





































































































































































































































































































































































































































































































































































































































































































































Автор: Артемьев В.М. Юсупов Р.М. Александров А.Г. Красовский А.А. Афанасьев В.Н.
Теги: автоматика системы автоматического управления и регулирования интеллектуальная техника технология управления оборудование систем управления техническая кибернетика справочник теория автоматического управления теория управления
Год: 1987



ОГЛАВЛЕНИЕ
Предисловие
13
Глава 1. Пространство состояний..................................19
§ 1.1. Понятие пространства состояний...........................19
1.1.1. Евклидово пространство состояний К77 непрерывкой конечно-
мерной системы (22). 1.1.2. Евклидово пространство состояний ко-
нечномерной системы с дискретным временем (22). 1.1.3. Прост-
раиство состоянии непрерывной конечномерной системы с дру-
гими метриками (22). 1.1.4. Пространство состояний дискретных
по уровню и времени конечномерных систем (24). 1.1.5. Пространст-
во состояний К°° бесконечномерной системы (24). 1.1.6. Однолист-
ная в многолистная фазовые плоскости (24).
§ 1.2. Описание движения в пространстве состояний. Математиче-
ские модели процессов и систем.......................................25
1.2.1. Детерминированная управляемая система, описываемая век-
торным дифференциальным уравнением в форме Коши (26).
1.2.2. Детерминированная непрерывная система с линейно входя-
щими управлениями (26). 1.2.3. Детерминированная линейная не-
прерывная управляемая система (27). 1.2.4. Стохастическая управ-
ляемая система, описываемая уравнением в форме Ито (28).
1.2.5. Стохастическая управляемая система, описываемая уравне-
нием в форме Ланжевена (28). 1.2.6. Стохастическая управляемая
система, описываемая уравнением в форме Ланжевена с аддитив-
ным белым шумом (29). 1.2.7. Линейная стохастическая управляе-
мая система в форме Ланжевена (29). 1.2.8. Уравнение Фоккера —
Планка — Колмогорова (ФПК-ураввение) для безусловной плотно-
сти вероятности в пространстве состояний непрерывной стохасти-
ческой системы (29). 1.2.9. Уравнение Стратоновнча для апостери-
орной плотности вероятности в пространство состояний наблюдае-
мой стохастической системы (30). 1.2.10. Детерминированная уп-
равляемая нелинейная система с дискретным временем (31).
1.2.11. Стохастическая нелинейная управляемая система с дискрет-
ным временем (32). 1.2.12. Детерминированная линейная управля-
емая система с дискретным временем (32). 1.2.13. Стохастическая
линейная управляемая система с дискретным временем (33).
§ 1.3. Структурные представления систем, описываемых в прост-
ранстве состояний.................................................. 33
1.3.1. Скалярные структурные схемы непрерывных систем (33).
1.3.2. Векторные структурные схемы непрерывных систем (35).
1.3.3. Векторные структурные схемы непрерывных систем, описы-
ваемых линейными уравнениями (35). 1.3.4. Векторные структур-
ные схемы систем с дискретным временем (36).
§ J.4. Другие формы описания динамических процессов. Преобра-
зования к пространству состояний................................... 36
1.4.1. Линейные непрерывные стационарные системы, заданные ра-
циональными передаточными функциями (38). 1.4.2. Линейная ста-
ционарная система с известной импульсной переходной функцией
(40). 1.4.3. Линейная стационарная система с известной частотной
характеристикой (41). 1.4.4. Система, заданная оператором Гам-
мерштейна (42). 1.4.5. Описание в пространстве состояний на ос-
нове физических законов (42). 1.4.6. Расширение пространства со-
стояний. Формирующие фильтры (42)s
Г л а в а 2. Наблюдаемость,
адаптируемость
§ 2.1. Наблюдаемость
идентифицируемость, управляемость,
.....................................44
.................................... 44
2.1.1. Виды общей наблюдаемости в пространстве состояний (45).
2.1.2. Локальное условие, благоприятствующее полной наблюдаемо-
сти для полно компонентного мгновенного измерения (48). 2.1.3. Ло-
кальное условие полной наблюдаемости при вычислении (изме-
рении) производных по времени (49). 2.1.4. Локальное условие не-
полной наблюдаемости (50). 2.1.5. Структурная интерпретация
наблюдаемости (50). 2.1.6. Условие наблюдаемости линейной стацио-
нарной системы (51). 2.1.7. Условие наблюдаемости линейной не-
стационарной системы (52). 2.1.8. Условие наблюдаемости линей-
ной нестационарной системы, выраженное через матрицу Коши
(53). 2.1.9. Локальное условие наблюдаемости нелинейного процес-
са с дискретным временем при п последовательных измерениях
(53). 2.1.10. Условие наблюдаемости линейной стационарной систе-
мы с дискретным временем (54). 2.1.11. Условие наблюдаем ост и
линейной нестационарной системы с дискретным временем (54).
2.1.12. Условие наблюдаемости процесса с дискретным временем
при q < п последовательных измерениях (55).
§ 2.2. Идентифицируемость....................................... 55
2.2.1. Локальное условие совместной наблюдаемости и идентифи-
цируемости при вычислении (измерении) производных z но вре-
мени (55). 2.2.2. Локальное условие параметрической идентифи-
цируемости при измерении .х и z (56). 2.2.3. Локальное условие
параметрической идентифицируемости при намерении х и х (57).
2.2.4. Условие параметрической идентифицируемости при линейно
входящих параметрах и измерении х и z (57). 2.2.5. Условие сов-
местной наблюдаемости и идентифицируемости линейной стацио-
нарной системы (58). 2.2.6. Условие параметрической идентифици-
руемости линейной стационарной системы при измерении х и г
(59). 2.2.7. Локальное условие совместной наблюдаемости и пара-
метрической идентифицируемости дискретного по времени про-
цесса при измерении последовательности z(v] (60). 2.2.8. Локальное
условие параметрической идентифицируемости дискретного по вре-
мени процесса при измерении и z[A] (61). 2.2.9. Локальное
условие идентифицируемости линейно входящих параметров дис-
кретного по времени процесса при измерении я [ft] и ffc] (61).
2.2.10. Условие полной идентифицируемости линейной стационар-
ной системы с дискретным временем при измерении ac[Zt] и zv[/<{
(61).
§ 2.3. Управляемость............................................ ^2
2.3.1. Управляемость линейных стационарных систем (66). 2.3.2. Уп-
равляемость линейных стационарных систем с дискретным време-
нем (72). 2.3.3. Управляемость линейных нестационарных систем
(74). 2 3.4. Управляемость линейных нестационарных систем с ди-
скретным временем (75). 2.3.5. Принцип двойственности в теории
управляемости и наблюдаемости (75). 2.3.6. Управляемость нели-
нейных систем (76). 2.3.7. Управляемость нелинейных спетом с
дискретным временем (77).
§ 2.4. Адаптируемость.............................................75
2.4.1. Постановки задач адаптивного управления в бсспонс новых
адаптивных системах управлении. Определения и классификации
видов адаптируемости (78). 2.4.2. Критерии адаптируемости основ-
ного контура (87).
Г л а в а 3. Устойчивость процессов в пространстве состояний. Ме-
тоды теории абсолютной устойчивости...........................
§ 3.1. Понятия устойчивости в пространстве состояний 9^
3.1.1. Устойчивость в целом (93). 3.1.2. Устойчивость певозмущеп-
ного движения пли процесса (93). 3.1.3. Устойчивость певозмушей-
ного движения по Ляпунову (94). 3.1.4. Асимптотическая устойчи-
вость певозмущепного движения по Ляпунову (95). 3.1.5. Устойчи-
вость линейных стационарных систем (95). 3.1.6. Устойчивость пе-
возмущепного движения системы с дискретным временем (95)*
§ 3.2. Критерии устойчивости движения «в оольшом» .... Пэ
3.21. Достаточное условие устойчивости состояния равновесия ста-
ционарной системы с областью притяжения Vm (96). 3.2.2. Доста-
точное условие устойчивости в целом состояния равновесия ста-
ционарной системы (98). 3.2.3. Общие и частные случаи построе-
ния функций Ляпунова для нелинейных систем (98). 3.2.4. Неко-
торые условия стохастической устойчивости (101). 3.2.5. Некото-
рые структурные условия неустойчивости состояния нелинейных
систем (103).
§ 3.3. Критерии устойчивости движения «в малом» , . . . 105
3.3.1. Критерий устойчивости линейной стационарной системы (105).
3.3.2. Необходимое условие устойчивости (106). 3.3.3. Области ус-
тойчивости и пространстве параметров (106). 3.3.4. Траектории кор-
ней. Модальное управление (106). 3.3.5. Функции Ляпунова для
линейных систем (107).
§ 3.4. Статизм и астатизм. систем в пространстве состояний . . 107
3.4.1. Ошибки, вызванные медленно меняющимися непрерывно дей-
ствующими внешними воздействиями (107). 3.4.2. Астатизм (108).
3.4.3. Структурные условия астатизма для линейной стационарной
системы (109). 3.4.4. Структурные условия астатизма первого по-
рядна для нелинейной стационарной системы (112). 3.4.5. Струк-
турные условия векторного астатизма первого порядка для нели-
нейной стационарной системы (113).
§ 3.5. Инвариантность в теории регулирования.........................113
3.5.1. Условия инвариантности для линейной стационарной систе-
мы в пространстве состоянии (114). 3.5.2. Условия инвариантности
для линейных нестационарных систем (116). 3.5.3. Инвариантность
для нелинейных систем (117). 3.5.4. Приближение к инвариантно-
сти невозму щепного движения нелинейной системы путем увели-
чения мощности управления (117).
§ 3.6. Методы теории абсолютной устойчивости.........................118
3.6.1. Понятие абсолютной устойчивости (118). 3.6.2. Абсолютная
неустойчивость (121). 3.6.3. Уравнения линейной и нелинейной ча-
стей системы (121). 3.6.4. Круговой критерий абсолютной устой-
чивости (1S2). 3.6.5. Круговой критерий абсолютной неустойчиво-
сти (127). 3.6.6. Абсолютная устойчивость систем со стационарной
нелинейностью. Критерий Попова (130). 3.6.7. Критерий абсолютной
неустойчивости систем со стационарной нелинейностью (132).
3.6.8. Критерии абсолютной устойчивости для систем с дифферен-
цируемой нелинейностью (133). 3.6.9. Абсолютная неустойчивость
систем с дифференцируемой нелинейностью (138). 3.6.10. Графиче-
ские критерии абсолютной устойчивости для заданного класса си-
стем с дифференцируемой нелинейностью (138). 3.6.11. Графический
критерий абсолютной устойчивости для различных классов нели-
нейностей (140). 3.6.12. Критерии диссипативпости (142). 3.6.13. Ча-
стотные критерии автоколебатсльности (144). 3.6.14. Примеры (146).
3.6.15. Связь с методом функций Ляпунова (149). 3.6.16. Краткий
обзор литературы по теории абсолютной устойчивости (150).
Глава 4. Методы и алгоритмы оценивания динамических про-
цессов ..................................... ..... 151
§ 4.1. Классификация задач оценивания........................151
4.1.1. Непрерывные процессы (152). 4.1.2. Дискретные процессы
(156). 4.1.3. Оценивание полей (159).
§ 4.2. Некоторые общие положения прикладной теории оценивания
непрерывных процессов......................................162
4.2.1. Условия, благоприятствующие точному оцениванию (162).
4.2.2. Распределение информации (165). 4.2.3. Критерии оптимиза-
ции оценивания (166).
§ 4.3. Алгоритмы оценивания непрерывных процессов .... 173
4.3.1. Общие выражения (173). 4.3.2. Субоптнмальпые в смысле
оценивания УМО алгоритмы второго порядка (177). 4.3.3. Субоп-
тимальные алгоритмы, основанные на кусочно-полиномиальной ап-
проксимации нелинейных функций (184). 4.3.4. Обобщенный и ли-
ионный непрерывные фильтры Налмана— Быоси (186). 4.3.5. Фильт-
ры, защищенные по отношению к отказам датчиков (191). 4.3.6.
Другие непрерывные фильтры первого порядка (195). 4.3.7. Непре-
рывные алгоритмы оценивания детерминированных процессов при
отсутствии шумов наблюдения (197). 4.3.8. Непрерывные алгорит-
мы оценивания с эмпирическими средними (200). 4.3.9. Непрерыв-
ные адаптивные и поисковые алгоритмы оценивания (202).
4.4. Математическое описание дискретных процессов
4.4.1. Цени Маркова (207). 4.4.2. Последовательности Маркова (209).
4.5. Алгоритмы оцеппваппя дискретных по времени процессов
4.5.1. Субоптимальные алгоритмы оценивания нелинейных процес-
сов (212). 4.5.2. Оптимальный рекуррентный алгоритм оценивания
линейных процессов (215).
4.G. Непрерывные алгоритмы оценивания полей . . . . .
4.6.1. Алгоритмы при векторном наблюдении (218). 4.6.2. Алгорит-
мы для случая скалярного наблюдении (221).
л а в а 5. Методы п алгоритмы идентификации динамических си-
стем .......................................................
5.1. Общая классификация задач идентификации ....
5.1.1. Теоретико-множественная постановка задачи идентификации
(224). 5.1.2. Идентификация непрерывных объектов в классе моде-
лей с дискретным временем (227). 5.1.3. Задача нспарамстрической
идентификации (228). 5.1.4. Задача параметрической идентифика-
ции (229). 5.1.5. Задача пепараыстрнчсской идентификации в прост-
ранстве состояний (229). 5.1.6. Задача параметрической идентифи-
кации в пространстве состояний (231). 5.1.7. Связь задач иденти-
фикации с теорией планирования эксперимента (232).
5.2. Классические методы пепараметрпческой идентификации
лилейных динамических систем................................
5.2.1. Метод частотных характеристик (233). 5.2.2. Метод времен-
ных характеристик (235). 5.2.3. Метод корреляционных функций
(237). 5.2.4. Расширение областей применимости классических ме-
тодов идентификации (240).
5.3. Прямые методы параметрической идентификации
5.3.1. Прямая идентификация статического объекта с линейно вхо-
дящими параметрами (245). 5.3.2. Метод сумм произведений (246).
5.3.3. Метод наименьших квадратов (246).
5.4. Беспопсковые алгоритмы идентификации с адаптивной мо-
делью ......................................................
5.4.1. Общая структура алгоритма в пространствах сигналов (248).
5.4.2. Общая структура алгоритма в пространствах состояний (250).
5.4.3. Эвристические алгоритмы (252). 5.4.4. Алгоритмы с оптималь-
ной настройкой модели (271).
5.5. Поисковые алгоритмы идентификации с адаптивной моделью
5.5.1. Общая структура алгоритма (275). 5.5.2. Непрерывные гра-
диентные алгоритмы с синхронным детектированием (276). 5.5.3.
Цифровые градиентные алгоритмы с синхронным детектированием
(281). 5.5.4. Цифровые алгоритмы с глобальным и комбинирован-
ным поиском (282).
5.6. Алгоритмы идентификации, основанные па теории оценива-
ния процессов ..............................................
5.6.1. Идентификация непрерывных объектов, описываемых в про-
странстве состояний (283). 5.6.2. Идентификация процессов с дис-
кретным временем, описываемых в пространстве состояний (293Ъ
5.7. Рекуррентные алгоритмы идентификации при коррелирован-
ных шумах...............................................
5.7.1. Динамический объект, описываемый оператором Гаммерштсй-
иа (296). 5.7.2. Идентификация методом наименьших квадратов
(298). 5.7.3. Идентификация по типу стохастической аппроксима-
ции (301). 5.7.4. Условия состоятельности оценок (30S). 5.7.5. Слож-
ность рекуррентных алгоритмов идентификации (306).
§ 5.8. Оптимальные совместные оценивание и параметрическая
идентификация в дискретных линейных системах . . . 307
5.8.1. Постановка задачи (307). 5.8.2. Уравнение для апостериорной
плотности (308). 5.8.3. Совместные оптимальные оценивание и иден-
тификация по критерию максимума апостериорной плотности (309).
5.8.4. Оптимальные адаптивные оценивание и идентификация (309).
Глава 6. Критерии оптимизации управления........................310
§ 6.1. Одпокритериальиая и многокритериальная оптимизации. Ме-
тодология выбора минимизируемого функционала . . . 310
6.1.1. Предварительный выбор (312). 6.1.2. Итерационная коррек-
ция (317).
§ 6.2. Развернутые формы функционалов для оптимизации непре-
рывных детерминированных процессов..............................318
6.2.1. Традиционные (классические) формы детерминированных
функционалов (319). 6.2.2. Функционалы обобщенной работы (321).
§ 6.3. Развернутые формы функционалов для оптимизации детер-
минированных процессов с дискретным временем . . . 323
6.3.1. Классические формы детерминированных функционалов (324).
G.3.2. Функционалы обобщенной работы (324).
§ 6.4. Функционалы для оптимизации управления стохастическими
процессами......................................................326
6.4.1. Безусловные и условные математические ожидания функци-
оналов (326). 6.4.2. Развернутые формы функционалов для опти-
мизации стохастических процессов с непрерывным временем (327).
6.4.3. Развернутые формы функционалов для оптимизации стоха-
стических процессов с дискретным временем (328).
Глава 7. Некоторые общие методы теории оптимального управ-
ления ........................................................ 329
§ 7.1. Классическое вариационное исчисление и современные за-
дачи оптимизации динамических систем......................329
7.1.1. Постановка задачи (329). 7.1.2. Задача со свободным правым
концом и заданным временем переходного процесса (330). 7.1.3. За-
дача е фиксированными значениями некоторых переменных в за-
данный момент времени окончания переходного процесса (332).
7.1.4. Задача с фиксированными значениями некоторых перемен-
ных состояния в неопределенный момент окончания переходного
процесса (339). 7.1.5. Заключение (347).
§ 7.2. Принцип максимума........................................347
7.2.1. Постановка задачи (347). 7.2.2. Предваритель71ые построения
(350). 7.2.3. Задачи с заданным временем окончания переходного
процесса (353). 7.2.4. Задачи с пезаданным временем окончания
переходного процесса (354). 7.2.5. Связь принципа максимума с ме-
тодами классического вариационного исчисления (356). 7.2.6. Ли-
нейные объекты (357). 7.2.7. Заключительные замечания (361).
Глава 8. Алгоритмы оптимального управления........................362
§ 8.1. Классификация алгоритмов оптимального автоматического
управления........................................................362
8.1.1. Классификация по объему необходимого информационного
обеспечения и характеру решаемых задач (362). 8.1.2. Общая ха-
рактеристика технологии алгоритмического обеспечения (365).
§ 8.2. Синтез заколов управления непрерывными детерминирован-
ными процессами при классических формах функционалов 367
8.2.1. Варианты уравнений Веллмана (367). 8.2,2. Методы решения
уравнения Веллмана (371). 8.2.3. Синтез законов оптимального уп-
равления детерминированными линейными объектами при квадра-
тичном функционале (373).
§ 8.3. Синтез законов управления детерминированными процес-
сами с дискретным временем при классических формах
функционалов.....................................................384
8.3.1. Варианты дискретного уравнения Веллмана для частных форм
функционала (385). 8.3.2. Синтез законов управления линейными
системами (387).
§ 8.4. Синтез законов управления стохастическими процессами при
функционалах классического типа..................................38Э
8.4.1. Приближенное разделение для стохастического нелинейного
объекта с линейно входящим управлением (389). 8.4,2. Точное раз-
деление для линейно-квадратичных задач оптимального управле-
ния марковскими процессами (392).
§ 8.5. Решение задачи минимизации критерия обобщенной рабо-
ты в общем виде..................................................393
8.5.К Оптимальные управления непрерывными детерминированны-
ми процессами (393). 8.5.2. Оптимальные управления детермини-
рованными процессами с дискретным временем (396). 8.5.3. При-
ближенное разделение при минимизации условного математиче-
ского ожидания функционала обобщенной работы (398). 8.5.4. Сто-
хастический принцип минимума обобщенной работы (399). 8.5.5. Сто-
хастический принцип минимума обобщенной работы и уравнение
ФПК (400).
§ 8.6. Синтез законов оптимального п субоптимальпого пелийейпых
управлений па стадии проектирования системы при функ-
ционалах обобщенной работы.......................................401
8.6.1. Приведение задачи к линейно входящему управлению (401).
8.6.2. Решение задачи оптимизации при функционале обобщенной
работы с квадратичной функцией затрат па управление (402),
8.6.3. Решение уравнения Ляпунова методом степенных рядов и со-
ответствующие законы управления (407). 8.6.4. Решение уравне-
ния Ляпунова операционным методом п соответствующие законы
управления (411). 8.6.5. Решение уравнения Ляпунова методом ха-
рактеристик и соответствующие законы управления (415).
§ 8.7. Синтез законов управления линейными процессами при
функционале обобщенной работы (метод АКОР) . . . 417
8.7.1. Общий закон оптимального по критерию обобщенной работы
управления линейным процессом, выраженный через решение урав-
нения Ляпунова (417). 8.7.2. Прямое решение уравнения Ляпунове!
для нестационарного случая (418). 8.7.3. Решение уравнения Ляпу-
нова с использованием матрицы Коши (419). 8.7.4. Решение алге-
браического уравнения Ляпунова для стационарного случая (419).
8.7.5. Иерархическая оптимизация линейных динамических систем
с использованном АКОР по критерию обобщенной работы (420).
8.7.6. Оптимальное по критерию обобщенной работы дискретное по
времени управление непрерывными динамическими процессами
(424).
§ 8.8. Оптимальные управления, синтезируемые в процессе функ-
ционирования системы в реальном времени (совмещенный
синтез)...................................................... . 420
8.8.1. Общее обоснование алгоритма с прогнозирующей моделью
(426). 8.8.2. Структура алгоритма с прогнозирующей моделью. Ва-
рианты алгоритма (428). 8.8.3. Уравнения характеристик в задаче
оптимального управления скоростью изменения входных величии
(428). 8.8.4. Алгоритм с прогнозирующей моделью и численным
дифференцированием (429). 8.8.5. Алгоритм с прогнозирующей мо-
делью, модифицированный (430). 8.8.6. Алгоритм с прогнозирую-
щей моделью и матрицей чувствительности (430>s 8.8.7., Алгоритм
с прогнозирующей моделью и синхронным детектированием (432).
8.8.8. Алгоритм с прогнозирующей моделью и аналитическим ре-
шением (434). 8.8.И. Вопросы численной реализации алгоритма в
реальном масштабе времени (435).
§ 8.9. Алгоритмы модального управления ............................4.35
8.9.1. Модальное управление при полностью измеряемом векторе
состояния (436). 8.8.2. Модальное управление при неполных изме-
рениях (438). 8.9.3. Модальное управление при внешних возмуще-
ниях (442).
Глава 9. Оптимизация динамических систем со случайной струк-
турой .........................................................444
§ 9.1. Основные определения..............................444
§ 9.2. Уравнения систем со случайной структурой .... 446
§ 9.3. Оптимальная фильтрация процессов случайной структуры 450
9.3.1. Уравнения для апостериорной плотности вероятности (450)
9.3.2. Структура и алгоритмы фильтра (452). 9.3.3. Оптимальная
линейная фильтрация (453). 9.3.4. Пример решения задачи фильт-
рации (455).
§ 9.4. Управление в системах со случайной структурой . . . 457
9.4.1. Особенности задач оптимизации (457). 9.4.2. Оптимальное уп-
равление при условии точного знания структуры и вектора состо-
яний (459). 9.4.3. Пример задачи оптимального управления при
точных измерениях (461). 9.4.4. Оптимальное управление при не-
точных измерениях (463). 9.4.5. Пример задачи оптимального уп-
равлении при неточных измерениях (465).
Глава 10. Алгоритмы адаптивных систем автоматического управ-
ления ...........................................................407
§ 10.1. Классификация адаптивных систем автоматического управ-
ления ..........................................................467
§ 10.2. Адаптивные оптимальные САУ с полной моделью управля-
емых процессов..................................................469
10.2.1. Система с обобщенным ФКБ и алгоритмом прогнозирую-
щей модели (471). 10.2.2. Система с автономной идентификацией
(типа ЛИТО) и алгоритмом прогнозирующей модели (473).
10.2.3. Система с л-алгоритмом совместного оценивания и иден-
тификации, прогнозирующей моделью н синхронным детектиро-
ванием (474).
§ 10.3. Адаптивные субоптимальпые САУ с упрощенными моделя-
ми управляемых процессов........................................477
10.3.1. Иерархические адаптивные субоптимальпые САУ (477)
10.3.2. Адаптивные субоптимальпые САУ с феноменологическими
моделями (479).
§ 10.4. Беспоисковые системы прямого адаптивного управления 480
10.4.1. Общая структура систем прямого адаптивного управле-
ния (480). 10.4.2. Системы с информацией о частотных, времен-
ных характеристиках п система с моделью (481).
§ 10.5. Беспоисковые адаптивные системы с неявной эталонной
моделью.........................................................492
10.5.1. Основные структуры (493). 10.5.2. Алгоритмы оптимальной
настройки линейных регуляторов адаптивной системы (494).
10.5.3. Алгоритмы оптимальной настройки комбинированной си-
стемы (495).
§ 10.6. Беспоисковые адаптивные системы с линейным оценивани-
ем на основе эталонной модели...................................496
10.6.1.. Алгоритмы системы с непрерывным временем (496),
10.6.2. Алгоритмы системы с дискретным временем (498). . . .
Г лава 11. Метод рекуррентных целевых неравенств в адаптив-
ном управлении.......................................501
§ 11.1. Формальное описание адаптивной системы.................501
§ 11.2. Описание метода рекуррентных целевых неравенств . . 503
§ 11.3. Основные конечно сходящиеся алгоритмы решения беско-
нечной системы рекуррентных неравенств..........................505
11.3.1. Алгоритмы «полоска» (506). 11.3.2. Конечно сходящиеся
алгоритмы решения линейных рекуррентных неравенств (507.1.
11.3.3. Алгоритм эллипсоидов дли решения линейных рекуррент-
ных неравенств (508).
§ 11.4. Адаптивное субоптпмалыюе управление минимально-фазо-
вым объектом....................................................511
§ 11.5. Адаптивные системы с эталонной моделью.................515
§ 11.6. Адаптивная стабилизация пемипималыю-фазового объекта
н адаптивное модальное управление........................518
§ 11.7. Адаптивное управление нелинейными статическими объек-
тами ....................................................521
§ 11.8. Стохастические линейные задачи с минимизацией квадра-
тичных функционалов.............................................523
§ 11.9. Заключительные замечания..................... 52(5
Глава 12. Системы экстремального регулирования .... 527
§ 12.1. Общие понятия.............................527
12.1.1. Типы систем экстремального регулирования (5.28).
12.1.2. Система с запоминанием экстремума (529). 12.1.3. Одно-
мерная система с управлением по градиенту (э31). 12.1.4. Систе-
ма с измерением производной по времени (531). 12.1.5. Система
шагового типа (532). 12.1.6. Система со вспомогательной модуля-
цией (синхронным детектированием) (532),
§ 12.2. Влияние дрейфа на устойчивость.........................534
12.2.1. Влияние вертикального дрейфа (534). 12.2.2. Влияние го-
ризонтального дрейфа (534).
§ 12.3. Переходные процессы и периодические движения . . 535
12.3.1. Точный метод (метод врннасовыиания) (535). 12.3.2. Ус-
тойчивость систем экстремального регулирования (536). 12.3.3. Мо-
нотонная устойчивость систем экстремального регулирования
(538).
§ 12.4. Улучшение качества работы..............................539
12.4.1. Методы уменьшения влияния инерционности объекта экст-
ремального регулирования (539). 12.4.2. Уменьшение влияния
случайных помех (543). 12.4.3. Уменьшение влияния дрейфа (545).
Глава 13. Методы и алгоритмы оценивания в корреляционно-
экстремальных системах.......................................о-г,1
§ 13.1. Классификация корреляционно-экстремальных систем . . 551
13.1.1. Области применения (551). 13.1.2. Классификация по ин-
формационным признакам (552).
§ 13.2. Методы и алгоритмы оценивания в корреляционно-экстре-
мальных системах................................................555
13.2.1. Беспоисковые методы оценивания (556). 13.2.2. Поисковые
методы оценивания (576), 13.2.3. Комбинированные методы оце-
нивания (593).
Глава 14. Методы теории чуветвителыкостн. . . . . . 60*
§ 14.1. Модели чувствительности непрерывных и разрывных си-
стем ........................................................60*
14 1.1. Основные понятия (605). 14.1.2. Уравнения чувствительно-
сти непрерывных систем (607). 14.1.3. Уравнения чувствительно-
сти высших порядков (669). 14.1.4. Модели чувствительности
разрывных систем (610).
§ 14.2. Чувствительность решении краевых задач......................612
14.2.1. Краевые задачи, завпепище от параметра (612). 14.2.2. Ус-
ловия существования функции чувствительности решении, крае-
вых задач ((ИЗ). 14.2.3. Модель чувствительности решения крае-
вом задачи ((514). 14.2.4. Исследование чувствительности простей-
шей вариационной задачи (615).
§ 14.3. Функции и коэффициенты чувствительности непременных
характеристик и показателен оптимальности систем управ-
ления .............................................................G16
14.3.1. Чувствительность передаточной функции и частотных ха-
рактеристик (617). 14.3.2. Чувствительность нулей и полюсов пе-
редаточных функций (619). 14.3.3. Чувствительность собственных
чисел матриц линейных стационарных систем управления (619).
14.3.4. Чувствительность интегральных показателей (620).
§ 14.4. Инварианты чувствительности . ... 623
14.4.1. Общие сведения (623). 14.4.2. Инварианты чувствительности
временных характеристик и передаточных функций линейных си-
стем (624). 14.4.3. Корневые инварианты чувствительности (626).
14.4.4. О применениях инвариантов чувствительности (627).
§ 14.5. Прикладные задачи теории чувствительности . 628
14.5.1. Классификация прикладных задач теории чувствительно-
сти (628). 14.5.2. Оценка дополнительного движения (629).
14.5.3. Оценивание параметров (631). 14.5.4. О применении мето-
дов теории чувствительности в задачах оптимизации и адапта-
ции (635).
Глава 15. Поисковые методы автоматизации проектирования . 637
§ 15.1. Постановка задачи автоматизации процесса проектирова-
ния САУ . . . .................................637
§ 15.2. Структура поискового алгоритма оптимизации . . . 638
15.2.1. Алгоритм случайного поиска с парными пробами (639).
15.2.2. Алгоритм статистического градиента (640).
§ 15.3. Алгоритм локального параметрического поиска 641
15.3.1. Алгоритм случайного спуска (641). 15.3.2. Случайный по-
иск с возвратом (641). 15.3.3. Релаксационный алгоритм случай-
ного спуска ((542). 15.3.4. Случайный поиск по па плутней пробе
(642). 15.3.5. Адаптивные параметрические алгоритмы случайного
поиска (643).
§ 15.4. Учет ограничений в процессах случайного поиска . . G45
15.4.1. Ограничения типа неравенств («45). 15.4.2. Ограничена и
типа равенств (646). 15.4.3. Ограничения типа неравенств и ра-
венств (646). 15.4.4. Дискретные ограничения (646). 15.4.5. Ди-
скретные ограничения с неравенствами (647).
§ 15.5. Глобальный поиск.........................................647
15.5.1. «Пабросовые» алгоритмы (647). 15.5.2. Сглаживающие ал-
горитмы (648).
§ 15.6. Оптимизация в обстановке случайных помех .... 650
15.6.1. Метод стохастической аппроксимации (651). 15.6.2. Сгла-
живание помех (651). 15.6.3. Стохастическое накопление (652).
15.6.4. Последовательное накопление (652). 15.6.5. Симплексный
алгоритм поиска (653).
§ lo. 7. Структурная оптимизация.................................055
15.7.1. Дискретизация структуры (G55). 15.7.2. Эволюционная оп-
тимизация структуры (656).
Г л а в а 16. Автоматизация проектирования систем автоматиче-
ского управления...............................................659
§ 16.1. Принципы автоматизации проектирования систем автома-
тического управления............................................659
16.1.1. Этапы и стадии проектирования (659). 16.1.2. Уровни ав-
томатизации проектирования (661). 16.1.3. Компоненты обеспе-
чения С ПР (662). 16.1.4. Общие принципы построения- САПР
(663).
§ 16.2. Способы построения систем автоматизированного проекти-
рования ........................................................663
16.2.1. Диалоговая система проектирования ДИСПАС (664).
16.2.2. САПР адаптивных систем СЛПРАС (665). 16.2.3. Система
«Гамма-1М» (666).
Приложение.....................................................668
Список основных обозначений .................................. 677
Список литературы..............................................681
Список аббревиатур ........................................... 705
Предметный указатель...........................................707
СПРАВОЧНИК
ПО ТЕОРИИ
АВТОМАТИЧЕСКОГО
УПРАВЛЕНИЯ
Под редакцией А. А. КРАСОВСКОГО
МОСКВА «НАУКА»
ГЛАВНАЯ РЕДАКЦИЯ
ФИЗИКО-МАТЕМАТИЧЕСКОЙ ЛИТЕРАТУРЫ
1 В 8 7.
С 74
УДК 681.5
АВТОРЫ:
А. Г. АЛЕКСАНДРОВ, В. М. АРТЕМЬЕВ, В. Н. АФАНАСЬЕВ,
А. А. АШИМОВ, И. П. БЕЛОГЛАЗОВ, В. Н. БУКОВ, С. И. ЗЕМЛЯКОВ,
|в. В. КАЗАКЕВИч|, А. А. КРАСОВСКИЙ, Г. А. МЕДВЕДЕВ, Л. А. РАСТРИГИП,
В. 10. РУТКОВСКИЙ, Р. М. ЮСУПОВ, И. Б. ЯДЫКИН, В. Л. ЯКУЕОВИ';
Справочник по теории автоматического управлепия/Под ред. А. А. Красовско-
го,—М.: Наука. Гл. ред. физ.-мат. лит., 1987.— 712 с.
Справочник охватывает все основные разделы теории управления, включая
оценивание, идентификацию, адаптацию, поиск экстремума, краткие сведения об
автоматизированном проектировании. Он создав представителями разных совет-
ских школ науки об управлении в свете единой концепции современной при-
кладной теории автоматического управления. Это концепция оптимального до-
стижения главной конечной цели па каждом* этапе функционирования системы
с соблюдением множества ограничений (информационных, энергетических, вы-
числительных и др.). Центральное место в книге занимают алгоритмы оптималь-
ного и субоптимального адаптивного управления сложными нелинейными систе-
мами, реализуемые посредством ЭВМ. Справочник не имеет аналогов в отече-
ственной и зарубежной литературе по автоматическому управлению.
Для разработчиков современных и перспективных систем управления техно-
логическими процессами и подвижными объектами, инженеров и научных ра-
ботников, студентов соответствующих специальностей.
Табл. 17. Ил. 154. Библиогр. 531 назв.
Рецензент доктор технических паук 77. Д. Крутъко
С
1502000000-156
—- - 103 ОI
053(02)-87
(g) Издательство «Наука»,
' Главная редакция
физико-математической
литературы, 1887
ПРЕДИСЛОВИЕ
Периодизация развития теории автоматического управления, как и
многих других относительно новых областей науки, не является уста-
новившейся и общепринятой.
До пятидесятых годов *) классической теорией автоматического ре-
гулирования (ТАР) принято было называть базирующуюся па рассмот-
рении обыкновенных, преимущественно линейных, дифференциальных
уравнений теорию устойчивости и качества процессов в системе объект —
регулятор. Основы этой теории были заложены И. А. Вышпеградским,
А. Стодолой, Д. К. Максвеллом. По существу она тесно соприкасалась с
теорией устойчивости движения «в малом» А. М. Ляпунова, по имела
ярко выраженную инженерную направленность.
Под влиянием потребностей автоматизации управления технологи-
ческими процессами и подвижными объектами в сороковых и пятид
сятых годах теория автоматического управления (ТАУ) интенсивно раз-
вивалась. Опа впитала существовавшие в то время методы теории связи,
теории колебаний и создала собственные методы анализа и синтеза си-
стем с обратной связью. Эта прикладная теория автоматического уп-
равления именовалась в то время современной. Получив во многом за-
вершенные формы, опа составила предмет учебных дисциплин техниче-
ских вузов, многочисленных учебников и учебных пособий. До сих пор
опа является основным инструментом предварительного анализа и сип-
теза контуров автоматической стабилизации на стадии их проектиро-
вания. Советская школа в области автоматики сыграла выдающуюся
роль па этом этапе развития пауки об управлении. Признанием этого
явилось проведение первого международного конгресса ИФАК (между-
народная федерация по автоматическому управлению) в Москве в 1960 г.
В инженерной теории управления этого периода уже ставились и
решались задачи оптимизации и адаптации, по в основном применитель-
но к управлению «в малом». Это означает следующее. Оптимальная про-
грамма изменения режимов технологического процесса, движения объек-
та, выраженная в задающих воздействиях или «уставках» регулято-
ров, считалась известной. Опа определялась па стадии проектирования
с привлечением некоторых посторонних по отношению к теории управ-
ления того времени областей знаний или практического опыта (програм-
му, как правило, разрабатывал конструктор объекта). Задача уп-
равления заключалась в выполнении этой программы, стабилизации
*) Везде в справочнике указываются даты и периоды, относящиеся
it текущему столетию.
программного движения. При этом допускались лишь малые отклонения
относительно заданного движения. Переходные процессы «в малом» оп-
тимизировались по тем или иным критериям.
Таким образом, предметом этой теории для сложных объектов явля-
лось решение множества частных задач на каждом этапе или режиме
технологического процесса или движения подвижного объекта. Увязка
всех этих задач для достижения конечной цели управления произво-
дится па стадии проектирования системы па основе априорной информа-
ции с помощью методов, внешних по отношению к данном теории.
Недостатки такого подхода к проблеме были ясны и в пятидесятых
годах, однако в тот период иные постановки были непрактичными, так
как отсутствовали аппаратные (быстродействующие ЦВМ) и математи-
ческие средства их решения. В большей части современной литературы
в области автоматического управления указанный второй этап разви-
тия теории также именуется классическим. В данном справочнике мы
придерживаемся этого наименования.
В конце пятидесятых — начале шестидесятых годов появились из-
вестные работы Л. С. Понтрягина, Р. Веллмана, Р. Калмапа, которые
заложили основы современной теории автоматического управления.
Впрочем, многие идеи этой теории сформировались па инженерном
уровне еще в предшествующий классический период развития.
Пока не существует общепринятого определения понятия современ-
ной теории автоматического управления (СТАУ). Одни авторы в ка-
честве ее характерного признака отмечают описание процессов в прост-
ранствах состояний. Однако и в классической теории широко приме-
нялось описание движения в фазовом пространстве (особенно — на фазо-
вой плоскости). Другпе подчеркивают методы, связанные с принципом
максимума, динамическим программированием, функциональным анали-
зом и пр. Однако новый для данной области или даже принципиально
новый математический аппарат сам по себе не может составить наибо-
лее характерные черты этапа развития пауки, имеющей прикладное
назначение.
Наконец, некоторые авторы связывают понятие СТАУ с адаптивным
управлением, т. е. управлением при неполной априорной информации.
Однако адаптивные или самонастраивающиеся системы довольно широ-
ко рассматривались в сороковых — пятидесятых годах, т. о. в период
классической теории управления.
Наиболее удовлетворительное определение СТАУ получается, сслп
в основу положить требования научно-технического прогресса, совре-
менной и перспективной автоматизации.
Важнейшим из таких требований является оптимальное использова-
ние на каждом этапе или режиме функционирования системы всех рас-
полагаемых ресурсов (энергетических, информационных, вычислитель-
ных и др.) для достижения главной для этого этапа цели при соблюде-
нии множества ограничений*).
) О многокритериальной оптимизации см. гл. б.
В связи с этим оптимизация «в большом», осуществляемая в реаль-
ном времени в процессе управления, становится центральной пробле-
мой СТАУ. Эта фундаментальная проблема порождает ряд крупных проб-
лем, задач и методов их решения. Прежде всего следует отметить, что
оптимизация «в большом» в реальном масштабе времени требует пол-
ного использования имеющейся априорной информации в виде модели
управляемого процесса пли объекта, заданной в той или иной форме.
Использование математических моделей не только па стадии проектиро-
вания, по и в процессе функционирования систем является одной из ха-
рактерных чорт СТЛУ.
Оптимальное управление возможно лишь при оптимальной обработ-
ке информации. Поэтому теория оптимального и субоптимального оцени-
вания (фильтрации) динамических процессов является составной частью
СТАУ. Располагаемой априорной информации обычно недостаточно для
осуществления оптимизации «в большом» в процессе управления. По-
втому важным разделом СТАУ является оптимальное и субоптимальпое
оценивание параметров и характеристик по экспериментальным дан-
ным — идентификация. Особо важной является параметрическая иден-
тификация, выполняемая в реальном масштабе времени в эксплуата-
ционных режимах объекта управления.
Центральной частью СТАУ является собственно теория оптималь-
ного или субоптимального управления движением «в большом». Это, как
правило, управление детерминированными или стохастическими нели-
нейными процессами (динамическими системами). Возможность рассмот-
рения задач управления в детерминированной постановке вытекает из
так называемого принципа разделения, который для нелинейных сис-
тем дает субоптимальное решение в виде соединения системы субоп-
тимальпого оценивания и системы оптимального или субоптимального
управления, синтезированной для детерминированных условий.
Иногда утверждается, что предметом этой части СТАУ является син-
тез оптимального или субоптимальпого управления, обеспечивающего до-
стижение поставленной цели. Но под такое определение попадает и клас-
сическая ТАР, ставящая такие цели, как достижение заданной точно-
сти стабилизации множества компонент состояния.
Согласно приведенному выше назначению СТАУ опа должна па каж-
дом этапе функционирования системы указывать алгоритмы оптималь-
ного (субоптимальпого) достижения более важной обобщенной конечной
цели. Такой целью могут являться запуск или выход па новый режим
работы машины, агрегата, станции с минимальными затратами; достиже-
ние заданной в трехмерном пространстве навигационной точки в задан-
ное время с заданным курсом при минимальном расходе топлива с со-
блюдением всех эксплуатационных ограничений, связанных с безопас-
ностью, расходованием ресурса и т. д.
С первого взгляда может показаться, что постановка столь общих и
«решительных» целей перед управлением, формируемым в реальном
масштабе времени, является непосильной задачей, чрезмерно усложнен-
ной; что более оправдана классическая постановка, когда такие задачи
и той или иной мере решались па стадии проектирования и для этапа
наладки и эксплуатации выдавались готовые программные задающие воз-
действия. Однако в действительности классический путь почти никогда
ио обеспечивал олизости к подлинно оптимальному управлению. Дело в
том, что проектировщик почти никогда не располагает информацией, до-
статочной для оптимальных решений во всех ситуациях, которые могут
иметь место в эксплуатации. Причем это положение усугубляется для
новых технологических процессов, объектов повой техники, для которых
оптимизация автоматического управления часто имеет решающее зна-
чение.
Подлинная оптимизация автоматического управления возможна в
этих условиях только в процессе функционирования системы в текущей
обстановке и возникшей ситуации. Теорию именно такой! оптимизации
должна содержать СТАУ.
Как видно, СТАУ должна рассматривать оптимальное (субоптималь-
пое) управление «в большом» в условиях неполной априорной инфор-
мации, т. е. адаптивное оптимальное (субоптнмальпое) управление
«в большом». Наиболее важные запросы современной практики ио мо-
гут быть удовлетворены, если не рассматриваются методы резервирова-
ния и структурного обеспечения надежности. К СТАУ относятся по край-
ней мере вопросы, связанные с принципами автоматической реконфигу-
рации системы при отказах. Итак, содержание СТАУ в указанном ее
понимании составляют обширные, трудные, весьма важные проблемы
и методы их решения.
Это видно и нз того, что общее число публикаций в области СТАУ
в мировой литературе исчисляется уже десятками тысяч и ежегодно
увеличивается па тысячи единиц. Одшако в развитии СТАУ с точки
зреппя практики далеко не все обстоит благополучно. Классическую ТАР
в основном создавали инженеры для инженеров и лишь частично ма-
тематики для инженеров. СТАУ создают в основном математики для ин-
женеров и во все большей мере математики для математиков. Последнее
с точки зрения практики вызывает определенное беспокойство. Дело не
только в том, что работы, написанные языком современной математики,
малодоступны для специалистов с техническим образованием. В усло-
виях непрерывного повышения уровня математической подготовки вы-
пускников многих вузов это не является основной опасностью. Главное
негативное влияние на практическое внедрение методов СТАУ оказы-
вает масса оторванных от практических потребностей и возможностей
работ и даже направлений, интересных в математическом отношении,
по бесплод1ГЫХ'..в отношении современных приложений. Нельзя отрицать
право на существование математической СТАУ как раздела математики,
развивающегося по,-собственным законам и находящего применение но
мере возникновения 'Ъоответствующих потребностей. Однако такая ма-
тематическая СТАУ должна быть достаточно четко выделена по отноше-
нию к прикладной СТАУ.
Прикладная СТАУ должна прежде всего учитывать информационные
и энергетические закономерности и ограничения, проявляющиеся при
создании реальных систем управления. Эти закономерности и ограниче-
ния до настоящего времени в основном сформулированы, как теперь-
говорят, лишь на «содержательном уровне». Однако опи играют реша-
ющую роль в предельных возможностях автоматического управления.
Именно опи ограничивают «могущество алгоритмов», которое абстракт-
ная теория нередко полагает беспредельным.
Информационные ограничения имеют место не только в отношении
объемов априорной и текущей информации в обычном смысле этого тер-
мина, по и в отношении статистических характеристик различных шу-
мов, возмущений, параметров. На практике, особенно для новых техно-
логических процессов и объектов, распределения вероятностей, как
правило, неизвестны. Экспериментальное определение многомерных зако-
нов распределения вероятностей требует чаще всего таких затрат, кото-
рые являются совершение недопустимыми. Поэтому многомерные рас-
пределения вероятностей рекомендуется применять в общем виде лишь
как промежуточный аппарат анализа н синтеза систем автоматического
управления.
Менее фундаментальными и строгими являются ограничения, свя-
занные с вычислительной производительностью. Быстрый прогресс ЭВМ,
уже наметившиеся контуры ЭВМ пятого поколения открывают перспек-
тиву реализации очень сложных алгоритмов. Однако па сегодняшний
день ограничения, связанные с вычислительными затратами, программ-
ным обеспечением, играют большую роль. Для микропроцессорной тех-
ники опи сохранят значение в обозримом будущем. При разработке
большинства конкретных систем управления большое значение имеют
энергетические ограничения. Это касается пе только энергетики самих
управляемых процессов, по и мощности управляющих воздействий, ко-
торая, как правило, должпа быть минимальной.
Все эти факторы надлежит учитывать в прикладной СТАУ. Именно
этим прикладная СТАУ прежде всего должпа отличаться от абстракт-
ной математической теории управления.
Таких концепций стремились придерживаться авторы при создании
данного справочника.
В пем нашла отражение большая часть разделов современной тео-
рии автоматического управления. Приведены классификации се задач
и методов, достаточно общие и в то же время целенаправленные. Ряд
параграфов паписап с широким привлечением оригинальных работ ав-
торов (что для справочника пе всегда является достоинством). Гл. 1, 2
посвящены общим понятиям СТАУ: описанию процессов в пространстве-
состояний и операторному описанию, наблюдаемости, идентифицируемо-
сти, управляемости и адаптируемости.
Устойчивость процессов в динамических системах, а также методы
теории абсолютной устойчивости в аспекте СТАУ излагаются в гл. 3.
Методы и алгоритмы оценивания динамических процессов излагаются в
гл. 4. Гл. 5 посвящена методам и алгоритмам параметрической и пепа-
раметрической идентификации. Формы-критериев оптимизации управ-
ления излагаются^у^^ Некоторые <<б||ЦИ', методы теории оптимального
управления изложены в гл, 7. К числу центральных относится гл. б, где
излагаются алгоритмы оптимального управления. Далее следует изло-
жение методов оптимизации динамических систем со случайной струк-
турой (гл. 9). Алгоритмы беспоисковых адаптивных систем автоматиче-
ского управления различных классов рассмотрены в гл. 10. Здесь же
кратко освещается структура поисковых оптимальных (субоптимальпых)
адаптивных систем. В отдельную главу (гл. 11) выделен метод рекур-
рентных целевых неравенств. Наиболее старый класс адаптивных си-
стем с поиском па реальном объекте—системы экстремального регули-
рования рассматриваются в гл. 12. Алгоритмы важного с точки зрения
приложений специального класса систем (корреляционно-экстремальных
систем) излагаются в гл. 13. В специальные главы выделены методы
теории чувствительности (гл. 14) и случайного поиска (гл. 15). Краткое
изложение вопросов систем автоматизации проектирования систем ав-
томатического управления содержится в заключительной гл. 10 спра-
вочника.
Гл. 1 написана А. А. Красовским и В. И. Буковым (и. 1.2.3); гл. 2 —
А. А. Красовским и И. Б. Ядыкипым (§ 2.4); гл. 3 — А. А. Красовским и
В. А. Якубовичем (§ 3.6); гл. 4—А. А. Красовским; гл. 5—А. А. Красовским,
А. А. Ашимовым (п. 5.4.3.5°Б), Г. А. Медведевым (§ 5.7) и И. Н. Белоглазо-
вым (§ 5.8); гл. 6 — А. А. Красовским; гл. 7 — В. Н. Афанасьевым; гл. 8 —
А. А. Красовским, В. Н. Буковым (п. 8.2.3.4е, § 8.6—8.8) и А. Г. Алексан-
дровым (§ 8.9); гл. 9 — В. М. Артемьевым; гл. 10 — А. А. Красовским,
В. Ю. Рутковским и С. Д. Земляковым (§ 10.4), И. Б. Ядыкиным (§ 10.5,
10.6); гл. 11 — В. А. Якубовичем; гл. 12 — В. В. Казакевичем; гл. 13 —
II. Н. Белоглазовым; гл. 14 — Р. М. Юсуповым; гл. 15 — Л. А. Гастриги-
пым; гл. 16 — А. Г. Александровым. Другие авторы, приславшие матери-
алы, использованные в справочнике, указаны в примечаниях.
Коллектив авторов особо отмечает большую организационную п ре-
дакционную работу, выполненную В. Я. Буковым, и выражает ему глу-
бокую признательность.
Справочник предназначается прежде всего для разработчиков алго-
ритмического и программного обеспечения современных и перспектив-
ных систем автоматического управления технологическими процессами
и подвижными объектами. Он может быть использован научными работ-
никами, инженерами и студентами соответствующих специальностей.
В мировой литературе по современной теории автоматического уп-
равления подобное издание предпринимается впервые. Оно пе может не
иметь недостатков. За все замечания по содержанию справочника авторы
будут благодарны читателям.
ГЛАВА 1
ПРОСТРАНСТВО СОСТОЯНИЙ
Понятие состояния физической системы, физического процесса ио
поддается общему определению, так как для каждого конкретного ре-
ального процесса пли системы оно различно, а общие определения сво-
дятся к синонимам.
В теории управления, как и всякой толпой пауке, мы имеем дело с
математическими моделями процессов и систем. Состояние таких моде-
лей процессов п систем поддается общему определению в математиче-
ских терминах.
§ 1.1. Понятие пространства состояний
Математическая модель системы или процесса отражает в той или
иной мерс свойства реальной системы, в том числе ограничения, суще-
ствующие в реальных условиях. Математическая модель составляется
(разрабатывается) в математических терминах (на математическом язы-
ке) и имеет, как правило, количественное описание. Поэтому состояние
математической модели системы пли процесса может быть представлено
в виде элемента х .множества возможных состояний X. Весьма важный
является то, чтобы каждый элемент множества х е=. X характеризовал
состояние рассматриваемой модели системы или процесса полностью, од-
нозначно. В дальнейшем для краткости слово «модель» будет чаще
всего опускаться и множество будет отождествляться с множеством
возможных состояний системы или процесса, а каждый элемент этого
множества отождествляется с состоянием системы или процесса (его ис-
черпывающим описанием). Множество X можно рассматривать как про-
странство состояний системы или процесса. Однако в математике (функ-
циональном анализе) пространством обычно называют множество, в ко-
тором задано соотношение между любыми его элементами, характери-
зующее «близость» между ними.
Так, метрическим пространством называется множество X, в кото-
ром задано расстояние между каждыми двумя элементами х е X, у еХ
в виде действительной функции р(ж, у), удовлетворяющей трем акси-
омам [1.1]:
1- Р(ж! !/) = 0 тогда и только тогда, когда х = у,
2. р(ж, у) = p(.V, а:) (аксиома симметрии), (1-1.1)
3. р(х, ’) 5g р(ж, у) + р(у, s) (аксиома треугольника).
Пространство состояний в теории динамических систем вообще и
теории управления в частности используется для исследования устойчи-
вости, оптимизации и др. Во всех этих случаях необходимо введение
метрики (определение расстояния) в этом пространстве. Действительно,
для определения устойчивости невозмугце иного состояния естественно
рассматривать изменение расстояния между возмущенным состоянием
и певозмущепным, при оптимизации необходимо введение функционала
(критерия), который, как правило, включает расстояние в пространстве
состояний.
Пространством состояний называется метрическое пространство,
каждый элемент которого полностью определяет состояние рассматри-
ваемой системы (процесса).
Здесь следует обратить внимание иа то, что состояние везде пони-
мается как мгновенное состояние, состояние в текущий пли заданный
момент времени. Процесс, протекающий во времени, отображается
как движение элемента в пространстве состояний. Понятие метриче-
ского пространства очень широкое, хотя в математике оно является
частным видом еще более общего понятия топологического простран-
ства [1.2].
Для многих задач теории управления понятие пространства состоя-
ний как метрического пространства вообще является чрезмерно широ-
ким. и удобнее пользоваться частными видами этого пространства, а для
других задач введение метрики вида (1.1.1) недостаточно. Так, при ис-
следовании устойчивости, управляемости, оптимизации по квадратично-
му критерию обычно достаточно самой естественной метрики — евкли-
довой и использования евклидова пространства состояний (см. ниже).
Для оптимизации по сложным пеквадратичным критериям метрики
(1.1.1) иногда недостаточно, приходится доопределять метрику различны-
ми дополнительными условиями.
Пространство состояний применяется как при описании замкнутых
(автономных) систем и процессов, не взаимодействующих с другими си-
стемами и процессами (в частности, внешней средой), так и для систем
и процессов, в которых такое взаимодействие существует. В последнем
случае необходимо введение дополнительных множеств, таких как мно-
жество управлений с элементами и <ez U, множество возмущающих воз-
действий с элементами ю е W. Эти множества также могут представлять
собой метрические пространства с различными метриками.
Кроме того, каждая система, рассматриваемая п пространстве состо-
яний х е; X, обычно может быть разделена на подсистемы (субсистемы),
как правило, взаимосвязанные. В соответствии с этим пространство со-
стояний X может быть представлено в виде суммы субпространств
состояний, как правило, взаимосвязанных и являющихся но существу
сечениями пространства X. Состояние системы полностью определяет
лишь совокупность элементов всех указанных субирострапств X(i),
А’(2), ..., Xw, т. е. элемент полного пространства состояний: х е; X =
— х(|) и Х(2)... и xw. Элементами пространства состояний могут быть
конечные упорядоченные совокупности действительных чисел (конечно-
мерные векторы). Подобный вектор в развернутой форме везд'о в даль-
нейшем будет обозначаться либо в виде строки, либо в виде вектора-
столбца (матрицы-столбца)
х — (жь х2, ..хп), х = [xi x2...xn]'r, (1.1.2)
где [a'l x2...Zn], — матрица-строка, «т» — символ транспонирования. Эле-
мент (1.1.2) пространства состояний называется конечномерным векто-
ром состояния. Элементами пространства состояний могут быть беско-
нечные совокупности действительных чисел (счетные множества) — бес-
конечномерные векторы
х = (жь ж2, ...), х = [Ж1 х2 • • •]т. (1.1.3)
Это обычно имеет место при описании дискретных математических мо-
делей непрерывных в физическом пространстве систем (систем с рас-
пределенными параметрами). Элемент пространства состояний (1.1.3) на-
зывается бесконечномерным вектором состояния. Наконец, элементами
пространства состояний могут быть и функции некоторого числа аргу-
ментов (помимо времени). Последнее может встречаться при непрерыв-
ном описании систем с распределенными параметрами, сопутствующем
классу задач, пе рассматриваемому в настоящем справочнике.
Случай конечномерного пространства состояний наиболее типичный,
наиболее разработанный в теоретическом и вычислительном аспектах,
и ему уделяется основное внимание в данной книге. При рассмотрении
движения системы (процесса) в пространстве состояний вектор состоя-
ния является функцией непрерывного или дискретного времени. Для слу-
чая непрерывного времени и конечномерного вектора состояния задание
состояния во все моменты времени означает задание векторной функции
x(t) = (.r,(t), T2(t),= [ari(t) ar2(t) ...ar„(t)],T. (1-1.4)
Соответствующее пространство состояний в теории динамических си-
стем прежде именовалось фазовым пространством, а для двумерного слу-
чая (п = 2) — фазовой плоскостью. В значительной части литературы по-
нятие фазового пространства и в настоящее время используется как си-
ноним пространства состояний вообще.
Дискретное время представляет собой последовательность моментов
времени
to, <1, ..., «л—1, th, ... (1.1.5)
(при необходимости индекс /с может принимать и отрицательные значе-
ния) . Вектор состояния в момент времени th в общем случае обозпачается
x(th) или аг[Л], (1.1.6)
В наиболее типичном случае интервал последовательности (1.1.5) постоя-
нен: iit — th-i = т = const и одинаков для всех компонент вектора со-
стояния. В этом случае при to = 0 величина tn в (1.1.6) равна kt. Одпако
цифровые управляющие вычислительные системы часто работают с раз-
личными интервалами повторения для различных групп переменных
(быстромепяющихся, медлеппомспяющихся). В этом случае структура
пространства состояний с дискретным временем усложняется (простран-
ство разделяется па субпространства). Встречаются такие случаи, когда
последовательность (1.1.5) является случайной. Помимо дискретности по
времени может иметь место дискретность (квантование) по уровню.
Это особенно характерно для систем управления с микропроцессорами,
имеющими небольшое число разрядов. Все это определяет большое число
вариантов пространств состояний и процессов в них. Основные из этих
вариантов указаны ниже.
1.1.1. Евклидово пространство состояний R’1 непрерывной конечно-
мерной системы. Непрерывность системы или процесса здесь понимает-
ся в смысле отсутствия квантования по уровню и времени, т. е. в смысле
непрерывности множества возможных состояний. Элементами прост-
ранства состояний К’1 служат векторы (1.1.2), а расстояние р определя-
ется как евклидова норма разности векторов. Для векторов х' — (д-р
д', ..., х’п}, х" (.г", ..., ж") расстояние выражается формулой
р (Z, ж") = [(.г' — а.")2 + (.?' - а")2 + ... + (а-'г - т")2],/а =
= [(х/ — аг")т (х' — х")]1/2. (1.1.7)
Это расстояние удовлетворяет аксиомам (1.1.1). Абстрактное евклидово
пространство наиболее естественное в том смысле, что при ге = 3 оно
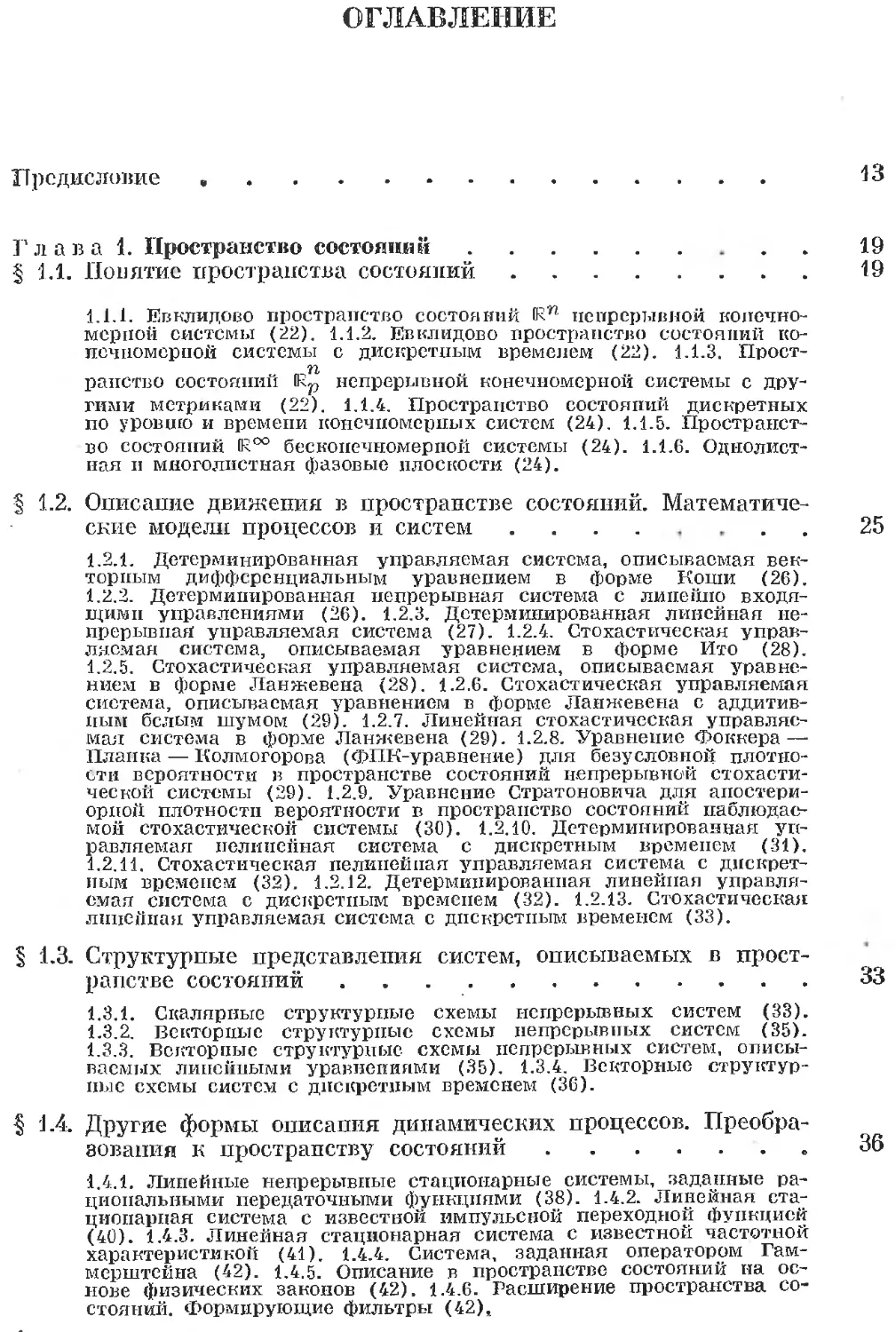
аналогично реальному трехмерному пространству (в евклидовом прибли-
жении). Иллюстрация этого пространства состояний и траектории дви-
жения в нем (фазовой кривой) приведена на рис. 1.1.1, а. Здесь полага-
ется х‘ — x(ti), х" = x(t2), ii < t2. Фазовая траектория описывается кон-
цом вектора х (4) при изменении времени t. Конец вектора х (4) называ-
ется изображающей точкой. Естественно, что изображающая точка име-
ет то же обозначение, что и вектор (1.1.2).
Евклидово пространство достаточно универсально, и чаще всего бу-
дет использоваться в дальнейшем именно оно.
1.1.2. Евклидово пространство состояний конечномерной системы
с дискретным временем. Само пространство состояний пе отличается в
данном случае от предыдущего. Однако перемещение изображающей точ-
ки происходит скачками, и вектор состояния а: [А], = x(h.) определен
лишь в дискретные моменты времени (1.1.5). Соответствующая иллюст-
рация для трехмерного случая приведена па рис. 1.1.1, б.
1.1.3. Пространство состояний IR” непрерывной конечномерной си-
стемы с другими метриками. Исследование устойчивости и управляемо-
сти, оптимизация процессов движения часто требуют введения метрик,
отличных от евклидовой (1.1.7). В качестве такой метрики может фигу-
рировать, например,
f« х") = У, |т' — т" |, (1.1.8)
г=1
гдо р, > 0 — заданные вещественные положительные коэффициенты.
Здесь в качестве расстояния фигурирует «взвешенная» сумма модулей
разности компонент векторов состояния. Метрика (1.1.8) удовлетворяет
аксиомам (1.1.1). Гис. 1 1.1, в иллюстрирует входящие в (1.1.8) разности
/ п.
компонент и х..
Гис. 1.1.1. Иллюстрации пространств состояний
Метрику (1.1.8) можно рассматривать как частный случай метрики
вида
i/v
п
р (х'9 х") —
--- ХА
(1-1.9)
где р 1 — действительное число. Пространство с метрикой (1.1.9), удов-
летворяющей аксиомам (1.1.1), часто обозпачается R”. При р = 1 мет-
рика (1.1.9) обращается в (1.1.8). При неограниченном увеличении р фун-
кционал (1.1.9) приобретает характер «функции штрафа», «срабатываю-
щей» при превышении разностями компонент — х'^ определенных
пороговых значений. Заметим, что при р = 2 и р; = 1 метрики (1.1.7) и
(1.1.9) совпадают и, следовательно, (1.1.7) можно рассматривать как част-
ный случай (1.1.9).
Метрики (1.1.8), (1.1.9) удобны как для формирования минимизиру-
емых функционалов, так и для выражений ограничений.
1.1Л. Пространство состояний дискретных по уровню п времени ко-
нечномерных систем. Для систем, в которых осуществляется квантование
по уровню и времени, например чисто цифровых систем, пространство
состояний представляет собой дискретное множество элементов (точек,
векторов) в совокупности с той или иной метрикой (рис. 1.1.1, г).
Чаще всего приходится иметь дело с сочетаниями (соединениями)
непрерывных и дискретных субсистем. Строгое описание процессов в та-
ких системах может осуществляться в пространствах состояний, состав-
ленных из непрерывных и дискретных субпрострапств. Однако наиболее
простые решения задач получаются при приведении субпрострапств к
одинаковой категории (непрерывных с непрерывным временем, непре-
рывных с дискретным временем, дискретных с непрерывным временем,
дискретных с дискретным временем). Способы приближенного или точ-
ного преобразования категорий пространств состояний (и соответствен-
но уравнений процессов) рассмотрены ниже.
1.1.5. Пространство состояний R°° бесконечномерной системы. При
рассмотрении дискретных моделей распределенных систем нередко воз-
никает потребность в рассмотрении бесконечномерных векторов состоя-
ния (1.1.3) и соответствующих метрических пространств. Примером бес-
конечномерного пространства состояний может служить гильбертово про-
странство, обозначаемое 1г или R°°.Гильбертовым пространством называет-
ся множество всех последовательностей действительных чисел (бесконеч-
номерных векторов х = [ад Х2... xt.. ,]т), таких, что ряды
оо
л = S 4
1—1
сходятся, а метрика определяется формулой
Р (*’, х") =
1/2
1.1.6. Однолистная и многолистная фазовые плоскости. В задачах ана-
лиза процессов в динамических системах па основе пространства состоя-
ний важную роль играют геометрические, топологические представле-
ния множества траекторий. При этом образование наглядного образа се-
мейства азовых траекторий (траекторий в пространстве состояний) уже
для п = 3 составляет во многих случаях довольно трудную задачу. По-
этому каждый новый случай исчерпывающего исследования движения
нелинейных систем в трехмерном фазовом пространстве в классической
теории динамических систем оценивался как научное достижение [1.3].
Наиболее обширные результаты были получены для п = 2, когда прост-
ранство состоянии превращается в плоскость состояний — фазовую плос-
кость. Для систем, описываемых обыкновенным дифференциальным урав-
нением второго порядка (или системой двух дифференциальных уравне-
ний первого порядка), для которых применяется фазовая плоскость, по
оси абсцисс откладывается координата zi, а по оси ординат — се произ-
водная х2 = ж,. При этом движение по фазовой траектории всегда про-
исходит по часовой стрелке (рис. 1.1.1, д). В прикладном аспекте наибо-
лее существенны результаты, получаемые с помощью фазовой плоскости
для систем с разрывными характеристиками, которые описываются по
существу различными дифференциальными уравнениями для различных
частей фазовой плоскости, разделенных, например, так называемой ли-
нией переключений (па рис. 1.1.1, д — штриховая прямая).
В каждой заданной области фазовые траектории определяются реше-
нном соответствующего дифференциального уравнения второго порядка,
а па линии (линиях) переключений задаются дополнительные условия,
например условие непрерывности фазовых траекторий. Такое доопре-
деление позволяет построить полную фазовую траекторию. Иногда ус-
ловия переключения имеют сложный вид, например, состоят из несколь-
ких этапов даже при периодическом установившемся движении. В этих
условиях полезным инструментом анализа движения систем второго по-
рядка оказывается мпоголистная фазовая плоскость [1.4]. Опа представ-
ляет собой как бы пачку параллельных плоскостей, причем переход
(мгновенный) изображающей точки из одной плоскости в другую проис-
ходит в соответствии с заданными условиями переключений (рис. 1.1.1, е)
без изменения координат zt, х2 (условие непрерывности траектории в
проекции па фазовую плоскость). В области конкретных приложений
мпоголистная фазовая плоскость оказывается полезной при анализе дви-
жения двумерных моделей динамических систем с гистерезисом, люф-
том, сухим трением в различных их сочетаниях [1.4], Для всех фазовых
плоскостей предполагается евклидова метрика, так что это пространства
состояний типа IK2.
§ 1.2. Описание движения в пространстве состояний.
Математические модели процессов и систем
Метрика пространства состояний пачипает фигурировать па стадии
решения конкретных задач устойчивости, управляемости, оптимизации.
Поэтому при записи уравнений в пространстве состояний можно указы-
вать лишь размерность пространства, полагая па этом первом этапе мет-
рику, например, евклидовой, или вообще по задавать метрики.
2.1. Детерминированная управляемая система, описываемая вектор-
ным дифференциальным уравнением в форме Коши. Если возмущающие
воздействия являются детерминированными (регулярными, неслучайны-
ми), то их можно представить в виде известных функций времени и
уравнение указанной системы записать в виде
х = f(x, и, t), (1.2.1)
где х <= R", и е К7', а точкой отмечена полная производная вектора х
по времени t. Что касается векторной функции f векторных аргументов
х, и и скалярного аргумента I, то опа считается заданной и принадлежа-
щей некоторому классу функций, допускающему существование реше-
ния уравнения (1.2.1) (при заданных x(tD), u(t) или и(х, I)) во всем про-
странстве состояний, либо в его областях, охватывающих интересующую
исследователя часть пространства состояний. В более сложном и общем
случае рассматриваемая область пространства состояний разделена па
подобласти, для каждой из которых задана своя непрерывная функция /,
удовлетворяющая указанному условию в области определения. Поведение
системы па границах подобластей доопределяется, т. е. определяется до-
полнительными условиями (например условиями непрерывности).
Наряду с понятием «система» или «динамическая система» будем ис-
пользовать понятие процесса. Если система описывается уравнением
(1.2.1), то процесс в этой системе описывается решением уравнения
(1.2.1) при определенном начальном условии x(t0) = х0 и определенном
управлении, например и = и(1). Вместо одного процесса может рассмат-
риваться множество процессов, соответствующее некоторому заданному
множеству начальных условий и заданному множеству управлений. Для
отличия описания системы и процесса вектор состояния процесса иног-
да будет обозначаться xt.
Процессы в непрерывном пространстве состояний Rn, описываемые
уравнением вида (1.2.1) и другими указанными ниже обыкновенными
дифференциальными уравнениями, для краткости называются непрерыв-
ными процессами. При обычных условиях существования решения диф-
ференциальных уравнений процесс x(t)—действительно непрерывная
функция времени. При расширенных условиях существования, когда f
содержит так называемые б-фуикции или состоит из нескольких непре-
рывных функций, определенных в подобластях пространства состояний,
«сшиваемых» без условия непрерывности решения, возможны разрывы
непрерывности x(t). Эти случаи, как правило, оговариваются особо, и со-
отвстствующим системам придаются подходящие наименования.
1.2.2. Детерминированная непрерывная система с линейно входящи-
ми управлениями. Широкий класс систем допускает при описании поль-
зоваться линейным по вектору управления и уравнением вида
х — ](х, I) + <р(ж, 1)и, (1.2.2)
где хе R", ие Rr, f(x, I) — векторная функция векторного х и ска-
лярпого t аргументов, <р(ж, t)—матричная функция размера п'Аг ар-
гументов х, t.
1.2.3. Детерминированная линейная непрерывная управляемая систе-
ма. Рассматривается система, изменение состояния которой во времени
описывается уравнением
х = A(t)x E(t)u (1.2.3)
или
х = Ах -|- Си, (1.2.4)
где х е. К", и е Йг, А — матрица коэффициентов (в общем случае
функций времени) размера п X п\ В — матрица коэффициентов (в неста-
ционарном случае также функций времени) размера п X г. Если А и С
являются матричными функциями времени (как в (1.2.3)), то линейная
система называется нестационарной. Если А = const, С = const, то ли-
нейная система стационарна.
Общее решение уравнения (1.2.3) может быть записано в виде
t
х (t) = К (t, Q х (to) + J К (t, 6) С (0) и (6) dO,
<о
где K(t, t') — матрица Коши системы (1.2.3), удовлетворяющая матрич-
ному уравнению и начальному условию
d
К (t, t') = A (t) К (t, t ), К (С, t ) = E,
где E — единичная матрица. Матрица Коши является частным видом
фундаментальной матрицы системы (1.2.3), которой называют любую
rf ,
невырожденную матрицу W(t, t'), удовлетворяющую W (t, t) =
= Z(t)PE(t, t').
При анализе систем вида (12.3) широко используется матрица
O(t, t') = K(t, t')B(t'), называемая импульсной переходной матрицей
или весовой матрицей. Столбцы этой матрицы можно рассматривать как
реакцию системы (1.2.3) па входные воздействия в виде ^импульсов, по-
даваемых па каждый из входов (компоненты вектора и) при пулевых
начальных условиях.
Сравнительно реже используется переходная матрица, определяемая
соотношением
t'
II («, t') = J Ф (t, 6) dQ,
'о
столбцы которой являются реакцией системы па единичные входные
воздействия, подаваемые па каждый из входов, при нулевых начальных
условиях,
У стационарных систем матрица Коши, весовая и переходная мат-
рицы являются функциями только относительного времени t = t — l'.
1.24. Стохастическая управляемая система, описываемая уравнением
в форме Ито. Для описания движения динамической стохастической
системы используется уравнение
dx = f(x, и, t)dt-[-g(x, t)dw(l), (1.2.5)
где х е R", и е Кг, / — векторная функция указанных аргументов,
ю(1)—5-мерный винеровский случайный процесс, g(x, t)—матричная
функция размера п X q.
Уравнение Ито в дифференциальной форме (1.2.5) является симво-
лическим и означает, что случайный процесс x(t) — xL удовлетворяет
равенству
Ч f2
х (Q — х (fl) = j (т), и (т)> т] е [-Z (т), т] dw (т)
<! ij
при всех ti < ti из промежутка «функционирования системы» (1.2.5).
Второй интеграл в правой части последнего выражения — стохастический
интеграл Ито. Оп может быть приближен в среднем квадратическом ин-
тегральными суммами, такими же, как и обычный интеграл Римана —
Стилтьсса.
1.2.5. Стохастическая управляемая система, описываемая уравнением
в форме Ланжевена. Другая форма описания динамической системы сво-
дится к уравнению
х = ](х, и, t) +g(:r, i)E(i), (1.2.6)
rue £(f) — g-мсрпый случайный процесс типа белого шума с пулевым
математическим ожиданием Е[5(f)] = 0 и ковариационной матрицей
вида
E[fc(0 VG')] =
ф(«) — матричная функция времени размера q X q. Конкретную реализа-
цию случайного процесса x(t), удовлетворяющего (1.2.6), будем обо-
значать Xi.
Процесс в виде белого шума доставляет много неприятностей мате-
матику. Действительно, при любой модели белый шум имеет бесконеч-
ные дисперсии своих компонент и разрывный характер при любом теку-
щем значении t. При этом использование моделей белого шума, получа-
емых путем предельных переходов в некоторых исходных «искусствен-
ных» моделях, может давать различные результаты в предельных формах
решений обыкновенных дифференциальных уравнений. Поэтому в стро-
гой трактовке уравнения типа (1.2.5), (1.2.6) есть просто условные обо-
значения соответствующих интегральных уравнений, в которых инте-
гралы имеют неклассический обобщенный смысл (интеграл Ито, интеграл
Стратоловича).дпако для инженера и физика совсем по обязательна
такая строгая трактовка стохастических уравнений с белым шумом. Де-
ло в том, что вместо белого шума, которого в природе не существует,
можно рассматривать широкополосный шум (с интервалом корреляции,
намного меньшим всех характерных постоянных времени рассматривае-
мой динамической системы). Каждая реализация такого широкополосного
шума может удовлетворять условиям существования и единственности
уравнения (1.2.6), рассматриваемого как обыкновенное дифференциаль-
ное уравнение. Такой широкополосный шум (с ограниченными диспер-
сиями) будем называть практически белым шумом. Подобное название
оправдано следующим. Па практике преимущественно применяются те
математические модели динамических систем, которые обладают гру-
бостью не только по отношению к собственным параметрам, по и по от-
ношению к форме возмущающих воздействий. Для таких моделей воз-
действие белого шума и практически белого шума в достаточной степени
одинаково. Поэтому нет необходимости прибегать к сложным и трудно
усваиваемым инженерами математическим конструкциям и понятиям
типа интегралов Ито и Стратоповича.
1.2.6. Стохастическая управляемая система, описываемая уравнени-
ем в форме Ланжевепа с аддитивным белым шумом. Частным случаем
(1.2.6) является случай, когда справедливо уравнение
х = f(x, и, t) + £(t), (1.2.7)
где £(t) — ^-мерный случайный процесс типа белого шума:
E[g(Z)]=O, E[g(i)ETG')] (1.2-8)
Q(t)—матричная функция времени размера 9X9, называемая мат-
рицей интенсивностей или (в случае Q — const) матрицей спектральных
плотностей белого шума.
1.2.7. Линейная стохастическая управляемая система в форме Лап-
жевена. Уравнение (1.2.6) в частных случаях может быть представле-
но в виде
х = + + (1.2.9)
где £(t) — g-мерпый случайный процесс типа белого шума, С(1)—мат-
рица коэффициентов размера п X <1-
1.2.8. Уравнение. Фоккера — Планка — Колмогорова (ФПК-уравненпе)-
Для безусловной плотности вероятности в пространстве состояний непре-
рывной стохастической системы. Стохастические непрерывные динамиче-
ские системы, помимо обыкновенных дифференциальных стохастических
уравнений в форме Ито или в форме Ланжевепа, имеют принципиально
отличную форму описания в виде уравнений в частных, производных
Для плотности вероятности. Если уравнения вида (1.2.5) — (1.2.9) описы-
вают каждую реализацию случайного процесса, то нижеследующие урав-
пения в частных производных описывают эволюцию статистической ха-
рактеристики — плотности вероятности нахождения изображающей точ-
ки в евклидовом пространстве состояний. Естественно, что начальная
плотность вероятности р(х, t0) считается заданной. Могут задаваться раз-
нообразные граничные условия. Тогда для случая (1.2.6), где /, g и ф счи-
таются дифференцируемыми, при фиксированном и текущая плотность
вероятности р = р(х, t) подчиняется ФПК-уравнепию вида
бр , yi 9 JL "V 8 ("‘Фа'1);,] _ о
dt ”г 2 2d 8х-8х-
г=1
(1.2.Ю)
Здесь (gipgT)ij — элемент матрицы g'ipg'T разхчера n X п. Если начальное
распределение удовлетворяет условию нормировки, то решение (1.2.10)
автоматически удовлетворяет этому условию:
оо
J р (.г, i) dx = 1.
— ОО
(1.2.11)
Здесь интегрирование ведется по всему пространству R”.
(1.2.7), (1.2.8) при фиксированном и
ВНД
Для случая
ФПК-урависнис (1.2.10) принимает
я2
д р
И д.г.дх-
(1.2.12)
бп 1
dt' 2 дх. 2
i=l 1
Если вместо обычной плотности вероятности р использовать логарифми-
ческую плотность вероятности In р, то ФПК-урависпио (1.2.12) преобра-
зуется к виду
5 In р _ г д In р 1 Vi
dt + 2d fi ~дх~ “ Т 2d
i—I i.J-1
б2 In р 0 In р д In р \ Ofi
dx^dxj + дх^ dXj ) 2i dx.'
Ох^
(1.2.13)
1.2.9. Уравнение Стратоповича для апостериорной плотности вероят-
ности в пространстве состояний наблюдаемой стохастической системы.
Введем вектор наблюдения (измерения) для процесса, например, ви-
да (1.2.6):
z = h(xt, t) +ti(Z). (1.2.14)
Здесь li(xi, t)—заданная векторная функция (размера m X 1) ука-
занных аргументов, i](Z) —гауссов случайный процесс типа белого шума
с корреляционной матрицей
Е[ц(ф1т(г')] = R(t)S(t — «'), (1.2.15)
где R(t) —матрица интенсивностей; xt—решепио уравнения (1.2.6), т. е.
истинное состояние наблюдаемого процесса. Для устранения трудностей
понимания, связанных с бесконечной дисперсией процесса тЦ1), вместо
белого шума можно рассматривать практически белый шум (см. п. 1.2.5).
Пусть стохастический процесс a;(t) = xt наблюдается в соответствии
с (1 2 14) на замкнутом интервале времени от t0 До t. Совокупность по-
лученных в результате наблюдения па этом интервале значений функции
-(() обозначим через Z. Ясно, что апостериорная или условная плотность
вероятности в пространстве состояний р(х, t | Z), полученная после на-
блюдения z(t), будет отличаться от безусловной или априорной плотно-
сти вероятности р(а>, t), определяемой ФПК-уравпспием. Эта апостериор-
ная плотность вероятности определяется уравнением Стратоповича, ко-
торое для случая (1.2.6), (1.2.14) при использовании обозначения р =
= р(х, t I Z) имеет вид [1.5],
Ot ‘ Лшл Ох- 2 .ZL Ох.Ох-
* j,.7=--l 1 3
— р [/г (.г;, /) — h (х, t)p/?—1 [z — h {х, /)] = 0, (1.2.16)
где
СО
h (х, t) = С h (х*, t) р (х*, 11 Z) dx* (1.2.17)
— оценка функции наблюдения, являющаяся условным математическим
ожиданием h(х, t). Через х* в (1.2.17) обозначена переменная интегриро-
вания по пространству состояний. Если х — истинный вектор состояния,
то функция р(х*, t|Z) должна зависеть от х, имея, в частности, экстре-
мум при х* = х. Поэтому в (1.2.17) указана зависимость h от х.
1.2.10. Детерминированная управляемая нелинейная система с дис-
кретным временем. Системы с дискретным временем описываются раз-
ностными уравнениями. Для непрерывных нелинейных систем, описыва-
емых уравнениями типа (1.2.1), как и для других нелинейных систем
с непрерывным описанием, в подавляющем большинстве случаев могут
быть получены лишь приближенные разностные модели (разностные
схемы). Исключение составляет случай, когда па каждом интервале дис-
кретизации при известном законе изменения и па данном интервале (на-
пример, при постоянстве и в пределах интервала) уравнение (1.2.1) ин-
тегрируется в общем виде. Действительно, общее решение задачи Коши
для (1.2.1) при x(th) = гс[Л;], и(1к) = и[к] = u(t), если th sy t <
имеет вид х[к + 1] = F(х[/с], и [к], к).
Если общее решение (1.2.1) неизвестно, то может быть построено
разностное уравнение (разностная схема), приближенно эквивалентное
(1.2.1), т. е. приближенно выражающее зависимость x(th+1) от значений
х, и, t в предшествующий момент времени (л и, вообще говоря, tk-\,
... (для так называемых многошаговых методов). Различные раз-
ностные схемы уравнения типа (1.2.1) и других дифференциальных урав-
нений рассматриваются в обширной литературе по численному интегри-
рованию обыкновенных дифференциальных уравнений [1.6]. Разностная.
схема Эйлера имеет вид
®[& + 1]. = + т/(х[А:], п[7с], к),
где т = tfc+i — (л — шаг дискретизации. Правая часть в разностном урав-
нении часто будет обозначаться, как и в обыкновенном дифференциаль-
ном уравнении, через /, и детерминированная пелипейпая управляемая
система с дискретным временем будет представляться в виде
®[fc + 1], = f(x[k], и[7с], к). (1.2.18)
1.2.11. Стохастическая нелинейная управляемая система с дискрет-
ным временем. Обобщение уравнения (1.2.18) получается за счет учета
случайных возмущающих воздействий в виде случайной последователь-
ности w [А], в частности, некоррелированной центрированной гауссовской
случайной последовательности: Е[гс[7с]] =0, Е[и>[/с]w[7с — 7]т] =0,7 =
= 1, 2, 3, [дискретный белый шум), а также, быть может, учета век-
тора параметров а, которые считаются постоянными или медленно меня-
ющимися величинами.
Соответствующее разностное уравнение имеет вид
ж[А: + 1] =/(ж[/с], u[fc], a[fc], геВД, к). (1.2.19)
1.2.12. Детерминированная линейная управляемая система с дискрет-
ным временем. Указанная система описывается следующим линейным
разностным уравнением:
47с + 1]. = Л [7с] 47с] + 7?[/с]п[7с]. (1.2.20)
Линейные непрерывные системы вида (1.2.3) относятся к тому клас-
су систем, для которых известно общее решение
t
х (7) = К (7, 7fJ х (7о) 4- J К (7, т) В (т) и (т) с7т, (1.2.21)
где К(7, 70) —матрица. Коши (фундаментальная матрица) непрерывной
системы, удовлетворяющая уравнению
71 К (7, 7()) == А (7) К (7, /п) (1.2.22)
при условии
К(7о, 7„) = £•, (1.2.23)
где Е — единичная матрица.
При постоянстве управления и(7) = и [7с] на каждом интервале от
1к до 7,i+j и ступенчатом его изменении в указанные моменты времени
из (1.2.21) следует (1.2.20), где
'ft+t
Л [А] = K(7ft+I, th), В [к\ — j" К (7ft+T, т) В (т) т/т. (1.2.24)
'ft
Обозначения 7?[А] и £'(т) здесь соответствуют разным функциям.
Матрица Коши дискретной во времени системы (1.2.20) К[/г, /] од-
нозначно определяется уравнением (к > /)
К [fc + 1, j] = A [7г]К[Л, /] (1.2.25)
и условием
к [7, /] = Е. (1.2.20)
Из (1.2.25), (1.2.20) следует при к > /
K[fc, /] = A [fc - 1]А [Л - 2] ... А [;]. (1.2.27)
Решение разностного линейного уравнения (1.2.20) имеет вид
fi-1
х [7с] = К р, /] х [/] + К [Л, v + 1] В [v] и [v], k>j. (1.2.28)
v=j
1.2.13. Стохастическая линейная управляемая система с дискретным
временем. Эта система отличается от системы (1.2.20) только наличием
аддитивного случайного члена:
х[к + 1] = A [7c]cc[A] + 7?[7с]«.[7г] + «,[*]. (1.2.29)
Случайная последовательность и?[7г], к — 1, 2, .... в частности, мо-
жет быть белой гауссовской. Тогда Е[и?[7,]] =0, Е[г/;[7с] tt>T[7; — 7]] = 0,
7 = 1, 2, ... Процесс ж [А] (1.2.29) при заданном и в этом случае явля-
ется марковским дискретным во времени процессом.
§ 1.3. Структурные представления систем, описываемых
в пространстве состояний
В классической теории большое значение имеет структурный ана-
лиз контуров управления. В современной прикладной теории управления
структурные представления также имеют определенное значение в смыс-
ле наглядного восприятия алгоритмов и обнаружения некоторых зако-
номерностей.
1.3.1. Скалярные структурные схемы непрерывных систем. Для дву-
мерного случая (п = 2, г — 2) уравнение (1.2.1) эквивалентно двум ска-
лярным уравнениям первого порядка
Т| =/1(Я1, х2, иь и2, 7), х2 = ^2, и-1, и2, I). (1.3.1)
Два варианта структурной схемы этой системы представлены па
рис. 1.3.1, а, б. В варианте а выделены операции интегрирования, обозна-
ченные 1/р (допускается на структурных схемах также обозначение ин-
теграла J"). В варианте б операции интегрирования не выделены и ука-
заны только связи между двумя субснстемамп (двумя дифференциаль-
ными уравнениями). Заметим, что па структурных схемах всегда обозна-
чаются однонаправленные связи. Двусторонние связи представляются в
виде совокупности двух однонаправленных связей.
Если имеются развернутые (конкретные) выражения для функций
/1, /2, то могут быть изображены и развернутые (конкретизированные)
скалярные структурные схемы. Так, для линейной системы второго по-
рядка при г = 2 уравнение (1.2.4) эквивалентно системе двух скалярных
уравнений вида:
ЗС1 = + <112^2 + + Ь12И2, = <^21^1 + 0-22^2 + Ь21Ч[ + &22П2.
(1.3.2)
Соответствующая структурная схема представлена па рис. 1.3.1, в. Круж-
ками обозначаются операции суммирования. «Прохождение» величин че-
рез звено с коэффициентом или (обозпачается прямоугольником
Рис. 1.3.1. Скалярные структурные схемы непрерывных систем в прост
рапстве состояний
с указанным коэффициентом) эквивалентно умножению упомянутой ве
личины на указанный коэффициент.
При высокой размерности систем и большом количестве перекрест
пых связей скалярные структурные схемы систем, описываемых в прост
ранстве состояний, становятся громоздкими, теряют наглядность и зача
сту10 _ полезность. Некоторое упрощение получается при обозначении
только входов и выходов, без детализации самих связей между субсисте-
мами В полом же для многомерных систем, описываемых в пространство
состояний, применяются векторные структурные схемы.
1.3.2. Векторные структурные схемы непрерывных систем. Векторы
па структурных схемах имеют те же обозначения, что и в уравнениях,
а «передача» или «воздействие» векторных величии, векторные связи
обозначаются двойными линиями *). Как и в скалярных структурных
схемах, каждая обозначаемая связь считается однонаправленной и име-
ет стрелку. Двусторонняя связь изображается посредством двух одно-
направленных связей с противоположными направлениями стрелок.
Рис. 1.3.2. Векторные структурные схемы непрерывных систем в прост-
ранстве состояний
Два варианта векторной структурной схемы, соответствующей урав-
нению (1.2.1), представлены па рис. 1.3.2, а, б. В схеме рис. 1.3.2, а вы-
делена операция интегрирования вектора ,т, обозначенная звеном с опе-
1
ратором — Е (Е — единичная матрица). Эту же операцию можно обо-
значать просто знаком интеграла, как и в скалярных схемах. В даппой
схеме, естественно, фигурирует векторная обратная связь по х. В схеме
рис. 1.3.2, б уравнение (1.2.1) записано впутрп прямоугольника и стрел-
ками указано, что и следует рассматривать как входную, а х как выход-
ную векторные величины данного звена.
1.3.3. Векторные структурные схемы непрерывных систем, описыва-
емых линейными уравнениями. Умножение вектора х на матрицу А на
векторной структурной схеме обозначается в виде «прохождения» х че-
рез звено с матрицей передаточных коэффициентов (чисел) А. В соот-
ветствии с этим структурная схема системы, соответствующая уравне-
нию (1.2.4), может быть представлена в виде рис. 1.3.2, в. Здесь, как,
впрочем, и в скалярной схеме рис. 1.3.1, в, фигурирует как бы положи-
тельная обратная связь. Это кажущееся представление связано с вы-
*) Применяются также для векторных структурных схем и обычпые
одиночные линии, если это пе приводит к путанице. .
бранным знаком перед Ajc в исходном уравнении. Вообще говорить о
знаке векторной обратной связи некорректно: некоторые скалярные свя-
зи, образующие векторную связь, могут быть отрицательными, а осталь-
ные — положительными.
Па рис. 1.3.2, г изображен другой вариант структурной схемы сис-
темы (1.2.4), который отличается от исходного уравнения только указа-
нием входной и выходной величин.
1.3.4. Векторные структурные схемы систем с дискретным временем.
Из простого сопоставления разностных уравпе.пий (1.2.18), (1.2.20) с их
непрерывными во времени аналогами следует, что структурные схемы
этих систем могут быть аналогичными схемам непрерывных систем, пред-
ставленным па рис. 1.3.2, при условии замены оператора интегрирования
па оператор задержки во времени па один интервал. Подобная задержка
обозначается прямоугольником с оператором г~'!£ или прямоугольником
с надписью «запаздывание», «задержка». Мы будем использовать пер-
вый способ.
В соответствии с ним структурная схема системы (1.2.18) может
быть представлена в виде, изображенном на рис. 1.3.3, а. Другой вариант
Гис. 1.3.3. Векторные структурные схемы систем с дискретным временем
в пространстве состояний
структурной схемы (рис. 1.3.3, б) никак пе раскрывает «механизм»
(1.2.18), отличаясь от этого уравнения только указанием входного и вы-
ходного векторов. Соответствующие структурные схемы для линейной
системы (1.2.20) представлены на рис. 1.3.3, в и г.
§ 1.4. Другие формы описания динамических процессов.
Преобразования к пространству состояний
Классическая теория управления в том понимании, о котором гово-
рилось во введении, опиралась в основном па операторный, метод описа-
ния динамических систем.
В математике оператором (в широком смысле) называется правило
(закон), который каждому элементу одного множества ставит в соответ-
ствие элемент другого множества. В теории динамических систем, в ча-
стности, систем управления, в качестве этих множеств рассматриваются
функциональные метрические пространства Х,и, Хпих, т. е. метрические
пространства, элементами которых являются функции. Для систем с
сосредоточенными параметрами элементами указанных функциональных
пространств являются функции одной переменной (непрерывного или
дискретного времени, частоты и др.). Правило (закон, уравнение), кото-
рое каждому элементу х,к е Хвх функционального метрического прост-
ранства ставит в соответствие элемент аг,1МХ е Х„Ых другого функциональ-
ного метрического пространства, назовем оператором динамической си-
стемы. Это понятие достаточно широкое, чтобы удовлетворить потребно-
сти теории управления. Понятие оператора можно связывать с физиче-
ским понятием отклика, реакции динамической системы па возбуждаю-
щее воздействие при определенных начальных условиях.
Пространство XL. назовем пространством входных сигналов, а прост-
ранство Х11ых — пространством выходных сигналов. Система управления
может состоять из подсистем, у каждой из которых имеется пространст-
во входных сигналов (совпадающее с пространством выходных сигналов
другой подсистемы при последовательном соединении подсистем). Пол-
ную совокупность менересекающихся пространств сигналов подсистем
назовем пространством сигналов системы. Описание системы посредст-
вом операторов можно рассматривать так же как описание в пространст-
ве сигналов. Одним операторным уравнениям (описаниям) можно со-
поставить строго эквивалентные уравнения (описания) в пространстве
состояний. Другим операторным уравнениям можно сопоставить лишь
приближенное описание в пространстве состояний (по крайней мере, в
конечномерном пространстве состояний).
Как правило, при этом пространство состояний имеет существенно
большую размерность, чем пространство сигналов при исходном опера-
торном описании. В том понимании, которое приводится выше, всякая
реальная динамическая система в силу закона причинности обладает
оператором (или множеством операторов), и выходной сигнал хПыХ(<)
(или при дискретном времени ж„,.гх [/г]) в случае доступности его изме-
рения может быть определен экспериментально. Одновременно может
быть измерен входной сигнал х,№(1) (или я,»[/г]), откликом на который
является выходной сигнал. В силу физического принципа причинности
оператор динамической системы обладает следующим свойством*): для
непрерывной системы .т„,ах(/) зависит лишь от xm(t'), где t' -С t; для
дискретной системы ж,.,.,,: [/с] зависит лишь от [Л:'], где k' sg к. Матема-
тическое описание системы (в частности, в пространстве состояний) по
экспериментальным данным составляет содержание задачи идентифика-
ции, рассматриваемой в гл. 5. Здесь рассматриваются способы описания
в пространстве состояний по известному аналитическому или численно-
му (графическому) операторному описанию. Это важно прежде всего
*) Зависимость от начальных условий (начального состояния) здесь
опускается.
для перевода задач с языка классической теории управления па язык
современной теории.
1.4.1. Линейные непрерывные стационарные системы, заданные ра-
циональными передаточными функциями. Пусть для системы указанного
класса известна передаточная функция, определенная как отношение
изображений (преобразований) Лапласа при пулевых начальных ус-
ловиях [1.10]
^Кых (*)] _ bn + biP-l- ••• +
& Kfx <0] ао + аур -|- ... + апр11'
где для так называемых физически реализуемых систем d п- Коэффи-
циенты a,, bj известны и постоянны. Если исключить случай так.назы-
ваемых сокращающихся пулей и полюсов, передаточная функция (1.4.1)
однозначно соответствует обыкновенному дифференциальному урав-
нению *)
VbhX 4” • • • 4” °1,гвых Г “о^ВЫК Ьо‘гвх4- Ьггвх 4- • • 4"
Вводя обозначения
жПнх = ж1- r™i = I2-
<"~1) __ г
вых п’
“1 = Vbx 4- 4- • •4- bdK^,
получаем следующее описание в пространстве
х = Ах + Bill,
где
состояний
(ж1’
- 0 1
0 О
0 0
0 0 ... 0 ~
1 0 ... 0
0 1 ... 0
(1.4.2)
(1.4.4)
Л=[0 О...а-«р.
(1.4,5)
Уравнения с матрицей (1.4.4) называют уравнениями в форме Фро-
бениуса. Часто измерению доступна лишь величина а;„к, а величины
Вк , .т^> могут быть лишь оценены па основе того или иного ал-
горитма (см. гл. 4). В этих случаях использование выражений (1.4.2)
оказывается неудобным.
*) Для обозначения производных по времепи используются точки,
а в случае произвольного заданного порядка производных — верхний ин-
декс (d).
Запишем другие уравнения в пространстве состояний, эквивалент-
ные в смысле передаточной функции (1.4.1). Введем систему уравнений
а'пых ~ xi +
= х2 + ₽1Ж1!Х1
Х2 ~ хз I- Рг^их’
................................................ (1.4.6)
ХП— 1 ХП Рп—1гнх>
% а1 ап-1 , „
Хп ~ ~ - Ч"Хп + ₽Лх’
где координаты (агц хг, ..хп) отличны от рассмотренных в (1.4.2).
Без ограничения общности можно принять в (1.4.1) d = п (если d <'
-С п, те соответствующее число коэффициентов в' числителе передаточ-
ной функции (1.4.1) полагаются равными пулю). Легко показать, что
если величины pj в уравнениях (1.4.6) связаны с коэффициентами пере-
даточной функции (1.4.1) соотношениями
Ъ
0 еп’
11 " ап ап ап
&П—2 °п— 1 ап— я
2 = ап (L4‘7)
„ ___ fep gl»—1 ^n—l an—2 bn—2 a0
П~ап~ an an ~ an an ~"'~anan
то передаточная функция S? (xnus) IS1 (xBS), соответствующая (1.4.6), совпа-
дает с (1.4.1).
Итак, получаем второе описание системы с оператором (.1.4.1) в про-
странстве состояний
х = Л х -|- feliX, (1.4.8)
Япых = Ж] + ftoa-. (1.4.9)
Здесь А имеет прежнее выражение (1.4.4),
в= [р, р2... р„]т,
а соотношение (1.4.9) можно рассматривать как скалярное уравнение
наблюдения (см. гл. 2).
; Еще одно представление в пространстве состояний можно получить
путем разложения передаточной функции (1.4.1) па элементарные дро-
би.. Если корни характеристического уравнения
а-пРп + ап—1рп~'1 -)-... + Оо = О
(собственные числа матрицы А) простые и равны Л(, Л2, ..., к», то
где сх (v = 0, 1...... п) определяются по известным формулам. Соотно-
шение (1.4.10) эквивалентно следующему выражению в оригиналах:
Хиых = C{f.Tux С|Ж| С2Х2 + ... + cnxnt
где
aci = Л-.ач +
а-2 = А.2Х2 + ^ик.
Хп — hnXri Х(|к.
Таким образом, в данном пространстве состояний система описывается
векторным уравнением
х = Ах + ех„к, (1.4.11)
где
0 . ..0-1
А = 0 Ч • .. о (1.4.12)
0 0 . • -
е — [1, 1, ..., 1]т — вектор, элементами которого являются единицы, и
скалярным уравнением наблюдения
я„Ы!1 = + стх, (1.4.13)
где
Ст = [С|С2 ... Сп].
Сходным образом можно построить описание в пространстве состоянии
и для случая кратных корней [1.9]. Конечно, подобные описания бази-
руются па знании корней характеристического уравнения (полюсов пе-
редаточной функции), что па практике является существенным ограни-
чением (недостатком). Естественно, что вводя те или иные пространст-
ва состояний, одной и той же передаточпой функции можно сопоставить
неограниченное число описаний в этих пространствах состояний (но, же-
лательно, единственное описание в каждом заданном пространстве).
1.4.2. Линейная стационарная система с известной импульсной пере-
ходной функцией. Системе с передаточпой функцией (1.4.1) соответству-
ет при пулевых начальных условиях интегральный оператор
t
^вых (0 = J ф — т) ж«х (т> rfT> (1 -4Л4>
fo
где Ф(<) —импульсная переходная функция, которая мотет быть интер-
претирована как реакция системы на 8-импульс, поступающий па вход
в момент времени -f-О. В случае многомерных входа и выхода системы
следует говорить о матрице-столбце интегральных операторов (1.4.14) и
соответственно о матрице (я X г) Импульсных переходных функций. По-
следняя для стационарных систем определяется в силу (1.2.21) и (1.2.22)
выражением К(г — т)С(т). При этом предполагается, что и = хкк.
Лилейная стационарная система с самого начала может быть за-
дана в виде (1.4.14). Если при этом импульсная переходная функция за-
дана аналитически и ее изображение Лапласа имеет форму рациональ-
ной функции, то для перехода к описанию в пространстве состояний
можно воспользоваться описанными в п. 1.4.1 способами. Если же изобра-
жение Ф(1) является трансцендентной функцией или задано численно
или графически, то точное описание в конечномерном пространстве со-
стояний, как правило, невозможно. Приходится прибегать к приближен-
ному описанию. Такое приближенное описание можно получить путем
аппроксимации Ф(/) конечным рядом (суммой) экспонент или других
функций, имеющих изображение Лапласа в виде рациональной функции.
После выполнения подобной аппроксимации дальнейшее сводится к из-
ложенному и п. 1.4.1.
1.4.3. Линейная стационарная система с изяестной частотной харак-
теристикой. В классической инженерной теории регулирования широко
применяется частотное описание линейных стационарных систем. Час-
тотное описание является частным видом операторного описания, при
котором элементами функционального пространства входных сигналов
являются линейные комбинации всевозможных гармонических функций
времени с различными частотами, а элементами функционального прост-
ранства выходных сигналов — такие ;ке функции времени, как устано-
вившиеся отклики на входные сигналы.
Особенно широко в инженерной практике используются логарифми-
ческие частотные характеристики: амплитудные (ЛАЧХ) и фазовые
(ЛФЧХ). Наиболее эффективно применение частотных характеристик
для скалярных систем (с одним выходом и одним входом), причем про-
ще всего строятся ЛЛЧХ или асимптотические ЛАЧХ [1.10] для разомк-
нутых систем, т. с. систем, у которых разорван контур внешней обрат-
ной связи. Несомненным достоинством метода логарифмических харак-
теристик (ЛХ) применительно к линейным стационарным системам
является возможность по виду ЛХ восстановить структурную схему в
форме соединения элементарных динамических звеньев, а также их па-
раметры. После этого можно записать передаточную функцию и, вос-
пользовавшись способами, изложенными выше, найти описапие в прост-
ранстве состояний.
Процесс аппроксимации ЛХ системы совокупностями ЛХ элементар-
ных звеньев можно формализовать и выполнять автоматически посредст-
вом ЭВМ. Однако -решение задачи определения структурной схемы ио из-
вестной ЛХ не является однозначным и для многомерных мпогосвязпых
систем затруднительно. Кроме того, экспериментальное определение ЛХ
через установившиеся гармонические колебания требует значительного
времени.
1.4.4. Система, заданная оператором Гаммерштейна. Оператор Гам-
мерштейиа для нестационарного случая имеет вид
t
гвых(0 = j ф(1’ т) f К.х<т). T] di, (1.4.15)
io
где f[.r„x, Z] —функция скалярных аргументов. Для стационарного случая
t
^вых (0 = J ф — т) / Кх<т>] dt. (1.4.1С)
*о
Непосредственно из (1.4.10) следует, что структурная схема соответст-
вующей системы может быть представлена в виде последовательного со-
единения нелинейного (если функция / нелинейна) безынерционного
звена и линейкой части с импульсной переходной функцией Ф(г). Таким
образом, задача описания в пространстве состояний здесь сводится к за-
даче типа изложенной в п. 1.4.2.
Существует много форм операторного описания нелинейных систем
(оператор Урысона, ряды Вольтерра [1.7, 1.12] и др.). Однако нет особой
необходимости излагать способы перехода от этих описаний к описанию
в пространстве состояний. Дело в том, что при разработке математиче-
ских моделей конкретных систем (по крайней мере систем с сосредото-
ченными параметрами) их первичная форма обычно ближе к описанию
в пространстве состояний, чем к операторному описанию.
1.4.5. Описание в пространстве состояний на основе физических за-
конов. При разработке математических моделей управляемых процессов
неизбежно приходится обращаться к (физическим законам и закономер-
ностям, определяющим течение этих процессов при заданных условиях.
Эти законы для каждого звена системы или процесса чаще всего выра-
жаются дифференциальными, разностными, алгебраическими уравнения-
ми, которые путем введения и исключения переменных, простых преоб-
разований приводятся к описанию в пространстве состояний. Таким об-
разом, описание в пространстве состояний является, пожалуй, самым
естественным из всех форм математического описания объектов управ-
ления и систем управления в целом.
1.4.6. Расширение пространства состояний. Формирующие фильтры.
Уже из приведенных выше уравнений стохастических процессов (1.2.5) —
(1.2.7), (1.2.9) видно, что в стандартных описаниях этих процессов (фи-
гурирует белый шум, чаще всего гауссовский, т. е. случайный процесс
с нулевым математическим ожиданием и дельтовидной корреляционной
матрицей. В стандартных формах описания (1.2.19), (1.2.29) стохастиче-
ских процессов с дискретным временем также фигурируют белые после-
довательности случайных величин.
Между тем реальные возмущающие воздействия являются цветными,
коррелированными шумами. Конечно, если время' корреляции этих шу-
мов много меньше «постоянных времени» наиболее высокочастотных
собственных движений рассматриваемой системы, го вх с высокой сте-
пенью приближения можно считать белыми. Однако это условие часто
нс выполняется. Тогда прибегают к понятию формирующего фильтра и
расширению пространства состояний.
"Допустим, что шум &(i)(Z) в уравнении
«иг = Щ t, 1б(1>) (1.4.17)
нб является белым, а сам подчиняется векторному дифференциальному
уравнению в форме Ланжевепа
id) =/(2)(Е(», 0 + U), (1.4.18)
1де £<2) = £<2)(0—белый шум. Уравнение (1.4.18) называется формиру-
ющим фильтром, а процесс £(!)(t) —марковским процессом.
Вводим расширенное пространство состояний, объединяющее прост-
ранства А(|) э £(>), Е( 1) э £(|), обозначив
х _ х(1) AdPxi)’ *’ £(1)) g — °
IAdJ Az) Ат)’ г) J 1^(2).
Тогда процесс в расширенном пространстве состояний приобретает стан-
дартную форму описания:
х = f(x, и, t) + g.
Расширенное пространство состояний используют не только при наличии
цветных шумов^ но и во многих других случаях. Так,, всякое усложнение
системы в процессе исследования можно отразить, иутем расширения
пространства состояний,. • - -
ГЛАВА 2
НАБЛЮДАЕМОСТЬ, ИДЕНТИФИЦИРУЕМОСТЬ,
УПРАВЛЯЕМОСТЬ, АДАПТИРУЕМОСТЬ
Прежде чем синтезировать алгоритмы оценивания, идентификации,
управления и адаптации, целесообразно рассмотреть принципиальные
возможности осуществления этих процессов для заданного объекта или
системы. Эти возможности в значительной степени выявляются при изу-
чении свойств системы, которые принято называть наблюдаемостью, иден-
тифицируемостью, управляемостью и адаптируемостью (часто между
наблюдаемостью и идентифицируемостью но делают различий, а адапти-
руемость рассматривают как частный случай управляемости). Поскольку
основной целью изучения этих свойств является выявление принципи-
альных возможностей управления, они обычно определяются в идеаль-
ных условиях в смысле отсутствии шумов и неизвестных возмущающих
воздействий. Расширения и модификации соответствующих понятий с
учетом возмущающих воздействий и шумов измерения составляют спе-
циальное направление.
§ 2.1. Наблюдаемость
Измерение, наблюдение является необходимой составной частью уп-
равления. Даже тогда, когда формируется так называемое программное
управление — функция времени, определяемая, например, па стадии про-
ектирования, исходным является измерение, доставившее необходимую
информацию об управляемом процессе. Связь управления с информа-
цией, получаемой посредством измерения, явлиется органической и мо-
жет быть положена в основу определения понятия управления.
При автоматическом управлении п|юдиолагаетси, что наблюдение
сопровождается измерением координат, параметров, и в понятия «наблю-
дение», «измерение» вкладывается практически одинаковый смысл.
В дальнейшем в основном будет применяться термин «наблюдение». В от-
личие от тождественности понятий «наблюдение» и «измерение», понятия
наблюдаемость и измеримость имеют, вообще говори, различное содер-
жание в теории автоматического управления. Под измеримостью пони-
мается возможность непосредственного измерения той или иной физи-
ческой величины. Синонимом этого понятия является непосредственная
наблюдаемость. Под наблюдаемостью (по крайней мере в узком смысле)
понимается возможность косвенного определения величии иа основа
измерения некоторых других величии и использования априорной ин-
формации («восстановления» величин). Косвенные измерения широко из-
вестны из классической метрологии. В теории управления под наблюда-
смостыо понимается возможность косвенных измерений, по в расширен-
ном по сравнению с традиционной метрологией смысле.
Можно рассматривать наблюдаемость как в пространстве состояний,
так и в пространстве сигналов (см. § 1.4). Одпако компоненты вектора
сигналов чаще всего выбираются измеримыми, так что в пространстве
сигналов обычно имеет место непосредственная наблюдаемость.
Завершая вводные положения, отметим, что можно применять обоб-
щенное понятие наблюдаемости, включающее как непосредственную, так
и косвенную наблюдаемость.
2.1.1. Виды общей наблюдаемости в пространстве состояний. Доста-
точно общая постановка задачи определения состояния системы по на-
блюдениям заключается в следующем.
Получено (через наблюдение) множество Z, связанное известным
оператором с множеством X, принадлежащим пространству состояний си-
стемы с заданной математической моделью. Требуется определить X или
некоторое его подмножество cz X.
В технической интерпретации это выглядит следующим образом.
Известно множество выходных величин идеальных (без шумов, по в об-
щем случае инерционных) измерителей заданных функций состояния
контролируемого процесса, подчиняющегося точно известным урав-
нениям. Требуется определить множество (или подмножество) состо-
яний процесса, которому соответствует указанное множество выход-
ных величин.
Заметим следующее. Измерители, которые фигурируют в поставлен-
ной задаче, как правило, могут быть описаны обыкновенными дифферен-
циальными или разностными уравнениями. Тогда путем расширения
пространства состояния (см. п. 1.4.6) можно задачу с операторной связью
между множествами состояний и наблюдений заменить задачей с функ-
циональной связью между этими множествами и сформулировать
ее так.
Получено (через наблюдение) множество Z, связанное заданной
функцией Z{X) с множеством состояний X системы с известным урав-
нением. Требуется определить X или подмножество с: X.
В зависимости от видов множеств Z, X, функции Z(X) и уравнений
наблюдаемого процесса возможно, как уже отмечалось, большое число
вариантов конкретных постановок задачи наблюдения. Пусть элемент
множества X представляет собой текущее значение вектора состоя-
ния х, а элемент множества Z — векторную функцию от а: той же раз-
мерности п, что и х: z = /z(a:), i е R", z е S". Этот вариант можно
назвать случаем полнокомпонентного мгновенного измерения. Его иллю-
стрирует рис. 2.1.1, а. Изогнутая стрелка означает здесь преобразование
вектора х в разноразмерный вектор z.
Задача сводится к общеизвестной задаче разрешимости системы п
нелинейных (в общем случае) алгебраических уравнений относитель-
но л неизвестных. Априорная информация в виде уравнений, определя-
ющих x(t), здесь не используется. Этот случай для теории оценивания
малоинтересен, так как полпокомпопсптпое измерение в динамических
системах встречается редко.
К случаю полнокомпоиентного мгновенного измерения в некотором
смысле примыкает случай однокомпонентного измерения и а заданном
(возможно, сколь угодно малом) интервале времени с возможностью вы-
числения п—1 производных по времени z, z, .В этом случае
элемент множества X задан в виде дифференцируемого необходимое
число раз решения уравнения наблюдаемого детерминированного про-
цесса па том же интервале времени [4, t + AzJ (известно уравнение про-
цесса, а пе сам процесс Элемент множества Z в данном случае
представляет скалярную дифференцируемую п — 1 раз функцию z(Z) =
= A(a:(t)), измеряемую па интервале [Z, t-J-At]. Этот случай иллюст-
рирует рис. 2.1.1, б. Его будем называть практически мгновенным ска-
лярным наблюдением с вычислением производных. Он имеет невысокое
практическое значение, так как при наличии шумов измерения вычисле-
ние указанных производных по времени сопряжено с известными труд-
ностями.
Самая распространенная постановка задачи наблюдения такая, при
которой элементом множества X является вектор состояния в некоторый
начальный момент времени x(t0), известно уравнение детерминирован-
ного процесса, которому подчиняется х(4), задана функция наблюдения
z = h[x(t), Z], измеряемая па конечном интервале времени [t0, ti],
/i > t0, и имеющая размерность меньше размерности х. Таким образом,
элементом множества Z здесь служит функция z(t) па указанном ин-
тервале, причем число компонент векторной функции z(t) заведомо
меньше числа компонент x(Z) ив частном случае z(t) = z,(t) может
представлять скалярную функцию при многомерном пространстве со-
стояний. Соответствующая иллюстрация приведена па рис. 2.1.1, в. Яс-
но, что задача определения (восстановления) a?(t0) в этой постановке
разрешима только за счет использования априорной информации об x(t),
т. е. уравнения процесса.
На практике решение последней задачи почти эквивалентно реше-
нию задачи восстановления текущего вектора состояния по измерениям
текущего значения функции наблюдения. Действительно, за начальный
момент времени в данной задаче можно выбрать любой момент, пред-
шествующий конечному моменту наблюдения tt. Поэтому при соблю-
дении соответствующих условий может быть восстановлено состояние
процесса, непосредственно предшествующее текущему и для непрерыв-
ных процессов мало отличающееся от текущего (рис. 2.1.1, г).
Во всех рассмотренных выше постановках задачи наблюдаемости
множество X имеет такую же размерность, что и пространство состоя-
ний. Если возможно определение (восстановление) полного вектора со-
стояния, то говорят о полной наблюдаемости. Соответствующая система
называется вполне наблюдаемой. Если же существует возможность вос-
становления лишь подмножества X,, с X, а именно части компонент
вектора состояния, другая же часть по может быть определена в задан-
ных условиях, то имеет место неполная наблюдаемость, а система назы-
вается не вполне наблюдаемой.
Изучение наблюдаемости, как и других свойств систем, нуждается
в критериях, условиях, которые позволяли бы судить о наблюдаемости
на основе некоторых правил, оперирующих априорной информацией (за-
данными условиями). Эти критерии и составляют основное содержание
теории наблюдаемости.
В заключение перечисления видов наблюдаемости укажем опреде-
ление используемого иногда понятия степени непосредственной наблю-
даемости или измеримости. При полной непосредственной наблюдаемо-
сти /г (а.-) — х и z = х. При неполной непосредственной наблюдаемости
Л (а) Нх, где И — диагональная матрица, имеющая в блочном изобра-
жении вид
II =
Ev 01
.° 0J
(2.1.1)
Здесь Ev — единичная матрица v X v, v< п (п— размерность х). Отно-
шение v/n называется степенью непосредственной наблюдаемости или
измеримости. Конечно, непосредственно измеряемые координаты могут
иметь первоначально произвольные индексы из числа п индексов. Мат-
рица непосредственного наблюдения приводится к виду (2.1.1) путем
присвоения измеряемым компонентам вектора состояния первых v
индексов.
2.1.2. Локальное условие, благоприятствующее полной наблюдаемо-
сти для полпокомпонентного мгновенного измерения. Как известно, нет
общих условий однозначной разрешимости системы нелинейных урав-
нений
z, = hi (ад, Xi,__________ х-п), i = 1, п,
(2.1.2)
эквивалентных векториому уравнению z — h{x). Однако необходимое и
достаточное локальное условие для гладком функции h имеет впд
dh dh I Oh I
rank^ = n илн det = 0. (2.1.3)
Здесь dhjdx — матрица Якоби, | dhfdx|—якобиан (определитель матри-
цы dh/dx). Если условие (2.1.3) выполнено в некоторой точке z°uz° =
Рис. 2.1.2. Геометриче-
ская интерпретация ло-
кального условия при
иолпокомпопептиом из-
мерении
= /г (а:0), то прн г, близких к г°, уравнение z = h(x) имеет единственное
решение х = F(z) в окрестности а:0. Кроме того, в окрестности а:0 ма-
лым приращениям Дг соответствуют малые приращения Лх, т. е. систе-
ма наблюдения является «грубой» по отношению к ошибкам измерения.
Геометрическая интерпретация условий (2.1.2), (2.1.3) шнрэко из-
вестна. Если выражения (2.1.2) при заданных zs рассматривать как по-
верхности положения в пространстве состояний (навигационная терми-
нология), то состояние определится как точка пересечения п таких по-
верхностей и из условий (2.1.3) следует единственность такой точки. Ус-
ловие (2.1.3) означает, что в окрестности точки х все поверхности поло-
жения различны в том смысле, что нормали к ним не коллинеарны
(рис. 2.1.2). Как уже отмечалось, свойственная данному случаю полнота
наблюдения (п измеряемых величин, связанных с «-мерным вектором
состояния) редко имеет место в системах со сложными (детальными) ма-
тематическими моделями. Поэтому данный вариант в теории управления
часто вообще не рассматривается.
2.1.3. Локальное условие полной наблюдаемости при вычислении
(измерении) производных по времени. Уравнение детерминированного
процесса [2.1] имеет вид
х — f(x, и, t), (2.1.4)
где и = u(t)—известная дифференцируемая нужное число раз функ-
ция времени, х е К”. Уравнение наблюдения записывается в несколько
более общей форме, чем ранее, т. е.
z — h(x, и, t), (2.1.5)
где z — векторная наблюдаемая величина размерности т. Заданные функ-
ции / и h считаются дифференцируемыми но всем аргументам необхо-
димое число раз.
Введем линейный оператор дифференцирования в силу уравнения
(2.1.4) {оператор Ляпунова)
где звездочкой обозначены функции-столбцы.
Дифференцируя (2.1.5) п — 1 раз но времени, получаем с учетом
(2.1.6)
z = 7г, z = L[Zt] = L7i, ..., z’"-') = Ln~’A. (2.1.7)
Соотношения (2.1.7) рассматриваем как уравнения относительно х при
заданных (измеренных или вычисленных по z(7)) левых частях. Вслед-
ствие самого способа получения данных соотношений вектор состояния
х(t) системы (2.1.4) является решением этих уравнений, причем имен-
но тем решением, которое необходимо найти по смыслу задачи наблюде-
ния. Для однозначного определения х (I) в этих условиях необходимо и
достаточно, чтобы
rank -• УУ 1Л->7г)Ч = ". (2.1.8)
L\ох) \ ох ) \ох ) \
где все матрицы Якоби вычислены па решении х = x(t) при известном
управлении и{1).
2.1.4. Локальное условие неполной наблюдаемости. Повторяя приве-
денные в п. 2.1.3 преобразования, убеждаемся, что если измеряется (вы-
числяется), как и выше, (« — 1)-я производная z, но
1 \(dh V ( д V ( 9 г, . VI 7
rank — I — L/г • • • Ьг L = d < п>
1 \дх) \ох. ] \ах ) J
(2.1.9)
то имеет место неполная наблюдаемость в том смысле, что по резуль-
татам измерения (вычисления) производных могут быть определены
с? < п компонент вектора состояния. Степень наблюдаемости (пе непо-
средственной, о которой говорилось в п. 2.1.1, а косвенной) естествен-
но определить как отношение d/n.
Допустим, что h — х. Это означает, что имеет место полная изме-
римость или полная непосредственная наблюдаемость. В этом случае
dhfdx = Е — единичная матрица размера п X п. Ранг матрицы в левой
части выражения (2.1.8) равен я, и имеет место полная наблюдаемость.
Полная наблюдаемость, очевидно, имеет место и при выполнении ус-
ловия (2.1.3).
2.1.5. Структурная интерпретация наблюдаемости. Разобьем вектор
х па два субвектора х — (хщ, (это эквивалентно представлению
матрицы-столбца в блочной форме). Уравнения (2.1.4), (2.1.5) запишут-
ся в виде
•Ло = /<1)(а:<1)> ж<2>. 0. *(2) = /(2)(ж(()7 х(2)« “» 0.
(2.1.10)
Z = Й(.Т(|), 37,2), и, I).
Структурная схема, соответствующая этим уравнениям, в условных изо-
бражениях, приведенных в гл. 1 (см. рис. 1.3.2, а), представлена па
рис. 2.1.3.
Гпс. 2.1.3. Структура процесса, который может быть как вполпе наблю-
даемым, так и не вполне наблюдаемым
Процесс, отвечающий этой структурной схеме, может быть как впол-
пе наблюдаемым, так и пе вполпе наблюдаемым. Полная или неполная
наблюдаемость в локальном смысле может быть установлена посредст-
вом критериев (2.1.8), (2.1.9). Допустим теперь, что уравнения имеют
следующую форму:
®ll) = fit) (я Uh и’ t), Я(2> — А2)(я<1>, ж<2), И, /),
z = h(xtib и, t).
Соответствующая структурная схема представлена па рис. 2.1.4. Непо-
средственно из этой структурной схемы видно, что процесс, характери-
зуемый вектором состояния х(2), понаблюдаем, так как я(2> никак не
Рис. 2.1.4. Структура нс вполне наблюдаемого процесса
воздействует на выход системы z. Если размерность х(1) равна d, а раз-
мерность х(2) соответственно (п — d), то степень наблюдаемости здесь
не более d/n. Это вытекает и из аналитического критерия (2.1.9). Дейст-
вительно, матрица (dhfdxy имеет в данном случае следующую блочную
структуру: {8h/8xy ~ [{&hfdxw) О]1', причем размер нулевой матрицы-
/ 8 V
блока (n — d)X т. Все другие матрицы Lfe~’fe ) имеют такую и;е
блочную структуру (с нулевыми блоками того же размера). Ранг мат-
рицы в левой части выражения (2.1.9) здесь не может превышать d.
2.1.6. Условие наблюдаемости линейной стационарной системы. Для
нелинейной системы следует говорить о наблюдаемости того или иного
процесса (движения), происходящего в этой системе. Для линейной си-
стемы я линейных условий наблюдения все процессы имеют одинаковую
степень наблюдаемости. Поэтому можно говорить просто о наблюдае-
мости линейной системы.
Условие наблюдаемости линейной стационарной системы было по-
лучено Налманом, который одновременно ввел наиболее распространен-
ное понятие наблюдаемости (и управляемости) [2.2].
Пусть уравнение процесса и уравнение наблюдения имеют вид
х = Ах -]- Ви, z — Их -}- Си,
где А, В, II, С — постоянные матрицы.
. Оператор (2.1.6) в данном случае принимает форму
аы <?]=*] • , <?1Н
L = {-Лх + + "лГ “ + “ёг •
Функция h здесь равна Их Д- Си. Критерий (2.1.8) приобретает вид
rank[77v Лт//т (Лт)277т... (Лт)"-'/7т] = п. (2.1.12)
Это широко известное необходимое и достаточное условие полпой наблю-
даемости Калмана. Матрица, обозначенная квадратными скобками, здесь
состоит из матриц-блоков размера п X т и имеет общий размер п X пт.
Иногда эти блоки отделяют штриховыми линиями, записывая
rank [ГГ i АГ1Г : (Л1)2//1 \ ... : (Лт)"~’/7Т] = п.
Для случая неполной наблюдаемости будем иметь
rank[//T Лт7/т (Л ‘)'НС ... (Л*)«-'Ят] = d < п. (2.1.13)
Степень наблюдаемости в этом случае d/п.
Степень наблюдаемости не меняется при линейном иеособом преоб-
разовании координат. Действительно, если выполнить преобразование
x-a.li, где а — невырожденная квадратная матрица, то условие (2.1.13),
примененное к системе с вектором состояния у, будет иметь вид
rank [<zT7/T атЛт/7т ... ат(Лт)’1-1] = d < п.
Рапг матрицы в левой части этого выражения такой же. как ранг
матрицы в левой части (2.1.13). Можно показать, что если наблюдаемость
линейной стационарной системы пе полная, то опа или непосредствен-
но имеет структуру, показанную па рис. 2.1.4, или может быть приве-
дена к этой структуре линейным пеособым преобразованием пространст-
ва состояний [2.3].
2.1.7. Условие наблюдаемости линейной нестационарной системы.
Уравнения процесса и наблюдения имеют вид
х = Л (t)x + z = 77(7)х-f-C(7)u,
где Л(7), /7(7), 7/(7), C(t)—дифференцируемые необходимое число раз
матричные функции времени. В данном случае
dh
т- = И (7) = 77 ,
Ох ' ’ о’
^7 Lfe = II (7) Л (7) -|- II (7) = 770Л -1- 7/0 = nv
d 2
^^=77^-1-77^77^
£ Ln~'h = Пп_чА + hn_z = 77n_r
Таким образом, условия (2.1.8), (2.1.9) принимают вид
rank [ 77j/7f ... Л’_г] = п, (2.1.14)
rank Г77'^77’ ... П* 1 = d < п, (2.1.15)
1_ V 1 L 1
где 77о =/7(7), Я,, = Я;<-1-}-77А_|Л (7), к = 1, и — 1. Формулы (2.1.14) и
(2.1.15) другим путем получены в [2.4, 2.5] из соответствующих условий
управляемости па основе принципа двойственности (см. и. 2.3.5).
2.1.8. Условие наблюдаемости линейной нестационарной системы, вы-
раженное через матрицу Коши. Если известна матрица Коши линейной
нестационарной системы K(l", t') (см. п. 1.2.3), то условие полной на-
блюдаемости па интервале [70, б] заключается в невырожденности
матрицы
j К' ('- 'о) IT К (г- Q dt- (2.1.16)
‘о
Это условие непосредственно получается из общего решении [2.5, 2.6]
однородного линейного векторного дифференциально)о уравнении с уче-
том задачи восстановления х(«0) по наблюдению z = Il(l)x на интерва-
ле [/о, lil-
Рассмотреи иые выше критерии являются локальными во времени.
Критерий, соответствующий (2.1.16),— интегральный.
2.1.9. Локальное условие наблюдаемости нелинейного процесса с дис-
кретным временем при п последовательных измерениях. Уравнения про-
цесса с дискретным временем запишем в компактной форме, обозначая
функцию как оператор:
х[к. + 1] = /[х[/£], «[7с], к] = Е!.т[Л].
Тогда
x[fc + 2] = /{/№], «[/.], 7с], п[/с + 1], к + 1} =
х[к м — 1] — Ffr+n-sl’fc+n—з - - - Fftxf/r].
Соответственно этому
z[A] = Л[Ж[7с], и [7с], 7г] = 1ц[х[7г] ],
х[/, + 1] = /i[F„x[7c], u[/c + 1], 7с + 1] = hi.+ 1[lW]].
..................................................................... (2.1.17)
4* + п - 1] = ft[Ffc+n_2Ffc+n_3 - . - F*44, u[fr + « - 1], + n - 3] ==
== hft ] n— i [^л-1-n—sFfc+n—з
где обозначения h,„ ..., 1ц+п_| введены для сокращения выражений.
Соотношения (2.1.17) в соответствии с самой постановкой задачи
рассматриваем как уравнения относительно х[Л] при заданных левых
частях. Локальное условие разрешимости этих уравнений, эквивалентное
локальному условию полной наблюдаемости, в рассматриваемом
варианте будет иметь вид
rank
дх [к| hfc
дх i/tj |,л+1 [Fftx [*ii
Ox [A:] h/<+n-l [Fh+n—2F/<+?i-3 • • • Fhx W]
Степень наблюдаемости d/n <. 1 будет иметь место, если
rank
&
dTpT *’ь[x (/iI1
0
дхЩ hh+i IF/<X
(2.1.18)
(2.1.19)
дх I A] hfe+n-i [Fh+n-2Ffc+n-3 • • • F/<xl*IJ
Матрицы, обозначенные внешними квадратными скобками в выра-
жениях (2.1.18), (2.1.19), имеют размер тп X п. Чтобы записать эти вы-
ражения в более привычном виде (аналогичном (2.1.8)), следует их тран-
спонировать. Однако форма записи (2.1.18), (2.1.19) в данном случае бо-
лее удобна.
2.1.10. Условие наблюдаемости линейной стационарной системы с
дискретным временем. Для линейной стационарной системы с дискрет-
ным временем
х[к + 1] = Лл:[/г] + Ви [/с], z [А] = Их [/с] + Си[к}
выражение (2.1.18) после транспонирования принимает вид
rank [1Г/1Т/Г ... (ЛТ)В-'ЯТ] = п, (2.1.20)
т. е. совпадает с условием полной наблюдаемости (2.1.12) непрерывной
линейной стационарной системы. Так же как условие (2.1.12), условие
(2.1.20) является необходимым и достаточным условием полной наблю-
даемости. Конечно, условие неполной наблюдаемости при дискретном
времени в стационарной системе также совпадает с соответствующим
условием (2.1.13). для непрерывной системы.
2.1.11. Условие наблюдаемости линейной нестационарной системы с
дискретным временем. Для линейной нестационарной системы с дискрет-
ным временем
х\к + 1] = Я + Z?[7c] uf A], z[А] = Я[ВД/с] + С[Л]и [А]
^выражение (2.1.18) получает вид
"Я [7г[
Я [7г + 1] А [7с]
Я [7с + 2] А [7с + 1[ А [7с]
rank
(2.1.21)
_Я [А- п — 1] А [А- + п — 2] ... А |/с].
Условие неполной наблюдаемости со степенью d/п < 1 будет иметь вид
rank
77 [Л:|
Л [7с 4- И А [7с]
II [7с 4- 2] А [7с +1[ А [А]
(2.1.22)
II [7с + п — 1] А [7г + п — 2] ... Л [7с]
2.1.12. Условие наблюдаемости процесса с дискретным временем при
q < п последовательных измерениях. При q < п последовательных из-
мерспнях условия наблюдаемости получаются из условий (2.1.18) —
(2.1.22) (для соответствующих вариантов) заменой п на q.
§ 2.2. Идентифицируемость
В абстрактно-теоретическом рассмотрении понятие идентифицируе-
мости, по крайней мере параметрической, является частным случаем на-
блюдаемости. Однако в практическом применении идентифицируемость
представляет собой настолько важное и специфическое свойство, что его
целесообразно выделить в специальную категорию. Параметрическая
идентифицируемость, рассматриваемая в данном параграфе, представ-
ляет собой возможность определения параметров математической моде-
ли системы или процесса по результатам измерения определенных вы-
ходных величин в течение некоторого интервала времени. Параметры,
вектор которых в дальнейшем обозначается через а, отличаются от ко-
ординат (вектор х) скоростью изменения. Параметры, как правило, счи-
таются медленно изменяющимися величинами, а в идеальном случае —
постоянными (а = 0).
При изучении идентифицируемости, так же как наблюдаемости, це-
лесообразно, по крайней мере на первом этапе, рассматривать идеальные
условия, когда шумы отсутствуют, а идентифицируемые параметры
постоянны.
13 соответствии с этим для задачи параметрической идентифицируе-
мости непрерывного процесса уравнения записываются в виде
х = /(х, и, a, I), о = 0, z = h(х, и, а, I). (2.2.1)
В рамках этой постановки задачи возможны различные варианты и раз-
личные формы условий идентифицируемости.
2.2.1. Локальное условие совместной наблюдаемости и идентифици-
руемости при вычислении (измерении) производных z по времени. Функ-
ция и — u(t) в задаче идентифицируемости, как и в задаче наблюдае-
мости, всегда считается известной (точно измеримой). Что касается
вектора состояния х = х(1), то он может считаться либо неизвестным
(подлежащим определению по наблюдению тон же векторной величи-
ны z), либо --носгй'л-твеппо я точно измеряемым. Данное условие от-
носится к первому ел;- ча..;, когда должно определяться условие наблюда-
емости как х, так и а ^последнее именуется условием идентифици-
руемости).
Предполагая функции f, h необходимое число раз дифференцируе-
мыми и вводя расширенный вектор состояния у = (х, а), записываем
(2.2.1) в виде, аналогичном (2.1.4), (2.1.5):
У = fiA’J, и, /), z = h(y, и, t),
где /р в блочной форме имеет вид
а, и,1)1_Г/(у, н,«)1
о J-[ о ]•
Оператор (2.1.6) здесь принимает форму
т . 1 д[*1 |7] 0 (*] • д [*]
L 1*1 “ ду |о] + ди и т 01 ‘
Локальное условие полной наблюдаемости и идентифицируемости
сохраняет вид, аналогичный (2.1.8), т. е.
(2.2.2)
где все компоненты вычисляются па том движении у = (я(г), с), наблю-
даемость и идентифицируемость которого изучаются. Через ns обозна-
чается размерность вектора у. Поскольку точное измерение z на сколь
угодно малом интервале времени и соблюдение условий дифференциру-
емости предполагают возможность вычисления любых производных по
времени, в дальнейшем измерение или вычисление этих производных не
оговаривается, хотя и подразумевается.
2.2.2. Локальное условие параметрической идентифицируемости при
измерении ж и z. В этом случае первое из уравнений (2.2.1) можно от-
бросить или объединить с третьим (поскольку точно измеряется х и мо-
жет быть вычислено х), и исходные условия записываются в виде
й — 0, z = h[x(t), u(t), a, t], (2.2.3)
где идентифицируемой величиной является вектор а, функции x(l), u(t)
считаются дифференцируемыми по времени необходимое число раз,
а функция h — дифференцируемой по х, и, a, t также необходимое чис-
ло раз. Оператор (2.1.6) в данном случае имеет вид
L [*] —
О [*1
дх
, ^1*1 ‘ 1*1
+ ди U Ot ’
(2.2.4)
х
Условие полной локальпой идентифицируемости можно согласно (2.1.8)
записать в виде:
К Як \г [ Я \т I Я п -1 \тТ
д^) (аГ Lh) k) P
где nn — размерность вектора а.
Это же условие можно записать и в иной форме:
rank
^-h[x{t), u(t), a, t]
Я d
к(И. u(l), a, t|
(2.2.5)
(2.2.С)
Я <Г1' 1
57 n„~i Л[г (<)’ м (0, я, П
dt
Прежде чем переходить к другим частным случаям, обратим вни-
мание па следующее. В данной задаче, как и в предыдущей, предпола-
гается возможность измерения x(t), u(t) и вычисления или измерения
x(t), ii(t) и других производных по времени до (па — 1)-го порядка. По
если x(t) измеряется или вычисляется, то, не имея другой функции на-
блюдения, можно в качестве таковой выбрать f, т. о. использовать пер-
вое уравнение системы (2.2.1).
2.2.3. Локальное условие параметрической идентифицируемости при
измерении х и х. Условия полной идентифицируемости в данном случае
получаются непосредственно из (2.2.5) или (2.2.6) заменой h на /;
(2.2.7)
где оператор L имеет прежнее выражение (2.2.4). Другая форма этого
условия:
/[.r(t), и (t), a, t]
rank
И-НО, и (о, Я, «I
(2.2.8)
Я d "
к(,)’в’
2.2.1. Условие параметрической идентифицируемости при линейно
входящих параметрах и измерении х и z. Случай линейно входящих па-
раметров является типичным. Действительно, большинство способов ап-
проксимации функций основало па представлении их в виде сумм не-
которых базисных функций, умноженных па постоянные коэффициенты.
Так обстоит дело при аппроксимации полиномами, тригонометрически-
ми рядами и широко известными специальными функциями. Надо за-
метить, что при векторной функции наблюдения идентифицируемые па-
раметры образуют не вектор, а матрицу, и нужно установить некоторое
искусственное правило их размещения, чтобы получить вектор.
Однако обычно коэффициенты (параметры), входящие в различные
компоненты вектора 7г, независимы, и задача распадается па ряд не-
зависимых задач со скалярным наблюдением вида
Zi = <гЛг) “> *>- °(i) = °’ (2’2’9)
Здесь o(i) — вектор-столбец параметров, входящих в г-е условие наблюде-
ния (функцию /г,); »!’(<) = Ф(г) [^(7), u(t), 7]—вектор-столбец базовых
функций ф(,)2, ... Применяя критерий идентифицируемости (2.2.5)
или (2.2.6), получаем
rank [ф(ПФ(0 ... Ф(( ^-1) ] = nai, (2.2.10)
где itni — число идентифицируемых параметров в данном «модуле» с ин-
дексом г. Условие (2.2.10) выполняется, если столбцы матрицы линейно
независимы, т. е. если нельзя указать постоянные числа X,, Х2, ..., Х„о.,
не все равные нулю, при которых тождественно выполняется условие
+ •' • + М» + М(г) °' <2-2Л '>
Процесс х(7), и (г), на котором осуществляется параметрическая
идентификация, будем называть идентифицирующим движением пли
процессом.
Условие (2.2.11) означает, что для полной параметрической иденти-
фицируемости линейно входящих параметров базовые функции на иден-
тифицирующем движении не должны удовлетворять линейному одно-
родному дифференциальному уравнению (2.2.11).
2.2.5. Условие совместной наблюдаемости и идентифицируемости ли-
нейной стационарной системы. Для. системы
х = А х -}- Ви, z = Их ф Си,
(2.2.12)
А = 0, В = 0, 11 = 0, С = 0
при заданном м(7) и точном измерении z(7) па сколь угодно малом ин-
тервале времени требуется указать условие полной наблюдаемости х и
идентифицируемости матриц параметров А, В, Н, С. Это частный слу-
чай задачи (2.2.1). По ввиду того, что идентифицируемые параметры
входят здесь как элементы матриц, а не одного вектора, выполним спе-
циально выкладки для получения критерия идентифицируемости.
Представим матрицы в виде блочных матриц с блоками-строками:
Л = [ац|...а]П|]т, В — [I'll! ... 6|„i]T,
11'= [Тгщ ... X|m|]T, С = [epi ... С|,М|]Т.
Вектор параметров а образуем, например, следующим образом:
а1 — [ящ ,,, «|п| 6ц| Ь|П| Л|ц ... Л|ТО| сц| ... С|та|]. (2.2.13)
Общая размерность вектора параметров равна п„ = /А-f -пг-1-пт-) т.г,
где 1— размерность вектора и, а т — размерность вектора z.
Дифференцируя второе из уравнений (2.2.12) по времени в силу
первого из этих уравнений, получаем
z = Их < Си,
z = IIАх -I- IIВи + Си,
........- . . ........................................•
Z(n-D = ПА^х + II (Ап~2Ви -I- А"~3Ви -]-... + Дн(п-2)) + Си0”"1’,
z<’” = II А" х + II {Лп'~1Ви + ЛП-2В« + ... Ви{п~1'>) + Сг/П),
/МП+И“-\ я(41,+ЭТ«-2Ди+...-|-Ди(”+"“-2))+Си<П+"““1)-
Эти соотношения рассматриваются как уравнения относительно у —
= (х, а). Условия их локальной разрешимости имеют вид
rank
И
на i о
на"-1 ;
НА" i~[HA"x + ...+Cu(n)]
ПА
^[11Ап+п"-'1х + ...+Си^-1П
(2.2.14)
Это условие совместпой полной наблюдаемости и параметрической
идентифицируемости линейной стационарной системы. Заметим, что обыч-
ное условие наблюдаемости является необходимым условием совместной
наблюдаемости н параметрической идентифицируемости. Это вытекает
из структуры матрицы (2.2.14).
Далее, параметрическая идентифицируемость зависит от характера
идентифицирующего движения x(t), u(t). В частности, для равновесного
состояния, когда х = const, и = const, имеет место тождество
Ах 4- Ви = О,
и полная параметрическая идентифицируемость невозможна.
2.2.6. Условие параметрической идентифицируемости линейной ста-
ционарной системы при измерения т п z, Этот случай может быть по-
лучен как частный либо из предыдущего, либо, более просто, из урав-
нения (2.2.9). Поскольку при точпом измерении x(t), u(t) между ними,
как и соответствующими коэффициентами, пет различий, соотношения
для i-ii компоненты вектора наблюдения удобно записать в виде г. =
= “(Vi»’ Здесь “Ь = lfeli|cU|]’ Ур = 1Л’Ь Условис полной
идентифицируемости получается как частный случай условия (2.2.10):
танкер хр...4Ир ^| = "р>
(2.2.15)
где "г — размерность вектора хр.
Таким образом, условие полной параметрической идентифицируемо-
сти здесь выполняется, если идентифицирующее движение не является
решением векторного дифференциального уравнения с постоянными ко-
эффициентами
+ • ’ ' + ХвГ₽ = 0’ (2 2ЛС)
где не все Хс, ..., А(11 равны пулю.
2.2.7. Локальное условие совместной наблюдаемости и параметриче-
ской идентифицируемости дискретного по времени процесса при изме-
рении последовательности z[v]. Подобно тому, как это осуществлено
в п. 2.1.9, для разностного уравнения введем сокращенное операторное
обозначение, на основе которого получаем
я [А 1] = / [ж |А), и (к], а, к] = Ffe (а) х [А],
х [А + 2] = Fft+I (a) F,; (с) х |А],
х [А + п -|- па~ 1] = F,i+(l+)1G_2 (а) Ffi+„+„a_3 (а} . .. (а) х [А].
Введем, как и ранее, обозначение для объединенного вектора состо-
яния и вектора параметров у [А] — (х[А], а). Наблюдаемая величина
в моменты времени А, к + 1, ..., к + п + па — 1 будет
z [А] = h [я [А], и [А], а, А] = h/t [у [А]],
2 [А -1- 1] = A [Fft (<7) X (А), и [А + 1], а, к 1] = hft+1 \у [А]], (2.2.17)
2 Р ‘И п -I’ «а - Ч = ЛЛ+н+>1(1-1 I» Ml’
Локальное условие полной наблюдаемости и идентифицируемости
запишется в виде
rank
—-— 1>ь 1У [А]]
^[A-l
—-— 1». ,. [у [А]]
сф[А] ft+1
(2.2.18)
4+n+na-11» PH
2.2.8. Локальное условие параметрической идентифицируемости дис-
кретного по времени процесса при измерении х[А] и z[A]. При изме-
рении х[А], z[k] в каждый дискретный момент времени уравнение са-
мого процесса х[к -f- 1] =/[х[А], и[А], о, к], можно объединить с урав-
нением наблюдения z[A] = 7г[х[А], и [7с], с, А] в единое условие наблю-
дения
zj[A] = h-L [х[А], u[A], о, А]. (2.2.19)
В частном случае, когда z и k отсутствуют, функцией к г служит
функция /, а вектором zz— вектор х[к + 1],. Рассматривая (2.2.19) при
к, к + 1, ..., к + па — 1 как уравнения относительно «, получаем локаль-
ное условие полной параметрической идентифицируемости:
А /г2 [ж [А], и [А], а, А]
да
rank
— Tiy |ж (А- -[- 1], и [к -|- 1], а, к 1)
да
- hs [х [к -1- по - 1 ], и [к + па - 1], а, к I- Па - 1]
(2.2.20)
2.2.9. Локальное условие идентифицируемости линейно входящих па-
раметров дискретного но времени процесса при измерении х[А] и Zx[A],
Для дискретных по времени процессов случай линейно входящих пара-
метров так же распространен, как для непрерывных. Ввиду незави-
симости параметров, входящих в отдельные строки матрицы 7г, обычно
можно рассматривать изолированные идентифицируемые модули вида
2Х; [А] = [ж [Л], U [7с], А]. (2.2.21)
Соответственно этому и (2.2.20) условие полной идентифицируемости
для данного случая принимает вид
-ф(;) р. [А], и [А], к]
'P(i) к И + Л, “ I* +1], к -I-11
_Ф(0 [Ж [А + «„ — 1 J, U [к -I- По — 1], к -]- па — 1]_
- па. (2.2.22)
rank
2.2.10. Условие полной идентифицируемости линейной стационар-
ной системы с дискретным временем при измерении х[А] и zx[A-J. Пет
смысла в рассматриваемом случае делать различие между переменными
•тии, так что исходное уравнение целесообразно записать в виде
= Я(Т{)« [А]. Тогда условие полной идентифицируемости запишется в
виде (в транспонированной форме)
rank [®[А]х[А + 1] ... х[А-|-П2— 1]] = пг, (2.2.23)
где пх — размерность векторов х и e(i). Матрица в левой части
Уравнения (2.2.23) квадратная, и это условие эквивалентно ее
по вырожденности:
[7с]
det
*2 ЬЧ
,т2 [А- + 1]
='1[fe + 'IE-1I ^[* + «2— 1] •••
Хп И
хп Р + 11
х„ [fc + «2 “ 1] -
(2.2.24)
§ 2.3. Управляемость
Понятие управляемости связано с переводом (переходом) системы
посредством управления из одного состояния в другое. Этому понятию
придается либо структурно-качественный, либо количественный смысл.
При рассмотрении структурно-качественной стороны управляемости ин-
тересуются принципиальной возможностью перехода управляемой си-
стемы из одного заданного множества состояний в другое заданное мно-
жество состояний, как правило, за конечное время. При количественном
изучении управляемости рассматривают те или иные характеристики пе-
реходных процессов при простейших типовых управляющих воздействи-
ях. Управляемость обычно рассматривают применительно к детер-
минированным процессам, хотя возможно построение стохастических
аналогов задач управляемости. Можно рассматривать управляемость как
динамических объектов, не оснащенных регуляторами, так и систем, со-
держащих множество замкнутых контуров управления. В большой си-
стеме с иерархической структурой можно изучать управляемость каждо-
го уровня (эшелона, страты), начиная от низшего и кончая высшим.
В любом случае управляемость зависит от структуры системы, состава
органов управления, значений параметров, располагаемой энергии уп-
равления.
Может применяться п применяется целая группа понятий управля-
емости *), различающихся как условиями перехода системы, так и ог-
раничениями, накладываемыми па управление.
Классификация видов управляемости по этим признакам приве-
дена в табл. 2.3.1.
Указанные здесь виды переходов иллюстрирует рис. 2.3.1. В слу-
чае I рассматривается переход из произвольной точки га-мерпого прост-
ранства состояний в произвольную точку этого пространства, причем
никаких ограничений на характер движения, кроме конечности време-
ни перехода t( — to, не накладывается. В случае II в пространстве со-
стояний задала замкнутая область G и должен обеспечиваться переход
из любой точки этой области в произвольную ее точку без выхода за
пределы области G. Это случай существования ограничении типа нера-
венств в пространстве состояний.
*) Кроме термина «управляемость», применяется понятие «достижи-
мость», характеризуемая областью пространства состояний каждая точка
которой может быть достигнута при управлении, ограниченном заданной
областью. Здесь достижимость рассматривается как вид управляемости.
Случай III соответствует переходу из заданной области пространства
состояний полной размерности п в заданную область меньшей размер-
ности. Например, управление должно обеспечивать переход из любой
точки пространства состояний па прямую, проходящую через начало
координат.
Рис. 2.3.1. Типы переходов при различных видах управляемости
Случай IV является как бы противоположным предыдущему: здесь
управление должно обеспечить перевод системы из любой точки облас-
сти меньшей размерности в любую точку полноразмерной области.
Случай V соответствует управляемости в малом. Здесь управление
должно обеспечить переход из любой точки пространства состояний х°
в любую точку малой n-мерпой окрестности е точки х°. Порядок мало-
сти окрестности может быть связан со временем перехода.
Управляемости в малом может быть дано другое определение. Пусть
при управлении u°(Z) и начальном условии х® = х (<0) имеет место про-
цесс x°(t). При управлении и = u°(f) -|-Ди(г) процесс описывается функ-
цией xru(Z)-|- Дх(1). Пусть каждая точка траектории к0 (,) служит центром
Виды управляемости
Таблица 2.3.1
Вид перекопа Ограничение на управление и номер варианта
содержательная формулировка rt К о-ва Ф s S о. не ограни- чено ограничено, Ou I принимает< дискретные (предельные) значения, например, wi=±wimax имеет импульсный характер
gg 1 2 3 4
Из произвольной точки про- странства состояний Rn в произвольную точку R” I 1.1 1.2 1.3 1.4
Из произвольной точки зам- кнутой области размерности п пространства IR” в произ- вольную точку этой области II II.1 II.2 II.3 II.4
Из произвольной точки об- ласти размерности п про- странства в произволь- ную точку области меньшей размерност 1 этого простран- ства III II1.1 III.2 II 1.3 III.4
Из заданной области раз- мерности т с п простран- ства в заданную область размерности п IV IV.1 IV.2 IV.3 IV.4
Из произвольной точки ,г° пространства состояний К” и любую точку малой ок- рестности || х — хи |; е этой точки V V.1 V.2 V.3 V.4
Из произвольной точки за- данной области подпро- странства IR™(™ <С и) в про- извольную точку другой за- данной области этого под- п ространс тва VI VI.1 VI.2 VI.3 VI.4
Из заданной точки про- странства состояний в другую заданную точку по заданной программной тра- ектории VII VII.1 VII.2 VII.3 VIT.4
сферы радиусом е, где е — бесконечно малая величина: Огибающая
указанных сфер образует е-трубку траекторий. Если можно указать уп-
равление Дм(г), обеспечивающее прохождение траектории х°(4)+Дж(0
через любую точку е-трубки, то система обладает управляемостью в
малом.
Случай VI соответствует переходу из заданной области подпрост-
ранства меньшей размерности т < п в заданную область того же под-
пространства. По отношению к определению I это может быть случаем
неполной управляемости.
Важное практическое значение имеет понятие управляемости, соот-
ветствующее случаю VII. Здесь задастся множество программных тра-
екторий х,(/) перехода из одной точки ^3(;0) в другую xs(t,). Система
считается управляемой, если существуют управления, обеспечивающие
движение пи заданным траекториям при условиях
х((а) = x-,(l0), X(t|) = xs(h). .
Все эти понятия управляемости могут рассматриваться при различ-
ных условиях, накладываемых па управление. Четыре варианта этих
условий указаны в табл. 2.3.1. В случае 1 никаких ограничений па век-
тор управления и(1) пе накладывается (и принадлежит открытой об-
ласти пространства управлений lRr)- В случае 2 управление ограниче-
но, оно должно принадлежать замкнутой области пространства Rr-
В случае -3 управление все время (за исключением счетного множества
моментов времени) имеет предельное значение, т. е. находится на гра-
нице замкнутой области пространства IRr. В случае 4 управление пе
ограппчепо по величине, по носит импульсный характер (типа вектор-
ной б-фупкцнп). Переход системы здесь осуществляется мгновенно.
Итак, существует большое число видов управляемости (табл. 2.3.1
содержит 28 видов). Эти виды применительно к линейным стационарным,
линейным нестационарным, нелинейным системам изучены в разной сте-
пени, и трудности па пути их исследования различны. Положение здесь
примерно аналогично тому, которое имеет место для наблюдаемости и
ндептнфнцируемостн. Самым сильным в теоретическом и практическом
onioiiieiiHH инструментом исследования управляемости является необхо-
димый и достаточный аналитический и структурный критерий управ-
ляемости того или иного вида. Подобные критерии получены пока лишь
для основных видов управляемости линейных систем. Во многих случа-
ях приходится довольствоваться лишь необходимыми или достаточными
критериями управляемости, а в ряде случаев лишь условиями, спо-
собствующими управляемости, подобно тому как это имеет место при
изучении наблюдаемости.
Наконец, во многих практических задачах аналитические и струк-
турные подходы анализа управляемости оказываются неприемлемыми по
причине чрезмерной громоздкости или неразработанности. В этих случа-
ях приходится прибегать к численному эмпирическому изучению уп-
равляемости путем моделирования.
2.3.1. Управляемость линейных стационарных систем. Для линейной
стационарной системы
х = Ах + Ви, (2.3.1)
где матрицы А (размер п X п) и В (размер п X г) постоянны, при от-
сутствии ограничений в пространстве состояний и пространстве управ-
лений управляемость зависит только от матриц А а В. Поэтому вместо
управляемости системы в этих случаях можно говорить об управляе-
мости пары (Л, В).
2.3.1. 10. Критерий полной управляемости по Калмаиу. Если для про-
извольных заданных х°, х' существует управление и (Г), переводящее
систему (2.3.1) за конечное время Ц—10 из состояния x(t0) = ж0 в со-
стояние = х' (случай 1.1 для стационарной линейной системы), то
система (2.3.1) или пара (Л, В) называется вполне управляемой (по
Калмаиу).
Необходимое и достаточное условие подпой управляемости имеет
вид
rank [В:АВ\А2В:; ... : ЛП*-1В] = в..
Здесь п* п — степень так называемого минимального полинома мат-
рицы А [2.6]. Для матрицы, имеющей простые корпи характеристическо-
го полинома det [ХЕ — Л] =0, степень минимального полинома совпада-
ет с п, т. е. п* — п.
Известно также, что ранг расширенной матрицы [В ; АВ; ...
. ..; Ап*~' В : Ап*В :...] равен рангу матрицы [В • АВ • ... : Лп*—гВ]. По-
этому п* в критерии можно заменить па п, что далее везде будет ис-
пользоваться:
rank [В : АВ ; ... : Лп-1В] = п. (2.3.2).
Пунктирными линиями отделены матрицы-блоки размера п X т. Вся
матрица (2.3.2) имеет размер л X (» ')
Доказательства критерия (2.3.2) приведены в [2.6, 2.8, 2.9]. Если ус-
ловие (2.3.2) не выполняется, т. е.
п — rank [В : АВ : А1 В : ... ; Л’’"1 В] = q > 0,
(2.3.3).
то система не вполне управляема (по Калмапу), причем q может быть,
названо степенью неуправляемости.
Рассмотрим структурные условия полной и неполной управляемости
по Калмапу. Пусть имеется только одно скалярное управление, воздейст-
вующее непосредственно только па одну координату. Тогда можно при-
нять Вт = [1 0 0... 0] и следующую структуру:
т. е. считать, что все элементы первого стол ца, кроме верхнего, — пу-
левые. Тогда
.... Ап~гВ = а?”1
и выражение (2.3.3) принимает вид
Таким образом, данная система при п > 1 не вполне управляема, при-
чем степень неуправляемости составляет п — 1.
Структуру данной системы иллюстрирует рис. 2.3.2. Причина, по
которой здесь лишь одна управляемая координата х(, а остальные п — 1
Рис. 2.3.2. Пример по вполне управляемой линейной системы
координат хг, х3, ..., хп неуправляемы, вполне ясна: пижпий блок урав-
нений размерности п — 1 lie имеет воздействий со стороны верхнего уп-
равляемого блока, воздействия же со стороны нижнего блока па верх-
ний не влияют па управляемость.
Рассмотрим второй случай, когда матрица В имеет тот же вид, а мат-
рица А обладает следующей структурой:
“11 “12 “13 "• “1П
Я21 Я22 Я23 ‘ ‘
0 0 “зз ••• “зп ’
причем e.1]L #= 0.
10
0 “из • ’ апп—
В этом случае степень неуправляемости
телыго,
составляет п — 2. Действие
rank [В АВ А2В ... Ап~гВ] = rank
1 “п
° «21
О (I
о о
+ ai-2a22
а11°21+а21а22
о о
о ... о
Структуру данной системы иллюстрирует рис. 2.3.3.
Рис. 2.3.3. Пример линейной системы со степенью неуправляемости
н—~2
по Налману заключаются в сле-
матрицы-столбцы х, и в блочном
В общем случае стационарной линейной системы структурные усло-
вия управляемости и неуправляемости
дующем. Представим матрицы Д В и
виде
ж(1)
(2) J
Ап) А12)
Ааг) Ага)
(1)
(2)
Ап) Ala)
Аги Агг)
Ап
пли
- '• < I ) — А (| |)Ж(Ц + И(12)Я(2) + ®(11 )u< I) 4“ S(I2)W(2)>
Х(2) = А (25 )Х( [) + Л (22)ж(2) + ®(2| )Н(1) + ®|22)“(2)-
(2.3/)
разбиение па блоки осуществляется произвольно с соблюдением,.
Здесь
разумеется, согласован пости соответствующих размеров.
Если среди всех возможных разбиений на блоки существует такое,
при котором
^(21) '—-0, Z?t2I) — 0, $(22) — О
ИЛИ
Д|2)— 0, $(ll)=0, = О,
(2.3.G)
•го система пс вполне управляема по Калмапу. Действительно, при
(2.3.5)
rank [7? АВ ...| = iank^б, * * * * (II) ^(12) W(W" ]<„
н аналогично при (2.3.6). Таким образом, если структура линейной ста-
ционарной системы может быть представлена в виде рис. 2.3.4, а или
Рис. 2.3.4. Структуры пе вполне управляемых линейных систем
б, то такая система не вполне управляема по Калмапу. Ясно, что слу-
чаи, представленные на рис. 2.3.4, а и б, отличаются только обозначения-
ми и полностью эквивалентны.
2.3.1.2е. Управляемость вида II.1. Необходимое и достаточное условие
управляемости вида 11.1 для стационарной линейной системы совпадает
с условием полной управляемости (2.3.2).
2.3.1.3е. Управляемость вида III.1. Задана плоскость
Dx = const = d,
(2.3.7)
где D— постоянная матрица размера р X n, Р п- Если постоянная d
фиксировала и осуществляется переход из любой точки пространства
1ЙИ ' в произвольную точку плоскости (2.3.7), то имеем управляемость
вида 1П.1. Если постоянная d не фиксирована, то необходимое и доста-
точное условие возможности перевода за конечное время системы (2.3.1)
из любой точки пространства состояний на указанную плоскость имеет
вид [2.5]
(2.3.8)
rank [Ой DAB DA2B ... DAn~'B] = p.
Этот вид управляемости часто называют полной управляемостью по вы-
ходу у = Dx. В случае, если р = п и D — невырожденная матрица, ги-
перплоскость (2.3.6) вырождается в точку, а задача — в задачу
п. 2.3.1.1°. Критерий (2.3.8) в этом случае преобразуется в критерий
(2.3.2). Таким образом, неособое линейное преобразование пространства
состояний не меняет управляемости по Калману (полная управляемость
по х эквивалентна в этом случае полной управляемости по у).
2.3.1.4е. Управляемость вида?V. 1 и V.I. Для системы (2.3.1) без огра-
ничений задача перехода из любой точки области размерности, меньшей
и, в любую точку области размерности п (случай IV.1, табл. 2.3.1) реша-
ется при полной управляемости по Калману. При такой управляемости
решается и задача V.1 перехода в любую точку близкой окрестности на-
чального состояния. Таким образом, полная управляемость по Калмаиу
для линейной стационарной системы достаточна для полной управляе-
мости в смысле IV.l, V.I. Что касается необходимости, то при достаточ-
ной произвольности областей в указанных задачах она также имеет
место, т. е. критерий (2.3.2) сохраняет силу необходимого и достаточ-
ного.
2.3.1.50. Управляемость вида VI.1. Задача перевода системы (2.3.1) из
произвольной точки подпространства состояний R™ (т <Z п) в произ-
вольную точку этого подпространства может быть решена при условии
rank [В АВ А2В ... Xn-'S] = т (2.3.9)
и такой структуре матриц А, В, при которой пространство К™ соответ-
ствует управляемой части системы (т. е. соответствует х(1) па
рпс. 2.3.4, а). Таким образом, полная управляемость в смысле VI.1 сво-
дится к неполной управляемости по Калману.
2.3.1.6е Управляемость вида VII.1. Заданная программная траекто-
рия ж3(!) предполагается дифференцируемой. Переход по этой траекто-
рии означает выполнение равенства
x3(t) —Лж3(<) —
Для того чтобы это соотношение могло выполняться тождественно на ин-
тервале t0 t tf при произвольной x3(t), необходимо и достаточно,
чтобы
п, rank В = п. (2.3.10)
Таким образом, размерность вецтора и должна быть не меньше п, т. е.
число независимых управляющих воздействий для осуществления полно-
го (в n-мерном пространстве состояний) управления должно быть пе ме-
нее п. Если г = п, то задача имеет однозначное решение
w(t) = u3(t) = B_,[x3(t) —Xx3(t)].
Если ставится задача программного перевода системы лишь в отно-
шении части координат состояния, то условия данного вида управляе-
мости могут быть облегчены. Пусть вектор х представлен в виде совокуп-
ности двух субвекторов я(1), х(2) размерности щ, п2 при условии
«I + = п и уравнения системы записаны в виде (2.3.4). Пусть также
гапкЛ(12) = nh гапкВ(22) — п2. (2.3.11)
Тогда даже при
п) = О, В{ 12) = 0, S(2i) = 0 (2.3.12)
система вполне программно управляема в отношении xfl}(t) = ®(1)3(г)г
где ®(1)з(г)—дважды дифференцируемая заданная функция. Действи-
тельно, если в уравнении
£(1) = А (11 )Xi 1 j + А (12)Ж(2) (2.3.13)
рассматривать л\2) как управление, то па основе (2.3.10), (2.3.11) заклю-
чаем, что всегда можно указать такое я(2) = (Z), при котором
®И)з(0 — -^<П)-Т( । >з — 21(12>а:(2). (2.3.14)
Если матрица 4(i2) квадратная, то (/) определяется однозначно:
я* *2) == Л“2) (я(1)3—Л(11)ж(1)й). Если Л иг)—прямоугольная, то задавая
соответствующее число компонент х*2у произвольным образом (напри-
мер, равными пулю), остальные компоненты определяем из (2.3.14).
Подставляя xltys(t), ^^(t) в нижпее уравнение (2.3.4), получаем урав-
нение
Л(2) ~ Аг2)Ж(2) А21)ж(1)3 = ^(22)“(2)’ (2.3.15)
которое согласно (2.3.10), (2.3.11) может быть обращено в тождество со-
ответствующим Подбором U(2)(t).
2.3.1.7е. Об управляемости вида 1.2—VI 1.2*). Вопросы управляемо-
сти при ограничениях на управление в виде неравенств были разработа-
ны в самое последнее время [2.9—2.11]. Важное значение они приобрели,
в частности, для биологических задач, где знак допустимых управлений
фиксирован [2.12]. В простейшем случае имеется только одно зпакоопрс-
делепное управление, т. е. В — вектор и 0 и < +<х>. Условие управля-
емости 1.2 в этом случае имеет место тогда и только тогда, когда выпол-
няется условие (2.3.2) и, кроме того, матрица А системы (2.3.1) не имеет
вещественных собственных значений [2.9, 2.10]. Таким образом, системы
нечетного порядка неуправляемы зиакоопределеппыми управлениями.
Более важное практическое значение при знакоопределепных уп-
равлениях имеет управляемость III.2. Пусть задана плоскость Dx —
— const (см. и. 2.3.1.3е). Управляемость III.2 при 0 и < -|-оо имеет
место тогда и только тогда, когда выполнено условие (2.3.8) и инвариант-
ное подпространство, соответствующее вещественной части спектра сис-
темы (2.3.1), принадлежит плоскости Dx = 0.
Подобная ситуация возникает в задачах биологии, когда матрица А
системы (2.3.1) имеет вид А — Ао — QC~, где А(,— матрица с неотрица-
тельными недиагональными элементами и собственными числами, пе
имеющими положительных вещественных частей, Q— [,gi ... §,1]'г и
С ~ [с| ... с„]т — ненулевые с неотрицательными компонентами. У та-
ких матриц все вещественные собственные значения лежат в левой
*) Подпункт и некоторые добавления написаны Б. Г. Заславским и
• А. Полуэктовым.
полуплоскости [2.13]. Задача управления биологическими системами
состоит в переводе процесса из произвольной точки фазового простран-
ства на устойчивое подпространство матрицы А.
Решение этой задачи таково. Пусть собственные значения матрицы
Л различны и Hi, ..., vp (р < п) — соответствующие этим собственным
значениям собственные векторы матрицы А. Если для комплексной мат-
рицы v — [У] — ар] выполнено условие (2.3.7), то система управляема
в смысле III.2.
В общем случае критерий управляемости III.2 имеет следующий вид
[2.11]. Пусть 7?— матрица размера п X г и и = [щ ... и,]1'— вектор, ко-
торый принимает значения из множества 12. Обозначим через СП(£1) вы-
пуклую оболочку множества 12. Предположим, что существует и е 12,
при котором Ви = 0 и (7/7(12) имеет непустую внутренность в 1РГ. Уп-
равляемость III.1 имеет место, если выполнено условие (2.3.2) и матри-
ца не имеет вещественных собственных векторов щ, для которых вы-
полняется неравенство 1/77и 0 при всех и е 12.
2.3.1.8е. Управляемость вида 1.4. Если в линейной стационарной сис-
теме (2.3.1) вектор управления задан в виде и = h(j6(Z— io)., где
®(i— го) —дельта-функция Дирака, то в момент t = t0 состояние систе-
мы изменяется скачком, причем вектор х получает приращение x(tB +
+ 0) = Ви.о. Ясно,, что необходимым и достаточным условием возможно-
сти перевода системы в произвольное состояние здесь является
п, rank В — п. (2.3.16)
Таким образом, условие мгновенного произвольного перехода совпадает
с условием перехода по произвольной заданной траектории (2.3.10). Это
условие можно также назвать условием полной Непосредственной управ-
ляемости: при его выполнении можно непосредственно (без «запаздыва-
ния») влиять на все компоненты скорости изменения х вектора состоя-
ния. Если матрица В — квадратная диагональная, то каждая компонента
управления т непосредственно влияет па свою компоненту .?,• производ-
ной вектора состояния.
2.3.2. Управляемость линейных стационарных систем с дискретным
временем. В уравнении линейного стационарного процесса с дискретным
временем
х [7с + 1] = Ах [7с] + Ви [7с] (2.3.17)
матрицы А и В постоянны. Из (2.3.17) следует
а.[н] = Лпж[0] + Ви[п — 1]-(-ЛВи[п— 2] + ... + Ап~1Ви [0].
При рассмотрении управляемости вида 1.1 (управляемости по Калмапу)
без ограничения общности можно считать ж[0] =0 и
а;[и] = Ви[п — 1] +АВи[п — 2] + ... + Л"-'Вн[0]. (2.3.18)
Если
rank [В АВ ... Л11-1/?] = п, (2.3.19)
ТО при любом .z[»] можно указать такие м [0J, и[1], ..и[п —1], при ко-
торых равенство (2.3.18) будет выполняться. И только при условии
(2.3.19) для любого ж[?г] существуют u[0], и[1], ..., u[n], удовлетворя-
ющие (2.3.18). Таким образом, условие (2.3.19) является необходимым и
достаточным условием перевода системы (2.3.17) посредством управле-
ния за конечное время (?г шагов или интервалов) из любого начального
состояния в любое конечное состояние.
Итак, условия полной управляемости по Калмаиу для стационарных
линейных процессов с непрерывным и дискретным временем но внешне-
му виду совпадают. Следует только иметь в виду, что если (2.3.17) есть
дискретная модель непрерывного процесса (2.3.1), то матрицы А, В в
(2.3.17) и (2.3.1) не одинаковы (см. гл. 1).
2.3.2.1е. Управляемость вида VI 1.1. Аналогия между управляемостью
линейных стационарных непрерывных и дискретных систем распростра-
няется и па другие виды управляемости. Так,, из выражения
+ 1] —Лж3[/с] = Ви [к]
следует, что для перевода посредством управления системы из произ-
вольного начального положения в произвольное конечное по заданной
траектории с дискретным временем т3[/>:] необходимо и достаточно вы-
полнения условия
rank В = п.
(2.3.20)
2.3.2.2е. Произвольный переход за один или несколько шагов. Из ра-
венств
ж[1] = Ат[0] +Дн[0],
ж [2] = /12ж[0] + /?«[!] +ЛВм[0],
я:[Л] =Л<>д.[0] +В„[/г —1] + АВи[к — 2] + ... +4л-1Ви[0]
следует, что для произвольного перевода системы'за один шаг необходи-
мо и достаточно, чтобы выполнялось условие rank В = п, за два шага —
условие rank [А .4/7] = п, за к < п шагов — условие
rank [В АВ ... Ak~lB] = п.
(2.3.21)
2.3.2.3е. Управляемость вида 11.1. Из уравнения
ж [Л ] = /1Лж[0] +Дн[7г — 1] -\-АВи[к — 2] + ... +Лп-'Ви[П]
следует, что необходимые и достаточные условия управляемости 11.1 име-
ют форму
a: [fl] е G,
Л х [0] + Ви [0] е G,
А2ж[0] + йн[1] + /1Вн[0] е G,
(2.3.22)
/1"ж[0] +Ви[п — 1] +АВи[п — 2] + ... +Л’1-,7?н[0] е G,
причем rank [В АВ ... Ап~'В] — п.
2.3.2.4е. Управляемость вида 1.2. Пусть и — вектор размерности г и
В — матрица размера т X г- Областью изменения управления и являет-
ся множество Q. Пусть существует и е Q, при котором Ви = 0 и вы-
пуклая оболочка CB(Q) имеет непустую внутренность. Для того чтобы сис-
тема (2.3.17) была управляема в смысле 1.2, необходимо и достаточно, что-
бы выполнялось условие (2.3.19) и по существовало собственного вектора
Vi матрицы АТ, отвечающего неотрицательному собственному значению,
для которого выполнено неравенство v^Bu^. О при «ей [2.16]. Част-
ным случаем является проблема управляемости при неотрицательных
управлениях щ О,_________ иг 0, которой в настоящее время уделяется
внимание в связи с задачами биологии [2.17].
2.3.3. Управляемость линейных нестационарных систем. В уравнении
непрерывного нестационарного процесса
х — A (t)x + B(t)u (2.3.23)
матричные функции A(t), B(t) считаются непрерывными. Матрица Коши
согласно гл. 1 обозпачается K(t, t0).
2.3.3. !°. Управляемость вида 1.1. Необходимым и достаточным усло-
вием управляемости по Калмапу нестационарной линейной системы яв-
ляется существование конечного времени ti, для которого матрица
*1
j К («о, т) В (т) /?'г (т) Кт (/0, т) dx (2.3.24)
положительно определена [2.6].
2.3.3.20. Управляемость видаVII.1. Для возможности перевода линей-
поп нестационарной системы по произвольной заданной дифференцируе-
мой траектории необходимо и достаточно, чтобы во время перехода вы-
полнялось условие
rankB(t) = п. (2.3.25)
2.3.3.3е. Управляемость вида 1.4. Необходимым и достаточным усло-
вием возможности мгновенного перевода системы в момент времени t0 из
произвольного начального состояния в произвольное заданное состояние
является
rank B(t0) — п. (2.3.26)
2.3.3.4°. Управляемость вида III. 1. Для возможности перевода систе-
мы (2.3.23) на отрезке времени i0 t fi из произвольного начального
состояния па любую плоскость
Dx = const,
где D — матрица размера р X п, р п, необходимо и достаточно, чтобы
матрица
j РК (tj, т) В (т) Вт (т) Кт (ty, х) D^dx (2.3.27)
*о
была положительно-определенной. Этот вид управляемости именуется
управляемостью по у = Dx [2.6].
2.3.4. Управляемость линейных нестационарных систем с дискретным
временем. Из уравнения системы яр + 1] = А РРР] + /?р] up] сле-
дует
яр] = А [7с— 1]Л[7с— 2] ... Л[0]я[0] -J-
+ Л р — 1] Л р — 2] ... Л[1]В[0]и[0]-Ь
+ Л[7с — 1]Л[7с — 2] ... А [2]В[1]и[1] +
4-Л[7с —1]В[7с —2]ир —2] 4-Bp — 1]ир — 1]. (2.3.28)
2.3.4.1е. Управляемость вида 1.1. Для перевода системы за п шагов из
произвольного начального состояния в любое заданное состояние необ-
ходимо и достаточно
rank [В [п — 1] • А [п — 1] В [п — 2] ]Л [и — 1J Л [п — 2] В [п — 3J : ...
,,.:Лр —1] Л р —2] ... Л [1] В [0]] = п. (2.3.29)
2.3.4.2е. Произвольный переход за один и несколько шагов. Для пере-
вода системы из любого начального положения в любое заданное поло-
жение необходимо и достаточно, чтобы:
для перевода за один шаг выполнялось условие
rank В [0] = п, (2.3.30)
для перевода за два шага выполнялось условие
rank [В[1] Л [1]В[0]] = п, (2.3.31)
для перевода за к шагов выполнялось условие
rank[Bp —1] Лр —1]Вр —2] ...
... Лр —1]Лр —2] ... Л[1]В[0]] = п. (2.3.32)
2.3.5. Принцип двойственности в теории управляемости и наблюдае-
мости. Пусть имеются две стационарные линейные системы:
система I
х = Ах + Ви, z = Их + Lu,
где х, и, г — векторы-столбцы размерности п, г, т соответственно; А, В,
Н — матрицы размера п X п, »Х r, т X п, т X г соответственно;
система II
Е = ЛТЕ + №&, £ = ВТЕ + ВТД,
где g, О, Е — вектор-столбцы размерности п, пг, г соответственно. Тогда
система I вполне управляема (по Калмапу), если система II вполне на-
блюдаема (по Калмапу), и вполпе наблюдаема, если система II вполне
управляема [2.6].
Действительно, условия полной управляемости и полной наблюдае-
мости для системы I имеют вид
rank [/? АВ ... /1П-|В] = п,
rank [1Г Л''1Г ... (4Т)"-1ЯТ] = п.
Для системы II соответственно полная управляемость п полная наблюда-
емость имеют место при
rank [Нт АЧГ* ... (ЛТ)"-'ЯТ] = п,
rank [В АВ ... А п~'В] = п.
2.3.6. Управляемость нелинейных систем. Теория управляемости не-
линейных систем разработана слабо, и трудности на пути се создания
достаточно велики.
2.3.6.1е. Управляемость вида VII. 1. Условия перевода системы
х = /(ж, и, t) (2.3.33)
но заданной произвольной дифференцируемой траектории х = x3(t), при-
надлежащей заданному множеству Х3, сводятся, очевидно, к разрешимо-
сти уравнения x3(Z) — и, t) относительно и.
Условие
rank (= п (2.3.34)
\ди) х=х3т
можно рассматривать как благоприятствующее такой разрешимости, хотя
и недостаточное. Для случая линейно входящего управления х = f(x, t) 4-
+ <р(ж, t)u необходимым и достаточным условием рассматриваемого вида
управляемости является
rank ср(ж3((), t) = п. (2.3.35)
2.3.6.2е. Управляемость вида V.I. Задача управляемости в малом в ок-
рестности заданной траектории ж°(/), получаемой при заданном и =
= »°(Z), приводится ц задаче управляемости линейной нестационарной
системы обычным путем линеаризации. Для дифференцируемой функции
f из (2.3.33) имеем
Д.т = А (г)Д.т + Z? (Z)Azt,
где
л(о = Ш|
V с?ж/ k—x°(Z),u=ut’(Z)
1а.-=х0(/),«=и0(()
“Пусть программной траекторией является пулевое'решение. РаСсмот-
рим нелинейный процесс x = f(x, и), где /(О, 0) =0 iiweficRr. Обо-
значим через К минимальный замкнутый выпуклый конус, содержащий
множество {/(0, u)|usfi}, и через Л = (df/dx) |х=0 — матрицу А («) па
программной траектории.
Результаты по управляемости нелинейных систем опираются на сле-
цующее положение. Для того чтобы нелинейный процесс был управляем
в смысле V.1, достаточно, чтобы решения уравнения х — Ах + iv(t) с пу-
левыми начальными условиями при всех измеримых функциях w(t) со
значениями в К заполняли окрестность начала координат. Обратное ут-
верждение неверно [2.14].
Следствие: если линеаризованная система управляема в смысле
/2 (см. и. 2.3.1.7е), то нелинейная система управляема в смысле V.2.
2.3.6.3е. Управляемость вида 111.2*). В нелинейных задачах часто
рассматривается задача попадания на многообразие. В связи с этим ес-
тественно возникает задача попадания па устойчивое инвариантное мно-
гообразие. Па этом многообразии решения стремятся к программной тра-
ектории при t оо.
Аналогом положения п. 2.3.6.2е является следующее. Пусть нелиней-
ная система управления та же, что и в п. 2.3.6.2е. Пусть 7И — гладкое
многообразие, проходящее через точку 0. Рассматривается задача попада-
ния па это многообразие из малой окрестности нуля. Для того чтобы
нелинейный процесс был управляем в смысле V.2, достаточно, чтобы
решения уравнения х = Ах 4- w(t) с начальными условиями из каса-
тельного к И в точке 0 пространства и управлениями в виде измеряемых
функций времени со значениями из й заполняли окрестность начала ко-
ординат [2.14, 2.15].
Отсюда следует, что если линеаризованная система управляема в
смысле 1.2, то нелинейная система управляема в смысле V.2.
2.3.7. Управляемость нелинейных систем с дискретным временем. Для
процессов, описываемых уравнением л[7с-|-1] = /[т[7г], u[7c], 7с], задачи
управляемости в принципе приводятся к задачам разрешимости функци-
ональных (алгебраических, трансцендентных) уравнений.
2.3.7.1е. Условия перевода за один и несколько шагов. Условия пере-
вода за одни шаг из заданного состояния х[0] в любое заданное состоя-
ние а:[1] эквивалентны разрешимости уравнения
/[ж[0], 1г[0],‘0] = -т[1] (2.3.36)
•относительно и[0].:Для линейно входящего управления, когда процесс
описывается уравнением
ж[7г + 1] = /[.,[/.], А-] + <р [*[*]. *]«[*].
необходимо п достаточно, чтобы
rank if [.т [0], 0] = п. (2.3.37)
*) Подпункт написан Б. Г. Заславским и Р. А. Полуэктовым.
Для двух шагов общая задача сводится к разрешимости относительно и
уравнения вида
/[/[*[0], и[0], 0], u[l], 1] = *[2], (2.3.38)
для трех шагов —
Л№[0], «[0], о], u[l], 1], и[2], 2} = а;[3] (2.3.39)
и т. д.
2.3.7.20. Управляемость вида VI 1.1. Условие возможности перевода
системы из одного состояния в другое по заданной в дискретном време-
ни траектории сводится к, разрешимости относительно и [/с] уравнения
+ 1] = /[ж3[Л], »['Ч, Л].
Для линейно входящего управления необходимо и достаточно выпол-
нение условия
rank <р [з.3 [/с], /с] = п.
§ 2.4. Адаптируемость
К понятиям достижимости некоторой точки в пространстве состоя-
ний нелинейной управляемой системы, частными случаями которого яв-
ляются рассмотренные выше понятия управляемости и наблюдаемости
динамического объекта, относится и понятие адаптируемости регулятора
для заданного нестационарного динамического объекта, управляемого
при помощи адаптивного регулятора [2.22—2.24].
2.4.1. Постановка задач адаптивного управления в беспоисковых
адаптивных системах управления. Определения и классификация видов
адаптируемости. Рассмотрим основной контур (ОК) беспонсковой адап-
тивной системы (БАС), подробно описанной в гл. 10. Схема ОК представ-
лена на рис. 2.4.1. Он образован обобщенным объектом 00, включающим
Рис. 2.4.1. Основной контур бссгюисковой адаптивной системы
привод, реальный динамический объект и датчики, и адаптивными регу-
ляторами прямой и обратной связи А?! и ЛР2. На обобщенный объект
-через канал прохождения возмущения К В воздействует помеха U, ко-
торая в адаптивных комбинированных системах управления измеряется
и подается па вход ЛР| (штриховая линия на рисунке). Команда управ-
ления g поступает на вход ОК, в то время как выходной сигнал обобщен-
ного объекта у поступает па вход АРг, а выходной сигнал последнего в
виде сигнала обратной связи подается па вход АРЬ Структурные блоки
00 и КПВ объединяются в объекте О.
Предположим, что математические модели 00, КПВ известны с точ-
ностью до неизвестных параметров (?2. В БАС можно выделать две
подцели управления:
— совпадение движения ОК по одной или нескольким координатам
с некоторым желаемым движением;
— совпадения коэффициентов управления ОК, связывающего опре-
деленную выходную координату с одним или несколькими входными
воздействиями, с коэффициентами уравнения желаемого движения, опи-
сываемого эталонной моделью ЭМ. В свою очередь желаемое движение
часто называют эталонной траекторией. Для выполнения второй подцели
.в адаптивной системе управления необходимо перестраивать параметры
.7?!, /?2 адаптивных регуляторов APi, АР2.
Как правило, известна лишь допустимая область пространства пере-
менных параметров объекта, внутри которой опи изменяются заранее
неизвестным образом. Адаптивные регуляторы АРЬ АР2 должны быть
спроектированы таким образом, чтобы
а) на поминальном режиме (при фиксированных значениях пере-
менных параметров (?i, Q2, R\, R'z) обеспечить желаемые дипамичесцис
характеристики ОК;
б) па любом произвольном режиме работы объекта (при любых за-
конах изменения переменных параметров объекта Qt, Q2 во времени и
при условии их нахождения внутри допустимой области) нашлись такие
законы изменения параметров регулятора Z?i, R2, для которых опе-
ратор основного контура совпадал бы с оператором эталонной модели.
Очевидно, второе условие физически означает возможность перевести
управляемую адаптивную систему из некоторого начального рассогласо-
вания параметров операторов ОК и ЭМ в пулевое, что аналогично физи-
ческому смыслу условий управляемости объекта, либо основного контура
по отношению к координатным рассогласованиям в начальный момент
времени. Указанное свойство существования (существования и единствен-
ности) вектора «идеальных» настроен регуляторов АР,, АР2 по отношению
к произвольному допустимому вектору параметров объекта называется
•свойством адаптируемости основного контура. Свойство полной адапти-
руемости ОК гарантирует возможность абсолютной параметрической ин-
вариантности и служит структурной характеристикой ОК (или адаптив-
ного регулятора), выражающего предельные возможности компенсации
влияния параметрических возмущений па его динамические характери-
стики [2.21, 2.23].
Обычно с эталонной моделью ОК или его части связывают поведение
системы управления, задаваемое техническими требованиями к ней.
Именно под эталонную модель замкнутого ОК настройщиц подстраивает
регулятор системы регулирования, причем параметры последней (суще-
ствующие только в сознании настройщика) определяются выбранными
значениями настроек регулятора на поминальном режиме.
• Наличие или отсутствие у GK или его части свойства адаптируемости
используется при решении задач анализа и синтеза следующих классов
БАС (см. гл. 10):
— прямого или непрямого адаптивного управления с эталонной мо-
делью,
— с эталонными наблюдателями состояния,
— оптимальных БАС прямого и непрямого адаптивного управления
со стационарной и обучаемой эталонной моделью.
Во всех перечисленных классах БАС алгоритмы непрямого адаптив-
ного управления непосредственно формируются с помощью матриц адап-
тируемости.
Рассмотрим задачу анализа адаптируемости адаптивного ПИД-регу-
лятора (пропорциопально-пптегралыю-дифференциального. регулятора)
для непрерывного многосвязного динамического объекта. Предположим,
что непрерывный лилейный нестационарный обобщенным объект управ-
ления, включающий линейные приводы, многосвязный объект управле-
ния и датчики, описывается системой уравнений вида
х = A(t)xB(t)u, x(t0) = х0, н(«0) = uD,
(2.4.1)
У == C(t)x -{- 0, 0(^о) == 0о,
где х — вектор состояния объекта управления, х е tRn: у — вектор выхо-
да объекта, у е С?”1, т п; и, 0 — векторы управляющего и возмущаю-
щего воздействий, и е 8?’п, 0 е 1Рпг.
Уравнения движения регулятора имеют вид *)
9-i = — G-t(t)y, 9-i(M — 9-ю, 9<)(М = 9оо>
= — G0(t)y, 91(^о) = 9ю, g(M — goo, (94?)
I'd'/i + 9i = Ki (t)g — G, (t)i), g(fo) = gio,
u = 9-i + 9o + 9i,
где g_b qo, 9i—векторы состояний интегральной, пропорциональной,,
дифференциальной составляющих адаптивного закона управления,
qv е tR™, v = —1, 1; g — вектор уставок регулятора, g е К”1. Пусть мат-
рицы параметров объекта A (t), B(t), C(t) заданы в классе кусочпо-пепре-
рывпых матриц вида (допустимое множество)
{Л(0, В(0, C(t)h = {11.1(011- »с(0Н- 11С(0П < «=)•
*) Уравнения (2.4.2) по являются уравнениями состояния, тем не
менее уравнения замкнутого ОК (2.4.3) задают движение ОК в форме
пространства состояний.
Предположим далее, что обобщенный объект полностью управляе-
мый, идентифицируемый и, вообще говоря, не полностью наблюдаемый,
а регулятор вида (2.4.2) стабилизирует объект управления (2.4.1).
Система уравнений (2.4.1), (2.4.2) образует систему уравнений ОК.
Желаемые динамические характеристики ОК задаются эталонной мо-
делью ЭМ, уравнения которой примем в виде (2.4.1), (2.4.2), где вместо
матриц Л, В, С, Gv, Kv, v = —1, 1, подставлены постоянные матрицы
/Iм, Вм, 6™, С", К*1, совпадающие со значениями первых матриц па но-
минальном режиме, а все переменные, кроме входных воздействий g, О,
отмечены индексом «м». Заметим, что указанная ЭМ присутствует в виде
реального функционального блока только в БАС с ЭМ.
Расчет матриц параметров G™, К™ ПИД-регулятора, обеспечиваю-
щий на номинальном режиме желаемые динамические характеристики
ОК, может быть выполнен методами линейной теории автоматического
управления. Например, если они задаются распределением нулей и по-
люсов матричной передаточной функции «вход — выход», то применимы
методы теории модального управления [2.2С] (см. § 8.9). Если решается
задача синтеза асимптотически оптимального адаптивного ПИД-регулято-
ра, то матрицы Gy, К" выражаются через решение соответствующе га
матричного уравнения Риккати для стандартной задачи АКОР, к кото-
рой при некоторых ограничениях сводится рассматриваемая задача на
номинальном режиме [2.3, 2.25, 2.26].
t
Введем новую переменную z = J у (т) с1л и расширенный вектор со-
стояния — [жт хт]. После преобразований получим матричное диффе-
ренциальное уравнение ОК и его ЭМ в стандартной форме пространства
состояний
*р = Ар (I) ,гр + Z?pl (0 0 + Вр2 (0 0 4- Брз (0 g + Вр/> (0 g +
*
+ BVb Ш J s (т) йт, (2.4.3)
у = Cvxp -I- £>р0,
где
Лр (0 =
^рг <0 —
ЛДц'КДО.
- G* (0
..
G* (0
0
> яр2 (0 =
> ^Р3(0 =
(0 = А (0 - 6* (0, Л12 (0 = - G* (0,
Л21(0 = С Л22(0 = О,
-<(0
0
> ®рз (0
(0
о
с;<0
о
=
C* (0 = [F (ОГ1 В (0 IGi (0 CA (t) + Go (0 C],
G*(t) = [F(or1/?(OG-1 (0,
G*(0 = [F(or1B(OG0(0, C*(0 = [Д(0Г1О(0С1(0, (2.4.4)
G* (0 = [F (ИГ1 В (0 Ko (0, 6* (0 = [F (0Г1 B[t)K1 (0,
c; (0 = [F (or1 В (0 K_A (0, CP= [C i 0], £>p= Em,
F(t) = [En + B(t)G1(t)C], det F (0=^0;
t
> = + Gp, 0 + Bp38 + Z?^ g + Bp5 [ g (г) Л,
tB (2.4.5)
r = c”x” + ^0-
Здесь матрицы Лр, Z?pi, i = 1, 5, вычисляются по формулам (2.4.4) с под-
становкой в них номинальных значений матриц параметров Лм, Д", См,
G”, К”, v = - 1Л-
Предполагая начальные условия нулевыми, а также Л(/.)=Л,
B(t) = В, имеем для системы (2.4.1), (2.4.2) следующие эквивалентные
уравнения в изображениях по Лапласу:
у(р) = [Е™ + B(p)G(p)]~ '0(/>) + [Ет + H(p)G(p)]~'H(p)K(p)g(p),
(2.4.6)
где матричные передаточные функции обратной и прямой связи регуля-
тора G(p), К(р), объекта И{р) п разомкнутого OK Hz(p) имеют вид
зз з
G{p) = 2 Gv_2pv-2 = £ GfiP*-\ К (р) = Kv_2pv~\
v = l Т|=] V —1
Gn = G2_v, И (p) = С (pEn - Л)”1 В, W (р) = II (р) G (р). (2.4.7)
Уравнения ЭМ в изображениях:
Г'(Р) = [Дт+ W”(p)G"(p)]-10(p) +
+ [Em + II* (р) G* (р)}-41* (р) К* (р) g (р),
где матричные передаточные функции эталонных моделей обратной и
прямой связей регулятора, объекта и разомкнутого основного контура по-
лучаются путем подстановки в выражения (2.4.7) матриц Лм, Вм, См,
izM
Gv, Е v.
Во временной области совпадению операторов ОК и ЭМ ОК по входу
g отвечают уравнения статики адаптации вида
Л (г) - [£п + В («) («) С]"1 В (() [Gx (0 С А (0 + Go (0 С] Лм - G*M,
|ДП + В (0 G± (0 ср1 в (0 G_t (0 = g;m,
[Kn + В (t) Gt (t) G]—1 В (t) Ko (t) G*M,
[En + В («) G± (f) q -1 В (t) Kv (t) g£m, (2.4.8)
[En + В (t) Gt (t) С]-’ В (t) K_x (t) G*M.
В частотной области аналогичные уравнения статики адаптации име-
ют вид тождества
1Т(р)=Жм(р). (2.4.9)
Область аналитичности Qf матричных функций ТУ(д), И™(р) совпадает
со всей комплексной плоскостью, за исключением особых точек: полюса
регулятора р = 0, полюсов объекта и его модели р„ и р“. Тождество
(2.4.9) в области <?р эквивалентно тождеству
2П+2 271+2 2н-|2
2 = 2 р2'г+2-^^ ^~Ч* =
|Л*=1 Ц=1 Ц*=1
2П-Ь2
= 2 Р2П+2“^М, (2.4.10)
Н—1
причем имеют место соотношения
^=2 s ^(лр)₽-<’
Р*=г p=i
det (pGn — Л) = 2 aipi' dct(P£n~ ^M)=2 <%p\ < = "n = l,
i=O i=O
F± (p, i) = САР~'В, Ff (p, 0 = См (Ам)р~г Вы,
L НД = 2 2 °P®271—Ц—i++1 <P’ г)>
i=l p=i
= 3 <*_v_i+1C/?+, (2.4.11)
n=l i=l
3 3
= 2 = 2
v=l Y)-^l
3 П П
~ 2 ^*v^v-2' = 2 2 ape2n-H-i+n^i (p’ 0>
v=i i=l p=i
n
bH*v“Zj aU*-v-i+iG niD •
i=l
Введенные здесь матрицы Ft(p, i) и F^ (p, i) называются марковскими-
параметрами объекта.
Из уравнения (2.4.8) видно, что относительно искомых матриц Gv,
Kv оно может не иметь решения. В этом случае вместо тождеств (2.4.10)
приходится рассматривать соответствующее уравнение, получаемое из
(2.4.10) заменой знака тождества па знак равенства. Это означает, что
ОК не может быть точно настроен под любую заданную ЭМ. В этом
случае целесообразно перейти к белее широкой задаче паилучшей в не-
котором смысле подстройки ОК под указанную модель. Это означает,
что исходную задачу отыскания матричных решений уравнений (2.4.8)—
(2.4.10) мы «погружаем» в соответствующую задачу отыскания минимума
функционала настройки ОК, связанного с полиномиальным уравнением
(2.4.10).
В качестве меры параметрического рассогласования матричных по-
линомов левой и правой частей (2.4.10) введем функционал вида
271-1-2
1= 2 ‘г(Лг-АЖ-*и)Т’ C* = argmin7(AB,C,G),
ц=1 G
GT = [G^ g;]_
Условие 7 = 0 означает тождественное выполнение (2.4.10). Основ-
ной контур адаптивной системы управления, описываемой уравнениями
(2.4.1), (2.4.2), называется полностью адаптируемым по выходу у для
входов g, 0, если любой тройке матриц А, В, С, принадлежащей допусти-
мому множеству {Я, В, С}д, соответствует единственная совокупность мат-
риц С], <7,, 6Г3, для которой имеет место тождество (2.4.10). Основной
контур адаптивной системы управления, описываемый системой урав-
нений (2.4.1), (2.4.2), называется слабо адаптируемым по выходу у для
входов g, 0, если любой тройке матриц А, В, С, принадлежащей допусти-
мому множеству {Л, В, С}д, соответствует, быть может, нсединственпая
совокупность матриц <7Ь С2, Сз, для которой имеет место тождество
(2.4.10) [2.24].
Основной контур адаптивной системы управления, описываемый
уравнениями (2.4.1), (2.4.2), называется частично адаптируемым по вы-
ходу у для входов g, 0, если любой тройке матриц Л, В, Се {Л, В, С}д
соответствует единственная совокупность матриц G*, С*, G*, для кото-
рой имеет место
Уравнению вида (2.4.10) можно сопоставить эквивалентное ему ли-
нейное матричное алгебраическое уравнение EG = TV. Его точное (или
приближенное) построенное па основе аппарата псевдоинверсии реше-
ние является решением сформулированной выше задачи минимизации
функционала настройки [2.18].
Перейдем к линейному динамическому регулятору общего вида
[2.23], структурная схема которого приведена на рис. 2.4.2. С целью об-
общения будем параллельно рассматривать постановки задач для
Рис. 2.4.2. Основной контур непрерывной адаптивной системы, содержа-
щей регулятор общего вида
непрерывного и дискретного случая, для чего введем в рассмотрение
дискретный обобщенный объект, описываемый уравнениями вида
4^ + 1] = /*4/с] + В*и[Л], р[/с] = С*х[к\ + 0[А],
(2 4 121
40] = ко, и[0] = ио, 0 [0] = 0о, к = 0, 1, 2, ... ' ’
Лилейные динамические регуляторы общего вида, последовательно
соединенные с объектами управления вида (2.4.1), (2.4.12), могут быть
описаны уравнениями
'7 = £рсг<7 + G, Ю - '/) Ч (У = %’ S (У = ё0,
« =-7’ррг?-1-С2(0 (.?-!/), (2.4.13)
<1 [fc + 1] = L*crq [/cl -I- G* [A] (g ]4 - у [4), 9 |0] — <70, g [0] = g0,
и [A] = F*ierq [4 + G* [7c] (g [7c] - у [4), к = 0, 1, 2, ..., (2.4.14)
где q, g—векторы состояния и задающих воздействий,geR ’, ge!Rm, 7,perj
7’рег, G G2, LppI„ F*,.r, G*, G2 —матрицы вещественных параметров регу-
лятора с размерами гг1 X «i, т X Щ, п\ X m, т X т- Предположим, что
регуляторы (2.4.13), (2.4.14) стабилизируют объекты управления (2.4.1),
(2.4.12), а целью регулирования является слежение за задающим воздей-
ствием и стабилизация выхода независимо от значений параметров объ-
екта регулирования.
Для непрерывного случая цель адаптации регулятора имеет вид
(2.4.9), а для дискретного
TV*(z) = H™(z), (2.4.15)
где матричные передаточные функции разомкнутого ОК и ЭМ ОК опре-
деляются аналогично (2.4.7). Для непрерывного случая полиномиальное
уравнение ОК (2.4.10) переходит в уравнение
_ 2П+П -г гп+п -1 ,
!"••• + ^H+ltj—1Д + ^гп+nj N S.P + • • •
• • • + Л2.П+П[_гр + N2n+n^ (2.4.16).
Для дискретного случая получаем уравнение вида
* 2H-f-n 1 * , *
P1Z + • • • + P-zn+n^iZ. -1 Р2„+П1 -=
= N*z2n+t,i 1 + ... -I- TV*_ z + TV* (2 4.17).
где
2
Л* = 2
n=l
„ „ n1+1
Лы=2 2 2 apa2n—i—(P> ’ИреД +2-1)’
i=l p—i 4—1
7?M —Ya rV-nj-2+П
n +2—i) Z-l pervpcr i
v=nx+2—Ц
•^p.2 = 2 2 2 °р°2П-г-р.+т/'1 (P’ г)>
i=l P=i i)=l (Z.4.1JJ
Ap=2S 2 S v^-i-p+Z^p.o^crC"1-2^^-
i—1 p—i l)=l V=1lx+2—1)
+ 2 2 2 Opa2n-i-n+n°pcr П +1—t/'j (P’ г) ^2’
i=l p=i 11=1
__пм__„ _ л
an un pernx
причем at, a“, aper { — коэффициенты характеристических полиномов
объекта, эталонной модели объекта и регулятора. <1>о[)мулы для дискрет-
ного случая получаются путем добавления ко всем скалярам и матрицам
верхнего индекса ««».
Для непрерывного случая функционал настройки Ц имеет вид
2П+ПХ
Л= 2 V’ (2-4-20>
|Л=1
а для дискретного случая получается из (2.4.20) путем добавления
к матрицам Рц, индекса «*».
Как и следовало ожидать, элементы матриц адаптируемости для ди-
намического регулятора общего вида определяются более сложными вы-
ражениями, чем в случае ПИД-рсгулятора, включая их зависимость от
коэффициентов характеристического уравнения и матриц Lper и Fver ре-
гулятора.
Следовательно, свойство адаптируемости в общем случае зависит по
только от свойств обобщенного объекта, т. е. от динамических характе-
ристик привода, самого объекта и датчиков, по и от структуры и пара-
метров самого регулятора. Для того чтобы обеспечить различные типы
адаптируемости регулятора, необходимо так построить процедуру его
синтеза, чтобы выполнялись определенные условия, которые полностью
вытекают из структурных свойств матриц адаптируемости.
Определения полной, слабой и частичной адаптируемости аналогич-
ны соответствующим определениям, изложенным выше, с заменой мат-
риц Gy, (v = 1,3) па матрицы Gy, (v = 1,2). В дискретном случае, кроме
того, всем матрицам и функционалу следует добавить верхний ин-
декс «»».
Матрицы адаптируемости в L, N, L*, N* имеют вид
(2.4.21)
Уравнения настройки регулятора имеют вид
LG = N, L*G* = N*,
(2.4.22)
тде g‘-[g; g;], g*t=[g;x']-
2.4.2. Критерии адаптируемости основного контура. В большинстве
практических случаев системы уравнений (2.4.22) являются переопреде-
ленными. Условия их разрешимости и существования единственного, хо-
тя бы н приближенного, решения известны как критерии адаптируемости.
2.4.2.1е. Критерии полной адаптируемости ОК. Необходимыми и до-
статочными условиями полной адаптируемости ОК по выходу у для вхо-
дов g, 0 для трех рассмотренных регуляторов являются, соответственно,
условия
(2.4.23)
Л°(£) = {0}, = {0}, 7T(i*) = {0}, (2.4.24)
где S?(o)—множество, образуемое столбцами матрицы, а Ле(°) ее ядро.
Условие (2.4.23) означает совместность переопределенной в общем
случае системы линейных уравнений (2.4.22). Условие (2.4.24) означает
существование и единственность решения задачи минимизации функцио-
нала настройки I и сводится к условию максимального ранга матриц
адаптируемости L, L, L*.
Условие (2.4.23) эквивалентно условию [2.18]
LL+N = N, LE+fl — N, L*L*+N* = N*,
а условие (2.4.24) — одному из условий
a) L+L = Еат, L+L = £П1+т, £*+£* = Е,^
б) det (Ет£) =/=0, dct(/?£)=#O, det (£*'/.,*)=/= 0;
в) столбцы матриц £, L, L* линейно независимы;
г) rank £ = 3m, rank £ — щ + т, rank L* = щ + т.
2.4.2.2е. Критерии слабой адаптируемости ОК. Необходимым и доста-
точным условием слабой адаптируемости ОК но выходу у для входов
g, 0 является условие (2.4.23).
2.4.2.3d. Критерии частичной адаптируемости ОК. Необходимым и до-
статочным условием частичной адаптируемости ОК по выходу у для
входов g, 0 является условие (2.4.24).
Существует связь между понятиями управляемости объекта и адап-
тируемости основного контура, содержащего этот объект управления.
Так, для ПИД-регулятора и квадратных матриц В и С (см. (2.4.1)) до-
статочным условием полной адаптируемости ОК (при выполнении усло-
вия (2.4.23)) является невырожденность матриц В и С. Необходимым ус-
ловием полной адантируемости ОК по выходу у для входов g, 0, а так-
же полной адаптируемости по выходу и для входа g является условно
detCtf^O [2.21].
УСТОЙЧИВОСТЬ ПРОЦЕССОВ
В ПРОСТРАНСТВЕ СОСТОЯНИЙ.
МЕТОДЫ ТЕОРИИ АБСОЛЮТНОЙ УСТОЙЧИВОСТИ
Понятие устойчивости движения, устойчивости динамических про-
цессов зародилось и получило значительное развитие главным образом
в области механики задолго до появления не только современной, по и
классической теории управления. Это естественно, так как устойчивость
есть категория, относящаяся прежде всего к собственным движениям
системы, порождаемым начальными условиями (возмущениями) и внут-
ренними свойствами системы, по не внешними воздействиями. Поэтому
устойчивость может рассматриваться применительно к любому процес-
су, как управляемому, так и неуправляемому. Неуправляемые механиче-
ские процессы, процессы небесной механики, а затем колебания всех ви-
дов явились первыми предметами теории устойчивости. В настоящее
время число понятий устойчивости настолько велико, что этот термин
справедливо считается перегруженным. Однако если рассматривать иде-
альные условия без шумов и постоянно действующих воздействий, т. е.
исходить из тех же предпосылок, что при определении управляемости,
наблюдаемости, идентифицируемости в предыдущих главах, то поня-
тия устойчивости не будут столь разнообразными. Понятие устойчивости
может определяться в пространстве состояний, в пространстве сигналов
как некоторые свойства операторов системы. В соответствии с основной
направленностью справочника оно здесь рассматривается в пространстве
состояний. Исключение составляет § 3.6, в котором так называемая аб-
солютная устойчивость изучается при операторном описании системы.
