/




















































































































































































































































































































































































































































































































































Текст
Ms 9035
M Ч H И С T F P С T В 0 0 ft « ~ Л В ь? СОЮЗА ССР
ГЛАВНОЕ УПРАВЛЕНИЕ - ОКЕАНОГРАФИИ
КОРАБЛЕВОЖДЕНИЕ
19 7 2
№ 9035
МИНИСТЕРСТВО ОБОРОНЫ СОЮЗА ССР ГЛАВНОЕ .УПРАВЛЕНИЕ НАВИГАЦИИ И ОКЕАНОГРАФИИ
КОРАБЛЕВОЖДЕНИЕ
Практическое пособие для штурманов
Под редакцией
контр-адмирала Шандабылова В. Д.
19 7 2
Настоящая книга предназначена в качестве практического пособия для штурманов Военно-Морского Флота н представляет собой обобщенный труд по вопросам современного кораблевождения.
Состав авторского коллектива: контр-адмирал Шандабылов В. Д. (руководитель и главный редактор), капитан 1 ранга П опеко Г. П. (заместитель руководителя и автор § 1—7, 25—30, 51—56, 59—75, 84—91, 103—
105 и приложений 1, 2 и 6), капитан 1 ранга Соломатин Е. П. (§ 44—50 и 57), капитан 1 ранга Яцук Б. И. (§ 8—17, 76—83), капитан 1 ранга Новоселов Л. П. (§ 92—102), капитан 1 ранга-инженер Кораблев А. Е. (§ 31—35, 42—43), капитан 1 ранга-инженер Егоров Н. И. (§ 21—24), капитан 2 ранга-инженер Кабиров Р. С. (§ 36—41) и капитан-инженер запаса Алты кис Е. В. (§ 18—19). Капитаном 1 ранга-инженером Егоровым Н. И. совместно с капитаном-инженером запаса Ал ты к и сом Е. В. написаны §§ 20 и 58.
Подготовка пособия к изданию выполнена в Центральном картографическом производстве ВМФ Курбатовым И. П., К у з н е ц о в ы м Е. И., Пановым А. Я. иШмаковым Н. А.
Ввиду того что практическое пособие по кораблевождению издается впервые»» Главное управление навигации и океанографии заинтересовано в получении от штурманов замечаний и предложений по его совершенствованию. Все отзывы, замечания и предложения просьба направлять в Главное управление навигации и океанографии Министерства обороны по адресу: 199034, гор. Ленинград, В-34.
ОГЛАВЛЕН И Е
ЧАСТЬ I
ОСНОВНЫЕ ПОНЯТИЯ и ОПРЕДЕЛЕНИЯ
Стр.
Глава 1. Земной эллипсоид § 1. Фигура Земли............................................9
§ 2. Основные линии и плоскости на Земле....................10
§ 3. Счет направлений.......................................11
§ 4, Системы координат для определения положения точки на поверхности Земли..........................................13
§ 5. Основные сечення эллипсоида. Меры длины................17
§ 6. Локсодромия, ортодромия и геодезическая линия .... 19
§ 7. Дальность видимого горизонта и дальность видимости предметов. Радиолокационная наблюдаемость.........................25
Глава 2. Небесная сфера и видимое движение светил § 8. Небесная сфера.........................................29
§ 9. Параллактический треугольник светила....................31
§ 10. Видимое суточное движение светил........................32
§ 11. Видимое собственное движение Солнца.....................35
§ 12. Видимое собственное движение Луны, планет и искусственных спутников Земли...........................................37
Глава 3. Время § 13. Основные сведения о счете времени......................42
§ 14. Время на различных меридианах...........................43
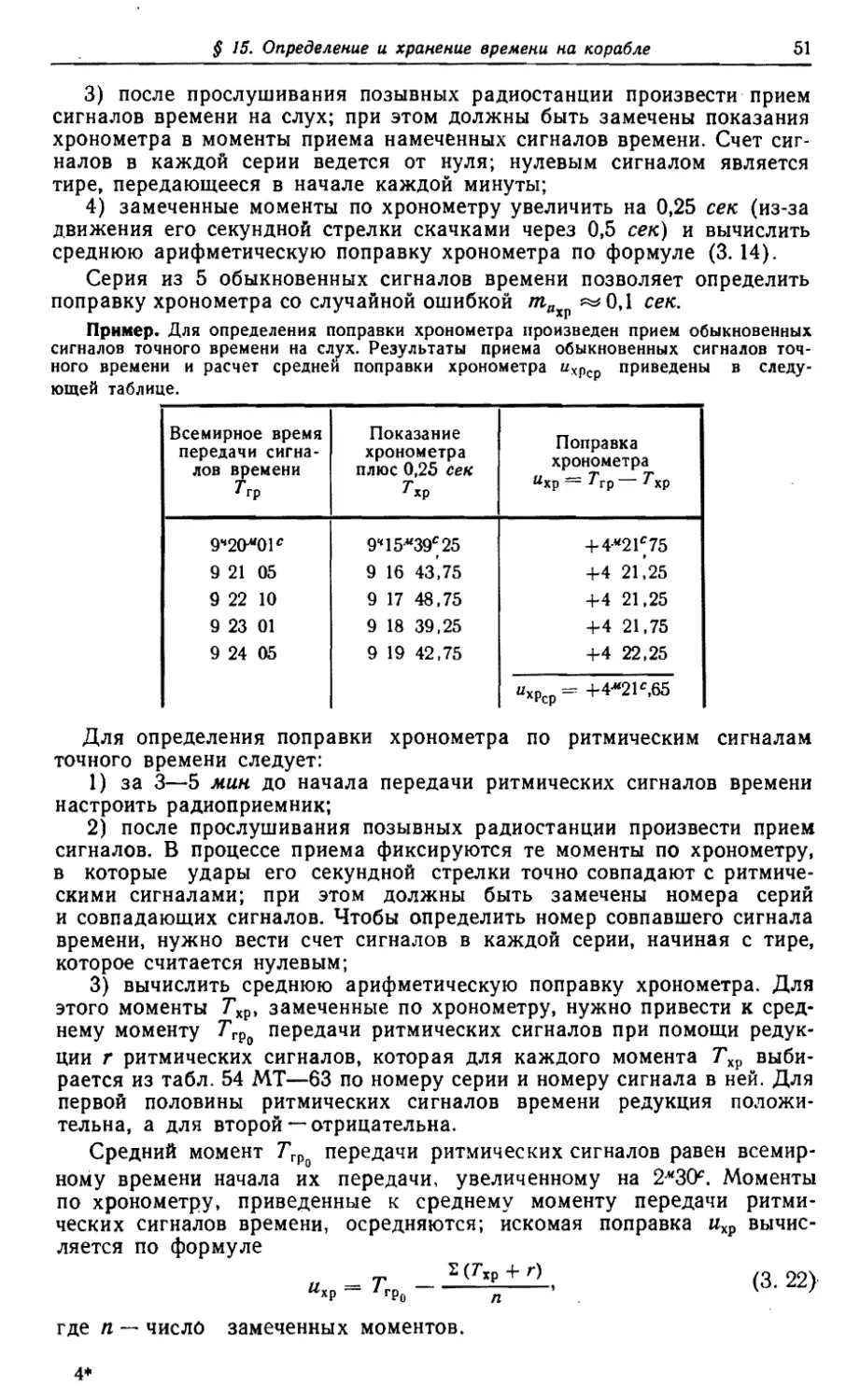
§ 15. Определение и хранение времени на корабле...............46
§ 16. Вычисление экваториальных координат светил на заданный момент времени ...............................................53
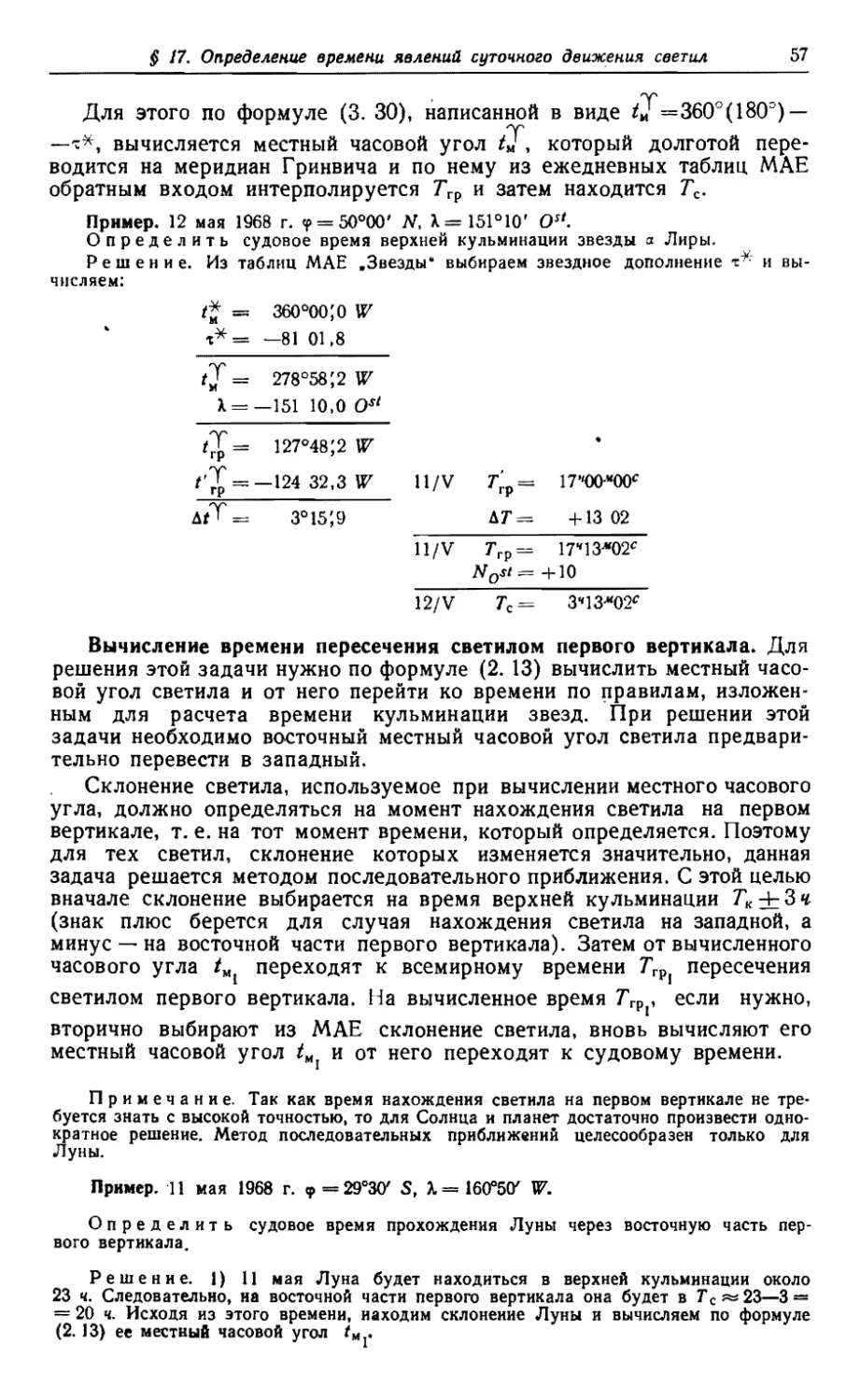
§ 17. Определение времени явлений, сопровождающих суточное движение светил .................................................55
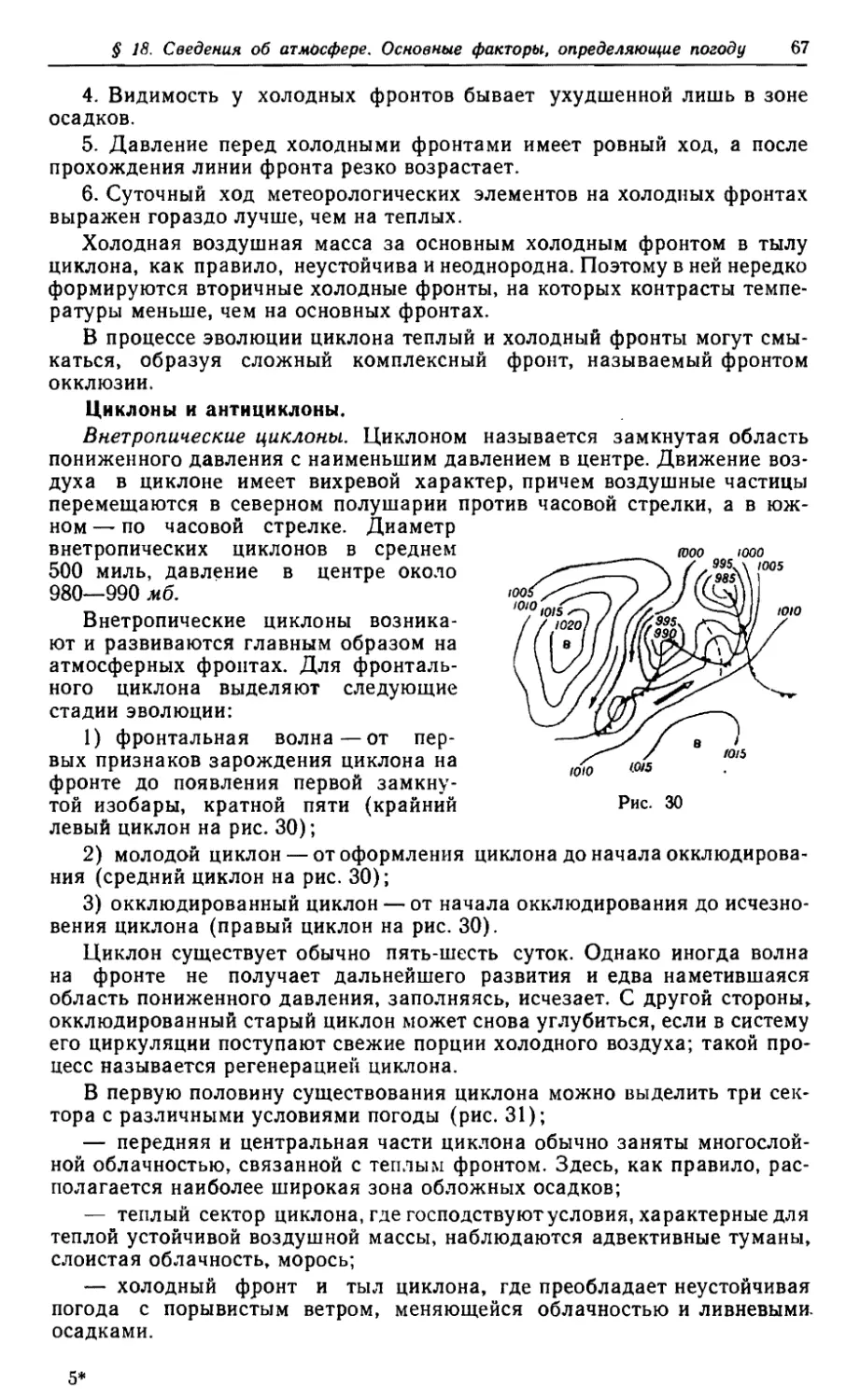
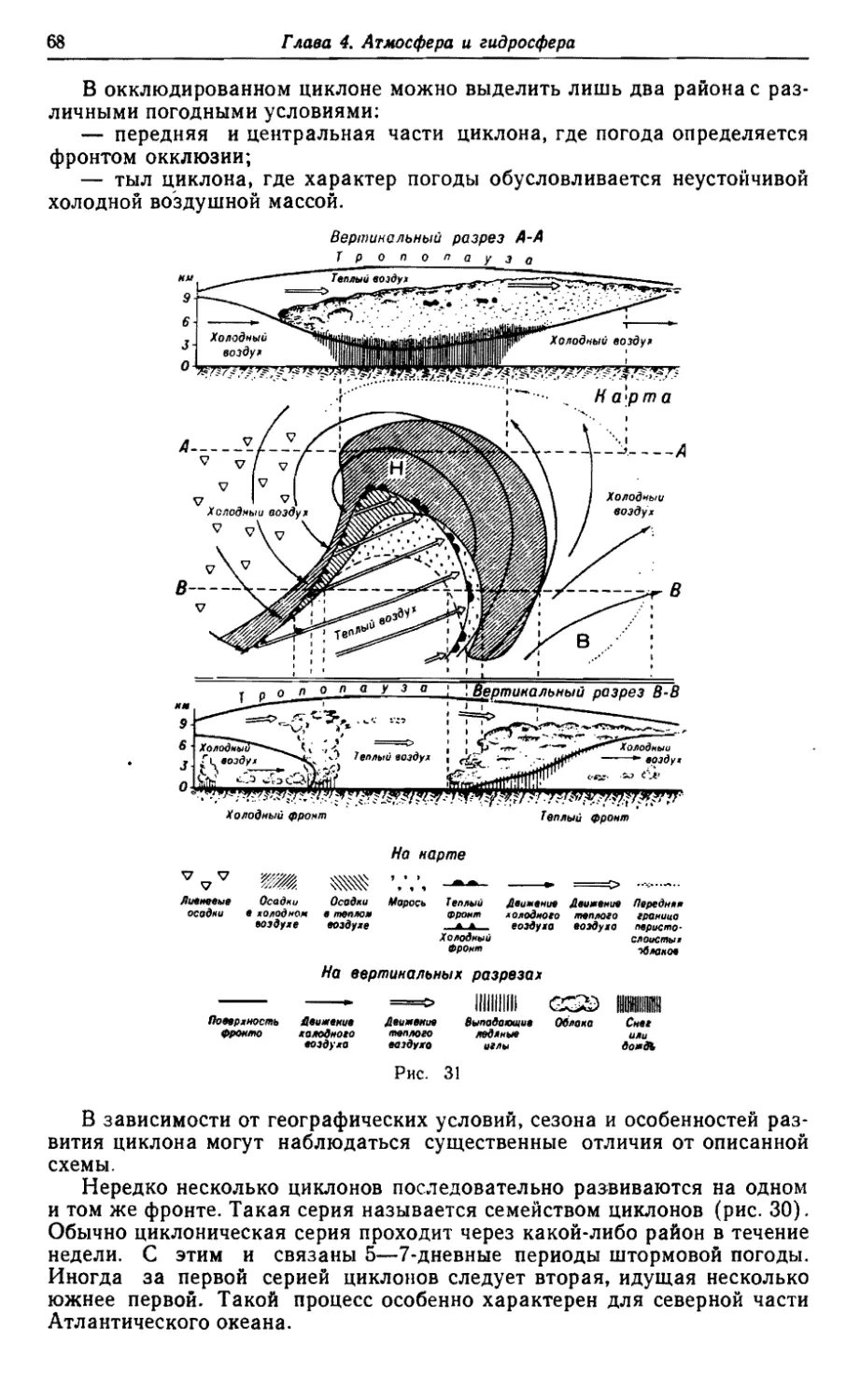
Глава 4. Атмосфера и гидросфера § 18. Общие сведения об атмосфере. Основные факторы и процессы, определяющие погоду и ее изменение........................................61
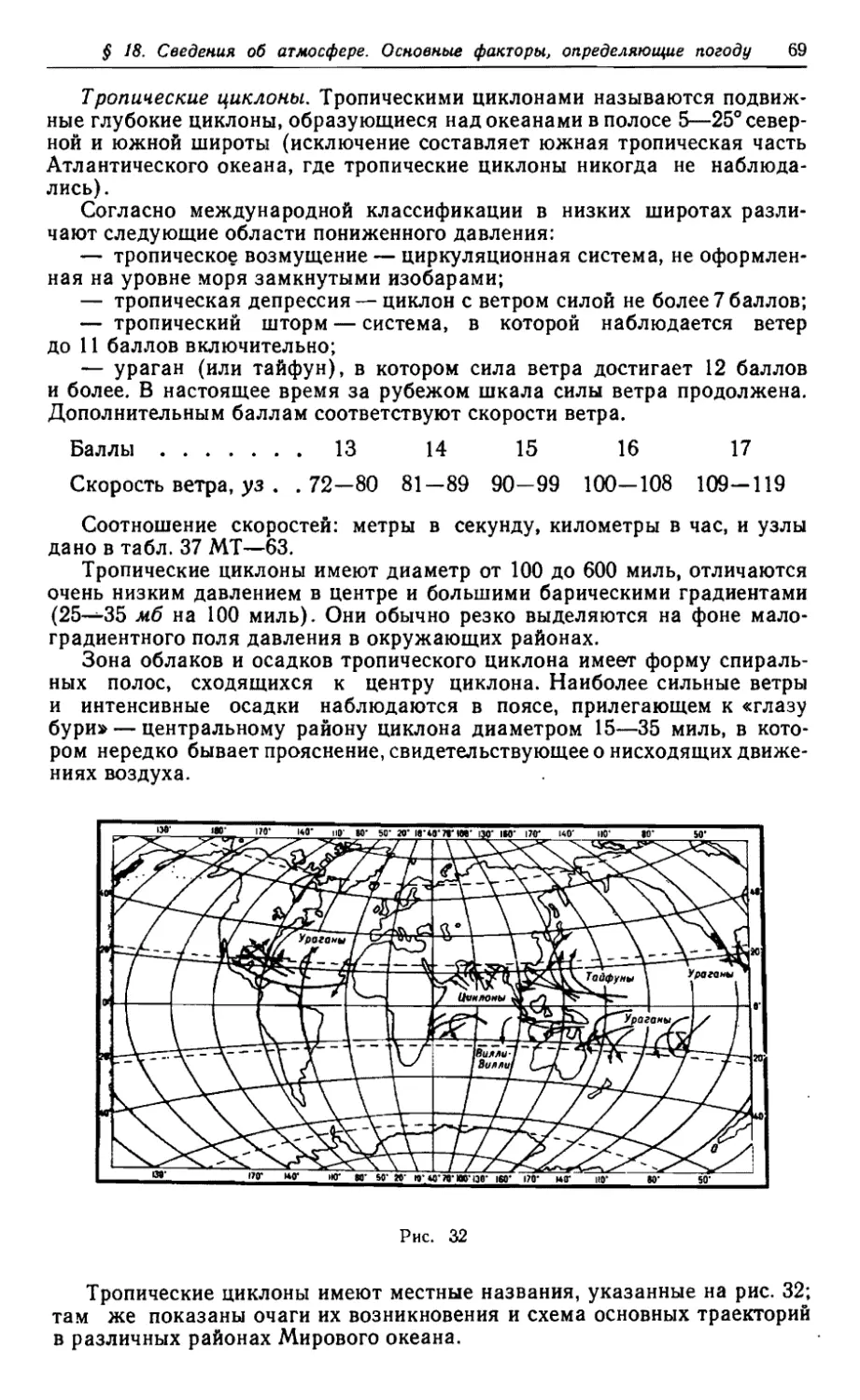
§ 19. Климатические особенности различных районов Мирового океана .......................................................71
§ 20. Организация сбора и распространения гидрометеорологической информации 73
§ 21. Общие сведения о Мировом океане и основные характеристики водных масс океанов и морей.............................82
§ 22. Колебания уровня моря и морские волны...................89
§ 23. Морские течения ........................................94
§ 24. Гидрометеорологические пособия..........................96
часть п
ПОДГОТОВКА К ПЛАВАНИЮ
Глава 5. Навигационные пособия § 25. Назначение морских карт, руководств и пособий для плавания 101 § 26. Общая характеристика морских карт.................................101
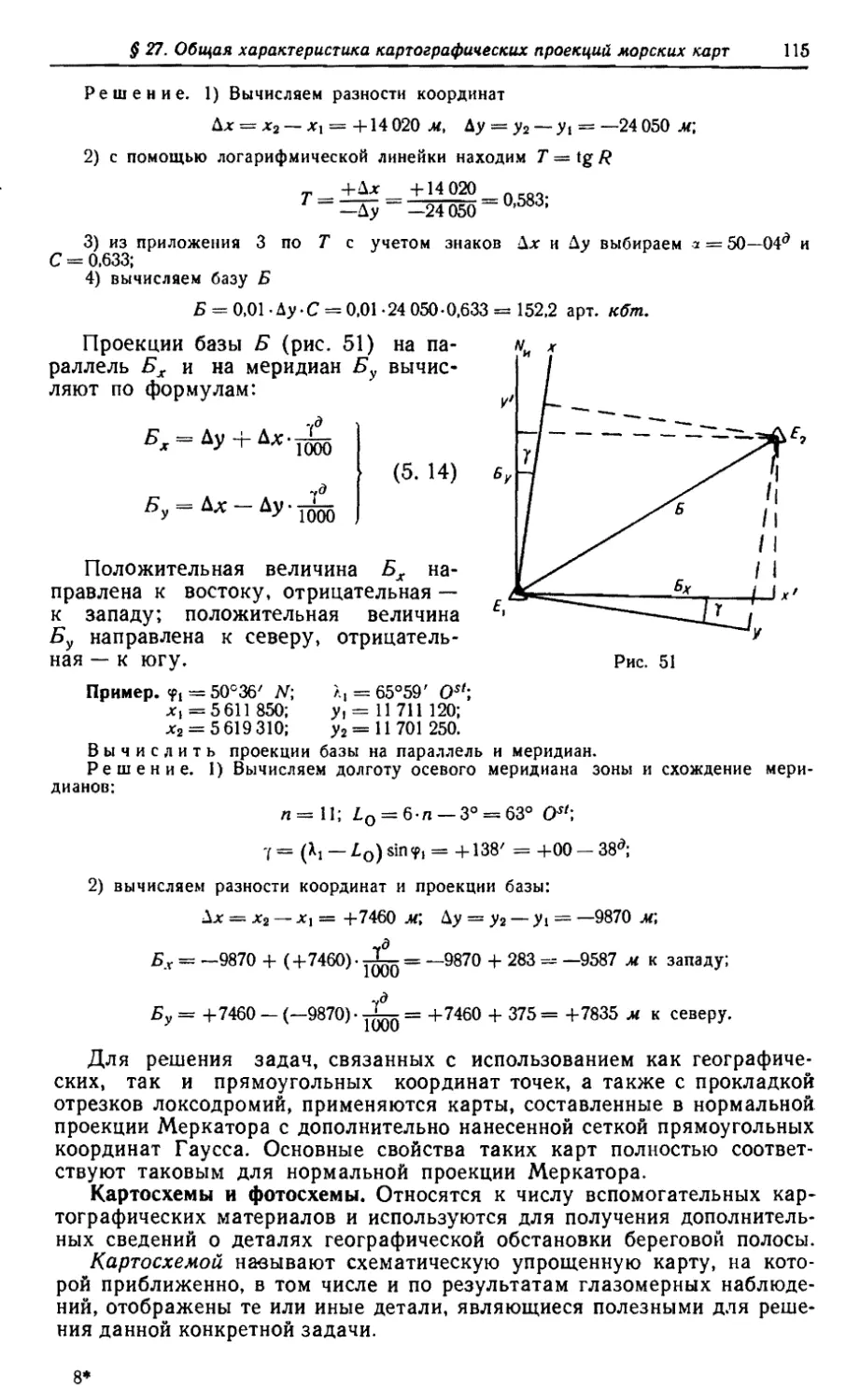
§ 27. Общая характеристика картографических проекций, применяемых для составления морских карт.............................104
§ 28. Точность морских навигационных карт и оценка степени доверия к карте...........................................• .i ..j Н6'
4
Оглавление
Глава
Глава
Глава
Глава
Глава
Глава
Стр.
§ 29. Общая характеристика руководств и пособий для плавания 118
§ 30. Поддержание морских карт, руководств и пособий для плавания иа уровне современности...................................120
6. Основные характеристики технических средств кораблевождения
§ 31. Гироскопические компасы и гироазимуты..................126
§ 32. Магнитные компасы......................................130
§ 33. Лаги...................................................132
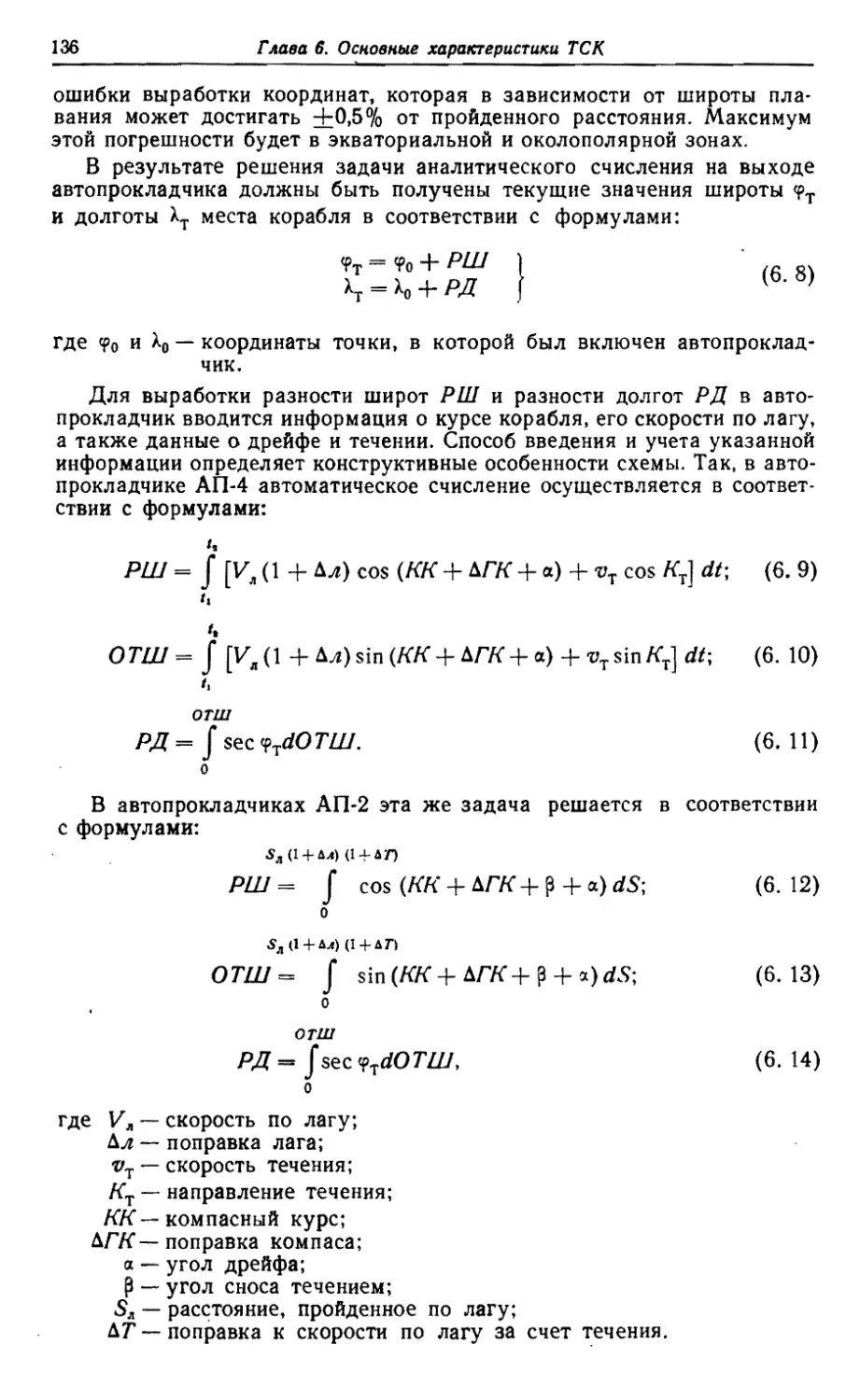
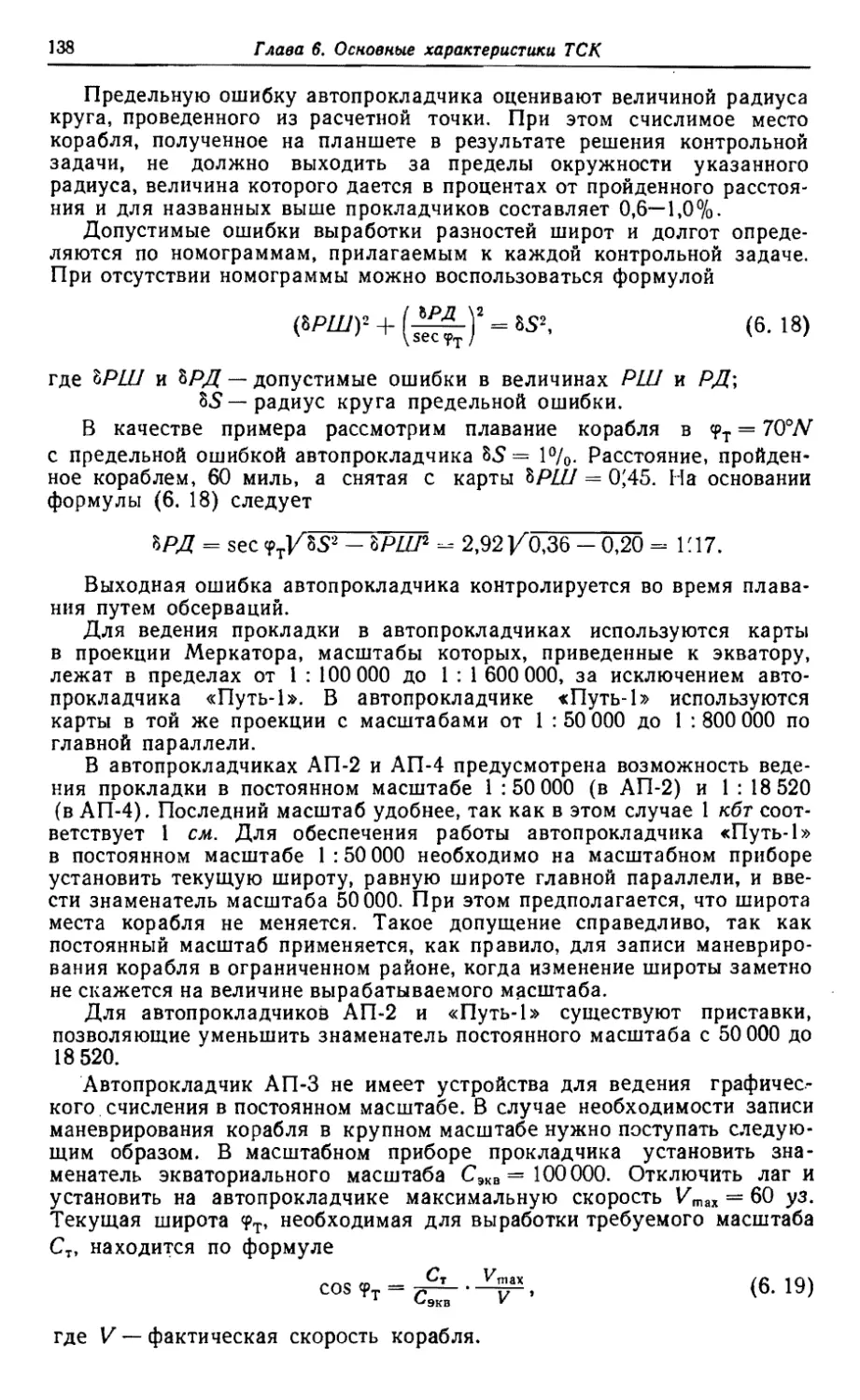
§ 34. Автопрокладчики........................................135
§ 35. Эхолоты................................................139
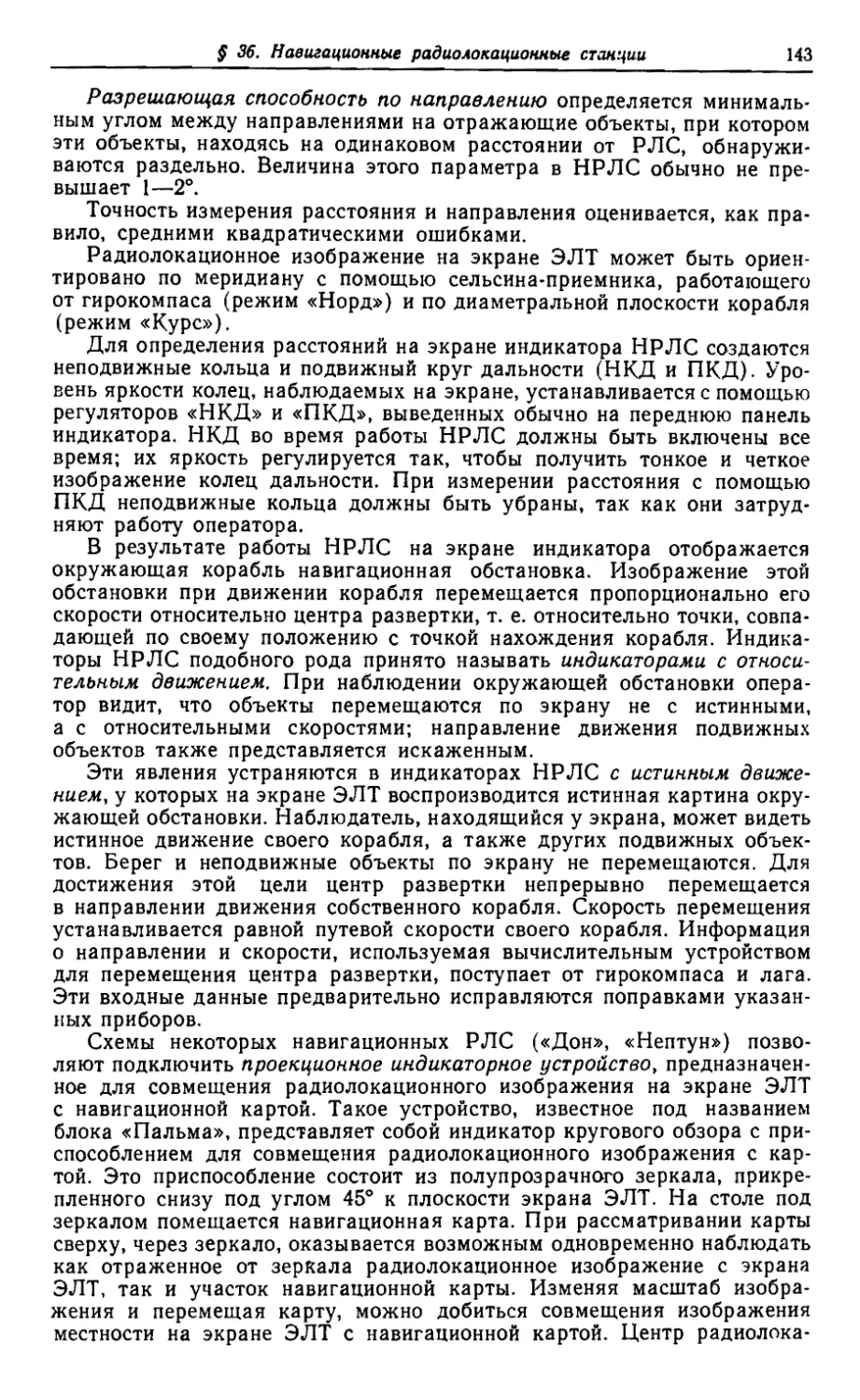
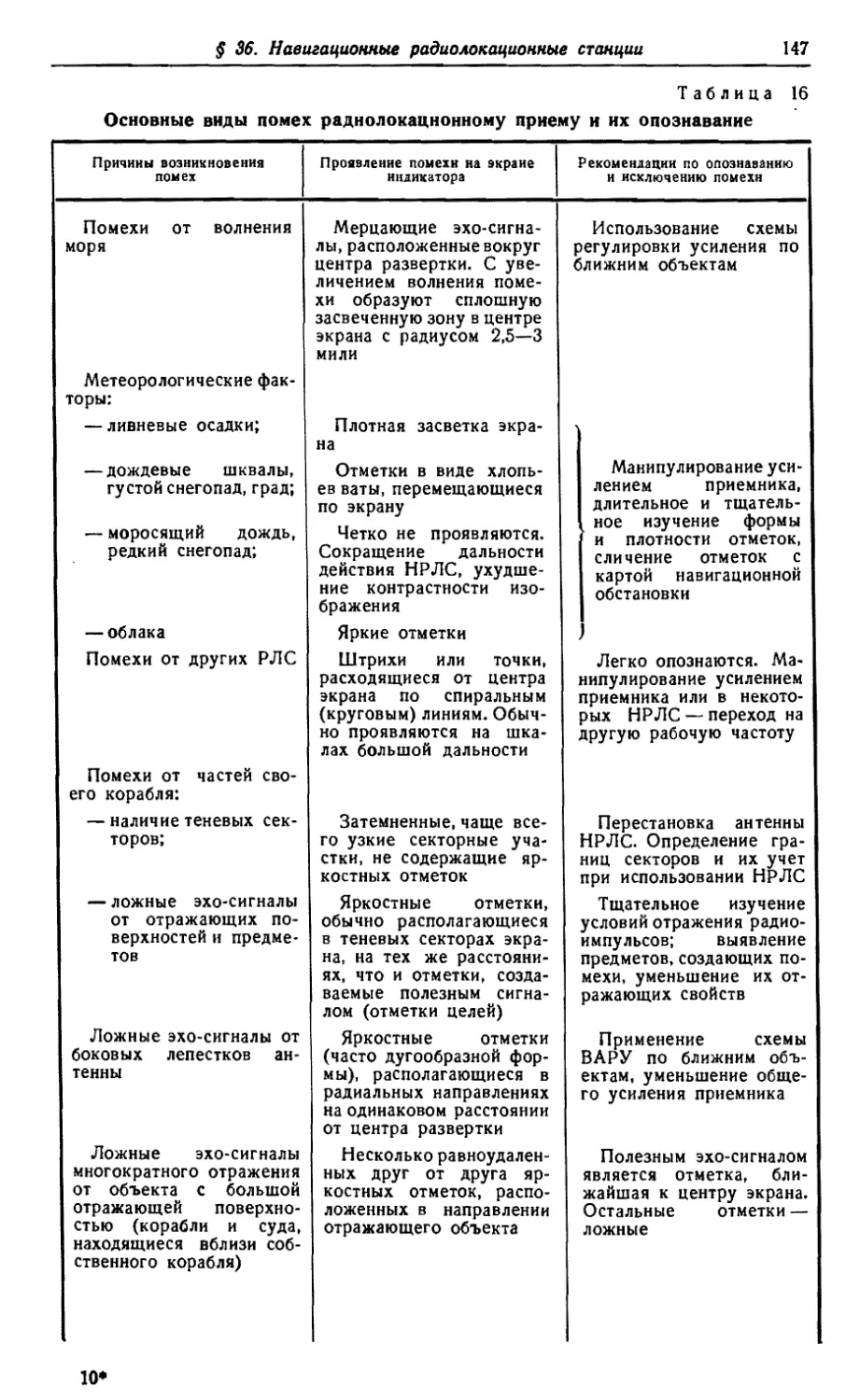
§ 36. Навигационные радиолокационные станции................141
§ 37. Корабельные радиопеленгаторы...........................148
§ 38. Корабельные приемоиндикаторы импульсных разностно-дальномерных и радионавигационных систем........................154
§ 39. Корабельные приемоиндикаторы фазовых разностио-дально-мерных радионавигационных систем............................162
§ 40. Корабельные приемоиндикаторы импульсно-фазовых разностнодальномерных радионавигационных систем......................168
§ 41. Корабельный индикатор секторных радиомаяков .... 169
§ 42. Общие принципы отыскания неисправностей технических средств кораблевождения.....................................171
§ 43. Эксплуатационная и ремонтная документация..............173
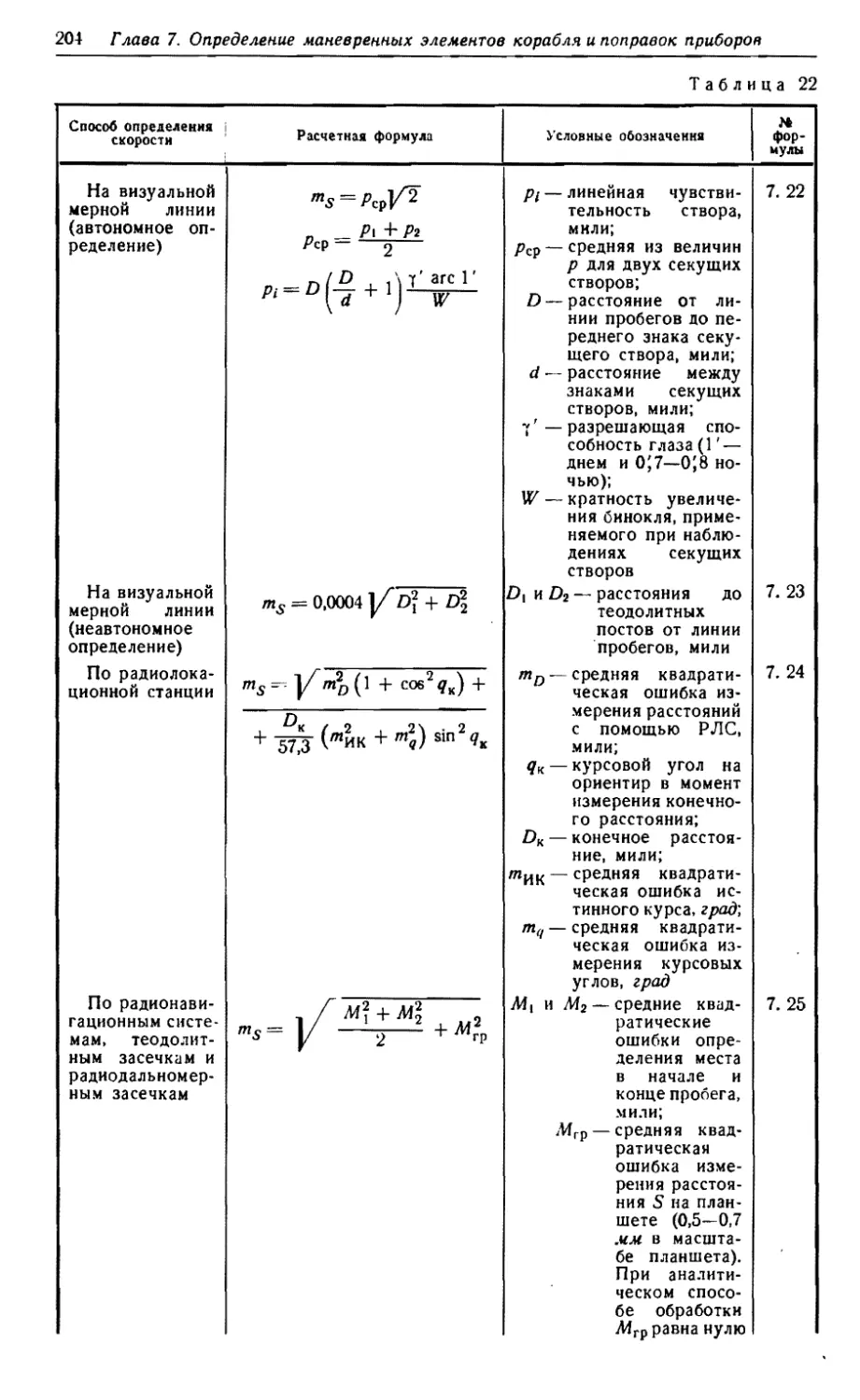
7. Определение маневренных элементов корабля и поправок основных
приборов технических средств кораблевождения
§ 44. Основные определения и терминология.....................177
§ 45. Общие требования, предъявляемые к определению маневренных элементов корабля ....................................... 179
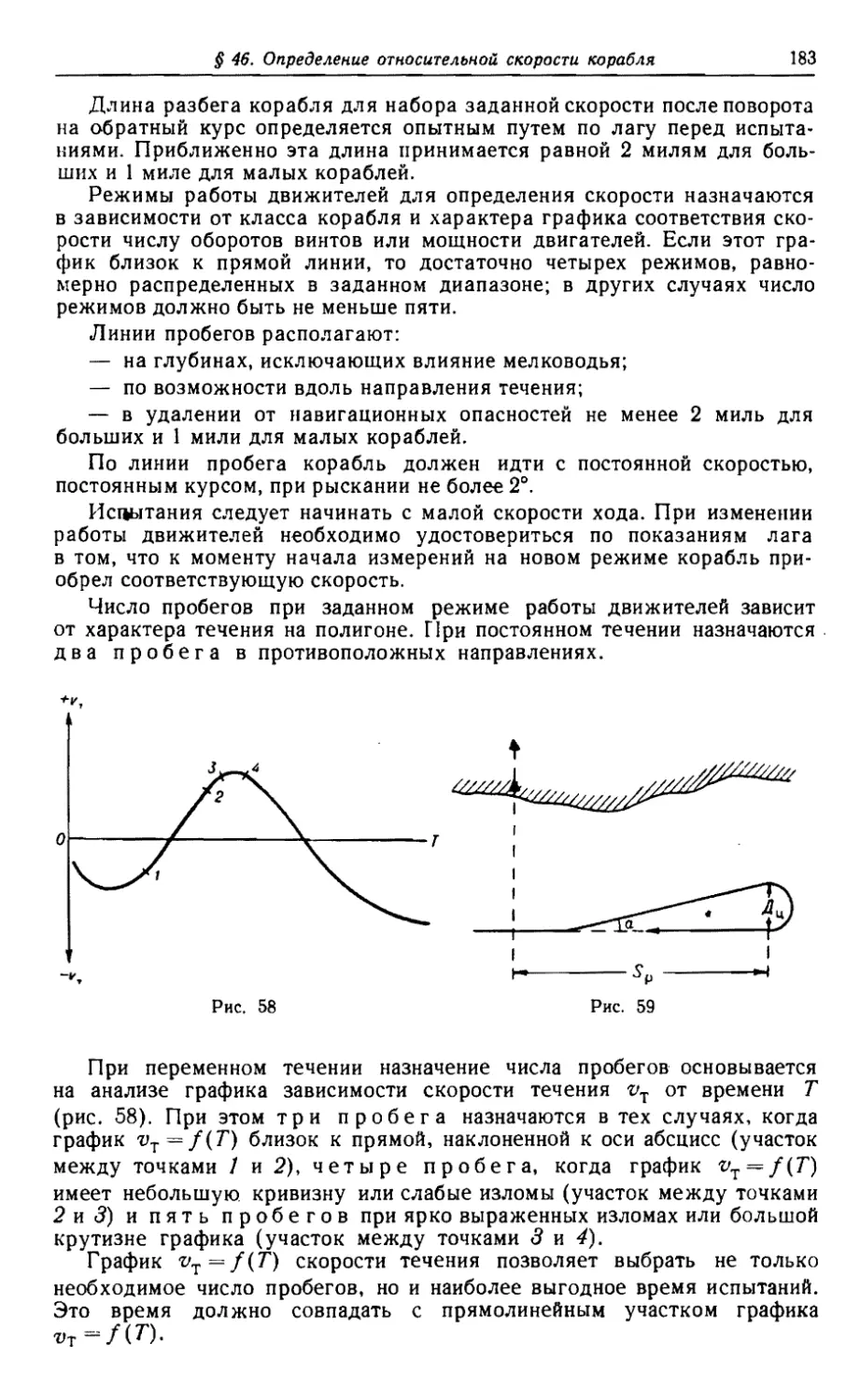
§ 46. Определение относительной скорости корабля..............182
§ 47. Определение поправки и коэффициента относительного лага . 201
§ 48. Точность определения скорости корабля и поправки лага . . 202
§ 49. Определение элементов инерции корабля...................209
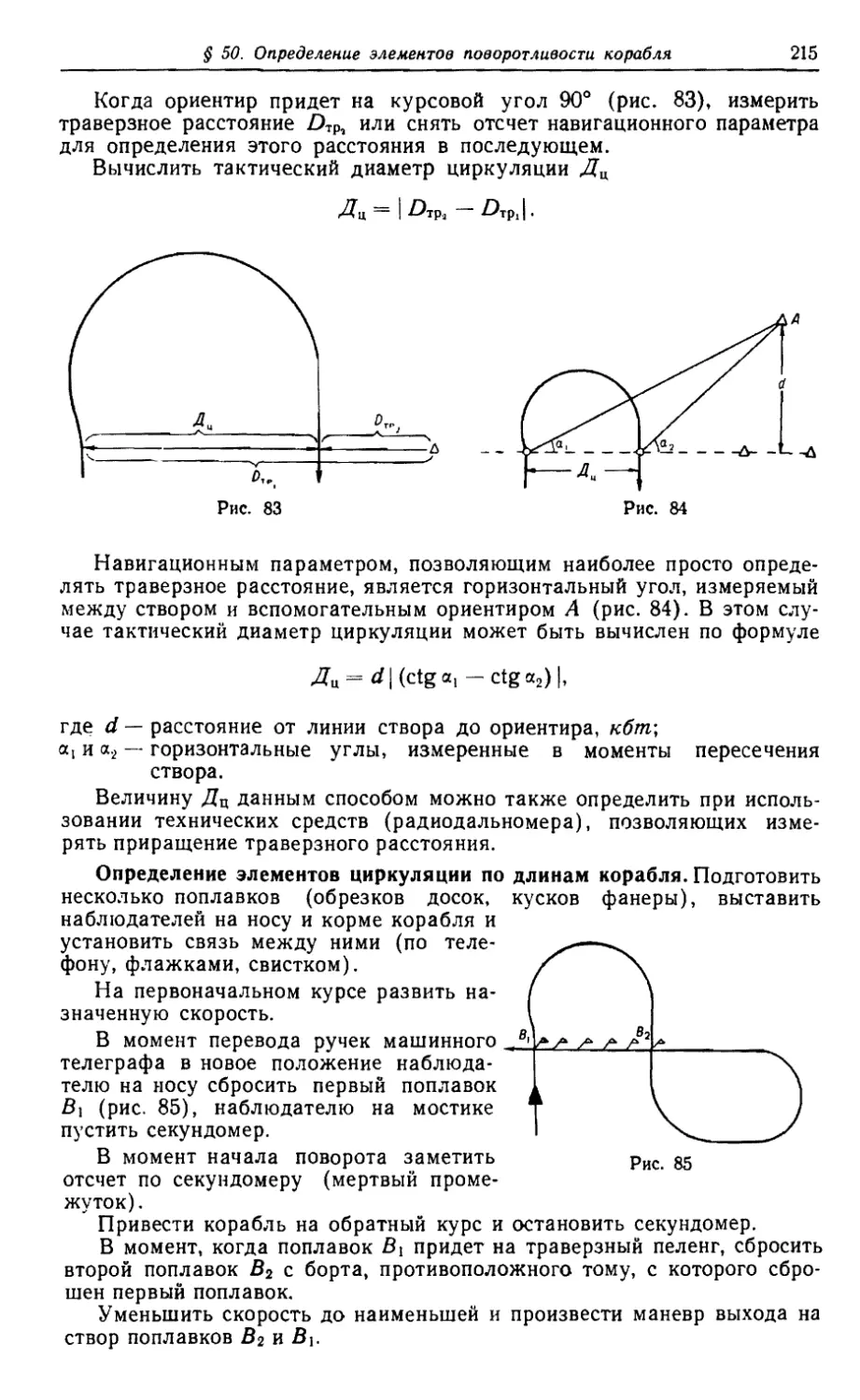
§ 50. Определение элементов поворотливости корабля . . . .213
§ 51. Проверка пеленгаторных репитеров, магнитных компасов и пеленгаторов .............................................. 217
§ 52. Определение поправки курсоуказания......................222
§ 53. Определение девиации магнитного компаса.................232
§ 54. Определение радиодевиации...............................241
§ 55. Определение поправок корабельных радиолокационных станций.......................................................248
§ 56. Определение поправок гидроакустических станций . . . .251
8. Выбор пути корабля
§ 57. Разработка маршрута похода..............................253
§ 58. Учет влияния гидрометеорологических условий при подготовке
к походу и в период плавания ........................... 259
ЧАСТЬ ш
СЧИСЛЕНИЕ ПУТИ КОРАБЛЯ
9. Ведение навигационной прокладки и основы счисления
§ 59. Обязанности штурмана на походе.......................267
§ 60. Навигационная прокладка..............................268
§ 61. Элементы движения корабля ...........................271
§ 62. Элементы счисления...................................273
10. Графическое н аналитическое счисление
§ 63. Графическое счисление ...............................27^
§ 64. Аналитическое счисление..............................283
§ 65. Счисление при помощи автопрокладчика и автосчислителя . 281
11. Учет дрейфа и сноса течением § 66. Учет дрейфа............................................290
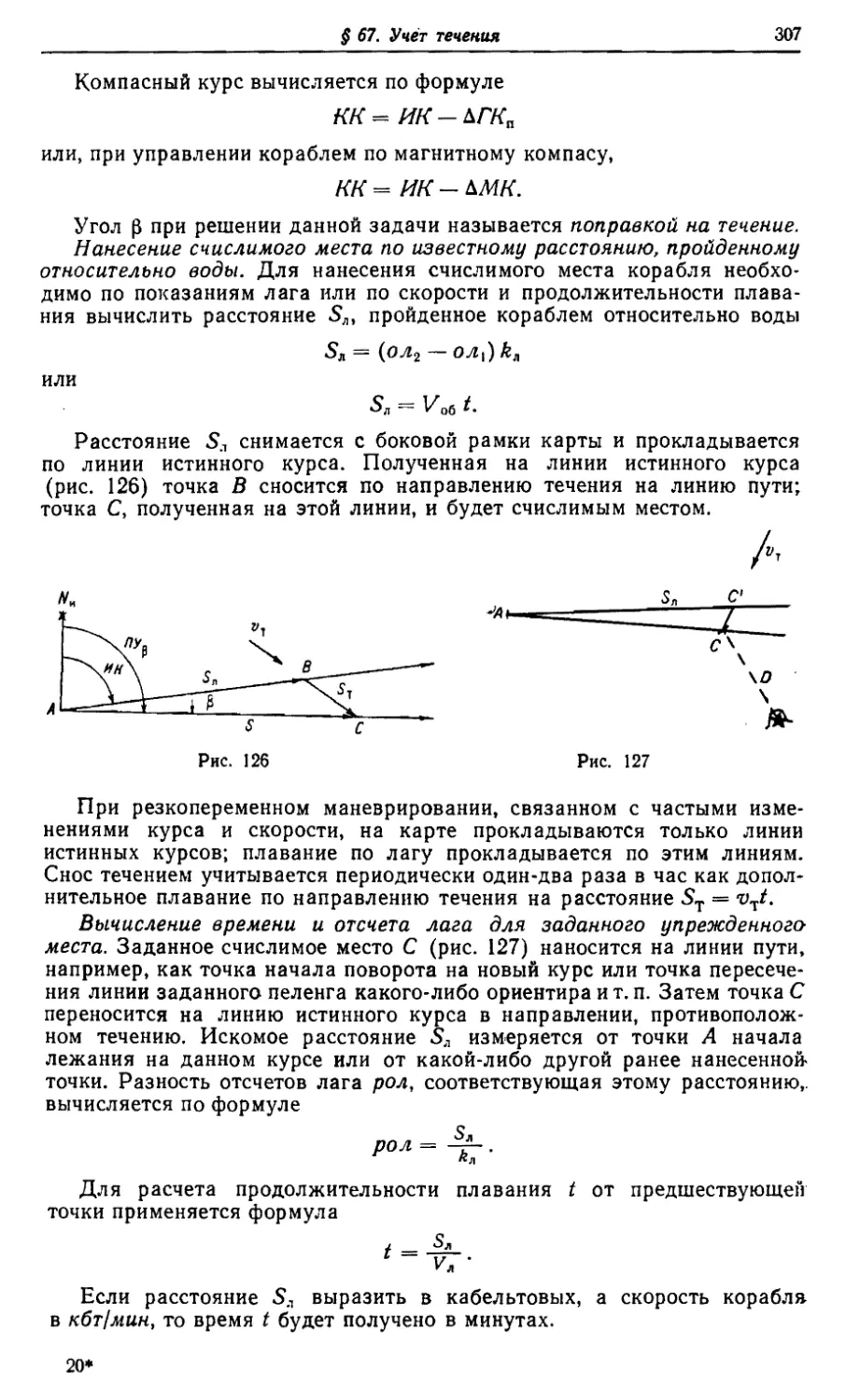
§ 67. Учет течения........................................3V1
§ 68. Совместный учет дрейфа и сноса течением.............309
Оглавление
5
Стр-.
ЧАСТЬ IV
ОПРЕДЕЛЕНИЕ МЕСТА КОРАБЛЯ
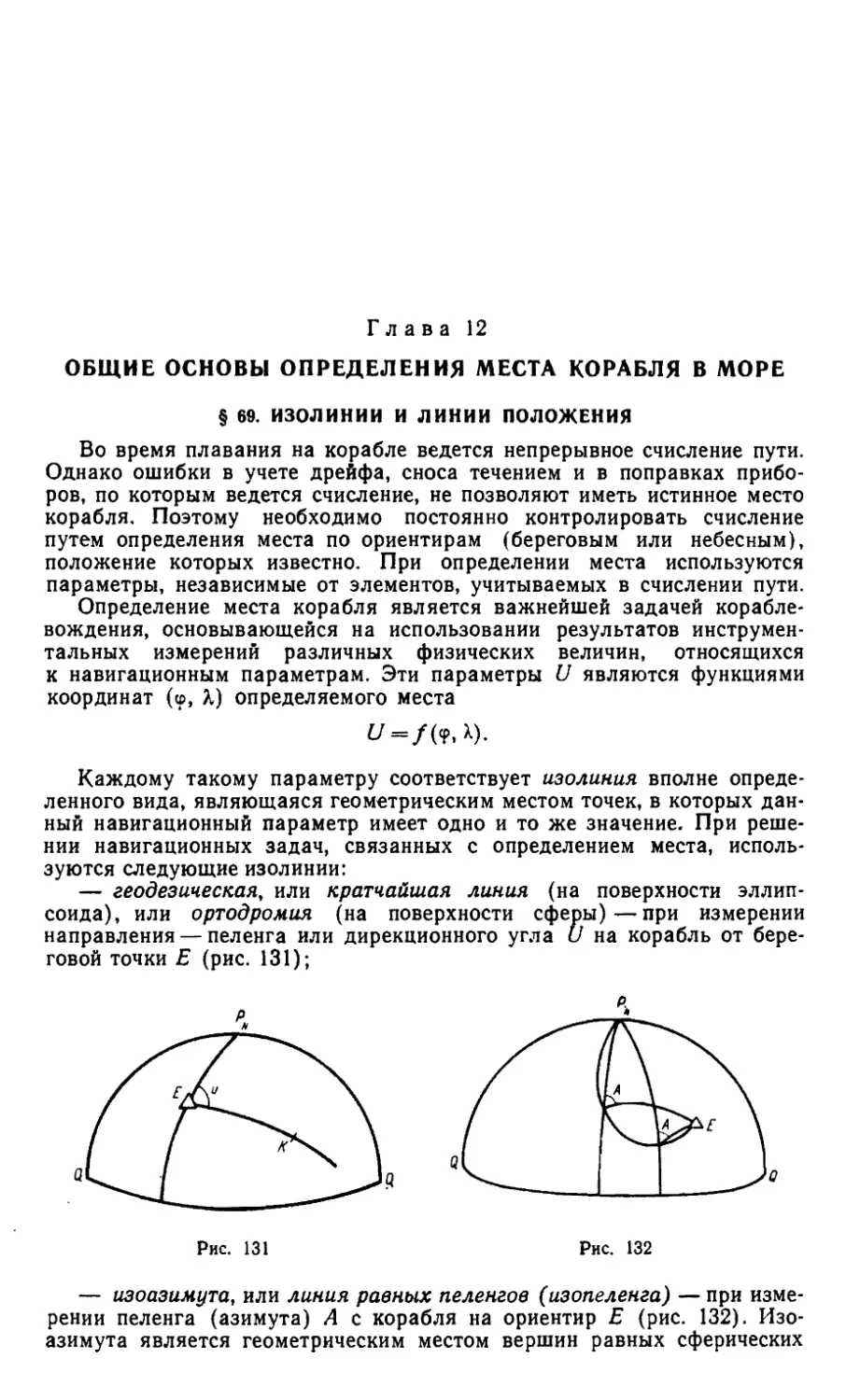
Глава 12. Общие основы определения места корабля в море § 69. Изолинии и линии положения........................................313
§ 70. Способы обработки измеренных навигационных параметров и приемы определения вероятного места.......................321
Глава 13. Определение места по земным ориентирам
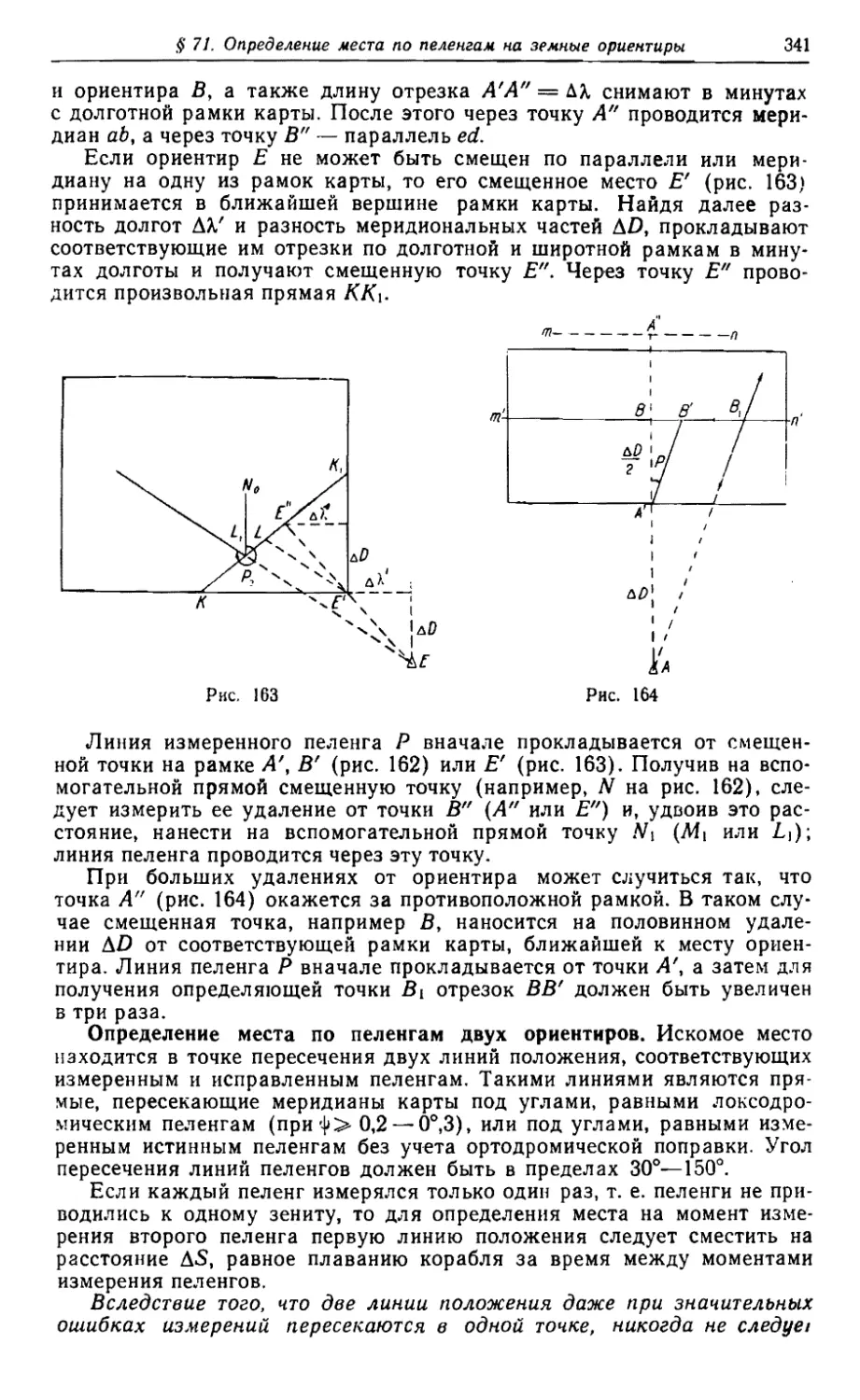
§ 71. Определение места по пеленгам на земные ориентиры . . . 334 § 72. Определение места по пеленгам от береговых станций (опорных точек)..................................................345
§ 73. Определение места по расстояниям......................351
§ 74. Определение места по разностям расстояний.............361
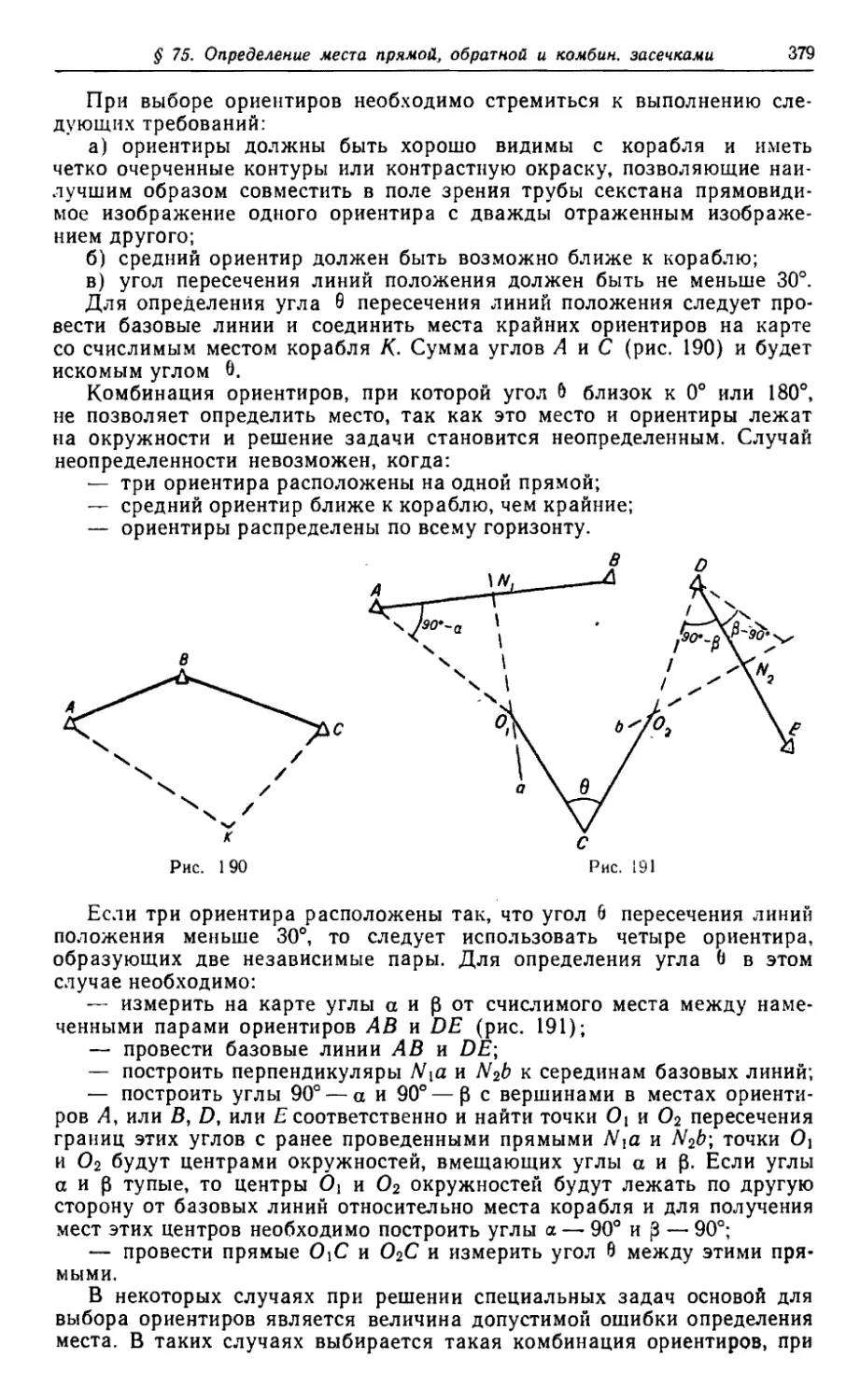
§ 75. Определение места прямой^ обратной и комбинированной засечками ...........................................377
Глава 14. Определение места по светилам
§ 76. Основы определения места корабля по высотам светил . . 383
§ 77. Измерение высот светил................................384
§ 78. Исправление измеренных высот светил...................395
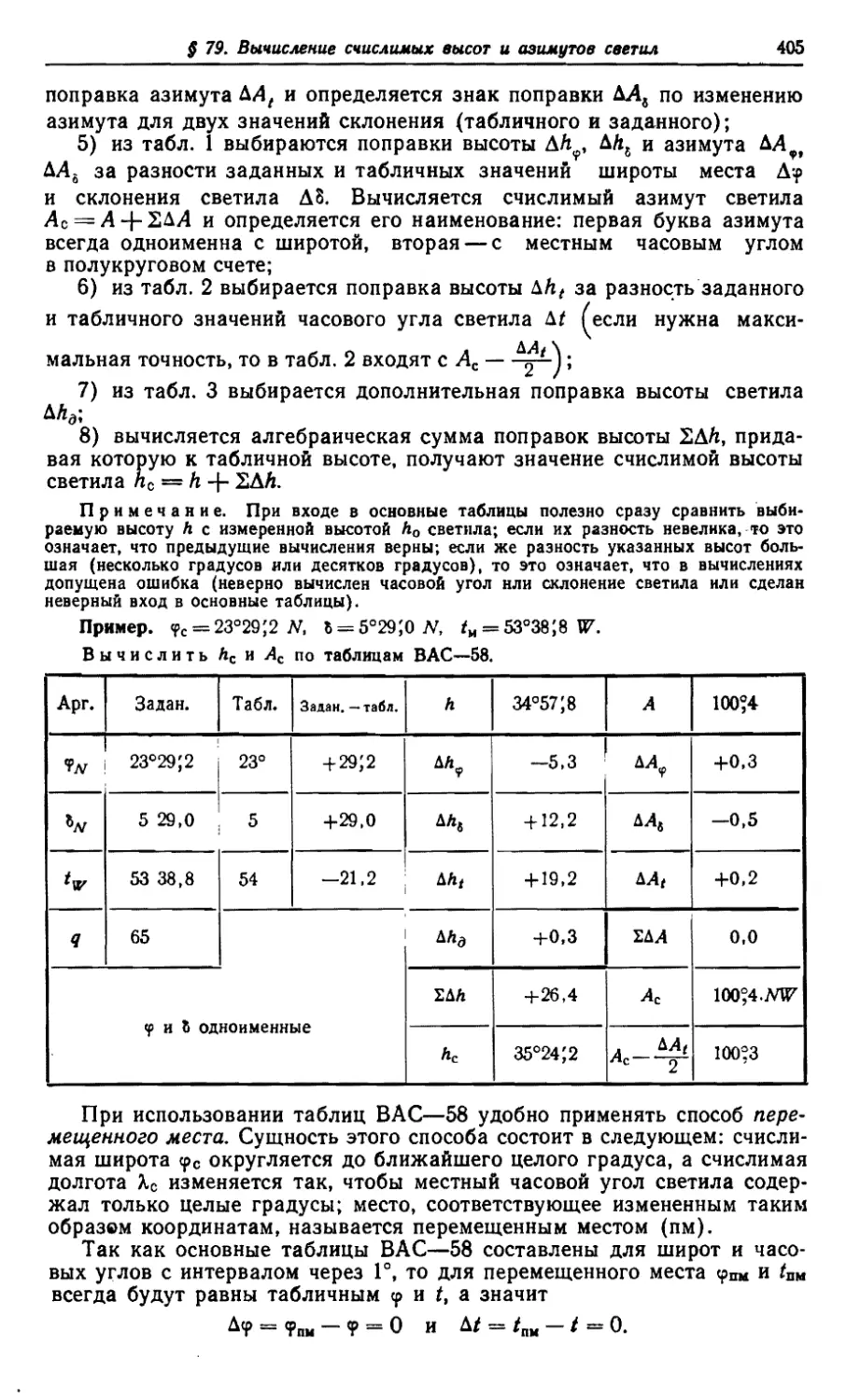
§ 79. Вычисление счислимых высот и азимутов светил .... 403
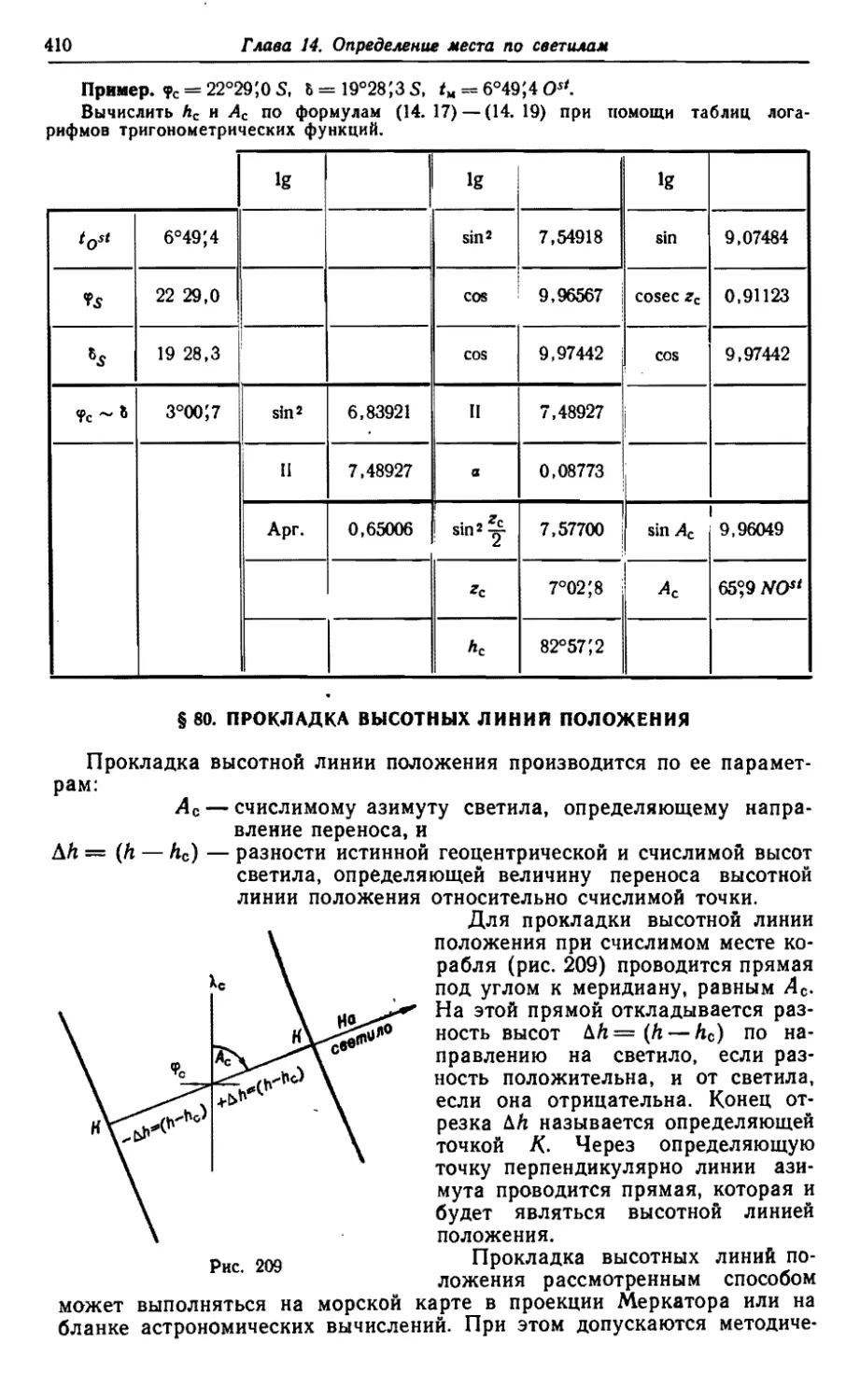
§ 80. Прокладка высотных линий положения....................410
§ 81. Определение места по высотам светил...................415
§ 82. Особые случаи определения места по высотам светил . . . 433 § 83. Особенности работы штурманской группы при определении места корабля...............................................439
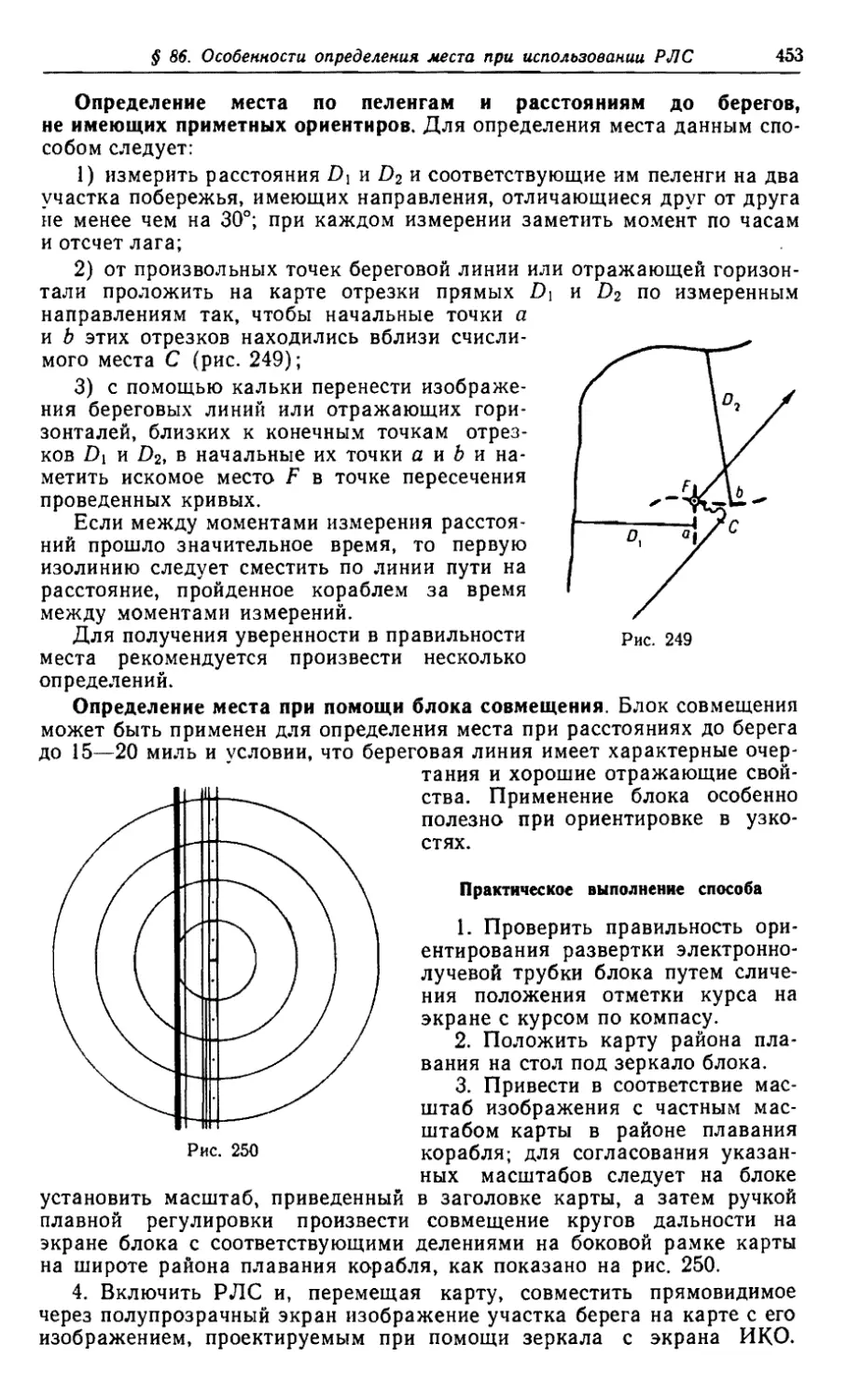
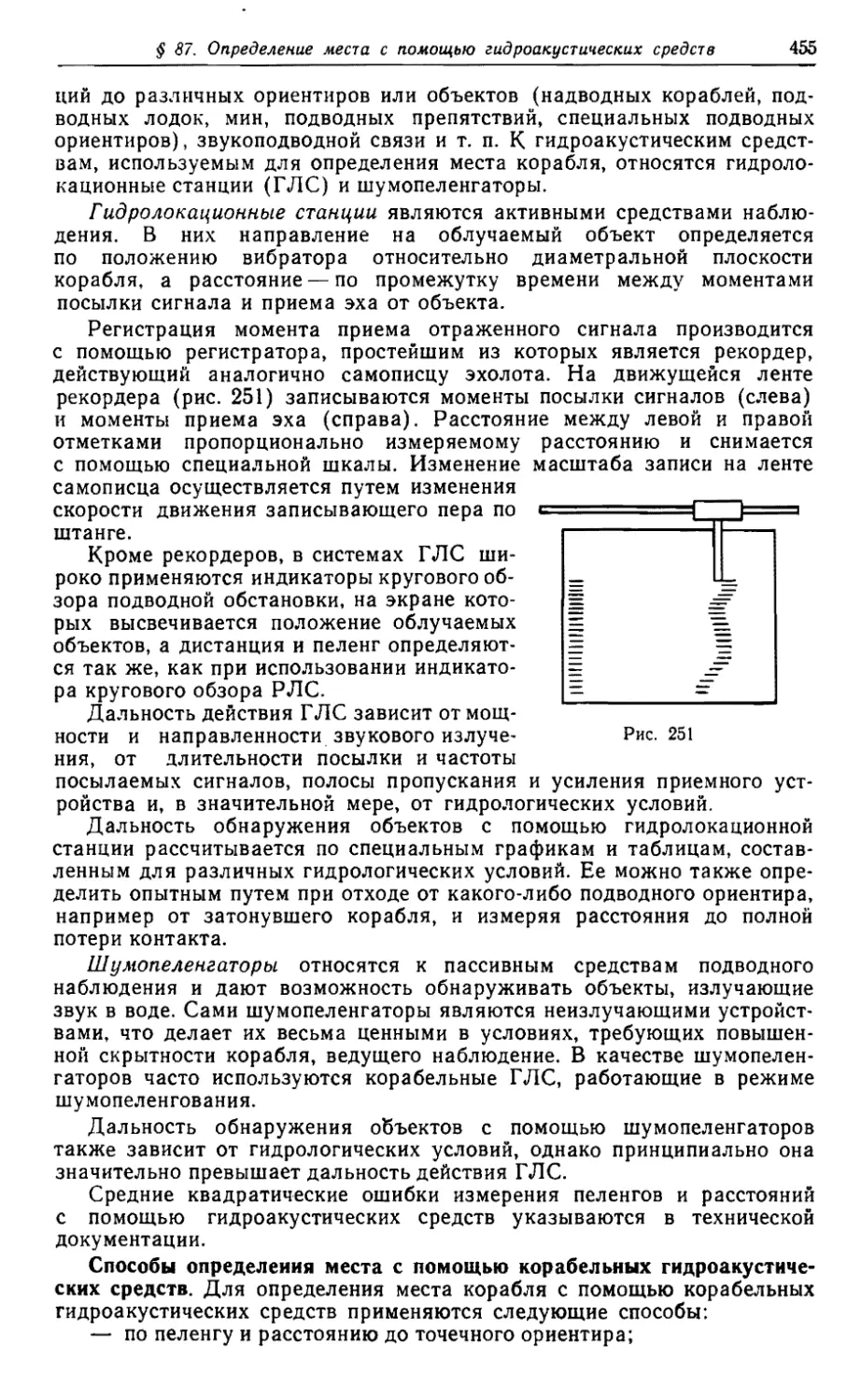
Глава 15. Определение места по разновременным и разнородным линиям положения § 84. Определение места по разновременным линиям положения . 441 § 85. Определение места по разнородным линиям положения . . 445 § 86. Особенности определения места при использовании радиолокационной станции.........................................................450
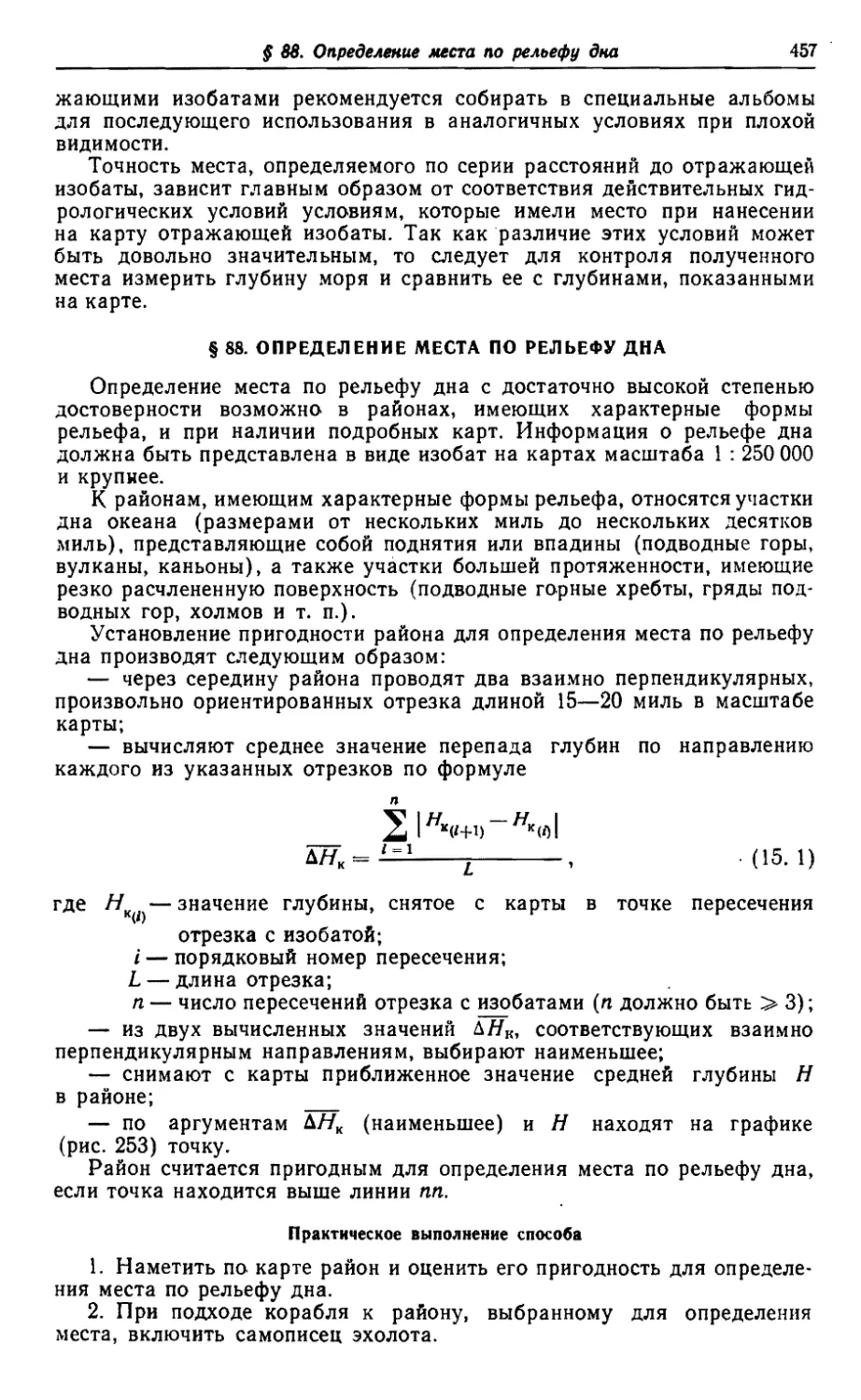
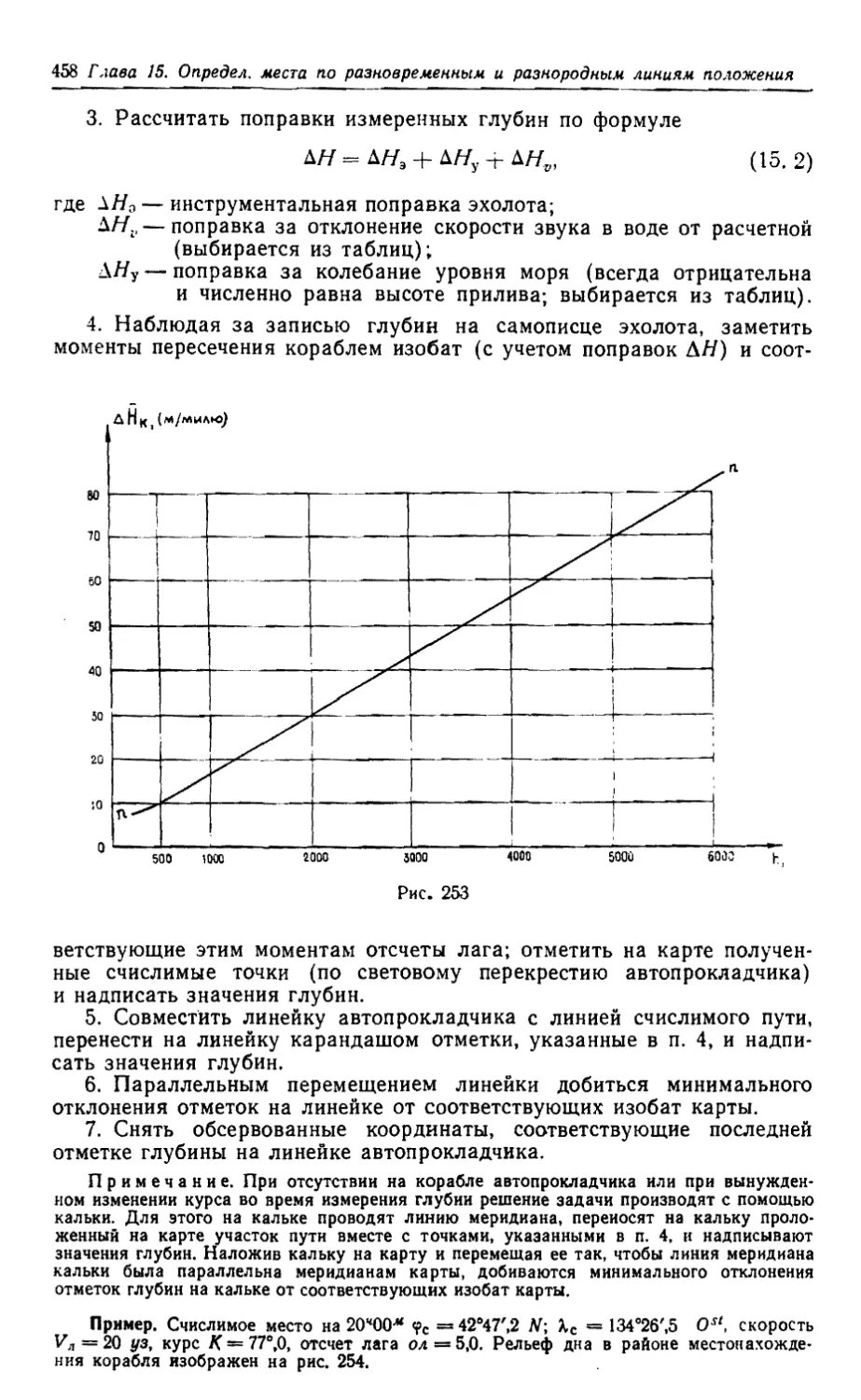
§ 87. Определение места с помощью гидроакустических средств . 454 § 88. Определение места по рельефу дна......................457
Глава 16. Оценка точности плавания корабля § 89. Точность счисления....................................461
§ 90. Точность определения места............................472
§ 91. Точность плавания корабля и расчет допустимого времени плавания по счислению.......................................516
ЧАСТЬ V РАСЧЕТЫ МАНЕВРИРОВАНИЯ КОРАБЛЕЙ
Глава 17. Общие основы маневрирования § 92. Основные понятия и определения............................... . 527
§ 93. Общая методика решения задач маневрирования . . 529
§ 94. Определение коордийат маневрирующего корабля .... 530
Глава 18. Маневрирование для занятия позиции
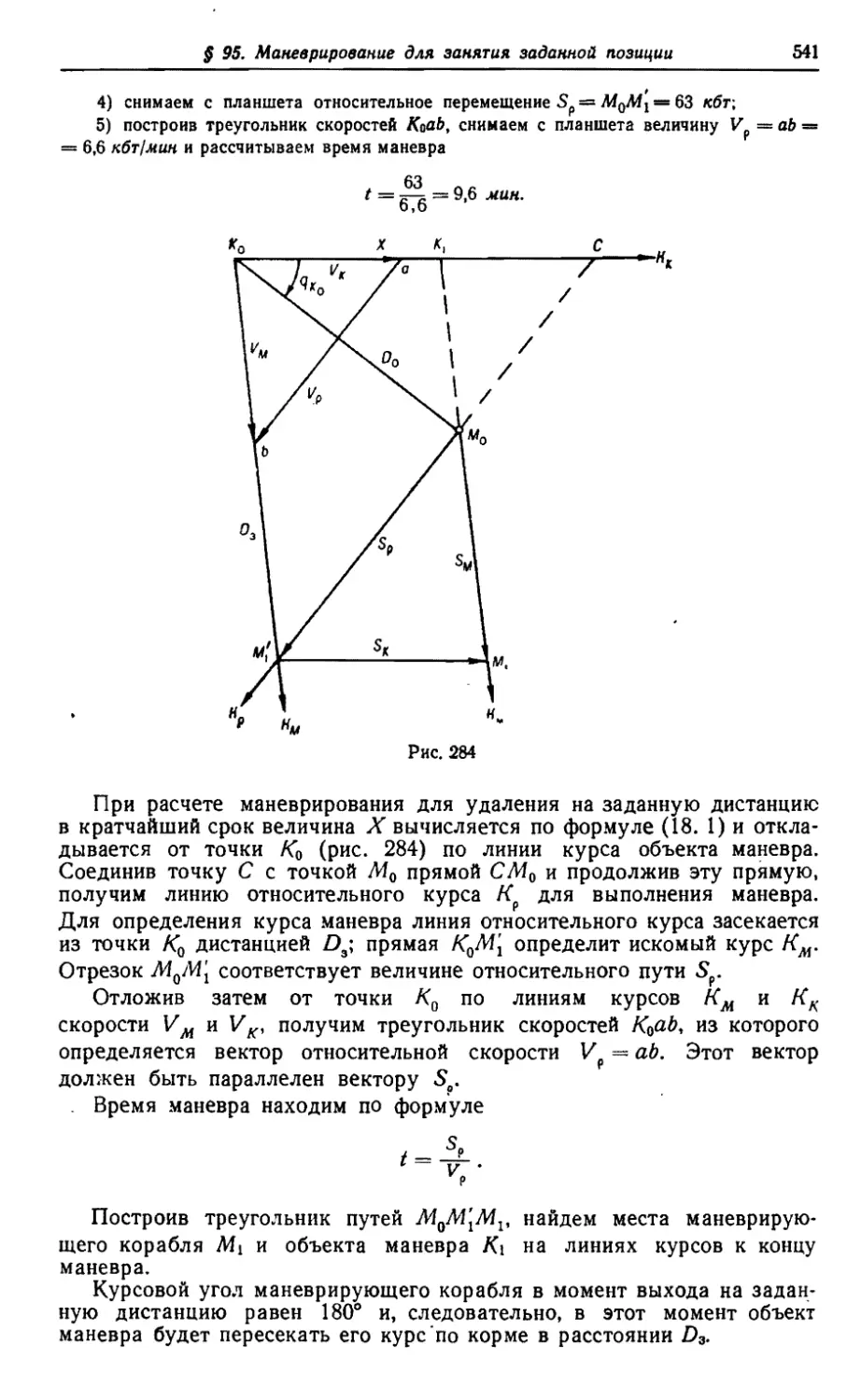
§ 95. Маневрирование для занятия заданной позиции .... 535
§ 96. Контроль маневра................................. 543
§ 97. Учет циркуляции при расчете маневра................544
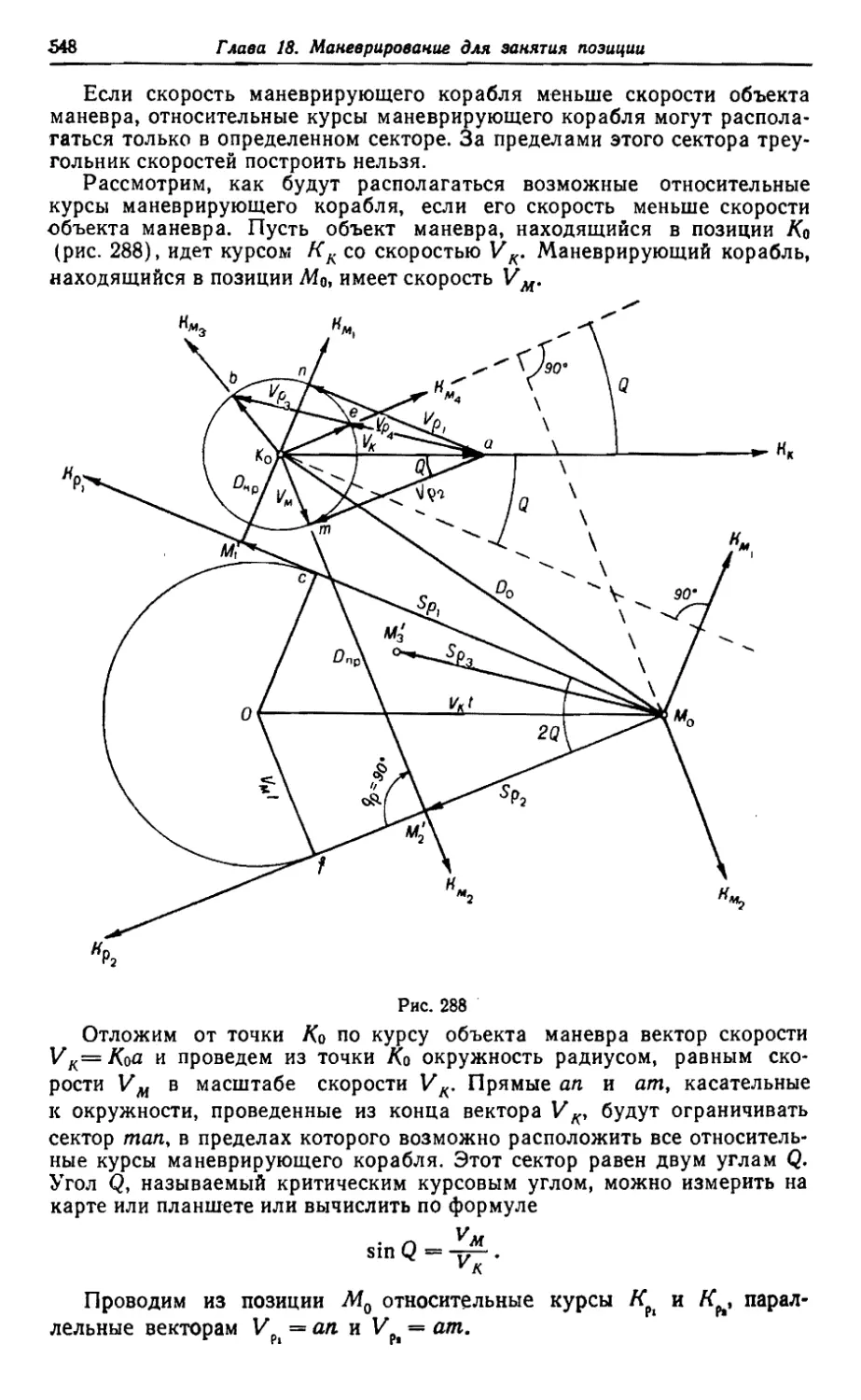
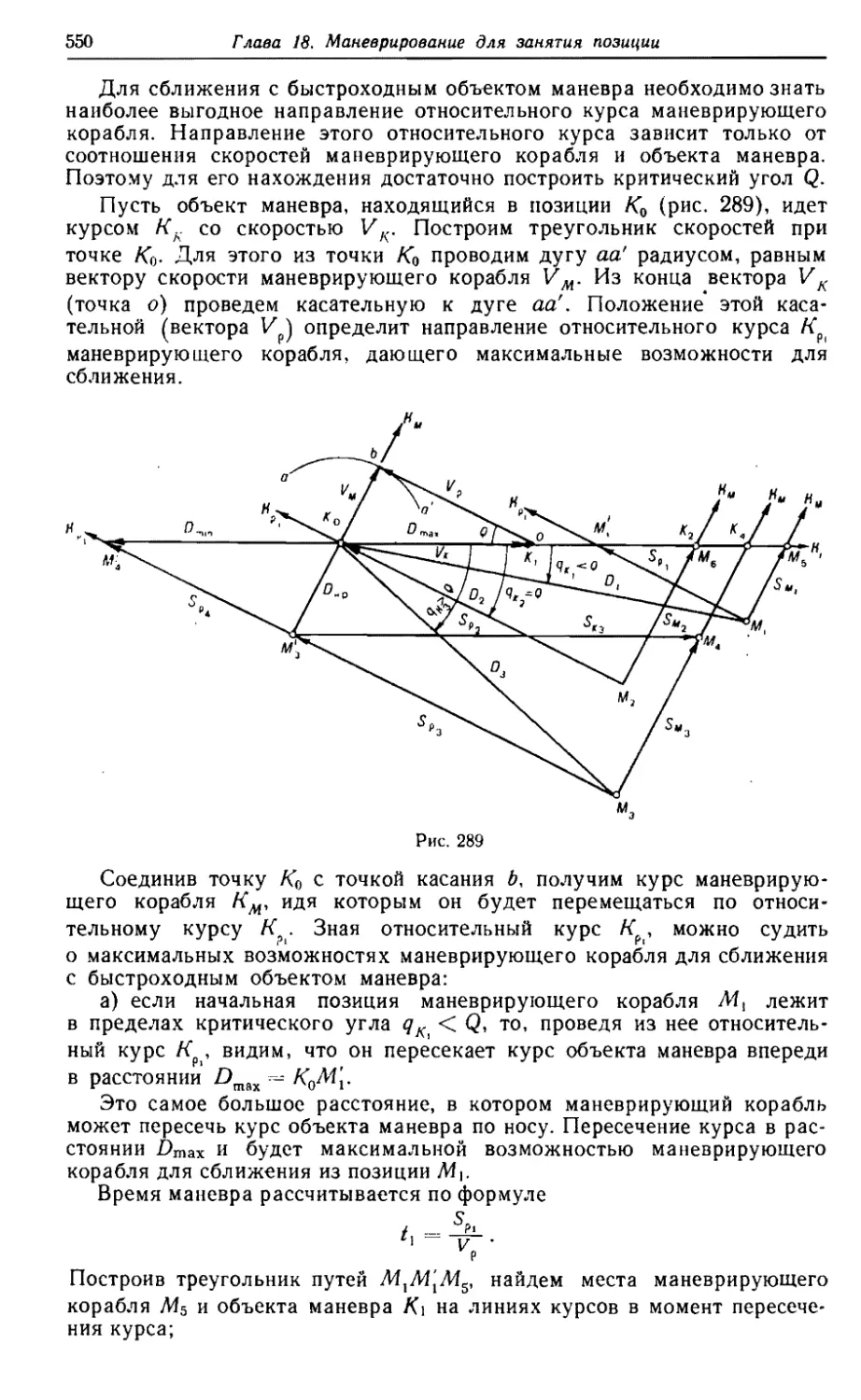
§ 98. Определение возможностей для сближения с быстроходным кораблем ................................................547
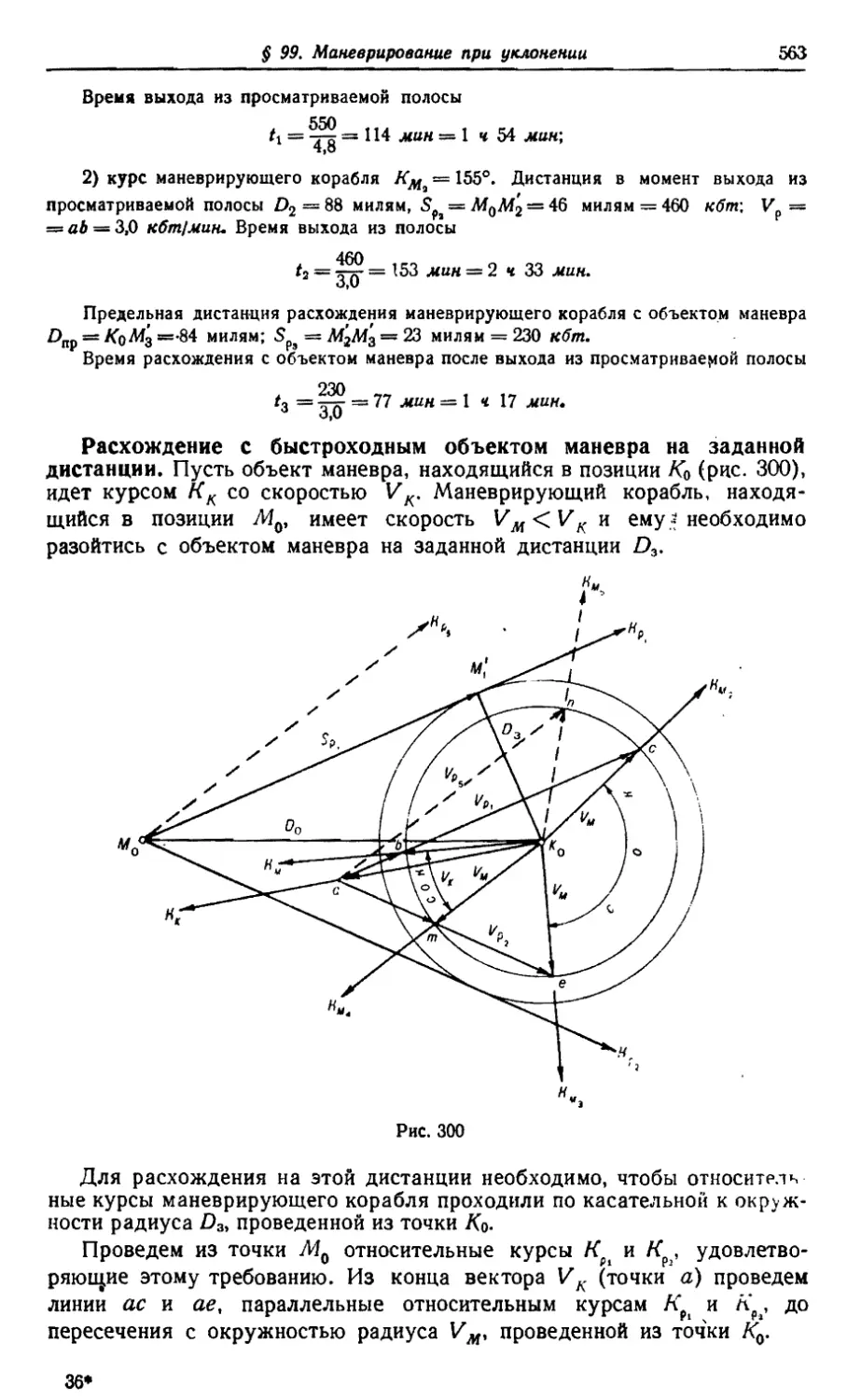
§ 99. Маневрирование при уклонении.......................555
Глава 19. Маневрирование при выполнении специальных задач § 100. Маневрирование при поиске .................................... 567
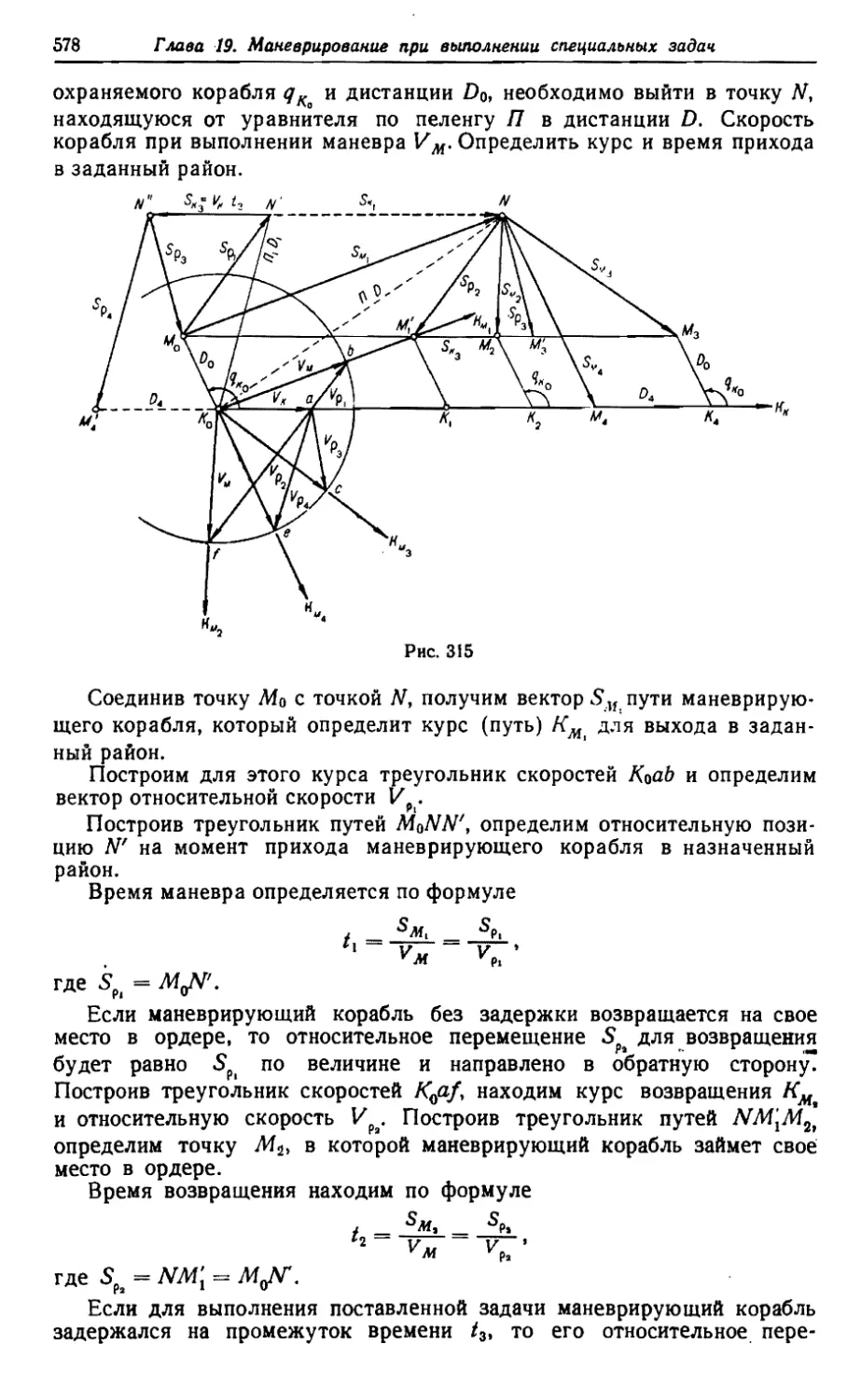
§ 101. Маневрирование при выходе из ордера или строя для выполнения специальных задач..................................577
§ 102. Маневрирование при использовании радиолокационной станции для расхождения с кораблями в море...................581
6
Оглавление
Стр.
