКК- Результаты оценки качества
канала используются для выставления порога ДКС. Таким обра-
зом, детектор качества сигнала с перестраиваемым порогом ДКСП
должен содержать ДКС и ДКК (рис. 6.71). Ниже будут рассмот-
рены принципы построения ДКСП для каналов, в которых дейст-
вует систематическая помеха. К такого рода помехам можно отне-
сти, в частности, межсимвольную помеху, которая проявляет себя
при работе с высокими удельными скоростями, сказываясь при не-
удачном выборе порога стирания на вероятности стирания и, сле-
довательно, на пропускной способности канала
На рис. 6.72 приведена структурная схема ДКС, осуществляю-
щего контроль одного параметра. Рассмотрим назначение отдель-
ных блоков ДКС Согласующее устройство СУ предназначено для
согласования сопротивления в точке подключения ДКС с входным
сопротивлением ДКС, а также в случае необходимости для изме-
нения уровня или мощности сигнала. Устройство преобразования
параметров УПП предназначено для выделения измеряемого пара-
метра. Измерительное устройство ИУ предназначено для нелиней-
ного преобразования принятого сигнала в «1», если условная веро-
ятность неправильного приема выше заданной, и «О», если услов-
ная вероятность неправильного приема ниже заданной. Датчик
опорного сигнала ДОС предназначен для формирования опорного
(эталонного) сигнала, необходимого для работы ИУ. Этим датчи-
ком задается то значение апостериорной вероятности неправильно-
го приема сигнала, превышение которого должно сопровождаться
235
Рис. 6.73. Структурная схема ДКС с контролем параметра по максимуму и мини-
муму
Рис 6.74 Структурная схема ДКС при независимом контроле нескольких пара-
метров
стиранием. Выходное устройство ВУ предназначено для согласова-
ния сопротивлений, уровня, мощности или длительности сигнала на
выходе ИУ с соответствующими сопротивлением, уровнем, мощно-
стью или длительностью сигнала, необходимого для дальнейшего
использования *.
Иногда под измерением параметра подразумевается определе-
ние того, находится или нет параметр сигнала в определенной зоне,
ограниченной максимальным и минимальным значениями. При-
мером такого контроля может служить контроль уровня по макси-
муму и минимуму, когда сигнал стирания выдается, если уровень
окажется ниже некоторого заданного уровня ит1п и выше, чем
Птах. Для этого случая структурная схема измерителя представле-
* Соответствующие рекомендации иа цепи стыка приведены в 16 3] Пре-
дусмотрены две цепи стыка оборудования передачи данных с оборудованием
обработки данных НО (детектор качества сигнала данных) и 123 (детек-
тор качества сигнала обратного канала).
236
Рис. 6 75. Структурная схема ДКС с контролем совокупности параметров
на на рис. 6.73. Здесь УОСС — устройство объединения сигналов
стирания, которые выдаются ИУ, и ИУ2. При этом ИУ, выдает сиг-
нал стирания при и^итах, а ИУ2 — при и^.итгП- Если же umtn<Z
<Zu<ZUmax, то сигнал стирания не выдается.
При слежении за п (п^2) параметрами сигнала возможны две
разновидности построения структурной схемы:
каждый параметр контролируется раздельно, а результаты кон-
троля объединяются (рис. 6.74) ;
параметры контролируются совместно, т. е. предварительно
объединяются по какому-либо закону. Тогда структурная схема
примет вид, представленный на рис. 6.75. Здесь УОП — устройство
объединения параметров — предназначено для объединения сигна-
лов yt в сигнал Y=f(yi, уг,..., уп)-
Работа ДКС как «обнаружителя ошибок» сопровождается сле-
дующими нежелательными ситуациями:
1. В УПСпр принято неправильное решение, но p(H/Y) <Х.
Этот случай может рассматриваться как необнаружение ошибки.
Вероятность его обозначим рпо-
2. В УПС„р принято правильное решение, но р(Нт. е.
стирание является ложным. Вероятность такого стирания обозна-
чим через Рл.с.
Возможны также ситуации, когда при правильном решении
р(Д/У)>Х, а при неправильном приеме p(H/Y) >к. Эти случаи
соответствуют правильному приему и правильному стиранию. Оче-
видно, что
Рн.о4~Рл.с-|-р/п.п-|-Рп.с= 1,
где р'п.п — вероятность правильного приема в системе со стирани-
ем; рп с — вероятность правильного стирания.
Если обозначить вероятности правильного и ошибочного при-
ема в системе без стирания через рПп и ро1и, то можно записать:
Рп.О = Рош Рп С, рп П ~ Рп.п Р1 С*
Эти соотношения определяют связь вероятностных характеристик
для дискретного канала со стиранием и без стираний (без ДКС).
Из двух сравниваемых ДКС лучшим является тот, который обеспе-
чивает при заданной вероятности рн.о меньшую вероятность рл.с.
237
УПС
nep
УПСПР^-
SA
Рис. 6.76. Устройство разделения на-
правлений передачи и приема
из-за задержки на переключение
в среднем составляет 240 мс.
Разделение направлений
передачи и приема. Большин-
ство современных модемов
обеспечивают поочередную
двустороннюю передачу дан-
ных по двухпроводным кана-
лам с автоматическим пере-
ключением направления пере-
дачи. Такие модемы эффектив-
но работают при пересылке
сообщений, но неудовлетвори-
тельно в диалоговом режиме
направления передачи, которая
Простейшим способом организации одновременной двусторон-
ней передачи данных является использование четырехпроводных
каналов. Однако такой способ экономически невыгоден, и поэтому
в последние годы прилагается много усилий по созданию УПС,
обеспечивающих одновременную двустороннюю передачу данных
по двухпроводным каналам и, в частности, каналам ТЧ. Выше упо-
миналось о модеме-300 (ЕС-8001), в котором разделение направ-
лений передачи и приема осуществляется фильтровым методом.
Частотное разделение подканалов применяется в модеме серии
ЕС-8007 (ВНР). В нем в соответствии с Рекомендациями МККТТ
используются несущие 1200 и 2400 Гц. Передача организуется ме-
тодом ДОФМ со скоростью модуляции 600 Бод.
Таким образом, скорость передачи информации в каждом под-
канале (направлении) оказывается равной 1200 бит/с. В модемах
ЕС-8001 и ЕС-8007 образуются два симметричных канала. Однако
далеко не всегда требуется наличие симметричных каналов. Так,
при диалоге асинхронного оконечного устройства (например, теле-
графного аппарата) с ЭВМ машина всегда работает быстрее чело-
века, сидящего за клавиатурой терминала, и в направлении от
ЭВМ к терминалу требуется более широкополосный канал, чем
в направлении от терминала к ЭВМ. Отсюда возникла идея разде-
лить полосу частот телефонного канала, выделяя низкоскоростной
канал с ЧМ для передачи данных от терминала к ЭВМ и резерви-
руя более высокоскоростной канал с ФМ для передачи от ЭВМ
к терминалу. Каналы разделяются фильтровым методом.
В последнее время все больше внимания уделяется разработке
бесфильтровых методов разделения направлений передачи и прие-
ма с применением компенсаторов [6.9]. Структурная схема такого
разделения с компенсацией на приеме сигналов передатчика при-
ведена на рис. 6.76. На входе УПСПр должен быть только прини-
маемый сигнал. Подавление передаваемого сигнала sA_>n на входе
приемника обеспечивается за счет дифсистемы ДС и компенсатора,
238
состоящего из устройства формирования компенсационного сигна-
ла УФКС и вычитателя. Использование компенсаторов позволяет
уменьшить влияние на приемник не только собственных сигналов
передатчика, проникающих через ДС на вход УПСпр; но и влия-
ние эхо-сигналов. Для этого необходимо произвести «обучение»
УФКС под условия передачи по каналу связи.
На рис. 6.76 сигналы помех, состоящие из ослабленных сигна-
лов собственного передатчика и эхо-сигналов, обозначены <?(/),
а сигнал, поступающий от станции В, sa-^f-
Устройства разделения направлений передачи и приема с ком-
пенсаторами позволяют более эффективно, чем при фильтровом
методе, использовать полосу частот канала связи. Однако техни-
ческая реализация таких устройств сложнее.
Разработка УПС различного класса продолжается. Основное
внимание уделяется созданию УПС, обеспечивающих передачу
с высокой скоростью. Решаются задачи построения УПС, позволя-
ющих организовать эффективную одновременную двустороннюю
передачу данных по двухпроводным каналам, а также УПС, не-
чувствительных к сосредоточенным во времени помехам.
6.9. ТЕЛЕГРАФНАЯ КАНАЛООБРАЗУЮЩАЯ
АППАРАТУРА
Общие положения. Телеграфная каналообразующая аппаратура
(КОА) может быть одно- и многоканальной. Для разделения ка-
налов в многоканальной КОА в современной технике телеграфной
связи находят применение частотный и временной методы.
Напомним, что при ЧРК полоса частот, отводимая для переда-
чи сообщений одновременно от N источников, делится на N частей
(по числу каналов). Таким образом, для каждого канала с по-
мощью фильтров выделяется своя полоса частот с защитным про-
межутком между ними. При ВРК интервал то, отводимый для
поочередной передачи У элементов от У источников, делится на У
частей (по числу источников), т. е. для каждого канала (источни-
ка) выделяется свой интервал времени. Спектры сигналов всех
каналов, в отличие от частотного разделения, занимают одну и
ту же полосу частот. Графически способы ЧРК и ВРК показаны
на рис. 6.77,а и б соответственно.
Рассмотрим организацию дискретных каналов при использова-
нии стандартного канала ТЧ и частотном разделении телеграфных
каналов. Частотное телеграфирование при этом называют тональ-
ным *. Число телеграфных каналов, которое можно организовать
* Под частотным телеграфированием (ЧТ) понимается передача телеграф-
ных сообщений переменным током, модулированным телеграфным сигналом. Пе-
редача телеграфных сигналов при ЧТ может осуществляться также в диапазоне
до 0,3 кГц (подтональиое телеграфирование) и свыше 3,4 кГц (надтональное те-
леграфирование).
239
Рис. 6.77. Методы разделения каналов
а — частотный; б — временндй
в спектре стандартного канала ТЧ, зависит от скорости телеграфи-
рования и используемого метода модуляции. Наибольшее распро-
странение в системах с ЧРК получил метод ЧМ. При этом удается
разместить в стандартном канале ТЧ 24 телеграфных канала.
Параметры КОА с ЧРК и ЧМ, удовлетворяющие Рекомендаци-
ям МККТТ и требованиям ГОСТ 186664—73, приведены в табл. 6.7.
Как видно из табл. 6.7, каналы, образуемые в полосе ТЧ, имеют
трехзначную нумерацию. Первая цифра указывает на тип канала
(1—для 50-, 2 — для 100- и 4 — 200-бодовых каналов), вторые
две — его порядковый номер от нижней границы полосы 300 Гц до
верхней 3400 Гц. Объединение двух 50-бодовых каналов дает один
100-бодовый, а объединение четырех 50-бодовых каналов позволя-
ет получить один 200-бодовый.
Системы ТТ с ЧМ могут строиться с использованием как инди-
видуального, так и группового принципа. Структурные схемы, ил-
люстрирующие индивидуальный и групповой принципы реализации
многоканальной КОА, приведены на рис. 6.78.
Таблица 6.7
Канал Скорость передачи, Бод Средняя частота канала, Гц Девиация частоты, Гц Нумерация каналов
ТТ-ЧМ-120 50 3004-1204* ±30 101 — 124
ТТ-ЧМ-240 100 240+240i ±60 201—212
ТТ-ЧМ-480 200 120+4801 ±120 401—406
• х—порядковый номер канала
240
Рис. 6.78. Принципы построения многоканальной КОА
а — индивидуальный; б — групповой
При индивидуальном способе (рис. 6.78,а) количество типов
УПС и фильтров совпадает с числом каналов, образуемых аппара-
турой. При групповом — все каналы разбиваются на несколько
групп (на рис. 6.78,6 две группы), работающих в одном и том же
частотном спектре. «Размещение» каналов в требуемых областях
линейного спектра осуществляется путем преобразования частот.
Здесь число типов УПС и фильтров сокращается пропорционально
числу групп, что делает этот вариант построения более технологич-
ным. Однако надежность аппаратуры при групповом способе
16—6085 241
уменьшается, так как выход из строя группового преобразователя
приводит к выходу из строя всей группы каналов
Групповой принцип нашел применение в аппаратуре ТТ с ЧМ
типов ТТ-17П, ТТ-12, ТТ-144, индивидуальным — принят в аппара-
туре ТТ-48. К достоинствам частотного метода разделения теле-
графных каналов относятся, обеспечение прозрачности каналов,
т. е возможности работы по ним как синхронным, так и асинхрон-
ным способом, простота выделения или ответвления любого числа
каналов в промежуточных пунктах. К недостаткам аппаратуры ТТ
с ЧРК следует отнести.
низкое использование пропускной способности телефонного ка-
нала;
малый уровень по напряжению в каждом индивидуальном ка-
нале в № раз меньше допустимого уровня на входе телефонною
канала (N — число индивидуальных каналов в системе),
взаимные мешающие влияния между индивидуальными кана-
лами;
невысокая технологичность из-за наличия большого числа эле-
ментов в неинтегральном исполнении;
высокая стоимость одного канала.
В настоящее время на магистральном и зоновом участках теле-
графной сети преобладает КОА с ЧРК, а на городском и сель-
ском — с ВРК.
В соответствии с ГОСТ 22575—77 временное разделение теле-
графных каналов — это способ одновременной передачи нескольких
телеграфных сообщении по одной линии связи или в канале ТЧ,
при котором линия или канал занимаются поочередно каждым ис-
точником сообщений через равные промежутки времени. Функции
выделения каждому источнику сообщений своего интервала време-
ни выполняет распределитель передачи Рпер или, как его еще на-
зывают, мультиплексор (рис. 6 79). Задачу распределения прини-
маемых сигналов между получателями сообщении выполняет рас-
пределитель приема РПр, или демультиплексор. В литературе часто
термин «мультиплексор» используется для обозначения устройств,
выполняющих функции как мультиплексирования, так и демульти-
плексирования, для чего вводятся понятия «мультиплексор пере-
дачи» и «мультиплексор приема»
Для того чтобы на приеме сигналы от первого источника попа-
дали первому получателю, а от второго — второму, приемник и
передатчик должны быть сфазированы. Эта задача решается с по-
мощью устройств синхронизации по циклам. В канал посылается
синхросигнал, правильный прием которого является гарантией
того, что приемник и передатчик сфазированы. В противном слу-
чае приемник подстраивается Задачу формирования синхросш на-
лов выполняет формирователь ФСС, а их выделения на приеме —
приемник синхросигналов ПСС.
242
Рис 6 79 Структурная схема системы ПДС с ВРК
На рис. 6.80 приведены временные диаграммы сигналов, посту-
пающих от источников сообщений № 1 и № 2 (рис 6 80,а и б), и
сигнала на выходе Рпер двухканальной системы с ВРК (рис 6 80,а
и б) и сигнала на выходе Рпер двухканальной системы с ВРК
(рис 6 80,в).
Достоинствами ВРК в сравнении с ЧРК являются
более высокое использование пропускной способности канала
ТЧ (в 2—8 раз); современные системы с ВРК позволяют органи-
зовать до 180 кодозависимых или 60 кодонезависимых телеграф-
ных 50-бодовых каналов по каналу ТЧ с групповой скоростью
9600 бит/с и довести использование пропускной способности кана-
ла более чем до 3 бит/с-Гпг1,
отсутствие влияния между каналами,
регенерация телеграфных сигналов в кодозависимых каналах;
высокая технологичность (многие узлы аппаратуры могут быть
реализованы на интегральных микросхемах или средствах вычис-
лительной техники) и, следовательно, более низкая стоимость,
возможность построения интегральных систем, объединяющих
в себе функции каналообразования и коммутации
Однако метод ВРК обладает и рядом специфических недостат-
ков-
размножение ошибок в кодонезависи-
мых каналах при использовании метода
СИП;
сравнительная сложность выделения
части каналов в промежуточных пунктах
Примеры телеграфной аппаратуры
образования дискретных каналов. Теле-
графная и низкоскоростная сеть ПД
вктючает в себя каналы магистральной,
внутризоновой (внутриобластной) и мест-
ной (городской и внутрирайонной) связи
Магистральные каналы образуются
путем вторичного уплотнения аппарату-
рой ТТ каналов ТЧ между двумя оконеч-
ными междугородными станциями
Рис 6 80 Временные диа-
граммы работы системы с
ВРК
16*
243
(ОМС), ОМС и УК, двумя УК; каналы внутризонной связи—путем
уплотнения аппаратурой ТТ каналов ТЧ между ОМС и РУС; каналы
городской телеграфной связи организуются между ОМС и ГОС.
Независимо от того, где используются КОА, к ней предъявля-
ются следующие требования:
электрические характеристики ее должны удовлетворять реко-
мендациям МККТТ. С одной стороны, это диктуется расширением
международных связей и возможностью поставки аппаратуры на
внешний рынок, с другой стороны, тем, что Рекомендации МККТТ
вобрали в себя опыт многих стран по разработке КОА и было бы
неразумно не воспользоваться этим опытом;
передача дискретных сообщений должна обеспечиваться на
скоростях 50, 100, 200, (300) Бод. Основные характеристики для
этих скоростей оговорены Рекомендациями МККТТ и требования-
ми ГОСТ;
возможность организации «прозрачного» (кодонезависимого)
дискретного канала;
заданные качественные показатели должны достигаться при
возможно более низких мощностях сигнала на ее выходе, что по-
зволит уменьшить загрузку каналов ТЧ или при той же загрузке
обеспечить максимально возможное число телеграфных каналов
в одной системе передачи;
возможность передачи дискретных сигналов по каналам систем
телеграфной связи с искажениями и вероятностью ошибки на эле-
мент, не превышающими допустимых;
высокая надежность — большое время наработки на отказ (по-
рядка тысячи часов) и малое время восстановления.
Кроме тою, поскольку число каналов, приходящееся на едини-
цу обслуживающего персонала, непрерывно растет, аппаратура
должна быть малообслуживаемой или необслуживаемой. Следует
также стремиться к уменьшению приходящейся на один канал по-
требляемой от сети мощности и стоимости.
Каналообразующая аппаратура магистральных связей. Эта ап-
паратура предназначена для получения больших пучков каналов,
что может быть прежде всего достигнуто за счет увеличения удель-
ной скорости передачи информации (бит/Гц).
В течение многих лет КОА магистральных связей строилась
в основном на использовании ЧРК и ЧМ. С 1963 по 1973 гг. вы-
пускалась аппаратура ТГ-17П, которая обеспечивала организащию
17 «прозрачных» телеграфных каналов, по которым можно было
осуществлять передачу со скоростью до 75 Бод. С 1972 г. налажен
серийный выпуск аппаратуры ТТ-48 (Десна). В настоящее время
эта аппаратура достаточно широко применяется на магистральных
связях. С ее помощью в одном канале ТЧ можно организовать 24,
12 и 6 каналов со скоростью телеграфирования соответственно 50,
100 и 200 Бод. Каналы прозрачные. Все параметры аппаратуры
соответствуют требованиям МККТТ. Принцип построения аппара-
244
туры индивидуальный, т. е. каждый телеграфный канал занимает
соответствующий участок ТЧ без дополнительного группового пре-
образования. По сравнению с ТТ-17П аппаратура имеет лучшие
эксплуатационно-технические характеристики- в расчете на один
канал она занимает в 3 раза меньшую площадь, более чем в 2 ра-
за легче и в 1,5 раза меньше потребляет электроэнергии.
Дальнейшее совершенствование традиционных систем ТТ с ЧМ
идет по пути улучшения эксплуатационно-технических характери-
стик и качественных показателей. Аппаратура ТТ-144 также соот-
ветствует Рекомендациям МККТТ и имеет такие же основные тех-
нические данные, как и аппаратура ТТ-48. За счет широкого ис-
пользования микросхем разработанная аппаратура позволяет раз-
местить не 48 каналов (как ТТ-48), а 144 канала на одной стан-
дартной стройке В аппаратуре предусмотрена организация кана-
лов до 1200 Бод. Аппаратура более надежна в работе, требует
меньше времени на обслуживание, удобнее в эксплуатации По
сравнению с ТТ-48 потребление электроэнергии уменьшено более
чем в 3 раза, существенно снижена масса, приходящаяся на один
канал.
Наряду с совершенствованием традиционных систем ТТ с ЧРК
создается КОА с ВРК.
С 1980 г. на телеграфной сети СССР начато внедрение аппара-
туры ДУМКА (дуплексная каналообразующая аппаратура), кото-
рая позволяет [6.11]: по сравнению с ТТ-48 и ТТ-144 увеличить
эффективность использования полосы частот канала ТЧ в 2—
2,5 раза; снизить мощность сигнала на выходе аппаратуры; сни-
зить стоимость канала связи в 1,5—3 раза. Аппаратура позволяет
организовать 23 «прозрачных» и 45 «непрозрачных» каналов со
скоростью 50 Бод. В кодозависимых каналах передача стартстоп-
ных сигналов должна вестись кодом МТК-2 с 7,5-контактным де-
лением. Путем объединения двух и четырех кодонезависимых ка-
налов с номинальной скоростью передачи 50 Бод можно получить
кодонезависимый канал для передачи на скоростях 100 и 200 Бод
соответственно.
В аппаратуре ДУМКА используются временной принцип обра-
зования каналов и метод формирования сигналов СИП, рассмот-
ренный в гл. 5.
Структурная схема аппаратуры ДУМКА (рис 6.81) содержит
типлексор МП, УЗО и УПС. Каждый из блоков имеет передающую
Рис. 6 81. Структурная схема аппаратуры ДУМКА
245
и приемную части. Объединение дискретных сигналов в групповой
сигнал осуществляется в МП передачи. Групповой сигнал ГС по-
дается на УЗО, где он разбивается на блоки, в каждый из которых
вводятся проверочные элементы, позволяющие на приеме исправ-
лять ошибки. Устройство преобразования сигналов передающей
части осуществляет преобразование подаваемого на его вход сиг-
нала с использованием двухуровневой амплитудной и однократной
относительной фазовой модуляции с частично подавленной одной
боковой (АМ-ОФМ ОБП). На приемной стороне сигнал усилива-
ется в УПС и преобразуется в дискретный групповой сигнал.
В УЗО происходит исправление ошибок, а в МП приема — разде-
ление индивидуальных сигналов и их декодирование, после чего
они могут быть поданы каждый на свой телеграфный аппарат.
Аппаратура зоновой связи. Эта аппаратура, как и аппаратура
магистральных связей, должна соответствовать Рекомендациям
МККТТ. Для обеспечения потребностей сети АТ, ПС, НСПД,
а также для сопряжения с магистральной аппаратурой ТТ-48,
ТТ-144 необходимо, чтобы зоновая аппаратура ТТ имела каналы
типа ТТ-ЧМ-120, ТТ-ЧМ-240 и ТТ-ЧМ-480, основные параметры
которых совпадали бы с параметрами каналов магистральной аппа-
ратуры. Кроме того, аппаратура должна иметь ряд особенностей,
обусловленных спецификой внутризоновых (внутриобластных)
участков телеграфной сети. К ним относятся следующие:
1. Емкость пучков каналов в большинстве случаев составляет
8.. .12, поэтому телеграфная аппаратура должна обеспечивать соз-
дание такого числа каналов при занятии как части спектра, так и
всего спектра канала ТЧ с созданием большего числа каналов на
тех направлениях, где требуются более мощные пучки каналов.
2 На внутризоновых сетях все еще используются воздушные
линии связи и соответствующие системы передачи, характеризую-
щиеся повышенными значениями уровня помех и сдвига частот
в канале ТЧ.
3. Пучки каналов малой емкости затрудняют эффективное ис-
пользование аппаратуры автоматического контроля ТТ и комплек-
са измерительной аппаратуры.
4. Разнотипность оборудования в РУС усложняет ее обслужи-
вание. В помещениях аппаратной РУС по сравнению с аппаратной
крупных телеграфных узлов может наблюдаться более резкое из-
менение температурного режима, что приводит к более жестким
требованиям к такой аппаратуре.
Таким образом, аппаратура ТТ внутризоновой связи, находясь
в более тяжелых условиях эксплуатации, должна обеспечивать те
же качественные показатели, что и аппаратура магистральная.
Исходя из специфики внутриобластной (зоновой) связи, аппарату-
ра, разрабатываемая для работы на этих участках, должна быть
более надежной и практически необслуживаемой.
Основными типами аппаратуры, используемыми на внутризо-
246
новых связях, являются ТТ-12 и ТТ-24. Аппаратура ТТ-12 позволя-
ет организовать методом ЧРК одновременную двустороннюю связь
со скоростью 50 Бод по 12 каналам. При использовании двух ком-
плектов аппаратуры в канале ТЧ можно организовать 24 телечраф-
ных капала. Могут быть организованы 100- и 200-бодные каналы,
а также смешанные каналы с различными скоростями.
Аппаратура городских связей. Аппаратура должна удовлетво-
рять следующим специфическим требованиям:
1. У абонентов сети АТ и ПД, как правило, устанавливается
один, реже два оконечных устройства. В этих условиях целесооб-
разно иметь одноканальную телеграфную аппаратуру, которая по-
зволила бы по двухпроводной цепи наряду с телеграфной связью
сохранить и телефонную.
2. Обычно ОП сети ПС имеют от одного до шести оконечных
телеграфных устройств. Для таких сетей целесообразно использо-
вать аппаратуру не более чем на шесть каналов.
3. На городских телеграфных связях различают абонентский
участок и межстанционный (между РАТС). Число каналов, кото-
рое требуется организовать на каждом из участков, различно. Если
на абонентском требуется от одного до шести каналов, то на меж-
станционном— от 12 до 48. Обеспечение соответствующего числа
каналов на абонентском и межстанционном участках может быть
обеспечено разной аппаратурой.
4. Аппаратура разделения каналов на городских связях долж-
на обеспечивать необходимую дальность без переприемов на рас-
стояние до 50 ... 60 км.
5. Чтобы использовать для передачи дискретных сообщений не
менее 25% пар в многопарных кабелях, уровень передачи, частот-
ный диапазон и форма сигналов, передаваемых по линиям ГТС,
должны обеспечивать минимальное влияние на соседние теле-
фонные цепи.
6. Аппаратура городских связей должна обеспечивать ио двух-
проводным цепям одновременную двустороннюю связь.
7. Аппаратура разделения каналов городских телеграфных свя-
зей должна быть экономичной — стоимость ее должна быть соиз-
мерима со стоимостью пары жил кабеля ГТС.
Основными типами аппаратуры, применяемыми в настоящее
время на городских связях, являются ТВУ и ДАТА.
Аппаратура временного уплотнения ТВУ-12 применяется для
образования телеграфных каналов на четырехпроводных кабель-
ных линиях городской телефонной сети (ГТС) и пригородной сети,
соединяющих телеграф с районными АТС, а также пунктами, име-
ющими большое число телеграфных аппаратов (почтамт, узел свя-
зи и др.). В основу построения аппаратуры ТВУ-12 положен прин-
цип временного уплотнения с амплитудно-импульсной модуляцией
сигналов индивидуальных телеграфных каналов. Аппаратура
ТВУ-12 позволяет образовать на четырехпроводных городских
247
соединительных линиях 12 «прозрачных» телеграфных каналов со
скоростью телеграфирования до 200 Бод.
В состав аппаратуры входят оконечные станции ТВУ-12А и
ТВУ-12Б. Станция ТВУ-12А устанавливается на телеграфе,
а ТВУ-12Б — на РАТС. На станции ТВУ-12Б и у телеграфных або-
нентов применяется устройство разделения абонентских линий
(УРАЛ), которое позволяет на участке «абонент-АТС» городской
соединительной линии передавать телеграфные сообщения и одно-
временно осуществлять телефонную связь.
В 1980—1983 гг. были проведены работы по модернизации
ТВУ-12 и устройства разделения абонентских линий, в результате
чего появились системы ТВУ-15 и АРАЛ. Модернизированные сис-
темы построены на новой элементной базе и имеют улучшенные
технико-экономические показатели. Так, аппаратура ТВУ-15 позво-
ляет организовать 15 (вместо 12) телеграфных кодонезависимых
каналов со скоростью до 200 Бод. На одной стандартной стойке
размещается оборудование для 210 каналов.
Дуплексная абонентская телеграфная аппаратура ДАТА так
же, как и аппаратура ТВУ-12, применяется для образования пуч-
ков телеграфных каналов, но на двухпроводных кабельных линиях
ГТС, соединяющих телеграф с ГОС или абонентами. В аппарату-
ре ДАТА использованы метод СИП и ВРК- Одновременная двух-
сторонняя передача сообщений (дуплекс) обеспечивается за счет
применения дифсистемы. Аппаратура имеет две модификации:
ДАТА-3 и ДАТА-6. Аппаратура ДАТА-3 позволяет образовать на
одной двухпроводной кабельной линии ГТС три двусторонних теле-
графных канала со скоростью передачи до 100 Бод, а ДАТА-6 —
пять двусторонних телеграфных каналов со скоростями передачи
до 100 и один —до 200 Бод. Путем объединения двух 100-бодовых
каналов в любой из модификаций может быть образован один те-
леграфный канал со скоростью передачи до 200 Бод.
Каждая модификация аппаратуры ДАТА состоит из оконечных
полукомплектов (ДАТА-З-ПО или ДАТА-6-ПО) и блока станци-
онных полукомплектов (ДАТА-З-БС или ДАТА-6-БС). Блок
ДАТА-З-БС обеспечивает работу с тремя оконечными полуком-
плектами ДАТА-З-ПО, а блок ДАТА-6-БС — с двумя оконечными
полукомплектами ДАТА-6-ПО разных направлений. Оконечные по-
лукомплекты устанавливаются в местах концентрации телеграф-
ных аппаратов (в отделениях связи, у абонентов), а станцион-
ные — на телеграфе.
Структурная схема аппаратуры ДАТА изображена на рис. 6.82.
Телеграфные сигналы напряжением ± (5 ... 25) В поступают на
входное устройство Вх.У и кодер аппаратуры ДАТА. Последний
преобразует входную последовательность сигналов методом СИП
в импульсно-кодовый сигнал. Сигналы от кодеров и от формирова-
теля синхросигналов ФСС, обеспечивающего синхронизацию по
циклам, поступают иа распределитель передачи Рпер, который
248
Рис. 6 82 Структурная схема аппаратуры ДАТА
управляется тактовыми импульсами задающего генератора ЗГ.
Частота тактовых импульсов определяет скорость модуляции (те-
леграфирования). Групповой многоканальный сигнал поступает
с выхода Рпер на передатчик Пер линейной ячейки ЯЛ. Передатчик
представляет собой электронное реле, преобразующее однополюс-
ный групповой сигнал в двухполюсный. Сигнал с выхода Пер пода-
ется на одну из диагоналей мостовой схемы развязки направлений
приема и передачи. Плечи моста составлены из резистора пере-
менного сопротивления балансного контура 7?б (резистора, эквива-
лентного сопротивлению линии) и двух резисторов 7?i и R2 (Ri =
— R2). Мост уравновешивается с помощью Rf>. При правильной
настройке баланса сигнал передатчика практически не поступает
на вход приемника своей станции, так как затухание, вносимое
дифсистемой, составляет не менее 43 дБ.
Приемник преобразует двухполюсное напряжение сигнала
±(5—20) В в однополюсный групповой сигнал, который подается
на Рпр и схему фазовой автоподстройки частоты ФАПЧ. Последняя
осуществляет формирование тактовых импульсов, обеспечивающих
управление Рпр и синхронную работу двух распределителей Рпр и
Рпер (синхронизация по элементам). Распределитель приема вы-
деляет синхросигнал, который регистрируется ПСС, если Рпр и
Рпер сфазированы В противном случае происходит подстройка Рпр.
Последовательность импульсов, соответствующая выделенному
индивидуальному каналу, подается в приемную часть кодека КД —
декодер. С помощью декодера и выходного электронного реле ЭР
249
телеграфный сигнал регенерируется, а затем подается в приемник
телеграфного аппарата.
Модернизированная аппаратура ДАТА обозначается ДАТА 2.
Различают модификации ДАТА 2-7 и ДАТА 2-3. Модернизирован-
ная аппаратура обеспечивает повышенную надежность, имеет улуч-
шенный тепловой режим, меньшие эксплуатационные расходы и
более стабильные параметры. Аппаратура может работать по од-
ной или двум двухпроводным цепям. Групповая скорость в зависи-
мости от этого будет 2400 или 1200 бит/с для ДАТА 2-3 и 4800 и
2400 бит/с для ДАТА 2-7. Аппаратура ДАТА 2-3 позволяет орга-
низовать три 50- или 100-бодовых (с соответствующим увеличени-
ем искажений с 1,5 до 2,5%) канала, а ДАТА 2-7 — семь 50-бодо-
вых (или 100-бодовых) каналов. Путем объединения 50-бодовых
каналов могут быть получены 100- или 200-бодовые.
Многоканальное оборудование сельской телеграфии (МОСТ)
предназначено для организации телеграфных каналов и низкоско-
ростной передачи данных на внутрирайонной (сельской) телефон-
ной сети. Каналы аппаратуры МОСТ обеспечивают двустороннюю
одновременную передачу дискретных сигналов со скоростью до
200 Бод без ограничений на код, метод синхронизации и структуру
сообщений.
На участке сети «РУС (центральная телефонная станция) —
сельская АТС» с помощью аппаратуры МОСТ может быть органи-
зовано до семи телеграфных каналов в служебном канале аппара-
туры ИКМ-12М, «Зона-12М», ИКМ-15, «Зона-15», т. е. без умень-
шения числа телефонных каналов. На участке «сельская АТС —
абонент» аппаратура позволяет организовать телеграфный канал,
обеспечивающий одновременную двустороннюю связь без наруше-
ния телефонной связи.
Принципы построения универсального комплекса КОА. Как
видно из вышеизложенного, на телеграфной сети создалась ситуа-
ция, когда в зависимости от участка сети, вида уплотняемого кана-
нала связи, необходимой мощности пучка дискретных каналов и
т. п. используется различная аппаратура разделения каналов. На-
личие на сети относительно большого числа разнотипной аппара-
туры, отличающейся конструкцией, элементной базой, схемными
решениями, существенно затрудняют ее производство и эксплуа-
тацию. В этой связи была поставлена и решена задача создания
универсального комплекса аппаратуры разделения телеграфных
каналов на основе единых принципов и унифицированных схемных
решений. Комплекс должен обеспечить организацию широкой но-
менклатуры дискретных каналов в пучках большой (160...180 ка-
налов), средней (20...45 каналов) и малой (до 5 каналов) мощ-
ности на всех (магистральном, зоновом и местном) участках сети
при работе по любым имеющимся каналам связи: стандартным
каналам ТЧ, спутниковым каналам, кабельным линиям ГТС и
цифровым трактам систем ИКМ.
250
Рассмотрим типы дискретных каналов, потребность в которых
существует в настоящее время. Массовым оконечным устройством
на сети является стартстопный телеграфный аппарат. Поэтому
основным видом дискретного канала должен быть кодозависимый
канал, рассчитанный на передачу стартстопных сигналов пятиэле-
ментным кодом со скоростью 50 Бод. Внедрение на сети аппаратов,
работающих со скоростью 100 Бод (РТА-80), делает целесообраз-
ным организацию кодозависимых каналов и на эту скорость для
передачи сигналов пятиэлементным кодом.
На сети имеется также определенное число абонентов, исполь-
зующих нестандартные коды и скорости. Поэтому наряду с кодо-
зависимыми в КОД должны организоваться и кодонезависимые
каналы, обеспечивающие передачу сигналов с произвольной внут-
ренней структурой и скоростью, но не выше предельной. Предель-
ные (номинальные) скорости передачи в кодонезависимых каналах
должны иметь стандартные значения 50, 100 и 200 Бод.
Наиболее эффективным методом организации кодонезависимых
каналов является метод СИП, который и целесообразно использо-
вать в комплексе. Применение кодонезависимых каналов, рассчи-
танных на скорость, не превышающую предельную, требует суще-
ственных затрат пропускной способности канала ТЧ по сравнению
с вариантом кодозависимых каналов. Поэтому появляется необхо-
димость в создании еще одного типа дискретного канала, рассчи-
танного на передачу с фиксированной скоростью, который бы обес-
печивал передачу стартстопных и изохронных сигналов. Такой
канал удается создать с существенно меньшими затратами, чем
кодонезависимый канал.
В дальнейшем с развитием сетей ПД, телеграфных сетей с ком-
мутацией сообщений и факсимильной связи следует ожидать уве-
личения потребностей в синхронных каналах со скоростями пере-
дачи 600, 1200 и 2400 Бод.
Кодозависимые (стартстопные и синхронные) и кодонезависи-
мые каналы, а также каналы с фиксированной скоростью переда-
чи исчерпывают все типы дискретных каналов, потребность в кото-
рых существует или может появиться в ближайшем будущем.
Созданный в СССР комплекс строится на принципах ВРК, ко-
торый позволяет существенно повысить эффективность использо-
вания пропускной способности дорогостоящих каналов первичной
сети, что особенно важно при организации магистральных связей,
имеющих большую протяженность. В состав комплекса входит ряд
модулей (устройств), в числе которых: телеграфный мульдекс с мо-
демом 2,4 (ТММ); статистический мульдекс с модемом 2,4 (СММ);
устройство преобразования сигналов (модем) на скорость
9,6 кбит/с (УПС-9,6); устройства абонентские тональное (УТА) и
надтональное (УНТА).
Основным элементом комплекса является телеграфный муль-
декс [6.12]. Он может работать самостоятельно с групповой ско-
251
ростью 2400 бит/с; совместно с УПС-4,8, обеспечивая групповую
скорость 4800 бит/с; совместно с аналогичными ТММ и УПС-9,6,
обеспечивая групповую скорость 9600 бит/с В каждом случае
с помощью ТММ может быть организовано различное число теле-
графных каналов При этом максимальное число 50-бодовых кодо-
зависимых каналов, которое можно opi анизовать, используя моду-
ли ТММ и УПС-9,6, равно 180 Устройство ТММ предназначено
для работы по стандартным каналам ТЧ магистральных, зоновых
и местных сетей, по физическим линиям кабеля ГТС Устройство
ТММ позволяет организовать следующие типы каналов
кодозависимые для передачи по сетям АТ и ПС стартстопных
сигналов пятиэлементным кодом с 7,5 элементами на знак со ско-
ростью 50 и 100 Бод;
кодонезависимые для передачи анизохронных сигналов произ-
вольной внутренней структуры со скоростями до 50, 100 и 200 Бод;
стартстопно-синхронные для передачи стартстопных сигналов
со скоростью 50 или 200 Бод в фазе установления коммутируемого
соединения и изохронных сигналов со скоростью 200 Бод в фазе
обмена информацией
Устройство ТММ позволяет также организовать каналы, обес-
печивающие передачу изохронных или анизохронных сигналов со
скоростью 2400 Бод для факсимильной связи и связи между цент-
рами коммутации сообщений
Устройство СММ, построенное на базе ТММ так же, как и ТММ,
является многоканальным Оно предназначено для использования
на зоновом участке сети от РУС до областного узла и работает по
стандартным каналам ТЧ либо в режиме ТММ, либо в режиме ста-
тистического уплотнения В последнем случае Л7/ абонентов полу-
чает выход на любой из М2 каналов, где В случае, если
канал занят, абонент получает отказ в соединении Соотношение
У2/У, выбирается с учетом фактической нагрузки таким образом,
чтобы процент отказов в обслуживании был не более 1% Благо-
даря этому удается повысить степень использования пропускной
способности каналов ТЧ в 3 раза по сравнению с ТММ
Устройства УТА и УНТА одноканальные Они обеспечивают ор-
ганизацию кодонезависимых каналов на скорости до 200 Бод
Устройства, работающие в тональном диапазоне частот, использу-
ются, как правило, для организации связи от абонента до телегра-
фа по выделенной паре кабеля ГТС и могут также применяться
при организации связи от АТС до удаленного абонента (при зату-
хании его абонентской линии более 4,5 дБ) Устройства, работаю-
щие в надтональном диапазоне частот, используются, как правило,
для связи на участке от абонента до АТС с сохранением телефон-
ной связи
252
КОНТРОЛЬНЫЕ ВОПРОСЫ
1 Какие задачи решают УПС’
2 Какие критерии используются для оптимизации УПС’
3 Перечислите основные характеристики сигналов
4 Как обеспечить передачу сигналов, имеющих спектр от 0 до оо (например,
последовательности импульсов постоянного тока) через канал, пропускающий
частоты от /1 до f2’
5 Приведите вывод формул (6 3) и (6 14)
6 Как формируется сигнал для биимпульсного и биполярного кодирования’
Приведите примеры обнаружения ошибок при использовании биимпульсного и
биполярного кодирования Можно ли исправлять ошибки’
7 Сравните спектры амплитуд при AM, ЧМ и ФМ
8 В чем заключается отличие в формировании сигналов ОФМ по сравне-
нию с абсолютной ФМ’
9 Поясните, почему система сигналов КАМ является обобщением систем
сигналов с AM и ФМ’
10 Поясните сущность алгоритма приема выражаемого формулой (6 19)
11 Пользуясь графиком на рис 6 20, определите, при каких отношениях
сигнал шум будет обеспечена вероятность ошибки на элемент 10-3 соответствен-
но при AM, ЧМ и ФМ
12 Выведите зависимость, аналогичную (6 22), для занижения уровня на
входе приемника
13 На сколько процентов удлинится (укоротится) посылка, если при AM
напряжение сигнала на входе приемника возрастет (уменьшится) на 20%’
14 Поясните, почему вероятность неправильного приема при AM для канала
с перерывами не зависит от скорости модуляции Является ли это положение
справедливым при других видах модуляции’
15 Поясните, почему с ростом девиации частоты (при прочих равных усло-
виях) уменьшаются искажения от сдвига частот’ Задайте ограничения на вели-
чину сдвига частот, если В=600 Бод, Д/=200 Гц, ДГк = 2700 Гц и искажения от
сдвига не должны быть более 3 %
16 Какие способы выделения опорного напряжения Вам известны’ Каковы
их достоинства и недостатки’
17 Что такое обратная работа’ В каком случае может возникнуть обрат-
ная работа’ Можно ли обнаружить появление обратной работы’ Придумайте
метод, позволяющий на приеме обнаружить появление обратной работы
18 К чему приводит скачок фазы несущей на передаче при ОФМ и приеме
методом сравнения фаз и методом сравнения полярностей’
19 При каком методе приема ОФМ сигналов в условиях гауссовых помех
обеспечивается меньшая вероятность ошибки’ Почему’
20 Покажите, что для ОФМ характерно даже в условиях гауссовых помех
появление двукратных ошибок
21 На чем основана цифровая обработка сит налов и каковы ее преиму-
щества’
22 Каковы принципы реализации устройств ЦОС на микропроцессорах’
253
23 Обоснуйте целесообразность передачи сообщений с высокой удельной
скоростью7
24 Сформулируйте основные направления обеспечения передачи с высокой
удельной скоростью
25 Какие методы борьбы с сосредоточенными во времени помехами исполь-
зуются в системах ПДС7
26 Поясните, за счет чего использование дискретных сложных сигналов поз
воляет повысить устойчивость к помехам, сосредоточенным во времени
27 Сформулируйте достоинства и недостатки двух вариантов использова-
ния СФ и ФФ для обеспечения высокой помехоустойчивости в каналах с сосре-
доточенными во времени помехами
28 Разработайте структурную схему системы ПДС с устройствами «рас-
тяжения» (ФФ) и «сжатия» (СФ) сигналов, обеспечивающую передач) сигналов
по цифровому каналу с ИКМ
29 Поясните назначение элементов структурной схемы приемопередатчика
УПС
30 Каковы особенности передачи дискретных сообщений по ПШК5
31 Для чего осуществляется в УПС оценка качества принимаемых сиг-
налов7
32 Какими способами можно обеспечить одновременную двустороннюю пе-
редачу сообщений7
33 Сравните КОЛ с частотным и временным разделением каналов Какой
метод разделения будет использоваться в перспективной аппаратуре7 Какие тре-
бования к этой аппаратуре должны предъявляться7
Глава 7. МЕТОДЫ ПОСТРОЕНИЯ
И ТЕХНИЧЕСКОЙ РЕАЛИЗАЦИИ
КОРРЕКТИРУЮЩИХ КОДОВ
7.1. ЛИНЕЙНЫЕ КОДЫ
Построение линейных кодов. В гл 2 простой трехэлементный
код был задан перечислением всех кодовых комбинаций (см.
табл. 2 I) Данное множество можно рассматривать как некоторую
алгебраическую систему, которая называется группой с заданной
на ней операцией сложения по модулю два [7 1]. Рассмотрим в об-
щем виде основные свойства такого множества Обычно группа
обозначается буквой G, а элементы множества g. На этом множе-
стве задана некоторая групповая операция, которую обозначим
символом «О» Эта операция однозначно сопоставляет двум эле-
ментам §, и g, множества G, третий элемент того же множества gk,
т. е giOgj — gk, где gk^-G. Обычно говорят, что группа является
замкнутой относительно операции «О».
254
Множество G с определенной на нем групповой операцией «О»
называется группой, если выполняются следующие условия,
1. Ассоциативность (сочетательность) - для любых трех элемен-
тов группы, например g,, gk, g,~.
(g.Ogk) Og,=^gtO (gnOgi).
2 Существование нейтрального элемента: среди элементов мно-
жества имеется некоторый элемент е, называемый нейтральным,
такой, что
g-IOe==eOg', = g,
для всех i.
3. Существование обратного элемента для каждого данного
элемента; к каждому элементу g^G можно подобрать такой
элемент gr\ что
g!Ogr‘ = g'r1Og, = e.
Группа, в которой выполняется также условие giOgj=g/Ogt
для всех I, ], называется коммутативной, или абелевой, группой.
Группа называется конечной, если она состоит из конечного
числа элементов. В противном случае она называется бесконечной.
Пример 7.1. Задав в качестве групповой операции операцию сложения по
модулю 2, убедимся, что множество ООО, 001, 010, 100, 110, ОН, 101, 111 являет-
ся группой Складывая элементы множества в различном сочетании, видим, что
каждый раз получаем элемент, входящий в множество Так, 001 © 100=101
и т п Нетрудно заметить, что условие ассоциативности также выполняется
Нейтральным является элемент 000 Для каждого элемента, заданного в приме-
ре множества, существует обратный Так, для элемента 100 обратным является
он сам, т е
100® 100 = 000
Таким образом, рассматриваемое множество является группой, порядок которой
(число элементов) равен восьми Очевидно также, что данная группа является
коммутат ивпой
Пример 7.2. Задавшись в качестве групповой операции операцией умноже-
ния, рассмотрим множество рациональных чисел
Перемножая элементы множества в различном сочетании, получаем рацио-
нальное число Легко убедиться в том, что выполняется условие ассоциативно-
сти Нейтральным элементом, очевидно, является единица Для каждого эле-
мента заданного рациональным числом, имеется ему обратный Так, для числа 2
это 1/2, числа 1/4 — это 4 и т д
Множество элементов примера 7 1 не обязательно задавать пе-
речислением всех элементов, входящих в группу Пользуясь свой-
ством замкнутости относительно операции сложения по модулю 2,
255
та кое. множество можно задать матрицей
100
010 .
001
(7.1)
Все остальные элементы группы (кроме 000) могут быть получены
путем сложения по модулю 2 различных сочетаний строк матрицы
(7.1). Матрица (7.1) называется производящей матрицей рассмот-
ренного в примере 7.1 трехэлементного* кода. Кодовые комбина-
ции, составляющие матрицу (7.1), являются линейно-независи-
мыми.
Можно было бы составить матрицу и из других линейно-неза-
висимых кодовых комбинаций. Напомним, что ненулевые комбина-
ции А|, А2, А3 являются линейно-независимыми, если а|А1Фа2А2Ф
Фа3А3У=0 (где а,е{0, 1}), при условии, что хотя бы один из ко-
эффициентов а<У=0.
Код, заданный матрицей (7.1), является линейным, т. е. имеет
структуру, обладающую свойством линейности. Двоичный блочный
код является линейным тогда и только тогда, когда сумма по мо-
дулю 2 двух кодовых слов является также кодовым словом [7.1].
Двоичные линейные коды называют также групповыми.
Так как в системе ПДС используются, как правило, корректи-
рующие коды, перейдем далее к рассмотрению линейных (группо-
вых) корректирующих кодов и поиску кодов с заданным алфави-
том передаваемых сообщений и кодовым расстоянием d0, которые
позволят обеспечить требуемую верность.
Пример 7.3. Пусть требуется построить линейный код с d0 = 3 для передачи
восьми сообщений
Тогда необходимое число информационных элементов & = log28=3 Запишем
исходный код в виде единичной матрицы (7 1) и дополним информационные эле-
менты элементами, которые в дальнейшем будем называть проверочными, так,
чтобы обеспечить do = 3. Дополним каждую строку матрицы (7.1) двумя эле-
ментами
100 10
010 01
001 11
(7.2)
Складывая по модулю 2 строки матрицы (7 2), видим, что хэммиигово расстоя-
ние для 1,2, 1,3; 2,3 строк равно 3 Однако при этом кодовое расстояние, рав-
ное 3, не обеспечивается, так как в числе разрешенных кодовых комбинаций
(множества, являющегося группой) имеется нейтральный элемент 00000, отно-
сительно которого комбинации 10010 и 01001 имеют хэммингово расстояние,
равное только двум. Таким образом, производящая матрица (7 2)—это матри-
* Под термином «элемент» здесь, как и ранее, понимается составная часть
чего-либо, в данном случае кодового слова.
256
ца кода (5 3) с кодовым расстоянием, равным только двум. Для получения
d0 = 3 необходимо к исходным информационным элементам добавить провероч-
ные элементы, в числе которых было бы не менее двух единиц, а добавляемые
проверочные элементы разных строк отличались бы, по крайней мере, в одном
элементе Этому требованию удовлетворяет производящая матрица
100 101
010 011
001 111
(7.3)
Добавляемые проверочные элементы могут быть записаны и в другом порядке.
Необходимо лишь обеспечить do=3. Матрица (7 3) является производящей, или
порождающей, матрицей кода (6 3), содержащею /; 6 элементов, из которых
три информационных. Обычно матрицу обозначают буквой G с индексом, ука-
зывающим, к какому коду она относится (в нашем случае С(6,з>).
Производящая матрица состоит из двух матриц: единичной раз-
мерности (k\k) и матрицы CkXr, содержащей k строк и г столбцов.
В строке матрицы CkXr должно быть не менее, чем (da—1) единиц,
а хэммингово расстояние между строками не менее чем (d0—2).
Очевидно также, что общее число элементов в строке матрицы
САХг должно определяться неравенством Сг0-1 ^k.
Обозначим элементы комбинаций кода, задаваемого матрицей
(7.3), Я1, а.2, аз, а^, аз, а§, где а\, й2, аз — информационные, a ait аз,
а6 — проверочные элементы. Полученный линейный код является
систематическим *. Проверочные элементы могут быть получены
путем суммирования по модулю 2 определенных информационных
элементов. Найдем это правило для а4, пользуясь матрицей (7.3).
Из первой строки следует, что в суммировании обязательно дол-
жен участвовать элемент а, (только в этом случае а4=1). Из вто-
рой строки следует, что элемент а2 в суммировании не должен
участвовать. Из третьей строки следует, что элемент аз должен
участвовать в суммировании. Итак,
а4=а|Фа3. (7.4)
Уравнения для аз и а6 записываются в виде
аз=а2®аз, (7.5)
а6=а\®а2®а3. (7.6)
* В систематических кодах кодовое слово делится на две части: информа-
ционную, состоящую из k неизменных элементов сообщения, и избыточную про-
верочную— из (n—k) проверочных элементов.
17—6085 257
Представим правила (7.4) —(7.6) в виде матрицы Н(б,з), назы-
ваемой проверочной. Эта матрица содержит г строк и k столбцов:
Н(,.3) =
101 100
011 010
111 001
(7-7)
Каждая из г строк матрицы (7.7) определяет правило форми-
рования соответствующего проверочного элемента. Так, единицы,
расположенные на местах, соответствующих информационным эле-
ментам в первой строке, указывают на то, какие информационные
элементы должны участвовать в получении первого проверочного
элемента (элемента а^). Единица на месте, соответствующем про-
верочному элементу (четвертом месте), указывает, какой провероч-
ный элемент получается в результате суммирования информацион-
ных элементов. Так, из первой строки следует а\Фа2—а^. Матрица
Н(6,3) состоит из двух матриц: прямоугольной DrXfc и единичной I,,
содержащей г строк и г столбцов:
Н(,71 k} — I । ’
Легко заметить, что DrX* = С*Хг («т» означает транспонирование)
Проверочная матрица задает правила кодирования линейного
кода и определяет схему кодирующего устройства. Структурная
схема кодирующего устройства, задаваемого проверочной матри-
цей Н(7,4), приведена на рис. 7.1. Запишите Н(7>4).
Обнаружение и исправление ошибок. Декодирующее устройст-
во. Рассмотрим процедуру обнаружения ошибок в принятой кодо-
вой комбинации. Обнаружение ошибок может быть основано на
сравнении принятой кодовой комбинации со всеми разрешенными.
Если принятая кодовая комбинация совпадает с одной из разре-
шенных, то можно сделать вывод о том, что ошибок при передаче
не было или переданная (разрешенная) кодовая комбинация А,
перешла в другую разрешенную кодовую комбинацию А,. Если
принятая кодовая комбинация не совпадает ни с одной из разре-
шенных, то делается вывод о том, что произошла ошибка (или
ошибки) в этой кодовой комбинации. Однако такой алгоритм де-
кодирования требует сравнения принятой кодовой комбинации со
всеми разрешенными и является поэтому весьма громоздким, осо-
бенно в том случае, когда число разрешенных кодовых комбинаций
велико.
Воспользуемся знанием правил формирования проверочных
элементов и сформируем на приеме проверочные элементы
по принятым информационным. Очевидно, что сформированные на
приеме проверочные элементы a*+i, a*k+2,... должны совпадать при
отсутствии ошибок с принятыми проверочными элементами
258
6
® Сумматор по модулю 2
Рис 7 1 Кодер кода (7,4) Рис. 7.2. Декодирование с обна-
ружением ошибок для кода (7,4)
ak+2, Они будут совпадать также и в том случае, если передан-
ная (разрешенная) кодовая комбинация А1 перешла в другую раз-
решенную А/.
Сравнение элементов a*+i, #*+2 ... 11 йу.ц, ^+г, ... можно выпол-
нить путем попарного суммирования этих элементов, т. е. Яй+1ф
фа4+1, а*+2ф«й+2 ... При отсутствии ошибок а£ц фя*ы == О,
= 0 и т. д. Последовательность = л*+1фай+1, й2—
— Дй+гфл^+г ... называется синдромом, элементы которого Ьъ Ьг,
Ьз,...,Ьг при отсутствии ошибок равны нулю. Если хотя бы один
элемент синдрома не равен нулю, то можно утверждать, что при-
нятая кодовая комбинация содержит ошибки.
Пример 7.4. Пусть код (6,3) задан системой проверок (7.4) — (7 6) и при
передаче кодовой комбинации 101 100 иа приеме получили 001 101, т. е. искаже-
ны элементы at и я-. Вычислим элементы синдрома Ьь Ьг, Ьг-
= ai Ф а9 Ф ai = 1,
Д = «2 ® аз Ф а5 = 0,
Ь3 = ф а2 © а3 ф ае = 1.
Так как синдром ft,, 62, Ь3 отличен от нуля, то ошибка обнаружена.
Декодер для кода (7,4), работающий в режиме обнаружения
ошибок, представлен на рис. 7.2. Выходы сумматоров, в которых
17* 259
формируются элементы синдрома, подаются на схему ИЛИ
С выхода последней снимается единица (сигнал «ошибка») при
обнаружении ошибок. При этом приемник отвергает принятое ко-
довое слово. Такой отказ от принятого кодового слова называется
стиранием и обычно предполагает повторение кодового слова за-
ново.
Операцию нахождения синдрома можно представить как опре-
деление произведения матрицы Н
иый вектор принятого кодового
НАТ = О, где
на Ат, где Ат — транспонирован-
слова. При отсутствии ошибок
д2
ak
а1г + г
Отсюда имеем систему уравнений
h 11 a j 4~й 1 fe-j-a fe+1 = 0;
/121^14*^22^2-}* • • • ~>Г^21Са^-1Г&к+г—0',
• • • ~\~hrk<ik-\-Clk+r—O.
Вид синдрома будет определяться только вектором ошибок и не
зависит от вида переданной кодовой комбинации. Действительно,
так как А=А4*Е, где Е — вектор ошибок, то
НАТ=Н(А4-Е)Т=НАТ4-НЕТ—НЕТ.
Рассмотренный в примере (7.4) код (6,3) имеет кодовое рас-
стояние d0=3 и способен исправлять однократные ошибки. Если
неправильно принят элемент &2, то из системы уравнений
^1=в1®йз®а4» (7 8)
&2=«2®аз®а5, (7.9)
&з=а|Фа2ФОз (7.Ю)
получаем 61 = 0, 62—1, Ь3=Л, так как а2 входит в (7.9) и (7 10) и
не входит в (7.8). Значение синдромов для случая, когда имеется
Таблица 7.1
Ошибка а1 Ад аа 04 О»
Синдром 101 011 111 100 010 001
260
Рис 7 3 Декодирование с исправлением
ошибок для кода (7,4)
одиночная ошибка в том или ином элементе, приведены в табл 7.1.
Нетрудно заметить, что вид синдрома, соответствующий иска-
женному элементу а,, совпадает с i-м столбцом матрицы (7.7). Это
со всей очевидностью следует из следующей записи:
1
0
101 100 0
011 010 >< 0 = 101
111 001 0
0
0
для случая, когда Е= 100000. Нетрудно догадаться, что если име-
ла место двухкратная ошибка, например в i-м и /-м элементах, то
синдром был бы равен сумме i-ro и /-го столбцов матрицы Н. Так,
если i=l, а / — 3, то bibib^ — OlO, т. е. будет сделан неверный вы-
вод о том, что искажен элемент а^, так как код двукратные ошибки
не исправляет.
Структурная схема декодера с исправлением одиночных оши-
бок для кода (6,3) приведена на рис. 7.3. На вход декодера по-
ступает кодовая комбинация, сформированная кодером, изобра-
женным на рис. 7.1. По принятой комбинации вычисляется син-
дром, который подается на дешифратор «синдром-ошибка». При
одиночной ошибке на одном из выходов дешифратора появляется
«1» (элемент вектора ошибки). Сложение вектора ошибки с при-
нятой комбинацией приводит к исправлению ошибки.
261
Примеры линейных кодов. Рассмотрим простейший линейный
код — код с одной проверкой на четность. Этот код независимо от
длины кодовой комбинации содержит всего один проверочный эле-
мент. Этот элемент выбирается таким, чтобы его сумма по моду-
лю 2 со всеми информационными элементами равнялась нулю. При
этом каждая кодовая комбинация содержит четное число единиц.
Если в принятой кодовой комбинации окажется нечетное число еди-
ниц, то делается вывод о наличии в ней ошибок. Очевидно, что та-
кой код обнаруживает любое нечетное число ошибок.
Производящая и проверочная матрицы такого кода имеют вид:
G(n, = k
1000... 0 1 0100 ...0 1
0000 ... 1 1
Для такого кода отношение числа информационных элементов k
к длине кодовой комбинации п (скорость кода) определяется вы-
ражением
Rk= (п—\)/п,
кодовое расстояние равно двум, а вероятность необнаруженной
ошибки
р,.0= 2 лло.
t =2, 4
где суммирование осуществляется по всем четным значениям t.
Рассмотрим еще один пример линейных кодов — коды Хэммин-
га. К ним обычно относят коды с +=3, исправляющие все оди-
ночные ошибки и коды с rfo=4, исправляющие все одиночные и об-
наруживающие все двойные ошибки. Для исправления всех оди-
ночных ошибок число синдромов должно быть «+1. Из них п син-
дромов используются для указания местоположения ошибки и
один — нулевой, соответствует их отсутствию. Следовательно, 205=
^п+1. Последнее выражение можно переписать в виде
2*<2п/(п+1). (7.11)
Используя (7.11), можно подобрать при известном k требуемое
число п.
Пример 7.5. Пусть А = 3 Требуется найти с помощью (7 11) значение п.
Задавая значения и=4, 5, 6 при и=5 получим 2"/(п+1) =5,3, т. е. 23>5,3,
а при и=6 2/п+1=9,1. Так как 23<9,1, то выбираем и=6. Такой код может
быть задан производящей матрицей или проверочной.
262
Рассмотрим далее код Хэмминга с d0=4. Операция кодирова-
ния для такого кода может выполняться в два этапа. На первом
этапе определяется кодовая комбинация с использованием матри-
цы Н, соответствующей коду с do — З, на втором добавляется один
проверочный символ, представляющий собой результат суммиро-
вания по модулю 2 всех элементов кодового слова, полученного на
первом этапе.
Операция декодирования также состоит из двух этапов. На пер-
вом— вычисляется синдром, соответствующий коду с б4=3, на
втором — проверяется последнее проверочное соотношение.
Пример 7.6. На основе кода (6,3), заданного проверочной матрицей (7 7),
построить код Хэмминга с do = 4.
Проверочная матрица такого кода будет иметь вид:
101 100 0
011 010 0
111 001 0
111 111 1
Такой код имеет дополнительное проверочное соотиошеиие
в7 = ai Ф в2 Ф аз Ф Ф а5 Ф ав
и дополнительный элемент синдрома
b 4 = Hi—рПаф Цз—0^4-1 |- Ц?
Если синдром Ь\Ь2Ь3 не равен нулю, а &4 = 0, то это говорит о том, что произо-
шла ошибка. Если Ь}Ь2Ь3 не равен нулю и &4#=0, то это является признаком
того, что была однократная ошибка. При равенстве нулю синдрома bib2b3 и
Ь4#=0 имеет место ошибка нечетной кратности t^3.
К линейным кодам относится также код с простым повторе-
нием, в основу которого положен метод повторения исходной кодо-
вой комбинации. Декодирование осуществляется путем сравнения
первой (информационной) и второй (проверочной) частей кода.
При несовпадении этих частей комбинация бракуется. Скорость
такого кода равна 1/2, а кодовое расстояние rfo=2. Проверочная
матрица записывается в виде Н= |1Д*|, где Ц —единичная ма-
трица. Такой код позволяет обнаружить все виды ошибок за ис-
ключением ошибок в «парных» элементах, т. е. элементах, стоя-
щих на одних и тех позициях в первой и второй комбинациях.
В [7.1] можно найти описание других линейных кодов, кото-
рые находят применение в технике ПДС.
7.2. ЦИКЛИЧЕСКИЕ КОДЫ
Широкое распространение получил класс линейных кодов, ко-
торые называются циклическими. Название этих кодов происхо-
дит от их основного свойства: если кодовая комбинация аь а2, • •
263
... ап_ь ап принадлежит циклическому коду, то комбинации ап,
Gi, а2, • • •, an-i; Qn-i, Оь • •ап-2 и т. д., полученные цикличе-
ской перестановкой элементов, также принадлежат этому коду.
Общим свойством всех разрешенных кодовых комбинаций ци-
клических кодов (как полиномов) является их делимость без
остатка на некоторый выбранный полином, называемый произво-
дящим. Синдромом ошибки в этих кодах является наличие остат-
ка от деления принятой кодовой комбинации на этот полином.
Описание циклических кодов и их построение обычно проводят
с помощью многочленов (полиномов). Цифры двоичного кода
можно рассматривать как коэффициенты многочлена перемен-
ной х.
Поскольку любое число в произвольной системе счисления
можно записать в виде
а„_1х«-1+а„_2г"-2+ ... +аох°,
где х— основание системы счисления, an-i, • • •, <*о — цифры этой
системы, то переход от двоичного числа к записи в виде много-
члена осуществляется следующим образом:
11011-И- х4+1 • *4-0 • X2+1 • *+1 • 1-1.
Отсюда видно, что кодовая комбинация длиной/г (тг=5) описыва-
ется многочленом степени п—1. Однако запись кодовой комбина-
ции в виде многочлена не всегда определяет длину кодовой ком-
бинации п. Например, при /г=5 многочлену х2-|-1 соответствует
кодовая комбинация 00101. Поэтому при переходе к записи в видэ
кодовой комбинации необходимо дописывать нулевые старшие раз-
ряды.
Кодовые комбинации циклического кода описываются полино-
мами, обладающими определенными свойствами. Последние опре-
деляются свойствами и операциями той алгебраической системы
к которой принадлежит множество полиномов. В частности, в этой
алгебраической системе, которая носит название поля Галуа
(GF(x)), действие над коэффициентами полиномов (сложение,
умножение) производится ио модулю 2. Умножение полиномов
должно производится по модулю некоторого полинома Рг(х). Эти
два условия определяют замкнутость указанных операций: их при-
менение не приводит к кодовым комбинациям, длина которых
больше длины заданного кода п.
Пусть п—5. Сложим два полинома:
Р\ (х) =x4-)—-v3-|-x—1 и Р2 (х) =х4--f-x2—(-x-j-1.