Как уже отмечалось, устойчивость рассматривается как внутреннее
свойство системы или движения (так называемая «техническая» устой-
чивость [3.1] не затрагивается). Поэтому система уравнений, описываю-
щих движение или процесс, замкнута, а движение свободно. Кроме ус-
тойчивости в этой главе рассматриваются такие свойства системы, как
статизм и астатизм, инвариантность по отношению к внешним воздей-
ствиям, т. е. свойства, связанные с влиянием постоянно действующих
возмущающих воздействий.
Все эти свойства рассматриваются в терминах пространства состоя-
ний. В целом следует констатировать, что если понятия наблюдаемости,
управляемости, идентифицируемости являются фундаментом для поста-
новки и решения задач синтеза в современной теории автоматического
управления, то понятия и критерии, излагаемые в данной главе, суть
прежде всего инструменты анализа, хотя в некоторых случаях они мо-
гут применяться и для синтеза систем. Эти понятия используются для
анализа систем и в классической теории управления. Здесь они излага-
ются с единых позиций пространства состояний и в более широком пред-
ставлении, чем это обычно делается.
§ 3.1. Понятия устойчивости в пространстве состояний
Для определения большинства понятий устойчивости достаточно ис-
пользовать евклидово пространство состояний, хотя пе представляют
труда обобщения на любые другие метрические пространства состояний.
Рассматривается конечномерное евклидово пространство R'1. Переход к
бесконечномерному пространству сопряжен с довольно очевидной транс-
формацией понятий устойчивости.
Для общего определения понятия устойчивости в Rn и времени t
назначим два множества: множество (область) начальных состоянии
CQ с R’1 и множество конечных состояний или процессов Glt. Множест-
во G,.- в общем случае задается в пространстве R” и времени. Элементы
множества G„ обычно удовлетворяют уравнению процесса (движения).
Для детерминированных процессов с непрерывным временем это урав-
нение типа (1.2.1) без управления и, т. е.
i = f(x, t). (3.1.1)
Область G0CR" обычно имеет ту же размерность, что и пространство
состояний, т. е. п, хотя в специальных задачах может рассматриваться
устойчивость по отношению к начальным состояниям, образующим кон-
тинуум или дискретное множество точек меньшей размерности, чем п.
Множество G,, рассматриваемое в пространстве 1₽п, чаще всего име-
ет размерность, меньшую п, хотя в специальных случаях эти размерно-
сти могут совпадать. Так, если (3.1.1) имеет решение х == 0 и рассматри-
вается устойчивость этого состояния, то множество G„ состоит из одпоп-
единствепной точки — начала координат. Здесь имеет место нулевая раз-
мерность области конечных состояний. На рис. 3.1.1, а множество G,,-,
состоящее из одной точки, находится внутри области Go, что является
наиболее характерным случаем. На рис. 3.1.1, б эта точка находится вне
области Go.
Если множество GK представляет собой одну из траекторий, удовлет-
воряющих уравнению системы (3.1.1) и имеющих параметрическое
представление г(0) (параметром 0 может служить время i), то размер-
ность множества G,, есть единица. Этот случай, весьма распространен-
ный, иллюстрирует рис. 3.1.1, в, г. Движение по указанной траектории
называется кевозмущепным движением. В предыдущем примере точку
GK можно рассматривать как частный случай певозмущепного движения.
Рис. 3.1.1, в иллюстрирует случай, когда певозмущеиным движением яв-
ляются автоколебания, траектория которых именуется предельным цик-
лом. Автоколебания, как известно, могут су1цествовать в нелинейных
системах как с гладкими, так и с разрывными функциями j(x, t).
На рис. 3.1.1, г представлен случай, когда множество GK представля-
ет собой отрезок прямой в пространстве состояпий. Подобные случаи
обычно пе рассматриваются в классическом качественной теории диффе-
ренциальных уравнений, так как здесь само уравнение (3.1.1) заведомо
ис удовлетворяет условию существования и единственности решения
Липшица. Эти случаи, связанные, в частности, с так называемыми
скользящими режимами, могут иметь место, когда функция / является
разрывной или определена в соприкасающихся областях пространства
Рис. 3.1.1. Иллюстрации понятий устойчивости
состояний с доопределением поведения решений па границах областей
(см. и. 1.2.1).
В качестве множества GK может фигурировать поверхность любой
размерности р < п, па которой лежат траектории, соответствующие ре-
шениям исходного уравнения (3.1.1). Уравнение поверхности может
иметь вид
F(x, t) = const, (3.1.2)
где размерпость векторной функции F мепьше п. В качестве поверхно-
стей (3.1.2) могут фигурировать цилиндры (рис. 3.1.1, д), торы и любые
другие поверхности. Для разрывных и негладких функций /, скользя-
щих режимов поверхность (3.1.2) может иметь вид гиперплоскости или
даже участка гиперплоскости (рис. 3.1.1, е). Наконец, для систем спе-
циального вида, в частности систем, в которых функция / обращается
в пуль в области GK размерности п, множество GH представляет поверх-
ность полноразмерной области в пространстве состояний. Соответствую-
щий случай иллюстрирует рис. 3.1.1, ж. Множество G„ будем называть
множеством невозмущенных состояний или множеством невозмущенных
движений (процессов), множество Go— «областью притяжения» (при
наличии устойчивости). Одна система может иметь несколько множеств
певозмущенпых движений и соответствующих областей притяжения.
Классическим примером является автоколебательная система с несколь-
кими предельными циклами. Так, па рис. 3.1.1, s одно певозмущсппое
состояние GK представлено началом координат. Два других певозмущен-
ных движения соответствуют предельным циклам G |(, G)(.
Множество невозмущеппых состояний (движений) GH называется
асимптотически устойчивым с областью притяжения Go, если всякое дви-
жение, начавшееся в Go, в силу уравнений (законов) динамической сис-
темы приходит в сколь угодно малую окрестность G„ с течением вре-
мени.
Сколь угодно малая окрестность области GK понимается в смысле
сколь угодно малого расстояния всех точек этой окрестности до границ
области GK в метрическом (евклидовом) пространстве состоянии.
Если хотя бы одно движение, начавшееся в G„ или в его сколь
угодно малой окрестности, с течением времени в силу уравнений (за-
конов) динамической системы выходит за пределы некоторой окрестно-
сти множества GK, то множество состояний (движений) GK называется
неустойчивым.
Данное общее понятие устойчивости может быть без каких-либо из-
менений перенесено па процессы с дискретным временем, описываемые
уравнением вида
^fZc-J-l] =/IX RL *]- (3.1.3)
Для случайных начальных условий понятие устойчивости может не-
сколько трансформироваться. Здесь можно говорить о стохастической
устойчивости. Одно из общих определений стохастической устойчивости
для систем типа (3.1.1) — (3.1.3) заключается в следующем. Рассматрива-
ются множества (области) GK и Go в пространстве состояний. На множе-
ство (области) Go задается начальное распределение вероятностей в ви-
де начальной плотности вероятности ро(^)-
Мпожество состояний или движений G,t называется стохастически
устойчивым с областью притяжения Go, если любое начальное распреде-
ление Ро(^), сконцентрированное в области Go, трансформируется в силу
свойств системы за конечное время в распределение р(х), сконцентриро-
ванное па множестве GK или его сколь угодно малой окрестности.
Выражение «распределение р(х) сконцентрировано в области G» оз-
начает, что плотность вероятности, удовлетворяющая, естественно, уело-
вию нормировки } р (ж) dx — 1, равна пулю вне области G. Если мпо-
— ОС
7КОСТВО GK представляет собой одну точку, то указанная концентрация,
по существу, означает стремление с течением времени плотности вероят-
ности к 6-фупкции [3.2]. Если множество G,t представляет собой поверх-
ность, то устойчивость означает неограниченную по амплитуде концент-
рацию плотности вероятности па этой поверхности.
От общих понятий устойчивости перейдем к более частным и кон-
кретным.
3.1.1. Устойчивость в целом. Если область притяжения GB охватывает
все пространство состояний, то соответствующую устойчивость называ-
ют устойчивостью в целом. В любой реальной системе существует об-
ласть ограничений, впе которой принятая математическая модель и свя-
занное с пой пространство состояний теряют силу. Поэтому для практи-
ки вполпе достаточно понятия устойчивости в целом, при котором об-
ласть притяжения совпадает с указанной областью ограничений.
3.1.2. Устойчивость невозмущенпого движения или процесса. Как
видно из предыдущего, обычно элементами множества G,, являются про-
цессы, движения или состояния, удовлетворяющие уравнениям свобод-
ного движения системы. Поэтому можно говорить об устойчивости невоз-
мущенпого движения.
Динамическая система (3.1.1), где функция / явным образом зависит
от времени t, в классической теории называется неавтономной, а в тео-
рии управления — нестационарной. Соответственно система
х = /(ж) ' (3.1.4)
называется автономной пли стационарной. Обозначим певозм у щепное-
движение индексом «О» вверху. Для случая (3.1.1) по определению
ж° = /(ж®(1), !)• (3.1.5)
Вычитая (3.1.5) из (3.1.1) и вводя обозначение Дж(1) = ж(1)—ж°(4),
получаем
Дж = /(ж(/), t) — f(x°(t), 1) = /(ж°(1) + Дж, 1) — ./(ж°(1), t) = Х(Дж, t).
(3.1.6)
Уравнение (3.1.6) называется уравнением в отклонениях или урав-
нением возмущенного движения. Уравнение
Дж Х(Дж, t) (3.1.7).
имеет пулевое решение Дж = 0. Путем введения уравпепия в отклонени-
ях задача об. устойчивости невозму щепного движения трансформируется
в задачу от.устойчивости состояния равновесия Дж = 0 (устойчивости
нулевого решения). Заметим, что, за исключением специальных случаен
(ж" = const ..или /.— линейная, не зависящая явно от времени функция),,
уравнение в отклонениях (3.1.7) является нестационарным (неавтоном-
ным), даже если исходная система стационарна, т. е. имеет вид (3.1.6).
Обозначим норму вектора Да; через ||Дх|| и допустим, что в началь-
ный фиксированный момент времени вектор Дх(40) принадлежит неко-
торой области Оол.х пространства отклонений. Невозмущепное движение
называется асимптотически устойчивым с областью притяжения7 в
отклонениях <70дх, если при любом Дх(40) е GB &х в силу уравнения
(3.1.7) ||Да;(4)|| —>0 при t-»-oo.
3.1.3. Устойчивость певозмущенпого движения по Ляпунову. Невбз-
мущенпое движение х°(/) называется устойчивым по Ляпунову, если для
любого положительного числа е, как бы мало оно ни было, можно указать
положительное число 6, такое, что из неравенства ||Дх(4„)|| <6 следует
при t > tB неравенство ||Да;(4)У < е. Здесь tB — фиксированный началь-
ный момент времени.
Устойчивость по Ляпунову является, вообще говоря, локальной ус-
тойчивостью, устойчивостью в малом. Этот вид устойчивости иллюстри-
рует рис. 3.1.2. На рис. 3.1.2, а изображена трубка траекторий в окрест-
ности невозмущенпого движения х° (4) и сферические окрестности этого
движения в отдельные моменты времени. Показана также область на-
чальных отклонений с радиусом 6. На рис. 3.1.2, а представлен случай,
Рис. 3.1.2. Иллюстрации понятия устойчивости движения по Ляпунову
когда б < е. Устойчивость по Ляпунову здесь означает, что как' бы ни
были узки трубка и сферическая окрестность певозмущепного движения,
возмущенное движение, начавшееся в окрестности б, равной или мень-
шей окрестности е; будет оставаться в указанной трубке и окрестности е.
Понятию нео.симптотичес^ой устойчивости в классической теории со-
ответствует понятие нейтральности в инженерном представлении. Так,
например, система х = 0, явно нейтральная в инженерном понимании,
является устойчивой неасимптотически в указанном выше смысле.
3.1.4. Асимптотическая устойчивость невозмущенного движения по-
Ляпунову. Движение хв(1) называется асимптотически устойчивым в
смысле Ляпунова, если оно устойчиво по Ляпунову и если существует
такое положительное число т], что при ||Дх(40)II < ц, имеет место-
НДж(t)II->0 при 4—>оо. Попятив асимптотической устойчивости в смысле
Ляпунова поясняет рис. 3.1.2, б. Здесь существует такая окрестность ц
начального состояния х°(4о) певозмущеппого движения (вообще говоря,
сколь угодно малая), что все движения, начавшиеся в этой окрестности,
стремятся с течением времени к х°(4).
Известно, что стремление к пределу может быть равномерным и не-
равномерным ио отношению к тому или иному параметру. Если равно-
мерность стремления ц пределу имеет место по отношению к 40, то асим-
птотическая устойчивость называется равномерной относительно 40.
Если равномерное стремление к пределу имеет место по отношению к
начальному значению ж(40) с любым 40, то говорят, что невозмущепноо
движение равномерно асимптотически устойчиво по отношению к началь-
ным условиям. Оба вида равномерной устойчивости имеют место для
стационарной системы с асимптотически устойчивым певозмущеппым
движением [3.4].
3.1.5. Устойчивость линейных стационарных систем. Для системы
х = Ах, А = const, (3.1.8)
вне зависимости от того, какое движение ж”(4) этой системы выбрано за
невозмущенпое, какой начальный момент времени 40 задан, имеет место
либо асимптотическая равномерная устойчивость в целом, либо просто
устойчивость в целом, либо неустойчивость. Все определяется собствен-
ными числами матрицы А. Поэтому, как отмечалось выше, для липейпоц
стационарной системы свойство устойчивости приписывается пе движе-
нию, а самой системе.
3.1.6. Устойчивость певозмущеппого движения системы с дискретным
временем. Все перечисленные выше виды устойчивости певозмущеппого
движения распространяются на системы с дискретным временем
4-1] =/[>[*], Л]. (3.1.9}
Определения остаются практически без изменений.
§ 3.2. Критерии устойчивости движения «в большом»
Для нелинейных систем единственным известным строгим аппаратом
аналитического исследования устойчивости «в большом» (при конечных
и даже бесконечных областях притяжения) являются функции Ляпунова
и прямой метод Ляпунова, которым посвяшена обширная литература,
в частности, монографии [3.3, 3.5—3.9]. Функции Ляпунова используют-
ся не только для исследовапия устойчивости, но и для оценки некоторых
показателей качества переходных процессов, конструирования «законов
управления» и в определенной мере — при решении задач оптимизации
управления (см. гл. 8). Универсального метода построения функций Ля-
пунова не существует, по имеется большое число частных способов, вклю-
чая в последнее время машинные методы [3.10]. Здесь имеется возмож-
ность осветить лишь некоторые из них. Пусть G — некоторая область
пространства состояний, содержащая точку х = 0.
Понятие функций Ляпунова базируется на понятиях зпакоопределсп-
пой (положительно-определенной, отрицательно-определенной) и знако-
постоянной (знакоположительной, знакоотрицательпой) функций в об-
ласти G пространства состояний:
— положительно-определенная функция V(х) > 0 при х е G, кро-
ме х = 0;
— отрицательно-определенная функция У (х) < 0 при х е G, кро-
ме х = 0;
— знакоположительная функция Е(х) 0 при хе fi;
— знакоотрицательная функция V (х) sg: 0 при х е G.
Если функция Е(х) зпакоонределеппа, то поверхности равного уров-
ня Е(х) = с = const при достаточно малом с замкнуты и содержат точг
ку х = 0 (эту точку будем также обозначать О). Везде в дальнейшем,
где пе оговорено особо, знакоопределепная функция V (х) считается та-
кой, что поверхности Е(х) = с — const замкнуты вплоть до значения
-с = ст- где ст — конечная величина. Область, ограниченную поверхно-
стью lz(x) = ст, назовем Ут-областыо.
3.2.1. Достаточное условие устойчивости состояния равновесия ста-
ционарной системы с областью притяжения Е,„. Если для системы Дх =
= Х(Дх) в области Vm существует зпакоонределенпая функция V, произ-
водная которой по времени V в силу уравнения системы является знако-
постоянной функцией со знаком, противоположным знаку функции V, то
равновесное состояние устойчиво. Если производная V есть знакоопредо-
леппая функция, противоположная по знаку V, то равновесное состоя-
ние асимптотически устойчиво с областью притяжения Vm.
Функция V, фигурирующая здесь, есть функция Ляпунова с допол-
нительным свойством, что поверхности V = с = const при изменении с
от 0 до с-щ представляют собой замкнутые поверхности, вложенные в Е,„
(рис. 3.2.1, а).
Заметим, что система
Дх = Х(Дх) (3.2.1)
стационарна (автономна). Ее уравнение записало в обозначениях, при-
мененных в п. 3.1.2 для уравнения в отклонениях. Конечно, опо может
соответствовать и исходной системе с положением равновесия в начале
.координат.
Полная производная по времени функции V в силу уравнения (3.2.1)
равна
8V dV • dV dV
V = dt + dx Qt + dx X’
Эта производная должна быть знакопостоянной иля зпацоопроделеппой,
что можно записать в виде'
где Q — знакопостоянная или зпакоопрсделеппая функция.
Выражение (3.2.2), рассматриваемое как липейнос уравнение в част-
ных производных (относительно V), называется уравнением Ляпунова и
Рис. 3.2.1. Иллюстрации устойчивости состояния равновесия и функций
Ляпунова стационарной системы
часто будет встречаться в дальнейшем (гл. 8, 10) в различных применен
пиях.
В рассматриваемом случае функция V от времени непосредственно
пе зависит, и уравнение (3.2.2) принимает вид
dV dV
дх х = дх X = — <?•
(3.2.3)
Интерпретация приведенного выше условия весьма проста. Скаляр-
ное произведение вектора dVjdx па вектор х (или X) (dVI8x)x, вычислен-
ное в любой точке поверхности И = с, = const, есть скорость проникно-
вения изображающей точки х через эту поверхность. Если вследствие
отрицательной определенности функции — Q (при положительной опре-
деленности V) движение по всем возможным внутри Vm траекториям на-
правлено внутрь поверхностей V = с (рис. 3.2.1, б), то состояние равно-
весия (начало координат) устойчиво асимптотически. Если же вследствие
положительной определенности —Q все траектории пронизывают поверх-
ности в противоположном направлении (рис. 3.2.1, в), то состояние рав-
новесия заведомо неустойчиво.
3.2.2. Достаточное условие устойчивости в целом состояния равнове-
сия стационарной системы. Функция Ляпунова Е(х) называется беско-
нечно большой, если опа неограниченно возрастает при увеличении рас-
стояния до начала координат. Любому решению уравнения (3.2.1), спра-
ведливому па бесконечном интервале времени —<ю t -g; оо, соответству-
ет траектория, называемая целой. Устойчивость состояния Лх = О назы-
вается устойчивостью в целом, если область притяжения пе ограничена
и любое движение &x(t), начавшееся в этой области, удовлетворяет ус-
ловию ||Дх(/) ||-> 0 при t->oo.
Если существует бесконечно большая определенно-положительная
функция V(Ax) такая, что в силу уравнения (3.2.1) V ig; 0, причем V = О
на множестве, пе содержащем целых траекторий (кроме Ах = 0), то сос-
тояние равновесия Дх = 0 устойчиво в целом (теорема Е. А. Барбапш-
па — Н. Н. Красовского).
Практическое значение этого условия связано с том, что часто зна-
чительно легче подобрать функцию Ляпунова, производная которой по
времени знакопостоянна, по пе зпакоопределеппа [3.11].
3.2.3. Общие и частные случаи построения функций Ляпунова для
нелинейных систем. Как уже отмечалось, пе существует общего аналити-
ческого метода построения (конструирования) функций Ляпунова, осо-
бенно если ставится задача нахождения по только достаточных, по и не-
обходимых условий устойчивости движения нелинейных систем. Даже
если бы существовал общий аналитический метод решения уравнения
Ляпунова (3.2.2), это не давало бы полного решения проблемы, так как
зпакоопредсленпая или знакопостоянная функция Q, вообще говоря, про-
извольна, а для необходимого и достаточного условия опа должна опре-
деляться единственным образом. Однако для некоторых классов систем
проблема функций Ляпунова решается практически исчерпывающим об-
разом, а для многочисленных частных видов систем построены удачные
функции Ляпунова.
3.2.3.1е. Функции Ляпунова для пассивных систем. Механические,
электрические, электромеханические системы, не содержащие активных
элементов (усиливающих, вносящих дополнительную энергию), подчи-
няющиеся уравнениям Лагранжа, называются пассивными системами.
В качестве функций Ляпунова для них традиционно принимается полная
энергия, равная сумме кинетической н потенциальной энергий. Для дис-
сипативных систем производная энергии по времени всегда отрицатель-
на или равна пулю (в равновесном состоянии). Для консервативных сис-
тем опа равна нулю.
Рис. 3.2.2. Потенциальная энергия (высота в поле силы тяжести) может
в некоторых случаях служить функцией Ляпунова пассивной системы
Пусть, например, тяжелый маленький шарик находится в поле силы
тяжести на твердой поверхности с определенным сложным рельефом
(рис. 3.2.2). Трением качения можно пренебречь. В предположении отсут-
ствия проскальзывания кинетическая энергия вращательного движения
шарика всегда составляет определенную долю от кинетической энергии
его поступательного движения. При другом предположении (поверхность
без трения) кинетическая энергия вращательного движения равна пулю.
Пространство состояний для шарика без учета его вращения (материаль-
ная точка) является шестимерпым, а представленная па рис. 3.2.2 карти-
на есть двумерная проекция этого пространства состояний с изображени-
ем линий равного уровня, которые соответствуют также сечениям упо-
мянутой поверхности эквипотенциальными плоскостями. Если кинетиче-
ская энергия мала, панример за счет того, что указанная поверхность
является дном сосуда с вязкой жидкостью, то можно рассматривать
трехмерное пространство состояний и в качестве функции Ляпунова при-
нять потенциальную энергию. Из четырех показанных па рис. 3.2.2 сос-
тояний равновесия два (точки с и б) в этом случае асимптотически ус-
тойчивы с областями притяжения, ограниченными линиями — 1Ц (при-
близительно), а два состояния (точки с и d) неустойчивы. При учете
кинетической энергии функция Ляпунова представляет собой полную
энергию, и области притяжения состояний а и Ъ уменьшаются.
3.2.3.20. Функции Ляпунова для градиентных систем. В теории экс-
тремальных систем, да и в общей теории автоматического управления
в целом, градиентные системы занимают видное место. Непрерывной
идеальной градиентной системой принято называть систему, описывае-
мую уравнением вида
/йН\т
х — к ( J » (3.2.4)
где V — положительно-определенная скалярная функция х; к — положи-
тельно-определенная, чаще всего диагональная с положительными эле-
ментами, квадратпая матрица.
В качестве функции Ляпунова для системы (3.2.4) целесообразно
выбрать F(x), т. е. именно ту функцию, градиент которой фигурирует
в уравнении системы. Действительно, при этом выражение (3.2.3) при-
нимает вид
dV l8V\r
— ТГ- к =- I = — Q.
дх \дх j v
Квадратичная форма в левой части этого выражения отрицательно опре-
делена относительно компонент вектора dV/дх, и состояние, соответству-
ющее дУ/дх == 0, асимптотически устойчиво. Заметим, что это имеет ме-
сто при любых сколь угодно больших элементах матрицы к, при которых
сохраняется ее положительная определенность. Поэтому системы типа
(3.2.4) относятся к системам, положение равновесия которых устойчиво
при сколь угодно больших коэффициентах усиления. Следует добавить,
что для существования состояния равновесия уравнение dVfdx = 0 долж-
но иметь решение относительно х.
3.2.3.30. Функции Ляпунова для систем с одной нелинейностью. Для
систем, содержащих одну нелинейность, обозначаемую /о(о), где а —
одна из составляющих вектора состояния или линейная форма этих сос-
тавляющих, функцию Ляпунова оказалось удобным строить в виде
с
V = D + 0 /о, (o') do', (3.2.5)
о
где D — квадратичная форма вектора состояния, 0 — число. Таким путем
удалось получить ряд практически эффективных достаточных условий
устойчивости узкого класса систем, содержащих одну нелинейность
[3.12]. Получено необходимое и достаточное условие существования у за-
данной системы функции Ляпунова вида (3.2.5). Для систем с к нели-
нейностями /oj(Oj) функция Ляпунова строится в виде
k
P(x) = D+ 50. i
1=1 о
3.2.3.40. Метод квадратичной формы от скорости в пространстве сос-
тояний. Для системы Дх — Х(Дх), Х(0) =0 функция Ляпунова строится
в виде V = ХТЛХ, где симметричная постоянная матрица П подбира-
ется так, чтобы ее собственные числа были положительны (матрица П
положительно определена) и чтобы симметризоваппая функциональная
матрица
7 =
8Х
дх
была отрицательно-определенной в любой точке пространства состояний.
Тогда состояние равновесия устойчиво в целом [3.13]. Действительно,
\т / <9Х \
-z-х) ЛХ + Х’Я 4;Х =ХТП.
3.2.3.5е. Векторные функции Ляпунова. Нередко сложную систему
можно разбить па ряд субсистем с относительно слабыми связями. Если
для каждой субсистсмы в се автономном режиме, т. е. с разорванными
межсубсистемными связями, найдена функция Ляпунова для состояния
равновесия, то совокупность таких функций можно рассматривать как
секторную функцию Ляпунова. При соблюдении определенных положе-
ний на основании векторной функции Ляпунова можно судить об устой-
чивости состояния равновесия в целом. Методу вецторных функций Ля-
пунова посвящено много работ, в том числе [3.14—3.17]. Это связано,
в частности, с тем, что трудности построения скалярных функций Ляпу-
нова быстро нарастают с увеличением размерности и стремление к спе-
цифичной «декомпозиции» системы при построении функций Ляпунова
является естественным.
3.2.4. Некоторые условия стохастической устойчивости. Стохастиче-
ская устойчивость здесь понимается в смысле, указанном в § 3.1, в ча-
стности, асимптотическая стохастическая устойчивость состояния равно-
весия /(Дж) =0, Дж = 0 означает концентрацию распределения вероят-
ностей в начале координат, стремление плотности вероятности к 6-функ-
ции с течением времени.
3.2.4.1е. Необходимое условие асимптотической стохастической устой-
чивости. Для свободного движения (со случайными начальными услови-
ями) ФПК-уравпепие (см. и. 1.2.8) для логарифмической плотности ве-
роятности (1.2.13) запишется в виде
И п
^ + 2/i£±12 = -2?i- <3-2’6)
dl Ansi l дх. *** дх-
г=1 г г~1 г
Для точки равновесия Дя? = 0 это уравнение принимает вид
din р = _ V? / df, \
dt \ дх. I
i=l \ г /Ах=о
Плотность вероятности в начале координат будет неограниченно нарас-
тать тогда и только тогда, когда
Дх=0
Ото условие являетсн необходимым условием асимптотической стохасти-
ческой устойчивости (и обычной устойчивости «в малом») положения
равновесия. Если
то плотность вероятности в начале координат неограниченно уменьшает-
ся и состояние равновесия стохастически неустойчиво (а также неустой-
чиво в обычном смысле).
3.2.4.2е. Энтропийная устойчивость. Энтропией распределения вероят-
ностей (информационной энтропией), называется величина
ОО
II = — f р In р dr.
— ОО
Умножая ФПК-уравнение (1.2.12), записанное для данного случая в виде
i=l 1
на In р и интегрируя по всему пространству состояний с учетом условия
нормировки (1.2.10) в левой части, получим производную энтропии с об-
ратным знаком
п °°,
-H=-V I InpJLfp/jtta. (3.2.7)
<=1 -ОО
Принимая, что все члены вида /гр In р, Др исчезают па бесконечности,
и дважды интегрируя по частям в правой части (3.2.7), находим
(3.2.8)
где Е — символ математического ожидания (безусловного). Условие не-
ограниченного уменьшения энтропии (условие асимптотической монотон-
ной энтропийной устойчивости) имеет вид
0.
(3.2.9)
Оно заключается, таким образом, в отрицательности математического
ожидания следа матрицы Якоби дЦдх [3.2].
Данное условие, как исходное ФПК-уравнение, записано для сис-
тем с гладкими (дифференцируемыми) функциями /. Однако при дооп-
ределении условиями непрерывности решения па границах стыковки ку-
сочно-гладких функций оно обобщается па системы с такими функция-
ми. Например, системы с зонами нечувствительности (рис. 3.1.1, ж), ког-
да все dft/dxi = 0, пе обладают асимптотической энтропийной ус-
тойчивостыо. Для гладких систем примером может служить градиентная
система х =—k(dVjdx) (к — скалярная постоянная), функция V кото-
рой удовлетворяет уравнению -Лапласа
i!e=o.
Попятив энтропийной устойчивости может быть распространено [3.20] па
динамические системы, возмущаемые шумами.
3.2.5. Некоторые структурные условия неустойчивости состояния не-
линейных систем. Для практики весьма важными являются структурные
условия устойчивости и неустойчивости, позволяющие по одному виду
системы (ее структурной схеме) определить возможность существования
устойчивых или неустойчивых процессов. Для линейных стационарных
систем невысокой размерпости подобные критерии имеют инженерную
форму и разработаны достаточно полно. К сожалению, в области устой-
чивости нелинейных процессов «в большом» структурные критерии сла-
бо разработаны.
3.2.5.1е. Условие неустойчивости системы с неустойчивой субсистемой.
Понятие управляемости в принципе можно перенести на субсистемы
замкнутой системы, назвав ее внутренней управляемостью или связ-
ностью. Действительно, представим векторное уравнение (3.1.4) в виде
двух уравнений с субвекторами ж(1), ж(2):
^(i) — /<1)(ж<1), ж<2)), (3.2.10)
^(2) = /(2)(-Т(1), -Т(2)). (3.2.11)
Если в системе (3.2.10) рассматривать ж(2) как управление, то можно го-
ворить об управляемости этой субсистемы со стороны субсистемы (3.2.11)
Рис. 3.2.3. Одно из струк-
турных условий неустой-
чивости: нижняя субен-
стема неустойчива и не-
управляема
и, напротив, можпо рассматривать управляемость субсистемы (3.2.11) со
стороны (3.2.10) через х(|). Конечно, если субсмстема (3.2.11) имеет вид
Х(2) -- f(2) (0, ^(2)),
(3.2.12)
то опа неуправляема со стороны первой субсистемы.
Достаточно очевидным является следующее положение. Если система
содержит субсистему, состояние равновесия которой неустойчиво, и эта
субсистема является неуправляемой со стороны оставшейся части сис-
темы, то состояние равновесия всей системы неустойчиво. Соответствую-
щая структурная схема для неуправляемости неустойчивой субсистемы
типа (3.2.12) представлена па рис. 3.2.3.
3.2.5.2°. Отсутствие асимптотической устойчивости состояния равно-
весия в системе без самовыравпивапия. Субсистему (звено) вида
Я* = 0, »i + l, ..., ж„)
назовем звеном без самовыравиивания, если /, (0, .... 0) = 0. Если систе-
ма состоит только пз звеньев без самовыравиивания, то опа по обладает
асимптотической устойчивостью состояния равновесия.
Так, система со структурой, представленной па рис. 3.2.4, о, може.т
обладать асимптотической устойчивостью состояния равновесия, a coc-
ci
Рис. 3.2.4. Системы без самовыравпивапия могут обладать (а) и пе обла-
дать (б) асимптотической устойчивостью
тоявие равновесия системы рис. 3.2.4, б пе может иметь асимптотиче-
скую устойчивость. В случае а последнее n-е звено не является звеном
без самовыравпивапия. Указанное положение вытекает непосредственно
из условия типа (3.2.7).
§ 3.3. Критерии устойчивости движения «в малом»
Теория Ляпунова (первый метод) ставит в соответствие устойчиво-
сти «в малом» (устойчивости ио Ляпунову) состояния равновесия нели-
нейной системы
Дж = Х(Дж), Х(0)=0 (3.3.1)
устойчивость линейной системы (первого приближения): Дж =
/ дХ \
= I I Если среди собственных чисел матрицы
I f)X \
А ^(с'Дх Уд^ (3’3’2)
нот мнимых плп нулевых, т. е. система первого приближения
Ai = ИДх (3.3.3)
пе находится на границе устойчивости, то из асимптотической устойчи-
вости (3.3.3) следует асимптотическая устойчивость но Ляпунову состоя-
ния равновесия (3.3.1) и из неустойчивости (3.3.3) вытекает неустойчи-
вость по Ляпунову состояния равновесия (3.3.1).
В особых случаях, когда среди собственных чисел матрицы А есть
нулевые пли мнимые, требуется дополнительное исследование с учетом
старших (по отношению к первому) приближений, т. е. с учетом стар-
ших степеней разложения в ряд функции Х(Дж). Однако на практике
особые случаи являются редким исключением и в прикладной теории
чаще всего опускаются.
3.3.1. Критерий устойчивости линейной стационарной системы. Для
асимптотической устойчивости линейной стационарной системы х - Ах
необходимо и достаточно, чтобы все корпи характеристического урав~
нения
det [Х£ — /1] = О
(3.3.4)
имели отрицательные действительные части. Коэффициенты а, характе-
ристического уравиенн я
'/и + «п-l*"-1 + • • • + % = dct =
'X —«(1 — «12
® >>-. ... X — а
ин
1 ( d1 1
могут быть вычислены по формулам а; = — I —: det |/.£— И] I .
г! \dV А=о
Для того чтобы все корпи характеристического уравнения имели от-
рицательные действительные части, необходимо и достаточно, чтобы все
диагональные определители матрицы
О
О
(3.3.5)
были положительны (критерий Гурвица).
3.3.2. Необходимое условие устойчивости. Известно, что условие
асимптотической устойчивости в виде положительности главных миноров
матрицы (3.3.5) может быть преобразовано к виду, при котором необхо-
димым и достаточным условием устойчивости является положительность
всех коэффициентов а., т. е.
Д det [%£ —А] ) >0,
d}.1 А=о
(3.3.G)
и положительность старшего определителя матрицы (3.3.5). Условно
(3.3.G) является необходимым условием асимптотической устойчивости.
3.3.3. Области устойчивости в пространстве параметров. Построение
областей в пространстве параметров а0, щ, ..., on-i или в пространстве
параметров ац (элементов матрицы Д), которым соответствует асимпто-
тическая устойчивость или заданное распределение корней характери-
стического уравнения па комплексной плоскости, восходит к Вышнегран-
скому (диаграммы Вышпеградского) и составляет традиционный раздел
классической теории регулирования.
Аналитическое выражение этих областей в принципе дает также кри-
терий Гурвица. Однако графическое построение и представление па осно-
ве соответствующих неравенств для систем высокой размерности сложно
и осуществимо только посредством ЭВМ с получением многопарамегри-
ческих семейств графиков. Для случая параметрической плоскости (об-
ласть устойчивости в пространстве двух параметров) широкое примене-
ние в свое время имел так называемый метод D-разбиений [3.18].
3.3.4. Траектории корней. Модальное управление. В классической те-
ории автоматического регулирования широкое применение имел метод
корневого годографа [1.10]. При этом методе изучался характер кривых
перемещения корней (точпее, направленность перемещений) па комп-
лексной плоскости при измепепии какого-либо параметра, прежде всего
так называемого коэффициента усиления разомкнутого контура, с кото-
рым связан коэффициент «о. Идея целенаправленного изменения распре-
деления корней привлекает внимание и получает развитие и в настоя-
щее время. Соответствующее направление получило пе вполпе удачпое
наименование «модальное управление». Это направление кратко освеща-
ется в гл. 8.
3.3.5. Функции Ляпунова для линейных систем. Изучение устойчиво-
сти линейных стационарных систем через построение функций Ляпунова
пе представляет практического интереса. Однако решение уравнения Ля-
пунова (3.2.2) для случая линейной системы п квадратичной функции
(J = .ггрх, где [j — заданная, обычно положительно-определенная матри-
ца, представляет значительный интерес с точци зреция синтеза (см. гл. 8).
Решение уравнения
dV dV
5Г + 57^ = -*г₽* " <3-3-7)
ищется в виде квадратичной формы V = хгах. В общем случае а =
= а ((). Производная этой квадратичной формы в силу уравнения сис-
темы х = Ах равна
dF '!' 77 Aj: =л а “ Л а 'Ь аА) х- (3.3.8)
Из (3.3.8), (3.3.7) получаем
а ф Лта + а А = (3.3.9)
Это уравнение именуется обыкновенным дифференциальным матричным
уравнением Ляпунова. Существует много способов его решения. Некото-
рые из них будут изложены в гл. 8.
§ 3.4. Статизм и астатизм систем
в пространстве состояний
В классической линейной теории автоматического регулирования,
оперирующей передаточными функциями (операторами) звеньев и кон-
туров, видную роль играют понятия коэффициентов ошибок, статизма и
астатпзма замкнутой системы, структурные условия эстетизма. Все эти
понятия в принципе могут быть перенесены па нелинейные и линейные
системы, описываемые в пространстве состояний.
3.4.1. Ошибки, вызванные медленно меняющимися непрерывно дей-
ствующими внешними воздействиями. Рассмотрим уравнение, записан-
ное в отклонениях от певозмущеппого движения с линейно входящим
внешним векторным возмущающим воздействием re(t):
AS = Х(Дж) -f- Cw(t). (3.4.1)
Состояние равновесия Ал- = 0 считается асимптотически устойчивым.
Возмущающее воздействие iv(l) считается дифференцируемым неограни-
ченное число раз по времени па всем интервале —оо оо и изменя-
ющимся достаточно медленно для того, чтобы сходилась рассматриваемая
ниже последовательность. Функция Х(Дж) также полагается аналитиче-
ской относительно указанного аргумента.
В качестве первого приближения для частного решения уравнения
(3.4.1) возьмем «статическое» приближение Джцц|, удовлетворяющее
уравнению статики:
Х(Д^тц) + Cw(t) = 0. (3.4.2)
Матрица Якоби (йХ/йДж)Дх^^.о невырожденная. Это, как видно из пре-
дыдущего параграфа, заведомо имеет место для асимптотически устой-
чивого невозмущеппого состояния. Тогда по крайней мере при достаточ-
но малой норме (|Дж|цц|| уравнение (3.4.2) можно разрешить относитель-
но Дж|цц:
Дагтп = -V[Cu>(f)]. (3.4.3)
Последующие приближения строятся по формуле
Дх№ц = — 4х[Cit>(£) — Джя([_1||], к = 2, 3, ... (3.4.4)
Если последовательность (3.4.3), (3.4.4) сходится при 7с->оо, то опа схо-
дится к решению уравнения (3.4.1), в чем можно убедиться непосредст-
венной подстановкой.
Для линейной стационарной системы Х(Дж) = АЛж, Джщц = —A-ICw,
Джц*ц = —A~l(Cw— Дж||А-]ц) имеет место соотношение
Ах = — A~l (CwA~lCwA~2Cw...). (3.4.5)
Величину Дж в (3.4.5), как и Дж = Tim Д^цм, в (3.4.4), можно назвать
?1-*оо
векторной ошибкой, вызванной медленно меняющимся векторным возму-
щающим воздействием. Матрицы —А~'С, —А~2С, ... ио аналогии с од-
номерными стационарными линейными системами можно назвать матри-
цами коэффициентов ошибок.
Для линейной стационарной системы Дж = А Ах + С w решение мо-
жет быть записано в виде
t
Дж (/) = [exp (At)] Дж (0) + j" [охр А (t — т)] Си> (т) dt,
о
Интегрируя по частям в предположении, что ряды сходятся, получаем
Дж(£) = exp (At) [Дж(0) + A~lCw(0) + A~2Cw(0) + ...] —
— A-‘[Cw(t) +A~2Cw(t) + ...],
где, в отличие от (3.4.5), учитывается переходный режим. Для асимпто-
тически устойчивой системы это решение стремится к (3.4.5) с течени-
ем времени.
3.4.2. Астатизм. Если составляющая Джу векторной ошибки Дж =
= lim ДЖ||Ь[| (3.4.4) пе зависит от р-й составляющей возмущения ш, то
система обладает астатизмом первого порядка типа (V, р)ь Для линей-
ной стационарной системы астатизм типа (v, p)t эквивалентен равенству
пулю элемента -v-й строки и р-го столбца матрицы А~'С.
Если составляющая Джг. пе зависит от р-й составляющей возмущения
iv и его первой производной по времени w, то система обладает астатиз-
мом второго порядка типа (v, р)а. Для линейной стационарной системы
астатизм типа (v, |1)г получается при равенстве нулю элементов па пере-
сечении v-й строки и р-го столбца матриц А~'С, А~гС.
Аналогично астатизм fc-ro иорядца типа (у, ц)а имеет место, если
пе зависит от ww ..Для линейной стационарной систе-
мы такой астатизм получается при равенстве нулю элементов па пере-
сечении v-й строки и р-го столбца матриц
А~'С, А~2С, А-*С. (3.4.6)
3.4.3. Структурные условия астатизма для линейной стационарной
системы. Рассмотрим линейную стационарную асимптотически устойчи-
вую систему Аж = Л Аж - Cw. Вектор-столбец g = Cw назовем суммар-
ным возмущающим воздействием. В сцаляриой форме
п
^Хг = 2 йгЛДг/< + 1 =
/4=1
Звено типа
АЖг — -|- (3.4.7)
где р =/= i, назовем интегрирующим гвеном с одной входной компонентой
вектора состояния Ажр. Допустим, что система содержит одно интегри-
рующее звено с одной входной компонентой вектора состояния Аж?,.
Тогда матрица А имеет вид
Ясно, что алгебраические дополнения' всех элементов р-го столбца будут
равны нулю, кроме алгебраического дополнения элемента которое
может быть равно пулю лишь в особом случае. Это означает, что все
элементы р-й строки матрицы А~', кроме элемента с индексом pi, равны
нулю. Согласно изложенному в п. 3.4.2 система будет обладать астатиз-
мом первого порядка выхода Аж?, по отношению ко всем и — 1 возмуща-
ющим воздействиям £j, . . ., £г-1, £г + ь • • •,
Итак, достаточным структурным условием астатигма первого поряд-
ка выхода Джр по отношению ко всем и — 1 возмущающим воздействи-
ям *) ..., (, gi+I,...., является наличие указанного интегриру-
ющего звена с единственной входной величиной Ажр. Соответствующая
структурная схема приведена па рис. 3.4.1. Звено типа (3.4.7) является
звеном без самовыравпивапия.
Рассмотрим теперь случай двух интегрирующих звеньев, включен-
ных последовательно. Уравнения последовательно соединенных
*) Указанный астатизм согласно приведенному выше условному обо-
значению можно представить символом (р, 1)ь ..., (р, р —1)1,
(р, р +1)1, ..., (р, n)i. При этом имеется в виду суммарное возмущаю-
щее воздействие.
интегрирующих звеньев с входной величиной Дхр запишем так:
А^р-Н --- Нр+1, р Аср, Л-Гр+2 — ЛР + 2.РТ lA-Zp+b
(3.4.8)
Матрица А будет иметь вид
Ясно, что все элементы р-й н (р + 1) й строк матрицы А-1, кроме эле-
ментов 7р. р+1 м 7рч-1. р-г2, будут равны нулю. Тогда матрица .'Г2 будет
иметь все нулевые элементы в р-н строке, кроме ёр. р+2.
Рис. 3.4.1. Структурная схема линейной стационарной системы, обладаю-
щей астатизмом первого порядка выхода Дгг, по отношению к возмуща-
юще .му воздействию Е —
Итак, достаточным структурным условием астатизма второго поряд-
ка выхода Джр по отношению к возмущающим воздействиям gi, £2, ...
..., Ер, |р+з, ..., является наличие двойного интегрирующего звена
вида (3.4.8). Соответствующая структурная схема показана на рис. 3.4.2.
Увеличивая число последовательно включенных интегрирующих
звеньев, можно повышать порядок астатизма в принципе до (я— 1)-го.
Однако обеспечение устойчивости при этом, естественно, затрудняется.
При п интегрирующих звеньях (звеньях без самовыравпивапия) теряет-
ся структурная асимптотическая устойчивость (см. п. 3.2.5.20).
Рассмотренные структурные условия астатизма являются грубыми
по отношению к параметрическим изменениям. А именно, изменения па-
|раметров (кроме появления самовыравиивапия у «интегрирующих»
звеньев) не меняют эти условия.
Кроме таких условий астатизма, существуют более общие, по и бо-
лее строгие по отношению к наличию паразитных связей и поэтому
трудно осуществимые условия. Так, например, система, изображенная
Рис. 3.4.2. Структурная схема линейной стационарной системы, обладаю-
щей астатизмом второго порядка выхода Ат?, по отношению к возмуща-
ющим воздействиям ..., £р, £р+3, ...,
Рис. 3.4.3. Структура с неуправляемой субсистемой, вектор состояния ко-
торой Дх(2) обладает полным астатизмом и инвариантностью по отно-
шению К £(1)
па рис. 3.4.3, состоит из двух субсистем, из которых пижпяя (субвектор
состояния А^(2)) неуправляема по отношению к верхней (субвектор сос-
тояния Аял;). Ясно, что здесь выход Дж<2) обладает пе только астатиз-
мом сколь угодно высокого порядка по отношению к возмущающему
воздействию g(1) (см. рис. 3.4.3, этот вид астатизма можно обозначить
(2, J)«), но и полной инвариантностью к этому возмущающему воздей-
ствию (см. § 3.5). Однако искусственным путем обеспечить подобную
структуру обычно весьма трудно, если речь идет о сложных системах
с натурными объектами.
3.4.4. Структурные условия астатизма первого порядка для нелиней-
ной стационарной системы. Допустим, что в составе системы
Дх = Х(Дх) + g, (3.4.9)
состояние Дх == О которой асимптотически устойчиво, имеется звепо
Дх4 = Xf(Axp), (3.4.10)
где i =/= р и функция X; (Дхр) обращается в нуль только при Дхр — 0.
Рис. 3.4.4., Структурная схема нелинейной стационарной системы, обла-
дающей астатнзмом первого порядка выхода Дхр по отношению it воз-
мущающему воздействию
Звепо (3.4.10) будем называть интегрирующим звеном с одномерным не-
линейным еходол. Запишем уравнения статики в скалярной формо
ХДДхп ..., Дхп) ——£1,
Хр(Дх|, ..., Дхя) —
Х< (Дхр) — 0,
Хтг(ДХ|, . . ., Дх„) —
Отсюда следует Дхр = 0. Таким образом, наличие интегрирующего звена
с одномерным нелинейным входом. (3.4.10) обеспечивает астатизм первого
порядка выхода Дхр по отношению к возмущающим воздействиям
Вь ..., Ё-;-ь £г-ц, •••! Соответствующая структурная схема представ-
лена на рис. 3.4.4.
3.4.5. Структурные условия векторного астатизма первого порядка
для нелинейной стационарной системы. В предыдущих случаях рассмат-
риваются условия астатизма одной выходной величины по отношению
к определенной совокупности входных величин. Представляют также ин-
терес условия, когда астатизмом обладают сразу несколько выходных
величин.
Допустим, что вектор состояния (в отклонениях) представлен в виде
двух субвекторов Дж = (Дж(1), Дж(2)), удовлетворяющих уравнениям
Д^(|) = /(1)(ЛЖ(1)> ЛЖ<2)) + Е(1), ДЖ(2) = /(2) (Д^(1)),
где —функция, обращающаяся в пуль только при Дх(1) = 0.
Рис. 3.4.5. Структурная схема нелинейной стационарной системы, облада-
ющей астатизмом первого порядка векторной выходной величины Дх(1)
до отношению к векторному возмущающему воздействию £(|>
Подобная система при соблюдении условия асимптотической устойчиво-
сти равновесного состояния обладает астатизмом первого порядка выхода
Дж(1) по отношению к возмущающему воздействию £(1). Это вытекает из
уравнений статики:
/(1)(Дх(1), Дж(2)) + £(i) = 0, /<2)(Дж(1>) = 0.
Соответствующая структурная схема представлена на рис. 3.4.5.
§ 3.5. Инвариантность в теории регулирования
Пусть астатизм рассматривается как невосприимчивость того или
иного выхода системы ц постоянным или нарастающим по степенному
закону во времени медленно меняющимся возмущающим воздействиям
в установившемся режиме асимптотически устойчивой системы. Тогда
инвариантность определяется как невосприимчивость того или иного
выхода к возмущающему воздействию w(t) произвольного вида. Триви-
альным случаем полной инвариантности выхода Дж(2| по отношению к
возмущающему воздействию £(1) является полная неуправляемость суб-
системы с вектором состояния Дж(2) по отношению к субсистеме, па ко-
торую действует возмущение £(i) (пример соответствующей структуры
представлен на рис. 3.4.3). Однако возможность осуществления подоб-
ных структур, особенно при наличии натурных объектов, как уже отме-
чалось, является весьма редким исключением.
3.5.1. Условия инвариантности для линейной стационарной системы в
пространстве состояний. Обозначая изображение Лапласа векторов состо-
яния и возмущения через я(р) и iv(p) соответственно для уравнения
х = Ах Civ при хо = 0, получаем
Х(Р) = (рЕ — A)~'Cw(p).
В скалярной форме
п q
xi (Р) = 7 2 2 (Р) CPvU>v {р}'
Ц=1 v=i
где <zMi (р) — алгебраическое дополнение соответствующего элемента оп-
ределителя
А =
р~аи — а 12 -а1п
-°21 Р~а22 а2п
ап1 ~ап2 Р - а,т
Для того чтобы выход xi был инвариантен по отношению к возмущаю-
щему воздействию wv, необходимо и достаточно, чтобы
п
И=1
Допустим, что возмущающее воздействие ivv приложено только к одному
«входу» системы, например, Cvv #= О, Сц? — 0 при р =/= V. Тогда условие
(3.5.1) обращается в тождество aVi(p)/AsO, которое может выполняться
Рис. 3.5.1. Инвариантность при одном канале воздействия получается
только при бесконечном коэффициенте усиления
только, если щ, = °°, а остальные коэффициенты — конечные. Это слу-
чай «бесконечного коэффициента усиления» (рис. 3.5.1), малая практи-
ческая значимость которого связана с общеизвестными трудностями обес-
печения устойчивости при высоком коэффициенте усиления. Если хотя
бы два коэффициента отличны от нуля, например, ¥= 0, =/= 0, и
civ = О, то равенство
п
2 “щ (Р) = 0 (3.5.2)
11=1
может выполняться тождественно и условие (3.5.1) может выполняться
при конечных значениях коэффициентов. Это положение является след-
ствием принципа деухканалъности Б. Н. Петрова [3.19, 3.21].
Алгебраические дополнения ам.(р) при р =/= i являются полиномами
степени п — 2 относительно р. Поэтому условие (3.5.2) эквивалентно сле-
дующим равенствам:
С = °> е = 0, п — 2. (3.5.3)
/1=0
Необходимое структурное условие сводится к наличию двух или болео
точек приложения и?т, причем ни одна из них пе должна находиться в
Гис. 3.5.2. Случай, когда инвариантность ач по отношению к u>v может
иметь место при конечных коэффициентах усиления
канале с выходом а, (рис. 3.5.2). Следствием этого условия является вы-
вод о том, что для систем с нормальной структурой в пространстве сос-
тояний (типа рис. 3.5.2) указанная инвариантность возможна лишь для
систем третьего и более высокого порядка.
Условия (3.5.3) при заданных можно рассматривать как уравне-
ния относительно параметров ath- Для случая инвариантности одного вы-
хода Xi по отношению к одному возмущающему воздействию w„ число
этих уравнении равно п — 1.
При полной свободе выбора параметров aik, когда среди них пет за-
ранее фиксированных, заданное число неизвестных в уравнениях (3.5.3)
равно и2, т. с. заведомо превышает число уравнений. С этой точки зрения
задача инвариантности в указанной постановке всегда имеет решение.
Однако при ограниченной свободе выбора параметров, стесненной к то-
му же условиями обеспечения устойчивости, задача даже в указанной
постановке (одна инвариантная величина и одно возмущающее воздей-
ствие) может пе иметь решения.
Главные трудности при практической реализации инвариантных к
возмущающим воздействиям систем обусловлены «пегрубостью» условий
инвариантности. Действительно, если для таких свойств, как наблюдае-
мость, управляемость, устойчивость, существуют области в пространстве
параметров, описываемые неравенствами, то для инвариантности необхо-
димо соблюдение (и притом достаточно точное) равенств тина (3.5.3).
Это возможно или при достаточно точной, стабильной математической мо-
дели (большой объем априорной информации), или при идентификации
в реальном времени. Первый случай сравнительно редкий, чем были
вызваны ожесточенные споры вокруг инвариантности в сороковых годах
и сохранившийся до сих пор у значительного числа ученых скептицизм
относительно инвариантности в системах автоматического регулирования.
Возможность реализации второго пути появилась сравнительно недавно
с внедрением ЭВМ. Этот путь, несомненно, расширяет возможности прак-
тического осуществления инвариантных систем.
3.5.2. Условия инвариантности для линейных нестационарных систем.
Для системы х = A (t)x + C(t) w общее решение согласно (1.2.21) равно
t
х (t) = К (f, to) х 4" К- (t, т) С (t) w (t) dx, (3.5.4)
(o
где K(t, tB) —матрица Коши.
В задаче инвариантности рассматривается вынужденное решение,
т. е. второй член в правой части (3.5.4), который в скалярной форме име-
ет вид
£ и Q
W = I S S КУ т) cjh <т) wk <т) dx- (3-5-5)
Условие инвариантности координаты xi по отношению к возмущающему
воздействию u>v имеет форму
* m
2 къ-(t- (т)(т>dx=°- (3-5-6)
7 ?=1
Ho wv(t) — совершенно произвольная функция. Поэтому условие (3.5.6)
может выполняться только при
у, Kij (t, т) Cjv (т) = 0. (3.5.7)
1=1
Принцип двух (и более) каналов здесь также должен соблюдаться, так
как в противном случае условие (3.5.7) превращается в
Kiv(t, т) = 0,
что может иметь место только в тривиальном случае полной неуправляе-
мости i-ro выхода Xi по отношению к v-му входу.
Но и при соблюдении условия двух- (много-) капалыюсти выполнить
условие инвариантности в нестационарной системе нелегко. Действитель-
но, допустим, что возмущающее воздействие приложено в двух точках
(Clv, Cmv =/= 0) и соответствующие коэффициенты постоянны. Тогда необ-
ходимое и достаточное условие инвариантности (3.5.7) принимает форму
CivKii (t, т) + (t, т) = 0. (3.5.8)
Элемент матрицы СцКц(1, т) можно трактовать как реакцию сис-
темы по выходу Xi па б-импульспое воздействие, приложенное к /-му ка-
налу в момент времени т.
Таким образом, инвариантность обеспечивается тогда и только тогда
(упомянутый особый случай полной неуправляемости во внимание пе
принимается), когда импульсные переходные функции для данного вы-
хода и двух (или более) входов (пе находящихся в канале выхода) сов-
падают с точностью до коэффициента. Для нестационарной системы
обеспечить это намного труднее, чем для стационарной.
3.5.3. Инвариантность для нелинейных систем. В достаточной степени
очевидно, что для нелинейных систем правильнее говорить пе об инва-
риантности системы, а об инвариантности того или иного певозмущеппо-
го движения или процесса. Различают слабую и сильную инвариантность
[3.22]. Для слабой инвариантности характерна независимость компонен-
ты движения x(t), подчиненного уравнению
х = f(x, w, t),
в момент времени, когда изображающая точка достигает заданной гипер-
поверхности в пространстве состояний, от компоненты возмущающего
воздействия и>.
При сильной инвариантности компонента х по зависит от компонен-
ты ш па всем конечном интервале времени. Обеспсчеяие сильной инва-
риантности певозмущеппого движения нелинейной системы в общем еще
сложнее, чем для нестационарной линейной системы. Все это связано с
необходимой «точностью» математической модели, объемом априорной ин-
формации. Однако в нелинейных системах специфический характер при-
обретает пе «информационный», а «энергетический» путь обеспечения
инвариантности.
3.5.4. Приближение к инвариантности невозмущенпого движения не-
линейной системы путем увеличения мощности управления. Давно за-
мечено, что релейные системы, системы с переменной структурой (СПС,
[3.23]), да и просто автоколебательные системы с непрерывными харак-
теристиками при определенных условиях обладают слабой чувствитель-
ностью движения или состояния по отношению к параметрическим и пе-
параметрическим («координатным») возмущающим воздействиям. Все
это связано с повышенной мощностью управления, повышенной крутиз-
ной характеристик в окрестности рассматриваемого состояния или дви-
жения. В натурных системах, а часто и в их математических моделях,
подобный избыток мощности управления обычно приводит к высоцоча-
стотпым автоколебательным или скользящим режимам, которые и о опа-
дают указанной слабой чувствительностью к возмущающим воздействи-
ям, по крайней мере до определенного уровня их интенсивности.
Идеальным примером может служить система
X = — sgn (ах) +
где а — положительно-определенная матрица размера п X п, а символ
sgn (ах) обозначает матрицу-столбец вида
sgn (аж) =•
sgn 2 а1А
sgn У, anv^v
V=1
Состояние равновесия ж = 0 обладает здесь полной инвариантностью но
отношению к £, если |£<| <1. Это заманчивое свойство системы при лю-
бой физической ее интерпретации достигается за счет бесконечной мощ-
ности (в частности, мощности управления). Между тем в натурных сис-
темах эта мощность чаще всего ограничена и дефицитна.
§ 3.6. Методы теории абсолютной устойчивости
Всякую систему, содержащую нелинейные блоки, можно подразде-
лить на линейную (L) и нелинейную (N) части. Струдтурпая схема по-
добной системы будет иметь вид, изображенный па рис. 3.6.1. Часто сис-
тема имеет лишь одно нелинейное звено (либо в математической моде-
ли системы целесообразно учитывать нели-
нейные эффекты лить в одном звене). Тог-
да нелинейная часть системы совпадает
с этим нелинейным звеном, которое обычно
описывается уравнением u(t) = <р[;(!)], где
ср (г) —некоторая скалярная функция, z(t) —
вход, a u(t)—выход нелинейного звена,
и (t), z(t) — скалярные величины.
Рис. 3.6.1. Структурная 3.6.1. Понятие абсолютной устойчивости
схема произвольной сис- Выше было определено понятие устойчпво-
™iekia“P4acTb“w-LH^ стн 110 Ляпунову (в малом). Поясним попя-
линейпая часть тие абсолютной устойчивости.
Во-первых, абсолютная устойчивость оз-
начает асимптотическую устойчивость в целом (т. е. относительно всего
пространства состояний), а нс в малом. Это означает, что при любых от-
клонениях начальных данных от расчетных (а пе при «достаточно малых»
отклонениях) разность отклонения истинного процесса от расчетного
убывает и стремится к пулю при возрастании времени (т. е. при
—оо). Пусть х(1)—вектор состояния рассматриваемой системы,
записанный в отклонениях от певозмущенного состояния (см. п. 3.1.2).
Для абсолютно устойчивой системы требуется, что ы
||z(t)||->0 при t -> -1- оо
(3.6.1)
для любого начального состояния.
Во-вторых, обычно рассматривается случай, когда нелинейность из-
вестна не полностью. Например, часто известно лишь, что график нели-
нейности лежит в заданном секторе (рис. 3.6.2). Неполное задание не-
линейности означает, что задана не конкретная нелинейность, а некото-
рый класс М нелинейностей. Этим классом, например, может быть мно-
жество М[|Ч, рз] всех кусочио-иепрерывпых функций, графики которых
Рис. 3.6.2. Нелинейности
класса M[plt график
расположен в двуполост-
ном секторе |12]
менаду линиями и = p2z
пи — niz
лежат в секторе S[pi, ц2] между линиями и = |iiz и и = |12з. Абсолют-
ная устойчивость означает, что соотношение (3.6.1) имеет место для всех
нелинейностей заданного класса. Более того, обычно требуется, чтобы ус-
ловие (3.6.1) было выполнено равномерно относительно нелинейностей
из заданного класса. Например, часто вместо (3.6.1) требуют выполнения
условия *)
||x(t)ll С ехр (—е/)||х(0)11,
t>0,
(3.6.2)
где числа С > 0, в > 0 — одни и те же для всех нелинейностей заданно-
го класса. Последнее и означает равномерность этого условия. При вы-
полнении (3.6.2) говорят об экспоненциальной абсолютной устойчивости.
Поясним указанные требования. Пусть для наглядности прострапстио
состояний двумерно, а фазовые портреты двух рассматриваемых систем
имеют вид, показанный па рис. 3.6.3, 3.6.4. Имеются неустойчивый (для
системы 7) и устойчивый (для системы II) предельные циклы (см. рис.
3.1.1, в). У системы 1 все траектории вне цикла «уходят па бесконеч-
ность», а у системы II они «наматываются па этот цикл». Начало коор-
динат (движение xi х2 = 0) у системы / устойчиво в малом (но
Ляпунову), а у системы II —неустойчиво в малом. Предположим теперь,
что область D, ограпичеппая предельным циклом, мала по сравнению с
реально возможной областью начальных состояний. Тогда устойчивая в
малом система I является практически поустойчивей, а неустойчивая в
) Здесь <о = О — начальное значение времени.
малом система II является практически устойчивой. Вместе с тем, если
система абсолютно устойчива, го выполнено требование (3.6.1) (или
(3.6.2)), и случай, изображенный па рис. 3.6.3, невозможен. Поэтому аб-
солютно устойчивая система всегда практически устойчива.
Кроме того, при малых изменениях нелинейности (без выхода из
рассматриваемого класса) система, устойчивая в малом (и даже в целом),
Рис. 3.6.3 Положение равновесия ж, = х? — 0 устойчиво в малом, по
практически неустойчиво (при малой области D)
Рис. 3.6.4. Положение равновесия Ж| = =0 неустойчиво в малом,
по практически устойчиво (при малой области D)
может стать неустойчивой. Абсолютно устойчивая система по самому оп-
ределению абсолютной устойчивости остается устойчивой при любых
таких изменениях нелинейности. Это свойство практически важно, по-
скольку иногда характеристики нелинейных блоков заранее неизвестны,
иногда же они меняются в процессе эксплуатации системы. Нужно, ко-
нечно, выбрать класс нелинейностей так, чтобы быть уверенным, что при
любых возможных изменениях нелинейности опа остается в этом классе.
Таким образом, абсолютно устойчивая система является заведомо прак-
тически устойчивой и «прочной» по отношению к свойству устойчивости.
В определении абсолютной устойчивости вместо всего фазового про-
странства можно было бы говорить о некоторой заданной области Go,
в которой лежит вектор начального состояния ж(0), т. е. вместо устойчи-
вости в целом говорить об устойчивости в большом (см. § 3.2). Однако
для систем сколько-нибудь общего вида отсутствуют эффективно прове-
ряемые критерии устойчивости в большом (по не в целом). Теория аб-
солютной устойчивости получает подобные критерии для устойчивости
в целом. Практически это пе является ограничением, поскольку вне об-
ласти реального движения можно произвольным образом изменить не-
линейности, заменив тем самым устойчивость в большом иа устойчивость
в целом.
3.6.2. Абсолютная неустойчивость. Наряду с абсолютно устойчивыми
рассматриваются и абсолютно неустойчивые системы. Это системы, кото-
рые практически неустойчивы и являются «прочными» по отношению к
свойству неустойчивости. Говоря об абсолютной неустойчивости, следует
снова задать некоторый класс нелинейностей. Пусть, папример, это снова
будет описанный выше класс М[щ, р,2]. Абсолютно неустойчивая система
обладает двумя следующими свойствами. Во-первых, в пространстве сос-
тояний для любого числа г > 0 на сфере Ikll = г найдется точка х0 и
такой шарик II х— ж0|| ^fic центром в этой точке, что для любого началь-
ного состояния из этого шарика (т. е. при II г (0) —а:0П < 6) для соответ-
ствующего состояния x(t) системы выполнено
|a:(f) |-f-оо при t-*oo. (3.6.3)
Во-вторых, свойство (3.6.3) должно быть выполнено равномерно для всех
нелинейностей рассматриваемого класса.
Если вместо (3.6.3) имеет место
Ik (О II > Сехр (e£)lk(O)ll, (3.6.4)
где числа С > 0, е > 0 — одни и те же для всех нелинейностей рассмат-
риваемого класса, то говорят об экспоненциальной абсолютной неустой-
чивости.
Таким образом, практически устойчивая, по неустойчивая в малом
система II (рис. 3.6.4) не является абсолютно неустойчивой.
Отметим, что говоря о классе M[pi, р2], мы по исключаем случай,
когда либо Ц1=—оо, либо р2 = 4-°°- Папример, нелинейности и = z3,
и = sgn z, а также нелинейности с графиками, изображенными па
рис. 3.6.5, принадлежат классу М[0, оо]. Здесь в график разрывной функ-
ции включается вертикальный отрезок с концами <p(z0 4-0), <p(z0 — 0),
где zo — точка разрыва.
3.6.3. Уравнения линейной и нелинейной частей системы. Говоря о
звепе L, т. е. о липейпой части системы, будем всегда иметь в виду ли-
нейное и стационарное звено. Уравнения липейпой системы в простран-
стве состояний имеют вид (1.2.3):
х = Ах + Ви, z — Их.
(3.6.5)
Уравнения нелинейной части весьма многообразны; они связывают ка-
ким-то образом u(t) и z(4). Здесь и — u(t) —векторный вход линейной
части (выход нелинейной части), z = z(t) —векторный выход линейной
Рис. 3.6.5. Нелинейности класса М[0, оо]
части (вход нелинейной ча-
сти). Важно подчеркнуть, что
уравнение (3.6.5) вместе с
уравнением нелинейной части
описывает произвольную сис-
тему нелинейных дифферен-
циальных уравнений. В част-
ности, произвольная система
х = <р(ж, 4) записывается в ви-
де х = и (линейная часть),
и = <р(лг, t) (нелинейная часть);
в этом случае А — О, В —
— II — Е. Явное выделение
линейной части часто позво-
ляет более глубоко учесть
конкретные свойства системы.
В дальнейшем для простоты изложения ограничимся, однако, лишь
наиболее часто встречающимся случаем одного нелинейного блока; тогда
u(«), z(4)—скалярные величины. Подчеркнем, что все результаты, опи-
санные ниже, имеют аналоги и для случая произвольной нелинейной
части (т. е. для векторных u(4), z(4)).
Будем считать, что система (3.6.5) управляема (см. п. 2.3.1) и (для
простоты изложения) что det(j<nE— Л)^=0 при вещественных ы. В даль-
нейшем потребуется передаточная функция от входа и к выходу (—z):
W) = В(А—рЕ)~'В,
(3.6.6)
где Е — единичная матрица. Заметим, что в дальнейшем будет использо-
вана лишь функция 1У(р), а пе матрицы А, В, II. Поэтому линейный
блок L может быть задан лить своей передаточной функцией либо уран-
непиями в физических переменных. В последнем случае IV(р) находится
стандартным образом: нужно перейти к преобразованиям Лапласа (при
пулевых начальных данных) и выразить 2(р) через й(р): z(p) —
= — W(p)u(p).
3.6.4. Круговой критерий абсолютной устойчивости. Этот критерий
относится к классу M[pi, Цг] любых нелинейных зиспьев, входы z(t) и
выходы и (4) которых удовлетворяют условиям
рг ТиГ < ^2 при z (г) * °’
и (4) = О прп z (4) = О,
(3.6.7)
т. е., иначе, условию: точка [z(4), и (4)] всегда находится в двухполост
ном сецторо S[pi, р2] между прямыми и = piz и и = p2z на плоскости
{z, и}, включая эти прямые. Мы расширили, таким образом, класс
M[pi, р2], 0 котором говорилось в и. 3.6.1. К этому классу относятся пе
только стационарные пелинейпости с графиками, показанными па
рис. 3.6.2. К этому же классу относятся нелинейные нестационарные
звенья
и(4) = ф[г(4), 4], (3.6.8)
где <р (z, 4) — функция, удовлетворяющая условию
Ф (z, 4)
р2 при z=A0. (3.6.9)
В частности, звепо может быть линейным, по нестационарным:
и(4) = a(4)z(4). (3.610)
Рис. 3.6.6. Гистерезисная нелиней-
ность класса М[0, р0]
Зто звепо содержится в классе M[pi, р2], если выполнено р, a(t) р2.
Нелинейность, удовлетворяющая условию (3.6.7), может быть и гистере-
зисной. Например, нелинейность с графиком, изображенным на рис. 3.6.6,
принадлежит классу М[0, ро] -
ВОЗМОЖНО, ЧТО Либо Ц| = —со,
либо р2 = +°° (см. рис. 3.6.5, где
изображены лелннсйпости класса
М[0, +<х>]). Однако вначале раз-
берем случай конечных pi и р2.
Рассмотрим частотную харак-
теристику W(/со) линейного зве-
на L; выясним ее возможное рас-
положение при условии, что зам-
кнутая система {В, N} (рис. 3.6.1)
абсолютно устойчива в классе
М[рь р2]. Класс М[рь р2] содер-
жит, в частности, линейные ста-
ционарные блоки и = pz при
условии, что Pi р р2. Пусть вначале 0 pi р2. По критерию Ми-
хайлова—Найквиста частотная характеристика пе пересекает отрезок
[— pj~l, — р.^1]- Если pi = 0, тоэтим отрезком является (— оо, — р7’]-
Построим па комплексной плоскости характеристику (годограф)
—оо ы +°о; и зная степень неустойчивости /грз разомкнутой
системы (т. с. число полюсов И'(р) или равное ему число собственных
значений матрицы А в правой полуплоскости), разделим комплексную
плоскость па области с одинаковыми (и известными) степенями иоустой-
чивости к замкнутой системы, т. е. системы (3.6.5) е и = pz. Хорошо из-
вестно (критерий Михайлова — Найквиста), что к = крл — ков, где
А'„с,— число оборотов годографа IV (/<>>) —оо со +оо, вокруг точки
(—р-<). Отрезок [— р”1, — р-71] должен лежать в области устойчивости
(т. е. в области со степенью неустойчивости к = 0). Так, на рис. 3.6.7
годограф делит комплексную плоскость (Re W — действительная и
Im W — мнимая оси) на три области: со степенями неустойчивости к =
— О (внешность кривой к = 1 и к — 2. На этом и следующем
рисунках стрелки показывают направление увеличения параметра ш,
а штриховка — образ правой полуплоскости при отображении w = W(р).
Разомкнутая система в этом примере устойчива, отрезок |— Р^1’ —]
должен лежать в области устойчивости. На рис. 3.6.8 разомкнутая систе-
ма имеет степень устойчивости 2, отрезок [—р]-1,—р^] ] должен ле-
жать в области устойчивости (степень неустойчивости равна 0).
Эти построения хорошо известны из липейпой теории регулирования.
Круговой критерий абсолютной устойчивости, относящийся к нели-
нейным системам, формулируется следующим образом. Если для некото-
рого р s [pi, р2] линейная система с и = pz асимптотически устойчива и
Рис. 3.6.7. Построение
грапичпой окружности
(и прямой) по кругово-
му критерию, выделяю-
щей секторы Sfpi, р2]
(и SfO, ро]) абсолютной
устойчивости системы
(случай устойчивой ли-
пейпой части)
окружность с центром па действительной оси, проходящая через точки
{— р^"1), (— рГ1)> пе пересекается с годографом W(ju>), —оо ю +°о,
то имеет место абсолютная устойчивость в классе M[pi, р2]. При этом для
любого решения x(t) системы (3.6.5), (3.6.6) для любых t^t0 справед-
лива оценка
11^(4)11 С exp [—e(t — t0) ] На:(40) ||
(3.6.11)
с некоторыми числами С > 0, е > 0, зависящими лишь от чисел pi, р2
и липейпой части системы, т. е. имеет место экспоненциальная абсолют-
ная устойчивость в классе M[pi, р2].
Итак, при р2 > pi ^0 круговой критерий требует, чтобы паряду с
отрезком [— pj-1, — Р.71] пе пересекалась бы с частотной характеристикой
и окружность, диаметром которой он является (см. рис. 3.6.7, 3.6.8). Если
р( = 0, то окружность превращается в прямую. Так, для рис. 3.6.7 абсо-
лютная устойчивость имеет место в классе М[0, ро]. Приведенная фор-
мулировка справедлива для чисел pi, р2 любых знаков. Если pi <0,
р2 > 0, то окружность проходит так, как доказано на рис. 3.6.9.
Иногда удобнее вместо годографа строить [—IV (/со) ~’]. Фор-
мулировка кругового критерия почти не меняется: для любого решения
системы (3.6.5), (3.6.7) выполнено (3.6.11), если годограф [—1Р()ы)_’]
пе пересекается с окружностью, диаметр которой есть отрезок [pi, р2],
и если хотя бы для одного р е [pi, рг] устойчива линейная система
Рис. 3.6.9. Построение граничной ок-
ружности по круговому критерию
выделяющей сектор S[pi, р2] абсо'
лютной устойчивости при pt <0
Р2 > 0
Рис. 3.6.8. Построение граничной ок-
ружности по круговому критерию,
выделяющей сектор S[pb р2] абсо-
лютной устойчивости (случай неус-
тойчивой липейпой части)
(3.6.5) с и = pz. На рис. 3.6.10 и 3.6.11 показаны необходимые располо-
жения годографа [—IP(/w)-1] и соответствующих окружностей. Часто
удобной является аналитическая форма записи кругового критерия:
Re {[1 + р,W«)]*[1 + Р2^(/со)]} > 0.
(3.6.12)
Здесь и ниже в параграфе звездочка означает комплексное сопряжение.
Неравенство (3.6.12) должно быть выполнено для всех частот (в и вместо
Рис. 3.6.10. Построение
граничной окружности
согласно круговому кри-
терию по годографу
[—И7(/о)-1], выделяю-
щей сектор S[pt, р2] аб-
солютной устойчивости
(случай неустойчивой
липейпой части)
с условием устойчивости липейпой системы с и — pz, pt р р2 гаран-
тирует абсолютную экспоненциальную устойчивость в классе M[pt, р2].
В классе М [0, р0] таким условием будет
— + Re W (ja) > 0 Vw. (3.6.13)
,lo
Заметим, что условие (3.6.12) можно записать также в виде
1 п „ W(p)
7^- + Re^(/£o)>0, где руп (р) = (3.6.14)
Здесь И/П(д)—передаточная функция преобразованной линейной части
системы. Круговой критерий можно сформулировать поэтому и так: для
Рис. 3.6.11. Построение гра-
ничной окружности по кру-
говому критерию по годо-
графу [—WZ(/<o)_*], выде-
ляющей сектор S [рь р2] аб-
солютной устойчивости
(случай устойчивой линей-
ной части)
абсолютной устойчивости в классе M[pt, р2] достаточно, чтобы было вы-
полнено (3.6.14) и чтобы функция, соответствующая lVn(p), была устой-
чива. Неравенства (3.6.12), (3.6.14) можно использовать для синтеза кор-
ректирующих звеньев, обеспечивающих абсолютную устойчивость замк-
нутой системы. Если р2 = —Pi = До > 0, то неравенство (3.6.12) можно
переписать в виде
[ W (/<в) |< ц-1, (3.6.15)
содержащем лишь амплитудно-частотную характеристику. Это неравен-
ство используется для синтеза корректирующих устройств с помощью
метода логарифмических частотных характеристик [3.24].
Отметим, что в круговом критерии, как правило, нельзя для опреде-
ления чисел р.1, р,2 рассматривать предельные положения окружностей,
показанные на рис. 3.6.7—3.6.11 штриховыми линиями: при приближении
к этой штриховой линии в общем случае в оценке (3.6.11) С—
е 0. И только в отдельных случаях (на пих мы нс останавливаемся) эти
предельные положения рассматривать можно. Это равносильно замене в
(3.6.12)—(3.6.14) знака > знаком
Выше числа pi, р2 были конечны. Пусть либо pi = —00, либо р2 =
= со. В этом случае в критерии (3.6.14) следует сделать соответствую-
щий предельный переход. При р2 = +°° получаем из (3.6.12)
Re {[1 + Р11Е(/ы)]*1Е(/(й)} > 0, при ы ±оо. (3.6.16)
Это неравенство следует дополнить условием
lim ы2 Re {[1 + pjjl7 (;ы)]* W (/со)} > 0. (3.6.17)
(1)—>ОО
При pt = —со соответствующие условия имеют вид:
Re {IV (/и)* [1 + р2ЕЕ (/w)]J < 0, (3.6.18)
lim ы2 Re fW [1 р2И7 (/(в)]} < 0. (3.6.19)
Аналогично преобразуется неравенство (3.6.12) при pi=—
Пример. Пусть WZ(p) = 1/[(7\р + 1) (Т2р + 1)] — передаточная функ-
ция звена L (см. рис. 3.6.1), Ti > О, Т2 > 0, а характеристика и = ф(«, z)
нелинейного звена N удовлетворяет условию О^ф(г, z)/z^p0. Найдем
ро, при котором имеет место абсолютная устойчивость (система, изобра-
женная на рис. 3.6.1, асимптотически устойчива в целом). Из выражения
для WZ(p) видим, что разомкнутая система (т. е. система (3.6.5) си — pz,
р = 0)) устойчива. Достаточно проверить неравенство (3.6.13), т. е. не-
равенство
| (7’,/w + 1) (727<о + 1) Р + p0Re [(1 - ТДы) (1 - T^Cfr)] > 0.
Итак, при всех вещественных ы должно быть выполнено условие
(Т^2 + 1) (^ы2 + 1) + р0 (1 - TJ^2) > 0.
Легко проверить, что ото имеет место при
-I / +
Ro < 2 + Г172 + 2 У 2 + Г17’а -•
Последнее неравенство является условием абсолютной устойчивости рас-
сматриваемой системы.
Класс М[Ц1, р2] нелинейных звеньев, определенный выше, характе-
ризовался неравенством
[u(t) — piZ(1)] [p2z(i) — u(Z)] 5== 0,
которому удовлетворяют входы z(Z) и выходы u(t) нелинейных звеньев.
Действительно, зто неравенство равносильно условию (3.6.7).
Круговой критерий — лишь достаточное условие абсолютной устойчи-
вости в этом классе. Необходимое и достаточное условие абсолютной ус-
тойчивости в классе М[рь р2] получено А. С. Пятницким [3.25]. Опо за-
ключается в требовании асимптотической устойчивости некоторой кон-
кретной нелинейной системы. Можно указать более широкий класс не-
линейностей, для которого круговой критерий (3.6.12) — необходимое и
достаточное условие абсолютной устойчивости. Им является класс
Мин[р|, р2] нелинейных звеньев, входы z(l) и выходы u(t) которых удов-
летворяют условию
Тп
J [u(Z)-p1z(Z)][p2z(Z)-u(O]^>-у (3.6.20)
о
с некоторыми числами Тп-*-оо и (эти числа могут быть разными
для разных процессов). Притом система (3.6.5) с и — pz должна быть
асимптотически устойчивой для некоторого р, pi р р2.
Здесь pi =# —оо, р2 -|-оо. Аналогичное утверждение справедливо и
в случаях, когда либо pi = —00, либо р2 =-|-оо.
Соотношение (3.6.20) представляет собой простейший пример интег-
ральной квадратичной связи. Подобным связям удовлетворяют, в частно-
сти, импульсные модуляторы с разными типами модуляции.
3.6.5. Круговой критерий абсолютной неустойчивости. Этот критерий
Применяется в случаях, когда необходимо установить неустойчивость
даппон нелинейной системы, а также для установления свойств колеба-
тельности системы, па чем мы подробнее остановимся ниже.
Рассмотрим снова класс M[pi, р2] и линейные обратные связи и —
= yz из этого класса: pi р р2. Предположим теперь, что отрезок
[Pi, Иг] расположен в одной из областей со степенью неустойчивости
к >• 0. Ои, следовательно, не пересекает годограф [—WQ’co)-1]. Если на-
ряду с отрезком [pi, р2] годограф [—IVfjw)-1] пе пересекает и окруж-
ность, диаметром которой является отрезок [pi, р2], то имеет место аб-
солютная экспопеициальпая неустойчивость в классе М[рь р2].
Опишем множество тех начальных значений, для которых
|ж(г) | -> оо при t->oo. Пусть линейная система (3.6.5) с и = pz имеет
степень неустойчивости к > 0. Тогда, как известно, существует такая
матрица Р = Рт с к отрицательными и п — к положительными (п — раз-
мерность пространства состояний) собственными числами, что при
а:т(0).Рж(0) < 0
для всех t t0 и любых соответствующих решений выполнено
lk(t)|| > С exp [e(t — to)]!k(to)||,
(3.6.21)
где С > 0, е > 0 — одинаковые для всех решений числа. Оказывается,
что при выполнении сформулированного выше кругового критерия тем
же свойством обладают все системы (3.6.5), (3.6.7), При этом матрица
Р и числа С > 0, е > 0 одни и те же для всех решений системы
(3.6.5), (3.6.7) (т. е. онп не зависят от нелинейности из класса M[pi, р2]).
Кроме того, не существует матрицы Р с аналогичным свойством и с чис-
лом отрицательных собственных значений, большим чем к. В этом смысле
можно говорить о степени неустойчивости системы (3.6.5), (3.6.7) (или
систем (3.6.5), (3.6.8), а также (3.6.5), (3.6.10) и т. и.). Чем больше сте-
пень неустойчивости, тем больше (в естественном смысле) единое для
всех нелинейных систем из класса М[рь р2] множество начальных дан-
ных, для которых имеет место экспоненциальное возрастание (3.6.21).
На рис. 3.6.12 показано определение с помощью кругового критерия
чисел pi, р2, задающих класс М[рь р2] абсолютной экспоненциальной
неустойчивости степени 2. Каждой паре чисел pi, р2 отвечает на пло-
скости {z, и} двуполостиый сектор 8[рь р2] между линиями и — щз и
и = р2з (сами линии включаются в сектор). Будем называть эти секто-
ры сектором абсолютной неустойчивости (k 1) и сектором абсолютной
устойчивости {к = 0), построенными по круговому критерию.
Так же как и для случая абсолютной устойчивости, для определения
чисел рь р2 можно использовать годограф W(ju>) вместо [—W(/©)_,J.
Пусть, например, числа ро, Pi, рг, Vi, v2 определены так, как показано па
рис. 3.6.13. В этом случае имеем: S[0, ро] —сектор абсолютной устойчи-
вости, S [pi, р2] — сектор абсолютной неустойчивости со степенью к = 2
и S [vi, v2J — сектор абсолютной неустойчивости со степенью к = 1. Эти
секторы изображены па рис. 3.6.14.
Заметим, что каждый из секторов абсолютной неустойчивости содер-
жится в открытом сецторе линейной неустойчивости соответствующей
Рис. 3.6.13. Построение граничных окружностей и граничной прямой по
круговому критерию, выделяющих сектор S[0, щ] абсолютной устойчи-
вости, сектор S[vI, v2] абсолютной неустойчивости степени 1 и сектор
S [pi, р2] абсолютной неустойчивости степени 2
Рис. 3.6.14. Секторы иелипсйпых характеристик: S[0, ро]—абсолютной
устойчивости; S[Vi, т2]—абсолютной неустойчивости степени 1;
S [pi, рг] — абсолютной неустойчивости степени 2
степени (т. е. в секторе, составленном из линий и = pz, для которых мат-
рица соответствующей линейной системы имеет ровно к собственных зна-
чений в области Rep > 0 и не имеет их на мнимой оси). То же можно
сказать про сектор абсолютной устойчивости: он содержится в секторе-
линейной устойчивости (его называют также гурвицевым сектором).
Сектор -абсолютной устойчивости (неустойчивости), в отличие от сек-
тора линейной устойчивости (неустойчивости), определяется неоднознач-
но. Так, можно достаточно сильно изменить число щ (рис. 3.6.13), при
этом соответствующим образом изменится число р2. Для сектора абсо-
лютной устойчивости (неустойчивости) часто одну границу можно за-
дать произвольно (в известных пределах), вторая же определяется по
первой. Если пренебречь тем, что сплошная окружность пе совпадает со
штриховой (они могут быть сколь угодно близкими), то возможны слу-
чаи, когда обе границы определяются однозначно. Так, предельное по-
ложение сектора S[vb v2] па рис. 3.G.13 определяется однозначно.
Далее будем говорить, что S[pi, р2) —сектор абсолютной устойчиво-
сти (абсолютной неустойчивости, липейпой устойчивости или неустой-
чивости), если таковым является сектор S[pi, р2— е] с любым е > 0.
Аналогично определяются секторы S(pb р2), S(pb ц2], S(—00, р2],
S[pi, +°°).
Пример. Пусть, как и в примере п. 3.6.4. R7(p) = (7\р + I)-1 V
XGTsp + l)-1. Годограф g = [-^(/ы)-1] =-1-(Л+Г2)/ы +
является параболой, расположенной симметрично относительно вещест-
венной оси в полуплоскости Rc g —1. Поэтому линейная система с
и == pz устойчива при у > —1 и неустойчива (степени к = 1) при
у. < —1. Рассмотрим сектор S(—°°, р2] с р2 < —1. Условия (3.6.18) и
(3 6.19) выполнены, так как
М2 + 1 —Г Г w2
Re fW* [1 + u JP1) = .----1---------------r- < 0,
lim to2 fW* ft p JT]} = — 1 < 0.
(D~>oo 1 f
Следовательно, S[—00, y2] —сектор абсолютной неустойчивости (сте-
пени к = 1): замкнутая система экспоненциально абсолютно неустойчи-
ва (степени 1) в классе нелинейных блоков, графики которых располо-
жены в секторе S[—оо, ц2],
3.6.6. Абсолютная устойчивость систем со стационарной нелиней-
ностью. Критерий Попова. Критерий. Попова описан во многих моногра-
фиях п обзорах [3.24, 3.26—3.32], поэтому остановимся па пом кратко.
Рассматривается класс Mst[gi, ц2] стационарных нелинейностей cp(z) с
графиками в секторе S[pi, р2], т. е. нелинейностей, удовлетворяющих
условию
<p(z) „ „ „
~—С р2 При z=/=0. (3.6.22):
Таким образом, вместо (3.6.8) имеем
u(l) =<p[z(t)]. (3.6.23)
Для абсолютной устойчивости системы (3.6.5), (3.6.23) в классе M8t[pi,
j.i2] достаточно, чтобы для некоторого вещественного числа 6 и всех ве-
щественных со (включая со = ±оо) было выполнено условие
Re {[1 + Ц1Ж(7<,>)]*[1 + ЩгИД/со)]} + 0 Re [/coW(jco)] > 0 (3.6.24)
и чтобы для некоторого р, pi р р2, была устойчива линейная систе-
ма (3.6.5) с и = pz.
Часто этот критерий формулируют для pi = 0:
р2 1 + Ис [(1 /сой) W (/со)] > 0 Vco.
(3.6.25)
Эта формулировка остается справедливой и при р2 = +<», тогда р2 = 0.
Для определения соответствующего числа р2 следует вначале построить
кривую па плоскости с координатами R(co) = Ис W(/co), Q'(ы) =
= Ис [/со1У(/со)] при 0 со +оо (называемую видоизмененной ча-
стотной характеристикой или кривой Попова) и построить прямую (на-
зываемую прямой Попова) так, чтобы кривая Попова находилась справа
ют прямой Попова и чтобы абсцисса (которую обозначим через —р^1
точки пересечения прямой Попова с осью абсцисс была максимально
возможной. На рис. 3.6.15 эта прямая показана штриховой ли-
нией. Тогда имеет место абсолютная
устойчивость в классе Mst[0, (л2],
Рис. 3.6.15. Построение прямой По-
пова по видоизмепеппой частотной
характеристике (случай различных
секторов липейпой устойчивости и
абсолютной устойчивости)
где р2 < рп- Действительно, пусть
мой Попова, тогда
Рис. 3.6.16. Построение прямой Попо-
ва по видоизмепеппой частотпой ха-
рактеристике (случай совпадающих
секторов липейпой устойчивости и
абсолютной устойчивости)
,-t р е<2' = 0 — уравнение пря-
р”1 + Р (со) + 6(?'(®) < О, (3.6.26)
где Р(со) = Re W(M), <?'(со) = Re [/сой7(/со)]. Следовательно, выполне-
но неравенство (3.6.25).
Пусть — р^1 — абсцисса самой левой точки пересечения кривой По-
пова с полуосью Р = 0, Q' 0; если такой точки пет, то полагаем
-— p.jJj1 = О, |ЛП = +°о- Пусть при и = О система (3.6.5) устойчива. Тогда-
по критерию Михайлова — Найквиста сектор S[0, р.п)—сектор линейной
устойчивости: система (3.6.5) устойчива при и = pz, О р. <' рн. Сектор
S [0, р2] содержится в секторе S[0, рп) и является сектором абсолютной
устойчивости для стационарных нелинейностей с графиками, располо-
женными в этом секторе.
Возможен случай, когда рн = рп, как это показано на рис. 3.6.16.
Тогда сектор абсолютной устойчивости S[0, р2] можно брать сколь угод-
но близким к сектору линейной устойчивости S[0, рп).
Из критерия Попова вытекает утверждение, что для систем второго
порядка из асимптотической устойчивости любой линейной системы, для
которой выполнено условие (3.6.22) (т. е. cp(z) = pz, pisjp^p2), сле-
дует абсолютная устойчивость в классе Msl[p,, р2]. Этот факт был из-
вестен задолго до критерия Попова: он, наряду с другими результатами,
был независимо установлен И. Г. Малкиным, Н. П. Еругипым и Н. Н. Кра-
совским. В. А. Плисс (1955 г.) показал, что аналогичное утверждение
неверно для систем третьего и более высокого порядка: существуют не-
линейности, графики которых лежат в гурвицевом секторе и система име-
ет периодическое решение. Тем самым был дан отрицательный ответ на
проблему, поставленную в 1949 г. М. А. Айзерманом.
Критерий Попова — лишь достаточное условие абсолютной устойчи-
вости в классе Mst [рь р2]; существуют абсолютно устойчивые в классе
Mst[pb р2] системы, для которых критерий Попова пе выполнен. Этот
фацт установлен А. С. Пятницким [3.33]. Можно указать более широкий
класс нелинейных звеньев, для которых критерий Попова (3.6.24) — не-
обходимое и достаточное условие абсолютной устойчивости. Им является
класс М™ |[J(, р2] нелинейных звеньев, входы z(i) и выходы u(t) ко-
торых удовлетворяют соотношению
J {р (О “ HjZ (0] [H2Z “* и dt^ ~ V
о
для некоторых Тп-*--\-со и (вообще различных для разных нели-
нейных звеньев). Указанной интегральной квадратичной связи удовлет-
воряют, в частности, различные типы импульсных модуляторов.
Сформулированное утверждение, как и аналогичное утверждение
для кругового критерия,— следствие общего квадратичного критерия аб-
солютной устойчивости [3.26, § 46; 3.31, § 22]. Все частотные критерии
абсолютной устойчивости, приведенные ниже в этом параграфе выводят-
ся из квадратичного критерия и являются необходимыми и достаточны-
ми условиями абсолютной устойчивости в соответствующем классе не-
линейных звеньев; далее эти классы не указываются.
3.6.7. Критерий абсолютной неустойчивости систем со стационарной
нелинейностью. Рассматривается система (3.6.5), (3.6.23) с <j>(z) е
eMBt[pi, р2] (т. е. выполнено (3.6.22)). Пусть для какого-либо ре [p-i, Иг]
линейная система (3.6.5), (3.6.23) неустойчива. Пусть также выполнено-
частотное условие (3.6.24) (с некоторым числом 0). Тогда нелинейная
система (3.6.5), (3.6.23) абсолютно неустойчива в классе Mst[pb р,2].
Итак, если кривая Попова имеет вид, показанный па рис. 3.6.15, и
6 < р2 < Цп (число р2 может быть сколько угодно близким к рп), то
нелинейная система (3.6.5), (3.6.23) либо абсолютно устойчива, либо аб-
солютно неустойчива в классе нелинейностей с графиком из сектора
S[0, ц2] одновременно с соответствующей линейной системой и = pz;
О s'; |Л sS р.2-
3.6.8. Критерии абсолютной устойчивости для систем с дифференци-
руемой нелинейностью. Пусть нелинейный блок описывается уравнением
(3.6.23), где функция <p(z) удовлетворяет условиям
, Лр (z)
(z) = ~< М2, ср (0) = 0 (3.6.27)
или (если cp'(z) пе существует) условиям ср(О) = 0, 0 sS (Лер) (Az)-1 Цо,
где Лер = <p(zi) — cp(z2), Az = Z( — z2. Здесь zb z2 — произвольные числа.
Класс таких функций обозначим Мя[рь р2]. Заметим, что это более уз-
кий класс, чем Mst[pb р2]: из (3.6.27) следует (3.6.22).
Пусть при некоторой липейпой функции cp(z) = pz, pij ssj р p2 сис-
тема (3.6.5), (3.6.23) асимптотически устойчива. В. А. Якубовичем [3.34]
доказано, что если при некоторых числах '0, т, 0, т2 0, ц + т2 > 0,
и всех со, —оо «с о, gs -j-оо, выполнено неравенство
Be {[1 + (/со)]* [1 . |- jj2W (/co)]} 4--—Г Re [7соЖ (/co)] > 0,
Т1 -г т20)
(3.6.28)
то система (3.6.5), (3.6.23) абсолютно устойчива в классе Md[pb р2].
В (3.6.28) возможен и знак Эг, по при этом следует потребовать устой-
чивости линейных систем (3.6.5) с ц = щ и р = р2. Из этого критерия,
как установил Н. Е. Барабанов [3.35], следует, что если система (3.6.5),
(3.6.23) не выше третьего порядка асимптотически устойчива при ср(о) =
= |10 и любых р е [рь р2], то она абсолютно устойчива в классе
М°[р„ р2].
Очевидно, что в критерии (3.6.28) можно ограничиться лишь значе-
ниями т) е {0, 1, —1}. Существуют геометрические приемы проверки ча-
стотного условия (3.6.28), а также определения наибольшего значения р2
(при заданном ц,), для которого выполнено (3.6.28). Эти приемы сложны
и поэтому здесь пе приводятся. Указанные задачи решаются легко с при-
менением ЭВМ.
Простой вид принимает критерий (3.6.28) для т, = 0:
Г Z ft А 1
р"1 + Re [[1 + — ] W (/со)] > 0. (3.6.29)
Без ограничения общности здесь ft заменено на —ft и взяты значения
р, = о, т2 = 1. Критерий (3.6.29) проверяется геометрически .так же, как
и критерий Попова. Теперь видоизмененной частотной характеристикой
является
Р (го) = Re W (/о), <?" (Ш) = Re j.
Имеются и другие критерия абсолютной устойчивости в классе
М'*[0, р2], более сложные для проверки. Они имеют вид
Ro IZ (/со) [ц-1 Н-МЧ/го)]) >0, (3.6.30)
где Z(A)—множитель из некоторого класса функций [3.35—3.41]. Один
из наиболее общих критериев такого рода установлен Н. Е. Барабановым
[3.35]: достаточно, чтобы множитель Z(%) имел вид
2 (1>-П(Г+1уП(т^ <ч-~).
где 0 <Х[ < Pi < ... < аР < рР, 0 -R < б| < ... < 7, < б7 и
—ОРр < г, Об, <т. Критерии этого вида преобразуются в более
удобные для проверки графические критерии, некоторые из которых
приведены в п. 3.6.10. Опи же служат для установления грубых, по про-
стых для проверки достаточных условий абсолютной устойчивости. На-
пример, достаточно, чтобы + W (X) = Z (А,)-где Z(%) имеет ука-
занный вид.
А. А. Вороновым получено простое аффективно проверяемое условие,
гарантирующее выполнение критерия (3.6.28) и тем самым абсолютную
устойчивость в классе Mll[gi, р2]. В целях простоты формулировок огра-
ничимся классом Md[0, go], тем более, что это пе ограничивает общности.
Пусть, как и выше, — Др1 = — W (/го н)— абсцисса Найквиста. Это озна-
чает, что ImlV(/(0n) =0, причем Re И^/соц)—наименьшее значение из
всех значений' Re W(/со), для которых Im W(/со) = 0. Пусть, кроме того,
разомкнутая система устойчива. Рассмотрим четыре типа секторов, изо-
браженных па рис. 3.6.17, 3.6.18 Эти секторы (секторы Воронова) будем
называть так: нижний горизонтальный (рис. 3.6.17, о), нижний вертикаль-
ный (рис. 3.6.17, б), верхний горизонтальный (рис. 3.6.18, а) и верхний
вертикальный (рис. 3.6.18, б). Числа •&,, О2, фигурирующие в уравнени-
ях границ этих секторов (опп могут быть разными), будем называть
угловыми коэффициентами секторов. Вершина каждого сектора лежит на
вещественной оси в точке с неположительной абсциссой, которую обо-
значим — ц-1; она исключается из сектора.
Критерий Воронова формулируется следующим образом*). Пусть
выполнено одно из указанных ниже условий I' или 1", а также усло-
вие 77:
7". При 0 ш^го* годограф W(/<o) лежит в верхнем горизонталь-
ном секторе, а при <0* го sC оо — в нижнем вертикальном секторе Во-
ронова с общей вершиной в точке (— 1'в1)-
♦) А. Л. Вороновым [3.42] доказано также другое, близкое утверж-
дение. Приведенная формулировка критерия следует из доказательства
в [3.42] (либо в [3.26, § 4.8]).
I". При 0=C co =C co* годограф И7 (/cd) лежит в верхнем горизонтальном
секторе, а ври со* со й' оо — в верхнем вертикальном секторе Воро-
нова с общей вершиной в точке (— Рв')’
Рис. 3.6.17. Нижние секторы Воронова: а — горизонтальный; б — верти-
кальный
Рис. 3.6.18. Верхние секторы Воронова: а — горизонтальный; б — верти-
кальный
II. Если />|. На — угловые коэффициенты этих секторов (соответствен-
но нижних или верхних) п (й, w2 — ближайшие к со* значения часто-
ты, соответствующие пересечению годографа с линией р^1 + Re W = 0'
и с линией Im И7 = 0, то |Oi|coi | О2| со2.
Тогда система (3.6.5), (3.6.23) абсолютно устойчива в классе
Md [0, go], где go < цв (число р,0 может быть взято сколь угодно близ-
ким к цв).
Из рис. 3.6.19, 3.6.20 видно, что сектор абсолютной устойчивости, до-
ставляемый критерием Воронова, всегда шире сектора, получаемого по
круговому критерию (или совпадает с ним). Однако при этом утверж-
дается абсолютная устойчивость в более узком классе нелинейностей.
Аналитически условия 7', 7" формулируются так:
Г. Существуют такие чпела '0| 0, т)2 0, со* > 0, рБ > 0, что
Вв 1 -J Re W (fa>) — -О j Im W (/со) >0, Im W (/co) < 0 при 0 < co < co*,
jig1 + Re W (ja>) — fl- 2 Im W (/co) > 0,
I'b’ +
Re W (/co) > 0 при co* co < oo.
J". Существуют такие числа Р/ О, fl2 0, со* 0, цв 0, что
Pg1 + Re W (]<£>) (- Ог Im W (/co) 0, Im W (/co) ОО при O^co^co*,
рвг -{- Ro W (/co) ]- fl 2 Im W (/co) > 0,
p^1 + Re IC (/co) > 0 при co* co < oo.
Критерий Воронова приобретает простой вид, если брать fl| = й2.
В этом случае условие 77 отпадает (оно всегда выполнено). Критерий
Воронова для Ат = Th будем называть упрощенным критерием Воронова.
Весьма близким к упрощенному критерию Воронова является сле-
дующий критерий Чо и Нарендры*). Пусть годограф W(/со) расположен
Рис. 3.0.19. Применение критерия Воронова (используются нижние сек-
торы)
при со >0 в некоторой полуплоскости, граница которой пересекается с
действительной осью в точке (— Bn1), и разомкнутая система устойчива.
Тогда система (3.6.5), (3.6.23) абсолютно устойчива в классе Md[0, pto],
где ро < Hn.
*) В [3.43] имеется пробел в доказательстве. Полное доказательство
этого критерия, использующее критерии работы [3.37], получено Н. Е. Ба-
лабановым [3.35], обобщение сделало А. В. Липатовым [3.46].
В обычных случаях критерий Чо и Нарендры дает тот же результат,
что и упрощенный критерий Воронова. Например, для характеристики,
изображенной па рис. 3.6.21, имеем рн = рв. Если кривая W(/со) сильно
закручивается, то возможен случай, когда рк > ри. С другой стороны,
Рис. 3.6.20. Применение критерия Воронова (используются верхние сок-
Рис. 3.6.21. Построение граничной Рис. 3.6.22. Построение грапич-
ирямой ио критерию Чо и Нарендры ной окружности по критерию
Чо и Нарендры
возможны случаи, когда критерий Воронова дает более широкий сектор.
Это имеет место, например, для характеристик, изображенных на рис.
3.6.19, 3.6.20 при условии | От | со1 | '0г| ‘<^2.
Выше предполагалось для простоты, что pi — 0. При Pi=£0 прямые
заменяются окружностями. Критерий Чо и Нарендры, например, форму-
лируется так. Если характеристика W(/со) расположена при 0 «т со < оо
внутри окружности, которая пересекает вещественную ось в точках рд N
и — р~^ (рис. 3.6.22), и разомкнутая система устойчива, то система (3.6.5),
(3.6.23) абсолютно устойчива в классе МЯ[Ц1, р2|, где |ii>Pi,N, pis <
< Hs. n. Эго утверждение называется также внеосевым круговым критери-
ем. Здесь, в отличие от кругового критерия, не предполагается, что центр
круга лежит на вещественной осп. Поэтому обычно сектор S[pii.N, pis, n]
шире сектора, получаемого по круговому критерию. С другой стороны,
утверждается абсолютная устойчивость в классе Мя[рь pi2], а не в клас-
се М[рь ц2]. Очевидно, что М[щ, р,2] zd Мя[р1, р2].
3.6.9. Абсолютная неустойчивость систем с дифференцируемой нели-
нейностью. Критерии предыдущего пункта переносятся па случай не-
устойчивости: имеет место абсолютная неустойчивость в классе
Md[pi, р.?], если выполнено соответствующее частотное условие и неус-
тойчива линейная система (3.6.5) с и = pz для какого-либо р е [щ, ц2].
Так, если разомкнутая система неустойчива н характеристика имеет вид,
показанный па рис. 3.6.21, то система (3.6.5), (3.6.23) абсолютно неустой-
чива в классе Md[0, рхо], где н0 < pn, а для случая, показанного на
рис. 3.6.22,—в классе Md[pt|, р2], где pi > pi, n, р2 < Ps, к- Заметим,
что этот результат отсутствует в работах [3.42] и [3.43]; его можно по-
лучить, используя прием введения дополнительных нелинейностей [3.37]
и результаты [3.44].
Неравенства (3.6.28) и (3.6.29) являются критериями абсолютной
неустойчивости соответственно в классах Md[pi, р2] и Ма[0, р2] при ус-
ловии, что неустойчива хотя бы одна из линейных систем с и = pz, где
ре [pi, р2] или ре [0, р2]. Из этого критерия следует, что для систем
порядка п^З сектор абсолютной неустойчивости в классе Md[pi, р2]
может быть взят сколь угодно близким к сектору линейной неустой-
чивости. Аналогично переформулируются и становятся критериями аб-
солютной неустойчивости критерий (3.6.30) и критерия Воронова.
Все предыдущие формулировки графических критериев абсолютной
устойчивости (и неустойчивости) были направлены на то, чтобы но го-
дографу W(/со) определять числа р( р2 для соответствующего класса
абсолютной устойчивости (неустойчивости) М[рь р2], Mst[pb р2],
Мп[Р-ь Из]. Ситуация сильно упростятся, если эти числа, как и годограф
В'(/со), даны и требуется установить, выполнен или пет тот или иной
критерий. При этом можно использовать и более сложные критерии типа
(3.6.30). Графические критерии, отвечающие на вопросы такого рода, бу-
дут рассмотрены в двух следующих пунктах.
3.6.10. Графические критерии абсолютной устойчивости для заданного
класса систем е дифференцируемой нелинейностью *). Рассматриваются
системы класса Md[gi, р2].
[п st 1
— ~2 , ГДО
G (р) = [IV (Р) + цГ' ]/[Р1И7 (Р) т !]• Построенная в функции от со 5г О
(или от 1g со), опа имеет разрывы в точках, где ImG(/co) =0, т. е.
Пупдт написан А. В. Липатовым.
разбивается на ряд ветвей. Будем предполагать, что выполнено требу-
ющееся во всех вышеприведенных критерипх устойчивости условие
устойчивости системы, состоящей из линейной части с передаточной
функцией W(p), охваченной обратной связью с некоторым коэффициен-
том р е [ць р-г]-
Приведем графический критерий абсолютной устойчивости систем с
дифференцируемой нелинейностью [3.45—3.47]. Пусть существует кривая
£ (со) = Лл/2 — (А — В) arctg' (70))
с какими-либо А (= [—1, 1], Вее [—1, 1], f <= [0, оо), разделяющая ветви
кривой Ф(со), тогда система абсолютно устойчива в классе M“[gi, р2]
(случай |Л1 = 0 пе исключается).
При А = В кривая (со) превращается в горизонтальную прямую и
критерий эквивалентен круговому критерию (при А = 0) и внеосевому
Рис. 3.6.23. Семейство
шаблонных разделяю-
щих кривых.
круговому критерию (при А 0). При А = 0, В = ±1 получаем крите-
рий, соответствующий критерию В. М. Попова, а при А = ±1, В = 0 —
усиление критерия А. А. Воронова, приведенного в п. 3.6.8.
Для практического использования критерия достаточно иметь семей-
ство «шаблонных» разделяющих кривых £с(со) = С arctg со, Се[0, 2],
построенных для некоторых значений С в удобном пользователю мас-
штабе (желательно па кальке) в функции 1g со (рис. 3.6.23). В масштабе,
Рис. 3.6.24. Пример ис-
пользования графическо-
го критерия
согласованном с масштабом шаблонных кривых, должна быть построена
кривая Ф(со). Использование нарисованного па прозрачном носителе се-
мейства шаблонных кривых заключается в том, что путем наложения
этих кривых на графиц кривой Ф(со) и перемещения их вдоль оси абс-
цисс и вдоль оси ординат (без выхода за пределы полосы ±л/2), а так-
же зеркального отражения их относительно оси абсцисс должна быть най-
дена хотя бы одна кривая семейства, которая разделяет ветви кривой
Ф(ы). Па рис. 3.6.24 доказан случай применения предлагаемого критерия
в ситуации, когда cp(z) р.2], ио ии один из вышеперечисленных
графических критериев неприменим (кроме, разумеется, критерия
(3.6.30)).
3.6.11. Графический критерий абсолютной устойчивости для различ-
ных классов нелинейностей*). Из предыдущего видно, что по мере су-
жения класса нелинейностей (М[рь ('г], Mst[gi, р.2], Md[pi, р2]) избыточ-
ность достаточных условий абсолютной устойчивости уменьшается. Сле-
дует ожидать, что при приближения (в некотором смысле) нелинейного
звена к, линейному условия устойчивости нелинейной системы будут
приближаться к условиям устойчивости системы линейной. Можно так-
же ожидать, что если нелинейность принадлежит классу более широко-
му, чем, например, класс Mrt[pi, р.2], по более узкому, чем класс
Мв'[щ, р.2], то и условия устойчивости системы с такой нелинейностью
должны быть чем-то промежуточным между условиями устойчивости в
классе МЛ[Ц|, ,и2| и условиями устойчивости в классе MBt[p,|, ц2]. Усло-
вия абсолютной устойчивости, отражающие эти две ситуации, получены
в работах [3.41, 3.47]. Ниже приведены некоторые из этих результатов.
Введем функцию /?(со) = [Re С(/со)]/[1т G(/co)], связанную с исполь-
зовавшейся в предыдущем пункте функцией Ф(со) равенством 7? (со) =
= tg®(tt). Данная выше геометричесцая интерпретация известных кри-
териев устойчивости практически сохраняется при использовании кри-
вой /?(<!)). Так, выполнению условия кругового критерия устойчивости
соответствует факт разделения ветвей кривой R(со) осью частот, а вы-
полнению условия внеосевого кругового критерия — факт разделения вет-
вей кривой 7?(со) любой горизонтальной прямой. Критерий В. М. Попова
для всех трех случаев (щ <0, рщ = 0 и щ > 0) формулируется так:
пусть существует любая проходящая через начало координат прямая,
разделяющая ветви кривой R(со)—тогда система абсолютно устойчива
в классе Mst [щ, р2]. Отметим также, что факту устойчивости множества
линейных систем с обратными связями вида и = \iz, це [щ, р,2] (если
устойчива хотя бы одна из этих систем) соответствует кривая R(со), оба
конца каждой из ветвей которой уходят или в +°о, или в —оо (отсут-
ствуют ветви, идущие, например, из —оо в +<»).
Введем понятие класса нелинейностей M[gi, р.2, 6]. Пусть в системе,
описанной в и. 3.6.3, нелинейность принадлежит классу М8*[щ, ц2] и, кро-
ме того, характеризуется некоторым параметром б, принимающим значе-
ния в диапазоне от 0 до +°о. Строгое определение класса М[рь ц2, б]
можно найти в работах [3.41, 3.47], нам же достаточно знать наиболее
характерные примеры функций из классов М[р.(, щ, б] с различными б.
Если ф(г)еМ,*[р|, ц2], то ср(г) еМ[ц|, р.2, °0]- Если ср(з) еМ,|[ц|, ii2]
и является нечетной функцией, то <j>(z) е М[ць р2, 1]. Если cp(z) = p.z,
где цёе [р-ь Ц2], то cp(z) ёе М[р], р2, 0]. Если функция cp(z) заключена
между двумя другими функциями, а именно z/(z) z<j>(z) ^6z/(z), где
б ёе [1, оэ), /(z) е Md[|i|, р2] и /(z)—нечетная функция, то <j>(z) е
) Пункт написан А. В. Липатовым.
е М[Дь р.2, б]. Если функция <p(z) имеет вид cp(z) = t])m(z) = C|z|’n sgn z
или cp(z) = '’l’m(z) = C'|z|1/msgn z, где C 0, m >.l, то она принадлежит
классу M[pi, Щ, fim], где 6m = max ((x— xm)/(xm+1 -ф 1)]-
*s(o,i]
При 6->-oo класс M[gl, p2, 6] переходит в класс Mst[gi, ц2], при
б>1—в класс нечетных функций из Md[pi, р2]. При m-> 1
класс функций ф,„ (z) переходит в класс линейных функций <p(z) — pz,
ц е [Ць pd-
Пусть построена кривая Я(а), по критерий Попова неприменим, т. е.
нельзя провести проходящую через
щую ветви кривой А (со). Пусть
нелинейность принадлежит клас-
су более узкому, чем класс
Mst [pi, р2], конкретней — классу
М[ць ц2, 6], где б < оо. Прове-
дем «прямую Попова», отсекаю-
щую «горбы» ветвей кривой /?(со),
со >0 (рис. 3.6.25). Заключим эти
отрезанные горбы в треугольни-
ки, основания которых лежат па
прямой Попова v — qa>, со фг 0,
две другие стороны пе пересека-
ют соседние ветви кривой Я(со),а
проекции этих сторон на ось абс-
цисс равны друг другу. Пусть
длины медиан этих треугольни-
ков, проведенных из вершин, пе
начало координат прямую, разделяю-
Рис. 3.6.25. Применение графическо-
го критерия для класса Md[jii, р2]
Лежащих на прямой Попова (расстояния от этих вершин до прямой По-
пова вдоль оси ординат), равны (рис. 3.6.25). Величины V, характе-
ризуют «степень нарушения» критерия Попова.
Критерий устойчивости: если выполняется неравенство
2 vi < л
то система абсолютно устойчива в классе; M[pb р.2, б].
При б -► оо класс М[рь р2, б] расширяется до класса Mst[ph щ],
—>- 0, и сформулированный критерий вырождается в критерий Попова.
При б-1-0 класс М[Ц1, р2, б] сужается до класса функций <p(z) = цц
це [pi, р2], указанное неравенство выполнено и сформулированный кри-
терий превращается в «отрезковый критерий» устойчивости множества
линейных систем [3.49].
При заданном секторе S[|ii, р2] многие известные графические кри-
терии могут быть применены унифицированным образом построением од-
ной кривой /?(со). При неприменимости этих критериев для конкретных
классов нелинейностей эта же кривая используется для установления
факта устойчивости систем с нелинейностями из более узких классов.
Отметим, что построение кривой /?(со) проще построения фазовой харак-
теристики.
В [3.41, 3.47] приведены примеры использования описанного крите-
рия. В работе [3.48] предложены графические методы исследования аб-
солютной устойчивости в классе M[pi, р2, 6] с использованием годографа
14z(/<o) и кривой Попова.
3.6.12. Критерии диссипативное™. Система называется диссипатив-
ной, если для любого ее вектора состояния выполнено
lim ||ж (1) ||St R,
где R — постоянная, зависящая лишь от параметров системы (по пе от
начального состояния ж(0)). Всякая линейная асимптотически устойчи-
вая система становится диссипативной после включения ограниченного
внешнего возмущения. Однако диссипативной может быть и нелинейная
система (3.6.5), (3.6.8) (или (3.6.5), (3.6.23)) без внешнего возмущения.
Рассмотрим систему (3.6.5), (3.6.8) при наличии внешнего возмущения
а(1) = Ax(t) + bu(t) + f(t), z(l) = Ux(t),
и = cp[z(l), t].
(3.6.31)
(3.6.32)
Здесь 11/(1)11 St const. Рассмотрим сектор S[pi, p2] па плоскости {z, и}, яв-
ляющийся сектором абсолютной устойчивости в одном из классов
M[pi, р2], Mst[ph р2] или Mll[pi. р2]. Будем называть расширенным сек-
тором абсолютной устойчивости множество на плоскости {z, и}, опреде-
ленное для каких-либо С\ > О, С2 > 0 неравенствами:
PiO — Ci S и pi с -|- С2
при
о X),
(3.6.33)
р2С С2 st U PiO -|- С2
при о St 0.
(3.6.34).
Если р2 = -|-со, то вместо (3.6.33), (3.6.34)
имеют впд:
соответствующие неравенства
и ts gio — С2
и st Д1С + С2
при
при
о 2s О,
0.
(3.6.35)
(3.6.36)
Аналогично определяется расширенный сектор для pi = —оо.
На рис. 3.6.26 штриховкой отмечены расширенные секторы.
Любой из описанных выше критериев абсолютной устойчивости мо-
жет служить также для установления диссипативпости системы (3.6.31),
(3.6.32). Так, система (3.6.31), (3.6.32) диссипативна, если выполнено од-
но из следующих условий:
I. График функции и = cp(z, Z) расположен в каком-либо расширен-
ном секторе, отвечающем сектору S[pi, р2] при всех / Js 0, а также вы-
полнен круговой критерий абсолютной устойчивости для сектора
S[p-i, р2] (в частности, при и = pz, pi st р St р2, система (3.6.5) асимп-
тотически устойчива).
II. Нелинейность стационарна (и = ср (z)) и ее график расположен в
каком-либо расширенном секторе, отвечающем сектору. S[pb р2], а так-
же выполнен критерий Попова (3.6.24) абсолютной устойчивости (в ча-
стности, при и = цз, pi Ji Из, система (3.6.5) асимптотически устой-
чива).
111. Нелинейность стационарна, существует <p'(z) = ckp/dz и prsj
cp'(z) • Из, а также выполнено частотное условие (3.6.28) (или при
р, =0 условие (3.6.29)) и система (3.6.5) с и — pz асимптотически ус-
тойчива при некотором ре [pi, рз]. Заметим, что в данном случае гра-
Рис. 3.6.26. Расширенные секторы абсолютной устойчивости в критерии
диссипативности
фик нелинейности расположен в каком либо расширенном секторе, отве-
чающем сектору S[p,, р2], и система (3.6.5) с и = pz асимптотически ус-
тойчива при всех р е [рь рз].
В приложениях часто встречаются нелинейности и = <p(z), для ко-
торых существует предел
Ф (г)
Jim = (3.6.37)
hl’® 2
Если асимптотически устойчива липецкая система (3.6.5) с и ~
= pooz («линеаризованная па бесконечности система»), то исходная сис-
тема (3.G.31), (3.6.32) с cp(z, t) = tp(з) диссипативна. Действительно,
легко показать, что существует сецтор абсолютной устойчивости в классе
М“1[рь рз], содержащий луч и = В силу (3.6.37) график пелнпей-
мостн при больших |z| входит п расширенный сектор абсолютной устой-
чивости.
Если выполнено (3.6.37) и при и = p«>z система (3.G.5) имеет соб-
ственные значения па мнимой оси, то диссипативпость может пе иметь
места. Однако, если выполнено (3.6.37) и при больших |z| график нели-
нейности входит в сектор линейной устойчивости, причем расстояние от
графика до границы сектора липейпой устойчивости остается больше не-
которого числа р > 0, то система диссипативна.
Подчеркнем, что свойство систем указанных типов быть диссипатив-
ными определяется поведением нелинейности лишь при больших значе-
ниях аргумента: |z| К.
3.6.13. Частотные критерии автоколебательиости.. Рассмотрим систе-
му со стационарной нелинейностью и без внешнего возмущения
х = Ах + Ви, г — Их, и = <p(z). (3.6.38)
Предположим, что х — 0 — единственное стационарное решение этой
системы. Легко видеть, что при det Л ^=0 это имеет место, если прямая
z + И7 (0) и = 0, (3.6.3!))
называемая характеристической прямой, имеет единственную точку пере-
сечения с графиком нелинейности и = q>(z), совпадающую с началом
координат, т. е. z = 0, и = 0.
Система (3.6.38) называется автоколебательной (по выходу z(4)), ес-
ли все ее решения ограничены (т. е. ||ж(4)|| const) и для почти всех
я(0) выход z(4) колеблется, не затухая: функция z(4) нри 4->со имеет-
бесконечно много перемен-знака и либо
—а < 0, где 4^оо, (3.6.40)
либо
z(t^^P>0, где t"->-|-oo. (3.6.41)
г п
Здесь 4ft и — последовательности моментов времени, возможно, раз-
личные для разных z(o). Условия (3.6.40), (3.6.41) означают, что колебания
пе затухают. Слова «для почти всех ж(0)» означают, что исключительны-
ми множествами в пространстве состояний могут быть лишь некоторые
поверхности Л. Оказывается, что часто такие множества Л действитель-
но имеются, и если х(0)^Л, то ||а (4) II-> О при I оо, а значит, и
|z(4) | ->() при 4-> со.
Критерий автоколебательности формулируется так: если система
(3.6.38) диссипативна и если неустойчива система, полученная из (3.6.38)
заменой и = <p(z) уравнением и = q?'(O)z, то система (3.6 33) автоколе-
батсльпа. При этом числа а > 0, р > 0 в (3.6.40), (3.6.41) могут быть вы-
браны одинаковыми для всех колеблющихся решений, т. е. при х(0)^Л.
Здесь под неустойчивостью понимается наличие собственных значе-
ний матрицы А + /?//<[/(0) в полуплоскости Re р > 0 и их отсутствие па
мнимой оси (передаточная функция замкнутой системы ^(р) =
= И7(р)[1— <р'(0)W(р)]_ 1 имеет полюсы в полуплоскости Rep>0 и
пе имеет их при Rep = 0). Отметим, что в случае полной неустойчиво-
сти, т. е. когда все указанные собственные значения (или все полюсы
^“(р)) лежат в полуплоскости Re р > 0, исключительное множество Л
отсутствует: условие (3.6.40) либо (3.6.41) выполнено для любого реше-
ния системы (3.6.38) при х (4) Ф 0.
Итак, критерии диссипативности (а значит, и критерии абсолютной
устойчивости) используются также для установления свойства автоколе-
бательпости.
Будем говорить, что имеет место [—а, р]-колебательность (по выхо-
ду z(i)), если система автоколебательпа и для почти всех ее решении
выполнено условие (3.6.40) или (3.6.41). Для определения чисел аир
могут быть использованы критерии абсолютной неустойчивости. Имеет
место [—а, ^-колебательность, если при —а о «с [j график нелиней-
ности лежит в секторе абсолютной неустойчивости S[pb ц2], соответству-
ющем одному из классов M[gi, р,2], Mst[pb ц2], Md[pb р,2], и нелиней-
ность принадлежит соответствующему классу, т. е. она стационарна для
класса M6t[pI, ц2], стационарна и удовлетворяет неравенству
С Иг Для класса Md[|Xi, ц2].
Рис. 3.6.27 поясняет применение этого критерия. Пусть, для опреде-
ленности, па этом рисунке секторы абсолютной устойчивости (/) и не-
устойчивости (11) построены для классов Met[jXi, ц2] и нелинейность ста-
ционарна. Так как при больших |з| нелинейность входит в сектор абсо-
лютной устойчивости, то система диссипативна. Характеристическая пря-
мая (111) пересекается с графиком нелинейности лишь в точке z = 0,
Рис. 3.6.27. Критерий ав-
токолебательности: / —
сектор абсолютной ус-
тойчивости; 11 — сектор
абсолютной неустойчи-
вости; 111 — характери-
стическая прямая (3.6.39)
и = 0, поэтому стационарное решение х = 0 единственно. При —а sC
-С о р график нелинейности лежит в секторе абсолютной неустойчиво-
сти. Поэтому система [—а, р] автоколебательпа.
Из качественной теории дифференциальных уравнений известно, что
если пространство состояний двумерно (п — 2) и система (3.6.38) авто-
колебательпа, то любая траектория системы либо приближается к началу
координат, либо «наматывается» на некоторый предельный цикл. В ча-
стности, она сама может быть предельным циклом. При п > 2 картина
поведения траекторий может иметь весьма сложный вид. Могут, напри-
мер, появляться так называемые «странные аттракторы», система может
становиться практически стохастической—колебания приобретают слу-
чайный, нерегулярный характер, при весьма малых изменениях началь-
ных данных решения могут расходиться далеко и вести себя совсем по-
разному.
Из сформулированного критерия можно вывести следующий упро-
щенный критерий автоколебателыюсти, относящийся к специальному, но
часто встречающемуся в приложениях случаю. Пусть нелинейность ста-
ционарна и выполнено условие (3.6.37). Система (3.6.38) автоколебатель-
на, если линеаризованная на бесконечности система (т. е. система (3.6.38)
с cp(z) = p,ooS) асимптотически устойчива, а линеаризованная в пуле
система (т. е. система (3.6.38) с cp(z) = cp'(O)z) неустойчива и ее матрица
коэффициентов не имеет чисто мнимых собственных значений.
Приведем в заключение принадлежащий Е. Д. Гарберу критерий от-
сутствия периодических решений у системы с периодом меньше заданной
величины. Пусть ср (о) eMs‘[jh, щ] (либо ср(о)е Md[pb ц2]) и для неко-
торого •& и для всех со 2s (Оо > 0 выполнено частотное неравенство
(3.6.24) (либо неравенство (3.6.28)). Тогда система (3.6.5), (3.6.23) пе име-
ет отличных от. стационарных периодических решений с периодом
7 < 7 = 2лсо0 1. Подробнее о критериях автоколебательности см.
[3.50, 3.51].
3.6.14. Примеры. Рассмотрим два характерных примера использова-
ния теории абсолютной устойчивости.
А. Мультивибратор. Согласно [3.52, гл. 10 § 9] уравнения мульти-
вибратора с индуктивностью в анодной цепи имеют вид
er, = хз — х\ — бср(z), ±2 = Ж1, хз — —2hxi — z = х>. (3.6.42)
Здесь /; > 0, е > 0, б > 0 и
<p(z) =1 при z —1, cp(z) = —z при |z| 1,
ср (z) = —1 при z 2з 1. (3.6.43)
График ср (г) показан па рис. 3.6.28 сплошной жирной линией. Из резуль-
татов [3.52] следует, что при 6 > I и малом числе е, характеризующем
паразитную емкость, в системе возникают автоколебания.
К этому же выводу, притом с оценкой числа е, приводит критерий
п. 3.6.13 на основе анализа лишь линейных систем. Действительно, в
Рис. 3.6.28. Определение зопы автоколебательности (параметров а и р)
для различных нелинейностей в задаче о мультивибраторе: 1— сектор
абсолютной устойчивости; 11 — сектор абсолютной неустойчивости; III —
характеристическая прямая 2 = 0
(3.6.37) [Сео = 0 и при f. -2 2h линейная система с cp(z) — 0 асимптоти-
чески устойчива. Поэтому система (3.6.42) диссипативна. Стационарное
решение системы (3.6.42) единственно: xj = 0. При 6 > 1 линеаризован-
ная система (3.6.42) (т. е. система (3.6.42) с cp(z) = —z) неустойчива со
степенью неустойчивости к — 2. По упрощенному критерию автоколеба-
тельности при е < 2/г, 6 > 1 система (3.6.42) автоколебательпа.
Определим числа а и р в (3.6.40), (3.6.41). Нетрудно установить по
критерию (3.6.24), что при любом сколь угодно большом числе ро сек-
тор S[—Ро, Икр], где Цкр = (е — 27г) (27гё)-1, является сектором абсолют-
ной неустойчивости (см. рис. 3.6.28). Числа —а и р находятся как абс-
циссы точек пересечения графика и = ср (z) с прямой и — p2z, где р2 <
< gup и сколь угодно близко к ркр. Предельные значения чисел аир
(для р2 = Ркр) следующие: а = р = 27гё(27г — е).
Важно отметить, что, в отличие от [3.52], указанные рассуждения
применимы не только к нелинейности (3.6.43). Так, па рис. 3.6.28 штри-
ховой линией показан другой график u = cp(z). Такая система автоколеба-
тельпа при е < 27г, 6 > 1; числа —а = —аь р = Pi находятся как точки
пересечения графика нелинейности с границей сектора абсолютной не-
устойчивости.
Б. Следящая система с нелинейным приводом. Структурная схема
рассматриваемой системы представлена па рис. 3.6.29, ее уравнения
имеют вид [3.53]:
(7'iP + l)pxi = cp(z), х2 = ж„х —
(Т2р + 1)я3 == 7с2ж2, = kocpxi, z = хг3— х^.
(3.6.44)
(3.6.45)
Здесь (3.6.44) — уравнения привода с учетом нагрузки, создаваемой
объектом, а также датчика рассогласований, (3.6.45) — уравнения усили-
теля и обратной связи. Все коэффициенты положительны. Пусть ж,1Х = 0.
График нелинейности ф(г) изображен па рис. 3.6.30: <p(z) = при
Рис. 3.6.29. Структурная схема следящей системы с нелинейным приво-
дом
&i | z | д' фтах, ф' (z) = 7с0 ж 0 при Ад | Z | > фтах, /io 3= 0 — малое число. Ис-
следуем вначале линеаризованную систему, т. е. систему с ф(х)=р/,
р > 0. Ее характеристическое уравнение:
“0 (^'i + ?2 + Р*ос7’2)р2 + (1 + p^ocjp + ц7с2 = 0. (3.6.46)
Условие устойчивости этой системы (т. е. условие ащг > а0а3 для уравне-
ния а0р3 -|- а,р2 + а2р + а3 = 0) имеет вид
ф (р) = Лр2 + 2£р + С > 0, (3.6.47).
где
А = A(V2, 2В = 7^(7^ 2^1-7^, С = Г1 + Р2. (3.6.48)
При )/ЛС + В > 0, т. е. при выполнении неравенства
7сОе(2у?’2(7\ + Т2) + Т\ + 272) > к2'1 тГ2 (3.6.49)
имеем ф(р) > 0 при р > 0. В этом случае S(0, со) —сектор липейпой
Устойчивости. При выполнении противоположного неравенства уравнение
if (p) = 0 имеет два корпя 0 < pi < р2, где
14.2 = °>5 iWt - *ОС (Л + ЗТ’-Л +
+ Г_|_ J/r//, - z-(:t (Т1 + 2Т2)]2 - Л2с72 (Т1 + Г2)]’/2, (3.6.50)
и ф(р) < 0 яри р.! < р < н2. При этом S(0, pi) и S(p2, оо) —секторы
линейной устойчивости, a S(ph р2)—сектор линейной неустойчивости.
Перейдем к исследованию исходной нелинейной системы.
Пусть выполнено (3.6.49). Система (3,6.44), (3.6.45) имеет порядок
п = 3, поэтому сектор абсолютной устойчивости может быть взят сколь
угодно близким к сектору линейной устойчивости. Итак, без вычислений
Рис. 3.6.30. Секторы абсолютной устойчивости и неустойчивости и зона
автоколебателыюсти [—а, р] в задаче о следящей системе с нелиней-
ным приводом: I и Ill — секторы абсолютной устойчивости; II — сектор
абсолютной неустойчивости
получаем, что S(0, оо)—сектор абсолютной устойчивости в классе
А1"(0, со): при выполнении (3.6.49) исходная система абсолютно устой-
чива в классе нелинейностей <р(г) е Мй[Ц1, pi2] с любыми 0 < щ сС р2 <
< со. В частности, при любых 0 <_ ке < исходная система с ука-
занной нелинейностью устойчива в целом.
Пусть выполнено неравенство, противоположное неравенству (3.6.49):
йос (2у / 2( 11 + 12) + Т[ + 2'1' 2) < к$Т112.
(3.6.51)
Поскольку п — 3, то секторы абсолютной устойчивости и неустойчивости
могут быть взяты сколь угодно близкими к соответствующим секторам
линейной устойчивости, т. е. для любого малого 8 >0 и любого Цо > Цг
секторы S[e, ц,— е], S[p.2 + e, ро] — секторы абсолютной устойчивости
в классах М'‘[е, p.i — е], М‘'[ц2 + в, Мо], а сектор S[|ii -j- е, р2— е] — сек-
тор абсолютной неустойчивости в классе Ma[pi + е, №— е]. На рис. 3.6.30
I и III — секторы абсолютной устойчивости, а II — сектор абсолютной
неустойчивости.
Пусть кроме (3.6.51) кй < ц(, kt < ц,. Так как график нелинейно-
сти лежит в секторе. S[e, р:— е], то система (3.6.44), (3.6.45) устойчива
в целом. Можно показать, используя не описанные здесь результаты,
относящиеся к критическим случаям, что указанный вывод остается
справедливым и в случае, когда к0 == 0, т. е. когда cp(z) = const при боль-
ших |z | (и вообще, когда <p(z) > 0 при z^O). Итак, неравенства (3.6.51)
и ki < Pi являются для исходной системы условиями устойчивости в
целом.
Пусть к0 < pi. Поскольку при больших |z| график функции <p(z)
лежит в секторе абсолютной устойчивости, то система (3.6.44), (3.6.45)
диссипативна.
При fci > Ц2 система диссипативна и устойчива в малом.
Пусть Р| < к{ < ц2 (этот случай изображен па рис. 3.6.30). Система
(3.6.44), (3.6.45) имеет единственное стационарное решение ж, э 0. Так
как линеаризованная в малом система неустойчива и имеет место дисси-
нативпость, то при и, < />-, < исходная система автоколебательпа.
Числа а, Р в (3.6.40), (3.6.41) находятся из условия рц — е<:<р'(г)г^
ц2 + е при —а z р. В случае, изображенном на рис. 3.6.30, когда
q>(z) — k\z при /i'i|z|^(pm и <p'(z) = Ао 0 при fri|z|.^rpm, имеем
а = ₽ = VmV1-
Подчеркнем, что все эти выводы об исходной нелинейной системе
получены почти без всяких вычислений лишь па основе изложенных
выше общих результатов и с использованием результатов анализа линеа-
ризованной системы. Заметим, что полученные для этого примера точ-
ные формулы и выводы отличаются в деталях от приближенных формул
и выводов, основанных па методе гармонического баланса.
3.6.15, Связь с методом функций Ляпунова. Условия устойчивости в
целом, как показано в п. 3.2.1, можно получать, используя функции Ляпу-
нова. Например, можно взять в качестве- функции Ляпунова положитель-
но-определенную квадратичную форму
У(ж) = xTLx (3.6.52)
и потребовать, чтобы ее производная по времени V в силу уравнений
системы (3.6.5), (3.6.8) была отрицательно-определенной. Это условие вы-
делит в пространстве параметров системы некоторую область KL, завися-
щую от выбранной матрицы L. Область эта может быть и пустой, т. е.
таких параметров вообще пе будет. Если же эта область будет непустой,
то для значений параметров из этой области система (3.6.5), (3.6.8) будет
асимптотически устойчивой в целом. Меняя матрицу L, получим другую
область KL. Заранее для заданных параметров трудно сказать, какой
должна быть функция Ляпунова (3.6.52), обеспечивающая устойчивость
системы, и есть ли вообще такая функция. Оказывается, круговой крите-
рий абсолютной устойчивости (см. п. 3.6.4) выделяет область в простран-
стве параметров системы, являющуюся объединением всех областей К,,
со всевозможными формами (3.6.52). Иначе говоря, круговой критерий
абсолютной устойчивости охватывает все критерии устойчивости в целом,
которые могут быть получены с использованием функций Ляпунова вида
(3.6.52).
Точно так ясе круговой критерий абсолютной неустойчивости охва-
тывает все критерии неустойчивости, которые могут быть получены с ис-
пользованием функций Ляпунова (3.6.52). В этом случае V положи-
тельно-определенная, а V — зпаконеопределенпая формы. Критерий
Попова охватывает все критерии, основанные на функции Ляпунова
вида
г
V (г) = xYLx 0 j ср (<J) do, z = Пх. (3.6.53)
о
Параметр 0 в (3.6.53) и в критерии Попова — один и тот же. Аналогич-
ное, по более сложно формулируемое утверждение имеет место н для
критериев пн. 3.6.8—3.6.10.
Функцию Ляпунова вида (3.6.53) для установления эффективных ус-
ловий абсолютной устойчивости впервые применил А. И. Лурье (1955).
То обстоятельство, что описанные выше критерии абсолютной устой-
чивости охватывают все критерии, основанные на использовании функ-
ции Ляпунова пз мпогопараметрического класса, указывает на их прак-
тическую эффективность.
Напомним еще, что, как отмечалось в п. 3.6.6, каждый из частотных
Критериев абсолютной устойчивости этого параграфа является необходи-
мым и достаточным условием абсолютной устойчивости в классе нели-
нейных звеньев, определенном соответствующей интегральной квадратич-
ной связью.
3.6.16. Краткий обзор литературы по теории абсолютной, устойчиво-
сти. Выше были изложены лишь наиболее просто формулируемые и до-
статочно важные для приложений результаты теории. Другие результа-
ты, относящиеся к задачам абсолютной устойчивости, читатель найдет в
книгах [3.24, 3.26—3.31] и в обзоре [3.32]. В [3.54], [3.55] показано, что
абсолютная устойчивость в классе М[)1ь р?] может быть обеспечена на-
личием единой функции Ляпунова (в частности, кусочно-квадратичной,
а также кусочно-линейной функции), и рассмотрены вопросы ее построе-
ния. Книга [3.56] посвящена частотным методам исследования часто-
встречающихся в приложениях систем с разрывными нелинейностями
и с пееднпствеппым состоянием равновесия.
Импульсным системам управления посвящены книги и статьи
[3.57-3.63].
Критерии абсолютной неустойчивости имеются, например, в [3.44,
3.63, 3.64], а критерии диссипативпости — в [3.65, 3.66]. Частотные кри-
терии существования периодических решений получены в [3.67—3.69]
и др. Относительно условий абсолютной устойчивости вынужденных ре-
жимов см. [3.70, 3.71]. Новые частотные методы исследования важных
для приложений систем с угловыми координатами развиты Г. Л. Леоно-
вым, см. [3.56, гл. 4, п 3.72]. Абсолютной устойчивости систем с распреде-
ленными параметрами посвящена книга [3.73]; оценки качества переход-
ных режимов абсолютно устойчивых систем, условия отсутствия автоко-
лебаний получены в книге [3.74], где рассматриваются и другие вопро-
сы. В указанных статьях и книгах читатель найдет ссылки па многочис-
ленную литературу по абсолютной устойчивости.
ГЛАВА 4
МЕТОДЫ И АЛГОРИТМЫ ОЦЕНИВАНИЯ
ДИНАМИЧЕСКИХ ПРОЦЕССОВ
Оцениванием в математической статистике принято называть обра-
ботку данных измерений (наблюдений) с целью уменьшить влияние
случайных факторов (ошибок). Еще в начале XIX столетия зародился
один из основных методов оценивания математической статистики — ме-
той наименьших квадратов (MIJK), тесно связанный с именем Гаусса.
Этот метод, теория которого получила значительное развитие в трудах
А. А. Маркова [4.1] и последующих исследованиях (см., например,
[4.2—4.4]), полностью сохранил свое значение в настоящее время.
В математической статистике часто рассматривается совокупность
измерений (наблюдений), расположенных в каком-либо порядке вне за-
висимости от времени. Динамика оцениваемого процесса в этом случае
не фигурирует в качестве основного фактора, а сам процесс оценивания
осуществляется пе в реальном масштабе времени (пе одновременно с
оцениваемым процессом).
Пропесс оценивания для управления должен протекать в рсалытом
времени и учитывать динамику управляемого процесса. Тем по менее
теорию оценивания в математической статистике с полным основанием
можно считать одним из фундаментов теории оценивания в современной
теории управления.
К задачам оценивания вплотную примыкает приближение функ-
ций— обширный раздел математики, одним из основоположников кото-
рого по праву считается П. Л. Чебышев.
Третьим источником современной теории оценивания в управлении
можно считать фильтрацию в классической линейной теории связи и уп-
равления. Эга теория, базировавшаяся в основном па операторном опи-
сании, полностью учитывала динамику (спектры) фильтруемых сигналов.
Ориентированная главным образом па реализацию с помощью простых
аналоговых фильтров, эта теория обычно давала лишь приближенное ре-
шение задач оптимального оценивания в пространстве сигналов.
§ 4.1. Классификация задач оценивания
Число публикаций, посвященных теории оценивания и ее приложе-
ниям, в современный период исчисляется многими тысячами, и имеется
весьма большое число постановок задач фильтрации, интерполяции и
«кстраполяцпп разнообразных процессов. Классификация соответствую-
щих задач п методов может быть осуществлена па основе различных
признаков, таких как вид математической модели оцениваемого процес-
са, характер наблюдения, шум наблюдения, время наблюдения и др.
4.1.1. Непрерывные процессы. В табл. 4.1.1, 4.1.2 классификационные
признаки пронумерованы следующим образом:
признак 1 — вид математической модели оцениваемого процесса;
признак 2— характер условий наблюдения (степень наблюдаемости);
признак 3 — шум наблюдения;
признак 4 — время наблюдения.
По первому признаку случаи располагаются в порядке убывания
объема априорной информации, содержащейся в математической модели
Таблица 4.1.1
Варианты (признаки 1, 2) постановок задачи оценивания
для непрерывных динамических процессов
Признан 1 Вид математической модели оцениваемого процесса Признан 2 Ха раите р наб л юления, степс.ць наблюдаемости и номер варианта
содержательная формулировка номер случая пол покомпо- нентное измерение полная на- блюдаемость неполная на- блюдаемость
1 2 3
Процесс описывается за- данной функцией време- ни с неизвестным пара- метром 7 и 1.2 1.3
Процесс описывается обыкновенным диффе- ренциальным уравнени- ем (1.2.1) с неизвестным начальным условием 2 2.1 2.2 2.3
Процесс описывается сто- хастическим дифферен- циальным уравнением (1.2.5), (1.2.7) с извест- ными интенсивностям 11 шумов 3 3.1 3.2 3.3
Процесс описывается сто- хастическим обыкновен- ным дифференциальным уравнением с неизвест- ными распределен ням 11 шумов 4 4.1 4.2 4.3
Математическая модель оцениваемого процессе) неизвестна, кроме, быть может, таких качеств, как непрерывность, глад- кость функций времени 5 5.1 5.2 5.3
(см. табл. 4.1.1). Номером 1 обозначен случай, когда процесс описывается
заданной функцией времени с неизвестным параметром (в общем случае
векторным). Этот случай наиболее часто встречается в теории связи, ста-
тистической радиотехнике. В теории управления он характерен для про-
цессов идентификации (параметрического оценивания) с искусственным
пробным движением. Задачи идентификации рассматриваются в гл. 5.
Номером 2 в табл. 4.1.1 обозначены случаи, когда математической
моделью оцениваемого процесса служит обыкновенное (в общем случае
Таблиц а 4.1.2
Варианты (признаки 4) постановок задачи оценивания
для непрерывных конечномерных динамических процессов
Признак 3 Шум наблюдения Признак 4 Продолжитсльпость наблюдения (оценивания) и номер варианта
содержательная формулировка иомер случая мгновен- ное на конечном интервале времени Fia бесконечном интервале времени
7 ? 3
Шум наблюдения отсутству- ет 7 7.7 1.2 1.3
Аддитивный шум наблюде- ния с известными статистиче- скими характеристиками 2 2.1 2.2 2.3
Неаддитпвный шум наблю- дения с известными статис- тическими характеристика- ми 3 3.1 3.2 3.3
Шум наблюдения с неизвест- ными статистическими ха- рактеристиками 4 4.1 4.2 4.3
векторное) дифференциальное уравнение вида (1.2.1), т. е. детерминиро-
ванное уравнение с неизвестным (случайным) начальным условием. Это
уже достаточно распространенный в теории управления случай. Дело в
том, что с целью упрощения математической модели оцениваемого про-
цесса можно разбить время па циклы оценивания (см. ниже). В течение
каждого цикла можно использовать упрощенную детерминированную
модель, пренебрегая постоянно действующими возмущениями (возбуж-
дающими шумами £(<))• Вроме того, применяя описанный ниже
принцип распределения информации, можно часть измеряемых величин
рассматривать как управление и в оцениваемом процессе. Если при этом
соответствующие измерители являются достаточно точными или если их
ошибки постоянны во времени, то модель оцениваемого процесса обычно
удается представить в детерминированной с точностью до начального
условия форме.
Самым известным и разработанным в современной теории непрерыв-
ного управления является случай, обозначенный в табл. 4.1.1 номером 3.
Математической моделью оцениваемого процесса здесь служит стохасти-
ческое векторное дифференциальное- уравнение с аддитивным белый
шумом известной интенсивности (задана матрица интенсивностей). С уче-
том принципа формирующего фильтра и расширения пространства сос-
тояний (см. гл. 1) такое описание обладает достаточной общностью. Соот-
ветствующий оцениваемый процесс является «непрерывным» марковским
процессом. Именно для подобного описания разработаны ФПК-уравнение,
уравнение Стратоновича и многочисленные субоптимальпые алгоритмы
оценивания (см. ниже).
Номером 4 в табл. 4.1.1 обозначен случай, когда известно стохастиче-
ское дифференциальное уравнение, описывающее оцениваемый процесс,
но неизвестны стохастические характеристики (распределение вероятно-
стей) шумов, возбуждающих этот процесс. Это случай, который в послед-
нее время получил наименование задачи оценивания в условиях неоп-
ределенности [4.С].
Конечно, априорная неопределенность сильно затрудняет процесс
оценивания, однако при данном уровне априорной пеопределсппости мо-
гут быть использованы различные эффективные пути преодоления этих
трудностей. Во-первых, могут быть применены так называемые адаптив-
ные алгоритмы оценивания (см. ниже). Во-вторых, могут использоваться
алгоритмы без явно выраженных свойств адаптапии, по малочувствитель-
ные (в определенных пределах) к распределениям вероятности шумов.
Наконец, могут создаваться алгоритмы, рассчитанные па «наихудшее»
помеховое воздействие из множества воздействий, ограниченных, напри-
мер, по норме (модулю). Это приводит к игровой постановке задачи и тео-
рии дифференциальных игр [4.6—4.8], по рассматриваемой в настоящем
справочнике.
Крайним из указанных по признаку 1 случаев является случай, от-
меченный номером 5 в табл. 4.1.1. Здесь математическая модель оценива-
емого процесса вообще неизвестна, кроме, быть может, таких свойств это-
го процесса, как непрерывность, гладкость и т. п. Такие задачи возника-
ют при управлении человеко-машинными, биологическими, экологиче-
скими системами. Впрочем, подобные задачи малой размерности часто
встречались и в классической математической статистике при построе-
нии эмпирических формул.
Вторым признаком в табл. 4.1.1 служит характер наблюдения в смыс-
ле степени наблюдаемости. В принципе здесь можно было бы указать
все случаи, упомянутые в п. 2.1.1 и иллюстрируемые рис. 2.1.1. Однако
для сокращения таблицы указаны лишь три наиболее характерных
случая:
. 1 — полпокомпопептпое измерение, когда размерность вектора наблю-
дения совпадает с размерностью вектора состояния;
2 — полная наблюдаемость;
3 — неполная наблюдаемость.
Варианты постановки задачи оценивания в табл. 4.1.1 обозначены
двойными номерами, первый соответствует первому признаку, а вто-
рой — второму.
Двойными номерами обозначены и варианты, в табл. 4.1.2, по первая
цифра соответствует признаку 3 — шуму наблюдения, а вторая цифра —
признаку 4— времени наблюдения (оценивания).
В первой строке табл. 4.1.2 фигурируют случаи, когда шум наблю-
дения отсутствует. С первого взгляда кажется, что это нереальные, по
представляющие практического интереса случаи. На самом деле это по
так. Дело в том, что путем расширения пространства состояний шумы
наблюдения нередко переводятся в шумы, возбуждающие контролируе-
мый процесс, и просто компоненты вектора состояния. Так происходит
при цветных шумах наблюдения, преобразуемых в компоненты вектора
состояния с помощью формирующего фильтра.
Действительно, пусть первоначально вектор наблюдения имеет впд
2 = ^С1) (жц>)
где -т(|)—вектор состояния исходной модели оцениваемого процесса
^’(|) — /(1)и, О + В(1),
(4.1.1)
Ц[1)(0 = т(2) — цветной шум, удовлетворяющий уравнению формирую-
щего фильтра
Л'(9) = /(2>(ж(2)) + В (2),
где В (2) — белый шум. Тогда путем расширения вектора состояния х =
— (••£(!>, .г(2)) задача преобразуется к виду
ж = /(л-, I/.) + g, z = /г(т), (4.1.2)
где
Лт) (r(i)’ 0 £(i)
А-2)(3’(2)) . 7(2).
/?(.т) = +х(2).
Таким образом, задача преобразована к варианту наблюдения без шумов.
Аналогичные преобразования осуществляются при инерционной измери-
тельной системе, когда вектор наблюдения z(2) подчиняется стохастиче-
скому дифференциальному уравнению
2(2) — /(2)(т(|>, Z(9)) + В(2)> (4.1.3)
где g(2) — белый шум*). Вводя обозначения
ГЛп(ж(1)’ и' О’ f_rw
7(2) (Т(1)’ Ж(2)) . 17(2).
приводим уравнения (4.1.1), (4.1.3) к виду (4.1.2), где
Самыми известными и изученными являются случаи, указанные во
*) Шу'! может быть п цветным, описываемым с помощью форми-
руюгцего (Ьильтра, как в предыдущем случае. Соответствующим расши-
рением пространства состояний задача приводится к той ясе форме.
второй строке табл. 4.1 2, когда вектор наблюдения имеет вид
z = h(z, t) (i)t (4.1.4)
где т](4) чаще всего считается гауссовским белым шумом с известной
матрицей интенсивностей.
Безынерционные математические модели реальных измерителей не-
редко содержат неаддитивные ошибки и шумы:
z = h{z, ц, t).
Это имеет место, в частности, при медленных и быстрых (флуктуацион-
ных) изменениях масштабного коэффициента. Соответствующие вариан-
ты постановки задачи оценивания указаны в третьей строке табл. 4.1.2.
Чаще всего они приводятся к вариантам первой или второй строки пу-
тем расширения пространства состояний.
В нижней строке табл. 4.1.2 указаны варианты, при которых стати-
стические характеристики шумов наблюдения неизвестны. Это требует,
как правило, применения адаптивных алгоритмов оценивания. Варианты
постановки задачи оценивания, сочетающие четыре указанных в табл.
4.1.1, 4.1.2 классификационных признака, обозначаются индексом с че-
тырьмя цифрами, расположенными в порядке номеров признаков. Так,
вариант 1.1.1.1 означает, что математической моделью оцениваемого про-
цесса служит заданная функция времени с неизвестными параметрами
и осуществляется мгновенное полнокомпопептное абсолютно точное из-
мерение. Индекс 22.2.2 соответствует варианту, когда оценивается реше-
ние детерминированного дифференциального уравнения с неизвестным
начальным условием, имеет место полная наблюдаемость и в течение
конечного интервала времени измеряется функция наблюдения вместе
с аддитивным шумом, имеющим известные статистические характери-
стики. Индекс 3.2.2.3 означает, что оценивается стохастический процесс
типа (1.2.5), возбуждаемый шумом с заданными статистическими харак-
теристиками, имеет место полная наблюдаемость, измеряется функция
наблюдения вместе с аддитивным шумом с известными статистическими
характеристиками и время наблюдения неограниченно велико.
Конечно, указанные признаки и приведенная классификация нс ис-
черпывают всех вариантов задач оценивания даже в классе непрерывных
процессов. Существуют дополнительные признаки и варианты. Частично
они будут рассмотрены в дальнейшем изложении.
4.1.2. Дискретные процессы. При рассмотрении пространств состоя-
ний в гл. 1 указывалось па дискретность процессов во времени и по уров-
ню. Многомерные и одномерные дискретные процессы можно разделить
па три класса:
а — дискретный во времени, непрерывный по уровню;
б — непрерывный во времени, дискретный по уровню;
в — дискретный во времени и по уровню.
Копечпо, для многомерных процессов могут иметь место промежуточ-
ные классы, в которых одна группа компонент изменяется во времени
или по уровню непрерывно, а другая дискретно.
Дискретные процессы, как и непрерывные, могут быть детермштиро-
ваппыми и стохастическими.
Математической моделью стохастического процесса класса а являет-
ся последовательность Маркова (ПМ). Допустим, что векторная случай-
ная величина в дискретные последовательные моменты времени обозна-
чена через х[7с], к = 0, 1, 2, ... Каждый из векторов имеет непрерывное
распределение вероятностей и непрерывным является совместное распре-
деление вероятностей
р[.г[7с], х [А: — 1], ..., т[0]].
Последовательность х [0], х[1], ..., т[7с], ... является белой, если распре-
деление вероятностей х[к] пе зависит от предшествующих членов по-
следовательности, т. е.
р[.г[/с]|х[/с — 1], .... х[0]] = р[.т[7с]]. (4.1.5)
Последовательность х [0], .г[1], ..., т [7г], ... называется марковской (или
простой марковской), если распределение вероятностей каждого члена
последовательности зависит только от значения предшествующего члена,
т. е.
р[ж[7г] |ж[Л — 1], ..., х[0]] = р[х[7с] ]х[к — 1]]. (4.1.6)
Вероятность (4.1.6) можно рассматривать как вероятность перехода
из состояния х[к — 1] в состояние х[Л-]. Для марковской последователь-
ности вероятность перехода зависит только от пары состояний, между
которыми осуществляется переход.
Если ю[0], ^[1], ..., w [7г], ...— белая последовательность, то после-
довательность, определяемая разностным уравнением
,z[7c-f-l] =/[x[7t], (y[7i], 7с], (4-1-7)
где f — заданная непрерывная функция, а начальное распределение
р[г[0]] непрерывно, является марковской последовательностью.
Цепь Маркова (ЦМ) отличается от марковской последовательности
только тем, что каждый из векторов х[7с], к — 0, 1, 2, ..., может прини-
мать лишь дискретное множество значений. Элементы этого множества
можно обозначать x(v)[7c], где v — целое число, принимающее значение
из заданного множества целых чисел. Распределения вероятностей для
марковских цепей являются дискретными. Вероятность перехода из сос-
тояния я<|О[7с — 1] в состояние x‘v> [7с] характеризуется матрицей вероят-
ностей перехода p[.r(,v>[7c] |ж<ю[к — 1]].
ЦМ может генерироваться разностным уравнением типа (4.1.7), где
/— разрывная функция, принимающая лишь дискретные значения. Фи-
зическим примером генератора сигнала в форме скалярной марковской
цепи является преобразователь аналог — цифра, на вход которого пода-
ется марковская последовательность.
Классификация задач оценивания дискретных динамических процес-
сов может быть построена почти так же, как для непрерывных процес-
сов (см. табл. 4.1.1, 4.1.2). Разумеется, предполагается, что для процессов
с дискретным временем измерения производятся в дискретные моменты
времени, а шумы представляют собой последовательности случайных ве-
личин.
Отличие классификации задач оценивания дискретных процессов за-
ключается главным образом в признаке 7 (первая колонка табл. 4.1.1),
т. е. в математической модели оцениваемого процесса. В соответствии с
этим для задач оценивания дискретных процессов классификация по
первым двум признакам может быть представлена табл. 4.1.3. В свете
Таблица 4.1.3
Варианты постановок задач оценивания для дискретных конечномерных
динамических процессов
Признак 1 Вид математической модели оцениваемого процесса Признак 2 Характер наблюдения, степень наблюдаемости и помер варианта
содержательная формулировка номер случая полнокомпо- нентное измерение полная на- блюдаемость неполная на- блюдаемость
1 2 3
Детерминированное раз- ностное уравнение с не- известными начальными условиями 1 1.1 1.2 1.3
Стохастическое разност- ное уравнение с заданны- JWH статистическими ха- рактеристиками шума или марковская последо- вательность (цепь) с за- данны ми вероятностями переходов 2 2.1 2.2 2.3
Стохастическое разност- ное уравнение с неиз- вестными статистически- ми характеристиками шума 3 3.1 3.2 3.3
Марковская последова- тельность (цепь) с неиз- вестп ы ми вероятностя- ми переходов 4 4.1 4.2 4.3
Математическая модель оцениваемого дискретно- го процесса неизвестна, кроме, быть может, вре- менных и амплитудных интервалов, разделяю- щих дискреты 5 5.1 5.2 5.3
изложенного выше эта таблица но требует специальных пояснений. Опа
должна рассматриваться совместпо с классификационными признаками,
аналогичными приведенным в табл. 4.1.2. .
4.1.3. Оценивание полем. Хеория процессов управления системами с
распределенными параметрами пе входит в содержание данного справоч-
ника. Однако оценивание полей представляет столь специфичную и
вместе с тем столь близкую к оцениванию динамических процессов про-
блему, что целесообразно дать ее краткое описание.
Рассматривается оценивание стационарных полей, постоянных во
времени. На практике встречаются в основном двумерные (поверхност-
ные) и трехмерные (пространственные) поля [4.9]. Примером поверхно-
стного поля может служить распределение яркости в каком-либо плос-
ком изображении. Примерами трехмерных полей являются магнитное по-
ле, поле температур в объеме какого-либо тела.
Поле характеризуется интенсивностью как функцией координат (двух
координат для поверхностного поля и трех координат для пространствен-
ного поля). Эта функция h(x) в практических задачах носит весьма
сложный характер н априори неизвестна.
Первым классификационным признаком задач оценивания полей яв-
ляется характер поля (табл. 4.1.4). В первой колонке таблицы указаны
шесть цлассов полей:
1. Гладкое поверхностное поле, для которого существуют частные
производные dh/dx^, dh/dx?. Примером может служить, например, поло
рельефа в слабопересечепной местности со сглаженными особенностями
рельефа.
2. Негладкое поверхностное поле, примером которого является рель-
еф пересеченной местности.
3. Разрывное поверхностное поле, примером которого может служить
радиотспловое поле местности, изобилующей водоемами.
4. Потенциальное поле, подчиненное уравнению Лапласа в «свобод-
ном пространстве» и имеющее граничное условие в виде неизвестного
распределения потенциала или его производных па заданной базовой по-
верхности. Задача заключается в оценивании именно этого распределе-
ния. Примерами могут служить аномальное магнитное и аномальное гра-
витационное поле Земли.
5. Пространственные поля, подчиненные другим известным уравнени-
ям в частных производных (папример, уравнению Пуассона, уравнению
теплопроводности и др.) с неизвестным распределением па заданной ба-
зовой поверхности.
б. Пространственное поле с неизвестным математическим описанием.
Примерами могут служить распределения удельной электропроводности,
удельной плотности в земной коре.
Вт орым классификационным признаком в табл. 4.1.4 служит характер
наблюдения.
Характерным для оценивания полей является распределенность или
размытость наблюдения. Для поверхностных полей распределенность на-
блюдения вызывается ограниченной угловой разрешающей способностью
аппаратуры наблюдения. Эта разрешающая способность зависит от диа-
пазона элецтромагпитпых волн, в котором наблюдается поверхностное по-
ле, и максимальна для аппаратуры оптического диапазона.
Самым распространенным способом описания размытости или рас-
пределенности наблюдения является применение интегрального операто-
ра вида
z = j g (z, z') h (ж') dz' + ip
G
(4.1.8)
Здесь x' — вектор, характеризующий положение точки па базовой поверх-
ности; h (.-с') — интенсивность поля па этой поверхности; g(z, z') —«диа-
грамма направленности» аппаратуры наблюдения; G — «пятно» или
Таблица 4.1.4
Варианты постановки задачи оценивания полей
Признак 1 Виц математической модели оцениваемого ируцссса Признак S Характер наблюдения и номер варианта
содержательная формулировка номер случая измерение в точке измерение вдоль ЛИНИН измерение в кадре
1 2 .3
Гладкое поверхностное поле (существует й/г/дж) 1 1.1 1.2 1.3
Негладкое поверхностное тюле 2 2.1 2.2 2.3
Разрывное поверхност- ное поле 3 3.1 3.2 3.3
Потенциальное про- странственное поле, под- чиненное уравнению Ла- пласа с неизвестным рас- пределением на гранич- ной поверхности 4 4.1 4.2 4.3
Пространственные поля, подчиненные другим из- вестным уравнениям в частных производных с п епзвсстным расп реде- лсинем на граничной по- верх пости 5 5.1 5.2 5.3
Пространственное ноле с н е из вести ы м ыатематп - чсскнм описанием 6 6.1 6.2 6.3
«след» диаграммы направленности на базовой поверхности (т. е. область
па этой поверхности, в пределах которой g(x, z') =1-0 при фиксирован-
ном ж); т) — аддитивный шум наблюдения.
Различают (см. табл. 4.1.4 и рис. 4.1.1) наблюдение или измерение в
«точке», вдоль «линии» и в «кадре». При скалярпой функции g(z, :с}
выражение (4.1.8) соответствует наблюдению или зондированию в точ-
ко. Функция g(x, х') обычно имеет максимум мри х = х' и убывает мо-
нотонно юш колебательно при увеличении нормы ||ж — х'||.
Вектор х, соответствующий текущему положению аппаратуры наблю-
дения в отображении на базовую поверхность, может быть известной
функцией времени, т. е. точка наблюдения может двигаться заданным об-
разом в пространстве. Зондирование в точке иллюстрирует рпс. 4.1.1, а.
Гис. 4.1.1. Различные варианты зондирования поля: а — в точке; б —
вдоль линии; в— в кадре
Оценивание поля производится в полосе, описываемой «пятном» при
движении .'<(/). Для поверхностных полей эта полоса может быть очень
узкой. Для пространственных потенциальных полей интегральный член
в (4.1.8) соответствует интегралу Пуассона [4.10] и распространяется,
строго говоря,- па- всю базовую поверхность. Однако при численных рас-
четах линейный размер области G выбирается равным нескольким высо-
там съемки или меньше.
Таким образом, хотя при потенциальных пространственных полях
измерение интенсивности поля производится действительно в точке трех-
мерного пространства, наблюдается некоторое распределение, сглаженное
в широкой области па базовой поверхности.
Если функция g(x, х’) является векторной и имеет компоненты, об-
разующие цепочку пятен (рис. 4.1.1, б), то это соответствует наблюде-
нию вдоль липни. Здесь измерение одновременно ведется по одномер-
ному множеству параллельных каналов, сдвинутых друг относительно
друга, например, перпендикулярно направлению движения ,т(1).
Если функция g(x, х') является матричной и имеет элементы, обра-
зующие кадр (рис. 4.1.1, в), то имеем наблюдение в кадре. Здесь из-
мерение осуществляется одновременно ио двумерному множеству парал-
лельных каналов, сдвинутых друг относительно друга в пространстве.
Возможны п промежуточные варианты, по указанные в строках
табл. 4.1.1. Так, возможно одновременное наблюдение и нескольких точ-
ках, расположенных не па одной прямой, наблюдение вдоль нескольких
прямых и даже в нескольких кадрах. Возможно быстрое сканирова-
ние, которое при безынерционном капало наблюден ня практически экви-
валентно многоканальному наблюдению (вторая и третья колонки
табл. 4.1.4).
В принципе сканирование может быть учтено в программном движе-
нии я(1). Итак, указанная постановка задачи оценивания поля опирается
на два выражения
= О, z — I g [ж (Z), я'] h (.r') dx' -J- 1] (t)- (4.1.9)
dt J
Возможно применение дополнительных классификационных признаков
для вариантов задач оценивания поля, связанных с характером шума на-
блюдения i](0, видом функции g и др. Все это указывает на разнообра-
зие возможных постановок задач оценивания полей по результатам раз-
мытых наблюдений.
§ 4.2. Некоторые общие положения прикладной
теории оценивания непрерывных процессов
Прежде чем приступать к изложению конкретных алгоритмов оцени-
вания непрерывных процессов, целесообразно привести некоторые общие
положения и понятия прикладной теории оценивания. Эти положения
помогают не только построить удобные в практическом применении ал-
горитмы, по и пояснить логику их получения и функционирования.
4.2.1. Условия, благоприятствующие точному оцениванию. При выбо-
ре датчиков измерительных систем и алгоритмов оценивания для поста-
новок задач, указанных во второй и третьей колонках табл. 4.1.1, боль-
шое значение имеет специальный вид наблюдаемости. Его можно назвать
условием, благоприятствующим точному оцениванию [4.11]. При выпол-
нении этого условия неограниченное повышение точности измерения не-
скольких скалярных величин h\(xt), (•'<;), ... или даже одной-единст-
веппой величины Л](ж(), зависящих от текущего п-мерпого вектора со-
стояния xi = x(Z) оцениваемого процесса, создаст по крайней мере прин-
ципиальную возможность сколь угодно точного оценивания всех компо-
нент xt, если измерение осуществляется па конечном или бесконечном
интервале времени.
Рассмотрим основную для непрерывных процессов постановку задачи
оценивания 3.2.2.2 (см. табл. 4.1.1, 4.1.2). Задано стохастическое уравнение
процесса в форме Ланжевепа
= /(*<) + £ (4.2.1)
и функция наблюдения
z = й(Х() + ц, (4.2.2)
где.теК"; у — дифференцируемая функция; Л(х()—непрерывная
функция; £ = £(z), т] = i](z) —независимые гауссовские случайные про-
цессы типа белого шума с корреляционными матрицами
E[U0£T(«')] E[n(/)r]T(i')] = —О-
Пусть наблюдение (4.2.2) осуществляется па интервале времени [0, Z]
и множество значений на этом интервале обозначается Z. Уравнение
Стратоповича (1.2.1G), описывающее апостериорную или условную плот-
гость вероятности р ~ р (я | Z) в пространстве состояний, будет иметь
вид
п , v п 2
+2 “ 4- ,2 ('а ” 1‘(I,) ~т‘W1 ’R” “ ~s и|”
= p[h (xi) — М'гл-1 lk (xt) — ?Ч + p P(xi) — /qT«-1 *), (4.2.3)
где
CO
h = C h (xr) p (x’ | Z) dx’
— оценка функции наблюдения h(x}.
Уравнение (4.2.3) является стохастическим и апостериорная плот-
ность распределения р = p(x.|Z) имеет случайную составляющую. Одна-
ко по смыслу задачи о точном оценивании мы должны рассматривать
асимптотическое решение при R—>-0, ц->-0 (по интенсивности). Очевид-
но, в этих условиях основной будет регулярная составляющая p(x[Z).
Зададим какую-либо достаточно большую одпосвязпую область Gp в про-
странстве R'1, например, шар достаточно большого радиуса с центром в
начале координат. Допустим, что начальное распределение ро(х) скон-
центрировано в этой области в том смысле, что иптсграл от ро(х) по
всему внешнему к Gp пространству бесконечно мал. Подобное же пред-
положение сделаем относительно апостериорной плотности вероятности
p(x[Z). Бесконечно малыми считаются п величины
1’
X,
, Xn)
x.
Здесь индекс (—i) означает, что интегрирование ведется по всем коор-
динатам пространства состояний, кроме xi. Аналогично индекс (—I— j)
означает, что интегрирование ведется по всем координатам, кроме х{, х}.
Вследствие подобного исчезновения па бесконечности имеет место соот-
ношение
д (Ph) 1
П
„2
, д Р
И дх-дх
dx = e,
(4.2.4)
где s — бесконечно малая величина. Из (4.2.3), (4.2.4) следует (построе-
лия носят характер иллюстраций, а не строгих доказательств):
ОО 00
h dx + e.
(4.2.5)
Но условию h(x) —непрерывная функция, а
ОО
р (х1 Z) О 0, р (х | Z) dx = 1.
— со
Ла основании теоремы о среднем
оо
k - j h (л;') р (х' | Z) dx' — h (х), (4.2.6)
— оо
где х— некоторое значение х в области Gp, которое будем называть оцен-
кой х.
Пусть R = кг, где. к — положительное число, по условию стремящее-
ся к пулю; г—положительно-определенная матрица. Из (4.2.5), (4.2.6)
и указанного выражения для R следует
ОО
р (х | Z) [7г (х^ — h (х)]тг-1 [7г (х() — h (х)] dx =
— СО
= Еу ([h (?) — /г (X()JTr-’ п] + ке, (4.2.7)
где Еу —условное математическое ожидание выражения в скобках.
При т)->0 правая часть (4.2.7) стремится к пулю и, стало быть.
Еу{[Л(х() — 7г(х)]гг-’[7г(;г() — 7г (х) ]}->-0.
(4.2.8)
Условие, благоприятствующее точному оцениванию, заключается в том,
что в процессе оценивания движения xt равенство /г(х) = h(xt) выпол-
няется тождественно только при "ж = xt.
Действительно, пз (4.2.8) вытекает, что h (х) -> h(xt) и при выпол-
нении условия, благоприятствующего точному оцениванию, х->х(.
4.2.1.1°. Частный вид условия, благоприятствующего точному оцепи-
иапию в метрическом пространстве состояний. Допустим, что в каче-
стве скалярной функции наблюдения в метрическом пространстве состо-
яний выбрано расстояние до начала координат. По определению рассто-
яния в метрическом пространстве
р(г(, 0) — р(х, 0) sg р(х(, х)
или
р(х(, 0) — р(х, 0) = 5р(х(, х),
где 9 = 0, только если точки xt, х находятся па одной сфере с центром
в начале координат. Отсюда вытекает: при наблюдении расстояния до на-
чала координат в метрическом пространстве состояний условие, благопри-
ятствующее точному оцениванию, выполняется, если в процессе оцени-
вания точки х, xi пе находятся все время на одной сфере.
Избежать тождественного выполнения равенства р(я(,' 0) = р(х, 0)
при ж; =т^ х можно как за счет организации процесса оценивания. тан и
за счет выбора оцениваемого процесса.
4.2.1.2е. Локальное условие, благоприятствующее точному оценива-
нию, при дифференцируемой функции h. Пусть k(z)—дифференцируе-
мая функция и ошибки оценивания настолько малы, что можно принять
dh (ж)
h (ж ) — k (ж) = —Ах, (4.2.9)
' ' дх
где Дх =-г-( — х. Если столбцы матрицы Якоби dhldx линейно независи-
мы, то выражение (4.2.9) тождественно равно пулю только при Дж = 0.
Таким образом, локальное условие в виде линейной независимости столб-
цов матрицы dhldx, благоприятствующее точному оцениванию [4.9], по-
лучается как частный случай из более общего условия (4.2.8).
4.2.1.3е. Локальное условие полной наблюдаемости и локальное усло-
вие, благоприятствующее точному оцениванию. Локальное условие пол-
ной наблюдаемости (2.1.8)
где все элементы вычисляются па х — x(l) = z(, также благоприятству-
ет оцениванию. Ио, как видно на примере, когда размерность h равна п,
оно является более слабым условием, чем локальное условие п. 4.2.1.2е.
4.2.1.4е. Случай, при котором условие, благоприятствующее точному
оцениванию, заведомо пе выполняется. Очевидно, что условие (4.2.9) мо-
жет выполняться лишь тогда, когда функция h зависит от всех компо-
нент вектора состояния. Если опа зависит лишь от части компонент (суб-
вектора состояния), то можно говорить об условии, благоприятствую-
щем точному оцениванию этого субвектора состояния. Так, при наличии
инерционных датчиков (случай (4.1.3)) функция h зависит лишь от суб-
вектора z.i) и условие, благоприятствующее точному оцениванию полно-
го вектора состояния, здесь заведомо ire выполняется. Условие точного
оценивания субвектора ж(г) здесь выполняется и является тривиальным
(субвектор ж(2) при указанном в п. 4.1.1 расширении пространства состо-
яний измеряется непосредственно и абсолютно точно).
4.2.2. Распределение информации. Оптимальные и многие субопти-
мальпые алгоритмы оценивания многомерных мпогосвязпых процессов
отличаются высокой сложностью даже под углом зрения бурного прогрес-
са вычислительной техники. Поэтому много усилий направлено па упро-
щение алгоритмов. В ряде случаев такое упрощение с .одновременным
снижением объема необходимой априорной информации об уравнениях
эцениваемого процесса может быть достигнуто рациональным распреде-
лением информации между вектором наблюдения и вектором, играющим
роль управления в оцениваемом процессе [4.9]. Речь идет О следующем.
Пусть векторное .наблюдение разбито па два субвектора, т. с. вместо
выражения z = h(x, и, t) +1] записаны два выражения
z<i) = и, t) + т](1)1 (4.2.10)
z(2) = Л(2)(ж, ll, t) + T](2). (4.2.11)
Субвектор z(2) по-прежнему рассматривается как вектор наблюдения,
а уравнение (4.2.10) используется для упрощения уравнения оценивае-
мого процесса х = f (х, и, t) + g.
То, в каком смысле желательно осуществлять упрощение уравнения
оцениваемого процесса, видно из приводимых ниже алгоритмов оценива-
ния. В общем можно сказать, что желательно увеличение числа пулевых
элементов матрицы Якоби df/dx путем исключения части аргументов
функции { за счет соотношении (4.2.10), рассматриваемых как уравнения
относительно компонент вектора х. Самым наглядным является следую-
щий случаи. Пусть из х выделяется субвсктор .г„), имеющий ту же раз-
мерность, что н z( 1), и удовлетворяющим уравнению
Я(1) = /(П)(х, u, t) + /(12)(я, и, t) + ^(i), (4.2.12)
причем /(II)(х, и, t) совпадает с й1п(х, и, t), т. е. непосредственно измеря-
ется при наблюдении (4.2.10). Тогда (4.2.12) преобразуется к виду
•Т(1) = 2(1) + /(12) (ж, U, /)+В(1) -Т](1). (4.2.13)
Наибольший вычислительный выигрыш при реализации оценивания
получается в случае, когда /о2) вообще отсутствует, т. е. непосредственно
измеряется часть функции /,(х, и, I) в правой части исходных уравнений
оцениваемого процесса. Данный подход дает существенный положитель-
ный эффект также в том случае, когда вид пли параметры (в обозначе-
нии функции эти параметры пе указаны) /(и)(х, и, t) априори неиз-
вестны,
4.2.3. Критерии оптимизации оценивания. Существуют два класса
критериев оптимизации процессов оценивания, в некоторых случаях
сливающиеся друг с другом в смысле конечных результатов. Это кри-
терии, непосредственно выражаемые через апостериорную вероятность,
и функционалы ошибок оценивания или невязок.
4.2.3.!°. Критерий максимума апостериорной вероятности. В качестве
оценки вектора состояния естественно принять значение х, при котором
условная плотность вероятности p(x[Z) имеет максимальное значение.
Это записывается в виде
тмА. в = аг° п1ах <-r I (4.2.14)
эс
а критерий max р (,r|Z) называется критерием максимума апостериорной
вероятности (МЛВ). Па примере критерия МЛВ можно убедиться, на-
сколько пе прост вопрос выбора критерия оптимизации в общих слу-
чаях и как критерий, очевидно эффективный в одпих условиях, стано-
вится неэффективным в других.
Апостериорная плотность вероятности, полученная для наблюдения,
загрязненного шумами, является случайной функцией х (случайным по-
леи относительно х) при конечном времени паолтодония. Сложный вид
функции p(x\Z) может быть обусловлен как этим обстоятельством, так
Рис. 4.2.1. Иллюстрация условных распределений p(x[Z) разной степени
сложности: а—одномодальпое; б—двухмодальное; в—четырехмодальиое
и нелинейностью оцениваемых процессов или условий наблюдения, слож-
ным характером начального распределения вероятностей.
Рис. 4.2.1 иллюстрирует возможность существования условных рас-
пределений плотности вероятности, создающих разные степени сложно-
стп решения задачи опеиивания по критерию МАВ. Здесь изображены
линии равного уровня р(хь a?2]Z) для двумерного случая (плоскости со-
стояний). Для одпомодальиого распределения критерий МАВ даст одно-
значное решение х — (жи х2). Для двухмодального распределения даже
при разной величине максимумов (рис, 4.2.1, 6) определение величины
(4.2.14) представляет определенную трудность, так как, папример, гради-
ентные методы здесь могут сходиться к ложному (пе наибольшему) мак-
симуму. Тем более затруднительно применение, критерия МАВ при много-
модальном распределении с наличном одинаковых по величине экстрему-
мов (рис. 4.2.1, в).
Трудности применения критерия МАВ исчезают при стремлении
распределения к нормальному и при неограниченной концентрации рас-
пределения, т. е. наличия стохастической устойчивости в смысле § 3.1
по отношению к апостериорной плотности вероятности. В последнем слу-
чае, хотя p(x|Z) может иметь бесконечное множество экстремумов, все
они концентрируются в сколь угодно малой окрестности точки х, кото-
рую можно принять за опенку.
4.2.3.2е. Критерий максимума правдоподобия. Кроме условной плот-
ности вероятностей p(x)Z) можно рассматривать функцию p(Zjx), ко-
торая выражает условную плотность вероятности множества измерений
при фиксированном х. Критерий максимума правдоподобий/ (МП) соот-
ветствует максимуму p(Z[x) но х. Соответствующая МП оценка выража-
ется формулой
®МП = ar£ max Р I *)• (4.2.15)
X
Между критериями МАВ и МП п оценками (4.2.14), (4.2.15) существует
тесная связь, вытекающая из формулы Байеса:
p(x\Z)p(Z) = p(Z\x)p(x). (4.2.10)
При этом для точно известных распределений критерий МАВ «лучше»
критерия МП, так кац содержит больше информации об х [4.12]. Однако
в условиях неопределенности положение может меняться па обратное.
Для гладких распределений из (4.2.16) следует
flpJHZ) р (7} = ДМ2|г) р (г) р (Z ] х) дрМ
дх дх дх
(4.2.17)
Для тацпх распределений необходимое условно МАВ имеет вид
ГДд (х | Z)
I дх
(4.2.18)
- =0.
|х=*МАВ
При этом согласно (4.2.17)
ГД In р (Z | ,т)
дх
ЖМАВ I
При выполнении необходимого условия МП:
ГДр (Z | ж)
I дх
д In Р (г)’
х=К1ИАВ
(4.2.19)
~ =0.
Р=*’МП
(4.2.20)
Из (4.2.17), (4.2.16) следует
[Д In р (г | Z)1 [д In р (г)1
[ " 1*=^ М|,= L Ь=*МГ(’ (4‘2,21)
4.2.3.3е. Условные моменты. Для нелинейных стохастических процес-
сов высокой размерности точное определение многомерных распределе-
ний представляет исключительные трудности. Дело ие только в вычисли-
тельных трудностях соответствующих численных методов, но и в отсут-
ствии достоверной информации о начальных распределениях и распре-
делениях шумов. За исключением задач статистической физики и неко-
торых других естественнонаучных задач, объем статистияеекой инфор-
мации и физико-технических обоснований всегда оказывается недостаточ-
ным для достоверного определения многомерных распределений. Поэтому
многомерные распределения вероятностей чаше всего фигурируют как ма-
тематический инструмент, служащий для получения алгоритмов оцени-
вания па более доступном языке таких величии, как математические
ожидания координат, вторые моменты и др.
4.2.3.4°. Условное математическое ожидание. В качестве оценки х' век-
тора состояния х естественно принять условное математическое ожи-
дание
ОО
х = Еу [г] = J хр (х I Z) dx. (4.2.22)
— ОО
Вследствие только что указанных причин желательно вычислять х не
через p(x[Z), а посредством алгоритмов, содержащих математические
ожидания (МО).
4.2.3.5е. Несмещенные оценки. Оценка х при паличпи щумов измере-
ния и шумов, возбуждающих оцениваемый процесс, всегда является слу-
чайной величиной (случайной функцией времени). Обычно желательной
считается несмещенность оценки, т. е. равенство се математического
ожидания математическому ожиданию истинной величины
ЕЙ=Е[г]. (4.2.23)
4.2.3.6е. Квадратичные критерии. Квадратичные критерии являются
самым распространенным традиционным инструментом синтеза алгорит-
мов обработки результатов наблюдений, в том числе метода наименьших
квадратов (МИК). Для линейных процессов и линейных условий наблю-
дения
z = Их + ц, (4.2.24)
где т) = т)(0—гауссовский процесс тина белого шума*), существует
определенная эквивалентность методов МП, МАВ п МИК, Так, для про-
цессов, соответствующих линейному детерминированному .уравнению
х = А(1)х
) «Практически белый шум», см. и. 1.2.4.
и наблюдению (4.2.2), где II = //(<), оптимизация оценивания по методу
МП эквивалентна [4.12] МНК с квадратичным функционалом невязок
измерений
t
J [z (т) — II (т) х (т)]т7?—1 [z (т) — II (т) х (т)] clx, (4.2.25)
‘о
где [Zc, Z] — интервал наблюдения; R — матрица интенсивностей вектор-
ного белого шума.
Для тех же условий оптимизация оценивания по методу МЛВ экви-
валентна МНК с цвадратичным функционалом невязок измерений и квад-
ратичной функцией ошибки оценивания [4.12]
t
1 Дхт (Zo) р-’Д-т (Zo) + С [Z (т) - II (х^х (Т)]^-1 [Z (Т) - II (т) X (Т)| dx,
(4.2.26)
где Дх = х — х — ошибка оценивания; Р = Е [Дх Дхт] — ковариационная
матрица ошибки оценивания.
4.2.3.7е. Критерии оптимизации, обеспечивающие помехозащищен-
ность по отношению к выбросам. В элементарной теории ошибок рекомен-
дуется отбрасывать «выпавшпе» точки. Давно замечено, что если даже ос-
новное распределение ошибок является строго нормальным, то возможны
сбои, отказы системы, и результирующее распределение отлично от нор-
мального, причем имеет более интенсивные «тяжелые» хвосты, чем ос-
новное. Пусть измерительная система имеет в исправном состоянии, веро-
ятность которого Pq. соответствующую плотность распределения измере-
ний po(z). В результате различных отказов эта же система может при-
нимать ./V состояний с вероятностями Pv п распределениями pv(s),
Л'
2 Pv = l. Тогда результирующее распределение выразится формулой
т.-_о
p(z) = У PvPv (z)- (4.2.27)
v=o
Нередко рассматривают только одно «аварийное» состояние с вероятно-
стью Pi = е, Z’o = 1 — е. Тогда
p(z) = (1 —e)po(z) +epi(z) (4.2.28)
и говорят о «е-загрязиснии» распределения ро(з) [4.13].
С другой стороны, как уже отмечалось, экспериментальное и теорети-
ческое определение мпогомерпых распределений вероятностей во многих
случаях составляет весьма трудную, практически неразрешимую задачу.
Все это вызывает значительное внимание к задачам оценивания в
условиях неполной начальной статистической информации о помехах
(см. табл. 4.1.1, 4,1.2). Самым перспективным направлением решения
указанных задач являются адаптивные алгоритмы оценивания. Однако
существуют Солсе простые алгоритмы оцеппвапия, малочувствительные
к определенным нарушениям априорных распределении.
В зарубежных [4.18, 4.19] и некоторых отечественных публикациях
[4.16] соответствующие алгоритмы именуются робастными. Однако, учи-
тывая общую перегруженность теории управления маловыразительными
терминами иностранного происхождения, вряд ли можно признать целе-
сообразным распространение этого названия. Термин «грубые» системы
и алгоритмы, широко распространенный в отечественной литературе, так-
же не вполне подходит, так как обозначает более широкое понятие слабой
чувствительности не только к распределению шумов, но и изменению па-
раметров, характеристик самой системы. Поэтому, не вводя специально-
го термина, будем говорить о системах и алгоритмах, обладающих пони-
женной чувствительностью к распределениям шумов. Частным видом
таких систем являются системы, помсхозащищеппыс по отношению к вы-
бросам (сбоям) источников текущей информации.
Обширная библиография в области математической статистики, ка-
сающейся указанного вопроса, приведена в [4.13]. В области оценивания
и идентификации в современной постановке внимание к данной проблеме
было привлечено работами [4.14, £15, 4.17]. Для непрерывных процессов
задача может рассматриваться в следующей постановке. Задан класс
распределения шума ц(г). Требуется указать вид подынтегральной функ-
ции певязкн функционала
J F [z — h (2)] dx, (4.2.29)
минимизация которого обеспечивает паилучшую в определенном смысле
оценку. При этом удобнее рассматривать не функцию F, а
ф(2)=^М (4230)
Некоторые из результатов [4.14—4.19] приведены в табл. 4.2.1. Хотя эти
результаты относятся к простейшему скалярному (и притом дискретному
во времени) случаю оценивания постоянной величины, опи имеют более
общее значение. Слева в табл. 4.2.1 указан класс распределений, а спра-
ва— график функции (4.2.30), гарантирующей наплучшую точность оце-
нивания в минимаксном смысле (минимальные ошибки в наиболее небла-
гоприятной ситуации).
Как видно, для распределений с ограниченными средними квадрата-
ми (других оргаиичений пет) оптимальной является линейная функция
ф и, стало быть, квадратичный фупцциопал (вторая строка табл. 4.2.1).
Во всех остальных случаях ф(х) существенно нелинейна или «линейна с
насыщением», как в случае «загрязненного» распределения 3 табл. 4.2.1.
Соответственно наилучшими в минимаксном смысле здесь являются пе-
квадратичные функционалы.
Другой подход к построению алгоритмов многомерного оцеппвапия,
Помехозащнщенпых по отношению к отказам датчиков, описан в п. 4.3 5.
Т а б л и ц а 4.3.1
Классы распределений шумов и производная подынтегральной функции
минимизируемого функционала
4.2.3.80. Использование априорной информации. Любой алгоритм оце-
нивания, претендующий па оптимальность, должен полностью использо-
вать имеющуюся априорную информацию. Наиболее полная информация
об оцениваемом процессе содержится в математической модели этого
процесса. Это наводит па мысль, что оптимальный алгоритм оценивания
должен в том или ином виде содержать математическую модель оценива-
емого процесса. Приводимые в § 4.3 оптимальные и субоптимальные
алгоритмы оценивания и соответствующие структурные схемы подтверж-
дают эту закономерность. Уместно заметить, что задолго до открытия
фильтра Калмана — Бьюсн (ФКБ) в отечественных работах указывалось
па целесообразность применения систем фильтрации, построенных на ос-
нове математической модели оцениваемого процесса, охваченной обратной
связью, и предлагались адаптивные поисковые варианты таких систем
[4.20]. Далее описывается один из вариантов.
§ 4.3. Алгоритмы оценивания непрерывных процессов
11 Гнело опубликованных алгоритмов оценивания весьма велико. Здесь
приводится лишь небольшая часть алгоритмов оценивания непрерывных
процессов, по-видимому, наиболее важная с точки зрения практического
применения. Изложение строится следующим образом. Сначала приводят-
ся общие выражения, которые сами по себе еще не являются алгоритма-
ми, по могут быть использованы для получения алгоритмов оценивания
непрерывных марковских процессов. Далее следует изложение субопти-
мальных алгоритмов оценивания нелинейных непрерывных марковских
процессов. Здесь охвачены далеко пе все варианты задач, указанных в
табл. 4.1.1, 4.1.2. Это обусловлено, с одной стороны, отсутствием практиче-
ски эффективных решений ряда указанных задач, а с другой стороны тем,
что адаптивное оценивание освещается также в других главах справоч-
ника.
4.3.1. Общие выражения. Условная плотность вероятности p(x|Z) для
наблюдаемого процесса (1.2.7), (1.2.14)
•т< = /(*t, 0 + В(0, z = k(xt, I) + ц((), (4.3.1)
Е[В(0Г(О] = Е [!](«) nT(t')] = W-П
(g(/), il(0 —некоррелированные ио отношению друг к другу гауссов-
«щие белые шумы) подчиняется уравнению Стратоновича [4.24]
др , У g (р/,)
<Н дх.
i=l 1
где
” 2
1 1
fi ~ j h (.т, t) р (.г | Z) Их,
—оо
(4.3.3)
Уравнение (4.3.2) по может быть решено непосредственно пе только
вследствие вычислительных трудностей, ио и вследствие того, что в лом
фигурирует истинное текущее состояние xt = x(f) оцениваемого процес-
са, которое по условию задачи пе может быть измерено.
Случай, когда h(xt) измеряется без шумов, рассматривается ни-
же. В дальнейшем условное математическое ожидание (УМО) люоой
величины 7 будет обозначаться так:
ОО
у = j" УР (х I 2) dx. (4.3.4)
— ОС
Умножим уравнение (4.3.2) па xt и проинтегрируем по всему про-
странству состояний. Заметим еще раз, что уравнение (4.3.2) является
стохастическим и стохастические интегралы должны пониматься в фор-
ме Стратоповича пли Ито [421] (относительно возможности использо-
вания обычного понятия интеграла для стохастических процессов см.
п. 4.2.5). Выполняя интегрирование по частям в предположении исчезно-
вения в бесконечности р и других величии (см. п. 4.2.1), получаем
ОО оо
x-t— j f j> dx— J x.pptT(xz)—Лт] Я”1 (z— h) dx =
—oo —oo
= [л^/4Т (Z() ---- X JlT] R ’ (z ----- Л),
где символ оценки Л понимается в смысле (4.3.4).
Из (4.3.5) следует
х = / (х, t) + (аАт — х 4Г) Я-1 (z — h).
(4.3.5)
(4.3.С)
Ото известное [4.22—4.24] общее выражение, которому строго удовлетво-
ряют оценки в виде условных математических ожиданий. Однако «точ-
ное» (даже численное) решение соотношения (4.3.6), рассматриваемого
как уравнение относительности х, найти не удается. Действительно, для
точного вычисления xh\ f(x, t), да и h, необходимо вычислить p(xJZ),
что вновь приводит к неразрешимой в общем случае задаче иптегрпрова-'
ния уравнения (4.3.2). Однако па основе (4.3.6) могут быть получены
различные субоптимальпые алгоритмы (см. пн. 4 3.2 и 4.3 3) Посредством
операций, аналогичных примененным при выводе (4.3.6), может быть
получено соотношение для ковариационной матрицы ошибок оценивания
[4.22—4.24]:
i’n=CQi ~ М1) + (Qi~ ?i) + <2-(Q- x (!Q - *j) +
+ (x.x-h — xx-h — x x-h — xjz.li-]-2x,xih\1R~1 (z — h ). (4.3.7)
Заметим, что Q может зависеть от xt. Это, в частности, бывает, когда бе*
лые шумы, возбуждающие оцениваемый процесс, воздействуют через ко-
вффициепты объекта, зависящие от xt. При наличии зависимости Q от
xt вместо Q в уравнении (4.3.7) фигурирует Q.
Соотношение (4.3.7), рассматриваемое как уравнение относительно
Рц, пе может быть точно решено по той же причине, что (4.3.6), но па
его основе могут быть получены приближенные разрешимые уравнения.
Наиболее распространенные общие приемы получения суооптималь-
пых алгоритмов оценивания сводятся к следующему:
разложение нелинейных функций в ряд Тейлора в окрестности оцен-
ки х или некоторого программного (певозмущеппого) движения (при на-
личии такого движения);
другие виды аппроксимации;
применение гауссовского приближения для распределения вероят-
ностей;
замена оценки функции па функцию оценки;
замена среднего по множеству средним по времени [4.25, 4.26].
Кри построении субоптимальных алгоритмов нелинейного оценива-
ния па основе разложения в степенные ряды с сохранением квадратич-
ных (и тем более кубических) членов получаются громоздкие выражения,
для сокращенной записи которых недостаточно широко распространен-
ных матричных обозначении. Поэтому вводятся дополнительные обозна-
чения [4.24, с. 525—527].
Матрицей Гесса скалярной функции <р(х) называется симметричная
матрица
д~<[> <?2ср
дх3
д2([) д2(р
дх1дхп дх2дхп
(4.3.8)
Пусть h (х) — m мерная векторная функция и-мерпого векторного аргу-
мента, а Р — симметричная матрица размера п X п. Тогда через
кхх: Р обозначают m-мерный вектор
(4.3.9)
»\г
dxjdxk
Пусть М — матрица размера m X 7. элементы которой суть функции
п-мериого аргумента х, а Р, как и раньше,— симметричная матрица раз-
мера и X тогда через Мхх: Р обозначают следующую m X Q матрицу:
Мжж: Р =
Ли,,
11 Р,
дх-дх
3j(=l 3
mi p
дх-дх. 3
_ j,ft=l 3 к
9-M^Pjk
дх^хк 3k
д2ь1р.
дх:дх. зк
3 11
(4.3.10)
Совместно с обычными обозначениями матриц Якоби
/ =
дх
<4 дхп
-^1 •"
~dfil Oh^-
*'* дхп
Ohm dhm
_ дх1
(4.3.11)
обозначение (4.3.9) позволяет записать норные три члена ряда Тейлора
векторных функций векторного аргумента в следукиЛыр компактном
виде:
f (z) = /G ) -г fx (?) U — z) ): [(z —z) (z—iz)'r] ‘
(4.3.12)
h (z) = h (x ) hx (x ) (x — x) + 0,5/ixx (z ): [(z — z) (z — z)T] ...
Величина Az = z— x есть текущая ошибка оценивания. Скорость сходи-
мости степенных рядов типа (4.3.12) зависит от соотношения нормы век-
тора Az и области сходимости ряда. Для аналитической функции с ко-
нечной областью сходимости эта область в метрическом пространстве со-
стояний или ее подобласти описываются в виде «шара»:
p(z, z) йС рсх,
где p(z, z)—расстояние между точками х, х в метрическом прост-
ранстве.
Для евклидова пространства удобной формой описания области (под-
области) сходимости является эллипсоид. Величина Az в стохастических
задачах оценивания является случайной функцией времени. Для «хоро-
ших» процессов оценивания она монотонно уменьшается в средпеквадра-
тическом со временем*). Если начальное распределение Az является
нормальным, то оно может характеризоваться эллипсоидом рассеивания.
В упомянутом случае скорость сходимости рядов (4.3.12), и, стало быть,
точность аппроксимации первыми тремя членами ряда (аппроксимация
второго порядка) или первыми двумя членами ряда (линейная аппрокси-
мация, аппроксимация первого порядка) зависят от соотношения эллип-
соида рассеивания величины Az и эллипсоида сходимости.
Допустим, что оценивание является несмещенным, т. с.
ОО
EJy (Az) = j (z — z) p (z | Z) dx = 0.
~ oo
(4.3.13)
*) Монотонно уменьшается во времени средиеквадратнческое значе-
ние величины Az.
Тргда, вычисляя УМО от (4.3.12), получаем
7 (ж) = j f(x) р(х I Z) dx = /(.ж ) + 0,5/хх(ж); Р ..
(4.3.14)
ОО
h (х) — к (х) р (ж | Z) dx = h (х ) + 0,5hxx (х ): Р ,
— оо
где Р = Еу(ДжДжг) — ковариационная матрица ошибки.
Определим приближенно также величину xlp. Используя второе иы-
ражевис (4.3.12), применяя оператор УМО, учитывая (4.3.13) С точностью
до малых третьего порядка, получаем
ж/?’ = j (ж -}- х — х) Ь?' (ж ) + [/гх (х ) (х — ж)]’1" +
—оо
+0,5 [/г^. (ж ); [(ж — ж) (ж —'ж)' ]]т j р (ж | Z) dx -J-
— ж/?' (ж ) + 0,5хР: кхх (ж ) + Ркх (ж) ... (4.3.15)
Из второго выражения (4.3.14) также следует
х к1' = х к' (ж ) + ОД//’: hxx (ж ) + ...
Поэтому
жЛт — ж/i т = Ркх (х) ___ (4.3.16)
.Заметим, что выражение
— ж/?т = Ph? (ж ) (4.3.17)
справедливо С точностью до малых третьего порядка (третьих моментов
компонент Дж),
4.3.2. Субоптимальпые в смысле оценивания УМО алгоритмы второго
порядка. Прежде чем переходить к изложению алгоритмов субоптнмаль-
пого оценивания [4.23, 4.27—4.29] нелинейных процессов, проинтерпрети-
руем условие, благоприятствующее точному оцениванию (4.2.8) для
случая
/г(ж() = h(Xt) + hx(xt)&x + 0,5/<Л1(ж1): Дж Джт. (4.3.18)
Согласно (4.2.8), (4.3.18) условие, благоприятствующее точному оце-
ниванию, нарушается, если в процессе оценивания равенство
Л.,(ж)Дж + 0,5Л.«(ж): Дж Джт = 0 (4.3.19) ’
выполняется тождествеппо при Дж + 0. Это условие является более сла-
бым в сравнении с условием /гх(ж)Дж = О при Дж =+0, сводящимся к
линейной независимости столбцов матрицы /гЛ(ж),
4.3.2.!°. Усеченный фильтр второго порядка. Подставляя выражения
(4.3.14), (4.3.17) в уравнение (4.3.6), получаем так называемый основной
модуль субоптимальпого алгоритма второго порядка в виде
* = /(?, 0 г 0,5/хх (т, /): Р-|-
/) Я-1 [z — h (х, i) — 0,5hxx (х, t); Р]. (4.3.20)
Уравнение (4.3.20) должно решаться при заданном начальном усло-
вии »(/0) = х-о и ковариационной матрице ошибки Р, определяемой из
другого («ковариационного») уравнения (алгоритмического модуля). Этот
модуль может быть получен из общего выражения (4.3.7) путем преоб-
разований, в целом подобных вышеприведенным, по более громоздких.
Он представляет собой матричное дифференциальное стохастическое
уравнение вида *) [4.24, с. 527—531]:
Р = fx (х, О Р + Pfl (х, t) - Phi (х, t) p-lhx (х, t) P + Q —
— 0,5 {P: h'lx(x, t) R-1 [z — h (x, l) — Q,5hxx(x, t): p]) P. (4.3.21)
Здесь P: - транспонированная матрица (4.3.9). Это уравнение ин-
тегрируется совместно с (4.3.20) при начальном условии Р (t0) = Ро-
Алгоритм (4.3.20), (4.3.21), называемый усеченным непрерывным
фильтром второго порядка, предназначен для решения задач оценивания
типа 3.2.2.2, 3.2.2.3, 3.3.2.2, 3.3.2.8 (см. табл. 4.1.1, 4.1.2), т. с. оценивания
процессов, описываемых стохастическими дифференциальными уравнени-
ями с известными интенсивностями шумов при полной или неполной сте-
пени наблюдаемости на конечном или бесконечном интервале времени.
Этот алгоритм может применяться и для оценивания процессов, задан-
ных детерминированными дифференциальными уравнениями при слу-
чайных начальных условиях, т. е. для задач типа 2.2.2.2, 2.2.2.3, 2.3.2:2,
2.3.2.3. В этих случаях матрица Q в уравнении (4.3.21) считается пулевой.
4.3.2.20. Гауссовский фильтр второго порядка. Как указывалось выше,
другим способом получения субоптимальных алгоритмов оцеппвапия яв-
ляется использование для условного распределения вероятностен p(xfZ)
нормального (гауссовского) приближения. Таким путем из (4.3.6), (4.3.7)
получен следующий алгоритм [4.24, с. 527—531]:
х = / (J, 0 + 0,5/хх (.«, i): Р -|-
Рkl (х, t) 7?-1 [z— h (х, t) — 0,5йХ1С {х, t): Р],
* (U = V
р = fx (х, i) Р + РГХ (т, t) - Phi (z, t) РГ\ (x, t) P -I- (? + T
Р(10)~Р0’
(4,3.22)
(4.3.23)
) Q считается не зависящим от x или x.
где
Т--=
11=1 P.«=I
д\, *
• Р л Л
lpd^q ql л •
7П п л2к
v v р д,1ч р
дГдГ,1 ь
in
m п д2»
2 2
— k=lp,<3~l V q k~l ptq~l
г. * i
I Az,
d-hh
&z.
= Л 1[z — h(x, l) — 0,5hxx(x, t); Z*]
(4.3.24)
т
Матрицу T можно записать также в виде
?п
k=i
Поэтому уравнение (4.3.23) можно представить в форме
Р = fx (х, t)P + Pf 'x (х, t) — Pl^ (x, t) p~lhx (x, t)P +
+ S Р\хХР + <?• (4.3.25)
11=1
Алгоритм (4.3.22), (4.3.23) (или (4.3.25)) называют непрерывным га-
уссовским фильтром второго порядка.
Модуль (4.3.22) этого алгоритма совпадает с модулем (4.3.20) усе-
ченного алгоритма второго порядка. Однако ковариационное уравнение
(4.3.23) (или (4.3.25)) отлично от (4.3.21).
4.3.2.3d. Модифицированный фильтр второго порядка. Алгоритм так на-
зываемого модифицированного фильтра второго порядка получается из
усеченного алгоритма (4.3.20), (4.3.21) или гауссовского алгоритма (4.3.22),
(4.3.23) изъятием последнего члена в ковариационном уравнении:
х = f(x, t) + 0,5/^. (х, t): Р +
-j- Pkx (х, t) Л 1 [z—h(x, t) — 0,5hxx(x, t): Z’J, x (Z^) = xo,
p = fx (x, t) P -I- Pfl (x, t) — Phi {x, t) Л~‘ьх (x, t) P + Q,
(4.3.26)
(4.3.27)
4.3.2.4°. О практическом применении непрерывных алгоритмов оцени-
вания второго порядка. Оценивание в системах автоматическою управ-
ления должно осуществляться сипхронпо с поступлением информации
измерения (сигнал z(Z)), т. е. в реальном времени. При этом большое зна-
чение приобретает необходимая вычислительная производительность,
особеппо при оценивании многомерных многосвязных процессов. В этом
отношении алгоритмы второго порядка для сложных случаев предъяв-
ляют весьма высокие требования к вычислительным системам.
Как видно, оппсапиые выше непрерывные алгоритмы оцепивапия
представляют совокупность векторного дифференциального уравнения
размерности п и матричного дифференциального уравнения размерно-
сти п X п. С учетом симметрии ковариационной матрицы общее число
скалярных дифференциальных уравнений, соответствующих каждому из
указанных алгоритмов, составляет п + 0,5л(я + 1). Уравнения интегри-
руются па основе того или иного метода численного интегрирования
обыкновенных дифференциальных уравнений (методов Эйлера, Адамса,
Рунге — Кутта и др.) с использованием инструментальной информации z
на каждом шаге. Шаг численного интегрирования Л/ш ограничивается
сверху одним нз следующих двух факторов:
устойчивым управлением в реальном времени;
численной сходимостью алгоритмов оценивания.
Одной из характеристик вычислительной «трудоемкости» алгоритма
является общее число элементарных арифметических операций па один
шаг. Именно в этом отношении алгоритмы оценивания второго порядка
сложнее и труднее в реализации по сравнению с алгоритмами первого
порядка (см. и. 4.3.4). Для усечен него алгоритма второго порядка (4.3.20),
(4.3.21) самой трудоемком операцией является вычисление
MCA 1): Л 4Л..,(^, /): Р. (4.3.28)
Число арифметических операций, необходимых для вычисления (4.3.28),
складывается из операций вычисления матриц Гесса jxx, hxx и операций
вычисления собственно (4.3.28) согласно выражениям типа (4.3.9). Если
на вычисление второй частной производной от скалярной функции тра-
тится в среднем в.те операций, то общее число элементарных арифмети-
ческих операций, необходимых для однократного вычисления (4.3.28),
приблизительно равно
( m + п) П[2 П + 0,5 ( п. + 1) Пхх] .
J [рп п = 10, m = 5. пхх — 8 это составляет 9600.
Целесообразно отмстить, что наиболее трудоемкие операции (4.3.28)
присутствуют как в основном алгоритмическом модуле (4.3.20), так и в
модуле ковариаций (4.3.21).
Следующими ио вычислительной трудоемкости являются члены
Pfl(x, i), Pl^(x, l). (4.3.29)
Если па вычисление первой частной производной от скалярной функции
требуется в среднем пх арифметических операций, то общее число эле-
ментарных операций, необходимых для однократного вычисления (4.3.29),
составит
(т + п)п(2п -|- яЛ).
Обращаясь к гауссовскому фильтру второго порядка (4.3.22), (4.3.23), ви-
дим тс же выражения плюс матрицу
m
Pbhxxl’^
Л=1 *
ла однократное вычисление которой требуется приблизительно 8n3m эле-
ментарных операций. Таким образом, данный алгоритм при оценивали si
многомерных процессов является наиболее трудоемким из рассмотрен-
ных субоптимальных алгоритмов второго порядка.
Переходя к другим вопросам практического использования алгорит-
мов оценивания второго порядка, заметим, что главная цель их приме-
нения— достижение сходимости при больших начальных ошибках. Дей-
ствительно, наиболее характерным случаем устойчивого оценивания яв-
ляется случай, когда установившиеся (например, в средпеквадратиче-
ском) ошибки относительно малы. Это иллюстрирует рис. 4.3.1, на кото-
ром для наглядности представлены одномерные процессы. Рис. 4.3.1, а, б
относятся к оцениванию стохастического процесса, реализация которого
xi = изображена на рис. 4.3.1, а. На рис. 4.3.1, б изображено изме-
нение ошибки оценивания и расчетное (полученное путем решения ко-
вариационного уравнения) среднее квадратическое отклонение (СКО)
оценки от истинного значения, точнее, удвоенное расчетное СКО. В дан-
ном случае как расчетное СКО, так и фактическое СКО, которое может
быть получено методом статистических испытаний, стремятся к доста-
точно малому установившемуся значению.
Рис. 4.3.1, в, г соответствуют устойчивому оцениванию детермипиро-
ваппого процесса, возбуждаемого случайными начальными условиями.
Если этот процесс, цак па рис. 4.3.1, в, стремится к постоянному уста-
новившемуся значению, то при принятой модели шума точность устой-
чивого оценивания неограниченно нарастает с течением времени
(рис. 4.3.1, г) за счет эффекта накопления.
При малых ошибках оценивания алгоритмы второго порядка в смыс-
ле достижимой точности практически эквивалентны алгоритмам первого
порядка, существенно более экономичным в вычислительном отношении.
Разумеется, малость ошибок здесь понимается в смысле малости чле-
нов второго и более высокого порядков степенных рядов (4.3.12). Однако
при больших (в указанном смысле) ошибках алгоритмы второго
и первого порядков могут давать качественно различные резуль-
таты, причем расходимость фильтров второго порядка может на-
ступать при больших отклонениях, чем расходимость фильтров первого
порядка.
Расходимость процессов нелинейного оценивания может иметь раз-
личный характер. Для одномерного случая это иллюстрирует рис. 4.3.2.
Па рис. 4.3.2, а изображена реализация оцениваемого стохастического
процесса. Па рис. 4.3.2, б представлены графики для случая, когда рас-
четное значение Р (решение ковариационного уравнения) сходится,
а фактически процесс оценивания расходится. Такая ситуация возникает
вследствие приближенности ковариационного уравнения. Рис. 4.3.2, в со-
ответствует случаю, когда как расчетная дисперсия, так и фактические
ошибки оценивания нарастают в среднеквадратическом с течением вре-
мени. Рис. 4.3.2, г соответствует интенсивной расходимости фактическо-
го процесса оценивания и медленной колебательной сходимости' расчет-
ной дисперсии ошибок оценивания.