ЧАСТЬ VI
ДОПОЛНИТЕЛЬНЫЕ ВОПРОСЫ
Глава 20. Кораблевождение в особых условиях плавания
§ ЮЗ. Кораблевождение в районах, стесненных в навигационном отношении............................................593
§ 104. Кораблевождение в условиях малой видимости .... 602
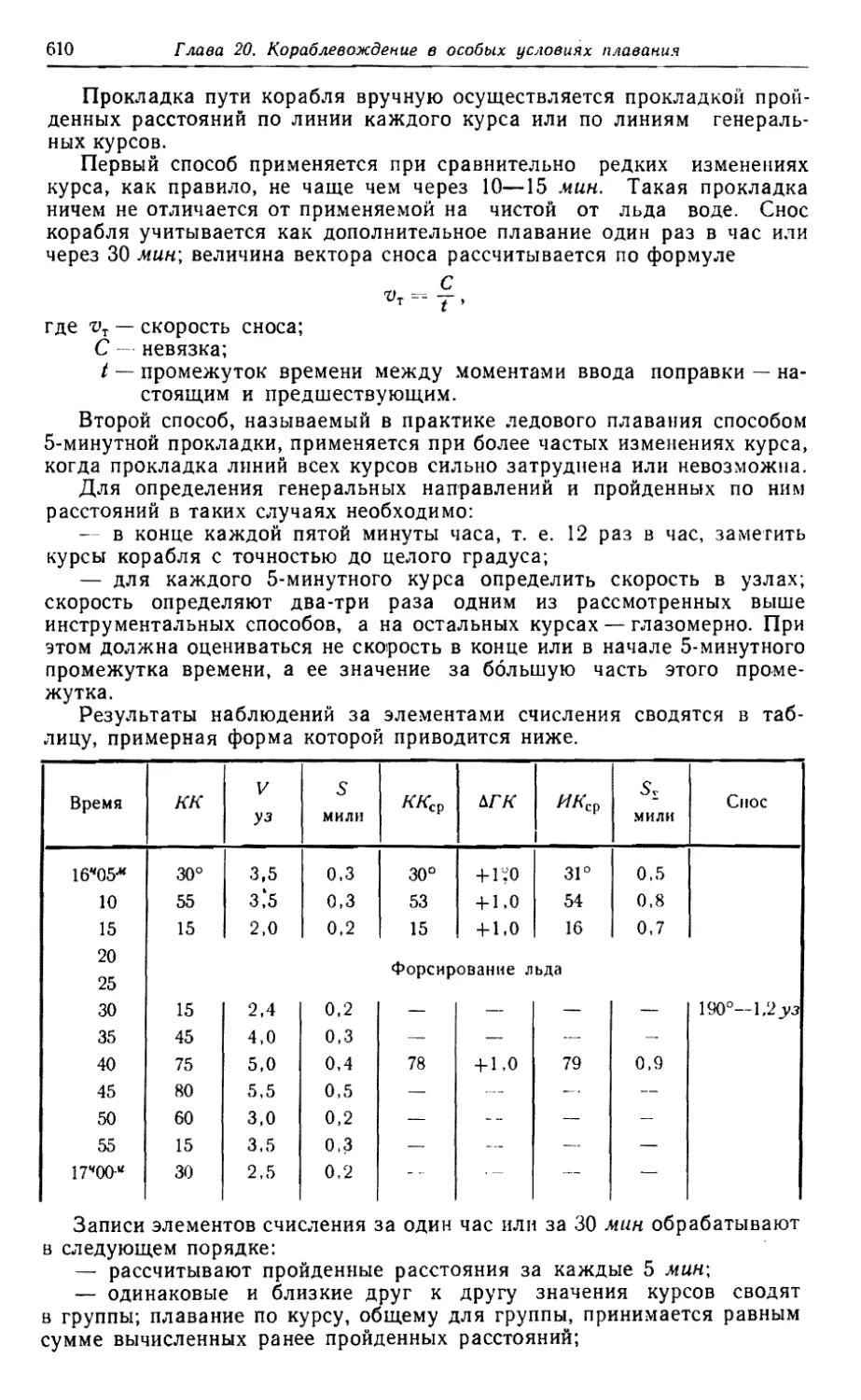
§ 105. Кораблевождение при плавании во льдах..............605
Приложения
1. Некоторые справочные сведения по математике........................615
2. Основные сведения из теории вероятностей...........................617
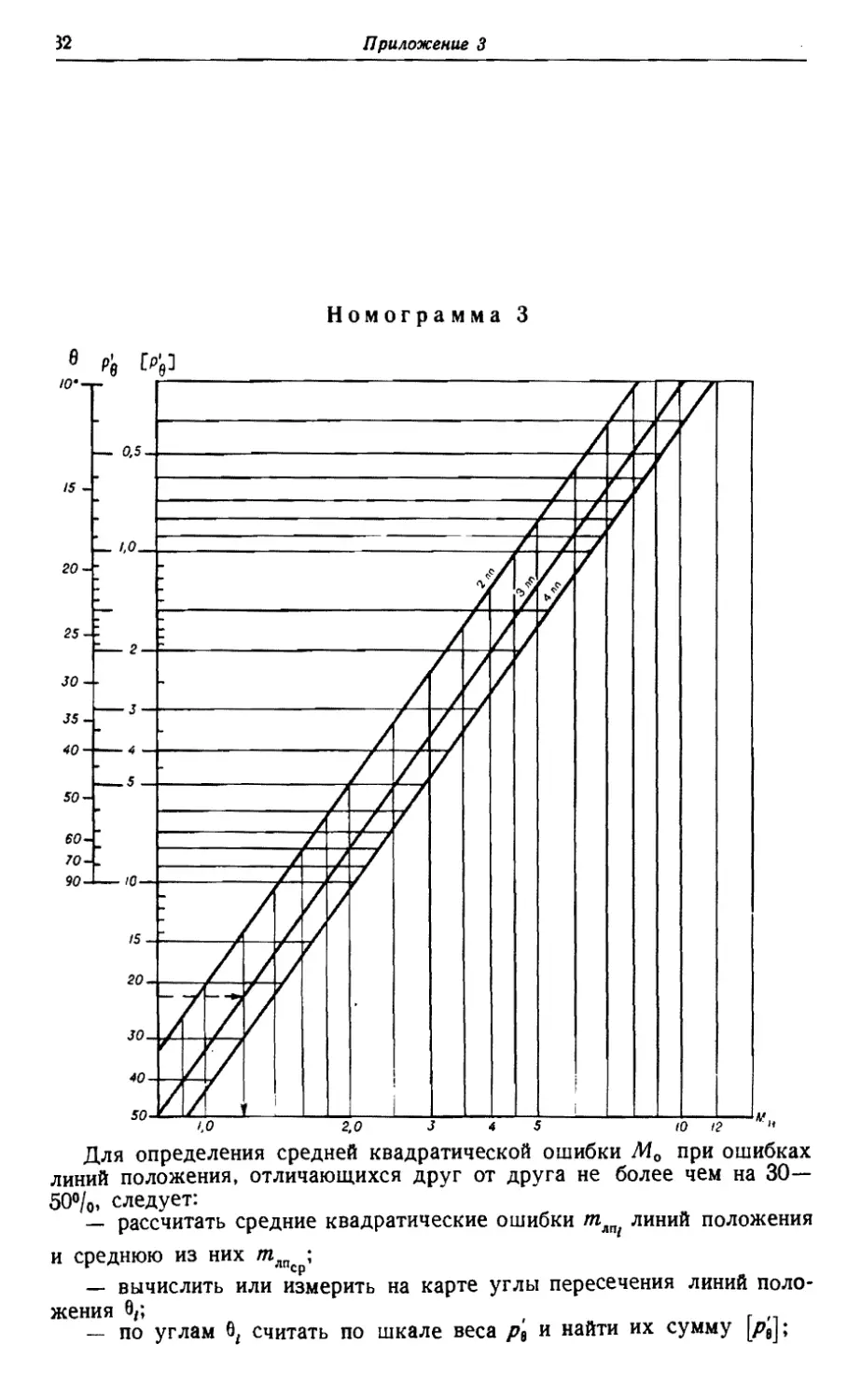
3. Номограммы для расчета средних квадратических ошибок определения места . 629
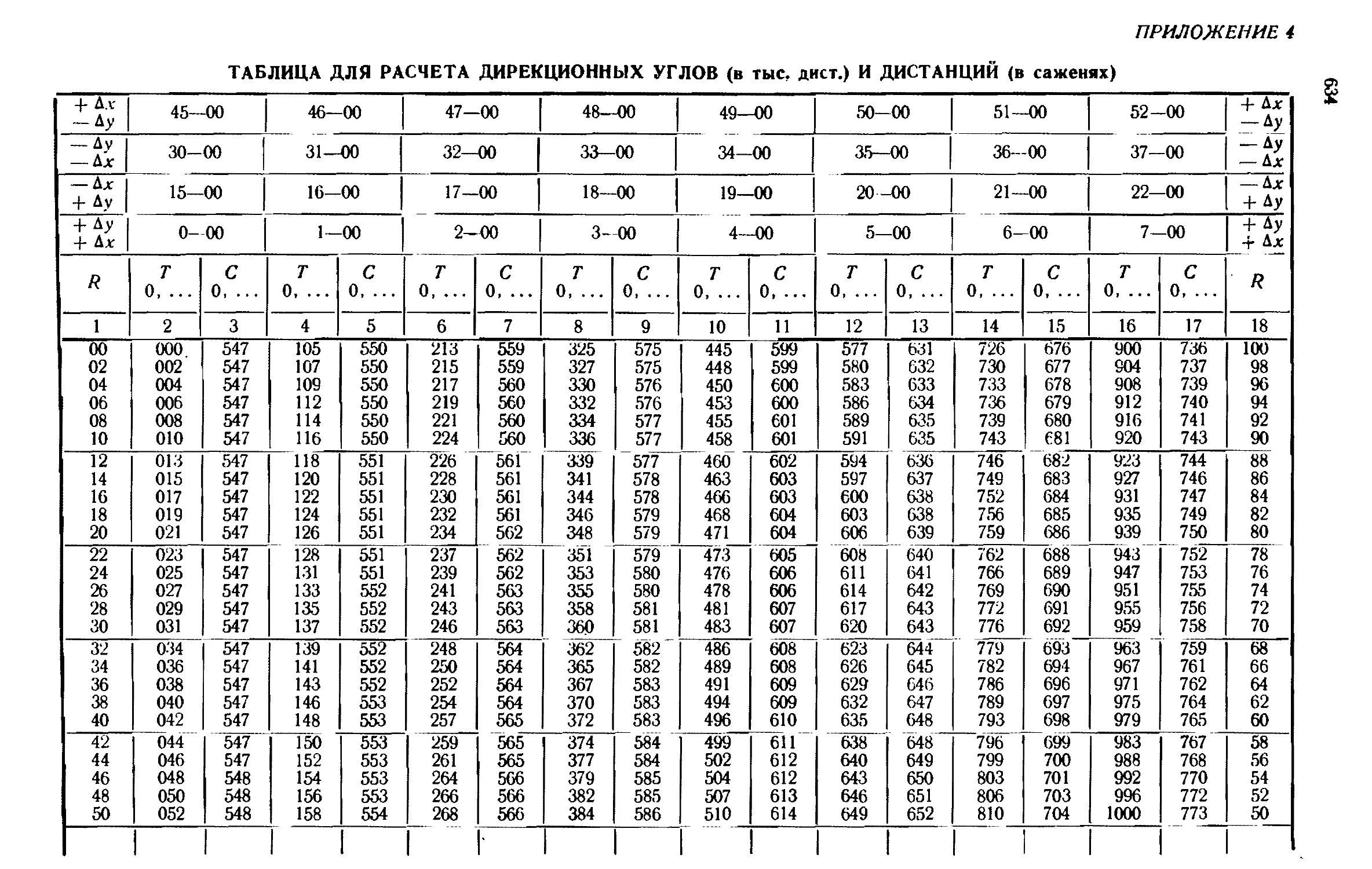
4. Таблица для расчета дирекционных углов (в тыс. диет.) и дистанций (в саженях) ...........................................................634
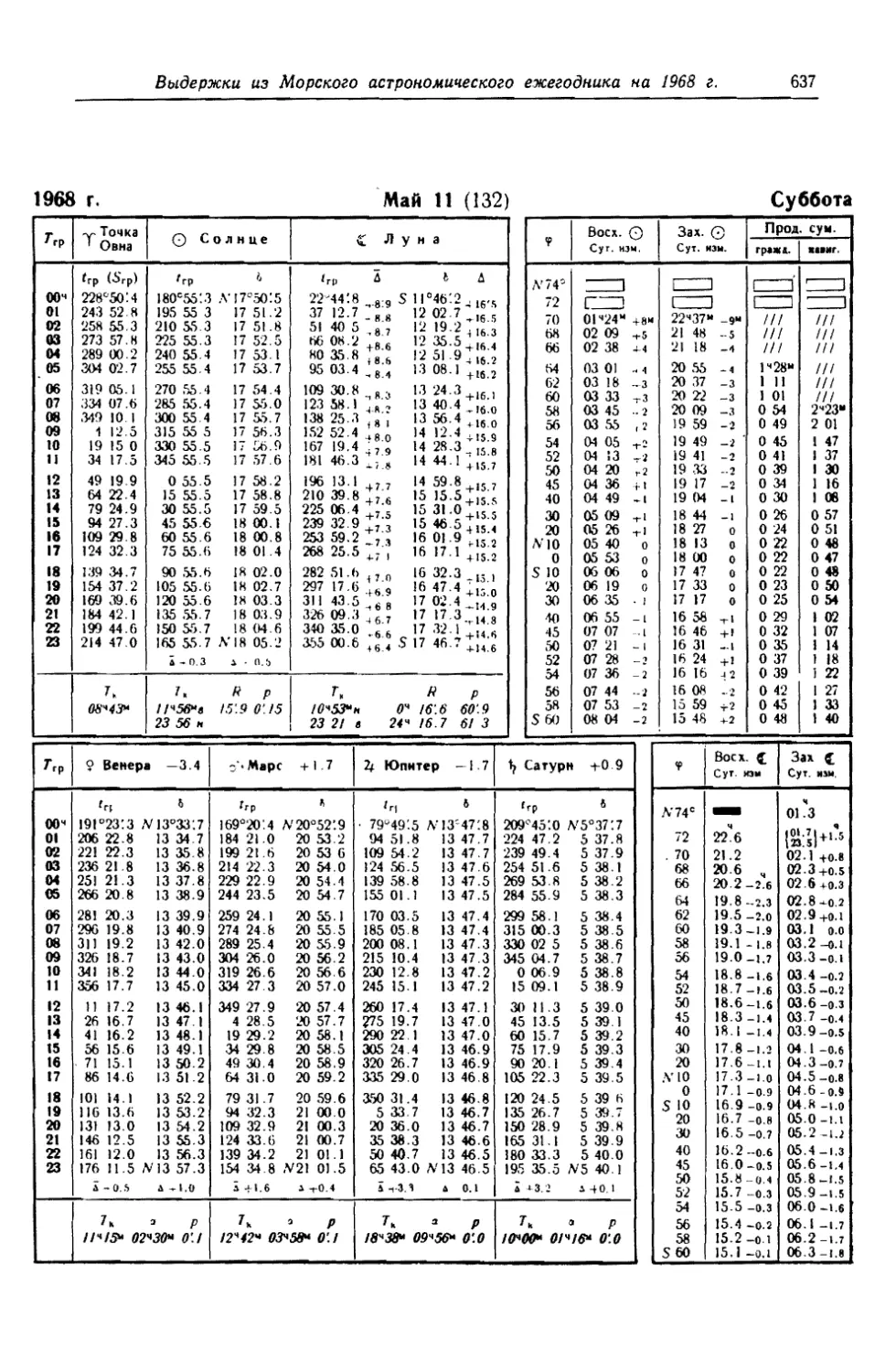
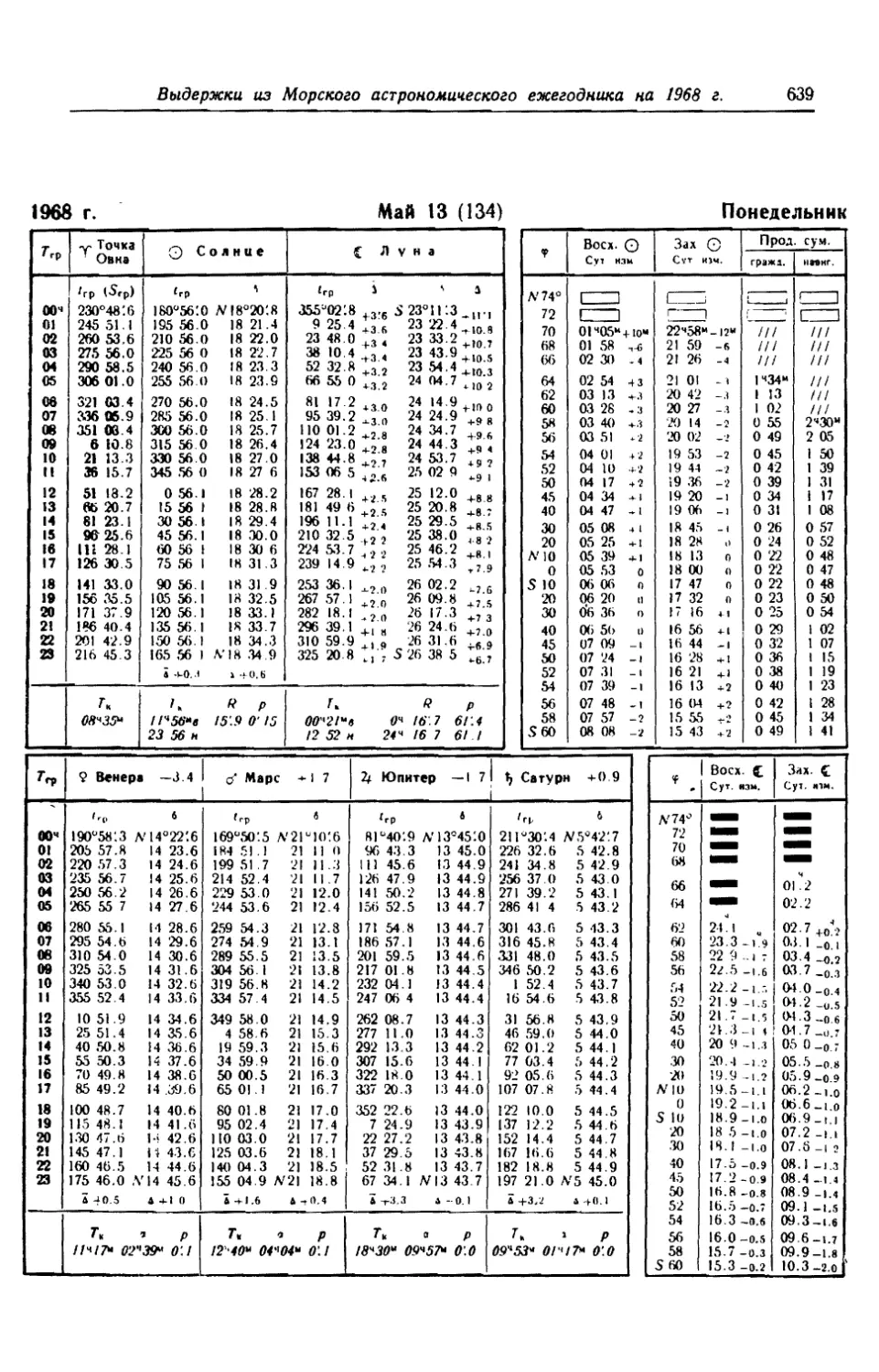
5. Выдержки из Морского астрономического ежегодника на 1968 г.........636
6. Средние значения средних квадратических ошибок навигационных параметров 640
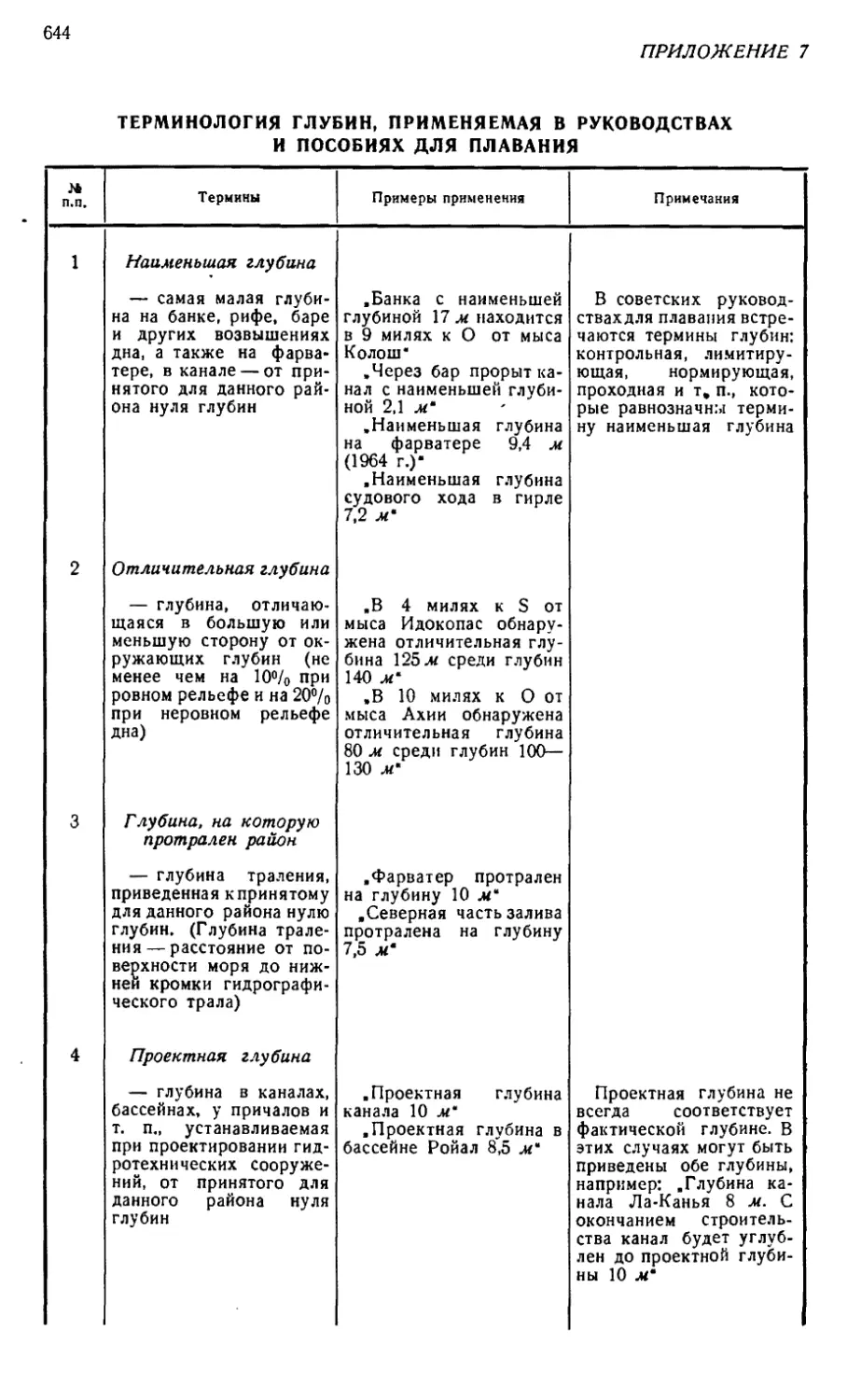
7. Терминология глубин, применяемая в руководствах и пособиях для плавания 644
8. Системы навигационного оборудования морей и озер СССР плавучими предостерегательными знаками (вклейка между стр. 646 и 647).
Список использованной литературы....................................647
Часть I
ОСНОВНЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ
Глава 1
ЗЕМНОЙ ЭЛЛИПСОИД
§ 1. ФИГУРА ЗЕМЛИ
Решение многих задач кораблевождения и связанных с ним дисциплин приводит к необходимости учета фигуры и размеров Земли.
Действительной фигурой Земли является геоид — тело, поверхность которого во всех точках перпендикулярна отвесной линии. Спокойная
свободная поверхность океанов и морей является частью поверхности геоида.
Вследствие неравномерного распределения массы в теле Земли форма геоида весьма сложна. Некоторое представление о форме геоида дают рис. 1 и 2. На первом из них изображено немасштабное меридианное сечение геоида, на втором — развернутое экваториальное сечение и показаны превышения геоида относительно некоторой средней, наиболее близкой к геоиду
Рис. 1
окружности экватора.
Сложность фигуры геоида приводит к необходимости замены его более простой и вместе с тем достаточно близкой к нему фигурой. Такой фигурой является эллипсоид вращения, т. е. тело, полученное при вращении эллипса вокруг его малой оси.
Размеры эллипсоида вращения (рис. 3) задают указанием его полуосей а и b или только одной, например большой, полуоси а и полярного сжатия а или эксцентриситета е, вычисляемых по формулам:
а — b Уа2— Ь2
а =-----: е = —------
а
а
10
Глава 1. Земной эллипсоид
В настоящее время в различных странах применяются различные земные эллипсоиды, размеры и ориентировка которых в теле Земли наилучшим образом удовлетворяют заданную территорию. Эллипсоид, применение которого обязательно в дан-
в 1964 г. был выведен общий
ном государстве при производстве всех топогеодезических и картографических работ, называется референц-эллипсоидом. В Советском Союзе в качестве референц-эллипсоида принят эллипсоид Ф. Н. Красовского.
Для решения некоторых практических задач применяется общий земной эллипсоид, достаточно полно удовлетворяющий всей поверхности Земли. Известно несколько таких эллипсоидов. Так, например, й эллипсоид с размерами:
а = 6 378 160 х; а = 1 : 298,25, который был утвержден XII конгрессом Международного астрономического союза и включен в систему астрономических постоянных.
При решении ряда задач Землю считают шаром, радиус которого выбирают исходя из дополнительных условий. Так, например, шар, для которого длина одной минуты большого круга равна 1852 м (длине одной международной морской мили), должен иметь радиус (/? = 6 366 707 м.
§ 2. ОСНОВНЫЕ ЛИНИИ И ПЛОСКОСТИ НА ЗЕМЛЕ
Воображаемая прямая РР' (рис. 4), вокруг которой происходит суточное вращение Земли, называется земной осью. Эта ось совпадает
с малой осью земного эллипсоида.
Точки Р и Р' пересечения земной оси с поверхностью Земли называются полюсами. Полюс Р, со стороны которого вращение Земли усматривается против движения часовой стрелки, называется Северным, противоположный полюс Р'— Южным.
Плоскости, перпендикулярные земной оси, в пересечении с поверхностью земного эллипсоида (сферы) образуют круги qq', называемые параллелями. Наибольшую из параллелей QQ', плоскость которой проходит через центр Земли, называют земным экватором.
Плоскости, проведенные через полюсы Земли, называются плоскостями истинных меридианов; эти же плоскости в пересечении с поверхностью Земли образуют истинные меридианы. Меридиан, проходящий через место наблюдателя, называется меридианом наблюдателя.
Рис. 4
Прямая ZZ', совпадающая с направлением силы тяжести в данной
точке, называется вертикальной или отвесной линией. Вследствие слож-
§ 3. Счет направлений
11
ности фигуры Земли отвесные линии не пересекаются в одной точке.
Продолжение линии ZZ' вверх (от центра Земли) дает на небесной сфере точку, называемую зенитом наблюдателя, а продолжение этой же линии в обратном направлении — точку на небесной сфере, называемую надиром.
Плоскость NOstSW, перпендикулярную отвесной линии в заданной точке, называют плоскостью истинного горизонта.
Плоскость EFRG истинного меридиана, пересекаясь с плоскостью истинного горизонта, дает на последней прямую N— S (север — юг), называемую полуденной линией.
Плоскости, проходящие через отвесную линию ZZ', называются плоскостями вертикалов. Одна из этих плоскостей, перпендикулярная плоскости истинного меридиана, называется плоскостью первого вертикала. В пересечении с плоскостью истинного горизонта эта плоскость дает прямую Ost—W (восток — запад).
§ 3. СЧЕТ НАПРАВЛЕНИЙ
Измеряемые направления во всех случаях получают как углы между
плоскостями вертикалов, одним из которых является вертикал, принимаемый за начальный, а другим — вертикал, проходящий через место наблюдателя и наблюдаемый ориентир. В качестве начального принимается обычно вертикал, совпадающий с меридианом наблюдателя; началом для счета направлений чаще всего принимается его северная часть.
Вертикалы, между которыми измеряются направления, в пересечении с плоскостью истинного горизонта образуют плоские прямолинейные
углы. Те же плоскости в пересечении с поверхностью сферы образуют дуги больших кругов — ортодромии, а в пересечении с поверхностью эллипсоида — нормальные сечения.
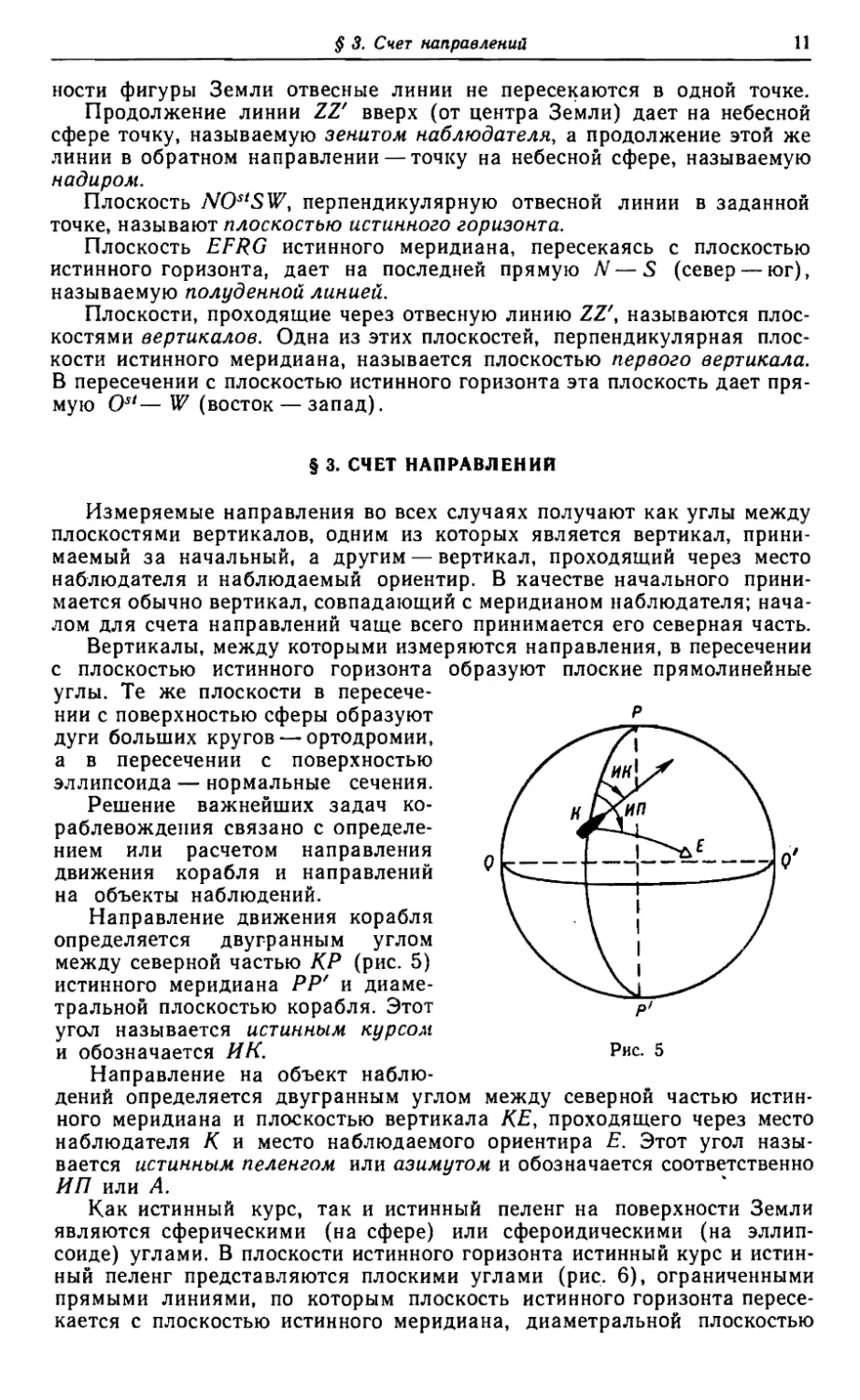
Решение важнейших задач кораблевождения связано с определением или расчетом направления движения корабля и направлений на объекты наблюдений.
Направление движения корабля определяется двугранным углом между северной частью КР (рис. 5) истинного меридиана РР' и диаметральной плоскостью корабля. Этот угол называется истинным курсом и обозначается ИК.
Р
pf
Рис. 5
Направление на объект наблю-
дений определяется двугранным углом между северной частью истинного меридиана и плоскостью вертикала КЕ, проходящего через место
наблюдателя К и место наблюдаемого ориентира £. Этот угол назы-
вается истинным пеленгом или азимутом и обозначается соответственно ИП или А.
Как истинный курс, так и истинный пеленг на поверхности Земли являются сферическими (на сфере) или сфероидическими (на эллипсоиде) углами. В плоскости истинного горизонта истинный курс и истинный пеленг представляются плоскими углами (рис. 6), ограниченными
прямыми линиями, по которым плоскость истинного горизонта пересекается с плоскостью истинного меридиана, диаметральной плоскостью
12
Глава 1. Земной эллипсоид
корабля и плоскостью вертикала, проходящего через наблюдаемый ориентир Е. Прямую, совпадающую с направлением диаметральной плоскости корабля, называют линией курса, а прямую, совпадающую с направлением на ориентир, — линией пеленга.
Следовательно, в плоскости истинного го-
ризонта истинным курсом называется угол, заключенный между северной частью истинного меридиана и линией курса в сторону движения корабля, а истинным пеленгом — угол между северной частью истинного меридиана и линией пеленга в направлении на ориентир.
В настоящее время для счета курсов применяется только круговая система счета направлений— от северной части истинного меридиана по ходу часовой стрелки от 0 до 360°.
Для счета пеленгов (азимутов) применяются системы:
— круговая, аналогичная применяемой для счета курсов;
— полу круговая — от северной или южной части истинного меридиана к востоку и западу от 0 до 180°;
— четвертная — от северной или южной части истинного меридиана к востоку и западу от 0 до 90°.
При записи направлений в полукруговой системе счета, кроме величины угла, нужно указывать, от какой части меридиана и в какую сторону (к Ost или W) отсчитывается угол, например A^132°U^, S67°Osf
и т. д.
Для перехода от полукруговой системы счета к круговой следует:
— при направлении от N к Ost—оставить величину угла без изменений;
— при направлении от S к Ost— взять дополнение величины угла до 180°;
— при направлении от S к W — к величине угла прибавить 180°;
— при направлении от N к W—взять дополнение величины угла до 360°.
Так, например, направлению S150°№ соответствует направление 330°, а направлению S65°Os*—направление 115° в круговой системе счета.
При использовании четвертной системы счета направление записывается с указанием четверти, например NO 67°, 85° и т. д. Переход
от четвертной системы счета направлений к круговой осуществляется по тем же правилам, которые изложены выше для случая перехода от полукруговой системы счета к круговой.
Направление, отличающееся от истинного пеленга на 180°, называется обратным истинным пеленгом и обозначается буквами ОИП.
Угол между носовой частью диаметральной плоскости корабля и направлением на объект называется курсовым углом и обозначается буквами КУ или q.
Счет курсовых углов ведется обычно в полукруговой системе от 0э, определяемого направлением носовой части диаметральной плоскости корабля, до 180° в стороны правого и левого бортов. Курсовые углы в этой системе счета записываются с обязательным указанием борта, например КУ— 55° пр!б или КУ— 130° л/б. При счете курсовых углов, измеряемых, в частности, с помощью радиопеленгатора, применяется
§ 4. Системы координат для определения положения точки на поверхности Земли 13
также круговая система счета от 0 до 360° по направлению движения часовой стрелки.
Между истинным курсом, истинным пеленгом и курсовым углом (рис. 6) установлена зависимость, выражаемая формулами:
ИК + КУпр!б\
ИП = ИК-КУ л[б.
При круговой системе счета курсовых углов используется первая из приведенных формул. Если при этом истинный пеленг получается больше 360°, то его нужно уменьшить на 360°.
При использовании второй формулы, когда ИК < КУ, истинный курс ИК следует увеличить на 360°.
Из рис. 6 следует также, что во всех случаях кругового счета курсовых углов
КУ=ИП-ИК.
По данной формуле определяется не только величина, но и знак или наименование курсового угла: если результат получен со знаком плюс, то КУ правого борта, если со знаком минус — левого борта.
Примеры. 1. ИК— 100°; КУ — 50° пр/б. Определить ИП и ОИП.
ИП = 100° + 50° — 150°; ОИП = 150° + 180° = 330°.
2. ИК — 245°; ИП — 120°. Определить КУ.
КУ = 120° — 245? = —125^или КУ = 125° л/б.
3. И К = 100°; ИП = 254°. Определить КУ.
КУ « 254° — 100° = 154° пр!б.
Направление, перпендикулярное диаметральной плоскости корабля, т. е. соответствующее курсовому углу 90° правого или левого борта, называется траверзом.
§ 4. СИСТЕМЫ КООРДИНАТ ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ТОЧКИ НА ПОВЕРХНОСТИ ЗЕМЛИ
Координатами называют совокупность чисел, определяющих положение точки на линии, плоскости, поверхности или в пространстве.
Для определения положения точки на поверхности Земли применяют несколько систем координат. Основными из них являются: географическая, геодезическая, астрономическая, прямоугольная и полярная.
Географическая и геодезическая системы отнесены к земному эллипсоиду. Вследствие различия фигур геоида и эллипсоида для определения положения точки на геоиде используются три координаты:
— широта, соответствующая углу между нормалью к поверхности эллипсоида в данной точке и плоскостью экватора;
— долгота, соответствующая двугранному углу между плоскостью начального меридиана и плоскостью меридиана, проходящего через данную точку;
— расстояние по нормали от поверхности эллипсоида до данной точки.
Рассматривая вместо точек земной поверхности их проекции на поверхность эллипсоида, ограничиваются только первыми двумя координатами — широтой и долготой. За начальный меридиан для счета долгот в большинстве стран принят меридиан Гринвича.
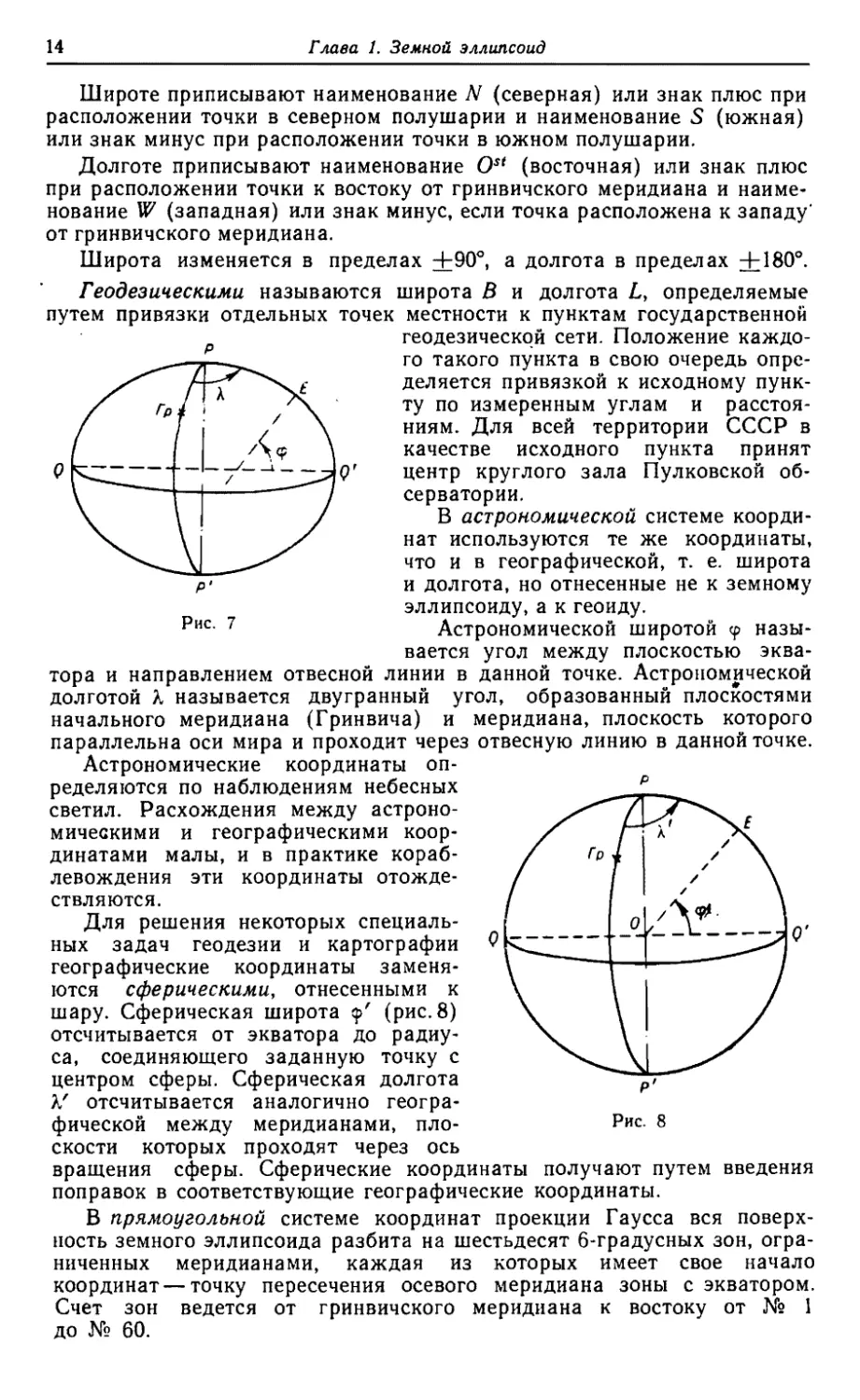
Географическими называются широта и долгота К (рис. 7), соответствующие рассмотренным выше координатам, без связи их со способом определения.
14
Глава 1. Земной эллипсоид
Рис. 7
Широте приписывают наименование N (северная) или знак плюс при расположении точки в северном полушарии и наименование S (южная) или знак минус при расположении точки в южном полушарии.
Долготе приписывают наименование Ost (восточная) или знак плюс при расположении точки к востоку от гринвичского меридиана и наименование W (западная) или знак минус, если точка расположена к западу' от гринвичского меридиана.
Широта изменяется в пределах +90°, а долгота в пределах +180°.
Геодезическими называются широта В и долгота L, определяемые путем привязки отдельных точек местности к пунктам государственной геодезической сети. Положение каждого такого пункта в свою очередь определяется привязкой к исходному пункту по измеренным углам и расстояниям. Для всей территории СССР в качестве исходного пункта принят центр круглого зала Пулковской обсерватории.
В астрономической системе координат используются те же координаты, что и в географической, т. е. широта и долгота, но отнесенные не к земному эллипсоиду, а к геоиду.
Астрономической широтой ср называется угол между плоскостью эква-
тора и направлением отвесной линии в данной точке. Астрономической долготой X называется двугранный угол, образованный плоскостями начального меридиана (Гринвича) и меридиана, плоскость которого параллельна оси мира и проходит через отвесную линию в данной точке.
Астрономические координаты определяются по наблюдениям небесных светил. Расхождения между астрономическими и географическими координатами малы, и в практике кораблевождения эти координаты отождествляются.
Для решения некоторых специальных задач геодезии и картографии С географические координаты заменяются сферическими, отнесенными к шару. Сферическая широта ср' (рис. 8) отсчитывается от экватора до радиуса, соединяющего заданную точку с центром сферы. Сферическая долгота V отсчитывается аналогично географической между меридианами, плоскости которых проходят через ось
вращения сферы. Сферические координаты получают путем введения поправок в соответствующие географические координаты.
В прямоугольной системе координат проекции Гаусса вся поверхность земного эллипсоида разбита на шестьдесят 6-градусных зон, ограниченных меридианами, каждая из которых имеет свое начало координат — точку пересечения осевого меридиана зоны с экватором. Счет зон ведется от гринвичского меридиана к востоку от № 1 до № 60.
§ 4. Системы координат для определения положения точки на поверхности Земли 15
Любую заданную точку в пределах зоны (например Л, рис. 9) получают в пересечении двух координатных линий — дуги эллипса пАп', параллельной осевому меридиану зоны, и кратчайшей линии AA'f проведенной из данной точки А перпендикулярно осевому меридиану.
Удаление точки А' (основания пер-
пендикуляра) от экватора определяется абсциссой х, а удаление малого круга пп' от осевого меридиана — ординатой у. Ординате у приписывают знак плюс, когда точка удалена к востоку от осевого меридиана зоны, и знак минус,— когда точка удалена к западу от осевого меридиана.
Для определения номера зоны, в которой расположена заданная точка с долготой X, применяют формулу
л=4+ь (I-п
Деление долготы X производится до бли- Рис. 9
жайшего меньшего целого, остаток отбрасывается; так, при X = 55° О( получим п = (55 : 6) + 1 = 10.
Для вычисления долготы Lo осевого меридиана зоны применяют формулу
Lo — 6п — 3.
(1-2)
Так, например, при п = 10 получим Lo = 6-10 — 3 = 57° Ost.
Номер зоны и долготу осевого меридиана для точки, находящейся в западном полушарии,«следует определять, заменив западную долготу на восточную, равную 360° —Взяв для примера X = 58° W, получим: X = 360° - 58° - 302° п - (302: 6) +1 -51; £0 = 6-51 - 3° = 303° О' или 57 °W.
Прямоугольная система координат применяется при производстве топогеодезических работ, составлении топографических карт, расчете направлений и расстояний между точками на небольшие расстояния и решении ряда других специальных задач.
В полярной системе координат, называемой также тангенциальной, место заданной точки определяется относительно другой известной точки (ориентира, корабля); при этом указываются:
— угол, определяющий направление с одной точки на другую;
— расстояние между точками.
Полярная система координат применяется, в частности, при определении места по пеленгу и расстоянию.
В практике решения задач кораблевождения часто приходится находить разности географических широт и долгот по заданным координатам точек.
Разностью широт (РШ, Дер) двух заданных точек на земной поверхности называется дуга меридиана, заключенная между параллелями этих точек. Если переход от одной точки (Д или А') к другой (В или В') совершается в общем направлении к северу (рис. 10), то независимо от; полушария, в котором расположены точки, разности широт приписывают наименование «к N» или знак плюс; если же этот переход совершается в общем направлении к югу — то наименование «к S» или знак минус.
16
Глава /. Земной эллипсоид
Считая северную широту положительной, а южную отрицательной, разность широт и ее наименование можно получить по формуле
РШ(Д<Р) = Т2-Т|,
’ где cpt и срг — широты соответственно начальной и конечной точек.
Разность широт измеряется меньшей дугой меридиана, заключенной между параллелями заданных точек, т. е. она не может быть больше 180°.
Разностью долгот (РД, ДХ) двух заданных точек на земной поверх-
ности называется меньшая из
дуг экватора, заключенная между меридианами этих точек. Так, например, разность долгот между точками А и В или В и А (рис. 10) измеряется дугой экватора EF,
Если точка перемещается в общем направлении на восток, то разности долгот приписывают наименование «к Ost» или знак плюс, при обратном перемещении — наименование «к W» или знак минус.
Приписывая восточной долготе знак плюс, а западной минус, разность долгот и ее наименование можно определять по формуле
РД(ДХ) = Х2-А,
где Xi и Л2— долготы соответственно начальной и конечной точек.
При разноименных М и Х2 в формуле вместо разности будет сумма, которая не должна превышать 180°; если в результате алгебраического вычитания долгот полученная разность будет больше 180°, то ее необходимо вычесть из 360° и изменить наименование разности долгот на обратное.
Пример. = 60°50' TV; Xt == 134°5(У Ost\
<р2 = 56°40' М Х2 = 167°42 • РГ.
Вычислить РШ и РД.
Решение. РШ=( + 56°40') —( + 60°50')= 4°10' к S;
РД=(—167°42')~(+134°50') = 302°32' к W = 57°28' к Ost.
При известных координатах cpi и Xi исходной точки и приращениях координат РШ и РД координаты конечной точки вычисляются по формулам:
?2 = ?i + = ?i 4-
Х2 — Х| РД = дх.
Пример. <pi = 64°48' N\ =* 3°45' О5*',
РШ = 5°10' к$; РД — Ь°ЫУ к W.
Вычислить <р2 И Х2.
Решение. «2 = (+ 64°48') + (—5°10') = 59°38' М к2 = (+ 3°45') + (— 6°50') = 3°05' W.
В отдельных случаях, например при использовании морских карт, построенных на полярные районы в поперечной проекции Меркатора, используется система так называемых квазигеографических (т. е. как бы географических) координат. В этой системе координат роль меридианов
§ 5. Основные сечения эллипсоида. Меры длины
17
выполняют квазимеридианы, которые на карте изображаются прямыми, параллельными гринвичскому меридиану, а роль параллелей — квазипараллели, перпендикулярные квазимеридианам. Более подробно вопрос о системе квазигеографических координат рассмотрен в § 27.
§ 5. ОСНОВНЫЕ СЕЧЕНИЯ ЭЛЛИПСОИДА. МЕРЫ ДЛИНЫ
Основными сечениями эллипсоида являются:
— сечение плоскостью, проходящей через малую ось;
— сечение плоскостью, перпендикулярной малой оси;
— нормальное сечение.
Сечение плоскостью, проходящей через малую ось РР' эллипсоида, образует на его поверхности меридианный эллипс^ или истинный меридиан PQP'Q' (рис. И). Кривизна меридианного эллипса, а следовательно, и радиус кривизны М являются переменными величинами. Из рисунка видно, что радиус М уменьшается с уменьшением географической широты <р. Радиус М вычисляется по формуле
/и =_____а<1~е2)_____
(1 — e2sin2f)t/a ’
где а и е — параметры референц-эллипсоида.
Сечение эллипсоида плоскостью, перпендикулярной его малой оси РР', дает на его поверхности малый круг qq', называемый параллелью. Радиус параллели г определяется формулой
г- „ ars?2 ... . (1.4) (1— e2sin>)/j
При = 0° радиус г параллели равен большой полуоси а эллипсоида, и эта параллель носит название земного экватора.
Нормальным называют сечение эллипсоида плоскостью, проходящей через нормаль к его поверхности. Из
бесчисленного множества возмож-
ных нормальных сечений выделяют два главных нормальных сечения — меридианное и перпендикулярное ему сечение первого вертикала. Последнее сечение дает эллипс, радиус N кривизны которого в данной широте ср определяется формулой
N==~n-----5 2 УТ •
(1 — Г Sin2 Ср) /а
(1.3)
(1.5)
Радиус кривизны нормального сечения, составляющего с меридианом в заданной точке угол А, определяется формулой
рА = J/ЛТЛГ^ 1 —~ cos2 ср cos 2А
где М и N — величины, определяемые в зависимости от широты ср по формулам (1.3) и (1.5).
2 Заказ 1833
18
Глава 1, Земной эллипсоид
Радиусом средней кривизны эллипсоида в данной точке с широтой ср называют среднее геометрическое из радиусов М и N, вычисляемое по формуле
П V 1—e2sln2<p
Произведение любого радиуса кривизны на аге Г равно длине дуги в Г данного сечения. Учтя приведенные выше формулы, получим выражения для определения длин дуг:
1) одной минуты параллели
p = rarcl =-т------J 2 v. (1.6)
(1 — e2sln2<p)/j 4 1
или без учета сжатия Земли (е = 0)
р = a cos <р arcl'; (1. 7)
2) одной минуты первого вертикала
Д1 v = Ward' = т; ?2агс1' ... {1. 8)
N (1 — e2sin2?)v f
или приближенно
А1^= 1858,461-3,404 cos 2<р; (1.9)
3) одной минуты меридиана
= М arcl' = а ° ~е? 2Гу/, (1.10)
(1 — Г Slrr ср)'»
или приближенно
А1^ = 1852,23 — 9,34 cos 2<?. (1.11)
Длину дуги одной минуты меридиана А1^ называют морской милей. Как видно из формул (1.10) и (1.11), она является величиной переменной и изменяется от 1842,9 м на экваторе до 1861,6 м на полюсе. Длина дуги одной минуты меридиана А!^ в метрах для различных широт приведена в табл. 1.
Таблица 1
<р 0° 10° 20° 30° 40° 50° 60° 70° | 80° 90°
1842,9 1843,5 1845,1 1847,6 1850,6 1853,8 1856,9 1859,4| 1861,0 1861,6
При решении практических задач кораблевождения применяют стандартную, или международную, морскую милю, длина которой принята равной 1852,0 м, что соответствует длине дуги одной минуты меридиана А1^ в широте около 45°.
Кроме морской мили, применяются следующие меры длины.
Кабельтов — одна десятая часть морской мили. Служит для измерения небольших расстояний.
Артиллерийский кабельтов — условная единица длины, равная 182,88 м, или 600 фут. Применяется в морской артиллерии. Для перевода артиллерийских кабельтовых в морские служит коэффициент KD~ 0,987, а для обратного перевода коэффициент KD =1,013 или таблицы соответственно 45-а и 45-6 МТ—63.
$ 6. Локсодромия, ортодромия и геодезическая линия
19
Метр — основная единица длины метрической системы мер. Первоначально в 1791 г. метр вводился как единица длины, равная одной 10-миллионной части четверти парижского меридиана. С 1889 г. считается единицей длины, равной международному прототипу метра. В 1960 г. 11-й Генеральной конференцией по мерам и весам метр утвержден как единица длины, равная 1 650 763,73 длины волны излучения атома криптона 86 при строго определенных условиях, гарантирующих устойчивость излучения.
Километр равен 1000 м, или 0,54 стандартной морской мили. Служит для измерения расстояний на суше. Для перевода морских миль в километры используется коэффициент 1,852, а для обратного перевода коэффициент 0,540 или таблицы соответственно 44-а и 44-6 МТ—63.
Сажень морская равна 1,83 м, или 6 фут. Применяется для обозначения глубин на некоторых иностранных морских картах.
Фут равен 30,48 см. Применяется для обозначения высот на берегу и малых глубин на некоторых иностранных морских картах.
Ярд— условная единица длины, равная 3 футам, или 91,44 см. Применяется в Англии и США для измерения небольших расстояний.
Статутная, или береговая, миля, равная 1609,4 м, используется в ряде иностранных государств при плавании по рекам и на озерах, а также для измерения расстояний на суше. В таких милях, в частности, выражают дальность действия радионавигационных систем в Англии и США.
Для выражения скорости кораблей принята условная единица — узел, соответствующая скорости в 1 стандартную морскую милю в час (0,514 м/сек, или 0,167 кбт/мин). При решении многих задач кораблевождения, и в частности задач маневрирования, скорости кораблей часто выражают в кабельтовых в минуту, пользуясь для перевода формулой
(1.12)
В настоящее время при решении некоторых задач морские меры длины и скорости — мили и узлы заменяют соответственно километрами и километрами в час.
§ 6. ЛОКСОДРОМИЯ, ОРТОДРОМИЯ и геодезическая линия
Локсодромией называется кривая, пересекающая все меридианы под одним и тем же углом К (рис. 12). Корабль, совершающий плавание постоянным курсом, перемещается именно по локсодромии.
Уравнение локсодромии на поверхности эллипсоида имеет вид
*.-*! = /([in lg (-Г + -Т') x
Если пренебречь сжатием эллипсоида, т. е. принять Землю за шар, то уравнение (1, 13) примет вид
х2 -А, = tg tf[ln tg (-£- + -£-) - In tg(-=- + -*-)]. (1.14»
2*
<20
Глава 1. Земной эллипсоид
В приведенных уравнениях срь <р2 и X], Х2—географические координаты точек, лежащих на локсодромии, е — эксцентриситет эллипсоида.
Из исследования уравнений (1.13) и (1.14) выводятся следующие свойства локсодромии:
— при курсах К, равных 0 и 180°, локсодромия совпадает с меридианом;
— при курсах К, равных 90 и 270°, локсодромия совпадает с параллелью, а в широте ср = 0° — с экватором;
— при любых других курсах локсодромия является логарифмической спиралью, стремящейся к полюсу, но никогда его не достигающей.
На поверхности эллипсоида или сферы локсодромия своей выпуклостью обращена в сторону экватора.
Длину и направление локсодромии по известным координатам точек вычисляют по формулам аналитического счисления, приведенным в § 64.
Ортодромией называется дуга большого круга, которая на поверхности сферы является кратчайшим расстоянием между двумя точками. Уравнение ортодромии, проходящей через две заданные точки, имеет вид
ctg Д1 = tg<p2cos<p| cosec ДХ — sin ctg ДХ. (1. 15)
Разность углов, под которыми дуга большого круга пересекает меридианы двух точек, называется схождением меридианов. Так, если дуга большого круга проведена через точки В\ и В2 (рис. 13), то угол схождения меридианов можно записать так
При известных координатах точек В{ М и В2 (<?2; Х2) угол 7 вычисляется по приближенной формуле
7 = 0-2 - М) sin <(„, (1.17)
где — средняя широта.
Знак 7 в северном полушарии совпадает со знаком разности долгот Х-2 — в южном полушарии следует брать разность Xi — Х2.
Угол схождения меридианов используется при расчете направления А2 дуги большого круга (ортодромии) в заданной точке В2 по ее направлению Ль в другой точке Вг по формуле
Л2 == Л1 + 7.
Если через две общие точки провести локсодромию и ортодромию (рис. 14), то эти кривые пересекутся под некоторым углом ф. Этот угол между ортодромией и локсодромией называется ортодромической поправкой.
§ 6. Локсодромия, ортодромия и геодезическая линия 21
Обозначив направление локсодромии в точке В\ через К, а ортодромии — через Д1, на основании рисунка можем написать
(1.18)
Данная формула является точной, однако для использования она неудобна, так как расчет ортодромической поправки ф1 требует предварительного вычисления направлений как ортодромии, так и локсодромии.
Если углы К и Ai выразить в функциях координат заданных точек, то можно получить следующую формулу для непосредственного вычисления ортодромической поправки
= а*ы° + в\ (1.19)
Величины Аф и В° приводятся в табл. 23-а МТ—63.*Коэффициент Аф выбирается по широтам точек ?.| и а слагаемое В° — по разности долгот АХ = л2 ~ и средней широте <?т = ~ •
Формулу (1. 19) и табл. 23-а МТ—63 применяют при разности долгот более 10—15°.
При малой разности долгот, не превышающей 6—10°, расчетные формулы имеют вид:
>, = -“sin?, (1.20)
И
11 = -у- sin ?„. (1.21)
Здесь под <pi понимается широта той точки, для которой вычисляется ортодромическая поправка.
Формула (1.20) дает возможность получить более точный результат в широтах, превышающих 35—40°, а формула (1.21) —в меньших широтах. Вместо вычисления по формуле (1.21) ортодромическую поправку^ можно выбрать из табл. 23-6 МТ—63.
Ортодромическая поправка применяется для перехода от ортодроми-ческих направлений (азимута А или пеленга 0pm П) к локсодромическим (курсу Я или пеленгу Р) и наоборот. Из формулы (1. 18) получаем:
^/>) = Д, (O/W&Z7,) Ч- <|ч; (1.22)
Ai (Оpm Пх) = tf(P) - (1. 23)
Применительно к последним формулам знак ортодромической поправки рекомендуется определять по величине угла Аг. в северном полушарии при А <180° ортодромическая поправка ф, положительна, а при Л > 180° —отрицательна; в южном полушарии знаки поправок обратны указанным.
Пример. С корабля (<pi = 75®,0 N, Xi = 36°,0 Ost) взят радиопеленг ОртП = 226°,0 на точку (<рз = 71® 5 N, fa = 12°,0 Ost).
Определить локсодромический пеленг Р.
Решение. 1) Так как ДХ = 4-12°—(4-36®)==—24® больше 15® (по абсолютной величине), то вычисление ортодромической поправки будем вести по формуле (1.19). Из табл. 23-а МТ—63 выбираем: коэффициент /Ц = 0,496; слагаемое В° = 0°,0. =0,496»24®,0 4-0®,0 = —11®,9 (знак минус, так как в северном полушарии ОртП> 180°);
2) по формуле (1.22) находим локсодромический пеленг: Р — 226®,0—11°,9 = 214®,1.
22
Глава 1. Земной эллипсоид
Геодезическая линия является кратчайшим расстоянием между точками на поверхности земного эллипсоида. Представление о геодезической линии можно получить, если на поверхности эллипсоида натянуть упругую
нить, которая, находясь под действием только силы собственного натяжения, примет форму геодезической линии КЕ, показанной на рис. 15.
Геодезическая линия, являясь весьма сложной кривой, обладает следующими основными свойствами.
1. Если через точку К провести нормальное сечение (н. с.) так, чтобы его Q* плоскость одновременно проходила через точку Е, а затем провести нормальное сечение через точку Е, чтобы его плоскость проходила через точку К, то эти нормальные сечения не будут совпадать друг с другом. Геодезическая линия во всех случаях находится между этими нормальными сечениями.
2. Геодезическая линия делит угол А между нормальными, сечениями в отношении приблизительно 1 : 3, располагаясь в данной точке ближе к прямому нормальному сечению. Прямым нормальным сечением называется сечение, плоскость которого в данной точке совпадает с нормалью к поверхности эллипсоида.
Угол 8 между геодезической линией и прямым нормальным сечением определяется по приближенной формуле
р" е2 a2 cos2 sin 2/7г 12
где е — эксцентриситет эллипсоида;
о — расстояние между точками в радианах;
<Рт — средняя широта;
/7Г — геодезический пеленг, т. е. угол, определяющий направление геодезической линии в данной точке относительно меридиана;
р" — число секунд в радиане.
Максимальные величины углов о при различных расстояниях приведены в табл. 2.
3. Разность AD длин геодезической линии и нормального сечения в общем величина малая и определяется формулой
А М _ Sln2 2/7г COS*
360
где обозначения прежние.
При расстоянии между точками до 15 000 км величина AD не превышает 72 м.
Из перечисленных выше свойств геодезической линии следует, что при больших расстояниях между точками для вычисления геодезического пеленга необходимо, вычислив направление
Таблица 2
ВКм б
200 0J12
1 000 3"0
5 000 1J2
10000 4;5
19 000 17П
прямого нормального сечения, учесть при переходе к геодезическому пеленгу 77г поправку угла 8; длину же нормального сечения можно принять равной длине геодезической линии без введения в нее каких-либо
поправок.
§ 6. Локсодромия, ортодромия и геодезическая линия
23
Задачу по вычислению геодезических пеленгов (азимутов) и расстояний по известным координатам точек называют обратной геодезической задачей. Простейшими способами решения этой, задачи являются: — способ, связанный с равнопромежуточным проектированием поверхности эллипсоида на шар с соответствием по нормалям;
— способ, связанный с вводом поправок в пеленг и расстояние, вычисленные по географическим координатам точек.
Сущность первого способа, связанного с равнопромежуточным проектированием, состоит в следующем. Земной эллипсоид заменяется сферой, радиус которой R =6 366 7017 м’, при этом длина одной минуты большого круга будет равна 1852 м, т. е. одной стандартной морской миле.
Заданные географическими координатами точки К и Е (рис. 15) переносятся с эллипсоида на сферу с таким расчетом, чтобы длины дуг меридианов РК и РЕ на эллипсоиде и на сфере были одинаковыми. Для этого географические широты cpi и <ра должны быть исправлены поправками Acpi и Д<?2, вычисляемыми по формуле
где ДХ — удаление точки от северного полюса на эллипсоиде;
ДХ' —то же удаление на сфере радиуса R.
Вместо вычислений поправки Д<р могут быть выбраны из табл. 12 ТВА—57.
Поправки Дер вычитаются из северных широт и прибавляются к южным. В результате получаются сферические широты
= ?i =F Д?1 И <?2 = Ъ * Д<?2-
Теперь для определения искомых геодезического пеленга (азимута) ПГ и геодезического расстояния Dr сферический треугольник КРЕ по широтам <pf и фг' и разности долгот ДХ может быть решен по обычным формулам сферической тригонометрии. При этом следует иметь в виду, что геодезический пеленг ПГ будет получен с точки 1 на точку 2 и что расстояние между точками I и 2 получается в дуговой мере; искомое расстояние Dr в километрах будет равно
Dr= 1852 a' (1.24)
где с' —расстояние, выраженное в дуговых минутах.
Рассмотренный способ можно применять для расчета геодезических пеленгов (азимутов) и дистанций При расстояниях до 1000—1200 миль. При этом предельные ошибки в расстояниях в зависимости от широт точек и пеленгов могут достигать 0,1— 0,3 мили.
Во втором способе, связанном с введением поправок в пеленг и расстояние, радиус сферы принимается равным большой полуоси а эллипсоида. Сферический треугольник решается по географическим широтам н фг и разности долгот ДХ=Х2 — Xi заданных точек без введения в них каких-либо поправок. При этом, в результате решения получают приближенные величины геодезического пеленга ПГ и расстояния а в дуговой мере. Выразив а в дуговых минутах, вычисляют приближенное расстояние Dr в километрах, по формуле
D' = 1,8554 а', (1.25)
где коэффициент 1,8554 соответствует длине Г большого круга, имеющего радиус, равный большой полуоси эллипсоида.
Чтобы учесть сжатие эллипсоида, приближенные величины Dr и ПГ исправляют поправками 6D и о/7, вычисляемыми по формулам:
bD — kx (sin 4- sin <?2)2 — ^2 (sin 44 — sin <?2)2
ЪП = k3 cos2 sin 2/7' — k4 sin 2<pT sin rfr
(1-26)
24
Глава 1. Земной эллипсоид
Коэффициенты k\t k2, k3 и kt выбираются из Таблиц для вычисления длины и азимута геодезической линии, изд. УГС ВМФ, или им аналогичных по приближенному расстоянию Dr.
Данный способ является одним из наиболее точных. При решении сферического треугольника по шестизначным таблицам логарифмов ошибки в вычисляемых пеленгах не превышают 3", а в расстояниях 50 м (при дистанциях до 15 000 кж).
Решение сферического треугольника, как в первом, так и во втором способах решения обратной геодезической задачи, удобно производить с помощью Таблиц для вычисления высоты и азимута (ТВ А—57). Однако при этом следует иметь в виду появление дополнительных ошибок в вычисляемых расстояниях; эти ошибки могут достигать 0,3 мили при расстояниях 45° (т. е. 2700 миль).
Для решения применяются формулы:
Т (х) = Т (?2) + S (ДХ);
Т (77г) = Т (ДХ) - S (л) + S (90° + у);
T(a) = T(y) + S(/7r);
ДХ = Х2 — *1! У — X ~
В приведенных выше формулах буквами Т и S обозначены соответственно тангенсы и секансы величин, указанных в скобках, увеличенные в 10000 раз.
В последней формуле величины х н «pi суммируются, если оии разноимеины, и вычитаются, если они одноименны. Знак х всегда совпадает со знаком <pz.
При решении задачи угол /7Г получается в четвертном счете; наименование четверти этого угла определяется по следующим правилам:
— первая буква наименования пеленга одноименна с широтой <pi только когда х > «pi н при этом они одноименны; во всех остальных случаях первая буква наименования пеленга разнонменна с широтой «рг,
— вторая буква наименования пеленга всегда одноименна с разностью долгот ДХ — — X].
Пример. Заданы координаты двух точек: ?1 = 74°15;5M X, = 12°46',0 О5*-, <р2 = 70°18;2Л, Х2 = 4°51;отг.
Вычислить геодезические расстояние Dr и пеленг Пг с точки 1 на точку 2.
Решение. 1) По способу, связанному с равнопромежуточным проектированием эллипсоида на шар:
а) из табл. 12 ТВА—57 по и «р2 выбираем поправки широт A«pj = 4J7 и Д«р2 — 557;
б) решаем сферический треугольник по элементам: — Д^ — 74°10;8 А;
^== <р2 — Дср2 = 70°12J5 N и ДХ = Х2 —Xj — 17°37;0 W. Решение сводим в следующую схему:
= 70°12J5 N T (^) 79 602 ДХ= 1777J0 W S(AX) 417 Т(ДХ) S(x) 60 761
x = 71°04;i N T(x) 80 019 = 74°10;8 N у = 3°06;7 90° + у = 93°06;7 9778
S (90° + У) 50983 + 25307 Г(у) S(/7r) 45431 6629
/7r= 62°12;85 SW Ж) 76290 Г(о) 52 060
/7Г = 242O12J85 1g о = 2,60 108
о= 6°39{1=399J1 1g 1,852 = 0,26764
Dr = 739,13 км lgDr = 2,86872.
§ 7. Дальность видимости. Радиолокационная наблюдаемость
25
2) По способу, связанному с вводом поправок в вычисленные пеленг и расстояние: а) решаем сферический треугольник по элементам: = 74°15',5 Nt 42 — 70°18',2 N и ДХ = 17437',О IF;
<f2= 70°18;2W ДА = 17°37;о W Т(ъ) 5 (ДХ) 79 648 + 417 Г (ДА) 60 761
Х= 71°09;65W Г(х) 80065 SW 9818
?i = 74°15',5 ЛГ у= 3°05;85 90° + у = 93°05J85 S (90° + у) 50 943 + 25 346 Т (у) ЧП'г) 45392 + 6 628
/7;= 62°12;65 51Г П’=242°12;65 з = 6°37;27 = 397^27 D’= 737,10 км 11 1g 1,85 lg ‘ S И io см оо СМ О CM II + II II О М- -. и ьл О 76 289 Г (а) 52020
б) из Таблиц для вычисления длины и азимута геодезической линии по приближенному значению расстояния Dr выбираем: £1 = 0,62; £2 =370; £з = 690 и £< = 40;
в) по формулам (1.26) вычисляем поправки SD и ЪП":
BD = 0,62 (sin 74°15^5 + sin 70°18;2)2 — 370 (sin 74°1555 — sin 70°18;2)2 =
= 0,62 (0,9625 + 0,9415)2 — 370(0,9625 — 0,9415)2 = 0,62-3,625 — 370-0,0004 = = 2,25 — 0,15= + 2,10 km;
ЪП" = 690 cos2 74°15;5 sin 124°25J3 — 40 sin 148o31'sin 242°12J65 = 690-0,0736 X X 0,8249 + 40-0,5222-0,8846= +42 + 18= + 60*= + 1JOO;
г) вычисляем искомые значения пеленга и расстояния:
Dr = 737,10 + 2,10 = 739,20 км;
Пг = 242°12;65 + 1J0O = 242°13;65.
§ 7. ДАЛЬНОСТЬ ВИДИМОГО ГОРИЗОНТА И ДАЛЬНОСТЬ ВИДИМОСТИ ПРЕДМЕТОВ. РАДИОЛОКАЦИОННАЯ НАБЛЮДАЕМОСТЬ
Видимым горизонтом называется видимая на море линия, по которой море как бы соединяется с небосводом.
Удаление видимого горизонта от наблюдателя может быть охарактеризовано:
— теоретической дальностью Дт;
— географической, или геометрической, дальностью Де.
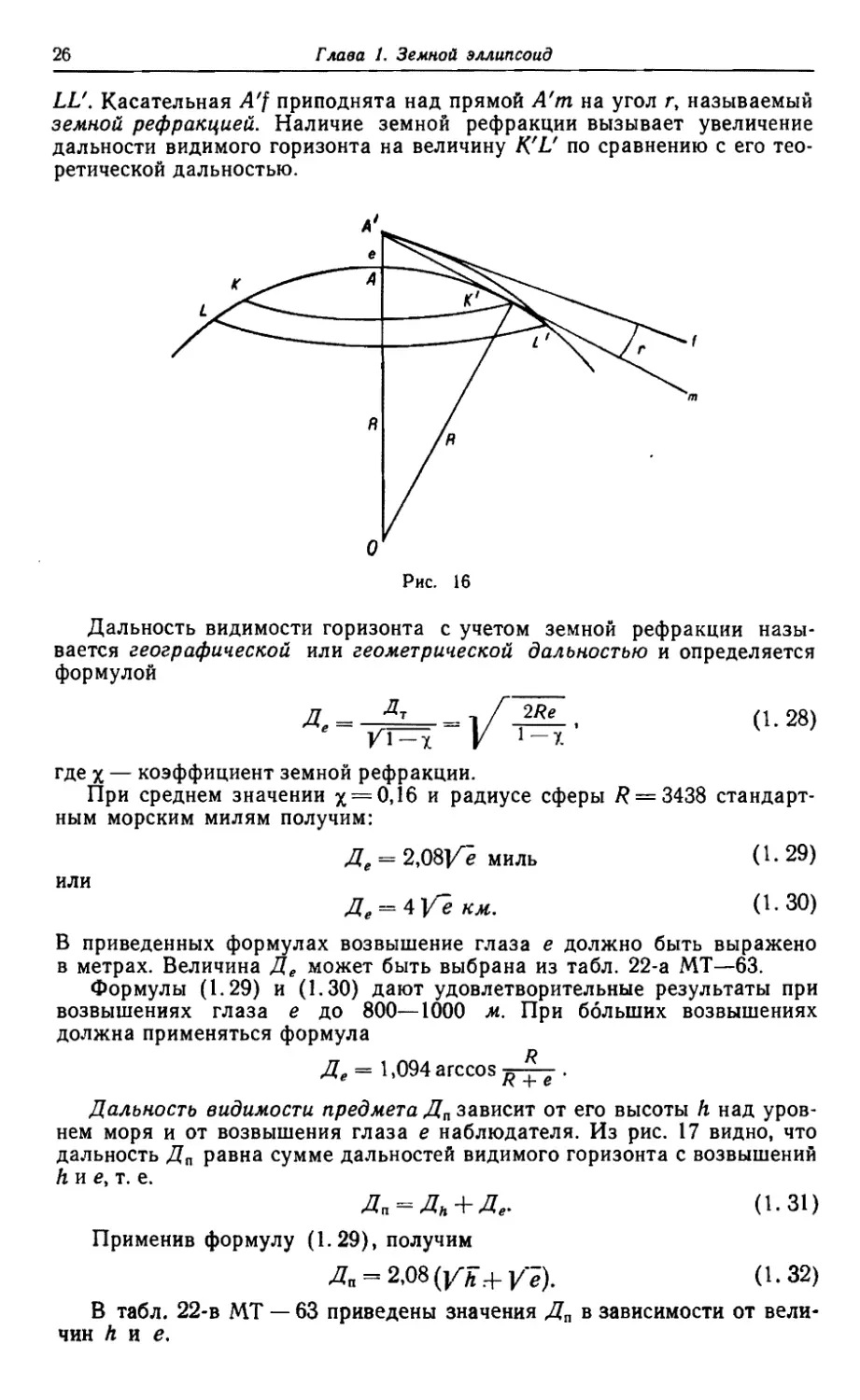
Теоретической дальностью видимого горизонта называется расстояние от места наблюдателя А (рис. 16) до малого круга К К', являющегося геометрическим местом точек касания прямых, проведенных из глаза наблюдателя к сферической поверхности Земли. Для наблюдателя, имеющего возвышение глаза е над уровнем моря, эта дальность определяется формулой
Дт = ¥2Яе + ег^У2#ё, 0-27)
где R — радиус Земли.
Наличие атмосферы, имеющей неодинаковую плотность, вызывает преломление лучей света, вследствие чего эти лучи искривляются, отклоняясь в сторону более плотных ее слоев. Поэтому глаз наблюдателя, находящийся в точке Д', будет видеть горизонт не по прямой А'т, а по прямой Л'Д касательной к криволинейным лучам, идущим от малого круга
26
Глава 1. Земной эллипсоид
LL'. Касательная A'f приподнята над прямой А'т на угол г, называемый земной рефракцией. Наличие земной рефракции вызывает увеличение дальности видимого горизонта на величину К'£' по сравнению с его теоретической дальностью.
Дальность видимости горизонта с учетом земной рефракции называется географической или геометрической дальностью и определяется формулой
Л = (1.28)
П-х V ’-X
где % — коэффициент земной рефракции.
При среднем значении х = 0,16 и радиусе сферы /? = 3438 стандартным морским милям получим:
Де = 2,08/ё миль (1.29)
или
Де^\У~екм. (1.30)
В приведенных формулах возвышение глаза е должно быть выражено в метрах. Величина Де может быть выбрана из табл. 22-а МТ—63.
Формулы (1.29) и (1.30) дают удовлетворительные результаты при возвышениях глаза е до 800—1000 м. При больших возвышениях должна применяться формула
Де = 1,094 arccos .
Дальность видимости предмета Дпзависит от его высоты h над уровнем моря и от возвышения глаза е наблюдателя. Из рис. 17 видно, что дальность Дп равна сумме дальностей видимого горизонта с возвышений h и е, т. е.
Дп = ДЛ + Де. (1.31)
Применив формулу (1.29), получим
ДП = 2,О8(/Л.+ У7). (1.32)
В табл. 22-в МТ — 63 приведены значения Дп в зависимости от величин h и е.
§ 7. Дальность видимости. Радиолокационная наблюдаемость
27
На морских навигационных картах и в руководствах для плавания (лоциях, огнях и знаках) дальность видимости маяков и огней Дк указывается для постоянного возвышения глаза наблюдателя, равного 5 м. Следовательно, эту дальность можно записать так
Дх = 2,08(]/'Л + у 5).
Рис 17
Если возвышение глаза е не равно 5 м, то дальность, указанную на картах или в руководствах, необходимо исправлять поправкой ДД, равной
ДД = Д,- 4,7 мили. ‘(1.33)
Формула (1.33) дает не только величину, но и знак поправки.
Пример. Дальность видимости маяка, показанная на карте Дк — 22 милям.
Вычислить, с какого расстояния Да наблюдатель может увидеть этот маяк при возвышении глаза £ = 2,5 м.
Решение. 1) Из табл. 22-а МТ—63 по е — 2,5 м выбираем Де — 3,3 мили;
2) по формуле (1.33) вычисляем поправку ДД=3,3 — 4,7 = —1,4 мили;
3) рассчитываем искомую дальность Дп = 22 — 1,4 = 20,6 мили.
Расчет дальности видимости по приведенным формулам дает удовлетворительные результаты только для дневного времени и при некотором среднем состоянии атмосферы. С изменением этого состояния изменяются и фактические дальности видимости горизонта и предметов на море. Кроме того, при расчете дальности видимости маяков и огней ночью следует учитывать, что фактические дальности в значительной мере зависят от силы источника света, характеристики и цвета огня. Дальность видимости огня называют оптической дальностью видимости; ее определяют опытным путем из многократных наблюдений.
Как правило, маяки и светящие знаки строятся так, чтобы их оптическая дальность видимости соответствовала геометрической. Если же эти дальности различны, то на картах и в руководствах указывается меньшая из них.
Учитывая значительные изменения дальности видимости огней, о положении корабля относительно данного ориентира по времени открытия его огня можно судить лишь приближенно.
Геометрическая дальность действия РЛС и дальность обнаружения объектов при достаточной мощности отраженных импульсов лишь незначительно превышает геометрическую дальность видимости объектов с высоты антенны станции. Геометрическую дальность радиолокационного горизонта Др и дальность радиолокационного обнаружения объекта Др0 можно рассчитать по формулам:
Др = 2,224 /й; (1-34)
Др0 = 2,224 (у77^Кл), (1.35)
где Др и Дро — дальности в милях;
Н — высота облучаемого объекта в м;
h — высота антенны РЛС в м.
28
Глава Земной эллипсоид
По формуле (1.34) составлена табл. 22-6 МТ—63.
Практическая дальность радиолокационного обнаружения объектов может значительно отличаться от вычисленной по формуле (1.35), так как коэффициент преломления радиоволн может сильно изменяться при изменении состояния атмосферы.
В зависимости от метеорологических условий различают три типа радиорефракции атмосферы:
— отрицательная рефракция, при которой коэффициент преломления радиоволн увеличивается с высотой; при этом радиоволны распространяются по кривым линиям, выпуклостью обращенным к поверхности Земли, что уменьшает дальность обнаружения объектов;
— положительная рефракция, при которой коэффициент преломления радиоволн уменьшается с высотой; вследствие этого радиоволны огибают поверхность Земли и дальность обнаружения объектов увеличивается по сравнению с прямой видимостью;
— сверхрефракция, при которой коэффициент преломления радиоволн также убывает с высотой, но величина его превышает некоторое критическое значение; вследствие этого радиоволны распространяются в ограниченном слое атмосферы вблизи поверхности Земли с полным внутренним отражением и дальность обнаружения объектов возрастает во много раз.
Дальности обнаружения объектов, приводимые в формулярах станций, относятся к нормальному состоянию атмосферы, когда коэффициент преломления радиоволн имеет среднее значение.
Радиолокационной наблюдаемостью называют отношение фактической дальности действия Дф РЛС при данном состоянии атмосферы к дальности Д, указанной в формуляре. Ее характеризуют баллом наблюдаемости по следующим признакам:
— 1 балл при (Дф:Д) <0,9 (пониженная наблюдаемость);
— 2 балла при (Дф:Д) от 0,9 до 1,1 (нормальная наблюдаемость); — 3 балла при (Дф:Д) от 1,1 до 2 (повышенная наблюдаемость); — 4 балла при (Дф:Д)>2 (сверхдальняя наблюдаемость).
Приведенная шкала используется при составлении и передаче прогнозов радиолокационной наблюдаемости. Составление таких прогнозов для заданных районов производится на основе всесторонней оценки факторов, влияющих на распределение и величину коэффициента преломления радиоволн: температуры и относительной влажности воздуха, атмосферного давления, температуры воды, направления, скорости и продолжительности действия ветра, наличия или возможности осадков и их интенсивности и т. д. Для решения задачи по определению балла радиолокационной наблюдаемости используются специальные графики и таблицы. Прогнозируемую радиолокационную наблюдаемость следует учитывать при планировании действий кораблей.
Фактическая дальность обнаружения объектов с помощью РЛС зависит от конкретных значений метеорологических элементов в районе плавания корабля; для ее определения можно использовать указанные выше графики и таблицы, а также опытные данные. Последний способ является наиболее достоверным.
Средние статистические дальности обнаружения различных объектов с помощью навигационных РЛС приведены в табл. 15.
Глава 2
НЕБЕСНАЯ СФЕРА И ВИДИМОЕ ДВИЖЕНИЕ СВЕТИЛ
§ 8. НЕБЕСНАЯ СФЕРА
Основные точки, линии и плоскости. Мореходная астрономия базируется на положениях сферической астрономии, в которой все светила считаются находящимися на поверхности вспомогательной сферы произвольного радиуса, называемой небесной сферой.
Рис. 18
Основные точки, линии и плоскости небесной сферы (рис. 18) аналогичны таковым на Земле. К ним относятся:
— отвесная линия наблюдателя ZZ';
— точки зенита Z и надира Z';
— плоскость истинного горизонта NOstSW;
— ось мира PNPS\
— полюсы мира PN и полюс, находящийся в надгоризонтной части сферы, называется повышенным, а противоположный ему — пони* женным;
— плоскость небесного экватора EWQO3*',
30
Глава 2. Небесная сфера и видимое движение светил
— меридиан наблюдателя PNZPSZ'\ осью мира он делится на полуденную (с точкой Z) и полуночную (с точкой Z') части;
— полуденная линия NS;
— меридианы — большие круги, проходящие через полюсы мира;
— вертикалы — большие круги, проходящие через точки зенита и надира; вертикал, проходящий через точки и W, называется первым вертикалом;
— небесные параллели — малые круги на небесной сфере, параллельные небесному экватору;
— альмукантараты — малые круги на небесной сфере, параллельные истинному горизонту.
Центральный угол между отвесной линией ZZ' и плоскостью небесного экватора равен широте ср места наблюдателя. Широте места наблюдателя равна также высота повышенного полюса мира над одноименной точкой горизонта.
Положение светил на небесной сфере определяют с помощью систем сферических координат: горизонтной и экваториальной.
Горизонтная система координат. Положение светила а на небесной сфере (рис. 18) в горизонтной системе координат определяется относительно плоскостей истинного горизонта и меридиана наблюдателя двумя координатами — высотой h и азимутом Л.
Высотой светила называется угол при центре небесной сферы между плоскостью истинного горизонта и направлением на светило. Этот угол измеряется дугой Ма вертикала светила. При нахождении светила над горизонтом его высота считается положительной, при нахождении под горизонтом — отрицательной и в этом случае называется снижением. Численно высота светила может быть в пределах от 0 до 90°.
Удаление светила от точки зенита называется зенитным расстоянием z, которое определяется по формуле
z = 90° - h.
При расположении светила на меридиане наблюдателя его высоту и зенитное расстояние называют меридиональными. Меридиональная высота именуется той точкой горизонта (W или S), над которой находится светило; наименование меридионального зенитного расстояния противоположно наименованию меридиональной высоты.
Азимутом светила называется сферический угол при точке Z между меридианом наблюдателя и вертикалом светила. Для счета азимутов применяются круговая, полукруговая и четвертная системы, изложенные в§3.
Экваториальная система координат. Положение светила а на небесной сфере (рис. 18) в экваториальной системе координат определяется относительно плоскостей небесного экватора и меридиана наблюдателя также двумя координатами — склонением В и часовым углом t.
Склонением светила называется угол при центре сферы между плоскостью небесного экватора и направлением на светило. Этот угол измеряется дугой La меридиана светила. Склонение светила может быть северным или южным в пределах от 0 до 90°; если склонение одноименно с широтой места, то оно считается положительным, а разноименно — отрицательным.
Удаление светила от повышенного полюса называется полярным расстоянием А, которое определяется по формуле.
А = 90° - 8.
Часовым углом светила называется сферический угол при повышенном полюсе мира между меридианами наблюдателя и светила. Его вели
$ 9. Параллактический треугольник светила
31
чина измеряется дугой небесного экватора от полуденной части меридиана наблюдателя к западу от 0 до 360°. Этот счет часовых углов называется западным или обыкновенным. Применяется также полукруговой счет часовых углов светил от полуденной части меридиана наблюдателя в сторону запада и востока в пределах от 0 до 180 , который называется практическим.
Часовой угол светила, отсчитываемый от меридиана наблюдателя, называется местным и обозначается /м. Часовой угол светила, отсчитываемый от меридиана Гринвича, называется гринвичским и обозначается /гр. Между местным и гринвичским часовым углом светила существует зависимость
*м='г₽±^'.
Вместо часового угла в экваториальной системе координат часто применяется другая координата — прямое восхождение светила а. Оно измеряется дугой небесного экватора от точки весеннего равноденствия Т до меридиана светила в сторону, обратную счету западных часовых углов в пределах от 0 до 360°.
Прямое восхождение звезд при вычислении их часовых углов заменяют звездным дополнением т, величина которого определяется выражением
т _ 360° - а.
Прямое восхождение (или звездное дополнение) определяет на небесной сфере положение меридиана светила относительно точки весеннего равноденствия.
Пары координат 8 и t или 8 и а образуют соответственно первую и вторую экваториальные системы координат.
§ 9. ПАРАЛЛАКТИЧЕСКИЙ ТРЕУГОЛЬНИК СВЕТИЛА
Параллактическим (полярным) треугольником светила называется сферический треугольник PNZa (рис. 18), образованный дугами меридиана наблюдателя, меридиана светила и его вертикала.
Параллактический треугольник (рис. 19) имеет следующие элементы:
стороны
P„Z = 90°-<p;
Za = 90° - А;
Рлта == 90° - 8;
углы
/м — местный часовой угол светила;
А — азимут светила;
q — параллактический угол светила.
В параллактическом треугольнике гори-зонтные и экваториальные координаты светила связаны с географическими координатами наблюдателя.
Решение параллактического треугольника относительно координат места наблюдателя лежит в основе определения места корабля по наблюдениям светил.
На решении параллактического треугольника относительно азимута светила основано определение поправки курсоуказателя по наблюдению светил.
Наконец, решение параллактического треугольника относительно
местного часового угла светила лежит в основе определения времени различных явлений суточного движения светил, например восхода (захода) Солнца и Луны.,
32
Глава 2. Небесная сфера и видимое движение светил
Параллактический треугольник чаще всего приходится решать относительно высоты, азимута и часового угла светила. Для вычисления указанных элементов применяются формулы:
— для вычисления высоты (зенитного расстояния) светила
sin2” = sin2 + cos <р cos 8 sin2 (2. 1)
или
sin Л = sin 9 sin 8 4- cos <р cos 8 cos /м; (2. 2)
— для вычисления азимута светила
sin А = cos 8 sin sec h (2. 3)
или
ctg А = cos <р tg 8 cosec tM — sin 9 ctg /M; (2. 4)
для вычисления часового угла
cos /м = sin h sec © sec 8 — tg 9 tg 8. (2. 5)
Формулы (2.1) — (2.5) получены из основных формул сферической тригонометрии, приведенных в приложении 1.
Конкретные примеры решения параллактического треугольника даны в соответствующих разделах настоящего пособия при рассмотрении различных практических задач кораблевождения.
§ 10. ВИДИМОЕ СУТОЧНОЕ ДВИЖЕНИЕ СВЕТИЛ
Видимым суточным движением называется перемещение светил на небосводе, происходящее вследствие вращения Земли вокруг своей оси.
z'
Рис. 20
В видимом суточном движении светила перемещаются по небесным параллелям а'а, Ъ'Ъ и т. д. (рис 20) с востока на запад и занимают различные положения относительно основных точек и кругов небесной
$ 10. Видимое суточное движение светил
33
сферы, связанных с наблюдателем. Такими положениями светил являются:
— истинный восход (заход);
— кульминация;
— пересечение первого вертикала;
— элонгация.
Истинным восходом (заходом) светила называется прохождение его центра через плоскость истинного горизонта наблюдателя. Точки а" и Ь", расположенные в восточной половине сферы, называются точками восхода; в западной половине сферы им соответствуют точки захода этих светил.
Все светила, склонение которых удовлетворяет условию
| 8|< 90Q - <р, (2.6}
восходят и заходят. При этом, если и о одноименны (светило Л), то большая часть пути суточного движения располагается над горизонтом, меньшая — под горизонтом; если ср и 8 разноименны (светило В), то наоборот.
Светила, имеющие
8 > 90° - <р, (2. 7)
являются незаходящими при ср и 8 одноименных (светила С и Е) и невосходящими— при ср и 8 разноименных (светило D).
Кульминацией светила называется пересечение им меридиана наблюдателя. Нахождение светила на полуденной части меридиана наблюдателя (точки а, Ь, с, d, е) называется верхней кульминацией, а на полуночной части (точки a', b\ с', d\ е') — нижней кульминацией.
В момент верхней кульминации любое светило имеет наибольшую высоту
Н - 90° - (<р - 8), (2. 8)
а в момент нижней кульминации — наименьшую высоту
- ср-(90е-8). (2.9)
Светило, имеющее склонение одноименное с широтой и равное ей 9 = 8, (2. 10)
в момент верхней кульминации проходит через точку Z (светило С).
Первый вертикал в надгоризонтной части небесной сферы пересекают светила, склонение которых меньше широты места наблюдателя иодно-именно с ней (светило Д), т. е.
8 < <р. (2.11)
На момент прохождения светилом первого вертикала его высота и местный часовой угол определяются формулами:
sin = sin 8 cosec 9; (2. 12)
cos = ctgcptg8. (2. 13)
По формуле (2.12) составлена табл. 21 МТ—63, которая дает высоту светила на первом вертикале по аргументам: широта места наблюдателя и склонение светила.
Пересечение светилом первого вертикала является моментом его перехода из одной четверти горизонта в другую, что лежит в основе определения первой буквы наименования азимута светила в четвертном счете.
3 Заказ 1833
34
Г лава 2. Небесная сфера и видимое движение светил
Элонгацией светила называется его наибольшее удаление по азимуту от меридиана наблюдателя; она бывает восточной и западной. Элонгацию имеют только те светила, которые не пересекают первый вертикал, т. е. для которых склонение больше широты места наблюдателя и одноименно с ней.
Положение светила в момент элонгации определяется местным часовым углом, значение которого выражается формулой
cos /м = tg <Р ctg 8. (2.14)
Для наблюдателя, находящегося на полюсе, явлений восхода, кульминации и захода светил нет. Над горизонтом находятся только те светила, склонение которых одноименно с широтой наблюдателя. Высота светила не изменяется (при 8 = const) и численно равна его склонению.
Для наблюдателя, находящегося на экваторе, все светила восходят (заходят). Азимуты восхода и захода светил и их меридиональные высоты равны полярным расстояниям. Азимуты любого светила располагаются только в двух четвертях горизонта.
Изменение горизонтных координат светил при суточном движении. Под влиянием суточного вращения Земли происходит непрерывное изменение высоты и азимута светила.
Изменение высоты светила ДЛГ за малый промежуток времени выражается формулой
ДЛг=УАгДГ, (2. 15)
где VhT~- скорость изменения высоты светила в данный момент;
ДГ — промежуток времени, за который подсчитывается изменение высоты ДЛГ<
Скорость изменения высоты VhT в минутах дуги выражается формулами:
VhT = iScosysin А мин.дуг/мин\ (2. 16)
VhT = 0,25 cos ? sin А мин.дуг/сек. (2. 17)
По этим формулам составлены табл. 15-а и 15-6 МТ—63, которые дают величины изменения высоты в 1 мин и 10 сек времени по аргументам ср и А.
Величина УА положительна от восхода до кульминации и отрицательна от кульминации до захода светила.
Из анализа приведенных формул видно, что:
1) в низких широтах изменение высоты светила в единицу времени больше, чем в высоких; при ср = 90° высота светила под влиянием суточного вращения Земли не изменяется;
2) изменение высоты в данной широте происходит в общем случае неравномерно и зависит от положения светила на небесной сфере; наибольшая неравномерность изменения высот светил происходит вблизи кульминации; светила, находящиеся вблизи первого вертикала, изменяют высоту практически равномерно.
Учет изменения высоты светила под влиянием суточного вращения Земли называется приведением высот к одному моменту.
Высота Лп, приведенная к моменту Гп, вычисляется по формуле Лп^^ + ^ДТ, (2. 18)
где Л| — высота светила, измеренная в момент 7\-^Т— Тп — Т| — промежуток времени приведения.
§11. Видимое собственное движение Солнца
35
Пример. Высота светила A!=46°44J0 соответствует моменту 7\ =3*20-*14с.
Привести высоту светила к моменту Тп — Зч21м47с, если <р = 52°10' М и А = 75° S1F.
Решение. Из табл. 15-а МТ — 63 выбираем 1/Лг = —8'9.
По формуле (2.18) получаем: Лп = 46°44,'О 4-(—8^9)«1,55 = 46°44^0—13'8 = = 46°30;2.
Изменение азимута светила ДАГ за малый промежуток времени выражается формулой
ДЛг = ^агД7'> (2.19)
где VA — скорость изменения азимута светила в данный момент;
ДТ—промежуток времени, за который подсчитывается изменение азимута ДАГ.
Скорость изменения азимута V Ат в градусах выражается формулой
VАт = 0,25 (sin © — tg h cos <pcos Л) град!мин. (2.20)
Как видно из приведенной формулы, скорость изменения азимута светила зависит от широты места, высоты светила и его азимута и по указанным аргументам дается в табл. 15-г МТ—63.
Учет изменения азимута светила под влиянием суточного вращения Земли называется приведением азимутов светил к одному моменту.
Азимут Ап, приведенный к моменту Тп, вычисляется по формуле дп = А, + VAt ЬТ, (2.21)
где А, — азимут светила, измеренный в момент 7\;
ДГ = Тп — — промежуток времени приведения.
Пример. Азимут светила А = 151’4 NO51 соответствует моменту — 10ч50д<00г, высота светила й = 59’10'.
Привести азимут светила к моменту Тп = 10w55x00c, если — 48°30' N.
Решение. Из табл. 15-г МТ—63 выбираем VAг = +0’4.
По формуле (2. 21) получаем: Ап = 151 ?4 + (+0’4)-5,0 — 151’4 + 2’0— 153’4; Ап = 153’4 NO.
§ 11. ВИДИМОЕ СОБСТВЕННОЕ ДВИЖЕНИЕ СОЛНЦА
Обращение Земли вокруг Солнца является причиной его видимого собственного движения на небесной сфере, называемого годовым. Путь видимого годового движения Солнца на небесной сфере является большим кругом ГТ /— (рис. 21), который называется эклиптикой.
Плоскость эклиптики наклонена к плоскости небесного экватора на угол е — 23°27' и пересекает его в точках весеннего (Т) и осеннего (-П-) равноденствий. Точки / и Г называются соответственно точками летнего и зимнего солнцестояний. Они отстоят от точек равноденствий на 90°. Прямая ЛШ', перпендикулярная плоскости I'ТZ—, называется осью эклиптики, а точки М и М' — ее полюсами: северным и южным.
При нахождении Солнца в точках Т, /, — и Г его склонение и прямое восхождение имеют соответственно следующие значения: 8 = 0°, 2 = 0°; 3 = 23°27' N, а = 90°; 8 = 0°, а = 180°; 8 = 23°27' S, а = 270°. В указанных точках Солнце бывает около 21 марта, 22 июня, 23 сентября и 22 декабря. При максимальном склонении Солнце в суточном движении проходит по наиболее удаленным от экватора параллелям, которые называются тропиками Рака (северная) и Козерога (южная).
3*
36
Глава 2. Небесная сфера и видимое движение светил
При движении Солнца по эклиптике происходит непрерывное изменение его экваториальных координат 8 и 'а, причем прямое восхождение изменяется только в сторону его увеличения; поэтому видимое собственное движение Солнца является прямым.
Экваториальные координаты Солнца в течение года изменяются неравномерно. Для приближенных расчетов величину суточного измене-
Рис. 21
ния его прямого восхождения Да следует считать равной Г. Суточное изменение склонения Солнца Д8 зависит от его положения на эклиптике, т. е. от даты, и приведено в табл. 3. Приближенный расчет экваториальных координат Солнца может применяться для решения задач на 0 звездном глобусе.
Климатические пояса и времена года. Изменение положения Солнца на небесной сфере, происходящее вследствие годового движения Земли, определяет климатические пояса на ней: тропический, умеренный и полярный.
Тропический пояс охватывает те районы поверхности Земли, в которых Солнце в суточном движении хотя бы один раз в тече-
ние года проходит через зенит. По условию (2.10) тропический пояс ограничен параллелями 23°27' N — 23°27' S.
Таблица 3
Дата 22/1 21 /II 21/ N 21/ V 22/’ 23/' Ип 23 /X 22) ’XI 22/1
0=3 0=4 0?3 0=1 0?3 0=4 0°3 0=1
Умеренный пояс охватывает те районы поверхности Земли, в которых Солнце в суточном движении ежедневно восходит (заходит), но не проходит через зенит. По условию (2.6) умеренный пояс ограничен параллелями 23°27' /V — 66°33' N в северном и 23°27' S — 66°33' S в южном полушариях.
Полярный пояс охватывает те районы поверхности Земли, в которых наблюдается незаходящее (невосходящее) Солнце. По условию (2.7) полярные пояса располагаются от параллелей 66°33' JV и S до полюсов Земли.
Временами года или сезонами называются промежутки времени, в течение которых Солнце перемещается по эклиптике от точки Y к /, от точки / к rl- и т. д. Времена года имеют собственные названия: весна, лето, осень и зима. Для северного полушария астрономическая весна наступает 21 марта, лето — 22 июня, осень — 23 сентября и зима — 22 декабря..
§ 12. Видимое собственное движение Луны, планет и спутников Земли
37
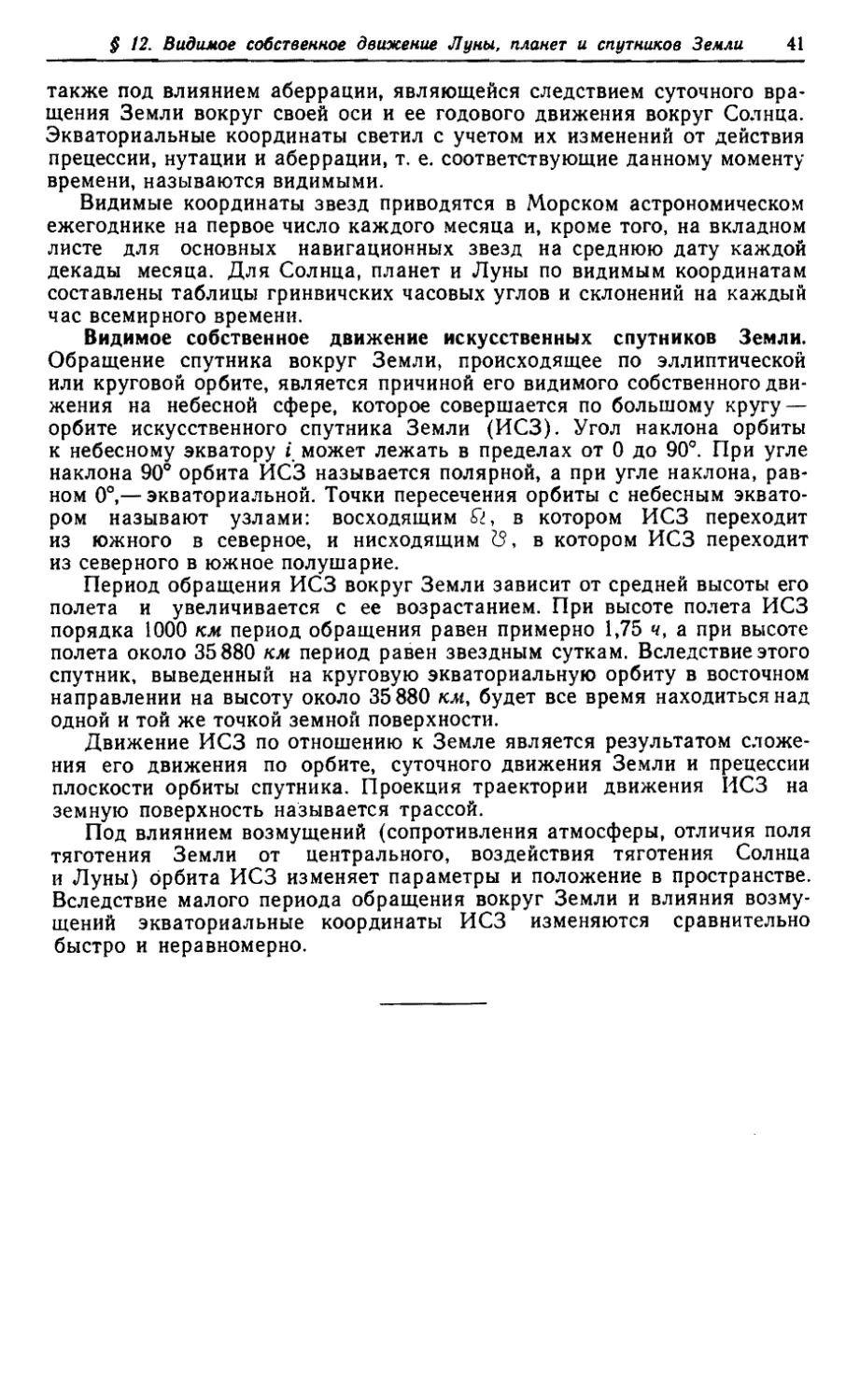
§ 12. ВИДИМОЕ СОБСТВЕННОЕ ДВИЖЕНИЕ ЛУНЫ, ПЛАНЕТ И ИСКУССТВЕННЫХ СПУТНИКОВ ЗЕМЛИ
Видимое собственное движение Луны. Обращение Луны вокруг Земли является причиной видимого собственного движения Луны на небесной сфере, которое совершается по большому кругу kk' (рис. 22), называемому лунной орбитой. Движение Луны по лунной орбите направлено в ту же сторону, что и годовое движение Солнца, т. е. является прямым; его период равен месяцу и поэтому оно называется месячным движением.
Плоскость лунной орбиты наклонена к плоскости эклиптики на угол х, средняя величина которого равна 5°09'. Точки пересечения орбиты Луны с эклиптикой называются узлами: восходящим Q и нисходящим б. Под влиянием возмущений орбита Луны изменяет свое положение, что приводит к перемещению узлов по эклиптике на 19°,3 в год. Полный оборот по эклиптике узлы совершают за 18,6 лет.
Звездным (сидерическим) месяцем называется период обращения Луны вокруг Земли относительно звезд. Его продолжительность равна примерно 27,32 средних суток. Суточное перемещение Луны относительно звезд равно 13°,2, или 53*.
Лунным (синодическим) месяцем называется период обращения Луны вокруг Земли относительно Солнца. Его продолжительность около 29,53 средних суток. Суточное перемещение Луны относительно Солнца равно 12°,2, или 49*.
Лунными сутками называется промежуток времени между двумя последовательными одинаковыми кульминациями Луны на одном и том же меридиане. Их продолжительность равна около 24ч 50*. По этой причине в течение месяца обязательно бывают такие сутки, в которые Луна не имеет верхней или нижней кульминации на данном меридиане и не имеет восхода или захода в данном пункте поверхности Земли.
38
Глава 2. Небесная сфера и видимое движение светил
Половина поверхности Луны всегда освещается Солнцем. Но для земного наблюдателя в течение лунного месяца вид ее различен из-за изменения положения Луны относительно Земли и Солнца (рис. 23).
Рис. 23
Фазой Луны называется видимая форма ее освещенной поверхности. Положение Луны Л3, Л$ и Л7 называется соответственно новолунием, первой четвертью, полнолунием и последней четвертью. В новолуние Луна не видна, в полнолуние она видна в форме диска, а в первую и последнюю четверти — в форме половины диска.
Любое положение Луны между точками Л[ и Л3, Л3 и Л5, Л5 и Л7, Л7 и Л\ называется соответственно первой, второй, третьей и четвертой четвертью. В периоды первой и четвертой четвертей Луна видна в форме серпа, а в периоды второй и третьей четвертей — в форме неполного диска.
Фазы новолуния и полнолуния называются сизигиями, а фазы первой и последней четвертей — квадратурами. Период смены фаз равен лунному месяцу. Для приближенных вычислений период смены фаз Луны считается равным 30 суткам. Фазы Луны повторяются в те же даты через 19 лет. Этот период называется циклом Луны.
Возрастом Луны называется число суток, прошедших от новолуния до данной ее фазы. В новолуние возраст Луны равен нулю, в полнолуние 15 суткам, а в первую и последнюю четверти — соответственно 7,5 и 22,5 суток.
Возраст Луны определяет ее фазу, а фаза определяет степень освещенности Луной морского горизонта. Возраст Луны, а также время наступления ее основных фаз выбирают из специальных таблиц Морского астрономического ежегодника (МАЕ).
Приближенно возраст Луны на любой день года вычисляется по формуле
В^=Д + М + К, (2.22)
где Д — дата (число месяца);
М — порядковый номер месяца в году;
К — лунное число, постоянное для данного года; выбирается из табл. 4.
§ 12. Видимое собственное движение Луны, планет и спутников Земли 39
Таблица 4
Год 1970 1971 1972 1973 1974 1975 1976 1977 1978 1979 1980
К 20 2 13 24 5 16 27 8 19 0 11
Если по формуле (2. 22) результат получится больше 30 или 60 суток, то из него нужно вычесть 30 или 60,
По возрасту Луны можно вычислить приближенные значения ее прямого восхождения, а также местного времени верхней кульминации Тк и восхода Гв (захода Т3) Луны по формулам:
Ъ = а0 + 12°.Ву, (2.23)
Гк = 12*+0*8-^; (2.24)
ГВ=ГК_6’; Т3 = Тк + 6’. (2.25)
Пример. 15.01.70 г.
Определить возраст, фазу, прямое восхождение и местное время верхней кульминации и восхода Луны (без использования МАЕ).
Решение. 1) По формуле (2.22) возраст Луны Ву — 15+ 1 + 20 = 6 суток; 2) фаза луны — первая четверть;
3) прямое восхождение Солнца 22 декабря равно а© =270° (см. § 11); изменение в течение 23 суток Да = 23°; на заданную дату 15.01 а© — 270° 4-23° — 293°;
по формуле (2. 23) прямое восхождение Луны
= 293° + 12°‘6 = 293° + 72° = 365°; = 5°;
4) по формуле (2. 24) местное время кульминации Луны
Тк = 12“ + 0ч8-6 = 12ч + 4Ч8 == 16ч8; Тк « 17ч; • > »
5) по формуле (2. 25) примерное время восхода Луны Тв= 17ч — 6Ч = 11ч.
Видимое собственное движение планет. Планеты подобно Солнцу и Луне имеют видимое собственное движение на небесной сфере, которое совершается по петлеобразным кривым. Часть такой кривой показана на рис. 24. На различных участках своего пути планеты совершают прямое (в сторону увеличения а) и обратное (попятное) движение, перемещаясь в общем направлении с запада на восток. Видимое обратное движение для каждой планеты имеет продолжительность от нескольких недель до нескольких месяцев. Точки смены движения называются «стояниями» планеты.
При нахождении планеты в этих точках ее прямое восхождение не изменяется.
Видимое собственное движение планет является следствием их обращения вокруг Солнца, которое совершается по эллиптическим орбитам в одну и ту же сторону без стояний и обратных движений. На небесной же сфере планеты описывают петли потому, что они наблюдаются нами с Земли, движущейся тоже вокруг Солнца, но с другой скоростью.
40
Глава 2. Небесная сфера и видимое движение светил
При движении по своим орбитам планеты занимают различное положение относительно Солнца S и Земли 3 (рис. 25). Внешние планеты (орбиты которых располагаются вне орбиты Земли) могут иметь угловое удаление от направления на Солнце в пределах от 0 до 180° в обе стороны. Положение этих планет при угловом удалении в 90° называется квадратурой — восточной Кв и западной К3. Положение в точке Сх называется соединением, а в точке П — противостоянием.
Внутренние планеты (орбиты которых располагаются внутри орбиты Земли) имеют предел углового удаления от направления на Солнце, который называется элонгацией. Элонгация бывает восточной Эъ и западной Э3, Положение внутренней планеты в точке С2 называется верхним, а в точке С3 нижним соединением. Данные об элонгациях, соединениях и противостояниях планет приводятся в Морском астрономическом ежегоднике.
Величина элонгации Венеры колеблется от 43 до 48°, а для Меркурия— от 18 до 28° вследствие большого эксцентриситета его орбиты. Малая величина элонгации Мерку-
Рис. 25 рия является причиной невозмож-
ности его наблюдения в условиях корабля. По этой же причине Венеру можно наблюдать небольшой промежуток времени перед восходом или после захода Солнца. Внешние
планеты при их нахождении около точек соединения видимы в утренние или вечерние сумерки, а в период противостояния—всю ночь.
Планеты светят отраженным светом Солнца и имеют фазы, которые неразличимы невооруженным глазом. От фаз, а также от удаления планет от Земли зависит их видимая яркость, которая в звездных величинах приведена в ежедневных таблицах Морского астрономического ежегодника.
Прецессия и нутация. Прецессией земной оси называется ее перемещение в пространстве под влиянием гравитационного воздействия главным образом Луны, а также Солнца; некоторое влияние на это движение оказывают также планеты.
Вследствие прецессии земной оси изменяется положение плоскости экватора в пространстве. Плоскость эклиптики своего положения не изменяет. Поэтому на небесной сфере точки равноденствий перемещаются по эклиптике в сторону, обратную видимому собственному движению Солнца. Величина годового перемещения точек равноденствий равна 50",3. Полный оборот по эклиптике они совершают за 25 800 лет. В течение этого промежутка времени полюс мира опишет на небесной сфере вокруг полюса эклиптики малый круг сферическим радиусом 23р27'.
Полюс мира, перемещаясь вокруг полюса эклиптики, совершает одновременно некоторые колебательные движения относительно своего среднего положения. Эти колебательные движения имеют период 18,6 лет и называются нутацией.
Прецессия и нутация вызывают изменение экваториальных координат о и 8 светил. Незначительное изменение этих координат происходит
§ 12. Видимое собственное движение Луны, планет и спутников Земли
41
также под влиянием аберрации, являющейся следствием суточного вращения Земли вокруг своей оси и ее годового движения вокруг Солнца. Экваториальные координаты светил с учетом их изменений от действия прецессии, нутации и аберрации, т. е. соответствующие данному моменту времени, называются видимыми.
Видимые координаты звезд приводятся в Морском астрономическом ежегоднике на первое число каждого месяца и, кроме того, на вкладном листе для основных навигационных звезд на среднюю дату каждой декады месяца. Для Солнца, планет и Луны по видимым координатам составлены таблицы гринвичских часовых углов и склонений на каждый час всемирного времени.
Видимое собственное движение искусственных спутников Земли. Обращение спутника вокруг Земли, происходящее по эллиптической или круговой орбите, является причиной его видимого собственного движения на небесной сфере, которое совершается по большому кругу — орбите искусственного спутника Земли (ИСЗ). Угол наклона орбиты к небесному экватору : может лежать в пределах от 0 до 90°. При угле наклона 90° орбита ИСЗ называется полярной, а при угле наклона, равном 0°,— экваториальной. Точки пересечения орбиты с небесным экватором называют узлами: восходящим в котором ИСЗ переходит из южного в северное, и нисходящим ?5, в котором ИСЗ переходит из северного в южное полушарие.
Период обращения ИСЗ вокруг Земли зависит от средней высоты его полета и увеличивается с ее возрастанием. При высоте полета ИСЗ порядка 1000 км период обращения равен примерно 1,75 ч, а при высоте полета около 35880 км период равен звездным суткам. Вследствие этого спутник, выведенный на круговую экваториальную орбиту в восточном направлении на высоту около 35880 км, будет все время находиться над одной и той же точкой земной поверхности.
Движение ИСЗ по отношению к Земле является результатом сложения его движения по орбите, суточного движения Земли и прецессии плоскости орбиты спутника. Проекция траектории движения ИСЗ на земную поверхность называется трассой.
Под влиянием возмущений (сопротивления атмосферы, отличия поля тяготения Земли от центрального, воздействия тяготения Солнца и Луны) орбита ИСЗ изменяет параметры и положение в пространстве. Вследствие малого периода обращения вокруг Земли и влияния возмущений экваториальные координаты ИСЗ изменяются сравнительно быстро и неравномерно.
Глава 3
ВРЕМЯ
§ 13. ОСНОВНЫЕ СВЕДЕНИЯ О СЧЕТЕ ВРЕМЕНИ
Течение времени измеряется природной единицей времени — одним оборотом Земли вокруг своей оси. Эта единица называется сутками. Сутки различают звездные, истинные и средние.
Звездными сутками называется промежуток времени между двумя последовательными одноименными кульминациями точки весеннего равноденствия Т на одном и том же меридиане. За начало звездных суток принимается момент верхней кульминации точки Т на данном меридиане. Звездное время воспроизводится звездными часами (хронометрами).
Звездное время S в данный момент равно западному часовому углу точки весеннего равноденствия
(3.1)
Звёздное время применяется в астрономии. В повседневной жизни счет времени ведется по Солнцу.
Истинными солнечными сутками называется промежуток времени между двумя последовательными одноименными кульминациями центра видимого диска Солнца (О) на одном и том же меридиане. За их начало принимается момент верхней кульминации Солнца на данном меридиане. Эти сутки продолжительнее звездных на величину суточного изменения прямого восхождения Солнца.
Продолжительность истинных суток вследствие наклона эклиптики к экватору и неравномерного движения Солнца по эклиптике непостоянна и поэтому они не применяются в качестве единицы измерения времени. Для получения постоянной единицы измерения времени, связанной с организацией жизни человека по Солнцу, введена фиктивная точка, называемая средним Солнцем (©), которая равномерно перемещается по экватору.
Средними солнечными сутками называется промежуток времени между двумя последовательными одноименными кульминациями среднего Солнца на одном и том же меридиане. За начало средних суток принят момент нижней кульминации среднего Солнца.