Получим
Р3(х) =Pi(x)+?2(*) =х4+х3+*+1+*4+*2+х+1=
= х4(1©1)+х3+х2+х(1©1) + (1©1)=х3+х2.
264
Таким образом, степень полученного полинома Рз(х) не превыша-
ет п=5.
Умножение полиномов производится по модулю Рг(х). Это оз-
начает, что в качестве результата умножения принимается остаток
от деления обычного произведения полиномов на полином Рг(х).
Напомним, что умножение чисел по модулю q сводится к тому,
ЧТо обычное произведение этих чисел делится на q и записывается
остаток. Например, 2-4=3 (mod5), т. е. 2-4 = 8; 8:5 имеет в ос-
татке 3 Это число и является результатом умножения по моду-
лю 5
Указанная операция над многочленами не приводит к появле-
нию полинома с большей степенью, чем заданная длина кода.
Рассмотрим код с п=5. Возьмем Р\ (х) = х44~х+1 и Р2(х)=х4.
Произведем обычное умножение полиномов:
Лз (х) =Р1(х) Р2 (х) = (х4+х+1) х4=х8+х5+х4.
Полином Рз(х), имея степень /г=8, не принадлежит коду с п=5.
Рассмотрим умножение по модулю Рг(х). При этом полином
Рг(х) должен иметь степень г<п. Выберем Рг(х)=х3+х2+1. На-
ходим Pi(x)P2(x) [modPr(x)]=Pi(x)P2(x) : Рг(х), т. е.
X8 + х5 + X4 | X3 + Л2 + 1
X5 + X4 + X3 + х2 + X
Ф х8 -|- л7 -|- л5
X7 -Г х4
Ф х7 + х’ + л4
ф X6 + Л 5 + х3
Л5 + X3
Ф Л5 + х4 + х2
х’ -р х3 + X2
Ф х4 + л3 + х
X2 + Л
Таким образом, x2-\-x=R(x). Полученный остаток Р(х)=х24~х и
является результатом произведения полиномов РДх), Р2(х) по
модулю Р3(х). Он именуется вычетом по многочлену Р3(х).
Для того чтобы полиномы, отображающие кодовые комбинации
циклического кода, имели нужные свойства, необходимо выполне-
ние двух условий:
1) полиномы Рг(х) должны быть неприводимыми, т. е. не де-
лится ни на какой другой полином;
265
2) двучлен вида хп-|-1 должен делиться на Рг(х) без остатка
(имеется в виду обычная операция деления).
Такие полиномы в циклических кодах играют роль порождаю-
щих (производящих) полиномов; с их помощью строится заданный
циклический код.
Поскольку неприводимый многочлен не может быть представ-
лен в виде произведения многочленов более низших степеней, то
проверить это можно простой подстановкой в него корней х=1,
х=0. Например, имеем Р3(х) =х3-|-х-|-1. Если Рз(х) можно раз-
ложить на множители, то это означает, что уравнение х3-|-х-|-1 = О
имеет корни %; —0; 1. Прямой подстановкой этих корней можно
убедиться, что в обоих случаях Р3(х) = 1, т. е. этот полином не-
приводим. Существенно, что степень образующего многочлена
Рг(х) г совпадает с числом проверочных разрядов (п, k) цикличе-
ского кода.
В циклических кодах разрешенными кодовыми комбинациями
являются те, которые имеют нулевой вычет по модулю Рг(х), т. е.
делятся на образующий полином без остатка. Из всех возможных
полиномов степени п (2") только 2* полиномов (k=n—г) имеют
нулевой вычет по модулю Рг(х). Они и образуют множество раз-
решенных кодовых комбинаций циклического кода.
Циклические коды являются блочными, равномерными и линей-
ными Линейность кодов вытекает из того, что если кодовые слова
принадлежат циклическому коду, то их линейная комбинация бу-
дет также принадлежать циклическому коду, т. е. обязательно де-
литься без остатка на образующий полином.
По сравнению с обычными линейными кодами (см. разд. 7 1)
на разрешенные кодовые комбинации циклического кода наклады-
вается дополнительное ограничение: делимость без остатка на по-
рождающий полином. Это свойство существенно упрощает аппара-
турную реализацию кода.
Обнаружение ошибок в циклическом коде производится делени-
ем принятой кодовой комбинации на кодовую комбинацию образу-
ющего полинома (вид его должен быть известен на приеме). Оста-
ток от деления R(x) играет роль синдрома. Если R(x)=^=0, то счи-
тается, что произошли ошибки. Если /?(х)=0, то комбинация при-
нята правильно.
Возможность исправления одиночной ошибки связана с выбо-
ром образующего полинома Рг(х). Точно так же, как и в обычных
линейных кодах вид синдрома в циклических кодах зависит от ме-
ста, где произошла ошибка. В данном случае в качестве синдро-
мов рассматриваются различные остатки R{x) от деления полино-
ма ошибки на образующий полином Рг(х). Среди множества поли-
номов Рг(х) существуют так называемые примитивные полиномы,
для которых существует зависимость п—2г—1. Это означает, что
при возникновении ошибки в одном из п разрядов кодовой комби-
нации число различных остатков также будет равно п. Например,
266
образующий полином Р4(1>(%) =%4+%+l дает п=15 различных
остатков, а образующий полином Р4(2)(х) = х4—|-лг3—|—л:2—|-хД-1 толь-
ко пять различных остатков. Поэтому полином Р4(1)(х) может ис-
пользоваться для построения циклического кода (15, 11) с исправ-
лением одной ошибки (при n=2r— 1; 15=24—1), а полином
Р4<2>(лг) при /г=15 только для обнаружения ошибок. (Читателю
предлагается самостоятельно проверить свойства указанных поли-
номов путем деления многочленов ошибки £(%)—х15, х14, ... на
Р^'Цх) и Р4(2)(лг), подсчитывая число различных остатков.)
Признаком примитивных полиномов является наличие остатка,
равного единице только для полиномов х° = 1 и хп, т. е. число раз-
личных остатков равно п—1.
Выбор образующего многочлена. В теории кодирования показа-
но, что степень многочлена Рг(х) следует выбирать равной г=
— mtnow, где т определяется условием 2т—п-1-1, а ^110ш — число
ошибок, исправляемых циклическим кодом (7.12).
Пример 7.7. Определить г для кода с 6=20, /Яош=2.
Примем т=3. Тогда 2т=23 = 8, п=7, что меньше 6=20. Возьмем т=5.
Тогда и=31; г=т!я ош = 5-2 = 10. Получается код с £=21, г=10. Этот код обес-
печивает кодовое расстояние Ц,о5э2/И ош^-1 =5.
В табл. 7.2 приведены образующие (примитивные) полиномы до
10-й степени.
Базис циклического кода, формирование кодовых комбинаций.
Поскольку циклические коды являются линейными, то их можно
строить точно так же, как и рассмотренные выше коды Хэмминга,
определяя производящую матрицу (базис циклического кода). Для
его построения используют свойство цикличности разрешенных ко-
довых комбинаций: циклический сдвиг разрешенной кодовой ком-
бинации есть разрешенная комбинация того же кода.
Рассмотрим циклический сдвиг кодовой комбинации:
Л (%) —2 • • • ^0 • 1^п 2 • • • (7.12)
Такая циклическая перестановка при представлении комбинаций
в виде полиномов соответствует умножению данного полинома
А(х) на х, т. е. (an_Ixn-I-|-an_2Xn-2-|- ... -j-a0)x—an-ixn-\-
+an_2%n-1-|- ... -|-АоХ=Л1(х). Чтобы степень полученного полино-
ма ЛДх) не превышала п—1, член an-i%n заменяется единицей.
Поэтому A (x)x—Ai (х) =ап-2^”_1+Оп-з^"-24- ••• +аох-|-1.
Например, имеем кодовую комбинаццию: 1011101-э-Л (%) = х6-|-
+ х4-]-х34-х2-|-1. Образуем циклический сдвиг на один разряд:
0111011-э-Л (х)х=х7-)-х5-|-х4-|-х3-|-х-э-10111010. Заменив х1 на еди-
ницу, имеем х5-|-л:4-|-ха-|-л:-|-1^-0111011, т. е. сдвинутую на один
разряд исходную кодовую комбинацию.
Базис циклического кода можно построить на основе цикличе-
ских сдвигов кодовой комбинации, соответствующей образующему
многочлену.
267
Таблица 7.2
Г PrW Двоичная запись Рг(х)
2 х2 4-х4- 1 111
3 х3 4 х 4- 1 Х3 + %2 + 1 1011 1101
4 + X2 + 1 -f- х2 -4- 1 10011 100101
5 х8 4-х4 4-х3 4-х2 4- 1 X6 + X4 + X2 + X + 1 111101 110111
6 Xе -г X + 1 х® + х6 4-х2 + х + 1 1000011 1100111
7 х’ 4- х3 4- 1 х’ 4 х3 4- х2 4- х 4- 1 х’ 4- х4 4- х3 4- х2 + 1 10001001 10001111 10011101
8 х8 4- х7 4- хв 4- х6 4- х2 4- х 4- 1 х8 4- х4 4- х3 + х1 4 1 х8 4- х® 4- х6 4- х 4- 1 111100111 100011101 101100011
9 х9 4- х6 4- х3 4- х2 4- 1 х9 4- х8 + х7 + х8 4- х6 4- х3 4- 1 1000101101 1111101001
10 х10 4- х4 4- х3 4- х 4- 1 х10 + х9 4- х® 4- х8 4- х4 4- х2 4- х 4- 1 10000011011 11001110111
Пример 7.8. Сформировать базис циклического кода (7,4) с Р3(х) =х3-х-- 1,
r=3, k = 4, do = 3. Для формирования первой разрешенной комбинации базиса
следует взять кодовую комбинацию с п = 7, соответствующую образующему по-
линому х3-|-хЦ-1. (Ясно, что она будет делиться без остатка на образующий
полином.)
Итак, первая разрешенная комбинация имеет внд
Д1(0,1)=0 0 0 1 0 1 l-^41(x)=x34-x-)-l.
Остальные три разрешенные комбинации находятся циклическим сдвигом получен-
ной кодовой комбинации, т. е. умножением ДДх) на х, х2, х3. В результате
имеем
Д1 (х)х=х4-|-х24-х->-0 0 10 1 10
A1(x)x2=x3-\-x3-\-x2^Q 10 110 0
Д1(Х)Х3 = Хб-|-Х4-|-Х3->1 Q110 0 0
268
Тогда производящая матрица циклического кода (7,4) имеет вид:
ООО 1011
00] оно 010 1100 101 1000
Все остальные кодовые комбинации можно определить линейной компози-
цией комбинации базиса (ср. с производящей матрицей (7,3)).
Формирование кодовых комбинаций по заданной информацион-
ной части в циклическом коде так же, как и в обычных линейных
систематических кодах, осуществляется на основе определенного
алгоритма. Причем в отличие от ранее рассмотренного линейного
кода этот алгоритм позволяет сформировать сразу всю провероч-
ную группу:
{а^+ь • • •, cik+r} = П {oi, • , cih}-
В качестве оператора П используется вычисление вычета произве-
дения Дц(х)хг по модулю Рг(х), где Л^-Дх)—многочлен, пред-
ставляющий информативную часть кодовой комбинации, а Рг(х) —
образующий многочлен степени г. Ранее было определено, что сре-
ди 2” кодовых комбинаций Лп-1(х) длиной п элементов имеется
подмножество из 2к комбинаций, которые характеризуются отсут-
ствием вычета по образующему многочлену степени г, где г=п—k.
Это создает возможность дополнить каждую кодовую комбина-
цию Ak-\ (х) ^-элементного первичного кода группой из г прове-
рочных элементов, которая определяется в виде остатка /?(х) от
деления произведения Д/>-1 (х) Ххг на образующий многочлен Рг(х).
При этом образуется многочлен Лп-1(х), соответствующий п-эле-
ментному коду, у которого отсутствует вычет по Рг(х).
Действительно, умножение Ak-\ (х) на хг приводит к многочле-
ну, соответствующему «-элементной кодовой комбинации, у кото-
рой г младших разрядов нулевые. Определив /?(х) как вычет
Ak-i(x)xr по Рг(х), получаем всю проверочную группу из г элемен-
тов, которую и приписываем вместо г нулей.
Пример 7.9. Задана кодовая комбинация простого семиэлементного кода
Д6(0,1) = 1001011, т. е. Д6(х) =х6-]-х3—|—х—1. Надо образовать циклический код
(9,7). Это код, у которого г — степень образующего многочлена (число прове-
рочных элементов) равна 2.
Из табл 7 1
Р2(Х) =Х2-рХ-р1.
Повысим степень полинома на два:
Д6(х)х2 = х8-|-х54х3-]-х2.
269
Определим группу проверочных разрядов в виде остатка от деления Дв(*)*2 иа
Рг(х) Значение остатка будет R(xj=x, т е Л(0,1) = 10
Найдем полином разрешенной кодовой комбинации
Д8(х) =Д6(*)х2-р?(х) =х8—|-х5—[-х3—|-х2—[-х
Кодовая комбинация имеет вид 100101110.
Наряду с определением кодовой комбинации в виде многочле-
на все операции можно проделать и в записи двоичными элемента-
ми. В этом случае Ak-i(x)xr соответствует добавлению к Л^-ДО, 1)
г нулей, т. е. 100101100. Определение вычета произведем на основе
деления в двоичной записи.
ф1 0 0 1 0 1 1 0 0 |111
^1 1 1 1100010
Ф1 1 1
W1 1 1 ______
0 i 1 0
® 111
~0 0 1 о
^0 0 0
/?(0, 1)= 10
Тогда Л(0, 1) = 100101.10
Можно заметить, что при таком способе построения комбина-
ций циклического кода проверочные и информационные разряды
находятся на определенных позициях, т. е код является раздели-
мым. При другом способе построения это свойство нарушается и
код становится неразделимым. Способ основан на простом пере-
множении кодовых комбинаций информационной группы и образу-
ющего полинома. Действительно, поскольку произведение
Ak-i (x)Pr(x) =Xn-i (х) делится без остатка на Рг(х), то Xn-i(x)
является разрешенной комбинацией циклического кода. Однако
в этой комбинации нельзя выделить информационные и провероч-
ные разряды. Из примера 7.9 имеем произведение
(х6—|-х3—|—х—|—1) (х2-|-л:-|-1) =
= х8—|-х7—|-х6—|-х5—|-х4—1-№—|-х3—|-х2—1 =
= X8 -|- X7—|-х6 —|-х5 —)-х4—|-1,
что соответствует кодовой комбинации 111110001 Выделить пози-
ции информационных элементов здесь нельзя. Поэтому на практи-
ке используется первый способ построения циклического кода.
270
7.3. СИНДРОМ ЦИКЛИЧЕСКОГО КОДА
И ЕГО СВОЙСТВА
Синдром циклического кода, как и в любом систематическом
коде, определяется суммой по модулю 2, принятых проверочных
элементов и элементов проверочной группы, сформированных из
принятых элементов информационной группы.
В циклическом коде для определения синдрома следует разде-
лить принятую кодовую комбинацию на кодовую комбинацию про-
изводящего полинома Если все элементы приняты без ошибок,
остаток R(x) от деления равен нулю. Наличие ошибок приводит
к тому, что R(x)=^0 Следовательно, синдромом циклического кода
является многочлен R(x).
Д 1я определения номеров элементов, в которых произошла
ошибка, существует несколько методов Один из них основан на
свойстве, которое заключается в том, что R(x), полученный при де-
лении принятого многочлена Н(х) на Рг(х), равен R(x), получен-
ному в результате деления соответствующего многочлена ошибок
Е(х) на Рг(х).
Многочлен ошибок £(х) =А (х)-\-Н(х), где Д(х)—исходный
многочлен циклического кода Так, если ошибка произошла в аь
то при коде (9.5) ДДО, 1) = 100000000, ошибка в а2 соответствует
Д2(0, 1) =010000000 и т. д. Остаток от деления £(0, 1) на
РД0, 1) = 10011 =7?i(0, 1) для данного 9-элементного кода всегда
одинаков, он не зависит от вида передаваемой комбинации. В рас-
сматриваемом примере 7?(0, 1) =0101. Наличие ошибки в других
элементах (а2, а3, ...) приведет к другим остаткам Остатки зави-
сят только от вида Рг(х) и п. Для п=9 и Р4(0, 1) = 10011 будет
следующее соответствие:
Элемент с ошибкой а, «2 аз «4
Синдром 0101 1011 1100 оно =0011
Указанное однозначное соответствие можно использовать для
определения места ошибки. Синдром не зависит от переданной ко-
довой комбинации, но в нем сосредоточена вся информация о на-
личии ошибок. Обнаружение и исправление ошибок в систематиче-
ских кодах может производиться только на основе анализа син-
дрома.
На основании приведенного свойства существует следующий
метод определения места ошибки. Сначала определяется остаток
R1 (0, 1), соответствующий наличию ошибки в старшем разряде.
Если ошибка произошла в следующем разряде (более низком), то
такой же остаток получится в произведении принятого многочлена
и х, т. е Н(х)х. Это служит основанием для следующего приема,
суть которого ясна из следующего примера.
271
Пример 7.10. Предположим, задан код (11,7) в виде кодовой комбинации
10110111100 Здесь последние четыре разряда проверочные и получены на основе
использования производящего многочлена Р(0,1) = 100011. Принята кодовая
комбинация 10111111100. Определить ошибочно принятый элемент
Вычисляем Ri(x) как остаток от деления Ei(0,1) = 10000000000 на 10011.
Произведя деление, получим 0111. Далее делим принятую комбинацию на
Л(0,1) и получаем остаток /?(0,1). Если 7?(0,1) = /?i(0,l), то ошибка в старшем
разряде. Если нет, то дописываем нуль и продолжаем деление. Номер ошибочно
единицу больше числа приписан-
равным 0111. Проведем процесс
«2(0,1), 7?з(0,1), Я4(0,1):
принятого разряда (отсчет слева направо) на
иых нулей, после которых остаток окажется
деления, отмечая штрихом получаемые остатки
дописываемые
нули
10111111100 0000 1100011
да 1----------
1010000101
0 (I)
1
«2(0, 1) = Ю1 10 (2)
W 100 1 1
/?з(0, 1) = 01 О 1 0 (3)
ф 01 0 1 0 0 (4)
10 0 11
Я4(0, 1)= 0 1 1 1 =R, (0, 1).
В данном примере для этого пришлось дописать четыре нуля.
Это означает, что ошибка произошла в пятом элементе, т. е. ис-
правленная кодовая комбинация будет иметь вид
Л (0, 1) = 10111111100® 00001000000= 10110111100
Оптимальное декодирование на основе анализа веса. Для на-
хождения ошибочных элементов в кодах с do>5 получили распро-
странение методы, основанные на анализе веса остатка. При этом
осуществляются следующие процедуры:
принятая кодовая комбинация делится на Рг(х);
подсчитывается вес остатка о> (количество единиц в остатке);
если й<<и.ош (<иош — допустимое количество ошибок, которое
исправляется кодом), то исправление сводится к сложению приня-
той кодовой комбинации с остатком;
если со^/иош, то производят циклический сдвиг принятой кодо-
вой комбинации влево на один разряд, а затем делят на ее Рг(х) и
определяют вес остатка. Если ош, то делимое суммируют
с остатком, а затем производят циклический сдвиг на один элемент
вправо. Это и будет исправленная кодовая комбинация;
272
если после первого сдвига остаток дает й^/и.ош, то повторяют
операцию сдвига на один разряд влево, а затем деление и опреде-
ление веса остатка производят до тех пор, пока не будет удовлет-
воряться уСЛОВИе СОйДи ош-
Исправленная комбинация получается в результате сдвига
вправо суммы последней кодовой комбинации и остатка на столько
разрядов, на сколько сдвинута исходная кодовая комбинация
влево.
Пример 7.11. Рассмотрим данную методику применительно к do = 3 и ош=
= 1. Передано 1001110 Образующий полином Рг(х) =х3-|~х-|~1, ошибка про-
изошла на позиции а4, т. е. принято 1000110. Определить номер элемента
с ошибкой.
1 Находим /?(0,1) от деления 1000110 на Р,(0,1) = 1 0 1 1 Итак, /?(0,1) =
=011
2 Сдвигаем 1000110 влево на один разряд, имеем 0001101, а
Р(0,1) = 110, <в=2>/иош.
3 Сдвигаем влево еще на разряд (всего на два), имеем 0011010;
Я(0,1) = 1 1 1, <D = ЗХиош
4 . Повторяем сдвиг (всего на три разряда), имеем 0110100, а
Р(0,1) = 101, <в=2>/„ош
5 Делаем еще сдвиг (всего четыре разряда), при этом имеем 1101000.
Тогда
P(0,l)=001, <D= 1= /и ош.
6 Производим сложение сдвинутой кодовой комбинации с остатком. Имеем
1101000® 001 = 1101001.
7 Сдвигаем эту кодовую комбинацию вправо на четыре разряда и получаем
исправленную кодовую комбинацию.
1101001-Н 110100->0111010->0011101-Н01110
7.4. КОДЫ БОУЗА—ЧОУДХУРИ —
ХОКВИНГЕМА
Методика построения циклических кодов с d0 = 5 была разра-
ботана Боузом, Чоудхури и Хоквингемом. В литературе эти коды
известны как коды БЧХ. Эта методика отличается от методики
построения кодов с d0<5 способом выбора образующего многочле-
на. Построение образующего полинома зависит от двух основных
параметров: длины кодовой комбинации п и числа исправляемых
ошибок ?и.ош. Остальные параметры, использующиеся для построе-
ния образующего полинома, определяются из специальных таблиц
и соотношений.
Для исправления ?и.Ош5*2 необходимо иметь d0^26iom+l; дли-
на кодовой комбинации должна удовлетворять условию:
п=2т— 1, (7.13)
где п — всегда нечетное число.
18—6085 273
Таблица 7.2
№ п/п Щ п=2п-1 с № п/п т п=2П—1 С
1 3 7 1 6 8 255 17; 5; 3
о 4 15 5; 3 7 9 511 7; 3; 7
3 5 31 1 8 10 1023 31; И; 3
4 6 63 7; 3; 3 9 11 2047 89; 23
5 7 127 1 10 12 4095 3; 3; 5; 7; 13
Величина т определяет выбор числа проверочных символов г и
связана с г и 6i.Om соотношением
r^mta.om^m(d0—1)/2. (7.14)
В то же время число г определяется степенью образующего по-
линома. При больших значениях т длина кода п становится боль-
шой, что снижает эффективность кода из-за того, что часть ин-
формационных разрядов не используется и возникают трудности
технической реализации кодекса. В этом случае для определения
т удобно пользоваться выражением
2т—\=пС, (7.15)
где С — один из сомножителей, на которые разлагается число п.
Соотношения для п, С, т можно свести в табл. 7.2. Из таблицы
следует, например, что при т —10 длина кодовой комбинации п
может равняться и 1023 (С=1), и 341 (С=3), и 33 (С=31) и 31
(С— 33), однако ясно, то п не может быть меньше
Величина С влияет на выбор порядковых номеров специальных
неприводимых многочленов (табл. 7.3), с помощью которых обра-
зующий полином кода БЧХ находится как их наименьшее общее
кратное (НОК). Эти многочлены называются минимальными. Ма-
ксимальный порядок р определяет номер последнего из выбирае-
мых табличных минимальных многочленов;
р^=2/и.ош—1. (7.16)
Порядок р может быть только нечетным. Значения р меняются
от 1 до do—2 (do — нечетно). Так как образующий полином Рг(х)
является произведением указанных нечетных минимальных много-
членов, то р используется для определения числа сомножителей
Рг(х). Например, если /ИОш=6, то р=2/Иош—1 = 1 и нечетными
минимальными многочленами будут М\(х), Мо(х), Л45(х), Л47(х),
Л4д(х), Мц(х). Старший из них имеет порядок р=Н. Число со-
множителей Рг(х) равно 6, т. е. числу исправляемых ошибок. По-
этому число минимальных многочленов, образующих Рг(х), равно
Ci.om, а старшая степень многочлена 1—т. Число I указывает ко-
274
Таблица 7.3
Порядок Степень 1
1 2 3 4 5 6 7 8
1 3 5 7 9 11 13 15 17 19 21 111 1011 1101 111 10011 11111 110111 11001 100101 111101 1100111 ЮПИ 110111 111011 1000011 1010111 10011101 1001001 1101 1101101 10001001 10001111 111110011 11110111 10111111 11010101 10000011 11001011 11100101 100011101 101110111 1100110001 101101001 110111101 111100111 100101011 111010111 010011 101100101 110001011
лонку в таблице минимальных многочленов, из которых выбирает-
ся многочлен для построения образующего полинома.
Степень образующего многочлена Рг(х), полученного в резуль-
тате перемножения выбранных минимальных многочленов, равна
Гош — .ОШ- (7.17)
Таким образом, Рг(х) = НОК [^i (х)-М3(х) • ... -Л1р(х)].
Для конкретизации приведенной методики рассмотрим приме-
ры.
Пример 7.12. Построить код БЧХ, исправляющий две ошибки. Длина кодо-
вой комбинации п=15.
Согласно условию m=log2 (я—f-1) = log2 16 = 4. Число проверочных разрядов
r^ZmtK ош^4-2=8. Порядок старшего из минимальных многочленов р = 2/ИоШ—
—1=2 2-1=3. Число минимальных многочленов, участвующих в построении
образующего полинома, Б=/Иош=2, а старшая степень /=т=4 Степень обра-
зующего многочлена: г<С8.
Из колонки 4 табл. 7 3, где расположены минимальные многочлены 1=4,
выбираем два (Z. = 2) минимальных многочлена, порядок старшего из которых
равен 3 (р = 3), т. е. выбираем минимальные многочлены 1 н 3:
М,(0, 1) = 10011; Мз(0,1) = 1 1111
Тогда Рг(0,1) = Мт(0,1)Мз (0,1) = 11101 000 1, что соответствует образующему по-
линому Р8(х) =х8-|-х7-|-х6-|-х4-|-1. Тогда параметры кода r=8, k=n—г=15—8=
= 7. Имеем код (15,7). Производящую матрицу этого кода Gib, т можно полу-
чить шестью циклическими сдвигами исходной комбинации, соответствующей
образующему полиному Р8(0,1) =000000 111010001 (см. пример 7.8).
Пример 7.13. Построить код БЧХ, исправляющий двойную ошибку, если тре-
буемая длина кода п=21
1. Определяем значение т по формуле m=log2 (М 1) или согласно (7 15)
для больших значений п m=log2 (яС—[1). Так как т всегда целое число, то
m=[log2 (21C-J-1)], где [7.1]—меньшая целая часть. Отсюда С=3, так как бли-
,8* 275
жайшее число, которое в сумме с 1 дает целую степень двух, есть 63. Тогда
имеем m = log2 (21 -3—1-1) =6.
2. Находим: г<С(и Ошт^6-2=12; р=2£н ош—1=4—1=3; £ = 4ош = 2; |3 = г^:12;
Z=m = 6.
3. Из колонки 6 (1 = 6) табл. 7.3 выписываем два (L = 2) минимальных не-
четных многочлена, порядок старшего из которых равен 3 (р = 3). Таким обра-
зом, выбираем многочлены ЛТ(х) н Ms(x) (ЛЛ (0,1) = 1000011, Мз(0,1) = 1010111).
4 Умножаем индексы (порядки) выбранных многочленов на С и оконча-
тельно получаем порядковые номера минимальных многочленов, из которых
строим образующий полином циклического кода:
All(0,1) имеет порядок 1 (ХЗ)->М3(0,1);
Л13(0,1) имеет порядок 3 (ХЗ)--М, (0,1)
Из колонки 6 (1 = 6) табл. 7.3 имеем
М3(0,1) = 1010111, ЛЬ (0,1) = 1101; (0,1) = 10101 ИХИ01 = 1110110011->х9+
4 xs4x74x54x44x41.
5. Так как степень образующего многочлена г=9, то уточнеииое число про-
верочных разрядов г=9 (а не 12, как в расчете на втором шаге).
Итак, n=21, r=9, fe=12. Имеем код БЧХ (21, 12). Первая строка образую-
щей матрицы G2i, и этого кода имеет вид 000000000001 1 1011001 1.
Остальные строки находятся соответствующими циклическими сдвигами.
7.5. ПОНЯТИЕ ОБ ИТЕРАТИВНЫХ
И КАСКАДНЫХ КОДАХ [7.1]
Различные коды обладают разными корректирующими способ-
ностями. Для получения более совершенных кодов можно исполь-
зовать комбинации двух и более кодов. Одним из таких классов
кодов являются итерированные коды. Они получаются путем рас-
положения информационных символов в виде таблицы (рис. 7.4).
Каждая строка этой таблицы кодируется каким-либо кодом, а за-
тем кодируется каждый столбец, причем не обязательно тем же
кодом. Символы, расположенные в правом нижнем углу таблицы,
получаются в результате проверки проверочных символов. Они
могут быть построены на основе проверки по строкам и тогда будут
удовлетворять проверке по столбцам, и наоборот.
В качестве примера рассмотрим итерированные коды (рис. 7.5)
с одной проверкой на четность для каждого столбца и строки. Та-
кой код имеет большую корректирующую способность по сравне-
нию с кодом с одной проверкой на четность, который позволяет
только обнаруживать одиночные и нечетнократные ошибки. Итери-
рованный код позволяет исправить все одиночные ошибки, так как
пересечение строки и столбца, содержащих ошибку, однозначно
указывает ее место.
Минимальное кодовое расстояние итерированного кода равно
произведению кодовых расстояний итерируемых кодов. Действи-
276
Информационные символы Проверочные символы по строкам
Проверочные символы по столбцам Проверка проверок
Рис. 7.4. Расположение
символов итерированно-
го кода
Рис. 7.5. Пример итери-
рованного кода
тельно, если минимальный вес одного кода равен coj, а другого сог.
то кодовое слово, соответствующее произведению кодов, должно
иметь, по крайней мере, сщ ненулевых элементов в каждой строке,
которая содержит ненулевые элементы и, по крайней мере, со2 не-
нулевых элементов в каждом столбце, который содержит ненуле-
вые элементы. Следовательно он должен иметь оцмг ненулевых
элементов. Поскольку минимальное кодовое расстояние равно ми-
нимальному весу, то кодовое расстояние рассматриваемого кода
J0=d0id02=2X2=4. Поэтому простейший итерированный код по-
зволяет обнаруживать все ошибки кратностью до трех. Он также
обнаруживает все ошибки нечетной кратности, а также любые па-
кеты ошибок длиной не более /-)-1, где I — длина строки.
Итерированные коды благодаря простоте реализации (особен-
но при использовании ЭВМ) нашли широкое применение в низко-
скоростных системах ПД.
Каскадные коды. Каскадные коды, как и итерированные, со-
стоят из двух или более кодов, но в отличие от них строятся сту-
пенчатым образом: кодовые слова одного кода являются инфор-
мационными символами для кода следующей ступени. Каскадный
принцип построения кода иллюстрируется схемой, представленной
на рис. 7.6. Как видно из рисунка, система «внутренний кодер —
дискретный канал — внутренний декодер» создает относительно
внешних кодера и декодера как бы расширенный внешний канал,
имеющий словарь из 2Л' кодовых векторов, где М — разрядность
внутреннего кода. Если разрядность внешнего кода равна п, то
разрядность каскадного кода N0 = nN, и он содержит 2Wn кодовых
слов. Процедура кодирования каскадным кодом сводится к сле-
дующему: информационные символы разбиваются на &2 подблоков
по fei символов в каждом. Каждый подблок из ki символов запи-
277
Расширенный дискретный канал
Расширенный кодер Расширенный декодер
Рис. 7 6 Принцип построения каскадного кода
сывается как элемент поля GF (2*‘), в результате чего получается
вектор из /г2 символов над полем GF(2ft‘).
Полученным вектор над GF (2*1) рассматривается как информаци-
онный вектор некоторого линейного кода над полем GF (2kl) [длиной
п2 с k2 информационными символами и кодируется указанным ко-
дом (п2, k2), называемым кодом второй ступени. В результате ко-
дирования получается кодовое слово кода второй ступени, т. е.
некоторый вектор длиной п2 над GF (2*1). Каждый из п2 символов
кода второй ступени представляется как вектор длины k\ и коди-
руется кодом («ь fej) первой ступени. В результате получается
кодовое слово длиной п—п\п2, которое и является кодовым словом
каскадного кода (рис. 7.7).
Показано, что каскадные коды являются линейными и кодовое
расстояние d0 не меньше, чем произведение кодовых расстояний
кодов первой и второй ступеней: d0^^oi^o2; п—п\п2\ k=kik2.
Достоинствами каскадных кодов являются относительно не-
большая сложность их технической реализации и возможность ис-
правления не только независимых (одиночных) ошибок, но и па
кетов ошибок. Это достигается за счет того, что в качестве внут-
реннего кода используется код, исправляющий одиночные ошибки,
а в качестве внешнего кода — код, обнаруживающий и исправля-
ющий пакеты ошибок. Наибо-
Рис. 7.7. Процедура кодирования кас-
кадным кодом
лее полно исследованы каскад-
ные коды, где внутренними яв-
ляются коды Хемминга, а
внешними коды Рида — Соло-
мона [7.1, 7.2].
Принцип каскадного деко-
дирования аналогичен дей-
ствию получателя искаженной
телеграммы: если и имеются
отдельные ошибки в словах
(независимые ошибки), то они
могут быть обнаружены и ис-
правлены за счет других букв
278
того же слова (внутреннее кодирование), а если до неузнаваемо-
сти искажены отдельные слова из-за пакетов ошибок, то исправле-
ние таких ошибок возможно только с помощью других слов или
текста в целом (внешнее кодирование).
7.6. ПОНЯТИЕ О НЕПРЕРЫВНЫХ КОДАХ
В непрерывных кодах операции кодирования и декодирования
производятся непрерывно над последовательностью информацион-
ных символов без деления ее на блоки. К таким кодам относятся
цепной и сверточные. Эти коды применяются для обнаружения и
исправления пачек ошибок. Для сверточных кодов разработаны
специальные процедуры последовательного декодирования, позво-
ляющие упростить их техническую реализацию.
Цепной код. В данном коде после каждого информационного
элемента следует проверочный элемент. Проверочные элементы
формируются путем сложения по модулю 2 двух информационных
элементов, отстоящих друг от друга на шаг сложения I. Шаг I —
это расстояние между двумя информационными элементами, фор-
мирующими проверочный элемент.
Обозначим через ао, а1г ..., alt at+l, ..., a2zn, ••• информацион-
ную последовательность, элементы которой отстоят друг от друга
на шаг сложения I. В отличие от обозначений предыдущих разде-
лов проверочные разряды будем обозначать через Ь.
Из информационных элементов (яо, ut ), (яь a/+i), ••• форми-
руются следующие проверочные элементы по правилу
bQti — a0®ar, 61,/+1=а1®аж, • •
(7.18)
bl+l, 2Z+1 = aZ+l®a2Z+I-
Закодированная цепным кодом последовательность будет иметь
вид
ao^oz«i^i, z+ia2^2, z+2.flz+i^z+i, 2z+i, •••
Избыточность такого кода, очевидно, равна 0,5.
Процесс декодирования принимаемой кодовой последователь-
ности определяется принципом формирования проверочных эле-
ментов и заключается в следующем:
на приеме выделяются отдельно информационные элементы и
отдельно проверочные элементы;
из принятой последовательности информационных разрядов по
известному правилу кодирования (7.18) формируются новые про-
верочные разряды;
каждый сформированный проверочный разряд сравнивается по
модулю 2 с принятым проверочным элементом. При отсутствии
ошибок принятые и вычисленные проверочные разряды, очевидно,
совпадают. Наличие ошибок приведет к несовпадению этих раз-
279
рядов. (Указанная процедура эквивалентна нахождению синдрома
в коде Хемминга.)
Корректирующие возможности цепного кода зависят от шага
сложения I. Изменяя его, можно построить код, обнаруживающий
и исправляющий пачки ошибок длиной /и ОШ-----2/ [7.1]. Показано,
что при шаге сложения I код исправляет пачки ошибок длиной t,
если каждый проверочный элемент перед передачей в канал связи
задерживается на время /т0 с и рядом расположенные пачки оши
бок разделены между собой защитным интервалом Т, не содержа-
щим ошибок. При этом Т—6Z-J-1, (3/4-1)то, где то — длитель-
ность единичного элемента.
Рассмотренный цепной код за счет большой избыточности срав-
нительно просто позволяет обнаруживать или исправлять пачки
ошибок. Изменяя шаг сложения, можно согласовывать корректи-
рующие способности кода с характеристиками ошибок в канале
связи.
Сверточные коды. Рассмотренный цепной код является про-
стейшим случаем сверточных кодов. В основу сверточного кодиро-
вания положен принцип формирования последовательности- про-
верочных элементов линейной комбинацией элементов информа-
ционной последовательности, поступающей непрерывно на вход ко-
дирующего устройства. Сверточные коды могут иметь произволь-
ную скорость k/n. Кодер сверточного кода имеет k входов и п вы-
ходов. Эти коды могут быть разделимыми и неразделимыми. В по-
следнем случае в каждый дискретный момент времени на входы
кодирующего устройства поступают k информационных символов,
а с выходов считываются п символов, из которых k символов яв-
ляются информационными, а остальные п—k линейными комбина-
циями информационных последовательностей и образуют после-
довательность проверочных элементов. Если передача информации
происходит по одному каналу, то к выходу кодирующего устрой-
ства подключается специальная коммутирующая схема.
Представим входные информационные последовательности в
виде k полиномов:
Л(0(х) = По(1)+а1(1)х+ ... +а((')Х’'+ ....
Л(2) (х) = ао<2>+а/2>х4- ... ±а,(2)х'+ ..
Л<*)(х) = а0<*)-|-а1(^х+ ...
Выходные проверочные последовательности можно представить в
виде п—k полиномов:
B(i)(x) = 60(i)+6l(i)x4- ...
В(2)(х)==Й0(2) + Й1(2)х+ ...
В(п-Ю(х)=й0(л-Ю4-й)(п--ЮА;4_ ...
280
Поскольку в сверточном коде проверочные последовательности
являются линейными комбинациями информационных последова-
тельностей, то согласно алгебре многочленов проверочная после-
довательность может быть записана в виде
В(;) (х) = Д(» (х) (х)4-Л(2) (х)Ж'> (х) 4- ... -фЛ(*)(х)(х),
(7.19)
где /= 1, 2, ... п—k. Полиномы G<')(x), ..., Z(/>(x) называются об-
разующими (по терминологии циклических кодов). Если г — наи-
большая степень образующих полиномов, то любой информацион-
ный элемент будет оказывать влияние на проверочную последова-
тельность В^(х) на протяжение не более г+1 тактов. В течение
этого времени с выхода кодирующего устройства будет считано
щ=«(г+1) символов. Величину т называют кодовым ограниче-
нием сверточного кода. Для сверточных кодов со скоростью пере-
дачи kin число образующих полиномов равно k(n—k). Начальным
кодовым словом сверточного кода называют первую совокупность
символов на выходах кодирующего устройства.
Для пояснения принципа кодирования рассмотрим случай, ког-
да скорость кода равна fe/n=l/2. Тогда число образующих поли-
номов равно k(n—k) = \. Возьмем образующий полином степе-
ни г:
6(-4=£о4Д1х+ ... +grxr, £г = 0,1.
При поступлении на вход кодера информационной последователь-
ности ао, щ, «2, • • на выходе получаем информационную последо-
вательность а0, cii, й2, ..., совпадающую с исходной, и провероч-
ную последовательность Ь$, Ь\, Ьъ, ... Представляя эти последова-
тельности в виде полиномов и используя (7.19), имеем
B(x) = G(x)4(r). (7.20)
Таким образом, кодирование заключается в вычислении произ-
ведения В(х). С учетом того, что операция умножения происходит
в поле GE(2), вычисление В(х) осуществляется линейным много-
тактным фильтром, содержащим регистры и сумматор по модулю
2 (но без обратных связей). Значения проверочных элементов
определяются выражением
by—goa;+^l«/-l+^2fl/-2+ ... +gra/-r- (7.21)
Если на вход кодирующего устройства информационные символы
поступают поочередно, то проверочные разряды Ь, в соответствии
с (7.20) будут формироваться следующим образом:
bo=goao,
bi =goai4-gi ао,
281
b<z=goOi-^-g i о i -Н&До,
(7.22)
br — go#r-• • • ~\~grCk>-
Из (7.22) видно, что формирование проверочных разрядов проис-
ходит суммированием по модулю 2 каждого информационного раз-
ряда с некоторым набором предыдущих разрядов. Подобная ре-
куррентная процедура и объясняет название этих кодов как не-
прерывных (рекуррентных). Рассмотренный выше цепной код яв-
ляется простейшим частным случаем такого кода. Очевидно, что
структура сверточного кода полностью определяется образующим
полиномом.
При декодировании принятые последовательности информаци-
онных и проверочных символов могут вследствие ошибок отли-
чаться от переданных. Декодирование сверточного кода осущест-
вляется следующим образом. Принятая информационная последо-
вательность кодируется так же, как это делается на передаче, да-
лее выполняется сложение по модулю 2 с принятой проверочной
последовательностью. В результате получается корректирующая
последовательность, по которой можно исправить ошибки.
Существуют различные процедуры декодирования, среди кото-
рых наиболее эффективен алгоритм Возенкрафта — Фано [7.1,
7.2J. Подробнее со свойствами сверточных кодов можно ознако-
миться в [7.1 J.
7.7. ПРИНЦИПЫ ТЕХНИЧЕСКОЙ
РЕАЛИЗАЦИИ КОРРЕКТИРУЮЩИХ КОДОВ
Оценка сложности построения устройств кодирования. Как сле-
дует из принципов построения линейных блочных кодов, основны-
ми операциями, выполняемыми при кодировании и декодировании,
являются: суммирование по модулю 2, операции сдвига, запись,
считывание и хранение двоичных разрядов. Эти операции могут
быть реализованы на стандартных логических элементах. Поэтому
сложность схем кодирования и декодирования можно оценить чис-
лом таких элементов (например, триггеров).
Рассмотрим принцип построения кодера кода Хемминга. Коди-
рование сводится к нахождению проверочных разрядов путем сло-
жения по модулю 2 соответствующих информационных элементов.
Вариант построения кода (6,3) показан на рис. 7.1. Поскольку на
вход кодера символы поступают со скоростью k элементов в еди-
ницу времени, а на выходе формируется поток со скоростью п
элементов в единицу времени, то для согласования скоростей не-
обходимо буферное устройство памяти, содержащее k ячеек. Ин-
формация в буферную память записывается в последовательном
282
коде и на (k-|-1)-м такте в параллельном коде поступает в коди-
рующее устройство. Сформированная «-разрядная комбинация
в параллельном коде записывается в буферный регистр, откуда
с нужной скоростью поступает в канал связи. Поскольку скорость
работы кодирующего устройства может быть значительно выше,
чем скорость поступления входной информации, то кодер всегда
работает в реальном масштабе времени передачи информации.
Сложность построения кодера определяется сложностью вход-
ного буферного устройства, схемы кодирования и выходного бу-
ферного устройства памяти. Выражая сложность через число типо-
вых элементов (сумматоров, ключей, ячеек памяти), определяем
сложности входного буферного устройства vi^2)fe, схемы кодиро-
вания V3<2« и выходного буферного устройства k(n—k). Таким
образом, сложность всей схемы кодера х’КОд-Д2^Ц-2«-Ь^(«—k).
Используя показатель R=kln (относительную скорость кода),
выражение для уКод можно привести к следующему виду:
vKOfl^2(l+7?)+7?(l-7?)«2.
Отсюда следует, что для любого линейного кода сложность его
кодирующей схемы растет не быстрее, чем квадрат длины его ко-
довой комбинации п, т. е. v—п2.
Оценим сложность декодирующего устройства с исправлением
ошибок. Здесь сложность будет определяться способом декодиро-
вания. Рассмотрим декодирование по синдрому. Входной и выход-
ной регистры декодера будут иметь сложность V|(I'*C2zz. Блок вы-
числения синдрома будет обладать сложностью v2(l>^«(«—k). При
декодировании по способу Хемминга (хранение всех синдромов)
схема исправления ошибок будет иметь сложность V3(I)^2"(n-ft'.
Таким образом, сложность всего декодера vneK^ 2 т. е.
растет экспоненциально квадрату числа разрядов кодовой комби-
нации п.
В режиме обнаружения ошибок сложность существенно снижа-
ется, поскольку в декодере остается лишь схема вычисления син-
дрома ПОЭТОМУ V06n^M2( 1—7?).
Построение кодирующего устройства циклического кода. В ци-
клических кодах формирование проверочной группы элементов ко-
довой комбинации происходит делением полинома G(x)x' на об-
разующий полином Рг(х). Так как операция деления в двоичном
коде состоит из операций сдвига и сложения по модулю 2, то
схемы кодирования содержат упоминавшиеся уже выше типовые
элементы двоичной логики. Деление осуществляется схемами, ко-
торые называются регистрами с обратными логическими связями,
или многотактными линейными фильтрами. Принцип построения
такого устройства рассмотрим на примере кода (9,5) с образую-
щим полиномом Р(х) =х4-|-х-Н1. Пусть кодируется группа, инфор-
мационный полином которой имеет вид G(x) =х4-|-х2-|-х4-1. По-
скольку операция умножения на хг означает добавление к соот-
283
Рис 7.8. Формирователь остатка цик
лического кода (9,5)
ветствующей кодовой комбинации
г нулей, то никакого специального
устройства не требуется, а сдвиг
па г=4 разряда осуществляется
обычным регистром задержки.
В данном примере регистр за-
держки имеет четыре ячейки. Де-
ление производится в многотакт-
ном фильтре. Элементы информа-
ционной группы подаются па
вход первой ячейки регистра, на-
чиная со старшего разряда. Через
четыре такта элемент старшего
разряда появится на выходе регистра. С пятым тактом выходная
ячейка будет свободна от поступления элементов информационной
группы и в регистр вводится группа проверочных элементов, пред-
ставляющая остаток от деления R(х).
Формирователь проверочной группы представляет собой сдви-
гающий регистр с обратными связями между ячейками. Эти связи
реализуются через сумматоры по модулю 2. Указанная схема вы-
полняет деление G(x)xr на Рг(х). Делимое в виде кодовой группы,
представляющей полином G(x)xr, подается на вход сдвигающего
регистра, а полином Рг(х) вводится в регистр в виде соответству-
ющей подобранной структуры обратных связей через сумматоры.
Проверочная группа элементов последовательно формируется на
выходе регистра.
Число ячеек сдвигающего регистра выбирается равным степени
образующего полинома, а число сумматоров по модулю 2 на еди-
ницу меньше его веса (числа членов образующего полинома).
В рассматриваемом примере вес полинома <о—3, следовательно,
должно быть два сумматора. Возможная структура формировате-
ля представлена схемой на рис. 7.8.
Предположим, что в некоторый момент to в ячейки регистра
при разомкнутом ключе К вводятся четыре разряда информаци
онной группы элементов (старший разряд в выходной ячейке). Та-
ким образом, в исходном положении ячейки будут находиться в
состоянии 1101 (соответственно номерам ячеек). С некоторой за-
держкой А/, но до прихода очередного тактового импульса ключ К
замыкается. В момент прихода тактового импульса единица стар
шего разряда «выталкивается» на выход и одновременно посту-
пает на сумматор Si, где складывается по модулю 2 с «1» мпад-
шего разряда. В результате первая ячейка окажется в состоянии
«О». Одновременно с этим «1», которая определяла состояние пер-
вой ячейки в сумматоре 5г, складывается с «1» старшего разряда
и сумма подается на вторую ячейку. Поэтому вторая ячейка так-
же перейдет в состояние «0». Третья ячейка перейдет в состояние
второй, т. е. «1», а четвертая в состояние третьей, т. е. «0». Таким
284
Регистр задержки (РЗ)
Рис. 7.9. Упрощенная схема кодера циклического кода (9,5)
образом, после первого такта ячейки из состояния 1101 перейдут
в состояние 0010, что соответствует двоичному числу 0100. На вто-
ром такте на выходе «0» и одновременно появятся «0» на выходах
сумматоров Si и S2. Состояние ячеек после второго такта будет
0001. Третьему — пятому тактам будут соответствовать состояния
1100, ОНО, 0011. Если представить состояния ячеек регистра в ви-
де двоичных чисел (старшим разрядом в четвертой ячейке), то
будем иметь: первый такт—0100, второй такт—1000, третий такт—
ООН, четвертый такт — ОНО, пятый такт—1100. Эти числа соот-
ветствуют первому, второму и т. д. остаткам от деления числа
101110000 на двоичное число образующего полинома 10011. Про-
ведем это деление:
® 101110000
10011
ф!000
^00000
дИОООО
^10011
„00110
ЧоООО
01100
47 00000
1100
|10011
10100
первый остаток (первый такт)
второй остаток (второй такт)
третий остаток (третий такт)
четвертый остаток (четвертый такт)
пятый остаток (пятый такт)
Упрощенная структурная схема кодирующего устройства при-
ведена на рис. 7.9. Она содержит: регистр задержки РЗ, обеспечи-
вающий сдвиг информационной группы на четыре такта; форми-
рователь проверочной группы, включающий в себя регистры сдви-
га и сумматоры по модулю 2 в цепях обратной связи. В схеме
имеются также два ключа К\ и обеспечивающие необходимую
285
последовательность работы схемы. В положении, когда К\ за-
мкнут, a Ki разомкнут, информационная часть кода подается на
вход схемы, т. е. в первую ячейку регистра задержки и через S)
в первую ячейку регистра сдвига. По окончании четырех тактов
старший разряд информационной группы записывается в послед-
ние ячейки обоих регистров. Во время пятого такта информацион-
ная группа начинает поступать на выход кодера. С этого момента
тлюч К\ размыкается, а ключ Ki замыкается. Начиная с пятого
такта, формирователь проверочной группы работает в соответст-
вии с ранее описанной процедурой. После девятого такта ключ
Ki размыкается, а К\ замыкается. С этого момента формирователь
проверенной группы работает как обычный регистр сдвига, «вы-
талкивая» на вход кодера записанные в ячейках регистра прове-
рочные разряды. Одновременно в регистры начинают поступать
новые информационные разряды.
Структура декодера с обнаружением ошибок аналогична коди-
рующему устройству. Она содержит в качестве основного блока
схему деления. В случае исправления ошибок схема декодера зна-
чительно усложняется, поскольку содержит в своем составе опре-
делитель места ошибки.
Сложность устройств кодирования и декодирования цикличес-
кого кода. В соответствии со структурой кодирующего устройства
его сложность должна быть пропорциональна длине кодовой ком-
бинации п. В [7.1] показано, что сложность построения кодера
циклического кода не превосходит величины Vk.'—ЪпИ. Таким об-
разом, сложность кодирующих устройств циклических кодов рас-
тет пропорционально п, а не л2, как это было для линейных не-
циклических кодов. При исправлении ошибок методом синдромно-
го декодирования так же, как и для нециклических кодов, слож-
ность декодирующих устройств циклических кодов носит экспо-
ненциальный характер. Для кодов БЧХ, исправляющих пакеты
ошибок, были разработаны специальные методы декодирования,
позволяющие упростить их техническую реализацию. Не вдаваясь
в сущность этих способов [7.1], отметим, что сложность построе
ния декодирующих устройств с исправлением ошибок уИспр^
log2 («—1), т. е. растет почти по линейному закону.
Программная реализация помехоустойчивых кодов. В связи
с развитием микропроцессорных систем связи функции кодирова-
ния и декодирования возлагаются на связной процессор и реали-
зуются программным путем. В модульной структуре связного
процессора выделяются функциональные блоки (модули), отвеча-
ющие за процессы кодирования/декодирования, — программируе-
мые кодеки. Программируемый кодек — это микропроцессор, реа-
лизующий функции защиты от ошибок в системе ПДС. Проекти-
рование программируемого кодека состоит в том, что для выбранных
варианта кода и алгоритма его реализации необходимо оце-
нить требуемое быстродействие процессора, реализующего функ-
286
ции кодирования/декодирования, с тем, чтобы выбрать тип соот-
ветствующего микропроцессора.
Согласно [7.3, 7.4] оценка требуемого быстродействия програм-
мируемого кодека может быть проведена следующим образом. Бу-
дем считать, что передача ведется непрерывно блочными (л, k)
кодами Быстродействие процессора будем измерять в циклах об-
ращения к памяти (циклах памяти) за секунду. Ввод блока (/г, k)
кода в кодирующий процессор осуществляется наборами из /вв бит,
вывод блоков — наборами из /в бит. Обозначим через Q — быстро-
действие процессора, цикл/с, NBB— требуемое число циклов для
ввода одного набора, В—скорость модуляции в канале связи, Бод,
s — минимальный интервал между кодовыми комбинациями кода,
бит, /7 — пропускная способность кодирующего процессора, бл./с,
Т—время обработки, цикл/бл. Определим скорость поступления
информации в блоках за секунду по формуле В/(5вв+5), причем
SBB—k, SB = n при кодировании и SBB = n, SB—k при декодирова-
нии. Для исключения потерь информационных символов при их
непрерывном поступлении на вход программируемого кодека не-
обходимо, чтобы скорость поступления информации была не более
пропускной способности кодека. Отсюда получаем неравенство
B(Sbb-^S)C/7.
Выражение для определения быстродействия процессора будет
иметь вид:
Q-B (SBB + sB)-’ [г + (М /А\л;],
'*вв \ *В /
где <х> — ближайшее целое, не меньшее х. Для кодирующего про-
цессора при условии, что 5=0, имеем
К L /ва / \ 1в / J
а при декодировании
Q.VK- — |7’ + /lUbb + (A)nb],
П I /вв / ' /в / 1
В [7 4] для различных способов реализации процессов декоди-
рования циклических кодов с образующими полиномами не выше
16-й степени получены асимптотические границы по быстродейст-
вию. Так, допустимое время обращения к памяти определяется
выражением Пттцдоп(^)->0,1 В1, мкс/цикл. Это означает, что
для указанных кодов быстродействие процессора должно в 10 раз
превышать скорость модуляции в канале связи. Так, для кода
(976,960) и скорости в канале ТЧ 9600 бит/с требуемое время
цикла тцдоп не превышает 9 мкс/цикл, что вполне приемлемо для
современных микро- и мини-ЭВМ.
287
7.8. методика выбора корректирующих
кодов
Корректирующие коды могут использоваться в системах с об-
ратной и без обратной связи (ОС). В системах с ОС корректиру-
ющие коды используются в режиме обнаружения ошибок, а в си-
стемах без ОС — в режиме исправления ошибок. Иногда в систе-
мах без ОС допускается режим обнаружения ошибок. При обна-
ружении ошибок в кодовой комбинации она не выдается получа-
телю. При этом считается, что лучше получателю выдать сигнал
стирания, нежели неправильный символ.
При выборе кодов исходят из необходимости обеспечения за-
данной потребителем верности и требуемой скорости передачи ин-
формации. Последняя зависит от избыточности, вводимой в код.
В теории информации избыточность алфавита источника сообще-
ний, использующего N& кодовых комбинаций из общего числа No,
определяется как
Х=1—log2^A/log2 No.
Для блочных разделимых избыточных кодов
1—log2 2fe/log2 2n=l—kln=rln,
где г — число проверочных элементов в кодовой комбинации; п —
число элементов в кодовой комбинации. Коэффициент х характе-
ризует потери скорости вследствие введения избыточности.
Верность будем определять веротностью выдачи получателю
кодовой комбинации с ошибками
z=i
где Рп(/) —вероятность появления в кодовой комбинации ошибок
кратности t (см. гл. 2); Z(Z) —доля ошибок кратности t, которые
или не исправляются (при коде, исправляющем ошибки), или не
обнаруживаются (при коде, обнаруживающем ошибки).
Очевидно, что для простого кода Z(/) = l для всех t и вероят-
ность неправильного приема кодовой комбинации равна вероятно-
сти ее искажения, т. е. появления в пределах комбинации хотя бы
п
одной ошибки Ра
t=\
Перейдем к определению Z(Z) для некоторых корректирующих
кодов.
Код с постоянным соотношением нулей и единиц. Такой код
относится к неразделимым. Разрешенными комбинациями явля-
ются те комбинации длины п, у которых число единиц всегда рав-
но определенной величине /, а число нулей (п—j). Такой код ис-
288
пользуется для обнаружения ошибок. Ошибки в кодовой комби-
нации будут обнаружены при изменении соотношения числа еди-
ниц и нулей. Очевидно, чго код не обнаружит только такие ошиб-
ки, которые не приведут к изменению указанного соотношения и,
следовательно, будут превращать одну разрешенную комбинацию
в другую разрешенную комбинацию. Найдем Z(Z) для 7-элемент-
ного кода, комбинации которого содержат четыре единицы и три
нуля. Общее число разрешенных комбинаций равно 35.
Двукратная ошибка не будет обнаружена, если одна из четы-
рех единиц перейдет в нуль и один из трех нулей в единицу. Об-
щее число возможных вариантов двукратных ошибок равно Cr,
а число вариантов двукратных ошибок, которые не обнаружива-
ются, равно С31С4|. Тогда доля необнаруживаемых двукратных
ошибок
Z(2)=C4'C3I/C72.
Аналогично доля необнаруживаемых четырех и шестикратных
ошибок
Z(4) =С42С32/С74, Z(6) = С43С33/С76.
Код (/?, п—1) с защитой на четность. Разрешенные кодовые
комбинации кода выбраны таким образом, что содержат четное
число единиц. Очевидно, что любое число ошибок четной кратно-
сти не нарушит этого условия, т. е. не будет обнаружено. В то же
время любое число ошибок нечетной кратности вызовет превра-
щение разрешенной кодовой комбинации в запрещенную, а сле-
довательно, будет обнаружено. Следовательно,
1, t — четное число,
О, t — нечетное число.
В общем случае определить Z(Z) для кодов с обнаружением
ошибок удается не всегда. Для групповых кодов, к которым отно-
сится и рассмотренный выше код (п, п—1), задача несколько упро-
щается, если учесть, что любая комбинация ошибок, вызывающая
переход переданной разрешенной кодовой комбинации в другую раз-
решенную, совпадает с разрешенной кодовой комбинацией. Поэтому
для групповых кодов с обнаружением ошибок Z(t)=NP(t)/Cnt,
где Ap(f)—число разрешенных кодовых комбинаций веса W—t.
Однако АР(0 вычисляется аналитически далеко не для всех груп-
повых кодов. Значение АР(0 можно, конечно, определить пере-
бором всех комбинаций, но это практически возможно только при
достаточно малых значениях k.
Пусть для выбранного (n, k) группового кода известно кодо-
вое расстояние d0. Тогда очевидно, что при кратности ошибок /<
<До Z(/)=0. При t^do часто используется оценка Z(t) в виде
Z(/)^2”(7!-ft), которая получена как отношение числа разрешен-
19—6085 289
Z(0 =
них кодовых комбинаций 2* к общему числу возможных кодовых
комбинаций 2'1. Отсюда
*=<*„
Если код используется для исправления ошибок, то вероятность
неправильного приема кодовой комбинации с учетом известной
взаимосвязи между кратностью исправляемых ошибок и кодовым
расстоянием (см. гл. 2) определяется выражением
2 Рп (0 Для четного d0,
i=dQ/2
Pn(t) для нечетного d0.
1(оГ0—1J/2J + 1
Пользуясь полученными соотношениями, нужно подобрать та-
кие п, d0, при которых обеспечивается требуемое значение Рн.п и
скорость передачи информации не ниже заданной.
Пример 7.14. Передача информации осуществляется в дискретном симметрич-
ном канале без памяти с рОш=10-3. Для повышения верности необходимо подо-
брать код с исправлением ошибок. При этом Р„п<10-4, k/n^0,6, алфавит пе-
редаваемых сообщений равен 15.
Для передачи сообщений достаточно 15 разрешенных кодовых комбинаций.
Выберем двоичный код с k=4, который обеспечивает 16 разрешенных кодовых
комбинаций. Проверим, сможет ли обеспечить требуемую верность код, нсправ-
ляющип однократные ошибки. Для такого кода должно выполняться соотноше-
ние 1, откуда г=3, п = 1. Для этого кода &/«=0,57<0,6. Объединим
две кодовых комбинации в блок длиной 26=8 элементов и будем далее осу-
ществлять защиту блока. Из соотношения 2r^fe-|-r-|-l найдем число проверочных
разрядов, необходимое для получения do = 3, а следовательно, исправления одно-
кратных ошибок. В результате получим код (12,8). Прн этом &/« = 0,66>0,6
Вычислим для данного кода
Р«.п=?: С‘пР(ош^-РоШ)П '=6,62-10-* <10'*.
Таким образом, код (12,8) удовлетворяет сформулированным в примере требо-
ваниям
В системах с ОС кодовая комбинация, в которой обнаружена
ошибка, переспрашивается. При этом возможны три исхода: пра-
вильный прием с вероятностью Pn.n = Pn(t — 0), неправильный
прием с вероятностью PH.n— 2 и обнаружение оши-
290
п
бок с вероятностью Ро.о= У [1—Z(/)]/’n(Z). При обнаружении
t=i
ошибок кодовая комбинация переспрашивается, в результате че-
го после повторения опять возможны три исхода. Если в системе
допускается конечное число переспросов, получатель в конце кон-
цов или получает кодовую комбинацию с вероятностью Рп п без
ошибки или с вероятностью Р,, п с необнаруженной ошибкой или
же кодовая комбинация после определенного числа повторений
стирается. Соответствующие выражения, определяющие эти веро-
ятности для систем с ОС получены в гл. 8. Используя их, можно
подобрать код, удовлетворяющий исходным требованиям. Сле-
дует помнить, что здесь потери скорости определяются не только
введенной в код избыточностью, но и частостью повторений.
Аналитические методы подбора кодов не всегда позволяют
выбрать код, который на практике позволит обеспечить требуе-
мую верность передачи. Это объясняется весьма сложным харак-
тером распределения ошибок, описать который достаточно точно
аналитическими методами удается далеко не всегда. Поэтому
на практике широкое распространение получили методы отбора
кодов, основанные на статистическом моделировании процессов
передачи дискретных сообщений с использованием ЭВМ.
В настоящее время накоплен достаточно большой опыт при-
менения корректирующих кодов в различных условиях связи, по-
зволяющий рекомендовать некоторые из них для применения
в АПД. Так, МККТТ стандартизован циклический код с образую-
щим полиномом х1б+х12+х5+1, применяемый в настоящее время
во многих системах ПДС.
В заключение кратко сформулируем рекомендации по выбору
корректирующих кодов. В большинстве случаев следует выбирать
код из числа стандартизованных МККТТ и описанных в сущест-
вующих ГОСТ. Если же эти коды не удовлетворяют по тем или
иным соображениям разработчика, то можно руководствоваться
следующей методикой. По заданному алфавиту передаваемых со-
общений (мощности кода) А,гд однозначно определяется число
информационных элементов из соотношения NA=2k. Далее на-
ходится наименьшее значение п (или г), обеспечивающее обнару-
жение или исправление ошибок заданной кратности, исходя из
требований к верности. И, наконец, проверяется выполнение тре-
бований по скорости передачи информации, что позволит пере-
дать заданные объемы информации за время, оговоренное в тех-
ническом задании на систему ПДС.
19*
291
7.9. СОПРЯЖЕНИЕ ПРОЦЕДУР
ДЕМОДУЛЯЦИИ И ДЕКОДИРОВАНИЯ
Выше были рассмотрены двухэтапные процедуры определения
на приеме переданного кодового слова. На первом этапе в схеме,
которую можно назвать первой решающей 1РС, определялся вид
переданного элемента (символа) кодовой комбинации. На втором
этапе по второй решающей схеме 2РС по последовательности
di, d2, ...,dn определялось кодовое слово. Вторая решающая схема
при двухэтапной процедуре вынесения решения называется в ли-
тературе также жестким (дискретным) декодером, а чаще всего
просто декодером. Двухэтапное декодирование называют поэле-
ментным (посимвольным).
Дискретный декодер выносит решение о переданном кодовом
слове только по последовательности «О» и «1», не испочьзуя ин-
формацию о качестве приема каждого из элементов. Это, как
нетрудно догадаться, не способствует получению максимальной
верности решения и, кроме того, ограничивает возможности де-
кодера. Для пояснения данного тезиса рассмотрим декодирова-
ние для кода (7, 6), который при поэлементном приеме способен
только обнаруживать ошибки. Если декодер будет располагать
информацией о качестве приема каждого из элементов, то можно
и исправлять одиночные ошибки. Качество (надежность) приема
i-ro элемента определяется условной вероятностью его неправиль-
ного приема р,(Н/У) (см. разд. 6.8). Чем больше щ(Н/У), тем
хуже качество принятого элемента (символа). Предположим, что
в последовательности двоичных элементов di, d2, ...,d7 имела ме-
сто однократная ошибка, которую необходимо исправить. Наибо-
лее вероятно, что местоположение ошибки соответствует место-
положению наименее надежного символа. Изменяя его на про-
тивоположный, произведем исправление одиночной ошибки. Вы-
ше был рассмотрен один из вариантов так называемого мягкого,
или аналогового, декодирования, при котором используется ин-
формация о надежности принятых символов. Чем полнее исполь-
зуется декодером информация о надежности символов, тем мень-
ше вероятность неправильного декодирования. Наиболее полное
использование информации о надежности принятых символов со-
ответствует приему в целом. Свое название такой метод приема
получил вследствие рассмотрения тракта приема как единой ре-
шающей схемы, осуществляющей вынесение решения о передан-
ном кодовом слове на основе анализа сигнала Y (t) = {yi(i),
yz(t),..., yz(t)} без предварительного определения вида передан-
ных элементов, т. е. анализа всего сигнала в целом, с использо-
ванием всей информации о сигнале на входе приемника Y(t).