Для описанных субоптимальных фильтров расходимость оцепивапия
нелинейных процессов может наступить при значительных начальных
ошибках Да: (/о) вследствие влияния отброшенных старших члепов сто-
^Ax.ZVp
Рис. 4.3.1. Иллюстрации реализаций сходящихся одномерных процессов
оценивания: а — стохастический процесс; б — ошибки оценивания и рас-
четное удвоенное СКО; в — детерминированный процесс; г — ошибки оце-
нивания и удвоенное СКО при оценивании детерминированного процесса
пенных рядов. Наибольшие начальные отклонения допускаются при ис-
пользовании фильтров второго порядка для оценивания процессов с про-
стым характером течения нелинейных гладких функций (монотонными
функциями). Для сложных нелинейных функций лучшие результаты в
указанном отношении может дать следующая группа алгоритмов.
jL.X-t
Ax.Zi/P
Рис. 4.3.2. Иллюстрации расходящихся одномерных процессов оценива-
ния: а — реализация оцениваемого стохастического процесса; б — расчет-
ная дисперсия сходится, процесс оценивания расходится; в — расчетная
дисперсия и процесс оценивания расходятся; г — процесс оценивания ин-
тенсивно расходится, расчетная дисперсия медленно сходится
4.3.3. Субоптпмалытые алгоритмы, основанные па кусочно-полпиоми-
я.иыюп аппроксимации нелинейных функций. Задан нелинейный стаци-
онарный стохастический процесс
•т( = f(xt) + g
и нелинейное стационарное уравнение наблюдения
г = h(xt) + 1].
Рассмотрим варианты алгоритмов оценивания с аппроксимацией.
4.3.3.1е. Кусочно-полиномиальная аппроксимация. В практических за-
дачах всегда можно указать ограниченную область пространства состо-
яний G, которой со сколь угодно высокой (близкой к единице) вероят-
ностью принадлежит вектор состояния xi е G. Область G разбивается па
подобласти Gv с: G, в пределах которых функции /, h аппроксимируются
полиномами второго порядка:
[кусочно- квадратична я аппроксимация}.
В другом варианте нелинейные функции в каждой пз областей Gv
аппроксимируются линейными функциями:
з-= I
>=1
(4.3.31)
х е Gv
[кусочно-линейная аппроксимация}.
Выражения (4.3.30) можно записать в матричной форме
/(а-) « o<v> + A<v>a + xr\^x,
(-1.3.32)
h (a-) at /t<v> + B^x + aTB<v>x,
a'B'v'a представляют собой матрицы-столбцы кпад-
Выражеппя aTA<v>a,
ратичиых форм:
aTA<v>a- -
а'та</>а-
aTB<v>a- -
(4.3.34)
где
(4.3.35)
— квадратные матрицы.
Диалогично вместо (4.3.31) можно записать
f(x) «<*> + A<v>x, h (з) w № + Wx, aeGu. (4.3.36)
Коэффициенты матриц (4.3 33), (4.3.35) могут определяться на осно-
ве МИК или другим способом. Аппроксимация функций представляет
собой хорошо развитый раздел прикладной математики и здесь под-
робно но рассматривается. Приведем только простейшую иллюстрацию.
На рис. 4.3.3 представлена кусочно-линейная интерполяция одномер-
ной функции: типа синусоиды с четырьмя областями (интервалами) Gv
Рис. 4.3.3. Иллюстрация кусочпо-лппейной интерполяции
в «полупериоде» функции /. Касательные к кривой /(.т) проведены в
граничных точках интервалов G2, G3. Они соответствуют первым двум
членам ряда Тейлора. Видно, что кусочно-линейная интерполяция при
значительных Аг дает здесь лучшую точность воспроизведения функции,
чем представление с помощью двух членов степенного ряда.
4.3.3.20. Субонтимальный алгоритм, основанный на кусочио-липейпой
аппроксимации нелинейных функций. Матрицы Якоби Д, 1>х в каждой
из областей G., в которой принята линейная аппроксимация (4.3.36),
постоянны и равны
fx = A<v\ hx = = Blv>.
Матрицы Гесса fiXv, hlxx при линейном представлении функций равны
нулю. Поэтому в. каждой из областей Gv алгоритм (4.3.20), (4.3.21)
обращается в линейный ФКБ:
J = „(Ч + л<г>£ РИ<уУгл-1 (z _ fc<v> _ (4.3.37)
Р = A<V)P + PX<V>1' — PH^R-'II^P j- Q. (4.3.38)
Такой же вид приобретают и алгоритмы (4.3.22), (4.3.23), (4.3.26), (4.3.27).
Сравнения (4.3.37), (4.3.38) должны быть дополнены условием нахожде-
ния в области Gv. Так как истинный вектор состояния х неизвестен, это
условие естественно принять в виде
х е? Gv. (4.3.39)
При переходах из одной области Gv в другую, определяемых па основе
соотношения (4.3.39), производится изменение элементов матриц o<v>,
-4<v>, //<“>, b<v>. Сопряжение решений, получаемых в результате инте-
грирования уравнений (4.3.37) в последовательно проходимых областях
Gv, осуществляется па основе условий непрерывности.
Фильтр (4.3.37)—(4.3.39) дает приближенное (субоптимальпое) реше-
ние задачи оценивания как вследствие приближенности кусочпо-липой-
мой аппроксимации, так и вследствие замены условия х е Gv условием
(4.3.39).
4.3.3.3е. О применении фильтра е кусочно-квадратичной аппроксима-
цией нелинейных функций. Па основе методики, аналогичной только что
изложенной, подставляя выражения (4.3.32) в уравнения (4.3.20), (4.3.21),
можно получить субоптимальиып алгоритм оценивания для случая ку-
еочпо-квадратичпой аппроксимации нелинейных функций. Одпако гро-
моздкость алгоритма делает сомнительной целесообразность его приме-
нения для многомерных, мпогосвязяых процессов.
4.3.4. Обобщенный и линейный непрерывные фильтры Калмана —
Бьюсн. При пренебрежении в разложениях (4.3.12) членами второго и
более высокого порядка малости получаем субоптимальпый алгоритм
оценивания первого порядка. Очевидно, что для нахождения этого ал-
горитма достаточно в фильтрах (4.3.20), (4.3.21) или (4.3.22), (4.3.23) по-
ложить fxx, kxx = 0.
Получается широко известный алгоритм!
х — fix, l) -J- Pli^ix, t) R~1 [z— h (.r, i)l, (4.3.40)
П (x, l)P + Pfl(x, t) - Ph* (x, t) R~Jhx (x, t) P -1- Q, (4.3.41)
именуемый обобщенным, расширенным или нелинейным непрерывным
ФКБ »).
4.3.4.1е. Структура обобщенного ФКБ. Вводя управление u=u(Z),
рассматриваемое как известная функция времени, и применяя другие
♦) Иногда говорят еще о линеаризованном ФКБ, имея в виду разло-
жение соответствующих функций в ряды Тейлора пе в окрестности оцен-
ки х, а в окрестности некоторого номинального состояния х°.
обозначения матриц Якоби, записываем
х — f (х, и,
7? 1 [z — h (.г, t)L
df
дх
, dh
п~1 —
дх
(4.3.42)
(4.3.43)
Структурная схема основного модуля (4.3.42) обобщенного ФКБ вме-
сте со структурой оцениваемого процесса представлены па рис. 4.3.4.
Отчетливо видно наличие в фильтре модели оцениваемого процесса. Эта
Рис. 4.3.4. Структура основного модуля обобщенного непрерывного филь-
тра Калмап — Быоси и оцениваемого процесса
модель охвачена многомерной обратной связью по еектору невязки
z — h (х, t). Заметим, что этот вектор прежде всего умножается па об-
ратную матрицу интенсивностей шумов измерений R~l. Если каналы
измерительной системы (датчики) независимы, то и компоненты вектора
шумов ц(4) независимы и матрицы R, R~l — диагональные. При этом
компоненты вектора невязкн измерений в контуре обратной связи умно-
жаются па коэффициенты, обратно пропорциональные интенсивностям
соответствующих шумов измерения. За счет этого сигнал точного дат-
чика входит с большим «весом», а сигнал грубого датчика (с интенсив-
ным флуктуационным шумом) — с малым «весом».
Далее следует умножение «взвешенного» векторного сигнала повяз-
ки па (dhldx)-1. Это соответствует как бы учету чувствительности вектор-
ной (в общем случае) функции наблюдения к приращениям аргумента,
причем производные вычисляются па оцепеппом движении х[1). Поело
этого следует умножение на матрицу Р, приближенно равную ковариа-
ционной матрице ошибок оценивания, после чего контур обратной связи
по вектору невязки замыкается перед многомерным интегрирующим
звеном (см. рис. 4.3.4).
Матрица Р определяется ковариационным уравнением (4.3.43), ко-
торое связано с основным алгоритмическим модулем только через мат-
рицы Якоби dfldx, dlijdx (только для нелинейных систем).
То, что решение ковариационного уравнения (4.3.43) для нелиней-
ных процессов лишь приближенно равно ковариационной матрице оши-
бок оценивания, следует как пз приближенности (субоптимальности) ал-
горитма (4.3.42), (4.3.43) в целом, так и из стохастичпости уравнения
(4.3.43), обусловленной случайной составляющей х. Именно вследствие
указанной приближенности возможны показанные па рис. 4.3.2 случаи
(сохраняющие силу для данного фильтра), когда процесс no Р сходится,
а в действительности ошибки оценивания нарастают в среднеквадра-
тическом.
Однако в обычных режимах устойчивого оценивания матрица Р близ-
ка к ковариационной матрице ошибок оценивания. Если дисперсии оши-
бок оценивания велики, то имеет место «глубокая» отрицательная обрат-
ная связь в основном модуле фильтра (см. рис. 4.3.4). Процесс «спи-
сания» или ликвидации ошибок оценивания при этом идет интенсивно.
При уменьшении дисперсий «глубина» обратной связи уменьшается, а
при Р-ч-0 процесс оценивания как бы выключается. Приведенные здесь
пояснения «механизма» работы обобщенного ФКБ во многом распрост-
раняются и на рассмотренные в и. 4.3.2 фильтры второго порядка.
4.3.4.20. Вопросы практического применения обобщенного непрерыв-
ного ФКБ. Пеносредствешю из сопоставления алгоритма первого поряд-
ка (4.3.42), (4.3.43) и алгоритмов второго порядка, например (4.3.20),
(4.3.21), следует, что данный ФКБ в вычислительном отношении сущест-
венно экономичнее фильтров второго порядка. Однако применение и это-
го алгоритма для оценивания многосвязпых многомерных быстротеч-
ных (широкополосных) процессов наталкивается па трудности, связан-
ные с необходимой вычислительной производительностью. Действитель-
но, одпа операция перемножения трех квадратных матриц
требует 4п3 элементарных операций. При численном интегрировании че-
тырехточечным методом Рунге — Кутта с тактовой частотой /т (обрат-
ной шагу интегрирования АД,) указанная операция потребует 16/т»3
элементарных арифметических операций в единицу времени. Для п = 20,
/г = 30 Гц это составит ~4-106 операций в секунду.
А. Распределение информации. Принцип распределения информации
между вектором наблюдения - и вектором управления и позволяет в ря-
де случаев резко снизить необходимую вычислительную производитель-
ность не только за счет упрощения вида функции /, по п за
счет декомпозиции оцениваемого процесса, снижающей размерность
фильтров [4.9].
Суть этого приема можно пояснить па следующем характерном при-
мере. Пусть из общего вектора состояния х можно выделить субвектор
ad), производная которого ио времени доступна измерению, а из вскто-
ра z — h(x, t) + ц можно выделить субвектор г(|) =/i(1)(x(i), /)+t)(d,
зависящий от х(|). Тогда задача оценивания аг()) может быть сформули-
рована как автономная с моделью оцениваемого процесса .
2ц> = «и, — 6,1) (4.3.44)
и вектором наблюдения
zd> — Л11>(жин 0 + Чо»'
(4.3.45)
Здесь u<i) — сигнал измерителен производных, рассматриваемым как уп-
равление; 5и> — шумы измерения производных.
Если E(i) можно считать белым шумом*), то обобщенный ФКВ для
(4.3.44), (4.3.45) будет иметь вид
д /ЙЛ(п\Т
^(1) == !'(П ) 7?и) [г(1)“~ z,(i) ('(i), ')]’ (4.3.4b)
/ d,l<n\e
Л»'-Л.)Ьг- (4-3.47)
Размерность вектора хщ может быть низкой м вычислительная произ-
водительность, необходимая для реализации алгоритма (4.3.46), (4.3.47),—
невысокой.
Б. Циклические оценивание. Иногда оцениваемые координаты изме-
няются настолько медленно, что допустима относительно редкая выдача
их оценок в систему управления. Примерами могут служить оценпвапио
параметров — идентификация (см. гл. 6), оценивание навигационных ко-
ординат и др. В этом случае процесс оценивания целесообразно разбить
на циклы. В начале каждого цикла алгоритм «запускается», в конце каж-
дого цикла выдается оценка вектора состояния (или вектора парамет-
ров). Смысл применения циклического оценивания заключается прежде
всего в возможности использования в течение цикла упрощенной моде-
ли оцениваемого процесса, в частности, детерминированной модели. При
численной реализации ограничение времени процесса оценивания в каж-
дом цикле позволяет избавиться от неприятностей, связанных с накоп-
лением ошибок и численном расходимостью.
Для детерминированной модели оцениваемого процесса Q — 0 кова-
риационное уравнение (4.3.43) принимает вид
(4.3.48)
Умножая слева и справа это уравнение па Р_| (ковариационная матри-
ца является невырожденной, матрица Р в режиме устойчивого оцени-
вания близка к ковариационной матрице), вводя обозначение Л = Р~*
и принимая во внимание, что А — —Р 1РР получаем
(4.3.4!))
Для случая ОЦдх = 0 (оценивание постоянных за время цикла парамет-
ров, оценивание координат, временные производные которых измеряются
и рассматриваются как управления, см. А)
фор-
4.1.1.
*) В случае цветных шумов применим обычный прием введения
Пирующего фильтра п расширения пространства состояний, см. н.
Для этого случая получается следующая форма фильтра для каждого
цикла:
dh \т
R~l\z—h(x, <)]
дх /
(4.3.50)
Л-1 —— dx.
дх
о
dh
дх
'о
То, что локальное условие, благоприятствующее точному оцениваппто,—•
линейная независимость столбцов матрицы Ohldx,— действительно явля-
ется таковым, видно хотя бы из уравнения (4.3.48). В самом деле, диа-
гональные элементы матрицы
( dh \т dh
в~1-^-р
дх
(4.3.52)
Р
при независимых шумах измерителей (диагональной матрице В) равны
2
, i = 1, п.
т
(4.3.53)
Л=1 \j=l 1
При соблюдении указанного условия величины (4.3.53) опрсделеппо-
положителыгы относительно Рц. Если шум хотя бы одного из измери-
телей неограниченно уменьшается, то член (4.3.52) становится преоб-
ладающим в уравнении (4.3.48) н диагональные элементы матрицы Р
монотонно неограниченно быстро уменьшаются, стремясь к нулю. Эти
элементы приближенно равны дисперсиям ошибок оценивания.
4.3.4.3d. Линейный непрерывный ФКБ. Если оцениваемый нормаль-
ный марковский процесс описывается липейпым стохастическим урав-
нением
х = A(l)x + B(l)ti + g
и уравнение наблюдения линейно
Z = Il(l)x + 1),
то алгоритм (4.3.42), (4.3.43) принимает вид
(4.3.54)
(4.3.55)
(4.3.56)
"5 == А (/) х + В (0 и PlTR"1 [z — II (I) z],
Р = A (() Р -I- 7>ЛТ («) — РПт (<) R-1!! (0 Р 4- Q.
(4.3.57)
Это линейный непрерывный ФКБ, являющийся строгим решением зада-
чи оптимального оценивания в случае (4.3.54), (4.3.55). При этом вслед-
ствие нормальности распределений вероятностей перечисленные в раз-
деле критерии оптимизации (УМО, МАВ, МП и др.) совпадают. Матри-
ца Р здесь точно равна ковариационной матрице ошибок оценивания. Ко-
вариационное уравнение (4.3.57) при детерминированных матричных
функциях А(1), В(1), 11(1) является детерминированным и полностью
независимым по отношению к основному алгоритмическому модулю
(4.3.56). Матричное обыкновенное дифференциальное уравнение (4.3.57)
называется матричным уравнением Риккати.
А. Линейный непрерывный фильтр Налмана—Бъюси для стационар-
ных процессов. Если матрицы коэффициентов А, В и матрицы интенсив-
ностей шумов В, Q постоянны (нс зависят от времени), то уравнения
ФКБ (4.3.56), (4.3.57) записываются в виде*)
х = Ах -|- Ви Р1ГВ.-1 (z — Il х), (4.3.58)
Р = АР -|- 7МТ — Р1ГП~1ПР Q. (4.3.59)
Если условие полной наблюдаемости (2.1.12) выполнено, то уравнение
Риккати (4.3.59) имеет единственное устойчивое установившееся реше-
ние, к которому стремятся все другие решения, соответствующие про-
извольным неотрицательным начальным условиям [4.30]. Процесс оце-
нивания при этом устойчив в среднеквадратическом. Это нс означает,
конечно, что при численной реализации, осуществляемой па основе оп-
ределенных разностных схем уравнений (4.3.58), (4.3.59), процесс оце-
нивания для случая полной наблюдаемости всегда будет устойчив. Су-
ществуют многочисленные дополнительные факторы, частично освещен-
ные в пп. 4.3.2.40 и 4.3.4.20, влияющие па численную устойчивость.
Б. Линейный стационарный фильтр. Для многомерных мпогосвязпых
процессов наиболее трудоемким является решение ковариационного урав-
нения, для стационарных линейных процессов — матричного уравнения
Риккати. Поэтому естественно стремление осуществить решение этого
уравнения на стадии проектирования и ввести в основной алгоритмиче-
ский модуль (4.3.58) заранее определенную матрицу Р или матричную
функцию /'(Z). Наиболее просто реализовать фильтр с постоянной мат-
рицей Р — Р,,т, получаемой, в частности, как установившееся реше-
ние уравнения (4.3.59)—решение алгебраического матричного уравне-
ния Лурье
ЛРСТ + РстЛт + Q = P^IFR-'IIP™ (4.3.60)
В этом случае фильтр принимает вид
X = 4z -I- Ви + РСТ1ГП~1 (z — ItX), (4.3.G 1)
где РСт определено па стадии проектирования системы оценивания.
Этот стационарный линейный фильтр является уже субоптимальпым,
он заведомо пе оптимален в начальном переходном режиме.
4.3.5. Фильтры, защищенные по отношению к отказам датчиков. По-
вышение надежности и другое совершенствование вычислительных си-
стем делают все более актуальным обеспечение высокой надежности ин-
формационной системы в целом за счет автоматического диагностирова-
ния отказов датчиков и соответствующего автоматического изменения ал-
*) Для нестационарных процессов также допускается подобная со-
кращенная запись, ио в этом случае уже А = А(1), В — В(1), ...
горптмов обработки информации. Оптимальное (субоптимальпос) оцени-
вание органически связано с возможностью автоматического диагноза
отказов датчиков и открывает в этом отношении значительные перспек-
тивы. Заметим, что построение фильтров, защищенных по отношению к
отказам- датчиков, можно трактовать и в смысле и. 4.2.3.7° как синтез
алгоритмов, малочувствительных («робастных») к распределениям веро-
ятностей помех.
4.3.5.1°. Фильтр первого порядка. При построении данного фильтра
предполагается, что наблюдение оцениваемого процесса является вектор-
ным, т. е. осуществляется посредством нескольких независимых дат-
чиков: з = [Л,(х, I) h2(x, t) ...hm(x, «)]т+ [ф(0 МО При
этом могут использоваться как принципиально различные датчики,
измеряющие различные физические величины, так и однотипные дат-
чики (простое резервирование). В случае применения нескольких групп
однотипных датчиков (группы измеряют разные физические величины)
векторная функция h(x) разбивается на субвскторы с одинаковыми
(в предположении идентичности датчиков в группе) компонентами (напри-
мер, hi(x) — h2(x) — hs(x), /ц(ж) = li$(x), ...). Выявление внезапно от-
казавшего датчика при комплексной обработке информации, например,
в обобщенном ФКБ (4.3.42), (4.3.43), нс представляет труда. Действи-
тельно, оценки х, а значит п h(х, /), формируются па основе сигналов
всех датчиков и при внезапном отказе одного, двух или даже большего
числа датчиков (меньшего ш) не могут измениться мгповеппо. При этом,
как правило, невязка —h,(x, t) для отказавшего датчика сильно воз-
растает. Это возрастание невязки и можно принять за признак отказа.
Естественной реакцией па отказ датчика является автоматическое от-
ключение его сигнала. Это можно выполнить, введя вместо
/{ll lZ!~ !,1 ‘>1
Пп,т [гт-М*> 0]
(шумы датчиков независимы) векторную функцию
(4.3.02)
где функции Fv (Az*y v = 1, m, имеют вид, представленный па
рис. 4.3.5.
Ширина зоны пропорциональности ±A,V выбирается для каждого ка-
нала на основе метрологических характеристик датчика и точности оце-
нивания х. Это можно представить следующим образом. Дисперсия флук-
туационной ошибки любого реального датчика ограничена. Белый
шум является лишь идеализированным представлением этой ошибки.
Реальный белый шум имеет коночное время корреляции tAzv, п его ин-
тенсивность принимается равной
Л?
'vv ~ °&zvTAzV
Если постоянная ошибка исправного датчика пренебрежимо мала
я ошибка оценивания х также достаточно мала, то Arv целесообразно
выбрать ранной
(3 -4- 4) oA?v _ 3—4
^V'V ClAzvTAzv
Это для распределения вероятностей ошибок датчика, близкого к нор-
мальному (для исправного датчика характерно именно такое распределе-
ние), гарантирует малую вероят-
ность «ложного выключения сиг-
нала» (выход в зону | Az* | Л^,,
см. рис. 4.3.5). При возможности
появления значительной система-
тической ошибки, пе учтенной в
расширенном пространство состо-
яний, зона ±AzV в соответству-
ющей мере расширяется. При
возникновении отказа датчика
приведенная невязка Azv, как
правило, превосходит по абсолют-
ной величине Дгт, и сигнал это-
го датчика пе попадает в си-
стему оценивания.
Рис. 4.3.5. Характеристики нелиней-
ных звеньев, предназначенных для
защиты системы оценивания от от-
казов датчиков
Однако для приближения к оптимальной (субоптимальпой) филь-
трации в условиях отказов датчиков этого недостаточно. Необходимо
соответственным образом перестроить ковариационное уравнение и мат-
рицу Якоби dhldx. При диагональной матрице R выключение сигнала
т-го датчика можно имитировать в ковариационном уравнении обраще-
нием в пуль элементов (R~')vv матрицы R~x. При этом нет необходимо-
сти перестраивать матрицу dh/дх, так как матрицы
перестраиваются нужным образом автоматически. Действительно, эле-
менты этих матриц равны соответственно
дх i
и
dhj dh}
dxi 0x/t
Обращение в пуль (Л ')то «выключает» производные от hv. Поэтому
дополнительная перестройка матрицы dh/дх пе требуется.
Структурная схема рассматриваемого фильтра, защищенного от от-
казов датчиков, представлена па рис. 4.3.6. Здесь изображен как основ-
ной алгоритмический модуль, так и модуль ковариаций. Звепо F(Az*) по
только выключает сигналы датчиков, для которых невязки превышают
заданные значения, по и формирует сигналы отказов Е. Эти сигналы
Рис. 4.3.6. Структура фильтра, защищенного от отказов датчиков
поступают в ковариационный модуль, обнуляя соответствующие диаго-
нальные элементы матрицы R~l. Задание начальных условий в даппоьг
фильтре производится обычным образом.
4.3.5.20. Скалярный фильтр с однотипными датчиками. Данный прин-
цип обеспечения отказоустойчивости может быть с успехом применен
при построении резервированных систем с несколькими однотипными
датчиками.
Рассмотрим случай, когда оценивается скалярный (одномерный)'
марковский процесс
«I, О + £1,
контролируемый несколькими однотипными датчиками:
z= [M®i) ... ЫЖ1)Г + [iii(O П.;(О]Т,
где в исправном состоянии
Мж1) = ... =
белые шумы ip, ..., TjG независимы и имеют одинаковую интенсивность
йдат. Уравнения фильтра, защищенного от отказов датчиков в соответ-
ствии с п. 4.3.5.!°, запишутся в данном случае в виде
(4.3.63).
(4.3.64).
где Fдат — функция типа изображенной па рис. 4.3.5, ио с псприведсп-
пой невязкой в качестве аргумента; хгдат — число ненулевых членов
<?
суммы V, ^дат [Агц.Ь т е- число исправных датчиков (в соответствии
М-=1
с принятым критерием отказа).
Если характеристики датчиков линейны йлат(Ж|) = ад, то алгоритм
еще упрощается:
- Р
S = Л (*Г “1. 9 + уА 2 ^ат fZU - *г], (4.3.65)
д;,т Ц=1
д Л Pl
Pi=2Pi^f!(xv и> О-Т^^дат + Сг (4.3.66)
Для линейного стационарного марковского процесса
х, = ацх, + btIut + оц, i>n = const
ковариационное уравнение (4.3.66) принимает вид
При неизменном числе исправных датчиков хдпат это скалярное уравне-
ние Риккатп интегрируется в общем виде.
Для установившегося режима
Р =
1 1СТ
^лат
^Хдат
хЕдат<?1
^дат
Если лц = 0, то Р1ст = (Яд91Яу;даТ)1/2. если Ли > 0, Qt ~ 0, то Р|ст =
== 2г?; |/?дат/ИтдаТ.
Существование устойчивого установившегося режима для случая от-
сутствия шумов, возбуждающих оцениваемый процесс, может показаться
парадоксальным. Однако надо учитывать, что при <1ц > 0 оцениваемый
процесс имеет расходящийся характер (неустойчив). Данный фильтр ос-
тается работоспособным даже при отказах датчика.
4.3.5.3’. Фильтры второго порядка. Структура основного алгоритмиче-
ского модуля всех фильтров второго порядка, рассмотренных в п. 4.3.2,
аналогична соответствующему модулю обобщенного ФКБ. Различие за-
ключается лишь в виде оценок функций / и h. Поэтому изложенный вы-
ше принцип (эвристического происхождения) защиты от отказов дат-
чиков может быть распространен на все эти фильтры с соответствую-
щими изменениями структур.
4.3.6. Другие непрерывные фильтры первого порядка. Оптимальность
(субоптимальность) приведенных выше алгоритмов оценивания рассмат-
ривалась в смысле одного критерия — УМО оцениваемого ректора со-
стояния. Между тем в п, 4.2.3 приводились различные возможные кри-
тории оптимизации процессов оцеппвапия: МЛВ, МП, минимизация раз-
личных функционалов.
Для гауссовских марковских процессов применение различных ука-
занных критериев оптимизации процессов оценивания дает одинаковые-
результаты. Для нелинейных марковских процессов каждому критерию
соответствует, вообще говоря, свой оптимальный фильтр. Однако для
нелинейных марковских процессов при зашумленном нелинейном на-
блюдении известны лишь субоптимальпые решения задач оценивания.
При одном и том же критерии оптимизации и постановке задачи оце-
нивания существует множество субоптимальпых фильтров, получающих-
ся при различных приемах синтеза. Поэтому классификация субопти-
мальпых фильтров по критериям оптимизации пе является безупречной..
Тем не менее опа применяется, и мы будем ею иногда пользоваться.
Здесь яге приведем один субоптимальпый непрерывный алгоритм оце-
нивания первого порядка, который характерен пе критерием оптимиза-
ции, а методом синтеза, именуемым методом инвариантного погружения
[4.12, с. 204—210].
Основной модуль этого алгоритма имеет точно такой же вид, как в
обобщенном ФКБ:
х = / (ж, и, /) -]- РI —— j R 1 |z — h (х, /)].
\ дх I
(4.3.67).
Одпако модуль ковариаций отличается от (4.3.43) и имеет вид:
т
Р =
ГГ1
(4.3.68)
Далее для диагональной матрицы Я
д (/ dh \т . ~ ]
---J I —- 1 я—г I,__hi, п I =
где
dh
дх
. dh
R~* — +
дх
/г1
Р=1
zv — hf‘
hvxx(x’ 0 =
д\(х, t)
д'х^х^
р = 1, п,
m
— матрица Гесса.
Таким образом, модуль ковариаций (4.3.68) можно представить в виде
(4.3.69)
Хотя данный алгоритм именуется в [4.12] фильтром первого порядка,
в его ковариационном модуле фигурируют матрицы вторых производ-
ных lipxx = (х, t). Для линейного наблюдения !грхх=0 и (4.3.69) пол-
ностью совпадает с ковариационным модулем обобщенного ФКБ. При-
мечательно то, что в ковариационный модуль (4.3.68) или (4.3.69) посту-
пают сигналы текущей невязки zp— hp(x, I), р = i, т, чего пе было
в вышеприведенных алгоритмах.
4.3.7. Непрерывные алгоритмы оценивания детерминированных про-
цессов при отсутствии шумов наблюдения. В табл. 4.1.1, 4.1.2 задачи оце-
нивания непрерывных процессов, описываемых детерминированными
дифференциальными уравнениями
х = /(a?, u, t) (4.3.70)
при отсутствии шумов наблюдения
z = k(x, t), (4.3.71)
обозначены индексами 2.1. 2.2, 2.3 (табл. 4.1.1) и 1.1, 1.2, 1.3 (табл. 4.1.2).
4.3.7.1’. Локально оптимальные (градиентные) непрерывные алгорит-
мы оценивания. Синтез детерминированных алгоритмов оценивания мо-
жет осуществляться па основе минимизации заданных функционалов
качества оценивания по методу, сходному с методами синтеза систем
оптимального управления (см. гл. 8, 10). Задача ставится следующим
образом.
Алгоритм оценивания ищется в виде модели оцениваемого процесса
с дополнительным аддитивным сигналом (управлением)
х = / (х, и, t) -|- и^., (4.3.72)
определяемым па основе минимизации функционала невязки А; =
= z — h(x, t) и самого управления и^..
Включение искомого управления в минимизируемый функционал
типично для современных задач оптимального управления (см. гл. 6, 8).
Помимо этого наличие в функционале «штрафа за управление» и~, на-
пример, квадратичной формы
0,5uLfc7’«~, (4.3.73)
ЗС X X
где к-.— назначаемая положитсльпо-онределсппая (обычно диагональ-
эс
пая) матрица, можно обосновать следующим образом. Если функции
/, и и начальные условия в оцениваемом процессе (4.3.70) и его модели
(4.3.72) строго совпадают, то при соблюдении условий единственности ре-
шения вообще по требуется «корректирующее» управление и~, т. е.
Должно равняться пулю. Однако всегда существуют ошибки в задании
начальных условий и ошибки воспроизведения функций f(x, и, t) и u(t)
(4.3.70) в модели. Поэтому должно существовать корректирующее уп-
равление и~., по пе слишком большое, чтобы резко не нарушалось ди-
намическое подобие процессов x(t), х(1). Коэффициенты диагональной
матрицы It j целесообразно выбирать в соответствии с максимальными
значениями компонент разности х— х, возникающей из-за ошибок в
начальных условиях и поточности модели оцениваемого процесса.
Функция невязки минимизируемого функционала в общем случае
может быть неквадратичпой
[z — h (х, t)l, (4.3.74)
где Cj — определенно-положительная, диффореппируомая скалярная
функция векторного аргумента. Если ставится локальная оптимизацион-
ная задача, т. е. вместо функционала фигурирует сумма функций (4.3.74),
(4.3.73) текущих значений x(t), z(l), то решение получается в
виде простых градиентных управлений (см. гл. 8)
( д V
[z~h(x, i)]J
А.. V[z — h (x, i)],
(4.3.75)
где V, = (д/дх)т — символ градиента.
Итак, оптимальный в указанном смысле детерминированный алго-
ритм оценивания имеет вид
х = f (х, и, t) —
h (х,
(4.3.76)
к, J — С-
ж 1 дх х
Обращаясь к истории развития градиентных методов управления, за-
метим, что непрерывные градиентные системы управления были иссле-
дованы в СССР еще в 50-х годах [4.31—4.33]. При этом «экстремальная
функция», которой в (4.3.76) является в большинстве случаев счи-
талась априорно неизвестной. Для определения градиента в этих усло-
виях применялся поисковый метод — метод синхронного детектирования
[4.34]. При поисковых (пе аналитических) методах определения гради-
ента уравнения типа (4.3.76) получаются в идеализированном случае, так
называемом квазистационарном режиме, когда частоты пробных или
поисковых движений намного превосходят верхнюю границу частотного
спектра x(t).
В дальнейшем разностные аналоги непрерывных градиентных систем
были привлечены к различным фундаментальным задачам управления
[4,35—4.37]. Вошел в обращение неудачный (как и большинство ино-
странных терминов в области автоматического управления) термин «сто-
хастическая аппроксимация». Было обращено внимание па то, что в клас-
сической и современной вычислительной математике градиентные мето-
ды (при аналитическом вычислении градиента) применяются давно и
имеют разнообразные оценки сходимости. Вокруг этого образовалось це-
лое направление [4.37—4.41]. Начиная с книги Я. 3. Цыпкина [4.35],
получившей широкую известность, градиентные методы, стохастическую
аппроксимацию нередко рассматривают как основной принцип адаптив-
ных систем. Для этого пет достаточных оснований. Хотя понятие адап-
тивности не имеет четкого определения, основным признаком адаптации
целесообразно считать минимальное количество необходимой априорной
информации и ее восполнение за счет испытаний, сочетающихся с рабо-
чим режимом функционирования системы. Беспоисковые градиентные
системы с аналитическим определением аналогов градиента, если и мо-
гут быть отнесены к адаптивным, то находятся на невысокой ступени
иерархии адаптивных систем в смысле количества необходимой априор-
ной информации.
Кроме того, как видно из изложенного в начале этого подпункта, си-
стемы, использующие градиент функции (а не «градиент функционала»),
оптимальны лишь в локальном смысле, часто является недостаточ-
ным для высокого качества процессов функционирования.
4.3.7.2е. Непрерывный детерминированный алгоритм оценивания при
квадратичной функции потерь. Минимизируемая функция часто имену-
ется функцией потерь. Пусть эта функция имеет квадратичный вид, т. е.
(4.3.74) представляет собой квадратичную форму невязки
— 6,5 [z — h (х, t)\'r р„ [z — h (x, t)], (4.3.77)
где p = p j — квадратная опрсделенпо-положительпая (как правило, ди-
агональная) постоянная матрица размера т X задаваемая на основе
дополнительных условий и соображений. При (4.3.77) алгоритм оценива-
ния (4.3.76) принимает вид
xs. I (Jib \
х = f(x, и, «) + I I [z — h (х, «)].
(4.3.78)
Элементы матрицы р-. могут быть определены, как в задачах оптималь-
ного управления вообще (см. гл. 6), на основе равных вкладов макси-
мальных отклонений. В хороших системах оценивания максимальные не-
вязки возникают в начальный момент времени. Поэтому естественно рас-
смотреть в качестве «максимальных отклонений» величины
/ dh \
h (-V 9 - h Ой’ 4) ~ (^) Ахо’
где Лж0 = хо — х0 считается достаточно малым.
Равные вклады в функцию (4.3.77) начальных невязок при диаго-
нальной матрице р~ означают:
XI1
хтт
(4.3.79)
Если задать один из коэффициентов Р^..., то остальные элементы мат-
рицы р-. определяются соотношениями (4.3.79).
4.3.7.30. Фильтр Люэнбергера. Для линейной детерминированной за-
дачи оцепивапия
х = Ах -р Ви, z = Их
(4.3.80)
алгоритм (4.3.78) принимает вид
х = Ах Ви -|- к 7/тр_ (z—Пх). (4.3.81)
Если матрицы к\, задаются иа основе указанных выше условий, то
алгоритм (4.3.81) имеет силу оптимального в описанном смысле. Однако
часто матрица К в алгоритме
х = Ах + Ви -]- К (z — Их) (4.3.82)
подбирается просто из условии устойчивости или заданного распределе-
ния корней характеристического уравнения (см. Молельное управление,
§ 8.9). Тогда фильтр (4.3.82) именуется фильтром или «.наблюдателем»
Люэнбергера.
4.3.7.4е. О практическом применении непрерывных детерминирован-
ных алгоритмов оценивания. Все изложенные в и. 4.3.7 алгоритмы име-
ют только одну модель размерности н, и необходимая для их реализа-
ции вычислительная производительность невелика. Можно показать, что
алгоритмы (4.3.7С), (4.3.78), (4.3.81) сохраняют силу локально оптималь-
ных в смысле критерия обобщенной работы (см. гл. 8) и при наличии
аддитивных белых шумов, возбуждающих оцениваемый процесс.
Однако в целом практическая ценность детерминированных алгорит-
мов оценивания в сравнении со стохастическими алгоритмами невелика.
Это обусловлено тем, что флуктуационные ошибки датчиков в наиболее
важных задачах оценивания имеют существенное значение. Правда, для
пперциоппых датчиков задача может быть приведена к форме, когда
шумы лишь возбуждают оцениваемый процесс, т. е. г) 0. но условие,
благоприятствующее точному оцениванию (п. 4.2.1), в этом случае за-
ведомо пе выполняется.
4.3.8. Непрерывные алгоритмы оценивания с эмпирическими средни-
ми. Стремление сократить необходимую вычислительную производитель-
ность за счет исключения алгоритмического модуля ковариаций или его
замены более простым выражением привело к созданию ряда эвристи-
ческих алгоритмов, в которых среднее но множеству для некоторых чле-
нов заменено средним по времени. Эти алгоритмы, как правило, эконо-
мичны в вычислительном отношении. Однако условия сходимости и об-
ласти работоспособности этих алгоритмов изучены еще недостаточно.
4.3.8.1е. Фильтр, основанный па эмпирическом определении xlit(x).
Обратимся к уравнению (4.3.6) илп, что то же, к уравнению
'х = / (х, и, f) (ж/г'г —• х h1') Л-1 (z — h). (4.3.83)
Это уравнение является точным, по непосредственно неразрешимым, так
как УМО /, h, хкЛ определяются через апостериорную плотность ве-
роятности p(x[Z).
Однако при достаточной малости (например, в средпеквадратиче-
ском) ошибки оценивания с точностью до малых второго порядка можно
принять
/(х)=/(х), h (х) = h (х).
Уравнение (4.3.83) принимает вид
х — f (х, и, t) + [аЛт — xhr (х)] /?-1 [z — h (z)]. (4.3.84)
Это уравнение все еще является неразрешимым, так как содержит УМО
xhT . Используя обозначение Дх = х — х, получаем выражение
xh"1 = (х + Дх) h ( х) —- Дх + ... =
L \ 7х /
— xh' (х) f\xhr (х) + х ( —— Л.тЛ Дх (—-£ Дх I -|- (4.3.85)
\ дх J \дх J
По предположению оценивание является несмещенным (хотя бы
с точностью до малых второго порядка).
Рассматривая установившийся режим оценивания, полагаем случай-
ную функцию х/гт стационарной эргодической функцией времени. Тогда
среднее по множеству xh1 можно замелить средним по времени хЛт.
Здесь могут возникнуть следующие возражения. Величина х/гт (х) есть
условное среднее, вычисляемое с учетом наблюдения, а среднее по вре-
мени, вообще говоря, есть безусловное среднее. Однако, как видно из
дальнейшего, усреднение по времени производится для величин, явля-
ющихся выходными сигналами основного модуля, где используется на-
блюдение. Указанное среднее по времени согласно (4.3.85) и условию
несмещенности с точностью до малых второго порядка равно xh1 (х).
Заменим среднее по бесконечному интервалу времени скользящим
средним ио конечному интервалу или просто выходной величиной
апериодического звена вида
T^Ah + Dxh = xh'r(x).
Заменяя xh'1' в (4.3.84) па матрицу Dxh, получаем фильтр следующего
вида:
'х = / (х, и, t) + [ПхЛ — x/iT (х)] Л 1 [г — /г(х)], (4.3.86)
ТфДл + Dxh = х/гт(х). (4.3.87)
Назовем этот алгоритм фильтром с эмпирической матрицей xhT(x).
Приведенный вывод относится к установившемуся режиму оценивания.
Одпако предполагается, что фильтр работоспособен и в переходных ре-
жимах, заданных начальными условиями x(la) = xq, /)хл(40) = Dxfa.
4.3.8.2’. Фильтр, основанный на эмпирическом определении ЛхДхт.
Рассмотрим основной модуль обобщенного ФКБ
Л / dh \т хч
х = / (х, и, i) -|- Р'1 —т. j Л 1 [z — h (х, <)] (4.3.88)
совместно с уравнением оцениваемого процесса
х = /(х, u, t) + g(t). (4.3.89)
Вычитая из (4.3.89) уравнение (4.3.88), с точностью до малых вто-
рого порядка относительно Дх = х — х находим
• Of I dh \ г , -ч
Дх = —Дх — Р — I /Г1 [z — h (х, Z)| -|- | (Z). (4.3.90)
дх \дхI
Матрица Р близка к ковариационной матрице Еу[ДхДхг]. Заменим сред-
нее но множеству средним по времени, подставив в (4.3.88), (4.3.89) вме-
сто Р матрицу Р, формируемую с помощью многомерного апериодическо-
го звена:
ТфР + Р = ДхДхт.
Шум £ (Z) недоступен для измерения. Одпако в (4.3.90) он может быть
заменен эквивалентным (с той же матрицей интенсивностей) генериру-
емым белым шумом £*(/).
В результате получаем следующий фильтр:
А - / dh \ т
х = / (х, и, t) 4- Р I —) /I 1 [z — h (х, /)], (4.3.91)
\ dxj
df ~ ( dh \ т , ,,
Дх* = —Дх* — Р ( —- | R 1 [z — h (х, <)] -|- £* (4), (4.3.92)
дх \ дх J
ТфР + Р - - Лх*Лх*т, (4.3.93)
х(40) — х0, Дх*(40) =0, Р(40) = Ро- (4.3.94)
Хотя общая размерность этой системы уравнений с учетом симметрии
матрицы Р равна 2га + 0,5га (га + 1), т. е. выше, чем у ФКБ, необходимая
вычислительная производительность здесь намного меньше. Это обус-
ловлено простотой матричного уравнения (4.3.93), требующего при чис-
ленном интегрировании небольшого числа арифметических операций на
один шаг.
4.3.9. Непрерывные адаптивные и поисковые алгоритмы оценивания.
Все задачи оценивания, соответствующие четвертой и пятой строкам
табл. 4.1.1 и четвертой строке табл. 4.1.2, характеризуются неполной ап-
риорной информацией. Это создает существенные трудности для реше-
ния задач оценивания.
Существуют по крайней мере три пути хотя ы частичного преодо-
ления этих трудностей:
алгоритм-ы, малочувствительные к тем или иным факторам и на-
чальным сведениям;
алгоритмы, синтезированные па основе минимаксного (игрового)
подхода;
адаптивные алгоритмы оценивания.
Первый путь практически важен (пример — фильтр, защищенный от
отказов датчиков, см. п. 4.3.5), по пе дает общего решения проблемы.
Минимаксный подход (расчет па паихудшин случай) редко оправ-
дывается в системах, где отсутствует «разумный и информированный
противник». Он чаще всего дает заниженные (в сравнении с достижи-
мым в среднем) результаты или чрезмерно сложные в реализации
решения.
Наиболее перспективными являются адаптивные алгоритмы, хотя
именно в задачах оценивания недостаток априорной информации часто
бывает практически невосполнимым. Как бы пи был совершенен алго-
ритм, информационные заколы действуют здесь неотвратимо. Вопросы
идентификации, тесно связанные с адаптивным оцениванием, рассматри-
ваются в гл. 5. Здесь излагаются лишь некоторые краткие сведения о
непрерывных адаптивных фильтрах.
4.3.9.1Л Совместные оценивание п идентификация. Допустим, что
оцениваемый процесс и условие наблюдения представлены в виде
х — f(x, и, а, 0 + 5(0» (4.3.95)
z = h(x, a, t) + т](/.), (4.3.96)
где а — вектор неизвестных, по постоянных параметров (4 = 0). Ясно,
что при достаточной размерности вектора параметров в форме (4.3.95)
можно описать объект в условиях даже сильной априорной неопреде-
ленности, когда конкретные его характеристики заранее неизвестны.
Вводя расширенный вектор состояния = (ж, а), приводим задачу
оценивания х и оценивания а (идентификации) к обычной задаче нели-
нейного оценивания:
£р = /р(яр, и, 0 + £р(0» z = A(xp, О+МО» (4.3.97)
где
Синтезированный для (4.3.97) алгоритм совместного оценивания и
идентификации в отношении х является адаптивным алгоритмом оцени-
вания. Такое наименование оправдано тем, что математическая модель
оцениваемого процесса здесь априори известна лишь с точностью до па-
раметров. Сходимость адаптивного оценивания (совместного оценивания
и идентификации) во многом зависит от условий наблюдения h(xv, t),
T)(t) (см. гл. 5).
4.3.9.2’. Непрерывный адаптивный фильтр с поисковой градиентной
настройкой. Выше указывалось, что применение модели оцениваемого
процесса в непрерывных фильтрах систем автоматического управления
предлагалось еще в 50-х годах, причем в адаптивных вариантах.
Структура одного из вариантов (в современных обозначениях) пред-
ставлена на рис. 4.3.7. Основной многомерный контур здесь подобен со-
ответствующему контуру рассмотренных ранее фильтров. Контур обрат-
ной связи по вектору невязки Az содержит перестраиваемую матрицу
Рпс. 4.3.7. Структура непрерывного адаптивного фильтра с поисковой
градиентной локальной оптимизацией
коэффициентов К. Эта матрица настраивается по принципу минимиза-
ции локального критерия представляющего собой определенно-по-
ложительную функцию Аз. Минимизация выполняется градиентным ме-
тодом с поисковым определением компонент градиента посредством син-
хронного детектирования.
Параметрические (возмущающие элементы матрицы К) поисковые
сигналы обозначены через 6К = 6К(<). Они подаются аддитивным обра-
зом па матрицу К и на входы множительных звеньев синхронных де-
текторов, установленных па скалярном выходе вычислителя ()(Az). Про-
интегрированные по времени выходные сигналы множительных звеньев
управляют основными составляющими элементов матрицы К.
Нетрудно построить разностную схему этого непрерывного адап-
тивного фильтра, приспособленную для реализации в ЦВМ. Возможны
различные модификации подобных адаптивных фильтров. С целью раз-
грузки контура адаптации (самонастройки) возможно введение матрич-
ного множителя (5/г/бх)т (матричного усилительного звена) в основ-
ной контур обратной связи по вектору невязки. Возможна организация
поисковой адаптации модели по параметрам. В этом случае модель со-
держит функцию ](х, и, a, t) и организуется контур настройки вектора
параметров а, подобный контуру настройки элементов матрицы К.
Главная сложность осуществления подобных систем оценивания за-
ключается в организации непрерывного одновременного многоканального
поиска экстремума.
4.3.9.3’. Поисковые алгоритмы оценивания. Самые сложные задачи
оценивания возникают при больших начальных ошибках Да: и сложном
характере /г(г, t) и f(x, и, t), например, при h (ж, t) в виде реализации
случайной функции векторного аргумента (случайного поля), либо да-
же просто периодической функции h(x, t). Минимизируемый функцио-
нал при этом имеет множество экстремумов. Поэтому беспоисковое оце-
нивание не может в этих условиях дать решение задачи. Необходим по-
иск типа перебора либо сочетание такого поиска с рассмотренными ме-
тодами оценивания — комбинированные алгоритмы оценивания. Поиско-
вые и комбинированные алгоритмы оценивания рассматриваются в раз-
деле теории корреляционно-экстремальных систем (гл. 13), так как имен-
но в этих системах в настоящее время они находят наибольшее практи-
ческое применение. Здесь ограничимся примером, указывающим па один
из истоков данного направления теории оценивания.
Допустим, что рассматривается задача (4.3.1), по для детерминиро-
ванного с точностью до начального условия процесса (| == О, Q 0):
xt = f(xlt t), (4.3.98)
z = h(xt, t) + T](t), (4.3.99)
где lt(x, t) —сложная функция х, имеющая, например, характер реали-
зации случайной функции.
Уравнение Стратоповича (4.3.2) для данного случая примет форму
др vi 8 (Р> fj) __ др чгт °fi aP
dt ' дх, ' <11‘ Р дх. ' 2^ дх. ’г"
i=l i—1 1=1
= р[(Лт(г()— h'e) К-1 (z -h)], (4.3.100)
где р = р(ж|2) —апостериорная плотность вероятности,
оо
h = j h (х', I) р (х' | Z) ilx'.
— сю
Разделим уравнение (4.3.100) па р и введем логарифмическую плотность
вероятности In р. Получаем
(AF)X<=- 2 -4 + [ЛТ (7;) _ 12 я (4-ЗЛ01>
1=1
где производная в левой части вычислена па решении уравнения (4.3.98).
Допустим, что наблюдение ведется па интервале от to до tl. Интегри-
руя (4.3.101), находим
/j n ti [ ,
=J[ЛТ (ж/) _ nl [2 {t) ~h]dt ~ d1,
«о 11 *0
(4.3.102)
тде правая часть вычисляется на решении уравнения (4.3.98), соответ-
ствующем некоторому начальному условию ж;(1о) = ж0. Необходимо нам-
тн то начальное условие х0 (и соответствующее ему решение уравнении
(4.3.98)), которое доставляет максимум pt^ (zu)> а значит, минимум
1п(Рг1/Р< )• Трудность заключается в том, что величина k в подынте-
гральном выражении неизвестна. Поэтому приходится использовать метод
последовательных приближений.
Первое приближение для h выбираем эвристически, например,
УфЧц| + Чл = г> (U = °’ 7Ф<*1-г0- <4-3-103>
Полученное таким образом
(4.3.102) и соответствующая
Далее решается задача
/гщи(<0) = 0 подставляется в правую часть
величина pt^ обозначается Pg
, -P'tIUII
min In--------------,
Xy Pl0
Поскольку эта задача может быть мпогоэкстремальней, применяется по-
иск, включая, быть может, простой перебор на заданном дискретном ко-
нечном множестве значений a:0. Найденное таким образом значение
^oinn и соответствующее решение зщцц рассматриваются как первое при-
ближение для ж0 и xt, а величина /Цяццц) как второе приближение
для /г. Подстановка второго приближения для h и повторение процедуры
поиска дает второе приближение для хо и xt и т. д. После достижения
малых отклонений (об этом можно судить по малости разности двух по-
следовательных приближений) осуществляется переход к беспоисковому
оцениванию, более экономичному в вычислительном отношении.
§ 4.4. Математическое описание дискретных процессов
Как указывалось выше, дискретные процессы делятся на дискрет-
ные во времени, непрерывные по уровню; дискретные по уровню, непре-
рывные по времени; дискретные во времени и по уровню.
Дискретные модели непрерывных оцениваемых процессов и дискрет-
ные алгоритмы оценивания широко распространены. Эта популярность
дискретных алгоритмов вызвана по крайней мере тремя причинами:
простотой интерпретации случайных последовательностей, пе требу-
ющих даже в строгом рассмотрении таких сложных понятий, как сто-
хастические интегралы (в смысле Ито, Стратоновича и др.);
определенной адекватностью дискретных во времени алгоритмов вы-
числительным процессам ЦВМ;
предполагаемой экономией вычислительной производительности.
Хотя эти положения применительно к оцениванию в реальном вре-
мени в системах автоматического управления не бесспорны (в частно-
сти, третье положение), дискретные алгоритмы являются весьма важным,
разделом теории оценивания.
4.4.1. Цени Маркова. Цепи Маркова (ЦМ) представляют собой вид
стохастических процессов (последовательностей), дискретных во вре-
мени и по уровню. Прежде чем излагать математическое описание
этих цепей, остановимся па происхождении соответствующих матема-
тических моделей в задачах управлении.
4.4.1.1°. ЦМ в задачах автоматического управления. Самыми распрост-
раненными автоматически управляемыми объектами являются непре-
рывные объекты. Соответственно самыми распространенными автомати-
чески управляемыми процессами являются непрерывные процессы. Дис-
кретный по времени и по уровню процесс может быть получен из не-
прерывного процесса путем квантования по времени (отсчеты x(th) в
.дискретные моменты времени tD, t|, ..., th, ..., обозначаемые просто О,.
1, ..., /с, ...) и квантования по уровню, при котором нахождению xi в
интервале
Xij Xi <С
ставится в соответствие состояние
г
Число возможных состояний аДг> для каждой компоненты обычно
считается ограниченным. Нумерация этих состояний для n-мерного век-
тора может осуществляться посредством п индексов. Однако для просто-
ты обозначений будем применять одноиндексовую порядковую нумера-
цию. Тогда состояние дискретного во времени и по уровню векторного
процесса в момент времени th будет обозначаться
Преобразование непрерывного процесса в указанный дискретный фи-
зически может осуществляться аналого-цифровыми преобразователями
(АЦП). Вообще говоря, АЦП в цифровых системах управления преобра-
зуют сигналы z, и в цифровую форму. Однако для случая пепосредствеи-
1ПОГО (и достаточно точного) измерения компонент можно говорить о пре-
образовании посредством АЦП вида x(l)
Квантование одной компоненты ж, (/,) по уровню и времени иллюстри-
рует рис. 4.4.1. Следует подчеркнуть, что квантование непрерывных си-
гналов как по времени, так и по уровню связано с потерей информации.
.Для того чтобы снизить эти потери, шаги квантования стремятся сде-
лать достаточно малыми. При достаточно малом шаге квантования по
уровню и соответствующей разрядной сетке цифровых систем управле-
ния дискретностью уровня часто пренебрегают, либо рассматривают эту
.дискретность только как источник «шума квантования».
Для микропроцессорных систем управления с небольшим числом
разрядов такое рассмотрение может оказаться чрезмерно грубым. В це-
лом описание систем с ЛЦП посредством дискретных по уровню и вре-
мени последовательностей является более точным, чем то, которое по-
лучается при использовании «шума квантования». Соответственно ЦМ
являются аппаратом, обеспечивающим достаточно точное описание си-
стем с АЦП.
Однако роль ЦМ в описании управляемых процессов вообще сущест-
воппо шире указанной. Дело в том, что современные системы автома-
тического управления нередко осуществляют одновременное управление
как непрерывными, так и дискретными по своему существу процессами,
формируют «разные» или «эпизодические» команды. Для описания та-
ких сложных комбинированных процессов наиболее подходящим аппа-
ратом являются ЦМ.
4.4.1.2е. Описание ДМ через вероятности переходов. Посредством
ЦМ описываются стохастические дискретные процессы. Обозначим через
рт[/т] вероятность состояния в к в момент времени. Очевидно, что-
pv[A-]>o, 2м*1 = 1.
v
где суммирование ведется но индексам всех возможных в А--й момент
времени состояний. Дискретный простой марковский процесс может пе-
рейти в состояние x<v>[AJ из любого состояния J7<u>^z]i соответствую-
щего одному предшествующему моменту времени I < к.
Если рассматривать условную вероятность состояния z<v)[A] при
состояниях х[0J, а?[1], ..., х[к— 1] в предшествующие моменты време-
ни, то для простой ЦМ эта условная вероятность будет зависеть только
от предшествующего состояния:
р(х<’>[Л]|40], z[l], .... a:[fc^l]) = p(.rW[fc]|a[fc-l]). (4.4.1)
Если pv[Z] —вероятность состояния а:<р>[Z], то
Л. [М = 2 Рц [Л Pp.v Л1. (4-4-2>
н
где pMV|7, fc] — вероятность перехода из состояния у. в момент времени I
в состояние v в момент времени к.
Если число возможных состояний в каждый момент времени конеч-
но, то можно рассматривать вектор-столбец вероятностей
P[fe] = [Pit*] Рг[к] ...Рм[А]]т.
Тогда соотношение (4.4.1) запишется в матричной форме
р[/с] = П‘[/, /с]/ф], (4.4.3)
где П[Z, А] — [Ppv[Z, Л]] — матрица вероятностей переходов или «стоха-
стическая» матрица. Из (4 4.3) следует Пт[/, in] — ПГ[А, m]IIr[Z, А].
Стало быть,
П[/, т] = П[/, А] II [А, т]. (4.4.4)
ЦМ называется однородной, если вероятности переходов зависят
только от длины перехода, г.е. II[Z, /я] = И[т—/], т > I Для однород-
ных ЦМ, как видно из (4.4.4),
П[0, т] = П[т] = П[1]П[1] ...П[1] = П’"[1],
где П[1] —матрица вероятностей перехода па один интервал.
Если р [А] не зависит от А, ЦМ называется стационарной. Для одно-
родной стационарной ЦМ р — П'гр. Это уравнение, которое можно запи-
сать в форме (П1—£)р=0, может иметь при заданной матрице П'г не-
тривиальное решение, так как матрица в круглых скобках вырождена.
В этом легко убедиться, суммируя строки определи гели
Рц - 1 ... P1N
p N1 ... pyN 1
и принимая во внимание, что сумма вероятностей перехода равна
о дипн не.
4.4.1.3’. Описание ЦМ посредством разрывных разностных стохасти-
ческих уравнении. Другой формой описания марковских цепей являют-
ся стохастические разностные уравнения с разрывными характеристи-
ками. Уравнение
а:[А + 1] =/[ж[А], к, te[A]], (4.4.5)
где ш[0], и>[1], ..., ш[А], ...— «белая» последовательность случайных
гауссовских векторных величии, в которой иЦА] независимо по отно-
шению к и>[А—1], при соответствующем выборе векторной функции /
может описать любую ЦМ, заданную дискретными конечными множест-
вами состояний и матрицами вероятностей переходов.
Поясним это для одномерного случая, когда х[A], it? [А], / — скаляр-
ные величины. Пусть конечное множество возможных состояний для
каждого значения А задано. Тогда заданы ступеньки по оси ордппаг
ступепчагой функции /[.т[А], А, и>] (рис. 4 4.2), а также возможные дис-
кретные ввачеппя аргумента »<*>[<:] этой функции (вертикальные штри-
ховые липни ла рис. 4.4.2). Подбирая горизонтальные размеры ступенек
функции / п форму зависимости этой функции от п>[А], можно обеспе-
чить любую матрицу вероятностей перехода из состояний z(1J>[A] в со-
стояния £<v>[A -pl], v, ц = 1, АС
4.4.2. Последовательности Маркова. Последовательности Маркова
(НМ) представляют собой стохастические процессы, дискретные во вре-
мени, по непрерывные чо уровню. Это наиболее распространенная фор-
ма оцениваемых процессов с дискретным временем. Непрерывное наблю-
дение преобразуется в дискретное но времени просто путем отсчетов зна-
чений z в моменты времени /о, б, t-г, ...
4.4.2. !°. Описание ПМ посредством вероятностей переходов. В каж-
дый дискретный момент времени непрерывная по уровню случайная
последовательность описывается непрерывным распределением плотно-
сти вероятности />(хг[А;]), а переход из
Гис. 4.4.2. Разрывная (ступенчатая)
функция стохастического разностного
уравнения, описывающего ЦМ
состояния х [Л — 1] в состояние
ж [Л]—непрерывной плот-
ностью вероятности перехода
л [ж [А:] |ж[7с— 1]]. Наряду с
р(ж[7г]) можно рассматривать
плотность вероятности совме-
стного распределения р[ж[7с],
ж [7г — 1], ..., ж[0]], а также
условные плотности ве-
роятности р [ж [7с + 1] | х [/.],
х[к — 1], ..., ж[0]].
Случайная последователь-
ность является однородной
марковской (или простой мар-
ковской), если
р[х[Л + 1].|ж[/г], х [7г — 1], ...
..., х[0]] =p[x[fc + l]|x[M],
(4.4.6)
т. е. распределение вероятностей зависит лишь от состояния в один
предшествующий момент времени. Для ПМ
р[ж[7г + 1], ж[7с].х[0]] =
= р(^[0])д(ж[1] |ж[0]) ...р(ж[Л + 1] |x[fc]). (4.4.7)
Соотношение (4.4.7) может служить определением ПМ.
Частным случаем уравнения Колмогорова — Чэпмена является соот-
ношение
СЮ
л [ж [7с] | х [7]] = J л [ж [7с] | ж [иг]] я [ж [т] | ж [Z]] dx [т]. (4.4.8)
—сю
4.4.2.2е. Описание ПМ посредством разностных уравнений с непре-
рывными функциями. ПМ может быть описана посредством разностного
уравнения вида
ж[7с 4.1] = /[ж[7с], 7г] + ю[7с], (4.4.9)
где / — непрерывная векторная функция; ю[/с], к = 0, 1, ... — гауссов-
ская белая последовательность. Матрица интенсивностей (ковариацион-
ная матрица) Е[ю[/с],ю’г[7;]] может зависеть не только от к, по и от
.ж [Тс]. Она может быть получена путем рассмотрения процесса, заданно-
го разностным стохастическим уравнением вида
х[к + 1] = /[ж[7с], 7г] + <р[ж[7с]] ю*[7с], (4.4.10)
где <₽[я[7>]]—заданная матричная функция ж[Л]; ю*[7с]—белая гаус-
совская последовательность, для которой Е [w [A] [А] ] зависит только
от А или постоянна.
Описание ПМ в виде стохастических разностных уравнений является
для теории автоматического управления основным. Дело в том, что раз-
ностные уравнения (для нелинейных систем — приближенные) могут-
быть получены из обыкновенных дифференциальных уравнений непре-
рывных процессов на основе стандартных методов.
4.4.2.3d. Получение разностных уравнений на основе обыкновенных
дифференциальных уравнений непрерывных процессов. Для линейных,
непрерывных систем с известной переходной матрицей разностное урав-
нение, связывающее значения х(1) в дискретные моменты времени, по-
лучается в общем точном виде (см. гл. 1).
Для нелинейных непрерывных процессов, описываемых, в частности,,
стохастическим дифференциальным уравнопием вида
х = f(x, t) + g(z),
получение точного разностного уравнения (точно отражающего связь
между х [А- + 1] и а: [А]) в общем случае невозможно. Однако сущест-
вуют глубоко изученные методы численного интегрирования обыкновен-
ных дифференциальных уравнений. Эти методы указывают способы по-
строения разностных схем, которые и являются искомыми разностными
уравнениями. Заметим, что для получения разностных уравнений в ви-
де (4.4.9), (4.4.10) непосредственно пригодны лишь одношаговые (одно-
точечные) методы первого порядка, например, метод Эйлера.
§ 4.5. Алгоритмы оценивания дискретных
по времени процессов
Общая классификация задач оценивания дискретных процессов по
признаку описания оцениваемого процесса и условиям наблюдения со-
держится в табл. 4.1.3. Ниже рассматриваются задачи, соответствующие
первой и второй строкам этой таблицы. Адаптивные и другие разновид-
ности рекуррентных (разностных) алгоритмов оценивания могут быть,
в ряде случаев построены по аналогии с соответствующими непрерыв-
ными алгоритмами (см. § 4.3).
Оцениваемый дискретный во времени стохастический процесс (ПМ)
описывается разностным уравнением вида (4.4.10)
х[А+1] = /[ж[А], Л] + <р[>-[А], (4.5.1).
при наблюдении вида
z[A] = h [х[А], А] + v[А], (4.5.2)
где w [А], 4А], А-= 0, 1, .. . — независимые друг от друга белые гауссов-
ские последовательности такие, что
E[w[A-]ipt[Z]], = (?[А’]бы, ,
Е [о [А] [/]]=/? [А] бы.
где —символ Кронекера.
Существует глубокая аналогия между оцениванием дискретных ио
времени (дискретизированных) и непрерывных во времени процессов,
хотя есть и неизбежное различие в алгоритмах. Ниже сначала рассмат-
риваются субоптималг.пые алгоритмы оценивания нелинейных дискрет-
ных процессов, а затем алгоритмы оптимального оценивания линейных
процессов.
4.5.!. Субоптимальпые алгоритмы оценивания нелинейных процес-
сов. Для непрерывных процессов алгоритмы оцепива-пия содержали ос-
новной модуль и модуль ковариаций (см. пи. 4.3.1—4.3.4). Дискретные
фильтры, описываемые рекуррентными (разностными) уравнениями,
удобно рассматривать состоящими из большего числа модулей. Это
связано с тем, что в рекуррентных алгоритмах фигурирует боль-
шее число векторных и матричных величии. Так, если в непрерывных
алгоритмах присутствует .т(7), то в рекуррентных алгоритмах фигуриру-
ют как оценки в дискретные моменты времени после измерения z[/c 4- 1],
;[А], обозначаемые х[А + 11 к + 1] = а: [7с 4-1], ж[А|А] = х[А], так и
оценка х [А-+ 11/с], относящаяся к моменту времени к -|- 1, но получае-
мая до измерения z[k + 1] (предвидение. предсказание).
Оценку х[А -)- 117г] иногда называют оценкой между измерениями или
предсказанной, прогнозируемой оценкой. Опа получается по информа-
ции z [А] и, быть может, предшествующим измерениям. В рекуррентных
алгоритмах наряду с ковариационной (или близкой к пей) матрицей
7’[7т + 1|7т + 1] = Р[/с + 1], Р[А-|7т] = Р[7т], вычисляемой после получе-
ния измерений соответственно z[/г + 1], z[А], рассматривается аналогич-
ная по смыслу матрица Р[/т + 117т], рассчитываемая для момента вре-
мени 7т + 1 по информация, получаемой в момент времени А и предшест-
вующие моменты.
Подобно непрерывным алгоритмам оценивания нелинейных процес-
сов, рекуррентные алгоритмы могут подразделяться па алгоритмы пер-
вого и второго порядков.
4.5.1.1е. Субоитимальпып рекуррентный алгоритм второго порядка.
Для оцениваемого процесса и условий наблюдения (4.5.1) — (4.5.3) суб-
оптимальпым в смысле критерия МАВ является следующий рекуррент-
ный алгоритм' [4.29, 4.30]:
а) основной модуль
z[/r+l] =2[7;-Н|7С] +К[А- + 1]{2[А-+1] -
- А[?[/т + 1 |А], к+ 1]-А,т[х[АЧ-1|А], 7т + 1]: 7>[А + 1]}, (4.5.4)
где условные обозначения соответствуют § 4.3, а также пояснены
выше;
б) матрица К [7; 4- 1] определяется выражением
К [А- -| 1| = Р (А- -|- 1] h% [х (A- -f- 1 | /т], к -]- 1] R-1 [А- 4- 1]; (4.5.5)
в) матрица 7’[А 4-1] удовлетворяет уравнению
р [/с + 1] = Р [к + 1 | А] - Р I* -J- 1 | А| кгх [2 [А+1| к ], Л-|-1 ] X
х [2 [* +11 *1, к + 11 ? I* + 11 Ч [* + 11 Л1. к +11 4-
+ И [к + l]]-1 hx [2 [А + 1 I Л], А + 1] Р [к + 1 I Л]; (4.5.6)
г) оценка т[А- 4- 11 /с] определяется рекуррентным соотношением
х[А + 1 |Л] = /[2[А], А] +0,5/.™№1, А]: Р[А]; (4.5.7)
д) матрица /’[А- -|- 11 /с] удовлетворяет рекуррентному выражению
р [Л +11 А] = /х [2 ГЛ], Л] Р [Л] £[2 IЛ], А] 4- <р fx [Л], А]<2[А]фт [.?[А], А]-|-
-I 0,5 {<р I.? [А], Л] Q [А] <рт [х [А], Л]}жж: Р [Л]. (4.5.8)
Этот алгоритм является дискретным аналогом непрерывного модифи-
цированного фильтра второго порядка (см. и. 4.3.2.3е).
Порядок вычислений па каждом шаге следующий.
1. Вначале (рассматривается таг А, 7с 4- 1) вычисляются
7[.т[А], А], А[т[А], 7с], М[ж[А], А],
Ф №], 7с], {Ф [2 [7с], к] Q [7с] ф- [Г[А], А] }да
(величины х[А], Р[А] известны из вычислений па предыдущем шаге,
а для А = 0 задаются).
2. Далее посредством рекуррентных выражений (4.5.7), (4.5.8) опре-
деляются
^[А4-1|А], Р[А4-1|А].
3. Вычисляются
АХ[Р[А+1|А], А4-1], /?[/с4-1], Л[ж[Л4-11 А], А 4-1],
Ает[^[А 4- 11 А], А 4- 1]. (4.5.10)
4. Посредством рекуррентного соотношения (4.5.6) определяется
7>И + 1].
5. Из (4.5.5) определяется К[А4-1].
6. Посредством основного алгоритмического модуля (4.5.4) опреде-
ляется х[к 4- 1].
Шаг закончен. Далее идут в том же порядке вычисления следующе-
го шага и т. д.
4.5.1.2е. Замечания о практическом применении рекуррентных алго-
ритмов оценивания второго порядка. Изложенное в п. 4.3.2.4е примени-
тельно к непрерывным алгоритмам второго порядка в определенной ме-
ре соответствует и рекуррентным алгоритмам. Здесь приводятся краткие
дополнительные сведения.
Количество элементарных арифметических операций, необходимых
Для вычисления матриц (4.5.9), (4.5.10), зависит от вида и формы пред-
ставлепня векторных и матричных функций /, <р, h, Q, R. Наиболее тру-
доемким является вычисление матриц Гесса, отмеченных нижним ин-
дексом хх. Если даже не принимать во внимание эти вычислительные
затраты (опи соответствуют операциям 1 и 3, указанным в п. 4.5.1.1°), то
число элементарных арифметических операций па один шаг согласно
рекуррентным выражениям (4.5.7), (4.5.8), (4.5.6), (4.5.5), (4.5.4) (опе-
рации 2, 4, 5, 6 из п. 4.5.1.1е) превысит
14га3 + 6ге2т + бга/га2 -|- 4 гаг3 -|- 2 га2,
где п — размерность х; т — размерность z. При /г = 20, т = 5 число
элемептариых арифметических операций на один шаг превысит 1,3-105.
Оценивание в системах автоматического управления должно осу-
ществляться в реальном времени. При тактовой частоте 30 Гц и указан-
ной размерности оцениваемого процесса потребная вычислительная про-
изводительность для рекуррентного фильтра второго порядка превысит
4-106 элементарных арифметических операций в секунду. Рекуррентные
алгоритмы оценивания второго порядка, как и соответствующие непре-
рывные алгоритмы, целесообразно применять и первую очередь для оце-
нивания нелинейных процессов невысокой размерности с гладкими
(в пределах максимальных возможных ошибок оценивания) характери-
стиками.
4.5.1.30. Обобщенный рекуррентный ФКБ. Если в выражениях
(4.5.4) — (4.5.8) отбросить члены с матрицами Гесса, отмеченными ниж-
ними индексами хх, то получается алгоритм первого порядка, именуе-
мый обобщенным рекуррентным ФКБ:
а) основной модуль
+ 1] =
= /№], Л] + К[Л-Ь 1]{г[Л-Ы]-Л[2[Л+1|Л], *4-1]}; (4.5.11)
б) матрица К [* + 1] определяется выражением
К [Л- -j- 1] = Р [Л + 1] [х [Л-1-1| Л], Л + 1] R~l [Л + 11; (4.5.12)
в) матрица Р [Л + 1] удовлетворяет уравнению
р [/,-|-1] = р +11 *] _ р [Л + 11 л[ [х [л11 л|, л +1]х
X {Лх [х [Л-|-1 | Л], Лф- 1]Р [Л+1| Л] /£ [х [Л + 11 Л], к 4- Ц + R [к 1 [)-Ь<
ХЛЖ [х [к + 1 I Л], к + 1] Р [к -I- 1 I Л]; (4.5.13)
г) матрица Р[Л-[-1|Л] удовлетворяет рекуррентному соотношению
Р [Л + 1 I Л] = 4 [Г[Л[, Л] Р [Л] /J [G [*], A-J +
+ <Р [х [Л], Л[ Q [Л] <рт [х [Л], Л]; (4.5.14)
д) величина л[Л + 1|Л] определяется равенством
я[Л + 1|Л] = /[Г[Л], Л]. (4.5.15)
Порядок вычислений па каждом шаге в целом тот же, что и в фильт-
ре п. 4.5.1.1°, по отсутствует вычисление вторых производных. При оце-
нивании многомерных миогосвязпых процессов необходимая для реа-
лизации рекуррентных фильтров первого порядка вычислительная про-
изводительность па поряди: и более меньше, чем для фильтров второго
порядка.
4.5.1.40. Рекуррентный фильтр первого — второго порядка. Один из
вариантов алгоритма оценивания имеет вид [4.41]:
а) основной модуль
х[к + 1] = / К[А], к] 4- Р [7с + 1] /£ [S' [А- + 11А], 7с + 1]Х
ХЛ”1 [7с + 1] {z [7с-|- 1] — h [а? [А -[- 1 17с], 7с + 1]}. (4.5.1С)
Этот модуль совпадает по форме с объединенными модулями (4.5.11),
(4.5.12); "
б) матрица Р [7с + 11 /с] определяется рекуррентным соотношением,
аналогичным (4.5.14), т. е.
Р [Л 4- 1 I 7с] = /ж [ х[к\, 7с] Р [7с] fx [2 [А], 7с] 4-
4- <р [ж [7с], A] Q [А] <pT [2[7с], 7с]; (4.5.17)
в) матрица /’[7,4-1] =/’[Л 4~ 11А 4-1] определяется соотношением
Р[А+1] == Р[А 4-11 А] {Е — Мх[-г[А 4-1| А], к 4- 1]Р[7с 4- 1| А]}-', (4.5.18)
где М — последний член основного модуля без множителя 7’[А-|-1]:
М [ж [7с4- 1 I А], к 1] =
= [я [А 4-1 | А], А |- 1] П~1 [А 4- 1] {z [7с ф- 1] — 7г [.? [7с4- 1 I А], А 4- 1]}.
(4.5.19)
По форме основного модуля это рекуррентный фильтр первого порядка.
•Однако соотношение (4.5.18), как видно из выражения (4.5.19), содер-
жит вторые производные, что характерно для алгоритмов второго
порядка.
4.5.2. Оптимальный рекуррентный алгоритм оценивания линейных
процессов. Рекуррентные алгоритмы линейного оценивания имеют наи-
большее распространение в системах автоматического управления в сов-
ременный период. Эти алгоритмы строятся для оценивания ПМ, описы-
ваемых уравнением
х[7г 4- 1] = Л[А]х[А] + В[А]н[А] 4- С[А]ш[А] (4.5.20)
лри наблюдении вида
z [ А] = II [А] х [А] 4- v [А], (4.5.21)
где w [А], v [А] — белые гауссовские последовательности, независимые
Круг от друга. Уравнение типа (4.5.20) получается при линеаризации не-
линейного дискретного во времени процесса в малой окрестности пеко-
торого заданного певозмущениого или программного движения. Вообще
в виде (4.5.20) описываются линейные нестационарные процессы в дис-
кретном времени.
4.5.2. !°. Рекуррентный линейный ФКБ. Если принять во внимание,,
что в случае (4.5.20), (4.5.21)
/[44, Л] =Л[Л]£[Л] + В[А]и[А], /х[х[А], А] = Л[А],
h [S[/c + 11 А], к+ 1] = /7р+ 1J4& + 1|А],
hx[х[А- + 11 А], к + 1] = 11 [к -|- 1], ц[ж [А], А] = С[7с],
то вместо алгоритма (4.5.11) — (4.5.15) для линейной задачи оценивания
получим:
а) основной модуль
Г[7с + 1] = А [А]4А] + В[А]н[А] +
+ К [Л- + 1 ] [и [7с + 1] - II [Л- + 1 ] х [Л- + 11 А] ]; (1.5.22)
б) одпошаговое предсказание х
4 к + 117с] = А [А] 4 А] + В [А] и [7с]; (4.5.23)
в) одпошаговое предсказание Р
Р[к + 1|А] = Д[А]Р[Л]ЛТ[А] + С[А](2[А]СТ[А-]; (4.5.24)
г) выражение для матричного коэффициента усиления К[/с-|-1]
К[А + 1] = Р[к + 1]Z7[A + 1]/?-'[7; + 1]; (4.5.25)
д) уравнение для матрицы Р[А + 1]
Р [А + 1]. = Р [7с + 11А] - Р [А + 11 A] IB [к + 1] X
X {ZZ[/c + + 1] + '<[* + !]}-'//[* + 1]Р[7с + 1|А].
(4.5.26)
Это рекуррентный оптимальный ФКБ, получивший очень широкое при-
менение. Порядок вычислений па каждом шаге следующий. Сначала па
основе выражений (4.5.23), (4.5.24) определяются а[7с -|- 11А], Р\к -]- 11 А|.
Далее из (4.5.26) определяется Р [7с + 1]. После Этого по формуле (4.5.25)
вычисляется К[А + 1]. Шаг завершается вычисленном х[7с + 1] в ос-
новном модуле (4 5.22). Далее цикл повторяется.
4.5.2.2°. Рекуррентный ФКБ для стационарного линейного процесса.
Этот фильтр получается из (4.5.22) — (4.5.26) в предположении, что мат-
рицы А, В, С, 11, Q постоянны':
а) основной модуль
х[к -j- 1] = Лх[А] + Ви[к] + К[А + 1] [z[A- -j- 1]- Пх[к + 1|А]]; (4.5.27)
б) одпошаговое предсказание х
4 А + 11 А] = Ах[А]. + Ви [А]; (4.5.28)
в) одношаговое предсказание
Р [А- + 11 Zc] = АР [7с] Лт -|- С(?СТ; (4.5.29)
г) выражение для матричного коэффициента усиления К[7с-[-1]
К [А + 1] = Р[А + 1]П7?~1; (4.5.30)
д) выражение для матрицы P[k + 1]
Р[А+ 1] =
= Р[А -[- 11 А] — Р[А + 11 А]Н'{ПР[к J- 11 к]Н‘ + R}~4IP[k + 11 А].
(4.5.31)
4.5.2.3". Защита рекуррентных фильтров от отказов датчиков. Для
рекуррентных фильтров можно применять эвристический способ защиты
от отказов датчиков, описанный в п. 4.3.5 применительно к непрерывным
фильтрам. В частности, для стационарного линейного оцениваемого про-
цесса алгоритм будет иметь вид:
а) основной модуль
ДА-+ 1] = д£[А] +7?н[А] +K[A + 1]F[z[7c4-1]-/747c+1|A-]]; (4.5.32)
б) одпошаговое предсказание х
х [А + 11 А] = Ах [А] + Ви [А]; (4.5.33)
в) одпошаговое предсказание Р
р[к + 11 А] = АР [А] Ат + С<2СТ; (4.5 34)
г) выражение для матричного коэффициента усиления
К [7с -|- 1] = Р [А- + 1] rfR-г- (4.5.35)
д) выражение для матрицы Р[7с + 1]
Р [А + 1] = Р [А 4-1 | 7с) - Р [7с 1 17с| X
XpW и + 11 *1 яз/< + йзл1-1 I7'’ + 117‘1- <4-5 3°)
Здесь F—векторная функция, каждая составляющая которой имеет вид,
подобный представленному на рис. 4.3.5; Е/,—символ отказа, обнаружен-
ного (посредством блока В) па А-м шаге; Hsu— матрицы, соответ-
ствующие элементы которых обнуляются при поступлении сигнала от-
каза датчика.
§ 4.6. Непрерывные алгоритмы оценивания полей
Постановка и классификация задач оценивания полей приведены
в § 4.1. Наблюдение скалярного поля h(x) может быть скалярным и век-
торным. Характерным примером конечномерного наблюдения является
одновременное измерение в нескольких точках (см табл. 4.1.4) Для по-
тепциальпых пространственных полей векторное наблюдение получает-
ся и при измерении в одной точке различных производных потенциала
(три первых производных, шесть вторых производных в трехмерном
пространстве).
4.6.1. Алгоритмы при векторном наблюдении. Оцениваемое поле h
считается постоянным во времени, точнее, постоянным за время оцени-
вания:
7Г = °- (4.6.1)
Вектор наблюдения связан с оцениваемым полем линейным интеграль-
ным оператором вида [4.47]
оо
z[.z'(Z)] = j g [z, х' (Z)] h (л.) dx •]- £(Z), (4.6.2)
-—co
где z, g— всктор-столбцы; z'(l)—точка наблюдения или некоторая
средняя точка наблюдения, заданным образом перемещающаяся в про-
странстве; g(Z)—векторный белый шум с матрицей интенсивностей R.
Все компоненты векторной весовой функции g(x, х‘) считаются исчеза-
ющими с ростом нормы вектора х — х’, и притом достаточно быстро.
Вектор невязки примем равным
СО
Дг --- z — z = z — j g [х, х' (Z)J h (.г, Z) dx, (4.6.3)
—со
где h(x, Z) —искомая оценка поля.
Минимизируемый локальный функционал (функцию) невязки зада-
дим в виде
О,5ДгтЛ-1Лг =
Градиент (производная Фреше) этой функции по h ранен
д ,
0,5 — (ДгтЛ-’Дг) = — Л’1'/?-1
dh
где
g(x, x’jdx.
(4.6.5)
Стационарное поле (4.G.1) можно рассматривать как детерминирован-
ный во времени процесс и применить для синтеза оптимальных алгорит-
мов оценивания подход, изложенный в п. 4.3.7.!°. В этом случае основ-
ной модуль алгори тма оценивания будет иметь вид
i)h _
01 =
к1Г11~г
{х, х') h (х, f) dx ,
(4.6.6)
где коэффициент или оператор к может задаваться различным образом.
4.6.1.1°. Распределенный ФКБ. Введем ошибку оценивания ДА. =
= Л(ж)—h(x, t). Вычитая из (4.6.1) уравнение (4.G.6), получаем
ОО
- -f- lcH'll~l j” g (ж, ж') ДА (ж, 4) dx — — kllv7? (I).
—оо
(4.6.7)
Пусть весовые функции g, (ж, х') (компоненты векторной весовой фупк-
ОО
ции g(x, ж')) нормированы так, что J g.; (ж, x’)dx = 1. Тогда
— оо
оо
—+ кПгП~1 У g (ж, ж') Л'г (ж, 4) dx ~ — кН1 (4), (4.6.8)
— оо
где в данном случае
!/’= [1 1...1] = ет.
(4.6.9)
Введем в рассмотрение корреляционную функцию ошибки оценивания
М(х, х", 4) = Е[ДЛ(ж, 4)АЛ.(ж", 4)]. (4.6.10)
Умножая (4.6.8) сначала па Ак(х", 4), затем, заменяя в (4.6.8) ж па
ж", и умножая па Лк(х, 4), складывая, применяя оператор математиче-
ского ожидания и вычисляя Е[Л7т£], находим
оо
~ М (ж', ж", 4) + kUlR~l g\x, X {t)] М(х, х", t)dx = 0. (4.6.11)
—оо
Зададим к так, чтобы
к!Г =
gT [ж*, х (4)] М (ж, ж*, 4) dx*.
(4.6.12)
Из (4.6.6), (4.6.11), (4.6.12) получаем следующую систему иптегро-
дифферспциальпых уравнений с частными производными:
Oh (ж, t)
dt =
co
= J gT [ж*, ж' (4)] M (ж, ж*, 4) dx*R~1
— ОО
(4.6.13)
ОО
д с
М (ж, ж*, t) -|- I g1 [ж", ж' (4)] М (ж, ж", 4) <4ж"Х
— оо
оо
X/?-1 f g [ж", ж'(4)] М (ж*, ж", 4) йж" = 0. (4.6.14)
ОО
z — g [ж*, ж' (4)] h (ж*, t) dx*
— оо
Алгоритм (4.6.13), (4.6.14) является аналогом ФКБ для линейной за-
дачи сосредоточенного измерения. Реализация алгоритма (4.6.13), (4.6.14)
в ЦВМ путем построения разностных схем интегро-дифференциальных
уравнений наталкивается на трудности, связанные с очень высокой раз-
мерностью разностных схем.
4.6.1.2е. «Экономичный» распределенный фильтр. Введем в рассмот-
рение матрицу-столбец
К (ж, ж', 4) =
ж') М (ж, ж*, 4) dx*.
(4.6.15)
Тогда уравнение (4.6.14) можно переписать следующим образом:
М (ж, ж*, 4) + Кт (ж, ж', 4) 7?—1К (ж*, ж, 4) = 0. (4.6.16)
Умножая это уравнение справа на gT^*, ж') и интегрируя по ж* в пред-
положении медленности изменения ж'(4) (dx'ldl « 0), вместо алгоритма
(4.6.13), (4.6.14) получаем следующий «экономичный» алгоритм:
dh (ж, 4)
’ dt
= Кт (ж, ж' (4), 4] R~l
z — I g |ж*, ж' (4)] h (ж*, 4) dx*
(4.6.17)
Кт (ж, ж', 4) = — Кт (ж, ж', 4) R 1 J К (ж*, ж, 4) gT [ж*, ж' (4)J dx*.
— ОС
(4.6.18)
Указанное название алгоритма оправдано тем, что соответствующая
ему разностная схема имеет существенно меньшую размерность в срав-
нении с распределенным фильтром (4.6.13), (4.6.14).
4.6.2. Алгоритмы для случая скалярного наблюдения. При измере-
нии одной величины z и g(x, х') суть скалярные функции. Соответст-
вующие алгоритмы получаются как частные случаи алгоритмов
§ 4.5 [4.43].
4.6.2.1е. Распределенный ФКБ при скалярном наблюдении. Алгоритм
фильтрации имеет вид
dh (х, t)
dl
— R
х*, х' (t)] М (х, х*, t) dx* z —
х' (I)] h (x*, I) dx*
(4.6.19)
М (х, х*,
oo
J g [x", X (t)J w*, x", t) dx" = 0. (4.6.20)
—oo
Допустим, что g[z*, x'(i)] = — ж'(<)], т. с. наблюдение является по
распределенным, а сосредоточенным. Положим также x=x'(t), т. е.
оценивание выполняется для точки наблюдения. Тогда уравнения (4.6.19)
А М М2
обращаются в простейший ФКБ: h --- (z — /г), М -|- = 0, где М —
- М(х', х', 1), точками обозначено дифференцирование по времени.
4.6.2.2е. «Экономичный» распределенный фильтр при скалярном на-
блюдении. Алгоритм фильтрации имеет вид
dh (я, t) 1
------= -д К [.?, х‘
К (х, х' (I), I) -jj К (х, х' («), 1}
, х t) dx* , (4.6.21)
i*, x, t) g |t*, x’ (Z)] dx*.
(4.6.22)
Эти уравнения, как и предыдущие интсгро-диффсреициальпые урав-
нения с частными производными, интегрируются численным путем при
граничных условиях, заданных па основе априорной информации.
ГЛАВА 5
МЕТОДЫ И АЛГОРИТМЫ ИДЕНТИФИКАЦИИ
ДИНАМИЧЕСКИХ СИСТЕМ
Под идентификацией в широком смысле понимается получение или
уточнение по экспериментальным данным модели реального объекта
(процесса), выраженной в тех или иных терминах (описанной па том
.или ином языке). Идентификацией динамической системы (процесса)
называется получение или уточнение но экспериментальным данным ма-
тематической модели этой системы или процесса, выраженной посредст-
вом того или иного математического аппарата.
Хотя название «идентификация» в СТАУ стало применяться лишь
с 60-х годов, идентификация в широком смысле, как видно из приведен-
ного определения, составляет неотъемлемую часть всякой подлинной на-
уки и имеет древнее происхождение. Идентификация функциональных
зависимостей составляет предмет разработки эмпирических формул. Иден-
тификация статистических объектов и процессов образует одну из глав-
ных частей математической статистики. В последнее время проблемы
идентификации па стадии исследований и проектирования срослись с
относительно новым направлением: планированием многофакторных эк-
спериментов [5.1—5.9]. В связи с тем, что научно-техническая револю-
ция сопровождается внедрением математического моделирования почти
во всех отраслях знаний, значение идентификации возрастает. Это отно-
сится в полной мере к области управления, причем как к стадии про-
ектирования систем управления, так и к стадии функционирования этих
систем (идентификация в реальном времени).
Некоторые успехи, достигнутые в области методов идентификации,
приводят иногда к противопоставлению идентификации разработке ма-
тематических моделей па основе законов соответствующих отраслей на-
уки, инженерных знаний и интуиции. Такое противопоставление непра-
вильно в той же мере, как противопоставление дедуктивного и индуктив-
ного методов, теории и эксперимента.
В действительности эффективность идентификации во многом зави-
сит от удачно выбранных языка и структуры модели, которые целиком
базируются на теоретических априорных предпосылках. Даже в уни-
кальной по своей сложности (и вследствие этого еще не решенной) за-
даче разработки математической модели деятельности человека-опера-
тора в сложной человеко-машинной системе чисто эмпирический подход
менее плодотворен, чем подход, основанный на сочетании теоретических
положений психологии и физиологии с идентификацией.
Разумеется, это пе исключает целесообразности примепепия в не-
которых случаях в задачах идентификации чисто феноменологических
моделей и даже моделей типа «черный ящик». Заметим еще, что выше
говорилось как об идентификации объекта, так и об идентификации про-
цесса. В эти понятия целесообразно вкладывать следующее содержание.
Допустим, что рассматривается объект во всех его эксплуатационных
режимах. Получение или уточнение по экспериментальным данным мо-
дели этого объекта, работоспособной для всех эксплуатационных режи-
мов, называется идентификацией объекта. Пусть теперь рассматривает-
ся один режим (процесс) функционирования объекта. Получение или
уточнение на основе экспериментов модели данного режима именуется
идентификацией процесса (режи-ма).
§ 5.1. Общая классификация задач идентификации
Уже из приведенного выше понятия идентификации следует, что
классификация задач идентификации может осуществляться по целому
ряду признаков: идентифицируемый объект или процесс; класс модели,
в терминах которой осуществляется идентификация; условия наблюде-
ния и возбуждающие процесс воздействия и др.
В практике идентификации идентифицируемый объект или процесс-
оказывает определяющее влияние и на условие наблюдения (в частно-
сти, состав измерительной и регистрирующей аппаратуры), условия воз-
буждения идентифицируемого процесса, располагаемое время идентифи-
кации и др. Однако в теории идентификации, как и в любой другой тео-
рии, реальный объект или процесс представлен своей моделью, в той
или иной мере описывающей этот объект или процесс. Таким образом, в
теории идентификации приходится иметь дело с двумя моделями: мо-
делью, описывающей идентифицируемый процесс, и моделью, в терми-
нах которой производится идентификация. Эти модели по своей форме
(классу) могут совпадать, а могут и нс совпадать. Последнее имеет, в
частности, место в том случае, когда в интересах простоты алгоритма
идентификации (или простоты использования ее результатов) модель, в
терминах которой выполняется идентификация, выбирается более про-
стой, чем модель идентифицируемого процесса.
В случае одинаковой структуры двух указанных моделей эффектив-
ность идентификации при теоретических исследованиях (численных экс-
периментах) может быть проверена непосредственно по степени близо-
сти этих моделей после завершения процесса идентификации (степень
близости чаще всего выражается в норме разности векторов парамет-
ров моделей). При различной структуре указанных моделей эффектив-
ность идентификации может быть проверена косвенным путем — посред-
ством сопоставления реакций моделей (после завершения процесса иден-
тификации) на те или иные возбуждающие воздействия. Этим же путем
обычно проверяется эффективность идентификации реальных объектов
(процессов): сравниваются реакции реального объекта и модели, полу-
ченной в результате идентификации.
Укрупненная общая классификация задач идентификации по двум
признакам: модель, в терминах которой выполняется идентификация,,
и условия наблюдения, представлена в табл. 5.1.1.
Классификация задач идентификации
Таблица 5,1.1
Условия наблюдения
содержательна я
формулировка
Лекторы ВХОДНЫХ II выход-
ных сингалов
Векторы управления и на-
блюдения
Векторы управления и со-
стояния
Векторы управления, состо-
яния и его производной но
времени
I
II
III
Модель, в терминах которой
выполняется идентификация
В таблице указаны задачи идентификации в терминах операторных
моделей п пространств епгпалов, хотя преобладающее внимание в дан-
ной книге уделяется пространству состояний. При этом учитывается,
с одпоп стороны, то, что первые методы идентификации линейных дина-
мических систем были разработаны еще в классической теории управ-
ления пмеппо для случаев их операторного описания, а с другой сторо-
ны— то, что операторное описание в теоретико-множественном смысле
является более общим, чем описание в пространстве состояний. В основ-
ной частп табл. 5.1.1 указаны задачи идентификации, в которых модель
представлена в пространстве состояний (в параметрическом или
нспараметричсском виде), а условия наблюдения соответствуют трем
вариантам. Это число даже меньше числа вариантов условий иден-
тифицируемости, приведенных в § 2.2. Дело в том, что некоторые
условия наблюдения, рассматриваемые в § 2.2, редко реализуются на
практике.
5.1.1. Теоретико-множественная постановка задачи идентификации.
Понятие функциональных метрических пространств (частный случай
множеств) настолько широкое, что любые входные и выходные сигналы
реального объекта (процесса) можно рассматривать как элементы та-
ких пространств:
^их(1) ЕЕ х^пх, ЛГцых(1) 6= Хсых* (5.1.1)
Яспо, что как число компонент хВх(0< жвых(4) (размерности этих векто-
ров), так и физическая природа соответствующих сигналов могут быть
различными. Пространства А„х, л„ых охватывают, вообще говоря, все
возможные режимы функционирования объекта. При идентификации,
использующей как естественные, так и искусственные возбуждающие
сигналы, их множества ограничены, так как ограничены допустимое вре-
мя идентификации и затраты на идентификацию (в том числе расход
ресурса объекта). Поэтому входные и выходные сигналы реального объ-
екта при идентификационных экспериментах удовлетворяют соотно-
шениям
<’х W «= А"х с Ai,x> Ч'ых W е А™х <= Хвы... (5.1-2)
где А’"х, А"’}ых—пространства входных и выходных сигналов реального
объекта при идентификационных экспериментах.
Попятно оператора в теории множеств и функциональном анализе
также достаточно широкое, чтобы считать, что всякий реальный объект
при заданных начальных условиях в отношения преобразования входно-
го сигнала в выходпойхсколь угодно точно описывается некоторым опе-
ратором F [ * ] :
^лых(^) ™ F[^ox(i)]. (5.1.3)
Оператор (5.1.3) будем называть истинным.
Вообще говоря, операторы могут быть детерминированными, стоха-
стическими (со случайной структурой или параметрами) пли неопреде-
ленными (с детерминированными, по неизвестными структурой или па-
раметрами). Следуя [5.5], проиллюстрируем понятия детерминирован-
ного и стохастического (илп пе полностью определенного) оператора
схемами, представленными па рис. 5.1.1.
Детерминированный оператор (рис. 5.1.1, с) каждой векторной функ-
ции квх(0 пространства Апх при заданных начальных условиях ставит
в соответствие одну-сдпнственную векторную функцию anblx(t) прост-
ранства А'вых. Функция жпЫх(<) является реакцией (откликом) па возбуж-
дающее воздействие xBX(Z). Реакция детерминированного объекта (объек-
та, имеющего детерминированный оператор) па детерминированное
входное (возбуждающее) воздействие есть детерминированная функция
-Гвых(^).
Стохастический оператор (рис. 5.1.1, б) каждой детерминированной
входной функции жгх(() даже при заданных начальных условиях ставит
в соответствие случайную функцию x,iux(t)> характеризуемую теми или
иными распределениями вероятностей.
Не полностью определенный оператор (см. также рис. 5.1.1. б) каж-
дой входной функции Жпх(0 s Авх ставит в соответствие подмножество
функций с: А'пых, определенных с некоторой точностью, например, с точ-
ностью до векторного параметра. Задача идентификации существует
только для объектов со стохастическими или пе полностью определен-
ными операторами.
Согласно ранее приведенным пояснениям, кроме идентифицируе-
мого объекта (5.1.3) и движений (экспериментов) (5.1.2), посредством
которых осуществляется идентификация, должна задаваться модель, в
Рис. 5.1.1. К пояснению понятия оператора: а — детерминированный опе-
ратор; б — стохастический или не полностью определенный оператор
терминах которой производится идентификация. В данном рассмотре-
нии модель естественно задать в операторном виде
= (5-м>
Пространства входных и выходных сигналов модели должны совпадать
с пространствами входных и выходных сигналов объекта:
у*И у ум __ у
Лпх Лвх» Лвых ВЫХ'
Задача идентификации может быть сформулирована следующим об-
разом. На основе множеств функций (сигналов) (5.1.2), полученных экс-
периментальным путем для реального объекта (5.1.3), необходимо ука-
зать оператор F"[*] из заданного класса операторов, который паилуч-
шим в определенном смысле образом представлял бы (аппроксимировал)
оператор F[*J на заданных множествах сигналов (5.1.1).
В понятие паилучшего представления или аппроксимации оператора
F[*] оператором FM[«•] может вкладываться различный смысл. Так, па-
пример, аппроксимация может считаться наилучшей, если некоторый
функционал разности
жвых W жвых (г) = F [жвх (0] [ ^вх СО]» (5.1.5)
вычисленный па множествах (5.1.1) при заданных начальных условиях,
принимает экстремальное значение. Возможна также постановка задачи
идентификации, при которой ищется по паилучшая, а достаточно точ-
ная аппроксимация оператора F[*] оператором FM[<] па заданных мно-
жествах сигналов (5.1.1) или (5.1.2).
5.1.2. Идентификация непрерывных объектов в классе моделей с ди-
скретным временем. Непрерывные динамические объекты могут иденти-
фицироваться в классе дискретных моделей и непрерывных моделей с
дискретным временем. В последнем случае сигналы (5.1.2) дискретизи-
руются по времени (снимаются в дискретные моменты времепи с но-
мером к) и обозначаются х“х [7с], я“ых [&]. Оператор, в терминах ко-
торого осуществляется идентификация, может записываться в форме,
аналогичной (5.1.4):
С,х М = FM [С [*J] (5-1.6)
(при определенных начальных условиях).
При рассмотрении выражения (5.1.6) следует помнить, что FM есть
оператор, который может содержать операции сдвига на целое число ар-
гумента к как на стороне входа (в отношении хих), так и на стороне
выхода (в отношении хЕыХ).
Иными словами, оператор FM может отражать память по входу и
выходу. Однако часто в моделях с дискретным временем стремятся пре-
образовать операторы FM к функциональному виду. Тогда выражение
(5.1.6) уступает место следующему:
^ых [*1 = фМ К [*]. ^х [*- И. • • •• 4 (5-1-7)
где ряд ж“х [7с], к“х [Л—1], ... может содержать как фиксированное
число членов, так и нарастающее число (например, закапчивается
жвх [°])- В выражении (5.1.7) Фм — обычпо векторная функция ука-
занных векторных (и последнего скалярного) аргументов.
Б остальном постановка задачи идентификации при дискретном вре-
мени такая же, как при непрерывном. Следует заметить, что «прозрач-
ность» модели (5.1.7), содержащей просто функции векторных аргумен-
тов, обусловливает се популярность. Однако в практических задачах про-
стота этой модели кажущаяся, так как общая размерность векторного
аргумента здесь может быть весьма высокой.
5.1.3. Задача непараметрическоп идентификации. Оператор F“ (5.1.4)
может содержать неизвестные функции (например, ядра интегральных
операторов или еще более мощные неизвестные множества). Идентифи-
кация в терминах таких операторов называется непараметрической. Са-
мым простым вариантом непараметрическоп идентификации является
статическая идентификация, когда = а."х = const. В этом случае опе-
ратор обычно уступает место функции, в частности, функции, пе зави-
сящей от времени:
^ых = /М(<х)- (5.1.8)
Статическая пепараметрическая идентификация осуществляется при
обычном экспериментальном определении статических характеристик
объекта. Трудности непараметрическоп идентификации мпогосвязпых
многомерных объектов (я1!ЫХ и особенно ж,1к имеют высокие размерности,
объект не допускает декомпозиции на изолированные каналы) видны уже
на примере статической идентификации. Действительно, испараметриче-
ская идентификация в принципе предполагает получение в эксперимен-
тах непрерывных множеств входных и выходных величин (сигналов). Но
ввиду того, что каждое измерение в статическом режиме занимает ко-
нечное время, бесконечные множества измерений неосуществимы. При-
ходится вводить некоторую сетку в пространстве Х„х и в узлах этой сет-
ки выполнять измерения. С чисто математической точки зрения — это уже
подмена непараметрическоп идентификации параметрической (в качест-
ве вектора параметров здесь выступают множества значений функций
в узлах сетки пространства аргументов). Однако с практической точки
зрения прп достаточно плотной сетке и использовании интерполяции —
это пепараметрическая идентификация. Главная трудность даже в ука-
занном варианте детерминированного статического объекта — большой
объем необходимого экспериментального материала (высокая мощность
множеств (5.1.2)).
Еще более трудной в указанном отношении является пепараметрп-
ческая идентификация стохастического объекта, описываемая стохасти-
ческим оператором (см. рис. 5.1.1, б). Допустим, в частности, что стоха-
стический объект идентифицируется в классе моделей с дискретным
временем вида (5.1.7), где, однако, Фм является векторной случайной
функцией векторного аргумента. Случайность этой функции может от-
ражать аддитивные шумы па входе и выходе объекта, внутренние слу-
чайные изменения, дрейфы параметров и др. Допустим, что для всех
случайных факторов существуют распределения вероятностей. Тогда ес-
тественно рассматривать модель в виде апостериорной плотности веро-
ятности;
Р [<ых [*] | <х И - 1]. ..4 (5Л $))
Идентификация в классе таких моделей является иепарамстриче-
ской. Однако для нелинейных многосвязных многомерных объектов та-
кая идентификация исключительно сложна прежде всего вследствие ог-
ромного объема необходимого экспериментального материала. Часто на
практике это обусловливает принципиальную певояможлость получения
моделей типа (5.1.9) вследствие ограниченного жизненного цикла объек-
та, его пестационарпости (старения, модернизации, развития и др.).
Динамическая пепараметрическая идентификация применяется пре-
имущественно к объектам (процессам), близким к линейным и ограни-
ченной размерности. Это широко известные методы частотных и времен-
ных характеристик, взаимных корреляционных функций [510,
с. 887—947].
5.1.4. Задача параметрической идентификации. Задача 1.1 табл. 5.1.1
представляет все задачи параметрической идентификации в терминах
операторного описания объекта. В этом случае оператор модели (5.1.4)
задается с точностью до вектора параметров а:
= 4 (5.1.10)
где FM — оператор, структура которого полностью задана.
Задача идентификации при детерминированном с точностью до век-
тора постоянных параметров а операторе модели (5.1.10) формулирует-
ся следующим образом: на основе экспериментальных данных (5.1.2)
указать значение вектора параметров а, при котором модель (5.1.4) па-
илучшим (или достаточно точно) в определенном смысле образом ап-
проксимирует оператор объекта (5.1.3) на множествах сигналов (51.2).
Для стохастического нестационарного объекта нередко ставится за-
дача идентификации в классе моделей вида
<,х («) = F“ |4х (*> а, w (О], (5.1.11)
где те (4)—шум с заданными или идентифицируемыми вероятностными
характеристиками. В остальном постановка задачи аналогична пре-
дыдущей.
Постановки задач параметрической идентификации непрерывных
процессов в терминах дискретных моделей аналогичны предыдущему.
Так, для детерминированной модели с дискретным временем и вектором
постоянных параметров приближение ищется в виде
1*1 = FM [<х [fc], Л, а]. (5.1.12)
5.1.5. Задача нспараметрической идентификации в пространстве со-
стояний. Задачи идентификации в классе моделей в пространстве состо-
яний в принципе можно рассматривать как частные случаи задач иден-
тификации в классе операторных моделей. При этом считается, что ре-
альный объект может быть с необходимой точностью описан в прост-
ранстве состояний.
Для детерминированного объекта с сосредоточенными параметрами
уравнение имеет вид
х = /(ж, u, t), (5.1.13)
где
х = х(1) ев Хэ, и = и (Г) <= Uа, (5.1.14)
Х'3 и U3 — эксплуатационные области состоянии и управлений. Под экс-
плуатационными областями состояний и управлений понимаются те мно-
жества функций к(<) и u(t) соответственно, которые могут иметь место
в процессе эксплуатации объекта и для которых справедливо описание
типа (5.1.13).
Входной величиной всегда считается управление и, которое в иден-
тификационных экспериментах подчинено условию
u(t) = ии(() е= UK с=. Щ.
(5.1.15)
Что касается выходной величины, непосредственно измеряемой, то со-
гласно табл. 5.1.1 можно с учетом шума измерения т] (?) различать три
случая:
II.4
III.4
IV.4
zK = h (.г”, t) + Т]и (t),
ги = i" -J- q" (.£),
еИ= *„ + <(o.
(5.1.16)
где верхние индексы означают, что данные измерения имеют место па
том яте множестве идентификационных экспериментов, что и (5.1.15).
Аналогичные выражения имеют место пе только в функциональных
пространствах идентификационного эксперимента, по и в эксплуатаци-
онных областях объекта (5.1.13) вообще:
II.4
Ш.4
IV.4
z = h (х, V) + q (Z),
z — z-J- q (t),
(5.1.17)
+ 1) («)г
причем для эксплуатационных режимов
z — z(f) е Z, (5.1.18)
где Z — функциональное пространство наблюдения.
Функция Л (к, Z) считается заданной. Заданными считаются стати-
стические (вероятностные) характеристики шума q(Z). Задача пспара-
мстрической идентификации в пространстве состояний ставится следую-
щим образом: на основе экспериментальных данных (5.1.15), (5.1.16) най-
ти функции /м, и характеристики шума qM(«) модели:
= /м(хы, uK, Z), zM = йм(хм, I) + qM((), (5.1.19)
в классе которой осуществляется идентификация, такие, что процессы
(5.1.13), (5.1.17) аппроксимируются (5.1.19) достаточно точно по край-
ней мере в отношении входных и выходпых величин во всем функцио-
нальном пространстве (5.1.15) и (5.1.18).
Нетрудно видеть, что в этом определении фигурируют как бы три
категории: реальный объект, его «истинная модель» (5.1.13), (5.1:17) и
модель (5.1.19), в терминах которой осуществляется идентификация. Та-
кое усложнение определения связано с тем, что даже размерности х
и хм могут пе совпадать (размерность zM обычно совпадает с размер-
ностью z).
Обобщение постановки задачи пепараметрпческой идентификации па
случай стохастического процесса (1.2.5), (1.2.6) или в более общем
случае
ж = 1(х, и, t, w) (5.1.20)
(уравнение в форме Лапжевепа, w = ш(() — случайная функция време-
ни) осуществляется очевидным способом.
5.1.6. Задача параметрической идентификации в пространстве со-
стояний. Идентифицируемый объект (процесс) описывается уравнением
х = f(x, и, a, t, w), (5.1.21)
где функция f известна с точностью до вектора параметров a; w =
= w(t)—случайная функция времени с известными статистическими
характеристикам и.
Условия наблюдения
z = h(х. и, a, t, ц), (5.1.22)
где h — известная функция указанных аргументов; ц = ц(1) •—случай-
ная функция с известными статистическими характеристиками. Управ-
ление и — u(t), как в п. 4.2.2 и п. 4.3.4.!°, считается точно измеряемым
процессом. Варианты 11.2—IV.2, представленные в табл. 5.1.1, в част-
ности, аналогичные (5.1.17), получаются из (5.1.22) как частные случаи.
Эксплуатационные области объекта заданы в виде функциональных
пространств
и(1) е Ua, x(t) е Х3, z(t) e=Z. (5.1.23)
В результате проведения идентификационных экспериментов (занимаю-
щих некоторый известный интервал времени) получаются множества
функций:
н”(/) е U" с: £7В, z"(t) е Zv cz Z. (5.1.24)
Ввиду того что функции / и h считаются известными с точностью
до вектора параметров а (и, конечно, мгновенных значений случайных
функций ю, ц), идентификация обычно осуществляется в классе моде-
лей, аналогичном (5.1.21), (5.1.22):
х* = /(.г*, и, a*, t, w*), z* = h(x*, и, a*, t, ц*). (5.1.25)
Задача идентификации ставится следующим образом: па основе экспе-
риментальных данных (5.1.24) указать значение вектора параметров а*
в (5.1.25), при котором норма разности z*(t)—z(t) достаточно мала для
всех реализаций из функциональных пространств (5.1.23). Конечно, бо-
лее точная постановка задачи должна содержать меру указанной раз-
ности (случайной функции времени). Как и в других случаях, вместо
условия «достаточно мала» может выдвигаться условие «принимает на-
именьшее в определенной мере значение».
Указанная задача идентификации может быть названа слабой. Бо-
лее сильные требования заключаются в том, чтобы па основе обработки
экспериментальных данных обеспечить достаточную малость нормы раз-
ности Да = а — а*.
5.1.7. Связь задач идентификации с теорией планирования экспери-
мента. Как уже отмечалось, между теорией идентификации, математиче-
ской статистической теорией и теорией планирования эксперимента име-
ются тесные связи, во многом области применения этих теории перекры-
ваются. Однако задачи теории планирования эксперимента шире, чем
задачи идентификации в приведенном выше описании. Во-первых, вместо
входных (возбуждающих) воздействий в теории эксперимента фигуриру-
ют факторы, иод которыми понимаются самые разнообразные воздейст-
вия, изменяемые при проведении экспериментов. Во-вторых, и это глав-
ное, задачей теории эксперимента является разработка оптимального п
определенном смысле плана эксперимента. Это означает, что определя-
ются такие совокупности факторов, при которых минимизируется число
необходимых экспериментов или максимизируется количество получае-
мой информации.
При указанных постановках задач идентификации динамических
объектов возбуждающие воздействия (естественные или искусственные)
считаются заданными. Конечно, возможно расширение постановки зада-
чи идентификации с включением в нее оптимизации возбуждающих воз-
действий.
§ 5.2. Классические методы пепараметрической
идентификации линейных динамических систем
В этом параграфе кратко рассматриваются методы пепараметриче-
ской идентификации, оспованные па экспериментальном определении ча-
стотных, временных характеристик стационарных линейных динамических
систем, взаимных корреляционных функций шумовых входных и выход-
ных сигналов таких систем. Эти методы отнесены к классическим мето-
дам идентификации. Последнее можно обосновать тем, что эти способы
идентификации действительно зародились и получили применение в пе-
риод классической теории управления (в механике, физике и некоторых
других областях — еще раньше). С другой стороны, эти способы требуют
либо значительного времени экспериментирования с системой, либо осо-
бо «чистых» условий эксперимента (низкого уровня непредвиденных воз-
действий иа объект). Это делает данные способы малопригодными для
идентификации в реальном времени, а именно такая идентификация пре-
имущественно является предметом современной теории и практики уп-
равления (см. введение).
Что касается линейности и стационарности динамических систем, то
в пределах всех эксплуатационных областей этими свойствами практиче-
ски обладают лишь очень немногие объекты (практическая линейность
«в большом» — редкое свойство, абсолютно липейпых дипамичсских сис-
тем в реальном миро ист). Поэтому речь идет здесь в основном об идеи-
тификации динамических объектов в окрестностях некоторых стационар-
ных певозмущечных состояний, т. е. об идентификации «в малом».
5.2.1. Метод частотных характеристик. Линейный стационарный дина-
мический объект (система) описывается линейным стационарным опе-
ратором-матрицей передаточных функций
W (р) =
-И^/Р) ... ^„„/Р)
••• ^выхпвх (Р)
(5.2.1)
где плх — размерность вектора входных величин п„ых — размерность
вектора выходных величии агвыХ.
Для такого объекта идентификационный эксперимент метода частот-
ных характеристик может заключаться в следующем (рис. 5.2.1, а). Обес-
печивается устойчивость певозмущеппого состояния объекта. Это может
Рис. 5.2.1. Пояснение идентификационных экспериментов метода частот-
ных характеристик
иметь место как за счет собственных свойств объекта, так и за счет ох-
вата его обратными связями (объект как звено замкнутого контура). Экс-
перимент разбивается во времени па циклы, отличающиеся поморами
возбуждаемого входа (всего пвк поморов) и частотами гармонического
(синусоидального) сигнала возбуждения.
Необходимая плотность распределения точек на оси частот при за-
данной точности аппроксимации частотных характеристик зависит от ви-
да этих характеристик, который во многом определяется «модальной
структурой» объекта, т. е. полюсами и пулями передаточных функций
И^л(р). Наибольшего числа измерений требуют острорезопапспые объек-
ты типа механических систем со слабым затуханием ряда «топов» коле-
баний. Наименьшее число измерений требуется для объектов с плавными
частотными характеристиками. При идентификации слабо изученных
объектов «модальная структура» заранее неизвестна, и плотность сетки
но осп частот приходится выбирать эмпирически.
В каждом цикле эксперимента синусоидальный сигнал возбуждения
с заданной частотой и заданной амплитудой подается па один вход. Пос-
ле достижения практически установившегося режима вынужденных ко-
лебаний объекта регистрируются ампли туды и фазы гармонических коле-
баний па всех пиыи выходах и амплитуда и фаза единственного ненулево-
го входного сигнала (при наличии контура обратной связи последние нс
могут быть предписаны заранее).
Синфазные и «квадратурные» (сдвинутые па ±90 градусов по фазе
относительно входного сигнала) составляющие выходных сигналов, пред-
ставленные как функции частоты, составляют вещественные Pik(a>) и
мнимые (?ifc(a>) частотные характеристики
Wih(ja>) = Pifc(co) 4- /Qi(1(m), / = V—1.
Из них получаются все другие виды частотных характеристик.
Хотя в исходной форме метод частотных характеристик относится к
методам непараметрическоп идентификации, он позволяет выполнить и
параметрическую идентификацию. Для этого спадала, например, по ло-
гарифмическим амплитудным частотным характеристикам (ЛАЧХ) подби-
рают приближенную структуру модели объекта, а затем определяют па-
раметры выбранного набора звеньев. Частотные характеристики вообще
дают достаточно большой объем информации о линейном стационарном
динамическом объекте. Однако получение этих характеристик требует
длительного эксперимента в условиях установившеюся невозмущеипого
(слабовозмущеппого) режима.
Действительно, обратимся вновь к схеме эксперимента с последова-
тельной подачей возбуждающих воздействий па п1:х входов (см.
рис. 5.2.1, а). Если измерения производятся па пш частотах, то общее чис-
ло экспериментов (циклов эксперимента) составит nmtia. При этом про-
должительность каждого цикла эксперимента должпа быть достаточной
для достижения установившегося режима. Эта продолжительность особен-
но значительна па весьма низких частотах (в окрестности пулевой часто-
ты) и па резонансных частотах при малом затухании. Общее время экс-
перимента получается большим.
Можно пытаться сократить время эксперимента, используя полигар-
ионический возбуждающий сигнал па одном входе в каждом цикле и вы-.-
деление реакций па выходах па каждую из гармоник входного сигнала-
за счет соответствующей обработки (гребенчатые фильтры, синхронное
детектирование, быстрое преобразование Фурье). Этот вариант поясняет
рис. 5.2.1, б.
Необходимое время эксперимента при этом сокращается, однако ус-
ловия определения гармонических установившихся реаццпй объекта ус-
ложняются. Одновременное «прохождение» через объект целого ряда
гармоник предъявляет повышенные требования к мощности возбуждаю-,
гцего сигнала, увеличивает влияние нелинейных искажений, которые в
той или иной мере проявляются почти во всяком реальном объекте и
измерительных трактах.
Для увеличения производительности частотного метода идентифика-
ции многомерных миогосвязных линейных стационарных объектов мож-
но использовать одновременное возбуждение всех входов гармоническими
сигналами разных частот. В каждом новом цикле эксперимента частоты
возбуждения входов меняются. Выделение соответствующих установив-
шихся реакций производится путем синхронного детектирования или
другой обработки выходных сигналов объекта. Возможности этого вари-
анта примерно аналогичны предыдущему.
В целом частотный метод идентификации обладает невысокой произ-
водительностью, практически неосуществим в реальном масштабе време-
ни, требует использования искусственных возбуждающих сигналов, ори-
ентирован в основном па линейные стационарные объекты (о расшире-
нии границ применимости см. п. 5.2.4). Однако для некоторых примене-
ний (папример, частотные испытания металлических конструкций) оп
стал традиционным и необходимым.
5.2.2. Метод временных характеристик. Идентификация стационарно-
го линейного объекта методом временных характеристик сводится к оп-
ределению импульсной переходной матрицы Фных (4—г0) пли интегра-
ла от этой матрицы (см. и. 1.2.3)
t
<,х (ОНО. (5.2.2)
10
Векторы выходных и входных сигналов такого объекта при пулевых на-
чальных условиях связаны интегральным оператором
со
*иых (0 = J <Сх (0) хнх U - 0) rfe = [ Ф-Х(4 - Т) Жвх(т) Л=
«о —™
= (5.2.3)
где * — символ операции свертки.
Допустим, что объект устойчив (обеспечение устойчивости путем ох-
вата объекта обратными связями связано здесь с усложнением обработки
результатов идентификационного эксперимента, см. ниже). Тогда иден-
тификационный эксперимент по непосредственному определению импульс-
ной переходной матрицы Фвых может заключаться в следующем
(рис. 5.2.2, а).
На входы объекта последовательно во времени с интервалами, пре-
вышающими время затухания собственных движений объекта, подаются
короткие импульсы, длительности которых малы в сравнении с обратной
величиной модуля наибольшего но абсолютной величине полюса пере-
даточных функций объекта. Воздействие таких импульсов на линейную
Гис. 5.2.2. Иллюстрации идентификационных экспериментов метода вре-
менных характеристик
систему близко к воздействию 6-импульсов и реакции па них близки к
импульсным переходным функциям. Выполнение подобного идентифика-
ционного эксперимента с циклами (подача импульса па один вход и
регистрация реакций па выходе до затухания этих реакций считается
одним циклом) обеспечивает определение всех столбцов импульсной пе-
реходной матричной функции Ф™1!(.
В этом отношении данный вариант метода временных характеристик
(цак и другие варианты) производительнее метода частотных характери-
стик. Его недостатком является то, что для получения значительного от-
клика, резко выделяющегося на фоне неизбежных в реальном объекте
шумов, необходима большая величина («амплитуда») кратковременного
импульса. В реальных объектах это связано обычно с появлением «пели-
нейных искажений» (проявлением нелинейностей).
Элементами матрицы Ф™!Х являются функции, именуемые импульс-
ными переходными или весовыми функциями. Элементами матрицы
Иных (5-2.2) служат просто переходные функции, выражающие реакции
(отклики) па ступенчатые входные воздействия.
Постановку идентификационного эксперимента для определения
матрицы переходных функций H”*x(f) линейного стационарного устой-
чивого объекта поясняет рис. 5.2.2, б. Па входы объекта поочередно и по-
следовательно во времени подаются ступенчатые воздействия, точнее,
пары прямоугольных импульсов противоположных знаков, длительность
которых превышает время затухания переходных процессов в объекте.
Интервалы между соседними во времени парами импульсов также пре-
вышают время затухания переходных процессов.
Вследствие справедливости принципа суперпозиции для линейных
стационарных систем каждая переходная функция после прохождения
пары импульсов снимается дважды (с положительным и отрицательным
знаками). За циклов (каждый цикл идентификационного эксперимента
соответствует подаче на один вход пары импульсов) дважды определяют-
ся все элементы матрицы переходных функций Нвых (0- По производи-
тельности данный метод но уступает предыдущему. Однако он все же
пе позволяет обычно осуществлять идентификацию в реальном времени,
не ориентирован на использование естественных входных и выходных
воздействий, не обладает повышенной помехоустойчивостью.
В принципе переходные функции линейных стационарных объектов
могут определяться путем численного решения интегральных уравнений
(5.2.3) при естественных входных и выходных сигналах. Однако это тре-
бует специальных способов обработки результатов измерений. Эти спо-
собы кратко рассматриваются в § 5.3 (прямые методы идентифи-
кации) .
5.2.3. Метод корреляционных функций. Случайной функцией времени
X(t) обычно называют множество (функциональное пространство) реа-
лизаций xt = x(t) е. X(t), для которого существуют необходимые рас-
пределения вероятностей. Для стационарной эргодической случайной
функции среднее по ансамблю (множеству X при t — const) равно сред-
нему по времени реализации x(t). Для стационарной эргодической слу-
чайной функции реализацию x(t) для краткости часто будем именовать
случайной функцией.
Допустим, что xIK(t) является реализацией стационарной эргодиче-
ской случайной функции. Центрированную реализацию случайной функ-
ции будем обозначать
Axux(t) = «вх(Ц —E[kbk(Z)]. (5.2.4)
Воздействие случайной функции па линейный стационарный объект опи-
сывается оператором тина (5.2.3). Полагая, что на вход и выход объекта
воздействуют центрированные векторные шумы (стационарные эргоди-
ческие случайные функции) fcnxG) и цОых(0 соответственно, записываем
оо
Л-^ых (0 = У ф«ых (6) [Л*пх (t - 6) + Евх (t - 0)] de -I- 1]вых (0 =
(>
t
= J ф™х(<-т)[Д-гПх(г) + ё»х(г)1£гт+11выХ(0- (5.2.5)
— OO
Объект считается устойчивым. При этих условиях установившаяся реак-
ция объекта (случайная функция) — стационарная эргодическая.
Пусть ДжГ1Х(£) пекоррелпрована с 6»х(0, 11i«(i)- Умножая (5.2.5) слева
па А'с’*х (I') и применяя оператор безусловного математического ожида-
ния па пространстве Х,1х X -Увых, получаем
ОО
Е [ дЖпь,х (0 д^х (О ] = J (0) ЕI Ат„х (t - 0) А.г;х (Г)] de =
О
I
= У Фвых(*—г) МДтвх (т) Д^(г')] (5.2.6)
— с»
Введем обозначения для ковариационных матриц стационарных и
стационарно связанных случайных функций:
^вых (г (~ Е [Джвых ^0 Д,гвх )]’ ^5 9
Ог- О = Е |>вх (0 Чх ('')]•
Тогда (5.2.6) принимает вид
оо i
= У фвых (0) р“х («- 0 - О de = У <ЩХ (t - т) (т - Г) dx. (5.2.8)
О — оо
Пусть шумы па входах объекта Дж„х(4) имеют практически равномерные
спектры в пределах максимальном из полос пропускания объекта (пли
времена корреляции и взаимной корреляции этих шумов значительно
меньше минимальной из «постоянных времени» объекта). Тогда шумы
Дтю:(г) можно считать белыми с матрицей интенсивностей SBX. Выраже-
ние (5.2.8) принимает вид
(5-2-0)
При шумах Джпх(г) с ограниченным спектром (отличных от белых шу-
мов) равенство (5.2.9) носит приближенный характер, по практически
обычно легче воспроизводить шумы, близкие к белым, чем определить
экспериментально с достаточной точностью взаимную корреляционную
матрицу t')- Поэтому знак приближенности в (5.2.9) пе фигу-
рирует. При невырожденной матрице из (5.2.9) следует
ф^х (Я = (Я (О-1- (5-2.10)
Для рассматриваемых стационарных эргодических случайных процес-
сов ковариационная матрица (т) может приближенно определяться
путем усреднения по достаточно большому интервалу времени:
t
(т) « Г"1 J дЯ>ых(О)Л^х(0-т)й0. (5.2.11)
t-T
Таким образом, для указанных условий
t
Фвых (Я ~ Г-1 J ДЖвых (0) Л.<х (0 - т) dO (S1*)"1. (5.2.12)
t-T
Соответствующая схема идентификационного эксперимента и алго-
ритма приближенного вычисления ковариационной матрицы и Фв*х (т)
метода корреляционных функций (в его аналоговой форме) приведена
па рис. 5.2.3.
Идентификационный эксперимент, как и в других рассмотренных в
данной главе методах, состоит из ряда циклов. В каждом цикле устапав-
Рис. 5.2.3. Иллюстрация идентификационного эксперимента и алгоритма
метода корреляционных функций
ливается время задержки т = const в пределах времени переходных про-
цессов идентифицируемого устойчивого объекта. На вход подаются прак-
тически белые шумы и осуществляется усреднение согласно (5.2.12) в те-
чение достаточно длительного интервала времени Г. В результате после
умножения па (^й'х)-1 приближенно определяется зпачепио переходной
матрицы при выбранном т. Далее задается повое значение т и цикл
повторяется.
К числу педостатцов данного метода идентификации относится очень
большое время каждого цикла, особенно при больших т (определение
конечной фазы переходных процессов). Известно [5.8, 5.9], что ошибка
определения корреляционной (ковариационной) функции путем усредне-
ния по времени (формула (5.2.11)) убывает только как т-0'5 и для дости-
жения точности в несколько процентов требуется время накопления Т,
в 100 и более раз превышающее т.
Другим недостатком является искусственное возбуждение идентифи-
цируемого объекта широкополосными, а стало быть, достаточно мощными
шумами. Возможно применение цветных, не широкополосных шумов
(в том числе естественных). Это требует численного решения интеграль-
ного уравнения типа (5.2.8). Соответствующие приемы кратко освещены
в следующем пункте.
5.2.4. Расширение областей применимости классических методоп
идентификации. Методы частотных и временных характеристик, корре-
ляционных функций изложены выше применительно к идентификации
линейных стационарных объектов, преимущественно устойчивых. Суще-
ствуют многочисленные работы, в которых делаются попытки расшире-
ния границ применимости этих методов за счет той или иной их транс-
формации. Многие инженерные исследования исходят из того известного
простого положения, что метод, строго обоснованный для одного сравни-
тельно узкого класса динамических объектов, обычно сохраняет силу
приближенного метода для значительно более широкого класса объектов.
Другие исследования теоретического плава направлены па изыскание
моделей, идентификация в терминах которых может быть осуществлена
па основе модификаций указанных методов. При этом идентификации
подлежат динамические объекты существенно более широких классов,
в частности, нелинейные.
5.2.4.1е. Вариант применения частотного метода для идентификации
линейной нестационарной системы. Преобразование Фуръе импульсной
переходной матрицы линейного непрерывного нестационарного объекта
записывается в виде
ОО
V (4, /со) = [ Ф (4, т) ехр [—/ы (4 —т)] г/т, (5.2.13)
— ОО
где верхний предел может быть заменен па 4, так как Ф(4, т) — 0 при
т > 4.
Пусть хвх(4) удовлетворяет условиям Дирихле и имеет изображение
Фурье
ОО
жвх О'®) = J жвх W exp (— (5.2.14)
— ОО
Тогда выходная величина линейного нестационарного объекта при пуле-
вых начальных условиях выражается формулой
ОО
1 г »
жвых W = 1®)жих(/®)ехр(/(о4)<?о). (5.2.15)
С учетом (5.2.14)
ОО оо
ЖВЫХ W = J J жвх (г) ех₽ Ь® (г ~ г)1 d® dX- (5.2.16)
—оо —оо
Если жвых(г) определены в результате идентификационного экспе-
римента, то (5.2.16) можно рассматривать как интегральное уравнение от-
носительно V(4, /со). Для приближенного решения этого уравнения сле-
дует применить ту или иную разностную схему, в частности, использу-
ющую быстрое преобразование Фуръе (БПФ). Дальнейшее подобно пря-
мым методам идентификации, представленным в § 5.3. Следует, однако,
заметить, что размерность разностной схемы получается высокой и вы-
числительные затраты большими. Использование данного способа иденти-
фикации в реальном масштабе времени затруднено или практически не-
возможно.
5.2.4.2е. Применение частотного метода для приближенной идентифи-
кации нелинейных стационарных объектов. Метод гармонической линеа-
ризации [5.10; 5.11, с. 594—607] позволяет выполнить анализ нелинейного
контура на основе семейства частотных характеристик, снятых при раз-
личных амплитудах входного сигнала. Под частотной характеристикой
нелинейного (обычно разомкнутого) контура понимается зависимость
амплитуды и фазы (или синфазной и квадратурной составляющих) пер-
вой гармоники установившегося периодического сигнала на выходе от
частоты синусоидального входного сигнала заданной амплитуды. Иллю-
страция идентификационного эксперимента метода частотных характери-
стик для нелинейного стационарного многомерного объекта с устойчи-
вым «в большом» невозмущенным состоянием представлена на рис. 5.2.4.
Рис. 5.2.4. Схема идентификационного эксперимента метода частотных
характеристик для нелинейного стационарного объекта
Эксперимент, как и для липейпого стационарного объекта, разбивается
на циклы. Однако число циклов здесь во столько раз больше, сколько
значений амплитуд придается входному сигналу. В каждом цикле на
один вход объекта подается синусоидальный сигнал заданной частоты и
заданной амплитуды. Регистрируются установившиеся периодические
сигналы па всех выходах.
Выделение первых гармоник этих сигналов может осуществляться
различными способами. Однако при современном развитии цифровой вы-
числительной техники и программного обеспечения предпочтение следу-
ет отдать БПФ.
бщая длительность иденти икациопного эксперимента для пелн-
нейного объекта при прочих равных условиях во столько раз больше
времени идентификации линейного объекта, сколько задано контроль-
ных значений амплитуд. Поэтому все трудности, связанные с большим
временем идентификационных экспериментов, здесь усугубляются.
5.2.4.30. Определение импульсной переходной матрицы линейного ста-
ционарного устойчивого объекта при произвольных детерминированных
сигналах. Объект идентификации описывается оператором свертки (5.2.3)
t
*вых (0 = J Фвых « - V *вх w Л. (5.2.17)
— ОО
Пусть время затухания переходных процессов (время «памяти» объекта)
составляет 7ЗТХ, тогда с высокой степенью точности (5.2.17) можно заме-
нить па
t
*выхЮ = f Фвых^-^вхСОЙт;. с5-2-1»)
зтк
Функции ^вх(0> #вых(0, точнее, последовательности с дискретным време-
нем яВх[&], яВых[&] получаются из идентификационного эксперимента,
п выражение (5.2.18) рассматривается как интегральное уравнение с не-
известным ядром Фвых* Для приближенного решения этого уравнения
•строится разностная схема, папример, простейшая схема «прямоуголь-
ников»:
k
жвых М = Дт 2 (5.2.19)
v—k—m
где Дт — шаг равномерной сетки по оси времени.
Задача в постановке (5.2.19) аналогична задачам прямой параметри-
ческой идентификации, рассматриваемым в § 5.3.
Единственным достоинством метода в сравнении с вариантами, осно-
ванными на идентификационном эксперименте с тестовыми сигналами
(см. п. 5.2.2), является его применимость к объектам, находящимся в
нормальных эцсплуатациоппых условиях (при естественных входных сиг-
налах). Все недостатки, связанные с большим временем идентификацион-
ного эксперимента, здесь сохраняют силу.
5.2.4.4е. Идентификация классическими методами нелинейной систе-
мы, описываемой оператором Гаммерштейиа. Стационарная детерминиро-
ванная нелинейная система описывается оператором Гаммерштейна вида
ОО
*вых (0 = J фвых (0) Ьх - 0)] < (5.2.20)
О
гДе ф«ых (0 — известная импульсная переходная матрица-столбец разме-
ра п X 1, связывающая скалярный вход у липейпой динамической части
системы с ее векторным выходом ж1)ЫК;
у = «ЧН-М (5.2.21)
— выражение, описывающее безынерционную нелинейную входную часть
системы, имеющую векторный вход жпх и скалярный выход у, а — век-
тор неизвестных параметров; ф — неизвестная векторная функция век-
торного аргумента, по такая, что ф (0) = 0.
Рассмотрим лишь тот случай, когда каждая из компонент векторной
функции ф зависит только от одной компоненты векторного аргумента
т. е. выражение (5.2.21) имеет вид
т
г/= 2 “Л(жвхг)- (5.2.22)
1=1
Линейная часть системы считается устойчивой.
В этом случае идентификационный эксперимент может состоять из
испытаний, предназначенных для снятия статических характеристик,-
и испытаний, предназначенных для определения импульсной переходной
матрицы (импульсных переходных функций).
В статическом режиме
СЮ
J <.х <6) (*пх) = Ы- (5.2.23)
О
где
сю
D = [ Ф^х <°) <1в (5-2.24)
о
— постоянный вектор-столбец (матрица установившихся значений пе-
реходных функций, см. п. 1.2.3).
В сцалярпой форме (5.2.23) имеет вид
т
жвь>х 1= Dj 2 аЛ (*вх i). i = (5.2.25)
i=i
Полагая (.гвх ;) ~ ^iaA (-гвх i)’ выражение (5.2.24) запи-
сываем в виде
т ___
х . = ZX V ipt (х •), i = 1, п\ D* == 1.
ЖВЫХ з ] AJ ( их I/’ 1 1
2 = 1
Задавая всем а;„хкроме v, пулевые значения, изменяя медленно
(в сравнении с собственными движениями линейной части системы)
и регистрируя ж„ых j (j — 1, п), определяем (^nxv)- Поделив жБЫХ j
па ж||Х,, находим D*. Повторив эти эцеперимепты для всех v = I, т, оп-
ределяем все компоненты векторной функции ф*(жвх) и т раз — посто-
янный вектор В*.
Вторая фаза идентификационного эксперимента состоит из импульс-
ных испытаний, при которых па один, несколько или все входы подается
кратковременный импульс (длительность импульса значительно меньше
наименьшей «постоянной времени» линейной части системы).
Регистрация реакций на этот импульс иа всех п выходах дает с точ-
ностью до масштабов по оси ординат все компоненты импульсной пере-
ходной матрицы-столбца Ф^ых (О- С другой стороны, рапее были опре-
делены величины
ОО
^ = M = jXx/e)d0-
о
Это позволяет определить с точностью до общего множителя Z), масшта-
бы по осям ординат всех импульсных переходных функций линейной ча-
сти системы.
Данная методика распространяется па идентификацию объекта, у ко-
торого нелинейная часть описывается пе суммой скалярных функций ска-
лярного аргумента, а скалярной функцией векторного аргумента общего
вида. Однако объем статических испытании, и без того большой для клас-
сических методов идентификации, еще возрастает (необходимы измере-
ния в узлах m-мерной достаточно плотной сетки). В целом данный при-
мер показывает, что комбинация различных классических методов иден-
тификации позволяет решать достаточно сложные задачи. Однако необхо-
димый объем (время) испытаний при этом весьма велик.
§ 5.3. Прямые методы параметрической идентификации
Прямыми методами параметрической идентификации назовем тс, в
которых неизвестные параметры дискретной во времени модели опреде-
ляются па основе того или иного способа (обычно приближенного) реше-
ния системы уравнений, получающихся путем подстановки в оператор
модели последовательностей значений входных и выходных величин ре-
ального объекта, измеренных в дискретные моменты времени. Искомые
параметры считаются на протяжении интервала идентификации (к кото-
рому относятся измеренные значения жвх, жиых) постоянными.
Таким образом, при прямых методах идентификация производится
в цлассе моделей типа (5.1.12), где к пробегает ряд значений.
Следует иметь в виду, что сам оператор FM в выражении (5.1.12) мо-
жет быть оператором с «памятью» как в отношении ж“х, так и в отно-
шении <ых. Он может быть эквивалентен векторному разностному не-
линейному уравнению вида
^ых[4х1*1- - *1. *]= [ад. •••.
(5.3.1)
где 7?рЫХ-, — векторные функции указанных векторных аргументов;
d, г —• целые положительные числа.
Выражение (5.3.1) является достаточно общим описанием разностной
детерминированной модели идентифицируемого объекта. Частные виды
этой модели будут использованы в данном параграфе. Согласно опреде-
лению метода прямой идентификации величины к“х, заменяются па
-измеренные входную и выходную величины объекта.
Считая, что эти величины измеряются с аддитивными шумами
тр:ых, вместо (5.3.1) записываем
^вых [~вых W + '‘иых 1*], .... *вых [* - + Пвых 1* - (П, а, 7г] =
= *гх Р..х 1*1 + ^вх 1*1 . • -Л.К I* - и + Евх [* - И, «, *] (5.3.2)
Задача прямой идентификации в классе моделей (5.3.2) ставится тац: по-
лучив в идентификационном эксперименте последовательности значений
ж„к[/г], ж„ик[/с] (7с = 7.T, к2, ..кг), злая вид функций Г“х, 7'’“ых,
зная (или пе зная) статистические характеристики шумов измерения
g„x[A"], т)вмх[А], решить (приближенно) систему уравнений (5.3.2) отно-
сительно а, получив таким путем оценку вектора параметров а.
Обратим внимание па следующее. Функции Р'^ыг. в векторном
разностном уравнении (5.3.2) суть вектор-столбцы, причем каждое из со-
ответствующих скалярных уравнений
^выхг 1гвых 1*1 -I- Пвых 1*1.*вых t*“ f/l+ [А - d], а(<), /г] =
= ^х ,-Ь.х 1*1 + 5вх f*L *вх 1* - Н + £вх 1* - Н, «(0, Ч (5.3.3)
обычно содержит автономную группу параметров o(i) (субвсктор [[ара-
метров, пе фигурирующих ни в одном из скалярных уравнений (5.3.3) с
индексом, отличным от г). При этом задача идентификации распадается
ла независимые задачи, в каждой из которых фигурирует скалярное раз-
ностное уравнение типа (5.3.3).
5.3.1. Прямая идентификация статического объекта с линейно входя-
щими параметрами. Пусть модель, в классе которой осуществляется иден-
тификация некоторого безынерционного (пе имеющего памяти) реально-
го объекта, имеет вид
1*1 = [Cl*!-*]- (5.3.4)
где а — а™ — вектор неизвестных постоянных параметров; .т^х [7с] — век-
торный входной сигнал модели; твых ]/с]— скалярный выходной сигнал
модели: ф [.т”х [/г], /с] — векторная известная базисная функция. В ска-
лярной форме
4hJ*1= 2 “Л [<х [*].*]• (5-3.5)
V—L
Самым простым с формальной точки зрения прямым методом идентифи-
кации является следующий. Пусть в идентификационном эксперименте
производится N измерений х,.г. и хиЫк, папример, в моменты времени 7с =
= Подставляя вместо ,т“х [Л], .г“ых р] значения, полученные в иден-
тификационных экспериментах, записываем уравнения в матричной
форме
(5.3.6)
где вектор-столбец, составленный из N скаляров: ж^х = [жвых Ш • • •
.. . жвых [У ] ]Г; V —матрица вида
V =
^’1 Гвх [1]. 1] ••• tiVpBxHl. М ’
.ШМ 7V]
(5.3.7)
Если матрица Ч1, невырожденная, то согласно (5.3.6)
(5.3.8)
Однако па практике алгоритм прямой идентификации (5.3.8) обычно ока-
зывается неприемлемым. Это связано с часто встречающейся плохой
обусловленностью (близостью к вырождению) матрицы V, наличием
случайных ошибок измерений. Поэтому еще со времен Гаусса для опре-
деления характеристик по экспериментальным данным применяют спе-
циальные методы статистической обработки.
5.3.2. Метод сумм произведений. Предполагается, что имеется N изме-
рений входных и выходной величин объекта в моменты времени к =
= 1, N. Измеренные величины используются в качестве значений соот-
ветствующих сигналов модели (5.3.4).
Умножая уравнение (5.3.5) па Фц[явх [А], А-J, обозначая эту вели-
чину для краткости через ЧгМ и суммируя по к от 1 до (V, получаем
N N
2 % [*1 % «V = 2 С.х pl % [*]. (5.3.9)
Обычно матрица размера N X N
N
2 % И1 фр Р‘1 (5.3.10)
h=l
при достаточно большом /V лучше обусловлена, чем матрица (5.3.7).
Считая эту матрицу невырожденной, из (5.3.9) получаем
fw 1-1 N
2 *ВЫХ [/fl (5.3.11)
k=l J k=l
Случайные ошибки, входящие в измерения (в величины жвх[/с|,
я™ых[4'])и имеющие интервалы корреляции, меньшие N, при суммирова-
нии произведений заметно сглаживаются. Это, а также улучшенная обус-
ловленность матрицы (5.3.10) являются достоинствами метода. Однако
он требует числа измерений, равного числу параметров, и нуждается в
обращении матрицы размера N X N. Это существенные недостатки ме-
тода.
5.3.3. Метод наименьших квадратов. Число измерений при использо-
вании метода наименьших квадратов (МНК) может как превышать число
неизвестных параметров N, так и быть меньше этого числа.
жвых [/с1 = 2 Mv [жвх [*]]•
V—1
Входная (в общем случае векторная) величина объекта a:os[7c] измеряет-
ся точно (к = 1, L), а выходная величина со случайной ошибкой г] [fc],
значения которой в различные моменты времени центрированы, незави-
симы (белая последовательность случайных величин).
Идентификация выполняется в терминах модели
N
жвых [/г1 = Сх [*] + п И1 = 2 М’г Кх [*!]•
V—1
Согласно МИК наилучшая оценка соответствует выражению
(5.3.12)
где Е — символ безусловного математического ожидания на распределе-
нии величины гр
Раскрывая выражение (5.3.12), записывая необходимое и достаточное
условие минимума квадратичной функции и полагая матрицу
' L
% (жвх %. (жвх [^1)
,А=1
невырожденной, получаем
' L Т-l L
S % fjsxW) (жвх И'1) 2 Ж»ых Р1 1*1-
_/«==! J h—1
(5.3.13)
При L = N это выражение совпадает с (5.3.11).
Теории МИК, его многочисленным вариантам посвящена обширная
литература. Рекуррентные формы МНК непосредственно смыкаются с ал-
горитмами теории оценивания марковских процессов (см. гл. 4 и § 5.7).
§ 5.4. Беспоисковые алгоритмы идентификации
с адаптивной моделью
Идея использования аналоговой или цифровой модели, настраиваемой
па минимум (или достаточную малость) разности (певязци) выходных
сигналов реального объекта и модели, возбуждаемых одним и том же
входным сигналом, возникла еще в пятидесятых годах [5.12, 5.13]. При
этом алгоритмы настройки модели сразу разделились па два направле-
ния: поисковые [5.12] и> беспоисковые [5.13].
Беспоисковые алгоритмы идентификации с адаптивной (самонастраи-
вающейся) моделью (БАИАМ) ориентированы на функционирование в
реальном масштабе времени и в этом отношении с полным основанием
могут быть отнесены к современным методам идентификации. Однако
разными авторами предложены самые различные алгоритмы настройки
модели от относительно простых эвристических алгоритмов до алгорит-
мов, построенных па основе минимизации функционалов невязки, обла-
дающих памятью (интегральных функционалов). Впрочем, следует ска-
зать, что задача синтеза алгоритма настройки адаптивной модели, так
же как и задача построения адаптивных систем регулирования с эталон-
ной моделью (эти задачи имеют много общего), не является простой.
В наиболее важных постановках известны лишь субоптимальпые реше-
ния. Ряд этих решений излагается в данной главе, но им предшествуют
общие формулировки задач БАИАМ.
Следует отметить, что существующие БАИАМ предназначены для
параметрической идентификации, так что они ориентированы на реше-
ние задач, указанных в первых двух столбцах табл. 5.1.1.
5.4.1. Общая структура алгоритма в пространствах сигналов. Здесь
приводятся общие структуры беспоиековых систем идентификации с
адаптивной операторной моделью в непрерывном и дискретном времени
без раскрытия самих алгоритмов настройки моделей.
5.4.1.1°. Общая структура непрерывных БАИАМ в пространствах сиг-
налов. Идентифицируемый объект описывается в операторной форме
(5.1.3). Одпако, подчеркивая параметрическую постановку задачи иденти-
фикации, наличие шумов (стохастический «истинный» оператор объекта),
а также возможную нестациопарность объекта, его оператор записываем
в виде
Жцых(О = F[x0S(J), t, U>(«)]. (5.4.1)
Вектор параметров а = a(t) считается в общем случае неизвестной функ-
цией времени. Статистические характеристики случайного процесса w(t)
могут быть как известными, так и неизвестными.
Если идентификация осуществляется в классе детерминированных
(с точностью до вектора параметров ам(0) моделей, то настраиваемая
модель задается в виде
твых<г) = ^'[^вх (0> (0. *]• (5.4.2)
Входные сигналы объекта и модели одинаковы а выходные сиг-
налы имеют одинаковую размерность, так что можно рассматривать век-
тор невязки
Джвых (0 = жпых (0 - *вых (0- (5 Л-3>
Задача БАИАМ в данном случае заключается в том, чтобы на основе
Az0HX(t) и, возможно, квх(г), t так управлять вектором параметров мо-
дели
aN(t) = Е°[ДЖ„ЫК(О, кох(<), t], (5.4.4)
чтобы норма вектора невязки (5.4.3) была минимальной или достаточно
малой. Выражение (5.4.4) есть операторная форма алгоритма настройки
модели. Структурная схема, соответствующая выражениям (5.4.1)—(5.4.4),
представлена па рис. 5.4.1, а.
Легко видеть, что БАИАМ такой структуры даже при сдоль угодно
точном «обнулении» сигнала невязки A.rBb,x(i) не гарантируют идентифи-
кации в смысле точного отслеживания неизвестных параметров объекта.
Это заведомо имеет место при неодинаковой форме операторов F, F" и на-
личии шума w(t), по может иметь место и при w = 0, одинаковых опера-
торах модели и объекта. Все, что можно требовать от БАИАМ данной!
Рис. 5.4.1. Общие структурные схемы БАИАМ с операторным описанием
и пространствах сигналов с идентификацией в классе моделей с непре-
рывным (я) и дискретным (б) временем
структуры,— это достаточная малость повязки выходных сигналов объек-
та и настраиваемой модели на всем множестве Х„х реализаций входного
сигнала a:„K(i). Однако для одинаковых (пли примерно одинаковых) ви-
дов операторов F, FM это в большинстве случаев означает приближение
в пространствах параметров « а(1), т. е. параметрическую иденти-
фикацию.
5.4.1,2°. Общая структура БАИАМ с дискретным временем и оператор-
ным описанием. Рассматривается задача идентификации непрерывного
объекта в классе моделей с дискретным временем. Объект по-прежпему
описывается оператором (5.4.1), одпако входной и выходной его сигналы
дискретизируются (квантуются) во времени, т. е. измеряются в дискрет-
ные моменты времени. На структурной схеме рис. 5.4.1, б эти преобра-
зования выполняются преобразователями И. В современных системах
подобные операции выполняют обычно АЦП, которые при достаточном
числе разрядов и быстродействии можно считать квантователями во вре-
мени (квантованием по уровню в АЦП при указанном условии можно
пренебречь). Конечно, квантование во времени может выполняться и
другими устройствами.
Модель с дискретным временем и операторным описанием можно пред-
ставить в виде (5.1.6), записав в явном виде дополнительные аргументы.
жвых [*1 = F“ [жвх И1, И1, fc]- (5.4.5)
Алгоритм настройки модели в общей операторной форме запишется
в виде
ам[Л-] = р“[ДЖьых[А:] , #ВЫХ [А], М. (5.4.6)
гДе Джвых [,£1 = жвь,х [*1 - жвых 1М.
5.4.2. Общая структура алгоритма в пространствах состояний. БАНАМ
в пространствах состояний отличаются тем, что идентифицируемый про-
цесс, адаптивная модель и алгоритм ее настройки описываются в про-
странствах состояний, а наблюдаемыми (выходными) величинами явля-
ются функции векторов состояний.
5.4.2. !°. Непрерывное время. Наиболее обгцие из рассматриваемых
описаний идентифицируемого объекта и условий наблюдения в простран-
стве состояний соответствуют выражениям (5.1.21), (5.1.22). Одпако при-
менительно ц БАИАМ ограничимся зависимостью наблюдаемой величи-
ны *) от х, и, t и аддитивной помехой:
х = f(x, и, a, t, w), z = h(x, и, i) + Т|. (5.4.7)
В отличие от уравнений (5.1.25), характеристики настраиваемой модели
и условия ее наблюдения считаем в общем случае отличными от характе-
ристик объекта и функции его наблюдения
я" = щ 2м = йм(я", и, /). (5.4.8)
В уравнениях (5.4.7), (5.4.8) зависимость х, и, а, и>, ам, ж” от времени
в явном виде пе показана.
Задачей БАИАМ в общей («слабой») постановке является обеспече-
ние достаточной малости нормы невязки Az = z — zM в заданной области
U входных (управляющих) воздействий (n(i) е U). При одинаковых
формах функций /м и / относительно первых четырех аргументов
/“(ж, и, a, t) — j(x, и, a, t, 0) (5.4.9)
и одинаковых формах функций /гы и h
hM(x, и, t) = h(x, и, i) (5.4.10)
перед БАИАМ может ставиться более «сильная» задача — обеспечение в
заданной области V (u^V) пе только достаточной малости нормы век-
тора невязки Az, но и достаточной малости нормы разности параметров
Да = а — ам.
*) Зависимость z от а облегчает, вообще говоря, решение задачи
идентификации.
Как «слабая», так и «сильная» функции БАИЛМ могут быть обеспе-
чепы при алгоритме настройки модели вица
«м = /“(«”, Az, и, 7). (5.4.11)
Структурная схема, соответствующая выражениям (5.4.7), (5.4 8),
(5.4.11), изображена па рис. 5.4.2, а.
Рис. 5.4.2. Общие структурные схемы БАИЛМ с описанием в простран-
ствах состояний с идентификацией в классе моделей с непрерывным (а)
и дискретным (6) временем
5.4.2.2е. Дискретное время. Непрерывный идентифицируемый объект
описывается прежним уравнением (5.4.5)
х — f(x, и, a, t, w). (5.4.12)
Однако наблюдение дискретизировано во времени:
z[7c] = /г[ж[7с], н[7с], 7с] + д[7с]. (5.4.13)
Настраиваемая модель и алгоритм настройки описываются в дискрет-
ном времени
жм[7с] = /»'[жм[7с — 1], и[к — 1], «м[Д' — 1], к — 1], (5.4.14)
zM[7c] = 7гм[жм[7с], н[7с], Л], (5.4.15)
а“[7с] = /«р-[7с — 1], Az [7с — 1], и[к — 1], к — 1], (5.4.16)
где Аз [7с] = z[k] — zM[7c],
Структурная схема, соответствующая соотношениям (5.4.12) — (5.4.16),
представлена на рис. 5.4.2, б.
5.4.3. Эвристические алгоритмы. Весьма трудно дать определения по-
нятия эвристического алгоритма. Дело в том, что нередко алгоритм, каза-
лось бы, чисто эвристического происхождения, изобретенный на раннем
этапе развития теории, оказывается оптимальным по тому или иному
критерию и может быть получен формальным путем. Тем не менее су-
ществуют алгоритмы, построенные именно интуитивным путем и пе ук-
ладывающиеся в существующие формальные методы синтеза. Вообще же,
как уже отмечалось, обычно существует целая гамма алгоритмов, разли-
чающихся своим происхождением: от полученных интуитивным путем до
синтезированных на основе наиболее мощных формальных методой.
5.4.3.1е. БАИАМ для линейного непрерывного объекта с операторным
описанием. Объект описывается передаточпой функцией (в операторной
форме) со скалярными входной и выходной величинами
bQ-\-blP-\- ...+ъпрп
где р — d/dt. Модель задается в аналогичном виде:
(5.4.17)
(5.4.18)
причем отклонения параметров модели от параметров объекта
Ля- = а. — a?’, i\bj = — b™, i, j = 1, n, (5.4.19)
считаются малыми.
Непосредственным вычитанием (5.4.18) из (5.4.17) можно получить,
что с точностью до малых второго порядка
Az :— А г — 7’ — —-
°* вых вых вых
= 2 A6j ( 2 «’/>Ч 1 р\х - 2 Aoi ( 2 а1У ) 7’Чх- (5-4.20)
j=l \i=o / i=l ' i==<) /
В настраиваемой модели есть вся необходимая информация для вычисле-
ния функций
В, <z) = f 2 ₽Чых> vi (0 = ( 2 aiPl) *>Чх- (5-4.21)
\ i—О / \ /
Сигнал повязки согласно (5.4.20), (5.4.21) с точностью до малых второго
порядца равен
п
= 2 имг) л6,—vi(z)A«ij-
i—О
5.4.22)
«Идеальным» алгоритм м настройки модели можно считать
а™ = к. (а. - а™) = к£а /Л = (b - Ь™) = d-ЛЪ.,
где ki, di > 0 — постоянные коэффициенты.
Однако этот алгоритм неосуществим, так как Да,, ДЬ; непосредствен-
но не могут быть измерены. Зато можно пытаться выделить соответству-
ющие сигналы путем умножения сигнала невязки па «опорные» сигналы
(5.4.21). В результате получается следующим эвристический алгоритм на-
стройки модели:
а“ =—7ыу; (4) Az, Ъ™ — d,ini (t) Az, i = 0, n. (5.4.23)
Покажем, что этот алгоритм обеспечивает, вообще говоря, сходимость
«в малом» процесса адаптации (настройки) модели и отслеживание до-
статочно медленно меняющихся параметров объекта. Действительно, вы-
ражения (5.4.23) с учетом (5.4.22) и (5.4.19) преобразуются в уравнения
вида
Alv. (t) 2 &Ьз “ v3 (5.4.24}
з=о
Ы>.=>- (i) J lb (0 (О + bv (5-4.25)
30
Полагая параметры объекта во время идентификации» постоянными
(а,- = 0, 6{ = 0), умножая уравнение (5.4.24) паДаТсГ1 уравнение (5.4.25)
на ДЬ^г/”1, складывая два полученных выражения и суммируя по i от
0 до п, получаем
п , 2 2 \ Г П "I2
»«>
i=0 ' 1 i ' Li=0 J
В левой части (5.4.26) записана производная но времени от положи-
тельно-определенной (/с,-, d, ~> 0) квадратичной формы ошибок настрой-
ки. В правой части (5.4.26) —по положительная, а за исключением осо-
бых входных сигналов хпх, отрицательно-определенная функция.
В самом деле, равенство
2 О' i W ~ vi Даг) = °
i —о
может выполняться тождественно только при Да,, Д6; =0, 1 = 1, п (за
исключением особых случаев, когда р.;, Vi == 0 или р,-, vt = const). Итак,
процесс адаптации сходится «в малом» (см. п. 3.3.5): при достаточно ма-
лых начальных отклонениях параметров Д«,(0), ДЬ;(О). Легко доказать
и слежение за параметрами объекта при достаточно медленном их
изменении.
5.4.3.2е. БАИАМ для линейного непрерывного объекта с описанием
в пространстве состояний. Метод функций Ляпунова, использованный в
предыдущем подпуицте для доказательства сходимости процесса адап-
тацпи модели при интуитивно подобранном алгоритме, сам может исполь-
зоваться для подбора алгоритмов настройки модели. При этом процедура
в целом в значительной мере остается эвристической, так как нахождение
функций Ляпунова для такого класса систем не имеет общих формаль-
ных методов.
Наиболее простым является случай липейных объекта и модели.
Линейный объект и линейная модель описываются в пространствах сос-
тояний (случай II.2, 111.2, IV.2 табл. 5.1.1)
х = Ах -j- Ви, (5.4.27)
хм = Лмхм + Вяи. (5.4.28)
Соответствующие векторы и матрицы объекта и модели имеют одина-
ковые размерности, и рассматриваются отклонения
Дх = х —жм, ДА =А — Ам, ДВ = В —Вм. (5.4.29)
Все векторы х, х№, и, х, хм считаются непосредственно наблюдаемыми
(измеряемыми), так что имеем случай 1V.4 (см. табл. 5.1.1).
Вычитая (5.4.28) из (5.4.27), находим
Дх = ДАх + АыДх + АВи. (5.4.30)
Матрица Ам соответствует текущей настройке модели и известна,
Дх определяется непосредственно по измеряемым величинам, так же как
и Дх. Таким образом, наблюдаемый сигнал невязки можно принять
равным
Дз = Дх — АмДх = ДАх -{- АВи. (5.4.31)
Элементы матриц А, Ам, В, Вм независимы друг от друга. По-
этому, как отмечалось в п. 2.2.6, идентификация может осуществляться
параллельно по строкам этих матриц. Соответственно записываем
Дз< = ДАщх -|-ДВщгд i = 1, п, (5.4.32)
где ДАщ, ДВщ — г-е строки матриц ДА, ДВ.
Фушщию Ляпунова для i-ro капала БАИАМ будем искать в виде по-
ложительно-определенной квадратичной формы
К = 0,5 (ДЛ|{|К<«ДА’| + ДВ|.1В<«>ДВ|Т.|), (5.4.33)
где К<*>, В<г> — положительно-определенные диагональные матрицы задан-
ных постоянных коэффициентов. Производная по времени функции V,
равна
+ Д^Н|ОИ>ДВЖ- (5.4.34)
Пусть
ДДЩ = - Дз^х = - (ДА^х + ДВн|н) х, (5з5)
ДВ^ = - (О<г>)-1 Azm = - (В<{>)-! (ДЛн,х + ДВ1пи) и.
Подставляя (5.4.35) в (5.4.34), находим
V,- = — (АД hi* + АВщи)2. (5.4.36)
Выражения (5.4.33), (5.4.35) свидетельствуют об асимптотической схо-
димости процесса настройки модели, если обеспечиваются соотношения
(5.4.35) и величина невязки (5.4.32) обращается тождественно в пуль па
реализациях *(г) еХ, u(t) е U только при ДДщ = 0, АВщ = 0.
Выражения (5.4.35) с учетом (5.4.23) преобразуются к виду
Д|7 = (7<<П)“1Д^ + ^-|, B1^ = (D<i>)-1AZiu + B;rj(. (5.4.37)
Этот алгоритм настройки модели точно нельзя реализовать, так как А и
В неизвестны. Одпако при достаточно медленном изменении А и В или
достаточно больших коэффициентах усиления, образующих диагональ-
ные матрицы
А*«> = D*<*> = (#<*>)-1,
членами В^ можно пренебречь и заменить (5.4.37) алгоритмом
= K*<iyAz.x, = (5.4.38)
Это реализуемый алгоритм пастройци модели. Запишем его в матричной
форме, полагая О*<4> не зависящими от г,
= Лг(А**)'г, Вм = Дг(©*и)т. (5.4.39)
Структурная схема, соответствующая уравнениям (5.4.27), (5.4.28),
(5.4.39) и соотношению Дг = Дж — ЛмДж, приведена на рис. 5.4.3, а.
Если разработать разностную схему для численного интегрирования
(5.4.28), (5.4.39), то реализация данного БАИАМ в ЦВМ, как легко ви-
деть, требует вычислительной производительности лишь в полтора — два
раза большей той, которая необходима для моделирования идентифици-
руемого объекта в реальном времени. Одпако здесь требуется высокая
степень непосредственной наблюдаемости объекта (измерение х, и, изме-
рение или вычисление х).
5.4.3.30. БАИАМ для нелинейного непрерывного объекта с линейно
входящими параметрами и описанием в пространстве состояний. Нередко
характеристики объекта могут быть аппроксимированы посредством не-
которых известных базисных функций, умноженных па коэффициенты,
которые до идентификации точно неизвестны и могут изменяться во
времени.
Допустим, что в скалярной форме уравнения объекта имеют впд
N м __
'Хг = 2 ЛЛ W + 2 <«)• «=!,«•
3=1 Л=1
Тогда в векторной форме
х = Лф(.г) ф-В<р(и).
(5.4.40)
Уравнение подели формируется в аналогичном виде
хм = Аыф (г1) Z?rj<p(t(). (5.4.41)
Вводя, как и раньше, обозначения
Дх — х — жм, ДА =А — Лм, Дф = ф (ж) — ф (ж’1), ДВ = В —
(5.4.42)
получаем
Дх = ДЛф(х) + ЛмДф ДВ<р(и).
Аналогично предыдущему варианту величины Дх, х, х'". 71мДф
считаются непосредственно наблюдаемыми или вычисляемыми через
Рис. 5.4.3. Структурные схемы, соответствующие БАИЛМ, полученным
па основе подбора функций Ляпунова, для линейного объекта (а) и объ-
екта с липепио входящими параметрами (6)
непосредственно измеримые величины. Поэтому
Де = Дх — ЛмДф = ДАф (х) ABcp(ii) (5.4.43)
считается непосредственно наблюдаемым вектором повязки.
Дальнейшее построение почти полностью аналогично приведенному
в п. 5.4.3.20. Вместо (5.4.35) фигурируют выражения
Л А[;) = — К*<оДг1ф (.г) = — /Г<1> (ДАщф (ж) + ЛЯщф (“)) 4 44)
ДВ^ = — П4:<1>Дглр (и) = — £*<г> (ЛАщф (ж) + Д2?(г1ф (и))ф (и),
а вместо (5.4.30)
Vi = -(ДАшф(х) + ДВц|<р(и) )2- (5.4.45)
Реализуемый алгоритм пастройки модели в матричной форме для даппого
1 .учая при = К*, £)*<•> = D* для i — 1, п имеет вид
Лм = Дз(А*ф(а:))т, В" = Дг(О*<р(и))т. (5.4.46)
Структурная схема, соответствующая (5.4.40), (5.4.41), (5.4.43), (5.4.46),
изображена па рис. 5.4.3. б.
Метод функции Ляпунова использовался для формирования БАИАМ
в ряде работ [5.14, 5.15].
5.4.3.40. БАИАМ, получаемые градиентным методом при локальной
целевой функции. Идея градиентных методов формирования алгоритмов
при локальной целевой функции чрезвычайно проста: скорость измене-
ния управляющих или настраиваемых параметров устанавливается про-
порциональной градиенту назначаемой целевой функции в пространстве
этих параметров. По своему существу градиентный метод с локальной
целевой функцией занимает промежуточное положение между эвристи-
ческими и формальными методами. Назначение локальной целевой функ-
ции полностью определяет решение вне зависимости от объекта и опира-
ется на эвристику.
Для задачи БАИАМ градиентный метод локальной оптимизации не-
обходимо сочетать с так называемым вспомогательным оператором
[5.13, 5.16]. Рассмотрим градиентный метод применительно к относитель-
но общей структуре БАИАМ, представленной в п. 5.4.2.1°, но без учета
шумов.
Уравнения объекта и наблюдения записываются в виде
х — f(x, и, a, t), (5.4.47)
z = h(x, и, t). (5.4.48)
Соответственно для настраиваемой модели
хм = f"(xM, и, «м, i), (5.4.49)
zM = (5.4.50)
Все функции считаются дифференцируемыми по всем аргументам, в том
числе по векторам параметров а, ая.
Целевая функция (7:, задается в виде скалярной функции на-
блюдаемых величии, чаще всего в виде нормы разности z — zM (при
/i.M (х, и, t) = h(x, и, t)). В общем случае <?а = <?n(z, zM). Алгоритм па-
стройки модели имеет вид
( dQ?. V ( dQ?. dhK
°М = _7Л'^Г/ дхк да™)' (5-4-51)
где к — матрица коэффициентов усиления, выбираемая из условия обес-
печения сходимости процесса адаптации и других дополнительных
условий.
Матрица х™ — дх™/да™, именуемая матрицей чувствительности,
определяется с привлечением матричного уравнения, получающегося
дифференцированием (5.4.49) по вектору параметров ам:
d дх** dfM дх™ , df*
М ~да™ = ~да™ 'Г ~да™ ' (5.4.52)
Замкнутая (с учетом заданного входного воздействия и = u(t)) система
уравнений состоит из выражений (5.4.47) — (5.4.50), алгоритма настрой-
ки (5.4.51)
• / dhw \т / 8Q \т
ам = - к (^)т — — (5.4.53)
V \ дх™ J \ '
и матричного уравнения (5.4.52)
Структурная схема, соответствующая выражениям (5.4.47) — (5.4.50),
(5.4.53), (5.4.54), представлена па рис. 5.4.4. Эта структура с первого
взгляда кажется ненамного более сложной, чем предыдущие. Одпако раз-
мерность матричного уравнения чувствительности (5.4.54) при большом
Рис. 5.4.4. Структура БАИАМ, полученного градиентным методом при
локальной целевой функции
числе оцениваемых параметров и значительной размерности вектора
получается большой. Необходимые вычислительные затраты при числен-
ном интегрировании значительны. Кроме того, вопросы сходимости про-
цессов идентификации в общем случае здесь остаются открытыми.
Дополнительные трудности возникают при идентификации неустой-
чивых объектов (процессов). В этом случае уравнение матрицы чувстви-
тельности (5.4.54) также неустойчиво. Для решения задачи в этом случае
приходится прибегать к приемам создания искусственной устойчивости.
Проблема задания начальных условий для я” в случае наличия
устойчивости решается просто: задаются относительно произвольные
печальные условия, а алгоритм настройки модели включается после до-
стижения установившегося режима в «модуле» (5.4.54). Различные ва-
рианты систем данного типа рассматриваются в ряде работ [5.16—5.21].
А. Градиентный БАИАМ при квадратичной локальной целевой функ-
ции и линейном объекте. Уравнения идентифицируемого объекта и на-
блюдения имеют вид
х = Ах + Ви, z = Их. (5.4.55)
Уравнения настраиваемой модели и наблюдения аналогичны:
хм = А мхм + BMu, zM = Нхм (5.4.56)
(кроме того, как всегда, все параметры модели, т. с. в данном случае
элементы матриц Лы, Вм считаются непосредственно наблюдаемыми).
Для того чтобы вместо матриц параметров иметь дело с вектором
параметров, запишем выражения для строк уравнений объекта и модели:
= А^х + В|.;|и, (5.4.57)
где Ац|, В|,| — строки матриц А, В. которые можно рассматривать как
субстроки вектор-строки параметров объекта. Аналогичны обозначения
для модели.
Полный вектор параметров модели образуется согласно этому следу-
ющим образом:
(«М)Т = [Л|11 ... Л171) Вщ ... В|П|] = [“(“) ••• °(n) a^+i)
Локальная целевая функция задачи задается в виде положительно-
определенной квадратичной функции невязки
Q3 = 0,5Дгт;уУ = 0,5(z — zM)T₽(z — zM).
В данном случае
, <9/?.м dfM
тх--” (5АЖ>
Рассмотрим алгоритм оценивания субвсктора параметров _
— Соответствующие уравнения настройки моде-
ли согласно (5.4.53), (5.4.58), (5.4.54) запишутся в виде
где
«(г==л(о(^«))тят₽(г-гМ)’
(5.4.59)
(5.4.60)
(5.4.61)
Если вновь вернуться к матрицам параметров, то вместо (5.4.59),
(5.4.60) получим
где
Лм
вм
= ?((^)тя'г₽(г-гм),
’ М /ММ I Т
а “ Ь да™’
(5.4.62)
(5.4.63)
да™
(хм)т кт 0 0 ... 0 0
О 0 (хм)т ит ... О О
О 0 0 0 ... (хм)т ит
— блочная матрица размера (А + М) X (А + М], где N = п2— общее
число элементов матрицы Лм; М = пг — общее число элементов мат-
рицы Вм.
Структурная схема, соответствующая (5.4.55), (5.4.56), (5.4.62),
(5.4.63), изображена па рис. 5.4.5, а.
Б. Градиентный БАИАМ при квадратичной локальной целевой функ-
ции и объекте с линейно входящими параметрами. Уравнения идентифи-
цируемого объекта и модели имеют вид (5.4.40), (5.4.41)
х = Лф(ж) + Вф(ц), хм = Лиф(я:ы) + В"<р(и).
Уравнения наблюдения и целевая функция те же, что в позиции А, так
что справедливы выражения
а<23 _
dz™ -
(pAz)T,
dh™
дх™
= Я,
по в данном случае
дх™ дх™
фт (хм) (рт (и) 0 о ... О О
О 0 ф'г (хм) <рт (и) ... О О
О 0 0 0 ... 1|>т(хт) «рг (и)
(5.4.64)
Алгоритм настройки модели имеет вид (5.4.62), однако уравнение
матрицы чувствительности отлично от (5.4.63):
. М д1™
х™ = Лм—х™ + —V, (5.4.65)
° дх™ а да™
где последний член имеет выражение (5.4.64). Соответствующая струк-
турная схема приведена на рис. 5.4.5, б.
Л
Рис. 5.4.5. Структуры БАИАМ для линейного объекта («) и объекта с
линейно входящими параметрами (б), полученные градиентным мето-
дом при локальной квадратичной целевой функции
5.4.3.50. БАИАМ эвристического происхождения с дискретным вре-
менем. Как и для алгоритмов другого назначения, для БАИАМ сущест-
вуют два основных пути получения дискретных вариантов: построение
разностных схем непрерывных (аналоговых) алгоритмов и использование
дискретных во времени моделей с самого начала формирования алгорит-
мов. Первый путь обеспечен хорошо известными способами вычислитель-
ной математики, в частности, методами численного интегрирования диф-
ференциальных уравнений, и пе нуждается в специальных разъяснени-
ях. Некоторые применения второго подхода излагаются ниже.
А. Вариант БАИАМ для линейного объекта с дискретным временем.
Идентифицируемый объект и условие наблюдения описываются выраже-
ниями
х[А + 1] = Л[Л]я[Л-] + £[Л]н[Л], (5.4.66)
г [А] = //[А] я [А]. (5.4.67)
А нелогично описываются настраиваемая модель и условие ее паолю-
дения:
хм[7с + 1] = Аы[7с]хм[7с] + В“[7с]и [7с], (5.4.68)
гы[7с] — Н [Тс] х“ [ 7с]. (5.4.69)
Вводя обозначения
Дх[7с] = х[7с] — хм[7с], Д.4 [7с] = Л [7с] — Ам[7с],
ДВ[7с] = В[7с] — Вм [fc], Дг = z[k] — zM[7c],
из (5.4.66) — (5.4.69) получаем
Дх[7с + 1] = ДА [7с] х [7с] + ДВ[7с]п[7с] + 4“[7с]Дх[7с],
(5.4.70)
Дг[7с] = В[7с]Дх[7с].
Непосредственно наблюдаемыми в момент времени 7с считаются z[7c],
г”[7с] (а стало быть, Дг[7с], п[7с], хм[7с], Аы[7с]).
Рассмотрим случай полной непосредственной наблюдаемости. Пусть
7/[/с]—единичная матрица размера «Хп (м — размерность векторов
х[/с], х“[7с]). Тогда векторы х[7с], хм[7с], Дх[7с] непосредственно наблюда-
емы и величину
Дг*[7с+ 1] = Дх [7с + 1] — Ам[7с]Дх[7с] =
= ДА [7с]х[7с] -|- ДВ [7с] и [7с] (5.4.71)
кгожпо считать непосредственно наблюдаемой в момент времени 7с + 1
(предполагается возможность запоминания хотя бы на один интервал).
Алгоритмы настройки модели задаются в виде
Ам[7с + 1] = Аы[7с] + А'Дг* [Тс + 1]хт[7с],
Вм [7с + 1] = В” [7с] + ВДг* [Л + 1] хт [Тс], (о.4.72)
где К, D — матрицы постоянных коэффициентов.
Если во время идентификации А и В можно считать постоянными
(не зависящими от 7с), то из (5.4.72), (5.4.71) следует
ДА [7с + 1] = ДА [Тс] — 7<[ДА[7с]х[7с]хт[7с] + ДВ[7с]п[7с]х'г[7с]],
ДВ[7с + 1] = ДВ[7с] — В [ДА [7с] х [Тс] пт [7с] + ДВ[7с] и [7с] ит [7с] ]. (5Л73)
Можно показать, что при соответствующем выборе К, D и и [к] процесс
адаптации модели, описываемый матричными уравнениями (5.4.73), ус-
тойчив.
Рассмотрим общий случай. В общем случае (5.4.70), (5.4.71) непосред-
ственно наблюдаемыми в момент времени 7с являются Дг[7с], хм[7с],
А "[/с], Вм[7с]. Образуем квадратичную локальную целевую функцию
<?з = 0,5Дзт [7с] рДз [Тс], (5.4.74) •
где р — положительно-определенная заданная матрица. После подстанов-
ки в квадратичную форму (5.4.74) выражений (5.4.71), (5.4.70) получаем
Q., = 0,5[ДА [7с — 1] х [7с — 1] + ДВ[7с — 1] и [Тс — 1] +
+ А и [Тс — 1] Дх [fc — 1] ] ТВТ [7с] рВ [7с] [ДА [7с — 1] х [7с — 1] +
+ ДВ[7с — 1]и [Тс — 1] + А" [7с — 1] Дх[7с — 1]].
Градиентные алгоритмы настройки модели в данном случае будут иметь
вид
ДЛ[А + 1] = ДА [А] — Л7/т[А]₽П[А]Дг[Л]х’[А —1],
ДВ[А + 1] = ДВ[А] — DZ/T[A]p//[A]Az[A]uT[A — 1]. (5‘4'j5)
Этот алгоритм строго реализовать нельзя, так как А, В, х непосредствен-
но не наблюдаемы. Однако, считая А, В на интервале идентификации
достоянными и заменяя х па хы (ошибка Дх считается малой), вместо
(5.4.75) записываем
АЫ[А + 1] = ЛМ[А] + ^Ят[Л]₽Л[А]Дг[Л] [х"[A — 1]]т,
[7С + 1] = В!" [7с] + DHT [Тс] р/7 [А] Az [ к ] и* [7с — 1]. (5.4.76)
Если Р, U — единичные матрицы, то алгоритм (5.4.7G) весьма близок к
алгоритму (5.4.72).
Б. Идентификация методом общего параметра*). При идентификации
реальных объектов в классах моделей большой размерности с весьма
большим числом идентифицируемых параметров возникают значительные
трудности. В реальных производственных условиях скорость сходимости
процессов идентификации нередко снижается из-за наличия корреляции
между входными сигналами.
Здесь изложен один из возможных методов идентификации объектов
большой размерности, названный методом общего параметра, а также не-
которые комбинированные способы, основанные па нем [5.22—5.25].
а) Метод общего параметра. Метод общего параметра можно рассмот-
реть на примере оценки параметров объекта вида
х[А] = ати[к], (5.4.77)
где х [7с] — скалярная выходная величина объекта, ат = [щ ... aN [,
«”[*] = [«.[*] нлг[А]]. Вместо индекса «м» для координат и парамет-
ров модели применим здесь.индекс «Д» над буквой:
х[А] = ат[А — 1]н[А]. (5.4.78)
Компоненты вектора я [А] представим согласно следующим выражениям:
«3[А] —'a.jo + bj [А] или а3[7с] = ад)Ь3-[А]. Соответственно будем гово-
рить об аддитивной параметрической настройке (АПН) и мультиплика-
тивной параметрической настройке (МПН).
Тогда модель (5.4.77) представляется выражениями
х [7с] = + 7>'г [7с — 1]] и [А], (5.4.79)
х[А] =ЬТ[А—1] Д.н[А], (5.4.80)
«о
где ЬТ[А] == [bt[7c] .. ,bN [А] ]— соответственно вектор аддитивных для
(5.4.79) и мультипликативных для (5.4.80) параметрических составляю-
щих; = [а .. ,«Л7)]— вектор начальных значений оценок парамет-
) Подпункт написан А. А. Ашимовым и Д. Ж. Сыздыковым.
ров; =diag(a10, ...,aNo)— матрица, диагональными элементами
которой являются элементы вектора а<>.
Предположим теперь, что
х= [«о + ₽j I*- И еТ] “ 1*1. (5.4.81)
2 [*1 = Р2 Г* - 1) а^и |7с], (5.4.82)
где е — Л'-мерпый вектор, элементами которого являются единицы; Pi[7c],
р2[7с] —скалярные общие параметры. При представлении моделей в виде
(5.4.81), (5.4.82) векторы оценок параметров записываются следующим
образом:
н[Л] = ао4“Р1[Л]е, л[Л] = Рг]*]^. (5.4.83)
Алгоритмы перестройки общих параметров для БАИАМ с АПН и
МПН соответственно имеют вид
₽1[Л] = Р1[Л- 1] — (^ [Л1 — х [Л]) етм [Л], (5.4.84)
₽2 1Л'1 = ₽2 и — i 1 — Та (ж.[7с] — х [Тс]) а^и [7с], (5.4.85)
где '(1, '(2 — параметры рекуррентных (итеративных) алгоритмов.
б) Метод общего параметра с АПН. Для определения основных
свойств метода общего параметра будем считать, что входной сигнал есть
последовательность случайных величин, удовлетворяющая условиям
Е ]и{ ]Л]1 = О, Е [и, [7с] и- [7с]] = 0, i ¥= j,
3 (5.4.83)
Е [и? [7с] J = о2, Е [7с] ui [7с -|- т] ] = 0, тп^ьО,
где Е — символ математического ожидания.
Условие сходимости. Если входной сигнал удовлетворяет условиям
(5.4.86) и общий параметр модели (5.4.81) перестраивается согласно ал-
горитму (5.4.84), то lim Е [f. [7с]] с, когда удовлетворяет условию
fe->OO
е < Y1 < (Ао2)-'. (5.4.87)
Введем обозначение для начальных параметрических рассогласований
объекта и модели в виде А«,о = а.— Oto (7 = 1, TV) и определим такое
значение с, что
2 (Aoi0 + с) = 2 Л“* = °- (5.4.88)
г=1 1--1
Представим теперь алгоритм перестройки общего параметра (5.4.84) с
учетом (5.4.88) и предыдущих выражений в виде
А₽, 1*1 =
(N \ 2 N
2 “г И Ajlj [7с — 1] — 2 А«’\[7с] UJ7C], (5.4.89)
i=l / . i,j=l
где ДР> [7с] = Pi [7с] —с. Па основе (5.4.86), (5.4.88), (5.4.89) получаем
Е[ДР,[А-]] = (1-7i.Vo2)E[A?i[7c-1]], (5.4.90)
При 71, удовлетворяющем условию (5.4.87), limE [Дрг] -> 0. Тогда с есть
некоторое среднее 'Значение общего параметра в установившемся состоя-
нии, а Да* (i = 1, Л') — средние по реализациям значения параметриче-
ских рассогласований в установившемся состоянии, и сумма их равна
нулю (5.4.88). .
Скорость сходимости. Пусть определено выражение Д[3? [7с] согласно
(5.4.89). Тогда, применяя операцию математического ожидапия к Д|3? [7с],
с учетом (5.4.86)., (5.4.88) находим
Е [Д₽? [Щ =
= [ 1 -1- (Зу.Уо2 — 2) уЛ’о2] Е [ др? [/с — 1 ]] -]- /Ло21| Да* Ц2, (5.4.91)
где ||.Да*||2 = 2] При выборе
г==1
7 = (ЗЛ'о2)-1 (5.4.92)
уравнение (5..4.91) можно представить как
Е [Др? [7с]] = (2/3) Е [Др? [А:]] (1/9А) || Да*Ц? (5.4.93)
Исключая промежуточные значения Е[д|3?[т]], тп — 1, Тс — 1, полу-
чим выражение, определяющее скорость сходимости алгоритма (5.4.84)
метода общего параметра в виде
Е [Др? [Тс] ] (2/3)'1 Др? [0] + (1/3.V) (1 - (2/3)'1) ||Да* ||2. (5.4.94)
Видно, что скорость сходимости для АПН не зависит от числа оценивае-
мых параметров.
Дисперсия общего параметра с АНН. При Тс-»-оо выражение (5.4.94)
определяет дисперсию общего параметра в установившемся состоянии
’ П1Ч = Е [Др? [со]] = (1/ЗА) || Да* ||2. (5.4.95)
Тогда при входных сигналах, удовлетворяющих условиям' (5.4.86), чем
меньше значение конечной нормы параметрических рассогласований, тем
меньше значение дисперсии общего параметра, и при точном определе-
нии значений параметров объекта дисперсия общего параметра равна
пулю. Таким образом, величина дисперсии общего параметра является
мерой точности процесса параметрической идентификации. Так, если за-
даться определенной точностью оцепки параметров б, то при выполнении
условия <б параметры объекта будут определены как а,[7с]=аиг|-
+ EfpjfZc]]. Для случая, когда > б, т. е. точность оценки метода с
АПН не удовлетворяет заданной, необходимо перейти к методам иденти-
фикации, способным уменьшить ЦДа*|] до требуемых пределов.
Норма параметрических рассогласований. Параметрические рассогла-
сования на fc-м шаге метода с АПП определяются в виде
Да, [/с] = ai0 + Pi [fr] — а{ = Да,0 + Pi [/c], i = 1, А. (5.4.9Г1)
Поскольку АР, [0] = с при Pi [0] =0, а также с учетом (5.4.88) и
/V
У Да,0 = — cN уравнение (5.4.94) можно записать в виде
г=1
Е[||Да [fc]||2J = [1+-| (^(т) )]«А«*Ц2+ (4) <?N-
W
С учетом || Ла* ||2 = || AafJ|2 -|- 2с У, Аа.гп + с2 А это выражение принимает
г—1
вид
Е [ || Да [7г] ||2] =
(5.4.98)
Если ввести в рассмотрение следующее очевидное равенство:
JV \2 N
2 Aoio ) = ^1оА 2 Aaio’
i=T / i=i
где Aj0 = cos2 (Л°о, с) — значение квадрата косинуса угла между векто-
ром начальных параметрических рассогласований и единичным вектором,
то (5.4.98) можно записать в виде
Е [ || Да [А] ||2] = [1 + (1/3) (1 - 4Х20)] (1 - (2/3)'!) || Дар ||2. (5.4.9?)
Установившаяся ошибка идентификации имеет вид
lim Е [ || Да [7с] ||2] = (4/3) (1 - Х20) | А%||2-
k~>oo
(5.4.100)
Кац видпо, точность оценок возрастает с увеличением значения 7-,п , и
при значении, равном единице, установившиеся оценки являются несме-
щенными.
Случай коррелированных входных сигналов. Для определения
свойств метода общего параметра с АПН при коррелированных входных
переменных полагаем, что входные сигналы удовлетворяют условиям
°2, * — i,
ГИ° ’ (5.4.101)
£ [7с] ш [/г + га]] = 0, «А 0,
Е [иД7с] =0, Е [ui [Л] и-[7с]] =
где 0 + г,} 1 — коэффициент корреляции, одинаковый для всех i + /.
Аналогично предыдущему можно показать, что при
0<i<(W)-', d = 1 + (TV— l)rtJ (5.4.102)
имеет место сходимость процессов идентификации, т. е. lim Е [рх [/с] ] ->
/г-»сю
-> с, где с есть некоторое среднее значение общего параметра в устано-
вившемся состоянии. Если определить значение 7 = (ЗЛМо2)”1, то выра-
жение для скорости сходимости общего параметра принимает вид
/ 2 \ ( / 2 V1 \ 1 —• г •
Е [Д|32 [Л]] = (-3 ) А₽2 [°] + (1 - ( д') ) зуу-Г'И Да* Й8- <5-4-103>
Из выражения (5.4.103) видно, что коррелированность-входных сигналов
не влияет па скорость сходимости метода с АПН. Значение дисперсии
общего параметра в установившемся состоянии для данного случая
1 — г. •
Яр1 = Е[др*[ТО]] = ^?^||Аа*||2. (5.4.104)
Оно может служить мерой качества оценок параметров. При г4,- = 0 вы-
ражения (5.4.103), (5.4.104) соответственно совпадают с (5.4.94), (5.4.95).
Аналогично предыдущему получаем
Е 11| Ла [А] ||2] =
= [1 + Т (1 - 0-го - 1) ЛЧ) G - (I)")] II Л“о.Г &АЛ05)
и при гц = 0 последнее уравнение совпадает с (5.4.99).
в) Метод общего параметра с МПН. Основные результаты, получен-
ные для БАИАМ с общим параметром АПН, можпо распространить и па
случай МПН, когда модель (5.4.78) представляется в виде (5.4.82), а ал-
горитм настройки общего параметра имеет вид (5.4.85).
Условия сходимости. Если входные сигналы удовлетворяют условиям
(5.4.86) и общий параметр модели (5.4.82) настраивается согласно алго-
ритму (5.4.85), то lim Е [|3 2 р|]с, когда у2 удовлетворяет условию
0< 72< (1Й12о2)-’. (5.4.106)
Вводя обозначение Да* = с«о — а, алгоритм перестройки общего па-
раметра (5.4.85) с учетом предшествующих выражений можпо предста-
вить в виде
Л₽2 [*] = [1 — V2 («> W)2] д₽2 - *] - V2“o“ t/£l Ae*Tw 1*1’ (5.4.107)
где Др2[/с] — Р»[А] — с. Пусть теперь с имеет такое значение, что
а рД«* = в J (евр — а) = 0. (5.4.108)
Тогда, определяя математическое ожидание Др2[^], с учетом (5.4.86) и
(5.4.108) получим
Е[Др2[Л]] = (1 —7211ао112о2)Е[Д02.[Л —1]]. (5.4.109)
Для 7г, удовлетворяющего условию (5.4.106), lim Е [ДР2 [7с]] -»-0. Так как
Л—*оо
с есть среднее значение общего параметра в установившемся состоянии,
то Да* есть среднее значение вектора параметрических рассогласовании
в установившемся состоянии, удовлетворяющее условию (5.4.108).
Скорость сходимости. При выборе
72 = (31|Г0||2аг)-' (5.4.110)
скорость сходимости процесса идентификации с МПП (5.4.85) определяет-
ся выражением
Е [др*17с]] = Д|32 [0] (1 - (4)") . (5.4.111)
При к —ьоо получаем дисперсию общего параметра в установившемся
состоянии
ср2 =Е[ЛР| [“!] = (5’4Л12)
Видно, что если определить начальные значения параметров а,0 = 1
(I = 1, N), то (5.4.112) переходит в (5.4.95).
Норма параметрических рассогласований. Аналогично предыдущему
можно получить
Г 1 1(2 VY1
Е [ || Да [Л-] ||2] = [1-|- у (1-4^)^- )]||Д«0||2. (5А113)
где X|n = cos2 ( ао, Д«п) — значение квадрата косипуса угла между векто-
ром начальных параметрических рассогласований и вектором начальных
значений параметров модели. Выражение (5.4.113) совпадает с соотноше-
нием (5.4.99). Отличие состоит только в том, что Л20 и Х20 суть квадра-
ты косинусов двух разных углов, определение которых дано выше. Ана-
логичны и все соотношения, базирующиеся па (5.4.113), (5.4.99).
г) Параллельная настройка общих параметров. Из рассмотрения ал-
горитмов аддитивного и мультипликативного вариантов метода общего
параметра можно сделать вывод, что в первом случае изменение вектора
параметров модели происходит вдоль направления, определяемого векто-
ром е, а во втором — вдоль направления вектора «о- Отмеченные свойства
идентификации по методу общего параметра приводят к тому, что ошиб-
ка идентификации при (5.4.84) может быть как больше по сравнению с
ошибкой при (5.4.85), так, и меньше. Поэтому возникает вопрос о совмест-
ной пастройке общих параметров согласно (5.4.84), (5.4.85), что позволяет
при определенных условиях обеспечить более высокую точность оценки
параметров объекта.
Представим модель в виде
*1 [Л] = ^2 [7с] +Р1|7С-ЦЛ[Ч 4
Р1 = Р2 [Л — 11 “о" lZcb
В даппом случае па каждом /с-м шаге настраиваются два общих па-
раметра модели (5.4.114) и ₽2р]:
₽х [*1 = ₽! Р— Я ~ [ж — xi И1] еТ“ [fel» (5.4.115)
Р2 [М = ₽2 [* — 1 ] - Т2 Р W - Я, [*]] а]'и [Л]. (5.4.116)
д) Комбинированные методы с применением общего параметра. Воз-
можно совместное применение известных рекуррентных методов оценки
параметров объектов и метода общего параметра. Постановка задачи сов-
местного применения указанных методов вытекает из сущности метода
общего параметра. При известных условиях скорость сходимости метода
общего параметра выше скорости сходимости процесса индивидуальной
настройки всех параметров модели аналогичным алгоритмом. Одпако при
решении вопроса о применении метода общего параметра следует обра-
тить внимание па достаточность получаемой точности оценки. Если по-
лученная средняя ошибка идентификации превышает допустимую, целе-
сообразно перейти к индивидуальной настройке всех параметров модели
объекта. При этом желательно использовать положительные свойства
обоих методов идентификации, а именно высокую скорость настройки
общего параметра, обеспечение требуемой точности при индивидуальной
настройке всех параметров модели.
Ниже приводится ряд способов комбинированной оценки параметров
объекта, приводящих ц повышению скорости сходимости процесса иден-
тификации при обеспечении приемлемой точности.
Способ с последовательным переходом. Сущность способа состоит в
следующем. На первом этане, когда вектор параметрических рассогласо-
ваний может иметь значительную величину, перестраиваются один или
два общих параметра модели. При достижении средней установившейся
ошибки идентификации оценивается точность настройки. При ошибке
идентификации, превышающей заданную, переходят ко второму этапу.
На втором этапе вычисляются значения величин общих параметров и
производится перестройка всех параметров модели по одному из алго-
ритмов до обеспечения заданной точности оценки параметров.
Ясно, что обеспечивая па первом этапе скорость сходимости большую,
чем при индивидуальной настройте всех параметров модели, можно до-
биться сокращения времени определения неизвестных параметров. Дей-
ствительно, если перестраивать на первых s шагах (первом этапе) об-
щий параметр согласно алгоритму (5.4.84) или (5.4.85), то норма пара-
метрических рассогласований после s шагов (этапа) будет определена
по дисперсии общего параметра соответственно как (5.4.95) или
(5.4.112). Если Е[||Да[«]II] > б, где б —заданная точность идентифика-
ции, необходимо перейти ко второму этапу идентификации — индивиду-
альной настройке всех параметров модели.
На втором этапе начальным параметрам модели присваиваются зна-
чения at(s) = Що+ E[₽[s]] для АПН и аг [«] = «?оЕ [₽ [s] ] для МПН. Тог-
да, папример, при входных переменных, удовлетворяющих условиям
(5.4.86), для алгоритма
а"([Л] = at [/с — 1] —ft [ж [7с] —ж[7с]]п{ [7г], i = 1, 7V, (5.4.117)
скорость сходимости определяется как
Е 11| Да [Л] ||2] = (1- д '" 2') Е[ ПДа [s] II2] . (5.4.118)
Среднее значение квадрата нормы параметрических рассогласований пос-
ле s шагов может быть определено в виде
Е [ || Да [s] ||2] = [1 - Xf0 (1 —'(4)S)] II Дао II2' <5-4'119)
Подставляя (5.4.119) в (5.4.118), нетрудно получить общую скорость схо-
димости рассматриваемого метода
Е [ || Да [7с] ||2] = [1 - Х20 (1 - (2/3)s)] (1 -1/(N ^2))h~s || Aatf ||2. (5.4.120)
Выражение
[1 - Х20 (1 - (2/3)s)] (1 - l.l(N + 2)fs > 1 (5.4.121)
определяет условие более высокой скорости сходимости для рассматри-
ваемого способа по сравнению со скоростью сходимости метода индивиду-
альной настройки всех параметров модели алгоритмами вида (5.4.117).
Способ с пошаговым переходом. Сущность комбинированного метода
оценки параметров с пошаговым переходом состоит в следующем. На
первом этапе перестраивается па одном шаге общий параметр согласно
алгоритму (5.4.84) или (5.4.85) и вычисляется значение параметров мо-
дели па основе величины общего параметра. На втором шаге перестраи-
ваются все параметры модели по известному алгоритму, па третьем ша-
ге снова осуществляется переход к перестройке общего параметра и т. д.
Параметры модели после каждого шага перестройки имеют случайный
характер. Для оценки скорости сходимости рассматриваемого способа при
Л2 [г] = 0,5 имеем
Е[||Да[7г]||2] = (1 — 1/(7V + 2) )W2(1 — l/9)ft/2||&a0ll2.
Условие более высокой сходимости рассматриваемого способа состоит в
том, что 7V > 7. Для коррелированных входных сигналов данное условие
будет иметь вид N > 7 — 9/\ j.
Способ параллельной настройки. В этом случае происходит совме-
щение изменения параметров модели, вызванных одновременной пере-
стройкой общего параметра и параметров модели. Для объекта (5.4.77)
модель может быть представлена уравнением вида
W
И*] = 2 [ [*-11+Р [*-!]]“{ [Л],
1=1
и па каждом шаге параметры модели a,s[7c] и общий параметр Р[7с] со-
ответственно перестраиваются согласно алгоритмам (5.4.117) и (5.4.84).
Тогда суммарное изменение параметров модели запишется как
а, [7г] = егР [А] + ₽[А], i = ТД/,
а алгоритм параметрической настройки — в виде
N
[fcj = tr [А- — 1] — т^е [А] и{ [А] — у2е [А] 2 [А].
Значения 71 и у2 могут быть интерпретированы следующим образом. Ес-
ли направление вектора параметрических ошибок совпадает с направле-
нием единичного вектора, т. с. X, [А] = 1, то работает только капал пере-:
стройки общего параметра со значением у2 = (ЗЛ'о2)-1, при этом 7, = 0.
Если вектор параметрических рассогласований ортогонален единичному
вектору, т. е. X® [А] = 0, 72 = 0, a 71 = [(А + 2)о2]-1, то работает ка-
пал перестройки N параметров модели. Для случая 0 < X® [А] с 1 и
7г принимают промежуточные значения.
Если среднее значение X® = 0,5, то скорость сходимости характери-
зуется соотношением
Е[||Да[А]112] = [1- (W + 6)/s(.V + 2)P|]Afl0||2. (5.4.122)
Можно заметить, что скорость сходимости рассматриваемого способа при
А > 2 будет выше, чем при индивидуальной настройке всех параметров
модели алгоритмами вида (5.4.117). Таким образом, организуя при пере-
стройке N параметров модели еще один канал перестройки общего пара-
метра, можно добиться в ряде случаев практической независимости ско-
рости сходимости от числа оцениваемых параметров при больших пара-
метрических рассогласованиях.
5.4.4. Алгоритмы с оптимальной настройкой модели. Алгоритмы, полу-
чаемые градиентным методом при локальной целевой функции (см.
п. 5.4.3.4е), лишь условно можно считать оптимальными. Эти алгоритмы
при априорном задании матрицы коэффициентов усиления вообще пе за-
висят по своей форме от математических моделей идентифицируемых
объектов (если пе считать матрицу чувствительности, которая фигури-
рует лишь в некоторых алгоритмах данного класса). Между тем из бо-
гатого опыта автоматического управления (к которому можно отнести
настройку модели) известно, что без учета характеристик управляемого
объекта нельзя достигнуть «подлинно оптимального» управления этим
объектом. Если прибегнуть к аналогии с житейской практикой, то опти-
мизация по локальному критерию эквивалентна стремлению к паилучшо-
му в каждый текущий момент времени, не учитывая будущего. Хотя
такой подход дает определенные результаты (для БАИАМ с дискретным
временем этот подход описан в конце данного пункта и в § 5.7), он да-
лек от оптимального по интегральному критерию.
Оптимизация управления вообще путем минимизации интегральных
Функционалов (функционалов с памятью) рассматривается в гл. 7 и 8.
Там же подробно излагается принцип минимума обобщенной рабо.ты и
алгоритмы, вытекающие из этого принципа, в частности, так называемый
операционный алгоритм. Здесь рассматривается этот алгоритм примени-
тельно к задаче настройки модели.
5.4.4.1е. Операционный БАИАМ. Детерминированный объект, условия
наблюдения и настраиваемая модель описываются уравнениями
ж — и, a, t), z = h(x, и, t), (5.4.123)
х"' ~ /(ям, и, a”, t), zM = Л (ж*1, и, Z). (5.4.124)
Синтезируется управление н™ скоростью изменения векторов па-
раметров модели
(5.4.125)
Минимизируемый функционал обобщенной работы задается в виде
*+гоп
/ = J <23 [z (6) - zM (0)] exp(-7’-Ie)rfO-h
t
+ 0,5 J [[<’ (0)]T (6) -4<-0ll (0)p A-4‘on(0)} exp (- 7V0>ZO.
(5.4.126)
Это функционал co скользящим интервалом оптимизации и релаксацией,
характеризуемой экспонентой ехр (—0/Г<г); TQ— время релаксации;
Qa — заданная положительно-определенная функция невязки; ки — задан-
ная, обычно диагональная, матрица коэффициентов; — синтезируе-
мое управление; — оптимальное управление, получаемое в резуль-
тате синтеза.
Первый член функционала (5.4.126) называется его главной частью.
После подстановки выражений для z, zM он принимает вид
4+гоп
J <23 {h [* (6), и (0), О] — h [жм (0), и (0), 0]} ЙО. (5.4.127)
t
Два других члена функционала (5.4.126) содержат квадратичные формы
от управлений и при положительно-определенной заданной матрице Ао
играют роль интегрального ограничения мощности управлений. В дан-
ной задаче это означает интегральное ограничение скорости перестрой-
ки параметров. При наличии помех такое ограничение является явно
полезным, так как отражает цель: отслеживание сравнительно медленного
изменения вектора параметров а и защищенность от выбросов и помех,
пе отраженных в уравнениях идентифицируемого процесса (5.4.123).
Уравнения
хы = { (жн, и, a™, t),
в данной задаче являются уравнениями управляемого объекта, а вектор
ж(г) рассматривается как функция времени.
Введем линейный оператор дифференцирования в силу уравнений
свободного (при == 0) движения объекта
Ц = + “> (5.4.128)
\ ОХ )
Было поцазапо [5.26; 5.27, с. 62—66, 121—123], что при достаточно
малом 7’q оптимальный в смысле минимума функционала (5.4.126) алго-
ритм настройки параметров модели имеет вид
“ М = - [(1 + г’<А + TWl + • • ) <?з]) • (5Л-129>
При достаточно малом TQ (при этом величина kaTQ может быть заданной,
достаточно большой) функциональный ряд в квадратных скобках схо-
дится равномерно. Практически, кроме особых частных случаев, возмож-
но вычисление лить первых членов указанного ряда, причем вычисли-
тельные затраты быстро возрастают с ростом числа сохраняемых членов.
А. Градиентный локальный алгоритм (нулевое приближение). В этом
случае сохраняется лишь первый член ряда и алгоритм принимает вид
(5.4.51)
—‘bs=J- <5А,ЗО>
Этому алгоритму посвящен п. 5.4.3.4°, в котором он отнесен к эвристиче-
ским алгоритмам.
Если вычисление градиента ведется через матрицу чувствительности
(см. (5.4.53), (5.4.54)), то даже в этом приближении вычислительные за-
траты при мпогопарамотрической идентификации получаются значитель-
ными.
Б. Алгоритм первого приближения. Сохраняя два члена ряда
(5.4.129), получаем
. Г д 1т
«М = -^[^(С3 + ^ЦС3)|. (5.4.131)
Алгоритм
= (5.4.132)
в работах [5.28, с. 82—120; 5.29] именуется алгоритмом скоростного гра-
диента. Выполнены обстоятельные исследования свойств этого алгорит-
ма [5.28—5.30].
БАИАМ (5.4.131) является комбинацией обычного градиентного и ско-
ростного градиентного алгоритмов.
В. Алгоритм второго приближения. Сохраняя три члена ряда (5.4.129),
находим
а « = - (<?3 + ТЪ (?3 + У? Ь*0я)]Т. (5.4.133)
Этот БАИАМ можно рассматривать как комбинацию обычного градиент-
ного, скоростного градиентного и «ускорительного» градиентного алго-
ритмов.
5.4.4.20. Субоптимизация алгоритмов типа стохастической аппрокси-
мации. Локальный градиентный алгоритм (5.4.130) для процессов с дис-
кретным временем (в том числе стохастических) уступает место алгорит-
мам, которые вслед за известными работами [5.18, 5.31, 5.32] именуются
.алгоритмами типа стохастической аппроксимации (ТСА). Применительно
к задаче идентификации соответствующий алгоритм в общей форме име-
ет вид
см [/г] = ам [Л - 1]-у[А] VoM<23 [z [Л - 1], zM [/г - 1], к - 1], (5.4.134)
•где V= (д/да^Г— символ градиента; 7[Л’] —матрица коэффициентов.
Оптимизация этого алгоритма п просто придание ему желаемых свойств
осуществляется именно за счет матрицы f [/>•], которая может быть
пе только функцией к, по и других переменных.
В работах школы, возглавляемой Я. 3. Цыпкиным, и более раппих
в вычислительной математике алгоритмы ТСА всесторонне исследованы
[5.18, 5.25, 5.26]. Если вектор V м(?3 вычисляется достаточно просто, ал-
горитмы ТСА экономичны в вычислительном отношении. Одпако они име-
ют силу лоцалыю оптимальных алгоритмов с указанными выше недо-
статками. Для задачи идентификации конкретного типа алгоритмы ТСА
рассматриваются в § 5.7.
§ 5.5. Поисковые алгоритмы идентификации
с адаптивной моделью
Как упоминалось во введении, информационные закономерности име-
ют силу объективных законов природы. Как бы пи были совершенны ал-
горитмы и средства обработки информации при ограниченной информа-
тивности измерений и ограниченной априорной информации об управля-
емом объекте, высоких результатов за ограниченное время управления
достигнуть нельзя.
В беспоисковых системах идентификации с адаптивной моделью ин-
формация получается за счет измерения входных и выходных сигналов
объекта. В поисковых системах идентификации также измеряются вход-
ные и выходные сигналы объекта, по, кроме того, ведется поиск в про-
странстве параметров настраиваемой модели. При этом поиск является
активным, сопровождающимся как бы испытаниями модели по парамет-
рическим каналам. При этом расширяются границы применимости сис-
тем идентификации с адаптивной моделью.
Утверждение о повышенной универсальности поисковых алгоритмов
идентификации с адаптивной моделью (ПАПАМ) можно пояснить сле-
дующим образом. Если модель, в терминах которой осуществляется иден-
тификация, по своей форме не вполне адецватпа идентифицируемому
объекту (что в действительности всегда имеет место), если па объект
действуют случайные возмущения (стохастический объект), если на-
чальные значения параметров нелинейной настраиваемой модели сильно
отличаются от значений параметров объекта, то может существовать
множество экстремумов в пространстве параметров модели целевой функ-
ции или функционала невязки. БАИАМ в этих условиях оказываются
ограниченно работоспособными или непригодными. В самом деле, если
начальные рассогласования параметров модели и объекта достаточно
малы и система, например, с градиентным БАИАМ находится в окрест-
ности главного экстремума, то градиентный беспоисцовый алгоритм обес-
печит решение задачи идентификации. Если же начальные рассогласо-
вания велики и система находится в окрестности одного из ложных экс-
тремумов целевой функции, то БАИАМ оказываются неработоспособ-
ными.
ПАИАМ, в принципе, могут использовать самые разные методы по-
иска, начиная от простого регулярного перебора в пространстве парамет-
ров, случайного поиска (гл. 15) и кончая градиентными методами, осно-
ванными па определении компонент градиента за счет тестовых сигна-
лов (в частности, путем синхронного детектирования).
Возможна комбинация методов, в частности, простой перебор для
поиска района главного эцстремума и градиентный метод с тестовыми
сигналами в районе экстремума.
Во всяком случае, ПАИАМ могут в принципе решать существенно
более сложные задачи, чем БАИАМ.
Как уже отмечалось, поисковые адаптивные системы, в том числе
ПАИАМ, были предложены и теоретически обоснованы практически
одновременно с беспоисковыми системами в 50-х годах (в области экс-
тремального регулирования — значительно раньше, см. гл. 12). Советская
школа в области теории поисковых адаптивных систем заняла передо-
вые позиции [4.20, 4.33, 4.34]. Однако в то время пе было достаточно со-
вершенных технических средств для реализации поисковых адаптивных
систем управления. К тому же основные усилия были направлены па
адаптацию реальных систем: объект + регулятор. Осуществление поиска
па реальных объектах затруднено инерционностью, энергетическими и
иными ограничениями. Это обусловило переключение внимания па
БАС. Поисковые системы в течение длительного времени находи-
лись в тени.
В настоящее время для осуществления ПАИАМ имеются все необхо-
димые средства в виде прежде всего микропроцессорной техники. Поэто-
му теория ПАИАМ вновь становится актуальной.
5.5.1. Общая структура алгоритма. Общая структура ПАИАМ может
быть представлена схемами, которые в отношении описания объекта уп-
равления и настраиваемой модели аналогичны схемам, представленным
па рис. 5.4.1. Соответствующие структуры представлены на рис. 5.5.1.
Здесь алгоритм вычисления целевой функции, программа поиска и алго-
ритм поисковой настройки модели не раскрыты, так как опи могут быть
различными для ПАИАМ разных классов. В любом случае путем поиска
адаптивная модель настраивается так, чтобы обеспечивался минимум це-
левой функции (функционала) невязки.
Для объектов и моделей, описываемых в пространстве состояний,
общие структуры систем с ПЛИАМ могут быть представлены по-
добно рис. 5.4.2, по с описанием контуров настройки модели, как
на рис. 5.5.1.
5.5.2. Непрерывные градиентные алгоритмы с синхронным детекти-
рованием. Если вновь обратиться к беспоисковым градиентным алго-
ритмам, папример, БАИАМ типа (5.4.53), (5.5.54), то можно заметить,
Рис. 5.5.1. Общие структурные схемы систем с ПЛИАМ при операторном
описании объекта и настраиваемой модели с идентификацией в классе
моделей с непрерывным (а) и дискретным (б) временем
что наибольшие вычислительные затраты приходятся па определение
градиента целевой функции в пространстве параметров и, в частности,—
на численное интегрирование уравнений чувствительности (5.4.54). Труд-
ности усугубляются при наличии неустойчивости идентифицируемого
режима. Возникает стремление непосредственного численного определе-
ния компонент градиента. Одним из наиболее совершенных методов опре-
деления компонент градиента в непрерывных системах является син-
хронное детектирование.