В силу того что начало счета часовых углов среднего Солнца (полуденная часть меридиана) не совпадает с началом счета среднего времени Т (полуночная часть меридиана), между ними существует следующая связь
Т = + 12ч. (3-2)
Средние сутки продолжительнее звездных на величину суточного изменения прямого восхождения среднего Солнца, т. е. на 3*56f 56. Они разделены на 24 средних часа, час—на 60 средних минут, минута — на 60
$ 14. Время на различных меридианах
43
средних секунд. Среднее время воспроизводится часами или хронометром, отрегулированными по этому времени.
Угол между меридианами истинного и среднего Солнца называется уравнением времени. Его величина определяется формулой
= а0 - а® = *® - Аэ- (3- 3)
Величина уравнения времени в течение года непрерывно изменяется, достигая экстремальных значений +14 мин 11 февраля и —16 мин 2 ноября. На эти величины отличается среднее время верхней кульминации центра видимого (истинного) Солнца от 12 ч, а нижней его кульминации от 0 (24) ч в указанные даты.
Вследствие неравномерного вращения Земли вокруг своей оси средняя секунда является величиной не строго постоянной. Поэтому приточных расчетах координат светил применяется специальное, равномерно изменяющееся время, которое называется эфемеридным временем. Эталоном времени в нем взята секунда, равная 31 556 9259747 части тропического года, отнесенного к эпохе 1900 г.
Тропическим годом называется промежуток времени между двумя последовательными прохождениями среднего Солнца через точку весеннего равноденствия. Величина этого года тоже не является постоянной. Его продолжительность изменяется примерно на 0,5 сек за столетие. В связи с этим в настоящее время ведутся исследования с целью выработки нового эталона времени.
§ 14. ВРЕМЯ НА РАЗЛИЧНЫХ МЕРИДИАНАХ
Местное время. Среднее и звездное время, отнесенное к данному меридиану, называется местным и обозначается соответственно Тм и 5М. Местное среднее время называется местным гражданским временем. Местное гражданское время на меридиане Гринвича называется всемирным или гринвичским гражданским временем и обозначается 77р. Звездное время, отнесенное к меридиану Гринвича, называется звездным гринвичским временем и обозначается Srp.
Зависимости между временами на различных меридианах определяются формулами:
SM = Srp±C (3.4)
ТМ=ТГ^‘ (3.5)
или
= \ + С (3.6)
7'Гр=7’м + ^- (3-7)
Переход от времени одного меридиана ко времени другого меридиана производится обычно с промежуточным расчетом времени на меридиане Гринвича.
Среднее время всегда указывается с календарной датой. При расчетах по формулам (3. 5) и (3. 7) Ттр или Гм могут быть меньше или ^Qst, В таких случаях к Ггр или нужно прибавлять 24 ч и уменьшать на 1 сутки календарную дату. Когда же при расчетах Гм или Ггр получается больше 24 ч, то из полученного результата нужно вычесть 24 ч и увеличить календарную дату на 1 сутки. Звездное время календарной даты не имеет.
44
Глава 3. Время
Пример. 12 февраля 1968 г. всемирное время Тгр = 18'‘10-м16г.
Определить местное среднее время в этот момент на меридианах Xt = 131*10' Ost и Х2 —64°15' W.
Решение. По формуле (3. 5) вычисляем:
12/П 7гр= 18*10*16^ X, = +8 44 40 Ost 12/П тге= 18’1О*16с Х2—-4 17 00 117
13/П ТЯ1 = 2-54м56е - 12/П Т„2 = 13’53ж16с
Пример. 16 мая 1968 г. на меридиане X, 168°42' W ТМ1 == 16ч52ж31с.
Определить всемирное время и местное среднее время в этот момент на меридиане Х2 = 109°18'ОЧ
Решение.
1) по формуле (3.7) определяем Т^р
16/V ГМ1 = 16“52*31с
Х^ +П 14 48 W
17/V 7гр=- 4ч07‘*19с
2) по формуле (3. 5) вычисляем ТМ2
17/V Ггр= 4**07ж19г Х2 = +7 17 12 Ost
17/V ^2- 1Р24*ЗИ.
Часовые углы любого светила, отнесенные к разным меридианам, вычисляются по формулам:
'М=Ч₽± + (3-8)
'"гр ~ '"м + • (3. 9)
Поясное время. В системе поясного времени TN вся поверхность Земли разделена на 24 часовых пояса, охватывающих 15° по долготе. В пределах каждого данного часового пояса принимается одинаковый счет среднего времени, равный времени на осевом меридиане этого пояса. Среднее время соседних поясов отличается друг от друга на 1 ч. Разность между поясным и местным средним временем внутри пояса не превышает 30 мин.
Осевые меридианы поясов имеют долготы 0, 15, 30, 45,... 180° восточного и западного наименования. Нумерация часовых поясов идет от нулевого до + 12 пояса. Восточные часовые пояса имеют знак минус, а западные имеют знак плюс.
Для определения номера У часового пояса долготу места нужно разделить на 15°, и если дробная часть частного меньше 0,5, то номер часового пояса равен целой части частного; когда дробная часть частного больше 0,5, то номер часового пояса больше целой части частного на 1. Определение номера часового пояса может производиться также по долготе, выраженной во временной мере по правилу: если временных минут в долготе меньше 30, то номер часового пояса равен числу часов долготы; если временных минут в долготе больше 30, то номер часового пояса равен числу часов долготы плюс 1.
Фактические границы часовых поясов, часто не совпадающие с теоретическими, а также сведения о системах счета времени в разных странах приводятся на карте часовых поясов мира (№ 90080).
Переход от всемирного времени к поясному и от поясного к всемирному производится по формулам:
О-10)
(3-11)
§ 14. Время на различных меридианах 45
Для перехода от местного среднего времени к поясному и от поясного времени к местному среднему служат формулы:
7'JV=7’„ + X^±</, (3.12)
7’и= 7'1V + N^'±^‘. (3.13)
Пример. 25.06.68 г. Тм = 7ч\0м22с, Х= 131°10' (X
Определить поясное время Ту.
Решение. По формуле (3. 12) определяем:
25/VI Гм = 7ч10м22с
X == -8 44 40 Ost
24/VI Ггр = 22“25“42‘ = +9
25/VI Т„ = 7Ч25*42С
Декретное время. На территории СССР в 1930 г. постановлением Совета Народных Комиссаров введено декретное время Тд, равное поясному времени, увеличенному на 1 ч. Оно введено с целью более рационального использования светлого времени суток и перераспределения потребления электроэнергии для производственных и бытовых нужд.
Декретное время ТЛ равно:
т = Т — Г ' д * N : 1
Т — Т 4- Г
Для перехода от декретного времени к всемирному нужно вначале Тд уменьшить на 1 ч, а затем произвести расчет по формуле (3. 11).
В некоторых странах декретное время вводится только на летнее время и поэтому называется летним временем. Поправки для перехода от поясного или летнего времени к всемирному (гринвичскому) времени для различных стран и районов даны на карте часовых поясов мира.
Судовое время. Судовым временем Тс называется система счета времени, принятая на корабле; его основой является поясное время. Судовое время равно поясному времени того часового пояса, по которому установлены корабельные часы.
Во время плавания при переходе корабля из одного часового пояса в другой счет судового времени обычно изменяется: корабельные часы переводятся на один час вперед (ночью) при перемещении корабля в восточном направлении и на один час назад (в период послеобеденного отдыха) при перемещени корабля'в западном направлении. Решение об изменении счета судового времени принимает командир корабля или командир соединения (при совместном плавании). Все случаи изменения судового времени должны быть отмечены в вахтенном и навигационном журналах. При плавании в высоких широтах, когда долгота места изменяется весьма быстро, перевод корабельных часов при переходе из одного часового пояса в другой производить нецелесообразно; счет времени следует вести по прежнему часовому поясу или по времени третьего восточного часового пояса (по московскому времени).
Переход от всемирного времени к судовому и от судового к всемирному производится по формулам (3.10) и (3. 11) с учетом номера пояса, по которому идут корабельные часы.
Линия изменения даты. Линией изменения даты (демаркационной линией времени) называется условная линия, при пересечении которой изменяется дата. Положение этой линии, проходящей в основном
46
Глава 3. Время
по меридиану 180°, определено международным соглашением и показано на карте часовых поясов мира.
Смена даты производится в ближайшую полночь после пересечения кораблем демаркационной линии времени. При этом, если корабль следует в восточном направлении, то повторяется прежняя дата; при следовании корабля в западном направлении пропускаются одни сутки.
До смены даты счет времени нужно вести по прежней дате и при вычислении всемирного времени учитывать тот часовой пояс, по которому велся счет времени до пересечения демаркационной линии.
Календарь. Календарь представляет собой систему измерения больших промежутков времени. В настоящее время наиболее распространен солнечный календарь, который называется григорианским или новым стилем основанный на движении Земли вокруг Солнца. Единица измерения времени в этом календаре называется тропическим годом. Средняя продолжительность этого года равна 365,2422 средних суток.
Для исключения ошибок в счете дат поскольку год помимо целого числа содержит 0,2422 доли суток, три года подряд считают его продолжительность равной 365 суткам, а продолжительность четвертого года, называемого високосным, — 366 суткам. Високосными являются те годы, номер которых делится на четыре без остатка. Для более точного приведения в согласие календарного года с тропическим вековые високосные годы, число сотен которых не делится на четыре, считаются простыми. В СССР переход на григорианский календарь совершен в 1918 г.
§ 15. ОПРЕДЕЛЕНИЕ И ХРАНЕНИЕ ВРЕМЕНИ НА КОРАБЛЕ
Государственная служба времени. Государственная служба времени СССР, состоящая из ряда астрономических учреждений, производит определение, хранение и распространение точного времени.
Хранение точного времени производится при помощи кварцевых, молекулярных (аммиачных) и атомных (цезиевых) часов, обладающих высокой точностью хода. Так, например, изменение хода кварцевых часов за сутки составляет несколько миллионных долей секунды; цезиевый стандарт частоты вырабатывает секунду с погрешностью около 5* 10~п от ее величины.
Распространение времени осуществляется передачей радиосигналов точного времени, которые по их назначению делятся на вещательные, обыкновенные и ритмические.
Вещательные сигналы состоят из шести секундных точек, передаваемых в последние 5 сек каждого часа. Они предназначены для проверки часов в повседневной жизни, но, как исключение, при приеме сигналов непосредственно московских станций, могут использоваться также для проверки хранителей точного времени на корабле.
Обыкновенные сигналы передаются по различным программам и состоят из нескольких серий секундных сигналов. Это позволяет определить поправку корабельных хранителей времени несколько раз подряд, что повышает ее точность.
Точность подачи как обыкновенных, так и вещательных сигналов не ниже 0,1—0,2 сек.
Ритмические сигналы передаются в течение 5 мин по различным программам и состоят из 5 серий сигналов. Каждая серия состоит из 61 сигнала, подаваемых в течение 1 мин с интервалом в бО^/б! = 0,9836 сек. Прием ритмических сигналов на хронометр позволяет использовать свойство звукового верньера для регистрации моментов их прихода с точностью до 0,01 сек.
$ 15. Определение и хранение времени на корабле
47
Сведения о радиостанциях, передающих сигналы точного времени, их позывных, а также о программах передач помещаются в выпуске № 1 извещений мореплавателям ГУ МО.
Служба времени на корабле. На каждом корабле организуется служба времени, решающая задачи определения, хранения и распространения точного времени. Хранение точного времени в промежутках между приемами сигналов времени, в условиях корабля осуществляется при помощи хронометра и палубных часов.
Кроме того, в ряде радионавигационных систем для формирования высокостабилизированных излучаемых сигналов и создания шкалы высокоточного времени применяются атомные и кварцевые стандарты частоты (атомные и кварцевые часы).
В основу работы атомных часов положено высокое постоянство внутриатомных и молекулярных энергетических состояний, переходы между которыми характеризуются большой стабильностью частоты. Однако высокие рабочие частоты и малые выходные мощности затрудняют непосредственное использование таких колебаний. Поэтому в состав атомных часов входят дополнительные устройства, призванные перенести высокостабильные колебания в диапазон относительно низких частот с одновременным их усилением и преобразовать колебания на выходе системы в колебания с периодом, кратным общепринятой шкале времени.
Одним из основных элементов кварцевых часов является автогенератор синусоидальных колебаний, стабилизированный кварцевым резонатором. Наибольшее распространение получили резонаторы, выполненные в форме круглых, прямоугольных или чечевицеобразных кварцевых пластин. Полученные высокостабилизированные колебания используются для индикации текущего значения времени при помощи циферблата и стрелок или путем высвечивания на выносной панели часов, минут и секунд в десятичной системе счета. Точность работы кварцевых часов зависит от постоянства температуры пластинки кварца, для достижения которого применяются специальные термостаты. В корабельных условиях применение высокоточных термостатов связано со значительными трудностями, поэтому корабельные кварцевые часы требуют периодической проверки.
Морской хронометр представляет собой пружинные часы специальной конструкции, отрегулированные по среднему времени. Для управления работой временных регистрирующих механизмов хронометр может иметь контактные устройства, замыкающие контакты через 0,5 сек; такой хронометр называется контактным.
Несмотря на тщательное изготовление, на работу хронометра оказывают влияние изменение температуры, влажность воздуха, изменение атмосферного давления, сгущение масла в трущихся частях, качка и магнитное поле корабля, а также другие причины. Поэтому при хранении хронометра и обращении с ним необходимо соблюдать следующие правила:
1) храниться хронометр должен в специальном ящике в штурманской рубке или ином специальном помещении в удалении от тех устройств, которые вызывают сильные магнитные поля, большую вибрацию или где могут быть резкие изменения температуры воздуха и большая его влажность. В месте хранения хронометра следует поддерживать постоянство температуры в пределах 20 + 5° С; с хронометром должны находиться максимальный и минимальный термометры, по показаниям которых определяется средняя суточная температура воздуха;
2) заводиться хронометр должен ежедневно утром в одно и то же время. Завод нужно производить не до конца, а до деления 8* по указа
48 Глава 3, Время
телю завода. Пропуск завода хронометра недопустим, так как он ведет к изменению равйомерности его хода;
3) снятие отсчетов времени с хронометра, для уменьшения воздействия на хронометр влажности воздуха и изменения температуры, должно производиться через стекло крышки ящика. Выносить хронометр на палубу или в другое помещение для взятия отсчетов времени по нему при различных наблюдениях категорически запрещается;
4) перед пуском нового хронометра, полученного на корабль, необходимо убрать пробковые клинья, которыми крепится его баланс. Для этого следует снять хронометр с карданова подвеса, снять стеклянную крышку и осторожно, перевернув хронометр, вынуть из корпуса его механизм. Клинья из-под баланса убираются при помощи иголок циркуля-измерителя. После этого на механизм хронометра надевается его корпус; хронометр переворачивается циферблатом вверх, и после навинчивания стеклянной крышки он закрепляется в кардановом подвесе;
5) для перевозки неработающего хронометра его баланс должен быть закреплен пробковыми клиньями. Для перевозки идущего хронометра должен быть закреплен его карданов подвес. Во время транспортировки хронометр, находящийся в наружном деревянном ящике, необходимо держать на руках и не допускать резких его поворотов и сотрясений;
6) один раз в два года хронометр должен сдаваться на проверку и смазку.
Каждый хронометр имеет аттестат, в котором приводятся данные проверочных испытаний и параметры хода.
В целях упрощения расчетов, связанных с вычислением всемирного времени при наблюдениях светил, хронометр обычно ставят приближенно по всемирному времени.
Палубные часы представляют собой точные пружинные часы, предназначенные для измерения времени при астрономических наблюдениях, а также для его хранения на тех кораблях, где нет хронометра.
Палубные часы регулируются по среднему времени. Они имеют аттестат, аналогичный аттестату хронометра. Для того чтобы палубные часы работали устойчиво, необходимо:
1) завод производить ежедневно утром, одновременно с заводом хронометра;
2) при переводе часов стрелки переставлять только по их ходу;
3) не допускать резких поворотов часов вокруг оси стрелок;
4) часы хранить в футляре с закрытой наружной крышкой. Место хранения часов должно удовлетворять требованиям, изложенным для хранения хронометра.
Поправка хронометра (часов). Поправкой хронометра иХр или часов Оч относительно среднего гринвичского времени называется разность между всемирным временем и показанием хронометра (часов) в один и тот же момент. Поправки вычисляются по формулам:
^хр ~ ^гр 7\р; (3. 14)
^==Лр-Гч. (3.15)
Величины Ггр, Гхр, Гч должны быть выражены в счете от 0 до 24 ч. Всемирное время по показаниям хронометра или часов определяется по формулам:
ЛР = ЛР 4-ихр; (3.16)
+ (3.17)
Поскольку циферблаты хронометра и палубных часов разбиты на 12 ч, то чтобы не допускать ошибки в Ггр на 12 ч и верно определить дату
$ 15. Определение и хранение времени на корабле
49
на меридиане Гринвича, необходимо при всех вычислениях, связанных с нахождением Ггр, рассчитать вначале приближенно всемирное время по судовому времени.
Пример. 12 мая 1968 г. Тс = 8ч30* 10 Ost Тхр = 10ч25*46с, ихр= +4*03с.
Определить всемирное время Т^р.
Решение. 12/V Тс = 8’30* 7*хр = 10“25*46с
jV== —Ю uxp ~ +4 03
11/V Ггр=- 22ч30х 11/V Тгр = 22*29*49*
Суточный ход хронометра. Экстраполированная поправка. Величина изменения поправки хронометра за некоторый промежуток времени называется ходом хронометра за этот промежуток времени. Ход хронометра за одни сутки называется суточным ходом. *
Для вычисления суточного хода хронометра применяется формула
где <о — суточный ход хронометра;
яхРо, «хр, — последовательные значения поправок хронометра, соответствующих датам До и Дн
п — число суток (до 0,01) между датами До и Дх.
По суточному ходу хронометра и поправке ях₽1, определенной в дату Ди экстраполируют поправку хронометра ихр, на заданную дату Д2. При возможности ежедневного приема сигналов точного времени и экстраполировании не более чем на одни сутки расчет поправки хронометра производится по формуле
йхр, = йхР1 + rtWj, (3. 19)
где /г — промежуток времени экстраполирования в долях суток;
< i>j — суточный ход, полученный по результатам последних определений.
При необходимости экстраполирования поправки на более продолжительный период времени следует учитывать температурные изменения суточного хода и рассчитывать поправку хронометра по формуле
йхРа = йхР1 + (3. 20)
Суточный ход хронометра при данной температуре вычисляется по формуле
= (о0 4- а (/ — /0) + р (/ — /0)2, (3.21)
где Ф/ — суточный ход хронометра при температуре /, которая является средней за данный промежуток времени;
< о0 — суточный ход хронометра при нормальной температуре 4-20° С, точное значение которой приводится в аттестате хронометра;
а и р — линейный и квадратичный температурные коэффициенты компенсации.
Формула (3. 21) позволяет:
— по определенной величине о)/, вычислить <в0;
— по вычисленному значению ш0 найти для нового значения рабочей температуры.
Для упрощения вычислений необходимо по значениям а, р и взятым из аттестата, рассчитать по формуле Дш = а(/ — /0) 4- ₽ (t — /0)2 таблицу поправок суточного хода для всего диапазона возможных
4 Заказ 1833
50
Глава 3. Время
температур через Г. Образец такой таблицы для значений а = = +0,1 се/фрао. сутки, р = +0,01 сек/град2. сутки и /0 = +20°0С дан в табл. 5.
Таблица 5
t° с А<о, сек г с Дш, сек t° с Дш, сек г с Д<и, сек
и —0,09 16 —0,24 21 +0,10 26 +0,96
12 —0,16 17 —0,21 22 +0,24 27 + 1,19
13 —0,21 18 —0,16 23 +0,39 28 + 1,64
14 -0,26 19 —0,09 24 +0,56 29 + 1,71
15 -0,25 20 0,00 25 +0,75 30 +2,00
Пример. 12 февраля 1968 г. в Тгр = 8*00* определена поправка хронометра ахро= +3*15*; 18 февраля 1968 г. в 7^ = 8*00* определена поправка хронометра «хр — +3*06*. Средняя суточная температура в этот период была: 12/11 18°0; 13/II 18?Ь; 14/11 17°0; 15/II 17°5; 16/11 18?5; 17/II 18?0; 18/11 19?5.
Определить экстраполированную поправку хронометра ахр на Тгр = 12*00* 24 февраля, если средняя суточная температура была: 19/П 20°0; 20/П 2П5; 21/11 21 °0; 22/П 22°0; 23/II 21?5; 24/П 22?5.
Решение. 1) Вычисляем средние значения температуры за периоды с 12 по 18/11 ti = 18°1 С и с 19 по 24/П /2 = 21 °4 С;
2) вычисляем суточный ход , соответствующий средней температуре— 18?1 С:
+3*06* — (+3*15*) , ,Л .
«о,, ---------------- = —1,50 сек (сутки;
3) из таблицы поправок по = 18^1 С выбираем До», = —0,15 и рассчитываем суточный ход для /0 = 20° С: — —1,50 — (—0,15) = —1,35 сек(сутки\
4) для средней .температуры /2 = 21°4С из таблицы поправок выбираем Дсо2 — +0,16 и вычисляем суточный ход ш/ ——1,35 + (+0,16) = —1,19 сек(сутки\
5) по формуле (3. 20) вычисляем поправку хронометра на заданное время: ихРа = +3*06* + 6,17 - (—1,19) = +2*58*,7.
Допустимый суточный ход хронометра при температуре от +4° до +36° не должен превышать 4 сек, а разность последовательных суточных ходов 2,5 сек\ для палубных часов эти величины не должны превышать соответственно 10 и 6 сек. При превышении указанных допусков хронометр или палубные часы подлежат замене.
Определение поправки хронометра по радиосигналам времени. Для определения поправки хронометра обычно принимаются обыкновенные сигналы времени. Прием ритмических сигналов производится в тех случаях, когда эту поправку необходимо знать с повышенной точностью. Вещательные сигналы времени при определении поправки хронометра можно использовать только в том случае, когда обыкновенные и ритмические сигналы не прослушиваются.
Для определения поправки хронометра по обыкновенным сигналам точного времени необходимо:
1) заблаговременно наметить 3—5 разных номеров сигналов в различных сериях, по которым будут замечаться показания хронометра, чтобы исключить получение отсчетов при одном и том же числе секунд; намечать для приема нулевой сигнал серии не следует, так как он имеет продолжительность 0,5 сек\
2) за 3—-5 мин № начала 'передачи сигналов времени настроить радиоприемник;
§ 15. Определение и хранение времени на корабле
51
3) после прослушивания позывных радиостанции произвести прием сигналов времени на слух; при этом должны быть замечены показания хронометра в моменты приема намеченных сигналов времени. Счет сигналов в каждой серии ведется от нуля; нулевым сигналом является тире, передающееся в начале каждой минуты;
4) замеченные моменты по хронометру увеличить на 0,25 сек (из-за движения его секундной стрелки скачками через 0,5 сек) и вычислить среднюю арифметическую поправку хронометра по формуле (3. 14).
Серия из 5 обыкновенных сигналов времени позволяет определить поправку хронометра со случайной ошибкой /пйхр ^0,1 сек.
Пример. Для определения поправки хронометра произведен прием обыкновенных сигналов точного времени на слух. Результаты приема обыкновенных сигналов точного времени и расчет средней поправки хронометра ихрср приведены в следующей таблице.
Всемирное время передачи сигналов времени Л-р Показание хронометра плюс 0,25 сек Т'хр Поправка хронометра мхр — Л-р T'xj)
9*20*01 * 9*15*39*25 + 4*21*75
9 21 05 9 16 43,75 +4 21*25
9 22 10 9 17 48,75 +4 21,25
9 23 01 9 18 39,25 +4 21,75
9 24 05 9 19 42,75 +4 22,25
«хРср = +4*21‘65
Для определения поправки хронометра по ритмическим сигналам точного времени следует:
1) за 3—5 мин до начала передачи ритмических сигналов времени настроить радиоприемник;
2) после прослушивания позывных радиостанции произвести прием сигналов. В процессе приема фиксируются те моменты по хронометру, в которые удары его секундной стрелки точно совпадают с ритмическими сигналами; при этом должны быть замечены номера серий и совпадающих сигналов. Чтобы определить номер совпавшего сигнала времени, нужно вести счет сигналов в каждой серии, начиная с тире, которое считается нулевым;
3) вычислить среднюю арифметическую поправку хронометра. Для этого моменты 7\р, замеченные по хронометру, нужно привести к среднему моменту ГгРо передачи ритмических сигналов при помощи редукции г ритмических сигналов, которая для каждого момента Гхр выбирается из табл. 54 МТ—63 по номеру серии и номеру сигнала в ней. Для первой половины ритмических сигналов времени редукция положительна, а для второй — отрицательна.
Средний момент ГгРо передачи ритмических сигналов равен всемирному времени начала их передачи, увеличенному на 2*30*. Моменты по хронометру, приведенные к среднему моменту передачи ритмических сигналов времени, осредняются; искомая поправка мхр вычисляется по формуле
и — т - 2 (Г,р + Г) . (3. 22)
«хр — 1 гр0 П .
где п — число замеченных моментов.
4*
52
Глава 3. Время
Ритмические сигналы времени позволяют определить поправку хронометра с ошибкой порядка 0,01 сек.
Пример. Для определения поправки хронометра произведен прием ритмических сигналов точного времени. Всемирное время начала передачи сигналов 7'гр = 8ч01*. Результаты приема ритмических сигналов точного времени и расчет средней поправки хронометра ихр приведены в следующей таблице.
Прием сигналов Вычисления
№ серии № сигнала Лр г Т'хро — Лр + Г
I 4 8*06*01*0 + 2*26*07 8*08*27*07
II 5 8 07 02,0 + 1 25,08 8 08 27,08
III 6 8 08 03,0 +0 24,10 8 08 27,10
IV 34 8 09 30,5 —1 03,44 8 08 27,06
V 35 8 10 31,5 —2 04,43 8 08 27,07
7хРср =8*08*27*08
Средний момент передачи ритмических сигналов времени равен
7’гро = 08ч01м + 2*30* = 8ч03*30*.
Искомая поправка хронометра равна
цхр = 8Ч03*30* — 8*08*27*,08 == —4*57* 08.
Поправка часов обычно определяется по обыкновенным сигналам времени аналогично определению поправки хронометра с той лишь разницей, что замеченные по часам моменты на 0,25 сек не увеличиваются вследствие плавного движения секундной стрелки часов. Вычисление поправки часов производится по формуле (3.15).
Сличение измерителей времени. Сличением называется разность одновременных показаний хронометра и часов
сл = Тхр - Гч. (3. 23)
Сличение позволяет:
1) по моментам часов, замеченным при наблюдениях, рассчитать соответствующие моменты хронометра по формуле
ЛР- Л + сл; (3.24)
2) по известной (экстраполированной) поправке хронометра определить поправку часов
«ч = яХр + сл-, (3. 25)
3) по известной поправке часов определить поправку хронометра
«хР = «ч — сл. (3. 26)
Сличение хронометра с часами может выполняться одним наблюдателем на слух или с использованием секундомера, а также с помощником.
При сличении на слух необходимо наметить по хронометру (несколько вперед) и записать момент, кратный целому десятку секунд. Когда показания хронометра будут меньше записанного на 10 сек, необходимо начать счет ударов хронометра и перевести взгляд на циферблат часов. По счету «и десять» замечается момент по часам, который будет соответствовать записанному ранее моменту по хронометру.
§ 16. Вычисление экваториальных координат светил
53
При сличении с использованием секундомера последний пускают в заранее намеченный по хронометру и записанный момент, также кратный 10 сек. После этого наблюдатель останавливает секундомер, когда секундная стрелка часов будет показывать целое число секунд, кратное 5 или 10, и записывает этот момент по часам.
Показание хронометра Гхр в момент остановки секундомера будет равно его показанию при пуске ЛРп плюс показание секундомера ДГС
Лр = Лрп -5- ЛГС. (3.27)
Пример. Для сличения хронометра с часами замечен момент Тхрп= 6ч25*30<? и в этот момент произведен пуск секундомера. Секундомер остановлен в момент по часам Тч = 9*29*15е; его показание ДТс = 32е,6. •
Определить сличение хронометра с часами.
Решение. 1) По формуле (3.27) вычисляем показание хронометра в момент остановки секундомера Тхр = 6*25х30с + 32е,6 = 6ч26-*02с,6;
2) по формуле (3.23) вычисляем сличение: сл — 6*26*О2С,6—9*29* 15е = —3*03* 12е,4.
Для сличения хронометра с часами при наличии помощника нужно наметить и записать несколько вперед момент по хронометру. За 5 сек до намеченного момента наблюдатель должен подать команду «товсь», а в намеченный момент—«ноль». По команде «ноль» помощник замечает момент по часам и записывает его. Величина сличения находится по формуле (3. 23).
Для повышения точности и исключения промахов производятся два-три сличения; моменты по хронометру намечаются в разных частях секундного циферблата; в дальнейшие расчеты должно вводиться среднее сличение.
Для фиксации моментов астрономических наблюдений могут применяться наручные или карманные часы. При использовании этих часов необходимо учитывать, что их суточный ход значительно больше и менее постоянен, чем палубных часов. Поэтому такие часы для определения их поправки должны сличаться дважды, — до и после астрономических наблюдений, приблизительно через равные промежутки времени. При вычислении их поправки нужно учитывать среднее сличение.
§ 16. ВЫЧИСЛЕНИЕ ЭКВАТОРИАЛЬНЫХ КООРДИНАТ СВЕТИЛ НА ЗАДАННЫЙ МОМЕНТ ВРЕМЕНИ
Для решения параллактического треугольника необходимо знать экваториальные координаты светил. Вычисление их значений на заданный момент времени, соответствующий моменту наблюдения, производится при помощи Морского астрономического ежегодника (МАЕ).
Морской астрономический ежегодник обеспечивает получение экваториальных координат светил со средними квадратическими ошибками, не превышающими О',05 для Солнца, планет и звезд и 0',1 для Луны.
В ежедневных таблицах МАЕ на каждый час всемирного времени приведены гринвичские часовые углы Солнца, Луны, четырех планет и точки весеннего равноденствия, а также склонения указанных светил. Кроме того, в таблице «Звезды» приведены значения склонений и звездных дополнений звезд на первое число каждого месяца и на вкладном листе для основных навигационных звезд — на середины декад каждого месяца.
Вычисление экваториальных координат t и S светил на заданные моменты производится путем линейного интерполирования между их табличными значениями, выполняемого при помощи основных интерполяционных таблиц.
54
Глава 3. Время
Рассмотрим вычисление экваториальных координат светил при помощи МАЕ, введя следующие обозначения:
Ггр — заданный момент всемирного времени;
/гр, S' — часовой угол и склонение, соответствующие времени
Тгр — табличный момент всемирного времени (ближайший меньший час к Тгр);
/'р, 8' — табличный часовой угол и склонение, соответствующие времени Т'р;
дг=тгр-лР.
Вычисление гринвичского часового угла на заданный момент времени производится по формулам:
— для Солнца, Луны и планет
/гр = /гр + Д./гр + Д2/Гр; (3.28)
— для точки весеннего равноденствия
/J = /£' + Д1/гр. (3. 29)
Поправки Aj/rp выбираются из соответствующих колонок основных интерполяционных таблиц по аргументу ДТ, взятому в минутах и секундах.
Поправку Д24р для Солнца, Луны и планет выбирают из средних (общих) колонок основных интерполяционных таблиц по аргументам ДТ (минуты) и величине Д, называемой квазиразностью. Квазиразности Д приведены в ежедневных таблицах МАЕ; для Солнца и планет дано ее среднее суточное значение, а для Луны — на каждый час всемирного времени.
Местный часовой угол указанных светил и точки весеннего равноденствия находится по гринвичскому часовому углу путем учета долготы места наблюдателя по формуле (3. 8).
Часовые углы звезд в МАЕ в готовом виде не даны. Их значение на заданный момент находится через часовой угол точки весеннего равноденствия и звездное дополнение по формуле
/? = /^ + X*. (3. 30)
Величина т* выбирается из таблицы «Звезды» или из таблицы на вкладном листе по наименованию звезды и дате; при выборке т* из таблицы «Звезды» производится интерполяция по дате.
Вычисление склонения Солнца, Луны и планет на заданный момент времени производится по формуле
8 = 8'4-Д8. (3.31)
Интерполяционная поправка ДЗ выбирается из средних (общих) колонок основных интерполяционных таблиц по аргументам ДТ (минуты) и изменению склонения светила Д за 1 ч. Величина Д приведена в ежедневных таблицах МАЕ; для Солнца и планет дано ее среднее суточное значение, а для Луны— на каждый час всемирного времени.
Склонение звезд выбирается из таблицы «Звезды» или из таблицы на вкладном листе по названию звезды и дате с интерполяцией, в первом случае, по дате.
Вычисление экваториальных координат светил производится по всемирному времени на момент их наблюдений, которое находится по формуле (3. 16) или (3. 17).
§ 17. Определение времени явлений суточного движения светил
55
При вычислении часовых углов и склонений все расчеты производятся по схемам, помещенным на бланках астрономических вычислений.
Часовые углы светил даны в МАЕ в круговом счете западного наименования. Поэтому если вычисленный часовой угол светила /м окажется больше 180°, то необходимо взять его дополнение до 360°, а наименование изменить на Ost. Если же при вычислении часового угла Солнца, Луны или планет часовой угол /гр окажется меньше долготы Х^,, то его величину можно вычесть из этой долготы и сразу получить местный часовой угол восточного наименования.
Пример. 10 мая 1968 г. = 16*45*, <pc = 3c05'S, Хс = 118°50' W, 7’хр - 0*42* 10е, ихр - + 3*18е.
Вычислить часовой угол и склонение Солнца.
Решение. 10/V Тс= 16*45* 7\р = 0*42*10*
Мур ~ +8 нхр — +3 18
И/V Тгр = 0*45* П/V Тгр = 0*45*28*
/'р = 18о°55;з (д = +о;з> v == i7°5o;s w <д = +о;б)
Д^гр= 11 21,8 ДЬ= +0,5
Д2ггр= 0,2 S=17°5i;o лг
192°1753
хс = —118 50.0 U7
tM = 73°27;зг
Пример. 13 мая 1968 г. 7^= 1*00*. ?с=^55°20;0 N, Хс=145°32' 05t,
7^ = 3*01*56* иХр = — 4*06*.
Вычислить часовой угол и склонение Капеллы.
Решение. 13/V Гс- 1*00* 7\р + 12* = 15*01*56*
Nost = — 10 «хр = —4 06
12/V ТГр- 15*00* 12/V Ггр = 14*57*50*
= 80°24;0
дХр= 14 29,9
94°53;9
Хс = +145 32.0 Ost
= 240°25J9
т= 281 25,4 & = 45°58J3/V
tM =- 161°5Г,3 W
§ 17. ОПРЕДЕЛЕНИЕ ВРЕМЕНИ ЯВЛЕНИИ, СОПРОВОЖДАЮЩИХ СУТОЧНОЕ ДВИЖЕНИЕ СВЕТИЛ
Вычисление времени кульминации светил. Судовое время кульминации светил на меридиане наблюдателя можно вычислить:
— для Солнца, Луны и планет по времени кульминации, приведенному в МАЕ;
— для звезд по их часовым углам.
Для Солнца, Луны и четырех планет в ежедневных таблицах МАЕ на каждые сутки дается среднее местное время Тк их верхней и нижней (для планет только верхней) кульминаций на меридиане Гринвича с округлением до 1 мин. Видимое собственное движение этих светил не является одинаковым с видимым собственным движением среднего Солнца, по которому исчисляется среднее время. Поэтому для указанных светил среднее местное время Тк кульминации на меридиане Гринвича, даваемое в МАЕ, не будет равным среднему местному времени их кульминации на меридиане наблюдателя.
56
Глава 3. Время
Для нахождения Тм необходимо учесть поправку Д7\ за долготу места наблюдателя, величина которой может быть получена по формуле
~ А‘*° = ft**4 (3 з2)
* 360° 24* ’ ^2
где Д — разность моментов соответствующих последовательных кульминаций.
Для нахождения величины и знака Д необходимо время кульминации светила заданной даты вычесть из времени его кульминации последующей даты при западной долготе и из времени кульминации предыдущей даты — при восточной долготе наблюдателя.
По формуле (3. 32) составлена таблица, помещенная в МАЕ (приложение 3), которая по аргументам X и Д дает величину поправки за долготу Д7\. Знак поправки Д7\ одинаков со знаком Д.
Таким образом, местное время кульминации Солнца, Луны и планет будет равно
Гк + ДЛ-
Примечание. Поправка Д7\ для Солнца не превышает 0,5 мин, а для планет 2 мин, поэтому для указанных светил этой поправкой часто можно пренебречь.
Судовое время Тс кульминации светила по вычисленному местному времени Тм находится по формуле
Гс = rM + Xg- ±Nw , (3.33)
где N — номер пояса, по которому установлены судовые часы.
Так как для планет в МАЕ дано время только верхней кульминации, то при вычислении времени их нижней кульминации следует к полученному Тм верхней кульминации придать +12 ч и поправку времени ДТ = — , одинаковую по природе с поправкой за долготу.
Пример. 12 мая 1968 г., <р = 4Г50' N, Х= 133°28' Osi.
Определить судовое время верхней кульминации Луны (судовые часы установлены по времени часового пояса ^ = 10 0s") -
Решение. Из ежедневных таблиц и приложения 3 МАЕ выбираем:
11/V Тк== 23*21*
Д7\ = —20 Д = —55*
11/V = 23*01*
X = —8 54 Ost
11/V Trp = 14*07*
Nost = +10
12/V Tc= 0*07*
Примечание. Точное (до И) время кульминации Солнца, Луны и планет можно рассчитать как время прихода светила на заданный часовой угол (0° или 180') по правилу, изложенному ниже для звезд.
Для звезд нахождение времени кульминации по часовым углам (0° для верхней и 180° для нижней кульминации) является задачей, обратной вычислению часового угла по заданному времени, рассмотренной в § 16.
$ 17. Определение времени явлений суточного движения светил
57
•у4
Для этого по формуле (3. 30), написанной в виде /м =360°(180°) — —х*, вычисляется местный часовой угол который долготой переводится на меридиан Гринвича и по нему из ежедневных таблиц МАЕ обратным входом интерполируется Ггр и затем находится Тс.
Пример. 12 мая 1968 г. ? = 50°00' N, Х= 151°10' О5*.
Определить судовое время верхней кульминации звезды а Лиры.
Решение. Из таблиц МАЕ „Звезды1* выбираем звездное дополнение т* и вычисляем:
360°00;0 W т*= —81 01,8
= 278°58;2 W
К = —151 10,0 Ost
/Т = 127°48J2 1Г
Г^ = —124 32,3 W 11/V 7;р= 17’Ю0-«00с
Д/Т = 3°15',9 ДТ = 4-13 02
11/V Тгр = 17ч13ж02с
Nost^= +10 12/V 7\~ 3*13*02'
Вычисление времени пересечения светилом первого вертикала. Для решения этой задачи нужно по формуле (2. 13) вычислить местный часовой угол светила и от него перейти ко времени по правилам, изложенным для расчета времени кульминации звезд. При решении этой задачи необходимо восточный местный часовой угол светила предварительно перевести в западный.
Склонение светила, используемое при вычислении местного часового угла, должно определяться на момент нахождения светила на первом вертикале, т. е. на тот момент времени, который определяется. Поэтому для тех светил, склонение которых изменяется значительно, данная задача решается методом последовательного приближения. С этой целью вначале склонение выбирается на время верхней кульминации Тк + 3 ч (знак плюс берется для случая нахождения светила на западной, а минус — на восточной части первого вертикала). Затем от вычисленного часового угла переходят к всемирному времени ГГР1 пересечения светилом первого вертикала. На вычисленное время TrPi, если нужно, вторично выбирают из МАЕ склонение светила, вновь вычисляют его местный часовой угол и от него переходят к судовому времени.
Примечание. Так как время нахождения светила на первом вертикале не требуется знать с высокой точностью, то для Солнца и планет достаточно произвести однократное решение. Метод последовательных приближений целесообразен только для Луны.
Пример. 11 мая 1968 г. ф=29°30' S, Х=160°50' W.
Определить судовое время прохождения Луны через восточную часть первого вертикала.
Решение. 1) 11 мая Луна будет находиться в верхней кульминации около 23 ч. Следовательно, на восточной части первого вертикала она будет в Тс ~ 23—3 — — 20 ч. Исходя из этого времени, иаходим склонение Луны и вычисляем по формуле (2.13) ее местный часовой угол /м .
58
Глава 3. Время
ц/V Тс= 20ч
Nw == +11 1g ctg <р = 0,24736
12/V Тгр7- Tl . . . &»19°40' S. . . lg tgБ = 9,55315
• lg cos JMl = 9,80051
Ц = 50°49' Ost;
2) по Ц находим TrPi
50°49' Ost Mi = 309° 11 W
1=+160 50 W
trp = 110°01' w
/'p= —95 56,3 W . . .12/V Г^б’ЮО*
ДГ = 14°04;7 . 7..........ДТ = +59
12/V Trpi=6459*.
Так как Тгр = 6ч59‘* совпадает с приближенным 7гр = 7ч, по которому выбиралось склонение, то дальнейшего приближения не требуется;
3) по вычисленному Тгр находим Тс
12/V Тгр = б“59*
?^ = -11__________
ц/V Тс= 19ч59*«20\
Вычисление времени видимого восхода (захода) светил и продолжительности сумерек. В явлении восхода (захода) нужно различать истинный и видимый восход (заход).
Истинным восходом (заходом) светила называется такое положение светила на суточной параллели, когда его центр находится в плоскости истинного горизонта наблюдателя.
Видимым восходом (заходом) светила называется такое положение светила на суточной параллели, когда его центр (для Солнца и Луны их верхний край) находится в плоскости видимого горизонта наблюдателя.
С восходом и заходом Солнца связано явление утренних и вечерних сумерек, которые делятся на гражданские, навигационные и астрономические.
Гражданскими вечерними сумерками называется промежуток времени от момента видимого захода Солнца до снижения его центра под горизонтом до 6°.
Навигационными вечерними сумерками называется промежуток времени от момента видимого захода Солнца до снижения его центра под горизонтом до .12°.
Астрономическими вечерними сумерками называется промежуток времени от момента видимого захода Солнца до снижения его центра под горизонтом до 18°.
Соответственно определяются и утренние сумерки.
В море практическую ценность имеет знание времени видимого восхода и захода Солнца и Луны, а также продолжительность гражданских и навигационных сумерек.
§ 17' Определение времени явлений суточного движения светил 59
Определение времени указанных явлений производится при помощи специальных таблиц, помещенных в ежедневных таблицах МАЕ. В этих таблицах приведено местное время Гм видимого восхода и захода Солнца и Луны на меридиане Гринвича для наблюдателя, находящегося на уровне моря, а также продолжительность гражданских и навигационных сумерек для 30 значений широт от 60° S до 74° N.
Вычисление судового времени видимого восхода и захода Солнца и Луны для возвышения глаза наблюдателя е при помощи таблиц МАЕ производится в следующем порядке.
Исходная величина явления Т'м выбирается на табличную широту <рт, ближайшую меньшую к широте места наблюдателя <рс. При выборе Т'м одновременно следует определить:
— разность времени явления для соседних широт Дф (разность соседних строк);
— - разность времени явления для соседних суток Дх (сут. изм. из таблиц);
— склонение Солнца, округленное до 1°.
Знак Д? определяется по изменению Т'м в соседних широтах.
Знак Дх показан в таблице для восточной долготы наблюдателя; для западной долготы он будет обратным.
По Д? и Д\ из таблиц, помещенных в приложении 1 для Солнца и в приложении 2 для Луны, выбираются поправки времени за разность широт ДТ^ и за долготу Д7\.
Поправку ДГр выбирают из таблицы А (Интерполирование по широте) по аргументам Д? и Д<р <рс — <рт. При этом значение Д<р должно быть взято в строке, соответствующей интервалу табличных широт 2, 5 или 10°; знак поправки ДГ? одинаков со знаком Дт.
Поправку Д7\ выбирают из таблицы Б (Поправка за долготу) по аргументам Дх и Хс; знак поправки Д7\ одинаков со знаком Дх.
В результате учета указанных поправок получаем местное время явления на меридиане наблюдателя. Переход к судовому времени осуществляется учетом долготы места Хс и номера часового пояса N по формуле (3. 33).
Вычисленное таким образом время явления Tz соответствует времени восхода (захода), наблюдаемого с уровня моря. Для учета возвышения глаза наблюдателя необходимо ввести поправку за возвышение глаза ДГе. Эта поправка учитывается только к моментам восхода и захода Солнца; для Луны она мала и практического значения не имеет.
Для вычисления ДГе необходимо из табл. 20-а или 20-6 МТ — 63 по широте места <рс и склонению Солнца & выбрать его азимут А на момент видимого восхода (захода), а затем из табл. 20-д по <?с и найденному азимуту А Солнца — величину ДГ,. Поправка ДГе вычисляется после этого по формуле
ДГе- Д7>ДА,
где ДА = ДА^ т ДА, — ДАВ — алгебраическая сумма поправок высоты Солнца за наклонение видимого горизонта наблюдателя d. температуру ДА, и атмосферное давление ДАВ. Знак поправки ДГе одинаков со знаком ДА при восходе и обратен знаку ДА при заходе Солнца.
Примечания. I. Вычисление времени видимого восхода и захода Солнца для широт <р > 74° W производится по специальным Таблицам восхода и захода Солнца для северных широт 74—90°, изд. У ГС ВМФ, 1962 г. Если таких таблиц нет, а также для южных широт ф > 60° S, время видимого восхода и захода Солнца может быть
60
Г лава 3. Время
определено по звездному глобусу (приближенно) или вычислено по часовому углу, получаемому по формуле
cos tM = sin Л sec у sec Б — tg у tg 6,
или
t __ cos (у — В) Г_______sin Л ~|
2 ~ 2cosycosd L cos (у — o)’j ’
2. Время видимого восхода и захода Луны в у > 74° М и у > 60° S определяется при помощи звездного глобуса, так как его не требуется знать с большой точностью.
При определении продолжительности гражданских и навигационных сумерек производится интерполяция только по широте места (таблица А, приложение 1).
Для нахождения судового времени начала утренних или конца вечерних сумерек следует их продолжительность соответственно вычесть из судового времени видимого восхода Солнца и прибавить к судовому времени его захода.
Пример. 13 мая 1968 г. yc = 61°39'M Хс == 177°46' Ost, е=16л, /в= +5°С, Вв = 770 мм.
Определить судовое время видимого захода Солнца.
Решение.
13/V 04 О1 04 ~ 1 8 + II II II <1 <1 А, = +15" Ах= -3" > о > CD Л. е» II 11 II ?? П II 1 сю о •—1 о - о СЛ Ь —
13/V Тм = 20 37 Х==—11 51
Дй = —8,8 ХДЛ= 0,2
13/V Тгр= 8 46 ATojf=+12
Д7’е = +1*76 л +2*.
13/V Тс = 20 46 аг, = +2
13/V Тс = 20 48
Рассмотренный порядок вычисления времени явлений, сопровождающих суточное движение светил, соответствует неподвижному кораблю. На ходу при решении указанных выше задач необходимо учитывать перемещение корабля. Для этого применяется метод последовательных приближений в следующем порядке:
а) решается задача по координатам места корабля, снятым с карты на момент решения задачи;
б) на вычисленное время явления находятся координаты места корабля и с ними вторично решается данная задача.
Глава 4
АТМОСФЕРА И ГИДРОСФЕРА
§ 18. ОБЩИЕ СВЕДЕНИЯ ОБ АТМОСФЕРЕ. ОСНОВНЫЕ ФАКТОРЫ И ПРОЦЕССЫ, ОПРЕДЕЛЯЮЩИЕ ПОГОДУ И ЕЕ ИЗМЕНЕНИЕ
Земной шар окружен слоем газообразного воздуха — атмосферой.
Толщина этого слоя одного порядка с радиусом Земли.
Состав сухого воздуха в нижнем слое атмосферы (до высоты 25 км)
приведен ниже.
Название rivt Содержание в воздухе по объему,% Молекулярный вес
Азот 78,08 28,016
Кислород 20,95 32,000
Аргон 0,93 39,944
Углекислый газ 0,03 44,010
Кроме того, в воздухе содержатся в незначительном
количестве неон, гелий, криптон, водород, ксенон, озон
и радон.
Атмосферу принято делить на следующие слои.
Название слоя Средние высоты ннжней и верхней границ, км Наименование переходного слоя
Тропосфера 0— 11 Тропопауза
Стратосфера 11— 50 Стратопауза
Мезосфера 50- 80 Мезопауза
Термосфера 80—800 Термопауза
Экзосфера выше 800
Погода — это физическое состояние атмосферы в определенном месте, в определенный момент или промежуток времени, характеризуемое сочетанием метеорологических элементов (температура, давление, ветер, влажность, облачность, видимость и т. д.) и атмосферных явлений (туман, дождь, гроза и т. п.).
Большую роль в эволюции метеорологических процессов играют вертикальные и горизонтальные движения (потоки) воздуха. Совокупность основных крупномасштабных воздушных течений называется общей циркуляцией атмосферы.
В низких широтах такие потоки достаточно устойчивы во времени и в пространстве и лишь изредка возмущаются тропическими циклонами и пассатными волнами.
Во внетропических широтах основной чертой циркуляционных процессов является интенсивная циклоническая деятельность, т. е. непрерывное возникновение, перемещение и эволюция крупномасштабных воз
62
Г лава 4. Атмосфера и гидросфера
мущений — циклонов и антициклонов. В этой циркуляции участвуют воздушные массы, сформировавшиеся над разными районами и имеющие различные метеорологические характеристики. Переходные зоны между воздушными массами различного происхождения нередко бывают довольно узкими и в этом случае называются фронтальными зонами или атмосферными фронтами^ они являются районами с особо сложными условиями погоды.
Основные особенности воздушных масс, атмосферных фронтов, циклонов и антициклонов состоят в следующем.
Воздушные массы. Воздух тропосферы в процессе общей циркуляции атмосферы расчленяется на отдельные воздушные массы, размеры которых соизмеримы с размерами материков и океанов, а вертикальная протяженность составляет несколько километров. Выделяют четыре географических типа воздушных масс: арктический (в южном полушарии антарктический) воздух, воздух умеренных широт, тропический и экваториальный воздух. Воздушные массы каждого географического типа делятся на морские и континентальные.
При перемещении из одних районов в другие воздушная масса под влиянием изменившихся радиационных условий и свойств подстилающей поверхности меняет свои характеристики — трансформируется.
Характер погоды в воздушной массе в большой мере зависит от того, перемещается она на более теплую или на более холодную подстилающую поверхность. В этом плане воздушные массы разделяют на теплые и холодные.
Теплой воздушной массой называется масса воздуха, перемещающаяся в районы, занятые прежде холодным воздухом, и приносящая потепление. Сама масса при этом охлаждается вследствие теплообмена с холодной подстилающей поверхностью и становится, как правило, устойчивой.
В теплых устойчивых воздушных массах погода имеет следующие характеристики:
— ветер у подстилающей поверхности ровный, без порывов;
— видимость ухудшена за счет скопления в нижних слоях воздуха продуктов конденсации, пыли и других жидких и твердых примесей;
— наблюдается адвективный туман или сплошная слоистая (слоистокучевая) облачность, иногда сопровождающаяся выпадением моросящих осадков (рис. 26, а, б, в).
Суточный ход метеорологических элементов в теплых массах выражен очень слабо.
Теплые воздушные массы наблюдаются над океанами в летний период, когда на относительно холодную морскую поверхность поступает прогретый воздух с континента. Аналогичные условия создаются, когда воздушная масса смещается из районов теплых морских течений в зону холодных.
Холодной воздушной массой называется воздушная масса, перемещающаяся в район, занятый ранее более теплым воздухом. Такая масса постепенно прогревается, начиная с самых нижних слоев, и становится неустойчивой.
В холодной неустойчивой воздушной массе погода характеризуется следующими особенностями:
— ветер порывистый, неустойчивый;
— видимость хорошая (вне зоны осадков);
— в дневные часы развиваются облака кучевых форм, возможно выпадение ливневых осадков и возникновение очагов грозовой деятельности.
§ 18. Сведения об атмосфере. Основные факторы, определяющие погоду
63
В холодное полугодие неустойчивые холодные массы типичны для морей при перемещении на относительно теплую водную поверхность воздуха с выхоложенных материков (рис. 26, г) или из районов холодных морских течений. Суточный ход метеорологических элементов в этих условиях сравнительно невелик. Зимние облака кучевых форм в неустойчивых массах дают осадки при гораздо меньшем развитии по вертикали, чем летом. Например, в Баренцевом и Беринговом морях, в Датском и Девисовом проливах интенсивные ливневые осадки — снежные заряды наблюдаются в холодное полугодие при ветрах северной четверти. Эти заряды обычно начинаются и оканчиваются внезапно, сопровождаются усилением ветра, а снегопад бывает настолько интенсивным, что видимость сокращается почти до нуля.
Туман
3 а)
2 -
\a2Z222ZZZZZZza№ Холодный материн
Холодный онеан е)
О
Теплый океан 2'^ Туманили I _ слоистые облака
з
Е
О
2
/
О 10
Туман или слоистые облана
Теплый океан Холодные береговые воды Холодный материн
О
5
Теплый океан
Холодный материк
Рис. 26
Воздушные массы различного происхождения имеют свои характерные черты (диапазон температур, влажность, запыленность и т. д.), но так как они все время трансформируются, то для правильной оценки условий погоды в воздушных массах необходим их всесторонний физический анализ, а также учет взаимодействия воздуха с подстилающей поверхностью.
Атмосферные фронты. Фронтальная зона располагается наклонно к горизонту таким образом, что более холодный воздух лежит узким клином под теплым (угол наклона переходного слоя в среднем 0,5—1°,0). На картах погоды полосу пересечения фронтального раздела с подстилающей поверхностью обозначают одной линией и называют линией фронта или фронтом. Атмосферные фронты располагаются в барических ложбинах, где имеются условия для сближения разнородных воздушных масс. В зонах фронтов наблюдаются наиболее сложные условия погоды: мощная многослойная облачность, осадки, нередко грозовая деятельность, усиление ветра, ухудшение видимости и другие явления.
В зависимости от относительного направления перемещения фронты делят на теплые, холодные и малоподвижные.
Теплые фронты. Теплыми называются фронты, перемещающиеся таким образом, что теплый воздух приходит в районы, в которых ранее распо
64
Г лава 4. Атмосфера и гидросфера
лагалась холодная воздушная масса. Если сделать вертикальное сечение по нормали к линии фронта, то получится картина, изображенная на рис. 27.
Рис. 27
Для теплых фронтов характерны следующие особенности погоды.
1. Мощная система облаков, горизонтальная протяженность которой по нормали к фронту достигает нередко 500—600 миль, и обширная зона осадков. Наблюдатель, к которому приближается фронт, вначале увидит перистые когтевидные облака (Ci). Постепенно уплотняясь, облака покрывают тонкой пеленой весь небосвод — это перисто-слоистые облака (Cs), которые располагаются на расстоянии 400—500 миль от линии фронта. В перисто-слоистых облаках обычно наблюдается гало, которое представляет собой бесцветный или слабо окрашенный круг вокруг Солнца или Луны радиусом 22° (иногда 46°). Затем облака еще более уплотняются и снижаются, переходя в высоко-слоистые (As) и, наконец, в слоисто-дождевые облака (Ns). На расстоянии около 200 миль от линии фронта начинается обложной дождь, интенсивность которого с приближением линии фронта усиливается. Под системой надфронтальных облаков в зоне дождя обычно наблюдаются разорванно-слоистые (Fr st) и разорванно-дождевые (Fr nb) облака. В непосредственной близости от линии фронта высота облаков становится минимальной и может составлять несколько десятков метров. Интенсивность осадков здесь достигает максимума. Вблизи линии фронта могут образовываться фронтальные туманы. После прохождения фронта обложные осадки прекращаются и в дальнейшем характер погоды определяется свойствами теплой воздушной массы, перемещающейся за теплым фронтом.
2. Ветер перед фронтом несколько усиливается, а при прохождении фронтов всех типов поворачивает по часовой стрелке (в южном полушарии при прохождении фронтов ветер поворачивает против часовой стрелки).
3. Температура после прохождения фронта повышается, так как в районы, ранее занятые холодной воздушной массой, приходит теплый воздух.
4. Видимость перед фронтом в холодном воздухе вне зоны осадков хорошая; в зоне предфронтальных осадков и туманов она значительно
§ 18. Сведения об атмосфере. Основные факторы, определяющие погоду 65
ухудшается; после прохождения фронта видимость, как правило, остается ухудшенной.
5. Давление с приближением фронта обычно равномерно падает, а после прохождения фронта падение давления прекращается.
6. Суточный ход метеорологических элементов в зоне теплого фронта очень мал.
Могут наблюдаться отклонения от описанных типовых условий погоды на теплых фронтах. Наиболее существенные из них следующие:
— на участках фронта, расположенных в центральной части циклона, мощность облачной системы и ширина зоны осадков больше, чем на периферии;
— в зимний период ширина зоны обложного снега несколько шире, чем ширина зоны обложного дождя летом;
— над морями влагосодержание воздуха и водность облаков, как правило, больше, чем над сушей, вследствие чего ширина зоны осадков и их интенсивность над морями также больше, чем над сушей;
— при сильной неустойчивости теплого воздуха внутри массива слоисто-дождевой облачности теплого фронта могут развиваться кучево-дождевые облака (СЬ) и возникать грозовая деятельность. Грозы на теплых фронтах отмечаются преимущественно ночью.
Холодные фронты. Холодными называются фронты, движущиеся в сторону теплого воздуха так, что на районы, занятые ранее теплым воздухом, перемещается холодная воздушная масса. В зависимости от расположения системы облаков и зоны осадков относительно линии фронта различают холодные фронты 1 и 2-го рода.
Рис. 28
Холодные фронты характеризуются следующими особенностями погоды.
1. Облачная система холодного фронта 1-го рода подобна массиву облаков теплого фронта, но с приближением такого фронта к пункту наблюдения последовательность появления форм облаков и осадков противоположна той, что наблюдается при прохождении теплого фронта (рис. 28). Вначале появляются слоисто-дождевые облака, из которых выпадают обложные осадки. Нижняя граница этих облаков находится
5 Заказ 1833
66
Глава 4. Атмосфера и гидросфера
на небольшой высоте. После прохождения линии фронта нижняя кромка облаков поднимается, они постепенно переходят в высоко-слоистые, которые пр мере удаления линии фронта становятся все более тонкими. Осадки начинаются на небольшом расстоянии перед линией фронта, и основная полоса их располагается за фронтом в холодном воздухе. Над передней частью фронтальной поверхности могут возникать наряду со слоисто-дождевыми также кучево-дождевые облака. В этом случае осадки у линии фронта имеют ливневый характер. Перед кучево-дождевыми облаками на удалении 30—60 миль наблюдаются высоко-кучевые (Ас) и перисто-кучевые (Сс) облака. Таким образом, холодные фронты 1-го рода по наблюдениям за облачностью могут быть обнаружены лишь в непосредственной близости, когда у горизонта уже вырисовывается стена слоисто-дождевых или вал кучево-дождевых облаков.
Рис. 29
Облачная система холодного фронта 2-го рода является в основном предфронтальной (рис. 29). В теплые сезоны на этих фронтах формируется преимущественно кучево-дождевая облачность. В передней части такой облачной системы образуются высоко-кучевые чечевицеобразные и перистые облака. Днем приближение холодного фронта 2-го рода может быть определено по следующим признакам: на расстоянии 100—150 миль перед фронтом появляются высоко-кучевые чечевицеобразные облака (Ac lent) в виде сигар, веретен и т. д., а затем небо быстро покрывается пеленой перистых и перисто-слоистых облаков, представляющих сомкнутые вершины фронтальных кучево-дождевых облаков. Ночью приближение таких фронтов можно заметить по зарницам.
Как правило, система облаков и осадков, характерная для холодных фронтов 2-го рода, формируется на быстро движущихся холодных фронтах, скорость которых составляет 30—40 уз и более. На медленно перемещающихся холодных фронтах образуются облака и осадки согласно схеме холодного фронта 1-го рода.
2. Ветер при прохождении холодных фронтов 1 и 2-го рода поворачивает вправо более резко, чем на теплых фронтах. Нередко он становится у холодных фронтов шквалистым и сохраняет порывистый характер после прохождения фронта.
3. Температура при прохождении холодных фронтов обычно резко падает.
§18. Сведения об атмосфере. Основные факторы, определяющие погоду 67
4. Видимость у холодных фронтов бывает ухудшенной лишь в зоне осадков.
5. Давление перед холодными фронтами имеет ровный ход, а после прохождения линии фронта резко возрастает.
6. Суточный ход метеорологических элементов на холодных фронтах выражен гораздо лучше, чем на теплых.
Холодная воздушная масса за основным холодным фронтом в тылу циклона, как правило, неустойчива и неоднородна. Поэтому в ней нередко формируются вторичные холодные фронты, на которых контрасты температуры меньше, чем на основных фронтах.
В процессе эволюции циклона теплый и холодный фронты могут смыкаться, образуя сложный комплексный фронт, называемый фронтом окклюзии.
Циклоны и антициклоны.
Внетропические циклоны. Циклоном называется замкнутая область пониженного давления с наименьшим давлением в центре. Движение воздуха в циклоне имеет вихревой характер, причем воздушные частицы перемещаются в северном полушарии против часовой стрелки, а в южном — по часовой стрелке. Диаметр
внетропических циклонов в среднем 500 миль, давление в центре около 980—990 мб.
Внетропические циклоны возникают и развиваются главным образом на атмосферных фронтах. Для фронтального циклона выделяют следующие стадии эволюции:
1) фронтальная волна—от первых признаков зарождения циклона на фронте до появления первой замкнутой изобары, кратной пяти (крайний
левый циклон на рис. 30);
2) молодой циклон — от оформления циклона до начала окклюдирова-ния (средний циклон на рис. 30);
3) окклюдированный циклон — от начала окклюдирования до исчезновения циклона (правый циклон на рис. 30).
Циклон существует обычно пять-шесть суток. Однако иногда волна на фронте не получает дальнейшего развития и едва наметившаяся область пониженного давления, заполняясь, исчезает. С другой стороны, окклюдированный старый циклон может снова углубиться, если в систему его циркуляции поступают свежие порции холодного воздуха; такой процесс называется регенерацией циклона.
В первую половину существования циклона можно выделить три сектора с различными условиями погоды (рис. 31);
— передняя и центральная части циклона обычно заняты многослойной облачностью, связанной с теплым фронтом. Здесь, как правило, располагается наиболее широкая зона обложных осадков;
— теплый сектор циклона, где господствуютусловия, характерные для теплой устойчивой воздушной массы, наблюдаются адвективные туманы, слоистая облачность, морось;
— холодный фронт и тыл циклона, где преобладает неустойчивая погода с порывистым ветром, меняющейся облачностью и ливневыми, осадками.
5*
68
Глава 4. Атмосфера и гидросфера
В окклюдированном циклоне можно выделить лишь два района с различными погодными условиями:
— передняя и центральная части циклона, где погода определяется фронтом окклюзии;
— тыл циклона, где характер погоды обусловливается неустойчивой холодной воздушной массой.
Вертикальный разрез А-А
Tpononay3Q
9
6
0 о п о п о у з а ; »Вертикальный развез В-В
ч/) Теплый воздух J *
Холодны
Холодный фронт
Холодный
•—воздух
Теплый фронт
!ЯН|
На нарте
v v
Ливневые осадно
Осадки в холодном воздухе
Ж ——
Осадни Морось Теплый е теплом фронт
воздухе а а
Холодный Фронт
Движение Движение Переднем холодного теплого граниио воздуха воздуха перисто-слоистых кланов
На вертикальных разрезах
Поверхность Движение фронта холодною воздуха
Движение теплого воздуха
1111 Выпадающие ледяные иглы
Облава
Снег или дождь
Рис. 31
В зависимости от географических условий, сезона и особенностей развития циклона могут наблюдаться существенные отличия от описанной схемы.
Нередко несколько циклонов последовательно развиваются на одном и том же фронте. Такая серия называется семейством циклонов (рис. 30). Обычно циклоническая серия проходит через какой-либо район в течение недели. С этим и связаны 5—7-дневные периоды штормовой погоды. Иногда за первой серией циклонов следует вторая, идущая несколько южнее первой. Такой процесс особенно характерен для северной части Атлантического океана.
§ 18. Сведения об атмосфере. Основные факторы, определяющие погоду 69
Тропические циклоны. Тропическими циклонами называются подвижные глубокие циклоны, образующиеся над океанами в полосе 5—25° северной и южной широты (исключение составляет южная тропическая часть Атлантического океана, где тропические циклоны никогда не наблюдались).
Согласно международной классификации в низких широтах различают следующие области пониженного давления:
— тропическое возмущение — циркуляционная система, не оформленная на уровне моря замкнутыми изобарами;
— тропическая депрессия — циклон с ветром силой не более 7 баллов;
— тропический шторм — система, в которой наблюдается ветер до 11 баллов включительно;
— ураган (или тайфун), в котором сила ветра достигает 12 баллов и более. В настоящее время за рубежом шкала силы ветра продолжена. Дополнительным баллам соответствуют скорости ветра.
Баллы............... 13 14 15 16 17
Скорость ветра, уз . .72-80 81-89 90-99 100-108 109-119
Соотношение скоростей: метры в секунду, километры в час, и узлы дано в табл. 37 МТ—63.
Тропические циклоны имеют диаметр от 100 до 600 миль, отличаются очень низким давлением в центре и большими барическими градиентами (25—35 мб на 100 миль). Они обычно резко выделяются на фоне малоградиентного поля давления в окружающих районах.
Зона облаков и осадков тропического циклона имеет форму спиральных полос, сходящихся к центру циклона. Наиболее сильные ветры и интенсивные осадки наблюдаются в поясе, прилегающем к «глазу бури» — центральному району циклона диаметром 15—35 миль, в котором нередко бывает прояснение, свидетельствующее о нисходящих движениях воздуха.
Тропические циклоны имеют местные названия, указанные на рис. 32; там же показаны очаги их возникновения и схема основных траекторий в различных районах Мирового океана.
70
Глава 4. Атмосфера и гидросфера
В отличие от внетропических циклонов эти возмущения обычно перемещаются с востока на запад, а затем меняют направление, огибая субтропические антициклоны. Однако в некоторых случаях траектории тропических циклонов сильно отличаются от показанных на рис. 32; циклоны могут перемещаться, описывая петли и совершая попятные движения.
/Скорость движения тропических циклонов в начальный период составляет 5—10 уз, а в последующем при перемещении в умеренные широты она может возрасти до 20—30 уз.
Максимум повторяемости тайфунов и антильских ураганов приходится на август — сентябрь; на севере Индийского океана циклоны отмечаются в основном с апреля по ноябрь; у Мадагаскара — в январе — марте.
Чаще всего возникают восточноазиатские тайфуны — в среднем 22—> 23 тайфуна в год. В Бенгальском заливе регистрируется 10—И циклонов в год, в Вест-Индии — около 4, на юге Тихого океана и в Аравийском море — по 2 тропических циклона. Приведенные статистические данные являются несколько заниженными. Наблюдения с ИСЗ показали, что часть циклонов, возникающих в тропической зоне вдали от основных океанских путей, прежде не регистрировалась.
Антициклоны. Антициклонами называют области повышенного давления с замкнутыми изобарами. Воздух в антициклоне циркулирует в северном полушарии по часовой стрелке, а в южном — против часовой стрелки. Диаметр хорошо развитого антициклона в среднем около 1000 миль, давление в центральной части 1015—1030 мб.
Над океанами в умеренных широтах наблюдаются главным образом два вида антициклонов (рис. 30):
— промежуточные антициклоны (гребни), которые располагаются между смежными циклонами серии циклонов;
— антициклоны, заключающие серию циклонов (заключительные антициклоны).
Антициклоны умеренных широт перемещаются по направлению воздушных течений над ними со средней скоростью 15—20 уз. По мере развития по вертикали скорость антициклона уменьшается и он становится малоподвижным.
Над океанами вблизи 30—40° северной и южной широты располагаются малоподвижные субтропические антициклоны, особенно четко выраженные в летний сезон. Наиболее известны азорский и гавайский антициклоны.
Центральная область антициклона характеризуется, как правило, малыми градиентами давления и соответственно слабыми ветрами. На периферии антициклонов в зоне перехода к циклонической циркуляции градиенты давления увеличиваются и скорость ветра возрастает, доходя иногда до штормовых значений.
В центральной части антициклона летом преобладает малооблачная погода. Зимой здесь нередко образуются слоистые или слоисто-кучевые облака, но мощных облачных систем фронтального происхождения с выпадением обложных осадков в антициклонах не бывает. В передней части антициклонов умеренных широт условия погоды несколько напоминают погоду тылового сектора циклона, расположенного впереди, а в тылу антициклона на характер погоды оказывает влияние теплый фронт (или фронт окклюзии) следующего циклона.
В прибрежных районах, занятых антициклонами, на фоне слабых барических градиентов в теплое полугодие наиболее четко прослеживается бризовая циркуляция. Радиационное выхолаживание побережья в ночные часы иногда приводит к образованию туманов, которые могут закрывать огни маяков и береговые знаки. При слабых ветрах со стороны
§ 19. Климатические особенности районов Мирового океана
71
берега эти туманы перемещаются на море, усложняя плавание вблизи побережья.
Условия погоды в антициклоне могут сильно отличаться от описанных выше, так как они зависят от характера воздушной массы, в которой сформирован антициклон, от стадии его развития, от особенностей подстилающей поверхности, от сезона и т. д. Однако в целом в антициклонах гидрометеорологические условия плавания гораздо более благоприятны, чем в циклонах.
§ 19. КЛИМАТИЧЕСКИЕ ОСОБЕННОСТИ РАЗЛИЧНЫХ РАЙОНОВ МИРОВОГО ОКЕАНА
Основными показателями характеристики климата, т. е. многолетнего метеорологического режима, являются средние и экстремальные значения метеорологических элементов, повторяемость различных градаций этих элементов и их изменчивость. Эти показатели определяются по многолетним данным для каждого месяца (сезона) и в целом для всего года.
Климат формируется под воздействием следующих основных факторов:
— притока солнечной радиации;
— распределения суши и моря;
— орографических особенностей суши;
— циркуляции атмосферы и вод Мирового океана.
Вследствие влияния солнечной радиации, поступление которой зависит от географической широты, в распределении климата наблюдается достаточно четко выраженная зональность.
Зона внутритропической конвергенции. Вблизи экватора в области пониженного давления происходит слияние пассатов северного и южного полушарий, вследствие чего этот район, охватывающий полосу 5—10° широты, называется зоной внутритропической конвергенции. Зимой она располагается вблизи экватора и прослеживается во всех океанах. Летом же она смещается на 10—20° к северу, а в Индийском океане вообще не обнаруживается.
Эта зона характеризуется следующими условиями погоды.
1. Температурный режим в течение года меняется мало. Средняя многолетняя температура воздуха 24—28°, а годовая ее амплитуда не превышает 1—3°.
2. Абсолютная влажность очень велика (часто превышает 30 г/м3). Сходимость воздушных течений способствует усилению кучево-дождевых облаков. Поэтому велика повторяемость ливневых осадков и гроз.
3. Вблизи экватора в Атлантическом и Тихом океанах имеются полосы слабых западных ветров, появление которых связано с образованием в низких широтах обоих полушарий небольших областей пониженного давления.
Пассатные зоны. По обе стороны экваториальной депрессии над океанами располагаются зоны пассатов, т. е. воздушных течений, формирующихся между 25—30° широты каждого полушария и экватором.
В пассатных зонах отмечаются следующие особенности режима погоды.
1. Умеренно-высокие температуры воздуха (20—27°), возрастающие по направлению к экватору. Годовая амплитуда 5—10°.
2. Устойчивые ветры в течение всего года. В восточной части океанов они имеют в северном полушарии северо-восточное направление, в южном — юго-восточное. В центральных и западных районах океанов пассаты становятся восточными ветрами. Средняя сила пассатов 3—
72
Глава 4. Атмосфера и гидросфера
4 балла. Пассатные ветры наблюдаются в Атлантическом и Тихом океанах, а также в южной части Индийского океана.
3. Кучевые и слоисто-кучевые облака, имеющие хороший суточный ход; они возникают в дневные часы и растекаются к ночи. Вертикальное развитие облаков сдерживается пассатной инверсией, нижняя граница которой повышается с востока на запад. Поэтому в западной части океанов в пассатной зоне кучевые облака имеют большую вертикальную мощность и могут давать ливневые осадки. Облачность в среднем 5—6 баллов.
При общем постоянстве пассатных воздушных потоков в них могут наблюдаться различные возмущения: пассатные волны и тропические циклоны (последние описаны выше). Пассатные волны представляют собой волнообразные возмущения воздушных течений, которые перемещаются с востока на запад. В этих волнах может происходить усиление ветра до 7—8 баллов, нередко формируется значительная облачность и выпадают осадки, ухудшающие видимость.
Зоны тропических муссонов. В северной части Индийского океана и на западе Тихого океана северо-восточный перенос наблюдается лишь зимой, а летом сменяется юго-западными потоками. Районы низких широт, в которых происходит сезонная смена преобладающих ветров, называются зонами тропических муссонов.
. Для зоны муссонов характерны следующие особенности погоды.
1. Температура воздуха здесь примерно такая же, как и в районах с экваториальным климатом и имеет такую же малую годовую амплитуду.
2. Влажность воздуха, облачность и осадки имеют хорошо выраженный годовой ход. Как правило, они увеличиваются летом и резко уменьшаются в зимний сезон.
3. В Индийском океане юго-западный (летний) муссон является более штормовым, чем северо-восточный; в Китайском море, наоборот, зимний муссон значительно сильнее и устойчивее летнего.
Субтропические зоны океанов (30—40° широты). Эти зоны характеризуются сезонной сменой условий циркуляции. Летом сюда смещаются субтропические антициклоны, зимой они отступают в более низкие широты и субтропики оказываются в зоне циклонической деятельности умеренных широт. Поэтому летом здесь преобладает малооблачная сухая погода со слабыми ветрами, а зимой увеличивается облачность, часто выпадают осадки, ухудшающие видимость, ветер усиливается и нередко достигает штормовой скорости.
Зоны умеренных широт (40—60° широты). Климат умеренных широт характеризуется интенсивной циклонической деятельностью и поэтому режим погоды здесь очень изменчив. Наиболее глубокие циклоны наблюдаются в северных районах Атлантического и Тихого океанов и у берегов Антарктиды. Например, над Беринговым морем в зимний сезон 30% циклонов имеет глубину от 980 до 960 мб. Циклоны умеренных широт перемещаются в основном в восточном направлении. Скорость их в начальной стадии развития 15—20 уз (иногда до 60 уз), а к моменту заполнения они становятся малоподвижными. Зимой барические образования перемещаются быстрее, чем летом.
Климат океанов в умеренных широтах отличается следующими особенностями.
1. В северном полушарии над обоими океанами среднегодовая температура воздуха от 40 до 60° широты меняется от 22 до 8°. Зимой в Атлантическом океане температуры на этих широтах составляют соответ
§ 20. Организация сбора и распространения гидромет. информации 73
ственно 15 и 0°; в Тихом океане температуры значительно ниже: от 10° на 40° до —10° на 60°. В южном полушарии перепад температуры в зоне широт 40—60° составляет летом 15°, зимой 20°.
2. В глубоких циклонах ветер нередко достигает штормовой силы на больших территориях. Часто такая ситуация наблюдается в холодное полугодие в северной Атлантике и в северной части Тихого океана. Особенно сильны ветры в умеренных широтах южного полушария, которые поэтому получили название «ревущие сороковые».
3. С прохождением циклонов связана пасмурная погода с осадками и ухудшенной видимостью. Повторяемость такой погоды увеличивается в осенне-зимний период.
4. В северо-западных частях Атлантического и Тихого океанов особенно часто отмечаются адвективные туманы, которые образуются при перемещении теплого влажного воздуха в районы холодных течений (Лабрадорского и Ойя-Сиво). В некоторых районах Ньюфаундлендской банки и Курильских островов повторяемость туманов в летние месяцы превышает 40%.
Полярные районы. В Арктическом бассейне имеет место циклоническая деятельность, что приводит к интенсивному междуширотному обмену воздушными массами. Средние месячные температуры от —40° зимой до 0° летом. Ветер в арктических районах зимой сильнее, чем летом, и очень изменчив. В летние месяцы велика повторяемость адвективных туманов; особенно «туманными» являются районы, занятые паковыми льдами.
У побережья Антарктиды также развивается интенсивная циклоническая деятельность. Особенно сложные ветровые условия создаются в узкой прибрежной полосе, где потоки воздуха, стекающие с оледеневшего материка (стоковые ветры), достигают особенно большой силы. Во многих пунктах побережья сила ветра в среднем за год превышает 9 баллов и в году наблюдается 250—350 штормовых дней.
Приведенный краткий обзор основных климатических зон Мирового океана дает лишь самое общее представление об особенностях климата различных районов. Реальное распределение метеорологических элементов в каждом конкретном случае может существенно отличаться от осред-ненных их значений.
§20. ОРГАНИЗАЦИЯ СБОРА И РАСПРОСТРАНЕНИЯ ГИДРОМЕТЕОРОЛОГИЧЕСКОЙ ИНФОРМАЦИИ
Основой гидрометеорологической информации служат данные гидрометеорологических наблюдений на станциях специальной синоптической сети, насчитывающей несколько тысяч станций.
Для обеспечения трансокеанских полетов самолетов и морского судоходства создана международная сеть судов погоды. Они дрейфуют в пределах квадратов, центры которых соответствуют географическим координатам судовых станций. Эти суда могут отлучаться из отведенных им районов только для проведения спасательных операций. Суда погоды производят регулярные метеорологические и аэрологические наблюдения по полной программе и передают результаты наблюдений в метеоцентры. По запросам судов и самолетов суда погоды передают информацию о фактической погоде в районах их расположения, а также прогнозы погоды на срок до суток.
74
Глава 4. Атмосфера и гидросфера
Суда погоды расположены в северной части Атлантического океана
(девять судов) и в северной части Тихого океана (два судна) и имеют
следующие координаты:
А ф = 62°00' М X = 33°00' Г; J ср — 52с30' N, X - 20°00' W;
В <р = 56°30' М X = 5Г00' Г; К ? - 45°00' N, X = 16°00' 1Г;
С ср = 52°45' М X = 35°30' W; М ? - 66°00' N, X 02г00' Ost\
D <р = 44°00' М X - 41°00' W; N ? - 30W М X = 140W W;
Е ф = 35°00' м х - 48°00' Г; Р <р - 50W N, X = 145°00' W.
I ? = 59W N, X = 19°00' W-
Кроме судов погоды, в северной части Атлантического океана функционирует международная служба наблюдений за льдом (служба ледового патруля). Эта служба ведет наблюдения за ледовой обстановкой, определяет положение айсбергов и границы ледяных полей, находящихся вблизи морских путей, для чего используются специальные патрульные суда и самолеты. Бюллетени с сообиДгниями о ледовой обстановке передают радиостанции Ардженшия и Вашингтон.
Информация, поступающая от судов погоды и службы ледового патруля, недостаточна, и поэтому большое значение имеют попутные гидрометеорологические наблюдения на судах различного назначения.
Эти наблюдения являются обязательными для всех судов СССР и регламентируются Постановлением Совета Министров СССР и Положением о порядке производства гидрометеорологических наблюдений на судах Министерства морского флота, Министерства рыбного хозяйства и других ведомств нештатным составом наблюдателей и передачи гидрометеорологических сведений в органы службы погоды ГУ ГМС.
Гидрометеорологическая деятельность на кораблях и судах ВМФ регламентируется Правилами наблюдения на кораблях и судах ВМФ за гидрометеорологической обстановкой.
На иностранных торговых и промысловых судах также производятся попутные гидрометеорологические наблюдения.
В сборе синоптической информации с Мирового океана принимает участие около 4000 судов всех морских стран, однако лишь 25% из них дают информацию на конкретный срок наблюдений.
Акватория океанов освещена метеорологическими данными крайне неравномерно: 89% наблюдений приходится на северное полушарие и лишь 11% —на обширную акваторию южного полушария.
Для получения дополнительной гидрометеорологической информации в настоящее время применяются установленные на якорях и дрейфующие автоматические радиометеорологические буи. Во льдах Арктики органы советской гидрометеослужбы ежегодно устанавливают 20—30 дрейфующих автоматических радиометеорологических станций (ДАРМС). Значительную оперативную информацию о метеорологических процессах над малоосвещенными акваториями дают метеорологические искусственные спутники Земли.
Большое внимание развитию наблюдательной сети в океанах и привлечению новых технических средств для получения информации из малоос-вещенных районов уделяется в программе Всемирной службы погоды (ВСП), созданной в 1967 г. в рамках Всемирной метеорологической организации, а также в программе Объединенной глобальной системы океанских станций (ОГСОС), создаваемой в настоящее время.
Использование на корабле гидрометеорологической информации.
В каждом крупном порту местная метеорологическая служба издает ежедневные бюллетени погоды и дает консультации. Поэтому в порту отхода можно получить информацию о фактической погоде по маршруту,
§ 20. Организация сбора и распространения гидромет. информации
75
а также прогноз гидрометеорологических условий на 1—3 суток. Это дает возможность определить наиболее благоприятное время выхода, а также выбрать оптимальный маршрут.
Во время плавания необходимо организовать получение информации о фактической погоде по маршруту, прогнозов погоды и предупреждений об опасных гидрометеорологических явлениях. Для этого могут быть также использованы:
— гидрометеорологические наблюдения, выполняемые на корабле штурманским составом или персоналом штатной гидрометеорологической станции. Они используются для уточнения обстановки в районе плавания, корректировки прогноза, обнаружения опасных явлений. В случае отсутствия других видов информации эти наблюдения могут служить основой для прогноза развития атмосферных процессов на срок до 6—12 ч\
— сообщения других судов, которые содержат обычно лишь сведения о внезапном ухудшении погоды или резком изменении ледовой обстановки;
— передачи специальных радиометеорологических центров, которые содержат наибольший объем гидрометеорологических сведений.
Радиометеорологические центры передают сводки фактической погоды и состояния моря, суточные, двух- и трехсуточные прогнозы и штормовые предупреждения.
Акватория Мирового океана разделена на районы, каждый из которых обслуживается одним или несколькими радиометеорологическими центрами. Всемирная метеорологическая организация публикует списки радиостанций, передающих гидрометеорологические сведения. Эти списки публикует Гидрографическое управление Министерства обороны в Расписаниях радиопередач навигационных и гидрометеорологических сообщений для мореплавателей.
Подавляющее большинство зарубежных радиометеорологических центров производит передачи на английском языке, но имеются также передачи на немецком, французском и испанском языках. При этом часто используются различные сокращения (особенно при телетайпных и телеграфных передачах, а также в обозначениях на факсимильных картах). Поэтому для понимания этих передач необходимо знать используемые термины и соответствующие сокращения. Наиболее полный англо-русский словарь таких терминов и их сокращений приведен в Правилах наблюдения на кораблях и судах ВМФ за гидрометеорологической обстановкой.
Береговые радиометеорологические центры передают сообщения открытым текстом или в виде закодированных телеграмм. Наиболее удобным и достаточно подробным является международный код «FM 46D». В схему этого кода включены консультации по анализу приземной карты погоды, а также прогноз развития синоптических процессов (будущая приземная карта погоды) и сведения о барических системах, атмосферных фронтах, типах циркуляции в тропических районах, о погоде.
Нередко береговые радиостанции используют код «MAFOR», имеющий международный индекс «FM 61D»; с помощью этого кода передаются сокращенные прогнозы, содержащие лишь самые общие сведения о будущей погоде.
Такие консультации используются для оценки фактической и ожидаемой гидрометеорологической обстановки.
По данным консультации необходимо составить схематическую карту погоды (фактическую или прогностическую или ту и другую). Для этого на бланковую или навигационную карту района плавания наносят раскодированный текст синоптической консультации: обозначают центры бари
76
Глава 4. Атмосфера и гидросфера
ческих образований, характерные точки фронтальных разделов и изобар; проводят фронты и изобары и подписывают их; указывают положение и номера (или названия) тропических циклонов; обозначают направление и величину скорости перемещения основных синоптических объектов. Наносят на карту другие данные: расположение зон осадков, штормовой деятельности, сведения об эволюции барических образований и т. д.
В таком виде гидрометеорологическая информация наиболее наглядна и позволяет достаточно полно оценить гидрометеорологические условия.
Метеорологические службы ряда стран публикуют специальные метеорологические бюллетени для мореплавателей. Например, метеорологическая служба Великобритании передает по радио специальный Атлантический бюллетень погоды для- мореплавателей, который содержит гидрометеорологическую информацию по районам северной Атлантики от 35 до 65° сев. шир. между 15 и 40° зап. долг., по Бискайскому заливу и району мыса Финистерре. В этот бюллетень включены штормовые предупреждения, обзор синоптической обстановки и прогноз погоды, передаваемые открытым текстом, а также закодированные сводки погоды судовых и береговых метеорологических станций.
Если необходима дополнительная гидрометеорологическая информация, можно запросить ближайшую радиостанцию или национальный гидрометеорологический центр. Гидрометеорологические прогнозы даются бесплатно, судно, запрашивающее погоду, несет расходы только по связи.
Прием на корабле факсимильных карт. Расшифровка сводок, нанесение данных и обработка карт погоды требуют специальных знаний и дополнительного времени. К тому же всесторонний анализ метеорологической обстановки и составление прогноза не могут быть осуществлены в корабельных условиях. Поэтому большое значение имеют факсимильные циркулярные передачи гидрометеорологических карт.
Для приема факсимильных материалов используются фототелеграфные аппараты, с помощью которых принимаются изображения гидрометеорологической карты шириной до 480 мм; для приема стандартного бланка длиной 690 мм требуется от 11 до 44 мин.
В настоящее время имеется более 30 станций, ведущих факсимильные передачи и обслуживающих различные районы Мирового океана. Все сведения, касающиеся работы этих станций,— район обслуживания, позывной сигнал, часы работы, режим работы, границы карты включены в Расписания факсимильных гидрометеорологических радиопередач, издаваемые Гидрографическим управлением Министерства обороны.
Основное научно-исследовательское учреждение СССР — Гидрометеорологический научно-исследовательский центр Советского Союза (Москва) — является одновременно и одним из трех мировых метеорологических центров Всемирной службы погоды. Этот центр распространяет большой объем гидрометеорологической информации всех видов. Факсимильные радиопередачи центра ведутся по трем программам и в сутки передается более 100 различных карт, 48 из которых являются прогностическими. Часть этих карт охватывает морские районы.
Большое количество факсимильных материалов передают и другие метеорологические центры. Комплекты передаваемых карт включают фактические и прогностические приземные и высотные карты погоды, карты особых явлений погоды, карты облачности по данным от ИСЗ, фактические и прогностические карты волнения, карты состояния льдов и айсбергов и т. д. Наиболее удобны для анализа погоды приземные синоптические карты, а для прогноза — прогностические карты.
На рис. 33 дан пример прогностической карты синоптической обстановки, которая передается Гидрометеоцентром СССР. На этой карте
$ 20. Организация сбора и распространения гидромет. информации
77
обозначено будущее (через 24 ч) положение основных барических систем и фронтальных разделов, а также указано направление (стрелками) и модуль скорости их дальнейшего перемещения. На таких картах отмечаются районы, где ожидаются осадки или другие явления. В зонах штормовых ветров ставятся стрелки с оперением (малое перо обозначает скорость ветра 5 уз, большое— 10 уз, вымпел — 50 уз). В случае, если ожидаются резкие колебания температуры, делаются соответствующие надписи.
Рис. 33
По прогностической карте (рис. 33) можно сделать следующие выводы:
— район Азорских островов будет находиться под влиянием южной периферии малоподвижного циклона в зоне умеренных юго-западных ветров;
— приближение фронта окклюзии к Гебридским островам должно сопровождаться увеличением облачности, выпадением осадков, ухудшением видимости;
— выход циклона на Балтийское море приведет к усилению ветра западных направлений над западными районами Балтики;
— над Баренцевым морем в гребне высокого давления должна сохраняться хорошая погода со слабыми ветрами переменных направлений; аналогичный характер погоды будет наблюдаться в антициклоне над Средиземным и Черным морями.
Выводы, сделанные по прогностической карте, следует корректировать по мере поступления новых данных.
Анализ факсимильных карт погоды, передаваемых зарубежными радиометеорологическими центрами, осложняется тем, что на них встречаются обозначения, отличающиеся от принятых в Советском Союзе. Так,
78
Глава 4. Атмосфера и гидросфера
области низкого и высокого давления на немецких картах обозначаются Т (tief) и Н (hoch), на картах стран, ведущих передачи на английском языке, соответственно L (low) и Н (high), на картах стран, где употребляется испанский язык (например, Латинская Америка) — В (bajas) и A (altas).
Направление прогнозируемого перемещения барических образований обозначается стрелкой с указанием скорости в узлах.
Характеристика горизонтальной видимости на зарубежных картах дается в милях. Высота облаков обычно указывается в сотнях футов, количество осадков — в дюймах. На картах погоды США и Японии изобары проводятся через 4 мб (на картах советской гидрометеослужбы и европейских стран — через 5 мб), поэтому во избежание ошибок при оценке ветра по густоте изобар следует обращать внимание на их оцифровку.
В отдельных случаях используемая система единиц и обозначений указывается в углу карты.
В Правилах наблюдения на кораблях и судах ВМФ за гидрометеорологической обстановкой описаны и другие особенности изображения различных метеорологических характеристик на факсимильных картах погоды зарубежных стран.
Принятые по радио факсимильные карты обычно «поднимают» (раскрашивают) с тем, чтобы придать им большую наглядность.
На приземных фактических и прогностических картах океаны и моря подкрашивают синим цветом, сушу — светло-коричневым, теплые фронты обозначают красными линиями, холодные — синими, фронты окклюзии — коричневыми, иногда выделяют зоны осадков, грозовой деятельности, туманов, штормовой погоды.
Карты приземного синоптического анализа составляют через каждые 6 ч, и регулярный прием их позволяет следить за развитием атмосферных процессов и фактической погодой. Прием карт будущей синоптической обстановки дает возможность в наиболее полной и наглядной форме использовать прогностическую информацию органов службы погоды.
Когда на корабле располагают только картами фактической погоды, их можно использовать для прогноза синоптической обстановки и условий погоды.
Одним из простейших является метод формальной экстраполяции, который основан на инерционности метеорологических процессов. По двум последовательным картам погоды можно рассчитать скорость перемещения воздушных масс, барических систем, атмосферных фронтов и экстраполировать будущее перемещение этих синоптических объектов с такой же скоростью. При наличии трех последовательных карт можно рассчитать не только скорость, но и ускорение синоптических объектов. Таким же образом оценивается эволюция (углубление, заполнение) барических образований. Формальная экстраполяция дает удовлетворительные результаты в случае плавного развития синоптических процессов, однако на срок более 12 ч ее распространять не следует.
Если на корабле имеются приземные и высотные карты, для прогноза можно использовать правило ведущего потока, согласно которому синоптические объекты (воздушные массы, фронты, барические образования) перемещаются по направлению воздушных потоков над ними в средней тропосфере. Скорость перемещения пропорциональна скорости высотных течений. Если используется карта АТ7оо (высота около 3 км), следует брать коэффициент пропорциональности 0,8; при пользовании картой АТ5оо (высота около 5,5 км) коэффициент составляет 0,6.
Если на корабле располагают только фактической приземной синоптической картой, можно применить ряд дополнительных приемов.
$ 20. Организация сбора и распространения гидромет. информации
79
Так, на анализе очагов изменения давления (барических тенденций) основаны следующие прогностические правила.
1. Циклон с круговыми изобарами перемещается в направлении очага падения давления. Скорость движения циклона тем больше, чем сильнее падение давления и чем меньше барический градиент в циклоне (т. е. чем реже расположены изобары).
2. Циклоны с эллиптическими изобарами перемещаются в направлении, среднем между большой осью эллипса и направлением на центр очага падения давления.
3. Если область падения давления в передней части циклона имеет такую же интенсивность, как и область роста в его тылу, то циклон перемещается параллельно прямой, соединяющей центры этих областей.
4. Удаление очага падения на периферию циклона и его ослабление свидетельствуют о замедлении перемещения циклона.
5. Если центр очага изменения давления совпадает с центром циклона, то циклон должен быть малоподвижным.
Эти правила применимы также для прогноза движения антициклонов с той разницей, что антициклоны перемещаются в область роста давления.
Нередко полезными оказываются также следующие правила.
1. Циклоны, имеющие теплый сектор, перемещаются в направлении изобар этого сектора со скоростью около 0,8 скорости градиентного ветра в теплом секторе циклона (правило изобар теплого сектора).
2. Идущие друг за другом циклоны одного семейства обычно перемещаются так, что траектории последующих циклонов располагаются в более низких широтах, чем траектории первых циклонов серии.
Если прогностические указания, полученные различными способами, совпадают, то прогноз можно считать достаточно надежным. В противном случае следует доверять признакам, которые выражены более четко.
Прогноз перемещения и эволюции воздушных масс, атмосферных фронтов и барических образований является базой прогноза погодных условий, характерных для каждого из этих объектов. При прогнозе погоды обязательно учитывать суточный ход атмосферных процессов и физико-географические особенности района, для которого составляется прогноз.
Местные условия сильно влияют на ветровой режим, повторяемость гроз, туманов и других метеорологических явлений.
В прибрежной зоне на характер ветра воздействует ориентировка береговой линии, наличие мысов, вблизи которых ветер, как правило, усиливается. В проливах с крутыми берегами ветер обычно направлен вдоль пролива независимо от направления изобар, а по скорости может быть в два-три раза сильнее ветра, рассчитанного по величине барического градиента (по расстоянию между изобарами). На воздушные потоки в прибрежной зоне иногда накладывается бризовая циркуляция, а у гористых берегов могут возникать ветры типа боры.
В зоне бризовой циркуляции отмечается увеличение неустойчивости воздуха днем над берегом, а ночью — над прибрежными районами моря, что способствует усилению грозовой деятельности днем на побережье, а ночью над морем.
Над островами в дневные часы образование облаков происходит более интенсивно, чем над морем, и иногда приближение к островам можно зафиксировать по наличию облачной шапки над ними.
В районах холодных морских течений отмечается'повышенная повторяемость адвективных туманов.
Прогноз погоды по местным признакам. Наблюдения за изменением погоды позволяют четко представлять, какую погоду вызовет развиваю
80
Г лава 4. Атмосфера и гидросфера
щийся синоптический процесс, и использовать последние сведения о текущей погоде для контроля правильности прогноза и его своевременной корректировки.
Если данных из гидрометцентров нет, личные наблюдения за погодой на корабле позволяют получить некоторые прогностические выводы. Такой прогноз обычно называется прогнозом по местным признакам погоды.
Под термином «местные признаки погоды» обычно понимаются такие метеорологические, оптические, электрические или другие явления, по появлению и развитию которых можно судить о состоянии и дальнейшем развитии атмосферных процессов.
Местные признаки погоды зависят от общего характера атмосферного процесса (общие признаки) и от местных условий данного района (специальные признаки).
Наибольшее количество местных признаков основано на наблюдениях за облачностью. Другие признаки базируются на характере ветра, ходе температуры, оптических и других явлениях.
По совокупности местных признаков можно судить о синоптической обстановке в районе плавания. Ряд признаков указывает на приближение атмосферных фронтов, перемещение барических образований и другие атмосферные процессы, определяющие характер погоды. Однако район, просматриваемый из одного пункта, ограничен и местные признаки лишь дополняют комплекс наземных и высотных данных синоптической сети. Поэтому прогнозы по местным признакам не могут соперничать с синоптическими прогнозами ни по заблаговременности, ни по надежности.
Ориентировка в барическом поле. Для правильного анализа погоды важно уметь ориентироваться в барическом поле, т. е. по данным наблюдений на корабле определять, в каком секторе циклона (или антициклона) находится корабль.
а) н б; н
990---------------- 990 990---------------990
995--------995 -------995
/ООО----------------1000 1000---------------Ю00
В В
Рис. 34
Известно, что ветер над морем отклоняется от изобар в сторону низкого давления на угол около 20°. В северном полушарии, если стать лицом по направлению ветра, то область низкого давления окажется слева и несколько впереди, а область высокого давления — справа и несколько позади (рис. 34,а). Ветер в барическом поле в южном полушарии изображен на рис. 34,6. Сила ветра определяется величиной барического градиента (густотой изобар) и зависит от широты места. Эти положения можно использовать для определения места корабля в барическом поле.
Например, на корабле, находящемся в северном полушарии, по данным наблюдений, давление 993 мб, ветер юго-западный. На листе бумаги проводим ось NS (рис. 35,а). От любой точки О на оси откладываем по направлению ветра отрезок V произвольной длины. Затем через точку О под углом 70° против часовой стрелки проводим линию OG, которая и указывает направление градиента давления G.
§ 20. Организация сбора и распространения гидромет. информации 81
Так как давление меньше 1000 мб, полагаем, что корабль находится в циклоническом поле. Приняв любую точку на линии градиента за центр циклона Н, проводим часть окружности с радиусом ОН. Эту кривую можно принять за изобару 993 мб. Такие построения позволяют сделать вывод о том, что над кораблем располагается юго-восточная часть циклона, а центр его находится в северо-северо-западном направлении.
Если давление больше 1020 мб, то следует считать, что корабль располагается в антициклоническом поле. В этом случае центр антициклона В (рис. 35, б) следует поместить в направлении, противоположном направлению градиента давления.
При атмосферном давлении от 1000 до 1020 мб, для того чтобы определить характер барического поля, следует руководствоваться признаками циклонов и антициклонов, приведенными выше.
В южном полушарии вектор барического градиента повернут по отношению к вектору ветра на угол 70° по часовой стрелке; остальные построения аналогичны изображенным на рис. 35.
Подробное описание местных признаков и соответствующей им погоды с указанием типов барического поля и прогностическими выводами дано в Правилах наблюдения на кораблях и судах ВМФ за гидрометеорологической обстановкой.
Некоторые местные признаки, являющиеся достаточно общими, перечислены ниже.
Признаки сохранения хорошей погоды:
— безоблачная погода или уменьшение вечером облачности, образовавшейся днем;
— слабые ветры на высотах (определяется по движению облаков);
— правильный суточный ход метеорологических элементов (ветра, температуры, давления);
— сохранение прежнего цвета зари;
— медленный рост или сохранение постоянства давления;
— наличие бризов (в зоне бризовой циркуляции).
Все эти признаки свидетельствуют, что корабль находится в умеренноустойчивой однородной воздушной массе в области высокого давления.
Признаки ухудшения погоды:
— появление и увеличение количества перистых облаков;.
6 Заказ 1833
82
Глава 4. Атмосфера и гидросфера
— появление гало;
— увеличение количества облаков ночью;
— сохранение или усиление ветра к вечеру;
— понижение атмосферного давления;
— появление красного цвета в заре;
— нарушение бризовой циркуляции.
Эти признаки указывают на приближение циклона и атмосферных фронтов.
Признаком приближающегося шторма может служить зыбь при штиле или зыбь, идущая от иного направления, чем ветровая волна. Сильный прибой у берегов при тихой погоде является признаком циклона, проходящего на большом расстоянии.
В прибрежной зоне можно использовать некоторые признаки, основанные на поведении птиц и животных. Например, если чайки и другие морские птицы вылетают рано утром и удаляются далеко в море, то до вечера можно не ожидать штормового ветра. Если же птицы при слабом ветре держатся у берега, следует ожидать усиления ветра. Массовое возвращение птиц с моря к берегу указывает на скорое приближение шторма. Если дельфины собираются в стаи и резвятся, касатки уходят от берегов, киты отходят от кромки льда, также можно ожидать приближения шторма.
Признаки приближения тропических циклонов описаны в § 58.
При использовании местных признаков в прогностических целях руководствоваться следующими соображениями:
— учитывать совокупность различных признаков, а не основывать выводы лишь на одном из них. Чем больше признаков указывает на изменение (сохранение) характера погоды, тем более надежен прогноз;
— если несколько признаков противоречат друг другу, следует ожидать неустойчивую погоду;
— если признаки выражены нерезко и меняются медленно, то погода будет меняться медленно; если признаки резко выражены и меняются быстро, погода вскоре изменится.
Для составления прогноза погоды по местным признакам необходимо учесть и обобщить данные наблюдений за несколько (четыре-шесть) предыдущих сроков.
Для оценки метеорологической обстановки полезны сведения, полученные при радиолокационных наблюдениях на корабле. На экранах радиолокаторов сантиметрового диапазона хорошо видны зоны кучеводождевой облачности и ливневых осадков, информация о которых существенно дополняет данные визуальных наблюдений.
§ 21. ОБЩИЕ СВЕДЕНИЯ О МИРОВОМ ОКЕАНЕ И ОСНОВНЫЕ ХАРАКТЕРИСТИКИ ВОДНЫХ МАСС ОКЕАНОВ И МОРЕЙ
Большая часть поверхности Земли покрыта водами Мирового океана. Мировой океан понимается как совокупность всей непрерывной водной оболочки земного шара.
Из общей площади поверхности Земли на долю океана приходится 70,7%, на долю суши 29,3%.
В Советском Союзе принято деление Мирового океана на четыре океана: Тихий, Атлантический, Индийский и Северный Ледовитый.
Площади океанов и площади различных ступеней глубин Мирового океана приведены на стр. 83.
§ 21. Общие сведения о Мировом океане и характеристики водных масс 83
Название океана Площадь млн. км* Средина глубина, м
Тихий 179,7 4028
Атлантический . . 93.3 3926
Индийский . . . 74,9 3897
Северный Ледовитый 13,1 1205
Ступени глубин М Площадь
МЛН. KJ0 в/о
0- 200 28,0 7,8
200—1000 15,0 4,2
1000—2000 15,0 4,2
2000—3000 24,0 6,6
3000—4000 71,0 19,7
4000-5000 119,0 33,0
5000—6000 84,0 23,1
Более 6000 5,0 1.4
Рельеф дна океанов и морей подразделяют на три основные категории: материковая отмель (континентальное плато, континентальный шельф), материковый склон и ложе океана.
Материковая отмель окаймляет материки непрерывной, относительно мелководной полосой. Материковый склон продолжает материковую отмель. Нижней границей материкового склона принято считать изобату 2500 м, В пределах ложа океана пока известны лишь крупные формы рельефа: котловины, глубоководные впадины, хребты, пороги и плато.
Грунты океанов разделяют на неорганические (прибрежные), состоящие главным образом из продуктов разрушения берегов континентов и островов, и органические (вдали от берегов), состоящие из скоплений остатков мельчайших организмов. На больших глубинах встречается очень тонкий ил, названный красной глиной.
Соленость морской воды. Общее содержание растворенных в морской воде твердых веществ в граммах на килограмм воды (в промилле) характеризует ее соленость. Средняя соленость Мирового океана 35 г на 1 кг воды, т. е. 35 % о. Характерной особенностью морской воды является постоянство ее солевого состава.
Несмотря на то, что общее количество растворенных веществ может меняться в различных районах Мирового океана в весьма широких пределах, соотношение между растворенными солями остается стабильным. Если принять за 100% все растворенные в морской воде твердые вещества, то на долю хлористых соединений (хлористый натрий и магний) будет приходиться 88,7%, на сернистые соединения (сернокислый магний, калий, кальций) 10,8%, углекислые соединения (карбонаты) 0,3% и на прочие вещества 0,2% • Такое постоянство соотношений растворенных веществ позволяет определять общую соленость морской воды по одному из главных компонентов, например, по содержанию хлора.
В практике кораблевождения для определения солености морской воды используют специальные гидрологические карты. Кроме того, соленость можно измерить с помощью прибора, имеющего опускаемый с корабля на заданную глубину чувствительный элемент. Действие чувствительного элемента основано на зависимости электропроводности воды от ее солености.
Соленость влияет на плотность воды, температуру ее замерзания1 и температуру наибольшей плотности, которые определяют особые условия льдообразования в море по сравнению с пресноводными бассейнами.
Плотность (удельный вес) морской воды. Плотность морской воды, зависящую от ее солености, температуры и давления, принято выражать в условных единицах. Под условной плотностью о, понимается увеличенная в 1000 раз разность между истинным ее значением s в г}см? и единицей
О, = 1000(s- 1).
Л*
84
Глава 4. Атмосфера и гидросфера
Значения условной плотности в зависимости от температуры t и солености морской воды S помещены в табл. 10 Океанологических таблиц (Гидрометеоиздат, 1957) и в табл. 53 МТ—63.
Величина, обратная плотности, называется удельным объемом vt. Перевод условного удельного объема в условную плотность производится по табл. 13 Океанологических таблиц.
Поправка удельного объема на давление приведена в табл. 15 Океанологических таблиц.
Плотность наряду с соленостью является важной физической характеристикой морской воды. От ее распределения по горизонтали зависит движение вод океана. Вертикальное распределение плотности определяет условия перемешивания, распространения звука в море и другие процессы.
Для определения плотности морской воды в заданном слое для заданного сезона используют гидрологические карты. Кроме того, плотность воды можно определить по ее температуре, солености и давлению с помощью' Океанологических таблиц.
Акустические явления в море. Морская вода представляет собой акустически неоднородную среду. Акустическая неоднородность воды обусловлена неравномерным распределением ее плотности, а также наличием в ней пузырьков газа, взвешенных частиц и планктона, которые вызывают рассеяние и поглощение звуковой энергии.
При исследовании распространения звука в морской воде необходимо также учитывать отражение его как от поверхности моря, так и от дна.
Распространение звука в морской воде сопровождается затуханием, обусловленным поглощением и рассеянием определенного количества энергии звуковых волн, преломлением (рефракцией) и отражением звуковых волн.
Затухание звука в непереслоенной воде определяется экспоненцио-нальным законом:
/ = he~v>
где / — сила звука на расстоянии г от излучателя;
/0 — начальная сила звука;
7 — коэффициент затухания.
Значение коэффициента затухания по экспериментальным данным для частот от 7,5 до 60 кгц определяется формулой
7 = 0,03б/'’<^/«л,
где f—частота колебаний в кгц.
С увеличением частоты колебаний коэффициент затухания звука возрастает.
При отсутствии примесей в морской воде затухание звука определяется преимущественно поглощением звуковой энергии. Наличие примесей увеличивает затухание и обусловливает явление реверберации (после-звучания), связанной с рассеянием звука.
Реверберация заключается в том, что после прекращения посылки сигнала в течение некоторого времени (от долей секунды до нескольких секунд) в некоторой области пространства, в которой распространяется звук, создается постепенно убывающий по силе звуковой сигнал. Попадая в приемник, он маскирует полезный сигнал и снижает эффективность гидроакустических средств.
§ 21. Общие сведения о Мировом, океане и характеристики водных масс 85
Реверберация может создаваться примесями, взвешенными в воде (объемная реверберация), неровностями поверхности моря (поверхностная реверберация), неровностями дна (донная реверберация).
Скорость звука в воде. Скорость звука в воде зависит от температуры воды, ее солености и гидростатического давления.
Различают горизонтальную и вертикальную скорости звука.
Горизонтальная скорость звука в воде зависит от распределения температуры, солености и гидростатического давления в слое воды между излучателем и приемником, находящимися на одной глубине. Эту скорость можно определить:
— измерением;
— по таблицам;
— по гидрологической карте.
Горизонтальная скорость звука в заданном слое воды измеряется с помощью приборов, действие которых основано на учете разности фаз гидроакустических сигналов стабильной частоты на концах строго фиксированной базы. Определяемая скорость записывается на ленте самописца. Данный способ является наиболее удобным и точным.
Таблицы для определения скорости звука в воде вычисляются по эмпирическим формулам. Имеется два вида таблиц, которые могут быть использованы в кораблевождении.
1. Таблицы скорости звука в воде в зависимости от солености и температуры воды и поправки скорости звука за глубину (табл. 34-а и 34-6 МТ—63).
2. Таблицы для расчета скорости звука в морской воде (изд. УГС ВМФ, 1965). Таблицы рассчитаны по формуле, учитывающей зависимость скорости звука от температуры, солености и гидростатического давления. Средняя квадратическая ошибка скорости звука, рассчитанная по этой формуле, составляет 0,22 м!сек.
Ошибки в скорости звука, определяемой с помощью таблиц, зависят главным образом от ошибок измерения температуры и солености воды.
Температуру воды на заданной глубине измеряют с помощью термометров и самопишущих установок, имеющих опускаемый в воду чувствительный элемент. Наиболее простым термометром-самописцем является батитермограф. В нем глубина погружения и температура воды на этой глубине измеряются величинами деформации упругих элементов приемников давления и температуры. Регистрирующее приспособление в процессе погружения прибора записывает измеряемые величины в виде сложной кривой на стекле, покрытом специальным составом. Запись расшифровывается с помощью специального отсчетного приспособления.
Горизонтальную скорость звука в воде можно определить приближенно по специальным картам, составляемым по результатам осреднен-ных многократных наблюдений. Точность определения скорости звука зависит от степени соответствия фактических гидрологических элементов их величинам, учтенным при составлении карт.
Изменение скорости звука по вертикали зависит от распределения температуры, солености и давления по глубине. В заданном слое скорость звука определяется как средняя из скоростей на различных глубинах и называется вертикальной скоростью звука.
Вертикальная скорость звука определяется:
— по измеренным скоростям на различных глубинах;
— по специальным картам, имеющимся в атласах гидрологических данных.
Второй способ применяется для предварительного изучения района, а также тогда, когда на корабле нет приборов для измерения скорости звука на различных глубинах.
86
Глава 4. Атмосфера и гидросфера
Рефракция звуковых лучей проявляется в искривлении траектории звукового луча, обусловленном изменением скорости звука. Наиболее сильно она проявляется в вертикальной плоскости.
В зависимости от характера вертикального распределения скорости звука выделяют положительную рефракцию, отрицательную рефракцию, переход от положительной рефракции к отрицательной и подводный звуковой канал.
Положительная рефракция наблюдается при возрастании скорости звука с глубиной. На рис. 36 справа показан ход звуковых лучей при этом типе рефракции, а слева — характер изменения скорости звука с глубиной. Точка И соответствует положению источника звука. При этом типе рефракции наблюдается повышенная (по сравнению с прямолинейным распространением звука) дальность действия гидроакустических средств.
Рис. 37
Отрицательная рефракция наблюдается при уменьшении скорости звука с глубиной (рис. 37). Заштрихованная область соответствует зоне акустической тени, в которую прямые звуковые лучи не проникают. Эта зона ограничена лучом, который претерпевает полное внутреннее отражение у самой поверхности моря.
Переход от положительной рефракции к отрицательной представлен на рис. 38. В этом случае в верхнем слое, где скорость звука возрастает, нет рефракционных ограничений для распространения звука, а в нижнем слое, где скорость звука убывает с глубиной, звуковые лучи не будут проникать в заштрихованную зону.
Отражение звуковых лучей от дна и поверхности моря или нижней кромки льдов несколько увеличивает силу звука в воде и позволяет звуковым лучам проникать в зону акустической тени, создаваемой рефракцией.
Подводный звуковой канал (ПЗК) определяется как слой в толще воды, в пределах которого звуковые лучи распространяются, претерпевая
§ 21. Общие сведения о Мировом океане и характеристики водных масс 87
многократное внутреннее отражение. При этом происходит концентрация звуковой энергии вдоль оси канала, что создает условия для сверхдальнего распространения звука, если излучатель и приемник находятся на оси канала АЕ. На рис. 39 показан ход звуковых лучей в ПЗК (левая часть рисунка) и характер изменения скорости звука с глубиной (правая часть рисунка).
Спорость звука сэ
Рис. 38
Ось ПЗК соответствует глубине, на которой скорость звука минимальна.
Условия распространения звука при наличии ПЗК зависят от взаимного расположения приемника и излучателя и от глубины залегания оси канала.
На рис. 40 представлен случай, когда ось канала залегает ближе к поверхности, так что скорость звука на поверхности меньше скорости звука у дна. В этом случае границами канала являются поверхность моря и горизонт ниже оси канала (пунктир с точкой), на котором скорость звука равна скорости звука на поверхности.
Ход звуковых лучей при расположении источника звука выше оси канала показан в правой части рисунка сплошными кривыми. Заштрихованные зоны являются зонами акустической тени. На рисунке (в левой части) видно, что вблизи излучателя имеет место отрицательная рефракция.
В слое, расположенном выше оси канала, за зоной тени появляется зона сходимости, или дальняя зона акустической-освещенности. Появляется дополнительная зона освещенности и ниже нижней границы ПЗК.
88
Глава 4. Атмосфера и гидросфера
Во всей незаштрихованной зоне может быть слышен сигнал, посланный излучателем. Если в этой зоне находится ненаправленный излучатель, то его сигналы могут быть восприняты в точке И. Удаление зоны
Рис. 40 .
сходимости от излучателя может достигать нескольких десятков миль.
На рис. 41 показан случай, когда ось канала расположена ближе ко дну, так что скорость звука на поверхности больше скорости звука у дна. В этом случае границами канала являются дно и горизонт выше оси канала, где скорость звука равна скорости звука у дна.
Рис. 41
В правой части рисунка представлен ход звуковых лучей при расположении излучателя выше оси канала, а в левой — характер изменения скорости звука с глубиной. Заштрихованные области — зоны акустической тени.
Слой скачка плотности. Это слой более или менее резкого увеличения плотности с глубиной. Наиболее часто причиной его возникновения является резкое понижение температуры воды с глубиной, но он может возникать также за счет резкого изменения солености или за счет одновременного изменения температуры и солености.
В слое скачка плотности отмечается значительное преломление звуковых лучей, а также частичное отражение и рассеяние звуковой энергии. Это приводит к заметному ослаблению звука под слоем скачка, которое особенно сильно при наличии планктона (мельчайших животных и растительных организмов), обычно находящегося в слое скачка.
Средние глубины залегания слоя скачка плотности для данного сезона можно определить по специальным картам. Кроме того, глубину залегания этого слоя можно получить, построив график распределения измеряемой скорости звука по глубине, так как со слоем скачка плотности связан и слой скачка скорости звука.
Оптические явления в море. Для практических целей наибольший интерес представляют условия распространения естественного солнечного света, которые определяются оптическими характеристиками морской воды, основными из которых являются коэффициенты поглощения, рассеяния и ослабления света.
$ 22. Колебания уровня моря и морские волны
89
На поверхность моря падает как прямой, так и рассеянный облаками и атмосферой свет. С уменьшением высоты Солнца возрастает количество отраженного от поверхности моря прямого солнечного света. Так, при высоте Солнца 90° от поверхности моря отражается около 5% прямого солнечного света, при высоте 10° — около 40% и при высоте, близкой к нулю, — 100%.
Ослабление света в море, освещенность на различных глубинах, видимость объектов под водой, цвет моря и другие оптические явления определяются прежде всего поглощением и рассеянием света в море.
Поглощение света в море. Поглощение света представляет собой потерю энергии за счет ее перехода в тепловую, затрат на биохимические и другие процессы при прохождении потока лучистой энергии в толще воды.
По мере проникновения света в воду наиболее интенсивно поглощаются более длинные волны, поэтому вначале, примерно на глубине 50 м, исчезают лучи красной и оранжевой частей спектра, затем желтой и зеленой на глубине около 150 м и, наконец, голубой, синей и фиолетовой на глубине 300—400 л.
Приведенные цифры характеризуют ослабление света за счет поглощения. Однако на ослабление света с глубиной существенное влияние оказывает также рассеяние света, вследствие чего свет в море проникает до значительно меньших глубин.
Рассеяние света в море. Рассеяние света в морской воде может создаваться как молекулами воды (молекулярное рассеяние), так и взвешенными в воде частицами (рассеяние крупными частицами).
Наличие взвешенных в воде частиц уменьшает глубину проникновения дневного света в толщу воды, увеличивая рассеяние.
Суммарное уменьшение света с глубиной под влиянием поглощения и рассеяния определяет прозрачность морской воды.