Реализовать прием в целом в условиях гауссовых помех и ди-
скретного канала без памяти можно, используя схему, аналогич-
ную схеме оптимального приемника (см. разд. 6.3). Эта схема
292
позволяет осуществить разделение двух сигналов, соответствую-
щих символам «О» и «1». В нашем случае число сигналов, кото-
рые требуется разделить, равно 2*, где k — число информацион-
ных элементов в кодовом слове. Если взять £ = 20, то потребует-
ся разде 1ить 1048576 сигналов и, следовательно, такое же число
ветвей приема. Реализовать такой приемник, даже на современ-
ной элементной базе, невозможно.
Применение приема в целом по сравнению с поэлементным
приемом в гауссовом канале без памяти дает энергетический вы-
игрыш примерно в 3 дБ при фиксированной вероятности ошибоч-
ного декодирования. Дчя каналов с переменными параметрами
и памятью этот выигрыш будет значительно больше и составляет
уже 10 ... 20 дБ [7.3].
Сложность приема в целом заставляет искать такие двухэтап-
ные процедуры вынесения решения о переданном кодовом слове,
при которых будет обеспечена более простая реализация тракта
приема, чем при приеме в целом, и в то же время будет исполь-
зована информация о надежности принятых элементов, т. е. ре-
шена в той или иной мере задача сопряжения процедур демоду-
ляции и декодирования. В зависимости от степени использования
информации о надежности элементов будет обеспечено большее
и in меньшее приближение по помехоустойчивости к приему
в целом.
Различают два подхода к проблеме мягкого декодирования.
При первом минимизируется вероятность неправильного декоди-
рования кодового слова, при втором минимизируется средняя ве-
роятность ошибки на элемент. В последнем случае декодирован-
ная последовательность может и не быть кодовым словом (раз-
решенной кодовой комбинацией). Характеристики декодеров, ре-
ализующих эти два правила, совпадают, поскольку минимизация
вероятности ошибки на элемент ведет к минимизации вероятно-
сти ошибки в последовательности элементов, и наоборот.
Наиболее часто на практике решается задача минимизации
вероятности неправильного декодирования. При этом учитывают-
ся ограничения на сложность реализации приемного тракта. Во
всех этих случаях делается попытка породить относительно не-
большое число кодовых слов, среди которых с большой вероятно-
стью содержится переданное кодовое слово, находящееся на
наименьшем расстоянии от принятой последовательности элемен-
тов (символов). Различные методы минимизации вероятности
неправильного декодирования различаются способом порождения
этих кодовых слов. Ниже рассматриваются некоторые из них.
Прием по наиболее надежным символам. Идея метода деко-
дирования по наибо iee надежным символам (элементам) пред-
ложена Л. Ф. Бородиным и может быть пояснена следующим об-
разом. Определим вид двоичных символов Й2, ..&п и их на-
293
дежность у„ i=l, п. Пусть наименее надежные символы распо-
ложены на проверочных позициях. Сотрем эти символы. Тогда,
если оставшиеся k символов приняты без ошибок, последователь-
ность di, d2,...,ak будет правильно декодирована, т. е. будет ис-
правлено г стираний. Известно, что любой код способен испра-
вить до (d0—1) стираний, если на нестертых позициях не было
ошибок. Отсюда следует, что число символов щ, по которым мо-
жет быть вынесено решение о переданном кодовом слове, опреде-
ляется неравенством —(do—1). На кодирующее устрой-
ство поступает последовательность единиц и нулей, а также ин-
формация о надежности каждого из символов принимаемой по-
следовательности di, «2, ... ап.
Декодирование начинается с выделением k наиболее надеж-
ных символов и проверки возможности однозначного декодиро-
вания по этим символам. Если однозначное декодирование невоз-
можно, то добавляется еще один наиболее надежный из остав-
шихся (л—k) символов и все операции повторяются. При приеме
* по методу Бородина могут быть исправлены все ошибки (стира-
ния) кратности t^d0—1, если любой из (п—d0-f-l) безошибочно
принятых символов имеет меру надежности большую, чем у каж-
дого из неправильно принятых.
Для гауссовских каналов метод Бородина обеспечивает по
сравнению с поэлементным приемом выигрыш примерно в 1,4 дБ,
а для кода с k = n—1 обеспечивает такую же помехоустойчивость,
как и метод приема в целом.
Более сложными по сравнению с методом Бородина являются
алгоритмы декодирования, предложенные Чейзом.
Класс алгоритмов Чейза [7.2]. Предложенная Чейзом про-
цедура заключается в следующем:
1. Определяется значение каждого элемента (символа), вхо-
дящего в кодовую комбинацию. В резутьтате этого получаем
вектор A={di, а2,...,ап}, состоящий из 0 и 1.
2. На принятую кодовую комбинацию А накладываются сфор-
мированные определенным образом тестовые последовательно-
сти Т. Полученные последовательности А* = АФТ декодируются
жестким (дискретным) декодером по ранее рассмотренным в пре-
дыдущих параграфах правилам (см., например, § 6.1). В резуль-
тате получаем кодовые слова A'i, А'2,..., А',,..., А'у, где N— чис-
ло тестовых последовательностей.
3. С учетом верности (надежности) каждого из элементов оп-
ределяем расстояние последовательности А до каждого из кодо-
вых слов А',, где i= 1, 2,...,N. Принятым считается то кодовое
слово, расстояние до которого будет минимальным. Расстояние
291
Рис. 7.10. Декодер Чейза
L] до /-го кодового слова можно вычислить по формуле
^ = 2 / = ТЛ, (7.23)
1 = 1
где у, — положительное число, характеризующее степень надежно-
сти принятого i-ro элемента. Например, при восьмиуровневом
квантования сигналов на выходе демодулятора это могут быть
числа 0 ... 7; а',, — i-й символ /-го кодового слова А',; последова-
тельность at®dlh i=l, п определяет вектор ошибки Е\.
Схема, реализующая декодирование по Чейзу, представлена
на рис 7.10, где двойными линиями изображены векторные свя-
зи. На вход схемы с выхода непрерывного канала подается сиг-
нат V(i), который демодулируется; уровень сигнала на выходе
демодулятора определяет надежность принимаемых элементов.
Вид элемента определяется в первой решающей схеме 1РС.
Три предложенных Чейзом алгоритма отличаются методом
формирования тестовых последовательностей Т. Алгоритм 1 тре-
бует формирования наибольшего числа последовательностей и
обеспечивает наилучшую помехоустойчивость. В алгоритмах 2 и
3 формируется меньшее число тестовых последовательностей и
соответственно обеспечивается худшая помехоустойчивость.
Для алгоритма 1 требуется взять в качестве тестовых после-
довательностей нулевой вектор и все комбинации веса [с?о/2], где
знак [•] означает наибольшее целое число, не превосходящее
заданное. Число таких тестовых комбинаций Для алгорит-
ма 2 используется 2Id^21 тестовых последовательностей, имеющих
295
различные символы на [d0/2] наименее надежных позициях и ну-
левые символы на остальных. Для алгоритма 3 определяется
(do—1) наименее надежных символов. Тестовые последовательно-
сти имеют единицы на i наименее надежных позициях и нули на
остальных (7=0, 2, 4,..., do—1 для нечетного do', i—0, 1, 3, ...,d0
— 1 для четного d0). Общее число возможных тестовых последо-
вательностей [do/2+l].
Пример 7.15. Рассчитать требуемое число тестовых последовательностей для
кода (7,3) с кодовым расстоянием do=4.
Для алгоритма 1 число тестовых последовательностей N-C-i2 = 21; для алго-
ритма 2 = 2^2] —22=4; для алгоритма 3 W=[do/2-|-l]=2-|-l =3. Таким обра-
зом, наименьшее число тестовых последовательностей требуется при использова-
нии алгоритма 3
Рассмотрим на примере процедуру декодирования по Чейзу для алгорит-
ма 3
Пример 7.16. Код (6,3) задан производящей матрицей (7.3) Передана ко-
довая комбинация ООО 000. В результате действия помех принята кодовая ком-
бинация с ошибками иа позициях 2 и 3 А=011000. Так как do = 3, то необходимо
сформировать две ,естовые последовательности, первая из которых ООО 000,
а вторая содержит d0—2=2 единицы на позициях наименее надежных символов
Пусть надежность символов определяется числами 732656, т. е. наименее надеж-
ными являются символы, стоящие на позициях 2 и 3 Тогда вторая тестовая по-
следовательность имеет вид 011000, и в результате сложения принятой последо-
вательности с тестовыми имеем
011000 011000
Ш000000 ®011 00
011000 -- А/ 000000 =г Д2*
После декодирования жестким декодером получим кодовые слова A'i = 011100 и
А'2= 000000 Вычисляя L по формуле (7.32) для первого и второго кодовых
слов, получим соотвегствеино Li=6 и Т2 = 5 Таким образом, делается вывод
о том, что передавалось кодовое слово 000 000. В рассмотренной выше ситуации
удалось исправить двукратную ошибку.
Описание других алгоритмов аналогового декодирования
можно найти в [7.2, 7.3].
При разработке систем ПДС приходится решать не только за-
дачи сопряжения процедур демодуляции и декодирования, но и
модуляции и кодирования, так как характеристики дискретного
канала зависят от вида модуляции. Наиболее общий подход
к решению этих задач сводится к тому, что кодирование и моду-
ляция рассматриваются как единый процесс формирования наи-
лучшего сигнала, а демодуляция и декодирование — как процесс
наилучшей обработки принятого сигнала [7.4].
296
КОНТРОЛЬНЫЕ ВОПРОСЫ
1. Является ли множество элементов ПО, ООО, 101, 010 группой, если в ка-
честве групповой операции выбрана операция сложения по модулю 2.
2 Запишите производящую матрицу для кода с fe = 4, d0=3 Найдите правила
формирования проверочных элементов (символов)
3. Правила формирования проверочных элементов для кода (8 4) записы-
ваются в виде
й5 = Й2-фаз—Й4,
aG=a14-a24a3,
Й7 =й1~(-Й2-фй4,
Й8 = Й1~j-йз—|-Й4.
Найдите проверочную матрицу, определите, сколько ошибок такой код может
обнаружить, сколько ошибок он может исправить. Нарисуйте структурную схему
кодирующего и декодирующего устройства
4. В принятой кодовой комбинации 10100111 кода (8,4), заданного системой
уравнений предыдущего пункта, имеется одна ошибка. Определите ее местопо-
ложение.
5. Постройте структурную схему кодера циклического кода с образующим
полиномом Р(х) = х4; х5 ; 1 с fe=ll. Сколько проверочных элементов содер-
жит кодовое слово такого кода?
6 Какие способы формирования кодовых комбинаций циклического кода
вам известны? Перечислите их достоинства и недостатки.
7. Определите, есть ли ошибки в принятой кодовой комбинации циклическо-
ю кода 101010, если производящий полином Р(х) =х3-|-х2-1-1.
8 Чем отличаются непрерывные коды от блочных? Каковы достоинства не-
прерывных кодов’
9 Будут ли обеспечены требования к вероятности неправильного приема ко-
довых комбинаций кода (7,4) в режиме исправления ошибок, если P*n<10-s,
а вероятность ошибки на символ рош=10_4. Ошибки в дискретном канале пола-
гаем независимыми
10 Докажите, что любой линейный код способен исправить (<Д—1) стира-
нии (или ошибок на стертых позициях кода) при условии, что на нестертых по-
зициях ошибок нет.
11. Будет ли правильно декодировано кодовое слово в примере 7
12 Докажите, что код с добавлением одного разряда на четность является
линейным.
13. Построите комбинацию циклического кода для /г=4(1100) и г = 3,
Д(х)=х3-|-х2-ф1. Осуществите циклический сдвиг полученной кодовой комби-
нации и проверьте, является ли она разрешенной Докажите, что полученные
кодовые комбинации принадлежат линейному коду.
14. Постройте производящую матрицу для кода (7,4) с /Д)=х34хт1.
15. Можно ли с помощью образующего многочлена Р(х) = х4_|-х3-|-х2-| х—1
исправить все одиночные ошибки в коде (15,11)?
297
16. Постройте структурную схему кодера циклического кода с образующим
полиномом х3Ц-хЦ-1 (6=4).
17 Как исправляются ошибки в циклических кодах?
18 Постройте код БЧХ, исправляющий 2 ошибки при длине л=20
Глава 8. АДАПТАЦИЯ В СИСТЕМАХ ПДС
8.1. СТРУКТУРА АДАПТИВНЫХ СИСТЕМ
Принципы адаптации. В предыдущих главах были рассмотрены
вопросы построения приемников, позволяющих в условиях задан-
ной (не меняющейся) помеховой обстановки получить расчетную
вероятность ошибки; даны рекомендации по выбору кодов, обес-
печивающих при известной статистике ошибок требуемую досто-
верность. Во всех случаях полагали, что канал связи стационар-
* ный. Однако большинство известных каналов связи относится
к числу нестационарных — состояние или качество канала связи
меняется во времени. Типичным примером нестационарного ка-
нала являются коротковолновый радиоканал, коммутируемый
проводной канал и др. Для последнего в течение суток вероят-
ность ошибки на элемент может меняться от 10 5 до 10 2. Наи-
большая вероятность ошибки на одиночный элемент наблюда-
ется в начале рабочего дня — в период наибольшей активности
абонентов.
Если число состояний, т. е. промежутков времени, в течение
которых свойства канала неизменны, конечно, а длительность со-
стояния много больше длительности сообщения, передаваемого по
каналу, то такие каналы называют кусочно-стационарными или
квазистационарными. Реальные каналы связи можно, как прави-
ло, отнести к классу кусочно-стационарных.
Пусть дискретный канал без памяти характеризуется значе-
ниями вероятности ошибки Рош, Рош, Рош, ..., Рош, где индекс L
означает число состояний канала (число интервалов стационар-
ности). При этом код можно выбрать исходя или из средней ве-
роятности ошибки
L
Рош ~ Рош,
z=t
или из максимального значения вероятности ошибки. В первом
случае заданная верность будет обеспечена не на всех интервалах
стационарности, во втором случае потребуется введение слишком
большой избыточности. Очевидно, что для наилучшего использо-
298
Внешнее возмущение
Рис 8 1. Структурная схема адап-
тивной системы ПДС-
УУ — управляющее устройство; РУ—
решающее устройство УК — устрой-
ство контроля
Рис. 8.2. Плотности распределения
сигналов на выходе демодулятора
вания канала связи, необходимо в зависимости от состояния ка-
нала менять вносимую в сигнал избыточность, увеличивая ее по
мере роста вероятности ошибки и уменьшая по мере снижения
вероятности ошибки. Можно также менять алгоритм декодирова-
ния, используя, например, при хорошем качестве канала исправ-
ление ошибок и переходя в режим обнаружения ошибок с ухуд-
шением качества канала. Системы, в которых осуществляется
процесс целенаправленного изменения параметров, структуры или
свойств системы в зависимости от условий передачи сообщения
с цепью достижения оптимального в том или ином смысле функ-
ционирования системы, называются адаптивными.
Одной из основных проблем, возникающих при создании адап-
тивных систем, является проблема контроля за состоянием кана-
ла связи на заданном интервате времени. Очевидно, что интер-
вал контроля должен быть меньше (и существенно!) интервала
стационарности. Второй, и не менее важной, является проблема
рационального и наиболее полного использования для перестрой-
ки состояния ПДС полученных сведений о состоянии канала.
Структурная схема адаптивной системы ПДС представлена
на рис. 8.1.
Контроль за состоянием канала связи. Методы контроля со-
стояния канала связи различаются прежде всего используемыми
критериями оценки состояния канала связи. Такими критериями
могут быть вид импульсной характеристики, коэффициент оши-
бок на элемент и т. п. В последнем случае целесообразно гово-
рить об оценке качества дискретного канала, понимая под этим
оценку степени пригодности капала для передачи дискретных со-
общений. Дтя определения коэффициента ошибок Л,)Ш могут быть
использованы прямой и косвенный методы. Прямой метод пред-
299
полагает определение коэффициента ошибок путем подсчета чис-
ла ошибочных элементов в заранее известной на приеме последо-
вательности элементов на интервале анализа Т:
Кош--Иощ/N ,
где Пош—число ошибочных элементов на интервале анализа;
К— число элементов, переданных за время Т. Коэффициент оши-
бок является оценкой вероятности ошибки, обозначаемой в даль-
нейшем Рош-
Косвенные методы оценки качества каналов основаны на ис-
пользовании связи между ошибками и искажениями формы сиг-
нала и предполагают подсчет числа искаженных сигналов с по-
следующим определением раш- Вне зависимости от того, какой
метод применяется, ставится задача—получить за возможно ко-
роткое в<ремя оценку вероятности ошибки. Точность получаемой
оценки можно характеризовать дисперсией оценки вероятности
ошибки. Очевидно, что лучшим из двух рассматриваемых мето-
дов оценки качества канала будет тот, который при заданном
объеме выборки (интервале ана 1иза) дает меньшее з'начение
дисперсии оценки.
При прямом методе по каналу требуется передавать извест-
ную на приеме последовательность, которая называется тестом.
Поэтому метод часто называют тестовым. Косвенные методы не
требуют передачи по каналу тестовой последовательности, и по-
этому называются бестестовыми. Применение бестестовых мето-
дов оценки качества каналов более предпочтительно, так как при
этом качество канала оценивается в процессе работы и по рабо-
чим сигналам.
При передаче по дискретному каналу тестовой последова-
тельности
Рош==тХУг’
г = 1
где //<=1 при наличии ошибок и гу, = О в противном случае. По-
лученная оценка является несмещенной, т. е. математическое
ожидание случайной величины рош равно рош (Л! (р*ош) = pos).
Дисперсия оценки определяется выражением
v
Worn] = Т^-УО[уг]=-^/?О||(1—P(W1).
/V2 7V
/ = 1
Оценка качества канала при использовании бестестового ме-
тода, как уже отмечалось, осуществляется по результатам прие-
ма рабочих сигналов. Пусть для каждого из N единичных элемен-
тов на интервале анализа можно определить условную вероят-
300
ность неправильного приема р,(Н/У), где Н — означает непра-
вильный (ошибочный) прием, a Y—сигнал на приеме. Тогда
Pou, = J] Pi (И/П-
i=l
Полученная оценка является также несмещенной, и дисперсия
этой оценки, как показано в [6.10], меньше, чем при тестовом
методе. Таким образом, при использовании бестестового метода
можно получить при заданном времени анализа меньшее значе-
ние дисперсии оценки или при заданном значении дисперсии
оценки получить оценку для вероятности ошибки за меньшее
время
Рассмотрим еще один простой косвенный метод оценки каче-
ства канала, основанный на подсчете числа стертых единичных
Положим, что в канале
известной дисперсией о2,
определяется формулой
элементов на интервале анализа [6.1J
действует флуктуационная помеха с
При этом пусть вероятность ошибки
(см. гл. 6)
оо о
А„ = f ^i(y)dy = ^W0(y)dy.
0 —оо
_ (У—а)*
(У 3-gp
Пусть M/oW = 7^e - ,м/1(р) = —е
]/ 2л а |/ 2ла
где W'o(y), №i(y)—плотности распределения сигнала на выходе
демодулятора при передаче «0» и «1» соответственно (рис. 8.2).
Тогда
Ав, = у[1 -ф(«И. (8.1)
2
где Ф(?) = —В= С e~tll2dt — функция Крампа. Для заданных а, а и
V 2п J
о
порога стирания А вероятность стирания единичного элемента
А А
А = ^i(y)dy =
—‘д —д
2 \ о / J
Вероятность ошибки является функцией а или (и) о. Вероятность
стирания зависит еще и от порога А. Определяя на интервале
анализа в N элементов число стираний v, можно найти оценку
для вероятности стирания элемента pc — v!N и из уравнения
v/W = — [1 — ф /—-
2 [ \ а
(8.2)
301
Рис 8 3 Вероятности ошибок для трех состояний канала
для заданных значений о и А определить а. Подставив найденное
значение а в (8.1), определим вероятность ошибки
Данные о числе стираний на интервале анализа можно также
использовать для разделения состояний капала. Пусть канал мо-
жет находиться в одном из L состояний, каждое из которых ха-
рактеризуется вероятностью ошибки на элемент Рот- Положим
также, что стирания независимы Тогда вероятность того, что на
интервале передачи N единичных элементов число стираний для
i-ro состояния канала равно v, определяется формулой
р«) (у, v)=сг (рс(1)) (1—Рс(,)) N~v,
где рс(1)— вероятность стирания элемента для i-ro состояния ка-
нала. Типичные графики зависимости P(i)(jV, v) в случае, когда
канал может находиться в одном из трех состояний, приведены
на рис. 8.3. Графики соответствуют случаю 01<02<огз- Из графи-
ков следует, что если число стираний v = 3, то наиболее веро-
ятно, что канал находится в состоянии I (вероятность ошибки
равна Рош), так как P(,)(jV, 3)>P(2)(Ai, <?) >P<3)(jV, 3). При чис-
ле стираний v = 5 целесообразно считать, что канал находится
в состоянии II.
Таким образом, полагаем, что первому состоянию соответству-
ет 0^v^4, второму 5^v^8 и третьему При исполь-
зовании данного метода оценки качества канала, как и любого
другого, возможно вынесение неправильного решения о том, в ка-
ком состоянии находится канал. Например, если при v=4 выно-
сится решение о том, что канал находится в первом состоянии, то
на самом деле он, правда, с меньшей вероятностью мог нахо-
диться и в состоянии II и даже III. Для оценки качества разде-
ления состояний канала можно использовать матрицу у(3, где
у,; — вероятность принять решение о том, что канал находится
в /-м состоянии, когда в действительности имеет место i-e со-
стояние.
302
При разделении трех состояний канала
Yn Y12 Y13
1и = Ъ1 ^22 Пз
Пт У32 Ъз
4 8
где Т11 = 2 C\(p^-pP)N~v-, Yu= Sc^mi-Pcrv-
v=0 v=5
Идеальное разделение состояний канала соответствует случаю,
когда -yi 1 = №2=:Узз= 1, а все остальные элементы матрицы рав-
ны нулю. Разумеется, обеспечить такое разделение невозможно.
Рассмотренные методы оценки качества каналов далеко не
исчерпывают всех возможных, описанию которых посвящено не-
мало статей и монографий [8.2, 8.3].
По месту включения устройств контроля различают адаптив-
ные системы ПДС с устройствами контроля, включаемыми на
передаче, приеме или на передаче и приеме одновременно. Чаще
всего устройства контроля включаются на приеме и информация
о результатах контроля (в случае необходимости) посылается по
каналу обратной связи на передающий конец.
По времени анализа состояния канала различают системы
ПДС с постоянным и переменным временем анализа. В послед-
нем случае интервал анализа зависит от качества канала, при
этом чем больше коэффициент ошибок, тем быстрее можно вы-
нести решение о качестве канала Использование переменного
времени анализа позволяет сократить среднее время, затрачивае-
мое на вынесение решения о качестве канала
Контроль может осуществляться с целью вынесения решения
о качестве канала только на интервале контроля. Это, так на-
зываемый текущий контроль. Его можно трактовать как контроль
качества сигнала. Примером такого контроля является определе-
ние применительно к каждой кодовой комбинации правильности
ее приема. Контроль может производиться также с целью опре-
деления качества канала на участке стационарности по результа-
там измерений на интервале времени существенно меньшем, чем
интервал стационарности При этом задачей контроля является
прогнозирование состояния канала
Если текущий контроль, как правило, предназначен для улуч-
шения условий приема сигнала, по результатам анализа которо-
го вынесено решение о его качестве, то прогнозирование направ-
лено на изменение в системе ПДС, обеспечивающее требуемые
качественные показатели системы после принятия решения.
Использование результатов контроля. По результатам конт-
роля могут меняться параметры УПС или УЗО либо обоих уст-
ройств одновременно. Вопросы адаптации, связанные с УПС, бы-
ли рассмотрены в гл. 6. При адаптации на уровне УЗО различа-
303
ют: адаптивное кодирование и адаптивное декодирование. При
адаптивном кодировании в соответствии с состоянием канала ме-
няется структура кода — соотношение между числом информаци-
онных и проверочных элементов, длина блока и т. п. Вариантом
простейшего адаптивного кодирования является повторение ко-
довой комбинации при обнаружении в ней ошибки. Системы,
в которых повторение кодовых комбинаций происходит при об-
наружении в них ошибок, относятся к системам с ОС. Эти систе-
мы чаще всего применяются на практике, поэтому подробно
рассматриваются ниже.
Если при неадаптивном декодировании решение о виде пере-
даваемой кодовой комбинации принималось на приеме однознач-
но, так как каждому синдрому приписывалось одно наиболее ве-
роятное сочетание ошибок, то при адаптивном декодировании
каждому синдрому соответствует N вариантов сочетания ошибок,
где N — число состояний канала. Таким образом, решение о при-
нимаемой комбинации для одного и того же синдрома зависит
от состояния канала.
Так как при вынесении решения о состоянии канала возмож-
ны ошибки, то и оптимальное решение о кодовой комбинации мо-
жет быть принято с вероятностью, отличной от единицы и зави-
сящей в свою очередь от качества работы устройства контроля
качества канала (сигнала).
8.2. КЛАССИФИКАЦИЯ СИСТЕМ
С ОБРАТНОЙ СВЯЗЬЮ
В системах с ОС ввод в передаваемую информацию избыточ-
ности производится с учетом состояния дискретного канала.
С ухудшением состояния канала вводимая избыточность увели-
чивается, и наоборот, по мере улучшения состояния канала она
уменьшается.
В зависимости от назначения ОС различают системы: с реша-
ющей обратной связью (РОС), информационной обратной связью
(ИОС) и с комбинированной обратной связью (КОС).
В системах с РОС (рис. 8.4,а) приемник, приняв кодовую ком-
бинацию и проанализировав ее на наличие ошибок, принимает
окончательное решение о выдаче комбинации потребителю ин-
формации или о ее стирании и посылке по обратному каналу сиг-
нала о повторной передаче этой кодовой комбинации (переспрос).
Поэтому системы с РОС часто называют системами с переспро-
сом, или системами с автоматическим запросом ошибок (АЗО).
В случае принятия кодовой комбинации без ошибок приемник
формирует и направляет в канал ОС сигнал подтверждения, по-
лучив который, передатчик ПКпер передает следующую кодовую
304
Рис. 8.4. Структурные схемы системы ПД с ОС:
а —С РОС; б —с ИОС; ПКпер — передатчик прямого капала; ПКПР — приемник прямого
канала; ОКпер — передатчик обратного канала; ОКПР — приемник обратного канала; РУ —
решающее устройство
комбинацию*. Таким образом, в системах с РОС активная роль
принадлежит приемнику, а по обратному каналу передаются вы-
рабатываемые им сигналы решения (отсюда и название — решаю-
щая ОС).
Передача с РОС аналогична телефонному разговору в усло-
виях плохой слышимости, когда один из собеседников, плохо рас-
слышав какое-либо слово или фразу, просит другого повторить
их еще раз, а при хорошей слышимости или подтверждает факт
получения информации, или во всяком случае не просит повто-
рения.
В системах с ИОС (рис. 8.4,6) по обратному каналу переда-
ются сведения о поступающих на приемник кодовых комбинаци-
ях (или элементах комбинации) до их окончательной обработки
и принятия заключительных решений. При разговоре по телефо-
ну часто используют ретрансляционную ИОС, когда в условиях
сильных помех просят собеседника повторить переданное сооб-
щение, чтобы убедиться, что он его воспринял правильно. При
правильном повторении передающий дает подтверждение, а при
неправильном — повторяет сообщение еще раз. Частным случаем
ИОС является полная ретрансляция поступающих на приемную
сторону кодовых комбинаций или их элементов. Соответствующие
системы получили название ретрансляционных. В более общем
случае приемник вырабатывает специальные сигналы, имеющие
меньший объем, чем полезная информация, но характеризующие
качество ее приема, которые по каналу ОС направляются пере-
датчику. Если количество информации, передаваемое по каналу
ОС (квитанции), равно количеству информации в сообщении, пе-
редаваемом по прямому каналу, то ИОС называется полной. Ес-
ли же содержащаяся в квитанции информация отражает лишь
* В ряде случаев специальный сигнал о правильности приемников не посы-
лается, а передатчик, не получая в течение определенного времени сигнала за-
проса на повторение, передает следующую кодовую комбинацию.
20—6085 305
некоторые признаки сообщения, то ИОС называется укороченной.
Таким образом, по каналу ОС передается или вся полезная ин-
формация, или информация о ее отличительных признаках, по-
этому такая ОС называется информационной.
Полученная по каналу ОС информация (квитанция) анализи-
руется передатчиком, и по результатам анализа передатчик при-
нимает решение о передаче следующей кодовой комбинации или
о повторении ранее переданных. После этого передатчик переда-
ет служебные сигналы о принятом решении, а затем соответст-
вующие кодовые комбинации. В соответствии с полученными от
передатчика служебными сигналами приемник ПКпр или выдает
накопленную кодовую комбинацию получателю информации, или
стирает ее и запоминает вновь переданную. В системах с укоро-
ченной ИОС, естественно, меньше загрузка обратного канала, но
больше вероятность появления ошибок по сравнению с полной
ИОС.
В системах с КОС решение о выдаче кодовой комбинации по-
лучателю информации или о повторной передаче может прини-
маться и в приемнике, и в передатчике системы ПДС, а канал ОС
используется для передачи как квитанций, так и решений.
Системы с ОС подразделяют также на системы с ограничен-
ным числом повторений и с неограниченным числом повторений.
В системах с ограниченным числом повторений каждая кодовая
комбинация может повториться не более I раз, и в системах с не-
ограниченным числом повторений передача комбинаций повторя-
ется до тех пор, пока приемник или передатчик не примет реше-
ние о выдаче этой комбинации потребителю. При ограниченном
числе повторений вероятность выдачи получателю неправильной
комбинации больше, но зато меньше потери времени на передачу
и проще реализация аппаратуры. Заметим, что в системах с ОС
время передачи сообщения не остается постоянным и зависит от
состояния канала.
Системы с ОС могут отбрасывать либо использовать информа-
цию, содержащуюся в забракованных кодовых комбинациях,
с целью принятия более правильного решения. Системы первого
типа получили название систем без памяти, а второго — систем
с памятью.
Обратной связью могут быть охвачены различные части си-
стемы (рис. 8.5):
1) канал связи, при этом по каналу ОС передаются сведения
о принимаемом сигнале до принятия какого-либо решения;
2) дискретный канал, при этом по каналу ОС передаются ре-
шения, принятые первой решающей схемой PCi на основе ана-
лиза единичных элементов сигнала;
3) канал передачи данных, при этом по каналу ОС переда-
ются решения, принятые второй решающей схемой РС2 на осно-
ве анализа кодовых комбинаций.
306
Передатчик
Приемник
Рис 8 5 Обратная связь
в системе ПДС
Канал ОС
В первом случае для контроля канала связи используют уст-
ройства типа детектора качества, которые анализируют те или
иные параметры принимаемого сигнала (амплитуду, частоту, дли-
тельность) или уровень помех. При этом по каналу ОС могут пе-
редаваться команды на изменения параметров передаваемых
сигналов: мощности, спектрального состава, темпа передачи, из-
быточности кода и т. п. На передающей стороне должны быть
предусмотрены соответствующие органы воздействия на источни-
ки сигналов: регуляторы мощности, корректоры, кодопреобразо-
ватели, управляемые сигналами, поступающими по каналам ОС.
Во втором случае в качестве анализатора также обычно ис-
пользуют детекторы качества, контролирующие амплитуду, или
краевые искажения сигнала после демодуляции, или и то,
и другое.
В третьем случае анализатором служит сам декодер канала,
принимающий решение о наличии или отсутствии ошибок в при-
нятых кодовых комбинациях.
Из изложенного следует, что системы с ОС являются адаптив-
ными’ темп передачи информации по каналам связи автоматиче-
ски приводится в соответствие с конкретными условиями прохож-
дения сигналов.
Наличие ошибок в каналах ОС приводит к тому, что в систе-
мах с РОС возникают специфические потери верности, состоящие
в появлении лишних кодовых комбинаций — вставок — и пропа-
дания кодовых комбинаций — выпаданий Вставки получаются
в тех случаях, когда приемник посылает сигнал решения о пра-
вильности принятой кодовой комбинации, а в канале ОС он
трансформируется в сигнал переспроса. В этом случае передатчик
повторяет предыдущую кодовую комбинацию, а приемник вос-
принимает ее как следующую, т. е. потребителю одна и та же
кодовая комбинация выдается дважды. Выпадения получаются
тогда, когда выработанный приемником сигнал переспроса в ка-
на ie ОС трансформируется в сигнал подтверждения правильно-
сти приема. В этом случае передатчик передает следующую ко-
довую комбинацию, а предыдущая стирается приемником и к по-
лучателю не поступает.
В системах с ИОС также возможны потери верности за счет
ошибок в каналах ОС. В укороченных ИОС такие ошибки возни-
20* 307
кают по причинам, аналогичным вышеизложенным, когда квитан-
ция, соответствующая искаженному сигналу в канале ОС, транс-
формируется в квитанцию, соответствующую неискаженному сиг-
налу. В результате передатчик не в состоянии обнаружить факт
ошибочного приема. В полных ИОС в канале ОС возможны ис-
кажения, полностью компенсирующие искажения в прямом кана-
ле, в результате чего ошибки не могут быть обнаружены. Поэто-
му вопросам образования каналов ОС в системах ПДС уделяется
очень большое внимание. Каналы ОС обычно образуются в кана-
лах обратного направления связи с помощью методов частотного
или временного разделения от каналов передачи полезной ин-
формации. Методы ЧРК используют обычно в системах со срав-
нительно небольшой удельной скоростью передачи, например, при
передаче данных со скоростью 600... 1200 бит/с по каналам ТЧ.
Во многих системах с РОС применяется структурный метод раз-
деления, когда для сигнала переспроса используется специальная
кодовая комбинация, а любая разрешенная кодовая комбинация
в приемнике дешифруется как сигнал подтверждения и любая не-
разрешенная комбинация — как сигнал переспроса. Для защиты
от искаженных сигналов, передаваемых по каналам ОС, приме-
няют те же способы, что и для повышения верности полезной ин-
формации: корректирующие коды, многократную и параллельную
передачи.
В настоящее время известны многочисленные алгоритмы ра-
боты систем с ОС. Наиболее распространенными среди них явля-
ются системы: с РОС с ожиданием сигнала ОС; с безадресным
повторением и блокировкой приемника и с адресным повторе-
нием.
Системы с ожиданием после передачи кодовой комбинации
либо ожидают сигнал обратной связи, либо передают ту же ко-
довую комбинацию, но передачу следующей кодовой комбинации
начинают только после получения подтверждения по ранее пере-
данной комбинации.
Системы с блокировкой осуществляют передачу непрерывной
последовательности кодовых комбинаций при отсутствии сигна-
лов ОС по предшествующим S комбинациям. После обнаружения
ошибок в (5-|-1)-й комбинации выход системы блокируется на
время приема S комбинаций, в запоминающем устройстве прием-
ника системы ПДС стираются S ранее принятых комбинаций и
посылается сигнал переспроса. Передатчик повторяет переда-
чу S последних переданных кодовых комбинаций.
Системы с адресным повторением отличает то, что кодовые
комбинации с ошибками отмечаются условными номерами, в со-
ответствии с которыми передатчик производит повторную пере-
дачу только этих комбинаций.
В системе с РОС по прямому каналу передаются информаци-
онные комбинации длиной п единичных элементов и команды
308
решения, а по каналу обратной связи — служебные комбинации.
В системе с ИОС по прямому каналу передаются информацион-
ные комбинации длиной k единичных элементов и команды реше-
ния, а по каналу ОС —проверочные комбинации длиной п—k
единичных элементов. При п—k<Ck система с РОС подобна си-
стеме с укороченной ОС, при п—k=k — системе ИОС с полной
ОС. Нередко при сравнении систем с РОС и ИОС игнорируется
это обстоятельство и сопоставляются системы с РОС при п—
с системой с полной (ретрансляционной) ОС В результате срав-
нения несопоставимых систем делается вывод о том, что скорость
передачи в системе с РОС указанного типа вдвое выше, чем в
рассмотренной системе с ИОС.
При сравнении сопоставимых систем с РОС и ИОС выводы
получаются иные. Выберем в качестве объектов сравнения
системы с РОС и ИОС, использующие помехоустойчивый код
(n, /г). Если каналы прямого и обратного направлений передачи
одинаковы и ошибки в них независимы, то вероятности одинако-
вой трансформации проверочных разрядов в обоих каналах оди-
наковы. Поэтому обнаруживающая способность кода не зависит
от того, где происходит сравнение проверочных разрядов: на пе-
редающей (в системе с ИОС) или на приемной (в системе с
РОС) стороне системы. Следовательно, при равной помехозащи-
щенности прямого и обратного каналов и при условии безошибоч-
ной передачи служебных сигналов системы с ИОС и РОС обеспе-
чивают одинаковую верность передачи. Отсюда следует, что и
среднее число повторных передач (переспросов) в обеих системах
совпадает.
Средняя скорость передачи сообщений по прямому каналу в
системах с РОС меньше, чем в системах с ИОС, поскольку в пер-
вых с каждым сообщением длиной k дополнительно передается
еще п—k проверочных единичных элементов В системах с ИОС
эти проверочные элементы передаются по обратному канату. Ес-
ли помехоустойчивость обратного канала выше, чем прямого, то
верность передачи в системах с ИОС также выше, чем в системах
с РОС. Такое положение может иметь место, например, при пе-
редаче информации с искусственного спутника Земли (ИСЗ) на
землю, когда обратный канал может быть организован с по-
мощью мощного передатчика и высокоэффективной антенны.
В случае группирующихся ошибок в системах с ИОС часто воз-
никает естественная (за счет разноса во времени передачи по
прямому и обратному каналам) декорреляция ошибок в прямом
и обратном каналах. В системах с РОС информационные и про-
верочные разряды передаются слитно и такая декорреляция от-
сутствует.
Верность передаваемой информации в обоих типах рассмат-
риваемых систем в значительной! степени определяется свойства-
ми выбранного кода, обнаруживающего ошибки. При пакетном
309
распределении ошибок верность определяется не только свойст-
вами кода, но и временем блокировки. Объясняется это тем, что
приемник, обнаруживая первую ошибку пакета, блокируется на
S кодовых комбинаций, благодаря чему часть ошибок этого па-
кета им не воспринимается. Таким образом, увеличение емкости
накопителя передатчика приводит к некоторому увеличению вер-
ности передачи. Однако при этом снижается пропускная способ-
ность системы, так как при запросе приемник блокируется на
большее время.
Невыгодны и короткие кодовые комбинации, поскольку для
обеспечения заданных корректирующих свойств отношение kfn
в них меньше, чем в длинных кодовых комбинациях, т. е. больше
относительная избыточность. Поэтому существуют оптимальные
значения длин кодов, которые для каналов с определенными ха-
рактеристиками и заданными скоростями модуляции обеспечива-
ют максимальную скорость передачи информации.
Исследования показали, что при заданной верности передачи
оптимальная длина кода в системах с ИОС несколько меньше,
чем в системах с РОС, что удешевляет реализацию устройств ко-
дирования и декодирования. Однако общая сложность реализа-
ции систем с ИОС больше, чем систем с РОС. Поэтому системы
с РОС нашли более широкое применение. Системы с ИОС при-
меняют в тех случаях, когда обратный канал может быть без
ущерба для других целей эффективно использован для передачи
квитанций.
8.3. СТРУКТУРНЫЕ СХЕМЫ, АЛГОРИТМЫ
И ХАРАКТЕРИСТИКИ НЕКОТОРЫХ СИСТЕМ
С РОС И ИОС
Система с РОС и ожиданием решающего сигнала (РОС-ОЖ).
Структурная схема РОС-ОЖ представлена на рис. 8.6, а алго-
ритм работы — на рис. 8.7. Работает система следующим образом.
По сигналу управляющего устройства передатчика УУпер
прямого канала ПКпер, источнику сообщений ИС посылается сиг-
нал готовности аппаратуры к передаче данных (А1). По этому
сигналу ИС выдает одну очередную комбинацию сообщения, ко-
торая поступает в кодер и накопитель передачи Нпер передатчи-
ка ПКпер (А2). Накопитель Нпер служит для запоминания одной
передаваемой комбинации с целью возможности ее повторения,
если придет сигнал «Переспрос» по обратному каналу. Кодер в
процессе кодирования добавляет к передаваемым информацион-
ным разрядам проверочные разряды, полученные по законам
формирования разрешенных комбинаций применяемого кода, на-
пример циклического (АЗ). Пройдя через УПСПеРПКпер дискрет-
ные сигналы приобретают вид, удобный для передачи по исполь-
310
Рис 8 6 Структурная схема системы ПД с РОС-ОЖ
зуемому каналу связи. Если последний является каналом ТЧ, то
сигнал на выходе УПС имеет вид модулированного колебания
(А4).
В приемнике прямого канала ПКпер сигнал после обратного
преобразования в УПСпр(А5) появится через соответствующее
время распространения tP.
Информационная часть комбинации записывается в Нпр пря-
мого канала (А6) и одновременно эта комбинация поступает
в декодер приемника прямого канала, с помощью которого про-
изводится обнаружение ошибок.
Решающее устройство РУ выдает решение о качестве приня-
той комбинации на УУпр. Через tdn устройство УУпр прямого ка-
нала выдает команды в Нпр и формирователь сигнала обратной
связи ФСОС передатчика обратного канала ОКпеР- Если ошибка
не обнаружена, то формируется сигнал «Подтверждение» в об-
ратном канале и выдается команда, по которой информация из
Нпр поступает потребителю ПС (А7, А8), (см. на рис. 8.8 пере-
дачу блока 1). Для наглядности графики сигналов, относящихся
к разным частям системы (относительно ст. А и Б), разнесены
на рис. 8 8. Пройдя по обратному каналу за время tp0C сигнал
подтверждения распознается дешифратором сигнала обратной
связи ДСОС на ст. А (А10... А12). С помощью УУпер через вре-
мя анализа сигнала обратной связи /а ос от ИС запрашивается
очередная комбинация и цикл передачи повторяется (информа-
ция в НПер и Нпр в этом случае автоматически стирается при по-
ступлении новой порции (А13... А14)).
311
Рис 8 7 Граф-схема алгоритма работы системы ПДС с РОС-ОЖ
АД — запрос очередной комбинации (ЗОЮ от ИС, А2 — запись очередной комбинации (ин-
формационной части) в Нпер, АЗ — кодирование А4 — передача по ПК, А5 — прием из ПК,
Аб — декодирование и запись принятой комбинации (информационной части) в Нпр, А7 —
выдача комбинации из Нпр ПС, А8—формирование сигнала подтверждения, А9 — фор-
мирование сигнала переспроса, стирание комбинации в Нпр и запрещение ее выдачи в ПС;
АЮ —передача по ОК, АП—прием из OK, А12 — дешифрирование сигнала ОС, А13 —
стирание предыдущей комбинации в //пер, AI4 — блокировка ИС и повторение передачи
комбинации из Нпер
Если же ошибка в ПКпр обнаруживается декодером, то фор-
мируется сигнал переспроса в обратном канале и УУпр ПК вы-
дает команду, запрещающую выдачу информации потребителю
ПС из Нпр (эта информация уже не представляет интереса и она
уничтожается в накопителе, т. е. «стирается»). Временная ди-
аграмма процессов (А9...А13) показана на рис. 8 8 при передаче
комбинации 2 Пройдя по обратному каналу за время /рОс сигнал
переспроса распознается ДСОС ст. А. С помощью УУпер через
/а ос из накопителя Нпер хранящаяся там комбинация повторно
передается в кодер и далее. А источнику сообщений ИС и
УУпер ПКпеР поступает сигнал, запрещающий передавать очередную
комбинацию. Следовательно, информация из Нпер будет повто-
ряться до тех пор, пока не придет сигнал подтверждения. Если
происходит длительное нарушение связи, в системе начинает цир-
кулировать одна и та же комбинация — говорят, что система «за-
312
- ИНН Сигнал подтверждения
Сигнал леоеспроса
Комбинация с обнаруженной ошибкой
Рис 8 8. Временная диаграмма работы системы с РОС-ОЖ
цикливается» С целью предотвращения «зацикливания» обычно
ограничивают количество таких повторов. После некоторого чис-
ла повторов одной и той же комбинации система переводится
в режим «авария»
Таким образом, источнику сообщений «разрешается» выда-
вать только по одной комбинации с паузой между двумя сосед'
ними, равной времени ожидания ответа подтверждения по обрат-
ному каналу
Минимальное время ожидания /ож можно легко определить на
рис. 8 8:
Сж = ^р-МанЧ-МсТ^р + ОС,
где Мс— длительность сигнала обратной связи.
Алгоритм работы системы с РОС-ОЖ весьма наглядно иллю-
стрируется графом состояний системы на рис. 8.9. Как видно из
313
Выдача ошибки ПИ Выпадение
_____________1_________________I___________1
1 и цикл 2 и цикл 3 й цикл
Рис. 8 9 Граф состояний
системы с РОС-ОЖ
НП — начало передачи. 00 —
обнаруженная ошибка. НО —
необнаруженная ошибка. ППр—
правильный прием, ИП — иска-
жение подтверждения, ИЗ—
искажение запроса, ПП — пра-
вильное подтверждение, ПЗ —
правильный запрос
рисунка, правильный прием кодовой комбинации происходит
только в следующих случаях (отмечено двойными окружностями
и двойными линиями):
правильная (без ошибок) первая передача по прямому кана-
лу и правильный прием сигнала подтверждения;
обнаружение ошибки при первой передаче, правильный при-
ем сигнала запроса, правильная вторая передача и правильный
прием второго сигнала подтверждения;
обнаружение ошибки при первой передаче, правильный прием
сигнала запроса, обнаружение ошибки при второй передаче, пра-
вильный прием второго сигнала запроса, правильная третья пе-
редача и т. п.
После этого система переходит к передаче следующей кодо-
вой комбинации. В случае необнаружения ошибки при передаче
по прямому каналу и правильному приему сигнала подтвержде-
ния (отмечено штриховой линией) к ПИ поступает информация
с ошибкой и система переходит к передаче следующей кодовой
комбинации. Если при необнаруженной ошибке в прямом канале
происходит трансформация сигнала подтверждения в сигнал за-
проса в обратном канале (отмечено штрихпунктирной линией),
то система повторяет передачу той же кодовой комбинации, в ре-
зультате чего происходит «вставка». Вставка может произойти и
в том случае, когда при правильном приеме по прямому каналу
в обратном канале сигнал подтверждения трансформируется
в сигнал запроса.
Если при передаче по прямому каналу приемник обнаружива-
ет ошибки и в обратном канале сигнал запроса трансформирует-
ся в сигнал подтверждения, передатчик выдает новое сообщение,
а так как предыдущее сообщение стирается, то происходит «вы-
падение». Как видно на графе, вставки и выпадения могут про-
исходить не только на первом цикле передачи кодовой комбина-
ции, но и на последующих.
314
От ИС
(ст А)
ПКпер
(ст А)
ПКпр
(ст Б)
0Кпер
(ст Б)
0Кпр
(ст А)
к ПС
(ст Б)
Рис. 8.10 Появление сдвига при работе системы ПД с РОС-ОЖ
Эти два явления, характерные для всех систем с ОС, получи-
ли общее название «сдвига».
На рис. 8.10 показана временная диаграмма работы системы
с РОС-ОЖ с изменением сигнала в канале ОС. При ошибке в сиг-
нале подтверждения (см. передачу кодовой комбинации 3) про-
исходит вставка, при ошибке в сигнале переспроса (см. передачу
кодовой комбинации 4) образуется выпадение. Для борьбы со
сдвигами применяют различные способы. Наряду с общими
методами повышения помехоустойчивости обратного канала наи-
более радикальным оказался метод циклической нумерации пе-
редаваемых комбинаций. Используют две разновидности таких
методов.
При первом методе передаваемые комбинации циклически ну-
меруются. Номер размещается в начале каждой комбинации или
непосредственно за синхропоследовательностью, служащей для
групповой синхронизации, и сохраняется за комбинацией до тех
пор, пока она не будет правильно принята, т е. при повторных
передачах комбинации ее номер сохраняется Например, при пе-
редаче комбинаций 1, 2, 3, 4 и длине цикла нумерации, равно-
го 3, в случае однократной передачи первой комбинации, трех-
кратной— второй и двухкратной — третьей последовательности
номеров в канале имеет следующий вид- ai, а2, а2, а2, ait а3, а^.. ,
где аь а2, аз — циклические номера комбинаций.
При втором методе все комбинации, которые передаются
1 раз, имеют один и тот же номер (например, а0) и только при
повторениях производится циклическая нумерация, соответствую-
щая числу повторений. Например, при трех циклических номе-
рах, однократной передаче первой комбинации, двух повторениях
второй, пяти — третьей и одном — четвертой последовательность
циклических номеров в канале имеет следующий вид:
«о, «о, «1, «2, «о, «1, п2, аз, ah а2, а0, а,,...
315
При обоих методах циклической нумерации приемник системы
контролирует номера принятых комбинаций. В тех случаях, ког-
да номер принятой комбинации предшествует ожидаемому, при-
нятая комбинация стирается, а в канал ОС передается сигнал
подтверждения. Рассмотренная ситуация возникает при транс-
формации сигнала подтверждения на предшествующую комби-
нацию в сигна'1 запроса, что в отсутствие циклической нумерации
привело бы к вставке комбинации. Если номер принятой комби-
нации соответствует номеру следующей после ожидаемой, что со-
ответствует трансформации «переспроса» в «подтверждение», то
приемник системы вырабатывает специальный сигнал о выпаде-
нии комбинации. По этому сигналу передача может быть пре-
кращена, зафиксирован факт наличия выпадения или произведен
повторный запрос на повторение.
Следовательно, процесс передачи кодовой комбинации может
быть закончен в течение одного цикла выдачей получателю сооб-
щений правильной или содержащей ошибку комбинации, а может
продолжаться некоторое число циклов. Таким образом, работа
системы с ОС и повторением передачи блоков представляют собой
случайный процесс, удобным средством исследования которого
является использование вероятностных графов. Подобно широко
используемым в теории электрических цепей сигнальным графам,
вероятностные графы состоят из некоторого числа узлов и соеди-
няющих их направленных ветвей. Каждый из узлов вероятностно-
го графа соответствует одному из характерных временных момен-
тов состояния системы в процессе ее функционирования. Каждая
из направленных ветвей отображает переход системы из одного
состояния в другое.
Если из одного состояния системы в другое возможны перехо-
ды за время t\ с вероятностью pi, за время G — с вероятностью
р2 и за время tx—с вероятностью рх, то соответствующему реб-
v t.
ру графа соотносят переходную функцию f (z) = Piz ’•
i=i
Для анализа системы ПДС удобно предположить, что вели-
чины /, кратны некоторой величине t, т. е. /,= cpt, где at — целые
числа. При этом в качестве единицы масштаба времени примем
i — время передачи одной комбинации помехоустойчивого кода
(я, k). Обозначив можно переходы описывать производя-
V а
щей функцией / (х) = S ptx 1.
1=1
Эффективность системы ПДС оценивается вероятностью вы-
дачи ПС кодовых комбинаций с ошибками, временем задержки
сообщений и скоростью их передачи.
316
ф,ПЗ^-~3 3
1 2\р^ ПП 3
ЗП ЗП
Рис 8 11 Вероятностный граф си-
стемы с РОС-ОЖ при идеальном
канале ОС
Рис 8 12 Вероятностный граф системы
с РОС-ОЖ при канале ОС с ошибками
Рассмотрим сначала случай передачи сообщения, состоящего
из S кодовых комбинаций кода (п, k), при отсутствии ошибок
в канале ОС.
Соответствующий вероятностный граф, содержащий S-j-1 со-
стояние системы, представлен на рис. 8.11. Каждое из S первых
состояний системы соответствует передаче t-й кодовой комбина-
ции. Состояние S-|-l характеризует окончание передачи сообще-
ния, т. е. выдачи в ПС всех S кодовых комбинаций.
После приема сообщения каждой t-й кодовой комбинации и
принятия по ней решения на выдачу ее ПС система переходит
в состояние !-{-1. Если же принимается решение о переспросе, си-
стема остается в состоянии I. Обозначим вероятность принятия
решения о выдаче информации ПС через рп, а решение о пере-
спросе — р3= 1—р„.
Будем считать, что эти вероятности зависят только от сигна-
лов, соответствующих данной кодовой комбинации, и не зависят
от ранее принятых решений. При этом по графу системы могут
быть найдены производящая функция вероятностей перехода
р(£, S) системы из состояния 1 в состояние S-f-l за £ шагов
(g>S):
и производящая функция вероятностей перехода системы из со-
стояния i в состояние i-|-l за £ шагов:
fi(x) = рпх/(1 — р3х).
Среднее число переданных по каналу комбинаций на одну
(л-=1) принятую комбинацию
All[g] =Л'(1) = 1/(1—Рз) = 1/Рп.
Поскольку число комбинаций, поступающих в ПС, в Л4[£] раз
меньше числа передаваемых комбинаций, вероятность выдачи
ПС комбинации с необнаруженной ошибкой
рошс(п) =РоШ(п)М1[£]=рош(п)/рп,
где рош(п) —вероятность необнаруженной ошибки.
317
J'aK как скорость передачи данных, т е число символов вы-
даваемых ПС за единицу времени, в системах с ОС меняется
в зависимости от состояния дискретного канала, различают те-
кущую R, и среднюю Rcp скорости Текущая скорость определя-
ется отношением числа двоичных символов, выданных с выхода
системы ПС за время t, ко времени t. Средняя скорость есть ве-
личина, к которой стремится текущая скорость при достаточно
больших t В соответствии с этим определением и временной ди-
аграммой на рис 8 8
т «+(/0ж/’со) Л'пер
где т0 —длительность единичного элемента; NBP— число комби-
наций, выданных ПС за время /; 7Vnep — число комбинаций, пере-
данных по каналу за время t
С уЧеТОМ ТОГО, ЧТО Nnp/Nnep = 1/Л4[£] =рп,
Ят = /грп/(п+Д),
где Д = /ож/т0 Время /ож=2/р-4-/о с4-/а К-На с гДе t?— время рас-
пространения сигнала по каналу; toc — длительность сигнала об-
ратной связи; /а к, /ас — время анализа комбинации и сигнала об-
ратной связи
Следовательно, система с РОС-ОЖ достаточно эффективна
при п^>Д, т е при работе со сравнительно длинными кодовыми
комбинациями и небольшими скоростями модуляции по каналам
небольшой протяженности
Время передачи сообщения длиной S кодовых комбинаций—
время задержки сообщения в системе является случайной вели-
чиной и может быть охарактеризовано вероятностью задержки
сообщения в системе на время, большее некоторой величины т—
—Величину т цезесообразно выбрать исходя из време-
ни, необходимого для однократной передачи всего сообщения, ко-
торое, как следует из рис 8 11, составляет
/| = *8ито-{- — 1) Дтсф/р-ф/а к
Так как при передаче сообщения возникает необходимость в по-
вторных передачах некоторых кодовых комбинаций, время пере-
дачи всего сообщения увеличивается, что может быть учтено
введением коэффициента числа повторений х
(S-фх) ИТп-{- [ (5— 1) -р(х— 1) ] Дто4"/р4~/а к,
где х = 0, 1, 2,
Величину /х целесообразно принять в качестве т Вероятность
приема всего сообщения после передачи по каналу £ комбина-
ций равна вероятности p(g, S) перехода системы из состояния 1
в состояние S-J-1 за g шагов Поэтому вероятность задержки со-
318
общения из S блоков в системе на время, большее т=/х, равна:.
оо
р(/>т)= 2
£=S + x
Вероятности p(g, S) равна соответствующим коэффициентам
разложения производящей функции fs(x) в степенной ряд:
, , . s s|, . S , . , S(S+1) , ,
/5(л) — рпХ 1 + — р, (л) — р3х + ...
S(S+1) .(S + x-i) х х ]
ф----------------- р3х
X' J
Г1 /С I S (S-р 1) . (S-|-X—1) X х ^х х S
Поэтому p(S ч х, 5) =----------i—I------p3pn = С5+х-1рзРп-
xi
С учетом S4 x = ^ получим p(?, S) = c\-ipl~sp„ при £S&S.
Искомая вероятность задержки сообщения в системе состав-
ляет
р т) = V clzf p3~spn-
Рассмотрим теперь более общий случай, когда обратный канал
не идеален, т е в нем имеются ошибки Введем следующие обо-
значения рпп — вероятность получения сигнала подтверждения
при передаче сигнала подтверждения, рзп=1—рпп — вероят-
ность получения сигнала запроса при передаче сигнала подтверж-
дения; р3 з — вероятность получения сигнала запроса при переда-
че сигнала запроса, рПз=1—р3 з — вероятность получения сигна-
ла подтверждения при передаче сигнала запроса
Вероятностный граф, соответствующий передаче сообщения
из S комбинаций, представлен на рис 8 12 На нем показаны
следующие состояния системы 1 — начало передачи первой
комбинации сообщения; Г — принятие приемником системы ре-
шения о выдаче первой комбинации ПС и передача по каналу
ОС сигнала подтверждения; I" — принятие приемником системы
решения о переспросе первой комбинации и передача по каналу
ОС сигнала запроса; 2 — прием сигнала подтверждения по пер-
вой комбинации и передача второй комбинации или прием сиг-
нала запроса по первой комбинации и повторная передача пер-
вой комбинации; 2', 2", 3 определяются аналогично; 5-|-1— при-
ем сигнала подтверждения по S-й комбинации, т е конец переда-
чи сообщения
Производящая функция перехода системы из состояния 1
в состояние S~{-1 за | шагов имеет следующий вид
fS(^) = (PnPn г, + РзРп.з)5-----~----------->
(1 —(АРз.з + РпРз.п) W
319
где переходам системы из состояния i в состояние i' и I" припи-
сана переменная х, а переходам из состояний I' или I" в состоя-
ния i или i-j-1 — переменная у.
Вводя следующие обозначения: z=xz/; р = р3рз.з+рпрз п; Q =
= 1— р = рпрп.п+рзрпз, получим fs(z) = ( ——V.
рг /
Следовательно, производящая функция для системы
с РОС-ОЖ с неидеальным обратным каналом имеет тот же вид,
что и для системы с идеальным обратным каналом. Поэтому по-
лученные выше формулы справедливы и для системы с неиде-
альным обратным каналом при замене в них р3 на р и рп на Q:
Ml [£] = 1/Q= 1/(рпРп.п+рзрп.з) ;
рош.с (П) =рош («) /Q = Poiu(n)/PnPn п+ РзРп з!
' 7 (РиРи п 4" РзРп з)>
П + Л
оо
Р т) = Е Ci-l (РзРз.з+РпРз n?“S(№.n+ РзРп зЛ
Эти выражения показывают, что при незначительных вероят-
ностях ошибок рп.з и р3.п->0 и соответственно рп.п и р3з->1 пара-
метры обратного канала практически не сказываются на значени-
ях верности, скорости передачи и временных характеристиках си-
стемы.
Эффективность использования пропускной способности кана-
ла связи в системах с РОС—ОЖ сравнительно невелика, так как
прямой канал простаивает в промежутки времени между пере-
дачами отдельных комбинаций в ожидании получения сигналов
решения. Поэтому такие системы используют главным образом
в тех случаях, когда определяющим является требование просто-
ты (экономичности) аппаратуры. Стремление к более полному
использованию каналов привело к разработке систем, в которых
отсутствуют промежутки между передачей отдельных комби-
наций.
Система с РОС и непрерывной передачей информации и бло-
кировкой РОС-НПбл. Структурная схема системы РОС-НПбл
аналогична схеме, представленной на рис. 8.6, а алгоритм ее ра-
боты дан на рис. 8.13. Работа системы происходит следующим
образом.
При отсутствии сигнала переспроса к ИС от УУ идет сигнал
готовности аппаратуры к передаче (ЗОК) и ИС соответственно
выдает информационные комбинации (А1). Они поступают в ко-
дер и одновременно запоминаются в накопителе Япер емкостью h
комбинаций (при отсутствии сигнала переспроса информации
в Нпер заменяется, сдвигаясь каждый раз на одну комбинацию)
(А2).
320
Рис. 8.13 Граф-схема алго-
ритма работы системы ПД
с РОС-НП бл:
А1 — запрос очередной комби-
нации от ИС; А2 — запись оче-
редной комбинации (информа-
ционной части) в HneD ем-
костью h комбинаций, АЗ—
кодирование, А4 —передача по
ПК; А5 — прием из ПК. Аб —
декодирование и запись приня-
той комбинации (информацион-
ной части) в HnD, А7 — выдача
комбинации из Нпр к ПС, А8 —
формирование сигнала под-
тверждения А9 — формирова-
ние сигнала переспроса н бло-
кировка ПС на ft блоков;
А10 —передача по обратному
каналу, АН — прием из обрат-
ного канала, А12 — дешифриро-
вание сигнала ОС, AI3 —стира-
ние предыдущей комбинации из
Нпер; А14 — блокировка ИС и
повторение передачи h комби-
наций из Нпер
На приеме информационная часть очередной комбинации бу-
дет записана в Нпр и одновременно декодер так же, как и в си-
стеме с РОС-ОЖ, определит наличие или отсутствие ошибок
в этой комбинации (АЗ...А6). Решающее устройство выдает со-
ответствующий сигнал в УУ приемника ПК. Если ошибка не об-
наружена, то УУ ст. Б формирует команду подтверждения, кото-
рая передается по обратному каналу и одновременно дает сиг-
нал на вывод информационной комбинации из Нпр потребителю
(А7, А8). Получая сигнал подтверждения, передатчик ст. А про-
должает непрерывную передачу информации. Если же ошибка
обнаружена, то УУ ст. Б формирует команду переспроса, переда-
ваемую по обратному каналу на передатчик прямого канала
ст. А (А9, А10).
При реализации такой системы возникают трудности, вызван-
ные конечным временем передачи и распространения сигналов.
Если в некоторый момент закончен прием комбинации, в которой
обнаружена ошибка, то к этому моменту по прямому каналу уже
ведется передача следующей комбинации. Если время распрост-
ранения сигнала в канале превышает длительность комбинации,
то к моменту окончания приема комбинации с ошибкой может
21-6085 321
закончиться передача одной или нескольких комбинаций, следую-
щих за ней. Еще некоторое число комбинаций будет передано до
того времени, пока будет принят и проанализирован сигнал пере-
спроса по второй комбинации.
Так как передатчик повторяет лишь комбинации, по которым
принят сигнал переспроса, то в результате повторения с запазды-
ванием порядок следования комбинаций, выдаваемых системой
ПС, будет отличаться от порядка поступления комбинаций в си-
стему. Но получателю комбинации должны поступать в том же
порядке, в котором они передавались. Поэтому для восстановле-
ния порядка следования комбинаций в приемнике должны быть
специальное устройство и буферный накопитель значительной
емкости, поскольку возможны многократные повторения.
Во избежание усложнения и удорожания приемников систе-
мы с РОС-НП строят в основном таким образом, что после обна-
ружения ошибки приемник стирает комбинацию с ошибкой и бло-
кируется на h комбинаций (т. е. не принимает h последующих
комбинаций), а передатчик по сигналу переспроса повторяет h
комбинаций (комбинацию с ошибкой и h—1 комбинаций, следу-
ющих за ней). Такие системы с РОС-НП получили название
систем с блокировкой РОС-НПбл. Эти системы позволяют органи-
зовать непрерывную передачу кодовых комбинаций с сохранени-
ем порядка их следования. Поэтому одновременно с формирова-
нием сигнала переспроса УУ ст. Б блокирует (т. е. запрещает)
вывод информации потребителю из Нпр на время, равное h ком-
От ИС
(ст. А)
Н
пер
(ст.А)
ПК
пер
(ст Б)
П%_
(ст. Б)
Решение
(ст~бГ
ок
пер
(ст. Б)
ОК
пр
(СТ. А)
к ПС
(ст Б)
Рис. 8.14. Временные диаграммы работы системы ПДС с РОС-НП бл
322
бинациям (оценка величины h рассмотрена ниже). Временная
диаграмма для данного случая может быть проанализирована на
примере обнаружения ошибки в комбинации 12 (рис. 8.14). По-
лучив сигнал переспроса по обратному каналу, УУ ст. А ожида-
ет конца передачи последней комбинации, во время которой по-
лучен этот сигнал. Затем ИС блокируется также на время пере-
дачи h комбинаций, а из Нпер в это время в канал через кодер
передаются хранящиеся в накопителе последние h комбинаций
(в примере на рис. 8.14 это комбинации 12, 13, 14). После их пе-
редачи ИС опять получает разрешение на передачу очередных
комбинаций. Таким образом, последовательность передаваемых
и принимаемых комбинаций не нарушается.