5.5.2.!°. Определение градиента методом синхронного детектирования.
Пусть имеется безынерционное «звено», описываемое дифференцируемой
векторной функцией векторного аргумента
z = h(x), (5.5.1)
где х и z доступны для непосредственного наблюдения. Они могут быть,
в частности, функциями времени: х = x(t), z = z(7).
К входному сигналу x(t) добавляется «поисковый» сигнал 6ж, на-
столько малый, чтобы можно было принять
Oh
z (7) 4- 6z (7) = 7г [ж (7) ф- бж (7)] = 7г [ж (7)] ф- дх (7). (5.5.2)
Умножим это выражение справа па бжт(7). Получаем
д!г
z (7) бжт (7) -j- 6z (7) бжт (7) = h (ж (7)] бжт (7) ф- дх (7) бжт (7). (5.5.3)
Поисковые сигналы задаются в виде периодических или случайных функ-
ций времени с пулевым средним значением (центрированных функций).
Удобным специальным видом поисковых сигналов являются функции
Уолша [5.33]. Это периодические разрывные (прямоугольно-импульсные)
функции, обладающие свойством ортогональности:
бж(7)бжт(7) = diag бж(7)бжт(7), (5.5.4)
где усреднение ведется по периоду.
Свойством ортогональности (5.5.4) обладают гармонические (синусо-
идальные) функции с кратными частотами компонент и многие другие
регулярные функции. Если бж(7)—реализация стационарной эргодиче-
ской случайной функции, то условие (5.5.4) приближенно выполняется
при некоррелированности компонент бж(7) и времени усреднения, суще-
ственно превышающем время автокорреляции этих шумов. Запишем
среднее по некоторому скользящему интервалу времени от (5.5.3):
[z (7) ф- dz (7)] бжт (7) = р (ж (7)) ф- дх (7)| бжт (7). (5.5.5)
Процедура, соответствующая (5.5.5), именуется синхронным детек-
тированием. Ее схематическое изображение представлено па рис. 5.5.2.
Рис. 5.5.2. Иллюстрация принципа синхронного детектирования
Следует заметить, что вместо усреднения типа скользящего среднего мо-
жет применяться усреднение в любом линейном фильтре низших частот.
5.5.2.2е. Синхронное детектирование в квазистационарпом режиме.
Режим называется квазистационарным, если функции ж (7) и z(7) явля-
ются модлешюмепяющимися в сравнении с бж(7). Это эквивалентно ут-
верждспию, что в квазистациопарпом режиме Их (t) — быстромеиягощаяся
функция в сравнении с х(1) и z(t). Функция называется быстроменяго-
щсйся в сравнении с другой функцией, если ос спектр лежит в области
частот <о, намного превышающих верхнюю границу частотного диапазона
второй функции. Это определение предполагает, что частотные спектры
двух функций практически ограничены и пе перекрываются. Существу-
ют и другие определения указанного отношения функций.
При цвазистационарпом режиме время усреднения в выражении
(5.5.5) может выбираться, исходя из низших частот спектра функции
6x(t). При этом с достаточной точностью
-------;--- dh ------------—
6z (t) f>xT (Z) = f>x (Z) бжт (Z). (5.5.6)
Так как по условию z(Zj = Л [^(Z)], то при получении (5.5.6) из (5.5.5).
делается лишь одно допущение:
д/г „ д/г ---------—-— д ------—:—
&х (Z) Их" (Z) = —г; Их (Z) Их (Z) = -jr- h [х (Z)] Их (Z) 6т‘ (Z).
C/at- Cz
Поисковые сигналы выбираются так, чтобы матрица b.c(i)ёхт(Z) бы-
ла невырожденной, в частности, диагональной с ненулевыми элементами
(ортогональные сигналы). Поэтому
-^ = бгбжт (бжбж’1') 1 (5.5.7).
— основная формула непрерывного синхронного детектирования в квази-
стационарном режиме. Она показывает, что метод позволяет определять
градиент скалярной функции и матрицу Якоби векторной функции вец-
торпого аргумента.
5.5.2.3е. Расширение границ применения метода. В непрерывных
ПАПАМ, да и других поисковых непрерывных системах, встречаются бо-
лее сложные задачи определения градиента, чем в п. 5.5.2.2е. Это обуслов-
лено наличием динамических звеньев основных контуров. Однако метод,
синхронного детектирования может быть применен и в этом случае.
Покажем это для описания идентифицируемого объекта п модели в
пространствах состояний. Согласно (5.4.7), (5.4.8)
х = f(x, и, a, t, w), z = h(x, и.' I) + T), (5.5.8)
жм = /м(жм, и, a“, Z), z = Z?1 (жы, и, z). (5.5.9)
Целевая функция задается в виде положительно-определенной выпуклой
функции <?3(Az) невязки
Az = h(x, и, Z) —А"(ж", н, Z) + T](Z). (5.5.10)
Модель является полностью непосредственно наблюдаемой, тац что, кроме
zM, известны текущие значения жм, г™, ам. Вектору параметров ам прида-
ется высокочастотная центрированная поисковая составляющая 6aM(Z)
(периодическая или случайная), заведомо удовлетворяющая условию ква-
зистационарности основного процесса настройки модели.
Уравнение в вариациях для модели будет иметь вид
QfM
б.м = -^б^ + -^ бам. (5.5.11)
Пусть собственное движение модели и движение, порожденное и(0, яв-
ляются медлспиомепяющимися функциями но отношению к 6aM(t). Тогда
можно приближенно принять
• dfw 1 df™
0.5.12)
где р = d/dt— символ дифференцирования по времени.
Для осуществления градиентного метода ПЛИАМ необходимо опре-
делить
й(?з dh™ д.т™
(5.5 13)
По согласно (5.5.12) для квазистациопарцого режима
дх™ 1 df™
да™^ Р да™’
причем степень приближения такова, что для достаточно высокочастот-
ных поисковых сигналов приближенное равенство можно заменить на
строгое. Тогда согласно (5.5.13)
д$з д(К dh™ / 1 df™ \
да™ =“ 8х« р дам } (5.5.14)
Из (5.5.12) в квазистацпонарпом режиме паходим
--------- л ---------
6х™ (ба“)г =----~ ба” (ба “Г,
р даы
1 (5.5.15)
4-К =бх“(6а”г1бам(6а”г] .
Р да
Итак, в квази стационарном режиме при невырожденной матрице
ба“(бам)т
OQ Qh™ -----------Г----------I-1
—(ба ба1" (бам)1J . (5.5.16)
da" <>Az
5.5.2.4е. Структура непрерывного градиентного ПЛИАМ с синхронным
детектированием. Уравнения (5.5.8) — (5.5.10), (5.5.16) в совокупности с
выражением
где К — матрица коэффициентов размера N X N, определяют структуру
непрерывной поисковой системы идентификации с синхронным дстекти-
рованием при описании в пространствах состояний. Соответствующая
структурная схема изображена па рис. 5.5.3.
Для реализации в ЦВМ строится разностная схема алгоритма на-
стройки
Г-------------I-1 -------------- I dhM
а м = К [бам (t) 6нмт (t)J бнм (t) бямт (t) I —
(5.5.17)
и настраиваемой модели. При оценке вычислительных затрат, необходи-
мых для численной реализации алгоритма (5.5.17), следует учитывать,
что матрица
[ <W (Z) taMT (Z)J
вычисляется заранее, па стадии проектирования и, как правило,
Рис. 5.5.3. Структура системы с непрерывным градиентным ПАИАМ, ме-
тодом синхронного детектирования
является диагональной. Матрица К в простейшем случае постоянна
и обычно также задается диагональной. Матрипа-столбсц
/ dQs V
\ I
dQa dhM У
0Дг }
при аналитическом задании целевой функции сначала раскрывается ана-
литическим путем и не требует больших вычислительных затрат при
окончательном численном определении.
Поэтому необходимое число операций па одни шаг численного ин-
тегрирования уравнения (5.5.17) при большом числе N может быть при-
ближение выражено формулой
(т 2)А'«,
(5.5.18)
где п — размерность вектора я"; т — число шагов суммирования, заме-
няющего в дискретной схеме усреднение, обозначенное чертой в выра-
жении (Z)6«MT(Z). Следует здесь заметить, что усреднение в выраже-
шш бям(4)бямт(4) может быть опущепо в предположеппп, что в процессе
последующего интегрирования (см. (5.5.17)) все равно происходит усред-
нение. Тогда число операций имеет порядок 2Nn.
Для сравнения оцепим число операций, необходимых для одного ша-
га числеппой реализации БАИАМ (5.4.53), (5.4.54). Основные вычисли-
тельные затраты здесь приходятся па уравнение матрицы чувствитель-
ности (5.4.54). Если среднее число операций, необходимых для вычисле-
ния элемента матрицы д{ы/дх", обозначить через я/., а среднее число
операций для элемента матрицы — через п^, то общее число
операций па один шаг примерно равно
(4n + + 2) Nn + n2nfx. (5.5.19)
Это по крайней мере в 2п раз превышает вычислительные затраты в пре-
дыдущем случае (5.5.18) при т = 0.
Можпо полагать, что система со структурой рис. 5.5.3 сохраняет ра-
ботоспособность при значительных начальных рассогласованиях векторов
параметров а" и а и даже при отличии структуры модели (форма функ-
ции /м) от структуры объекта (форма функции /). При этом, однако,
указанные факторы пе должны приводить к мпогоэкстремальности целе-
вой функции. Система работоспособна также при действии па объект
случайных возмущений. Все это является достоинствами ПАПАМ типа
(5.5.17).
5.5.3. Цифровые градиентные алгоритмы с синхронным детектирова-
нием. Цифровые системы отличаются квантованием сигналов по времени
и но уровню. Рассмотрим сначала ПАПАМ с синхронным детектирова-
нием и дискретным временем. Это соответствует случаю реализации
ПАПАМ в ЦВМ с достаточно большой разрядной сеткой (например,
16-разрядпой и выше).
5.5.3.1 °. Градиентные ПАПАМ с дискретным временем и синхронным
детектированием. Построение дискретного во времени аналога непрерыв-
ного алгоритма может осуществляться формальным способом. Для алго-
ритма (5.5.17) дискретным во времени аналогом является:
[/с + 1] = ам [fc] -|-
+ А
[v] &мт
k
6ам f-v] 6хмт [v]
V--- h—т
8Q:. dhм
дДЦА] 5хм [А']
(5.5.20)
Структурная схема соответствующей системы приведена па рис. 5.5.4.
5.5.3.2е. Использование шумов квантования по уровню в цифровых
ПАИАМ в качестве поисковых сигналов. Реализация ПАПАМ в микропро-
цессорных вычислителях с небольшим числом разрядов, по крайней ме-
ре в выходных «звеньях» алгоритма, вполне возможна, так как настройка
параметров не требует высокой точности. Точность в несколько процен-
тов для параметрического входа модели является обычно вполне доста-
точной, тупенчатое изменение во времени выходных сигналов микропро-
цессорного вычислителя с малым числом разрядов можно приближенно
рассматривать как результат воздействия некоторого независимого адди-
тивного шума квантования по уровню. Выделение этого шума осущест-
Рис. 5.5.4. Структурная схема системы с градиентным, дискретным во
времени ПАИАМ, использующим метод синхронного детектирования
вляется путем измерения разности между значениями параметров в со-
седних тактах.
Этот шум может быть использован в качестве поисковой составляю-
щей, т. е. бам[А] = Да" [А’] =аы[А--{-1]—аы[А].В этом случае одновре-
менно достигается снижение требуемой разрядности выходных звеньев
вычислителя и исключение искусственно вводимых шумов. Наличие не-
обходимых свойств матрицы
h
2 &?’ [v] «амт Ivj,
v=k—m
а именно достаточной стабильности, невырожденности (и даже близо-
сти к диагональной форме) при использовании шумов квантования в ка-
честве поисковых сигналов должно проверяться в каждом конкретном
случае.
5.5.4. Цифровые алгоритмы с глобальным и комбинированным поис-
ком. Описанные выше варианты градиентных ПАИАМ являются алгорит-
мами локального поиска. В пих за счет регулярного или случайного скани-
рования в пространстве параметров модели в малой окрестности текущего
значения вектора аы определяется вектор градиента целевой функции и
организуется движение (настройка) к точке минимума этой функции.
Однако при идентификации слабо изученных объектов возникают
задачи глобального поиска для отыскания главного экстремума мпогоэке-
тремальпой целевой функции. Здесь пет смысла останавливаться на ме-
тодах и проблемах глобального поиска, так как они освещены в обшир-
ной литературе но многоэкстремальным задачам и частично освещаются
в гл. 13, 15. Заметим только, что мпогопараметрическая идентификация
слабо изученного объекта в условиях существования многих экстремумов
целевой функции весьма трудна, как и всякая проблема поиска в слож-
ной обстановке многомерного пространства.
§ 5.6. Алгоритмы идентификации, основанные
на теории оценивания процессов
Как видно из гл. 4, теория оценивания динамических процессов,
в том числе нелинейных, достигла относительно высокого уровня разви-
тия. Естественно применять ее и для параметрического оценивания, т. с.
параметрической идентификации. Соответствующие алгоритмы будем на-
зывать алгоритмами идентификации, основанными па теории оценива-
ния (АИТО). Для того чтобы алгоритмы оценивания вектора состояния
процессов, описываемых стохастическими или детерминированными диф-
ференциальными или разностными уравнениями, применить в задачах
параметрической идентификации (или оценивания и идентификации од-
новременно), необходимо для процессов изменения параметров записать
стохастические или детерминированные дифференциальные или разно-
стные модели.
Типовыми моделями являются
о = 0, (5.6.1)
о = Ь(0. (5.6.2)
с[А’-|-1] = о [, (5.6.3)
+ 1] = -|- 5а [4с]. (5.6.4)
Здесь а — вектор параметров. В случае (5.6.1) на интервале времени
идентификации вектор параметров считается постоянным. В случае
(5.6.2) 5а (4) —реализация случайной функции, так что учитывается слу-
чайный дрейф параметров. Выражения (5.6.3), (5.6.4) являются дискрет-
ными аналогами предыдущих выражений, причем 5а И — случайная
последовательность.
На практике самыми распространенными и важными являются мпо-
гопараметричсскис задачи идентификации, осуществляемой к тому ;ке в
реальном времени. Поэтому для идентификации из всех алгоритмов оце-
нивания, изложенных в гл. 4, целесообразно привлекать алгоритмы пер-
вого порядка: ФКБ первого порядка, алгоритмы с эмпирическими сред-
ними и др.
Что касается задач идентификации, указанных в табл. 5.1.1, то ука-
занные методы оценивания применимы к вариантам 11.2, 111.2, 1V.2, а
также к варианту, когда непосредственно наблюдается лишь некоторая
известная функция векторов состояния и управления.
5.6.1. Идентификация непрерывных объектов, описываемых в прост-
ранстве состояний. Пусть стохастический объект (процесс) описывается
уравнением в форме Ланжевепа
х = f(.v, а, и, t) + 5(4), (5.6.5)
где 5(0 —белый шум:
Е[5(0?т(О] = £«(*-*'),
(5.6.6)
а — вецтор параметров, который считается имеющим «белый дрейф»:
а = МО- (5.6.7)
Здесь = 5o(i) —:белый шум, пе зависящий от 5(г)>
Е [М0 (О] = Сов (*-*')• (5.6.8)
Вектор управления и = u(t) всегда считается непосредственно на-
блюдаемым без шумов. Что касается векторов х, х, то в табл. 5.1.1 ука-
заны случаи, когда наблюдаются так называемый вектор наблюдения,
вектор состояния х, векторы х и х одновременно. Первый из этих
случаев является наиболее общим. Его и примем при постановке задачи,
а именно
z = h (х, а, и, t) + т], (5.6.9)
где ц = Т](0 —белый шум, пе зависимый от 5,
Е[ч(4)Нт(И] — (5.6.10)
Непосредственное наблюдение х, т. е. z = х + т], относится к случаю
(5.6.9), так как согласно (5.6.5) здесь
z = f(x, и, a, t) +5+11. (5.6.11)
В данном случае шум в уравнении наблюдения коррелирован с шумом,
возбуждающим идентифицируемый процесс.
Вводя, как в п. 4.3.9.1е, расширенный вектор состояний Яр = [хгс’г],
записываем (5.6.5), (5.6.7), (5.6.9) в виде
Щ 0 + (5.6.12)
z = h(xp, и, t) + Г], (5.6.13)
ГДО
Итак, совместное оценивание и идентификация будут проводиться па ос-
нове стохастического описания процесса (объекта) и условия наблюде-
ния в пространстве состояний вида (5.6.12) — (5.6.14).
Отметим следующую особенность ЛИТО. Модель, которая фигурирует
в АИТО и получается автоматически, всегда совпадает с описанием иден-
тифицируемого объекта и условий наблюдения. Иными словами, АИТО
осуществляют идентификацию в терминах тех моделей, которые приня-
ты для описания объекта и условий наблюдения.
5.6.1.1е. Одновременные оценивание и параметрическая идентифика-
ция посредством АИТО типа обобщенного ФКБ. Применяя к задаче
(5.6.12) — (5.6.14) алгоритм (4.3.40), (4.3.41), получаем [5.34]
*р = fP (Ч’ и’ 0 + Рр,1*р (*₽’ г) lz — h (V u’ Ob (5.6.15)
Pp = fpxv (;1Щ 0 Pp + Pp^px-p (x> u> ~
~ Vx₽ (%’ 0 Л~Чр(-р. 0 Pp + <?p- *?₽ = [o <2 ]• (5-6-16*
Представляя матрицу Pv в блочной форме
ГР . Р 1
XX XPi _ гр гп
р= р=р р = р р = рГ
Р р р хх хх* аа <ш’ ах ха
* ах 1 аа
и раскрывая уравнения (5.6.15) до матриц-блоков, получаем
2 = / (х, а, и, Z) (Pxxhl + Pxuhty li 1 [z — h (х, а, и, Г)],
“ = (Paxhl + Paaha) (2 ~ h (*> и> 01, (5.6.17)
Рхх = f xpxx + fapax + Pxxfx + Pxafa ~
“ (Рхх*х + Рха^ /Г’ (hxPxx + haPax) +?<?,
(5.6.18)
Рха = fxPxa + fapaa ~ (Pxxhx + Рха^ R~l (hxPxa + haPaa),
Paa = - (PaxhTx + Paahl) (Vxa + VOfl) + Qa'
Структурная схема, соответствующая уравнениям (5.6.5), (5.6.7),
(5.6.9), (5.6.17), изображена па рис. 5.6.1. Ковариационные уравнения
(5.6.18) в этой структурной схеме пе представлены ввиду громоздкости.
Декомпозиция алгоритма одновременной идентификации и оценива-
ния (5.6.17), (5.6.18) для мпогосвязпого объекта в общем случае невоз-
можна. При высокой размерности векторов параметров и состояний вы-
числительные затраты на каждом шаге численного интегрирования
(5.6.17), (5.6.18) велики.
А. Случай непосредственного наблюдения вектора состояния. При
h = х имеет место hx = Е (единичная матрица), и алгоритм одновремен-
ного оценивания и идентификации (5.6.17), (5.6.18) принимает вид
х = f (G;, а, и, t) 4- PXXR 1 (z — х),
2 = PaxP~l (z —ж),
pxx = fxpxx + fapax + Pxxfx + Pxafa ~ PxxP~lpxx + <?,
Pxa = fxPxa + faPaa ~ PxxP~1Pxa, (5-6-20)
Paa = -PaxP~1Pxa+Qa-
Б. Случай непосредственного наблюдения производной вектора сос-
тояния. В этом случае, если шумы измерения х достаточно велики в срав-
нении с £(4) и корреляцией между g(i) +ц(0 п lj(i) можно пренебречь,
то алгоритм совместного оцеппвапия и идентификации получается про-
стой заменой в (5.6.17), (5.6.18) h па /.
В. Идентификация посредством АИТО при непосредственном наблю-
дении вектора состояния и его производной. Важное значение, в частно-
сти, в задачах идентификации летательпых аппаратов и других подвиж-
ных объектов, имеет случай, когда непосредственно измеряется вектор
Рпс. 5.6.1. Структура системы одновременного оценивания и идентифика-
ции посредством АИТО типа обобщенного ФКБ
состояния объекта (5.6.5) и его производная х. Так, угловые и линейные
ускорения в связанных осях, которые для подвижных объектов обычно
составляют компоненты вектора х, измеряются акселерометрами соответ-
ствующих типов.
Компоненты вектора состояния могут измеряться отдельными изме-
рительными преобразователями (датчиками) и измерительными система-
ми. При непосредственном измерении х и х возможны по крайней мере
две постановки задач:
совместное оцепиваппе и параметрическая идентификация;
только параметрическая идентификация с заменой х па пспосрсдст-
вепно измеренное х.
В первом случае
h =
х
J.
(5.6.21)
Подстановка этих выражений в (5.6.17), (5.6.18) дает соответствующий
алгоритм. В отпошепи t вычислительных затрат он почти эквивалентен
(при прочих равных условиях) общему случаю.
Во втором случае получается существенное сокращение необходимой
для мпогопараметрическоп идентификации вычислительной производи-
тельности.
5.6.1.2°. АИТО при непосредственном наблюдении х и точном измере-
нии х. При точном измерении х он может быть отнесен к управлению
и и исключен из процесса оценивания. В этом случае задача ставится
так. Имеется вектор наблюдения
z = f(x, а, и, t) + ц, (5.6.22)
где х = x(f), w = w(t)—известные (точно измеряемые) функции вре-
мени; ц = ц(г) •—белый шум (5.6.10). Уравнение идентифицируемых па-
раметров имеет вид (5.6.7):
а = (5.6.23)
Требуется найти оценку а. Применяя обобщенный ФКБ, в данном слу-
чае получаем
а = а, и, г) R—1 I2— /(т, °, lt> 0), (5.6.24)
Р = — pfa (х, а, и, I) (х, а, и, t)P + Qa_ (5.6.25)
Сокращение вычислительных затрат здесь происходит пе столько за счет
упрощения векторно-матричной формы алгоритма, сколько за счет воз-
можности декомпозиции. Дело в том, что, как уже упоминалось, различ-
ные компоненты векторной функции /(х, а, и, t) обычно зависят от раз-
личных групп параметров, т. е. независимых субвекторов ащ размерно-
сти А,; шумы измерения компонент / независимы и матрица R — диаго-
нальная с элементами /?;. В этом случае алгоритм (5.6.24), (5.6.25) рас-
падается на независимые группы уравнений:
Я = Р(гЛ)а (* “(i)> 0 lZi - Лг) (*• “(г)- “> ОЬ (5.6.26)
P(i) = “ (*’ “(i)> 0 Pi ГАг)а (*’ “(i)’ lt’ 0 Лг) + ^о(г)-
Размерность системы скалярных уравнений, эквивалентных матричному
ковариационному уравнению, с учетом симметрии матриц P(t) составляет
0,5 У АД А{ -j- 1) ( вместо 0,5А (А -|- 1), А = У, А{ в случае совместно-
го оценивания и идентификации).
А. АИТО постоянных параметров при h = f и точном измерении х.
Циклическая идентификация. Если 5а = О, а — 0, то QB = 0 и уравне-
ние (5.6.25) подобно (4.3.48) может быть преобразовано к виду
где Л = Р~1. Отсюда получается алгоритм
я = Pf^R 1 [z — / (х, а, и, t)],
(5.6.27)
который называется обычно циклическим. Это связано с тем, что непре-
рывное время здесь обычно разбивается па интервалы (циклы), в преде-
лах которых идентифицируемые параметры можно считать постоянными
и в которых может достигаться необходимая точность оцепивапия этих
параметров. Конечно, оба эти условия удается выполнить пе всегда.
Вычисление Р и интегрирование первого уравнения (5.6.27) произ-
водится в каждом цикле, начнпая с относительно произвольных, заведо-
мо не нулевых начальных значении Ро и а0 при t = t0. Матрица Ро обыч-
но задается диагональной, соответствующей представлению о точности ап-
риорного знания параметров. Вектор а0 задается в соответствии с априор-
ными сведениями о порядках величин параметров. Интегрирование
(5.6.27) ведется до тех пор, пока диагональные элементы матрицы Р(<)
не будут достаточно малы. Получеппое к этому моменту времени значе-
ние a(t) считается паплучшей оценкой. Далее задаются новые начальные
условия и следует повып цикл оценивания и т. д.
Хотя алгоритм (5.6.27) включает обращение матрицы размера A X N
(при использовании декомпозиции АгХА',), он удобен тем, что, кроме
численного интегрирования, в ряде случаев допускает аналитическое ис-
следование точности идентификации. Эта точность, помимо уровня шумов
измерения, характеризуемого матрицей R, во мпогом зависит от движе-
ния объекта, для которого производится идентификация. Последнее ха-
рактерно для любых алгоритмов идентификации. В данном случае это
выражается в степени обусловленности матрицы
1
J Га [х (6), а, и (6), 6] R-'fa [х (6), а, и (6), 6] сЮ.
f0
Локальное условно, благоприятствующее точному оцениванию, в
данном случае заключается в липейпой независимости столбцов матрицы
/о(.г, а, и, I) для движения, па котором производится идентификация.
Алгоритм (5.6.27), как и все предшествующие АИТО, изложенные в
данном параграфе, является субоптималъным и пе гарантирует в общем
случае сходимости «в большом» процессов идентификации, даже при
выполнении указанного условия. Иначе обстоит дело при линейпо входя-
щих параметрах.
Б. АИТО постоянных линейно входящих параметров при h = f и
точном измерении х. Пусть уравнение объекта имеет вид (5.4.40), точнее
х = 41|>(х) + Вф(п) -|- g, (5.6.28)
где А, В — матрицы постоянных параметров.
По условию
z = И-ф(х) + В<р(и) + t], А = О, В = 0.
Ввиду того, что коэффициенты матриц, подлежащих идентификации, не-
зависимы, алгоритм сразу может строиться для строки:
Zf = А ц|ф (х) + В|{|<р(и) +
(5.6.29)
где zl|,|, В1{|—векторы-строки матриц А и В. Вектором параметров здесь
служит
«т = [Лщ В|{|], (5.6.30)
а вектор-строка ha = /п в даппом: случае определяется соотношением
/я = [фг(х)<рт(«)]. Подставляя эти соотношения в (5.6.27), находим
•1Н = Л<) [! ~ (Г) ~ Й'г1Т (Ж)Ь
S|TJ LT(H (5-6.31)
р_Л = p_i д-! г Гф (* (в» фт ио» ф & (0)) ч>т (и (0)) de
(П 0)0 4 Д<р(и(0))Фт«0)) Ф(а(0))<рт(“(0)) J
Здесь В,- — скалярная величина.
Алгоритм (5.6.31) является модификацией ФКБ для указанных ус-
ловии наблюдения линейной (в отношении вектора параметров а) стаци-
онарной системы и дает строгое оптимальное решение задачи иденти-
фикации.
Если сопоставить алгоритм (5.6.31) с полученными иначе для тех
же условий субоитимальпымп алгоритмами, в частности (5.4.46), то
обнаруживается следующее. Структуры «основного модуля» (верхнее
уравнение) оптимального алгоритма (5.6.31):
2UI = W lzi “ Яй|’1’ (-г) ~ &9-|ф (,,)Ь (5.6.32)
в[£( = В(;)ВГ1ср (u) [z. — Л1;1ф (х) — В|;1<р (м)]
и субоптпмальпых алгоритмов одинаковы с точностью до матрицы «ко-
эффициентов усиления». В оптимальном алгоритме эта матрица пропор-
циональна ковариантной матрице Р. Последняя в алгоритме (5.6.31) оп-
ределяется вторым уравнением. В субоптпмальпых и эвристических ал-
горитмах матрица коэффициентов усиления задается па основе тех или
иных соображений, в частности, пз условий сходимости.
В. ЛИТО стационарного линейного объекта при непосредственном
наблюдении х и точном измерении х. В даппом случае
hi = Afux -|- BfifU
и алгоритм идентификации (5.6.31) принимает вид
= Vr4;-'V-V)’
(5.6.33)
х (0) тт(0) а (0) и т (0)
и (0) ят(0) и(0) нт (0)
Г. О границах применимости АИТО, представленных в данном под-
пункте. Абсолютно точное измерение вектора состояния х неосуществи-
мо. В связи с этим возникает вопрос о практической значимости алго-
ритмов типа (5.6.27), изложенных в позиции А и. 5.6.1.20. Довольно зна-
чительный опыт численной реализации этих алгоритмов применительно
к задачам идентификации летательных аппаратов [5.35] показывает, что
они эффективны и при зашумленных (в определенной мере) измере-
ниях х(<) и u(t), так что границы применимости данных АИТО шире,
чем следует из исходных предположений.
5.6.1.3е. АИТО с эмпирическими средними. Изложенные в пн. 5.6.1.1е,
5.6.1.2е алгоритмы идентификации для мпогопараметрических объектов
требуют значительных вычислительных затрат па каждый шаг числен-
ного интегрирования. В первую очередь это относится к субоптимальпо-
му алгоритму (5.6.17), (5.6.18) одновременного оценивания состояния и
параметрической идентификации нелинейного объекта. Естественно для
решения той же задачи прилепить алгоритмы с эмпирическими сред-
ними (см. пп. 4.3.8.1°, 4.3.8.2е), которые являются экономичными в от-
ношении вычислительных затрат.
А. Одновременные оценивание и параметрическая идентификация по-
средством АИТО с эмпирическим средним. Применим алгоритм типа
(4.3.91) — (4.3.94) к задаче (5.6.12), (5.6.13). Получаем
= fp (*Р- и> V + М’р (*₽’ к’ 0 к-1 (z ~,l (V ОЬ
А =ц, (v “>z) Ажр - и’ о/rl tz ~h (vм’ 91 + s; (0,
д л <. .|.„ (5.6.34)
ГфРр + /’р=Д^А<г.
В развернутой до матриц-блоков форме этот алгоритм имеет вид
х = f (х, 'а, и, /) -J- -г Рха,1а) Iz ~ h & а, U, 01, (5.6.35)
“ = (?ОХ + Раа,1а) Iz ~ и’ 91, (5-6.36)
Д> = /ХДЖ* + /0Да* - (рхх1^ -I- ржйй’) И-1 [z - h(x, а, и, Z)] + (Z),
(5.6.37)
Да* = — I3 —11 (*, 01 + Й (о, (5-6.38)
Тъ1}ж+Кх = Л.т*Д.г*'г, (5.6.39)
V.a + PXa- Л.г*Да*т, (5.6.40)
Да*Да*т, (5.6.41)
Рт . * ах*
Напомним, что шумы Е*(0, ^(0 являются искусственно создавае-
мыми шумами, эквивалентными (пли приблизительно эквивалентными)
шумам £(t), Уравнения (5.6.35)—(5.6.38) имеют суммарную раз-
мерность 2(А-|-п), где п—размерность вектора состояния, Л'— размер-
ность вектора параметров объекта.
Эти уравнения имеют одинаковые матричные члены, что благопри-
ятно в отношении сокращения вычислительных затрат. Несмотря па вы-
сокую размерность системы уравнений при многонараметрической иден-
тификации (общее число скалярных уравнений с учетом симметрии со-
ставляет 0,5(Л'2 + п2 4~ 3/V + Зп)), опа требует небольших вычислитель-
ных затрат при численном интегрировании. Это объясняется исключи-
тельной простотой автономных уравнений первого порядка.
Таким образом, АИТО (5.6.35) — (5.6.41) действительно является эко-
номичным в вычислительном отношении и может быть рекомендован для
использования,. особенно при высоком уровне шумов g(t), £а(0. й(г)-
Б. Одновременные оценивание и параметрическая идентификация
посредством ^-алгоритма. В алгоритме (5.6.35) — (5.6.41) уравнения
(5.6.39) — (5.6.41) предназначены для усреднения по времени произведе-
ний ошибок или отклонений Аж*Даг*т, Ах*Аа*т, Аа*А«*т. Однако процесс
интегрирования уравнений (5.6.35)—(5.6.38) также может интерпретиро-
ваться как усреднение во времени. Отсюда возникает мысль о возмож-
ности замены
Л»~*Дя:*Лл« ?«-*Дх*Да*т, Pna-*Aa*Aa*». (5.6.42)
При такой замене вместо (5.6.35) — (5.6.38) получаем
ж = / (ж, а, и, t) Д.г*л, а = Да*я,
Дх* = /кДж* + /аД«* — Л.т*л + (/), Да* = — Да*Я + (t),
где
л = (hz&x* + ha^a*yR-l[z — h[x, а, и, f)] (5.6.44)
— скалярная величина.
Алгоритмы .типа (5-.6.43), (5.6.44) именуются «-алгоритмами [4.9]. Это
весьма экономичные в вычислительном отношении алгоритмы, условия
сходимости которых, однако, изучены недостаточно.
То, что при определенных условиях сходимость «-алгоритма имеет
место, видно из следующего. По определению при £* = £> раз-
ности Дх* = х — х и Дя* = а — а суть ошибки оценивания параметры-
ческой идентификации соответственно (см. п. 4.3.8.1е). При этом соглас-
но (3.6.43)
Дх* + лДх* = fx&X* + /аДа* + £ (Z),
Да* + лЛа = (1).
(5.6.45)
Если ошибки Дх*, Да* малы, то с точностью до малых второго порядка
z •— h (х, а, и, I) ~ h(x, а, и, /) — k(x, а, и, 1) + Т) (!) =
= ЛхДх* + ЛоДа* + ц (/).
Если шум ц(() имеет конечный спектр (по время (интервал) корреля-
ции мало в сравнении с характерными временами процесса оценивания
и идентификации), то можно говорить о малом уровне этого шума по
дисперсиям. Ясно, что при стремлении ц(7) к пулю (например, но дис-
персиям) вероятность определенной положительности относительно Дх*,
Да* квадратичной формы
л = (7ivAx* 7гаДа*)т7?-1 (/гЛ-Дх* 7г„Да* ц)
при линейной независимости столбцов матрицы [/г.т 7го] стремится к еди-
нице. При этом вследствие 7? -> О соответствующие члены с положитель-
ным скалярным мпожителем л доминируют и Дх*(7), Да* (г) с течением
времени стремятся по уровню (дисперсиям) к сколь угодно малым зна-
чениям.
В. Структура л-алгоритма. Сопоставление с поисковыми алгоритма-
ми. При малых Дх*, Да* величину (5.6.44) можпо рассматривать как пер-
вую вариацию квадратичной формы
V3 — 0,5[z — 7г(х, а, и, f)]T7?“l[z — 7г(х, а, и, 1)], (5.6.46)
вызванную вариациями Дх*, Да*, т. с.
dV„ о1'\ *
л = —Д.г* + .—Да*.
дх да
(5.6.47)
В свою очередь V:, можпо рассматривать как локальную целевую функ-
цию, минимизируемую в процессе оценивания и параметрической иден-
тификации. Если не отображать третье и четвертое уравнения (5.6.43),
которые можно рассматривать как формирующие фильтры с выходами
Дх*, Да*, то структурная схема системы с л-алгоритмом будет выгля-
деть так, как показано на рис. 5.6.2, а.
Воспользовавшись выражениями (5.6.46), (5.6.47) и полагая, что мед-
леппомепяющиеся составляющие па выходе звена квадратичной формы
иевязки практически ио воздействуют па а, х, преобразуем структурную
схему с тем же л-алгорнтмом к виду, представленному па рлс. 5.6.2, б.
Здесь отчетливо видно родство я-алгоритма с поисковыми градиентными
системами с синхронным детектированием. Особенностью является то,
что Дх*, Да* нс задаются произвольным образом, а являются выходными
Гпс. 5.6.2. Структуры систем одновременного оценивания и параметриче-
ской идентификации с n-алгорнтмом: « — полная, б — упрощенная
сигналами формирующих фильтров, па которые, помимо аддитивного
воздействия £*, £и, мультипликативным образом воздействует я-сигиал.
5.6.2. Идентификация процессов с дискретным временем, описывае-
мых в пространстве состояний. Натурные объекты, функционирующие в
дискретном времени, встречаются относительно редко. Большем частью
дискретность получается за счет дискретного съема информации, в част-
ности, посредством аналого-цифровых преобразователен. Дискретные во
времени модели нелинейных непрерывных процессов получаются по-
средством разработки разностных схем.
Уравнения идентифицируемого процесса п условия наблюдения за-
писываем в виде
*[£ + 1] = /[^[А], «И, A] 4-w[7c], (5.6.48)
«[А 4- 1] — «[/<•] + ш„[Л], (5.6.49)
з[А] = 7/ [о.[А], а [7с], 7с] + i>[A], (5.6.50)
где 1«[7с], 1«„[7с], i’[/c], А- = 0. 1, ... — не зависимые друг от друга белые
гауссовские последовательности:
Е [«,- [7с] ,ет [/]] = Qx [7с] 6/(7,
Е ['«о И !t’a UH = Qa И'] 6AZ> (5.6.51)
E [в [7c] «T[Z]1 = J?[/c] 6ft|,
где —символ Кропекера.
В разностных уравнениях (5.6.48), (5.6.50) в явном виде по учтено
управление и [7с]. Одпако управление всегда считается известной (точ-
но измеряемой) функцией времени. Поэтому оно может быть учтено че-
рез зависимость от дискретного времени к, что и подразумевается в вы-
ражениях (5.6.48), (5.6.50). Вводя расширенный вектор состояния =
= [Лт], записываем (5.6.48) — (5.6.50) в виде
[7с -f- 1] = fp [.тр [к], 7с] 4- 1«р [7с],
z[7с + 1] = 7t[.Tp[A"], 7с] + «[/;], ’ 4
где
,,, ГИА1] f _ [f [А], а [7с], А]1 ... _ Г [*1
Л'р[' Iя [7с]]’ }? [ а[7с] ]’ IfPP1 [zej/c] ’
(5.6.53)
5.6.2.1°. Одновременные оценивание и идентификация посредством
обобщенного рекуррентного ФКБ. Для оценивания расширенного векто-
ра состояния (5.6.52) можно применить обобщенный рекуррентный ФКБ
(см. и. 4.5.1.3°):
а) основной модуль
а'Р[/с -f- 1] = fp[-Tp[/c], А] -|-
+ ^[7с 4- 1]{-[7-' + 1] — 71[хр[/с 4- 1 I 7с], 7с 4- 1]}; (5.6.54)
б) матрица К[7с 4- 1] определяется выражением
К [/с 4- 1] = р [А- -и 1] рр [7с 4- 1 1 /с], 7с 4- 1] 1Г1 [7с 4- 1]; (5.6.55)
в) матрица Р[7с 4- 1] удовлетворяет уравнению
Р [7с 4- 1] = Р [7с 4- 11 А] - Р [А- + 1 | /с] й’р рр [7с + 11 А], 7с ]- 1] X
х !Ц> [*р lfe +11/cL к + р [Л' +i|M^p[2p[/H-i|fc], А4-1]+Л[Н-1]}_1х
ХЛ [zp [7с 4- 11 А], 7с 4- 11 р [к 4- 1 I 7с[; (5.6.56)
г) матрица Р[А + 11 А.], удовлетворяет рекуррентному соотношению
Р [к + 11 А] = /рХр [£р [А], А] Р [А] рр [А], А] + Qp, (5.6.57)
где
д) величина arp [А 4- 1 | А] определяется соотношением
хр [А + 1 | А] = /г [,Т|. [А], А]. (5.6.58)
Ввиду громоздкости развернутое до матриц-блоков выражение алго-
ритма (5.6.54) — (5.6.57) не приводим.
5.6.2.2е. Одновременные оценивание и идентификация посредством
рекуррентного л-алторптма. Основной модуль (5.6.54) после подстановки
в пего выражения (5.6.55) принимает вид
*р [А- 4- 1] = /р [?р [А], Ь] 4- Р [к + 1] л;р Г/р (% (А], к), к + 1] X
XR-1 [А + 1] (z [А + 1] - А [/р (?р [А], А), А + 1]}. (5.6.59)
Здесь величина Р по-прежпему приближенно равна ковариационной
матрице ошибок оценивания Ахр — жР — zp.
Вычитая (5.6.59) из первого уравнения (5.6.52), полагая ошибки оце-
нивания малыми, с точностью до малых высших порядков получаем
Атр [А- -И 1] = /Хр pp [А], А] Ахр [А] - Р [A J- 1] А^ [/р (хр [А], А), А 4- ф<
XR-1 [А 1] {z [А + 1] - А [/р (хр [А], А), А +1 ]} -J- wp [А].
Случайная последовательность гур[А] (А = 1, 2, ...) считается недоступ-
ной для непосредственного наблюдения. Поэтому заменяем ее па экви-
валентную в отношении статистических характеристик случайную после-
довательность гур [А]. Соответственно вводим индекс «*» для ошибок:
Ч [А + 1] = /рТр Я [А], А] Аж* [А] - Р [А + 1] А^ [/р (2р [А], А),А-|-1] X
XR-1 [к + 1 ] {г [А + 1] - А [/р (жр [А], А), А 1 ]} + w* [/с]. (5.6.60)
Для стационарной эргодической последовательности можпо положить
Р [А + 1] = Аж* [А-;- 1] Ат*т [А -}-1], (5.6.61)
где чорта означает усреднение по некоторому скользящему интервалу
дискретного времени относительно А -В 1. Замела (5.6.61) в уравнениях
(5.6.59), (5.6.60) означает переход к алгоритму с эмпирическим средним
вместо ковариационной матрицы.
Учитывая, что рекуррентные соотношения (5.6.59), (5.6.60) сами обес-
печивают некоторое усреднение, заменяем Р[А 4-1] просто па
аж; [А +1] дг*; [А + и.
Тогда получаем рекуррентный л-алгорнтм:
% R + И = /р [?р [*]] + Az* [к + 1] л [А: + 1|, (5.6.62)
Az* [7г + 1] = /рХр [zp [А], A] Az* [7с] — Azp [Тс + 1] л [7с + 1] + w* [А],
(5.6.63)
где
л [7с + 1] = Az*T [7с + 1] [7р (?р [Л-1, А), А + 1] X
XR-1 {г [7с + 1] - h [/р (?р [7с], А), к + 1]} (5.6.64)
— скалярная величина.
В развернутой до матриц-блоков форме рекуррентный л-алгоритм
оценивания и параметрической идентификации имеет вид
ж[7с + 1] =/[z[A], а [7с], А] + Az*[7r + 1]л[А + 1], (5.6.65)
2[7г + 1] = а [А] + Да* [7г + 1]л [А + 1], (5.6.66)
[1 + л[7г + l]]Az*[A + 1] =
= АИЛ], «"[А], А]Аж*[А] + /a[z[A], а [А], А]Д<г*[А] + »*[А], (5.6.67)
[1 + л [7с + 1]] Да* [7г + 1] = Да* [А] + и-* [А], (5.6.68)
где
л[А- + 1] = {AJ/(z[A], ?г[А], А), а [7г], А + l]Az*[A + 1] +
+ Mf(z[A], а[7г], 7г),?[А], к + 1]Да*[7г + 1] }* X
ХЛ-W’ + l]-A[f(z[A], а[7г], к),к + 1]}. (5.6.69)
Рекуррентный л-алгорптм совместных оценивания п параметрической
’идентификации (5.6.65) — (5.6.69) экономичен в вычислительном отноше-
нии. Он имеет примерно такую ;ке аналогию с поисковым градиентным
алгоритмом с синхронным детектированием, как непрерывный л-алгорптм
(5.6 43), (5.6.44).
§ 5.7. Рекуррентные алгоритмы идентификации
при коррелированных шумах
Рассматривается идентификация пелипейпого объекта относительно
простой структуры (описывается оператором Гаммерштсйпа), но при ос-
ложняющих обстоятельствах, связанных с коррслпровапиостью шумов.
При этом интервал корреляции ио ограничен. Рекуррентный МПК рас-
пространяется на этот случай. Производится сопоставление с субопти-
мальпым методом ТСА.
5.7.1. Динамически!! объект, описываемый оператором Гаммерштей-
на. Рассматриваемый нелинейный объект имеет структуру, представлен-
ную па рис. 5.7.1. Опа означает наличие нелинейного преобразования
вектора входных переменных и, которое вместе с аддитивным шумом
поступает на вход линейной части объекта. Входная величина и и вы-
ходная переменная объекта z (скалярная величина) наблюдаются в ди-
скретные моменты времени. Предположим, что нелинейное преобразова-
ние. 5.7.1. Структура объекта, описываемого оператором Гаммерштсйпа
нпе может быть представлено в виде разложения по некоторому ба-
зису, т. с.
Л'1
!/(/)= 2 “v% (Z> И1 " •> ит (О)-
v=l
Функции яр,., 1 v п, считаются известными, а коэффициенты av не-
известны и подлежат определению в процессе идентификации.
Таким образом, математическое описание рассматриваемой системы
в стационарном режиме дается в виде оператора Гаммерштейна
СЮ
2/ = Z (() = J ф (?, t - т)Х
о
2 av% (z - т> ui (z - т)>
. V=1
..., um (l — Т)) + g (t — т) ch.
Зде№ Ф(г, т) — известная импульсная переходная функция лппейпого’
динамического элемента. Введем обозначения
ОО
Т]г = 1] (/) = j* Ф (t, t — т) £ (Z — т) dx,
I)
<PV («) = J ф (t, t - T) % (t - T, (t - т)....um(l- T)) dx.
0
Сделаем обычные предположения о том, что математическое ожидание
шума £ равно пулю. Тогда математическое ожидание и ковариационная
функция равны соответственно
Е ['>(]= °, /2),
сооо
Р (*!’ гг) = Л Ф (fl- г1 “ т1) Р; (г1 - т1- *2 - т2) Ф (г2- *2 - Т2) Л1Л2-
О о
Здесь р« (t, т)—ковариационная функция шума g(<). Заметим, что ес-
ли даже g(0 —белый шум, гр тем по менее будет коррелированным слу-
чайным процессом. Линейный динамический объект задан, поэтому
Ф((, г) —известная функция. Значения функций iii(t), i — 1, т, наблю-
даются или задаются. Поэтому для всяких t, г, и tz значения функций
fPv(O, v = 1, Ari, и р(fi, <г) могут быть вычислены. Таким образом, урав-
нение объекта (управляемой системы) при переходе к дискретному вре-
мени приобретает впд
jVi
2 PI = 2 °vcIv lfcl -г Ч lfel = Ч>Т ° -г Ч С5-7-1)
V=1
Здесь а — вектор-столбец неизвестных постоянных параметров, значения
которых нужно оцепить в процессе управления; — размерность векто-
ра в; 2 [ft] —наблюдение выходной переменной в момент времени к;
к — дискретное время (к = 1, 2, ...); ср [ft] = [ЧД [ft] • 4>дг1 [MjT— из-
вестный вектор; н[7с]—аддитивный шум с нулевым математическим
ржпдапием Е[ц [ft] ] = 0 и ковариационной функцией Е[ц[А:]т][/]] =
= p(ft, I). Дисперсию i][ft] обозначим p[ft]. Пусть также 21л'] =
= [г[1] ... :[;V]]T — А'-мериып вектор наблюдений; Ф1'"1 = [<р[1]ср[2] ...
. ..cf[-V]]T— известная матрица размера iVXA'i; = [ц[1]ц[2] ...
... т] [А'] ]т — вектор шумов. Здесь и далее в данном параграфе все мат-
рицы и векторы с нарастающей в текущем дискретном времени размер-
ностью обозначаются верхним индексом в скобках.
Тогда наблюдения в течение интервала времени к = 1, .V запишутся
в матричной форма
-Е-xi = ф[-ч]а + (5.7,2)
При этом Е[ц[и1ц[л1т] = —матрица ковариации шумов, =
- [p(ft, Z)], ft, I — 1, А'. Обозначим также r[WI = [p(l, A) p(2, Л')...
.p(N — 1, A)]T— (Л’—1)-мерный вектор ковариаций.
5.7.2. Идентификация методом панменьших квадратов. Как извест-
но, оценки по МНК являются оптимальными в средиеквадратическом.
Наиболее полные исследования рекуррентной процедуры оценивания
МНК при использовании независимых наблюдений (матрица /?[к1 — ди-
агональная) приведены в работе [5.36]. Для использования этих резуль-
татов в случае коррелированных шумов преобразуем (5.7.2) таким об-
разом, чтобы были выполнены условия работы [5.36].
5.7.2. !°. Декорреляция данных. Введем в рассмотрение матрицу
определяемую рекуррептпо соотношениями
пГЛ] л "1 _____
Р[1] = 1, П[/(+1] = , к = 1, Л— 1, (5.7.3)
^№+11 б [7с + 1] J
где
б[7с + 1] = (р[/с + 1] — rT['1+|lz?-iDdr[s+i])--i/2i
dfft+u = —6[7С i]rm+i]fl-i[M
Обозначим
г[Л1 _ дрЦЦй], ф[Ы = р[»]ф[Л1т
Непосредственные вычисления показывают, что
= Е p]rft]lT)'r(*1] = = Е,
где Е — единичная матрица соответствующего размера. Таким образом,
умножая (5.7.2) слева па Z?IN1, мы получим соотношение
= ф[Л’]а + -rwi, (5 74)
в котором компоненты вектора i)[N1 попарно нскоррелировапы. Заме-
тим, что введенное матричное преобразование обладает необходимым для
построения рекуррентной процедуры свойством:
7т№+11 = [7T[fel i z [7с + 1]], Фт№+1] = [фт['Н i ф [7с + 1]],
~т[Ь+1] = [~тВД j ~ [л .j. !]].
Здесь
£[Л-4-1] = + 6[/L. + 1] г[7с _]_ 1] =
= 6[fc + 1] [z[7c + l] -г^+ЧД-Ч^"]],
ф[*+1] = фт[Мй»1Л+11 _]_ 6[Тс + 1] ф[7с + 1] =
= 6[7с + 1] [<p[fc + 1] — фНМД-ФПДМ-Ы],
ц[7с + 1] = + 6[7с + 1]т][7с + 1] =
= б[7с+ 1] [i)[7c + 1] —
5.7.2. 2°. Рекуррентный алгоритм МИК в общем случае. Используя
для построения оценки параметров декорреляцию (см. п. 5.7.2.!°) п ре-
зультаты [5.31], можно убедиться, что рекуррентная оценка МИК имеет
вид
<?[А] = c[ZV - 1] + '(R [z[W] - rTbv]n-i[iv-ijstw-i 1 _ ipTpvpf.v _ !]].
(5.7.5)
Здесь 4f[A'] = <р[Л’] — фт[м-|]д-Чи-|]г1№1 а коэффициент влияния ч[Л’]
вычисляется по формуле
(d [N]/4/T [Лт] d [Л’], если d[Ar]^=0, (5.7.fi)
7 ‘A1 " U [A]/(o2 [Ar] + Д”1, [A] Ъ [A]), если d [N] = 0, (5.7.7).
где o2[7V] =p[A] — rT[-vJfl-i[N-4rrNi; d[/V] = Л [TV - 1] Д' [A] - ^-мер-
ный вектор; b [/V] = 7?[<V- 1]Т[7У] - Л^-мерный вектор; А и В-матрп-
цы размера Л\ X Л'ь удовлетворяющие рекуррентным соотношениям
Л [Д’] =
, d [-V] г/1 [TV]
А [Л — 1 — —А—!----—
1 Ч’1 LVbZLVI
если d [Д'] =/= О,
„ . ь [Д’] <1С [Д’] г7[У|&т
В [Д' — 1 — ——!-------L,J------—-----
Чг[Д']й[Д-|
. о2 [/V] ут
сели d [Лг] = 0;
Ж ,
(ч- [Д'] d [Др~ d 1Л'] </Т [Л ’’ сслп d l/V1 * °’
I Z? [-V - 1]
-------------, если d [Д'] = 0.
- V1 [Л] b [Д']
(5.7.8)
(5.7.9)
(5.7.10)
(5.7.11)
Полагается, что А [0] — В. Если исходные данные о параметрах отсут-
ствуют, то w[OJ = 0, Л[0] — 0.
Условие d[.V] =/= 0 является необходимым и достаточным для того,
чтобы вектор V[/V] не являлся линейной комбинацией векторов Ч'ф!],
Чг[2], .... 'F[.V— 1]. Отсюда следует, что в процессе построения оценок
вектора ко текущим данным, каково бы пи было .V, формулы (5.7.6),
(5.7.8) и (5.7.10) используются не более чем Лд раз.
5.7.2. 3°. Рекуррентный алгоритм МПК для линейно независимых вхо ь
ных воздействий. Пусть cfv[Z.], v= 1, A'i, образуют набор линейно неза-
висимых функции. В этом случае (чему можно дать строгое обоснова-
ние) первые Л'| строк матрицы Ф1Л|, Д’Л’,, являются линейно не-
зависимым и.
Процедура оценивания распадается па два этапа. На первом этапе
(/ = 1, п) для оценивания используются формулы (5.7.6), (5.7.8), (5.7.10),
так как в этом случае <7[Z>] ¥= 0, к = 1, Л'|. На втором этапе (к ~> Д’,)
всегда </[/.] = 0 и поэтому для оценивания используются только форму-
лы (5.7.7) и (5.7,11). Второй этап рекуррентного оценивания при корре-
лированных наблюдениях описан в [5.37].
В некоторых частных случаях формулы (5.7.7), (5.7.11) могут быть
значительно упрощены [5.37]. Ото происходит тогда, когда корреляцион-
ные свойства шума 1] [7г] таковы, что матрица имест значительное
число пулевых элементов. Пусть ц[7г] является процессом авторегрессии
порядка s. Тогда для него справедлива рекуррентная формула
S
’) i*] = 2 iA' — +8 W’
i—1
где а,-, 1=1. s,— константы (а, =/= 0): е[/.-] —последовательность незави-
симых случайных величин, для которых Е[е[Л]] = 0, Е[в2[7>:]] = о2,
Е[е[/]е[7г]] = 0, если к /.
Процесс п[А-], к = 1, 2, ..., является стационарным и его ковариа-
ционная функция р(7г, Z) удовлетворяет уравнениям Юла — Уолкера, ко-
торые в матричной форме для к > s записываются в виде [5.38]
Д[*1а1Л1 = r['i+l1, аг,,] =
где а1^ = [О; ат]—вектор-строка с к компонентами, первые к — s
из которых являются пулями, а последние s образуют вектор ат =
= [<zs as-j.^Oi]. В формулах (5.7.7), (5.7.11) должно быть учтено, что
Ч'’ [Л] = ср [Л7] — фт[*1а, о2 [Л7] = р[Л’| — T-tb'ia.
Здесь черточка сверху означает, что вместо соответствующей матрицы
пли вектора используется матрица или вектор, составленные из s послед-
них строк или компонент соответственно.
Заметим, что s = 1 соответствует случаю, когда шум является мар-
ковским процессом.
Пусть теперь аддитивный шум т] [7с] пскоррелировап. Это означает,
’по помехи £,[/’[ являются некоррелированными и добавляются пе ко
входу линейного динамического элемента (см. рис. 5.7.1), а к его выхо-
ду. Иначе говоря, ц[7с] ^Eg[/c|. В этом случае r[WI = 0, а матрица 77[VJ
становится диагональной и формулы (5.7.5) — (5.7.11) существенно упро-
щаются, так как в них должно быть учтено, что в этом случае
ЧГ[Л7] = cp[7V], о2 [Л] = Р[Л'|,
d[/V], = A [TV — 1]ср[Лг], Ь[Л'] = B[N — l]cp[7V],
5.7.2. 4°. Влияние корреляции шумов на характер рекуррентности ал-
горитмов. Привлекательный аспект рекуррентных методов обычно состо-
ит в том, что для вычисления оценки в текущий момент времени к до-
статочно зпать оценку а [к— 1] в предшествующий момент времени и
текущее наблюдение вход — выход (ср [7с], z[/c]). Таким свойством обла-
дает и рекуррентная оценка МИК для независимых наблюдений. Правда,
в этом случае необходимо знать еще дисперсию текущего наблюдения
и две вспомогательные матрицы А [/;] и В [7с]. Это плата за оптималь-
ность в отношении объема информации, необходимой для функциони-
рования алгоритма (объем вычислительных работ будет рассмотрен в
и. 5.7.5). Рекуррентная оценка МНК для коррелированных наблюдений
(5.7.5) — (5.7.11) по обладает таким свойством простой рекуррентности.
Для вычисления оценки «[7с] в этом случае необходимо зпать пе только
оценку «[/с — 1] и наблюдение (ср[7с], с[/г]), по также все предшеству-
ющие наблюдения (cp[i], z[i], i = k — 1), а также, кроме матриц Л и
В, еще матрицу корреляции /?[Л1 размера к X к.
Отсюда следует, что объем информации (количество числовых зна-
чений), необходимых для вычисления оценки, растет с помором итера-
ции квадратичсски. Попятно, что число арифметических операций для
проведения таких вычислений должно увеличиваться пе медленнее, чем
увеличивается количество чисел, которые используются для вычисле-
ний. Таким образом, оценка МИК при наличии корреляции наблюдений
существенно усложняется. В п. 5.7.5 даны сравнительные данные слож-
ности алгоритмов оцеппвапия.
5.7.3. Идентификация по типу стохастической аппроксимации. Вы-
числительные сложности рекуррентных оцепок МНК служат препятст-
вием к их применению. Существенно более простыми являются оценки,
построенные по типу стохастической аппроксимации (оценки ТСА), ко-
торые для рассматриваемой задачи имеют вид
а[А] = ?[А-1] + 7[A][z [TV] ,-fpT[VJ4.iV-l]]. (5.7.12)
Сходимость (5.7.12) для независимых наблюдений обеспечивают ко-
эффициенты влияния (коэффициенты усиления) [5.39]
7 [А] = «р[А]/А, где с = const. (5.7.13)
Объем необходимой информации и число арифметических операций
па каждой итерации имеют порядок А| независимо от того, коррелиро-
наны наблюдения или пет. Конечно, за счет простоты оценки (5.7.12),
(5.7.13) теряет в эффективности по сравнению с (5.7.5)—(5.7.11). К со-
жалению, пе представляется возможным аналитически определить ухуд-
шение качества оценки при переходе от (5.7.5)—(5.7.11) к (5.7.12),
(5.7.13). Здесь уместно заметить, что оценка ТСА может оказаться пред-
почтительней, чем оценка МНК, так как за одно и то же время при вы-
числениях по (5.7.12), (5.7.13) можпо сделать в №/Л\ раз больше итера-
ций, чем при применении (5.7.5)—(5.7.11) [5.40].
Для одной из оценок ТСА в [5.40] экспериментально установлены
области такой предпочтительности.
Удобно след матрицы ковариаций оценок выбрать в качестве меры их
эффективности, поскольку он совпадает с суммой дисперсий компонент
вектора оценок. Оценка (5.7.12) может быть улучшена, если коэффици-
ент влияния выбрать оптимальным образом — так, чтобы след матрицы
ковариаций был минимальным.
Пусть
РДА] = Е[(а[А],— с)(Г[А] -а)т], PN = 1гРДА]. (5.7.14)
Если компоненты вектора шума в (5.7.2) корродированы, то коэф-
фициент влияния 7[А] оценю! ТСА в (5.7.12), минимизирующий Рм, вы-
числяется по формуле [5.41, 5.42]
Лх[А-1]ф[А]-МА]
“ ~ 1 ~ ” (0.7.101
Р [А] - <р* [А] Ра [N -1]<р [А] - 2(р* [Л] Л [А]
где Л[.У] — a L — матрица размера Ai X А, определяемая ре-
куррептпо
£Ш==Т(1]1 £[Л'] = [(£_ т [А] фт |7V]) UN~И : у [A]], (5.7.1G)
причем Я [1] — 0, если наблюдения некоррелировапы с априорными опен-
ками. Матрица ковариаций Ра[А] в этом случае рекуррептво вычисля-
ется согласно соотношению
Лх[А] =
[Рп [А - 1] Ф [А] - Я [А]] [Рс [А- 1] ф [А] - Л [А]]т
al 1 р[А] + ф'г[А]Ра [А —1]ф[А]—2фт[А]Х[А]
(5.7.17)
Априорная оценка о[0] и ес матрица ковариаций Ра[0] считаются
заданными.
Сложность алгоритма (5.7.12), (5.7.15) — (5.7.17) такова: для выполне-
ния одной итерации необходимо выполнить порядка NNi арифметиче-
ских операций. Более точные свсдеппя о сложности алгоритмов (5.7.12) —
(5.7.14) и (5.7.12), (5 7.15)—(5.7.17) содержатся в и. 5.7 5
5.7.4. Условии состоятельности оценок. Наличие корреляции между
наблюдениями обычно ухудшает качество оценок. Поэтому возможны
ситуации, когда корреляция между наблюдениями пе позволяет постро-
ить состоятельную оценку*). Рассмотрим эту проблему па примере ска-
лярного случая оценивания математического ожидания. В этом случае
Ai = 1, ср [А ] = 1 для всех к и
г [/.] — а + т] [7г], 7г Ух 1. (5 7.18)
5.7.4. !°. Состоятельность оценок МНК. Пусть е — вектор соответству-
ющей размерности, составленный из единиц е = [I_______1]т; пусть также
е[1] = 1, е[7,-] = 1 — к > 1. (5.7.19)
Тогда оценка МИК параметра а в соответствии с (5.7.5) имеет вид
«[А] = а[Л-1] +7[fc][z [Л] —
— —£[?c]e[/; _ 1]]. (5.7.20)
Из соотношений (5.7.6) — (5.7.11) получаем
= 1, № = 0, к > 1,
&UJ =0,6 И = 6[7с —1]е[А], /с>1, 6[1] = р[1] = о2,
и имеют место рекуррентные соотношения
О2 [7с] 6 (7с— 1]__ г?1 е[/.| 6[7;-1|
1 ~ о2 [7с]+ ег[А'] 6 [7с—1] ’ 7 ‘ o2[/c]4-e2[fc]b[7c—1]’ 71
(5.7.21)
где о2 [7с] было определено ранее в п. 5.7.2 2°.
Оценим дисперсию оценки (5.7 20). Пусть А[7.] = «[/с] —а. Тогда
Д[!]=Т][1],
Д[/с] = (1-7[/с]е[7с])Д[/с-1] +7[/.](|1[/1] -гПм/г-цл-ицРс-и).
(5.7.22)
Введем в рассмотрение вектор-строку определив се рекуррент-
ным соотношением
5[/>1 = [(! _ у [Л] е [7с]) gf'c-i] _ Y [fe] гт[Мл-1[Л-1] : у [/.]], g[lJ = j.
(5.7.23)
*) Оценка и [/г] величины а называется состоятельной, если для вся-
кого с > 0 имеет место lim Р { | а [/г] — а | > е) --- 0.
Легко убедиться, что
Д[А] = gtftlyjtM.
Поэтому дисперсия оценки (5.7.20)
7г[А] =ФИ] = Е[Д2[А]] =
(5.7.24)
Используя (5.7.23), можно придать (5.7.24) рекуррентную форму и
с ее помощью вычислить дисперсию в явном виде
7, [А] = [1 - у [7г] е [A]]2 h \к - 1] + у2 [7с] =
Л-1 л
= у2 [/с] о2 [7с] + V у [v]o2[v] 1£ (1 - у[р]е[р])2.
^==1 H=^V4-J
Обозначим
_ е2 [А] _ (1 — eff-Jtft-HrlM)2
V lAJ ~ о2 [А] = р [А] — rTLkh{- 1i/l“‘Jr1 h 1'
Из (5.7.21) следует
(5,7.25)
(5.7.26)
и далее
у2 [А] о2 [А] = р[А]
к
У V [V]
у=1
Л-1
1 — у [А] е [7с] = У V |v]
V=I
1л
У, v [V]
V=1
-2
*V—1
(5.7.27)
(5.7.28)
Используя это, получаем дисперсию А [А] в виде
(5.7.29)
Таким образом, чтобы оценка МНК (5.7.5) была состоятельной нс-
л
обходимо и достаточно, чтобы ряд У v [v] расходился при А->оо. Дей-
ствительио, если указанный ряд сходится, то из (5.7.29) следует, что
дисперсия при А -> оо стремится к положительной константе и оценка
не является состоятельной.
Отсюда можно установить некоторые полезные следствия. Пусть
шум ц является марковским с дисперсией о2 и параметром р(А, 7с + 1) =
Л
= р <: 1. Тогда v[А] = (1 — р)о-2(1 + р)-’ для всех А. Ряд У n[v]
v=i
расходится для всех р < 1 и дисперсия оцепки МПК
h [А] = о2
1 — р 7с
Пусть теперь шум т] пскоррелировап. Тогда для состоятельности
оцепки МПК получаем необходимое условие, ограничивающее возмож-
иьш рост дисперсии шума со временем:
(й \-1
2 з-1 lvl I = °*
v=i /
5.7.4.2е. Состоятельность оценок ТСА. Рассмотрим теперь оценку ТСА
(5.7.12) с коэффициентом влияния у [/с] = d/k. Подобно (5.7.16) введем
матрицу-строку № рекуррентным соотношением
/[1] = d, Z[ftl == [(1 — 4) i 4]’ /c>l. (5.7.30)
Тогда Apr] = a Pc] —a — л(1, k, d)A[O] фДОЦ1*), где
/ d \ f d \
n(l, k, d) = 11 —-^jll — A._ {j ... (1 — d).
Дисперсия оценки (5.7.12) имеет вид
А[А] = зт2(1, d)7t[0] + /[MftiMptM.
Здесь h [0] — дисперсия априорной оценки. Используя рекуррентное со-
отношение (5.7.30), получаем
Ар] =(1-4) ftP-ll+2(l-4)4z[/1_llrt'£]+(4) РМ =
d ( "~1 h \
= n2d, к, d)A|0] + T ep] + 2еМ П ₽i • (5-7-31)
\ ^=1 J=V+1 J
Здесь
d ( d
6 [A] = T p pc] + 2 I 1 - T
(j \ 2
1 — —j (j — I)-1.
Пусть выполнены условия
d
тР] = Т,
1,
1
lim —2 У P[v] =0.
h^>°° k
(5.7.32)
Для того чтобы оценка (5.7.18) была состоятельной, достаточно,
чтобы
, л
lim -V У (v - d) = 0. (5.7.33)
/г~>оо
При доказательстве (5.7.33) существенно Используется тот факт, что
при d 1, v < к имеет место соотношение JJ Pj С v//c.
j—v-pl
Заметим, что при d — 1 оценка превращается в выборочное среднее,
а (5.7.33) в известное условие состоятельности выборочного среднего при
коррелированных паолюдепиях
1
lim —т
5.7.5, Сложность рекуррентных алгоритмов идентификации. В прак-
тических задачах оценивания параметров нелинейных объектов управ-
ления в процессе их функционирования удобно применять рекуррент-
ные методы. При наличии динамических элементов задача идентифика-
ции связана с проблемой оценивания неизвестных параметров по кор-
релированным наблюдениям. Для решения этой задачи могут быть при-
менены рекуррентные оценки МНЕ и ТСА. Оценки МНЕ оптимальны
в среднеквадратическом, по являются сложными в вычислительном отно-
шении. Оценки ТСА более простые, по менее эффективные при равном
числе итераций.
Таблица 5.7.1
Сравнительные данные о сложности алгоритмов адаптивного оценивания
(для А'-й итерации, А > А',)
Алгоритм оценивания Объем информации Количество операций
сложения умножения
МН К. шум некоррели- рованный О(А-2) О(А*)
МНК, шум — процесс авторегрессии A J + (1 т s) X XAjH- 3s 2Л'| + (s - - 1)Л\ + 2 4А? + Л\ + s
МНЕ, общий случай № + (А\ + <2)А- + О(А2) 2N2 + (Л\ - — 3)А + O(N\) ЗА'2 + NVN + + О(А‘)
ТСА. у[А7] — нсоптп- мальный 2А\ 2Л\ ЗЛ\
ТСА, у[Аг] — оптималь- ный (1 + АДА + -1- О(Л^) (ЗАХ - 1)А -|- O(N\) ЗАЛу + O(N[)
С практической точки зрения целесообразнее рассматривать точ-
ность оценок в зависимости пе от количества итераций, а от числа ариф-
метических операций, требующихся для вычисления оценки. С этой точ-
ки зрения оценки ТСА в некоторых случаях оказываются предпочти-
тельнее. Простота оценок ТСА позволяет повышать их точность при по-
мощи повторного использования наблюдений.
В табл. 5.7.1 приведены сравнительные данные о сложности алгорит-
мов адаптивного оценивания. Данные таблицы соответствуют А'-й итера-
ции (считаем А’>А'1). Для каждого из алгоритмов, приведенных в таб-
лице, указан объем информации, т. е. количество числовых значений, ис-
пользуемых при реализации А-й итерации вычислительного процесса. Это
соответствует требуемому объему памяти. Далее указано количество опе-
раций сложения и умножения, требуемых для реализации N-й итерации.
Используя информацию о быстродействии применяемой ЭВМ, по этим
данным можно оцепить реальное время, требуемое для совершения N-й
итерации процесса оценивания.
§ 5.8. Оптимальные совместные оценивание
и параметрическая идентификация в дискретных
линейных системах
Вопросы оптимального совместного оценивания и параметрической
идентификации разработаны еще недостаточно. Исчерпывающее решение
задачи может быть получено путем определения апостериорной совмест-
ной плотности распределения векторов состояния и неизвестных пара-
метров, одпако вычисление такой плотности связапо с нахождением ин-
тегралов сложного иптегро-диффсрепциального уравнения в частных про-
изводных [5.43], аналитическое решение которого в общем случае не-
возможно. Имеется также приближенный подход, сводящийся к трудной
в вычислительном отношении так называемой «двухточечной краевой за-
даче» [5.44]. В настоящем параграфе предлагается сравнительно простое
и в то же время строго оптимальное решение.
5.8.1. Постановка задачи. Заданы липейпая дискретная система
x(th+i) = A(th, + v(tk, с) + (5.8.1)
и капал наблюдения
z(M = c)x(lk) +F(th, c) +t)(M, k = >•', < (5.8.2)
где
X — [X| X2. . . ?л]Т, z = [zt Z2. . . Zm]T, I = [si £2 - - • Sn]\
>1 = hl v(^’ c) = c) ••• vAth, c)]T,
F(th с) = [7<Л(*л, C) ... Fm(th, c)]1.
Матрицы объекта A (tk, c), v(tk, с) и капала наблюдения Н(1к, с),
F(tk, с), а также ковариационные матрицы Q(tk, с), 7?(7л, с) центриро-
ванных нормальных возмущающих воздействий ^(7ь), т)(7ь) и параметры
условного априорного начального нормального распределения р(х(10) |с)
зависят от вектора неизвестных параметров с — [ci с2...с,]т, плотность
распределения р(с) которого предполагается известной:
15 [Вд IС1 = °’ Е (М Iе! = °’
Eh(MTiT(^)ic]=0 vc>
E[s(MV'G«) И = <Ж> с)6А„ Е[т](7»)т]т(<в) I С1 = л(б.,
p(x(t0) |с) eA[m(c), 0(c)],
здесь б*, —символ Кропекера, m(c), G(с) — соответственно математиче-
скос ожидание и ковариационная матрица вектора x(t0). Требуется па
основании проведенных наблюдении панлучшим образом оцепить вектор
состояния x(t^) и вектор неизвестных параметров с.
5.8.2. Уравнение для апостериорной плотности. В [5.45] получено
выражение для совместной апостериорной плотности вероятности век-
торов состояния x(th) и неизвестных параметров с при условии прове-
денных наблюдений 2('Н — [гт(г0) : zT(zj)
р (чис| г["])=
= [(2n)’V3 Jp (fft> с) | р {tk, с) р СХр (- 0,57 (ffe> c)) de]"1 X
>' ь У» c) СКП I- °-5 (IIx ('/<) - * (fft> c) 1 Vli’ c))b <5-8-3)
Используемые здесь матрицы и скалярные величины определяются фор-
мулами
b(th+l, с) = b(tk, с) |П(7Ь, с) |1/2(|fi(ifc+[, с)| |<?(£н, с) |)-1/2; (5.8.4)
с) = A(tk-i, c)x(th-,, с) с) +K(tn, с)Д(7л, с),
K(tk, с) = P(tk, c)IIT(tk, cjR-'tth, c);
(5.8.5)
A(0<, c) = z(tk) — H(tk, c) [.4 (tfc-ь c)x(lk-i, с)+п(гЛ-1, c)] — F(tk, c);
(5.8.6)
c) = c) +IP(lk, c)R~'(tk, c)II(tk, c),
c) =
= Q~4ht, c)—Q~l(tk. c)A(tk, c)H(tk, c)A'l(ik, c)Q-l(tk, c). (5.8.7)
n-‘('ft, c) = G-‘(6„ c) +zlT(0„ c)Q~l(tk, c)A(l,„ c);
С)+||Л(^ f)llU(f/t.c)’
(5.8.8)
(fft- c) = II (th, c) P (th. с) 1Г (t,„ с) Л-’ (tk, c),
к = 0, 1, ...
Начальные условия для (5.8.4) — (5.8.8) задаются в виде
b(t0, с) = р(с)\1Ц1.е, с) |-1/2|G(c) |-‘/2,
Л (I-к c)x(l-t, с) + с) — тс, (5.8.9)
AI(t0, с) = G(c), Z(t-i, с) = 0.
В (5.8.3) условно записан г-мерпып интеграл, где
de == dct de? dc^_____________________________dcr.
Соотношения (5.8.4) — (5.8.9) позволяют явным образом рассчитать
условную плотность для заданных значений x(tk), с.
5.8.3. Совместные оптимальные оценивание п идентификация по кри-
терию максимума апостериорной плотности. Наличие явной процедуры
расчета р(л(О<), c|s[f11) позволяет реализовать оптимальные совместные
оценивание п идентификацию по различным критериям [5.45]. Остано-
вимся лишь па критерии максимума апостериорной плотности. Пусть
сОп — оптимальные (ио рассматриваемому критерию) оценки после
проведения наблюдений z(l0), z(tt), ..., z(tK). Подстановка хоп, с011 в
(5.8.3) дает
Р (*оп- соп 1 z[‘V]) «
« exp -у [ || х011 — .с (Су, сои) Bp-i(ZjViCon)"|- р ((Л’ гон)]}* (5-8-10)
Здесь введен функционал J(tk, с) = I(lh, с) — 21п/>(//<, с). Следователь-
но, наиболее вероятная оценка вектора состояния выдается ФКБ (урав-
нения (5.8.5) — (5.8.7), (5.8.9)), синтезированным для значения с = с0Г1:
«он = -t(Cv, соп), а сам наиболее вероятный вектор параметров получа-
ется путем минимизации функционала /(Ст, с) по с: J (tN, соп) =
= min J (Ц., с). Методы такой минимизации могут быть различными.
С
5.8.4. Оптимальные адаптивные оценивание п идентификация. На ос-
новании (5.8.3) можпо получить апостериорные плотности как вектора
состояния, так и вектора неизвестных параметров:
Р (г (М I ’[Л ]) = f Р (ж с I z[A])-dc’
р (е | ztA]) = J р (т (ty), с| dx (Су) =
b (Су, с) | Р (tK, с) |I/2 exp [— 0,5Z (tK, с)]
j b (fA> С) I Р (lN’ С) Г'2 еХР [“ °>5/ (Z№ С)] [к '
Знание этих плотностей позволяет осуществлять раздельные оптималь-
ное адаптивное оценивание и идентификацию по различным критериям.
В частности, оптимальные адаптивные оценки, обладающие наименьшей
дисперсией и представляющие собой апостериорные математические ожи-
дания, определяются соотношениями
а-оц — J х (Су) р (.г (f д) | z™) dx (tN), сО1[ = J ср (с | zl ]) dc.
ГЛАВА G
КРИТЕРИИ ОПТИМИЗАЦИИ УПРАВЛЕНИЯ
Согласно концепции, изложенной во введении, центральной зада-
чей современной теории автоматического управления (СТАУ) является
оптимизация управления «в большом» для оптимального достижения па
каждом этапе функционирования системы главной цели при соблюдении
множества ограничений. Такая оптимизация возможна при выражении
главной цели (или главной цели и ограничений) в виде минимизируе-
мого функционала или целевой функции. Функционалы и функции, вы-
ражающие цель управления и ограничения, именуются также критерия-
ми оптимизации.
Назначение минимизируемого функционала, критериев оптимизации
для каждого этапа п эксплуатационного (и, возможно, аварийного) ре-
жима системы является самой важной частью задачи оптимизации. Эта
часть проблемы не может целиком решаться формализованными метода-
ми. Опа требует глубокого проникновения в существо управляемых про-,
цессов, общую ситуацию и «глобальное» назначение систем как состав-
ном части более общей метасистемы. Достигается это творческой
деятельностью проектировщика (па стадии проектирования) и человека-
оператора (при выборе п задапип функционала для очередного этана
функционирования системы).
С точки зрения абстрактно-математической теории управления это
считается трудностью, чуть ли пе обесценивающей оптимизационный
подход. С точки зрения прикладной СТАУ это неизбежное и в целом по-
ложительное качество, придающее гибкость методу и способствующее
использованию интеллектуального потенциала, таланта конструктора и
человека-оператора.
§ 6.1. Однокрптерпальпая и многокритериальная
оптимизации. Методология выбора
минимизируемого функционала
Хотя для каждого этапа или режима технологического процесса пли
движения подвижного объекта обычно можно указать главную цель,
процессы управления современными объектами должны удовлетворять
множеству условий. Каждое из этих условий, взятое в отдельности, мо-
жет выражаться в виде минимума некоторой целевой функции илп
функционала. Например, для самолета необходимо выйти в заданную на-
вигационную точку в заданное время, с заданной точностью, в заданном
направлении, израсходовав минимальное количество топлива, обеспечи-
вая минимальную вероятность аварийных ситуаций, минимальных рас-
ходов ресурса силовой установки и планера и др. Некоторые из этих
требований формализуются па основе характеристик, определяемых для
других потребностей: зависимости секундного расхода топлива от поло-
жения ручки управления двигателем, параметров режима полета, поло-
жения входных и выходных устройств двигателя.
Другие требования для формализации требуют построения специ-
альных «искусственных» целевых функций. Ясно, что многие из требо-
ваний противоречивы, возможно достижение лишь условных экстрему-
мов (компромисс).
Абстрактная математическая теория векторной или многоцелевой
оптимизации [6.1—6.3] рассматривает проблемы формальных обобщен-
ных методов выбора решении на основе некоторых правил сравнения
вариантов пли формирования обобщенной целевой функции (подход
Парето). Причем все это рассматривается в нентерациониом аспекте,
когда установленное правило выбора или целевая функция не подлежат
коррекции ио результатам принятого решения.
Нс отрицая определенное значение формального подхода, отметим
еще раз, что в прикладной СТАУ проблема многокритериальной опти-
мизации пе должна и пе может решаться целиком формализованным
путем: выбор функционала и. его уточнение по крайней мере па ста-
дии проектирования системы управления должны производиться с уча-
стием «главного конструктора», как правило, итерационным путем, т. е.
с коррекцией по полученным (путем моделирования) результатам.
Для детерминированных процессов с непрерывным временем, опи-
сываемых в пространстве состояний, минимизируемый функционал в до-
статочно общем случае задается в форме
7 = У3 [х (tK), р] + L [ж (0), и (0), 0, (3, A] clQ. (6.1.1)
'г
Здесь V3 — заданная с точностью до вектора (или матрицы) параметров
р скалярная функция конечного состояния (для данного этапа) процес-
са Эта часть функционала (целевая функция) часто называется
терминальной. Обычно па основе процедуры предварительного выбора
(см. п. 6.1.2) задается не только общая форма функции Т7:), по и вектор
параметров р, который может уточняться при последующей итерацион-
ной коррекции; L — скалярная функция пли в самом общем случае —
оператор со скалярным выходом, действующий пз пространств состоя-
ния, управления; вектор (пли .матрица) параметров р влияет преиму-
щественно па зависимость L от х; вектор (или матрица) параметров К
влияет главным образом па зависимость L от и.
Интегрирование в (6.1.1) может осуществляться по различным ин-
тервалам времени:
от текущего момента времени t, = t до конечного t2 = А;
по скользящему интервалу от G — t до А = i + Tvn (Tm заданная
длительность интервала);
от текущего ti — t до фиксированного промежуточного момента вре-
мени < tK.
Частным случаем является чисто терминальный функционал (целе-
вая функция), когда 6 = h или £ = 0.
Локальной (в отношении времени) оптимизацией с целевой функ-
цией от текущего состояния называется случаи, когда t,< — t, L = 0. Оп-
тимизация в такой постановке настолько же меиее совершенна в срав-
нении с общим случаем (6.1.1), когда t2 > t, i,; > t, насколько планиро-
вание и управление без прогноза па будущее менее совершенны в срав-
нении с управлением с предвиденьем.
Еще менее результативным является минимизация функционала ти-
па (6.1.1) при й: = t, i2 = t, ti < t (ретроспективный интервал опти-
мизации) .
Для процессов с дискретным временем аналогом функционала (6.1.1)
является
ft2—1
I = V8 [X [£„], Р] + 2 i I* IM, и [*], К Р, К], (6.1.2)
h=ht
где р, f>, К — векторы (пли матрицы) параметров; к — дискретное
время.
Оптимизация по функционалам типа (6.1.1), (6.1.2) является одно-
крптерпальпой. Получение обобщенных критериев (функционалов) из
множества частных критериев п требовании составляет предмет пред-
варительного выбора функционала п его итерационной коррекции.
6.1.1. Предварительный выбор. Предварительный выбор функциона-
ла осуществляется па стадии проектирования. Разумеется, он должен
учитывать опыт создания предшествующих систем аналогичного и.тп
сходного назначения, опыт и интуицию конструкторов управляемого
объекта и технологов, создающих новый технологический процесс. Су-
ществуют некоторые формальные приемы, облегчающие выбор и зада-
ние минимизируемого функционала.
6.1.1.1°. Зависимость вероятности выполнения задачи этапа от конеч-
ного состояния п задание целевой функции. Для некоторых объектов
и процессов известна зависимость вероятности достижения конечной це-
ли этапа (режима) от конечного состояния процесса:
Рк = Рк [x(Q]
(для непрерывного времени) или
Рк = Рк[х[Лк]]
(для дискретного времени).
Ясно, что в этом случае целевые функции в терминальных час-
тях функционалов (6.1.1), (6.1.2) можпо задавать равными Рк с обрат-
ным знаком:
Рз = -Рк.
(6.1.3)'
Копечпо, может оказаться подходящей и другая монотонная функция ве-
роятности, например,
V3 = —In Рк (6.1.4)
или
V3 = P-1. (6.1.5)
При нормальном распределении (6.1.4) означает задание терминальной
целевой функции в виде квадратичной формы (квадратичная терми-
нальная целевая функция).
6.1.1.2°. Учет ограничений посредством функций штрафа. Любой ре-
альный технологический процесс, движение подвижного объекта обя-
заны удовлетворять многочисленным ограничениям, связанным с са-
мыми различными физическими факторами и в то же время с безопас-
ностью, стоимостью, расходом ресурсов, загрязнением окружающей сре-
ды и другими технико-экономическими и экологическими показателями.
Для современных п перспективных технологических процессов и по-
движных объектов, работающих, как правило, вблизи «границ возмож-
ного», достаточно точное выдерживание ограничений имеет исключи-
тельно важное значение.
Ограничения определяются при проектировании, разработке, испы-
таниях, а иногда и эксплуатации объекта, причем сама методика опре-
деления или уточнения ограничений нередко требует планирования
многофакторного эксперимента. Возможна постановка задачи определе-
ния ограничений как задачп идентификации, по это направление в духе
методов СТАУ пока практически пе разработано. Если ограничения из-
вестны, они обычно могут быть выражены в виде областей пространства
состояний и пространства управлений:
г е «е L/3, (6.1.6)
где X:,, U3 — области, условно именуемые эксплуатационными (индекс
«э» означает эксплуатационная область).
Нередко выход за пределы эксплуатационной области, по иаайпен
мерс в течение ограпичеипого времени, пе ведет к аварийной ситуации.
Эксплуатационные области «вложены» в области предельных режимов:
Хя с ХПр, U3 с С7Пр. (6.1.7)
Области (6.1.6) пли (6.1.7) ограничены поверхностями, которые могут
быть представлены уравнениями в неявном виде
0<>г(-т, и) = const. (6.1.8)
Обычно области ограничений являются одпосвязпыми.
Существо метода функций штрафа сводится к введению в функци-
онал (в его интегральную часть) положительной функции Ошт (т, и), ко-
торая мала или равна нулю внутри областей (6.1.6) или (6.1.7) и быстро
(в пространственном смысле) нарастает при выходе за пределы этих
областей.
Функции штрафа па границе п впе области ограничений естествен-
но выбирать в виде, близком к (6.1.8). Однако в целях экономии па-
мяти и сокращения вычислительных затрат границы области ограни-
чений обычно аппроксимируются достаточно простыми функциями, на-
пример, кусочпо-липейпыми. Опыт показывает, что п впе области огра-
ничений функция штрафа может задаваться в достаточно простом виде,
папример, кусочпо-лпиейпом с вектором градиента, нормальным к со-
ответствующей грапи многогранника, представляющего область огра-
ничений прп кусочпо-липейноп аппроксимации. Важно лишь, чтобы гра-
диент был достаточно велик.
6.1.1.3°. Учет посредством функций штрафа конечных и начальных
условий. Часто ставится задача перевода объекта управления из одно-
го состояния в другое оптимальным в смысле минимума заданного ин-
тегрального функционала образом. В классическом вариационном ис-
числении эта задача решается как задача с закрепленными концами.
Однако известны трудности решения двухточечных краевых задач, не
позволяющие реализовать оптимизацию в реальном времени для слож-
ных нелинейных систем высокой размерности. Но согласно изложенной
концепции такая оптимизация является самой главной проблемой СТАУ.
В прикладной СТАУ выход из положения получается путем назна-
чения подходящих штрафных функций в терминальной и интегральной
части функционала. Если учесть, что за счет шумов и ошибок измери-
тельных систем, возмущающих воздействий, приложенных к объекту,-
в любом случае можно достигнуть лишь прохождения траектории в не-
которой достаточно малой окрестности заданной точки в пространстве
состояний, то становится очевидной полная допустимость такого подхода.
Принцип минимума обобщенной работы (см. гл. 8) позволяет исключить
решение двухточечной задачи и в процессе оптимизации «со свободны-
ми концами». Это создает возможность решать основную задачу при-
кладной СТАУ в реальном времени в процессе управления.
6.1.1.4е. Целевые функции с насыщением. Прп заданной целевой
функции Из в терминальном члене функционала использование квадра-
тичных и иных неограниченно нарастающих с ростом нормы аргумента
функций связано со следующей трудностью. При большом расстоянии
до конечной точки, что обычно имеет место в начальный для данного
этапа момент времени, такая функция «подавляет» другие члены, в том
числе интегральный. Для устранения этой трудности функцию на-
значают в виде кусочно-гладкой пли гладкой функции с насыщением.
Такая функция при увеличении расстояния до терминальной точки стре-
мится к конечному пределу (пли обращается в конечную величину) и
не «подавляет» другие члены функционала. Подобный подход может
применяться и при выборе подынтегральной функции L.
Другой путь преодоления указанной трудности заключается в специ-
альном программировании изменения векторов параметров р, р, К как
функций времени.
6.1.1.5е. Терминальные условия без фиксации конечного момента вре-
мени. В приведенных выше случаях конечный момент времени в тер-
ыппальпых задачах оптимизации фиксируется. Такая постановка задач
оптимизации нередко является наиболее удобной с позиций метасисте-
мы. Так, например, выход самолетов в заданные точки пространства
(в том числе в точку приземления) в строго установленные моменты
времени удобен с позиций службы управления воздушным движением
(УВД). Однако существует широкий класс задач оптимизации, где при-
ход в конечное (для каждого этапа) состояние в строго заданный мо-
мент времени пе является обязательным, но выход в заданное положе-
ние является необходимым.
Примером может служить та же посадка самолета па незагружен-
ный аэродром. Здесь момент посадки пе имеет особого значения, ио точ-
ность посадки в пространственном смысле полностью сохраняет
свою роль.
Для решения подобных задач можпо перейти к новому пространству
состояний, в котором роль независимой переменной играет выбранная
переменная, как правило, компонента исходного вектора состояния.
В упомянутом примере посадки такой переменной может служить вы-
сота над уровнем аэродрома. Для стационарных («автономных» — по тер-
минологии классической теории устойчивости) динамических систем ис-
ключение времени в уравнениях системы производится простым делением
п — 1 уравнения (при «-мерном исходном пространстве состояний) па
уравнение с временной производной выбранной переменной. Так получа-
ются и уравнения «фазового портрета» в классической теория колебаний,
качественной теории обыкновенных дифференциальных уравнений.
Далее следует назначение функционала в новом пространстве
состояний.
К задачам оптимизации без фиксации времени прихода в конечную
точку относятся п задачи па максимальное быстродействие. Как из-
вестно, для этих задач подынтегральный член функционала задается
постоянным.
6.1.1.6°. Приведение различных показателей к одинаковом физиче-
ской размерности. Как уже подчеркивалось, первоначальная постановка
задачи оптимизации обычно является многоцелевой или многокрите-
риальной. Для получения единого функционала со скалярным выходом,
выражающего основную обобщенную цель и ограничения, можно вос-
пользоваться приведенном различных требований к величинам одинако-
вой физической размерности. Пусть, например, речь идет о пуске или
останове агрегата, который потребляет энергию, различного рода ве-
щества, расходует ресурс и т. д. Пусть секундный расход всех этих ин-
гредиентов может быть выражен в единицах стоимости в единицу вре-
мени. Тогда подынтегральную функцию функционала естественно зада-
вать в виде суммарной стоимости за единицу времени.
В других случаях все факторы могут приводиться к мощности, се-
кундному расходу некоторого эквивалентного вещества и др.
6.1.1.7е. Определение параметров целевой функции на основе прави-
ла ранных вкладов максимальных отклонений. Целевая функция
1''л[х(1к), р], как указывалось в п. 6.1.1.1°, «отвечает» за выход в задан-
пое конечное положение с заданной точностью. Эта точность может быть
представлена максимальными допустимыми отклонениями
= х3 ± Дт„„
или в скалярной форме
| xt (tK) —x3i| Да:,,,,, i = 1, п.
Для симметричной относительно х3 функции У3, т. е. такой, что
V3 (х3 + Дх„„ р) = У3 (х3 — Дхп1, р),
зададим п значений вектора следующим образом:
— я,п, • •., я,-1 = хг — а',,, + Дх,,,,,
xi+i — х31-+1, хп — хзп, I = 1, п. (6.1.9)
Для краткости обозначим эти значения вектора состояния через а:*'(/,.),
i — 1, п. Потребуем, чтобы целевая функция при всех этих значениях
аргумента была одинакова:
У3[*Л1(«к), р] = Г3[а:Л2(«к), р] = ... = У3[хд’*(М, р]. (6.1.10)
Выражения (6.1.10), рассматриваемые как уравнения относительно р,
называются соотношениями равного вклада максимальных отклонений.
Этих уравнений п — 1 и. вообще говоря, они позволяют определить ком-
поненты л-мерпого вектора параметров (или элементы диагональной
матрицы параметров размера п X п) с точностью до одного параметра.
Так, если Р’3 есть квадратичная форма вида
Г3 = 0,5[х(1ь) — х3]тр[ж(1,.) — х3],
где р — диагональная матрица параметров, то уравнения (6.1.10) прини-
мают вид
Д.г2п __ Д^п2 _ _ Д.т2т (6.111)
Р1 Р2 Рп
При заданных максимальных отклонениях Дт,,,, опи определяют пара-
метры Pi (i = 1, п) с точностью до общего множителя.
Способ определения параметров функционала по максимальным до-
пустимым отклонениям может быть распространен и па подынтеграль-
ную функцию L, если опа является мерой точности отработки некото-
рой программы изменения x(t), u(t). В свете основной концепции при-
кладной СТАУ, изложенной во введении, такая задача возникает при
«иерархической» оптимизации. При этом (см. гл. 8) оптимизация «в боль-
шом» осуществляется сначала па основе простых моделей па старшем
«навигационном» уровне (термин заимствован из области управления
подвижными объектами). Далее полученные «программные траектории»
отрабатываются (воспроизводятся) па исполнительном уровне.
6.1.2. Итерационная коррекция. Изложенные выше приемы и рецеп-
ты позволяют выбрать структуру и ориентировочные значения парамет-
ров минимизируемого функционала. Уточнение значений параметров,
а иногда и структуры функционала, как правило, производится па ста-
дии проектирования конструктором в итерационном (итеративном) ре-
жиме. Оно может осуществляться и в процессе эксплуатации.
6.1.2.1е. Мощности множеств параметров минимизируемого функцио-
нала и оптимальных управлений. Как уже упоминалось, трудность ап-
риорного назначения мппимпзпруемого функционала, потребность в его
апостериорной коррекции иногда оказывает разочаровывающее воздейст-
вие па исследователей, особенно в абстрактно-математической теории уп-
равления. При этом логика рассуждений сводится примерно к следую-
щему. Если необходим поиск в пространстве параметров функционала,
то пе лучше ли сразу искать решение путем поиска в пространстве па-
раметров управлений (т. е. прибегнуть к так называемой «параметри-
ческой оптимизации»)? Такая постановка вопроса подкрепляется тем
обстоятельством, что в ряде случаев структура оптимальных управле-
ний известна заранее. Так, для линейных объектов и квадратичного ми-
нимизируемого функционала оптимальное управление линейно.
Одпако очень простые соображения указывают па принципиальное
превосходство оптимизации через минимизируемый функционал над
прямой «параметрической оптимизацией».
Первое соображение заключается в том, что даже в самой простой
линейно-квадратичной задаче мощность множества параметров опти-
мальных управлений обычно намного выше мощности множества пара-
метров минимизируемого функционала. Так, для объекта, описываемого
в п-мервом пространстве состояний, число параметров г линейных уп-
равлений равно гп. В то же время в квадратичном функционале с диа-
гональной матрицей параметров, которым обычно можпо удовлетворить-
ся, пе более п параметров. Ио наиболее выпукло различие проявляется
при оптимизации управления процессами, описываемыми нелинейными
моделями (а для оптимизации «в большом» именно этот случай харак-
терец).
Структура оптимального управления здесь вообще априори неиз-
вестна (если пе принимать во внимание представления в виде рядов с
бесконечным количеством коэффициентов). Поэтому прямая «парамет-
рическая оптимизация» невозможна, а субоптимизация затруднена. Меж-
ду тем оптимизация через функционал осуществима (см. гл. 8), и мощ-
ность множества параметров функционала может оставаться весьма
небольшой.
Наконец, еще одно соображение, показывающее возможность дости-
жения высокого «единства функционалов».
Вариационные принципы механики, электродинамики, термодинами-
ки [6.4, 6.5] указывают-, что огромное разнообразие процессов в неживой
природе порождается небольшим числом функционалов, которые мини-
мальны для истинных пли действительных процессов. Конечно, такого
единства функционалов в управляемых процессах, отличающихся от
«естественных» процессов неживой природы циркуляцией информации,
достичь нельзя. Все же можпо полагать, что внедрение методов приклад-
ной СТАУ в проектирование автоматизированных систем управления
технологическими процессами (АСУ ТП) и систем автоматического уп-
равления (САУ) подвижных объектов приведет со временем к унифика-
ции функционалов как по пх структуре, так и по параметрам (в опре-
деленной мере).
6.1.2.2°. Методика итерационной коррекции минимизируемого функ-
ционала. На стадии проектирования системы управления после предва-
рительного выбора функционала па основе описанных выше методик
производится синтез оптимальных управлений согласно методам, изло-
женным в гл. 8. Далее с синтезированным алгоритмом управления и
математической моделью управляемого процесса проводятся численные
эксперименты. Если результаты оказываются удовлетворяющими всем
требованиям, то дальнейшая коррекция функционала пе производится.
Однако это является исключением. Как правило, после рассмотрения ре-
зультатов численных экспериментов возникает стремление улучшить
процесс в том или ином отношении. Для этого производится коррекция
структуры илп параметров минимизируемого функционала. Эта коррек-
ция может осуществляться относительно целеустремленно, так как от-
дельные компоненты функционала отвечают за те илп иные качества
процессов в управляемой системе. В целом же здесь полностью при-
менима методика многофакторного эксперимента [5.1—5.3].
После коррекции функционала численный эксперимент повторяется,
и так до получения приемлемых во всех отношениях результатов.
Чем меньше затраты машинного времени па одпу итерацию, тем
быстрее достигается конечный результат. В этом отношении оптими-
зация ио так называемому критерию обобщенной работы (см. § 6.2 и
гл. 8) имеет неоспоримые преимущества.
Выбор и коррекция функционала может производиться и человеком-
оператором (диспетчером, летчиком п т. д.) в процессе эксплуатации.
В этом случае выбор производится нз заготовленного па стадии проекти-
рования набора функционалов. Человек-оператор в зависимости от сло-
жившейся ситуации (в том числе аварийной) может сменить мпппми-
вируемый функционал нажатием соответствующей кнопки.
Возможна и коррекция по воле человека-оператора параметров ми-
нимизируемого функционала. Разумеется, для предотвращения ошибоч-
ных действий человек-оператор должен иметь достаточно совершенную
систему отображения информации (СОИ).
§ 6.2. Развернутые формы функционалов для оптимизации
непрерывных детерминированных процессов
В СТАУ доказана теорема разделения [6.6, 6.7], согласно которой
для линейного управляемого процесса типа (1.2.9) при липейпом наблю-
дении с аддитивным белым шумом минимизация математического ожи-
дания квадратичного функционала приводит к системе, состоящей пз
ФКБ, построенного для детерминпроваппого (точно известного) управ-
ления, и алгоритма оптимального управления, построенного для детер-
минированного процесса с полной степенью непосредственной наблюда-
емости, в котором истинный вектор состояния заменен на выходной
вектор ФКБ (вектор оценки х).
Приближенное разделение имеет основание и для нелинейных сто-
хастических процессов (см. [6.8] и § 6.4). Это, а также прямое значе-
ние детерминированных задач придают особую важность детерминиро-
ванным функционалам.
6.2.1. Традиционные (классические) формы детерминированных
функционалов. Функционал общего вида (6.1.1) можно назвать класси-
ческим или традиционным, так как при l2 — t1( он использовался в клас-
сических задачах вариационного исчисления [6.9]:
задаче Больца, где 1'3 ф О, L Ф 0;
задаче Лагранжа, где Р’а = О, L Ф 0;
задаче Манера, где Vs Ф О, L = 0.
Опустим векторы параметров как аргументы функций в (6.1.1). Тогда
функционал Больца запишется в виде
(2
Z = У3 [х (i2)] + J L [х (6), и (6), 6] 6’0. (6.2.1)
*1
Это весьма общая формула функционала. Оптимизация управления мно-
гомерными нелинейными динамическими системами путем минимизации
функционала (6.2.1), как показано в гл. 8, сопряжена в общем случае
с большими трудностями. Поэтому чаще применяются частные формы
классического функционала (6.2.1), для которых решение задачи опти-
мизации несколько облегчается.
6.2.1. !°. Классический функционал е аддитивной функцией затрат на
управление. Зависимость подынтегральной функции L сразу от двух
векторных аргументов: вектора состояния и вектора управления услож-
няет решение задачи оптимизации управления. Решение получается про-
ще, если эта функция может быть представлена в виде суммы функции,
зависящей только от х(0), 0, и функции, зависящей от и(0), 0, т. е.
Б[х(0), ц(0), 0] = Q,[х(0), 0] + U3[»(0), 0],
где Q-., и Ua — заданные, обычно положительные, функции. Функция
173[и(0), 0], как правило, имеет смысл тех пли иных «секундных за-
трат» па управление. Поэтому функционал
I = [ж (QI + f <?з Iх <е)> е1 + J U3 [“ 01 М (6.2.2)
будем именовать классическим функционалом с аддитивной функцией
затрат па управление.
Заметим, что приведение задачи оптимизации к форме, при кото-
рой минимизируемый функционал имеет вид (6.2.2), так же как прове-
дение уравнений управляемого процесса к форме с линейно входящими
управлениями (см. гл. 1), может быть осуществлено путем расширения
пространства состояний. Действительно, пусть в исходном объекте по-
требляемая мощность пли ппые секупдпые затраты па управление за-
висят пе только от и(0), но п от я(0). Введем расширенный вектор со-
стояния хр = (х, и), приняв за новый вектор управления и* скорость
изменения старого:
й = и*.
Векторная величина и* интерпретируется теперь как совокупность
управляющих сигналов на входах некоторых интегрирующих управля-
ющих устройств. Ясно, что мощность таких сигналов уже пе зависит
от хр п минимизируемый функционал может быть представлен в виде
(6.2.2), а именно:
<2 Ч
I = V3 [хр (f2)| + [ Q3 [xp (0), 6] JO 4- J U3 [«* (0), 0] JO. (6.2.3)
6.24.2°. Классический функционал с аддитивной степенной функцией
затрат- на управление. Пусть функция U3 в функционале (6.2.2) равна
. . Qj
где qj > 1 — заданные действительные числа, такие, что Uj — четная
функция iif, kj >0 — заданные коэффициенты.
Соответствующий функционал
I = Р (*2) ] + f <?з Р (6). 61 + f 2 V? М (6-2-5)
J J >гз
далее именуется классическим функционалом с аддитивной степенной
функцией затрат па управление. Необходимо обратить внимание на то,
что все показатели степени в (6.2.4) больше единицы. Это связано с не-
равенством Гёльдсра [6.10, 6.11].
6.2.1.3е. Классический функционал с аддитивной квадратичной функ-
цией затрат на управление. Пусть в (6.2.4) qj — 2 (/ = 1, г). Тогда
’ к- 2
3=1 1
где К = diag 1к\, ..., кг) — диагональная невырожденная матрица задай
пых коэффициентов.
*2
Соответствую щи й фу и кциопал
*2 f2
1 = УзР О + j ?з I* (°). 61 + 0,5 f ит (0) К~ги (0) J0 (6.2.7)
именуется классическим функционалом с квадратичной функцией за-
трат на управление.
6.2.1.4°. Классический квадратичный функционал (Летова — Калма-
па). Пусть все три функции V-,, Q3, U3 выражаются квадратичными фор-
мами:
К3 = 0,5^) ра:^), Q3 = 0,5жфт, UB = 0,5u*K-iu, (6.2.8)
где Р, Р, К~' — заданные квадратные матрицы параметров (последние
две могут быть матричными функциями текущего времени 0).
Соответствующий функционал
*2
з? (0) (0) + _L J ит (0) к~ги (0) ае
h
(6.2.9)
является классическим квадратичным функционалом. Он также имену-
ется функционалом Летова — Калмапа. Это обусловлено следующим.
А. М. Летов [6.12] в 1960 г. ввел термин аналитическое конструиро-
вание оптимальных регуляторов (АКОР) для синтеза автоматических
регуляторов па стадии проектирования путем минимизации функциона-
ла типа (6.2.9). Точнее, в указанных статьях получено решение для
функционала «стационарного» вида (i2 = оо, t| = 0, р — 0), скалярного
управления и линейного стационарного управляемого объекта.
Практически одновременно была опубликована работа Р. Калмапа
[6.13], в котором иным методом решена та же задача в несколько более
общем виде с использованием функционала (6.2.9). В последующем эти
работы получили широкую известность и примепепие.
6.2.2. Функционалы обобщенной работы. Трудности решения задач
оптимизации управления нелинейными многомерными динамическими
системами путем минимизации классических функционалов*) обуслови-
ли появление функционалов нового типа, которые получили условное
наименование критериев или функционалов обобщенной работы (ФОР)
[6.14—6.19]. Хотя фушщиопалы обобщенной работы являются полуопре-
делеппымп, они, как показано в гл. 8 и многих приводимых в списке
литературы публикациях, могут играть фундаментальную роль в реше-
нии основной проблемы прикладной СТАУ — оптимизации управления
«в большом» в реальном масштабе времени.
*) Первоначальным стимулом явилось стремление к конечным ана-
литическим выражениям оптимальных управлений в простых липейпо-
квадратичных задачах оптимизации.
Полуопрсдслсппость функционала заключается в том, что оп содер-
жит неизвестное до выполнения синтеза оптимальное управление иоп.
Ото управление процессом типа (1.2.2), доставляющее минимум рассмат-
риваемому функционалу. Интерпретация принципиальных отличпй, вно-
симых в вариационные задачи оптимизации динамических процессов та-
кими функционалами, содержится в гл. 8.
Изложение ФОР начнем с общих, по редко применяемых форм.
6.2.2.1е. ФОР с аддитивными функциями затрат на управление. Пусть
заданы скалярные дифференцируемые функции векторных аргументов
£/э[и(0), 6], Z7* [иоп (0), 6] такие, что функция
* Г & 1
us (и, 6) + и* (UOI1, 0) - ия (иоп, 0)] и (6.2.10)
является положительно-определенной относительно и при любом 0, при-
нимающей минимальное значение при и — иоп. Тогда рассматриваемый
ФОР имеет вид
*2 (2
/ = Уз1а:(«2)] + ]elde+ f 1^3 [“ (°)- 01 +^з1“оп(0)- е]И°-
'1
(6.2.11)
6.2.2.2°. ФОР с аддитивными степенными функциями затрат на уп-
равление. Пусть
Г Qj Г Qj
U3(U,Q) = ^1-^L, (%n> е) = (6.2.12)
j=l 3 3 J=1 3 3
где
Hpi + llQi = 1, (6.2.13)
причем pj, qj — действительные числа, большие единицы; up___ четная
функция и.,; kj >0 (j = 1, г). При (6.2.12) функция (6.2.10) принимает
вид
г [ <7; 9; 9:-1
-I- 1 Ц7ОП_5ОИ
Й k Ч Pj ki ki
Эта функция относительно и имеет единственный минимум (равный пу-
лю) при и — Поп. Таким образом, условие положительном определенно-
сти (6.2.14) относительно и выполнено,
z В соответствии с этим данный ФОР имеет вид
rZO. (6.2.15)
1 ‘1
Коэффициенты kj в принципе могут быть функциями времени.
и- . (6.2.14)
6.2.2.30. ФОР с аддитивными квадратичными функциями затрат на
управление. Положим в (6.2.15) pj — qj = 2 (/ = 1, г). Тогда
J = VAX (г2)1 +
+ [ <23[*(0), 01 Л)+ 0,5
ч
плп
j = v3 р (У] +
*2 'а
-I- [<?3 к (0)- 01 Й0 + 0,5J[ит (0) К-1 и (0) + и-п (6) К-1^ (6)] ЙО, (6.2.17)
*1 о
где К — diag (А-,. А-,). Это наиболее распространенная в практичен
скпх приложениях форма ФОР.
6.2.2 Л°. Квадратичный ФОР. Еслп все функции в (6.2.17) квадратич-
ные:
О
I = 0,5zT (fQ) рх (<2) + 0,5 хт (0) Pz (0) d0 +
h
%
+ 0,5 I p (0) K-'u (6) + «Jn (6) K-iUon (0)] do, (6.2.18)
то ФОР называется квадратичным. Он используется преимущественно в
линейно-квадратичных задачах оптимизации.
6.2.2 .50. Пзопсриметричеекие интерпретации. Каждый из рассмот-
ренных функционалов может быть трансформирован, если ввести flonojr
мптельпое условие в виде интегрального равенства (ивопериметрическое
условие). Так, минимизация достаточно общего ФОР (6.2.11) эквивалент-
на минимизации классического функционала (6.2.2) при дополнитель-
ном условии
*2
[ U* [«он <°)-е1 6,0 = С- (6-2.19)
h
Интегральное равенство (6.2.19) может быть интерпретировано как
задание некоторой обобщенной работы управлений в оптимальной си-
стеме. Отсюда происходит название данной группы функционалов.
§ 6.3. Развернутые формы функционалов для оптимизации
детерминированных процессов е дискретным временем
Запишем общий функционал (6.1.2) без указания векторов парамет-
ров и при кк = А:2:
л,-1
z==F3[xp2]]-[- v £[*[*], «W, (6.3.1)
k=ftt
Вообще говоря, (6.3.1) является пе функционалом, а функцией х[/с2] и
предшествующих значений a:[Z ], ио в интересах общности будем имено-
вать (6.3.1) функционалом.
Частные формы (6.3.1) могут быть построены как простые анало-
гии функционалов с непрерывным временем (6.2.2) — (6.7.18) формаль-
ной заменой интегралов суммами.
6.3.1. Классические формы детерминированных функционалов. Пред-
полагается, что оптимизируемый процесс описывается разностным урав-
нением типа (1.2.18). Аналог задачи Больца получается (см. (6.3.1)) при
У3 Ф О, Л^О. Задаче Лагранжа соответствует Vs = О, L Ф 0. Аналог
задачи Майера Va 0, L = 0 характерен отсутствием «памяти» у функ-
ционала.
6.3.1.!°. Функционал с аддитивной функцией затрат на управление.
Аналогом (6.2.2) для случая дискретного времени является
*2-1 *2~1
' = ШЧ1 + 2 C3k[A'l, М+ 2 (6.3.2)
6.3.1.2е. Функционал с аддитивной степенной функцией затрат на
управление. Для случая дискретного времени функционалу (6.2.5) со-
ответствует
*2-1 *2-1 г
'=г iM] + 2Q*[х [к]’ + 2 2 - (63-3)
где q-j > 1 — заданные действительные числа такие, что up — четная
функция iij\ dj > 0 (/ = 1, г) —заданные коэффициенты.
6.3.1.3е. Функционал с квадратичной функцией затрат на управление.
При q j = 2 (/ = 1, г) функционал (6.3.3) принимает вид
*2“! *2-1
/ = F3[4*2H + 2 <?31ММ, *1 + 0,5 £ ^[k]D^u\k^ (6.3.4)
где D = diag (dh .dr). Функционал (6.3.4) является аналогом (6.2.7)
для случая дискретного времени.
6.3.1.4°. Квадратичный функционал. Аналогом функционала (6.2.9)
для дискретного времени служит
/ = 0,5zTp2] pz[fc2] +
*2-i £2-i
-J-0,5 z’HWlW “т [*'1 D~Pl- (6.3.5)
11=1^ /1=11}
6.3.2. Функционалы обобщенной работы. Так же как для классиче-
ских функционалов, дискретные аналоги функционалов обобщенной ра-
боты получаются простым построением соответствующих разност-
ных схем.
6.3.2.1е. ФОР с аддитивными функциями затрат па управление и
дискретным временем. Если функция (6.2.10) является положительно-оп-
ределенной относительно и и принимает минимальное значение при и =
= иоп, то аналогом функционала (6.2.11) служит
/ = *s Р [*2]J +
Л2-1 Л2-1
+ 2 <?3 [т [А], А] + У {*4 [“ l*J, *1 I- и* [140п [А], А]}. (6.3.6)
ft—
6.3.2.2е. ФОР с аддитивными степенными функциями затрат на уп-
равление и дискретным временем. Аналогом функционала (6.2.15) явля-
ется
I = Р [*21] +
*2-1 ft2-l
+ 2 м+ 2
h h=ltl
(6.3.7)
где Pj, q, > 1, Pj 1 4- 1 = 1, «р — четная функция Uj, j = 1, г.
6.3.2.3е. ФОР с аддитивными квадратичными функциями затрат па
управление и дискретным временем. При Pj = <jj = 2, j = 1, г, из (6.3.7)
получаем аналог функционала (6.2.17)
1= М*г211 +
Л2-1 ft2-l
+ 2 С3[^[*Ь *14-0,5 2 (6.3.8)
A=Aj h li)
6.3.2.4е. Квадратичный ФОР с дискретным временем. Аналогом функ-
ционала (6.2.18) служит
I = 0,5zT [А2] рт [А2] 4-
А,-1 А2-1
+ 0,5 хт PI ₽* 1*14-0,5 [ит [A] D^u [А] + ujn [A] D~luQn [А]]. (6.3.9)
ft—ft* ft—
6.3.2.5е. Гибридный (с непрерывным и дискретным временем) квад-
ратичный ФОР*). Для синтеза оптимальных управлений в системах,
в которых цифровая вычислительная машина включена в контур управ-
ления непрерывным динамическим объектом, может быть использован
гибридный квадратичный ФОР [6.20]
Г = 0,5а:т(«2)Р*(«2) +
*2
4-0,5 [р (0)^(0)
|- ит (0) К~ги (0) 4- %п (0) К2~Чп (6)] (б-З-Ю)
) Подпункт паписап Б. М. Миркиным.
Функционал построен па непрерывных состояниях процесса х(1) и ку-
сочпо-постоянпых значениях управления
u(t) = u(tk) = n[fc], te[tk,tk+i), k = l,t2—l-
Здесь р, р — положительные знакопостоянные*) матрицы соответствую-
щих размеров; К1г К2 — положптелыю-определеппые матрицы.
Такой критерий учитывает при постановке задачи непрерывный ха-
рактер протекания процесса в объекте и дискретный характер описания
управляющей последовательности, выдаваемой па объект цифровой уп-
равляющей машиной.
Функционал с помощью некоторых соотношений (см. п. 8.7.8) пре-
образуется в эквивалентный дискретный прп синтезе. Там же приве-
ден вид матрицы К2.
§ 6.4. Функционалы для оптимизации управления
стохастическими процессами
Величины (6.1.1), (6.1.2), вычисленные для реализации стохастиче-
ского процесса, являются случайными величинами. Для получения кри-
терия, пригодного для оптимизации управления стохастическим процес-
сом, величины типа (6.1.1), (6.1.2), отиесеппые к реализации процесса,
должны усредняться па некотором вероятностном поле.
6.4.1. Безусловные и условные математические ожидания функцио-
налов. Пусть для непрерывного управляемого стохастического процесса
существует безусловное распределение вероятностей с плотпостыо
р(х, и, <). Тогда безусловное МО функционала типа (6.12.1), отнесенного
к произвольной реализации стохастического процесса, будет иметь вид
х, и) р (х, и, i) dx du —
гзР(г2)] + j £Н0). “(°). °и0
'1
(G.4.1)
Величина J неслучайная, п постановка задачи оптимизация управ-
ления путем минимизации функционала (6.4.1) прозрачна в математи-
ческом отношении.
Одпако на практике часто нс может быть «ансамбля реализаций»,
и усреднение по этому ансамблю является чисто искусственным подхо-
дом. Кроме того, управление всегда сопровождается измерением, наблю-
дением текущего состояния управляемого процесса. Игнорирование соот-
ветствующей информации прп построении минимизируемого функцио-
нала неоправданно.
*) В отличие от положительно-определенных матриц, для них спра-
ведливы нестрогие неравенства' 0, г'рг 5s 0.
Более плодотворным является подход, когда минимизируется функ-
ционал
оо
Jy = Еу [Л = f I (ж, “) Р (z> «, t I Z) dx du =
—oo
I г 1
= Ey [x («2)J + j L lx (0), и (0), 01 dOj. (6.4.2)
Здесь p(x, u, t\Z)—условная (апостериорная) плотность вероятности
при наблюдении величины з в течение рассматриваемого интервала вре-
мени; Еу — символ УМО. Величина (6.4.2) является для ансамбля реали-
зации x(t), u(t) случайной. Однако это пе мешает ставить и решать
задачу ее минимизации для каждой конкретной реализации стохастиче-
ского управляемого процесса.
О лучшей приспособленности (6.4.2) к задачам оптимизации стохас-
тических процессов (в сравнении с (6.4.1)) свидетельствует следующее.
Пусть точность измерения (оценивания) x(t), u(t) неограниченно по-
вышается. Тогда условное распределение р(х, и, t\Z) стремится к 6-
фупкцпи с центром в истинных значениях х, и. Функционал (6.4.2)
здесь вырождается в функционал (6.2.1) для детерминированного про-
цесса. Так и должно быть, поскольку точно измеряемая реализация слу-
чайного процесса ничем пе отличается от детерминированного процесса.
6.4.2. Развернутые формы функционалов для оптимизации стохасти-
ческих процессов с непрерывным временем. Согласно только что сказан-
ному стохастические функционалы отличаются от детерминированных
символами безусловного плп условного математического ожидания. По-
этому пет необходимости записывать стохастические функционалы, со-
ответствующие всем вариантам (6.2.2) — (6.3.9). Для непрерывных про-
цессов ограничимся вариантами (6.2.2), (6.2.11), как достаточно общими
(из пих, как частные случаи, получаются все другие функционалы § 6.2).
6.4.2.1е. Стохастические аналоги классического функционала с адди-
тивной функцией затрат иа управление. Эти функционалы имеют вид
<2 '?
V3 Iх (4)1 + 1 ^3 Iх (°)- 01 dQ + j из Iй <e)’ 0] сЮ ,
*1 <1
Jy = Ey Ps [я (t2)] -I- f Q3 [x (0), 0| d0 + j U3 [u (0), 01 d0
(6.4.3)
(6.4.4)
6.4.2.2°. Стохастические аналоги ФОР с аддитивными функциями за-
трат на управление. Если 0)-|- U'3 (моп, ®) — (И°п’ U
является положительпо’определепной функцией относительно и, прини-
мающей минимальное значение при и == иОп, то функционалами для
оптимизации управления стохастическими процессами могут служить
2
2
f Us [“on (°). °] de
(6.4.5)
( *2
= Еу р73 [г + j Q3 [а: (6), 6) б7О +
*2 '2
+ [ из [и (0), 01 м + f (7* [Иоп (0), 0] оо
(6.4.6)
6.4.3. Развернутые формы функционалов для оптимизации стохасти-
ческих процессов с дискретным временем. Ввиду тривиальности перехо-
да от детерминированных функционалов к стохастическим, как и в
предыдущем случае, ограничимся относительно общими вариантами.
6.4.3.1е. Стохастические аналоги классического функционала с адди-
тивной функцией затрат на управление и дискретным временем. Такие
функционалы имеют вид
1 l<2 1
J = E1P3[x[fc2]]+ 2 <?3[*1*1, *1 + 2 U3 [u [7c], Л] ,
fe=/?j h~
ft2-1 Й2“1 1
Jy = Ey 7зН/£2]]+ 2 C3kR],fc]+ 2 Z73[u [fc], /г] .
(6.4.7)
(6.4.8)
6.4.3.2е. Стохастические аналоги ФОР с аддитивными функциями за-
трат на управление и дискретным временем. Если удовлетворяется ука-
занное выше условие для функций 77э, 77*, то для оптимизации управ-
ления стохастическими процессами с дискретным временем могут ис-
пользоваться функционалы
J = Е
*2-1
МИМИ S <23[И*1,*1 +
Л='!1
ft.-i й2-т
+ X U3 [и [Л[, 7сЦ- S Us [“он 1*1- *]
/’•=/< J &—/<!
&2-1
Еэ№]]+ 2 <231И*1. *1 +
*=*1
(6.4.9)
V1 '<2-г 1
+ Ц *1+ 2 [“он 1*1. *] - <С-4’10)
J
В конкретных случаях функционалы (6.4.7) — (6.4.10) детализируются за-
данием функций V3, Q3 и Us.
ГЛАВА 7
НЕКОТОРЫЕ ОБЩИЕ МЕТОДЫ ТЕОРИИ
ОПТИМАЛЬНОГО УПРАВЛЕНИЯ
Данная глава содержит краткое изложение общих методов класси-
ческого вариационного исчисления применительно к задачам оптималь-
ного управления непрерывными процессами, а также изложение прин-
ципа максимума Л. С. Понтрягина.
Непосредственное применение этих методов для задач синтеза оп-
тимального управления сложными многомерными нелинейными систе-
мами обычно наталкивается па серьезные вычислительные трудности.
Одпако это не умаляет принципиального значения этих методов, а с
развитием средств вычислительной техники делает, их применение в за-
дачах синтеза вполпе реальным.
§ 7.1. Классическое вариационное исчисление
и современные задачи оптимизации динамических систем
К классическому вариационному исчислению принято относить все
методы решения оптимизационных задач, основанные на анализе необ-
ходимых (и достаточных) условий оптимальности, вытекающих из апа'
лиза вариаций (малых смещений) минимизируемого функционала.
7.1.1. Постановка задачи. Пусть объект описывается па интервале
[б, дифференциальным уравнением
х (t) = / (х, и, I), ielSK, usR1”. (7.1.1)
Вудем считать, чте область допустимых управлений t7Hon есть множество
всех ограниченных непрерывных функций u(Z) па [Zb Z2] таких, что
u(t) е Q для любого t из [Z|, t2], где Q — заданное подмножество из (R™.
Введем скалярный критерий качества (см. п. 6.2.1)
*2
I = Г3 (х (<2), Z2) + J L (х, и, Z) dt, (7.1.2)
где L(x, и, t) —действительная функция па R X Rm X [Zp zg] и
Гз(г(г2), Z2) —действительная функция па R" х <2].
Пусть S — заданное множество из R’1 х АЬ Элементами S'
являются пары (x(t2), z2). Назовем S множеством целей (множеством
конечных состояний) и Va(x(t2), Z2) —функцией конечных состояний.
Будем считать, что функции f(x, и, Z) и L(x, и, Z) непрерывны и
дифференцируемы по совокупности переменных х, и и Z.
Пусть Zi — элемент из [?,, /2] м z(ti) —элемент из (р/\
Задачей оптимального управления для системы (7.1.1) при сделан-
ных предположениях относительно множества конечных состояний 5 для
функционала I (7.1.2), области допустимых управлении u(t) s Q и на-
чального состояния x(ti) в начальный момент времени Z| является отыс-
кание такого управления u (2) нз Q, что функционал I достигает мини-
мального значения.
Конкретизация выражений /(.т, и, t), L(x, и, t), KHMs), ti) и мно-
жества целей S порождает различные типы задач синтеза управлений
[7.1—7.6].
7.1.2. Задача со свободным правым концом н заданным временем пе-
реходного процесса. Пусть заданы объект в виде (7.1.1) с начальным
условием ж((,), время окончания переходного процесса t2 и функционал
качества
*2
I = Гз (х (f 2)) + L (*> О dt- (7-1-3)
п
Образуем вспомогательный критерий качества I прибавлением к (7.1.3)
системы дифференциальных уравнений (7.1.1) с некоторыми множите-
лями, совокупность которых представим [2.10] вектором Х(2) =
= [X,(i)... мог,
*2
Г= v3 (х (г2)) + j {£ (.-г, и, t) + Хт (0 [/ (Я, и, t)—x (£)]} dt. (7.1.4)
Множители 7,(2) носят название множителей Лагранжа.
Введем скалярную функцию Ж(х, и, I) (гамильтониан):
<?в(х, и, }., I) = Цх, и. t) +№(t)f(x, и, t). (7.1.5)
Интегрируя по частям последнее слагаемое в правой части выражения
(7.1.4) и учитывая (7.1.5), получим
7 = М* Г2)) + (г1)* (М - (Г)* ('2) -I-
*2
-I- [ {W, И, X, t) Хт (2) X (2)} dt. (7.1.6)
*г
Найдем вариацию критерия качества 7, соответствующую вариаци-
ям вектора управления u(t) с учетом возникающих вариаций х(1):
& = ?Т (tJ & (<2) + хт (<1) (<1) +
I { 2) J
*2
( (Г (X, и, X, t) + ^т (г)1 (г) _|_
J Н ^(0 -I
+ и, хм 6M(!;)U. (7.1.7)
ди (1) J
Для того чтобы исключить влияние вариаций 6х(7), вызванных ва-
риациями по управлению 6u(Z), на вариации критерия 67, выберем мно-
житель X(Z) таким образом, чтобы коэффициенты цри 6х(7) и 6x(Z2) об-
ратились в пуль. Тогда
Х(7) =-
дУё (.т, w, X, Z)
дх (Z)
дх (Ч)
т
(7.1.8)
Система скалярных уравнений типа (7.1.8) называется сопряженной
системой.
При таком выборе X(Z) уравнение (7.1.7) примет вид
'г
67 = хт (t ) <5х (t\ -I- ( О Ьи (7) dt. (7.1.9)
' 17 ' 17 J ди (?)
7
Выражение (7.1.9) называется первой вариацией критерия качества I.
Поскольку 1 = 1 па решениях системы (7.1.1), то и 57 = 67. Если
7 достигает экстремума, то 67 должно быть нулем для произвольных
би (7). Учитывая, что в рассматриваемой задаче х (tj = х^ s Кп задано,
т. е. 6х(7|) = 0, a u(t) s fi, где й —множество ограниченных непрерыв-
ных функций, необходимые условия стационарности критерия качества
1 .можно записать в виде
8Уё (х, U, 1., I)
ди (I)
(7.1.10)
Уравнения (7.1.8) и (7.1.10) известны в вариационном исчислении
как уравнения Эйлера — Лагранжа.
Таким образом, для того чтобы пайти и (?) еД при котором крите-
рий качества достигает стационарного значения, нужно решить двух-
точечную задачу, т. е. решить систему дифференциальных уравнений
порядка .2 и
х(?) = ](х, и, t),
Г 8f(x, и, t) 1Г Г 8L{x, и, 7) ]т
М0= —[ дх(1) ]И0—[ ]>
(7.1.11)
где и(7) определяется из условия
df (х, и, 7)
ди (?)
(7.1.12)
с п краевыми условиями x(?i) == x<i> на левом конце и п краевыми ус-
ловиями Х(?2) = (бЕа(х(?2))/бх(?2))т на правом конце.
Для того чтобы критерий качества I достигал локального минимума,
недостаточно выполнения условия 8<№(х, и, X, t)/8u(t) =0. Необходимо,
чтобы вторая вариация функционала 1 па решениях системы была бы
неотрицательна для всех значений 8u(t), т. е.
8х^) +
US. (J J
~д2Ж
дх1
IF Ж
ди дх
д2^ J
дх ди
д2Ж
ди2
8х (<)j
би (£) J
(7.1.13)
при условии 6(.г(?) —f(x, и, <)) =0.
Нахождение второй вариации б27 проведено в п. 7.1.3.2е, где синтези-
руются управления для более общей задачи.
7.1.3. Задача с фиксированными значениями некоторых переменных
в заданный момент времени окончания переходного процесса. Широкий
круг задач оптимизации управления содержит требования к конечному
состоянию объекта, предъявляемые только к некоторым компонентам
вектора состояния. Ниже рассматриваются такие задачи.
7.1.3.!°. Исследование первой вариации. Предположим, что в зада-
че конструирования оптимальных управлений, рассмотренной в п. 7.1.2,
некоторые компоненты вектора состояния x(t) должны принимать зара-
нее заданные значения при t = t2. Пусть задано
x,-(t2), i = 1, q. (7.1.14)
Тогда первое слагаемое критерия качества (7.1.2) будет являться функ-
цией остальных х,(72), i = q + 1, п, т. е.
Н3(ж(!2)) = V3(xe+1(t2)....х.(/2)). (7.1.15)
Выводы п. 7.1.2 справедливы для рассматриваемой задачи вплоть до
уравнения первой вариации (7.1.9). Учитывая, что x(t\) задано, т. е.
бх(Ц) = 0, перепишем (7.1.9) в виде
^"(4) =
(х, и, t)
дх (t)
ГdL (х, и, г)1т
| дх (1) J ’
0 при
^з(*(М)
---------при
7 = 1, Ч,
бх.((2)
i = <i + 1, «•
(7.1.16)
(7.1.17)
(7.1.18)
ЛМ (£) =
В рассматриваемой задаче 6u(t) пе являются полностью произволь-
ными. Допустимые значения 6u (t) подчинены ограничениям, а именно
L, (Z2) задано дли i = 1, g, или
6xi(Z2)=0, i = W (7.1.19)
Приращение квордипаты x,(Z2), i = 1, q, соответствующее произвольной
вариации 6u(Z), нетрудно отыскать, назначив в (7.1.2) У3 = x{(Z2) и
L(x, и, t) = 0. Тогда, учитывая (7.1.16), (7.1.17) и (7.1.18), будем иметь
для субвектора x(Q) с компонентами х,, i = 1, д,
t2
Ч»(*2) = j ЛТ(<)( (7Л-2°)
h
где Л(0—матрица размера и X <?, удовлетворяющая уравнению
- , \df(x, и, 7)1т
Л(<)=Л(/) (7Л'21)
при граничном условии
Л(/2) = [Е О]1', (7.1.22)
тде Е — единичная матрица размера д X Q-
Добавим вариацию Sx<Q)(t2) с некоторым вектором множителей
7 = ['р..-7в]т к выражению (7.1.16). В результате получим
*2
« + r’4.l(y = He-Wa +
*1
+ [(ЛМ(О)Т + ТТЛт (01 ° } (Z) dt. (7.1.23)
Выберем 6u(Z) в виде
= (7.1.24)
где к — положительная скалярная величина. Тогда выражение для ва-
риации (7.1.23) принимает вид
*2
= - 4 IКЛоГ + ?ТАТ (/)] (7.1.25)
Так как па решениях системы (7.1.1) и при выполнении условия
_____________________ _ ?
6zi(f2) = 0 для i = 1, д справедливо ~р у ‘Y.fixi («2) = ol, то пе-
i=i
обходимые условия стационарности критерия качества (7.1.2) можно
записать в виде
dL (х. и. t) r/ !lnU , _ _ п dt (х, и. t)
' du (t) - + К*"”* <^Т+ VTAT <01 - = 0. (7.1.26}
Определим множители так, чтобы выполнялись условия б.т; (<2) = 0,
i=i, q. Подставляя (7.1.24) в (7.1.20), получим
*2
„ С m д/ (х, и, 1.) [ОЦх, и, t)
бх(9) (4г) = — * J Л («) fjn (Z) +
+ [(лИ1 (0)т + Ттлт (/)] 4dt = О
ии {IJ J
ПЛИ
2
f df(x, и, f) (dL (а?, п, /)
J Л W Ни (/) [ ии (0 +
‘1
8f (,z, и, t}
clu {I)
(7.1.27}
Введем вектор
и матрицу
Тогда условие выбора вектора } можно записать в виде d + (?} = 0. Со-
множители следует выбирать на основе соотношении
7 = - (7.1.28)
Существование обратной матрицы вытекает из условия управ-
ляемости системы. Так, если Q~‘ не существует, то невозможно найти
вариацию би(<), переводящую систему в состояние, удовлетворяющее од-
новременно всем q ограничениям при t — «2.
Таким образом, необходимые условия оптимальности динамической
системы (7.1.1) с заданными условиями на правом конце (7.1.14), учи-
тывая (7.1.17), (7.1.18), (7.1.21) и (7.1.22), могут быть записаны в виде
и, X, i)/o« (() = 0, где
24s(z, и, Ji, 1) — L(x, и, t) Л'(г)/(г, и, I)
и
X(t) = [дЖ(х, и, X, t)/dx(t)y,
(7.1.29)
Tj, 7 = 1,9,
В некоторых задачах множество целей задастся в виде гладкого мно-
гообразия, т. о. при t = /2 должно выполняться
gi(x(Z2))=0, «=£Т (7.1.31)
Вспомогательный критерий качества образуется присоединением к
исходному функционалу (7.1.2) системы (7.1.1) с множителем Л (1) s R”
и ограничении (7.1.31) с множителями у, т. е.
*2
1 = Гз (ж (Q) + (* (<2)) + I {L (.т, и, t) + Лт (!) [/ (X, и, t) - х (/)]} dt.
'г
(7.1.32)
Введем обозначение
Ф(х(/2)) = В3(х(«2)) + Пг(*(12)). (7-1.33)
Тогда необходимые условия стационарности I будут иметь вид 2п
уравнений
• • Г ОЖ (х, и, X, t) ]т
ж(1) =/(ж, и, t), x.(t) = —[----------------j (7.1.34)
и т уравнений
дЖ(х, и, Л, t)/du(t) = 0, (7.1.35)
где
Ж(ху и. К, t) = L(x, и, t) + Лт/(ж, и, t), (7.1.36)
а также 2п граничных условий
x(t>) и X(Z2) = [бФ(ж(Ь))/дж(«2)]’' (7.1.37)
и q дополнительных условий
g(x(Z2))=0. (7.1.38)
Условие (7.1.35) определяет m-мсрпый вектор управления u(Z). Си-
стема 2я дифференциальных уравнений (7.1.34) с 2п граничными усло-
виями (7.1.37) описывают двухточечную краевую задачу с q параметра-
ми у,-, i=l, q, которые находятся из (7.1.37) так, чтобы выполнялись q
условий (7.1.38).
7.1.3.2е. Исследование второй вариации. Для нахождения достаточ-
ных условий оптимальности управления, организованного в соответствии
с решением двухточечной краевой задачи (7.1.34)—(7.1.38), рассмотрим
выражение для второй вариации
- 1
б27=т W(i2)
a2v3
дх дх'1
х(*г) + [тт^ НМ)1х
&(г2) +
[бхт (t) бит («)]
28хх (х> “> Звхи (х> 4)
Зв-UV ui Л, 0 28 .,и (х, ut X, t)
1ЛЛ. Г ' • ' 1Л1Л
Гбх (01
I *
[би (0 J
(7.1.39)
Задача исследования второй вариации при всех би(0 =/= 0 называет-
ся в классической литературе ио вариационному исчислению присоеди-
ненной задачей на минимум.
Прибавим к выражению (7.1.39) следующее тождественно равное ну-
лю выражение:
?2 ,
вз? (t2) (х (t2)) — 6gr (X (i2)) ay + |dTTliT (t) [fx (X, U, t) 6x (0 +
'i
+ fu (x. u7 0 6u (o — fix (/) ] 4-
+ -y 6xT (0 S (0 [/A. (x, u, t) Их (0 + fu (z, u, 0fiu (0 — 6z (0]| dt = 0,
в котором dy = const, R(0 и S(t) должны быть определены. Интегрируя
йут7?т(/)бх(0 и бхт(05(0бх(0 по частям, получим
б2/= -^6x^)1 _^-1_^+{^(жОг))]х_5({2) I 6z(t2)T
\ U 7ЛУ (J А7 J
+ dTr I [<?Х (* (9) - RT ('г)] бх ('s) “ 6g (х Oi +
+4-Ь;Т (г1)5 (' г)fix (zi)+б*т ('О П (4r) dy+
+ 4" f f2dVr [ят (0 + (t) fx “> 0] бх (0 -I-
+ 2dVT7?T (0 fu (х, и, t) би (0 + бхт (0 5 (0 бх (0 4-
+2 [бхт (0 fx (х, и, 0 4- бит (I) fu (х, и, 0] 5 (0 бх (/) 4-
4- [бхт (0 бит (0]
Звхх (х, и, х, 0 28xv (х, и, X, 0
-Звих (^> м, Л, 0 S^uu (х, и, Л, 0
бх(01]
} at.
8и (?) J)
(7.1.40)
Расппшем отдельно подынтегральное выражение
0,5
[бхт (0 [5 (0 4- « (0 fx «, 0 + С (*> “> 0 S («) 4-
4- 28хх (х, и, X, 0]бх (0 4- бит (0 (х, и, Л, Z) би (<) +
+ бхт (Z) [Л (Z) + fx (х, и, t) R (t)] dy + [A (Z) + Z?T (Z) fx (x, u, t)]x
X бх (Z) + 6xT (Z) \Жхи (x, u, A, t) + S (Z) fu (x, u, Z)] 6u (Z) +
+ 6«T (Z) [3^x (x, u, A, Z) + fu (x, u, t) S (t)] бх (Z) +
+ dYTZ?T (Z) fu (x, u, t) 6u (Z) + 6zzT (Z) fl (x, u, t) R (Z) dy] dt.
Выберем матрицы 5(Z) и R(Z) так, чтобы обращались в пуль выражения,,
стоящие перед вариациями 6x(z), dy, 6x(Z2), т. е.
Л G) -Ь 8 (О (Ж1 0 ~Ь /х Q $ (О ~Ь Явхх и> 0 ~
= [2£хи (X, и, fu (х, и, Z)] (X, u, A, Z) X
X [^их^ ". Ъ t) + fu(*, ", i) S (Z)], (7.1.41)
S2V3(x (Z„))
7? (Z) + fx (x, u, Z) R (Z) — [^xu w*
+ s (Z) fl (x, u, Z)] M~l (X, u, A, Z) fl (x, u, Z) R (Z) = 0, (7.1.42).
R (У= й(х (Ч))-
Введем матрицу Q(t), определяемую решением уравнения
<?(Z)=/?T(Z)7u(x, и, t)3fg~l(X, и, A, Z)/^(x, и, t)R(t), (7.1.43)
С (9 = 0.
Выражение для второй вариации (7.1.39) с учетом выбора матриц R(t),.
S(t) и назначения матрицы Q(t) будет иметь вид полного квадрата, т. е.
627 = 0,5<5х‘ (Zj) 5 (ZJ бх (ZJ + бхт (ZJ R (ZJ бх (Zx) —
f2
- 6gT (X (Z2)) dy + o^dy^l^dy + 0,5J (x, zz, A, Z) [ {^ux(x, u, A, Z)H>
'i
+ fl (x, u, t) S (I) I бх (Z) + fl (x, u, Z) R (Z) dy] +
-|-6u(Z)}T^uu(x, u, A, Z) {^7i (x, u, A, z) [(^UX(X, u, A, Z) -|-
+ fu (x, u, Z) S (Z)] бх (Z) + fl (x, u, Z) R (Z) dy] + 8u (Z)] dt. (7.1.44)
Выберем dy так, чтобы удовлетворялось уравнение
dy = ^-‘(Z)[6g(x(Z)) — 7?T(Z)6x(Z)]. (7.1.45)
Тогда (7.1.44) можно переписать в видо
б27 = 0,5бхт (ZJ [5 (ZJ - 7? (ZJ Q~l (Zx) 7?т (ZJ] бх (Гх) +
+ 6gT (х (ZJ) I?-1 (^) R (ZJ бх (Zx) - 0,56gT (х (ZJ) С"1 (9 6g (x (Zx))
*2
-j- 0,5 J UU 0 {^@ux w’ 0 H~
*1
+ fl (x, u, t) [5 (t) - Z? «) <?-l (<) RT («)] 6x (<) +
+ /£(*. t)R (t) <2-1 {t)8g (x(l))[ + 6u(t))>T x
X 36 uu (x, и, A, t) {36~l (x, u, A, t) {36 ux (x, u, A, t) -f-
+ (x, и, I, t) [S (t) - R (t) f?-1 «) RT (t)] 6x («) +
+ /^(x, u, t) R WQ-1 (l)6g(x(«))} + 6u(«)>d«. (7.1.46)
Из (7.1.46) видно, что для любых траекторий с одинаковыми началь-
ными и терминальными условиями, т. е. при 6х(ц) = 0 и 6g(x(t2)) = 0,
вторая вариация строго больше пуля для всех 6u(t), за исключением
тех, при которых подынтегральное выражение (7.1.46) обращается в
пуль, т. е. за исключением вариации по управлению, определяемому
выражением
6u (1) = —Ж^(х, и, A, t) {Зёг1Х (х, и, A, t) +
+ fu (х, и, «) [У (!) ~ R<J) Q-1 (t) /?т (/)] ] бх (1) (7.1.47)
Из (7.1.47) следует равенство би(1) = 0, если бх(Ц) = 0, 6g(x(t2)) =
= 0 и при t е [t|, t2] выполняются условия
<7^„„(х, u, A, t) > 0, (7.1.48)
Q(t) < 0, (7.1.49)
5(t)—R(t)Q~t(t)RT(t) ограничена при ti sc t t2. (7.1.50)
Это означает, что б2/ > 0 для всех ненулевых 6u.(i) при бх(«,) = 0,
6g (x(t2)) =0. Таким образом, исходное управление u(t) доставляет ло-
кальный минимум критерию качества I.
Условие (7.1.48) обычно называют условием выпуклости (или уси-
ленным условием Лежандра — Клебша), условие (7.1.49) —условием нор-
мальности, а условие (7.1.50) —условием отсутствия сопряжсппых точек
па траектории или условием Якоби.
Условия (7.1.48) — (7.1.50) можпо ослабить. Действительно, если
Ж(х, и, A, t)—гладкая функция и ограничения на управления отсут-
ствуют, то необходимые и достаточные условия локального минимума
функционала качества I можпо записать в виде
а№и{х, и, A, t) = 0, ^uu(x, и, X, t) 0.
В классическом вариационном исчислении это условие называется не-
обходимым условием первого порядка.
Что касается условия нормальности, то уравнение (7.1.45) позволяет
сделать заключение, что малые изменения 6g(x(t)) могут быть получе-
ны при малых изменениях только в случае невырожденности матри-
цы <2(t) при t, t < t2. Если 28ии(х, и, Л, t) > 0, то из (7.1.43) следует,
что (?(t) 0, а так как Q(t2) = 0, то, следовательно, Q(t) 0.
И, наконец, если S(t) — 2?(t)^-1(<)/?','(«)-> сю в некоторой точке t = t'r
где ti I' < <2, то необходимо, чтобы некоторая линейная комбинация
f>x(t') была равна нулю. Эго в свою очередь означает, что система допу-
стимых возмущений имеет размерность меньше чем п. Следовательно,
поверхность постоянных значений 1 в окрестности точки t = t' имеет
взлом, поскольку <PU8x2(j.) -* оо при t —t'. Таким образом, участки тра-
ектории и управлений на отрезке [G, <2], где t < t', a t2 фиксировано,
не будут минимизирующими. Проверку условия ограниченности матри-
цы S(t)—удобно проводить, начиная с правого конца
траектории, поскольку S(t2), Z?(t2) и Q(t2) заданы формулами (см.
(7.1.41) — (7.1.48)). Отметим, что если S(t)->-ooI то это не обязательно
означает, что S(t) —-> оо.
Исследование выражения для второй вариации (7.1.44) дает возмож-
ность организовать управление объектом в окрестности некоторой нор-
мальной траектории с помощью обратной связи. Если поминальная тра-
ектория оптимальна, то управление при бх(£,) ф 0 и 6g(x(l2)) =-/= 0 мож-
но построить в виде
6u(i) — — (х, и, %, t) {[2&ах (х, и, X, t) +
+ £>, и, Z){5 (0-7? (OC~Ht)^T (/)}]} (?)+
+ и, t) R(t) Q^1 (<) 6g(x(«2)),
где матрицы <$(?)> 7?(i) и Q(t) отыскиваются па стадии проектирования
системы.
7.1.4. Задача с фиксированными значениями некоторых переменных
состояния в неопределенный момент окончания переходного процесса.
В отличие от задачи, рассмотренной в п. 7.1.3, время окончания переход-
ного процесса здесь не задано, и целесообразно считать t2 еще одним
параметром, оптимизирующим систему управления (7.1.1) в соответствии
с критерием качества (7.1.2).
Приращение вспомогательного критерия качества, вызванное вари-
ацией управляющих воздействий и временем омопчапия переходного про-
цесса, имеет вид
2 '2/
+ L {х, и, t2) dt2 + (^“('г))Т бх - (ЛМ (*2))т бх (12) +
+}{[ ь (°+
где 6x(t) —вариация траектории, вызванная вариациями по управлению;
c?x(t2)—вариация траектории, вызванная вариациями по управлению и
по времени окончания переходного процесса dt2.
Полное приращение вектора х в конечное время i2 можно записать
в виде [2.11]
dx (t2) = fa (<2) + x (i2) dt2 + 8x (t2) dt2 + О (dtf),
где О —члены порядка выше первого. Мы рассматриваем лишь сла-
бые вариации. Поэтому величина 6x(t2) является малой и произведени-
ем Sx(t2)dt2 можно пренебречь как величиной второго порядка малости.
Таким образом,
dx(t2) — 6x(t2) + x(t2)dt2. (7.1.52)
Подставляя 6x(i2), определяемую из выражения (7.1.52), в (7.1.51),
получаем
[6V (x(t ))
+ L (х, и, UM(«2))T х(г2) dtz +
+ dx(t ) ( 2)) “X(J9) +
*2
+,f (Нгдг2+«W + (kM(0)’] s, („ +
13L (х, и, t) . 8f(x, и, i\ 1 „ 1 „ ___
- du(i) - + мо'-j б“ (г)/ dt- (7Л-53)
дифференциального уравнения
Выберем функцию 7||<г11 (г) как решение
(7.1.17), (7.1.18). Вариация (7.1.51) в этом случае принимает вид
d[ =
'8УЯ (ХО
dt2
2
Г fdL^u^J) + (хМ(г))т df(x, и, Q1 &и (г) dit (7 л 54)
J I ди (t) ди (t)
где бх(«|) = 0, так как x(ii) задало.
Вариации управляющих воздействий 6и(<) пе являются полностью
произвольными. Но являются полностью произвольными и вариации
окончания переходного процесса. Допустимые значения бм(<) и dt2 под-
чинены ограничениям: х, (г2) —заданы, i = 1, q, или
(t2) =0, i = 1, q.
(7.1.55)
Приращения координат x<(t2), i = 1, q, соответствующие произволь-
ным вариациям бм.(г) и dti, нетрудно отыскать, подставив в (7.1.54)
Р3(х(/,)) = х,(/2) и Цх, и, t) =0. Тогда, учитывая (7.1.17) и (7.1.54),
будем иметь
*2
, С . df (х, и, t)
</х(<7) (/2) = Аа) (ж’ “> гг) ^гг + J Л ди (г) $и (df’ (7.1.56)
где Л(0 определяется решением дифференциального уравнения (7.1.21),
(7.1.22). Умножив уравнение вида (7.1.21) на постоянный транспониро-
ванный вектор 7, прибавим полученные выражения к (7.1.54). Получим
d/ + ?Tdxw) (t3)=
(x (/.,))
"dt ~ (X> ‘2) +W0\t2))'r f (x, u,
*2) + v'%) (X, u, t2) dt2+
ЯдЬ(х, u, t) u, t))
-^(7) - + IU V))T + ? Л (*)) V(i) j 6u (t) dt. (7.1.57)
'i
Выберем 6и(/) и dz2 следующим образом:
dt2 = “ /li
+ (ЛМ(«2))Т/(Ж, и, Г2) + т7(<г)(*. <2)],
(dL(x, и t) r, . rri .df(x, u, t) )t
6u = — Ц du I -[(A (t)) + у A (i)I au(t)
(7.1.58)
(7.1.59)
где 7,-| и A2 — положительные числа.
Выражение (7.1.57) с учетом (7.1.58) и (7.1.59) принимает вид
1|бК,(х(«2))
й/ у dx(5) (t2) =- 1Ч |-------+ L (х, и, «2) +
+ U"”(4))T/(^ “ Q + v7(5)(a и. *2)|2-
12
- k2 JI аЛ£(0 ° + ((хМ1('))т + ?ТЛТ (i)1 dfSd“(tr Гdt- (7•1-CG)
Так как па решениях системы (7.1.1) и при выполнении условия dx, (t2) =
= 0, i ~ 1, q, справедливо dl= dj то необходимые условия
стационарности критерия качества (7.1.2) можпо записать в виде
SVs
-1- L (х, и, t2) 4- (лМ(12))т / (х, и, t2) + т7(9) (^. %) = 0, (7.1.61)
2^,+ КЛ>)'+т’л’<.)1^-, = ».___________________________
1
Для отыскания множителей 74 воспользуемся соотношением (7.1.56). Под-
ставляя в него (7.1.58) и (7.1.59) и учитывая, что dxi(t2) = 0, I — 1, q,
получим
*1Ад) (х’ У
Г^з(ЧМ)
^2
f2
[’ df(x, и, t) (ТбЛ (.г, и, /)
Л du (7) -----
ди (I)
df (х, и. t)
ди (I)
+ рАд)(х’ (2)Ад)(х> “>
2
(’ т ^/(Ж> «,
PW ди (I) >
л f (х, и, О Тг 1 ,
A(i)dzly = O. (7.1.63)
L (л
Дополнительно к обозначениям (7.1.28) введем матрицу и вектор:
5 = Ад) (х> “> *2) Ад) (*’ и’ 1г)’
(7.1.64)
г = Ад) (*’
Тогда из (7.1.6) получим
7 = -[<2+ (к}/к2)8]-'[й + к}/к2]. (7.1.65)
Учитывая условия стационарности (7.1.61) и (7.1.63), последнее вы-
ражение можно переписать в виде
7 = —(J-’d. (7.1.66)
Таким образом, 7,- не зависят от коэффициентов kt и к2. Существование
обратной матрицы (J-1 вытекает из условия управляемости объекта.
Окончательно необходимые условия стационарности критерия каче-
ства (7.1.2) для рассматриваемой задачи можно записать в
Й73 (Х (г2-)) , . ... „
----(X, U, Л, t2J = U,
(.т, ич 1}
виде
(7.1.67)
где
ди(1) О’
(7.1.68)
Зё(х, и, К, 1) = L(x, и, t) +ХТ(7)/(А w, t),
д?в (х, и, X, 0 ]т
Х = —
дх (г)
ь-
ЭД)
дхА12)
при
при
7 = 1, Ч,
i = с/ -j- 1, п.
(7.1.69)
(7.1.70)
(7.1.71)
Обобщим получеппыс результаты па случай, когда множество целой
задается в виде гладкого многообразия, т. е. при t = С должно вы,
полпяться
g,-(x(M)=0, i=l?V (7л-72>
Тогда, учитывая результаты п. 7,1.3, условия стационарности (7.1-34) —
(7.1.38) дополняются условиями
аф (Х(Ч)
----и, К i2)=0
или
(1ф (х (tA)
—+ L (х, и, г2) = 0, (7.1.73)
где
Ф(х(9) = Т;,(х(0)) + Y'gWM), (7.1.74)
',ф (*(М) _ , дф(*(ЧУ) . .
dt2 - ot2 + ax(t2) Х(М-
Скалярное уравнение (7.1.73) является дополнительным условием для
определения времени t2 окончания переходного процесса.
Достаточные условия минимума критерия качества в задаче, где мно-
жество целей определено в виде гладкого многообразия и не задано вре-
мя переходного процесса, аналогичны указанным в п. 7.1.3 для задачи с
фиксированным временем окончания переходного процесса. При их на-
хождении должпа быть учтена вариация времени окончания переходно-
го процесса.
Решения уравнений (7.1.71), (7.1.72) и (7.1.73) можно отыскать ме-
тодом прогонки [2.12] в линеаризованной форме
'dX(i)'
fig (t)
S(l) Л(/) m (I) ~6x{t)~
Пт (0 Q (t) n (t)
mT(0 nT(0 a(l)_-dt2 -
(7.1.75)
Продифференцировав (7.1.75) ио времени и считая, что 6g, dy и dt2 —
постоянные величины, a dQ = 0, получим
6А (t)
0
0
S(t)
iiT (О
mr (t)
i?(t)
(мп
nr(<)
™(t)
n (t)
a(t)_
dy
dt
~S(t) ~
ят(о 6x(0-
_mT (<)_
(7.1.76)
Линеаризованные в окрестностях экстремальной траектории уравне-
ния вариаций бх(/) и 6Х(<) в предположении о невырожденности матри-
цы Зёии (0 для t, t 1г имеют вид
бх(«) = Л(«)бх(г) — В(«)6Х(0, (7.1.77)
g\(t) = -C(f.)&r(f) -ЛТ(1)6Ц«)>
(7.1.78)
где
4 (f) = fx (x, u, t) — fu (x, u, t) (x, и, Л, t) S@ux <x, u, t),
В (0 = iu U> 0 3/$йи и, К t) f'u (•*, «> 0,
C (I) = 3^xx (x, и., X, t) — ^xu К *) u> A, t) ^ux (я, “> X, 0-
Подставим выражения для 6x(Z) и 6X(Z) из (7.1.77) п (7.1.78) в (7.1.76),
используя при этом первую строку (7.1.75) для исключения 6X(i). В ре-
зультате будем иметь
’0'
О =
_0 _
5 + SA -J- 4Т.$' — SBS + С R + (.4Т — SB) R т + (4Т — SB) in rfe -
= 7?т + RT (4 - BS) Q — R^BR n — RrBm
_mT-'rmT(4— BS) nT — rrj BR a — mTEm _ 2
(7.1.79)
Так как уравнение (7.1.79) должно выполняться для любых dti, 6x(t) и
dy, то
S(t) +S(t)A(t) +4T(l)5(t) — S(t)B(l)S(t) + C(t) = 0,
R(t) + [4T(Z) — S.(t)B(t)]R(t) = 0, Q(t) — fP(t)B(t)R(t) = 0,
m(t) -|- [4T(i) —S(l)B(t)] m (t) = 0, n(<) —RT(t)B(t)m(i) = 0,
a(J) — ?nT(t)B(t)?n(t) = 0. (7.1.80)
Краевые условия для (7.1.80) отыскиваются с помощью линеаризо-
ванных условий (7.1.71) — (7.1.73). Эти условия имеют вид
сЭ2ф(х(« )) (х (%)) ]т
' 2' dx (t2)dx {t.2) dx(Lz)
dQ. lx, it, y, t \ It
CC2) ^0, m(l2) = j , (7.1.81)
d₽(x(Z„)) dQ (x, и, у, t„)
n (t\ =-----—— , --------г,------ .
v 2/ dR ’ \ 21 dl„
2 Z
Достаточные условия минимума критерия качества (7.1.2) при ма-
лых вариациях dx(l), Su(t), dti в задаче с множеством целей, заданным
в виде гладкого многообразия, и незадаппым временем окончания пере-
ходного процесса формулируются следующим образом:
а) условие выпуклости 3^utl(x, и, К, t) > 0 для <i i t2;
б) условие нормальности Q (1) — < 0, a(t) > 0 для
<z(i)
ii t
Таблица 7.1.1 Основные случаи задачи вариационного исчисления
Постапонна задачи Краевые условия для сопряженной системы; дополнительные условия
Функции функцио- нала aitadfj Множество конечных состояний
11 II t2 фиксировано (Rn ми = (<2)) ' Й.г («2)
Xj(Z2) задано, i — 1, q V-, М'2)= £ с 7 = 1, <1, з (г (*2))
i — q - 1 п хЯг2)
5I: t2) = 0 i = 1, q * ('2) = ф(ж((2)> + т L дх {Ч) *2) = у3(ж ((2) r^Hf2). f2) T » )+
t.> не задало Rn * ((2) = (* (Q) L дх (г2) T » 2)=°
^’*z» ^1 »v> ь
задано, i = 1, q М ат М = Yj, 7 = 1, 7,
й.г (Т2) , 7 -- q -b- 1 1 . <36? f'T 11 7 t n; 2) = o
д12 T- dv> (л, и., л, i
SjZ gjWs), <2) = °> i = 1, q * = Ф(х(«2), + тт z2 <?<2 *2)Г . Sx (г2) J ’ г2) = ^3 (x (f2)) + 4х (z2)> Q’ - + 36 [X, u, K, t2) = 0
Постановка задачи Краевые условия для сопряженной системы; дополнительные условия
Функции функцио- нала Время Множество конечных состояний
II ►q II со 0 не задано .*0(0) задано, 1 = 1, q Ъ(У для 7 = 114 определяются в процессе решения; \j(f2) = 0, j = q -i- 1, я, Ж (х, и, л, t2) = — 1
5р 0) = 0, ’i — 1, q 7 <^-РФ 2 ’ дф (х (t ), t ) dt (?,«,?.,(,) 0, ' ф(ж((2)’ g(z(^’ У
в) условие отсутствия сопряженных точек матрица S(t)——- ' '
- [/? } _ т(0»ги1 Ь ( Гя (г) _ :МПл11П1Тограпи-
L а(0 JL «(0 J [ а(0 J
чека при t, t < t?.
Для управления объектом в области оптимальной траектории, орга-
низованного по принципу обратной связи, можно воспользоваться следу-
ющим законом:
<5и (0 = - {х, и, К, t) [Жг1Х (х, и, t) -I- fl (х, и, К, 0 {5(0-
т (t) mT (0
«То
._m (0 nT (0
a(0
/ф);.00 0(0
«(0
<?(0
^x(t) +fl(x, и, t) LK (0
-1
n (0 nT
«(0
nT(0
a(0
n (0 nr(01—1
a(0 ]
Я(0-
где матрицы 5(0, Q(t), R(t), векторы m(0 и n(0, скалярная функция
a(0 отыскиваются на стадии проектирования системы.
Часто оказывается желательным предсказать дополнительно измене-
ние времени окончания переходного процесса. Такое предсказание мож-
по осуществить с помощью соотношения
сц = _ КШ. - L (/) _ МО ^(ОГ1 Гд ( m(t)
2 ( a (/.) a(t) L а (0 j L а (t) J J
— iLlO [(J (0 — "Г^1 1 dg (х Н )).
a. («) L a (J) J ' ' 2>'
7.1.5. Заключение. Основные случаи постановок задачи вариационно-
го исчисления и соответствующие им результаты сведены в табл. 7.1.1.
Здесь отражены постановки без ограничений па компоненты состояния
объекта и управления.
§ 7.2. Принцип максимума
В практических задачах множество управлений нередко имеет огра-
ничения, выражаемые неравенствами. Для таких управлений необходи-
мые условия в том виде, в котором они были установлены в § 7.1,
непригодны. Дальнейшим и существенным развитием теории опти-
мального управления является принцип максимума Л. С. Понтрягина
[7.3, 7.0—7.8].
7.2.1. Постановка задачи. Общая постановка синтеза оптимального уп-
равления сформулирована в п. 7.1.1. Впачале рассмотрим задачу, в кото-
рой функция конечных состояний Ba(x(t2)) пе задана. Пусть объецт опи-
сывается дифференциальным уравненном
х(0 = /(^, 0. ж(?|) = х<|>, (7.2.1)
где х (t) е Rn, и (t) е Скалярный критерий качества в рассматрива-
емой задаче имеет вид
f2
I (х, и) = L (х, и, t) dt. (7.2.2)
Предполагаем, что вектор-функция /(.г, и, t) непрерывна по аргументам
вместе с функцией Of(x, и, t)ldx(l) и скалярная функция В(х, и, I) не-
прерывна по аргументам вместе с функцией 8L(x, и, l)/8t. Область до-
пустимых управлений 17лоп есть множество ограниченных кусочпо-пепре-
рыипых функций u(Z) щ О.
Для отыскания необходимых условий оптимальности удобно пере-
формулировать задачу. Добавим к фазовым координатам ^i(t), ...
..., x„(t), меняющимся по закону (7.2.1), еще одну координату xn+i(t),
которая является решением уравнения
Xn+i(0 = £(*, Щ 0- (7.2.3)
В результате получим в векторной форме
xp(t) = /р(хр. 1С. 0’ (7-2-4)
где Xp(«)elRn+1, /р(хр, и, t) = [/ТС]Т. Заметим, что вектор /р(ж, и, t)
пе зависит от координаты z„+i(t) вектора xp(t).
Пусть u(t) —некоторое допустимое управление, переводящее z(tt) в
x(t2), а ж(«)—соответствующее решение уравнения (7.2.1) с начальным
условием x(t|). Обозначим через жр<1) точку zp(f|). Тогда решение урав-
нения (7.2.4), соответствующее управлению u(t) и начальным условиям
а:Р(|>, определено па всем отрезке [?,, <2] и относительно ж„+1(0
t
имеет вид zn+1 (t) = J L (z, и, t') dt'. В частности, при t = С получим
<2
xn+i{t2) = L (z, u, t') dt', t. e. решение xp(t) уравнения (7.2.4) c
4
начальным условием zp(t|) проходит при t = t2 через точку жр(/2) =
= [*T(M Лт-
Проведем прямую линию П (рис. 7.2.1) в (и +1)-мерном простран-
стве Хр через точку zp(t2) = [zT(t2) 0]т параллельно оси zn+l.
Сформулируем теперь задачу управления (см. § 7.1) в другом виде.
В (п + 1)-мерном пространстве Хр даны точка zp(t1) = [жт(1|) 0]т и
прямая П, параллельная оси хп+1 и проходящая через точку [zT(i2) 0]т.
Среди всех допустимых управлений u(t) щ £2, обладающих тем свойством,
что соответствующее решение
zp(t) уравнения (7.2.4) с пе-
чальными УСЛОВИЯМИ Xpf^) =
= £Р<1> пересекает прямую П,
пайти такое, для которого точ-
ка пересечения с прямой II
имеет наименьшую координа-
ту ж„+1(«2).
Отметим, что из определе-
ния оптимального управления
следует, что если жр. 0It(f) —
оптимальная траектория, то пе
существует траекторий, кото-
рые порождают допустимые
управления и (t) ей £2, приво-
дящие к меньшему значению
критерия. Это справедливо
для любой промежуточной точ-
ки траектории zp.On(0. Таким образом, точки, расположенные ниже тра-
ектории жр. оп(0, недостижимы.
Введение ограничений па управления приводит ц тому, что допусти-
мые вариации управления должны удовлетворять условию u(t) =
= uon(i) + 6u(t) е £2, где uon(t) — оптимальное управление.
Центральным понятием, позволяющим пайти необходимые условия
минимума функционала (7.2.2) в задаче Л. С. Понтрягина, является по-
нятие игольчатого варьирования управления. Игольчатым варьированием
управления называется управление
(v, т t sg т + eZ,
(u (Z), т > t, t > т + eZ,
(7.2.5),
где v = const, причем и ей Q; т — заданный момент времени; Z — задаппое
положительное число; е — произвольное число.
Рассмотрим влияние игольчатых вариаций па движение системы.
Обозначим через аГр1" (£) траекторию, соответствующую управлению
ulir(Z), и определим вариацию фазовой траектории
, 41г(0 — жп(«) (dx"T(t)\
(Z) = lim —И.—-----111 = —1—1 , (7.2.6)
1 e^o 6 \ <Ze /e=0
где ХрГ (z) и zp(Z) удовлетворяют уравнениям x“r (Z) = /р (хиг, ииг, z),
ж₽(0 = /р(х> и< Z) соответственно, т. е. определяются решениями
z
ЖрГ («) = -т”г (Zj) + J /р (*иг> «‘I t) dt, (7.2.7)
fi
t
*p (0 = *p (1) + j Л> (*’“’*) (7.2.8)
Подставляя (7.2.7) и (7.2.8) в (7.2.6), получим
t
бхр (Z) = 6жр (ZJ + lim (1/е) J {/р (жиг, и™, z) — /р (х, и, t)}dt,
где 6жр (ZJ = Zp^tj) — zp (ZJ. Из (7.2.5) видно, что для Z < т имеет место
x"r(Z) —x(Z) =0 при xlir(Zi) = x(Z|) и, следовательно,
6жр (Z) = 0 для Z| sg Z < т. (7.2.9)
При Z т получим
я+е/
&г (Z) = lim ( — у (ж*, и*, Z) — f (х, и, Z)) dz +
t
+ lim J -~-^Р (‘Х*’ U*’ ~ U’ dt"
т+eZ
Как векторные, так и скалярные величины, имеющие более высокий по-
рядок малости по е, обозначим 0(e), т. е. lim О (е)/е = 0.
е-»е
Используя теорему о конечных приращениях при непрерывности
/р(х, и, Z) и dfp(x, и, t)/dx(t) и тот факт, что при Z > т + eZ имеет ме-
сто u*(Z) — u(Z), получим при />ти е->0 соотношение
z
(Z) = Z [/р (х, и, т) - /р (ж, и, т)Ц- J /рЖр (х, и, I) 6жр (Z) dt. (7.2.10),
т
Из сравнения (7.2.9) и (7.2.10) видпо, что функция 6xp(t) разрывная.
При filter имеем 6хр(?) = 0. а при t т значение 6xp(t) удовлет-
воряет дифференциальному уравнению
Ч (f) = /рхр о &Р (0 (7.2.11)
с начальным условием
6хр(т) = l[fp (х, v, т) — /р(х, и, t)]. (7.2.12)
Введем сопряженную систему
%(f) =-^хр(*’%(0eRn+1. (7.2.13)
Поскольку уравнение в вариациях (7.2.11) является однородным, то для
т t sg t2 имеет место равенство
Л/ = 'фр (Z) 6хр (() — const.
(7.2.14)
В этом нетрудно убедиться, отыскав производную функции по времени
и учитывая (7.2.11) и (7.2.13):
&р (t) + ф’р(о &р (z) = -ф;(п /рХр (х, и, t)б.тр(о +
+ 'Фр (0 fPXp о бхР (о = °-
Уравнение (7.2.13) соответствует уравнению Эйлера — Лагранжа в
классическом вариационном исчислении. Введем функцию Понтрягина
Жи = Ж (х, фр, и, t) = ф£ (Z) /р (х, и, Г). (7.2.15)
Из выражения (7.2.15), принимая во внимание соотношение (7.2.4) и
(7.2.13), получаем ' дЖ (х, фп, и. ?)1т дфрП) ’ (7.2.10) [ЯЖ (х, ф„, и, 1) 1т % (0 = - Цг-777 • (7-2.17). L (0 J
Уравнения (7.2.1G) тона. и (7.2.17) образуют каноническую систему Гамиль-
7.2.2. Предварительные построения. Объект управления описывается
пелипейным векторпым уравнением
x(f) = /(х, и, t), x(t|) = х<|), (7.2.18)
где xeR", ueRm, [t(, t2]. Пусть также и(1) ей, причем t2 зада-
ло. Скалярный критерий качества имеет вид
*2
I (х, и) = J L (х, и, t) dt.
(7.2.19)
Пусть Won (0 —оптимальное управление, a xon(tj —соответствующая
оптимальная траектория. Из необходимых условий минимума критерия
качества (7.2.19), состоящего в неотрицательности его первой вариации,,
вызываемой вариациями оптимального управления, получаем
б^оп. п+1 (^2) 5^0. (7.2.20)
Вывод принципа максимума состоит в том, что значение вариаций
функционала бхоп. n+i (t2) с помощью свойства (7.2.14) связывается с не-
которым выражением, определенным на траектории.
Выберем значение вектор-фупкции тр следующим образом:
фп+|(«2)=—1, фг(«2)=0, 1 = (7.2.21)
Будем рассматривать 4(0 как решение уравнения (7.2.17) при краевых
условиях (7.2.21). Подставляя (7.2.21) в (7.2.14), получим М =
= ф р (t2)6xp. on (О) = — fi^on. n+i (i2), и учитывая условие (7.2.20), можно
записать
(7.2.22)
Поскольку скалярное произведение (7.2.14) на оптимальной траектории
есть величина постоянная, то неравенство (7.2.22) должно выполняться
при t = т:
I’pCOtop.onW^0- (7.2.23)'
Подставляя в (7.2.23) выражение для бхр. оп(т), будем иметь
Фр (г) h (хоп> v’ г) — Фр (г) /р (хоп> “оп> т) < 0. Учитывая (7.2.15), послед-
нее выражение можно переписать в виде
Ь^(^оп, V. *ф, Т) ^(^оп, Won, Т)
ИЛИ
З’фоп' “оп> Ф> т) = тах^ (хоп, и, ф, т).
v=U
Таким образом, если управление иоп(0 и траектория хоп(0 достав-
ляют минимум критерию качества (7.2.19) при уравнениях связи (7.2.18),
то существует такая непрерывная функция 4г (0, удовлетворяющая
уравнению (7.2.17) и условиям (7.2.21), что при каждом fe [И, h] функ-
ция Понтрягина ^(хоп, иОп, 4, 0 (7.2.15) достигает максимума по всем
u(t) е R.
Для задачи с фиксированными значениями некоторых переменных
состояния в заданный момент времени окончания переходного процесса
неравенство, аналогичное (7.2.20), должно выполняться пе для всех ва-
риаций, а только для тех из пих, которые пе нарушают граничных ус-
ловий.
Пусть значения некоторых переменных фиксированы, а время окон-
чания переходного процесса не задано. Определим концевую вариацию
<fop(t2), получающуюся при воздействии одной игольчатой вариации
управления и вариации конечного времени окончания переходного
процесса:
^p(z2) = lim
ХрГ(г2+е^2)~ХР (М
8
где dt2 — произвольное число. Учитывая, что ХрГ (f Q) + еЛ2 = хрг (*2) +
Н- /р (х, и, ZJ ed«2H- 0(e), получим dxp(Z2) = 6x(Z2) + fp(x, и, t2)dt2.
Рассмотрим теперь результат воздействия игольчатого варьирования
па нескольких отрезках, т. е. результат воздействия управления
(0 = К при г е 1гй’+ eZa1 ,
1«оП(0 при t<£ [Тй, T/1 + eZft]i
к = 1, q.
(7.2.24)
Обозначим через бжр. ft(Z) вариации траектории, получающиеся при не-
зависимом воздействии одной игольчатой вариации 6us(Z). Вариация
6^p.?i(/) зависит от выбора параметров Vk, Ik- Нас будет интересовать за-
висимость бхР.k(t) только от Ik'.
б^р./<(0 -- бхр. Ik) ------ ^йб^р. ft (Z, 1) ,
(7.2.25)
так как параметр Ik входит в вариации по управлению как множитель,
а дифференциальное уравнение (7.2.11), решением которого является
Рис. 7.2.2. Конус дости-
жимости
б^р. ft(0,— линейное. Вариация 6xp.ft(Z, 1) со-
ответствует игольчатой вариации по управ-
лению с параметрами Vk = 1, Ts = 1, Ik = 1.
Суммарная вариация траектории, возникаю-
щая при вариации по управлению, имеет вид
9 9
2 (г) = 2 л (0 = 2 h^xp.k
(i=T Л=1
Полная вариация, вызванная вариациями по
управлению и времени окончания переход-
ного процесса, будет иметь вид
9
dxp (М = 2 lifixp.k (Z2’ *) 0"
/<=1
Н(’оп-“ОП>'М (7.2.26)
Совокупность векторов <tap(Z2) образует мно-
жество К, которое является выпуклым кону-
сом (конусом концевых вариаций или кону-
сом достижимости) (рис. 7.2.2).
Конус К пе может занимать всего пространства состояний, так кац
точки, расположенные ниже оптимальной траектории, недостижимы. По-
этому через вершипу Р можно провести гиперплоскость Г таким обра-
зом, что конус К целиком будет расположен в одном из полупространств,
определяемом этой гиперплоскостью. Проведем из точки Р нормаль п к
плоскости Г. Для любого вектора dxp(Z2) еК будет справедливо нера-
венство
nTdxt (Z2) sg: 0.
(7.2.27)
7.2.3. Задачи с заданным временем окончания переходного процесса.
Пусть грапичпые условия объекта (7.2.18) имеют вид
= ж<|>, gj(x(t2)) = О, J ="177, 9 "С п, (7.2.28)
где tt, t? заданы, причем gj(x(t.2)) непрерывны и непрерывно дифферен-
цируемы, а якобиан dgj>(х (Z2) )fdxi (Z2) имеет своп максимальный ранг q
(правый конец x(i2) принадлежит (н— д)-мерпому гладкому многооб-
разию).
Концевые вариации <7.?р(£2) не должны нарушать граничных усло-
вий (7.2.28), т. е. должно выполняться соотношение
dx (у = 0, j = i?7 (7.2.29)
Выберем вектор п в качестве конечного значения всктор-фупкцип
Tpp(«2), т. е.
фр(<2)=п. (7.2.30)
Тогда для любых dx(tt), удовлетворяющих граничным условиям (7.2.28),
должно выполняться условие трансверсальности:
1])т(«2)Лг(«2) = 0. (7.2.31)
Используя (7.2.31) и (7.2.29), найдем условие трапсверсальпости от-
. ^'(7) J
посителыю ф(<2). Для этого умножим каждое уравнение результат вычтем из уравнения (7.2.31). Будем иметь (7.2.29) па и
П Г о i=l L ?=1 1 ' 21 _ dxi (г2) = °’ (7.2.32)
Так как полученное уравнение должно выполняться для любых dxj (i2),
ТО ХТ (х (/ )) (ч)=z ъ -###- 7 8xi (7) i = 1, п. (7.2.33)
По предположению якобиан 6gj(x(t2))/3xi имеет свой максимальный
рапг q. Приравнивая нулю соответствующие коэффициенты в (7.2.32),
можно получить систему с ненулевым детерминантом, определяющую
множители / = 1, по ф(<2) однозначно. Остальные (п— q) условий
в (7.2.32) также равны пулю в силу независимости оставшихся ва-
риаций.
Учитывая (7.2.30), неравенство (7.2.27) можпо переписать в виде
фр (г2) dxp (z2) =g:0. (7.2.34)
Согласно (7.2.14) выражение М ~ фр (t) бхр (t) постоянно. Этот факт
позволяет произвести перепое неравенства (7.2.34) из конечного момепта
времени t = Z2 в момент времени t = т, при котором осуществлялось
игольчатое варьирование управления,
фр (*2) Ч- (г2) = Фр (г> 6rP W < °-
(7.2.35}
Подставляя в (7.2.35) выражение (7.2.12) для &ep(t) при яОп(т) и иоп(т),
получим
Фр И) /р (жоп’ и’ г) - Фр И) /р (аоп> %П> Ч О,
которое с учетом функции Понтрягина (7.2.15) можно переписать в виде
^(а’ст, у, Ч5, г) <^(*on, «ап, Ip, г) ИЛИ
К,гр “оп> Ф> г) = ^Кгр v> Ф, Ч-
(7.2.35)
Таким образом, если управление un„(t) и траектория х0„(/) достав-
ляют минимум функционалу (7.2.2) при уравнениях связи (7.2.18), огра-
ничениях на управление n(t) е£!и краевых условиях (7.2.28), то суще-
ствует такая ненулевая непрерывная вектор-функция 1рр(О = (Ф1, Ч^,
• • •, Ч’п-н) при Zn+i (0 • 0, удовлетворяющая сопряженной системе
(7.2.17) и условиям трансверсальности (7.2.35), что при каждом te
е [Ц, С] функция Понтрягина Ж(жоп, м, Ч’, z) достигает при оптималь-
ном управлении иоп(г) максимума по всем и(«) ев й.
7.2/1. Задачи с незаданным временем окончания переходного процес-
са. Пусть время tz в функционале (7.2.19) не задано, т. е. параметр tt
является дополнительным параметром оптимизации. Далее, вернувшись
к неравенству (7.2.27) и рассматривая концевую вариацию dxj,(t^
(7.2.26) при Ik = 0, к = 1, q (игольчатые вариации отсутствуют), при
dt? #= 0 будем иметь
~~ /р(жоп, Hon, t-s) $1%.
(7.2.37)
Подставляя (7.2.37) в (7.2.31), получим
Фр('2)Мжоп> «ОГР М ^2С0.
(7.2.38)
Поскольку по условию dl'j может принимать как положительные, так
и отрицательные значения, то соотношение (7.2.38) будет выполняться
при едипственпом условии
ФЖ(*о-Иоп-У = 0> <7-2-3(»
т. е. в конечный момент функция Понтрягина должпа быть равной пулю:
(^-оп, Ноп, Чб С) — 0.
Сформулируем вначале принцип максимума для автономных (ста-
ционарных) систем. Пусть объект описывается уравнением:
х (0 = / {х (0» 11 (0), х(;)еК”; u(i)ERm, и (/) е Й. (7.2.40).
функционал качества записывается в виде
12
I (х, и.) = J L (х (t), и (/)) dt. (7.2.41)
'1
Рассмотрим поведение функции Понтрягина на оптимальной траектории.
Используя равенство
д^п du(i)
dt дфр (t) dt dxf)(t) dt du dt ’
можно показать, что в любой точке оптимальной траектории функция
Понтрягина для автономной системы обращается в пуль. Из канониче-
ских уравнений (7.2.16), (7.2.17) следует, что сумма двух первых слага-
емых равна пулю. Внутри множества Q необходимое условие максиму-
ма 36 состоит в том, чтобы <№6v /ди (0 =0. Отсюда следует, что
д36и /dt = 0. Если максимум 36 ц достигается только на замыкании об-
ласти управления Q, то равенство дЗвц /du(t} =0 не будет выполнять-
ся. В этих случаях, как правило, функпия lift) является постоянной, сле-
довательно, du./dt = 0 и опять дЗбц /ди~ 0. Если пи одно из этих усло-
вий пе удовлетворяется, то [7.3, 7.7, 7.9] векторы дЗв п /ди (/) и du(t)/dt
взаимно ортогональны, следовательно, производная d36n jd.t всегда рав-
на нулю, т. е. 36ц (^оп(0> Щ>п(0, Фг(О) = const. Таким образом, вдоль
оптимальной траектории
тахЖ(яоп(П, non(z), W)) = 0, ts[tv t2], (7.2.42)
Рассмотрпм случай, когда система неавтономна (нестационарна) и
ограпичепия па правом конце задаются в виде функций, т. е. в момент
окончания переходного процесса состояние системы должно отвечать ус-
ловию
gj(x(t.2), Z2) = 0, j = 1, g; q sg n + 1. (7.2.43)
Введем обозначение xK+2(z) = t и рассмотрим расширенную систему
S (0 =/р(Х> Жп+2)> Жн+2(г) = 1-
^'р (0 ~ /рхр (х> хп+1)
?=о п+2
^('2)> Xn+2(M) =0’ т = ~ч-
В такой формулировке эта задача, с одной стороны, эквивалентна
уже рассмотренной, а с другой стороны, является частным случаем за-
дачи с фиксированными значениями некоторых переменных состояния
в заданный момент окончания переходного процесса. Определим функ-
цию Понтрягина в виде Ж' — Жц + 'Ф|щ-2 11 выпишем необходимые ус-
ловия оптимальности.
Согласно (7.2.36) имеем
Ж (хоп <т)> “on (т)> Ф W. хп+2 <т)) + ^п+2 № =
= шах [3^(х011 (т), V, 1)5 (т), х (т)) -|- фп+2 (т)]. (7.2.45).
Поскольку 1|>п+2(т) пс зависит от управления, то выражение (7.2.45)
после обратной замены t — хп+2 запишется в форме (7.2.36).
Из условий трансверсальности (7.2.31) и (7.2.39) следует:
5^?(л:оп(i2), Uon(^), ф(гг), ^n+s(h)) + фп+гПг) = О
или
ф„+2(12) = —3%(xon(t2), iiUK(t2), ф(t2), t2), (7.2.46)
ф. (t )= V ?j (.!.?)’ i = 1Гп, (7.2.47)
2) ff3 Ч(г2)
j=l 2
Сравнивая (7.2.46) и (7.2.48), получим
(жОп (i2)> «он =-1 ъ м-
3=1 2
Таким образом, если управление uon(t) и траектория хоп(0 достав-
ляют минимум функционалу (7.2.41) при уравнениях связи (7.2.40), ог-
раничениях па управление u(t)eB Q и краевых условиях (7.2.43), то суще-
ствует такая ненулевая непрерывная вектор-функция фр = (фь ф2, ...
..., фп+i), фчц-i 'С 0, удовлетворяющая сопряженной системе (7.2.17) и ус-
ловиям трансверсальности (7.2.47) и (7.2.48), что при каждом i ев [t|, />|
функция Понтрягина Жп — Ж (zon (1), uou (<), Ф U)> *) достигает мак-
симума при оптимальном управлении иоп(1) по всем u\V) евО..
Необходимые условия задач в других постановках (задачи Майера,
Больца, задачи быстродействия) легко получаются пз полученных ус-
ловий.
7.2.5. Связь принципа максимума с методами классического вариаци-
онного исчисления. В последние годы принцип оптимальности Понтряги-
на получил широкое распространение в форме принципа минимума. Пре-
имущества такого подхода состоят в его более тесной связи с вариацион-
ным исчислением, принципом Гамильтона в механике и динамическим
программированием Веллмана.
При формулировке этого принципа используется вектор вспомога-
тельных переменных р = (Pi, .... Pn+i), определяемый соотношением
р(«)=—фр(1), (7.2.49)
Pi(t) = i = 1, n, pn+i(t) = —ip,l+i(O, (7.2.50)
где Pn+i^0. В этом случае функция Понтрягина будет иметь вид
ЯМ*(0, “(0, />(«)) = PT(t)fp(x, и, t) (7.2.51)
и, следовательно, = — Жи
Если р,1+1(«) > 0, то можно назначить pn+i == I. Тогда канонические
уравнения будут иметь вид
х (0 =
дЖ. (x(t), u(t). Х(0, t)
с)Л(О
A(t)= -
дЖ (ж (О, и (0, X (Q, t) |т
дх (г)
(7.2.52)
где
Ж(х(1), u(t), X(Z), 7) = L(x, и, t) + Хт(7)/(х, и, t).
Если рассматриваемая задача включает вырожденный случай
Pn+i(t) = 0, то необходимо использовать функцию Понтрягина (7.2.51)
и канонические дифференциальные уравнения (7.2.16) и (7.2.17). Условия
оптимальности теперь будут записываться в виде
Зё (хои W’ “он (0, Р (0) = min (*оп (0- Р (0).
7.2.6. Линейные объекты. Линейный объект описывается уравнением
x(t) = Ax(t) + Bu(t). (7.2.53)
Предполагается, что объект (7.4.53) управляем. Ограничения на управ-
ления и u (7) е й записываются в виде
| Uj | С 1, / = 1, т. (7.2.54)
Функционал качества записывается в виде
*2
1 (х, и) = j L (х (7), и (()) dt. (7.2.55)
о
Гамильтониан задается соотношением
Ж(х, и, X) = L(x(t), u(t)) -|- Хт(7)ж(?) =
= L(x(l), u(t)) + Хт(7)Лж(7) + XT(7)Bu(7). (7.2.56)
Сопряженная система будет описываться уравнением
мо = -
\дЖ(х, и, X)
L Sx (I)
= — А1 X (t) —
dL (х (t), и (0)ТР
дх (t) ] '
7.2.6.1е. Задача оптимального быстродействия. В этом случае гамиль-
тониан имеет вид
Ж(х, и, X) = 1 + Лт(«)Лх(г) + ?S(t)Bu(t).
(7.2.57)
Дифференциальное уравнение относительно вспомогательной переменной
Х(/) и его решение записываются в виде
A(t) — —АТЛ(1), h(l) = exp (—At)h(tt). (7.2.58)
Исследуя выражение (7.2.57), можно сделать вывод, что минималь-
ное значение оно будет принимать при условиях (7.2.54) тогда, когда
будет выполняться иоп(0 =—sgn7?TA.(i) или, учитывая (7.2.58),
Иоп(0 = —sgn йт exp (—X«)MQ- (7.2.59)
Так как функция ехр (—At) — положительная знакопостоянная, то оп-
тимальное управление (7.2.59) можно записать в виде
lion (0 = — sgn /7ГХ(/,). (7.2.С0)
Таким образом, оптимальное управление задается кусочно-непрерыв-
ной функцией, принимающей значения иип j = +1 пли иоп , — —1, j =
= 1, т, в зависимости от знака Л((). В силу нелинейных зависимостей
A(t>) и Л(<2) от x(t|) и ж(<2) в общем случае невозможно отыскать оп-
тимальное управление как функцию времени.
Гпс. 7.2.3. Альтернативная блок-схема оптимального управления линей-
ным объектом
Для решения рассматриваемой задачи разработан геометрический
подход так называемых поверхностей переключения. На рис. 7.2.3 при-
ведена альтернативная блок-схема оптимальной системы управления ли-
нейным объектом. В задаче оптимального быстродействия переключаю-
щим элементом S является двухпозпциоппое реле с выходными сигнала-
ми —1 и 4-1. Альтернатива 1 вырабатывается в виде решения
(t) = (ij) -к I Ax (r) dx. Альтернатива 2 вырабатывается в виде ре-
ШОНИЯ
*2
Х2 (0 = (ZJ | Л-2 (т) dx.
0
7.2.6.2е. Задача оптимального управления расходом топлива. Объект
задан уравнением (7.2.53), ограничения па управление имеют вид
(7.2.54). Требуется определить оптимальное управление unn(t), переводя-
щее объект из начального состояния х(1л) в конечное состояние х(1>)
таким образом, чтобы функционал
(2 т Ч
I = j | iij (0 | dt = J «т (/) sgn и (I) dt (7.2.61)
G 0
принимал минимальное значение.
Гамильтониан в данной задаче записывается п виде
3%{х, и, О =Т‘ (0 sgn u(0 +Х‘(£).4х(0 +%T(OS«(0. (7.2.G2)
Дифференциальное уравнение относительно вспомогательной переменной
Х(0 и его решение имеют вид(7.2.58). Рассмотрим, вводя вектор д(Х) =
= ВТХ(О, Два случая достижения гамильтонианом (7.2.62) минимального
значения:
1) если |?j(0| >1, то иОц. ДО = — sgn<7j(0;
2) если |<73 (О | < 1, то иОп. ДО — 0.
Эти условия можно выразить в виде соотношения
££ол(0 = —sgzm q(t) = —sgzm B'X (Z), (7.2.63)
где sgzm означает покомпонентную знаковую функцию с зоной нечувст-
вительности.
7.2.6.3е. Задача оптимального управления на минимум энергии. Зада-
ча заключается в построении управления для объекта (7.2.53) с ограни-
чениями па управления (7.2.54), переводящего объект из состояния
х(1л) в состояние x(Z2) и доставляющего минимум функционалу
f2
I = 0,5 [ ит (Z) и (X) dt. (7.2.64)
0
Гамильтониан в этой задаче записывается в виде
Ж(х, и, X) = 0,5uT(Z)u(Z) + + Kr(t)Bu(t). (7.2.65)
Дифференциальное уравнение относительно вспомогательной переменной
Х(£) и его решение имеют вид (7.2.58).
Рассмотрим два случая, когда гамильтониан (7.2.65) принимает ми-
нимальное значепие:
1) если |<7, (0| <1 (случай, когда ограничения (7.2.54) неэффектив-
ны), то необходимые условия экстремума определяются соотношением
дЗ>в{х, и, K)/du(t) = 0, т. е. u(t) + q(t) = 0, откуда
Иоп (0 = -9(0: (7.2.66)
2) если |93(t)| + 1, то рассматриваемый гамильтониан принимает
наименьшее значение при условии
u3n(t) = — sgn q(t). (7.2.67)
Закон управления (7.2.66), (7.2.67) может быть записан в виде
uon(t) ——sat <у(0 =—satBTX(O, (7.2.68)
где sat — функция покомпонентного насыщения векторного аргумента,
имеющая единичные коэффициенты усиления для всех компонент вход-
ного сигнала в диапазоне [—1, 1].
7.2.6.4°. Квадратичный критерий. Критерий качества имеет вид
I = 0,5 {хт (t) ₽ (0 х (t) + uT (t) К-1 (t) и (t) + zT (t) N (t) и (t)} dt, (7.2.69)
где ₽(<), A-1(0, A’(0 —положительно-определенные матрицы. Гамильто-
ниан в этой задаче записывается в виде
3^(х, и, л) = 0,5хт(0Р(0 ^(0 + 0.5uT(t)A-I(t)u(Z) +
+0,5 хт(0Л'(0“(0 +лт(0Лж(0 + V(Z)Bi<(Z). (7.2.70)
Дифференциальное уравнение относительно вспомогательной переменной
X(t) и соответствующее граничное условие имеют вид
X(t) = — ₽(t)x(t) —.4+(t) — N(t)u(t), =0. (7.2.71)
Минимальное значение гамильтониан (7.2.70) будет принимать, ког-
да будет принимать минимальное значение выражение
0,5uT(t)K-'[t)u(t) + O,5zT(Z)7V(Z)u(Z) +V(Z)Bu(t) =
= u?(t)K-i(t)[0,5u(t) + K(t){0,5N(t)X(t) + A+(Z)}] =
= uT(Z)A-I(Z) [0,5u(Z) + 9(Z)L
где q(t) = K(t){0,5N(t)x(t) +B+(Z)}.
Таким образом, как и в предыдущем случае, оптимальное управле-
ние определяется соотношением uon(t) =—sat </(£)-
Реализовать решения рассмотренных задач можно с помощью обрат-
ной связи, включив в нее соответствующие нелинейные элементы, реа-
лизующие одно из управляющих воздействии
Нол (0 = —sgn/с[жОл(г)], Uol[(t) = — sgzm /c[xou(t)],
поп (г) = — sat /с[хоп(г)].
При этом отпадает необходимость решения дифференциального уравне-
ния для вспомогательного вектора. Структурная схема системы опти-
мального управления приведена на рис. 7.2.4, где блок /f[x(t)] реализует
поверхность переключения.
Рис. 7.2.4. Структурная схема системы оптимального управления с по-
верхностью переключения
7.2.7. Заключительные замечания. Классическое вариационное исчис-
ление и принцип максимума Л. С. Понтрягина сводят задачу оптимально-
го управления к решению двухточечной краевой задачи для системы
нелинейных дифференциальных уравнений с краевыми условиями, задан-
ными как па левом, так и па правом концах. Принцип максимума при-
меним к задачам с уравнениями общего вида. В случае линейных объ-
ектов общая теория задач оптимального управления, основанная на про-
блеме моментов, предложена и обоснована И. Н. Красовским [7.5].
Характерным для задач оптимального управления является то, что
точные аналитические решения удается получить лишь в редких слу-
чаях. К этим случаям относятся задачи с линейными объектами и квад-
ратичными функционалами.
Сложность или невозможность получения аналитических результатов
для задач в более общей постановке привели к развитию вычислитель-
ных и приближенных методов построения оптимального управления.
Разработка подобных методов стимулировалась потребностью практики,
с одной стороны, и бурным развитием вычислительной техники, с другой.
Работы по этой тематике ведутся с конца 50-х — начала 60-х годов [7.8].
ГЛАВА 8
АЛГОРИТМЫ ОПТИМАЛЬНОГО УПРАВЛЕНИЯ
Постановки и решения задач оптимизации автоматического управле-
ния отличаются чрезвычайным разнообразием. Хотя согласно концепции
прикладной СТАУ, изложенной во введении, главной ее проблемой яв-
ляется оптимизация управления «в большом» в реальном времени и с ре-
шительными целями, необходимо осветить решения частных задач опти-
мизации и оптимизацию па стадии проектирования.
Это следует делать па базе изложенных выше моделей, критериев,
алгоритмов и методов.
§ 8.1. Классификация алгоритмов оптимального
автоматического управления
Классификацию алгоритмов оптимального и субоптимальпого управ-
ления целесообразно осуществлять с учетом решаемых задач, условий,
для которых предназначен тот или иной алгоритм. Правда, задача опти-
мального или субоптимальпого управления может решаться системой в
целом, включающей пе только аппаратные пли программные модули
формирования управляющих воздействий, по п модули оценивания, иден-
тификации, адаптации, реконфигурации. Тем пе менее алгоритмы опти-
мального (субоптимальпого) автоматического управления целесообразно
классифицировать по объему необходимой апрпорпоп п текущей (апо-
стериорной) информации, минимизируемому функционалу, необходимой
вычислительной производптелытостп, назначению и другим подобным
признакам.
8.1.1. Классификация по объему необходимого информационного
обеспечения и характеру решаемых задач. Измерение и модель управляе-
мого процесса являются основой всякого управления. Поэтому количест-
во необходимой для функционирования системы (алгоритма) текущей и
априорной информации можно считать одним из важнейших классифи-
кационных признаков. Априорную и апостериорную информацию, ис-
пользуемую для управления, будем называть также информационным
обеспечением управления.
В табл. 8.1.1 приведена укрупненная классификация алгоритмов ав-
томатического управления по признаку необходимого информационного
обеспечения.
Как априорная, так и текущая информация здесь делятся па три
уровня (высокий, средний, малый). Варианты одпой строки отличаются
объемом необходимого априорного (начального) информационного обес-
печения. Варианты одного столбца — объемом текущего (апостсриорпогоУ
информационного обеспечения. Априорное информационное обеспечение
осуществляется па стадии проектирования всеми имеющимися средства-
ми (включая идентификацию при испытаниях). Текущее информацион-
ное обеспечение осуществляется аа счет измерения (наблюдения) в про-
цессе управления, включая, быть может, специальные искусственные те-
стовые (пробные) воздействия.
Таблица 8.1.1
Классификация алгоритмов управления по объему необходимого
информационного обеспечения
Текущее (апостериирное) информа иконное обеси е ч е.ине Априорное информационное обеспечение., характеристика и номер варианта
характеристика номер нарианта высокое 1 среднее малое о
Высокое 1 1.1 1.2 1.3
Среднее 2 2.1 2.2 2.3
Малое 3 3.1 3.2 3.3
Осуществление управления затрудняется при перемещении в табл.
8.1.1 сверху вниз, слева направо (особенно совместно, т. с. при переходе
к нижнему правому варианту таблицы).
Эта трудность носит принципиальный характер и пе может быть
полностью преодолена никакими алгоритмическими, вычислительными
средствами. Однако необходимо выделять различные группы вариантов.
Обратимся к вариантам 1.1, 1.2, 1.3 верхней строки таблицы. Здесь
текущее информационное обеспечение высокое, а априорное изменяется
от высокого до малого (об управляемом процессе заранее мало что из-
вестно). Для управления (в том числе оптимального, субонтимальпого)
в случаях 1.2, 1.3 служат алгоритмы адаптивного автоматического управ-
ления или алгоритмы с обучением. Здесь недостаток априорной инфор-
мации восполняется за счот текущей информации, получаемой в процес-
се управления. За счот высокосовершеппого алгоритмического обеспече-
ния и высокопроизводительных вычислительных средств здесь даже и ва-
рианте 1.3 (пе говоря уже о вариантах 1.1, 1.2) можпо получить высоко-
эффективное управление.
Все это, по уже с меньшими возможностями, относится и к вариан-
там второй строки табл. 8.1.1. Здесь для вариантов 2.2 н отчасти 2.3 с ус-
пехом могут применяться алгоритмы адаптивного управления. Задачи
типа 3.1, в которых налицо достаточно полное априорное информацион-
ное обеспечение, ио текущая информация резко ограничена, могут
решаться посредством программных управляющих воздействий (систем
разомкнутого типа).
амыми сложными являются условия, обозначенные индексом 3.3.
Относительно сложными являются и условия, обозначенные индексами
3.2, 2.3. В абстрактно-математической современной теории управления
задачи, соответствующие этим условиям, весьма популярны (управление
в условиях неопределенности, объект управления в виде «черного» ящи-
ка, системы с самообучением и т. д.). При этом нередко у исследовате-
лей возникают иллюзорные представления о всемогуществе алгоритмов.
В действительности возможности управления в отмеченных случаях рез-
ко ограничены и ничего сверх некоторых пределов добиться нельзя, Kai;
бы пи были совершенны управляющие ЭВМ и их математическое обес-
печение.
Другой группой классификационных признаков алгоритмов автома-
тического управления являются решаемые задачи, цели управления, вы-
раженные в виде минимизируемого функционала или в других терми-
нах. Сюда относятся все виды функционалов, представленные в гл. (>.
Это формализованное выражение целей управления. Конечно, при клас-
сификации алгоритмов могут указываться и цели управления, выражен-
ные па «содержательном» уровне (например, управление агрегатом ко-
тел— турбина при пуске и останове, управление посадкой самолета па
этапе от дальнего радиомаяка до приземления п т. д.).
С практической точки зрения весьма важным является следующее
обстоятельство. В классической теории автоматического управления
(КТЛУ) также ставились задачи типа 1.2, 1.3 (см. табл. 8.1.1). При до-
статочной энергии управления (эффективности управляющих органов)
и необходимой степени управляемости (см. гл. 2) почти любая цель
управления в вариантах 1.1—1.3 может быть достигнута за счет
«навязывания» управляемому объекту повой «искусственной» ди-
намики.
Отсюда появлялись в КТЛУ системы, «почти эквивалентные по сво-
им свойствам адаптивным»*). Сюда относятся системы с обратными
связями с большими коэффициентами усиления [8.1, 8.2], некоторые
релейные системы [8.3], системы с переменной структурой (СПС) [8.4,
8.5], некоторые системы автоматического управления, спптезпроваппые
посредством функций Ляпунова эвристического происхождения.
Несмотря па простоту соответствующих алгорптмов и их достаточно
высокую эффективность в некоторых приложениях, популярность по-
добных систем в современный период падает. Объясняется это следую-
щим. Если обратиться к реальным новым технологическим процессам п
подвижным объектам, то ясно видна ограниченность ресурсов для управ-
ления. Вследствие предельного использования всех факторов в таких
процессах и объектах пет возможности увеличивать энергию плп мощ-
ность, или потоки вещества, затрачиваемые па управлепис. Такие энер-
гетически напряженные режимы, как скользящий режим, становятся не-
допустимой роскошью. Необходимо оптимальное управление с макси-
*) Речь пдет, конечно, о системах с простейшими целями управле-
ния, например, системах стабилизации.
мальным использованием естественных, собственных движении объекта
[8.6, 8.7]. Именно такие управления получаются па основе СТАУ.
8.1.2. Обгцая характеристика технологии алгоритмического обеспече-
ния. В период классической ТАР синтез алгоритмов или законов управ-
ления осуществлялся на стадии проектирования, а доводка, коррекция
законов — па стадии испытаний объекта и системы. Это касалось и за-
дающих воздействий, программных значений параметров, проектирова-
ние которых в рамки классической ТАР пе входило, по которые обяза-
тельно разрабатывались конструкторами объекта. Подобное положение
сохраняется в значительной мере и в настоящее время. Ясно, что такая
технология алгоритмического обеспечения весьма критична к объему и
достоверности априорной информации. Это в свою очередь затягивает
сроки проектирования и испытаний. Для создания систем оптимального
управления «в большом» многофункциональными объектами подобная
технология вообще во многих случаях оказывается непригодной.
Тенденции развития алгоритмического обеспечения систем автомати-
ческого управления в соответствии с концепцией, изложенной во введе-
нии, иллюстрирует рис. 8.1.1. Аналитическая теория автоматического уп-
равления играет и будет играть возрастающую роль в создании алгорит-
мического обеспечения. При этом классическая ТАР все в большей сте-
пени будет уступать место СТАУ.
Гис. 8.1.1. Тенденции развития алгоритмического обеспечения систем ав-
томатического управления
Высокая роль прикладной СТАУ пе только в создании методов и
структур систем автоматического управления, по непосредственно в ал-
горитмическом обеспечении, определяется следующим. Главиой трудно-
стью решения основной современной проблемы автоматического управле-
ния — оптимального управления «в большом» весьма сложными процес-
сами — остается необходимая вычислительная производительность. 11ре-
одолепие этой трудности возможно только на нуги сочетания развитой
аналитической прикладной СТАУ как фундамента алгоритмического
обеспечения с численными методами как формой реализации алгоритмов.
Существенные различия существуют между двумя фазами алгорит-
мического обеспечения: синтезом алгоритмов (законов) управления па
стадии проектирования и синтезом управлений в процессе функциони-
рования системы {совмещенный синтез}.
8.1.2.1е. Синтез алгоритмов (законов) управления на стадии проекти-
рования системы. Эта форма синтеза в классической ТАР была единст-
венной, причем собственно ТАР решала задачи отработки задающих
воздействий, устойчивости и качества переходных процессов в контурах
стабилизации. Технология алгоритмического обеспечения сводилась здесь
в общих чертах к следующему.
На основе инженерной ТАР и располагаемой (как правило, значи-
тельной) априорной информации об управляемом объекте, а также но-
менклатуре измерительных преобразователей (датчиков), производился
предварительный сиптез контуров. Далее следовало математическое и
(во многих случаях) полунатурпое моделирование. На этом этапе выпол-
нялся основной объем анализа и синтеза алгоритмов (законов) управ-
ления. Завершающей стадией была отладка при натурных испы-
таниях.
В общих чертах эти фазы технологии алгоритмического обеспечения
сохраняются и при СТАУ, однако появляются и принципиальные отли-
чия. Прежде всего резко расширяются задачи оптимизации и в связи
с этим коренным образом изменяется математический аппарат. Сиптез
алгоритмов регулирования иа стадии проектирования получил в СТАУ
даже повое название — аналитическое конструирование оптимальных ре-
гуляторов (АКОР). Роль прикладной СТАУ в алгоритмическом обеспече-
нии современных и перспективных систем автоматического управления
непрерывно расширяется (см. рис. 8.1.1). За аналитической фазой син-
теза следует численная фаза, выполняемая, как правило, на универсаль-
ных ЭВМ. Она сопровождается разработкой или использованием про-
граммного обеспечения, свойственного этим ЭВМ. Далее следует весьма
сложная технология редактирования или создания необходимого про-
граммного обеспечения для управляющих или специализированных ЭВМ.
Несмотря иа все возрастающее оснащение научно-исследовательских
и проектпо-копструкторскпх организаций вычислительной техникой,
трудности алгоритмического обеспечения па базе СТАУ в процессе про-
ектирования еще весьма значительны. Речь идет о трудностях априорно-
го информационного обеспечения, высоких вычислительных затратах и
сложности развития фаз аналитического решения задачи при классиче-
ских формах функционалов.
В связи с этим в справочнике особое место уделяется вопросам оце-
нивания и идентификации, оптимизации при функционалах типа обоб-
щенной работы, адаптивным алгоритмам управления. Эти методы СТАУ
позволяют при уже достигнутой вычислительной, производительности
ЭВМ значительную часть синтеза оптимальных управлений выполнять
в реальном времени в процессе функционирования системы.
8.1.2.2°. Синтез управлений в реальном времени в процессе функци-
онирования системы. В любой реально функционирующей системе уп-
равления формирование управляющих воздействий происходит в реаль-
ном времени. Одпако в традиционных системах это формирование про-
изводится па основе строго детерминированных законов (формул), запи-
санных в памяти ЭВМ или устройствах аналогового типа. В лучшем слу-
чае в «классических» САУ происходит смена фиксированных законов уп-
равления при изменении некоторых параметров режима работы объекта.
Под синтезом управлений в реальном времени понимается синтез
законов или алгоритмов управления, осуществляемый па основе оптими-
зации практически одновременно с формированием самих управляющих
воздействий. Это понятие пе отличается четкостью, и трудно провести
границы между обычным формированием управляющих воздействий и
«совмещенным синтезом», а также формированием управляющих воздей-
ствий в реальном времени па основе «проб и ошибок». Тем пе менее
именно этот подход является решающим в главной проблеме СТАУ —
оптимизации управления «в большом» с достижением наилучшего конеч-
ного результата.
§ 8.2. Синтез законов управления непрерывными
детерминированными процессами при классических формах
функционалов
Как отмечалось выше, вычислительные затраты при оптимизации
сложных динамических систем при классических формах функционалов
настолько велики, что соответствующие методы применяются только па
стадии проектирования. Да?ке в этом качестве практическое использова-
ние методов резко ограничено. Последнее связано с быстрым ростом
мощности множеств, с которым приходится сталкиваться при усложне-
нии (увеличении размерности) нелинейных математических моделей уп-
равляемых процессов.
8.2.1. Варианты уравнений Веллмана. Пусть управляемый процесс
описывается детерминированным уравнением общего вида (1.2.1):
х = f(x, и, t), (8.2.1)
а минимизируемый функционал классического типа также имеет общин
вид (6.2.1) (задача Больца):
I = Г:( [х (i2)] + f L [х (0), и (0), 0] d0. (8.2.2)
ч
Рассматривается задача синтеза алгоритмов класса 1.1 (см. табл. 8.1.1).
Тогда уравнение Беллмана (Гамильтона — Якоби — Беллмапа) имеет вид
^+minb(Xj и> + и> г)]=0, (8.2.3)
где
^=t2 = M*(‘2)b <8-2’4>
а допустимые управления и, вообще говоря, принадлежат заданному
множеству.
Несмотря иа компактную общую форму функционального уравнения
Беллмапа (8.2.3), его решение в практических многомерных случаях
сталкивается с непреодолимыми трудностями. Это видно хотя бы из сле-
дующих преобразований. Обозначим управление, доставляющее минимум
выражению в скобках, через v и положим, что оно удовлетворяет необ-
ходимому условию локального минимума гладкой функции. Тогда вместо
(8.2.3) записываем
OV 0V г
+ v' = — L (х, V, V), (8.2.5)
д 0 [dV ] „ n .
— L (х, v, t) + 7— I 7— f (х, v, t) = 0. (8.2.6)
Таким образом, получили систему пелииейпых взаимосвязанных уравне-
ний в частных производных. Только при решении этой системы уравне-
ний с учетом условия (8.2.4) и последующим выражением и как функции
х, t задача синтеза оптимального управления в виде обратной связи мо-
жет считаться решенной. Рассмотрение последующих более простых слу-
чаев показывает, какие трудности возникают при этом.
8.2.1.1е. Уравнение Веллмана для функционала с аддитивной функци-
ей затрат на управление и процесса с линейно входящим управлением»
Для процесса (1.2.2), т. е.
i = f(x, t) + ф(ж, t) и, (8.2.7)
и функционала (6.2.2):
I = И3 [* ('2)] + J Qs [* (0)> 0] dQ + J us [« (6), 0] dQ (8.2.8)
'i 'i
уравнения (8.2.5), (8.2.6) в предположении, что V = V(x, t), принимают
вид
0+ <PU + 0 = -С3(^ О, (8.2.9)
Ul V •Л-
,82-10)
Допустим, что уравнение (8.2.10) может быть разрешено относитель-
но v единственным образом:
v = А [фт (х, t) (dV/dxy, t], (8.2.11)
где <рт(dV/dxy и v г-мсриые вектор-столбцы.