Различают физическую прозрачность (или просто прозрачность) и относительную прозрачность. Физическая прозрачность характеризуется величиной ослабления светового потока при прохождении толщи воды в один метр. Относительная же прозрачность определяется глубиной исчезновения стандартного белого диска диаметром 30 см.
Относительная прозрачность зависит не только от физической прозрачности, определяемой суммарным эффектом поглощения и рассеяния света, т. е. ослаблением, но и от условий освещения и наблюдения, волнения, цвета моря, наличия взвешенных частиц и других факторов.
§22. КОЛЕБАНИЯ УРОВНЯ МОРЯ И МОРСКИЕ ВОЛНЫ
Колебания уровня моря. Уровень моря (океана), характеризующий положение его свободной поверхности, подвержен значительным непериодическим и периодическим колебаниям.
Непериодические колебания уровня моря обычно обусловливаются деятельностью атмосферы или геодинамическими и геотермическими процессами в земной коре. С последними процессами связаны сейсмические волны (цунами). В настоящее время нет методов прогноза цунами, однако в отдельных случаях их удается своевременно обнаружить и дать предупреждение. С этой целью созданы специальные службы предупреждения возможного появления цунами.
Не являясь опасными в открытом океане, цунами могут приносить огромный ущерб и вызывать человеческие жертвы у побережья.
Из непериодических колебаний уровня, связанных с деятельностью атмосферы, наиболее значительны сгонно-нагонные колебания, вызывающие иногда катастрофические наводнения. Существуют методы прог
90
Глава 4. Атмосфера и гидросфера
ноза этих колебаний уровня, благодаря чему при наступлении опасных подъемов (спадов) уровня подразделения гидрометслужбы дают специальные прогнозы и оповещения. Расчет непериодических колебаний уровня на корабле практически нереален.
Помимо сгонно-нагонных колебаний, к непериодическим колебаниям уровня относятся сейши — полупериодические колебания всей массы воды, обусловленные метеорологическими факторами. Период сейш может достигать суток и более. Полагают, что с сейшами связано и явление тягуна, т. е. комбинации вертикальных и горизонтальных движений воды, при которых происходит наваливание судов на причалы или на соседние суда. Методы прогноза тягуна пока не разработаны.
Периодические колебания уровня моря обусловлены в основном приливо-отливными явлениями. С приливами и отливами, являющимися следствием действия периодических сил притяжения Луны и Солнца, связаны значительные колебания уровня моря, охватывающие практически все побережье Мирового океана.
Благодаря периодичности приливов оказалось возможным создать методы предвычисления приливов, доступные широкому кругу мореплавателей. Применимость этих методов для различных районов зависит от характера приливов в данном районе.
Приливы делятся на полусуточные, суточные и смешанные.
Полусуточные приливы характеризуются двумя полными и двумя малыми водами в течение лунных суток (24 ч 50 мин среднего времени) и изменением величины прилива (разности между полной и малой водой) в течение половины лунного месяца.
Наибольшие — сизигийные приливы отмечаются в новолуние и полнолуние, а наименьшие — квадратурные — в период первой и последней четвертей Луны.
Суточные приливы имеют в течение лунных суток только по одной полной и малой воде. Наибольшие величины приливов наблюдаются при максимальных склонениях Луны (тропические приливы), а наименьшие— при склонении Луны, равном нулю (экваториальные и равноденственные приливы).
Смешанные приливы характеризуются преобладанием в течение половины лунного месяца полусуточных (обычно при этом высоты смежных полных и малых вод неодинаковы) или суточных приливов. Величины приливов зависят как от фазы Луны, так и от ее склонения.
Наиболее просто можно предвычислить полусуточные приливы. Для этого достаточно знать определяемый из наблюдений средний промежуток времени от момента кульминации Луны на меридиане места наблюдений до момента наступления полной воды, называемый прикладным часом порта.
Для вычисления времени наступления полной воды прикладной час прибавляется к моменту кульминации Луны на меридиане места наблюдений; момент кульминации выбирается из Морского астрономического ежегодника.
Указанный метод не позволяет получить высоту (положение уровня от принятого нуля глубин) и величину прилива. Поэтому в практике кораблевождения для вычисления полусуточных приливов принят метод сравнения. Сущность этого метода заключается в установлении связи между колебаниями уровня в двух пунктах. Для одного из них, называемого основным пунктом (портом), приливы вычисляются точным способом (способом гармонического анализа) на основе длительных наблюдений за колебаниями уровня моря. Другой пункт называют дополнительным. Для основных пунктов ежегодно издаются таблицы приливов,
§ 22, Колебания уровня моря и морские волны
91
в которых публикуются моменты и высоты полных и малых вод на каждый день данного года.
Сведения о моментах полных и малых вод для основных портов можно получить также из таблиц постоянного действия, в которых данные о приливах в основных портах приведены в форме постоянных характеристик. В последнем случае необходимо дополнительно иметь таблицы Астрономические данные W и С для входа в таблицы приливов, публикуемые Главным управлением гидрометеорологической службы СССР.
Для дополнительных пунктов определяют поправки времен полных и малых вод Д£пв и Д/мв и коэффициенты приливов /С, которые публикуются в таблицах приливов для основных пунктов (портов) или в специальном издании.
Расчеты времен и высот полных и малых вод в дополнительном пункте производятся по простым формулам:
^ИВд = ^ПВо + А^пв‘»
^МВд = ^МВо + А^мв’»
^ПВд = ^ПВо’
^МВд “ ^МВо’
где ^пвд» ^мвд моменты полных и малых вод в дополнительном пункте; /ПВо, ^мво — то же в основном пункте;
АПВд, ^мвд “ высоты полных и малых вод в дополнительном пункте; АПВо, ^мво — то же в основном пункте.
Метод сравнения применяется и для расчета суточных приливов.
Таблицы приливов для основных пунктов и поправки для дополнительных пунктов дают возможность получить высоту прилива относительно того же условного уровня, относительно которого приведена глубина на карте, но без поправки среднего уровня за сезон.
Общая глубина в данный момент в данном пункте определяется путем алгебраического суммирования глубины, показанной на карте, высоты прилива, рассчитанной по таблицам, и поправки среднего многолетнего уровня за сезон.
Для расчета (предвычисления) смешанных приливов рекомендуется упрощенный метод гармонического анализа, называемый штурманским или адмиралтейским методом, В соответствии с этим методом высоту прилива оказывается возможным представить в виде суммы составляющих:
А = Zo + HSJ3SCS cos (^5 cs
+ НмВмСмcos [qMt - (bM + см + gM>)] +
+ нк COS ~ (*« + сх + £ х,)] 4"
+ ноВосоcos [Чо* ~(ьо+со + «Ъ.)]
где Zo — средний уровень;
Н и g — гармонические постоянные для данного пункта;
В, С, Ь, с — астрономические аргументы, выбираемые на дату предвычисления приливов.
Величины Zo, g, В, С, b я с приводятся в таблицах приливов (постоянного действия), в которых дано и описание практических приемов расчета высот уровня на заданный час.
92
Глава 4. Атмосфера и гидросфера
Морские волны. В зависимости от происхождения различают следующие виды морских волн:
— ветровые;
— приливо-отливные;
— анемо-барические, связанные с отклонением поверхности океана от положения равновесия под действием ветра (стоны и нагоны) и с резкими изменениями атмосферного давления.
Преобладающими волнами на поверхности морей и океанов являются ветровые и приливо-отливные.
Основное внимание в данном разделе уделено ветровым волнам. Распространение приливо-отливных волн сопровождается периодическими колебаниями уровня, рассмотренными выше, и периодическими течениями, сведения о которых помещены в следующем параграфе.
По расположению различают поверхностные волны, возникающие на поверхности моря, и внутренние, возникающие на той или иной глубине и почти не проявляющие себя на поверхности.
По отношению длины волны к глубине моря различают короткие волны, у которых длина волны значительно меньше глубины моря, и длинные, у которых длина волны значительно больше глубины моря.
По перемещению формы волны выделяют волны поступательные, у которых наблюдается видимое перемещение формы волны, и стоячие, у которых такого перемещения формы волны нет.
Поступательные волны характеризуются тем, что у них перемещается только форма (профиль) волны. Частицы же воды двигаются по почти замкнутым орбитам, имеющим форму, близкую к окружности или к эллипсу. Поэтому предмет, находящийся на поверхности моря, также совершает колебательные движения, тождественные движению частиц воды по их орбитам.
При стоячей волне, или сейше, частицы воды не совершают движений по круговым орбитам. В пучностях, т. е. в точках, в которых амплитуда колебания уровня наибольшая, частицы движутся только по вертикали. В узлах, т. е. в точках, в которых колебания уровня отсутствуют, частицы движутся только в горизонтальном направлении. В промежуточных точках частицы совершают колебания вдоль наклонных прямых.
Элементы волны. Каждая волна, поступательная или стоячая, характеризуется определенными элементами. Общие элементы для обоих типов волн следующие:
гребень волны — наивысшая точка волнового профиля;
подошва (ложбина) волны — наинизшая точка волнового профиля;
высота волны h — расстояние по вертикали от подошвы до гребня волны. Высота волны равна удвоенной амплитуде или удвоенному радиусу орбиты поступательной волны при круговых орбитах;
длина волны %—расстояние по горизонтали между соседними гребнями или подошвами, отсчитываемое в направлении наибольшего изменения уровня (стоячая волна), или в направлении перемещения волнового профиля (поступательная волна);
крутизна волны — наклон волнового профиля в данной точке к горизонту. Крутизна волны в различных точках волнового профиля различна. Для характеристики крутизны волны пользуются отношением высоты к длине j-, которое и называют крутизной волны.
Перечисленные элементы определяют геометрические характеристики волны. Для поступательной волны необходимо добавить еще два элемента: фронт волны — линию, проходящую вдоль гребня волны перпендикулярно к направлению перемещения ее профиля, и длину гребня волны — протяженность гребня волны в направлении ее фронта.
$ 22. Колебания уровня моря' и морские волны
93
Кроме элементов, определяющих геометрические характеристики волны, выделяют кинематические элементы — период и скорость волны.
Периодом волны т называется промежуток времени между моментами прохождения двух последовательных гребней или подошв волн через одну и ту же точку пространства. Для стоячей волны период определяется промежутком времени, за который совершается полное колебание уровня.
Скоростью распространения или фазовой скоростью с называется расстояние по горизонтали, проходимое любой точкой волнового профиля поступательной волны в единицу времени в направлении его перемещения.
Для характеристики ветрового волнения, наблюдаемого на поверхности океанов и морей, используются шкалы балльности (силы) волнения. С 1954 г. в СССР введена единая 9-балльная шкала степени волнения, приведенная в табл. 50 МТ—63.
Внутренние волны возникают в толще воды на границе раздела слоев различной плотности. Высота внутренних волн может достигать 20—30 м и более.
Соответственно высоте внутренних волн изменяется и глубина залегания слоя скачка плотности воды, что приводит к периодическим изменениям глубины залегания жидкого грунта.
Элементы морских волн, возникающих под действием ветра в океанах и морях, зависят не только от силы ветра, но и от продолжительности его действия, длины разгона волны и рельефа дна. Поэтому ветер одной и той же силы в различных конкретных условиях может вызывать различные волны.
Приближенные величины наибольших высот ветровых волн и соответствующие им длина, скорость и период по наблюдениям в океанах и морях приведены в табл. 6.
Таблица 6
Ветер Элементы волн
баллы скорость Mice* высота м длина м скорость м! се к период сек крутизна
6 11 4,0 87 11,8 7,4 1:22
7 14 5,8 129 14,2 9,1 1:22
8 17 8,4 138 14,7 9,4 1:16
9 20 11,5 180 16,8 10,7 1:16
10 23 12,6 285 21,1 13,5 1:22
11 27 14,5 376 24,4 15,5 1:25
12 29 16—18 — — — —
Ветровые волны высотой до 18 м наблюдались в Тихом и Атлантическом океанах при ветре 10—И баллов и около 21 м при ветре 12 баллов. В антарктических водах в 1958 г. были инструментально измерены волны высотой до 24,5 м.
Повторяемость волн различной высоты (в процентах) в различных районах Мирового океана приведена в табл. 7.
94
Глава 4. Атмосфера и гидросфера
Таблица 7
Район наблюдений Высоты ВОЛН, М
0-0,6 0,6-1,2 1,2-2,1 2,1-3,6 3,6-6,0 >6
Атлантический океан Северная часть . . . 20 20 20 15 10 15
Экваториальная часть 20 30 20 15 10 5
Область западных ветров . . 15 20 20 20 15 10
Индийский океан Северная часть (до 10° сев. шир.) во время северо-восточного муссона 55 25 10 5 5 0
Во время юго-западного муссона 15 15 25 20 15 10
Южная часть (до 20° южн. шир.) 30 25 20 15 5 5
Область западных ветров 10 20 20 20 15 15
Тихий океан Северная часть (до 40° сев. шир.) 25 20 20 15 10 10
Экваториальная область 25 30 25 10 5 5
Область западных ветров 10 20 20 20 15 15
§ 23. МОРСКИЕ ТЕЧЕНИЯ
Морские течения классифицируются по трем основным признакам:
— по факторам или силам, их вызывающим;
— по устойчивости;
— по глубине расположения.
По факторам или силам, вызывающим течения, можно выделить градиентные, ветровые, или дрейфовые, и приливо-отливные течения.
Градиентные течения обусловлены действием горизонтальной составляющей силы барического градиента. Эта составляющая возникает при наклоне поверхности моря относительно изопотенциальной поверхности, т. е. поверхности одинаковой силы тяжести.
В зависимости от причин, создающих наклон поверхности моря, в группе градиентных течений можно выделить сгонно-нагонные течения, являющиеся следствием нагона или сгона воды под действием ветра, баро-градиентные, связанные с изменением атмосферного давления, и плотностные, или конвекционные, обусловленные неравномерным распределением плотности воды по горизонтали.
Наиболее существенное значение в открытом океане имеют плотностные течения, а у берегов — сгонно-нагонные.
Ветровые, или дрейфовые, течения вызываются силами трения, создающимися при движении воздуха над водной поверхностью.
Приливо-отливные течения вызываются действием периодических приливообразующих сил Луны и Солнца.
§ 23. Морские течения
95
Течения, наблюдаемые после прекращения действия вызвавшей их силы, называются инерционными.
По устойчивости выделяют постоянные, периодические и временные (непериодические) течения.
Постоянными течениями называют течения, малоизменяющиеся по скорости и направлению длительное время. Примером таких течений являются пассатные течения океанов, Гольфстрим и др. Однако в строгом смысле слова постоянных течений нет. Все течения подвержены изменениям. Поэтому под постоянными течениями обычно понимают течения, всегда наблюдавшиеся в одних и тех же местах океана (моря). Эти течения зависят от характера распределения плотности и преобладающего распределения полей ветра.
Периодическими течениями называют течения, повторяющиеся через равные промежутки времени в определенной последовательности. К их числу относятся приливо-отливные течения.
Временными течениями называют течения, возникающие вследствие непериодического воздействия внешних сил и в первую очередь ветра.
По глубине расположения течения делятся на следующие:
— поверхностные, наблюдаемые в так называемом навигационном слое, т. е. в слое, соответствующем осадке надводных кораблей (0—10м)\
— глубинные, наблюдаемые на различных глубинах;
— придонные, наблюдаемые в слое, в котором сказывается влияние трения о дно.
Основной причиной существования достаточно мощных глубинных течений (кроме приливо-отливных) является неравномерное распределение плотности воды по горизонтали.
Ветровые течения, называемые также дрейфовыми, быстро затухают, не достигая больших глубин. На глубине, называемой глубиной трения, скорость течения уменьшается по отношению к поверхностному течению в 23 раза, т. е; практически до нуля. Глубина трения D в метрах в зависимости от скорости ветра U и широты места ср определяется приближенной формулой
о = -^.
У sin
Для расчета скорости поверхностного ветрового течения в узлах по скорости ветра U (м/сек) применяется формула
0,0254^7 ^Т = •
У smcp
при скорости ветра U = 14 м/сек в широте места
Так, например, ср = 30° получим:
152 м'<
у sin 30°
0,0254'14
г>т = /— - = 0,5 уз.
У^ sin 30 л
В широтах меньше 20° при расчете скорости ветрового течения следует учитывать ср = 20°.
С увеличением глубины вектор ветрового течения поворачивает вправо в северном полушарии и влево в южном. На поверхности глубокого моря (глубина больше D) вектор течения отклонен от вектора ветра на 45° вправо (в северном полушарии) или влево (в южном полушарии). С уменьшением глубины моря угол отклонения поверхностного течения
96 Глава 4. Атмосфера и гидросфера
от линии действия ветра уменьшается. На глубине трения вектор течения имеет направление, обратное поверхностному.
Приведенные выше соотношения и выводы для ветрового течения справедливы при условиях, когда глубина моря превышает глубину трения, направление ветра и его сила одинаковы над всей площадью моря, а время действия достаточно для образования установившегося течения. Это время должно быть не меньше 16—18 ч.
В действительности указанные условия далеко не всегда существуют. Поэтому реальная картина ветровых течений достаточно сложна и несмотря на многочисленные теоретические разработки и экспериментальные исследования практических методов расчета ветровых течений для любых реальных условий пока не создано. Наиболее близкие к реальным результаты дают развиваемые в настоящее время физикостатистические методы. Их сущность состоит в том, что все многообразие ветровых полей сводят к ограниченному числу типов, для которых по результатам наблюдений и теоретическим расчетам составляются карты течений, объединяемые в атласы.
Приливо-отливные течения, по аналогии с приливо-отливными колебаниями уровня моря, делятся на полусуточные, суточные и смешанные. Методы их расчета основаны на выводах, получаемых при обработке результатов наблюдений над течениями в море.
На корабле информация о течениях может быть получена путем прямых или косвенных измерений вектора течения или из навигационных пособий.
§ 24. ГИДРОМЕТЕОРОЛОГИЧЕСКИЕ ПОСОБИЯ
Гидрометеорологическая обстановка меняется как во времени, так и в пространстве. Поэтому заблаговременное знание возможных (вероятных) характеристик гидрометеорологических элементов в районе плавания в соответствующий период позволяет правильно решать задачи, связанные с обеспечением безопасного плавания.
Указанные задачи решаются с помощью гидрометеорологических пособий. К таким пособиям относятся: гидрометеорологические очерки, помещаемые в лоциях; гидрометеорологические карты; атласы физико-географических данных; атласы волнения и ветра; таблицы приливов; таблицы течений; атласы поверхностных течений и др.
Гидрометеорологические очерки лоций содержат сведения по общему гидрометеорологическому режиму района, охватываемого лоцией. Очерк обычно включает метеорологическую, гидрологическую характеристики и ледовый режим. В конце очерка помещены гидрометеорологические таблицы.
В метеорологической характеристике дается описание климата, указывается повторяемость и продолжительность типов погоды по сезонам года и приводятся основные сведения по гидрометеорологическим элементам (температура и влажность воздуха, ветер, туман, видимость, радиолокационная наблюдаемость, облачность и осадки и др.)
В гидрологической характеристике приводятся основные черты гидрологического режима: колебания уровня; течения; волнение; температура, соленость и плотность воды; прозрачность и цвет воды.
В описании ледового режима даются общие сведения о характере и продолжительности ледового сезона в типичные зимы, средние и крайние даты ледовых фаз, сведения о характере льдов и их распределении, а также навигационная характеристика льдов.
§ 24. Гидрометеорологические пособия
97
Гидрометеорологические карты содержат сведения о волнении, ветре, осадках, видимости, штормах, ураганах, облачности, температуре воды и воздуха, солености, плотности и прозрачности воды, течениях, приливах, границах распространения плавучего льда и айсбергов. Ветер и волнение показаны в виде роз, остальные сведения—изолиниями вероятностей или среднемесячных значений элементов. Каждая карта сопровождается пояснительным текстом, в котором излагаются характерные особенности гидрометеорологического режима в данном месяце.
Атласы физико-географических данных содержат сведения об элементах земного магнетизма, о грунтах, давлении воздуха, ветре, туманах, облачности, осадках, приливах, течениях, волнении, температуре, солености и плотности воды на поверхности, изменении плотности с глубиной, а также о ледовом режиме. В таблицах даны средние величины гидрометеорологических элементов по береговым пунктам.
Ветер показан в виде роз на картах температуры воздуха за каждый месяц. В некоторых атласах даны карты повторяемости ветра на высотах по сезонам. Осадки, туманы и облачность представлены на картах или на диаграммах годового хода этих элементов по береговым пунктам. Течения, волнение, температура, соленость и плотность воды показаны на картах по сезонам.
Атласы волнения и ветра состоят из карт волнения и графиков распределения средних высот волн и скоростей ветра.
В атласах помещены карты средних высот и средних периодов волн 50%-ной режимной обеспеченности; карты высот и средних периодов волн 5%-ной режимной обеспеченности; карты режимной обеспеченности (в процентах) средних волн 3, 4, 5, 6 м; карты максимальных высот и средних перирдов волн 1%-ной режимной обеспеченности, карта отношений средних высот волн к волнам 1%-ной режимной обеспеченности (в процентах) для средних высот волн 3, 4, 5, 6 м\ карта отношений средних волн 1%-ной режимной обеспеченности к средним высотам волн 50%-ной режимной обеспеченности и карты роз ветра по сезонам.
Таблицы приливов предназначены для предвычисления времени наступления и высоты полных и малых вод в отдельных пунктах побережья.
Каждый том таблиц состоит из двух частей:
Часть I. Приливы в основных пунктах.
Часть II. Поправки для дополнительных пунктов.
В конце тома помещены вспомогательные таблицы.
Часть I содержит сведения о времени наступления и высотах полных и малых вод в основных пунктах.
Часть II содержит таблицы поправок для дополнительных пунктов. Эти поправки позволяют предвычислить время и высоты полных и малых вод в дополнительных пунктах в зависимости от приливов в основных пунктах.
По табл. 1 вспомогательных таблиц можно определить промежуточную высоту уровня по времени и высотам полной и малой вод и по промежутку времени от момента, на который определяется уровень, до ближайшей полной и малой воды.
Кроме таблиц календарного типа, изданы Таблицы приливов постоянного действия, в которых сведения о приливах в основных портах отнесены к двум астрономическим параметрам N и С, связанным с датой.
Параметры W и С публикуются в таблицах Астрономические данные W и С для входа в таблицы приливов (постоянного действия).
7 Заказ 1833
98
Глава 4. Атмосфера и гидросфера
Таблицы постоянного действия состоят их следующих книг:
1. Воды Европейской части СССР и прилегающих зарубежных морей. Часть I и II.
2. Воды Азиатской части СССР и прилегающих зарубежных морей. Часть I и II.
3. Зарубежные воды. Атлантический океан. Часть I.
4. Зарубежные воды. Индийский и Тихий океаны. Часть I.
5. Зарубежные воды. Часть II.
Таблицы течений составляются для районов, в которых плавание осложнено сильными приливо-отливными течениями.
Таблицы рассчитаны на постоянное действие, служат для предвычис-ления элементов приливо-отливных течений и состоят из двух частей.
Часть I содержит предвычисленные на четные часы скорости и направления течений в поверхностном слое для основных районов.
Элементы течений даются относительно астрономических параметров N и С, связанных с датой.
Параметры /V и С публикуются в- таблицах Астрономические данные N и С для входа в таблицы течений.
Часть II содержит поправки времени смены течений и максимальной его скорости, коэффициенты для определения максимальной скорости течения, а также максимальные скорости и направления приливного и отливного течений, для дополнительных районов.
Атласы поверхностных течений позволяют определить элементы течений для любой точки моря. В атласах помещены карты постоянного, непериодических и приливо-отливных течений. Суммарное течение определяется с учетом всех этих типов течений.
Сведения о течениях, получаемые по атласам, следует считать приближенными.
7*
Часть II
ПОДГОТОВКА К ПЛАВАНИЮ
Глава 5
НАВИГАЦИОННЫЕ ПОСОБИЯ
§ 25. НАЗНАЧЕНИЕ МОРСКИХ КАРТ, РУКОВОДСТВ И ПОСОБИИ ДЛЯ ПЛАВАНИЯ
Сведения, помещаемые на картах, в руководствах и пособиях для плавания, взаимно дополняют друг друга, что приводит к необходимости комплексного их использования, так как только при этом может быть получен весь объем информации, необходимый для решения задачи.
Морские карты предназначены для графического решения задач кораблевождения, изучения района плавания, получения наглядного представления о местности, а также для решения различных задач, связанных с использованием вод Мирового океана.
Руководства и пособия для плавания содержат сведения, которые дополняют морские карты и в сочетании с данными, помещаемыми на морских картах, дают возможность выбрать наиболее оптимальный путь и осуществить плавание по этому пути.
§ 26. ОБЩАЯ ХАРАКТЕРИСТИКА МОРСКИХ КАРТ
Морские карты по своему назначению подразделяются на три основные группы:
— навигационные карты;
— специальные карты;
— справочные и вспомогательные карты.
Содержание морских карт включает в себя математическую основу (картографическую проекцию, геодезическую основу, масштаб), общегеографическую и специальную нагрузку и элементы оформления.
Картографической проекцией называется математически выражаемый способ изображения поверхности земного эллипсоида или сферы на плоскости. Математические зависимости, которыми задается проекция, определяют способ построения картографической сетки карты, т. е. сети координатных линий, и свойство изображения на карте.
Картографическая проекция может быть задана аналитическим или геометрическим способами построения картографической сетки.
При аналитическом способе задаются уравнения, позволяющие по координатам изображаемой точки на эллипсоиде вычислить координаты ее на плоскости (карте). Геометрический способ состоит в том, что указывается вид меридианов и параллелей на карте и их относительное расположение.
Геодезическую основу советских морских карт составляют координаты опорных пунктов, используемых при построении данной карты и определяющих географическое (плановое и высотное) положение всех ее точек.
102
Г лава 5. Навигационные пособия
При составлении карт на иностранные воды в качестве геодезической основы принимаются картографические сетки используемых карт. Учитывая возможные значительные расхождения геодезических основ имеющихся на корабле карт и, как следствие этого, расхождения в координатах одних и тех же точек на различных картах, переход (или перенос точки) с одной карты на другую при плавании вблизи берегов следует производить по пеленгам и расстояниям до точечных ориентиров на берегу. Переходить с одной карты на другую по координатам можно только при плавании вдали от берегов.
Высотной основой морских карт для показа глубин является уровень моря, называемый нулем глубин.
На картах, составляемых на советские воды, за нуль глубин принимается:
— для морей с незначительными высотами приливов (менее 50 см) — средний многолетний уровень;
— для морей с высотами приливов более 50 см — теоретический нуль глубин, т. е. наинизший уровень, теоретически возможный по астрономическим причинам;
— для некоторых морей и районов Северного Ледовитого океана, где величины приливов незначительны и нет достаточных данных для окончательного вывода нуля глубин, — средний навигационный уровень, т. е. уровень моря, зафиксированный в период, доступный для плавания судов;
— для Каспийского моря — средний его уровень за 1940—1955 гг.; этот уровень ниже нуля Кронштадтского футштока на 28 м.
На картах, покрывающих иностранные воды, принимаются нули глубин, указанные на исходных картографических материалах, использованных для составления карт.
Высоты на морских картах территории СССР и примыкающих к ней вод указываются от нуля Кронштадтского футштока в так называемой Балтийской системе высот, а на картах иностранных морей и их побережий—от уровней, принятых на исходных картографических материалах.
Вследствие многообразия принятых в различных странах нулей глубин и высот следует принять за правило перед началом пользования любой картой обязательно прочитать в ее заголовке и в примечаниях сведения о нулях глубин и высот.
Масштабы морских карт выбираются в зависимости от их назначения, навигационно-гидрографических особенностей и изученности рай-
она. Стандартными масштабами для карт и планов являются
1: 500 1 : 10000 ' 1 : 500000
1 :1000 1 : 15000 1 : 1000000
1:2000 1 : 20000 1 : 2000000
1:3000 1 : 25000 1: 5000000
1 :4000 1 : 50000 1:10000000
1 :5000 1 : 100000 1 :20 000 000
1:7500 1 : 200 000 1:50000000
Карты-сетки, покрывающие воды Мирового океана по широтным поясам, издаются в масштабах 1:250 000 и 1:500 000; для нескольких широтных поясов изданы карты-сетки масштаба 1 :100 000.
Каждой морской карте присваивается адмиралтейский номер. С 1 января 1968 г. введена новая система адмиралтейских номеров советских навигационных карт. Номер карты состоит из пяти цифр (например, 25478). Первая цифра номера навигационной карты обозначает океан или его часть, вторая цифра — масштаб (тип) карты, третья
$ 26. Общая характеристика морских карт
103
цифра— район (море). Последние две цифры определяют порядковый номер карты в данном районе (море). Адмиралтейские номера проставляются в углах карты без символа «№» (номер).
В зависимости от масштаба и назначения на морских картах с различной полнотой и подробностью изображаются:
— береговая линия;
— гидрография суши (реки, озера, каналы);
— рельеф суши;
— населенные пункты и связывающая их дорожная сеть;
— рельеф морского дна (глубины и изобаты), навигационные опасности и донные грунты;
— средства навигационного оборудования (СНО);
— магнитное склонение, его годовое изменение и магнитные аномалии;
— навигационные ориентиры, сведения о приливах и течениях, запретные и опасные районы, фарватеры, морские каналы, рекомендованные курсы, виды берегов и рисунки СНО;
— элементы специальной нагрузки;
— сетки изолиний для определения места с помощью радионавигационных систем или других СНО;
— надписи и элементы оформления.
Навигационные карты. По своему назначению подразделяются на следующие подгруппы:
— морские навигационные карты;
— радионавигационные карты;
— навигационные промысловые карты;
— речные карты.
Морские навигационные карты. На районы, расположенные в пределах широт 0—85°, карты составляются в нормальной проекции Меркатора, а на приполярные районы — в поперечной проекции Меркатора.
. В зависимости от масштаба морские навигационные карты подразделяются на генеральные, путевые, частные и планы.
Генеральные карты составляются в масштабах 1 : 1 000 ООО— 1 :5 000 000. Служат для общей ориентировки при выборе пути корабля. В некоторых случаях могут быть использованы для графического решения задач кораблевождения при плавании в открытых частях океанов и морей.
Путевые карты составляются в масштабах 1 : 100 000— 1 :500000. Обеспечивают навигационную безопасность плавания и решение задач кораблевождения при плавании вдоль побережий, а также подход с моря к берегу.
Частные карты составляются в масштабах 1:25 000—1:50000. Предназначены для обеспечения навигационной безопасности плавания вблизи берега, в узкостях и т. д.
Планы составляются в масштабах 1 : 500—I : 25 000 и предназначаются для обеспечения плавания в портах, гаванях, на рейдах, в бухтах; каналах и т. п.
Планы издаются отдельно или помещаются в виде врезок на свободных местах путевых и частных карт.
Радионавигационные карты представляют собой морские навигационные карты с дополнительной нагрузкой в виде сеток изолиний, а также различных поправочных величин и пояснений, необходимых при определении места с помощью радионавигационных систем.
104
Глава 5. Навигационные пособия
Навигационные промысловые карты представляют собой морские навигационные карты, на которые дополнительно нанесены:
— участки морского дна, непригодные для тралового лова вследствие сложности рельефа дна;
— места возможного задевания тралов;
— сетки квадратов;
— сведения из промысловых характеристик района;
— сетки изолиний для определения места с помощью радионавигационных систем;
— другие специальные сведения.
Речные карты предназначены для обеспечения плавания по судоходным рекам, каналам, водохранилищам и составляются в масштабах от 1 : 5000 до 1 : 50 000.
Специальные карты. К числу специальных карт относятся обзорные карты и другие.
Справочные и вспомогательные карты. Бланковые карты, на которых отображаются лишь самые общие элементы общегеографической нагрузки (береговая линия, главнейшие пути сообщения, административные и промышленные центры, маяки и станции радионавигационных систем, государственные границы и т. д.), служат основой для составления различного рода схем. На картах грунтов помещают сведения о распределении донных грунтов и их характеристике. На картах элементов земного магнетизма показывают линиями равных значений элементы земного магнетизма. На картах радионавигационных систем, составляемых в мелких масштабах, приводят сведения о расположении станций радионавигационных систем, а также показывают дальности их действия и линии равных точностей определения места. Карты часовых поясов содержат данные о границах поясов.
К числу вспомогательных карт относятся также ортодромические карты, составляемые в гномонической проекции и предназначенные для решения задач, связанных с прокладкой дуг больших кругов.
Карты-сетки предназначаются для графического решения задач кораблевождения в районах, не покрытых крупномасштабными картами. Они представляют собой картографическую основу (сетку меридианов и параллелей) морских навигационных карт. На картах-сетках оцифрованы только широтные (боковые) рамки; долготные рамки оцифровывает штурман в зависимости от района плавания корабля.
§ 27. ОБЩАЯ ХАРАКТЕРИСТИКА КАРТОГРАФИЧЕСКИХ ПРОЕКЦИИ, ПРИМЕНЯЕМЫХ ДЛЯ СОСТАВЛЕНИЯ МОРСКИХ КАРТ
Основными проекциями, применяемыми для составления морских карт, являются:
— нормальная проекция Меркатора;
— поперечная проекция Меркатора;
— перспективные проекции — гномоническая и стереографическая.
Кроме того, для составления речных карт и планшетов применяется равноугольная поперечная цилиндрическая проекция Гаусса, являющаяся основной для топографических карт.
Нормальная проекция Меркатора применяется для составления морских навигационных карт в поясе широт 0—85°. Она обладает двумя важнейшими свойствами:
— проекция равноугольна. Свойство равноугольности обеспечивает подобие фигур на карте и на местности;
— локсодромия, т. е. линия постоянного курса, изображается на карте прямой линией.
§ 27. Общая характеристика картографических проекций морских карт
105
Картографическая сетка — сетка меридианов и параллелей карт в нормальной проекции Меркатора представляет собой систему прямых линий, пересекающихся под прямыми углами. Расстояния между меридианами пропорциональны разностям долгот ДХ (рис. 42), а удаление параллелей от экватора соответствует меридиональным частям Ь, вычисляемым по формуле
D = 791570447 lg tg
(5. 1)
где — широты параллелей;
е — эксцентриситет референц-эллипсоида.
Значения меридиональных частей для различных широт приводятся в Картографических таблицах, а также в табл. 26 МТ—63.
Меридиональные части и минуты дол-
готы на карте имеют одну величину. Длина одной экваториальной минуты (минуты долготы) на карте, выраженная в миллиметрах, называется единицей карты.
Карты в нормальной проекции Меркатора масштаба 1:50 000 и мельче составляются в масштабе, отнесенном к главной параллели моря, обширного
Энватор
района или широтного пояса и называе- дА да
мом главным масштабом. Широтные рис 42
пояса и границы районов выбираются
так, чтобы изменение масштаба в пределах всего пояса или района по отношению к масштабу по главной параллели не превышало ±27%.
Карты масштаба крупнее 1:50 000 составляются по своим средним
параллелям.
Боковые рамки карт разбивают на минуты широты, т. е. на морские мили. Рядом с боковой рамкой может быть нанесена километровая
шкала.
Масштаб в данной точке карты называется частным или текущим масштабом. Частный масштаб увеличивается по мере увеличения широты.
Закон изменения масштаба карты определяется выражением
^гп _ Ргп
Су Ру
(5. 2)
где Сгп и Ст- знаменатели численных масштабов — главного и частного соответственно;
ргп и Ру — длины Г дуг параллелей на главной и заданной параллелях.
• Если пренебречь сжатием эллипсоида, то формула (5. 2) примет вид
Сгп _ coscprn
Ст cos ?т ’ °
Пример. Вычислить частный масштаб 1 : Су карты в нормальной проекции Меркатора для параллели <рт = 71°30' М если главный масштаб 1:СГП по параллели 69° равен 1: 200 000.
Решение. Из формулы (5.3) получаем
== Срп cos sec Три*
106
Г лава 5. Навигационные пособия
Логарифмируя полученное выражение, находим:
1g Сгп =5.30103
4-lg cos ут = 9.50148 lg sec угп =0.44567
lgCT = 5.24818 1 : Ст = 1 : 177 080
Кроме главного масштаба, указываемого в заголовке карты, на морских навигационных картах в нормальной проекции Меркатора масштабов 1 : 100 000—1 : 500 000 приводится экваториальный масштаб 1 : СЭКв, знаменатель которого вычисляется с учетом сжатия эллипсоида по формуле
_ ^ГПРэ экв _
Ргп
(5.4)
где рэ — длина г дуги экватора; для референц-эллипсоида Красовского рэ = 1855,356 м.
Кратчайшие линии с поверхности Земли переносятся на карты в нормальной проекции Меркатора в виде сложных кривых, обращенных выпуклостью в сторону полюсов (рис. 43).
Морские навигационные карты, составляемые в рассматриваемой проекции в одном масштабе, отнесенном к одной главной параллели,
можно склеить так, что одна карта будет продолжением другой.
Учитывая непрерывное изменение масштаба карты с изменением широты, измерение расстояний по карте следует делать так, чтобы средняя точка между ножками циркуля, приложенными к боковой рамке карты (или к километровой шкале), при отсчете расстояния лежала в средней широте измеряемого отрезка. Ошибка &D от расхождения Аср фактической широты ср средней точки между ножками циркуля и средней широты <рт измеряемого отрезка определяется формулой
cos (ym ± Ду) \ cos^ ;
(5. 5)
Величины А£> в милях для D = 20 милям в различных широтах <рт при ведены в табл. 8.
Таблица 8
Ду Широта ут
30° 40° 50° 60° 70° 80° 85°
5' 0,02 0,02 0,03 0,05 0,08 0,17 0,33
10 0,03 0,05 0,07 0,09 0,16 0,33 0,67
15 0,05 0,07 0,10 0,15 0,24 0,50 1,00
30 0,10 0,15 0,21 0,28 0,48 0,99 2,00
§ 27. Общая характеристика картографических проекций морских карт
107
Уравнение локсодромии на карте в нормальной проекции Меркатора имеет вид
Х2-Х, = (5.6)
где Х2 — Х, — разность долгот точек в минутах;
К — локсодромический курс;
Z)2 ~ Di — разность меридиональных частей, выбираемых из табл. 26 МТ — 63 по широтам точек, через которые* проходит локсодромия.
Данное уравнение используется как одна из формул аналитического счисления в географической системе координат.
Поперечная проекция Меркатора. Применяется для составления морских навигационных карт и карт-сеток в широтах более 75—80°. Как и нормальная проекция Меркатора, эта проекция является равноугольной.
При построении и использовании карт в данной проекции применяется система квазигеогра-фических координат.
1. Началом счета координат является северный полюс РЛ, (рис. 44).
2. В качестве координатных ( диан и меридиан 90° Ost и W.
3. Координатными линиями являются квазимеридианы и квазипараллели.
Квазимеридианами называют большие круги, проходящие через точки и PQs пересечения гринвичского меридиана с экватором и называемые квазиполюсами.
Квазипараллелями называют малые круги, параллельные меридиану 90° Ost и W. Меридиан 90° Ол и W называют квазизкватором.
4. Координатами для определения места точки являются квазиширота и квазидолгота
Квазишироты, определяющие положение квазипараллелей, отсчитываются от квазиэкватора к квазиполюсам Pq^, (+?<?) и Р^(— Квазишироте приписывают знак плюс или минус в зависимости от расположения точек относительно квазиэкватора, как показано на рис. 44.
Квазидолготы, определяющие положение квазимеридианов, отсчитываются по квазиэкватору: положительные—к востоку и отрицательные — к западу от гринвичского меридиана.
Между географическими и квазигеографическими координатами существуют зависимости, определяемые формулами:
sin ср = coscp^cosX^;
tg* = —ctg<p,sin*?;
sin ср? = -—cos ср cos X;
tg*, = ctg? sinX.
При построении квазигеографической сетки карты используются формулы, аналогичные формулам для нормальной проекции Меркатора
108
Глава 5. Навигационные пособия
с заменой в них географических координат квазигеографическими. Главный масштаб карт и карт-сеток относят к квазиэкватору.
Кроме квазигеографической сетки, на карты и карты-сетки в поперечной проекции Меркатора наносят (черным цветом) меридианы и параллели географической сетки. Географические меридианы изображаются кривыми, близкими к прямым линиям, а параллели — кривыми, близкими к окружностям.
Координатные оси и координатные линии на карте в поперечной проекции Меркатора изображаются прямыми линиями; вид картографической сетки показан на рис. 45.
Рис. 45
Угол Kq между квазисеверной частью квазимеридиана и направлением носовой части диаметральной плоскости корабля (рис. 46) называется квазикурсом. Квазикурс равен разности истинного курса ИК и угла Q, называемого углом перехода
Kq--HK-Q. (5.7)
Угол перехода вычисляется по известным географическим или ква-зигеографическим координатам точек по формуле
Q“arc‘g(^)
или
Q = arctg (--------
5 \ Sin<p?/
(5. 8)
Пренебрегая кривизной квазимеридианов, приближенно можно считать, что Q = X.
По аналогии с нормальной проекцией Меркатора на картах и картах-сетках в поперечной проекции Меркатора прямой линией изображается квазилоксодромия, т. е. кривая на поверхности Земли, пересекающая квазимеридианы под постоянным углом Kq. При квазиширотах до 10—15° квазилоксодромию можно принимать за кратчайшую линию.
Уравнение квазилоксодромии имеет вид
(5.9)
где — разность квазидолгот точек;
Kq — квазикурс;
Dqi ~ Dqi — разность квазимеридиональных частей.
§ 27. Общая характеристика картографических проекций морских карт 109
Квазимеридиональные части и DQi можно выбирать из таблиц меридиональных частей, например, из табл. 26 МТ — 63, по квазиширотам точек и cpff.
Уравнение (5. 9) используется при аналитическом счислении в ква-зигеографической системе координат.
Если известен главный масштаб карты или карты-сетки МГ = 1 :СГ по квазиэкватору, частный масштаб Мт = 1 : Ст в точке с квазиширотой ср^ вычисляется по формуле
Л)т = Л1г5есу?т (5.10)
ИЛИ
CT = Crcos<p,T. (5.П)
Из приведенных формул видно, что масштаб
мере удаления от квазиэкватора.
Перспективные проекции. Применяются для составления некоторых справочных и вспомогательных карт, например, обзорных карт обширных районов, ортодромических карт, ледовых карт и пр. Эти проекции представляют собой частный случай азимутальных проекций. В них
поверхность Земли (сферы) переносится на картинную плоскость методом проектирования с помощью пучка прямых, исходящих из одной точки, называемой точкой зрения.
Картинная плоскость может отстоять от поверхности сферы на некотором расстоянии, касаться сферы или пересекать ее.
Точка зрения О (рис. 47) в перспективных проекциях лежит в одной из точек на перпендикуляре к картинной плоскости, проходящем через центр сферы.
Точку пересечения картинной плоскости с перпендикуляром, являющимся геометрическим местом возможных мест точек зрения, называют центральной точкой карты (ЦТ).
В зависимости от положения точки зрения
карт увеличивается по
одна и та же точка, например точка Ко. будет отстоять на различных расстояниях р от центральной точки карты, что и будет определять характер искажений, присущих данной проекции.
Наиболее распространенные перспективные проекции — гномоническая, или центральная, и стереографическая.
В гномонической проекции точку зрения совмещают с центром сферы. Сетка меридианов и параллелей карты строится по формулам, связывающим прямоугольные координаты точек с их географическими коор-
динатами.
В зависимости от положения центральной точки карты гномоническая проекция может быть:
— нормальной, или полярной, если центральная точка совмещена с географическим полюсом;
— экваториальной, или поперечной, если центральная точка расположена на экваторе;
— косой, если точка зрения расположена в некоторой промежуточной широте.
Виды картографических сеток нормальной, поперечной и косой проекций показаны на рис. 48, а, б н в.
по
Глава 5. Навигационные пособия
Общие свойства карт, составляемых в гномонической проекции, следующие:
— большие искажения как формы, так и размеров фигур, возрастающие по мере удаления от центральной точки карты, поэтому измерение
Измеряемые по карте углы и расстояния, называемые гномоническими, могут довольно значительно отличаться от истинных, вследствие чего для точных измерений карты в данной проекции не применяются, хотя принципиально возможно получить путем учета поправок достаточно точные величины;
— отрезки дуг больших кругов изображаются прямыми линиями. Данное свойство позволяет использовать гномоническую проекцию при построении ортодромических карт.
Карты в гномонической проекции строятся, как правило, в мелких масштабах для участков поверхности Земли меньше полушария. Сжатие Земли при построении карт не учитывается,
В стереографической проекции картинная плоскость касается поверхности сферы, а точка зрения расположена в точке О2 (рис. 47), являющейся антиподом точки касания.
Проекция равноугольная, однако для решения навигационных задач она неудобна, так как основные линии — локсодромия и ортодромия — изображаются на картах в этой проекции сложными кривыми линиями.
Стереографическая проекция является одной из основных для построения справочных и обзорных карт обширных территорий.
Равноугольная проекция Гаусса. Применяется для составления топографических и речных карт, а также различных планшетов.
Основной картографической сеткой этой проекции является сетка прямоугольных координат (см. § 4). Началом счета этих координат принята точка пересечения экватора с осевым меридианом зоны. Зоны, как указывалось выше, ограничены меридианами, отстоящими друг от друга на 6°. Каждой зоне приписывается порядковый номер от 1 до 60.
По принятой в СССР системе счет зон ведется к востоку от гринвичского меридиана, а по международной системе также к востоку, но от меридиана 180°.
Осевые меридианы являются средними меридианами зон.
Граничными линиями карты в проекции Гаусса служат меридианы и параллели.
Положение точки на карте определяют указанием плоских прямоугольных координат х и у. Этим координатам соответствуют километровые линии х = const, параллельные экватору, и у = const, параллельные осевому меридиану зоны.
§ 27. Общая характеристика картографических проекций морских карт
Ш
Плоские координаты х и у являются функциями географических координат точки и в общем виде могут быть представлены выражениями:
(?; Z);
У Z),
где Z—разность долгот заданной точки и осевого меридиана.
Вид функций fi и /2 выводится так, чтобы обеспечивалось свойство равноугольности проекции при постоянном масштабе вдоль осевого меридиана зоны.
Километровые линии х = const и у — const представляют собой два семейства взаимно перпендикулярных прямых и оцифровываются соответствующими значениями координат в километрах.
Для исключения отрицательных значений ординат оцифровка осевого меридиана увеличена на 500 км. Номер зоны, в которой расположена километровая линия или точка, указывается одной или двумя цифрами, приписываемыми в начале ординаты у. Так, если точка имеет координаты х — 6656 и у = 23 612, то она удалена от экватора по осевому меридиану на 6656 км, находится в 23-й зоне и имеет условную ординату 612. Действительное удаление точки от осевого меридиана зоны равно 612 — 500= 112 км к востоку.
Прямоугольные координаты х и у выражают обычно в метрах.
Рамки карт в проекции Гаусса разбиты на минуты по широте и долготе. Значения широт и долгот параллелей и меридианов, ограничивающих карту, надписываются в углах рамки (рис. 49).
На рамках листов, расположенных к востоку и западу от граничного меридиана зоны, даются выходы километровых линий сетки соседней зоны. При необходимости определения координат какой-либо точки в системе координат соседней зоны требующиеся километровые линии могут быть проведены карандашом в виде прямых через соответствующие штрихи на противоположных рамках.
Меридианы и параллели на карту не наносятся. При необходимости их можно провести самому через соответствующие деления минут широты и долготы на рамках карты.
Угол между километровой линией у = const и истинным меридианом называется сближением или схождением меридианов. Этот угол 7 отсчитывается от северной части истинного меридиана по часовой стрелке до северной части километровой линии у = const. Схождению меридианов приписывают знак плюс, если точка расположена к востоку от осевого меридиана, и знак минус, если она расположена к западу от осевого меридиана зоны.
При известных координатах © и 1 заданной точки угол 7 вычисляется по формуле
7 - (л — £0) sin <?, (5. 12)
где Lo — долгота осевого меридиана зоны.
Номер зоны и долготу осевого меридиана вычисляют по формулам (1.1) и (1.2).
Пример. Вычислить схождение меридианов для точки с координатами ф = 56°20' N и 124°5Г Ost.
Решение. 1) Вычисляем номер зоны и долготу осевого меридиана:
л = 4+ 1=21, о
Lo = б л - 3° = 123° О";
112
Глава 5. Навигационные пособия
2) вычисляем искомый угол у:
7 = (X—£0)ып?= +11Г • sin 56°20' = +92',4= +1°32',4.
Угол 7 вычисляется с достаточной для практики точностью при помощи нормальной логарифмической линейки.
Ввиду ограниченной ширины зоны кратчайшие линии на картах в проекции Гаусса изображаются практически прямыми линиями, а масштаб по всей площади карты остается постоянным. Эти свойства, а также наличие сетки прямоугольных координат являются главными причинами широкого применения данной проекции при всех топографических, геодезических и гидрографических работах.
Рис. 49
Планшеты в проекции Гаусса составляют в крупных масштабах (обычно не мельче 1 :50 000). Границами планшета являются километровые линии, координаты которых х v, yw и yo$t пишут вдоль линий. На рамках планшета наносят выходы километровых линий, соответствующих целому числу километров.
Для прокладки курсов и пеленгов на планшетах проводят несколько истинных меридианов через 10—15' по долготе.
Линии курсов прокладывают, отсчитывая углы от ближайших к месту корабля меридианов, а линии пеленгов —от меридианов тех точек, в которых измерялись пеленги.
£ 27. Общая характеристика картографических проекций морских карт 113
Для прокладки пройденного кораблем расстояния на планшете
вблизи одной из боковых рамок строится шкала стандартных мор-
ских миль. Если такой шкалы нет, расстояния должны быть переведены в километры.
Направления на картах или планшетах в проекции Гаусса часто определяют относительно километровых линий. Угол между северной частью километровой линии у = const (рис. 50) и направлением заданной прямой называется дирек-ционным углом и обозначается буквой а. Счет дирекционных углов ведется по круговой системе.
При известном дирекционном угле истинный пеленг ИП рассчитывается по алгебраической формуле
Рис. 50
(5. 13)
ИП = а + y,
где y — схождение меридианов, вычисляемое по формуле (5. 12).
Пример. На планшете (карте) в проекции Гаусса в точке с координатами ? = =^50°35' N и Х = 66°10' Osi измерен дирекционный угол а=156°2.
Вычислить истинный пеленг.
Решение. 1) Вычисляем номер зоны и долготу осевого меридиана
" = 4 + i = i2;
£0 = 6л - 3° = 69° Ost\
2) вычисляем схождение меридианов и искомый пеленг
7 — (X — £0) sin = —170' • sin ср = —131' == —2^2;
ИП= а + 7 = 154,0.
Применение прямоугольной системы координат упрощает решение прямой и обратной геодезических задач.
Прямой геодезической задачей называется вычисление координат искомой точки Е2 (рис. 50) по известным координатам хь у\ исходной точки Е], дирекционному углу а и расстоянию (базе) Е^Е2 = Б:
х2 = Xi 4- Ах;
У2 = У: +ДУ-
Приращения координат Дх и Ь.у, как это видно на рис. 50, равны:
Дх = Б cos а;
Ду = Б sin а.
Знаки приращений Дх и Ду совпадают со диаками функций cos а и sin а.
Если задан истинный пеленг ИП или азимут Аъ базы, то дирекционный угол рассчитывается по формуле
а = ЛБ 7.
Схождение меридианов рассчитывается для точки Е\ (рис. 50).
Обратной геодезической задачей называется вычисление направления и расстояния между точками по известным их координатам.
8 Заказ 1833
114
Глава 5. Навигационные пособия
Дирекционный угол ат в четвертной системе счета и база Б вычисляются по формулам
= ctgaT = ^;
5 = (х2 — хО sec<xT или Б = (у2 — У\) cosec ат.
Угол а в круговой системе счета при известном угле ат определяется в зависимости от сочетания знаков разностей координат Дх и \у по правилам, приведенным в табл. 9.
Таблица 9
о - Лх Знаки разностей Ду + 4- + 1 1 1 + |
Угол ат прибавить к Угол ат вычесть из 0° 360° 180° 180°
Координаты точек и Е2 должны быть даны в одной и той же координатной зоне.
Для перехода от угла в градусной мере к углу в делениях угломера, т. е. в тысячных дистанции, служит табл. 40 МТ—63. Можно также воспользоваться зависимостью:
360° соответствует 60 — 00а; 6° соответствует 1 — 00а;
90° соответствует 15 — ОСР; 3° соответствует 0 — 50д;
45° соответствует 7 — 50^; 3^6 соответствует 0 — 0К
Отсюда а? = .
Так, например, углу 216°49' соответствует угол 36—13,6^.
Для упрощения решения обратной геодезической задачи по прямоугольным координатам точек рекомендуется применять таблицу, приведенную в приложении 3. В таблице даны натуральные значения тангенсов углов R от 00—00д до 07—50d (величины Т), а для определения угла а (в тысячных дистанции) в круговой системе счета предназначены верхняя и нижняя дополнительные части таблицы, состоящие из четырех строк каждая (по количеству четвертей). Выбор соответствующей строки в дополнительных частях таблицы производится в зависимости от знаков разностей координат — делимого и делителя в формуле для расчета 7.
При вычислении Т меньшая разность координат Дх = х2— или ку = У? — У1 делится на большую.
Искомую дистанцию (базу) Б в артиллерийских кабельтовых находят умножением 0,01 величины большей разности координат заданных точек на коэффициент С, выбираемый из таблицы в той же строке, где находится Г.
Величины Г и С вычислены по формулам
Т= tg/? =
мёньшая разность координат большая разность координат
С = sec /?: 1,83.
Пример. Даны прямоугольные координаты точек л, — б 377 280, у, = 14 624130; х2 = 6391 300, у2= 14600 080.
Вычислить дирекционный угол а и базу Б (дистанцию между точками 1 и 2).
§ 27. Общая характеристика картографических проекций морских карт
115
Решение. 1) Вычисляем разности координат
Дх = х2 — Xi — +14 020 м, Ду = у2 — yi == —24 050 м\
2) с помощью логарифмической линейки находим Т — tg
Т = = +94~Fikn = О’583:
—Ду —24 050
3) из приложения 3 по Т с учетом знаков Дх и Ду выбираем а = 50—04д и С = 0,633;
4) вычисляем базу Б
Б = 0,01 - Ду-С = 0,01 -24 050-0,633 = 152,2 арт. кбт.
Проекции базы Б (рис. 51) раллель Бх и на меридиан ляют по формулам:
(5. 14)
на па-вычис-
Бг на-
Бх=Ьу+ЬХ.^
Бу = Дх — Ду • удод
Положительная величина правлена к востоку, отрицательная — к западу; положительная величина Бу направлена к северу, отрицательная — к югу.
Пример. <pj — 50°36' N\ х, = 5611 850; х2 — 5 619 310;
Вычислить проекции
Решение. 1) Вычисляем долготу осевого меридиана зоны и схождение меридианов:
ajS=65o59' Ost\ у, = 11711 120; у2 = 11701 250.
базы на параллель
н меридиан.
/1=11; £0 = 6-п — 3° = 63° Ost\
= (Xj — ^*о) == “I- 138х = +00 — 38д;
2) вычисляем разности координат и проекции базы:
Дх — х2 — X] = +7460 м\ Ду = у2 — У1 = —9870 м\
Бх = —9870 + (+7460)- = —9870 + 283 = —9587 м к западу;
1UVU
Бу = +7460 — (—9870) • = +7460 + 375 = +7835 м к северу.
1 иии
Для решения задач, связанных с использованием как географических, так и прямоугольных координат точек, а также с прокладкой отрезков локсодромий, применяются карты, составленные в нормальной проекции Меркатора с дополнительно нанесенной сеткой прямоугольных координат Гаусса. Основные свойства таких карт полностью соответствуют таковым для нормальной проекции Меркатора.
Картосхемы и фотосхемы. Относятся к числу вспомогательных картографических материалов и используются для получения дополнительных сведений о деталях географической обстановки береговой полосы.
Картосхемой называют схематическую упрощенную карту, на которой приближенно, в том числе и по результатам глазомерных наблюдений, отображены те или иные детали, являющиеся полезными для решения данной конкретной задачи.
8*
116
Г лава 5. Навигационные пособия
Фотосхемой называют несколько плановых аэрофотоснимков заданного района, смонтированных по общему контуру, на которых условными знаками, принятыми для топографических карт, выделены необходимые детали географической или иной обстановки. На фотосхеме проводится один или два истинных меридиана, а иногда и несколько параллелей; для ориентировки по месту выделяется несколько ориентиров, имеющихся на картах.
§ 28. ТОЧНОСТЬ МОРСКИХ НАВИГАЦИОННЫХ КАРТ И ОЦЕНКА СТЕПЕНИ ДОВЕРИЯ К КАРТЕ
Точность карты характеризуется величинами ошибок в положении различных точек на карте; эти ошибки являются результатом накопления погрешностей на всех этапах создания карты, начиная с измерений и определений на местности и кончая деформацией бумаги после печати карты.
Обычно оценивается точность:
— координатной сетки карты и опорных пунктов;
— контурных точек карты, глубин и изолиний относительно математической основы.
Картографическая сетка при составлении карты строится с точностью не ниже 0,2 мм, т. е. с точностью, максимально достижимой при графических построениях. С такой же точностью наносят и опорные пункты, которые были основой для определения положения отдельных точек местности (маяки, знаки, триангуляционные пункты и пр.).
На тиражных оттисках вследствие деформации бумаги размеры рамок карты могут отличаться от номинальных на 1—2 мм. Учитывая, что в различных местах листа эти искажения могут быть различными, снимать координаты точек с карты и наносить точки по их координатам на карту следует относительно ближайших координатных линий.
Результирующие средние квадратические ошибки в положении контурных точек и объектов, не относящихся к математической основе карты относительно координатных линий, близки к 1 мм. Указанным ошибкам соответствуют ошибки в натуре, приведенные в табл. 10.
Таблица 10
Масштаб карты Ошибки в натуре
в метрах в угловой мере
1 : 10 000 10 0"5
1 : 25 000 25 1"
1 : 50 000 50 2"
1 : 100000 100 4"
1 : 200 000 200 o;i
1 -.500 000 500 о;з
1 : 1000 000 1000 о;б
Точность нанесения глубин на карту зависит от применяемых при промере способов определения места. Приближенные величины средних квадратических ошибок нанесения глубин приведены в табл. 11.
Ошибки нанесения изобат превышают указанные в табл. 11, так как изобаты проводят по точкам, положение которых определяется интерполяцией между глубинами, нанесенными на промерном планшете. Эти ошибки для прибрежных районов, как правило, не превышают 1—2 мм.
§ 28. Точность морских карт и оценка степени доверия к карте 117
Вдали от берегов средние квадратические ошибки в положении изобат могут достигать 2—5 миль и более, в особенности в тех случаях, когда места промерного судна определялись по астрономическим наблюдениям.
Таблица 11
Расстояние до берега мили Способ определения места
визуальный, по береговым ориентирам м с помощью РНС м по астрономическим наблю- дениям м
До 5 5—30 — —
5—15 50—80 20-50 —
До 100 — 50—100 —
До 300 — 500-600 —
Более 300 — 1500—2000 3500- 4000
Сетки изолиний для определения места с помощью радионавигационных систем наносят на карту со средними квадратическими ошибками до 0,3 мм.
Достоинство карты следует оценивать с учетом задач, решаемых данным кораблем.
При оценке достоинства карты и степени доверия к ней необходимо учитывать следующие обстоятельства.
1. Год составления и пополнения карты результатами последующих работ. Эти сведения обычно помещаются в правом нижнем углу карты под ее рамкой. Давность работ, положенных в основу при составлении карты, указывает на то, что исследования могли быть произведены несовершенными методами и приборами, вследствие чего возможны значительные несоответствия карты действительной обстановке, в особенности в районах, редко посещаемых кораблями.
2. Масштаб карты. В процессе составления карты производится генерализация с целью ограничить нагрузку и изобразить на карте все наиболее существенное достаточно наглядно. Однако независимо от масштаба карты на ней показываются объекты, имеющие важное значение для кораблевождения (навигационные опасности, ориентиры).
Учитывая, что с уменьшением масштаба количество элементов, наносимых на карты, неизбежно уменьшается и карты становятся все менее подробными, следует для обеспечения плавания, в особенности в прибрежной зоне и в узкостях, применять карты наиболее крупного масштаба. При этом облегчается ориентировка в окружающей обстановке и повышается точность графических построений, выполняемых для определения места корабля.
3. Подробность промера и рельеф дна. Сведения о глубинах должны быть настолько полными, чтобы можно было получить ясную картину рельефа дна.
Глубины наносят на карты с промерных планшетов. Если промер был детальным (систематическим), то глубины на карту нанесены равномерно, заметно направление промерных галсов и «белые пятна» отсутствуют. При недостаточно детальном промере промерные галсы выражены нечетко, расстояния между глубинами значительны, изобаты отсутствуют совершенно или прерываются. В таких случаях на карте образуются «белые пятна». На «белых пятнах» глубины никогда не измерялись и, следовательно, там можно встретить любую глубину, в том
118
Г лава 5. Навигационные пособия
числе и опасную для корабля. Для уточнения сведений о глубинах рекомендуется использовать атласы изученности, а также карты специального назначения.
Созданию представления о рельефе дна способствует наличие на карте сведений о грунтах. Сложный рельеф дна определяется по наличию каменистого грунта (кроме плиты). Резкое изменение глубин обычно служит показателем сложного рельефа дна, например, в районах валунных россыпей. Полное доверие к глубинам в районах со сложным рельефом дна может быть только на участках, протраленных жестким тралом. Такое траление осуществляется лишь на шхерных фарватерах, плесах, полигонах. При плавании на непротраленных участках измерение глубин эхолотом не может предотвратить посадку на отдельный камень или малую банку.
На участках песчаного грунта, особенно в устьях рек, глубины сильно изменяются из-за переменных наносов и, следовательно, могут не соответствовать указанным на карте. Поэтому при плавании в мелководных районах большие корабли не должны заходить без особой надобности на участки с глубинами менее 20 м, а малые корабли — на участки с глубинами менее 10 м.
Перед тем как пользоваться картой, необходимо прочесть заголовок карты и изучить предупреждения и примечания.
В заголовке карты указываются: название изображенного на карте района, масштаб карты, сведения о глубинах, высотах и о магнитном склонении.
В предупреждениях даются важнейшие сведения, влияющие на безопасность плавания, как, например, сведения об обнаружении новых магнитных аномалий; опасных для плавания изменениях рельефа морского дна; особенностях течений; о недостоверности некоторых элементов карты вследствие плохой гидрографической изученности; о неточности нанесения на карту отдельных объектов и другие сведения.
В примечаниях приводятся данные, не имеющие прямого отношения к безопасности плавания, но требующие обязательного учета при пользовании картой, как, например, о способе перехода с карты на карту и т. п.
§ 29 ОБЩАЯ ХАРАКТЕРИСТИКА РУКОВОДСТВ И ПОСОБИИ ДЛЯ ПЛАВАНИЯ
Руководства и пособия делятся на два основных вида:
— общие руководства и пособия;
— промысловые руководства и пособия.
Общие руководства и пособия в свою очередь делятся на руководства для плавания и на справочные пособия и таблицы.
Основными руководствами для плавания являются:
— лоции;
— «огни и знаки (огни)»;
— «радиотехнические средства навигационного оборудования»;
— расписание радиопередач навигационных и гидрометеорологических сообщений для мореплавателей.
Лоции. Предназначены для обеспечения кораблей и судов навигационно-гидрографической и гидрометеорологической информацией, которая в сочетании с данными, приведенными на морских картах и в других руководствах для плавания, должна обеспечить:
— изучение условий плавания;
— выбор маршрута плавания и способов обсервации в различных условиях обстановки;
— определение мер навигационной безопасности;
£ 29. Общая характеристика руководств и пособий для плавания
119
— получение исходных данных для учета влияния на плавание навигационно-гидрографических и гидрометеорологических факторов;
— изучение положений, определяющих режим плавания в территориальных и внутренних водах, а также правила входа в порты и стоянки в них;
— ознакомление с организацией лоцманской и спасательной служб, портовыми средствами, ремонтными возможностями и пр.
Лоция содержит вводные документы, общий обзор, навигационное описание, справочный отдел и алфавитный указатель.
В разделе «Вводные документы» приводятся важные предупреждения, циркулярное указание начальника Гидрографического управления Министерства обороны, обращение к мореплавателям, общие замечания и схема района.
В общем обзоре дается общая навигационно-географическая и гидрометеорологическая характеристика района, а в лоциях на иностранные воды, кроме того, даются правила плавания в данном районе.
Навигационное описание содержит описание: берегов, приметных пунктов и средств навигационного оборудования; прилегающих к берегам водных пространств; портов, гаваней и якорных мест, гидрометеорологическую характеристику и наставления для плавания на отдельных участках.
В справочном отделе помещаются сведения об основных портах и якорных местах, о доках и эллингах, таблицы расстояний, сведения о ширине территориальных вод и специальных зон и другие сведения справочного характера.
Алфавитный указатель служит для удобства нахождения географических объектов, описанных в лоции.
«Огни и знаки». Руководства под этим названием содержат сведения о навигационном оборудовании, за исключением вех. Руководства под названием «Огни» содержат сведения только о светящих СНО, за исключением буев и вех.
Описание средств навигационного оборудования дается в виде таблиц, содержащих следующие сведения:
— название и положение, координаты; годы учреждения и модернизации (на советские воды);
— цвет, характер, сила света (на иностранные воды) и дальность видимости огня;
— описание маяка (знака) с указанием его высоты от основания и высоты огня от уровня моря;
— секторы освещения, направления створов, звукосигнальные средства, радиомаяки. Дополнительные сведения.
В графе «Описание маяка (знака)» приводятся также фотографии и рисунки СНО.
Кроме описания средств навигационного оборудования, в данном руководстве приводятся общие замечания, описания систем навигационного оборудования плавучими предостерегательными знаками, таблица дальности видимого горизонта, номограмма дальности видимости предметов и номограмма оптической дальности видимости огней.
«Радиотехнические средства навигационного оборудования». Содержат сведения о радионавигационных системах, секторных радиомаяках, морских радиомаяках и аэрорадиомаяках, радиостанциях, работающих по запросу для радиопеленгования, океанских судах службы погоды, радиопеленгаторных станциях и радиолокационных маяках.
В разделе «Общие замечания» даны пояснения к тексту описания.
В основном тексте приведены принцип работы радионавигационной системы, краткие технические данные, сводная таблица станций системы
120
Глава 5. Навигационные пособия
и схема расположения станций, описание секторных радиомаяков, морских радиомаяков и аэрорадиомаяков, их координаты, режим работы, характер радиосигналов, дальность действия; порядок пользования радиостанциями, работающими по запросу для пеленгования; описание радиомаяков, установленных на океанских судах службы погоды, и порядок пользования ими; схемы расположения радиомаяков; описание радиопеленгаторных станций и радиолокационных маяков.
«Расписания радиопередач навигационных и гидрометеорологических сообщений для мореплавателей». Содержат информацию о радиостанциях, передающих указанные сведения, и, в частности: номера станций, их названия, позывные сигналы, номера по аналогичным английским руководствам, названия в иностранном написании, район обслуживания, время и содержание передач, включающее тип сообщения, код или название языка, на котором ведется передача.
Справочные, учебные пособия и таблицы. Содержат сведения по вопросам кораблевождения, гидрографии и гидрометеорологии, эксплуатации технических средств кораблевождения, а также сведения по теоретическим основам кораблевождения, гидрографии и гидрометеорологии. К группе справочных, учебных пособий и таблиц относятся:
— каталоги карт и книг;
— правила штурманской службы и правила гидрографической службы;
— наставления и инструкции по вопросам технической эксплуатации технических средств кораблевождения, гидрографических и гидрометеорологических приборов;
— таблицы приливов и течений;
— атласы течений;
правила плавания в узкостях и т. д.
Промысловые руководства и пособия. Предназначены для получения сведений, позволяющих оценить различные условия обитания промысловых объектов и гидрометеорологические условия ведения промысла, а также рекомендаций, позволяющих делать прогностические выводы на основе сопоставления фактических данных гидрометеорологических наблюдений с прогнозами, получаемыми от соответствующих центров.
$ 30. ПОДДЕРЖАНИЕ МОРСКИХ КАРТ, РУКОВОДСТВ И ПОСОБИЙ ДЛЯ ПЛАВАНИЯ НА УРОВНЕ СОВРЕМЕННОСТИ
Под действием природных факторов, а также вследствие деятельности человека многие элементы навигационно-гидрографической обстановки изменяются. При этом важнейшие для мореплавания элементы — характер побережья, береговая линия, глубины, навигационные опасности, береговые сооружения и средства навигационного оборудования могут иметь настолько существенные изменения, что морские карты, руководства и пособия для плавания без соответствующих исправлений не будут удовлетворять своему назначению*
Поддержание на уровне современности карт, руководств и пособий относится к числу важнейших мероприятий, обеспечивающих решение всех задач кораблевождения и в особенности обеспечения навигационной безопасности плавания.
В целях поддержания на уровне современности морских карт, руководств и пособий для плавания Гидрографическая служба ВМФ периодически переиздает их, а также издает вклейки на карты, дополнения и сводные корректуры к руководствам для плавания. Кроме того, Гидрографическая служба ВМФ выдает информацию об изменениях навигационной обстановки и режима плавания в океанах и на морях для повсе
$ 30. Поддержание карт, руководств и пособий на уровне современности 121
дневной корректуры морских карт, руководств и пособий в корректорских группах, а также на кораблях и судах.
Корректура карт, руководств и пособий для плавания. В зависимости от объема и характера исправлений морских навигационных карт в картографическом производстве различают три вида корректуры:
— новое издание;
— большая корректура;
— малая корректура.
Новым изданием морские карты выпускаются в тех случаях, когда исправления настолько значительны, что требуется пересоставление и изготовление нового издательского оригинала карты. Карте, вышедшей новым изданием, присваивается прежний номер; 1 масштаб и нарезка, как правило, сохраняются. В отдельных случаях допускается незначительное изменение нарезки и масштаба, но при обязательном сохранении целевого назначения карты.
На карте нового издания под нижней рамкой правее надписи «Издание Гидрографического управления Министерства обороны» делается надпись: «Нов. изд. (дата)». Дата нового издания указывает время переиздания карты и дату последнего учтенного выпуска извещений мореплавателям.
Большой корректуре подвергаются морские карты в тех случаях, когда объем исправлений достаточно велик и они не могут быть произведены вручную, но вместе с тем характер исправлений не требует пересоставления издательского оригинала карты в целом.
На карте, изданной с большой корректурой под рамкой слева между номером карты и надписью «Мал. кор. ...» делается надпись: «Больш. кор. ...». Дата большой корректуры указывает время исправления карты и дату последнего учтенного выпуска извещений мореплавателям.
О выходе карты новым изданием или с большой корректурой объявляется в извещениях мореплавателям. Все оттиски ранее изданных карт того же номера для навигационных целей использоваться не могут и подлежат изъятию.
Когда отдельные участки карты подверглись таким изменениям, которые не могут быть исправлены путем опубликования корректуры в извещениях мореплавателям, издаются вклейки, представляющие собой отдельные врезки размером не более 15X25 сл<. О выходе в свет вклеек объявляется в извещениях мореплавателям с указанием границ, охватываемых вклейками. В извещениях дается предупреждение о том, что карты в объявленных границах без использования вклеек для навигационных целей непригодны.
Малой корректурой называются такие исправления, которые могут быть внесены на оттиск карты без существенного ущерба для ее читаемости. Картографическое производство выпускает карты с малой корректурой для пополнения их тиража. О выходе в свет карт'с малой корректурой в извещениях мореплавателям, как правило, не объявляется.
По исправлении оригиналов карт малой корректурой под нижней рамкой у надписи «Мал. кор.» ставится дата, которая указывает время
1 С ноября 1970 г. осуществляется переход на новую систему нумерации карт. Новые номера присваиваются навигационным картам при подготовке оригиналов к печати новым изданием и с большой корректурой, а специальным, справочным и вспомогательным картам — при очередной подаче на печать. Все карты, выходящие из печати с новыми адмиралтейскими номерами, считаются картами первого издания. Поэтому указанное в настоящем руководстве правило о сохранении номера карты действует в том случае, если карте до этого был уже присвоен новый номер.
122
Глава 5. Навигационные пособия
исправления оригинала и дату последнего учтенного выпуска извещений мореплавателям.
Даты нового издания, большой корректуры и малой корректуры указываются на картах, покрывающих иностранные воды или воды открытого моря, по извещениям мореплавателям Гидрографического управления Министерства обороны, а на картах, покрывающих отечественные воды,— по извещениям гидрографических служб флотов.
В корректорских подразделениях гидрографической службы выполняется текущая корректура карт по постоянным и временным извещениям мореплавателям. По предварительным извещениям мореплавателям корректура не производится, но о наличии этих извещений делаются пометки карандашом в левом нижнем углу под рамкой карты.
На каждой откорректированной карте ставится штамп с указанием номеров и дат последних выпусков извещений мореплавателям, использованных при текущей корректуре.
Руководства и пособия для плавания подвергаются только текущей корректуре. По мере накопления корректуры издаются дополнения к лоциям и к другим руководствам для плавания. На одну лоцию может быть издано несколько дополнений, которым присваиваются очередные номера.
Ежегодно, как правило, издаются сводные корректуры к руководствам для плавания. Сводная корректура включает в себя всю информацию, которая объявлена в извещениях мореплавателям для данного руководства после его издания или после издания последнего дополнения к нему.
При издании дополнений и сводных корректур временные и предварительные извещения мореплавателям не используются.
Переиздание руководств для плавания осуществляется в том случае, когда исправления настолько значительны, что не могут быть внесены в книгу иначе, как путем полного пересоставления ее текста.
По выходе из печати переизданных руководств для плавания предыдущие их тиражи становятся непригодными для навигационных целей, о чем объявляется в извещениях мореплавателям.
С получением карт и руководств для плавания на корабль дальнейшая текущая корректура их выполняется на корабле с того номера извещения мореплавателям, который указан на корректорском штампе. Не откорректированную по извещениям мореплавателям карту (руководство для плавания) следует считать недостоверной.
Для удобства и ускорения корректуры карт следует пользоваться нумерниками извещений мореплавателям, а также перечнем карт, руководств и пособий для плавания, подлежащих корректуре по данному выпуску извещений мореплавателям.
Корректурные исправления на картах производить следующим обра-* зом:
— вклейки приклеивать по всем сторонам на соответствующее место; необходимо проверять согласованность стыков вклейки с картой;
— исправления по постоянным извещениям наносить красной тушью (чернилами). Отмененные обозначения перечеркивать крестиком, а текстовую часть — двумя тонкими линиями. Ошибочно нанесенное на карту обозначение перечеркнуть синей тушью (чернилами);
— по временным извещениям мореплавателям корректуру наносить простым черным карандашом; места исправлений обвести черным карандашом;
— по предварительным извещениям мореплавателям корректура карт не производится; на картах под нижней рамкой делается запись простым черным карандашом: например, «см. ИМ ГУ МО № 236 (П)»;
$ 30. Поддержание карт, руководств и пособий на уровне современности 123
— по НАВИМ и НАВИП корректуру карт производить простым черным карандашом. С получением извещений мореплавателям или печатных выпусков НАВИП нанесенная корректура уточняется и в зависимости от срока действия информации обводится красной тушью или остается в карандаше.
Все исправления на карте делать аккуратно и четко в соответствии с условными знаками и сокращениями, принятыми для морских карт и планов.
В нижнем левом углу карты под рамкой вписать красной тушью все номера извещений мореплавателям, по которым произведена корректура; затем ставится дата и подпись лица, выполнившего корректуру.
Объявленные в извещениях мореплавателям предупреждения, имеющие навигационное значение, помещают на карте текстуально.
Корректура руководств для плавания на корабле производится только по постоянным извещениям мореплавателям.
При получении дополнений к руководствам или сводных корректур следует сличить их с откорректированными руководствами и, если необходимо, выполнить дополнительную корректуру.
Корректура руководств для плавания выполняется рукописно или с помощью вклеек. При рукописной корректуре все исправления наносить аккуратно и четко красной тушью. Названия, номера и год издания корректурных документов пометить на полях страниц против откорректированных строк текста.
При использовании вклеек соблюдать следующие требования:
— текст, подлежащий исправлению, аккуратно перечеркнуть красной тушью;
— из извещения мореплавателям, дополнения или сводной корректуры вырезать строки, абзацы или страницы текста взамен вычеркнутых;
— приклеить вырезки и вкладные листы нового текста точно в те места, где вычеркнут текст; приклеивать нужно за край к внутреннему полю страницы лоции или руководства так, чтобы можно было прочесть вычеркнутое (заклеивать вычеркнутый текст не разрешается);
— изъять предыдущую вклейку, если ее текст отменен или заменен новой вклейкой;
— записать на вклейке или около нее на полях книги ссылку на использованный номер извещения мореплавателям.
Отметки о выполненной корректуре производятся в листе для учета корректуры, который помещен в начале корректируемого руководства.
Записи в листе для учета корректуры делать красными чернилами аккуратно и четко.
Вписывать только те номера извещений мореплавателям, по которым произведена корректура. Ошибочную запись перечеркнуть синими чернилами так, чтобы ее можно было легко прочесть.
Корректура каталогов карт и книг и номерного указателя карт и книг производится по приложениям к выпускам извещений мореплавателям ГУ МО и отделу II выпусков извещений мореплавателям ГУ МО.
Исправления вносятся в текст каталога и в сборные листы. Номера и нарезку изъятых карт аккуратно перечеркивать. Новые карты, а также изменение нарезки действующих карт наносят на сборные листы цветом, отличным от цвета типографской печати.
Штурман корабля, обнаружив несоответствие карты, руководства или пособия для плавания действительной обстановке, например, изменение характеристики огня, отсутствие нанесенного на карту ориентира, изменение кодовой задержки радионавигационной системы и т. п., должен исправить соответствующие карты или руководства простым каран
124
Глава 5. Навигационные пособия
дашом. При этом следует тщательно определить место корабля и произвести инструментальные измерения, подтверждающие глазомерные наблюдения. Так, например, для нанесения на карту нового ориентира следует, определив место корабля, нанести положение этого ориентира, измерив до него дистанцию и пеленг. Если измерение дистанции невозможно, то положение нового ориентира может быть получено в пересечении линий пеленгов на него, взятых из двух-трех известных мест корабля.
О всех замеченных изменениях навигационной обстановки следует сообщать в ближайший орган гидрографической службы флота (флотилии). В случае обнаружения не показанных на картах навигационных опасностей, а также изменений в средствах навигационного оборудования необходимо независимо от последующего представления сведений для корректуры немедленно сообщать об этом в адрес начальника Гидрографического управления Министерства обороны.
Более подробные указания по данному вопросу приведены в Методических указаниях по сбору сведений для корректуры навигационных карт и руководств для плавания, изд. ГУ МО, и в обращении к мореплавателям, публикуемом в извещениях мореплавателям ГУ МО. К обращению приложен бланк навигационного донесения.
Информация об изменениях навигационной обстановки и режима плавания осуществляется путем:
— передачи по радио навигационных извещений мореплавателям (НАВИМ) на прибрежные воды СССР и навигационных предупреждений (НАВИП) на прибрежные воды иностранных государств и воды открытого моря, содержащих наиболее срочные и важные сведения об изменениях навигационной обстановки и режима плавания;
— доведения до мореплавателей извещений мореплавателям (ИМ) — печатных изданий.
НАВИМ, НАВИП и ИМ являются официальными документами, использование которых кораблями и судами обязательно.
Навигационные извещения мореплавателям (НАВИМ) и навигационные предупреждения (НАВИП) передаются береговыми радиостанциями, режим работы которых публикуется в Расписании радиопередач навигационных и гидрометеорологических сообщений для мореплавателей, изд. ГУ МО, и в извещениях мореплавателям.
НАВИМ и НАВИП имеют на каждом бассейне свою порядковую нумерацию, которая начинается с 1 января каждого года.
НАВИМ и НАВИП, утратившие свое значение, отменяются по радио или через извещения мореплавателям. НАВИМ и НАВИП, содержащие информацию с указанием срока действия, по истечении последнего утрачивают свое значение без специального объявления об отмене.
Навигационная информация, переданная в НАВИМ и НАВИП, за исключением той, срок действия которой невелик, публикуется затем в извещениях мореплавателям. Кроме того, на следующие сутки после передачи в эфир НАВИП печатаются в специальных выпусках и рассылаются мореплавателям.
Извещения мореплавателям (ИМ). Извещения мореплавателям издаются систематическими выпусками. Извещения и выпуски имеют свою порядковую нумерацию, которая начинается с 1 января каждого года.
В выпуске № 1 публикуются действующие законы, положения и инструкции, регламентирующие правила плавания в водах СССР, а также различная общая информация по вопросам мореплавания. Выпуск № 1 строится по ежегодно устанавливаемой схеме.
$ 30. Поддержание карт, руководств и пособий на уровне современности 125
Последующие выпуски ИМ по своему построению однотипны. Вся информация в этих выпусках размещается в следующих трех отделах:
Отдел I. Навигационные извещения и общая информация по вопросам мореплавания.
Отдел II. Издания Гидрографического управления Министерства обороны.
Отдел III. Корректура руководств и пособий для плавания.
В I отделе помещаются объявления и предупреждения, имеющие важное значение для мореплавания, а затем навигационные извещения, которые содержат сведения для исправления карт. Навигационные извещения группируются по географическим районам, последовательность расположения которых приводится перед отделом I.
Во II отделе приводятся сведения о выходе из печати новых карт, карт нового издания, карт с большой корректурой, карт с малой корректурой,1 вклеек к картам, новых руководств и пособий для плавания, а также сведения о прекращении издания, объявления о непригодности и об изъятии карт, руководств и пособий для плавания.
В III отделе помещаются сведения, необходимые для поддержания руководств и пособий для плавания на уровне современности. Корректура руководств и пособий для плавания располагается в порядке адмиралтейских номеров руководств и пособий.
Для удобства выборки карт, руководств и пособий, подлежащих корректуре по данному выпуску, в начале выпуска помещается соответствующий перечень, в котором корректируемые карты, руководства и пособия расположены в порядке возрастания их адмиралтейских номеров.
Извещения мореплавателям по своему характеру подразделяются на постоянные, временные и предварительные.
Постоянные извещения содержат сведения, не подвергающиеся частым изменениям. Временные извещения (отмечаются буквой В) содержат информацию о непродолжительных изменениях навигационной обстановки. Предварительные извещения (отмечаются буквой П) содержат сведения о предполагаемых или планируемых в ближайшее время изменениях в навигационной обстановке или о начатых, но не доведенных до конца изменениях.
1 Все тиражи этих карт предыдущих лет печати для навигационных целей непри годны.
Глава 6
ОСНОВНЫЕ ХАРАКТЕРИСТИКИ ТЕХНИЧЕСКИХ СРЕДСТВ КОРАБЛЕВОЖДЕНИЯ
§ 31. ГИРОСКОПИЧЕСКИЕ КОМПАСЫ И ГИРОАЗИМУТЫ
Гироскопические компасы. На кораблях используются двухгироскоп-ные компасы «Курс» и «Гиря» различных модификаций. Время прихода в меридиан с точностью ±1°,0 данных гирокомпасов путем свободных затухающих колебаний составляет от 2,5 до 7 ч в зависимости от начального угла отклонения чувствительного элемента (ЧЭ) от истинного меридиана и широты места корабля.
Для сокращения этого времени гирокомпасы имеют устройство для ускоренного приведения в меридиан. Если с помощью такого устройства установить и удерживать чувствительный элемент гирокомпаса в меридиане с точностью до 2—3°, то время прихода в положение равновесия с ошибкой не более +1°,0 путем свободных затухающих колебаний сокращается до 1—1,5 ч.
Чтобы привести гирокомпас в меридиан при пуске, необходимо знать компасный курс корабля или компасный пеленг отдаленного ориентира. Компасный курс или пеленг отдаленного ориентира следует записывать перед выключением гирокомпаса по прибытии из похода.
Главная ось ЧЭ работающего гирокомпаса на движущемся корабле вследствие наличия динамических и статических погрешностей располагается по направлению гироскопического меридиана, не совпадающего с истинным меридианом.
К динамическим погрешностям относятся:
— скоростная погрешность;
— инерционные погрешности 1 и 2 родов;
— погрешность от качки.
Скоростная погрешность возникает вследствие угловой скорости вращения плоскости истинного горизонта из-за движения корабля по поверхности Земли. Главная ось ЧЭ гирокомпаса на движущемся корабле устанавливается вдоль вектора угловой скорости вращения плоскости истинного горизонта в пространстве. Этот вектор является равнодействующим двух векторов, лежащих в горизонтальной плоскости: вектора горизонтальной составляющей суточного вращения Земли, изменяющегося с изменением географической широты места, и вектора угловой скорости вращения корабля относительно центра Земли. Равнодействующий вектор отклонен от истинного меридиана на угол 8С
V cos ПУ /АП
с” 900 cos f + V sin/7У *
где V — скорость корабля относительно грунта, в узлах;
ПУ — путевой угол;
<? — широта места.
§ 31. Гирокомпасы и гироазимуты
127
Угол Вс вырабатывается с помощью счетно-решающего механизма — корректора гирокомпаса.
В простейших конструкциях корректоров вместо ПУ учитывается истинный курс корабля, а скорость вводится от относительного лага.
Для обеспечения нормальной работы корректора необходимо своевременно вводить вручную величины, определяющие поправку &с или периодически контролировать их автоматический ввод.
Инерционная погрешность 1 рода возникает у гирокомпасов («Курс-3», «Курс-4», «Гиря-М», «Гиря-МК»), в конструкции которых не предусмотрена регулировка периода То незатухающих колебаний ЧЭ при маневрировании корабля в широте, отличающейся от расчетной, когда период незатухающих колебаний не равен 84,3 мин.
Гирокомпасы с регулируемым периодом незатухающих колебаний называются апериодическими. Чувствительные элементы этих гирокомпасов приходят в новый гироскопический меридиан за то же время, за какое корабль изменяет скорость или курс.
У гирокомпасов с нерегулируемым периодом То инерционная погрешность 1 рода достигает максимума в момент окончания маневра и может быть подсчитана по формуле
8 = (8 -8 \ -iL (6.2)
Т с2 С1 H COS <р0 I * ' '
где &С1 и &С2 — скоростные погрешности до и после маневра соответственно;
<рт — текущая широта места корабля;
<?0 — широта, для которой произведена регулировка периода Го заводом-изготовителем; эта широта называется расчетной и для отечественных гирокомпасов принята равной 60°.
Гирокомпас по окончании маневра приходит в новое положение равновесия практически через 25—30 мин. При резкопеременном маневрировании в течение длительного времени ошибка йт может накопиться до нескольких градусов.
Инерционная погрешность 2 рода возникает у компаса в результате работы приспособления для гашения незатухающих колебаний чувствительного элемента во время маневра корабля и обусловлена действием сил инерции на жидкость в гидравлическом успокоителе. Эта погрешность достигает максимума через периода затухающих колебаний гирокомпаса, т. е. примерно через 25—30 мин по окончании маневра. Для предупреждения появления указанной погрешности затухание гирокомпаса выключают путем перекрытия соединительной трубки сосудов успокоителя на время маневра. У некоторых типов гирокомпасов выключение и последующее включение затухания по окончании маневра производится автоматически.
Расчеты и практика показывают, что в широтах меньше расчетной погрешности 1 и 2 родов в значительной мере компенсируют друг друга и выключение затухания становится нецелесообразным. Выключать затухание на время маневра необходимо только при плавании в широтах, превышающих расчетную.
Погрешность от качки обусловлена раскачиванием ЧЭ гирокомпаса относительно его главной оси. Для предупреждения появления этой погрешности применяется стабилизация ЧЭ в плоскости горизонта, например с помощью двух гиромоторов, как это сделано у гирокомпаса типа «Курс» или «Гиря».
128
Глава 6. Основные характеристики ТС К
Максимальная величина погрешности проявляется при качке от четвертных румбов. Если направление распространения волн совпадает с направлением NW— SO, то гирокомпас выходит из меридиана к востоку, а если с направлением NO — SW — к западу.
При интенсивной и длительной качке погрешность от качки может достигать нескольких градусов.
Статические погрешности гирокомпаса вызываются следующими основными причинами:
— наличием трения в подвесах гиромоторов;
— изменением скорости вращения роторов гиромоторов;
— неточной установкой основного прибора в диаметральной плоскости корабля;
— действием магнитных полей.
Статические погрешности, характеризующие устойчивость работы гирокомпаса на неподвижном основании, определяются опытным путем.
Таким образом, точность работы гирокомпаса зависит от многих факторов и прежде всего от характера маневрирования корабля, широты района плавания, характера и интенсивности качки. Для гирокомпасов типа «Курс» по техническим условиям точность работы характеризуется предельными (с вероятностью 0,95) ошибками, приведенными в табл. 12.
Таблица 12
Условия плавания Предельная ошибка курсоукаэания
Курс и скорость постоянны, качки нет 1°0
Скорость переменная 15—25 уз, качка и повороты корабля на угол до 180° 1,5-4°
Для обеспечения нормальной работы необходимо производить проверку и регулировку гирокомпасов в соответствии с эксплуатационной документацией.
Исходя из особенностей случайной составляющей погрешности гирокомпаса, пользоваться его поправкой, определенной однократно на переходе морем, можно в течение не более 15 мин, т. е. не выходя за пределы интервала корреляции погрешности. Если после определения поправки прошло более 15 мин, целесообразнее использовать поправку, полученную по многократным наблюдениям в базе. Если поправку гирокомпаса определяют в процессе плавания по многократным наблюдениям светил, то каждая серия пеленгов светила должна быть сдвинута по времени не менее чем на 15 мин от предыдущей.
Гироазимуты. Гироазимутами (ГА) называются гироскопические приборы, предназначенные для сохранения заданного азимутального направления.
В гироазимутах применяются гироскопы с подвесом на шарикоподшипниках и с аэродинамическим подвесом. Первый представляет собой гирокамеру, в которой на шарикоподшипниковых опорах вращается дисковый ротор с утяжеленным ободом. У второго гироскопа ротор, имеющий форму шара, при работе находится во взвешенном в воздухе состоянии. Такие гироскопы принято называть шаровыми гироскопами.
В отличие от гирокомпаса у ЧЭ любого гироазимута его центр тяжести должен быть совмещен с точкой подвеса элемента. По этой причине гироазимут не обладает избирательностью по отношению к пло-
§ 31. Гирокомпасы и гироазимуты
129
скости меридиана, т. е. у него нет «направляющей силы», и не имеет баллистических погрешностей, присущих нерегулируемым гирокомпасам.
С помощью системы горизонтальной коррекции главная ось ЧЭ гироазимута принудительно удерживается в плоскости горизонта. При этом угловая скорость а изменения азимутального направления главной оси ЧЭ гироазимута определяется зависимостью
• . , V sin ПУ. .
а - о sin <? -£— tg <? + <Од, (6. 3)
где (о — угловая скорость вращения Земли;
R — радиус Земли;
(од — угловая скорость остаточного дрейфа ЧЭ гироазимута.
Дрейфом гироазимута называется уход главной оси ЧЭ от заданного направления под действием моментов сил трения, небаланса и др.
Для компенсации азимутального ухода главной оси ЧЭ с угловой скоростью а применяются два вида азимутальной коррекции — внутренняя и внешняя.
Внутренняя азимутальная коррекция применяется в основном в гироазимутах с подвесом ЧЭ на шариковых подшипниках и заключается в том, что с помощью специальных устройств формируется момент внешней силы относительно горизонтальной оси подвеса ЧЭ. Этот момент по величине и направлению делается таким, чтобы вызвать прецессию в плоскости горизонта со скоростью а, но направленную в обратную сторону.
Внешняя азимутальная коррекция применяется в основном в гироазимутах на шаровых гироскопах. При внешней коррекции на гироскоп корректирующий момент не накладывается. В этом случае с ЧЭ гироазимута снимается фактическая скорость ухода а и подается на суммирующее устройство, где происходит ее алгебраическое сложение с расчетной скоростью ар, вырабатываемой в специальном счетно-решающем устройстве. Если расчетная скорость вычислена правильно, то выходной сигнал сумматора, соответствующий курсу корабля, при постоянстве последнего не изменяется с течением времени.
В общем случае из-за неточного знания широты места, скорости и путевого угла (курса) корабля, а также действительной величины скорости дрейфа (Од расчетная скорость ар оказывается отличной от ее действительной величины а. Это различие приведет к появлению изменяющейся во времени погрешности курса. Такой же результат будет получен и при использовании внутренней азимутальной коррекции, если корректирующий момент будет отличаться от необходимой величины.
Общая погрешность гироазимута включает в себя широтную погрешность, скоростную погрешность и погрешность, обусловленную дрейфом ЧЭ гироазимута.
Широтная погрешность Ai появляется в тех случаях, когда текущая широта плавания срт отличается от расчетной широты введенной в азимутальный корректор. Она наиболее характерна для гироазимута с азимутально-широтным (грузиковым) корректором, а ее величина и знак определяются в соответствии с формулой
= а) / (sin сро — sin срт)э (6.4)
где to — угловая скорость вращения Земли;
t — промежуток времени, за который подсчитывается погрешность в часах.
9 Заказ 1833
130
Г лава 6. Основные характеристики ТСК
Скоростная погрешность Д2 возникает в том случае, когда азимутальная коррекция осуществляется без учета скоростной составляющей
А V sin ПУ
—tg<p.
Для промежутков времени /, в течение которых изменением широты можно пренебречь, погрешность Д2 рассчитывается по формуле
А WsinZ/y,
Д, =----£---tg?. (6.5)
Скоростная погрешность достигает значительных величин при плавании в высоких широтах и на больших скоростях.
К гироазимутам, в конструкции которых не предусмотрен учет скоростной составляющей для подсчета погрешности Д2, прилагается специальная линейка. Неучет этой составляющей приводит к тому, что плавание корабля совершается по ортодромии.
Во всех случаях, когда требуется получить ортодромическое направление, узел в системе коррекции гироазимута, учитывающий скоростную составляющую, должен быть отключен.
Погрешность от дрейфа гироазимута имеет сложный характер и включает в себя как систематическую, так и случайную составляющие. Систематическая составляющая изменяется во времени, причем характер изменения не остается постоянным. Эта составляющая может быть скомпенсирована с точностью, зависящей от способа ее осреднения и возможностей азимутальной коррекции. Случайная составляющая погрешности относится к категории нестационарных случайных процессов. Ошибки случайного ухода гироазимута растут во времени.
Для выявления средней скорости ухода гироазимута необходим промежуток времени, равный интервалу корреляции 70—90 мин — при определении ее по двум поправкам гироазимута и 2,5—3 ч— при определении ее по разностям курсов. Способы определения средней скорости некомпенсированного ухода гироазимута рассматриваются в § 52.
Основным критерием качества работы гироазимутов является остаточная скорость ухода гироазимута, допустимые величины которой для различных типов гироазимутов и различных условий эксплуатации указываются в эксплуатационно-технической документации.
Для обеспечения нормальной работы необходимо проводить проверку и регулировку гироазимутов в соответствии с эксплуатационной документацией.
§ 32. МАГНИТНЫЕ КОМПАСЫ
Магнитный компас, как автономный курсоуказатель, основан на использовании магнитного поля Земли. Чувствительным элементом компаса является магнитная картушка, помещенная в жидкость.
Достоинства этого компаса — немедленная готовность к работе, простота устройства, относительная дешевизна производства, высокая надежность и долговечность.
Основной недостаток—невысокая точность показаний, вследствие чего магнитный компас используется в качестве резервного курсоуказа-теля. Источниками погрешностей магнитного компаса являются:
— неточное знание элементов земного магнетизма;
— нестабильность корабельного магнитного и электромагнитного полей;
§ 32. Магнитные компасы
131
— ускорения, сообщаемые магнитной системе компаса на качке и при изменении элементов движения корабля;
— трение в подвесе магнитной системы.
Неточное знание элементов земного магнетизма приводит к появлению погрешности в величине учитываемого магнитного склонения для данного района плавания.
Магнитное поле корабля отклоняет магнитную ось картушки от направления магнитного меридиана. Это отклонение называется девиацией магнитного компаса. Величина и направление вектора напряженности корабельного магнитного поля в месте установки компаса зависят от курса корабля, его крена и дифферента, а также от широты плавания. При изменении этих параметров изменяется величина и знак девиации, которая в общем случае может достигать больших значений.
Магнитное поле корабля изменяется с течением времени в результате сотрясений корпуса при использовании оружия, ударах о волну и лед. На магнитное поле влияет и характер груза, принятого кораблем. Длительное лежание корабля на одном и том же курсе, как, например, во время длительного ремонта или во время ледостава в замерзающих районах моря, тоже приводит к изменению магнитного состояния корпуса корабля и, следовательно, величины остаточной девиации. Поэтому магнитная девиация, являясь основной погрешностью компаса, должна периодически контролироваться и при необходимости уничтожаться (компенсироваться).
Электромагнитное поле корабля создается главным образом обмотками размагничивания и тоже вызывает отклонение магнитной оси картушки компаса от плоскости магнитного меридиана, называемое электромагнитной девиацией. Девиацию этого рода уничтожают с помощью компенсирующих устройств.
После компенсации электромагнитной девиации должна быть рассчитана таблица остаточной девиации. Таким образом, на каждый магнитный компас на корабле должны быть две таблицы остаточных девиаций— одна для плавания с включенными обмотками РУ, а вторая — с выключенным размагничивающим устройством.
На подводных лодках таблицы остаточных девиаций должны быть как для надводного, так и для подводного положения.
Ускорения, сообщаемые магнитной системе компаса при маневрировании корабля, вибрациях и особенно при качке, вызывают колебания картушки около компасного меридиана.
Наличие жидкости в котелке компаса в значительной мере демпфирует колебания картушки, но эта же жидкость увлекает картушку за собой при маневрах корабля из-за наличия сил вязкого трения. Эти девиации, имеющие механическое происхождение, при сильной качке, особенно на малых кораблях, могут сделать компас непригодным для использования.
Трение в подвесе магнитной системы приводит к уменьшению чувствительности магнитного компаса и образованию зоны застоя. Для. уменьшения сил трения в опоре (топка — шпилька) картушка снабжается поплавком, с помощью которого давление картушки на шпильку существенно снижается.
Величину зоны застоя, или просто застой, необходимо периодически проверять. Она должна быть не более +0°,2. Если застой превышает указанную выше величину, то следует вывинтить шпильку и осмотреть ее. Прн необходимости шпильку заменить или аккуратно заточить.
На кораблях и судах применяются компасы с картушкой диаметром 127 мм, а также катерные и шлюпочные компасы с диаметром кар
9*
132 Глава 6. Основные характеристики ТС К
тушки 75 мм. Картушки последних двух компасов имеют цену деления 2°, а их магнитная система состоит из двух магнитных стрелок. Цена деления картушки 127 мм компаса равна одному градусу, что обеспечивает точность отсчета курсов и пеленгов со средней квадратическом ошибкой порядка +0°,25.
Котелки компасов заполняют водным раствором этилового спирта, температура замерзания которого при 43% содержания спирта —26°, а при 80% —46° С.
Дистанционные магнитные компасы. У обычного магнитного компаса отсутствует дистанционная передача курса различным потребителям на корабле. Это обстоятельство вызвало появление дистанционных магнитных компасов с оптической и электрической дистанционными передачами.
Оптическая передача, состоящая из системы линз и зеркал, служит для передачи рулевому изображения картушки компаса, установленного, например, над ходовой рубкой.
Электрическая дистанционная передача позволяет передавать показания магнитного компаса на принимающие, устанавливаемые в различных постах корабля. К магнитным курсоуказателям с электрической дистанционной передачей относятся компасы:
КДЭ-П — компас дистанционный электролитический с самосинхро-низирующейся синхронной передачей на переменном токе;
ДКГМК-3 — дистанционный катерный гиромагнитный компас с потенциометрической передачей;
«Градус-2» гиромагнитный компас с сельсинно-потенциометрической передачей.
У всех перечисленных компасов в качестве чувствительного элемента применяется система из шести или двух магнитных стрелок.
Гиромагнитные компасы представляют собой конструкцию, в которой используется уравновешенный гироскоп, управляемый магнитным компасом. При таком сочетании приборов главная ось гироскопа удерживается в компасном меридиане. Гироскоп повторяет все колебания картушки, в том числе и при качке корабля. Однако вследствие большой инерционности гироскопа его главная ось совершает колебания с амплитудами во много раз меньше амплитуд колебаний магнитной системы, т. е. гироскоп выступает здесь как фильтр высокочастотных колебаний чувствительного элемента компаса. В гиромагнитных компасах датчик компасных курсов связан с гироскопом, поэтому снимаемый курс практически свободен от погрешностей магнитной системы, носящих колебательный характер. Что же касается постоянных или очень медленно меняющихся погрешностей в показаниях магнитного датчика, то они не отфильтровываются гироскопом и передаются потребителям без изменения. Точность показаний гиромагнитного компаса в статическом режиме (при отсутствии качки) определяется точностью показаний магнитного датчика и даже несколько ниже этой точности за счет погрешностей, вносимых системой управления гироскопом и дистанционной передачей показаний.
§ 33. ЛАГИ
Исходя из физических принципов, положенных в основу конструкции, лаги подразделяются на гидродинамические, индукционные и гидроакустические.1
1 Принцип действия гидроакустического лага изложен в § 67.
$ 33. Лаги
133
Гидродинамические лаги. Приемные устройства этих лагов измеряют давление скоростного напора (гидродинамическое давление) воды, возникающего при движении корабля. На основании измеренной величины давления в счетно-решающей схеме лага вырабатывается скорость корабля и пройденное расстояние. Для измерения динамического давления применяются пружинные (сильфонные) и жидкостные (ртутные) дифференциальные манометры. Независимо от конструкции лагов рассматриваемого типа, всем им свойственна гидродинамическая погрешность. Причина появления этой погрешности лежит в возмущениях, вносимых корпусом корабля в набегающий поток жидкости. Величина гидродинамической погрешности зависит от места установки приемных устройств лагов на корабле, от скорости корабля, состояния его корпуса и других факторов.
Уменьшение величины гидродинамической погрешности достигается рациональным выбором места установки приемных устройств, размещением отверстий приема полного давления за пределами пограничного слоя корабля и другими средствами. Кроме перечисленных выше причин, на величину и характер погрешности влияют дрейф корабля, волнение моря, качка, маневрирование корабля, изменение его осадки и т. д. Большинство из этих факторов носит случайный характер, а потому и в гидродинамической погрешности принципиально существуют две составляющие — систематическая и случайная.
Суммарная погрешность лага включает в себя также инструментальные погрешности, которые характеризуют точность работы счетнорешающих и измерительных приборов лага.
Инструментальные погрешности зависят от схемы и конструкции прибора, а также от качества его изготовления. По характеру проявления эти погрешности также делятся на систематические и случайные. Поэтому суммарная погрешность лага включает в свою систематическую составляющую погрешности, обусловленные как гидродинамическими, так и другими причинами (механическими, электрическими и т. п.).
Такую же природу имеет и ее случайная составляющая. Случайная составляющая погрешности лага может достигать заметных величин при измерении скорости в условиях качки корабля. При этом на ее величину оказывает влияние направление распространения волн относительно диаметральной плоскости корабля, скорость корабля, характер качки и ее интенсивность, а также тип приемного устройства лага. Так, при использовании приемного устройства типа «Штевень» большая масса воды в канале полного давления под действием ускорений от килевой качки и маневрирования скоростью совершает колебательные движения, заметно искажающие показания скорости по лагу.
Мгновенные значения скорости, показанной лагом в условиях качки, могут отличаться от истинной на 2—3 уз. Однако ошибка в величине пройденного расстояния, получаемого в результате непрерывного интегрирования мгновенной скорости, обычно невелика.
Если на корабле, помимо приемного устройства «Штевень», имеется устройство с двухканальной трубкой, то в условиях интенсивной качки целесообразнее использовать последнее. Все современные лаги имеют приспособления для автоматического исключения из их показаний систематической составляющей погрешности. Способ исключения погрешности зависит от конструкции лага.
В лагах, имеющих- сильфонные дифференциальные манометры с пружинными компенсационно-измерительными системами, погрешность компенсируется изменением настройки компенсационной системы.
134
Глава 6. Основные характеристики ТСК
В лагах с ртутным дифференциальным манометром погрешность исключается автоматическим введением поправки в кинематическую линию выработанной лагом скорости от специального корректора.
Регулировка лагов с компенсационными системами. Опыт эксплуатации лагов показывает, что в подавляющем большинстве случаев их относительная погрешность ол представляет собой плавно изменяющуюся функцию скорости, которая, как правило, может быть аппроксимирована прямой линией с погрешностью, не превышающей 1%:
Зл = v° а + bV0, (6. 6)
и о
где Ул — скорость по лагу;
Vo — истинная скорость относительно воды;
а — постоянная составляющая погрешности лага;
*У0 — переменная составляющая погрешности лага;
b — тангенс угла наклона регулировочной линии к оси абсцисс на регулировочной номограмме.
Из формулы (6. 6) следует, что отношение скоростей
^=1+а + />1/0 = Л. (6.7)
V о
Коэффициент k называют гидродинамическим коэффициентом лага или коэффициентом Пито.
Компенсационные системы имеют два регулятора (4 и В). С помощью регулятора А изменяется начальное натяжение компенсационной пружины, что дает возможность исключать постоянную составляющую а погрешности лага. Регулятор В создает дополнительное натяжение (или наклон) пружины, пропорциональное скорости хода, чем исключается переменная составляющая погрешности bVQ.
Регулировка лагов с ртутными дифференциальными манометрами. Особенность регулировки состоит в том, что для настройки ленточного корректора на мерной линии необходимо определять не относительные погрешности, а абсолютные поправки лага. Кроме того, каждая регулировка выполняется независима от предыдущей. Поэтому перед выходом на мерную линию все регуляторы корректора выставляются на заводские отсчеты.
Порядок регулировки лагов изложен в соответствующих инструкциях.
Наряду с рассмотренными выше двумя типами гидродинамических лагов на вооружении кораблей и судов находятся лаги с пружинной компенсационно-измерительной системой, в которых погрешности показаний лага исключаются с помощью ленточного корректора.
Основные характеристики гидродинамических лагов с компенсационно-измерительными системами приведены в табл. 13.
Лаги с ртутным дифференциальным манометром обладают достаточно высокой чувствительностью и обеспечивают устойчивые показания, начиная со скорости 2—3 уз. Пределы измерения скорости зависят от модификации лага.
Предельные остаточные погрешности в определении скорости составляют от ±2—2,5% на малом ходу до ±1%'— на среднем и полном.
Для обеспечения нормальной работы необходимо производить проверку и регулировку лагов в соответствии с эксплуатационной документацией.
Индукционные лаги основаны на явлении электромагнитной индукции, возникающем, в частности, в морской воде при ее движении в магнитном поле источника, неподвижно закрепленного на корпусе корабля.
$ 33. Лаги
135
Таблица 13
Наименование параметров Марка лага
Л Г-25 Л г-50 Л Г-4 Л Г-5 МГЛ-25 МГЛ-50
Диапазон измеряемых скоростей, уз Пределы компенсации погрешности, °/о- 3-25 6-50 6—45 10-60 3-25 6—50
а) постоянной составляющей; ±8 ±8 ±15 ±15 ±10 ±10
в) переменной составляющей Предельные остаточные погрешности, °/0: ±8 ±8 ±10 ±10 ±8 ±8
а) на малых скоростях; ±3,0 ±(6-4) ±4,5 ±4,5 ±5,2 ±5,2
б) на средних и больших скоростях ±1.0 ±1,0 ±1,0 ±1,0 ±1,0 ±1,0
Источником магнитного поля в лаге служит электромагнит, питаемый переменным током. Он заключен в обтекатель, на поверхности которого расположены два измерительных электрода, соприкасающиеся с морской водой. Под воздействием переменного магнитного поля магнита в воде возникает переменная э. д. с. Амплитуда этой э. д. с. оказывается пропорциональной скорости движения электромагнита, а следовательно, и корабля, расстоянию (базе) между электродами и напряженности магнитного поля вблизи электродов. Измерение сигнала снимаемого с измерительных электродов, осуществляется по компенсационному методу.
Точность работы индукционного лага определяется погрешностью, включающей в себя две основные составляющие: гидродинамическую и инструментальную.
Гидродинамическая погрешность возникает вследствие того, что э. д. с. индуктируется в потоке воды, скорость движения которого относительно корабля отличается от истинной скорости корабля по отношению к воде из-за искажений, вносимых в поток жидкости корабельным гидродинамическим полем. Эта погрешность по причине своего возникновения аналогична такой же по названию погрешности гидродинамических лагов.
Инструментальная погрешность является следствием влияния многих факторов, к которым относятся нелинейность и нестабильность компенсационных устройств, нестабильность частоты и напряжения питающего тока, дрейф нуля усилителя, зона нечувствительности автокомпенсатора, наличие люфтов и моментов трения в кинематических линиях и т. д. Под воздействием указанных факторов инструментальная погрешность, как и гидродинамическая, имеет систематическую и случайную составляющие. Компенсация систематических составляющих гидродинамической и инструментальной погрешностей производится с помощью ленточных корректоров, настраиваемых на мерной линии.
§ 34. АВТОПРОКЛАДЧИКИ
Автопрокладчики представляют собой аналоговые вычислительные устройства, предназначенные для автоматического счисления пути корабля.
В основу конструкции автопрокладчиков «Путь-1», АП-2, АП-3 и АП-4 положены формулы аналитического счисления, в которых Земля принимается за шар, что приводит к возникновению методической
136
Глава 6. Основные характеристики ТСК
ошибки выработки координат, которая в зависимости от широты плавания может достигать +0,5% от пройденного расстояния. Максимум этой погрешности будет в экваториальной и околополярной зонах.
В результате решения задачи аналитического счисления на выходе автопрокладчика должны быть получены текущие значения широты <рт и долготы Хт места корабля в соответствии с формулами:
<РТ = Фо + РШ 1
== *о + рД J
(6. 8)
где <ро и Хо — координаты точки, в которой был включен автопрокладчик.
Для выработки разности широт РШ и разности долгот РД в автопрокладчик вводится информация о курсе корабля, его скорости по лагу, а также данные о дрейфе и течении. Способ введения и учета указанной информации определяет конструктивные особенности схемы. Так, в автопрокладчике АП-4 автоматическое счисление осуществляется в соответствии с формулами:
РШ = J [ул (1 + Ал) cos (КК + &ГК + а) + cos tfT] dt- (6. 9)
0ТШ= J [Ул(1 +A4)sin(tftf + AFtf+a) + vTsin/CT]<ft; (6. 10)
0ТШ
РД = J SK'^OTIU. (6.11)
0
В автопрокладчиках АП-2 эта же задача решается в соответствии с формулами:
5Л (1 + Ал) (1 + АЛ
РШ = J* cos {КК + ЬГК + ₽ + a) dS\ (6.12)
о
5Л(1+Дл) (14-АЛ
0ТШ= J sin (ЯК + AW+₽ + a)dS; (6.13)
о
отш
РД = у sec '^dOTLU, (6. 14)
о
где УЛ — скорость по лагу;
Ал — поправка лага;
— скорость течения;
Кт — направление течения;
АК — компасный курс;
Д/ТС—поправка компаса;
а — угол дрейфа;
р — угол сноса течением;
5Л — расстояние, пройденное по лагу;
АГ — поправка к скорости по лагу за счет течения.
$ 34. Автопрокладчики
137
Для графического счисления на планшете автопрокладчика используются выработанные счислителем РШ и ОТШ, которые переводятся в текущий масштаб карты Мт в соответствии с зависимостями:
Мт = Л/экв sec <рт (6. 15)
или
гп
^T = l^rsec<?T- (6.16)
где Л/экв — масштаб по экватору;
Л4ГП — масштаб по главной параллели;
<ргп — широта главной параллели;
<РТ — текущая широта места корабля.
При использовании в автопрокладчике формулы (6. 15) экваториальный масштаб приходится выбирать из специальных таблиц (по Л4Гп и ^гп) или рассчитывать по формуле
мзкв = (6. 17)
и полученный результат вводить в масштабный прибор автопрокладчика.
Если используется формула (6. 16), то в прибор вводится только Л4ГП, ?гп (с карты) и ?т, при этом никаких расчетов не требуется. Однако в этом случае схема прибора усложняется, так как появляется дополнительный узел, вырабатывающий экваториальный масштаб.
За исключением автопрокладчика «Путь-1», во всех названных выше автопрокладчиках материализована зависимость (6. 15).
Ошибки, сопровождающие решение задач автоматического счисления, делятся на три группы:
1) ошибки входных данных, как следствие неточной работы гирокомпаса, лага, а также ошибок, допущенных при определении их поправок. Сюда же относятся и ошибки из-за неточного знания дрейфа, элементов течения, а также ошибки начальных координат, введенных в автопрокладчик;
2) ошибки, являющиеся следствием замены точных математических зависимостей приближенными для конструктивного упрощения прибора. Эти ошибки носят название методических ошибок;
3) ошибки, обусловленные технологическими причинами: отклонение в пределах допусков размеров деталей и их конфигурации, люфты, моменты сил трения, зазоры и т. д. Сюда же относятся погрешности, возникающие в процессе эксплуатации прибора и являющиеся следствием износа деталей, температурных деформаций и т. д. Эти ошибки принято называть инструментальными.
Ошибки автоматического счисления являются результатом совместного проявления всех групп ошибок и называются выходными ошибками автопрокладчика.
Наибольшее влияние на величину выходных ошибок прокладчика оказывают ошибки первой группы, которые в свою очередь зависят от условий плавания, способов определения течения и дрейфа и т. д. Поэтому точность работы прибора оценивается по величине ошибки автопрокладчика, представляющей собой результат совместного проявления ошибок второй и третьей групп.
138
Глава 6, Основные характеристики ТСК
Предельную ошибку автопрокладчика оценивают величиной радиуса круга, проведенного из расчетной точки. При этом счислимое место корабля, полученное на планшете в результате решения контрольной задачи, не должно выходить за пределы окружности указанного радиуса, величина которого дается в процентах от пройденного расстояния и для названных выше прокладчиков составляет 0,6—1,0%.
Допустимые ошибки выработки разностей широт и долгот определяются по номограммам, прилагаемым к каждой контрольной задаче. При отсутствии номограммы можно воспользоваться формулой
(3PW + (^)2 = a^, (6.18)
где ЪРШ и ЪРД — допустимые ошибки в величинах РШ и РД\ is — радиус круга предельной ошибки.
В качестве примера рассмотрим плавание корабля в ?т = 70W с предельной ошибкой автопрокладчика SS — 1%. Расстояние, пройденное кораблем, 60 миль, а снятая с карты %РШ = 0J45. На основании формулы (6. 18) следует
ЪРД = sec <pT/8S2 - ZPLLP - 2,92/0,36-0,20 = К17.
Выходная ошибка автопрокладчика контролируется во время плавания путем обсерваций.
Для ведения прокладки в автопрокладчиках используются карты в проекции Меркатора, масштабы которых, приведенные к экватору, лежат в пределах от 1 : 100 000 до 1 : 1 600 000, за исключением автопрокладчика «Путь-1». В автопрокладчике «Путь-1» используются карты в той же проекции с масштабами от 1 : 50 000 до 1 :800 000 по главной параллели.
В автопрокладчиках АП-2 и АП-4 предусмотрена возможность ведения прокладки в постоянном масштабе 1 : 50 000 (в АП-2) и 1 : 18 520 (в АП-4). Последний масштаб удобнее, так как в этом случае 1 кбт соответствует 1 см. Для обеспечения работы автопрокладчика «Путь-1» в постоянном масштабе 1:50 000 необходимо на масштабном приборе установить текущую широту, равную широте главной параллели, и ввести знаменатель масштаба 50 000. При этом предполагается, что широта места корабля не меняется. Такое допущение справедливо, так как постоянный масштаб применяется, как правило, для записи маневрирования корабля в ограниченном районе, когда изменение широты заметно не скажется на величине вырабатываемого масштаба.
Для автопрокладчиков АП-2 и «Путь-1» существуют приставки, позволяющие уменьшить знаменатель постоянного масштаба с 50 000 до 18 520.