В соответствии с вышесказанным определим необходимую ем-
кость накопителя Нпер из следующих соображений: каждый при-
нятый по обратному каналу на ст. А сигнал переспроса соответ-
ствует комбинации, которая была передана tOjK секунд тому назад
(см. рис. 8 14). Следовательно, для того чтобы начать повторную
передачу с комбинации, в которой была обнаружена ошибка,
необходимо в накопителе НПер хранить информацию за последние
(/бл-Нож) секунд до момента получения сигнала переспроса. Та-
ким образом, емкость накопителя
/i> (tож -Нбл)//бл или /l^l 4-Z ОА/^бл,
где /ож:==2/р-|-/ан4_^ОС_|_^а ОС-
Так как h не может быть дробным числом, то й^2+
4-£[/ож//бл], где Е[а] —символ целой части а.
Рассмотренные системы РОС являются односторонними, так
как передача информации ведется только в одну сторону: от
ст. А к ст. Б. При работе по четырехпроводным каналам имеется
возможность одновременной передачи информации в двух на-
правлениях.
Это оказывается возможным благодаря тому, что переспросы
в системе с РОС-НПбл происходят сравнительно редко и подав-
ляющую часть времени обратный канал может быть использован
для передачи. Структурная схема двусторонней одновременной
системы передачи с РОС-НПбл представлена на рис. 8.15, а вре-
менная диаграмма — на рис. 8.16. Обмен информацией в такой
системе при отсутствии ошибок в дискретных каналах АБ и БА
происходит в обоих направлениях независимо в следующей после-
довательности. Передатчик ст. А, запросив (сигнал ЗОК—за-
прос очередной комбинации) и получив информационную комби-
нацию от ИСА, вводит в нее избыточность (с помощью кодера)
и передает по дискретному каналу АБ на ст. Б. Приемник ст. Б
с помощью декодера декодирует кодовую комбинацию и выдает
ее ПСб. Одновременно по дискретному каналу БА аналогичным
образом происходит передача информации от ИСб к ПСл. Такой
режим функционирования системы (в условиях отсутствия оши-
21* 323
Рис. 8.15. Структурная схема двусторонней одновременной системы ПДС с
РОС-НП бл
ш
Т
<
О.
с
го
Т
<
t
LQ
О.
с
го
Т
'От ИС
(ст Al
Н
пер _
(ст А)
. ™пео
(ст А)
ПКпр
(ст Б)
к ПИ
(ст Б) _Стир
'от ИС_
(ст БГ
Н"ер ! 1 ! I । I 1 I ь I в | г । д { ; । । [ । ।
(ст Б)-1--1--|--1 Tl 1 5 1 1---------------rill I—т
. ™|а 1дЦ-^ Bl В I Г I Д и|к
п"„Бр. '' А.?
(ст А)
к ПС
(ст А)
Рис. 8 16. Временная диаграмма работы двусторонней одновременной системы
ПДС с РОС-НП бл
324
бок) называют режимом работы. При наличии ошибок в дискрет-
ных каналах передача информации осуществляется в режиме пе-
респроса.
При приеме комбинации с ошибкой в любом направлении пе-
редачи (например, ошибка обнаружена в комбинации 3 направ-
ления от ст. А к ст. Б, рис. 8.16) эта комбинация в Нпр ст. Б
стирается и дальнейшая выдача информации ПС блокируется на
время передачи h комбинаций. Управляющее устройство УУпр ст. А
передает команду в УУпер ст. Б, которое: 1) останавливает пере-
дачу очередных комбинаций от ИС; 2) формирует и передает спе-
циальную комбинацию переспроса БП (см на рис. 8.16 БП сле-
дует за комбинацией Д); 3) выдает команду Нчер ст. Б к повто-
рению последних комбинаций Б, В, Г, Д, хранящихся там, после
чего разрешает ИС продолжить передачу очередных блоков Е,
ж, з, и, к, л,..
Приняв БП от ст. Б на ст. А с помощью дешифратора БП
УУпр блокирует выдачу сообщений ПС на h комбинаций
и передает сигнал в УУпер ст. А. По этому сигналу УУПеР ст А
останавливает передачу очередных комбинаций от ИС и форми-
рует и передает комбинацию БП (на рис. 8.16 БП следует за ком-
бинацией 6);
рыдает команду Нпер ст. А к повторению последних h комби-
наций 3, 4, 5, 6, хранящихся там, после чего разрешает ИСд про-
должить передачу очередных комбинаций 7, 8, 9, 10,...
Таким образом, появление обнаруженной ошибки даже в од-
ном направлении передачи информации приводит к блокировке
приемников двух направлений на длительность h комбинаций,
после чего восстанавливается правильная передача комбинаций.
Определим необходимую емкость НПеР. Аналогично предыду-
щему (см. рис. 8.16) время ожидания сигнала БП на неправиль-
но принятую комбинацию /ож=/Р+^ан+^бл+^Р+^БП -Наи. С учетом
неправильно принятой комбинации 3, передаваемой в направлении
А->Б, длительность блокировки Тбл=Л>л+^Р+^ан+^Р+Л5л +^БП +
4~А,Н. Так как /бл = ^вп, то 7’бл = 32‘бл+2/Р+2/ан. Отсюда мини-
мальная емкость накопителя или
й^4-|-Е[2(£р-|-^ан) >
где Е [а] — символ целой части а.
Подобно тому, как это было сделано для системы с РОС-ОЖ,
могут быть определены выражения для расчета основных пара-
метров системы с РОС-НП. Скорость передачи в односторонней
системе с идеальным обратным каналом определяется по форму-
ле RT—k(\—Рз)//?[1-ррз(/г—1)], из которой следует, что увеличе-
ние емкости накопителя h приводит к уменьшению скорости пе-
редачи.
325
Вероятность появления на выходе системы комбинации с не-
обнаруженной ошибкой
Рош.с(«) - j /’ош('г) J3(l—jpJ (”)]’
где рош(п) — вероятность ошибочного декодирования, обеспечи-
ваемая (п, k) кодом; рош(п)—вероятность появления комбина-
ции с необнаруживаемой ошибкой среди комбинаций, принимае-
мых во время блокировки приемника.
Для системы с двусторонней одновременной передачей инфор-
мации при одинаковых каналах прямого и обратного направлений
передачи
Д — k (1—А)2
д п 1 +Л(Л-1) (2-А) ’
Из сравнения этого выражения с аналогичным выражением
для односторонней системы следует, что из-за малой вероятности
переспросов (р3) скорость передачи в каждом из направлений
двусторонней одновременной системы незначительно меньше, чем
в односторонней. Это снижение скорости вызывается задержками
передачи в каждом из направлений при возникновении ошибок
в противоположном направлении.
Система с РОС и адресным переспросом РОС-АП. Во всех
рассмотренных выше системах с РОС с целью обеспечения сохра-
нения порядка следования кодовых комбинаций в принимаемом
сообщении для определения местоположения забракованной ком-
бинации используется момент прихода служебной комбинации
БП. При каждом переспросе повторно передается минимально
одна комбинация (например, в системе с РОС-ОЖ) или блок из
нескольких кодовых комбинаций (например, в системе с РОС-
НПбл). Так как при передаче сообщений с большой скоростью
модуляции и на большие расстояния обычно используются систе-
мы с РОС-НПбл, то скорость передачи в таких системах при
больших значениях h резко уменьшается при росте вероятности
обнаруживаемых ошибок, так как при этом резко возрастает
число переспросов. Для уменьшения объема информации, повто-
ряемой при переспросах, были разработаны системы с РОС и ад-
ресным переспросом (РОС-АП). В этих системах передача ин-
формации осуществляется блоками и в приемнике имеется па-
мять на весь блок с регистрами для каждой комбинации. Прием-
ник системы РОС-АП вырабатывает сигнал переспроса адресов
(условных номеров) комбинаций, в которых обнаружены ошибки,
т. е. осуществляет адресный переспрос. В соответствии с этими
адресами передатчик повторяет только забракованные комбина-
ции, а не весь блок.
Структурная схема системы РОС-АП представлена на
рис. 8.17, а ее алгоритм — на рис. 8.18.
326
Рис 8.17 Структурная схема системы ПДС с РОС-АП
По сигналу запроса сообщение от ИС поступает блоком из
т комбинаций (А1). Сообщение на ст. А кодируется кодером, на-
правляется в прямой канал связи и одновременно записывается
в накопитель Н„,пер емкостью т комбинаций (А2, АЗ). Принятое
на ст. Б сообщение сначала по одной комбинации записывается
в приемный накопитель Н[ емкостью в одну комбинацию (А4—
А5) и декодируется (Аб, А7). Если при декодировании комбина-
ции ошибки не обнаруживаются, то УУпр переписывает комбина-
цию из Н[ в накопитель Нтпр емкостью т комбинаций (А8). При
этом комбинация размещается в регистре, который соответству-
ет ее месту (номеру) в блоке данных. Если же фиксируется на-
личие ошибки, то УУпр стирает комбинацию из накопителя Н( и
соответствующий этой комбинации регистр в Нтпр остается сво-
бодным. Номера комбинаций с ошибками запоминаются в Надр.ц.
После окончания приема всего блока адреса искаженных комби-
наций (2 и 5 на рис. 8.19) по команде УУпр через шифратор сиг-
налов обратной связи ШСОС передается по обратному каналу
(А9, А10, А13, А14). В передатчике ст А они после дешифратора
ДСОС запоминаются в накопителе адресов запрошенных блоков
Надр.з (А15...А17). Под управлением УУпер в соответствии с эти-
дии адресами из НТОпер по прямому каналу передаются нужные
комбинации с адресами. Источник информации при этом соответ-
ственно блокируется УУпер (А18...А20).
Принятые на ст. Б повторенные комбинации опять проверя-
ются на наличие ошибок, а сопровождающие их адреса записы-
ваются в Надри и сравниваются с адресами искаженных комби-
наций (А21, А22). Если ошибок ни в адресах, ни в комбинациях
нет, то принятые комбинации записываются в соответствующие
регистры НтПр (А23). Если обнаруживается ошибка в адресе или
в комбинации, то процесс переспроса повторяется.
327
Рис 8 18. Алгоритм системы ПД с РОС-АП:
А1—запрос очередного блока комбинаций от ИС, А2 — запись очередного блока в Нт пер;
АЗ — кодирование А4 —передача по прямому каналу связи ПК, А5 — прием из ПК, Аб—
декодирование, А7 — запись одной комбинации (информационной части), в HIt А8 — запись
комбинации в Нт пр из Hf А9— контроль конца передачи блока комбинаций, А10 —про
верка занятости регистров Н п пр АН—выдача блока из Н пр к ПС, А12 — формирование
сигнала подтверждения, А13 — формирование сигнала переспроса с адресами искаженных
комбинаций и запрещение выдачи блока комбинаций нз H,n nD к ПС, А14 —передача по
обратному каналу, А15 —прием из обратного канала, А16 — дешифрование сигнала ОС;
А17 —стирание предыдущего блока комбинаций в nep, А18 — блокировка ИС и запись
адресов запрещенных комбинаций в н аДр 3
А19 — извлечение из Нт пер комбинации
по принятым адресам, А20 — повторение передачи запрошенных комбинаций с адресами;
А21 — запись адресов повторенных комбинаций в Надр И; А22 - сравнение адресов иска-
жениых комбинаций с адресами в НаДр ц и определение ошибки в повторенных комбина-
циях, А23 — определение адреса комбинации с ошибкой, запись, адреса в НаДр И и стира-
ние комбинации из Hi
328
От ИС
(ст А)
ПКпер
(ст А)
пкпр
(ст Б)
Нт
(ст Б)
ОК пер
(ст Ь)
ОК пр
(ст А)
к ПС
(ст Б)
1 й блок
2 и блок
3 й блок
hl 2.1.314151 1И__|l 12l3|4l51_EH
Рис 8 19 Временная диаграмма работы системы ПД с РОС-АП
Когда все регистры накопителя Нтпр будут заполнены, что
свидетельствует о правильном приеме всего блока (или с необ-
наруженной ошибкой), то УУЛр формирует и передает по обрат-
ному каналу сигнал подтверждения, а информация из Нтпр вы-
дается ПС (All, А12). Получив сигнал подтверждения, УУпер
разрешает ИС выдать очередной блок информационных комбина-
ций и стирает предыдущий блок в Нтпер.
Выражения для расчета скорости передачи и вероятности
ошибочного приема комбинации в системе с РОС-АП при иде-
альном обратном канале получается аналогично тому, как это
было сделано выше для системы с РОС-ОЖ, а именно:
__ km
nm + tcp/ta
РОЛ1
РО11(п)
Рп
где /СР — среднее время, затрачиваемое на переспросы и ожида-
ние сигнала подтверждения при передаче одного блока из т
комбинаций.
Достоинством систем с РОС-АП помимо уменьшения потерь
времени на повторения, является практически полная независи-
мость (при условии накопителя большой емкости) от длины
линии, что особенно существенно, например, при передаче по кос-
мическим каналам связи (через ИСЗ). Кроме того, если потре-
битель информации допускает браковку нескольких знаков в ко-
дограмме при условии указания адресов забракованных знаков,
то системы с РОС-АП позволяют обеспечить при этом более эф-
фективное использование пропускной способности канала по
сравнению с системами с РОС-НП Действительно, в системах
с РОС-НП, несмотря на наличие указанного допущения, число
забракованных знаков путем переспросов все равно будет дово-
диться до нуля, а в системах с РОС-АП алгоритм может быть
построен так, что подтверждение на прием блока (квитанция)
329
Рис. 8.20. Структурная схема системы ПД с ИОС-ОЖ (укороченная ИОС):
УС — устройство сравнения; СС — служебный сигнал
будет выдаваться в том случае, когда число забракованных зна-
ков в кодограмме не превышает установленного ПС предела.
Недостатком систем с РОС-АП является более сложный ал-
горитм обработки информации в передатчике и приемнике аппа-
ратуры ПД по сравнению с алгоритмом систем с РОС-НП и, как
следствие, большая сложность технической реализации. Кроме то-
го, трансформация служебных команд информационных кодовых
комбинаций в служебные и обратная трансформация служебных
команд могут приводить к искажениям сообщений, встав'кам и
выпадениям. Поэтому применяются меры по защите служебных
команд от искажений, что влечет за собой некоторое снижение
скорости передачи информации. В связи с вышеизложенным при-
менение систем с РОС-АП экономически было оправдано толь-
ко на линиях большой протяженности и с высокой вероятностью
ошибок.
Применение программных методов позволяет преодолеть свя-
занные со сложностью алгоритма недостатки, что открыло доро-
гу внедрению систем РОС-АП в практику.
Система с информационной обратной связью (ИОС). Разли-
чают следующие алгоритмы работы системы с информационной
обратной связью: с ожиданием (ИОС-ОЖ), с непрерывной пе-
редачей (ИОС-НП) и с адресным повторением (ИОС-АП). Эти
алгоритмы аналогичны алгоритмам соответствующих систем
с РОС, но решение о выдаче информации ПС или ее стирании и
необходимости повторной передачи в системах с ИОС принима-
ется передатчиком системы.
ззо
Рис. 8.21. Алгоритм системы
ПД с укороченной
ИОС-ОЖ:
д1 __запрос очередной комби-
нации, А2 — запись очередной
комбинации (информационной
части) вНпер; АЗ—формирование
комбинации передачи (СС+ин-
формационная часть). А4 — пе-
редача по ПК, А5 — прием из
ПК. Аб — Дешифрирование СС,
Д7 — выдача предыдущей ком-
бинации из HnD к ПС, А8 —
запись очередной принятой ком-
бинации в Нпр; А9 — кодирова-
ние записанной в Нпр комбина-
ции, А10 — формирование г-раз-
рядной комбинации из прове-
рочных разрядов АП—запре-
щение выдачи комбинации из
НПР к ПС; А12 —передача по
обратному каналу А13 — прием
из обратного канала: А14—срав-
нение с УС. А15 —стирание
предыдущей комбинации из
Нпер и формирование сигнала
подтверждения, А16 — блоки-
ровка ИС. формирование сиг-
нала стирания и повторение
передачи комбинации из Нпер
Наиболее широко применяются системы с ИОС-ОЖ, которые
рассматриваются ниже. Структурная схема системы с ИОС-ОЖ
представлена на рис. 8.20, а ее алгоритм — на рис. 8.21. Времен-
ная диаграмма работы системы с укороченной ИОС-ОЖ изобра-
жена на рис. 8.22. Система работает следующим образом. По
команде готовности УУпер ст. А ИС передает в прямой канал ком-
бинацию из k разрядов. Эта комбинация одновременно запомина-
ется в накопителе Нпер (А1 ... А4).
На приеме принятая комбинация записывается в накопитель
Нпр и одновременно поступает в кодер для получения г провероч-
ных разрядов (Аб, А8, А9). Сформированная из г проверочных
разрядов комбинация по сигналу УУпр передается по обратному
каналу (А10).
Принятая на ст. А по обратному каналу r-разрядная комби-
нация поступает на один из входов устройства сравнивания УС.
На второй вход УС из кодера передатчика поступает соответст-
вующая r-разрядная комбинация как результат кодирования
комбинации, хранящийся в Нпер. Таким образом, УС сравнивает
поразрядно две r-разрядные комбинации соответствующие одной
и той же информационной ^-разрядной последовательности. Если
331
От ИС
(ст. А)
Н
пер
(ст А)
ПКпер
(ст А)
ПКпр
(ст Б)
ПКпер
(ст Б)
°Кпр
(ст А)
Пер. СС
(ст. А)
Пр. сс
(ст. Б)
ПС
(ст. Б)
Рис 8 22. Временная диаграмма работы системы ПД с ИОС-ОЖ (укороченная
ИОС)
в результате сравнения окажется, что ошибка не обнаружена, то
РУпер выдает соответствующий сигнал УУпер, которое в свою оче-
редь дает команду шифратору служебного сигнала СС передать
в сторону приемника сигнал подтверждения. После этого УУпеР
разрешает ИС выдать очередную комбинацию для передачи
в прямой канал и стирает предыдущую в НПеР-
Получив подтверждение с выхода дешифратора СС, УУпр вы-
дает команду на выдачу информационной комбинации, хранящей-
ся в Нпр, ПС и приступает к приему следующей комбинации, по-
ступающей вслед за сигналом подтверждения (А7, А10,..., А15).
Если же при сравнении в УС обнаружится ошибка, то РУпеР
даст соответствующий сигнал УУпер, которое выдаст команду
шифратору СС на передачу в сторону приемника служебного
сигнала стирания, вслед за которым из Нпер будет повторяться
передача предыдущей комбинации (А16) Источнику сообщений
поступает запрет на передачу очередной комбинации (см. пере-
дачу комбинации 2 на рис 8.22). Получив сигнал стирания, при-
емник с помощью УУпр блокирует поступление информации к ПС
и стирает хранящеюся в Нпр информацию, записывая туда же
комбинацию, поступившую вторично вслед за сигналом стирания.
Опять производится кодирование, формируется и передается г-
разрядная комбинация по обратному каналу и т. д. Й так будет
332
продолжаться до тех пор, пока не поступит в приемник сигнал
подтверждения.
При полной ИОС в приемнике и передатчике отсутствуют ко-
деры и по обратному каналу на УС поступает вся информация,
принятая приемником. Очевидно, что при полной ИОС обратный
канал должен иметь такую же пропускную способность, что и
прямой.
Из рис. 8.22 видно, что минимальное время ожидания
Сж — /р-]-/ан-]-^г-]-/р~Маг== 6 4-2/р-|-/ан_]_/аг,
где tr — длительность r-разрядной комбинации, передаваемой по
обратному каналу; /аг—время анализа r-разрядной комбинации.
При полной ИОС t ,— /бл, тогда
^ож= /бл-4“2/р-]-/ан'4“/ан — /бл~|~2(/р-|-/ан).
Таким образом, эффективность использования канала связи
в системе с ИОС-ОЖ ухудшается при увеличении длины инфор-
мационного блока (/бл или tr) и протяженности (времени рас-
пространения) линии связи (/р).
Для увеличения эффективности использования канала в систе-
мах с ИОС возможно использование непрерывной передачи и ад-
ресного переспроса. Однако широкого практического применения
эти системы не имеют.
Скорость передачи в системе с полной ИОС может быть под-
считана по формуле
R __ fe РпГ (1 P32k)
2k j-(2/p~f- С.к + С.с) //» 1 + Par 4“Pszk + Pnr
а вероятность ошибочного приема комбинации по формуле
„ z м _____PaikPnr 4~ Рз2/гРз 1Г
Р 041 \^/ . . ’
PnkPxir т PsikPnr *Т Рз%кРз\г
где pnk — вероятность правильного приема комбинации из k эле-
ментов; p3ik — вероятность приема комбинации из k элементов
с ошибкой, при которой b' — b, Ь' — контрольные последователь-
ности соответственно приемника и передатчика; рз2й — вероят'
ность приема комбинации из k элементов с ошибкой, при которой
b'=£b; рлг—вероятность правильного приема комбинации из г
элементов по каналу ОС; рзЬ— вероятность приема комбинации
из г элементов с ошибкой, после которой на передатчике Ь' = Ь\
Рз2г—вероятность приема комбинации из г элементов с ошибкой,
после которой на передатчике b' = b.
Выдача ПС ошибочного символа в системе с ИОС и ретранс-
ляцией происходит только в тех случаях, когда при ошибке
в прямом канале в обратном происходит трансформация ошибоч-
ного символа в правильный (зеркальная ошибка). Если ошибки,
вносимые каналом, не коррелированы и возникают в прямом и
333
обратном каналах независимо с вероятностью р, то вероятность
одиночной ошибки составит р2. В случае значительного группиро-
вания ошибок верность передачи сообщений резко увеличивает-
ся, так как вероятность возникновения в одной и той же комби-
нации одинаковой многократной ошибки в прямом и обратном
каналах значительно меньше, чем вероятность двукратного сбоя
одиночного символа.
В этом отношении система с ИОС противоположна по своим
свойствам системе с РОС, где вероятность необнаружения ошиб-
ки тем выше, чем больше их корреляция. Поэтому и в случае г=
=k с целью повышения верности передачи в системах с ИОС це-
лесообразнее в качестве контрольной последовательности исполь-
зовать не информационные комбинации (Ь'=£а), а образовывать
контрольные последовательности по правилам линейных систе-
матических кодов. Применение кода позволит обнаруживать
ошибки с суммарной кратностью менее кодового расстояния, в то
время как в случае Ь' — а не обнаруживаются однократные зер-
кальные ошибки. Ретрансляционную ИОС целесообразно исполь-
зовать в системах, имеющих вероятность ошибок в каналах ОС,
значительно меньшую, чем в прямом канале.
КОНТРОЛЬНЫЕ ВОПРОСЫ
1. Какие системы называются адаптивными’
2 Каковы достоинства и недостатки прямых и косвенных методов оценки
качества дискретных каналов?
3 Каковы достоинства и недостатки методов повышения верности с обрат-
ной связью и без нее?
4. Классификация систем с обратной связью.
5. В каких случаях в системах с ОС возникают вставки и выпадения’
6. Каковы достоинства и недостатки систем с ожиданием, блокировкой,
адресным переспросом’
7. Каковы достоинства и недостатки систем с ИОС и РОС’
Глава 9. МЕТОДЫ И УСТРОЙСТВА
СИНХРОНИЗАЦИИ В СИСТЕМАХ ПДС
9.1. СИНХРОНИЗАЦИЯ В СИНХРОННЫХ
И СТАРТСТОПНЫХ СИСТЕМАХ ПДС
Общие положения. Синхронизация есть процесс установления
и поддержания определенных временных соотношений между
двумя и более процессами. Различают поэлементную, групповую и
цикловую синхронизацию. В соответствии с ГОСТ 17657—79 по-
334
Рис. 9.1. Формирование элементов кодовых комбинаций прн синхронном методе
передачи
элементная, групповая и цикловая синхронизация — это синхрони-
зация переданного и принятого цифровых сигналов данных, при
которой устанавливаются и поддерживаются требуемые фазовые
соотношения между значащими моментами переданных и принятых
соответственно единичных элементов сигналов, групп единичных
элементов этих сигналов и циклов их временного объединения. По-
элементная синхронизация позволяет на приеме правильно отде-
лить один единичный элемент от другого и обеспечить наилучшие
условия для его регистрации. Групповая синхронизация обеспечи-
вает правильное разделение принятой последовательности на кодо-
вые комбинации, а цикловая синхронизация — правильное разде-
ление циклов временного объединения элементов на приеме. Обыч-
но задачи цикловой и групповой синхронизаций решаются одними
и теми же методами.
Рассмотрим особенности поэлементной и групповой синхрони-
заций синхронных и стартстопных систем.
Синхронизация в синхронных системах. При синхронном методе
передачи передатчик непрерывно формирует элементы сигнала
длительностью то, равной единичному интервалу (рис. 9.1,а). Эле-
менты объединяются в комбинации длительностью Тк. Зная мо-
мент начала включения передатчика 10, можно определить время
прихода любого единичного элемента, а зная число единичных эле-
ментов кодовой комбинации, легко отделить одну кодовую комби-
нацию от другой. На рис. 9.1,6, в показаны соответственно импуль-
сы, отделяющие один элемент от другого и одну группу элементов
от другой. Определив интервалы времени, на которых появляются
элементы, можно предсказать время прихода наиболее устойчивой
части элементов сигнала. Регистрируя сигнал в этой части, можно
снизить вероятность неправильного приема элемента.
Синхронная работа распределителя передатчика и приемника
обычно поддерживается автоматически. Для этого в приемнике по
мере необходимости вырабатываются сигналы подстройки частоты
задающего генератора (ЗГ) приема. Частота этого генератора
должна по возможности совпадать с частотой генератора переда-
чи. Пусть частота ЗГ f3n на передаче равна номинальной Час-
тота ЗГ на приеме вследствие нестабильности может отклоняться
335
Рис. 9.2. Гармонические сигналы задающих генераторов передачи и приема
от номинального значения [н на величину Д/ (коэффициент неста-
бильности £=Д/7/н). Уход частоты ЗГ на приеме приводит к от-
клонению тактовой последовательности от ее идеального положе-
ния, причем со временем расхождения по фазе будет накапливать-
ся. Пусть в момент ^>=0 тактовая последовательность совпадает
с идеальной. Определим время, за которое уход по фазе в полях от
длительности единичного элемента будет равен величине е. Для
этого рассмотрим два гармонических сигнала с частотами ft и /2,
вырабатываемых соответственно ЗГ на передаче и приеме
(рис. 9.2). Из этих колебаний формируется тактовая последова-
тельность (последовательность синхроимпульсов).
Пусть /] = 1/(7’—Д7’), где 7’=т0, /2 = 1/(7’4-ДТ’). За т0/\Т=п
единичных интервалов расхождение по фазе достигнет е=1. Это
произойдет за время
t =/7х -J- (9.1)
где й=Д7’/то или с учетом относительной нестабильности генера-
тора передатчика и приемника ^=1/2&В.
Если обозначить допустимое расхождение по фазе через еДОп, то
время, за которое уход по фазе будет превышать допустимое зна-
чение (произойдет рассинхронизация),
^едоп== 8доп / (2&В) . (Д2)
Если 8Доп выразить в процентах от единичного элемента, то
формула (9.2) примет вид
tg доп==8доп/ (200ЙВ) .
Используя полученное выражение, можно также для заданных
te доп и В определить необходимую величину k.
Пример 9.1. Определить значение k, при котором обеспечивается едоп==0,03,
если В = 200 Бод, а /ЕД0П= 1 ч.
Из выражения (9 2) получим
k = едой/(2В1едоп) = 0,03/ (2 • 200 • 3600) ^2 • 10"».
336
Таблица 9.1
В, Бод 50 100 200 600 1200
t с ^едоп’ v 0,3 0,15 7.5-10-2 2,/5-10-2 1,05.10-2
Обеспечить такую стабильность достаточно сложно. Обычно без
применения специальных мер можно обеспечить стабильность k^.
^10 3. Значения /ЕДОп, полученные при этом для разных скоростей
телеграфирования, сведены в табл. 9.1.
Приведенные расчеты свидетельствуют о необходимости приня-
тия специальных мер по поддержанию синхронизма.
Особенности поэлементной и групповой синхронизации при
стартстопном методе передачи. При стартстопной работе каждая
кодовая комбинация начинается со стартового (бестокового) эле-
мента, за которым следуют кодовые элементы. Каждая кодовая
комбинация оканчивается стоповым (токовым) элементом
(рис. 9.3,а).
Приемный распределитель запускается стартовым элементом и
останавливается при поступлении стоповой посылки. За счет оста-
новки распределителя приема накопившееся по фазе расхождение
распределителей передачи и приема ликвидируется и прием сле-
дующей кодовой комбинации начинается при нулевом расхождении
по фазе распределителей.
Найдем максимальное отклонение синхроимпульсов (рис. 9.3,6),
используемых для регистрации методом стробирования единичных
элементов за время стартстопного цикла Тст (рис. 9.3,о) относи-
тельно идеального положения. Оно определяется выражением
ДЛпах = (И-)- 1 ) kto,
где (п+1) —длина кодовой комбинации с учетом стартового эле-
мента. Относительная величина отклонения синхроимпульса
&тах== Д^тах/то — (^4“ 1) &.
Рис. 9.3. Формирование элементов стартстопных кодовых комбинаций
22—6085 337
Пример 9.2. Определить требуемую стабильность генератора k, если передача
осуществляется стартстопным методом со скоростью В=2100 Бод, етал:=0,03,
длина кодовой комбинации я=5.
Так как применяется стартстопнын метод, то допустимый уход по фазе
етал = 0,33 происходит за время ^едоп—t^max— (п4-1)-Цо. Тогда
k = =2 5. ю-s
2В (п+ 1)т0 2 (п 4- 1) 2-6 ’
Здесь k не зависит от скорости телеграфирования В.
Из приведенного выше примера следует, что при стартстопной
передаче вследствие необходимости поддерживать требуемые фа-
зовые соотношения только на интервале стартстопного цикла, тре-
бования к стабильности генератора тактовых импульсов сущест-
венно ниже, чем при синхронной передаче. При синхронной пера-
даче на приеме требуется подстройка генератора тактовых импуль-
сов в течение всего сеанса связи.
Другими преимуществами стартстопного метода являются быст-
рое вхождение в синхронизм и возможность аритмичной работы
передатчика. Однако при стартстопном методе хуже используется
пропускная способность канала за счет включения в состав пере-
даваемых кодовых комбинаций элементов «Старт» и «Стоп», кото-
рые не несут информации потребителю. Кроме того, при стартстоп-
ном методе помехоустойчивость приемника хуже.
Стартстопнын метод находит применение в системах телеграф-
ной связи и низкоскоростных системах ПД. Работа со скоростью
свыше 300 Бод предусматривает только синхронный способ пере-
дачи.
9.2. МЕТОДЫ И УСТРОЙСТВА
СИНХРОНИЗАЦИИ ПО ЭЛЕМЕНТАМ
Требования к устройствам синхронизации по элементам. К уст-
ройствам синхронизации по элементам предъявляются следующие
требования:
1. Высокая точность синхронизации. Допустимое относительное
отклонение синхроимпульсов (тактовых импульсов) от моментов,
соответствующих идеальной синхронизации, едоп=±3%.
2. Малое время вхождения в синхронизм как при первоначаль-
ном включении, так и после перерыва связи.
3. Сохранение синхронизма при наличии помех и кратковре-
менных перерывов связи.
4. Независимость точности синхронизации от статической струк-
туры передаваемого сообщения.
Указанные требования противоречивы. Однако путем выбора
рациональной структуры сигналов и выбора оптимальных парамет-
338
Форми-
рователь
^импульсов
Д I
Усили-
тель —
ограни-
читель
д
Форми " 6 j,
рователь
ж_
импульсов"^*
________Г
Рис. 9.4. Структурная схема резонансного устройства поэлементной синхрони-
зации
ров устройств синхронизации можно обеспечить требуемую точ-
ность синхронизации.
Методы синхронизации по элементам. Классификация методов
синхронизации. Поэлементная синхронизация может быть обеспе-
чена за счет использования автономного источника — хранителя
эталона времени и методов принудительной синхронизации. Пер-
вый способ применяется лишь в тех случаях, когда время сеанса
связи, включая время вхождения в связь, не превышает время со-
хранения синхронизации. В качестве автономного источника можно
использовать местный генератор с высокой стабильностью.
Методы принудительной синхронизации могут быть основаны
на использовании отдельного канала (по которому передаются им-
пульсы, необходимые для подстройки местного генератора) или
рабочей (информационной) последовательности. Использование
первого метода требует снижения пропускной способности рабоче-
го канала за счет выделения дополнительного синхроканала. По-
этому на практике чаще всего используется второй метод.
По способу формирования тактовых импульсов устройства син-
хронизации с принудительной синхронизацией подразделяются на
разомкнутые (без обратной связи) и замкнутые (с обратной
связью).
Разомкнутые устройства поэлементной синхронизации. В ра-
зомкнутых (резонансных) устройствах синхронизации (рис. 9.4)
синхросигналы (тактовые импульсы) выделяются непосредственно
из инофрмационной последовательности элементов (рис. 9.5,а).
Формирование синхроимпульсов обеспечивается на основе выде-
ления из принятой последовательности элементов сигнала с часто-
той /= 1 /т0 элементов (ЗМ) с помощью высокоизбирательных ре-
зонансных контуров с частотой настройки 2/т=1/т0. Для формиро-
вания частоты 2fr используют нелинейные преобразователи
сигнала. На рис. 9.4 приведена структурная схема резонансного
устройства синхронизации, а на рис. 9 5 временная диаграмма его
работы.
Сигналы информационной последовательности (рис. 9.5,а) по-
ступают на формирователь импульсов, соответствующих фронтам
единичных элементов (рис. 9.5,6). Импульсы, соответствующие ЗМ,
поступают на расширитель импульсов (одновибратор), который
формирует сигналы длительностью то/2 (рис. 9.5,а). С помощью
узкополосного фильтра выделяется гармоническое колебание с час-
22* 339
Информация
Рис. 9 5 Временная диаграмма работы резонансного устройства поэлементной
синхронизации
тотой 2fT, которое усиливается и ограничивается усилителем-огра-
ничителем устройства. Формирователь фронтов выделяет из полу-
ченных сигналов две серии импульсов (рис. 9.5,е, ж), совпадающих
с началами п с серединами единичных элементов.
В резонансных устройствах синхронизации основным узлом яв-
ляется резонансный узкополосный фильтр — колебательный кон-
тур. Каждый импульс (рис. 9.5,в), действующий на входе контура,
вызывает на его выходе затухающее гармоническое колебание
с частотой 2[т- Амплитуда напряжения на выходе контура зависит
от частоты следования этих импульсов (рис. 9.5,г), т. е от статис-
тической структуры передаваемой последовательности. Наибольшее
напряжение возникает при приеме последовательности вида 1 : 1.
Случайные краевые искажения усредняются контуром. Период ко-
лебаний в контуре может рассматриваться как случайная величина
с математическим ожиданием а = то и дисперсией о=/(<т, Q), где
о — среднеквадратическое отклонение краевых искажений; Q —
добротность фильтра. Прекращение поступления импульсов на вхо-
де контура при перерывах вызовет процесс затухания колебаний на
его выходе. Если импульсы действуют с интервалами, которые
меньше времени затухания колебаний контура, то амплитуда на
его выходе растет до установившегося значения.
Время вхождения в синхронизм в резонансных системах при
приеме комбинаций вида 1 : 1 составляет tc = Qro при приеме тек-
ста tc = 2Qro. Если через время /с импульсы на контур не поступят,
то колебания на его выходе затухнут полностью, что приведет
к прекращению работы аппаратуры в целом. С увеличением Q уве-
личивается точность синхронизации, девиация фазы синхроимпуль-
сов при этом уменьшается. С другой стороны, увеличение Q приво-
дит к росту времени синхронизации. Величина Q для разомкнутых
систем берется равной 80... 120. При В—1200 Бод /с = 83 мс.
340
К достоинствам резонансных систем
следует отнести простоту реализации,
К недостаткам — сильную зависимость
точности синхронизации от статистической
структуры текста и искажений единичных
элементов, нарушение синхронизма при
кратковременных перерывах связи.
В настоящее время для уменьшения
влияния статистической структуры текста
Рис. 9.6 Структурная схема
замкнутого устройства син-
хронизации
на точность и время поддержания синхро-
низма используют скремблирование. При этом на передаваемую по-
следовательность накладывают (заранее известную) псевдослучай-
ную последовательность, а на приеме осуществляют вычитание
данной последовательности из принятого сигнала. Устройства син-
хронизации такого типа находят применение в высокоскоростных
системах передачи дискретных сообщений.
Замкнутые устройства поэлементной синхронизации. Замкнутые
устройства синхронизации широко используются в низко- и сред-
нескоростных системах связи.
Замкнутые устройства синхронизации разделяются на два под-
класса: с непосредственным воздействием на задающий генератор
синхроимпульсов и с косвенным воздействием.
Упрощенная структурная схема замкнутого устройства синхро-
низации изображена на рис. 9.6.
В фазовом дискриминаторе ФД осуществляется сравнение по
фазе значащих моментов ЗМ принимаемого сигнала с тактовыми
импульсами (ТИ), вырабатываемыми ЗГ. При расхождении по
фазе вырабатывается управляющий сигнал, меняющий частоту ЗГ.
При этом если ТИ появляются позже ЗМ (ЗГ «отстает»), то часто-
та ЗГ увеличивается. Если ТИ появляются раньше ЗМ (ЗГ «спе-
шит»), то частота ЗГ уменьшается.
Устройства синхронизации с непосредственным воздействием на
частоту генераторов по способу управления делятся на две группы:
устройства с дискретным (релейным) управлением, в которых
Рис. 9.7. Структурная схема устройства синхронизации с дискретным управлением
341
Информация
Рис. 9.8. Временная диаграмма работы устройства синхронизации с дискретным
управлением
управляющее устройство дискретно изменяет управляющий сигнал
время от времени. В интервалах между подстройками управляю-
щий сигнал остается постоянным и зависит от величины расхож-
дения по фазе;
устройства с непрерывным (плавным) управлением, в которых
управляющее устройство непрерывно воздействует на генератор
синхроимпульсов, а управляющий сигнал пропорционален величи-
не расхождения фаз.
Структурная схема устройства синхронизации с дискретным
управлением приведена на рис. 9.7, а его временная диаграмма —
на рис. 9.8. На фазовый дискриминатор, содержащий формирова-
тель фронтов ФФ, инвертор и логические схемы И,, И2 поступают
одновременно два сигнала: информационные сигналы в виде ЗМ и
тактовые импульсы. Задающий генератор с помощью преобразова-
теля сигнала, который преобразует гармонический сигнал с выхода
генератора в прямоугольный сигнал, вырабатывает серию такто-
вых импульсов (рис. 9.8,в). С помощью инвертора дискриминатора
формируется другая серия (рис. 9.8,г), сдвинутая на 180° относи-
тельно серии b. С помощью двух схем Hi и И2 определяется поло-
жение ТИ относительно ЗМ, принимаемого сигнала. Если колеба-
ния задающего (тактового) генератора отстают по фазе от прини-
маемого сигнала (рис. 9.8,г) по ТИ пройдут на выход схемы сов-
падения И]. Если колебания опережают по фазе, то ТИ пройдут на
выход схемы И2. Управляющее устройство УУ реагирует на сигна-
лы с выхода ФД и с помощью реле осуществляет управление час-
тотой синхрогенератора. В зависимости от того, «спешит» тактовый
генератор или «отстает», с помощью контактов реле к колебатель-
ному контуру генератора подключается конденсатор Ci или индук-
тивность Ц. При этом частота генератора будет меньше (/2) либо
больше номинальной тактовой частоты fH. В этом случае
управление частотой будет непосредственным и ступенчатым.
На рис. 9.9,а приведена зависимость частоты генератора от
величины расхождения фаз, а на рис. 9.9,6 показаны изменения
342
Рис. 9.9. Характеристики системы синхронизации с двухпозиционным управляю-
щим устройством
частоты во времени. С учетом нестабильностей генераторов пере-
датчика и приемника девиация частоты выбирается равной А/=
= (4 ... 6)kfzr, где k — нестабильность генератора.
По способу управления различают устройства синхронизации
с двух- и трехпозиционными УУ. Приведенная на рис. 9.7 схема
устройства синхронизации относится к схемам с двухпозицион-
ным УУ.
Основной недостаток устройств синхронизации с двухпозицион-
ным УУ состоит в том, что во время передачи сигналов одного ви-
да либо при перерыве связи расхождение по фазе будет расти, так
как частота генератора всегда отличается на А/ от номинальной
частоты (f2—fn—&f', f} — fн+Af) • В системах синхронизации с трех-
позиционным УУ генератор кроме частот f2 и f, вырабатывает
среднюю частоту f0, которая выбирается равной /н. Это позволяет
исключить ложную подстройку частоты во время перерыва связи.
Расхождение по фазе при обрыве будет определяться лишь неста-
бильностью частот генераторов передатчика и приемника. Харак-
теристики системы синхронизации с трехпозиционным УУ приведе-
ны на рис. 9.10.
0 Расхождение +
фаз
Рис. 9.10 Характеристики системы синхронизации с трехпозиционным управляю-
щим устройством:
а—зависимость частоты от расхождения фаз, б — изменение частоты и фазы по времени
313
Рис. 9.11. Характеристики системы синхронизации с непрерывным (плавным)
воздействием на генератор
Особенность устройства синхронизации с непрерывным (плав-
ным) воздействием на генератор синхроимпульсов состоит в том,
что зависимость изменения частоты от расхождения фаз
во времени будет иметь плавный характер (рис. 9.11,6). Для
управления частотой генератора используют управляемый реактив-
ный элемент (варикап). Благодаря плавному изменению частоты
и фазы можно добиться более высокой точности поддержания син-
фазности, чем при дискретном управлении.
Отметим достоинства и недостатки замкнутых устройств син-
хронизации с непосредственным воздействием на частоту генера-
тора приемника. Достоинством таких устройств синхронизации яв-
ляется относительная простота реализации, особенно на высоких
скоростях работы. К недостаткам следует отнести: небольшую точ-
ность синхронизации; трудность обеспечения высокой стабильности
вследствие паразитных связей, возникающих за счет подключения
к контуру генератора реактивного элемента; выход из синхрониз-
ма системы при перерыве связи или при отсутствии ЗМ в прини-
маемой из канала последовательности, что может иметь место при
передаче последовательности из одних нулей (единиц).
В устройствах синхронизации с косвенным управлением фаза
подстраивается в промежуточном преобразователе ПП (рис. 9.12),
через который проходят импульсы от ЗГ. Устройства синхрониза-
ции без непосредственного воздействия делятся на два вида:
ти
Рис. 9 12. Структурная схема
устройства синхронизации с кос-
венным управлением частоты ге-
нератора
Рис 9 13 Структурная схема устройства
синхронизации, использующего делитель
частоты с переменным коэффициентом
деления
344
Рис. 9.14. Временная диаграмма работы устройства поэлементной синхронизации
с делителем с переменным коэффициентом деления частоты
устройства, в которых промежуточное устройство представляет
собой делитель частоты с переменным коэффициентом деления час-
тоты;
устройства, в которых в процессе корректировки фазы произво-
дится добавление или вычитание импульсов на входе делителя час-
тоты.
На рис. 9.13 приведена структурная схема устройства синхрони-
зации, использующего делитель частоты с переменным коэффици-
ентом деления. Фазовый дискриминатор устройства производит
сравнение временного положения ЗМ и вырабатываемых ТИ. На
выходе появляются два сигнала управления, соответствующие опе-
режению или отставанию тактовых импульсов от ЗМ информаци-
онного сигнала. В процессе корректирования фазы возможны толь-
ко два состояния устройства: первое, когда ТИ приемника смеще-
ны вправо относительно ЗМ, т. е. приемник «отстает»; второе, ког-
да ТИ смещены влево относительно поступающих ЗМ, т. е. прием-
ник «спешит».
Изменяя коэффициенты деления частоты &д, производим изме-
нение частоты импульсов на выходе делителя. При этом происхо-
дит сдвиг ТИ на величину At относительно ЗМ (рис. 9.14) как
влево при ka = kA2, так и вправо при ka=kai, где /?д1>йд2.
Рассмотренное устройство синхронизации можно отнести к уст-
ройствам с двухпозиционным управлением.
Устройства синхронизации без непосредственного воздействия
на генератор с добавлением и вычитанием импульсов на входе час-
тоты относятся к трехпозицнонным (рис. 9.15). Здесь возможны
три случая: импульсы от генератора без изменения проходят на
вход делителя частоты ДЧ; к последовательности импульсов, по-
ступающих от генератора добавляется один импульс; то же, исклю-
чается один импульс. Процесс изменения фазы тактовых импульсов
можно пояснить с помощью рис. 9.16.
Генератор вырабатывает колебание частотой /зг в 2/гЛ раз боль-
ше тактовой частоты (так как коэффициенты деления делителей на
рис. 9.15 соответственно равны 2 и йд). Фазовый дискриминатор,
в состав которого входит формирователь фронтов ФФ, определяет
345
Рис. 9.15. Структурная схема устройства синхронизации с добавлением и вычи-
танием импульсов на входе делителя частоты
Рис. 9.16. К принципу изменения фазы в процессе деления частоты'
а —нормальный процесс деления (£д=7), б— добавление импульса, б — исключение им-
пульса
величину расхождения по фазе ЗМ и ТИ генератора. Если частота
генератора приемника больше частоты генератора передатчика
(приемник «спешит»), то на входе схемы И, появится управляю-
щий сигнал, который, пройдя реверсивный счетчик (усредняющее
устройство), запретит прохождение одного импульса от ЗГ, в ре-
зультате чего тактовая последовательность на выходе делителя
сдвинется в сторону отставания на ДЕ Исключение такта (запрет)
происходит с помощью схемы запрета НЕТ. Если приемник «отста-
ет», то сигнал управления появится на выходе схемы И2, что при-
водит к появлению дополнительного импульса на выходе схемы
ИЛИ. В результате тактовая последовательность на выходе дели-
теля сдвинется в сторону опережения на ДЕ При пропадании вход-
ного сигнала положение тактовой последовательности на выходе
346
делителя обусловлено лишь значением коэффициента деления и
стабильностью ЗГ.
Выше рассматривалась ситуация, когда опережение или отста-
вание ТИ выявлялось при отсутствии краевых искажении. В реаль-
ных условиях ЗМ принимаемых информационных сигналов иска-
жены. Эти искажения приводят к тому, что устройство синхрониза-
ции может произвести ложную подстройку частоты, что приведет
к снижению точности синхронизации. Учитывая случайность сме-
щений краевых искажений, можно полагать, что смещения ЗМ
в стороны опережения и отставания равновероятны. Поэтому влия-
ние этих искажений на точность синхронизации можно уменьшить,
включив между ФД и УУ усредняющее устройство (инерционный
элемент или интегратор). Обычно для этой цели используют ревер-
сивный счетчик PC, представляющий собой элемент задержки
управляющих сигналов не менее, чем на S тактов, где S — емкость
PC. При поступлении на один из входов подряд S импульсов на
выходе PC появится управляющий сигнал. Если же в процессе
синхронизации на левый вход PC поступит (S—1) им-
пульс, а затем на правый вход также поступит (S—1) импульс, то
счетчик возвращается в исходное состояние. Ясно, что включение
PC приводит к увеличению времени вхождения в синхронизм. Лож-
ное корректирование фазы может произойти лишь в том слу-
чае, когда в S подряд принимаемых информационных элементах
ЗМ смещены влево или вправо относительно идеального положе-
ния. Такое событие маловероятно.
9.3. МЕТОДЫ И УСТРОЙСТВА ГРУППОВОЙ
И ЦИКЛОВОЙ СИНХРОНИЗАЦИИ
Требования к устройствам групповой синхронизации. К устрой-
ствам групповой синхронизации в системах ПДС предъявляются
следующие требования:
обеспечение требуемой точности групповой синхронизации
с учетом всех факторов, влияющих на канал и систему связи;
малое время вхождения в синхронизм как при первоначальном
включении, так и после кратковременных перерывов;
автоматическое вхождение в синхронизм и поддержание син-
хронизации в процессе сеанса связи;
минимальные потери пропускной способности канала связи за
счет введения синхронизирующей информации в сообщение;
простота и надежность работы устройств групповой синхрони-
зации.
Методы групповой синхронизации. Классификация. Этот вид
синхронизации имеет исключительно важное значение, так как
нарушение синхронизма приводит к неправильному декодированию
кодовых комбинаций.
347
В устройствах групповой (цикловой) синхронизации в отличие
от устройств синхронизации по элементам информации о фазе
можно извлечь лишь тогда, когда в сообщении есть избыточная
информация. Для этого можно воспользоваться избыточностью,
вводимой для повышения верности передачи информации. В таком
случае факт синхронизации подтверждается сравнительно малым
числом обнаруженных ошибок, которые обусловлены только дейст-
вием в канале связи помех.'Когда избыточная информация в сооб-
щении отсутствует, необходимо на передаче вводить специальные
сигналы, позволяющие на приеме разделить группы элементов,
в качестве которых, в частности, могут выступать кодовые комби-
нации. При этом скорость передачи информации снижается.
В случаях передачи информации в течение сравнительно корот-
кого промежутка времени и при использовании равномерного коди-
рования для обеспечения групповой синхронизации достаточно
определить начало сеанса связи и послать сигнал пуска (старто-
вый сигнал) перед передачей информации в канал связи. Такой
метод одноразовой передачи синхронизирующей информации назы-
вают безмаркерным методом групповой синхронизации. Метод,'при
котором специальные сигналы, позволяющие отделить одну кодо-
вую комбинацию от другой, посылаются в течение всего сеанса
связи, называется маркерным.
Безмаркерный метод групповой синхронизации. Безмаркерный
метод групповой синхронизации можно использовать только при
синхронном способе передачи. На рис. 9.17,а приведена структур-
ная схема организации связи при безмаркерном методе групповой
синхронизации. Первоначально запуск распределителя приема про-
изводится от специальной кодовой комбинации (или серии комби-
наций), называемой фазирующей ФК и формирующейся в датчике
фазирующей комбинации. В исходном состоянии источник сообще-
ния ИС заблокирован управляющим устройством УУ и передается
фазирующая кодовая комбинация с помощью «-элементного рас-
пределителя передачи РПеР. Распределитель передачи в простей-
шем случае может представлять собой устройство, состоящее из
контактной группы и щетки. С помощью щетки происходит считы-
вание элементов сообщения на передаче и запись в соответствую-
щие ячейки распределителя приема Рпр. Фазирующая комбинация
регистрируется на приеме приемником ФК. Если приемник не сфа-
зирован с передатчиком, то ФК не будет зарегистрирована. В конце
цикла УУ приемника произведет подстройку фазы приемника. Эта
подстройка будет происходить до тех пор, пока приемник не будет
сфазирован с передатчиком. После того как приемник сфазирован,
передатчик начинает передачу информационных кодовых комбина-
ций. Накопители передачи Нпер и приема Нпр выполняют на схеме
рис. 9.17,а роль буферных устройств.
Временная диаграмма работы при безмаркерном методе груп-
повой синхронизации приведена на рис. 9.17,6. Время фазирова-
348
Канал
Датчик
ФК
Информация
1 • •
Лриемник
__ФК____|
Информация
Рис. 9.17. Схема организации связи при безмаркериом методе групповой синхро-
низации (а) и временная диаграмма работы устройства синхронизации (б)
ния /ф зависит от длины самой ФК и фазового положения распре-
делителя приема относительно распределителя передачи.
При безмаркериом методе групповой синхронизации подстрой-
ка распределителя приемника, как правило, производится на ве-
личину, равную длительности одного элемента. Групповой синхро-
низм после того, как приемник и передатчик сфазировались при
данном методе, поддерживается благодаря тому, что приемнику
заранее известна длина принимаемых кодовых комбинаций. Мо-
менты начала и конца кодовых комбинаций определены после
вхождения в синхронизм на весь сеанс передачи информации.
Недостатки безмаркерного метода: необходимость прекращения
передачи информации после любого нарушения групповой синхро-
низации; отсутствие постоянного контроля синхронизма приемника
относительно передатчика (наличие синхронизации можно оцени-
вать лишь косвенно, по появлению большого числа ошибочных ко-
довых комбинаций); необходимость наличия обратного канала для
передачи информации о рассинхронизации приемника. Преимуще-
ство безмаркерного метода состоит в том, что фазирование осуще-
ствляется без существенного снижения скорости передачи инфор-
мации.
Маркерный метод групповой синхронизации. Маркерный метод
можно использовать как при синхронном, так и при стартстопной
методах передачи. На рис. 9.18,а приведена структурная схема
синхронной системы, использующей маркерный метод групповой
синхронизации, а на рис. 9.18,6 представлена его временная диа-
грамма.
349-
ИС
р
пер
Р
пр
ZEZ
Прием-
ник
маркера’
1
ПС
й элемент
маркера
Информация
2 й элемент
маркера
Информация • • •
’Время цикла
Рис. 9.18. Схема организации связи в синхронной системе, использующей мар
керный метод групповой синхронизации (а) н временная диаграмма работь
устройства синхронизации (б)
Алгоритм работы устройства состоит в следующем. От источни-
ка сообщение поступает на накопитель и с помощью щетки рас-
пределителя считывается п элементов в канал связи. На (п-|-1)-м
такте считываются элементы маркера, поступающие от датчика
маркера. В данном случае за цикл передачи считывается один эле-
мент маркера, который находится в конце кодовой комбинации.
На приеме кодовая комбинация с помощью щетки распредели-
теля приемника записывается элемент за элементом на Нпр. К («+
4-1)-му выходу распределителя подключен приемник маркера, вы-
ход которого соединен с управляющим устройством УУ. При рас-
хождении распределителей по фазе маркер не поступает на
приемник маркера и УУ смещает щетку распределителя приема
на один шаг.
Количество шагов (циклов) подстройки определяется исходным
положением щетки распределителя приема (расхождением по фа-
зе между передатчиком и приемником). Смещение щетки распре-
делителя приема будет происходить до тех пор, пока приемник
маркера не зарегистрирует фазирующую комбинацию (маркер).
Синхронизм в такой системе контролируется на протяжение всего
сеанса работы, так как в каждом цикле передачи имеется элемент
маркера. При обнаружении рассинхронизации приемник маркера,
спустя некоторое время, снимет блокировку с УУ и система связи
перейдет в режим синхронизации. В этом режиме приемник мар-
кера запрещает выдачу информации с накопителя.
На рис. 9.19 приведены структурная схема и временная диа-
грамма стартстопной системы, которая относится к системам с мар-
керным методом групповой синхронизации. Отличительной особен-
ностью данной системы по отношению к синхронной является то,
350
Старт | Информация
Время цикла
Старт Информация Стоп
б)
Рис. 9.19. Схема организации связи в стартстопной системе, использующей мар-
керный метод групповой синхронизации (а) и временная диаграмма работы
устройства синхронизации (б)
что маркер представляет собой совокупность двух элементов: эле-
мента «Старт», с которого начинается каждая стартстопная кодо-
вая комбинация, и элемента «Стоп», которым кодовая комбинация
заканчивается (рис. 9.19,6).
Передатчик стартстопной системы содержит приемник старта и
стопа. С помощью схем объединения СО и разделения СР
(рис. 9.19,а) производится объединение и разделение информаци-
онной части и сигналов маркера.
Преимущество маркерного метода групповой синхронизации
состоит в том, что при передаче информации осуществляется по-
стоянный контроль за синхронизмом передатчика и приемника.
Недостатком маркерного метода является большее, чем при без-
маркерном снижение информационной скорости передачи инфор-
мации.
В зависимости от требований, предъявляемых к системе связи,
может применяться тот или иной маркерный метод групповой син-
хронизации. Так, синхронный метод широко используется в сред-
не- и высокоскоростных системах ПДС. Стартстопный метод син-
хронизации применяется в телеграфных аппаратах как в механи-
ческих, так и в электронных и в низкоскоростных системах ПДС.
351
9.4. РАСЧЕТ ПАРАМЕТРОВ УСТРОЙСТВ
СИНХРОНИЗАЦИИ
Расчет параметров устройств поэлементной синхронизации.
Рассмотрим основные параметры устройств синхронизации замкну-
того типа и порядок их расчета с учетом влияния помех в каналах
связи. Из всех ранее рассмотренных устройств синхронизации
практическое применение нашел способ поэлементной синхрониза-
ции без непосредственного воздействия на задающий генератор
синхроимпульсов (см. рис. 9.15). К основным параметрам, харак-
теризующим устройства такого типа, относятся:
погрешность синхронизации е— величина, выраженная в долях
единичного интервала и равная наибольшему отклонению синхро-
сигналов от их оптимального (идеального) положения, которое
с заданной вероятностью может произойти при работе устройства
синхронизации;
время синхронизации ic — время, необходимое для корректиро-
вания первоначального отклонения синхроимпульсов относительно
границ принимаемых элементов;
время поддержания синхронизма tn.c — время, в течение кото-
рого отклонение синхроимпульсов от границ единичных элементов
не выйдет за допустимый предел рассогласования (±е) при пре-
кращении работы устройства синхронизации по подстройке фазы;
вероятность срыва синхронизма Рс.с — вероятность того, что
из-за действия помех отклонение синхроимпульсов от границ еди-
ничных элементов превысит половину единичного интервала.
Погрешность синхронизации целесообразно рассматривать как
сумму двух погрешностей:
статической погрешности синхронизации 8СТ, определяемой
нестабильностью задающего генератора и шагом коррекции;
динамической погрешности еД11Н, вызываемой краевыми иска-
жениями единичных элементов: е=еСт-ЬеДин.
В свою очередь, статическая погрешность синхронизации etT
складывается из двух составляющих: погрешности, обусловленной
дискретным шагом синхронизации, и погрешности, обусловленной
смещением тактового импульса за время между двумя подстрой-
ками:
8ст—Аф-|-2^S7= 1 /#д-}-2&$7,
где Д<р=1/£д — шаг коррекции, т. е. смещение фазы тактовых им-
пульсов в долях единичного интервала (то) на выходе делителя
частоты при добавлении или вычитании одного корректирующего
импульса; &д— коэффициент деления делителя; 2k— суммарный
коэффициент нестабильности задающих генераторов передатчика
и приемника; S — емкость реверсивного счетчика; 7— среднее чис-
ло принимаемых подряд элементов одного знака, определяющее
период корректирования 7=2... 3.
352
Промежуток времени между сигналами управления является
случайной величиной и зависит от числа ЗМ в принимаемой ин-
формационной последовательности. Число ЗМ определяется стати-
стической структурой сообщения. Минимальный период корректи-
рования tKmin — это минимальное время между двумя подстройка-
ми, зависящее как от емкости реверсивного счетчика S, так и от
длительности единичного элемента то. При S= 1, т. е. когда отсут-
ствует реверсивный счетчик, корректирование будет происходить
при приеме каждого ЗМ информационной последовательности, т. е.
^ктш = То. В общем случае 7к = 75т0.
Статическая погрешность ест устройств синхронизации с ре-
версивным счетчиком тем меньше, чем больше коэффициент деле-
ния делителя йд, чем меньше нестабильность генератора k и
емкость реверсивного счетчика S.
Динамическая погрешность синхронизации еДПн представляет
собой случайную величину и подчиняется гауссовому закону
с плотностью вероятности
Среднеквадратическое значение аДИн можно рассчитывать по сле-
дующей формуле:
стди„ = V 0,628ohp ,,/(Зйд),
где Окр.и — среднеквадратическое значение краевых искажений еди-
ничных элементов.
С вероятностью, близкой к единице, можно утверждать, что
случайная величина един не будет превышать своего утроенного
среднеквадратического значения (известное правило «трех сигм»).
Следовательно, для оценки значения еДШ1 можно воспользоваться
выражением
Ели„ = ЗаДИ1, = 3 Г0,628аьр.„/(5^). (9.4)
Общее выражение для оценки погрешности синхронизации име-
ет вид:
г = 1/£д + 2kST + 3 Г0,628окр и/(5^). (9.5)
Определим время вхождения в синхронизм. Это время будет
зависеть от первоначального расхождения по фазе тактовой по-
следовательности, вырабатываемой на приеме, и принимаемой
последовательности ЗМ. Расхождение по фазе случайно и лежит
в пределах от 0 до то/2. Рассмотрим случай, когда сдвиг по фазе
максимален и ТИ сдвинут относительно идеального положения на
то/2 (рис. 9.20). Подстройка производится шагами, при каждом
шаге тактовые импульсы смещаются на время Д7. Тогда число ша-
гов, необходимое для подстройки, будет равно то/2Л/. Если под-
стройка осуществляется через интервал ho, то время, необходимое
23-6085 353
Рис. 9.20. К определению времени
вхождения в синхронизм
Рис. 9.21. Два варианта представле-
ния синхронизирующей информации
при маркерном способе групповой
синхронизации
для вхождения в синхронизм, будет равно (то/2Д02то. Учитывая
увеличение интервала между подстройками за счет реверсивного
счетчика, получим окончательно
?С=6Д57/2В, (9.6)
где 6д=т0/Д/; В = 1/т0.
Время поддержания синфазности ^п.с—время, в течение кото-
рого фаза синхроимпульсов не выйдет за допустимые пределы при
прекращении работы устройства синхронизации, определяется
формулой ^п.с = едОп/ (2kB). В качестве еДОп обычно используют
величину теоретической исправляющей способности приемника цт,
уменьшенную на величину погрешности синхронизации, т. е. едоп =
= цт—е. Тогда
/п.с=(ц-е)/(2^В). (9.7)
Поскольку величина теоретической исправляющей способности
приемника определяется способом регистрации и заранее из-
вестна, то увеличение tn с при заданной скорости модуляции В мо-
жет быть достигнуто лишь уменьшением коэффициента нестабиль-
ности задающих генераторов.
Вероятность срыва синхронизации по элементам Рс.с — это ве-
роятность того, что фаза синхроимпульсов под действием помех
сместится на величину, большую ±то/2. Такой сдвиг фазы нару-
шает работу устройств синхронизации и приводит к сбою группо-
вой синхронизации. Уменьшить величину Рс.с можно путем увели-
чения времени усреднения сигналов корректирования, т. е. умень-
шения емкости реверсивного счетчика S. Однако время
синхронизации будет также расти пропорционально S, а период
корректирования уменьшаться. Следовательно, необходимо решать
и другую оптимизационную задачу — выбора параметров с учетом
конкретных условий передачи для обеспечения минимума.
При проектировании и расчете устройств синхронизации обыч-
но задаются следующие параметры: погрешность синхронизации
е; скорость передачи В; среднеквадратическое значение краевых
искажений акр.и; исправляющая способность приемника ц; время
354
синхронизации tc\ время поддержания синхронизма /п.с. На осно-
вании заданных параметров рассчитываются: частота задающего
генератора /зг; допустимый коэффициент нестабильности генера-
тора k\ емкость реверсивного счетчика S; коэффициент деления
делителя /гд.
Коэффициент нестабильности задающего генератора определя-
ется из (9.7): —е)/ (2В/П с) Емкость реверсивного счетчика S
и коэффициент деления делителя определим из системы уравнений
(9.5) и (9.6) относительно S и &д:
е един
S = ; fe =1CB/S.
4kl + \!tcB д
(9-8)
В выражении (9.8) един определено из (9.4). Частота задающего
генератора /зг = /г1В.
Расчет параметров устройств групповой синхронизации. Уст-
ройства групповой синхронизации оцениваются в основном двумя
параметрами: временем вхождения в синхронизм (фазирования)
£ф и временем поддержания синхронизма £Пф. Последний параметр
характеризует помехозащищенность устройства и означает средний
промежуток времени работы аппаратуры связи (системы) между
интервалами, вызванными нарушениями синхронизма. В правиль-
но спроектированном устройстве время вхождения в синхронизм
должно быть минимальным, а /п.ф — максимальным.
Время вхождения в синхронизм и время поддержания синхро-
низма в приемнике в основном определяются алгоритмом работы
устройства групповой синхронизации, а также вероятностью иска-
жения сигналов в канале связи. Время вхождения в синхронизм
определяется также видом представления синхронизирующей ин-
формации. На рис. 9.21 приведены два варианта представления
синхронизирующей информации при маркерном способе группо-
вой синхронизации:
1. В каждом цикле передачи имеется группа п$ единичных эле-
ментов, представляющих синхронизирующую комбинацию (на
рис. 9.21,а «ф=3) и п элементов кодового слова.
2. Элементы синхронизирующей комбинации, число которых
равно трем, рассредоточены по отдельным циклам (на рис. 9.21,6
по трем циклам).