Подставляя в (8.2.9), получаем
лу &V 8V Г _ (dV V 1
аГ + аГ/(я' г> + г71₽(* *> <)Л [Ф (х, , *] +
( Г (ovX1 11
+ С7ДЛ[фт(х, t)^ , ф = -<2э(х, 0- (8.2.12).
Нелинейное уравнение в частных производных (8.2.12) есть уравнение
Веллмана для данного случая. Решение этого уравнения при граничном
условии (8.2.4) должно определять оптимальное управление и = иоп - - и
согласно выражению (8.2.10).
Покажем, что если
Г д 1
С73 (и, I) — U3 (v, f) — [ бе us(v> *)].(“ — v) (8.2.13)
есть положительно-определенная функция относительно и, обращающая-
ся в нуль только при и = р, то управление (8.2.10) действительно мини-
мизирует функционал (8.2.8) на решениях уравнения (8.2.7).
Действительно, добавляя к обеим частям уравнения (8.2.9) члепы
0V
— ф (х, I) и + U3 [н (/), Z]
и учитывая (8.2.7) и (8.2.11), получаем
0V dV dV
+ + i) + ue(u, /) =
0V
= — <23 (®, 0 + ^7 Ф (х> t) и + ив (и, Z), (8.2.14)
или с учетом (8.2.10)
д
V + Q3 0 + иа (и, V) = из (и, t) — ua(v, — us (v, t) (и — v).
Здесь производная V вычисляется па решениях уравнения (8.2.7).
Интегрируя это выражение по времени от tf до па решениях урав-
нения (8.2.7) с учетом граничного условия (8.2.4), находим
(2 *2
I = V3 [* (12)] + j (2а [х (0), 0] rfO Ч- J (7а [и (0), 01 de
«1 ч
*2 (
= Fa Г о + J г з (0)' 61 - иг к (0)- 01-
- иа (р (0), ОЦи (0) — V (0)]] dO. (8.2.15)
Величина Va[x(/j)] не зависит от управления па интервале i2l«
Из выражопия (8.2.15) и указанного свойства функции (8.2.13) непосред-
ственно следует, что функционал (8.2.8) для процесса (8.2.7) принимает
минимальное значение при и — v.
8.2.1.2°. Уравнение Боллмана для функционала со степенной функци-
ей U3 и процесса с линейно входящим управлением. Допустим, что для
процесса (8.2.7) функционал имеет вид
«2
/ = ГзР(^)] +J
‘1
0] dQ +
с70,
(8.2.16)
где qj > 1 и такие,, что _______ четная функция u3-, к} >0, j == 1, г.
В данном случае функция(7Я (и)—Ug(v)—{ “ДГ U3 (п)^(ге—v) имеет един-
ственный минимум по и при и = е, равный пулю, и указанное выше ус-
ловие выполняется.
Равенство (8.2.10) в скалярией форме имеет здесь вид
= _^ У £Кср...
J ri-r г3
(8.2.17)
Вводя величины pj согласно равенствам
Pj 1 + ?/ = 1’
(8.2.18)
выражение (8.2.17) преобразуем к виду
n
к. N
----rPij
их. J
(8.2.19)
После подстановки этих выражении в уравнение Веллмана (8.2.12) и пре-
образований получаем
дУ , дУ
dt дх
Л'”1
. з__
Рз
= - <2„ (X, г).
(8.2.20)
Итак, если V(x, t) есть решение нелинейного уравнения в частных
производных (8.2.20) при граничном условии V<=/ = I[х (*.,)], т;>
оптимальным управлением, минимизирующим функционал (8.2.16), яв-
ляется
из из оп
к. У £КФ...
з Qx . LJ
i=l 1
(8.2.21)
8.2.1.3°. Уравнение Веллмана для случая функционала е квадратич-
ной функцией Ua. Пусть в выражениях (8.2.20), (8.2.21) р} = 2, / = 1, г.
Тогда согласно (8.2.18) qj = 2, j = 1, г, и минимизируемый функционал
имеет вид
2 2 Г 2 /£\\
(' Л (* W - (v)
I = v3 [X (t2)] + <?3[ х (0), 0] dO + -1- 2j ~7~- dG-
ч ч’=1 3
Уравнение Боллмана (8.2.20) и оптимальное управление (8.2.21) здесь
принимают вид:
,7V , dV ,,
— + — И*, Z)
dt О.с
=1 1)Х; 11
uj= ui on
В матричной форме:
1 = 173 [X («,)] -I- j Qs [X (0), 0| d0 -I- j «'*’ (0) K^u (0) dO,
/д tj
dV dV I (IV I dV V
1H + dT f - ~z Ч’u- z) A<P t) = - <?s (*. 0,
vt=i2 = VSW’
u = — £cpT (x, i) (dV/dxf.
(8.2.22).
(8.2.23)
(8.2.24).
(8.2.25)
Частные случаи, соответствующие лпнейпо-квадратичной задаче, бу-
дут рассмотрены в п. 8.2.3.
8.2.2. Методы решения уравнения Веллмана. Согласно изложенному
синтез оптимальных управлений сводится к решению уравнения Веллма-
на. Решение уравнения Веллмана в его формах (8.2.12), (8.2.20), (8.2.23),.
не говоря о более общих формах (8.2.3), (8.2.5), (8.2.6), для многомер-
ных нелинейных объектов встречает огромные трудности. Эти трудности
являются принципиальными и связаны с высокими мощностями конеч-
ных множеств, с которыми приходится иметь дело при приближенном
численном решении таких уравнений. Аналитическое же построение точ-
ных решений существует лишь для линейно-квадратичных задач.
Все же здесь кратко излагаются способы приближенного решения
уравнений Веллмана для нелинейных систем. Эти способы могут ока-
заться полезными при решении задач синтеза на стадии проектирования
субонтнмальиых .управлений для процессов невысокой размерности. Та-
к не задачи возникают, в частности, при использовании декомпозиции или
иерархической оптимизации.
8.2.2.1е. Численная форма динамического программирования. Уравне-
ние (8.2.3) иногда получается путем предельного перехода от численной
конечной формы динамического программирования. Легко осуществить.
и обратный переход. Однако для многомерных многосвязных (пе допус-
кающих декомпозиции) задач численное решение методом динамического
программирования требует огромного объема памяти и вычислительных
затрат. Поэтому в практических динамических задачах управления оно
оказывается в большинстве случаев неприменимым даже па стадии про-
ектирования.
8.2.2.2е. Построение разностных схем. Для числеппого решения урав-
нений с частными производными (8.2.9), (8.2.10), (8.2.12), (8.2.20),
(8.2.23) могут быть построены разностные схемы и соответствующие
процессы численного интегрирования. Как известно, этот метод весьма
успешно применяется для интегрирования разнообразных уравнений с
частными производными в двух- и трехмерных пространствах. Однако
для задач оптимизации управления, где размерность пространства состоя-
ний нередко измеряется десятками, мощности конечных множеств, фи-
гурирующих в разностных схемах, чрезмерно велики («проклятие» раз-
мерности). Положение здесь аналогично изложенному выше.
8.2.2.3е. Метод рядов. Если функции /, <р, Qa, V3 представлены в виде
рядов по каким-либо базисным функциям, то решения уравнений Велл-
мана можно искать также в виде рядов по этим функциям.
Метод степенных рядов применительно к уравнению типа (8.2.23)
рассмотрен в работе [8.8]. Решение ищется в виде ряда
V=(l/2) J Ту^+(1/3) 2
i,J=l
Для коэффициентов этого ряда '[ij, уць, . (они не меняются при пе-
рестановках индексов) получается в общем случае бесконечная система
групп обыкновенных дифференциальных уравнений нарастающей раз-
мерности. Решение этих групп уравнений для сложных объектов пред-
ставляет чрезвычайные трудности.
8.2.2.4е. Метод характеристик. Для уравнений с частными производ-
ными первого порядка общеизвестен метод характеристик [8.9]. Однако
в данном случае он приводит к необходимости интегрирования уравне-
ний. которые для наиболее простого (из рассмотренных) случая (8.2.23)
при f = f(x), <р = <р(х), Qa = Qa{x) имеют вид [8.10; 8.11, с. 189—200]:
х = —<р(х)/Прт(х)р,
рТЧ; (х) Kq? (х) р]
(8.2.26)
Главная сложность здесь заключается в том, что интегрирование
системы уравнений (8.2.20) необходимо осуществлять при начальном ус-
для р.
ловии х<==( = х(<2) для х и конечном условии pt=t -
Таким образом, здесь возникает двухточечная краевая задача, которая
для многомерных процессов сопряжена с большими вычислительными
трудностями.
8.2.3. Синтез законов оптимального управления детермииироваины-
ми линейными объектами при квадратичном функционале. Как уже ука-
зывалось, липейпо-квадратичпая задача является единственной, при ко-
торой решение получается в общем виде. Это решение находит практи-
ческое применение при проектировании систем стабилизации, контуров
отработки задающих воздействий при многомерных линейных моделях
объекта в отклонениях. В отечественной литературе соответствующие ме-
тодики получили название АКОР.
8.2.3.1е. Решение линейно-квадратичной классической задачи АКОР
для случая стабилизации при отсутствии возмущающих воздействий.
Пусть управляемый объект описывается уравнением типа
х = Ах -|- Ви,
а минимизируемый функционал имеет вид
I = 0,5хт (i2) рх (12) + 0,5 хт (6) (0) dQ + 0,5 [ ит (0) K~Ju (Q)dQ.
\ «1
(8.2.27)
Эта задача несколько более широкая, чем задача оптимальной стабилиза-
ции состояния х = 0 в обычном ее понимании, так как здесь помимо ка-
чества переходных процессов фигурирует задача приведения системы в
положение х = 0 в заданный момент времени. Но для краткости будем
эту задачу называть задачей стабилизации (в широком смысле).
Уравнение Веллмана для данной задачи получается из уравнения
(8.2.23), если положить
-/ = Лх, <р = В, Q3 — 0,5хтр,г, V3 = 0,5хтрх.
Таким образом, здесь
=-0,5хтрЖ. (8.2.28)
dt 1 дх 2 дх \дх )
Решение этого уравнения ищется в виде квадратичной формы
V = 0,5хт5х, (8.2.29)
где 5= ST = S(l) —симметричная матрица размера п X п. Из гранич-
ного условия следует 5(«2) = р.
Подставляя (8.2.29) в (8.2.28) и приравнивая (в скалярной форме)
коэффициенты при одинаковых произведениях XfXj, получаем известное
матрпчпое уравнение Риккати
S -р SA +A'S — SBKBrS = —р. (8.2.30)
Решение этого уравнении прп условии S(ti) = р определяет согласно
(8.2.25) оптимальное управление
и = Моп = -KBTSx. (8.2.31)
Это и есть решение задачи АКОР для данного случая.
В общем рассматриваемом случае Л — Л(<), В — B(t), р = p(t), 5 =
= S(t). Таким образом, решение задачи синтеза здесь сводится к интег-
рированию матричного уравнения Риккати, которое в скалярной форме
эквивалентно системе п(п+1)/2 уравнений первого порядка (с учетом
симметрии матрицы 5 = 6’т):
^•+ i ки i к ад,{=-₽4г-.
fc=i 1=1 p=i k=i
(8.2.32>
Теория матричного уравнения Риккати хороню разработана [8.10].
В частности, было показано [8.11], что если условие полной управляемо-
сти (2.3.2) выполняется, то уравнение (8.2.30) имеет единственное реше-
ние, к которому стремятся все другие решения в обратном времени. Для
нестационарных терминальных задач синтез производится путем интег-
рирования уравнения (8.2.30) в обратном времени, начиная с S(t2) =р.
Количество операций на одни шаг численного интегрирования матрич-
ного уравнения Риккати (8.2.30) при большой размерности п имеет поря-
док (4 — 16)п3 (в зависимости от метода численного интегрирования).
Информация о синтезированном па стадии проектирования оптималь-
ном терминальном управлении хранится в системе в виде матричной
функции времени K(t)B'r(t)S(l), точнее, K(t? — t)BT(l2— t) S (t2— t) (мат-
ричная функция оставшегося времени 12 — I).
Однако нестационарные терминальные задачи редко удается свести
к линейным моделям и квадратичным функционалам. Большое практи-
ческое применение линейно-квадратичные способы синтеза систем ста-
билизации находят в стационарных и квазистационарпых задачах АКОР
для объектов высокой размерности. Характерным примером таких объек-
тов являются объедты с распределенными параметрами, аппроксимиро-
ванные конечномерными линейными моделями. К такому классу задач
относятся, в частности, задачи аэроавтоупругостп [8.12].
Существует несколько вариантов постановки линейно-квадратичных
стационарных задач оптимизации систем стабилизации.
А. Решение линейно-квадратичной, классической стационарной зада-
чи АКОР для случая стабилизации и скользящего интервала оптимиза-
ции. Пусть для стационарного линейного объекта
х = Лх + Ви, А, В = const
задан минимизируемый квадратичный функционал со скользящим ин-
тервалом оптимизаци и:
t+'fon (+7'оп
7 = 0,5 j х'г (0) МО) dO + 0,5 J uT (0) K~lu (0) dO, (8.2.33)
t t
где матрицы p, К также постоянны.
Ясно, что решение данной задачи получается как частный случай
решения более общей задачи п. 8.2.3.1° при р = 0. Ц = t, t2 = t + Топ и
постоянных матрица?; коэффициентов. В соответствии с этим постоянная
матрица S, входящая в оптимальное управление
и = иоп = —KBTSx, (8.2.34)
получается путем интегрирования матричного уравнения Риккати
(8.2.30) в обратном времени при начальном условии S(Tm) =0. Тогда
решение S(t) при t = 0 будет тем значением матрицы S, которое входит
в оптимальное управление (8.2.34).
Уравнение (8.2.30) в обратном времени запишется в виде
S — SA — ATS + SBKB^S = р, (8:2.35)
и решение рассматриваемой задачи можно сформулировать так: опти-
мальным в смысле минимума функционала (8.2.33) является управление
(8.2.34), где 5 — постоянная матрица, получаемая путем решения урав-
нения (8.2.35) при нулевом начальном условии 5(0) =0, S = S(Ton).
Б. Решение линейно-квадратичной классической стационарной зада-
чи АКОР для бесконечного интервала оптимизации. При выполнении ус-
ловия полной управляемости система, замкнутая через оптимальные уп-
равления, в рассматриваемых случаях получается устойчивой. Поэтому
с полным основанием можно применять функционал с бесконечным ин-
тервалом оптимизации, например,
СО оо
I = 0,5 j (0) |3х (0) dQ 0,5 нт (0) К~1и (0) d0.
о о
Оптимальное управление при этом имеет прежний вид (8.2.34), где по-
стоянная матрица S = S есть «установившееся» решение уравнения
(8.2.30), т. е. решение алгебраического матричного уравнения [6.12. 8.12]
SA + A TS — SBKBTS = —р, (8.2.36)
известного под названием *) уравнения Лурье.
Согласно указанному выше для вполне управляемой системы любое
решение дифференциального матричного уравнения (8.2.35) (решение,
соответствующее любым начальным условиям) стремится к S при t —>
-> оо. Это используют для нахождения 3, так как численное интегрирова-
ние системы нелинейных обыкновенных дифференциальных уравнений
(эквивалентных (8.2.35)) па достаточно большом интервале времени ока-
зывается осуществить проще, чем непосредственное численное решение
системы алгебраических квадратичных уравнений, эквивалентных (8.2.36).
В. Решение линейно-квадратичной классической стационарной зада-
чи АКОР для нетерминального функционала. Точно такое же, как в пре-
дыдущем случае, оптимальное управление получается для произвольного
*) Ввиду большого самостоятельного значения в СТЛУ алгебраиче-
ского уравнения (8.2.36) представляется вполпе обоснованным использо-
вание названия, пе связанного с названием уравнения (8.2.35).
интервала оптимизации, по функционала вида
*2
I = 0,5хт («2) 5 («2) х («2) + 0,5 [ хт (0) |3х (0) d0 +
4
*2
+ 0,5 J ит (0) К~ги (0) d0. (8.2.37)
Ч
Этот функционал относится к числу полуопределспных, так; как 5 здесь
пе заданная матрица, а решение уравнения (8.2.30). Вследствие этого
граничное условие S t=t =S(t^ выполняется автоматически. Поэто-
му для синтеза оптимального управления необходимо искать то решепие
уравцепия (8.2.30), которое не зависит от каких-либо начальных или ко-
нечных условий. Таким решением является «вынужденное» решепие У
уравнения (8.2.36).
Матрица S(t), являющаяся решением уравнения (8.2.30), в общем
случае вполне управляемой системы и положительно-определенных мат-
риц р, р, К является положительно-определешюй. Поэтому применение
функционала (8.2.37) имеет определенный смысл.
8.2.3.2е. Решепие линейно-квадратичной классической задачи АКОР
для случая стабилизации при наличии измеряемых возмущающих воз-
действий. Встречаются задачи стабилизации в условиях действия па уп-
равляемый объект возмущений, поддающихся достаточно точному конт-
ролю. Для линейного объекта это соответствует уравнению
х — Ах -|- Ви -|- w, (8.2.38)
где w = w{t) —измеряемая векторная функция времени.
Функционал в общем случае задается в прежнем виде (8.2.27). Урав-
нение (8.2.28) уступает место следующему:
W 8V 1 i)V rf&VX1 1 Tn „ „ „
1Г+д^Ах + ^-~ТдГВКБ (8-2.39)
Решепие этого уравнения ищется в виде
V = 0,5x58(Z) х -|- х!у (г) + ? (f),
где S{1), y(t), g(t)—пока неизвестные матричная, векторная и скаляр-
ная функции времени соответственно. Подставляя это выражение в
(8.2.39) и (8.2.31), выполняя обычные процедуры, находим [8.10]
w = ыОп = —KBT(Sx + у}, (8.2.40)
у = (SBKB1 — Ат)у — Sw, (8.2.41)
где 5 определяется прежним уравнением Риккати при прежнем конеч-
ном условии S(tz) = р, a y(ia) =0.
Заметим, что условие y(h) — 0 делает реализацию данного нестаци-
онарного варианта оптимального управления затруднительной. Действи-.
тельло, в (8.2.30), (8.2.41) входят текущие значения x(«), w(t) (которые
измеряются согласно предположению) и, кроме этого, y(t), определенное
с учетом будущего =0). Если w(t) иа всем интервале оптимиза-
ции неизвестно (т. с. неизвестны будущие значения возмущающих воз-
действий), то (8.2.41) точпо решить нельзя. Одпако можно решить зада-
чу, пренебрегая конечным условием для y(t) (у(<2) = 0), т. е. определяя
«вынужденное» решение уравнения (8.2.41).
Рис. 8.2.1 Структурные схемы систем, получеппыс в результате решения
линейно-квадратичной классической задачи АКОР при наличии измеря-
емого возмущающего воздействия: а — полное решение; б— компенса-
ция с ограниченной памятью; в — компенсация с разложением по про-
изводным
Л. Решение линейно-квадратичной классической задачи стабилизации
при скользящем интервале оптимизации и отброшенном граничном усло-
вии для у. Задавая скользящий интервал оптимизации (как в п. 8.2.3.!°)
С — t, h — t + Гоп и отбрасывая граничное условие для у, из предыду-
щего получаем оптимальное управление
и = uon — — КВТ (Sonx + у), (8.2.42)
где Son есть значение •5(У0П) решения уравнения (8.2.35):
S — SA - A'rS -)- SBK& = [J (8.2.43)
при 5(0) = р, а у — вынужденное решение уравнения (8.2.41)
у = (SaaBKBT — Лт) у — SBnw (8.2.44)
(частное решение неоднородного линейного уравнения, пе зависящее ог
граничных условий).
При заданном Топ матрица 5„г, постоянна. Если А, В также посто-
янны (стационарный линейный объект) и К — const, то оптимальная си-
стема управления (8.2.42), (8.2.44) стационарна. Соответствующая струк-
турная схема представлена па рис. 8.2.1, а (индекс у 5оп здесь опущен).
Здесь ясно видны два капала распространения возмущенного воздей-
ствия, и в этом отношении система напоминает инвариантную к возму-
щениям [3.19]. Однако полной инвариантности пе получается вследствие
ограниченных затрат на управление, предусмотренных минимизируемым
функционалом. Действительно, запишем уравнения, соответствующие
структурной схеме рис. 8.2.1, а (т. с. уравнения (8.2.38), (8.2.40), (8.2.41))
в операторной форме (для стационарного случая):
(рЕ — А -|- BKB'rS)x = —ВКВ^у + iv,
(рЕ + — SBKBT) у = —Sw,
где р = d/dt, Е — единичная матрица размера п X п. Исключая у, полу-
чаем
(рЕ — Л + BEE'S) х = [ВКВЦрЕ + Ат — SBKB^-'S + £] w.
Правая часть может обращаться тождественно в нуль при К -> оо (все
элементы диагональной матрицы стремятся к бесконечности), т. е. при
неограниченной мощности управления. Таким образом, помимо полной
априорной информации, полная инвариантность требует отсутствия энер-
гетических ограничений на управление. Уто обстоятельство обычно ос-
тается в тени.
При практическом осуществлении структур типа представленной па
рис. 8.2.1, а, точнее, звена (8.2.44), возникает следующая трудность. Лег-
ко видегь, что уравнения свободного движения основного оптимального
контура
х + (— Л + BKB'S)x = 0 (8.2.46)
и контура компенсации
у + (А ’ — SBKB') у = 0 (8.2.47)
являются сопряженными (К'! = К). Если K(t, Zc) = К(£— Io) —матрица
Коши*) уравнения (8.2.46), то матрица Коши сопряженного уравнения
(8.2.47) есть K(Z0, t) = K(ZC—t). Отсюда следует, что если основной кон-
тур в оптимальной системе устойчив (а это, естественно, должпо быть
для любой практически пригодной системы), то контур компенсации не-
устойчив.
*) Матрица Коши здесь считается «двусторонней», т. е. соответству-
ющая матричная аналитическая функция существует при —<» t °0-'
Построение системы, воспроизводящей (хотя бы приближенно) вы-
нужденное движение неустойчивого контура, требует специальных
приемов.
Б. Контур компенсации с ограниченнной памятью. Трудность, связан-
ная с воспроизведением вынужденного движения неустойчивого контура
компенсации, может быть в некоторой мере преодолена, если искусствен-
но ограничить «время памяти» этого контура. Основанием этому служит
то, что время памяти основного оптимального контура Тк также практи-
чески ограничено. Практически оно не превышает двух-трех значений
обратной величины наименьшей по модулю действительной части собст-
венных чисел матрицы — А + BKTPS (см. (8.2.46)).
Вынужденное решепие уравнения (8.2.41) равно
t
y(t)=— J К (0 — t) Sw (6) dO. (8.2.48)
— oo
Ограничивая память контура компенсации, записываем
t
у (t) = — [ К (0 — t) Sw (0) d0. (8.2.49)
Выражение (8.2.49), в отличие от (8.2.48), может быть реализовано
численно со сколь угодно высокой точностью. Соответствующая струк-
турная схема представлена на рис. 8.2.1, б.
В. Компенсация возмущений с точностью до остаточных членов раз-
ложения по коэффициентам ошибок. Низкочастотную часть вынужден-
ного движения в контуре компенсации можно представить в виде ряда
по производным w, w, i), ... Это можно выполнить, в частности, следую-
щим образом. Пусть
1 1 •• ?
w (0) = w (i) 4- — w (/) (0 — t) + -2Г W («) (0 - t)2 + ...
Тогда согласно (8.2.49)
!/(«) = — cllQw(t) — cvlw(t) — cytw(t) —
где
( о
cy(j = К (0 — t) SdQ = j К (т) Sai,
1-т„ -та
0 1 *
С1П=1Г [ К S1:dl:' CV2 = 1T J К (T)5T2dT, ...
~Тц ~гп
Соответствующая структурная схема представлена па рис. 8.2.1, в.
8.2.3.30. Решение линейно-квадратичной классической задачи АКОР
для случая отслеживания известного задающего воздействия. Линейные
модели управляемых процессов в наибольшей мере соответствуют управ-
леиию «в малом» в окрестности программного или заданного движения.
Для оптимизации процесса отслеживания задающего воздействия квадра-
тичный функционал содержит квадратичные формы рассогласования.
В качестве рассогласования может фигурировать разность между линей-
ным преобразованием вектора состояния и заданной векторной функцией
А = Их — za(t).
Представим z3(i) в виде z3(t) = Ux3(t). Тогда А = Н(х— За-
дающее воздействие хЕ(0) при 0 t, а в другом случае и при 0 t2
считается известным. Квадратичная форма относительно рассогласования
ДтрдД преобразуется к виду [х— х3(/)]тр[х— х3(/)], где Р = //'Рд//.
Итак, квадратичный функционал для данной задачи может быть
представлен в виде
12.
I = 0,5 [х (tj - х3 (г2)]тр [х («J - х3(<2)] + 0,5 j [х (0) - x3(0)f X
'г
f2
X ₽ [х (0) — х3(0)] </0 + 0,5 j u'r(0)K_1u(0) </0. (8.2.50)
Ч
Уравнение (8.2.28) принимает форму
д± + Ах - 0,5 ВКВТ = - 0,5 [х - х3 (/)]т р [х -х3 (/)].
dt дх дх \ох }
(8.2.51)
Как и раньше, можно искать решение в виде
V = 0,5хт5'(/)х + xTy(t) + q(t). (8.2.52)
После выполнения стандартной процедуры находим [8.12, 8.14]
и = мОп = —KB'r{Sx + у}, (8.2.53)
у = (SBKBT —Ат)у + Рхэ (/), (8.2.54)
где 5 определяется прежним уравнением (8.2.36) при прежнем гранич-
ном условии S(t2) = р, а у удовлетворяет граничному условию у (г2) =
= —рх3(/2).
Во всех традиционных следящих системах используется сигнал рас-
согласования Дх = x(t)—х3(/). В соответствии е этим представляем
(8.2.53) в виде
и = иОп = —KB^S^x + Sx3 + у). (8.2.55)
При реализации системы (8.2.55), (8.2.54) с граничным условием y(t2) =
= —рх3(/2) возникают те же трудности, что и для систем стабилизации
(см. п. 8.2.3.2е). Однако задающее воздействие нередко прогнозируется в
системе старшего уровня. Поэтому целесообразно сначала привести струк-
туру, соответствующую точному решению.
А. Структура алгоритма, соответствующего точному решению. Обо-
значим Sx3 + у = у*. Подставляя выражение у = у* — 8х3 в (8.2.54) и
используя (8.2.30), получаем
у* = (SBKB? — /1Т) у* + S(x3 — Лха) (8.2.56)
(функция х,, = x„(t) считается дифференцируемой или кусочно-диффе-
ренцируемой с разрывами первого рода).
Выражение (8.2.55) при этом принимает вид
и = н„„ = —КВ'(5Дж + !/*). (8.2 57)
Для задачи слежения наиболее подходит функционал со скользящим ин-
тервалом оптимизации t, = t, t2 — t + TOH:
/ = 0,5А+(/ + 70П)рДх(« + 7on) +
1 ^on
+ 0,5 j’ [Д.?'г(е)РДя(0) + ит(0) A*u(0)] dG. (8.2.58)
t
Тогда точный оптимальный алгоритм слежения для нестационарного ли-
нейного объекта
х A (t)x + B(t)u
заключается в следующем. Мгновенно в обратном времени при усло-
вии S(l + Тол) =р решается матричное дифференциальное уравнение-
Риккати
S + 5/1(«) + +(«)5 —5W)ABT(t)5 = — ₽
до момента времени t. Одновременно при условии у* (t + Топ) =
= Sx3(t + Тол) — px.,(t + То„) = 0 в обратном времени интегрируется
уравнение (8.2.56) (функция x3(t) на интервале [t, t + Тоб] ПО УСЛОВИЮ-
считается известной).
Так определяются 5(t), у*(0- Величина Дх(0 измеряется. Из этих
величин формируется текущее оптимальное управление и (8.2.57).
Для стационарного объекта (/1 = const, В = const) при р = const,
А = const решение уравнения Риккати должно производиться заблаго-
временно, па стадии проектирования. В данной задаче при этих условиях
5 постоянно. Таким образом, в данном случае точное решение заключа-
ется в мгновенном интегрировании векторного уравнения (8.2.56) от
г+ Г€П до I при y*(t+ То,,) = 0 и вычислении и согласно (8.2.57). Соот-
ветствующая структура системы представлена па рис. 8.2.2, а. Прогноз
на интервале [t, t + Гоп] может выполняться как в самой следящей
системе путем экстраполяции (этот вариант показан па рис. 8.2.2, а),
так и поступать с верхнего уровня (где производится формирование х3).
Как видно из указанных уравнений и структурной схемы, контур
компенсации отсутствует только при + —Ляэ = 0 (при этом у* = 0),
т. е. в том случае, когда задающее воздействие соответствует собственно-
му движению неуправляемого объекта. Очевидно, что это редкое исклю-
чение.
Мгновенное численное решение уравнения (8.2.56) па интервале от
* 4-Гоп ДО t невозможно, но практически достаточно решепие в ускорен-
ном времени (обычно коэффициент ускорения времени должен состав-
лять несколько десятков).
Хотя численная реализация данного алгоритма для управления в
реальном времени даже относительно сложными системами находится
в пределах современных возможностей ЭВМ, вычислительные затраты
Гис. 8.2.2. Структурные схемы следящих систем, полученных в результа-
те решения линейно-квадратичной классической задачи АКОР при нали-
чии измеряемого задающего воздействия: а — с прогнозом; б — с вынуж-
денным решением; в — с ограниченной памятью
могут считаться недопустимо большими. Действительно, речь идет всего
лишь о линейно-квадратичной стационарной задаче отслеживания. Для
этой задачи желательно иметь простое алгоритмическое обеспечение,
требующее минимальных вычислительных затрат.
Б. Структура алгоритма, соответствующего вынужденному решению
в контуре компенсации. Как и в позиции А, существенное упрощение
алгоритма получается при отказе от граничного условия в коптуре ком-
пенсации и переходе к вынужденному решению уравнения (8.2.56). До-
пустимость такого подхода, по крайней мере для достаточно больших
диагональных элементов задаваемой матрицы р, следует из выражения
(8.2.52) и условия S(t + Топ) — р. Структура системы с вынужденным
решением в контуре компенсации в общем виде представлена па
рис. 8.2.2, б.
В. Структура алгоритма, соответствующего вынужденному решению
а контуре компенсации с ограниченной памятью. При построении вы-
нужденного решения уравнения (8.2.56) в виде
t
y*(t)= j" К (О— Z).S' [ г3(0) — Лхв(О)]й'О, (8.2.59)
— ОС
где K(t) — матрица Коши замкнутого основного контура, возникает та
>ке трудность, что и в позиции А и. 8.23.2°, обусловленная неустойчи-
востью сопряженной системы (К(0) оо при 0 —оо). Для устранения
этой трудности ограничиваем память в контуре компенсации. Тогда
t
y*(t)= J К (8— t)S [i3(0) — Ax3(0)J rfO. (8.2.60)
„ ‘-rn
Структурная схема соответствующем системы представлена па рис.
8.2.2, в. /
8.2.3.4е. Упрощение структуры регуляторов в лимепно-квадратпчной
классической задаче АКОР. Для объекта
х — Ах + Ви, x1=i^==x^lj (8.2.61)
рассматривается задача синтеза регулятора
u(t) = —йж(4), (8.2.62)
где матрица коэффициентов Q размера г X п характеризуется тем, что
отличными от нуля являются либо только предварительно указанные
элементы, либо так называемые существенные элементы, т. о. играющие
доминирующую роль в полном законе управления, полученном в задаче
АКОР (8.2.27) —(8.2.31) [8.15].
Вводится матрица Z, элементы которой принимают значения только
О и 1, в операция поэлементного умножения матриц одинакового размера
Q = Q (Q', Z) + Q' * Z, (8.2.63)
при которой каждый элемент матрицы-произведения представляет собой
произведение аналогичных элементов сомножителей
Мипкмизпрусмый функционал (8.2.27) при этом принимает значение-
1* > /о... (8.2.64)
В общем случае выполнение этого неравенства может зависеть от на-
чальных условий ж(1|). В этом случае полезны предположение о нор-
мальном распределении начальных условий и переход к неравенству, вы-
раженному через вторые моменты [8.15] (с использованием функциона-
ла мша (6.4.1)).
Если матрица Z задана на основе физических представлений, то за-
дача сводится ц выбору матрицы £2'. Если же требуется просто сократить
число обратных связей в (8.2.62), то задача решается в два этапа: выяв-
ление несущественных связей (которым в Z ставятся в соответствие
элементы 0) и выбор матрицы £2'.
Выбор матрицы £2' осуществляется из условия
1 (fion> z) = ™,in 1 (й'. z) (8.2.65)
с использованием любого метода поиска минимума функции многих пе-
ременных (минимизация осуществляется по элементам £2', соответству-
ющим единичным элементам Z). Иногда (8.2.65) целесообразно заменить
условием
Жубои. z)<d + e)Zon, (8-2-66)
где е — заданное «малое» число, характеризующее допустимое ухудшение
качества регулирования.
Выявление несущественных связей регулятора (8.2.31) осуществляет-
ся полным перебором (поочередной заменой 0 па 1) элементов матрицы
Z в (8.2.63) при условии, что £2' = KB^S. Принятие решения о сущсст-
т.епности каждой связи делается по условию (8.2.66). Помимо большого
объема вычислений, к трудностям следует отнести неединственность по-
лучаемых решений.
§ 8.3. Синтез законов управления детерминированными
процессами с дискретным временем при классических
формах функционалов
Стационарный процесс с дискретным временем описывается разност-
ным уравнением
z[* + 1] = /[4*1, u[fc]]. (8.3.1)
Классическая форма функционала типа (6.3.1) имеет вид
7'г—1
* = 7з[г[*2]] + 2 *44*1, 4*]1- (8.3.2)
Уравнение Беллмапа для задачи минимизации функционала (8.3.2)
па процессе (8.3.1) имеет вид
vk2-k [х [*2~ *]] = {L Iх l/c2 “ и *]] +
+ [/Iх [*2~*Ь 4'^ “*]]]} * = 1.2,..., (8.3.3)
•при
^21х[М]=Уз[хР2]]- <8-3-4)
Решение этого функционального уравнения для нелинейных много-
мерных систем так же трудно осуществить, как решепие уравнения
(8.2.3) для систем с непрерывным временем. Дело пе только в трудно-
сти многократного нахождения экстремума функции многих перемен-
ных (в практических задачах число шагов /.'2 — к\ составляет, как ми-
нимум, десятки). Главная трудность в нарастании сложности функций от
шага к шагу. Каждая следующая функция Vh h [х [Л'2 — /с]] для
нелинейного объекта — функция другого, более сложного класса, чем
функция Vh Л+1 [ж — + 41 (|1МС1,1,° па э'10 должны указывать ин-
дексы у функций). Для запоминания таких функций большого числа ар-
гументов при численном решении необходим огромный объем памяти.
8.3.1. Варианты дискретного уравнения Веллмана для частных форм
функционала. Трудности решения общего дискретного уравнения Веллма-
на (8.3.3) сохраняются и для всех пели пенно-квадратичных многомерных
задач.
8.3.1.1е. Дискретное уравнение Веллмана для процесса с лппепип
входящим управлением и аддитивной степенной функцией затрат на
управление в функционале. Пусть процесс имеет вид
х[к + 1] = /[441 + ф[ж[^1 ] w [А], (8.3.5)
а функционал (G.3.3) (стационарный вариант)
л2-1 л2-1 г
'=w2]i + 2 2 2
k—Aj k~k j=l
(8.3.6)
Здесь д} > 1, up — четная функция uj, j = 1, r.
Дискретное уравнение Боллмана (8.3.3) принимает вид
Vh2-k [* [*2- Ч] = [СзР Р2- 41 + 2 4 Ч ’«Г Рз- 4 +
+ V„2_ft+1 [f [* [4 - 4] + <₽ [* [*2- 41 » IS - 41}' (8-3.7)
Необходимое условие локального минимума для гладких функций в
даппом случае запишется в виде
(4*Г „р-1 р2_ /.] + 7"'ПГП7 ср1Л = °’ (8 3-8)
v J J 1 1 J ox [/»‘2 — к _r
где cpljl — j-ii столбец матрицы ср.
Вводя величины ps такие, что
Рг1 + Q71 = I, (8-3-9)
и разрешая (8.3.8) относительно и,, находим
• ft ' 1 {' «Г,4^-11 '!} " 183 101
Подставляя в (8.3.7), прядаем уравнению Веллмана вид
vi.2-h k[*2-*]] = e3m-*|] +
+ v Г - ov'^h+l- <₽|j| № - q i Р
J J рхр, — k r 1J 2 JJJ 1
+ iz„2_,i+i {/ [* [*2 - /]] - «Р [x P2- Л]] X
/ dVh _ft+I ... Y''j/<zn
l11*.-*!1.) }• <8'ЗЛ1>
ГДО
f A —A+1 Cl \
d.-----2—111-----mbl p r/j — All) (8.3.12)
'<МЦЛ-,2— к -i- 1] ' 1 1 2 J7
—матрица-столбец, составленная из элементов (8.3.10).
8.3.1.2°. Дискретное уравнение Веллмана для процесса с линейно
входящим управлением п квадратичной функцией АД,. При р; = qj = 2.
j == 1, г, т. е. использовании функционала типа (6.3.4), выражении
(8.3.11), (8.3.10) принимают вид
Fft_fer[*2-^] = <23[^p2-fr]] Ь
. „г ^h.-A+l , , ,, т. , , ,7''л„-А+1
+ 0’5 [/'2“ *|] и
' ^л2-а+1 V [г [А’г 41
^ср[х[/г2-7,]]рс(;г[х|А-2-А-]]
м[/С2-/1]=-Пс1Л[.цА2-А]]
dx [кг- к
^1^2-
(8.3.13)
(8.3.14)
8.3.1.3е. Дискретное уравнение Веллмана для ликейио-квадратпчпой
классической задачи. Для процесса
х[/£+1] =Л[А].г[А]+ В[А]н[А]
и функционала (6.3.5)
1 = 0,5хт [А-2] рх [Л-2] +
(8.3.15)
а2-1 а2-а
4-0,5 У, хт 1*1 ₽* Р1 + 0,5 иг[,', ] Д-’„[А] (8.3.16)
1^
уравнение Боллмана принимает вид
[х р, - А]] = 0.5 zr [/s - А] $х [А, - А]
ь —Ь+< Г — 7-1-1 1Т
+ и,5----_—- В ГЛ- — А1 1)В1 I к — А] ___________'г +1 J.
Ox |Ag - к + 1] 2 1 J дх[к2— A-I-1]J 1
+ Г„2_,(+1|Л р2- Л]Ж[Л2— А] -
- В |., - *, ВС’ р, - В, [ ’]• <».337,
Это уравнение должно решаться при граничном условии
[r l/f2П = 0’5/Г [Л21 Р* [/га1- (8.3.18)
Оптимальное управление равно
„ [А-2 - А] = _ щ, (а-2 - А]
8.3.2. Синтез законов управления линейными системами. Единствен-
ным случаем, когда дискретное уравнение Веллмана решается в общем
виде, является линейно-квадратичная задача. Это связано с тем, что
класс функции V здесь не меняется на каждом шаге (квадратичная
форма). Поэтому индекс у этом функции в (8.3.17) —(8.3.19) можно опус-
тить.
8.3.2.1°. Решение линейно-квадратичной классической дискретной за-
дачи АКОР для случая стабилизации. Решение уравнения (8.3.17) можно
искать в виде квадратичной формы с привлечением уравнения управляе-
мого процесса
ж [А2 _ к -j- 1J = А [А"2 - А ] х [А-2 - А] -
(0V \ т
------.
дх [А2 — A- -j- 1J )
А именно, если положить
R И2 - к + !]] = Г R Р2 -* + !]] =
= 0,5 .гт [А2 - А- + 1 |S* [А-2 - к + 1] xs [kz - к + 1],
ТО
[ 0V , у
VR^+lJ ='S*P2-'H-l].P2-^- + lJ =
= $ - к + 1] А [А2 - А] х2 [к2 - А] -
/ ov, , ,, \
— 5 [А - к -I- 11 В ГА- — АЛ DBr Гко — А1 ---^5-2-!-- ) ,
12 ‘112 J 12 J кс,ж1/'2~Л+11/
т. е.
---Ш ;,2 ',+1 = [Е + S* [А- - к + 11 В [А - А| 7)ВТ[Л- - А-]1-1 X
дх [/г2 — к + 1J 1 12 J 1 2 1 12 JJ
X 5* [fc2 - к + 1] A [fc2 - А] х [А-2 - А].
Подставляя эти выражения в (8.3.17) и приравнивая коэффициенты
при одинаковых произведениях х,Х; (в скалярной форме), можпо полу-
чить рекуррентное уравнение для .S'* и выражение для оптимального уп-
равления. Можно использовать другую процедуру доказательства *) [8.10,
с. 514—517]. В результате получаем
и [Аг — А ] = иоп [А-2 — к] =
= [/<-2 - А] + В'[А2 - А]В[А’з- к + 1]В[А-2 - А]]-1 X
X йт[А'2 — А]В[А*2 — к -[- 1].1 [А*2 — А']х[А2 — А*], (8.3.20)
5[А-2 — А] = Дг[А-2 — A],S'[A2 — к + 1]Л [А2 — А] —
— _4Т [ А2 — А] 5 [ А2 — А + 1] В [ А2 — А] [В-1 [А-2 — А] +
+ ВТ[А2 — А]5[А-2 — А-}- I] В[А2 — А] ]-1 Вт[А2 — А] X
X В[А2 - к + 1]Л [A-г — А] + р [4-2 - А]. (8.3.21)
Здесь А пробегает значения 1, 2, ... Рекуррентное уравнение (8.3.21) ре-
шается при граничном условии 5[А2] = р.
Приближенно можпо оцепить вычислительные затраты для данной
нестационарной задачи прп определении .S' па .V шагах. При большой
размерности (высокое п) общее число необходимых элементарных опе-
раций приближенно равно 4(2,г3 + n?r + nr2)N. При п = 20, г = 5, N =
= 100 это число составляет примерно 4-10ь.
8.3.2.20. Решение линейно-квадратичной стационарной задачи АКОР
для случая стабилизации. Для стационарной линейно-квадратичной за-
дачи стабилизации А [А] = А = const, В [А] = В = const, а минимизиру-
емый функционал естественно задавать в виде
ft+Aon /?оп
7 = 0,5 У, хт [г] рх [г] + 0,5 У ит [<] D~ [г],
г—h i~k
где ₽ = const, D = const. Тогда рекуррентное уравнение (8.3.21) прини-
мает форму
S[i] = .4TS[i+ 1]Л —ЛтВ[г+ 1] X
X В [В + BTS [i + 1 ] В] - 'BBS [i + 1 ] А + р. (8.3.22)
Если граничное условие записать в виде В[А0П +1] =0, то i в
(8.3.22) должно принимать значение ^*оп, ^ОП ------ 1, АОп — 2, ..., 0. При
*) В указанной книге доказательство приведено для процесса, воз-
буждаемого белым дискретным шумом, ио оно сохраняет силу для детср-
мицпровашюй линейно-квадратичной задачи.
этом 5(0) является искомой матрицей, которая входит в выражение оп-
тимального стационарного управления
«[/] = «опШ = -[£>-' + /?т5[0]В]-'Вт5[0]Лх[/]. (8.3.23)
§ 8.4. Синтез законов управления стохастическими
процессами при функционалах классического типа
В § 6.4 приведены функционалы классического типа двух разных
форм для оптимизации управления стохастическими процессами. Первую
форму образуют функционалы в виде безусловного математического ожи-
дания (6.4.1) классических функционалов, применяемых для детермини-
рованных процессов. Вторую форму составляют функционалы в виде ус-
ловного математического ожидания (6.4.2) классических функционалов,
применяемых для детерминированных процессов.
Эти две формы функционалов порождают разные формы алгоритми-
ческого обеспечения. При этом для нелинейных систем задача синтеза
управления стохастическими процессами путем минимизации функцио-
налов (6.4.1) отце намного сложнее, чем для детерминированных процес-
сов (где, как показано в § 8.2, 8.3, она тоже пе имеет удовлетворитель-
ного с точки зрения практики решения).
В то же время для функционалов (6.4.2) для нелинейных задач при-
ближенно, а для линейно-квадратичных задач точно, справедлива теорема
разделения. Это делает сиптез законов управления стохастическими ие-
липенпымп системами путем минимизации функционалов типа (6.4.2)
по своей сложности примерно эквивалентным синтезу алгоритмов управ-
ления детерминированными системами. Для липейно-квадратпчпых задач
оптимизации управления стохастическими процессами решения по своей
трудоемкости не отличаются от соответствующих детерминированных
аналогов кац при использовании безусловных, так и условных математи-
ческих ожиданий целевых функций.
8.4.1. Приближенное разделение для стохастического нелинейного
объекта с линейно входящим управлением. Пусть управляемый процесс
описывается уравнением в форме Лапжевеиа
х = f(x, I) + ср(х, + £(«), (8.4.1)
а функционал задан в виде
ОО
J\' — Еу [/] = J 1р (х, и, t1 Z) dxdu = —-ОО [ '2 ' = Еу Гз [* («а)] -1- J С3 [« (0), 0] <10 -|- j t’3 [u (6), 0] <10 , (8.4.2)
где U3 (u, t) — U3 (v, l) - Ua (r, <)] (u - I’) (8.4.3)
— положительно-определенная функция относительно и, обращающаяся
в пуль только при и = V.
Условия паолюдспия здесь гге уточняются, одпако предполагается,
что обработка сигнала наблюдения s па интервале наблюдения (эта ин-
формация обозначается Z) позволяет хотя бы приближенно определить
текущее значение оценки
ж = Еу [ж (Z)| — хр(х.
Для каждой реализации £(Z) сохраняют силу уравнения (8.2.9) с учетом
^(Z) и (8.2.10):
-г Т7" I/ 0 + (р -х' 0 v £ (01 + f73 ('•. 0 = — *?з (*. (8-4-'0
a дУ
(г’ о т °- (8-4-5)
и выражение (8.2.15) принимает вид
1 = v3 Р ('J] + f R [" (0), 0! - U3 [Г (0), 0] -
4
- U3 [I- (0), 0]j [u (0) - V (0)]j de. (8-4.6)
Заметим, что для любой непрерывной функции F(x, и, t) вследствие
теоремы о среднем справедливо соотношение
ОО
Ev [Е (х, и, /)] = j* F (х, и, I) р {х, и, 11 Z) dx du = F (х, и, 1),
— оо
где х. й — некоторые значения х, и- в области, для которой условная
плотность вероятностей р(х, и, tfZ) отлична от пуля. Чем выше точность
оцеппвапия, выполняемая некоторым фильтром (см. гл. 4), тем ближе
р(х, к, Z|Z) к 6-фупкцни и ближе приближенно к равенству
Еу[/’(.г, и, Z)] = F(x, и, I), (8.4.7)
где
ОО оо
х = j" хр (х, и, t I Z) dxdu, и = J j" up (х, и, 1 | Z) dx du. (8.4.8)
•— со —со
Прпмепим оператор условного математического ожидания к выражени-
ям (8.4.4) —(8.4.6), исиользуя везде приближенное равенство (8.4.7). По-
лучаем
с) д л
к (ж, t) г {х, t) [/ (х, I) -;- ср (х, t) г] -,- с3 (р, I) + vxg =
= — <23 U, Л, (8.4.9)
а /?
—— U, (г, I) — Р (х, I) ср (х, I) = о, (8.4.10)
д г дх
Ч ,
Jy = Еу [/1 =• Г, р («J] -I- j Ж [" (0), 01 - Ъ\ [е (0), 0] -
‘1
— -4- ия [? (0), О) [и (0) - Р (0)1] rfO, (8.4.11)
dv J
где
r.v? = J 6 (О P <z> ' 0 dxdv- (8.4.12)
Вследствие указанного свойства функции (8.4.3) J, имеет единствен-
ный минимум при и =i\ где v определяется выражением (8.4.10). Если
величина (8.4.12) равна нулю, то (8.4.9), (8.4.10) отличаются от уравне-
ний (8.2.9), (8.2.10) для детерминированных процессов только заменой
х на х и v па и. Итак, при условии га о оптимальное (в смысле ми-
нимума /у) управление стохастическим процессом (8.4.1) при стохасти-
ческом условии наблюдения может быть приближенно получено как оп-
тимальное (в смысле минимума I) управление детерминированным про-
цессом с точным измерением х путем замены в последнем истинного
значения х па оценку х = Еу[г]. Получоппоо таким путем приближен-
ное решение задачп синтеза закона управления стохастическим процес-
сом тем точнее, чем выше точность оценивания, т. е. чем меньше Д.г =
= х — х.
Это составляет содержание приближенного принципа (теоремы) раз-
деления в общем виде.
Принцип разделения удобен в практическом использовании, так как
позволяет раздельно синтезировать систему оценивания и идентифика-
ции, с одной стороны, и систему собственно управления, с другой сто-
роны. Далее принцип приближенного разделения формируется для ча-
стных видов минимизируемого функционала (8.4.2).
8.4.1.!°, Приближенное разделение для случая минимизации функ-
ционала Jy со степенной функцией U:s. Если минимизируемый функцио-
нал имеет вид
/у — Еу
Q3 [х (0), 01 rfO
(8.4.13)
где Qi > 1, kj > 0, up — четная функция щ и приближенно или
точно равно пулю, то субоптпмальпым управлением для процесса (8.4.1)
служи г
где F(.r, /) определяется как решение уравнения
dt
дУ
дх
(8.4.15)
при граничном условии
= гз [* (<>)ь
(8.4.10)
В (8.4.14) используются значения р; = qjKq,—1), а х(1) есть оценка
истинного значения z(t) в виде УМО х = Еу[х].
8.4.1.2°. Приближенное разделение для случая функционала Д- с
квадратичной функцией Пусть минимизируемый функционал имеет
вид
С t2 Д !
уу = Еу]уз [.г («.,)]+ [ О3[х(0), 0] <Z0-1-0,5 J ит(0) А'-1и(О)й0
t " Д '1
(8.4.17)
л ЕД приближенно пли точно равно пулю. Тогда субоптпмальпым уп-
равлением для процесса (8.4.1) служит
и = —А'<рт(ж, 1) (дУ/дх)т,
(8.4.18)
где V = Г (г, t) есть решение уравнения
дУ дУ ~ дУ л л /йК\т
— -|- — / (х, t) — 0,5 —~ ср (х, 0 А<рт (х, 1) = — <23 (г, 1) (8.4.19)
('с Ох дх \ Ох )
при граничном условии (8.4.10), а х(1) в (8.4.18) есть оценка истинного
значения x(t) в виде УМО х = Еу[.т].
8.1.2. Точное разделенно для липейпо-квадратпчных задач оптималь-
ного управления марковскими процессами. Для линейных стохастиче-
ских процессов, описываемых уравнением
х = А(Г)х + В(1)и + Ц1),
(8.4.20)
где Ё(0 — процесс типа гауссовского белого шума, а также для линей-
ных стохастических процессов с дискретным временем:
х\к + 1] = .1 [/.:]4/с] + В[Л] и [А-] + g [А],
(8.4.21)
гДс | [А] —белая гауссовская случайная последовательность, справедлив
принцип точного разделения, причем как при мплпмпзацпп квадратич-
ных функционалов типа J. так и типа Jr.
8.4.2.Г. Непрерывное время. Для процесса (8.4.20) оптимальным в
смысле минимума квадратичного функционала
J= Е
0,5хт(/„)Р2;(?о) + 0,5 J г'г (0) ₽.т(0)</0ф0,5 J ит (0)
является управление [G.G, с. 500—505]
К 1 и {0)d0
(8.4.22)
и — Иоп — —КВ1 (l)S(l)x,
(8.4.23)
где 8(1) есть решение матричного уравнения Риккати (8.2.30):
S + S/1 + — SBK&S = — ₽
прп условии S(l2) = р, а х(1) есть оценка истинного значения x(t) в ви-
де УМО £у(г), получаемая, в частности, ла выходе ФКБ (4.3.58), (4.3.59).
8.4.2.2е. Дискретное время. Для процесса (8.4.21) оптимальным в
смысле минимума квадратичного функционала
J= Е
Г Л2-1 7.2-1
0,5хт [*2] р.г [7с2] 0,5 хт[£]₽х [7г]-1-0,5 2 нт [7г] Z)~[/>:]
(8.4.24)
является управление [8.17]
и [г] = -[£>-ф] +Вф]£[7 + 1]Я[1]]-1ЯФ]5'[7+ l]4[i]z[i], (8.4.25)
где £[«] определяется рекуррентным уравнением
£ф] = дф]5ф + 1]/ф] -Лф]£[г + i]B[i] X
X [П-ф] +^[«]S[i + l]Z?[7]]-I^r[7]S[i + l]4[i] + [ф] (8.4.2G)
прп граничном условии 5ф/2] == р, а аф] есть оценка истинного значе-
ния лф] в виде УМО Еу[аф]], получаемая, в частности, па выходе ФКБ
с дискретным временем (4.5.27) — (4.5.31).
§ 8.5. Решение задачи минимизации критерия
обобщенной работы в общем виде
Здесь приводятся общие решения задач синтеза оптимальных уп-
равлений прп функционалах типа обобщенной работы. Из этих решений,
как частные случаи, получаются многие известные решения, излагае-
мые ппже.
8.5.1. Оптимальные управления непрерывными дстермипироваипыми
процессами. Рассматриваются задачи управления объектом с линейным
управлением и аддитивными функциями затрат на управление в мини-
мизируемом функционале обобщенной работы (ФОР).
8.5.1.1°. Минимизация ФОР с аддитивными функциями затрат. Пусть
управляемый процесс описывается уравнением типа (8.2.7)
х = f(z, 7) + <f(z, t)u, (8.5.1)
а минимизируемый функционал имеет вид ((i.2.11):
к
1 = Гз Iх ('2)] J <?а 1* (°)> °] + j (С'3 [и (0), 0] -!- 77* [иоп (0), 0] ] </0,
'1 'с
(8.5.2)
где 17;], U*— заданные функции указанных аргументов такие, что
Ua (и, 6) -’г Ua (и Л1, 0) — Ua (нц„, 0)] и (8.5.3)
— положительпо-определошгая функция относительно и, обращающаяся
в нуль при и — иоп. Функция Поп в (5.5.2) — цока неизвестное оптималь-
ное управление.
Покажем, что оптимальное управление v = uOJl в данном случае оп-
р одел я е т с я с сот но mt1 пн е м
-^U3(r, t) = - — <p(x, t), (8.0.4)
где V — Г(.'<. <) есть решение уравнения Ляпунова для неуправляемого
(и = 0) объекта
617 6Р _
Ж, 7) = — (?3 (z, 7) (8.3.0)
при граничном условии Г 1_г1 — Т’3 (г).
Запишем уравнение Веллмана (8.2.3) для задачи (8.5.1), (8.5.2):
<Л' 7 ,х 0V 1
-^--'rmink>3(z, /)4-t73(«, 7)Ч-673 («оп, + O + 7)и]|=0
пли с привлечением достаточного условия локального минимума гладкой
функции:
0V * 6Р
-уг-rQ.^, о-кж- о от^-1/u, отфо, «)7'1 -о,
О д V7
77;)(г, 7) ср(z, 7) == 0. (8.5.С)
Если из второго уравнении выражение
0V О
— ср (х, {) = — — (7 (г, /) (8.5.7)
дх ' ' di.’ з' 1 / ' >
подставить в первое и учесть, что согласно указанному условию
* 6
('•. 0 !- t * ('•- 7) - й? U3 (7-. 7) и = 0,
то получаем выражения (8.5.4).. (8.5.5),
Как и в случае классического функционала (8.2.8), можно привести
другое доказательство, более наглядное с точки зрения единственности
решении. Добавим к обеим частям уравнения (8.5.5) функции
i)V »
— гр (т, I) и -J- Ua (и, /) Ua (v, /),
с учетом (8.5.1) получаем
• & * <9 К
V -г <?3 (*, О “1‘ t73 (« П -г из о = из <" о -Ь из (у> 0 -г 7^7- ф (!О и-
(8.5.8)
Здесь полная производная по времени V вычислена па решении уравне-
ния (8.5.1). Интегрируя (8.5.8) ио времени от К до 12 с учетом гранич-
ного условия Г,^( — I’.. (х) и выражения (8.5.7), находим
<2
I = и [х (ij] j [с7а («, о) -ь и* (,.-, 0) - и3 (и, о) и] ао.
‘1
Отсюда непосредственно вытекает, что при заданном условии для функ-
ции (8.5.3) функционал I имеет единственный минимум при управле-
нии и = г = Коп, определяемом выражениями (8.5.4), (8.5.5).
8.5.1.2°. Минимизация ФОР с аддитивными степенными функциями
затрат. Для управляемого процесса (8.5.1) минимизируется функцио-
нал (6.2.12)
I = V’:J [х (/.,)] О, [х (0), 0] <10
S < 1’Т'к7'
г4оп(0)) rf0,
(8.5.9)
где 7; >1, — четная функция к.,-, р~' + q~' = 1. Согласно (6.2.14)
здесь удовлетворяется условие, заданное для функции (8.5.3).
Выражение (8.5.4) имеет вид
/ = I, г.
По (<ц — 1)-' = Pi/(Jj и
Uj =,и-
j = 1, г. (8.5.10)
Таким образом, оптимальное управление при функционале обобщенной
работы (8.5.9) имеет такой же внешний вид, как при классическом
функционале (8.2.16) (см. (8.2.19)). Однако I’ = 1Л(.г, t) здесь есть ре-
шение линейного уравнения с частными производными (8.5.5) (уравне-
ния Ляпунова), в то время как при классическом функционале V =
= Г’(г, /) есть решение нелинейного уравнения Веллмана (8.2.20). Это
принципиальное отличие, сохраняющееся для всех задач оптимизации
по ФОР (в том чпсле для предшествующей), обусловливает широкие воз-
можности решения основной проблемы СТАУ, как опа представлена во
введении.
Ввиду большого значения оптимизации по неклассическому (полу-
определенному) функционалу обобщенной работы соответствующая по-
становка задачи и ее решение через уравнение Ляпунова (8.5.5) вслед
за [8.18] именуется часто в дальнейшем принципом минимума обобщен-
ной работы. Для детерминированных управляемых процессов с непре-
рывным временем конкретными выражениями этого принципа служат
уравнения (8.5.1) — (8.5.5), а для степенной функции затрат на управле-
ние в функционале — формулы (8.5.9), (8.5.10), (8.5.5). Это более общие
формулировки принципа минимума обобщенной работы, в сравнении с
опубликованными в [8.19—8.21]. В указанных публикациях наиболее об-
щим был случай (8.5.9) при pj = р, щ = q, j - 1, г.
8.5.2. Оптимальные управления детерминированными процессами с
дискретным временем. Рассматриваются два решения задачи оптимиза-
ции по ФОР: строгое и приближенное.
8.5.2.1°. Строгое решение задачи оптимизации. Для процесса
г [7с + 1] = /[г [7г]] + <f [ж [А-]] и [7г] и функционала обобщенной работы
й2-1 й2-1
' = W211 + 2 + 1] win- 2 из [%п 1*1]-
ц ll—ll J k=llL
(8.5.11)
где функция
Us («) + (иоп) - [^~ (“оп)1 и (8.5.12)
. oil J
является положительно-определенной относительно и и обращается в
нуль при и = uORi дискретное уравнение Боллмана (8.3.3) записывается
в виде
[* UU = min [<23 (х [»]) us (u[i[) 17* (Uon [i]) -I-
H[i]
+ ri+1[/U[d)4-<pU17])n[l]]}, 7=7.-2-l, 7^-2, ... (8.5.13)
Рекуррентное функциональное уравнение (8.5.13) должно решаться
при граничном условии
%№]]=^з№1]. (8-5-14)
Привлекая необходимое условие локального минимума гладкой фуик-
ции, вместо (8.5.13) записываем
гг [х [dl = Qi к [dl г и3 [%п [«]] -|- и* [%п U1] +
+ ri+i [fl* Idl + <P[z[dl «оп]> (8.5.15)
<7 0Fi+i
дн()П С з tK°n I' 1 [г 11 ф Iх ('II- (8.5.16)
Учитывая, что по условию при и = иоп выражение (8.5.12) равно
пулю, преобразуем (8.5.15) к виду
VJ® [dl = Q3 [Mdl + Vi+1 И* Idl -|-<pk [dl %„ [i] —
svi+i
~ лГ[ГТи (₽ lz]1 lton fZJ- (8-517>
Выражения (8.5.16), (8.5.17) описывают строгое решение задачи син-
теза оптимальных управлений для указанных условий. Во для многомер-
ных нелинейных объектов сложность выражений быстро нарастает с
ростом числа шагов, а при численных формах решений быстро растет
необходимый объем памяти. Положение кажется аналогичным тому, ко-
торое имеет место при классическом функционале. Однако для уравне-
ний (8.5.16), (8.5.17) есть несравненно более простое приближенное реше-
ние. Опо для большинства случаев, встречающихся на практике, ока-
зывается удовлетворительным по своей близости к строго оптимально-
му решению. Это решение получается следующим образом.
8.5.2. 2е. Приближенное решение задачи оптимизации. Обычно раз-
ностное уравнение (8.3.5) х[/с + 1] = /[rc[/c] ] + <p[x[Zc]]u[/«] непрерыв-
ного нелинейного объекта ,т = f*(z) +<р*(х)н получается путем приме-
нения какого-либо метода численного интегрирования, например, метода
Эйлера, при котором
жГ/с-ь 1] = .?[/(]+д«ш/*№]] +-МЧ4Ч14Ч.
где Л/ш — шаг численного интегрирования.
Шаг в разностных схемах или рекуррентных алгоритмах управле-
ния должен быть достаточно малым, в противном случае «чистое запаз-
дывание», вносимое дискретностью управления, вызовет нежелательные
эффекты, включая потерю устойчивости.
Отсюда следует, что норма величины <р[^И]н[А:] — A/lu<p*[.r[A:]]u[fc],
вообще говоря, мала, а величина /[#[£]] = г1Л] + Д(ш/*[^[*]] близ-
ка к х[Л] их[/с+1]. Таким образом, справедливо приближенное ра-
венство
Гг+1 {/ 1г Idl I- <р [г [dl иоп [d) -=
l-i
= К, pt {/ Iх Idl) I- i)X j, j ..]] Ф Iх Idl w01i fd,
при котором уравнение (8.5.17) принимает очень простую приближен-
ную форму:
V.I4,]] =<?3[x[d] +V(+I[/[x[d]].
(8.5.18)
Решение этого рекуррентного уравнения при граничном условии
(8.5.14) определяет согласно (8.5.1G) субоптимальное управление в смыс-
ле минимума функционала (8.5.11).
8.5.3. Приближенное разделение при минимизации условного мате-
матического ожидания функционала обобщенной работы. Для стохасти-
ческого процесса
* = /(ж, I) + ср(х, t)u + £(Z)
и наблюдения при наличии шумов (здесь пе конкретизируется) мини-
мизируется функционал в виде условного математического ожидания ве-
личины (8.5.2)
ОО
Jy — Еу [7] = j* J /р (х, и, 11 Z) dxdu =
— ГО
гз Iх (?2)1 + У <}з(6). °] "'° + У 1" (0), 01 rfO
<2
4- j ^:роп(0). ojrfo
<1 J
где величина (8.5.3) удовлетворяет тому же условию, что и в детерми-
нированном случае.
Согласно приведенному в и. 8.5.1 преобразованию
Jy ~ Еу Р Iх (*i)]} 4
+ ЕУ
J [с73 (и, 0) -Ь (иоп, 0) - ия («оп, 0) н] с/0
Л
При достаточно точном оценивании текущего состояния условная плот-
ность вероятности р(х, 0|Z) близка к 6-фуикппц и при непрерывных
* д
функциях с/3, -j- U3 функционал /у приближенно равен
^оп
2у = Еу{7 [г(Ч)]} -[-
'2,-
д
ди
“оИ>
но,„ 0)«
dO. (8.5.19)
При этом же условии справедливо приближенное выражение
д -. dV
z> = ^(pu’ °’
с lion ox
(8.5.20)
где I'xcCTb решение уравнения
<ЭГ i)V - [57 1
~вТ !- £ *) = -?» » - Еу [р7 (8-5-21)
при граничном условии Vt=i2 = F3 (.г). Индексом «~» в (8.5.19), (8.5.20)
обозначены УМО.
[57 1
Из (8.5.19), (8.5.21) следует, что если величина Еу g (t) I при-
ближенно или точно раина нулю, то функционал (8.5.19) достигает ми-
нимального значения при и = иоп, где w„fr определяется выражением
(8.5.20), в котором z(t') есть условное математическое ожидание истинно-
го значения x(l), а V определяется уравнением Ляпунова типа (8.5.5).
Таким образом, принцип разделения при оптимизации по ФОР спра-
ведлив в той же мере, как и при оптимизации по классическому функ-
ционалу.
8.5.4. Стохастический принцип минимума обобщенной работы. Пусть
система описывается уравнением вида
х =/(ж, t) +<р(ж, t)и -j- g (t),
(8.5.22)
где £ (t) — процесс типа гауссовского белого шума с матрицей интенсив-
ностей Q. Стохастический ФОР имеет вид (6.4.5)
Ернин-
72 ^2 ^2
-|- f (?3 к (0), 0] d0 4- [ Р3[«(0), 0]d6-)- j U* [ноп (6), 0J do|, (8.5.23)
й й h J
где соблюдается условие (8.5.3), а Е— символ безусловного МО. Функ-
циональное уравнение Боллмана для задачи (8.5.22), (8.5.23) имеет вид
57 * ,
gp mtn [<?3 (ж, Z) -|- f/3(u, t) -|- Ua (won, t) -I-
и
TIZ I 527 \)
-I- g If (*, t) -I- <J> (x, 0 Hi -I 0,5 tr Q =0. (8.5.24)
dx \ uxax j j
Необходимое условие минимума но и выражения в фигурных скобках
имеет вид
[£• и.л (и, г)]и=1(оп + g <р (х, о = о. (8.5.25)
Подставляя ^~<р нз (8.5.25) в (8.5.24), получаем
+ min [С73 (и, t) 4- U* («оп. 9 — Г-57— U3 (%,„ г)] “ +
и L *-’11 J
+ Q3 (*, t) + / (ж, /) + 0,5 tr (Q 7^')! = 0.
,5 дх I дхдх /I
Согласно условию (8.5.3) это экви валентно
8V 8V / <72К \
77 + to f г> + °’5 tr Р ZZd = “ {х’ z)- (8-S-2G)
Гешепие уравнения (8.5.2G) должно удовлетворять граничному условию
V (х, t?) = V3(z).
(8.5.27)
Итак, стохастический принцип минимума обобщенной работы может быть
сформулирован следующим образом. Оптимальное управление, достав-
ляющее минимум функционалу (8.5.23) па множестве решений уравне-
ния (8.5.22), при выполнении условия (8.5.3) определяется выражением
[8 1т f8V\v
О] =- (РТ(*. О (to) ’ (8-5‘28)
где V = V(x, t) есть решение уравнения в частных производных (8.5.26)
при граничном условии (8.5.27).
Как видно, стохастический принцип минимума обобщенной работы,
в котором ищется условно минимума математического ожидания функ-
ционала по всему множеству реализаций, отличается от детерминиро-
ванного (Q = 0) случая п случая с условным средним тем, что вместо
уравнения Ляпунова (8.5.5) здесь фигурирует уравнение (8.5.26), со-
держащее «диффузионный член»
0,5 1г
Д21/ \
to to1 / ’
(8.5.29)
П.з приведенной формулировки стохастического принципа минимума
обобщенной работы вытекают все частные случаи, являющиеся анало-
гами решений соответствующих вариантов детерминированной зада-
чи (Q = 0).
8.5.5. Стохастический принцип минимума обобщенной работы и урав-
нение ФПК. Выражение (8.5.26) напоминает уравнение ФИК для систе-
мы (8.5.22) без управления
* = /(*, 0 +U0-
(8.5.30)
Ото позволяет получить следующую интерпретацию. Уравнение ФПК
Для логарифмической плотности вероятности после добавления к обеим
частям равенства удвоенного члена (8.5.29) примет вид
а , <?1п р
di 1а р + ах
1
о 1т
Q Р
дхдх1
Of Я In р
— t -r V- + —Н- О
ох 1 дх '
(8.5.31)
Из сопоставления (8.5.31), (8.5.26) —(8.5.28) вытекает следующее. Если
для системы без управления (8.5.30) известно распределение плотности
вероятности р(х, I), удовлетворяющее начальному условию р(х, t0) =
= /'о(-т), то оптимальное управление в смысле минимума функциона-
ла (8.5.23), где
V3(a) = —In До (л),
~ of a in р (a in д\т
— tr дх + дх $ ( дх ) +
а21» р
дхдх1
(8.5.32)
для системы (8.5.22) определяется выражением
Г д ,
з(“оп’ г)
(д In р\т
— гот (ж, П -----;-- .
— 'Р ' ’ ' I Ox I
(8.5.33)
§ 8.6. Синтез законов оптимального
и субоптпмального нелинейных управлений
па стадии проектирования системы
при функционалах обобщенной работы
Основным достоинством метода синтеза оптимального по ФОР управ-
ления является возможность его эффективного использования для су-
щественно нелинейных объектов и пеквадратичпых функционалов. Од-
нако наиболее конструктивные результаты применения этого метода от-
носятся к динамическим объектам с линейно входящим управлением.
8.6.1. Приведение задачи к линейно входящему управлению. Для слу-
чая непрерывного времени уравнение движения такого объекта имеет
вид (1.2.2):
X = /(.Z, t) -г Cf(x, 1}и.
(8.6.1)
Условия, накладываемые па функции / и <р, а также па множество и е U,
пока оговаривать не будем.
Объект управления исходной постановки задачи, когда уравнение
его движения имеет более общин вид (1.2.1):
х = f(x, и, I), (8.6.2)
может быть приведен к форме (8.6.1) различными способами.
Во-первых, ряд задач управления предполагает, что синтезирован-
ные законы будут использовать значения вектора управления пз доста-
точно малой окрестности некоторого базового значения вектора управ-
лепия и°. Малость окрестности определяется допустимостью линеариза-
ции функции f(x, и, t) по вектору и. Тогда, воспользовавшись извест-
ными правилами линеаризации, вместо (8.6.2) можно записать
• I о \ и, Г) \
л = / (х, и , t) о Ди‘ (8.6.3)
Здесь f(x, и0, t) — n-мерпая функция, вычисляемая при базовых значе-
ниях вектора управления -и текущих значениях х и t, отождествляется
с функцией f(x, t) уравнения (8.6.1); (Of (х, и, t)/du) о —матри-
ца размера п X г частных производных функции f(x, и, t) по компонен-
там вектора и, вычисляемых при базовых' значениях вектора управле-
ния и текущих значениях х и t, опа отождествляется с матрицей <[>(х, I)
уравнения (8.6.1); йи— r-мерный вектор приращений вектора управле-
ния объекта (8.6.2), отождествляемый с вектором управления объекта
(8.6.1).
Во-вторых, большинство задач управления динамическими объекта-
ми допускает переформулировку задачи в таком виде, когда оптимизи-
руемым управлением является скорость изменения вектора управления
исходной задачи (см. п. 6.2.1.1°). Тогда, вводя новые обозначения у —
— r-мерный вектор управления, заменяющий в (8.6.2) вектор и; и — г~
згерный новый вектор управления, соответствующий скорости измене-
ния у, запишем
х = f(x, у, t), у = и. (8.6.4)
Формально такой объект может быть записан в виде (8.6.1) при рас-
ширении вектора состояния объединением х и у. Уравнение движения
такого объекта имеет вид
(8.6.5)
где 0 — матрица с пулевыми элементами; Е — единичная матрица. Мат-
рицы уравнения (8.'i.5) отождествляются с соответствующими матрица-
ми (8.6.1).
В качество недостатков каждого из этих способов следует отметить
следующее: первый способ сужает множество U до окрестности базового
значения вектора управления, второй способ приводит к расширению
вектора состояния и требует переформулировки минимизируемого функ-
ционала.
8.6.2. Решение задачи оптимизации при функционале обобщенной ра-
боты с квадратичной функцией затрат на управление. Рассматривается
задача синтеза для непрерывного объекта
х = /(х, г) +ф(х, t)u
(8.6.6)
управления и, оптимального в смысле минимума функционала
/2 t2
I = v3 [.-г (г2)] + j <?3 <х, О dt + °>5 J (wTA'-1w + гЛпЛ—dt, (8.6.7)
*i G
где f H cp — векторная и матричная функции указанных аргументов, оп-
ределенные для всех (е [;,, !г]; Ря п <7,— заданные положительно-опре-
деленные функции указанных аргументов; К—положительно-определен-
ная матрица заданных коэффициентов.
Хотя решение для данной задачи получается как частный случаи
решения, приведенного в п. 8.5.1.1° (при q, = 2, j = 1, г), ввиду важно-
сти данной задачи целесообразно изложить ее решение подробнее.
8.6.2. !°. Оптимальное управление непрерывными детерминированны-
ми процессами. Пусть выполняются следующие условия:
а) уравнение, описывающее движение объекта, линейно относитель-
но вектора управляющих воздействий it;
б) минимизируемый функционал является квадратичным относитель-
но вектора управления и;
в) область возможных значений управляющих воздействии явля-
ется незамкнутой;
г) решения (8.6.6) х(1)еХ непрерывны и непрерывно дифференци-
руемы па X';
д) па X X [б, tz] существует такое непрерывное дифференцируемое
решение V(x, t) уравнения
-Ь f (х, !) = - - Q (х, !), (8.6.8)
которое при t = t-2 принимает значение
К(х„ г)/=/2= V3[x(t.,)]. (8.6.9)
Тогда существует единственное решение задачи оптимизации (8.6.6),
(8.6.7), а вектор оптимального управления определяется соотношением
«о.. = -лФт4г- <8-6л°)
Здесь V = V(x, t) — вещественная скалярная функция указанных
аргументов; dV/dx— матрица-строка, элементами которой являются част-
ные производные V(.т, t) по компонентам вектора состояния.
Решение уравнения (8.6.8) с условием (8.6.9) и последующая реа-
лизация (6.6.10) представляют собой содержание синтеза закона управ-
ления, оптимального по ФОР.
Перечисленным условиям может быть дапа физическая интерпрета-
ция. В большинстве случаев эти условия приводят к несильным ограни-
чениям в практических задачах. Так, вопросы удовлетворения первым
двум условиям обсуждены в п. 8.4.1. Приближенный учет ограничений
управлений по абсолютной величине может быть заменен соответствую-
щим выбором K(t) в (8.6.7). Однако следует заметить, что при этом бу-
дет паблюдаться некоторое, обычно несущественное, недоиспользование
располагаемого диапазона управляющих воздействий. Условие г) яв-
ляется естественным для непрерывных динамических систем и редко
может вызвать затруднения.
Последнее из перечисленных условий связано с существованием по-
ложительно-определенного решения уравнения Ляпунова (8.6.8). Па ана-
лизе этого условия остановимся несколько подробнее. Если длительность
интервала [tH t2] является конечной, т. е. момент окончания процесса
оптимизации Г2 является конечной заданной величиной, (8.6.8), (8.6.9) со-
ответствуют типовой задаче уравнений с частными производными пер-
вого порядка. Сюда относятся случаи с заранее заданным моментом /2,
т. е. терминальные задачи оптимизации, и случаи со скользящим интер-
валом оптимизации, когда интервал [{,, Ь| задается с постоянной дли-
тельностью. т. е. = t -|- Топ, где Ton = const.
Если же по содержанию задачи Ц отождествляется с бесконечно
удаленным моментом времени, то положительно-определенное значение
Г(х, удовлетворяющее (8.6.8), (8.6.9), существует только для асимпто-
тически устойчивых объектов. Следовательно, в нетерминальной поста-
новке, когда вместо интервала [/,, t ] рассматривается [Ц, оо], решение
вадачп оптимизации (8.6.6), (8.6.7) в виде (8.6.8) — (8.6.10) определено
только для асимптотически устойчивых объектов.
8.6.2.2е. Решение нетерминальной задачи для неустойчивых и ней-
тральных объектов. Для обеспечения применимости рассматриваемого
метода к неустойчивым и нейтральным объектам разработан ряд спо-
собов [8.20, с. 483—492]. К их числу относятся
предварительное обеспечение устойчивости объекта за счет спе-
циально введенных «стабилизирующих» обратных связей;
преобразование переменных, при котором вектор состояния объек-
та представляется в виде
x(t) = x(t)x*(z), (8.6.11)
где х* — вновь введенный и-мерпый вектор состояния; х(/) —диагональ-
ная матрица достаточно быстро нарастающих функций времени.
Второй способ ио существу приводит тоже к асимптотически устой-
Кг d
чивому объекту в новых переменных, если величина = “^~1п х.; > 0
достаточно велика. Методика синтеза управления в этом случае пред-
полагает задание в новом пространстве состояния (для вектора х*) под-
пптегральных функций минимизируемого функционала 1’я и (>*, ре-
шение задачи оптимизации управления для устойчивого объекта
х* — —х_,х.т* -|- x~'f(wr*, t) х-1<р(хх*, t)u, (8.6.12)
полученного из (8.6.6) заменой вектора состояния в соответствии с
(8.6.11), а также обратный переход к исходному вектору состояния. При
этом
"оп = -^т-7Г. (8-6-13>
где Е(г, t) = V*(x-'r, t). В качестве функций Xi(t) рекомендуется вы-
бирать экспоненты. (Jiii.it использования этого спосо а можно найти в
[8.20, с. 490].
8.6.2.30. Варианты алгоритмов оптимального по ФОР управления. Раз-
работанные алгоритмы данного типа можно классифицировать следую-
щим образом.
I. Но особенностям задания функционала различают терминальные
и нетерминальные задачи (см. также гл. 6). К терминальным (по вре-
мени) относят задачи, в которых из физического содержания за-
дачи назначен конкретный момент времени окончания процесса. Со-
ответствующие требования формируют в Iz;)(z, «)• К нетерминальным
относят задачи, для которых не назначается заранее момент окончания
процесса. В этом случае поступают следующим образом [8.20, с. 483—492]:
задают Ря((2) в виде вынужденного решения уравнения (8.6.8) в
момент времени t = t2;
назначают скользящий интервал оптимизации некоторой постоян-
ной длительности Т„„, т. е. /2 = t + Топ.
II. По особенностям представления объекта управления задачи де-
лятся па управление положением органов объекта (8.6.1) и па управ-
ление скоростью перемещения органов (8.6.4). Исследования показали,
что в прикладных задачах подход, основанный па представлении объек-
та в форме (8.6.4), дает хорошие результаты.
III. По способу реализации процесса оптимизации управления раз-
личают решение оптимизационной задачи предварительное, т. е. при
проектировании системы управления, когда на период функционирова-
ния этой системы возлагается только реализация полученного закона,
а точнее, его аппроксимации в пространстве X, и так называемый совме-
щенный синтез управления. В последнем случае вся оптимизационная
задача решается непосредственно в процессе функционирования систе-
мы управления.
IV. По основам алгоритмического обеспечения варианты делятся па
алгоритмы:
с матричным уравнением Ляпунова (область применения этпх ал-
горитмов ограничена линейными объектами и квадратичными функцио-
налами) [8.20, с. 493—494 ; 8.22];
с фундаментальными матрицами (область применения этих алгорит-
мов ограничена линейными объектами и квадратичными функционала-
ми или случаем степенных разложений соответствующих функции в
(8.6.6) и (8.6.7)) [8.20, с. 495-501; 8.23—8.25];
операционные (область применения ограничена задачами с неболь-
шой длительностью интервалов оптимизации — t) [8.21, с. 39—48; 8.26];
с прогнозирующими моделями (можно полагать, что это наиболее
универсальный вариант алгоритмического обеспечения) [8.21, с. 48—61;
8.27—8.30].
8.6.2.4е. Управление объектом с чистым запаздыванием. Рассматри-
вается наиболее простой случай, когда в системе действует одинаковое
для всех входов запаздывание. Пусть управляемый процесс описывается
уравнением
x — j(x, t)-t-ff(a:(£— s). t — s)ii.(t — s) (8.6.14)
на отрезке [6, i2], где s — единое для правой части уравнения запазды-
вание во времени. Предполагается, что па интервале [Z,. г, + s] уравне-
ние (8.6.14) имеет некоторое не противоречащее дальнейшему Изложе-
нию решение в X. Минимизируемый функционал задается в виде
*2
I = Г3 [г (/.,)] -F <?(.Т, t)dl-'r
(2
0,5 j (uT (t — s) К-1и (t — s) (t — .?) X~3Hon (/ — s)} dt.. (8.6.15)
Тогда оптимальное в смысле минимума (8.6.15) управление из не-
замкнутого множества U определится соотношением [8.31]
, пут (г (t+S»
1,ои М <0, г) . (8.6.16;
где V(.t, t)—скалярная дифференцируемая по t и х функция, удовлет-
воряющая па отрезке [0 + s, t2] уравнению .(8.6,8).
Реализация описанного алгоритма управления сводится к вычисле-
нию функции V(x, t), удовлетворяющей (8.6.8) с граничным условием
(8.6.9), и использованию упреждающих значений производных dV/dxt
(вычисленных для будущих моментов времени, сдвинутых относительно
настоящих моментов времени па время s) для определения сигналов
управления в соответствии с (8.6.16). Па практике строгое осуществле-
ние (8.6.16) невозможно, так как при действии неконтролируемых воз-
мущений неопределимо точное значение x(t + s).
8.6.2.50. Дискретное во времени кусочно-постоиипое управление не-
прерывным процессом. Применение для управления непрерывными ди-
намическими объектами ВЦВМ неизбежно создает особые условия ре-
ализации управления. К числу основных особенностей относится кванто-
вание по времени управляющего сигнала [8.32]. В этом случае вектор
управления следует рассматривать как кусочно-постоянную функции»
«,т(0 = »л(0). tj 1 < G+b (8.6.17)
где tj — момент формирования управляющих сигналов па /-м шаге (так-
те), длительность которого составляет Д/„.
Для объекта (8.6.6) минимум функционала (8.6.7) па кусочно-посто-
янных функциях (8.6.17) обеспечивается лини, при условии, что па каж-
дом цикле от ij до Z, + ! функция имеет значения
~tj+blu -1-1
ид(9= J K~l Wdt J А-1(/) «он (0 dt. (8.G.18)
Для случая К = const формула (8.6.18) упрощается:
/ j + Л/ u
f “0.1 <')<«• (8.6.19)
'j
Здесь uOn(0 —непрерывное оптимальное управление для данной задачи.
Таким образом, оптимальное кусочно-постоянное управление иа каж-
дом такте сеть среднее значение непрерывного оптимального управле-
ния на этом такте. При отсутствии точного прогнозирования непрерыв-
ного оптимального управления на такт вперед абсолютно строгое осу-
ществление (8.6.18), (8.6.19) невозможно. Однако при достаточно малой
длительности такта А/„ легко осуществляются близкие приближения к
(8.6.18), (8.6.19) нутом экстраполяции иоп.
8.6.3. Решение уравнения Ляпунова методом степенных рядов и со-
ответствующие законы управления. Данный тип алгоритмов основан на
аппроксимации решения уравнения (8.6.8) степенными рядами, для оп-
ределения коэффициентов которых используются различные подходы.
8.6.3.1" Алгоритм с дифференциальными уравнениями. Предполага-
ется, что компоненты векторной функции f(x, t) исходного объекта
(8.6.1) могут быть представлены степенными рядами, сходящимися во
всей рассматриваемой области пространства Д', т. е.
Л = S "1Л + 5 Vh + 2 aijki’cjxkxl + •••> (8.6.20)
з=1 j h i j,it, 1=1
где a* — постоянные коэффициенты пли функции времени, одинаковые
при любом расположении индексов, начиная со второго. Положительно-
определенные функции 1’з и Q:, минимизируемого функционала в об-
щем случае тоже задаются в виде степенных рядов
2 = (i/2) 2 (1/з) Z - (8.6.21)
;,Г-I I
С3-=(1/2) 2 P;/Vi-Hl/3) 2 PoaWa.+ •••- (8-0-22)
i,j=l i,j,l<=l
где р*— постоянные коэффициенты, одинаковые при любом расположе-
нии индексов: (3* — постоянные коэффициенты или функции времени,
не зависящие от порядка следования индексов.
Решение уравнения Ляпунова
flV 1 V / £2 = - (9 (8.6.23)
i 1 *
с граничным условием
Г(М = Ра[х(Ь)] (8.6.24)
в данном случае целесообразно искать также в виде степенного ряда
Г (i, /) = (1/2) 2 Л (1/3) 2
п
...-]-(1/.17) У Л. xXi...xx, (8.6.25)
где /1* в общем случае — функции времени, обладающие той же симмет-
рией по индексам, что и коэффициенты рядов (8.6.21), (8.6.22). При этом
полагается, что
п п -п
А*л+ 2 2 мм+-.. <8-c-2G>
1 3=1 j.*=l j.7i,/=I
— сходящийся в рассматриваемой области ряд.
Для рассматриваемого случая оптимальные в смысле ФОР управле-
ния (при диагональной матрице К(1)) имеют вид
2
/<=1 /£
(8.6.27)
Коэффициенты искомой функции К(г, t) в (8.6.27), представленной ря-
дом (8.6.25), удовлетворяют системе дифференциальных уравнений
~ 2 •7тгГ1я)!- i (Л'ЛЗ (8-,5-28>
'~д- /i==1 ’ p=il, /v^Tf J "л"
с граничными условиями
Ai ... q(t2) = р,- ... q, i, ...,</ = 1, /г. (8.6.29)
Здесь фигурные скобки условно обозначают суммирование заключенно-
го в них произведения после каждой возможной взаимной замены ин-
дексов прп Лиа [8.20, с. 507—510].
8.6.3.2е. Алгоритм с матрицей Коши. Оптимальные коэффициенты,
удовлетворяющие (8.6.28), могут быть также определены с помощью
матрицы Когпп линейного приближения объекта [8.20, с. 510—517], ко-
торая удовлетворяет уравнению
d
К (/, /') = «К (/, О (8.6.30)
прп начальном условии
К (Г, /') = Е,
(8.6.31)
где а — квадратная матрица коэффициентов ан, функций (8.6.20); Е —
единичная матрица. Для терминальной постановки задачи (см. (8.6.7))
оптимальные коэффициенты определяются выражениями
Здесь фигурные скобки используются так же, как в (8.6.28)
Соотношения (8.6.28) и (8.6.32) в общем случае приводят к громозд-
ким вычислительным операциям. В первом случае это интегрированно
системы дифференциальных уравнений высокой размерности, а во вто-
ром •— интегрирование достаточно сложных комбинаций функций
времени.
&6.3.3® Алгоритм с «индексированными множествами». Основанные
па (8.6.28) и (8.6.32) процедуры синтеза управлений для нелинейных
объектов типа (8.6.20) высокой размерности весьма трудоемки. Более
экономными в вычислительном отношении являются процедуры, постро-
енные на специально организованном анализе индексов значимых (от-
личных от пуля) коэффициентов степенных рядов (8.6.20) — (8.6.22),
(8.6.25).
Для формализации таких процедур вводится понятно индексирован-
ного множества и определяются для них специальные операции
[8.23, 8.24].
Индексированное множество (ПМ) — множество элементов с пспов-
торяющимися индексами. При этом различают симметричное ИМ, эле-
менты которого ис изменяются при перестановке индексов (при форми-
ровании соответствующих ИМ из коэффициентов р*, р;6 и А* элементы,
отличающиеся перестановкой индексов, складываются алгебраически),
и квазисиммстрнчпос ИМ, элементы которого не изменяются при пере-
становке любых индексов, кроме первых (при формировании ИМ из ко-
эффициентов «* элементы, отличающиеся перестановкой второго, третье-
го и последующих индексов, складываются алгебраически).
Индексное число ИМ, обозначенное I, —количество симметричных
индексов, уменьшенное иа единицу.
Суммой двух ИМ
а(1)+Ъ(1) = с(7)
с индексным числом Z называется ИМ, которое объединяет все элементы
слагаемых множеств, причем при совпадении совокупностей индексов
элементы суммируются алгебраически. Свойства суммы: симметрич-
ность при симметричных слагаемых; коммутативность п ассоциатив-
ность; неизменность индексного числа; присутствие какого-либо опрс-
деленного индекса при элементе .в том и только том случае, если он
присутствовал при элементе слагаемого.
Условным произведением симметричного ИМ па квазисимметрич-
пое ИМ
Ь(Д,)«(7„) = c(J.)
называется такое симметричное ИМ, элементами которого являются по-
парные алгебраические произведения элементов перемножаемых ИМ, у
которых первый индекс элемента кназнсимметрпчпого ИМ совпадает
с одним из индексов элемента симметричного ИМ. Индексы результата
перемножения образованы объединением симметричных индексов со-
множителей без одного индекса, равного первому индексу элемента
квазпеимметрпчного множества. Результаты перемножения с одинако-
выми индексами суммируются алгебрам^ски. Примером может быть
симметричное ПМ Ь(2): {Ь^. 1>а^, Ь^. квазисиммэтричиое ИМ
с(1): {«арр, «и® произведение— симметричное ИМ с(3): {с(адц =
“ ЬаррОарр, СаРРР ~ “Ь 2ЬаррЛ»рЧ “t* ЬаррЯаар, Ср^р; =
СааРР ==l ^сшрСррр -р 26гхарОаар, Сарру = ^apyOppp -р &rzp-(<lttap}. СвОЙСТВЭ ПрОИЗ-
ведепия: некоммугатнвность; пеассоцпатпвностг. (все сомножители, кро-
ме одного, должны быть квазпеимметричиыми, а операция выполняется
последовательно для симметричного и одного из квазпенмметричпых
сомножителей); дистрибутивность умножения по отношению к сложе-
нию; равенство индексного числа произведения сумме индексных чисел
сомножителей; присутствие какого-либо определенного индекса при эле-
менте произведения в том и только том случае, если он содержится в
числе симметричных индексов элемента квазисимметрпчиого ИМ или в
числе индексов элемента симметричного ИМ с учетом исключения од-
ного индекса, равного первому индексу элемента квазисимметричпо-
го ПМ.
Синтез управления, а точнее определение коэффициентов функция
(8.С.25), осуществляется следующим образом. Формальным впадением
дополнительной переменной £n+i 1 нелинейный объект управления
приводится к виду, когда коэффициенты ац в (8.6.20) с двумя индек-
сами равны пулю. Далее вводится симметричное ИМ временных функ-
ций о"'(/) с элементами
ст =______1____[о. -LB. -Six’"-1, (8.6.33)
'-s (ж — 1)! [ ' -* г-’-5 ж. J
где т = 1> — t — относительное обратное время. Тогда для стационарно-
го объекта и стационарного функционала с учетом (8.6.33), правил вы-
полнения введенных операций н перечисленных свойств множество ко-
эффициентов ряда (8.6.25) с заданным индексным числом (/= 1, 2, ...)
может быть определено соотношением
1-1 1-1
А (/)—с1(/)— а - А) + 2 °3 <*) а <'V - к - 1) « (1) - • • •
/;=1 Л= I
... (— l)J-Io7 (1) а(П ... Д(1). (8.6.34)
1-1
Дальнейшее развитие этого направления, а также исследование
свойств симметрии (по совокупности существенных коэффициентов ря-
да (8.6.2С)) нелинейного объекта можно найти в [8.25, 8.33].
8.6.4. Решение уравнения Ляпунова операционным методом н соот-
ветствующие законы управления. Операционный метод решения уравне-
ния Ляпунова основан на многократном применении некоторого опера-
тора. В данном случае используется дифференциальный оператор.
8.6.4.f". Операционный метод в задаче оптимизации управления. Вво-
дится линейный дифференциальный оператор
L = У f- (х, t) (8.6.35)
Р.Г.
i—1 1
определенный па всем .YX[Ji, <г]. Тогда уравнение Ляпунова (8.6.8)
может быть записано в виде
(S.6.3G)
С помощью введенного оператора и функций минимизируемого функци-
онала генерируется последовательность скалярных функций {Т\.}, эле-
менты которо,й определяются соотношениями
‘2
V1= f (Lr3-[-C3)dT, ..., 7V+1= | LVvdT, v = l, 2, ... (8.6.37)
t t
Если функции f, Eg и (?э в (8.6.35) и функционале (8.6.7) таковы, что
для области их задания X X Jzi> О] можно указать хотя бы один такой
элемент последовательности {1\} с порядковым номером ц, которому
оператор L ставит в соответствие функцию, удовлетворяющую нера-
венству
|LVJ e(«, Z), (8.6.38)
где s — положительная достаточно малая па XX [1ц h] функция, то со
степенью точности, определяемой (8.6.38), решение уравнения Ляпунова
(8.6.36) в задаче оптимизации (8.6.6) — (8.6.10) может быть представлено
суммой ряда
(8-С-39)
V=1
При этом (8.6.39) япляется точным решением уранпепня
с) И
-I- + Аем, I м (/2) = Уя [х (/2)1, (8.6.40)
которое отличается от (8.6.36) наличном функции ACiiuii = LFM. Следова-
тельно, использование в управлении (8.6.27) функции Уццц соответствует
минимизации функционала (8.6.7), в котором заданная ф>упкцня за-
мепепа па О — — Афиин» а V — па УЦ(1ц. Если я:е выполняется (8.6.38),
то разница между функциями Q3 п Q отвечает требованиям малости и
можно говорить о близости заданного и действительного минимизируемо-
го функционалов.
8.6.4.2е. Сходимость операционного ряда. Стационарный случай. Ука-
занное выше условие возможности замены точного решения уравнения
Ляпунова приближенным решением (8.6.39) является относительно сла-
бым. Если потребовать от последовательности {1Л} выполнения более
сильных условий, а именно обеспечения сходимости ряда (8.6.39) вместо
с частными производными dV^dt и dE^n/d.? при р->-оо, то сумма этого
ряда является точным решением уравнения (8.6.36).
Для стационарного объекта и функционала, у которых функции / и
(9.1 пе зависят явным образом от времени, ряд (8.6.39) может быть пред-
ставлен иначе [8.21, с. 42]:
—0v+1 v
т=о 1
(8.6.41)
В большинстве случаев нестационарную систему можно привести к ста-
ционарной путем введения дополнительных координат и вместо (8.6.39)
использовать (8.6.41).
Достаточным условием равномерной сходимости ряда (8.6.41) в не-
которой области G пространства X является предположение о том, что
функции f, V3 и Q таковы, что для области G можно указать такое по-
ложительное чпело Во п целые d 0 и p ~> d, при которых V.r сз G
и для натуральных чисел v Э' р справедливо соотношение
I (tv3 C3) I < Ari+1Do | Lr3 (< |, (8.6.42) -
где , j—число размещений из v + 1 по d элементов. Действительно,
остаток ряда (8.6.41) при условии (8.6.42) удовлетворяет неравенству
охр р0 ((,
Jttai /I
и стремится к пулю при р->оо, Равномерно сходятся и ряды dV\^Jdl7
ЬЕ|Ь1||.
Для оценивания сверху допускаемой при ограниченных р. погреш-
ности в определении функции Tz(.e, /) можно пользоваться соотпоше-
пиямп
г _ Pn.rf Ро(Ч- 011
ОВД- । LV'g -|- (>3 |
г)"]мР 14
(8.6.43)
или
lA<W ,вр/м
°QH ~ IЫ'3 + Q31 (ц -d)! ’ (8.6.44)
последнее из которых предполагает, что зависимость решения уравне-
ния (8.6.36) от подынтегральной функции Q3 функционала непрерывна
и удовлетворяет условию Липшица.
Непосредственно из (8.6.43) и (8.6.44) видно, что малые значения
погрешности обеспечиваются на малых временных интервалах [f, t2],
С ростом же De(tz — I) верхние границы ошибки оптимизации быстро
увеличиваются. Увеличение числа вычисляемых членов обеспечивает
как уменьшение величин а^ы и °<?Пи|ь так и расширение приведенного
интервала О0(г2— 1) с относительно малыми погрешностями оптимиза-
ции. Все это указывает па квазилокальиый (по времени оптимизации)
характер оптимального управления, осуществляемого с помощью опера-
ционного алгоритма. Другими словами, применение этого алгоритма на-
иболее эффективно в задачах с небольшим временем оптимизации t2 — t.
В предельном случае, когда ц -> оо, погрешности оп(щи и а0||ц|| исчезают,
что соответствует приближению к точному решению задачи синтеза.
8.6.4.3е. Операционные алгоритмы управления. Операционный алго-
ритм управления (субоптимальпого управления) объектом типа (8.6.6)
сводится к реализации (8.6.39), где используются приближенные значе-
ния функции V(x, Г), полученные вычислением ряда (8.6.39) или в ста-
ционарном случае — ряда (8.6.41). Операционный алгоритм допускает
как аналитическое решение задачи, так и числовую реализацию па ЦВМ.
В последнем случае достаточно вычислить числовые значения Гцмц в оп-
ределенных точках пространства X.
Описанный выше алгоритм осповап па использовании оператора,
предусматривающего дифференцирование по всем компонентам вектора
состояния в X. Это часто сопряжено с большим объемом вычислений,
затрудняющим как аналитическую, так и числовую реализацию опера-
ционного алгоритма для объектов больших размерностей. Ог указанного
недостатка в значительной мере освобождены модификации этого ал-
горитма [8.21, с. 77—88].
Алгоритм с дифференцированием по длине дуги вдоль траектории
свободного движения предполагает наличие в X евклидовой нормы век-
тора состояния. Тогда, вводя скалярную величину s, характеризующую
перемещение конца вектора состояния вдоль траектории свободного (т. о.
неуправляемого, и — 0) движения объекта (8.6.6), переходят к линейно-
му оператору
(8.6.45)
Здесь s — скорость перемещения конца вектора х вдоль траектории сво-
бодного движения; dlds — оператор дифференцирования вдоль единст-
венного направления в X, совпадающего с касательной к траектории
S=.s Д
свободного движения. Направление касательной задается вектором
7 =4-/(к, I). (8.6.46)
Уравнение Ляпунова записывается в виде
д-S Г = - Q, F (7g) = Г3 [х (/.,)], (8.6.47)
а его решение ио аналогии с (8.6.31) может быть приближенно вычис-
лено суммированием ряда (8.6.39) или (8.6.41) с тон лишь разницей, что
вместо оператора L следует использовать оператор S, осуществляющий
дифференцирование в одномерном подпространстве в общем случае мно-
гомерного пространства состояний.
Алгоритм с дифференцированием но времени вдоль траектории сво-
бодного движения связан с введением дифференциального оператора D,
который ставит в соответствие искомой оптимизирующей функции
lz(x, 7) другую скалярную функцию, равную скорости изменения во вре-
мени функции Г(х, 7), если это изменение обусловлено изменением не-
управляемого (свободное движение) состояния объекта при и = 0.
В этом случае уравнение Ляпунова записывается в виде
' 9V
5Г + ОГ = -(7, Г('г) = Гт1- (8.6.48)
Простота оператора D обусловливает вычислительные преимущества опе-
рационного алгоритма (8.6.39), (8.6.41), в котором вместо L использу-
ется D. При этом все вычисления выполняются на свободном движении
объекта. Применение' данного алгоритма в аналитической форме основы-
вается па аналитическом решении уравнения
,т = /(х, т).
(8.6.49)
Если известно достаточное число раз дифференцируемое решение
Х[х(7), 7, т] этого уравнения, проходящее через точку текущего состоя-
ния х(7) объекта, то па этом решении соответствующие функции стаци-
онарного функционала примут вид И3(Х[х(7), 7, т]) и (?3(Х[х(7) 7, т]).
Здесь буквой т обозначено время свободного движения. Решением урав-
нения (8.6.48), представленным рядом (8.6.41), в этом случае будет
Е(7) = У3(Х[х(7), 7, т])т=4 +
ОО
у (*2 ~ 0v
v!
^-Г3(Х [х (7), 7, т])
<7т
r)v-l
От1’-1
<?3 (X [ж («), t, т])
Х—1
(8.6.50)
Вычислительные процедуры операционных алгоритмов изложены в
[8.21, с. 97—120].
8.6.5. Решение уравнения Ляпунова методом характеристик и соот-
ветствующие законы управления. В основе большой группы алгоритмов
оптимального по ФОР управления, так называемых алгоритмов с про-
гнозирующей моделью, лежит применение для решения уравнения Ля-
пунова (8.6.8) с граничным условием (8.6.9) метода характеристик, на-
зываемого также методом Коши или первым методом Якоби.
8.6.5.1е. Метод характеристик в задаче оптимизации но ФОР. Если
воспользоваться обозначением
Ж х.
дУ
dx
/) + (\U, t),
dx
(8.6.51)
t
где Ж — гамильтониан, то для искомой интегральной поверхности урав-
нения в частных производных (8.6.8) можно записать в общем виде как
уравнения характеристик
х =
(8.6.52)
где введено обозначение р — (dVjdxy — вектор частных производных ис-
комой функции У (х, I) по компонентам вектора х в X.
При этом полная производная фупкпии Т'(т, /) па характеристиках
(интегральных кривых, удовлетворяющих уравнениям (8.6.52)) опре-
деляется соотношением
v да
V = _—р — Ж.
др
(8.6.53)
Граничные условия для (8.6.52), (8.6.53) формируются из начальных ус-
ловий для (8.6.6) н граничных условий (8.6.9).
Применение (8.6.52), (8.6.53) к уравнению Ляпунова (8.6.8) дает
£ = f {х, t),
\dx/ '.dx /
V = -Q(x, l).
(8.6.54)
(8.6.55)
(8.6.56)
Полагая известным текущее состояние объекта, можно определить все
необходимые граничные условия для (8.6.52) — (8.6.56). При известном
x(i) детерминированное уравнение (8.6.54) однозначно определяет со-
стояние объекта в момент /2. Подстановка я(«2) в (8.6.56) дает грапичпос
условие для скалярного уравнения (8.6.56), а предварительное диффе-
ренцирование (8.6.54) по компонентам х с последующей подстановкой
х(12) дает граничное условие, для (8.6.55).
Принципиальной особенностью уравнений (8.6.54) — (8.6.56), обуслов-
ленной структурой уравнения Ляпунова, является то, что опи связаны
со «свободным» движением объекта, т. с. движением, описываемым
(8.6.6) при и = 0.
Другой принципиальной особенностью в сравнении с оптимизацией
па основе классических функционалов (см. § 8.2) является отсутствие.
Двухточечной краевой задачи при решении уравнений характеристик
(8.6.54) —(8.6.56) сравнить с методом характеристик в классической зада-
че п. 8.2.2.40). Это, как многократно отмечалось выше, создаст широкие
возможности применения принципа минимума обобщенной работы.
Алгоритмы оптимального по ФОР управления, связанные с реали-
зацией (8.6.54) — (8.6.56), (8.6.10), в той или иной форме прогнозируют
свободное (и = 0) движение объекта управления на интервале [t, /г] с
помогцтяо (8.6.54), что и послужило основанием для их названия. Алго-
ритмы с прогнозирующими моделями подробнее рассматриваются в § 8.8.
8.6.5.2°. Применение алгоритма с прогнозирующей моделью на ста-
дии проектирования системы. Алгоритм с прогнозирующей моделью мо-
жет иметь разнообразные применения па стадии проектирования систе-
мы. Рассмотрим один нз вариантов такого применения.
Особенностью рассматриваемой задачи является то, что структура
системы управления выбрана на основе предварительного анализа, ин-
женерных п экономических соображений и т. д. Требуется определить
оптимальные значения некоторых параметров, постоянных во времени
или настраиваемых и функции параметров среды. Тогда можно запи-
сать уравнение замкнутой системы
х = f(x, а), (8.6.57)
где а — вектор настраиваемых параметров, уравнение пастройкп па-
раметров
а = иа (8.6.58)
и минимизируемый ФОГ
С <2
. Та = +, [х (41 + (<?(*> 0 Л+ 0,5 j («;К'1в(1 + «’.опК_,«(!.0п)л-
Ч 'I
(8.6.59)
Сформулированная задача аналогична (8.G.5), (8.6.7), и для ее решения
могут применяться различные алгоритмы, одпако наиболее подходящи-
ми представляются алгоритмы с прогнозирующими моделями. В качест-
во начальных значений вектора параметров могут принимать произ-
вольные значения этого вектора из допустимой области.
В детерминированном случае прп условии Iz3 = 0 и отсутствии яв-
ной зависимости функции Q-л от вектора параметров а (что вполне оп-
равдано для задач предварительного параметрического синтеза законов
управления, когда переходные процессы, связанные с изменением а, нс
имеют практического значения) метод характеристик дает вместо
(8.6.54) — (8.6.56) уравнения
х = [(.г, а), (8.6.60)
• /л»\т ISO \т
= Рх- , (8.6.61)
х \<Jxj л \ (IX ]
Ра = -(Рх, (8.6.62)
\оа/
V = t), (8.6.63)
где Дх — dV/Ox, ра — д\'!да.
Решение дайной задачи включает интегрирование па заданием ин-
тервале [ti, I2J замкнутой системы уравнений управляемого объекта
(8.6.60) при некоторых фиксированных значениях параметров а (или ис-
пытание па этом же интервале реальной системы с соответствующими
настройками параметров). Затем па полученных процессах xa(t) с ис-
пользованном (8.6.61), (8.6.62) или (8.6.63) определяются корректирую-
щие управления
«а.оп = -К(У =~Кра, (8.6.64)
в соответствии с которыми происходит настройка параметров. Скорость
настройки параметров во многом определяется выбором элементов мат-
рицы К. В практических задачах рекомендуется выбирать достаточно
малые значения этих элементов.
В результате применения алгоритмов с прогнозирующими моделя-
ми, реализующими (8.6.60) — (8.6.64), получается кусочпо-липейпая (с ша-
гом, равным длине цикла вычислений) программа a(t) и кусочно-посто-
янная программа С точностью до переходных процессов на на-
чальном участке интервала [<,, 1?] и ошибок квантования по циклам (см.
также п. 8.6.2.50) эти программы совпадают с оптимальными. Конкрет-
ные алгоритмы с прогнозирующими моделями рассматриваются в § 8.8.
§ 8.7. Синтез законов управления линейными процессами
при функционале обобщенной работы (метод АКОР)
Управление линейными процессами является частным, но весьма
важным случаем. Получаемые решения характеризуются, как правило,
завершенностью. Они в наибольшей степени доступны для реализации.
8.7.1. Общий закон оптимального по критерию обобщенной работы
управления линейным процессом, выраженный через решение уравне-
ния Ляпунова. Уравнения линейного объекта запишутся в виде
2 <8-7Л)
Я=1 л=1
где коэффициенты ац, Ьц. постоянны для стационарных объектов и яв-
ляются функциями времени для нестационарных объектов. В матричной
форме уравнения линейного объекта записываются в виде
х = ах + Ьи,
(8.7.2)
где х, и — векторы (матрицы-столбцы) соответствующих размерностей;
о, Ъ — квадратная и прямоугольная матрицы постоянных или изменя-
ющихся во времени коэффициентов. Функции Q3 и V3 функционала
(8.5.9) для линейного объекта часто задаются в виде положитсльно-оп-
редолсппых квадратичных форм
п
С3 = 0,5 У ^ijxixj = 0,5.?т|Ъ,
i,i=i
V3 = 0,5 У, = 0,5.rTp.c. (8.7.3)
i,j=l
Здесь ₽ij = Рл — заданные коэффициенты (в общем случае функции
времени); p<j = Рл — заданные коэффициенты. Таким образом, задачу
(8.7.1) — (8.7.3) можно рассматривать как частный случай (8.6.20)—
(8.6.22).
Решение уравнения Ляпунова (8.6.1) целесообразно искать в виде
квадратичной формы
7 = 0,5 У, = 0,5х'Аа:, (8.7.4)
г, 3=1
где Л = Лт — матрица неизвестных пока коэффициентов. В рассматри-
ваемом случае уравнение (8.6.1) может быть записано в виде
п
dV . 'V' dV /о -7 r\
<31 4 3 0X
i,3=l 1
пли с учетом (8.7.3) и (8.7.4)
хЧ\х ф- ятАах + хтатЛх = —zTp.r.
Очевидно, что если это скалярное уравнение справедливо для произволь-
ного вектора х, то вместо него можно использовать матричное уравне-
ние для коэффициентов
А + Ас + с’Л = — р (8.7.6)
с граничным условием А (О) = р. В данном случае оптимальное управ-
ление (8.6.10) приводится к виду
иоп = — KWhx, (8.7.7)
где Л = Л (г) —решение матричного уравнения (8.7,6), которое является
более простым по сравнению с (8.2.30).
Решение задачи АКОР сводится к решению уравнения (8.7.6) и фор-
мированию управления (8.7.7).
8.7.2. Прямое решение уравнения Ляпунова для нестационарного
случая. Одни из основных способов решения задачи АКОР заключается
в решении линейного уравнения (8.7.6) интегрированием в обратном вре-
мени от конечного t2 (при условии Л(12) = р) до текущего момента t.
В отдельных случаях удается получить аналитическое решение, ио в
большинстве случаев (и особенно для нестационарных задач) широко
используются вычислительные методы. Определенная сложность связа-
па с необходимостью наличия информации о будущих значениях коэф-
фициентов в (8.7.1) и (8.7.3). При неограниченной (па практике — дос-
таточно большой) длительности интервала оптимизации [t, t2] (т. е. при
i2—>оо) возникает проблема получения положительно-определенной мат-
рицы Л искомых коэффициентов управления для неустойчивого объекта.
В этом случае следует воспользоваться рекомендациями, изложенными
в п. 8.0.2.20.
В общем случае матрица коэффициентов закона управления (8.7.7)
является нестационарной, при этом
«on = —7<(Zj6T(I)A(f2, Z).r. (8.7.8)
Если же коэффициенты в (8.7.1) и (8.7.3) по зависят от времени, то ре-
шение уравнения (8.7.6) в общем случае зависит от относительного вре-
мени t2—tn закон управления (8.7.7) остается нестационарным
поп = — КЪ-'А. (h—l} х. (8.7.9)
Стационарный закон управления имеет место, во-первых, при за-
дании скользящего интервала оптимизации, когда /2 — I + Топ, где 7’,1Н —
заданное постоянное время, и, во-вторых, при значительных длительно-
стях интервала [I, i2] и устойчивости объекта, когда решение (8.7.6)
достигает установившегося значения.
8.7.3. Решение уравнения Ляпунова е использованием матрицы Ко-
ши. Матрицей Коши для объекта (8.6.66) называется квадратная невы-
рожденная матрица К (i, I'), удовлетворяющая уравнению
K(i, I') = fiK(t, t'), K(f, t') = E, (8.7.10)
где точкой отмечена операция дифференцирования по t. Решение урав-
нения (8.7.6) записывается следующим образом [8,20, с. 497]:
*2
Л (/) = Кт (f2, г) рК (i2, t) -J- J Кт (Г, 1) [3 (Г) К (f, t) dt’. (8.7.11)
t
В этом случае синтез закона управления заключается в определении
K(Z, t') интегрированием (8.7.10) и вычислении (8.7.11), что в общей
сложности эквивалентно интегрированию га2 + п(п + 1)/2 скалярных
уравнений. Для стационарного объекта уравнение (8.7.10) может решать-
ся один раз предварительно, а (8.7.11) требует вычисления для каждого
текущего относительного времени t2 — t.
Данный метод позволяет использовать полученные экснерпмспталь-
по матрицы К (z, t') объекта и благодаря этому можпо исключить опе-
рацию идентификации коэффициентов уравнений объекта.
8.7.4. Решение алгебраического уравнения Ляпунова для стационар-
ного случая. В случае назначения достаточно большой длительности ин-
тервала оптимизации [I, t2], при которой интегрирование (8.7.6) дает
установившееся значение (исходный объект полагается устойчивым),
можно воспользоваться непосредственным вычислением установившего-
ся решения уравнения (8.7.6). Это решепие удовлетворяет алгебраиче-
скому уравнению
Аа + атА = —[j.
(8.7.12)
Часто такой подход дает существенный выигрыш в объеме вычислений.
Уравнение (8.7.12) приводится к нормальному виду
~нЛ = —₽ (8.7.13)
специальным формированием расширенной квадратной матрицы а и мат-
риц-столбцов Аир размерности п(ге +1)/2. Правило формирования а
предусматривает [8.22] введение четырехипдексиого обозначения эле-
ментов где (г/) рассматривается как единый помер строки, а
(/cZ) — соответственно как помер столбца. Полагается, что всегда i /,
к I. Элементы матрицы а определяются соотношением
= CiUHki) + 'Лыдыь (8.7.14)
где
fa.j- при i — к
akj при г = !с,
О при i #= Zc, i #= I,
iaki ”РИ i = Z’
rf(v)(ftZ) = |aZi ПРИ / = (8.7.15)
'О при j Ф к, j Ф I.
Элементы матриц-столбцов Аир размещаются в соответствии с вве-
денной индексацией, т. с. [А^г)] и [Рыя].
Из (8.7.13) следует решение (в силу невырожденности а)
А = (8.7.16)
8.7.5. Иерархическая оптимизация линейных динамических систем е
использованием АКОР по критерию обобщенной работы*). Возрастаю-
щая размерность рабочих моделей автоматизируемых систем, с одной
стороны, и существенный прогресс микропроцессорной техники — с дру-
гой, выдвигают дополнительные требования к уже существующим ме-
тодам оптимизации и требуют разработки новых, использование которых
позволяет получить результаты в рамках имеющихся средств обработ-
ки информации.
Одним из современных, развивающихся методов решения такого
рода задач большой размерности является теория многоуровневого
иерархического управления [8.34]. Идея решения здесь состоит в де-
композиции и формировании максимально упрощенных локальных за-
дач, составляющих пижпий уровень управления, с координацией послед-
них для обеспечения решения всей задачи.
) Пункт паписап Б. М. Миркиным,
Использование для иерархических многоуровневых систем принци-
па минимума обобщенной работы позволяет существенно облегчить ре-
шение задачи синтеза и машинной реализации [8.35], пайти оптималь-
ные стратегии управления с уменьшенным объемом вычислений на
пижпем уровне управления, т. с. приспособленные для реализации па
малых ЭВМ с ограниченными ресурсами.
8.7.5.1 °. Многоуровневая оптимизация по ФОР. Рассматривается ли-
нейная система большой размерности
х = ах + Ьи, я (t0) = хо, (8.7.17)
которая разбивается па N взаимосвязанных подсистем
Xfi) = + Л(г ), (8.7.18)
= 2 x(i) (Zi) = x(i)0- (8.7.19)
г А?
Здесь
х = х (I) = (/) ... xJN) (t)р — и-мерпый вектор состояний;
и = и(1) = [j (t) ... и(тЛ1) (г)]т — r-мерный вектор управлений;
л = л (г) = [ (t) ... (t)]'Г — /г-мерпый вектор взаимосвязей.
Каждая подсистема па первом уровне управляется с помощью локаль-
ных управляющих устройств (.11У У,, г = 1, IV), которые в свою очередь
координируются подсистемой верхнего уровня.
Задача управления состоит в определении управлений и($) по под-
системам i = 1, N, минимизирующих глобальный функционал всей
системы
*2
I -= 0,5 [ [ят (0) (0) + ит (0) К~*и (0)] d0 -Ь
+ f 2 <i) (°) A(i) (°) !\i)K~ib(l)AC0 (°) *(t) (°) (8.7.20)
i=l
где p и К — заданные блочно-диагональные матрицы соответствующих
размеров; A(i) — матрицы, определяемые пз решений уравнений Ля-
пунова.
Найденные локальные оптимальные управления имеют вид
“(1) (0 = - (0 - (*)> (S.7.21)
A(i) + A(i)"( i) + °(i)A(i) + P(i) = °’ (8.7.22)
/(«=(A(i)b(oA-ib;o - «(о) Ad+2 - А(1)л<о- <8-7-23)
jVi
Для получения локальных оптимальных управлений требуется ре-
шать, как видно, 0i5ni + 1) линейных, а пе нелинейных, как
i
обычно, дифференциальных матричных уравнений; /(4)(г) является функ-
цией состояний всех подсистем. Переменные л(1) и 7(i) определяются
итеративно подсистемами верхнего уровня.
В [8.36] исследованы двухуровневые структуры системы, когда па
верхнем уровне итеративно определяются множители 7(1) и взаимосвязи
Jt(,> и затем передаются нижним подсистемам. В [8.35] рассмотрены
трехуровневые структуры управления для дискретных динамических
систем. Здесь па втором уровне определяются переменные /(1) и л(,>,
а множители уточняются итеративно па третьем уровне. Доказана
сходимость трехуровневых алгоритмов управления.
8.7.5.20. Многоуровневая оптимизация по квадратичному критерию.
Если га функцию штрафа в квадратичном функционале наложены жест-
кие требования и ее нельзя изменять, то синтезированные по ФОР ал-
горитмы для исходного функционала будут субоптпмальпыми [8.36].
В [8.35] предлагается подход к построению иерархических систем, ли-
шенный этого недостатка. Алгоритмы находятся из условия оптимиза-
ции квадратичного фупкцпопала с заданной матрицей коэффициентов.
При этом пе только сохраняются достоинства метода синтеза по ФОР,
по п еще более упрощается вычислительная сторона определения опти-
мальных управлений па нижнем уровне.
А. Формулировка задачи. Рассматривается задача многоуровневой
оптимизации динамической системы большой размерности (8.7.18),
(8.7.19), где для г-й подсистемы х(г) — щ-мерпый вектор состояний;
— г4-мерный вектор управлений; Л(4> — щ-мерпый вектор взаимосвя-
зи; в(4), L(i) и Ь(г) — постоянные матрицы размеров га-; X «•;, га , X «г 11
и; X ’ г соответственно.
Уравнения (8.7.18), (8.7.19) можно переписать в форме
х = аж + Ъи + сх, (8.7.24)
где а — блочно-диагональная матрица с блоками ацу, с = а — а.
Общий критерий качества задастся выражением
%
I = 0,5хт (<2) рж (/2) + 0,5 j [тт (0) (0) -|- >? (0) (0)] <Ю, (8.7.25)
ч
где р > 0, р > 0, К > 0 — блочно-диагональные матрицы. Требуется оп-
ределить векторы управлений по подсистемам n(4), i = 1, IV, которые
минимизируют общий критерий качества системы (8.7.25) при ограни-
чениях (8.7.18), (8 7 19).
Б. Двухуровневое иерархическое управление (модификация 1). Пред-
полагается, что верхний уровень обеспечивает равенство
x(l) = x(l). (8.7.26)
Тогда модель системы можно записать в виде
х — ах -|- Ьи -[- сх. (8.7.27)
Вводится следующий критерий:
'а
/' = 1 Ч- j’ к (0) - х (0)]т Р2Ж к (0) - х (0)] rf0- (8.7.28)
Ч
Здесь первый член определяется выражением (8.7.25), второй же
вводится для снижения вычислительных затрат и обеспечения сходимо-
сти. Вид матрицы р2зс, которая является положительно-определенной блоч-
но-диагональной соответствующего размера, определяется так [8.20]:
₽2^ = A(i)fc(i)A(i)fc(i) А(гГ
Очевидно, что задача (8.7.27), (8.7.28) эквивалентна исходной (8.7.24),
(8.7.25) в случае выполнения условия (8.7.26).
Найденные локальные оптимальные управления имеют вид
nd) = X(i)^T(A<i)^(i) + /<{>), (8.7.29)
А(г) + e(OA(i) + A(i)e(i) + ₽(i) = °’ (8.7.30)
/(г) = A(i)fc(i)X&(4)Лг) ~ + Ргх^Н) — А(г) 2 eUi)XO') ~ “(г)' (8-7.31)
г=^з
Итерационная процедура верхнего уровня определяется, например, со-
отношением
где X(j) = А1г-)хи-) +/(j); I — помер итерации (Z = 0, 1, ...).
Алгоритм двухуровневой оптимизации описывается следующим об-
разом [8.35].
Шаг 1. На первом уровне вычисляются и запоминаются матрицы из
уравнений Ляпунова (8.7.30).
Шаг 2. На втором уровне задаются начальные функции x(i) и а,,,
в передаются на первый уровень.
Шаг 3. На первом уровне с помощью полученной информации из
уравнений (8.7.27), (8.7.29), (8.7.31) вычисляются rrt(i), ищ, Резуль-
таты посылаются на второй уровень.
Шаг 4. На втором уровне после замены номера итерации I па I + 1
определяются новые значения а($) из (8.7.32).
Шаг 5. Осуществляется проверка сходимости. Если условия сходи-
мости выполнены, то расчеты прекращаются, а полученные в(,) п
передаются па первый уровень и выполняется переход к шагу 3.
В. Двухуровневое иерархическое управление (модификация 2). Если
в качестве критерия оптимальности принять
1 - 0,5 [х (Z2) - *(Z2)pp* [х (t2) - Г(Z2)] -|-
l2
ф 0,5ят (i2) рх (г2) ф 0,5 J {хт (0) (0) -I- «т (0) К~'и (0) ф
Ч _
ф- [х (9) — х (0)1т РЛ х (0) — х (0) ]} dQ, (8.7.33)
а блоки матрицы р* определить каве
P*(i) = A(i)CT P(i)’
CCi)A(i)CT + A(i)CTC(i) + P(O = 0
(полагаем, что матрацы а({> соответствуют устойчивым подсистемам), то
локальные оптимальные управления определяются соотношениями [8.35]
u(i) — (Ati)iTZ(i) +
1(i) = — Лг) + Р*ж(г) S оО'г)х(1) ~ a(i)‘ (8.7.34)
Ff-i
Для этого случая нужно решать семейство алгебраических уравнений
Ляпунова (a ire дифференциальных) п запоминать одно значение мат-
рицы А,г)ст, а пе временные функции Ati,(f) для всех значений времени.
Структура итерационной процедуры системы второго уровня оста-
ется такой же, как и в (8.7.32).
8.7.6. Оптимальное по критерию обобщенной работы дискретное ио
времени управление непрерывными динамическими процессами*). При-
веденное в п. 8.6.2.50 построение дискретных по времени кусочпо-посто-
япных оптимальных управлении непрерывным процессом имеет отме-
ченный уже недостаток, связанный с необходимостью прогнозирования
управления па такт вперед. Здесь приведено [8.37] другое решение за-
дачи синтеза оптимального по ФОР кусочпо-постоягпюго управления не-
прерывной лппепной системой. В интересах общности изложение ведет-
ся применительно к процессу, возмущаемому белым шумом, т. е. рас-
сматривается стохастический вариант:
х = Ах + Ви + w(l). (8.7.35)
Задача управления состоит в построении кусочпо-постоянпых сиг-
налов управления
u(t) — u(tk) = гг[/|], [</1, tft+i), к — 1,2, ... (8.7.36)
по известным в дискретные моменты времени значениям ж(/л) = z[A-|
(th = к + k&t, А/— интервал квантования), которые минимизируют
ФОР, построенный па непрерывных состояниях процесса x(t) и кусочно-
постоянных значениях управления (см. п. 6.3.2.50):
J = Е Г'3 [т (?2)] -|- j' L [.г (0), и (0), иои (0)] dO (8.7.37)
'1 J
где
L = 0,5 (ттр.т + нтЛ-Ъг + <К7ЧП), (8.7.38)
У, = (1/2)хт(Мр.г(Г2). (8.7.39)
Здесь ,3 — положительная знакопостоянная, a Kt—положитсльпо-опрсдс-
*) Пункт написан Б. М. Миркиным.
лепная матрицы: вид матрицы К> будет определен позднее. Эквивалент-
ная задача с дискретным временем будет определяться моделью
а:[А + 1] = -|- /?ди[А] 1Дл[А], (8.7.40)
поведение которой точно совпадает с (8.7.35) в моменты ti„ и критерием,
эквивалентным интегральному
Л'-i <л+1 1
J = Е |ZW [.г [АГ]] -I- 2 f L [* (°)- «(0), uotI (0)] dO =
ft=« thJ I
{JV-l W-l 1
vN k [JV]] -I- 2 Lh I* И-11 lAl, “on W] + 2 ’
k--0 k~0 J
(8.7.41)
где
м
Лд = Лд (A«) = exp (ЛД/), Z?n=j BdO,
Loh= 0,5 [лт [ AJ Рд» I A] + жг [А] ГдН [A] uT [A] [A] +
+ uT [A] A-iM [A) + ц’„ [А] А2-1Иоп [A]],
i₽[fc] —гауссовская последовательность с характеристиками
E[w[AJ] = 0, Е[(У[А] ют[/]] =
₽д = Рд(А0 = j А^О)₽^(О)ЙО,
о
7д-7,д(Д0= f л;(0)рВд(0)</0,
° д, (s-7^)
Z<-! •= A”1 (Л/) « J [А71 4- В^0)3/?д (0)] dO,
(I
£()/<== WA')== J t‘W)rf0-
I)
Оптимальное управление для исходной задачи имеет вид
И[А] = -А2|^5[А+ЦЛД |-Гд]«[А], A = oT7V, (8.7.43)
где А [А] определяется из дискретного разностного уравнения Ляпунова
5 [ А] = 4S [А -|- 11 Лд 4- рд (8.7.44)
с граничным условием A[A'j = р,
М
К2 - [А7* F [А 4- и сд]K-J = j Лд/?мЛ>0. (8.7.45)
о
В [8.38] описывается разработанный пакет прикладных программ
автоматизированного синтеза цифровых управлений непрерывными ди-
намическими процессами, реализующий описанный алгоритм.
§ 8.8. Оптимальные управления, синтезируемые в процессе
функционирования системы в реальном времени
(совмещенный синтез)
Традиционный путь создания системы управления содержит сле-
дующие этапы:
1) формулировка критерия (функционала);
2) разработка математической модели объекта;
3) синтез законов (алгоритмов) управления;
4) разработка алгоритмов адаптации (настройки) законов управле-
ния по режимам функционирования объекта;
5) осуществление полученных законов, в частности, с помощью
ЦВМ пли А НМ.
Такой подход позволяет достичь относительно невысокого объема
вычислений, выполняемых в процессе управления (этап 5), по приво-
дит к существенному сужению возможностей управляющих алгоритмов,
так как структура и значительная часть параметров алгоритмов вы-
бираются для конкретных условий.
Объединение трех последних этапов позволяет создать па базе ЭВМ
управляющую систему, осуществляющую синтез оптимальных управ-
лений и само управление практически одновременно в процессе функ-
ционирования объекта (совмещенный синтез управления). Именно этот
путь является основным в решении главной задачи СТАУ — оптимиза-
ции управления «в большом» для достижения конечной цели этапа пли
режима функционирования системы.
8.8.1. Общее обоснование алгоритма с прогнозирующей моделью.
Для процесса
ж = f(x, t) + <р(х, t)u (8.8.1)
оптимальное в смысле минимума ФОР *)
(2 *2
I = Vs [ж (i2)] + ( Q3 [X (6), 0] d0 + j {C78 |u (0), 0] -I-[ u0„ (6), 0]} rfO
S '|
(8.8.2)
управление и = uon определяется выражением
d dV ,
^8(“оп. 9 + 0 = 0, (8.8.3)
где полная производная V, вычисленная в силу уравнения свободного
*) Заданные функции U3, О'* удовлетворяют условию, указанному
в и. 6.2.2.!°.
движения о ъекта
== / (л'с, 0, (8.8.4)
равна
V=—t). (8.8.5)
Из полученного выражения следует
*2
v (zc (ч)’ м - v 1жс (о, q = - । <?3 [*с (0), о] do,
t
или с учетом граничного условия для V
*2
V [хс (0, tj = Р3 рс (t2)] -|- J Q3 рс (0), 0] dO.
t
Обозначим общее решение уравнения свободного движения (8.8.4) па
интервале [/, t2] при начальном условии xt = x(t) (где x(t) —текущий
вектор состояния управляемого движения (8.8.1)) через
X(ar, t, 0). (8.8.6)
Тогда общее аналитическое выражение алгоритма с прогнозирующей мо-
делью запишется в виде
8исп °3
9 дх
vs№ 4)1 + J <?з [Х(^, t, 0), 0] de
<р (я, г).
(8-8.7)
Решепие (8.8.6) можно интерпретировать как прогпоз свободного
движения управляемого объекта до момента времени t2 ~> t. Выражение
в фигурных скобках (8.8.7) есть главная часть функционала (первые
два члена правой части (8.5.2)), вычисленная па прогнозируемом
движении.
Для случая степенной функции (6.2.15) затрат па управление в
ФОР алгоритм с прогнозирующей моделью принимает вид
• 3
/г- Z Фч> (х, t) —
з 1 з'1 ' ’ ' дх-
. v =1 3
Va[X(x, t, /2)] -I-
+ J <23[Х(я, t, 0), о] de
Pjlq3
j = 1, г. (8.8.8)
Здесь 7>у* + = 1, up —четная функция и,. Для случая квадратич-
ной функции затрат на управление в ФОР (pj = qj = 2) аналитическая
форма алгоритма с прогнозирующей моделью принимает вид:
и
%п =“ Ксрт(х, t) —
f
и3 [X (х, t, г2)] + J с8 [X (х, t, 6)] de
( t
(8.8.9)
8.8.2. Структура алгоритма с прогнозирующей моделью. Варианты
алгоритма. Содержание алгоритма с прогнозирующей моделью можно
интерпретировать как решение уравнений характеристик (8.6.54) —
(8.6.56), соответствующих уравнению Ляпунова (8.6.8) в задаче оптими-
зации управления по ФОР, и формирование управления по формуле
(8.6.10) (для случая р; = <л = 2). При численной реализации все не-
обходимые вычисления выполняются циклически (цикл формирования
управления) с продолжительностью цикла Ыи. Численный алгоритм с
прогнозирующей моделью включает операции:
а) измерение или оценка текущего состояния объекта в дискретные
моменты времени, соответствующие началу очередного цикла форми-
рования управления;
б) прогнозирование свободного (неуправляемого) движения объек-
та ла заданном интервале [1и, t2] оптимизации управления (интервал
прогнозирования) с начальными условиями, совпадающими с текущим
в момент tu состоянием объекта или лежащим в некоторой окрестности
этого состояния;
в) вычисление градиента изменения функции V(т, t) для текущего
состояния объекта;
г) формирование сигнала управления.
Конкретные возможности и вычислительные затраты зависят от ва-
рианта алгоритма. Основные варианты алгоритма с прогнозирующей
моделью:
1. Алгоритм с численным дифференцированием.
2. Алгоритм модифицированный.
3. Алгоритм с матрицей чувствительности.
4. Алгоритм с синхронным детектированием.
5. Алгоритм с аналитическим решением.
Кроме того, возможны различные комбинации этих алгоритмов.
8.8.3. Уравнения характеристик в задаче оптимального управления
скоростью изменения входных величин. Для широкого класса объектов
моделирование (8.6.1) ллп (8.6.2) при и = 0 па интервале [Д, со-
пряжено с трудностями, главным образом, вычислительного характера.
Так, окрестность текущего состояния объекта, содержащая прогнозируе-
мые па [1„, /г] траектории, может либо значительно превышать по раз-
меру область допустимых состояний в X, либо совсем нс пересекаться
с пей. Кроме того, для нелинейных объектов возможно существенное
изменение динамических свойств при замене текущего вектора входных
величин пулевым вектором.
Поэтому наряду с описанной в п. 8.6.2 задачей рассматривается за-
дача управления скоростью изменения вектора входных величин. Дви-
жение объекта описывается уравнениями
ж = /(-. У> У = и- (8.8.10)
Минимизируемый функционал задается в виде (8.6.7), при этом в об-
щем случае вектор у может быть включен в функции К„ и (Л>.
Переход от объекта (8.6.6) к объекту (8.8.10) с введением обозпа-
нений Рх(1) = = [dV(t)ldz(t)]e, pv(t) = [dV(t)/dy(t)y г дает уравнения ха-
рактсрпстик х = /(; У, t), у = 0, (8.8.11)
,дх) х \ дх ) ' (8.8.12)
^ = -| (dfV _(dQAT <ду)Рх \djj' (8.8.13)
Г = = Q(x, у, О, (8.8.14)
.заменяющие (8.6.54) —(8.6.56).
8.8.4. Алгоритм с прогнозирующей моделью и численным дифферен-
цированием. Алгоритм заключается [8.21, с. 51] в вычислении 7(x(t), t)
интегрированием (8.8.14) при условии (8.6.9) па моделируемом в уско-
ренном времени т = t/к (к — масштаб ускорения времени) движении
объекта (в соответствии с (8.8.11)) с последующим численным диффе-
ренцированием этой функции.
Таким образом, для определения оптимального в смысле (8.6.7) уп-
равления объектом (8.8.10) в текущий момент времепи (реально — па
очередной цикл формирования управления Azu) в управляющей ЭВМ
осуществляется как минимум г + 1 прогнозов движения объекта инте-
грированием уравнений модели
т)’ Ji = 0 (8.8.15)
в ускоренном времени т с различными начальными условиями умО>(0),
j = 1, г + 1, лежащими в окрестности текущего значения, полученного
в предыдущем цикле. Начальные условия для первого уравнения (8.8.15)
задаются соотношением
*м(ти) = (8.8.16)
На основе этих прогнозов вычисляются скалярные функции
Т2
V (*u) = V (М = V:: (*М (т2)) + к J т> (8.8.17)
где тг1 = tu/к и т2 = 42/к — пределы интегрирования в ускоренном вре-
мени, соответствующие моменту определения управляющих сигналов tu
и моменту окончания интервала оптимизации хм(т)—прогнозируе-
мый в ускоренном времепи вектор состояния управляемого объекта
(8.8.10); /м — векторная функция, представляющая в модели (8.8.15) со-
ответствующую функцию объекта (8.8.10) и в общем случае пе равная
ей (в предположении точно известной структуры / эта функция может
отличаться вектором параметров а).
Вычисленные*) значения (8.8.17) используются для аппроксимации
разностным аналогом частных производных в соотношении
”'“(Ч = ~А(^У = ~АЧ(Ч'
(8.8.18)
заменяющем (8.6.10) для объекта (8.8.10).
8.8.5. Алгоритм с прогнозирующей моделью, модифицированный.
Предполагается дифференцируемость но .?(/) функций Иа(х, у, I) и
(?а(х, !/ t) функционала (8.6.7) па У- Алгоритм связан с
решением в ускоренном «обратном» времени [8.21, с. 55—61]
О' = т2 — т,
(8.8.19)
изменяющемся от 0 до Ок = (т2— т„), уравнений (8.8.12), (8.8.13) с
граничными условиями
Рх(0) = Рх(То) = [йП3(х"(т2))/<5хм(т2)]г,
Ри (0) = рй(т2) = [ЛЛя(а.-м(т2))/йа:м(т2)]т.
(8.8.20)
Вычисление этих условий предполагает знание состояния (8.8.11) в кон-
це интервала оптимизации, получаемого предварительным моделирова-
нием (8.8.15) и ускоренном «прямом» времени т с начальными условия-
ми (8.8.16) и
№(т«) = y(tu). (8.8.21)
Необходимость вычисления вдоль прогнозируемой траектории объекта
функций df/dx, df/dy, dQ/dx п dQjdy приводит либо к запоминанию в уп-
равляющей ЭВМ траектории (8.8.15), пройденной при предварительной
моделировании, либо к совместному решению в обратном времени О
уравнений
= 0), = (8.8.22)
d
dO
Полученные компоненты вектора /^(1),.) = ра(ти) = р<Дг„) определяют
оптимальное управление (8.8.18).
Алгоритм (8.8.18), (8.8.22) нс требует численного дифференцирова-
ния и поэтому потенциально обладает более высокой точностью.
8.8.6. Алгоритм с прогнозирующей моделью н матрицей чувствитель-
ности. Алгоритм сводится к вычислению и использованию вдоль про-
гнозируемого движения (8.8.15) чувствительности прогнозируемого со-
*) При выполнении вычислений па ЦВМ множитель z в (8.8.15) и
(8.8.17) можно пе принимать во внимание, имея в виду, что вычисления
производятся в ускоренном темпе.
стояния хм(т) к вариациям компонент вектора входных величин ум(ти) =
= У"'(1^)- Алгоритм может быть получен нз (8.8.11) и (8.8.14) следую-
щим образом [8.25, 8.26].
Если функция / в (8.8.10) и, следовательно, в (8.8.11) непрерывна
вместе со своими частными производными по х и у па XX УХ(4~, <+),
где (t_, t+) — открытая временная область, содержащая отрезок [«b t2],
тогда в соответствии с теоремой Пеано [8.39, с. 120] решение уравнения
(8.8.11), которое обозначим xc(t), принадлежит классу С1 в открытой
области его определения. При этом матрица x!y(t) = дхс (1)/ду(1и) част-
ных производных этого решения по вектору параметров y(tu) удовлет-
воряет уравнению
£/, t)
xv = дхс (l) xv + dy (4U) (8.8.23)
с начальным условием
(4ц) — 0,
(8.8.24)
где матрицы df!dxc и дЦду вычисляются па хс(1).
Вводится обозначение частной производной ру(1) = (дТ/(г)/сф(ги))т,
вычисляемой дифференцированием V(x, у, t) как сложной функции
y(tu), которая отличается от явной производной py(t). Дифференцирова-
ние (8.8.14) по у(tu) по правилу дифференцирования сложной функции
дает
(8.8.25)
Аналогично из (8.6.9) получается для (8.8.25) граничное условие
\ racV2) /
(8.8.26)
Имеет место соотношение
Ру (0 = ^(0 Рх(0 + Ру(4)-
(8.8.27)
Из пего следует, что в момент tu, для которого определяется значение
управления, в силу (8.8.27) вместо pv(tu) можно использовать pu(tu).
При реализации этого варианта алгоритма оптимального управле-
ния с прогнозирующей моделью в управляющей ЭВМ должно моделиро-
ваться движение (8.8.15) с начальными условиями (8.8.16) и (8.8.21). На
прогнозируемом движении следует интегрировать (8.8.25) в форме запи-
си с ускоренным временем т или, что то же самое, вычислять
(8.8.28)
Используемая при этом матрица ^(т) определяется интегрированием
в ускоренном времепи т уравнения
— х” (т) = х ь>/ (гм, .'А т) ж“ (т) + X /М*”’ -'/М’ т) (8.8.29)
dT 5х“(т) - й/ы(ги)
с начальным условием (8.8.24). В отличие от предыдущего варианта, ал-
горитм (8.8.28), (8.8.29) пе имеет интегрирования в обратном ускорен-
ном времени.
8.8.7. Алгоритм с прогнозирующей моделью и синхронным детекти-
рованием. Вариации начальных условий и многократный ((г + 1)-крат-
ный) запуск прогнозирующей модели в варианте алгоритма с числен-
ным дифференцированием (см. и. 8.8.4) можно заменить па быстроме-
ияющиеся вариации в процессе одного запуска модели с соответствую-
щей обработкой сигналов. Речь идет о том, чтобы использовать принцип
синхронного детектирования (см. п. 5.5.2) для определенья компонент
градиента в алгоритме с прогнозирующей моделью. Цель этого заклю-
чается в сокращении необходимых вычислительных затрат.
Данный алгоритм изложим применительно к общей форме алгорит-
ма с прогнозирующей моделью (8.8.4), (8.8.6), (8.8.7), из которой, как
частные случаи, получаются варианты (8.8.8), (8.8.9). Применяя форму-
лу сложной производной, вместо (8.8.7) записываем
1- |Ё Р (*- '• 91 i х (>. >. у t
(Л, [X 'х, /, 9), б] — X (х, t, 0) dO(ср (х, Z),
дх
(8.8.30)
где Х(х, t, 0) —по определению решение па интервале [г, уравнения
свободного движения объекта
х = /(X, о
(8.8.31)
при начальном условии
Х(х, t, I) = xt,
где xt — x(l) — текущее значение вектора состояния объекта (8.8.1).
Допустим, что значению х(/) придается малая вариация бх(/) (реа-
лизация этого при численном интегрировании уравнения (8.8.31) описа-
на ниже). Тогда с точностью до малых второго порядка
д
X (х -|- бх, t, 0) = X (х, t, 0) + X (х, I, 0) бх (t).
(8.8.32)
Функция бх(«) задается быстромеияющейся (в сравнении с х(Ц) де-
терминированной или случайной с пулевым средним значением. Для
цифровой реализации наиболее подходит детерминированная функция
6z(Z), каждая компонента которой представляет кодовую группу из пря-
моугольных импульсов по типу функций Уолша. Длительность каждого
прямоугольного импульса соответствует шагу численного интегрирова-
ния уравнения прогнозирующей модели (уравнения типа (8.8.31)) в
ускоренном времени. Кодовые группы удовлетворяют условиям, при ко-
торых
d = 6x(t)6xr (I)
— диагональная постоянная (пе зависящая от Z) матрица,
6x(z) = 0.
(8.8.33):
(8.8.34)
Здесь чертой обозначено усреднение по интервалу времени, равному
длительности наиболее протяженной кодовой группы.
Умножим (8.8.32) справа па 6xT(z) и усредним по указанному интер-
валу. С учетом медленного изменения х(1) в сравнении с бх(г) и выра-
жений (8.8.33), (8.8.34) получаем
X [я (Z) + бх (Z), I, 6 j (t) = аГ х (ж> °) d-
(8.8.35>
Подставляя это выражение в (8.8.30), получаем следующее непрерывное
описание алгоритма с прогнозирующей моделью и синхронным детекти-
рованием [8.28]:
а [/5УЯ(Х)\ ____________________________
auoU из (“оп> *)---5Х /е=«2 X Iх <0 + бж z> М &т (#)
#2
Г (X)
+ J дХ
t
X [х (Z) -|- бх (Z), Z, 0] бх '(Z) dO d 1<р(х, Z), (8.8.31
где
руч(Х)\ а ^<?3(Х) а
Hx~Jo=zaвёх гз[X (*, t, Mb -ах“ = ахIх t, 0)1.
Цифровая численная реализация алгоритма (8.8.36) заключается it
следующем. Как и в других алгоритмах с прогнозирующей моделью, вре-
мя разбивается па циклы, а циклы в ускоренном времени — на шаги
(такты). В начале каждого цикла запускается прогнозирующая модель
свободного движения в ускоренном времени (модель типа (8.8.31)) с на-
чальными условиями, близкими к текущему значению вектора состоя-
ния. В отличие от других вариантов алгоритма с прогнозирующей мо-
делью, «запуск» занимает несколько шагов, а именно столько, сколько
содержится импульсов в наиболее длинной кодовой группе вариаций
начальных условий бх. Пусть это число шагов равно пт. В течение
этих пш начальных шагов каждого цикла численное интегрирование
уравнений (8.8.31) ведется при искусственных малых возмущениях каж-
дой из компонент посредством кодовых групп, присвоенных этим ком-
пойентам. Только после пш шагов прогнозируемое движение становится
действительно свободным (ограниченность разрядной сетки пе учиты-
вается) .
«Умножение» па те же кодовые группы компонент прогнозируемого
по шагам свободного движения и усреднение в пределах длительности
кодовой группы обеспечивает согласно (8.8.36) определение градиента
главной части функционала на прогнозируемом движении и формирова-
ние вектора оптимального управления па очередной цикл. Вычислитель-
ные затраты па синхронное детектирование («умножение» па кодовые
группы и усреднение), а также другие операции численной реализации
(8.8.36) невелики в сравнении с затратами па чнелеипое интегрирова-
ние уравнений свободного прогнозируемого движения. Ввиду того, что
при данном алгоритме это чнелеппое интегрирование выполняется лишь
один раз за каждый цикл, необходимая вычислительная производитель-
ность по крайней мере в г -}- 1 раз меньше, чем для алгоритма с числен-
ным дифференцированием, и в 3—4 раза ниже, чем для модифицирован-
ного алгоритма с прогнозирующей моделью (см. п. 8.8.5).
8.8.8. Алгоритм с прогнозирующей моделью и аналитическим реше-
нием. В ряде случаев уравнения свободного движения управляемого
объекта (уравнения прогнозируемого движения) допускают общее ана-
литическое решение, т. е. векторная функция (8.8.6) известна в аналити-
ческом выражении. Это имеет место, в частности, для процессов, описы-
ваемых линейными уравнениями с известной переходной матрицей. Ча-
сто к такому описанию можпо прийти при иерархическом подходе к за-
даче оптимизации (см. гл. 10), когда на верхнем уровне используются
простые, в частности линейные, модели прогнозируемых процессов.
Для квадратичной функции затрат на управление в функционале
обобщенной работы и управления скоростью изменения вектора у (урав-
нения управляемого процесса в форме (8.8.10)) общий алгоритм (8.8.4) —
(8.8.7) дает:
[л 1т\ I
4- 03 (*, и, 0) ро . (8.8.37)
Оу 1 / )
При наличии аналитического решения Х(х, у, t, 0) уравнения прогно-
зируемого свободного движения необходимые вычислительные затраты
резко сокращаются. В некоторых случаях приближенное аналитическое
решение может строиться в форме степенного ряда
X (л. (Z), 0)-
- * и+^ / 4- /+ . (8.3.38)
11 21 дх 3! дх \0х ]
8.8.9. Вопросы численной реализации алгоритма в реальном масшта-
бе времени. Все пять вариантов алгоритма с прогнозирующей моделью
приводят по существу к одному решению (при предельной точности ап-
проксимации производных в (8.8.18) и решения (8.8.38) и отличаются
только вычислительными процедурами. При этом первые четыре вари-
анта являются алгоритмами численного решения задачи, а пятый — ана-
литического решения задачи. Очевидно, что последний из них требует
высокой квалификации разработчиков и больших трудозатрат при пред-
варительной подготовке алгоритма управления, по характеризуется са-
мым низким уровнем трудозатрат па формирование управления в про-
цессе функционирования системы.
Остальные же варианты практически всю трудоемкость синтеза уп-
равления сосредоточивают па этапе формирования управления в процес-
се функционирования системы управления.
Для приближенного сравнения трудоемкости вычислительных про-
цедур первых трех вариантов алгоритмов с прогнозирующими моделями
предполагается, что объем вычислений, связанных с интегрированием
каждого скалярного уравнения (кроме тривиальных) в (8.8.15), (8.8.22),
(8.8.28) и (8.8.29), одинаков и составляет 7ИНТ. Тогда трудоемкость каж-
дого из вариантов алгоритма сцепится соответственно
Гг — IVn’juHT, Гц = (Зн ф- ш)^И11Т, Гш = [п(m -ф— 1) ф- wi]Yi>iit>
(8.8.39)
где N — число дискретных значений функции V(x, у, г), необходимое
для реализации разностного аналога.
Таким образом, для многомерных объектов с большим числом вхо-
дов при невозможности аналитического решения задачи наиболее пред-
почтительным с точки зрения трудоемкости является второй вариант
алгоритма с прогнозирующей моделью, так называемый модифицирован-
ный алгоритм (алгоритм п. 8.8.7 здесь пе рассматривается).
§ 8.9. Алгоритмы модального управления
Нули и полюса передаточных функций линейных стационарных си-
стем (собственные числа соответствующих матриц) традиционно игра-
ют большую роль при описании динамических свойств систем указан-
ного класса. В классической ТАР эти величины использовались как при
анализе, так и при синтезе линейных стационарных систем. При этом
метод синтеза, обеспечивающий заданное распределение полюсов пе-
редаточной функции замкнутой системы на комплексной плоскости, по-
лучил название метода стандартных коэффициентов [8.40].
В 80-х годах алгебра собственных чисел передаточных матриц ли-
нейных стационарных систем получила всестороннее развитие и стала
именоваться модальным управлением. Этот частный раздел теории ди-
намических систем не вполне соответствует основной концепции СТАУ
как теории оптимального управления «в большом» (см. введение). Тем
пе мопее, учитывая популярность вопросов модального управления в
современной литературе и полезность соответствующих показателей в
общем комплексе критериев качества автоматического регулирования,
было решено включить их обсуждение в настоящий справочник.
8.9.1. Модальное управление при полностью измеряемом векторе со-
стояния. Смысл термина «модальное управление» заключается в прида-
нии собственным числам матрицы замкнутой линейной системы желае-
мых значений или обеспечении прнпадлеягпости этих чисел к заданному
множеству. Ясно, что возможность решения указанной задачи зависит
от степени непосредственной наблюдаемости, наблюдаемости и управ-
ляемости (см. гл. 2).
8.9.1.1е. Постановка задачи. Пусть имеется объект управления
х = Ах + Ви, (8.9.1)
где А п В — заданные матрицы чисел размеров и X п и п X г соответ-
ственно, удовлетворяющие условию полной управляемости. Требуется
найти управление
и = С!х, (8.9.2)
(где С — искомая матрица размера п X г) такое, чтобы все или часть
собственных чисел (мод) матрицы А + ВС1 замкнутой системы имели
заданные значения.
Эта задача называется задачей модального управления. Ес формули-
ровка для случая дискретных и нестационарных объектов аналогич-
на [8.41].
8.9.1.20. Алгоритмы модального управления. Рассмотрим вначале слу-
чай скалярного управления. Тогда в (8.9.1) В = b, vjifs b — га-мерпый век-
тор. При заданном характеристическом полиноме D(p) = рп ап_|рп_1-]-
+ ... + щр осо замкнутой системы алгоритм (процедура 1) синтеза мо-
дального управления состоит из операций:
1. Вычислим характеристический полином объекта (8.9.1)
d(p) = det [Ер - А] = рп + dn-tP"-1 + ... + dtp + do. (8.9.3)
2. Из коэффициентов полиномов D(p) и d(p) сформируем вектор
1= [осо — d0 ... «„-t — d„_1]T. (8.9.4)
3. Найдем искомый вектор
ст = — /т [б : АЬ : .. . [Ь j АЪ ; ... : , (8'9'5)
Г ДО
Оппсаппая процедура синтеза опирается па известный [8.41] факт,
состоящий в том, что уравнения полностью управляемого объекта (8.9.1)
скалярным управлением (полная управляемость означает, что
det [И АЪ\ ... • 4"—1Ь]=/=0) можно, используя преобразование х — ipyx,
где
1ру= [?7; 4Н ... [Ь: АЬ ; ...; 4"-1fc]“\
привести к виду х = Ах 4- Ьи.
Переходя к процедуре синтеза для векторного управления
(rank В > 1), заметим, что, в отличие от случая скалярного управления,
решение задачи модального управления пеедипствеппо и при этом мо-
гут быть предложены различные алгоритмы вычисления матрицы С. Опи-
шем один из пих, называя его процедурой 2. Опа состоит из трех частей:
1. Найдем матрицу М размера г X и такую, чтобы система
х = [4 + ВМ]х + 61‘lu! (8.9.6)
(где Ы‘1— n-мерный первый столбец матрицы В; ui —первая компонен-
та вектора и) была полностью управляема.
2. Применяя для «объекта» (8.9.6) процедуру 1, найдем вектор с =
= [с[... сп]т и сформируем матрицу
(8.9.7)
(8.9.8)
3. Вычислим искомую матрицу
Ст = М + N.
Первая часть процедуры, 2 состоит из операций:
1.1. Сформируем матрицу управляемости
К = [felll : : : Лг>П1 ... : Л&1Н ; дп- 1&1г1 Ап~]. (8.9.9)
1.2. Выберем из п X г столбцов этой матрицы п линейно независи-
мых. Такие независимые столбцы матрицы Ку существуют в силу пол-
ной управляемости объекта (8.9.1). Имеется несколько способов такого
выбора. Опишем один из пих. Будем перебирать столбцы &1*1, ...
4^-’ыЧ до тох пор, пока вектор А 1б'11 по будет выражаться
в виде липейпой комбинации векторов Ь1*!, 4&[1|> ..., 4 1 &1Ч.
Если = п, то объект (8.9.6) полностью управляем с помощью щ,
и тогда переходим ко второй части алгоритма (процедуре 1). Если v, < п,
то будем последовательно присоединять к полученному набору столб-
цы Ь|21, 46|21, ..., 4Vs S*2', пока вектор 4V2ft'21 пе будет выражаться
как линейная комбинация векторов 6111, 4611!, ...,4 1 Ь11', ...,4 2 &*21.
Если Vi v2 < п, продолжаем присоединять к полученному набору век-
торы 6|s|, 4Z>|31, ..., 4V3-16,3I и т. д. Пусть для простоты изложения V| +
+ Vs + v3 = n и, следовательно, матрица
P = [м1 I i ЛЬ11! 4V1-Ibl’l; ... ; ']
— пе особая (det P =f= 0).
1.3. Вычислим
M = —SP-',
(8.9.1")
(8.9.11)
где 5 = [0 : ... 0 : e2 : 0 i ... 0 e3 ... 1 0] — матрица размера гХ», в ко-
торой Vi-м и (Vi -J-VsJ-m столбцами являются столбцы Ct (i = 2, 3), пред-
ставляющие собой г-е столбцы единичной матрицы размера г X г.
8.9.1.3е. Управление отдельными корнями. В ряде случаев требуется
«переместить» с помощью управления (8.9.2) не все корни характеристи-
ческого уравнения объекта, а лишь один (например, ближайший к мни-
мой оси), либо несколько из них. Пусть корпи Xi, Xs, ..., Ли характери-
стического уравнения объекта (8.9.1) вещественны и различны. Рассмот-
рим задачу выбора управления (8.9.2), обеспечивающего сдвиг -*-/.*
(где х* — заданное отрицательное число) и оставляющего неизменными
остальные собственные числа объекта. Процедура решения этой задачи
состоит из операций:
1. Используя преобразование у = Тх (где Т — пеособая матрица чи-
сел размера «X п), приведем уравнение (8.9.1) к виду
у = Ау + Ви, (8.9.12)
где А —треугольная либо диагональная матрица.
Матрица 7, при которой А = diag(Xi, ?.2, ..., Лп), имеет в случае
скалярного управления вид
Г1 -Лг ... (-XJ'1”11
г ; I [ь i — • i (- ^)”_16]"1. (8.9.1З)
[1 -Лп ... (-Л,,)"”1]
2. Сформируем матрицу х размера г X п вида
и ° °1
хн о ... 0J
Отличные от пуля элементы этой матрицы определяются из равенства
Vit- (s-9-i5>
i—1
S. Найдем искомую матрицу
Ст = — у.Т. (8.9.1G)
8.9.2. Модальное управление при неполных измерениях. Рассматри-
вается случай, когда не все компоненты вектора доступны непосредст-
венному измерению.
8.9.2.1°. Модальное управление с наблюдателем полного порядка.
Пусть управление (8.9.2) обеспечивает заданное расположение корней си-
стемы (8.9.1), (8.9.2) и пусть реализация закона управления (8.9.2) за-
труднена тем обстоятельством, что вместо вектора х непосредственному
измерению доступен лишь m-мерпый вектор
z = Их, (8.9.17)
где II— заданная матрица чисел размера т X п, удовлетворяющая вмес-
те с матрицей А условию полной наблюдаемости. В этом случае естест-
венно использовать фильтр («наблюдатель»):
х = (А — КЯ)?+Kz +/?и, (8.9.18)
где К — матрица чисел размера п X т, и использовать закон управле-
ния (8.9.2) для восстановленного состояния x(Z):
и = СТх. (8.9.19)
Характеристический полипом D(p) системы (8.9.1), (8.9.17), (8.9.18),
(8.9.19) имеет вид
О(р) = D*(p)Du(p), (8.9 20)
где Д* (р) — желаемый характеристический полином системы (8.9.1),
(8.9.2); Du(p) —характеристический полипом фильтра (8.9.18)
Ои (р) = det [£р — А 4- КЯ]. (8.9 21)
Определим матрицу К так, чтобы Du (р) = д* (р), где £>* (р) = дп+
+ ipn—1 + •••+ ₽0— желаемый заданный характеристический поли
пом. Для решения этой задачи воспользуемся процедурой 2 (см.
п. 8.9.1.2е). В связи с этим рассмотрим вспомогательную систему
(1 = дтр 4- /Га, а = —К'ц, (8.9.22)
где ц — это «мерный вектор, который полностью управляем г-мерпым
вектором а, так как
rank [Яг : ЛЧ1’Г ; • • • ; 4ТП~1//Т] = п
в силу полной наблюдаемости системы (8.9.1), (8.9.17). Применяя про-
цедуру 2 для системы (8.9.22), найдем матрицу К, при которой паблю
датель имеет желаемое распределение корней, и таким образом, проце-
дура синтеза модального управления при неполных измерениях вектора
фазовых переменных объектов (процедура 3) состоит из частей:
1. Применим процедуру 2 для определения матрицы С"г, входящей в
(8.9.19).
2. Применим процедуру 2, заменив в ней А па /1т, В на //г,
D*v (р) па Dxu (р), и вычислим матрицу С,
3. Найдем матрицу К = —С.
8.9.2.2е. Модальное управление с наблюдателем пониженного поряд-
ка. Рассмотрим объект (8.9.1), в котором непосредственному измерению
доступны пе все компоненты вектора состояния.
А. Система с одной измеряемой переменной. Пусть непосредственно-
му измерению доступна переменная
z = hx, (8.9.23)
где h — заданный n-мерпый вектор-строка, удовлетворяющий вместе с
матрицей А условию полной наблюдаемости.
Для оценки вектора х используется вместо наблюдателя (8.9.18) ре-
дуцированный наблюдатель, описываемый уравнениями
х = S'z + К'г, г — в г -|- Fz -|- ТВи, (8.9.24)
матрицы которых определяются из дополнительных соотношений. За-
мкнем систему обратной связью (8.9.19) и опишем алгоритм выбора мат-
риц уравнений (8.9.24). При этом характеристический полипом системы
(8.9.1), (8.9.23), (8.9.24), (8.9.19) имеет вид
D[p} = D*(p) D»*(p),
где D'V* (р) = рп~1 Ц- 2 + ••• + "() — желаемый характеристиче-
ский полином наблюдателя, пониженного па одну единицу порядка. Ос-
нову этого алгоритма составляет приведение уравнения (8.9.1), (8.9.23)
объекта к канонической форме
х — А х -р Ви, z = h х,
(8.9.25)
где
h = [0, ..., 1],
(8.9.26)
di (г = 0, п— 1) —коэффициенты полинома det [Ер —4].
Переход от формы (8.9.1), (8.9.23) к канонической форме (8.9.25) осу-
ществляется с помощью преобразования х — фиж, в котором
(ф-1)т = [ Лг i ... =: (4"-1)т /?] hT i ... i (4n-!)T fcT]-\ (8.9.27)
Нетрудно убедиться, что матрицы наблюдателя (8.9.24) для объекта, за-
писанного в форме (8.9.25), имеют вид
"1
г f'—[ i ^п—г):
£n—2 |
1 &П—2 (^n—1 ^n—z)]'
Таким образом, процедура 3 модального управления с наблюдате-
лем пониженного (па одну единицу) порядка состоит из частей:
1. Используя процедуру 2, найдем матрицу Ст закона управления
(8.9.19).
2. Построим матрицы (8.9.28) и найдем матрицы уравнения (8.9.24)
наблюдателя
5'=-ф-1£': К' = ф“1К'; Г=71фи; 0 = 0; F = F. (8.9.29)
Б. Системы с несколькими измеряемыми переменными. Как и в слу-
чае скалярного выхода объекта, основу алгоритма модального управле-
ния объектом (8.91), (8.9.17) составляет приведение уравнений к кано-
нической форме
(8.9.30)
гдех=Г.т,, ...ж,,, .. ,.г„,.. ,.гто1, Г‘. Символом * обозначены элементы,
[ 11 > kJ mi ' ‘M-mJ
значения которых могут быть отличны от нуля. Нетрудно видеть, что
уравнения (8.9.30) могут быть записаны как совокупность m под-
систем уравнений, каждая из которых имеет несколько входов и единст-
венный выход. Каждая из этих подсистем имеет вид
+ D(i)z + ВЦ1и'
(8.9.31)
где Сын B(i; — матрицы размеров р, X m и 10 X г соответственно,
I — 1, /и.
Для каждой из подсистем (8.9.31) можно построить, используя фор-
мулы (8.0.29) (замепив в них п па щ), наблюдатель. Объединяя эти
наблюдатели, получим наблюдатель, описываемый п — т дифференци-
альными уравнениями (наблюдатель (п—т)-го порядка).
Опишем теперь процедуру приведения уравнений (8.9.1), (8.9.17) к
канонической форме. (8.9.30). Опа состоит из операций:
1. Сформируем матрицу
ки = Kn Ь • • I АГт| i • • -\ 4i ’ d U"-’)T ^ll-
где /i|,| — i-я строка матрицы II.
2. Выберем из п X т столбцов матрицы Ки линейно независимые.
Способ выбора таких столбцов (отличный от используемого в процеду-
ре 2) заключается в следующем. В качестве первых столбцов искомого
набора выберем линейно независимые столбцы матрицы Нт (так как
rank 7/т = т). Присоединяем к ним последовательно столбцы А‘Л|Г|»
>1ТА|^|, ..проверяя, является ли каждый новый столбец ли-
нейно независимым от всех предыдущих столбцов набора. После того
как столбец проверен, переходим к проверке столбцов
(л2)т/г;1(, .... (Л2)т и т. д., до тех пор пока не получим п ли-
нейно независимых столбцов, из которых сформируем матрицу
₽ - [ч, i... | (/"'")’ ч„;... | ч« । - i
Заметим, что У р; = п.
i
3. Вычислим матрицу L — Q~l и сформируем матрицу
V - [/и., Ь • • | 1 • •. | Ч | ] /’%,]. (8.9.32)
в которой — соответствующие столбцы матрицы L.
Используя преобразование х == приведем уравнения (8.9.1),
(8.9.17) к виду (8.9.20). Таким образом, алгоритм модального управле-
ния с наблюдателем (п — т)-го порядка состоят из частей:
1. Используя процедуру 2, найдем матрицу С1 закона управления
(8.9.19).
2. Приведем уравнения (8.9.1), (8.9.17) к виду (8.9.30).
3. Используя формулы (8.9.28), построим матрицу наблюдателей для
каждой из подсистем (8.9.31). Объединяя наблюдатели каждой пз этих
подсистем, построим наблюдатель системы (8.9.30).
4. Используя преобразование х = (где х — фазовые порсмоппыо
наблюдателя системы (8.9.30)), получим фильтр, обладающий наперед
заданным расположением корней своего характеристического уравнения.
8. 9.3. Модальное управление при внешних возмущениях. Пусть
объект (8.9.1) с полностью измеряемым вектором состояния подвержен
скачкообразному внешнему возмущению £(т) — const при t 0 (£(() =
= 0 при t < 0). Уравнение объекта примет в этом случае вид
х = Ах + Би + Ml, ' (8.9.33)
где М — заданная матрица чисел размером г. >(р.
Пусть задан r-мерный вектор регулируемых переменных
0 = Nx
(8.9.34)
(где N— заданная матрица чисел размером г X и) и пусть матрицы А,
Б, N удовлетворяют соотношению
I А /э!
rank I Q -- п + г. (8.9.35)
Требуется найти управление и, при котором установившаяся ошиб-
ка по регулируемому вектору удовлетворяла бы условию
0Уст = 0 (8.9.36)
(8.9.37)
(8.9.38)
(8.9.39)
(8.9.40)
^0уст — Нт 0 Wj, а корпи характеристического уравнения системы рас-
полагались бы заданным образом в плоскости корней.
Для решения задачи введем новые переменные
Дж -- X *TyCTj Ди -- U Uy„T,
где объединенный вектор
жуст1 ГЛ В]-1ГЛЛ
Д'уст] Ь О] [Op*
В новых переменных (8.9.33) примет вид
Дт — Л Дж + В£ш,
0 = Л'Дж.
Из (8.9.38) следует, что 0уст -= /УДжуСТ = 0. Используя процедуру 2
для (8.9.39), найдем управление Дн = СгДж, обеспечивающее требуемое
расположение корней. Возвращаясь к прежним переменным, получим
искомое управление
Л' о] [ о р- (8-9-41)
Для точной реализации (8.9.41) необходима полпая априорная информа-
ция (знание матриц коэффициентов) и точное измерепие Оба эти
условии па практике не выполняются. Возможна трансформация реше-
ния, приводящая к общепринятому астатическому регулированию.
ГЛАВА 9
ОПТИМИЗАЦИЯ ДИНАМИЧЕСКИХ СИСТЕМ
СО СЛУЧАЙНОЙ СТРУКТУРОЙ
Свойства систем автоматического управления могут скачкообразно
изменяться в случайные моменты времепи. Наиболее простой пример
таких изменений — скачкообразное изменение одного или нескольких
параметров системы вследствие выхода из строя какого-либо элемента.
Возможны и более сложные случаи, связанные с работой нескольких
различных по своему назначению систем, включаемых в определенной
последовательности, когда конечные условия предыдущей системы вли-
яют на работу последующей.
§ 9.1. Основные определения
Рассмотрим работу радиолокационной системы поиска и слежения
за воздушными объектами. На начальном участке система работает в
режиме поиска, осуществляя обзор заданной части пространства. После
обнаружения сигнала цели система переводится в режим слежения п
определения координат. В случае потери цели осуществляется возврат
к режиму поиска и т. д. Здесь характерно то, что па разных этапах
решаются различные задачи: вначале обнаружение, затем слежение. Ал-
горитмы работы систем па этих этапах различны, однако связаны меж-
ду собой конечными условиями. Так обнаружение и остановка поиска
приводят к появлению начальных ошибок слежения. С другой стороны,
ошибка в момент срыва слежения влияет па последующее время поиска
н захвата. Сами моменты перехода с поиска па слежение и наоборот
в рассматриваемой системе будут случайными как из-за наличия шу-
мов и помех, так и за счет случайного характера траектории полета
объекта.
Динамические системы, свойства которых скачкообразно изменяют-
ся в случайные моменты времепи, называются системами со случайны-
ми изменениями структуры (ССС), имеющей определенное число со-
стояний *).
В настоящей главе даются способы описания и оптимизации непре-
рывных систем этого класса.
Простейшими ССС являются автоматические системы со скачкооб-
разными изменениями параметров, изучение которых было начато в ра-
ботах [9.1—9.6] и др. В статистической радиотехнике подобные задачи
*) Не следует смешивать понятия состояния структуры и текущего
состояния динамической системы. Первое относится к пространству
структур, второе — к обычному пространству состояний системы с за-
данной структурой.
также решались [9.7, 9.8]. Однако большинство задач, некоторые из ко-
торых описаны выше, приводят к более сложным условиям, когда при
изменении структуры меняется само уравнение системы (в том числе
его порядок) и начальные условия последующего состояния структуры
определенным образом связаны с конечными условиями предыдущего.
Построить достаточно общую теорию ССС удалось лишь после того,
как был рассмотрен специальный подкласс марковских процессов со
случайной структурой (МСС), в котором обобщаются свойства известных
Кусочно-непрерывных марковских процессов и процессов с непрерывны-
ми и дискретными компонентами. Это обобщение позволяет сформулиро-
вать и решить ряд новых задач из класса систем со случайными измене-
ниями структуры, а также получить некоторые известные результаты
иными, более общими способами. Математические основы марковской
теории ССС изложены в монографиях [9.9—9.11].
Следует, однако, отметить, что проблемы теории систем со случайно
изменяющейся структурой сложнее, чем соответствующие проблемы сис-
тем с неизменной структурой. Поэтому если пе существует, например,
точного общего решения задачи оценивания нелинейных стохастических
процессов неизменной структуры, то заведомо нельзя надеяться получить
такое решение для ССС.
Будем рассматривать ССС с конечным числом структур, равным s.
Процессы в такой системе удобно изображать так, как показано на
рис. 9.1.1, где индексами 1, ..., I, ..., г, ..., s обозначены структуры
системы, буквами xw(t) —векторы состояний в l-ii структуре, —
вецторы воздействий. Случайные моменты времени Ti, Тг, ... соответству-
ют смене структуры, а для каждой из них состояние является не-
прерывной функцией времени и подчиняется своим уравнениям. Штри-
ховые липни па рис. 9.1.1 отображают возможные направления перехода
от одной структуры к другой. Так как процессы в каждой из под-
систем могут иметь различную физическую природу и размерность, объ-
единять их в некоторый единый процесс пе всегда возможно. Это неце-
лесообразно и по методическим соображениям, так как часто требуется
определять свойства системы в каждой структуре в отдельности.
Важнейшим признаком классификации ССС является характер вза-
имодействия процессов а:<г>(/) в системе и процесса &(£), определяющего
моменты смены структур. Влияние процесса ©(/) па очевидно,
так как приводит к прерыванию функционирования одной структуры
и переходу к другой. Обратное же влияние может иметь место, а может
и пе иметь. Если ход процесса смены структур '&(/) пе зависит от
то такие ССС называются системами с независимой структурой.
Очевидно, что в этом случае статистические свойства процесса •&(«) мо-
гут изучаться независимо и основные особенности задачи определяются
односторонним влиянием '&(/.) па x<z>(Z), I = 1, s.
В системах с зависимой структурой имеется обоюдное взаимодейст-
вие между fl'(Z) и Особенность заключается в характере влияния
х<г>(/) па 'O(Z), Для которого можпо выделить два случая. В первом это
взаимодействие носит вероятностный1 характер, т. е. моменты перехода
из одной структуры в другую случайным образом зависят от изменения
фазовых координат. Тогда в принципе переходы могут иметь место при
любых значениях x^(t), по с различной вероятностью. Системы, обла-
дающие подобными свойствами, называются системами с распределен-
ными переходами.
Рис. 9.1.1. Процессы в системах случайной структуры
Во втором случае моменты переходов могут быть функционально свя-
заны с ходом изменения фазовых координат, т. е. переходы будут в те
моменты, когда процесс ж<!>(г) достигнет определенного уровня. Такие
задачи будем классифицировать как системы с сосредоточенными пере-
ходами. Достаточно общая теория ССС может быть разработана лишь в
рамках определенных ограничений. Такими рамками служат условия
марковости, накладываемые па совместный процесс -&(t) и I =
= 1, s. К настоящему времени наиболее полно разработана теория сис-
тем с распределенными переходами, которая и будет рассматриваться
ппжо. С методами исследования систем с сосредоточенными переходами
можно познакомиться в [9.9, 9.11].
§ 9.2. Уравнения систем со случайной структурой
Пусть для каждой из s возможных структур система описывается
векторными стохастическими дифференциальными уравнениями
х<!>(г) = /<г>(я, t) + £<'>(«), I = цТ (9.2.1)
где —вектор состояний системы в l-м структуре размерности п{;
— нелинейная векторная функция; £<(> — вектор нормальных случай-
ных процессов типа белого шума с ковариационной матрицей
Е[В<'>(г)В<г>т(П] = ¥<'>(1)<ф-Г).
При некоторых предположениях относительно свойств функции реа-
лизации в каждой структуре будут отрезками непрерывных мар-
ковских процессов, а процесс в целом будет разрывным. Эти предположе-
ния считаем в дальнейшем выполненными, поэтому для каждой струк-
туры в отдельности можно было бы записать уравнение ФПК (см. п. 1.2.8)
для плотности вероятности фггзовых координат р(х, t), имеющее следу-
тощий вид:
(9.2.2)
Уравнение ФПК использовалось в теории систем автоматического уп-
равления многими авторами, папример, [9.13, 9.14]. Как было показано
в [9.12], уравнение (9.2.2) может рассматриваться как уравнение сохра-
нения вероятности и быть представленным в следующей форме:
д д
dt Р(х, t) Вх
П (х, /),
где П — вектор плотности потока вероятности, равный
и (х, «) = / (г, О р (х, «) — 4" р
д \
дх г
В основе теории ССС лежит возможность составления уравнений типа
(9.2.2) для каждого из состояний системы. Эти уравнения называются
обобщенными уравнениями ФПК.
Вначале вводят в рассмотрение пепормироваппые плотности распре-
деления вероятности координат системы pi(x, t), I — 1, s. Смысл этих
функций таков, что интеграл от них по всей области изменения перемен-
ных равен вероятности реализации l-й структуры системы РД/) =
pt(x, t) dx. Очевидно, что для всех структур выполняется усло-
вие нормировки У, Pj (t) = 1. Нормированная функция
1=1
рI (х, I) = pi(x,
является плотностью вероятности состояния в l-й структуре в обычном
смысле. В работах [9.9—9.11] показано, что если условия смены струк-
тур зависят только от текущих значений фазовых координат или не за-
висят от пих и образуют марковский случайный процесс с s конечными
состояниями, то для ненормированных функций плотности вероятности
получается следующая система обобщенных уравнений ФИК:
д ( 8 V
0 =
П1 (х, t) — Vf (х, 1) -]- (х, t), I — 1, s, (9.2.3)
где вектор плотности потока вероятности находится по уравнению
(9.2.1) обычным способом, по с использованием ненормированных функ-
ций плотности вероятности. Функция ut называется функцией поглоще-
ния и определяется условиями переходов от одной структуры к другой,
а и-i — функция восстановления, вид которой зависит от начальных ус-
ловий при включении последующей структуры.
Рассмотрим системы с распределенными переходами. Пусть моменты
переходов образуют случайный ординарный поток с независимыми [9.8]
интервалами между переходами. Вероятность перехода за малое время
AZ от структуры I к структуре г обозначим Vtr(x, t)ht, I, г = 1, s, где
•v;r — интенсивность переходов, зависящая от хода изменения состояния
j?<i>(Z) в Z-й структуре. Для этого случая функция поглощения становится
равной
2 vfr (ж, i) (ж, «). (9.2.4)
г=1^1
Итак, фупкцпя (9.2.4) определяет второе слагаемое в уравнен пи
(9.2.3) при распределенных переходах от одной структуры к другой. Важ-
ной особенностью марковских процессов со случайной структурой явля-
ется то, что в момент смены структур, например г па Z, могут иметь
место определенные начальные условия, зависящие от индекса предыду-
щей структуры г, конечного состояния системы при предыдущей струк-
туре я<г>(/) и. индекса повой структуры. Зададим их условной плотностью
вероятности восстановления
дн(х<г’, t/x<-r\ t) = ?r((x, t/x\ t), (9.2.5)
где первый пижппй индекс означает помер предыдущей структуры, а вто-
рой — номер повой структуры. Для функция (9.2.5) выполняются условия
нормировки
оо
J qrl (х, Их', t) dx = 1.
—оо
Функция (9.2.5) определяется физическим содержанием задачи,
а структура фушщип восстановления в уравнении (9.2.3) принимает сле-
дующий вид:
ut(x,t)= 2 j vH(x', Z) pr(x', t)/qrl(x, i/x', I) dx'. (9.2.G)
—CO
Подставляя (9.2.4) и (9.2.G) в (9.2.3), получаем в окончательном виде
обобщенные уравнения ФПК спстем со случайными изменениями струк-
туры п распределенными пере ходами
Р/ (х, t) = — НЧ 17, (х, t) - vir (Л t) (x, t) -[-
' ' r=l*l
s T
+ y, ( vrj (x, Z) pr(x', Z) qrl (x, Z/x', I) dx', 1= 1, s. (9.2.7)
’’=1¥:Z —oo
Таким образом, статистическое описание марковских систем со случай-
ными изменениями структуры дается системой из s пптегродпфферепци-
альпых уравнений, связанных друг с другом функциями поглощения
и восстановления. В указанных выше работах аналогичные уравнения
получены и для систем с сосредоточенными переходами.
В зависимости от вида условной? плотности вероятности восстанов-
ления (9.2.5) можно провести дополнительную классификацию ССС. Так,
если
?ы(г, t/x', t) = qrl(x, I), (9.2.8)
т. e. плотность вероятности восстановления пе зависит от состояния и
предыдущей структуре, то восстановление будет независимым. В частном
Гпс. 9.2.1. Восстановление реализации па заданных функциях
&
Рис. 9.2.2. Случай совпадения начальных п конечных условий
случае qTi(x, t/x', t)=6[a: — ar((Z)] и восстановление реализаций идет
па заданных функциях art (t) (рис. 9.2.1). При полном совпадении началь-
ных условий новой структуры с конечными предыдущей имеем функ-
цию Qri(z, t/x', t) =6 (я — х'), а вид реализаций процесса показан па
рис. 9.2.2. Этот случай является простейшим примером зависимых усло-
вий восстановления, задаваемых в общем случае функцией (9.2.5).
Выделим из состава функций поглощения (9.2.4) и восстановления
(9.2.6) парциальные составляющие
Vir(x, t) =vir(.x, t)pi(x, I), (9.2.9)
OO
Url (T> 0 = f vrl (x > 0 Pt (X’’ Irl tX’ */Х'> 0 dx'> r> г r+
—oo
(9.2.10)
n образуем матрицы V и U из этих компонент с нулевыми диагональ-
ными элементами. Если у этих матриц отличны от нуля только Элемен-
ты, прилежащие к нулевой диагонали, то возможны взаимные переходы
только между соседними состояниями I, !ф1 и ! — 1с разностью в один
помер и в системе происходят лишь циклические переходы. Если матри-
цы V и U треугольные, то возможны лишь однонаправленные переходы
в направлении возрастания или убывания номера структуры. Например,
если у матрицы V отличны от пуля элементы справа от главной диаго-
нали, а у матрицы U слева от диагонали, то переходы совершаются толь-
ко в направлении увеличения померз структуры. Если матрица V явля-
ется треугольной с элементами, отличными от пуля слева от диагонали,
Рис. 9.2.3. Процессы со случайным моментом окончания
Рис. 9.2.4. Ветвящиеся процессы
а матрица U также треугольная с отличными от пуля элементами спра-
ва от диагонали, то в системе возможны переходы только с уменьшением
номера структуры. Важным подклассом являются системы только с по-
глощением состояний, прекращающих свою работу в случайные момен-
ты времени [9.15, 9.16]. Для таких систем U = 0, а характер реализа-
ций изображен па рис. 9.2.3. Противоположным случаем являются сис-
темы с ветвящейся структурой, у которых V = 0, а характер реализаций
показан па рис. 9.2.4. В таких системах имеется некоторая порождающая
структура, а в случайные моменты времени появляются дополнительные
структуры с реализациями процессов, начинающихся на порождающем
процессе.
§ 9.3. Оптимальная фильтрация процессов случайной
структуры
Задачи оцеппвапия (фильтрации) динамических процессов поизмеп-
пой структуры рассмотрены в гл. 4. Здесь приводится краткое изложение
результатов в области фильтрации процессов со случайной структурой.
9.3.1. Уравнения для апостериорной плотности вероятности. Приве-
денные выше методы описания процессов и систем со случайными измс-
испиями структуры позволяют формулировать и решать целый ряд ва-
дач оптимизации. Начнем с рассмотрения вопросов оптимальной фильт-
рации марковских процессов со случайной структурой. Традиционная
схема задачи фильтрации изображена па рис. 9.3.1, где 1 — модель филь-
труемого процесса х{1), 2 — капал на-
блюдения с помехой Г|(/) .и наблюдае-
мым процессом z(4), 3— фильтр с опти-
мальной оценкой x(t) па выходе. Слу-
чайные изменения структуры могут про-
исходить за счет оцениваемого процес-
са х(4), капала наблюдения и комбини-
рованного случая. Рассмотрим общую задачу оптимальной фильтрации
процесса ж(4) со случайной структурой при использовании нелинейного
канала наблюдения также со случайной структурой. Воспользуемся ме-
тодами теории оптимальной нелинейной фильтрации [9.17]. Пусть филь-
труемый процесс описывается стохастическими дифференциальными
уравнениями с s возможными структурами и распределенными перехо-
дами между пими. Наблюдаемый процесс z(4) является результатом не-
линейного преобразования x(t) при аддитивном белом шуме »]:
Рис. 9.3.1. Схема задачи филь-
трации
z(I>(.r, t) = Л/(>(ж, f) +ц<г>(0. I — 1, s. (9.3.1)
Структура капала наблюдения изменяется в случайные моменты
времени и имеет s вариантов. Для получения оптимальных оценок филь-
труемого процесса необходимо зпать апостериорную плотность распре-
деления вероятности р(ж, 4) при наличии наблюдений г (4). Для рассмат-
риваемой задачи имеют место следующие уравнения для апостериорных
плотностей каждого состояния структуры:
д ~ д ¥г -
— (г, 4) = — I j 1Ц (х, t) — (х, 4) -г иг (х, t) -|-
-г PjU, О
L<Z) (ж, Z, I)- 2 J Рт *) L<ry 0 dx
Г~1 ~^oo
(9.3.2)
Эти уравнения являются обобщенными интегро-дифференциальными
уравнениями Стратоновича для Ненормированных апостериорных плот-
ностей вероятности фазовых координат pi(x, 4) фильтруемого процесса
для каждой пз s возможных структур. В выражении (9.3.2) функции
Hi, vt, ui имеют ту же структуру, что и в априорном уравнении (9.2.7)
с заменой априорной плотности вероятности ца апостериорную. Функция
Н1>(х, 4) является производной по времени от логарифма функции
правдоподобия и для капала наблюдения (9.3.1) записывается следую-
щим образом:
Д<г>(х, z. 4) = — 0,5[z — А<г>(а:, 4)]т(й<г>)-'[г — й<г>(ж, 4)],
где'ДО—матрица спектральных плотностей шума в канале наблюде-
ния д(4) для 1-& структуры системы.
9.3.2. Структура п алгоритмы фильтра. В первую очередь оптималь-
ный фильтр па основе наблюдений должен формировать апостериорные
вероятности реализованной в данный момент времепи той или иной струк-
туры фильтруемого процесса. Ту часть фильтра, которая решает данную
задачу, назовем идентификатором структуры. Так как число возможных
структур исходного процесса заранее задано и равно s, то идентифика-
тор должен иметь столько же каналов идентификации. Уравнения для
каждого из них можно получить интегрированием обеих частей (9.3.2)
по всей области изменения х. В результате для апостериорных вероят-
ностей состояний Р( (г) получаем следующие уравнения:
рг (о=- 2 (о + 2 ап (о + ?-<г> - Pi (о 2 о,
Г—1^1 l-lrl Г~1
I = 177, (9.3.3)
где
ОО
«/г (t) = J vlr (я, I) (ж, I) dx,
— оо
ОО
(г, <) = j (х, z, t) pL(x, t) dx.
— OO
Из этих уравнений видно, что . все каналы идентификатора структуры
связаны между собой и для определения слагаемых правой части (9.3.3)
требуется определить апостериорную плотность вероятности.
Теперь перейдем к оценкам состояния процесса для каждой из струк-
тур. В качестве оптимальной оценки принимается апостериорное матема-
тическое ожидание состояния системы. В общем случае пас интересуют
опепки всех компонент векторов состояний для всех возможных струк-
тур. Это значит, что фильтр должен иметь s-капалыгый блок оценки и
каждый канал будет иметь щ, I — 1, s, выходных координат. Для нахож-
дения апостериорного математического ожидания i-й компоненты состо-
яния системы с l-й структурой (i = 1, щ, I = 1, s) должна использовать-
ся l-я нормированная апостериорная плотность вероятности. Существуют
два пути получения этой оценки. В первом случае из уравнений (9.3.2)
получают уравнения для ненормированных апостериорных матсматичо-
ОО
ских ожидании m:' (?) = J xiPi (ж, О а затем нормируют их по
— ОО
формуле
х<г>«) = ™<г>(<)/Р;(г)
и получают оптимальную оценку пужпой координаты для l-й структуры.
Во втором случае от уравнений (9.3.2) переходят к уравнениям для
нормированных плотностей вероятности и затем к уравнениям для
оценок.
Используем первый из перечисленных подходов. Предварительно от-
метим, что в некоторых случаях требуется решить задачу фильтрации
пе для каждой структуры в отдельности, а для процесса в целом. Так
как реализации процесса каждой структуры несовместны во времени, то
8
апостериорная плотность вероятности процесса ”р (ж, О = Рг О-
z=i
Для нахождения алгоритма оптимальной оценки умножим обе части урав-
нения (9.3.2) па переменную (г = 1, ге(; I = 1, s) и проинтегрируем в
бесконечных пределах. В результате получим векторное диффоре.нцпаль-
пое уравнение для математических ожидании
оо оо
(I) — — J" х dx — j" ж 1 'I ^х’
---ОО — ОО
оо
j* х щ (х, t) dx -f-
ОО _ ОО
«-}- J xL^ (ж, z, t) Pi (ж, Г) dx —- 2 (0 f (ж, z, t) pr (х, f) dx,
—оо 1 1 —ОО
I = 1, s. (9.3.4)
Таким образом, структурная схема оптимального
блока идентификатора структуры 1 (рис. 9.3.2),
выходом которого являются апостериорные веро-
ятпости текущей структуры фильтруемого про-
цесса, и блока оценки состояния 2, выходами ко-
торого являются апостериорные математические
ожидания компонент состояния для каждой
структуры. Между указанными блоками имеется
взаимная связь, так как уравнения (9.3.3) и
(9.3.4) должны решаться совместно. Конкретиза-
ция уравнений оптимального фильтра требует
фильтра состоит из
Рис. 9.3.2. Структура
оптимального фильтра
знания функции Пг(х, l), Lm(x, z, t), vri(x, t), которые определяются
свойствами фильтруемого процесса, капала наблюдения и характеристи-
ками процесса переключения структуры.
9.3.3. Оптимальная линейная фильтрация. Рассмотрим случай, когда
исходный процесс задается линейным стохастическим дифференциаль-
ным уравнением
ж<г>(0 =4<О(11)ж<'>(0 4-g<(>(0,
а интенсивности переходов от одной структуры к другой пе зависят от
переменных состояния, т. с.
т(,.(ж, t) = v(, (f), г, I = 1, s.
Для такой задачи уравнения идентификатора структуры и блока оценки
состояния принимают следующим вид:
pz (о = - vz (о Р/ (о ч- 2 vrI (о рг (о -j- л(,) и, о Р[ (п 2 х<г> и, о,
т—1^=1 Г=1
111^ (4) = А^ (4) (4) Vj (4) m® (4)
+ 2 vn (о р,- w "i<r> ю -ь ii<z> (*> n - m<l) (') 2 & *),
» —l=/4 1=1
где
s ~
vz(4) = 2 ^<,>(г-0 = ) L<1> (x> => 0 ?z (ж' z) clx>
Г-14^1 — OO
OO
Ji® (z, I) = J xl№ (x, z, 4) pt (.r, t) dx.
— oo
Диализируя структуру уравнений оптимального фильтра, видим, что
даже в .чиненном случае уравнение блока оценок, является нелинейным,
хотя бы за счет слагаемых, содержащих члены Рг(4)пг<г>(4). Поэтому
апостериорная плотность вероятности будет всегда пегауссовской. Этот
вывод следует и из общих соображении о характере преобразования слу-
чайных процессов стохастическими системами. Даже при линейном ка-
нале наблюдения, когда ;(4) = 7/<г>(4)а:<,>(4) + т]<г>(4), вычисление функ-
ций Х<(> и ц<г> требует знания вида функции /ц(г, 4). Задача еще более
усложняется для нелинейных уравнений фильтруемого процесса, нели-
нейного капала наблюдения п интенсивностей переключения v,z(.r, 4),
вависящцх от переменных состояния.
В условиях пегауссовской статистики получить уравнения оптималь-
ного фильтра в замкнутой форме невозможно, и для решения задачи
приходится прибегать к приближенным способам, дающим цвазпопти-
мальное решение. Одним нз наиболее распространенных является способ,
основанный па гауссовском приближении функций апостериорной плот-
ности вероятности pi(x, 4). Как известно, в этом случае получается при-
ближенная замкнутая система уравнений, включающая уравнения для
апостериорных вероятностей структур (9.3.3), уравнения оценок состоя-
ний (9.3.4) и уравнения апостериорных корреляционных моментов, ха-
рактеризующих текущую точность фильтрации. При этом дополнительно
к структуре оптимального фильтра па рис. 9.3.2 добавляется блок выра-
ботки корреляционных моментов пли блок точности. Гауссовская аппрок-
симация апостериорной плотности вероятности удобна тем, что получа-
ющиеся при этом алгоритмы сравнительно несложно реализовать суще-
ствующими вычислительными средствами. К сожалению, до настоящего
времепи отсутствуют методы оценки точности и пригодности гауссовской
аппроксимации в задачах фильтрации, что приводит к определенным
трудностям при ее применении. Для решения задач квазноптимальной
фильтрации возможны и другие подходы [9.18—9.28]. Рассмотрим пример
решения задачи квазиоптцмалыюн фильтрации в гауссовском прибли-
жении.
9.3.4. Пример решения задачи фильтрации. Предположим, что на один
капал наблюдения последовательно поступают два процесса, подлежа-
щих измерению (рис. 9.3.3). Закон пере
цесса па другой полагаем марковским (
переключения = v, и v2i = v2. Пусть
оба процесса описываются линейными
стохастическими дифференциальными
уравнениями с постоянными коэффици-
ентами ж(1>(7) = —л<г>а;<'>(]) + Е<1>(<),
1 = 1, 2. Спектральные плотности
белых шумов обозначите Ф| и
Капал наблюдения линейный с урав-
ненном г(/) = х<!>(«) 4-1](г), где белый
шум ц(г) имеет спектральную пл от-
ключения капала с одного про-
: постоянными интенсивностями
Гис. 9.3.3. Последовательное
наблюдение двух процессов
гость II. По смыслу задачи функции поглощения (9.2.9) в данном при-
мере равны vir(x, l) =Vipi(x, t), г, 1=1, 2, а функции восстанов-
ления (9.2.10)
ОО
url = г'г1 [ Л- z) fJrl dx’
—ос
оо
= %'rlrlrl j Рг г) d:v' = xrl (Pr Wpi W) Pl 0j
— ОО
так как ход процесса zw(t) и считается по зависящим от процесса ж<2>(()
л наоборот. В итого можно получпть следующее уравнение (см. (9.3.2))
для апостериорной плотности вероятности:
D 0
йГ Т>1 («, о = Л(1> у [ x'pl (х, /)] 4- У ^2 7’( (2. 0 — Р; (я, I) Ф-
Рг(!)
-г- vry—- Pj (х, <)4 pj(.t, t) La> (.r, z, /) — (x, t) [Aa> (z, t) 4- X<3> (z, /)],
11 (t)
1 = 1,2, r = 2,1.
В этом уравнении при линейном капало наблюдения и гауссовской ап-
процепмацпн плотности вероятности получаем, что
£<г>(х, z, J) = - (1/27?) [z (i) - хф (i)]2,
X® (z, t)=— (1/27?)
Рг(0
+ о<г> («)
Используя гауссовскую аппроксимацию, составляем следующие уравне-
ния для апостериорных вероятностей структур, оценок состояний
и вторых корреляционных моментов:
P/(i) = — Р/ (0 [vz + cp; (Z)] -J- Pf. (Z) vr,
(Z) = — aS^m^ (Z) — m<l> (t) [v; -f- cp; (Z)] -j-
P,. (0
v„ —---------------------------------(Z)
r РДО
L<'> (Z) = - 2а<1>»<1> (0 ’P/Pz (0 - v<l> («) Lvz + <Pz (/)] -I-
Pr (0
v , —---
ZP((Z)
... (t)
z (Z) —
Рг«) J’
R
р<г> (г)
R
где
Ъ (0 = —R
Р,.(«) '
m<l> (Z) y2 ,
' ₽7w
r = 2, 1.
z (Z) ..
' P,U) )
I = 1, 2,
z U) — —----
pr «)
/r>(<)]
(t) J’
От этих уравнении удобно перейти к другим — для оптимальных оценок
ж<0(() =
и нормированных корреляционных моментов
d«>(Z) = v^/P^t).
После преобразовании эти уравнения принимают вид
Рг (Z) = - Рг (Z) [v£ + сРг (Z)] 4- рг (0 Vri (9.3.5)
ж<г> (Z) = — (z) -I- (Л<г> (г)//?) [г (z) — х<г> (z)], (9.3.6)
d<Z)(Z) = -2u<'>d<D(/) + ЧП — Рг (Z) [rf<(>(Z)]2//?. (9.3.7)
Эти уравнения определяют структуру фильтра, представленную па
рис. 9.3Л. Па выходе блоков оценки 1 и 2 первого и второго процессов
(9.3.6) получаем оценки х(!>(г). Алгоритмы этих блоков полностью совпа-
дают с алгоритмами ФКБ для каждого из процессов в отдельности с ко-
эффициентами усиления, регулируемыми выходами d(,>(z) блоков точ-
ности 3 и 4. Алгоритмы этих блоков напоминают аналогичные для ФКБ,
однако зависят от апостериорных вероятностей, выдаваемых идентифи-
катором структуры 5. Сам идентификатор структуры работает по сигна-
лам <рг(г), зависящим от квадрата сигналов рассогласования в блоках
оценки и от апостериорных дисперсий. Таким образом, все блоки оказы-
ваются связанными и образуют нелинейный фильтр.
Как и для всякого суооптималытого нелинейного фильтра, оценка точ
пости фильтрации затруднена, в частности, из-за того, что уравнения для
апостериорных дисперсий зависят от
тонкий. Можпо предложить следую-
щий подход к приближенной оценке
дисперсий ошибок фильтрации, в не-
котором смысле дающий верхнюю
оценку дисперсий. Предположим, что
идентификатор структуры работает
и условиях низкой апостериорной
оценки вероятностей структур, т. е.
Vi >> <pi. Тогда данные, выдаваемые
идентификатором, будут практиче-
ски совпадать с априорными вероят-
ностями, получаемыми из решения
уравнений Колмогорова
P((t) =-т,Рг(/) +v,P,(/),
I = К 2, г = 2, 1.
апостериорных вероятностей сос-
Рис. 9.3.4. Оптимальный фильтр
при последовательном наблюдении
Прп указанных условиях уравнения
для дисперсий не зависят от наблю-
дений и легко решаются автономно.
В частности, в стационарном режиме при t оо, d<!> = const, Р; ==
= const = vr/(vr + Т(). В итоге можно найти, что дисперсия ошибки
фильтрации равна величине
Р,
У,
-----'----— 1
1 R (н<;>)2
§ 9.4. Управление в системах со случайной структурой
Естественно, что осуществление управления в системах со случайной
структурой затруднено. 'Гем по менее возможны постановки и решения
задач оптимизации управления ССС.
9.4.1. Особенности задач оптимизации. Если объект управления име-
ет структуру, скачкообразно изменяющуюся в случайные моменты вре-
мени, то это приводит к трудностям и особенностям оптимизации систем
управления. Особенность состоит в том, что в процессе оптимизации не-
обходимо оценивать состояние структуры объекта и менять алгоритм
управления в зависимости от сложившейся ситуации. Основном задачей
оптимизации является определение алгоритма управляющего устройства
(оптимальных управлений) в присутствии помех при имеющейся инфор-
мации о состоянии объекта управления. Здесь возможны два случая:
в нервом моменты изменения структуры могут быть пзвсстпы точпо, во
втором за счет помех в канале измерений эти моменты определяются с
определенной вероятностью. В первом случае специфика задачи заклю-
чается в случайном характере моментов переключения, а во втором —
в необходимости оптимальных апостериорных оценок состояний струк-
туры. Решение задачи оптимизации в принципе может быть достигнуто
теми же методами, что и для процессов с детерминированном структу-
рой (см. гл. 7, 8). Все они в той или иной степени могут применяться
для оптимизации систем со случайной структурой и изложены в моно-
графиях [9.9—9.11] и в статьях [9.18, 9.19, 9.28, 9.29]. Здесь остановимся
па описании метода динамического программирования, позволяющего
при некоторых условиях в явном виде получать алгоритмы оптимально-
го управления и структуру управляющего устройства.
Сформулируем задачу исследования. Предположим, что объект уп-
равления описывается стохастическим дифференциальным уравненном,
имеющим вид
ж<(>(0 = /<г>(ж> и, I) 4- 6<г>(1), I = 1?7? (9.4.1)
где в отлпчпе от (9.1.1) имеется дополнительный вектор управления
к(<). Если процесс ж(г) при заданном управлении u(t) является марков-
ским со случайной структурой, то плотности вероятности компонент век-
тора состояния системы для каждой структуры будут удовлетворять об-
общенным уравнениям ФПК
Pl (ж, О = — ^4-^ 1 'г и^х’ (9-4.2)
отличающимся тем, что вектор плотности потока вероятности зависит
от управления:
П i (?, и, I) = /<(> (х, и, i) pl {х, i) — А (Z) р; (х, Z) ] (J1
Цели управления для каждого из состояний системы могут быть различ-
ными, поэтому различными могут быть и критерии оптимизации. В после-
дующем задача оптимизации рассматривается прп функционале в форме
Z®
*о
2
’, U, Т) С?Т
1
= 2 И'>(^
где 1-, — моменты начала п конца управления, 1’^ (.т, 1.,) — терми-
нальная целевая функция; Qw(x, и, 1) —текущая целевая функция. При
такой форме записи каждой из структур соответствует собственный кри-
терий оптимальности, а общий критерий определяется в виде суммы ча-
стных критериев.
Управление называется оптимальным, если оно минимизирует вели-
чину критерия при наличии ограничений па управления и вектор состо-
яний. Формирование оптимальных управлений производится на основе
измерений z(f), являющихся функцией вектора состояний. При точных
измерениях фазовых координат z(t)—x[t), а прп неточных z{l)—
= h<‘' (х, t) +т]<г>(/), где т]<*' (/), как и раньше, полагаются белыми шу-
мами канала измерений с матрицами 2/<г>(«) спектральных плотностей..
Структурная схема системы управления изооражсна на рис. 9.4.1, где
I — объект управления со случайной структурой, 2 — капал измерения
фазовых координат, 3 — управляющее устройство. Перейдем д рассмотре-
нию метода динамического программирования при условии точного зна-
ния структуры объекта управления п ого вектора состояния.
9.4.2. Оптимальное управление при условии точного знания структу-
ры п вектора состояний. При точных
равняющем устройство имеется пол-
ная информация о моментах измене-
ния структуры, а вектор состояний
измеряется без ошибок, т. с. z(i) =
= з.<г>(4). По этим данным управля-
ющее устройство вырабатывает уп-
равления где верхний индекс
подчеркивает, что управления выби-
раются в зависимости от того, какую
структуру имеет объект в текущее
время. Управления будем искать в
измерениях полагается, что в ун-
Рпс. 9.4.1. Структурная схема си-
стемы управления
виде некоторой фупццпи измеряемых компонент вектора состояния и
структуры системы
„<'>(«) = и<«>(с, I) е= U.
В таком случае пе нарушаются условия марковости для совместного про-
цесса x(i) и смены состояний, и остается справедливой система обобщен-
ных уравнений ФПК (9.4.2). Для метода динамического программирова-
ния вводится в рассмотрение функция оставшихся потерь или функция
Веллмана
S Г
У (х, f) = min Е V У^ (х, t \ -J- i Q'r) (х, и, т) Л
где Е — символ математического ожидания.
При отыскании оптимального управления для каждой структуры не-
обходимо решить обобщенное уравнение Боллмана в виде
— 4 (х, 0 = min {х, и, О + — У<(> (х, 0 (х, и, I) -|-
Ul VGU Ох
о,5
tr (х, I) [Т® (х, /)]т —-— (х, V)
дх дхт
vl (х, J) Т'<г> (х,
Z) vlr (х, I) f У<г> (х', I) qlr (хг, t/x, t) dx
s.
(9.4.3)
Система уравнений (9.4.3) является связанной, так как в правые части
входят функции Беллмапа с различными индексами; при этом миними-
зация должна проводиться по своим управлениям Все уравнения
должны решаться с конечными условиями
В<г>(х,г2) = В<г>(х,г2), 1 = 1,*.
В результате определяются оптимальные! управления для каждой струк-
туры системы. Если в некоторый момент времени наблюдается смена
структуры с индексом I, то из всей совокупности управлений выбирает-
ся то, которое соответствует повой структуре.
Решить уравнения Боллмана и найти в общем виде оптимальные
управления невозможно, однако известен случай, когда задача решается.
Рассмотрим линейный объект, у которого интенсивности переходов не
зависят от фазовых координат, т. с. Т'Г(х, t) — vir(t), и плотность веро-
ятности восстановления t/x, 4) = 8 (У— ж). В качество целевых
функции используем квадратичные функции, имеющие вид
У = (У рФж(У-
(ж, и, t) = ,гг (4) Р® (4) X (4) + «т (4) К~1 (4) и (4),
где и К-1 — симметричные положительно-определенные матри-
цы. Для порочпелоппых условий уравнения Боллмана (9.4.3) примут сле-
дующую форму:
— JL Г® (ж, 4) = min <агтр®я: -|- 1^К~ги + ~ Г® (х, 4) /® (х, и, 4) -р-
ugU
4-0,5tr Ч<1> (х, 4) (х, 4)]
дх дх?
V<1> (х, 4)
— v;(4)F®(x, 4)+ 2 ^(4) Е<г>(ж, 4) , 1 = 1, s, (9.4.4)
где р\х, 4) = Л<(>(4)х(4) + В<!>(4)и<(>(4). Уравнения (9.4.4) должны ре-
шаться с граничными условиями Vay(x, 42) - хт(42) р(г> (42)г(42).
Еслп иа управления и<г>(4) пе накладываются никакие ограничения,
то решение уравнений (9.4.4) получается в виде квадратичной положи-
тслыю-опрсделсииой формы
У® (ж, 4) = Д® (4) -j- гт (4) Л® (4) х (4),
где ЛдР — скалярная функция, Л<;> — положительно-определенная сим-
метричная матрица. Оптимальное управление линейно и имеет вид
u«>(4) = —Д(4) (В<г>)тЛ<»(4)х<(>(4).
По своей структуре это соотношение совпадает с алгоритмом оптималь-
ного управления в системе с фиксированной структурой (см. п. 8.2.3.1е),.
однако входящие в псе функции Л® и Л(,> находятся из более слож-
иол системы уравнении
- Л® = tr [Т<г> (Ч^Г Л<0] - ^Л<Ъ + t ^гл<»,
г=1
— Л<£> = ₽<г> — Х^В^К (В^У1 Х<1> + (Л<г>)т Х<1> Ч-
+ Лф А<1> — 4- 2 тг,.Л<г>, I = 17^ (9.4.6)
г=1
которые решаются с начальными условиями i
Л<г>(Г1)=О, A<'>(t1) = p®(i). |
Таким образом, в линейном случае задача оптимального управления ре-
шается до конца при условии решения системы нелинейных уравнений
(9.4.6) с учетом интенсивностей переходов от одной структуры к другой.
9.4.3. Пример задачи оптимального управления прп точных измере-
ниях. Рассмотрим линейный объект управления, скачкообразно изменяю-
щий свои характеристики в случайные моменты времени. Пусть пара-
метры объекта могут принимать два значения, а моменты их изменения
образуют марковский процесс с двумя -состояниями (речь идет о двух
структурах) и постоянными интенсивностями vz = v;r = -v. Считаем, что
как моменты смены структур, так и переменные состояния измеряются
точно.
Пусть объект описывается скалярным уравнением
х(1) = A«>(t)x(t) + B«>(t)u(t) + £<!>(i)> Z = 1, 2.
Для оцепки качества примем квадратичный функционал с функциями
(?ш (х, и, t) = P<z’x3(t) + u3(t)/A<z> (t), V%> = 0.
Ila управление i№(t) не накладываем никаких дополнительных огра-
ничений. При сделанных предположениях можно использовать резуль-
таты предыдущего параграфа, согласно которым оптимальное управление
должно быть линейным и иметь вид (9.4.5). Так как рассматривает-
ся модель первого порядка, то функция управления будот скалярной
и равной
И«>(«) = —£<‘>({)В<‘>(1)Л<г>(0х<г>(1).
В этой формуле все переменные, кроме X<n(t)» заданы. Неизвестная
функция Х<г>(1) находится из решения системы уравнений (9.4.6), в ска-
лярной форме имеющих вид
^-\«>(г) = рю -J- 25<(>Х<‘> — [Х<'М<г>]2К^> — тХ<г> 4- vZ<r>,
I = 1, 2, г = 2, 1.
Эти соотношения образуют систему из двух нелинейных уравнений
типа Риккати и могут быть рошены лишь численными методами. В ка-
честве конечных условий при t = t2 следует брать равенство Z.<(>(Z2) = (),
так, как по условию задачи конечная целевая функция в критерии ка-
чества равна нулю. Структурная схема оптимальной системы показана
на рис. 9.4.2. Здесь 1 — объект управления, выходная координата кото-
Рис. 9.4.2. Схема оптималь-
ной системы
рого измеряется и поступает па усилители
2 и 3 с коэффициентами усиления, рав-
ными
А<*> = -Я<г> («)Л(П (Z) Х<г> (Г).
J ь
При этом предполагается, что функция
%<'>(«) вычислены заранее. Выходные сиг-
налы усилителей попеременно подключа-
ются ко входу объекта. Моменты подклю-
чения соответствуют моментам переключе-
ния структуры. Таким образом, оптималь-
ная система оказывается линейной со скач-
кообразно изменяющимися параметрами.
Оценим качество управления в этой системе.