Автопрокладчик АП-3 не имеет устройства для ведения графического счисления в постоянном масштабе. В случае необходимости записи маневрирования корабля в крупном масштабе нужно поступать следующим образом. В масштабном приборе прокладчика установить знаменатель экваториального масштаба Сэкв= 100000. Отключить лаги установить на автопрокладчике максимальную скорость ^тах = 60 уз. Текущая широта <рт, необходимая для выработки требуемого масштаба Ст, находится по формуле
где V — фактическая скорость корабля.
§ 35, Эхолоты
139
Так, если требуется получить масштаб Ст= 1:18520 при фактической скорости корабля V = 20 уз, то подсчет, выполненный по формуле (6. 19), показывает, что широта, которую следует в данном случае ввести в автопрокладчик, будет ?т = 56° 15'. Если корабль будет менять скорость, то для сохранения избранного масштаба следует изменять и установку ?т в соответствии с ее новым значением, рассчитанным по формуле (6. 19) для новой фактической скорости.
§ 35. ЭХОЛОТЫ
Принцип действия эхолота основан на измерении промежутка времени от момента посылки звукового импульса до момента его приема после отражения от дна. При этом предполагается, что скорость распространения звука в воде известна. В навигационных эхолотах типа НЭЛ временной промежуток измеряется с помощью механической развертки времени, при прохождении индекса которой через начало отсчета производится посылка сигнала вибратором-излучателем. В указателях глубин развертка представляет собой вращающийся с постоянной скоростью диск с неоновой лампой, которая дает вспышку в момент прихода на вибратор-приемник отраженного от дна сигнала.
Угол поворота диска с неоновой лампой за время от момента посылки сигнала до вспышки лампы является мерой времени прохождения звука на глубину и обратно и, следовательно, мерой глубины. В самописцах мерой глубины служит расстояние, пройденное равномерно движущимся пером от момента посылки импульса до отметки на бумаге момента приема эхолотом отраженного сигнала. В последних образцах навигационных эхолотов (НЭЛ-10) применен цифровой указатель глубин (ЦУГ), работающий на принципе электронной развертки.
Исходя из принципа действия эхолота, ошибки измерения глубины этим прибором делятся на ошибки, обусловленные средой, и инструментальные ошибки.
Ошибки, обусловленные средой, зависят от условий распространения звука в воде. Из этой группы наиболее существенна ошибка за счет отклонения фактической скорости звука с от расчетной ср, положенной в основу конструкции прибора. В эхолотах типа НЭЛ скорости движения разверток времени пропорциональны расчетной скорости звука 1500 м/сек,. Из-за изменений плотности воды фактическая скорость может быть меньше или больше расчетной. В первом случае эхолот покажет глубину больше фактической, а во втором — меньше. Поправка к глубине Н, измеренной эхолотом, рассчитывается по формуле
ДЯС = //,^ -1). (6.20)
Чтобы не вычислять поправку по указанной формуле к каждой измеренной глубине, следует скорость индекса развертки времени привести в соответствие с фактической скоростью звука. В механических развертках это достигается изменением скорости вращения электродвигателя путем изменения настройки автоматического центробежного регулятора (АЦР). При этом число п оборотов индекса (пера) в минуту, соответствующее фактической скорости, вычисляется через расчетную скорость вращения пр по формуле
п = п.-^. (6.21)
F ср
Регулировка производится с остановкой или без остановки прибора, что зависит от конструкции эхолота.
140
Глава 6. Основные характеристики ТСК
Ошибка из-за наклона дна заметно проявляется при больших уклонах дна. Причина ее появления заключается в том, что вибратор излучает сигнал в пределах некоторого конуса, а поэтому первым отраженным сигналом, принятым вибратором-приемником, будет сигнал, соответствующий кратчайшему расстоянию до грунта, но не глубине под вибраторами. В этом случае поправка Д/7а к измеренной глубине И будет
Д// == //9(seca— 1), (6. 22)
где а — угол наклона дна.
Поправка Д//а всегда положительна. Она вводится в измеренные глубины, начиная с 2000 м, при углах наклона дна более 5°.
Ошибка измерения глубины на волнении является следствием вертикальных перемещений вибраторов эхолота вместе с корпусом корабля. Изменения глубины при ровном дне происходят в такт с вертикальной качкой корабля. Для обеспечения навигационной безопасности следует принимать в расчет только наименьшие показания указателя или самописца.
Кроме того, при качке корабля с углами больше тех, на которые рассчитан эхолот, могут наблюдаться пропуски в регистрации глубины как по причине того, что отраженный от грунта сигнал может оказаться за пределами конуса направленности вибратора-приемника, так и за счет сильного поглощения излученного импульса пузырьками воздуха, попадающего под вибраторы.
Измерение малых глубин может сопровождаться ошибками вследствие наличия расстояния между вибраторами или стать вообще невозможным из-за акустической связи между вибраторами и реверберации.
В эхолотах вибраторы расположены на некотором расстоянии один от другого, поэтому путь сигнала по трассе излучатель — грунт— приемник больше, чем действительная двойная глубина. Для коррекции показаний эхолота поправкой на величину базы между вибраторами следует пользоваться таблицей поправок, придаваемой к комплекту документации эхолота.
Наличие акустической связи между вибраторами за счет боковых максимумов характеристики направленности излучателя и связи непосредственно через корпус корабля приводит к появлению «нулевой» помехи, которая проявляется как вспышка индикатора в указателе или как отметка в самописце в районе нуля шкалы. Поскольку во многих эхолотах зажигание неоновой лампы указателя или прожигание бумаги самописца осуществляется в конечном итоге за счет разряда специального конденсатора, то пришедший вслед за нулевой помехой сигнал от малых глубин застает тракт регистрации не подготовленным для его приема—конденсатор не успел перезарядиться.
К аналогичным последствиям приводит и реверберация, которая представляет собой эффект отражения излученной энергии от находящихся в поверхностном слое микроорганизмов, пузырьков воздуха, планктона и т. д. Реверберация растягивает во времени посылочный импульс и тем самым как бы продлевает время действия нулевой помехи. Это растягивание тем больше, чем длиннее по времени сам импульс. Поэтому в последних выпусках эхолотов (НЭЛ-10) продолжительность посылочного импульса меняется в зависимости от измеряемой глубины.
§ 36, Навигационные радиолокационные станции
141
При измерении глубин 10—15 м и менее надлежит пользоваться выключателем нулевой помехи, с помощью которого приемный тракт закрывается на момент посылки сигнала.
И нет рументальные ошибки эхолота определяются его конструктивными особенностями. Однако общей для всех эхолотов с механической разверткой времени и наиболее существенной инструментальной ошибкой является ошибка, обусловленная нестабильностью скорости вращения двигателя развертки времени. Постоянство скорости его вращения обеспечивается АЦР с ошибкой от ±0,5 до 1—1,5% в зависимости от типа АЦР.
Эхоледомеры применяются на подводных лодках и представляют собой приборы, имеющие эхолот и гидростат. Вибратор-излучатель посылает звуковой импульс в сторону поверхности моря. Отраженный сигнал принимается вибратором-приемником, и на ленте самописца реги-стируется расстояние от вибратора до поверхности моря.
Если водная поверхность покрыта льдом, то на ленте самописца эхо-ледомера показывается расстояние до нижней поверхности льда. Для определения толщины подводной части льда эхоледомер снабжается гидростатом, с помощью которого на той же ленте показывается глубина погружения подводной лодки. Толщина подводной части льда получается как разность показаний гидростата и эхоледомера.
Точность измерения толщины льда определяется точностью измерений по гидроакустическому и гидростатическому каналам.
По гидроакустическому каналу сигнал регистрируется с помощью механической развертки времени, скорость вращения которой, как и в эхолотах типа НЭЛ, пропорциональна расчетной скорости звука гр = 1500 м[сек. Так как действительная скорость звука отличается от расчетной, то в измерения следует вносить поправку, определенную с помощью номограммы, придаваемой в комплект прибора. Для автоматического учета этой поправки следует изменить скорость вращения двигателя развертки времени так, как это делается в эхолотах.
Меры борьбы с реверберационной и «нулевой» помехами те же, что и в эхолотах.
На показания гидростата оказывают влияние атмосферное давление над поверхностью моря и давление внутри корпуса подводной лодки, а также изменение плотности воды. Последний фактор учитывается вводом поправки за изменение скорости звука при изменении температуры и солености воды.
Эхоледомеры обеспечивают не только определение толщины подводной части льда и глубину погружения подводной лодки, но они могут дать информацию о характере волнения, а также о состоянии нижней поверхности льда и наличии разводий.
§ 36. НАВИГАЦИОННЫЕ РАДИОЛОКАЦИОННЫЕ СТАНЦИИ
Навигационные радиолокационные станции (НРЛС) предназначены для обнаружения и определения положения объектов с помощью радиоволн, отражающихся от этих объектов.
Положение отражающих объектов определяется относительно излучателя НРЛС измерением расстояния и направления с излучателя на объект, поэтому НРЛС являются дальномерно-азимутальными радионавигационными средствами.
142 Г лава 6. Основные характеристики ТСК
Если координаты отражающего объекта известны, то измеренные с помощью НРЛС навигационные параметры позволяют определить место корабля. Возможность решения этой задачи при плавании в сложных условиях (отсутствие видимости, наличие навигационных опасностей и т. д.) определяет особую ценность НРЛС как средства кораблевождения.
Технические характеристики НРЛС следующие: максимальная и минимальная дальности действия, разрешающая способность по расстоянию и направлению, время непрерывной работы и время, необходимое для включения станции. Основные технические данные некоторых НРЛС приведены в табл. 14.
Таблица 14
Технические данные некоторых НРЛС
Технические данные яНептун* „Створ* „Дон* я Донец*
Длина волны, см 3,2 3,2 3,2 3,2
Диаметр экрана ЭЛТ, см 300 230 300 230
Мертвая зона (для высоты антенны 15 м), м 95 85 85 85
Шкалы дальности, мили 1,5; 5; 15; 30 0,5; 1; 2,5; 10; 25 0,8; 2,5; 5; 15; 30; 50 1,5; 3; 6; 12; 24
Цена деления НКД, мили 0,5; 1;5; 10 0,1; 0,2; 0,5; 2; 5 0,5; 0,5; 1; 5; 10; 10 0,2; 0,5; 1; 2; 4
Точность определения пеленга 2° 2° 1° 2°
Точность определения дистанции, % от шкалы 0,5-3,0 3-5 0,6—1,5 3
Разрешающая способность по дальности, м 40—150 40 15—150 20-90
Время непрерывной работы, ч 8 Неограни-чено 24 24
Максимальная дальность действия (дальность обнаружения цели) — наибольшее расстояние, на котором возможно обнаружение объектов и определение их положения. Этот параметр зависит от эффективной отражающей площади объекта, условий распространения радиоволн, мощности и длительности излучаемого радиоимпульса, остроты диаграммы направленности антенны, чувствительности приемника и др. Максимальная дальность действия существующих НРЛС составляет 25—50 миль.
Минимальная дальность действия (мертвая зона) ограничивает пространство вокруг антенны, в котором объекты, способные отражать радиоволны, не обнаруживаются. Площадь центрального пятна мертвой зоны в основном определяется длительностью импульса, скоростью срабатывания антенного переключателя, степенью восстанавливаемости необходимой чувствительности приемника, а также высотой установки и диаграммой направленности антенны. В некоторых образцах НРЛС минимальная дальность действия не превышает 30—45 м.
Разрешающая способность по расстоянию — минимальное расстояние, на котором объекты, расположенные в одном направлении от РЛС, на экране ЭЛТ наблюдаются раздельно. Этот параметр в современных НРЛС находится в пределах 30—90 м.
$ 36. Навигационные радиолокационные станции
143
Разрешающая способность по направлению определяется минимальным углом между направлениями на отражающие объекты, при котором эти объекты, находясь на одинаковом расстоянии от РЛС, обнаруживаются раздельно. Величина этого параметра в НРЛС обычно не превышает 1—2°.
Точность измерения расстояния и направления оценивается, как правило, средними квадратическими ошибками.
Радиолокационное изображение на экране ЭЛТ может быть ориентировано по меридиану с помощью сельсина-приемника, работающего от гирокомпаса (режим «Норд») и по диаметральной плоскости корабля (режим «Курс»).
Для определения расстояний на экране индикатора НРЛС создаются неподвижные кольца и подвижный круг дальности (НКД и ПКД). Уровень яркости колец, наблюдаемых на экране, устанавливается с помощью регуляторов «НКД» и «ПКД», выведенных обычно на переднюю панель индикатора. НКД во время работы НРЛС должны быть включены все время; их яркость регулируется так, чтобы получить тонкое и четкое изображение колец дальности. При измерении расстояния с помощью ПКД неподвижные кольца должны быть убраны, так как они затрудняют работу оператора.
В результате работы НРЛС на экране индикатора отображается окружающая корабль навигационная обстановка. Изображение этой обстановки при движении корабля перемещается пропорционально его скорости относительно центра развертки, т. е. относительно точки, совпадающей по своему положению с точкой нахождения корабля. Индикаторы НРЛС подобного рода принято называть индикаторами с относительным движением. При наблюдении окружающей обстановки оператор видит, что объекты перемещаются по экрану не с истинными, а с относительными скоростями; направление движения подвижных объектов также представляется искаженным.
Эти явления устраняются в индикаторах НРЛС с истинным движением, у которых на экране ЭЛТ воспроизводится истинная картина окружающей обстановки. Наблюдатель, находящийся у экрана, может видеть истинное движение своего корабля, а также других подвижных объектов. Берег и неподвижные объекты по экрану не перемещаются. Для достижения этой цели центр развертки непрерывно перемещается в направлении движения собственного корабля. Скорость перемещения устанавливается равной путевой скорости своего корабля. Информация о направлении и скорости, используемая вычислительным устройством для перемещения центра развертки, поступает от гирокомпаса и лага. Эти входные данные предварительно исправляются поправками указанных приборов.
Схемы некоторых навигационных РЛС («Дон», «Нептун») позволяют подключить проекционное индикаторное устройство, предназначенное для совмещения радиолокационного изображения на экране ЭЛТ с навигационной картой. Такое устройство, известное под названием блока «Пальма», представляет собой индикатор кругового обзора с приспособлением для совмещения радиолокационного изображения с картой. Это приспособление состоит из полупрозрачного зеркала, прикрепленного снизу под углом 45° к плоскости экрана ЭЛТ. На столе под зеркалом помещается навигационная карта. При рассматривании карты сверху, через зеркало, оказывается возможным одновременно наблюдать как отраженное от зеркала радиолокационное изображение с экрана ЭЛТ, так и участок навигационной карты. Изменяя масштаб изображения и перемещая карту, можно добиться совмещения изображения местности на экране ЭЛТ с навигационной картой. Центр радиолока
144
Глава 6. Основные характеристики ТСК
ционного изображения, он же центр развертки, проектируясь на карту, будет фиксировать место корабля в данный момент времени.
Проверка готовности НРЛС к работе. Основным этапом подготовки НРЛС к работе является выверка аппаратуры в базе.
Выверка НРЛС должна производиться строго в соответствии с инструкцией по эксплуатации аппаратуры. Эта работа выполняется специалистом, обслуживающим данную НРЛС.
НРЛС можно считать подготовленной к работе, если выполняются следующие основные условия:
1) величины токов и напряжений в соответствующих цепях находятся в допустимых пределах;
2) начало линии развертки точно совпадает с центром ее вращения;
3) центр вращения механического визира совпадает с началом развертки электронного луча на экране ЭЛТ;
4) измеренные расстояния соответствуют истинным (с точностью, допустимой для данной шкалы дальности);
5) курсовые углы, снятые с экрана ЭЛТ, соответствуют визуальным (с точностью, допустимой для данной НРЛС);
6) линия отметки курса строго параллельна диаметральной плоскости корабля;
7) подвижная шкала точно согласована с репитером гирокомпаса;
8) дальность действия на каждой из шкал соответствует техническим данным;
9) НРЛС дает достаточно яркое и четкое изображение как ближних, так и дальних объектов.
Характеристика точности измерений и рекомендации по повышению точности измерений. Точность определения направлений с помощью НРЛС обусловливается ошибками пеленгования, возникающими вследствие:
— влияния ширины диаграммы направленности в горизонтальной плоскости;
— несовпадения начала развертки с центром вращения визирного устройства;
— несинфазности вращения антенны и линии развертки;
— ошибки в поправке гирокомпаса;
— неточного визирования.
В результате действия перечисленных факторов суммарная средняя квадратическая ошибка пеленгования в современных НРЛС составляет 1—2°.
Для повышения точности пеленгования необходимо учитывать факторы, порождающие ошибки пеленгования, и принимать меры по ограничению их влияния.
Способ определения места по радиолокационным пеленгам рекомендуется применять только при малых расстояниях до ориентиров, когда точность определения места по расстояниям ниже, чем по пеленгам.
При пеленговании следует выбирать отдельно лежащие точечные ориентиры, расположенные на сравнительно больших расстояниях от центра развертки. Это позволит в некоторой степени уменьшить ошибку визирования и ослабить влияние ширины диаграммы направленности. Так как растягивание изображения точечного объекта происходит симметрично в обе стороны от оси диаграммы направленности, то при пеленговании визир необходимо установить точно на середину эхо-сигнала на экране ЭЛТ.
При необходимости пеленгования оконечностей больших объектов, мысов, молов и т. д. необходимо выбирать объекты, вытянутые на экране в радиальном направлении, в сторону корабля, а не по окружности. Это
£ 36. Навигационные радиолокационные станции
145
способствует уменьшению ошибки пеленгования за ширину диаграммы, так как растягивание отметки всегда происходит в направлении с берега в море. Полезно также уменьшать при этом усиление приемника.
Точность измерения расстояний в основном определяется ошибками дальномерного устройства, субъективными ошибками оператора, а также ошибками, возникающими при выборе и опознавании объектов, расстояние до которых подлежит измерению.
Для уменьшения указанных ошибок необходимо соблюдать следующие основные рекомендации:
— для измерений расстояний выбирать точечные ориентиры или части больших объектов, выступающие в сторону корабля;
— дальномерное устройство должно быть откалибровано с возможно высокой точностью; калибровку проверять при всяком удобном случае;
— уровень усиления приемника и усиление по ближним объектам установить оптимальные, не допуская слияния отдельных эхо-сигналов и добиваясь получения на экране четкого изображения;
— при измерении расстояния предпочтительнее пользоваться «приемом касания» ПКД к эхо-сигналу, следя за тем, чтобы линия ПКД не пересекала яркостную отметку. Толщина светящейся линии ПКД должна быть минимальной;
— измерение расстояния повторять несколько раз с различных ракурсов, что позволит исключить ошибку опознавания ориентиров.
Чтение радиолокационного изображения и краткая характеристика помех. Эхо-сигналы, отраженные от различных объектов, расположенных вокруг корабля в зоне действия НРЛС, создают на экране индикатора отметки, различающиеся по степени яркости, форме и величине (яркостные отметки). Совокупность этих отметок на экране ЭЛТ и образует радиолокационное изображение. Отражательная способность объектов зависит от их размеров и формы, от материала, из которого состоит объект, а также от характера отражающей поверхности. Наибольшее влияние на силу эхо-сигнала оказывают форма и размеры объекта.
Наилучшие сигналы можно получить при прямом угле падения электромагнитной волны от объектов с плоскими вертикальными гранями, имеющими гладкие поверхности (зеркальное отражение). Гладкими поверхностями для радиоволн 3,2 см считаются такие, неровности которых по своим размерам не превышают 0,8 см. Например, снежный и ледяной покровы, ровный песчаный пляж, стены зданий и т. д. Металлические поверхности обладают большей отражающей способностью по сравнению с поверхностями таких материалов, как, например, дерево, земля, камень, песок и др. С увеличением размеров объектов сила эхо-сигналов на экране ЭЛТ возрастает, так как увеличивается количество отраженной энергии.
Ниже в табл. 15 приводятся ориентировочные дальности обнаружения различных объектов с помощью корабельной НРЛС (высота антенны 15 м, длина волны 3,2 см).
Вид эхо-сигналов на экране радиолокатора зависит также от взаимного расположения облучаемых объектов, ракурса облучения, расстояния между НРЛС и объектом, а также от интерференции радиоволн. Благодаря действию указанных факторов, радиолокационное изображение, в основном правильно отражая окружающую обстановку, может иметь особенности, которые необходимо учитывать при использовании НРЛС. Нередко радиолокационное изображение окружающей местности значительно отличается от истинного, что может привести к ошибкам в опознавании берега или отдельных объектов.
Ю Заказ 1833
146
Глава 6. Основные характеристики ТС К
Для облегчения опознавания берега, не имеющего характерных радиолокационных ориентиров, а также для увеличения дальности радиолокационного обнаружения навигационных знаков используются радиолокационные маяки-ответчики (РМО). Эти средства работают в комплексе с корабельными навигационными РЛС.
Таблица 15
Объект наблюдения Дальность обнаружения МИЛН
Низменный песчаный берег (пляж) 1-3
Холмы и «горы 15-40
Скалы и утесы высотой до 60 м 20
Приливо-отливная волна 0,5-1
Мели и рифы До 4
Сулой До 2
Ровные ледяные поля До 3
Отдельные льдины До 3
Айсберги (высокие) 3-15
Смерзшийся лед, торосы До 5
Волноломы, пирсы 5-10
Здания 5-20
Мосты и доки До 5
Отдельно расположенные маяки 5—10
Шлюпки , До 2
Малые деревянные суда 1-4
Рыболовные траулеры 6-9
Плавучие маяки 6—10
Суда водоизмещением 1000 m 6—10
Суда водоизмещением 3000 m 10-13
Суда водоизмещением 10 000 m ............. 10—16
Суда водоизмещением 50 000 m ............. 16-20
Буи малые морские 1—2
Буи большие морские 3-4
Буи с пассивными радиолокационными отражателями . . 6-8
Слабое волнение 0,5—1
Сильное волнение 2—4
Дождевой шквал 3—10
Грозовые облака 2—5
Сильные ливни (грозы) 10-20
На экране индикатора НРЛС наряду с яркостными отметками от реальных объектов могут появляться ложные отметки, являющиеся результатом воздействия на работу радиолокатора различного рода помех.
Некоторые виды помех радиолокационному приему, наиболее часто встречающиеся в практике использования НРЛС, приведены в табл. 16.
$ 36. Навигационные радиолокационные станции
147
Таблица 16
Основные виды помех радиолокационному приему и их опознавание
Причины возникновения помех Проявление помехи на экране индикатора Рекомендации по опознаванию и исключению помехи
Помехи от волнения Мерцающие эхо-сигна- Использование схемы
моря лы, расположенные вокруг регулировки усиления по
Метеорологические факторы: центра развертки. С увеличением волнения помехи образуют сплошную засвеченную зону в центре экрана с радиусом 2,5—3 мили ближним объектам
— ливневые осадки; Плотная засветка экрана
— дождевые шквалы, Отметки в виде хлопь- Манипулирование уси-
густой снегопад, град; ев ваты, перемещающиеся по экрану лением приемника, длительное и тщатель-
— моросящий дождь, Четко не проявляются. । ное изучение формы и плотности отметок,
редкий снегопад; Сокращение дальности действия НРЛС, ухудшение контрастности изображения сличение отметок с картой навигационной обстановки
— облака Яркие отметки
Помехи от других РЛС Штрихи или точки, расходящиеся от центра экрана по спиральным (круговым) линиям. Обыч- Легко опознаются. Манипулирование усилением приемника или в некоторых НРЛС —переход на
Помехи от частей своего корабля: но проявляются на шкалах большой дальности другую рабочую частоту
— наличие теневых сек- Затемненные, чаще все- Перестановка антенны
торов; го узкие секторные участки, не содержащие яркостных отметок НРЛС. Определение границ секторов и их учет при использовании НРЛС
— ложные эхо-сигналы Яркостные отметки, Тщательное изучение
от отражающих по- обычно располагающиеся условий отражения радио-
верхностей и предме- в теневых секторах экра- импульсов; выявление
тов на, на тех же расстояниях, что и отметки, создаваемые полезным сигналом (отметки целей) предметов, создающих помехи, уменьшение их отражающих свойств
Ложные эхо-сигналы от Яркостные отметки Применение схемы
боковых лепестков ан- (часто дугообразной фор- ВАРУ по ближним объ-
тенны мы), располагающиеся в радиальных направлениях на одинаковом расстоянии от центра развертки ектам, уменьшение общего усиления приемника
Ложные эхо-сигналы Несколько равноудален- Полезным эхо-сигналом
многократного отражения ных друг от друга яр- является отметка, бли-
от объекта с большой костных отметок, распо- жайшая к центру экрана.
отражающей поверхно- ложенных в направлении Остальные отметки —
стью (корабли и суда, находящиеся вблизи собственного корабля) отражающего объекта ложные
10*
148
Глава 6. Основные характеристики ТСК
§ 37. КОРАБЕЛЬНЫЕ РАДИОПЕЛЕНГАТОРЫ
Корабельные радиопеленгаторы служат для определения направления (радиокурсового угла или радиопеленга) с корабля на источники излучения электромагнитных колебаний.
Сущность радиопеленгования состоит в определении положения нормали к фронту радиоволны, приходящей в точку приема на корабле от берегового излучателя. Фронт радиоволны, или линия, соединяющая точки с одинаковыми значениями фазы напряженности электрического поля радиоволны, представляет собой окружность, в центре которой находится излучатель электромагнитных волн.
Для радиопеленгования используется замкнутая рамочная антенна (рамка), обладающая свойством направленного радиоприема. Линейные размеры рамочной антенны выбираются значительно меньшими по сравнению с длиной радиоволны. Приемник и индикаторное устройство, также входящие в состав радиопеленгатора, обеспечивают прием радиосигналов, их усиление и измерение радиокурсового угла (РКУ). Для получения радиопеленга (РП) в индикаторное устройство автоматически вводится курс корабля от гирокомпаса. В некоторых типах радиопеленгаторов отсчет курса по азимутальной шкале устанавливаетя вручную.
Устранение неоднозначности в отсчетах радиокурсового угла (радиопеленга), возникающей от наличия двух минимумов в диаграмме направленности рамочной антенны, достигается одновременным приемом радиосигнала на рамку и ненаправленную антенну. С этой целью у большинства современных корабельных радиопеленгаторов антенное устройство состоит из двух взаимно перпендикулярных неподвижных рамок и открытой (лучевой) антенны. Эта система антенн совместно с гониометрическим устройством обеспечивает направленный радиоприем и разрешение неоднозначности отсчетов.
В основу классификации существующих корабельных радиопеленгаторов положен метод индикации радиопеленга. По этому признаку различают радиопеленгаторы:
— слуховые, в которых радиопеленг определяется по минимальному уровню звукового сигнала в оконечном устройстве (громкоговорителе, телефоне);
— визуальные, в которых индикация радиопеленга выполняется непосредственно подвижным указателем отсчетного устройства шкального типа или по характерным линиям фигуры, появляющейся на экране электронно-лучевой трубки при пеленговании.
Слуховые радиопеленгаторы, как правило неавтоматические, т. е. направление на радиомаяк может быть определено лишь в результате установки вручную указателя пеленга в положение, соответствующее минимальному уровню звукового сигнала. Момент достижения минимума звука, определяемый на слух, зависит от степени натренированности оператора. Следовательно, и точность радиопеленгования в слуховых радиопеленгаторах в значительной мере определяется субъективными качествами оператора.
В автоматических радиопеленгаторах индикация радиопеленга выполняется независимо от оператора. Действия оператора в основном сводятся к настройке приемного устройства радиопеленгатора и отсчету радиопеленга.
К автоматическим корабельным радиопеленгаторам относятся:
— радиопеленгаторы со следящей искательной катушкой гониометра;
§ 37. Корабельные радиопеленгаторы
149
— двухканальные радиопеленгаторы с визуальным отсчетом радиопеленга;
— одноканальные радиопеленгаторы с вычерчиванием диаграммы направленности приема.
Радиопеленгаторы со следящей искательной катушкой. В этих приборах искательная (роторная) катушка гониометра устанавливается в положение радиопеленга электродвигателем, который в свою очередь управляется специальной схемой слежения. Стрелка — указатель радиопеленга, механически связанная с искательной катушкой, непрерывно фиксирует по круговой шкале отсчет радиопеленга.
Преимущество автоматических радиопеленгаторов со следящей искательной катушкой гониометра по сравнению со слуховыми заключается в возможности исключения субъективных ошибок оператора.
В схеме радиопеленгатора предусматривается вариант работы в слуховом режиме. Обычно этот вариант работы применяется в условиях сильных помех, создаваемых близкими по частоте к полезному сигналу мешающими радиостанциями, а также в случае отказа системы автоматического пеленгования.
Двухканальные радиопеленгаторы с визуальным отсчетом радиопеленга. В визуальных радиопеленгаторах с использованием в качестве оконечного устройства электронно-лучевой трубки (двухканальные и одноканальные радиопеленгаторы) фигура, наблюдаемая на экране ЭЛТ при работе берегового излучателя, определенным образом независимо от оператора указывает направление прихода электромагнитных волн. Однако для отсчета радиопеленга необходимо выполнить некоторые дополнительные действия (совмещение подвижного визира с характерной линией наблюдаемой фигуры, определение стороны пеленга, отсчет по шкале и т. д.). Поэтому визуальные радиопеленгаторы с электроннолучевой трубкой можно считать автоматическими лишь условно, применяя этот термин только в отношении возможности визуальной индикации направления на излучатель радиоволн.
Основная часть этих радиопеленгаторов — двухканальное приемно-усилительное устройство, подключенное со стороны входов к двум неподвижным взаимно перпендикулярным рамкам, а со стороны выходов — к системе отклоняющих пластин ЭЛТ. В случае полной идентичности обоих каналов по усилению и отсутствия в них дополнительных фазовых сдвигов на экране ЭЛТ наблюдается светящаяся линия, указывающая направление прихода радиоволны.
Совмещая подвижный визир с этой линией,, оператор имеет возможность отсчитать радиопеленг по круговой шкале, охватывающей экран ЭЛТ.
При наличии фазовых сдвигов между напряжениями в каналах на экране трубки наблюдается эллипс, большая ось которого по-прежнему устанавливается в направлении излучателя радиоволн. В этом случае оператор должен стремиться установить линию визира по большой оси эллипса. Неточность установки приводит к появлению субъективных ошибок в отсчете радиопеленга. Неодинаковость усиления приемников каждого канала вызывает отклонение оси эллипса от искомого направления. Возможные по этой причине ошибки радиопеленга исключаются выравниванием усиления каналов, а также путем выравнивания фазировкой напряжений в обоих каналах.
Одноканальные радиопеленгаторы с вычерчиванием диаграммы направленности приема. В процессе работы берегового излучающего устройства на экране ЭЛТ появляется изображение диаграммы направленности приема рамочной антенны. Эта фигура внешне напоминает пропеллер, ось симметрии которого, проходящая через центр экрана и конеч
150
Глава 6. Основные характеристики ТС К
ные точки фигуры, будет указывать направление на работающую радиостанцию. Для отсчета радиопеленга используется подвижный визир.
Технические характеристики радиопеленгаторов следующие: точность радиопеленгования и время измерения радиопеленга.
Точность радиопеленгования оценивается средней квадратической ошибкой радиокурсового угла. Эта ошибка зависит от факторов, рассмотренных ниже, и в зависимости от типа радиопеленгатора может достигать 1—2°.
Время измерения радиопеленга включает время, необходимое для определения направления на работающую радиостанцию, определения стороны и отсчета радиопеленга. В слуховых радиопеленгаторах это время составляет в среднем 1—2 мин, а в автоматических 15—30 сек.
К техническим характеристикам радиопеленгаторов относятся также диапазон длин волн (частот) приемного устройства, чувствительность радиопеленгатора, чувствительность и избирательность приемника, потребляемая мощность, род работы.
Навигационные радиопеленгаторы проектируются в основном для работы на диапазонах длинных и средних волн (200 кгц — 3 Мгц).
Чувствительность радиопеленгатора. Под чувствительностью радиопеленгатора подразумевают напряженность поля, которая требуется для отсчета пеленга с ошибкой, не превышающей заданную величину. Чувствительность радиопеленгатора зависит от чувствительности регистрирующего прибора (оконечного устройства), крутизны диаграммы направленности вблизи значения угла, соответствующего минимуму приема, и от уровня помех.
За меру чувствительности в слуховом радиопеленгаторе часто принимают модуль чувствительности, который представляет собой произведение напряженности поля, соответствующей реальной или инструментальной чувствительности, на угол молчания.
Углом молчания называется угол, внутри которого слышимость сигналов радиомаяка в телефонах при вращении искательной катушки гониометра отсутствует. Отсчет пеленга устанавливается оператором по среднему значению из двух отсчетов, соответствующих границам угла молчания. Среднюю квадратическую ошибку пеленга, как показывает опыт, в зависимости от навыков оператора и времени, затрачиваемого на взятие пеленга, можно принять равной у — от величины угла молчания.
Чувствительность двухканальных радиопеленгаторов оценивается тангенсом угла 6, представляющим собой отношение ширины светящейся линии на экране ЭЛТ, указывающей направление на радиомаяк, к ее длине. Средняя квадратическая ошибка определения радиокурсового угла составляет около от угла 6; при средних условиях угол 6 имеет величину 2—5°.
Технические характеристики радиопеленгаторов, относящиеся к параметрам их приемных и усилительных трактов, источников питания и конструкции, определяются в основном теми же показателями, что и у обычных радиотехнических устройств средне- и длинноволнового диапазона. Они выбираются с таким расчетом, чтобы обеспечить надежную, экономичную и помехоустойчивую работу радиопеленгатора независимо от условий его эксплуатации (наличия помех, широты плавания, сезона года, времени суток и т. п.).
Характеристика ошибок радиопеленгатора и рекомендации по повышению точности радиопеленгования. Случайные ошибки проявляются в виде быстрых или медленных колебаний радиопеленгов около их сред
$ 37. Корабельные радиопеленгаторы
151
них значений. Влияние этих ошибок на точность радиопеленгования может быть сведено к минимуму выполнением многократных наблюдений и осреднением полученных результатов измерений.
Систематические ошибки приводят к устойчивым отклонениям радиопеленга от истинного направления на излучающую радиостанцию. Часть систематических ошибок может быть выявлена и устранена в процессе выверки радиопеленгатора.
В зависимости от причин возникновения различают: инструментальные ошибки радиопеленгатора; ошибки, вызванные условиями распространения радиоволн; субъективные ошибки и ошибки, обусловленные влиянием местности и вторичных излучателей, расположенных вокруг рамки.
Инструментальные ошибки. К инструментальным относятся ошибки радиопеленгатора, зависящие от выбранной схемы технической реализации, особенностей конструкции, технологии изготовления, качества монтажа и правильности установки на корабле.
Значительная доля инструментальных ошибок порождается антенным эффектом рамки.
Антенным эффектом рамки называется ее способность осуществлять ненаправленный прием радиосигналов, излучаемых радиомаяком. Это явление возникает в основном вследствие наличия несимметричных емкостных связей между сторонами рамочной антенны и окружающими предметами (корпусом корабля, землей), электрической несимметрии входных цепей радиоприемного устройства, а также непосредственного приема радиоволн соединительными проводами рамки. Антенный эффект при радиопеленговании в слуховых радиопеленгаторах проявляется в виде расплывчатости минимума слышимости, излома осей минимумов, а в визуальных — эллиптичности линии пеленга. В конечном итоге ухудшается точность радиопеленгования.
С целью ослабления антенного эффекта применяется электростатическое экранирование рамочной антенны с ее соединительными проводами и симметрирование входных цепей радиоприемного устройства, включая и рамочную антенну. Для более полной компенсации антенного эффекта в процессе радиопеленгования используется напряжение от ненаправленной антенны, которое вводится во входные цепи радиоприемника в противофазе с вызывающим антенный эффект напряжением рамочной антенны.
Прочие инструментальные ошибки (боковой эффект рамки, ошибки гониометра, ошибки установки и ориентировки рамочной антенны, влияние неодинаковой электрической длины кабелей и др.) в ряде случаев достигают значительных величин. Обычно эти ошибки выявляются в процессе испытаний или установки аппаратуры на корабле и учитываются одновременно с радиодевиацией.
Ошибки, вызванные условиями распространения радиоволн. Эти ошибки возникают в случае приема рамочной антенной поверхностных и пространственных радиоволн. Результирующее поле в точке приема оказывается эллиптически поляризованным. Поэтому в горизонтальных частях рамки индуктируются э. д. с., которые воздействуют на входные цепи приемника наряду с э. д. с., наводимыми в вертикальных сторонах рамки. Вследствие этого явления направление на работающий радиомаяк, определяемое радиопеленгатором, будет ошибочным. Ошибки радиопеленгатора, возникающие под влиянием пространственной радиоволны, называются поляризационными ошибками или «ночным эффектом». Последнее название объясняется тем, что в ночное
152
Глава 6. Основные характеристики ТС К
время влияние пространственной радиоволны сказывается сильнее из-за уменьшения поглощающих свойств нижних слоев ионосферы.
С течением времени, вследствие изменения условий отражения радиоволн от ионосферы, поляризационные ошибки радиопеленгования также изменяются. Эти ошибки могут достигать значительных величин (до 30° и более). Наряду с искажениями пеленгов имеют место также замирания сигналов, расплывчатость минимума (в слуховых радиопеленгаторах), а у визуальных радиопеленгаторов с ЭЛТ наблюдается изменение формы и размеров эллипса, сопровождаемое качанием его большой оси. Рекомендации по уменьшению ошибок пеленгования, обусловленных влиянием ионосферы, приводятся ниже.
Субъективные ошибки. Ошибки подобного рода присущи, в основном, слуховым и в некоторой степени тем визуальным радиопеленгаторам, у которых визир совмещается с линией пеленга (большой осью эллипса) на экране ЭЛТ.
Величина этих ошибок в слуховых радиопеленгаторах зависит от чувствительности уха оператора, четкости минимума, величины угла молчания, следовательно, от уровня помех и других факторов. У натренированного оператора в реальных условиях предельные субъективные ошибки обычно не превышают 0,5—0°,7. При работе с визуальными радиопеленгаторами указанные ошибки близки к 0,2—0°,3.
Ошибки, обусловленные влиянием местности (береговой эффект) и вторичных излучателей, расположенных вокруг рамки (радиодевиация). Когда вблизи радиопеленга проходит граница двух участков подстилающей поверхности с различными электрическими параметрами (море — суша), а радиоволны пересекают эту линию под острыми углами (10—20°), в отсчетах радиопеленга будут появляться ошибки. Появление этих ошибок объясняется искривлением фронта радиоволны вблизи береговой черты вследствие изменения скорости распространения радиоволн над различными участками подстилающей поверхности. Величины ошибок пеленга за счет берегового эффекта могут достигать в ряде случаев 2-3°.
Металлические предметы, расположенные вблизи антенной системы радиопеленгатора (корпус корабля, его надстройки, рангоут, такелаж, вооружение и т. д.), оказывают сильное влияние на работу корабельного радиопеленгатора. Это влияние сказывается в первую очередь в виде появления систематических ошибок радиопеленгования, называемых радиодевиацией, и ухудшения качества минимума слышимости (размытость минимума).
Возникновение радиодевиации объясняется появлением вторичного излучения электромагнитных волн от указанных выше металлических предметов. Эти предметы в определенных комбинациях могут быть представлены в виде эквивалентных электрических элементов: открытых и замкнутых контуров, емкостей, индуктивностей и т. д. Под действием электромагнитного поля радиоволн, приходящих от радиомаяка на корабль, они превращаются во вторичные излучатели. Поле вторичных излучателей, складываясь с основным полем, образует результирующее поле, под влиянием которого показания радиопеленгатора будут ошибочными, т. е. появится радиодевиация.
Радиодевиация вычисляется как разность между истинным значением курсового угла (КУ) на радиомаяк и измеренным значением радио-курсового угла (РКУ). Эта разность в виде поправки со своим знаком придается к отсчету радиокурсового угла или радиопеленга для получения их истинного значения.
Определение радиодевиации изложено в § 54.
§ 37. Корабельные радиопеленгаторы
153
Каждому РКУ соответствует свое значение радиодевиации, но она не остается постоянной. Факторами, влияющими на изменение радиодевиации, являются:
— изменение частоты принимаемых колебаний;
— изменение осадки корабля;
— крен и дифферент;
— электрическая проводимость морской воды;
— качество контактов (величина контактных сопротивлений) в местах соединений элементов рангоута и такелажа с корпусом корабля;
— изменение положения корабельных пушек, орудийных башен, торпедных аппаратов, грузовых стрел и других предметов относительно исходного.
Радиодевиацию можно уменьшить, если рамочную антенну установить как можно дальше от корпуса корабля и вторичных излучателей.
Для компенсации радиодевиации применяются механические и электрические способы. Эта работа выполняется периодически по мере возрастания радиодевиации свыше допустимых величин.
Остаточная радиодевиация определяется и учитывается при радиопеленговании графическим или табличным способом. В автоматических радиопеленгаторах со следящим приводом предусмотрено устройство для механической компенсации остаточной радиодевиации до величины 0,3—0°,5.
Рекомендации по повышению точности радиопеленгования. Для повышения точности радиопеленгования необходимо соблюдать следующие основные правила.
1. Не рекомендуется производить радиопеленгование за 1 ч до и после восхода и захода Солнца. В ночное время при появлении признаков поляризационных ошибок (расплывчатость минимума, его непостоянство во времени, замирания) можно пеленговать лишь радиомаяки, расположенные на расстояниях не более 25—30 миль.
В визуальных радиопеленгаторах с ЭЛТ следует определить границы качания большой оси эллипса на экране и отсчитывать пеленг по ее осредненному положению.
2. Пеленги на радиомаяк необходимо определять путем осреднения ряда последовательных отсчетов с приведением ихкодному моменту; это позволит уменьшить субъективные ошибки оператора.
3. Для уменьшения ошибок за счет берегового эффекта необходимо следить за тем, чтобы пеленги на радиомаяк пересекали береговую черту под углами не менее 20°, а расстояние до берега превышало 3—5 длин рабочей волны радиомаяка.
4. На качке отсчеты пеленгов брать при прямом положении корабля.
5. Во время радиопеленгования все подвижные устройства на корабле привести в положение, соответствующее тому, при котором определялась остаточная радиодевиация. Корабельные антенны изолировать.
6. При наличии помех необходимо в слуховых радиопеленгаторах определить границы угла равной слышимости и радиопеленг отсчитывать путем осреднения граничных отсчетов. В визуальных радиопеленгаторах для отсчета пеленга подвижный визир совмещать с продольной осью симметрии светящегося прямоугольника, образующегося из линии на экране ЭЛТ под влиянием помех.
В визуальных автоматических радиопеленгаторах со следящей катушкой при колебаниях указателя необходимо также осреднять отсчеты измеряемых пеленгов.
154
Глава 6, Основные характеристики ТСК
7. В двухканальных радиопеленгаторах с визуальным отсчетом перед радиопеленгованием выровнять амплитуды и фазы напряжений в обоих каналах.
Если на входы двухканального радиопеленгатора с ЭЛТ попадают сигналы двух одновременно работающих радиостанций с близкими частотами, то на экране будет наблюдаться фигура в виде засвеченного параллелограмма. В этом случае возможно определение направлений на оба источника излучения радиоволн путем последовательной установки линий визира параллельно сторонам наблюдаемой фигуры.
В случае одновременного приема сигналов трех работающих радиостанций фигура, наблюдаемая на экране, превращается в параллелепипед. Направления на радиостанции могут быть приближенно определены путем последовательной установки подвижного визира параллельно каждой из граней параллелепипеда.
Корабельные радиопеленгаторы могут быть также использованы для приема сигналов створных и секторных радиомаяков. В последнем случае возможна совместная работа радиопеленгатора и корабельного индикатора КИ—55, позволяющего производить визуальный отсчет сигналов секторного радиомаяка, что повышает точность определения пеленга на радиомаяк.
§ 38. КОРАБЕЛЬНЫЕ ПРИЕМОИНДИКАТОРЫ ИМПУЛЬСНЫХ РАЗНОСТНО-ДАЛЬНОМЕРНЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ
Импульсные разностно-дальномерные радионавигационные системы предназначены для определения места корабля на основе измерения временных интервалов между моментами приема радиоимпульсов, излучаемых береговыми станциями.
Для получения координат места корабля по двум линиям положения требуется установка на берегу не менее двух пар станций. Одна из станций пары называется ведущей, другая — ведомой. Типовой комплекс обычно включает три станции, которые группируются в две пары.
Комплекс береговых станций совместно с корабельным приемоинди-катором образует радионавигационную систему.
Корабельный приемоиндикатор предназначен для измерения разности времени между моментами приема радиоимпульсов, излучаемых ведущей и ведомой станцией. Измеренные интервалы времени t\ и fa пропорциональны разностям длин соответствующих радиотрасс между излучателями и приемником; они могут быть выражены для каждой пары АВ и АВ в виде:
(6. 23)
гдеJA> tB, tE — время прохождения радиоимпульсами расстояний Z)A, DB, De между береговыми станциями А, В, Е и корабельным приемником соответственно;
Ьх, Ь2 — кратчайшие расстояния между ведущими и ведомыми береговыми станциями (базы);
V' \ ~ время распространения импульсов ведущей станции вдоль базовой линии;
'кД, \е ~ временные задержки излучения импульсов на ведомых станциях (кодовые задержки);
v — скорость распространения радиоволн.
§ 38. Корабельные приемоиндикаторы импульсных РНС 155
На основании (6. 23) по измеренным значениям t\ и t* полагая, что величины кодовых задержек и длины баз известны, можно определить разности расстояний
^в~~ v |А (%! +
= + М (6-24)
Последние выражения представляют параметры двух семейств гипербол с фокусами, находящимися в точках расположения излучателей береговых станций. Для любых измеренных значений /, == const (/2 = const) всегда могут быть найдены соответствующие гиперболы DB — Da = const — Da = const), определяющие в точке пересечения место корабля.
Введение кодовой задержки хк. на ведомых станциях исключает неоднозначность измерений интервалов времени и соответственно определения номеров гипербол. В этом случае оцифровка гипербол возрастает от ведомой станции к ведущей, причем минимальный отсчет будет на продолжении базы со стороны ведомой станции.
Импульсные разностно-дальномерные РНС создаются на различных диапазонах радиоволн. Для обеспечения больших дальностей действия используются диапазоны средних и длинных волн. Корабельные приемоиндикаторы обеспечивают прием импульсных сигналов и измерение временных интервалов между импульсами в пределах всей рабочей зоны РНС, границы которой в зависимости от назначения системы могут проходить на расстояниях 500—2500 км от береговых станций.
Широкое распространение получила разностно-дальномерная средневолновая система Лоран-А. Сигналы береговых станций этой системы состоят из одиночных импульсов.
Импульсные сигналы излучает также разностно-дальномерная импульсно-фазовая длинноволновая РНС Лоран-С. Сигнал ведущей станции этой системы состоит из пакета, включающего 9 импульсов; сигналы ведомых станций излучают пакеты по 8 импульсов в каждом.
Приемоиндикаторы импульсных РНС соответствующей конструкции могут принимать сигналы импульсно-фазовой РНС Лоран-С. Однако в этом случае определение навигационного параметра — разности расстояний — производится только временным методом, т. е. путем измерения интервалов времени между моментами приема импульсов от ведущей и ведомых станций.
Основной показатель приемоиндикатора — точность измерения интервалов времени характеризуется средней квадратической ошибкой измерений (в микросекундах) и зависит от следующих факторов:
— точности синхронизации ведомых станций по сигналам ведущей станции;
— точности измерения временных интервалов путем совмещения огибающих импульсов;
— инструментальных ошибок согласования шкал электрических и механических отсчетных устройств;
— условий распространения радиоволн;
— влияния помех.
С учетом указанных факторов при работе приемоиндикатора РНС типа Лоран-А по сигналам поверхностных радиоволн, огибающих поверхность Земли, средняя квадратическая ошибка измерения навигационного параметра составляет примерно 1,5—2,0 мксек.
При больших уровнях помех (2:1) точность ухудшается, и ошибка может достигать 3—4 мксек.
156
Глава 6. Основные характеристики ТС К
При работе приемоиндикатора по сигналам пространственных радиоволн, отраженных от ионосферы, ошибка может достигать 4—5 мксек и более (на расстояниях 600—800 миль от береговых станций). С уменьшением расстояний ошибка возрастает, так как при малых расстояниях даже незначительное изменение высоты отражающего слоя ионосферы вызывает заметное изменение разности расстояний, проходимых поверхностными и пространственными радиоволнами. Так, например, на расстояниях 250—300 миль от береговых станций могут возникать ошибки до 10—12 мксек (пгг= 1,6 4- 1,9 мили).
Приемоиндикаторы, работающие по сигналам поверхностных радиоволн РНС Лоран-С, позволяют измерять навигационный параметр со средней квадратической ошибкой 1—2 мксек\ при использовании сигналов пространственных радиоволн ошибка достигает 3—10 мксек, как и для РНС Лоран-А.
К техническим характеристикам приемоиндикатора относятся частоты настройки, количество частотных каналов, число частот, число частот повторения, чувствительность, потребляемая мощность. Эти характеристики выбираются так, чтобы удовлетворить заданные требования к радионавигационной системе в целом и обеспечить оптимальный прием сигналов береговых станций.
Приемоиндикаторы, предназначенные для приема сигналов РНС Лоран-А, позволяют осуществлять прием в пяти частотных каналах фиксированной настройки: № 1 1950 кгц, № 2 1850 кгц, № 3 1900 кгц, № 4 1750 кгц, № 5 1800 кгц. В настоящее время используются первые три канала.
Соответственно трем группам частот повторения импульсов: H(High), L(Low) и S(Special) — приемоиндикатор позволяет измерять временные интервалы между импульсами на 24 различных частотах повторения.
Указанные частоты повторения положены в основу обозначения пар береговых станций (ведущая — ведомая). Первый символ обозначения (цифра) означает номер канала, второй (буква) — группу частот и третий (цифра)—точное значение частоты повторения импульсов. Например, 1L3, 2S5, 1Ь0ит. д.
Приемоиндикаторьь в которых предусмотрена возможность приема сигналов РНС типа Лоран-С, имеют дополнительные частотные каналы, позволяющие принимать радиоимпульсы на соответствующей частоте; для РНС Лоран-С эта частота равна 100 кгц.
Частоты повторения пакетов радиоимпульсов в системе Лоран-С объединены в шесть групп: SH(Slow High), SL(Slow Low), SS(Slow Special), H(High), L(Low) и S(Special). В настоящее время используются группы SH, SL, SS и S. Каждая группа частот включает восемь частот повторения, которые пронумерованы от 0 до 7.
Пары станций РНС Лоран-С обозначаются символами, включающими группу частот, частоту повторения пакетов импульсов и обозначение пары станций (X, Y, Z или W), например, SL1-X, SH4-Y и т. д.
Корабельная аппаратура наряду с эпизодическими измерениями навигационного параметра (разности расстояний, выраженной в микросекундах), выполняемыми вручную, обеспечивает автоматическое слежение за сигналами от двух пар береговых станций. В этом случае измерение временных интервалов между импульсами от ведущей и ведомых станций выполняется непрерывно. Простейшие приемоиндикаторы позволяют производить лишь последовательное измерение навигационных параметров для выбранных пар станций.
Приемоиндикаторы КПИ-ЗМ, работающие по сигналам системы Лоран-А, обеспечивают измерение временных интервалов между импуль
§ 38. Корабельные приемоиндикаторы импульсных PH С
157
сами лишь одной пары береговых станций. При переходе к измерениям по другой паре необходимо перестраивать приемоиндикатор.
Приемоиндикатор КПИ-4, работающий по сигналам систем Лоран-А и Лоран-С, позволяет одновременно измерять разности времени между импульсами двух пар береговых станций, работающих на одной частоте, но имеющих различные частоты повторения. Это достигается путем создания двух самостоятельных каналов измерений по каждой паре береговых станций.
Визуальное наблюдение за сигналами производится по экрану электронно-лучевой трубки поочередно по I и II каналам, соответственно парам станций.
Порядок включения корабельной аппаратуры и действий оператора при выполнении навигационных измерений определяется инструкцией по эксплуатации.
Методика опознавания поверхностных и пространственных радиоимпульсов РНС Лоран-А при использовании корабельного приемоиндикатора. Радиоимпульсы системы Лоран-А в ночное время на больших трассах могут претерпевать отражение от различных слоев ионосферы. Вследствие выбора несущей частоты радиоимпульсов в пределах 1,7—2,0 Мгц отражение возникает от ионосферных слоев Е и F, лежащих на различной высоте. По этой причине на экране приемоиндикатора наряду с импульсами поверхностной радиоволны в ряде случаев наблюдаются отраженные радиоимпульсы пространственной радиоволны.
Для навигационных определений могут быть использованы как поверхностные, так и однократно отраженные от слоя Е пространственные импульсы. Во избежание больших ошибок штурману необходимо прежде всего правильно опознать радиоимпульсы, наблюдаемые на экране ЭЛТ. Эта задача представляет значительную трудность и может быть решена лишь при наличии опыта.
Методика опознавания радиоимпульсов на экране ЭЛТ приемоиндикатора основывается на признаках, приведенных ниже.
Опознавание радиоимпульсов по времени их прихода к приемной антенне корабельной аппаратуры. На экране ЭЛТ приемоиндикатора радиоимпульсы поверхностной волны во всех случаях наблюдаются ранее пространственных импульсов. Это объясняется меньшей траекторией поверхностной радиоволны по сравнению с пространственной. Радиоимпульсы, отраженные от высоких слоев ионосферы, будут наблюдаться позже. В общем случае, когда на антенну приемоиндикатора ночью приходят радиоимпульсы поверхностной и пространственных радиоволн
Рис. 52
(например, при удалениях 400—500 км от береговых станций и при малом уровне помех), на экране ЭЛТ может наблюдаться картина, изображенная на рис. 52.
Как видно на рисунке, импульсы пространственных радиоволн сдвигаются вправо по развертке соответственно расположению ионосферных слоев по высоте, что облегчает штурману их опознавание.
158 Глава 6. Основные характеристики ТС К
Для опознавания радиоимпульсов полезно воспользоваться приведенным на рис. 53 графиком, позволяющим судить о задержке Ат различных радиоимпульсов по отношению к импульсам, однократно отраженным от слоя Е (обозначение Ei). В дальнейшем индекс у Е и F означает количество отражений радиоволны от того или иного слоя.
Единственным аргументом для определения искомых задержек Ат является расстояние D (в милях) между кораблем и береговой станцией РНС Лоран-А. Например, для Z) = 400 миль импульс поверхностной радиоволны опережает импульс, отраженный от слоя Е (импульс £j), на 90 мксек; импульсы Е2 и F] задерживаются по отношению к импульсу Е1 на 275 и 560 мксек соответственно. Имея эти данные и анализируя картину расположения импульсов на экране ЭЛТ, можно опознать импульсы поверхностной и пространственных радиоволн.
Импульс поверхностной радиоволны на расстояниях свыше 500—800 миль уже не наблюдается, следовательно, первый импульс, наблюдаемый на развертке, — импульс, отраженный от слоя Еь
На меньших расстояниях (300—350 миль) импульс Е^ зачастую накладывается на импульс поверхностной радиоволны, образуя двугорбый импульс. Передний фронт этого импульса принадлежит импульсу поверхностной радиоволны, по нему и следует производить измерения.
Аналогичная картина может иметь место перед заходом Солнца при наложении на импульс поверхностной радиоволны импульса, отраженного от слоя D — более низкого по сравнению со слоем Е.
Опознавание радиоимпульсов по расстоянию между кораблем и береговой станцией. Сущность применения дистанционного признака при опознавании радиоимпульсов состоит в следующем. Прежде всего необходимо определить, хотя бы приближенно, на какое расстояние могут распространяться поверхностные радиоволны при данных условиях (с учетом подстилающей поверхности, уровня атмосферных помех, широты места). Сравнивая это расстояние с приближенно известным (по счислению) расстоянием между кораблем и излучающей станцией, можно судить о принадлежности импульса к той или иной радиоволне.
$ 38. Корабельные приемоиндикаторы импульсных РНС 159
Дальность приема сигналов поверхностных радиоволн РНС Лоран-А для различных широт в летнее время приближенно может быть оценена по графикам рис. 54.
Когда на пути распространения импульсов поверхностной радиоволны находятся участки суши со значительной протяженностью (50—100 миль и более), то дальность приема импульсов сильно сокращается. Для оценки дальности распространения импульсов поверхностной радиоволны D в зависимости от длины трассы /, проходящей над сушей, можно воспользоваться графиком, приведенным на рис. 55.
Дальность распространения радиоимпульсов, отраженных от слоя Е}, колеблется около 1200—1400 миль. На больших расстояниях нормальный прием импульсов, однократно отраженных от слоя £, становится невозможным вследствие атмосферных помех и внутренних шумов приемного устройства.
Для опознавания радиоимпульсов полезно также воспользоваться схемами рабочих зон, которые имеются в описаниях радиотехнических средств навигационного оборудования издания Гидрографического управления МО. На этих схемах нанесены зоны уверенного приема поверхностных и пространственных радиоимпульсов, по которым можно судить о качестве приема в данном районе плавания.
Опознавание радиоимпульсов по виду изображения на экране приемоиндикатора. Для опознавания радиоимпульсов по изображению на экране ЭЛТ полезно руководствоваться следующими основными закономерностями:
— форма, длительность и амплитуда импульсов поверхностной радиоволны остаются неизменными в течение длительного срока наблюдения;
— те же параметры отраженных от ионосферы импульсов не отличаются стабильностью. В наибольшей степени подвержены изменениям параметры радиоимпульсов, отраженных от более высоких слоев ионосферы;
— импульсы, отраженные от слоя £, вследствие замирания могут изменять свою амплитуду от нуля до максимального значения. Период замираний колеблется в пределах нескольких минут;
— импульсы, отраженные от слоев £а, Е\ и резко изменяют свою амплитуду за сравнительно короткое время (несколько десятков секунд), а их длительность может достигать 1200—1500 мксек (длительность поверхностного импульса РНС Лоран-А равна у основания 100 мксек). На верхушках этих импульсов наблюдается много гребней (пиков), что для них является характерным.
160
Глава 6. Основные характеристики ТС К
Опознавание сигналов PH С Лоран-С. Из-за большой длительности импульсов системы Лоран-С на экране приемоиндикатора обычно наблюдается результирующий импульс, образованный путем сложения в точке приема поверхностных и пространственных радиоволн. На огибающей импульса, особенно в его верхней части и на заднем фронте, может наблюдаться несколько уступов и небольших подъемов. Это в значительной степени затрудняет работу оператора по опознаванию импульсов поверхностной и пространственной радиоволн перед выполнением навигационных измерений.
Основная задача заключается в том, чтобы установить, какой из радиоволн образован передний фронт результирующего импульса. Эту задачу можно решить, исходя из возможной дальности распространения и приема радиоимпульсов различных радиоволн.
Импульсные сигналы поверхностных радиоволн РНС Лоран-С при распространении над морем в северных районах принимаются на расстояниях: днем до 1000 миль, ночью — до 800 миль. В южных районах дальность приема днем составляет около 800 миль, а ночью до 600 миль. Однако использовать поверхностные импульсы для навигационных измерений на этих дальностях приема не представляется возможным из-за воздействия пространственных радиоволн, отраженных от слоя Е. Навигационные определения с использованием поверхностных радиоволн возможны лишь до расстояний, на которых интенсивность поверхностных радиоволн преобладает над интенсивностью пространственных радиоволн, т. е. до расстояний 350—500 миль от береговых станций.
На расстояниях ближе 350—500 миль, т. е. в зоне уверенного приема поверхностной радиоволны днем на экране ЭЛТ наблюдается один стабильный импульсный сигнал (в режиме установки большой скорости развертки), который и используется для навигационных определений. В ночное время, начиная с расстояний 100—150 миль от береговых станций, на задний фронт этого импульса накладывается импульс пространственной радиоволны, однократно отраженной от слоя Е. Это приводит к некоторому искажению формы сигнала — появлению уступа на заднем фронте импульса, что, однако, не вызывает особых затруднений при совмещении передних фронтов импульсов ведущей и ведомых станций.
На расстояниях свыше 500 миль поле пространственной радиоволны, однократно отраженной от слоя Е, преобладает над полем поверхностной радиоволны. Примерно до расстояний 800—1100 миль передний фронт результирующего импульса не соответствует ни поверхностному, ни пространственному импульсам.
На расстояних 1100—1600 миль с известной степенью приближения можно считать, что результирующий импульс является однократно отраженным от слоя Е и его можно использовать для навигационных определений. В измеренные отсчеты разности времени необходимо вводить поправки за дальность распространения пространственной радиоволны.
Амплитуды однократно и дважды отраженных от слоя Е радиоволн Е\ и Е2 становятся соизмеримыми на удалениях 1500—1800 миль от береговых станций. Поэтому указанные области для навигационных определений становятся ненадежными.
Основные правила и рекомендации по выполнению навигационных измерений. При выборе радиоимпульсов для выполнения навигационных измерений надлежит руководствоваться следующими основными правилами.
1. Если на экране ЭЛТ наблюдаются импульсы поверхностной радиоволны, то их необходимо использовать в любых случаях, даже если их амплитуда меньше амплитуд импульсов пространственных радиоволн.
§ 38. Корабельные приемоиндикаторы импульсных РНС
161
2. В случае отсутствия импульсов поверхностной радиоволны можно использовать импульсы пространственных радиоволн от одной или обеих станций пары. Отсчеты, снятые со счетчиков, необходимо исправить соответствующими поправками.
3. При выполнении измерений по импульсам поверхностной радиоволны необходимо общее усиление приемника регулировать так, чтобы амплитуды импульсов были равными (примерно 10—15 мм). Допустимое различие в амплитудах импульсов должно быть не более 25%.
4. При наличии шумовых помех, регулируя общее усиление, яркость и фокусировку, необходимо добиваться, главным образом, четкости изображений передних фронтов импульсов (которые впоследствии совмещаются друг с другом), не обращая внимания на остальные части изображений импульсов.
5. Для уменьшения ошибок измерений полезно выполнить серию измерений через интервалы времени 2—4 мин и затем учитывать осред-ненные отсчеты.
6. При выполнении измерений с использованием импульсов пространственной радиоволны, необходимо также брать серию отсчетов и вычислять средний отсчет.
7. Для более уверенного различения слабых сигналов на фоне шумов следует пользоваться регулятором «Быстрое перемещение», так как движущиеся импульсы легче обнаружить.
Необходимо периодически определять инструментальные поправки каждого измерительного канала. Для этого следует, используя в качестве эталонных сигналы, вырабатываемые специальным имитатором (с интервалом 1000 или 5000 мксек), измерять промежутки времени между соседними сигналами. Искомая поправка для данного измерительного канала вычисляется по формуле
— ^эт ^и»
где /эт — эталонный промежуток времени;
/и — измеренный промежуток времени.
При отсутствии имитатора в качестве эталонных можно использовать сигналы пакета, излучаемого ведущей или ведомой станцией РНС Лоран-С. В таких случаях эталонный промежуток времени будет равен сумме промежутков между сигналами, принятыми в качестве ведущего и ведомого. Так, например, если ведущим взят первый, а ведомым восьмой сигналы, то /Эт = 7000 мксек.
Влияние помех. На работу корабельных приемоиндикаторов значительное влияние оказывают помехи, мешающие нормальному приему и затрудняющие работу оператора по опознаванию сигналов на экране индикатора. В итоге точность навигационных измерений может ухудшаться. Помехи могут порождаться излучателями радиоволн, паразитными связями между частотными каналами, атмосферными разрядами и другими факторами.
Наиболее характерные виды помех, встречающиеся в практике использования корабельных приемоиндикаторов импульсных РНС, приведены в табл. 17.
11 Заказ 1833
162
Глава 6. Основные характеристики ТСК
Таблица 17
Основные виды помех работе приемоиндикаторов импульсных РНС и их опознавание
Причины возникновения помех Проявление помехи на экране индикатора Рекомендации по опознаванию н исключению помехи
Помехи от связных радиостанций, работающих в телеграфном режиме Резкое перемещение линий разверток вверх и вниз в такт работы ключа; искривление линий разверток, появление изображения помех Сужение полосы пропускания приемника, включение режекторных фильтров, регулировка усиления. В ряде случаев измерения невозможны
Помехи от радиовещательных станций Линии развертки превращаются в бегущие волнистые линии неправильной формы То же
Помехи от работающих РЛС Отдельные радиоимпульсы, расположенные на линиях развертки на одинаковых расстояниях, быстро перемещающиеся по экрану Легко опознаются. Производство измерений возможно по сигналам импульсных РНС на фоне помех
Помехи от сигналов соседнего частотного канала, отстоящего на 50 кгц (РНС Лоран-А) Импульсы помехи имеют двугорбую вершину Переход на частоту подозреваемого частотного канала; в случае подтверждения предположения амплитуды импульсов помехи резко возрастают
Помехи от кратных частот повторения, находящихся в соотношении 5:4:3 Непрерывно мерцающие импульсы помех, отличающиеся меньшей яркостью: непрерывность линии развертки у основания импульсов помех Опознаются легко. На производство измерений практически не влияют
Помехи от импульсных сигналов одного и того же частотного канала, но различных по частоте повторения (Лоран-А) Прогиб линий разверток Уменьшение общего усиления; отсчет необходимо брать в моменты времени, когда мешающие импульсы находятся вне пьедесталов
Атмосферные помехи Расплывчатость линий разверток; хаотически возникающие импульсы с различными амплитудами на линиях разверток Уменьшение общего усиления и сужение полосы пропускания приемника
Помехи от искрящихся контактов электрических машин (двигателей, генераторов, преобразователей и т. д.), находящихся на корабле Помехи аналогичны помехам от работающих РЛС, но имеют неодинаковые амплитуды Измерения в большинстве случаев возможны на фоне помех; регулировка усиления, сужение полосы пропускания приемника
§ 39. КОРАБЕЛЬНЫЕ ПРИЕМОИНДИКАТОРЫ ФАЗОВЫХ РАЗНОСТНО-ДАЛЬНОМЕРНЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ
Фазовые разностно-дальномерные радионавигационные системы предназначены для определения места корабля по разностям расстояний, получаемых на основе измерения разностей фаз электромагнитных колебаний, излучаемых береговыми станциями.
§ 39. Корабельные приемоиндикаторы фазовых РНС
163
Для получения места корабля по двум линиям положения требуется установка на берегу не менее трех станций: центральной — ведущей и двух боковых — ведомых. Функции ведомых станций сводятся к приему и переизлучению сигналов ведущей станции; благодаря этому обеспечивается когерентность электромагнитных колебаний, излучаемых всеми береговыми станциями.
Комплекс береговых станций совместно с корабельным приемо-индикаторным устройством образует радионавигационную систему.
Корабельные приемоиндикаторы предназначаются для приема и измерения значений разностей фаз радиоволн, приходящих от каждой пары береговых станций. Эта информация служит основанием для определения разностей расстояний между кораблем и точками установки наземных излучателей. Соответствующие зависимости могут быть выражены формулами:
= “(^ - Тв) - Ш(/-’а) =
*2=?£-<₽A==U)(Z~X£)--“(/-Xa)= (6'25)
где ?л, <рд, — фазы электромагнитных колебаний, приходящих к приемной антенне на корабле от каждой из береговых станций (ведущей А и ведомых В, Е);
ш — круговая частота колебаний;
тл, тд, — время распространения радиоволн от излучателей к приемнику;
£)л, DB, De — расстояния между приемником и излучателями; v — фазовая скорость распространения радиоволн.
Геометрическим местам точек с одинаковыми значениями разностей фаз Ф1 = const (Ф2== const)—изофазам — на местности соответствуют линии равных разностей расстояний — гиперболы, фокусы которых совпадают с точками установки излучателей береговых станций. Место корабля определяется точкой пересечения двух гиперболических линий положения по отсчетам двух измеренных разностей фаз.
Из уравнений (6.25) следует, что в тех случаях, когда разность расстояний приобретает значения, равные или кратные длине волны X, измеренные разности Фьг становятся равными целому числу 2л.
Показаниям фазоизмерительных устройств на корабле, равным 0; 2л; 2 ♦ 2л; 3 ♦ 2л,..N • 2л, где W — любое целое число, на радионавигационной карте будут соответствовать гиперболы-изофазы, имеющие оцифровку 0,1,2,3,..., N. Участок карты, ограниченный двумя соседними изофазами, проведенными через фазовый цикл 2л, называется фазовой дорожкой; ее номер определяется числом N,
Фазоизмерительное устройство позволяет однозначно определить разность фаз лишь в пределах одного фазового цикла 2л; соответственно разность расстояний может быть определена однозначно лишь внутри одной фазовой дорожки. Однако показания фазоизмерительного устройства, ограниченные шкалой 0< Ф/ < 2л, могут быть отнесены в равной мере к любой фазовой дорожке, что приводит к появлению неоднозначности в фазовых измерениях.
164
Глава 6. Основные характеристики ТС К
Неоднозначность измерений можно разрешить, если установить номер фазовой дорожки, т. е. определить число Для этой цели применяются следующие методы:
— метод привязки, который заключается в определении исходного положения корабля, а следовательно, и номера данной дорожки, с использованием всех доступных средств определения места;
— создание дополнительных масштабных сеток (грубых сеток) с более широкими фазовыми дорожками, которые вмещают несколько дорожек первоначальной (точной) сетки изофаз. Измерения разностей фаз по грубым сеткам позволяют определить дорожки более точной сетки. Для входа в наиболее грубую сетку используются данные о координатах места корабля, полученные по счислению.
Работа фазовых разностно-дальномерных радионавигационных систем осуществляется практически на всех диапазонах радиоволн, за исключением коротковолнового диапазона.
Системы дальнего действия (свыше 3000 км от береговых станций) обычно создаются на диапазонах длинных и сверхдлинных волн. Для систем средней дальности действия (до 3000 км) используются средние и длинные волны. На этих же диапазонах реализуются также системы ближнего действия (до 1000 км). Базовые системы (до 200 км) могут быть созданы на УКВ и средневолновом диапазонах.
Корабельные приемоиндикаторы осуществляют избирательный прием сигналов береговых станций, различая их либо по частоте, либо по временному положению в общей диаграмме излучения. Соответственно этому принципу различают радионавигационные системы с частотной и временной селекцией.
Примерами фазовых РНС с частотной селекцией могут служить отечественная система «Координатор», английская система Декка, французская «Рана» и др. К системам с временной селекцией относятся отечественные РНС РСВТ-1 и «Брас», американская «Омега», английская «Hi — Fix».
Точность получаемой информации о разности расстояний оценивается средней квадратической ошибкой измерений. В основном эта точность определяется инструментальными ошибками фазоизмерительного устройства, условиями распространения радиоволн, стабильностью частоты передатчиков береговых станций и рабочей длиной волны.
Ошибки измерений составляют: в РНС ближнего действия на средних волнах 12—15 м\ в РНС средней дальности действия на длинноволновом диапазоне 50—60 м\ в РНС дальнего действия на сверхдлинноволновом диапазоне 300—500 м.
К техническим характеристикам приемоиндикаторов фазовых РНС относятся: частоты настройки, количество частотных каналов, чувствительность и полоса пропускания приемного устройства, способ разрешения неоднозначности, потребляемая мощность и некоторые другие.
Измерение разностей фаз с помощью корабельной аппаратуры производится автоматически. Установка номеров дорожек точной сетки (разрешение неоднозначности) должна быть выполнена в исходной точке путем привязки к береговым ориентирам или на основе показаний счетчиков грубой сетки (при наличии нескольких крупномасштабных сеток изолиний).
В корабельных приемоиндикаторах часто применяется визуальная индикация принимаемых сигналов с целью контроля за работой как приемоиндикатора, так и береговых станций.
В наиболее современных приемоиндикаторах фазовых РНС наряду со стрелочными приборами широко применяются цифровые отсчетные устройства.
§ 39. Корабельные приемоиндикаторы фазовых РНС
165
Для регистрации результатов измерений разностей фаз используются счетно-пишущие устройства.
Радионавигационные карты, предназначенные для определения гиперболических изолиний — изофаз — обычно рассчитываются только для одной рабочей или масштабной частоты /к. При смене частот результаты фазовых измерений пересчитываются на частоту /к. Для этой цели используются специальные таблицы, графики или номограммы. Существуют также индикаторы с приведенным отсчетом, в которых пересчет результатов фазовых измерений к постоянной частоте масштабной сетки карты осуществляется автоматически.
Порядок включения приемоиндикатора, действия оператора по выполнению навигационных измерений и разрешению неоднозначности, а также правила ухода за материальной частью в период ее эксплуатации на корабле определяются инструкцией, содержащейся в технической документации.
Ошибки измерений разностей фаз и рекомендации по повышению точности измерений. Ошибки измерений разностей фаз, выполненных корабельным приемоиндикатором, как правило, содержат систематическую и случайную составляющие.
Случайные ошибки измерений проявляются в виде беспорядочных колебаний отсчетов разностей фаз около их средних значений.
Регулярные отклонения отсчетов разностей фаз от их истинных значений, подчиняющиеся определенному закону, характеризуют проявление систематических ошибок измерений. Значительная часть этих ошибок после выявления закона их действия может быть исключена из результатов измерений.
В зависимости от причин возникновения все ошибки измерений подразделяются на инструментальные ошибки и ошибки, вызванные условиями распространения радиоволн.
Инструментальные ошибки. Инструментальные ошибки в измерениях могут возникать в результате изменения режима питания или старения отдельных элементов и узлов аппаратуры, нестабильной работы генераторов ведущей и ведомых станций, изменения частоты опорного генератора в приемоиндикаторе, невысокого качества изготовления фазоизмерительных устройств и ряда других причин.
Систематическая составляющая этих ошибок может быть существенно уменьшена в результате компарирования (выверки) аппаратуры. Устранение причин, вызывающих появление этих ошибок, как правило, достигается в ходе проведения приемо-сдаточных испытаний, выполняемых обычно после установки аппаратуры на корабле.
Случайная составляющая инструментальных ошибок может достигать 30—40% от суммарной случайной ошибки измерений.
Ошибки, вызванные условиями распространения радиоволн. Наиболее существенное влияние на результаты фазовых измерений оказывают ионосфера и подстилающая поверхность на трассе распространения радиоволн. На более коротких волнах в диапазоне СВ и УКВ диапазоне заметно ощущается также влияние некоторых метеорологических факторов (осадки, изменения температуры, влажность и т. д.).
Появление ошибок в результатах фазовых измерений и при разрешении неоднозначности из-за влияния ионосферы объясняется тем, что в точку приема на корабле наряду с поверхностной радиоволной от берегового излучателя приходит также пространственная радиоволна. Это явление наблюдается особенно сильно в ночное время.
Амплитуда и фаза пространственных радиоволн резко изменяются в зависимости от состояния ионосферы; это в свою очередь приводит
166
Глава 6, Основные характеристики ТСК
к значительным случайным колебаниям амплитуды и фазы результирующего поля у приемной антенны индикатора. В итоге на месте приема наблюдаются замирания сигналов, резкие скачки отсчетов фазоизмери- ’ гелей и т. д.
Указанные интерференционные явления на средних волнах при их распространении над морем наблюдаются очень отчетливо ночью на сравнительно больших расстояниях (200—250 км) от излучателя. На этих удалениях амплитуды поверхностных и ионосферных волн практически соизмеримы; с увеличением расстояния преобладает поле ионосферной радиоволны.
На длинных волнах (%> 1000 л<) пространственные радиоволны днем поглощаются сильнее, особенно в нижних слоях ионосферы. Интерференционные явления наблюдаются только на значительных расстояниях от излучателей: более 1000 км летом и более 500—600 км зимой. Ночью влияние ионосферы иногда ощущается уже на расстояниях, начиная с 4—5 длин волн и более (500—600 км).
Работа приемоиндикаторов фазовых РНС на корабле при условии соизмеримости амплитуд поверхностной и пространственной радиоволн практически невозможна.
Как правило, приемоиндикаторы работают в зоне приема поверхностной радиоволны (РНССВ и ДВ диапазонов).
Влияние подстилающей поверхности приводит к изменению фазовой скорости поверхностной радиоволны вдоль трассы ее распространения от береговой станции к корабельному приемоиндикатору. Вследствие поглощения и частичного отражения радиоволн у поверхности Земли средняя фазовая скорость распространения будет всегда меньше скорости распространения радиоволны в однородной атмосфере. Это приводит к появлению ошибок в измерениях разностей фаз радиоволн, принимаемых на корабле от различных береговых станций. Величины ошибок определяются электрическими параметрами подстилающей поверхности, длиной радиоволны и расстояниями между приемником и излучателями. Ошибки носят в основном систематический характер и могут быть уменьшены введением соответствующих поправок в результаты измерений.
На СДВ диапазоне работа приемоиндикаторов фазовых РНС происходит в условиях волноводного распространения радиоволн, в которых из-за изменения степени освещенности ионосферы резко изменяется скорость распространения радиоволн. Отсчеты измеренных разностей фаз должны быть также исправлены соответствующими поправками.
Фазовый фронт поверхностной радиоволны может также искажаться вследствие местных (локальных) неоднородностей подстилающей поверхности вблизи приемной антенны. К таким неоднородностям могут быть отнесены холмы, горы, островки, близко проходящая береговая черта и т. д. В итоге могут появляться ошибки в фазовых измерениях. Особенно это заметно на СВ диапазоне.
Рекомендации по повышению точности измерений. Для повышения точности и надежности измерений навигационного параметра при использовании приемоиндикаторов фазовых РНС штурману необходимо соблюдать следующие основные рекомендации.
1. При любой имеющейся возможности для определения точных координат места корабля иным способом необходимо контролировать результаты измерений, выполненных с помощью приемоиндикатора фазовой РНС. При этом обращать внимание на правильность разрешения неоднозначности измерений, особенно в темное время суток и при нахождении корабля близко к границам рабочей зоны.
Для проверки надежности радиоизмерений и выявления допущенных ошибок прокладки целесообразно также периодически брать серию отсче
§ 39. Корабельные приемоиндикаторы фазовых РНС
167
тов с интервалами 10—15 мин. В случае надежных измерений, точки, проложенные на карте, будут располагаться по линии пути через отрезки, пропорциональные интервалам времени между измерениями разности фаз.
2. С целью исключения случайных ошибок измерений необходимо для прокладки использовать отсчеты, полученные осреднением ряда последовательных отсчетов разностей фаз.
3. В случае радиоизмерений в зоне приема поверхностной радиоволны рекомендуется исключать систематические ошибки путем ввода специальных поправок. Эти поправки обычно рассчитывают заранее во время калибровки радионавигационной системы и выдают на корабли в виде таблиц, графиков или мелкомасштабных карт с нанесенными поправками.
Границы зоны приема поверхностной радиоволны обычно приводятся в руководствах по использованию корабельных приемоиндикаторов фазовых РНС.
4. В той части рабочей зоны РНС, в которой амплитуды принимаемых поверхностной и пространственной радиоволн соизмеримы, следует по возможности избегать использования приемоиндикаторов фазовых РНС, применяя для определения места корабля другие технические средства кораблевождения. Эти области в зависимости от диапазона радиоволн располагаются примерно на следующих удалениях D от береговых станций при распространении радиоволн над морем
Диапазон СВ дв дв
D, км 150—250 (ночью)
500—600 (ночью)
1200—1500 (днем)
В табл. 18 приведены допустимые расстояния D, км, на которых еще возможно использование приемоиндикаторов некоторых фазовых РНС в ночное время без существенного ухудшения точности измерений и потери дорожки при разрешении неоднозначности.
Таблица 18
РНС Тип приемо-ннднкатора Пары станций
красная зеленая фиолетовая
РСВТ-1 Декка КПФ-1 .м-хп* .ПИРС-1* 300 230—250 250—260 300 210—230 230—240 270—280 300—330
5. При работе приемоиндикаторов в зоне приема пространственной волны необходимо использовать только осредненные значения навигационного параметра, полученные из ряда последовательных измерений. При наличии нескольких масштабных сеток и возможности выполнения измерений раздельно по грубой и точной сеткам следует всегда производить двойные измерения; для прокладки в этом случае использовать средние значения навигационного параметра (например, в приемоиндикаторах типа КПФ).
6. В зоне приема пространственной радиоволны разрешение неоднозначности фазовых измерений предпочтительнее выполнять методом привязки к видимым ориентирам, а приемоиндикатор включить в режим непрерывной работы. При этом особенно возрастает значение рекомендации, указанной в п. 1.
168
Глава 6. Основные характеристики ТСК
7. Для оценки надежности радиоизмерений в темное время суток в области приема пространственной радиоволны рекомендуется использование счетно-пишущих или других регистрирующих устройств. Запись на ленте позволяет оценить и затем исключить случайные флюктуации отсчетов разностей фаз, что в конечном счете способствует повышению качества полученной навигационной информации.
8. На больших скоростях хода корабля вводить в работу стабилизирующие устройства фазоизмерительных устройств. Ступени стабилизации определяются величиной скорости корабля.
Влияние помех. Наиболее распространены помехи от близких по частоте работающих радиостанций, атмосферные помехи, индустриальные помехи, помехи, обусловленные условиями распространения радиоволн, а также внутренние шумы приемоиндикаторного устройства.
Влияние помех на качество радиоизмерений может быть ослаблено включением на входе приемника узкополосных режекторных фильтров, применением блоков ограничителей импульсных сигналов и другими мерами.
Значительную помощь штурману в борьбе с помехами может оказать применение счетно-пишущего устройства. Характер записи на ленте самописца в ряде случаев дает достаточно наглядное представление о степени воздействия помехи на полезный сигнал и может помочь оператору отфильтровать помеху.
§ 40. КОРАБЕЛЬНЫЕ ПРИЕМОИНДИКАТОРЫ ИМПУЛЬСНО-ФАЗОВЫХ РАЗНОСТНО-ДАЛЬНОМЕРНЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ
Дальнейшее развитие импульсных и фазовых радионавигационных систем привело к созданию комбинированных импульсно-фазовых систем (Лоран-С).
При создании этих систем одновременно реализуются положительные качества импульсных (отсутствие неоднозначности измерений) и фазовых (высокая точность) радионавигационных средств.
Импульсно-фазовые системы, как и импульсные, по измеряемому параметру относятся к разностно-дальномерным (гиперболическим) системам и обеспечивают решение навигационных задач на значительных удалениях (2000—4000 км) от береговых станций.
Измерение навигационного параметра корабельным приемоиндика-тором импульсно-фазовой РНС в принципе выполняется двумя методами:
— временным методом, путем измерения интервала времени между моментами прихода импульсов (пакетов импульсов) от двух береговых станций;
— фазовым методом, путем измерения разности фаз между высокочастотными колебаниями (несущими частотами) указанных импульсных сигналов.
Точность навигационных измерений определяется фазовым методом измерений; временной метод измерений служит лишь для разрешения неоднозначности фазовых измерений.
При излучении пакетов радиоимпульсов береговыми станциями РНС Лоран-С применяется фазовое кодирование высокочастотного заполнения импульсов в пакете. В итоге фаза высокочастотного колебания от импульса к импульсу может изменяться на ±180°.
Установлен специальный закон кодирования, который при необходимости может изменяться.
Применение фазового кодирования обеспечивает автоматический поиск сигналов береговых станций корабельным приемоиндикатором в условиях помех, выполнение измерений и исключение мешающего действия пространственных радиоволн.
§ 41. Корабельный индикатор секторных радиомаяков 169
Приемоиндикатор может работать и в условиях, когда отношение -~м— на входе приемника снижается до 0,1.
Работа измерительных устройств по точному (фазовому) и грубому (временному) каналам строго синхронизируется. Для правильного разрешения неоднозначности отсчетов разностей фаз погрешность измерений временных интервалов (по огибающим импульсов) должна быть не хуже ’/г периода высокочастотных колебаний.
Все измерения выполняются в основном автоматически; результаты регистрируются десятичными счетчиками и записывающими устройствами на ленте.
§ 41. КОРАБЕЛЬНЫЙ ИНДИКАТОР СЕКТОРНЫХ РАДИОМАЯКОВ
Принцип действия секторных радиомаяков типа ВРМ и Консол основан на сложении электромагнитных полей идентичных антенн, разнесенных на расстояния, значительно превышающие длину радиоволны.
Остронаправленные многолепестковые характеристики излучения создаются при помощи трех вертикальных антенн, расположенных по прямой, называемой базовой линией, на расстоянии 2,5—3 длин радиоволны друг от друга. Передатчик радиомаяка питает каждую антенну следующим образом: начальная фаза тока в центральной антенне остается постоянной; начальная фаза токов боковых антенн при помощи дифференциального фазовращателя плавно изменяется так, что фаза тока в одной антенне получает положительное приращение, а в другой антенне это приращение отрицательное. В начале цикла передачи фазы токов боковых антенн сдвинуты относительно друг друга на 180°, а для любого момента времени начальные фазы токов боковых антенн определяются выражениями:
Ф, = 90е-<?(/);
Ф2 = —90° + <?(/), где <р(/)—пропорциональный времени фазовый сдвиг, создаваемый дифференциальным фазовращателем.
Таким образом, за время плавного изменения начальных фаз токов в боковых антеннах от +180° до 0° и далее до —180° характеристика направленности антенной системы радиомаяка также плавно изменяется от одной крайней формы к другой. Характеристика направленности изображена на рис. 56. Пунктиром показана характеристика направленности той же антенной системы после изменения (коммутации) на 180° фазы результирующего тока, создаваемого центральной антенной. В результате коммутации фаз токов боковых антенн на 180° появляется семейство, или веер, равносигнальных зон.
Сигналы, излучаемые при обоих положениях характеристики направленности, различаются между собой по длительности, так что передача одного из них соответствует длительности точки, а другого — длительности тире. Так как каждому положению характеристики направленности соответствует передача точек или тире, то в результате будут получены 6 секторов, в которых преобладает слышимость точек, 6 секторов, в которых преобладает слышимость тире, и 11 направлений равной слышимости точек и тире или направлений равносигнальных зон.
Таким образом, процесс работы секторного радиомаяка заключается в том, что одновременно с плавным изменением фаз токов в боковых антеннах периодически производится коммутация фаз токов у этих антенн на 180°, в результате чего в пространстве формируется семейство
170
Глава 6. Основные характеристики ТСК
равносигнальных зон, перемещающихся со скоростью плавного изменения фаз из одного предельного положения в другое. Время перехода веера равносигнальных зон из одного положения в другое 30 сек, в течение которых производится 60 переключений фазы, соответствует передаче 60 точек при одном положении характеристики направленности и 60 тире при другом ее положении.
Принимая сигналы радиомаяка на корабельный радиоприемник, можно принять некоторое количество точек и дополняющее его до 60 количество тире (или наоборот). Зная сектор своего положения относительно радиомаяка и сосчитав количество принятых точек и тире, можно определить направление с радиомаяка на корабль. Для грубого определения сектора используется корабельный радиопеленгатор^ для чего радиомаяк действует также и в режиме кругового излучения. В этом режиме работает только центральная антенна. В течение 30 сек передаются позывной сигнал и длинное тире для радиопеленгования, а в продолжение следующих 30 сек передаются точки и тире.
Для счета сигналов секторных радиомаяков типа ВРМ и Консол используется корабельный индикатор КИ-55.
Корабельный индикатор КИ-55 выполнен в виде двух отдельных блоков: блока электронного индикатора и блока питания. Блок индикатора служит для воспроизведения сигналов радиомаяка на экране электронно-лучевой трубки, а блок питания служит для обеспечения индикатора необходимыми для работы схемы напряжениями тока.
Блок индикатора состоит из усилителя, электронно-лучевой трубки, привода развертки и высоковольтного выпрямителя.
Сигналы радиомаяка поступают от выходного устройства любого корабельного радиоприемника, обеспечивающего прием незатухающих
§ 42. Общие принципы отыскания неисправностей
171
колебаний, и воспроизводятся на электронно-лучевой трубке с круговой разверткой и длительным послесвечением.
Перед экраном электронно-лучевой трубки установлена поворотная прозрачная шкала с делениями от 1 до 60; количество делений соответствует количеству сигналов, подаваемых радиомаяком за один цикл.
Для снятия отсчета необходимо совместить начало шкалы с началом изображения сигналов на ЭЛТ, и против места, где меняется характер сигналов, берется отсчет по шкале, т. е. определяется число точек или тире до равносигнальной зоны.
По принятым и сосчитанным сигналам на карте или при помощи таблиц определяются ортодромические пеленги на корабль, а затем и место корабля по нескольким пеленгам.
§ 42. ОБЩИЕ ПРИНЦИПЫ ОТЫСКАНИЯ НЕИСПРАВНОСТЕЙ ТЕХНИЧЕСКИХ СРЕДСТВ КОРАБЛЕВОЖДЕНИЯ
Современные технические средства кораблевождения являются сложными электромеханическими и радиоэлектронными системами, состоящими из значительного количества блоков или узлов. Каждый блок (узел) включает в себя разнообразные элементы. Выход из строя хотя бы одного элемента приводит систему в неисправное состояние. Система считается исправной, если все ее параметры находятся в заданных пределах.
Наряду с понятием «исправная» существует понятие «работоспособная» система. Система считается работоспособной, если ее основные параметры, характеризующие нормальное выполнение заданных функций, находятся в допустимых пределах.
Полная или частичная утрата работоспособности называется отказом.
Поддержание системы в исправном состоянии достигается путем постоянного контроля. Предусмотренные эксплуатационной документацией основные проверки и регулировки составляют важную часть контрольных мероприятий, направленных на поддержание навигационных приборов и систем в исправном состоянии.
Разработкой оптимальных методов контроля, позволяющих в кратчайший срок по измерению минимального количества параметров системы установить характер и место неисправности, занимается техническая диагностика. Методы, разрабатываемые этой наукой, заложены в основу построения систем автоматического контроля и поиска неисправностей.
Для контроля технического состояния и поиска неисправностей ТСК рекомендуется пользоваться приборами обнаружения неисправностей (ПОН), если они входят в состав аппаратуры, а также указаниями, имеющимися в эксплуатационной документации. Успех в восстановлении работоспособности и поддержании исправного состояния ТСК в большинстве случаев достигается за счет высокого уровня знаний и опыта эксплуатации у обслуживающего персонала.
Отыскание неисправности является логической задачей и основывается на следующих положениях:
— четком и ясном представлении оператором принципа действия и устройства системы в целом;
— умении представлять функциональную схему системы или ее части, в пределах которой может находиться та или иная неисправность;
— умении анализировать результаты проявления неисправности и показаний контрольно-измерительной аппаратуры.
Если, например, при пеленговании было обнаружено, что у гирокомпаса значительно изменилась поправка, то часто бывает невозможно
172 Глава 6. Основные характеристики ТСК
мгновенно ответить на вопрос: почему это произошло? Этот ответ можно найти лишь в результате логического поиска и проверки причин, вызвавших изменения в показаниях компаса, так как таких причин может быть достаточно много.
На практике обычно применяют следующие частные способы поиска причин отказов.
1. Последовательное слежение за прохождением сигналов по различным каналам системы путем промежуточных измерений.
2. Исключение исправных частей аппаратуры (системы), устанавливаемое посредством контрольных измерений.
3. Замена элементов и узлов системы, подозреваемых как неисправные, на заведомо исправные однотипные элементы и узлы.
4. Сравнение результатов функционирования или испытаний неисправной системы с результатами испытаний заведомо исправной системы, работающей в тех же условиях.
5. Внешний осмотр, дающий возможность судить о рабочем состоянии электрических или механических элементов системы.
Каждому из отмеченных способов поиска причин отказов присущи те или иные достоинства и недостатки. Для наиболее полного суждения о действительных причинах отказов ТСК целесообразно эти способы поиска применять совместно.
Обнаружив неисправность в каком-либо блоке, прежде всего необходимо определить — приведет ли (или привела) обнаруженная неисправность к утрате работоспособности системы, о чем следует доложить по команде, так как отказ системы может привести к срыву решаемой кораблем задачи.
Отыскание причины неисправности нужно, как правило, начинать с того блока, в котором она была обнаружена. Так, например, если обнаружены неверные показания репитера гирокомпаса, то нужно сличить его показания с другим репитером или с основным прибором. Если неисправность блока установлена, заменить его запасным. В случае невозможности замены приступают к поиску и устранению неисправности. Неисправность может быть как в кинематической линии, так и в электрической. Кинематическая линия проверяется на легкость вращения и производится осмотр состояния, крепления и зацепления ее звеньев.
В электрической схеме блока нужно найти линию, в которой произошла неисправность, на что могут указать сгоревшие предохранители, сработавшие автоматические защитные устройства, стрелочные и другие индикаторы, предусмотренные конструкцией прибора. Затем методом замера сопротивления изоляции убедиться в целости монтажа и его изоляции, в отсутствии коротких замыканий. Проверяется целость отдельных электроэлементов. Если проверяемый элемент шунтируется какой-либо электрической цепью или другим элементом, то при проверке его следует отключить (отпаять) от этой цепи. Изменение цвета элемента, его сильный перегрев и запах подгоревшей изоляции также являются немаловажными факторами при отыскании причин отказа. Если в комплекте технической документации имеется карта (диаграмма) напряжений и токов на исследуемый блок, то следует сравнить параметры, полученные замером на контрольных точках приборов, с их величинами, показанными на карте. Иногда такие сведения можно получить из принципиальных электрических схем.
Сказанное имеет особо важное значение при проверке радионавигационной или электронной аппаратуры, входящей в состав ТСК.
В радиоэлектронных узлах (блоках) ТСК необходимо тщательно измерять напряжение и токи в цепях приемно-усилительных ламп. Несоответствие измеренных токов и напряжений (режимов ламп) номиналь
§ 43. Эксплуатационная и ремонтная документация
173
ным, указанным на диаграмме, дает достаточное основание для суждения о неисправности того или иного блока.
После устранения неисправности необходимо проверить основные параметры отремонтированного блока и, если это необходимо, подрегулировать его. При замене электроэлемента строго придерживаться следующего правила: устанавливаемый вместо отказавшего в работе новый элемент должен по всем параметрам соответствовать заменяемому элементу. Поэтому нужно пользоваться запасными деталями из ЗИП и постоянно следить за восполнением его расхода.
Когда блок, в котором была обнаружена неисправность, оказался в порядке, необходимо, следуя функциональной схеме, проверить линии связи рассматриваемого блока с другими блоками системы. Проверять следует только те линии, по которым передается сигнал, величина которого вышла за допустимые пределы и линии, способствующие формированию этого сигнала.
Такой способ отыскания неисправностей длителен, но он безусловно приводит к поставленной цели. При хорошем знании принципа действия и функциональных схем прибора этот поиск существенно сокращается. Так, если по репитеру обнаружено изменение поправки гирокомпаса, то, следуя предложенному порядку, от репитера нужно перейти к проверке ЗУ, затем прибора ЗК5» усилителя и т. д. до проверки работоспособности гиросферы. Но если при этих же самых обстоятельствах индикатор положения гиросферы отметил ее опускание ниже нормального уровня, а сигнализатор тока показал существенное уменьшение силы тока в цепях гиромотора, то изменение поправки курсоуказания могло быть вызвано уменьшением напряжения источника питания или увеличением сопротивления поддерживающей жидкости. Определить, которая из двух причин имеет место в действительности, не представляет больших трудностей.
Иногда отыскание неисправностей связано с применением высокочувствительной контрольно-измерительной аппаратуры и использованием специальных испытательных стендов. Аппаратура подобного типа зачастую не входит в состав ЗИП. В этом случае проверки приборов производятся в базовой мастерской. Поэтому личному составу корабля строго определены границы дозволенного ремонта своими силами. Командир, организующий эксплуатацию ТСК, должен строго следить за пунктуальным исполнением инструкций по эксплуатации и ремонту аппаратуры, а также за соблюдением правил техники безопасности во время ремонта. Замена каких-либо элементов в схеме, находящейся под напряжением, в корабельных условиях категорически запрещается.
§ 43. ЭКСПЛУАТАЦИОННАЯ И РЕМОНТНАЯ ДОКУМЕНТАЦИЯ
Эксплуатационные документы предназначены для изучения приборов и правил их эксплуатации. Документы поставляются заводом-изготовителем и входят в комплект прибора. В комплект эксплуатационной документации входят: техническое описание, инструкция по эксплуатации, формуляр (паспорт), ведомость ЗИП. В виде отдельных документов могут включаться инструкция по техническому обслуживанию и инструкция по монтажу, пуску и регулировке прибора на месте его применения.
Кроме того, конструкторскими организациями, проектирующими корабль, могут поставляться схемы размещения приборов на корабле, монтажные схемы, а также инструкции и правила эксплуатации, отражающие специфику использования приборов на данном корабле.
К эксплуатационной документации относятся также издания Гидрографического управления: правила штурманской службы, инструкции и бланковые формы.
174
Глава 6. Основные характеристики ТСК
Техническое описание должно содержать описание устройства и принципа действия прибора, а также технические характеристики и другие сведения, необходимые для обеспечения полного использования технических возможностей прибора.
В инструкции по эксплуатации излагаются сведения, необходимые для правильной эксплуатации прибора и поддержания его в постоянной готовности к действию.
Формуляр является документом, удостоверяющим гарантированные заводом-изготовителем основные параметры и технические характеристики прибора, отражающим техническое состояние данного прибора и содержащим сведения по его эксплуатации (длительность и условия работы, техническое обслуживание, виды ремонта и другие данные за весь период эксплуатации).
В технический формуляр должны быть записаны и скреплены подписями ответственного сдатчика, представителя заказчика и штурмана корабля результаты швартовных и ходовых испытаний. Если при испытаниях аппаратура хотя бы по одному какому-либо параметру выходит за пределы, определенные техническими условиями (ТУ), штурман не должен подписывать формуляр и принимать аппаратуру в эксплуатацию до приведения ее показаний в строгое соответствие с ТУ. После приемки аппаратуры в эксплуатацию записи в формуляре ведет штурман корабля в соответствии с правилами ведения формуляра.
В формуляр следует записывать ежемесячные сведения о времени, отработанном прибором, положение регуляторов после регулировок, предусмотренных правилами эксплуатации. Все замечания о недостатках прибора, выявленных в процессе эксплуатации, о неисправности и текущем ремонте должны быть обстоятельно записаны в формуляр. Характер работ, связанных со средним и капитальным ремонтом, результаты испытаний на корабле после окончания ремонта должны быть записаны в формуляр, подписаны штурманом и представителем ремонтной организации. При направлении аппаратуры в ремонт или на другой объект (склад) технический формуляр, заполненный на день передачи, сдается вместе с аппаратурой. При консервации или расконсервации аппаратуры в формуляре должен быть записан не только сам факт выполнения этих работ, но и какие были допущены отклонения от требований инструкции по консервации (расконсервации) и по каким причинам.
Тщательно и правильно заполненный технический формуляр является документом, позволяющим установить техническое состояние приборов и выявить недостатки эксплуатационного и технического характера в серийной продукции.
Кроме технического формуляра, техническое состояние приборов отражается в журнале навигационных приборов и карточках учета отказов и неисправностей аппаратуры, которые выдаются на корабль управлением (отделом) гидрографической службы флота (флотилии).
Журнал навигационных приборов имеет несколько разделов, по одному на однотипные приборы, установленные на корабле.
Все записи в журнале делаются чернилами лицом, обслуживающим приборы. На походе журнал передается по вахте штурманским электриком, о чем делается запись в конце вахты. В соответствии с правилами ведения в журнал обстоятельно записываются все работы, производимые с прибором: замеры сопротивления изоляции, чистки, регулировки, а также неисправности и способы их устранения, поправки и способы их определения и т. д. Из журнала навигационных приборов выбираются сводные данные для заполнения технического формуляра. Ответственность за правильность и полноту записей в журнале несет штурман.
$ 43. Эксплуатационная и ремонтная документация
175
Карточки учета отказов и неисправностей аппаратуры ведутся на каждом корабле на каждую автономно работающую и резервную аппаратуру. Эти карточки являются формой информации о характере отказов, неисправностей и условий, при которых они произошли. В карточке записываются все отказы, включая отказы источников питания, а также последствия отказов и меры, принятые для их устранения, с указанием времени, затраченного на отыскание неисправностей, их устранение, вызов базового специалиста и доставку запасных частей.
Заполненная штурманом корабля, согласованная с флагманским штурманом соединения и утвержденная командиром корабля карточка ежеквартально сдается в управление (отдел) гидрографической службы флота. Если неисправностей за квартал не было, то в карточке делается запись о том, что неисправностей и отказов не было. На основании сведений, занесенных в карточки, оценивается характер отказов, характер и количество израсходованного ЗИП по всем приборам, находящимся в эксплуатации на кораблях и судах флота. Это дает возможность заводам-изготовителям более оперативно вносить изменения в серийное производство ТСК и их комплектование ЗИП.
Ремонт ТСК подразделяется на гарантийный, планово-предупредительный, текущий, средний и капитальный. Гарантийный ремонт производится безвозмездно заводом-изготовителем системы только в течение срока действия гарантии по заявкам и рекламационным актам.
Рекламационный акт (рекламация) составляется при обнаружении неисправностей в аппаратуре в течение гарантийного срока и происшедших по вине изготовителя. Для составления акта командир корабля назначает комиссию.
Рекламационный акт должен составляться в присутствии представителя завода, который уполномочен подписать его. Представитель завода для составления двустороннего акта вызывается телеграммой командира корабля (части) после того, как будет дано заключение флагманского штурмана соединения и специалиста подразделения гидрографической службы о причине выхода из строя прибора и по чьей вине прибор вышел из строя.
Если завод-изготовитель имеет на флоте своего представителя, то с претензиями следует обращаться к нему. Иногородний представитель завода должен выбыть по вызову не позже, чем через четверо суток после вручения телеграммы и установить дефект не более чем за пять суток, если на этот счет нет другого срока, установленного соглашением сторон.
Когда ремонт не терпит отлагательства, а представитель завода не прибыл, составляется односторонний акт, копия которого высылается заводу не позднее трех дней после его утверждения. Ремонт аппаратуры в этом случае производится мастерскими флота путем замены вышедшего из строя узла или прибора из обменного фонда.
В акте комиссия должна указать:
— какой прибор (номер и шифр) и каким заводом изготовлен, где установлен и когда подписан гарантийный акт;
— сколько времени проработал прибор со дня установки и какие имел за этот срок ремонты;
— условия эксплуатации прибора: регулярность осмотра, подготовленность личного состава, ведение технической документации, нагрузка на систему и т. д.;
— краткое описание последствий неисправности (отказа);
— результаты осмотра аппаратуры комиссией;
— заключение комиссии о причинах, вызвавших неисправность;
• — перечень вышедших из строя деталей и элементов с указанием срока их работы;
176 Глава 6. Основные характеристики ТСК
— конкретного виновника выхода из строя прибора;
— предложения и выводы комиссии.
К акту прикладывается заключение специалистов и начальника гидрографического управления (отдела) флота.
По истечении срока гарантии рекламации заводу не предъявляются.
Планово-предупредительный ремонт имеет целью своевременно выявить и устранить мелкие неисправности приборов и предупредить преждевременный их выход из строя. Этот ремонт производится силами личного состава корабля по планам командира штурманской боевой части. Результаты ремонта должны быть зафиксированы в техническом фомуляре и в журнале навигационных приборов.
Текущий ремонт производится на корабле или в штурманских мастерских силами личного состава корабля и штурманских мастерских. Основанием для назначения текущего ремонта служат межремонтные сроки. Для выполнения текущего ремонта командир штурманской боевой части составляет заявку на ремонт и ведомость работ по ремонту.
Ведомость работ заполняется штурманом в части его касающейся и после согласования с флагманским штурманом соединения подписывается штурманом и командиром корабля. Против каждой ремонтной позиции специалисты мастерской делают свои отметки и окончательно определяют вид ремонта, а также степень виновности личного состава. Разрешение на ремонт и срок, к которому его следует закончить, дает должностное лицо, в чьем ведении находится мастерская, о чем на первой странице ведомости делается соответствующая запись, скрепленная подписью.
Основания для направления приборов в средний и капитальный ремонт и оформление соответствующей документации остаются теми же, что и при текущем ремонте, с тем лишь отличием, что виды ремонта ТСК должны приурочиваться к соответствующим видам ремонта корабля. Заявки на ремонтные работы, планируемые на следующий год, должны быть поданы в гидрографическое управление (отдел) флота к 1 сентября текущего года.
Сдача ТСК в мастерскую производится по наряду (ремонтной ведомости). При всех видах ремонта, выполняемого мастерскими, расходование корабельного ЗИП не допускается.
В случае выполнения срочного или аварийного ремонта на корабле специалистами мастерских при крайней необходимости разрешается использовать запасные части и детали из комплекта эксплуатационного ЗИП при условии их возвращения. По окончании среднего или капитального ремонта ремонтные мастерские обязаны при сдаче личному составу корабля подвергать аппаратуру швартовным и ходовым испытаниям по полной программе технических условий.
Если ремонту подвергались лишь отдельные приборы системы (комплекса), работа которых не влияет на точность параметров, вырабатываемых системой, то испытаниям подлежат только эти приборы.
При получении имущества, отремонтированного в мастерской, штурман или его доверенное лицо одновременно должно, принять следующие документы:
— второй экземпляр наряда (ремонтной ведомости) с записью о проведенном ремонте;
— аттестат на те приборы, которые аттестуются заводом-изготовителем;
— проверочный лист на приборы, не подвергавшиеся аттестации на заводе;
— заполненный технический формуляр.
Глава 7
ОПРЕДЕЛЕНИЕ МАНЕВРЕННЫХ ЭЛЕМЕНТОВ КОРАБЛЯ И ПОПРАВОК ОСНОВНЫХ ПРИБОРОВ ТЕХНИЧЕСКИХ СРЕДСТВ КОРАБЛЕВОЖДЕНИЯ
§ 44. ОСНОВНЫЕ ОПРЕДЕЛЕНИЯ И ТЕРМИНОЛОГИЯ
Маневренные элементы. Маневренные элементы корабля характеризуют его способность развивать, поддерживать и изменять режим движения. К маневренным элементам относятся ходкость, инерция и поворотливость.
Ходкостью называют способность корабля развивать заданную скорость хода при определенном режиме работы движителей. Различают следующие скорости хода:
— наибольшая скорость — скорость, достигаемая при форсировании 1 главных двигателей и поддержании полной боевой готовности корабля;
— полная боевая скорость—скорость корабля, соответствующая работе главных механизмов движения на полную мощность при нормальном водоизмещении2 и работе всех корабельных боевых и технических средств в режиме, обеспечивающем полную боевую готовность;
— боевая экономическая скорость — скорость корабля, требующая наименьшего расхода топлива на пройденную милю при нормальном водоизмещении и работе всех боевых и технических средств в режиме, обеспечивающем полную боевую готовность и готовность главных двигателей к развитию полной боевой скорости;
— экономическая скорость — скорость корабля при наименьшем расходе топлива на пройденную милю с учетом действия механизмов, необходимых для поддержания установленной боевой готовности и обеспечения бытовых нужд личного состава;
— наименьшая скорость — скорость, при которой корабль еще способен управляться с помощью руля;
— абсолютная, истинная или путевая скорость — скорость корабля относительно дна моря (с учетом действия ветра и течения);
— относительная скорость — скорость корабля относительно воды.
1 Под форсированием понимается работа двигателей при развитии мощности, превышающей полную, но не свыше предельной, указанной в технической документации.
2 Нормальное водоизмещение соответствует такой нагрузке корабля, при которой он полностью укомплектован личным составом, оружием, боеприпасами, снаряжением и оборудованием, продовольствием и пресной водой для личного состава, но имеет половинный запас топлива, смазочных материалов и котельной воды.
12 Заказ 1833
178 Глава 7. Определение маневренных элементов корабля и поправок приборов
Кроме перечисленных, в морской практике применяются еще следующие скорости:
— самый полный ход — скорость корабля, несколько превышающая скорость, соответствующую понятию «полный ход». Степень этого превышения определяется специальными указаниями и рассчитана на возможность удержания мест кораблей в строю при совместном плавании;
— полный ход — скорость корабля, численно равная скорости хода, назначенной на переход или на определенный период времени;
— средний ход—скорость, составляющая 75% от полного хода;
— малый ход — скорость, составляющая 50% от полного хода.
Значения среднего и малого ходов округляются до целого узла;
— самый малый ход соответствует понятию «наименьшая ско-
рость».
Инерция. Инерцией корабля называется его способность сохранять движение, соответствующее первоначальному режиму работы движителей после изменения этого режима на другой. Основными данными,
характеризующими инерцию, являются время /и и расстояние £и, необходимые кораблю для его остановки или приобретения другой заданной скорости при изменении режима работы движителей.
Поворотливость. Поворотливостью называется способность корабля изменять направление своего движения под действием руля или машин, или руля и машин совместно.
Поворотливость корабля характеризуется следующими основными тактическими элементами (рис. 57):
— тактическим диаметром циркуляции Дц — расстоянием по нормали между линиями обратных курсов после поворота корабля на первые 180°;
—диаметром установившейся циркуляции Д, соответствующим диа-
метру окружности, которую описывает центр тяжести корабля в период установившейся циркуляции;
— продолжительность поворота на заданный угол а, т. е. промежутком времени от момента отдачи приказания об отклонении руля до момента прихода корабля на заданный курс, отличающийся от прежнего на угол а. Промежутки времени, необходимые для изменения курса на 360 и 180°, называются периодом (/Збо) и полупериодом (/iso) циркуляции соответственно;
— угловой скоростью шц изменения курса, соответствующей скорости, с которой вращается корабль вокруг мгновенного центра вращения;
— углом дрейфа 0ц на циркуляции, соответствующим углу между диаметральной плоскостью корабля и касательной к траектории циркуляции данной точки;
— углом крена /ц корабля во время поворота;
- —потерей скорости ДУЦ, соответствующей уменьшению скорости хода корабля относительно первоначальной в процессе циркуляции;
$ 45. Общие требования к определению маневренных элементов
179
— мертвым промежутком времени /м, проходящим от момента подачи команды об отклонении руля до момента начала поворота.
§ 45. ОБЩИЕ ТРЕБОВАНИЯ, ПРЕДЪЯВЛЯЕМЫЕ К ОПРЕДЕЛЕНИЮ МАНЕВРЕННЫХ ЭЛЕМЕНТОВ КОРАБЛЯ
Виды корабельных испытаний. Маневренные элементы определяются во время корабельных испытаний.
Заводские и государственные испытания проходят все корабли после постройки, капитального ремонта и модернизации. Эти испытания проводятся по специальным программам для детального выявления тактико-технических данных корабля в целом.
Дополнительные испытания проводятся на одном-двух кораблях каждого проекта для уточнения всего комплекса тактико-технических данных в тех случаях, когда государственные испытания проведены по недостаточно полной программе.
Проверочные испытания проводятся для определения или уточнения наиболее важных и изменяющихся с течением времени элементов. В программу этих испытаний входит определение маневренных элементов и, в частности, скоростей корабля при наиболее часто употребляемых режимах работы движителей, определение поправок лага и расхода энергоресурсов.
Сроки проведения проверочных испытаний устанавливаются для каждого класса кораблей специальными документами.
Требования к полигону для определения маневренных элементов. Глубина моря на полигоне должна быть такой, чтобы исключалось влияние мелководья на определяемые элементы. Минимальные глубины моря для определения скоростей хода приведены в табл. 19.
Таблица 19
Осадка корабля, м Скорость, уз
5 10 15 20 25 30 35 40
2 15 20 30 40 55 75 95 —
3 20 25 35 45 60 80 100 —
4 20 30 40 50 70 85 105 130
5 25 35 45 60 75 95 115 135
6 30 40 50 65 80 100 120 145
7 35 45 55 70 85 105 125 150
8 40 50 60 75 90 ПО 135 155
9 45 55 65 80 95 115 140 165
Подготовка к определению маневренных элементов. Подготовка к определению маневренных элементов слагается из следующих мероприятий:
— планирования;
— подготовки корабля;
— подготовки технических средств, обеспечивающих необходимые измерения;
— подготовки личного состава.
Планирование испытаний начинается с определения объема работ, который зависит от вида испытаний, и устанавливается официальными
12*
180 Глава 7. Определение маневренных элементов корабля и поправок приборов
документами. Затем, исходя из характера оборудования полигона и корабля техническими средствами, требуемой точности определений и отведенного времени, выбираются способы определения маневренных элементов.
Порядок выполнения маневров корабля отражается на графическом плане и в таблице последовательности маневров (утверждаются командиром корабля). После разработки этих документов на карте крупного масштаба вычерчивается проект маневрирования, представляющий собой предварительную прокладку пути корабля во время испытаний. Кроме пути корабля, на эту карту наносятся границы полигона, предельные изобаты, соответствующие допустимым глубинам моря, поворотные и ограждающие изолинии, а также средства специального оборудования: буи, вехи, отражатели сигналов радиолокационных станций, гидроакустических станций и т. п.
Подготовка корабля осуществляется личным составом электромеханической части и включает в себя осмотр корпуса и движителей, рулей и других забортных устройств, уточнение весовой нагрузки, прием топлива и других необходимых грузов, выравнивание крена и дифферента, измерение осадки, проверку двигательно-движительного комплекса.
Корпус и забортные устройства осматриваются в доке, а если корабль перед испытаниями не проходил докования, то в базе на плаву при помощи водолазов.
В процессе подготовки технических средств осматриваются и приводятся в состояние готовности к использованию курсоуказатели, лаги, суммарные счетчики оборотов винтов, тахометры, тахоскопы, указатели положения рулей, глубиномеры, дифферентометры, кренометры, таксиметры, индикаторы радионавигационных систем (РНС), радиолокационные станции (РЛС), а также средства связи постов корабля, где будут производиться измерения.
Для обеспечения определений места с помощью РНС подается заявка на включение береговых станций в назначенное время. Проверяются также морские часы и необходимое количество секундомеров.
Проверка секундомеров на точность хода производится сравнением промежутков времени по секундомеру с соответствующими промежутками времени по хронометру или иному высокоточному хранителю времени.
Поправка секундомера uz вычисляется по формуле
и = t — t , с *р с’
где /хр — промежуток времени по хронометру;
/с — отсчет по секундомеру.
Допустимые значения средних поправок секундомера и допустимые отклонения частных поправок от средней приведены в табл. 20.
Таблица 20
Класс секундомера Скачки секундной стрелки сек Средняя поправка (сек) за Максимально допустимые отклонения поправок от средней (сек) за
30 и СО сек 15 мин 30 мин 30 и €0 сек 15 мин 30 мин
1 0,1 0,2 0,4 0,6 0,2 0,3 0,4
2 0,1-0,2 0,3 0,6 1,0 0,3 0,4 0,5
3 0,1—0,2 0,3 0,8 1,6 0,3 0,5 0,8
§ 45. Общие требования к определению маневренных элементов 181
Истинные промежутки времени it по отсчетам I', полученным с помощью секундомера, вычисляются по формуле
6 = V + «с,-
' где и^ — поправка секундомера, вычисленная по среднему значению ис для промежутка времени Эта поправка вычисляется по формуле
где t — промежуток времени, для которого вычислена поправка ис.
Для характеристики точности получения поправок секундомера вычисляется средняя квадратическая ошибка /я^по отклонениям Лопастных значений поправок от средней поправки. Расчет пг^ производится по формуле (6) приложения 2. Приближенно величину ти^ можно принимать равной наибольшему значению отклонения, приведенному в табл. 20 для промежутка времени в 15 мин.
Для записи результатов наблюдений и расчета определяемых маневренных элементов готовятся бланки форм, издаваемых Гидрографическим управлением Министерства обороны.
Подготовка личного состава, участвующего в испытаниях, включает распределение личного состава по постам для производства наблюдений и измерений и специальную подготовку. Специальная подготовка осуществляется проведением инструктажа, занятий, тренировок и учений. Перед выходом на испытания производятся проверки, в ходе которых должно быть установлено, что личный состав подготовлен к выполнению возложенных на него обязанностей.
Организация работ при определении маневренных элементов. Точность и надежность определяемых маневренных элементов зависит от следующих факторов:
— четкой организации связи между постами, на которых производятся наблюдения;
— четкого взаимодействия личного состава;
— качества специальной подготовки, тренированности и внимательности всех наблюдателей и операторов;
— правильного выполнения маневров корабля.