Для установления групповой синхронизации приемника необхо-
димо принять в целом все элементы синхронизирующей комбина-
ции. В первом варианте необходимо принять Пф элементов за один
цикл, во втором — Пф элементов за «ф циклов. Снижение пропуск-
нои способности канала связи в первом случае составляет --
(пф/п+1)
100%, а во втором случае —-— 100%. В то же время минимальное
n-f- 1
23*
355
Рис. 9.22. График зависимости Рл.ф от
числа информационных элементов п и
элементов фазирующей комбинации лф
время фазирования при сбое син-
хронизации равно одному циклу
1фт,п=То(»+»ф) в первом слу-
чае, а во втором /фтт=то (»+
+ 1)«ф-
Время поддержания синхро-
низма зависит как от интенсивно-
сти помех в канале связи, так йот
помехоустойчивости устройства
поэлементной синхронизации в
условиях помех. Время поддер-
жания синхронизма определяет-
ся вероятностью поражения по-
)й комбинации и зависит от спо-
соба представления синхроинформации.
Наличие помех в каналах связи может привести к ложному
корректированию и сбою работы аппаратуры ПДС в целом. Лож-
ная подстройка фазы распределителя приемника произойдет, если
под действием помех исказится маркер. Вероятность ложного фа-
зирования связана как со структурой фазирующей кодовой комби-
нации, так и с соотношением числа элементов кодовой комбинации
и числа элементов маркера. На рис. 9.22 приведен график зависи-
мости Рл.ф=ср(», «ф). Оптимизация длины комбинации при дан-
ных условиях передачи позволяет уменьшить вероятность Рл.ф.
Для уменьшения вероятности ошибки за счет групповой син-
хронизации величина пф должна быть как можно больше. Однако
передача длинных синхронизирующих кодовых комбинаций снижа-
ет пропускную способность каналов. Поэтому выбор пф должен
производиться с учетом как требуемой верности передачи, так и
пропускной способности канала связи.
Для стартстопных систем ПДС запуск и остановка распреде-
лителя приемника происходит по сигналам «Пуск» и «Стоп»
(рис 9.23). В случае действия помех возможно превращение бес-
токовой (пусковой) посылки в токовую и запуск распределителя
приемника со сдвигом во времени от ЗМ информационного эле-
мента (на рис. 9.23 в момент t=t2).
Процесс восстановления синхронизма носит случайный харак-
тер и полностью определяется статистической структурой инфор-
мационной последовательности. При равновероятном появлении
всех кодовых комбинаций алфавита сообщений вероятность вхож-
дения в синхронизм может быть представлена в виде графика
зависимости Рф=Д(яц) (рис. 9.24, где яц — число циклов).
356
Рис. 9 23. К определению времени вое- Рис. 9.24. График зависимости Рф
становления фазы стартстопных систем от числа циклов пц
синхронизации
Как видно из рис. 9.24, для обеспечения вероятности Рф = 0,9
необходимо восемь циклов. Это значит, что время восстановления
групповой синхронизации с вероятностью 0,9 при п=7,5 элементов
составит 7,5то-8 —60tq.
Оценка влияния точности поэлементной синхронизации на до-
стоверность приема элементов. Определим влияние погрешности
синхронизации на вероятность ошибки. Рассмотрим случай, когда
регистрация единичных элементов осуществляется методом стро-
бирования. На рис. 9.25 приведен единичный элемент то, отмечен
оптимальный момент регистрации МР (время регистрации ^р=0 и
исправляющая способность приемника цт~50%). Плотности веро-
ятностей смещения левой и правой границ единичного элемента
обозначены соответственно 1РЛ(6) и W'np(6). Ошибочная регистра-
ция элемента то произойдет в следующих случаях: левая или пра-
вая граница единичного элемента сместится вправо на величину
|6|^ц, одновременно обе границы сместятся внутрь единичного
элемента и смещение превысит исправляющую способность прием-
ника ц.
Вероятность ошибочной регистрации pom=pi+p2—Р1Р2, где р\
и р2 — соответственно вероятности смещения левой и правой гра-
ниц на величину больше ц. Как видно из рис. 9.25,
оо — |Л
Л=^л(8)</8; р2= JlK„p(8)d8. (9.9)
у, —оо
Наличие статической и динамической погрешностей корректи-
рования приведет к уменьшению верности приема единичного эле-
мента.
Пусть устройство поэлементной синхронизации вырабатывает
синхроимпульсы (стробирующие импульсы) с некоторым смещени-
ем (погрешностью е) (см. рис. 9.25). В этом случае
оо —|Л + £
Pi = f W\(3)d8; р2= J №„p(8)d8. (9.10)
е —оо
357
Рис. 9.25. К определению влияния поэлементной синхронизации иа достоверность
приема элемента
Если плотности вероятности 1ЕЛ(6) и 1ЕпР(б) описываются гауссо-
вым законом с параметрами акРи и окри, то вероятности pi и р2
можно выразить через функцию Ф(г)
а
Р1=0,5[1—<D(zi)J, где Zi=(p+e—аКри)/окРи; (9-11)
р2 = 0,5[ 1 —Ф (зг2) J, где z2= (jx—е—акри)/аьри (9 12)
Как показывает анализ выражений (9 11) и (9 12), погрешность
синхронизации вызывает увеличение вероятности ошибки. Стати-
ческая погрешность корректирования регулярна и поэтому может
быть в значительной степени скомпенсирована Основное значение
имеет динамическая погрешность синхронизации, величина которой
может быть обеспечена порядка 4...5% при значении S= 16 При
нарушении групповой синхронизации вероятность ошибки на эле-
мент увеличивается.
КОНТРОЛЬНЫЕ ВОПРОСЫ
1 В чем особенности поэлементной и групповой синхронизации для син-
хронных систем ПДС’
2 В чем особенности поэлементной и групповой синхронизации для старт-
стопных систем ПДС’
3 Перечислите требования, предъявляемые к устройствам поэлементной енн
хронизацин
4 Дайте классификацию методов и устройств поэлементной синхронизации
5 Поясните, почему в стартстопных системах требования к частоте задаю-
щего генератора оказываются менее жесткими, чем для синхронных систем’
6 Каков принцип действия устройств синхронизации по элементам разо-
мкнутого типа’
7 Какой недостаток устройств синхронизации с автономным источником син-
хронизации’
358
8 Расскажите о принципе построения и действия устройств синхронизации
с непосредственным воздействием на задающий генератор
9 Расскажите о принципе действия устройств синхронизации с дискретным
управлением без непосредственного воздействия на задающий генератор
10 Почему с увеличением шага коррекции время вхождения в синхронизм
уменьшается’
11 Чем объяснить, что с увеличением емкости реверсивного счетчика время
вхождения в синхронизм уменьшается’
12 Перечислите требования, предъявляемые к устройствам групповой син-
хронизации
13 Дайте классификацию методов и устройств групповой синхронизации
14 Расскажите о принципе действия устройств групповой синхронизации
в системах ПДС
15 Расскажите о принципе действия устройств, использующих маркерный
и безмаркерный метод групповой синхронизации
16 Перечислите основные параметры устройств поэлементной синхрони
зации
17 Какие факторы влияют на время вхождения и поддержания синхрони-
зации’
18 Как влияет точность синхронизации иа верность передачи сообщений
в системах ПДС’
19 На какую величину (в долях от т<0) сместится стробирующий импульс за
вртмя перерыва в канале /п=1 мин, если В= 1200 Бод, /г==2 Ю-0’
20 Определите величину смещения стробирующего импульса за счет не-
стабильности задающего генератора для каждого из пяти информационных эле-
ментов стартстопной комбинации, если В=100 Бод, fe=10-3
21 Сравните значения вероятности ошибки элементов для случаев, когда
погрешность синхронизации е=0 и е=20 % Устройство синхронизации реализо-
вано по схеме рис 9 15, £=10~5, £д=10, S=10, смещения ЗМ подчинены гаус
совскому закону акр и=0, о1(р и=25 % Регистрация осуществляется методом
стробирования цт=50 %
22 Определите время поддержания синхронизма /п с и время вхождения
в синхронизм tBX для устройства синхронизации (рис. 9 15) с йд=50 и S=16
Расчеты произвести для В=100 Бод, цг=50 %, # = 10-4 Определите шаг кор-
рекции, минимальный интервал коррекции и статическую погрешность
Глава 10. СИСТЕМЫ ФАКСИМИЛЬНОЙ
ПЕРЕДАЧИ СООБЩЕНИИ
10.1. ПРИНЦИПЫ ФАКСИМИЛЬНОЙ
ПЕРЕДАЧИ СООБЩЕНИЙ
Область электросвязи, которая занимается передачей неподвиж-
ных изображений по каналам электрической связи, называется
факсимильной связью. Факсимильный способ передачи информа-
359
ции является универсальным. Им одинаково удобно передавать
любые изображения: цветные и черно-белые фотографии, чертежи,
графики, метеокарты и газеты, микрофильмы и деловую коррес-
понденцию. В случае передачи полутоновых черно-белых изобра-
жений факсимильные системы называются фотофаксимильными,
поскольку носителем записи чаще всего является фотопленка или
фотобумага. Системы, обеспечивающие передачу цветных изобра-
жений, называются цветными факсимильными.
Во всех случаях принцип осуществления факсимильной связи
одинаков и состоит в следующем. Передаваемое изображение —
оригинал — разбивается на элементарные площадки. Яркости этих
площадок при отражении (или пропускании) падающего на них
светового потока преобразуются в электрические импульсы, кото-
рые в определенной последовательности передаются по каналу
связи. На приеме эти электрические сигналы в той же последова-
тельности преобразуются в соответствующие элементы изображе-
ния на каком-либо носителе записи В результате получается ко-
пия изображения (факсимиле)
Любое изображение можно рассматривать как совокупность
большого числа элементов, способных в различной степени отра-
жать падающий на них свет. Образование элементарных площадок
(растр-элементов) происходит за счет пермещения по поверхности
изображения светового луча, создаваемого светооптической систе-
мой Процесс перемещения луча называется разверткой, в резуль-
тате действия которой изображение разбивается на строки. Отра-
женный от поверхности оригинала световой поток попадает на
фотоэлектрический преобразователь, выходной электрический сиг-
нал которого повторяет форму входного светового потока. Узлы
передающей аппаратуры, обеспечивающие развертку изображения
и фотоэлек!рическое преобразование, объединяются в группу ана-
лизирующих устройств.
В приемном аппарате осуществляется обратное преобразование
переданных электрических сигналов в той же последовательности,
что и на передаче Соответствующие электрические (или преобра-
зованные в световые) сигналы вызывают окрашивание элементар-
ных площадок на поверхности носителя записи. В результате за-
писанное построчно изображение является копией переданного.
Устройства, осуществляющие эти преобразования, объединяются
в группу синтезирующих устройств. На рис 10 1 изображена
структурная схема факсимильной связи
Какое бы изображение не передавалось по линии связи, сигнал
с выхода фотоэлектрического преобразователя является аналого-
вым, 7 е непрерывным ио уровню и времени видеосигналом В ана-
логовых системах факсимильной связи этот сигнал после усиления
переносится в область высоких частот и непосредственно переда-
ется в линию связи. В цифровых факсимильных системах аналого-
360
I
I
Анализир/юшее
устроистео
Электри- Канал Электри- Синтезирующее
। ческии
I узел
связи
ческии ।
узел | Устройство
Рис 10 1 Структурная схема факсимильной связи
вый сигнал подвергается квантованию, дискретизации по времени
и кодированию.
Следует отметить, что интерес к факсимильной связи общего
пользования в середине 60-х г. понизился, поскольку передача
фототелеграмм не могла конкурировать с обычной телеграфной
(кодовой) передачей, существенно проигрывая последней по вре-
мени передачи, полосе частот и другим показателям. Стало ясно,
что традиционные аналоговые методы передачи видеосигналов не
способны обеспечить повышения эффективности факсимильной
связи общего назначения. Только переход на цифровые способы
обработки и передачи сигналов позволил факсимильной связи
в настоящее время занять в ряде стран доминирующее положение
среди всех других видов документальной связи. В нашей стране
объективная потребность в факсимильной связи общего назначе-
ния появилась сравнительно недавно За короткое время была раз-
работана цифровая аппаратура как общего, так и специального
назначения (аппаратура типа «ФАНТ»), усиленными темпами ве-
дется исследование и разработка цифровой факсимильной сети
общего пользования на базе телефонных коммутируемых каналов,
созданы и приняты ГОСТ на различные цифровые коды, позволя-
ющие быстро передавать факсимильную информацию Дальнейшее
развитие получила факсимильная сеть децентрализованного печа-
тания газет, которая в настоящее время является крупнейшей в ми-
ре. Разрабатывается оригинальная цифровая аппаратура передачи
газет («Газета-3»),
10.2. ОСНОВНЫЕ ХАРАКТЕРИСТИКИ
ФАКСИМИЛЬНЫХ СИСТЕМ СВЯЗИ
Вне зависимости от способа развертки изображение оказывает-
ся представленным совокупностью элементарных площадок (растр-
элементов), информация о яркости которых передается по каналу
связи. Размеры растр-элементов определяются прежде всего раз-
361
M DO g,s^,
э)
Отраж. световой
поток
Видеосигнал
Яр
Рис. 10.3. Форма chi на-
ла в случае конечного
размера растр-элемента
Рис 10 2 Формирование сигнала в иде-
альном случае (ар=0):
а — cipoka развертки, б — отраженный све-
товой поток: в — видеосигнал
решающей способностью анализирующего устройства. Если раз-
вертка изображения происходит за счет перемещения светового
луча, то размеры сечения этого луча определяют минимальную
площадь растр-элемента. Тогда величина разрешающей способно-
сти пр=1/ар, лин./мм, где ар —диаметр светового пятна, мм.
Роль разрешающей способности легко уяснить на следующем примере.
Предположим сначала, что световой луч является идеальной световой точ-
кой, т е. луч бесконечно тонкий. Тогда выходной сигнал 1 с фотоэлемента
(рис. 10.2) будет точно повторять по форме все изменения градаций яркости
анализируемого фрагмента (рис. 10.2). Предположим, что черному цвету соот-
ветствует сигнал единичного уровня, а белому — сигнал нулевого уровня
Однако на самом деле световое пятно, формирующее растр-элемент, имеет
конечные размеры, поэтому отраженный световой поток Фотр будет отличаться
от идеальной формы (рис. 10.3). Пусть световое пятно имеет диаметр ар, а тол-
щина самого тонкого штриха фрагмента (рис 10 2) меньше этого диаметра; /<ар.
При попадании светового луча на этот штрих изображения суммарная интенсив-
ность отраженного потока в случае /<ар будет мала или равна нулю, и поэтому
видеосигнал, соответствующий данному штриху, воспроизведется со значитель-
ными искажениями.
Очевидно, что толщина воспроизводимого штриха полностью определяется
размером светового пятна (апертуры) н не может быть меньше, чем ар
Таким образом, качество факсимильного изображения целиком
определяется способностью аппарата передавать (и воспроизво-
дить) самые мелкие детали изображения, т. е. разрешающей спо-
собностью. При высокой разрешающей способности изображение
получается четким (резким), перепады градаций яркости хорошо
362
выделяются, могут быть переданы самые тонкие линии. При низ-
кой разрешающей способности изображение получается размытым,
тонкие линии могут быть потеряны.
Выбор величины разрешающей способности целиком определя-
ется требованиями к качеству факсимильного изображения и
в большинстве случаев согласовывается с особенностями зритель-
ного восприятия. Так, при передаче метеокарт достаточно иметь
разрешающую способность порядка 4 лин./мм, для передачи дело-
вой корреспонденции 4... 8 лин./мм. Передача газет в силу осо-
бенностей полиграфического процесса требует 30...60 лин./мм.
В современной цифровой факсимильной аппаратуре в качестве
устройства считывания изображения применяется линейка длиной
в строку, состоящая из ряда миниатюрных фотодиодов, и поэтому
анализируемая строка состоит из дискретного по времени набора
сигналов — растр-элементов. В этом случае можно считать, что все
изображение разбито на элементарные площадки — растр-элемен-
ты, размеры которых определяются разрешающей способностью
анализирующей системы факсимильного аппарата.
Удобно представлять такое изображение дискретным, задан-
ным на решетке с ячейками квадратной формы. В качестве приме-
ра рассмотрим изображение буквы газетного текста, которая имеет
размеры 2X3 мм2. Примем, что разрешающая способность равна
30 лин./мм, т. е. размеры растр-элемента порядка 0,03X0,03 мм2.
Тогда изображение буквы будет представлено 6600 растр-элемен-
тами черного и белого цветов. Примем, что белому цвету соответ-
ствует сигнал «0», а черному «1». Тогда изображение знака будет
можно записать в виде матрицы, состоящей из «1» и «0». Таким
образом, каждая буква данного газетного шрифта будет иметь
свое факсимильное изображение, состоящее из 6600 двоичных сим-
волов.
Напомним, что при кодовых способах передачи буквенных зна-
ков, например при телеграфной передаче, каждый знак кодируется
при использовании кода МТК-2 пятиразрядной кодовой комбина-
цией. Сравнивая эти два способа передачи знака, нетрудно видеть,
что факсимильный способ крайне неэффективен. При одной и той
же скорости передачи двоичных символов за время передачи
изображения только одной буквы кодовым способом можно было
бы передать 6600/5—1320 знаков!
Столь не эффективная по времени поэлементная передача изо-
бражения имеет и положительную сторону: огромная избыточ-
ность факсимильного сообщения обеспечивает очень высокую по-
мехоустойчивость этого вида передачи документальной информа-
ции. Действительно, любая ошибка, возникшая при кодовом
способе передачи в любом из разрядов пятиэлементной комбина-
ции, приведет к регистрации другого знака. Например, кодовая
комбинация, соответствующая букве «Л» — 01001, при возникнове-
нии ошибки во втором младшем разряде (01011) будет дешифри-
363
рована телеграфным аппаратом как буква «Г». На факсимильном
же изображении ложный переход из «О» в «1» (т. е. появление
ложной точки другого цвета размером 30X30 мкм) вообще не бу-
дет заметен наблюдателю.
Известно, что факсимильную передачу можно осуществлять при
очень больших помехах в канале связи в условиях, когда любые
другие способы передачи оказываются абсолютно неработоспособ-
ными. Помимо того, что факсимильное изображение буквы состоит
из очень большого числа элементов, эти элементы образуют опре-
деленную геометрическую структуру, соответствующую данному
знаку, т. е. все элементы изображения определенным образом свя-
заны между собой. Помехи и ошибки, которые они вызывают, име-
ют случайную природу и такими связями не обладают. Поэтому
для того, чтобы разрушить изображение знака, помеха должна
быть очень мощной.
Таким образом, источники факсимильных сообщений являются
избыточными и требуют при прочих равных условиях существен-
ного увеличения времени передачи. В аналоговых системах фак-
симильной связи требуемое время передачи факсимильного сооб-
щения достигалось в принципе за счет увеличения полосы про-
пускания канала связи. Практические возможности сокращения
времени передачи факсимильного сообщения возникают при пере-
ходе к цифровым методам передачи на основе реализации принци-
пов эффективного кодирования. При этом можно построить факси-
мильную аппаратуру, позволяющую по скорости передачи успешно
конкурировать с кодовыми методами. Так, если обычный аналого-
вый факсимильный аппарат передает бланк документа формата
А4 в канале ТЧ примерно за 5 мин, то современный цифровой
факсимильный аппарат способен передать этот бланк в том же
канале менее чем за 1 минуту.
10.3. КВАНТОВАНИЕ И ДИСКРЕТИЗАЦИЯ
ВИДЕОСИГНАЛА
В цифровых факсимильных системах аналоговый выходной сиг-
нал анализирующего устройства подвергается квантованию, дис-
кретизации и цифровому кодированию. В идеальном случае сигнал
двухградационного изображения является двухуровневым. Однако
реально из-за конечных размеров апертуры, неравномерности осве-
щения, шероховатостей бумаги, собственного шума оптоэлектриче-
ского преобразователя выходной сигнал является аналоговым. Ти-
пичный вид реализации такого сигнала представлен на рис. 10.4,
а на рис. 10.5 представлена гистограмма распределения Р(х)
мгновенных значений сигнала двухградационного изображения.
После квантования аналогового сигнала он превращается
в двухуровневый сигнал, который после дискретизации его во вре-
мени представляет собой последовательность двоичных импульсов.
364
PM
Рис. 10.4. Типичная реали-
зация сигнала двухградаци-
онного изображения
Белое Черное X
а)
Рис. 10 5. Гистограмма распределения мгно-
венных значений сигнала (а) и распреде-
ление вероятностей значений сигнала в
идеальном случае (б)
Белое Черное X
б)
Обычно процесс квантования сигнала двухградационного изобра-
жения сводится к сравнению его значений с некоторым фиксиро-
ванным порогом и последующим формированием двухуровневого
сигнала.
Квантование сигналов многоуровневых (полутоновых) изобра-
жений происходит аналогично квантованию сигналов в телевизи-
онных системах, но с меньшим числом уровней. Обычно требуется
передавать не более 64 ... 128 уровней яркости.
При дискретизации двухградационных факсимильных сигналов
учитывают специфику формирования сигнала в реальной аппара-
туре и требования, предъявляемые к копии восстановленного изо-
бражения. Экспериментальный анализ факсимильных изображений
показывает, что приемлемое качество копии можно получить, если
интервал дискретизации выбрать равным длительности самого ко-
роткого импульса видеосигнала, соответственно частота дискрети-
зации выбирается исходя из этой длительности, т. е. равной удво-
енной верхней граничной частоте спектра короткого импульса.
Очевидно, что длительность такого импульса определяется прежде
всего размерами растр-элемента (см. § 10.2).
10.4. МОДЕЛИ ФАКСИМИЛЬНЫХ
СООБЩЕНИЙ
Выше было показано, что поэлементный способ передачи изо-
бражений приводит к резкому увеличению времени передачи. Ана-
лиз статистической избыточности, содержащейся в изображениях,
часто проводится на основе представления изображения как слу-
чайного объекта — в виде некоторой статистической модели, отра-
жающей основные свойства изображения. Поскольку передача изо-
бражения происходит построчно, то целесообразно считать, что
сигналы строк являются реализациями некоторой случайной по-
следовательности. Статистические характеристики этой последова-
365
тельности позволяют оценить среднее количество информации, со-
держащейся в элементе изображения, а следовательно, и возмож-
ный коэффициент сжатия.
Простейшей моделью видеосигнала двухградационного изобра-
жения является случайная последовательность с независимыми
значениями (1 и 0). Для полного статистического описания такого
процесса достаточно знать вероятности появления значений сигна-
ла Р(1) и Р(0). Эти вероятности легко оценить экспериментально,
подсчитывая число белых и черных элементов двухградационного
изображения. Так, для изображений типа документов Р(1) =0,34;
Р(0)=0,66 («1» — черные, «0» — белые элементы). В этом случае
энтропия, приходящаяся на один элемент изображения, Я—
=—2 l°g2 Pi = —Р(1)log2 P(l) — P(0)log2 Р(0) =0,925 бит/эл.
i
При равновероятном появлении «1» и «0» /7max = log2 2= 1 бпт/эл.
Избыточность %=1—Н/Нтах = 0,075.
В действительности элементы изображения нельзя считать ста-
тистически независимыми. На изображении имеются протяженные
участки однородной градации яркости. Поэтому для видеосигналов
двухградационных изображений характерно наличие чередующих-
ся серий «1» и «0». В этом случае более полезной и адекватной
моделью сигнала является марковская случайная последователь-
ность.
Значения марковской случайной последовательности статисти-
чески зависимы между собой. Степень этой зависимости отражает-
ся на так называемой вероятности перехода P(S//S/_1), которая
указывает, с какой вероятностью появится значение сигнала St
в момент t, если на предыдущем шаге сигнал принял значение S/-i.
В случае, когда сигнал принимает два значения s = 1, s = 0, веро-
ятности перехода образуют для стационарной последовательности
следующую матрицу переходных вероятностей:
P(s,/s, ,)= P<s'=1's-=‘> P(S,=0/S,.1 = l)
₽(.,, = 0,S,_, = 0) P(s, = 0)
Для полного задания последовательности необходимо задать
начальные вероятности появления So=l и s0=0: Ро(1) и Ро(О)
соответственно. Вероятность совместного распределения п значе-
ний марковской последовательности s0 • • •sn определяется выра-
жением
п
Р (s0) slt s„) = Р (s0) [] Р (Si/Si-i). (10.2)
/=1
Для последовательности с независимыми значениями очевидно,
п
что Р($о, Si,...,sn)= P(Si), где Р (sO — вероятность значения
<=о
st, причем P(s()=P(sj) для любых i, /.
366
I I I
7,7 пин/мм
(машинописный 1екп|
6)
30 лин/мм
' -зетныи текст)
в)
Рис. 10 6 Сигналы при раз-
личной разрешающей спо-
собности
Рис. 10.7 Распределение длин
белых отрезков для двух изо-
бражений типа синоптических
карт:
-------теоретическая кривая;
х—х—х — экспериментальная кри-
вая
Вычислим среднее количество информации для элементов изо-
бражений газетного текста и машинописных документов. Для этих
изображений переходные вероятности измерены экспериментально
[10.1].
Для сигнала изображения машинописного текста
Рм(1/1) =0,65; Рм (0/1) =0,35;
Рм (0/0) =0,85; Рм(1/0) =0,15;
Ри(1)=0,4.
Для сигнала изображения газетного текста
Р, (1/1) =0,95; Рг(0/1) =0,05;
Рг(0/0) =0,99; Рг(1/0) =0,01;
Рг(1)=0,4.
Различие в значениях переходных вероятностей для сигналов
газетного и машинописного текстов объясняется прежде всего
различной разрешающей способностью анализирующих устройств,
соответствующих ФА. Если даже считать, что толщина штрихов
букв у этих изображений одинакова, то число элементов, описы-
вающих эти штрихи, будет разным. Газетный сигнал будет содер-
жать более длинные серии одинаковых элементов, чем сигнал ма-
шинописного текста.
367
На рис. 10.6,а представлен увеличенный фрагмент буквы тол-
щиной 0,5 мм. Соответствующие цифровые видеосигналы изобра-
жены ниже. Очевидно, что в случае на рис. 10.6,в переход из «1»
в «1» осуществляется с более высокой вероятностью, поскольку
в состоянии «1» сигнал пребывает большее число раз. Это означа-
ет, что значения сигнала (как случайного процесса) изображения
газетного текста статистически сильнее связаны между собой. Сте-
пени этой связи и определяют переходные вероятности. Так, если
определить вероятность совместного появления трех черных элемен-
тов (рис. 10.6,6), то для газетного изображения Рг(1, 1, 1) =
= РГ(1)РГ2(1/1) =0,4-0,952=0,3, а для изображения машинопис-
ного текста Рм(1, 1, 1) = РМ(1)-Рм2(1/1) =0,17. Для случайного
изображения с независимыми элементами при той же вероятности
появления черного элемента Р = 0,4 получим Р(1, 1, 1) = Р<!(1) =
= 0,064.
Из этого расчета видно, что марковская модель более точно
отражает специфику сигнала реального изображения, чем модель
в виде процесса с независимыми значениями.
Пользуясь известным обобщением формулы Шеннона на ис-
точники с зависимыми сообщениями можно подсчитать количество
информации, содержащееся в элементе машинописного или газет-
ного изображения:
/ = -£P(Si) 2 (10.3)
sl si-l
Если в (10.3) подставить значения переходных и безусловных
вероятностей для газетного и машинописного текстов, то для газет-
ного текста количество информации, содержащееся в элементе
изображения /г=0,188 бит/эл, а для машинописного текста /м =
= 0,76 бит/эл.
Оценим избыточность изображений:
%г= 1 —7Г/7max = 0,8 1J Хм= 1 /м //max = 0,24.
Для источника в виде модели с независимыми элементами и
неравными вероятностями /=0,02.
Полученные значения % свидетельствуют о том, что в случае
передачи газетного и машинописного изображений потери в ско-
рости передачи информации составляют 81 и 24% соответственно.
Введем коэффициент сжатия 2Ссж = /тал//=1/(1—х), показы-
вающий, во сколько раз можно уменьшить количество двоичных
цифр для представления источника с энтропией 1 = Н, по сравне-
нию с тем, когда все сообщения равновероятны. При передаче га-
зетного изображения Ксж=5,31, а машинописного текста ^ж= 1,3.
Расчет энтропии показывает, что потенциально при передаче
изображений газет можно более, чем в 5 раз уменьшить объем
368
передаваемой информации. Более подробные статистические рас-
четы, основывающиеся на учете связей элементов более, чем на
один шаг, показывают, что возможные коэффициенты снятия мо-
гут быть еще выше (Ксж = 12, = 0).
Определяя возможные коэффициенты сжатия, в качестве моде-
ли исходного алфавита сообщений рассматриваем элементы изо-
бражения: значения цифровых сигналов строк развертки изобра-
жения (1,0).
Известно, что идея эффективного кодирования сообщений свя-
зана с укрупнением алфавита сообщений, т. е. с возможным
сокращением его исходного объема. В качестве элементов изобра-
жения можно рассматривать, например, отрезки строк из черных
и белых элементов, далее можно еще больше укрупнить алфавит,
разбивая изображение на некоторые типовые фрагменты, охваты-
вающие несколько строк развертки. Так, при передаче изображе-
ния машинописного текста такими фрагментами могли бы быть
уже изображения отдельных знаков текста. В этом случае факси-
мильная передача фактически свелась бы к кодовой передаче
аналогично телеграфной передаче текста, однако необходимо авто-
матическое опознавание изображения знака. Рассмотрение этой
задачи выходит за рамки данного раздела.
Оставаясь в рамках факсимильной передачи, т. е. передачи
сигналов строк развертки изображения, можно рассматривать мо-
дели этих сигналов в виде случайных серий, состоящих из черных
и белых элементов. Таким образом, изображение представляется
совокупностью различных отрезков черного и белого цветов.
Здесь следует сделать одно замечание. Рассматривая изобра-
жение в виде набора различных отрезков белого и черного цветов,
мы просто по-другому интерпретируем прежний источник, порож-
дающий сообщения в виде единичных элементов «0» и «1». Поэто-
му, если в качестве такого источника выбрать марковскую после-
довательность, то серии, состоящие из «0» и «1», — это укрупнен-
ные состояния того же марковского процесса. И поэтому
статистические характеристики этих состояний (серий) полностью
определяются статистическими свойствами исходного источника.
Отсюда следует, что избыточность обоих источников одинакова.
Целесообразность представления изображения в виде источника
длин серий белого и черного цветов обусловливается существенной
неравномерностью распределения вероятностей длин этих серий,
что и позволяет использовать методы статистического кодирова-
ния.
Зная статистические характеристики марковского процесса,
легко найти вероятности длин серий. Обозначим через Р (0; и) ве-
роятность того, что серия длиной п содержит только белые элемен-
ты. Тогда, пользуясь соотношением (10.2), найдем, что
Р(0, п)=Р(0)Р(0/0)»~1. (Ю.4)
24—6085 369
Здесь в качестве Р(0) следует рассматривать не начальную
вероятность появления значения «О», а финальную вероятность
появления значения «О» на любом шаге I, определяемую форму-
лой
р (0) =-----------
Р(1/0) + Р(0/1)
Р(1) = 1_р(0) = —£_LLZ2>—. (Ю.5)
' ’ ’ Р(1/0)+Р(0/1) v
На рис. 10.7 приведены теоретические и экспериментальные
кривые вероятностей Р(0, п) для двух изображений Ai, Аг типа
синоптических карт. Пользуясь этими данными, можно найти сред-
нее количество информации, приходящееся на серию длиной п.
В случае равномерного распределения длин серий каждая серия
длиной п содержала бы максимальное количество информации
I сер —— I * И,
где 1 —- количество информации, приходящееся на один элемент
серии. Однако распределение длин серий носит резко выраженный
неравномерный характер. Средняя длина серии определяется как
математическое ожидание случайной величины п:
М {п} = п = (0, tii). (10.6)
I
Подставив в (10.6) выражение для Р(0, щ) из (10.4) и прове-
дя суммирование,
й=п[1 — Р(0)Р(0/0)«-'].
Тогда количество информации, содержащееся в серии средней
длины й,
/сер=/-п==/{п[1—Р(0)Р(0/0)п-|]4-1}.
Возможный коэффициент сжатия для каждой серии длиной п
определится выражением
-------------- . (10.7)
п n[l-P(0)P(0/0)«-iJ+i-------------------------'
На рис. 10.8 приведена зависимость коэффициента сжатия
от длины п. Анализируя кривые Ah Аг, можно сделать вывод, что
существует некоторое оптимальное значение длины блока п, при
котором коэффициент сжатия получается максимальным. Оно
определяется прежде всего вероятностями Р(0) и Р(0/0), которые
в свою очередь зависят от разрешающей способности анализирую-
щего устройства и конкретного изображения.
Для изображения типа синоптических карт оптимальная длина
серии белого равна 7 и 8, что определяет коэффициенты сжатия
2,55 и 2,75 соответственно.
370
Рис 10 8. Зависимость коэффициента
сжатия КгЖ от длины п серин
экспериментальная, ------------теоретиче-
ская
Обобщением рассмотренной модели может служить представ-
ление изображения в виде совокупности отрезков строк-блоков
размером п\п. Статистические характеристики этих блоков мож-
но получить, основываясь на рассмотренной выше модели марков-
ской цепи. Подробнее с этими вопросами можно познакомиться
в [10.2].
Заканчивая рассмотрение моделей факсимильных сообщений,
следует отметить, что основной упор был сделан на статистическое
представление элементов, серий, фрагментов изображений в виде
случайных событий. Такой подход оправдан, когда в качестве ме-
тодов эффективного кодирования используются статистические
методы, в основу которых положено представление о случайном
источнике сообщений. В этом случае понятия «избыточность» и
«количество информации» трактуются на основе понятий теории
информации, т. е. как статистические категории
Не следует думать, что описание изображений в виде статисти-
ческих моделей является единственно возможным. Целесообраз-
ность статистического описания определяется, прежде всего, свой-
ствами изображения и требованиями к его воспроизведению полу-
чателем. Ниже будет рассмотрен нестатистический подход
к описанию изображения.
10.5. ЭФФЕКТИВНЫЕ МЕТОДЫ ПЕРЕДАЧИ
ФАКСИМИЛЬНЫХ СООБЩЕНИЙ
Существующие методы сокращения избыточности можно услов-
но разбить на две группы.
Первая группа методов позволяет так закодировать сообщения,
что в отсутствие ошибок в канале связи декодирование позволяет
точно восстановить переданное сообщение Это — методы кодиро-
вания с сохранением информации, или неискажающие методы эф-
фективного кодирования.
Вторая группа методов отличается тем, что в процессе эффек-
тивного кодирования сообщения в него вносятся определенные не-
устранимые искажения, которые считаются допустимыми Даже
в отсутствие ошибок канала связи декодированное сообщение от-
личается от истинного передаваемого сообщения. Эти методы «без
сохранения информации» называют искажающими методами коди-
рования.
24* 371
Большинство неискажающих методов кодирования основаны
на представлении источника сообщений (изображений) как статис-
тического источника. Поэтому данные методы иногда называют ме-
тодами статистического кодирования. Основой для их построения
служат положения теории информации и теории эффективного
кодирования. На этой базе были разработаны эффективные мето-
ды кодирования двухградационных изображений и построена соот-
ветствующая цифровая факсимильная аппаратура общего назна-
чения для передачи в основном документальной информации.
Методы обладают высокой эффективностью при отсутствии ошибок
в канале связи. Для повышения помехоустойчивости в данном слу-
чае используют традиционные методы защиты от ошибок, приня-
тые в системах ПД.
Следует отметить, что при использовании методов неискажаю-
щего кодирования задачи сокращения избыточности и повышения
помехоустойчивости, как правило, решаются независимо друг от
друга: сначала устраняется собственная избыточность источника,
что приводит к сжатию объема сообщения, а потом для повышения
помехоустойчивости, учитывая возможные ошибки канала связи,
вносится искусственная избыточность в передаваемый сигнал для
борьбы с ошибками.
Практически, подобные методы кодирования работоспособны
в каналах с низкой вероятностью ошибки (10-5 и ниже).
Искажающие методы кодирования развиты значительно мень-
ше. В огличие от регулярных статистических методов кодирования
они носят в основном эвристический характер, при их построении
используется нестатистическое описание источника изображений
и учитываются свойства зрительного восприятия. Особенностью
этих методов является также то, что они не универсальны и стро-
ятся для каждого класса изображений отдельно. Искажающие
методы кодирования значительно меньше чувствительны к ошиб-
кам и могут использоваться в каналах с вероятностью ошибки
10~4, IO"3.
Статистические методы кодирования. Основой для использова-
ния этих методов является представление источников факсимиль-
ных сообщений в виде серий — черных и белых отрезков строк
развертки. Рассмотрим идею метода нестатистического кодирова-
ния длин серий КДС. Допустим, что длины серий черного лежат
в пределах от 0 до 8, а длины серий белого в пределах от 0 до 30.
Пусть эти серии чередуются. Каждую длину серии можно предста-
вить в виде двоичного числа. Например, серия черного длиной в 7
элементов будет представлена как III (число 7 в двоичной систе-
ме счисления), а серия белого из 25 элементов будет представлена
в виде соответствующей двоичной кодовой комбинации 1101 (чис-
ло 25). В канал будут передаваться не сами серии, а их двоичные
номера. Например, серия белого из 25 элементов и серия черного
372
из 7 элементов будет передана как набор из кодовых комбинаций:
1101 111
серия серия
белого черного
Легко определить, во сколько раз в данном случае сокращается
объем передаваемой информации: К,ж= (25Ц-7)/(5-|-3) =32/8=4.
Декодирование сигнала происходит однозначно, если условить-
ся, что первой кодовой комбинацией всегда будет кодовая комби-
нация белого отрезка, и белые, и черные отрезки всегда чередуют-
ся. Такие коды практически применяются при передаче факси-
мильных изображений метеокарт. Средние длины серий белого и
серий черного определяются, исходя из статистики длин серий для
данного вида изображений. Так, серии черного кодируются трех-
битовыми кодовыми словами, и все серии белого — шестибитовыми
кодовыми словами. Если на изображении встречаются длины серий,
отличающиеся от «стандартных», они кодируются специальным
образом, с тем, чтобы можно было однозначно декодировать сиг-
нал. Подробно с этим кодом и его разновидностями можно позна-
комиться в [10.3].
Более эффективным способом кодирования длин серий является
использование кода Хафмена (см. разд. 5). Напомним, что сущно-
стью кода Хафмена является реализация основной идеи эффектив-
ного кодирования: длина кодовой комбинации сообщения обратно
пропорциональна вероятности его появления. Выше было показа-
но, что распределение длин серий носит неравномерный характер,
поэтому применение кода Хафмена должно обеспечить максималь-
ное сжатие исходного объема источника, поскольку принцип коди-
рования предписывает более короткие кодовые слова часто встре-
чающимся длинам серий.
Этот код с некоторыми модификациями был предложен в ка-
честве международного стандарта для построения факсимиль-
ной аппаратуры III группы общего назначения (см. разд. 10.8),
работающей в канале ТЧ. Код получил название модифицирован-
ного кода Хафмена (МКХ) [10.2]. Главная цель стандарта за-
ключалась в обеспечении передачи типичных документов фор-
мата А4 цифровым способом по телефонному каналу в среднем
за 1 мин.
В цифровой форме при нормированных значениях разрешаю-
щей способности 7,7 лип./мм и 3,85 стр./мм документ содержит
1188 строк по 1728 элементов в каждой строке. Непосредствен-
ная передача такого объема информации в канале ТЧ заняла
бы 12 мин. Однако код Хафмена позволяет существенно сокра-
тить это время передачи.
Используя статистику длин (отрезков) белого и черного, мож-
но построить два кода Хафмена: для серий белого и для серий
черного. Очевидно, что в каждом коде число кодовых слов равно
37
1728. Такой объем существенно усложняет реализацию кода
Хафмена, поэтому этот код был модифицирован. Модификация
заключается в том, что все кодовые слова в серии разбиваются
на две группы: кодовые слова для основных серий длиной М+64,
где N — целое число, и дополнительные слова (концевые) для
серий длиной 0 ... 63 элементов. Очевидно, что каждую серию
можно представить этими группами, что позволяет уменьшить
общее число кодовых слов и упростить реализацию.
Код МКХ в сочетании с многопозиционными методами моду-
ляции позволил реализовать передачу бланка формата А4 в ка-
нале ТЧ со скоростью 9600 бит/с менее чем за 1 мин. При этом
общий коэффициент сжатия определяется как произведение ко-
эффициентов сжатия за счет кода (Кмкх = 5) и за счет приме-
нения многопозиционного модема (Лмод=3). Поэтому общий ко-
эффициент сжатия исходного объема изображения 2-Ю6 бит ра-
вен 15.
Рассмотренный код МКХ является одномерным кодом. Есте-
ственно, что большей эффективности можно достичь, применяя
кодирование нескольких строк развертки. Одним из вариантов
двумерного кода является код READ, который рекомендован для
использования в факсимильной аппаратуре III группы [10.2].
В этом коде используется сочетание одной из разновидностей
КДС и кода МКХ. Кодирование следующей строки данным ко-
дом осуществляется с учетом предшествующей или последующей
строк. В среднем этот код позволяет увеличить эффективность
сжатия на 20 ... 40 %.
Существуют двумерные коды, использующие для сжатия ин-
формацию в нескольких строках развертки. Так, в целях сокра-
щения объема информации при передаче изображений газетных
полос, передаваемых с высокой разрешающей способностью
(30 ... 60 лин./мм), применяется кодирование с предсказанием.
Предсказание следующего элемента происходит по 12 окрестным
элементам. Ошибка предсказания кодируется кодом Хафмена.
Такой способ кодирования позволяет получить высокий коэффи-
циент сжатия (до 10 .. . 12). В Советском Союзе принят в ка-
честве ГОСТ на цифровую аппаратуру III группы двумерный
код, который называется планарным [10.4]. Данный код исполь-
зуется в цифровой аппаратуре передачи метеокарт. При этом
кодировании сжатию подвергаются фрагменты изображения раз-
мером 8X8 элементов, на которые разбивается все передаваемое
изображение. Идея кодирования состоит в следующем.
Рассмотрим фрагмент изображения 8X8 и разобьем его на
четыре равные части (рис. 10.9). В данном примере квадраты
I, II, III содержат черные элементы, а квадрат IV не содержит
черных элементов. Квадраты 4X4, содержащие черные элементы,
обозначим 1, а не содержащие черных элементов, через 0.
Запишем условные обозначения квадратов 4X4 в порядке их
374
1
Рис. 10.9. Принцип планар-
ного кодирования
Рис. 10 10. Разбиение раст-
рового изображения на суб-
растры:
/—растровые точки; 2 — суб-
растры
нумерации: 1110. Если бы фрагмент 8X8 был бы весь белым
(черным), то были бы записаны либо 0, либо 1.
Каждый квадрат 4X4, имеющий в своем составе черные эле-
менты, снова разобьем на четыре части, образуя квадраты раз-
мером 2x2 элементов. Если в этих квадратах имеются черные
элементы, то обозначим соответственно их через 1. Для нашего
примера имеем:
111 О
001 1 0010 1000
/ I / I
11101 100 0 0100
Те квадраты, которые содержат черные элементы, опять ра-
зобьем на группы из четырех квадратов, но уже размером 1X1
элемент и проделаем ту же операцию. В результате получим
иерархию уровней описания, на самом младшем уровне кодиро-
вания фактически не происходит. Кодовое описание фрагмента
будет выглядеть следующим образом:
1110 ООН 0010 1000 1110110010001000
3-й старший 2-й старший младшие уровни 1 X 1
уровень 4 X 4 уровень 2 X 2
В данном примере массив из 64 бит сжимается в 2 раза. Оче-
видно, что подобный способ кодирования будет тем эффектив-
нее, чем реже встречаются черные элементы изображения. По-
скольку синоптические карты в основном состоят из редких тон-
ких линий, то такое кодирование обеспечивает сжатие в 5 раз.
Методы эффективного статистического кодирования обладают
следующими особенностями.
1. Неравномерность длин кодовых комбинаций. Однако в ка-
нал кодовые комбинации должны поступать равномерно. Поэто-
375
му согласование кодера с каналом связи происходит с помощью
буферного устройства памяти, откуда кодовые комбинации пере-
даются в канал связи с постоянной скоростью. В ряде случаев
объем буфера получается большим, а при ограниченном объеме
буфера приходится останавливать развертку факсимильного ап-
парата, чтобы предотвратить память от переполнения (опусто-
шения) .
2. В отсутствие ошибок коды позволяют точно восстановить
переданное сообщение, по действие даже одиночной ошибки мо-
жет вызвать недопустимые искажения. Дело в том, что несмотря
на то, что рассмотренные коды с переменной длиной кодового
слова обладают свойством, позволяющим разделить кодовые
слова и осуществить однозначное декодирование, действие
ошибки может нарушить условие правильного разделения, в ре-
зультате не только одно слово, по и все последующие могут быть
декодированы неверно. Поэтому при использовании таких кодов
ошибка может поражать строки или даже группы строк (в случае
двумерного кодирования) и требуется высокое качество канала
связи, которое в ряде случаев нельзя обеспечить.
Кроме того, неравномерные коды строятся без учета специ-
фики зрительного восприятия, только на основе статистиче-
ских свойств факсимильного сообщения. В отсутствие помех коды
позволяют передать изображение точно (что при зрительном
восприятии не всегда необходимо), но при небольшом уровне
помех они могут приводить к недопустимому искажению копий.
Построение неискажающих кодов ведется без учета помехо-
устойчивости, повышение которой осуществляется после кодиро-
вания применением средств кодозащиты и обратной связи.
Учитывая вышесказанное, можно поставить задачу построе-
ния эффективного кода с заданным критерием верности воспро-
изведения копии. Подобные методы кодирования относятся к ко-
дированию с искажениями. Искажения вносятся в изображение
в процессе его кодирования и не могут быть устранены в про-
цессе декодирования. Достоинством такого подхода являются
возможность построения равномерных кодов и обеспечение вы-
сокой помехоустойчивости за счет свойств самого кода.
К сожалению, регулярных методов построения таких кодов
не существует. Их необходимо строить эмпирически на основе
детального изучения свойств каждого передаваемого оригинала
и требований к качеству копии, при этом мера верности обяза-
тельно должна быть согласована с требованиями получателя.
Поскольку алгоритм является равномерным, то любое иска-
жение одного кодового слова не может привести к нарушению
декодирования других кодовых слов, и помехоустойчивость бу-
дет выше, чем при использовании «неискажающих» алгоритмов.
Таким образом, сущность искажающих методов кодирования
состоит в том, что в целях сжатия изображения в него вносятся
376
определенные, допустимые с точки зрения требований к качеству
искажения, которые не могут быть полностью устранены на
приеме.
В качестве примера рассмотрим задачу сжатия изображений
иллюстраций газетных полос. Как известно, полутоновые иллю-
страции в газете выполняются растровым способом: воспроизве-
дение полутонов происходит за счет изменения площади регу-
лярно расположенных растровых точек. Расстояние между точ-
ками не изменяется. Белое поле растрового изображения состоит
из самых маленьких точек (в аппаратуре «Газеча-З» их размер
30 мкм). Эти точки совершенно незаметны, если рассматривать
изображение на нормальном для Ч1ения расстоянии (около
30 см). Поскольку глаз не в состоянии различить отдельные точ-
ки, то все точечное изображение воспринимается как белое. При
большем диаметре точек структура будет восприниматься как се-
рое поле и при максимальном диаметре точек — как черное.
Таким образом, информацию о полутоне несет только площадь
растровой точки, причем показано [10.5], что ее форма не влияет
на качество восприятия изображения.
Поскольку растровое изображение обладает резко выражен-
ной регулярной (детерминированной) структурой, то описание
его в виде случайного статистического источника очевидно непри-
годно. Действительно, статистические характеристики факсимиль-
ного сигнала растрового изображения имеют следующие значе-
ния.
Р(1)=0,488; Р(0)=0,512;
Р( 1/1) =0,775; Р (0/0) =0,785.
Находя энтропию сигнала и определяя возможный коэффициент
сжатия, получим /Ссж=1,29. Следовательно, применение стати-
стических методов кодирования растрового факсимильного сиг-
нала неэффективно. Это следует из того факта, что в данном
случае информационная избыточность растрового изображения
определяется не вероятностными, а детерминированными его
свойствами — регулярностью растровых точек. Так как полез-
ную информацию несет только площадь точки, то именно инфор-
мацию о площади и следует передавать в канал связи, а на при-
емной стороне восстанавливать эту площадь в соответствующих
узлах растровой решетки.
Эффективность такого способа передачи растрового изобра-
жения можно оцепить следующим образом.
Расстояние между растровыми точками определяет их мини-
мальный размер и называется линиатурой растра. Этот параметр
характеризует разрешающую способность полутонового растро-
вого изображения, поскольку минимально различаемая деталь
не может быть меньше расстояния между сооседними растровы-
377
ми точками. Растровое изображение можно составить из площа-
док — субрастров, каждый из которых содержит одну растро-
вую точку. Варианты форм субрастров показаны на рис. 10.10.
Дискретизация факсимильного сигнала приводит к квантованию
площади растровой точки. Зная линиатуру растра L, см-1 и раз-
решающую способность анализируемого устройства, можно опре-
делить число уровней квантования.
= «№ = 1(Х) 2£ 2
$э.и Р
где 3Сб — площадь субрастра, равная 100L~2; S3.H — площадь
элемента изображения, равная пр2; пр — разрешающая способ-
ность мм
Очевидно, что число уровней квантования полутонового изо-
бражения характеризуется числом площадок элементов изобра-
жения, составляющих один субрастр. Для L=36 см-1, /гр=33 мм-1
(параметры аппаратуры «Газета-3») имеем А=83. Известно, что
для качественного воспроизведения полутонового изображения
вполне достаточно иметь А=64 уровня яркости. Для передачи
такого числа уровней двоичным кодом необходимо иметь длину
кодовой комбинации /?=Iog2 А=6. В рассматриваемом примере
n=log2 83=7. Таким образом, вместо поэлементной передачи
А=83 бит необходимо передать только 7 бит, что обеспечивает
сжатие объема передаваемой информации более чем в 11 раз.
Существенным достоинством такого способа передачи являет-
ся равномерность кодовых комбинаций и поэтому возникающая
в канале ошибка может исказить площадь только одной растро-
вой точки. Напомним, что при использовании статистических ме-
тодов кодирования одна ошибка канала связи может вызвать
треки ошибок на изображении. Поэтому рассмотренный способ
кодирования растрового изображения обладает высокой помехо-
устойчивостью. Кроме того, равномерность поступления кодовых
комбинаций облегчает согласование кодера с каналом связи, что
упрощает соответствующие узлы аппаратуры [10.6].
Рассмотренный способ эффективного кодирования растрового
изображения с некоторыми модификациями используется в раз-
рабатываемой аппаратуре передачи газет «Газета-3».
10.6. МЕТОДЫ ПОВЫШЕНИЯ
ПОМЕХОУСТОЙЧИВОСТИ ПЕРЕДАЧИ
ФАКСИМИЛЬНЫХ СИГНАЛОВ
Повышение помехоустойчивости передачи факсимильных со-
общений является не менее важной задачей, чем сжатие объема
факсимильной информации. Выбор способа повышения качества
принимаемого изображения определяется требованиями получа-
378
теля сообщения, а также существенно зависит от способа переда-
чи сигналов изображения.
При использовании методов статистического кодирования
практически ликвидируется избыточность факсимильного изобра-
жения, кодированный сигнал представляется равновероятной
случайной последовательностью 1 и 0, и поэтому методы защи-
ты от ошибок канала полностью аналогичны методам, приме-
няющимся в АПД: помехоустойчивое кодирование, обратная
связь, снижение скорости передачи и т. п. При реализации таких
методов предъявляются повышенные требования к качеству ка-
нала связи, например, согласно МККТТ применение цифровых
факсимильных аппаратов 111 группы, где используется статисти-
ческое кодирование, возможно только в каналах ТЧ с вероятно-
стью ошибки не хуже 10-5. Однако в реальных условиях, осо-
бенно в коммутируемых каналах, такой показатель трудно обес-
печить. Как уже отмечалось, особенностью статистических
(неискажающих) методов кодирования является высокая чув-
ствительность к ошибкам канала. Одиночная ошибка приводит,
как правило, к неверно восстановленным блокам и даже целой
строке развертки. В факсимильных системах, предназначенных
для передачи деловой документальной информации, меры борьбы
с такими ошибками в силу невысоких требований к качеству при-
нимаемой копии сводится либо к замене пораженной строки
ближайшей верно декодированной строкой, либо при высокой
плотности развертки допускается просто пропуск пораженной
строки.
В факсимильных системах, использующих искажающие мето-
ды кодирования, а также в системах без эффективного кодиро-
вания, избыточность изображения частично либо полностью со-
храняется. Поэтому здесь применяются методы повышения по-
мехоустойчивости, основанные на структурных, статистических
характеристиках факсимильных сигналов, отличающихся от со-
ответствующих свойств помех канала связи. Для решения этой
задачи используются методы оптимального приема. Трудность
такого подхода состоит в разработке адекватной статистической
модели изображения и сложности практической реализации ал-
горитмов обработки. Не менее развиты и применяются на прак-
тике эвристические и, в частности, логические методы улучшения
качества двухградационпых изображений. При реализации этих
методов учитывают особенности зрительного восприятия.
Следует отметить, что задача улучшения качества изображе-
ния должна решаться не только на приемной стороне, но и на
передающей. Подобная задача возникает при передаче некаче-
ственных малоконтрастпых изображений. Такие изображения
всегда содержат искажения, возникающие из-за шероховатости
бумаги, неравномерности освещения, механических дефектов пе-
чатающих устройств. Значительные искажения возникают в фо-
379
тоэлектронном преобразователе, особенно, если используются
фотоэлектронные умножители. Подобные искажения изменяют
статистические характеристики сигнала и при использовании ме-
тодов статистического кодирования, например кода Хафмена,
увеличивают объем кодового словаря, что снижает эффективность
кодирования. Поэтому перед процедурой эффективного кодиро-
вания передаваемое изображение обязательно подвергается
фильтрации, позволяющей устранить искажения и улучшить его
качество.
Улучшение качества сигнала изображения можно осущест-
влять аналоговыми и цифровыми методами. В последнем случае
устраняются ошибки, возникшие на двухградационном изобра-
жении в виде ложных черных и белых элементов. При аналого-
вых методах обработки ставится задача наилучшего выделения
«идеального» двухградационного сигнала на фоне шума. По-
скольку формирование такого сигнала в факсимильной аппара-
туре происходит в пороговом устройстве, то, по существу, задача
выделения сигнала сводится к оптимизации структуры этого
устройства.
Эффективное решение задачи фильтрации факсимильного сиг-
нала может быть получено на основе статистической теории
фильтрации марковских процессов [10 7]. Здесь предполагается,
что моделью идеального двухградационного сигнала является
марковская двоичная последовательность.
В [10 8] дан вывод алгоритма фильтрации. Он состоит в сле-
дующем Входной сигнал yt=st-{-nt сравнивается с порогом П.
Если у^П, то s/=l, а если yt<.n, то s/=0. Величи-
на П не постоянна, а зависит от опенки сигнала s/_j в предыду-
щий момент времени. Таким образом, У1^П\, если st-i=l, и
у^Па, если S/-i=0. Значения 77j и 77О определяются выраже-
ниями:
П
1 2 1 “ ( 1 )
т~п жл/
2 Р Р4(0)
где а=Р?(1/1), р=Р5(0/0); о,,2 — дисперсия флуктуационного
(белого) шума nt.
В частном случае, когда Р4(1)=Р,,(0)=а=₽=0,5, 771=
==77о=1/2. При этом марковская цепь превращается в незави-
симую равновероятную последовательность 0 и 1 (сигнал пере-
дачи данных), а правило приема совпадает с известным методом
стробирования (см. разд. 2 7).
На рис. 10.11 показаны зависимости значений порогов 77] и
Па от отношения сигнал-шум р:
ц=Рс/Рп=Р4(1)Р4.(0)/щЛ
380
1 2 3 4 567 89 10 ц
Рис JO 1J. Зависимость величины
порогов сравнения от отношения
сигнал-шум
Рис J0 12 Структурная схема
устройства фильтрации
Видно, что при больших отношениях ГЦ о—’-0,5 и не зависит от
значений переходных вероятностей сигнала а, |3 и предыдущей
оценки Sf-i. При небольших отношениях сигнал-шум значение
предыдущей оценки st-i существенно влияет на формирование
оценки сигнала st- Так, если st-i=l, то yt сравнивается с поро-
гом /7], значение которого меньше 0,5. Поскольку вероятность
перехода из 1 в 1 достаточно высока, то решающее устройство
«склонно» считать следующее значение сигнала также равным 1.
Структурная схема такого устройства достаточно проста
(рис. 10.12). Входной сигнал yt поступает одновременно на два
компаратора /7, и По, на выходах которых появляются значения
оценки сигнала st. В зависимости от значения предыдущей оцен-
ки st-i ключевая схема выби-
рает сигнал то с одного, то
с другого компаратора.
На рис. 10.13 приведены
расчетные зависимости вероят-
ности ошибки оценивания ог
отношения сигнал-шум: кривая
/ — оценка сигнала st при а=
= Р = 0,5 (вероятность ошибки
канала); кривая 2 — вероят-
ность ошибки при а = |3 = 0,85;
кривая 3 — вероятность ошиб-
ки при а = |3 = 0,99.
Рис 10 13. Зависимость вероятности
ошибки после фильтрации от отноше-
ния сигнал шум в канале связи
381
Анализируя графики, легко заметить, что чем выше значения
переходных вероятностей сигнала, тем более высоким получает-
ся качество оценки. В заключение отметим, что приведенная
схема оценивания известна как схема со следящим порогом
10.7. ОСОБЕННОСТИ АНАЛИЗА И СИНТЕЗА
ИЗОБРАЖЕНИЙ
Представление изображения в виде совокупности элементар-
ных площадок — растр-элементов (РЭ) происходит за счет про-
цесса развертки изображения. Сущность развертки состоит в
последовательном перемещении РЭ в плоскости изображения по
определенному закону Наиболее широкое применение в факси-
мильной связи получили прямолинейные развертки с постоянной
скоростью.
В зависимости от назначения системы, требований к качеству
входного изображения применяются механические, электронные
и электрические способы развертки. Развертка является двумер-
ным процессом. Обычно он осуществляется раздельно в направ-
лении оси X (строчная развертка) и в перпендикулярном на-
правлении У (кадровая развертка, иногда называемая подачей).
Механические способы на практике реализуются в виде ба-
рабанной, дуювоп и плоскостной разверток. При плоскостной
развертке производится перемещение РЭ вдоль строки при плос-
ком расположении оригинала (или копии при записи). При ба-
рабанной развертке разложение изображения на элементарные
площадки происходит за счет вращательного движения барабана,
на котором закреплен оригинал и поступательного движения све-
'ювого развертывающего элемента, образуемого системой свето-
оптического луча. Возможен вариант, в котором световой луч
неподвижен, а барабан осуществляет вращательное и одновре-
менно поступательное движение. Очевидно, строчная развертка
осуществляется вращательным движением барабана, а кадровая
создается за счет поступательного движения либо самого бара-
бана, либо светового пятна относительно барабана. Линия
развертки получается винтообразной (как стружка на токарном
станке).
Основными достоинствами развертки барабанного типа явля-
ются относительная простота конструктивного выполнения и воз-
можность получения больших скоростей вращения (а значит, и
скорости передачи бланка). Однако этим способам развертки
присущи и недостатки: ограничение формата бланка по длине и
ширине, сложность закрепления бланка на барабане, его дефор-
мация при больших скоростях вращения барабана, невозможность
Параграф написан по материалам [10 9].
382
Рис. 10 14. Дуговая развертка-
/ — оптическая головка, 2— объектив, 3—
призма, 4 — экспонированная пленка, 5 —
неподвижная
эмульсионная
оптическая система, 6—
сторона 7 — рулон фото-
пленки
системы непрерыв-
создания
ной подачи оригиналов, что за-
трудняет организацию авто-
матической системы переда-
чи.
Разновидностью барабанного
способа развертки является ду-
говая развертка, принятая в отечественной аппаратуре передачи
газет «Газета-2». При этом способе оригинал на передаче или
фотопленка на приеме размещаются внутри цилиндрической ка-
меры и за счет разряжения воздуха прижимаются к стенкам
камеры. Внутри камеры с помощью вращающейся оптической
системы развертывающий элемент перемещается по окружности,
образовывая строчную развертку. Кадровая развертка образует-
ся за счет перемещения самой камеры вместе с оригиналом или
носителем записи. Дуговая развертка позволяет производить за-
пись на рулонной фотопленке (рис. 10 14).
Значительно большее применение нашла плоскостная разверт-
ка. Чаще всего строчная развертка образуется с помощью ка-
чающегося зеркала и вспомогательного сферического зеркала,
а развертка по кадру осуществляется перемещением оригинала
с помощью конвейера в направлении, перпендикулярном стро-
кам (рис. 10.15). В плоскостных системах световое пятно, созда-
ваемое оптической системой, проецируется на поверхность зер-
кала, которое отклоняется относительно своей оси кулачковым
Плоскость передаваемого
изображения
6}
91
Рис 10 15 Плоскостная развертка
а — принцип райвертки. б — принцип образования строки развертки, 1 — осветитель, 2 — ка-
чающееся зеркало, 3 — ось зеркала, 4 — сферическое зеркало, 5 — оригинал изображения,
S — Протягивающее устройство, 7 — фотоэлектрический преобразователь
383
Импульсы сдвига
Свет
Рис. 10 16 Плоскостная развертка с помощью ПЗС
механизмом — эксцентриком. При отклонении зеркала световое
пятно перемещается от одного края изображения до другого,
образовывая строку развертки. Равномерная скорость движения
пятна обеспечивается заданным профилем кулачка. Время обрат-
ного хода луча может использоваться для передачи вспомога-
тельных сигналов. За время передачи каждой строки оригинал
перемещается на одно и то же расстояние, равное шагу кадровой
развертки.
Достоинствами плоскостной развертки являются: неограни-
ченная длина бланка, что позволяет автоматизировать процесс
передачи сообщений, и простота закрепления оригинала, кото-
рый не деформируется в процессе передачи. К недостаткам плос-
костной развертки следует отнести сложность обеспечения тре-
буемой линейности развертки вдоль строки и при наличии ку-
лачкового механизма ограничение скорости развертки по строке
за счет возникновения сильного механического удара кулачко-
вого механизма в момент перехода с прямого луча на обратный.
Для получения больших скоростей вместо качающегося зер-
кала используют вращающуюся многогранную призму.
В последнее время большое распространение получили элек-
трические способы строчной развертки, в которых строка изобра-
жения формируется с помощью миниатюрных точечных опгико-
электрических преобразователей, коммутируемых электрическим
способом. Применяются линейки из фотодиодов и фоточувстви-
тельных приборов с зарядовой связью (ФПЗС). Рассмотрим при-
мер реализации плоскостной развертки с использованием линей-
ки из ПЗС, которая позволяет получить разрешающую способ-
ность по строке не менее 8 ... 15 лин./мм. Отраженный от объ-
екта передачи свет попадает на фоточувствительные элементы
(рис. 10.16). Накопленные электрические заряды от каждого
элемента через канал переноса поступают в аналоговый регистр
переноса, имеющий МОП-структуру. Образуемые в этой струк-
384
туре зарядовые пакеты под действием тактовых импульсов сдви-
га получают направленное перемещение. Выходное устройство
преобразует зарядовые пакеты в электрический сигнал, который
в дальнейшем после обработки поступает в линию связи. После
окончания цикла развертки У элементов, составляющих одну
строку, объект передачи механически перемещается в перпенди-
кулярном направлении на величину, равную размеру растр-эле-
мента. Существенное преимущество такого способа развертки
заключается в отсутствии механических узлов, сложных оптиче-
ских систем, что обеспечивает большую скорость развертки,
уменьшенные габариты и простоту.
В ряде случаев в цифровой факсимильной аппаратуре с устра-
нением избыточности кадровая развертка выполняется дискрет-
но-шаговой. Конструктивно она базируется на применении элек-
тромеханического привода, создающего строго фиксированные
углы поворота (линейные перемещения оригинала или носителя
записи) в определенные моменты времени. Для создания таких
разверток используются шаговые двигатели. Такой способ раз-
вертки облегчает согласование скоростей поступления информа-
ции из буферного устройства памяти кодера и сигнала в канал
связи, поскольку в случае опасности переполнения памяти мож-
но остановить развертку и на передаче, и на приеме. Шаговые
развертки реализуют стартстопную передачу факсимильных сиг-
налов.
Размер растр-элемента аР (вдоль строки развертки) связан
с шагом развертки (по кадру) бР. Шагом развертки принято счи-
тать расстояние между осями соседних строк развертки. Выбор
аР и бр зависит от характера изображения и требований к его
воспроизведению. В современных факсимильных аппаратах эти
величины равны. Таким образом, разрешающая сособность как
по строке пр— 1/Яр лин./мм, так и по кадру пр=1/бр строк/мм
выбирается одинаковой (пр=б?1).
Скорость развертки определяется числом строк в минуту и,
очевидно, зависит от скорости подачи бланка при плоскостной
развертке и скорости вращения при круговых развертках.