В соответствии с выбранной функцией критерий качества равен
jo=е ij J w)-1 (“<z> dt-
1=1‘i
При оптимальном управлении функция Веллмана Р<п(.г, t) определяет
величину критерия качества при условии, что в момепт t объект имел
состояние I и значение переменной состояния x(Z). Следовательно, вели-
чина критерия качества за все время оптимального управления
2 “
Jo = 2 poz j (V zi) Pi (V \) % = x (г1)’
1=1 -co
где Poz—вероятность реализации Z-й структуры в момепт пачала управ-
ления t|j pi (.то)—плотность вероятности компонент начального состоя-
ния объекта для Z-й структуры. В данной задаче квадратичная функция
Боллмана равна V® (г, Z) = X® (Z) + X® (Z) k (Z)]2, а потому качество уп-
равления ^0=2Рог[^г>(0+%Ф(0('»®)2+Х®(г)0®], где т<1> и Р®—
г=1
математическое ожидание и дисперсия начального состояния. Функции
%<O(Z) вычислялись при нахождении коэффициентов оптимального управ-
ления, а функции X® (Z) являются решениями уравнений
- (/) = (Т® (Z))2 Л® (t) X® (Z) - VX® (Z) + П® (Z), Z, r = 1, 2.
Нахождение функций X® сводится к решению системы двух лппей-
иых уравнений, в которые входят функции VZ)(Z), при пулевых конеч-
ных условиях.
9.4.4. Оптимальное управление при неточных измерениях. Для изме-
рения координат объекта применяются различного рода датчики с ог-
раниченной точностью измерений, а дальнейшая передача информации
по каналам связи и ее преобразование из одной формы в другую вносят
дополнительные погрешности. Еще сложнее обстоит дело с определением
состояний структуры объекта, что равносильно решению задачи класси-
фикации, которая обычно проводится косвенными способами по данным
измерений выходных координат. Таким образом, измерение выходных
координат необходимо для решения двух задач: оценки текущих значе-
ний переменных состояния и оценки структуры объекта управления.
Весь комплекс устройств для измерения выходных координат объекта бу-
дем называть каналом наблюдения. При этом структурная схема систе-
мы примет вид, изображенный па рис. 9Л.1, где результаты измерения
выходных координат z(t) используются в управляющем устройстве 3 как
для идентификации структуры объекта, так и для оценки переменных
состояния, и по этим данным формируется оптимальное управление.
Пусть объект управления описывается уравнением (9.4.1), а канал
наблюдения — уравнением z(7) =7t<n(z, 7) + т]<г,(7), i = 1, s, т. е. яв-
ляется нелинейным и безынерционным. В качестве критерия оптималь-
ности вновь используем фупццнонал
*2
(г> f2) + j *?<г> “• 4)dZ
<1
Можпо показать, что. оптимальное управление находится из решения
обобщенных уравнений Беллмапа
й ...
— У<(> (х, 7) =min
<77 ' ’ '
E(?<Z> (х, и, 7) + E^-£-rU><2, 7)/<г> (х,и, 7)]-|-
Г д2
+ 0,5 tr Е [<£ <z> (г, 7)]т-------(г, 7)
I дхдх
— Ет((х, 7)V<z>(x,7)-|-
t/x, 7) clx' р
I = 1, s. (9.4.7)
По своей структуре уравнения (9.4.7) совпадают с уравнениями
(9.4.3) для случая точных измерений, однако имеется и ряд особенно-
стей, приводящих к усложнениям. Прежде всего, чтобы найти слагаемые
в правой части (9.4.7), надо провести усреднение с учетом апостериор-
ных плотностей вероятности для каждой структуры. Кроме того, в пра-
вую часть входят фупкции Боллмана V<l>(x, 7), определяемые для слу-
чая, когда наблюдения считаются точными. Все это усложняет процесс
нахождения решения уравнении (9.4.7), которые должны решаться с ко-
нечными условиями К<1> (72) — EFgZ> (z, г2)-
Рассмотрим задачу оптимального управления линейным объектом,
описываемым уравнением
а-(/.) =Л<г>(«)*(г)+Я<п(0и(0.
линейным каналом наблюдения
z(0 = IJW(t)x(t) +т)<‘>(0
при интенсивностях смей структур, не зависящих от фазовых координат
vri(x, t) =Vri(t) и плотности вероятности восстановления qri (#', 4x,t) =-
= f>(x'— х), обеспечивающей непрерывность траекторий фазовых пере-
менных. В качестве целевых функций возьмем квадратичные функции,
имеющие вид
Q'ty(x, и, t) = a:T(/)[Ju>(Z)a:(Z) + uT(i) (K<n(t))~'u(i),
с симметричными положительно-определенными матрицами. После под-
становок и преобразований уравнение Веллмана принимает вид
— E<z> (а:, г) = min { хт|3<г> х + tr 0(Z>p<z> +
т и<=и I
рЕ^ Я (х, г) (а<1>х + Вфи) + Р, (u<z>)'r (Л’<г>)~1 u<zJ
5 F<Z> (х, /)1 —
дхдх1
ф- 0,5 tr Е Y<z> (х, 0 [T<z> (х, 0]т
— хг («) V<1> (х, t) + 2 vlr (0 Е E<Z> (х, «)|, I = 1 ,S,
!—1 J
(9.4.8)
где х — вектор апостериорных оценок компонент вектора состояния;
матрица апостериорных значений корреляционных моментов; В;—
апостериорная вероятность реализации Z-й структуры системы.
Если па управление и (г) не накладывается ограничений, то функ-
цию оптимального управления можно получить в явном виде
и{1> (t) = 0,5 (Pf (())-’ К™ (t) (/?<» («))т Е И» (х, t).
Входящая сюда функция Веллмана I) соответствует случаю точ-
ного знания вектора состояния и структуры объекта. Ее выражение для
линейной задачи управления уже было приведено выше в виде
Va>> (х, t) = AzZ> (t) -f- хт(0 Л<г> (Z) х (t). В итоге функция оптимального
управления станет равной
U<O(Z) = —Z<<O(«)B<i>(«)A«>(/)x<O(/), (9.4.9)
Если сравнить это выражение с функцией оптимального управления при
точных измерениях (9.4.5), то видна полная аналогия в их структуре.
Одпако в случае неточных измерений переменные состояния x(t) в
(9.4.9) заменяются па их оценочные значения х(1). В результате струк-
турная схема оптимальной системы управления линейным объектом прп-
мет вид, изображенный па рис. 9.4.3, где 1 — ооъект управления, 2 — ка-
нал наблюдения, 3 — оптимальный фильтр для выделения оценок вектора
состояния, 4 — блок формирования оптимального управления в соответ-
ствии с выражением (9.4.9). Таким образом, для задачи управления ли-
нейным объектом со случайной структурой остается справедливой теоре-
ма разделения (см. и. 8.4.2). Сущест-
венным отличием здесь является то,
что оптимальный фильтр в соответст-
вии с изложенным в § 9.2 нелинеен.
9.4.5. Пример задачи оптималыю-
Рис. 9.4.3. Структурная схема си-
стемы управления
го управления при неточных изме-
рениях. Рассмотрим следующую за-
дачу оптимального управления.
Пусть имеется s линейных динамических объектов, работающих одновре-
менно, которые непрерывно управляются с помощью воздействий
1 = 1, s. Пусть каждый из этих объектов описывается стохастическим
дифференциальным уравнением
X<!>(t) = Л<‘>(4)х<г>(0 + в<г> («)г4<г> (Г) +
Выходные координаты объектов последовательно наблюдаются с по-
мощью одного линейного канала наблюдения
z(t) = 77<'>(/)x<i>(Z) +t)<O(z).
Рис. 9.4.4. Структурная схе-
ма системы управления при
последовательном наблюде-
нии объектов
По результатам наблюдений непрерывно формируются управления
u<‘>(t). Структурная схема системы изобра-
жена па рпс. 9.4.4, где 1 — s-объекты уп-
равления, УУ — управляющее устройство.
Переключения капала наблюдения со-
провождаются скачкообразным изменени-
ем его свойств и. образуют марковский
процесс из s состояний с интенсивностями
переходов Vi(t) и Решим задачу
управления такими объектами, для чего
объединим все уравнения объектов в еди-
ную систему уравнений, которую запишем
в виде
ip(i) = Л (Z) £(t).
Изменения структуры такой объединенной
системы будут определяться только изме-
нениями свойств канала наблюдения при его последовательном подклю-
чении к различным группам выходных координат ооъедипеппон системы.
Так как все функции остаются непрерывными, то плотность ве-
роятности восстановления
0 = 6(rp-aj>)-
В качестве критерия оптимальности возьмем квадратичный функционал
е f *2
j0 = е s к (М р*р (У + J И (о ₽*Р (о + “<г?т(о (А'<г>)-1 <о] <4
Z=1 I t,
где учтено, что в каждом из состояний оценка качества управления всех
объектов управления остается неизменной. Размер матриц р, р соответ-
ствует размерности вектора хр(«) объединенной системы. Матрица
соответствует системе I. При сделанных предположениях остается спра-
ведливым метод синтеза, изложенный в предыдущем параграфе.
При снопе состояний меняются только характеристики капала на-
блюдения и свойства матрицы в то время как, коэффициенты
уравнений и матрицы р и [i остаются неизменными. С учетом этого мож-
но конкретизировать обобщенное уравнение Беллмапа (9.4.8) и получить
вакои управления в виде (9.4.9). Управляющее устройство системы будет
содержать в своем- составе оптимальный фильтр оценки вектора состоя-
ния x(t) каждого из объектов при их последовательном наблюдении, вы-
ходы которого поступают па группу из s усилительных элементов, фор-
мирующих оптимальные управления в соответствии с формулой (9.4.9).
Оптимизация систем со случайной структурой может вестись и дру-
гими методами, в частности, с использованием принципа максимума и
по ФОР с соответствующим расширением разрешимых до конца случа-
ев [9.11].
Г Ji ABA 10
АЛГОРИТМЫ АДАПТИВНЫХ СИСТЕМ
АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Адаптивными обычно называют системы, в которых недостаток ап-
риорной информации восполняется за счет более полного (в сравнении
с нсадаптивнымп системами) использования текущей информации.
К адаптивным можно отнести все категории систем, размещенных в табл.
8.1.1 во второй и третьей колонках. Адаптивные системы более универ-
сальны, чем неадаптивпые. Они позволяют сократить сроки проектирова-
ния, наладки и испытании, обеспечить управление новыми, мало изучен-
ными технологическими процессами и объектами, способствуют решению
основной проблемы СТАУ — оптимизации «в большом».
Однако для решения этой задачи адаптивности мало. Необходимо оп-
тимальное в отношении достижения конечной цели адаптивное управ-
ление.
§ 10.1. Классификация адаптивных систем
автоматического управления
Укрупненная классификация систем по признакам адаптивности и
оптимальности приведена в табл. 10.1.1.
В первой строке этой таблицы указаны неоптимальпые системы ав-
томатического управления, в частности, системы с практически неогра-
ниченной энергией управления. Как уже отмечалось выше, в таких сис-
темах может достигаться слабая параметрическая чувствительность (ра-
ботоспособность при широких диапазонах изменения характеристик объ-
екта). Однако это получается за счет навязывания объекту искусствен-
ных связей при избытке энергии управления. Подобные системы будем
относить к категориям 7.7, 1.2. За недостаток априорной информации
здесь приходится платить энергетической избыточностью. Высокоразви-
тые свойства адаптации приписываются системам, указанным в третьей
колонке таблицы, в частности, системам 1.3. Подобные системы основаны
па максимальном использовании текущей информации для организации
процесса управления. Одпако задачу оптимального достижения постав-
ленной цели они не решают. Системы, соответствующие второй строке
табл. 10.1.1, обеспечивают оптимальное достижение частной цели управ-
ления при различных объемах априорной информации: от полного (ка-
тегория 2.1) до минимального (2.3). К адаптивным, оптимальным (суб-
онтпмальпым) по частному критерию системам относятся системы
2.2, 2.3.
Беспоисковые (БАС) и поисковые (ПАС) адаптивные системы, обес-
печивающие требуемое качество регулирования в контурах автоматиче-
ской стабилизации и сложения при изменении характеристик среды и
объекта, можно отнести к этим категориям. Это один из наиболее ста-
рых и изученных классов адаптивных (самонастраивающихся) систем.
Ему посвящена обширная литература и значительная часть настоящей
главы (§ 10.4, 10.5).
Таблица 10.1.1
Укрупненная классификация систем автоматического управления
по признакам адаптивности и оптимальности
Оптимальность Адаптивность, характеристика и номер варианта
Характеристика Номер варианта иеадаптивиыс 1 ограниченно адаптивные 2 с высоко- развитой адаптацией «5
Нсоптпмальные 1 1.1 1.2 1.3
Оптимальные (субопти- мальиые) в отношении частного критерия 2 2.1 2.2 2.3
О птпмальныо (суб опти- мальные) в отношении достижения конечной це- ли 3 3.1 3.2 3.3
Одпако эти системы не могут решать основную проблему СТАУ: он-
тпмальное (субоптимальиое) адаптивное управление «в большом» с до-
стижением конечной цели в заранее неизвестном ситуация. Решение этой
проблемы под силу тольдо системам 3.2, 3.3 (табл. 10.1.1). Вообще говоря,
к категории 3.2 можпо отнести и такой наиболее старый класс адаптив-
ных систем, как системы экстремального регулирования (см. гл. 12).
В этпх системах сам реальный технологический объект обладает неста-
бильной (или точно неизвестной) экстремальной зависимостью главного
показателя эффективности от некоторых входных переменных. Главным
показателем или параметром эффективности здесь служит физическая
величина, доступная для пепосрсдствеппого или косвенного измерения
(мощность, секундный расход, температура п т. п.). Задачей системы экс-
тремального регулирования является поддержание таких значений вход-
ных величин (априорно неизвестных), при которых главный выходной
параметр имеет экстремальное значение.
То, что системы экстремального регулирования можпо отнести к ка-
тегории 3.2, следует из решаемой задачи: достижение экстремума глав-
ного для данного объекта параметра эффективности в условиях неполной
информации о характеристике объекта. Одпако это все же простейший
вид адаптивных оптимальных систем. Здесь цель формируется в локаль-
ной форме (без прогноза и интервала оптимизации), объект имеет отно-
сительно простую структуру с ограниченной неопределенностью.
Самые сложные задачи оптимального адаптивного автоматического
управления возлагаются па системы категории 3.3. Здесь необходимо
решепие очередной задачи целого этапа функционирования объекта уп-
равления (пуск или останов агрегата, станции, выход в заданную нави-
гационную точку с заданными навигационными параметрами и т. п.) оп-
тимальным образом в условиях сложившейся, априорно не заданной си-
туации.
Теория таких систем в соответствии с концепцией, изложенной во
введении, является главной для прикладной СТАУ.
Табл. 10.1.1 может рассматриваться совместно с табл. 8.1.1. Обе эти
таблицы в совокупности дают классификацию систем автоматического
управления (САУ) по трем признакам: степень оптимальности и уровень
решаемой задачи, необходимое априорное информационное обеспечение,
необходимое текущее информационное обеспечение.
БАС могут строиться по схеме прямого адаптивного управления
(direct adaptive control) или по схеме непрямого адаптивного управле-
ния (indirect adaptive control). В случае прямого адаптивного управления
в процессе работы системы измеряются некоторые характеристики моде-
ли и системы (временные, частотные), и па основании их рассогласова-
ния перестраиваются коэффициенты регулятора так, чтобы свести это
рассогласование к пулю или допустимой малой величине. В системах
непрямого адаптивного управления производится предварительно иден-
тификация объекта, а затем, зная параметры объекта или желаемые ко-
эффициенты замкнутой системы (неявная модель), вычисляются коэф-
фициенты регулятора. В иностранной литературе регуляторы, построен-
ные но первой схеме, чаще всего называются model reference adaptive
systems, построенные по второй схеме — self-tuning regulators.
Существует ряд других классификационных признаков САУ: наличие
пли отсутствие системы (модуля) идентификации, наличие или отсут-
ствие поиска, класс алгоритмов оптимизации и др. Если учесть, что для
подсистем (модулей) оценивания, идентификации, оптимизации сущест-
вует большое число алгоритмов (см. гл. 4—8), то становится попятным
разнообразие возможных вариантов САУ.
§ 10.2. Адаптивные оптимальные САУ с полной моделью
управляемых процессов
Структура этого класса адаптивных оптимальных САУ (АОСАУ) в
значительной степени определяется принципами разделения (см. § 8.4).
Согласно этим принципам оптимальная (в липейпо-квадратичиой задаче)
или субоптимальпая (в пелнпейпой задаче) система состоит из оптималь-
ной (субоптимальпой) системы оценивания и идентификации и системы
оптимального управления, построенной для условий точного измерения
вектора состояния и вектора параметров, по использующей оценки этих
реличип (выходные сигналы системы оценивания и идентификации).
Системы, где осуществляется параметрическая или пепараметриче-
ская идентификация, иногда называют системами с идентификатором.
В неоптнмальпых вариантах (когда идентификатор соединяется с систе-
мами регулирования традиционных типов) соответствующие структуры
имеют эвристическое происхождение. Однако структура АОСАУ, как
следует из принципа разделения, имеет достаточно общее и строгое обос-
нование. Эта структура в общем виде представлена па рис. 10.2.1.
Рис. 10.2.1. Общая структура АОСАУ с полной моделью
Управляемый процесс контролируется (наблюдается) посредством
первичных измерительных преобразователей (датчиков). Вектор сигна-
лов наблюдения поступает в систему (модуль) оптимального (субоптн-
малыюго) оценивания и идентификации. Па выходе этой системы фор-
мируется оценка х вектора состояния и оценка вектора параметрон а
принятой достаточно полной математической модели управляемого про-
цесса (имеется в виду параметрическая идентификация). Система оце-
нивания и идентификации, помимо формирования оценок х, а, может вы-
являть отказавшие датчики и каналы и выдавать сигналы реконфигура-
ции. Функции реконфигурации па схеме рис. 10.2.1 не отражены.
Система (модуль) оптимального управления (нижний блок) па основе
указанной модеип управляемого процесса, текущей оценки вектора сос-
тояния и критерия оптимизации (целевой функции), поступающей от
системы старшого уровня, формирует оптимальное управление. Это уп-
равление воздействует па управляемый процесс и используется в модуле
оценивания и идентификации.
В зависимости от алгоритмического ооеспечспия подсистем возмож-
но выделение значительного числа вариантов АОСАУ данного класса.
10.2.1. Система с обобщенным ФКБ и алгоритмом прогнозирующей
дюдели. Среди беспоисковых алгоритмов идентификации типа АИТО (ос-
нованных на теории оценивания) первого порядка согласно п. 5.6.1.!° на-
иболее общим является алгоритм одновременного оценивания и иденти-
фикации в виде обобщенного ФКБ.
Для управляемого процесса, описываемого в расширенном простран-
стве состояний
(10.2.1)
этот субоптимальпый алгоритм в непрерывной форме имеет вид (5.6.15),
(5.6.16):
£р=fv (Ч> “> о+(хр’ и’ О Л-1 (г -h (*»'%
= ^p(xp’ "> t)'pp+7Vpxp(:l:P’
- Vxp (SP> О Л“’Ч (*p. 0 Pp + Cp. (10.2.2)
Обозначения и развернутая до матриц-блоков форма алгоритма ясны из
п. 5.6.1.1°.
Модель свободного прогнозируемого движения, соответствующая
(10.2.1), имеет вид
xM = /(zM, ум, ам, т), <?' = 0, уы = 0, (10.2.3)
Пусть общее решение уравнений (10.2.3) па цикле прогнозирования
для 0 t при начальных условиях
xM(t)=x(l), y"(t) =?(/), a«(t) = а(() (10.2.4)
обозначено через Хр[х” («), t, 0] =гХр [zp О), t, 0]- Тогда в соответ-
ствии с принципом приближенного разделения п общим выражением
(8.8.7) алгоритма с прогнозирующей моделью (10.2.3) оптимальное (суб-
онтимальное) в смысле минимума ФОР *)
А = еу
4 2
+ (0). +
t
^2
01 + ^(“оп(0).
I
(10.2.5)
*) Заданные функции U-,, У‘я удовлетворяют условию, указанному
д п. 6.2.2.1°.
управление па очередном цикле в непрерывной форме выражается фор-
мулой
д
диоп из (“оп’ 0 ~
*2 1
*7з 1хр (Ч (0, *, Ml + J Q3 [Xp (2P (0, t, 0)] <70 . (Ю.2.6)
t j
Структуру соответствующего алгоритмического обеспечения (в кепрерыв-
ной форме) поясняет рис. 10.2.2.
Рпс. 10.2.2. Алгоритм (непрерывная форма) АОСАУ с обобщенным ФКБ
и прогнозирующей моделью
Конечно, подобные алгоритмы (точнее, их дискретные аналоги) осу-
ществимы лишь в ЦВМ. Как всегда, построение дискретных аналогов ал-
горитмов может осуществляться посредством методов численного интег-
рирования дифференциальных уравнений пли использоваппя алгоритмов
с. дискретным временем для исходных разпостпых схем модели управля-
емого процесса (см. п. 5.4.3.5°). Поскольку оба эти пути изложены прп-
мепителыю к основным модулям рассматриваемого алгоритмического
обеспечения, то здесь иет необходимости на них останавливаться.
АОСАУ с алгоритмическим обеспечением типа (10.2.2), (10.2.6) иног-
да называются универсальными [6.8]. Они обеспечивают управление
объектами с априорно неизвестными параметрами, причем управление
«в большом» с оптимальным (субоптимальиым) достижением конечной
цели. Однако для сложных нелинейных объектов с моделями высокой
размерности, содержащими большое число идентифицируемых парамет-
ров, требования к вычислительной производительности управляющих
ЦВМ получаются высокими. Наиболее жесткие требования к быстродей-
ствию предъявляет решепие в реальном времени ковариационного урав-
нения совместного оценивания и идентификации, а также многократное
прогнозирование в ускоренном времени свободного движения объекта.
Для сокращения требуемой вычислительной производительности при со-
хранении в основном полной адаптивной модели управляемого процесса
можно применять разделение задач оценивания п идентификации, прпб-
лпжениое прогнозирование свободного движения.
10.2.2. Система с автономной идентификацией (типа АИТО) и алго-
ритмом прогнозирующей модели. При реализации алгоритма совместно-
го оценивания и идентификации (10.2.2) для многомерных процессов с
большим числом идентифицируемых параметров наибольшие вычисли-
тельные затраты приходятся па ковариационное матричное уравнение.
Если размерность обобщенного вектора состояния равна п + Л' (п— раз-
мерность вектора (х, у), N — общее число идентифицируемых парамет-
ров), то размер матрицы Рр есть (п + N) X (« + А7). Вычислительные за-
траты растут но крайней мере как (?г + А)3. Одним из путей сокращения
необходимой вычислительной производительности является прпмепепие
алгоритмов раздельного (автономного) контроля вектора состояния п
вектора параметров, изложенных в п. 5.6.1.2е. Эти алгоритмы предпола-
гают, вообще говоря, непосредственное наблюдение вектора состояния х
и непосредственное наблюдение (или вычисление) его производной х. По-
следнее означает измерение (или вычисление) величины
z = f(x, у, а, I) + т]. (10.2.7)
Согласно (5.6.24), (5.6.25) алгоритм идентификации (при точном из-
мерении х, у) в этом случае имеет влд
а = Pfa У' ". О Iz — / (х> ". 01. (10.2.8)
Р = - Pfl {X, у, a, I) R~rfa (х, у, a, t) Р + Qa. (10.2.9)
Как показано в и. 5.6.1.20, основное сокращение вычислительных за-
трат получается за счет декомпозиции ковариационного уравнения
(5.6.26). Эта декомпозиция получается вследствие того, что каждая ком-
понента вектора z обычно зависит от автономной группы параметров
(субвектора ищ).
Структура АОСАУ с автономной идентификацией параметров (типа
АИТО) и алгоритмом прогнозирующей модели представлена па рис. 10.2.3.
10.2.3. Система с л-алгоритмом совместного оценивания и идентифп-
нации, прогнозирующей моделью и синхронным детектированием. Как
показано в п. 5.6.1.3°, самым экономичным в вычислительном отношении
Гис. 10.2.3. Алгоритм (непрерывная форма) АОСАУ с автономной иден-
тификацией и прогнозирующей моделью
субоптимальпым алгоритмом совместного оценивания и Идентификации
является так называемый л-алгоритм (5.6.43).
Применительно к процессу (10.2.1) в непрерывной форме он имеет
вид
х — f (х, у, o', () -J- Дх*я, “у = Ду*Л + и,
а = Да* Я,
Д.т* = /хДх* + fyM/* + 1аМ* - Д.т*л + (<),
Ду* = — Ду*Л, Да*=—Да*Я-(-§*( t),
(10.2.10}
где
л = (7;хДя* + + ЛаДа*)т7?-1[г; — 7г(ж, а, и, £)], (10.2.11)
£*(*)— генерируемые шумы, статистические характеристики ко-
торых должны быть по возможности близки к соответствующим характе-
ристикам шумов g((), £a(i).
Чаще всего вектор у доступен для непосредственного высокоточного
контроля (например, путем интегрирования и). Поэтому его обычно
можно исключить из числа оцениваемых векторов. Тогда алгоритм
(10.2.10), (10.2.11) уступает место следующему:
х --- f (х, у, a, t) + Да:*л, а = Да*п,
Дя* = /^Дх* -}- /пДа* — Дг*л -|- (1), (10.2.12)
Да* = — Да*л + (1),
где
я = (hx&x* -|- ha\a*yR~' [z — h {x, у, a, и, ()]. (10.2.13)
Согласно изложенному в гл. 8 среди алгоритмов с полной (в доста-
точной мере адекватной истинному свободному движению объекта) прог-
нозирующей моделью самым экономичным в вычислительном отношения
является алгоритм с завершающей операцией дифференцирования типа
синхронного детектирования. Он достаточно подробно описан в п. 8.8.7.
На каждом цикле в начале запуска прогнозирующей модели в ускорен-
ном времени производятся вариации начальных условий. Это получается
за счет ввода на первых шагах численного интегрирования кодовых
групп. В данном случае кодовые вариации вводятся в компоненты век-
тора у. Для непрерывной формы это можно обозначить в начальных ус-
ловиях запуска модели:
xN = /(.г51, у", а”, т), dM = 0, ум = 0, (10.2.14)
я'!(0) = x(t), у“'(0) = ?(i) +бу(<), ан(0) = a(t). (10.2.15)
Модель па протяжении каждого цикла работает в ускоренном вре-
мени т, поэтому вместо (10.2.14) правильнее записать
г/п'1' du™
^^Kf(x™,y™,a™,^, ~^=0, -^- = 0. (Ю.2.16)
Коды вариаций обладают свойством ортогональности п 6у(7)6ут(7)—
диагональная матрица. Здесь и дальше чертой обозначается среднее (пли
сумма) по интервалу (шагам) наиболее длинной кодовой группы. Кодо-
вые группы также центрированы: 6у(г) = 0.
Тогда основную часть алгоритма с прогнозирующей моделью и син-
хронным дифференцированием (дифференцированием посредством син-
хронного детектирования) в аналитической непрерывной форме можно
представить в виде
д 5Гя ------------------------
^^(“оп-г) = “рх7хр *^) + мо,«, t, /j c/r(t)-h
- Хр [х (t), у (() + by (г), а, t, 6] Ьу' (0 <70
р
(бг/бг/т) \
(10.2.17)
Можно и пе прибегать к формулам сложных производных, поручая
определение частных производных целиком синхронному детектированию.
Рис. 10.2.4. Алгоритм (непрерывная форма) АОСАУ с л-алгоритмом сов-
местного оценивания н идентификации,прогнозирующей моделью и син-
хронным детектированием
Совокупность алгоритмов (10.2.12) — (10.2.17) образует алгоритмическое
обеспечение АОСАУ рассматриваемого цласса. Опи представлены па
рис. 10.2.4.
Целесообразно обратить особое внимание па этот алгоритм (его циф-
ровые формы). Он, являясь достаточно совершенным для рептспия слоя?-
пых задач оптимального адаптивного управления «в большом», эконо-
мичен в вычислительном отношении, делая возможной реализацию па со-
временных управляющих ЭВМ средней и высокой производительности.
§ 10.3. Адаптивные субоптимальпые САУ с упрощенными
моделями управляемых процессов
Кроме путей снижения необходимой вычислительной производитель-
ности, указанных ранее, существуют пути снижения потребного быстро-
действия за счет декомпозиции и использования упрощенных моделей
цак в подсистемах (модулях) оценивания и идентификации, так и под-
системах формирования оптимальных управляющих воздействий.
Декомпозицию и построение упрощенных математических моделей
можно производить различными способами, так что здесь возможно выде-
ление большого числа вариантов.
10.3.1. Иерархические адаптивные субоптимальпые САУ. Иерархиче-
ский принцип построения систем управления выработан громадным
практическим опытом в самых разнообразных областях, начиная от ад-
министративного управления и кончая локальными системами автомати-
ческого регулирования [10.23]. По существу переход от централизован-
ных АСУ ТП к распределенным есть повое подтверждение целесообразно-
сти иерархической структуры систем управления.
Целесообразность иерархической структуры определяется пе только
вычислительной производительностью ЭВМ, по и целесообразной органи-
зацией потоков информации, условиями надежности и многими другими
факторами. Применительно к системам рассматриваемого класса задача
выделения уровней (страт) в иерархической системе может быть фор-
мально описана следующим образом. Пусть «полная» модель управляе-
мого процесса имеет вид (1.2.1), а с учетом вектора параметров и шу-
мов— вид (10.2.1)
хР = fP(xP, и, t) + gp. (10.3.1)
Разобьем расширенный вектор состояния хр па два субвектора =
= (хр(|), а=р(2))- Субвектор xp(d = характеризует состояние стар-
шего уровня (страты), субвектор хр(2) = £р(2)(9 описывает состояние
исполнительного уровня (страты). Процедура стратификации (деления
на уровни) нс поддается полной'формализации. Положение здесь при-
мерно такое же, как с назначенном критерия оптимизации. Обычно к
старшему уровню относят те кдордипаты и процессы, которые непосред-
ственно влияют па решение главной задачи — достижение конечной пе-
ли данного этапа функционирования системы. Применительно к автома-
тическому управлению полетом одиночного летательного аппарата ха-
рактерным является выделение в качестве старшей страты павпгациоп-
пого илп траектоРпого уровней. Исполнительская роль здесь отводится
пилотажному уровню.
С учетом деления па два уровня уравнение (10.3.1) записывается в
виде системы двух векторных дифференциальных уравнений:
•т'р(1) = /рн)(^РИ)? л’рс2), и, 0 + £рц), (10.3.2)
аТ>(2) = /р(2) (ZP(I), aT>(2), "i 0 + £р(2). (10.3.3)
Допустим, что функцию /р(|) удается представить в виде
Axi) (а1>(1)’ хр(2)’ 9 — Л»(1) ('с||(1)’ г) "г 9я1) (гр(2>* г)' (Ю.3.4)
где доступна для непосредственного измерения. Тогда вместо
(10.3.2) записываем
хр(1) = 1 р(1) (-гр(1)’ 9 + "(О V) “г £р(1)’ (10.3.5)
где п(1)+ т](1)—измерение УриД^»), ", ')•
Представление оцениваемого процесса (верхней страты) в виде
(10.3.5) есть применение принципа распределения информации (см.
и. 4.2.2). Приведение к виду (10.3.5) означает возможность применения
описанных выше алгоритмов оценивания и идентификации к выделен-
ным процессам старшей страты, описываемым уравнением пониженной
размерности.
Однако главный выигрыш получается вследствие часто встречающей-
ся детерминированности модели процессов старшего уровня. Это означа-
ет, что функция Zpd) часто пе содержит вектора неизвестных парамет-
ров. Например, кинематические соотношения, описывающие процесс
движения в реальном трехмерном пространстве (навигационный уро-
вень), являются практически точными и пе нуждаются в идентификации.
Оценивание вектора состояния старшего уровня невысокой размерности
(без вектора параметров) требует невысокого быстродействия ЦВМ.
Задача оптимизации управлеппя в иерархической постановке для
старшего уровня также может решаться па основании модели типа
(10.3.5), прячем здесь в принципе даже пот необходимости в соблюдении
равенства (10.3.4) и непосредственной наблюдаемости /р(1). Действи-
тельно, пусть для старшего уровня мы имеем модель хр(|) = i>(гсР(i)»
а'р(2)» 0 + £i>(t). Поставим задачу так: па основе минимизации функцио-
нала типа (10.2.5), зависящего как от процессов старшего уровня хп(1)(/),
так и от процессов ТщгЦЦ пнжпего уровня, определить оптимальное ис-
кусственно вводимое управление v = гоп =
Таким образом, па стадии оптимизации старшей страты искусствен-
но расширяется вецтор синтезируемых управлений за счет включения в
него производной вектора состояния процесса нижнего уровня. Этот при-
ем обосновывается следующим образом. В результате оптимизации стар-
шего уровня в указанной постановке получаются зависимости и програм-
мы, которые рассматриваются как задающие воздействия для нужного
(исполнительного) уровня.
Построение оптимального управления и = иОп может осуществляться
па основе алгоритма с прогнозирующей моделью. Интегрирование соот-
ветствующих уравнений свободного движения хР(1) = /₽<i>(a^pji), хР(2), t),
я-р (2) = 0 в ускоренном времени позволяет найти текущие значения за-
дающих воздействии в реальном времени.
Нижний уровень строится по принципу оптимальной в определенном
смысле отработки задающих воздействий, сформированных на старшем
уровне. Критерием оптимизации может служить функционал, содержа-
щий некоторую норму разности текущего и заданного значений вектора
Яр(2). Здесь уместно использовать скользящий сравнительно небольшой
интервал оптимизации 7'0П. Таким образом, нижняя страта оптимизирует-
ся как система автоматического регулирования (система стабилизации,
следящая система), в общем случае адаптивная (с идентификацией).
Как в функционал верхней страты, так и в функционал нижней
страты могут быть введены функции штрафа с целью обеспечения огра-
ничений.
10.3.2. Адаптивные субоптимальные САУ с феноменологическими мо-
делями. Феноменологическими математическими моделями обычно назы-
вают упрощенные модели, пе претендующие па раскрытие глубоких ме-
ханизмов описываемых процессов, а отражающие в количественном от-
ношении лишь самые важные закономерности.
Во всех модулях адаптивных субоптимальпых САУ в принципе могут
применяться упрощенные феноменологические модели. Это относится и к
модулю совместного оцеппвапия и идентификации, построенному в виде
сбобщеппого ФКБ (10.2.1), (10.2.2). В этом случае вместо функции /,
соответствующей «полной» или «истинной» модели управляемого процес-
са, фигурирует упрощенная функция /м, да и сам расширенный вектор
состояния имеет меньшую <Z пр) размерность.
Однако условия сходимости нелинейного ФКБ с упрощенной мо-
делью изучены еще хуже, чем условия сходимости просто обобщенного
ФКБ, а причин для нарушения сходимости здесь много. Действительно,
помимо ограничений применимости, связанных с локальной линеариза-
цией, здесь появляется неизбежное несоответствие истинной ковариаци-
онной матрицы ошибок оцеппвапия и решения матричного ковариацион-
ного уравнения (10.2.2). Это расхождение может привести к расходимо-
сти процессов оценивания.
Есть основание считать, что для случая применения сильно упро-
щенных моделей в модуле оценивания и идентификации большую ус-
тойчивость гарантируют простые алгоритмы с адаптивной моделью, опи-
санные в § 5.4, или алгоритмы с эмпирическими средними (см. п. 5.6.13).
Что касается алгоритмов управления с прогнозирующей моделью, то
здесь также могут быть применены сильно упрощенные модели свобод-
ного движения, особенно если интервал оптимизации Топ невелик. Для
этих случаев возможно использование моделей типа (8.8.38).
§ 10.4. Беспоисковые системы прямого
адаптивного управления
Как отмечалось выше, существует весьма важный и обширный под-
класс адаптивных САУ, предназначенный для автоматического регулиро-
вания в условиях ограниченной априорной информации, в условиях из-
менения характеристик окружающей среды ц управляемого объекта.
Речь идет о системах, выполняющих исполнительные функции, о конту-
рах управления, отрабатывающих постоянные или переменные задающие
воздействия.
В иерархических системах управления такие системы автоматическо-
го регулирования непременно присутствуют. Эти системы ио решают за-
дачи оптимизации «в большом» (подобные задачи решаются па старшем
уровне). Однако от качества регулирования зависит достижение конеч-
ной цели. Поэтому адаптивные системы автоматического регулирования
могут строиться как оптимальные в смысле качества регулирования сис-
темы. Это качество в основном выражается в точности воспроизведения
задающих воздействий и описывается функцией Q, точнее, разностью
Адаптивные системы автоматического регулирования зародились еще
в классический период развития САР. В тот период они назывались са-
монастраивающимися системами. В общей классификации, адаптивных
систем автоматического управления, представленной в табл. 10.1.1, сис-
темам данного класса соответствует вторая строка (индексы 2.1, 2.2, 2.3).
В процессе развития адаптивных систем автоматического регулиро-
вания, предназначенных для стабилизацип и слежения, выяснилось, что
в большинстве случаев они могут выполняться в беспоисковых вариан-
тах. Поэтому здесь освещаются беспоисковые адаптивные системы авто-
матического регулирования. Для краткости они в дальпейшем обознача-
ются БАС.
10.4.1. Общая структура систем прямого адаптивного управления.
Блок-схема БАС представлена па рис. 10.4.1. Объект О и регулятор L1
образуют основной контур системы. В блок 1 поступает вся доступная
для измерения информация. Блок 2 представляет собой модель-эталон с
вектором состояния ям. В блоках 3 и 1 вычисляются текущее значение
меры качества Q и мера качества Qj. Па выходе блока сравнения 5 имеем
А<2 = — Q. В блоке С па основании А(> и другой необходимой инфор-
мации вырабатываются законы изменения вектора г, обеспечивающие
сведение &Q к нулю илп к малой величине. На рисунке использованы
обозначения: g— задающее (управляющее) воздействие; / — внешнее
воздействие (возмущенно); у — педоступные измерению параметриче-
ские возмущения (отклонения параметров объекта от их поминальных
значений).
Из рис. 10.4.1 впдеп иерархический принцип построения БАС. Основ-
ной коптур представляет первый уровень управления. Контуры адаптации
(блоци 2—6) управляют коэффициентами регулятора. Это второй уро-
вень управления. Процессы адаптации зависят, как правило, от векто-
ров внешних воздействий g, f и от параметрических возмущений q. Это
требует иногда перестройка коэффициентов устройства 6, т. с. третьего
контура управления.
10.4.2. Системы с информацией о частотных, временных характеристи-
ках и система с моделью. В большинстве случаев мерой качества Q слу-
жат некоторые величины пли функции, характеризующие динамические
Рис. 10.4.1. Общая структура БАС автоматического регулирования
свойства системы. По виду динамических характеристик, используемых
при формировании Q, БАС делятся па три класса:
БАС с информацией о частотных характеристиках [10.6, 10.7, 10.10];
БАС с информацией о временных характеристиках [10.1, 10.3, 10.9];
БАС с моделью [10.5, 10.8, 10.10].
В первом классе в качестве Q принимаются значения частотной ха-
рактеристики объекта пли всей системы, в качестве Q., — значения ча-
стотной характеристики модели-эталона. Последние вводятся заранее в
виде некоторых уставок в контуре адаптации или получаются в про-
цессе работы в блоке 2.
В БЛС с информацией о временных характеристиках в качестве Q
выбирают некоторые величины или функции, характеризующие переход-
ные или установившиеся процессы в системе, папример, число пересече-
ний переходной функции с осью абсцисс, допустимую величину автоко-
лебаний в системе, оптимальную импульсную переходную функцию и т. д.
Если устройство 2 представляет динамическое звено — эталонную мо-
дель, обладающее желаемыми динамическими характеристиками, то рас-
согласование координат х и Xя песет в собе информацию об отклонении
динамических свойств системы от свойств модели-эталопа и может быть
использовано для настройки вектора г. Это избавляет от необходимости
иметь в схеме измерители мер качества Q и Qs.
БАС, в которых вектор г перестраивается в зависимости от ошибки
рассогласования коордппат движения реальной системы и эталонной
модели, присутствующей обязательно в виде реального динамического
звена, получпли название систем с моделью.
10.4.2.1°. Методы синтеза структуры основного контура. Обобщенный
настраиваемый объект. Основной контур включает в себя ряд заранее
заданных устройств, функционально необходимых для решения задачи
управления. К таким устройствам относятся объект, исполнительный ме-
ханизм, датчики.
Объект управления и исполнительный механизм обычно описывают-
ся нелинейными дифференциальными уравнениями. Наиболее распрост-
раненным подходом при синтезе основного контура является синтез на
базе линеаризованных уравнений движения. При этом выбирается струк-
тура регулятора, позволяющая обеспечивать решение задачи адаптации,
оптимальности и т. д. Учет нелппонпых характеристик объекта и других
элементов системы целесообразно проводить на втором этапе синтеза с
целью уточнения и корректировки параметров регулятора.
Синтез осповпого контура адаптивпоп системы целесообразно разде-
лить па две задачи [10.10]. Первая задача состоит в том, чтобы синтези-
ровать обобщенный настраиваемый объект (ОНО), включающий в себя
собственно объект, датчики, исполнительные механизмы и корректирую-
щие устройства с перестраиваемыми коэффициентами. При этом надо
определить законы перестройки этих коэффициентов из условия, что ОНО
описывается уравнениями с постоянными коэффициентами илп, в более
общем случае, уравнениями с желаемыми законами изменения коэффи-
циентов. Вторая задача состоит в енптезе управления для ОНО, т. е. для
объекта, как правило, с постоянными коэффициентами. В этом случае
решается традиционная задача управления линейным стационарным
объектом.
В общем случае корректирующие устройства, реализующие управле-
ние ОНО, могут быть и нестационарными. Их коэффициенты могут пере-
страиваться с целью получения, например, оптимального оператора ос-
повпого контура при изменении статистических свойств воздействий g и
/. Если характер этого изменения заранее пепзвостеп, то для соответст-
вующей настройки корректирующих устройств могут быть применены
принципы адаптации. В этом случае система будет обладать двумя под-
системами адаптации, из которых одна подсистема будет решать вопро-
сы управления, связанные с постациопарпостыо исходного объекта, вто-
рая — задачу оптимизации с учетом текущих спектральных свойств
внешних воздействии.
Выделение ОНО является методическим приемом, при котором про-
цедура синтеза адаптивной оптимальной системы является наиболее про-
стой. Конструктивно, естественно, корректирующие коптуры ОНО могут
быть объединены с корректирующими контурами, формирующими управ-
ление ОНО.
10.4.2.2°. Синтез па основе инвариантности. Пусть многомерный не-
стационарный объект вместе с исполнительными механизмами описыва-
ется уравнением в матричной форме
х = Л(0о:-|-Р(/)р + С(1)/, (10.4.1)
ГД1. х — [х,хг ... z„]T — вектор состояния; р = [р,ц2 .. .1и,„]т — вектор
входных координат исполнительных механизмов; / = [/,/2 ... /г]т— век-
тор возмущающих воздействий; /1(0, ^(0, С(<) — матрицы с переменны-
ми коэффициентами размера п X п, пХ.т. и и X г соответственно.
Требуется синтезировать ОНО из условия, чтобы он описывался ста-
ционарным уравнением
х = А°х + В°и, (10.4.2)
где и = [«iii2 кт]т —вектор управления; /1°, В° — стационарные мат-
рицы размера пХ» и п. X т, коэффициенты которых соответствуют по-
минальным параметрам исходного объекта или выбираются на этапе
синтеза управления и. Предполагаем, что (10.4.2) соответствует устой-
чивому, полностью управляемому и полностью наблюдаемому движению.
Представим матрицы A(t), D(t), C(t) в виде [10.11]
Л(1) = 4° + Д4(«), »(«) = О° + Д£>(«), С(«)=ДС((). (10.4.3)
Здесь D° — постоянная матрица размера п X т, коэффициенты которой
соответствуют поминальному режиму работы объекта; Д/1(1), ДО(1),
Дб’(1) будем рассматривать как матрицы параметрических возмущений.
Тогда для решения поставленной задачи в предположении, что матрица
(Е + О°+Д.¥)—неособенная (Е — единичная матрица), уравнение для
корректирующих контуров ОНО можно выбрать в виде
р = О°+ (О Ju — АКх — ДЛ'р — ARf), (10.4.4)
где Do+ — псевдообратпая матрица размера т X п Для О0; D? — постоян-
ная матрица размера п X т, коэффициенты которой подлежат выбору;
АК, ДА', AR— матрицы перестраиваемых коэффициентов размеров пХ",
п X "1, п X г соответственно.
Из условий параметрической инвариантности и инвариантности от-
носительно / системы (10.4.1), (10.4.4) (при выполнении этих условий
она описывается уравнением (10.4.2)) имеем
7>"л0+Д/1 ^ДЛ(Д, D°D°+AAr = AD (Z), , _
(10.4.5)
ZAd°+A7J = AC (I), D°D°+D° = B°.
Таким образом, уравнения (10.4.4), (10.4.5) определяют структуру
корректирующих контуров ОНО, а задачей адаптации является пере-
стройка коэффициентов АК, ДА', AR с целью обеспечить с надлежащей
точностью условия (10.4.5).
Если имеет ранг rD == п, то в качестве О°+ можно выбрать
до+ = рот(ророт)-1 (10.4.G)
— неособенная, т. е. она имеет обратную матрицу). Тогда D°D°+ =
= Е, где Е — единичная матрица, и уравнения (10.4.5) примут вид
ДКе=ДА(0, Д^е=ДО(<), ДЯ = ДС(0, D° = B°. (10.4.7)
Одпако это возможно лишь при п т. Практически обычпо имеем
т п. В этом случае целесообразно переходить к коордипатпо-параме г-
рпческому управлению объектом [10.11].
Изложенный путь придания ОНО желаемых динамических свойств
требует достаточно большого объема априорной и текущей информации:
необходимо знание формы (порядка) уравнений, для компенсации па-
раметрических возмущений требуется мпогопарамстрическая идентифи-
кация в реальном времени. Одпако ниже (см. п. 10.4.2.0°) описаны алго-
ритмы настройки (синтезированные па основе задания функции Ляпуно-
ва), прп которых идентификация совмещается с настройкой. Эти алгорит-
мы, аналогичные описанным в гл. 5 применительно к идентификации с
адаптивной моделью, в значительной мере снимают указанный недоста-
ток. Кроме этого, надо учитывать, что полная компенсация координат-
ных возмущений может потребовать высокого быстродействия и больших
мощностей. В таком случае в (10.4.3) матрицу С(1) целесообразно пред-
ставить в виде С{1) =С°-|-ДС(1), где С° — составляющая, которая оп-
ределяется допустимой мерой воздействия возмущения f(t) па выход
системы, ДС(1) —составляющая, которая компенсируется средствами па-
раметрической настройки. Алгоритмы работы цепей настройки при этом
пе изменяются [10.11].
10.4.2.3°. БАС с информацией о частотных характеристиках. В систе-
мах с контролом частотных характеристик измеряется амплитудно-час-
тотная А (со), реже п фазочастотная 0(со) характеристики системы или
одного объекта в достаточном числе течек со,. Вместо А (со) и 0 (со) часто
удобнее измерять вещественную Р(со) и мнимую Q(w) частотные харак-
теристики. Используя информацию о А (со), ©(со) пли Р(со), (?(со), пере-
страивают параметры корректирующих устройств ОНО с тем, чтобы его
частотные характеристики, а следовательно и переходные процессы, соот-
ветствовали желаемым. Обычпо требуется, чтобы частотные характери-
стики ОНО оставались неизменными при переменных параметрах объ-
екта.
Поскольку система является нестационарной, то классическая ча-
стотная характеристика, строго говоря, теряет смысл. В связи с этим из-
ложенные в [10.10, 10.6, 10.4] принципы построения подобных систем
справедливы только в случае медленного изменения коэффициентов объ-
екта, т. е. для квазистационарпых режимов. Одпако, если контуры само-
настройки являются достаточно быстродействующими и измеряются ча-
стотные характеристики ОНО, то системы сохраняют эффективность н
прп отноептелыю быстрых изменениях параметров объекта.
10.4.2.4°. БАС с информацией о временных характеристиках. В клас-
сическпй и современный периоды развития ТАР было предложено боль-
шое число различных типов БАС с контролем импульсной переходной
функции [10.1, 10.3, 10.14]. В большинстве случаев при исследовании та-
ких спетом предполагается выполнение условий квазистациопарности,
процессах иа границе устойчивости.
объектами в ряде случаев требуется
Рис. 10.4.2. Структура самонастраи-
вающейся системы с информацией
о процессах па границе устойчивости
т. е. считается, что па интервале времени, равном длительности переход-
ных процессов, систему с достаточной степенью точности можно считать
стационарной.
В принципе достаточно совершенными в классе линейных систем
являются аналитические самонастраивающиеся системы [10.1], в кото-
рых в блоке 4 (см. рис. 10.4.1) иа основании всей доступной информации
вычисляется оптимальная импульсная переходная функция системы, в
блоке 3 —текущая импульсная переходная функция. С помощью разно-
сти этих функций параметры регулятора настраиваются так, чтобы све-
сти эту разность к пулю или минимальной величине.
Па практике нашли распространение более простые системы, кото-
рые, естественно, обладают и более ограниченными возможностями с
точки зрения адаптации. Рассмотрим две из них, ориентированные па
аналоговое исполнение.
А. Системы с информацией о
При управлении нестационарными
поддерживать коэффициент уси-
ления замкнутой системы макси-
мально или минимально допусти-
мым с точки зрения устойчиво-
сти линеаризованной системы.
Информацией о достижении гра-
ницы устойчивости служат авто-
колебания, существующие за счет-
нелинейности, вводимой блоком
перестраиваемого коэффициента,
и нелинейных характеристик дру-
гих элементов системы.
Блок-схема системы приведе-
на па рп-с. 10.4.2, где О — объект,
включающий исполнительный ме-
ханизм; ВПК — блок перестраи-
ваемого коэффициента; КЗ — корректирующее звепо; БАА — блок алго-
ритма адаптации; Ф — полосовой фильтр; В — выпрямитель. Заметим, что
па рис. 10.4.2 корректирующее звепо включено в цепь главной обратной
связи. Одпако оно может быть включено в цепь огппбкп, кроме того,
в схеме может быть несколько корректирующих звеньев.
Допустим, что мы хотим поддерживать коэффициент усиления мак-
симально возможным, т. с. система должна работать па верхней границе
устойчивости. Естественно, что величина этого коэффициента усиления
будет зависеть от параметров объекта. Пусть в начальный момент вре-
мепи система находится в области устойчивости. Тогда па выходе филь-
тра, настроенного па частоту автоколебаний, имеем пулевой сигнал и,
следовательно, = 0. За счет сигнала щ коэффициент к будет расти
(БАА имеет интегрирующее звено) до тех пор, пока система ие выйдет
па границу устойчивости, что приведет к возникновению автоколебании.
Очевидно, допустимая амплитуда автоколебаний задается величиной
опорного напряжения щ Еслп к слишком велик, то амплитуда автоколе-
баннй будет больше допустимой, и тогда отрицательное напряженно
ец = ш — щ приведет к уменьшению к до соответствующего значения.
Алгоритм адаптации, реализуемый в БАЛ, обычпо имеет вид
к = °1 J Eadt + °2еа + ко или к =о1е« + а2еш (Ю.4.8)
где к0 = const.
Б. Системы, построенные на сравнении высокочастотной и низкоча-
стотной составляющих сигнала. Структурная схема БАС с контролем
низкочастотной и высокочастотной составляющих спектра движения ко-
ординат системы (БАС со спектральным анализатором') представлена на
Гис. 10.4.3. Структура БАС со спектральным анализатором
рис. 10.4.3, где 1Г0(р) —передаточная функция объекта в предположении
квазистациопарного режима работы; ТГр(р)—передаточная функция ис-
полнительного механизма и корректирующих устройств; у — регулируе-
мая координата; g — задающее воздействие. В контур самонастройки
входят: И',ц (р)—«балансировочный» фильтр; 1Гф2(р), 1Гфз(р) — высоко-
частотный и низкочастотный фильтры соответственно; В — выпрямители;
интегрирующее устройство имеет передаточную функцию а/p, а = const.
Высокочастотная и низкочастотная составляющие сигнала ошибки
рассогласования e(t) = g(t)—y(t) выделяются фильтрами
^Фз(Р)» выпрямляются и. сравниваются. При наличии рассогласования
интегрирующее устройство изменяет коэффициент усиления к до тех
пор, пока между высокочастотной и низкочастотной составляющими по
наступит заданный баланс, при котором динамические свойства основно-
го контура удовлетворяют заданным требованиям.
Рассмотрим работу системы при случайном воздействии g(t). Точ-
ность работы основного контура будем характеризовать величиной
Т
J = lim J e2(t)cZz.
-Т
Если е — стационарный, эргодический случайный процесс, то J соответ-
ствуег дисперсии ошибки с(/). Тогда
СО
1 Г 5?(со)
7 - 2Л Л ' 1 + WP (/С0) IV0 (Л°) I" А0’ (10Л’9)
где 5й(со) —спектральная плотность g(J).
Величина J зависит от многих факторов, в том числе от изменяю-
щихся динамических свойств объекта и значения настраиваемого коэф-
фициента к. При прочих равных условиях каждому режиму работы объ-
екта fVo(p) соответствует свое оптимальное значение к, при котором J
минимально.
Градиентный алгоритм поиска оптимального значения к имеет вид
dk д.Г
~сй ~ ~йк ' = const > 0- (10.4.10)
В квазпетацнопарпом режиме
ОС
0J 1 Г
Ы~ — J $e(co)P(fc, co)dco, (10.4.11)
— oo
где
5e(co) = |1 + 7>:1Гр(;со)ТГо(/со) |-2Sg(w)
является спектральной плотностью ошибки рассогласоваппя основного
контура е(7), Р(к, со)—вещественная частотная характеристика, соот-
ветствующая передаточной функции
И/(Л) = [1 + А1Гр(р)К0(р)]-ЧУр(р)РГ0(р).
Известно, что динамика липеннон системы во многом определяется
видом ее вещественной частотной характеристики, в частности, соотно-
шением между положительной и отрицательной площадями, охватывае-
мыми кривой Р(к, со) и осью частот. При некотором балансе между по-
ложительной и отрицательной площадями Р(к, со) выполняется' равен-
ство dJ/dk = 0, и коэффициент к далее перестраиваться пе будет. Естест-
венно, что этот баланс должен соответствовать желаемому переходному
процессу основного контура. Для настройки желаемого соотношения
между высокочастотной и низкочастотной составляющими спектра сиг-
нала е(7) и величиной выставляемого значения к в контуре самопастрой-
ки вводится балансировочный фильтр 1Г,н(р). С учетом этого фильтра
ОО
д.Г 1 С
= J 5£ (со) | И'Ф1 (7со) |'Р (7с, со) с7со.
—ОС
Если — представить в виде суммы двух интегралов в диапазоне ча-
стот ОТ СО = 0 ДО СО = СО0, где Р(к, со) > 0, И ОТ СО = СОО ДО СО = Climax,
где Р(к, со) < 0 (при со > сотах Р(к, со) « 0), то алгоритм поиска оптн-
мального значения коэффициента к по методу градиента записывается
в виде
= J (С°) । ^Ф! (Л°) \2Р {к' Л° + •
О
^niax
+ (2Л,'л) J Se (со) | ТРф, (/со) |2Р (/с, со) rfco. (10.4. 12)
“о
Интегралы в последнем выражении определяют энергию высокоча-
стотной и низкочастотной составляющих в составе ошибки рассогласо-
вания e(i). В системе выделение высокочастотной и низкочастотной сос-
тавляющих осуществляется с помощью специально подобранных фильт-
ров, передаточные функции которых могут, например, иметь вид [10.9]
^ф2 W = (! + V»? + (W 13)
^Фз № = (1 + 2^нР +
Рассмотренный принцип построения БСНС прост по конструктивной
реализации, одпако п ограничен по своим возможностям. Настраивается
только один коэффициент усиления разомкнутого основного контура.
Вещественная частотпая характеристика Р(А-, со) должпа иметь участок
с отрицательной площадью, что не является обязательным для любой
реальной системы.
10.4.2.5°. БАС с эталонной моделью. В рассматриваемом классе БАС
эталонная модель присутствует в виде реального динамического звена,
а за основу работы контуров самонастройки принимается непосредствен-
но ошибка рассогласования движений основного контура и модели-эта-
лона. Отсутствие дополнительных измерителей качества процессов ос-
новного доптура и эталонной модели делает эти системы простыми и до-
ступными для исполнения.
Методы использования модели в БАС делятся па два класса. В пер-
вом модель используется в качество настраиваемого звена, которое с по-
мощью контуров самонастройки подстраивается под динамические харак-
теристики нестационарного объекта управления или всего основного
коптура. Этот метод настраиваемой модели используется, таким образом,
для решения задачи идентификации (см. § 5.4). Параметры настраивае-
мой модели далее используются для перестройки регулятора основного
контура. Блок-схема такой системы представлена па рис. 10.4.4.
Устройство идентификации УИ подстраивает параметры q" настраи-
ваемой модели НМ (жм— вектор состояния модели) под текущие пара-
метры основного коптура. Па основе полученной информации о текущих
параметрах основного коптура вычисляются значения г параметров ре-
гулятора Р основного коптура. С помощью устройства адаптации УК из-
меняются параметры Р. Данные системы отнесены к классу БАС с эта-
лонной моделью условно. В действительности они представляют собой
системы адаптивного регулирования с идентификацией посредством на-
страиваемой модели. Здесь О — объект управления.
Второй класс составляют собственно БАС с эталонной моделью. Для
пих характерна настройка параметров
параметры эталонной модели.
В этом случае эталонная модель
представляет собой стационарное
динамическое звено, выбранное
заранее на основе априорной ин-
формации о входных воздействи-
ях основного контура. В более об-
щем случае, как указывалось вы-
ше, эталонная модель может быть
перестраиваемой.
Блок-схема системы приведе-
на па рис. 10.4.5, где О — объект,
включающий исполнительные
устройства; М — модель; ПКУ —
основного контура или ОНО под
Рис. 10.4.4. Структура БАС с пастра-
ивае»мой моделью
перестраиваемые корректирующие устройства ОНО; БЛА — блок алгорит-
мов адаптации; КУЬ КУ2— корректирующие устройства; .гм — вектор сос-
тояния модели; е„ — вектор ошибок адаптации; д— матрица коэффици-
ентов объецта; г — матрица перестраиваемых коэффициентов ПКУ.
Рис. 10.4.5. Структура БАС с эталонной моделью
Заметим, что возможен вариант, когда передаточные функции КУ2
выбраны пулевыми, а КУ, — единичными. Тогда g — и и ОНО представ-
ляет собой замкнутую систему управления. В этом случае модель должна
выбираться оптимальной или желаемой, что ведет к ее усложнению и
требует, как показывают примеры синтеза такого типа систем, более
полной информации при практической реализации алгоритмов адапта-
ции и ПКУ. Наконец, М и КУ1, КУ2, как указывалось выше, сами могут
быть перестраиваемыми. Известные методы синтеза алгоритмов адапта-
ции основываются на прямом методе Ляпунова, методе градиента и тео-
рии гинерустончивости. Наиболее полные результаты получены на осиово
прямого метода Ляпунова, которые и приводятся ниже.
10.4.2.6°. Синтез БАС с эталонной моделью на основе функции Ляпу-
нова. Пусть объект и его входная координата описываются уравнениями
(10.4.1), (10.4.4), выполнено условие D°D0+ — Е, т — п. Требуется, сле-
довательно, обеспечить (10.4.7).
В качестве модели выберем звепо, описываемое уравнением
ж” = логм + (10.4.14)
Введем обозначения
ДЛ(0 = [A«o(t)], ED(t) = [AdfI(i)], AC(t) = [Ае.ъ(0].
ДА = [Д*,3], ДА = [Алы], ДА = , У = [yi3],
У ij '— До i j — [ z i i ], Zu = Ad, i An, fl,
5 = [s,s], stll = Ectl,—&rtk, i, i, I = 1, П, к = 1, r. (10.4.15)
Тогда уравнения ОНО можно записать в виде
Ба = А°£а "Т УЖ "Т Ztl -{- Sf,
+ u z = -vz + gz, S = -Vs-H„ (10’4Л6)
где гТв = [Ч-vij], tyyij = ДЙ, j, = [’i’zil], гргы=Дл.ч, = [t-ife],
i|:s,s — Дйл, г, j, I = 1, п, к = 1, г,— функции, которые необходимо синте-
зировать; ==‘ Attij, ъг == [ъгТ|], sZil == ЛЙ,1, Е« =я [^sih],
Esik = Acift, j, /, 1=1, п, к = 1, г,— постоянно действующие возмуще-
ния, зависящие от скорости изменения параметров объекта.
Если выбрать функцию Ляпунова в виде У = 'ле^Ре^ 4- tr (УТУ 4-
4~ ZCZ -у 5'5), и = const > 0, а Р = [д,3], i, j = 1, и, — симметричная
положительно-определенная матрица, еа — х— ж1'1, то при алгоритмах
адаптации
Д/cij = zOi.rj, Д/г,1 = хогрг, Дг,л = ‘XOifh, (10.4.17)
где о, — компоненты вектора Реа, и при = £z = Bs = 0 V =
~ — хе^(/’ео, Q = А^Р 4- РЛ“, Q — положительно-определенная матрица;
д° — гурвицева матрица, т. е. С 0 и, следовательно, алгоритмы (10.4.17)
обеспечивают устойчивость пулевого решения системы (10.4.16) еа = 0,
У = 0, Z = 0, 5 = 0. Условие = 0 означает, что мы рас-
сматриваем режим работы объекта при неизвестных, по постоянных его
параметрах, или квазистацнопариый режим, когда скорости изменения
коэффициентов объекта весьма малы.
В ряде работ (библиография приведена, папрнмер, в [10.11]) доказа-
ны положения, пз которых следует:
1. Пулевое решепие системы (10.4.16) при алгоритмах (10.4.17) и при
= 0 асимптотически устойчиво по вектору еа, т. е.
lim х (t) = .'сэд (0.
2. Прп условии, что компоненты векторов жм(/), /(/), p(Z) составля-
ют линейно независимую, равпомсрпо пепсчезающую систему функций,
пулевое решепие системы (10.4.16) прп тех же алгоритмах, при ограни-
ченных значениях компонент векторов и, й, /, j и при = дг = =0
асимптотически устойчиво в полом. Папомппм, что система непрерывных
функций ai(f), ..., a„(0, заданных при I >> Zo, называется линейно не-
зависимой, равномерно пеисчезающей, если существует такое I — const >
> 0, что для любой линейной комбинации этих функций
е(о = 2 сЛ(1),
i=l i-I
можно указать число р = const > 0 такое, что 10 (1) | р по крайней
мере в одной точке любого отрезка времени [7, £ + 7], £ ^ £0. Очевидно,
этому условию будет удовлетворять система функций из компонент век-
торов хы(£), /(f), ц(0, если g(t) и /(f) будут содержать достаточное чис-
ло гармоник. В случае асимптотической устойчивости пулевого решения,
кроме условия lim •?(£) =-сИ (f), имеем
t-»OO
lim ДА-.. = Д«;,, lim Д^г = Д(Лг, lim Arik = Дсш
t~»<x> j t~>oo t-»oo
т. e. появляется возможность идентифицировать в процессе работы сис-
темы параметры объекта.
3. В случае, когда ж” (f), /(£), p(f) составляют лппеппо независимую,
равномерно пепсчезающую систему фупкцпй, пулевое решение (10.4.16)
при алгоритмах (10.4.17) устойчиво при постоянно действующих возму-
щениях gz, т. е. алгоритмы (10.4.17) обеспечивают близость дви-
жения системы x(f) к движению модели xM(t) при переменных парамет-
рах объекта по крайней мере при малых скоростях их изменения.
10.4.2.7°. Улучшение процессов адаптации. В ряде случаев для улуч-
шения процессов адаптации в (10.4.17) вводят члены, пропорциональные
ДА-,;, Дни, Дпх, т. е. переходят к алгоритмах! вида [10.17]
Д/г^ = щец#/ + KsAA-jj. (10.4.18)
Введение таких членов, одпако, приводит к тому, что ДА,,(оо) = 0, в то
время как требуется иметь ДА-,-у = Дл,-,-. Тем пе мопее алгоритмы типа
(10.4.18) могут дать лучшие результаты по сравнению с (10.4.17) прп бы-
стро меняющихся параметрах объекта.
Известны алгоритмы типа [10.10]
ДА, = х. f a.xdt + x2ar (10.4.19)
CJ JI 1 I J 4 1
Практика их применения показывает, что члены, пропорциональные щ
(т. е. пропорциональные sa = х— %™, с« и т. д.), улучшают качество про-
цессов адаптации. Заметим, что в этом случае контуры самонастройки
обладают «памятью».
При малых значениях ]|u (I) ||, в случае, когда /(<) недоступна изме-
рению, может наблюдаться неограниченное увеличение ДА-,,-, Ди,; с те-
чением времени. Для предотвращения этого явления («огрубления алго-
ритмов») в (10.4.17) вводят зоны нечувствительности [10.10], папрпмер,
ДА-,,- = хФ(хЛ1) OfZj,
(10.4.20)
где
(1
ф«’|о
при || Xм || б,
при ||лм II < 6,
б —- const.
Наконец, при V. оо алгоритмы (10.4.17) с учетом ограничении выходных
координат умножителей превращаются в релейные типа [10.10]
AA'i3 = ДА'ы sgn (п,х3), Д/fjj = const.
(10.4.21)
В этом случае возникает скользящий режим относительно движения
модели, а система становится особым типом систем с переменной струк-
турой. Одпако скользящий режим существует лишь при ограниченных
параметрических возмущениях |А«г3-(4) | и при |Д«г3(<) | > ДА,3
срывается. С другой стороны, выбор больших значений Д/с33 неблагопри-
ятно сказывается па работе системы при помехах. В связи с этим целе-
сообразно применять совместно интегральные и релейные составляющие,
•г, с. иметь алгоритмы тина
ДА-у = х | + ДА-Ъ- sgn (о^.).
(10.4.22)
§ 10.5. Беспоисковые адаптивные системы
с неявной эталонной моделью
Наличие в составе ВАС идентификатора, который можпо рассматри-
вать как датчик параметрических возмущений, позволяет использовать в
контуре адаптации принцип регулирования по возмущению. При этом
вторым каналом прохождения возмущения является контур адаптации
[10.10]. Отметим, что указанным принцип адаптивного управления реа-
лизован в адаптивных системах с идентификатором (АСИ) [10.25], в са-
монастраивающихся регуляторах, использующих идентификатор
[10.21—10.27]. При этом идентификатор, осуществляющий текущее оце-
нивание параметров объекта, может быть построен па различных прин-
ципах как, поисковой, так и беспоисковон идентификации. Поскольку
принципы построения и алгоритмы работы идентификаторов рассмотре-
ны в гл. 5, ниже мы пе будем па них останавливаться. С точки зрения
работы контура адаптации важно, чтобы получаемые при помощи идеи-
тпфикатора оценки параметров объекта были бы состоятельными и эф-
фективными *).
10.5.1. Основные структуры. Цель адаптации в БАС с пеявпой мо-
делью заключается в такой подстройке параметров основного цоптура
ОК, при которой его динамические характеристики подстраивались бы
под характеристики заданной эталонной модели. В отличие от БАС с мо-
делью, рассмотренных выше, указанная модель в алгоритме настройки
присутствует неявно, только я
виде описывающих ее пара-
метров, а в алгоритме настрой-
ки регулятора по данным иден-
тификации по использует-
ся сигнал ошибки адаптации,
представляющий собой раз-
ность выходных сигналов ОК
и ЭМ.
Блок-схема БАС с неяв-
ной эталонной моделью изо-
бражена па рис. 10.5.1
(сплошная линия — основной
вариант структуры). Основ-
ной контур) БАС образован
•обобщенным объектом ОО,
включающим привод, соб-
ственно объект управления
м датчики, регуляторами пря-
Рис. 10.5.1. Структура БАС с пеявпой
эталонной моделью
мой Р) и обратной Р2 цепи.
Коптур адаптации КА образован идентификатором ИД| и блоком па-
стройки регулятора БИР. Для простоты в структуре не показан логиче-
ский блок, осуществляющий переключение работы контура адаптации с
цикла идентификации па цикл настройки регуляторов и наоборот.
Штриховыми линиями обозначен дополнительный контур адаптив-
ной компенсации возмущений (АСИ), который целесообразно использо-
вать, если имеется возможность измерения внешних возмущений (см.
рис. 2.4.1). В этом случае дополнительный ОК включает компенсатор К
и упомянутый выше КГ1В. Дополнительный КА состоит из ИД2, который
может быть объединен с ИД1, и блока настройки компенсатора БНК.
На рисунке использованы обозначения: g — задающее воздействие,
f — доступное измерению возмущение, щ — сигнал управления, п2 — сиг-
нал компенсации, — оценки параметров обобщенного объекта, д2 —
сцепки параметров канала прохождения возмущепия, гъ 2,з— пастраивас-
„ *) Речь идет об оценках, которые при большом количестве наблюде-
ний стремятся по вероятности к истинному зяачению вектора парамет-
ров, т. е. limP {|| а — а || > е} = 0 (состоятельность), а также обладают
дисперсией, достаточно близкой к наименьшей возможной (эффектив-
ность — отношение дисперсий наилучшей и данной несмещенной оценок).
мыс параметры регуляторов Р,, Р2, компенсатора К, yi — ненаблюдаемый
выходной сигнал обобщенного объекта, у2— ненаблюдаемый выходной
сигнал контура прохождения возмущения, у — наблюдаемый выходной
сигнал основного контура.
Иногда БАС с неявной эталонной моделью называют адаптивными
системами непрямого адаптивного управления (model reference adaptive
control — indirect adaptive control [10.19]). Близкими но принципу по-
строения к этому классу систем являются самонастраивающиеся регу-
ляторы (sell-tuning regulators [10.21—10.23]). Отличие между пими за-
ключается в алгоритмах работы ВНР. В самонастраивающихся регулято-
рах в БИР обычно решается задача параметрической оптимизации ОК
ио настраиваемым параметрам и, 2 для выбранного критерия качества
ОК [10.21—10.24].
В БАС с неявной ЭМ решается также задача параметрической опти-
мизации ОК но настраиваемым параметрам. По благодаря использованию
беспоисковых методов оптимизации задача оптимизации заменяется
иной, алгебраической задачей, решение которой дает искомую связь
оценок параметров объекта и настроек регулятора. Кроме того, сам функ-
ционал настройки является мерой параметрического рассогласования
основного коптура и его эталонной модели, что в ряде случаев позволяет
более простым путем учесть технические требования к адаптивной си-
стеме управления.
10.5.2. Алгоритмы оптимальной иастронкп линейных регуляторов
адаптивной системы. Вернемся теперь к ПИД-регулятору, непрерывным
п дискретным регулятором общего вида, рассмотренным рапсе в § 2.4.
Предположим, что в копце цпкла идентификации оценки Л, В, С матриц
объекта (2.4.1) близки к их истинным значениям, т. е. Л ~ А, В В,
С si С. Тогда алгоритмы настройки всех указанных типов регуляторов
описываются простыми соотношениями [10.28—10.30]
G = L+1V, G = L+N, G* = b*+N* (10.5.1)
пли
G = G=(M)~'LtA', G* = (Z,*TL*) -'£*ТЛТ*. (10.5.2)
При этом остаточные значения функционала настройки задаются
формулами
Jmin = tr.VT(£-IZ+)A\ (10.5.3)
Amin = М»'Т ~ £i+)(10-5'4>
4min = tr N*T & ~ Л'*- (Ю.5.5)
В формулах (10.5.1) —(10.5.5) в матрицы адаптируемости подставля-
ются оценки параметров матриц обобщенного объекта и коэффициентов
его характеристического уравнения, получеппые в копце цикла идепти-
фнгкации.
10.5.3. Алгоритмы оптимальной настройки комоннпроваппон системы.
Пусть в ОК БАС, структурная схема которого приведена па рис. 2.4.1,
уравнения движения ОО и КПВ имеют вид
xi = Ai (z)xi + Bi (t)u, xs = As(t)x2 + B2(l)f,
i/l = С, (l)Xi + 0, 1/2 — C2(1)X2, (10.5.6)
У = У l + У2,
где xi, x2 — векторы состояния подсистем, описывающих ОО и КПВ соот-
ветственно; 2 е /> 0 — векторы управления и возмущений;
ij2 — векторы (неизмеряемые) выходов подсистем; у— измеряемый
вектор выхода объекта; у, ylt у.,^ Rm, At, Bi, Ci — матрицы параметров
ОО и КПВ соответствующих размеров (г = 1, 2).
Комбинированный регулятор ОК БАС описывается уравнениями ви-
да (2.4.2), в которых К-i = G—i = G3, Ко = Go = G?, Ki = Gy = Gi, T& = 0
и к которым добавлены уравнения П-компепсатора
вок — —II(t)f, и = g_i + q0 + qi + вок. (10.5.7)
Условия абсолютной двукратной параметрической инвариантности
имеют впд [10.10]
Н(р) VkOMB (р) F(p), (10.5.8)
где Б(р) и У1Я)Мп(р)—матричные передаточные функции КПВ и П-ком-
пепсатора, Н(р)—передаточная функция ОО вида (2.4.7), т. е,
Il [р) = Ci(pEn— Ai)~lBi, К(р) = Сч^рЕп - А?) гВ2, Ккомп(р) = 77.
Тождеству (10.5.8) соответствует тождество
2 = 2 Р2П~^’ (10.5.9)
где матрицы Р®, определяются формулами
4=2“^Г> 4=2^44
P=i Р=1
det (p£n - AJ = 2 4?, det (pEn - AJ = 2 anliP\
i=0 i=o
4 = = 1, = E° (P, i), C2A^B2 = F° (p, i),
n
4=22 (p. 0,
ij=l Q—i
4=2 2«-p-i+i4(p> 0,
i-~ 1 p-—г
2П
j0 = 2 tr (4 - 4) (4 - 4)T- <10-5-10)
Ц=1
Определения полной, слабой и частичной адаптируемости П-компенсато-
ра повторяют определения § 2.4 с замепой g па /; А, В, С на /1ь В}, С,,
А?, В2, Сг\ Gt, Gz, G3 на II, тождества (2.4.10) на (10.5.10), G*, G*, G'
иа II*, J па 7°.
Патрицы адаптируемости комбинированного регулятора определя-
ются в виде L° = [7/^, Л° = [Л°], L = [Zpt]], == [Л?р], v = 1, 2/г,
р = 1, 2п + 2, ц = 1, 3.
Критерии подпой, слабой и частичной адаптируемости П-компспса-
тора имеют вид необходимых и достаточных условий (2.4.23)—(2.4.24)
с замепой L па LP, Л7 на №. Критерии полной, слабом и частичной адап-
тируемости ППД-регулятора сохраняют вид (2.4.23)—(2.4.24). Критерии
полной, слабой и частичной адаптируемости комбинированного регуля-
тора получают путем объединения соответствующих условий (2.4.23) —
(2.4.24). Алгоритмы настройки комбинированного регулятора по данным
идентификации ОО и КПВ имеют вид [10.29]
G = Z+/V, Я = £°+№. (10.5.11)
При этом остаточные значения функционала настройки задаются
формулой (10.5.3), а функционала 7° — формулой
Jmin = tr iV°T (S — G°G0+) А°. (10.5.12)
§ 10.6. Беспоисковые адаптивные системы с липейпым
оцениванием на основе эталонной модели
Существо рассматриваемого здесь подхода [10.31—10.33] заключается
в использовании в БАС ФКБ, в котором заложена не модель объекта
управления, а эталонная линейная модель контура, образованного не-
стационарным объектом и местной обратной связью с перестраиваемыми
параметрами, изменяющимися с помощью дополнительных контуров
адаптации. Подобная структура может быть положена в основу ряда
адаптивных регуляторов. Ее достоинство заключается в том, что в явном
виде параметрическая идентификация объекта здесь отсутствует, а зна-
чит, отсутствуют соответствующие вычислительные затраты. Недоста-
ток в том, что задача оптимизации здесь может решаться лишь в узком
плане.
10.6.1. Алгоритмы системы с непрерывным временем. Рассмотрим
лилейный полностью управляемый и полностью наблюдаемый стохасти-
ческий объект управления (включающий привод, собственно объект и
датчики), описываемый уравнением в форме Ито
dx = А (7) xdt + В (i) udt В (t) dE (1) dj + (t) d^,
zdt = II(t) xdt + Dn(t) dt), E[57(Zo)]=O, (10.6.1)
где x e R'1 — вектор состояния объекта и ие — скаляров управле-
ние; е R”— векторный и т), с g= R1— скалярные центрированные слу-
чайные процессы, которые предполагаются гауссовскими белыми шума-
ми с корреляционными матрицами
Е [&. («) (*)] = ^6 (4- т), Е [g (4) « (т)] = J£ (4) 6 (4 - т),
Е[ц(4)ц(т)] = </ч (4)6(4 —т),
где R — диагональная матрица интенсивности шумов; <Ь(()—интенсив-
ность наблюдаемых шумов (пробного случайного сигнала); йч(4)—ин-
тенсивность аддитивной помехи по выходу (в наблюдениях z). Матрицы
в уравнениях объекта имеют следующую структуру:
Л(4) =
а :......... I,
io ... оJ
в = [^-г --Мт.
1Ц1) =[1 О ... 0],
^(0 = ^(0[&п_1 ... ь0)\
где Ея-| — единичная матрица размера (п — 1) X (п — 1).
Образуем с помощью линейной обратной связи но состоянию
п = В! — кЦ1)х (10.6.2)
внутренний коптур (ВК) управления, уравнения которого имеют вид
dx = [л (4) — D (I) k?(f)\ х dt13 [кхЛ 1-^(4) йъ] + /_^(4) dt,*,
zdt = И (t) xdt D (t) dr),
E[z(4o)]=O, E[>(4o)xT(/c)] =Pr;. (10.6.3)
Устройство оценивания состояний ВК представляет собой ФКБ, по-
строенный для эталонной модели ВК
dx = [/Iм — k(l)Il]x dt + K(4)z dt + dt,
'zdl = Ilxdt, (10.6.4)
k(t) = P (t) ird~l (I), (10.6.5)
P (4) = A”P (4) + P (t) /1,1г — P (l) ll^d-^t) HP (l) + dl (t) R-\ (10.6.6)
= Л(40) P(4C) = Z\.
Введем расширенные векторы состояния и наблюдений хр — (х, х),
z,, = (z, z). Последовательное соединение ВК и ФКБ образует динами-
ческую систему, описываемую уравнениями вида
dx» — (4) ,Tp<Z4 -|- Bv [иг<Й + (t) tig] -|- /?Ер<^* |- Bl](4)<Zi],
zp dt = llvxv dt + P,„, (/) Л], (10.6.7)
ГДО
л ГЛ(4)-/?(4)АТ(4):; 0 [/7(4)1
11 Lmo# i/1’1—/7(4)1/J 1^(0J
Г ° 1 Г 11 I 0 1
0 Л(4)/?п(/)]’ 11 N/d
(10.6.8)
Параллельная эталонная модель ведается уравнениями вида
dxil = A^'dt + Вр [ut + d~ (4) rfg],
zM dt = IlXя dt, (10.6.9)
где матрица А” получается путем подстановки А'1 в выражение
для Ар (10.6.8). Легко проверить, что при Bo(t) = Во выполняются усло-
вия полной адаптируемости ВК. Отметим, что в общем случае эталоппая
модель нестационарна.
Пропорционально-интегральные алгоритмы адаптации, синтезиро-
ванные прямым методом Ляпунова, имеют вид [10.31]
2П
к. (4) = - у.Ъ-^. j 2 + k№i - J [/<; (t) -- dt,
e, = X;1 — x-, (10.6.10)
J 4 J
где 7, >0, 62 > 0 — вещественные числа; рц — элементы вещественной
симметричной положнтельпо-определеппой матрицы; — значения i-ro
настраиваемого коэффициента обратной связи для матрицы заданных
значений переменных параметров А(4о), обеспечивающие совпадение
матриц А(10)—B(to)P'n и А51, что гараптируется полной адаптируе-
мостью ВК.
10.6.2. Алгоритмы системы с дискретным временем. Для адаптации
внутреннего контура (ВК) к желаемой эталонной модели, в отличие от
схемы, рассмотренной в и. 10.6.1, можно использовать принцип непрямого
адаптивного управления с эталонной моделью, основанный на идентифи-
кации параметров БК и перестройке параметров регулятора па основе
статических алгоритмов (см. п. 10.5.2).
Рассмотрим линейный, равномерно вполне управляемый и наблю-
даемый стохастический объект управления вида
х[А- + 1J = [А + ДА.[4М4 + [В + 4ВДФ] + 1У[А] 6 [*],
(10.6.11)
!/И =ДЖ[А-] +F[A]T][fc],
где х, у, и — векторы состояния объекта, выхода объекта и управления;
хе R'1, у, u£Kw; {ъ[Л]}, {т][7с]}—взаимно независимые белопгумпые
гауссовские последовательности, Е,, т; е Rm, для которых Е [g [/с] ] s=
= Е[т)[Л]] =0, Е{^[/г] = Ет, Е{цИцт[Ч} U = [Е : 0],
Е[х[0]] =0, Е[х[0]хт[0]] = Ро. Как и ранее, рассмотрим два варианта
алгоритма управления объектом:
«И = ~Й,[444 + Л2[Л]И[Л] + и[Л] (10.6.12)
— адаптивный регулятор с эталонным ФКБ или
и,[Л] = Иоп[/г] + v [7r], uun [А-] = — £[444 (10.6.13)
оптимальный адаптивный регулятор с эталонной моделью, построен-
ггын па основе принципа разделения, где иоп — оптимальное управление,
формируемое в соответствии с принципом разделения, и — измеримая
последовательность случайных чисел (случайный пробный сигнал).
Уравнение состояния ВК принимает вид
ЦА + 1] = [Л-ВВ,[А]]ж[7С] + [B + BB2[A]]u[7£] + W'[ A:] g [7с]. (10.6.14)
Необходимые и достаточные условия полной адаптируемости ВК
(2.4.23), (2.4.24) приобретают вид
rank [Д/1'1: 7?] = rank В, rank [ДВ1’’1; В] = rank В, rank В = in,
Z = 1, 7t, г = 1, т, (10.6.15)
где ДА11', ДВ|Г| — Z-й и r-й столбцы матриц Д.4, ДВ. Рассмотрим задачу
синтеза оптимального адаптивного регулятора относительно функционала
потерь вида
( Д'-i 1
J (ж, и) = Е хт [7V] рх [В] + 1*Т Pl IР] * + “Т И] К-1 [А] и [к]] ,
I Л=0 J
где матрицы р, |3[А], К~'[А]—симметричные, р 5® 0, ЦА]>0,
К~1 [А] > 0. Решением этой задачи па основе теоремы разделения явля-
ется алгоритм управления (10.6.13), в котором оценки состояния ВК
получаются с помощью эталонного ФКБ вида [10.37]
х[7с + 1] = А”х[А] + В"в[А] + В[А] [у [А] - Ях[А]],
К[А] = /Р’/фг] 1Р[НР[к]1Г + Е[А]Вф]]_', (10.6.16)
Р\к + 1] = Л'Тф] (А”)т + W[A] IP [А-] - К[7с] [ИР [к] IP +
+ В[А:]Вф]]Л-ф], Р[0] = В0,
где Лм, В" — матрицы эталонной модели, заложенной в ФКБ и опреде-
ляемой уравнением вида
жм[А + 1] = Лмхм[А] + В”и[А], ун[А] = Вхф]. (10.6.17)
Матрицы усиления К в законе управления (10.6.13) формируются с
помощью второго уравнения Риккати, в которое подставлены матрицы
параметров эталонной модели
в?[Л] = [к-1 [Л] + (bm)ts[a + ^в^-и^ад + 1]ли,
(10.6.18)
В[А] = [Лм - В”Л’[А] ]ад + 1] + ЦА-], В[Л’] = р.
Регулятор адаптации ВК двухуровневый, причем па верхнем уров-
не используются динамические (рекуррентные) алгоритмы адаптации
для вычисления промежуточных матриц параметрических рассогласова-
нии ВК ДЛ и ДЛ, а на нижнем уровне — статические алгоритмы для вы-
числения матриц параметров настроек Bi и В2 прямой и обратной связп
ВК [10.37—10.39]
х[А] = ЕУк[А]к^],
Р-Н] = Еу[а.м[А] к1"1],
?[*] = [?[^i«TR]lT,
Ф [А] = Дм — А — АЛ [А],
Р = Р‘, Р > 0,
l/к] =EJk[7.]kl'tlI,
£[/;] = Еу[и [А] | 1>1*1],
£'[/’] = ®М[А’] —ж [А],
z[k] = ё[к + 1] — Лмё[А],
V[AJ = ВМ — В — ДЛ[А],
/ = 0, /V—1.
Здесь алгоритмы адаптации верхнего уровня:
ДЛР + 1J = Д/1[А] + e[A]Pz[A]2-[A],
ДВ [ к + 1] = ДВ [А] [A] Pz [ А] й~ [А], (10.6.19)
гдэ
е [А] =--хтт--,
W/' И-1 р w
О < а < 2, Xmax = max \v (р);
V
алгоритмы адаптации нижнего уровня:
Pi [А] = (BTB)-'BTAzl [А], ЯДА] = (В1В)-1ВТДВ[А]. (10.6.20)
Для получения условных математических ожиданий х, х"\ у приме-
няют цифровые фильтры, реализующие методы динамического усредпе-
;<д(+о
пня, у [А] = (l/o) J у (т) dt, 0 < о <С Д(, у [0] = 0.
НЫ—о
Кроме того, при практической реализации в выражениях (10.6.20)
заменяют неизвестную матрицу В на известную матрицу В™.
К рассмотренным выше алгоритмам адаптивного управления примы-
кают некоторые смешанные схемы адаптивных регуляторов, сочетающих
алгоритм адаптивного управления и пропорцпопалыю-иитегральпын (ПИ)
пли пропорциональпо-интегро-дпфференциалънын (ПИД) регулятор в
цепи обратной связи, внешней по отношению к внутреннему контуру
[10,39],
ГЛАВА 11
МЕТОД РЕКУРРЕНТНЫХ ЦЕЛЕВЫХ НЕРАВЕНСТВ
В АДАПТИВНОМ УПРАВЛЕНИИ
Ие всякое адаптивное управление содержит идентификацию как яв-
но выраженный процесс или алгоритмический модуль. Об этом свиде-
тельствует адаптивное управление в живой природе, нередко весьма
совершенное в смысле развитых функций адаптации. Ряд алгоритмов
адаптации, изложенных в гл. 8, 10, а также в настоящей и последующей
главах, подтверждают это. Главным назначением данной главы является
изложение леидептификациоппых алгоритмов адаптивного управления,
основанных па методе рекуррентных целевых неравенств [11.1, 11.3—
11.8, 11.19, 11.21]. В указанных работах, помимо данного метода, широко
представлены математические конструкции и определения, призванные
повысить строгость понятий в области адаптивного управления вообще.
Содержательная сторона понятий принципиально пе отличается от изло-
женной в гл. 8, 10. Поэтому указанная система определений, ориентиро-
ванная в основном на математиков, в данном справочнике пе излагается.
Все же некоторые определения и формулировки задач целесообразно
привести.
§ 11.1. Формальное описание адаптивной системы
Рассматриваются процессы с дискретным временем *) к = 0, 1,2, ...
Управляемый процесс описывается уравнением типа (1.2.18), (1.2.19);
х[к + 1] = f(x[ft], ti[7c], ft, ap), (11.1.1)
а условие наблюдения имеет вид
z[ft] = /c(z[ft], ft, Ср). (11.1.2)
Здесь a:[ft]—вектор состояния в момепт времени ft; u [ft] — вектор уп-
равления в момепт времени ft; ар — расширенный вектор параметров,
который состоит из вектора неизвестных параметров а (среди его компо-
нент может быть начальный момепт функционирования системы ft0 и
начальный вектор состояния ж [ftp]) и некоторого абстрактного парамет-
ра ы, характеризующего случай
ар = (а, со), со Q, а.р Ар. (11.1.3)
Вектор ар именуется также «вариантом» [11.1]. В пеадаптивпой поста-
новке задачи управления все компоненты вектора а считаются пзвест-
*) В литературе (см., например, [11.1]) распространено также обозна-
чение моментов дискретного времени нижним индексом I.
нымп. Поэтому для детерминированного управляемого процесса оп не
указывается (опускается в уравнении типа (11.1.1)). Вектор z[7r] есть
вектор наблюдения, измерения («сепсор» [11.1]).
Заметим следующее. Помимо выходных сигналов измерительной си-
стемы в момент времени А-, вектор z[A] в общем случае может содер-
жать предшествующие измерения в моменты времени к — 1, к — 2, ...
(формально этот случай сводится к рассматриваемому).
При современном развитии цифровой техники запоминание величин
пе встречает затруднений, и такое расширение вектора наблюдения лег-
ко реализуется. Этого, конечно, нельзя сказать о различных расшире-
ниях вектора наблюдения в каждый данный момепт времепи. Последнее
обычно связано с применением дополнительных измерительных устройств,
что нередко сопряжено с большими затратами и принципиальными
трудностями.
Цели управления (ЦУ), помимо описанных в гл. б, могут быть сле-
дующими:
||.г[7г]|| -ч-0, ||и[7.]|| -»0 при Л->оо, (11.1.4)
если отсутствуют внешние возмущения;
На-[7г] || < Ci = const, ||u [7г] || < С2 = const (11.1.5}
при наличии возмущающих воздействий;
(7(з:[7г], и [7г], 7г, Яр) 8 (11.1.6)
— локальный критерий;
sup liin Q (х [7г], и [7г], 7г, а ) -> inf (11.1.7)
(О k~»оо
при ограниченных возмущающих воздействиях;
где Еи—математическое ожидание (усреднение по случаю).
Рассматриваются н другие ЦУ. В частности, ими могут быть мно-
гокритериальные ЦУ вида {<?| 8|, ..., Qn -С Sjv}, где Qj = Qj (x [7г], »[/г],
к, ар). Этот случай сводится к (11.1.6): Q — max (Qj — 83), 8 = 0.
Как адаптивное, так и пеадаптивпое управление должно обеспечивать
достижение поставленной цели. Управление, формируемое в виде
н[7г] =U(s[/C], а).
(11.1.9)
не является адаптивным, так как предполагает знание вектора парамет-
ров (варианта) а.
Систему можпо сделать адаптивной, если к (11.1.9) добавить алго-
ритм оценивания вектора параметров, т. е. идентификатор. Алгоритми-
ческое обеспечение подобных систем подробно описапо в гл. 5, 10.
Идея одного пз методов построения цеидептифпкациопных адаптив-
ных систем может быть пояснена следующим образом. Допустим снача-
ла, что вектор а известен. Если задача управления имеет решение, то
обычно оно имеет вид и [/г] = U*(z[fc], т*), где т* = т* (ар) — вектор
существенных параметров, как правило, меньшей размерности, чем а.
Пусть теперь вектор а неизвестен. Если при этом вектор т* доступен для
непосредственного измерения (входит в сенсор), то задача может счи-
таться решенной: управление обеспечит достижение поставленной цели
для заданного множества вариантов. Одпако существование вектора т*,
доступного для непосредственного измерения и обладающего указанны-
ми свойствами для всего множества вариантов, является скорее исключе-
нием, чем правилом.
Тогда возникает мысль определить некоторый вектор существенных
параметров путем обработки информации, доставляемой измерениями
z[/c], z[k 4- 1]. В связи с этим адаптивное управление ищется в виде
u[/cj = U(z[fc], т[А.]),
тИ+1] =T(z[A + lJ, z[A-], т[Л]),
(11.1.10)
(11.1.11)
где U и Т — некоторые функции указанных аргументов.
§ 11.2. Описание метода рекуррентных целевых неравенств
Без ограничения общности полагаем, что начальный момент функ-
ционирования системы есть ко = 0. Рассмотрим задачу нестроения адап-
тивного управления с локальной целью управления типа (11.1.6):
Q(x[/г+1], и[к + 1], к + 1, ар) < е.
Обозначим Q* — е — Q. Тогда локальную цель управления можпо пред-
ставить в виде
С*(а.[7с +1], u[7c + l], fc+ 1, ар) > 0. (11.2.1)
Пусть т* — вектор размерности п. Задача состоит в построении урав-
нений (11.1.10), (11.1.11) так, чтобы для любого epeAp было выполнено
(11.2.1) для всех к > к*(а ). Функцию U(z, т) в (11.1.10) выберем, исхо-
дя из точного или приближенного представления управления в соответ-
ствующей пеадаптивной задаче: U(z, т) ~ U*(z, т). Функцию Т в (11.1.11)
будем выбирать, основываясь па целевых условиях (11.2.1).
Ограничимся для простоты изложения случаем, когда Q*(x, и, к, ар) =
— Q*(x, к, ар) не зависит от и. Тогда, для момента к + 1, что следует
из (11.1.1), (11.1.2), (11.1.10), (11.1.11), левая часть в (11.2.1) зависит от
ч[Л], т[0]. Выделим зависимость от т[Л]:
(>*(*1Л + 1], 7; + 1, а₽) =Е[7с + 1, т[7с]]. (11.2.2)
Целевое неравенство (11.2.1) выполнено, если т[А]е@)!+1, где —
область в пространстве {т}, выделенная неравенством
F[7c + 1, т] >0. (11.2.3)
Подчеркнем, что по смыслу рассматриваемой задачи неравенства
(11.2.3) заранее не даны,— их можпо написать для всех к, лишь имея
алгоритм (11.1.11), а этот алгоритм как раз и требуется найти. Целевые
неравенства (11.2.3) появляются последовательно, рекуррептпо: по дан-
ным т[0], ..., т[/г — 1] определяются н[А-], ж[/> + 1], зависящие от т[/с] -----
= т, п область (П.2.3). Эти неравенства называются рекуррентными,
целевыми, неравенствами, (РЦН). Алгоритм (11.1.11) должен быть по-
строен так, чтобы появляющаяся в момент k + 1 область =
= {т: F[7r1, т] 0} «накрывала» точку т[А], т. е. так, чтобы
F[k + 1, т[А]] > 0, ор е= Ар. (11.2.4)
Управление адаптивно, если для любого «р е Ар существует момент
= к* (Др) такой, что указанное «накрытие» происходит для всех
к к* (йр), т. е. (11.2.4) выполнено прп всехЛ^ А’* (ар). Если, кроме того,
т [А:] — т = const прп Л Л* (вр), то можно сказать, что алгоритм
«находит» закон управления и[A] = U(z[A.], т), обеспечивающий 'Выпол-
нение целп управления. Алгоритмы (11.1.11), обладающие этими двумя
свойствами, называются конечно сходящимися (КСА).
Опишем возникшую ситуацию, отвлекаясь от задач адаптации. Пусть
имеется правило, которое по заданным векторам т[0], ..., т[к — 1] указы-
вает перавепство (11.2.3). Алгоритм, строящий точку т [А] по т[А: — 1]
и по области (11.2.3) и такой, что для некоторого к* прп всех к к*
выполнено (11.2.4), называется конечно решающим алгоритмом для
бесконечной системы рекуррентных неравенств (11.2.3). Если, кроме того,
т[А-] = const при A:JsA-s,, то алгоритм конечно сходящийся.
Итак, КСА доставляет за конечное число шагов решение бесконечно-
го числа заранее неизвестных рекуррентных неравенств.
КСА строятся прп выполнении следующих двух предположений:
о) области &k = {F [А-, tJ 0} выпуклы;
б) существует шар В = {т: |т—т4 | --С б*}, который содержится во
всех &k. При этом т* = т.., (ар), 6* — б* (ар) > 0 могут зависеть от speA|>.
Предположение а) ограничивает круг задач, решаемых излагаемым
методом, одпако во многих практических задачах оно выполняется. Пред-
положение б) не ограничительно. Оно означает наличие такого управле-
ния и [А] = U (z [A], тй; (ар)) (пеадалтивного), что для пего и для всех
управлений w[A J = U(z[/c], т) с близким параметром tefl выполнена
цель управления.
Условия а), б) позволяют осуществить следующую идею построения
КСА. Еслп т[/с] то полагаем т[А + 1] =т[А-]. Если т[/с] ф. @л+ь
то строим точку т[А’-(- 1] так, чтобы было выполнено
, 1 т [Ас 1] — |3| т [А] — щ |3 — е®, (11.2.5)
где е2>0— постоянная, одинаковая для всех к. Для построения точки
т[/г+1] следует отделить точку т[А] гиперплоскостью от области @/1+1
(что возможно в силу предположения а)) и сдвинуть точку т[А: + 1]
по нормали к этой гиперплоскости па определенное расстояние в сторону
области @/i+i (см. рпс. 11.2.1). Элементарное геометрическое рассуждение
показывает, что еслп точка т[А: + 1] лежит на отрезке [т[А:], т'[/с]], где
х'[А] —точка, симметричная точке т[/с] относительно граничной гипер-
плоскости, то 1 т [A: -l 1] — т, |3 <С | т [А] — т* |3 (см. рис. 11.2.1). Можно
Рис. 11.2.1. Иллюстрация идеи по-
строения конечно сходящихся ал-
горитмов
показать, что при подходящем расположении точки т [fc + 1] будет вы-
полнено и (11.2.5). Явные формулы для т[7с + 1] будут указаны ниже
для различных типов областей @,i+i.
При выполнении (11.2.5) управление будет адаптивным. Действи-
тельно, каждый раз, когда произо-
шла ошибка, т. е. когда пе вы-
полнено целевое неравенство
(11.2.1), справедливо и (11.2.5).
Если к моменту к произошло г[7с]
ошибок, то в силу (11.2.5)
0<|т[7с-|-И~-г*|2<
< I т [01 - т, I2- 1 [7с] е®. (11.2.6)
Следовательно, число ошибок
г[7с] конечно и не превосходит
величины
г [7с] < г = [ т [0] — т* |2/е®.
(11.2.7)
Итак, найдется такой момепт 7с = 7с* (ар), что т [7с] = т = const при
7:^7с*(ар) и ошибок пе будет; т [7с] = т е @k+i. Следовательно, наш ал-
горитм — КСА и управление адаптивно.
Условие (11.2.5) означает, что адаптивная система «учится» па
ошибках: каждый раз, когда пе выполнено целевое неравенство, проис-
ходит приближение значения т;,+1 [7с] к неизвестному т* = т* (ар), т. е.
приближение текущего закона управления u[7c] = U(z[7c], т[7с]) к не-
известному «хорошему» закону управления и [7с] =U (z [7с], xj.
Мы пояснили, каким образом в рамках излагаемого метода строятся
уравнения (11.1.10), (11.1.11) адаптивного управления. Важно подчерк-
нуть, что основное условие (11.2.5) не гарантирует, что т [7с] ->тг, и при-
меры показывают, что это неверно и что значение т [7с] = т = const при
7с к^к* (ар) может сильно отличаться от т* = Однако найденный
закон управления u[7c] =U(z[7c], т) вполне приемлем, ибо оп тоже обе-
спечивает выполнение цели управления.
§ 11.3. Основные конечно сходящиеся алгоритмы
решения бесконечной системы рекуррентных неравенств
Ис всякий КСА решения РЦН (11.2.3) может быть использован в ка-
честве алгоритма (11.1.11). Для этого нужно, чтобы значение т[7с + 1]
выражалось через известные величины т[7с], z[7c], z [7c + 1], несмотря па
то, что функция 7',[7с-[- 1, т] в неравенстве (11.2.3) может зависеть от
неизвестного ар. Для одних и тех же неравенств (11.2.3) могут быть
предложены различные КСА, решающие эти неравенства при разных
предположениях о том, какие пз параметров считаются известными.
11.3.1. Алгоритмы «полоска». Чаще всего в задачах адаптации возни-
кают рекуррентные неравенства (PH) вида
|cP[fc]T + а[Л] I е[7с]. (11.3.1)
Здесь, как и выше, к = 0, 1, 2, ...; d [7с] и т — векторы одинаковой раз-
мерности в пространстве {т}; а [7с], е [7с] — вещественные числа. Нера-
венства (11.3.1) выделяют «полосы» в пространстве {т}. Условие с) § 11.2,
очевидно, выполнено. Условие 6) означает, что существуют числа е*>0,
0< р < 1 и вектор (неизвестный) такие, что
е [Л] > е* | d [7с] |,
|с7т[7с] т, +а [7с] [ <ре [7с].
(11.3.2)
(11.3.3)
В силу (11.3.2) ширина полос (11.3.1) пе меньше а из (11.3.3),
(11.3.2) следует, что все полосы (11.3.1) содержат некоторый шар с
центром в точке ts.. Напомним, что согласно постановке задачи о РП не-
равенства (11.3.1) заранее пе даны. Предполагается, что имеется (вообще
неизвестный) алгоритм й, который по заданным т[0], ... т[7с] выраба-
тывает вектор d[7c], и числа а[7с], е[7с] такие, что выполнено (11.3.2),
(11.3.3). Введем обозначение
ц[/с] =dT[7c]r[7c] +и[7с].
(11.3.4)
Пусть х[7с]—произвольные числа такие, что 0 < х' s' х[7с] s' х" < 2.
Для произвольного т[0] следующий алгоритм — КСА решения PH (11.3.1):
т [/с -г-1] =
_ [7с], если [ Ц [7с] | < е [7с],
(т [7с] — х [7с] (ц [7с] — ре [7с] sgn ц [7с]) d [7с] |<7[7с]р2, если [ ц [7с] | > е [7с.
(11.3.5)
Для числа г® ошибок алгоритма верпа оценка
r° 11 [0] — т* [2 (в^х') 2.
Итак, утверждается, что для любого алгоритма 21 существует
такой момент к*, что т [7г] — т = const при к к* и для т = т, к 7с#
все неравенства (11.3.1) выполнены.
Если в (11.3.3) р < 1/2, то молено считать 0 < х' s' 1 s' (1 — р)-’
х" < 2, х[7с] = |ц [&] | (| ц[7с] | — ре[7с] )-1; в этом случае алгоритм
(11.3.4) приобретает особенно простой вид:
(11.3.G)
Пусть 0^р<1 и х > 2р — произвольное число. Для тех 7с, при
которых |ц [7с] | хе[7е], рекомендуется брать в (11.3.5) х[7с] =
= |т][7с] | (|i)[fc] | — ре[7с])-1. При этом (11.3.5) приобретает более про-
стой вид и часто ускоряется сходимость.
Иногда применяется алгоритм в еще более простой форме
т[7с + 1] = т[7с] — ц [7с] [с7[7г] |-2с/[7с].
(11.3.7)
On означает проектирование точки т[7т] па гиперплоскость й'г[А]т[А] +
। а[Л] =0. Алгоритм (11.3.7) называется алгоритмом Качмажа. Оп был
предложен в 1937 г. для решения конечной системы лилейных уравнений
с7т[А[т + к[А] = 0 (k = 1, Т, для к>Т полагаем d[& + Г] = й[Л],
«[7с 4 '7) =а[Л-]), т. е. для фиксированной (ие рекуррентной) системы.
Отметим, что алгоритм (11.3.15) при р > 1/2, а также алгоритм Качмажа
(11.3.7) не являются конечно сходящимися алгоритмами решения PH
(11.3.1).
В ряде задач адаптации РП имеют впд
| ₽ [А] <[А-]т + а [А] | е [А], (11.3.3)
где р[7с]—неизвестные числа. Поэтому для этих задач использовать
алгоритм (11.3.5) нельзя (хотя значение ц[7с] обычно известно). Пусть
О< IP[A’J| < С$ и известны Сц и sgnp[7cj. Пусть выполнено (11.3.2) и
(11.3.3) с заменой с/[А] на р[А]й[А]. Пусть р', р", р[7с] — произвольные
числа, удовлетворяющие неравенствам
О < р' < р [7с] < р" <2(1- р) Ср1. (11.3.9)
Положим
ОД = ОДйОДОД + а[А]. (11.3.10)
Для любого т[0] следующий алгоритм — КСА решения PH (11.3.8):
, р [7], если | £ [М | < е [7с],
’ С + U [7с] - р [7с] £ [7с[ Sgn ₽ [7с] ] d [А] [ -= d [7с], если [ £ [7с] [ > е [А].
(11.3.11)
Для числа ошибок г° алгоритма справедлива оценка
г° < | г [ОJ - Щ Г Ср (е2р' [2 (1 - р) - Срр"])~Ч
Правая часть минимальна при р'= р" = (1 — р) Ср1- Поэтому естествен-
но брать в (11.3.11) р [А] = (1 — р) Ср1; для этого случая
r°<[|T-rJCp(l -рГ’е-1]2.
11.3.2. Конечно сходящиеся алгоритмы решения линейных рекур-
рентных неравенств. Предположим, что РП имеют вид:
<ОДт + ОД > 0, А-=0, 1, 2, ...; ОД=/=0. (11.3.12)
Условие а) § 11.2 в этом случае, очевидно, выполнено, а условие б) озна-
чает, что существуют такие вектор т* и число б > 0, что
сГ |А:| т* +« [7с|> б [ tl [7с] [.
(11.3.13)
Следующий алгоритм является (для любого т[0]) КСА решения Р11
(11.3.12):
т [Л Ч-Ц =
(т[7с], если 1] [Л] > О,
= (т [А] + (26 [А] | d [7v] 1 - р [А] Т] [&]) d [7c]|d [А] Г2, если т] [7с] < О.
(11.3.14)
Здесь г][7г] вычисляется по (11.3.4), а б[&], Р [7 ] —произвольные числа,
такие, что
0<6'sg6[A:] sg6"<6, 0 р[А:] 2. (11.3.15)
Для числа г ошибок алгоритма (числа значений к, для которых
dT [А]т[А] + “|AJ < 0) справедлива оценка
г < I т [0] — т, [2 [46' (6 — б")]-1. (11.3.16)
Папвыгодпейшая оценка получается при 6' = 6" = 6/2:
rsg|-r[O] — т* [s 6—2. (11.3.17)
Есть и другие КСЛ решения РН (11.3.12) [11.1, 11.7, 11.8].
Напомним снова, что в соответствии с определением РН неравенства
(11.3.12) заранее пе даны. Коэффициенты d[fc], а[А] в (11.3.12) появля-
ются согласно некоторому алгоритму в ответ па выданные значения
т[0], ..., -с [А]; т. е. (с?[А'], а [/г]) = 81 (т [0], ..., т[А:]). Алгоритм И, однако,
должен удовлетворять условию (11.3.13). Конечная сходимость алгоритма
(11.3.13) — (11.3.15) означает, что для любого алгоритма Я найдется такой
момепт А:*, что т[7с] = т = const и йт[А-]т + а[А>] 5=0 для всех к ks..
Если вместо (11.3.14) взять другой КСА, то бесконечная последова-
тельность d[A-], к[А-] в (11.3.12) будет, вообще, другой.
11.3.3. Алгоритм эллипсоидов для решения линейных рекуррентных
неравенств. По-прежнему рассматриваются РП (11.3.12) при выполнении
условия (11.3.13). Излагаемый алгоритм требует знания эллипсоида Е[0]
(или шара), в котором находится неизвестная точка т*, что практически
пе ограничительно. В каждый момепт к строится эллипсоид
Е [7г] = {т: (т - т [А-] )тр-1.[А] (т - т[А]) С 1}
(11.3.18)
с центром в точке т[А], т. с. запоминаются вектор т[7>] и симметричная
положительно-определенная матрица р[/с]. Алгоритм имеет вид:
т[/с],
т [7г] - (н + 1)-1 р [A] d [A] (dT [А] р [7г] d [А])-!/2,
р [A--J-l] =
если т] [7с] 0,
если т] [7с ] < 0;
(11.3.19)
если т] [7с] 0,
Р [А],
Р [А]
_ 2 (p[A]d[A])(p[A]d[A])T
»-rl dr [А] р [7с] d [А[
если т] [А] < 0.
(11.3.20)
Зпачепия р[0] > 0 и т [0]—любые, удовлетворяющие условию
(т [0] — тф)т р-1 [0] (т [0] — т*) <1, а ц[7с] вычисляется по (11.3.4). Для
числа г ошибок алгоритма справедлива оценка
r<r =«(lnpft ) ’In------------g-----, (11.3.21)
где
_____________________
Рп ~ (,). + l)(»2-l)('t-I,/2‘
Здесь я — размерность пространства {т}. При больших п
г:’ = 2«2 (1 + О (/г”2)) In —016~ Т* *. (11.3.22)
Алгоритм (11.3.19), (11.3.20) имеет следующую геометрическую ин-
терпретацию. Эллипсоиды (11.3.18) строятся так, что т* еЕ[7с]. Для
к — 0 это выполнено ио предполо-
жению. Пусть построен эллипсоид
Е[7с]. Если т] [7с] 0, то согласно
(11.3.19), (11.3.20) Е[7с + 1] = Е[7с].
Если же т] [7с] <0, т. е. точка т[7с]
не находится в полупространстве
©м-i = (г: с?1,[Л]т + <х[7с] < 0}, то
через цептр т[Л] эллипсоида E[k]
проведем гиперплоскость, параллель-
ную граничной
<Г[Л]т + а [А] = 0.
эллипсоид Е [71] на
рис. 11.3.1). В одной
чим ее через Н<+> [Л:],
эллипсоид наименьшею объема, содержащий Е<+> [7с], который и примем
в'качестве Е[7с + 1]; его центром будет т[7с + 1]. Довольно просто пока-
зать, что указанное правило запишется в виде формул (11.3.19), (11.3.20).
Оказывается (это самый существенный момент), что при ц[7с] < 0
для отношения объемов любых двух эллипсоидов Е[7с] и Е [7с + 1], свя-
занных указанным построением, справедливо неравенство
гиперплоскости
Опа разделяет рПс. 11.3.1. Иллюстрация алгорит-
две части (см. ма эллипсоидов
из пих, обозпа-
находнтся неизвестная нам точка т*. Построим
рЕ[/с + 1]/рЕ[7с] рп < 1, (11.3.23)
где р„ —число, указанное в (11.3.21). Поскольку все эллипсоиды Е[7с]
содержат тар | т — т* | < 6, то объемы рЕ[7с] пе могут неограниченно
уменьшаться. Из (11.3.23) поэтому следует, что конечно число значений к,
для которых т] [7с] < 0.
Алгоритм эллипсоидов предложен для решения задач линейного про-
граммирования в [11.9, 11.10]. К идее использования алгоритма эллип-
соидов как КСЛ решения PII независимо пришли А. С. Немировский,
а также Г. М. Бакай и О. Л. Пижпичепко [11.12].
Из сравнения формул (11.3.22) и (11.3.17) видно, что при фиксиро-
ванном п и больших £ = | т [0] — т ] б-1 алгоритм эллипсоидов лучше
алгоритма (11.3.14), а прп фиксированном £ и больших п алгоритм эллип-
соидов хуже этого алгоритма. Представление о соответствующих значе-
ниях £ и п дает табл. 11.3.1 *). В задачах самообучения н адаптации обычно
и 100, значения £ меняются обычпо в пределах от 10 до 103 или 10*.
Значению £ = 1 соответствуют тривиальные задачи: уже закон т = т[0]
Таблица 11.3.1
Сравнение алгоритмов (11.3.14), эллипсоидов
н полного перебора
С 41
10 1—5 1—2 1020
20 1—9 1—3 68-10’
102 1—33 1—7 ^<Х>
10;: 1—270 1—29 ОО
101 1—2330 1—122 ~оо
удовлетворителен и подстройка параметров пе нужна. Во втором столб-
це таблицы указаны значения размерности и, для которых г3 г. По-
скольку время вычислений связано с числом операции для каждого
шага, а эти числа М3 и М различны для алгоритма эллипсоидов и (11.3.14)
(причем Ма > М), то лучшее представление о времени счета (т. о. о вре-
мени адаптации) дает третий столбец таблицы. В нем указаны значе-
ния п, удовлетворяющие неравенству s3 s, где s = М3т3 и s = Л/т, т. е.
значения п, для которых в процессе адаптации общее число операций s'
по алгоритму эллипсоидов меньше общего числа операций s но алгорит-
му (11.3.14). Так, алгоритм (11.3.14) [11.7] предпочтительнее алгоритма
эллипсоидов для £ . 20 при п > 3, а для t = 100 — при п > 7. Также
практика расчетов показывает, что в обычных задачах адаптццин алгоритм
(11.3.14), а также алгоритмы «полоска» предпочтительнее эллипсоидов.
В четвертом столбце таблицы указано отношение времени полного
перебора Taa ко времени Т = 2’° для алгоритма (11.3.14). В качестве
размерности п взяты значения, для которых алгоритм (11.3.14) и алго-
ритм эллипсоидов дают одинаковое число ошибок (г3 = г). Числа, боль-
шие чем 1061, обозначены символом ~ оо.
В заключение отметим, что при применении указанных (п других)
КСА в задачах адаптации необходимо установить выполнение условии
их сходимостп (т. е. условий (11.3.2), (11.3.3) для PH (11.3.1) и др.). Эти
условия сводятся обычно к установлению оценки |d[7c] | const, что
требует анализа соответствующей замкнутой нелинейной системы. Ниже,
при иллюстрации метода РЦН, проверка этих условий опускается (см.
подробнее [11.1] и соответствующие оригинальные работы).
*) Вычисления выполнены Б. II. Козпнцом. Прп подсчете чисел
третьего и четвертого столбцов принято, что операции умножения и де-
ления эквивалентны по времени счета няти операциям сложения.
§ If.4. Адаптивное субоптимальное управление
минимально-фазовым объектом
Линейный стационарный объект имеет один скалярный выход у [7с]
и одно управляющее воздействие и [А] (скалярное). Его уравнение в
переменных вход — выход есть
у 1*1 + «,'/ [* — И -г • • • “г ary [7с — ? J =
= bjU [7; — 11 + ... + bru [7с — r2] -[- w [7c], (11.4.1)
где ;e[A]—возмущающее воздействие, являющееся ограниченной функ-
цией времени:
|w[A-]|^C. (11.4.2)
Целью управления является поддержание заданного уровня уа вы-
ходной переменной, т. е. требуется, чтобы текущее значение выхода у [7с]
по возможности меньше отличалось бы от заданного значения При
этом замкнутая система должна быть устойчивой. Естественно уточнить
сказанное: цель управления в пеадаптивпой постановке состоит в мини-
мизации функционала
7 = lim sup | у [А-] — у3| (11.4.3)
при условии, что *)
IУ [7с] I const, | в [7с] | const. (11.4.4)
В (11.4.3) верхняя грань берется по всевозможным помехам, для кото-
рых выполнено (11.4.2) (с фиксированной постоянной С).
Будем предполагать, что запаздывание в управлении минимально:
Ь, ф 0. (11.4.5)
. Решение пеадаптивпой задачи минимизации функционала I полу-
чается немедленно: управление гг[А] может выбираться из условия
ijU [7с — 1] -I- ... -|- ъги [7с — г2] = у3 -|- агу [7с — 1] + .. . + аг1/ [7с — rj.
(11.4.6)
Действительно, если выполнено (11.4.6), то из (11.4.1) имеем
У [*1 —!/:»== “>[*] (11.4.7)
и, следовательно, для управления (11.4.6) J = С. Если же (11.4.6) пе
выполнено для какого-то момента к — 1, то в следующий момепт 7с,
как следует из (11.4.1),
у[7с] - у[0] = д[к - 1] + пф’], (11.4.8)
w) Заметим, что для линейных систем условие (11.4.4), выполненное
для любых начальных данных и любых ограниченных помех, эквивалент-
но устойчивости соответствующей однородной системы. Кроме (11.4.3),
все дальнейшее справедливо и для функционала sup lini [у [7с] — уа|.
0<17]} оо
где q [7с— 1J ф 0. Для помехи и> [7с] возможно значение w[7r] —-
= С sgn q [ft — 1], при этом | у [7г] — у [0] | = С + | q [Л — 1] |. Следователь-
но, для такого управления 1 > С, т. е. значение 1 больше, чем при управ-
лении (11.4.6).
Одпако для управления (11.4.6) пе всегда выполнено условие устой-
чивости (11.4.4). Действительно, (11.4.1), (11.4.6) равносильны уравне-
ниям (11.4.7) и
[7с — 1] -|- ... -|- bru [fc — г„] =
= V3 + Й1 (ул + w + И) + • • • + ЙГ2 (!7з + w [/с — г1])- (Н.4.9)
Первое соотношение (11.4.4) удовлетворяется согласно (11.4.7), а вто-
рое соотношение (11.4.4) справедливо лишь для устойчивого полинома
й (л) = Ь, -|- ЬЛ, + ... + Ь_ /Х (11.4.10)
12 2
т. е. для полинома Ь(Х), не имеющего корней в круге |Х| cj 1. Последнее
условие, означающее, пак пзвестпо, минимальную фазовость объекта
(11.4.1), будем считать выполненным.
Перейдем к решению соответствующей адаптивной задачи, считая,
что коэффициенты aj, bj в (11.4.1) неизвестны, т. е. неизвестен вектор
а = р1, ..., аг , Ь1 .. ,,ЪГ В этом случае управлением (11.4.6), естест-
венно, воспользоваться нельзя. Будем считать, по-прежпему, что полипом
6(7.) устойчив, а также что |fci| <" В и числа В, sgn 7ц известны. Этими
условиями задано множество объектов, которое составляет класс адап-
тации.
Цель управления запишем в виде
|У.Н]s=C/p, (11.4.11)
где 0 < р < 1, р — заданное число, сохраняя, по-прежпему, требование
устойчивости замкнутой системы, т. е. требование (11.4.4). Целевое не-
равенство (11.4.11) имеет впд (11.1.6). Поскольку для оптимального регу-
лятора infI = С, а из (11.4.11) следует Is^C/p, то целевое неравенство
(11.4.11) означает субоптпмальпость с заданным уровнем р.
Применим метод РЦН. Запишем (11.4.6) в виде
и[7с] = сГ[Л]т(н), (11.4.12)
где
<?[*] = ’J[k + 1 - г,]а[/с- 1] ... и[к + 1 - г2]р, (11.4.13)
Ьрг («) = р аг .. . а —Ъ2... — brJT. (11.4.14)
Согласно общему правилу уравнение для определения п[7с] следует
брать в виде (11.4.12) с заменой неизвестного вектора т(п) его текущей
сценкой т[/с]:
В[7С] =dTi[7c]T[7c]. (11.4.15)
Для определения т[7с] следует составить РЦН. Будем составлять РЦН,
исходя пз целевых неравенств (11.4.11). Используя обозначения (11.4.13),
(11.4.14), запишем уравнение о ъекта управления в виде
у [7с +1] — Уз = bi [и [Л] — с/т[7с]т(а)] + w[k + 1].
Из (11.4.15) имеем
у[7с + 1J — у3 = Ь,Ит[7с]т[7с] — <7т[/с]т(а)] + u>[fc + 1]. (11.4.1G)
Выделяя в целевых неравенствах |у[7с + 1]—у3[ ^С/р зависимость от
т[А], получаем следующие РЦН:
|bi[dT[/c]T — с/т[/с]т(а)] + и>[/с + 1] | С/р. (11.4.17)
Эти неравенства имеют вид (11.3.8), причем [1[7с] = /ц, Ср = В, е[7с] =
= С/р. Применим для их решения алгоритм (11.3.11). В данном случае
в силу (11.4.1G) £[/с] — у[7с + 1] —уз. В качестве pi [7с] в (11.3.9) возьмем
р [7с] = (1 — р) Ср1 = (1 — р) В-1. Алгоритм (11.3.11) примет вид:
т[7с + 1]=
т[7г1, если ]у[7с + 1] — у3|<Ср х,
т [7с] — (1 — р) В~1 (у [7с + 1] — у3) sgn I d [7с][~2 d [7с],
если | у [Тс+ 1] — у°|>Ср~1. (11.4.18)
Для того чтобы этот алгоритм был КСЛ, нужно, чтобы были выполне-
ны условия (11.3.2), (11.3.3). Условие (11.3.3), очевидно, выполнено для
•с* = т (а). Условие (11.3.2) совпадает с условием (11.4.4). Относительно
его обоснования для случая у3 = 0 см. [11.1, § 4.Д.1°]. Для случая у3 ф О
его обоснование совершенно аналогично.
Итак, адаптивное управление описывается формулами (11.4.15),
(11.4.18); значение т[0] может быть любым. Замкнутая система (11.4.1),
(11.4.15), (11.4.18) адаптивна в указанном классе по отношению к цели
управления (11.4.11). Структура адаптивной системы представлена па
рис. 11.4.1.
Если зпачепие 7ц известно, то для решения РЦН (11.4.17) можно
применить алгоритм (11.3.5), который, вообще говоря, сходится быстрее.
Рис. 11.4.1. Структура адаптивной системы
Сравнивая (11.4.17) и (11.3.1), видим, что роль вектора d[/c] в (11.3.1)
играет вектор 61с7[/с]. В данном случае е[7с] = Ср-1, т][7с] = у [/с 4-1] — у-л.
Пусть и — произвольное число, такое, что и > 1, к, > 2р. Положим в
(11.3.5) к[/с] = к, если е [7с] < |ц[Тс] | < хе[7с], и x[fc] = h [7с] | X
X (|ц[/с] | — ре[7с] J-'1, если |ц[/с] [ > хе[7с], Тогда 0 < к' к,[7с]
eg к" < 2, и мы получаем из (11.3-5) такой алгоритм:
T[fc + 1] =
т[А], если \у [к + 1] — уз |< Ср \
г |/с] - (у [7с + 1] - у3) Ь~- | d (Л] J А],
если | у р + 1] — !/31 > хСр-1;
г [/с] — (//[7с-|-1] — у3 —
— С sgn [у [/; + 1]— у3]) Ъ~* | d [7с] Г2 <7 [7с],
если Ср-1 < | У — У*| sg иСр-1.
(11.4.19)
Управление (11.4.15), (11.4.19) адаптивно в ловом классе объектов
(с известным коэффициентом 1>\). Если р< 1/2, то можпо взять х=1,
тогда последний случаи в (11.4.19) отсутствует и алгоритм упрощается.
Выше в качестве р в целевом условии (11.4.11) можно было взять
любое число в интервале 0 < р < 1. Чем ближе р к единице, тем ближе
адаптивная система к оптимальной (спустя время адаптации), но тем
больше, вообще говоря, время адаптации.
Рассмотрим еще один прием составления РЦН— так называемый
способ функциональной идентификации. Этот прием применяется также
во многих других задачах адаптивного управления.
Пусть классом адаптации является множество всех минимально-фа-
зовых объектов (11.4.1).
Способ функциональной идентификации состоит в попытке «как бы»
идентифицировать объект (11.4.1). Мы говорим «как бы», поскольку па
самом деле идентификация объекта в рассматриваемой задаче пе проис-
ходит и, более того,— она невозможна. Действительно, зная все у [7;],
п]7г], определить aj, bj из уравнений (11.4.!) нельзя, поскольку каждое
повое уравнение (11.4.1) (для нового момента 7>) прибавляет и новую
переменную и>[7с]. а ограничение (11.4.2) «пе помогает». Поставим вспо-
могательную ЦУ: попытаемся пайти какие-либо коэффициенты = ац
bj = bj. удовлетворяющие неравенствам
[у [Тс] 4-^у [Тс — 1] + ... +яГ1_гу [7с — г,] —
— Ун [7с — 1]— ...—К. ufk
1 Г 2
411
< Ср-1,
(11.4.20)
где снова 0 < р < 1. Эти неравенства можно рассматривать как РЦП
для вектора
T = R ... \_r ... - Ъ К (11.4.21)
Предположим, что построен КСЛ для решения РЦН (11.4.20). Тогда для
кк* неравенства (11.4.20) будут выполнены, т. е. при к^к* будут
выполнены равенства
У И] + «!>/[*— 1] + ... + «^-177 [7с — гг] =
= \и [7с — 1] -]- ... +^r !« [7с - r2] + w [Тс], (11.4.22)
где «новая помеха» w [7с] удовлетворяет вместо (11.4.2) похожему соот-
ношению
| w [/с] | sg С/р. (11.4.23)
Соотношения (11.4.22), (11.4.23) и означают функциональную идентифи-
кацию: переменные у [7с], и [7с] реального объекта удовлетворяют при
к^к* соотношениям (11.4.22), (11.4.23), похожим па соотношения
(11.4.1), (11.4.2), но с известными коэффициентами о), ь) (при этом нс
утверждается, что а,- = а3, bj = bj).
Управление можпо осуществлять по формуле (11.4.6), в которой
вместо a,, bj берутся их оценки. Тогда при 7с 'У к* будет выполнено.
(11.4.7) с замепой «3, bj па'а,-, Ь}, т. е., в силу (11.4.20),
У [7с] = Уз + w [7с],
а это значит, в силу (11.4.23), что при к~^к* будет выполнено целевое
неравенство (11.4.11).
Окончательные формулы (для уя — 0) приведены в [11.1, § 2.1],
Выше был рассмотрен случай минимального запаздывания в объекте
управления: Ь, 0. Случай, когда bt = 0, ..., bs_[ = 0, bs =г 0, является
более сложным, по и в этом случае решается задача построения субопти-
мальпого адаптивного регулятора (в том же классе адаптации) для любо-
го заданного уровня субоптималыюсти р, 0 < р < 1 [11.1].
§ 11.5. Адаптивные системы с эталонной моделью
Адаптивные системы автоматического регулирования с эталонными
моделями и рядом различных алгоритмов настройки рассматривались
в гл. 10. Здесь системы подобного класса с дискретным временем синте-
зируются па основе метода рекуррентных целевых неравенств. Обозна-
чим оператор сдвига назад па один такт (шаг) через z-1, так что
?~'ж[7--|-1] =£[/,-]. Уравнение линейного стационарного объекта со ска-
лярными входами и [7с], х[7с] и скалярным выходом у [7с] записывается
в виде
a(z-l)y[7c] = (Цг-')н[7с] + c(Z->)^[7c] + /[7с], (11.5.1)
а уравнение модели имеет форму
aM(z_|) уд:[7с] = см(г-1)ж[й].
Помеха / [7с] ограничена по модулю
I/WI
(11.5.2)
(11.5.3)
а в остальном произвольна, a(z_|), b(z“’)i c(z_|)jaM(z_|), cM(z-1)—по
липомы оператора z~':
(11.5.4)
«м (А) = 1 + 2 М = 2 4'Х’-
3=1 3=1
Будем предполагать, что полиномы Ь(к) и а1" (А) пе имеют корней в
области |А| <" 1 (объект (11.5.1) минимально-фазовый), а также что
входное воздействие х[А] ограничено; |х[А] | const.
Коэффициенты полиномов (11.5.4) могут меняться при изменениях
внешних факторов. Таким образом, все или некоторые из этих коэффи-
циентов неизвестны. Задача состоит в построении регулятора (адаптив-
ного), вырабатывающего сигнал а [/с] так, чтобы компенсировать эти
Рис. 11.5.1. Структура
адаптивной системы с
эталонной моделью .
изменения и обеспечить близость (по возможности) выхода объекта к
выходу эталонной модели (см. рис. 11.5.1):
|у[А] -ум[А]| с: С. (11.5.5)
Здесь С — возможно меньшее число. Кроме того, должно быть выполнено
условие устойчивости замкнутой системы
| и [7с] | const. (11.5.6)
Рассмотрим вначале пеадаптивпую задачу, т. е. будем считать, что
все коэффициенты всех полиномов (11.5.4) известны. Легко убедиться
в том, что оптимальным является регулятор
Туг [А] + ... + 6?.н[А — г + 1] — «у/ [7с] — ... — агу [ к — г + 1] +
+ [А] + ... + <уи [А - г + 1] + (у - <) х [А] + ...
...+(сг-с")ж1,с-г+11 = 0’ С11-5-7)
а минимально возможное значение С в (11.5.5) есть С = F. Действитель-
но, при выполнении (11.5.7) у [А] —ум[А] = /[А], т. е. | у [А] —у“[А]|
-С F. Если же (11.5.7) пе выполнено, то у [А] —ум [А] =д[А—1] +/[А],
где q\k — 1] ¥=0и при подходящем выборе /[7с] будет | у [/с] —у "’[7с] | >
> F. Формулу (11.5.7) можпо записать в виде
u[/c] =z'[A-]t", (11.5.8)
где
zT[7c] = [u[7с — 1] ... u[/c — г + 1] j/[7c] ...
... у[к — г + 1] i/M[7c] ... j/u[7c — г 1] х[7с] ... ж [7c — г + 1]],
а т” — постоянный вектор.
Рассмотрим теперь задачу в адаптивной постановке, считая, что не-
которые (или все) коэффициенты полиномов (11.5.4) неизвестны. Цель
управления (ЦУ) задана неравенством
IУ [7с + 1J - Г [7с + 1] | ==£ Fр-, (11.5.9)
где р — заданное число, 0 < р < 1. Должно выполняться требование
(11.5.6), которое также включается в ЦУ.
Обозначая упорядоченный набор всех неизвестных коэффициентов
через т*, выделим зависимость этих полиномов от вектора т*:
а (Л, TJ, Ь(Л, TJ, с(Х, Т«), ам(А, TJ, см(Л, т»). (11.5.10)
Левая часть (11.5.7) представима в виде линейной функции вектора т*:
b1U [ТсЦ- ... = <рт [7с] т* -1- Ф [7с], (11.5.11)
где <р[7с] = <p(z[A])—вектор-столбец, ф [7с] = ф (z[7c])—скаляр, <р[/с] и
‘Г [7с] —измеряемые величины.
Из (11.5.1), (11.5.2) получаем, что для произвольного управления
выполнено
1/ [Тс + 1] - 1/м [7с + 1] - <₽т [7с] т* - ф [7с] = / [Тс + 1]. (11.5.12)
Применим описаппый в § 11.4 способ функциональной идентифика-
ции неизвестного векторного параметра т* в (11.5.12). Рассмотрим сле-
дующие рекуррентные целевые неравенства для векторов т[/с].:
I т/ [7с + 1] — yv[k + 1] — фт[7с]т[7с] — ф[7с] | sg Гр”1 (11.5.13)
(эти неравенства, как и любые РЦН, могут быть и не выполненными в
фиксированный момент 7с). Управление па каждом шаге будем опреде-
лять по оптимальному закону (11.5.7), заменяя в нем вектор т* неиз-
вестных коэффициентов его оценкой — вектором т [7с]. В силу равенств
левых частей (11.5.7) и (11.5.11) значение и [Тс] определяется из соот-
ношения
7>i [Тс] и [7с] + ... = <рг[7с]т[7с] + ф [Тс] =0 (11.5.14)
при условии, что Ь1[/с]^0. (Если ti — известный коэффициент, то
bi [7с] = bi =/=0.)
Для решения РЦН (11.5.13) применим алгоритм (11.3.5):
| т [7с], если | Ц [7с][ < Ер-1;
т [7с ф- 1] = | г pj _ к [д.] j7c] _ р ggn [ /Ц) fp । <р ।/,;] |-2, (11.5.15)
I если | Д [7с][ > Ер-1.
Здесь т] [Л ] = у [А: + 1] — у" [7с 4- 1], 0 < х' < и [Zr] < и." < 2 и параметр
к [7с] выбирается так, что [/с 4-1] =/= 0. Легко видеть, что такой выбор
всегда возможен. Итак, считая, что E>i [0] =4=0, получаем, что все fei [/. ] #=
=#=0, поэтому из (11.5.14) можпо пайти ц[/с]. Из (11.5.12), (11.5.3) и
(11.5.13) следует, что условие (11.3.3) сходимости алгоритма (11.5.15)
выполнено для т [7с] ~= т*. Используя свойства минимально-фазового
объекта и условия |г/“[7с] | const, |ж[/.-] | с'7 const, можпо показать,
что [z[7cj | -'7 const, т. е. выполнено и условие (11.3.2). В частности, вы-
полнено и (11.5.6).
Итак, (11.3.15) —КСА. Поэтому существует такой момент к*. = к* (т*),
что при к Лл к* выполнены все неравенства (11.5.13) и т[7с]= const.
Ио тогда в силу (11.5.14) выполнены и целевые неравенства (11.5.9)
при к ^к*.
Достоинство указанного решения состоит в том, что оно почти пол-
ностью переносится па векторный случай, когда (11.5.1), (11.5.13) —
векторные уравнения.
выходом
§ 11.6. Адаптивная стабилизация
неминимально-фазового объекта
и адаптивное модальное управление
Для неминпмалыю-фазового объекта в настоящее время задачи
адаптации решены лишь с более слабыми, чем субоптимизация, целями
управления. Рассмотрим в простейшем варианте задачу модального
адаптивного управления. Объект со скалярным входом и [Л],
у [Тс] и помехой ш [/с] описывается уравнением
т*) у [7с] = b (z“\ т*) и [7с] -|- /[7с].
Здесь т* —вектор неизвестных коэффициентов полиномов
а (X,, т*) = 14- а1к 4- —, Ъ (Л, т*) = Ъ4- ...
(возможно, по необязательно, что т* — вектор всех коэффициентов
т* = [<Zj ... ar bt ... Ь,.|т).
Помеха /[7с], как и выше, предполагается ограниченной:
|/[А]|<П. (11.6.3)
Предполагается, что полиномы a (А,, т^,), Ъ (Z, т*) пе имеют общих кор-
ней— их результант отличен от пуля: R[a, Ь] =А 0. Задача стабилизации
объекта (11.6.1) состоит в построении регулятора
a(z-')(i[A] =P(z-')y[/c] (11.6.4)
(где а (А) = 14- Аоц 4- • • •> р(А) = A₽i 4- . •. — полиномы), для которого
характеристический определитель
(11.6.1)
(11.6.2)
g(X) =
а Ь
(11.6.5)
устойчив, т. е. пе имеет корпей в области |А| 1. Тогда система (11.6.1),
(11.6.4) устойчива. Задача модального управления состоит в построении
управления, удовлетворяющего условию (1'1.6.5) с заданным (обычпо
устойчивым) полиномом g(X). Если В[а, Ь] =/= 0, то задача модального
управления разрешима и сводится к решению системы линейных урав-
нений для а,- и получаемой из (11.6.5) приравниванием коэффициентов
при одинаковых степенях Полиномы о. (?.), [3(2.) находятся однозначно
из (11.6.5) при выполнении одного из следующих двух условий:
deg а < deg b, deg ₽ < deg а, (11.6.6)
где deg а — степень полинома а. Если выполнено неравенство
deg g < deg а + deg Ь, (11.6.7)
то каждое из условий (11.6.6) приводит к одной и той же паре полино-
мов а, р (см., папример, [11.1, лемма 3.1.1]). Обозначим
[а, Р]=Л[а, Ь] (11.6.8)
решепие (11.6.5) при заданном g — g(X).
В задаче адаптивного модального управления вектор т* предпола-
гается неизвестным. Поэтому формулой (11.6.8) воспользоваться нельзя.
Поставим задачу функциональной идентификации объекта, т. с. задачу
определения такого вектора т = t (р), что при к д? к* (р) выполнено
а(г т)у[/с] = 6(z~\ T)u[fc] + /[fc], (11.6.9)
|/[/с]| Cfp-1, (11.6.10)
где 0 < р < 1 — заданное число. Ясно, что при р, близком к единице,
соотношения (11.6.9), (11.6.10) «почти те же», что и (11.6.1), (11.6.3), по
они имеют то преимущество, что вектор т известен. Далее, поставим за-
дачу модального управления для объекта (11.6.9), т. е. задачу определе-
ния такого регулятора (11.6.4), что при заданном устойчивом полиноме
g(X) выполнено (11.6.5), где а = а(Л, т), Ъ = Ъ[к, т). При этом без огра-
ничения общности будем считать, что g(0) = 1.
Итак, в качестве цели управления возьмем указанные два требова-
ния. Очевидно, что сформулированная задача включает в себя и задачу
адаптивной стабилизации, состоящую в том, что указанные условия вы-
полнены для какого-либо, пе заданного заранее, устойчивого полино-
ма g(X,).
Поставленную задачу будем решать в предположении, что пзвестпа
выпуклая область @ в пространстве {т}, содержащая неизвестный век-
тор т„ и такая, что
Н[а(А., т), b(?v, т)]=^=0 при те@. (11.6.11)
Это предположение ограничительно. В связи с этим отметим, что описан-
ный ниже метод может быть применен и для случая, когда этого пред-
положения пет, но для этого случая пет доказательства сходимости
алгоритма.
Перейдем к решению поставленной задачи. Класс адаптации опреде-
лен заданием степеней deg a, deg Ъ (а значит, и размерности вектора т)
и условием TeG. Пусть т[7с] е® — Оценка в момепт к неизвестного век-
тора т*.Согласно общему правилу управление возьмем в виде (11.6.4)
с заменой неизвестного т* па т[/с]. Иначе, будем определять а(Л, т[7с[),
₽(Х, т[/г]) из- (И.6.5), где а = а(Х, т[/с]), 7> = 7>(А, т[/с]) при наличии
первого условия (11.6.6), т. е.
[сс(А, т[А-]), ₽(Х. т[Л])] = L[a(A, т[7с]), ₽(Х, т[7с])]. (11.6.12)
Так как а(0, т[/с]) =1, Ь(0, т[/>]) =0, g(0) =1, то из соотношения
(11.6.5), равносильного соотношению (11.6.12), имеем а(0, т[/с]) =1. По-
этому управление гг[/г] однозначно находится из уравнения
a(z~‘, т[7с])п[Л] =P(z-1, т[/с]) у [Тс]. (11.6.13)
Для определепия вектора т[7с] составим РЦН из требования функ-
циональной идентификации объекта (11.6.1):
т[7с])у[7с] — b(z,~l, т[/с])гг[7с] | Fp-'. (11.6.14)
Здесь 0 < р < 1 — заданное число. Чем блпгке р к единице, тем лучше
функциональная идентификация, но тем дольше, вообще говоря, будет
сходиться сформулированный ниже алгоритм.
Выражение под знаком модуля в (11.6.14), которое обозначим через
ц[/с], линейно зависит от вектора т [/,], т. е. представимо в виде
ц[7с] =a(z_|, т[7;])у[А’] —T[/c])w[fc] =
= ст[/с]т[7с] + 7[fc], (11.6.15)
где с [7г], 7 [7с] выражаются через у [7с], ..., у [Тс — г], к [Тс — 1], ...
..., и [А-— s] (здесь г = deg a, s = deg Ъ). Поэтому векторы т[/с] опреде-
ляются алгоритмом «полоска» (см. § 11.3). Условие (11.3.3) сходимости
выполнено в силу (11.6.3). При этом р в (11.3.3) совпадает с р в (11.6.12).
Условие (11.3.2) в данпом случае сводится к неравенствам
IV1Л] I const, | и [7с] | const. (11.6.16)
Так как в пашем случае имеется дополнительная информация Tte@
то алгоритм «полоска» возьмем в сочетании с операцией Pg проектиро-
вания па выпуклую область S. Используя, например, (11.3.5) (или [11.1],
теорема 2.1.1 иа с. 57), получаем такой алгоритм:
т [7с 1] =
т [7с], если | ц [7с] [ < Fp-1,
pg [^[7.]— ц [А] с [7с] ] с [7с] [-г], если | ц |/с] | > и [7с] е [7с],
I р@ К[^1- США] — F sgn. тг) [Л-]) c[/c] I c[7c]|—2],.
I если Fp-1 < [ T] [fc] [ [fc] с [7с].
(11.6.17)
Здесь и[/с] —произвольные числа такие, что к[7с] 1, к[7с] к > 2р.
Можпо, конечно, использовать и другие алгоритмы для решения РЦН
(11.6.14). Взяв t[OJ е ®, получаем, что все т[А| е ®. Поскольку выпол-
нены условия (11.3.2), (11.3.3) конечной сходимости, то (11.6.17)—КСА:
существует такой момент Аф, что при к 1с* выполнены все неравен-
ства (11.6.14) и т[А] = т = const.
§ 11.7. Адаптивное управление нелинейными
статическими объектами
Рассмотрим статический объект управления, описываемый урав-
нением
Ф (у [*], и [/с], т*. w [А]) = 0, (11.7.1)
где w [А] е (В”1 — вектор измеряемых внешних воздействий; w [А] е
е= IB™2— вектор управляющих воздействий; у [А] е (В 13 — векторный ВЫ-
Пд
ход системы; т* s !В — вектор неизвестных параметров ооъекта. Век-
торная функция Ф имеет непрерывные производные по всем аргументам.
Предполагается известным выпуклое замкнутое множество (Я, содержа-
щее неизвестный вектор т*, характеризующее априорную информацию
о неизвестных параметрах. Для учета неконтролируемых возмущений,
возможной неточности математической модели объекта и помех измере-
ний будем считать, что равенство (11.7.1) выполняется с некоторой
погрешностью:
Ф (У [А], и [А], т*, w [А]) = в [А], (11.7.2)
где
|е|.А]||<е, (11.7.3)
и е* > 0 — верхняя граница нормы погрешности. Предполагается, что
уравнение (11.7.2) разрешимо относительно у [А], в частности, что раз-
мерности векторов у [А] и Ф совпадают. Будем считать, что решения
уравнений (11.7.1) и (11.7.2) мало отличаются для любых достаточно
малых в*, т. е.
IIУ [А] У [А] || < (11.7.4)
где у[А], у [А]—решения уравнений (11.7.1) и (11.7.2) соответственно.
Постоянная Ко не зависит от и,*, те® и переменных ip [А], у [А], меня-
ющихся в заданных ограниченных областях. Это будет иметь место, если
в рассматриваемой области переменных.
Пусть цель управления состоит в приближении некоторых компо-
нент выхода объекта к заданным значениям:
Йи)[А]-щ»з[А]11^б. (И-7.6)
Здесь у [А] = [г/*) [А] [А]]т, щ))3 [А] — вектор заданных значений
векторного выхода г/())[А], а у(2)[А] — вектор дополнительных выходных
переменных, чьи значения пе заданы. Конечно, пе исключаются случаи,
когда заданы все выходные переменные у[А] = и когда г/(1)3[к] =
= const. Ниже излагаются результаты [11.15].
При известном векторном параметре т* управление w[/c] должно
определяться по заданным значениям P(i)3[A]. Поэтому предполагается
разрешимым относительно н[А], у<2)[А] уравнение
ф 0Л1)з 1/г1> У(2) И. и [*]• г*> ^1А’])=0 (11.7.7)
при любых те® и любых выходных воздействиях гр [А’] из заданной
ограниченной области. Соответствующее решение
ы [А] = U [у(1)3 [Л], т*. w [А]) (11.7.8)
определяет пеадаптивпое управление, которое используется при извест-
ном значении т*. Из (11.7.4), (11.7.7) и (11.7.2) следует, что при этом
выполнена цель управления (11.7.6) с б = Л'^е*.
Перейдем к решению адаптивной задачи при неизвестном вектора
т*. Пусть б = е*7<0 и т[/с] —текущая оценка вектора т*. Согласно об-
щему правилу управление и [А] будем находить из соотношения (11.7.8)
с замепой т* на т[А], т. е. пз уравнения
ф(г/(1)з[А], у(2)[А'], и[А], т[А], 1р[А-])=0. (11.7.9)
Для определения оценок т[А] составщм РЦП
ПФ(г/[А’], к[Л], т[/с], ю[А])|| <^ е, (11.7.10)
где е >8*. Смысл РЦН (11.7.10) состоит в функциональной идентифика-
ции объекта. Предполагается выполненным условие применимости мето-
да— выпуклость областей (11.7.10) для т[А] в пространстве {т}. В при-
ложениях часто функция Ф линейно зависит от параметра т, тогда усло-
вие выпуклости выполнено. В общем случае алгоритм определения т[А]
имеет вид [11.1]:
т[/с-|- 1] =
(т [А], если || ф [7г] || = ||Ф (у [/с], и [7с], т [7с], w [/с])ц < в,
~[р@{т[А]—уф [7c]TVd> [Л] | ц?Ф |7с] Г2}, если II ф ИП1> е- (Ц.7.11)
Здесь Pgj — оператор проектирования на @, V = б/дт:
Г й ]
W W = 77 ф (У И1- “ 1/£1 • т- !У1М)
и
0 < у < 2(1 — е*е-1).
Основное условие сходимости алгоритма — существование точки
во всех областях (11.7.10)—выполнено согласно (11.7.2) и (11.7.3). Точ-
ное условие сходимости — существование шара || т — т* || б* во всех
областях (11.7.10) — должно быть проверено для каждого конкретного
случая. 0по заведомо выполнено в тех практически часто встречающихся
случаях, когда величины ||VФ[/г] |1 ограничены. Легко показать, что при
выполнении этого условия формулы (11.7.9), (11.7.11) определяют адап-
тивное управление.
Сделаем некоторые замечания по применению описанного метода.
Если трудно написать формулы, определяющие явно оператор I’g, то
операцию проектирования В® в (11.7.11) можно опустить. Алгоритм
(11.7.11) по-прежнему останется конечно сходящимся, по будет сходить-
ся медленнее. Часто область & в пространстве {т}, т - [т., ..., т„]г,
задается неравенствами а3 tj рз-. Тогда формулы для Р® очень
простые.
Прп практическом применении описаппого метода обычпо добива-
ются, чтобы компоненты Ф линейно зависели от неизвестных парамет-
ров io, ... тп. При этом, уравнение объекта в неявной форме (11.7.1) ока-
зывается часто предпочтительнее уравнения, разрешенного относительно
выходных переменных, т. с. уравнения вида у (Л] = Y (и [Zc], т*, w [Z J).
Действительно, часто удается модель объекта записать в виде (11.7.1),
где Ф линейно зависят от т, по при этом У будет нелинейной функцией т.
В случаях, когда У оказывается линейной функцией т*, можно взять
в качестве повои функции Ф функцию у [£] — У (и [Л], т*, w [Л:]); тог-
да предыдущие формулы упрощаются.
Описанный метод проиллюстрирован па примере алгоритма адаптив-
ного управления стендом для испытания теплообменного аппарата
[11.15].
§ 1 i .8. Стохастические линейные задачи
с минимизацией квадрата шых функционалов
Объект управления описывается скалярным уравнением
a(z~') г/[/г] = 6(z_|)u[A] + с(z—l)[fc], (11.8.1)
где ie[A]—последовательность независимых случайных величин та-
кая, что *)
Е [иг[/> ] ] = О, Е [гс [/с] w [s]] == 6,.«. (11.8.2)
В (11.8.1) а(Л), Ь(Л), с(/.) — полиномы; а(0) = 1, d(0) = 1, с(Л) —устой-
чивый полипом.
Пусть Q(у, u) 0 — квадратичная фюрма
u) = Ql}y2 + 2(?12</п + few2, (11.8.3)
неотрицательная при всех значениях у и и (т. е. (?п О, С22 О,
<?и+<?22>0).
*) Заметим, что независимость значений ггг[7с] существенна, ее нель-
зя заменить некоррелированностью. В случае, если гу[7с] лишь пекорре-
лировапы, оптимальный регулятор может быть нелинейным.
Б пеадаптивпой постановке задача состоит в минимизации функ-
ционала
т
J = lim (1/П 2 EK>(j/|Al, Mp-l])] = lim E[<? (</(*], u[7c-l])]
T->oo k-0 k~*oo
(11.8.4)
в классе управлений, таких, что выполнено неравенство
lim Е [у2 [А] + к2 ]А]1 < °°. (11.8.5)
k—оо
а это озтгачает, что замкнутая система устойчива.
Описанная задача оптимизации имеет решение, причем оптималь-
ным является линейный регулятор (11.6.4) (где а(7.), [5(/,)—полиномы,
<х(0) = 1). Формулы для определения полиномов «(Л), Р(Л) приведены
в [11.1, § 3.3J. Пусть г = deg a, q = deg р — степени полиномов а и р.
Формула (11.6.4) означает, что наблюдением z[A-] в задаче является
г [А] = [{/[Ч ••• 9.1+ —9+1] »[А—1] ... и[к — r-Ь 1]]т. (11.8.6)
Перейдем к постановке задачи в адаптивном варианте. Предпола-
гается, что неизвестны все (или некоторые) коэффициенты полиномов
я, Ь, с в (11.8.1). Пусть т— переменный вектор неизвестных коэффици-
ентов и т* —истинное (неизвестное) значение вектора т. Предполагает-
ся известной выпуклая замкнутая и ограниченная область & в простран-
стве {т}, содержащая вектор т* и такая, что R(a, 6)#= 0 при
Таким образом, при т s & полиномы а и b нс имеют общих корней.
Указанными условиями задан класс адаптации. Кроме того, помеха
предполагается ограниченной:
|ю[А] | sSC, (11.8,7)
и постоянная С известна. Цель управления в данной задаче по-прежпе-
му состоит в минимизации функционала (11.8.4) при наличии условия
(11.8.5).
Обозначим через аоп(А. т), рОп(А, т) полиномы, определяющие опти-
мальный регулятор для объекта и помехи с векторным параметром т.
Пусть т[/с]—оценка в момент к неизвестного вектора т*. Алгоритм
ищется в виде
aOn(z-1, т[/г])и[А-] =₽nn(z_I, т[7с])у[/г] + /[А] (11.8.8)
для моментов А, которые будут указаны ниже. Здесь /[/с] = 1[к, ы| —
так называемый пробный сигнал со свойствами: I [Л] и u>[s] независимы
при любых к и s; /[А] п 7 [s] независимы при к #= я, а также
Е {/[А]] = О, Е I/2 |А]] С (1п к)~\ lim Е [74[А]] =0. (11.8.9)
Последние два условия (11.8.9) означают, что пробный сигнал убывает
во времени, по не слишком быстро. Формула (11.8.8) означает, что сен-
сор (вектор наблюдения) в задаче адаптации расширяется по сравнению
с (11.8.6) за счет добавления пробного сигнала:
z[k] = [;/[/,] ...у[А — ? + 1] »[А—1] ...и[7с — г+1] 7[А, со]]т. (11.8.10)
Пусть g(X)—заданный устойчивый полипом, такой, что выполнено
'(11.6.7). Обозначим через а(Х, т), р(X, т) полиномы, определяемые одно-
значно из соотношения (11.6.5) и первого условия (11.6.6), где а — а(Х, т),
Ь = Ь(к, т), т е @. Наряду с (11.8.8) будем использовать алгоритм
a(z-1, т[Л])п[Х] =P(z-1, т[7с])у[X], (11.8.11)
называемый стабилизирующим. Этот алгорим используется для момен-
тов к, когда нарушено условие
h
(i/fc) 2 Is! + “2 Is!) < М< (11.8.12)
8=0
где М — заданное достаточно большое число. Для прочих моментов 7с
используется алгоритм (11.8.8).
Настройки векторных параметров т[7с] и т[7с] осуществляются по-
средством соответственно метода РЦН и метода наименьших квадратов
(МНК). Алгоритмы МНК используются для идентификации объекта,
алгоритм с РЦН и алгоритм (11.8.11) используются для обеспечения
сходимости алгоритма идентификации.
Окончательные формулы приведем для случая, когда c(z-1) = 1
и неизвестен векторт* = [а* • •• ад Ь* ... всех коэффициентов поли-
номов а(Х), 6(Х) в (11.8.1). Уравнение (11.8.1) запишем в виде
у [Тс] = т’г [Тс] + w [Тс], (11.8.13)
где z[Tc] = [у[7с — 1] ... (/[А — ?]п[7с — 1] ... и[7с — ?]]т. В моменты /г,
для которых выполнено условие (11.8.12), т[7с| = const. В момент к,
когда условие (11.8.12) нарушено, определяем [7с + 1] по алгоритму
«полоска» (11.3.6) для РЦН
|V[Tc]z[Tc] - у[Тс] | < С'(1 + e||z[7c]||), (11.8.14)
где С > 2С и е > 0 —подходяще выбранное малое число. Вектор т[7с]
определяем для всех моментов времепи по методу МНК с последующим
проектированием па область &:
т Р + Л = Р«>{г Р1 + V [/с1 z Ь [/с1 — тТ[/с] z
& (11.8.15)
(у [Тс])"1 = (у [Тс - I])-1 + Ц z [Тс] ||2.
Но для управления (посредством алгоритма (11.8.8)) используются
значения т[Тс], как уже сказано выше, лишь в моменты выполнения ус-
ловия (11.8.12).
Можпо показать, что с вероятностью единица существует такой мо-
мент к*, что при /с^Тс* выполнены условия (11.8.12) (и следовательно,
управление осуществляется регулятором (11.8.8)), при 7с->оо имеет
место т [X]-► т*, а также что выполнено (11.8.5). При этом значение
функционала (11.8.4) для указанного управления минимально*):
J* = inf J.
*) Приведенные в этом параграфе результаты принадлежат В. Н. Фо-
мину £11.16].
Отметим, что основная сложность описанной задачи связана с от-
сутствием предположения о минимальной фазовости объекта. Для ми-
пималыю-фазового объекта задача адаптивной оптимизации с функ-
ционалом
J =Tim Ei/2[A-]
/<-*оо
решена другим способом в [11.17].
§ 11.9. Заключительные замечания
Метод РЦП был выше проиллюстрирован па примере решения наи-
более простых задач адаптивного управления динамическими объекта-
ми. В частности, линейные объекты, рассмотренные выше, имели мини-
мальное запаздывание. Указанным методом решены также задачи для
произвольного запаздывания в управлении и в наблюдении [11.1, 11.5].
Эти задачи существенно сложнее. Выше предполагалось, что помеха
ограничена (| w [А] | С) и что постоянная С известна. Относительно
случая, когда постоянная С неизвестна, см. [11.18]. Предположение об
ограниченности помехи может быть заменено другими, одпако какие-
либо априорные сведения о помехах должны быть известны. Все описан-
ные выше задачи решаются также и при других видах помех. Как сле-
дует из изложенного, линейность объекта управления пе существенна
для применения метода РЦН, существенна лишь линейная зависимость
функций, определяющих уравнения объекта, от неизвестных парамет-
ров. В общем случае области неизвестных зпаченпй параметров должны
быть выпуклыми.
Решения задач адаптивного управления, аналогичных рассмотрен-
ным выше, но для векторных объектов, имеются в [11.19]. В [11.20] по-
лучены оценки переходных режимов при адаптивном управлении в за-
даче § 11.4. Ряд задач адаптации других типов, отличных от описанных
выше и решаемых методом РЦН, рассмотрен в [11.4—11.6, 11.14, 11.21].
Относительно применения метода РЦН в задачах робототехники см.
[11.22—11.32]. В [11.33—11.35] описаны некоторые практические задачи
адаптивного управления, решенные с применением метода РЦП.
Выше мы ограничились дискретными объектами, т. е. системами
управления для дискретного времени. Задачи адаптивной стабилизации
для непрерывного времени решаются обычно даже более просто. Как
для дискретных, так и для непрерывных объектов наиболее труднымп-
являются задачи адаптивной оптимизации. Многие такие задачи оста-
ются порешенными.
ГЛАВА 12
СИСТЕМЫ ЭКСТРЕМАЛЬНОГО РЕГУЛИРОВАНИЯ
Среди подклассов адаптивных систем автоматического управления,
приведенных в гл. 10, указаны системы экстремального регулирова-
ния (СЭР).
§ 12.1. Общие понятия
Экстремальные регуляторы были предложены еще в начале двад-
цатых годов и теоретически обоснованы в сороковых годах [12.1, с. 351—
355; 12.2]. Эти регуляторы предназначались для поддержания на экст-
ремальном уровне некоторого показателя функционирования реального
объекта, обладающего естественной экстремальной зависимостью ука-
занного показателя от входной величины (входных величин) объекта.
Экстремальный регулятор и объект экстремального регулирования со-
ставляют СЭР. Характерными для СЭР являются априорно неизвестные,
обычно относительно медленные трансформации (дрейф) характеристик
объекта. Поэтому СЭР с самого пачала развивались как поисковые си-
стемы, в которых недостаток априорной информации восполнялся за
счет текущей информации, получаемой в виде реакций объекта па ис-
кусственно вводимые поисковые (пробные, тестовые) воздействия. Прав-
да, существуют объекты, в которых значение экстремального показателя
(выходной величины) удается измерять одновременно в нескольких точ-
ках пространства входных величин. Например, реакцию колебательного
контура с резонансной характеристикой можно одновременно измерять
на двух и более частотах. Указанную возможность одновременного из-
мерения выходного экстремального показателя в разных точках прост-
ранства входных сигналов иногда удастся получить за счет моделирова-
ния объекта экстремального регулирования. Во всех этих случаях могут
применяться беспоисковые или дифференциальные экстремальные
регуляторы [12.3]. Одпако в целом отмеченная возможность — отно-
сительно редкое исключение, и беспоисковые СЭР здесь по рассмат-
риваются.
В указанном понимании СЭР предполагается, что экстремальный вы-
ход объекта доступен для непосредственного измерения. Как это обычно
бывает, специалисты в области экстремального регулирования стремятся
расширить границы своей области. К СЭР часто относят системы, в ко-
торых экстремальный показатель пе измеряется непосредственно, а вы-
числяется па основе измерения некоторой совокупности выходных ве-
личин объекта.
На рис. 12.1.1 приведена соответствующая блок-схема СЭР. Вектор
управляющих воздействий обозначен через и; вектор возмущений, дей-
ствующих на объект,— через ц; вектор состояния ооъекта — через х.
В СЭР входят устройство формирования экстремального показателя (це-
Рис. 12.1.1. Структура СЭР с вычис-
лением экстремального показателя
левой функции Q), устройство
организации поиска и органы
управления. Устройство органи-
зации поиска включает в себя эле-
менты логического действия.
В зависимости от изменения Q(t)
оно вырабатывает командные си-
гналы, иоступающие иа органы
управления, необходимые для
приближения системы к экстре-
муму показателя Q.
Система действует следую-
щим образом. В а входы объекта
подаются поисковые (пробные)
воздействия и оценивается реак-
ция па них объекта, проявляю-
щаяся в изменении Q(t). Далее определяются те воздействия и (г),
которые приближают к экстремуму Q. Зателг сигналы на входе объекта
изменяются в нужную сторону, т. е. прикладываются рабочие
воздействия. Далее снова па входы объекта подаются поисковые воз-
действия, определяются те нз них, которые приближают Q к экстремуму.
Затем прикладываются рабочие воздействия к объекту и т. д. После про-
хождения значения иж, соответствующего экстремуму показателя Q,
происходит реверс па входе объекта и начинаются колебательные дви-
жения системы вокруг точки экстремума. Иногда поисковые и рабочие
воздействия производятся в одно н то же время (т. е. совмещаются).
В качестве поисковых (пробных) сигналов в некоторых случаях могут
использоваться случайные воздействия (флуктуации) искусственного
или естественного происхождения.
Возможно дальнейшее обобщение понятия СЭР, когда вместо целе-
вой функции Q рассматривается функционал, вычисляемый, в частности,
па прогнозируемом движении объекта. При таком обобщении СЭР ста-
новятся неразличимыми с поисковыми системами оптимального управ-
ления вообще (см. гл. 8, 10).
12.1.1. Типы систем экстремального регулирования. Предложено и
реализовано большое количество СЭР, отличающихся по принципу дей-
ствия, устройству, конструкции и сложности. Большинство из этих СЭР
разработано еще до появления управляющих ЦВМ, микропроцессорных
вычислителей. Поэтому опи ориентированы па аналоговую и релейную
технику. Некоторые из этих СЭР достаточно совершенные и рекомен-
дуются для цифровой реализации.
На рис. 12.1.2 в качестве простого примера показана структурная
схема часто встречающихся иа практике одномерных систем экстремаль-
него регулирования с сигнум-реле. Зависимость выхода объекта от его
входа и имеет экстремум — максимум. С помощью датчика информации,
о состоянии объекта подается сигнал Q на устройство организации по-
иска. Последнее состоит из сигнум-реле, реагирующего на знак изме-
нения Q и срабатывающего при пе-
реходе изменения Q от увеличения
к уменьшению, и устройства логиче-
ского действия — триггера, изменя-
ющего знак сигнала q на обратный
при каждом срабатывании сигнум-
реле. Орган управления представля-
ет собой двигатель, перемещающий-
ся в ту или иную сторону, в зависи-
мости от знака сигнала q.
При включении системы сигнал
и на входе объекта изменяется с по-
стоянной скоростью. Если при этом
происходит увеличение Q, то такое
движение допускается. В случае, ес-
Рпс. 12.1.2. Пример схемы одно-
мерной СЭР
ли происходит движение в сторону удаления от экстремума, то Q умень-
шается, срабатывают сигнум-реле и триггер, знак q меняется па обрат-
ный, изменяется направление скорости и. При этом устанавливается дви-
жение, соответствующее приближению системы к экстремуму. После
прохождения точки экстремума устанавливается режим колебаний сис-
темы вокруг точки экстремума с некоторой амплитудой.
Основным в классификации экстремальных систем является их де-
ление па типы по способам поиска экстремума: с запоминанием экст-
ремума; с измерением производной; шагового (импульсного) типа; не-
прерывного действия с модулирующими воздействиями.
Экстремальные системы можно оценить по их помехоустойчивости
и’ по качеству регулирования. К показателям качества относят время
поиска (быстродействие), «потерн на рысканье» (вызываемые тем,
что в окрестностях экстремума обычно происходят установившиеся
колебания), а также амплитуды колебаний па входе в объект и па
его выходе.
В некоторых системах применяют устройства для их самовыключе-
ния после достижения экстремума, причем включение системы в ре-
жим поиска происходит пли через заданные промежутки времени, или
осуществляется автоматически при изменении выходной координаты.
12.1.2. Система с запоминанием экстремума. В СЭР с запоминанием
экстремума на сигнум-реле подается разность между текущим значени-
ем выходного сигнала объекта п его значением в предыдущий момент
времени.
Структурная схема СЭР с запоминанием экстремума представлена па
рис. 12.1.3, а. Выходная величии а объекта О со статической характери-
стикой Q — /(и) подается па запоминающее устройство ЗУ экстремаль-
ного регулятора. Рассмотрим случай максимума. Запоминающее устрой-
стно такой системы должно фиксировать только увеличение входного си-
гиала, т. е. запоминание происходит только при увеличении Q. На
уменьшение Q запоминающее устройство не реагирует. Сигнал с запо-
минающего устройства непрерывно подается на элемент сравнения ЭС,
где сравнивается с текущим значением сигнала Q. Сигнал разности
Q-Qзап с элемента сравнения поступает па сигнум-реле СР. Когда раз-
ность Q — ^зап достигает значения зоны нечувствительности Д(1и сиг-
нум-реле, оно производит реверс исполнительного механизма ИМ, кото-
рый воздействует па входной сигнал и объекта. После срабатывания
сигнум-реле запомненное устройством ЗУ значение ()зап сбрасывается,
и запоминание сигнала Q начинается снова.
Одни из вариантов схемы ЗУ с ЭС приведен па рис. 12.1.3,6. На-
пряжение г’вх, пропорциональное значению выходного сигнала Q объекта,
Рис. 12.1.3. Одномерная СЭР с запоминанием экстремума
подается па запоминающий конденсатор С через диод Д. Диод шунтиро-
ван замыкающим контактом сигнум-реле. Этот контакт замыкается при
срабатывании сигнум-реле, т. е. при реверсе исполнительного механиз-
ма. При увеличении iw диод пропускает входное напряжение, и напря-
жение па конденсаторе С равно пг,х. При этом потенциалы точек А и ZJ
схемы равны (падением напряжения па диоде Д пренебрегаем), и на-
пряжение ГцХ равно пулю. При уменьшении vBK (уменьшении выходного
сигнала Q объекта) потенциал точки В становится больше потенциала
точки А — диод запирается. Появляется напряжение па выходе схемы.
Таким образом, выходное напряжение пропорционально разности между
текущим значением Q и его значением (Дат:, достигнутым в предыдущий
момент времени. Когда Д()Пых превысит зону нечувствительности сигнум-
реле, произойдет срабатывание сигнум-реле и реверс исполнительного
механизма. При этом контакт КСр кратковременно замкнется и потен-
циалы точек А и Б сравняются — произойдет сброс запомненного зна-
чения Q. После этого конденсатор С запомнит текущее значение Q,
и начнется новый цикл работы схемы.
Системы с запоминанием экстремума имеют исполнительные меха-
низмы с постоянной скоростью перемещения, т. е. du/dt = ±к\, где
ki = const. В зависимости от сигнала сигнум-реле исполнительный ме-
ханизм меняет направление перемещения.
12.1.3. ОдпомсрЕ1ая система с управлением по градиенту. Такие СЭР
используют то свойство экстремальной гладкой статической характери-
стики, что производная dQ/du равна нулю при значении входного сигна-
ла объекта и — иик.
Структурная схема одной из таких СЭР приведена па рис. 12.1.4.
Значения входного п выходного сигналов
дифференциатора Д, и Д2, па выходе
которых получаются сигналы соответст-
венно du/dt и dQ/dt. Сигналы производ-
ных поступают па делительное устрой-
ство ДУ. На выходе ДУ получается си-
гнал dQ/du, который подается па усили-
тель У С КОЭФФИЦИЕ НТОМ усиления й2.
Сигнал с выхода усилителя поступает
на исполнительный механизм ИМ с пе-
ременной скоростью перемещения, зна-
чение которой пропорционально вы-
ходному сигналу усилителя и. Коэф-
фициент усиления ИМ равен кь
объекта О подаются па два
Рис. 12.1.4. Одномерная СЭР
с управлением по градиенту
Если статическая характеристика
объекта Q — f(u) имеет форму парабо-
лы Q — —к. и'-, то СЭР описывается ли-
нейными уравнениями (прп отсутствии
возмущений), так как dQ/du =
= —2ки, а остальные звенья системы линейны. Логическое устройство
для определения направления движения к экстремуму в такой системе
не применяется, так как опа чисто линейна и в пей, казалось бы, зара-
нее известно значение экстремума (поскольку dQ/du — 0 прп и — 0).
Описанная система обладает рядом недостатков, которые делают ее
практически малопригодной. Во-первых, при du/dt-^-G производная
dQ/dt также стремится к нулю — задача отыскания экстремума стано-
вится неопределенной. Во-вторых, все реальные объекты обладают инер-
цией, поэтому необходимо делить друг па друга пе одновременно заме-
ренные производные dQ/dt и du/dt, а сдвинутые ио времени па время
задержки сигнала в объекте, что выполнить сложно.
Кроме того, такая система теряет работоспособность при сколь угод-
но малом дрейфе статической характеристики.
12.1.4. Система с измерением производной по времени. Структурная
схема такой СЭР показана на рис. 12.1.5.
В этой системе дифференцируется только выходной сигнал объекта,
который подается па сигнум-реле СР. Поскольку при переходе системы
Через экстремум знак dQ/dt изменяется, то для отыскания экстремума
нужно реверсировать ИМ, когда производная dQldt станет отрицательной
и превысит зону нечувствительности сигнум-реле.
Система, реагирующая на знак dQ/dt, по принципу действия близка
к шаговой СЭР, по менее помехоустойчива.
12.1.5. Система шагового типа. Структурная схема шаговой СЭР по-
казана па рис. 12.1.С. Измерение выходной величины объекта Q в систе-
ме происходит дискретно (за датчиком выхода объекта имеется им-
пульсный элемент ИЭ1), через определенные промежутки времени At.
Рис. 12.1.5. СЭР с измерением
производной dQldt
Обозначим значения Q в момепт времени t = n\t через Qn- Значения Q.,
подаются па запоминающее устройство ЗУ (элемент запаздывания). За-
поминающее устройство подает па элемент сравнения ЭС предыдущее
значение Qn_\. На ЭС одновременно поступает Qn- На выходе элемента
сравнения получается сигнал разности &Qn = Qn — Qn-i-
Итак, на сигнум-реле в шаговой СЭР подается сигнал, пропорцио-
нальный приращению AQ выхода объекта за отрезок времени At. Если
AQ > 0, то такое движение допускается сигпум-реле, если Д(? < 0, то
сигнум-реле срабатывает и меняет направление изменения сигнала
входа и.
Между сигпум-реле СР и исполнительным механизмом ИМ включен
еще один импульсный элемент ИЭ2 (работающий синхронно с ИЭ|), ко-
торый осуществляет периодическое размыкание цепи питания ИМ. Ис-
полнительный механизм в подобных СЭР обычно осуществляет измене-
ние входа и объекта шагами па постоянное значение Ди.
12.1.6. Система со вспомогательной модуляцией (синхронным детек-
тированием)- В некоторых работах такие СЭР называются системами с
непрерывным поисковым сигналом или просто непрерывными система-
ми экстремального регулирования [12.4].
В этих системах используется свойство статической характеристики
изменять фазу колебаний выходного сигнала объекта по сравнению с фа-
зой входных колебаний объекта на 180° при переходе выходного сигнала
объекта через экстремум. Можпо также интерпретировать работу этих
СЭР как определение градиента посредством поисковых колеоапий и
синхронного детектирования.
Структурная схема одномерной СЭР представлена на рис. 12.1.7.
Входной сигнал объекта О с характеристикой Q = /(и) при гармониче-
ском поисковом сигнале представляет собой сумму двух составляющих
и = uo(t) + a sin ы1, где а и со—по-
стоянные величины. Составляющая
и sin cot является поисковым сигналом
и вырабатывается генератором Г.
Составляющая u0(t) является рабочим
движением. При отклонении от экстре-
мума малая переменная составляющая
a sin cot входного сигнала объекта вызы-
вает появление переменной составляю-
щей той же частоты со = 2л/Т в выход-
ном сигнале объекта.
Если и = иоп, то па выходе объек-
та появляются колебания двойной час-
тоты 2со, а коле Сания частоты со отсут-
ствуют (если статическая характеристи-
ка вблизи экстремума отличается от
параболы, то па выходе объекта могут
Рис. 12.1.7. Пример одпомерпой
СЭР со вспомогательной моду-
ляцией (синхронным детекти-
рованием)
появиться колебания с частотой
больше со).
Составляющая величины Q, имеющая частоту со, выделяется поло-
совым фильтром Фь Назначение фильтра Ф, состоит в том, чтобы не
пропускать постоянную или медленно меняющуюся составляющую и
составляющие второй и высших гармоник. В идеальном случае фильтр
должен пропускать только составляющую с частотой со. Фильтра Ф[
может и не быть, но в этом случае условия работы последующих элемен-
тов усложняются.
Выделенная фильтром Ф| переменная составляющая величины Q,
имеющая частоту со, подается на множительное звепо М3 (синхронный
детектор). На второй вход множительного звена подается также опор-
ная величина щ = a sin (cot + ср). Фаза ср опорного напряжения vi под-
бирается в зависимости от фазы выхода фильтра ф(, поскольку фильтр
Ф| вносит дополнительный сдвиг фазы *).
Напряжение на выходе множительного звена и = uvt. При значе-
нии и < 1/.оп
iii = ab sin2 (cot + ср) = 0,5а&[1 — cos 2(cot + ср)].
При значении сигнала па входе и > иоп значение сигнала па выходе
множительного звепа М3 составляет:
щ = —0,5а&[1 — cos 2(cot + ср)].
*) Если объект О обладает инерционностью, то появляется также
сдвиг фазы, вызванный инерцией объекта, и фаза <р должна учитывать
и этот фазовый сдвиг (см. п. 13.4.1).
После положительного звена сигнал щ подается па низкочастот-
ный фильтр Ф2, который пе пропускает переменную составляющую
сигнала щ. Постояппая составляющая сигнала щ после фильтра Ф2
подается па релейный элемент РЭ. Релейный элемент управляет ис-
полнительным механизмом ПМ с постоянной скоростью перемещения.
Вместо релейного элемента в схеме может быть усилительное звепо. Тог-
да исполнительный механизм будет иметь переменную скорость пе-
ремещения.
§ 12.2. Влияние дрейфа на устойчивость
В связи с тем, что в основе действия СЭР — поисковые движения,
а априорная информация является неполной, вопросы устойчивости
стоят более остро, чем в обычных системах стабилизации.
12.2.1. Влияние вертикального дрейфа. Рассмотрим влияние верти-
кального дрейфа экстремальной характеристики [12.1]. Пусть действу-
Рис. 12.2.1. Иллюстрация влияния
вертикальною дрейфа
ют возмущения, смещающие экстре-
мальную характеристику I, напри-
мер, вверх (рпс. 12.2.1). Пусть кри-
вые I, II соответствуют экстремаль-
ным характеристикам в моменты t-,,
t\, - и при t = ti сигнал и =
— ui па входе (которому соответст-
вует точка а) уменьшается. Тогда
моменту /2, которому соответствует
и = и^, вместо точки Ь (при отсутст-
вии дрейфа) будет соответствовать
точка Ъ' кривой II, моменту t3 при
и = пз вместо точки с — точка с'
кривой III, моменту при и — и4
вместо точки d — точка d' кривой IV
и т. д. В связи с том, что вместо
уменьшения сигнала па выходе по
кривой abed происходит его увеличе-
ние по кривой ab'e'd', реверса ИМ
не произойдет п сигнал и па входо
тему значению п* будет удаляться
вместо
приближения к паивыгодпей-
в крайнее положение, т. е. СЭР поте-
ряет устойчивость.
12.2.2. Влияние горизонтального дрейфа. Если вход экстремального
объекта дрейфует*), то это эквивалентно дрейфу со временем самом эк-
стремальной характеристики в горизонтальном направлении.
‘ *) Речь идет о неконтролируемом смещении уровня входного сигна-
ла, принятого в системе за нулевой.
Пусть дрейф входа характеризуется воздействием Р(0, тогда выход Q
объекта будет (? = —/«;[“ + ₽ (О J2 (l™c. 12.2.2), максимум выхода будет
Рис. 12.2.2. Иллюстрация
влияния горизонтально-
го дрейфа
соответствовать соотношению 2&[и + [3(/)J =0, т. е. итах =—₽(0- Так
же как и при вертикальном дрейфе, горизонтальный дрейф может вы-
звать потерю устойчивости поиска экстремума.
§ 12.3. Переходные процессы и периодические движения
В предыдущем изложении свойства объекта экстремального регули-
рования детально пе рассматривались, точнее, этот объект считался
безынерционным. Реальные объекты обычпо обладают инерционностью.
Распространенной моделью объекта экстремального регулирования яв-
ляется соединение линейного звепа с «памятью» па входе объекта, без-
инерциоппого звепа с экстремальной характеристикой и линейного зве-
на с «памятью» на выходе объекта. Часто ограничиваются только уче-
том инерционности («памяти») на выходе объекта. При учете инерци-
онности выходную величину объекта экстремального регулирования удоб-
но обозначать х (а но Q, как выше).
СЭР представляют собой нелинейные динамические системы. Ана-
литическое исследование процессов в СЭР представляет немалые труд-
ности. Ужо в классический период развития теории управления этим
системам было посвящено значительное число работ [12.1—12.14].
12.3.1. Точный метод (метод прппасовывания). Рассматривается СЭР
с запоминанием экстремума для устойчивого объекта 1-го порядка. Урав-
нение объекта
Тх + х — f(u) = —bus,
Т — постоянная времени объекта. Пусть хп — зона нечувствительно-
сти сигнум-реле. Пусть и = ии-'гк.(1— Ц). Изменение и представлено па
рис. 12.3.1, а участком А1А2/}3А4; изменение х соответственно происходит
по кривой ВХВ2В3В* (рис. 12.3.1, б). В момент t„ когда x(t3) — x(t4) = х,,..
происходит реверс ИМ и делается к < 0. Начинается убывание и (уча-
сток А,А5__) и изменение х по кривой В4В3— и т. д. Оба процесса мо-
гут быть смещены па плоскости (и, х) (рис. 12.3.2). Точки Сх, —, С$ со-
ответствуют точкам В,, ..., С5. Здесь следует иметь в виду, что фазовая
плоскость (к, х) является совмещением двух листов двухлистпой фа-
зовой поверхности, дающей адекватное отображение движений в СЭР.
Таким образом, в каждом из этапов переходный процесс получается
путем решения дифференциального уравнения, описывающего этот этап,
и последующего припасовывапия с решением для следующего этапа.
В установившемся режиме (автоколебаний) действуют условия пери-
одичности.
12.3.2. Устойчивость систем экстремального регулирования. Для то-
го чтобы судить о работоспособности СЭР с автоколебательным рабочим
Рис. 12.3.1. Процессы в одномерной СЭР с запоминанием экстремума
Рис. 12.3.2. Иллюстрация
процессов в одномерной
СЭР с запоминанием экс-
тремума па плоскости (и, х)
режимом, необходимо установить, устойчиво ли периодическое движе-
ние. При этом можно не интересоваться формой периодического движе-
ния пли предельного цикла па фазовой плоскости.
Поскольку процесс установления определяется от цикла к циклу, то
можно ограничиться рассмотрением характера изменения координат ин-
тегральной кривой в начало (пли в конце) каждого этапа-цикла, т. е.
в моменты срабатывания сигнум-реле. Ес-
ли эти координаты стремятся к значениям,
соответствующим координатам предельно-
го цикла, то периодические движения ус-
тойчивы, а если удаляются от них, то не-
устойчивы.
Рассмотрим общий случай системы п-
го порядка. В этом случае фазовое прост-
ранство будет (п-f-1)-мерпым.
Рассмотрим (га + 1)-мерное фазовое
пространство переменных х — [xix2...
...Xn+i]'r, каждая точка которого соответ-
ствует координатам системы экстремально-
го регулирования в момент срабатывания
сигнум-реле (т. е. в момент начала очеред-
ного этапа работы или конца предыдущего этапа).
Координаты изображающей точки в начальный момент тга-го этапа
будут Xj[m] (i = 1, п+1), а в начале (т + 1)-го этапа (т. е. в конце
т-го этапа) —• соответственно Xi[m -|- 1].
Предположим, что переход от момента т к моменту т + 1 опреде-
ляется уравнениями
фг[Ж1[«г], хп+1 [т]] = <р,[а?1[т + 1], xn+i[т + 1]], i = 1, п + 1,
(12.3.1)
или в векторной форме
ф[я[т]] = <p[x[?n-(-1]]. (12.3.2)
Выражение (12.3.1) или (12.3.2) назовем преобразованием. Предположим,
что оно взаимно однозначно.
Условие периодичности х{[т] = х([т+1] = х* определяет коор-
дипаты предельного цикла, т. о. инвариантную (неподвижную) точку
преобразования
<Р_; р*. • • <+1) = pj , <+1), i = 1, «+ 1.
Предположим, что опа найдена, тогда можпо рассмотреть точку,
близкую к инвариантной: xi [m] = х* 4- а,, [т], где а4 [т] — отклонение
в т-м цикле i-й координаты этой точки от координаты предельного
цикла.
Предположим, что функции ф,- и <р,- — аналитические в окрестности
инвариантной точки, тогда их можпо разложить в окрестности этой
точки в степенные ряды по а,- и получить (не принимая во внимание
членов разложения со вторыми и более высокими степенями отклоне-
ний tz;[m] и «;[т + 1])
5Ч;> ЭД’г
% (ж*) + £ aj М = ’Ч’г (ж*) + X ~дхУ tti 1т + 151
j=i 3 з=1 3
где частпые производные вычислены для предельного цикла. С учетом
равенства функций <(;; и ф, в стационарной точке получаем уравнения
первого приближения в матричном виде
5ф
(12.3.3)
где rz[m]—вектор-столбец отклонений rz,[m]; dtpfdx и д^/дх— матри-
цы частных производных функций (рифм компонентам вектора х.
Рассмотрим (12.3.3) как уравнение относительно а[т 4-1]. Вводим
йф
обозначение D = D (х*) = det Пусть этот определитель не равен
пулю, тогда отклонения будут определяться выражениями
«1т4-11=-^
5<Р Г 1 1
ТГк1т1=77
ВЦ • • • И + 1
^п+1 1 • • • ^п+1 «+1
dtp
“I™!-
Раскрывая (12.3.4), получим
(12.3.4)
n+l ________
а. (т + 1) = 2 1™], г = 1, и 4-1, (12.3.5)
1=1
где Bij — алгебраические дополнения D, Сц — D^B^.
Уравнения (12.3.5) являются линейными уравнениями в конечных
разностях. Решение ищется в виде
rz,[m] = kizm< (12.3.6)
где kf и z — величины, которые необходимо определить. Для системы
разностных уравнении (12.3.5) с использованием (12.3.С) можно запи-
сать характеристическое уравнение
det
С11 z-”Cin+l
С С
п+И ‘ • • Hi+1 п+1
(12.3.7)
Оно имеет п 4-1 корней ..., z„+1. Если эти корпи простые, то реше-
ние системы (12.3.5) имеет вид
“i (т -j- 1) = V™
3=1
(12.3.8)
Для асимптотической устойчивости предельного цикла необходимо
lim [m] = 0.
7/1—* СО
(12.3.9)
Для выполнения условия (12.3.9) необходимо и достаточно, чтобы
все корни характеристического уравнения были по модулю меньше
единицы, т. е.
Ы < 1.
(12.3.10)
Как для любых линейных разностных систем, требования, наклады-
ваемые па коэффициенты Сц уравнения (12.3.5) для обеспечения ус-
ловия устойчивости (12.3.10), можно свести к условиям Рауса—Гурий-
ца, если в характеристическом уравнении (12.3.7) перейти к повой- пе-
ременной, связанной с z линейным преобразованием z = (d-\-i)/(d— 1).
Это преобразование переводит внутреннюю область единичного кру-
га на плоскости z в левую полуплоскость плоскости d, а границу об-
ласти— окружность |z| = 1 — в мнимую ось плоскости d.
12.3.3. Монотонная устойчивость систем экстремального регулирова-
ния. Рассмотрим теперь монотонную устойчивость системы. Введем рас-
стояние р в фазовом пространстве от точки, соответствующей т-му
и+1
такту, до неподвижной точки преобразования, т. с. р“ [да] = У [»'1-
г=1
Введем условие монотонной устойчивости в виде
?l-rl П + 1
У а? [та 4- 1] < У ['»]
7=1 г=1
Подставляя вместо аф» + 1] его значения пз соотношения (12.3.5),
получим
п+1
X
®,J=1
п+1
%• [да] кс [«] < У af [да].
1=1
(12.3.11)
Введем обозначение 2 СцС is = ejs- Тогда неравенство (12.3.11)
1=1
п + 1 ’
примет вид 2 Vjsaj “s I'rel > °’ гДе
j,s=i
D =(~е>» ирИ >^5’
1S (— e/s + 1 при / = s.
Таким образом, условие монотонной устойчивости свелось к условию
положительной определенности квадратичной формы п +1 пере-
менных ос.
По теореме Сильвестра для этого необходимо и достаточно, чтобы
Dn>°-
1 п+1
®п+11 ••• ®п+ш+1
>0.
Условие монотонной устойчивости более жесткое, чем условие асим-
птотической устойчивости.
§ 12.4. Улучшение качества работы
Под улучшенным качеством работы СЭР здесь понимается:
уменьшение времени поиска папвыгоднейшего значения управления
Поп в системах с инерционным объектом как при непрерывном поиске,
так и в СЭР дискретного типа;
уменьшение вредного влияния дрейфа экстремальной характеристи-
ки объекта па устойчивость и качество регулирования;
уменьшение вредного влияния случайных помех.
12.4.1. Методы уменьшения влияния инерционности объекта экст-
ремального регулирования. Методы уменьшения влияния инерционности
в СЭР направлены на сокращение времени поиска экстремума в случа-
ях, когда инерционность объекта управления существенна и ею пре-
небречь нельзя.
12.4.1.1°. Улучшение, качества функционирования инерционных СЭР
с синхронным детектором. Рассмотрим СЭР со вспомогательной модуля-
цией, в которой объект может быть представлен безынерционным зве-
ном с унимодальной характеристикой, расположенной между звеньями
с передаточными функциями И70(р) и Wzi(p) (рнс. 12.4.1), где IV0(p) —
передаточная матрица входной n-мерпой линейной части объекта; х —
~ Q = /(ге) —характеристика унимодального звепа; Wt(p) —передаточ-
ная функция одномерной выходной части; Ф;, Фг; — фильтры; М3, — син-
хронные детекторы (множительные звепья); ФУ;—формирующие уст-
ройства; Г — генератор; И Р; — регуляторы.
Генератор Г создает ортогональные поисковые сигналы, подаваемые
на входы объекта и синхронных детекторов.
Пусть внешнее возмущение т] имеет низкочастотные составляющие,
вызывающие дрейф унимодальной характеристики /(»). При использова-
иии таких СЭР, обладающих определенными преимуществами, возни-
кает ряд проблем, которые делают их применение для оптимизации
сколько-нибудь инерционных объектов затруднительным, а зачастую
невозможным. Это связано с двумя обстоятельствами: во-первых, в свя-
зи с возможностью потери устойчивости частота поиска существенно ог-
раничена сверху, что приводит к необходимости уменьшения скорости
поиска ('особенно опасно это обстоятельство при большой вариации па-
раметров объекта и при быстром неопределенном дрейфе экстремальной
Рис. 12.4.1. Структура многомерной СЭР с синхронным детектированием
и инерционным объектом
характеристики). Во-вторых, низкая частота поиска затрудняет опти-
мизацию по нескольким параметрам в связи с необходимостью сущест-
венного различия поисковых частот.
Рассмотрим методы организации поиска, в значительной мере уст-
раняющие указанные трудности, что расширяет область применения рас-
сматриваемых систем.
Отмеченные недостатки связаны с отставанием по фазе выходного
сигнала объекта от входного сигнала. Значительные фазовые сдвиги
приводят к потере устойчивости. Рекомендуемый в некоторых работах
сдвиг фазы в синхронном детекторе при изменении параметров системы
и при многомерной оптимизации оказывается недопустимым. Положи-
тельный результат может быть достигнут при использовании производ-
ных выходпого сигнала инерционного объекта. Это требует введения
специальных формирующих устройств (ФУ,), представляющих собой
датчики производных выходного сигнала или их комбинации с самим
выходным сигналом. Усовершенствованные таким путем системы обла-
дают значительно большим быстродействием и качеством поиска, чем
обычные системы со вспомогательной модуляцией.
В идеализированной ситуации применение подходящих фильтров
высших частот в качестве ФУ полностью решает проблему многомерно-
го быстрого поиска, даже для объектов со значительной инерционностью,
но одиоэкстремальной (унимодальной) характеристикой. В действитель-
ности, конечно, дело обстоит сложнее. При использовании относительно-
высокочастотных поисковых сигналов приходится работать в той об-
ласти частотных характеристик ТГоО’со), И/](уы) (можпо показать, что
определяющим здесь является произведение которая за-
висит от так называемых малых параметров объекта (малых иперци-
онпостей). Если ати малые параметры достаточно стабильны, то органи-
зация контуров СЭР при соблюдении второго, указанного ниже, условия
пе вызывает затруднений. Если же малые параметры изменяются в ши-
роких пределах, то устойчивость процессов экстремального регулирова-
ния даже при наличии отмеченных фильтров высших частот (форми-
рующих устройств) можпо обеспечить только при наличии дополнитель-
ных контуров адаптации высшего уровия.
Вторым условием применимости рассматриваемого метода являет-
ся определенная ограниченность высокочастотных (широкополосных)
помех как па входе, так и на выходе объекта экстремального регулиро-
вания. Ясно, что если случайные шумы, приведенные ко входу и вы-
ходу этого объекта, имеют высокую спектральную плотпость во всем
диапазоне возможных частот поисковых сигналов, то применение рас-
сматриваемого метода практически невозможно.
12.4.1.2°. Метод прогнозирования установившихся значений в дискрет-
ных СЭР. Рассмотрим метод, который позволяет по начальному участку
переходного процесса в объекте, вызванного изменением входного си-
гнала на шаг Дв, оцепить установившееся значение z(oo) выходного
сигнала объекта, т. е. значение выходного сигнала объекта, определяе-
мое статической характеристикой z = /(и). Если значение z(oo) подать
па сигнум-реле шаговой системы, то система будет осуществлять поиск
как бы по статической характеристике объекта. Значение z(oo) может
быть вычислено за относительно малый промежуток времепи, поэтому
интервал А/ между шагами исполнительного механизма может быть не-
большой и время поиска экстремума многократно сокращается.
Рассмотрим этот метод поиска экстремума применительно к объекту,
динамика которого описывается линейным дифференциальным уравне-
нием первого порядка. Примем, что постоянная времепи Т объекта из-
вестна и не меняется при изменении режима работы объекта. Пусть к
моменту включения экстремального регулятора состояние объекта ха-
рактеризовалось точкой Ж| на статической характеристике (рис. 12.4,2).
Если бы объект был безынерционным, то после изменения входного си-
гнала на Ав значение выходного сигнала объекта в соответствии со ста-
тпческой характеристикой z = /(и) мгновенно приняло бы значе-
ние z[l] = /(u[l]). Одпако из-за наличия инерции после измене-
ния входного сигнала на Au начнется переходный процесс (кривая I
на рис. 12.4.2).
Приращение выходного сигнала Az[l] объекта на первом шаге:
Az (i) = z (t) — z [0] = [/ (u [1]) - / (и [0])] [ 1 - ехр (- ЦТ)},
(12.4.1)
lim Az (г) = / (и[1]) — / (и [0]) = d [1]. ' '
t-^OO
Для определения значения <Ц1] за малый промежуток време-
ни нужно через время т замерить приращение выходного си-
Рис. 12.4.2. Иллюстрация прогнозирования установившегося значения ве-
личины z в шаговой СЭР
гнала объекта А", (т) = Ат1т. Теперь, воспользовавшись уравнением
(12.4.1) для момента времени т, можно определить значение d[l] =
= AMl-expi-T/n]-1.
После этого вход объекта смещается еще па Ан, т. е. и [2], = и [1] +
+ Л/г. В системе будет протекать переходный процесс по кривой II
(рис. 12.4.2). Снова через время т замеряется значение приращения
Аз? (г) = Дг2г выходного сигнала z объекта. Определить значение выход-
ного сигнала d[2] объекта в установившемся режиме можно так же, как
это делалось при первом шаге, т. е. d[2] — Az2tZ)(t) = Az2t X
X [1 — ехр(—т/7’)]-1. После этого на сигпум-реле подается сигнал раз-
ности Az[l] = d[2],— d[l], В зависимости от знака Az[l] сигпум-реле
определяет направление следующего шага и т. д. Для и-го шага d[n] =
= &zntD(x). Тогда Az[n] = d[n] —d[n — 1].
Структурная схема шаговой системы с предвычислением статиче-
ской характеристики в процессе поиска экстремума показана па
рис. 12.4.3. Она отличается от структуры обычной шаговой СЭР (см.
рис. 12.1.6) тем, что между выходом объекта О и запоминающим устрой-
ством ЗУ регулятора включено вычислительное устройство ВУ для оп-
ределения значений характеристики.
Ясно, что работоспособность данной СЭР в значительной мере оп-
ределяется уровнем шумов, а также объемом априорной информации
о динамических свойствах объекта экст-
ремального регулирования.
12.4-2. Уменьшение влияния случай-
ных помех. Для уменьшения влия-
ния па поиск экстремума случайных
помех могут применяться различ-
ные методы. В дискретных СЭР полу-
чил применение метод многократ-
ного измерения выходного сигнала СЭР
па каждом шаге с последующей обра-
боткой но МНК. В системах с синхрон-
ным детектированием успешно приме-
няется метод накопления полезного
сигнала.
Рассмотрим использование МПК на
примере дискретной СЭР, в которой
объект представляет собой безынерци-
онное экстремальное звепо и цепочку
из трех расположенных за ним аперио-
Рис. 12.4.3. Структура одномер-
ной шаговой СЭР с предвычис-
депием статической характери-
стики
дических звеньев первого порядка и
звена с чистым запаздыванием. Как и ранее, предполагается, что экстре-
мальная характеристика унимодальна и непрерывна. Допустим, что на
выходе объекта действует случайная центрированная помеха, обладаю-
щая ограниченной дисперсией, а экстремальная характеристика дрейфует
с ограниченной скоростью.
Выше было показано, что поиск по динамическому выходному си-
гналу х значения входного сигнала и, дающего экстремум функции х —
= /(п), в инерционных системах длителен и сопровождается значитель-
ным колебательным перерегулированием ио входному сигналу. Убыст-
рения поиска при отсутствии помех можпо достигнуть методами, приве-
денными в п. 12.4.1.
При воздействии па выходной сигнал объекта случайных помех для
прсдвычислепия статического значения выходного сигнала за малый
промежуток времени наблюдения выходной величины целесообразно
применить один из методов прогнозирования случайных процессов. Здесь
применительно к конкретной структуре СЭР рассматривается метод на-
именьших квадратов. Рассматриваемая СЭР включает безынерционное
звепо с экстремальной характеристикой, последовательное соединение
звена с чистым запаздыванием т и трех апериодических звеньев первого
порядка с известными постоянными времени 7\, Тч и 72, па выходе ко-
торых действует случайная центрированная помеха ц с ограниченной
дисперсией.
Тогда связь между выходным сигналом х и входным сигналом и
описывается уравнением
з
ехр(рт)П(Гр+1)х = /(м). (12.4.2)
4=1
Пусть па (7г —1)-м шаге в момент t = 0 при начальных условиях
Л'(О) = х0, х(0) = .io, т(0) = х0, u(0) = uq произведено изменение вход-
ного сигнала па Ди. В течение промежутка времепи т изменение выход-
ного сигнала будет определяться начальными условиями uo, xD, xq, хо и
правой частью f(u0). Уравнение, связывающее выходной сигнал х и
входной сигнал и системы, будет иметь вид:
з
П(^р+1)Дг = %. (12.4.3)
4=1
где Д1 = х(г) —то, а0 = f(tio) —ЗД новая переменная Ai имеет началь-
ные условия Д[ о= 0, Д. (0) = Д[ о, Д1(0) — Д ю-
Решение уравнения (12.4.3) имеет вид
Д[ (i) = c?o77i (£) 4- Д[Т?2{t) 4" Д[77з(£),
где
*1 (0 = 1 ~ 2 Л (У4 - Л+гГ1 ехР (-
г—1
3
^(0=2 Ti (Л+1 + Ti+2) (Л - ^гГ1 Гг - ^+2)~г еХР (-
г=1
3
В3 & = Т^Т3 2 Тг (?г ~ 7\+1)~г (Л ~ ^Г1 е*Р (- ЧТг)-
4=1
При t > т движение будет определяться уравнением
Д! (i) = Д[(т) + aiB(t — г) + KiB2(t — г) + Д[В3(7 — т), (12.4.4)
где Д|(т) —значение выходного сигнала Д, в момент t = т,
°, = /(«о + Ди) — (жо + До:), Д( — Д[ = х(т).
Еслп бы измерения были точными, то для определения этих пара-
метров Д|(т), at, Д1, Д[ достаточно было бы измерить переменную Д|(О
при четырех значениях времепи t|, <2, t3, t4 и решить получающуюся
систему четырех уравнений с четырьмя неизвестными. Одпако, так как
измерения производятся с определенной погрешностью, рекомендуется
выполнять измерения в п точках (п > 4) и применять МНК*).
Зная оценки «т и Д2(т), можно найти за промежуток времепи т +
4-иДт оценку статического значения выходного сигнала s*[fc —1]. Для
!:) Процедуры МНК общеизвестны [4.2, 4.3] и здесь пе описываются.
определения правильного направления следующего (7г + 1)-го шага вы-
полняем еще одно изменение входного сигнала па Ди и отыскиваем ана
логичным путем величину Тогда направление (к + 1)-го шага
можно определять из выражения
Ли[& + 1] = Csgn[(x*[fc] — х*[к — 1])Дх[/с]], С = const. (12.4.5)
Это выражение определяет один из алгоритмов ускоренного поис-
ка в СЭР рассмотренного вида прп наличии помех.
12.4.3. Уменьшение влияния дрейфа. В § 12.2 отмечалось, что дрейф
экстремальной характеристики па выходе (вертикальный дрейф) и
дрейф входа в объект (горизонтальный дрейф) могут нарушить устой-
чивость работы СЭР и ухудшить качество поиска. Нсучет этого обсто-
ятельства приводил к многочисленным трудностям при попытках внед-
рить в практику СЭР. Для уменьшения влияния дрейфа разработан ряд
методов.
12.4.3.1°. Метод коммутатора. Одним из первых и наиболее простых
методов является введение коммутатора поверочных реверсов — устрой-
ства, обеспечивающего реверс ИМ независимо от действия сигпум-реле.
Рис. 12.4.4. Иллюстрация метода коммутатора
При этом целесообразно, чтобы период ДЮм коммутатора (промежуток
времени от одного до другого реверса) отсчитывался от момента време-
ни реверса ИМ, вызванного действием сигпум-реле (так называемая СЭР
со взводом коммутатора).
Рассмотрим действие коммутатора при дрейфе вверх экстремума-
максимума (рис. 12.4.4) для случая достаточно быстрого смещения ста-
тистической характеристики. Примем период коммутатора равным 7\-Ом =
= 2Д/. Тогда при значении и3 = иг + 2Ди в системе произойдет реверс
от срабатывания коммутатора и через время At входной сигнал опять
будет равен н2 (траектория па рис. 12.4.4). Если при этом
выходной сигнал объекта уменьшился па значение зоны нечувствитель-
ности сигпум-реле ха — — х4, то в точке tl'/4 произойдет реверс си-
стемы от воздействия сигпум-реле; входной сигнал объекта снова на-
чнет увеличиваться и возобновится движение к экстремуму. Экстремум
Рис. 12.4.5. Иллюстрация функционирования одномерной СЭР с запоми-
нанием экстремума и коммутатором
будет найден регулятором и в условиях дрейфа статической характе-
ристики объекта.
Представим теперь менее благоприятный случаи, когда зона нечув-
ствительности сигпум-реле велика. Тогда реверс в точке М4 пе произой-
дет и через время 2Л/ система придет в точку Ме. Если ха > то
в М6 пе будет реверса от сигпум-реле, по произойдет новый реверс от
действия коммутатора. Это значит, что действие возмущения сильнее
воздействия СЭР; в этом случае СЭР пе приближается к экстремуму, по
и пе удаляется от пего. Устанавливается режим, когда входной сигнал
объекта изменяется от hj до из = Uj-J-Au. Когда дрейф статической ха-
рактеристики объекта прекратится, система возобновит движение к экс-
тремуму. Следовательно, коммутатор поверочных реверсов обеспечивает
устойчивость СЭР в условиях интенсивных монотонных возмущений.
Рассмотрим характер протекания поиска экстремума в СЭР с инер-
ционным объектом при наличии коммутатора поверочных реверсов в
экстремальном регуляторе с запоминанием экстремума. Предположим,
что к моменту включения экстремального регулятора положение СЭР
характеризовалось точкой Mi па статической характеристике х = f(u)
(рис. 12.4.5). Допустим, что после включения регулятор стал уменьшать
вход и. При этом движение СЭР изображается траекторией М\М2. В точ-
ке Л?2, когда разность между запомненным максимальным значением xt
и текущим значением х станет меньше зопы нечувствительности хи сиг-
пум-реле, произойдет реверс и входной сигнал и начнет возрастать. Эта
часть траектории движения системы представляется участком М2МъМ,.
В точке М-, коммутатор производит новерочцып реверс системы и после-
дующее движение СЭР изображается траекторией Л/4Л/6Л/в. Длина участ-
ка траектории М2М3М^ пропорциональна периоду коммутатора Гном.
В точке Л/е, когда разность между наибольшим достигнутым и за-
помненным значением выхода (соответствующим точке ЛД) и текущим
значением х станет равпа зоне нечувствительности х„, сигпум-реле сно-
ва произведет реверс, после чего движение СЭР определяется траекто-
рией В точке М3 коммутатор опять произведет реверс и т. д.
На рис. 12.4.5 видно, что движение системы с коммутатором при по-
иске экстремума па инерционном объекте существенно отличается от
движения такой же системы без коммутатора (рис. 12.3.2). У системы с
коммутатором движение происходит вдоль одной ветви статической
характеристики объекта. Для некоторых объектов, где ограничение вида
и «он (т. е. в процессе поиска значение входа и пе должно превышать
«on), приближение системы к экстремуму вдоль одной ветви характери-
стики х = /(и) является необходимым. В таких системах коммутатор,
кроме обеспечения устойчивости, придает процессу поиска требуемый
характер.
12.4.3.2°. Определение величины дрейфа и устранение его влияния в
дискретной СЭР. Для устранения погрешностей, вносимых дрейфом, мо-
жет быть использован метод сравнения величины выхода объекта па
различных поисковых шагах, позволяющий определить характеристики
дрейфа с целью его последующего исключения.
Рассмотрим применение этого способа па примере СЭР с инерцион-
ным объектом, описанной в п. 12.4.2. С выходным сигналом объекта сме-
шивается случайная помеха, а экстремальная характеристика дрейфует
вертикально со скоростью Ъ, которая может быть принята постоянной в
течение двух последовательных шагов. В этом случае уравнение систе-
мы имеет вид
з
ехр (рт) JJ (Т т,Р + 1) я = / (и) + Ы.
2=1
Ila Jc-м шаге при 0 t < т решепие выражается формулой
(0 = «Л (0 + М2 -
г + 2 (Г1 + (Л+1 - Л)~’ (Т<+2 - ЛГ1 СХР (- Л))
“ bh
где Д/Д/) = xh(l) — Xha, ai,o = f(ua) — хьо, T<i = Ti, T3 = T2.
Начиная с момента t = т, имеем
Лд = Aft (T) + ah + £ u. [(aft - b hT.) - 1) + Д„В2 + A,Al -
- bk
2Г4-(1-т) ,
(12.4.6)
где аи — f(u0 + ^u) — (?«, +А/;(т)), ut = ехр(—кт/Тг).
Поскольку неизвестных параметров теперь четыре, выбираем число
выдержек времени большим четырех. Далее по МНК определяем пара-
метры Д^(т), a*, ft*, Д*, Д*. Подставляя параметры со звездочкой
в (12.4.6), находим Да, хь. Выполняя еще одно изменение входного сигна-
ла, находим подобным образом Дд+!, х/1+1. Следующий рабочий шаг оп-
ределится алгоритмом:
Ди[7с + 1] — С sgn [.7ЪН — (xk + bkT + 7гДтЬк+1)]Ди[А:]. (12.4.7)
Введение величины лДт6д+1 связано с тем, что к момепту начала
(к + 1)-го цикла экстремальная характеристика смещается па это значе-
ние (если считать процесс вычисления мгновенным).
Алгоритм (12.4.7) позволяет ускоренно находить экстремум в инер-
ционных системах при небольшом объеме априорной информации.
12.4.3.3°. Устранение влияния полиномиального дрейфа в СЭР с син-
хронным детектированием. Рассматривается СЭР с нестационарным объ-
ектом, имеющим экстремальную характеристику х = — ки^. Опа состои т
из безынерционного объекта и непрерывно-дискретного регулятора им-
пульсного тина. Экстремальное звено объекта с входом и и выходом х
находится под воздействием низкочастотных возмущений; сигнал y(t)
смещает характеристику / в горизонтальном направлении, a р (4) — в
вертикальном.
Генератор колебаний формирует периодический поисковый сигнал
р = А<р (4) с амплитудой Л и периодом Т, который подается па вход
объекта управления. Выходной сигнал объекта Q, учитывающий помеху
Р(4), измеряется непрерывно. В экстремальном регуляторе этот сигнал
перемножается с сигналом Л<р(4) и при пулевых начальных условиях
усредняется интегратором в течение времени, кратцого периоду Т поис-
ковых колебаний. После интегрирования 6-импульс, пропорциональный
накопленному значению г„+ь поступает на вход линейного интегриру-
ющего звена, которое формирует управление.
При учете помех имеем
<2 = -/<[н + у(4)]2 + Р(4),
где К > 0 — постоянный коэффициент; и — управление; '((/) п Р(4)—
низкочастотные возмущения. Относительно низкочастотных возмущений
предполагается, что их зависимость от времени представлена поли-
4г
помами не выше к-'й и m-й степени, т. е. Т(4)== 2 > Р (0 ~
v=o
m
= 2 ₽^4^-\ Для определенности принято 2к <. т.
v=o
Экстремальный регулятор осуществляет операцию сипхроппого де-
(п+1)Т
тактирования гп = (А/Т) j х (4; [л (4) dt с последующей шаговой
яТ
перестановкой исполнительного органа в дискретные моменты времени
t = пТ (п = 1, 2, ...), кратные периоду пробных сигналов. Перестаповка
осуществляется по закону u[n-|-l] = я [я], + £г[я], где £ — коэффици-
ент усиления.