Командир корабля (иногда командир соединения) утверждает план и организацию испытаний. На командира корабля возлагается ответственность за своевременность и точность определения маневренных элементов.
Командир штурманской боевой части:
— руководит работами личного состава в период подготовки и во время испытаний;
— разрабатывает графический план испытаний и проект маневрирования корабля, распределяет личный состав по постам для производства наблюдений и измерений;
— координирует и контролирует работу личного состава на постах;
— лично следит за правильностью маневрирования корабля в соответствии с графическим планом, определяет место корабля и поправку курсоуказателя;
— лично рассчитывает определяемые маневренные элементы и поправки приборов;
— заполняет рабочие таблицы штурмана данными, полученными во время испытаний, и выдает командиру электромеханической
182 Г лава 7. Определение маневренных элементов корабля и поправок приборов
части таблицу соответствия скорости хода числу оборотов или мощности двигателей;
— записывает время и условия проведения испытаний, а также состояние приборов, использованных в процессе определения маневренных элементов;
— хранит результаты наблюдений и расчеты до следующих испытаний.
Командир электромеханической боевой части:
— руководит подготовкой личного состава, участвующего в испытаниях, согласуй действия с командиром штурманской боевой части;
— контролирует работу личного состава;
— лично рассчитывает водоизмещение корабля, число оборотов винтов, мощность главных двигателей, расход энергоресурсов и дальность плавания корабля при различных скоростях хода;
— фиксирует изменение осадки, расход переменных грузов, водоизмещение корабля и состояние двигательно-движительного комплекса;
— выдает штурману данные о водоизмещении корабля, числе оборотов винтов или мощности двигателей и осадке корабля на указанные моменты.
Гидрометеорологические условия. Маневренные элементы определяются в хорошую видимость при отсутствии на полигоне льда, по возможности в периоды слабых и мало изменяющихся течений, при силе ветра и волнении до 3 баллов для больших кораблей, до 2 баллов — для малых кораблей и до 1 балла — для катеров.
§ 46. ОПРЕДЕЛЕНИЕ ОТНОСИТЕЛЬНОЙ СКОРОСТИ КОРАБЛЯ
Для определения поправок лага с предельной ошибкой, не превышающей 1%, относительную скорость корабля следует определять с предельной ошибкой не более 0,5%, что соответствует средней квадратической ошибке до 0,17%.
Выполнение указанного требования достигается рациональным выбором длины пробега, числа определяемых скоростей на каждом пробеге, числа пробегов, определением длины пробега с предельной ошибкой не более 0,10—0,15% и предельной ошибкой фиксации продолжительности пробегов не более 1,0—1,5 сек.
Длина пробега S (в милях) назначается исходя из определяемой скорости V и должна быть приближенно равной
Таблица 21
Скорость уз Длина пробега мили
До 6 0,5
6—12 1
12-24 2
24-36 3
36—50 4
Более 50 5
При определении длины пробега S руководствуются табл. 21.
Когда скорость намечается определять способом, позволяющим производить несколько единичных определений на каждом пробеге, общая длина пробега увеличивается. Увеличение зависит от числа п единичных определений скорости и длины пути, проходимого кораблем за промежуток времени Д/ между моментами соседних наблюдений.
Общую длину пробега 50б рассчитывают по формуле
Так, при скорости V •= 18 уз, л = 5-и Д/ = 30 сек (0,0083 ч) получим So6 = 18 : 12+ 18 (5—1) 0,0083 = 2,1 мили.
§ 46. Определение относительной скорости корабля 183
Длина разбега корабля для набора заданной скорости после поворота на обратный курс определяется опытным путем по лагу перед испытаниями. Приближенно эта длина принимается равной 2 милям для больших и 1 миле для малых кораблей.
Режимы работы движителей для определения скорости назначаются в зависимости от класса корабля и характера графика соответствия скорости числу оборотов винтов или мощности двигателей. Если этот график близок к прямой линии, то достаточно четырех режимов, равномерно распределенных в заданном диапазоне; в других случаях число режимов должно быть не меньше пяти.
Линии пробегов располагают:
— на глубинах, исключающих влияние мелководья;
— по возможности вдоль направления течения;
— в удалении от навигационных опасностей не менее 2 миль для больших и 1 мили для малых кораблей.
По линии пробега корабль должен идти с постоянной скоростью, постоянным курсом, при рыскании не более 2°.
Испытания следует начинать с малой скорости хода. При изменении работы движителей необходимо удостовериться по показаниям лага в том, что к моменту начала измерений на новом режиме корабль приобрел соответствующую скорость.
Число пробегов при заданном режиме работы движителей зависит от характера течения на полигоне. При постоянном течении назначаются два пробега в противоположных направлениях.
При переменном течении назначение числа пробегов основывается на анализе графика зависимости скорости течения vT от времени Т (рис. 58). При этом три пробега назначаются в тех случаях, когда график ят = /(Г) близок к прямой, наклоненной к оси абсцисс (участок между точками 1 и 2), четыре пробега, когда график ^т = /(Т) имеет небольшую кривизну или слабые изломы (участок между точками 2 и 3) и пять пробегов при ярко выраженных изломах или большой крутизне графика (участок между точками 3 и 4).
График vT=f(T) скорости течения позволяет выбрать не только необходимое число пробегов, но и наиболее выгодное время испытаний. Это время должно совпадать с прямолинейным участком графика ^=/(П
184 Глава 7. Определение маневренных элементов корабля и поправок приборов
Маневрирование при повороте на обратный курс для измерений на следующем пробеге следует осуществлять так, чтобы корабль выходил на линию предыдущего пробега (рис. 59).
Угол отворота а рассчитывается по формуле
др
где Sp — длина разбега при наборе скорости до заданной.
При значительном удалении полигона от берега условия испытаний будут практически одинаковы на всей его площади. В этом случае выход на линию предыдущего пробега не обязателен.
Промежутки времени маневра для выхода на обратный курс при одном режиме работы движителей должны быть примерно одинаковы.
Для наблюдений и измерения параметров назначается 6 групп наблюдателей:
— группа управления для подачи команд, наблюдения и записи моментов начала и конца пробегов, пересечения секущих ствопов или секущих кабелей, определения поправок курсоуказания, измереш<я расстояний до ориентиров, разностей расстояний и т. п. Группу возглавляет обычно командир штурманской боевой части, а иногда специалист гидрографической службы;
— группа наблюдения и записи показаний репитеров, аксиометров, кренометров, дифферентометров и глубиномеров;
— группа наблюдения и записи отсчетов лага;
— группа наблюдения и записи числа оборотов движителей;
— группа наблюдения и записи энергоресурсов (топлива);
— группа наблюдения и записи мощности главных двигателей.
Последние три группы формируются личным составом электромеханической боевой части.
Для определения скоростей корабля необходимо измерять:
~ длину пробегов;
— продолжительность пробегов;
— число оборотов или мощность движителей.
Длина пробега S{ измеряется в милях (1 миля= 1852 м) различными способами, в зависимости от используемых средств навигационного оборудования на полигоне.
Продолжительность пробегов измеряется в минутах и секундах с помощью выверенных секундомеров не менее чем четырьмя наблюдателями, независимо друг от друга. Наблюденные промежутки времени при необходимости исправляют поправками секундомеров.
Число оборотов движителей (винтов) на пробеге измеряется при всякой к тому возможности по суммарным счетчикам оборотов; наблюдатели выставляются у счетчиков всех работающих движителей.
После команды или условного сигнала звонком «Начать измерения», подаваемого старшим группы управления в начале пробега, наблюдатель группы наблюдения и записи числа оборотов движителей пускает секундомер, когда на счетчике появится отсчет, равный целой сотне оборотов. Остановка секундомера производится после команды (сигнала) «Закончить измерения», когда на счетчике будет отсчет оборотов, также равный целому числу сотен. Отсчеты оборотов движителей и соответствующие им промежутки времени записываются в бланк наблюдений.
Наблюдения, необходимые для расчета поправки лага, определяемой одновременно с определением скоростей хода, производятся в порядке, изложенном в § 47.
§ 46. Определение относительной скорости корабля
185
Маневр для поворота на обратный курс или изменение режима работы движителей следует начинать не раньше момента окончания наблюдений за суммарными счетчиками оборотов и отсчетами лага. -
При отсутствии на корабле суммарных счетчиков число оборотов движителей измеряется с помощью тахометров; отсчеты, снимаемые с тахометров, записываются в течение всего пробега через 15—20 сек, а затем осредняются.
Скорость хода на пробеге У\ вычисляется по формуле
= (7.1)
где Si — длина пробега в проекции на линию курса, мили;
— средняя продолжительность пробега, вычисленная по результатам измерений отдельных наблюдателей, сек.
Величины можно выбрать из таблицы, составленной для данной мерной линии.
Если скорость корабля на пробеге определялась многократно, например при использовании РЛС, то средняя истинная скорость V/ рассчитывается по формуле
_ Vtl + Vh+ ... +vin
* п *
где — единичные скорости.
Число оборотов Nj одного движителя (винта) в одну минуту на про* беге при использовании суммарного счетчика вычисляется по формуле
у - 60A'v<-
где AAf, — разность отсчетов суммарного счетчика в начале и в конце пробега;
/об. — промежуток времени между отсчетами, соответствующий разности ДТУу, сек.
Если число оборотов на пробеге определялось многократно, то среднее значение рассчитывается по формуле
Nh+Nl2+...+Nl
где Nt — результаты единичных определений.
Когда' корабль имеет два и более движителей, среднее число оборотов на пробеге выводится как среднее арифметическое из чисел оборотов каждого движителя.
Относительная скорость VQ корабля и среднее число No оборотов движителей на данном режиме работы двигателей рассчитываются по формулам:
— при двух пробегах
— при трех пробегах
186 Глава 7. Определение маневренных элементов корабля и поправок приборов
— при четырех пробегах
> V । 4* 31^2 4* ЗУ3 4*
О =- §
r TV, 4- 3^2 4- ЗЛГ3 4- Л^4
0 8
— при пяти пробегах
v _ Vx 4- 4V2 4- 6V3 4- 4V\ 4- V5 v° 16
\r __ 4- 4ЛГ2 4- 6N3 4- 4uV4 4-^5
/v°
(7. 4)
} (7. 5)
)
Скорости Vo вычисляются с округлением до 0,01 уз, а числа оборотов — до 0,1 об/мин.
Когда водоизмещение Д надводного корабля во время испытаний на данном режиме не равно нормальному До, вычисленные относительные скорости К, приводятся к нормальному водоизмещению с помощью специальных графиков. При отсутствии графиков приведение производится по приближенной формуле
У' ~у о о
М'Р УД',)
где У’о — относительная скорость, мещению.
приведенная к нормальному водоиз-
Пример. Относительная Д=3200 т.
Вычислить скорость Решение.
скорость корабля Vo = 30,00 уз при водоизмещении хода Vo при нормальном водоизмещении 4о = 27ОО т.
1g 30 = 1.47712
9
1g 3200 = 0.77892
X = 2.25604
— 1g 2700 = 0.76252
lg V;= 1.49352
lg 3200 = 3.50515
lg 2700 = 3.43136
V' =31,15 уз.
График соответствия скорости корабля числу оборотов винтов строится на миллиметровой бумаге в крупном масштабе, например, 0,5 уз и 10—20 об/мин в 1 см. С осью абсцисс совмещается шкала скоростей, приведенных к нормальному водоизмещению, а с осью ординат — шкала чисел оборотов No. Через точки, соответствующие наблюденным значениям Уо и No, проводится равноудовлетворяющая их прямая или плавная кривая с незначительным изгибом на участке больших скоростей (рис. 60). Характер кривой может быть уточнен на основании материалов предшествующих скоростных испытаний. По графику V0=f(N0) составляется таблица соответствия скорости корабля числу оборотов винтов через 1 уз.
При наличии на корабле крыльчатых движителей или винтов регулируемого шага на график наносится несколько кривых для различных положений полюса системы или шага винта. Аналогично несколько кривых наносится на график в тех случаях, когда одновременно с винтами используются ускорительные реактивные двигатели (УРД).
• § 46. Определение относительной скорости корабля
187
При прогрессивных испытаниях на листе бумаги с графиком зависимости Vo от No наносятся другие кривые, показывающие дальность плавания, продолжительность плавания, расход топлива на одну милю и мощность двигателей при различных скоростях Vo.
Контроль качества определения скоростей осуществляется по характеру графиков соответствия скорости числу оборотов винтов и проекции вектора течения на линию пробегов.
Считается, что наблюдения и вычисления произведены правильно, если точки, соответствующие наблюденным величинам и 7V0, расположены практически на, одной прямой или плавной кривой, а также тогда, когда отклонения AVo (рис. 61) этих точек от сглаживающей кривой или прямой линии Уо = /(/Vo) не превышают 0,5%.
Если эти условия не соблюдены, необходимо проверить правильность всех расчетов.
При отсутствии ошибок и промахов в вычислениях суждение о каче- > стве испытаний принимается на основании следующих соображений:
а) если недопустимые отклонения имеют две точки (точки 2 и 4 на рис. 62) — испытания бракуются и их нужно повторить;
б) если из четырех-пяти точек недопустимое отклонение имеет одна крайняя точка — испытания следует повторить на режиме, соответствую щем этой точке, и на одном-двух режимах, способствующих более полной характеристике графика. Так, для случая, представленного на рис. 63, следует повторить испытания на режиме, соответствующем точке 4, а дополнительный режим назначить в диапазоне скоростей между точками 3 и 4\
в) если недопустимое отклонение AI/q имеет одна из шести или одна из четырех-пяти точек при прямолинейном графике, испытания считают удовлетворительными, но скорость Уо для этой точки следует исправить на величину bVQ (рис. 64).
188 Глава 7. Определение маневренных элементов корабля и поправок приборов
График проекций вектора позволяющий оценить качество чаях, когда для измерения
беге от среднего. Так, для трех
течения по времени на линию пробегов, испытаний, можно построить в тех слу-числа оборотов винтов применялись суммарные счетчики. Для получения этих проекций следует:
1. Для каждого режима работы главных двигателей вычислить коэффициент пропорциональности а — «аванс», устанавливающий зависимость между скоростью корабля и числом оборотов винтов
<7-6)
2. Рассчитать отклонения числа оборотов винтов ДМ на каждом пропробегов получим
дм = м - м ДМ = М - М> ДМ = М - М
(7.7)
3. Рассчитать отклонения скоростей на пробегах от средней скорости Уо за счет непостоянства оборотов
ДУ, - а ДМ ду2 ~ дДМ ДУ3 - аДМ
(7. 8)
Знаки величин ДУ, совпадают со знаками ДМ.
4. Рассчитать относительные скорости Уо для каждого пробега
(7.9)
= V0 + Д^2 v03-v0 + w3
5. Рассчитать проекции векторов течения на линию пробегов (с их
знаками) % = v2 - 'Z02 (7. 10) *t3=V3-1/03
Знак плюс при величине vT. означает попутное течение, а знак минус встречное течение.
График проекций скорости течения по времени vT—f(T) строится в прямоугольной системе координат; каждый вектор *от относится к среднему моменту времени данного пробега. При построении графика величины соседних пробегов, имеющие разные знаки, откладываются в одну сторону от оси абсцисс, а имеющие одинаковые знаки — в противоположные стороны (рис. 65).
§ 46. Определение относительной скорости корабля
189
Качество испытаний оценивается в результате анализа графика *vT = /(Т) для каждого режима работы движителей в отдельности. Испытания считаются удовлетворительными, если:
— при двух пробегах график представляет собой прямую, параллельную оси абсцисс;
— при трех пробегах график является наклонной прямой или прямой, параллельной оси абсцисс (рис. 66, а);
— при четырех пробегах график является плавной кривой без резких изгибов (рис. 66,6) или прямой;
— при пяти пробегах график имеет вид кривой, переменной кривизны (рис. 66, в) или прямой.
Несоответствие графиков указанным условиям свидетельствует о наличии ошибок в расчетах, низкой точности измерений или о недостаточном числе пробегов на каждом режиме работы главных двигателей.
Пример. Вычислить относительную скорость, среднее число оборотов винтов и проекции вектора течения на линию пробегов по данным, приведенным в следующей таблице.
№ пробега Длина пробега мили Средняя продолжительность пробега сек Среднее число оборотов винтов об1мин Средний момент пробега
ч мин
1 2,000 500,4 199,4 10 00
2 2,000 539,1 200,0 10 22
3 2,000 497,5 199,0 10 44
п 1Ч __ 3600-2,000 1ЛОП
Решение. 1) V, =- —— — 14,39 уз;
0vU,O
V2 = 36^00 = 13 зе уз; Уз = 3600-WO = 14 47
2) Vb = 14,38+2J3,36 + J4.47 = 13 89 уз.
No = 1^+2.200,4-199 = 199,6 об/мин.
190 Глава 7. Определение маневренных элементов корабля и поправок приборов
AW3 z= 199 — 199,6 = —0,6.
3) = = 0,0696.
4) AtV, == 199,4 — 199,6 = —0,2; ДМ> - 200 - 199,6 -- 4-0,4;
5) Д V! = аШ} = —0,01 уз; 6) v01 = Vo + AIZj - 13,88 уз;
ДУ2 = аДЛГ2 = 4-0,03 уз; VO2 = Vo 4- AV2- 13,92 уз;
ДУ3 = аДЛГ3 = —0,04 уз. Vo 4- AV3- 13,85 уз.
7) vTl H-V'o, = 4-0,51 уз;
V’2- % - —0,56 уз;
V3-VO3 — 4-0,62 уз.
График vT=f(T) приведен на рис. 67. При таком графике испытания на данном режиме можно считать удовлетворительными.
Способы определения скорости корабля
Способы определения скорости корабля различаются по методике и навигационному оборудованию или техническим средствам, использованным для определения длины пробега.
Применяются следующие способы определения скорости кораблей:
— на визуальной мерной линии (автономное определение);
— на визуальной мерной линии (неавтономное определение);
— по радиолокационной станции;
— по радионавигационным системам;
— по теодолитным засечкам;
— по приращениям расстояний, измеренных геодезическим радиодальномером;
— по радиодальномерно-теодолит-ным засечкам;
— на веерной линии.
визуальной мерной
мерная линия щих створов, которые расположены на таких удалениях друг от друга, чтобы было возможно подобрать необходимую длину пробега для определения любой скорости корабля. Положение линии пробегов (рис. 68) указывается ведущим створом или буями (вехами). По прибытии на полигон корабль ложится на курс, перпендикулярный секущим створам, и развивает назначенный ход. Направление пробега в дальнейшем выдерживается по компасу, поправку которого определяют по пеленгам секущих створов в начале и конце организации работ первый пробег рекомендуется делать пробным.
на
визуальной мерной
Определение скорости определение). Визуальная
состоит
из
линии (автономное параллельных секу-
Д 9 .
4
$
Рис. 68
пробега. Для проверки
§ 46. Определение относительной скорости корабля
191
При подходе к первому секущему створу по кораблю подается предварительный сигнал или команда «Приготовиться к измерениям», а в моменты пересечения начального (конечного) створа — сигнал или команда «Начать (окончить) измерения». По этим командам на корабле производятся все необходимые измерения и записи полученных результатов.
Продолжительность пробега измеряется несколькими наблюдателями, которые самостоятельно, используя бинокли и не изменяя места наблюдений, фиксируют с помощью секундомеров моменты пересечения секущих створов.
По окончании измерений на первом пробеге поворачивают на обратный курс и наблюдения повторяются.
Скорость корабля на каждом пробеге вычисляется по средней продолжительности пробега и расстоянию 3 между секущими створами.
Поправка гирокомпаса за время пробега, как правило, несколько изменяется. Это изменение равно разности поправок конечной ДГЛ'2 и начальной ДГЛ1
ЪГК - Д/7Л> - ДЩ.
Компасный курс каждого пробега исправляется средней поправкой гирокомпаса ДГКср, и полученный истинный курс вычитается из курса, перпендикулярного секущим створам, в результате чего получают угол е. Допустимая величина угла £доп вычисляется по формуле
зес8доп^ 1 г O,OO2/nV/°/o, (7. 11)
где /ии.°/о “ допустимая средняя квадратическая ошибка определения скорости на пробеге.
При mVi = О,5°/0 зеседоп == 1,00100 и ®доп = 2°6.
Когда угол е превышает допустимую величину, истинная скорость, вычисляемая по формуле (7.1), умножается на sees.
Расчет относительных скоростей и среднего числа оборотов для каждого режима выполняют по формулам (7.2) — (7.5).
Определение скорости на визуальной мерной линии (неавтономное определение). Данный способ применяется для определения скорости быстроходных малых кораблей и катеров.
На полигоне вместо секущих створов устанавливаются теодолитные посты ТП\ и ТП2 (рис. 69), оборудовайные средствами радиосвязи между собой и с кораблем, определяющим скорость. Положение теодолитов и ориентировка их горизонтальных кругов производятся геодезическими способами. Линии визирования теодолитов ориентируются по направлениям, перпендикулярным линии пробегов.
На каждом теодолитном посту должно быть не менее двух выверенных секундомеров для измерения продолжительности пробегов.
Корабль (катер) выходит на рекомендованную линию пробегов и развивает назначенную скорость, удерживая курс по компасу. При появлении корабля в поле зрения трубы первого теодолита наблюдатель теодолитного поста подает по радио предварительную команду «Товсь», а в момент прохождения через вертикальную нить теодолита назначенной характерной точки (форштевень, мачта, срез рубки) корабля — исполнительную команду «Ноль». По этой команде на обоих теодолитных постах пускаются секундомеры, а на корабле производятся измерения, необходимые для определения поправки курсоуказания, числа оборотов движителей, расхода топлива, поправки лага и мощности двигателей.
192 Г лава 7. Определение маневренных элементов корабля и поправок приборов
При подходе корабля к линии визирования второго теодолита и прохождении ее предварительная команда «Товсь» и исполнительная «Ноль» подаются наблюдателем второго теодолита. По исполнительной команде останавливаются секундомеры на теодолитных постах и заканчиваются измерения на корабле.
Расчет скорости для различных режимов работы движителей производится командиром гидрографической партии, в ведении которого находятся теодолитные посты. При этом длина пробега S (рис. 69) рассчитывается по формуле
S = Б cos а,
где Б— расстояние (база) между теодолитными постами, мили;
а — угол между направлением базы и линией среднего истинного курса корабля.
Рис. 69
Поправки курсоуказания, необходимые для расчета среднего истинного курса, определяются по пеленгам на теодолитные посты, измеряемым в моменты подачи исполнительных команд «Ноль».
Определение скорости по радиолокационной станции. На полигоне должен быть точечный радиолокационный ориентир. В качестве такого ориентира может быть:
— радиолокационный отражатель, установленный на берегу;
— радиолокационный отражатель, смонтированный на буе, стоящем на якоре или на дрейфующем буе, имеющем осадку, одинаковую с осадкой испытуемого корабля;
— обеспечивающий надводный корабль, стоящий на якоре или бочках.
Ориентирами могут служить также отвесные скалы или скалистые островки.
Линия пробегов располагается так, чтобы корабль шел на ориентир (РЛО) или от него (рис. 70).
Кроме того, корабль должен идти:
— по направлению течения, если ориентир не дрейфующий;
— перпендикулярно направлению ветра, если ориентир дрейфующий;
— по направлению ветра, если течение отсутствует, а ориентир не дрейфующий.
Длина пробега S определяется по разности расстояний конечного DK и начального измеренных до ориентира с помощью РЛС. Средняя квадратическая ошибка измерения расстояний не должна превышать 20 м.
§ 46. Определение относительной скорости корабля
193
Для обеспечения возможно большей точности измерений следует:
— использовать наиболее крупный масштаб изображения;
— измерять расстояния по 3—5 раз в начале и в конце каждого пробега через 20—30 сек, фиксируя моменты измерения по 4—5 секундомерам.
В зависимости от точности и удобства снятия отсчетов расстояний с индикаторного устройства РЛС расстояния могут измеряться:
— через одинаковые промежутки времени, по команде наблюдателя с секундомером;
— через одинаковые интервалы расстояний по заранее составленной таблице; моменты по секундомерам в этом случае отмечаются по команде оператора радиометриста.
Расстояния можно также измерять с помощью РЛС обеспечивающего корабля, если его станция имеет большую точность по сравнению со станцией корабля, определяющего скорость. В этом случае между кораблями должна быть установлена радиосвязь для координации действий личного состава, участвующего в испытаниях.
Одновременно с каждым измерением расстояния пеленгуют ориентир.
По результатам измерений на одном пробеге можно вычислить несколько частных значений скорости в зависимости от числа расстояний, измеренных в начальной и конечной сериях. Скорость корабля на данном пробеге принимается равной средней скорости из ее частных значений.
При обнаружении сноса корабля относительно заданной линии пробега расстояния, измеренные до ориентира и используемые для расчета длины пробега S, следует предварительно исправить поправками AD/, вычисляемыми по формуле
(1 — cosjft),
где qt — курсовой угол ориентира в момент измерения расстояния, равный разности пеленга на ориентир и истинного курса корабля.
Поправка всегда отрицательна.
Допустимое значение угла сноса р, при котором можно пренебрегать поправками AD/, вычисляется по формуле (7.11) в виде
8еС₽доп= 1 +О>°°2отг’/о-
13 Заказ 1833
194 Г лава 7. Определение маневренных элементов корабля и поправок приборов
Для вычисления фактических углов сноса р (рис. 71) применяется формула
sinp = sinqK-у-,
(7. 12)
где — последнее измеренное на пробеге расстояние до ориентира
<7к — курсовой угол ориентира в момент измерения расстояния;
S—расстояние, пройденное кораблем за время между измерениями начального расстояния DH (когда угол q = 0 или 180°) и расстояния DK.
Определение скорости по радионавигационным системам. Способ применяют при повышенных требованиях к точности определяемых скоростей, а также в случаях, когда полигон удален от берега на большое расстояние.
Длина пробега определяется как расстояние между обсервованными местами корабля, получаемыми с помощью высокоточных радионавигационных систем.
По прибытии на полигон корабль приводят на курс, совпадающий с направлением течения или отличающийся от него на 180°, и развивают назначенную скорость хода. По сигналу «Начать измерения» определяют место корабля через одинаковые промежутки времени 20—30 сек, и выполняют другие ранее перечисленные измерения.
На каждом пробеге делается не меньше 20 определений места с точной фиксацией моментов этих определений с помощью прибора регистрации времени или 4—5 секундомеров. Сигнал «Окончить измерения» подается после момента последнего определения места.
Длину пробега можно получить графически или аналитически. Графический способ состоит в нанесении мест корабля на крупномасштабный планшет и последующем измерении расстояний между соответствующими парами мест (рис. 72). При 20-кратных определениях места на пробеге составляется 10 комбинаций пар точек (точки / и 11, 2 и 12 и т. д.) и получается 10 длин пробега. По этим длинам и соответствующим промежуткам времени рассчитывается 10 скоростей корабля, которые затем осредняются.
Если промежутки времени между обсервациями были строго одинаковы, то можно осреднить частные значения длин пробега и среднюю скорость вычислить с учетом величины Sep.
При аналитическом способе по измеренным навигационным параметрам вычисляются прямоугольные координаты обсервованных точек. Затем рассчитываются расстояния между точками, которые комбини
§ 46. Определение относительной скорости корабля
195
руются в указанном выше порядке. Для расчета расстояния S, применяется формула
S, /(Дх,)2 + (Ду,)2, (7. 13)
где Дх, и Ду, — разности прямоугольных координат соответствующих пар точек, м.
В случае выдерживания одинаковых промежутков времени между обсервациями в формулу (7.13) подставляются средние значения разностей координат (Дх и Ду) и тогда в результате получится средняя длина пробега So в метрах.
Скорость хода в узлах равна «г 3600 Sq Vf="l852 ‘V’
где tt — промежуток времени, сек.
При наличии бокового сноса корабля, превышающего допустимую величину, вычисляемую по формуле (7. 11), скорость V't рассчитывается по формуле
V' - К cos 0,,
где р, — фактический угол сноса корабля, равный разности фактического пути и истинного курса.
Путевой угол /7 У, измеряется на планшете или вычисляется аналитически по формуле
ПУ^Т^ + ъ.
где Ts — дирекционное направление линии пробега, вычисляемое по формуле
7^-arctg-g;
7, — схождение меридианов для средней точки пробега. Для расчета угла ъ применяется формула
I/ = Л — ^о) sin <р(,
где Lo — долгота осевого меридиана зоны;
и X, — географические координаты средней точки пробега.
13*
196 Глава 7. Определение маневренных элементов корабля и поправок приборов
Поправка курсоуказания для расчета истинного курса должна определяться на каждом пробеге одним из возможных способов, например, по пеленгам небесных светил.
Если в ходе испытаний нет возможности для определения поправки курсоуказания и, следовательно, угол сноса ₽ определить нельзя, то следует:
а) проложить линии пробегов на планшете;
б) измерить углы т) непарал-лельности противоположных пробегов;
в) вычислить допустимый
угол 7jl0II непараллельности по формуле
cos Vn = 1 - 0,008тИ((0/о,
где — допустимая средняя квадратическая ошибка относительной скорости, обычно равная 0,17%;
г) если ^>^ДОп» то необходимо выравнять наблюденные скорости по направлению. При четырех пробегах для одного режима работы движителей выравненные скорости вычисляются по формулам, полученным на основе рис. 73, где изображены векторы скоростей первых двух пробегов:
- 2Цcos (TS1 - Tsj
= у У VI + V* - 2l/2l/3 cos (7^ - TS3y,
-= у/И + 4 - 2 W cos (TSi - TSJ.
Относительная скорость вычисляется как при трех пробегах по формуле
v __ + 2Vn + VIH
4
Когда векторы Vp 1/и и VU1 также имеют непараллельность, превышающую допустимую величину, выравнивание продолжается по формулам:
l/A = 1 /^+^-2ЦЦ, COS (62-62);
Ув = у + cos (02-63),
где Oj = TSi — af, 02 = TS2 — аи; 63 = 7^ — аш.
Углы а, вычисляются по формулам:
sin а, = -Д- sin (Г51 - TS2);
siliaH-^sin(Ts2~Ts3Y
sin^- 2y,*j sin(%3 ?S4).
§ 46. Определение относительной скорости корабля
197
Относительная скорость в таких случаях должна вычисляться как при двух пробегах по формуле
v о 2
При трех пробегах вычисляются только скорости У{ и У1р а относительная скорость получается как среднее арифметическое из величин и ^в-
Расчет скорости корабля на всех режимах в данном способе производится командиром гидрографической партии, обеспечивающей испытания.
Определение скорости по теодолитным засечкам. В данном способе место корабля определяется по теодолитным засечкам с двух или трех теодолитных постов, развернутых на берегу. Теодолиты не ниже 30" точности обслуживаются личным составом обеспечивающей гидрографической партии.
Число определяемых мест — ие менее 20, с интервалом между определениями 20—30 сек\ пробеги совершаются по течению или против него.
После развития заданной скорости на пробеге командир группы управления подает команду «Начать измерения». По этой команде наблюдатели на теодолитных постах начинают визировать заранее обусловленную точку корабля; отсчеты дирекционных углов по горизонтальным кругам теодолитов берутся по командам «Ноль», передаваемым с корабля по радио. Измеренные дирекционные углы немедленно передаются на корабль и записываются в журнал наблюдений. Моменты по секундомерам для определения продолжительности пробегов фиксируются на корабле.
Длина пробега между соответствующими парами точек, как и в предыдущем способе, определяется графически или аналитически. Поправка гирокомпаса для расчета среднего истинного курса на каждом пробеге вычисляется по мгновенным поправкам и Д/7С2 определяемым, в свою очередь, по пеленгам на теодолитные посты в начале и в конце пробега. Для определения поправок применяется формула
АЩ. - 1\ 4- ъ - КПЬ
где 7\ — измеренный с помощью теодолита дирекционный угол;
— схождение меридианов, вычисленное для соответствующей точки (начала или конца пробега);
КГЦ — компасный пеленг, взятый в момент измерения угла Т\.
Если угол сноса 3Z == /7XZ — HKL превышает допустимую величину, то скорости, вычисленные по формуле (7. 1), умножаются на cos pz.
Определение скорости по приращениям расстояний, измеренных геодезическим радиодальномером. Ведущая станция геодезического радиодальномера устанавливается на корабле, определяющем скорость, а ведомая—на берегу или на обеспечивающем корабле (рис. 74). Корабль должен маневрировать курсами на ведомую станцию или от нее.
На каждом пробеге личный состав, обслуживающий радиодальномер, измеряет приращения расстояний ADZ, равные пройденным кораб
198 Глава 7. Определение маневренных элементов корабля и поправок приборов
лем расстояниям Sh и фиксирует продолжительность пробегов. Величины (в метрах) вычисляются по формуле
S,. =
где kx — коэффициент радиодальномера, характеризующий „цену" фазового цикла, м\
число циклов за время пробега.
Рис. 74
Скорости на пробегах вычисляются по формуле Sif V. = 1,9438-^-, 1 *4
где и 1^ — длина (л<) и продолжительность (сек) пробега соответственно.
Суммарные углы сноса корабля на пробегах не должны превышать 3°,3. Контроль за этими углами осуществлятся по пеленгам на ведомую станцию.
Определение скорости по радиодальномерно-теодолитным засечкам. Данный способ аналогичен способу определения скорости по теодолит-х ным засечкам с той лишь разницей,
\ что определение мест на пробеге
А производится по дирекционным
'3 углам, измеряемым с помощью тео-
долита и расстояниям Dh измеряе-мым с помощью геодезического ра-
X диодальномера (рис. 75). Указан-
| ные навигационные параметры изме-
о\ ряются личным составом обеспечи-
Я вающей испытания гидрографиче-
ской партии, находящимся на совме-X щенном радиодальномерно-теодо-
g литном посту.
|} Вычисление наблюденных скоро-
» стей осуществляется так же, как
Рис. 75 в способе определения скорости по
теодолитным засечкам.
Определение скорости на веерной визуальной мерной линии. Способ применяется как исключение при отсутствии оборудованного полигона, а также при пониженных требованиях к точности определяемых скоростей.
На полигоне выбираются два ориентира А и В (рис. 76), расстояние между которыми ориентировочно равно длине пробега (до 4—5 км),
§ 46, Определение относительной скорости корабля.
199
а пеленг базы Б приближенно совпадает с направлением береговой черты. Направление и длина базы измеряются на крупномасштабной карте (не мельче 1 : 50 000) или вычисляются по координатам ориентиров; желательно получение длины базы с точностью до 0,001 мили.
Измеряемая или вычисляемая база должна быть выражена в морских милях. Для перехода к стандартным милям применяется формула
R ^Д1М ° 1852 ’
где АВ — расстояние между точками в минутах дуги меридиана на параллели полигона;
Д1м == 1852,23 — 9,34 cos 2<? — длина 1' дуги меридиана, м.
Так, в широте <р = 60° при АВ = 1,76 мили получим а/ 1 осс пл с 1,760-1856,90 ,
Д1м = 1856,90 м, и S = •——- = 1,765 мили.
1852
Сущность способа состоит в определении с помощью серии пеленгов ориентиров А н В продолжительности пробега, длина которого равна базе или проекции этой базы на линию пробега. Для этого корабль приводят на курс, параллельный базе АВ, и развивают заданную скорость. Когда курсовой угол первого ориентира станет равным 75—80°, подается команда «Начать измерения».
Для определения продолжительности пробега наблюдатель группы управления, используя оптический пеленгатор, измеряет две серии пеленгов ориентиров; моменты измерений фиксируются с помощью 2—3 секундомеров. В каждой серии измеряется не менее 7 пеленгов, симметричных относительно траверзного пеленга. Сектор пеленгов 6 в одной серии не следует делать больше 30°, а угловой интервал Д/7° между соседними пеленгами назначается одинаковым и вычисляется по формуле
Д/7° = 0,16^2, (7.14)
‘-'тр
где Vt — определяемая скорость корабля, уз;
^дп — промежуток времени между моментами измерения соседних пеленгов, необходимый для наведения пеленгатора, снятия отсчета и записи результатов измерений, сек\
Dyp — траверзное расстояние до ориентира, кбт.
Вычисленная по формуле (7. 14) величина Д/7° округляется в большую сторону до целого градуса.
Для фиксации моментов взятия пеленгов целесообразно применять секундомер с двумя секундными стрелками, одна из которых движется непрерывно (после взятия первого пеленга), а другая стопорится в моменты измерения очередных пеленгов.
200 Глава 7. Определение маневренных элементов корабля и поправок приборов
Аналогичные измерения производятся в конце пробега относительно второго ориентира и при этом каждому пеленгу первой серии должен соответствовать параллельный пеленг второй серии.
Для расчета скорости на пробеге пройденное кораблем расстояние принимается равным длине базы» а за продолжительность пробега берется средний из промежутков времени между моментами, когда корабль находился на параллельных пеленгах первой и второй серий наблюдений.
Если параллельность пеленгов первой и второй серий не соблюдалась, то продолжительность пробега снимается с графика соответствия пеленгов времени наблюдений (рис. 77). График строится на миллиметровой бумаге в крупном масштабе, например, 1° (по оси ординат) и 10 сек (по оси абсцисс) в 1 см.
По данным наблюдений на график наносятся точки, через которые проводятся равноудовлетворяющие их прямые линии ИП — f(T). Затем проводится линия, параллельная оси абсцисс, соответствующая траверзному пеленгу ИП^ и еще 4—6 прямых, симметричных ИП^У через одинаковые угловые интервалы Д/7° с таким расчетом, чтобы был использован весь график.
С графика снимается 5—7 значений продолжительности пробега, для чего предварительно определяются моменты нахождения корабля на линиях выбранных пеленгов (на рис. 77 показаны моменты и Т2 только для траверзного пеленга), а затем вычисляются разности этих моментов. Для расчета скорости учитывается средняя из величин t...
Когда пробеги невозможно расположить параллельно линии базы (.рис. 78), длина пробега принимается равной проекции базы Б на линию истинного курса
S ВС = Б cos а, а продолжительность пробега выводится как среднее из частных ее значений, полученных для параллельных пеленгов, симметричных траверзному и отстоящих друг от друга на одинаковом угловом интервале Д/7°. Так, если траверзный пеленг равен 30°, а угловой интервал выбран в 4°, то величины 7] должны определяться:
— для пеленга 30°;
— для пеленгов 26 и 34°;
— для пеленгов 22 и 38°;
— для пеленгов 18 и 42° и т. д.
§ 47. Определение поправки и коэффициента относительного лага 201
Определение потери скорости корабля от обрастания подводной части корпуса. Интенсивность обрастания подводной части корпуса корабля различными организмами (ракушками, водорослями и пр.), а следовательно, и потеря скорости, зависит от ряда причин. Плавающий корабль обрастает меньше, чем корабль, стоящий на якоре или швартовах. Быстроходные корабли и корабли с малой осадкой обрастают меньше, чем корабли тихоходные и с большой осадкой. В низких широтах обрастание происходит интенсивнее, чем в высоких; с увеличением температуры и солености воды обрастание усиливается.
Потеря скорости зависит также от времени, в течение которого корабль подвергается обрастанию после очистки корпуса, от качества защитной краски, покрывающей подводную часть корпуса, и от величины самой скорости корабля.
Наблюдения за потерей скорости должны быть систематическими, с тем, чтобы по их результатам можно было построить график потери скорости для различных скоростей и промежутков времени, прошедших после очистки корпуса корабля.
Данные о потере скорости корабля получаются в результате сравнения скоростей, определенных непосредственно после очистки корпуса и в последующие сроки. Изменение скорости за один месяц вычисляется по формуле
где VOj и VOi — относительные скорости хода при одинаковом режиме работы движителей, приведенные к нормальному водоизмещению и определенные, когда корпус был чистым и после обрастания соответственно;
^обр — промежуток времени в месяцах между сроками определения скоростей VOi и ИОг
§ 47. ОПРЕДЕЛЕНИЕ ПОПРАВКИ И КОЭФФИЦИЕНТА ОТНОСИТЕЛЬНОГО ЛАГА
Поправка и коэффициент относительного лага определяются сравнением относительной скорости, являющейся эталонной, со скоростью, измеренной с помощью лага.
Скорость корабля по показаниям лага Ул определяется, как правило, тремя наблюдателями с секундомерами, производящими независимые наблюдения у центрального и двух периферийных приборов лага. Задача наблюдателей состоит в измерении промежутков времени, за которые корабль по показаниям лага проходит расстояние, близкое к длине пробега. Для этого наблюдатели пускают секундомеры после команды «Начать измерения» в момент, когда на счетчике пройденного расстояния появляются отсчеты, ближайшие, кратные целому числу кабельтовых. Секундомеры останавливаются после команды «Окончить измерения» в моменты, когда на счетчиках будут отсчеты, также ближайшие, кратные целому числу кабельтовых.
Разности конечного и начального отсчетов лага у всех наблюдателей должны быть одинаковыми.
Для повышения точности измерений наблюдения в начале и конце пробега производятся серийно (по 2—3) через небольшие промежутки времени, необходимые для изменения отсчета лага на 1 или 2 кбт.
202 Глава 7. Определение маневренных элементов корабля и поправок приборов
По результатам измерений трех наблюдателей для каждого пробега рассчитывается средний промежуток времени tt (в сек), за который корабль прошел расстояние, соответствующее выбранной разности отсчетов лага (рол). Скорость хода на пробеге по лагу вычисляется по формуле
у, _ 3600рол\ у ч ~ Ti ’
Средняя скорость по лагу Ул, соответствующая данному режиму работы движителей, рассчитывается по формулам, аналогичным (7. 2) — (7. 5), а поправка лага Дл (в %) и коэффициент лага кл рассчитываются по формулам:
Дл = 100;
к -£>• л V,'
Ьл = (кл — 1)100.
Так, если относительная скорость Vo = 12,68 уз, а скорости по показаниям лага на трех пробегах были: Ул = 12,33 уз, V => 12,56 уз,
V + 2V 4- V ' ига
ИЛз = 12,40 уз, то Ул = = 12,46 уз, кл = = 1,018 и
Дл-+1,8°/0.
Поправка и коэффициент относительного лага могут быть определены также сравнением длины пробега S, являющейся эталонной (например, расстояния между секущими створами визуальной мерной линии) с длиной пробега рол, полученной по лагу
1000/°-
Имея частные значения поправок лага для каждого пробега, вычисленные по последней формуле, рассчитывают среднюю из них, применяя формулы, аналогичные (7.2) — (7. 5), в зависимости от числа пробегов.
При регулировке относительных лагов используется не поправка лага, а его погрешность, т. е. величина, аналогичная поправке, но отнесенная не к скорости по лагу (или разности отсчетов лага), а к относительной скорости Vo (или истинной длине пробега S).
§ 48. ТОЧНОСТЬ ОПРЕДЕЛЕНИЯ СКОРОСТИ КОРАБЛЯ И ПОПРАВКИ ЛАГА
Для характеристики точности определения скорости корабля и поправки лага пользуются средними квадратическими ошибками, которые могут быть вычислены априорно и апостериорно.
Априорные, или ожидаемые, ошибки вычисляются для предварительной оценки точности выбранного способа определения скорости и его соответствия требованиям, установленным официальными документами или выработанным практикой кораблевождения.
§ 48. Точность определения скорости корабля и поправки лага
203
Апостериорные ошибки вычисляются по результатам проведенных испытаний, в ходе которых на каждом пробеге скорость определялась несколько раз. Апостериорная ошибка служит критерием для оценки точности выполненных испытаний.
Точность определения скорости корабля. Априорная средняя квадратическая ошибка определения скорости корабля для заданного режима работы главных корабельных двигателей вычисляется по формулам:
— при двух пробегах
? V + m2vt; (7.16)
— при трех пробегах
отИо = + + - (7. 17)
— при четырех пробегах
тУ0 = Т + 9/га^. + 9< + mv. 1 (7.18)
— при пяти пробегах
mV0 = VmV: + 16/”^ + 36/”^ + 16/”^ + 19>
где mv — средняя квадратическая ошибка определения скорости 1 корабля на пробеге.
Если средние квадратические ошибки mv. определения скоростей на пробегах одинаковы, то расчеты производятся по более простым формулам:
— при двух пробегах
— при трех пробегах
— при четырех пробегах
— при пяти пробегах к
mv 0,71 mv о
tnv =-= 0,61 mv
mv — 0,56
v O
m., 0.52 m.,
(7. 20)
Априорная средняя квадратическая ошибка определения скорости корабля на пробеге ти (в %) вычисляется по формуле
=- J/X’ + V'o'nV (7. 21)
где S — длина пробега, мили;
ms — средняя квадратическая ошибка длины пробега, мили;
п — число определений скорости на одном пробеге;
mt — средняя квадратическая ошибка измерения продолжительности пробега, ч.
Величины mt определяются в процессе проверки секундомеров или выбираются из их аттестатов.
В зависимости от способа определения скорости корабля ошибка в длине пробега вычисляется по формулам, приведенным в табл. 22.
204 Глава 7. Определение маневренных элементов корабля и поправок приборов
Таблица 22
Способ определения скорости Расчетная формула Условные обозначения м формулы
На визуальной мерной линии (автономное определение) На визуальной мерной линии (неавтономное определение) По радиолокационной станции Чз « с3 а.| е> II II + 5 pl — линейная чувствительность створа, мили; Рср — средняя из величин р для двух секущих створов; D — расстояние от линии пробегов до переднего знака секущего створа, мили; d — расстояние между знаками секущих створов, мили; 7'— разрешающая способность глаза (Г — днем и 0'7—0J8 ночью); UZ — кратность увеличения бинокля, применяемого при наблюдениях секущих створов 7. 22 7. 23 7. 24
ms = 0,0004 У Dj + D% D| и D2 — расстояния до теодолитных постов от линии пробегов, мили
+ С0б2?«) + mD — средняя квадратическая ошибка измерения расстояний с помощью РЛС, мили; qK — курсовой угол на ориентир в момент измерения конечного расстояния; DK — конечное расстояние, мили; тик — средняя квадратическая ошибка истинного курса, град} mq — средняя квадратическая ошибка измерения курсовых углов, град
По радионавигационным системам, теодолитным засечкам и радиодальномер-ным засечкам + (тИК + sin2?K 7. 25
•>/ М? + Л,2 , M2 ms~ у 2 +Afrp All и Af2~ средние квадратические ошибки определения места в начале и конце пробега, мили; Afrp— средняя квадратическая ошибка измерения расстояния S на планшете (0,5—0,7 мм в масштабе планшета). При аналитическом способе обработки Л4гр равна нулю
§ 48. Точность определения скорости корабля и поправки лага
05
Продолжение
Способ определения скорости Расчетная формула Условные обозначения № Формулы
По приращениям расстояний, измеряемых с помощью радиодальномера средняя квадратическая ошибка измерения приращений расстояний, мили (выбирается из формуляра радиодальномера) тБ — средняя квадратическая ошибка изме- 7. 26 7. 27
На веерной визуальной мерной линий mS = V ml + а,с2
п / М2 + M'i . ">Б = ]/ 7 +2^Р i । рения базы, мили; £>тр — траверзное расстояние до излучателя или берегового ориентира, мили; тП —средняя квадратическая ошибка пеленгования берегового ориентира, град; М, и М2 — средние квадратические ошибки определения мест излучателей или береговых ориентиров, мили; Л1гр — средняя квадратическая ошибка графических построений при измерении базы на карте или планшете (0,5— 0,7 мм)
Пример 1. Скорость корабля, близкую к 14 уз, намечено определять на визуальной мерной линии днем при длине пробега S = 2 милям, расстоянии между створными знаками d= 1 миле, расстоянии до переднего створного знака D = 5 милям, на трех пробегах. Число наблюдателей 3 (с шестикратными биноклями), средняя квадратическая ошибка измерения продолжительности пробегов mt = 0,5 сек.
В ычислить априорную среднюю квадратическую ошибку определения относительной скорости.
Решение. 1) Вычисляем линейную чувствительность створов Р\—Р2 — = d(P- + 1V' а^1' + 1^^^-7 = 0,00145 мили;
\ d j W у 1 / 3438 • 6
2) по формуле (7. 22) вычисляем среднюю квадратическую ошибку в длине пробега т5=/>ср/2 — 0,00145 У"2 = 0,00205 мили;
3) по формуле (7.21) вычисляем среднюю квадратическую ошибку определения скорости на одном пробеге
mvi=+ = 5% °’002052 + 142 (S2=°'08П;
4) по формуле (7.20) вычисляем среднюю квадратическую ошибку относительной скорости
mv° = 0,61/пи = 0,61 -0,08 = 0,05%.
206 Глава 7. Определение маневренных элементов корабля и поправок приборов
Пример 2. Вычислить среднюю квадратическую ошибку ms в длине пробега при определении скорости на визуальной мерной линии (неавтономным способом) при расстояниях до теодолитных постов Di и D2 по 8 миль.
Решение. По формуле (7. 23) получаем
ms = 0,0004 D\ + £>2 “ 0,00452 мили.
Пример 3. Вычислить среднюю квадратическую ошибку в длине пробега при определении скорости по РЛС, если средние квадратические ошибки измерения расстояний znD = 30 м (0,016 мили), определения’курса /пик — 0?8, определения курсового угла mq—\Q. Конечный курсовой угол qK = 10° и конечное расстояние DK = — 1 миле.
Решение. По формуле 7. 24 получаем:
ms=]/m2D(l + cos29„) + (т2ик + m2) siir<?K =
= ]/0,016= (1 + 0,97) + (5У3)2 (0.82 + 1) (0,174)2 = 0,023 мили.
Апостериорная средняя квадратическая ошибка определения относительной скорости вычисляется по одной из формул (7. 20) в зависимости от числа пробегов.
Апостериорная ошибка определения скорости на пробеге в общем виде выражается формулой
м _ юо-./Ч^-^)2 (7 28)
OT’ZI-V'l|/ n(n-l) ’ (' 28'
где Vtj — численное значение единичной скорости на пробеге;
Vt — средняя скорость на пробеге;
п — число единичных определений скорости хода на пробеге.
Так, если каким-либо способом на пробеге определено 5 скоростей: 18,24 уз\ 18,45 уз\ 18,30 уз\ 18,48 уз и 18,33 уз, то средняя скорость будет равна 18,36 уз и средняя квадратическая ошибка этой скорости тК/ = 0,25%.
При расчете апостериорной ошибки определения скорости на визуальной мерной линии среднюю квадратическую ошибку скорости на пробеге можно вычислить по формуле
где ti. — продолжительность пробега, измеренная одним наблюдателем, сек\
tt — средняя продолжительность пробега, сек.
§ 48. Точность определения скорости корабля и поправки лага
207
Точность определения поправки относительного лага. Априорная средняя квадратическая ошибка определения поправки относительного лага /пДл (в %) вычисляется по формуле
«дл= У + (7. 30)
где mv и mv ~ средние квадратические ошибки относительной скорости и скорости по лагу соответственно, °/0.
Для расчета средней квадратической ошибки /пи скорости по лагу применяется одна из формул (7. 20) в зависимости от количества пробегов, в которую вместо ошибки Шу подставляется ошибка mv опре-' Л1
деления скорости по лагу на одном пробеге.
Ошибка ту (в %) вычисляется по формуле л1
= ( (7.31)
где п — число единичных определений скорости по лагу;
т([ — средняя квадратическая ошибка единичного измерения продолжительности пробега, соответствующей величине рол,^', — средняя квадратическая ошибка единичного наблюдения разности отсчетов лага (в °/0), вычисляемая по формуле
+ , (7. 32)
здесь ту — инструментальная средняя квадратическая ошибка измерителя скорости лага, уз;
tt — продолжительность пробега, m&s — инструментальная средняя квадратическая ошибка устройства вычисления пройденного расстояния, мили;
/пол “ средняя квадратическая ошибка отсчета лага, мили.
Величины mv и m&s выбираются из технического описания лага, а /пол рассчитывается по формуле m -°л 21Лз »
где ЦД — цена минимального деления шкалы счетчика пройденного расстояния лага.
Пример. Поправка относительного лага определялась путем сравнения относительной скорости со скоростью, измеренной по показаниям лага. На одном режиме работы движителей было сделано 3 пробега, скорость УЯ/ на каждом пробеге определялась по два раза при рол^ =. 2,000 мили, = 330 сек, цена деления счетчика пройденного расстояния 0,01 мили, mv = 0,03 уз, = 0,03%, mtl = 0,3 сек и mv Q = 0,10%.
Вычислить априорную среднюю квадратическую ошибку поправки лага.
Решение. 1) трол = 2251 т^,2 + + 2тол =
10° ]/ /0 03 330 \2 /0,03-2\2 / 0,01 \.2_ 02511,.
—у V 1°103 зб0б) +(nooj ДгуТ) ' /о'
208 Глава 7. Определение маневренных элементов корабля и поправок приборов
2) = =о,19./о:
3) т^л = 0,61тИ1 =0,61-0,19 = 0,12%;
4) ты=Vr,nl'o + тУД = У0'102 + 0 -122 = О-16"/»-
Апостериорная средняя квадратическая ошибка определения поправки относительного лага вычисляется по формулам (7. 16) — (7. 19) или (7. 20), в которые вместо ошибки скорости mv на пробеге подставляется ошибка фиксации промежутков времени, соответствующих изменению отсчета лага на величину рол^
Пример. Поправка относительного лага определялась сравнением относительной скорости со скоростью по лагу. Произведено три пробега на одном режиме работы движителей, скорость по показаниям лага определялась пятью наблюдателями, средняя квадратическая ошибка относительной скорости mv^ = 0,15%.
Вычислить апостериорную среднюю квадратическую ошибку определения поправки лага, учтя наблюденные промежутки времени, приведенные ниже.
Решение. 1) Применяя формулу (7.29), вычисляем ошибку mtl
№ пробега Номера на-блю-дате-лей Продолжительность пробега сек Средняя продолжительность пробега сек j (S--'O2
1 1 2 3 538,0 539,0 538,5 —0,5 4-0,5 0 0,25 0,25 0 __ 100 1/8.50 _ 0,12%
538,5 т‘< 538,5 Г 20
4 540,5 4-2,0 4,00
5 536,5 —2,0 4,00
= 8,50
2 1 534,0 —0,8 0,64 100 /7Тзб_ 0,11%
2 535,0 4-0,2 0,04 534.8 Г 20
3 535,5 534,8 +0,7 0,49
4 536,5 + 1.7 2,89
5 533,0 -1,8 3,24
S = 7,30
3 1 2 3 539,0 538,0 539,0 538,7 +0,3 —0,7 +0,3 0,09 0,49 0,09 _ 100 1/6780 _ 538,7 Г 20 0,11%
4 540,5 + 1,8 3,24
5 537,0 —1,7 2,89
S = 6,80
2) по формуле (7. 17) вычисляем ошибку mv :
л
mv = -1- /(0,12)» + 4 (0,11)2 + (0,11)2 = 0,06%; л 4
3) по формуле (7. 30) вычисляем искомую ошибку определения поправки лага
тДл = У (°'15>2 + (0,06)» = 0,160/о
$ 49. Определение элементов инерции корабля
209
§49. ОПРЕДЕЛЕНИЕ ЭЛЕМЕНТОВ ИНЕРЦИИ КОРАБЛЯ
Элементы инерции определяются на постоянном курсе, при положении руля в диаметральной плоскости. Отклонение руля на небольшие углы допускается лишь в крайних случаях.
Для достижения достаточной точности определение элементов инерции при каждом варианте изменения режима работы движителей производится по 2—4 раза на противоположных курсах; полученные результаты осредняются.
Измерение элементов инерции начинается с момента подачи команды об изменении режима работы движителей и заканчивается в момент полной остановки корабля или в момент приобретения им новой скорости. Момент полной остановки корабля определяется по сброшенному с корабля свободноплавающему предмету, с помощью ручного лота или по пеленгу малоудаленного ориентира, расположенного вблизи траверза корабля; последние два способа применяются только при отсутствии на полигоне заметного течения.
Момент, когда корабль развил назначенную скорость, определяется по указателю скорости лага.
При наличии течения инерцию целесообразно определять на курсе, перпендикулярном направлению течения. Пройденное по инерции расстояние 5И в таких случаях должно отсчитываться по линии истинного курса, между начальной точкой и точкой, перенесенной течением на линию курса в конце маневра (рис. 79).
14 Заказ 1833
210 Г лава 7. Определение маневренных элементов корабля и поправок приборов
Если элементы течения неизвестны, то проходимое по инерции расстояние следует определять на курсах, перпендикулярных направлению ветра.
По результатам наблюдений составляется таблица и строится график инерции (рис. 80). Для построения графика необходимо иметь пройденные по инерции расстояния через 15—20 сек в течение всего времени испытания от начала до конца маневра.
В таблицу инерции вписываются время (числитель) и проходимое по инерции расстояние (знаменатель).
Способы определения элементов инерции. Элементы инерции определяются:
— по дистанциям до ориентира, измеренным с помощью РЛС или по приращениям дистанции, измеренным с помощью РНС;
— по навигационным обсервациям;
— по числу длин корабля;
— по лагу.
Таблица 23
Таблица инерции
Определение элементов инерции по дистанциям до ориентира, измеренным с помощью РЛС или по приращениям дистанции, измеренным с помощью РНС. Корабль привести на курс так, чтобы ориентир (буй или веха с радиолокационным отражателем, корабль без хода, точечный ориентир на берегу или отражающая станция радионавигационной системы) оказался на курсовом угле 0 или 180° и дать назначенный ход. В дальнейшем корабль удерживается на курсе по компасу.
Подвижный круг дальности (ПКД) РЛС установить на отсчет упрежденного расстояния DH. В момент касания эхосигнала от ориентира
§ 49. Определение элементов инерции корабля
211
ПКД ручки машинного телеграфа поставить в новое положение, пустить секундомер.
Когда корабль приобретет новый режим движения, измерить расстояние Рк до ориентира и остановить секундомер.
Вычислить пройденное расстояние по формуле
— | DK |.
Время движения по инерции отсчитывается по секундомеру.
При использовании РНС, позволяющей измерять приращения расстояний, измерение этих приращений и их суммы производятся от момента перевода ручек машинного телеграфа в новое положение до момента приобретения кораблем соответствующей скорости.
Определение элементов инерции по навигационным обсервациям. Привести корабль на заранее выбранный курс и дать назначенный ход.
За 1—2 мин до перевода ручек машинного телеграфа в новое положение начать определение места одним из точных способов (по теодолитным засечкам, по двум углам, с помощью высокоточной РНС). Моменты измерения навигационных параметров фиксировать по секундомеру; места корабля наносить на крупномасштабную карту или планшет с сеткой изолиний, соответствующих выбранному способу определения места.
Моменты перевода ручек машинного телеграфа в новое положение Тн и приобретения кораблем соответствующей этому положению скорости /к заметить по секундомеру.
Нанести на карту или планшет места корабля, соответствующие моментам Тп и Гк, измерить пройденный по инерции путь 5и';и вычислить промежуток времени
“= Гк
Определение элементов инерции по числу длин корабля. Данный способ применяется на полигоне, не имеющем специального оборудования и течение на котором неизвестно.
Рис. 81
Заблаговременно подготовить несколько поплавков (обрезки досок, куски фанеры) и выставить наблюдателей на носу и корме корабля. Установить связь между наблюдателями и мостиком (по телефону, свистком, флажками).
Привести корабль на выбранный курс и развить заданный ход.
В момент перевода ручек машинного телеграфа в новое положение наблюдателю на носу корабля по сигналу с мостика сбросить первый поплавок /7] (рис. 81), наблюдателю на мостике пустить в ход секундомер.
Когда первый поплавок окажется против среза кормы, наблюдателю на носу по сигналу кормового наблюдателя сбросить второй поплавок /?2-
14*
212 Глава 7. Определение маневренных элементов корабля и поправок приборов
Сбрасывание поплавков продолжается до того момента, пока корабль не приобретет новую скорость. В этот момент останавливается секундомер и определяется расстояние от носа или кормы до последнего сброшенного поплавка.
Время движения по инерции отсчитывается по секундомеру, а пройденный путь вычисляется по формуле
SH = L0(fi-V) + L}1 (7.33)
где Lo — расстояние между наблюдателями, м;
п -- число сброшенных поплавков;
£] — расстояние от форштевня до последнего сброшенного поплавка в момент окончания маневра, м.
Данный способ не может обеспечить требуемую точность определения пройденного расстояния при переводе работы двигателей с переднего хода на задний и с заднего хода на передний вследствие воздействия на поплавок сильных струйных течений от движителей.
Определение элементов инерции по лагу. На выбранном курсе развить заданную скорость.
В момент перевода ручек машинного телеграфа в новое положение пустить в ход секундомер и заметить отсчет лага.
По показаниям указателя скорости лага заметить момент приобретения кораблем новой скорости, остановить секундомер и записать отсчет лага.
Вычислить пройденное по инерции расстояние по формуле
=~- к:Срол,
где рол — разность отсчетов лага;
к3 — коэффициент лага.
Продолжительность маневра отсчитывается по секундомеру.
Точность определения инерции. Точность определения инерции характеризуется априорной средней квадратической ошибкой определения расстояния 5И, проходимого по инерции. Апостериорная ошибка ввиду отсутствия многократных измерений не вычисляется.
Для вычисления средней квадратической ошибки (в %) применяются следующие формулы:
— при определении инерции по дистанциям или приращениям дистанции до ориентира
_ 100 1/"9 2 ~ 2 ~ .
тп I/ iitfip. ~J— тп q ,
"и <>н г и 61т
— при определении инерции по навигационным обсервациям
ms = ^1Ли2 + 2^р-г/п’ ;
6И ОИ Г Г₽ °2Т
— при определении инерции по числу длин корабля
ms =^К,г(35 + 0’25'7)2;
И
— при определении инерции по лагу .
ЦД
лц =——100. 6и ролуЗ
§ 50. Определение элементов поворотливости корабля
213
В приведенных формулах:
— расстояние, пройденное по инерции, м;
mD ~ средняя квадратическая ошибка измерения дистанции или приращения дистанции, м;
ms у — средняя квадратическая ошибка определения расстояния за счет сноса корабля течением г/т (м/сек). Учитывается при определении инерции на двух противоположных курсах и наличии разности Д^и промежутков времени движения корабля по инерции на этих курсах, здесь Д/и ==^ = ^Ср — — разность между средним промежутком ^Ср и промежутком времени на одном из курсов;
М — средняя квадратическая ошибка определения места корабля, м;
Afrp — средняя квадратическая ошибка графических построений на карте или планшете при нанесении обсервованных мест (0,5 — 0,7 мм в масштабе планшета);
1
~~ у ^ТД^ИСО57Т--средняя квадратическая ошибка определения расстояния за счет течения, направление которого отличается от курса корабля на угол <ут;
п — число длин корабля, пройденных по инерции;
V = V1 — среднее арифметическое из скоростей корабля в начале и в конце маневра;
ЦД — цена минимального деления отсчетной шкалы пройденного расстояния.
§ 50. ОПРЕДЕЛЕНИЕ ЭЛЕМЕНТОВ ПОВОРОТЛИВОСТИ КОРАБЛЯ
В период подготовки устанавливаются режимы работы движителей и углы отклонения руля, при которых будут определяться элементы поворотливости.
Способ определения элементов поворотливости выбирается в зависимости от того, какие элементы и с какой точностью необходимо определить.
Эти способы отличаются друг от друга методикой измерения тактического диаметра циркуляции и угла дрейфа на циркуляции. Другие элементы определяются во всех способах одинаково:
а) продолжительность поворота на заданный курс, период и полупериод циркуляции, угловая скорость изменения курса вычисляются по показаниям секундомера, фиксируемым в моменты изменения курса на каждые 10°;
б) мертвый промежуток определяется как разность моментов подачи команды о перекладке руля и фактического начала изменения курса;
в) угол крена на циркуляции измеряется с помощью систем стабилизации или кренометров, показания которых записываются через 10—15 сек;
г) потеря скорости на циркуляции вычисляется по показаниям лага, отсчеты скорости должны фиксироваться через каждые 10° изменения курса.
214 Г лава 7. Определение маневренных элементов корабля и поправок приборов
Элементы поворотливости для данного конкретного режима работы движителей и угла отклонения руля определяются на двух циркуляциях вправо и влево. Полученные величины одноименных элементов осред-няются, если корабль имеет четное число одинаково работающих и симметрично расположенных относительно диаметральной плоскости винтов. При нечетном числе винтов или неодинаковом режиме работы винтов при четном их количестве осреднение не производится.
Для определения элементов поворотливости корабля применяются следующие способы:
— по навигационным обсервациям;
— по траверзным расстояниям;
— по длинам корабля;
— с помощью автопрокладчика.
Определение элементов циркуляции по навигационным обсервациям. Для определения места корабля на циркуляции можно применить теодолитные засечки, радиодальномерно-теодолитные засечки, одновременное измерение двух горизонтальных углов, а также использовать РЛС или высокоточные РНС.
На первоначальном курсе, с которого будет начинаться циркуляция,
развить назначенную скорость и произвести несколько контрольных определений места с целью проверки работы аппаратуры и организации работ.
По исполнительной команде об отклонении руля пустить 2—3 секундомера и с интервалом 15—30 сек начать определение места. Заметить момент начала поворота и отметить соответствующее место на карте (планшете).
Придя по компасу на курс, обратный первоначальному, заметить моменты по секундомерам; отсчеты будут соответствовать полупериоду
и периоду циркуляции.
Соединить на планшете (карте) обсерво-ванные места корабля плавной кривой (рис. 82) и на различных участках этой кривой нанести положение диаметральной плоскости корабля; измерить углы дрейфа на циркуляции 6ц,тактический диаметр Дц и диаметр установившейся циркуляции Д.
Если диаметр установившейся циркуляции не определяется, то перед изменением курса по компасу на обратный должны быть поданы команды «Отводи» и «Одерживай».
Рис g2 Определение элементов циркуляции по
траверзным расстояниям. На первоначальном курсе развить назначенную скорость. Когда ориентир, относительно которого будут измеряться траверзные расстояния, придет на курсовой угол 90°, подать команду рулевому о перекладке руля на установленный угол, пустить секундомер и измерить траверзное расстояние DTpj или снять отсчет навигационного параметра, позволяю-
щего определить это расстояние.
Записать момент начала поворота.
При подходе корабля к линии обратного курса подать команды «Отводи», «Одерживай» и «Так держать» (на обратном курсе). Заметить момент окончания поворота на обратный курс (полупериод циркуляции).
§ 50. Определение элементов поворотливости корабля
215
Когда ориентир придет на курсовой угол 90° (рис. 83), измерить траверзное расстояние DTp, или снять отсчет навигационного параметра для определения этого расстояния в последующем.
Вычислить тактический диаметр циркуляции Дц
Л — I £)тра £>ТР1|.
Навигационным параметром, позволяющим наиболее просто определять траверзное расстояние, является горизонтальный угол, измеряемый между створом и вспомогательным ориентиром А (рис. 84). В этом случае тактический диаметр циркуляции может быть вычислен по формуле
A=d|(ctga1-ctga2)|,
кусков фанеры), выставить
где d — расстояние от линии створа до ориентира, кбт\
aI и а2 — горизонтальные углы, измеренные в моменты пересечения створа.
Величину Дц данным способом можно также определить при использовании технических средств (радиодальномера), позволяющих измерять приращение траверзного расстояния.
Определение элементов циркуляции по длинам корабля. Подготовить несколько поплавков (обрезков досок, наблюдателей на носу и корме корабля и установить связь между ними (по телефону, флажками, свистком).
На первоначальном курсе развить назначенную скорость.
В момент перевода ручек машинного телеграфа в новое положение наблюдателю на носу сбросить первый поплавок Bi (рис. 85), наблюдателю на мостике пустить секундомер.
В момент начала поворота заметить отсчет по секундомеру (мертвый промежуток).
Привести корабль на обратный курс и остановить секундомер.
В момент, когда поплавок Bj придет на траверзный пеленг, сбросить второй поплавок В2 с борта, противоположного тому, с которого сброшен первый поплавок.
Уменьшить скорость до наименьшей и произвести маневр выхода на створ поплавков В2 и В\.
216 Глава 7. Определение маневренных элементов корабля и поправок приборов
Измерить расстояние В^В^^Д^ в длинах корабля приемом, применяемым при определении расстояния, проходимого по инерции, и вычислить тактический диаметр циркуляции по формуле (7.33).
Определение элементов циркуляции с помощью автопрокладчика. Перед началом определений установить на автопрокладчике самый крупный масштаб с использованием для этого всех возможностей, например, искусственное увеличение широты. На столе автопрокладчика закрепить чистый лист бумаги.
Идя постоянным курсом, уточнить установленный масштаб, для чего на листе бумаги под карандашом автопрокладчика сделать две отметки через одну милю по показаниям лага с учетом его поправки, если она существенна. Вычислить знаменатель Ст частного масштаба по формуле
г _ 1 852000
где расстояние между отметками через одну милю в мм.
Повернуть на 180°, а при необходимости на 360° с установленным утлом отклонения руля; в процессе поворота на линии пути, вычерчиваемой автопрокладчиком, сделать отметки и записать моменты, когда:
— подана команда на руль;
— начал изменяться курс;
— изменяется курс через каждые 10°;
— подана команда «Отводи»;
— подана команда «Одерживай»;
— корабль лег на обратный курс.
Пользуясь уточненным масштабом, определить тактический диаметр циркуляции, длй чего измерить этот диаметр Да (в мм), а величину Дц рассчитать по формуле
Дц = ДцСт°,°01 м или
185,2 ^ц^т кбт.
При необходимости определения углов дрейфа на циркуляции нанести положение диаметральной плоскости в точках, соответствующих отметкам, фиксирующим изменение курса на 10°, и измерить углы, как показано на рис. 82.
Точность определения тактического диаметра циркуляции. Априорная средняя квадратическая ошибка определения тактического диаметра циркуляции /пДц (в %) вычисляется по формулам:
— по навигационным обсервациям
тд = ^/а12 + 2Л42гр ;
— по траверзным расстояниям
В приведенных формулах:
М — средняя квадратическая ошибка определения места корабля, кбш'у
Да — тактический диаметр циркуляции, кбтп',
Л4гр — средняя квадратическая ошибка графических построений на карте или планшете при прокладке мест;
и mD — средние квадратические ошибки начального и конечен тРк ного траверзных расстояний.
§ 51. Проверка репитеров, магнитных компасов и пеленгаторов
217
В зависимости от способа измерения средняя квадратическая ошибка траверзного расстояния рассчитывается по формулам:
— при использовании РЛС
где mD — средняя квадратическая ошибка измерения расстояния с помощью РЛС, кбтп\
— по горизонтальному углу и секущему створу _ dm’a mDTp " 3438 sin2 а '
. где /п' — средняя квадратическая ошибка измерения горизонтального угла.
Среднюю квадратическую ошибку пг^ для других способов определения элементов поворотливости вычислить трудно вследствие сложности получения достаточно достоверных данных об ошибках измерений.
§ 51. проверка пеленгаторных репитеров, магнитных компасов И ПЕЛЕНГАТОРОВ
Проверка пеленгаторных репитеров. Пеленгаторные репитеры должны удовлетворять следующим требованиям:
1) рассогласование нуля шкалы курсовых углов с диаметральной плоскостью корабля не более 0°,2;
2) рассогласование картушек грубого и точного отсчетов не более 0°, I;
3) рассогласование с датчиком курса не более 0°, 1;
4) эксцентриситет картушки грубого отсчета не более 0°,2.
Репитеры проверяются:
— при приемке гирокомпаса после установки приборов на корабле;
— после ремонта корабля;
— при замене пелоруса;
— при подготовке к походу.
Проверка согласования нуля шкалы курсовых углов с диаметральной плоскостью корабля. Проверка выполняется при отсутствии крена и дифферента.
Применяются два способа:
— по контрольным маркам, наносимым в период постройки корабля;
— по пеленгам небесного светила или отдаленного ориентира.
Для проверки по контрольным маркам следует:
а) из формуляра гирокомпаса выбрать сведения о марке, использованной при установке пеленгаторного репитера в диаметральной плоскости корабля и отсчете курсового угла на эту марку;
б) установить на репитер пеленгатор;
в) удерживая пузырек уровня пеленгатора в среднем положении, навести пеленгатор на марку и снять отсчет курсового угла. Наведение пеленгатора на марку повторить 5—7 раз, а затем вычислить среднее значение курсового угла;
г) сравнить средний отсчет курсового угла с указанным в формуляре. При расхождении, не превышающем 0°,2 (для некоторых кораблей допустимое расхождение установлено в 0°,1 и меньше), пеленгаторный репитер считается установленным правильно. При больших расхожде
218 Глава 7. Определение маневренных элементов корабля и поправок приборов
ниях для устранения рассогласования пеленгатор следует установить на указанный в формуляре отсчет курсового угла и разворотом верхней части пелоруса привести контрольную марку на визирную нить, после чего закрепить стопорные болты.
Когда контрольная марка неизвестна, курсовой угол, удовлетворяющий согласованию нуля шкалы курсовых углов пеленгаторного репитера с диаметральной плоскостью корабля, может быть измерен на плановом чертеже верхней палубы и надстроек. В качестве контрольной марки выбирается линейный ориентир, перпендикулярный палубе (срез надстройки, гюйсшток), или точечный ориентир, расположенный на уровне верхнего среза пеленгаторного репитера; для измерения курсового угла рекомендуется использовать протрактор.
Чтобы исключить ошибку ориентировки репитера, являющуюся следствием несоответствия, действительного положения контрольной марки и ее положения на чертеже, следует измерить курсовые углы на несколько марок. В дальнейшем используется одна из марок, относящаяся к группе таких, которые дают практически одно и то же направление нуля шкалы курсовых углов, и имеющая максимальное удаление от пелоруса.
Выбранная контрольная марка и курсовой угол на нее для облегчения последующих проверок записываются в формуляр гирокомпаса.
Проверка по пеленгам небесного светила или отдаленного ориентира применяется в тех случаях, когда шкала курсовых углов одного из репитеров не имеет рассогласования с диаметральной плоскостью корабля. Этот репитер используется затем в качестве эталонного.
Для проверки данным способом следует:
а) отключить проверяемый и эталонный репитеры от датчика курса и вручную выставить на них курс, равный нулю (для удобства считывания курсовых углов);
б) выбрать неподвижный ориентир или небесное светило, хорошо видимое от мест установки пеленгаторных репитеров и имеющее высоту не более 15°;
в) одновременно взять отсчеты курсовых углов светила или отдаленного ориентира по эталонному и проверяемому репитерам;
г) сравнить полученные отсчеты.
Если полученные отсчеты отличаются не более чем на 0°,2, то нули шкал курсовых углов считаются согласованными с диаметральной плоскостью корабля. При больших расхождениях необходимо при неизменном отсчете курсового угла проверяемого репитера подобрать или наметить какую-либо приметную точку на корабле, находящуюся на визирной линии пеленгатора. Затем пеленгатор устанавливается на отсчет курсового угла эталонного пеленгатора и разворотом верхней части пелоруса та же точка приводится на визирную нить.
Для контроля произведенного согласования необходимо повторить одновременное измерение курсовых углов ориентира или небесного светила.
Чтобы исключить ошибку за параллакс, являющуюся следствием несовпадения мест установки эталонного Э и проверяемого П репитеров, ориентир Ор, используемый для пеленгования, должен быть удален от корабля на расстояние D (рис. 86), удовлетворяющее неравенству
D > 3500*sin(?-₽) , (7. 34.)
где b — расстояние по горизонтальной плоскости между местами установки репитеров;
§ 51. Проверка репитеров, магнитных компасов и пеленгаторов
219
? _ уГОЛ ПрИ эталонном репитере между диаметральной плоскостью и направлением на проверяемый репитер (снимается с корабельного чертежа или измеряется с помощью пеленгатора);
q — приближенный курсовой угол ориентира;
Д' — допустимая ошибка взаимной ориентировки репитеров, численно равная половине угла допустимого рассогласования нуля шкалы курсовых углов проверяемого репитера.
Вычисленное по формуле (7. 34) расстояние D получается в той же размерности, что и база Ь. При b = 15 м, Д' = 3', р — 240° и q = 135° получим:
3500-15 sin (135°-240°) . с п
D > -------------------- = 16900 я 16,9 к я.
Проверка согласования картушек грубого и точного отсчетов и точности синхронной передачи. Для проверки согласования картушек репитера и точности синхронной передачи следует: а) включить питание линии синхронной связи;
б) согласовать вручную репитеры с датчиком курса;
в) изменяя курс вручную в одну и другую сторону на 360°, приближенно через 10° фиксировать величины рассогласования курса на датчике и на репи-
тере. Рис. 86
Если рассогласование
превышает 0°, 1, репитер подлежит сдаче в ремонт.
Когда рассогласование одного знака и одинаковой величины обнаруживается при проверке нескольких репитеров, его считают следствием неисправности датчика курса.
Проверка эксцентриситета картушки грубого отсчета. Для выполнения данной проверки следует:
а) выключить следящую систему гирокомпаса;
б) установить пеленгатор на пеленгаторный репитер и закрепить его на произвольном отсчете курсового угла (в целых градусах);
в) вручную установить по шкалам картушек курсы через 30° и снять отсчеты пеленга, вращая шкалы на 360° в одну и другую сторону;
г) рассчитать углы, равные разностям между устанавливаемыми курсами и соответствующими им пеленгами;
д) сравнить полученные разности с отсчетом курсового угла (по круговой системе счета), на который установлен пеленгатор.
Если разности не превышают 0°,2, эксцентриситет картушки грубого отсчета можно считать практически равным нулю; при больших разностях репитер должен быть сдан в ремонт.
Проверка согласования нуля шкалы курсовых углов магнитного компаса с диаметральной плоскостью корабля. Точность согласования нуля шкалы курсовых углов магнитного компаса с диаметральной плоскостью корабля должна быть не ниже 0°,2.
220 Г лава 7. Определение маневренных элементов корабля и поправок приборов
Проверка производится:
— после установки компаса на корабле;
— при подготовке к выходу для уничтожения и определения девиации;
— после ремонта корабля;
— при подготовке к походу.
Для проверки применяются способы, изложенные выше (стр. 217— 219). Отличие в выполнении способа проверки по пеленгам небесного светила или отдаленного ориентира состоит лишь в том, что отсчеты кур’ совых углов берутся не по картушке компаса, а по азимутальному кругу.
В качестве эталонного может использоваться предварительно выверенный главный магнитный компас или пеленгаторный репитер гирокомпаса.
Проверка правильности установки пеленгаторных репитеров дистанционных компасов, имеющих в качестве чувствительного элемента магнитную систему, производится по правилам, изложенным для проверки пеленгаторных репитеров гирокомпасов.
Проверка пеленгаторов. Для измерения пеленгов применяются:
— оптические пеленгаторы;
— визуальные пеленгаторы, называемые также визирными или обыкновенными;
— пеленгаторы Каврайского.
Оптические пеленгаторы типа ПГК-2, устанавливаемые на пеленгаторных репитерах гироскопических и дистанционных компасов, отъюстированы и проверены в заводской лаборатории.
При бережном обращении необходимо лишь производить:
— внешний осмотр;
— опробование диоптрийной установки, обеспечивающей поступательное движение окуляра при фокусировке;
— проверку качества изображения ориентиров и видимой части картушки;
— проверку эксцентриситета.
При обнаружении неисправностей — пятен на стеклах, перекосов прицельного приспособения для грубой наводки, повреждений корпуса или наличия эксцентриситета, превышающего допустимую величину, пеленгаторы подлежат сдаче в ремонт.
Оптические пеленгаторы типа ПГК-2 и визирные пеленгаторы пеленгаторных репитеров (приборы 22-А) вследствие неточности установки центрирующей буксы в защитном стекле репитера могут иметь эксцентриситет относительно азимутального круга. При сдвиге оси вращения пеленгатора относительно центра азимутального круга более чем на 0,5 мм появляются заметные ошибки пеленгов. Эти ошибки имеют полукруговой характер и зависят от курсового угла пеленгуемого ориентира, а также от величины и направления сдвига оси вращения пеленгатора относительно диаметральной плоскости корабля.
При сдвиге до 2 мм максимальные ошибки пеленгов могут достигать Г,5.
Наличие эксцентриситета проверяется при приемке пеленгатора, а затем периодически для контроля или при замене пеленгаторного репитера.
Для проверки применяются два способа:
— непосредственные измерения;
— сравнение разностей курсовых углов и пеленгов.
§51. Проверка репитеров, магнитных компасов и пеленгаторов
221
углов (по круговой системе
и наибольшее отклонение
- Дср по абсолютной величине
а) б)
Л о
Рис. 87
Для проверки первым способом следует с помощью штангенциркуля измерить расстояния по радиусам через 15° курсового угла от края азимутального круга до внутренней поверхности центрирующего отверстия буксы. Допустимые расхождения максимального и минимального расстояний не должны превышать 1 мм.
Для проверки вторым способом следует:
а) отключить пеленгатор от датчика курса;
б) устанавливая пеленгатор на курсовые углы qh равные 0, 30, 60 .. . 330°, снять отсчеты пеленгов 77О, /73о, /7бо, • • •, Дззо;
в) вычислить разности А, курсовых счета) и соответствующих им пеленгов;
г) вычислить среднюю разность (Дср) ^тах Аср.
Предельно допустимое отклонение Дтах не должно превышать 0°2.
Визирные пеленгаторы магнитных компасов должны удовлетворять следующим требованиям:
1) отражающая грань призмы и отражающая поверхность зеркала должны быть перпендикулярны к визирной плоскости пеленгатора, проходящей через нить предметной мишени, прорезь глазной мишени и ось вращения пеленгатора;
2) эксцентриситет пеленгатора не должен превышать 0°,25.
Для проверки положения призмы пеленгатора следует:
а) установить пеленгатор на отсчет курсового угла 180° и закрепить его с помощью стопорного винта, находящегося под предметной мишенью;
б) наблюдая через призму, проверить, составляет ли видимая в ней курсовая черта продолжение нити предметной мишени по прямой линии.
При неверном положении призмы курсовая черта будет иметь излом с нитью пеленгатора (рис. 87, а), или, оставаясь параллельной нити, будет смещена вправо или влево (рис. 87,6).
При наличии излома изображения курсовой черты следует ослабить винты, крепящие призменную коробку, и поворотом призмы устранить излом, после чего винты поджать.
При наличии смещения курсовой черты без излома необходимо ослабить винты, крепящие глазную мишень, и, повернув мишень вокруг вертикальной оси, закрепить ее в таком положении, чтобы курсовая черта составляла продолжение нити предметной мишени.
Данная проверка должна производиться перед каждым выходом в море и периодически в процессе плавания.
Для проверки визирной плоскости и зеркала пеленгатора следует: а) закрепить отвес на расстоянии 2—5 м от компаса;
б) установить пеленгатор и пеленговать отвес. При правильно проходящей визирной плоскости линия отвеса, предметная мишень и глазная мишень должны совпадать.
Если указанное условие не соблюдено, то следует ослабить винты не совпадающей с отвесом мишени и подложить под нее кусочки фольги;
в) поставить зеркало в положение, при котором в нем можно было наблюдать отраженное изображение отвеса.
222 Глава 7. Определение маневренных элементов корабля и поправок приборов
При правильном положении зеркала прямовидимое и отраженное изображения отвеса должны располагаться по одной прямой. Если отраженное изображение нити имеет излом' относительно прямовидимого, следует ослабить винты, крепящие зеркало к мишени, повернуть зеркало и, добившись устранения излома, закрепить в новом положении.
§ 52. ОПРЕДЕЛЕНИЕ ПОПРАВКИ КУРСОУКАЗАН ИЯ
Поправка курсоуказания определяется:
— при регламентных проверках курсоуказателей в сроки, установленные технической документацией;
— при подготовке к походу;
— периодически во время похода.
При использовании гирокомпаса в качестве курсоуказателя необходимо знать постоянную поправку, характеризующую среднее положение равновесия чувствительного элемента.
При использовании гироазимута должна быть известна его поправка на заданный момент, зависящая от исходной поправки и скорости ухода чувствительного элемента от начального направления.
Для магнитного компаса должна быть известна его поправка на данном курсе, зависящая от магнитного склонения и девиации.
Постоянная поправка гирокомпаса Д/7СП определяется в базе или в море при установившемся режиме работы гирокомпаса по ряду мгновенных поправок, наблюденных не менее чем за 2,5—3 ч. Элементы движения корабля в этот срок должны быть неизменными.
При экстренной съемке с якоря или швартовов следует учитывать постоянную поправку гирокомпаса, полученную из прежнйх наблюдений.
Для вычисления постоянной поправки применяется формула
= (7.35)
где [ДГ7С] — алгебраическая сумма мгновенных поправок, определенных с интервалом 10—15 мин;
п — число определений.
Средняя квадратическая ошибка постоянной поправки гирокомпаса вычисляется по формуле
(7. 36)
_ тгк 4ГКп“ /л где /пгк—средняя квадратическая ошибка, характеризующая устойчивость гирокомпаса в меридиане.
Величина /пгк вычисляется по формуле
^гк - V п _ 1 ’
где [ДА] — сумма квадратов отклонений мгновенных поправок гирокомпаса от постоянной его поправки.
Для вычисления дпгк может быть применена также формула
_ " A/V^min
™гк -
где ДГЯтах — — „размах*1, т. е. разность максимальной и мини-
мальной мгновенных поправок;
KR — коэффициент размаха (выбирается по числу наблюдений из табл. 1 приложения 2).
$ 52. Определение поправки курсоуказания
223
Предельная ошибка, характеризующая устойчивость гирокомпаса, вычисляется обычно для вероятности Р = 0,95 по формуле
шгк — 1,96тгк.
Величина тгк используется для оценки исправности гирокомпаса в целом. Выведенная из наблюдений величина тгк не должна превышать значения, указанного для аналогичных условий (широта места, скорость корабля, характер маневрирования) в технической документации гирокомпаса также для вероятности 0,95. Кроме того, величина тгк является доверительным интервалом текущей поправки гирокомпаса, которая с вероятностью 0,95 в каждый отдельный момент может быть равна:
ДЛЯ (0 - ДГЯП ± тгк.
Пример. При стоянке в базе с интервалом в 15 мин:
ДГЛ-, = +0^20
ЬГК2^ +0,58
+0,62
определены 10 мгновенных поправок гирокомпаса
ДГЯ4 = +0?22
ДГЯ5 = -0,11
ДГЯ*б = —0,16
ДГЯ7 - +О;15 ДГЯ8 = +0,48 ДГЯ9 = +0,54 ДГЯ10 = +0,26
Вычислить постоянную поправку гирокомпаса, предельную ошибку тгк(Р=0,95) и среднюю квадратическую ошибку постоянной поправки.
Решение.
== 1,96/лгк 0^55;
Величины ДЛЯ', ДГЯШ /лгк и т^ГЕ показаны на рис. 88. П
Мгновенная поправка гирокомпаса вычисляется по формуле
ДЛЯ' = ИП-КП,
где ИП и КП— истинный (эталонный) и компасный пеленги ориентира соответственно.
Ориентирами для измерения пеленгов могут быть:
— небесное светило;
— теодолитный пост;
— отдаленный ориентир, положение которого известно;
— створ.
224 Глава 7. Определение маневренных элементов корабля и поправок приборов
Мгновенную поправку гирокомпаса можно также определить по сличению с показаниями другого курсоуказателя, поправка которого известна.
С целью уменьшения случайных ошибок наблюдений измерение компасных пеленгов должно производиться сериями по 5—7 пеленгов с интервалами 15—20 сек. В момент измерения пеленга визирная плоскость должна занимать вертикальное положение и совпадать с центром ориентира.
Определение мгновенных поправок гирокомпаса по пеленгам небесных светил. Выбранное для наблюдений светило должно иметь достаточную яркость, обеспечивающую хорошую видимость с помощью применяемых измерительных устройств, небольшую высоту, не превышающую 15°, и располагаться вблизи первого вертикала. Пределы максимально допустимых высот наблюдаемого светила указываются в технической документации угломерных устройств.
Для решения задачи следует:
а) при подготовке к наблюдениям определить поправку часов или секундомера;
б) взять серию пеленгов выбранного светила, замечая моменты измерений по часам (секундомеру) с точностью 1—2 сек;
в) вычислить средний пеленг Я77ср и средний момент ТСр;
г) вычислить местный часовой угол светила на средний момент измерений;
д) вычислить истинный пеленг (азимут) светила, а затем искомую поправку Д/7С как разность пеленгов ИП — КП.
Истинный пеленг светила вычисляется по формулам сферической тригонометрии с использованием таблиц логарифмов или с помощью таблиц ТВА—57 или ВАС—58.
Для упрощения определения истинного пеленга светила можно воспользоваться таблицами истинных пеленгов светил (ТИПС—56).
При использовании таблиц логарифмов применяется формула котангенсов
ctg А = cos <р tg о cosec t — sin <р ctg t.
Схема вычисления истинного пеленга по формуле котангенсов приведена ниже.
ср = 59°35;о S cos 9.70439 sin 9.93569
8= 12 28,5 W tg 9.34486 —
t = 12 31,0 W cosec 0.66409 ctg 0.65365
I 9.71334 II 0.58934
АГ 0.87600 a 0.05425
Ctg A 0.64359
A 12?8A/UZ
ИП 347,2
КП 346,0
ЬГК' + 1?2
При выверке высокоточного курсоуказателя измерение КП и расчет ИП производятся до 0°01.
§ 52. Определение поправки курсоуказания
225
Поправку гирокомпаса или любого другого курсоуказателя можно также определить по пеленгу Солнца, измеренному в момент его видимого восхода или захода. Азимут (истинный пеленг) Солнца в этот момент вычисляется по формуле
о = ^0 “Ь © ♦
где А'с — приближенное значение азимута Солнца;
ДА0 — поправка за наклонение видимого горизонта.
Величина А'о выбирается из табл. 20-а или 20-6 (МТ —63) по широте ? и склонению S.
Для определения поправки ДАф необходимо знать:
— наклонение видимого горизонта d;
— температуру воздуха t и атмосферное давление В.
Измерение указанных величин должно быть произведено в период измерения пеленгов Солнца или во время, близкое к этому периоду.
При отсутствии возможностей измерения наклонения видимого горизонта с помощью наклономера величину его можно выбрать из табл. 11-6 МТ—63 по возвышению глаза наблюдателя.
Для расчета поправки ДА© с помощью МТ—63 следует:
а) из табл. 14-а или 14-6 (МТ — 63) по видимой высоте Солнца, равной наклонению горизонта — hd = d, температуре воздуха t и атмосферному давлению В выбрать поправки &ht и ДА5 высоты;
6) вычислить поправку ДА© видимой высоты с учетом полудиаметра Солнца и поправки за наклонение горизонта по формулам:
— при измерении пеленга в момент видимого захода (восхода) нижнего края Солнца
ДА© = 32'+ ДА^ + ДА, + ДАВ,
— при измерении пеленга в момент видимого захода (восхода) верхнего края Солнца
ДА^ = ДА, + ДА, + ДАВ;
в) из табл. 20-в (МТ —63) по приближенному азимуту А^ и широте zr rz tg cosec А
места <р выбрать аргумент К = ;
г) из табл. 20-г (МТ — 63) по величинам К и ДА© выбрать поправку ДА©; знак поправки одинаков со знаком ДА©.
Пример. 20 мая 1969 г. в <р = 62°00' W и Х = 22°00' 0s* наблюдали видимый заход верхнего края Солнца КП-q — 318°5. Измеренное наклонение видимого горизонта d — — 6J8, температура воздуха t= +16°, атмосферное давление В = 772 мм.
Определить мгновенную поправку гирокомпаса.
Решение. 1) Из Морского астрономического ежегодника для момента захода Солнца выбираем склонение Ь = 20°0 N;
2) вычисляем поправку высоты
дл— = —е;8 + 1;з—о;е==—6ji;
3) из таблиц 20-а, 20-в и 20-г (МТ—63) выбираем A’q= N 40^9 W, К = 0,05 и поправку ДЯ © = —0^3;
4) рассчитываем поправку гирокомпаса
Я'^^ 40°9 W
ДЛО= — 0°3
AQ = HHQ=N 40°6 1F = 319°4
КПа= 318,5
ДГЯ' = +0?9
15 Заказ 1833
226 Глава 7. Определение маневренных элементов корабля и поправок приборов
Определение мгновенных поправок гирокомпаса по взаимным пеленгам с теодолитным постом. Теодолитный пост выставляется в тачке О, видимой с корабля К (рис. 89). Желательно, чтобы теодолит находился на одинаковой высоте с пеленгаторным репитером. Горизонтальный круг теодолита ориентируется относительно километровой линии х — const проекции Гаусса по известному дирекционному углу на вспомогательный ориентир.
Пеленгуемыми объектами являются световые ориентиры (электролампы), установленные над центрами теодолита и пеленгаторного репитера. Взаимные измерения направлений производятся одновременно по исполнительному сигналу с корабля; таких измерений делают 5—7 в одной серии.
В результате измерений получают 5—7 дирекционных углов а и столько же компасных пеленгов. В дальнейшем для расчета искомой поправки гирокомпаса используются средние значения дирекционного угла аср и компасного пеленга КП^. .
Мгновенная поправка гирокомпаса вычисляется по формуле
ЫК' = (аср ± 180е) + 7 - КПср.
Схождение меридианов для точки К вычисляется по формуле (5.12).
Определение мгновенных поправок гирокомпаса по пеленгам отдаленного ориентира. Подбирается ориентир, положение которого известно и который виден с корабля. На этот ориентир берется серия (5—7) компасных пеленгов, из которых вычисляется среднее значение. Истинный пеленг ориентира измеряют по карте с помощью транспортира или протрактора.
Если используется карта в нормальной проекции Меркатора, то искомый истинный пеленг ИП вычисляется по измеренному локсодромическому пеленгу Р по алгебраической формуле
ИП=Р-^
где ф — ортодромическая поправка.
В результате измерения на топографической карте в проекции Гаусса получается дирекционный угол а; истинный пеленг вычисляется по формуле
ИП = а — *[.
§ 52. Определение поправки курсоуказания
227
Угол y должен вычисляться для места корабля по формуле (5. 12).
При стоянке корабля на швартовах место пеленгатора определяется по расстояниям до палов или иных точек, положение которых показано на крупномасштабной карте (плане). При стоянке на якоре или на бочках место пеленгаторного репитера определяется одним из наиболее точных способов — по двум горизонтальным углам или с помощью высокоточной РНС.
Определение мгновенной поправки гирокомпаса по пеленгу створа. Компасный пеленг створа измеряется в момент пересечения створа, направление которого известно.
В целях повышения точности наблюдений желательно момент прихода корабля на линию створа отмечать с помощью бинокля.
Существенным недостатком данного способа является невозможность уменьшения влияния случайных ошибок измерений за счет увеличения количества измерений.
Определение мгновенной поправки гирокомпаса по сличению с другим курсоуказателем. Если на корабле имеются два гирокомпаса и известна мгновенная поправка одного из них, то мгновенная поправка ДГЯ^ другого гирокомпаса может быть вычислена по формуле
ДГЛ’п = ДГ^-Р, где Р = ^ГКя — №rKi — разность курсов, взятая на один и тот же момент.
Для получения надежной поправки ДГЯ' необходимо сличение курсов производить одновременно с измерением компасного пеленга для определения поправки ДГ^'.
Поправка гироазимута ДГЛ на момент наблюдений определяется так же, как мгновенная поправка гирокомпаса по формуле
ДГД = Я/7-/7га,
I л
где /7га — компасный (приборный) пеленг, измеренный с помощью пеленгатора на пеленгаторном репитере, подключенном к гироазимуту.
Поправка магнитного компаса Д/ИЯ равна алгебраической сумме магнитного склонения и девиации
ДМ# = d 4- В, определяется:
— по магнитному склонению, взятому с карты, и девиации, выбираемой из таблицы или с графика девиации;
— из сравнения истинного и компасного пеленгов ориентира или створа;
— по сличению курсов с другим курсоуказателем.
Первый способ применяется для определения поправки ЬМК в процессе плавания. Второй и третий способы используются для контроля за поправкой, вычисленной для данного курса по величинам d и б, и, кроме* того, для определения девиации. Порядок определения девиации рассматривается в § 53.
Оценка точности определения мгновенной поправки курсоуказателей. Средняя квадратическая ошибка определения мгновенной поправки курсоуказателей вычисляется по формуле
/Пдгк' = )Лтип + ткп » 37)
где тип и /икп — средние квадратические ошибки истинного и компасного пеленгов.
15*
228 Г лава 7. Определение маневренных элементов корабля и поправок приборов
Средние квадратические ошибки тип истинных пеленгов зависят от пеленгуемого ориентира, а также от методики определения эталонного пеленга.
При пеленговании небесных светил. Ошибка тип истинного пеленга слагается из следующих ошибок:
— методической ошибки тА вычисления азимута светила, которая зависит от применяемой формулы и значности таблиц логарифмов или натуральных величин тригонометрических функций или от типа таблиц (ВАС-58, ТВА-57 и т. д.);
— ошибки тА , зависящей от ошибок координат места корабля;
— ошибки тпА^, зависящей от неточной фиксации моментов измерения компасных пеленгов светила.
Результирующая ошибка тип истинного пеленга равна
тИП = KmAM+mAc + 'nA< •
При вычислении азимута светила по формуле котангенсов с использованием пятизначных таблиц логарифмов средняя квадратическая ошибка /пип выражается формулой
тип == 0,'04sin2A
Наибольшей величины эта ошибка достигает при 4 = 45°, когда она равна О',04.
Средние квадратические значения методических ошибок истинных пеленгов, вычисленных по таблицам ТВА—57 и ВАС—58, равны О',07 и 4', 1 соответственно.
Вычисление истинных пеленгов светил по таблицам ВАС—58 можно производить только в том случае, когда высокая точность определения поправки не требуется.
Ошибка дпА , зависящая от ошибок координат места, учтенного при вычислении азимута, определяется формулой
OTAc = /mAT+mAK.
где /пА и дпАх — ошибки истинного пеленга вследствие ошибок в широте и долготе места.
Эти ошибки в зависимости от высоты светила h вычисляются по формулам:
/пА*= sin Atg?;
/пАх == (sin <p — cos f tg h cos A).
При определении поправки курсоуказателя в базе, когда место корабля известно с высокой точностью, ошибкой /пА можно пренебречь по ее малости; в море же при решении задачи на ходу корабля эта ошибка может достигать 0°1 и более. Так, в широте = 60°, при т? = 5', = 8', h == 15° и А = 45° получим тА == 4' = 0°07. Поэтому
следует во всех случаях, когда это возможно, использовать для вычисления азимута светила координаты обсервованного места.
§ 52. Определение поправки курсоукаэания
229
Средняя квадратическая ошибка тА* азимута светила (дуг. сек), являющаяся следствием ошибки mt (сек) фиксации моментов измерения пеленгов светил, вычисляется по формуле
тА* = 0,25/n, (sin — cos 9 cos A tg h).
При mt не более 1—2 сек ошибкой тА* можно пренебрегать.
Результирующая ошибка /пип истинного пеленга светила при высоте h не более 15° и mt не более 1—2 сек не превосходит 0,05—0°1.
При пеленговании теодолитного поста. Ошибка /пип истинного пеленга, измеренного с помощью теодолита, зависит от следующих ошибок:
— ошибки ориентирования горизонтального круга теодолита;
— ошибки визирования;
— величины отклонения визируемой точки от вертикальной прямой, проходящей через центр пеленгаторного репитера.
Суммарная ошибка при неподвижном корабле обычно не превышает 0,3—О',5, а на ходу Г. Поэтому ошибку истинных пеленгов, измеряемых с помощью теодолита, следует учитывать только при определении поправки курсоуказателя с высокой точностью.
При пеленговании отдаленного ориентира. Ошибка /пип истинного пеленга отдаленного ориентира зависит главным образом от средней квадратической ошибки Мп места пеленгаторного репитера на карте (плане). С учетом только этой ошибки ошибку /пип в градусах можно вычислить по формуле
= 40.^1, (7.38)
где D — расстояние до ориентира.
Величины D и Мп должны иметь одну размерность. При Мп = 50 м и D = 5000 м получим
тип = 0’4*
Минимальное расстояние до ориентира для определения истинного пеленга с ошибкой не более т'ИП при известной ошибке Мп места репитера должно удовлетворять неравенству
т и п
При пеленговании створов. Средняя квадратическая ошибка истинного пеленга створа при пеленговании створов специальной постройки не превышает 0,03—0,°05 и поэтому данную ошибку в большинстве случаев можно не учитывать.
Средние квадратические ошибки компасных пеленгов. Средняя квадратическая ошибка ткп компасного пеленга слагается из ошибок:
— /пвиэ визирования ориентира;
— т0 отсчета пеленга;
— тЛ за люфт пеленгатора;
— тн за наклон пеленгатора;
— /ИдП выставки пеленгаторного репитера в диаметральной плоскости корабля;
— тсс синхронной связи датчика курса с пеленгаторным репитером.
230 Глава 7. Определение маневренных элементов корабля и поправок приборов
Если для измерения пеленгов применяется не пеленгатор, а какой-либо иной измерительный прибор, то все указанные составляющие должны быть отнесены к этому прибору.
Результирующая ошибка компасного пеленга рассчитывается по формуле
^кп
mвиз + 4- /Ял + /Ин 2 2
(7. 39)
п где п — число пеленгов в серии измерений.
Наиболее вероятные значения составляющих ошибки ткп определяются по следующим формулам.
Ошибка визирования
^виз уу sec Л,
где m — средняя квадратическая ошибка наведения пеленгатора (визирного устройства);
W — увеличение оптики;
h — угловая высота визируемого ориентира.
Для оптического пеленгатора при А = 0 и при пеленговании с неподвижного корабля в базе ошибка твйз близка к 0°,03, а при пеленговании с движущегося корабля 0°,07.
Ошибка отсчета пеленга
т0 = 4 ЦД,
где ЦД — цена деления отсчетной шкалы.
При пеленговании с помощью пеленгаторов ПГК-2 на пеленгаторном репитере гирокомпаса или на магнитном компасе ЦД = 1° и, следовательно, пг0 == 0°,25.
Ошибка за наклон пеленгатора относительно плоскости визирования тп = К tgft,
где #— угол наклона пеленгатора.
При удержании пеленгатора в горизонтальной плоскости по уровню, видимому в поле зрения пеленгатора, угол К принимается равным 0°,25 — при пеленговании с неподвижного корабля и 0°,5 — при пеленговании на ходу. При высоте А, близкой к нулю, ошибка /ин также близка к нулю.
Ошибка за люфт пеленгатора при хорошо подогнанном пеленгаторе не превышает 0°,15.
Ошибка за неточность выставки пеленгаторного репитера или магнитного компаса в диаметральной плоскости корабля близка к 0,1—0°,2.
Ошибка синхронной связи для гирокомпасов и дистанционных магнитных компасов должна приниматься равной 0,05—0°,08.
Конкретные значения перечисленных ошибок следует выбирать из технической документации приборов, применяемых для измерения пеленгов.
Наиболее вероятное значение средней квадратической ошибки среднего из пяти пеленгов, измеренных оптическим пеленгатором типа ПГК-2 на пеленгаторном репитере гирокомпаса, близко к 0°,37. Для магнитного компаса и обыкновенного пеленгатора эта ошибка принимается равной 0°,5.
Порядок определения ошибки /пкп из наблюдений рассматривается в §90.
§ 52. Определение поправки курсоуказания
231
Суммарное значение средней квадратической ошибки мгновенной поправки гирокомпаса при определении ее по пеленгу светила, по взаимным пеленгам с теодолитным постом и по пеленгу створа можно принимать равным ошибке дпкп компасного пеленга* При использовании же отдаленного ориентира эту ошибку следует подсчитывать с учетом ошибки тип истинного пеленга.
Поправка гироазимута на заданный момент Т3 называется также поправкой гироазимутального курса, вычисляется по исходной поправке ДГДо, определенной из сравнения истинного и компасного пеленгов ориентира в момент То и остаточной скорости ухода гироазимута а, по формуле
ДГДз = ДГД0 + а(Т3 - То). (7. 40)
Остаточная скорость ухода гнроазимута находится:
— по поправкам, определенным на моменты Т\ и Т%
• _ дгл-дгл, Т2-Т, ’
— с помощью графика разностей курсов по гирокомпасу и гироазимуту.
Для определения величины а с помощью графика разностей курсов следует:
а) в течение 3 ч через каждые 10—15 мин замечать компасные курсы по гирокомпасу и гироазимуту, работающему без коррекции от гирокомпаса;
б) рассчитать разности курсов 'Р, = ККгк^ —
в) построить график (рис. 90) зависимости Р от времени /;
г) провести плавную кривую разностей курсов;
д) с помощью прозрачной линейки провести прямую, являющуюся осью симметрии кривой разностей курсов; эта прямая будет соответствовать разностям курсов для положения равновесия чувствительного элемента гирокомпаса (она же характеризует уход гироазимута);
е) снять с графика две ординаты и осредняющей прямой и соответствующие этим ординатам моменты Т\ и Т'2‘,
232 Глава 7. Определение маневренных элементов корабля и поправок приборов
ж) вычислить остаточную скорость ухода гироазимута по формуле а = .
С помощью графика разностей курсов можно также определить постоянную поправку гирокомпаса при условии, что за время его ведения хотя бы один раз была определена поправка гироазимута ДЛ40. Для этого на график на момент То определения поправки ДЛ40 в масштабе разностей курсов наносится точка С с учетом знака ДЛ40. Отрезок DC и будет искомой постоянной поправкой гирокомпаса ДГА*П. Численная величина и знак этой поправки определяются по формуле
= ДГД0 -/?0. (7.41)
Точность вычисленной таким способом поправки ДГЯ*П зависит от продолжительности ведения графика разностей курсов, точности проведения осредняющей прямой, а также от точности определения поправки ДГЛо.
§ 53. ОПРЕДЕЛЕНИЕ ДЕВИАЦИИ МАГНИТНОГО КОМПАСА
Девиация магнитного компаса определяется, а при необходимости и уничтожается:
— после ремонта, докования и размагничивания корабля;
— при изменении магнитной широты 1 на 8° и более;
— при обнаружении расхождений наблюденной и табличной девиации, превышающих Г для главного компаса и 1°,5 — для путевого компаса.
Конечным результатом определения девиации является составление таблицы или графика девиации в зависимости от компасного курса.
Для определения девиации магнитного компаса следует:
1) выбрать полигон для маневрирования корабля и составить проект маневрирования;
2) подготовить корабль;
3) распределить личный состав и проинструктировать его о порядке выполнения наблюдений;
4) произвести измерения пеленгов или курсов и вычислить наблюденные величины девиации для различных курсов;
5) составить таблицу девиации или вычертить ее график.
Полигон для определения девиации должен иметь размеры, позволяющие безопасно маневрировать на самом малом ходу постоянными курсами с продолжительностью лежания на них по 5—7 мин и безопасно совершать повороты с одного курса на другой.
На побережье вблизи района маневрирования корабля должны иметься в наличии один или несколько секущих створов или отдаленный ориентир. В отдельных случаях в качестве ориентира может быть выбрано небесное светило.
Для повышения точности определения девиации желательно с наибольшей достоверностью знать элементы земного магнетизма — магнитное склонение и его годовое изменение в районе маневрирования корабля.
1 Магнитной широтой называется угол, численная величина которого равна значению угла наклонения магнитной стрелки относительно горизонта в данной точке. Линии равных значений наклонения приводятся на специальных картах элементов земного магнетизма.
§ 53. Определение девиации магнитного компаса
233
Такие сведения могут быть получены с крупномасштабных карт последнего издания или из описаний девиационных полигонов.
Проект маневрирования составляется на карте крупного масштаба, на которой прокладываются частные курсы с таким расчетом, чтобы все наблюдения можно было произвести за минимальное время, а продолжительность лежания на отдельных курсах была равна примерно 5—7 мин.
При подготовке корабля следует:
а) все металлические предметы оборудования и вооружения корабля, окружающие компасы, установить и закрепить по-походному;
б) проверить правильность установки магнитных компасов в диаметральной плоскости корабля;
в) проверить пеленгаторы;
г) организовать связь между местами установки главного и путевых магнитных компасов.
Для производства необходимых измерений выделяются наблюдатели на главный и путевые магнитные компасы.
Наблюдатель у главного магнитного компаса, являющийся руководителем работ, производит измерения пеленгов и курсов, а наблюдатели у путевых компасов по командам руководителя с наибольшей возможной точностью фиксируют курсы, на которых намечено определять девиацию данного компаса.
Измерения, необходимые для определения девиации, могут быть произведены:
а) на курсах 0, 10, 20 и т. д. до 350°; таблица или график девиации в таких случаях составляется непосредственно по наблюденным величинам девиации;
б) на 8 курсах: 0, 45, 90, 135,180, 225,270 и 315°; таблица или график девиации составляется по величинам девиации, вычисленным для курсов через 10°.
Измерения с целью определения девиации следует производить:
а) для обеспечения перемагничивания мягкого железа корабля — через 2—3 мин после начала лежания на данном частном курсе;
б) для уменьшения случайных ошибок пеленгования или фиксации компасных курсов по 3—5 раз на каждом курсе.
В последнем случае при составлении графика девиации или расчете коэффициентов должно учитываться среднее значение из полученных наблюденных девиаций.
Определение девиации производится следующими основными способами:
1) по створу, магнитное направление которого известно;
2) по створу, магнитное направление которого неизвестно (например, вследствие отсутствия сведений об элементах земного магнетизма);
3) по пеленгам отдаленного ориентира;
4) по пеленгам небесного светила;
5) по сличению показаний двух компасов.
Определение девиации по створу, магнитное направление которого известно. В момент пересечения створа на выбранном курсе берется отсчет обратного компасного пеленга (ОКП). Наблюденная девиация вычисляется по формуле
S = OM/7-OA77, (7.42)
где ОМП ~ОИП — d — обратный магнитный пеленг створа, вычисленный по истинному пеленгу (ОИП), приведенному на карте;
d— магнитное склонение.
234 Глава 7. Определение маневренных элементов корабля и поправок приборов
Отсчеты О КП снимаются с точностью 0°,1.
Чтобы повысить точность пеленгования и исключить промахи в отсчетах пеленгов, следует начинать пеленгование до пересечения створа, визируя задний створный знак. Отсчет пеленга берется в момент прихода переднего створного знака на визирную плоскость.
Для того чтобы ошибки измерения ОКП, зависящие от чувствительности створа, не превышали 0°,1, корабль должен маневрировать на расстоянии от переднего створного знака не более пятикратного расстояния между створными знаками.
Результаты измерений и вычислений наблюденной девиации рекомендуется записывать в следующую схему.
кк омп ОКП б кк омп ОКП 8-
0° 44°3 49°4 -5°1 180° 44*3 40°0 +4°3
45 44,3 45,6 —1,3 225 44,3 41,6 +2,7
90 44,3 41,5 +2,8 270 44,3 46,2 —1,9
135 44,3 39,9 +4,4 315 44,3 49,3 -5,0
При наличии нескольких створов (веера створов) на каждом курсе следует брать 3—5 пеленгов; вычисленная по этим пеленгам девиация осредняется.
На кораблях и катерах, где главный магнитный компас отсутствует, компасные пеленги могут быть получены суммированием фиксируемых величин курса и курсового угла. Курсовой угол в момент пересечения створа на данном курсе измеряется с помощью имеющегося угломерного прибора (пеленгатора на временно установленном котелке магнитного компаса, таксиметра, визира). Курсовые углы рекомендуется брать по круговой системе счета.
Для записи результатов измерений и вычислений рекомендуется следующая схема.
Заданный КК КУ Отсчет курса на створе КП мп Наблюденная девиация
0° 76°4 0°5 76°9 +о°з
45 29,6 45,0 74,6 + 2,6
90 344,3 91,0 - 75,3 + 1,9
135 302,6 134,6 77,2 0
180 257,0 181,0 78,0 77°2 -0,8
225 212,8 225,5 78,3 —1,1
270 170,5 269,0 79,5 -2,3
315 123,6 314,0 77,6 -0,4
Определение девиации по створу, магнитное направление которого неизвестно. В качестве объекта для пеленгования используется створ любых неподвижных ориентиров. В результате измерений получаются обратные компасные пеленги створа, взятые на 8 равноотстоящих ком-
пасных курсах.
$ 53. Определение девиации магнитного компаса 235
Средний компасный пеленг соответствует магнитному пеленгу без коэффициента А
кпср = = мп - а .
Все остальные коэффициенты при условии, что пеленги измерялись на равноотстоящих курсах, исключаются*
Разности КПф — КГЦ соответствуют условным девиациям. По этим девиациям вычисляются коэффициенты В, С, D и Е, а затем и таблица девиации с использованием формул и схем, приведенных выше.
Коэффициент Л, необходимый для расчета таблицы девиации, берется из прежних наблюдений.
Определение девиации по пеленгам отдаленного ориентира. Для наблюдений используется любой неподвижный ориентир, удаленный от района маневрирования корабля на расстояние не менее 2 миль.
При взятии компасного пеленга ориентира на первом курсе с корабля сбрасывается буек или вешка; пеленги ориентира на последующих курсах берутся в моменты, когда корабль будет в непосредственной близости от буйка.
Для исключения влияния течения следует маневрировать с таким расчетом, чтобы обеспечивалась возможность измерения пеленгов через близкие друг другу промежутки времени; первый и последний курсы должны быть одинаковыми.
Затем из пеленгов, кроме первого и последнего, алгебраически вычитается поправка &КПЬ вычисляемая по формуле
кп^-кп' (j- 1),
где i порядковый номер исправляемого пеленга.
Дальнейшая обработка производится в том же порядке, как при определении девиации по створу, направление которого неизвестно.
Для записи результатов наблюдений и вычислений рекомендуется следующая схема.
Заданный КК КП Поправка пеленга ДЯ77 Исправленный пеленг КГЦ - ДА77; Условная девиация $ - KnCQ - КГЦ
45°. 155°5 — 155°5 —3°1
90 151,4 +0?2 151,2 + 1,2
135 149,1 4-0,4 148,7 +3,7
180 148,6 4-0,6 148,0 +4,4
225 151,5 4-0,8 150,7 + 1,7
270 154,8 + 1,0 153,8 —1,4
315 159,8 + 1,2 158,6 -6,2
0 154.2 + 1,4 152,8 -0,4
45 157,1 — — —
А77ср == 152°4
236 Глава 7. Определение маневренных элементов корабля и поправок приборов
Определение девиации по пеленгам небесного светила. Для наблюдений выбирается светило, имеющее высоту над горизонтом не более 15°. На каждом из 8 равноотстоящих курсов берется по 3—5 пеленгов светила; моменты измерений фиксируются помощником наблюдателя по часам или секундомеру, поправка которых известна. Затем полученные моменты измерений и отсчеты пеленгов светил осредняются.
Для средних моментов вычисляются местные часовые углы светила и азимуты его Ас с учетом координат места наблюдений.
По полученным азимутам Ас (истинным пеленгам) рассчитываются затем магнитные пеленги MI7 = Ас — d\ учитываемое магнитное склонение d определяется по, карте.
Далее задача решается так же, как при наблюдениях створа, магнитное направление которого известно.
Для расчета азимутов светила рекомендуется использовать таблицы ВАС—58 или ТВА—57.
Определение девиации по сличению показаний двух компасов. Данный способ применяется для определения девиации путевых компасов.
Корабль последовательно приводят на главные и четвертные компасные курсы по путевому компасу. Через 2—3 мин после начала лежания на каждом курсе наблюдатель на путевом компасе в моменты, когда курс точно соответствует заданному, подает сигнал «Ноль» голосом или короткий сигнал звонком. По этим сигналам наблюдатель на главном магнитном компасе записывает 3—5 отсчетов курса. Полученные отсчеты затем осредняются. Наблюденная девиация путевого компаса вычисляется по формуле
\к = МК-ККп„
где МК = ККшкА- ^гл.к магнитный курс, вычисленный по показанию главного магнитного компаса с учетом его девиации;
ККпк — компасный курс по путевому компасу.
Для записи результатов наблюдений и вычислений рекомендуется следующая схема.