Более универсальной характеристикой скорости работы факси-
мильного аппарата является величина B^Q/Т, где Q — площадь
бланка, дм2, Т — время передачи бланка, мин.
Выразим верхнюю частоту спектра сигнала через параметры
развертывающих устройств. Очевидно, что граничная частота
спектра будет определяться минимально возможной длительно-
стью сигнала, которая в свою очередь зависит от размера мини-
мального штриха. Этот размер не может быть меньше, чем раз-
мер растр-элемента.
Рассмотрим случай барабанной развертки. На окружности
барабана диаметром D может уложиться л£>/бР строк развертки.
Если считать, что передаваемое изображение состоит из чере-
25—6085 чае
дующихся тонких черно-белых штрихов размером бР, то тогда
один период колебаний фототока образуется чередованием чер-
ного и белого штрихов. Тогда за один оборот барабана таких
периодов будет л£)/2бР. Если учесть, что скорость барабана рав-
на А/60, об./мин, то максимальная частота фототока, т. е. гра-
ничная частота спектра сигнала, Гц:
frp=n£W/1206. (10.8)
Для плоскостной развертки со скоростью А строк в минуту и дли-
ной строки I
frp=l-N/\20&. (10.9)
Аналогично можно найти и время передачи бланка изобра-
жения.
При барабанной развертке на длине барабана I уложится
//б строк. При скорости N об./мин передача бланка составит,
мин:
T=l/6N. (10.10)
Для аппаратов с плоскостной разверткой под I следует пони-
мать длину строки, а под N — число строк, передаваемых в ми-
нуту.
Пользуясь (10.9) и (10.10), можно найти скорость передачи
бланка, дм3/мин:
B=Q/T=1206PaP/rP; (10.11)
при ар=бр
В=120а,р2/гР. (10.12)
Развертка определяет последовательность во времени процес-
сов поэлементного анализа и синтеза изображений. Эти процессы
должны быть синхронными и синфазными. При несовпадении
скоростей разверток происходит удлинение или укорочение строк
развертки, что в конечном итоге приводит к перекосу изобра-
жения. Нормы на перекос изображения определяют способы
синхронизации передающего и приемного аппаратов. На прак-
тике используются принудительные и автономные способы син-
хронизации.
Обозначим через а — угол перекоса (отклонения от верти-
кальной линии). Тогда можно показать, что
tga=(//6)(AW), (10.13)
где / — длина строки изображения; б — шаг подачи; A/V — раз-
ность скоростей вращения передающего и приемного барабанов.
Поскольку AAf/A=Ao/u=Af//, то между частотой f питающе-
го напряжения и линейной скоростью v растр-элемента сущест-
вует линейная зависимость. Тогда условие правильного воспро-
изведения копии состоит в выполнении неравенства Af/f^
386
-<tga(6//), где tga — заданная норма перекоса. Например,
в факсимильной аппаратуре общего назначения допустим пере-
кос не более 1 мм на каждые 100 мм длины развертки по кадру.
Отсюда tga=0,01. Приняв параметры 6=0,2 мм, /=200 мм, по-
лучим, что A/Z/s^lO5. Эта величина и определяет стабильность
задающих генераторов передатчика и приемника.
В факсимильной аппаратуре в основном используется авто-
номная синхронизация. В данном случае развертывающие устрой-
ства передачи и приема работают независимо, но с равными ско-
ростями. Это достигается путем применения высокостабильных
задающих генераторов, управляющих частотой питания синхрон-
ных двигателей разверток.
Принудительная синхронизация осуществляется путем пере-
дачи специальных синхросигналов по каналу связи, управляю-
щих скоростью развертки синтезирующего устройства.
Кроме синхронизации необходимо осуществлять фазирование
аппаратов. Для этого перед началом связи с передатчика на при-
емник передается информация о фазовом положении оригинала.
В простейшем случае при барабанной развертке на барабане
расположена черная полоса, прилегающая к краю оригинала, а
при плоскостной развертке — расположенная на транспортном
механизме. Во время развертки изображения в момент прохож-
дения этой полосы возникают фазовые импульсы, которые управ-
ляют положением развертывающего устройства приемника. Су-
ществуют автоматические, полуавтоматические и ручные способы
фазирования. При принудительной синхронизации процессы фа-
зирования полностью аналогичны строчной и кадровой синхро-
низациям телевизионных систем.
Рассмотрим принципы построения синтезирующих устройств и
основные способы записи изображений.
Синтезирующие устройства приемных аппаратов состоят из
устройства развертки, определяющего последовательность приема
элементов изображения, и записывающего устройства, регистри-
рующего яркость элементарных площадок, и создают копию изо-
бражения оригиналов. В случае записи на светочувствительные
материалы узел записи содержит также светооптическую систему.
По способам записи синтезирующие устройства делятся на
открытые и закрытые. При открытом способе записи регистра-
ция производится на открытой для света бумаге. Такой способ
позволяет в некоторой степени контролировать качество записи
на приеме. К открытым способам относятся: электрохимический,
электротермический, чернильный способы записи.
При закрытом способе записи регистрация производится с
помощью светового луча на светочувствительный материал —
фотобумагу или фотопленку, которые помещаются в изолирован-
ную от света кассету. При этом способе достигается высокое ка-
25* 387
чество копии как двухградационных, так и полутоновых изобра-
жений.
Фотографическая запись применяется в основном в аппаратах,
передающих полутоновое изображение, и в аппаратуре передачи
газет.
В настоящее время в факсимильных аппаратах для передачи
документальной информации в основном применяется электро-
термическая запись. Сущность этого способа записи состоит в
тепловом воздействии электрического тока факсимильного сигна-
ла на термочувствительный носитель. Для термозаписи разрабо-
тана и используется специальная электротермическая бумага. Она
состоит из трех слоев- металлизированного слоя, контактирую-
щего с поверхностью барабана, графитизированного слоя и верх-
него токопроводящего слоя, с которым соприкасаются записы-
вающий (или записывающие) элементы, выполняемые обычно в
виде металлических иголок.
Факсимильный сигнал подводится к барабану (корпусу ап-
парата) и иголкам. Под действием электрического тока сигнала
происходят прожигание верхнего слоя и обнажение графитизиро-
ванного слоя, в результате чего осуществляется окрашивание
бумаги.
В современных записывающих устройствах в качестве запи-
сывающих электродов применяется термолинейка, ряд точечных
электродов, конструктивно расположенных в линию длиной в
строку развертки. При принятом стандарте разложения такая
линейка содержит 1728 электродов. Напряжение на электроды
подается последовательно в соответствии со значениями факси-
мильного сигнала в определенные моменты времени. Формируе-
мое изображение получается точечным (дискретным), но площа-
ди точек настолько малы, что глаз не замечает этой структуры.
Термозапись обладает большими преимуществами; недостат-
ками является ограниченный срок хранения копий на термобу-
маге.
Разновидностью термозаписи является запись на обыкновенную
бумагу с использованием эффекта термопереноса. Он заключает-
ся в том, что между бумагой и термолинейкой протягивается
специальная термопленка с графитизированным слоем, обращен-
ным к бумаге; в момент записи пленка прижимается к бумаге
и за счет нагревания графитный слой переносится на бумагу.
Происходит своеобразное термокопирование, в котором роль ко-
пировальной бумаги выполняет термопленка.
Аналогичный процесс происходит при электрохимическом спо-
собе записи. Окрашивание под действием электрического тока
происходит в токопроводящей бумаге, пропитанной специальным
составом, который чернеет под действием электрического тока.
Этот способ позволяет получать полутоновые изображения с не-
большим числом (до восьми) градаций яркости. Недостатками
388
способа являются необходимость поддержания влажности бума-
ги и ограниченный срок храпения копии.
Во многих факсимильных аппаратах применяется электроста-
тическая запись, осуществляемая на слое диэлектрика многоэлек-
тродной системой записи. Этот способ обладает большими пре-
имуществами: запись происходит на обычную бумагу, возможно
получение очень больших скоростей записи (до 6000 строк/мин),
высокую разрешающую способность (до 16 лин/мм). Изображе-
ние на бумаге практически не поддается старению.
10.8. СОВРЕМЕННАЯ ЦИФРОВАЯ
ФАКСИМИЛЬНАЯ АППАРАТУРА
Цифровые факсимильные аппараты общего и специального
назначения стали появляться в конце 70-х годов. Благодаря бо-
лее быстрой доставке сообщений и высокой степени автоматиза-
ции процессов передачи и приема цифровая факсимильная связь
начала успешно конкурировать с телеграфной и почтовой связью.
В некоторых развитых странах, например Японии, факсимильная
связь стала основным видом документальной связи. Наиболее
быстро развивается аппаратура передачи документальной, в ос-
новном текстовой, информации. Она соответствует рекомендациям
МККТТ, хотя не исключено и применение национальных стан-
дартов. Общими характеристиками для зарубежной цифровой
факсимильной аппаратуры являются: плоскостная развертка, реа-
лизованная на базе линеек из элементов ПЗС, прогрессивный
способ записи на термобумагу, статистическое кодирование по
методу МКХ и его модификаций, скорость передачи информации
в каналах ТЧ до 9600 бит/с, для чего используются модемы с
многопозиционной модуляцией, применение микропроцессоров
и больших интегральных схем. Основными параметрами и тре-
бованиями рекомендаций МККТТ для аппаратов III группы яв-
ляются:
Формат документа: лист А4 (допускается формат АЗ).
Разрешающая способность- вдоль строки 7,7 лин /мм, т. е 8 точек/мм н поперек
строки 3,85 лин /мм, т е. 4 точки/мм.
Время передачи—не более 1 мин (этот параметр существенно зависит от инфор-
мационного содержания, т е. соотношения черных и белых элементов на доку-
менте)
Тип кода — МКХ или двумерный код РЕАД, а также их модификации.
Тип канала передачи — коммутируемые телефонные каналы или выделенные ка-
налы ТЧ, цифровые тракты
Информационная скорость передачи 9600, 7200, 4800, 2400 бит/с.
Вероятность одиночной ошибки канала—не более 5-10~5.
Практически все зарубежные факсимильные аппараты удов-
летворяют этим требованиям. Выпускаемые факсимильные аппа-
389
раты общего (коммерческого) назначения практически отлича-
ются только габаритами, массой и наборами сервисных услуг.
Все аппараты имеют плоскостную развертку, считывающую си-
стему в виде линеек ПЗС, и запись на термобумагу с помощью
линейки термоэлектродов па всю строку.
Гарантированное, высокое качество телефонных каналов по-
зволило обойти трудности, связанные с реализацией специальных
методов повышения помехоустойчивости, что значительно упро-
стило и удешевило аппаратуру. Повышение качества приема до-
стигается либо снижением скорости передачи от максимальной
9600 бит/с до минимальной 2400 бит/с (это делается автоматиче-
ски), либо пораженная строка просто не записывается приемным
устройством (в этом случае используется повышенная плотность
кадровой развертки 8 лин./мм), либо пораженная строка заме-
няется соседней правильно принятой, что тоже практически неза-
метно, при плотности развертки 8 лин./мм.
Отметим, что все аппараты имеют в своем составе микропро-
цессор, управляющий процессами передачи и приема, обеспечи-
вающий функции контроля и ряда дополнительных сервисных
услуг.
Серийный выпуск отечественной цифровой факсимильной ап-
паратуры начался в XI пятилетке с комплекса аппаратуры «Луга»
для передачи и приема метеокарт размером 480X700 мм по ка-
налам ТЧ со скоростью 9600 бит/с. В аппаратуре реализована
кодированная передача с использованием планарного кода, ко-
торый принят в СССР в качестве ГОСТ. Существенно, что ап-
паратура может работать по телефонным каналам с повышенной
вероятностью ошибки (не более 104). Для повышения помехо-
устойчивости применяется кодозащита.
С целью обеспечения цифровой передачи документальной ин-
формации и фотографий был создан комплекс ФАНТ, предназна-
ченный для работы в цифровых системах связи со стандартными
стыками С2 и СНТ (9600 бит/с) при использовании аппаратуры
ФАНТ-В, по коммутируемым телефонным и радиоканалам со
скоростью передачи 800, 1200 бит/с при использовании аппара-
туры ФАНТ-1, по световодным линиям связи со скоростью пере-
дачи 230 кбит/с. С помощью факсимильных аппаратов Ф2/4Д31.
Ф2/4П31 комплекса реализуется кодированная планарным кодом
цифровая передача черно-белых документов и фотографий раз-
мером не более 210x297 мм (формат А4). Число элементов в
строке 1728 (международный стандарт), скорость развертки до
960 стр./мин, скорость передачи информации 800, 1200, 2400, 4800,
9600 бит/с. Вероятность ошибки канала не более 5Х10“4. Время
передачи машинописной страницы (плотно напечатанный текст
через 1,5 интервала) не более 1,5 мин. Запись происходит на
электрохимическую бумагу. Высокая помехоустойчивость дости-
гается применением помехоустойчивого кода БЧХ с исправле-
390
нием до двух ошибок в блоке. По сравнению с аналогичными
зарубежными аналогами комплекс ФЛНТ уступает по габаритам
и массе, однако имеет меньшую степень искажения тонких штри-
хов, способен работать в каналах с достаточно большой вероят-
ностью ошибки.
В СССР развивается система децентрализованного печатания
газет на основе факсимильной передачи печатных форм газетных
полос (страниц) по каналам связи. Она практически полностью
заменила менее оперативные способы — перевозку матриц или
других дубликатов печатных форм авиационным или наземным
транспортом. К настоящему времени факсимильная сеть переда-
чи газет в нашей стране является крупнейшей в мире, охватывая
более 50 городов по всей территории. Сеть построена в основном
на базе аппаратуры второго поколения «Газета-2» с использова-
нием аналоговых методов передачи и наземных каналов связи.
В 70-х годах было разработано оборудование «Орбита», «Моск-
ва», обеспечивающее передачу газет по спутниковым каналам.
В связи с растущими требованиями к качеству принятой копии
осуществляется переход на прогрессивные методы офсетной пе-
чати, а также к цифровым методам передачи изображений га-
зетных полос.
Дальнейшее развитие цифровой сети передачи газет будет
происходить на базе аппаратуры третьего поколения — «Газе-
та-3» с заменой наземных каналов спутниковыми каналами со
скоростью передачи 2048 кбит/с (система «Орбита»), со ско-
ростью передачи 480 кбит/с (система «Москва»), а также с ис-
пользованием цифровых каналов первичной сети ЕАСС со ско-
ростью передачи 2048 кбит/с. Сеть будет состоять из нескольких
циркулярных пучков:
со скоростью передачи 2048 кбит/с по системе ИСЗ «Орби-
та-РВ» для пунктов с офсетной технологией печатания газет.
Емкость этих пучков может достигать до 25 пунктов децентра-
лизованного печатания;
со скоростью 2048 кбит/с по каналам первичной цифровой
сети;
со скоростью 480 кбит/с по системам «Москва» для пунктов
с технологией высокой печати и офсетной технологии. Емкость
пучков может достигать 15 пунктов.
Сеть будет строиться на основе нормализованных цифровых
стыков и стандартных сигналов в соответствии с требованиями
ЕАСС и МККТТ, что позволит для передачи газет использовать
стандартные и вновь разрабатываемые спутниковые и наземные
цифровые системы связи.
Комплекс оборудования «Газета-3» имеет в своем составе
Цифровое оконечное оборудование, каналообразующее и обору-
дование цифрового спутникового канала. За время 2,5 мин он
реализует некодированную цифровую передачу изображения га-
391
зетной полосы размером 420X630 мм с линиатурой растра до
36 лин./с при скорости развертки 6000 стр./мин и плотности раз-
вертки 33 стр./мин в цифровом канале спутниковой системы
«Орбита-РВ» со скоростью 2048 кбиг/с.
При работе со спутниковыми системами «Орбита» и «Москва»
для обеспечения скорости 480 кбит/с в комплексе предусмотре-
ны устройства кодирования с коэффициентами сжатия до 4. В од-
ном из вариантов построения кодера используется алгоритм
сжатия растровых иллюстраций, рассмотренный в разд. 10.5.
КОНТРОЛЬНЫЕ ВОПРОСЫ
1 . Поясните сущность факсимильной передачи сообщений.
2 . Чем определяется качество воспроизведения копии изображения’
3 В чем состоит основной недостаток факсимильного способа передачи и
в чем его достоинство’
4 Как можно вычислить избыточность двухградационных изображений’
5 . Имеются два изображения одно типа «шахматной доски» — регулярно
чередующиеся черные и белые клетки; второе содержит случайно расположен-
ные черные и белые клетки с одинаковыми вероятностями Какое изображение
избыточно и почему? (Размер клетки принять равным размеру растр-элемента.)
6 Как устраняется избыточность факсимильных сообщений’
7 . От каких параметров факсимильного аппарата зависит ширина спектра
факсимильного сигнала’
8 Два факсимильных аппарата при прочих равных параметрах имеют раз-
личную разрешающую способность (5 и 50 лин./мм) Чем отличаются спектры
соответствующих сигналов’
9 Сравните методы эффективного кодирования, рассмотренные в разделе.
Объясните их достоинства и недостатки.
10 Поясните целесообразность описания факсимильных сигналов в виде
случайных (марковских) последовательностей:
а) с точки зрения применения методов эффективного кодирования,
б) с точки зрения методов повышения качества приема.
11 . Изображение знака размером 2X3 мм передается с разрешающей спо-
собностью 10 лин/мм Какое число знаков можно было бы передать кодовым
способом (кодом МТК-2) при равных скоростях кодовой н факсимильной пе
редачи’
12 Как визуально на копии изображения будет проявляться расфазирование
приемного и передающего аппаратов?
13 Сравните способы развертки изображений
14 Сравните способы записи изображений
ЗАКЛЮЧЕНИЕ
В последнее десятилетие к ставшим уже традиционными теле-
графии, передаче данных и факсимильной связи добавились новые
службы дискретных сообщений: «Телетекс», «Телефакс», «Факс-4»,
«Бюрофакс», «Телеавтограф», «Видеотекс» и «Телетекст».
Телеграфия претерпела значительные перемены, коснувшиеся
всех компонентов оконечных устройств, аппаратуры каналообра-
зования, систем и устройств коммутации. Идет процесс перехода
от электромеханических к электронно-механическим аппаратам,
построенным с применением микропроцессоров, запоминающих
устройств и устройств редактирования. В каналообразующей
аппаратуре осуществляется переход от систем с ЧРК к более эко-
номичным многоканальным системам с ВРК. Наряду с коммута-
цией каналов все шире используется коммутация сообщений. Стан-
ции и подстанции (концентраторы) систем коммутации строятся
на базе цифровой электронной техники с управлением от ЭВМ.
Система коммутации сообщений высвобождает по сравнению
с системой коммутации каналов значительное число операторов
телеграфной связи и улучшает технико-экономические характери-
стики сети.
Все же основной проблемой в подотрасли телеграфной связи
остаются большие затраты ручного труда: 70% работников теле-
графной подотрасли заняты обработкой телеграмм, в том числе
около 50% работают непосредственно на телеграфных аппаратах.
Ручная работа оператора по заготовке телеграмм (перфорирова-
ние) весьма тяжела, неперспективна, а потому малопрестижна.
В связи с этим на сети Тлг-ОП внедряются аппаратурно-про-
граммные комплексы АПК «Телеграф», автоматизирующие обра-
ботку телеграмм, перепринимаемых на телеграфных узлах. Комп-
лекс АПК принимает телеграммы, осуществляет полуавтматиче-
скую индексацию (присвоение индекса по адресу), передачу, ве-
дение журнальных записей.
На базе электронно-механического телеграфного аппарата
с дисплеем разрабатывается система, позволяющая возложить не-
посредственно на отправителя заготовку телеграмм в сети ОП.
Специальная оконечная установка на базе микро-ЭВМ помогает
отправителю правильно составить телеграмму, а затем без его
участия оформить ее в соответствии с требованиями сети и авто-
матически передать ее в ЦКС-Т.
Кардинально проблема ручного труда может быть решена
автоматизацией процесса заготовки телеграмм, путем перехода на
факсимильный метод передачи. Процесс перехода осложняется
невозможностью непосредственного обмена сигналами между циф-
ро-буквенным существующим оконечным оборудованием телеграф-
ной связи и факсимильным оборудованием, что вызывает необхо-
393
димость сохранения существующей телеграфной сети на период
до полного оснащения оконечных пунктов факсимильными аппа-
ратами Для облегчения и ускорения этого процесса на переход-
ный период планируется разработка комбинированного оконечно-
го оборудования, которое обладает возможностью принимать со-
общения как от телеграфных, так и факсимильных аппаратов.
Таким образом, можно отметить тенденцию к интеграции Тлг-ОП
с сетью факсимильной связи.
Передача данных. Сейчас подавляющее большинство абонен-
тов систем ПД пользуются арендованными (некоммутируемыми)
каналами ТЧ и телефонными сетями общего пользования, значи-
тельно меньше используют арендованные телеграфные каналы и
телеграфные сети. Только несколько процентов от общего числа
абонентов ПД включены в специализированные сети ПД. В 70- и
80-е годы большинство новых сетей ПД создавалось на основе
коммутации пакетов и реже — каналов. Следует подчеркнуть, что
новые сети ПД с коммутацией каналов принципиально отлича-
ются от ранее построенных сетей тем, что они синхронные.
По мере насыщения учреждений, научно-исследовательских и
проектных институтов, предприятий и организации индивидуаль-
ными микро-ЭВМ стало целесообразным объединение всех вычис-
лительных средств и терминальных устройств внутри организации
в единую распределенную вычислительную систему. Так, на ру-
беже 80-х годов появилась и начала быстро расти принципиально
новая система телеобработки — локальные вычислительные сети
(ЛВС), т. е. объединение с помощью каналов ПД вычислитель-
ных средств индивидуального и коллективного пользования, разме-
щенных в одном здании или принадлежащих одной организации.
По протяженности каналов ПД (0,01 ... 10 км) и их скорости
(0,1 .. 10 Мбит/с) локальные сети занимают промежуточное по-
ложение между внутренними шинами вычислительных систем и
вычислительными сетями.
Несмотря на замедление темпа роста региональных и глобаль-
ных сетей телеобработки в 70-е годы и в начале 80-х годов, вы-
званное появлением микро-ЭВМ и развитием ЛВС, остается проб-
лема оперативного доступа пользователей к централизованным
банкам данных и сверхбольшим ЭВМ коллективного пользования.
Поэтому есть основания предполагать, что по мере развития ло-
кальных сетей в ближайшее время возрастает нагрузка по пере-
даче данных на каналы и сети связи. Развитие региональных и
глобальных сетей ПД стимулируется возрастающими потребно-
стями новых служб ПДС.
Системы передачи текстовой и графической информации. Как
бы ни была велика роль ЭВМ в управлении народнохозяйствен-
ными процессами, последней инстанцией был и остается человек—
за ним принятие решений. В процессе работы административно-
394
управленческому аппарату приходится много общаться, причем
основными средствами непосредственного общения являются те-
лефон и почта. В 70-е годы сформировалось несколько новых си-
стем электросвязи. Одну группу систем передачи текстовой и гра-
фической информации, обеспечивающих доставку «твердой копии»
документов, составляют: «Телетекс», «Телефакс», «Факс-4» и «Бю-
рофакс».
«Телетекс» — буквенно-цифровая система передачи деловой
корреспонденции, построенная по абонентскому принципу. Основ-
ная идея «Телетекса» состоит в объединении всех возможностей
современной конторской пишущей машинки с передачей сообщений
по сети электросвязи при условии сохранения содержания и фор-
мы текста. Эта система несколько напоминает систему «Телекс»
(абонентский телеграф), но отличается от нее значительно боль-
шим набором знаков (256 за счет использования 8-элементного
кода), большей скоростью передачи (2400 бит/с), высокой верно-
стью, возможностью редактировать подготовляемую к передаче
документацию и другими дополнительными особенностями. Пере-
дача сообщений в системе «Телетекс» осуществляется по теле-
фонным сетям или сетям ПД.
Важной особенностью и принципиальным преимуществом «Те-
летекса» по сравнению с «Телексом» является отсутствие необходи-
мости в дополнительной работе на клавиатуре при передаче текста.
Это преимущество достигается благодаря тому, что подготовлен-
ный в оконечном устройстве (ОУ) отправителя текст запоминается
в его оперативном запоминающем устройстве (ОЗУ), откуда со-
общение передается по каналу связи. Сообщение принимается в
ОУ «Телетекс» адресата также в запоминающее устройство, а за-
тем принятое сообщение может быть воспроизведено на экране
дисплея или отпечатано. Можно ожидать, что по мере увеличения
числа установок «Телетекс» сначала прекратится рост, а затем
начнется сокращение числа ОУ «Телекс» (за счет тех организа-
ций, где появятся установки «Телсгекс»).
Система «Телетекс» имеет много общего с системой передачи
данных, а именно: цифровой метод передачи, скорость передачи
2400 бит/с, те же методы повышения верности, методы управле-
ния соединением, используемые сети. Заметим, что «Телекс»
в крупных учреждениях и организациях может заменить доставку
письменных документов курьерами между подразделениями, на-
ходящимися внутри одного здания или в соседних зданиях. Это
обстоятельство сближает внутриучрежденческую систему «Теле-
текс» с локальными сетями ПД.
Различия между системой «Тслетекс» и ПД заключается в ос-
новном в следующем. В «Телетексе» используется «разговорный»
язык, в ПД — формализованные языки Различия между ними по-
степенно уменьшаются. В «Телетексе» обмен происходит в системе
395
«человек — человек» по принципу «каждый абонент с каждым».
В ПД обычно происходит обмен человека с ЭВМ, причем число
корреспондентов ЭВМ ограничено. Как видим, и это различие не
является принципиальным. Общность «Телетекса» и ПД позволя-
ет создать универсальный терминал (оконечное устройство), по-
зволяющий работать как в сети «Телетекс», так и в сети ЭВМ.
В отличие от принятого в «Телетексе» буквенно-цифрового спо-
соба передачи, в системах «Телефакс», «Факс-4» и «Бюрофакс»
используется факсимильный способ передачи. При этом «Теле-
факс» и «Датафакс» являются абонентскими системами и отлича-
ются тем, что первая работает по телефонной сети общего поль-
зования, а вторая — по сетям ПД, тогда как «Бюрофакс» — систе-
ма клиентская, т. е. действующая между предприятиями связи.
Подчеркнем, что во всех перечисленных системах факсимильное
сообщение превращается в цифровое в передатчике и передается
по каналам связи в цифровой форме.
Достоинством всех систем, где используется факсимильный ме-
тод, является возможность передачи не только буквенно-цифро-
вых, но и графических сообщений. Основной недостаток факси-
мильных систем по сравнению с буквенно-цифровыми — значи-
тельно больший объем информации, необходимый для передачи
оригинала. Так, для передачи оригинала размером А4 (210Х
Х296 мм2) методом «Телетекс» требуется 2-Ю4 бит, а методом
«Телефакс» и ему подобными — 2-Ю6 бит, т. е. в 100 раз больше.
При применении устройств сжатия (исключения избыючности) фа-
ксимильных сообщений передаваемый объем информации удается
уменьшить в 7 ... 8 раз и он остается в 12 ... 15 раз больше, чем
при буквенно-цифровом способе. Поэтому применение факсимиль-
ных методов передачи требует значительно большей пропускной
способности сети связи.
В настоящее время ОУ факсимильных систем представляет со-
бой цифровой факсимильный аппарат, работающий по телефон-
ной сети со скоростями 2400 ... 4800 бит/с и по сетям ПД со ско-
ростями 4800, 9600 и 48 000 бит/с. В нем осуществляется статисти-
ческое кодирование информации с коэффициентом сжатия около
8, что позволяет передавать страницу текста за 2 мин при скорости
2400 бит/с и соответственно за 30 с при скорости 9600 бит/с.
Проводятся исследования и в направлении создания термина-
ла, работающего как буквенно-цифровым, так и факсимальным
методами. На этом пути имеются трудности, о которых упомина-
лось выше при рассмотрении передачи телеграмм факсимильными
методами С решением этой проблемы окажется возможным объ-
единить сети «Телетекс»., «Телефакс» и т. п. в единую службу
«Текстфакс» и с сетями ПД.
Более экономичными преобразователями текста в цифровые
электрические сигналы являются так называемые читающие авто-
396
маты, построенные на принципах опознавания образов. Однако
несмотря на интенсивную разработку читающих автоматов они
пока весьма сложны и дороги. Со временем можно ожидать, что
читающие автоматы заменят факсимильные передатчики, что по-
зволит значительно сократить объемы передаваемой информации.
Несомненным преимуществом читающих автоматов по сравнению
с устройствами факсимильной передачи является возможность при
передаче рукописных сообщений воспроизводить их на приеме ма-
шинописным текстом.
Система с приемом сообщений на экраны бытовых телевизоров.
В середине 70-х — начале 80-х годов получает развитие еще одна
группа систем ПДС, для которых характерен прием сообщений
(текста, изображений) на экраны бытовых телевизоров. В системе
«Видеотекс» буквенно-цифровые данные передаются из специаль-
ного вычислительного центра по запросам абонентов телефонной
сети — запрос выдается с помощью тастатуры, имеющей десять
кнопок с цифрами от 0 до 9 и кнопки управления. Сигналы за-
проса преобразуются методом в аналоговую форму и по телефон-
ной сети передаются в специальный вычислительный центр (ВЦ),
где запрос дешифрируется, после чего абоненту по телефонной
сети передаются в аналоговой форме из банка данных необходи-
мые сведения. Поступившие сведения выводятся на экран быто-
вого телевизора.
Система «Телетекст» (не путать с системой «Телетекс») пере-
дает буквенно-цифровые данные на эраны бытовых телевизоров
по сети телевизионного вещания (дополнительно к основной про-
грамме). В отличие от телесправочной системы «Видеотекса»
«Телетекст» является циркулярным телевещанием всем абонен-
там телевизионной сети. Информационно-вычислительный центр
«Телетекста» по запросам телезрителей обеспечивает централизо-
ванную вы 1ачу оперативных сведении и? числа имеющихся в его
памяти программ. Для выбора программы телезритель использует
тастатуру телефонного аппарата.
Сведения в системе «Телетекст» могут передаваться независи-
мо от телепередач или во взаимодействии с ними (например, суб-
титры к иностранным фильмам или для глухих). Эти сведения со
скоростью 1200 бит/с вводятся в телевизионный тракт во время
обратного хода луча кадровой развертки.
Система «Телеавтограф» предназначена для передачи по теле-
фонной сети общего пользования рукописных текстов и графиков
одновременно с передачей речи. Для передачи письменных сооб-
щений в системе «Телеавтограф» в частотном спектре речи вы-
деляется полоса шириной порядка 400 Гц (например, 1600 .
... 2000 Гц). Ввод информации осуществляется с помощью так
называемого «электронного пера» и планшета с координатной сет-
кой, на который накладывается лист бумаги форматом А5 (148Х
397
Х2Ю мм2) с сообщением, подлежащим передаче. Для передачи
необходимо «электронным пером» обвести знаки текста или линии
рисунка Наличие емкости между пером и планшетом позволяет
с помощью координатной сетки закодировать сигнал, определяю-
щий координаты пера. Эти сигналы передаются по сети со скоро-
стью порядка 200 бит/с В приемнике информация декодируется и
выдается на экран дисплея
На основании вышеизложенного можно предполагать, что раз-
витие служб передачи дискретных сообщений будет происходить
в следующих направлениях:
телеграфная сеть общего пользования постепенно превратится
в факсимильную цифровую сеть, образовав единую сеть типа «Бю-
рофакс»;
сеть абонентского телеграфирования постепенно превратится в
сеть «Телетекс», которая, в свою очередь, будет интегрирована
с сетью ПД;
сети «Бюрофакс» и «Телетекс»-ПД на последующем этапе бу-
дут объединены в единую интегральную по услугам сеть ПДС на
базе первичной цифровой сети связи;
в дальнейшем все виды сообщений — аналоговые и цифровые—
будут передаваться в цифровой форме по цифровой сети с инте-
грацией служб (ЦСИС) с использованием универсальных терми-
налов Предпосылками реализации ЦСИС являются: внедрение
цифровых систем коммутации с управлением от ЭВМ и ЦСП на
всех участках сети связи — местном, внутризоновом, магистраль-
ном; интеграция оборудования систем передачи и систем комму-
тации в УК; существование системы сигнализации по общему ка-
налу; возможность и целесообразность создания на базе микро-
процессорной техники универсального оконечного оборудования
данных для различных служб (речевых и неречевых); общность
процессов передачи и коммутации речевых и неречевых сигналов
в цифровой форме; наличие высокостабильных генераторов, по-
зволяющих создавать синхронные сети; возможность в ЦСИС до-
биться хороших технико-экономических показателей, базирующих-
ся на высоком использовании пропускной способности каналов
связи на всех участках сети (в том числе и на абонентском), уни-
фикации оборудования, монтажа обслуживания. Стремление к ин-
теграции сетей связи проявлялось на всех этапах их развития
Вспомним, например, постепенный отказ от отдельных проводов
для телеграфирования, появление систем передачи, каналы в ко-
торых используются для разных служб, многоцелевые коммутаци-
онные станции типа, например, АТ-ПС-ПД; использование теле-
фонных сетей для других служб.
В этом отношении ЦСИС можно рассматривать как высшую
ступень интеграции, которую отличают: доведение цифрового ка-
нала до терминала абонента; наличие систем как с КК, так и с КП
398
и отсутствие необходимости в специализированном доступе к каж-
дой из них (интеграция доступа), существование универсальных
интерфейсов «сеть — терминал» к службам как передачи речи, так
и неречевым (интеграция служб).
В ЦСИС различают два вида услуг, обмен информацией (се-
тевые услуги — протоколы уровней 1—3) между абонентами сети
и телеуслуги (протоколы уровней 1—7), включающие промежу-
точное накопление информации, преобразование форматов, редак-
тирование, запрос информации, находящейся в банках данных (ко-
торые могут находиться внутри ЦСИС или вне ее — например,
ЭВМ на ВЦ). Следовательно, ЦСИС выходит за рамки традици-
онной сети связи, обеспечивающей только услуги по передаче ин-
формации (транспортная сеть).
На начальном этапе развития ЦИС целесообразно ограничить-
ся представлением абонентам только сетевых услуг, т. е. интегра-
цией служб речи, данных и текста на основе каналов В и Д. При
этом ЦСИС строится таким образом, чтобы удовлетворялась сум-
ма требований, обеспечивались одновременная передача разных
видов информации и более высокая верность передачи по срав-
нению с существующими сетями, возможность установления связи
раз яичными службами к одному абоненту по одному номеру или
одной абонентской линии и обслуживания в перспективе всех
служб одним многофункциональным абонентским терминалом, а
также снижения тарифов на услуги связи
Наряду с интеграцией служб электросвязи явно просматрива-
ется интеграция электросвязи и вычислительной техники. Послед-
няя развивается в двух направлениях: во-первых, ЭВМ становят-
ся абонентами сетей связи; во-вторых, в устройствах связи все ши-
ре используются ЭВМ Большие и средние ЭВМ широко приме-
няются в узлах коммутации и управления сетями, малые и микро-
ЭВМ используются в абонентских установках, аппаратуре систем
передачи, измерительных установках, концентраторах.
Приложение 1.
ИССЛЕДОВАНИЕ ПОМЕХОУСТОЙЧИВОСТИ
СИСТЕМ ПДС МЕТОДОМ ИМИТАЦИОННОГО
(СТАТИСТИЧЕСКОГО) МОДЕЛИРОВАНИЯ
П1 1 ОСНОВНЫЕ ПОНЯТИЯ
При решении задач разработки, создания и эксплуатации систем ПДС часто
возникают ситуации, когда аналитическое решение задачи оценки помехоустой-
чивости ввиду значительных математических трудностей невозможно В этих
случаях, как правило, используют имитационное математическое моделирование
исследуемой системы ПДС иа ЭВМ Под имитационным моделированием систе-
мы обычно понимается воспроизведение происходящих в ней процессов с искус-
ственной ими!ациси случайных величин, от которых зависят эти процессы Осно
вой имитационного моделирования является имитационная математическая мо-
дель (ИММ) исследуемой системы
Имитационная математическая модель представляет собой алгоритм выпол-
нения вычислительной машинной последовательности действий, представляющих
собой имитацию элементарных явлений, составляющих исследуемый процесс, с со-
хранением их логической структуры и последовательности протекания во вре-
мени Другими словами, ИММ представляет собой оформленный в виде про-
граммы для ЭВМ алгоритм функционирования исследуемого объекта Реализа-
ция этой программы па ЭВМ позволяет находить искомый показатель
эффективности исследуемого объекта при заданных значениях его параметров
Широкое применение получил метод имитационного моделирования систем
связи, базирующийся на описании случайных процессов (сигналов и помех)
с помощью систем стохастических дифференциальных уравнений Такой способ
имитационного моделирования систем связи позволяет успешно решать как за-
дачи синтеза оптимальных устройств связи, так и задачи их анализа при воздей-
ствии случайных помех
Чаще вс<го ИММ реализуется на основе так называемого функционального
метода При этом математическая имитационная модель, системы связи, пред-
ставляется в виде совокупности операторов или процедур (программных моду
лей), соответствующих отдельным функциональным элементам (источнику инфор-
мации, модулятору, каналу связи и так далее) моделируемой системы Состав
модулей в общем случае зависит от назначения и характера объекта и целей
исследования Функциональный метод позволяет легко отображать существенные
взаимосвязи элементов моделируемого объекта, а также воздействие различных
внешних факторов, имеющих как детерминированный, так и вероятностный ха
рактер
В отлнчие от других методов имитационное моделирование оказывается весь-
ма удобным аппаратом для исследования широкого круга сложных систем, к ко-
торым относятся, в частности, системы и сети связи, и позволяет получать ре-
зультаты даже тогда, когда применение аналитических методов расчета невоз-
можно в силу математических трудностей Так, имитационное моделирование
400
оказывается весьма удобным аппаратом для исследования случайных процессов,
особенно характерных для функционирования систем и сетей связи Например,
при использовании аналитических методов для исследования процессов передачи
информации с учетом случайных факторов обычно возникают значительные труд-
ности, связанные с тем, что зависимости между случайными факторами (напри-
мер, помехами) и показателями качества функционирования (например, вероят-
ностью ошибки) описываются сложными математическими выражениями, а иногда
даже невозможно установить эти взаимосвязи Для метода имитационного моде-
лирования указанные трудности обычно сравнительно легко преодолимы
При моделировании процессов передачи информации с учетом действия слу-
чайных факторов необходимо иметь в виду следующие обстоятельства. Резуль-
таты моделирования одной реализации процесса передачи информации в силу
действия случайных факторов будут сами по себе реализацией случайного про-
цесса и не могут достаточно полно характеризовать изучаемую систему или сеть
связи Поэтому искомые характеристики системы или сети связи при исследова-
нии их методом имитационного моделирования обычно определяют как средние
значения по данным большого числа реализаций процесса передачи информации
В силу закона больших чисел при большом числе реализаций средние значения
определяемых величин приобретают статистическую устойчивость и с достаточ-
ной для практики точностью могут быть приняты в качестве приближенных
значений искомых величин
Метод имитационного моделирования можно считать распространением иа
сложные системы применявшегося ранее только в специфических случаях одною
из численных методов — метода статистических испытаний или метода Монте-
Карло
Основные требования, предъявляемые к ИММ. Главные требования, кото-
рым должна удовлетворять разрабатываемая ИММ — это, с одной стороны, про-
стота, а с другой стороны, достаточная точность отображения тех свойств ре
альною объекта, которые подлежат исследованию Эти требования противоречи-
вы, так как желание повысить точность воспроизведения исследуемых
характеристик приводит к усложнению модели В результате модель может
оказаться настолько сложной и громоздкой, что в итоге для получения одной
реализации процесса потребуется значительное машинное время Возрастание
сложности модели, а следовательно, и времени испытания увеличивает вероят
носгь сбоев, так что чрезмерно сложные модели могут оказаться иеработоспо
собнымп Поэтому при разработке модели необходимо на основе имеющейся
априорной информации о структуре и назначении моделируемого объекта, зада-
чах и точности испытаний руководствоваться принципом создания модели пре
дельной простоты Этою можно достичь правильным подходом к отбору наибо-
лее существенных факторов и рациональным выбором структуры модели
Последовательность операций при разработке модели и ошибки моделиро-
вания. На первом этапе осуществляется формулировка задачи исследования
Далее следует содержательное описание процесса функционирования исследуе
мого объекта После этого приступают к разработке структурной схемы (алго-
ритма) модели Затем производят уточнение и отбор наиболее существенных
факторов, влияющих на исследуемые характеристики объекта моделирования
С у четом проведенного отбора производят возможное упрощение модели, после
26-6085 401
чего приступают к разработке алгоритма модели и программы его реализации
на ЭВМ
Программу моделирования обьекта исследования опробуют и при необходи-
мости вносят коррективы в разработанную протрамму. Наконец, производят
исследования искомых характеристик модели, анализируют результаты исследо-
ваний и оценивают их точность При оценке точности полученных результатов
исследования важно знать причины, снижающие точность расчета Основные из
них следующие
ошибки моделирования, возникающие при упрощении моделирующего алго-
ритма (любая математическая модель — лишь упрощенное представление моде-
лируемою объекта),
ошибки моделирования, возникающие из-за необходимой для реализации на
ЭВМ дискретизации во времени моделируемых процессов,
ошибки моделирования, являющиеся результатом неточного знания, а сле-
довательно, п задания в модели исходных данных (например, мощности помех,
законов распределения вероятностен их мгновенных значений, спектральных
плотностей и т п ),
случайные ошибки моделирования, обусловленные ограниченностью количе-
ства реализаций случайных процессов (числа испытаний).
Среди перечисленных причин ошибок существенное значение имеет ограни-
ченность числа испытаний Л'исп Влияние Nисп нэ точность результатов модели"
рования будет рассмотрено далее.
На рис П1 1 изображена упрощенная структурная схема исследуемой систе-
мы ПДС Она содержит двоичный источник сообщений ИС, вырабатывающий
случайным образом образом информационные символы «О» или «1». Эти символы
поступают в передатчик Пер. Передатчик может содержать кодер и модуля юр
На выходе модулятора получается модулированный сигнал, который поступает
в канал связи. В канале связи сигнал искажается вследствие неидеальности час-
тотных характеристик канала, а также наложения помех, имеющих случайную
природу Таким образом, на входе приемника Пр сигнал носит вероятностный
характер, обусловленный случайным характером информационных символов и
помех Приемник осуществляет фильтрацию сигнала от помех, его демодуляцию
и декодирование Из-за искажений сигнала приемник не всегда может правиль-
но определить, какой из символов «О» или «1» передавался Важнейшим пока
зателем эффективности системы передачи дискретных сообщений является ве-
роятность ошибки рош на выходе приемника Как уже отмечалось, из-за сложно-
ности процессов, происходящих в системе ПДС, не всегда удается получить
Рис. П1.1. Упрощенная структурная схема исследуемой системы ПДС
402
Рис П1 2 Структурная схема моделирующей про|раммы
аналитическое выражение для расчета рош В этом случае оценку вероятности
ошибки можно получить путем имитационного моделирования системы на ЭВМ.
Моделирующая программа в соответствии с функциональным методом моде-
лирования должна содержать программные модули, имитирующие соответствен-
но источник информации, передатчик, канал связи, источник помех и приемник.
Кроме того, для определения факта ошибки и расчета оценки вероятности ошиб-
ки необходим программный модуль расчета рош В этом модуле сравниваются
переданный символ и символ на выходе приемника, в результате чего выявляется
наличие ошибки Далее производится накопление ошибок и подсчитывается чис-
ло проведенных испытаний Если число проведенных испытаний системы доста-
точно, осуществляется расчет оценки вероятности ошибки рош путем деления
числа ошибок на число переданных символов (число испытаний)
На рис. Ш 2 изображена соответствующая моделирующая программа Про-
грамма начинается с блока ввода исходных данных Он представляет собой сово-
купность операторов Среди них оператор, задающий число испытаний системы
Лгисп, равное количеству информационных символов, генерируемых программным
модулем ИС. Другие операторы блока ввода исходных данных задают парамет-
ры сигналов и помех
Модуль ИС состоит из операторов, в результате выполнения которых вы-
рабатывается значение информационного символа, имеющего случайный харак-
тер Далее следует модуль передатчика. Операторы, входящие в этот модуль,
26* 403
Рис П1 3 Плотность рас-
пределения вероятности рош
формируют отсчеты модулированного сигнала, со
ответствующие выработанному информационному
символу, и принятым виду модуляции и помехо-
устойчивому коду (если он используется)
Модуль источника помех включает в себя one
раторы, вырабатывающие случайные значения от-
счетов, в зияние которых на качество передачи
информации исследуется в данной модели си-
стемы ПДС
Модуль канача связи реализует математиче
ские операции, в результате которых сигналы
передатчика искажаются вследствие неидеально
сти частотных характеристик канала и наложения
отсчетов помех иа отсчеты сшнала Если помеха мультипликативная, например,
типа занижения уровня сигнала, то отсчеты мультипликативной помехи перемно
жаются с соответствующими отсчетами сигнала
Модуль приемника содержит операторы, реализующие операции фильтрации,
демодуляции и декодирования Информационный символ с выхода приемника
поступает в логический блок, где он сравнивается с переданным символом Если
при 1 м испытании символы не совпадают, величине ошибки я, приписывается
значение 1 в противном случае — 0 Соответственно в счетчик ошибок добав-
ляется либо а,= 1, либо а, = 0
Датее осуществляется увеличение содержимого счетчика числа испытаний
на единицу После этого текущее число испытаний сравнивается с заданным чис-
лом Мисп Если текущее число испытаний оказывается меньше Мисп, управление
выполнением программы передается в начало программы и начинается новый
цикл испытания. В противном случае рассчитывается оценка вероятности ошибки
1 л,исп
риш ~~ Т,-' 7 а1> которая выводится на печать Работа программы на этом
"иен
<=1
заканчивается
Определение числа испытаний МИСп. Исходя из самого определения вероят
ности, значение рош можно получить лишь при бесконечно большом числе испы
таний, что практически невозможно При ограничении числа испытаний некоторой
величиной 2V„cn вместо значения рОш получают оценку вероятности ошибки рОш,
являющуюся случайным числом Как любое случайное число, оно характери-
зуется плотностью вероятности щ()5ош), дисперсией Л[/50ш] и математическим
ожиданием А4[рОш], которое равно рош (рис Ш 3) При достаточно большом
числе испытаний рош можно считать случайной величиной, имеющей нормальный
закон распределения
Выбор числа испытаний зависит от того, какие требования предъявляются
к точности определения рош Точность оценки рош зададим шириной доверитель
ного интервала еР, который определим следующим образом |рош—/50Ш|<еР
Определение необходимого числа испытаний /Уисп для получения оценки ве
роятности ошибки с необходимой точностью 8Р и доверительной вероятностью рр
можно произвести с помощью известного из теории вероятностей выражения,
404
которое для рассматриваемой задачи примет вид
D _ Л- f е-х2/2б/х=Ф[ер|/л/исп/|/оТ?;]].
Py~V^ .)
о
Здесь Ф[ ] — функция Крампа, значения которой табулированы
Очевидно, что вначале используя таблицы значений функции Крампа, по
величине рр необходимо найти аргумент функции Ф[еР—УМисн/У^а,]] Пусть его
значение равно tp Тогда можно записать tp=ерУ^сп/УО[й|], откуда
£) [а,]
лг — ft —L_LL
«исп— 2
(П1 1)
Теперь остается найти дисперсию Д[а/]
Как уже говорилось выше, в рассматриваемой задаче можно считать, что
итогом каждого i-го испытания модели системы ПДС будет случайная величи-
на щ, являющаяся результатом сравнения переданного информационного сим-
вола с принятым При их несовпадениеи а,=1 (ошибка), а при совпадении щ = 0
(нет ошибки), т с случайная величина а, может принимать только два значе-
ния a<i=l с вероятностью рош и а,2=0 с вероятностью 1—раш Следовательно,
математическое ожидание
Л4 (Щ) = ] ( 1 Рош) =Рош
Тогда согласно определению дисперсии
D[a,]=[a,i—ЛГ (Ф) ]2рОш+[я12—М (а,) ]2 (1—рош) =рош (1—рош).
Подставляя последнее выражение в (П1 1), получим
у - t 2 ^шО—Гои) = t 2 Р ... (П1.2)
исп I F 2 ’ п о *2 '
где еР* = 8р/р0ш — относительная погрешность определения рош
Поскольку значение рош лишь подлежит определению, то для нахождения
числа испытании поступают следующим образом Выбирают вначале число испы
таний (100 200), по результатам этих испытаний определяют грубую оценку
вероятности ошибки, которую подставляют в формулу (П1 2) в качестве рош
После этого вычисляют окончательное значение Л'исп
Из (П1 2) следует, что число испытаний существенно зависит от величины
оцениваемой вероятности ошибки Поэтому целесообразно так строить модели
рующий алгоритм или так выбирать исходные данные, чтобы вероятность ошиб-
ки была не очень близка к нулю во избежание значительного увеличения необхо-
димого числа испытаний
Проиллюстрируем сказанное примером Пусть необходимо наити число испы-
таний для оценки вероятности ошибки с точностью 10 % (ер* = 0,1) и довери-
тельной вероятностью 0,9 Грубая оценка вероятности ошибки, полученная в ре-
зультате пробных испытаний, равна 0,1
Вначале по заданной доверительной вероятности с помощью таблицы зна
чений функции Крампа определяем верхний предел интегрирования /р, который
в данном случае равен 1,65 Подставляя в (П1 2) числовые значения, полечим
405
Аисп==245. При уменьшении вероятности ошибки в 10 и 100 раз необходимое
число испытаний достигает соответственно значений 2703 н 27273.
Конкретные вопросы моделирования отдельных блоков системы ПДС рас-
смотрены ниже
П1.2. МОДЕЛИРОВАНИЕ ОТДЕЛЬНЫХ
БЛОКОВ СИСТЕМЫ ПДС
Понятие случайных чисел Для имитации источника сообщения, а также
действия различных случайных факторов, сопровождающих процесс передачи
сообщений в системе ПДС, при моделировании возникает необходимость форми-
ровать реализации случайных событий, величин, процессов.
Исходным материалом для формирования в цифровых вычислительных ма-
шинах реализаций, имеющих случайный характер, обычно служат так называе-
мые случайные числа Последние могут быть получены и введены в машину раз-
личными способами Например, можно хранить в запоминающих устроис'.вах
ЭВМ специальные таблицы случайных чисел и выбирать из них отдельные числа
по мере надобности Однако чаще всего случайные числа вырабатываются
в самой машине с помощыр специальных программ (датчиков случайных чисел).
Однако случайные числа являются лишь исходным материалом для получения
реализаций различных случайных процессов, необходимых при моделировании.
Существуют различные способы преобразования исходных случайных чисел в реа-
лизации случайных процессов с заданными свойствами В качестве исходной
совокупности случайных чисел чаще всего используется совокупность случайных
чисел с равномерным распределением в интервале (0,1). Такая совокупность по-
лучается с небольшими затратами машинного времени и обеспечивает простоту
и удобство дальнейших необходимых преобразований.
Моделирование источника сообщения. Задачей программного модуля источ-
ника информации, как это отмечалось в разд П1.1, является генерация инфор-
мационных символов «0» или «1», имеющих случайный характер Для большин-
ства двоичных источников сообщений вероятности «0» или «1» примерно рав-
ны 0,5.
Для получения равновероятных чисел «1» и «0» удобно воспользоваться
имеющимися в математическом обеспечении современных ЭВМ стандартными
подпрограммами, вырабатывающими при каждом обращении к ним случайное
число X с равномерным законом распределения вероятностей в интервале зна-
чений от 0 до 1. Можно предложить следующий алгоритм формирования рав-
новероятных информационных символов /Вх = 0 или /вх=1 с помощью числа X;
если сформированное подпрограммой число А'-зэО,5, то /вх=1, иначе /вх=0
Структурная схема программного модуля источника сообщений, использую-
щего подпрограмму RANDU формирования равномерно распределенных в интер-
вале 0 ... 1 чисел, изображена иа рис П1 4. В языке Фортран обращение к под-
программе осуществляется оператором CALL RANDU (II, 12, X). Числа целого
типа II, 12, равные нулю, выполняют служебные функции. Они должны быть
заранее заданы в модуле ввода исходных данных. При необходимости формиро-
вания неравновероятных символов следует, очевидно, генерируемое число X срав-
406
Рис. П1 4. Структур-
ная схема программ-
ного модуля источни-
ка сообщения
Рис П1 5. Структурная схема про-
граммного модуля частотного мо-
дулятора
нивать не с серединой интервала 04-1, тсс 0,5, а с другим порогом, который
делит интервал пропорционально вероятностям «0» и «1».
Программный модуль источника информации, написанный на языке Фортран,
вьнлядит следующим образом:
CALL RANDU (II, 12, X)
IF (X—0.5) 1, 2, 2
1 IBX = 0
GOTO 3
2 1BX=1
3
Второй оператор, называемый условным арифметическим, вычисляет выра-
жение, стоящее в скобках, и в зависимости от того, меньше, равно или больше
нуля результат, передает управление на операторы, помеченные метками, ука-
занными в списке меток после (X—0,5). Так, если (X—0,5) <0, то управление
передается на оператор с меткой 1. Если (X—0,5)>0, управление передается на
оператор с меткой 2.
407
Оператор безусловного перехода GO ТО служит для обхода оператора
с меткоп 2 с целью сохранения уже полученного значения 1ВХ=0.
Моделирование передатчика. Задачей модуля передатчика является форми-
рование временных отсчетов сигнала, посылаемого в канал связи В общем слу-
чае программный модуль передатчика должен содержать группу операторов,
моделирующих работу кодера, и группу операторов, моделирующих работу мо-
дулятора В качестве примера рассмотрим реализацию модуля передатчика,
использующего частотную модуляцию (помехоустойчивое кодирование не исполь-
зуется)
Согласно соответствующей рекомендации МККТТ информационный элемент,
равный нулю, передается гармоническим сигналом с верхней характеристической
частотой f2, а равный единице — с нижней характеристической частотой flt т е
Si(0 =sin (2я/1/); =sm (2nfit). (П1.3)
Эти выражения описывают сигналы, непрерывные во времени. ЭВМ может рас-
считывать значения сигналов лишь для конкретных значений /, отстоящих друг
от друга через определенные интервалы Д1 Величину Д/ можно рассчитать
с помощью теоремы Котельникова, выбрав в качестве верхней частоты спектра
сит нала, например, верхнюю частоту полосы пропускания канала связи. Могут
быть и другие соображения относительно выбора значения Д/ С учетом дискре-
тизации времени для расчета отсчетов сигналов на ЭВМ (Ш 3) необходимо пе-
реписав следующим образом
$i(/) =sin (2л/1/Д/), s2(/) =sin (2л/д/Д1), (П14)
где / — номер отсчета сигнала; /Д.' — момент времени, для которого рассчиты-
вается отсчет сигнала.
Число отсчетов сигнала L, приходящихся на единичный интервал времени т0,
легко рассчитать Д = То/Д/=1/(ВД0 (В — скорость модуляции).
Для уменьшения числа операций, выполняемых в процессе моделирования
передатчика, целесообразно заранее рассчитать отсчеты сигналов Si(t) и s2(I),
а не вычислять их каждый раз по формулам (П1.4) после генерации очередного
информационного символа Другими словами, желательно перед программным
модулем источника информации сформировать с помощью (П14) двумерный
массив (матрицу) отсчетов сигналов st(V) и s2(Z)
5(1, /)=sin (2nfiIA.t), 5(2, 7)=sin (2nfJ&t).
Таким образом, в первой строке матрицы 5 (J, Г) будут находиться отсчеты
сигнала, соответствующего информационному символу «1», а во второй строке
матрицы-—отсчеты сигнала, соответствующего информационному символу «0».
Схема алгоритма моделирования частотного модулятора изображена на
рис П15, а программный модуль, написанный на языке Фортран, имеет сле-
дующий вид
3 IF (IBX—1) 4, 6, 6
4 DO 5 1=1, L
5 SM (I) = S(2, I)
GO TO 8
6 DO 7 1 = 1,L
408
7 SM (1)=S(1,1)
8 . . . .............
В этой программе расчет отсчетов на выходе модулятора sM (/) осуществ-
ляется с помощью оператора цикла DO Напомним, что следующая за DO цифра
указывает метку циклически выполняемого оператора (при изменении индекса
отсчета I от 1 до L с шагом, равным 1) В этом и последующих фра!мен1ах
программы индексные символы написаны большими буквами, поскольку в Фор-
тране не предусмотрено обозначение индексов малыми подстрочными символами
Моделирование канала связи. При прохождении через канал связи сигнал,
во-первых, подвергается искажениям, вызванным неидеальностью элементов
аппаратуры и фншческой среды, по которой он распространяется, а во-вторых,
на сигнал воздействуют аддитивные и мультипликативные помехи. Вначале рас-
смотрим моделирование влияния на сигнал первою фактора — неидеальностн эле-
ментов аппаратуры, например, фильтров передающей и приемной сторон аппара-
туры, и физической среды, по которой он распространяется.
Свойства канала связи, состоящего из последовательно включенных фильтра
передающей стороны, физической среды распространения сигнала, фильтра при-
емной стороны, можно охарактеризовать импульсной реакцией g(Z), являющейся
откликом канала на входное воздействие в виде б импульса С учетом дискрет-
ного во времени представления сигналов в ЭВМ канал связи можно описать
с помощью модели трансверсального фильтра, имеющего дискретную во времени
импульсную реакцию g (/) (рис П1 6) Очевидно, что интервал дискретизации
импульсной реакции должен бьпь равен интервалу дискретизации сигналов.
Исходя нз рассматриваемой модели канала связи, Z-й отсчет сигнала на выходе
канала связи можно рассчитать по формуле (П1 5), представляющей собой дис-
кретный аналог интеграла свертки входного сигнала с импульсной реакцией кана-
ла связи (для
N
skc(^) = 2' sm (J (П1.5)
/=1
На Фортране эгу операцию можно записать следующим образом
RE = 0.
DO 9 1 = 1,N
9 RE = RE-|-SM(J—I-pl) >=G (I)
SKS (J) =RE
Для накопления результатов умножения в этом фрагменте программы
использован прием, аналогичный рассмотренному в разд. 6 5 при реализации
алгоритма работы демодулятора Для расчета отсчетов сигнала .s, с (l<N)
предварительно следует ввести N— 1 начальных отсчетов sM(/)=0
Рассмотренный пример относится к простейшему случаю—моделированию
каналов с постоянными параметпамп (с неизменной §(/)), к которым можно
отнести ряд каналов, таких, например, как кабельные каналы, длинноволновые
радиоканалы, световодные каналы. Однако имеется целый ряд каналов гидро-
акустические, тропосферные и коротковолновые радиоканалы, которые характе-
ризуются изменяющейся с течением времени импульсной реакцией. Для их мо-
409
Ячейки памяти
Рис П1 6 Модель канала связи в виде трансверсального фильтра (а) и его им-
пульсная реакция (б)
делирования необходим дополнительный программный модуль, задачей которого
является соответствующее изменение фопмы импульсной реакции
Моделирование источника помех. Для моделирования воздействия на сигнал
аддитивных или мультипликативных помех нужно вначале смоделировать источ-
ник помех. Помехи, как правило, представляют собой случайные процессы
с определенными статическими характеристиками (спектральной плотностью
мощности, плотностью распределения вероятностей мгновенных значений, ве-
роятностью распределения интервалов между импульсами для импульсных по-
мех и т д )
В каналах связи всегда присутствует помеха типа «белого шума», пред-
ставляющая собой случайный процесс с равномерной спектральной плотностью
мощности и нормальным законом распределения вероятностей мгновенных значе-
ний Для ее моделирования удобнее всего воспользоваться имеющейся в мате-
матическом обеспечении ЭВМ стандартной подпрограммой CAUSS, генерирующей
отсчеты гауссовского случайного процесса с заданными дисперсией (мощностью)
D и математическим ожиданием МО. На языке Фортран обращение к этой под-
программе осуществляется оператором CALL GAUSS (IX, D, МО, R). Здесь
IX — служебное число целого типа, содержащее не более девяти цифр и зада-
ваемое в блоке ввода исходных данных После каждого обращения к подпро-
грамме получается новое случайное число R, имеющее нормальный закон рас-
пределения с дисперсией D и математическим ожиданием МО Значения D н МО
также должны быть заданы в блоке ввода исходных данных Генерацию и на-
ложение отсчета помехи на отсчет сигнала можно отобразить следующими двумя
операторами-
CALL CAUSS (IX, D, МО, R)
SBXPR(J)=SKS (J)-f-R
Идентификатор SBXPR обозначает отсчет сигнала на входе приемника
Моделирование помех с заданным законом распределения вероятностей
мгновенных значений. Помимо помех, имеющих нормальный закон распределе-
ния вероятностей мгновенных значений, в каналах часто действуют помехи
с другими законами распределения. В качестве исходных случайных процессов
410
Рис. П1.7. Формирование случайных чисел с необходимой плотностью распреде-
ления вероятностей методом кусочной аппроксимации
для получения процессов с необходимым законом распределения чаще всего
используют процессы с равномерным законом распределения вероятностей мгно-
венных значений в интервале 0 ..1. Как уже упоминалось, программным дат-
чиком случайных чисел с таким законом распределения может служить подпро-
грамма RANDU. Существуют различные методы преобразования случайных чисел
с равномерным законом распределения в случайные числа с заданным законом
распределения. Одним из наиботее общих является метод нелинейного преобра-
зования, обратного функции распределения, а также метод кусочной аппрокси-
мации искомой функции распределения Суть этого метода заключается в сле-
дующем
Пусть необходимо генерировать случайные числа у с функцией распределе-
ния р*(у) (рис. П1 7,а). Аппроксимируем эту функцию ступенчатой функцией
р(у) Обозначим площадь каждой i-й ступеньки pt, а границы ее значениями
у, и p,+i. Разделим диапазон значений равномерно распределенной в интервале
О ... 1 случайнои величины X, генерируемой подпрограммой RANDU, на подын-
тервалы, пропорциональные значениям щ (рис. П1 7,6) Очевидно, что вероят-
ность попадания случайного числа X в i-й интервал будет равна /Л Тогда алго-
ритм формирования чисел у с плотностью распределения вероятностей р(у)
может быть принят следующим Вначале генерируется число X. Затем опреде-
ляется, в какой i-й подынтервал значений X оно попало После этого числу у
приписывается значение yi Однако при этом случайные числа у будут принимать
лишь дискретный ряд значений yi, у?, ., у,, . , ут Чтобы получить непре-
рывный закон распределения р(у), к числу р, можно прибавить равномерно рас-
пределенное в интервале yi ... yi+i число X(yl+l—у,), т е у=у,-\ Х(у1 + 1—у,)
Существуют различные модификации этого метода, учитывающие конкретные
особенности программного обеспечения ЭВМ.
411
Моделирование приемника. Задачами приемника являются демодуляция сиг-
иалла и, если используется декодер, обнаружение и исправление ошибок Рас-
сммотрим моделирование приемника для простейшего случая, когда его функции
свсзодятся лишь к демодуляции, например, частотно-модулироваииых сигналов.
Известно большое число методов демодуляции частотно-модулированных
сингиалов. В качестве примера рассмотрим демодуляцию сигналов с помощью
дв^ух фильтров, каждый из которых согласован соответственно с сигналами
S|Kkc(0 п s2Kc(0 Форма сигналов определена с учетом их искажений, вызван-
ные нендеальиостью элементов аппаратуры и среды распространения Модули
маиксимумов напряжений на выходах согласованных фильтров при поступлении
на а вход приемника сигналов sBxnp(t) будут равны соответственно
simar —
J СВч.|ф(0 ’1К.с(0^
(П1.6)
SB\.llp(O 2К.с(0 dt
Здцесь Sikc(0 и S2kc(/) обозначают импульсные реакции первого и второго со-
глаасоваиных фильтров, to— начало интервала обработки сигнала на выходе ка-
налла, /о—|-То — конец интервала обработки После вычисления si max И S2tnax ПрО-
извводится их сравнение. При этом, если s \max'^-S‘2tnax — решение приемника
о I принятом информационном символе /Пр=1, в противном случае /пр=0.
Программный модуль приемника выглядит следующим образом:
RE-0
DO 1 0 1=1, L
10 RE = RE SBXPR (I)*SKS1 (1)
SMAX1=ABS (RE)
RE-0
DO 11 1 = 1,L
11 RE-RE -SBXPR (I) *SKS2 (I)
SMAX2=ABS (RE)
IF (SMAX2—SMAX1) 12, 12, 13
12 IPR=1
GOTO 14
13 IPR=0
Оператор ABS (RE) вычисляет абсолютное значение RE
Моделирование счетчика ошибок. Вначале необходимо определить сам факт
ошпибки Это можно сделать, сравнивая информационные элементы на выходе
истточиика информации /вх и на выходе приемника /ПР Если их значения не оди-
иакковы, то в счетчик ошибок следует заслать единицу, свидетельствующую о на-
личчии ошибки Если значения одинаковы, то содержимое счетчика изменять не
слеедует. Реализуются эти операции следующими операторами:
14 IF(IBX—IPR) 15, 16, 15
15 OPR=1
4122
GOTO 17
16 OPR = 0
17 SUMOPR-SUMOPR j-OPR
Идентификатор OPR обозначает значение ошибки приемника, SUMOPR— сумму
ошибок Начальное значение SUMOPR = 0 должно быть задано в блоке ввода
исходных данных
После окончания испытания системы оценку вероятности ошибки получают
путем деления SUMOPR на количестве проведенных испытании
В заключение определим число основных операций, необходимых для рас-
чета SMAX1 и SMAX2 Для получения L отсчетов сигнала на выходе модулятора
потребовалось L операций присваивания значениям SM (I) значений S(J, I)
Далее для расчета с помощью операции свертки L значений сигнала на выходе
канала связи необходимо было затратить, не считая операции сдвига, LN сло-
жений и LN умножений (для каждого отсчета А сложений и А умножений).