Легко видеть, что работа дайной СЭР оказывается полностью нечув-
ствительной к действию низкочастотных возмущений, если поисковые
сигналы удовлетворяют условию
J Is[л (i) dt = 0 при любом s — 0, т. (12.4.8)
пТ
Рассмотрим случаи, когда пробные сигналы р(г) имеют прямоуголь-
ную форму и принадлежат множеству: а) функций Бернштейна —
{Bj(f)}, б) функций Уолша — {Wal3(f)} (где / — число точек пересече-
ния оси t на отрезке пТ < t < (я + 1)Л- Показано, что указанными
свойствами обладают пробные сигналы вида
2/1+1
р (?) = П Wali е {Wal>W}*
V=1
обеспечивающие выполнение условия (12.4.8) для всех v = 1, 2k + 1.
/ 2л. \
Здесь Walj (г) = sgn I sin — t j — диск-
ретный аналог синусоиды. На рис. 12.4.G
показано графическое построение функ-
ций
gl(t) = Wal1(t)Wal,(2t),
[x2(t) = pi (J)Wall (4г).
Если дрейф — первой степени вре-
мепи, то при поисковом сигнале [Ло(г) =
= Wall (г) СЭР теряет устойчивость при
7 > 4/1. При значениях 7 < 4/1 ус-
тановившееся значение и* блуждает по
всей оси и в пределах 0 и* < оо.
Если же берется сигнал р, (г) =
= Wall (г) Wall (2г), то СЭР устойчива
при любых 7, а смещения х* малы. При
указанном виде поискового сигнала ко-
личество перемен знака функции р ра-
стет пропорционально квадрату степе-
ни дрейфа.
При использовании функций Берн-
штейна число перемен знака растет
Рис. 12.4.6. Иллюстрация коле-
баний, обеспечивающих инва-
риантность к полиномиально-
му дрейфу: а—д — последова-
тельность формирования поис-
ковых функций
пропорционально первой степени дрей-
фа, что является преимуществом. Одпако в связи с тем, что в функциях
Берпштейпа ц(г) = Bn+](/) при больших m точки переключения стя-
гиваются к концам интервала пТ < г < (я —1)У, затрудняется управ-
ление инерционными объектами.
Определенным недостатком описанного метода как при применен
нии функций Уолша, так и функций Бернштейна, является все более
частая (или длительная) раскачка объекта с повышением степени
дрейфа.
Уменьшение числа раскачивающих поисковых воздействий па объ-
ект, а также повышенно быстродействия и точности поиска экстремума
Рпс. 12.4 7 Вид попсковых сиг-
налов усложненной формы
достигается при применении двух гене-
раторов пробных епгпалов, из которых
один подает прямоугольные колебания
рщ (£) основной частоты pi = Wal|(Z)
на вход объекта. Другой генератор, ра-
ботающий синхронно с первым, выра-
батывает и подает па один из входов
синхронного детектора сигнал Цуф(!)
усложненной формы, зависящей от сте-
пени m дрейфа, причем
Руф, о (О = Wal[(i)
прп m — О,
Руф. 2(0 = Walt(Z) + 2Wa]3(Z)
при m — 1, 2,
цуф 4(z) =Wali(Z) +2Wal3(z) +
+ 2WaV,(()
при m = 3, 4.
Виды этих сигналов приведены па
рис. 12.4.7.
Па другой вход синхронного детек-
тора подается выход объекта; выходной
сигнал синхронного детектора в тече-
пио периода Т основного сигнала p,i (/) усредняется при нулевых началь-
ных условиях в интеграторе. Подаваемый при этом на вход объекта уп-
равляющий импульс оказывается «очищенным» от помех и p(Z).
Существенным преимуществом описанной схемы является малая рас-
качка объекта.
В рассматриваемой схеме при действии помех у(1) и P(t) рабочий
шаг входного воздействия целесообразно делать постоянным, поскольку
в общем случае неизвестны характеристики дрейфа. Если же известно,
что имеется только дрейф входа, возможно убыстрение поиска
экстремума.
ГЛАВА 13
МЕТОДЫ И АЛГОРИТМЫ ОЦЕНИВАНИЯ
В КОРРЕЛЯЦИОННО-ЭКСТРЕМАЛЬНЫХ СИСТЕМАХ
Под корреляционно-экстремальными системами (КЭС) понимаются
системы обработки информации, представленной в виде реализаций слу-
чайных функций (полей), предназначенные для определения координат
движения или иных целей. Название данного типа систем объясняется
гем, что по принципу действия первые образцы КЭС рассматривались
как системы экстремального регулирования, в которых для построения
экстремальной функции используется свойство корреляционной функ-
ции одного или нескольких аргументов достигать максимума при пуле-
вом значении аргументов. В них в той или иной степени использовалась
корреляционная связь между реализациями случайных функций, а оп-
ределение выходных величин (координат местоположения и их произ-
водных) осуществлялось с помощью отыскания экстремума корреляци-
онной функции или какой-либо другой статистической оценки реали-
заций случайных функций.
В настоящее время разработаны общие методы синтеза и анализа
оптимальных и субоптимальпых КЭС па основе различных теоретиче-
ских подходов. Тем не менее название «корреляционно-экстремальные
системы» сохраняет право на существование как в историческом плане,
так и вследствие того, что при тщательном исследовании динамики да-
же очепь сложных КЭС выясняется, что их принцип действия и дости-
жимые характеристики теснейшим образом связаны с экстремальным и
другими свойствами корреляционных функций используемых полей.
§ 13.1. Классификация корреляционно-экстремальных систем
В последний период в отечественной литературе появился целый ряд
монографий [13.1—13.12], посвященных КЭС, определивший передовые
позиции советской пауки в этой области.
13.1.1. Области применения. Подробное описание разнообразных при-
менений КЭС содержится в [13.1—13.12, 13.17, 13.18]. Здесь перечис-
ляются лишь наиболее крупные области применения КЭС:
для целей навигации, паведепия и радиолокации; подобные системы
получили название корреляциоппо-экстремальпых навигационных си-
стем (КЭНС);
для управления технологическими процессами; эти системы можпо
условно назвать корреляционно-экстремальными технологическими си-
стемами (КЭТС);
для исследования природных ресурсов и окружающей среды; такие
системы можно называть корреляционно-экстремальными геофизически-
ми системами (КЭГС).
13.1.1.1°. Использование КЭС в области навигации, наведения и ра-
диолокации. Среди этих применений целесообразно упомянуть о корреля-
ционных измерителях скорости самолетов и космических кораблей [13.19],
корреляционных измерителях углового положения, комплексной ипер-
цналыю-корреляцпоипой системе [13.20], системах экстремального при-
ема сигналов и экстремальной радионавигации [13.4], корреляционном
методе радиолокации, системах слежения за объектами в дальнем космо-
се, корреляционно-экстремальном пеленговании протяженных и точеч-
ных источников [13.21], методе автоматической стыковки спутников па
орбите.
В [13.5, 13.8, 13.22—13.25] рассматриваются системы навигации и
наведения по картам геофизических нолей. Эти применения КЭС связа-
ны с точечным зондированием полей. В [13.1—13.11; 13.26—13.28; 13.80,
с. 502—503], рассматриваются «кадровые» КЭС, использующие изображе-
ния местности и предназначенные для навигации и наведения летатель-
ных аппаратов и для вождения речных и морских судов вблизи бере-
гов [13.27, 13.28].
13.1.1.2°. Использование КЭС для управления технологическими про-
цессами. Среди применений КЭС для управления технологическими про-
цессами надо отметить использование КЭС для очувствления промыш-
ленных роботов, создания органа корреляционного технического зрения
[13.29—13.32, 13.35, 13.36], навигации транспортных роботов [13.33, 13.34],
измерения скорости проката, движения бумаги и других материалов бес-
контактным способом [13.37], поиска и сортировки изделий [13.39],
выбора неориентированных деталей из бункера [13.38], автоматического
распознавания микроструктур материалов [13.40], измерения расходов
[13.41, 13.42], настройки радиоаппаратуры [13.44], в АСУ технологиче-
скими процессами нефтехимической [13.43] и микробиологической [13.12]
промышленности, для исследования колебаний плазмы и турбулентности.
Находят применение идеи КЭС в бионике [13.45, 13.46] и медицине [13.12,
13.47].
13.1.1.3°. Использование КЭС для исследования природных ресурсов
п окружающей среды. Значительные применения находят КЭС в иссле-
дованиях оптики атмосферы [13.7], в частности для целой измерения
скорости ветра [13.48], в задачах контроля за состоянием биосферы
[13.49]. Развиты статистические подходы, в том числе и методы КЭС,
в гидроакустике и гидролокации [13.50—13.52], дистанционном зондиро-
вании ц исследовании природных ресурсов с летательных и космических
аппаратов [13.53—13.56], при поиске полезных ископаемых и анализе
сейсмограмм [13.57].
В геодезии [13.58], гравитационной и магнитной разведке [13.59,
13.60], при исследовании статистических свойств магнитного и гравита-
ционного полей [13.61, 13.62] КЭС также получили применение.
13.1.2. Классификация по информационным признакам. Кроме обла-
стей применения (назначения) КЭС в качестве их основных классифи-
кационных признаков, в настоящее время используются следующие:
1) способ зондирования используемых полей измерителем поля п в
блоке карт (эталоне),
2) методы и алгоритмы оценивания,
3) используемые поля,
4) эталонное обеспечение (картообеспечепие).
По последнему признаку КЭС можно подразделить па системы со
статической п динамической памятью, если условиться понимать под
системами со статической памятью такие КЭС, в которых априорная ин-
формация об используемых полях накапливается до начала функциони-
рования КЭС, а под системами с динамической памятью — КЭС, в ко-
торых эталонные реализации поля фиксируются уже во время функцио-
нирования КЭС, как это имеет место, например, в корреляционных из-
мерителях скорости.
Картообеспечепие павпгацпонпых КЭС со статической памятью по-
лезно дополнительно подразделять па долговременное, оперативное н
мгновенное в зависимости от величины Временного интервала между со-
зданием эталонных карт полей и применением КЭС.
Так как настоящий пункт посвящен, главным образом, методам син-
теза и анализа, которые пе зависят непосредственно от области приме-
нения КЭС, используемого поля п характера картообеспечепия, то для
Т а б л и ц й 13.1.1
Классы корреляционно-экстремальных систем
«Мгновенное» наблюдение процесса «Мгновенный» съем информации в памяти, характеристика и номер варианта
Характеристика Номер варианта в точке в конечном множестве точек вдоль липин вдоль конеч- ного мно- жества ЛИНИЙ В кадре
1 1ч I1 1 /С 111
В точке I и 1.1а I.1I 1.11а I.III-
В конечном мно- жестве точек 1а la. I la.1а la. II I а. Па la.III
Вдоль линии II II.I 11.1а II.II II.Па 11. HI
Вдоль конечного множества линий Па Па.1 На.1а IIа.II Ha.11а Ila.III
В кадре III IIII III.1а 111.11 II 1.11а III. 111
целей дальнейшего изложения- существенной является лишь классифи-
кация КЭС по первому и второму указанным признакам. Остановимся
па пей подробнее.
13.1.2.Г’. Классификация КЭС по способу зондирования полей. В фик-
сированный момепт времени («мгновенное» паблюдеппе) зондирование
полей (измерителем поля и в блоке памяти) возможно в точке, в ко-
нечном множестве точек, вдоль линии, вдоль конечного множества лил
пий, на кадре. В зависимости от сочетания характера зондирования по-
ля измерителем и в блоке памяти можно выделить 25 классов КЭС, при-
веденных в табл. 13.1.1. Каждый класс имеет двойную нумерацию. На-
пример, класс 1.1а означает, что «мгновенное» наблюдение производится
в точке, а съем информации в блоке памяти — в конечном множест-
ве точек.
13.1.2.2°. Классификация КЭС по методам и алгоритмам оценива-
ния. В настоящее время, не считая эвристических подходов, в области
КЭС используются три метода обработки информации — беспоисковое,
поисковое и комбинированное оценивание, отличающиеся теоретически-
ми основами, достижимыми характеристиками и сложностью реализации.
Таблица 13.1.2
Алгоритмы оценивания вытекают из методов и различаются видом урав-
нений контролируемых процессов и наблюдения, числом оцениваемых
параметров п и наблюдаемых величии (полей) т.
Теоретической основой беспоискового метода является теория не-
линейной фильтрации (см. гл.. 4). Поисковые методы, основаны па ис-
пользовании теории статистических решений, главным образом одной из
ее ветвей, связанной с проверкой статистических гипотез. Теоретической
основой комбинированных методов являются подходы, объединяющие
идеи оптимальной фильтрации и проверки статистических гипотез. Та-
ким подходом, в частности, является рекуррентно-поисковое оценивание
и его непрерывный апалог. Классификация КЭС по методам и алгорит-
мам оценивания поясняется табл. 13.1.2. В этой таблице характеристики
алгоритмов сведены лишь к указанию чисел п и т. Для примера в таб-
лице приведены обозпачепия некоторых вариантов.
Далее излагаются все перечисленные методы оценивания примени-
тельно к основным, нашедшим практическое применение классам КЭС.
Методы и алгоритмы оценивания пе рассматриваемого непосредствен-
но класса II.I1 и др. могут быть получены в качестве частного случая
из приводимых результатов.
§ 13.2. Методы и алгоритмы оценивания
в корреляционно-экстремальных системах
Применительно к КЭС существует некоторая (не обязательно един-
ственная) «каноническая» запись уравнений контролируемого процесса
н наблюдений. Характерными для этой записи являются два признака:
явное выделение в уравнении наблюдений используемого КЭС век-
торного поля h (т. е. множества скалярных полей /zv);
выделение из общего вектора состояния подвектора г — аргумента,
от которого зависят эти поля. Методы и алгоритмы оценивания в КЭС
могут быть получены из обгцпх методов гл. 4. Единственным (по чрез-
вычайно существенным!) обстоятельством, выделяющим КЭС из других
классов систем управления, является характер наблюдения Л (г), кото-
рое представляет реализацию случайной функции (поля) как функции
с высокой степенью нелинейности. На учете этого факта и должна бази-
роваться собственная теория КЭС.
В единичном акте функционирования КЭС используется конкретная
реализация поля /г, (г), i = 1, N, где N — мощность рассматриваемого
множества реализаций. Соответствующие ей точностные оценки КЭС мо-
гут быть весьма индивидуальными и непредставительными, пе характе-
ризующими точностные характеристики КЭС при использовании дру-
гих реализаций. Поэтому при исследовании точности КЭС плодотворным
оказывается использование среднестатистических оценок, получаемых
усреднением по множеству реализаций поля. Такие оценки зависят уже
не от единичной реализации /г*(г), а от соответствующим образом вве-
денных корреляционных функций полей.
Более того, рассмотрение математического ожидания ошибки оцени-
вания, также усредненной по множеству реализаций, позволяет по-но-
вому ставить и исследовать задачи устойчивости и качества процессов
оценивания в КЭС, выявлять новые нелинейные эффекты, которые при
рассмотрении динамики процессов оценивания по отдельным реализа-
циям ускользают из теоретического поля зрения..
Отмеченные обстоятельства последовательно используются в даль-
нейшем изложении.
13.2.1. Беспоисковые методы оценивания. Беспоисковые методы оце-
нивания возникли в результате развития эвристических методов и ал-
горитмов, осповаппых па оценивании координат движения путем авто-
матического поиска экстремума взаимной корреляционной функции эта-
лонной и рабочей реализаций используемого поля. Теоретической осно-
вой беспоисковых методов являются различные варианты субоптимал!.-
пого оценивания па основе нелинейной калмаповской фильтрации [13.65]
и нелинейной марковской фильтрации [13.63, 13.64], дающие близкие или
совпадающие [13.8] результаты.
Основное достоинство использования беспоисковых методов в КЭС
связано с возможностью мпогопараметрического оценивания. Одпако им
присущи и определенные недостатки, ограничивающие области приме-
нения, о чем будет сказано ниже.
13.2.1.1°. Постановка задачи и алгоритмы оценивания в бесноиско-
вых КЭС. Воспользуемся для синтеза беспоисковых алгоритмов КЭС обоб-
щенным рекуррентным ФКБ. Применение обобщенного фильтра в бес-
поисковых КЭС имеет ряд особенностей, что и вызывает необходимость
их специального исследования и изучения. Уравнения контролируемого
процесса в КЭС чаще всего линейны, а зависимость ряда наблюдаемых
величин (полей) от вектора состояния является существенно нелиней-
ной (иосит характер реализаций случайной функции). Распространенная
постановка задачи беспоискового оценивания имеет вид
x[fc + l] = А [7с]ж[&] 4-B[fc]u[fc] + <p[/C]w[Zc], (13.2.1)
z[fc] = Цг[/с].) + С[Л]ж[/с] + t>[Zc], (13.2.2)
где к = 0, 1, ... — дискретное время, х— н-мерпый вектор контролиру-
емого процесса, z— m-мерпый вектор наблюдений, h(r) - [ht (г) li}(r)...
.-7(,„(/•) ]т— вектор измеряемых полей. Все поля hv(r) зависят от век-
тора г= [г1г2...п]т, содержащего только I компонент и линейно свя-
занного с векторами х п и
r[fc] = D[/f] г[7с] + JK[/C]u[fc]. (13.2.3)
В разных физических применениях размерность I может быть различ-
ной. Папример, если используются так называемые поверхностные но-
ля [13.5], то I = 2, а при использовании пространстве шых полей 7 = 3.
В (13.2.1), (13.2.3) п[7с]—вектор известных величин. Слагаемые
B[/i]u[Zf], W[/с]и[7с] введены в уравнения (13.2.1), (13.2.3) в соответст-
вии с принципом перераспределения информации (рациональное зада-
ние векторов наблюдения и управления в задачах оценивания [13.5],
гл. 4). Формы записи (13.2.1) — (13.2.3) позволяют синтезировать и ана-
лизировать алгоритмы оценивания как в отклонениях от некоторой опор-
ной траектории (например, в ошибках навигационной системы), так и в
полных переменных.
Не обязательно все наблюдаемые величины должны являться интен-
сивностями используемых полей, функциями этих интенсивностей или
их линейными комбинациями. В частности, если /я составляющая век-
тора наблюдения нс содержит информации о пояс, то в векторе h(r)
проекция hj{r) тождественно равна пулю. A [7с], Z?[7c], <р[/с], С[/с], Z)[/c],
1У[/с]—матрицы в уравнениях контролируемого процесса и наблюде-
ний. Последовательности и?[А], п[7с] —случайные центрированные, взаим-
но некоррелированные, белые, с ковариационными матрицами С[Л]
и Л’[А] соответственно. Начальное априорное распределение вектора
а:[0] предполагается нормальным р [.г [0] ] е Л'(.г0, Ра) с математическим
ожиданием х0 и ковариационной матрицей Ро. Вектор .т[0] некоррели-
рован с возмущениями и? [А], п[/с].
Пример. Пусть летательный аппарат (ЛЛ) совершает равномерный
горизонтальный полет со скоростью У вдоль оси (>Х горизонтальной си-
стемы координат ОХУ; в дискретные моменты времени к — 0, 1,__про-
изводятся измерения поля рельефа /(X, У) [13.8]. Предположим, что
скорость полета точно измеряется навигационной системой (ПС), а рельеф
местности фиксируется радиовысотомеры с постоянной Л/ и неременной
т][7с] ошибками. Дисперсию переменной ошибки обозначим о~. Уравне-
ния контролируемого процесса и измерений можпо представить в форме
Х[Л:Н-1] = Х[7с] + VT, У[А-ф 1] = У[7с],
Д/[/с + 1] = Д/[А], z[/c] =/[Х[7с], У[/с]] +Д/[7с]+ц [7с],
где Т—временной интервал между измерениями, z — сигнал радиовы-
сотомера.
Введем обозначение т[/г] = [X[7г] У[А-] Д/[/с]]т. Начальное априорное
распределение вектора х[0] примем нормальным с пулевым математиче-
ским ожиданием ц = 0 и ковариационной матрицей
где о,о — средпеквадратические
Ло "О
Ло
отклонения (СКО) местоположения
ЯЛ в начальный момепт времени относительно центра системы коорди-
нат ОХУ; пд/ — СКО постоянной ошибки радиовысотомера.
На борту ЛЛ имеется карта поля рельефа. Необходимо па основе
измерений радиовысотомера и НС, используя бортовую карту рельефа
местности, уточнить текущее местоположение ЯЛ. Рассматриваемая зада-
ча сводится к исходной (13.2.1), (13.2.2), если принять дополнитель-
ные обозначения r[7c] = [X[7с] У[7с]]т, п[/с] = [VT О 0]т, 7ф[А]] =
= /[Х[А], У[7с]], е[А] =ц[7с] и задать матрицы
1 0 О’ '1 0 о' „ , , [1 0 01
Л [7с] — 0 10 , Д’[7с] = 0 10 , В[А = [о 1 oj
0 0 1 0 0 1
С [7с] = [0 0 1], ТУ[А] = О, <р[/с]=О, «[&[=<,.
Алгоритм оценивания в беспоисковых КЭС может быть получеп как
частный случай (4.5.11)—(4.5.15) и имеет вид:
х[А] = ж[А|А — 1] + [*]{г[А] — 7г[г[А|А— 1]] — С [Л] rc[/c | А: — 1]},
(13.2.4)
а [А- + 11AJ = А [А]х [А] + В[А| и[А],
?[А|А—1] = В[А]7[А|А — 1] + РИ[7с] и [/с], (13.2.5)
К [A] = Р [A:] [Uh* (?[к | к - 1 ]) + С'Г [А]] Я-1 [А]; (13.2. 6)
уравнения ковариационной матрицы
jO[A] = Pl/f|/c— 1] —
— Р [А-1 А- 1] (LVr [?[А | к - Ц] + Ст [А]] <{/г,. [7[А-1 А - 1]] L +
4- С [А]} Р [А-1 А - Ц {Г%Г [ ?[А | к - 1]] + Ст [А)} +
+ 7?1А]>-1{Л,. [?[A|A-1]]L+C[A]}P[A|A- 1], (13.2.7)
Р[А + 11Ze] = А [А]Р[А]ЛТ[А] + Ч>[ВДМ<Р’[А],. (13.2.8).
В уравнениях (13.2.4) — (13.2.8) принято обозначение
dh^ д}4 dh^ -
— — - * —
дг1 ЙГ2 ’ •• РГ;
Sk2 дЬ2 5Аг
hr [7 [А | А - 1]] = дГ1
dflm 8hm Ollm
dr dr drt
r=r[A|ft—1]
и введена вспомогательная матрица
Все соотношения (13.2.4) — (13.2.8) выполняются при к — 0, 1, ... в ре-
шаются при начальных условиях
7[0| - 1] = хо, Р[0|- 1] = Ро. (13.2.9)
Наряду с уравнениями (13.2.4), (13.2.5), при анализе дипамики про-
цессов оценивания полезно иметь и уравнения для ошибок
я[А] = £[А] — я[А], (13.2.10)
я*[А] = J[A| А — 1] — я[А], г*[А] = Р[А| А — 1] — г[А], (13.2.11)
которые могут быть получены подстановкой в (13.2.4) уравнения ваблю-
дспия (13.2.2) и последующего вычитания (13.2.1) из (13.2.4), (13.2.5):
7[А] = х* [А] + Р [А] {LX (г [А] + г* [А]) + Ст [А]} Д-1 [A] (h (г [А]) -
— h (г [А] + г* [А]) - С [/с] х* [А] + v [А]}, (13.2.12)
«•[А + 1] = Д[А]х[А] -<р[А]и>[А], г*[А] = О[А]х*[/с]„ (13.2 13)
А = О, 1, ..х* [0] = х0 — х [0].
В дальнейшем понадобятся условные математические ожидания
Ею, „[х[А] |ж[0]], Е„,, „[ж*[А] |ж[0]], т. о. значения величин х[А], х*[А],
усредненные по всевозможным последовательностям возмущений ш[А],
г [А] при фиксированном начальном условии х [0]. Из теории нелинейной
калмаповской фильтрации вытекает, что при небольших ошибках оце-
нивания
В[А] «Ею.„ х[о1[^[А]хт[А]], (13.2.14)
Р[А|А-1] « Ею. х[01[х*[А]х*т[А]]|. (13.2.15)
Возьмем от обеих частей равенств (13.2.12), (13.2.13) условные матема-
тические ожидания Ew, г, [. | х[0]],. С учетом сделанных замечаний и
свойств шумов u’[A], v [А] получим
е«,в^1/£11^[011 =
- EWj1> k* [A] I X [0]] + Р [А] Е„, „ [ {ГЛ’ Ir ИН +
+ С'г [A]} R-1 [А] {А [г [А]] - h [г[А] |- г* [А]] - С [А] х* [А]} | х [0]];
(13.2.16)
Ею. v[к* [к + 1 ] | х [0] ] = A [A] Ew, „ [z [А] | х [0] ],
Ew,„[r*[A] |x[OJ] = £>[А]Ещ, г[ж*[А] |а[0].]; (13.2.17)
А = 0, 1, ..., E„, »[а:*[0] |х[0]] = х0 — х[0].
При выводе (13.2.16) использовано то обстоятельство, что г*[А] зависит
только от наблюдений, проведенных до момента А, и поскольку г [А] —
дискретный белый шум, то взаимная корреляция между Аг(г[А] + г*[А])
и v [А] пе имеет места.
Из уравнений (13.2.7), (13.2.8) следует, что В [А] и Р[А + 1|А] зави-
сят от г[А|А — 1], а это в известной степени противоречит соотношениям
(13.2.14), (13.2.15), если понимать их абсолютно, а пе приближенно. Вы-
ясним это обстоятельство. Воспользовавшись известным матричным тож-
деством [13.66], перепишем (13.2.7) в виде
Р-! [А] = Р~1 [А I А - 1] + [LX к [*1 + r* +
+ Ст [А]] R 1 [A] {hT [г [А] + г* [A]] L + С [А]}. (13.2.18)
Ковариационные матрицы Р[А], Р[А|А — 1] в несущественной степени
зависят от того, берутся градиенты полей в точке г[А]-|- г*[А] или
близких точках г [Л]. Поэтому можпо принять
Р-1 JA] = р-1 [А 1 к + 1] + (LX Г' ИП +
+ С'г [А]] /Г1 [A] {hr [г [A-]] L + С [А]}. (13.2.19)
Соотпошсппе (13.2.19) по зависит от проведенных наблюдений z [0],
z[l], ..., z[A] и пе противоречит физическому смыслу уравнений
(13.2.14), (13.2.15).
13.2.1.2°. Статистический анализ процессов оценивания в беспоиско-
вых КЭС. Уравнения оценок (13.2.4) — (13.2.6) п вычисленных усреднени-
ем по и>[А], и[А] математических ожиданий ошибок оценивания (13.2.16),
(13.2.17) зависят от конкретной траектории движения г [А] и связанной
с ней детерминированным образом реализации поля Л(г[А]), по которой
работает КЭС. Для нестационарных пеэргоднческпх (в пространствен-
ном смысле) полей пет никаких оснований свойства КЭС, выявленные
при рассмотрении одной реализации /i(r[A]), переносить па случай дви-
жения по другим траекториям. Для преодоления возникающих при этом
затруднений приходится рассматривать усредненные показатели КЭС
по множеству реализаций Л(г<*>[А]). Эти усредненные характеристики
КЭС могут быть достаточно строго определены путем введения мпоже-
/ Л’ \
ства траекторий г<г>[А], i — 1, <V, и задания вероятностей Р, I У, = 1 1
\i=L
движения по этим траекториям. Хотя такое построение является пе
единственно возможным, оно вполпе оправдано с теоретической точки
зрения. При введении статистического подхода будем считать, что все
возможные траектории движения смещены друг относительно друга на
постоянный сдвиг и могут быть представлены в виде г<о[А] = г°[А] 4-
+ Дг<'>, где г°[А] —некоторая исходная траектория, определяющая вид
всего множества возможных траекторий *).
В зависимости от конкретного рассматриваемого применения КЭС
исходная траектория, в частности, может быть плоской, либо прострап-
ствеппой кривой. Реализации поля Л. [r<i5[Zc]J = Л [г°]/с] + Ar(i>] обозна-
чим h<-‘> [г1 [А] ].
А. У равнения для МО ошибок оценивания в случае нестационарных
полей. Соотношения (13.2.16), (13.2.17) при движении по i-n траектории
примут вид
иоп =
= Еи.л [X* [А] ] i, х [ОН + pt [А] [г° [А] + г*«>[А]]
+ [А]] 1{~1 [А] [го [А]] - А<;> [/’ [А] + г*<» [А]] -
— С [А] [А]} [ 1, х [0]], (13.2.20)
*) Возможно очевидное обобщение рассматриваемого статистическо-
го подхода для случая, когда множество возможных траекторий получа-
ется из г°[А] пе только вследствие сдвига, но также и путем поворота
[13.5, 13.8].
Ew,!;[2:*[fc+ 1] I i, x [0] ] = А [A]E„, r[x[A] I i, ж[0]],
Ew, ®[r*[A] |i, ж[О]] = Z)[A]EW, г[л:*[А] |г, я[0]],
A = O, 1......Ew, „ [a:* [0] |i, ж[0]] = x0 — a?[0], (13.2.21)
поскольку я* [А], г*[Л], В [А] в силу равенств (13.2.12), (13.2.13), (13.2.19)
зависят от вида траектории.
Умножим правые и левые части равенств (13.2.20), (13.2.21) па Г,
и просуммируем по всем I. Так как У, PjE^^ [•[ г, х [0]] совпадает
г
с математическим ожиданием EW1 г[-|ж[0]] рассматриваемой величины,
вычисленным по всевозможным последовательностям н?[А], р[А] п тра-
екториям г<г>[А], то после несложных преобразований получим
т [AJ = m* [AJ + Е,,, ^ [Р{ [А] |£ТЛ«>Т [г0 1*1 + г*® [AJ1 +
+ Ст [Л]} [AJ [г° [А]] - /г<0 [г° [ AJ + г*«> [А]] _
— С[А]ж*«>[А]}|ж[0)], (13.2.22)
т* [А 1] = А [А] т [А], т* [AJ = D [AJ т* [А],
А = 0, 1, ..., т* [0] = xQ — х [0]. (13.2.23)
В (13.2.22), (13.2.23) обозначены т[к] = Еш, г[х[А] | [0]],
гп*[А) = Еи,щ г[х*[А]|ж[01], < [Л] = Ew „ r [г* [А]| Ж[0]].
Оставшееся нераскрытым выражение
J = Ew,«,r [pi I*1 l*T lr° 1*1 + rS,<i> [A-]] +
+ C'[ [А]) Л'1 [A] {/t«> [r° [A]] - Л«> [r° [AJ + r*«> [A]] -
- C [AJ /=«> [A]} | x [0]] (13.2.24)
представляет собой сложную математическую конструкцию — математи-
ческое ожидание случайной функции от случайного аргумента. При рас-
смотрении сложных нелинейных случайных процессов можпо использо-
вать прием, иногда называемый «методом динамики средних» [13.67].
Применительно к рассматриваемому выражению (13.2.24) этот прием
позволяет заменить случайные аргументы па их математические ожи-
дания и приближенно записать
J = [р41*1 {*'ЧН,Т И 1*1 + 1*1] +
+ Ст [А]} Я"’ [А] {Л<‘> [г° [A|J - А<0 [г° [А] + тл; [А|] -
— С[А]т*[А]} | х [01]. (13.2.25)
Введем обозначения
м (r) = 2 pift<i> <г) = 2 pih + Ar<i')’ (13-2-26)
1^1 i=i
TV TV
(s. P) = 2 Е,Л® U) Л® (P) = 2 PЛ kv (p + A/i>)-
(13.2.27)
Здесь М (г) = 2 РЛ <г + Аг<°) 2 РЛ <r + Аг<°) • • Sp?m<r+Ar<0)]T
представляет собой вектор математических ожиданий полей, a р) —
взаимную корреляционную функцию р-й и v-й реализаций.
После ряда преобразований (13.2.25) получим приближенное урав-
нение для математических ожиданий ошибок оценивания в случае не-
стационарных полей:
т [7с] = т* [7с] + Г [Л] Ат ( 2 I*] Р° 1*1 + т* 1*1- г° 1*1] “
\ I ц.у ®
- 2 1*1 Ryvs Р 1*1 + тт 1*1. г° 1*1 + < [ *1] -
p.,v
— М'‘г [г° [/с] + т* [Л. 1 ] У?"1 [Л] С [7с] т* [7с]} + Ст [Л] R~l [7с] \М [гП [Л]] —
— М [г° [7с] + т* [7с]]} — СТ[Л] R~l [Л] С [7с] т* [Л]^>, (13.2.28)
гп* [А -4- 1] = А [7с] т [Л], т* [7с] = D [7с] т* [7с],
7с == 0, 1, ..т* [0] = сс() — х [0]. (13.2.29)
Здесь [Л] — элементы матрицы Й“’[Л],
N
Г [Л] = Ew>Vir [Р{ [7с] IX [0]] = Er [Pi [Л]] = 2РЛ 1*1-
t==I
Г <Х-у (g. Р) (*, Р) (у. Р)
Is’ Р) — ds ds ds,
L J- < J
Равенства (13.2.28), (13.2.29) по образуют замкнутой системы соотноше-
ний, так как пока не указаны уравнения, определяющие Г [Л]. Эти урав-
нения будут получены позднее.
Б. У равнения для МО ошибок оценивания в случае стационарных по-
лей. Если все поля стационарны, то М(г) = const и R*IV (s, р) =
= 7?*v(s-—р). Введя обозначение s — р = А = [А1А2... А(]т, получим
^у - Р) = С (Л) = R*v (Ар Аа, ..Аг) и
<VS(S- P)=**VJA) =
Мцу(Л) ^цу(А)
<*А! 5А2
g<v(A)
5Дг
Уравнения (13.2.28), (13.2.29) принимают более простой вид
т [7с] = т* [7с]-[- Г [7с]
& 2 [*] (Кул [-с 1*1] - Сд 1°1} ~
\ цу
— Ст [7с] R-1 [7с] С [7с] т* [7с]\ (13.2.30)
т* [7с -|- 1] = А [Тс] т [Л], т* [k] = D [Л] т* [Л],
к = 0, 1, ..., т* [0] = х0 — ж [0]. (13.2.31)
в случае взаимной некоррелированности различных полей
т
2 К pj] = 2 и СЛ К i*j],
2 pj Ю1 = 2 pj СЛ ioj = о
B,v 1-1=1
по свойству четности автокорреляционной фупкции.
Дальнейшие упрощения возможны при условии, что ошибки дат-
чиков различных полей взаимно пекоррелировапы и матрица 7?[/г] диа-
гопальпа: R Р] = diag (Оц~), где о2~— дисперсия ошибки измерения
поля /гр(г). В этом варианте получаем
™ [А] = «г* [М + Г RJ Ат 2 Н Р1]
— Ст р] diag (ц-^) С [/с] т* [к](13.2.32)
т* [/с + 1] — A [irj т [А], т* р] = D [А] т* р],
/с = 0, 1, ..., m*[0J = Ko — ж[0], (13.2.33)
Пример. Получим уравнения (13.2.32), (13.2.33) для условий приме-
ра 13.2.1.1". Полагая используемое поле J(X, У) стационарным, паходим
т [Л] = т* [Л] + Г [Л] ^Лто-2Д*/т [т* [Л]] — а~2Ст р] Ср] т* р]|,
(13.2.34)
m* р1] =m р], m*[fc]=Pm* [А], к — 0, 1, ..., т* [0]= [ДХо АУ0 А/]т;
(13.2.35)
здесь II* f = Il*t Лу) —корреляционная функция поля, например,
ноля рельефа местности; Ах, Av — аргументы корреляционной функции;
ДХо, ДУо— начальные ошибки навигационной системы в определении ме-
стоположений ЛА; А/ — постоянная ошибка датчика поля (радиовысото-
мера) ;
1 0 О’]
о 1 01
Ст [А] С р] =
D = L =
ООО
ООО
0 0 1
Введем обозначения
[АХ pf
АУ р]
Л/Р].
т* [Л] =
АХ* [А]
АУ* [к]
А/* [Л]
где АХр], ЛУр], Д/ [А] и ДХ*р], ЛУ*р], Л/*Р] —ошибки оценпваппя
с помощью КЭС местоположения ЛА и постоянной ошибки радиовысото-
мера после проведения к то и (к—1)-го измерений соответственно.
Элементы ковариационной матрицы Г [Л], являющейся симметрич-
ной, обозначим Ггд[Л]. В принятых обозначениях соотношения (13.2.34),
(J 3.2.35) для моментов времени к = О, 1, ... перепишутся в скалярной
форме следующим образом;
АХ[/г) = лХ[Л —1] +
+ о”2
Дх=ДХ[Л-1]
Ду=Д Y[h-1]
дх=дх|Д-1]
Лу=ДУ[Л-1]
-Г13[Л]А/[Л-П
(13.2.3G)
ЛУ[/.| = ЛУ[Л— 1Ц
Дх=ДХ[Л-1]
Ду=ДУ[Л-1]
0^/
+ Г22^^А7
ДХ=ДЛ'[Л—1]
Ду=ДУ[/>.-1]
-Г23[Л]д7[/С- 1)
(13.2.37)
А/ [4] = Д/р-Ц-
Дх=ДА[й-1]
Ду=ду[я-1]
+ Г2зИ1-ал;
дж=дх[л-1]
Ду=Д У[Л-11
-r33[i] a7 [7с-1]
(13.2.33)
В формулах (13.2.3G) — (13.2.38) принимается АХ[—1] = АА'о, АР[—1] =
= АУо, Л/[—1] = Л/о.
В. Определение статистических характеристик полей. МО и корре-
ляционные функции полей определяются формулами (13.2.2G), (13.2.27).
Еслп все возможные траектории движения отличаются постоянным сдви-
гом в пространстве R1, то согласно (13.2.26), (13.2.27) вид траектории
пе влияет на статистические характеристики полей и все определяется
лишь сдвигами траекторий Аг<’\
Конкретизируем формулы (13.2.26), (13.2.27) для частного случая
поверхностных полей h (X, Y), т. е. полей, зависящих только от двух
горизонтальных координат X, Y. В этом случае I — 2, г — [X У]т, Аг<’>=.
•= [АХ’(1>АУ<*)]Т. Рассмотрим несколько частных случаев.
1. Пусть все траектории движения равновероятны (I\ = 1/Л?) и сдви-
нуты вдоль оси X па расстояние А?. Тогда АХ<’> = (г— 1)Дг, ДУ<г> — О
и согласно (13.2.26), (13.2.27)
N
М(Х, У) = (1/JV) 2 7г[Х-|-(г —1) AZ, У], (13.2.39)
i=l
/V
= d/Л) 2 [Хх +(i — 1) AZ, yj hv [Х± + Аж + (г — 1) AZ, Ух + А^].
(13.2.40)
В равенстве (13.2.40) введены обозначения Х2 — Xf J- Дх, У2 = У| + Д„.
Предположим, что поле h(X, У) стационарно и число N выбрапо доста-
точно большим для проявления стационарности. Тогда математическое
ожидание ноля нс зависит от X, У, а корреляционная функция поля
зависит только от сдвигов Дх, Аи и нс зависит от Xt, Уь Положив па
этом основании X = У = XL = У1 = 0, найдем
Я
M = WN) 2 МО’ — 1)Л/, 0],
г—1
Я
(0, 0; Лх, Лу)= (1/ЛЭ 2 \ [(« - 1) АЛ 0) hv [(£ - 1) AZ -|- Аж, AJ.
i=i
Часто при проведении теоретических оценок точности КЭС рассматри-
вается одномерный вариант системы, т. е. предполагается, что боковые
отклонения У от траектории движения тождествеппо равны пулю. В этом
случае для оценки точности требуется знать лишь одно сечение про-
странственной корреляционной функции. Необходимые формулы при-
нимают вид
Я
М = (1//V) 2 h К1' — !) АЛ 0], (13.2.41)
2=1
7?*v (0, 0; A, 0)=(1/Лг) 2 !ln Кг’ — *) ДЛ 0] hv [(г - 1) AZ Д, 0]. (13.2.42)
2=1
Они полностью совпадают с теми зависимостями, по которым обычно
рассчитывают статистические характеристики полей.
2. Пусть все траектории равновероятны и сдвинуты вдоль оси У на
расстояние AZ; тогда АХ; = 0, ЛУ; = (г— 1)AZ и
ZV
М (X, У) = (1/7V) 2 h [X, У -I- (г-1) AZ],
<v(Xl’ У1 = Xl + Av У1 + Аг/) =
7V
= (W) 2 Иг у1 + - !) AZ1 hv lXi + АХ’ у1 + А!/ + <г - AZ1-
Предположив стационарность поля и рассмотрев одномерный вариант,
находим
N
М = (1/ДГ) 2 h l°i <г* “ !) д*1, (13.2.43)
г=1
7V
7?*v (0, 0; 0, А) = (UN) 2 \ Ю, (» — 1) AZ] Ч [0, (Z-l) AZ+А]. (13.2.44)
1=1
3. Пусть все траекторип равновероятны и область возможных сдви-
гов представляет собой квадрат (рис. 13.2.1). Тогда Ares = [ЛХ,;3 =
= (q — 1)AZ, АУв„ = (s — 1)AZ]T, q, s = 1, Q, N = Q2, и из формул
(13.2.26), (13.2.27) получаем
Q
М (X, Y) = (1/С?2) У, Zt [X(5 — 1) AZ, У-]-(s — 1) AZ], (13.2.45)
Q,S=1
Q
(У. \ + Дя, У2 + Ay) = (1/c2) 2 [^ + (<? - 1) AZ, yx +
g,s=l
+ (s - 1) AZ] hv [Xx + Ax + (<7 — 1) AZ, Ух -I- Ay + (s - 1) AZ]. (13.2.46)
Для стационарных полей формулы упрощаются:
Q
М = (1/<22) У Л[(д — 1) AZ, (s— 1) AZ], (13.2.47)
Q
K*v (0, 0; Дж, Ay) = (l/<?2) 2 \t[(7-l)AZ, (s-l)AZ]X
Х7Ч.[ЛЖ 4- (q — 1) AZ, Ay -|- (s - 1) AZJ. (13.2.48)
Получеппые расчетные формулы (13.2.39)—(13.2.48) могут быть исполь-
зованы для предварительной обработки информации о полях. Рассчи-
танные таким образом статистические характеристики описывают пе
один какой-то маршрут, а целый район. Если существует необходимость
более тщательного учета особенностей поля, то пе следует делать пред-
положения о стационарности. Специальным выбором параметров Q, N и
AZ необходимо добиться, чтобы математическое ожидание Л1(Х, У) было
постоянным или изменялось плавно, тогда основная информация о свой-
ствах поля будет содержаться в корреляционной функции. Некоторые
рекомендации по выбору параметров N, Q и AZ в подобных случаях мож-
по пайти, папримср, в [13.68, 13.69].
Г. Нелинейные аффекты в беспоисковых КЭС. Соотпошеппя (13.2.28),
(13.2.29) или (13.2.32), (13.2.33) (опп еще должны быть дополнены урав-
нениями для ковариационной матрицы Г[Ы) позволяют исследовать ус-
тойчивость и анализировать динамику процессов оценивания в беспопс-
ковых КЭС «в среднем» при работе как по нестационарным, так и ста-
ционарным полям. Динамика беспоисковых КЭС в области больших на-
чальных ошибок оценивания (в сравнении с характерными «лппейнымн
мерами» используемого поля) существенно нелинейна. Одним из наибо-
лее неприятных проявлений нелинейности является возможность потери
работоспособности беспоисковых КЭС. Поскольку аналитическое иссле-
дование указанных уравнений в общем случае представляет большие
Рис. 13.2.1. Область воз-
можных сдвигов траек-
торий движения
сложности, поясним характер нелинейных эффектов в беспоисковых КЭС
на примере.
Пример. Проанализируем динамику процессов оценивания в про-
стейшей КЭС, рассмотренной в п. 13.2.1.1°. Будем считать, что корреля-
ционная функция поля f(X, У) может быть аппроксимирована выра-
жением _______
A.1/) = ^exp[-a2(A2+A2)]coSpJ<A2 + A2, (13.2.49)
где о2 — дисперсия поля; а, Р — параметры корреляциоппой функции.
Входящие в уравнения (13.2.36) — (13.2.38) частные производные опреде-
ляются соотношениями 5/?*у/дАх = — <р (А) Ах, dR^/db.y = — <р (А) Ау
Здесь А == ]/"Л* + А2, <р (А) = а,2 охр [— а2Д2] ^2а2 cos РА + j
Для случая ic[/c] = 0 в п. 13.2.1.3° показапо, что элементы ковариацион-
ной матрицы Г[7с] равны
Г11Р1 = [%а + (* + 1)‘’г~Ч']-1. Г12[7е] = 0, Г13[7С]=О,
г22т=[^02+^ + 1)^Ч']Л r23w=o: г33[/С] =
= [°Z/2 + <к -I- !) (13.2.50)
Величина о2,, фигурирующая в (13.2.50), представляет собой дисперсию
градиента используемого поля. Для корреляциоппой функции вида
(13.2.49) п2, = (2а2 + р2) о2.
В соответствии с равенствами (13.2.36) —• (13.2.38), (13.2.50) каналы
X и У ведут себя одинаково. В общем случае управление по X, Y взаим-
но связано через функцию ср(А). Оценивание постоянной ошибки радио-
высотомера протекает автономно. Если начальное отклонение АУ0 = 0,
то и во все последующие моменты времепи АУ[7с] = 0. Используем это
обстоятельство и рассмотрим лишь один капал X. Перейдем i« безразмер-
ным величинам ,5'[/г] = аАХ[Л], о() = апх , X = p/а. С учетом этих
обозначений уравнение (13.2.36) примет вид
5p] = Fft(5[A-lJ) =
ехр(— S2 [А— 1]) (2S [Л—1] cos AS [А —1] + Asin AS[A—1])
~s *'- <»№ + </.4-i>(J+n ’
к = 0, 1, ...; 5[—1] = аДХ0. (13.2.51)
Дипамику простейшей КЭС удобно анализировать па фазовой плос-
кости с осями 5 [/с— 1], 5[А]. Статическая характеристика Fh(S[k— 1])
беспоисковой КЭС пестацпопарпа, так как коэффициенты усиления ФКВ
меняются се временем. На рис. 13.2.2 показано семейство статических
Рпс. 13.2.2. Исследование персходпого процесса оцеппваипя па фазовой
плоскости
характеристик F*(S\k — 1]), рассчптаппое для a~/O;t = 0,5, Оо = 1, А = 2
и различных к. Если па оси абсцисс отложить начальное значение
S'[—1J, то иа осп ординат по характеристике Fo(>S[—1]) можпо получить
значение 5[0]. Затем, отложив па осп абсцисс полученное значение S[0],
по характеристике />’,(5[0]) па оси ординат можпо пайтп значение S[l|
и таким образом шаг за шагом построить весь переходный процесс. 11а
рис. 13.2.2 оппсаппое построение проведено для 6’[—1J = 1. С целью
облегчеппя построения удобно провести биссектрису. В точке с, соответ-
ствующей 5[—1] и Fo(S[—1]), проведем горизонтальную линию до пе-
ресечения с биссектрисой в точке Ъ, а затем в точке b проведем вертикаль-
ную липпю до пересечения с характеристикой ^(^[О]) в точке с. Про-
должая этот процесс, определим всю траекторию движения прп печаль-
ном отклонении 5[—1J = 1. В установившемся положении равновесия
в этом случае ^'[оо] — 0. Если выбрать S'[—1] = 1,8, то в установившем-
ся положеппп равновесия iS[oo] = 3,2, т. е. спстема захватит «ложный»
экстремум — пеглавпый максимум корреляционной фупкцпп (13.2.49),
«Водоразделом» между этими двумя положеппямп равновесия является
начальное отклонение ,S'[—1J = 1,5, совпадающее с точной первого ми-
нимума корреляционной фупкцпп Ду).
В КОС более высокого порядка, прп учете взаимосвязи между ка-
налами и других факторов, динамика процессов оценивания посит бо-
лее сложный характер. Одпако во всех случаях существует область до-
пустимых начальных ошибок КЭС, впе которой беспоисковые КЭС теря-
ют работоспособность. Сопоставление результатов примера с данными
[13.70] обнаруживает глубокое сходство простейших беспоисковых и эв-
ристических КЭС в отношении главных свойств.
13.2.1.3°. Оценка точности беспоисковых КЭС. Точность беспоисковых
КЭС при движении по некоторой фиксированной траектории г<г>[А] оп
ределяется уравнениями ковариаций (13.2.19), (13.2.8), в которые долж-
на быть подставлена конкретная реализация ноля А^ДгДА]], т. е. ра-
венство (13.2.19) необходимо переписать в виде
[А] = [А | А — 1] 4-
+ {LTh^ ['° IM] + [А]} И-1 [А] {&«> [г° [A]] L + С [А]). (13.2.52)
Надо еще раз подчеркнуть, что Р<г>[А], Р<’>[А|А — 1] совпадают с кова-
риационными матрицами ошибок оцеппвапия только в случае небольшой
величины этих ошибок. Одпако при исследовании вопросов достижимой
точности, когда заведомо речь идет о небольших ошибках, использование
матриц Р<г)[А], /Хг>[А|А — 1] в качестве оценок точности вполне до-
пустимо.
Если мы рассматриваем реализации поля как случайные функ-
ции, то по физическому смыслу 7J<i>[A], P(i>[A|A— 1] представляют со-
бой условные ковариационные матрицы
Р«>[А.] = е,0 ^оЛадз-ЧАПгО’],
Р<’>[А|А-1] = E,„.K,j:loi[^[A]x*T[A]|'-<i>].
Прп статистическом подходе рассматриваются средпие оцепки точности
КиС по множеству возможных траекторий
Г[А] = Ев, г, Ж[о], г[.?[А]хт[А]],
Г[А|А-1] = Ew.t).x(oj.r[a:*[A]^[A]].
13 соответствии с известными соотношениями, выполняющимися для ус-
ловных математических ожиданий, в общем случае
/V
Г [А] = Ег [Р<1> [А]] = 2
г—1
N
Г [А | А — 1] = Er [Рп> [А I А — 1]] = 2 Pj Р[/с I к —11-
1=1
При работе КЭС по конкретной траектории г<‘>[А] па эргодических по-
лях по прошествии определенного интервала времени матрицы Р(1>[А],
PW[A|A — 1] могут приближаться и в дальнейшем практически совпа-
дать со своими математическими ожиданиями Г[А], Г[А|А — 1].
А. Уравнения для ковариационных матриц в случае нестационарных
нолей. Возьмем математическое ожидание по множеству траекторий от
обеих частей уравнений (13.2.52), (13.2.8)
ErP<i>_1 [А] = ЕгР(Г>~1 [Л | к — 1] + £г {£ТА<ЙТ [г° [ A J] +
+ Ст [/с]] R-1 [А] {//;> [г° [AJ] L + с [Ajp
Г [А -|- 1 I А] = А [А] Г [7с] /Г' [А] + <р [А] (? [А] <рт [*],
к = 0, 1, ..., Г[0|— 1] = Р0.
Воспользуемся «методом динамики средних» и будем считать, что в пер-
вом приближении
Er [P<i>-1 [Aj] да Е~1 [P(i> [А]] = Г-] [AJ,
Er[k\k — 1J] « E~* [Р<‘> [A | к - 1Ц = Г-] [A | A — 1J.
Отметим, что в случае эргодических полей приведенные приближенные
соотношения превращаются в точные равенства. Вводя обозначение
~62T?*V(S, р) 02R*iv (s, р) ~
R* (s, р) .................................,
6P d2<v (x’ P) <g’ P)
dsz^Pi ''' ^si^Pi
после ряда преобразований получим систему матричных уравнений, оп-
ределяющих Г[А] и Г[А| А—1]:
Г-1 [А] = Г-1 [А | А - 1] LT 2 Я”! [A] R^ [Н> [AJ, г" [A]] L Д-
H,v=i
+ LTM^. [г» [AJ] 7?-i [AJ С [A] + CT [AJ R~l [A] r<> [AJ] L +
+ CT [A] R~ 1 [AJ C [AJ, (13.2.53)
Г[А + 1|А] = Л [А] Г[А]ЛТ[А] +<P[A]<?[A]<PT[A],
A = 0, 1, ..., Г [0 [ — 1] = Po. (13.2.54)
Совместно c (13.2.28), (13.2.29) соотношения (13.2.53), (13.2.54) образуют
замкнутую систему уравнений беспоисковой КЭС в случае использова-
ния нестационарных нолей.
Б. Уравнения для ковариационных матриц в случае стационарных
полей. Если поля стационарны, тоЛ7,.[г°[А]] = 0, R^v(s, р) = 7?('iv(s—Р)““
= (-'1 — Pp s2 — Р2> • •’ si — Р?)- Обозначим А = [А, ... AZ]T = s-p,
тогда dzR*v (s. P)/<VPs = ~ PXv (A)/c?Agc)Ag n
Г-1 [A] = Г-l [A | A- 1J +
+ ^T 2J Л-^AJ/?* [0]L + CT[A]/?-i[A]C[A], (13.2.55)
u,v=i
где 7?*Гдд 1 Л) — матрица Гесса корреляционном функции ^*V(A).
Дальнейшие упрощения возможны, если Ац(г), Av(r) взаимно пекоррели-
ровапы. В этом случае в (13.2.55) остаются только составляющие
(д2Т?*ц (Л)/АЛ£йАд)д_0. Если, кроме того, все поля изотропны, т. е.
р* /д') зависит только от модуля
1мя k '
Ъ то
g = <?’
------------------- I "п.
Здесь о2, — дисперсия градиента поля 7г,.(г) по любой из коордипат
Лд
71} п. Предположим отце, что ошибки датчиков различных полей
взаимно пскоррелнровапы, т. е. 7? [А] = diag (<т2~),
(13.2.55), (13.2.54) принимают вид
тогда уравнения
Г”1 [А] = Г-1 [А | А - 1] -|-
+ 3 +CT[A]diag(o-2) С [А],
Ц=1 лц V /
Г[А + 1|А] = Л[А]Г[А].П[А] +<р[А](4А]фЧА],
А- = 0, 1, ..., Г[0] — 1] = Ро.
(13.2.5G)
(13.2.57)
Уравнения ковариаций в этом случае зависят только от дисперсий гра-
диентов. Соотношения (13.2.32), (13.2.57), (13.2.33), (13.2.56) образуют
замкнутую систему уравнений беспонсковой КЭС при работе по стаци-
онарным, изотропным, взаимно некоррелированным полям и при отсут-
ствии корреляции ошибок датчиков этих полой.
В. У равнения для ковариационных матриц в случае свободного дви-
жения (и?[А] ==0). В этом варианте (?[А] =0 и уравнения ковариаци-
онных матриц существенно упрощаются как при использовании стаци-
онарных, так и нестационарных полей. Рассмотрим только случай стацио-
нарных полей. Подстановка (13.2.57) в (13.2.56) в предположении невы-
рожденности матрицы А [А] дает
Г-i [А] = д-it [А—1] р-i [А - 1] А-1 [А-i] -j- LTL °йД°2' +
н=1 ~ ли
4- Ст [A] diag (о“2 ) С [А], (13.2.58)
А = 0,1, ..., /Г1Т[— 1] Г-1 (—1] т!-1 (— 1] = P-!.
Проверкой можпо убедиться, что решением разностного уравнения
(13.2.58) является
Г-* [А -|- 1] = JJ Л~1Т [А - s] А»-* |] И-’ И +
8=0 5==0
A h-q Г тп
+ 2Пл-1т[А-*1 ^So-2o2, -I-
g-Os=O ll.-—-1 ~ 'll
-f- CT [</] diag
A-’ [s + <714- LTL Uoh2°,2'-|-
+ CT[A+ Udiag(o-JC|A-1-U,
A = 0, 1,
(13.2.59)
Г”’ [01 = p-i
+ Г7' 3 cC °2' + C'T 101 diag (°йа ) C [0]-
ll=rl ~ Ли '
Если КЭС стационарна и матрицы А, С, R по зависят от дискретного
времени к, то решепие (13.2.59) можно представить одним выражением
Г-1 [А] = (Л-1Т)Й Р-1 (тТ1? +
k Гт
+ У, (л~1'г)/!~<г| L^L 2 о-2 о2,
<7=0 L Н=1 ~ ЛН
+ CTdiag(o-y С
(13.2.60)
к = 0, 1, ...
Воспользовавшись правилами перемножения транспонированных матриц,
можно упростить выражение (13.2.60) и привести его к виду
Г-1 [А] = (И-'1)’’ P~xA-h +
+ 21Л-(/г-9)1Т £Т/' 2 %2 °2 + c’r dia8 [%2 ) С А=0, 1, ...
q=0 L Ц=1 ~ ,lU ' J
(13.2.61)
Пример. Определим коварпациоппую матрицу Г [А] для условий пре-
дыдущих примеров. Обозначим Г-1 [А] = Х[А]. Поскольку в рассмат-
ривавшихся примерах А—единичная матрица, то Х[А] = Р~1-|-
71
4- 2 (iTbo“2o21Z + сС2С’тС’)- Матрицы Ро, L ll С в предыдущих при-
д=о
мерах были равны
0 О
О
Г1 0 01
[о 1 0J
С = [0, 0, 1].
Поэтому
Элементы обратной матрицы имеют вид
2ц [А] = + Vе + 1) cr~2°rZ.'’ 2i2 1*5 ~ °> 21з 1*1 =
S22 [Al = о'2 + (А + 1) о-Х'. 223 И1 = 0; 233 [А] = Од/2 + (к + D а“2-
Матрица 2 [А] получилась диагональной, следовательно,
Г11[*1 = [%2 + (Л+ 1)<С2сф]_1. Г12[А]=0, Г18[А-] = О;
Г22 W = [%02 + (* + D °~2оЛ<]-1. Гм [А] = 0;
Г33 И] == [од/+ (А 4-1) о-2]"1.
По физическому смыслу ковариационной матрицы Г [А] ее диагональные
элементы совпадают с дисперсиями о2 [А], о2 [А], Од^А] ошибок оце-
нивания соответствующих величин после А-го наблюдения. Отсюда
о-2 [А] = о-2 + (А + 1) (Г^ОдД о-2 [А] = о~2 + (А + 1) о-2о2„
°a 2 1*1 = °л/2 + (* + 1) О-2-
13.2.1.4°. Многократная линеаризация уравнений наблюдения и ис-
пользование множества обобщенных ФКБ. Отмеченное в п. 13.2.1.2° отри-
цательное влияние нелинейных эффектов па процессы оценивания в
КЭС привело к поиску более сложных, чем обобщенный ФКБ, оптималь-
ных и субоптимальпых алгоритмов оценивания, сохраняющих работо-
способность и оптимальность (субоптималыюсть) при любых значениях
ошибок оценивания. Одним из таких алгоритмов является применение
множества обобщенных ФКБ с линеаризацией измерений в ряде точек
и усреднением полученных при этом оценок [13.76]. Поясним идею это-
го способа для более упрощенной по сравнению с (13.2.1) — (13.2.3) по-
становки задачи:
а:[А+1] =Л[А]а:[А] + iy[A], z[A] = 7г(г[А]) + и[А], к = 0, 1........
которая получается из (13.2.1) — (13.2.3), если положить и[к] 0, С[А] =
еО, D[А] и <р[А] —единичные матрицы. Остальные предположения со-
храняются без изменения.
Для случая нелинейного уравнения измерения h(а-[А]) известные
оптимальные оценки, например [13.79], требуют очень больших вычисли-
тельных затрат при численной реализации, что привело к разработке
субоптимальпых алгоритмов фильтрации. Существует несколько подхо-
дов к этой задаче, например метод условных семиинвариантов [13.77]
и др. Одпако соответствующие схемы требуют значительно большего
объема памяти вычислителя по сравнению с ФКБ. Для получения за-
мкнутой рекуррентной процедуры калмановского типа можпо воспользо-
ваться линеаризацией функции h(х[/с]). В обобщенном ФКБ в качество
точки, где производится линеаризация, берется значение прогноза
а-[А|А — 1]. Алгоритм, предложенный в работе [13.78], использует не-
сколько локальных итераций по схеме Гаусса — Ньютона для того, что-
бы, отправляясь от ж[А|А — 1], приблизить точку линеаризации к денет-
вительпому значению вектора состояния х [7с]. Однако этот алгоритм мо-
жет быть малоэффективным, когда нелинейность функции h (х [7с]) на-
столько значительна, что приводит к сложной неунимодальной зависи-
мости от х[к] критерия оптимизации в апостериорной зоне 0[А] неоп-
ределенности ж[А], папример, в эллипсоиде рассеяния плотности
Гпс. 13.2.3. Множество то-
чек линеаризации
p[;c|z[ft]]. Данный недостаток невозможно
устранить, используя одну точку линеари-
зации х[А|/с — 1], так как при этом при-
влекается лишь локальная информация о
нелинейности 7г(гс[А-]). Поэтому в [13.76]
предлагается, кроме гс[/с|7с — 1], взять еще
некоторое множество {£><*>[7с]}, j — 1, 7,
точек линеаризации. Количество и распо-
ложение точек £)<’> [7с] следует выбирать
па каждом А-м шаге так, чтобы их окре-
стности в совокупности накрывали апосте-
риорную зону 0[А], а в каждой из этих окрестностей была достаточно
точной линейная аппроксимация h (х [7с]) (см. рис. 13.2.3),
Алгоритм с многократной линеаризацией уравнений наблюдения и
использованием множества обобщенных ФКБ содержит две группы урав-
нений:
уравнения оценок
J / J
ж[А]= 2М'У>Р1*<ЛР1 / 2н0>РЬ
/ 1=1
x(i> [A] = x (A | к — 1 ] + K& [A] Ati> [A];
A® [A] = z [A] — h& (x [A | A — 1 ]),
(13.2.62)
7г0> (x [A | A - 1]) =
, -v 4 dh
[x [A | к — 1] - lJ(i> [A]],
(13.2.63)
x[k + 1|A] = A [A] x[A],
7ic> [A] = P'j> [A]
Oh
Ox
T
x= D<j>[/i].
A = 0, 1, ..., x[0| — 1] = xo
и уравнения ковариация
J I J
p Pl = 2 Pl Pl + Pl / 2 Pl
3=1 I J=1
ж[А]жтр],
P> j>[A] = P [A | A— 1] —
— P[A[ A — 1]
dh
dx
s0> 'Р14г1 Pp|*-U,
° lx=D<i)[A]
Z.K dh
2<А>[А] = 7?И1 + -а^
dh
дх
Р [к [ к— 1]
х=о<з>[/1]
6/<1> [А] = Д0>т [А| [А] Д«> [А],
цЯ [А] = | Я® [А] |“1/2 exp [— 0,56Zg> [А]],
Р[А-|-1|А] = А [А]Р[А]ИТ[А] +Q[A],
А = 0, 1, ..., Р[0| — 1]=Р0.
Упрощенная схема этого алгоритма показана па рис. 13.2.4. С физиче-
ской точки зрения принцип действия этого алгоритма может быть пояс-
нен следующим образом. Оценка х [А | к — 1] представляет собой прогноз
47 ([A] BoNucnenue
х=О<Л[й] .
(13.2.64)
Л<Р1А]
4W[*J
.42)-
«>т </>-’ <!>
л Иг Ил W
I <г>т <?г1 <^>
•р № Ил [А|
<2>W I_______
<J>T СГ>~1 <J>
A [A]S WZI И
4<J>W
Вычисление .
<(з
Карти поля Ь(х)
Определение
значений поля
и матрицы
ерадиентпЬ
d/K/cuc в точкох -
линеаризации
Вычисление I/1 3>И
<А-/| -
й?[А1Л-7]
Задание
множества
точек
D<J> И для лине-
аризации ПОЛЯ
Л<г>[А]
И
47 <2>[Л] Вычисление llL И
£<г>И
х[А-7] •
В<3\к\
Рис. 13.2.4. Структура беспоискового алгоритма оценивания с многократ-
ной линеаризацией уравнений наблюдения
значения вектора состояния ж[А] по совокуппости наблюдений
проведенных в моменты времени 0, 1, ..., А — 1. Условная плотность
распределения прогноза р[ж[А] является нормальной с математи-
ческим ожиданием ж[А|к — 1] и ковариационной матрицей Р[А|/с— 1].
Величины №> (х [А | к — 1]) — это значения поля в прогнозируемой коорди-
пате х [А [ к — 1], рассчитанные путем линеаризации поля относительно
опорной точки Z/J>[A]; h<’>(a:[A|к — 1]) совпадает с действительным зна-
чением поля 7г(ж[А|А — 1]) лишь при условии, что точка я[А|А— 1]
близка к [А], так как именно в этом случае справедливо линеаризо-
ванное представление (13.2.63). Невязка
A<j> [А] = h (х [ А-]) — h (D® [А]) +
dh
+ дх
[2 [А | к — 1] — D [А]] + v [ А]
x=D0>[ft]
(13.2.65)
и соответствующая ей квадратическая форма 6/^^А] будут малы лишь
для тех точек линеаризации 7)°>[А], которые, во-первых, группируются
близко к действительному значению а? [А], так как в этом случае мало сла-
гаемое h(х[А]) —h(£)<й[А]) в (13.2.65), и для которых, во-вторых, неве-
лика разность х [А | к — 1]—что обеспечивает малость второго
слагаемого формулы (13.2.65). Для этих же точек Z?W>[A] будут относи-
тельно большими весовые коэффициенты |xw>[A], представляющие собой
значения в точке z [А] плотности А-го измерения (13.2.64) при линеари-
зации функции й(х[А]) в точке /)<’>[&] И1 следовательно, отражающие
степень соответствия ;-ц линеаризации поступившему измерению г[А].
Поэтому в общем суммарном сигнале ж [А] существенную роль играют
лишь оценки ж°>[А], близкие к действительному значению ж [А]. На этом
свойстве рис. 13.2.4 и основан, в главных чертах, принцип действия рас-
смотренного алгоритма. В п. 13.2.3.2° рассмотрена схема еще одного бес-
поискового алгоритма оценивания, основанного па использовании мно-
жества ФКБ.
13.2.2. Поисковые методы оценивания. В поисковых КЭС проверя-
ются гипотезы о возможных траекториях движения н конечном (в мо-
мент проведения последнего наблюдения) значении вектора состояния.
Для каждой проверяемой гипотезы на основе измерений поля и имею-
щейся карты этого поля рассчитываются значения функционала, явля-
ющегося мерой близости полученной в ходе движения реализации поля
и реализации поля, извлекаемой из блока памяти и соответствующей
проверяемой гипотезе. Путем поиска экстремума функционала по всем
гипотезам определяется траектория движения и конечное значение век-
тора состояния. Способы достижения экстремума фупкцпопала могут
быть различными.
Может применяться «слепой поиск», когда вводится дискретизация
координат п величины фупкцпопала рассчитываются для всех возможных
дискретных значений конечного местоположения движущегося объекта.
Такой метод поиска, являющийся в определенных условиях единствен-
но возможным, надежно решает проблему ликвидации больших началь-
ных отклонений в КЭС, хотя в некоторых случаях требует повышенной
производительности вычислителей. Другая группа методов поиска свя-
зана с вычислением градиентов (пли их аналогов) функционала, опреде-
лягощих направление движения к экстремуму. В этом варианте требо-
вания к быстродействию ЭВМ оказываются весьма ограниченными.
13.2.2.1°. Постановка задачи оценивания в поисковых КЭС. Теорети-
ческой основой синтеза алгорптмов оценивания в поисковых КЭС явля-
ется теория статистических решений, а точнее — одна из ее ветвей, свя-
занная с проверкой статистических гипотез. По проведенным наблюде-
ниям z[A], 7с = О, К, необходимо оцепить значение вектора состояния
a[Z<], принадлежащего области 0, являющейся частью пространства R".
Область 0 дискретизируется и задастся множеством возможных значе-
ний 7 = 1. А вектора состояния х[К]. Проверяемые гипотезы 7/J>
соответствуют возможным значениям х^. Точнее, гипотеза состоит
в предположении, что х [7г] = ж°>
Для применения теории статистических решений необходимо устано-
вить связь между гипотезами D(i> и соответствующими им сигналами
S'n, причем сигнал б4’* представляет собой ожидаемую совокупность на-
блюдений, которая имела бы место, если бы шумы наблюдения е[7с] от-
сутствовали п выполнялась гипотеза 7/j>.
Определим множество сигналов й. С этой целью рассмотрим урав-
нения (13.2.1), (13.2.3) п найдем траекторию r<J>[7c], соответствующую
£)'7>. По аналогии с [13.71] введем дискретную матрицу Коши (см.
п. 1.2.12) К [А, <т| уравнения (13.2.1). Эта матрица связывает решения од-
нородного уравнения ж[Л -[- 1] = А [7с]х[А] для различных моментов вре-
мени к и </:
ж[А]. = К[А, е]^[(/].
Проверкой можно убедиться, что
К [7с,
л—I
JJ А |/с+ q — s- 1]
Е
при
при
при
С помощью К[А‘, устанавливается связь между решениями неоднород-
ного уравнения (13.2.1) для различных моментов времени к, q:
<тР1 = К[7(;, о] —
Q
- - У, К [A, Z][D[Z— 1] и [7— 1] -I- <р[7— 11 U’[l— 1]],
l=/i+l
(13.2.66)
причем в этой записи предполагается q > к-
Задавая q = К и х[<у] = х^, получим ретроспективную последо-
вательность значений вектора состояния ж()>[7с], соответствующую ги-
потезе Z)<7>:
х'<} [А] = К [А, К1 х® _
— 2 K[MlUW-l]«[7-l| + <P|l-i|"’l*--lll1 7с = 0, Я - 1,
а по пей, согласно (13.2.3), траекторию
!к
К[к,К]х<л — У, К [A, Z][G[Z — l]u[Z — 11 +
Z=/i+l
+ ср [Z - 1] w [Z - 111] + W [A-J и [k],
k = о, К — 1, r<»[Z<] = £>[£]+>> + W[K]b[K],
Этой траектории соответствуют гипотетические значения наблюдений
А[г<«[Л]] + С[А]л:<7>[А].
Пренебрегая в исходной постановке задачи (13.2.1), (13.2.3) шумом
н>[А], записываем
{к
D [А] К [А, Л]^>— У, К [А, 7] В [Z—1] u [Z — 1] +
4~ W [/с] и [&]> + с [Л]
К
К[к,К]х<}> — У, К [A, Z] В [7 — 1] u [Z — 1]
Z=A+1
А = О, К — 1; (13.2.67)
В< Д [/<] = h [В [ А] х«> + W [К] и [В] ] + С [В] №.
Вектор S(^ = [0]5^т[1] ... ! [В]]г, где 5(;>[А] сами явля-
ются «-мерными векторами, представляет собой ожидаемый сигнал,
который должен быть «принят» КЗС, если выполняется гипотеза
В(В и шумы наблюдения отсутствуют. Зависимость (13.2.67) опреде-
ляет правило построения множества сигналов 5<j>, j - 1, J, по сформи-
рованным гипотезам D(J> и уравнениям (13.2.1) — (13.2.3). Опа достаточно
точно учитывает априорную информацию, содержащуюся в уравнениях
контролируемого процесса п наблюдений. Размерность пространства ги-
потез— размерность вектора х[7<]—и связанное с ней количество ги-
потез в рассматриваемом варианте может оказаться большим.
В поисковых КЭС часто удается значительно снизить число прове-
ряемых гипотез, если в качество таковых рассматривать только конеч-
ные значения вектора г[А£], т. е. того вектора, от которого непосредствен-
но в силу уравнения (13.2.2) зависит наблюдаемое поле 7i(r). Точными
преобразованиями соотношений (13.2.1) — (13.2.3) либо путем опреде-
ленных допущений удастся получить изолированное уравнение для век-
тора г
r[k + 1] = Ф[А] г [А] + Р[А] и [А] (13.2.68)
н уравнение наблюдений в виде
2 [А] = А(г[A]) + V [А].
(13.2.69)
Дискретная матрица Коши Кг[7с, с] уравнения (13.2.68) равна
1 л-i
I П ф И'+ 5 “ s—ПРИ /£>5i
I s=9
Кг[7с, ?]=< Е при к = q, (13.2.70)
9-1 1-1
JJ Ф [ к q — s — 1 ] при к < q.
( s=h J
С се помощью устанавливается связь решений
уравнения
(13.2.68) для
различных моментов времени
9
r[M = Kr[7f, 91Н9]- 2 Kr[/£, Z]ZqZ-l|«[Z- 1],
/=/;+!
здесь предполагается q > к.
Если ввести множество {г(,>} возможных конечных значений векто-
ра ?[7f] и под гипотезой D<j> понимать предположение г[/С] = Н’>, то, как
и ранее, находим гипотетическую траекторию
К _________
г'» [Zc] = Kr[7r, £]/>>- Kr[/£, Z’-^U-lUIZ-ll, 7c == 0, K-i
/—/; + !
(13.2.71)
в соответствующую ей ожидаемую последовательность измерений
к А
— 2 Krl/£- 7]Z'[Z — 1]и[7 — 1] !,
/=/< + ! J
к = 0, К,— 1, (13.2.72)
St}> [К] = h (/>>)•
Si} [/с] = h Кг[к, К] г<?>
Итак, в обоих рассмотренных вариантах введены гипотезы
©<3> и показано, как могут быть сформированы соответствующие
этим гипотезам сигналы S(i>. Множества всевозможных сигналов =
= [.S' (’/Т |0| i S®T [1] ; S®T [К]]т и гипотез образуют пространства
сигналов п гипотез (или решений) Q — {5W>}, © = {D°>}, j — 1, J. Про-
странство входов (выборок, наблюдений) Г = {Z} включает всевозмож-
ные выборки Z = [zT [0] i zT [1] ... :zT[7i]]T, где z [7c] = [z! [/c]z2[/c] ...
• • • zm[7>:]]T — m-мсрпый вектор наблюдений. По конкретной полученной
выборке должно быть принято решение в пользу некоторой гипотезы D<j>.
13.2.2.2°. Байесов риск. Оптимизируемым критерием в поисковых
КЭС является байесов риск. Формула байесова риска имеет вид
[13.5, 13.73]
N J J
д(г) = 2 2 2 р1ряЛЙ fр (z<1) IsJli>) F<z (£,ф|г> Iz<i>)c?z<i>’
i=i i=i ii=i p
(13.2.73)
где jR(F) —средние потери (байесов риск) при движении по-всевозмож-
ным траекториям; Рг-— вероятность движения по г-й траектории, i = 1, Л’;
P(Z<’> |5<j|i>) —функция правдоподобия, равная условной вероятности по-
явления выборки при движении по i-ii траектории и при наличии на
входе сигнала — функция потерь, равная потерям, которые
будут понесены, если прп движении по г-й траектории и при принятом
входном сигнале 5(J|i> (когда в действительности выполняется гипотеза
£)<ЯО) будет вынесено решение (выбрана гипотеза) О<|1|г>; Р,-ц — априор-
ная вероятность сигнала (гипотезы £><j|i>) при движении по г-н тра-
ектории; F? (д<ц11> | 2<г>)— детерминированное решающее правило
ври движении по г-й траектории.
Выражение (13.2.73) получено в предположении, что используются
детерминированные решающие правила, т. е. по каждой полученной вы-
борке Z(i> принимается вполне определенное однозначное решепие D'*1".
Функция F? (дФ1г> | Z<u) зависит от вектора п индекса ц и при-
нимает значения только 0 или 1. Если для данного выбирается ги-
потеза №>, то F*’ = 1; если же для данного Z'’'1 выби-
рается гипотеза, отличная от 7/ll|‘>, то F® | Z<1>) =0. В развер-
нутом виде входящий в (13.2.73) многократный интеграл равен
ОО оо
( Р (z(i) I F0 (£)<Ц1» I Z<i>) dZ<i> = j _. f p (Z(i> | 5<jli>)x
Г —oo —co
Tn(KH-l)
X F? I Z«>)--.. dtfe •..
здесь iiz^ обозначает дифференциал составляющей наблюдения zg6> [А|,
s = 1, т, к = 0, К.
Формула (13.2.73) определяет байесов риск, усредненный по всевоз-
можным траекториям движения, т. с. уже сама постановка задачи поис-
кового оценивания основана па статистическом подходе. Общее решаю-
щее правило F состоит из совокупности детерминированных решающих
правил FQ, используемых прп движении по всевозможным траекториям
F={F« F«...F».].
Для нормального дискретного белого шума г[4] функция правдоподобия
равна
Р (Z(i)
exp — 0,5 У [Z™ [А] — (А]]т П(й 1 [A] [Z(i> [А]П
__I___!i — n_______________________________________
/ (2л)»“к+1) 1/п 1
У а=о
(13.2.74)
где 5<j|!> [А] и 7?<;>[7с] —составляющие сигнала 5<й*> и ковариационная
матрица шумов наблюдения при движении по г-й траектории; [7с]
определяется формулами (13.2.67) или (13.2.72), в которые должна быть
подставлена реализация поля 7Л!>(г), соответствующая г-й траектории
движения *).
Равенство (13.2.74) соответствует случаю, когда по выборке
должны быть оценены все проекции вектора или г<’>[К]. Если не-
обходимо оцепить лишь часть параметров (называемых существенными),
то па основе (13.2.74) путем усреднения по несущественным параметрам
может быть получена функция правдоподобия существенных парамет-
ров [13.5, 13.73],
13.2.2.3"'. Оптимальные алгоритмы оценивания в поисковых КЭС.
Средний по всевозможным траекториям движения риск 77(F) может быть
представлен в виде
7V
z?(F)= 2pA(F?)-
i=l
где 7,; (F°j) — риск на г-й траектории, равный
J J
Л. (F?) = У У P,,Xh Р I 5,<jli>) F" (Л<|Л1г> I Z<;>) dZ(i\ (13.2.75)
3=1 n=i r
В соответствии с этим минимум общего риска обеспечивается, если мини-
мизируется риск 7?Де®) при движении по каждой траектории. Выра-
жение (13.2.75) можпо переписать так:
(F?) = f У Лх|iF? I z<i>) (13.2.76)
Г
где
= 2 PilX3P (Z<i> 1 5'Я0)- (13.2.77)
j=l
Риск (13.2.76) обращается в минимум, если для любого наблюдения
J
подынтегральная функция У, Z j;F? | Z(,>) будет минималь-
но
пой. Если для некоторого наблюдения Z<!> детерминированное решающее
правило выбрало гипотезу то .
F0 I zti)) = б’ 11,/’
i 10, р ¥= ч,
при этом
2/м|Т«(^|г>|г<;>)=/ч|;. (13.2.78)
________________ |Х=1
*) Поскольку далее, в силу формулы (13.2.73), рассматривается ра-
бота КЭС по множеству траекторий, то все необходимые величины, вхо-
дящие в уравнения (13.2.69), (13.2.72), такие как 7г(г), гг(«), г<», до-
полнительно отмечаются индексом «г»: 7г<‘>(г), гг<°(г), ж0’10, г<й">.
Условно (13.2.78) подсказывает, что согласно оптимальному решающему
правилу по проведенным наблюдениям Z<'>[0], Z<!>[1], ..Z<'>[/f] для
каждой возможной гипотезы должны рассчитываться числа /цц.
а затем определяться гипотеза которая минимизирует функционал
Zv|i = пт in I
£><ГФ>
Эта гипотеза и выбирается в качестве ответа. Теория статистических ре-
шений позволяет находить оптимальные оценки для разного вида функ-
ций. потерь. Распространенной, связанной с наиболее простыми вычи-
слениями является простая функция потерь, соответствующая матри-
це W = [ТУр,-]:
го 1 П
w = 1 о ... 1
Байесов риск для простой функции потерь совпадает с вероятностью при-
нятия неправильного решения, а числа /Р|,- равны
Аги = 2 p,iiр <z<i> I soli>) - РдцР <z<i> 15<ц1й).
3=1
Минимум ZP|i достигается па той же гипотезе, па которой достигается
максимум величины
4|,- = Рц;,Р(г<‘>|5<в1О) = P(S'<BH>|Z<i>)P(Z<i>), (13.2.79)
т. е. оптимальное байесовское решение при простой функции потерь мак-
симизирует апостериорную вероятность сигнала P(S,<t‘|i>|Z<i>). Числа 7мц,
/нН, экстремум которых ищется в процессе принятия оптимального ре-
шения, иногда еще называют функционалами, так как в силу уравнений
(13.2.67) или (13.2.72) они зависят от извлекаемой из памяти реализации
поля 7i<‘>(r). Совместное рассмотрение (13.2.79) и (13.2.74) позволяет
упростить выражение функционала и представить его в виде
= 2 II 1*1 - ^И> 1*1 IP гл-1 ~ 2 Ь ’^|г’ (13-2’80)
11 к<г> Р<]
где принято распространенное обозначение квадратичных форм Ах —
= ||^||\. Оптимальные оценки или г[&] достигаются путем мини-
мизация функционала (13.2.80).
Если ошибки измерения различных полей взаимно пскоррелироваиы
к стационарны, т. е. 7?<!> [7с] = diag I I, то
1 2--------------------
fc=o V=1
(13.2.81)
здесь [A]— проекции вектора SOlOf/ф
13.2.2,4°. Оценка точности поисковых КЭС. Хотя оптимальные алго-
ритмы и минимизируемые функционалы (13.2.80), (13.2.81) синтезирова-
ны по критерию максимума вероятности правильного решения, формула
байесова риска (13.2.73) путем задания определенного вида функции
потерь позволяет оценивать характеристики поисковых КЭС по различ-
ным критериям. Если рассматривать риск (13.2.75) па конкретной тра-
ектории движения, то и оцепки будут относиться только к этой тра-
ектории. Они будут конкретными, но им может пе доставать общности.
Плодотворным, как и в случае беспоисковых КЭС, оказывается исполь-
зование статистического подхода. Введение статистического подхода в
поисковых КЭС достигается рассмотрением вероятностного пространства,
включающего и случайность траектории движения [13.5, 13.72]. Причем
оказывается, что при такой постановке задачи исходные статистические
характеристики полей должны рассчитываться по тем же формулам, что
и для беспоисковых КЭС (папример, (13.2.45), (13.2.46)).
А. Выражение риска через плотность распределения функционалов.
В дальнейшем рассматривается случай, когда ошибки измерения различ-
ных полей независимы и стационарны, т. о. функционалы определяются
соотношением (13.2.80). Это выражение содержит составляющую
22 nv2z<i>2 [7с], не зависящую от индекса р. и, таким образом, не
h v ~
влияющую па процесс минимизации функционалов по гипотезам
Эту составляющую в целях упрощения дальнейшего исследования целе-
сообразно опустить и рассматривать функционалы вида
m К
Лщ = 2 2 2 2 4° И1 <ЦН> (13.2.82)
V-- -1 ~ h^0
К m
где а[(|{ [7с] - 2 In Р |. — У, o“2s(,ll|,)2 Pl- При выборе оптимальной
h - оv=l ~
гипотезы должна осуществляться максимизация соотношения (13.2,82).
Из общей теории статистических решений [13.73] и из ее примене-
ния в области КЭС [13.5] известно, что от соотношении типа (13.2.73),
(13.2.75) можно перейти к зависимости
J J ОО
^(F<>) = 2Pj 2 «'w f dI» J f P<J\SW)dI, (13.2.83)
[1=1 —oo —oo —OQ
определяющей риск через условную плотность p(7\S^) распре де лепи я
вероятностей функционалов I = [/|/2... 7г]т (при условии, что па входе
присутствует сигнал, соответствующий гипотезе 77°-). При этом распре-
деление p(/|5<J>) должно быть определено с учетом случайности траек-
тории движения. Формула (13.2.83) получена для случая, когда функци-
оналы максимизируются, а априорные распределения и функции потерь
не зависят от траектории движения: Рщ = Pj» = Векторный
дифференциал dl содержит все проекции, кроме d/ц. В силу централь-
ной предельной теоремы при достаточно большом число траекторий N
условное распределение p(/|So>) близко к нормальному
Р (/ | S®) =
exp [— 0,5/TK7’/j
(Д/ТяУ У det К j ’
(13.2.84)
О
где 1 = 1— £[/[£<>>]. Для определения (13.2.84) достаточно вычислить
условные математические ожидания E[/|S,<J>] и ковариационную матри-
° °
цу Ki = E[/,/s|5<’>] вектора функционалов.
Эта задача решается введением условной характеристической функ-
ции /(Т|, т2, ..., T/IS0’’) [13.74], представляющей условное математиче-
ское ожидание
/(т,,г2, ...,Ъ|5^>) = Е
/ J
СХР j 2 Vn
\ Н=1
£)<j>
(13.2.85)
где j в показателе экспоненты — мнимая единица.
Условные математическое ожидание п ковариационная функция рас-
пределения (13.2.84) связаны с /(ть ..., соотношениями
, (13-2.86)
С] T|=T2=..-=Tj=0
В [ V. |S®]“- ж , (,3'2 Я>
У 5 i£ —т2—tj—и
Можно показать [13.5], что
дг сю оо
/ (tp т2....Tj I s'j)) = 2 pi f ••• f exp[7 P(v)dv-
t :1 —oo — OO 1
(13.2.88)
Функционалы /,,ц в соотношении (13.2.88) рассчитываются в предполо-
жении. что выполняется гипотеза Z)<J>, а плотность распределения шумов
наблюдения равна
к схр — 0,5 2 2'4 И
Р (Е) = П----------_ Г '™--------
"=0 С]/2л)™ 2 (Jv
v=i ~
dV = dvt [0] ... dvt [/f]dr2[O] ... dv2[K] ... dr,„[0] ... de„, [/£].
Для расчета значений фупкцпопала 7ц|,- падо уточнить, как формиру-
ются множество гипотез 6 и множество траекторий движения.
Гипотезы задаются в отклонениях от некоторого известного па дви-
жущемся объекте опорного значения Д1>0[/г]
,-<ш>[Х] = ,•<*><>[£] +Дг</>. (13.2.89)
Здесь г<Л’>[К] и Дг<->>— проверяемые при двнжеппи по Z-й траектории и
при рассмотрении гипотезы Z)<J> конечное значение вектора и сме-
щение относительно г<°°[Л'|. Характерным является то (и это соответ-
ствует делавшимся рапсе допущениям), что отклонения Дг<Л пе зависят
от траектории движения.
Считаем, что все опорные траектории движения, вокруг которых за-
даются смещения Дг<»[Л], могут быть получены из одной траектории
/"[Л] путем ее сдвига па Дг<*\ Из этого условия, в частности, следует
что
г<О0[К] =?>[/<] +Дг«’. (13.2.90)
Подставляя (13.2.89), (13.2.90) в (13.2.71), находим
,.GIi) [ft] = кг [*, A J г° [Л] + Kr [ft, Л'] Дг<*’ —
к
- 2 К?. [ft, Z] F [I - 1] «<» [Z - 1] -I- Kr [ft, Л-] Д,-«.
г=л+г
Обозначим
г°[Л] = К,, [ft, Z<]r°[Z<], Дг<»[*] = К,-[ft, 7<]Дг«>. (13.2.91)
Для постоянства сдвига всех траекторий должно выполняться равенство
К
Kr[ft, А?[ Дг(О— 2 Kr [ft, Z] Г [Z—1] u{i) [Z — 1] = ДИ*\ Это обес-
i=k+i
печивается специальным заданием последовательности управлений и<г>[1].
Тогда r<Z!»>[ft] = ro[ft] _|- -|- Дг<« [ft]. С учетом сделанных замечаний
в соответствии с (13.2.72)
[ft] = ft[(.0[ft] -|- Д,<о + Д,-О>[Л-]] = 7>W[r°[ft] + Дг<>>[*]]. (13.2.92)
Здесь принято обозначение /Л°(г) = Л(г + Дг<о), i = 1, N, определяющее
множество реализаций, a r°[ft] +.Ar<j>[ft] обозначает проверяемую гипо-
тетическую траекторию при движении но траектории r°[ft]. Подстановка
(13.2.92) в (13.2.82) дает
гп К
Лш = 1 + 2 Z °v 2 2 I'" [*1 -1- А'ХЦ) И11 vv [ft], (13.2.93)
v-i ~*=о
где
т К
=2IX2 2 ['° [ft]] ft<;) ['•° w+
*v=a '"'h-o
m К
-I- Дг(|1' [ft]] - 2 °72 2 4i>2 I'° [*] + [*)1 + 2 ln PH-
v=l ~ /i=0
Функционалы Zpij рассчитаны при условии, что выполняется гипо-
теза £)<>>.
Вычисление квадратур (13.2.88) с привлечением зависимости (13.2.93)
позволяет получить характеристическую функцию
/(ч.....ъГ0>)= ipiexP<5 2 sAui-0.5 2 Vx
i=l \ H=1 U=1 X=1
xwx I4 2 a72 2 4й lr° 1*1 + &rW [*11 4° Ir" 1*1 + [*11
I V=1 ~Л=0
(13.2.94)
Теперь все подготовлено для определения характеристик распределе-
ния (13.2.84).
Б. Плотность распределения вектора функционалов в случае исполъ-
вования нестационарных полей. Дифференцируя характеристическую
фупкцпю, в соответствии с формулами (13.2.86), (13.2.87) получим
EpJ^] =
= 2 о?2 2 f2 2рХ^(г°1*1 -i-дг^ [*i)*vi>(''°[*i + A'-fc'[*1)~
- 2 PXi)2 [* 1 + Д'4,71 [* l)j + 2 1« Pg. (13.2.95)
E [/,/, | 5(j>] =
= 4 2 2 (2РЛЙ ('-° i*i Ф Д'-Й>[*1)ЧЙ О-0 [*i 4-дг<” [*i)]+
v=l ~ k=o I 4 1
+ 2pi!2 2 2 *v>(r°[*i + дг0>[*1)4°('°[*i + л»-'®'i*D-
i I v=i ~ h=n
- 2 %! 2 *vi>2 ('-° i*i + i*i) + 2inp lx
V=I ~ A'=0 J
??? К
2 2 %2 2 № (r°izi + Ar0) iи)!ip (r° izi + Ar<s) izD -
. p l l—Q
m К \
- 2 cp 2 2 /ip >2 ('° 1Z1 + Ar<S> 1Л) + 2 In Pl. (13.2.96)
p=i ~ i=.i J
Воспользовавшись определение» (13.2.27) корреляционной функции по-
ля, преобразуем (13.2.95) к виду
Е[79|^] =
m К
= 2 (С 2 {27Zvv i*i -i- дг(А [*],'-° [*i + A^(Q) [*п -
V=1 /1=0
- <4, ['-° 1*1 + [к], r® [7c] + brw [к]] ] +21n Po. (13.2.97)
Элементы ковариационной матрицы E[/c7s|S<3>] = E)/.,/., —
— E[Z215<J>]E[7S|с учетом (13.2.95), (13.2.97) путем преобразований
и пренебрежения малыми членами могут быть представлены в формо
Е рД|Л'и)] ~
т к ..
& 4 £ 2 Rtv tr° 1*1 + д,<9) l*l> r° [*] + A'-(s>[A"l]. (13.2.98)
v-^l ~ /1=0
Зависимости (13.2.83), (13.2.84), (13.2.92), (13.2.97) и (13.2.98) образуют
замкнутую систему соотношении и позволяют в случае нестационарных
полей определять риск R (F) для произвольной функции потерь.
В. Плотность распределения вектора функционалов в случае исполь-
зования стационарных полей. Если все поля fev(r) стационарны, то фор-
мулы (13.2.97), (13.2.98) после подстановки в них уравнения (13.2.91)
принимают вид
тп К
Е [Zg |5 «’] = 2 2 2 < [К,- [*. *1 - Д,«2>)] -
- (К + 1) 2 + 2 1,1 Р«’ (13.2.99)
1 ~
г ° 1 m
Е I Igl's I S^> = 4 2 %! nvv [Kr *1 <Ar<9>- Ar<S))]> (13.2.100)
L J t=i h—o
где о-в = Z?*v [0] — дисперсия поля hv(r).
Заслуживает специального внимания случай равновероятных гипо-
тез (Рс = 1/J \fq) и мелкоструктурных полей, когда R*v [0] = о^, а для
любого отличного от пуля аргумента = 0. В этих условиях можно
записать
Е[Л/1^Ь
e[vj^>] -
m
(к-i-i) 2
V=1
Til
- (к +1) 2
J
' m
4(K -f-1) 2
V^I
о 2 о 2
при q = 7,
при q^i,
при q — s,
при q=^--s,
(13.2.101)
(13.2.102)
0
так как постоянное смещение JnP, в формуле для математических ожи-
даний пе влияет па величину риска (13.2.83). Плотность распределения
функционалов имеет вид
p(,,s ) = cmw“'‘
___________q--=i.q^j______________
8£2
(13.2.103)
1-ДО £ = {K + 1) 2
V=1
1’. Вероятность неправильного решения. Вероятность пеправильпого
решения Р при использовании оптимальных решающих правил, связан-
ных с минимизацией функционалов (13.2.81), определяется формулой
(13.2.83) при подстановке в нее простой функции потерь. Для равнове-
роятных гипотез (Р3- = 1/J) получаем
J
Р = (1//)
1=1
2 Р | S<7>).
H=l
у/j
(13.2.104)
В равенстве (13.2.104)
оо 1ц 1ц
P(D'^\S;j>)= J d/» [ ... [ р (j \ dl (13.2.105)
— со —оо —оо
обозначает условную вероятность принять решение D^>, когда в действи-
тельности па входе присутствует сигнал соответствующий гипо-
тезе DJ>.
Вероятности Р (Z><1‘> 15<J>) необходимы для оценки риска при любых
функциях потерь п могут быть рассчитаны па основе приведенных выше
выражений как для нестационарных, так и стационарных полей. Для наи-
более простого случая стационарных мелкоструктурных полей, когда
плотность распределения функционалов определяется зависимостью
(13.2.103), подстановка (13.2.103) в (13.2.105) и вычисление многократно-
го интеграла дают
Р | S’05) =
( ОО
(1Л|/2я) [ exp (— z2/2j ф-7”1 (z + g) dz при p = /,
— oo
(l/l/2n) f exp (— z2/2) Ф'7'2 (z) Ф (z — g) dz при p =4= j,
--OQ
(13.2.106)
z
где Ф (z) -(l/ |/2л) exp (—Z2/2) dt— интеграл вероятности. Совмест-
— co
нос рассмотрение (13.2.104) и (13.2.106) приводит к равенству
ОО
Р (£, /)=((/— 1)/уйг) J exp (— z2/2) Ф'7~2 (z) Ф (z — g) dz.
— ОО
Зависимость вероятности неправильного решения от параметра g и чис-
ла гипотез 1 показана па рис. 13.2.5.
13.2.2.5°. Совместное оценивание местоположения и скорости движу-
щихся объектов. Рассмотрим задачу совместного оценивания местополо-
жения и скорости движущегося объекта по наблюдениям скалярного по-
ля h(X, Y), являющуюся типичной для корреляционно-экстремальных
систем (см. пример п. 13.2.1.1°).
А. Алгоритм совместного оценивания местоположения и скорости,
движущихся объектов. Уравнения контролируемого процесса в непрерыв-
ной форме запишутся следующим образом:
X = Vx—AVx, AVX — О, У=Уу-ДУу, ДУу = 0, (13.2.107)
где X, Y — декартовы координаты местоположения движущегося объек-
та; Уд, Уу— измеренные навигационной системой горизонтальные про-
екции скорости движения; ДИх, ДИу— ошибки измерения скорости, пред-
Гис. 13.2.5. Зависимость вероятности неправильного решения от парамет-
ров £ и J
полагаемые постоянными при небольших длительностях наблюдения. Из-
мерения поля производятся в дискретные моменты времени th
z[7c] = /г(Хр], У[А]) +6fe[ft], Л = О. (13.2.108)
67i[7c] — случайная ошибца измерения поля, предполагаемая дискретным
белым шумом.
Проинтегрировав уравнения (13.2.107) па интервале [Zft, tk+i], по-
лучим
1] = Х[Л] -I- Vx(t)dt- iWx[k]T, &vx[k + 1] = ДУд[А],
Ot
(13.2.103)
гЛ+1
У [А- + 1] = У [А] + (' Vy(t) dt- ДГурИ, ДГу[& + 1] = ДУу[*1.
Если ввести обозначения
Z'[A’J = £, v [А] = 6Л[А],
[А] = [Х[А] ДУх[А] У[А] ДУТ[А-]]
Л(г[А]) = h(Х[А], у[А]),
(13.2.110)
то уравнения (13.2.109), (13.2.108) приводятся к стандартной исходной
постановке (13.2.69), (13.2.70) поискового оценивания.
Уточним задание множества гипотез. Каждая гипотеза содержит
предположение о конечных (па момепт времени К) значениях координат
местоположения и ошибках измерения скорости движения. Местополо-
жение проверяется в окрестности координат Х*[К], Г*[К], измеренных
навигационной системой в конечный момепт времени. Считаем, что пози-
ционные ошибки ДХ[/<], ДУ [76] могут принимать значения только с дис-
кретностью I, а максимальные значения позиционных ошибоц равны nl
(рис. 13.2.6, а). Скоростные ошибки ДКх[К], ДУу[76] будем проверять
с дискретностью v, предполагая максимальные значения скоростных оши-
бок равными ти (рис. 13.2.6, б). Перейдем от употреблявшегося обозна-
чения и нумерации гипотез к новым обозначениям Z)|lv;.t. Гипотеза
предполагает, что в момепт времени К, когда производится оценка,
позиционные и скоростные ошибки навигационной системы равны
AX[7f]=pZ ДУх[А] — w, ДУ[Я]=А7, ДУу[К] = т. е. =
= [X*[Zf]—pZ. vv У*[76]—AZ t17]1 = Индексы p, А могут при-
нимать значения —п, п, индексы v, £ пробегают значения —иг, т, т. е.
общее число гипотез 1 = (2n 4- l)2(2m-f- I)2. Определим матрицу Коши.
На основами (13.2.70), (13.2.110) получим
(13.2.111)
Подставив (13.2.111) в (13.2.71), пандой
Ис fK
Здесь X* [/с] = X* [X] - j У*х (/) dl, У* [Л | = У* [X] - f V*. (/) dt -
4 «Л
траектория движущегося объекта, вычисленная навигационной системой
(см. рис. 13.2.6, а). Гипотезе D^vki, согласно (13 2.72), соответствует сигнал
= Л[Х*1А1 - -p./ + v(X-/r)7’y, У*[/>] - М + ЦК - k)Tv]. По-
этому минимизируемый функционал согласно (13.2.81) имеет вид
К
W = 2 (z W “ h <Х* + v (X - к) То,
k=0
У* [А] - и + С (X - к) То)}2 - 2 In
где PMwit— вероятность гипотезы Din}^, а2^—дисперсия ошибки измере-
ния поля.
Поиском минимума функционала 1^ по всевозможным значениям
ji, v, X, £ находятся оптимальные оценки параметров ц, v, /., £ и коорди-
нат местоположения, а также ошибки измерения скорости
Х[Х] = Х*[Х] -Д
у [К] = У*[Х] — и.
АИа-[Х] = Су,
ДРу[Х] =
Поиск может осуществляться как сплошным перебором, так и градиент-
ными методами. Всо определяется характером зависимости функционала
Лиц; от вектора r,lvic. Если эта зависимость одноэкстремальпая, возмож-
но использование градиентных методов.
Б Точность совместного оценивания местоположения и скорости дви-
жущихся объектов. При введенной нумерации гипотез формула байесова
риска (13.2.83) примет вид
п m п m
^(F)= v X У 2 X
Uj=-n v1=_m Xi=,-n
n m n m у
XPfiiviMi ? 2 ij И'м-Мч^Р(£'н2т2г2?2|5|.1т1цг;1)-
M’g" fk v2-
(13.2.112)
Здесь — вероятность выполнения гипотезы ®ц1г1Х1£1 и появле-
ния соответствующего ей сигнала —функция потерь,
т. с. штраф, если в присутствии сигнала будет вынесено решс-
пие Dn2v2X2t2; P(Pn2v,X2;.2| - Условная вероятность принятия
решения при наличии сигнала
Рассмотрим случай равновероятных гипотез PnIv1A,1(;1= V(2»i1)Х
X(2n+ I)2 и мелкоструктурных полей, когда согласно (13.2.103)
Р ( Дх2Т2Х252 |
“ _____________________________________________
(l/~l/2n) j exp (— z2/2) (DJ—1 (z -|- [/А "И 1 <\~uv) dz
при И1 = p2, vr = v2, X! = X2, = g2,
(1/|/2jx) J exp (— z2/2) Ф17-2 (z) Ф (z — “]/A' -p 1 оД<\,) dz
— OO
в остальных случаях.
(13.2.113)
Если задать функцию потерь
<ЙЙ = (Рт-Н2)2^ (13.2.114)
то байесов риск совпадает с дисперсией ошибки опепвваппя коорди-
наты X, а при задании
wn2v.,X.2:2 , у2 ъ (13.2.115)
риск становится равным дисперсии ошибки оценивания скорости
движения вдоль оси X. Подставляя (13.2.113), (13.2.114) в (13.2.112),
после преобразований найдем
<4 = (2/3) I2 (n + 1) п (2н + I)2 (2m + I)2 (1Л|/%с)х
X j exp (— z2/2) Oj~2 (z) Ф (z — 'l/К -|- 1 °Д<\) f?z-
— oo
Поскольку zi(n-|-l)Z2/3 равно среднему квадрату o^2 априорной ошиб-
ки определения местоположения, то
2 со
U.Y _ р ______
= (2У/ |/2л) I exp (— z2/2) ф7-2 (z) Ф (z — + 1 о~Доу) dz.
& V J '
(13.2.11G>
Эта зависимость показана па рис. 13.2.7 (здесь Е = Д/Л -|-1 o~^ov).
Аналогичным образом в результате подстановки (13.2.113), (13.2.115) в.
(13.2.112) может быть вычислена
о2. = (2/3) v2 т (т + 1) (2m + I)2 (2n + I)2 (1Л|/2^)х
X J exp (— z2/2) CDJ-2 (z) ф (z — ~[/K + 1 o~’ ov) dz.
—oo
m (HI-1-1) 2 .. _*2 „
Величина-----j---v совпадает с дисперсией априорной ошибки
определения скорости движения, поэтому
оо
а^х = (2y/V^) JСХР(-?/2)ф,/~2&ф(z- 1/«+1
— оо
что идентично (13.2.116).
13.2.3. Комбинированные методы оценивания. Поисковые методы поз-
воляют надежно решить задачу оценивания в КЭС при наличии больших
Рис. 13.2.7. Зависимость точности совместного оценивания местоположе->
иия и скорости от параметров <; и /
начальных ошибок. Однако применение поисковых методов к многомер-
ным задачам, в которых существуют сложные дифференциальные зави-
симости между последовательно проводимыми наблюдениями, наталкива-
ется па определенные вычислительные трудности. В этих условиях пло-
дотворным оказывается использование комбинированных методов, соче-
тающих идеи фильтрации и поиска, обладающих достоинствами обоих
подходов.
13.2.3.1°. Рекуррентно-поисковое оценивание. РПО представляет со-
бой метод совместного оценивания состояния динамической системы и
проверки статистических гипотез [13.5, 13.75]. Помимо КЭС, РПО может
использоваться для контроля динамических систем, в статистической ра-
диотехнике, в задачах распознавания, идентификации и т. п. Применение
РПО целесообразно там, где рассмотрению подлежит как выбор пекото-
poii гипотезы, так и одновременное формирование оптимальных оценок
состояния системы.
А. Алгоритм РПО. Постановка задачи РПО состоит в следующем.
Имеется конечное множество гипотез 0 = 7 = 1, J, и заданы ап-
риорные вероятности гипотез Г,- = Р(О<-’>). В дискретные моменты вре-
мени к = О, Л' наблюдается сигнал
z [7с] = /7«>[А]х[А] + А«>[7с] + р[А], (13.2.117)
зависящий от вектора состояния х[7с] линейной дискретной системы
ж[7с-|-1] = 71<J>[7c]a:[7c] -|-P<7>[7c]u<-’>[7c] -|-ю[7с]. (13.2,118)
Матрицы объекта A<J>[7c] = Л (О(7>, 7с), 7?<3>[7с] = Б(О<’\ к), капала на-
блюдения 7/<j>[7c] =//(D<-’>, A), 7i(i>[7c] = A(D<i>, 7с), управляющее воздей-
ствие 1г<Р[7с] = п(О<7>, 7с), статические характеристики возмущений
ю[А], и[7с] и априорного начального распределения вектора состояния
х[0] зависят от гипотезы, имеющей место па интервале наблюдения
к = О, Л’. Наблюдателю неизвестно, какая из гипотез выполняется. Слу-
чайные возмущения ю[7с], р[7с] —центрированные нормально распреде-
ленные дискретные «белые» шумы, их условные ковариационные матри-
цы равны Е[сл [Л] tcT[s] |D<>>] = (?<j>[7c]6fts, Е[и[7с] vT[s] |£><’>] = 7?<i>[7c]6i,s,
где 6*s — символ Кропекера. Начальные условные распределения векто-
ра х[0] —нормальные: р (х [О] | £>®) е Л” (т®, Р^, где m® = m (£>®)
л р® = р (£)<з>) — УМО и ковариационная матрица распределения
P(x[0] |Р<’>).
Оптимальный в смысле максимума апостериорной вероятности
P(X[‘VI, £)<7>|ZIW1), где Z1W1—совокупность всех проведенных измерений
2[0], z[l], ..., z[TV], алгоритм оценивания вектора состояния .г[А] и вы-
бора гипотезы D^> включает три группы уравнении, справедливых для
j = 1, J и моментов времепи 7с =0, 1, ...:
уравнения оценок
х'Р [7с] = х«>[7с | к — 1] + А«>[7с] Д<«[7с],
Л<7> [7с] = z[k] — /7<«[7с] х<7> [7с| к — 1] — /г<7>[7с], (13.2.119)
хО>[7с + 1|7с] = zl<»[7c]^>[7c] + С<«[7с]п<7>[7с],
А® [А] = р<Р [7с] Я®т [7с] Г№~' [7с], [01 — 1] = ш®;
уравнения ковариационной матрицы
P(i>~1 [7с] = /И®-1 [А] + Я®т [7с] Р® [А] [7с],
[/с + 1] = [М - И] Л® [Тс] Пф [7с] [7с] (7® [Тс],
П®-1 [А] = Р®-1 [7с] + 4®т [ А] ()® [А] Д«> [А], М® [0] = Р®;
(13.2.120)
ур авпепп я фу пк i (и о пал ов
/ [А] = /• [А - 1] + А®'1' [А] [А] Д® [А] -Ь Ej [А],
Ej [А] = In {| Q<j) [А- —1]Ц [А] 11 П<Я [А - 1] Г1},
[А] = [А] + [А] [А] Р^> [A] //Ф'Г[А] /?Ф-1 [А],
ZJ—1] = 0, <?0>[— 11 = ^, П<Л [-1] = Р<Л2. (13.2.121)
По формулам (13.2.119) — (13.2.121) рассчитываются цоисчпые значения
функционалов Л[Д]. В качестве наиболее вероятной выбирается гипотеза
P<v>, минимизирующая функционал А,-[А]:
A,[7V] = min/ДА],
а оценка x<v> [Л], выдаваемая соответствующим этой гипотезе дискретным.
Рис. 13.2.8. Структура алгоритма рекуррентно-поискового оценивания
ФКБ, является оптимальной оценкой вектора состояния х[1У]. Схема ре-
куррентно-поискового алгоритма оценивания показана па рис. 13.2.8, где
z~1 обозначает блок единичного запаздывания.
Апостериорное распределение вектора х[А"] при условии выполнения
гипотезы и наблюдения вектора z[ftl нормально, а ж<-’>[7с] и Р<Р[А]
являются соответственно математическим ожиданием и ковариационной
матрицей этого условного распределения.
Рассмотренный критерий оптимизации приводит к такой оценке век-
тора состояния #[/V] и выбору гипотезы которые имеют наиболь-
шую вероятность совместного появления при проведенных наблюдениях
Z{N1. Апостериорная вероятность вектора состояния Р(л:[/г] опреде-
ляется соотношением
J
2 exp J—0,5( || х [7с] - 7» [к] ||2 + /5[7с])1
Р (ж [Л] I ZM) = Ш---------J--- --------------------,
С|/2л)" 2 И | P<j> [7с]| охр [—О,5/^[7с]]
j=l
а апостериорные вероятности гипотез равны
, гмч /Гр^7Й|схр(-О,5Г;[7С]) ___
Р (D<7> | Z™) = -j-- —-----—------j = 1, J, (13.2.122)
2 /| Р'Л Pl |exp (-0,51 j [A])
j=i
Апостериорные характеристики P(z[7V] |Z[N]), P(D<P|Ztwl) могут слу-
жить основой для использования других критериев оптимизации при
оценивании вектора состояния ж [А] и выборе гипотезы
Б. Нелинейный вариант РПО. Нелинейный вариант РПО уже по яв-
ляется строго оптимальным алгоритмом совместного оценивания и про-
верки статистических гипотез. Оп субоптималсп в тацой же степени, как
и различные варианты непрерывных обобщенных ФКБ. Итоговые зависи-
мости нелинейного варианта РПО могут быть получены в предположении
малости ошибок оценивания. Ниже приводится формулировка, соответ-
ствующая (в части фильтрации нелинейных дискретных процессов) об-
общенному рекуррентному ФКБ. Пусть задано конечное множество ги-
потез 0 = {O<j>}, / = 1, 1, и их априорные вероятности Р, = Р(О<7>).
В дискретные моменты времени к = О, N наблюдается сигнал
z[7c] = h<’> [ж [Л], 7с] + п[Л],
зависящий от вектора состояния х[к] пелинейпой дискретной системы
х[к + 1] = /<J>[x[7c], 7с] + [7с].
Вектор-фупкции объекта 7<J>[a?[A], 7с] = f[D<^, х[7с], 7с] и капала наблю-
дения №> [х [Тс], 7с] = /г[7)<Р, ж [7с], 7с],. статистические характеристики
<?О>И] = Q{D<i\ к), Я«>[/с] = Я(£>0>, 7с), т<» = m(D«>), p<i> = р^ (/)<?>)
возмущений <«[/г], р[/с] и априорного начального распределения вектора
состояния х [0] зависят от гипотезы, имеющей место па интервале наблю-
дения к = О, N. Свойства случайных векторов w[7c], р[7с] и ж[0] такие
же, как и при рассмотрении алгоритма РПО.
Субоптимальпый в смысле максимума апостериорной вероятности
Р[ж[А], D(i~> | Z[wi] алгоритм оценивания вектора состояния ж [А] и выбо-
ра гипотезы D(iy состоит из трех групп уравнений, выполняющихся для
всох ; = 1, J и моментов времени к = 0, 1, ..
уравнения оценок
[A] = x<J>[A|7c — 1] + 7НР[7с]Д^Р[7с],
ДО>[/с] = z [Л] —/!<»[£«> [Л 17с — 1], 7с],
+ 117с] = [х<7>[А], 7с],
К& [7с] = P<jy [7с]
dlP (.г, 7с)
дх
х=х 1]
т
7?<Л~ [А],
х [0 | — 1] =
уравнения для ковариационной матрицы
Р<3>-1 [7с] = [7с] 4-
dh^ fr)
дх
|х=5сО\м/с—1] J
[А 4- 1] = Q^1 [А] - <2«>-1 [А] Э/0>^’-
1 rifjdh^y (х, к)
дх
дР (ж, 7с)
дх
Д<Л[А]Х
xW[Al/i-l]
e^Vc],
1 [А] = Р(Л 1 [А] +
к)
дх
[/с] S>P (*, V
дх
—1]
М® [0] = Р®;
уравнения функционалов
/. [А] = [к - 1] + Д0>т [А] 2<Л-1 [А] Л® [А] 4- е. [«],
е;.[А] = ln{|(P> [А- 1] | /?®[А]| I lP[k- 111-1},
[7с] = 2?®“’ [7с] -|- Л®-1 [7с] dh<3^’ -
|х='х<Л[Л|Ь—1]
P<j>[k]X
х= x'3'[k[k—l]
дРу (ж, 7с)
дх
1] = О, ^ [-1] = Я0>[-1] = Р?.
д<з>
Путем минимизации функционалов Ij [Л'] определяется наиболее вероят-
ная гипотеза £><v> такая, что / [ЛА] = min Z-[Л7]. Оценка x<v>[/V] на
£Кз> '
выходе фильтра, синтезированного в соответствии с гипотезой D<v>, явля-
ется субоптималыюй оценкой вектора состояния ж [Л'].
зс^[МА—1].
:= acO’>[,t|ft—j]
г<’>[л|/<-г]
В. Непрерывный аналог РПО. Имеется конечное множество гипотез
© = {D^, ..., D<3>, ..D<J-} и заданы априорные вероятности гипотез
Pj. На интервале ро, 7] наблюдается сигнал z(Z) — (Р) х (t) -f- IiV (Z) +
+ v(t), зависящий от вектора состояния x(Z) линейной динамической
системы, описываемой уравнением
х = А<3> (Z) х + В'A (Z) u<3> (t) + w (t).
Матрицы объекта .1'3>(Z) = .1 (D<j>, Z), Z?<J>(i) = S(D<’>, f), капала наблю-
дения 7/<3>(Z) = П(Р<В, t), Z), статистические характери-
стики возмущения w(t) и начального распределения вектора состояния
зависят от гипотезы, имеющей место на интервале наблюдения [й>, Г].
Априори неизвестно, какая из гипотез выполняется. Случайные возмуще-
ния w(t), v(t) —центрированные нормально распределенные «белые» шу-
мы, их условные ковариационные матрицы равны Е [w (Z) w’1' (т) | £><3>] =
- - 5^ (Z)6 (Z — т), Е[e(Zjг1'(т) |DO>] = .S\(Z)6(Z —т), E[»;(Z)i/r(T) |D<’>] =.
= 0 V/. Начальные условные распределения вектора x(Z0) нормальные:
Р [х (Zo) | D<3>] <= (т<3>, Р<3>), / = О, где т'1'1 = Р'^ —
= Р (£)}>) — условные математическое ожидание и ковариационная мат-
рица распределения Р[ж(«о) Патрицы /7<3>(Z), 7t<3>(Z), St(l) непре-
рывны по t.
Оптимальные в смысле максимума вероятности Р[х(7), D<J:>|Z(/(i, 7)],
где Z(zo, 7) означает всю наблюдавшуюся реализацию z(t), ге [t0, 7],
оценивание вектора состояния ж (7) и выбор гипотезы D'i> могут быть
произведены следующим образом. По соотношениям
dx^
=- Л'3> (Z)73> (/) -I- J3<3> (/) г/3> (Z) +
+ P® (Z) 7/<3>T (Z) (Z) [z (Z) - Л<3> (Z) ж«> (Z) - 7i<3> (Z)], ж<3> (t0) = mV,
= P<3> (Z) (Z)+ A<3> (Z) P<3>(z) -
— P'A (/) 7/<3>T (Z) S-1 (Z) Л<3> (Z) P<3> (Z) -I- (Z),
Р<Л(го)=/’о>
для каждой из возможных гипотез £><3> моделируются (в совокупности)
] непрерывных фильтров Налмана — Быоси и путем интегрирования на
интервале [Zo, 7] уравнений
-5- =-- || z (Z) - II (Z) х'3> (Z) - 7С3> (Z) ||2_, -1-
S2 *<Z)
-I- tr [2Л <3> (Z) -I- (Z) /Уз>-1 (0],
рассчитываются конечные значения функционалов 7j(7).
В качество наиболее вероятной выбирается гипотеза D1^, минимизи-
рующая функционал ^j(7), а оценка x<v>(7), выдаваемая соответствую-
щим этой гипотезе непрерывным ФКБ, является оптимальной оценкой
вектора состояния я (Г).
13.2.3.2°. Оптимальные алгоритмы оценивания в комбинированных
КЭС. Строгая постановка оптимального комбинированного оценивания в
КЭС возможна лишь в том случае, когда уравнения контролируемого про-
цесса и наблюдений имеют некоторую стандартную форму. Достаточно
общий вид этой стандартной записи сводится к следующему. Общий век-
тор состояния разбивается па два подвектора х и г, а уравнения движе-
ния и наблюдения но отношению к этим подвецторам имеют вид
ж[Л + 1] = Л [г[7с], 7с]х[7г] + B[r[fc], fc]u[fc] + ш[7т], (13.2.123)
г [7с + 1] = Ф[/с]г[Л] + F[7c]u[7c], (13.2.124)
z[k] = A[r[fc]] + Я[г[Л], 7c].r[7r] + e[7c], к = 0T~N. (13.2.125)
Подвектор г включает все координаты, от которых зависит используемоо
векторное поле 7г. Особенность стандартной записи заключается в том,
что рекуррентные уравнения для г[7с] образуют автономную группу урав-
нений и не содержат случайных возмущений. Часто соотношении
(13.2.1) — (13.2.3) путем строгих математических преобразований или с
помощью обоснованных допущений приводятся к (13.2.123) — (13.2.125).
Уравнения для подвектора хг/с] могут произвольным нелинейным обра-
зом зависеть от г.
Теоретической основой комбинированных методов оценивания в КЭС
является ГПО. В данном случае РПО используется для оптимального не-
линейного оценивания дискретных процессов специального вида. Пере-
ход ц РПО от соотношений (13.2.123) — (13.2.125) осуществляется путем
задания множества гипотез О = {О<3>}, 7 = 1, Д 0 Дискретных конечных
значениях г<’> вектора r[ZV], Закон распределения вектора r[7V] предпо-
лагается известным и по нему могут быть найдены вероятности гипотез
Рд Обычно гипотезы формируются относительно математического
ожидания тг[Л'| вектора г[Л'].
Случайные возмущения ге[7с] и с [7.] предполагаются центрированны-
ми взаимно некоррелированными дискретными белыми шумами с кова-
риационными матрицами ()<-’>[7с] и 7?о>[7с]. Начальное распределение век-
тора х[0] нормальное, с математическим ожиданием и ковариацион-
ной матрицей Р^>. Статистические характеристики ^^[Zc], 7?<3>[7с], т<3>
и Р^ в общем случае могут зависеть ог того, какое значение принима-
ет вектор r[7V], т. о. от гипотезы П<3>.
По соотношению (13.2.70) рассчитывается матрица решений К,-[7с, </]
уравнения (13.2.124), и с се помощью по формуле (13.2.71) определяется
соответствующая гипотезе £><3> гипотетическая траектория г<3>[Л], 7с =
= О, /V, имевшая место при проведении наблюдений z[0], z[l], ...
..., z[A’]. После подстановки этой траектории в равенства (13.2.123),
(13.2.125) и введения обозначений
Л<3>[7с] = Л[г«>[/с], ft], В<3>[7с] = В[г<»[7с], 7с],
> 713 9 1261
№>[t]=fl[K»[q,il, 7г<»[/с] = 7г[г«>[7с]] k
соотношения (13.2.123), (13.2.125) приводятся к стандартной постановке
задачи РПО. Поэтому уравнения комбинированного оценивания в КЭС
сводятся к (13.2.119) — (13.2.121), (13.2.71), а структура алгоритма
комбинированного оценивания в главпых чертах совпадает с изобра-
женной на рис. 13.2.8. Особенность заключается лишь в количественно
Рис. 13.2.9. Структура алгоритма комбинированного оценивания
строгих зависимостях (13.2.123) — (13.2.125) между сигналами и
гипотезами Схема оптимального алгоритма комбинированного оце-
нивания в КЭС показана на рис. 13.2.9. При ее составлении для упроще-
ния сделало предположение [А] =0 Vj. Во многих применениях
КЭС эта схема существенно упрощается вследствие того, что уравнения
для подвектора я [Л] пе зависят от проверяемых гипотез т. е.
(К^[Л], /?<!>[&], Р®, а следовательно, и P<j>[7c], 77<j>[A],
АЗР[Л-], 2<J> [Л] и с; [А] не зависят от индекса /,
В этом случае множество нить может быть заменено одним мпого-
кратно просчитываемым фильтром, па вход которого подаются различ-
ные реализации поля Составляющая е[/с] в уравнении функцио-
налов может быть опущена, так как опа по зависит от проверяемых ги-
потез и поэтому пе влияет па положение экстремума.
Схема упрощенного оптимального алгоритма комбинированного оце-
нивания изображена па рис. 13.2.10. После проведения всех измерений
Рис. 13.2.10. Структура упрощенного алгоритма комбинированного оце-
нивания
z[0], ..., s [Л7] для всех подлежащих проверке гипотез £№> последова-
тельно рассчитываются значения функционалов Ij [TV], при этом исполь-
зуется уравнение лишь одного общего для всех гипотез ФКБ, па вход
Которого подаются различные извлекаемые из блока памяти реализации
поля. После нахождения гипотезы Dw, доставляющей минимум функци-
оналу Л [Л'], определяются оптимальные оценки к [TV] = ar<v>[TV], г [TV] =
= r<v\ Структура комбинированного алгоритма КЭС, основанного па РПО,
содержит все необходимые данные для беспоискового вычисления оце-
нок в виде апостериорных математических ожиданий жОп[Т7] =
— Е[ж[ТУ] 7on[TV] = E[r[TV] |Zlf71], оптимальных по критерию ми-
нимума дисперсии ошибок оценивания и пе содержащих процедуры по-
иска.
J
По законам теории вероятностей Е [я [Л7] | Е [z [TV] |
j 5=1
2[ЛП] p(D<»iz[.’V])==2 х<» [TV] Р (£>0> | Z| W]). Поэтому
г=г
J
Жоп [Л7] = 2 [Л7] Р (D<j> I Z[JV]), (13.2.127)
3—1
аналогично
Гоп [А] = 2 r0>p I Z[/V])- (13.2.128)
j=i
Соответствующая схема изображена па рис. 13.2.11. Априорное распре-
деление вектора r[TV], характеризующееся математическим ожиданием
m,. [TV] и ковариационной матрицей Kr[/V], предполагается известным.
Знание m,|A!J и Кг [Л'] необходимо для правильного формирования мно-
жества гипотез. Оба рассмотренных алгоритма надежно решают пробле-
му ликвидации больших начальных ошибок оценивания в КЭС. В случае
ЯД*]
I2 [A-/]
xT[w]|*
Г4HPfjupo6riHue
множества
гипотез
<2> I
jA fa/]|~*----
faM
____ppr]
g-jtf И
[AjE [/d/J [Aj+<
[Al*-/]
[AlA—/]
A KI \%1числение\
—1
Корта
поля /Кг). '
Извлечение
реализаций
л<г’М
fa
Л Ю вычисление P0-)
/Д/<-/]
ffh м
• г.7] \Внчислен1:^
|Д|А£[A0[Aj^e,Mj-®|__| ^\p()n>\z\^
Шн [Л']
/бМ
<» W
piv iz
y4 i w
j=>
HffIZ.
Рис. 13.2.11. Структура беспонскового алгоритма оцеппвапия, содержа-
щего множество ФКБ
Вычисле-
ние
eunome -
тичес -
них
rupnHKfпа-
рий
Ру\р\
2'!*-
M\
симметричности апостериорного распределения оцепки, оптимальные по
критериям максимума апостериорной вероятности и минимума диспер-
сий, совпадают, что говорит о близости рассмотренных алгоритмов. Это
сходство следует также из анализа схем алгоритмов. При большом чис-
ле наблюдений N достаточно точно выделяется истинная гипотеза Z)<v>.
Вероятность этой гипотезы P(Z)<v>|Z(wi) приближается к единице, а веро-
ятности остальных гипотез становятся малыми. Поэтому в суммах
(13.2.127), (13.2.128) остаются лишь слагаемые ic<v>[7V']r(Z)<v>[ZtJV]) «
[TV], r<v>P|Z[WI) « r<v>, и оценки в виде апостериорных матема-
тических ожиданий x01i[jV], гО1г[Л’] совпадают с оценками r<v>,
полученными в результате минимизации функционалов. Важным стано-
вится сопоставление алгоритмов по вычислительным затратам. С этой
точки зрения существенными преимуществами обладают алгоритмы РПО.
Наблюдается определенная общность между алгоритмами комбиниро-
ванных КЭС и рассмотренным в и. 13.2.1.4° алгоритмом с многократной
линеаризацией уравнений наблюдения (см. рис. 13.2.4). По вдаваясь в
тщательное сопоставление этих алгоритмов, затрагивающее и вычисли-
тельные, и точностные аспекты, отметим, что упомянутые алгоритмы ра-
ботоспособны при произвольных начальных ошибках оценивания (разу-
меется, при условии правильного выбора области линеаризации илп
области задания гипотез), и этим качеством они обязаны объединяюще-
му их признаку — использованию множества фильтров Калмапа.
ГЛАВА 14
МЕТОДЫ ТЕОРИИ ЧУВСТВИТЕЛЬНОСТИ
Согласно гл. 1 системы автоматического управления могут описы-
ваться или в пространстве состояний, или в пространствах сигналов.
В последнем случае доминирующим средством описания являются опе-
раторы.
Дифференциальные и разностные уравнения, являющиеся основны-
ми формами описания в пространстве состояний, также могут быть при-
ведены к операторной форме, если за пространство входных сигналов
Припять управляющее или возмущающее воздействие, а в качестве про-
странства выходных сигналов использовать пространство состояний при
определенных начальных условиях.
Операторы в свою очередь характеризуются структурой и парамет-
рами. В процессе функционирования системы структура и параметры
оператора могут возмущаться, что приводит, как правило, к изменениям
качества управления. Причиной указанных возмущений являются не-
контролируемые изменения структуры и параметров системы, либо спе-
циально организованный процесс управления перестройкой свойств опе-
ратора. Это характерно, в частности, для адаптивных систем управления.
Изучение влияния свойств оператора па управляемый процесс про-
изводится в теории чувствительности. Наиболее глубоко в теорпп чувст-
вительности развиты принципы и методы исследования зависимости из-
менений свойств систем управления от изменений их параметров. Поэто-
му в данной главе будут изложены элементы теории параметрической
чувствительности САУ. В теории чувствительности процедура исследова-
ния чувствительности системы управления включает три осповпых
этапа:
построение параметрической модели исходной системы или управля-
емого процесса;
построение модели чувствительности и ее реализация с целью полу-
чения функций чувствительности;
использование фупцпий чувствительности для решения исходной за-
дачи анализа или синтеза системы.
В дальнейшем главное внимание будет уделено второму и третьему
этапам исследования чувствительности.
§ 14.1. Модели чувствительности непрерывных
и разрывных систем
Вопросы построения моделей подробно рассматриваются в гл. 1 и по-
этому здесь можпо ограничиться лишь основными вопросами, связанны-
ми с особенностями построения моделей чувствительности.
14.1.1. Основные понятия. Пусть х — n-мерный вектор состояния, у —
g-мсрпый вектор входных воздействий, F — оператор системы. Система
характеризуется также совокупностью т параметров, отражающих ее
технические характеристики и свойства внешней среды. Обозначим со-
вокупность этих параметров m-мерпым вектором а. Тогда связь между
величинами у, а и х можпо записать в следующем символическом виде:
х = F(y, а). (14.1.1)
Если соотношение (14.1.1), начальные условия и входное воздействие у
фиксированы, то свойства системы определяются выбором параметров а.
Очевидно, что от вектора а будет зависеть и показатель качества 7, оп-
ределенный па множестве векторов состояния х:
1 = 1[х]=1(а). (14.1.2)
Изменения параметров а будут приводить к изменениям как вектора
состояния х, так и показателя качества 1.
Способность системы менять свою реакцию, выраженную в х (4) или
7, па заданные входные воздействия при изменении параметров а назы-
вается параметрической чувствительностью, изучение которой составля-
ет предмет теории чувствительности.
Следует отметить, что в технике (в частности, в измерительной тех-
нике) под чувствительностью понимается мера восприятия входных сиг-
налов прибором или системой. В теории управления понятие чувстви-
тельности, и прежде всего параметрической чувствительности, другое.
Оно перекликается с понятиями параметрической инвариантности [14.1,
14.2, 14.3] и грубости динамической системы [14.4].
Основными понятиями теории чувствительности являются: функции
чувствительности, основное и дополнительное движения.
Пусть соотношения вица (14.1.1) и (14.1.2) представляют параметри-
ческую модель исследуемой системы. Вопросы параметризации моделей
динамических систем изложены в работе [14.3]. Так как, вектор состоя-
ния х является функцией времепи, то при заданных начальных условиях
и заданном у(/) имеет место зависимость
х = x(t, а). (14.1.3)
Пусть а0 — фиксированное значение параметров. Это значение может
быть связано, например, с расчетным или поминальным режимом функци-
онирования системы управления. Вектору а0 соответствует следующее
соотношение для вектора состояния:
х° = x(t, а0). (14.1.4)
Функция x(t, сс°) описывает основное или базовое движение иссле-
дуемой системы (певозмущеппое состояние). Ему соответствует основное
(базовое) значение показателя качества
7° = 7 (а0).
(14.1.5)
При изменении значения вектора параметров па величину Да полу-
чим параметрически возмущенное движение
х = х(1, а0 + Да) (14.1.6)
и возмущенное значение показателя качества
1 = + Да). (14.1.7)
Вектор Дх, определяемый выражением
Дх = х({, а0 + Да)—х(1, а0), (14.1.8)
называется дополнительным движением.
Чувствительность систем количественно характеризуется с помощью
функции чувствительности. Функциями чувствительности /с-го порядка
компоненты вектора состояния х, (Z, аь ..., а,,,) по параметрам
«I, ..., ат называется частная производная
(14.1.9)
определяемая в точке а = а0. Если показатель 7(a) является числовой
величиной, т. е. функционалом (его аргументом являются только пара-
метры at, ..., ara), то производная
ш
2‘-‘.
(14.1.10)
вычисляемая при Да = 0, называется коэффициентом чувствительности.
Функции (14.1.9) и коэффициенты чувствительности (14.1.10) опреде-
ляются в предположении существования соответствующих производных.
Производные
xaij ~ ““ да.
(14.1.11)
называются соответственно функциями и коэффициентами чувствитель-
ности первого порядка или просто функциями и коэффициентами чувст-
вительности. Совокупности частных производных вида
дх
да
да-
дхп
da(
дх{ дху дх} -
дхп дхп дхп
да2
называют соответственно вектором к матрицей чувствительности. Мас-
дх
рица ха = есть матрица Якоби,
Кроме указанных выше функций и коэ )фициептов чувствительности,
в теории чувствительности рассматривают логарифмические функции и
коэффициенты вида
д In xt
д In а /
d In /
д In а-
и полулогарифмические функции и коэффициенты вида
dxi д!
S 1п сх^ ’ Slnc^ ‘
Предположим, что вектор x(t, а), зависящий от скалярного парамет-
ра а, имеет в точке а = а0 производные но а до (s + 1)-го порядка
включительно. Тогда существует разложение в ряд Тейлора
, 0. cb; (/., а0) 1 a2x(i,c£°) ..
x(t,a) = x(t,a ) + —-----------Да-|- -75--—2-------Да
1 d“x(t, а°)
•' • + ~s! 9-а‘ - ^ + PS+1, (14.1.12)
1 <?s+1x (t, а0 4- уЛа)
где рз+з = 0 + 1)! --------^+1------------Да®+1, 0 sg 7 1, - остаточный
член разложения. Если пренебречь остаточным членом ps+i, то получим,
приближенное представление движения x(t,' а):
, ,,, дх (t, а°) 1 dsx (t, а °)
х (t, а) « х (t, а°) + —-------- Да + ... + —~s-------Да", (14.1.13)
а также приближенное представление дополнительного движения
. 0, дх (t, а0) 1 dsx(t, а °)
Да (О = х (4, а) — х (t, а0) « — - Да -|- ... + -j-------—------Д+.
аа в! Ра
(14.1.14)
При достаточно малой вариации Да имеем линейные относительно
Ла приближения
, 0. дх (t, а°) 8x(t, а0)
x(l, a) = x(t, а0) -|-—--------Да; Д.г (/) = —---------Да. (14.1.15)
Все изложенное легко обобщается на случай, когда движение зави-
сит от т скалярных параметров.
14.1.2. Уравнения чувствительности непрерывных систем. Рассмотрим
модель исходной системы в виде дифференциального уравнения
dx
^---= f (х, t, а) ('4.1.16)
с начальными условиями
’ t0 = Zo(a); х0 = т0(а).
(14.1.17).
Предполагаем, что скалярный параметр а может принимать значе-
ния из некоторого интервала
[dm in, ССщах].
(14.1.18)
Допускаем также, что для уравнения (14.1.16) выполнены условия
существования п единственности решения х(4, а) при всех значениях
a [dmin, сетах], а также продолжимости решения при t->- оо [14.3, 14.5].
Эти условия включают, в частности, требование достаточной гладкости
правых частей уравнений (14.1.6) — непрерывности функций /,(х, 4) и их
производных dfildxj, t, j = 1, п. Динамические системы, описываемые
такими дифференциальными уравнениями, будем называть непрерывны-
ми с гладкими функциями.
В дальнейшем будем предполагать, что множество решений системы
(14.1.16)
х(1, а) — аг[4, я?о(сс), «о(а), а]
(14.1.19)
является семейством однопараметрических решений, т. е. при фиксирован-
ных функциях (14.1.17) каждому значению а из интервала (14.1.18) соот-
ветствует одно и только одно решение семейства (14.1.19).
Для непрерывных динамических систем функции чувствительности
являются решениями специальных дифференциальных уравнений, назы-
ваемых уравнениями чувствительности. В основу метода составления
уравнении чувствительности непрерывных систем может быть положена
общая теорема о дифференцируемости решения по параметру [14.5].
Еслп функция (14.1.17) непрерывно дифференцируемы по а, то ре-
шепие x(t, а), удовлетворяющее условиям х(10(а), а) = х0(а), непре-
рывно дифференцируемо по а па любом замкнутом интервале, таком,
что решепие x(t, а) принадлежит области, в которой правая часть
уравнения (14.1.16) непрерывно дифференцируема по х, а. При этом
производная (вектор чувствительности)
дх (t, а)
оа (14.1.20)
определяется уравнением
= +<±
dt дх а да
(14.1.21)
с начальными условиями
г! "г • dt fl т n.t
Соотношения (14.1.21) и (14.1.22) составляют уравнения чувствитель-
ности. Совместно с уравнениями (14.1.16), (14.1.17) они образуют модель
чувствительности. Функции чувствительности находятся при совместном
интегрировании уравнений (14.1.16), (14.1.21) с начальными условиями
(14.1.17) и (14.1.22) при а = а0. Некоторые модели чувствительности ти-
повых непрерывных систем представлены в табл. 14.1.1.
Таблица 14.1.1
Модели чувствительности типовых непрерывных систем
Номер
по
порядку
Уравнение исходной системы
У ра вне ние ч у ветвите лыюсти
2 = 2&i(a)//(i)
i--0 i—О
2
3
4
x = A (a) x + В (a) у
дА дВ
А (а) х„ 4- — х + V- и
гх 1 оа 1 да J
f(xw, xlu~l>, .... X, а, I.) = О
х = f (х, а, 7)
14.1.3. Уравнения чувствительности высших порядков. Рассмотрим
функцию чувствительности /с-го порядка
. dllx (t. а)
^>(0= L (14.1.23)
рмпеппя уравнения (14.1.16).
Функции чувствительности высших порядков получаются с помощью
моделей чувствительности, включающих, кроме уравнения (14.1.16) и
уравнения чувствительности первого порядка (14.1.21), (14.1.22), соответ-
ствующие уравнения чувствительности высших порядков. Уравнения
чувствительности вышних порядков могут быть определены на основа-
нии уравнения чувствительности низших порядков при выполнении со-
ответствующих условии дифференцируемости. В наиболее общем виде
условия существования функции чувствительности высших порядков и
путь их получения можно сформулировать в виде следующего положения
[14.3].
Для существования непрерывных функций чувствительности /с-го
порядка (14.1.23) одаопарамстрического семейства решений, определен-
ного начальными условиями (14.1.17), достаточно выполнения условий:
правые части уравнений (14.1.6) имеют непрерывные частные производ-
ные до /с-го порядка по я, a, t, в которых дифференцирование по t ис-
пользуется пе более 7с — 1 раз; кроме того, начальные условии (14.1.17)
должны быть также к раз непрерывно дифференцируемы по а. При этом
соответствующие уравнения чувствительности могут быть получены пу-
тем 7с-кратного дифференцирования по параметру исходного уравнения
(14.1.16), а соответствующие начальные условия — путем последователь-
ного применения соотношения (14.1.22).
Для функции чувствительности второго порядка я®(4, а) =
= й2х(4, сс)/5сс2 применение правила, получаемого на основе сформулиро-
ванного утверждения, приводит к следующему уравнению чувствитель-
ности:
Ч2)
dt
М ->.(2)
'а
дх
дз? “ дхда “ da2’
г(2) _
*ао
d\
da"
2х,
. ^-х ^-'х
Wda °da* 0
dt \2
da )
Достаточные условия существования функций чувствительности
высшнх порядков в случае векторного параметра сст = [cci ... ато] и
способы составления соответствующих уравнений чувствительности да-
ны в работе [14.3J.
14.1.4. Модели чувствительности разрывных систем. Разрывные сис-
темы на различных интервалах времени описываются различными диф-
ференциальными уравнениями вида
dxfdl — /<4>(х, t, a), if—1 < t < ti, (14.1.24)
где /(i> — вектор нелинейных функций, непрерывно дифференцируемых
по всем аргументам. Моменты времени ti, определяющие смену одного
уравнения (14.1.24) другим и называемые моментами переключения, зада-
ются условием переключения
gw(x, I, а) = 0, (14.1.25)
где скалярные функции также непрерывно дифференцируемы по сво-
им аргументам.
В общем случае вектор х в момент переключения может претерпе-
вать конечный разрыв, определяемый уравнением (условием скачков)
х™ = (р<;> (т«>, t., а), (14.1.26)
где = х («i -|- 0), х(^ — х — 0), —вектор нелинейных непре-
рывно дифференцируемых по всем аргументам функций. Соотношения
(14.1.24) — (14.1.26) дополним начальными условиями
«о = «о(ссх); я+(40) = x+(tD, а). (14.1.27)
Заметим, что в модели разрывной системы чрезвычайно важной яв-
ляется последовательность смены одного уравнения (14.1.24) другим, на-
зываемая типом движения (решения). При этом множество решений
х = x(t, а); t0(cc) t с; t(a), amIn -S w araal (14.1.28)
образует однопараметрическое семейство, если все они имеют одинако-
вый тип.
Условия существования функции чувствительности
xa(t) = dx(t, а)/да, (14.1.29)
не определенной в точках разрыва или излома решения x(t, сс), а также
способ ее определения формулируются следующим образом [14.3]. Пусть
исходная разрывная динамическая система задана соотношениями
(14.1.24) —(14.1.26) и для выбранного а° е [amin, tXmax] выполнены усло-
вия
^/«>+^1^0. (14.1.30)
дх dt
Тогда функция чувствительности (14.1.29) существует при всех
I ц и удовлетворяет уравнениям
при начальных условиях
ао
dx. dt
__о___х____о.
da da
(14.1.32)
При этом переходы от одного уравнения (14.1.31) к другому осуществля-
ются с помощью условий скачков
Д*ад> = (Ч + 0) - («< - 0) = [- Д/° +
/ \ dq№ dt . / dq/p \ дф^р
+ V-aT- - Еj + ~оГ d^ + (-аГ - Е) 1-33)
где
Д/<’> = /<’+!> (/j>, а) — /<*> (/р, Г, а) = /*> —
(1> 0д«>
дх а~ да
= ~ (14 L34)
~г п -
дх dt
Рассмотрим ряд частных случаев моделей чувствительности разрыв-
ных систем.
7. Решение исходной системы является непрерывным, т. е.
(14.1.35)
При этом условие скачков (14.1.33) принимает вид
Д^„ =-Д/(5>^, (14.1.36)
а da
причем
ds~ ж«> д- дё+ д_
А = _ -g£. + а+ , 14 37,
da- д^ ,п (
~дГ}~ + ~дГ -dZf+ + ~dF
и A/Ci> — разрыв правой части уравнения (14.1.24) в момент переключе-
ния ti.
2. Условия скачков и условия переключения стационарны, т. е.
При этом
(14.1.38)
5cp/5t = 0; dg^'ldt — 0.
£ I x<i> _L--------
-4-^
8.t “ ' da
da==~ д^у '
dx ~
(14.1.39)
3. Моменты переключения не зависят от а, т. с. dtjda = 0, тогда
Джа<г> = дх ~ Е) яа- + ~8а
(14.1.40)
Если к тому же решеппе является непрерывным, т. е. выполняются
условия (14.1.35), то
А^а<г) — 0.
Последнее означает непрерывность функций чувствительности xa(t).
Очевидно, что при непрерывных решениях x(t) функции чувстви-
тельности будут непрерывными также, если непрерывна правая часть
системы (14.1.24), т. е.
Д/<г> = 0.
Примеры исследования чувствительности типовых разрывных систем
можпо найти в работах [14.2, 14.3, 14.6]. Там же указаны пути реализа-
ции моделей чувствительности па непрерывных и цифровых вычисли-
тельных средствах.
§ 14.2. Чувствительность решений краевых задач
Впервые исследование чувствительности решений краевых задач бы-
ло проведено в [14.3]. Данный параграф содержит краткое изложение
этого вопроса.
14.2.1. Краевые задачи, зависящие от параметра. Типовая модель
краевой задачи включает систему уравнений
dx
(14.2.1).
и краевые условия. Для двухточечной краевой задачи эти условия име-
ют вид
С(ж<о>, ят<о, t0, ti, а) = 0, (14.2.2)
где G — векторный функционал, .т<о> = х0 = .т(/0), .r<o = r (ti):
<о = го(а), = ti(a)—функции от а, в общем случае неизвестные и
определяемые в процессе решения краевой задачи. Размерность вектора
G обычно равна числу неизвестных краевой задачи.
Для многоточечной (^-точечной) краевой задачи краевые условия за-,
писываются в виде
G(x(Oy, хм, .... х(к}, t0, ..., tk, а) =0. (14.2.3)
14.2.2. Условия существования функций чувствительности решений
краевых задач. Воспользуемся условиями существования функций чув-
ствительности задачи Коши, рассмотренной в п. 14.1.2. Из этих условий
следует, что функция чувствительности решения краевой задачи
*а.к8(*)=^^- (14.2.4)
будет существовать, если вектор f(x, t, а) в (14.2.1) непрерывен по всем
аргументам, непрерывно дифференцируем по х, а, и если существуют
п непрерывны производные dxKS(t0)/da, dt0/da.
Рассмотрим двухточечную краевую задачу. Пусть
x(t) —x(t, а:(о>, t0, а) (14.2.5)
— общее решение уравнения (14.2.1) такое, что
х (t0, ж<0>, tQ, а) = хуу. (14.2.6)
Кроме того, из (14.2.5) следует, что
a(t,) = x(tt, ж<0>, to, а). (14.2.7)
Подставим (14.2.7) в краевые условия (14.2.2):
G(a:<o>, x(tt, х(т, to, a), t0, t1, а) = 0. (14.2.8)
В результате условия существования функций чувствительности
(14.2.4) сводятся к требованию, чтобы уравнение (14.2.8) было разрешимо
в некоторой окрестности точки а = а0 и решепие х<0>(сх), <о(а) было не-
прерывно дифференцируемо в точке а = а0. Достаточные условия суще-
ствования функций чувствительности решений краевых задач могут
быть получены [14.3] с использованием теории неявных функций [14.7].
Предположим, что размерность вектора G равна п 4-1 и определе-
нию подлежат компоненты вектора ж<п> и величина t0. Пусть также сос-
тавляющие вектора G непрерывно дифференцируемы по всем аргумен-
там. Составим матрицу Якоби
3х<0>1 5®<0>П (>t0
д“п+1 ^^п+1 д&п+1
д^оя дх<о>п J
(14.2.9)
Нетрудно показать путем дифференцирования по а\о> и to левой ча-
сти выражения (14.2.8), что
0G ОС, (\) 0G 0G ^(t,)
.Sx<o> Sj\d, OLo dx<L> d/o .
(14.2.10)
Справедливо следующее положение [14.3]. Пусть правая часть урав-
нения (14.2.1) удовлетворяет условиям, приведенным в 14.1.2, а вектор-
функция G непрерывно дифференцируема по ж<0>, ж<1> (или to), а. Пред-
полагаем также, что при а = а° соответствующая краевая задача имеет
решение х = xK3(t, а0). Тогда, если выполнено условие
det О (а0) =/= О,
(14.2.11)
то в некоторой окрестности а° е [amin, атах] существует одпонарамег-
рическое семейство x(t, а) решений краевой задачи и начальные усло-
вия х<о)(а), to(a) непрерывно дифференцируемы по а.
Допустим, что данные условия выполнены. Найдем выражение дня
определения производных dx^jda и dtB/da. Вычисляя полную производ-
ную по а левой части уравнения (14.2.8), получим с учетом (14.2.10)
(полагая, что хф = ж(<1))
da
da
8G 8G 8G dt 8G 8x(v dt,
---- ------------------------------—------— ---—, (14 2 I9)
da 8x{d da-------------------------------------da 8x{i) da ' ’ ’
откуда
da /8G , 8G dx,,, , 8G dt, ( 8G d^i
dtQ \8a 1 Sx^ da 1 i>t, da 1 8t, da
da _
(14.2.13)
14.2.3. Модель чувствительности решения краевой задачи. Модель
чувствительности включает уравнения исходной системы (14.2.1) с крае-
выми условиями (14.2.2) или (14.2.3), уравнения чувствительности и со-
ответствующие краевые условия для функций чувствительности. Пусть
исходная система является гладкой. Тогда уравнения чувствительности
имеют вид
х +Л.
dt дх а да
(14.2.14)
Найдем краевые условия
ложеции, что величины to и G
для функций чувствительности в предпо-
заданы. Продифференцируем (14.2.8) по а:
fe<3> _
da ~xa (fi)—
8G
<9ж<0) da ' dx^ da да
Так как
dxm> , х
da — ха ('о) — жа«р>
ТО
0G дв
*а(о> + 8^ *«<!> + to = °‘
Соотношение (14.2.15) является краевым условием, определяющим
связь между Za<0> = ^a(tc) И = «a(G).
Сформулированная краевая задача (14.2.14), (14.2.15), в отличие от
исходной задачи (14.2.1), (14.2.3), является линейной. Ее решение можпо
найти следующим образом. Из (14.2.4) находим:
ха (У = = К (*!’ Qi) жа<(|) f К (tx, т) В (т) dT, (14.2.16)
«о
где B(t) = 8f(t)/8a, K(t, t0) —матрица Коши, являющаяся решением
уравнения dK(t, tD)/dt = A(t)K(t, t0), K(t0, t0) — E, где A (t) = df/dx.
Подставим (14.2.16) в (14.2.15) и после несложных преобразований
получим:
O*«<o> = Q, (14.2.17)
где
8G 8G 8G 8G С .. ,t . „. , ,
D = a— +=------<? = — 7Г— я—- I К (1 т) В (т) dr.
^(0> ^Ж<1> ^<о> ^ж<1>
*0
Так как матрица D является неособой, то ха,оу = D~'Q. С учетом
этого выражение для функции чувствительности решения краевой зада-
чи имеет вид
t
ха (1) = К (t, t0) D~'Q + J К (t, т) В (т) dx. (14.2.18)
«о
14.2.4. Исследование чувствительности простейшей вариационной за-
дачи. В качестве методического примера использования общего под-
хода, изложенного в предыдущих пунктах, рассмотрим модель чувстви-
тельности простейшей вариационной задачи.
Известно, что решение этой задачи удовлетворяет уравнению Эйлера
Fx (t, х, х, а) — F. (1, х, х, а) =0, (14.2.19)
dt х
где F(t, х, х, а) — обладающая соответствующими свойствами подынтег-
ральная функция функционала
\(а)
I [х, а] = F (t, х, х, а) dt. (14.2.20)
/0(а>
Краевые условия задачи имеют вид:
x(t0)=a; x(tt)=b. (14.2.21)
Необходимо найти условие существования функции чувствитель-
ности
xa(t) = дхж(1)/да, (14.2.22)
где жЭк(1) экстремаль, и построить модель чувствительности.
Предполагается, что для данной вариационной задачи условия суще-
ствования решения при всех а е [amin, атах] выполнены и введено од-
нонараметричесцое семейство решений
ж(1, а) = ж(1, а(а), Ь(а), «0(а), ii(ci), а). (14.2.23)
Приведем краевые условия (14.2.21) к виду
gi (жо, t0, а) = ж0 — а = 0; g2 (жо, а) = ж (tb жо, а) — Ь = 0.
(14.2.24)
Рассмотрим якобиан
dg±
dt я'
о дж0
д#2 дё2
8Х° 8хо
Таким образом, условие существования функции чувствительности
(14.2.22) сводится к неравенству
6х(11)/дхо=/=О. (14.2.26)
Уравнения чувствительности получим, дифференцируя по а уравне-
ние Эйлера (14.2.19):
• • j - г d \ d
F. ж -J- —F. .-Л™ ж„ — f'^-^F. =0.
хх “ dt XX “ И* хх лХ) “ ах dt ха
(14.2.27)
Краевые условия для уравнения чувствительности имеют вид:
da • at. db • dt
ж„ (t ) = -=— — ж. —0; ж„ = ж,—1. (14.2.28)
a. \ о) da о (/а a 1 1/ da, ’da
Примеры исследования чувствительности других классов задач вари-
ационного исчисления (вариационных задач с подвижными границами,
угловыми точками, задач па условный экстремум) можно найти в рабо-
те [14.3]. Там же с использованием теории неявных функций изложены
подходы к исследованию чувствительности задач линейного и пелипеп-
иего программирования.
§ 14.3. Функции и коэффициенты чувствительности
невремениых характеристик и показателей оптимальности
систем управления
При описании процессов динамических систем или оценивания их
качества часто используются формы описания (см. § 1.4) или показате-
ли, определенные пе во временной области. Ниже рассматриваются ме-
тоды теории чувствительности в подобных случаях,
14.3.1. Чувствительность передаточной функции и частотных харак-
теристик. Пусть И7!/;, а) является передаточной функцией линейной
стационарной одномерной системы, зависящей от параметра а. Известно,
что передаточная функция физически реализуемой стационарной систе-
мы является изображением по Лапласу весовой функции Ф(/ — t', а):
ОО
W (р, а) = j Ф (t, а) ехр (— pt) dt, (14.3.1)
о
где i — t — l'.
Можпо доказать [14.8], что преобразование Лапласа относительно
переменной t и дифференцирование по параметру а коммутативны, от-
куда следует, что
IV (р) = S РЗФ (^~ и)1, (14.3.2)
да | да ]
где IV«(/>)—функция чувствительности передаточной функции.
Комплексную частотную характеристику системы можно формально
получить замепой в W (р, а) аргумента р на /со. Кроме того, в теории
управления рассматривают амплитудную Л (и), фазовую 0(<о), вещест-
венную /J(co), мнимую <2(io) частотные характеристики, функции чув-
ствительности которых можпо определять различными способами. Все
эти способы можно объединить в четыре основные группы: численвйе
дифференцирование, аналитическое дифференцирование, эксперименталь-
ные способы, использование функций чувствительности временных ха-
рактеристик. Чаще применяются способы, основанные на прямом диффе-
ренцировании аналитических выражений для частотных характеристик
по соответствующим параметрам. При зтом достаточно универсальным
зарекомендовал себя следующий алгоритм.
Рассмотрим комплексную частотную характеристику JVQco, а):
d
У, I'i (а) (у®)*
IV (у со, а) = -------------= А (со) exp ]у© (со)], . (14.3.3)
У (а) (усо)’
1=0
где
А (со) = А[ы, а0(а), .. ап(а), Ь0(а), Ьд(а)],
(14.3.4)
©(со) =©[ю, «о(а), ..., ап(а), Ъо(а), ..., fed(a)].
В соответствии с правилами дифференцирования сложных функций
п
дА (со) 6А (со) V ДА (<Д)
да = да- da db, da’
1=0 г 1=0 <
ое (со) -у Р© (со) ,foi
да да- da
i=o 1
(14.3.5)
V б© (со)
db; da
i=o L
Сомножители dkjdai, dkjdbt, дв:дсц. d&fdbt определяются только струк-
турой передаточной функции и величинами коэффициентов л, и bt при
а = а0. Выражения для этих сомножителей могут быть составлены за-
ранее. В табл. 14.3.1 и 14.3.2 приведены такие выражения для ряда типо-
вых передаточных функций. Сомножители da-Jda и дЪ,1да определяют-
ся конкретной зависимостью коэффициентов передаточной функции от
параметров а.
Таблица 14.3.1
Чувствительность амплитудных характеристик простейших САУ
Передаточная функция W(p) Чувствительность но отдельным параметрам
а л ДА бон д А с76, ОК 0(it
р + ао 1 Ум _ «0А (®) м — —
btP + У \ ОрА (со) , 2 b J СО
* + % Умэ М Vmd
bjP + frp fcn (яр—<о2)А(ю) bjto a j<o2A (и)
2 i i Р +«^ + «0 К уу-у/-)!) № -|- OjO2 V (K2+a2C02)D f\' 2 1 2 2 «JO
где М = со2 + я2, N = aQ — о2, D = Ь2со2 + Ь*
Таблица 14.3.2
Чувствительность фазовых характеристик простейших САУ
Передаточная функция VV(P) Чунгтни''«.пьноеть по отце.чиным параметрам
пн <«hl ТнГ, Of) На (
fc„ С)
0 —— .—
р + «0 М
ьлР^~Ьо b^w о С|)’’о
Р + а0 ~ D м D
Ь1Р + 6п &гсо а^а) <оЬ0 — toN
Рг + агр + ав ~ D N +«2со В IN2 -|- я2со2
где М = и2 + я2, N = «0 — <а2, D = Ь?<о2 -|- Ьв
Более подробные сведения о других способах получения функций
чувствительности передаточной функции и частотных характеристик
можно найти в работах [14.2, 14.3, 14.6].
14.3.2. Чувствительность нулей и полюсов передаточных функций.
Нули и полюса являются корнями полиномов соответственно числителя
и знаменателя передаточпой функции. Рассмотрим полином
k
D (р,а) = 2 at w рг = °-
г=0
(14.3.6)
Допустим, что в окрестности точки а — а0 существуют непрерывные
производные da, Ida и что уравнение (14.3.G) при а = а° имеет к различ-
ных корней pi, ..., рк- Тогда эти корпи являются непрерывно дифферен-
цируемыми функциями параметра а. Значения производных dp,/da опре-
деляются на основе теоремы о дифференцируемости неявной функции
[14.7] выражениями:
h
^2 =
da
Так как
9D (р, а)/да
8D(p, а)/др p=Vi
а=а°
У, (9D (р, а)!да.) (дл./да')
(1___________________________
dDjd р
ТО
dD(p, а)
--------- = Р ,
8ал
I = 0, к,
(14.3.7)
(14.3.8)
Формула (14.3.8) позволяет найти коэффициенты чувствительности как
для вещественных, так и для комплексных корней.
Во многих случаях, параметр сх в полиномы числителя и знаменателя
входит линейно, т. е. D(p, а) = Di(p) + aD2(p). Тогда коэффициент кор-
невой чувствительности определяется выражением
^Р;
da
DAPi)
dl)(p)/dP\p=v.
(14.3.9)
14.3.3. Чувствительность собственных чисел матриц линейных стаци-
онарных систем управления. Рассмотрим постоянную вещественную мат-
рицу А с различными собственными значениями ?ч, ..., и соответст-
вующими им собственными векторами щ, ..., Ни при а е [a,nin, <xmaj].
Пусть Да = а — а0 — малый параметр. Образуем новую матрицу
А (Да) = Л + ДаВ, гд§ В — произвольная вещественная матрица одина-
кового с А размера, Из теории возмущений линейных операторов и мат-
риц следует [14.9], что Л, (Да) и г,-(Да) являются непрерывными и диф-
ференцируемыми функциями параметра Да, причем А (0) = А (а,) = /1,
7.,(О)=2.,, р,(0) = Vi и коэффициент чувствительности [J, = 57,г/дДа
определяется формулой
гТ/?Н.
Г; Г,
(14.3.10)
где Vi — собственные векторы соответственно исходной А и транспо-
нированной Лт матриц.
Если варьируемым параметром является один из элементов матрицы
А, например ai,s, то
₽.=!к
г <4.
i’-.
vih
(14.3.11)
где vij, vij — соответствующие
тонального элемента аьп
компоненты векторов Е»;
Для диа-
d'K.
да.
ill l ih
(14.3.12)
ij Vi3
Если матрица А является симметричной, то
п
ViSVik
8akS
d‘ki
(14.3.13)
п
и
получены формулы для
коэффициентов
коэффициентов
В работах [14.2, 14.3, 14.6]
чувствительности комплексных: собственных значений и
чувствительности высших порядков. Там же приводятся сведения об ис-
следовании чувствительности других характеристик матриц (собствен-
ных векторов, следа, определителя).
14.3.4. Чувствительность интегральных показателей. Интегральные
показатели получили широкое распространение при формулировании
требований, предъявляемых к качеству функционирования объекта уп-
равления. Выбор (синтез) оптимального управления производится при
максимизации (или минимизации) определенного функционала, являю-
щегося показателем оптимизации.
14.3.4.1°. Непрерывные системы. Рассмотрим интегральные показате-
ли в виде
t0(a)
вых («). ^ы’х («)’ • • ’ 4ык (“)> 0 dt
(14.3.14)
для одномерной системы и
оо
1.2 = Q2(x (a), t) dt (14.3.15)
для многомерной системы, где (Ji, <?2 — функции, имеющие при t t0
производные ofji/d.r1**, dQddx, г = (), п. Соответствующие коэффициенты
чувствительности будут определяться выражениями
й/ ( ЛкТ 9Q ,n dt
= У —4 4 л - 4 (Q -4’ (14.3.13)
да J и- 1 ' da
1d
dl, С <>О <К.
_2 = _Д2 X dt — О (*„) —2. (14.3.17)
да J дх а 2'-0,da ’
го
Для линейных стационарных систем коэффициенты чувствительности
многих типовых интегральных оценок можно находить непосредственно
через коэффициенты дифференциальных уравнений системы без нахож-
дения решений исходной системы и функций чувствительности xa(t).
Некоторые приемы для получения таких коэффициентов изложены в
[14.2, 14.3, 14.6]. В частности, для квадратичной интегральной оценки
/ = 2 2 j cijsci х (а)dt
1=1 1=1 0
при определении коэффициента чувствительности
,, " п °е
— = V! У с-; I (х.х- -j- х.х ) dt
da 4»^ ij J \ cti j I
i=l J=1 о
предлагается воспользоваться зависимостями вида
ОО
j xrj,ixjdl = & [xai Xj (f)]p=0’
О
14.3.4.2°. Разрывные системы. В случае разрывных систем определе-
ние коэффициентов чувствительности интегральных оценок несколько
усложняется, хотя формальная процедура сохраняется той же, что и для
гладких систем.
Пусть, для общности,
ОО
Z[a]= j Q (х{а), a) dt,
<4)
где Q(x{a), а)—функция переменных х, а, имеющая па, интервалах
[ti-i, I,] непрерывные производные dQjda и dQ/dx, i == i, I. Допустим,
что x{t) является решением разрывной системы. Тогда можно записать
z «j(a) оо
/ = 2 j Q (х’ ci) dt -j- j Q (x, cc) dt,
i=1 tta) i/a)
где ti(a.)—моменты переключения. При этом для коэффициента чувст-
вительности имеем:
или
+ 2 [С (tv хТ) /;>)] - Q («о, /;>) (14.3.18)
2 — 1
Если решепие исходной системы является непрерывным, т. е. х<® ~
— х^\ то
(14.3.19)
14.3.4.3°. Системы, функционирующие па конечном интервале време-
ни. В задачах оптимального управления наиболее употребительны ин-
тегральные показатели, вычисляемые на конечном интервале времени:
«2(a)
Z= Q {х (а), и (а), t, а) dt.
«/а)
Если моменты t|, t2 заданы (фиксированы), то чувствительность по-
казателя I оценивается по формуле
*2
£L= UW-x +^dJL + ^}dt.
да J \дх “ ди да да ]
Еслп же ii п I? являются дифференцируемыми функциями парамет-
ра с-., ю коэффициент чувствительности dljda находится с помощью
выражения
— = I
da 4 |(==/2 (il
()
dt
c/a
- 'к> t7“
a ' du da
dt. (14.3.20)
Обычно моменты tt и t2 могут определяться скалярными условиями
вида:
Qi(a-(M, l>, a) = 0, Q2(i(f2). t2, а) = 0. (14.3.21)
При этом производные dtjda и dtjda вычисляются по выражениям:
da
dQ. dQ.
-Л-М0 + —!
dx x da
М
f (z, и, I)
dx
(14.3.22)
~dl
§ 14.4. Инварианты чувствительности
Под инеприинтия чувствительности будем понимать функциональ-
ную (алгебраическую) зависимость между функциями чувствительности,
не содержащую переменных состояния и параметров исходной системы.
Обозначим инвариант чувствительности Q(.rK1, ..., гкт) =0.
14.4.1. Общие сведения. В настоящее время наиболее исследованы
линейные инварианты чувствительности, простейшим из которых явля-
ется сумма вида
m
у = const, (14.4.1)
i=l
где — постоянные коэффициенты. В частном случае "р = 1. : = 1, т.
Исследования показали, что причиной появления инвариантов чувст-
вительности является наличие в модели исходной системы параметриче-
ской избыточности [14.3]. Общих методов выявления и получения инва-
риантов чувствительности пока не существует. Известны лишь некото-
рые приемы получения инвариантов чувствительности линейных систем.
В частности, для этого могут быть использованы свойства однородных
функций.
Функция т переменных <р(«ь ..., ат) называется однородной поряд-
ка v, если для произвольного р выполняется условие
<р(раь ..., pam) = pv<₽(ai, ..., а,„). (14.4.2)
Продифференцируем выражение (14.4.2) по р:
m
у _d^_ 5р^_ = V_J _
^-dpai dp ' k i
Поделим последнее соотношение па ср и положим р, = 1. Получим инва-
риант
у О In ф
д In а.
7=1
— v = const.
(14.4.3)
Можно показать, что по крайней мере для линейных систем такие
характеристики, как передаточные функции, частотные характеристи-
ки и т. д., являются однородными функциями параметров, например, ко-
эффициентов дифференциальных уравнений системы.
14.4.2. Инварианты чувствительности временных характеристик и пе-
редаточных функций линейных систем. Рассмотрим одномерную линей-
ную систему
(14.4.4)
где
a-i = at (аь ..., а,,.), I = 0, п, Ък = &/,(а1, ..., сст), к = 0, d,
и соответствующие ей уравнения чувствительности
п а п
У а^г) = у dbi (i) - V dai _(i)
АЛ 1 Z* d In af d In a, ’
г~О , i=O J г—0 2 3
(0) =0, к = 0. n — 1. j = T^rn, (14.4.5)
dx
где xaj (t) = d In а ’ Просуммируем уравнения чувствительности (14.4.5)
но j:
(14.4.G)
т
Введем обозначения 'F (0 = У, ха^ (/). Допустим, что пара-
7=1
метрами at, ..., ат являются коэффициенты сц и Ь,-. При этом уравне-
п (1 п
ние (14.4.6) преобразуется к виду: У в{Чг<’)=2 — у а.х^,
_______ <=0 1=0 7=0
(0) •= 0, / = 0, п — 1, или в силу (14.4.4),
2 = 0, (0) = 0, j = 0, п - 1.
г О
(14.4.7)
Из последнего уравнения следует
п
О
дх
с) In а,-
(14.4.8)
Полученная сумма представляет инвариант чувствительности функ-
ции х(1) относительно коэффициентов at и Ъ}.
Нетрудно видеть, что модель (14.4.4) по отношению к коэффициентам
п bj является параметрически избыточной. Действительно, для урав-
нения (14.4.4) полная совокупность параметров при фиксированных на-
чальных условиях включает коэффициенты Ьi = О, п; f --- 0. d, т. е.
п + d + 2 параметра. Путем простого преобразования (деления правой и
левой частей уравнения иа любой отличный от пуля коэффициент, на-
пример «о) можно перейти к модели с полной определяющей совокуп-
ностью п + d + 1 параметров.
Во многих системах, например в ЯЛ-С-цепях, коэффициенты а,- и bj
являются полилинейными функциями первичных параметров а,, ..., ат.
При этом имеют место зависимости
(14.4.9)
где q > 0 — целое число. Для этих
систем существует инвариант
т
_^L_ = 0.
д In а .
(14.4.10)
Инвариант вида (14.4.8) можпо получить и с использованием свойств
однородности передаточной функции W(p, at, bj).
Заметим, что если начальные условия i = О, п — 1, являются
функциями параметров, то в общем случае инварианты чувствительно-
сти отсутствуют.
Передаточная функция
d
5 biP*
W (р) (14.4.11)
г=0
обладает свойством однородности пулевого порядка: W(р, ро.,-, р,бД —
= W(p, at, bj). В силу этого получаем инвариант чувствительности пере-
даточной функции
У ^(р) + V dW(p) = 0 (14.4.12)
0 In а. д In bt
0' 1 J
При выполнении условий (14.4.9)
т
У д!У(р) = о. (14.4.13)
д In а-
1=1 1
Из инварпантов чувствительности передаточных функций могут быть
получены инварианты чувствительности частотных характеристик путем
формальной замены р = /со, где / = У—1. Другие формы инвариантов
чувствительности частотных характеристик можпо найти в работе [14.3].
Там же приведены материалы, иллюстрирующие связь между инвариан-
тами чувствительности частотных и временных характеристик. С по-
мощью инвариантов чувствительности частотных характеристик получе-
ны инварианты чувствительности интегральных оценок вида
п d
У _^- + У _^_ = 0, (14.4.14)
д In а д In Ь;
1=0 5 3=0 3
nd °°
(14.4.15)
д la а. d In Ь: я, J д 1а со
г=0 1 j—О J 0
оо оо
С 2 if’
где I = 1 Ф (/) dt — — I А' (со) с/со; Ф (Z) — весовая функция; А (со) —
.1 J
о о
амплитудная частотная характеристика.
14.4.3. Корневые инварианты чувствительности. Пусть корпи полипо-
ti
ма D (р) =£ 2 &о Ф 0, зависят от параметра ah ..ата и диффе-
i—О
ренцируемы по ним. Сумма корней полинома D(p) равна
п
У — «j/dp. Поэтому
1=1
п я / \
У dPj = _ д I Д| |
да. да,, \ а. /
1=1 Ii И X 0 /
Допустим, что отношение а\/ав от параметра аь пе зависит. При
.этом имеет место инвариант
« ,
^_£п=0. (14.4.16)
1=1 h
Очевидно, что всегда существуют инварианты
п д
, У_£1=0, /с^О, 1. (14.4.17)
да,
2=-1
Если коз ями параметр ффициенты a,-, i = 0, п, являются полилинейными фупкци- ров СС|, ..., ат, то имеем инвариант V1 dPi — 2ё,1па -°' л =--i h
Рассмотр им произведение корней ^ = Пр; = (-1)Ч- г-==1
При этом др_ = у др^ « = (_ да^ dak да. М > 00 « -j—] « 3—I к Г-£1
ИЛИ д\пР _ууд\Пр._д\пап да, дак да. ' (11.4.19)
Если дап . V.'1 д In Р: ’oa.Tt — 0, то имеем инварианты 7 =0. В то же dak г—1 к
время всегда существуют инварианты Xi д 1п р- (0, если к ф п., да. Ц/вп' если к==п. (14.4.20) г=1 к
14.4.4. О применениях инвариантов чувствительности. Наличие инва-
риантов накладывает определенные особенности па исследование чувст-
вительности соответствующих систем.
Инварианты чувствительности позволяют упростить модель чувстви-
тельности. В частности, порядок (число) уравнений чувствительности
можно уменьшить па число инвариантов. Рассмотрим простейший при-
мер. Пусть система описывается уравнением aix + аох = 0, х (0) = х0,
и имеет уравнения чувствительности
«1-Тао + «оЯао + аох = 0, aixaI + aoxaI -|- atx = 0,
(0) = 0; аы (0) = 0, (14.4.21)
где xa0(t) — dx/dlnao', xal(Z) = dx/dlnat. Функции чувствительности гк0
и ха1 связаны инвариантом хао(О + (i) = 0, откуда слодует, что
жа0(<) — —В результате вместо двух уравнений (14.4.21) для оп-
ределения функций чувствительности достаточно использовать одно.
Из изложенного следует, что при наличии инвариантов упрощается
сама процедура получения функций чувствительности. Действительно,
пусть исходной системе
х = /(г, t, ab ..., am), z(*o) = х0, (14.4.22)
соответствуют уравнения чувствительности
= 5х Xai 1 — I, "I- (1-1.4.2,;)
Допустим также, что система функций ха,(t), xam(t) имеет к
инвариантов
fij(xal, хат) =0, j = J, 4- < т. (14.4.24)
Тогда вместо модели чувствительности (14.4.22) — (14.4.23) целесооб-
разно анализировать другую модель, включающую уравнение (14.4.22),
т — к уравнений чувствительности (например, т— к первых уравне-
ний системы (14.4.23)) и соотношения (14.4.24):
* = /(*. t, а1г ..., ат), ^{to) = xo,
*аг = £ xai + (гс) = °- » = I7('«-A), (14.4.25)
••.М = о’ ; = ГД.
В задачах синтеза малочувствительных систем в пространстве состо-
яний принципиальное значение приобретают проблемы управляемости и
наблюдаемости моделей чувствительности и уравнений чувствительно-
сти. В связи с этим важно отметить, что при наличии инвариантов чув-
ствительности система вида (14.4.23) является неуправляемой. Возможно-
сти управления всегда ограничены существованием гиперноверхпостей
(14.4.24).
Прп синтезе оптимальных по нечувствительности систем инвариан-
ты чувствительности должны учитываться в качестве голоиомпых связей,
накладываемых на функции или коэффициенты чувствительности. Далее
решается вариационная задача па поиск условного экстремума.
§ 14.5. Прикладные задачи теории чувствительности
Рассмотрим общие вопросы применения методов теории чувствитель-
ности в прикладных задачах.
14.5.1. Классификация прикладных задач теории чувствительности.
Во всех прикладных задачах теории чувствительности основными ис-
пользуемыми элементами являются функции (или коэффициенты) чув-
ствительности ха, дополнительное движение Дх (или Д/) и вариации па-
раметров Да. Обычно функции чувствительности задаются с помощью
уравнений чувствительности. В зависимости от природы задачи опреде-
ляются или дополнительное движение или вариации параметров. При
этом большинство прокладных задач теории чувствительности объединя-
ются в три следующие группы.
Первая группа — прямые задачи теории чувствительности, в которых
но известным функциям чувствительности х.х и величинам (или харак-
теристикам) вариаций Да исследуется дополнительное движение Дх.
Вторая группа — обратные (инверсные) задачи теории чувствитель-
ности, в которых ио заданным функциям чувствительности ха и допол-
нительному движению Дж оцениваются вариации параметров Да.
Третья группа — смешанные задачи, решение которых содержит эле-
менты прямых и обратных задач.
Наиболее характерными задачами первой группы являются задачи
анализа точности, инвариантности, устойчивости, управляемости и на-
блюдаемости параметрически возмущаемых систем, во вторую группу
можпо отнести задачи идентификации. В адаптивном управлении и чис-
ленной оптимизации анализ дополнительного движения Дж может соче-
таться с оцениванием вариаций Да.
16.5.2. Оценка дополнительного движения. В основу получения оце-
нок дополнительного движения положено использование того или иного
приближении для показателя качества или переменных состояния г(/, с/.).
Наиболее удобным для анализа является первое приближение, линей-
ное относительно вариаций параметров:
дх д!
Дж(г) = to Да; Д/== to Да‘ (14.5.1)
При допустимости представлений (14.5.1) последние могут быть при-
менены для оценивания как дополнительных движений Да: (О, Л/, так
и величин ж(1), J. В детерминированной постановке часто рассматрива-
ются оценки ио норме
II дх || I dl I | dl I
0Д*11=|^ Да||; 1Д/>= |to ДаН to |“Да11’ ‘(14-5-2>
Если параметрические возмущения являются случайными, то соот-
ношения (14.5.1) позволяют определить вероятностные характеристики
показателя качества и переменных состояния. Пусть Да,, i — 1, т,—
центрированные случайные величины с дисперсиями о* и коэффициен-
тами корреляции гц. Тогда для оценивания математических ожиданий и
дисперсий величин гкз(/) и /(а) имеют место выражения
EK3<OJ==*K3(Z. “°), Е[Л = /(а°),
тп
°хк, ~ Е [жкз (О] “ 2 ха.кз.1 (О + 2 2 га.кз,1 (О га.кз. j (Z) гг/,х1лху
1—1 КЗ
(14.5.3)
т
i=I \ г/ i<j •
где я:<х. кэ. г(0 — <?яй?з/ба,.
Линеаризация вида (14.5.1) широко использовалась в теории управ-
ления и ранее, ио область ее применения ограничивалась обычно глад-
кими системами. Развитый в последние годы аппарат теории чувстви-
тельности позволяет расширить возможности метода первого приближе-
пия практически иа любые системы управления. Но метод первого при-
ближения дает необходимую точность только в том случае, когда от-
брошенные члепы разложения достаточно малы. Учет дополнительных
членов разложения значительно усложняет решение задачи, пе всегда
обеспечивая требуемую точность. В работах [14.2, 14.6] был предложен
комбинированный метод, названный авторами методом частичной лине-
аризации, использующий достоинства простого в отношении организации
вычислений метода первого приближения и более точных методов (ста-
тистических испытаний; метода, предложенного в [14.10]; интерполяци-
онного метода [14.11] и др.). Идея метода частичной линеаризации за-
ключается в следующем. Все случайные параметрические воздействия
Да,, i = 1, m, делятся па группы: группу «малых» и группу «больших»
величин. Линеаризация вида (14.5.1) проводится только по «малым» ва-
риациям со = (Дар Дат^), mt < m. Функции гк. кз(4) и коэффици-
енты dl!da.j = Iaj чувствительности, так же как и основные движения
ж0 (4), /°, являются случайными, так как зависят от «больших» случайных
величин Q = (Дат^ + i, •• •, ), m, + m2 = m. Для оценивания
характеристик случайных величин га.Кэ(4, Q), x(t, Q), /(Q) пред-
полагается применить один из известных достаточно точных методов
(например, интерполяционный метод).
Применение метода первого приближения к липейным системам по-
зволяет получить аналитические зависимости, отражающие некоторые
качественные особенности параметрических возмущающих воздействий.
Рассмотрим это на примере одномерной физически реализуемой систе-
мы с весовой функцией Ф(4, т). Воспользуемся известной зависимостью,
связывающей выходной x(t) и входной у(4) сигналы системы при нуле-
вых начальных условиях:
ОО
х (4) = J Ф (4, т) у (т) dx. (14.5.4)
о
Пусть имеют место капоиические разложения:
Ф (4, т; а) = Ф (4, т; а0) + 2 vi т) ^аг’
г=1
ZV
р (т; ₽) = у (т; р°) + 2 И,- (О Д₽,-, (14.5.5)
1=1
где Да,, Др; — цептрпроваппые случайные величины с корреляционными
моментами ка_^,. Из выражения (14.5.4) с учетом (14.5.5) можно полу-
чить следующее соотношение для оценки математического ожидания вы-
ходного сигнала:
m N “ “
Е [* («)] = 22 J vi т) ^1 <т) dT + J Ф “°) У (т’- ₽°> dT‘
1=1 1=1 о о
(14.5.6)
Из последнего выражения следует, что при у (г, рс) = 0 и ^.р.^0
mN
Е [г (01 = 2 2 1 vi (*> г) Hi (Т) Л.
i=lj=l ‘7
(14.5.7)
Это одно из характерных свойств параметрически возмущенной линей-
ной системы.
Формула для оцепки корреляционной функции выходного сигнала
рассматриваемой линейной системы имеет вид:
N mN
т
+ ай (У a2i (гг)1 + 2 (\) «и ('2) (14.5.8)
i=i 1
где
ОО оо
аи (0 = [ vi <*• г> у (г- ₽°) dx' a2i (0 = J Ф (t, т; а0) (т) dr.
, i о о
Для стационарной липейпой системы имеем
сх; оо
кХ (Т) = j f к ЙГ’ а°) к (г2’ кЧ + Т1 ~ Т2) dTldT2 +
0 0
оо оо
+ 2 J J у (тг р°) к (т2, а0) /Суф (т + - т2) 4-
о о
со оо
+ [ j У (v 0°) у (т2, 0°) Аф (г + тх — т2) (14.5.9)
о о
где т = С2—«и ks(y)—корреляционная функция входного сигнала,
&1,ф(т) —взаимная корреляционная функция между сигналом j/(t) и ва-
риациями весовой функции Ф(т); />ф(т)—корреляционная функция ва-
риаций весовой функции.
Перейдя в (14.5.9) к изображениям Фурье, получим следующее выра-
жение, связывающее соответствующие спектральные плотности сигналов:
Sx(w) = |17(ya>)|2Sv(w) + |Ж1,(7<о).Р5ф(о>) + 21Г(-/(о)РГ(7со)5„ф(<о).
(14.5.10)
14.5.3. Оценивание параметров. Большинство алгоритмов оценивания
параметров базируется па следующей постановке. Предположим, что
связь между векторами состояния х и параметров а задается функцио-
нальной зависимостью
x(t) = F(t, а). (14.5.11)
Допустим также, что нам известны х(С), матрица чувствительности
ха = dFIda. и базовое значение вектора параметров а = а°. Считаем до-
пустимым представление x(t) =F(t, а0 + Да) = F(t, ап) + xK(t, а°)Да
или
Дх(7) = xa(t, а0)Да, (14.5.12)
где Дх(<) = x(t) —F(x, а0).
Выражение (14.5.12) является исходным для определения парамет-
ров а. К нему можно применить какую-либо из известных процедур ми-
нимизации невязки (дополнительного движения) Дх(7), например про-
цедуру МНК, и получить алгебраическое соотношение вида
Чг1(ха, Дж)Да = Чгг(ха, Дх), (14.5.13)
откуда вариация параметров Да определяется по формуле
Да = Чг~1Ч|2, (14.5.14)
где Чг“1—оператор, обратный оператору Vi.
В общем случае процедура решения задачи является многошаговой.
На А-м шаге находится величина Да [/с] = Ч*'”1 [/с] [7с]. Затем опреде-
ляется вектор а [7с] = а[/с — 1] + у [7с] Да [7с], являющийся исходным для
вычисления Чг|[/с-|- 1] и Ч^/с + 1]. Параметр у [7с], как и во многих ите-
рационных алгоритмах, используется для улучшения сходимости. Про-
цесс решения продолжается до шага 7V, после которого выполняются ус-
ловия «останова»: |Даг-| б, i /V.
Задача определения параметров а в своей основе, как и всякая об-
ратная задача, является некорректной [14.12]. Причинами некорректно-
сти могут быть неадекватность модели (14.5.11) реальному процессу,
ошибки измерений величины Дх, неоднозначность решения уравнения
(14.5.11) относительно параметров а, неустойчивость решения обратной
задачи. В связи с указанным для оценки параметров а необходимо при-
менять методы решения некорректных задач [14.12]. Наибольшее рас-
пространение па практике находит метод подбора, сущность которого
сводится к следующему. Допускается, что для произвольного элемента
ДР из некоторой области возможных решений Га может быть решена пря-
мая задача теории чувствительности, т. е. найдена величина Дх(Лр). Тог-
да в качестве приближенного решения обратной задачи берется такой
элемент Л|3 е Гк, иа котором достигается минимум расстояния между
Дх(ДР) и Дх, т. о.
I = р [Дх, Дх (Л$)] = min р [Дх, Дх]. (14.5.15)
Дрега
Функционал (14.5.15) в реальных задачах формируется следующим
образом. Рассмотрим разпость
z = х(а) — х(Р),
где х(а) —выходной сигнал системы (объекта), х(Р) —выходной сигнал
модели системы.
Представим х(р) в виде
х(Р° + ДР) = х(0°) + хГ)др. (14.5.16)
Пусть функционал / имеет вид
*2
I = (к — ж)1 D (а — a.) clt.
Тогда с учетом (14.5.10) получаем
*2
Г = j (Д.т — TpAf))1 D (Да- — ,трДЗ) dt, (14.5.17)
*1
где Д.Т = х (а) — х(р°).
Вектор Др находим, используя необходимое условие наличия экстре-
мума функционала (14.5.17). В результате получаем следующее необхо-
димое условие:
Т.Др = Уг, (14.5.18)
где
*2 #2
Vj = J .rpD.Tprfi, x^Dbxdt.
Матрица ’Г, имеет элементы
*2
*ij = I •грг£)а:р/г = (жРг- г01)- j =
*1
которые будем рассматривать как скалярные произведения вектор-функ-
цпп чувствительности х₽г- и Xf,j в /п-мерпом линейном пространстве. При
этом матрица Wt является матрицей Грама системы вектор-функций
Очевидно, что матрица V| будет невырожденной тогда и только тог-
да, когда векторы чувствительности хе1, ..., xp,„ образуют на интервале
[ij, is] линейно независимую систему. Отсюда следует необходимое ус-
ловие разрешимости поставленной задачи оценки параметров а — линей-
ная независимость векторов чувствительности .rpi, ..., жр,„. При выпол-
нении этого условия решение задачи можпо искать в виде Л[Л = 'Р,~1ЧГ2.
В работах [14.2, 14.3] показано, что при условии линейной независимости
векторов xpi,______ жрт итерационный процесс нахождения вектора а схо-
дится.
Из изложенного следует, что па процесс решения рассматриваемой
обратной задачи существенное влияние оказывают свойства матрицы Vi.
Естественным в связи с этим является стремление «улучшить» свойст-
ва матрицы ЧГ1 и таким путем повысить устойчивость решения обратной
задачи. В работе [14.3] описаны два способа улучшения устойчивости
решения обратной задачи за счет целенаправленной «реконструкции»
матрицы V|. Первый способ может быть реализован в условиях актив-
ной идентификации, когда имеется возможность выбора входных сигна-
лов. Функции чувствительности, с помощью которых формируется мат-
рица 4fi, зависят от вида и интенсивности входных сигналов. В связи
с этим появляется возможность через входные сигналы управлять ли-
нейной независимостью векторов чувствительности хщ, ..xgm и даже
величиной определителя Грама det В идеале надо стремиться к то-
му, чтобы векторы чувствительности были попарно ортогональными, т. е.
т
(хр,-, хр;) = gi6i3-, где 6,3- — символ Кронекера. Тогда det Y = JJ gi =/= 0.
i=i
Второй способ предполагает использование следующего неравенства
Лдамара применительно к матрице Грама Г(хР1, ..., хрт) [14.3]:
тп
Г (*рр .... *рт) < II Г (xpi) Ф 0, (14.5.19)
1=1
где Г(хр,) = (хр,, хр,-). Для решения уравнения (14.5.18) предлагается
воспользоваться заменой оператора Ч/”1 оператором Ч’'”1, определяе-
мым по описанной ниже схеме. Известно, что
, В В
w—1____________________________
1 detT; г (хр1, ..., Xpm) ’
где В — матрица, составленная из соответствующих алгебраических до-
полнении элементов матрицы Т,.
/ тп
Введем оператор = Bl (хр{, xRi) — BIN. Элементы мат-
/ i=1 —
рицы В всегда ограничены. Поэтому в силу того, что Л > 0, оператор
всегда является непрерывным. Если векторы хр,, ..., хр,„ попарно
ортогональны, то операторы Чгр1 и Ч7”1 совпадают.
Решепие уравнения (14.5.18), определяемое оператором Чг~1, равно
Д₽ = ^2 = йБГ^г1Г2- <14-5-20)
а пссвдорешепие, определяемое оператором Ч7”1, равно
ДР = (14.5.21)
12 Д 2
Нетрудно показать, что
Др<Др; ||Д^-др||<(!!^-1) * ||Т2||,
\ Д / ^min
где Amin — наименьшее собственное значение матрицы Чг1. Кроме того,
решепие ДР менее чувствительно к изменению правой части уравнения
(14.5.18), чем решение Др.
Как уже было отмечено, наиболее типовой обратной задачей теории
чувствительности является задача параметрической идентификации. Об-
щую схему решения этой задачи рассмотрим на примере системы, они-
сываемоп уравнением
x = f(x, t, a), x(t0) — х0. (14.5.22)
Уравнение модели системы запишем в виде
= t, f>), x”(t0)=x0, (14.5.23)
где Р — аналог неизвестного параметра а.
Для вектор-фупкции жм(Р° + ДР, 1) строим аппроксимацию
хм(«, р° + ДР) = x«(t, р«) + xfi(«)Др. (14.5.24)
Матрица чувствительности хр(«) является решением уравнения чув-
ствительности
df df
— дям + <9р ’ жр(го) — °’ ₽ = ₽• (14.5.25)
Допустим, что показатель качества идентификации имеет вид функ-
ционала (14.5.17) при D = Е. Тогда для нахождения варпацнп Др полу-
чаем алгебраическое уравнение
V|Ap = ЧЧ (14.5.26)
*2 *2
где Vj = XyXpdt, Ч*, — j х'^ЛхМ.
<1
Неравенство
det^.^O (14.5.27)
назовем условием идентифицируемости. При выполнении этого условия
др = (14.5.28)
N
Оценка параметра а находится из N шагов: а = р° + А₽г
4=1
14.5.4. О применении методов теории чувствительности в задачах
оптимизации и адаптации. Функции чувствительности могут найти ши-
рокое использование при реализации численных градиентных методов оп-
тимизации динамических систем. Составляющие градиента представляют
собой пе что иное, как функции (коэффициенты) чувствительности. В вы-
числительной практике для их оценивания применяются различные ал-
горитмы численного дифференцирования, которые требуют значитель-
ного объема вычислений, характеризуются малой оперативностью и нс
всегда удовлетворительной точностью. Однп из возможных путей пре-
одоления этих недостатков состоит в использовании для нахождения
вектор-градиепта метода дифференциальных уравнений чувствительно-
сти. Кроме того, анализ функций чувствительности па каждом этапе (ша-
ге) оптимизации позволяет находить направление максимальной чувст-
вительности функционала, отсеивать часть несущественных параметров
на данном этапе, что в целом может повышать эффективность всей про-
цедуры оптимизации [14.2]. В рассматриваемой постановке находятся и
анализируются функции чувствительности по отношению к параметрам
управления (регулятора), которые по мере приолижепия к точке экстре-
мума уменьшаются по абсолютной величине.
В теории оптимального управления возможно несколько иное при-
менение функций чувствительности. Речь идет о синтезе оптимальных
систем с учетом требований малой чувствительности. Теория и практика
решения таких задач в силу их малой изученности и сложности разра-
ботаны недостаточно, хотя формально многие из них могут быть сведены
к уже. известным задачам синтеза оптимального управления за счет оп-
ределенного усложнения функционала и увеличения размерности прост-
ранства переменных состояния. При этом в функционал, кроме векторов
состояния х и управления и, включаются вектор-фупкции чувствитель-
ности хаь ..., ха/и, а размерность пространства состояния увеличива-
ется па число функций чувствительности, т. о. на тп.
Возможная задача синтеза оптимального управления в результате
может быть сформулирована следующим образом. Необходимо опреде-
лить вектор-функции x(t), u(i), xai(t), , хат(1) при te [ib is], достав-
ляющие минимум функционалу i = i(x, и, zai, ..., xam) при наличии
дифференциальных связей
Of Of ----
x = f (x, u, t, a), xai = xai + i=l,ni, (14,0.29)
1
ограничений (x, и, i) e G n краевых условий (x, xal, ..., xam, i,) s
£= G<t)a, (x, Xcci, . . ., Xr,, ig) < G(2>a-
При решении подобных задач требуется, во-первых, исследовать ус-
ловия существования функций чувствительности соответствующей крае-
вой задачи, и во-вторых, тщательно проверить управляемость системы
(14.5.29), в описание которой включены, кроме уравнения объекта, и
уравнения чувствительности. Ряд дополнительных соображений по вопро-
сам синтеза оптимальных систем с учетом требований малой чувстви-
тельности можно пайти в работах [14.2, 14.3, 14.6].
В последние годы методы теории чувствительности начинают приме-
няться при исследовании некоторых адаптивных систем управления.
Очевидна необходимость и возможность применения функций чувстви-
тельности для анализа точности адаптивных систем. Методы исследова-
ния чувствительности показателей оптимальности и качества могут быть
применены для оценки того, насколько эффективно адаптивная система
парирует те или иные параметрические воздействия.
При проектировании определенных классов адаптивных систем чрез-
вычайно важной является задача выбора параметров регулятора, пере-
страиваемых по сигналам контура самонастройки. Очевидно, что пере-
стройка должпа осуществляться наиболее эффективно. Эффективность
(порцию) того или ипого параметра нетрудно оцепить с помощью соот-
ветствующих функций чувствительности. Аналогичным образом функции
чувствительности могут быть использованы при выборе места съема
анализируемого в контуре самонастройки сигнала. Наконец, использо-
вание функций чувствительности фактически является обязательным в
беспоисковых градиентных самонастраивающихся системах. Применение
функций чувствительности в системах идентификации обсуждалось в
ГЛАВА 15
ПОИСКОВЫЕ МЕТОДЫ АВТОМАТИЗАЦИИ
ПРОЕКТИРОВАНИЯ
При проектировании систем автоматического управления и других
систем возникают задачи оптимизации самой разной природы. Кроме
оптимизации алгоритмов управления, оценивания и идентификации, не-
обходима оптимизация выбора технических средств из заданной номен-
клатуры, оптимизация стоимости, коптролеспособпости, надежности, экс-
плуатационной технологичности. Формализация этих задач приводит к
поиску экстремумов функций для функционалов в условиях мпогоэкстре-
малыюсти и сложных ограничений. Для решения таких задач необходи-
мы поисковые методы.
§ 15.1. Постановка задачи автоматизации процесса
проектирования САУ
Как известно, задача проектирования САУ сводится к решению оп-
тимизационной задачи вида
Q(L, U)extr,
Ues
(15.1.1)
где Q — экстремизируемый функционал, зависящий от условий L функци-
онирования автоматической системы и проектируемых факторов U, ко-
торые должны удовлетворять упомянутым ограничениям S в виде
5:
7t..(L, U)>0,
gj (L, U) = О,
i = 1, lt
j = 1. g-
(15.1.2)
Эти ограничения связаны с удовлетворением различных требований,
предъявляемых к проектируемой системе автоматического управления.
Ути требования обычно носят характер равенств и неравенств, что и от-
ражено в структуре множества S.
В процессе проектирования САУ определяются структура системы
(папример в виде графа) п ее параметры. Будем обозначать структуру
буквой W, а параметры — вектором
С = [с, ... с„]т, (15.1.3)
компонентами которого могут быть значения весов, задержек, коэффици-
ентов усиления, постоянных времени и других параметров системы уп-
равления. Параметрами могут быть и значения сопротивления и емко-
стей электронной схемы системы управления.
Таким образом, в процессе автоматизации проектирования САУ оп-
ределяется пара
U = (И7, С>,
(15.1/г)
образованная структурой W регулятора и его параметрами С. Само опре-
деление структуры и параметров САУ происходит путем решения опти-
мизационной задачи:
Q(L, W, С) min =>W Соп,
w.ces
(15.1.5)
где множество S образовано условиями удовлетворения заданной систе-
мы равенств и неравенств (15.1.2), накладываемых па функционирование
САУ в условиях L, a !Von и С’оп — оптимальные структура и параметры
САУ в этих условиях.
Структурная схема решения постановленной задачи представлена па
рис. 15.1.1., где цель проектирования определяет критерий Q оптимиза-
ции (15.1.1) и структуру ограничений (15.1.2). Два контура оптимиза-
Рис. 15.1.1. Общая структурная схема задачи оптимизации САУ
ции соответствуют двум видам оптимизации — параметрической (no С)
и структурной (по И7), где Sc и Sw — множества допустимых параметров
и структур, в рамках которых происходит оптимальное проектирование
САУ.
Алгоритм решения задачи (15.1.5) при миогоэкстрсмальпости функ-
ционалов Q, h, и gj следует выбирать среди поисковых алгоритмов опти-
мизации. Более того, будем рассматривать алгоритм случайного поиска,
как наиболее эффективный метод решения задачи (15.1.5). Рассмотрим
структуру такого алгоритма.
§ 15.2. Структура поискового алгоритма оптимизации
Поисковый алгоритм решения задачи оптимизации вообще и слу-
чайного поиска в частности представляет собой последовательную проце-
дуру, имеющую рекуррентный характер. Это означает, что процесс поис-
ка состоит из повторяющихся этапов, каждый из которых представляет
собой переход от одного решения к другому, лучшему, что и образует
процедуру последовательного улучшения решения (пока не будем раз-
личать структуру W и параметр С):
U[0] -*U[J] U [A] ->U[.V4-1] -*...
(15.2.1)
В этой последовательности каждое последующее решение в определен-
ном смысле лучше, предпочтительнее предыдущего, т. е.
U[A+1]>U[A], N = О, 1, ... (15.2.2)
Здесь смысл знака предпочтения «>» может быть разпым. Например, ес-
ли U |А], U[2V + 1] е S, то (15.2.2) означает, что (?(U[A + 1]) < <2(U[A]).
Если U[Aj ф S, то предпочтение (15.2.2) естественно связать с выполне-
нием условия U [Л' + 1] ее S.
Алгоритм поиска оптимального решения, таким образом, связывает
следующие друг за другом решения. В простейшем случае
U[A + 1] = F(U[A]), (15.2.3)
где F — алгоритм поиска, указывающий, какие операции следует сделать
при U[Л'], чтобы получить решение U[A-f-l], более предпочтительное,
чем U[А].
Стандартный алгоритм F решения задачи оптимизации выполняет
две функции: сбора информации и принятия решения. Возможны и от-
клонения от этой схемы, когда обе функции совмещены и неразделимы.
Но они обязательно сохраняются.
15.2.1. Алгоритм случайного поиска с парными пробами. Этот алго-
ритм применяется обычно для решения задач без ограничений. В нем
процедура сбора информации сводится к заданию случайного направле-
ния g и определению значения показателя качества <2 в двух точках
С [А] ± gg, где ё —единичный случайный вектор. Решение, которое при-
нимается па базе этой информации, заключается в том, чтобы сделать
шаг в направлении уменьшения функции Q'.
C[N + 1] = <7 [А] - [<2(<7[А] + g£) - <2(<7[А] - gg)], (15.2.4)
где а и g — параметры процедуры, которые, как это будет показано ни-
же, могут изменяться в процессе поиска. Как видно, па первом этапе
здесь собирается информация о поведении функции качества в ранено
точки С [А], для чего оценивается ее приращение в случайном направ-
лении Е. Величина g определяет радиус сферы сбора информации. Сфе-
ру радиусом а естественно назвать сферой принимаемого решения (заме-
тим, что величина рабочего шага а может быть меньше, чем пробного g,
что характерно для окончания процесса оптимизации).
Выбор алгоритмов случайного поиска для решения задачи оптималь-
ного проектирования систем автоматического управления связан еще и
с тем, что регулярные (не стохастические) алгоритмы поиска можпо по-
лагать частным, а точнее вырожденным случаем стохастических алгорит-
мов, и следовательно, опи включаются в случайный поиск автоматиче-
ски. Это легко проиллюстрировать на примере алгоритма статистического
градиента.
15.2.2. Алгоритм статистического градиента. Этот алгоритм обобщает
алгоритм (15.2.4). В этом случае
т
С [Л' + 1] = С [А] - а 2 [(? (С [А] + й;) - Q (С |А] - g^)], (15.2.5)
i=l
где £t- — г-й случайный вектор, равномерно распределенный в простран-
стве оптимизируемых параметров {С}. Как легко наметить, в частном
случае при т = п и = е,, где е, — i-ii орт, получаем стандартный ал-
горитм метода градиента [10.1] с конечно-разностной оценкой производ-
ных. Аналогично строятся статистические обобщения и других регуляр-
ных алгоритмов поиска при оптимизации как параметров, так и струк-
туры проектируемой САУ.
Все алгоритмы поисковой оптимизации удобно подразделять но неко-
торым важным признакам.
1. Вид оптимизируемых факторов задачи. Эти факторы могут быть
параметрами и структурой объекта оптимизации.
2. Число экстремумов задачи оптимизации. В зависимости от этого
признака будем различать локальные и глобальные алгоритмы поиска,
решающие соответственно сдиоэкстремальные и мпогоэкстремалытыс
задачи.
3. Наличие алгоритмов адаптации в процедурах поиска.
На рис. 15.2.1 представлена схема классификации алгоритмов поис-
ка по этим признакам, где указаны параграфы, пункты и подпункты, со-
держащие описания этих алгоритмов. Рассмотрим наиболее характерные
Рис. 15.2.1. Классификация алгоритмов поиска
представители по каждому признаку. Будем при этом определять алго-
ритм поиска через приращение оптимизируемых факторов AU[A4- I],
такое, что
U[А + 1] = D [V] + Al) [.V 4-1].
(15.2.6)
Через Д<2[А] будем обозначать приращение минимизируемого функ-
ционала па А-м шаге поиска:
Д<?[ЛГ| = <?[7V] — <?[2V — 1],
(15.2.7)
где (?[AJ =^(U[7V])—значение этого функционала при U = U[A].
§ 15.3. Алгоритм локального параметрического поиска
В случае параметрического синтеза САУ алгоритм решения задачи
оптимизации имеет параметрический характер
С[А+1] =С[А]+АС[А+1], (15.3.1)
где приращение АС [А + 1] вектора параметров С [А] определяется алго-
ритмом поиска, использующим приращение (15.2.7), в котором
<?[А] = <?(С[А]).
15.3.1. Алгоритм случайного спуска. Этот алгоритм построен с по-
мощью только двух операторов: оператора случайного шага (£) и опе-
ратора повторения предыдущего шага (+), которые взаимодействуют
так, как показано на рис. 15.3.1, где этот алгоритм изображен в виде
графа с условными переходами (усло-
вия написаны рядом с соответствую-
щими дугами переходов). Рекуррент-
ная форма записи этого алгоритма
имеет вид
ДС[А+ 11 =
АС [А]
при АС [А] О,
при АС ]А] < О,
Рис. 15.3.1. Иллюстрация алго-
ритма случайного спуска
(15.3.2)
где а — величина шага (ЦДС11 = а), а единичный (||£|| = 1) случай-
ный вектор, равномерно распределенный по всем направлениям прост-
ранства оптимизируемых параметров {С}.
Алгоритм имеет очень простую геометрическую интерпретацию. Это,
по сути дела, спуск шагами а в выбранном направлении g. Как видно,
это стохастический аналог известного алгоритма паискорейшего спуска
[15.3J, в котором спуск производится в аптиградиентиом направлении.
Преимущество алгоритма случайного спуска заключается в том, что здесь
пет затрат па определение градиентного направления.
Алгоритм случайного спуска опирается па следующее очевидное
предположение относительно объекта оптимизации: вероятность удачи
(H.Q <Z 0) в рапсе удачном направлении больше, чем в случайном, т. о.
целесообразно повторять удачные шаги, а при неудаче (А<? 0) делать
случайный шаг, т. е. обращаться к оператору |. Такая ситуация обычно
имеет место вдали от экстремума Соп, что и определяет рекомендуемую
область применения для алгоритма случайного спуска.
15.3.2. Случайный поирк с возвратом. Этот метод поиска моделирует
метод проб и ошибок. Алгоритм этого метода построен из двух
операторов: оператора случайного шага (£) и оператора возврата (—).
Граф алгоритма с нелинейной тактикой показан на рис. 15.3.2. Его
работоспособность обеспечивается за счет того, что используются только
удачные случайные шаги, а неудачные устраняются (точное, исправля-
ются) с помощью операции возврата (—). Рекуррентная формула ал-
горитма имеет вид:
f ag прп ДА [А] <0,
АС [А 4-1] = ] (15.3.3)
1 -г j |_ДС[ЛГ]при Д(2[Лг]>0.
Рассмотрим область целесообразного использования этого алгоритма^
Анализ показывает, что его следует применять в ситуациях со значи-
тельной нелинейностью функционала Q(C), когда нецелесообразно повто-
рять удачные шаги, так как вероятность повторного успеха в этом слу-
чае мала. Такой бывает ситуация в районе экстремума Спп или па дне
Рпс. 15.3.2. Иллюстрация слу-
чайного попска с возвратом
Рпс. 15.3.3. Иллюстрация ре-
лаксационного алгоритма слу-
чайного спуска
«оврага» минимизируемой функции. Именно в этих случаях целесооб-
разно применение этого алгоритма.
15.3.3. Релаксационный алгоритм случайного спуска. Введение возвра-
та в алгоритм случайного спуска (см. п. 15.3.1) обеспечивает ему релак-
сационные свойства, т. е. пе увеличивает минимизируемый функционал.
Граф этого алгоритма изображен па рис. 15.3.3. Его рекуррентная фор-
мула имеет вид:
( «5 при АС [А] = — АС [А — 1],
АС [А + 1] = I ДС[А] при (Д<? [А] <0) П (АС [А] = АС [А — 1]),
I— АС[АГ] прп А<2[А]>0.
Здесь [) — знак конъюнкции, требующий одновременности выполнения
событий, указанных в скобках.
15.3.4. Случайный поиск по наилучшей пробе. Алгоритм имеет вид
АС[А -|- 1] = ^Воп,
(15.3.5)
где 5оп — случайный вектор, минимизирующий функционал в районе
точки С [А]:
Q (С [А] + ) = min <>(С[А]+5у, (15.3.6)
г—m
— случайные независимые единичные векторы, с помощью которых
обеспечивается режим случайных проб вокруг точки C[7V].
Если величина g мала и функционал в районе С [Л'] достаточно глад-
кий, то можно повысить эффективность алгоритма следующим образом:
ДС[.У4-1] =agon(-l)\ (15.3.7)
где
|б+ прп 7с = 1,
£оп = t , О (15.3.8)
(S— при 7с = 2
II
£ = arg max Q (С [TV] + gQ,
715 3
= arg min Q (C [TV] + g£A,
i=l,...,m v
k = 71 при Q (С [Д'] + g£+) - Q (C [TV]) >Q (С [.V]) - Q (C [TV] + g£_),
(2 в противном случае.
В этом случае шаг делается по паплучшей пробе если модуль
приращения функционала при этом больше модуля его приращения при
паихудшей пробе £+, и по наихудшем пробе £+ в обратном случае.
15.3.5. Адаптивные параметрические алгоритмы случайного поиска.
Многочисленные ситуации, складывающиеся в процессе решения задачи
оптимизации типа «холм», «яма», «плоскогорье», «хребет», «овраг» и т. д.
заставляют искать средства такой перестройки алгоритма поиска, чтобы
эти ситуации преодолевались бы с минимальными затратами. Такого ро-
да перестройка алгоритма, реализуемая формально, является адаптацией
этого алгоритма.
Таким образом, задача адаптации процесса поиска возникает всегда,
когда алгоритм необходимо изменять в процессе поиска, чтобы поддер-
жать его эффективность на необходимом уровне. Проблема адаптации
возникает всегда прп оптимизации сложных объектов, когда нельзя за-
ранее указать на ситуацию, в которую попадает алгоритм поиска. Тако-
го рода неопределенность типична для задач проектирования систем
автоматического управления.
Параметрическая адаптация алгоритма случайного поиска опирается
ла то, что параметрами алгоритма случайного поиска являются величи-
на рабочего шага а и параметры плотности распределения р(|) случай-
ного шага Заметим, что случайный поиск отличается от любого детер-
минированного именно наличием такого распределения, изменение кото-
рого позволяет адаптировать случайный поиск. Этой «рукоятки» управ-
ления процессом поиска не имеют регулярные алгоритмы, что выгодно
отличает случайный поиск.
Рассмотрим адаптацию по каждому из указанных факторов отдельно.
15.3.5.1°, Адаптация величины рабочего шага. Опа связапа с неоо-
ходимостыо уменьшить величину шага по мере приближения к поло-
жению экстремума Соп. Очевидно, что в процессе поиска ввиду априор-
ной пеопределеппостн необходимо увеличивать и уменьшать рабочий
шаг. Очень плодотворной эвристикой оказалась следующая: нужно умеиь-
шать величину а при неудачном случайном шаге и увеличивать при
удачном:
при A<?[7V] < О,
Д«[Лг+1] = < , , (15.3.10)
(у,a [Л ] при AQ (А] О,
где в соответствии с указанными соображениями "р > 1; 'р < 1.
Значения параметров 7; и 7? алгоритма адаптации (15.3 10) зависят
от вероятности того, что случайный шаг будет удачен, т. с. от
вероятности события &Q <0. В процессе адаптации следует стре-
миться к тому значению шага, при котором приближение к це-
ли было бы наибольшим. Пусть вероятность удачного случайного шага
при такой оптимальной величине шага равна В. Тогда оптимальные зна-
чения 7i и связаны следующими соотношениями [15.2];
т]-Т2~Р=_1, (15.3.11)
где величина Р с ростом п стремится к 0,27. Используя это выражение,
можпо добиться оптимального режима адаптации алгоритма, что позво-
ляет значительно убыстрить решение задачи оптимизации.