ККпк Средний **гл.к &ГД, к МК ft
0° 358°6 —0°5 358° 1 —1?9
45 47,9 4-0,2 48,1 4-3,1
90 92,5 4-0,4 92.9 4-2,9
135 136,3 4-0,7 137,0 4-2,0
180 182,2 4-0,7 182,9 +2,9
225 227,0 —0,2 226,8 + 1.8
270 269,4 -0,7 268,7 —1,3
315 313,3 —1,3 312,0 -3,0
§ 53. Определение девиации магнитного компаса 237
Девиацию путевого магнитного компаса определяют обычно по сличению сразу же после наблюдений, производимых для определения девиации главного магнитного компаса, на тех же курсах.
Если главный магнитный компас отсутствует, то девиацию путевого компаса можно определять по сличению его показаний с показаниями гирокомпаса. Учитывая возможность значительного выхода гирокомпаса из меридиана при большом количестве поворотов, следует в процессе сличения курсов определять мгновенные поправки АГ К' гирокомпаса одним из способов, например, по пеленгам створа.
Определив по карте магнитное склонение d для района маневрирования корабля, вычисляют магнитные курсы по показаниям гирокомпаса и девиацию путевого компаса по формулам:
МК = ККГК 4- Д/7С - d;
МК-ККПк. ПК ПК
Девиация как главного, так и путевого магнитного компаса на курсы через 10° по ее величинам, наблюденным на курсах через 45°, необходимая для составления таблицы или графика девиации, вычисляется по формуле
8 = А -г В sin к' 4- С cos к' + Z) sin 2лг' 4~ 2:cos2k', (7. 43)
где Ау В, С, D и Е — коэффициенты девиации.
Коэффициенты Ay By Су D n Е вычисляются по девиациям, наблюденным на указанных выше 8 курсах по способу наименьших квадратов, по формулам:
л __ Ь0 + 4- Ч- &!35 4- 518о 4- &225 4- ^270 4- 6315
А ~ 8
D __ (&90 — &270) 4- (&45-&22б) sin 45° 4“ (&|36 — ^31б) sin 45°
В ~ 4
р____ (% — ^18о) 4- (8<ь — &22б) sin 45° — (8135 — &з1ь) sin 45°
С “ 4
Г} _ (®45 4- &225) — 0136 4- &31б)
U ~ 4
р _ ($0 4- Ь|8о)—(&90 4- &2?о) ~ 4
При вычислении коэффициентов девиации и девиации через 15 и 10° по формулам (7.43) и (7.44) используются
(7. 44)
для курсов схемы, приведенные на стр. 238—240.
Для оценки точности определения девиации сравниваются наблюденные величины с вычисленными на главных и четвертных курсах. При расхождениях до 0°,4 ставится оценка «отлично», при расхождениях до до 0°,6 — «хорошо» и при расхождениях до 0°,8 — «удовлетворительно».
Для путевых компасов эти критерии имеют величины 0,6, 0,8 и Г,2 соответственно.
Порядок уничтожения девиации зависит от особенностей конструкции компаса и излагается в соответствующей технической документации.
Определение коэффициентов по девиациям, наблюденным на 8 компасных курсах
КК 1 КК и Ш IV Мн. V Мн. VI VII VIII IX X
г 5 4 w 4(,'и) Мн. IV Мн. IV Верхняя половина ст» III Нижняя половина ст. Ill 4<vn Will) A(vu-vhi)
N —1°1 S -0°3 —0°7 —0°4 0 — I -0*4 —0°7 + Ц0 —0°8
NO +3,3 SW +3,4 + 3,4 ±0,0 — — +3,4 —3,0 +0,2 +3,2 = D
О +1,3 W +0,7 + 1,0 +0,3 I +о°з 0 — м м + 0*4 А
SO —2,6 NW -3,5 -3,0 + 0,4 §46 +0,3 — s45 -0,3 + 0;2
Контроль HI + IV = 1 + 0,6 + —
— — — 0,7 Контроль X + IX = VII = С
+ 0*6 —0°,7
м +0°,з 4е —0°4
238 Глава 7. Определение маневренных элементов корабля и поправок приборов
$ 53. Определение девиации магнитного компаса
239
Вычисление таблицы девиации на компасные курсы через 15* = [Dsin2«' 4- Ecos2k'] 4- А 4- [Вsin к’ 4- Ccosk']
«С IV-VII см О to 1 4- to cm 4- + 3,5 to 4- to Cm 4- to" 4- -1-1 to cm" 1 —3,5 —3,6 —2,6
A'tf о «О о Ю О г-•• о О CM о § о § о Й CM W 270° о Ю co CM о § о in сл о § о
4Q ПЛ4-Л1 о + 0,8 CM 4- +3,3 to 4- cm" 4- to ’'4 4- to to i to to 7 чь 7 to 7
кк о О о Ю о 8 о in о s о to o06 l$O о 8 о О CM о й о § о
1 VII V + VI О to to to 1 CM to to 1 to to Cm to 4- +0,3 i to 4- to 4- to to 4- to to 4- to to 4-
о • о 1 f О > с. Мн, •** О to 1 to" 1 to 1 to to 1 Cm to 1 to 1 1 to 4- + 0,2 to to 4- ** to + to 4"
X £ Я S сл tn CO CO to сл о tn сл 1 О CQ CO 1 u> co 1 s co m co
со о * 3- I > х‘ S 0J 1 О*' to + +0,2 cm to + ем to 4- to to + to to" 4- + 0,3 Cm to" 4- Cm to" + CM to" + to 4-
1 о to СЛ 8 СЛ СЛ S сл to co R сл S сл !? сл сл сл
> см ° 1 V 4- III to О to 1 7 to cm 4- to 4- to 4- +2,5 + 1,0 to 1 См Cm" 1 to to 1 to to 1 CM 1
• 2 + to о to 1 to to 4- cm 4- Cm to 4" Cm to 4- +2,3 8'0 + to to 1 Cm' 1 Cm 7 CM to" 1 to cm" 1
8;o-=j | = Е. Мн. to^ to" 1 to" 1 to 1 1 to 4- to 4-i + 0,8 to 4- + 0,4 1 to" 1 to 1
X s CO S? СЛ о s co 1 s co 1 1 О CO 1 co 1 © СП CO $ сл
см о > СО 4- 1 Q —< D. Мп. 1 to О «* 4- to cm + См to 4- to Cm' 4- 9'1 + 1 to 7 to Cm 1 cm to 1 to 7 to 7
я о s СЛ S СЛ s co 5 сл © о tn 7 S сл 1 1 s co 1 о co CO 1
Вычисление таблицы девиации по коэффициентам Л, В, Cf D и Е на компасные курсы через 10° &*, = [Dsin2tf' + Ecos2«'] + А + [В sin к' + Ceos*']
D- +0?6 E =• - 0?2 in IV В - +2?2 C - - 5?2 VII Компасные курсы VIII Компасные курсы IX
Множители 1 Множители 11 Л-4-О73 Множители V Множители VI 8 8
DXMh. EX Мн. i+n III 4-A EX Мн. CXMh. v+vi iv+vn IV-VII
0 0e0 1 -0*2 -0°2 +o°,i 0 0°,0 1 — 5^2 —5е2 У0° —5?/ 5 180° -
S20 +0,2 S70 —0,2 0,0 + 0,3 Sjo +0,4 S8o —5,1 —4,7 10 -4,4 190 +5,0
S40 + 0,4 Soo —0,2 +0,2 +0,5 S20 +0,8 S70 -4,9 —4,1 20 —3,6 200 + 4,6
Seo +0,5 S30 -0,1 +0,4 + 0,7 S30 + 1,1 Sco -4,5 -3,4 30 -2,7 210 +4,1
Seo +0,6 Sio 0,0 +0,6 +0,9 S40 + 1,4 Soo —4,0 —2,6 40 —1,7 220 +3,5
Seo +0,6 —Sio 0,0 +0,6 +0,9 S50 + 1,7 S40 —3,3 —1,6 50 —0,7 230 +2.5
Soo +0,5 —S30 +0,1 +0,6 + 0,9 Soo + 1,9 S30 —2,6 —0,7 60 -0,2 240 + 1,6
S40 +0,4 —s80 +0,2 +0,6 + 0,9 S70 +2,1 S20 —1.8 +0,3 70 + 1,2 250 + 0,6
S20 +0,2 —S70 +0,2 +0,4 +0,7 Seo +2,2 Sio —0,9 + 1,3 80 +2,0 260 —0,6
0 0,0 -1 +0,2 +0,2 +0,5 1 +2,2 0 0,0 +2,2 О5'90° +2,7 W 270° —и
—S20 —0,2 —S70 + 0,2 0,0 +0,3 Seo +2,2 —Sl0 +0,9 +3,1 100 +3,4 280 —2,8
—S40 —0,4 —Soo + 0,2 —0,2 +0,1 S70 +2.1 —S20 + 1,8 +3,9 110 +4,0 290 —3,8
—Seo —0,5 —S30 + 0,1 —0,4 —0,1 S«o + 1,9 —S30 +2,6 +4,5 120 +4,4 300 —4,6
—S80 -0,6 Sio 0,0 —0,6 -0,3 S50 + 1,7 —S40 +3,3 +5,0 130 + 4,7 310 —5,3
—s80 -0,6 Sio 0,0 —0,6 —0,3 S40 + 1,4 —Soo +4,0 +5,4 140 +5,1 320 —5,7
—Soo —0,5 S30 —0,1 —0,6 -0,3 Soo + U —Soo +4,5 +5,6 150 +5,3 330 —5,9
—S40 —0.4 S50 —0,2 —0,6 —0,3 S20 +0,8 —S70 +4.9 +5,7 160 +5,4 340 —6,0
—S20 —0,2 S70 —0,1 Sio +0,4 S8o +5,1 +5,5 170 +5,4 350
240 Глава 7. Определение маневренных элементов корабля и поправок приборов
§ 54. Определение радиодевиации
241
§ 54. ОПРЕДЕЛЕНИЕ РАДИОДЕВИАЦИИ
Радиодевиация определяется один раз в год и, кроме того:
— после среднего ремонта корабля;
— при изменении положения замкнутых контуров надстроек и такелажа корабля;
— при обнаружении расхождений наблюденных и табличных значений радиодевиации, превышающих величину, установленную для данного типа радиопеленгатора.
Радиодевиация изменяется с изменением длины волны принимаемых сигналов и поэтому ее следует определять для:
— основной волны радиомаячного диапазона (Л= 1000 м);
— волны к — 600 м, на которой работают радиопередатчики портов и судов транспортного флота;
— волны или нескольких волн, близких к волнам связных и вещательных станций, в зоне действия которых может находиться корабль.
Определение радиодевиации производится визуальным или азимутальным способом.
В визуальном способе радиодевиация определяется как разность курсовых углов — измеренного визуально (эталонного) с помощью пеленгатора и измеренного с помощью радиопеленгатора. В азимутальном способе сопоставляются пеленги — истинный, определяемый по карте, и измеренный с помощью радиопеленгатора.
Определение радиодевиации визуальным способом. Для определения радиодевиации визуальным способом следует:
1) составить план выполнения работ, в котором предусмотреть:
— подготовку корабля,
— выбор района выполнения работы и порядок маневрирования,
— организацию связи с радиомаяком или радиостанцией вспомогательного судна, обеспечивающего выполнение работы,
— распределение личного состава и его инструктаж,
— составление заявки на работу радиомаяка или на выделение вспомогательного судна с радиопередатчиком, работающим в соответствующем диапазоне волн;
2) выйти в район выполнения работ;
3) измерить визуальные курсовые углы, соответствующие ряду радиокурсовых углов радиомаяка;
4) рассчитать радиодевиацию;
5) вычислить график остаточной радиодевиации в зависимости от радиокурсового угла.
При подготовке корабля к определению радиодевиации необходимо: а) все находящиеся на верхней палубе и надстройках предметы вооружения и оборудования установить и закрепить «по-походному»;
б) постоянно действующие антенны связи включить на прием, а остальные изолировать от земли;
в) проверить правильность установки пеленгаторных репитеров в диаметральной плоскости корабля и установить пеленгаторы;
г) наладить связь между штурманской рубкой (местом установки радиопеленгатора) и местами установки пеленгаторных репитеров.
16 Заказ 1833
242 Г лава 7. Определение маневренных элементов корабля и поправок приборов
Район выполнения радиодевиационных работ должен удовлетворять следующим требованиям:
— удаление корабля, производящего работы, от берега и других кораблей не должно быть меньше 0,5 км,
— направление на пеленгуемый радиомаяк (радиостанцию) не должно закрываться другими кораблями, островами или мысами, а с направлением береговой линии не должно составлять углы меньше 30°,
— в ночное время для исключения ночного эффекта расстояние между кораблем и радиомаяком не должно быть больше 15 миль,
— для исключения ошибок за параллакс (являющихся следствием несовпадения мест установки пеленгаторного репитера и рамки радиопеленгатора) расстояния до радиомаяка не должны быть меньше величины D, определяемой по формуле
£>-0,57 b (км),
где b — расстояние (база) между пеленгаторным репитером и рамкой радиопеленгатора в проекции на горизонтальную плоскость, м.
Маневрирование корабля должно обеспечивать наиболее точное измерение визуальных и радиокурсовых углов. Для этого угловая скорость изменения пеленга на пеленгуемый радиомаяк (радиостанцию) не должна превышать 0,1 град!сек. При большей угловой скорости могут возникнуть значительные ошибки за счет неодновременности взятия отсчетов измеряемых курсовых углов.
Для изменения курсового угла на работающий радиомаяк или радиостанцию применяются следующие способы:
— маневрирование переменными курсами;
— непрерывная циркуляция корабля;
— разворачивание корабля, стоящего на якоре или на бочках, с помощью буксира;
— обход корабля, стоящего на якоре (бочках) или находящегося в дрейфе, вспомогательным судном (радиоботом) с работающей передающей радиостанцией.
Применяя первый способ, корабль маневрирует по хордам окружности; частные курсы назначаются с таким расчетом, чтобы после поворота на данный курс плавно изменяющийся курсовой угол на радиомаяк имел заданную величину.
Для больших кораблей наиболее выгоден последний способ.
Связь с обеспечивающим радиомаяком или вспомогательным судном осуществляется обычно с помощью УКВ радиостанции, а при отсутствии таковой — с помощью зрительных средств. По сигналам (запросу) с корабля, определяющего радио девиацию, радиомаяк (радиостанция вспомогательного корабля) начинает (или прекращает) работу, а вспомогательное судно осуществляет соответствующий маневр.
Для производства измерений должны быть выделены операторы:
— на радиопеленгатор — для измерения радиокурсовых углов;
— на пеленгаторный репитер — для измерения визуальных курсовых углов.
Кроме того, для связи между операторами постов пеленгования и штурманской рубкой выделяется номер, передающий голосом команды и доклады от одного поста другому.
§ 54. Определение радиодевиации
243
Оператор на радиопеленгаторе в моменты взятия отсчетов радиокурсовых углов, близких к заранее намеченным, должен подавать команду «Товсь». По команде «Ноль» оператор, пеленгующий визуально, берет отсчеты визуально измеряемых курсовых углов. Эти отсчеты передаются для записи оператору на радиопеленгаторе по линии связи.
Команды об изменении курса подаются по соответствующим докладам (сигналам) оператора, измеряющего радиокурсовые углы. Для повышения точности измерения курсовых углов отсчеты последних рекомендуется брать по картушке пеленгаторного репитера, на котором устанавливается курс 0°; репитер отключается от датчика курса.
Заявка на работу радиомаяка или радиопередатчика вспомогательного судна составляется заблаговременно и передается обеспечивающему подразделению гидрографической службы. В заявке указываются:
— район маневрирования (полигон) корабля, определяющего радиодевиацию;
— время начала и окончания работы;
— длина (длины) волны радиомаяка;
— необходимость включения светового ориентира в случае работы при плохой видимости.
Измерения радиокурсовых углов <7р/ и соответствующих им визуальных курсовых углов qt производятся через 5—10° изменения углов q? на их отсчеты 0, 5, 10... 355 или 0, 10, 20 ... 350°. Для повышения точности измерений производятся наблюдения при повороте корабля или движении вспомогательного судна вправо и влево.
Измерения визуальных курсовых углов могут быть произведены также только на 8 равноотстоящих радиокурсовых углах, а именно: 20, 65, НО, 155, 200, 245, 290 и 335°.
Наблюденные величины радиодевиации вычисляются по формуле fi = <h - gn-
График радиодевиации в зависимости от радиокурсовых углов (рис. 91) строится в прямоугольных координатах на миллиметровой бумаге или на специальном бланке по величинам:
— наблюденных радиодевиаций, если последние определялись через 5—10° радиокурсового угла. Если при этом какая-либо из точек, нанесенных на графике, не укладывается на плавную кривую, то эту точку следует отбросить, отнеся выброс за счет промаха при измерениях;
16*
Вычисление коэффициентов радиодевиации по радиодевиациям на 8 радиокурсовых углах
РКУ I РКУ 11 Ш IV V X зе VI VII VIII IX X X XI X XII
Дев. Дев. ~2 (1 + + И) -II) Мн XIV мн X IV Верхняя половина Ст. III Нижняя половина Ст. III y(VH + + VI1I) J(VII- —VIII) Мнх X М„Х X 1
20° +2°9 200° +2°7 +2°8 +o;i C2q 0°0 Сто +0°1 + 2?8 —4°0 —0°6 +3°4 с 40 +2? 2 С50 +2°6
65° +2,1 245° +2,4 +2,2 —0,2 Сед -0,2 С25 -0,1 +2,2 —4,2 —1,0 +3,2 Сю +2,4 —С 40 -2,1
110° —4,4 290° —3,6 —4,0 —0,4 С/о -0,4 —С2о +0,1 i 1 Сумма = -1,6 D = — сумме +4°6 £ = = сумме +0°5
155° —4,5 335° —4,0 —4,2 -0,2 С25 —0,1 —С 65 +0,2 Сумма 2 “ -0,8 = А КОНТРОЛЬ: IX + X-VII
КОНТРОЛЬ: III + IV- I В-- + — + 0,4 Разность 1 стр. — 2 стр. Ст. IX +0,4
— 0,7 — 0,1 1 у разн. +0°2 ~-=н
Сумма —0,7 Сумма +0,3 i i 1 — С
Сумма -о: 4 Сумма 4-0? 2 1 1
2 2
244 Глава 7. Определение маневренных элементов корабля и поправок приборов
Вычисление таблицы радиодевиации на радиокурсовые углы через 10* f — Я 4- Bsinqr 4- Ceos? 4- Dsin2^ 4- £cos2g 4- #sin4g
I П III IV V VI VII VIII IX X XI
D = -= +4-6 Е- = +0*5 I 4-И +0?2 А - —0?8 III 4- V В - -0;4 с~ - 4-0*2 VII + VIII VI + IX VI- -IX
MH Мн X D Мн Мн X Е Мн MHxtf А 4- Мн X Н Мн М„ X В Мн Мн X С РКУ f РКУ f
0 — 1 +0°5 +0*5 0 — —0*8 —0^3 0 - - 1 4-0:2 +0*2 0° —0*1 180° —0;5
Сго + 1?6 С70 4-0,5 4-2,1 С40 +0*1 -0,7 4-1,4 Сю -0*1 Сео 4-0,2 4-0,1 10 4-1,5 190 + 1,3
Сю 4-3,0 С50 4-0,4 4-3,4 Сео 4-0,2 -0,6 4-2,8 С20 -0,1 С70 4-0,2 4-0,1 20 4-2,9 200 + 2,7
Qo 4-4,0 Сзо 4-0.2 4-4,2 Сео 4-0,2 —0,6 4-3,6 С30 —0,2 • СвО 4-0,2 0 30 4-3,6 210 +3,4
Сео 4-4,5 С1о 4-0,1 4-4,6 С20 4-0,1 -0,7 4-3,9 С40 —0,3 С50 4-0,2 —0,1 40 4-3,8 220 +4,0
С 80 4-4,5 —С1о -0,1 4-4,4 —С2о —0,1 —0,9 4-3,5 С50 —0,3 Сю 4-0,1 -0,2 50 4-3,3 230 +3,7
Сад 4-4,0 —Сзо -0,2 4-3,8 —Сю —0,2 —1,0 4-2,8 Сео —0,4 Сзо 4-0,1 -0,3 60 4-2,5 240 + 3,1
С «о 4-3,0 —С5о —0,4 4-2,6 —С80 —0,2 —1,0 4-1,6 С7о -0,4 С20 4-0,1 —0,3 70 + 1,3 250 + 1.9
С20 4-1,6 —с70 —0,5 4-1,1 —Сю —0,1 —0,9 4-0,2 Сео —0,4 Сю 0 —0,4 80 —0,2 260 +0,6
0 — —1 -0,5 -0,5 0 — —0,8 —1,3 1 —0,4 0 0 —0,4 90 —1,7 270 -0,9
—С20 -1,6 —С70 -0,5 —2,1 Сю 4-0,1 —0,7 —2,8 Сео -0,4 —Сю 0 —0,4 100 —3,2 280 —2,4
—С 40 —3,0 —С50 -0,4 -3,4 Сзо 4-0,2 —0,6 —4,0 С7о —0,4 —Сго -0,1 —0,5 ПО -4,5 290 —3,5
—С во —4,0 —Сзо —0,2 —4,2 Сео 4-0,2 -0,6 -4,8 Си —0,4 —Сзо —0,1 —0,5 120 —5,3 300 -4,3
—С8о —4,5 —Сю —0,1 —4,6 С20 4-0,1 —0,7 —5,3 С50 -0,3 —Сю —0,1 -0,4 130 -5,7 310 -4,9
—С 80 —4,5 Сю 4-0,1 -4,4 —С20 -0,1 -0,9 -5,3 С40 -0,3 —С 50 —0,2 —0,5 140 —5,8 320 -4,8
—С бо —4,0 С зо 4-0,2 —3.8 —Соо —0,2 -1,0 -4,8 Сзо -0,2 —Сео —0,2 -0.4 150 —5,2 330 —4,4
С 40 —3.0 С50 4-0,4 —2.6 С8и -0,2 —1,0 -3,6 С20 —0,1 —С70 —0,2 —0,3 160 -3.9 340 -3,3
—С20 -1,6 с 70 4-0,5 | —1.1 С 40 -0,1 —0,9 —2.0 Сю -0.1 Cgi, -0,2 —0,3 170 -2.3 350 -1,7
$ 54. Определение радиодевиации
246 Г лава 7. Определение маневренных элементов корабля и поправок приборов
— вычисленных радиодевиаций, если наблюденные радиодевиации определены только для 8 радиокурсовых углов.
В последнем случае радиодевиация рассчитывается на радиокурсовые углы через 10° по формуле
/ == А + В sin qp + С cos q$ + D sin 2 qp 4- E cos 2 qp + H sin 4/?p,
где A, B, C, D,E, H — коэффициенты радиодевиации.
Для расчета коэффициентов применяются формулы, аналогичные (7.43), т. е.:
л = §!/]; В =
c = t[/cos?p|; D = 4l/sin27P];
£=4f/cos2^i; н=4 i/sin4?pi’
где [/] — сумма радиодевиаций;
[/sin<7p], [/cos <7Р], [/sin2?p], [/cos 2^p], [/sin 4/?р] — суммы произведений наблюденных радиодевиаций на синусы или косинусы соответствующих им радиокурсовых углов.
Расчет коэффициентов и радиодевиации производится по схемам, приведенным на стр. 244 и 245.
Определение радиодевиации азимутальным способом. Азимутальный способ применяется в тех случаях, когда радиомаяк или пеленгуемая радиостанция находится за пределами видимости с корабля и поэтому эталонные курсовые углы с помощью пеленгатора измерить нельзя.
Способ может быть осуществлен в двух вариантах: с определением места и без определения места.
Для определения радиодевиации азимутальным способом с определением места корабля следует:
1) подготовить корабль;
2) выбрать способ определения места; *
3) выбрать радиомаяк или радиостанцию с соответствующей длиной волны;
4) маневрируя на 8 курсах, удовлетворяющих 8 равноотстоящим радиокурсовым углам, измерить ряд радиопеленгов, замечая моменты измерений по секундомеру. Места корабля определять не реже чем через 1 мин, фиксируя моменты определений по тому же секундомеру или другому, идущему с ним синхронно;
5) нанести на карту крупного масштаба обсервованные места, линию пути и счислимые места корабля на моменты измерения радиопеленгов;
6) снять с карты истинные локсодромические пеленги Р/ на радиомаяк от соответствующих счислимых мест и перевести эти пеленги в орто-дромические;
7) вычислить наблюденные радиодевиации;
8) вычислить радиодевиации через 10° изменения радиокурсового угла и вычертить график радиодевиации.
Подготовка корабля к определению радиодевиации и требования к району маневрирования те же, что в визуальном способе.
Выбираемый способ определения места корабля должен обеспечивать необходимую точность измерения истинных пеленгов на карте. Для этого
$ 54. Определение радиодевиации
247
средние квадратические ошибки Мо определяемых мест не должны превышать величины, вычисляемой по формуле
Мо = 0,005 D, (7.45)
где D •— расстояние до радиомаяка.
Так, при D — 50 милям получим допустимую ошибку Af0 не более 0,25 мили.
При выполнении условия (7.45) средние квадратические ошибки пеленгов, измеряемых на карте, не будут превышать 0°,2.
Когда в данном районе нельзя обеспечить требуемую точность определения места, решается обратная задача по выбору радиомаяка (радиостанции), удаленного от корабля на расстояние не меньше £>min, вычисляемого по формуле
^mln ~ 200Л/о.
Ошибка Af0 определения места должна вычисляться с учетом как ошибок измерения навигационных параметров, так и ошибок обработки в порядке, изложенном в § 90.
Выбираемый радиомаяк должен обладать достаточно большой мощностью; угол молчания при слуховом пеленговании не должен превышать 3—4°.
Курсы корабля вначале выбираются приближенно с таким расчетом, чтобы они соответствовали курсовым углам 20, 65, 110, 155, 200, 245, 290 и 335°, а затем уточняются, чтобы указанным величинам соответствовали указанные радиокурсовые углы. На каждом курсе берется 3—5 отсчетов радиопеленгов РПh которые затем осредняются.
Наблюденные радиодевиации вычисляются по формуле
fi = nnt - PHh
где Hili — истинные ортодромические пеленги;
Р/7; — осредненные отсчеты радиопеленгов.
Истинные ортодромические пеленги ИЩ вычисляются по формуле
ИГЦ - PL - 6,
где Pi — локсодромические пеленги, измеренные по карте;
Ф — ортодромическая поправка, вычисляемая по координатам <рк и места корабля и долготе Хр радиомаяка.
Коэффициенты А, В, С, £>, Е и Н и величины девиации через 10° изменения радиокурсового угла вычисляются по схемам, приведенным выше для визуального способа.
Азимутальный способ в варианте без определения места корабля отличается от изложенного тем, что в качестве эталонного учитывается приближенное значение истинного пеленга на радиомаяк, общего для всех измерений. Для определения радиодевиации следует:
а) маневрируя самым малым ходом курсами, при которых радиокурсовые углы были последовательно близки к 20, 65, НО, 155, 200, 245, 290 и 335°, на каждом из них измерить по 3—5 радиопеленгов, которые затем осредняются;
б) получив 8 средних радиопеленгов P/7Z, вычислить средний из них, который будет соответствовать приближенному истинному пеленгу
= И;
248 Г лава 7. Определение маневренных элементов корабля и поправок приборов
в) вычислить условные радиодевиации /Я7ср — РГЦ;
г) по условным радиодевиациям j\ вычислить коэффициенты В, С, D, Е и Я;
д) используя эти коэффициенты и коэффициент А, из прежних наблюдений вычислить радиодевиации через 10° радиокурсового угла и составить график радиодевиации.
Оценка точности определения радиодевиации. Средняя квадратическая ошибка определения радиодевиации визуальным способом вычисляется по формуле (23) приложения 2 с учетом разностей At между наблюденными и вычисленными радиодевиациями на 8 радиокурсовых углах и близка к 0°,5.
Для азимутального способа средняя квадратическая ошибка определения радиодевиации должна вычисляться по формуле
ntj — ]/^v whk i (7. 46)
где тпрку — средняя квадратическая ошибка радиокурсовых углов; тик — средняя квадратическая ошибка курсоуказания.
Ошибки тпрку и /пик близки к 0,7—0°8, вследствие чего результирующая ошибка nif приближенно равна 1°.
При оценке точности определения радиодевиации учитываются наибольшие расхождения между вычисленными и наблюденными радиодевиациями.
Для визуального способа при расхождениях до 0°,5 ставится оценка «отлично», при расхождениях до 0°,8—«хорошо» и при расхождениях до 1°,0 — «удовлетворительно».
Для азимутального способа эти расхождения соответственно равны 1, 1,5 и 2° для оценок «отлично», «хорошо» и «удовлетворительно».
§ 55. ОПРЕДЕЛЕНИЕ ПОПРАВОК КОРАБЕЛЬНЫХ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ
Выверка РЛС для определения поправок измеряемых расстояний и курсовых углов производится:
— при установке станции или после ее ремонта;
— периодически в сроки, установленные технической документацией (для контроля).
Поправки измеряемых расстояний определяются:
— геодезическим способом;
— способом двух РЛС;
— инструментальным способом.
Непосредственное участие в определении поправок РЛС штурман принимает только при использовании геодезического способа.
Геодезическим способом навигационные РЛС проверяются, как правило, один раз в год.
Искомая поправка измеряемого расстояния вычисляется по формуле д д Rr ~ ДРЛС ] ы п ’
где [Z)r — £>РЛС] — сумма разностей между эталонным (геодезическим) расстоянием Dr и расстоянием £>РЛС, измеряемым с помощью РЛС;
п — число измерений.
§ 55. Определение поправок радиолокационных станций
249
Штурман должен:
а) определить место антенны РЛС с необходимой точностью и нанести это место на крупномасштабный планшет;
б) вычислить или снять с планшета эталонное расстояние DT на момент измерения его с помощью РЛС.
Для определения эталонного расстояния Dr место антенны РЛС должно быть известно с предельной ошибкой, не превышающей 10—15 ле. Для обеспечения такой точности проверка РЛС по дальности должна производиться во время стоянки корабля на швартовах у стенки или на бочках.
Место антенны РЛС при стоянке корабля на швартовах определяется относительно специальных марок, нанесенных на причальной стенке и показанных на планшете. Положение антенны наносится на планшет по ее удалению от ближайшей точки на стенке.
При стоянке на бочках место антенны определяется по двум или трем теодолитным засечкам с берега.
Расстояния до двух или трех точечных
ориентиров (находящихся на различных удалениях и обладающих хорошими отражающими свойствами) от места корабля (антенны РЛС) могут быть вычислены путем решения обратной геодезической задачи по прямоугольным координатам точек.
Чтобы упростить определение расстояний Dr на планшете, составляемом гидрографической службой, наносится сетка изостадий с обозначением расстояний Dri (рис. 92). Масштаб планшета должен быть не мельче 1 :10000.
Поправка AD учитывается затем при регулировке узла измерения дистанции РЛС.
Контрольные проверки качества регулировки производятся измерением расстояний до других ориентиров, и если измеряемые расстояния отличаются от эталонных на величины, не превышающие установленных для данного типа РЛС (для навигационных РЛС порядка 25 м), регулировку считают выполненной.
В способе двух РЛС поправка Д£) вычисляется по формуле
Д/) — — (£>ки — Ркц)]|
П
где Ац — расстояние до вспомогательного ориентира Я
(рис. 93), измеряемое с помощью проверяемой РЛС;
Ан — расстояние до корабля, на котором установлена выверяемая станция, измеряемое с помощью предварительно выверенной (контрольной) РЛС; Ац— расстояние до вспомогательного ориентира, измеряемое с помощью контрольной РЛС;
[ {Ап — (Аи — Ац))] — сумма разностей Ац — (Аи ~ Ац) расстояний, полученных в п измерениях.
250 Глава 7. Определение маневренных элементов корабля и поправок приборов
Корабли и вспомогательный ориентир (катер, щит) должны быть без хода в положении, показанном на рис. 93.
В инструментальном способе вы-
верка блока РЛС, предназначенного для измерения расстояния, производится с помощью специального генератора, вырабатывающего импульсы установленной длительности и строго фиксированной частоты посылки.
Поправка измеряемых курсо-
рис 93 вых углов определяется для согла-
сования электрической оси антенны с оптической осью визира, отсчетный лимб которого согласован с диаметральной плоскостью корабля.
Для определения поправки применяются два способа: по удаленному объекту и инструментальный.
В способе по удаленному объекту, в выполнении которого непосредственное участие принимает штурман, поправка Ду курсового угла, измеренного с помощью РЛС, вычисляется по формуле
д<7 =
[<7в — <7р| п
где [ув — ур] — сумма разностей курсовых углов -- измеренного визуально ув и с помощью РЛС ур.
Штурман должен:
а) проверить правильность установки пеленгаторного репитера или магнитного компаса в диаметральной плоскости корабля;
б) по командам оператора РЛС измерять с помощью пеленгатора курсовые углы ув на ориентиры; отсчеты у' курсовых углов сообщаются руководителю работы по выверке РЛС.
Ориентиры, выбираемые для наблюдений, должны иметь высоту, близкую к нулю, находиться на различных курсовых углах и должны быть удалены от корабля на расстояния порядка 50—60 кбт. При минимальных размерах ориентиры должны давать четкие отметки на экране РЛС.
Несовпадение мест установки антенны А РЛС и пеленгаторного репитера П приводит к тому, что отсчеты ув курсовых углов, измеряемых с помощью пеленгатора, отличаются от угла ур, отнесенного к месту установки антенны РЛС (рис. 94), на величину Зу, называемую поправкой за параллакс. Поправка By вычисляется по формуле
8g = 57,3sin (gB-£),
где b — расстояние между местами установки пеленгаторного репитера и антенны РЛС в проекции на горизонтальную плоскость;
D — расстояние до ориентира О;
₽ — угол между диаметральной плоскостью корабля и направлением на антенну РЛС.
Знак угла By совпадает со знаком sin (ув — р) при счете углов ув и р по круговой системе.
§ 56. Определение поправок гидроакустических станций
25!
Так, при Ь = 15 лс, D = 2 км, р = 200° и <?' = 80° получим 5? = 572^о15 sin (80° - 200°) = —0°37.
Угол qB вычисляется по формуле
Поправкой oq за параллакс при любых курсовых углах можно пренебрегать, если расстояние D до ориентира удовлетворяет неравенству
D > 57,3b
где — допустимая величина угла qB. При b = 20 м и §q = 0°1 расстояние до ориентира не должно быть меньше 11,5 км.
Наблюдения для определения поправки \q производятся также во время стоянки корабля на швартовах или на бочках.
В инструментальном способе поправки \q определяются с помощью специального генератора. Выверка может осуществляться на ходу корабля.
§ 56. ОПРЕДЕЛЕНИЕ ПОПРАВОК ГИДРОАКУСТИЧЕСКИХ СТАНЦИЙ
Выверка гидроакустических станций (ГАС) для определения поправок измеряемых расстояний и курсовых углов или пеленгов производится: — при установке станции и после ее ремонта;
— после докования корабля;
— периодически (для контроля).
Поправки определяются сопоставлением измеряемых дистанций и курсовых углов (пеленгов) с их эталонными значениями, определяемыми более точным способом.
Корабль, производящий выверку ГАС, маневрирует переменными курсами на различных дистанциях до ориентира, приводя ориентир на необходимые курсовые углы. Эталонные курсовые углы qB измеряются с помощью пеленгатора, а дистанции £)р —с помощью РЛС.
252 Глава 7. Определение маневренных элементов корабля и поправок приборов
Обязанностью штурмана является измерение курсовых углов с помощью пеленгатора по сигналам (командам) руководителя работ по выверке ГАС.
Поправки измеряемых дистанции Д£) и курсового угла Д? вычисляются по формулам:
дд= t£p-Orac] п ’
Дл = .
п ’
где [«/в — <7Гас] и [Dp — Drac] — суммы разностей эталонных и измеренных величин;
п — количество измерений.
Регулировка ГАС производится так, чтобы отсчеты измеряемых величин были равны их эталонным значениям; допустимые расхождения указываются в технической документации.
Выверка ГАС, работающих в пассивном режиме, с целью определения поправки измеряемых пеленгов (курсовых углов) производится сопоставлением геодезических пеленгов ориентира (излучателя) с измеренными пеленгами. Геодезический пеленг вычисляется по координатам ориентира и корабля, производящего выверку.
Места ориентира и корабля определяются с высокой точностью с помощью радионавигационной системы или по теодолитным засечкам с берега.
Глава 8
ВЫБОР ПУТИ КОРАБЛЯ
§ 57. РАЗРАБОТКА МАРШРУТА ПОХОДА
Разработка маршрута похода осуществляется в период подготовки корабля к походу и состоит из следующих мероприятий:
— подбора карт и руководств для плавания;
— составления графического плана похода;
— предварительной прокладки маршрута похода на путевых картах;
— составления справочных материалов по маршруту похода.
Подбор карт и руководств для плавания производится после получения указаний:
— о целях похода;
— о районе плавания и конечной точке похода;
— о времени выхода, прохода назначенных рубежей и прибытия в конечную точку похода;
— о намечаемых и возможных пунктах захода корабля, якорных стоянках и пунктах укрытия.
В сответствии с этими указаниями штурман по каталогам карт и книг должен подобрать карты и руководства (лоции, описания огней и радиотехнических средств навигационного оборудования, таблицы приливов и т. п.), позволяющие достаточно полно изучить маршрут перехода, а также произвести необходимые расчеты.
Путевые карты подбираются, как правило, после предварительной прокладки пути на генеральной карте, т. е. после того, как будет в общих чертах определен маршрут похода.
На удаленные от берегов районы, не покрытые путевыми картами, подбираются карты-сетки.
Подобранные карты и руководства для плавания вносятся в списки в той последовательности, в какой они потребуются на походе. Списки составляются по форме
Карты
Судовые номера карт Адмиралтейские номера карт Заголовки карт Год издания и масштаб Примечание
254
Глава 8. Выбор пути корабля
Руководства для плавания
№ л.п. Название руководств Примечание
Все карты и руководства должны быть последнего издания и откорректированы по день выхода корабля с использованием всей информации об изменении навигационной обстановки.
Составление графического плана похода начинается с выбора и предварительного расчета маршрута похода. Графический план должен обеспечить наиболее эффективное решение задачи, поставленной кораблю, и навигационную безопасность его плавания. Поэтому перед выбором пути необходимо тщательно изучить тактическую обстановку и навигационные условия района предстоящего плавания.
При составлении графического плана маршрут похода следует разделить на отдельные участки по тактическим и навигационным признакам. При этом необходимо определить, в какое время суток наиболее целесообразно проходить тот или иной участок, с какой скоростью, а для подводных лодок, кроме того, на какой глубине погружения. Требуется также учитывать необходимость прохода в определенное время участков (например, проливов), в которых плавание кораблей регламентируется международными правилами и другими указаниями.
По мере возможности и необходимости маршрут похода следует прокладывать по районам:
— не имеющим навигационных опасностей;
— наиболее изученным в навигационно-гидрографическом отношении ‘и обеспеченным картами и руководствами для плавания;
— имеющим развитое навигационное оборудование, обеспечивающее как дневное, так и ночное плавание;
— с наиболее благоприятными гидрометеорологическими условиями;
— позволяющим укрыться от опасных погодных явлений;
— свободным от оживленного судоходства.
Рекомендации по учету этих условий приводятся в лоциях, а также в руководствах и наставлениях для плавания.
В прибрежной зоне следует обязательно учитывать положение границы территориальных вод данного государства, а также положение границ опасных и запретных районов.
В океане необходимо по возможности использовать экономические преимущества плавания по наивыгоднейшим путям. Описание рекомендованных путей для различного времени года, гидрометеорологических условий и скоростей хода корабля на переходе имеется в справочном пособии Океанские пути мира.
При необходимости отступления от рекомендованных путей маршрут следует прокладывать по дуге большого круга с учетом климатических обзоров и прогнозов погоды в порядке, указанном в следующем параграфе.
Основанием для принятия решения о целесообразности плавания по дуге большого круга является достаточно большой выигрыш в расстоянии. Этот выигрыш вычисляется по формуле
Д5^5Л-5О,
где 5Л и So - длины дуг локсодромии и ортодромии между заданными точками соответственно.
$ 57. Разработка маршрута похода
255
Расстояние 5Л по локсодромии вычисляется по формулам (10.11), (10. 12) или (10. 13), а по ортодромии So по формуле
cos So sin срj sin ср2 -t- cos cos cp2 cos ДХ.
Последнюю формулу необходимо исследовать на знаки по следующим правилам:
— все функции северной широты положительны, а для южной широты cos ср положителен, sin ср — отрицателен;
— знак cos ДХ зависит только от величины разности долгот, но не от ее наименования; при ДХ < 90° cos ДХ положителен, а при ДХ > 90° — отрицателен;
— сочетания знаков тригонометрических функций определяют знаки первого и второго членов правой части формулы;
— при одинаковых знаках членов правой части для решения задачи по таблицам логарифмов применяется таблица «Логарифмы для сумм а», а при разных знаках таблица «Логарифмы для разностей 3»;
— при положительном знаке результата (оба члена правой части формулы положительны или положительный член больше отрицательного) расстояние So < 90°, а при отрицательном знаке результата (оба члена отрицательны или отрицательный член больше положительного) расстояние So равно дополнению до 180° угла, выбранного из таблиц по cos So.
Пример. Вычислить расстояния по локсодромии и ортодромии между точками <Н==21°18',0 М Х, = 112o23J0 И7; ?2 = 47°3150 Д'; Х2 = 157°07',0 (X
Решение. 1) Вычисляем разности широт, долгот и меридиональных частей: ф2 = 47°31 J0 Х2 = 157o07J0 Ost D2 = 3231,4
— <Р, = 21 18,0 ~Xj = 112 23,0 W ~ £>1 = 1300.1
Аф = 26°13;о АХ = 90°30;0 AD = 1931,3
АТ= 1573',0 АХ= 5430',0
2) Вычисляем локсодромический пеленг Р и расстояние по локсодромии 5Л по формулам;
U2 —
_ IgAX = 3,73480 , IgA© ==3,19673
IgAD = 3,28585 + 1g sec P = 0,47480
lgtgP= 0,44895; P=70°25J2; 1g 5Л = 3,67153; 5Л = 4694 милям.
3) Вычисляем расстояние по ортодромии So
n <?2 = 47°ЗГ,0 N + sin + sin 9,56021 9,86775 + cos + cos 9,96927 9,82955
АХ = 9О°ЗО;о W — — cos 7,94084
i +1 9,42796 -II 7,73966
3 9.99101 АГ 1,68830
cosSo So 9,41897 74°47' или So = = 4487 милям
AS = 4694 — 4487 = 207 милям
Кроме выигрыша в расстоянии, при выборе маршрута перехода по дуге большого круга учитывается возможность плавания по тем районам, по которым проходит эта линия.
256
Г лава 8. Выбор пути корабля
Дуга большого круга на морские навигационные карты наносится по точкам, координаты которых с достаточной для практики точностью снимаются с карты, составленной в гномонической проекции. Для этого на генеральной или бланковой карте в указанной проекции проводится прямая линия, т. е. ортодромия между начальной и конечной точками перехода (рис. 95), а затем измеряются широты точек а и пересечения этой прямой с меридианами или долготы точек пересечения с параллелями карты через 5—10°.
Линии путей корабля при плавании по дуге большого круга должны совпадать с отрезками локсодромий, соединяющими точки, по которым эта дуга наносится на навигационные карты.
Графический план похода оформляется на генеральной карте и представляет собой прокладку пути корабля с основными расчетами похода и отметками:
— темного и светлого времени суток;
— участков, на которых возможно определение места и поправки курсоуказания;
— ожидаемой точности определения места возможными способами и точности текущих счислимых мест на наиболее важных участках пути;
— допустимой ошибки места корабля;
— границ переключения обмоток размагничивающего устройства и силы тока в них;
— назначенных или предполагаемых районов для пополнения запасов в море и встреч с другими кораблями;
— других элементов обстановки, необходимых для характеристики тактических и навигационных условий плавания и действий корабля.
Предварительная прокладка маршрута похода на путевых картах производится после составления графического плана похода и завершения предварительных расчетов.
В процессе выполнения предварительной прокладки на путевые карты наносятся: линии пути корабля, поворотные пеленги, контрольные дистанции до ориентиров, границы переключения обмоток размагничивающего устройства и магнитное склонение, приведенное к году плавания. На каждом отрезке пути указывается его длина и направление (путь).
Для облегчения ориентировки на картах различными цветами отмечаются предельные для осадки корабля изобаты или глубины погружения подводной лодки, приметные ориентиры для определения места корабля (в том числе с помощью корабельных РЛС и ГАС).
Кроме того, наносятся границы районов опасных от мин, запретные для плавания районы, границы территориальных вод, ограждающие изолинии, зоны действия радиомаяков и других радиотехнических средств навигационного оборудования, а в районах с навигационными опасностями— сетки изолиний для определения места (при необходимости).
В результате предварительной прокладки уточняются произведенные ранее расчеты похода, вычисляются ожидаемые ошибки места корабля на наиболее важных участках и допустимое время плавания по счисле
$ 57. Разработка маршрута похода
257
нию, если по условиям выполнения задачи и навигационной обстановки ошибка места ограничивается допустимой величиной.
Составление справочных материалов по маршруту похода имеет целью сбор в концентрированном виде кратких, но достаточно исчерпывающих справок, характеризующих навигационно-гидрографические и гидрометеорологические условия плавания.
Справки, как правило, выбираются из навигационных пособий, а часть из них составляется по материалам разработки маршрута.
Количество и объем справочных материалов определяются задачами и условиями конкретного похода. Обычно к ним относятся:
— таблица предварительных расчетов похода;
— сведения о портах, якорных стоянках и местах укрытия;
— гидрометеорологическая характеристика района плавания;
— таблица моментов и азимутов восхода и захода Солнца и Луны;
— список огней (с указанием их характеристик), которые могут наблюдаться с корабля;
— выписки из правил, регламентирующих режим плавания военных кораблей в особых районах, если через них проходит маршрут похода;
— схемы маневрирования корабля при входе в бухты, заливы и выходе из них, проходе проливов и других узкостей, способствующие надежной ориентировке.
Кроме того, в случае необходимости могут быть составлены:
— конспективное описание маршрута похода;
— описание входов в порты', которые будет посещать корабль;
— список радиостанций (советских и иностранных), передающих прогнозы погоды, навигационную информацию на район плавания и сигналы времени;
— альбомы карт, планов, схем и зарисовок шхерных фарватеров, а также приметных ориентиров и рекомендации для плавания в шхерном районе.
Справочные материалы составляются в произвольной форме. В качестве рекомендации может быть предложена следующая форма составления основных справок.
Предварительные расчеты перехода
№ п.п. Время Путь Расстояние по пути, мили Время лежания на курсе при скорости Примечание (поворотные и опасные пеленги и расстояния)
оперативное судовое уз Уз УЗ
Сведения о портах, местах укрытия н якорных стоянках
№ п.п. Наименование порта, места укрытия нлн якорной стоянки № карты, плана Ссылка на лоцию или другие пособия, в которых имеется описание пункта. Дополнительные данные, отсутствующие в пособиях Местные правила плавания, особенности системы ограждения, штормовые сигналы
17 Заказ 1833
258
Глава 8. Выбор пути корабля
Сведения о гидрометеорологических характеристиках района плавания
№ п.п. Наименование пункта, участок маршрута Гидрометеорологические характеристики Данные
лоции (преобладающие) прогноза
Ветер: направление сила
Температура: воздуха
воды
и т. д.
Таблица времени и азимутов восхода и захода Солнца и Луны
Характеристики Дата
Начало сумерек Восход Солнца Заход Солнца Конец сумерек Восход Луны Азимут восхода Заход Луны Азимут захода 1
Примечание. Таблица рассчитывается для приближенных координат мест на время перечисленных явлений и в последующем уточняется. При небольшой протяженности маршрута расчеты производятся для одного пункта, расположенного в средней части маршрута; для других пунктов приводятся поправки.
Таблица времени и высот полных (ПВ) и малых (МВ) вод
№ п.п. Название пункта Дата
1
ПВ МВ ПВ МВ ПВ МВ ПВ МВ
— — — — — — — —
Примечания. 1. Таблица составляется для основных пунктов маршрута.
2. В числителе указывается момент наступления полной или малой воды, в знаменателе—высота прилива.
3. Для участков маршрута, при проходе которых требуется учитывать высоту прилива, составляются таблицы высот прилива на каждый час.
При выходах в районы, примыкающие к месту базирования корабля, когда времени на подготовку к походу отводится мало, ограничиваются составлением предварительной прокладки на путевых картах из базы
$ 58. Учет гидромет. условий при подготовке и в период плавания
259
в назначенный район и обратно. На этих же картах производится запись необходимых справочных данных, которые уточняются и дополняются в процессе похода по навигационным пособиям.
§ 58. УЧЕТ ВЛИЯНИЯ ГИДРОМЕТЕОРОЛОГИЧЕСКИХ УСЛОВИЙ ПРИ ПОДГОТОВКЕ К ПОХОДУ И В ПЕРИОД ПЛАВАНИЯ
При учете средних климатических особенностей возможно установить пути, на которых корабли в соответствии с их скоростью и конструкцией могут в различные сезоны рассчитывать на благоприятные в гидрометеорологическом отношении условия плавания.
Особо важными климатическими факторами для выбора оптимального пути являются: средняя сила и преобладающее направление
ветра и волнения, повторяемость штормов и туманов, направление и скорость течений и ледовые условия.
Оптимальные пути приведены в справочном пособии «Океанские пути мира», а также в Атласах гидрометеорологических условий плавания судов морского флота. Поэтому, когда ожидаются гидрометеорологические условия, близкие к средним (климатическим), целесообразно воспользоваться рекомендациями указанных пособий.
При плавании по маршрутам, не приведенным в пособиях, следует
определить оптимальные климатические пути на основе анализа сезонных гидрометеорологических условий, приводимых в пособиях для заданного района плавания. В качестве основного критерия при этих расчетах целесообразно выбрать наименьшие потери скорости корабля с учетом степени волнения, преоб-
ладающего направления ветра, Луга большого яруга
направления и скорости течения.
Корректуру намеченного климатического пути следует затем осуществить по оценке повторяемости штормов, видимости и туманов, а также ледовых условий на основе прогностических данных. При этом следует учитывать, что чем больше заблаговре-
Рис. 96
менность прогноза, тем меньше
его достоверность. Поэтому, когда нет острой необходимости в корректировке пути по долгосрочным прогнозам, целесообразнее производить ее по краткосрочным (суточным или двухсуточным) прогнозам, имеющим значительно большую оправдываемость.
В основу расчета берется выбор пути, обеспечивающий наименьшую затрату времени на переход с учетом потери скорости корабля вследствие волнения. Для этого на прогностическую карту волнения (ветра) наносятся пути, отличающиеся от кратчайшего (рис. 96). Для каждого из этих путей рассчитываются расстояния, которые может пройти корабль через 12, 24, 36, ... ч с учетом скорости и направления течения и потери скорости корабля. Затем проводятся изолинии, соответствующие местоположению корабля через 12, 24, 36, . . . ч плавания (кривые Si, S2, 5з, S4 и S5). Точка С кривой S5, наиболее близко расположенная к пункту назначения В, и определяет оптимальный маршрут; этот маршрут обозначен на рис. 96 пунктиром.
Приведенный метод расчета не учитывает безопасности плавания. При учете безопасности плавания выбирается кратчайший путь, на котором не ожидается волнения больше предельно допустимого для данного корабля.
17*
260
Глава 8. Выбор пути корабля
Отклонения от запланированного климатического или прогностического пути производятся с целью обхода неожиданно появляющихся, а следовательно, и не учтенных гидрометеорологических опасностей. Эффективность решения данной задачи зависит от точности знания гидрометеорологической обстановки и особенно от точности знания размеров, интенсивности, местоположения, скорости и направления перемещения гидрометеорологических опасностей. Поэтому на корабле должен быть организован сбор сведений о гидрометеорологической обстановке (см. гл. 4).
Наибольшую опасность для мореплавателей представляют циклоны, с которыми связаны штормовые ветры и сильное волнение, пониженная видимость, невозможность астрономических определений места и ухудшение работы радионавигационных систем.
При плавании в низких широтах необходимо особенно тщательно следить за гидрометеорологической обстановкой, чтобы своевременно опознать приближение тропического циклона и разойтись с ним. Гидрометеорологические центры передают оповещения о координатах и перемещении тропических циклонов. Однако не исключена возможность встречи корабля с циклоном, который до этого не был обнаружен. Признаками, по которым можно судить о приближении тропического циклона, являются следующие.
1. Циклоническая область, как правило, окружена кольцом очень хорошей погоды. Поэтому сухая ясная погода с очень хорошей видимостью и безоблачным небом может предвещать тропический циклон.
2. С приближением циклона небо затягивается легкой дымкой, а при восходе и заходе Солнца приобретает багровые тона; вокруг Солнца и Луны образуются гало.
3. На расстоянии около 500 миль от центра циклона появляются перистые облака, вытянутые V-образными полосами, что дает ориентировочное представление о направлении на центр.
4. Воздух постепенно становится влажным и душным; на горизонте показывается вал мощной кучевой облачности.
5. По мере приближения штормовой зоны наблюдаются дождевые заряды, сопровождающиеся шквалами. В промежутках между зарядами выпадает обложной дождь, который переходит в ливень.
6. Зыбь, распространяющаяся к периферии циклона. Если эта зыбь со временем ослабевает или значительно изменяет свое направление, тропический циклон проходит стороной. Если же зыбь, мало изменяя свое направление, усиливается, циклон перемещается в сторону корабля. Следует учитывать, что наличие островов или подводных возвышенностей может искажать первоначальное направление зыби.
7. Нарушение правильного суточного хода давления. По величине отклонения давления и ветра можно сделать ориентировочные выводы о расстоянии до центра циклона.
Если давление, приведенное к уровню моря и исправленное на суточный ход, оказывается на 3 мб ниже нормы для данного района и сезона, необходимо внимательно следить за погодой. Если давление ниже нормального на 5 мб и сила ветра около 6 баллов, можно считать, что центр находится на расстоянии не более 200 миль. Если при этом сила ветра усилилась до 8 баллов, центр находится на расстоянии примерно 100 миль.
Среднее давление указано в лоциях или атласах. Поправки к наблюденному давлению суточного хода приводятся в табл. 24.
Важно учитывать также ход давления. Общее правило гласит: незначительное отклонение показаний барометра от нормальной величины
§ 58. Учет гидромет. условий при подготовке и в период плавания
261
или малое часовое падение давления (табл. 24а) свидетельствует о боль-шом расстоянии корабля от центра циклона (и наоборот).
Таблица 24
Поправки к давлению за счет суточного хода в поясе между параллелями 20° N и 20° 5
Местное время ч Поправка к наблюденному давлению мб Местное время ч Поправка к ’ наблюденному 1 давлению | || Местное время ч Поправка к наблюденному давлению мб
00 —0,6 08 “°’9 16 + 1,4
01 -0,1 09 —1,з 17 + 1,4
02 +0.4 10 —1,3 18 + 1.0
03 +0,7 11 —1,1 19 +0,1
04 +0.7 12 —0,6 20 —0,2
05 + 0,6 13 +0,1 21 -0,7
06 +0,1 14 +0,8 1 22 -0,9
07 -0,4 15 + 1,3 1 23 —0,8
Для количественной оценки можно ношениями:
При анализе ежечасных изменений давления необходимо учитывать приводимые в табл. 25 нормальные изменения давления за счет суточного хода.
Например, если с 18 до 19 ч местного времени давление упало на 0,3 мб, то сопоставление с табличной величиной показывает, что произошло относительное падение давления на 0,9 мб, так как в суточном ходе за : вырасти на 0,6 мб.
пользоваться следующими соот-
Таблица 24а
Падение давления, мб. ч Расстояние от центра циклона, мили
0,5-2 250-150
2-3 150-100
3-4 100-80
4-5 80—40
час давление должно было
Таблица 25
Изменения давления за счет суточного хода в поясе между параллелями 20° N и 20° 5
Местное время, ч Изменение давления, мб/ч Местное время, ч Изменение давления, мб1ч Местное время, ч Изменение давления, мб/ч
0—1 —0,4 8-9 + 0,4 16—17 0,0
1-2 -0,5 9—10 0,0 17—18 +0,4
2-3 —0.3 10-11 —0,2 18—19 +0,6
3-4 —0,1 11—12 —0,5 19-20 +0,6
4—5 + 0,2 12-13 -0,6 20—21 +0,5
5—6 +0,4 13—14 —0,7 21—22 +0,3
6-7 + 0,5 14-15 -0,5 22—23 —0,1
7-8 +0,5 15-16 —0,1 23—24 -0,3
Приведенные расчеты справедливы для случая, когда корабль лежит в дрейфе. При движении корабля необходимо учитывать изменение
262
Г лава 8. Выбор пути корабля
давления за счет перемещения корабля относительно барического образования.
При определении направления на центр циклона можно использовать данные о ветре, учитывая соответствие полей ветра и давления. При этом следует помнить, что на периферии циклона ветер отклоняется от изобар к центру на угол 30—40°, в средней зоне отклонение составляет 15—25°, а вблизи центра ветер направлен вдоль изобар.
— 2
Рис. 97
Полезно рассматривать в комплексе направления ветра 2 и зыби / в южном (рис. 97, а) и северном (рис. 97, б) полушариях, что позволяет более надежно определить пеленг на центр циклона.
Для выбора маневра в зоне циклона необходимо определить направление его движения и положение корабля относительно циклона.
Секторы циклона (рис. 98) определяются в зависимости от направления его перемещения. Правая половина циклона (полукруг), расположенная справа от направления движения циклона, делится на правый передний (I) и правый тыловой (IV) секторы (квадранты). Соответственно левая половина также делится на два сектора (II и III).
$ 58. Учет гидромет. условий при подготовке и в период плавания
263
В правой половине перемещающегося циклона ветер поворачивает вправо, в левой — влево. Это правило действительно для обоих полушарий. Использование его затрудняется в тех случаях, когда скорость корабля велика по отношению к скорости перемещения циклона.
Если направление ветра не меняется, корабль находится на пути центра циклона или движется в одном направлении с ним с такой же скоростью.
Совместные наблюдения за изменением ветра и ходом давления позволяют определить квадрант циклона, в котором находится корабль (рис. 98).
Кучево-дождевые облака и ливневые осадки тропического циклона хорошо видны на экране корабельной РЛС, поэтому радиолокационные наблюдения также следует использовать для уточнения метеорологической обстановки.
Рис. 99
Таким образом, наблюдения на корабле за состоянием атмосферы и моря, использование радиотехнических средств позволяют обнаружить тропический циклон и определить характер его перемещения. Однако необходимо использовать любую возможность для получения информации от радиометеорологических центров и кораблей, плавающих в зоне, где возможно появление тропических циклонов, что увеличивает заблаговременность и надежность обнаружения этих гидрометеорологических опасностей и прогноза их дальнейшего перемещения и эволюции.
Наиболее опасна правая (в южном полушарии — левая) часть тропического циклона (на рис. 98 квадранты I и IV). В этой половине циклона ветер и волнение, как правило, сильнее, чем в левой (в южном полушарии в правой) части циклона.
В любом случае необходимо стремиться избежать центральной (радиусом 50 миль) области циклона. Лучше всего пройти по периферии циклона на расстоянии не менее 200 миль от центра, так как при этом сила ветра обычно не превышает 7 баллов, что облегчает свободу маневрирования. Следует избегать попадания в правую (в южном полушарии— в левую) опасную зону тропического циклона.
264 Глава 8. Выбор пути корабля
Все правила маневрирования для судов с двигателем можно обобщить следующим образом.
При нахождении в зоне тропического циклона в северном полушарии необходимо располагать курсы так, чтобы ветер был с правого борта (в южном — с левого). Корабль в этом случае будет удаляться на периферию циклона (рис. 99), а в случае потери управляемости ляжет в дрейф на правильном галсе.
Более детально правила маневрирования в зоне тропического циклона в обоих полушариях в зависимости от положения корабля в том или ином секторе тропического циклона изложены в Правилах наблюдения на кораблях и судах ВМФ за гидрометеорологической обстановкой, изд. 1967 г.
Однако следует всегда помнить, что формальное использование любых правил может оказаться бессмысленным и даже опасным.
Часть III
СЧИСЛЕНИЕ ПУТИ КОРАБЛЯ
Глава 9
ВЕДЕНИЕ НАВИГАЦИОННОЙ ПРОКЛАДКИ И ОСНОВЫ СЧИСЛЕНИЯ
§ 59. ОБЯЗАННОСТИ ШТУРМАНА НА ПОХОДЕ
На походе штурман должен:
1. Вести непрерывную навигационную прокладку.
В длительном походе для обеспечения отдыха штурману организуется штурманская вахта; продолжительность этой вахты устанавливает командир корабля.
В сложной навигационной обстановке: при плавании в стесненных районах, вблизи опасностей, при малой видимости и при сложном маневрировании навигационную прокладку должен вести лично штурман.
2. Систематически определять место корабля наиболее точными из всех возможных при данных условиях плавания способами и при необходимости оценивать точность определения.
3. При плавании в узкостях:
— уточнять место всеми доступными способами и средствами;
— измерять глубины;
— использовать средства технического наблюдения для обнаружения надводных и подводных опасностей;
— использовать все возможности для определения поправки курсо-указания;
— своевременно докладывать командиру корабля о необходимости уменьшения скорости хода, стравливания якоря (на подводных лодках принятия дополнительного балласта) и поднятия выстреливающихся забортных устройств.
4. Знать навигационную и метеорологическую обстановку и ожидаемые изменения ее на ближайшее время. Для получения необходимой информации используются:
— сведения, опубликованные в руководствах для плавания;
— сведения, содержащиеся в гидрометеорологических прогнозах, предупреждениях и оповещениях, передаваемых по радио;
— материалы личных наблюдений.
5. Контролировать работу технических средств кораблевождения путем:
— определения поправок приборов и систем;
— сопоставления показаний различных приборов, вырабатывающих один и тот же навигационный параметр;
— сопоставления мест корабля, получаемых по результатам измерений навигационных параметров с помощью различных средств;
— сопоставления невязок счислимых мест, получаемых при обсервациях, с ожидаемыми предельными ошибками этих же мест, вычислен
268
Глава 9. Ведение навигационной прокладки и основы счисления
ных с учетом ошибок навигационных параметров, вырабатываемых с помощью курсоуказателей и лагов.
6. Докладывать командиру корабля:
а) о всех навигационных опасностях на пути следования корабля;
б) о времени прихода в заданный район;
в) о наиболее целесообразном курсе в соответствии с решаемой задачей, если по обстановке необходимы отклонения от предварительной прокладки;
г) о времени изменения курса;
д) о времени прихода корабля в новый часовой пояс и в зону, в которой необходимо изменить силу тока в обмотках РУ;
е) об элементах движения встречных кораблей.
7. При совместном плавании знать места кораблей соединения.
8. Сообщать вахтенному офицеру:
а) справочные сведения по району плавания (глубины, навигационные опасности, течения, средства навигационного оборудования, приметные пункты, дальности открытия ориентиров и т. п.);
б) время прибытия в заданный район;
в) новый курс, расчетное время поворота и контрольный пеленг;
г) поправки основных электронавигационных приборов;
д) о встречных целях и предложения по расхождению с ними.
9. Перед приходом на якорную стоянку произвести расчеты, обеспечивающие выход корабля в заданную точку.
10. После постановки на якорь определить место корабля и записать в навигационный журнал координаты этого места, величины навигационных параметров, по которым оно определено, и контрольные пеленги на 2—3 ориентира.
§ 60. НАВИГАЦИОННАЯ ПРОКЛАДКА
Навигационной прокладкой называют сочетание графического счисления на карте с расчетами и графическими построениями, производимыми для определения места, а также расчетами, связанными с корректурой курса и скорости, включая расчеты маневрирования корабля.
Навигационная прокладка начинается с момента съемки корабля с якоря или швартовов и ведется непрерывно до конца перехода. При этом в начальный период резкопеременного маневрирования основное внимание уделяется глазомерной ориентировке и ориентировке с помощью радиолокационных и гидроакустических станций. В основе этой ориентировки лежит хорошее знание всех особенностей гавани или рейда, а также правильное использование средств навигационного оборудования и естественных ориентиров для обеспечения навигационной безопасности корабля. Место корабля наносится на крупномасштабную карту через короткие промежутки времени по инструментальным измерениям пеленгов, дистанций или по наблюдениям с помощью блока совмещения радиолокационного изображения с картой.
Во время выхода (входа) корабля из гавани (в гавань) или с рейда (на рейд) большое значение имеет твердое знание командиром маневренных элементов корабля, четкая работа и своевременность докладов штурмана о необходимости изменения скорости или курса, а также четкая организация наблюдения за окружающей обстановкой.
В дальнейшем, по выходе из пункта базирования, счислимый путь прокладывается от исходной точки, положение которой надежно определено одним из точных способов. Для фиксации пути после включения лага используется автопрокладчик, а при отсутствии такового — прокладка осуществляется вручную.
§ 60. Навигационная прокладка
269
При счислении с помощью автопрокладчика используется обычно верхняя карта планшета, на которой производятся все графические построения, необходимые для определения места, элементов движения целей, выбора курсов, учета течения, а также для расчетов маневрирования корабля. Расчеты, связанные с определением элементов движения целей, и расчеты маневров могут производиться также на маневренном планшете.
На верхней карте планшета автопрокладчика штурман должен прокладывать не только пройденный путь, но и намеченный путь, с целью облегчения ориентировки о времени выхода в заданную позицию или в заданную точку, о начале поворота на новый курс и т. п. Нижняя карта планшета автопрокладчика используется для ведения контрольной прокладки.
Результаты измерения навигационных параметров,, необходимых для определения места, с соответствующими моментами по судовым часам и отсчетами лага, записываются вначале в записную книжку штурмана, а затем после выполнения необходимых расчетов и графических построений на карте эти записи переносятся в навигационный журнал в соответствии с правилами его ведения и образцами записей.
Объем и полнота всех записей в навигационном журнале должны быть вполне достаточными для восстановления прокладки пути корабля только по этим записям.
На малых кораблях вместо навигационного журнала ведется навигационно-вахтенный журнал.
При наличии на корабле управляющей вычислительной системы документирование важнейших навигационных параметров на заданные моменты производится на ленте самописца; поступление соответствующих величин в записывающее устройство автоматизировано.
Частота определений места в процессе похода должна соответствовать обстановке плавания, решаемой задаче и требуемой точности знания места корабля.
Если на каком-либо участке пути определения места по внешним ориентирам становятся невозможными, то на карту наносятся счисли-мые места корабля на каждый час плавания.
При резкопеременном маневрировании, связанном с частыми изменениями элементов движения корабля, курсы, скорости и проходимые расстояния фиксируются в журнале маневренных карточек. В навигационном журнале записываются моменты начала и конца маневрирования и координаты соответствующих этим моментам точек. Для определения конечных координат при отсутствии автопрокладчика может быть применен способ графического счисления с прокладкой пути корабля на крупномасштабной карте или на листе миллиметровой бумаги.
Навигационные параметры, измеренные для определения места во время ведения маневренной карточки и соответствующие им моменты по судовым часам, а также координаты получаемых мест записываются в навигационном журнале.
При автоматическом графическом счислении в период резкопеременного маневрирования автопрокладчик также переводится на крупный масштаб (1:18520 или 1:50000). При этом необходимо внимательно следить за отработкой курса механизмами автопрокладчика, а на больших скоростях — и за отработкой двигателей, перемещающих каретку с карандашом.
В процессе навигационной прокладки необходимо:
1. Для прокладки пути, в особенности при плавании в прибрежной зоне, применять карты крупного масштаба и обязательно откорректированные по всем корректурным материалам.
270
Г лава 9. Ведение навигационной прокладки и основы счисления
2. Осуществлять взаимный контроль счисления и обсерваций, сравнивая расстояния между обсервованными точками с соответствующими им расстояниями, вычисленными по показаниям лага и по оборотам винтов; расхождения расстояний не должны превышать сумм предельных ошибок определяемых мест и величин сноса течением. Кроме того, соединяя обсервованные места прямыми линиями, сопоставлять направления этих прямых с направлениями линий путей, учитываемых при счислении. Наличие значительных систематических расхождений в этих направлениях свидетельствует о наличии ошибок в учете дрейфа или течения, а также о возможных ошибках в поправке курсоуказания.
3. В сложной навигационной обстановке каждое определение места сопровождать измерением глубины эхолотом и сопоставлять эти глубины с глубинами на карте, находящимися поблизости от обсервован-ных мест. Если расхождения глубин превышают колебания уровня моря, указанные в лоции, уточнить место по возможности по трем или четырем линиям положения.
4. Все частные задачи графического счисления, выполняемые вручную, с целью исключения промахов решать дважды, обращая внимание на правильность определения и учета течения, определения и учета дрейфа, учета поправок компаса и лага, прокладки направлений и расстояний, а также на, правильность переноса точек с одной карты на другую.
£. Определение места при плавании в прибрежной зоне производить не реже'чем черея^О—30 мин. Такая частота даже в случаях, когда она не является об$эа*£льной для обеспечения навигационной безопасности плавания, оказывается полезной для контроля правильности учета всех факторов, влияющих на движение корабля, а также для облегчения опознавания появляющихся ориентиров.
6. При плавании в районах, стесненных в навигационном отношении, интервалы между моментами определений места сокращать до 1—5 мин. Для упрощения и ускорения процесса по определению места использовать специальные карты с сетками изолиний или нанести сетки изолиний заранее на путевые карты.
7. Контролировать работу основных навигационных приборов — курсоуказателей и лагов. Для контроля курсоуказателей сопоставлять курсы по различным компасам; допустимые расхождения не должны превышать суммы предельных ошибок выработки курсов компасами в данных условиях плавания. Кроме того, для контроля за работой курсоуказателей следует определять их поправки из сопоставления истинных и компасных пеленгов ориентиров. При нормальной работе гирокомпасов допустимые изменения поправок не должны превышать удвоенных величин предельных ошибок /пгк, характеризующих устойчивость работы этих гирокомпасов. Для магнитных и гиромагнитных компасов фактические поправки не должны отличаться от вычисленных более чем на 2—2°,5.
Работа лагов контролируется сравнением расстояний, пройденных по лагу, с расстояниями, вычисленными по скорости корабля и продолжительности плавания, а также с расстояниями между обсервованными точками.
Для решения задач, связанных с вероятностной оценкой точности получаемых мест (выход в заданный район или полосу, встреча с другим кораблем и пр.), рекомендуется вычислять предельные ошибки этих мест с вероятностью 0,99—0,997 и учитывать, что действительное место корабля может находиться в любой точке вычисленной фигуры погрешности полученного места.
§61. Элементы движения корабля
271
Ошибка места на данный момент вычисляется с учетом ошибки последней обсервации и последующего счисления.
Аналогично должна вычисляться средняя квадратическая или предельная ошибка места корабля на моменты смены штурманской вахты. Заступающий на вахту штурман должен по записям в навигационном журнале проверить правильность счисления пути от момента последней обсервации или от последнего счислимого места, утвержденного командиром корабля, и ознакомиться с ориентирами, находящимися в пределах дальности действия технических средств корабля или в пределах дальности видимости.
О всех сомнениях в месте корабля и в учитываемых поправках компаса и лага штурман должен немедленно докладывать командиру корабля. До устранения сомнений в месте и параметрах, характеризующих движение корабля, следует непрерывно измерять глубины, а при необходимости — уменьшить ход до самого малого или даже стать на якорь.
§ 61. ЭЛЕМЕНТЫ ДВИЖЕНИЯ КОРАБЛЯ
Движение корабля определяется направлением и скоростью. Направление движения соответствует заданному курсу, т. е. углу в плоскости истинного горизонта между северной частью истинного меридиана и диаметральной плоскостью корабля. Это направление под действием ряда факторов, главнейшими из кдторых являются ветер и течение, изменяется, в результате чего перемещение корабля совершается по линии пути, не совпадающей с линией истинного курс^и.^ .
Скорость самоходного корабля зависит от режима работы движителей. В качестве движителей в настоящее время применяются:
— винты постоянного шага;
— винты регулируемого шага;
— крыльчатые движители;
— водометные движители;
— турбореактивные установки.
Винты постоянного шага относятся к наиболее распространенным движителям. Соотношение между скоростями корабля Vi и Уг и соответствующими им числами оборотов движителей и \!2 определяется приближенной формулой
9 v2 \к2) • Из приведенной формулы видно, что одному и тому же приращению числа оборотов движителей соответствуют различные приращения скорости. При этом с увеличением скорости указанные приращения уменьшаются.
Винты регулируемого шага значительно улучшают маневренные качества корабля и упрощают управление кораблем и его главной энергетической установкой. Однако эти винты имеют довольно сложную конструкцию и недостаточную надежность, вследствие чего применяются сравнительно редко.
Крыльчатые движители представляют собой систему из четырех, шести или восьми вертикально расположенных обтекаемых лопастей, смонтированных на диске, вращающемся вокруг вертикальной оси. Лопасти, вращаясь вместе с диском, кроме того, поворачиваются вокруг своих осей, оставаясь все время перпендикулярными прямым, соединяющим их с точкой Е (рис. 100), называемой полюсом диска или полюсом системы. При вращении диска против часовой стрелки, как показано на рисунке, на лопастях /, 2, 4, 5, 6 и 8 возникают силы реакции /?й соста-
272
Г лава 9. Ведение навигационной прокладки и основы счисления
вляющие Pt которых дают движение кораблю по направлению, показанному стрелкой.
Местоположение полюса Е диска может изменяться дистанционно с помощью гидравлического привода. Этим обеспечивается изменение
Рис. 100
не только скорости, но и направления движения корабля.
Таким образом, крыльчатые движители выполняют функции винта и руля.
Водометные движители основаны на использовании силы реакции забортной воды, забираемой насосами, приводимыми в действие с помощью двигателей Д (рис. 101), и выбрасываемой в направлении, противоположном движению корабля. Возможность изменять направление выброса обеспечивает выполнение любого маневра без рулевого устройства.
Существенным недостатком водометного движителя является малый коэффициент его полезного действия. Эти движители применяются сравнительно редко, главным образом
Турбореактивные установки
на малых речных судах и буксирах, применяются в качестве основных дви-
жителей на кораблях и катерах с подводными крыльями, а также в качестве дополнительных движителей, ускоряющих движение сравнительно небольших винтовых кораблей. Реактивная тяга движителей создается при выбросе газов в атмосфере или в воде — в струе отработки винтов.
Удержание заданного направления движения осуществляется рулевым — вручную с использо-
Рис. 101
ванием имеющегося курсоуказа-
теля (гирокомпаса, магнитного компаса, гироазимута или гиромагнитного компаса) или с помощью автомата управления рулем. Для удобства задаваемый рулевому курс, особенно в свежую погоду, следует выбирать с таким расчетом, чтобы он соответствовал целому числу градусов; курс, выраженный дробным числом, вызывает излишнее утомле-
ние рулевого и практически не выдерживается.
Во всех случаях рулевому задается компасный курс, определяемый в соответствии с предварительной прокладкой, а при совместном плавании— в соответствии с приказанием флагмана. В отдельных случаях, например, при плавании по узким фарватерам и при наличии сильного течения, флагман может указывать путь корабля; истинные же курсы рассчитываются на каждом корабле самостоятельно, а затем корректируются так, чтобы сохранялись заданные пеленги и расстояния между кораблями.
При плавании в узкостях, на рейдах и по фарватерам для движения по заданному направлению используются ведущие створы и ведущие пеленги ориентиров.
Изменения курса, в соответствии с приказаниями или разрешениями командира корабля, в обычных условиях плавания должны произво-
§ 62, Элементы счисления
273
литься при вполне определенных углах отклонения руля. Это обстоятельство имеет важное значение прежде всего для прокладки пути корабля на карте. При совместном же плавании строгое выдерживание установленных углов отклонения руля для поворота является обязательным мероприятием, обеспечивающим как безопасность маневра, так и выполнение его одновременно или в заданное время всеми кораблями. Устанавливаемые углы отклонения руля для различных кораблей выбираются так, чтобы диаметры и угловые скорости поворота отдельных кораблей были одинаковыми или близкими друг другу.
В соответствии с этим должны быть отрегулированы автоматы управления рулем на различных кораблях.
Скорости корабля в одиночном плавании выбираются в соответствии с предварительной прокладкой и наивыгоднейшим режимом работы главных двигателей. Численно эти скорости могут быть выражены любыми произвольными числами (целыми и дробными). При совместном плавании скорости задаются флагманом, исходя из установленного полного хода. Как полный, так и средний (3/4 от полного) и малый (1/г от полного) хода округляются до целого узла.
Практически для удержания места в строю приходится периодически изменять заданную скорость, изменяя число оборотов движителей (или развиваемую мощность двигателей). При выполнении маневров, связанных с необходимостью увеличения скорости корабля, применяется самый полный ход, который превышает полный ход на установленную величину.
§ 62. ЭЛЕМЕНТЫ СЧИСЛЕНИЯ
В современном кораблевождении основным способом непрерывного получения ориентированного относительно местности положения корабля является учет его перемещений, происходящих под воздействием собственных движителей и возникающих под влиянием течения и ветра, и изображение этих перемещений на карте относительно какого-либо исходного пункта. Определение места по внешним ориентирам произво
дится периодически по мере возможности и необходимости.
Учет движения корабля с целью определения координат или нанесения места на карту называется счислением пути; параметры, характеризующие перемещения корабля, определяются с помощью автономных технических средств кораблевождения.
Счисление пути корабля должно быть непрерывным, наглядным и точным, т. е. давать возможность в любой момент судить о положении корабля относительно окружающей обстановки с точностью, достаточной для решения поставленной задачи и обеспечивающей навигационную безопас-
ность плавания.
Перемещение корабля относительно дна состоит из трех составляющих: перемещения под действием движителей, перемещения под дей-
ствием ветра и сноса течением.
Перемещение под действием движителей происходит по курсу корабля и характеризуется вектором скорости Ул=ЛВ (рис. 102) отно-
18 Заказ 1833
274
Глава 9. Ведение навигационной прокладки и основы счисления
сительно воды, имеющим направление, соответствующее истинному курсу И К, а величина вектора зависит от мощности, развиваемой главными двигателями, и сопротивления среды.
Перемещение корабля относительно воды под действием ветра, называемое дрейфом, характеризуется вектором г»др = ВС, направление которого в общем случае не совпадает с линией ветра, а величина зависит от ряда факторов, в частности, от скорости и направления’ ветра, скорости корабля и его конструктивных особенностей.
Геометрическое суммирование векторов Ул и г»др дает вектор АС = У'л результирующего перемещения корабля относительно воды. Этот вектор относительно истинного меридиана направлен под углом ПУа, называемым путем при дрейфе^ прямая, по которой движется корабль при наличии ветра, называется линией пути при дрейфе.
Численное значение скорости У'л при небольших углах дрейфа достаточно точно определяется с помощью относительного лага.
Угол между линией истинного курса и линией пути при дрейфе называется углом дрейфа и обозначается буквой а. При дрейфе вправо углу дрейфа приписывают знак плюс, а при дрейфе влево— минус. С учетом этого правила можно написать
/7Уа
а= ПУ -ИК
ОС
(9. 1)
Снос корабля течением представляет собой перемещение корабля вместе с водой и характеризуется вектором ^т, имеющим направление течения и величину, равную скорости течения.
Результирующий вектор У перемещения корабля относительно дна моря при наличии течения может быть найден геометрическим суммированием векторов Ул и Up т. е. решением векторного равенства -
Г = Гл + 5т.
Направление вектора V относительно истинного меридиана определяется углом /7УС, называемым путевым углом или путем корабля, а величина соответствует истинной скорости относительно дна моря.
Угол между линией пути корабля и линией пути при дрейфе или линией истинного курса при отсутствии дрейфа называется углом сноса и обозначается буквой 0. Угол считают положительным при сносе вправо и отрицательным при сносе влево.
На основе рис. 102 получаем
/7Ус = /7У. + ₽
₽ = ПУС - /7У. (9, 2)
При отсутствии дрейфа, когда ПУа = И.К
ПУ^ИКА-^ 1
₽ ПУ - ИК
1 р /
(9. 3)
Угол с между линией истинного курса и линией пути при наличии дрейфа и сноса течением называют суммарным сносом. Для определения этого угла применяются формулы:
С ПУС - ИК\ (9. 4)
с = (9.5)
§ 62. Элементы счисления
275
Алгебраическую сумму постоянной поправки гирокомпаса АГКп (или поправки магнитного компаса AM К) и угла суммарного сноса называют поправкой курса АК
= ЬГК„ + с. (9. 6)
При отсутствии дрейфа или сноса течением получим соответственно:
Д^ = ЛГ/<п + ₽; (9.7)
Д#в - АГКп ч- (9. 8)
Истинный курс и скорость корабля, дрейф, направление и скорость течения называют элементами счисления.
Истинный курс и скорость корабля или пройденное расстояние почти всегда имеют преобладающее значение в общем перемещении корабля и называются основными элементами счисления.
Применяются два способа счисления:
— графическое счисление, при котором движение корабля учитывается путем графических построений на карте;
— аналитическое счисление, при котором движение корабля учитывается последовательным вычислением координат текущего места.
Графическое и аналитическое счисление может выполняться вручную и автоматически. При графическом счислении, выполняемом вручную,, на карту с помощью прокладочного инструмента наносят линии составляющих движения корабля с целью получения линии действительного перемещения его относительно дна. На этой линии наносят счислимые места корабля на заданные моменты.
Автоматическое счисление осуществляется с помощью автопрокладчиков. Курс корабля и пройденное расстояние или скорость поступают в автопрокладчик от компаса и лага по линиям синхронных передач.
Аналитическое счисление, выполняемое вручную, производится по известным направлению и скорости корабля или пройденному им расстоянию от точки, принятой за исходную. Координаты <рт, X,. текущего места периодически вычисляются алгебраическим суммированием исходных координат epi и М с их приращениями Дер и ДХ:
<?т = + Дс₽;
хт = х, + дх.
Автоматическое счисление производится также с помощью автосчис-лителя, который в большинстве случаев является узлом автопрокладчика. На катерах иногда устанавливаются только автосчислители, представляющие собой сокращенные комплекты автопрокладчиков без планшета. Координаты текущего счислимого места в автосчислителе вырабатываются непрерывно, что является главным достоинством данного способа.
Основным способом счисления для обеспечения навигационной безопасности корабля в настоящее время является графическое счисление, так как оно удовлетворяет всем требованиям, предъявляемым к счислению вообще. Аналитическое автоматическое счисление применяется для обеспечения работы некоторых корабельных приборов и систем координатами счислимого места. Аналитическое же счисление, выполняемое вручную, применяется крайне редко и лишь для решения вспомогательных задач.
18*
Глава 10
ГРАФИЧЕСКОЕ И АНАЛИТИЧЕСКОЕ СЧИСЛЕНИЕ
§ 63. ГРАФИЧЕСКОЕ СЧИСЛЕНИЕ
Графическое счисление осуществляется обычно на картах или картах-сетках в нормальной проекции Меркатора, на которых линии курсов — отрезков локсодромий — изображаются прямыми линиями.
При отсутствии специальных карт-сеток для графического счисления может быть использована любая карта подходящего масштаба, составленная для того же широтного пояса, в котором плавает корабль, следует лишь изменить оцифровку ее долготных рамок в соответствии с районом плавания корабля.
В процессе графического счисления, выполняемого вручную, решаются четыре задачи.
1. Расчет и прокладка истинных курсов.
2. Расчет и прокладка пройденных расстояний.
3. Учет циркуляции.
4. Учет дрейфа и сноса течением.
Расчет и прокладка истинных курсов. Истинный курс рассчитывается по одной из формул:
при управлении кораблем по гирокомпасу
ИК = ККгк 4- ДГ#П;
при управлении кораблем по магнитному компасу
ИК = КК„к 4- ДМ К,
где ККгк, ККкк, &ГКа и ДМ# — компасные курсы и поправки гироскопического и магнитного компасов соответственно.
Численное значение компасного курса принимается равным курсу, заданному рулевому, а при использовании магнитного компаса — курсу по главному магнитному компасу. Неизбежные отклонения корабля вправо и влево от заданного курса считают одинаковыми.
В условиях штормовой погоды и значительного асимметричного рыскания корабля, т. е. рыскания преимущественно в одну сторону от заданного курса, истинный курс рекомендуется рассчитывать один раз в час, а также при повороте корабля на новый курс по среднему арифметическому значению компасного курса, вычисляемому по мгновенным его отсчетам, замечаемым через 5 мин или снятому с курсографа.
Определение и расчет поправки в зависимости от типа компаса приводятся в § 52.
Линии истинных курсов прокладываются с помощью прокладочного инструмента или прокладочной линейки планшета автопрокладчика
§ 63, Графическое счисление
277
последовательно от исходной точки. В качестве исходной принимается точка, положение которой надежно определено по инструментальным измерениям.
Расчет и прокладка пройденных кораблем расстояний. Расстояния, пройденные по линиям истинных курсов, определяются по показаниям лага или вычисляются по скорости и продолжительности плавания. Первый способ дает более достоверный результат, так как лаг учитывает все изменения скорости как вследствие изменения водоизмещения, наличия крена, обрастания корпуса и пр., так и под влиянием внешних условий (ветер, волнение).
Расстояние, пройденное кораблем относительно воды, вычисляется по разности отсчетов лага в данной (ол2) и в предшествующей (ОЛ]) точках по формуле
(ол2 — олх) кл (10. 1)
или
= (ол2 - ол,)(1 + (10.2)
где кл — коэффициент лага;
Дл — поправка лага в процентах.
При расчете расстояния 5Л пользуются табл. 28 хЧТ—63 или логарифмической линейкой.
Коэффициент лага может быть вычислен по формуле
Поправка лага, учитываемая при счислении пути, должна определяться в процессе определения скорости корабля.
В походе эта поправка может быть проконтролирована (для некоторых типов лага) с помощью специального манометра, позволяющего искусственно создавать динамическое давление, соответствующее заданной скорости. Более грубый контроль может быть произведен по разности отсчетов лага, полученной на измеренной по карте линии пробега между траверзами двух ориентиров или между обсервованными точками. Длина пробега при этом не должна превышать 3—5 миль.
Кроме того, для контроля за работой лага применяется расчет пройденного расстояния по скорости и продолжительности плавания по формуле
Скорость Уоб определяется по таблице или по графику соответствия скорости и оборотов движителей, а число оборотов движителей — по показаниям тахометров (как среднее из ряда отсчетов) или по суммарным счетчикам. Последний способ более точен.
Расстояния 5Л, вычисляемые по показаниям лага или по скорости и продолжительности плавания, получаются в стандартных морских милях (1852 м). Для перехода к морским милям, длина которых изменяется с широтой, необходимо пользоваться поправкой за сжатие Земли (табл. 26), которая рассчитана по формуле
AS = (J8S2. ]\ loo, (Ю.З)
\ Д1м /
где Д1м — длина Г дуги меридиана в средней широте прокладываемого отрезка, вычисляемая по формуле (1. 11).
Поправка алгебраически суммируется с поправкой лага и учитывается одновременно с последней.
Z7S
Глава 10. Графическое и аналитическое счисление
Таблица 26
<р... 0° 10° 20° 30° 40° 50° 60° 70° 80° 90°
AS... +0,5 + 0.5 +0.4 +0,3 +0,1 —0,1 -0,3 —0,4 -0,5 —0,5
Необходимость учета поправки AS возникает в тех случаях, когда она превышает 0,5 от средней квадратической ошибки выработки лагом пройденного расстояния.
На некоторых картах и картах-сетках для упрощения прокладки расстояний, выраженных в стандартных морских милях, на боковой рамке помещается специальная шкала стандартных морских миль. Прокладываемые по линиям истинных курсов расстояния Sn снимаются с боковой рамки карты в широте плавания корабля. Вблизи счислимых точек на карте в виде дроби пишется судовое время (в числителе) в часах и минутах и отсчеты лага до десятой доли мили (в знаменателе).
В процессе графического счисления часто приходится рассчитывать момент и отсчет лага для заданной упрежденной точки, например, точки начала поворота, выхода на заданную линию и т. п. Для решения этой задачи на линии курса наносится заданная точка и затем измеряется удаление ее от ранее нанесенной точки, для которой известны момент и отсчет лага. Продолжительность плавания от предшествующей точки до заданной получают делением измеренного расстояния на скорость, а разность отсчетов лага вычисляют по формуле
р0Л = '
Разность отсчетов лага может быть также выбрана из таблицы исправленных расстояний обратным входом.
Отсчет лага для заданной упрежденной точки получают суммированием вычисленной величины рол с отсчетом лага в предшествующей точке.
Пример. От счислимого места на момент Т\ = 16 ч 10 мин, ОЛ[ =6,4 мили измерено расстояние до упрежденной точки начала поворота 3 = 54,4 мили.
Вычислить момент по часам и отсчет лага для упрежденной точки, если скорость корабля V = 24 уз (4 кбт/мин), а поправка лага Дл = 4-2,5%.
Решение. 1) Вычисляем продолжительность плавания t и момент Та для упрежденной точки:
t — = 544 : 4 — 136 мин или t = 2 ч 16 мин,
Т2 — Т| 4- t = 16 ч 10 мин 4- 2 ч 16 мин = 18 ч 26 мин\
2) вычисляем разность отсчетов лага и отсчет лага для упрежденной точки: с
рол = -г—'= 54,4 : 1,025 — 53,1 мили;
*л
ол2 — ОЛ1 4- рол — 59,5 мили.
Учет циркуляции. При ведении графического счисления вручную циркуляцию учитывают в тех случаях, когда траектория движения корабля во время поворота изображается отрезком длиной не меньше 2 мм. При тактическом диаметре циркуляции 5—6 кбт необходимость учета циркуляции возникает при углах поворота, превышающих 30° и масштабе карты не мельче 1 :500 000.
Учет циркуляции возможен путем графических построений неиспользованием таблиц. Второй способ обеспечивает большую точность и его следует применять при плавании в прибрежных районах.
§ 63. Графическое счисление
279
При учете циркуляции решаются две задачи:
1) определение точки окончания поворота при известной точке начала поворота;
2) определение точки начала поворота для выхода корабля на заданную линию курса или пути, например на створ, рекомендованный курс, ось фарватера и т. п.
Определение точки окончания поворота при известной точке начала поворота. Для решения этой задачи способом графических построений траектория движения корабля во время поворота вычерчивается при помощи циркуля в масштабе карты. Место центра О окружности (рис. 103) должно быть удалено от точки В начала поворота на величину радиуса циркуляции по перпендикуляру к линии начального курса.
Точка С окончания поворота находится как точка касания линии конечного курса с проведенной окружностью.
Для ускорения и упрощения работы по учету циркуляции рассмотренным способом применяются прозрачные пластинки (палетки) с отверстиями различного диаметра. Отверстие подбирается в зависимости от тактического диаметра циркуляции и масштаба карты.
При использовании таблицы циркуляции траектория движения корабля во время поворота также совмещается с окружностью, имеющей диаметр, равный тактическому диаметру циркуляции. Положение точки С (рис. 104) окончания поворота определяется относительно точки В начала поворота направлением, характеризуемым углом q, отсчитываемым от линии начального курса, и расстоянием d, называемым промежуточным курсом.
Положение точки С может быть также определено по расстоянию d\ до нового курса.
Величины q, d и di определяются в зависимости от угла а изменения курса по формулам:
а
<7 =
• d = 2/?а sin q;
= Ratgq-
Значения q, d и d\ выбираются по радиусу циркуляции Яци углу поворота а=ЯЯ2 — ИКХ из табл. 30 МТ—63. В той же таблице приведены величины расстояний Sa, проходимых кораблем по криволинейной траектории во время поворота, и промежутки времени поворота на различные углы.
280
Глава 10. Графическое и аналитическое счисление
Направление отрезка d относительно меридиана, определяемое углом Кср. вычисляется по формуле
Угол q при повороте вправо прибавляется к начальному курсу, а при повороте влево вычитается из начального курса.
При определении точки окончания поворота с помощью расстояния d до нового курса отрезок d\ откладывается от точки В начала поворота вперед по продолжению линии начального курса (рис. 104). Затем от полученной точки Е прокладывается линия нового курса; место точки С окончания поворота наносится по удалению ее от точки Е на то же расстояние d\.
Определение точки начала поворота для выхода корабля на заданную линию; На карте проводятся линии курсов (начального и конечного) и из точки их пересечения проводится биссектриса EN (рис. 105) угла, дополняющего угол поворота а до 180°. Место центра О циркуляции находится вмещением радиуса циркуляции /?ц между биссектрисой и одной из линий курсов перпендикулярно этой линии.
Точки начала и конца поворота находятся в пересечении перпендикуляров, опущенных на линии курсов из точки О.
При использовании палетки отверстие, соответствующее диаметру циркуляции, должно быть вмещено между линиями курсов; точки В и С намечаются «на глаз».
При использовании таблиц циркуляции по углу а изменения курса выбирается расстояние di которое откладывается от точки пересечения курсов вперед по новому курсу и назад по старому. Полученные на этих
Е
линиях точки В и С (рис. 106) и будут соответствовать точкам начала и конца поворота.
Такой прием может быть использован при углах изменения курса до 150—160°; при больших углах его не применяют ввиду очень больших величин dj. В таких случаях более удобно пользоваться параметрами q и d\ отрезок d как вектор должен быть вмещен между линиями курсов (рис. 107).
Отрезок d строится в произвольной точке а под углом q к линии начального курса. Через конец отрезка d (точку Ь) проводится прямая ЬС параллельно линии начального курса до пересечения с линией конечного курса. Из точки пересечения С проводят отрезок d до пересечения с линией начального курса. Точка В и будет искомой точкой начала поворота.
Чтобы определить положение точки, в которой должна быть подана команда рулевому об отклонении руля, следует из точки В начала пово-
$ 63. Графическое счисление
281
рота отложить в сторону, обратную движению корабля, расстояние, проходимое кораблем за мертвый промежуток времени между моментом подачи команды и началом поворота.
Графическое счисление на миллиметровой бумаге осуществляется в тех случаях, когда необходимо изобразить резкопеременное маневрирование корабля в крупном масштабе, например, 1 см — 1 кбт.
Приемы решения частных задач счисления те же, что и при графическом счислении на картах или картах-сетках. Циркуляция учитывается обычно с помощью палетки.
Счислимое место В переносится на навигационную карту через 0,5—1 ч по пеленгу П и расстоянию D (рис. 108), измеряемым относительно раннее нанесенного места А.
Графическое счисление на планшетах в проекции Гаусса ведется при решении кораблем задач, связанных с тралением мин, а также при выполнении некоторых гидрографических работ. Для прокладки курсов на таких планшетах проводится
несколько меридианов, а для прокладки пройденных расстояний на одной из боковых рамок строится шкала морских миль.
Графическое счисление при управлении кораблем по гироазимуту. При удержании корабля на постоянном курсе по гироазимуту, корректор которого вырабатывает как широтную так и скоростную поправки, траектория движения будет совпадать с локсодромией, так как гироазимут, выставленный при пуске по направлению истинного меридиана, будет непрерывно следить за меридианом текущего места. Если отключить выработку скоростной составляющей коррекции, то гироазимут будет сохранять любое заданное ему при пуске направление неизменным, вследствие чего, удерживая корабль на постоянном курсе, мы получим траекторию движения, близкую к кратчайшей линии.
Если бы корректирующие устройства гироазимута работали идеально точно, а трение в осях подвеса гироскопа отсутствовало, то траектории движения корабля в обоих рассмотренных случаях строго соответствовали указанным. Но так как подвес гироскопа не идеален, а вырабатываемые поправки содержат некоторые погрешности, гироазимут уходит от заданного направления.
Суммарный уход 3ГА за время t определяют по формуле
8га =
где а — угловая скорость некомпенсированного ухода гироазимута.
Считая уход приближенно постоянным, получим, что если в некоторый начальный момент поправка гироазимута относительно истинного меридиана или любого другого исходного направления была равна ДГЛо, то спустя время t она будет соответствовать величине ДГЛЬ равной
ДГЛ, = ДГЛ0 4- at.
Уход гироазимута, являясь по происхождению величиной случайной, действует далее как систематическая ошибка прогрессивного типа, вызывая нарастающее, практически равномерное изменение положения нулевых делений картушек репитеров в какую-то одну сторону.
282
Глава 10. Графическое и аналитическое счисление
Рассмотрим особенности ведения графического счисления для случая, когда гироазимут используется как компас при выработке его корректором скоростной и широтной составляющих поправки.
Установка гироазимута в направлении истинного меридиана производится следующими способами:
1) по согласованию с магнитным или гироскопическим компасом;
2) по пеленгу створа;
3) по пеленгу ориентира.
В первом способе курс по гироазимуту делается равным истинному курсу, определяемому по показаниям компаса. Во втором способе, который применяется при плавании по створу, на гироазимуте выставляется курс, равный пеленгу створа. При использовании третьего способа, применяемого во время стоянки корабля у стенки, на гироазимуте выставляется курс по истинному пеленгу ориентира, измеренному на карте.
Поправка гироазимута определяется по пеленгу створа или небесного светила. Для расчета истинных курсов используется поправка, равная среднему арифметическому из 3—5 мгновенных поправок, определенных с интервалами 10—15 сек.
Поправка гироазимута в процессе плавания будет неизбежно изменяться и при этом ни численное значение, ни знак этого изменения не будут известны. Вследствие этого действительное перемещение корабля будет происходить по кривым линиям, близким к дугам окружностей, радиусы которых зависят от скорости ухода гироазимута.
Уточнение счислимого места возможно по-
* __ __________pl п еле очередного определения поправки гиро-
азимута.
р.1 Допустим, что поправки гироазимута ДГЛ1
। и АГА2 определялись в точках А и В (рис. 109)
Ча' при движении корабля одним курсом; расстоя-р ние 5Л между точками определено по
Если разность поправок ДГД2— A/V11 положительная, то корабль будет уклоняться вправо от прямой АВ, а если отрицательная — то влево от этой прямой.
Действительная траектория движения корабля будет совпадать с дугой АВ' окружности с центром в точке О. Уточненное счислимое место В' на момент определения поправки АГА2 можно найти, учтя, что длина дуги АВ' должна быть равна 5Л.
Точка В' относительно точки В имеет прямоугольные координаты Pi и р2 и при этом отрезок р! всегда направлен в сторону, обратную движению корабля, а р2 —вправо или влево от линии АВ в зависимости от знака разности поправок АГ42 и АГ/Ц.
Величины pt и р2 вычисляются по следующим приближенным формулам:
Р1 = 0,00005 S„ (8;а)2
р2 = 0,009 $л (g;A) u ;
Пример. Начальная поправка гироазимута ДГЛ^ = 4-0°,5; поправка, определенная через 15 ч ^ГА^ — —4°,2.
Вычислить величины pi и о2 для уточнения счислимого места, учтя, что корабль одним курсом прошел 90 миль.
Решение. 1) Вычисляем изменение поправки гироазимута:
ВГА = ДГЛ2 - ДГЛ( = — 4° 2 — (+0°5) = — 4°7;
2) вычисляем величины pt и р2:
pi = 0,00005«90 (4,7)2 = 0,1 мили в сторону, обратную курсу;
р2 — 0,009«90«4,7 = 3,8 мили влево от линии курса.
§ 64. Аналитическое счисление
283
Если между моментами определения поправок гироазимута корабль изменял курс, то для нахождения уточненного места общую величину изменения поправки следует разделить на части, прямо пропорциональные продолжительности плавания каждым курсом.
При использовании гироазимута с отключенной скоростной коррекцией, когда траектория движения корабля совпадает с кратчайшей линией, для прокладки пути используются карты или карты-сетки в поперечной проекции Меркатора. Главная ось гироазимута ориентируется при этом по направлению квазимеридиана.
§ 64. АНАЛИТИЧЕСКОЕ СЧИСЛЕНИЕ
Аналитическое счисление применяется:
— при непрерывной выработке текущих счислимых координат места корабля, вводимых в системы корабельной автоматики. Задача решается с помощью автоматических счетно-решающих устройств, являющихся узлами (блоками) автопрокладчиков и электронных вычислительных машин (систем);
— при периодическом вычислении счислимых координат места корабля в тех случаях, когда необходимо исключить ошибки счисления за счет неточности графических построений, связанных с прокладкой пути корабля на мелкомасштабной карте. Задача решается вручную или с помощью счетно-решающего устройства, в частности, при определении места корабля по разновременным наблюдениям светил, а также для контроля точности графических построений на карте.
Аналитическое счисление с помощью автоматических счетно-решающих устройств производится обычнр по формулам, приведенным в гл. 6 с учетом сжатия Земли. В простейших системах используются формулы без учета сжатия Земли, аналогичные формулам (10.5) — (10.7) для решения задачи вручную.
Аналитическое счисление в географической системе координат при плавании по локсодромии. Географические координаты фг» текущего места при известных начальных координатах <ph Xi вычисляются по формулам:
?2 РШ‘
Х2 = -4- РД,
где РШ и РД— приращения начальных координат, вычисляемые в свою очередь по известному истинному курсу ИК и пройденному расстоянию S.
Если расстояние S выражено в морских милях, то расчет РШ и РД
производится по следующим формулам:
РШ - S cos К\ (10. 5)
w = SsinK; (10. 6)
РД w sec <pm. (Ю. 7)
В формуле (10. 7) <Р,Л - т’ 2 <Р2 - Г РШ —2 средняя широта,
a w — отшествие, т. е. перемещение корабля по параллели, выражен-
ное в милях.
Формула (10.5) является точной на сфере, а формула (10.7) дает приближенную зависимость между разностью долгот (на сфере)
284
Глава JO. Графическое и аналитическое счисление
и отшествием, так как отшествие не точно совпадает со средней параллелью.
Если пройденные расстояния невелики, то ошибка в разности долгот, вычисляемой по формуле (10.7), мала и практического значения не имеет.
Для упрощения расчетов РШ, w и РД применяют табл. 24 и 25-а МТ—63.
Знаки разности широт и отшествия совпадают со знаками тригонометрических функций cos К и sin К соответственно.
Аналитическое счисление может быть простым, составным и сложным. Простое счисление ведется при переходе корабля из одной точки в другую одним курсом. Составное счисление ведется при плавании, совершаемом несколькими курсами.
Перемещение корабля во время поворотов при составном счислении учитывается как дополнительное плавание корабля по промежуточному курсу, определяемому средним курсом = ИКХ у" и отрезком d, выбираемым из табл. 30 МТ—63 по углу поворота а.
Координаты у>2 и Х2 вычисляются по формулам:
?2 = <Pi + Ген.РШ\
Х2 = К, -j- РД\
РД = Ген.м sec
где Ген.РШ и Ген.ш — генеральные разность широт и отшествие, равные алгебраическим суммам соответствующих перемещений корабля по меридиану и параллели.
Пример. ?1 = 58°24;(Ш Х, = 0°24;01Г, ИК= 341.5 (18=5NW), 5 = 74,0 мили.
Вычислить <р2 и Х2.
Решение. 1) Из табл. 24 МТ—63 выбираем:
РШ=70;17 к М
w — 23J48 к
2) вычисляем <?2 и ?т:
<р2 —58=24'0 + l=10J2 = 59=34J2 N,
PLU
+ -^- = 58=59' или 59°.
3) из табл. 25-а МТ—63 выбираем разность долгот и вычисляем Х2. Для упрощения выборки делим отшествие на части (20'; 3'; 0J4 и 0^08). Получаем:
да, = 20'........РЛ = 38;80
да2= 3'..........РД1= 5^82
да3 = 0^4........РДъ— 0J78
w4= о;о8.........РД1=- о; 16
РД = 45;5б1г
Х2 = Х, +РД = 1°09;б F
Составное счисление рекомендуется выполнять по схеме, приведенной в следующем примере.
Пример. = 67°12'0М X, — 179=22^0 Ost. Корабль прошел: ИКХ = 124°0, S, = 55,5 мили; ИК% — 200=5, S2 = 24,0 мили и ИК2 — 0=0; S3 = 85,0 мили.
Вычислить ?2 и Х2, с учетом радиуса циркуляции /?ц = 6 кбт.
§ 64. Аналитическое счисление
285
Решение.
М курсов ИК S, мили РШ
N 5 ost Д'
1 124^0 55,5 31,03 46,01 .—-
162,2 0,7 0,67 0,22 —
2 200,5 24,0 — 22,48 — 8,40
280,2 1,2 0,21 — — 1,18
3 0,0 85,0 85,00 — — —
| 85121 54; 18 46; 2.3 1 9,58
Ген. РШ = 31 ^0 к N Ген. w — 36^65 к Ost
= 67°12;о N Wj-ЗО'. . . . РД,= 78^40
<р2 = 67°43;0 W w2= 6' . . . . РД2= 15J68
РШ
= 15J5 w3 — о;б . . . РД3 = 1J57
<pm = 67;5 w4 = о;о5 . . . РД4 = о;1з
РД= 9578
РД= 1°35;8СН'
_____________= 179°22;о О5*
Х2= 180°57;8
Х2=179°02;2 W
Сложное счисление, как и составное, ведется при больших переходах несколькими курсами в высоких широтах. При этом широту <р2 определяют так же, как в составном счислении, а долготу Хг — через генеральную разность долгот, вычисляемых для каждого отдельного курса как при простом счислении. Практически более удобно сложное счисление заменять рядом простых.
Для учета сжатия Земли, т. е. при вычислении географических координат <р2, Хг на эллипсоиде, необходимо:
а) от разности широт РШ, вычисленной по расстоянию S в стандартных милях, перейти к минутам дуги меридиана в широте плавания корабля;
б) учесть изменение скорости приращения долготы на эллипсоиде по сравнению с таковой на шаре.
Для вычисления РШ3 и РД3 на эллипсоиде применяются формулы ршз = РШш + -^ /;
РД» ^РДш + ^- g,
где РШш и РДШ — разности широт и долгот, вычисленные без учета сжатия Земли.
Коэффициенты f и g выбираются из табл. 25-6 МТ — 63 по средней широте <рт и разности широт.
Пример. У! = 65°25;0 М РШщ = 254' к ЛГ (4°14'), РДш = 310'.
Вычислить РШ3 и РДЭ с учетом сжатия Земли.
Решение. 1) Вычисляем среднюю широту
<рт = 65°25' +0,5 РШш = 67°32' или 67°5;
286
Глава 10. Графическое и аналитическое счисление
2) из табл. 25-6 МТ—63 выбираем /=—0,36 и g——0,18;
3) вычисляем искомые РШ3 и РД9
РШ, = 254,0 + = 253; 1,
РД, = 310,0 + ~°у£3— = 309J4.
Необходимость ведения счисления с учетом сжатия Земли может возникнуть только при очень больших плаваниях.
Разность долгот на эллипсоиде может быть также вычислена по уравнению локсодромии в виде
(Х2 — Xi)'= tgtf (Do-DJ, (10. 8)
где D2 и Di — меридиональные части, выбираемые из табл. 26 МТ — 63 по широтам и
Формулы аналитического счисления применяются также для расчета локсодромических курсов или локсодромических пеленгов Р и расстояний между точками по их координатам. Из уравнений (10.8), (10.5) и (10.6) следует:
’ (Ю. 9)
или
(10.10)
И
$(?2 — ?i)'sectf (10. 11)
ИЛИ
$ = (Х2 — XJ' cos <pm cosec К. (10. 12)
Курс (пеленг) и расстояние следует вычислять по таблицам логарифмов. Табличный угол или Рт будет всегда в первой четверти. Для определения курса или пеленга по круговой системе счета рекомендуется сделать рисунок от руки, показывающий относительное расположение точек, между которыми рассчитывается курс (пеленг). Величину угла по круговой системе счета можно также получить, учтя знаки разностей широт и долгот.
Вследствие того, что отшествие не лежит точно на средней параллели, для вычисления больших расстояний целесообразно применять формулу
S = т-М2 + (А-А)2. (10.13)
в которой разность долгот должна быть выражена в дуговых минутах.
Пример. Вычислить локсодромический пеленг Р и расстояние S между точками, координаты которых равны: cfi = 67°28J5 М М — 5°36^5 Osi\ <f2 = 71°55;o АГ и X2=2°44J0 W.
Решение. __ <р2 - 71o55J0 N _D2 = 6296,8 _Х2 = 2°44;0 W
~'<p1 = 67°28;5W Dj = 5526,4 Xl==5°36;5O^
РШ — 4°26J5kW ДД = 770',4 РД = 8°20',5 к (Я
РШ = 266; 5 РД = 5оо;5
По знакам разностей широт и долгот устанавливаем, что пеленг Р по круговой системе счета должен быть углом четвертой четверти и, следовательно, Р = 360° — Рт.
1g ДХ = 2,69940 1g Д? = 2,42570
“ 1gДД=2<88672 + lg sec Рт = 0,07646
lg tg Рт = 9,81268 lg S = 2,50216
PT = 33°00;6 S = 317,8 мили
P = 360° — 33°oo;6 = 326°59;4.
§ 65. Счисление при помощи автопрокладчика и автосчислителя
287
Аналитическое счисление в квазигеографической системе координат. При расчете квазигеографических координат применяются формулы, аналогичные приведенным выше для счисления при плавании по локсодромии:
ср = ср Д- Да X = X ДХ :
Г<А> Т<7! 1 Т<7’ Qi ' Q
д<р9 = S, cos К9, sec
w, = S„sin (X„,-XJ = tgK9 (Dq, -D9t).
Расстояние Sq должно соответствовать плаванию в морских милях по квазилоксодромии.
Квазикурс Kq и расстояние Sq между точками при известных их координатах могут быть вычислены по формулам, получаемым из приведенных равенств.
§ 65. СЧИСЛЕНИЕ ПРИ ПОМОЩИ АВТО ПРОКЛАДЧИКА И АВТОСЧИСЛИТЕЛЯ
При подготовке к ведению счисления и в процессе счисления с помощью автопрокладчика решаются следующие частные задачи.
1. Подготовка карт и установка их на планшете.
2. Согласование автопрокладчика по курсу корабля, его скорости и координатам исходного места.
3. Наблюдение за работой автопрокладчика и ввод необходимых поправок в процессе автоматического счисления.
Подготовка карт и установка их на планшете. Подготовка карт требуется только в тех случаях, когда конструкцией автопрокладчика предусматривается ввод экваториального масштаба. Этот масштаб для автопрокладчиков, работающих без учета сжатия Земли, должен вычисляться по формуле
- ?ИГП COS <ргп,
где Ж9КВ — искомый экваториальный масштаб;
Л4Гп и ?гп “ главный масштаб и соответствующая ему широта главной параллели, указываемые на морской навигационной карте.
Практически более удобно вычислять не сам масштаб, а его знаменатель Сэкв по знаменателю Сгп главного масштаба и широте главной параллели
^экв = ^гп sec ^гп*
Экваториальный масштаб устанавливается в виде двух отсчетов — грубого и точного; величины этих отсчетов для различных широт главных параллелей и главных масштабов приводятся в технической документации автопрокладчика.
Так, при главном масштабе карты Л4ГП = 1:300000, <ргп = 69° экваториальный масштаб Л4ЭКВ = 1 : 837 120. Знаменатель этого масштаба дол’ жен быть установлен в виде отсчетов: грубого 832000 и точного 4800. Последние две цифры знаменателя масштаба во всех случаях округляются до нулей.
Для автопрокладчиков, масштабирующие узлы которых работают с учетом сжатия Земли, экваториальный масштаб вычисляется по формуле (5.4). Его величина приводится на картах и картах-сетках (слева над северной рамкой), а также в специальных таблицах, помещаемых в технической документации.
288
Глава 10. Графическое и аналитическое счисление
опустить его путем включения соот-
при установленной нижней необ-место корабля по координатам, сня-светящееся перекрестие проектора
Экваториальный масштаб, указываемый на картах, может быть принят и для установки на автопрокладчиках, работающих без учета сжатия Земли. Однако при этом будут неизбежно возникать дополнительные ошибки в прокладываемых расстояниях, пройденных кораблем, доходящие до 0,4—0,5%.
Вводимые масштабы должны быть написаны в заголовках карт.
Для автопрокладчиков, конструкцией которых предусмотрен ввод главного масштаба карты и широты главной параллели, карты дополнительной подготовки не требуют.
Установку (или смену) карт следует производить при включенном освещении планшета. Для установки нижней карты необходимо:
— нанести упрежденную точку начала автоматической прокладки;
— при поднятом карандаше каретки положить карту на нижний планшет и совместить один из меридианов или одну из параллелей карты с ближайшей соответствующей координатной линией планшета;
— закрепить карту кнопками, установить карандаш записывающего устройства в упрежденную точку и ветствующего тумблера.
Для установки верхней карты ходимо на верхнюю карту нанести тым с нижней карты, совместить
каретки с этим местом и ориентировать карту относительно меридиана. Для ориентировки карты может быть использована прокладочная линейка автопрокладчика; меридиан или параллель карты должны быть совмещены с рабочим срезом линейки при отсчете курса 0° или 90° соответственно. После этого карта закрепляется кнопками.
Когда прокладку намечено вести без использования нижней карты, верхнюю карту устанавливают как указано выше. В упрежденную точку начала автоматической прокладки устанавливается светящееся перекрестие проектора. В процессе счисления это перекрестие должно перемещаться по линии пути, проложенной на карте.
При ведении графического счисления в крупном постоянном масштабе вместо карт используются чистые листы бумаги, закрепляемые на крышке прибора (верхнем планшете). На этом листе должны быть проведены прямые, совпадающие с линиями меридианов и параллелей нанесенных на защитном стекле планшета.
Согласование автопрокладчика по курсу корабля, его скорости и координатам исходного места. До включения автопрокладчика необходимо на всех счетчиках координат «Широта» и «Долгота» выставить географические координаты исходной точки автоматического счисления. На шкалах «Курс», «Скорость», а для некоторых автопрокладчиков — на шкалах «Скорость течения», «Направление течения» и «Дрейф» установить отсчеты, соответствующие этим величинам, а затем проверить по сигнальным лампам поступление указанных данных (за исключением течения) от их датчиков.
На автопрокладчиках «Путь-1» и АП-2 выставляется только курс корабля и проверяется поступление курса и пройденного расстояния.
После этого на шкалах «Поправка курса» и «Поправка скорости» устанавливаются постоянная поправка гирокомпаса и поправка скорости в узлах, вычисляемая по формуле
ду = ——
v 100 •
$ 65. Счисление при помощи автопрокладчика и автосчислителя 289
Скорость У', учитываемую при расчете ДУ, следует вычислять по разности отсчетов лага рол (которая должна быть порядка 2—5 миль) и промежутку времени, за который корабль проходит расстояние, соответствующее взятой разности отсчетов лага
У»__ 3600рол
А~
Величина ДУ рассчитывается до сотой доли узла.
Чтобы упростить определение величин ДУ для различных скоростей и поправок лага в процентах, составляется специальная таблица, являющаяся одной из рабочих таблиц штурмана.
На автопрокладчиках «Путь-1» и АП-2 вместо поправки скорости вводится поправка лага в процентах.
При повреждении линии синхронной связи автопрокладчика с лагом или гирокомпасом или при выходе этих приборов из строя текущие значения скорости и курса могут вводиться вручную.
Наблюдение за работой автопрокладчика и ввод необходимых поправок в процессе автоматического счисления. В процессе автоматического счисления необходимо:
— контролировать поступление в прибор курса и скорости корабля или пройденного расстояния;
— контролировать судовое напряжение, поступающее в блок питания автопрокладчикй;
— после определения места вводить поправки счислимой широты и долготы (для автопрокладчиков «Путь-1» и АП-2 вводить новые значения координат на соответствующие моменты);
— при пересечении экватора и меридианов 0° и 180° переключать указатели наименований широты и долготы;
— для учета дрейфа и течения рассчитывать и вводить необходимые поправки. Порядок определения этих поправок рассматривается в гл. 11.
При наличии на корабле только автосчислителя, для ведения счисления выполняются те же проверки и действия, исключая работы, связанные с подготовкой карты. Счислимые места по их координатам, считываемым со счетчиков, периодически наносятся на навигационную карту.
Уход за автопрокладчиком (автосчислителем) во время работы осуществляется в порядке, излагаемом в технической документации.