Наконец, для вычисления SMAX1 и SMAX2 потребовалось 2L операций
сложения и 2 А операции умножения Таким образом, общее число операций
сложения Ас=ЛА-| 2L и операций умножения Ny=LN-\-2L. При достаточно
больших L и А число операций, затрачиваемых только иа один цикл испытаний,
может быть весьма велико, что скажется иа затратах машинного времени, не-
обходимого для проведения исследования модели системы ПДС Поэтому весьма
актуальной является проблема создания таких математических моделей систем
ПДС, которые сокращали бы число операций, затрачиваемых иа каждый цикл
испытаний Одну из таких моделей можно создать, описывая математические
модели модуляторов, каналов связи и демодуляторов соответствующими матри-
цами Мк с и Мд Перемножив эти матрицы, можно получить результирую-
щую матрицу небольшой размерности, отображающую, однако, все существен-
ные свойства модулятора, канала связи и демодулятора Рассмотрим такую
матричную модель системы ПДС
П1 3 МАТРИЧНАЯ МОДЕЛЬ СИСТЕМЫ ПДС
Матричная модель модулятора. Ранее при моделировании частотного моду-
лятора уже использовалась матрица S(J, /) отсчетов сигналов с нижней и верх-
ней характеристическими частотами Будем теперь называть се матрицей моду-
лятора ЛА Если информационный элемент /вх = 0 предварительно преобразовать
в матрицу строку /вх м, элементами которой являются числа «1» и «О», а /вх=1
преобразовать в матрицу-строку /вх м с элементами «О» и «1», то операцию по
формированию отсчетов сигнала на выходе модулятора можно записать в мат-
ричной форме следующим образом
Sy = ZBX мМм (П1 7)
Здесь SM — матрица-строка, состоящая из L отсчетов сигнала иа выходе моду-
лятора (рис П1 8)
С помощью (П1 7) можно получать отсчеты сигналов н с другими видами
модуляции, например с фазовой. Для этого элементами строк матрицы ЛА,
должны быть отсчеты сигналов с соответствующими начальными фазами, а /вх м
413
Рис П1 8 Матричная модель расчета сигналов па выходе модулятора
должна формироваться из информационных символов /вх с учетом используемого
принципа изменения начальных фаз
Как следует из (П1 5), для расчета одного отсчета выходного сигнала
Skc(0 необходимо располагать не менее У отсчетами входного сигнала sM(/).
Если Е<Л, ю в операции свертки должны участвовать не менее k=N/L после
довательных во времени сигналов модуляторов Для получения последовательно
сти из k сигналов модулятора матрицу модулятора следует представить в виде,
изображенном на рис П1 9 Здесь 6 = 3
После формирования нового информационного элемента /вх и определения
соответствующей /вх м производится сдвиг вправо элементов строки, м , т е
hex м замещает /звх м, Лвх м занимает место /2вх н, а на место /|ВХм записывается
новое значение /вх м Далее производится умножение составной строки м на
матрицу Л1„, в результате чего занимает место S3M> Si„ — место S2M, а на
место Sim записывается S4
Таким образом, на выходе матричной модели модулятора постоянно форми-
руется группа из k последовательных во времени сигналов S-С В общем случае
матрица М„ имеет kNc строк (Nc— число сигналов, используемых в системе
ПДС) и kL столбцов
Рис П1.9. Матричная модель расчета последовательности из нескольких сигна-
лов модулятора
414
Рис П1 10. Матричная модель расчета сигналов на выходе канала связи
Матричная модель канала связи. Операцию свертки отсчетов k последова-
тельных во времени сигналов sM(l) с отсчетами импульсной реакции канала
связи для расчета L отсчетов выходного сигнала sKC(0 можно записать в мат-
ричной форме следующим образом (рис П1 10)
Sbc=SmMkC (П18)
Матрица канала связи состоит из L столбцов элементами которых являются
отсчеты импульсной реакции Каждый последующий столбец отличается от пре-
дыдущего сдвигом элементов на одну строку вверх Матрица Мк с должна
иметь число строк, равное числу столбцов в матрице строке SMC, т е в общем
случае kL строк Это условие всегда можно выполнить, заполнив недостающие
строки нулями Итак, после сдвига содержимого столбцов матрицы строки SMC
на L разрядов вправо всякий раз после формирования нового значения /вх с по-
мощью (П1 8) вычисляются новые L отсчетов выходного сигнала
Матричная модель демодулятора. Нетрудно значения интегралов корреля
ции (П1 6) переписать для дискретного временного представления sBxnp(O,
Чьс(0, s«kc(Z) в матричной форме
/д— Sbx ПрМд = .81 сМ .
Здесь SBX Пр — матрица строка, элементами которой являются L отсчетов сигнала
на выходе канала связи (иа входе приемника),
Мд—матрица демодулятора, которая содержит в нашем случае два столб-
ца причем элементами первого столбца являются отсчеты cnrHaflaj s1KC(0,
а второго столбца — отсчеты S2Kc(Z),
/д — матрица строка, состоящая из двух столбцов первый элемент этой
матрицы равен верхнему интегралу (П16), а второй элемент — нижнему
Разумеется, что после вычисления элементов матрицы строки необходимо
определить нх модули, затем сравнить модули между собой и по результату
сравнения вынести решения о принятом информационном символе
Поскольку матрицы Мм, Мк с н Мд в процессе эксперимента остаются не-
изменными, то их можно заранее перемножить При этом матричная модель су-
415
ществеииой части системы ПДС, включающей в себя источник модулирующих
символов / с модулятор, канал связи, демодулятор (до блока решения
ВХ м
о принятом символе), может быть записана следующим образом:
Д = 1вх м'^Л.с'Д = мМобщ-
Зная размерность матриц Л/„, Мкс и Мл (см рис. П1.9 и П1.10), нетрудно
определить размерность матрицы ЛСбщ: kNQ строк и Nc столбцов. Для умноже-
пиния /дХМ на такую матрицу достаточно Nc2k сложений и столько же умно-
жений.
Определим приблизительно выигрыш Q в числе операций сложения, умно-
жения, затрачиваемых на один цикл испытания при матричном и традиционном
способах моделирования систем ПДС
(LN + 2L\
= N;?k
(П1.9)
Оценим выигрыш для рассматриваемою примера с частотной модуляцией
(A'c = 2). Возьмем L=8, а ^=16. Подставляя эти числовые значения в (П1 9),
получим Qc1=Q>m~18 Таким образом, применение матричного описания сово-
купности блоков системы ПДС может дать значительную экономию операций,
а следовательно, и машинного времени.
Если приемник обладает линейной амплитудной характеристикой, то влия-
ние помех можно смоделировать путем наложения на элементы матрицы-строки
Л отсчетов помехи, уже приведенной к выходу демодулятора.
Итак, имитационное математическое моделирование представляет собой
мощный инструмент для исследования важнейших характеристик систем ПДС
При этом затраты машинного времени (число операций) существенно зависят
от используемых математических моделей блоков системы. Поэтому разработка
новых более совершенных моделей блоков представляет собой одну из важ-
нейших задач математического моделирования.
Приложение 2.
ИСПОЛЬЗОВАНИЕ СРЕДСТВ
ВЫЧИСЛИТЕЛЬНОЙ ТЕХНИКИ
В ДОКУМЕНТАЛЬНОЙ ЭЛЕКТРОСВЯЗИ
П2.1. ОБЩИЕ ПОЛОЖЕНИЯ
Большая часть действующего оборудования систем ПДС обладает недоста-
точно высокими эксплуатационно-техническими характеристиками: оио не удов-
летворяет современным требованиям по производительности, уровню унифика-
ции аппаратуры (наличие нескольких модификаций оборудования одинакового
назначеиня), по степени автоматизации основных технологических процессов
(высока доля ручного труда), по эффективности использования каналов первнч-
416
иой сети, по ремонтопригодности и т. п. Большие резервы повышения эффектив-
ности техники связи могут быть реализованы путем внедрения в каналообразую-
щее, коммутационное, оконечное и другое оборудование систем ПДС последних
достижений микроэлектроники и вычислительной техники (ВТ), предоставляющих
в распоряжение связистов ряд ютовых функциональных узлов и блоков для
цифровой обработки сигналов в микроэлектронном исполнении в виде интеграль-
ных схем малой, средней и большой степени интеграции (ИС, СИС, БИС),
а также более крупные '.модули» в виде микро- мини- и даже универсальных
ЭВМ
В настоящее время в аппаратуре систем ПДС широко используется совре-
менная элементная база по данным [П2 1] доля компонентов ВТ в современном
оборудовании связи составляет 60 .. 80 % Одиако в оборудовании систем ПДС
пока в основном находят применение цифровые интегральные схемы с жесткой
(схемной, непрограммируемой) логикой, позволяющие повысить надежность,
улучшить массогабаритные показатели, снизить энергопотребление, но не обеспе-
чивающие решения задачи создания гибкои, лет ко модернизируемой, универсаль-
ной, малообслуживаемой техники связи
Одно из главных направлений совершенствования технических средств и тех-
нологических процессов связи базируется на применении в аппаратуре микро-
процессоров (МП) [П2.1—П2.4]. Микропроцессор — это алгоритмически универ-
сальное устройство обработки двоичных сигналов, реализованное в виде одной
или нескольких БИС или сверхБИС (СБИС). Управление им осуществляется
последовательностью команд, хранящейся в приданном ЗУ и образующей про-
грамму Микропроцессор является основой для построения микроЭВМ, использо-
вание которых все чаще оказывается экономически целесообразным даже
в отдельных узлах, блоках аппаратуры систем ПДС Отечественная промышлен-
ность серийно выпускает ряд пригодных для использования в системах ПДС вы-
сокопроизводительных мнкроЭВМ типа «Электроника». С появлением МП, мик-
роЭВМ разработчики аппаратуры связи получили в свое распоряжение не только
аппаратные, но и программные средства для реализации различных алгоритмов
обработки цифровой информации Микропроцессор ЗУ образует простейший
программно-аппаратный модуль (ПАМ) перспективной аппаратуры для систем
ПДС.
Микропроцессорные системы (МПС) строятся на базе БИС микропроцессор-
ных комплектов (МПК) и находят широкое применение в перспективной технике
связи. В частности, применение МПС в оконечном алфавитно-цифровом обору-
довании обеспечивает возможность автоматизации процессов заготовки, передачи
и приема информации, взаимодействия оконечного пункта с сетями связи, а сле-
довательно, существенное снижение затрат на эксплуатацию, возможность про-
граммной перестройки оборудования и его работы в различных сетях связи,
отказ от электромеханических устройств ввода-вывода, запись редактирование и
хранение информации в ЗУ [П2.3, П2.4]. В качестве примера можно привести
роботизированную универсальную телеграфную аппаратуру РУТА [П2.2], элек-
тронные телеграфные аппараты F-2000 (производство ГДР), РТА-80, современ-
ные цифровые факсимильные аппараты [П2.4].
Значительное расширение функциональных возможностей обеспечивается
внедрением средств ВТ в телеграфное коммутационное оборудование. Оии успеш-
27—6085 417
йо применяются в центрах коммутации сообщений ЦКС, электронных телеграф-
ных концентрациях ЭТК-КС (см. разд. П2 3). На базе универсального комплекса
создана каналообразующая аппаратура (КОА) с временным разделением кана-
лов (ВРК) для организации вторичной сети дискретных каналов в диапазоне
скоростей 50 . . 48 000 бит/с Внедрение такого комплекса существенно повысит
надежность сети, обеспечит возможность централизованного дистанционного
управления ею, самодиагностики оборудования, снизит эксплуатационные рас-
ходы
Имеются предпосылки для реализации многоуровневой системы управления
телеграфной сетью на основе серийных ЭВМ, которые предполагается использо-
вать в качестве управляющих систем на всех уровнях иерархической структуры
системы При этом должно будет использоваться стандартизованное программное
обеспечение (ПО) ЭВМ. Реализация тако? системы управления в полном объеме
позволит оптимизировать режимы функционирования телеграфной сети, увели-
чить ее пропускную способность, уменьшить время простоя связей, повысить на-
дежность сети
МикроЭВМ с устройствами ввода-вывода (УВВ — дисплей, клавиатура
и т. п.) ие только становятся составной частью систем ПДС, ио и превращают-
ся в инструмент для решения инженерно-технических, экономических, управлен-
ческих задач связи, служат для организации автоматизированных рабочих мест
(АРМ) различного назначения. Для этих целей применяются отечественные пер-
сональные микроЭВМ, ЕС-1840 «Искра-1030», диалоговые вычислительные ком-
плексы ДВК-2, ДВК-3 и др.
Использованию МПС в системах ПДС способствует то, что основные алго
ритмы обработки двоичных сигналов в аппаратуре документальной электросвя
зи (ДЭС), а также ряд технологических процессов обслуживающего персонала
телеграфов сравнительно просто поддаются автоматизации на основе програм-
мирования, при этом могут быть использованы алгоритмические языки высокого
уровня PL/1, Фортран, Бейсик и др В результате МПС, встроенные в телеграф-
ное оборудование, делают возможным выполнение дополнительных сервисных
операций, упрощают и автоматизируют контроль и диагностику, создают основу
для разработки универсального, гибкого, компактного оборудования, а про-
граммная реализация аппаратных функций аппаратуры и действий технического
персонала позволяет значительно повысить уровень автоматизации работ
Перспективным является создание автоматизированных узлов связи, осна-
щенных автоматическим коммутационным оборудованием (ЦКС-Т, ЭТК-КС),
комплексом автоматом для контроля, измерений и регистрации результатов (см
разд. П2 3), оборудованных аппаратно программными комплексами (АПК) и
электронными оконечными устройствами. Реконструкция действующих телегра-
фов на такой основе позволит нарастить их мощности без строительства новых
производственных зданий и без модернизации систем электропитания, значитель-
но повысить производительность труда, облегчить труд инженерно-технического
персонала. Следовательно, микропроцессорная техника позволит за короткое
время значительно принять эффективность действующего оборудования систем
ПДС, снизив долю ручного труда, создаст основу для разработки принципиаль-
но новых систем, которые войдут в состав единичной интегральной сети связи
418
П2.2 ОСОБЕННОСТИ ВЫБОРА
И ИСПОЛЬЗОВАНИЯ МПС ДЛЯ СИСТЕМ ПДС
В первую очередь МП и микроЭВМ находят применение в таком оборудо
вании систем ПДС как оконечное (телеграфные аппараты, абонентские пункты),
концентраторы нагрузки, ЦКС, аппаратура сопряжения (АС), контролирующие
автоматы При разработке перспективного оборудования приходится решать
задачи выбора элементной базы и структуры МПС, заниматься программно)!
реализацией ряда функции указанных систем Логическую шруктуру, состав
технических и программных средств МПС определяет множество реализуемых
ею взаимосвязанных функций пользовательских, присмопередачи, обмена с УВВ,
управляющих, сервисных, контроля и др
Типовая структура МПС содержит в виде функциональных блоков МП,
устронетва памяти (ОЗУ, ПЗУ, ППЗ\), обьедипепные общей шиной (систем-
ной магистралью), к которой через программируемые связные адаптеры (ПСА)
подключаются линии связи, а через специальные интерфейсные БИС или кон-
троллеры— УВВ (клавиатура, дисплей, печатающее устройство, трансмиттер, ре-
перфоратор и др) и органы управления (панель, шаговые двигатели и т п)
Примеры таких структур можно найти в раз П2 3 При недостаточно высоком
быстродействии МП к магистрали может быть подключено еще несколько фуик
циопалыю специализированных МП, работающих самостоятельно или под управ-
лением первого микропроцессора Например, современные телеграфные аппараты
с МП управлением OKI MTI00N (Япония), Г-2000 (ГДР) и некоторые другие)
имеют в своем составе но два МП, так как к микро-ЭВМ однопроцессорного теле-
графного аппарата предъявляются довольно высокие требования по быстродей-
ствию (до 10° он/с), времени обработки прерывании (30 80 мкс), емкости
ПЗУ (до 4 Кбайт) и т д При этом на один из МП возложены функции орга
низании режимов работы, передачи приема сообщении, предварительной заготов-
ки перфоленты, автонабора номера вызываемого абонента, па другой — управ-
ление мозаичным печатающим устройством и клавиатурой |[П2 4] В случае
ограниченной пропускной способности магистрали и возникновении «конфликтов»
при обращении к ней для отдельных МП могут быть дополнительно организова-
ны локальные магистрали.
При программной реализации аппаратных функций отдельных узлов и бло-
ков системы ПДС следует учитывать разнообразие, особенности, число операций,
выполняемых в этих узлах и блоках в процессе передачи приема дискретных
сообщений Существо программной реализации состоит в замене реальных аппа-
ратных средств (электромеханического узла, набора ИС и т. п ) на типовой ПАМ,
который реализует требуемый алгоритм обработки согласно программе, запи-
санной в ЗУ. Если, например, в ЗУ ПАМ заложить алгоритм, представленный
структурной схемой рис П2 1, то такой нодуль будет воспроизводить работу мар-
кера и регистра станции коммутации. Похожий алгоритм реализуют некоторые
АПК систем ДЭС прн автоматической маршрутизации сообщений Операции по
выработке команд на организацию местного или исходящего соединения преду-
сматривают выделение во введенном в ЭВМ шестизначном маршрутном индексе
определенных разрядов и сравнение нх с некоторыми «образцами» В системе
команд большинства МП есть операции с маской, команды обмена информацией
27* 419
1
Рис П2 1. Укрупненная структурная схема алгоритма автоматической маршрути-
зации сообщения
между регистрами, команды условных и безусловных переходов, операции сдвига,
которые позволяют разработать программу, реализующую обработку маршрут-
ного индекса по указанному алгоритму Подобным же образом можно было бы
программным путем воспроизвести и ряд других операций управляющего ycipon-
ства станции коммутации, передав в конечном счете все его функции одной
микроЭВМ (разумеется, если ЭВМ обладает быстродействием и емкостью ЗУ,
достаточными для последовательною выполнения всех этих операции в реальном
масштабе времени).
Действительно, если ПАМ должен воспроизвести функции Фь . , Ф,,, допу-
стимое время выполнения Фк равно tK и для реализации в МПС функции Ф|
требуется выполнить м( элементарных операций (типа регистр — регистр), то
действительные затраты времени МПС на реализацию всех этих функций со
ставят
Р
гмпс Е) 2 ni!w> (П2.1)
/=:1
где w—быстродействие МП, оп./с; е — показатель совместимости процессов
обработки при реализации в МПС различных Ф<; 0^е<1. Сопоставив отпущен-
420
ный па выполнение функций Фь , Фр лимит времени (при максимально воз
Р
можной скорости передачи сообщения) Т — А с Действи1ельпыми его затра-
4=1
тами Т'мис, можно определить требуемое быстродействие МПС оп /с или число
микропроцессоров т, необходимое для реализации заданных функции в реаль
ном масштабе времени
Р
2 njT; №>[Г/ГМПС], (П2.2)
i=l
где [х]— ближайшее к числу х по не меньше его целое число Конечно, для
таких расчетов необходимо предварительно детализировать прумурпую схему
реализуемого алгоритма на уровне элеметарных операций или команд МП
Таким образом, производит ельношь МПС должна быть согласована со скоростью
передачи и зависит от сложности реализуемого в МПС алюршма обработки
Естественной элементов базой при построении П\М являются МПК БИС,
имеющие в своем составе процессорные, интерфейсные и друте вспомогательные
БИС, орисн!ированные иа управление периферийными устройствами, обработку
прерываний и т д При разработке перспективного оборудования систем ПДС
к БИС МПК предъявляется ряд специфических требований Они должны быть
ориентированы на обработку в реальном времени непрерывного потока пакетов,
имеющих определенную структуру Для обеспечения работы оконечных пунктов
систем ПДС в режиме одновременной двусторонней передачи МПС должна до
пускать мультипрограммны!! режим обработки данных Болипое разнообразие
алгоритмов обрабо1ки дискретных сообщении предполагает наличие у МПС
совершенной операционной системы, достаточно обширной системы команд
средств универсальной обработки файлов Объем про1раммной памяти МПС дол
жен превышать несколько килобайт, а операптвная память должна иметь
емкость, достаточную для создания требуемых информационных массивов Для
уменьшения числа после щвателыю параллельных циклов обработки сппхросигпа
лов (в annapaiype ДУМКА их разрядность составляет 12 бит) разрядность МП
должна быть не менее 8 16 Минимизация затрат на создание высокопроиз
водительных МПС обеспечивается только при наличии транслятора с символиче
ского языка на машинный Большие интегральные схемы МПК должны допус
кать круглосуточную работу Указанным требованиям в основном удовлетворяют
БИС МПК К580, К589, К1810 и некоторые другие Например, с использованием
пяти БИС серии КР580 (МП, тактовый генератор, программируемый интервал!,
ный таймер, контроллер прерываний и БИС ввода вывода) построен адаптивный
приемопередатчик для телеграфных оконечных пунктов [П2 5] Пример програм
мной реализации УПС-9600, осуществляющего прием дискретных сигналов
с адаптивной коррекцией линейных межеимвочьных искажении приведен в [П2 6]
необходимый для корректора высокопроизводительный проблемно ориентирован
ный сигнальный процессор строится на универсальных БИС широкого примене
ния с разрядио модульной организацией МПК К1802, К1804 и на одиокристалль
вых умножителях — аккумуляторах типа К1518ВЖК
421
Программная реализация любого узла, блока, устройства систем ПДС, вы-
полненного иа основе МПС (микроЭВМ), обеспечивает оборудованию такие пре-
имущества, как многофункциональность, тибкость, унифицируемость, универсаль-
ность (П2 7] Многофункциональность МПС характеризуется способностью одного
комплекта программно аппаратных средств выполнять обработку по нескольким
алгоритмам Например, на основе одной микроЭВМ можно построить универ
сальный интегрированный телеграфно факсимильный терминал, в рамках одной
МПС совместить функции датчика испытательных текстов и измерителя краевых
искажении, встроенную МПС электронного телеграфного аппарата засзавить до-
полнительно выполнять функции автоматическою вызывного концентратора
и т п Гибкость, модифицируемость микропроцессорного оборудования дости
тается та счет доработки управляющей программы или использовании различных
ее частей либо вводом других исходных параметров передачи Посредством та
ких изменений, затрагивающих только программное обеспечение, ио не аппарат-
ные средства, можно, например, в УПС изменить скорость передачи, вид моду
ляции, адаптировать универсальную КОЛ к конкретным условиям эксплуатации
на местной, зоновой или магистральной сети перейти ог стартстопной передачи
к синхронной, сменить 5 элементный код иа 7- или 8-элементный и т. д [П2 8]
Единая элементная база, построение всей аппаратуры на одинаковых ПЛМ соз
дают основу для унификации всего оборудования системы ПДС, чем будет дик
товаться однородность конструкторских решении, достигаться простота обслужи
вания и сопряжения различного оборудования между собой и с сетями ЭВМ,
создаваться предпосылки для централизованной разработки ПО, обеспечиваться
сокращение сроков и стоимости разработок систем ПДС
Однако программная реализация по сравнению с аппаратной на жесткой
логике обладает существенным недостатком—более низким быстродепывием н,
как следствие, более высокими требованиями к производительности базовых
БИС Вместе с тем, при аппаратной реализации оборудование получается негиб-
ким, наблюдается пропорциональная зависимость между числом выполняемых
функций и объемом аппаратных средств Следовательно, аппаратная и про
граммная реализации хорошо дополняют друг друга и разумное их сочетание
позволяет снизить требования к быстроценствию МПС Если рсалтуемые алю
ритмы консервативны и требуют от элементной базы высокого быстродействия,
то предпочтительнее их аппаратная реализация И наоборот, при ограниченных
скоростях н необходимости изменять какие либо параметры передачи более цело
сообразной будет программная реализация В реальных условиях к оптимально
му решению приводит комбиниповаичая программно аппаратная реализация,
подтверждением чему является разработка АПК систем ДЭС
П2 3 ПРИМЕРЫ РЕАЛИЗАЦИИ СИСТЕМ ПДС
НА ОСНОВЕ СРЕДСТВ ВЫЧИСЛИТЕЛЬНОЙ
ТЕХНИКИ
В качестве примеров внедрения средств ВТ в оборудование систем ПДС
здесь рассмотрены центр коммутации сообщений телеграфного типа ЦКС-Т,
электронный телеграфный концентратор ЭТК КС, а также ряд АПК систем ДЭС
422
цкс-т предназначен для ав-
томатизированной обработки по-
токов транзитных телеграфных со-
общений па крупных узлах связи.
Состав н алгоритм работы ЦКС-Т
описаны в гл 3 [П2 9]
Электронный телеграфный
концентратор коммутации сообще-
ний ЭТК-КС. Концентратор пред-
назначен для широкой автоматиза-
ции общегосударственной теле-
графной сети В его функции вхо-
дят автоматизированные прием,
обработка и передача сообщений
по пскоммутируемым телеграфным
каналам на областных, районных
узлах связи, а также на пунктах
связи отдельных крупных юродов
Использование ЭТК позволит рез-
ко уменьшить объем ручного тру-
Рис П2 2 Состав и структура ЭТК-КС
да, сократить парк громоздких и
дорогих телетайпных аппаратов, повысить коэффициент использования каналов,
уменьшить длины абонентских линий [П2 10]. По сути, это ЦКС малой емкости
Попроси ЭТК КС по модульному принципу па базе специализированной
микроЭВМ «Электроника НЦ-80 32» и допускает изменение конфигурации (числа
модулей от двух до восьми) в соответствии с требуемой пропускной способно-
стью Модули попарно объединяются в блоки, которые устанавливаются па стой
ке ЭТК В зависимости от емкости узла связи па стойке может находиться от
одного до четырех блоков Установленные на стоике модули соединяются между
собой внутристоечпым монтажом по схеме, приведением на рис П2 2, образуя
кольцевую структуру Связи соседних модулей кольца являются основными,
а соединяющие модули «через один» — резервными Последние предназначены
для сохранения связности структуры н замкнутости кольца при выходе из строя
какого либо модуля Модуль ЭТК-КС (рис П2 3) состоит из следующих кон-
структивно законченных элементов-
процессора ПРЦ, на плате которого размещены соответственно однокри-
стальный МП K180IBMI, дополненный элементами сопряжения, два программно
управляемых интервальных таймера и системное ПЗУ для размещения программы
управления фотосчитывателсм и программ пультовых режимов объемом
265 слов;
ОЗУ с самоконтролем, т е ОЗУ-СК, имеющего встроенную систему само
контроля СК хранимой в ОЗУ информации, а также схему коррекции одиночных
и обнаружения двойных ошибок;
устройства ПЗУ СК для храпения программ н констант (также со встроен-
ной системой самоконтроля);
пульта управления, подключаемого к системной магистрали через контроллер
КП и обеспечивающего индикацию состояния технических средств и выполнение
423
К другим
Модулям ЭТК
0123 14 15
KulldJIbl CLSIIЗИ
Рис. П2 3. Структурная схема модуля ЭТК-КС
программных процедур (средствами функциональной диагностики), а также на-
чальный запуск и тестирование ЭТК, выполнение технологических функций при
отладке и ремонте модулей, контроль 1елеграфпых каналов с помощью контроль-
ного телетайпа, подключаемого к пульту; абонентский обмен н циркулярное
оповещение при отказе модуля (но при исправном питании элементов сопряже-
ния с каналами связи);
контроллеров считывателя КС и накопителя КН, через которые подключают-
ся фотосчитыватель FS-1501 и внешнее ЗУ модуля — НГМД;
канального устройства- одного мультиплексора каналов МК и восьми ка-
нальных адаптеров КА, предназначенных для реализации программно управляе-
мого обмена информацией между модулем ЭТК-КС и стартстопными телеграф-
ными каналами связи;
устройства межмодульных связей УМС, включающего в свой состав два
функционально независимых канала одновременной двусторонней связи, обеспе-
чивающих обмен информацией между модулями
К ЭТК-КС возможно подключение 128 телеграфных каналов (при максп-
мал1ном числе модулей) со скоростями телеграфирования 50, 100 или 200 Бод,
работающими в режимах одновременной и поочередной двусторонней передачи;
ЭТК-КС может иметь свят с двумя-гремя ЦКС, время наработки па отказ Т„-=
= 44 000 (т. е за 20 лет работы продолжительность отказов составляет 4 ч),
время восстановления Тв=1 ч
В состав оборудования ЭТК-КС входят-
вычислительный комплекс (ВК), состоящий из восьми модулей и выполнен-
ный на б;не микроЭВМ «Электроника НЦ-80-32», а 1акже из восьми комплек-
тов АС на 16 каналов каждый,
дисплей, обеспечивающий вывод информации со скоростью 200 Бод;
424
УВВ иа гибких магнитных дисках ГМД типа «Электроника ГМД-7012» или
«Электроника ГМД-6022»;
телеграфные аппараты и пульты для служебных рабочих мест. Для накопле-
ния сообщении и ведения журнальных записей каждому модулю в качестве ВЗУ
придается УВВ иа ГМД. В состав ЭТК-КС входят служба вычислительного
комплекса (СВК), служба диспетчера (СД), коитрольио-справочиая служба
(КСС) и служба индексации телеграмм (СИТ).
Вся аппаратура ЭТК-КС размещена на двух стойках: на одной — модули,
на друюй — накопители иа ГМД Эти два стат ива могут заменить 52 статнва
станции ПС Накопители служат для реалнтации журнальных записей и восста-
новления функционирования ЭТК после полного отка та, когда записанная на дис-
ки информация выводится иа телеграфные аппараты. Применение НГМД позво-
ляет автоматизировать поиск журнальных записей, что приводит к сокращению
времени обработки телеграмм в КСС, резко сокращает расход эксплуатационных
материалов (бумажной ленты). По сравнению с сетью ПС в ЭТК значительно
сокращается расход времени иа поиск и расследование причин брака: 5 ...
... 10 мин вместо 1 ч
Программное обеспечение комплекса состоит из базового (БПО) и техно-
логического (ТПО). С помощью программ БПО осуществляется начальная под-
готовка ЭТК-КС к работе, прием и передача информации по каналам связи
в реальном времени, управление очередностью выполнения программ, взаимодей-
ствие оператора с ЭТК-КС, обмен данными по линиям межмодульных связей,
автоматическое изменение конфигурации комплекса при отказах и после восста-
новления модулей, обмен информацией с ГМД Программы ТПО обеспечивают
сборку кодовых комбинации в сообщение, его запись в буферное ОЗУ, определе-
ние очередности передачи сообщения с учетом времени поступления и категории
срочности, выдачу сообщений в каналы в соответствии с шестизначными мар-
шрутными индексами; взаимодействие с эксплуатационными службами ЭТК-КС;
управление работой каналов связи (открыть, закрыть, заблокировать); восста-
новление после отказа нескольких модулей, а также после их перегрузки; реги-
страцию обрабатываемых сообщений (ведение журнальных записей иа ГМД);
обрабо!ку служебных запросов Во избежание потерь сообщений в ТПО входит
программа, ограничивающая поступающую нагрузку
Канальные адаптеры под воздействием мультиплексора МК и под управ-
лением программ БПО выделяют единичные элементы, формируют знаки, ана-
лизируют искажения знаков, записывают их в приемном буфере с указанием
номера канала. Затем с помощью программ ТПО эти знаки анализируются, из
них формируются тексты телеграмм, осуществляется аиалит текстов на искаже-
ния и их -.апись в буферное ОЗУ; по окончании приема каждой телеграммы по
маршрутному индексу определяется ее получатель и устанавливается очередность
передачи.
На ЭТК-КС возможны два состояния- нормальная работа и перегрузка. Пе-
регрузка наступает, когда на каком-либо направлении длина очереди на пере-
дачу превышает 270 телеграмм. В состоянии перегрузки ЭТК прекращает прием
телеграмм категории «простоя», о чем информирует все подключенные к нему ОП
Перегрузка обусловлена ограниченными ресурсами ЭТК по объему памяти и
быстродействию МП.
425
В ЭТК автоматизированы многие операции, выполняемые обычно работни-
ками телеграфов вручную По заданным про1раммам обеспечивается выдача те-
кущего времени при передаче каждой теле! раммы (что стимулирует рост культуры
производства, технологической дисциплины), автоматически осуществляется кон-
троль за порядковыми номерами телсчрамм, поступающих от ОП (в случае ошиб-
ки ОП информируется об этом), проводится учет задержа.......>ix тслшрамм по
всем категориям. Контроль за сроками прохождения телс!рамм через ЭТК осу-
ществляет сама ЭВМ простая—1 ч, срочная — 30 мин, авиа — 4 мин В конце
каждых суток ЭТК автоматически протводит смену нумерации телеграмм, под-
водит итоги за сутки.
В памяти ЭТК хранякя сведения о десяти телеграммах, переданных по
каждой связи- и! них три последних хранятся с тексюм, а остальные — без пего
(чю необходимо для автоматического повторения телеграммы по запросу ОП
или ЦКС). В ЭТК авгоматишровапы процессы учета и стагисической обработ-
ки информации, трудоемкий процесс проверки соответствия принятых и пере-
данных телеграмм. Производится подведение суточных и сменных итогов с рас-
печаткой их на телетайпе Кроме того, ЭТК выдает информацию о состоянии
каналов, о числе телпрамм, поставленных на очередь для передачи к каждому
ОП Эта информация ныводюся на дисплей и позволяет оцепить состояние те-
леграфной сети, нагрузку в каждом из каналов
Контроль за качеством телеграфных связен концентратором осуществляется
автоматически. В случае отклонения краевых искажении от нормы (4 %) па ОП
поступает извещение об этом Оконечные пункты могут сами проверить приемный
аппарат по исправляющей способности, закрыв свя зь и запросив соответствую-
щей кодограммой испытательный текст
По сравнению с существующей системой ПС ЭТК-КС имеет следующие
преимущества увеличивается производительность труда телеграфистов и умень-
шается число телеграфных аппаратов в ОП, в узлах ПС ликвидируются сущест-
вующие связи ЛТОЛ, в несколько раз сокращается площадь аппаратных залов,
освобождается емкость станции ПС (можно использовать для развития сети
ЛТ), сокращаемся штаг телеграфистов, потребление электроэнергии, ускоряется
прохождение телеграмм (особенно высших катеюрий срочности)
АПК «Зонд» создан на базе серийной микроЭВМ «Электроника-60» и пред-
назначен для автоматической pei ист рации и анализа (с требуемой точностью)
сигналов и процедур взаимодействия двух смежных станций КК телеграфной
сети, для статистического и эксплуатационного контроля коммутационных узлов
по реальной нагрузке, а также для имитации работы смежной станции или ОП.
В отсутствие АПК эта задача решается с помощью электромеханических двух-
шлепфпых самописцев опцуляюоов, измерителен интервалов времени и других
приборов, требует больших затрат труда при недостаточной точности Один АПК
«Зонд» обеспечивает замену восьми ондуляторов К коммутационной станции
АПК подключается параллельно входам оконечных или межстанционных участ-
ков (ОУ или МУ), осуществляя контроль сразу восьми участков [П2.11].
Аппаратура АПК представляет собой комплекс технических средств, управ-
ляемых своим ПО В процессе контроля АПК осуществляет поочередный «опрос»
всех подключенных участков, выявляет участок, находящийся в исходном состоя-
нии (по наличию сигнала «Вызов»), фиксирует все изменения потенциалов в це-
426
пях приема и передачи этого участка до поступления сигнала <Отбой» (или
автоответов обоих абонентов в конце обмена, или но сигналу «Подтверждение
отбоя», или прн наличии постоянных потенциалов дольше установленного вре-
мени). По окончании записи полученная информация анализируется, результаты
выводятся на печать, затем снова возобновляется обход участков.
В АПК предусмотрена работа в трех режимах. Каждый режим может со-
держать подрежимы, число котовых может наращиваться в процессе эксплуата-
ции посредством разработки дополнительных подпрограмм без изменения основ-
ной протраммы. В каждом конкретном подрежиме перечень контролируемых
сигналов и их параметров, форму регистрации результатов устанавливает опера-
тор перед началом очередною сеанса, вводя список настраиваемых параметров
(СНП).
В режиме регистрации фиксируются длительности и полярности сшиалов
в цепях передачи и приема на ОУ и МУ. Предусмотрена оперативная оценка
заданного участка для выявления причины отката по заявке абонента. Форма
тапттсей напоминает диаграммы на ондуляторных лентах
В режиме статистики осуществляется статистический контроль входящих,
исходящих и транзитных соединений, фиксируются данные о качестве функцио-
нирования станции при реальной нагрузке по отдельным направлениям и по
станции в целом. При этом печатается информация об общем числе вызовов и
отказов (по вине своего или любого смежного узла, или абонента), о числе со-
единении, установленных с нарушением параметров; о проценте и виде отказов
с указанием около 100 видов отказов и нарушений Предусмотрена возможность
вывода информации о результатах проключения соединения, указанного в СНП.
В режиме имитации для любого заданного номера осуществляется контроль-
ное соединение и регистрируется состояние приемной цепи с целью проверки
оборудования станции или отыскания поврежденною участка.
Список настраиваемых параметров содержит условный номер подрежима,
требуемое число вызовов в данном сеансе контроля, указания о форме печатания
выходных данных (выходной форме), сведения об условиях втаимодеиствия
станций (Iип смежной станции или данные абонента контролируемою ОУ) и
другие параметры сеанса контроля.
На рис. П2.4 приведена структурная схема АПК «Зонд». В его состав входят
микроЭВМ «Электроника 60М», устройство пользователя УП, устройство пре-
образования телеграфных сигналов УПС-ТГ и УВВ. В состав УПС ТГ входят
согласующие устройства СУ и электронные двухполюсные реле (ЭДР), которые
согласуют входные и выходные сигналы УПС ТГ по уровням Устройства ввода-
вывода состоят из аппарата РТА с вызывным прибором ВП и предназначены
для ввода СНП и вывода обработанной информации в регламентированном виде.
Устройство пользователя содержит: буферные регистры Рг ввода-вывода, свя-
зывающие между собой катил ЭВМ и УПС-ТГ и обратхющи: интерфейс парал-
лельного обмена НПО данными; электрически перепрограммируемое ПЗУ (ППЗУ)
емкостью 4К слов, в котором хранится (даже при отключенном питании) управ-
ляющая программа; вспомогательное ОЗУ на двух платах емкостью 20К слов
для записи, накопления и обработки данных, таймер 1 для контроля длитель-
ности сигналов и .запуска программы в заданные моменты времени
В АПК используется одна из трех модификаций микроЭВМ «Электрони-
427
Рис П2 4 Структурная схема ЛПК «Зонд»
ка 60М» (а именно, модификация 15ВМ 16 012), в которой имеется блок пита
ния, ио содержится минимальное число устройств, не исполыуемых в АПК, что
и обусловило выбор данной модификации МикроЭВМ предназначена для обра-
ботки информации о качестве работы коммутируемых связей и участков сети,
для управления УВВ в процессе регистрации результатов, статистического кон-
троля и имитации, а также для формирования сигналов н процедур взаимодей
ствия в режиме имитации Все функциональные блоки микроЭВМ выполнены
в виде конструктивно завершенных устройств (модулей), связь между которыми
осуществляется через единый канал обмена информацией (капал ЭВМ) Цен-
тралтный процессор (ЦП) управляет распределением времени использования
канала ЭВМ, внешними устройствами, а также выполняет все необходимые
арифметико логические операции по обработке информации Основные характе
ристики процессора разрядность— 16 бит, число команд — 81, время обращения
к ОЗУ — 700 нс, длительность цикла работы ОЗУ — 2,4 мкс, обработка преры
вапий осуществляется с помощью памяти магазинного типа (стека)
Программное обеспечение АПК «Зонд» имеет структурированное построение
Весь комплекс программ состоит из одной основной управляющей и нескольких
десятков подпрограмм, вызываемых основной программой в необходимые мо
менты времени Основная программа, в свою очередь, разбита на несколько
блоков — по числу разработанных схем настройки Каждый блок предназначен
для организации работы АПК по заданной схеме (с представлением результатов
по соответствующей выходной форме) и по окончании работы передает управ-
ление головному блоку Головной стартовый блок при включении комплекса
ожидает сигнал начала ввода СНП, записывает СНП в ОЗУ, расшифровывает
первый параметр СНП — код режима работы (т е схемы настройки) и пере-
дает управление соответствующему блоку Такое построение ПО позволяет уве-
личивать число схем настройки и расширять ПО, не изменяя основной про
граммы.
428
Рис П2 5 Структурная схема АПК «Телеграф»
В АПК «Зонд» предусмотрена возможность подключения дополнительных
внешних устройств к каналу ЭВМ или к НПО, а также разработки дополни-
тельных программ для обслуживания этих устройств с целью расширения экс-
плуатационно технических возможностей комплекса Длина управляющей про-
граммы— 12К слов Программное обеспечение написано иа языке Ассемблер
АПК «Телеграф». Универсальная модель комплекса иосит название АПК-У.
Комплекс устанавливается иа телеграфных узлах КК и предназначен для авто-
матизации процесса переприема транзитных телеграмм Кроме тою, АПК обес-
печивает взаимодействие с коммутационными станциями сетей ПС, АТ, КС.
В качестве базового в АПК «Телеграф» использован комплект коммуника-
ционного процессора «Электроника НЦ 32», построенного иа базе БИС МПК
серии К587 К АПК подключается 32 телеграфных капала, работающих па скоро-
стях 50, 100 или 200 Бод кодом МТК 2 Пропускная способность АПК —
0,12 сообщ/с при средней длине телеграммы 350 знаков (максимальной —
3000 знаков), потребляемая мощность — не более 500 В-A Конструктивно аппа-
ратура выпускается в виде стопки, па которой размещено два комплекса Функ-
циями АПК являются.
прпем/передача телеграмм по коммутируемым п некоммутнруемым каналам
связи (автоматическая обработка индексированных телеграмм, полуавтоматиче-
ская — неиндекспроваиных),
ведение журнальных записей о передаваемых п принимаемых телеграммах,
накопление статистических данных;
оперативное управление работой комплекса с аппарата диспетчера.
Структурная схема АПК «Теле! раф» приведена па рис 112 5 В состав АПК
входят специализированная микроЭВМ «Электроника НЦ ОЗС» с инженерным
429
пультом, блок канальных телеграфных адаптеров КТА, блок УПС-ТГ. Микро-
ЭВМ состоит нз процессора ПРЦ, адаптера магистрали (ЛМ), согласующего
интерфейсы ОЗУ и ПЗУ с внутренней магистралью микроЭВМ, ОЗУ емкостью
32К слов (для хранения обрабатываемых сообщений) и ПЗУ емкостью 24К слов
(для хранения программ), контроллера инженерною пульта управления КПУ
и самого пульта (предназначен для проверки работоспособности АПК), мульти-
плексора телеграфных каналов МТГ, через который они подключаются к вну-
тренней магистрали ЭВМ Блок КТА обеспечивает позначный обмен информацией
с четырьмя каналами связи, а УПС-ТГ — согласование каналов с аппаратурой и
их гальваническую развязку
Программное обеспечение АПК состоит из функционального ПО (ФПО) и
теста контроля аппаратных средств Про,раммы ФПО обеспечивают функциони-
рование подсистемы АПК, обмен по линиям связи, обработку сообщении, фор-
мирование служебной н справочной информации на все рабочие места Разрабо-
таны они в виде отдельных модулей, связь между которыми осуществляется
через общие области памяти, а управление ими — операционной системой ЭВМ
Автотест контролирует сохранность программ, размещенных в ПЗУ, и исправ-
ность блоков буферной области ОЗУ. Тест контроля аппаратных средств служит
для поиска неисправностей в аппаратуре комплекса при нарушении его работы
Внедрение комплекса «Телеграф» позволяет улучшить все показатели каче-
ства обработки перепринимаемых телеграмм, повысить производительность труда,
улучшить условия труда на рабочих местах приемника
Телеграфный АПК «Автомат» построен па основе микроЭВМ «Электроника
НЦ 80» (ДВК-1) и позволяет автоматизировать все операции по заготовке те-
леграмм и их отправке иа ЦКС. Комплекс имеет в своем составе несколько рабо
чих мест отправителя телеграммы и рабочее место теле!рафиста контроллера —
кассу, оборудованных клавиатурой и дисплеем Клиент самостоятельно согласно
инструкции и указаниям ЭВМ набирает и редактирует текст телеграммы, паблю
дая его иа экране дисплея, а телеграфист контролирует соблюдение «Телеграф
ных правил», осуществляет расчеты с клиентом н при необходимости индексирует
сообщение Оформление квитанции и передача телеграммы на ЦКС выполняется
АПК автоматически. Внедрение такого комплекса позволяет сократить числен-
ность телеграфистов в операционном зале, поднять производительность их труда
[П2 12]
Телеграфный аппарат F-2000 (фирмы RFT, ГДР) создан в результате мо-
дернизации электронного аппарата F-1100 посредством введения микропроцессор-
ною управления. В отличие от своего предшественника в F-2000 используется
ПУ с разложением 12X14, обеспечен режим редактирования сообщения, введена
буферная память емкостью 8000 знаков (8К байт) на передаче и 6000 знаков
на приеме Аппарат оборудован табулятором и устройством определения фор-
мата, автоматизирован переход с букв на цифры и обратно. Производительность
ПУ — до 50 зн./с. Устройство снабжено шрифтами трех видов, печать осуществ-
ляется при перемещении каретки в прямом и обратном направлении; продвиже-
ние каретки, перфоленты и перевод строки производится шаговыми двигателями.
Перфоратор выполнен на поворотных магнитах, трансмиттер — оптоэлектрон-
ный; максимальная скорость их работы 100 Бод.
430
Аппаратная часть телетайпа состоит из Двух микроЭВМ, созданных на базе
МП U880 один МП управляет режимом работы, другой —ПУ и клавиатурой
Наличие МП позволило снабдить аппарат рядом сервисных функции, таких как
редактирование текстов, возможность поиска сообщения в памяти по номеру или
ключевому слову, автоматическая выдача времени, порядкового номера теле
граммы, электронный замок, самодиагностика, возможность дистанционного
управления от противоположного аппарата посредством передачи кодо1рамм (для
включения — выключения ПУ, перфоратора и т и )
Телетайп может работать на скоростях 50, 75 или 100 Бод, предусмотрена
замена одной из скоростей на 200 Бод с помощью перепрограммирования За-
дание и изменение режимов работы, кодовою замка, функций аппарата осуще
ставляются npoiраммированием ППЗУ (БИС К573РФ2 или сс анало, U2716C35),
которые выдерживают до 100 циклов «стирание — запись» Программирование
ППЗУ реализуется на специальном диагностическом комплексе DI 2000 со
встроенной микроЭВМ
Здесь кратко рассмотрена только часть устройств документальной электро-
связи, в которых используются средства ВТ Более подробно с этой техникой
можно ознакомиться по лшературе, указанной в списке
КОНТРОЛЬНЫЕ ВОПРОСЫ
1 Укажите характерное отличие элементной базы перспективного оборудова-
ния системы ПДС
2 С позиции современных требовании перечислите конкретные недостатки,
которыми обладает изученное на лабораторном практикуме оборудование систе-
мы ПДС Сформулируйте предложения по ею модернизации на основе внедре-
ния средств ВТ.
3 Какие параметры передачи можно было бы оперативно изменять в КОА
с ВРК при ее реализации на основе МПС? Какие функции КОА целесообразно
в этом случае выполнять на БИС с жесткой логикой?
4 . Составьте структурную схему алюритма работы кодера с проверкой на
четность, а также программу, реализующую этот алюрптм иа одном из языков
высокою уровня.
5 Обобщите формулу (П2 1) на случаи многопроцессорной системы (Указа-
ние учтите затраты времени па межпроцессорный обмен )
6 Как в телеграфном аппарате с микропроцессорным управлением можно
использовать БИС КР580ВВ79, КР580ВИ53, КР580ВВ55?
7 . Поясните принцип построения и функционирования МПС, реализующей
алгоритм работы УПС 9600 [П2 5]. Зачем в этои МПС ОЗУ разбито на две
отдельно адресуемые части?
8 Почему для микропроцессорного управления мозаичным ПУ требуется
БИС ПЗУ емкостью несколько килобайт?
9 Ознакомьтесь с алгоритмом микропроцессорного управления работой мо
заичного ПУ [П2 4]
10 Разработайте структурную схему микропроцессорного приемопередатчи-
ка, реализующего алгоритм адаптивною интегрального приема двоичных сигна-
лов, подверженных искажениям тина дробления и преобладания [П2.5].
431
11 . В каких блоках аппаратуры, рассмотренной в разд. П2 3, может быть
Использована БИС К580ИК51?
12 . Рассчитайте пропускную способность ЦКС с общей памятью по форму-
ле [П2.13]
п
Сп-—(I—Рир)
'ср
сообш./с
при следующих исходных данных: число входящих каналов и=200 (из них 20
с пропускной способностью 200 бит/с, а остальные — 50 бит/с), вероятность
переполнения буферного накопителя РПер=0,01, средняя длина сообщения /ср^=
= 300X7,5 бит/сообщ.
13 При программной реализации кодера УЗО его быстродействие измеряет-
ся в циклах обращения к ОЗУ. Проанализируйте формулу для оценки быстро-
действия МП для кодера УЗО [П2.7]:
(ia 4~[ I k/lBB | ] ЛГВВ -Н I «//в I 1 ЛГВ), цикл/с.
к 4- У
Задавшись скоростью модуляции В, параметрами (п, й)-кода, длиной вводимых
и выводимых блоков /вв, /а при обмене между ОЗУ и МП (в случае побапговою
обмена /в=/вв=8), временем /„ на выработку в МП проверочных ра (рядов,
требуемым числом циклов NBB при вводе и Л'в при выводе блоков, а также
минимальным интервалом у (в битах) между поступающими из канала блоками,
определите требуемое быстродействие МП.
14 Сравните структурные схемы па рис. П2 3 и П2 5 За счет чею обеспе-
чиваются существенные различия в функционировании эгнх систем?
15 . Разработайте на алгоритмическом языке Бейсик и отладьте на микро-
ЭВМ типа ДВК-2 программу, реализующую алгоритм, представленный иа
рис. П2.1 и алгоритм поиска в ОЗУ сообщения по ключевому слову или номеру.
16 . Осуществите рациональный выбор аппаратных и разработку необходи-
мых программных средств для создания АРМ оператора службы «До востребо-
вания».
Приложение 3.
КОНТРОЛЬ И ИЗМЕРЕНИЯ В СЕТЯХ
И СИСТЕМАХ ПДС
П3.1. МЕТОДЫ УЛУЧШЕНИЯ
ЭКСПЛУАТАЦИОННО-ТЕХНИЧЕСКИХ
ХАРАКТЕРИСТИК СЕТЕЙ И СИСТЕМ ПДС
Техническое обслуживание (ТО) действующей системы ПДС представляет
собой комплекс мероприятий, направленных на обеспечение ее работоспособного
(исправного) состояния и рациональное использование ресурсов сети. В ТО
432
входят плановые и внеплановые работы, предусмотренные инструкцией по экс-
плуатации (осмотр, чистка, смазка, измерения, настройка, регулировка и т. п.),
диагностирование оборудования, выявление неисправных узлов и блоков, орга-
низация их ремонта, обеспечение требуемых климатических параметров в рабочих
помещениях, ведение эксплуатационной документации н передачи данных о ре-
зультатах контроля н профилактики в систему управления сетью.
Нарушение работоспособности системы ПДС вследствие недопустимого
изменения ее эксплуатационно-технических характеристик (ЭТХ) называется
отказом К основным ЭТХ относятся верность и скорость передачи системы,
а также ее надежность (безотказность, ремонтопригодность), массогабаритиые
показатели, энергоемкость, стоимость оборудования и его эксплуатации и ряд
других показателей Работоспособная система ПДС должна обеспечивать свое-
временную доставку иеискажеииого сообщения по заданному адресу; выход за
пределы нормы хотя бы одного показателя верности или скорости передачи де-
лает систему неработоспособной. Так как требуемую верность передачи можно
обеспечить за счет некоторого увеличения ее продолжительности (см гл. 7 8),
то обычно отказ системы ПДС связывают с превышением максимально допусти-
мого времени передачи сообщения, которое является важной ЭТХ и определяет-
ся надежностью.
Разность между максимально допустимым и теоретически возможным вре-
менем передачи называется критерием отказа. Норма иа величину критерия
отказа устанавливается с учетом скорости старения сообщения и представляет
собой некоторый резерв времени иа возможные (допустимые) задержки в пере-
даче сообщения, возникающие из-за нестабильности параметров канала связи,
действия импульсных помех, снижения уровня сигнала, неполадок в коммута-
ционных приборах или групповом оборудовании, неправильных действиях тех-
персонала (ТП) и других причин. Если задержка превышает норму, то реги-
стрируется отказ системы ПДС.
Отказы делятся на постепенные и внезапные. Кроме того, по продолжитель-
ности различают три группы отказов- кратковременные (менее 3 мии), средней
продолжительности (до 30 мии) и длительные (до нескольких часов). Длительные
отказы возникают весьма редко (из-за повреждения кабеля и общих станцион-
ных устройств). Наиболее часто (из-за повреждения контактов, действий ТП,
влияния импульсных помех) происходят кратковременные отказы, которые, как
правило, являются самовосстаиавливающимися
Надежностью системы ПДС называется свойство системы сохранять свою
работоспособность, обеспечивая нормальное выполнение всех заданных функций.
Надежность характеризуется средним временем наработки на отказ Т„, средним
временем восстановления после отказа Та, коэффициентом готовности Кг и ве-
роятностью P(t) безотказной работы в течение времени t:
N iV
/fr=7,7+T-B = (П3.1)
где Д' —число отказов за время испытаний; 1/Тн — интенсивность отказов.
На практике Т„ н определяют на основе статистических данных о времени
28—6085 433
безотказной работы между (i—1)-м н i-м отказами I, н о продолжительности
устранения i-го отказа Tz. Коэффициент готовности задает вероятность пребыва-
ния системы ПДС в работоспособном состоянии. Основные методы повышения
надежности системы связаны с введением аппаратурной избыточности (резерви-
рованием), улучшением качества входящих в состав системы узлов, блоков, изде-
лий, элементов, совершенствованием ТО системы
В коммутируемых сетях важными средствами повышения надежности явля-
ются выбор оптимального способа коммутации, а также организация обходных
направлений, рациональное распределение нагрузки по направлениям, т е ди-
намическое управление сетевыми ресурсами В некоммутируемых сетях один нз
главных способов повышения надежности системы ПДС—резервирование, т. е.
введение в систему дополнительного резервного элемента, способного заменить
основной в случае отказа последнего; при этом резервированию могут быть под-
вергнуты наименее надежные узлы, блоки, участки системы или вся она в целом
Использование современной элементной базы прн разработке и производстве
узлов и блоков системы ПДС, в частности, готовых функциональных блоков
в микроэлектронном исполнении также позволяет значительно улучшить надеж-
ность, габаритно-массовые показатели, энергоемкость н другие ЭТХ. Кроме того,
блочная структура оборудования обеспечивает высокую ремонтопригодность.
Прн технической эксплуатации важным фактором повышения надежности
сетей н систем ПДС являются измерения и функциональный контроль, осуществ-
ляемые в процессе ТО систем
П3.2. ЦЕЛИ И ЗАДАЧИ СИСТЕМЫ
КОНТРОЛЯ И ИЗМЕРЕНИЙ
Имея в своем составе сложное оборудование, сети и системы ПДС обладают
ограниченной надежностью н относятся к восстанавливаемым (ремонтируемым)
изделиям. Технический персонал (ТП) сетей с помощью коитрольно-нспытатель-
ных приборов (КИП) и измерительной аппаратуры непрерывно или периодически
следит за работоспособностью системы ПДС, контролируя и измеряя ряд пара-
метров, фиксирует отказы, осуществляет своевременную замену неисправного
оборудования (узла, блока, участка) и его ремонт Этим обеспечивается беспе
ребойное функционирование сетей ПДС с высокими ЭТХ
Таким образом, контроль н измерения являются обязательными составными
элементами ТО сетей ПДС
Система контроля и измерений (СКИ) включает в качестве составных частей
ТП, технические средства и эксплуатационно-техническую документацию и обра-
зует комплекс технических н организационных мероприятий, направленных иа
достижение требуемых ЭТХ путем оперативного выявления тех участков сети,
параметры которых не соответствуют установленным нормам. На рис. П3.1 по-
казаны структура н функционирование СКИ. Технический персонал СКИ обра-
зуют работники группы измерения н контроля в цехах коммутации каналов
(ЦКК), телеграфных каналов (ЦТК), городских связей (ЦГС), а также сотруд-
ники службы функционального контроля н управления (СФКУ) ЦКС и группы
ведения документации, статистической обработки результатов и контроля каче-
ства, которые организуются согласно [ПЗ 1] на всех (крупных) телеграфах
434
сеию
Рис П3 1. Состав и функционирование СКИ:
/ — процесс измерений, 2 — измерительная информация, 3 — прогноз работоспособности,
классификация отказов и их причин
страны. Техперсонал СКИ с помощью технических средств проводит рекомен-
дованные измерения, документирует полученную измерительную информацию и
анализирует ее, выявляя участки с пониженной надежностью, классифицирует
отказы и их причины
Технические средства СКИ состоят из специальных КИП для станций ком-
мутации каналов (СКК) и каналообразующей аппаратуры (КОА), специальных
средств контроля работы оконечных пунктов (ОП) и телеграфистов, програм-
мных средств функционального контроля и диагностики ЦКС, из средств изме-
рения параметров дискретных каналов и каналов ТЧ, а также измерительных
приборов общего назначения (осциллографов, генераторов, вольтметров, часто-
томеров и т. п). Каждый участок СКИ (цех телеграфа) комплектуется средства-
ми измерения согласно утвержденным нормам [ПЗ 2]
Основными задачами СКИ являются, своевременное и оперативное выпол-
нение операций по контролю и измерению всех необходимых параметров сетей
ПДС с целью получения требуемого объема данных о техническом состоянии
всех участков сети; анализ и документирование результатов контроля и измере-
ний, их статистическая обработка, классификация видов и причин отказов;
эффективное использование и содержание в исправном состоянии технических
средств СКИ, регулярная их поверка согласно указаниям нормативных доку-
ментов, а при необходимости — ремонт; совершенствование структуры СКИ и
оптимизация состава КИП По мере развития сетей ПДС; разработка более со-
вершенных методик и алгоритмов измерения и контроля, автоматизация процес-
сов контроля с целью повышения оперативности и точности измерений, скорости
анализа данных, производительности труда техперсонала.
Полностью роль СКИ становится понятной только после учета места СКИ
в иерархической структуре Подотрасли телеграфной связи, так как на основе
обобщения и обработки измерительной информации формируется представление
о состоянии сетей ПДС, подготавливаются задания для НИИ н КБ отрасли на
разработку более совершенного оборудования для СКИ и сетей ПДС. Благодаря
СКИ система управления и эксплуатации подотрасли приобретает возможность
через свои подсистемы решать организационно-технические и оперативные зада-
28* 435
чи по управлению СКИ и сетью принимать решения о необходимости модерни
зации или замены оборудования, перераспределять потоки нагрузки на действую
щей сети, создавая наиболее благоприятные условия для ее эксплуатации, ра
ционально планировать профилактические и ремонтные работы, повышение ква
лификации техперсонала и другие мероприятия
ПЗ 3 СИСТЕМЫ И СЕТИ ПДС КАК ОБЪЕКТ
КОНТРОЛЯ И ИЗМЕРЕНИЙ
Основные виды измерений и контроля. В процессе ТО системы ПДС чаще
всего осуществляется только контроль, реже — измерение ряда параметров аппа
ратуры и каналов на соответствие параметров заданным в [ПЗ 1] нормирован
ным значениям Углубленные измерения параметров проводятся на этапе ремон
та неисправных блоков после обнаружения отказа (средствами контроля) или
при проведении профи тактических (регламентных) работ, при приемосдаточных
испытаниях, настройке аппаратуры Сроки проведения таких работ (перподич
ность, продолжительность для различных видов аппаратуры и участков сети)
определены Телеграфными правилами [ПЗ 1].
Различают прямые и косвенные измерения и контроль Косвенные измерения
основаны на известной зависимости между искомой и непосредственно измеряе
мой величинами В зависимости от баланса времени, отведенного на измерения,
различают измерения большой продолжительности (от единиц до сотеи часов),
выполняемые при настройке, паспортизации, профилактике аппаратуры, и малой
продолжительности (единицы—десятки минут), проводимые при нарушении деи
ствия связи для выявления причины и восстановления
В отличие от собственно измерений функциями контроля являются выявле
ние и локализация предотказовых и отказовых состояний системы ПДС Поэтому
при контроле, как правило, используется двоичный отсчет с оценками «норма»
(«годен») и «авария», реже — троичный отсчет с оценками «норма», «предупреж
дсние» и «авария» Результаты контроля определяют необходимость и характер
воздействия иа контролируемый объект для поддержания его работоспособного
состояния Таким образом, все виды контроля способствуют повышению надеж
ности сетей и систем ПДС (см § ПЗ 1)
По целевому назначению различают контроль предупредительный (прогнози
рующий работоспособность), работоспособности и диагностический Предупре-
дительный контроль (благодаря своевременной замене стареющего элемента, до
почиитсльно регулировкс узла и т п) увеличивает наработку иа отказ, контроль
работоспособности (за счет своевременного установления факта отказа) и диаг-
ностический контроль (за счет быстрого нахождения поврежденного блока, ло
кализации неисправности) сокращают среднее время восстановления
Контроль может быть непрерывным и периодическим Первый — характери
зуется более высокой верностью, второй — экономичностью, так как позволяет
благодаря периодичности одним устройством контролировать большое число
однотипных параметров
Характеристикой верности контроля является вероятность безошибочной
оценки состояния контролируемого объекта Этот показатель обычно находится
436
Рис ПЗ 2 Мероприятия по измерению и контролю в типовом технологическом
цикле технического обслуживания системы ПДС
в пределах 0,50 . 0,95 Качество системы контроля характеризуется также
степенью его автоматизации, полнотой, быстродействием и т п
В зависимости от используемой методики различают три вида контроля
функциональный, тестовый и косвенный Функциональный контроль осуществ-
ляется без нарушения связи, в процессе фхнкционпрования системы ПДС вто-
рой тестовый — в паузах между передаваемыми сообщениями и применяется
для проверки правильности функционирования участка или локализации не
исправности Его основу составляет передача специальной испытательной
комбинации — теста ио «шлейфу» или на смежную станцию Косвенный контроль
технического состояния системы ПДС осуществляется по обобщенным парамет-
рам, характеризующим верность и скорость ПДС, качество работы системы
в целом Кроме того, применяется статистический контроль качества работы си-
стем ПДС с позиций потребителя, а также по таким интегральным характери-
стикам, как интенсивность отказов, на1рузка на сети, задержка в передаче
Рис ПЗ 3 Функциональные участи системы ПДС н их состав
АО — автоответчик ВП — вызывной прибор ПП — приемопередатчик ОП, ПУ, ПК, АП —
переходные устройства приборы коммутации и абонентская панель станции КК(СКК),
УС — устройства согласования
437
сообщений и другим показателям нагрузки. Рисунок П3.2 иллюстрирует роль
контроля и измерений в типовом технологическом цикле ТО системы ПДС.
Функциональные участки системы ПДС и измеряемые параметры. При оцен-
ке работоспособности системы ПДС целесообразно отдельно проверять" правиль-
ность функционирования дискретного канала, включая КОА; исправность эле-
ментов коммутации; исправность соединительных линий и оконечных пунктов.
В каждом из указанных случаев приходится выполнять специфические опера-
ции по измерению и контролю. В соответствии с этим в системе ПДС выделяют
три различных функциональных участка межстанционный (МУ), станционный
(СУ) и оконечный (ОУ). На рис. ПЗ 3 показаны состав и структура контроли
руемых функциональных участков системы ПДС для автоматизированной теле-
графной сети с КК.
Наиболее удобным местом размещения контрольно-измерительных приборов
является ЦКК или ЦТК телеграфа, откуда можно получить доступ к любому
из функциональных участков системы ПДС и где сосредоточен квалифицирован-
ный обслуживающий персонал Согласно [П3.1] измерениям подлежат следую-
щие основные параметры-
на всех участках сети — напряжения, токи, сопротивления, временные харак-
теристики служебных сигналов;
на ОУ и МУ — краевые искажения телеграфных сигналов и ошибки в пере-
даваемых сообщениях, исправляющая способность приемников ОУ и оборудова-
ния, осуществляющего регенерацию телеграфных сш налов, скорость телеграфи-
рования,
на СУ — нагрузка и процент отказов в установлении соединений.