15.3.5.2°. Адаптация распределения случайного шага. Опа заключа-
ется в том, что получаемая на каждом шаге поиска информация об ус-
пехе илп неуспехе случайного шага используется для. изменения этого
распределения так, чтобы эффективность процесса поиска возрастала.
Пусть p(g) — плотпость распределения случайного шага £. Основной
характеристикой всякого распределения является его математическое
ожидание Е[|]. Изменяя эту характеристику, можно эффективно воз-
действовать па процесс поиска. Практически это сведется к добавлению
вектора V к |° — случайному вектору с пулевым математическим ожида-
нием (Е [5°] = 0)
g = (15.3.12)
откуда следует, что E[g] = V, т. е. имеет место «снос» процесса поиска
в направлении V. Естественно, что этот снос должен быть направлен в
сторону уменьшения функционала Q(C). Вектор Е должен при этом от-
ражать предысторию процесса поиска и таким образом выявлять пер-
спективное направление движения при оптимизации.
Здесь помогает довольно очевидная эвристика: паправлепие Е сле-
дует формировать как взвешенную сумму случайных шагов, причем
удачные шаги (Д() < 0) следует брать с положительными весами, а не-
удачные— с отрицательными. При этом предпочтение должно отдавать-
ся более свежей информации. Эта эвристика реализуется, например, та-
кой простой рекуррентной формулой адаптации в процессе поиска:
Е[Д'] = fcE[7V —1] — 6ДС[АГ] Д<?[АГ], (15.3.13)
где 0 < к сГ 1 — коэффициент забывания, а 6 — коэффициент интенсив-
ности учета повои информации.
Случайный поиск, снабженный такой адаптацией вероятностных
свойств, обладает, как правило, повышенным быстродействием Для это-
го ситуация, которая складывается в процессе оптимизации, пе должпа
изменяться слишком быстро, иначе пе к чему будет адаптироваться.
Поэтому введение адаптации такого рода (ее часто называют самообу-
чением) пе всегда улучшает процесс поиска, по и пе ухудшает его.
§ 15.4. Учет ограничений в процессах случайного поиска
Проблема миогопараметрнческой оптимизации в задачах оптималь-
ного проектирования всегда имеет условный характер, т. е. связана с
обязательным выполнением ограничении 5 (15.1.2). Случайный поиск
как метод решения условных задач (15.1.1) отличается рядом пре-
имуществ по сравнению с детерминированными методами. У случайного
поиска имеются возможности, связанные со случайным характером по-
иска, которых в принципе пс может иметь не один детерминированный
метод решения задачи условной оптимизации.
Рассмотрим различные виды ограничений. Опи могут иметь троя-
кий характер. К ограничениям типа неравенств и равенств (15.1.2)
Sh- It, (С) 0, i = 1, I; Sc: gj(C) = 0, / = 1, п, (15.4.1)
добавим ограничения, связанные с дискретностью ряда функций опти-
мизирующих параметров
.Sn: 4 (С)^{/Р. *=Тр, (15.4.2)
где /ж(-) — заданные фупкцпп, a fz — г-е заданное значение, кото-
рое может принимать z-я функция (г = 1, kz). В частпом случае при
Л (С) = с2 получаем
SD: cze {е™ ..., ez!^j, z= 1, п, (15.4.3)
где с<-р — значения, которые может принимать z-я переменная (напри-
мер, целочисленные значения и т. д.).
Область поиска S, вообще говоря, может быть образована путем
различных комбинаций пересечения областей Sn, S(: и SD. Разумными
комбинациями в общем случае являются лишь две. Первая: S = S'H П S'G,
как известно, связана с непрерывными задачами математического про-
граммирования, а вторая: S = SH П SD — с задачами дискретного про-
граммирования.
Рассмотрим специфику процессов случайного поиска прп учете ог-
раничений различного рода.
15.4.1. Ограничения типа неравенств. Ограничения типа неравенств
(S = SH) образуют обычно область размерности п. Выход за границу
этой области (С S) является сигналом о необходимости учета ограни-
чений S. При случайном поиске это можно осуществить множеством спо-
собов. Рассмотрим паиболее эффективный из них.
Способ возврата заключается в том, что нарушение ограничений S
отождествляется с неудачным шагом, т. е. с неубыванием показателя
качества (Д<? 0), для чего вводится оператор возврата. Таким образом,
в процессе поиска различаются лишь две ситуации — удачного и неудач-
ного шагов:
a: (CeS) П (Д(2 < 0), ₽: (C&S) U (Д<?5г0), (15.4.4}
т. е. удачным шагом считается случай а, когда ограничения по наруше-
ны и одновременно уменьшился показатель качества. Неудачным ша-
гом Р считается тот, при котором нарушены ограничения или увели-
чился показатель качества. Реакцией па р является возврат в преды-
дущее состояние (ДС[ДН- 1] = —ДС[Л']) и случайный шаг (ДС[7V -)- 2] =
= а£). На удачу а можно реагировать по-разному. При случайном спус-
ке (см. п. 15.3.2)—повторять удачный шаг (АС[Л' + 1] = ДС[Л']). При
алгоритме с возвратом (п. 15.3.1)—вводить случайный шаг (ДС[Д-|-
+ 1] = ^)-
15.4.2. Ограничения типа равенств. Учет ограничений типа равенств
(S = Sc) в процессе случайного поиска связан с организацией движе-
ния вдоль этих ограничений. Это можно осуществить различными путя-
ми. Простейшим из них является введение «коридора», т. е. переход к
ограничениям типа неравенств:
llg3-(C)|| < е, / = 1, д. (15.4.5)
При атом величина е должна стремиться к пулю в процессе поиска.
15.4.3. Ограничения типа неравенств и равенств. Учет такого рода
ограничений (SH [~| SG) в процессах случайного поиска осуществляется
путем прямого комбинирования методов, используемых в двух рассмот-
ренных выше случаях.
15.4.4. Дискретные ограничения. Простейшая схема случайного по-
иска в случае ограничений SD опирается па случайный выбор повой точ-
ки в е-окрестпости исходной точки. Пусть е-окрестпость исходной точки
C’[7V] имеет вид
НС - C[7V]11 sS е (15.4.6)
и пусть для простоты множество SD образовано целочисленными векто-
рами С. Это означает, что все координаты этих векторов имеют целочис-
ленные значения (более общий случай легко сводится к этому). Пусть
£)C[7V] —множество целочисленных точек, попавших в в-окрестпость, т. е.
удовлетворяющих условию (15.4.6). Так, например, при е = 1 таких то-
чек будет 2п.
Тогда процедура случайного поиска па (7V + 1)-м шаге будет связана
со случайным выбором такой точки множества De [Л?], для которой вы-
полняются очевидные условия
£>(С[ЛЧ-1]) < <2(С[Ж Ф+ЧеВД- (15.4.7)
Можно точки, удовлетворяющие этому условию, сделать неравномерно
распределенными и изменять их вероятности в соответствии с выбран-
ным законом самообучения, папример, увеличивая вероятности тех век-
торов смещений, которые па предыдущем шаге дали уменьшение кри-
терия качества (с последующим нормированием, разумеется). Процесс
самообучения здесь естественно дополнить условием запоминания уже
проверенных точек с тем, чтобы не повторять проверку условия (15.4.7)
в одной и той же точке.
Критерием остановки процесса является отсутствие такой точки при
достаточно большом е.
Очевидно, что этот процесс можпо варьировать в широких пределах.
Например, изменять характер меры в неравенстве (15.4.6) или адапти-
ровать ее в процессе поиска. Большинство сугцествуюгцих эффективных
методов решения дискретных задач оптимизации в той или иной степе-
пи используют изложенное (см., например, [15.3]).
15.4.5. Дискретные ограничения с неравенствами. Учет ограничений
типа неравенств в задаче дискретной оптимизации (SD П 8„) незначи-
тельно усложняет процедуру случайного поиска. В этом случае к ус-
ловиям (15.4.7) добавляется еще одно условие C[7V + 1] е 8н, которое
легко проверяется.
§ 15.5. Глобальпый поиск
Поиск глобального экстремума минимизируемой функции, имеющей
несколько локальных экстремумов, является одной из труднейших задач
оптимизации. Дело здесь в том, что в процессе глобального поиска долж-
ны решаться сразу две противоречивые задачи: искать каждый конкрет-
ный минимум и одновременно уклоняться от пего, чтобы пайти дру-
гой— наименьший, т. е. глобальпый минимум. Эта двойственность гло-
бального поиска отражается и на затратах— опи значительно превышают
затраты па поиск локального экстремума.
Другой специфической чертой глобального поиска является отсутст-
вие полной уверенности, что пайденный за конечное время экстремум
является глобальным. И лишь ври неограниченном увеличении времени
поиска вероятность утери глобального экстремума может быть сколь
угодно малой.
Рассмотрим некоторые из основных алгоритмов глобального случай-
ного поиска.
15.5.1. «Пабросовые» алгоритмы. Так обычно называют алгоритмы
глобального поиска, в которых используется процедура случайного па-
броса, т е. случайного распределения пробных точек в области S.
15.5.1.1°. Случайный наброс с локальным иоиском. При этом па каж-
дом i-м этане из случайной начальной точки делается локальный спуск
в ближайший минимум Con. т любым локальным методом поиска (напри-
мер, описанным в § 15.3). За глобальпый минимум принимается наимень-
ший пз полученных М локальных минимумов
£Оп.||мц ~ a,'g m'n f^on.t)* (15.5.1)
i=l,Al
Обычно при М -> оо вероятность того, что Соп определяет поло-
жение глобального минимума, стремится к единице. При конечном Л/
вероятность утери глобального экстремума всегда конечна.
Однако использование локального поиска совершенно необязательно
при работе пабросовых алгоритмов.
15.5.1.2°. Адаптивный набросовып алгоритм. Он связан с адаптивным
изменением плотности распределения паброеа. Пусть р(С, V, о) — плот-
ность распределения, параметрами которого является вектор V, равный
математическому ожиданию случайного вектора, а о2 — некоторая ска-
лярная мера рассеивания этого распределения (типа обобщенной диспер-
сии), такая, что при о = 0 распределение вырождается в дельта-функцию
н С = И, а с увеличением о область паброеа расширяется пропорцио-
нально о. Алгоритм поиска заключается в генерировании последователь-
ности случайных точек С[1|, ..., С [2V] и выборе точки с наименьшим
значением показателя качества аналогично (15.5.1):
Соп.||Д'|| = ai'g min <Ж UI)- (15.5.2)
i=l,-V
Так будем условно обозначать решение задачи Q (Con.|lVfi)
= min Q {С (г])- При этом параметры V и о распределения адаптп-
i= 1.Л
руютея, например, следующим образом:
V [ЛЧ =
VbV- и
И-V]
о I .V] =
Т1о[Л’ — 1]
Т2о-[Л'- 1]
при Q (С [.V]) Q (Соп.м),
при Q (C[N])<Q (Сопллц),
при Q (С (Л'1) Q (Con.iiw-ili)-
прп Q (С [.V]) < Q (Со11||?;_1||),
(15.5.3)
(15.5.4)
где 71 < I, 7г > 1, т. с. зона поиска расширяется с каждой удачей п су-
жается при неудаче. Этот алгоритм стремится стянуть цаброе вокруг
лучшей точки. Темп такого стягивания, т. е. величина 7,, определяет сте-
пень глобальности алгоритма. Если он велик (т. е. 71 мало), то, очевпдпо,
будет найден ближайший локальный экстремум. Если мал, то шансы
найти экстремум лучше ближайшего локального повышаются и при
71 ~ 1 вероятность отыскания глобального экстремума при N -> оо стре-
мится к единице (для этого необходимо, чтобы р(С, V, о) =/= 0 для лю-
бой точки С е Л’, т. е. чтобы плотность вероятности появления любой до-
пускаемой точки пе была равна пулю).
15.5.2. Сглаживающие алгоритмы. Идея сглаживания минимизируе-
мого функционала или траектории поиска породила много эффективных
алгоритмов глобального поиска. Рассмотрим некоторые нз них.
15.5.2.1°. Сглаживание функционала. Если минимизируемый функ-
ционал 0 образован путем наложения па «хорошую» унимодальную функ-
цию мелких колебательных отклонении, то для отыскания глобального
экстремума можно воспользоваться идеей сглаживания [15.6—15.8]. Де-
лается эти следующим образом.
В районе точки осрсдпим функцию (/(6) с некоторым пеотрица-
тсльиым весом р(У):
Q (С) = f Q {С + У) р (У) dY.
(15.5.5)
Эта функция уже ближе к унимодальной, так как здесь несколько сгла-
жена колебательная составляющая. Для вычисления значений этой сгла-
женной функции нужно воспользоваться методом Монте-Карло. Пусть в
качестве весовой функции р(У) выбрана плотность распределения р(У),
для которой выполняются условия
j р (У) dY = 1;
1> (Г) > 0.
(15.5.6)
Тогда, генерируя в соответствии с этой плотностью случайные векторы
Уь .Улч можно оцепить значение интеграла (15.5.5) в любой точке С
следующим образом:
N
(?(С) = (1/ЛГ)2 <?(С + У£).
г=1
(15.5.7)
Эта оценка прп N -*• оо совпадает с точным значением интеграла (15.5.5)
и отличается от пего при конечном N на случайную величину с пулевым
средним и дисперсией порядка 1/N. Это дает возможность подбирать
объем N случайной выборки таким образом, чтобы свойства оцепки
(15.5.7) были приемлемыми.
Теперь, располагая значением оценки (15.5.7) в любой точке и зпая,
что функция Q(C) унимодальна, можно пайти ее минимум любым ло-
кальным методом поиска. Так как оценка (15.5.7) случайна, то этот по-
иск происходит в обстановке случайных помех, вызванных методом
оценки интеграла.
Если для этого воспользоваться градиентным методом, то для вычи-
сления градиента V(j(C) можно воспользоваться аналитическим видом
распределения р(-). Преобразуем интеграл (15.5.5) с помощью подста-
новки Z = С + У к виду
Q{C} = Jc>(Z)p(Z- C)dZ. (15.5.8)
Градиент можно определить путем прямого дифференцирования
V <7 (С) = j Q (Z) vcp (Z - С) dZ, (15.5.9)
/ О д \
где операция вычисления градиента Iосуществляется
аналитически. Оценивать (15.5.9) можно также методом Монте-Карло
Vy(C) =
1 у С)
7V р(^)
(15.5.10)
где Zi — случайные реализации вектора Z, распределенного в соответствии
с заданной плотностью р (Z) =/= О для Z е S. Процесс поисковой оп-
тимизации при этом реализуется очевидной формулой АС = —aV(7(C).
Как легко заметить, такой поиск является случайным, так как здесь
используются случайные точки Z,. Эффективная организация поиска тре-
бует изменения />() и Л' в процессе поиска, т. е. их адаптации таким
образом, чтобы вдали от экстремума сглаживание было бы сильным и .V
мало, а по мере приближения к глобальному экстремуму N возрастало
при уменьшении сглаживания.
15.5.2.2°. Сглаживание траектории. Очень часто глобальпый экстремум
находится па «дне оврага» минимизируемого функционала Q(C). Под ов-
рагом принято понимать ситуацию, характеризующуюся следующей осо-
бенностью: почти вдоль всех направлений функционал сильно увеличи-
вается (это «склоны» оврага) и только в сравнительно узком конусе на-
правлений он слабо уменьшается (это и есть направление «дна» оврага).
Локальный поиск в такой ситуации имеет рыскающий характер. Сле-
дует сгладить эту траекторию. Если глобальный экстремум лежит па
дне оврага, то для такого сглаживания можно воспользоваться методом
случайною поиска с направляющим конусом. Суть его состоит в сле-
дующем.
На сферическом (радиусом а) дпе конуса с вершиной в С[Л?] и осью
F[W] делаются т случайных проб ..., Cm[/V]. Следующее (N + 1)-е
состояние определяется по паилучшей пробе
С [N + 1] == arg min Q (С t [2V]),
i=l,m
а ось следующего конуса выбирается в соответствии с
Е[Л?+1] = (1/с) (C[W+ 1] - C[/V]),
(15.5.11)
(15.5.12)
т. е. вдоль сделанного рабочего шага. Легко видеть, что траектория тако-
го поиска полога и позволяет отслеживать направление оврага независимо
от того, вверх или вниз идет этот овраг. Угол между следующими друг
за другом шагами здесь пе превышает половины угла раскрытия на-
правляющего конуса. Изменяя этот угол, можпо воздействовать на глад-
кость траектории поиска, т. е. адаптировать его [15.9]. Когда конус рас-
крывается в сферу, получаем поиск по паилучшей пробе, рассмотрен-
ный выше (см. п. 15.3.4).
§ 15.6. Оптимизация в обстановке случайных помех
В задачах проектирования систем автоматического управления «за-
шумление» функционала появляется в результате применения методов
статистического моделирования для оценки значения функционала Q(C).
При этом точное значение функционала неизвестно. Доступны лишь его
наблюдения, которые удобно описывать соотношением
Q'(C) = Q{C) + е, (15.6.1)
где е — независимые случайные помехи с нулевым математическим ожи-
данием и дисперсией о2.
Рассмотрим наиболее распространенные методы поиска, решающие
задачу оптимизации исходного функционала Q(C) по его «зашумленным»
наблюдениям (см. и. 15.6.1).
15.6.1. Метод етохаетичеекой аппроксимации. Этот метод является,
по сути дела, градиентным методом с программно изменяемыми проб-
ными и рабочими шагами
AC[Af + 1] = — a [A] WW), (15.6.2)
где компоненты оценка градиента X1Q имеют вид
~ (с lN1 +е' ei) - Q’ (с [yvi ~ё [yvl е1)Ь (15-6-3)
а е< — г-й орт (i = 1, п). Для сходимости этой процедуры при достаточ-
но широком классе функционалов Q(С) необходимо, чтобы коэффициен-
ты рабочего (« [Л'() и пробного (д[Л']) шагов удовлетворяли следующим
соотношениям [15.10, 15.11]:
lira а [г] = lim g [г] = 0,
•j->OO i—fOO
(15.6.4)
Предпоследнее из этих соотношений требует, чтобы величина а [г]
уменьшалась пе слишком быстро, а последнее — чтобы коэффициент
пробного шага g[i| уменьшался значительно медленнее рабочего а [г]. Ус-
ловиям (15.6.4) удовлетворяют, папример, следующие соотношения:
a[N] = b/Na,- g[N].= b/№, (15.6.5)
где 0 < tzsgl; Р >0; 2(а — Р) > 1.
Хотя сходимость этого метода показана строго математически, его
практическое применение обычпо пе удовлетворяет решению прикладных
задач. Дело здесь в том, что указанная сходимость метода проявляется
при Л' оо. В практических расчетах всегда существенно иное — необ-
ходимо в процессе поиска быстро попасть в некоторую малую окрест-
ность экстремума. С другой стороны, программный характер изменения
параметров (15.6.5) нс учитывает ситуации, сложившейся в процессе по-
иска, что пе может пе повлиять па эффективность процесса оптимизации.
Все эти обстоятельства и объясняют то, что стохастическая аппрокси-
мация обычпо пе используется для решения практических задач син-
теза систем автоматического управления, хотя и хорошо исследована
математически. Потребности практики заставляют искать иные, более
эффективные пути решения задачи параметрической адаптации. Рас-
смотрим некоторые из пих.
15.6.2. Сглаживание помех. Идея сглаживания, примененная в
п. 15.5.2.1° для решения мпогоэкстремальпых задач, может быть ис-
пользована и для сглаживания случайных помех. Действительно,
сглаженный функционал
Q (С) = j Q' (С + Y) р (У) ЙУ (15.6.6)
отличается от исходного Q(C), ле возмущенного помехами, за счет двух
обстоятельств — процедуры сглаживания и наличия помех. Его монте-
карловская оценка имеет вид
/V
Сл-(О== | 2<?'(6’ + yi)’ (15-6-7)
4=1
где Yi — случайные реализации вектора У в соответствии с его задан-
ной плотностью распределения р(У) (15.5.6).
Легко виден., что случайная составляющая сглаженной функции име-
ет [15.12] пониженную дисперсию, равную о2/Л', где о2 — дисперсия слу-
чайной помехи в (15.6.1).
Аналитическая форма задания плотности распределения дает воз-
можность [16.13] оцепить градиент сглаженной «зашумленной» функции
(15.6.6). Для этого достаточно аналогично изложенному в п. 15.5.2.1° про-
дифференцировать (16.6.6) по С. Получаем формулу для численной оцен-
ки градиента зашумленного функционала по его наблюдениям в виде
(15.5.10), где вместо (?() надо подставить Q'(•). Однако оценку градиен-
та зашумленного минимизируемого функционала можпо получить и иным
образом.
15.6.3. Стохастическое накопление. Воспользуемся для вычисления
градиента его стохастической оценкой (15.2.6), где вместо Q(C) следует
поставить Q'(C). Проекция этой оценки па градиентное паправлепие име-
ет определенные статистические характеристики [15.12]. Ее среднее
значение равно модулю градиента, а дисперсия определяется выраже-
нием
где к — модуль градиента функционала. Дискретный вариант такой адап-
тации, когда каждый параметр варьируется па двух уровнях, рассмот-
рен в работе [15.2].
15.6.4. Последовательное накопление. Оно отличается от предыдуще-
го тем, что объем т накопления заранее пе определен и решение при-
нимается по достижении модулем лектора
N
л И) = 2 [<?' (С -I- Й-) - Q' (С - й{)] (15.6.9)
3=1
заданного порога
||Я [Д'*] I) >4.
(15.6.10).
Полученные значения Л'* и R[/V*] определяют оценку вектора градиента
2^Я[Л'*]. (15.6.11)
Эта оценка будет тем точнее, чем больше порог Л.
Порог А иногда удобно определять не для модуля Z?[7V], а для всех
его компонент г; [Л7],, i = 1, га:
/?[.¥] = [г, [Д'] ... гп [Д'] ]'г. (15.6.12)
При
MAJII S&4 (15.6.13)
принимается решение о рабочем шаге вдоль /-и координаты, которая из-
меняется следующим образом:
[Л7 + 1J = Xj [Л] — a sgn г, [Л7], (15.6.14)
а по остальным продолжается накопление информации. При этом на-
чальное значение суммы для )-й координаты может отличаться от пуля,
чем вводится адаптация к направлению наиболее интенсивного уменьше-
ния минимизируемого функционала.
15.6.5. Симплексный алгоритм поиска. Этот алгоритм отличается тем,
что па каждом А'-й шаге хранится пе одна, а га + 1 точек вершин сим-
плекса (га + 1)-гран ной пирамиды в я-мерпом пространстве парамет-
ров {С}:
S [/V] = <С0 [AJ, С. [Л7], ..., С„ [Л7] >, Л7 = 0, 1, ... (15.6.15)
Эта пирамида может быть «равносторонней» (см. рис. 15.6.1, а) или
«прямоугольной» (см. рис. 15.6.1, б). Алгоритм симплексного поиска со-
стоит в том, что па каждом (Л? + 1)-м шаге новый симплекс S[/V-|-l]
С2 a c[,vl C'7j [*-]
Рис. 15.6.1. Иллюстрация симплексного метода поиска
образуется из «старого» S[A7] путем добавления одной точки СП+1[Л7] и
исключением СДЛ7] е.$[Л']. Исключается точка с максимальным значе-
нием показателя качества (в случае его минимизации, а при максими-
зации надо исключать точку с минимальным значением критерия), т. е.
[Л7] = arg max <Х (С\ [Л7]), (15.6.16)
а новая Cn+i[A7] образуется симметрично основанию симплекса S[A7]\'
\Cj [Л7]. Иа рис. 15.6.1 показаны примеры образования нового симплекса
5 [Д' + 1] из 5 [Д'] (па рис. a j = 2. а па рис. б / = 1). В [15.15] приведе-
ны формулы для вычисления координат повои точки С„+|[Л'] равносто-
роннего симплекса. Приведем формулы для прямоугольного симплекса.
Пусть точка Со [Л ] соответствует вершине прямого угла симплекса
(см. 15.6.1, б), a bi (i = 1, п) —величина i-го ребра симплекса, направ-
ленного вдоль 1-п координаты С,. Тогда положенно прямоугольного сим-
плекса однозначно определится вершиной Со [Л ] и вектором Л [Л'] =
— [ai UV] ... [TV] ]т, координаты которого определяют направление ре-
бер симплекса:
а, [Д'] е {—1, +1}, 1=1, п
(15.6.17)
(так, папример, для симплекса па рис. 15.6.1, б имеем й([ZV] = 1, »2[Л'] =
= —1). Вершины симплекса S[Д’], таким образом, имеют вид:
Ct[7V] = C0[.V] + a,-[W]6fe(, i = 1, n.
(15.6.18)
где С; — i-й орт.
В соответствии с алгоритмом симплексного метода поиска получаем
Cjiv-I- и =
С [.V] -F А [АГ] прп I = 01
। ] = v,
С.; (.V] прп i=/=0j
Cf [-V] — а, [Лг] е; при i = /) у Q
Cj [.V] прп i = jj
(15.6.19)
Напомним, что j — помер точки симплекса S’ с максимальным значением
показателя качества.
Одпако прп использовании этих формул ввиду сложности минимизи-
руемого функционала п наличия случайных помех возможно образова-
ние тупиковых ситуации:
1. Может оказаться, что точка Ся+1 в 6 [Л' + 1] имеет минимальное
значение критерия, т. е. С, [Д' + 1] = Cn+1[/V], и тогда в соответствии с
алгоритмом перехода к S [:V -|- 1 ] мы вернемся к исходному симплексу
А [Л], т. с. А[Л7 + 2] = SpV]- Выход из этой ловушки осуществляется ис-
ключением точки А; [Д'+ 2] из множества точек, среди которых ищется
по (15.6.16) точка с максимальным значением показателя качества.
2. Может оказаться, что одна из точек сохраняется в симплексе бо-
лее чем га + 1 шагов, за которые при нормальной работе метода все точ-
ки должны обновиться. В результате происходит так называемое «враще-
ние» симплекса относительно этой точки. Следует повторить определе-
ние критерия в этой точке. Еслп значение критерия при этом изменится
существенно (и вращение должно продолжаться), то это означает, что
точка вращения расположена вблизи экстремума и следует уменьшить
симплекс
0< 1, 1=1, га.
(15.6.20)
подтянув его к этой точке. Так происходит адаптация размеров сим-
плекса.
§ 15.7. Структурная оптимизация
Задача автоматического проектирования САУ включает в себя и
определение структурных факторов. Опи могут быть определены в про-
цессе решения оптимизационной задачи (15.1.5). Для этого необходимо
построить процесс поиска оптимальной структуры W. Такого рода про-
цесс поиска можпо осуществить двояким образом — дискретизацией
структуры и путем ее эволюционной оптимизации.
15.71. Дискретизация структуры. Если структура образуется набором
структурных элементов, то се удобно кодировать двоичным вектором
W = (w,., wn), (15.7.1)
где iVi характеризует наличие (гац = 1) или отсутствие (гщ — 0) г-го
структурного элемента в проектируемой САУ. На вектор W могут быть
наложены ограничения типа равенств и неравенств, характеризующие
зависимость между структурными элементами. Тогда задача проектиро-
вания САУ сводится к решению следующей оптимизационной задачи:
С (И7)-*
min Won,
H'cS
(15.7.2)
где ограничения S' имеют вид
j*. (W)>0,
S: <g/W)=0,
e {0; 1},
i = 1, i,
j = 1> ч,
к = 1, га.
(15.7.3)
Здесь функционалы Q, gj и hi определяются характером задачи проек-
тирования конкретной САУ.
Как видно, задача проектирования сведена к задаче бипарпого про-
граммирования, решение которой при малых п возможно полным пере-
бором, а при больших — путем сведения дискретной задачи к непрерыв-
ной и дальнейшим решением ее методами параметрического поиска, рас-
смотренными выше. Сделать это можно, например, введением штрафной
функции вида:
Q (И7) = Q (И7) -|- v 2 wi (i — wi)
где v > 0 — коэффициент штрафа, а область S' определена
(15.7.4)
условиями
\ (И7) > 0,
gj (Ю = о,
1,
i == 1,
7 = 1,
к = 1,
(15.7.5)
где u>h — непрерывный параметр. Задача (15.7.4) имеет многоэкстре-
мальпып характер и решается глобальными методами, описанны-
ми в § 15.5.
Другим способом сведения дискретной задачи (15.7.2) и непрерывной
является рандомизация, в соответствии с которой вводится непрерыв-
ный вектор вероятностен
Р=(Р!.......Рл), (15.7.6)
в котором
Pfc = P{wft = l} (15.7.7)
— вероятность события юл - 1. С помощью этого вектора функционал
<2(1Г) сглаживается;
2п п
V (Р)= V(HIV) П (15.7.8)
1 '<=я
где суммирование проводится по всем вариантам двоичного вектора 1/
и введены обозначения
P,^ = l-P,(; P\=Ph. (15.7.9)
Сглаженный (или рандомизированный) функционал ()(И7) зависит лишь
от непрерывного вектора вероятностен Р. Легко видеть, что минимум
этого функционала лежит в одной из вершин гиперкуба {Р}, т. е. реше-
ние Роп является двоичным вектором, который совпадает с решением
исходной задачи. Для приближенной оценки значения сглаженного функ-
ционала при заданном Р можно воспользоваться методом Монте-Карло:
/V
V(P) = 11/A')2 <2(^4)’
4=1
где Л7 —база опенки, а ТГ,—случайный двоичный вектор с распределе-
нием Р. С ростом N точность оценки естественно возрастает.
15.7.2. Эволюционная оптимизация структуры. Если структура W
проектируемой системы может изменяться так, что будут соблюдаться
ограничения S, накладываемые па структуру, то синтез такой структуры
может быть реализован так называемым эволюционным методом. При
этом вариации 6W структуры пе выводят за пределы заданных 5, т. е.
1Р + б1Ре5. (15.7.10)
Задача структурной оптимизации записывается в виде
(?(W)-^ min. (15.7.11)
WeS
Процесс эволюции структуры W происходит поэтапно. Па первом
этапе порождаются измененные структуры:
IVo.i = W’o + filVi, i = 1, /со, (15.7.12)
где СИ7,— i-n случайная вариация структуры, ограниченная (15.7.10).
Число новых структур /со является параметром, который назначается из
конкретных условий эволюции даппон структуры.
Новые структуры (15.7.12) оцениваются по критерию эффективности
<?01 = <?(Т^0.*). 4 = 1, /го, (15.7.13)
и далее происходит отбор, в процессе которого отсеиваются структуры
с большим значением мипимизируемого функционала Q, в результате
чего па следующий этап эволюции остаются qu <' к0 структур. Можпо
применять алгоритм вероятностного отбора, при котором структура,
имеющая большее значение минимизируемого критерия, выбывает с
большей вероятностью, чем структура с меньшим значением критерия.
Вероятность такого выбора для Q > 0 может быть определена соотно-
шением
/
ро, = М 2 Сор 4=1, *<,- (15.7.14)
/ 1=1
При этом процесс «разыгрывания» выбывающих структур закапчивается
тогда, когда остается д0 структур.
Заметим, что вполне может оказаться (особенно при малом к0), что
лучшая из новых структур хуже исходной И'о. В этом случае естествен-
но 1Ио сохранить па следующий этан эволюции.
На втором этапе эволюции каждая из остающихся структур изме-
няется аналогично (15.7.12) и даст столько новых структур, чтобы их
общее число вместе с исходными было равно ко. Последующий отбор со-
ставляет структур на следующий этап эволюции, и т. д.
Легко видеть, что такого рода эволюция структуры будет стремить-
ся отбирать структуры с малым значением критерия качества, среди
которых находится и оптимальная структура. Случайность вариаций 6TV
и отбор обеспечивают целенаправленность процесса эволюции к опти-
мальному решению 1Р'ОП.
Рассмотрим влияние параметров /г, и qi (i = 0, 1, ...). Эти парамет-
ры позволяют изменять число структур на каждом этапе и уровень отбо-
ра. При 5г = 1 на следующий этап эволюции оставляется лишь одна
структура. Такая стратегия эффективна при унимодальности задачи
(15.7.11). Ее многоэкстремалыюсть требует qt > 1, и значение Qi тем
больше, чем сложнее поиск глобального экстремума. Число /с, также
влияет па эффективность процесса эволюции. При большем /<ц эволюция
имеет глобальную тенденцию, но идет медленней, т. е. требует значи-
тельных затрат времени и памяти ЭВМ.
Здесь изложены принципы структурной оптимизации без парамет-
рической подстройки параметров С объекта. Параметрическая оптимиза-
ция, если опа необходима для повышения эффективности структур, лег-
ко вводится перед стадией отбора и осуществляется параметрическими
методами, рассмотренными выше.
Рассмотрим в качестве примера структуры, описываемые графом.
В этом случае в процессе оптимизации эволюционирует граф.
Пусть структура IV объекта описывается графом
Г = <Д£>, (15.7.15)
где А — множество из га его вершин, а В — множество ребер с их пара-
метрами:
(15.7.16)
В = [bfj ] т. хю
где Ьц — параметры дуги, соединяющей i-ю и J-ю вершины. На графе Г
задан функционал качества, который следует минимизировать:
Q (Г) -> min, (15.7.17)
rsS
где S — ограничения, которым должен удовлетворять оптимизируемый
граф Г.
Опишем множество вариаций графа 6Г. Папример, оно может со-
стоять из следующих изменен ин:
объединение двух случайно выбранных вершин графа в одну;
введение повой (п + 1)-п вершины со случайными связями 6„+I, 1
(i = ib it,) n bj, n+I (/ = /1, /,);
устранение случайно выбранной вершины вместе с ее связями;
введение новой связи двух случайно выбранных вершин;
устранение случайно выбранного ребра;
случайное «переключение» случайно выбранного ребра и т. д.
Как видно, спектр возможных случайных вариаций графа может
быть достаточно велик, что обеспечивает эволюции большое разнообра-
зие, необходимое для отыскания оптимального графа. Значения пара-
метров дуг графа (15.7.16) могут подстраиваться специально на стадии
параметрической оптимизации, предшествующей отбору лучших
структур.
Это направление эволюционной оптимизации графа интенсивно раз-
вивается в настоящее время п получило название эволюционного моде-
лирования, что связано с оценкой функционала (?(Г) нутом моделирова-
ния поведения системы, работа которой описывается этим графом [15.14].
ГЛАВА 16
АВТОМАТИЗАЦИЯ ПРОЕКТИРОВАНИЯ СИСТЕМ
АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Автоматизация проектирования САУ претерпевает эволюцию и бур-
пос развитие в связи с научно-техническим прогрессом в области микро-
электроники, развертыванием высокопроизводительных вычислительных
систем в проектно-конструкторских организациях, перемещением цептра
тяжести процесса проектирования от аппаратного обеспечения к алю-
рнтмическому и программному обеспечению, внедрением нового методо-
логического обеспечения па базе современной теории автоматического
управления.
В процессе этого развития пока пе созданы унифицированные уста-
новившиеся структуры систем автоматизированного проектирования
(САПР) САУ, и поэтому здесь излагаются основные принципы и некото-
рые способы построения САПР САУ, пригодные для проектирования как
непрерывных, так и цифровых систем ограниченного уровня сложности.
§ 16.1. Принципы автоматизации проектирования систем
автоматического управления
Здесь раевматриваются наиболее общие вопросы автоматизирован-
ного проектирования САУ, основные этапы, уровни автоматизации про-
цесса проектирования
16.1.1. Этапы и стадии проектирования. Процесс проектирования си-
стем автоматического управления, как и любой технической системы,
можно разделить [16.1, 16.2] па следующие этапы.
1 этап — разработка и обоснование технического задания (ТЗ) па си
стену, в процессе которой определяется цель и назначение системы
управления, задаются характеристики и модель объекта управления
формулируются технические требования к системе и се техпико-экопо-
мические показатели.
2 этап—разработка технического предложения, на этом этапе выби-
рается одип или несколько вариантов построения систем управления и
дается оценка выполнимости требовании ТЗ.
3 этап—разработка эскизного проекта, когда осуществляется сип-
тез устройства управления и анализ выполнения требований ТЗ.
4 этап— техническое проектирование. На этом этапе, используя
выбранные структурные схемы и определенные па третьем этапе пара-
метры, разрабатываются принципиальные электрические (электромехани-
ческие, кинематические) схемы отдельных блоков системы и осуществ-
ляется анализ уточненной системы с учетом математических моделей
готовых и разрабатываемых блоков (под блоками системы понимаются
измерительные и исполнительные устройства, средства реализации алго-
ритма управления, аналого-цифровые и цифро-аналоговые преобразова-
тели и т. п.). Если результаты такого анализа показывают, что система
не удовлетворяет требованиям ТЗ, то осуществляется уточнение парамет-
ров устройства управления (параметрический синтез).
5 этап—конструкторское проектирование (разработка рабочих чер-
тежей). Здесь на основе принципиальных схем разрабатываются чертежи
для изготовления опытного образца создаваемой системы.
6 этап — технологическое проектирование и изготовление опытного
образца.
7 этап — экспериментальное исследование опытного образца, в ре-
зультате которого в конструкторскую и технологическую документацию,
разработанную на предыдущих этапах, вносятся изменения.
Отмстим, что процесс проектирования САУ, как и любого техниче-
ского устройства, носит характер последовательных приближений к тре-
бованиям, сформулированным в ТЗ. Это означает, что каждый этап про-
ектирования может закапчиваться пе переходом к следующему, а возвра-
том к любому из предыдущих этапов, и, таким образом, спроектирован-
ная система является результатом целого ряда итераций.
Содержание 5-го и 6-го этапов проектирования слабо связано со спе-
цификой задач автоматического управления, и поэтому проблемы про-
ектирования па этих этапах решаются в рамках задач проектирования
технических устройств (электрических, механических, гидравлических
и т. п.), па базе которых строится устройство управления.
Центральным и специфически характерным для САУ является 3-й
этап проектирования, который будем называть этапом анализа и син-
теза системы управления.
Этот этап можпо разбить па несколько стадии [16.3]:
1. Преобразование, анализ п упрощение математической модели
объекта (МАЮ). Вначале осуществляется преобразование МО, заданной
в произвольной форме, к форме, удобной для последующего анализа
объекта и синтеза устройств управления. К числу таких преобразования
относятся: приведение уравнений объекта к форме Коши, к форме
«вход — выход», построение передаточной матрицы, построение дискрет-
ной модели непрерывного объекта и т. д. Затем осуществляется анализ
управляемости, наблюдаемости, устойчивости, минималыю-фазовости и
других свойств объекта.
Упрощение ММО включает в себя попиженпе порядка (илп ’тела)
уравнений объекта, линеаризацию части илп всех нелинейных его эле-
ментов, пренебрежение малыми изменениями параметров и т. п.
2. Классификация и формализация задачи управления. Иа этой
стадии принимается решение о методе синтеза алгоритма управления
(алгоритма работы управляющего устройства) и осуществляется форма-
лизация задачп в соответствии с принятым методом синтеза.
3. Синтез алгоритма управления. Сп осуществляется в соответствии
с принятым выше методом синтеза. В качестве таких методов часто вы-
ступают изложенные в предыдущих главах методы современной тео-
рии управления.
4. Анализ синтезированной САУ. Вначале осуществляется анализ
САУ в условиях, при которых опа была синтезирована, а затем с учетом
факторов, опущенных при упрощении ММО (анализ в «реальных усло-
виях»).
Как процесс проектирования в целом, так и выполнение каждого
этапа и, в частности, этапов анализа и синтеза носят итерационный ха-
рактер (результат выполнения определенной стадии может привести
как к выполнению последующей, так и к возврату к предыдущей стадии)
до тех нор, пока пе будут выполнены требования ТЗ.
16 .3.2. Уровни автоматизации проектирования. Для автоматизации
процесса проектирования на 2—7 этапах широко используются ЭВЫ. По-
следующее изложение будет посвящено в основном вопросам использо-
вания ЭВМ для автоматизации третьего этапа проектирования, посколь-
ку автоматизация проектирования последующих этапов незначительно
зависит от особенностей задач автоматического управления. Кроме того,
широкое применение цифровых управляющих машин для реализации
алгоритмов управления приводит к тому, что процесс проектирования
САУ часто заканчивается четвертым этапом, в течение которого выби-
рается тип управляющей машины и устройства связи с объектом и осу-
ществляется программирование синтезированного алгоритма управления.
Можно выделить следующие уровни автоматизации:
1 уровень (уровень отдельных прикладных программ) характери-
зуется автоматизацией отдельных операции стадий анализа н синтеза.
Эти операции далее называются элементарными проектными операция-
ми (ЭПО). Каждый программный модуль ЭПО позволяет решить с по-
мощью ЭВМ содержательную в терминах ТЛУ задачу. К числу таких
задач относятся, например, приведение уравнений объекта к форме Ко-
ши, аналитическое конструирование оптимальных регуляторов, анализ
устойчивости системы и т. п.;
2 уровень (уровень пакетов прикладных программ), когда объедине-
ние программных модулей ЭПО в пакет прикладных программ позволяет
автоматизировать отдельную стадию или весь этап проектирования;
3 уровень — САПР САУ.
Выделим некоторые признаки, отличающие САПР от предыдущих
.двух уровней автоматизации.
Комплексность (или системность}. Этот признак заключается [16.4]
в том, что автоматизация проектирования должна пронизывать весь
процесс проектирования от «завязки» проекта САУ (разработки техни-
ческого предложения) до выпуска рабочих чертежей деталей системы,
обеспечивающих ее изготовление, либо программ для управляющей ЭВМ,
если процесс проектирования пе содержит пятого этапа. Этот признак
подразумевает возможность включения САПР САУ в САПР объекта
управления.
Простота общения с ЭВМ. Это означает наличие: а) технических
средств (например, дисплея), б) входного языка, близкого к естествен-
ному профессиональному языку пользователя, в) средств вывода инфор-
мации из ЭВМ в форме, близкой к принятой документальной, г) возмож-
ности диалога с ЭВМ, в процессе которого пользователь может получать
промежуточные результаты, изменять ход дальнейших вычислений,
а также исходные промежуточные данные, пе повторяя без необходи-
мости проделанных вычислений заново.
Быстродействие, под которым подразумевается достаточно малое
время (3 Ч- 5 мин) выполнения ЭВМ каждого этана проектирования.
Это время необходимо для осуществления диалога пользователя (спе-
циалиста в области ТАУ — па третьем этапе, инженера-электрика пли
инженера-механика — па четвертом этапе, конструктора — па пятом эта-
пе и технолога — па шестом этапе) с ЭВМ в естественном для человека
ритме.
16.1.3. Компоненты обеспечения САПР. Комплекс средств обеспече-
ния САПР содержит [16.5, 16.6] компоненты: математического (методо-
логического), лингвистического, программного, технического, информа-
ционного обеспечения.
Остановимся подробнее на некоторых компонентах.
Компонентами методологического обеспечения САПР САУ являются
документы, в которых изложены способы и методы ТАУ, позволяющие
построить программные модули элементарных проектных операций
(ПМ ЭПО) и указать способ объединения ПМ ЭПО в некоторый про-
граммный модуль процедуры (ПМП), разрешающий определенный класс
задач ТАУ.
ЭПО — это неделимый (минимальный) содержательный фрагмент
ТАУ. Как правило, ЭПО представляет собой операционное определение
понятия ТАУ. Такое операционное определение может быть пе един-
ственным. Например, устойчивость линейной стационарной системы мо-
жет определяться как с помощью построения функции Ляпунова, так п
непосредственно вычислением собственных чисел матрицы, входящей н
модель системы, записанной в форме Коши, и поэтому ЭПО «Анализ
устойчивости» имеет два варианта реализации.
Опишем теперь понятие класса задач ТАУ [16.7]. Класс задач ТАУ
характеризуется тремя видами математических моделей: модель целей
управления (критерии точности, качества и т. п.), модель объекта
управления и управляющего устройства (регулятор), модель среды
(внешние возмущения и помехи). Каждая из этих моделей характери-
зуется атрибутами 1-го, 2-го и т. д. рангов. Так, атрибутом 1-го ранга
модели объекта управления является тип оператора модели (линейный
или нелинейный оператор), атрибутом 2-го ранга — вид уравнений модели
объекта управления (алгебраические, обыкновенные дифференциальные,
дифференциальио-разпостпые, интегральные, в частных производных),
атрибутами 3-го ранга являются начальные отклонения, параметрические
и структурные возмущения модели.
Указанные три модели с их атрибутами образуют класс задач ТЛУ.
Совокупность классов задач, решаемых конкретной САПР САУ, опреде-
ляет ее функциональные возможности.
Компонентами лингвистического обеспечения являются документы,
содержащие словарь входного языка, синтаксический и семантический
процессор [16.8]. Словарь входного языка содержит термины ТА У, мате-
матические символы, используемые при описании моделей системы уп-
равления, возмущений и цели управления и их атрибутов, а также
отдельные слова естественного языка, необходимые для описания требо-
ваний к системе управления. Входной язык разделяется [16.2] на
язык описания системы управления (язык описаний объекта (ЯОО)) и
язык описания заданий (ЯОЗ).
Компонентами программного обеспечения САПР САУ являются до-
кументы с текстами программных модулей процедур, разрешающих от-
дельные классы задач ТЛУ. Программный модуль процедуры, решающий
некоторый класс задач ТЛУ, состоит из ПМ ЭПО, выполняемых в после-
довательности, образующей план решения класса задач ТАУ. План ре-
шения часто зависит от конкретных параметров моделей.
16.1.4. Общие принципы построения САПР. Процесс создания САПР
САУ базируется па следующих общих принципах [16.5]: включения,
системного единства, комплексности, развития, информационного един-
ства, совместимости, инвариантности.
Смысл первых трех принципов во многом исчерпывается описанием
приведенного выше 1-го признака САПР. Принцип развития требует,
чтобы САПР САУ разрабатывалась и функционировала как развиваю-
щаяся система. Это, в частности, означает, что расширение функцио-
нальных возможностей САПР САУ (т. е. увеличение числа классов ре-
шаемых задач ТАУ) пс должно приводить к переработке программных
модулей действующих (до расширения) процедур.
Принципы информационного единства, совместимости и инвариант-
ности состоит в том, что различные САПР САУ (САПР САУ различных
классов задач ТАУ) должны использовать единую терминологию, симво-
лы, условные обозначения, способы представления информации, а про-
граммное обеспечение третьего и четвертого этапов проектирования пе
должно зависеть от физической природы системы управления. Построе-
ние САПР САУ с использованием этих принципов позволяет создать
интегрированную САПР САУ, охватывающую в пределе всю совокуп-
ность задач ТАУ.
§ 16.2. Способы построения систем
автоматизированного проектирования
В 60-х и 70-х годах было разработано большое количество программ,
обеспечивающих первый [16.9—16.11] и второй ,[16.12—16.16] уровни
автоматизации проектирования САУ. В последние годы ведутся интенсив-
ные работы по созданию различных САПР САУ. Из этих систем выделим
наиболее характерные, отражающие распространенные способы построе-
ния САПР САУ: диалоговую систему проектирования автоматических
систем (Д11СПАС) [16.17]; САПР адаптивных систем [16.18]; диалоговый
пакет прикладных программ «Гамма-1М» для синтеза и анализа линей-
ных многомерных систем управления по заданной точности и качеству
[16.19].
Приведенные системы реализуются в рамках операционной системы
ОС ЕС, отличаются друг от друга функциональными возможностями
(классами задач ТАУ, решаемыми с их помощью), способами построе-
ния лингвистического и программного обеспечения.
16.2.1. Диалоговая система проектирования ДИСПАС. Основными
функциональными возможностями системы являются [16.17] анализ ли-
нейных и нелинейных стационарных и нестационарных непрерывных н
дискретных логико-динамических систем, описываемых обыкновенными
дифференциальными и дифференциально-разностными уравнениям!:.
Анализ включает в себя моделирование (вычисление переходных про-
цессов) при детерминированных и случайных возмущениях, анализ ли-
нейных моделей, преобразование моделей. Кроме того, система позволяет
осуществлять оптимизацию параметров модели.
Система ДПСПАС ориентирована на широкий круг пользователей,
пе владеющих программированием. Ее использование представляется
особенно эффективным на четвертом этапе проектирования САУ (этапе
технического проектирования).
Математическая модель исследуемой динамической системы пред-
ставляется в виде структурной схемы либо системы дифференциальных
уравнений первого порядка.
Основу лингвистического обеспечения составляет язык задания моде-
лей. Понятиями этого языка являются: «библиотека моделей», «модель»,
«блок».
Блок (являющийся блоком структурной схемы системы управле-
ния) определяется атрибутами: 1. Номер блока. 2. Тип блока (линейное
непрерывное звено, кусочно-линейная функция, дискретное звено, ком-
мутирующий элемент и т. д.). 3. Вид блока (динамическое звено, сум-
матор, интегратор). 4. Параметры блока (коэффициенты числителя и
знаменателя передаточпой функции линейного непрерывного динамиче-
ского звепа п т. и.). 5. Вход блока (па вход каждого блока может быть
подано до пяти сигналов с выходов других блоков. Все блоки имеют
лишь один выходной сигнал, которому приписывается помер блока, с
которого этот сигнал снимается).
Оператор ЗАДАНИЕ БЛОКА выдает последовательный ряд запросов
(которые высвечиваются па экране дисплея), относящихся к атрибутам.
Каждый последующий запрос выдается после поступления от пользова-
теля ответа па предыдущий.
Так, после введения (после запроса системы) номера блока, подлежа-
щего заданию, система ДИСПАС запрашивает тип задаваемого блока и
воспроизводит на экране дисплея пронумерованный список типов. Поль-
зователь должен ввести соответствующий номер нужного ему тина из-
предъявленного списка. Затем система запрашивает вид блока и воспро-
изводит на экране пронумерованный список видов для указанного ранее
типа. Пользователь должен ввести соответствующий номер нужного ему
вида и т. д. Слова русского языка, высвечиваемые па экране дисплея во
время запросов пользователю, образуют словарь входного языка. Анкет-
ный (запросный) характер общения пользователя с ЭВМ позволяет обой-
тись в ДИСПАС без синтаксического и семантического процессоров.
В программном обеспечении ДПСПАС можпо выделить следующие
ПМ ЭПО: «Моделирование» (численное решение дифференциальных урав-
нений), «Мпогопараметрическая оптимизация» и т. д. План решения
задачи формируется в процессе запросов пользователю.
Близкими к ДИСПАС по функциональным возможностям, структуре
лингвистического и программного обесценения являются системы
МОНСТР [16.20], КОМИКС [16.21].
16.2.2. САПР адаптивных систем САПРАС. Функциональные возмож-
ности этой системы [16.18] включают в себя сиптез структур и выбор
параметров адаптивных регуляторов для объектов, описываемых линей-
ными моделями, анализ (моделирование) линейных и нелинейных, ста-
ционарных и нестационарных, непрерывных и дискретных систем, ли-
неаризацию динамических и статических систем, решение задач много-
параметрической поисковой оптимизации.
Представляется эффективным использование системы па втором
и третьем этапах проектирования САУ (этапах разработки технического
предложения и эскизного проектирования). Это, как правило, предпо-
лагает высокую квалификацию пользователя в области проектирования
САУ. Кроме того, пользователь должен владеть языком АВАНС, соот-
ветствующим лингвистическому обеспечению САПРАС.
Язык АВАНС является цроблемно-ориептироваппыи языком, встроен-
ным в алгоритмический язык PL-1. Таким образом, в АВАНС-программе,
наряду с операторами базового языка PL-1, используются специальные
операторы, расширяющие возможности базового языка в данной пред-
метной области. Этп специальные операторы разделяются па три группы:
операторы описания системы управления, операторы описания действий,
вспомогательные операторы. К операторам описания системы управле-
ния относятся оператор описания подсистем (к подсистемам относятся,
в частности, линейные динамические звенья; звенья, описываемые си-
стемой линейных дифференциальных уравнений первого порядка), опе-
ратор описании связей подсистем, оператор описания входов и выходов
подсистем. Оператор описания действий включает в себя оператор моде-
лирования, оператор линеаризации, оператор оптимизации, оператор
синтеза. Заголовок оператора синтеза содержит название метода синтеза
(который определяет структуру адаптивного регулятора) и выражения,
которые определяют параметры регулятора.
Термины (английского языка), составляющие операторы описания
системы, образуют первую часть входного языка — язык описания си-
стемы, а термины, образующие операторы действий, составляют вторую
часть входного языка — язык описания заданий. Поскольку эти термины
входят в состав языка АВАНС, па котором составляется АВАНС-програм-
ма, обрабатываемая обычпым образом, то в САПРАС отпадает необходи-
мость в специальном синтаксическом и семантическом процессорах.
В программном обеспечении САПРАС можно выделить ПМ ЭПО:
«Моделирование», «Линеаризация», «Анализ статического режима», «Син-
тез» и т. д. План решения задачи задается текстом АВАНС-программы.
Близкой к САПРАС по способу построения лингвистического и про-
граммного обеспечения является система РАДИУС-2 [16.22]. В этой си-
стеме лингвистическое и программное обеспечения строятся с помощью
языка ФОРТРАП-4 при использовании специальных приемов программи-
рования. Способ построения лингвистического и программного обеспе-
чения САПР САУ предложен в [16.23]. Оп опирается па представление
знаний в области ТАУ в виде некоторой семантической модели.
16.2.3. Система «Гамма-1М». Эта система является развитием пакетов
прикладных программ «Гамма-1» и «Гамма-2» [16.15]. Система «Гамма-1М»
предназначена для синтеза и анализа регуляторов для объектов, описы-
ваемых линейными дифференциальными уравнениями с постоянными
коэффициентами. Модель объекта подвержена малым параметрическим и
структурным возмущениям. Внешние возмущения (модель среды): типо-
вые, детерминированные (ступенчатые, гармонические и т. п.), либо не-
определенные (неизвестные, ограниченные по модулю заданными чис-
лами) воздействия.
Синтез регуляторов осуществляется по принятым в классической
ТАУ временным и частотным критериям (моделям целей управления),
таким как установившаяся ошибка, время регулирования, перерегулиро-
вание, частота среза, запасы устойчивости по фазе и модулю. В качество
моделей целей управления может выступать и интегральный квадратич-
ный критерий.
По функциональным возможностям система «Гамма-1М» охватывает
ряд классов задач ТАУ, которые образуются в зависимости от атрибутов
модели среды и модели целей управления.
Основу лингвистического обеспечения «Гамма-1М» составляют язык
описания моделей системы и среды и язык описания заданий па проек-
тирование директивного типа. Словарь языка описания моделей системы
и среды содержит термины ТАУ и математические символы.
Каждой директиве соответствует план решения задачи, представляю-
щий собой последовательность выполнения ЭПО, приводящую к реше-
нию задачи па основе соответствующей процедуры синтеза п анализа
САУ. Для представления планов решения задач в системе <<Гамма-1М»
используется разработанный проблемпо-орпентироваппый процедураль-
ный язык [16.25] Интерпретации СТРУктурпых схем процедур и
МЕтодов снНТеза (ИНСТРУМЕНТ). План решения задачи представляет
собой последовательность предложений языка, имеющих 5 компонент:
7) метка — целое число; 2) имя операции — имя плаца подзадачи либо
имя элементарного действия, реализованного программным модулем;
3) исходные данные — указываются имена элементов базы данных, вы-
ступающих в качестве исходных данных вызываемой операции; 4) ре-
зультат операции — указываются имена элементов базы данных, являю-
щихся результатом операции; 5) метки перехода — указываются метки
предложений плана, к которым следует перейти после завершения
операции.
В основе программного обеспечения «Гамма-1М» лежат ПМ ЭПЭ
«Аналитическое конструирование оптимальных регуляторов», «Опреде-
ление параметров функционала оптимизации по требуемым значениям
времени регулирования и перерегулирования по каждой из регулируе-
мых переменных», «Анализ параметрической грубости», «Анализ устой-
чивости многомерных систем по критерию Найквиста» и др.
Близкой к «Гамма-1М» по функциональному назначению является
система для автоматизированного синтеза частотным методом [16.24].
ПРИЛОЖЕНИЕ
В таблице приведены обозначения и формы написания ряда мате-
матических выражений в широко известных отечественных и зарубеж-
ных монографиях и рекомендуемые обозначения и формулы, применен-
ные в настоящем справочнике.
В целом следует отмстить относительную унификацию обозначений
и математических выражений в современной теории автоматического уп-
равления. Однако имеются и заметные отличия. Так, в уравнении детер-
минированного процесса (или системы) с непрерывным временем I,
приведенном в первом столбце таблицы, зависимость вектора состояния
х и вектора управления и от t иногда указывается явно (t(Z), n(t)),
а иногда подразумевается, как в рекомендуемом варианте (строка 8).
Кроме общей формы уравнения, здесь приведено уравнение с линейно
входящим управлением, широко используемое в данном справочнике.
В столбце 4 приведены выражения минимизируемых (при оптими-
зации систем столбца 1) функционалов. Наиболее общим здесь является
функционал в задаче Больца. Среди рекомендуемых указана также част-
ная форма этого функционала с аддитивной квадритичпой подынтеграль-
ной функцией затрат на управление. В справочнике подробно освещаются
преимущества применения функционала обобщенной работы (ФОР).
В таблице указана лишь одна форма ФОР с аддитивными квадратичными
функциями затрат па управления. В гл. 6 справочника приводятся более
общие формы этого функционала. Столбцы 5 и 6 таблицы относятся к
линейно-квадратичным задачам оптимизации, являющимся частным слу-
чаем по отношению к указанным выше.
Уравнение марковского процесса с непрерывным временем (стол-
бец 7) записывается в форме Пто и форме Ланжевепа, причем последняя
имеет преимущественное применение в данном справочнике. Уравнения
наблюдения (столбцы 8 и 9) отличаются у разных авторов в основном
только обозначением аддитивного белого шума. Рекомендуемое обозна-
чение матричной ковариациошюй функции белого шума (столбец 10,
строка 8) соответствует случаю, когда шум наблюдения и шум, воздей-
ствующий па систему, пекоррелпрованы.
Следующие три столбца соответствуют вариантам фильтра Калма-
па — Быоси (ФКБ) с непрерывным временем. Функциональные уравне-
ния Веллмана (уравнения Гамильтона — Якоби — Веллмана), используе-
мые в различных источниках, отличаются лишь обозначениями (столб-
цы 14 и 15).
К системам с непрерывным временем относится также столбец 16
таблицы. Остальные столбцы соответствуют системам с дискретным
временем.
Основные обозначения, применяемые в некоторых монографиях и в этом справочнике
Наим с нова ние
Источник I. Уравнение летерминл- иного процесса (не- прерывное время) 2. Вектор состояния 5. Вектор управле- ния k, МинпмнзпруемыГ дс’гер-мшшровапныз функционал (критерий качества) для систем
1. 1П .1] -V = /(.V и. о X и '/ J = Ф [A-J + 1 L(.T, 1 о dt
2. [11.21 к(О = /|х(!> , ч(11. /| X и —
3. [П.31 л- = f(.T. и. /) X и 7 I = J /0 (х, и. /) dt 0
4. 1П.41 V = fix, /) + С (? > и (/) X и —
5 [П.5[ 7Г = '1Х- 11 X и т Q = f /0 (х, U) dt К
С. [П.6] 7Г"М*- U. п X и —
л- =с= qv'/k / 1 X — —
- 1 = ,Г3 [А- ((,)] + 1 = 1’3 [* ('.,)] + fa
8. Данное издание х = f(x. и, 1} X = f(X. О + + Ф(Л, t)u X и '•= v3 [а е2)] + + J L (х, и, 1) dt <1 + | Q3 (х, r)dt + '1 ч Н- 0,5 J uTK~iudt + i Q3 (X, о dt + '1 *2 + O,aj (uTK-lu + ч -F uonK u(in) c t
i9. Примечание к строке 8 Для случая линейно вхо- дящего уп- равления Общая форма С квадратично вхо- дящим управлением Функционал обоб- щенной работы
Продолжение
Источник Наименование
5. Уравнение детерминированного линейного процео са (непрерывное время) 6. Квадратичный функционал для детерминированного слу- чая
1. [П.1] х — F(t)x + G(t)u ч J = 0,5 (xTS;x)f=i 4- 0,5 J (хтАх + uTBu) dt ч
2. [П.2] x(t) = + B(i)u(i) ч xT(fi)P1x(l1) 4-f (zTn3? + uTR2u)<H Ч
3. [П.З] x — Ax 4- bu ОО (xTQx 4- Q0u2) di (и — скаляр) 0
Т
4. [П.4] x(f) = F(t)x(t) + G(f)u(i) 0,5ет (Т) Se (Т) + 0,5 J (eTQe + uTRu) di Ч
т
5. [П.5] X = A(f)x + B(f)u Jj = 0,5 <х (Т), Fx (Т)> + 0,5 J [L <х, Qxl + <u, Ru>] dt Ч
6. [П.6] dx -A (t) x+ В (t)u at -*
7. [П.7] — —
8. Данное издание x = A(t)x 4- B(t)u или x — Ax 4- Bu *2 J = 0,5 хт (/2) рх (12) 4- 0,5 J [хт (t) Сх (!) uT(t) К~1и (t)l di ч
J — функционал Летова — Налмана,
9. Примеча- ч
нйе к ~•
строке 8 J + 0»5 J uonK tt-oriaf — функционал обобщенной работы ч
Источник Продолжение Наименование
7. Уравнение стохастического процесса с аддитивным шу- мом (непрерывное время) 8. Нелинейное наблюдение (измерение) с аддитив- ным шумом 9. Линейное наблюдение (измерение) с аддитивным шумом
1. [П.1] х = f(x, и, t) + G(t)w (форма Ланжевена) z(t) = h(x. о + V z — Их + V
2. [П.2] x(t) = A(t)x(?) + B(nu(t) +- (лике йны й с л у ча й) у (t) = C(t)x(t) + viiW
3. [П.3] — — —
4. [П.41 — y(i) = h(x) + v(O y(i) = H(t)x(.t) +
5. [П.5] dx = /(х(О. t)dt + G(x(i), Odp(f) (форма Ито), = / (х (/), О + С {х (0, Ow (0 (форма Ланжевена) z(i) = h(x(i). t) + v(l) z(t) = C(t)x(i) + v(t)
6. [П.6] ' — — —
7. [П.7] х = flx(t), 1] + G]x(i), i]w z(0 = h[xlt), i] + r(t) —
8. Данное издание dx == f(x, u, t)dt + die X = f(X, U, 1) + 5 z = h(x, t) + n(0 Z ~ Hx + T)(o
9. Примеча- ние к строке 8 Форма Ито Форма Ланжевена — Зависимость H от t в яв- ном виде может не обо- значаться
Л р одолжение
Паимснова ипс
Источник 10. Интенсивность и ковариационная шума функция белого И. ЛипеариаоваииыН непрерывный фильтр Налмана
1. [П.1] Е [а Е| (11 кт ((')] Q(Ht(l - г- (П V1' U')] = К (1) 6 (1 - <'), -1'1 р £ = f (х, l) + P ^"'1 (У - h COL =Л p+p - p R-> Л P+G-QG4 ox \. dx ) \ dx J dx flh dh (x) | “^7 0x~ |Л-^7
2. [П.2] Е «1 ('1)' .«•s ('1). [<('.) (У] =Е((1)6(^ ~/2) —
3. [П.З] — —
4. [П.4] covfr (f)] = R, covJzz(Z)] = Q То же, что и в строке 1
о. [П.5] N [и (0 к» (•£)] = Q (О d (/ М [г (/) а* (т)] = R (/) Л (t - т), — т) —
Ь. [П.6] — —
7. [П.7] е {к (О ит (тй = ’I'HD ft0 U Е {а (!) тт (т)} = ч|-г. (/) Лп (/ 1 1 * “
8. Данное издание Е Н (О Г 1П1 = Q(H 6 (i - Е [п (И т|т ('')! = R (ti 6 (t - Eh (О nT(Oj= 0 - 1'1, - t'1. х = / (ж, «, 1) + Р к-1 [г — h (х, i)], • Oh ,Л,,( Oh Vr ( Oih \T_ _i dh Ox \ fl.v / \ 0\- ) dx
9. Примеча- ние к строке 8 — = x(t) — номинальное или нсвозм у щепное движение
Продолжение
Источник Наименование
12. Обобщенный непрерывный фильтр Налмана (первое приближение) 13. Линейный непрерывный фильтр Калмапа
1. [П.1] \т ] Л'-1 [г Г7)_ Л(х, 01, т-р(-^-Г н-1^-Р + СОсД \dx ) дх X = Fx + РНТН~1 (2 — Их), Р— FP + PFT — PH'1 ir '/iF f- GQGX
2. [П.2] — х = А (П х (t) {- B(t)u+ QCTV.^"1 [у (0 — С (') х], <? = Л<? + QA'r — QCTV^lCQ + Kt
3. [П.3]
4. [П.4] То же, что и в строке 1 х = F(i) ?+ PHTR-1 [(, (t) — Hx], P = F (t) P + PlT (t) — PHTR-lf/P + GQCT
5. [П.5] — => / (X. 0 + Phx (х, о Л-1 (t) [2 (1) — Л (х, П], г}р ® ~ = / г (х, П Р 4- Pfx (х, /) — РЛХ (х, /) (х, 0 Р + + G(x t)O(x. t)G*tx. t) ~ = zl (/) .?+ 2(() С» (t) Я-1 (t) [z(0 - C (i) 2], Л (0 2 + 2 1 (0 — SC» (0 Д-1 (0 C(i) 2 + + B(1)Q(OB*(O
6. [П.6]
7. [П.7] — —
8. Данное издание To же, что и в предыдущем столбце данной строки с заменой х на х J -= Ax + Bu + PHTB ~1 (z — Fix), P = AP + PAT-PHTR~1HP + Q
9. Примеча- ние к строке 8 Of х — опенка х, —— = Ох ~Э/ (х, П дх Jx^=X Для нестационарного случая может указываться в яв- ном виде зависимость от 1: Alt), Bit). Hit). R(t)
Продолжение
Источник Наименование
14. Уравнение Гамильтона — Якоби — Веллмана (общий вид) 15. Уравнение Гамильтона — Якоби — Веллмана для слу- чая линейно входящих управлений и квадратичного от- носительно управления функционала, оптимальное уп- равление
1. [П.1] —2 = —£/ (х, u) — ± —2 GB-1GT —I + L (x, t), dt дх I dx * dx }
5Jo . = mm 0i u L (х, и, i) + 1 (х, и, i) 0Х J
2. [П.2] — —
3. [П.З] _ = min (0_8Ц(П. t} , + (xo (f), u (t)i M <7 u=U I <)x ° ) —
4. [П.4] — —
5. [П.5] — 68 (X' = min [G (x, u, t) + <grad S (x, i), f (x, и, I))] di U~Q —
6. [П.6] — —
7. [П.7] — 1
8. Данное издание dV — —— — mm и Г 9V “I L (х, ut t) 4- — 1 (а, и, t) 8V SV ,, 1 8V t(8v\t ТГ+эГ/(х- ')--ГёТ(рКч’ Ы =“ез’ TZ T f u = u0n = -K<j>^_j
9. Примеча- ние к строке 8 Для общей формы функционала в детерминированной задаче /Для функционала обобщенной работы ov , dV „ T f 0v\T “a? + ST1 (x’ t} ~ °3’ v ~ “on —K<e' \ aT J
Продолжение
Источник Наименование
16. Оптимальные управлении для линейного детермини- рованного процесса квадратичного функционала Лето- ва — Налмана 17. Уравнение нелинейного процесса с дискретным вре- менем
1. [П.1] u = — B-lCTSx, 8 + SF + Г?8 _ SGB-1GTS = - А х(г+ 1) = /Ч-т(й( и (г)] (детерминированный процесс)
2. [П.21 и° (t) = — Я21В‘ Рх, — Р = Ях + РА + ATP — PBR^fiTp x(i + 1) ~ u(i), ij (детерминированный процесс)
3. [П.3] — —
4 [П.4] — x(fc + 1) = f[k, x(fe), u(fe), v(fe)l, k == 0, 1 N— 1
5. [П.5] и — — К = — КА — А*К -Ь KBR~*B*K — Q x(k + 1) = Ф(х(й), k) + r(x(fe), k), w(fe) (аддитивный шум)
6. [П.6] — x(f + 1) = /(x(i), U(t), t) (детерминированный процесс)
7. [П.7] — x(fe + 1) = <p[x(fe), ft] + r[x(fe), fe]W(fe)
8. Данное издание и — — ЮЗт8х7 S-г SA + ATS — SBKB^S == — (3, S (^) = р x[fe + 1] = 7[х[й], n[fe], a[fe], w[fe], ft]
9. Примеча- ние к строке 8 Для функционала обобщенной работы н = цсп=-КВТВж, S + SA + ATS = —р, S(*2) = p o[A] —вектор параметров фигурирует в задачах парамет- рической идентификации
Продолжение
Наимснование
Источник 18. Уравнение линейного процесса с дискретным вре- менем, условие наблюдения 19. Минимизируемый функционал дискретного по вре- мени детерминированного процесса
1. [ПЛ] а(А + 1) = Ф(А)х(А) + Г(А)«>(А), х; + 1 = Ф;х{ + г, — 1 и.; К-1 J - Ф [.V (-V)] + V L' fx (О, и (,)] 2--0
2. [П.2] x(i + 1) = ,4(i)a(i) + Л(О»(г), 1/(0 = C(i)x(i) + £)(i)u(i) г(г) = G(i)x(i), ’1 —1 у [zT(i + i)K3(i-r 1) z(i+ 1)4 uT(i) + i=i0
3. [П.3] - —
4. [П.4] xlk + 1) = F(A).v(A) -f- G(A)u(A) + k(A), E {r (А) »Т(Л) = Г (A) A-l S wi)» i~k квадрат и ч ны ti ф у и к ци о на л А-! т х 2L Vxi4-l^i+lxi+l 11 i ivi) i=n
5. |П.5] v(A + 1) = Ф(А + I, A)x(A) + rik)w(h), z(A) = H(A)x(A) + —
6. [П.6] x(1 + I) = Л (i).x(t) + />(», H —
7. [П.7] x(/i + 1) == <D(ft + 1, A).v(A) (детерминированный процесс) —
8. Данное издание x[A + 1| = Д(А]х(А| + В[/ф<[А] + ?JA|, г]М = U.v[A) + n [fej A—1 xTL-A’] PxI-VJt- У (xt La] ]4 [ft] » [a! 6 ur [A] A'-!« [A|l A >
9. Примеча- ние к строке 8 Д[А] = Ф[А + 1, A] Квадратичный функционал типа Летова — Калмана
СПИСОК ОСНОВНЫХ ОБОЗНАЧЕНИЙ
Ниже указываются номера параграфов или пунктов, в которых вво-
дятся или определяются обозначения, используемые в справочнике. 13а
рианты разделены Kocoii чертой.
Латинский алфавит
А— матрицу Фробениуса 1.4.1
а — вектор параметрон 1.2.11/скаляр-
нап величина 1.4.I/матрица коэф-
фициентов объекта 8.6.1
л(А, т) — полипом с коэффицненгамц
11.4
{7^-} — функции Бернштейна 12.4.3
'ь= [0 0 1]т — матрица-столбец, по-
следний элемент которой равен
единице, а остальные — нулевые
£>(Р) — характеристический полипом
8.9.2
гипотеза J 3.2.2
D^l^-j-я гипотеза при движении. по
i-й траектории 13.2.2
ВцуЛ,?,- гипотеза с указанием в ин-
дексе значений конкретных пара-
метров 13.2.2
Е—единичная матрица 1.2.3
Ev — единичная матрица с указани-
ем ее размера vXv 2.1.1
е—[1 1]т —вектор, элементами
которого являются единицы 1.4. L
e.j — i-й столбец единичной матрицы
8.9-1
е — орт, единичный вектор 15.2.2
F — оператор (широкое определение)
2.1.9
Г — алгоритм 15.2
F® (п*’И> | Z^) — детерминированное
решающее правило при движении
по i-й траектории 13.2.2
f(x, u, 1) — векторная функция 1.2.1
jx = df]dx— матрица Якоби 4.3.1
f ] 8^>)— условная характе-
ристическая функция 13.2.2
Go— область начальных значений век-
тора состояния (область притяже-
ния) 3.1
Ск — область конечных значений иск-
тора состоянии (область невозму-
щенного состояния) 3.1
g(x, х')—диаграмма направленности
4.1.3
Н. — матрица коэффициентов наблю-
дения 4.3.7
Н — энтропия 3.2.4
/i(x. tj — векторная функция наблю-
дения 1.2.9/интенсивпость поля
4.1.3
I — дстермипировянпьтй функционал
2-4.1/ипдсксное число 8.6.3
Jp|i“ функционал для ц-й гипотезы
при движении но i-й траектории
13.2.2
J — стохастический функционал 6.4.1/
/число компонент 13.2.1
7 = V— 1 —мнимая единица 5.2.4
Л' — матрица коэффициентов 6,2.1
А—дискретная переменная времени
1.1/степець неустойчивости 3.6.4
— корреляционная функция
центрированных случайных вели-
чин Actj и Д(3?- 14.5.2
L — оператор Ляпунова 2.1.3
Lj — оператор дифференцирования В;
силу уравнения свободного дви-
жения объекта 5.4.4
Р — ковариационная матрица ошибок
оценивания 4.2.3
Р(<о) — действительная частотная ха-
рактеристика 5.2.1
PGX — ковариационная матрица век-
торов а и х 5.6.1
р — плотность вероятности 1.2.8/сим-
вол дифференцирования по време-
ни 1.3.1/аргумент преобразования
Лапласа 1.4.1/скалярный параметр
11.3.3
Q — матрица спектральных плотно-
стей белого шума 1.2.6
Q(co)—мнимая частотная характери-
стика 5.2.1
Q3— подынтегральная функция функ-
ционала 6.2.1
(х. 1/х', /) — условная плотность
вероятности восстановления 9.2
RJa, б] —результант Г1.6
77цv —взаимная корреляцион-
ная функция u-й и v-й реализаций
13.2.1
r.jj — коэффициент корреляции 5.4.3
г — гипотетическая
соответствующая
т 13.2.2
(N — D’-мерный
риаций 5.7.1
Я — сектор 3.6
Я — множество ограничений 15.1
SJ7V]—симплекс 15.6.5
g(3> [ /Л — последовательность измене-
ний, соответствующая 7-й гипо-
тезе 13.2.2
траектория,
j-й гипотезе
вектор нова-
— последовательность изме-
рений, соответствующая j-й гипо-
тезе при движении по г-й траекто-
рии 13.2.2
Ti — постоянная времени г-го линей-
ного динамического звена 3.6.4
Гоп — длительность интервала опти-
мизации 5.4.4
Tq — время релаксации 5.4.4
Тзтх—время затухания 5.2.4
7 п—время памяти 8.2.3
t — непрерывная переменная времени
1.1
to — начальный момент времени 1.2.1
—г-й фиксированный момент вре-
мени 1.1
t — t — t' — относительное время 1.2.3
U — множество управлений 1.1
U — функция управления 11.1
U — пара, образованная структурой и
параметрами регулятора 15.1
и — вектор управления 1.2.1/выходной
сигнал нелинейного звена 3.6.1
zil — компоненты вектора управления
1.2.1/фупнция восстановления 9.2
V — функция Ляпунова 3.2.2
V 3— терминальная функция функци-
онала 6.2.1
—г-й собственный вектор матрицы
2.3.1/функция поглощения 9.2
W — множество возмущающих воз-
действий 1.1
W(p) — передаточная функция ли-
нейной системы 5.2.1
W(jw) — частотная характеристика
12.4.1
(.iy
—функция, равная потерям
принятия ц-й гипотезы на г-й тра-
ектории. когда справедлива j-я ги-
потеза 13.2.2
Wn(p)— преобразованная передаточная
функция линейной системы 3.6.4
{Wtilj] — функции Уолша 12.4.3
гу(О—винеровский случайный про-
цесс 1.2.4/мсдленно меняющееся
возмущение 3.4.1
А’ — множество возможных состояний
1.1/множество реализаций входно-
го сигнала 5.2.3/коордмната дви-
жения объекта 13.2.2
А’пх—пространство входных сиг-
налов 1.4
A'rjblx — пространство выходных сиг-
налов 1.4
x(t) — вектор состояния в по прерыв-
ном времени I. I
хр<]—вектор состояния в дискрет-
ном времени 1.1
х(р) — изображение Лапласа пере-
менной x(t) 3.5.1
ха —матрица чувствительности пе-
ременной х к изменению парамет-
ра а 5.4.3
х'— вектор, характеризующий поло-
же нпе точки па базовой поверхно-
сти 4.1.3
х — оценка х 4.2.1
-xz— непрерывная функция времени t,
процесс 1.2.1 /конкретная реализа-
ция случайного процесса 1.2.5
х ОТ1—оптимальная оценка х 5.8
Z— результаты наблюдения на за-
данном интервале 1.2.9
<i>
Z — вектор наблюдения при дви-
жении по г-й траектории 13.2.2
z — оператор сдвига вперед на один
шаг дискретного времени 1.3.4
2(f)—наблюдение 1.2.9/входиой сиг-
нал нелинейного звена 3.6.1
z(f0, f) —совокупность наблюдений на
интервале [f0, f]
Русский алфавит
П — переходная матрица 1.2.3
П(х, Z)—вектор плотности потока
вероятности 9.2
Р — проектирование 11.6
Ф— интеграл вероятности 13.2.2
Греческий алфавит
А(со) —амплитудно-частотная харак-
теристика 10.4.2
а — вектор параметров 14.1.1
[?п] — отклонение от устойчивого
положения i-fi компоненты векто-
ра состояния в m-м цикле 12.3.2
— алгебраическое дополнение со-
ответствующего элемента матрицы
В — шар 11.2
3 — общин параметр 5.4.3/всктор (мат-
рица) параметров функционала 6.1
Г—ковариационная матрица 13.2.1/
/граф 15.7.2
Ах—отклонение, приращение пере-
менной х 2.3/центрнрованная слу-
чайная величина 5.2.3
Atu— длительность цикла формиро-
вания управления 8.6.2
A fOT — длительность шага численного
интегрирования 4.3.2
Аха — скачок функции чувствитель-
ности 14.1.4
Az* — приведенная ошибка наблюде-
ния 4.3
— символ К рои о кер а 4.5
бх — поисковый сигнал 4.3.9/вариа-
ция переменной 5.5.2
6А — случайная ошибка намерения
поли 13.2.2
б(/ — t') —дельта-функция Дирака
1.2.1
Е — безусловное математическое ожи-
дание 1.2.5
E[-\z] —условное математическое
ожидание с указанием условии z
13.2.1
Ew — математическое ожидание по
всевозможным w 13.2.1
Fy — условное математическое ожи-
дание 4.2 1
т)(/)—гауссовский случайный про-
цесс типа белого шума 1.2.9
0 — множество гипотез 13.2.3
0(w) — фазочастотная характеристи-
ка 10.4.2
О-(f)—процесс, определяющий мо-
мент смены структуры 9.1
К — матрица коэффициентов фильт-
ра 4.3.7/матрмца-столбсц «сверну-
тых» корреляционных функции
ошибок оценивания 4.6.1
K(i, V) —матрица Коши 1.2.3
х — масштаб ускорения времени 8.8
х2д — число ненулевых членов сум-
мы 4.3
Xj — корни характеристического урав-
нения системы, собственные чис-
ла матрицы 1.4.1/постоянные мно-
жители 2.2.4/косииусы углов меж-
ду векторами 5.4.3/мпожители
Лагранжа 7.1.2
jiJ — класс нелинейностей 3.6
лН— объем эллипсоида 11.3.3
v7r—интенсивность перехода от
структуры I к структуре г 9.2
Е— символ отказа 4.5.2/эллипсоид
(шар) 11.3.3
£— белый шум 1.2.5/суммарпос возму-
щающее воздействие 3.4.3/с палко-
образное возмущение 8.9.3/едипич-
ный случайный вектор 15.2.1
П(/, AJ —матрица вероятности пере-
ходов (стохастическая матрица)
4.4.1
л —скалярный коэффициент алгорит-
ма 5.6.1/вектор взаимосвязи под-
систем 8.7.5
— 1]] _ непрерывная плот-
ность вероятности перехода из
х{7? — 1] в xj/?] 4.4.2
Р — вероятность некоторого события
PvOtJ—вероятность состояния x<v>
в момент k kA
Рр.т’7, k]— вероятность перехода из
состояния в состояние
^4^14.4.1
р—-вектор (матрица) параметров
функционала 6.1
pia, Р)—расстояние между элемен-
тами а и Р (метрика) 1.1
и — средненвадратпческое отклонение
4.3.5
т — время свободного движения 8.6.4/
/ускоренное время 8.8.4/вектор па-
раметров li.l
т* — вектор существенных парамет-
ров 11.1
TAzv — время корреляции «реальных
белых шумов» датчиков 4.3.5
Ф(£, V) — импульсная переходная
(весовая) .матрица 1.2.3
<р(х, 7) — матрица коэффициентов уп-
равления 1.2.2
<p[u(f)l — нелинейная скалярная
функция 3.6
Флх — матрица Гесса 4.3.1
Х(х(О, /, х] — решение уравнения
х=/ в общем виде 8.6.4
Х(Ах) — детерминированное слагае-
мое правой части уравнения в от-
клонениях 3.1.2
со — круговая частота 3.6/параметр,
характеризующий случай 11.1
Рукописные и готические буквы
—гамильтониан 7.1.2
— преобразование Лапласа 1.4.1
N (х, Р) — нормальное распределение
случайной величины с математи-
ческим ожиданием х и ковариаци-
онной матрицей Р 13.2.1
ГП
— n-мерное евклидово пространст-
во 1.1. t
@—пространство параметров 11.2
Верхние индексы
штрих — первая производная 3.6/дру-
гая, отличная от исходной пере-
мен нал 1.1.3
—1 — обращение, вычисление обрат-
ной матрицы 2.4.1
+ — несвдообращепие матрицы 10.4
о — опорное, фиксированное, невозму-
щен ное значение 2.1.2
ф — особое значение 4.3.8/срсднсе по
реализациям значение 5.4/стати-
стичсски эквивалентные величины
5.6.1/комплексное сопряжение 3.6.4/
измеренное значение 13.2.2
г — г-я степень 2.1.6/г-й вариант зна-
чения 2.3.1
(d) — d-я производная 1.4.1
Аг — вектор, отличающийся изменени-
ем i-й компоненты 6.1.1
Ji I—г-й столбец матрицы 8.3.1
Ш —А-й элемент множества 4.1.2
I1QII — векторная функция времени с
фиксированным условием для q
компонент 7.1.3
[IV J — вектор-столбец, составленный
из N скаляров или векторов-
столбцов 5.3.1/совокупность N'
векторных измерений 13.2.3
d — дифференциальный 3.6.8
st — стационарный 3.6.6
з — замкнутый 3.6.13
и — переменные и пространства, соот-
ветствующие процессу идентифи-
кации 5.1.1
иг — игольчатый 7.2.1
ин — интегральный 3.6.4
м — переменные и константы, соот-
ветствующие модели 2.4.1
т — транспонирование матрицы 1.1
э — значения, относящиеся к методу
эллипсоидов 11.3.3
Пнжпис индексы
----- значение слева от точки разрыва
14.1.4/паилучшая проба 13.4.4
+ — значение справа от точки раз-
рыва 14.1.4/на и худшая проба 13.4.4
0—-начальное значение 1.2.1
.v — заменитель других индексов 8.6.3
а — производная по а 5.4.3/всличипа,.
относящаяся к a ЬАА
(d) — d-e. субнространетво 1.1/субвек-
тор с номером d или с первыми
d компонентами вектора 1.4.6
г — г-н компонента вектора 1.1/г-е
значение скалярной величины
1.4.1
(—г)—совокупность всех компонент
вектора, кроме i-й компоненты
4.2.1
гэ — элемент 1-й строки и 5-го столи-
ца матрицы 1.2.8
111—i-я строка матрицы 2.2.5
<&> — значение в h-й момент непре-
рывного времени 7.1.2
||/|| — 1~е приближение решения зада-
чи 3.4.1
шах — максимальное значение 10.6.2
min — минимальное значение 10.5.2
N — Нарендры 3.6.8
ху— производная по х и ?/ 4.3.1/
блок матрицы, соответствующий
переменным х и у 5.6.1
В — Воронова 3.6.8
в. ч — высокие частоты 10.4.2
вх— входной 1.4.1
в ы х — в ы ход ной 1.4.1
д —дискретный 8.6.2
дат — величины, относящиеся к дат-
чикам 4.3.5
доп — допустимый 2.4.1
з — заданный 2.3
зап — запомненный 12.1.2
к—конечное значение 3.1
кз — решение краевой задачи 14.2.2
ком — величины, относящиеся к ком-
мутатору 12.4.3
комп — величины, относящиеся к
компенсатору 10.5.2
ТГ — Найквиста 3.6.6
п — нечувствительность 12.1.2
и. ч —низкая частота 10.4.2
об — обороты годографа 6.3.4
ср — ограничение 6.1.1
i»n — оптимальный 5.4.4
ос — обратная связь 3.G.14
П — Понтрягина 7.2.1
II —Попова 3.6.6
ир — предельный 6.1.1
р — ра с in п рол ны й 2.2.1
рог — величины, относящиеся к регу-
лятору 2 4.1
рз — разомкнутый 3.6.13
о — свободный Я 8.1
ст — стационарный 4.3.4
т — тя кто в ы й 4.3.4
ф — величины, относящиеся к фильт-
рам 4.3.8
п;т — штраф 6.1.1
э— эксплуатационный 5 1.5
эк— экстремальный 12.1
|а-0 — условие, прп котором выпол-
няются вычисления 2.3.6
Слоговые символы
arg —значение аргумента функции
2.4.1
const — постоянная величина 1.2.3
deg—-степень полинома 11.6
det — определитель матрицы 2.1.2
схр — экспоненциальная функция
6.3.1
extr — экстремальное значение функ-
ции 15.1
Im — коэффициент мнимой части ком-
плексной переменной 3-6.4
inf—наименьшее значение 11.1
lim — предел последовательности 11.4
Inn — предел верхний последователь-
ности 11.1
]п — логарифмическая функция с на-
туральным основанием 3.2.4
max — максимальное значение 3.6.11
min—минимальное значение 4.3.9
rank — ранг матрицы 2.1.2
Re — действительная часть комплекс-
ной переменной 3.6.4
sat — Функция насыщения 7.2.6
sgn —знаковая функция 3.5.4
sgzm — знаковая функция с зоной не-
чувствительности 7.2.6
sup— наибольшее значение 11.4
tr — след квадратной матрицы 8.5.4
Специальные знаки
G — принадлежи ость элемента мно-
жеству 1.1
С — включение подмножества в мно-
жество 4.3.3
V — квантор общности: «любой» или
«для всех» 13.2.2
> — предпочтение 15.2
— пропорционально 5.8
(J—дизъюнкция, выполнение любо-
го из условий 15 4.1
П — конъюнкция, одновременное вы-
полнен не условий 15.3.3
е| — модуль скалярной величины
1J .3/опре делитель матрицы 2.1.2
|[а|| — норма вектора 3.1.2
11 х Ilf? — квадратичная форма х^Бх 5.8.2
57 — оператор «набла», т. е. условный
вектор, составленный из символов
дифференцирования по компонен-
там вектора 4-3-7
4. — оператор свертки 5.2.2/опсрация
поэлементного умножения матриц
8.2.3
: — символ специальной матричной
операция 4.3.1/раяделитель пояс-
нения: «такое, что» 11.2
Г*о, t] — интервал от to до t включи-
тельно 4.2.3
1, N — последовательность натураль-
ных чисел от 1 до N 2.1.7
а — у сред пение по периоду 5.5.2/у ста-
новившееся значение 8.2.3/вспомо-
гатсльныс величины 8.7.5
а^Ъ — угол между векторами а и b
5.4.3
СПИСОК ЛИТЕРАТУРЫ
I» Г л а в с 1
1 1. Лолмогоров Л И, Фомин С. В. Элементы теории функций И фупкци-
оиалыюго анализа.— М.: Наука, 1972.
1 2. Энциклопедия кибернетики. Т. 2/Нод рСд. в. М. Глушкова.— Киев:
Укр. сов. энциклопедия, 1975.
1.3. Андронов А. А. Собрание трудов.— М.: Изд-во АП СССР, 1956.
1.4. Казакевич В. В. Многократные системы и простейшие динамиче-
ские модели часов Ц ДАН СССР.— 1950.— Т. 74, № 4.— С. 665—668.
1.5. Войтенберг Я. Н. Автоматическое управление.— М.: Наука, 1978.
1.6. Кори Г., Корн Т. Справочник по математике.— 4-е изд.— М.: Нау-
ка, 1978.
1.7. Куликовский В. Оптимальные и адаптивные процессы в системах
автоматического регулирования.— М.: Наука, 1967.
1.8. Ярлыков М. С. Применение марковской теории нелинейной фильт-
рации в радиотехнике.— М.: Сов. радио, 1980.
1.9. Деруссо П., Вой В., Клоуз Ч. Пространство состояний в теории уп-
равления.— М.: Наука, 1970.
1.10. Основы автоматического регулирования. Т. 1. Теория/Под рсд.
В. В. Солодовникова.— М.: Машгиз, 1954.
1.11. Петров В. В., Гордеев А. А. Нелинейные сервомеханизмы,—М.: Ма-
шиностроение, 1979.
1 12. Пупков К. А., Капалин В. И., Ющенко А. С. Функциональные ряды
в теории нелинейных систем.— М.: Наука, 1976.
К главе 2
2.1. Красовский А. А. Условие наблюдаемости нелинейных процессов Ц
ДАН СССР,— 1978 —Т. 242, № 6 —С. 1265—1268.
2.2. Колман, В. Е. Об общей теории систем управления Ц Теория дис-
кретных, оптимальных и самонастраивающихся систем: Тр. I Меж-
дунар. коигр. ИФЛК. Т. 2,— М.: Изд-во АН СССР, 1961.— С. 521—547.
2.3. Квакернаак X., Сиван В. Линейные оптимальные системы управле-
ния.— М.: Мир, 1977.
2.4. К расовыми П. II. О стабилизации неустойчивых движений дополни-
тельными силами нрп неполной обратной связи Ц ПММ.—1963.—
Т. 27, вып. 4.— С. 641—663.
2.5. Красовский II. II. Теория управления движением — М.: Наука, 1968.
2 6. Войтенберг Я. Н. Автоматическое управление,— М.: Наука, 1978.
2.7. Андреев 10. II. Управление конечномерными линейными объекта-
ми,— М_: Наука, 1976.
2.8. Воронов А. А. Устойчивость, управляемость, наблюдаемость.— М.:
Паука, 1979.
2.9. Габасов В., Кириллова Ф. Качественная теория оптимальных нро-
цессов.— М.: Наука, 1971.
2.10. Soperstone S. II., Yorke 1. A. Controllability Linear Oscilatory Systems
using Positive Controls // SIAM J. on Control.—1971.— V. 9, № 2.—
P. 253—262.
2.11. Brammer В. E. Controllability of Linear Autonomous Systems with
Positive Controllers Ц SIAM J. on Control.— 1972.— V. 10, № 2.—
P. 339—353.
2.12. Заславский В. Г. Об управлении неотрицательными воздействиями
динамической численности популяции и сообщества // ДАН СССР.—
1983.—Т. 269, Л" 11— С. 44—46.
2.13. Заславский В. Г. Динамика численности управляемых популяций Ц
АиТ.— 1982,— Л« 2,— С. 71—80.
2.14. Уог/се 1. A. The Maximum Principle and Controllability of Nonlinear
Equations Ц SIAM J. on Control.— 1972.— V. 10, № 2.— P. 334—338.
2.15. Заславский В. Г. Стабилизируемое™ и управляемость процесса вос-
производства Ц ЛиТ.— 1984.— № 5.— С. 71—78.
2.16. Evans М. Е., Murthy D. N. Controllability of Discrete Time Linear
Systems with Positive Control Ц Preprint of Hit 7th World Congr.
of IFAC. V. 4 —London: Pergamon Press, 1978,—P. 2403—2407.
2.17. Maeda II., Kodama S. Reachability Observability and Realizability of
Linear Systems with Positive Constraints Ц Electronics and Commu-
nications in Japan.— 1980.— V. 63-A, № 10.— P. 35—42.
2.18. Альберт А. Регрессия, псевдоипвсрсия и рекуррентное оценива-
ние.— М.: Наука, 1977.
2.19. Красовский А. А., Вуков В. II., Шендрик В. С. Универсальные алго-
ритмы оптимального управления непрерывными процессами.—
М.: Наука, 1977.
2.20. Рогоноэр Л. И. Вариационный подход к проблеме инвариантности
систем автоматического управления. Ч. 1 Ц АиТ.—1963.— Т. 24,
№ 6 — С. 744—756.
2.21. Петров В. В., Рутковский В. 10. Двукратная инвариантность систем
автоматического регулирования Ц ДАН СССР.— 1965.— Т. 161, № 4.—
С. 789—790.
2.22. Ядыкин И. В. Синтез алгоритмов ластройки параметров регулятора
в комбинированных адаптивных системах управления Ц Нзв. ву-
зов. Сер. Приборостроение.— 1984.— № 9.— С. 55—64.
2.23. Ядыкин И. В. Адаптируемость регулятора и двухуровневые алго-
ритмы настройки параметров адаптивных систем управления Ц
АиТ,— 1983,— № 5.— С. 99—106.
2.24. Ercberger Н. Analysis and design of model following systems by sta-
te space techniques / Proc. JACC.— 1968.— P. 578—580.
2.25. Muchopadya S. P1D equivalent of optimal regulator Ц Electronic Let-
ters—1978,—V. 14, № 25 —P. 821—822.
2.26. Park II., Seborg D. E. Eigenvalue assignment using proportional-inte-
gral feedback '// Int. J. of Control.— 1974 — V. 20, № 3 — P. 517-523.
К г л а в c 3
3.1. Качаров К. А., Пилютин А. Г. Введение в техническую теорию ус-
тойчивости движения.— М.: Физматгиз, 1962.
3.2. Красовский А. А. Фазовое пространство и статистическая теории
динамических систем.— М.: Паука, 1974.
.3.3. Барбашин Е. А. Функция Ляпунова.— М.: Паука, 1970.
3.4. Massera I. L. On Lyapunovs condition of stability Ц Ann. of Math.
Second series.— 1949 — V. 50, № 3.— P. 705—721.
3.5. Демидович В. П. Лекции по математической теории устойчивости.—
М.: Наука, 1967.
3.6. Зубов В. II. Методы А. М. Ляпунова и их применение.— Л.: Изд-во
ЛГУ, 1957.
3.7. Красовский II. Н. Некоторые задачи теории устойчивости движе-
ния.— М.: Физматгиз, 1959.
3.8. Ла-Салль Ж., Лефшец С. Исследование устойчивости прямым ме-
тодом Ляпунова.— М.: ИЛ, 1964.
3.9. Лётов А. М. Устойчивость нелинейных регулируемых систем.— М.:
Физматгиз, 1962.
3.10. Метод функций Ляпунова в динамике нелинейных систем/Под род.
В. М. Матросова, Р. И. Козлова.— Новосибирск.: Наука, Сиб. отдел.,
1983.
311. Барбашин Е. А. Введение в теорию устойчивости.— М.: Наука,
1967.
3.12. Лурье А. И. Некоторые нелинейные задачи теории автоматического
регулирования.— М.: Гостехиздат, 1951.
3.13. Красовский II. //. Об устойчивости в целом решения нелинейной
системы дифференциальных уравнений Ц ПММ.—1954.— Т. 18,
вып. 6.— С. 735—737.
3.14. Матросов В, М. Развитие метода функций Ляпунова в теории ус-
тойчивости Ц Тр. II Всесоюз. съезда по теор. и ирикл. механике.
Вып. 1.— М.: Паука, 1965.—С. 112—125.
3.15. Bailey F. N. The application of Lyapunov’s second method to intercon-
nected systems Ц J. Sec. Industr. and Appl. Math.— 1965 (1966). —
V. A3, № 3 — P. 443—462.
3.16. Ibrahim E. S., Hekasius Z. V. Construction of Lj'apunov functions for
nonlinear feedback systems roilh several nonlinear elements Ц J.
Automat. Control., Conference at Stanford University.— 1964.— P. 256—
260.
3.17. Пионтковский А. А., Рутковская Л. Д. Исследование некоторых
задач теории устойчивости с помощью метода векторных функций
Ляпунова Ц АиТ.— 1967.— № 10.— С. 23—30.
3.18. Неймарк Ю. И. О структуре областей устойчивости одноконтурных
систем / АиТ,—1950.—Т.Н, № 1,—С. 58—77.
3.19. Петров В. 11. Принцип инвариантности и условия его применения
при расчете линейных и нелинейных систем Ц Теория непрерыв-
ных систем. Спец. мат. проблемы: Тр. I Междупар. контр. ИФАК.
Т. 1,—М.: Изд-во АН СССР, 1961,—С. 259—275.
3.20. Phillis V. A. Entropy stability of continuous dynamic systems Ц Int.
J. of Control.— 1982 — V. 35, № 2,— P. 323—340.
3.21. Кухтенко А. 11. Проблемы инвариантности в автоматике.— Киев:
Техника, 1963.
3.22. Энциклопедия кибернетики. Т. 1/Под ред. В. М. Глушкова,—Киев:
Укр. сов. энциклопедия, 1975.
3.23. Теория систем с переменной структурой/Под ред. С. В, Емельяно-
ва.— М.: Наука, 1970.
3.24. Вавилов А. А. Частотные методы расчета нелинейных систем.— Л.:
Энергия, 1970.
3.25. Пятницкий Е. С. Абсолютная устойчивость нелинейных нестацио-
нарных систем Ц АиТ.— 1970.— № 1.— С. 5—15.
3.26. Воронов А. А. Устойчивость, управляемость, наблюдаемость.— М.:
Паука, 1979.
3.27. Попов Е. II. Теория нелинейных систем автоматического регулиро-
вания и управления.— М.: Наука, 1979.
3.28. Айзерман М. А., Гонтмахер Ф. Р. Абсолютная устойчивость регули-
руемых систем.— М.: АП СССР, 1963.
3.29. Попов В. М. Гйпсрустойчивость автоматических систем.— М.: Пау-
ка, 1970.
3.30. Наумов В. II. Теория нелинейных автоматических систем. Частот-
ные методы,— М.: Наука, 1972.
3.31. Методы исследования нелинейных систем автоматического управ-
лепия/Под ред. Р. А. Нелепипа.— М.: Наука, 1975.
3.32. Пятницкий Е. С. Новые исследования по абсолютной устойчивости
систем автоматического регулирования: Обзор Ц АиТ.—1968.—
№ 6,— С. 5—36.
3.33. Пятницкий Е. С. О существовании абсолютно устойчивых систем,
для которых не выполняется критерий В. М. Попова Ц АиТ.—
1973 — № 1.—С. 30—37.
3.34. Якубович В. А. Частотные условия абсолютной устойчивости нели-
нейных систем автоматического регулирования / Тр. межвуз. конф,
по прикладной теории устойчивости движения и аналитич. меха-
нике (Казань, 1962).—Казань: КАИ, 1964,—С. 135—142.
3.35. Барабанов Н. Е. Абсолютная устойчивость систем регулирования
с монотонными нелинейностями.— Дсп. в ВИНИТИ 18.07.79,
№ 2643—79.
3.36. Brockett R. W., Willems I. L. Frequency Domain Stability Criteria.
P. I Ц IEEE Trans. Automat. Control.— 1965.— V. AC-10, № 3.— P. 2—
261; P. II,— V. AC-10, № 4.— P. 407—413.
3.37. Якубович В. Л, Частотные условия абсолютной устойчивости систем
управления с несколькими нелинейными или линейными нестаци-
онарными блоками Ц АиТ.— 1967.— № 6.— С. 5—30.
3.38. O’Shea R. Р. An improved frequency domain stability criterion for
autonomous continuous systems Ц IEEE Trans. Automat. Control.—
1967,— V. AC-12, № 6.— P. 725—731.
3.39. Zames G., Falb P. L. On the Stability of Systems with Monotone and
Odd Monotone Nonlinearities // IEEE Trans. Automat. Control.—
1967 — V. AC-12, № 2 — P. 221—223.
3.40. Freedman M. I. L2-stability of lime varying systems — construction
on multipliers with prescribed phase characteristics Ц SIAM J. Cont-
rol— 1968 — V. 6, № 4 — P. 559—578.
3.41. Липатов А. В. Устойчивость непрерывных систем с одпой нелиней-
ностью Ц ДАН СССР,—1981,—Т. 260, № 4,—С. 812—817.
3.42. Воронов А. А. Абсолютно устойчивые системы с дифференцируемой
неубывающей нелинейностью /] АиТ.— 1978.— № 7.— С. 12—18.
3.43. С ho Y. S., Narendra К. S. An off-axis circle criterion for the stability
of feedback systems with a monotonic nonlinearity Ц IEEE Trans.
Automat, Control — 1968.— V. AC-13, № 4.— P. 413—416.
3.44. Якубович В. А. Абсолютная неустойчивость нелинейных систем уп-
равления. I Ц АиТ.— 1970,— № 12 — С. 5—14; II,— 1971,— № 6,—
С. 25—33.
3.45. Липатов А. В. Графоаналитический метод проверки устойчивости
непрерывной системы с одной монотонной нелинейностью в случае
неприменимости критерия А. А. Воронова Ц ДАН СССР.—1982.—
Т. 267, № 5.— С. 1069—1072.
3.46. Липатов А. В. Графические критерии устойчивости непрерывных си-
стем с одной дифференцируемой нелинейностью Ц АиТ.—1984.—
№ 3.— С. 57—65.
3.47. Липатов А. В. Устойчивость стационарной системы с одним нели-
нейным блоком. I / АиТ.— 1982.— №6.— С. 43—53; II.— 1982.—
№ 7 —С. 34—41.
3.48. Липатов А. В., Садыков Ф. Р., Соловейчик Г. Я. Графические методы
исследования устойчивости непрерывных систем с одной пелпней-
постыо различных классов Ц АиТ.— 1985.— № 3.— С. 28—35.
3.49. Цыпкин Я. 3. Основы теории автоматических систем.— М.: Паука,
1977.
3.50. Якубович В. А. Частотные условия автоколебаний в пелипеппцх
системах с одпой стационарной нелинейностью Ц Сиб. мат. жур.—
1973.—№ 5,—С. 1100—1129.
3.51. Якубович В. 4. Частотные условия колебаний в нелинейных регу-
лируемых системах с одпой однозначной или гистерезисной нели-
нейностью Ц АиТ.— 1975.— № 12.— С. 51—64.
3.52. Андронов А. А., Витт А. А., Хайкин С. Э. Теория колебаний.— М.:
Физматгиз, 1969.
3.53. Попов Е. П., Палътов И. П. Приближенные методы исследования не-
линейных автоматических систем.— М.; Физматгиз, 1960.
3.54. Мейлахс А. М. О существовании функции Ляпунова для параметри-
ческих возмущенных линейных систем Ц Сложные системы управ-
ления.— Киев: ИК АЛ УССР, 1980.— С. 11—15.
3.55. Молчанов А. П., Пятницкий Е. С. Построение функций Ляпунова,
определяющих необходимые и достаточные условия абсолютной ус-
тойчивости в классе нестационарных нелинейностей Ц Устойчивость
движения.— Новосибирск: Наука, Сиб. отдел., 1985.— С. 82—87.
3.56. Гелиг А. X., Леонов Г. А., Якубович В. А. Устойчивость нелинейных
систем с неедииствеппым состоянием равновесия.— М.: Паука, 1978.
3.57. Цыпкин Я. 3. Релейные автоматические системы.— М.: Наука, 1974.
3.58. Цыпкин Я. 3., Попков Ю. С. Теория нелинейных импульсных си-
стем.— М.: Наука, 1973.
3 59. Кунцевич В. М., Чеховой Ю. В. Нелинейные системы управления с
частотно-широтной импульсной модуляцией.— Киев: Техника, 1970.
3.60. Халанай А., Векслер Д. Качественная теория импульсных систем.—
М.: Мир, 1971.
3.61. Якубович В. А. Абсолютная устойчивость импульсных систем. I Ц
АиТ,—1967.—№ 9.—С. 59—72; II.-1968.—№ 2.—С. 81—101.
3.62. Гелиг А X Динамика импульсных систем и нейронных сетей.— Л.:
Изд-во ЛГУ, 1982.
3.63. Шепелявый А. И. Абсолютная неустойчивость нелинейных амплн
тудпо-пмпульсных систем управления Ц АиТ.— 1972.— № 6.—
С. 49-56.
3.64. Молчанов А. П., Пятницкий Е. С. Абсолютная неустойчивость нели-
нейных нестационарных систем Ц АиТ.— 1982.— № 1.— С. 19—27.
3.65. Якубович В. А. Частотные условия абсолютной устойчивости и дис-
сппативности регулируемых систем с одной дифференцируемой не-
линейностью Ц ДАН СССР.— 1965.— Т. 160, № 2.— С. 298—301.
3.66. Нечитайло А. В. Условия абсолютной устойчивости и диссилатпв-
пости регулируемых систем в классе нелинейностей с условием па
производную // Сиб. мат. жур,— 1976 — № 5.— С. 1190—1193.
3.67. Леонов Г. А., Заварыкин В. М., Иоффе И. В. Частотные методы в те-
рии колебаний: Учеб, пособие.— Курск: КПП, 1974.
3 68. Барабанов В. Е. О существовании периодических решений в систе-
мах регулирования с монотонной нелинейностью из гурвпцева уг-
ла,— Дсп. в ВИНИТИ 05.04.79, № 3543-79.
3.69. Буркин В. М., Леонов Г. А. О существовании нетривиальных перио-
дических решений в автоколебательных системах Ц Сиб. мат.
жури,—1977.—Т. 18, № 2,—С. 251—261.
3.70. Якубович В. А. Метод матричных неравенств в теории устойчиво-
сти нелинейных регулируемых систем. I. Абсолютная устойчивость
вынужденных колебаний Ц АиТ.— Т. 25, № 7.-— 1964.— С. 1017—1029.
3.71. Якубович В. А. Периодические и почти периодические предельные
режимы регулируемых систем с несколькими, вообще говоря, раз-
рывными нелинейностями // ДАН СССР.— 1966.— Т. 171. № 3.—
С. 533—536.
3.72. Леонов Г. А. Устойчивость и колебания фазовых систем Ц Сиб. мат.
жури.—1975,—Т. 16, А- 5.-С. 1031—1052.
3.73. Резван В. Абсолютная устойчивость автоматических систем с за-
паздыванием.— М.: Наука, 1983.
3.74. Баркин А. И. Оценки качества нелинейных систем регулирования.—
М.: Паука, 1982.
К главе 4
4.1. Марков А. А. Исчисление вероятностей.— 4-е изд.— М.: ГПЗ, 1924.
4.2. Романовский В. В. Основные задачи теории ошибок.— М.: Гостех-
издат, 1947.
4.3. Колмогоров Л. В. К обоснованию метода наименьших квадратов //
УМ11 —1946,— Т. 1, № 1,—С. 57—70.
4.4. Линник Ю В. Метод наименьших квадратов н основы теории обра-
ботки наблюдений.— 2-е изд.— М.: Физматгиз, 1962.
4.5. Чебышев II. Л. Об интерполировании по способу наименьших квад-
ратов Ц Поли. собр. сочинений. Т. II. Математический анализ.— М.;
Л.: Изд-во АН СССР, 1947,—С. 315—335.
4.6. Куржанский А. Б. Управление и наблюдение в условиях неопреде-
ленности.— М.: Наука, 1977.
4.7. Красовский II. Н. Игровые задачи о встрече движений.— М.: Пау-
ка, 1970.
4.8. Красовский II. II. Игровое управление при неполной фазовой инфор-
мации // Пробл. управления и теории информ,— 1976.— № 5.—
С. 3—12.
4.9. Красовский А. А., Белоглазов II. 11., Чигин Г. П. Теория кор-
реляцмопио-экстрсмальпых навигационных систем.— М.: Паука,
1979.
4.10. Дубошин Г. II. Небесная механика. Основные задачи и методы.—
М.: Паука, 1968.
4.11. Красовский А. А. Общее условие, благоприятствующее точному оце-
ниванию / ДАН СССР.—1983.—Т. 273, № 5,—С. 1067—1069.
4.12. Сейдж Э. 11., Мелса Дж. Л. Идентификация систем управления.—
М.: Наука, 1974.
4.13. Ершов А. А. Стабильные методы оценки параметров. Обзор Ц
АиТ,— 1978 — № 8.— С. 66—100.
4.14. Box G. Е. Р. Коп-normality and tests on variances Ц Bionielrika.—
1953 —V. 40 —P. 318—335.
4.15. Цыпкин Я. 3. Стабилизация и регуляризация оценок оптимальных
решений при наличии неопределенности Ц ДАН СССР.— 1977.—
Т. 236, № 2,— С. 304—307.
4 16. Ершов А. А., Липцер Р. III. Робастный фильтр Калмапа в дискрет-
ном времепи // АиТ.— 1978.— .№ 3.— С. 60—69.
4 17. Цыпкин Я 3., Поляк Б Т Огрубленный метод максимального прав-
доподобия Ц Динамика систем. Мат. методы теории колебаний: Меж-
вуз. сб. Вып. 12.— Горький: Изд-во ГГУ. 1977.—С. 22—46.
4.18. Huber Р. J. Bohust estimation of a location parameter // Ann. Math.
Slat — 1964. - V. 35,— P. 73—101.
4.19. Martin R. I.)., Masreliez C. 1. Robust estimation via stochastic appro-
ximation Ц IEEE Trans. Inform. Theory.— 1975,—V. IT-21.— P. 263—
271.
4.20. Красовский А. А. Динамика непрерывных самонастраивающихся
систем.— М.: Физматгиз, 1963.
4.21. Тихонов В. II., Кульман II. К. Нелинейная фильтрация и квазико-
герептпын прием сигналов.— М.: Сов. радио, 1975.
4.22. Вису В. Nonlinear filtering theory // IEEE Trans. Automat. Cont-
rol— 1965 — V. AC-1, № 2 —P. 198.
4.23. Race R W., Nonim V. I)., Schwartz L. Optimum multichannel nonli-
near filtering Ц J. of Malli. Analysis and Appl.— 1966.— V. 16.—
P. 152—164.
4.24. Ройтенберг Я. 11. Автоматическое управление.— М.: Паука, 1978.
4.25. Красовский А. А. Субоптимальпын адаптивный алгоритм оценива-
ния непрерывных процессов Ц ДАН СССР.—1976.— Т. 230, Л» 3.—
С. 538-540.
4.26. Красовский А. А. Условие наблюдаемости нелинейных процессов Ц
ДАН СССР,—1978,—Т. 242. Л» 6.- С. 1265—1268.
4.27. Вису R. S., lospch Р. D. Filtering for Stochastic Processes with Appli-
cations to Cuidancu.—New York: Interscicnce Publishers, 1968.
4.28. Sage A. P., Melsa J. L. Estimation Theory with Applications to Com-
munications and Control.— New York: McGraw-Hill, 1971.
4.29. Jazwinski А. II. Stochastic processes and filtering theory.— New York:
Academic Press, 1970.
4.30. Kalman В., Вису В. New results in linear filtering and prediction
theory Ц J. Basic. Engr (ASME Trans.)—1961.— V. 83,—P. 95—108;
4.31. Красовский Л. А. Синтез самонастраивающихся систем автомати-
ческого регулирования с дискретными корректирующими устройст-
вами Ц Теория и применение дискрет, автоматич. систем.— М.: Изд-
во АП СССР, i960.—С. 101—118.
4.32. Красовский /I. Л. Принципы поиска и динамика непрерывных си-
стем экстремального регулирования Ц Автоматическое управление
и вычислительная техника. Вып. 4.— М.: Машгиз, 1961.— С. 5—48.
4.33. Фельдбаум А. А. Статистическая теория градиентных систем авто-
матической оптимизации при квадратичной характеристике объек-
та Ц АиТ.—1960,—Т. 21, № 2,—С. 167—179.
4.34. Казакевич В. В. Об экстремальном регулировании: Дне. ... канд.
техн. паук.— М, 1945.
4.35. Цыпкин Я. 3. Адаптация и обучение в автоматических системах.—
М_: Паука. 1968.
4.36. Цыпкин Я. 3. Основы теории обучающихся систем.— М.: Паука,
1970.
4.37. Цыпкин Я 3., Поляк Б Т Достижимая точность алгоритмов адап-
тации // ДЛИ СССР,—1974.—Т. 218, № 3 — С. 532—535.
4.38. Поляк Б. Т. Введение, в оптимизацию.— М.: Наука, 1983.
4.39. Поляк Б. Т. Сравнение скорости сходимости одношаговых и много-
шаговых алгоритмов оптимизации при наличии помех Ц Изв. АП
СССР, Техн, кибернетика.— 1977.— № 1.— С. 9—12.
4.40. Поляк Б. Т., Цыпкин Я. 3. Оптимальные псевдоградиептпые алго-
ритмы адаптации Ц ДАН СССР.— 1980.— Т. 250, №5.— С. 1084—
1087.
4.41. Чаки Ф. Современная теория управления,—М.: Мир, 1975.
442. Красовский А. А. Оптимальное оценивание при векторном размы-
том измерении Ц ДАН СССР.—1981,-Т. 256, № 5,—С. 1061-1064.
4.43. Красовский А. Л. Оценивание стационарного поля при размытом
изображении // ДАН СССР,—1979,—Т. 249, № 5,—С. 1071-1073.
К г л а в с 5
5 1. Палимое В. В. Теория эксперимента.— М.: Паука, 1971.
5.2. Планирование эксперимента в исследовании технологических про-
цессов/Под ред. Э. К. Лецкого.— М.: Мир, 1977.
5.3. Астапов IO. М., Медведев В. С. Статистическая теория систем авто-
матического регулирования и управления.— М.: Наука, 1982.
5.4. Пупков К. А., Каплин В. И., Ющенко А. С. Функциональные ряды
в теории нелинейных систем.— М.: Наука, 1976.
5.5. Попков IO. С., Киселев О. П., Петров 11 П., Шмулъян Б А. Иденти-
фикация и оптимизация нелинейных стохастических систем.— М.:
Энергия, 1976.
5.6. Федоров В. В. Теория оптимального эксперимента.— М.: Паука, 1971.
5.7. Эйкхофф П. Основы идентификации систем управления.— М.: Мир,
1975.
5.8. Райбман II. С., Чадеев В. М. Построение моделей процессов про-
изводства.— М.: Энергия, 1975.
5.9. Лэнинг Дж. X., Бэттин В. Г. Случайные процессы в задачах авто-
матического управления.— М.: ИЛ. 1958.
5.10. Основы автоматического регулировання/Под ред. В. В. Солодовни-
кова.— М.: Машгиз, 1954.
5.11. Попов Е. П. Динамика систем автоматического регулирования.—-
М.: Гостсхиздат, 1954.
5.12. Красовский А. А. Динамика непрерывных самонастраивающихся
систем.— М.: Физматгиз, 1963.
5.13. Margolis M., Eeondes С. T. A parameter tracking series for adaptive
control systems Ц IRE Trans. Automat. Control.— 1959.— V. AC-4,
№ 2,—P. 100—111.
5.14. Аксенов Г. С., Фомин В. II. Метод функций Ляпунова в задаче син-
теза адаптивных регуляторов Ц Воир. кибернетики. Адаптивные
системы управления.— М.: Науч, совет АН СССР по комплекс,
проба. «Кибернетика», 1979.— С. 69—93.
5.15. Серегин В. II. Синтез асимптотически устойчивого алгоритма иден-
тификации нелинейной нестационарной системы прямым методом
Ляпунова Ц АиТ.— 1978.— .К” 4.— С. 28—32.
5.16. Казаков II. Е., Евланов Л. Г. К теории самонастраивающихся си-
стем с поиском градиента методом вспомогательного оператора Ц
Дискретные и самонастраивающиеся системы: Тр. II Междупар.
копгр. ИФАК,— М.: Наука, 1965,— С. 252—266.
5.17. Козлов К). М., Юсупов Р. М. Беспоисковые самонастраивающиеся
системы.— М.: Паука, 1969.
5.18. Цыпкин Я. 3. Адаптация и обучение в автоматических системах,—
М.: Наука, 1968.
5.19. Солодовников В. В., Шрамко Л. С. Расчет и проектирование анали-
тических самонастраивающихся систем с эталонными моделями.—
М.: Машиностроение, 1972.
5.20. Красовский А. А. Оптимальные алгоритмы в задаче идентификации
с адаптивной моделью Ц АиТ,— 1976.— № 12.— С. 75—82.
5.21. Ашимов А., Сыздыкое Д. Ж., Тохтобаев Г. М. Беспоисковые само-
настраивающиеся системы идентификации Ц АиТ.— 1973.— № 2,—
С. 184—188.
5.22. Ашимов А. А., Сыздыкое Д. Ж. Оценка объектов большой размер-
ности И Тр. IX Всесоюз. школы-семинара по адаптив. системам.—
Алма-Ата: МВ и ССО КазССР, 1978.— С. 17—26.
5.23. Сыздыкое Д. Ж., Заграничный А. В. Об оценке параметров объектов
управления большой размерности Ц Вопросы технической кибер-
нетики: Сб. тр. МВ и ССО КазССР.— Алма-Ата: МВ и ССО КазССР,
1979.—С. 107—113.
5.24. Ашимов А. А., Сыздыкое Д. Ж., Заграничный А. В. Форсированные
режимы оценки параметров объектов большой размерности Ц Мате-
матическое, алгоритмическое и техническое обеспечение АСУ ТП:
Тр. II Всесоюз. межвуз. научно-техн. конф.— Ташкент: МВ и ССО
СССР, 1980,— С. 3—4.
5.25. Сыздыкое Д. Ж. Идентификация объектов большой размерности ме-
тодом общего параметра Ц Тр. VIII Всесоюз. совещания но пробл.
управления.— Таллин: АН СССР, 1980.— С. 221—223.
5.26. Буков В. II., Красовский А. А. Операционный алгоритм оптималь-
ного управления Ц АиТ.— 1974.— № 10.— С. 5—12.
5.27. Красовский А. А., Буков В. II., Шендрик В. С. Универсальные ал-
горитмы оптимального управления непрерывными процессами,—
М.: Наука, 1977.
5.28. Фомин В. II., Фрадков /1. Л., Якубович В. А. Адаптивное управление
динамическими объектами.— М.: Наука, 1981.
5.29. Фрадков А. Л. Схема скоростпого градиента и се применение
в задачах адаптивного управления Ц АпТ.—1979.— № 9.— С. 90—
101.
5.30. Пеймарк IO. II., Берман В. Ш., Коган М. М., Ронин Е. И. Исследова-
ние идеализированной градиентной системы адаптивной стабили-
зации объекта второго порядка Ц Динамика систем. Оптимизация
и адаптация: Мсжвуз. сб.— Горький: Изд-во ГГУ, 1979.— С. 51—65.
5.31. Robbins II., Monro S. A stochastic approximation method Ц Ann.
Math. Statist.— 1957 — V. 22 — P. 400-407.
5.32. Kiefer J., Wolfowitz I. Statistical estimation of the maximum of a re-
gression function Ц Ann. Math. Statist.— 1952.— V. 23.— P. 462—466.
5.33. Анализ систем с запаздыванием с помощью функций Уолша Ц Экс-
пресс-информация ВИНИТИ. Сер. Системы автоматич. управления.—
1984.—№ 37.—С. 1—10.
5.34. Красовский А. А. Субоптимальный алгоритм оценивания и идепти
фмпацпи непрерывных процессов Ц ДЛИ СССР.—1976.—Т. 230,
№ 3,— С. 538—540.
5.35. Белоцерковский С. М., Кочетков 10. АКрасовский Л. Л., Новиц-
кий В. В. Введение в аэроавтоупругость.— М.: Наука, 1980.
5.36. Алберт А. Регрессия, псевдоипверсия и рекуррентное оценивание.—
М.: Наука, 1977
5.37. Аеедъян Э. Д. Рекуррентный метод наименьших квадратов при
коррелированных помехах Ц ЛнТ.— 1975.— №5.— С. 67—75.
5.38. Медведев Г. А. О сложности рекуррентных процедур оценивания по
коррелированным наблюдениям Ц Тр. IX Всесоюз. школы-семина-
ра по адаптив. системам.— Алма-Ата: КазПТИ, 1979.— С. 95—99.
5.39. Цыпкин Я. 3. Основы теории обучающихся систем.— М.: Паука,
1970.
5.40. Медведев Г. А., Хацкееич Г. А. О рекуррентных оценках по корре-
лированным наблюдениям Ц АиТ.— 1979.— № 8.— С. 69—75.
5.41. Медведев Г. А. Рекуррентное оценивание прп помощи коррелиро-
ванных наблюдений // АиТ.— 1974.— № 5.— С. 110—116.
5.42. Медведев Г. А. О стохастической аппроксимации коррелированных
последовательностей Ц АнТ.— 1973.—№ 5,—С. 33—41.
5.43. Стратонович Р. JI. Условные марковские процессы и их применение
к теории оптимального управления.— М.: Изд-во МГУ, 1966.
5.44. Сейдж Э. II., Мелса Дж. Л Идентификация систем управления.—
М.: Наука, 1974.
5.45. Белоглазов И. II. Оптимальные совместимо оценивание и иденти-
фикация в дискретных линейных системах Ц ДАН СССР.— 1983.—
Т. 273, № 4.— С. 811—815.
К г л а в е 6
6.1. Борисов А. И., Алексеев А. Б., Крумберт О. А. и др. Модели при-
нятия решений па основе лингвистической переменной.— Рига: Зи-
патне, 1982.
6.2. Трухаев Р. И. Модели принятия решений в условиях неопределен-
ности.— М.: Наука, 1981.
6.3. Хоменюк В. В. Элементы теории многоцелевой оптимизации.— М.:
Наука, 1983.
6.4. Вариационные принципы механики: Сб. статей/Под рсд. JI. С. По-
лака.— М,: Физматгиз, 1959.
6.5. Физический энциклопедический словарь. Т. 1/Ред. кол. Л. М. Про-
хоров (гл. ред.) и др.— М.: Сов. энциклопедия, 1983.
6.6. Wonham W. М. On the separation theorem of stochastic control Ц
SIAM J. on Control.— 1968.— V. 6.— P. 312—326.
6.7. Брайсон A., Xo Ю-ши. Прикладная теория оптимального управле-
ния.— М.: Мир, 1972.
6.8. Красовский А. А., Буков В. II., Шендрик В. С. Универсальные ал-
горитмы оптимального управления непрерывными процессами,— М.:
Паука, 1977.
6.9. Моисеев II. II. Численные методы в теории оптимальных систем.—
М.: Наука, 1971.
6.10. Куликовский Р. Оптимальные и адаптивные процессы в системах
автоматического регулирования,— М.: Наука, 1967.
6.11. Колмогоров А. В., Фомин С. В. Элементы теории функций и функ-
ционального анализа.— М.: Паука, 1972.
6.12. Летав А. М. Аналитическое конструирование регуляторов. I // АиТ,—
ЮВ0.—№ 4.—С. 436—441; 11.— I960.— А» 5,— С. 561—568; 111.—
I960.— № 6.— С. 661—1565; IV.— 1961.— № 4,— С. 425—435; V — 1962,—
Л° 11,—С. 1405—1413.
6.13. Kalman R. Contributions to the theory of optimal control Ц Boletin
de la Sociedad Malem. Mexican. Sequnda serie.— 1960.— № 1.—
P. 102—119.
6.14. Красовский А. А. Интегральные оценки моментов и синтез линей-
ных систем Ц ЛиТ.— 1976.— № 10.— С. 53—71.
G.15. Красовский А. А. Интегральные оценки моментов и синтез нели-
нейных регуляторов Ц АиТ.— 1967.— № 12.— С. 26—37.
6.16. Красовский Л. /1. Обобщение задачи аналитического конструирова-
ния регуляторов при заданной работе управлений и управляющих
сигналов Ц АиТ.— 1969.— № 7.— С. 7—17.
6.17. Красовский А. Л. Статистическая теория переходных процессов в
системах управления.— М.: Паука, 1968.
6.18. Krasovsky A. A. A Now Solution to the Problem of a Control System
Analytical Design Ц Autoinalica.— 1971.— № 1.— P. 45—50.
6.19. Красовский /1. А. Системы автоматического управления полетом и
пх аналитическое, конструирование.— М.: Наука, 1973.
G.20. Миркин Б. М., Шишлякова В. Л. Оптимизация гибридных дискрет-
но-непрерывных динамических систем но критерию обобщенной
работы Ц Адаптивное управление большими системами.— Фрунзе:
Илим, 1981,— С. 24—35.
К г л а в е 7
7.1. Атанс М., Фалб П. Оптимальное управление.— М.: Машиностроение,
1968.
7.2. Брайсон А., Хо Ю-ши. Прикладная теория оптимальности управле-
ния.—М.: Мпр, 1972.
7.3. Болтянский В. Г. Математические методы оптимального управле-
ния.— М.: Наука, 1969.
7.4. Зубов В. II. Лекции по теории управления.— М.: Наука, 1975.
7.5. Красовский И. И. Теория управления движением.— М.: Наука, 1968.
7.6. Моисеев II. II. Элементы теории оптимальных систем.— М.: Наука,
1975.
1.1. Понтрягин Л. С., Болтянский В. Г., Гамкрелидзе Р. В., Миценко Е. Ф.
Математическая теория оптимальных процессов.— М.: Наука, 1969.
7.8. Черноусым Ф. Л., Колмановский В. Б. Вычислительные и прибли-
женные методы оптимального управления Ц Итоги пауки и техники.
Математический анализ. Т. 14.— М.: ВИНИТИ, 1977.— С. 101—166.
7.9. Чаки Ф. Современная теория управления.— М.: Мпр, 1975.
К главе 8
8.1. Соколов II. II. Аналитический метод синтеза линеаризованных
систем автоматического регулирования.— М.:. Машиностроение,
1966.
8.2. Современная теория систем уиравлеппя/Под ред. К. Т. Леондеса.—
М.: Паука, 1970.
8.3. Приспосабливающиеся автоматические систсмы/Под ред. Э. Мишки-
па и Л. Брауна.— М.: ИЛ, 1963.
8.4. Емельянов С. В. Системы автоматического управления с перемен-
ной структурой.— М.: Наука, 1967.
8.5. . Теория систем с переменной структуройДХод ред. С. В. Емельяно-
ва.— М.: Наука, 1970.
8.6. Веллман Р., Гликсберг И., Гросс О. Некоторые вопросы математи-
ческой теории процессов управления.— М.: МЛ, 1962.
8.7. Иванов В. А., Фалдин II. В. Теория оптимальных систем автома-
тического управления.— М.: Паука, 1981.
8.8. Альбрехт Э. Г. Об оптимальной стабилизации нелинейных систем Ц
НММ,— 1961.—Т. 25, вып. 5.—С. 836—844.
8.9. Корн Г., Корн I. Справочник но математике.— М.: Наука, 1978.
8.10. Андреев IO. II. Управление конечномерными линейными объекта-
ми.— М.: Наука, 1976.
8.11. Весткотт Д. Г., Флорентин Д. Д., Пирсон Д. Д. Приближенные ме-
тоды теории оптимальных и самонастраивающихся систем Ц Оп-
тимальные системы. Статистические методы: Тр. II Междупар.
коигр. НФЛК.— М.: Наука, 1965.— С. 39—54.
8.12. Белоцерковский С. М., Кочетков Ю. А., Красовский А. А., Новиц-
кий В. В. Введение в аэроавтоуи ру гость.— М.: Наука, 1980.
8.13. Зубов В. И. Теория оптимального управления.— М.: Судостроение,
1966.
8.14. Брайсон А., Хо JO-ши. Прикладная теория оптимального управле-
ния,— М.: Мир, 1972.
8.15. Париев 10. И., Смагин В. И. Задачи упрощения структуры опти-
мальных регуляторов Ц Ли'!’.— 1975.— № 6.— С. 1'80—183.
8.16. Квакернаак X., Сиван Р. Линейные оптимальные системы управле-
ния,—М.: Мир, 1977.
8.17. Ройтенберг Я. П. Автоматическое управление.— М.: Наука, 1978.
8.18. Кочетков 10. Л. Об оптимальном управлении детерминированными
системами Ц Нзв. АН СССР. Техн, кибернетика.—1976.— № 1,—
С. 158—165.
8.19. Красовский А. А. Аналитическое конструирование контуров управ-
ления летательными аппаратами.— М.: Машиностроение, 1963.
8.20. Красовский А. Л. Системы автоматического управления полетом п
их аналитическое конструирование.— М.: Наука, 1973.
8.21. Красовский А. А., Буков В. Н., Шендрчк В. С. Универсальные алго-
ритмы оптимального управления непрерывными процессами.— М.;
Наука, 1977.
8.22. Карапетян Р. М. О численном решении уравнений оптимальных ко-
эффициентов в задачах аналитического конструирования регуля-
торов Ц АнТ,—1971.—№ 12.— С. 21—29.
8.23. Коробков С. Н. Рационализация процедуры аналитического конст-
руирования управлений для нелинейных объектов Ц АнТ.—1975.—
.№ 2,— С. 13—22.
8.24. Буков В. П. К проблеме рационализации процедуры аналитического
конструирования управления для нелинейных объектов Ц АиТ,—
1975.— № 2,—С. 23—29.
8.25. Коробков С. II. Структура оптимальных нелинейных управлений,
синтезируемых по критерию обобщенной работы Ц Изв. АП СССР.
Техн, кибернетика.— 1977.— А'“ 3.—С. 182—190.
8.26. Буков В. II., Красовский Л. А. Операционный алгоритм оптималь-
ного управления Ц АиТ.— 1974.— № 10.— С. 5—12.
8.27. Шеидрик В. С. Сиптез оптимальных управлений методом прогно-
зирующей модели Ц ДАН СССР.— 1975.— Т. 224, № 3.— С. 561—562.
8.28. Буков В. U. Адаптивные прогнозирующие системы управления по-
летом.— М.: Наука, 1987.
8.29. Федосеев А. С Алгоритм оптимального управления с обобщенной
прогнозирующей моделью Ц АиТ.— 1977.—№ 7.— С. 16—21.
8.30. Буков В. П. Спится управляющих сигналов с помощью прогнозиру-
ющей модели в адаптивной системе управления Ц Пробл. управ-
ления и теории информ.— 1980.— Т. 9 (5).— С. 329—337.
8.31. Вуков В. 1Г., Солодников И. Б. Применение алгоритма с прогнози-
рованном при управлении технологическими процессами с запазды-
. ваппем Ц Изв. АН СССР. Техн, кибернетика.— 1984,—№ 6,—С. 149-г
154.
8.32. Косякин А. А., Шамриков Б. М. Еолсоаппя в цифровых автомати-
ческих системах.— М.: Паука, 1983.
8.33. Коробков С. И. Использование симметрии нелинейного объекта при
синтезе оптимальных управлений Ц Изв. All СССР, Техн, кибер-
нетика.— 1976.— Л» 2.— С. 187—194.
8.34. Месарович М. Д., Мако Д., Такахара У. Теория многоуровневых
иерархических систем.— М.: Мир, 1973.
8.35. Mirkin В. II., Gandelman М. Н. Multilevel optimization for Dynamical
Discrete Systems Ц Prepr. 3 IFAC/IFORS Symposium. Theory and
Appl. (Warsaw, july 1983).— London: Pergamon Press, 1984.— V. 10.—
P. 346—351.
8.36. Г анделъман M. X., Миркин Б. М. Трехуровневая оптимизация ли-
нейных дискретных динамических систем Ц Адаптация в автомати-
зироваппых системах управления производством и научным экспе-
риментом.— Фрунзе: Илим, 1983.— С. 3—5.
8.37. Миркин Б. М., Шишлякова В. А. Оптимизация гибридных дискрет-
но-непрерывных динамических систем по критерию обобщенной ра-
боты Ц Адаптивное управление большими системами.— Фрунзе:
Илим, 1981,— С. 24—35.
8.38. Миркин Б. М., Шишлякова В. А. Комплекс алгоритмов и программ
для автоматизированного синтеза и исследования чувствительности
цифровых систем управления линейными динамическими объекта-
ми Ц Автоматизация синтеза и исследования систем управления.—
Фрунзе: Илим, 1984.— С. 55—67.
8.39. Хартман Ф. Обыкновенные дифференциальные уравнения.— М.: Мир,
1970.
8.40. Красовский А. А., Поспелов Г. С. Основы автоматики и технической
кибернетики.— М.: Госэпергоиздат, 1962.
8.41. Кузовков II. Т. Модальное управление и наблюдающие устройст-
ва.— М.: Машиностроение, 1976.
К главе 9
9.L Мишулина О. А. Анализ линейных систем управления со случай-
ным скачкообразным изменением параметров Ц Изв. АН СССР.
Техн, кибернетика.— 1968.— № 3.— С. 493—497.
9.2. Мишулина О. А. Исследование точности лиыойпых систем автома-
тического управления со случайными изменениями структуры Ц
Изв. АН СССР. Техн, кибернетика.— 1970.— А" 1.— С. 84—89.
9.3. Репин В. Г. Анализ одного класса систем со случайно изменяющи-
мися параметрами Ц АиТ.— 1970.— № 6.— С. 96—101.
9.4. Иргелгьее В. М. Статистический анализ систем с обратимой пере-
менной структурой Ц Проблемы повышения эффективности систем
управления.— Минск: Минсвязь, 1971.— С. 34—41.
9.5. Артемьев В. М. Уравнения числовых характеристик закона рас-
пределения фазовых координат систем с необратимой переменной
структурой Ц Проблемы повышения эффективности систем управ-
ления.— Минск: Минсвязь, 1971.— С. 41—46.
9.6. Скляревич А. II. Линейные системы с возможными нарушениями,—
М.: Наука, 1975.
9.7. Pawula В. F. Generalisation and extension of the Fokker — Plank —
Kolmogorov equations Ц IEEE Trans. Inform. Theory.—1967.—
V. IT-3, № 3,— P. 791—799.
9.8. Тихонов В. И., Кульман II. К. Нелинейная фильтрация и квазико-
гереитный прием сигналов.— М.: Сов. радио, 1975.
9.9. Артемьев В. М. Теория динамических систем со случайными изме-
нениями структуры.— Минск: Вышэйшая школа, 1979.
9.10. Казаков II. Е. Статистическая динамика систем с переменной струк-
турой.— М.: Наука, 1977.
9.11. Казаков И. Е., Артемьев В. М. Оптимизация динамических систем
случайной структуры.— М.: Паука, 1980.
9.12. Стратонович Р. Л. Избранные вопросы теории флуктуаций в радио-
технике.— М.: Сов. радио, 1961.
9.13. Красовский А. А. Фазовое пространство и статистическая теория
динамических систем.— М.: Наука, 1974.
9.14. Казаков II. Е. Статистическая теория систем управления в прост-
. рапстве состоянии.— М.: Наука, 1975.
9.15. .Мальчиков С. В. Приближенный метод статистического анализа си-
стем со случайным временем работы // АиТ.— 1979 — .№ 1 —-С 97—
101.
9.16. Шаламов А. С. Вероятность недостижения векторным процессом слу-
чайных границ многомерной области Ц АиТ.— 1977.— 6.— С 85—
88.
9.17. Стратонович Р. Л. Условные марковские процессы.— М.: Изд-во
МГУ, 1966.
9.18. Артемьев В. М. Оптимальная фильтрация и управление в системах
со случайной структурой Ц Тезисы докл. VIII Всесоюз. совещания
по проблемам управления.— Минск: НИИ НТИ, 1977.— С. 24—30.
9.19. Артемьев В. М., Степанов В. Л. Синтез стохастических систем уп-
равления со случайными изменениями структуры Ц Оценка харак-
теристик качества сложных систем и системный анализ.— Минск:
НИИ НТИ, 1976,—С. 12—17.
9.20. Бухалёв В. А. Оптимальная фильтрация в системах со случайной
структурой Ц АиТ.— 1967.— № И.— С. 65—69.
9.21. Гетманов В. Г. Нелинейная фильтрация марковского процесса при
скачкообразных отказах в измерительных каналах Ц Изв. АН СССР.
Техн, кибернетика.— 1975.— № 4.— С. 122—126.
9.22. Демин И. С. Оптимальное оценивание состояния и оптимальная
классификация стохастических систем со случайными скачкообраз-
ными процессами в канале измерений Ц АиТ.—1976.— № S.-
С. 79—83.
9.23. Демин Н. С. Оптимальное распознавание скачкообразных компонент
марковских сигналов Ц ППИ.—1977.— Т. 13, вып. 2.— С. 46—49.
9.24. Степанов В. Л. Оптимальная нелинейная фильтрация марковских
процессов со случайными изменениями структуры Ц Современные
проблемы радиотехники в народном хозяйстве.— М.: Сов. радио,
1977.— С. 47-50.
9.25. Тихонов В. И., Степанов А. С. Совместная фильтрация непрерыв-
ных и дискретных марковских процессов Ц РЭ.—1973.— № 7.—
С. 125—130.
9.26. Чердынцев В. В. Статистическая теория совмещенных радиотехни-
ческих систем.— Минск: Вышэйшая школа, 1980.
9.27. Яшин А. И. Оценивание характеристик скачкообразных случайных
процессов Ц АиТ.— 1976.— № 4.— С. 73—77.
9.28. Казаков II. Е. Оценивание и идентификация в системах перемен-
ной структуры Ц АиТ.— 1979.— № 11.— С. 81—84.
9.29. Бухалёв В. А. Синтез управления марковским объектом со случай-
ной структурой Ц АиТ.— 1979.— .№ 8.— С. 95—98.
К главе 10
10.1. Аналитические самонастраивающиеся системы автоматического
управлеиня/Под рсд. В. В. Солодовникова,—М.: Машиностроение,
1965.
10.2. Баховский М. Л. Чувствительность и динамическая точность си-
стем 'управления // Изв. АН СССР. Техн, кибернетика,—1964,—
№ 6,— С. 130—143.
10.3. Козлов Ю. М., Юсупов Р. М. Беспоисковые самонастраивающиеся
системы.— М.: Наука. 1969.
10.4 Косиков В. С., Крутова И. II., Павлов Б. В. Линейная модель БСНС
с контролем частотной характеристики Ц АиТ.—1976.— № 7.—
С. 68—75.
10.5. Костюк В. И. Беспоисковые градиентные самонастраивающиеся
системы.— Киев: Техника, 1969.
10.6. Красовский А. А. Динамика непрерывных самонастраивающихся
систем.— М.: Физматгиз, 1963.
10.7. Кухтенко В. И. Динамика самонастраивающихся систем со стаби-
лизацией частотных характеристик.— М.: Машиностроение, 1970.
10.8. Марголис М., Леондес С. Г. О теории самонастраивающейся систе-
мы регулирования; метод обучающейся модели Ц Теория дискрет-
ных, оптимальных и самонастраивающихся систем: Тр. I Между-
нар. копгр. ИФАК. Т. 2,—М.: Изд-во АН СССР, 1961.—С. 683—701.
10.9. Петров Б. В., Елисеев В. Д., Повальный О. А., Уколов И. С. К син-
тезу самонастраивающихся систем, основанных па энергетическом
балансе частотных компонент сигнала ошибки Ц Изв. АН СССР.
Техн, кибернетика.— 1969.— № 1.— С. 145—153.
10.10. Петров Б. II., Рутковский В. 10., Крутова И. И., Земляков С. Д.
Принципы построения и проектирования самонастраивающихся
систем управления.— М.: Машиностроение, 1972.
10.11. Петров Б. U., Рутковский В. Ю., Земляков С. Д. Адаптивное ко-
ординатно-параметрическое управление нестационарными объек-
тами.— М.: Наука, 1980.
10.12. Приспосабливающиеся автоматические системы/Под ред. Э. Миш-
кина и Л. Брауна.— М.: ИЛ, 1963.
10.13. Самонастраивающиеся системы: Справочник/Под ред. П. И. Чинае-
ва.— Киев: Наукова думка, 1969.
10.14. Солодовников В. В., Шрамко Л. С. Расчет и проектирование анали-
тических самонастраивающихся систем с эталонными моделями.—
М.: Машиностроение, 1972.
10.15. Фомин В. II., Фрадков А. Л., Якубович В. А. Адаптивное управле-
ние динамическими объектами.— М.: Наука, 1981.
10.16. Smith К. С. Adaptive Control through Sinusoidal Response Ц IRE
Trans. PCAC — 1962,— V. 7, № 2 — P. 129—139.
10.17. Whitaker П. P., lamrom S., Kezer A. Design of Model Reference
Adaptive Control Systems for Aircraft.— Massachuset Technol. In-
strum. Lah. Rept., 1958, Sept-., R-164.
10.18. Энциклопедия кибернетики. T. 1/Под ред. В. М. Глушкова.— Киев:
Укр. сов. энциклопедия, 1975.
10.19. Landan J. D. Adaptive Control — The Model Reference Adaptive Cont-
rol.— New York: Dekker, 1980.
10.20. Degen R. J. Enwurf und simulation eines adaptiven Regelungs sys-
tems mit Modellbylich Ц Rcgelugstechnik.— 1976.— V. 24, № 1.—
P. 24-27.
10.21. Пзермаи P. Цифровые системы управления.— M.: Мир, 1984.
10.22. Astrom К. J., Borrison U., Ljung L., Wiltenmark B. Theory and
Applications of Self-Tuning Regulators Ц Automatica.—1977.—
V. 13.— P. 457—476.
10.23. Peterka V. On steady state minimum variance control strategy Ц Ky-
hernetica.— 1972 — V. 8 — P. 219—231.
10.24. Зйкхофф П. Основы идентификации систем управления.— М.: Мир,
1975.
10.25. Основы управления технологическими процессами/Под ред.
II. С. Райбмапа.—М.: Наука, 1978.
10.26. Современные методы идентификации систем/Под ред. П. Эйкхоф-
фа.— М.: Мир, 1983.
10.27. Цыпкин Я. 3. Основы информационной теории систем.—М.; Пау-
ка, 1984.
10.28. Ядыкин II. Б., Шумский В. М., Овсепян Ф. А. Адаптивное управ-
лепив непрерывными технологическими процессами.— М.: Эперго-
атомиздат, 1985.
10.29. Ядыкин И. Б. Синтез алгоритмов настройки параметров регулятора
в комбинированных адаптивных системах управления // Изв. ву-
зов. Сер. Приборостроение.— 1984.— № 9.— С. 55—64.
10.30. Ядыкин И. Б. Оптимальная настройка линейных регуляторов Ц
ДАН СССР,— 1985,— Т. 285, № 3,— С. 574—577.
10.31. Ядыкин И. Б. Оптимальное адаптивное управление па основе бес-
поисковой самонастраивающейся системы с обучаемой эталонной
моделью Ц ЛиТ.— 1979.— № 3.— С. 99—110.
10.32. Петров А. И. Об одной задаче определения оптимального алгорит-
ма самонастройки Ц Изв. АП СССР. Техн, кибернетика.—1971.—
№ 1,—С. 206—217.
10.33. Афанасьев В. II., Данилина Л. Н. Вывод и сопровождение неста-
ционарного объекта па заданную траекторию // ЛиТ,—1979.—
№ 12.— С. 87—94.
10.34. Цыпкин Я. 3. Адаптация и обучение в автоматических системах,—
М.: Наука, 1968.
10.35. Kozin F. On almost shure asyndetic sample properties of diffusion
processes defind by stochastic differention equation Ц J. of Math, to
Kyoto Univ.— 1965,— V. 4, № 3,— P. 515—528.
10.36. Красовский А. Л., Буков В. JI., Шендрик В. С. Универсальные ал-
горитмы оптимального управления непрерывными процессами.—
М.: Наука, 1977.
10.37. Данилин А. Б., Ядыкин И. Б. Субоптималыюе управление стохас-
тическими динамическими объектами Ц Изв. АН СССР, Техн, ки-
бернетика.— 1982.— № 3.— С. 194—204.
10.38. Данилин А. Б., Кузнецов В. Н., Майоров А. А., Путинцев В. А.,
Ядыкин II. Б. Адаптивное управление термическим испарением в
вакууме Ц АиТ.— 1985.— № 4.— С. 81—86.
10.39. Sebakhy О. A. A discrete model reference adaptive system design Ц
Int. Control — 1976 — V. 23, № 6 — P. 799—804.
К г л а в e 11
11.1. Фомин В. II., Фрадков А. Л., Якубович В. А. Адаптивное управле-
ние динамическими объектами.— М.: Наука, 1981.
11.2. Срагович В. Г. Адаптивное управление.— М.: Наука, 1981.
11.3. Якубович В. А. К теории адаптивных систем Ц ДАН СССР.—
1968.— Т. 183, № 3,—С. 518—521.
11.4. Якубович В. А. Об одной задаче самообучения целесообразному
поведению Ц АиТ.— 1969.— № 8.— С. 119—139.
11.5. Якубович В. Л. Метод рекуррентных целевых неравенств в тео-
рии адаптивных систем Ц Вопросы кибернетики. Адаптивные си-
стемы,— М.: Науч, совет. АН СССР по комплекс, проба. «Киберне-
тика».— 1976.— С. 32—63.
11.6. Деревицкий Д. II., Фрадков Л. Л. Прикладная теория дискретных
адаптивных систем управления.— М.: Наука, 1981.
11.7. Якубович В. Л. Рекуррентные конечно сходящиеся алгоритмы ре-
шения счетных систем неравенств Ц ДАН СССР.—-1966.— Т. 166,
№ о,— С. 1308—1311.
11.8. Якубович В. Л. Конечно сходящиеся алгоритмы решения счетных
систем неравенств и их применение в задачах построения адап-
тивных систем Ц ДАН СССР.— 1969.— Т. 189, № 3.— С. 495—498.
11.9. Шор И. 3. Метод отсечения с растяжением пространства Ц Ки-
бернетика.—А'977.— № 1.— С. 94—95.
41,10. Юдин Д. В., Немировский А. С. Информационная сложность и эф-
фективные методы решения выпуклых.экспериментальных задач //
г Экономика и мат. методы.— 1976.— Т. 12, № 2.— С. 357—369.
41.11. Хачиян Л. Г. Полиномиальный алгоритм для линейного програм-
мирования Ц ДАН СССР.— 1979.— Т. 244, № 5.— С. 1093—1097.
11.12. Бакан Г. М., Пижниченко Е. А. Конечно сходящиеся алгоритмы ре-
шения счетных систем неравенств Ц Кибернетика и вычислит, тех-
ника.— 1981.— Вып. 53.— С. 78—83.
11.13. Bondarko V. A. Analysis of methods of the dcscritization of conti-
nuous linear dynamic systems Ц Systems and Control Letters.—
1984 — V. 1, № 3 — P. 288—294.
11.14. Агафонов С. А., Барабанов A. E. Адаптивная стабилизация и от-
слеживание траектории линейного объекта с ограниченной поме-
хой,— Деп. в ВИНИТИ 07.07.80, № 2841-80.
11.15. Люблинский Б. С., Фрадков А. Л. Адаптивное управление нелиней-
ными статическими объектами с неявно заданной характеристи-
кой И АиТ,—1983,—№ 4,—С. 126—135.
11.16. Фомин В. В. Адаптивное пределыю-оптимальпое управление ли-
нейными дискретными стохастическими объектами. Ч. 1.— Деп. в
ВИНИТИ 31.08.83, № 4909-83; ч. 2,— 06.04.84, № 2101-84.
11.17. Ljung L., Soderslrom Т. Theorie and practice of recursive identifi-
cation.— Cambridge: MIT Press, 1983.
11.18. Бондарко В. А. Адаптивное субоптимальпое управление решения
линейных разностных уравнений Ц ДАН СССР.—1983.— Т. 270,
№ 2,—С. 301—303.
11.19. Пономаренко В. И., Якубович В. А. Метод рекуррентных целевых
неравенств в задачах субоптимальпого адаптивного управления ди-
намическими объектами Ц Вопросы кибернетики. Адаптивные си-
стемы управления.— М.: Науч, совет АН СССР по комплекс, проба.
«Кибернетика», 1977.— С. 16—28.
11.20. Агафонов С. А. Глобальное поведение линейного минимально-фа-
зового объекта с ограниченной помехой при адаптивном управле-
нии.— Деп. в ВИНИТИ 20.08.81, № 4140-81.
11.21. Якубович В. А. Об одном классе адаптивных систем и о результа-
тах моделирования па ЭВМ процесса их самообучения Ц Механиз-
мы и принципы целенаправленного поведения.— М.: Наука, 1974,—
С. 50—78.
11.22. Гусев С. В., Беленков В. Д., Зотов 10. К., Ру женский В. Я., Ти-
мофеев А. В., Фролов В. М., Якубович В. А. Адаптивная система
управления автономным подвижным роботом Ц Изв. АН СССР.
Техн, кибернетика.— 1978.— № 6.— С. 52—63.
11.23. Гусев С. В., Якубович В. А. Алгоритм адаптивного управления ро-
ботом-манипулятором Ц АиТ,—1980,—№ 9.— С. 101—111.
11.24. Кулинич А. С., Пенев Г. Д. Параметрическая оптимизация уравне-
ния движения многозвенных систем и алгоритмы адаптивного уп-
равления Ц АиТ.— 1978.— .№ 12.— С. 104—116.
11.25. Лачинов В. М., Самарский В. Г., Тимофеев А. В., Якубович В. А.
Адаптивное управление манипулятором с шаговыми приводами Ц
Робототехника.— Л.: ЛИИ, 1976.— С. 66—74.
11.26. Тимофеев А. В. Принципы и алгоритмы построения адаптивных
систем управления роботами Ц Робототехника.— Л.: ЛИИ, 1977.—
С. 35—43.
11.27. Тимофеев А. В. Построение адаптивных систем управления про-
граммным движением.— Л.: Энергия, 1980.
41.28. Тимофеев А. В. Построение программных движений и управление
роботом-манипулятором с учетом его кинематической избыточно-
сти и динамики Ц Автоматика.— 1976.— № 1.— С. 71—81.
11.29. Тимофеев А. В. Адаптивное управление робототехническими систе-
мами па базе микропроцессоров и микроЭВМ Ц Системы управле-
ния роботов на базе микропроцессоров/Под род. И. М. Макарова и
Е. И. Попова.— М.: Наука, 1983.— С. 42—57.
41.30. Тимофеев А. В., Якубович В. А. Адаптивное управление программ-
пыл движением робота-манипулятора Ц Вопросы кибернетики.
Адаптивные системы,— М.: Науч, совет АН СССР по комплекс,
пробл. «Кибернетика», 1976.— С. 170—174.
11.31. Тимофеев А. В., Экало 10. В. Устойчивость и стабилизация про-
граммных движений робота-манипулятора Ц АиТ.— 1976.— № 10.—
С. 148-156.
11.32. Тимофеев А. В. Управление роботами.— Л.: Изд-во ЛГУ, 1986.
11.33. Аксенов Г. А., Брейтман В. М., Зак А. В., Любачевский Б. Д., Пе-
нсе Г. Д„ Перлин Б. А. Адаптивное управление процессом полиме-
ризации в производстве синтетического каучука // Вопросы кибер-
нетики. Адаптивные системы.— М.: Науч, совет. АН СССР но ком-
плекс. пробл. «Кибернетика», 1974.— С. 196—203.
11.34. Зильбере А. Г., Любачевский Б. Д., Смольников Л. П. Алгоритм
адаптивного управления вентильными преобразователями перемен-
ного тока Ц Вопросы кибернетики. Адаптивные системы,— М.: На-
уч. совет АП СССР по комплекс, пробл. «Кибернетика», 1974.—
С. 207—212.
11.35. Дождев В. П., Любачевский Б. Д., Перлин Б. А., Соколов Б. М.
Адаптивное управление иолимеризациопным реактором Ц Приборы
и системы упр.— 1977.— 2.— С. 685—707.
К г л а в е 12
12.1. Энциклопедия кибернетики. Т. 2/Под ред. В. М. Глушкова.— Ки-
ев: Укр. сов. энциклопедия, 1975.
12.2. Казакевич В. В. Об экстремальном регулировании Ц Автоматиче-
ское управление и вычислительная техника. Вып. 6.— М.: Маши-
ностроение, 1964.— С. 7-—53.
12.3. Кунцевич В. М. Системы экстремального управления.— Киев: Тех-
ника, 1961.
12.4. Красовский А. А. Динамика непрерывных самонастраивающихся
систем.— М.: Физматгиз, 1963.
12.5. Растригин Л. А. Системы экстремального регулирования.— М.: На-
ука, 1974.
12.6. Казакевич В. В., Родов А. Б. Системы автоматической оптимиза-
ции.— М.: Энергия, 1977.
12.7. Казакевич В. В. Об экстремальном регулировании инерционных
объектов Ц ДАН СССР.— i960.— Т. 133, № 4.— С. 756—759.
12.8. Казакевич В. В. Об уменьшении влияния инерционности при экст-
ремальном регулировании объектов я-го порядка Ц ДАН СССР.—
I960.— Т. 133, К» 5,— С. 1041—1044.
12.9. Казакевич В. В. О процессе экстремального регулирования инер-
ционных объектов при наличии возмущений [[ ДАН СССР.—1959.—
Т. 126, № 3,—С. 517—520.
12.10. Красовский А. А. Принципы поиска и динамика непрерывных си-
стем экстремального регулирования Ц Автоматическое управление
и вычислительная техника. Вып. 4.—М.: Машиностроение, 1961.—
С. 5—49.
12.11. Красовский А. А. Оптимальные методы поиска в непрерывных п
импульсных системах экстремального регулирования Ц Самона-
страивающиеся автоматические системы: Тр. междупар. симпози-
ума ИФАК.— М.: Наука, 1964.— С. 79—92.
12.12. Моросанов П. С. Релейные экстремальные системы.—М.: Наука,
1964. _
12.13. Юркевич А. П. О процессах экстремального регулирования с ди-
намическим преобразованием и запоминанием выходного сигнала
при наличии возмущений Ц ДАН СССР.— 1960.— Т. 133, №6.—
С. 1307—1310.
12.14. Либерзон Л. М., Родов А. Б. Системы экстремального регулирова-
ния.— М.: Энергия, 1965.
К г л а в с 13
13.1. Медведев Г. А., Тарасенко В. П. Вероятностные методы исследова-
ния экстремальных систем.— М.: Наука, 1967.
13.2. Белоглазое И. II., Тарасенко В. 11. Корреляционпо-экстремалышо
системы.— М.: Сов. радио, 1974.
13.3. Михлин Б. 3., Селезнев В. II., Селезнев А, В. Геомагнитная нави-
гация.— М.: Машиностроение, 1976.
13.4. Алексеев В. И., Кориков А. М., Полонников Р. И., Тарасенко В. П.
.Экстремальная радионавигация.— М.: Наука, 1978.
13.5. Красовский А. А., Белоглазов И. II., Чигин Г. П. Теория корреля-
ционно-экстремальных навигационных систем.— М.: Наука, 1979.
13.6. Баклицкий В. К., Юрьев А. II. Корреляционно-экстремальные ме-
тоды навигации.— М.: Радио и связь, 1982.
13.7. Орлов В. М. и др. Применение корреляционных методов в атмо-
сферной оптикс/Под ред. В. Е. Зуева.— Новосибирск; Наука, Сиб.
отдел., 1983.
13.8. Белоглазов И. II., Джанджагава Г. И., Чигин Г. II. Основы навига-
ции но геофизическим иолям/Под ред. Л. Л. Красовского.— М.: Па-
ука. 1985.
13.9. Павлов Ю. II., Селезнев А. В., Толстоусов Г. II. Геоипформациои-
пые системы.— М.: Машиностроение, 1978.
13.10. Белоглазов II. Н., Кориков А. М., Сырямкин В. II. Корреляционно-
экстремальные системы очувствления роботов.— Томск: ТГУ,
1986.
13.11. Баклицкий В. К., Бочкарев А. М., Мусьякое М. П. Методы фильт-
рации пространственно-временных сигналов.— М.: Радио и связь,
1986.
13.12. Богданов К. М., Шихер В. II.. Яновский К. А. и др. Оптико-струк-
турный машинный анализ изображений.— М.: Машиностроение,
1984.
13.13. Корреляцпоппо-экстрсмальныс системы управления: Докл. I Все-
союз. конф, по корреляционно-экстрем. системам.— Томск: ТГУ,
1979.
13.14. Статистические свойства микроструктур: Сб. докл. I Всесоюз.
конф.— М.: ОНТИ Микробиопром, 1978.
13.15. Тр. науч.-техн, конференций по информационной акустике.— М.:
АП нм. И. И. Андреева, 1976; 1977; 1978; 1980; 1981; 1982; 1984.
13.16. Тр. XI Всесоюз. школы-семипара по статистической гидроакусти-
ке— Новосибирск: ИМ СО АП СССР, 1980.
13.17. Козубовский С. Ф. Корреляционные экстремальные системы: Спра-
вочник.— Киев: Паукова думка, 1973.
13.18. Белоглазов И. 11., Вершинский А. В. Корреляционно-экстремаль-
ные и беснлатформепиые системы навигации КЛА Ц Исследова-
ние космического пространства. Т. 3.— М.; ВИНИТИ, 1972.—
С. 155—194.
13.19. Боркус RI. К., Черный А. Е. Корреляционные измерители путевой
скорости и угла сноса летательных аппаратов.— М.: Сов. радио,
1973.
13.20. Боднер В. А., Туваев В. А. Инерциальпо-корреляцпоппая система
для определения угловых координат ИСЗ Ц Косм, исследования.—
1967,—Т. V, № 5,—С. 733—745.
13.21. Баклицкий В. К. Корреляционно-экстремальное пеленгование про-
тяженных и точечных источников электромагнитных колебаний Ц
Изв. вузов. СССР. Радиоэлектроника.— 1979.— Т. 22, № 3.— С. 41—
45.
13.22. Чигин Г. П. Моделирование оптимальной корреляционно-экстре-
мальной системы Ц Изв. АП СССР. Техн, кибернетика.—1978.—
А» 2 — С. 182—192.
13.23. Бочкарев А. М. Корреляциоппо-экстрсмальпыо системы на-
вигации Ц Зарубеж. радиоэлектроника.— 1981.— № 9.— С. 28—
53.
13.24. Ржевкин В. А. Автономная навигация по картам местности // За-
рубеж. радиоэлектроника.— 1981,— № 10.— С. 3—28.
13.25. Гурьев И. С. Дифференциально-корреляционный принцип построе-
ния магнитометрических систем навигации Ц Корреляционно-экст-
ремальные системы (мат. обеспечение). Вып. 6.— Томск: ТГУ,
1981,—С. 57—65.
13.26. Тарасенко В. П. Экстремальная система управления движением
объекта по заданному курсу Ц Тр. III Всесоюз. совещания по ав-
томат. управлению (техн, кибернетика).— М.: Паука, 1967.—
С. 270—277.
13.27. Тарасенко В. П., Раводин О. М. Корреляционно-экстремальный ко-
ординатор для речных и морских судов Ц Поиск экстремума.—
Томск: ТГУ, 1969 —С. 214—225.
13.28. Ангелов М. II. и др. Корреляционно-экстремальная система опреде-
ления координат морского или речного судна по радиолокацион-
ным изображениям берегов Ц Корреляционно-экстремальные си-
стемы обработки информации и управления.— Томск: ТГУ, 1975.—
С. 131—143.
13.29. Алексеев К. В., Барков В. В., нелоглазов И. II., Тарасенко В. П.
Устройство для распознавания образов: Автор, свид. № 643918 с
приоритетом от 22.07.76.— Бголл. изобр.— 1979.— № 3.
13.30. Белоглазов II. II. Исследование и разработка оптического корре-
лятора для автоматизации производственных процессов: Дис.,.
канд. техн. наук.— М., 1980.
13.31. Белоглазов II. II. О выборе оптимальных параметров оптического
коррелятора Ц Корреляционно-экстремальные системы управле-
ния.— Томск: ТГУ, 1979.— С. 86—97.
13.32. Ангелов М. L., Сырямкин В. И. Телевизионное корреляционно-экст-
ремальное сенсорное устройство для промышленных роботов Ц
Корреляционно-экстремальные системы управления,— Томск: ТГУ,
1979.— С. 208—212.
13.33. Полонников Р. И., Николаев В. Д. Задача навигации антропоморф-
ных аппаратов Ц Системы управления. Вып. 2.— Томск: ТГУ,
1977.— С. 4-19.
13.34. Резник В. Г. Вероятность распознавания транспортным роботом
направления движения с использованием КЭС! Ц Корре ля циоппо-
экстремальпые системы управления,— Томск: ТГУ, 1979.— С. 203—
207.
13.35. Ангелов М. П., Белоглазов Н. II., Кориков А. М., Сырямкин В. И.
Вопросы применения корреляционно-экстремального сенсорного
устройства для промышленных роботов Ц Системы управления и
их элементы.— Томск: ТГУ, 1980.— С. 94—106.
13.36. Кориков А. М., Сырямкин В. И., Ангелов М. П. Исследование кор-
реляциоппо-экстремалыюго сенсорного устройства для промыш-
ленных роботов Ц Корреляционно-экстремальные системы управ-
ления. Вып. 5,- Томск: ТГУ, 1980.- С. 218-229.
13.37. Блюмин С. А., Кузнецов Л. А. Применение КЭС в АСУ ТП непре-
рывной прокатки Ц Корреляционно-экстремальные системы управ-
ления.— Томск: ТГУ, 1978,— С. 218 219.
13.38. Алексеев К. Б., Белоглазов II. II. Автоматизация процесса разбо-
' ра неориентированных деталей из бункера: Обзор.— М.: НИИМАШ,
1984.
13.39. Афримгон А. Ф. Корреляциоппо-экстремальпая система поиска и
сортировкп изделий в процессе сборочного производства Ц Корре-
ляционно-экстремальпые системы управления. Томск. 1ГУ,
1979.-С. 213-217.
13.40. Алексеев />'. Б., Белоглазов II. II., Белоглазов II. II. Оптическое уст-
ройство для автоматического распознавания микроструктур мате-
риалов: Автор, свид. Л" 548824 с приоритетом от 25.07.75.
13.41. Ильинский В. М. Бесконтактное измерение расходов.— М.: Энер-
гия, 1970.
13.42. Монахов В. И. Измерение расхода и количества жидкости, газа и
пара.— М.: Госэпергоиздат, 1962.
13.43. Копман В. А., Осипов В. Г. Применение принципов экстремально-
го управления в АСУ ТП некоторых нефтехимических произ-
водств Ц Корреляционно-экстремальные системы управления.—
Томск: ТГУ, 1978.— С. 288—291.
13.44. Лфримзон А. Ф., Тарасенко В. П. Применение корреляционно-экст-
ремального метода автоматической настройки радиоаппаратуры Ц
Поиск экстремума.— Томск: ТГУ, 1969.— С. 103—112.
13.45. Богданов И. М., Яновский К. Л. Бионика и радиоэлектроника.—
М.: Знание, 1975.
13.46. Богданов К. М. Применение методов кибернетики в гистологии Ц
Тез. 7-го Всесоюз. съезда анатомов, гистологов, эмбриологов.— Тби-
лиси; Мецниереба, 1966.— С. 26—32.
13.47. Побожий С. Б., Шлотгауэр В. А. Использование спектральных ха-
рактеристик электрокардиограмм для автоматической диагностики
заболеваний сердца ]] Корреляционно-экстремальные системы уп-
равления,— Томск: ТГУ, 1978.— С. 236—240.
13.48. Юрга II. И. Корреляционные методы определения скорости ветра
в атмосфере Ц Корреляционно-экстремальные системы обработки
информации и управления. Вып. 1.— Томск: ТГУ, 1975.— С. 253—
268.
13.49. Березин В. ТО., Полищук Ю. М., Юрга II. И. Анализ изображений
в корреляционно-экстремальных мониторинговых системах па ос-
нове преобразования Уолша Ц Корреляционно-экстремальные си-
стемы управления.— Томск: ТГУ, 1979.— С. 230—235.
13.50. Ольшевский В. В. Статистические свойства морской ревербера-
ции,—М.: Паука, 1965.
13.51. Ольшевский В. В., Панфилов В. А., Пинчук А. В. Корреляционные
характеристики океанской реверберации (машинное моделирова-
ние) Ц Корреляционно-экстремальные системы управления.—>
Томск: ТГУ, 1979.—С. 180—187.
13.52. Ольшевский В. В. Статистические методы в гидролокации (моде-
ли, алгоритмы, решения).— JI.: Судостроение, 1983.
13.53. Белинский А. II., Ярославский J1. П. Автоматический выбор опор-
ных объектов на аэрокосмических изображениях Ц Корреляцион-
но-экстремальные системы управления.— Томск: ТГУ, 1979.—
С. 241—244.
13.54. Космическая фотосъемка и геологические исследования.— Л.: Нед-
ра, 1975.
13.55. Телеков,ец В. А. Корреляционно-экстремальная система обработки
сигналов сканирования Ц Корреляционно-экстремальные системы.
Вын. 6.—Томск: ТГУ, 1981.—С. 73—78.
13.56. Сергеев Г. Л., Янутш Д. А. Статистические методы исследования
природных объектов.— Л.: Гидрометеоиздат, 1973.
13.57. Иванченков В. П., Потапов О. Л., Кувшинов Л. М. Оптические и
оптико-электронные устройства для анализа сейсмических мате-
риалов Ц Разведочная геофизика. Вып. 73.— М.: Недра, 1976.—
С. 8-14.
13.58. Нэш Р. А., Джордан С. К. Статистическая геодезия Ц ТИИЭР.—>
1978,— Т. 66, № 5,— С. 5—26.
13.59. Грушинский II. П., Сажина II. Б. Гравитационная разведка.— М.:
Недра, 1972.
13.60. Дладкий К. В. Гравиразведка и магниторазведка.— М.: Недра, 1967.
13.61. Луговенко В. И. Статистический анализ аномального магнитного
поля территории СССР.— М.: Наука, 1974.
13.62. Луговенко В. II., Сорока А. И. Статистические характеристики ано-
мальных гравитационных и магнитных нолей // Геомагнетизм и
аэрономия.—1970.— Т. X, № 3.— С. 513—518.
13.63. Стратонович Р. Л. Условные марковские процессы и их приведе-
ние к теории оптимального управления.— М.: Изд-во МГУ, 1966.
13.64. Баклицкий В. В. Применение метода нелинейной фильтрации для
синтеза корреляционно-экстремальных систем навигации Ц Кор-
реляционно-экстремальные системы управления.— Томск: ТГУ,
1979,— С. 292—296.
13.65. Красовский А. А. Оптимальная фильтрация в теории корреляцион-
но-экстремальных систем Ц Изв. АН СССР. Техн, кибернетика.—
197(5,—№ 3,—С. 155—160.
13.66. Аоки М. Оптимизация стохастических систем.— М.: Наука, 1971.
13.67. Хаг Г., Шапиро С. Статистические модели в инженерных задачах.—
М.: Мир, 1969.
1.3. 68. Солодовников В. В. Введение в статистическую динамику систем
автоматического управления.— М.; Л.: Гостехиздат, 1952.
13.69. Бендат Дж. Основы теории случайных шумов п ее приложения.—
М.: Наука, 1965.
13.70. Белоглазов И. II. Нелинейные эффекты в экстремальных корреля-
ционных системах Ц Поиск экстремума.— Томск: ТГУ, 1979.—
С. 161—189.
13.71. Красовский II. II. Теория управления движением.— М.: Наука, 1971.
13.72. Белоглазов И. Н. Оптимальные алгоритмы и достижимая точност ь
корреляционно-экстремальных систем Ц Научно-методические ма-
териалы по исследованию алгоритмов корреляционно-экстремаль-
ных систем.— М.: ВВИА им. Н. Е. Жуковского, 1975.— С. 50—73.
13.73. Амиантов И. II. Избранные вопросы статистической теории свя-
зи.— М.: Сов. радио, 1971.
13.74. Пугачев В. С. Теория случайных функций и ее примените к за-
дачам автоматического управления.— М.: Гостехиздат, 1957.
13.75. Белоглазов II. В. Рекуррентно-поисковые алгоритмы оценивания Ц
ДАН СССР.—1977,—Т. 236, № 2 —С. 292—295.
13.76. Дмитриев С. П., Шимелевич Л. И. Обобщенный фильтр Калмапа с
многократной линеаризацией и его применение в задаче навига
ции по геофизическим полям Ц АиТ.— 1978,-—№ 4.— С. 50—55.
13.77. Дашевский М. Л., Липцер Р. Ш. Применение условных семиин ва-
риантов в задачах нелинейной фильтрации марковских процес-
сов Ц АпТ.— 1967.— № 6.-—С. 63—74.
13.78. Tazwlnsky А. II. Stochastic Processes and Filtering Theory.—New
York: Academic Press, 1970.
13.79. Хазен Э. M. Методы оптимальных статистических решений и за-
дачи оптимального управления.— М.: Сов. радио, 1968.
13.80. Красовский А. А., Поспелов Г. С. Основы автоматики и техниче-
ской кибернетики,— М ; Л.: Госэпергоиздат, 1962.
К г л а в с 14
14.1. Петров Б. II., Рутковский В. 10. Двукратная инвариантность си-
стем автоматического управления Ц ДАН СССР,— 1965.—Т. 161,
№ 4,— С. 789—790. /
14.2. Методы теории чувствительности в автоматическом управлении/
Под ред. Е. И. Розепвассера и Р. М. Юсупова.—М.: Энергия, 1971.
14.3. Розенвассер Е. II., Юсупов Р. М. Чувствительность систем управ-
ления.—М.: Наука, 1981. ..
14.4. Андронов А. А., Витт А. А., Хайкин С. d. 1серия колебании,—М.:
Физматгиз, 1959.
14.5. Понтрягин Л. С. Обыкновенные дифференциальные уравнения,—
М.: Фпзматгиз, 1962.
14.6. Розенвассер Е. II., Юсупов Р. М. Чувствительность систем автома-
тического управления.— М.: Энергия, 1969.
14.7. Фихтенгольц Г. М. Курс дифференциального и интегрального исчи-
сления. Т. 1.— М.: Наука, 1966.
14.8. Гарднер Л1. Ф., Бернс Дж. Л. Переходные процессы в линейных си-
стемах.— М.: Гостехиздат, 1951.
14.9. Уилкинсон Дж. У. Алгебраическая проблема собственных значе-
ний.— М.: Наука, 1970.
14.10. Разаков И. Е., Доступов Б. Г. Статистическая динамика нелиней-
ных автоматических систем.— М.: Фпзматгиз, 1962.
14.11. Чернецкий Б. II. Анализ точности нелинейных систем управле-
ния.— М.: Машиностроение, 1968.
14.12. Тихонов Л. Н., Арсенин В. Я. Методы решения некорректных за-
дач.— М.: Наука, 1974.
14.13. Козлов 10. М., Юсупов Р. М. Беспоисковые самонастраивающиеся
системы.— М.: Наука, 1969.
К г л а в е 15
15.1. Растригин Л. А. Системы экстремального управления.— М.: Наука,
1974.
15.2. Растригин Л. А., Рипа К. К., Тарасенко Г. С. Адаптация случайно-
го поиска.— Рига: Зпнатне, 1978.
15.3. Корбут А. А., Финкельштейн Ю. Ю. Дискретное программирова-
ние,— М.: Наука, 1969.
15.4. Рыбников К. А. Введение в комбинаторный анализ,— М.: Изд-во
МГУ, 1972.
15.5. Лихтейнштейн В. Е. Дискретность и случайность в экономико-ма-
тематических задачах.— М.: Наука, 1973.
15.6. Петерсен И. Статистическая оптимизация посредством сглажива-
ния Ц Изв. АН СССР. Техп. кибернетика.— 1969.— № 2.— С. 36—
44.
15.7. Катковник В. Я. Пепараметрическая идентификация и сглажива-
ние данных: метод локальной аппроксимации.— М.: Наука, 1985.
15.8. Цыпкин Я. 3. Сглаженные рандомизированные функционалы в те-
ории адаптации и обучения Ц АиТ.— 1971.— № 8.— С. 29—50.
15.9. Калинников Ю. С., Лифшиц А. Л. О некоторых модификациях ал-
горитма глобального статистического поиска по направляющей сфе-
ре Ц Задачи статистической оптимизации,—Рига: Зипатне, 1971.—
С. 197—202.
15.10. Цыпкин Я. 3. Адаптация и обучение в автоматических системах.—
М.: Паука, 1968.
15.11. Вазан М. Стохастическая аппроксимация.— М.: Мир, 1972.
15.12. Растригин Л. А. Адаптация сложных систем.— Рига: Зипатпе, 1931.
15.13. Методы исследования нелинейных систем автоматического управ-
ления.— М.: Наука, 1975.
15.14. Букатова И. Л. Эволюционное моделирование и его приложения,—
М.: Наука, 1979.
15.15. Дсшбраускас А. П. Симплексный поиск.— М.: Энергия, 1979.
К главе 16
16.1. Машинное проектирование систем автоматического управления/
Под ред. В. А. Букатова.— Л.: Судостроение. 1978.
16.2. Поренков И. П. Введение в автоматизированное проектирование.—
М.: Высшая школа, 1980.
16.3. Деревицкий Д. II., Фрадков А. Л. Прикладная теория дискретных
адаптивных систем управления.— М.: Наука, 1981.
16.4. Моисеев II. II. Математические задачи системного анализа.— М.:
Наука, 1981.
16.5. Комплекс общеотраслевых руководящих материалов по созданию
АСУ и САЦР/Гос. комитет СССР но науке и технике.— М.: Стати-
стика, 1980.
16.6. ГОСТ 22487-77. Проектирование автоматизированное. Термины и
определения.— М.: Изд-во стандартов, 1977.
16.7. Александров А. Г. О принципах построения системы анализа ди-
намики и синтеза устройств управления (САПР САУ) Ц Аналити-
ческие методы синтеза регуляторов: Мсжвуз. науч, сб,—Саратов:
СПИ, 1982,—С. 123—136.
16.8. Абрамов В. Б., Брябрин В. М., Пховелишвили А. В., Сенин Г. В.,
Элигашвили Л. .1. Дилос — диалоговая система для взаимодейст-
вия с ЭВМ па естественном языке.— М.: ВЦ АН СССР, 1979.
16.9. Мелса Дж. Л., Джонс Ст. К. Программы в помощь изучающим те-
орию линейных систем управления.— М.: Машиностроение, 1981.
16.10. Барковский В. В., Захаров В. II., Шаталов А. С. Методы синтеза
систем управления (методы, основанные па применении цифровых
вычислительных машин).— М.: Машиностроение, 1969.
16.11. Белова Д А., Кузин В Е. Применение ЭВМ для анализа и синте-
за автоматических систем управления.— М.: Энергия, 1979.
16.12. Чхартишвили Г. С., Чхартишвили Л. П. Машинный анализ и син-
тез линейных систем: Методич. указания по курсу «Машинное про-
ектирование систем автоматического управления».— М.: МЭИ, 1978.
16.13. Чхартишвили Г. С., Чхартишвили Л. П. Машинный анализ и син-
тез нелинейных систем: Методич. указания по курсу «Машинное
проектирование систем автоматического управления».— М.: МЭИ,
1978.
16.14. Таблицы и математическое обеспечение спектрального метода тео-
рии автоматического управлепия/Под ред. В. В. Семенова.— М.:
МВТУ им. Н. Э. Баумана, 1974.
16.15. Александров А. Г., Небалуев II. А., Асмолова Л. С., Крупеника Л. Я.
Математическое обеспечение синтеза и анализа передаточных мат-
риц регуляторов многомерных линейных систем автоматического
регулирования (Комплексы программ «Гамма-1», «Гамма-2» для
ЭЦВМ тина М-220).— Саратов: СПИ, 1975
16.16. Александров А. Г., Небалуев II. А., Асмолова Л. С., Крупеника Л. Я.
Математическое обеспечение синтеза и анализа дискретных регу-
ляторов многомерных систем (Комплексы программ «Гамма-3»,
«Гамма-4» для ЭЦВМ типа М-220).— Саратов: СПИ, 1976.
16.17. Диалоговая система проектирования систем автоматического уп-
равления ДПСНАС, версия 2.— М.: МАИ, 1981.
1618. Андриевский. Б. В., Деревицкий Д II., Спиридонов А. А., Ут-
кии В. II., Фрадков А. Л. Принципы построения и входной язык
САПР адаптивных систем управления Ц Вопросы кибернетики. Ак-
туальные задачи адаптивного управления.— М.: Науч, совет. АП
СССР по комплекс, пробл. «Кибернетика», 1982.— С. 31—49.
16.19. Александров .1. Г. Синтез регуляторов многомерных систем.—
М.: Машиностроение, 1986.
16.20. Иодчукаев В. /1., Ильин С. А., Петрова Т. А. Диалоговая система
моделирования нелинейных структур — МОНСТР Ц Автоматизи-
рованное проектирование систем управления. —-М.: МВТУ
мм. П. Э. Баумана, 1983.— С. 44—52.
16.21. Ойт М., Яааксоо Ю. Диалоговая система машинного проектирова-
ния многомерных регуляторов Ц Автоматизация проектирования
систем управления. Вып. 4,—М.: Финансы и статистика, 1982,—
С. 145-156.
орри la. л., плимачев с. 1 . некоторые проолсмы автоматизации
проектирования структур систем управления непрерывными объек-
тами // АиТ.— 1982.— .№ 3.— С. 10—18.
16.23. Селенов В. В. Принципы формирования и фрагменты базы знаний
теории управления Ц Общее математическое обеспечение систем
автоматизированного проектирования,— М.: МАИ, 1981.— С. 3—17.
16.24. Солодовников В. В., Сивцов В. II., Чулин II. А. Пакетная система
для автоматизированного синтеза частотным методом Ц Автомати-
зация проектирования систем управления. Вып. 4.— М.: Финансы
и статистика, 1982.— С. 62—74.
16.25. Степанов М. Ф. Решатель задач системы автоматизированного син-
теза и анализа систем автоматического управления Ц Аналитиче-
ские методы синтеза регуляторов: Мсжвуз. науч. сб.— Саратов:
СПИ, 1984,—С. 116—129.
16.26. Кузин Л. Т. Основы кибернетики. Т. 2.— М.: Энергия, 1979.
16.27. Кахро М. И., Калья А. II., Тыугу 3. X Инструментальная система
программирования ЕС ЭВМ (Приз).— М.: Финансы и статистика,
1981.
16.28. Ефимов Е. И. Решатели интеллектуальных задач.— М.: Паука, 1982.
16.29. Попов Э. В. Общение с ЭВМ на естественном языке.— М.: Паука,
1982.
К п р и л о ж е п п ю
П.1. Брайсон А., Хо Ю-ши. Прикладная теория оптимального управле-
ния.— М.: Мир, 1972.
П.2. Квакернаак X., Сиван Р. Линейные оптимальные системы управле-
пня.— М.: Мир, 1977.
П.З. Чаки Ф. Современная теория управления.— М.: Мир, 1975.
11.4. Фильтрация п стохастическое управление в динамических спсте-
мах/Под ред. К. Т. Леондеса.— М.: Мир, 1980.
П.5. Ройтенберг Я. II. Автоматическое управление.— М.: Наука, 1978.
П.6. Габасов Р., Кириллова Ф. М. Качественная теория оптимальных про-
цессов.— М.: Наука, 1974.
П.7. Сейдж 3. П., Мелса Д.ж. Л. Идентификация систем управления,—
М.: Наука, 1974.
СПИСОК АББРЕВИАТУР
ABAI — аналоговая вычислительная
машина 426
АД — адаптация 640
ЛИТО — алгоритм идентификации,
основанный на теории оценивания
процессов 283, 284, 286—291, 471,
473, 474
АКОР — аналитическое конструиро-
вание оптимальных регуляторов 81,
321, 366, 373—377, 379, 382, 383, 387,
388, 417, 418, 420
АОСАУ — адаптнгшая оптимальная
система автоматического управле-
ния 469—474, 476
АПН — а да птивная параметричес кая
। lacTpoli ка 263—269
А1? — адаптивный регулятор 78, 79
АСП — адаптивная система с иденти-
фикатором 492, 493
АСУ TI1 — автоматизированная систе-
ма управления технологическим
процессом 318, 477, 552
АЦП — аналого-цифровой преобразо-
ватель 207, 249, 250
БЛА — блок алгоритма адаптации
485, 489
Б АП АМ — беспоисковый алгоритм
идентификации с адаптивной мо-
делью 247—253, 255—261, 267, 271 —
276, 281
БАС — бсспоисковая адаптивная си-
стема 78—81, 467, 469, 480—482, 484,
486, 488, 490, 492—495
БИК — блок настройки компенсатора
493
ВНР—блок настройки регулятора
493, 494
БИК — блок перенастраиваемого ко-
эффициента 485
БПФ — быстрое преобразование
Фурье 241
БСЫС — беспоисковая самонастраива-
ющаяся система 488
БЦВМ — бортовая цифровая вычисли-
тельная машина 406
В — в ы «I и сл и тел ь 485
ВК — внутренний контур 497—499
В У — вычислительное устройство 543
Г — генератор 539
Д — дифференциатор 531
ДИСПАС — диалоговая система про-
ектирования автоматических систем
664, 665
ДУ — делительное устройство 531
ИД — идентификатор 493
ПМ — индексированное множество
409, 410/исполнительный механизм
530—532, 534, 535, 545
ИФАК — Международная федерация
по автоматическому управлению
(IFAC) 13
ИЭ—импульсный элемент 532
К — компенсатор 493, 494
КА — контур адаптации 493
КЗ — корректирующее звено 485
КИВ — канал прохождения возмуще-
ний 79, 493, 495, 496
КСА — конечно сходящийся алгоритм
504—509, 513, 514, 518, 521
КТаУ — классическая теория автома-
^9£ нинов'яМпА оиояэоыы,
КУ — корректирующее устройство
489, 490
КЭГС — корреляционно-экстремаль-
ная геофизическая система 551
КЭПС — корреляционно-экстремаль-
ная навигационная система 551
КЭС — корреляционно-экстремальная
система 551—556, 560, 564, 566—
571, 573, 576—579, 581, 583, 593.
599—602
КЭТС — корреляционно-экстремаль-
ная технологическая система 551
ЛА — летательный аппарат 557
ЛАЧХ — логарифмическая амплитуд-
ная частотная характеристика 41,
234
ЛУУ — локальное управляющее уст-
ройство 421
ЛФЧХ — логарифмическая фазовая
частотная характеристика 41
ЛХ — логарифмическая характеристи-
ка 41, 42
М — модель 489, 490
МАЕ — максимум апостериорной ве-
роятности 166, 168—170, 190, 196,
212
М3 — множительное звено 533, 539
ММО — математическая модель объ-
екта 660, 661
МНК — метод наименьших квадратов
151, 169, 170, 246, 247, 296, 298—302,
304, 306. 526, 543, 544, 548
МО — математическое ожидание 326,
560, 562, 564
МП — максимум правдоподобия 168,
169, 190, 196
МПН — мультипликативная иарамет-
1 рическая настройка 263, 264, 267,
269
МСС — марковский процесс со слу-
чайной структурой 445
ЗУ — запоминающее устройство 530,
532, 543
НМ — настраиваемая модель 488
ПС — навигационная система 557
О — объект 79, 485, 489, 531, 533, 542
ОК — основной контур 78—82, 84,
86—88, 493—495
ОНО — обобщенный настраиваемый
объект 482—484, 489, 490
ОО — обобщенный объект 78, 79, 495,
496
ОС — операционная система 664
И — преобразователь 249
ПАИАМ — поисковый алгоритм иден-
тификации с адаптивной моделью
274—276, 279—282
ПАС — поисковая адаптивная систе-
ма 467
ПИ-регулятор — пропорционально-ин-
тегральный регулятор 500
ПИД-регулятор — пропорционально-
интсгрально-диффере п i[нальпый ре-
гулятор 80, 81, 85, 87, 88, 494, 500
П-компенсатор — позиционный ком-
пенсатор 496
ПКУ — перенастраиваемое корректи-
рующее устройство 489, 490
ПМ — последовательность Маркова
157, 209—211/программный модуль
662, 663, 665—667
ГШП — программный модуль проце-
дуры 662
Р — регулятор 480, 488, 493, 494
РН — рекуррентное неравенство 506—
510
РПО — рекурреитио- пои сков ое оцени-
вание 593, 594, 596, 597, 599—601
РЦН — рекуррентное целевое нера-
венство 504, 505, 510, 512—514, 517,
520, 522, 525, 526
РЭ — релейный элемент 534
САПР — система автоматизированно-
го проектирования 659, 661—664, 666
САПР АС — система автоматизирован-
ного проектирования адаптивных
систем 665, 666
САР — система автоматического регу-
лирования 480
САУ — система автоматического уп-
равления 318, 367, 469, 477, 479, 480,
604, 618, 637, 638, 640, 659—666
СКО — среднеквадратическое откло-
нение 181, 182, 557
СОИ — система отображения инфор-
мации 318
СПС — система с переменной струк-
турой 364
СР — сигнум-реле 531, 532
ССС — система со случайными изме-
нениями структуры 444—447, 449,
457
СТАУ — современная теория автома-
тического управления 14—17, 222„
310, 311, 314, 318, 321, 365—367, 375,
376, 426, 435, 467—469
СЭР — система экстремального регу-
лирования 527—533, 535, 539—543,
545—549
ТАУ — теория автоматического уп-
равлении 13, 661—664, 666
ТАР — теория автоматического регу-
лирования 13, 15, 16, 365, 366, 435,.
484
ТЗ — техническое задание 659—661
ТСА —тин стохастической аппрокси-
мации 274, 296, 302, 305, 306
У А — устройство адаптации 488
УВД — управление воздушным дви-
жением 315
УИ — устройство идентификации 488
УМО —'условное математическое
ожидание 173, 177, 190, 195, 327, 392,
393
Ф — фильтр 485. 533, 534, 539
ФКБ — фильтр Налмана — Еыоси 173,
186—188, 190, 192, 195, 196, 214, 216.
219—221, 283, 284, 286, 289, 294, 319,
393, 456, 471, 472, 479, 496, 497, 556,.
568, 573, 574, 576, 596, 599, 601, 602,
668
ФОР — Функционал обобщенной рабо-
ты 321—323, 325, 328, 393—396, 399,
401, 403, 405, 408, 415, 416, 421, 424,
42S. 466, 668
ФПК — уравнение Фоккера — План-
ка — Колмогорова 29—31, 400, 446—
44S
ФУ — формирующее устройство 539,
541
ЦВМ — цифрован вычислительная ме-
тина 14, 204, 206, 220, 255, 280, 281,
426, 430, 472, 473, 528
ЦМ— цепь Маркова 157, 207—210
ЦУ — цель управления 502, 514, 517
ЭВМ — электронно-вычислительная
машина 17, 41, 106, 307, 364, 366,
367, 426, 430, 477, 577, 661, 662, 665
ЭМ — эталонная модель 79, 81, 82, 84,
86, 493
ЭПО — элементарная проектная опе-
рация 661—663, 665—667
ЭС — элемент сравнения 530—532
ПОЗ — язык описания задании 663
ЛОО — язык описания объекта 663
ПРЕДМЕТНЫЙКАЗА ЕЛЬ
Автоколебания 90
Адаптируемость 44, 79—88
— полная 79, 84, 87
— слабая 84, 88
— частичная 84, 88
Алгоритм градиента скоростного 273
---статистического 640
— градиентным 273
— идентификации, основанный па
теории оценивания процессов (см.
.АйТО) 283
— — с адаптивной моделью бес по-
исковый (см. БАИАМ) 247
------ — __ .— поисковый (см.
ПАПАМ) 274
— Качмажа 507
— конечно решающий 504
— -— сходящийся (см. КСА) 504
— модального управления 435
— модифицированный 428, 430
— операционный 272, 405, 411
— оценивания 173, 581
— — комбинированный 205
• — — поисковый 202
---субонтимальиый 124
— поиска симплексный 653
------ случайного 638
— «полоска» 5ОС
— л 291, 295, 474
— рекуррентный 212, 296, 299
— робастный 171
— с аналитическим решением 428,
434
— с матрицей чувствительности 428,
430
— с матричным уравнением Ляпуно-
ва 405
— с обучением 363
— с оптимальной настройкой модели
— с пониженной чувствительностью
к ра спред еле пи jo шума 171
— с прогнозирующей моделью 405,
426, 474
— с синхронным детектированием
276, 428, 432, 474, 533, 539, 548
— с численным дифференцированием
428, 429
— тина стохастической аппроксима-
ции (см. ТСА) 274. 301
— эвристический 252
Аппроксимация 175
— кусочно-квадратичная 184
— кусочно-линейная 184—186
— стохастическая 198
Астатизм 107, 108
Аттрактор странный 149
Быстродействие оптимальное 357
Вариация критерия качества 331
—- траектории 340
Варьирование управления игольчатое
348
Вектор наблюдения 155, 165, 473
— невязки 187, 204. 218
— параметров 55, 470, 310, 501
------ существенный 503
Вектор состояния 21, 470, 501
— — бесконечномерный 21
— — расширенный 471,
Вероятность неправильного решения
538
Воздействие возмущающее 153
Время дискретное 21, 227, 249, 251,
281, 384. 393, 396, 406, 424, 49й
— относительное 28
— ускоренное 429
Гамильтониан
Гипотеза 577
Годограф 123,
Градиент 198,
Граф 637
330, 415
128, 130, 134, 142
218, 531
Движение асимптотически устойчи-
вое 94. 95
— базовое (основное) 605
— дополнительное 606
— идентифицирующее 58
— программное 13, 161
Декомпозиция 101
Декорреляция данных 299
Диаграмма Вышнеградского 106
Дискретизация структуры 655
Доопределение 25, 26, 91
Дополнение алгебраическое 115
Достижимость 62
Дрейф 534
Задача Больца 319, 367
— идентификации 226
------ слабая 232
— краевая двухточечная 335
— Лагранжа 319
— линейно-квадратичная 373, 387,
392
— Майера 319
— нетерминальная 404, 405
— присоединенная па минимум 336
— стабилизации 373, 387
— терминальная 404
Запаздывание (задержка) 36
Звено без самовыравпивапия 104
— безынерционное 42
— интегрирующее 109
----с одномерным нелинейным вхо-
дом 112
Зондирование 161
Идентификатор 502
Идентификация 15, 37, 222
— непараметрическая 228, 232
— объекта 223
— параметрическая 15, 229
— процесса 223
— функциональная 514, 519
Идентифицируемость 44, 55—62
Измерение 151
— мгновенное полнокомпоиептнос 45
Измеримость 44
Изображение Лапласа 38
Инвариант чувствительности 623
Инвариантность 113, 483
Инвариантность параметрическая 605
Интеграл стохастический Ито 28
Интенсивность белого шума 29
- - переходов 448
Интервал времени 311
— корреляции 246
— наблюдения 170
— оптимизации 311, 374
---скользящий 374
Информация априорная 47, 172
Класс нелинейностей 121
Колебательность 145
Конструирование аналитическое оп-
тимальных регуляторов (см. АКОР)
.121, 366
Контур компенсации 379 г
— основной 78
Конус достижимости 352
Координата 39
Коэффициент передаточной функции
39
— сектора угловой 134
— чувствительности 606
Кривая Попова 131
— шаблонная разделяющая 139
Критерий абсолютной неустойчивости
127, 132, 138
----устойчивости 122, 127, 133, 150
-------графический 139
— —----квадратичный 132, 422
----— круговой 124, 128
---------внеосевой 138
—• автоколебательности 144
•— Воронова 134
•---упрощенный 136
— Гарбера (отсутствия периодиче-
ских решений) 146
— Гурвица 106
— диссппативности 142
— квадратичный 169, 360
— максимума апостериорной вероят-
ности (см. МАВ) 166
----правдоподобия (см. МП) 168
— Михайлова— Найквиста 122, 132
— наблюдаемости 52
— оптимизации, обеспечивающей по-
мехозащищенность к выбросам 170
---- оценивания 166
— Попова 130, 141
— управляемости 66
— Чо и Нарендры 136
Матрица вероятностей переходов
(стохастическая) 209
— Гесса 175
— Грама 633
— ковариационная ошибок оценива-
ния 174, 177, 187, 190, 219, 569
— Коши 27, 32, 419, 615
•---дискретной во времени системы
33
— коэффициентов ошибок 108
— переходная 27
— — импульсная (весовая) 27, 242
— спектральных плотностей белого
шума (интенсивностей) 29
— фундаментальная 27
— чувствительности 257
— Якоби 49, 108, 176, 193, 606
Метод D-разбиений 106
— динамики средних 561
• — инвариантного погружения 196
• — коммутатора 545
— корневого годографа 106
— корреляционных функций 237
Метод Ляпунова (прямой) 96
— Монте-Карло 649
— наименьших квадратов (см. МПК>
151, 169, 246, 298
— общего параметра 263
— операторный 36
— оценивания бсспоисковый 556
----комбинированный 593
---- поисковый 576
----рСКУррСНТПО-ПОИСКОВЫЙ (см,
РПО) 593
— параметрической .идентификации
прямой 244
— прогонки 343
— рядов 372
— синхронного детектирования 198,
204, 432
— стандартных коэффициентов 435
>— стохастической аппроксимации
(см. ТСА) 274, 301
— сумм произведений 24G
— характеристик 372, 415. 428
------ временных 235
----частотных 233
— частичной линеаризации 630
Метрика 20, 176
Множество 90
— возмущающих воздействий 20
— индексированное (см. ИМ) 409
— невозмущепных движений 92
— состояний конечных 329
------ невозмущенных 92
------ неустойчивое 92
устойчивое асимптотически 92
------- стохастически 92
— управлений 20
Множитель Лагранжа 330
Модель математическая 19. 225
— — феноменологическая 479
— прогнозирующая 471
— чувствительности 608
— эталонная 79
Момент времени конечный 47
------начальный 47
— — текущий 47
— условный 169
Мультивибратор 146
Наблюдаемость 44. 154
— неполная 47, 262
— полная 47, 50
Наблюдатель Люэибергсра 200
Наблюдение 151, 160, 55з
Настройка параметрическая аддитив-
ная 263
— — мультипликативная 263
Невязка 192
Нейтральность 95
Неравенство рекуррентное 506
------ целевое (см. РЦН) 504. 515
Неустойчивость абсолютная 121
•---экспоненциальная 121
— полная 144
Нуль передаточной функции 619
Обеспечение информационное 3G2
Область 90
— ограничении 313
— предельных режимов 313
•— притяжения 92
— сходимости степенного ряда 176
— устойчивости 106
— эксплуатационная 230, 313
?п 96
Объект минимально-фазовый 511
— обобщенный 78
----настраиваемый (см. ОНО) 482
Объект с чистым запаздыванием 405
Ожидание математическое (см. МО)
169
•--условное (см. УМО) 169, 173
Оператор 36, 225, 229, 273
— Гаммерштейиа 42, 242, 297
— задержки 36
— интегральный 160, 235
— Ляпунова 49
— свертки 242
— Урысоиа 42
Операция свертки 235
— элементарная проектирования 661
Оптимизация «в большом» 15
— векторная (многоцелевая) 311
— иерархическая 420
— локальная 312
— параметрическая 317, 638
— структурная 638, 655
— эволюционная 656
Отклик 37
Оценивание 15. 151
— параметров 15, 229, 631
— нолей 159
— циклическое 189
Оценка несмещенная 169
— функции наблюдения 31
Ошибка 151
— неаддитивная 156
— оценивания 170
Параметр объекта малый 541
--- марковский 83
Плоскость фазовая 21, 24
Плотность распределения вероятно-
стей 30, 586
-----апостериорная 31
----- условная 31
Поверхность переключения 358
Подсистема 37
Подход Парето 311
Поиск глобальный 647
Поле поверхностное 159
— пространственное 161
Полюс передаточной функции 619
Последовательность белая гауссов-
ская 209
— Маркова (см. ПМ) 157. 209
Преобразование Лапласа 38, 617
— Фурье 240
---быстрое (см. БПФ) 240
Преобразователь аналого-цифровой
(см. АЦП) 207
— измерительный 366
Приближение гауссовское 175, 178,
454
— функций 151
Принцип двухканаивности 115
— максимума Понтрягина 329
— равных вкладов 199
Прогноз состояния 541
Производная Фреше. 218
Пространство метрическое 19
---функциональное 37, 224
— наблюдений функциональное 230
— сигналов 37
входных 37
выходных 37
— состояний 20. 229
--гильбертово 24
---евклидово 22
---расширенное 42
— фазовое 21
Процесс 26
— идентифицирующий 58
— марковский 43, 154, 445
---дискретный 33, 156, 206
• — случайный внпсровский 28
Процесс случайный гауссовский 30
169
— стохастический 182
Прямая Попова 131, 141
— характеристическая 144
Размытость наблюдения 159
Распределение вероятностей 17
— информации 165, 188
Расстояние между точками (см. мет-
рика) 20, 176
Реакция динамической системы 37
Регулятор адаптивный 78
•— дифференциальный экстремальный
527
Режим квазистациоиариый 277
— скользящий 1)1
Риск байесов 579
Роидомизация 656
Ряд Вольтерра 42
— Тейлора 175
Связность 103
Связь несущественная 384
Сектор 119
•— абсолютной неустойчивости 128,
130
•--устойчивости 128, 130
------расширенный 142
— Воронова 134
— линейной неустойчивости 128
—устойчивости (гурвицев) 130,
Семейство однопараметрических ре-
шений 608
Сигнал поисковый 2-78
Символ Кронекера 307
Синтез на стадии проектирования
366, 401, 416
— совмещенный 366, 405, 426
Система 26
— автоколебательная 144
— автоматического управления (см
САУ) 318, 469
•-- — адаптивная оптимальная
(см. АОСАУ) 469
— адаптивная 198, 513
---бссноисковая (см. БАС) 467
480
------с информацией о характери-
стиках временных 481, 484
— — — — — — — частотных 481,
484
----- — с моделью 481, 488, 492
------ поисковая (см. ПАС) 467
---е идентификатором 492
— вполне наблюдаемая 47, 50
• — градиентная 100
— грубая 171
— детерминированная непрерывная
— динамическая 26
--- автономная (стационарная) 93
---неавтономная (нестационар-
ная) 93
— диссипативная 99, 142
— иерархическая 477
— каноническая Гамильтона 350
— консервативная 99
—- корреляционно-экстремальная (см.
КЭС) 55.
— линеаризованная па бесконечности
143
— линейная 27, 32
— не вполне наблюдаемая 4/, 51
— непрямого адаптивного управле-
ния 494, 498
— отображения информации .ив
Система пассивная 98
— поисковая 527
— прямого адаптивного управления
480
— релейная 117 г
— самонастраивающаяся 480
— с независимой структурой 445
— сопряженная 331
— со случайной структурой (см.
ССС) 444
— со спектральным анализатором
486
— с переменной структурой (см.
СПС) 117
— с переходами распределенными
446
— — — сосредоточенными 446
— стохастическая 28
— физически реализуемая 38
— экстремального регулирования
(см. СЭР) 527
Состояние начальное 121
— певозмущенпое 118
— равновесия 104
— устойчивое 96
— — асимптотически 96
Состоятельность оценок 303
Способ возврата 645
— параллельной настройки 270
— с переходом последовательным
269
-------пошаговым 270
Среднее по интервалу времени 277
Статизм 107
Степень наблюдаемости 50, 52
---непосредственной 48
— неуправляемости 66
Субвектор 103, 111, 113
Субпространство 20, 21
Субсистема 101, 111
Сфера принимаемого решения 639
— сбора информации 639
Схема разностная 372
---Эйлера 32
— структурная 33
— — векторная 35
— систем с дискретным време-
нем 36
Теория автоматического регулирова-
ния (см. ТАР) 13. 46
---управления (см. ТЛУ) 13
---— классическая (см. КТЛУ)
14, 364
— > — — современная (см. СТАУ) 14,
310
Тип движения 610
Точка изображающая 22
Траектория 90
— корня 106
— опорная (заданная) 76
— фазовая 25
Трубка траекторий 94
Управление «в малом» 13
— корнями 438
— кусочно-постоянное 406
— модальное 106, 435, 518
— оптимальное 362, 403, 458
— положением органов объекта 405
— скоростью перемещения органов
объекта 405, 428
— субоптнмальиое 363
Управляемость 44, 62—78
— «в малом» 63
— внутренняя 103
Упрощение структуры регулятора
383
*
Уравнение Веллмана 367. 385, 459
— — обобщенное 463
— в вариациях 279
— возмущенного движения 93
— в форме Ито 28, 496
— — — Коши 26
-------Ланжевепа 28
-------Лапласа 103
---— Фробениуса 38
— Лурье 375
— Ляпунова в частных производных
97
— — матричное 107, 418
— наблюдения 39, 169, 215, 231
— поверхности 91
— разностное 32
— Риккати 101, 374, 461
— Стратоновича 30, 173, 451
— Фоккера — -Планка — Колмогоро-
ва (см. ФПК) 29
— характеристическое 39, 105
— чувствительности 608
— Эйлера — Лагранжа 331
Условие астатизма структурное до-
статочное второго порядка 110
—--- первого порядка 109
— благоприятствующее точному оце-
ниванию 164
— Лежандра — Клебша (выпуклости)
338
— наблюдаемости 51—56
---выраженное через матрицу Ко-
ши 53
• - Калмана 52
— начальное 95
— необходимое первого порядка 338
• — неустойчивости структурное 103
— нормальности 338
— нормировки 30. 92
— стационарности критерия 341.
— трансверсальности 353
— управляемости структурное 66
— устойчивости 106
— Якоби 338
У ставка регулятора 13
Устойчивость 89, 536
— абсолютная 118, 131. 133
— — экспоненциальная 119
— асимптотическая 95
— — равномерная относительно t0 95
— — — по отношению к начальным
условиям 95
— «в большом» 95
— «в малом» 105
— в целом 93
— неасимптотичсская 94
— по Ляпунову 94
— при сколь угодно больших коэф-
фициентах усиления 100
— стохастическая 92, 101
— техническая 89
— энтропийная 102
Устройство адаптации 488
— идентификации 488
Фактор 232
Фильтр адаптивный 204
— второго порядка 177—183, 195, 212
—------модифицированный 179
— гауссовский 178
— Калма на— Быоси (см. ФКБ) 173
---_ — обобщенный 186, 214, 294,
573
-------распределенный 219
— линейный стационарный 191
— Люэнбсргера (см. наблюдатель)’
200
— первого порядка 192
Фильтр с эмпирической матрицей
201.
— формирующий 43, 155
-— «экономичный» 220
Фильтре! ци : i 151, 450
Форму ла Ба йеса JL 68
Функционал 310 '
—'квадратичный 321, 323, 523
— классический с аддитивной функ-
цией затрат па управление 319
-— Летова. — Калмапа 321
— нетерминальный 375
— обобщенной работы (см, ФОР)
321, 393, 417
— терминальный 312
Функция .базисная 245
—- Беллмапа 459
— Бернштейна 549
— восстановления 447
— зпанеотрицательная 96
— знакоположительная 96
— ковариационная 298
— конечного состояния 311, 329
— Ляпунова 96, 98, 107, 149, 253, 490
------ векторная 101
— отрицател впo-о 11ределепшиi 96
— передаточная 38
— переходпая 237
----импульсная (весовая) 41, 237
•— поглощения. 447
— ноложительио-опрсделснпая 96
— Понтрягина 350
—- правдоподобия 451
— Уолша 433, 549
— целевая 257, 312
—- — обобщенная 311
— чувствительности 606
— штрафе! 24, 314
Характеристика амплитудно-частот-
ная 126
Характеристика логарифмическая
(см. ЛХ) 41
---амплитудно-частотная (см„
ЛАЧХ) 41
---фазо-частотная (см. ЛФЧХ) 41
— статистическая поля 564
— частотная 131
---видоизмененная 131, 133
Цепь Маркова (см. ЦМ) 157, 207
Цикл оценивания 153
— предельный 90
— формирования управления 428
Число индексное 409
— матрицы собственное 40, 619
— элементарных и арифметических
операций 180, 213, 306, 435
Чу ветвител ыюсть параметрическая
605
Шар 176
Шум белый гауссовский 42, 1G9, 1783
194, 284
— — дискретный 32
--- практически 29
генерируемый
— — эквивалентный
202
— возбуждающий 153
Экстремум глобальный 647
— локальный 647
Эллипсоид рассеивания 176
— сходимости 176
Энтропия 102
Якобиан 48