Для телеграфных каналов аппаратуры вторичного уплотнения основными
измеряемыми параметрамия являются мощность сигналов и шумов, изменения
частоты и фазы, искажения дискретных сигналов, вероятность ошибки, число
отказов канала, вызванных уменьшением уровня сигнала и увеличением уровня
помех
В каналах ТЧ, используемых для организации факсимильных связей и вто
ричного уплотнения, подлежат измерению [П3.1]; мощность сигналов и шумов;
остаточное затухание и его стабильность; амплитудно- и фазо частотные харак-
теристики; изменения частоты и фазы; характеристики перерывов и импульсных
помех; число отказов канала, вызванных уменьшением сигнала и увеличением
уровня помех Кроме того, в каналах ПД для косвенной оценки их работоспо-
собности измеряют коэффициент эффективности канала (техническую пропуск-
ную способность) и оценивают своевременность поступления данных из канала.
Основными контролируемыми параметрами на сети телеграфного типа
являются [ПЗ 1]
на ОУ—искажения и ошибки, вносимые элементами участка, исправляющая
способность приемника ОП, сигналы взаимодействия между ОП и станцией ком-
мутации,
на МУ—искажения и ошибки, вносимые элементами участка, временные
характеристики сигналов взаимодействия между станциями коммутации;
на СУ — число отказов в установлении соединений, средняя длительность
занятия устройств, интенсивность поступающей и пропущенной нагрузок.
Методика и алгоритмы измерений. Большинство из перечисленных выше ха-
438
Дискретный канал
Рис П3 4 Схема измерений коэффициента ошибок
рактеристпк и параметров (таких как напряжения, токи, сопротивления, мощ-
ности, остаточное затухание, сдвиги частот, частотные характеристики, уровни
сигналов и шумов и т п) измеряются с помощью приборов общего назначения.
Методика таких стандартных измерений рассматривалась ранее в курсе «Метро-
логия, стандартизация и измерения в технике связи». Ниже будут рассмотрены
только специфические измерительные процедуры телеграфии и передачи данных.
Коэффициент (вероятность) ошибок может быть измерен прямым или кос-
венным методом Измерение прямым методом заключается в передаче по каналу
известного дискретного сигнала (теста) и сравнении принятого из канала сигна-
ла с хранимым в памяти или генерируемым на приемной стороне сигналом, ко-
торый должен быть синхронизирован по элементам и по циклам с принимаемым
(рис П3 4). Число ошибок фиксирует счетчик Сч В синхронном режиме изме-
рений в соответствии с Рекомендацией МККТТ V 52 в качестве теста использует-
ся циклически повторяемый «псевдослучайный» двоичный 511-элементный сигнал,
который содержит все возможные (кроме одной) комбинации, составленные из
девяти элементов, и легко формируется 9-разрядным регистром сдвига с обрат-
ными связями. В стартстопной режиме измерений можно использовать любой
стандартный испытательный сигнал, например тест Q9S, который согласно Ре-
комендациям МККТТ R 79 включает следующую последовательность кодовых
комбинаций 7-элементно1 о кода МТК-5, перевод на буквенный регистр S, воз-
врат каретки, перевод строки Q, перевод на цифровой регистр, пробел, 9 Для
реализации процедуры измерения согласно рис. П3.4 необходимы датчик теста
ДТ н прибор для выявления ошибок ПВО, а также свободный от передачи сооб-
щений канал
Коэффициент ошибок по элементам (знакам) Кош равен отношению числа
ошибочно принятых элементов (знаков) к общему числу элементов (знаков),
принятых за сеанс измерений Так как появление ошибок носит случайный ха-
рактер, то продолжительность сеанса определяется исходя из статистических
характеристик помех и из требуемой точности измерении Рекомендуется про-
водить измерения в проводных каналах связи протяженностью 2500 км сеансами
по 15 мин в течение 50 ч.
Косвенный метод измерения Кош основан на анализе результаюв измерения
краевых искажений, дроблений, помех и т. п. и может осуществляться без на-
рушения связи Измерение краевых искажений в дискретном канале производит-
ся специальным измерителем ИКИ во время передачи по каналу сообщения или
испытательного сигнала (рис П3 5). В соответствии с определением (см гл. 2)
величина краевых искажений пропорциональна длительности временного интер-
вала между реальными ЗМ принятого сигнала й(/) и их идеальными положе-
439
Рис ПЗ 5 Принцип измерения краевых искажений-
а — схема; б — временные диаграммы
ниями в неискаженном сигнале и(/) Для получения указанных временных
интервалов при синхронной передаче с помощью фазовой автоподстройки часто-
ты (в приборе ИКИ-С) обеспечивается синхронизация сигналов и(/) и й(/),
а при стартстопной передаче — стартовым ЗМ в начале каждой кодовой комби-
нации (в приборе ИКИ-СТ). Измерение полученных временных интервалов (см
диаграмму |и—й\ на рис. П3.5) обычно выполняется подсчетом числа импульсов
в сфазированном сигнале v(t) образцового генератора меток с высокое ;абиль-
иым и известным периодом следования счетных импульсов.
На скоростях до 200 Бод рекомендуемая МККТТ продолжительность сеанса
(Рекомендация V.52) составляет 30 . .40 с, на более высоких скоростях — 20 с
Если в процессе измерения действие шумов и помех вызывает дробление еди-
ничных элементов, что, как следствие, приводит к появлению больших выбросов
в показаниях ИКИ, то результаты таких измерений должны быть аннулирова-
ны, а измерения продолжены до получения устойчивых результатов в несколь-
ких сеансах.
Исправляющая способность приемника ОП измеряется подключением на его
вход непосредственно или через СЛ электронного датчика испытательного текста
(ЭДИТ), который вводит в текст искажения или дробления нормированной
величины в диапазоне от 0 до 45 . 49 % (с погрешностью менее +1 %). Тот
уровень искажений, при котором в известном тексте (например, «В чащах юга
жил бы цитрус...») появляются редкие ошибки с вероятностью приблизительно
10~3, и определяет исправляющую способность приемника.
Измерения краевых искажений, исправляющей способности приемника, откло-
нений информационных параметров сигналов от их номинальных значений позво
ляют судить о запасе устойчивости связи, прогнозировать ее качество и може>
рассматриваться как средства предупредительного контроля.
Методика измерения коэффициента эффективности канала ПД зависит от
алгоритма работы системы ПД В частности, на рис ПЗ 6 приведена структурная
схема измерений для системы с РОС и с блокировкой приемника- вход канала
ПД подключен к источнику данных или к датчику теста, вырабатывающему,
например, 511-элементную рекуррентную последовательность При наличии оши-
бок в кодовой комбинации (блоке) УЗО вырабатывает сигналы переспроса,
число которых s подсчитывается счетчиком Сч в течение сеанса измерений Т.
При нарушении фазирования по циклам УЗО «вырабатывает» сигналы начала и
конца фазирования, управляющие работой измерителя интервалов времени ПИВ,
440
Рис. П3.6 Схема измерения коэффициента эффективности канала ПД
на выходе которого в конце сеанса будет получена величина времени пребыва-
ния УЗО в режиме фазирования /ф Коэффициент эффективности для рассмат-
риваемого случая вычисляют по формуле
Хэф=1-К1-К2-Кз = \—(n—k)/n—nsN/BT—t$/T, (П3.2)
которая учитывает потерн в скорости передачи, вызванные наличием служебных
и проверочных элементов (7G), из-за переспросов (7G) и из-за нарушения фа-
зирования по циклам (Кз). (Здесь k, п — число информационных и общее число
элементов в блоке соответственно, N — число циклов, на которое блокируется
выход приемника или емкость накопителя УЗО )
Определение своевременности поступления данных из канала ПД сводится
к измерению /ф по схеме рис. П3.6 и вычислению времени задержки при пе-
редаче заданного объема данных
<эад = 7’0-|-7’1-| tp~\-tlt, = qn/B-k I nsiN/B-\ /р4 (ПЗЗ)
г сравнению /Зад с максимально допустимым временем Тлои. В формуле (ПЗЗ)
q — число информационных единичных элементов в заданном объеме данных;
/р — время распространения сигнала по каналу ПД (зависит от длины трассы,
скорости распространения сигнала и числа перепрнемов); То и Ti—время на
передачу данных заданного обьема в отсутствии помех и сбоев и время задерж-
ки в канале ПД из-за переспросов, Si=s при условии, что длительность сеанса
Г<ГДОП.
Для измерения коэффициента необнаруженных ошибок (по блокам, по эле-
ментам) можно к каналу ПД по схеме рнс. П3.4 подключить ДТ и ПВО. По-
следний с помощью счетчиков фиксирует число ошибочно принятых блоков пощ
(или элементов), а также число блоков цвыд, выданных потребителю Коэффи-
циент необнаруженных ошибок по блокам
Кош — [Щ>ш (Побщ—Пвыд) ]/«общ. (П3.4)
Время измерения параметров канала ПД достаточно велико (несколько су-
ток и более), поэтому подобные измерения проводятся только на этапах на-
стройки, паспортизации и регламентных работ.
Наиболее специфическими измерениями в канале ТЧ, предназначенном для
ПДС, являются измерения активности импульсных помех и кратковременных
перерывов, для чего к каналу ТЧ подключается серийно выпускаемый промыш-
ленностью прибор ПАПП, принцип работы которого заключается в измерении
относительного времени пребывания входного сигнала выше (ниже) заданного
оператором уровня.
441
Методика измерения нагрузки и показателей качества ее обслуживания иа
сетях телеграфного типа мало отличается от аналогичных измерений на теле-
фонных сетях. Измерения сводятся к подсчету числа занятых коммутационных
приборов (методом сканирования) либо числа поступивших на станцию комму-
тации вызовов и процента отказов в установлении соединения.
П3.4. ТЕХНИЧЕСКИЕ СРЕДСТВА СИСТЕМ
КОНТРОЛЯ И ИЗМЕРЕНИЙ
Классификация и краткая характеристика оборудования. По назначению все
контрольно-испытагельные и измерительные приборы можно разделить на три
группы:
1) приборы для измерения, контроля и настройки ОП, обеспечивающие
оценку работоспособности ОП, измерение исправляющей способности приемника
ОП и искажений единичных элементов на выходе передатчика ОП; регулировку
телеграфных реле, измерение постоянных и переменных токов и напряжений;
2) измерительные устройства и приборы для станций коммутации АТ, ПС
и ПД, обеспечивающие измерение и контроль аппаратуры самой станции, про-
верку работы автоответчика, измерение искажений на выходе передатчика ОП,
дистанционное измерение исправляющей способности приемника ОП;
3) приборы для измерения и контроля КОА и телеграфных каналов, обес-
печивающие контроль работоспособности блоков собственно КОА, измерение
первичных параметров уплотняемых каналов ТЧ и вторичных параметров дис-
кретных каналов (коэффициентов ошибок, краевых искажений и т. п.).
Перечень основных приборов, используемых на каждом крупном юлстрафе
(в цехах телеграфных каналов и коммутации каналов) для выполнения специ-
фических телеграфных измерений, приведен на рис. П3.7 [ПЗ.З].
В отличие от узкоспециализированных приборов (датчиков, измерителей
искажений, ошибок и т. п.) пульты являются универсальными многофункцио-
нальными комплексами, содержащими тот или иной набор измерительных прибо-
ров общего и специального нашачення.
По уровню автоматизации операций измери!ельные и контрольные устрой-
ства подразделяются на ручные (участие ТП более 50 % рабочего времени),
полуавтоматические (2 ... 50%) и автоматические (менее 2%)
При измерениях в качестве датчиков тестовых сигналов используются се-
рийно выпускаемые приборы, электронный датчик испытательных текстов
ЭДИТ-2 и электронный размножитель телеграфных сигналов РЭТС-1. Краевые
искажения стартстопных и синхронных телеграфных сигналов измеряются при-
борами ИКИ-Ст, ИКИ-С либо более современными, серийно выпускаемыми
ИК-1У, ИК-ЗУ-1. Измерение коэффициента ошибок производится приборами вы-
явления ошибок ПВО-1 и ПВО 2.
Занижения уровня в каналах ТЧ и измерения полярности (нереполюсовка)
в телеграфных каналах измеряются с помощью сче!но-регистрирующего устрой-
ства СЧРУ-3. Параметры каналов ТЧ и дискретных каналов, образованных
аппаратурой вторичного уплотнения, измеряются набором приборов измеритель-
ного пульта тонального и подтонального телеграфирования ИП-ТТ, а также
измерителями П-321, ИВА н др.
442
Рнс. ПЗ 7. Классификация измерительных приборов ЦКК и ЦТК
Эксплуатационная настройка и регулировка стартстопных оконечных
устройств сети ОП н АТ производится универсальным телеграфным прибором
ПУТ-2. На телеграфной сети используются также приборы ДИИВ, ДИНИР,
ЭИР-2 и другие, предназначенные для измерения интервалов времени, парамет-
ров реле, номеронабирателей и т. п.
Для автоматического контроля ОУ, СУ, МУ используется аппаратура: на
ОУ —ТАКТ, КАНТ, БИП-КАНТ и КОНТУР, на МУ — РИТМ, на СУ —APT
[ПЗ.З].
Автоматический контроль и измерение параметров нагрузки, а также кон-
троль групповых ycipoficTB станции «Никола Тесла» осуществляется аппарату-
рой, входящей в комплект станции. Работоспособность станций отечественного
производства проверяется аппаратурой КИА-А н ПОИСК. Автоматический ди-
станционный контроль за эксплуатацией оконечных пунктов выполняется аппа-
ратурой ДКРТ. Текущее обслуживание телеграфных связей осуществляется
с использованием комплекса контрольно-нспьпательных пультов- пульта контро-
ля н измерений ПКИ-2, стола Д, ПТ-1, а также пульта техника коммутационной
станции и аппаратуры для обслуживания магистральных и зоновых телеграф-
ных каналов ОМЗ-ТК совместно с аппаратурой «Шлейф». Основные ЭТХ кои-
трольно-испытательного и измерительного оборудования ЦТК н ЦКК приведены
в [ПЗЗ].
Контрольно-испытательное и измерительное оборудование станционного
участка представляет наибольший интерес для специалистов по автоматической
электросвязи. Основными задачами станционной группы ЦКК телеграфа явля-
ются функциональный контроль за работой коммутационных приборов с по-
мощью КИП и сигнализации и косвенный контроль за работой станции по ре-
зультатам измерения нагрузки, по заявкам н жалобам.
Состав и сложность КИП зависят от типа станции коммутации и принятого
метода технического обслуживания. Существуют два основных метода ТО: пла-
443
ново-предупредительный (ППМ) н контрольно-корректнрующий (ККМ). При
ППМ с помощью несложных КИП проводятся периодические испытания и про-
верочные работы (по предварительно составленному графику, учитывающему
надежность блоков) станционного оборудования независимо от его реального
состояния. Недостатками ППМ являются большие опоздания при выявлении не-
которых повреждений, трудности при обнаружении редких отказов, большая тру-
доемкость работ. По ППМ обслуживаются все декадно-шаговые станции, имею-
щие недостаточно надежное оборудование, а также ряд координатных станций
(в отсутствие автоматизированных КИП, при неблагоприятных климатических
условиях). Разновидностью ППМ является динамично-предупредительный метод,
при котором график регулярно корректируется на основании реальных данных
об эксплуатационной надежности оборудования [ПЗ 3].
Контрольно-корректирующий метод полностью исключает профилактические
работы и базируется на постоянном автоматическом контроле работоспособности
основных приборов и качества работы станции. При этом не является обязатель-
ным немедленное устранение небольшого числа неаварийиых повреждений, пока
качество работы основного станционного оборудования не опустится ниже кри-
тического, допустимого уровня. Техперсонал станции имеет возможность до на-
чала восстановительных работ проанализировать причины снижения качества
работы коммутационного оборудования, перераспределить нагрузку по блокам,
модернизировать некоторые схемные решения. По ККМ обслуживаются в на-
стоящее время объединенные станции «Никола Тесла» и АТ-ПС-ПД (после
дооборудования их автоматической аппаратурой КИА-А и APT). Коигрольио-
корректирующий метод реализуется с помощью развитого комплекса контроля
и измерения показателен качества и нагрузки
В качестве примера рассмотрим контрольно-измерительную аппаратуру
станции «Никола Тесла». Она имеет в своем составе: центральный пульт контро-
ля качества связи—столы KKS, контрольно-регистрирующее устройство стан-
ционных повреждений — централограф Cph; статистические счетчики SM и аппа-
ратуру TM-N для измерения нагрузки на линиях и приборах; испытательный
стол для проверки абонентских установок и линий; передвижные испытательные
приборы переходных устройств IP, регистров и пересчетчиков IR; датчик испы-
тательных текстов DIT; контрольно-испытательный прибор телеграфных реле
ISTR; встроенные приборы индикации и сигнализации, выносные контрольные
точки для подключения измерительных приборов.
Централограф Cph предназначен для фиксации иесостоявшихся соединений
и регистрации вида неисправности. Он состоит (рис. П3.8) из релейных ком
плектов подключения РКП ценгралографа к пересчетчикам П, маркерам М и
пробным блокам ПБ станции; комплекта опознания вызова КОВ централографа,
а также из устройства печати УП (на столе KKS) н устройства управления им
УУП. Комплект опознания вызова принимает сигнал о повреждении цепей П
или М, фиксирует состояние цепей на время записи, подключившись через РКП
к участвующим в несостоявшемся соединении П, М и ПБ, кодирует эти сведения
и через УУП передает на электромагниты УП. Данные с помощью цифровых
барабанов печатаются на бумажной ленте в 20 графах: в 20-й графе указы-
вается причина повреждения, содержание остальных зависит от устройства,
вызывавшего Cph, в частности, могут быть записаны номера пересчетчика, ре-
444
гистра, набираемый абонентом номер,
направление, пучок переходных устройств
в направлении, пробный блок, номер
маркера, тип вызывающей или вызывае-
мой станции и т. д. К одному РКП цен-
тралографа можно подключить для кон-
троля до 20 пересчетчиков, 40 пробных
блоков, 10 маркеров, 20 исходящих сту-
пеней ГИ [ПЗ.З].
Испытательный -стол обеспечивает
проверку состояния абонентских устано-
вок, а также исправности и занятости
абонентских линий (двух- и четырехпро-
водных), проверку номеронабирателя и
автоответчика телеграфного аппарата
при разных уровнях искажений в сигнале
Рис. П3.8. Функциональная схема
цептралографа
запроса, измерение величины вноси-
мых передатчиком ГА искажений, рабочих токов в шлейфе линии, его сопротив-
ления. Подключение стола к требуемой установке осуществляется штекерами
через служебные гнезда на сггецстативах либо автоматически (набором номера)
с помощью специальных переходных устройств (ПУ), подключенных к выделен-
ным входам ступени АИ.
Оборудование для измерения качества и нагрузки на станции «Никола Тесла»
включает столы KKS, счетчики SM и аппаратуру TM-N.
Стол KKS позволяет подсчитать общее число вызовов и число отказов,
подключиться к различным групповым устройствам и снять качественную харак-
теристику их работы в течение любого интервала времени, автоматически по
проценту отказа контролировать качество работы основных групповых устройств
и абонентских групп, следить за повреждениями оборудования любого статив-
ного ряда по аварийной сигнализации.
Статистические счетчики SM обеспечивают накопление статистических дан-
ных о качестве работы станции и состоянии сети. Эти электромеханические счет-
чики устанавливаются на стативах по 1000 штук на каждом. Каждый счетчик
Рис. П3.9. Измерительный мост аппаратуры TM-N
445
включен в индивидуальную цепь измерения, имеет пять разрядов и работает
с накоплением результата, включается и выключается вручную
Аппаратура ТМ N позволяет измерить нагрузку на станции Принцип дей-
ствия прибора основан на методе сканирования Среднее число одновременно за-
нятых коммутационных приборов kt определяется с помощью измерительного
моста (рис П3 9), в котором сопротивления измерительных резисторов /?и равны
сопротивлениям компенсирующих резисторов /?к, а сопротивление постоянного
резистора /?п=1,3/?к, М=10 или 20. Находящиеся под контролем коммутационные
приборы ki включаются в левое плечо моста Каждый сеанс измерения (скани-
рование) длится 36 с и начинается размыканием всех контактов реле Л и под-
ключением генератора импульсов к счетчику С подачей каждого импульса до-
полнительно замыкаются контакты еще одного реле Р, до тех пор, пока сопро-
тивление правого плеча не станет меньше сопро!ивления левого плеча Послед-
нее зависит от числа замкнутых (занятых) приборов ki Тогда откроется диод
VD и схема управления отключит генератор от счетчика В течение часа выпол-
няется 100 сеансов и показания счетчика после деления на 100 характеризуют
измеренную нагрузку
Более детальное изучение оборудования контроля будет осуществляться
в рамках курсов углубленной подготовки
ПЗ 5 АВТОМАТИЗАЦИЯ КОНТРОЛЯ
И ИЗМЕРЕНИЙ
С целью повышения производительности труда техперсонала осуществляется
максимальная автоматизация всех производственных процессов, особенно трудо-
емких операций по измерению параметров и контролю работоспособности обо-
рудования телеграфных связей [ПЗ 1]
Первый этап автоматизации СКИ предусматривает разработку и внедрение
развитых контрольно диагностических комплексов, которые позволят перейти от
трудоемкого предупредительного метода ТО к более эффективным — восстано-
вительному (для КОА) и контрольно корректирующему методу (для коммута-
ционного оборудования) В частности, для автоматизации тестового контроля на
ОУ выпускается аппаратура ТАКТ, предназначенная для использования на всех
станциях коммутации отечественного производства, и несколько ее модифика
ций КАНТ (для станции «Никопа Тесла»), КОНТУР (для ПТС К), на МУ для
тех же целей используется аппаратура РИТМ Аппаратура APT позволит пол-
ностью автоматизировать косвенный контроль технического состояния коммута-
ционного оборудования станции по результатам регистрации и анализа на-
грузки
К числу контрольных автоматов относится централограф станции «Никола
Тесла», для решения аналогичных задач на станции АТ ПС ПД разработана и
осваивается промышленностью аппаратура КИА-А, которая осуществляет авто-
матический контроль за установлением соединений на ступенях АИ, ГИ, РИ и
при возникновении неисправностей фиксирует на специальном ТА основные дан-
ные, необходимые для их локализации и установления причин номер статива
(блока), номер входа, вид соединения, наличие обходов, номера сработавших
446
реле направлений п пробных реле, номер линии в выбранной группе п другие
сведения
На смену существующим испытательным приборам (ИП) и испытательным
регистрам (ИР) промышленность осваивает их автоматические аналоги — АИП
и АИР Автоматический испытательный прибор АИП предназначен для проверки
и испытания АП, ПУ и ШК станции АТ-ПС ПД, а также для контроля проклю-
чения на ступенях АИ, ГИ, РИ Прибор может работать в режимах одно и
многократной проверки путем автоматического установления испытательного со-
единения с остановкой при выявлении нарушений, а также непрерывной много-
кратной проверки. Автоматический испытатель регистров АИР станции
АТ ПС-ПД может осуществлять поэтапную проверку одного регистра с панели
управления, автоматическую одно- и многократную проверки одного или всех
регистров по заданной программе посредством установления всевозможных со-
единений Режим и программа проверки в АИП и АИР устанавливаются элемен-
тами ручной коммутации на панели управления, где находятся также сигналь-
ные лампы для наблюдения за результатами проверок
Аппаратура (пульт) оперативного и статистического контроля ПОИСК поз-
воляет автоматически путем установления больших серий контрольных соеди-
нений оценивать качество работы телеграфной коммутационной станции с пози-
ций потребителя [ПЗ 3] Для охвата контролем всех групповых блоков ПОИСК
подключается к станции с помощью 20 линий различных категорий (АТ, ПС,
ПД в любом соогиошеиии) Имитация входящих соединений обеспечивается до-
полнительно подключением аппаратуры к одному из свободных межстанционных
ПУ Аппаратура устанавливается на регистровых станциях и имеет три режима
работы статистический контроль, обнаружение повреждений и самоконтроль
В режиме статистического контроля осуществляется контроль своей станции
(многократным установлением местных соединений) либо одновременный кон-
троль своей станции по исходящим соединениям, а смежной — по входящим или
транзитным Контроль проводится сеансами по 100 или 1000 вызовов со средней
интенсивностью 2 выз/мин со случайными паузами между вызовами Результаты
статистического контроля автоматически фиксируются двумя служебными ТА.
В режиме обнаружения повреждения при отклонении параметров сигналов
или процедуры установления соединения от нормы проверка прерывается, сраба
тывает сигнализация о причине остановки, а на цифровых индикаторах указы-
ваются номера вызывающей и вызываемой линий, условный номер занятого
регистра При этом условным шифром фиксируются неисправности девяти раз-
личных типов 02 — поступление по цепи приема вызывающей линии сигнала
«Занято» или какого либо служебного сигнала, 04 — установление ложного со
единения, 06 — отсутствие сигнала вызова на приеме вызываемой линии спустя
20 с после окончания набора номера, 09 — отсутствие сигнала отбоя на приеме
вызывающей линии, спустя 3,5 4 с после его поступления в цепь передачи
и т п
В режиме самоконтроля аппаратура ПОИСК имитирует все виды неисправ-
ностей и осуществляет проверку «на себя» основных блоков
Функциональная схема аппаратуры приведена на рис ПЗ 10 Здесь УП —
программирующее устройство, управляющее остальными блоками в соответствии
с программой и данными о распределении испытательных линий по категориям
447
регистрак
Рис П3.10. Функциональная схема аппаратуры ПОИСК
АТ, ПС и ПД; ПЗУ и ОЗУ — постоянное н оперативное запоминающее устрой-
ства: в ПЗУ хранятся 30 номеров испытательных линий своей (20) и смежной
(10) станций, два номера служебных ТА, а в ОЗУ — программы контроля, за-
писи и выдачи сведений; УВ — устройство выборки данных из ЗУ и формирова-
ния импульсов набора номера; УУС — устройство установления соединения;
АУ — анализирующее устройство, контролирующее сигналы и процедуры уста-
новления соединения и отвечающее иа входящие вызовы; УК — устройство ком-
мутации УУС и АУ к требуемым линиям согласно программе; СУ — согласующее
устройство; УФ—устройство фиксации (счета) результатов контрольных вызо-
вов; УВР — устройство выдачи результатов, формирующее тексты для передачи
иа ТА; ПУ — панель управления с тастатурой и органами сигнализации для
ввода программы и отображения сведении о ходе проверки станции, режиме
работы аппаратуры и аварийных ситуациях.
Для линий одной категории проверке подлежат либо местные соединения
между испытательными линиями, либо исходящие — по программируемым но-
мерам, либо входящие от смежных станций, либо местные и исходящие — по
оперативно введенному (с тастатурьг) номеру.
Конструктивно аппаратура выполнена в виде пульта напольного типа,
в верхней части которого расположена ПУ, а в нижней части в два яруса карка-
сы с установленными в ннх типовыми элементами замены и четырьмя источни-
ками питания (по краям).
П3.6. ИСПОЛЬЗОВАНИЕ ДОСТИЖЕНИЙ '
МИКРОЭЛЕКТРОНИКИ
И ВЫЧИСЛИТЕЛЬНОЙ
ТЕХНИКИ ПРИ СОВЕРШЕНСТВОВАНИИ КИА
В новых измерительных приборах ИК-ЗУ, ВО-2, ПУТ-2, АИП, АИР по
сравнению с их предшественниками (ИКИ-С, ВО-1, ПУТ-1, ИП, ИР) широко
применяются готовые функциональные блоки цифровой техники, выполненные
448
в виде интегральных схем (ИС) сернн 155, что позволило заметно повысить
ЭТХ н расширить функциональные возможности КИА.
Дальнейшее развитие технических средств СКИ связано с широким исполь-
зованием достижений вычислительной техники и микроэлектроники, особенно
микропроцессоров (МП). Контрольно-измерительная аппаратура занимает одно
из первых мест по применению МП. С их помощью достигаются многофункцио-
нальность, простота управления процессом измерения, автоматизация регулиро-
вок, самокалнбровка и автоматическая поверка, значительное улучшение метро-
логических характеристик, надежности, массогабаритиых показателей и показа-
телей энергоемкости. Кроме того, облегчается статистическая обработка резуль-
татов наблюдений Радикально изменилась «технология» разработки КИА, так
как МП стал основной частью аппаратуры. Это привело к изменению конструк-
ции, компоновки, схемных решений, управления, позволило включить обработку
результатов в измерительную процедуру (без участия оператора), а выход на
стандартную интерфейсную шину открывает возможности для создания изме-
рительных комплексов. Широко используются МП в современных измерительных
приборах общего назначения: цифровых вольтметрах и мультиметрах, цифровых
частотомерах и синтезаторах частот, осциллографах с программным управлением
Многофункциональность средств измерения достигается за счет перехода от
аппаратной реализации функций к программной, что возможно на основе по-
строения гибкой программно-управляемой системы В частности, в [ПЗ 4] рас-
смотрена микропроцессорная система, построенная на больших интегральных
схемах (БИС) серии КР580 и представляющая собой универсальное устройство,
реализующее программным путем функции датчика ЭДИТ-2 и измерителя крае-
вых искажений ИК-1У. Там же показано, что многие измерительные и контроль-
ные устройства телеграфии и передачи данных можно унифицировать, построить,
используя небольшое число универсальных БИС, на единой схемно-конструк-
тивной базе; даны рекомендации по выбору комплекта БИС.
Массовое внедрение на телеграфной сети электронных станции коммутации
с программным управлением, КОА и оконечного оборудования, построенных на
базе МП и микроЭВМ, значительно облегчит автоматизацию ряда ручных опе-
раций техперсонала. Например, наличие микроЭВМ в составе станции АТ-ПС-ПД
позволило бы сравнительно просто программными средствами выполнить считы-
вание данных со статистнческих-счетчиков.
Применение МП в измерительных системах оказывается целесообразным,
если КИА содержит 30 ... 50 ИС малой и средней степеней интеграции, если
КИА должна взаимодействовать с большим числом входных и выходных
устройств (линий, каналов, приборов), когда необходимы хранения больших
групп данных и их последующая статистическая обработка, а также автодиаг-
ностика и самоконтроль оборудования по заданной программе. Программные
средства функционального контроля оборудования используются в современных
ИКС Широкое применение найдут МП и микроЭВМ для решения задач стати-
стического контроля на последующих этапах автоматизации, обработки и анали-
за эксплуатационных данных (например, выходных датаграмм аппаратуры
ПОИСК). В настоящее время эти задачи решаются на универсальных ЭВМ.
Микропроцессорные системы мало подвержены моральному старению, так как
их модернизация происходит за счет перепрограммирования (смены) ПЗУ.
29—6085 449
На базе серийной микроЭВМ «Электроника 60М» уже разработан аппарат-
но программный комплекс «Зонд», который позволяет автоматически анализиро
вать сигналы и процедуры взаимодействия телеграфных станций и осущест-
влять статистический контроль качества их работы по реальной нагрузке
с автоматической регистрацией результатов (см разд П2 3)
Создание универсальных микропроцессорных измерительных систем с вы
сокими ЭТХ позволит значительно сократить парк КИА отрасли, повысить
эффективность и качество работы сети, автоматизировать наиболее трудоемкие
операции, экономить трудовые ресурсы
П3 7 ОСНОВНЫЕ ТЕНДЕНЦИИ
В РАЗВИТИИ СКИ
Новая технология централизованного оперативно технического обслужива-
ния связей, внедряемая на крупных телеграфах страны, предусматривает созда
ине центра контроля и испытаний (ЦКИ) на основе объединения соотве!ствую
щих служб цехов телеграфных каналов и коммутации каналов Централизация
служб позволяет без увеличения штата работников заметно повысить произво
дительность труда и качество обслуживания за счет более быстрого выявления
места и причин нарушения связи устранения дублирования в работе разных
служб и участков уменьшения длительности служебных разговоров, сокраще
ния объема ведущейся учетной документации, более четкого управления и луч-
шей органитации труда
Таким образом, основные направления развития СКИ связаны
с полной автоматизацией операций по контролю и измерению на основе
создания универсальных измерительных комплексов с высокими технике эконо
мическими и эксплуатационными (малообслуживаемость) показателями,
с широким внедрением МП техники как в КИА, так и в статическую обра
ботку результатов измерении,
с созданием и внедрением в телеграфное оборудование новою поколения
встроенных программных средств контроля и диагностики,
с совершенствованием организационной структуры (созданием ЦКИ) и
использованием более эффективных методов технического обслуживания (вое
становительного, контрольно корректирующего и г п)
КОНТРОЛЬНЫЕ ВОПРОСЫ
1 Назовите методы ТО оборудования коммутационных станций докумен
тальноц электросвязи ДЭС
2 Как безотказность, ремонтопригодность, малообслуживаемость, эргономи-
ческие показатели оборудования системы ПДС влияют на стоимость его экс-
плуатации?
3 Укажите основные направления улучшения ЭТХ системы ПДС
4 Чем предпочтительнее новая технология централизованного оперативно
технического обслуживания связей?
5 Дайте краткую характеристику основным контрольно испытательным при
борам, используемым в ЦТК
450
6 Рассчитать Тн для канала ПД, если наработка на отказ одного комплек-
та аппаратуры ПД (УЗО }-УПС) составляет Т'нАпд""200 ч’ а канала связи
Ти кс=5 ч Ответ Гн=4,88 ч
7 Выветите соотношения для расчета Кг и Ти для системы, состоящей из
нескольких параллельно и последовательно включенных элементов Указание
см [П3 5], с 107—108
8 Какова роль контроля и измерений в типовом технолот ическом цикле ТО
системы ПДС’
9 Изложите принцип работы электронного датчика испытательных текстов
Как можно построить универсальный датчик текстов’
10 Каким образом осуществляется измерение краевых искажений’
11 Адаптируйте формулу (ПЗ 3) для случая ПД в системе с РОС и ожида-
нием сигнала обратной связи
12 Какие измерения и какими приборами осуществляются в канале ТЧ’
13 Для чего предназначена аппаратура ОМЗ ТК, КИА А’
14 Рассчитать вероятность безотказной работы системы ПДС прн исполь
зовании общего и раздельного резервирования, если система состоит из четырех
последовательно включенных устройств имеющих одинаковую вероятность без-
отказной работы Pi(t)=O 995
Ответ Р0бщ(/)=0,9996, РразД(/) =0,9999
15 Передача дискретных сообщений ведется по трехканальному тракту
в течение 10 ч Известно, что продолжительность ежегодных профилактических
работ в каждом канале составляет 100 ч, наработка на отказ для АПД равна
100 ч для канала—10 ч, а время восстановления канала—0,5 ч Определить
Кг и Р(/) трехканального тракта
Ответ Кг=0,996, Р(/)=0,94 Указания см [ПЗ 5] с 109
16 Приведите перечень аппаратуры для автоматического контроля СУ Ука
жите ее назначение н основные технические характеристики
17 Составьте блок схему алгоритма автоматического контроля МУ Указа
ние см [П3 4], с 56
18 Объясните, почему в аппаратуре ТМ N интервал сканирования выбран
равным 36 с
19 Перечислите основные функциональные блоки централографа укажите
нх назначение
20 Укажите главные недостатки статистических счетчиков станции «Никола
Тесла» Внесите предложения по автоматизации съема и обработки показаний
этих счетчиков с помощью микроЭВМ Указание см [ПЗ 6] с 29—31
СПИСОК ЛИТЕРАТУРЫ
К ВВЕДЕНИЮ
1 Марценнцен С Н, Новиков В В 150 лет отечественному телеграфу —
М Радио и связь, 1982 — 152 с
2 Родионов В. М. Зарождение радиотехники — М Наука, 1985 — 240 с
29* 451
к ГЛАВЕ 1
1 1 Зюко А. Г., Кловский Д. Д., Назаров М. В., Фиик Л. М. Теория пере-
дачи сигналов —М Радио и связь, 1986 —304 с
12 Игнатов В. А Теория информации и передачи сигналов — М Совет-
ское радио, 1979 — 278 с
1 3 Емельянов Г. А., Шварцман В. Л. Передача дискретной информа
ции — М Радио и связь, 1982 — 240 с
14 Шварцман В. О, Емельянов Г. А. Теория передачи дискретной инфор-
мации — М Связь, 1979 —424 с
15 Теория передачи информации Термииолшия Вып. 101 —М: Наука,
1984
1 6 ГОСТ 17657—79 Передача данных. Термины и определения
1 7 ГОСТ 22515—77 Связь телеграфная Термины и определения
1 8 Кловский Д. Д. Передача дискретных сообщении по радиоканалам —
М Радио н связь, 1982 — 304 с
19 Ильин В. А Телеуправление и телеизмерение Зе изд, перераб и
доп —М Энергоиздат, 1982 —560 с
1 10 Помехоустойчивость и эффективность систем передачи информации/
А Г Зюко, А И Фалько, И П Панфилов и др , Под ред, А Г Зюко — М
Радио и связь, 1985 —272 с
111 Гуткии Л. С. Проектирование радиосистем и радпоустройств —М
Радио и связь, 1986 — 288 с
К ГЛАВЕ 2
2 1 Васильев В. Н, Буркин А. П., Свириденко В. А. Системы связи — М
Высшая школа, 1987 — 280 с
2 2 Пуртов Л. П., Пушкин В. М. Дискретные каналы в системах передачи
данных —Л ЛЭИС, 1980 —69 с
2 3 Шувалов В. П. Косвенные методы обнаружения ошибок — М Связь,
1972 —80 с
2 4 Генкина Н. Ф., Куликов Ю. П., Курочкин А. Н. Избыточные (коррек-
тирующие) коды —М МЭИС, 1976.— 42 с.
К ГЛАВЕ 3
3 1 Сети связи Каналообразующая и коммутационная телеграфная аппара-
тура Справочник/ Под ред В И Ко) оля —М Радио и связь, 1986 — 226 с
3 2 Алешин В. С., Деарт В. Ю., Курочкин А. Н. Коммутационные станции
документальной лектросвязи —М Радио и связь, 1983 —200 с
3 3 Мизин И. А., Богатырева В. А., Кулешов А. П. Сети коммутации па-
кетов — М Радио и связь, 1986 —408 с
3 4 Синхронные сети данных/ В О Шварцман, Н Н Етрухин, М А Кар-
пинский и др, Под ред В О Шварцмана —М Радио и связь, 1988 —310 с
К ГЛАВЕ 4
4 1 Малиновский С. Т. Сети и системы передачи дискретной информации
и АСУ — М Связь, 1979 — 384 с
4 2 Заморин А П., Мячев А. А., Селиванов Ю. П. Вычислительные маши-
ны, системы, комплексы Справочник/ Под ред. Б Н Наумова, В В Пржиял-
ковского —М Энергоатомиздат, 1985 —264 с
4 3 Дивногорцев Г. П., Яшин В. М. Системы и аппаратура обмена инфор
мацией в сетях ВЦ —М Связь, 1976 — 216 с
4 4 Словарь по кибнернетике/ Под ред акад В М Глушкова. — Киев Гл.
ред укр сов энциклопедии, 1979 — 624 с
4 5 Справочник по цифровой вычислительной технике Электронные вычис-
лит машины и системы/ Б Н Малиновский, В Я Александров, В П Боюн
и др , Под ред Б Н Малиновского — Киев Техника, 1980 — 320 с.
4 6 Мячев А. А. Системы ввода-вывода ЭВМ — М Энергоатомиздат,
1983 — 168 с
4 7 Сахарчук С. И., Зелигер Н. Б. Электронные телеграфные аппараты —
М Радио и связь, 1986 — 144 с
4 8 Телеграфная и факсимильная аппаратура Справочник/ Б Н Твердов,
М И Оксман, В Т Сиваков и др, Под ред Б И Твердова —М Радио и
связь, 1986 — 248 с
К ГЛАВЕ 5
5 1 Кричевский Р. Е. Сжатие и поиск информации — М Радио п связь,
1989
5 2 Трофимов В. К. Кодирование потоков Пуассона при неизвестных и не-
точно известных параметрах// Проблемы передачи информации — 1987 —
Т XXIII — Выи 4 —С 49—57
к ГЛАВЕ 6
6 1 Мизин И. А-, Уринсон Л. С., Храмешин Г. К. Передача информации
в сетях с коммутацией сообщений —М Связь, 1977 — 328 с
6 2 Кисель В. А. Аналоговые н цифровые корректоры — М Радио и связь,
1986 — 184 с
6 3 Боккер П. Передача данных Техника связи в системах телеобработки
данных Пер с нем / Под ред Д Д Кловского — М Связь, 1980 Т 1 Осно-
вы — 264 с
6 4 Ситняковский И. В., Порохов О. Н., Нехаев А Л. Цифровые системы
передачи абонентских линий —М Радио и связь, 1987 —216 с
6 5 Клюев В. И., Кожаспаев Н. К. Частотно-временные преобразования сиг-
налов в линейных системах —Алма Ата Наука, Казахской ССР, 1987 — 229 с.
6 6 Витерби А. Д., Омура Дж. К. Принципы цифровой связи и кодирова
ния —М Радио и связь, 1982 —536 с
6 7 Захарченко Н. В., Нудельмаи П. Я. Выбор узлов аппаратуры передачи
данных Учеб пособие/ Одесский электротехнический ин т связи им А С По
пова —Одесса, 1985 —Ч 1 —92 с
6 8 Финк Л. М. Теория передачи дискретных сообщений —М Радио и
связь, 1970 — 728 с
6 9 Шувалов В. П , Фрицлер П. Г., Федоров Ю. Н. Устройства преобразо
вания сшнаюв Учеб пособие/ Новосибирский электротехнический пн т свя-
зи — Новосибирск, 1988 — 45 с
6 10 Шувалов В. П. Прием сигналов с оценкой их качества —М Связь
1979 — 240 с
6 11 Аджемов С. А., Куница А. Я-, Терещенкова И. А. Принципы построе
ния и основные технические решения дуплексной универсальной мультиплексор-
ной каналообразующей аппаратуры ДУМКА Учеб пособие/ Министерство связи
СбСР, ИПК-М 1983 -88 с
6 12 Телеграфный мульдекс с модемом/ С П Вольфбеин, К С Жевлюк,
Б В Короп// Электросвязь, 1989 —№ 3 —С 42—45
К ГЛАВЕ 7
7 1 Питерсон Л., Уэлдон Э. Коды, исправляющие ошибки Пер с англ /
Под ред Р Л Добрушина — М Мир, 1978 —594 с
7 2 Кларк Дж. мл, Кейи Дж. Кодирование с исправлением ошибок в си-
стемах цифровой связи Пер с англ / Под ред Б С Цыбакова — М: Радио
и связь, 1987 — 392 с.
453
7 3 Туркии А И. Рекуррентный прием сложных сигналов (на основе ме-
тода погружения и решения непрерывных экстремальных задач) — М Радио
и связь, 1988 — 248 с
7 4 Банкет В. Л., Дорофеев В. М. Цифровые методы в спутниковой связи —
М Радио и связь, 1988 — 240 с
к ГЛАВЕ 8
8 1 Бородин Л Ф Введение в теорию корректирующих кодов — М Сов
радио, 1968 — 408 с
8 2 Митряев Е В, Ростовцев Ю. Г., Рышков Ю П. Контроль верности
информации в морской радиосвязи —Л Судостроение, 1979 —164 с
8 3 Коричнев Л. П., Королев В. Д. Статистический контроль канатов свя
зи — М Радио и связь, 1989 — 240 с
8 4 Курицин С. А. Теоретические основы построения адаптивных систем
Учебн пособие —Л ЛЭИС, 1983 —64 с
8 5 Захарченко Н. В., Владишевский Б. С., Шувалов В. П Передача дан
ных Учебн пособие —ОЭИС, 1982 —80 с
8 6 Советов Б. Я., Стах В. М Построение адаптивных систем передачи
информации для автоматизированного управления —Л Энергопздат, 1982 —
120 с
К ГЛАВЕ 9
9 1 Системы электросвязи- Учебн для вузов/ В П Шувалов, С И Горш-
кова, Г П Катунин и др, Под ред Шувалова В П — М Радио и связь, 1987
9 2 Шеховцов О И., Горохов С. Г. Передача информации по нестацнонар
ным каналам связи Учеб пособие/ Под ред проф Б Я. Советова —Л Изд-во
Ленинград ун-та, 1985 —256 с
9 3 Линдсей В. Системы синхронизации в связи и управлении —М Сов
радио, 1978
К ГЛАВЕ 10
10 1 Скворцов Г. И., Свет С. Д. Модели и алгоритмы оптимальной фильтра-
ции видеосигналов газетных полос// Тез докл VIII Всесоюз конф по теории
кодирования и передачи информации —Москва — Вильнюс, 1978 —Ч 7 —
С 139—144
10 2 Цифровое кодирование графики// ТИИЭР —Т 68 —№ 7 — 1980 —
215 с
10 3 Орловский Е. Л. Передача факсимильных изображений —М Связь,
1980 —216 с
10 4 ГОСТ 25872—63 Апптратура факсимильная высокоскоростная для пе
редачи и приема метеорологических карт Основные параметры
10 5 Кузнецов Ю. С., Узилевский В А. Электронное растрирование в поли
графин —Л Книга, 1976 — 144 с
10 6 Гутштейн Е. И. Алгоритм сжатия сигнала растровых изображений//
Электросвязь, 1984 —№ 12 —С 40—42
10 7 Хазен Э. М. Методы оптимальных статистических решений п задачи
оптимального управления —М Сов радио, 1968 —256 с
10 8 Свет С. Д, Фролов Н. А. Фильтрация кодирования изображений//
Средства связи — 1986 —№2 —С 56—58
10 9 Зубарев Ю. Б., Глориозов Г. Л. Передача изображений —М Радио
и связь, 1982 — 223 с
К ПРИЛОЖЕНИЮ 1
П1 1 Бусленко Н. П. Моделирование сложных систем —М Наука 1978 —
400 с
П1 2 Быков В. В. Цифровое моделирование в статистической радиотехни-
ке — М Сов радио, 1971 —328 с
454
П1 3 Галкин А. П-, Лапин А. Н., Самойлов А. Г. Моделирование каналов
систем связи —М Связь, 1979 —96 с
П14 Советов Б. Я., Яковлев С. А. Моделирование систем Курсовое проек
тирование —М Высш шк 1988 — 135 с
к ПРИЛОЖЕНИЮ 2
П2 1 Кудрявцев Г. Г. Технический прогресс средств связи на основе микро
процессорной техники на телеграфной сети/ Электросвязь, 1987 — № 1 —
С. 1—5
П2 2 Король В. И. Состояние и перспективы применения микропроцессор-
ной техники в документальной электросвязи// Электросвязь — 1987 — № 3 —
С 4—7
П2 3 Современные оконечные устройства сетей документальной электросвя
зи/ В Д Аляпкии, В А Рац, Г. И Скворцов и др. — М ИПК МС СССР,
1985 — С 82
П2 4 Копничев Л. Н., Алешин В. С. Оконечные устройства документальной
электросвязи — М Радио и связь, 1986 — 248 с
П2 5 Белкин Н Г. Адаптивные микропроцессорные приемопередатчики//
Техника средств связи Сер ТПС — 1985 —Вып 10 —С 27—31
П2 6 Микропроцессорная реализация адаптивных систем передачи/
К Ф. Астапкович, С А Курицын, И Е Сосновский и др — Л ЛЭИС, 1986 —
60 с
П2 7 Применение микропроцессорных средств в системах передачи инфор-
мации/ Б Я Советов, О И Кутузов, Ю А Головин и др — М Высшая шко-
ла, 1987 — 256 с
П2 8 Захарченко Н. В., Киреев И. А. Программная реализация систем пе
редачи данных на основе микроЭВМ// Электросвязь — 1987 —№ 3 —
С 25—27
П2 9 Шестопалов А. М., Клепиков В. П., Жевлюк К. С. Центры коммута-
ции сообщений —М Радио и связь, 1982 —232 с
П2 10 Электронный телеграфный концентратор — узел коммутации сообще-
ний на базе микроЭВМ/ Качан А А, Литаврин А А, Лубяницкая Л В п др //
Электросвязь — 1987 —№ 1 С 30—33
П2 11 Дзюба А. Н., Кричевский Э. Н., Слюсаренко В. И., АПК «Зонд» для
регистрации сигналов и ироце тур взаимо теиствия иа телеграфной сети// Элек-
тросвязь — 1986 — № 11 - С 13—17
П2 12 Алешин В С., Броннер Б. В., Копничев Л. Н. Применение микроЭВМ
для автоматизации оконечных пунктов телеграфной сети общего пользования//
Электросвязь — 1985 — № 7 — С 29—32
П2 13 Абдулаев Д. А., Арипов М. Н. Передача дискретных сообщений в за-
дачах и управлениях — М Радио и связь — 128 с
К ПРИЛОЖЕНИЮ 3
ПЗ 1 Телеграфные правила Часть II Техническая эксплуатация —М Ра-
дио н связь, 1984 — 182 с
ПЗ 2 Ведомственные нормы технологического проектирования Проводные
средства связи Станции и узлы телеграфные и передачи данных ВНТП 113—79
МС СССР —М Радио и связь, 1981 — 129 с
ПЗ 3 Автоматизация контроля и измерений на телеграфных сетях/
В И Король, И Л Тарнопольский, И А Парикожка и др — М Радио и связь,
1986 — 222 с
ПЗ 4 Белкин Н. Г О возможностях создания универсальных измерительных
и контрольных устройств для телеграфии и передачи данных// Техника средств
связи Сер ТПС 1983 — Вып 10 — С 22—28
ПЗ 5 Абдулаев Д. А., Арипов М. Н. Основы эксплуатации систем передачи
дискретных сообщений — Ташкент ФАН, 1984 — 118 с
ПЗ 6 Семенюта А В Автоматизация с помощью микроЭВМ// Вестник свя-
зи — 1986 — № 11 — С 29—31
455
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
А
Амплитудный модулятор 183
Аппарат электронный телеграфный 135
Аппаратура канала данных 96
— передачи данных 92
Б
Бит 13
Быстрая коммутация каналов 80
В
Верность передачи 19. 26, 81
Вероятность срыва синхронизма 352
Время задержки кодовой комбина-
ции 54
— нарастания переходного процес-
са 56
— поддержания синхронизма 352
— срыва синхронизации 352
Вызов по сокращенному адрееу 100
— приоритетный 100
— прямой 99
Г
Генерация цифровая 205
Графопостроители 131
Д
Датчики служебных сигналов 137
Девиация частоты 177
Декодер источника 18
Декодирование поэлементное 292
Демодулятор 165
Детектор качества канала 235
---- сигнала 231
----с перестраиваемым порогом 235
Дискрет 168
Дискретизация 365
Дробление 35—39
3
Запоминающее устройство 66
Значащий интервал 15, 33, 67
— момент 15, 33, 39—42, 144
— позиция 15
И
Избыточность 17, 18
Импульсы постоянного тока 168
Индекс частотной модуляции 177
Интервал единичный 16
Интерференция межсимвольная 44
— краевые 34, 35
456
---- случайные 35
— стартстопные 41
— характеристические 35
Исправляющая способность 144
---- номинальная 144
------ теоретическая 144
------ эффективная 144, 145
К
Канал асинхронный 18
— двоичный симметричный 43
— дискретный 18
----синхронный 18
— квазистационарный 298
— кодонезависимый 18
— непрерывный 30
— передачи данных 19
----дискретных сообщений 12
— постоянного тока 33
— прозрачный 18
— расширенный 18
— с памятью по входу 44, 45
----по выходу 45
— электросвязи 30
Квантование 364
Клавиатура 140
Код бинарный 17
— блочный 52
— Боуза — Чоудхури — Хоквнигема
273
— двоичный 17
— групповой 256
— итеративный 276
— каскадный 277
— корректирующий?50, 288—290
----с исправлением ошибок 53
— линейный 254
— модуляционный 222
— неразделимый 52
— помехоустойчивый 52
— префиксный 148
— простой 50
— равномерный 52, 154
М
Метод бестестовый 300
— временного разделения каналов
22
— групповой синхронизации безмар-
керный 348
----маркерный 349
— динамического управления детер-
минированный 76
------ групповой 76
------разовый 76
------статистический 76
— скользящего индекса с подтверж-
дением 161
— стаффинга 163
— стробирования 36
— тестовый 300
— Хафмеиа 153
— частотного разделения каналов 21
— Шеннона — Фаио 151
Модель Гильберта 46
Модулятор 165
Модуляция амплитудная 174
— амплитудно-фазовая 180
— фазовая 178, 180
— частотная 177
Мультиплексор 24
Н
Направление первого выбора 75
— второго выбора 75
Настройка корректора 218
О
Обобщенный интеграл Фурье 168
— ряд Фурье 169
Обратная связь 306
ииформациоииая 306
Обслуживание с ожиданием 72
— с потерями 71
Оконечное оборудование данных 24
Оперативное запоминающее устрой-
ство 66, 113
Основание кода 16, 17
Ошибка синхронизации 154
П
Пакет 44
Параметры внешние 25
— внутренние 25
— информационные 25
— технико-экономические 26
— технико-эксплуатационные 26
Передача асинхронная 20
— параллельная 19
— последовательная 19
— синхронная 20
Перерыв длительный 32
— кратковременный 32
План распределения сообщений 75
Погрешность синхронизации 352
---динамическая 352
-- статистическая 352, 353
Позиция значащая 15
Помехи гармонические 32
— импульсные 32
— мультипликативные 32
— нелинейные 217
— • флуктуационные 32
Последовательность стартстопная 21
Посылка элементарная 16
Преобладания 35
Преобразование параллельно-после-
довательное 229
— последовательно-параллельное 229
Префикс 148, 149
Прием в целом 20
— поэлементный 20
Принцип построения сети радиаль-
но-узловой 59
•----- Радиальный 59
------ узловой 59
Производительность источника 14
Производящая матрица 256
Пропускная способность канала 14
Протокол 103
Процессор связной 24
Прямые соединения 86
Пункт абонентский 56. 121
— коллективного пользования 121
— оконечный 55. 120
Развертка 360
— дуговая 383
— кадровая 382
— плоскостная 382
— строчная 382
Р
Разделение каналов временное 22, 23
---частотное 21
Распределение сообщений асинхрон-
ное временное 66
--синхронное временное 66
Расстояние кодовое 51
— Хемминга 51
Расчет корректор 218
Регистр 17
— с обратными логическими связями
283
Регистрация 35
— с весовой функцией 41
Режим передачи датаграмм 73
— с переспросом 325
С
2вя ь факсимильная 359
Сдвиг 33
Сеть абонентского телеграфирования
85, 90
— «Гентекс» 85
— данных цифровая синхронная 96
— децентрализованная 59
— коммутируемая 59
— иекоммутируемая 56. 85
— общего пользования 84
— передачи данных 92
-------— с коммутацией каналов 70,
101
457
--------- пакетов 70
--------сообщений 70
— полносвязная 56
— теле! рафная 85
— «Телекс» 85
Сигналы анизохронные 16
— биортогоиальные 167
— дискретного времени 15
— дискретные сложные 225
— изохронные 16
— неортогональные 167
— непрерывные дискретного време-
ни 15
---- непрерывного времени 15
— ортогональные 167
— узкополосные 166
— широкополосные 166
Символ 12
Син 1ром 259
— циклического кода 271
Синтез оптимальный 168
Синхронизация автономная 387
— групповая 335
— поэлементная 20, 335
— принудительная 387
— цикловая 24. 335
Система АТОЛ 89
— динамического управления 76
— коммутации 69
--- децентрализованная 57
---- каналов 71
---- пакетов 71
----с ожиданием 69
----сообщений 71
----с отказами 69
— распределения сообщений 63
— с адресным повторением 308
— с блокировкой 308
— с информационной обратной
связью 304
--------- полная 305
--------- ретрансляционная 305
---------с адресным повторением
330
--------- с непрерывной передачей
330
---------с ожиданием 330
------— укороченная 305
— с обратной связью без памяти 306
------с неограниченным числом по-
вторений 306
------с ограниченным числом по-
вторений 306
------с памятью 306
— с решающей обратной связью 304
------—с адресным повторением
308
--------- с блокировкой 308
--------- с непрерывной передачей
информации и блокировкой 320
------с ожиданием 308, 310—320
— управления 73
Системы автоматические 74
— автомата шрованные 74
— адаптивные 299
— с автоматическим запросом оши-
бок 304
— с неограниченным числом повто-
рений ЗС6
— с ограниченным числом повторе-
ний 306
— ретрансляционные 305
— факсимильные 360
— фотофакс имильные 360
Скремблер 229
Скремблирование 341
Скорость модуляции 19
--- номинальная 145
— передачи информации 14
— развертки 385
— телеграфирования 19
— удепьная 28
Сложность алгоритмическая 26
— структурная 26
Cot динение каналов непосредствен-
ное 69
---с накоплением сообщений 69
Сообщение 12
— дискретное 12
— непрерывное 12
Состояние канала 44
Спектр непрерывный 168
— сигналов 168
Способ записи закрытый 387
--- открытый 389
--- электростатический 389
---электротермический 388
--- электрохимический 338
Стирание 260
Стык 24
— защитный 25
— канальный 24
— мультиплексорный 25
— преобразовательный 24
Т
Терминал 127, 131, 132
— интеллектуальный 133
Тест 300
У
Узел верхнего уровня 38
— коммутации 107
--- каналов 108
.--пакетов 101. 108 118
---сообщений 108
458
— концентраторов 101 — оконечный 58 — связи 56 — транзитный 58 Управление децентрализованное 74 • — централизованное 74 Устройство автоматического ввода 128 — ввода-вывода 127 — вывода 121 — запоминающее 131. 137 — индикаторное 128 — приемное 136 — регистрирующее 128 129—31 — ручного ввода 128 — согласующее 136 — считывания 134 Ц Центр коммутации 108 Цепь простая Маркова 46 Ч Частота хаоактеоистическая 187 нижняя 187 Ш Шаг квантования 208 — развертки 385 Ширина спектра сигналов 170 эффективная 170
Ф Э
Фазовые дрожания 33 — скачки 33 Элемент стартовый 21 — столовый 21
X Энтропия 13 — источника сообщений 150
Характеристика амплитудно-частот- ная 31 — фазочастотная 31 Эффективность информационная 27 — частотная 28 — энергетическая 28
ОГЛАВЛЕНИЕ
Основные обозначения 3
Основные сокращения 3
Предисловие 5
1 Введение 7
Глава 1 системы передачи дискретных сообщений 12
1 1 Основные понятия и определения 12
1 2 Внешние и внутренние параметры системы ПДС Оптимизация си
стсмы ПДС 25
Контрольные вопросы 29
Г пава 2 системы передачи дискретных сообщений ха
РАКТЕРИСТИКИ КАНАЛОВ 30
2 1 Непрерывный канал 30
2 2 Дискретный канал непрерывного времени и регистрация сигналов 33
2 3 Дискретный канал Статистика ошибок в двоичном дискретном канале 42
2 4 Расширенный дискретный канал 49
Контрольные вопросы 54
I пава 3 сети передачи дискретных сообщений 55
3 1 Некоммутируемые и коммутируемые сети ПДС 55
3 2 Требования к сетям ПДС 60
3 3 Способы распре деления дискретных сообщений 63
3 4 Системы коммутации в сетях ПДС 69
3 5 Управление в сетях ПДС 73
3 6 Сравнительные характеристики системы коммутации 77
3 7 Сеть телеграфной связи 84
3 8 Сети передачи данных 92
3 9 Узлы коммутации в сетях ПДС 107
Контрольные вопросы 120
Глава 4 оконечные устройства систем пдс 120
4 1 Абонентские оконечные пункты 120
4 2 Вводно выводные устройства АП 127
4 3 Электронный телеграфный аппарат 135
4 4 Исправляющая способность телеграфною аппарата 144
4 5 Рекомендации МККТТ по оконечной аппаратуре 145
Контрольные вопросы 146
Глава 5 методы сопряжения источника дискретных со
общений с дискретным каналом 146
5 1 Постановка задачи 146
5 2 Основы эффективного кодирования 147
5 3 Методы эффективного кодирования при известной статистике сооб
щений 151
5 4 Методы эффективного кодирования при неизвестной статистике со
общений 155
460
5 5 Сопряжение источников дискретных сообщений с синхронным дискрет
ным каналом °°
Контрольные вопросы
Глава 6 методы и устройства преобразования сигналов 165
6 1 Назначение и классификация устройств преобразования сигналов 165
6 2 Сигнаты используемые в технике ПДС Свойства сигналов 166
6 3 Оптимальный прием дискретных сигналов 180
6 4 Принципы построения дискретных каналов 183
6 5 Цифровая генерация и обработка сигналов в УПС _ 200
6 6 Обеспечение высокой удельной скорости передачи сообщений 215
6 7 Обеспечение высокой помехоустойчивости при передаче сообщений по
каналам с сосредоточенными во времени помехами 224
6 8 Устройства преобразования сигналов АПД 227
6 9 Тстеграфная каналообразующая аппаратура 239
Контрольные вопросы 253
Глава 7 методы построения и технической реализации
корректирующих кодов 254
7 1 Линейные коды 254
7 2 Циклические коды 263
7 3 Синдром циклического кода и его свойства 271
7 4 Коды Боуза — Чоудхури — Хоквингема 273
7 5 Понятие об интеративных и каскадных кодах [7 1] 276
7 6 Понятие о непрерывных кодах 279
7 7 Принципы технической реализации корректирующих кодов 282
7 8 Методика выбора корректирующих кодов 288
7 9 Сопряжение процедур демодуляции и декодирования 292
Контрольные вопросы 297
Глава 8 адаптация в системах пдс 298
8 1 Структура адаптивных систем 298
8 2 Классификация систем с обратной связью 304
8 3 Структурные схемы алгоритмы и характеристики некоторых систем
с РОС и ИОС . 310
Контрольные вопросы 334
Глава 9 методы и устройства синхронизации 334
9 1 Синхронизация в синхронных и стартстопных системах ПДС 334
9 2 Методы и устройства синхронизации по элементам 338
9 3 Методы и устройства групповой и циктовой синхронизации 347
9 4 Расчет параметров устройств синхронизации 352
Контрольные вопросы 358
Глава 10 системы факсимильной передачи сообщений 359
10 1 Принципы факсимильной передачи сообщений 359
10 2 Основные характеристики факсимильных систем связи 361
10 3 Квантование и дискретизация видеосигнала 364
10 4 Модели факсимильных сообщений 365
10 5 Эффективные методы передачи факсимильных сообщений 371
10 6 Методы повышения помехоустойчивости передачи факсимильных
сигналов 378
10 7 Особенности анализа и синтеза изображений 382
10 8 Современная цифровая факсимильная аппаратура 389
Контрольные вопросы 392
461
Заключение...........................................................393
Приложение 1. Исследование помехоустойчивости систем ПДС ме-
тодом имитационного (статистического) моделирования .... . 400
П1.1. Основные понятия . ... .................400
П1.2 Моделирование отдельных блоков системы ПДС......................406
П1 3 Матричная модель системы ПДС....................................413
Приложение 2 Использование средств вычислительной техники в до-
кументальной электросвязи ... ... .... 416
112.1. Общие положения . . . . ... 416
П2 2. Особенности выбора и использования МПС для систем ПДС . . 419
П2.3. Примеры реализации систем ПДС на основе средств вычислитель-
ной техники . .... ....................422
Контрольные вопросы ................................................ 431
Приложение 3. Контроль и измерения в сетях и системах ПДС . . 432
ПЗ 1. Методы улучшения эксплуатационно-технических характеристик се-
тей и систем ПДС . . . . . .... 432
ПЗ 2 Цели и задачи системы контроля и измерений ... ... 434
ПЗ 3. Системы и сети ПДС как объект контроля и измерений .... 436
ПЗ 4 Технические средства систем контроля и измерений................442
П3.5 Автоматизация контроля и измерений .... .... 446
ПЗ 6 Использование достижений микроэлектроники и вычислительной
техники при совершенствовании КИА................................448
ПЗ 7 Основные тенденции в развитии СКИ...............................450
Контрольные вопросы..................................................450
Список литературы .................................................. 451
Предметный указатель.................................................456
Передача дискретных сообщений: Учебник для вузов/
П27 В. П. Шувалов, Н. В. Захарченко, В. О. Шварцман и др.; Под
ред. В. П. Шувалова.—М.: Радио и связь,—1990—464 с.: ил.—
ISBN 5-256-00852-8.
Изла1аются принципы построения сетей и систем передачи дискретных
сообщений (ПДС), рассматриваются методы и устройства преобразования
сигналов, повышения верности, синхронизации, излагаются принципы фак-
симильной связи, вопросы моделирования систем передачи дискретных со-
общений, а также использования вычислительных средств в технике пере-
дачи дискретных сообщений Уделяется внимание проблемам измерения и
контроля в технике ПДС
Для студентов, обучающихся по специальности «Автоматическая элек-
тросвя ;ь».
2303040000-190
П б46(дТЬ90------ 94'91 ББК 32 88