19 Заказ 1833
Глава 11
УЧЕТ ДРЕЙФА И СНОСА ТЕЧЕНИЕМ
§ 66. УЧЕТ ДРЕЙФА
Сущность явлений при дрейфе корабля. Общее действие ветра и вызванного им волнения на движущийся корабль можно разделить на две составляющие — собственно дрейф и зарыскивание.
Дрейф, называемый также ветровым дрейфом, возникает под действием силы давления набегающего потока воздуха на надводную часть корабля как на парус. Скорость W этого потока соответствует скорости кажущегося или наблюденного ветра, зависящей от скорости корабля V и скорости истинного ветра U. Вектор W (рис. НО) определяется из геометрического равенства
Полная сила А давления наблюденного ветра (рис. 111) приложена к центру парусности g надводной части корабля и направлена всегда под ветер. При этом угол 7 между диаметральной плоскостью корабля и составляющей силы А в общем случае не равен курсовому углу наблюденного ветра.
Составляющая х силы А, равная ее проекции на диаметральную плоскость, дрейфа не вызывает, но изменяет скорость корабля относительно воды. При направлении силы х в нос корабля скорость должна увеличиваться. Однако в действительности такое увеличение происходит лишь при слабом ветре; с усилением ветра увеличивается и волнение, что приводит к потере скорости корабля.
Если сила х направлена в корму, то скорость уменьшается.
$ 66. Учет дрейфа
291
Действие силы х учитывается лагом, а при отсутствии лага потеря скорости определяется по данным, полученным в процессе определения скорости корабля при различном наблюденном ветре.
Составляющая z силы А, направленная по перпендикуляру к диаметральной плоскости, вызывает смещение корабля под ветер с некоторой скоростью ълр. Вектор улр геометрически суммируется со скоростью, создаваемой движителями, и направлен по диаметральной плоскости корабля. В результате этого корабль перемещается по равнодействующей V', численно близкой к скорости Ул, показываемой лагом и составляющей с диаметральной плоскостью угол а0, называемый собственно дрейфом. Собственно дрейф во всех случаях направлен под ветер.
Действие силы z при установившемся дрейфе уравновешивается силой z0 сопротивления воды, приложенной к одной из точек в подводной части корабля. Эта точка расположена ниже точки g приложения силы z и смещена к носу или корме относительно вертикали, проходящей через точку g. Вследствие этого возникают две пары сил, одна из которых создает крен корабля, а другая разворачивает его вокруг вертикальной оси, т. е. создает увальчивость корабля.
При отсутствии ветра рыскание корабля в одну и другую сторону от заданного курса практически одинаково как по углу, так и по времени лежания на каждом частном курсе. Такое рыскание называется симметричным. При симметричном рыскании удлиняется путь корабля, но уклонения его от курса не происходит.
Уваливание, усугубляемое действием волнения, приводит к тому, что рыскание корабля становится асимметричным, т. е. неодинаковым по углу отклонения вправо и влево от курса, или по времени лежания п----------
на частных курсах, либо и по углу и по времени. В последнем случае х
асимметричность называют полной.
Независимо от характера асим-
метричного рыскания средняя линия рис- 112
фактического движения корабля, как
показано на рис. 112, отклоняется от линии пути при наличии собственного дрейфа на угол а', называемый зарыскиванием. При этом если собственно дрейф а0 направлен всегда под ветер, то зарыскивание в зависимости от архитектуры корабля и курсового угла ветра и волнения может быть направлено как под ветер, так и на ветер.
Зарыскивание и собственно дрейф алгебраически суммируются, увеличивая или уменьшая суммарный дрейф а, равный
а = а0 4- а'.
При курсовых углах наблюденного ветра, превышающих 130—140°, зарыскивание, в большинстве случаев имеющее то же направление что и ветер, может превышать собственно дрейф, вследствие чего корабль будет смещаться с линии заданного курса также на ветер.
Вследствие сложности раздельного определения составляющих и а' на практике применяют такие методы, при которых зарыскивание объединяется с собственно дрейфом. Таким образом, под термином «ветровой дрейф» понимают обычно результирующее отклонение корабля от линии заданного курса под влиянием ветра.
Дрейф в сочетании с качкой приводит к понижению точности работы лагов. Ошибки в поправке лага, вызванные дрейфом и качкой, содержат как систематическую, так и случайную составляющие, т. е. носят смешанный характер. Они могут достигать нескольких процентов и учесты
19*
292
Глава 11. Учет дрейфа и сноса течением
их при эксплуатации лага на корабле в настоящее время не представляется возможным.
В процессе плавания дрейф может быть определен:
а) с помощью дрейфомера;
б) из сопоставления пути при дрейфе ПУл с истинным курсом;
в) по наблюденным курсовым углам и промежуткам времени между моментами их измерения.
В случаях невозможности применения перечисленных способов величина угла дрейфа приближенно может быть выбрана из таблиц, в которые сведены результаты определений этого угла при различной обстановке; может быть также применен способ вычисления угла дрейфа по подходящей для данного корабля формуле.
Корректура учитываемого угла дрейфа во всех случаях производится по результатам определения места корабля инструментальными способами.
Определение дрейфа с помощью дрейфомера. Чувствительный элемент гидродинамического дрейфомера представляет собой тело обтекаемой формы, помещенное в водный поток так, чтобы плоскость его симметрии была параллельна диаметральной плоскости корабля. В двух точках этого тела по правому и левому бортам помещены трубки, воспринимающие гидродинамическое давление на ходу корабля. Разность давлений Др при наличии дрейфа корабля может быть выражена формулой
у2р
V =
где р — плотность воды;
УЛ — скорость корабля относительно воды;
/(а) — функция от угла дрейфа, определяемая опытным путем, зависящая от формы тела, в котором помещены приемные трубки, и от расположения приемных отверстий.
При известных /(а) и разности давлений Др угол дрейфа вычисляется с помощью счетно-решающего устройства.
Основой дрейфомера могут быть также чувствительные элементы двух индукционных лагов, один из которых измеряет скорость Ул по направлению диаметральной плоскости корабля, а другой — скорость *пдр в перпендикулярном ей направлении. Геометрически суммируя Ул и ^др, можно получить не только угол дрейфа, но и скорость корабля по линии /7Уа.
Определение дрейфа из сопоставления пути /7Ув с истинным курсом. Путь корабля ПУа при дрейфе может быть получен по ряду мест, определяемых относительно свободноплавающего ориентира, и по пеленгам свободноплавающего ориентира.
Определение ПУа по ряду мест, определяемых относительно свободноплавающего ориентира. Для определения ПУ л данным способом следует:
а) обнаружив свободноплавающий ориентир Е (рис. 113), измерить до него ряд расстояний и пеленгов в секторе курсовых углов не менее 50—60°;
б) проложить пеленги на маневренном планшете от его центра и отложить измеренные расстояния;
в) провести прямую между полученными точками и измерить искомый путь ПУа как направление проведенной прямой относительно истинного меридиана.
§ 66, Учет дрейфа
293
Угол дрейфа вычисляется по формуле ^ПУ- ИК.
В качестве ориентира используется специальная веха, имеющая малую парусность.
Определение ПУа по пеленгам свободноплавающего ориентира. Для решения данной задачи следует:
а) взять три пеленга свободноплавающего ориентира, имеющего малую парусность, при разностях пеленгов не менее 30° и зафиксировать промежутки времени и t2 между моментами измерения.
При условии, что движение корабля было равномерным и прямолинейным, направление линии ПУа должно быть таким, чтобы отрезки пройденных расстояний, пропорциональные промежуткам времени, вмещались между линиями соответствующих пеленгов;
б) на карте от произвольной точки А (рис. 114) проложить линии исправленных пеленгов;
в) по линии истинного курса или по любой другой прямой секущей линии пеленгов проложить отрезки расстояний, пропорциональные
; промежуткам времени t\ и ^2- Величины этих отрезков вычисляются по формулам:
BC = ktx\
СЕ =
где k — произвольно выбранный коэффициент;
г) через точки С и Е провести прямые, параллельные линии первого пеленга, до пересечения с линиями второго и третьего пеленгов;
д) провести прямую через точки С' и Е'. Эта прямая и будет искомой линией пути ПУа.
При равенстве промежутков времени /г и /2 для определения ПУа измеряется отрезок ВС (рис. 115) линии курса между первым и вторым пеленгами и этот же отрезок прокладывается далее от точки С. Через полученную точку Е проводится прямая, параллельная линии второго
294
Глава 11. Учет дрейфа и сноса течением
пеленга до пересечения с линией третьего пеленга. Искомый путь ПУа будет соответствовать направлению прямой BE'.
Для повышения точности определяемого пути при дрейфе следует пеленговать ближайший к кораблю ориентир, беря пеленги с таким рас-
четом, чтобы их разности были близки к 45°, а промежутки времени фиксировать с помощью секундомера.
Если в качестве ориентира использовать сброшенный с корабля свободноплавающий предмет, имеющий малую парусность, то искомый путь ПУа (рис. 116) вычисляется по формуле
/7Уа = И/7±180°,
а угол дрейфа а = ИП- 180° — ИК.
В приведенных формулах ИП — истинный пеленг предмета.
Для повышения точности угла а рекомендуется брать несколько пеленгов на возможно большем расстоянии от сброшенного предмета, а затем учитывать среднее значение пеленга.
Вычисление угла дрейфа по наблюденным курсовым углам и промежуткам времени между моментами их измерения. Для решения задачи необходимо:
а) проходя вблизи вехи или иного свободноплавающего ориентира Е с малой парусностью, измерить пеленги: Л77о — на остром курсовом угле qo и А771 — на курсовом угле qiy более близком к траверзному (рис. 117). Моменты измерений пеленгов заметить по секундомеру;
б) по тому же секундомеру заметить момент прихода ориентира на траверз корабля;
в) рассчитать промежутки времени
между моментами измерения пеленгов
КПХ ъКП. (/) и измерения траверзного пеленга и пеленга КП. (/тр);
г) вычислить курсовые углы:
q. = КП. - КК\
q. = КП. - КК.
При расчете этих курсовых углов должен учитываться курс, заданный рулевому, а не мгновенные значения курса в моменты взятия пеленгов;
д) вычислить искомый угол дрейфа по формуле
а = 57,3 — tg^j) (11.1)
$ 66. Учет дрейфа
295
Пример. Компасный курс КК — 100° А77о=15О°3, КГЦ = 176°8, t — 505 сек, ^Тр = 702 сек.
Вычислить угол дрейфа.
Решение. 1) Вычисляем курсовые углы qQ и q^ qQ = КГЦ — КК ~ 50°3, д^КГЦ—КК^Г^
2) вычисляем угол дрейфа: Г 702 1
а = 57,3 "505“ (tg50?3 — tg 76°8) + tg76?8 = 0?6.
Ошибка определяемого угла дрейфа зависит от отношения -у2-, от
величин курсовых углов и ошибок их измерения, а также от ошибок фиксации моментов измерения курсовых углов. Для повышения точности вычисляемого угла а рекомендуется сначала брать пеленг K17Q на остром курсовом угле qo, затем фиксировать момент прихода ориентира на траверз и лишь после этого измерять пеленг Л77! при курсовом угле qit близком к 180° — q0.
Чтобы повысить точность фиксации моментов измерения курсовых углов, рекомендуется брать серии по 5—7 пеленгов, близких к намечен-
ным, а затем наносить эти пеленги на график (рис. 118) по времени, замечаемому с помощью секундомера. Проведя осредняющую прямую между точками, задаются выбранным значением пеленга и снимают с графика соответствующий ему момент. Такой график особенно полезен для уточнения момента прихода ориентира на траверз корабля.
При вычислении угла а по формуле (11. 1) следует учитывать значения tg qQ и tg q\ до четвертого десятичного знака.
Рассмотренье способ дает возможность определять дрейф со средней квадратической ошибкой 0,5—0°,8.
Составление таблицы углов дрейфа и потери скорости корабля. Применяя любой из рассмотренных способов определения дрейфа, следует определять потерю скорости корабля как разность между скоростями по оборотам винтов (мощности машин) и по лагу. Результаты определения углов дрейфа az и потери скорости ДУ/ = УЦ — Ул/ для соответствующих скорости корабля Ул, курсового угла и скорости наблюденного ветра следует сводить в таблицы, которыми можно пользоваться для выборки величин а и ДУ при аналогичных условиях.
Таблицы составляются для различных скоростей наблюденного ветра через 3—5 м!сек\ форма таких таблиц приводится ниже.
IF = 10 — 15 м!сек
Скорость корабля уз Курсовой угол наблюденного ветра
0° 15° 30° 45° 60° 140° 150° 160°
10 12 14 и т. д.
296
Глава 11. Учет дрейфа и сноса течением
Наблюденные величины записываются в виде дроби: в числителе — угол дрейфа (со знаком плюс при дрейфе под ветер и минус — при дрейфе на ветер); в знаменателе — потеря скорости в узлах.
Для ускорения заполнения таблиц можно объединять результаты, получаемые на однотипных кораблях.
Способы вычисления углов дрейфа. Применяемые в настоящее время способы вычисления углов дрейфа основываются на использовании статистических материалов, получаемых при определении дрейфа как в процессе испытаний, так и во время плавания корабля. Непременным условием, обеспечивающим достаточную достоверность получаемых результатов, является наличие большого числа наблюдений (не менее 30—40) с фиксацией элементов, от которых зависит дрейф корабля.
Для кораблей с резкоизменяющейся осадкой, например транспортов, при определении дрейфа необходимо фиксировать не только скорость корабля, скорость и курсовые углы наблюденного ветра, но и осадку корабля, а затем результаты наблюдений обрабатывать, сводя их в группы по основному признаку — осадке корабля.
Направление и скорость наблюденного ветра должны определяться как средние-из ряда наблюдений, производимых через 15—20 мин. Скорость корабля должна определяться с точностью до 0,1 уз.
Для вычисления дрейфа можно применить два способа: способ Н. Н. Матусевича и способ Г. В. Соболева.
Возможность применения этих способов для данного корабля должна определяться опытным путем.
В способе Н. Н. Матусевича искомый угол дрейфа вычисляется по формуле
“ = A;Osin?. (11.2)
где Ка — коэффициент дрейфа, в градусах;
W — скорость наблюденного ветра;
V — скорость корабля (по лагу);
q — курсовой угол.
Наилучшее значение коэффициента Кл должно вычисляться по спо собу наименьших квадратов решением нормального уравнения:
[оа] = Ка [аа],
(11.3)
/ ПТ \2
где а == l-y I sin q\
[аа] = а^ + а2а2 + . . . + алал;
[аа] == al + а| + . . . + а2.
Из уравнения (11.3) коэффициент дрейфа вычисляется по формуле
/г _
А« “ [ад] ’
§ 66, Учет дрейфа
297
Пример. При определении дрейфа получены следующие результаты (для простоты взяты лишь пять наблюдений).
м испытаний Наблюденный ветер W м1сек Скорость корабля V уз Курсовой угол q Угол дрейфа a
1 16 14 60° 3°5
2 14 10 35 2,5
3 18 16 80 4,0
4 15 12 110 1.8
5 12 8 45 2,8
Вычислить коэффициент дрейфа.
Решение. 1) Рассчитываем величины, необходимые для составления нормальных уравнений.
Ji испытаний ir V а ’ (F)8sin<7 (LI
1 1.14 1,30 1,13 1,28 3,95
2 1,40 1.96 1,12 1,25 2,80
3 1.12 1,25 1,23 1,51 4,92
4 1.25 1,56 1.47 2.16 2,64
5 1,50 2,25 1.59 2,53 4,45
[aa] = 8,73 18,76= |aa]
2) составляем нормальное уравнение Ка
18,76 = Ка8,73,
Кв = 2°15.
При выявлении возможности применения способа Матусевича можно в качестве критерия воспользоваться средней квадратической величи-ной относительной ошибки коэффициента Ка, т. е. __2 100 °/0. При относительной ошибке, не превышающей 15—2О°/о, способ может быть применен для решения поставленной задачи.
тк
Чтобы вычислить ошибку *^1ОО°/о, следует:
— подставить вычисленную величину Ка в уравнения наблюдений и вычислить углы а' дрейфа при тех же значениях IT, V и q\
— найти разности Д = a't — az и возвести их в квадрат;
— вычислить среднюю квадратическую ошибку та определения углов дрейфа в данном ряду испытаний по формуле
От.= 1/Ж
а Т л—1 *
298
Глава 11. Учет дрейфа и сноса течением
— вычислить среднюю дрейфа по формуле
квадратическую ошибку тк* коэффициента
пгк = —°- •
— вычислить искомую относительную ошибку к 1ОО°/0. ''а
При известном коэффициенте Ка углы дрейфа удобно рассчитывать с помощью номограммы, приведенной на рис. 119; эта номограмма составлена для Ка = 1°.
Рис. 119
Для вычисления угла а следует:
— на оси ординат номограммы найти точку, соответствующую скорости 1F наблюденного ветра;
— от полученной точки 1 по дуге окружности перейти на радиус курсового угла наблюденного ветра (точка 2);
— от точки 2 по прямой, параллельной оси абсцисс, перейти на прямую скорости корабля (точка 3)\
— от точки 3 перейти на ось абсцисс по прямой, перпендикулярной этой оси, и отсчитать угол ат;
— угол ат умножить на коэффициент Ка для данного корабля. Так, для W = 16 м/сек, V = 12 уз, q = 50° и Ка = 1°35 получим ат = 1?4 и а = Ка ат= 1,4-1,35= 1?9.
Для курсовых углов q наблюденного ветра, превышающих 130—140°, дрейф по номограмме не определяется. Его определяют опытным путем.
Способ Н. Н. Матусевича дает удовлетворительный результат при расчете дрейфа кораблей со слаборазвитыми надстройками при отноше-нии -у , не превышающем 3—3,5.
§ 66. Учет дрейфа
299
В способе Г. В. Соболева дрейф вычисляется по формуле
(П.4)
где и /\2- коэффициенты, определяемые для различной осадки корабля.
Коэффициент К\ вычисляется по формуле
где
г = 3,14— ;
Q-= 1,35 - 0,25 -у-.
здесь Т — осадка корабля;
L — длина корабля;
2? — ширина корабля по мидель шпангоуту.
Коэффициент Х2, зависящий от отношения площадей надводной и подводной частей корабля, отношения плотностей воздуха и воды, должен определяться опытным путем с учетом наблюденных углов дрейфа.
Параметр f(q), определяющий зависимость силы давления ветра от курсового угла наблюденного ветра, для большинства кораблей приведен в табл. 27.
Таблица 27
я /(?) Я Ля) Я /(?) Я Ля)
0° 0,0000 50° 0,9550 100° 1,0910 140° 0,8650
10 0,3430 60 1,0300 ПО 1,0710 150 0,7410
20 0,5520 70 1,0710 120 1,0300 160 0,5650
30 0,7310 80 1,0910 130 0,9510 170 0,3600
40 0,8650 90 1,0950
Коэффициент К2 вычисляется по формуле
_ [(а2 + 2^а)К2а] [/ф2] где л= (v)2/(<7);
[(а2 + 2К,а) К*а\ = (а2 + 2^а.) + (а2 + 2^а2) К$а2 + . . . +
+ № + 2^%) Krf ;
[Л>2] = А^а2 + + ... + АГ|а2.
Для корабля, имеющего длину L = 100 м, ширину В = 9 м и осадку Т = 4 м при наблюденных углах дрейфа и величинах W, V, q и а, соответствующих условиям, для которых решен пример на стр. 297, получим К\ = 4,57 и К2 = 1,01.
300
Глава 11. Учет дрейфа и скоса течением
Учет дрейфа при счислении пути корабля. В процессе счисления пути при наличии дрейфа учитывается движение корабля относительно воды по линии ПУа
ПУа = ИК + а.
Угол а считают положительным при дрейфе вправо и отрицательным — при дрейфе влево.
Корабль, перемещаясь по линии ПУЛ, сохраняет направление, соответствующее истинному курсу. При графическом счислении вручную вместо линий истинных курсов прокладываются линии путей ПУл; на этих же линиях прокладываются расстояния 5Л, пройденные кораблем относительно воды. Для контроля правильности знака учтенного угла дрейфа рекомендуется в начальной точке учета данного угла а провести отрезок линии истинного курса длиной около 3 см.
При счислении пути корабля с помощью автопрокладчика или авто-счислителя, не имеющего устройства для ввода угла дрейфа, для его учета необходимо на приборе учета поправок вместо постоянной поправки компаса установить поправку курса Д#а, равную
= ЛГКП + а.
Аналогично учитывается угол дрейфа при аналитическом счислении, выполняемом вручную. Разности широт и отшествия вычисляются не по истинным курсам, а по путевым углам ПУЛ.
Для нахождения счислимого места корабля на карте на момент, когда какой-либо ориентир будет на траверзе или ином курсовом угле, необходимо по курсу и заданному курсовому углу q рассчитать истинный пеленг ориентира и, проложив пеленг на карте, сделать засечку на линии пути, получая искомое счислимое место.
Учет дрейфа корабля с застопоренными машинами. Корабль, дрейфующий с застопоренными машинами, перемещается по направлению ветра, и направление его диаметральной плоскости относительно ветра составляет угол, близкий к прямому.
Линейная скорость дрейфа т/др определяется по приближенной формуле
% = (И-5)
где Kv — коэффициент дрейфа;
W — скорость наблюденного ветра.
Коэффициент Kv для данного корабля считается постоянным и определяется по наблюденным скоростям дрейфа.
Для определения скорости дрейфа рекомендуется с помощью РЛС измерить перемещение корабля 5ДР под действием ветра относительно буя или вехи с уголковым отражателем и заметить соответствующий промежуток времени t (сек). Скорость дрейфа в узлах по расстоянию (кбт) и времени t вычисляется по формуле
*лр = 360^.
При отсутствии РЛС перемещение 5ДР можно определить измерением на крупномасштабной карте расстояния между обсервованными точками. Для определения места в начале и в конце промежутка времени t следует применить наиболее точный из возможных способов.
В процессе наблюдений должна измеряться скорость наблюденного ветра W.
§ 67. Учет течения
301
При наличии многократных наблюдений (не менее 30—40) коэффициент дрейфа вычисляется по формуле
К -2^1 /11 «1
где КР IF] ~ %1 W1 + % IF2 + . . . + % W„, IWW] = IF? + IF| +... + W*.
Для учета дрейфа корабля с застопоренными машинами следует по скорости дрейфа и времени вычислить перемещение корабля и проложить его на карте, как плавание по направлению ветра. Направление и скорость W наблюденного ветра, учитываемого при расчете 5ДР, измеряются при установившемся дрейфе, о чем судят по курсовому углу наблюденного ветра, который должен быть близким к 90°.
§ 67. УЧЕТ ТЕЧЕНИЯ
Действие течения на корабль. Действие течения на корабль состоит в создании переносного движения относительно дна. Это движение суммируется с движением относительно воды, направленным по курсу — при отсутствии дрейфа или по линии ПУа — при наличии дрейфа. Результирующее движение происходит по равнодействующей, т. е. по линии пути. Диаметральная плоскость корабля при этом сохраняет направление относительно истинного меридиана, равное истинному курсу.
При счислении пути корабля должно учитываться суммарное течение, вектор которого равен геометрической сумме его составляющих.
Определение скорости и направления течения. Скорость и направление течения определяются с помощью гидроакустического лага или по невязке счислимого места.
В случае невозможности применения указанных способов направление и скорость течения выбираются из навигационных пособий.
Определение элементов течения с помощью гидроакустического лага. Данный способ дает наиболее достоверный результат.
Действие гидроакустического лага основано на измерении разности частот ультразвуковых сигналов, излучаемых с корабля, и тех же сигналов, отраженных от дна моря. Частота отраженного сигнала отличается от излучаемой частоты f на величину, определяемую формулой
где V — скорость корабля относительно дна моря;
с — скорость звука в воде.
Разность частот называют допплеровской частотой.
С помощью двух пар вибраторов, одна из которых установлена в диаметральной плоскости, а другая — перпендикулярно ей, измеряются осредненные допплеровские частоты F^ и F^ , характеризующие скорости перемещения корабля: — по направлению диаметральной плоскости корабля и V? — по направлению, перпендикулярному этой плоскости. Величины Vx и V? вырабатываются автоматически на основе приведенной выше зависимости между Fa и V. При этом скорость V? вырабатывается со знаком плюс или минус в зависимости от наименования борта, в сторону которого направлен вектор (вправо —плюс и влево — минус).
302
Глава И. Учет дрейфа и сноса течением
Зная величины Vx и а также скорость Уд корабля относительно воды, определяемую с помощью относительного лага, можно вычислить направление и скорость течения.
На основе рис. 120 получаем:
vT = yw3 + Vy; (11.7)
ЯТ==Ж+7Т; (11.8)
ДУ = ух - ул.
(11-9)
Знак угла qT совпадает со знаком составляющей У , величина же угла должна определяться по знаку ДУ: при положительной разности скоростей Ух — Ул угол q7 меньше 90°, а при отрицательной — он равен дополнению выбранного из таблиц угла q'T (по tg ?т) до 180°.
Скорость Ул должна определяться во время измерения допплеровских частот; за основу для расчета Ул принимаются разность отсчетов лага ол2—ол} и промежуток времени t в секундах.
Средние квадратические ошибки вычисляемых скоростей и направлений течения определяются по формулам, полученным в результате дифференцирования формул (И. 7) и (11. 8)
"Ч = УТД1/'М2+(^Лу)г; (11.10)
57,3 с о s2 Qt .---------------
= = Др2 (^у^ди)2 "Ь (Д^^Иу)2 » (1 У 1 1)
где ?пди = m2v* — средняя квадратическая ошибка разности
скоростей, зависящая от средних квадратических ошибок величин Vx и Уд, выбираемых из технической документации лагов;
/пИу ~ средняя квадратическая ошибка выработки скорости Уу.
При mv* = mv^ «= mVn = 0,1 уз средняя квадратическая ошибка скорости течения в зависимости от скорости vT будет порядка 0,15— 0,20 уз, а ошибка тКт направления течения — около 5—10°.
Для определения элементов течения гидроакустический лаг включается периодически на 1—5 мин. Частота включений зависит от изменчивости течения и определяется из опыта.
При наличии ветра определяемый вектор будет характеризовать суммарный снос корабля и для получения вектора течения необходимо исключить из него угол дрейфа. Для этого нужно:
— от произвольной точки А на карте провести линию истинного курса АВ (рис. 121) и линию пути АС под углом ПУа к истинному меридиану;
— отложить скорость по лагу Уд = АВ' = АС';
§ 67. Учет течения
303
— от точки В' проложить вектор течения = В'К. полученный
с помощью гидроакустического лага;
— измерить скорость и направление течения = С'К.
Точность вектора течения, получаемого в результате такого построения, всецело зависит от соответствия учтенного угла дрейфа действительному.
Рис. 121 Рис. 122
Определение скорости и направления течения по невязке счислимого места. В зоне действия постоянного течения или в зоне, где это течение является преобладающим, скорость и направление течения при отсутствии ветра можно определить, проложив на карте линию истинного курса от исходного обсервованного места А (рис. 122), полученного на момент 7\. На этой линии наносится счислимое место В на момент Гг, соответствующий повторному определению места в точке В'. Вектор с~ВВ' сноса за время 7\— Т\ можно измерить по карте.
Направление течения принимается равным направлению невязки, а скорость течения вычисляется по формуле
с
- r2—л •
Средние квадратические ошибки в скорости mv^ и в направлении тКт течения в зависимости от средних квадратических ошибок Af01 и ТИ02 обсервованных мест, а также в зависимости от ошибки Afc(f) счисления за время t = Т2 — 7\ вычисляются по формулам:
mvy- Т2— Т1
(11-12)
У 0,5 [jM’ +Л)^+Л|(О]
sin/nj, -----------------------
кт С
(11. 13)
Пример. Л101 — М02 = 1,5 мили, Т2 — Л === 5 «£, ошибка счисления Л4С (0 = 0,9 мили и невязка с = 3 мили.
Вычислить ошибки mv^ и тКт< Решение.
= /0.5 (1,5*+ 1.^+0,?) = Ш 0 33 уз>
VT о о
sin тКт= ЦЗ = 0,545; тк?= 33°.
При наличии дрейфа определяемый вектор будет характеризовать суммарный снос. Исключение угла дрейфа производится в том же порядке, что и при использовании гидроакустического лага.
Учитывая элементы течения, определенные рассмотренным способом, следует помнить, что они при прибрежном плавании имеют местный характер и могут существенно измениться с изменением метеорологических условий.
304
Глава 11. Учет дрейфа и сноса течением
При плавании в ограниченном районе осредненный вектор постоянного течения можно вычислить по ряду (8—12) невязок счислимых мест, полученных при определении места корабля. Для этого следует:
а) выбрать из навигационного журнала невязки Ct счислимых мест и промежутки времени за которые они накопились;
б) рассчитать невязки ct = Cz: приходящиеся на один час плавания по счислению (нормированные невязки);
в) вычислить или измерить на чертеже проекции векторов ct на меридиан и параллель по формулам:
сх = cicos = cisin аг
где а — углы, характеризующие направления невязок относительно истинного меридиана.
Проекциям, направленным на север и на восток, приписываются знаки плюс, а направленным на юг и на запад — минус;
г) вычислить суммы проекций на каждое из четырех направлений;
д) вычитая из большего меньшее, найти разности суммарных векторов, имеющих противоположные направления; полученные результаты разделить на число п взятых невязок. В итоге получим:
— среднее значение суммарной проекции по меридиану:
у _ W ~ Ы •
1 п ’
— среднее значение суммарной проекции по параллели
~ д —•
Величинам и приписываются знаки больших сумм, по которым они вычислялись;
е) проложить векторы fli и v2 по координатным осям в соответствующие стороны и найти их геометрическую сумму; эта сумма и будет искомым вектором осредненного течения.
Пример. Из навигационного журнала выбраны невязки счислимых мест С/ и промежутки времени ti, за которые эти невязки накопились; величины С/ и ti указаны в графах 1 и 2 приводимой ниже таблицы.
О п р'е д е л и т ь осредненный вектор постоянного течения.
Невязкн Ci мили Промежутки времени tt ч Нормированные невязки с - С: t мили Проекции на меридиан сх Проекции на параллель су
1 2 3 4 5
120°—4,5 3,0 120°—1,5 —0,75 + 1,30
170°—8,0 16,0 170°—0,5 -0,49 +0,09
156°—5,6 7,0 156°—0,8 —0,73 +0,32
300°—1,2 4,0 300°—0,3 +0,15 —0,26
100°—2,5 5,0 100°—0,5 —0,09 +0,49
145°—6,0 9,0 145°—0,7 —0,57 +0,40
210°—3,0 4,0 210°—0,8 —0,69 —0,40
90°—2,0 5,0 90°—0,4 0,0 +0,40
[^=0,15 [cos/] —3,00
Ы=3,32 =0,66
v, = 211L = 0,4 уз к S, v2 = ^ = 0.3y3 к 0s*. О о
$ 67. У чет течения
305
Решение. 1) Рассчитываем нормированные невязки и их проекции сх и су на меридиан и параллель (графы 3, 4, 5);
2) находим суммы проекций и разности сумм:
[М = °«15 [Су] = 3,32 [со^] — 3,00 = 0,66
=3,17 мили к S,
— 2,34 мили к Ost;
3) рассчитываем составляющие осредненной скорости течения: их — 3,17:8 = 0,4 уз к S,
v2 = 2,34:8 = 0,3 уз к СЯ;
4) с помощью рис. 123 определяем элементы течения vT =0,5 уз и Кт = 143°.
Вектор суммарного сноса за время (в часах), равное числу нормированных невязок, можно также получить геометрическим суммированием этих невязок.
Для получения достаточно достоверных величин и следует учитывать невязки, полученные при предельных ошибках обсервованных мест, не превышающих ОД—0,5 величин невязок.
Определение элементов течения по навигационным пособиям. Из навигационных пособий могут быть выбраны:
— элементы суммарного течения — для открытых частей океанов и морей без приливов; эти элементы приводятся в пособиях в зависимости от сезона или поля ветра, указываемого в прогнозе погоды;
— элементы составляющих суммарного течения (постоянного, приливо-отливного и ветрового течений) — для морей и прибрежных частей океанов со значительными приливо-отливными течениями. В некоторых случаях — для мелководных районов или районов узкостей в посо
биях приводятся элементы только двух соста-
вляющих суммарного течения (без элементов ветрового течения). Век-
тор суммарного течения находится геометрическим суммированием составляющих векторов на каждый час плавания;
— элементы приливо-отливного течения — для районов, где эти течения имеют преобладающее значение.
В качестве основы для составления пособий использованы статисти
ческие материалы, соответствующие вполне определенным или средним гидрометеорологическим и астрономическим условиям. Вероятность строгого повторения этих условий в дальнейшем крайне мала, и поэтому точность определяемых скоростей и направлений течения во многих случаях не удовлетворяет требованиям кораблевождения.
Учитывая течение, элементы которого выбраны из навигационных пособий, следует при всякой к тому возможности корректировать эти элементы по невязкам счислим ых мест.
Порядок решения основных задач при учете течения. Основными задачами, решаемыми при учете течения, являются:
1. Определение пути и истинной скорости при известных истинном курсе и скорости по лагу.
2. Определение компасного курса и истинной скорости при известном заданном пути.
3. Нанесение счислимого места по известному расстоянию, пройденному относительно воды.
20 Заказ J833
306
Глава 1L Учет дрейфа и сноса течением
4. Вычисление времени и отсчета лага для заданного упрежденного места.
5. Расчет траверзного и кратчайшего расстояний до ориентиров.
Указанные задачи приходится решать при счислении вручную, а часть задач и при счислении с помощью автопрокладчика.
Решение перечисленных задач при счислении вручную связано * с построением двух треугольников:
— скоростного, сторонами которого являются вектор скорости Ул корабля относительно воды, скорости течения и истинной скорости V относительно дна;
— путевого, или навигационного, подобного скоростному, но со сторонами, равными произведениям указанных выше скоростей на время t плавания корабля.
Определение пути и истинной скорости при известных истинном курсе и скорости по лагу. Задача решается в следующем порядке:
а) от исходной точки А учета течения по линии истинного курса прокладывается вектор Ул скорости корабля (рис. 124) относительно воды в масштабе, выбранном для построения треугольника;
б) из конца вектора УД прокладывается вектор течения = ВС\ в) через точки А и С проводится прямая, соответствующая -пути корабля; искомые путь /7Ур и истинная скорость У получаются’ простым измерением по карте.
Путь /7Ур может быть также вычислен по формуле (9. 3).
Из рис. 124 видно, что в данном случае для определения /7Ур и скорости У решается геометрическое равенство
^ = 7л + ^т.
Определение компасного курса и истинной скорости при известном заданном пути. При решении данной задачи вначале должен быть определен истинный курс, для чего на карте производятся следующие построения (рис. 125):
а) от исходной точки А прокладывается линия пути /7У, корабля;
б) из той же точки прокладывается вектор течения ит = АС в произвольно выбранном масштабе;
в) из конца вектора течения циркулем, имеющим раствор, равный скорости Ул корабля относительно воды, засекается линия пути;
г) искомый истинный курс соответствует направлению прямой СЕ, проведенной из точки А.
Искомая скорость V относительно дна и истинный курс ИК снимаются с карты после построения.
§ 67. Учёт течения
307
Компасный курс вычисляется по формуле КК=ИК-ЬГКа или, при управлении кораблем по магнитному компасу, КК = ИК-ШК.
Угол р при решении данной задачи называется поправкой на течение.
Нанесение счислимого места по известному расстоянию, пройденному относительно воды. Для нанесения счислимого места корабля необходимо по показаниям лага или по скорости и продолжительности плавания вычислить расстояние 5Л, пройденное кораблем относительно воды
$л — (ОЛ2 ОЛ|) кл
или
5Л - Уоб /.
Расстояние снимается с боковой рамки карты и прокладывается по линии истинного курса. Полученная на линии истинного курса (рис. 126) точка В сносится по направлению течения на линию пути; точка С, полученная на этой линии, и будет счислимым местом.
А
Рис. 127
При резкопеременном маневрировании, связанном с частыми изменениями курса и скорости, на карте прокладываются только линии истинных курсов; плавание по лагу прокладывается по этим линиям. Снос течением учитывается периодически один-два раза в час как дополнительное плавание по направлению течения на расстояние ST =
Вычисление времени и отсчета лага для заданного упрежденного места. Заданное счислимое место С (рис. 127) наносится на линии пути, например, как точка начала поворота на новый курс или точка пересечения линии заданного пеленга какого-либо ориентира и т. п. Затем точка С переносится на линию истинного курса в направлении, противоположном течению. Искомое расстояние 5Л измеряется от точки А начала лежания на данном курсе или от какой-либо другой ранее нанесенной точки. Разность отсчетов лага рол, соответствующая этому расстоянию,, вычисляется по формуле
Р°Л = 4г • «л
Для расчета продолжительности плавания t от предшествующей точки применяется формула
Г Ул *
Если расстояние 5Л выразить в кабельтовых, а скорость корабля в кбт)мин, то время t будет получено в минутах.
20*
308
Глава 11. Учет дрейфа и сноса течением
Для получения момента Т по часам и отсчета лага прихода корабля в счислимую точку С величины i и рол суммируются с соответствующими значениями времени и отсчетом лага в исходной точке.
Расчет траверзного и кратчайшего расстояний до ориентира. Диаметральная плоскость корабля, перемещающегося по линии пути, сох-
раняет направление, равное истинному курсу, поэтому траверзное расстояние DTp соответствует положению ориентира на курсовом угле 90°, а кратчайшее расстояние DKP — углу 90°, отсчитанному от линии пути.
N Определяя траверзное или
(М кратчайшее расстояние, необхо-
димо вначале рассчитать истинный пеленг ориентира, прибавляя к курсу или вычитая из него 90°— для расчета траверзного расстояния и к пути — для расчета кратчайшего расстояния.
Вычисленный пеленг прокладывается от места ориентира Е до пересечения с линией пути, в результате чего получаются счисли-мые места Ci и С2 (рис. 128). Эти
места переносятся на линию истинного курса по направлению, обратному течению. Момент и отсчет лага для точки С\ или С’2 определяются так же, как в предыдущей
задаче.
Учет течения при аналитическом счислении, выполняемом вручную. При аналитическом счислении, выполняемом вручную, для получения координат счислимого места течение учитывается как дополнительное плавание по направлению течения. Численная величина перемещения корабля равна произведению скорости течения на время его учета.
Учет течения с помощью автопрокладчика. С помощью автопрокладчика при учете течения решаются только две задачи: определение пути корабля при известном курсе и определение координат текущего счислимого места. Остальные задачи решаются вручную на карте, закрепленной на верхней крышке прибора.
В зависимости от типа автопрокладчика учет течения может быть произведен двояко:
— вводом скорости и направления течения в счетно-решающее устройство;
— вводом поправок в направление движения корабля и пройденное расстояние.
При использовании первого способа счетно-решающее устройство вырабатывает скорости перемещения корабля по меридиану VN и параллели V Е по формулам:
VN == Уя cos + vt cos ^Т’
VE = Ул sin ИК + sin К^
где Ул и ИК — скорость корабля относительно воды и истинный курс корабля.
Если автопрокладчик не имеет узла для выработки составляющих vT cos Кт и sin КГ то для учета течения необходимо вручную
§ 68. Совместный учет дрейфа и сноса течением 309
построить скоростной треугольник и определить из него угол сноса р и истинную скорость V. Затем угол ₽ алгебраически суммируется с постоянной поправкой гирокомпаса, в результате чего получается поправка курса
Величина А^ со своим знаком устанавливается на автопрокладчике вместо постоянной поправки гирокомпаса.
Для учета изменения скорости корабля под действием течения на приборе поправок вместо поправки лага устанавливается поправка скорости в процентах, вычисляемая по формуле
V — V’ AIZ ------100,
где V — истинная скорость;
У'л — скорость по лагу без учета его поправки.
При резкопеременном маневрировании течение учитывается дополнительным смещением карандаша пишущего устройства на величину, равную произведению скорости течения на время его учета; направление этого смещения совпадает со скоростью течения.
§ 68. СОВМЕСТНЫЙ УЧЕТ ДРЕЙФА И СНОСА ТЕЧЕНИЕМ
При решении данной задачи следует различать два случая:
1) когда угол дрейфа и элементы течения известны и учитываются раздельно;
2) когда известен только суммарный снос.
Первая задача при счислении вручную должна решаться в следующем порядке:
а) когда известен курс, а находится путь ПУС корабля — вначале должен быть учтен дрейф, а затем течение. Скорость Ул корабля по лагу в скоростном и путевом треугольниках должна быть направлена по линии ПУа (рис. 129);
б) когда известен путь ПУС корабля, а определяется курс — вначале должно быть учтено течение, а затем дрейф. Учтя течение построением треугольника, как показано на рис. 130, получают ПУ^ для расчета истинного курса из пути ПУа алгебраически вычитается угол дрейфа.
310 Глава 11, Учет дрейфа и сноса течением
При счислении, выполняемом с помощью автопрокладчика, на приборе устанавливаются:
а) на автопрокладчике, имеющем узел для учета течения, вместо постоянной поправки гирокомпаса устанавливается поправка курса АЛ‘в = А/7СП + а, а на шкалах элементов течения устанавливаются его скорость и направление;
б) на автопрокладчике, не имеющем узла для учета течения, вместо постоянной поправки гирокомпаса устанавливается поправка курса Aftc, равная алгебраической сумме постоянной поправки гирокомпаса, угла дрейфа а и сноса течением р, а вместо поправки лага устанавливается поправка скорости, вычисляемая так же, как при учете одного течения.
Когда известен вектор суммарного сноса vc, определяемый с помощью гидроакустического лага или по невязке счислимого места, учет этого вектора производится по правилам, изложенным для учета течения.
Часть IV
ОПРЕДЕЛЕНИЕ МЕСТА КОРАБЛЯ
Глава 12
ОБЩИЕ ОСНОВЫ ОПРЕДЕЛЕНИЯ МЕСТА КОРАБЛЯ В МОРЕ
§ 69. ИЗОЛИНИИ И ЛИНИИ ПОЛОЖЕНИЯ
Во время плавания на корабле ведется непрерывное счисление пути. Однако ошибки в учете дрейфа, сноса течением и в поправках приборов, по которым ведется счисление, не позволяют иметь истинное место корабля. Поэтому необходимо постоянно контролировать счисление путем определения места по ориентирам (береговым или небесным), положение которых известно. При определении места используются параметры, независимые от элементов, учитываемых в счислении пути.
Определение места корабля является важнейшей задачей кораблевождения, основывающейся на использовании результатов инструментальных измерений различных физических величин, относящихся к навигационным параметрам. Эти параметры U являются функциями координат (ф, X) определяемого места
^ = /(<Р, М-
Каждому такому параметру соответствует изолиния вполне определенного вида, являющаяся геометрическим местом точек, в которых данный навигационный параметр имеет одно и то же значение. При решении навигационных задач, связанных с определением места, используются следующие изолинии:
— геодезическая, или кратчайшая линия (на поверхности эллипсоида), или ортодромия (на поверхности сферы)—при измерении направления — пеленга или дирекционного угла U на корабль от береговой точки Е (рис. 131);
— изоазимута, или линия равных пеленгов (изопеленга) — при измерении пеленга (азимута) А с корабля на ориентир Е (рис. 132). Изоазимута является геометрическим местом вершин равных сферических
314
Г лава 12. Общие основы определения места корабля
углов А между истинными меридианами и кратчайшими линиями, проходящими через объект наблюдений и место наблюдателя;
— сферическая изогона — при измерении горизонтального угла Р между ориентирами 4 и В (рис. 133); при измерении разности азимутов светил вместо ориентиров должны использоваться полюса освещения светил. При малых расстояниях до ориентиров сферическая изогона обращается в окружность;
— изостадия — при измерении расстояния D до ориентира Е (рис. 134). При небольших расстояниях изостадия обращается в окружность, имеющую радиус, равный измеренному расстоянию;
— круг равных высот—при измерении высот светил. Все точки круга равных высот удалены от полюса освещения, т. е. проекции светила на поверхность Земли на одно и то же расстояние, соответствующее зенитному расстоянию светила;
— сферическая, или сфероидическая гипербола—при измерении разности расстояний до двух ориентиров А и В (рис. 135), лежащих в фокусах гиперболы;
— эллипс — при измерении сум- /уч.
мы расстоянии до двух точек, находящихся в фокусах эллипса;
— изодопа, или кривая равных скоростей а, Ь, с сближения наблюдателя с каким-либо ориентиром или удаления от этого ориентира,
Рис. 136
Рис. 135
например, с искусственным навигационным спутником Земли (НИСЗ) — при измерении допплеровской частоты. Для всех точек этой довольно сложной кривой, представляющей собой след пересечения поверхности конуса с поверхностью эллипсоида, общим является постоянство радиальной скорости Vr (рис. 136) сближения с ориентиром;
— изобата, или кривая равных глубин — при измерении глубины моря.
§ 69. Изолинии и линии положения
315
Могут быть также и другие изолинии, удовлетворяющие постоянным значениям различных навигационных параметров, например, скоростям изменения расстояний, пеленгов ориентиров, азимутов светил и т. п.
Ограниченный по длине отрезок любой изолинии за малостью его кривизны может быть заменен отрезком прямой, называемой линией положения. Уравнение линии положения имеет вид
аДср + bbw — Ш = 0 (12. 1)
или
cos тДср sin^Aw — п = 0, (12. 2)
W а = (g)c и b = (|)с• - коэффициенты;
Дер и До; — разности координат точек, лежащих на линии положения, и координат счислимого места;
Д£7 = Uo — Uc — разность между измеренным и счислимым значениями навигационного параметра;
тип — полярные координаты определяющей точки К (рис. 137), через которую проходит линия положения перпендикулярно отрезку СК\ отрезок п называется переносом линии положения.
Коэффициенты а и b равны частным производным уравнения изолинии в счислимой точке по координатам с и X соответственно. Так, например, при измерении расстояния до ориентира функция его в зависимости от координат места ср, X и координат ориентира ср£, у.
имеет вид У.
cos D = sin <pfsin ?-г у.
-г cos cpf cos <р cos (Х£ — X).
Частные производные этой функции \
, df 1 Л с --------
а = Wc и b = 5Г7БГГ бУдУт Равны с°- \
ответственно — cos А и — sin А, где А — ортодромический пеленг на ориентир Рис. 137
от счислимого места.
Для случая измерения разности расстояний, когда г = D2 — Dit эти же производные будут:
а = (*)е = C°S “ C°S
Ь = — = sin А2 — sin А,.
OK COS ? z
Величины cost, sinx и п определяются выражениями:
cos ~ = Уа2 + б2 > sinx = / ь — ; у/ а2 + А2 г Uo-Uc ЬЦ
У& + & +
Обозначив Vа2 -Ь Ь2 через g получим
(12.3)
316
Г лава 12. Общие основы определения места корабля
Коэффициент пропорциональности g между разностью измеренного и счислимого параметров и переносом линии положения п называется градиентом данного навигационного параметра или градиентом изолинии (линии положения).
В общем случае вместо разности £70—Uc в формуле (12.3) можно учесть любое приращение или ошибку навигационного параметра и тогда вместо переноса п получим смещение или ошибку линии положения
Дл = у. (12.4)
Градиент относится к важнейшим характеристикам линии положения (изолинии) и является векторной величиной. Вектор градиента направлен по нормали к линии положения „g (рис. 138) всегда в сторону возра-
стания навигационного параметра. -------------------------//+д{7 Во многих случаях решения J------------------------практических задач используются
градиенты, повернутые на 90° по на-___________ЛЬ__________и правлению движения часовой стрелки. Векторы повернутых градиентов
Рис. 138 совпадают с линиями положения
или параллельны им.
Модуль или численное значение градиента определяется по формуле ' <12.5)
или более строго
г - - /(й + <12- 6>
Градиенты имеют размерность в единицах навигационного параметра на единицу расстояния, соответствующего смещению линии положения по перпендикуляру к изолинии, например, градусов на милю, минут на метр и т. д. Градиенты некоторых параметров выражаются отвлеченными числами.
Для расчета модулей градиентов g и углов т применяются следующие формулы.
Градиент направления (пеленга) на корабль. При решении задачи на плоскости:
g == радиан на единицу расстояния; (12. 7)
g == градусов на единицу расстояния; (12. 8)
g = ^§MHHyT на единицу расстояния; (12.9)
т = (7-г 90°. (12.10)
При решении задачи на сфере:
g = J-p минут на милю, (12.11)
L7-M + 9O0, (12. 12)
где D — расстояние до ориентира;
U — ортодромический пеленг на корабль;
7 = (Х^ — Xf) sin <pm — схождение меридианов.
£ 69. Изолинии и линии положения
317
Пример. По числу сигналов, принятых от секторного радиомаяка, с помощью таблиц определен пеленг на корабль {7 = 310° (рис. 139).
Вычислить модуль и направление градиента пеленга, если расстояние до радиомаяка D = 300 миль (5°), долгота радиомаяка Х£ = 43°25' Ost, долгота прибли-
женного места корабля X^.= 31°50' Osi и средняя широта vm = 70°N.
Решение. 1) Вычисляем модуль градиента на сфере
g-—.—=т> = 11,4 на милю;
s sin 5° ’
2) вычисляем схождение меридианов и направление вектора g:
7 = (Х^ _ Х£) sin 70° = —10°8;
т = U + I + 90° = 29°2.
Решая ту же задачу на плоскости, получим:
3438 57,3
*=збо=п>4 на “илю или *=300
= 0? 19 на милю;
т = U + 90° = 40°0.
Градиент направления (пеленга) ориентира, измеренного с корабля. При решении задачи на плоскости формулы для расчета модуля градиента те же, что и для направления (пеленга) на корабль
Т = А - 90°.
(12. 13)
При решении задачи на сфере
g = j/"tg2<p 4- ctg2Z) — 2tg?ctg£> cos Л (12. 14)
или _ _ _
g = (12.15)
где А — ортодромический пеленг с корабля;
<р — широта места наблюдателя;
D — расстояние до ориентира;
^ = tg?;
gA, = ctg£>.
Угол х при решении задачи на сфере вычисляется по формуле (12. 13). Если же для нахождения градиента строится чертеж в соответствии с формулой (12. 15), то угол т измеряется как направление вектора g.
Пример. В точке К с широтой <р = 70° N измерили радиопеленг А = 115,0 на радиомаяк Е (рис. 140), находящийся на расстоянии D = 370 миль (6° 10') от корабля.
Определить градиент g и его направление.
Решение. 1) Вычисляем модуль градиента на плоскости:
57,3
g~ 370
= 0°155 на милю,
т = Л —90° = 25°;
2) на сфере возможны два решения:
—- аналитическое по формулам (12.14) и (12.13)
g = у tg270° + ctg2 6° 16' —2 tg 70° ctg 6° 10' cos 115° = 10J4 на милю,
т===Л —90° = 25°;
318
Г лава 12. Общие основы определения места корабля
— графическое по формуле (12. 15)
Sv = tg<p=»2',75 на милю, = etg О = 9,'2б на милю.
Векторы g и gAl прокладываются: первый по направлению на Северный полюс Земли, т. е. по пеленгу 0°, а второй — по пеленгу 115° (рис. 141).
На чертеже в масштабе, принятом для прокладки векторов > ✓ £р и gAX> измеряем величину g и направление увеличенное
j на 90° (вектор g, как и векторы g? и gAi, повернут на 90°
। / по часовой стрелке). Получаем:
^=10'7 на милю;
Н/ < = 129°;
I/V т = т' — 90° = 39°.
Вектор g независимо от величины угла А всегда на-правлен от конца вектора к концу вектора gA.
Градиент горизонтального угла, измеренного между двумя ориентирами. При аналитическом решении е*' задачи градиент вычисляется по формулам:
Рис. 141 3438 а
g = минут на единицу расстояния; (12. 16)
£/] L/2
Т = А + В - 90°.
(12. 17)
При графическом решении строится чертеж, удовлетворяющий равенству
g^gx-gt-
Угол х измеряется на чертеже.
В формулах (12.16) — (12.18):
а — база (расстояние) между ориентирами;
А и А — расстояния до ориентиров;
8 = arc tg тгтз:-: угол меж-
ду линией пеленга на левый ориентир и направлением вектора g\
о. — измеренный горизонтальный угол;
gi и g2 — градиенты прямых засечек, вычисляемые по формуле (12. 9).
Решая задачу на сфере, градиенты засечек gi и g2 для построения чертежа в соответствии с формулой (12. 18) следует брать gi = etg A, g2 = etg D2.
Пример. Определить модуль и направление градиента горизонтального угла а = 30°, если расстояния до левого и правого ориентиров равны £>] = 12 kai и О2=7 км (рис. 142), база между ориентирами а = 7 км, а направление А на левый ориентир равно 20°.
Решение. 1) Вычисляем модуль и направление градиента
3438 а 3438-7
g DtDi - 7-12-1000
= 0J286 на метр,
§ 69. Изолинии и линии положения
319
tp 5 — „в*11 а_12 «ОЛ_______4-1 74 & — 4-60 ° 2
g6_D1 cos a~D2~ 12.0,87 — 7 ~+1’74’
т = А + & — 90° = 350'2;
2) решая ту же задачу графически, получим;
3438 3438 Л,по<,
S' = -07 = 124000 = 0)286 на метр-
3438 3438
*2 = 757 =74666 = 0)491 на метр-
Прокладываем градиенты засечек в выбранном масштабе по направлениям Ai =20° и Л2 —ЛИ- « = 50° (рис. 142). В том же масштабе на рисунке измеряем модуль градиента g= 0^286 на метр.
Для определения угла т измеряем предварительно угол т' — А 4- В = 80,5, а затем вычисляем искомый угол т-т' —90° — 350°5.
В тех случаях, когда решаемая задача не связана с учетом величины угла т, градиенты засечек можно прокладывать по произвольным направлениям, но так, чтобы угол между ними соответствовал заданному или измеренному.
На практике для определения градиента угла обычно применяется графический способ.
Если горизонтальный угол измерялся между ориентирами, находящимися от наблюдателя на больших расстояниях, например, между небесными светилами, то для определения градиента такого угла применяется также графический способ, аналогичный рассмотренному в последнем примере. Градиенты засечек gi = ctg Dv и g2 = ctgD2 прокладываются в выбранном масштабе по направлениям на светила; величины Di> и D2 должны быть равны зенитным расстояниям светил.
Градиент расстояния. При угловой высоте ориентира, близкой к нулю:
g=l; т = 180°. (12.19)
При угловой высоте ориентира Ав:
g = sin zB;
т = Д4-180°, (12.20)
где zB == 90е — hB — зенитное расстояние;
А — пеленг ориентира.
Градиент угловой высоты ориентира. При высоте ориентира над поверхностью Земли Я, во много раз превышающей радиус Земли:
g = 1; т = (12.21)
При Н, меньшей радиуса Земли
g ------------5--------минут на милю; т = А. (12. 22)
। _ COS 2*в
“У(1 4-^)2 — sin2zB
При Я, значительно меньшей радиуса Земли (вертикальный угол измерялся над видимым горизонтом)
g = минут на милю; т == Л. (12. 23)
При Я, значительно меньшей радиуса Земли (вертикальный угол измерялся над основанием ориентира)
g = ^77 минут на милю; т = А. (12. 24)
320
Глава 12. Общие основы определения места корабля
В формулах (12. 21 — 12. 24):
г8 = 90° — Лв — зенитное расстояние;
d = i, здесь R = 6400 км — радиус Земли; к
D — расстояние до ориентира в милях;
₽ — вертикальный угол над истинным горизонтом (дуг. мин);
а — вертикальный угол над основанием ориентира (дуг. мин);
Н — высота ориентира в километрах для формулы (12. 22) и в метрах для формулы (12. 24).
Градиент разности расстояний.
о • ш g => 2sin 2-;
= 4+j4?±9(Fi
(12.25)
(12. 26)
где Л! и А - истинные ортодромические пеленги ориентиров; о = А2 — Д] — позиционный угол.
В формуле (12.26) знак (+) или (—) берется так, чтобы получить направление в сторону возрастания разности расстояний.
Пример. Вычислить модуль и направление градиента разности расстояний, если^ортодромические пеленги ориентиров от места корабля равны: Л| — 255°, А2 = 200°; корабль находится в точке К, расположенной относительно ориентиров и Е2, как показано на рис. 143.
Решение, g = 2 sin = 2 sin 27°5 — 0,914;
г = Л| ? А‘ — 90° = 227°5 — 90° = 13725.
В данном примере при угле 90° взят знак минус, так как при показанном на рис. 143 расположении точки К относительно ориентиров именно вправо от нормали к базовой линии разность расстояний увеличивается.
Градиент суммы расстояний.
g = 2 cos | ; (12. 27)
- = 4l+J?±i80\ (12.28)
Градиент глубины*
ДН
g = др единиц глубины на единицу расстояния.
Угол т измеряется по направлению, перпендикулярному изобате в заданной точке, в сторону увеличения глубины.
При использовании карт и планшетов с сетками любых изолиний модуль градиента g — ~^~ может быть вычислен по разности A U (рис. 144) оцифровок изолиний вблизи заданного места С и кратчайшему расстоянию Дп между соседними изолиниями.
Угол т измеряется по нормали к изолинии в сторону возрастания отсчета навигационного параметра.
§ 70. Способы обработки навигационных параметров и определение места 321
Пример. Приближенное место в точке у = 36°М Х=16°ОЧ
Определить модуль градиента g разности расстояний и угол т для пары станций Лоран-С SL1-Y.
"Решение. 1) Измеряем расстояние между гиперболами, имеющими оцифровку 35100 и 35150 мксек и угол т по нормали к гиперболе 35100. Получаем Дл — 10,2 мили, ДГ/ = 50 мксек и т = 304^5;
2) вычисляем модуль градиента
Д£/ 50 л о
g — д^- = = микросекунды на милю.
Методический недостаток способа линий положения, состоящий в замене отрезка любой изолинии прямой линией, в некоторых случаях приводит к необходимости введения поправок в параметры линии положения или к повторному решению задачи на расчет типе координатами места, полученного при первоначальном решении с использованием счислимых координат. Кроме того, иногда бывает необходимо (при больших величинах п) учитывать кривизну линии, по которой откладывается перенос п. Порядок введения поправок в параметры линий положения рассматривается в § 80.
Если в формулу (12.4) вместо приращения Д(7 навигационного параметра подставить среднюю квадратическую ошибку пги этого параметра, то получим среднее квадратическое смещение линии положения
= (12.29)
Su
Величину /плл называют ошибкой линии положения.
При малых изменениях навигационного параметра линия положения смещается, практически не изменяя своего направления.
Весом линии положения называется величина, обратная квадрату ее средней квадратической ошибки
лп=4- (12-3°)
тлп
Но так как шлп == ,
то
= (12.31)
ти
Из последней формулы видно, что вес линии положения тем больше, чем больше ее градиент и чем меньше средняя квадратическая ошибка измерения навигационного параметра.
§ 70. СПОСОБЫ ОБРАБОТКИ ИЗМЕРЕННЫХ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ПРИЕМЫ ОПРЕДЕЛЕНИЯ ВЕРОЯТНОГО МЕСТА
Способы обработки измеренных навигационных параметров для определения места. Для обработки измеренных навигационных параметров с целью определения места применяются три способа: аналитический, графо-аналитический и графический.
В аналитическом способе определяются координаты искомого места непосредственно, или поправки Дх и Д«/ к координатам счислимого места. В последнем случае искомые координаты х и у получают по формулам:
х = хс 4- Дх;
У = Ус + ДУ-
21 Заказ 1833
322
Г лава 12. Общие основы определения места корабля
Если задача решается в географической системе координат, то
<? = ?с + Д?;
х = хс + дх.
Аналитический способ является основным при' машинном решении навигационных задач. Обычно применяется наиболее простой вариант этого способа, связанный с вычислением поправок Дер и ДХ координат относительно счислимого места. Вычисление координат трудно осуществимо даже в быстродействующих машинах, так как при этом должны совместно решаться уравнения изолиний, в которых искомые координаты связаны с навигационными параметрами довольно сложными соотношениями.
При графо-аналитическом способе задача частично решается аналитически, а затем производятся графические построения на карте или листе бумаги.
В процессе графо-аналитического решения для каждой линии положения должны быть вычислены:
а) навигационный параметр Uc для счислимого места;
б) разность Uo — Uc между измеренным и счислимым параметрами с соответствующим знаком;
в) модуль градиента g измеренного параметра;
г) перенос п = и°~^с линии положения; знак переноса совпадает со знаком разности Uo — Uc.
Линия положения прокладывается по вычисленным элементам тип. Перенос п (рис. 137) откладывается по направлению т, если он положителен, и в сторону, обратную т, если он отрицателен.
Расчет тип может производиться как вручную, так и с помощью вычислительных машин.
Графо-аналитический способ является основным при обработке наблюдений для определения места по высотам небесных светил. Этот же способ применяется при машинном решении задач, когда место определяется по разнородным линиям положения.
При графическом способе производятся только графические построения; аналитические вычисления отсутствуют вообще или сведены к минимуму.
Графические построения, связанные с прокладкой линий положения, производятся на картах с помощью прокладочного инструмента или на картах с сетками соответствующих изолиний. Изолинии широко применяются при определении места с помощью радионавигационных систем.
Так как для нанесения точки на плоскость должны быть известны две ее координаты, то для определения места корабля необходимо знать не менее двух навигационных параметров.
Если навигационные параметры, по которым определяется место, измерены одновременно или через малые промежутки времени и приведены к одному моменту, то полученное место называют обсервованным. Если же навигационные параметры измерялись разновременно при значительном промежутке времени между моментами измерений, то полученное место называют счислимо-обсервованным.
Малыми можно считать такие' промежутки времени, при которых ошибки счйсления в 2—3 раза меньше ошибок линий положения и практически не будут сказываться на точности определяемого места. Для большинства навигационных способов определения места эти промежутки можно считать равными 5—10 мин.
§ 70. Способы обработки навигационных параметров и определение места 323
Для определения места, линии положения, соответствующие разновременно измеренным навигационным параметрам, должны быть приведены к одному зениту (месту). Это приведение выполняется графическим или аналитическим способом.
При графическом способе приводимая линия, например линия 1—1 (рис. 145), должна быть смещена по линии пути на расстояние AS, равное плаванию корабля за время между моментом измерения пара-осу ществляется приведение. Пря-
метра Ui и моментом, к которому мая Г—Г проводится параллельно линии /—I.
Моментом, к зениту которого приводится линия положения, обычно является момент измерения последнего навигационного параметра.
Аналитическое приведение линии положения к одному зениту осуществляется введением поправки Дп в перенос п. Поправка Дп, являющаяся проекцией отрезка пути корабля AS на линию переноса п (рис. 146), вычисляется по формуле
Дп = AScos (т-/7У). (12.32)
Знак Дп совпадает со знаком cos(t—ПУ). Так, при скорости корабля V = 24 уз, ПУ — 120°, т=10° и продолжительности плавания между моментами измерения параметров t — 5 мин, получим Дп = 4.5cos(10—120°) =20cos 110° = —6,8 кбт или —0,68 мили.
Определение вероятного места. При измерении двух навигационных параметров и обработке измерений графическим или графо-аналитическим способом место корабля принимается в точке пересечения линий положения, которая достаточно уверенно находится при угле пересечения линий не меньше 20—30°.
При аналитическом способе обработки измерений поправки координат счислимого места вычисляются из решения системы уравнений двух линий положения. Эти уравнения имеют вид:
— при измерении однородных навигационных параметров
^Дф + — ДЬ\ = 0;
а2Дф + b2hw — А£72 = 0,
— при измерении разнородных навигационных параметров cos + sin TjAw — nt = 0;
cos т2Дф + sin t2Az0 — n2 = 0.
Определение места с использованием только двух линий положения не дает возможности проконтролировать качество измерений навигационных параметров и обнаружить ошибки или даже промахи в измерениях. Такой контроль возможен только при наличии хотя бы одной избыточной линии положения.
21*
324
Г лава 12. Общие основы опреоеления места корабля
При наличии трех и более независимых линий положения на карте получается некоторая фигура погрешности, например, треугольник при трех линиях положения. Если число линий положения больше трех, то получаемая фигура будет многоугольником с числом k точек их пересечения (вершин фигуры погрешности), равным числу сочетаний из п линий по две
_ п(п — 1) к ” 2
Фигура погрешности малых размеров дает основание предполагать наличие в линиях положения преимущественно малых ошибок. Появление же большой фигуры погрешности свидетельствует о наличии промаха в измерениях, или о наличии ошибок в их обработке, или о неточностях карты, или, наконец, о наличии значительной ошибки в поправке измерительного прибора. Повторив более тщательно измерения и воспользовавшись другой комбинацией ориентиров, можно более уверенно судить о возможной причине появления большой фигуры погрешности.
При анализе фигуры погрешности рекомендуется учитывать характерные особенности проявления различных ошибок, приведенные в табл. 28.
Таблица 28
Ошибки Изменение фигуры погрешности при повторных измерениях навигационных параметров
Систематическая (по- При трех линиях положения
вторяющаяся) ошибка треугольник не устраняется и форма его изменяется мало. При четырех линиях положения фигура погрешности изменяется мало; относительное расположение линий .положения остается неизменным
Промах в измерении, Размеры фигуры погрешности
ошибка в обработке или в опознании ориентира резко уменьшаются
Ошибки в нанесении При использовании другой
мест ориентиров на комбинации ориентиров фигура
карте погрешности резко уменьшается. При использовании той же комбинации ориентиров форма и размеры фигуры погрешности изменяются довольно быстро
Во многих случаях для выявления действительной причины появления большой фигуры погрешности требуется, чтобы наблюдения и прокладка линий положения были произведены 3—4 раза с использованием различных комбинаций ориентиров. Особенно сложно обнаружить ошибки в нанесении ориентиров на карте, так как при повторных измерениях тех же параметров через малый промежуток времени изменения фигуры погрешности аналогичны таковым при наличии повторяющейся ошибки. Чтобы исключить проявление данной причины штурман должен тщательно изучать навигационное оборудование района и знать естественные ориентиры, положение которых на карте не вызывает сомнений.
Определение вероятного места при наличии преимущественно случайных ошибок в линиях положения. В данном случае вероятное место F
§ 70. Способы обработки навигационных параметров и определение места 325
(рис. 147) должно удовлетворять принципу наименьших квадратов, согласно которому сумма квадратов уклонений этого линий положения минимальна.
Вероятное место может быть найдено аналитическим и графо-аналитическим приемами.
Аналитический прием состоит в решении системы уравнений не менее чем трех линий положения по способу наименьших квадратов. Уравнения этих линий с учетом случайных (неизвестных) ошибок измеренных навигационных параметров и их средних квадратических значений имеют вид
рр,^ + pfi^-w — p^i PiVh
места от всех
где Pi = Д-----веса линий положения; L = — UCt
m,ni ''
Искомые поправки Дер и ДХ к координатам счислимого ляются решением двух нормальных уравнений
[раа] Дер + \pab\ Дад — [paZ] — 0 1
\pab] Д<р + [pbb] Дта — \рЫ\ 0 )
где [раа] = р,а[ + р2а% + ... + рпа2п
[раЬ] = pxa,bl + p2a2b2 + . . . + pnanbn
\pbb\ = ptf + р2Ь1 + . . . 4- pn&n
[pal] = pIa,Z1 +p2a2l2 + . . . +pna„l„
[pbl\= Pibji + p2b2l2 + . . . +p„b„l„
[pal] \pbb] — [pbl][pab] Y {Paa\ [PM] — [pab]2
A) _ [pab}
' iP<u] [pbb\ — [pab}2 *
места вычис-
(12. 33)
(12. 34)
В тех случаях, когда измерялись разнородные навигационные параметры, нормальные уравнения и уравнения для вычисления поправок координат имеют вид
\р cos2 т] Дер + [р sin т cos т] Aw — [рп cos т] = 0 1
[р sin т cos т] Дер + [р sin2 т] Дда — [рпsin т] = 0 J
А — sin2 г] [Рп cos Т1 ~ IP sin г cos г1 lPn sta.т] [р cos2 т] [/? sin2 г] — [р sin т cos ?]2
АХ -= cos2 ^рп sin г-1 ~~ sin г cos Т1 ^рп cos г1 QPP о [р cos2 г] [р sin2 т] — [р sin т cos т]2 Y
Ввиду большого объема вычислений по определению
места аналитическим приемом, задача решается с помощью вычислительной машины.
Графо-аналитический прием имеет теоретической основой приведенные выше формулы для вычисления поправок координат. Практически применяются два варианта этого способа: центрографический и противо-медиан.
Центрографический способ универсален в том смысле, что его можно применять при любом числе линий положения и любом соотношении их весов. Основой способа являются уравнения (12.34) и (12.36).
(12. 35)
(12.36)
вероятного
326
Г лава 12. Общие основы определения места корабля
Получив на карте или листе бумаги фигуру погрешности, например треугольник АВС (рис. 148), необходимо:
1) Вычислить веса линий положения по формуле
2) Вычислить веса вершин фигуры погрешности по формулам:
= PiP2sin29r,
^A’Asin2 02;
Рс = PiP3sin2e3.
3) Разделить одну из сторон треугольника, например сторону АВ, на части, обратно пропорциональные весам вершин А и В. Для этого сторона АВ измеряется в миллиметрах и вычисляется удаление точки Е, делящей сторону АВ в указанном отношении, от одной из вершин (4 или В);
ЛЕ =
или
BE =
АВ.РК
Полученной точке Ё приписывается вес РЕ, равный сумме весов Ра и Рв.
4) Точку Е соединить с точкой С и полученную прямую разделить на части, обратно пропорциональные весам РЕ и Рс> в порядке, аналогичном изложенному выше для деления стороны АВ. Удаления вероятного места F от точек Е и С будут равны:
ЕС'рс
FP = -----------•
^А + РВ + РС ’
СЕ =
ЕС-РЕ
Ра + Рв + Рс ’
При большем числе линий положения процесс деления прямых должен быть таким, чтобы последовательно захватывались все вершины фигуры погрешности.
Прием проведения противомедиан может быть применен лишь в частных случаях определения места при трех линиях положения.
Если линии положения равноточны, то противомедианы проводят без учета весов сторон треугольника.
Противомедианой называется прямая, проведенная из вершины треугольника к противоположной стороне его и составляющая с примыкающей к ней стороной такой же угол а (рис. 149), какой с другой стороной составляет медиана.
§ 70. Способы обработки навигационных параметров и определение места 327
Проведя противомедианы CN и ВМ из вершин В и С треугольника, в точке их пересечения получим вероятное место F.
Если линии положения неравноточны, то искомое место должна находиться в точке пересечения взвешенных противомедиан. Чтобы провести взвешенные противомедианы, следует вычислить веса линий положения pi, р2 и р3 по формулам:
где шлп. — средние квадратические ошибки линий положения.
После этого одна из сторон треугольника, например АС (рис. 150), делится на части, пропорциональные весам двух других сторон ВА и ВС. Так, если веса сторон треугольника АВС равны р2 и р3, то сторону АС нужно разделить на части, пропорциональные весам pi и р2. Удаление точки jV, делящей сторону АС в указанном отношении от вершины А, вычисляется по формуле
AN =
AC’Pi
Pi + Pi
Взвешенная противомедиана Bf должна составлять со стороной ВС угол а = //ВС = Z.ABN.
Аналогично проводится другая противомедиана.
Анализ рассмотренных способов нахождения вероятного места показывает:
1) вес вершины фигуры погрешности тем больше, чем ближе к 90° угол пересечения линий положения;
2) вероятное место находится всегда внутри фигуры погрешности и располагается тем ближе к той линии положения и к вершине, у которых больше вес.
На основе приведенных выводов вероятное место при малом треугольнике погрешности с достаточной для практики точностью может быть нанесено на глаз.
Определение вероятного места при наличии в линиях положения преобладающих повторяющихся ошибок. Повторяющиеся ошибки линий положения, как и случайные ошибки, зависят от ошибок навигационных параметров и их градиентов.
328
Г лава 12. Общие основы определения места корабля
Приближенное суждение о величинах повторяющихся ошибок измерений может быть сделано на основании анализа точности поправок, учитываемых при исправлении результатов измерений. При этом ожидаемая средняя квадратическая повторяющаяся ошибка тппов навигационных параметров может быть вычислена по формуле
/П„ов - zn| + . . . +ffi2,
где /и,— средние квадратические величины ошибок в поправках, общих для всех параметров.
Так, при измерении визуальных пеленгов и радиопеленгов повторяющаяся ошибка будет практически одинакова во всех пеленгах и основными ее составляющими будут:
а) т{ = тпгк — средняя квадратическая ошибка, характеризующая устойчивость гирокомпаса в меридиане;
б) т2 = /пДГКп — средняя квадратическая ошибка определения постоянной поправки гирокомпаса;
в) тп3 =/Пу—средняя квадратическая величина изменения постоянной поправки гирокомпаса, зависящая от широты места.
При измерении высот светил навигационным секстаном повторяющаяся ошибка исправленных высот зависит от составляющих:
a) mi — md — средней квадратической ошибки наклонения горизонта, выбранного из таблиц;
б) /и2 = mt — средней квадратической ошибки учтенной погрешности индекса;
в) т3 — ms — средней квадратической ошибки инструментальных поправок секстана.
Численные значения составляющих т} и т3 в зависимости от разностей азимутов светил и измеренных высот могут быть близкими друг другу или значительно отличаться. Следовательно, повторяющиеся ошибки высот могут быть как одинаковыми, так и различными и оценить их величину с достаточно высокой достоверностью очень трудно.
Средние значения возможных повторяющихся ошибок различных навигационных параметров приводятся в приложении 6.
Малыми повторяющимися ошибками можно пренебрегать; при больших повторяющихся ошибках фигура погрешности увеличивается и для определения вероятного места эти ошибки необходимо исключить.
Решение данной задачи возможно только при наличии избыточных линий положения.
Уравнения четырех линий положения, обладающих одинаковыми повторяющимися ошибками d, имеют вид:
C0STrAcp + sin Aw = + d
C0ST2Acp + sinT2Aw tu + d
cosT3Acp + sin t3Aw = + d ( • )
cosx4A(p + sin t4Aw == -r d
Для решения этой системы уравнений относительно искомых поправок координат А ср и ДХ составляются два нормальных уравнения:
[ДД] А? + [ДВ) Aw - [Д£] = 0;
[ДВ] А? + [ВВ] Aw - [В£] - 0,
г л Л1 V? ( [COS
где [ДД] = у cos т, — j ;
Г л ni VV [cos t]\ / . [sin t]\
[дя] = 2j (cos —(sinT<- 4—
§ 70. Способы обработки навигационных параметров и определение места 329
[sin /
[ВВ] = 2 (sin
=2(cos''“
[^] — ----4— I У'Н 4" / •
Из уравнений получаем
д МА][ВВ]-[ЛВ] [BZ.]
f МА] [ВВ] — [ЛВ]2
_ [BZ1 [ЯЛ] —MB] [>LL]
[ЛЯ] [ВВ] -- [ЯВ]2
(12.38)
Повторяющуюся ошибку линий положения можно вычислить после вычисления поправок Дер и ДХ по формуле
. [cos '1 А . [sin т] А. [л!
а = а 4- а cos ф — Ц-•.
4 1 4 1 4
Приведенные формулы ввиду их сложности могут быть применены только при машинном решении задачи.
Более простой графический прием исключения повторяющейся ошибки из равноточных линий положения основывается на отыскании точки пересечения биссектрис углов, под которыми пересекаются линии положения. Уравнения этих биссектрис при четырех линиях положения имеют вид:
(cos tj — cos т2) + (sin Tj — sin ^2) Aw =- /г, — n2\
(cos t3 — cos ^4) Д<? 4- (sin t3 — sin x4) bw n2 — zi4.
Повторяющаяся ошибка для биссектрис, а следовательно, и для точки их пересечения равна нулю.
Для получения вероятного места следует проводить при возможности независимые биссектрисы из вершин фигуры погрешности, образованных различными линиями положения. Кроме того, вершины следует выбирать так, чтобы биссектрисы пересекались под углом, близким к прямому.
В зависимости от расположения ориентиров искомое вероятное место может быть как внутри, так и вне фигуры погрешности. Если ориентиры или взаимодействующие пары их расположены равномерно по всему горизонту, то вероятное место находится внутри фигуры погрешности; при сосредоточении ориентиров в одной половине горизонта место будет вне фигуры погрешности.
Чтобы определить, биссектрисы каких именно углов нужно проводить, рекомендуется из выбранной вершины фигуры погрешности провести отрезки прямых ab и ас по направлениям а затем делить угол между этими отрезками пополам, как это показано на рис. 151 для вершины а.
Так, если четыре линии положения пересекаются, образуя фигуру погрешности abedeg (рис. 152), и углы т, на определяющие точки для положительных переносов nt распределены по всему горизонту, то искомое место, свободное от систематических ошибок линий положения, должно быть внутри фигуры погрешности. Для его определения следует провести биссектрисы в вершинах а и е, так как в них линии положения пересекаются под минимальными углами; искомое место F будет в точке пересечения биссектрис.
В частном случае при расположении ориентиров по всему горизонту, когда углы Т/ попарно отличаются друг от друга на величины, близкие к 180°, искомое место F принимается в точке пересечения прямых ab
330
Глава 12. Общие основы определения места корабля
и cd (рис. 153), делящих противоположные стороны четырехугольника погрешности на равные части.
При трех линиях положения вероятное место находится в пересече-
нии зависимых биссектрис, так как
при их проведении неизбежно учи
тывается одна общая сторона треугольника. Порядок прокладки биссектрис aF и bF двух вершин треугольника погрешности abc показан на рис. 154.
$ 70. Способы, обработки навигационных параметров и определение места 331
Если вследствие различия ошибок dt линий положения веса их
Pi = -х- различны, то вместо биссектрис углов следует прокладывать di
отрезки прямых, делящих соответствующие углы на части, обратно пропорциональные весам линий положения, пересекающихся в данной вершине. Эти отрезки прямых называются взвешенными биссектрисами. Так, например, если две линии положения пересекаются в точке а под углом 100° (рис. 155) и повторяющиеся ошибки их равны d} = 1 миле и d2 = 1,5 мили, то веса этих линий будут:
Л= dp1:
А = -4 = 0-44.
*2
Взвешенная биссектриса должна проходить ближе к первой линии положения, так как вес этой линий больше. Угол а между первой линией и взвешенной биссектрисой должен быть равен
Определение вероятного места при наличии в линиях положения случайных и повторяющихся ошибок. Наличие случайных и повторяющихся ошибок и сложность, а часто и невозможность определения их конкретных величин или отношений с достаточно большой вероятностью приводят к тому, что точное решение задачи на определение вероятного места становится невозможным.
Поэтому во всех случаях определения места при наличии избыточных линий положения следует:
1) оценить хотя бы ориентировочно ожидаемые случайные и повторяющиеся ошибки линий положения;
2) сравнить вычисленные ошибки;
3) если одна из ошибок меньше другой в три и более раза, то эту малую ошибку следует отбросить и при нахождении вероятного места учитывать только большую ошибку (случайную или повторяющуюся), в соответствии с чем применяется один из изложенных выше приемов;
4) если случайные и повторяющиеся ошибки соизмеримы, т. е. отношение их превышает !/з, то для получения вероятного места необходимо:
— пренебрегая случайными ошибками, провести две биссектрисы или взвешенные биссектрисы и получить место Fi (рис. 156), свободное от систематической ошибки;
— пренебрегая систематическими (повторяющимися) ошибками, определить место F2 одним из приемов, например центрографическим, это место будет удовлетворять принципу наименьших квадратов;
— соединить точки F\ и Л прямой; искомое место F намечается на этой прямой на равных удалениях от точек Ft и F2.
Для получения наиболее достоверного вероятного места при наличии как случайных, так и повторяющихся ошибок в линиях положения рекомендуется выбирать ориентиры так, чтобы разности углов попарно были близки к 180° — при четырех линиях положения и к 120° — при трех линиях положения. Вероятное место в этих случаях находится внутри фигуры погрешности и определяется приемом, изложенным для исключения повторяющихся ошибок.
Определение вероятного места при наличии нескольких мест, приведенных к одному моменту. Если места Л, F2,..Fn корабля определены в моменты Т1, Т2,..., Т„ соответственно, то можно найти место, обла
332
Г лава 12. Общие основы определения места корабля
(12. 39)
дающее большей точностью, чем каждое из отдельных мест, принятых в расчет. Для решения поставленной задачи места Г2>..F„ должны быть приведены к одному моменту. Обычно таким моментом является момент определения последнего места.
Приведение к одному моменту проще всего осуществляется графически, для чего отдельные места смещаются по линии пути на расстояния AS/, равные произведениям истинной скорости V на промежутки времени Тп— 7} между моментом Тп, на который определяется вероятное место, и моментом Tt определения места.
Координаты <?0, Хо вероятного места вычисляются по формулам: ю | Pl А?! + Д<?2 + • • • + Рп Д<РЛ 1 _ v । Pt Д^1 + Рг Д^2 + • • • + Рп^-п ° + и
где и X' — координаты, равные минимальным значениям из соответствующих заданных координат;
Pt — веса приведенных мест;
[/?] = pi 4- р2 я-+ рп — сумма весов.
Для вычисления весов мест применяется формула
Л = , (12. 40)
* где —средние квадратические ошибки отдельных мест, вычисленные с учетом средних квадратических ошибок определения исходных мест и последующего счисления для приведения к заданному моменту.
Координаты <?0 и Хо, вычисленные с учетом весов отдельных мест, называются средними взвешенными или средними весовыми.
Пример. Известны координаты места уравнителя — 56°12',0 /V, ЗГ14',5 Ost\
средняя квадратическая ошибка этого места Mi = 1,5 мили. Координаты того же места получены по данным трех кораблей охранения:
?2 = 56°14',5 N, Л2 = 31°13;0 Ost, Л/2—1,2 мили;
?3 = 56°П;5М Х3^31°15;з Ost, М3=2,0мили;
<р4 = 5бою;3 ЛГ, Х4 = 31°1б;2 Ost, М4-2,5 мили.
Вычислить средние весовые координаты <ро и а0.
Решение. 1) Вычисляем веса отдельных мест:
Pt — i = 0,44, р2 — -U = 0,69, р3 — i — 0,25, р4 = —U — 0,16;
М] 2 Л4| 3 М2 ™ М24
2) вычисляем вероятные значения широты и долготы:
То = 56°io;o + 2:0-0.44+4;5.0,69+J55-0,25+о;з.о,.6 = 5бО12;9 м
1,54
Х^31°13;о + 1;5-°’44 + 0 + 2;з.0.25 + з;2.0,16^31О14,1 оч
1,54
При равноточных определениях координаты вероятного места вычисляются как средние арифметические из широт и долгот отдельных мест.
Средние взвешенные координаты могут быть получены и без вычисления координат ср0 и Хо применением центрографического приема. Для этого следует:
1) вычислить веса мест/?/ по формуле
§ 70. Способы обработки навигационных параметров и определение места 333
2) два произвольных места, например Fi и F2 (рис. 157), соединить прямой;
3) проведенную прямую разделить на части, обратно пропорциональные весам pi и р2- Удаление точки f от любого из мест, например от места F2, вычисляется по формуле
^7=
Ps 4- р-г ‘
Полученной точке f приписывается вес pf, равный сумме весов pi и р2;
4) точку f соединить с третьим местом F3 и эту прямую разделить на части, обратно пропорциональные весам рз и pf — p\-\- р2 точек, через которые она проходит. Точка Fo, полученная при учете последнего из данных мест и будет искомым вероятным местом.
<ко
I I
I
Рис. 157
Среднее весовое место можно найти и не приводя отдельные места к одному моменту. Это место, полученное рассмотренными выше аналитическим или графо-аналитическим способом, будет относиться к среднему весовому моменту, вычисляемому по формуле
(12.41)
где [ Тр\ - Г,pt + Т2Р2 ТзРз + •••-+- ТпРп — сумма произведений моментов определения отдельных мест на их веса;
[р] — сумма весов мест.
Среднее весовое место приводится к заданному моменту графическим путем.
Использование одной линии положения для уточнения счислимого места корабля. При наличии одной линии положения наиболее вероятное место должно приниматься в точке С (рис. 158), являющейся основанием перпендикуляра, опущенного из счислимого места С' на линию положения.
Г л а в a 13
ОПРЕДЕЛЕНИЕ МЕСТА ПО ЗЕМНЫМ ОРИЕНТИРАМ
§ 71. ОПРЕДЕЛЕНИЕ МЕСТА ПО ПЕЛЕНГАМ НА ЗЕМНЫЕ ОРИЕНТИРЫ Практическое выполнение способа
1. Выбрать ориентиры.
2. Последовательно и быстро измерить пеленги ориентиров и записать отсчет лага.
3. Исправить измеренные пеленги соответствующими поправками.
4. Проложить линии положения.
5. Определить вероятное место и при необходимости сделать оценку точности обсервации.
Выбор ориентиров. Выбираются ориентиры, позволяющие применять имеющиеся на корабле технические средства для измерения пеленгов. Такими ориентирами могут быть радиомаяки, радиостанции, маяки, огни, радиолокационные ориентиры, гидроакустические излучатели, отражатели гидроакустических сигналов, излучатели тепловой энергии. Желательно, чтобы количество выбираемых ориентиров было равно трем или четырем и чтобы они были равномерно распределены по горизонту. Если в пределах видимости с корабля имеется только два ориентира, то определение места возможно только при разности пеленгов не меньше 30°.
Для выбранных из описания радиотехнических средств навигационного оборудования или из перечня радиостанций, пригодных для определения места радиомаяков или радиостанций, следует выписать частоты (длины волн), время работы и опознавательные сигналы.
Измерение пеленгов. Для измерения пеленгов с корабля на земные ориентиры применяются:
— пеленгаторы курсоуказателей, различные визиры и перископы;
— радиопеленгаторы;
— радиолокационные станции;
— гидроакустические станции в активном и пассивном режимах;
— теплопеленгаторы.
Пеленгаторы курсоуказателей могут быть визирные, или обыкновенные, и оптические. На пеленгаторных репитерах гирокомпасов устанавливаются, как правило, оптические пеленгаторы.
Визирная плоскость пеленгатора наводится на ориентир; компасный пеленг отсчитывается по отражению делений картушки в призме обыкновенного пеленгатора или в поле зрения трубы оптического пеленгатора. При отсчете пеленга следует непрерывно контролировать наведение пеленгатора на ориентир.
Плоскость азимутального круга репитера или котелка магнитного компаса при измерении пеленгов должна быть горизонтальна. Особо
§ 71. Определение места по пеленгам на земные ориентиры
335
внимательно надо следить за тем, чтобы пеленгатор не имел наклона в плоскости, перпендикулярной визирной линии, при пеленговании ориентиров, имеющих значительные угловые высоты. Наклон контролируется с помощью уровня, видимого в поле зрения трубы оптического пеленгатора.
Для исключения ошибок отсчета и визирования измеряемые пеленги проверяются не менее двух раз и немедленно записываются или передаются по линии связи в штурманскую рубку в порядке последовательности измерения. Отсчет лага замечается помощником по команде штурмана или самим штурманом (после взятия пеленгов).
Точность измерения пеленгов в значительной мере зависит от точности установки пеленгаторного репитера или магнитного компаса в диаметральной плоскости корабля и от наличия эксцентриситета пеленгатора. Выверка пеленгатора и проверка правильности установки репитеров (магнитных компасов) в диаметральной плоскости корабля изложены в § 51.
Для получения пеленгов с особо высокой точностью используются специальные высокоточные пеленгаторные репитеры, автоматически стабилизированные в горизонтальной плоскости. Пеленгаторы таких репитеров опираются не на азимутальный круг, а на специальную площадку, связанную с картушкой репитера, что дает возможность исключить влияние рыскания корабля на изменение отсчета пеленга.
Недостаток специальных пеленгаторных репитеров состоит в том, что с их помощью можно пеленговать только- те береговые ориентиры, которые имеют угловые возвышения над горизонтом, близкие к нулю.
Корабельные радиопеленгаторы дают возможность определять пеленги на радиомаяки или, в общем случае, на любые радиостанции, работающие в соответствующем диапазоне радиоволн.
При определении места вдали от берегов можно также использовать радиомаяки судов службы погоды. Координаты этих судов, режим работы и частоты радиомаяков приводятся в описаниях радиотехнических средств навигационного оборудования.
Суда службы погоды маневрируют в установленных для них квадратах; смещение со штатного места указывается условным двухбуквенным сигналом, передаваемым после опознавательного сигнала. Всего для указания положения судна службы погоды предусматривается до 441 квадрата со сторо-нами по 10 миль каждый. Для уточнения места судна погоды в соответствии с принятым двухбуквенным сигналом предназначены специальные планшеты, помещаемые в описаниях радиотехнических СНО.
Радиомаячное оборудование судов службы погоды обеспечивает надежное их пеленгование на расстояниях до 200 миль.
Оценивая точность определяемого места с использованием радиопеленгов на такие радиомаяки следует учитывать дополнительную среднюю квадратическую ошибку линии положения, порядка 2,5 мили за нежест-кость ориентира.
Для обеспечения возможности использования вещательных и связных радиостанций в качестве радиомаяков Гидрографическим управлением МО издаются специальные перечни, в которых приводятся координаты станций, их позывные, частоты и род излучаемых сигналов.
Радиомаяки одной группы пеленгуются в порядке последовательности их работы.
Измерение пеленгов с помощью радиолокационных, гидроакустических и теплопеленгаторных станций, а также специальных визиров производится операторами, обслуживающими эту аппаратуру. Штурман
336
Глава 13. Определение места по земным ориентирам
должен указать им ориентиры, приближенные значения пеленгов и дистанций, а также очередность пеленгования.
Для исключения влияния движения корабля на точность определяемого места следует:
— промежутки времени между измерениями пеленгов сокращать до минимально возможных;
— первыми измерять пеленги ориентиров, расположенных ближе к диаметральной плоскости корабля, а последними — расположенных ближе к траверзу.
Для сокращения времени пеленгования первыми следует пеленговать те ориентиры, которые видны хуже.
При большой скорости корабля и малых дистанциях до ориентиров, когда скорость изменения пеленгов значительна, измеряемые пеленги должны быть приведены к одному зениту. Для этого три ориентира пеленгуют пять раз: первый, второй, третий, а затем второй и первый. Получив отсчеты компасных пеленгов KFIV КП2, КГ73, КП2 и KITV место
КП, 4- КП<> 4- кп2
определяют по средним отсчетам ______------L и _____L и по
пеленгу КП3 третьего ориентира. Аналогично приводятся к одному зениту пеленги двух и четырех ориентиров.
Исправление измеренных пеленгов. Для вычисления истинных орто-дромических пеленгов (А или ИП) учитываются следующие поправки: — при измерении пеленгов с помощью пеленгатора на магнитном компасе — общая поправка магнитного компаса ДМА, равная сумме магнитного склонения d и девиации Б,
ИП = А = КП+ ДМА = Л77+(<* + &). (13. 1)
При этом магнитное склонение d должно определяться для точки, соответствующей месту корабля;
— при измерении пеленгов с помощью пеленгатора на пеленгаторном репитере гирокомпаса — поправка гирокомпаса ДГА’П. Пеленг вычисляется по формуле
ИП = А = КП + ЬГКП. (13. 2)
Когда постоянная поправка введена в счетно-решающее устройство системы курсоуказания, отсчеты пеленгов соответствуют истинным пеленгам А.
Аналогично может быть учтена поправка магнитного компаса в некоторых образцах гиромагнитных компасов, имеющих устройство для ввода магнитного склонения; девиация в этих устройствах учитывается автоматически с помощью лекала компенсатора;
— компасные пеленги, измеренные с помощью высокоточных пеленгаторных репитеров, исправляются постоянной поправкой гирокомпаса или поправкой гироазимута, введенной в счетно-решающее устройство системы курсоуказания, и дополнительной поправкой ЬКУ, зависящей от курсового угла пеленгуемого ориентира;
— при измерении пеленга с помощью корабельного радиопеленгатора учитываются поправка гирокомпаса (магнитного компаса) и радиодевиация. Для вычисления истинного ортодромического пеленга применяются формулы:
А =///7 = Р/7 + /+ДГЯП |
А = ИП= КК + &ГКа + РКУ + f J 1 ’
где РП — радиопеленг;
/ — радиодевиация;
§71. Определение места по пеленгам на земные ориентиры
337
КК — компасный курс в момент снятия отсчета радиокурсового угла;
РКУ — радиокурсовой угол.
Выше указывалось, что в радиопеленгаторах, связанных с гирокомпасом, суммирование КК и РКУ производится автоматически. Радиодевиация f выбирается из таблицы или снимается с графика по отсчету радиокурсового угла. В конструкциях некоторых типов радиопеленгаторов предусмотрен автоматический ввод радиодевиации с помощью механического компенсатора. Гибкое лекало компенсатора должно иметь форму, соответствующую кривой остаточной радиодевиации. Если длина радиоволны радиомаяка или радиостанции значительно отличается от той, для которой регулировался механический компенсатор, то, снимая отсчет пеленга, следует одновременно снимать и отсчет РКУ, По этому отсчету определяется остаточная радиодевиация из таблицы или по графику, составленному применительно к данной длине радиоволны. Практически изменение длины радиоволны до 200 м не вызывает заметного изменения радиодевиации.
При измерении радиопеленгов в подводном положении, как правило, должна учитываться радиодевиация, выбираемая из специальной таблицы или графика;
— при измерении пеленгов с помощью радиолокационных, гидроакустических и теплопеленгаторных станций, а также с помощью визиров и перископов искомый истинный пеленг вычисляется по формулам:
А - ИП = ОП -г Дп 4- Д/7СП
А = ИП ОКУ -АКК А- ЬГКп 4- Д#У
(13. 4)
где ОП — отсчет пеленга;
Дп — постоянная поправка прибора;
ОКУ — отсчет курсового угла;
Д#У — поправка курсового угла, определяемая при выверке станции.
Компасный курс КК и поправка гирокомпаса &ГКп учитываются
так же, как при исправлении радиопеленгов.
Прокладка линий положения. При измерении пеленгов с корабля
на ориентиры искомое место должно находиться в точке пересечения
двух или более изоазимут. Практически же отрезки изоазимут заменяются более простыми линиями локсодромических пеленгов, которые изображаются на морской карте в проекции Меркатора прямыми линиями.
Если через одни и те же точки провести ортодромию, локсодромию и изоазимуту (рис. 159), то можно легко заметить, что локсодромия является осью симметрии ортодромии и изоазимуты. По мере сближения корабля с ориентиром ортодромия и изоазимута сближаются, что и дает возможность заменять изоази-
муту локсодромией и считать локсодромию линией положения.
Для получения локсодромического пеленга Р, характеризующего направление локсодромии, измеренный ортодромический пеленг А исправляется ортодромической поправкой ф
Р А 4- ф.
22 Заказ 1833
338
Глава 13. Определение места по земным ориентирам
Ортодромическая поправка вычисляется с учетом координат счислимого места <рс, X. и долготы ориентира лЕ по формуле (1. 20) или выбирается из табл. 23-6 МТ — 63.
При большой ошибке счислимого места ортодромическую поправку можно вводить методом последовательных приближений — сначала с учетом координат счислимого места, а затем — координат обсервован-ного места.
Учет ортодромической поправки целесообразен в тех случаях, когда ее величина превышает 0,3—0,5 от средней квадратической ошибки изме
рения пеленгов, т. е. при 0,2—0°,3. Если ортодромическая поправка меньше указанной величины, то линии пеленгов в виде прямых линий прокладываются по направлениям, равным ортодромическим пеленгам.
Линии положения (отрезки локсодромий) проводятся вблизи счислимого места так, чтобы они проходили через места ориентиров. Если же ориентиры находятся за рамками карты, то отрезки локсодромий проводятся через определяющие точки, координаты которых могут быть получены вычислением по формулам аналитического счисления или способом смещений.
Расчет координат определяющей точки по формулам аналитического счисления. Пусть на рис. 160 точка Е — пеленгуемый ориентир, координаты которого <рЕ, ХЕ известны, прямая Еа — линия локсодромического пеленга Р и точка С — счислимое место. Координаты точек К или (называемых определяющими) пересечения прямой Еа с параллелью или меридианом счислимого места равны.
Для точки К
^К = ^Е— ^К
(13. 5)
Разность долгот ДХК вычисляется из треугольника КМЕ по формуле
(13. 6)
где Z)E и Dc — меридиональные части, выбираемые из табл. 26 МТ—63 по широте ориентира и счислимого места.
Для точки К]
^Ki ~ \ ADK1^DE-DKi = (XE-kc)'ctgP
(13. 7)
Меридиональная часть точки Н\ будет равна
— ^Е ^КГ
(13. 8)
§ 71. Определение места по пеленгам на земные ориентиры 339
Широта точки выбирается из табл. 26 МТ—63 по обратным входом.
Формулы (13. 5) и (13. 8) алгебраические. Величинам ДХК и приписывают знаки в соответствии с расположением точек К и К1 относительно точки Е. При пеленге Р<180° ДХК имеет знак плюс, а при Р> 180° —знак минус. Величине Д£)К1 придают знак плюс при пеленге Р от 270 до 360° и от 0 до 90°. При пеленге Р от 90 до 180° и от 180 до 270° величине ADK1 придают знак минус.
Способ решения задачи по формулам (13.5), когда вычисляется долгота точки К, называется способом долгот, а при вычислении широты точки Кх (по формулам 13.7 и 13.8)—способом широт.
Для прокладки линии локсодромического пеленга на бланке астрономического журнала вычисляется удаление Дер точки Л*! от счислимого места по меридиану или удаление точки К по параллели Aw. Величины As и Aw вычисляются по формулам:
А? = <Pki - 'Ре
Д® -=(>-K1-\)'cos<pc
(13. 9)
Пример. Счислимое место корабля в точке <рс = 70°Г2^0 N, Хс =.36°00' Ost; координаты радиомаяка cpE = 69°43J8 У, ХЕ = 33=05^8 Ost.
Вычислить координаты точек пересечения линии локсодромического пеленга с параллелью и меридианом счислимого места, если измеренный ортодромический пеленг А = 247=4.
Решение. 1) Вычисляем ортодромическую поправку ф и локсодромический пеленг Р
ф = |(*Е-Хс) sin<pc = 1°27',1 sin 70=2 = —1?4,
р в А 4- ф = 247=4 + (—1^4) = 246=0;
2) задавшись широтой по формулам
точки Я и ее удаление от счислимого места.
(13. 5—13. 6) вычисляем долготу
<pE = 69°43,'8tf
<РС =70°12;0.V
DE = 5897,2
Dc = 5979,5
ADK — 82,3
1-91540 + lg tg/> = 0.35142 +
1g ДХК = 2,26682
Д1К = —184J8 ~
,ли Д1к = —3°04;8
ХЕ = 33=05',8 ДХК- 3=04,'8
Хк=36°10,'6 хс = зб°оо;о
Aw — +10',6cos 70^2 = 4-3,6 мили;
22*
<340
Г лава 13. Определение места по земным ориентирам
3) задавшись долготой Хк — Хс, вычисляем широту точки Д’ и удаление этой точки от счислимого места по меридиану.
__ Хе = 33°05;8 1g ДХК = 2,24105 DE = 5897,2
~ Хс = 36°00;0 + lg etg Р = 9,64858 + д^к1 77>б
ДХК = 2°54J2 lgADK — 1,88963 =-5974,8
или 1 1 1
ДХК1= 17412 APk,= —77',6 = 70°10J4
<Рс — 70 12,0
Д<Р —— 1J6
Прокладка линии аа‘ локсодромического пеленга в соответствии с условиями настоящего примера показана на рис. 161.
На практике вполне достаточно знать координаты только одной определяющей точки ЯилиЯ1, и через нанесенную точку линия пеленга прокладывается под углом Р к меридиану.
В тех случаях, когда точность измерения пеленгов невысокая, координаты определяющей точки К или Кх могут быть измерены на карте мелкого масштаба после прокладки на ней линии пеленга от ориентира.
Рассмотренные способы широт и долгот применяются для прокладки линий положения на бланке астрономического журнала при определении места
по разнородным линиям положения.
Определение положения определяющей точки способом смещений. Места пеленгуемых ориентиров А или В смещаются на рамку карты по
параллели (ориентир А) или по меридиану (ориентир В), в результате чего на рамке получается точка А1 или В' (рис. 162). Затем на продолженные в пределах карты параллель (для ориентира Л) или меридиан (для ориентира В) наносятся точки А" и В", удаленные от соответствующих рамок карты на величины ДА' = ЛА' = А'А" и ДР = ВВ'=В'В". Значение ДР, равное разности меридиональных частей рамки карты
§ 71. Определение места по пеленгам на земные ориентиры
341
и ориентира В, а также длину отрезка А'А" = ДХ снимают в минутах с долготной рамки карты. После этого через точку А" проводится меридиан аЬу а через точку В" — параллель ed.
Если ориентир Е не может быть смещен по параллели или меридиану на одну из рамок карты, то его смещенное место Е' (рис. 163) принимается в ближайшей вершине рамки карты. Найдя далее разность долгот AX' и разность меридиональных частей АР, прокладывают соответствующие им отрезки по долготной и широтной рамкам в минутах долготы и получают смещенную точку Е". Через точку Е" проводится произвольная прямая КК\.
Др' / !
1 /
Рис. 164
Линия измеренного пеленга Р вначале прокладывается от смещенной точки на рамке А', В' (рис. 162) или Е' (рис. 163). Получив на вспомогательной прямой смещенную точку (например, N на рис. 162), следует измерить ее удаление от точки В" (А" или Е") и, удвоив это расстояние, нанести на вспомогательной прямой точку (Mj или L])\ линия пеленга проводится через эту точку.
При больших удалениях от ориентира может случиться так, что точка А" (рис. 164) окажется за противоположной рамкой. В таком случае смещенная точка, например В, наносится на половинном удалении АР от соответствующей рамки карты, ближайшей к месту ориентира. Линия пеленга Р вначале прокладывается от точки Д', а затем для получения определяющей точки Bi отрезок ВВ' должен быть увеличен в три раза.
Определение места по пеленгам двух ориентиров. Искомое место находится в точке пересечения двух линий положения, соответствующих измеренным и исправленным пеленгам. Такими линиями являются прямые, пересекающие меридианы карты под углами, равными локсодромическим пеленгам (при^> 0,2 — 0°,3), или под углами, равными измеренным истинным пеленгам без учета ортодромической поправки. Угол пересечения линий пеленгов должен быть в пределах 30°—150°.
Если каждый пеленг измерялся только один раз, т. е. пеленги не приводились к одному зениту, то для определения места на момент измерения второго пеленга первую линию положения следует сместить на расстояние AS, равное плаванию корабля за время между моментами измерения пеленгов.
Вследствие того, что две линии положения даже при значительных ошибках измерений пересекаются в одной точке, никогда не следув!
342
Глава 13. Определение места по земным ориентирам
ограничиваться единичным определением места. Необходимо поэтому производить ряд (3—4) определений, которые считаются достоверными только тогда, когда эти места располагаются по направлению движения корабля и расстояния между ними на карте пропорциональны разностям отсчетов лага. При наличии значительных ошибок в поправке компаса определяемые по двум пеленгам места на одном и том же курсе располагаются на кривой, изгибающейся в сторону базовой линии, соединяющей места ориентиров.
Определение места по пеленгам трех ориентиров. Способ определения места по пеленгам трех ориентиров является одним из самых надежных и обеспечивает достаточно высокую точность определяемых мест при минимальном объеме вычислительных и графических работ.
Исправив взятые пеленги поправками измерительного прибора, а если это нужно, то и ортодромическими поправками, и получив истинные пеленги, прокладывают соответствующие им линии положения. В пересечении этих линий получают искомое место, которое относят на момент взятия третьего пеленга.
Если пеленги первого и третьего ориентиров не осреднялись и каждый пеленг измерялся только один раз, то необходимо привести их линии к моменту взятия третьего пеленга графическим путем.
Проложенные линии положения, как правило, не пересекаются в одной точке, образуя треугольник погрешности. Причины неизбежного появления этого треугольника: '
1. Ошибки вследствие неодновременного измерения пеленгов. Этими ошибками можно пренебречь, если пеленги приводились к одному зениту.
2. Случайные ошибки пеленгования и прокладки пеленгов на карте.
Случайные ошибки визуальных пеленгов обычно малы, и поэтому получающийся треугольник погрешности имеет малые размеры; стороны его на путевой карте не превышают 5 мм, т. е. около 0,5 мили. Вероятное место внутри такого треугольника с достаточной точностью намечается на глаз ближе к малой стороне и углу, более близкому к прямому, а в равностороннем треугольнике — в его центре.
Если измеренные пеленги отягощены значительными случайными ошибками, например при использовании корабельного радиопеленгатора, то малым можно считать треугольник со сторонами до 1,5—2 миль. Вероятное место внутри такого треугольника рекомендуется находить центрографическим способом.
3. Неточности в нанесении мест ориентиров на карте или ошибки в опознании ориентиров. Наличие этих ошибок исключает возможность определения места.
Для предупреждения появления указанных ошибок штурман должен, изучая район плавания, накапливать сведения об ориентирах, пригодных для определения места.
В настоящее время неточности в положении ориентиров на картах встречаются крайне редко и, как правило, только для ориентиров, не являющихся средствами навигационного оборудования.
4. Ошибки в поправках измерительного прибора. Достаточно уверенное предположение о наличии значительной ошибки в поправке измерительного прибора, вследствие которой измеренные пеленги оказываются отягощенными повторяющимися ошибками, можно делать только после того, как штурман получит уверенность в отсутствии промаха в измерениях или ошибки в опознавании ориентиров. Для этого, получив треугольник погрешности значительных размеров (больших, чем это указано для случайных ошибок), необходимо тщательно повторить измерения и прокладку пеленгов, воспользовавшись по возмож-
§71. Определение места по пеленгам на земные ориентиры 343
пости другой комбинацией ориентиров. Повторное получение большого треугольника погрешности будет свидетельствовать о наличии значительной ошибки в поправке компаса (или иного курсоуказателя).
Место, свободное от систематических ошибок линий положения, должно находиться в точке пересечения биссектрис углов фигуры погрешности, в которых пересекаются линии положения. И так как в общем случае одной и той же ошибке в пеленгах будут соответствовать различные ошибки линий положения (из-за различия градиентов линий положения), то для получения искомого места следует проводить взвешенные биссектрисы.
Простейший способ проведения взвешенных биссектрис состоит в следующем.
Получив при учтенной поправке компаса треугольник погрешности, следует изменить все пеленги на одну и ту же величину (порядка 1—3°) в одну сторону и вновь проложить линии положения, удовлетворяющие измененным пеленгам. В результате будет получен новый треугольник погрешности. Взвешенные биссектрисы проводятся через сходственные вершины двух треугольников. Характерные виды треугольников погрешности показаны на рис. 165. Для повышения точности решения данной задачи рекомендуется изменять пеленги с таким расчетом, чтобы новый треугольник погрешности имел меньшие размеры по сравнению с первоначальным.
Рис. 165
Искомое вероятное место находится внутри треугольника только при расположении ориентиров по всему горизонту, т. е. когда корабль находится внутри треугольника, в вершинах которого лежат наблюдаемые ориентиры. Если же ориентиры сосредоточены в одной половине горизонта, то место корабля, свободное от систематической ошибки, будет вне фигуры погрешностей.
Найдя место, свободное от систематической ошибки, следует определить более верную поправку измерительного прибора (компаса). Для этого на карте измеряются истинные пеленги ориентиров, а затем из этих пеленгов вычитаются соответствующие им компасные пеленги. Средняя из полученных разностей и будет мгновенной поправкой компаса.
При определении места по радиопеленгам, как и по визуальным пеленгам, случайные и систематические ошибки пеленгов в большинстве
344 Глава 13. Определение места по земным ориентирам
случаев соизмеримы, т. е. имеют один порядок. Поэтому для определения вероятного места следует применять прием, изложенный в § 70. Порядок решения такой задачи рассматривается на примере.
Пример. Скорость корабля V = 16,5 уз, ПУ = 82°,5. При помощи автоматического радиопеленгатора измерены радиопеленги А на радиомаяки X и У и на широковещательную станцию Z. Получены отсчеты радиопеленгов:
Л — 18 ч Юлия радиомаяк X, Ai ~ 40°,5;
Т2 — 18 ч 11 мин радиомаяк У, Az — 347°,5;
Т3 — 18 ч 14 мин радиостанция Z, 43 — 29Г.З.
Остаточная радиодевиация равна: ft = +Г,5; f2 ~ ~~ Г,0 и f3 = -НЛ5.
Определить место на момент Т3, считая случайные и систематические ошибки соизмеримыми.
Решение. 1) Из описания радиотехнических средств навигационного оборудования и перечня радиостанций, рекомендованных для определения места, выбираем координаты пеленгуемых объектов: <рь Xi; <рг, Х2; <р3, Х3 и, учтя координаты <рс, Хс счислимого места, вычисляем ортодромические поправки или выбираем их из табл. 23-6 МТ — 63:
ф, - 4-078,
— —0.4,
Фз = —1 *8;
2) вычисляем локсодромические пеленги:
Вели- Радиомаяк Радио-
чин 1 X У станция Z
А’ + / 40.5 4-1.5 347-5 -1,0 29173 4-0,5
А + * 42.0 4-0,8 346:5 0.4 29178 - 1.8
р | 4278 i | 3467'1 | 290.0
3) смещаем место радиомаяка X по линии пути на расстояние Д£| = V (Т3 — 71) = = 1,1 мили, а радиомаяка У на Д52 = У(Тз — Т2) =0,8 мили;
4) прокладываем линии локсодромических пеленгов Pi и Р2 от смещенных мест радиомаяков X и У, а линию третьего пеленга — от радиостанции Z. В результате получаем треугольник погрешностей abc (рис. 166);
5) для определения места, свободного от систематической ошибки, уменьшаем все пеленги на 2° и прокладываем линии измененных пеленгов от тех же точек; в результате получаем новый треугольник а'Ь'с'. Проведя прямые через вершины аа' и bb\ получаем искомое место F\\
6) одним из изложенных в § 70 приемов, например центрографическим, находим вероятное место Р2, удовлетворяющее минимуму суммы квадратов отклонений его от линий положения. Соединив точки F\ и Р2 прямой, принимаем место Fq, соответствующее соизмеримым случайным и систематическим ошибкам линий положения на расстоянии от точки F2, равном 0,5 длины отрезка F2Fi.
В тех случаях, когда для решения поставленной кораблю задачи необходимо определять место через короткие промежутки времени, рекомендуется заранее подготовить на карте азимутальную сетку, т. е. сетку линий пеленгов выбранных ориентиров.
Азимутальные сетки рекомендуется строить на картах крупных масштабов. Линии положения в виде отрезков радиальных прямых (рис. 167) проводятся тушью различных цветов через такие разности пеленгов, при которых расстояния между прямыми в заданном секторе не превышают 1—2 см\ значения пеленгов пишутся у концов этих линий.
§ 72. Определение места по пеленгам от береговых станций
345
Если один или даже все ориентиры находятся за рамками карты, для построения сетки пеленгов может быть применен способ смещений, изложенный выше. Интерполяция между соседними линиями пеленгов на промежуточное значение пеленга при расстоянии между этими линиями до 2 см легко осуществляется на глаз.
Оценка точности пеленгов и вычисление средней квадратической ошибки полученного места излагаются в гл. 16.
§ 72. ОПРЕДЕЛЕНИЕ МЕСТА ПО ПЕЛЕНГАМ ОТ БЕРЕГОВЫХ СТАНЦИЙ (ОПОРНЫХ ТОЧЕК)
Для определения ортодромических пеленгов на корабль от береговых станций применяются следующие основные средства:
— секторные радиомаяки;
- - радиомаяки с вращающейся характеристикой направленности;
— береговые радиопеленгаторные станции.
Практическое выполнение способа
1. Выбрать радиомаяки или радиопеленгаторные станции, в зоне действия которых находится корабль.
2. Измерить пеленги или включить корабельную радиостанцию для обеспечения пеленгования береговыми радиопеленгаторными станциями. Заметить и записать отсчеты лага на момент измерения каждого пеленга, а при измерении пеленгов береговыми радиопеленгаторными станциями отсчеты лага записывать на каждую минуту по судовым часам.
3. Проложить линии положения.
4. Определить вероятное место и при необходимости сделать оценку точности обсервации.
Выбор радиомаяков и береговых радиопеленгаторных станций. Желательно, чтобы количество радиомаяков было равно трем или
346
Г лава 13. Определение места по земным ориентирам
четырем и чтобы они были равномерно распределены по горизонту, так как это упрощает получение вероятного места и повышает его точность. При наличии только двух опорных точек желательно, чтобы разность направлений на них от счислимого места корабля была возможно ближе к 90° и не меньше 30°; при меньшем угле определяемое место будет ненадежным. Кроме того, необходимо проверить, чтобы место корабля было в пределах рабочих секторов радиомаяков или радиопеленгаторных станций.
Рабочие сектора радиомаяков с вращающимися характеристиками направленности указываются в описаниях радиотехнических СНО.
Для выбранных радиомаяков из описаний выписываются частоты (длины волн) и характер радиосигналов, а для радиопеленгаторных станций — частоты (длины волн), продолжительность и режим работы корабельной излучающей радиостанции.
Измерение пеленгов. Секторные радиомаяки имеют дальность действия до 1500 миль и предназначены для определения места при плавании вдали от берегов. Ортодромический пеленг на корабль определяется по числу сигналов — точек или тире, принятых в начале рабочего цикла, равного 30 сек. Для счета сигналов применяются три способа:
— на слух;
— с помощью тестера и секундомера;
— с помощью корабельного индикатора.
Счет сигналов на слух может быть применен, когда радиоприемник имеет второй гетеродин, позволяющий слышать сигналы. Род сигналов,
слышимых в начале цикла, зависит от сектора, в котором находится
корабль. Слышимые вначале сигналы постепенно ослабевают, а затем после прохождения равносигнальной зоны, являющейся границей между секторами, появляются постепенно усиливающиеся сигналы — вместо точек тире, и наоборот.
Неизбежное замирание сигналов вблизи равносигнальной зоны приводит к тому, что при счете сигналов на слух часть
сигналов, имеющих уровень ниже порога слышимости, утрачивается и таким образом число W принятых сигналов будет, как правило, меньше 60.
Для устранения ошибки и получения более близкого к действительности числа па начальных сигналов, необходимых для прокладки линии положения, следует обязательно считать как начальные, так и конечные сигналы и прибавлять к начальным сигналам 60_____________________________________д/
половину разности 60 — /V, т. е. AN — —2— , где Лг = пп -|- пк — сумма принятых сигналов. Так, например, если вначале было принято 24 тире, а затем 29 точек, то W = 53, ДА7 — 3,5 и для дальнейшей обработки следует считать, что было принято 27,5 тире и 32,5 точки.
Для облегчения счета сигналов на слух рекомендуется применять секундомер. Пуск секундомера производится в момент (рис. 168) приема начального сигнала, а затем фиксируются моменты: — исчезновения слышимости начальных сигналов, /2 — появления первого из конечных сигналов и t0 — окончания цикла. Начальное число сигналов, соответсг-
§ 12. Определение места по пеленгам от береговых станций
347
вующее отсчету *2- секундомера, вычисляется по формуле
60.Ш
п„ == —. (13. 10)
го
Практикой установлено, что при счете сигналов на слух число начальных сигналов, если они состоят из тире, вследствие инерции счета получается обычно (особенно при сильных помехах) завышенным. Для устранения этой ошибки рекомендуется поправку для начальных сигналов — тире — вычислять по формуле
ддг _ 60 — (лн 4- ПкУ _।
Счет сигналов с помощью тестера и секундомера:
а) к выходу радиоприемника подключить тестер, имеющий нулевое деление посредине шкалы;
б) настроить радиоприемник на частоту выбранного секторного радиомаяка;
в) после приема позывных и длинного тире с началом передачи основной серии сигналов — точек или тире — пустить в ход секундомер. Стрелка тестера при приеме сигналов будет отклоняться вправо или влево от среднего положения в зависимости от рода сигналов, и по мере прохождения равносигнальной зоны амплитуда отклонений будет уменьшаться;
г) наблюдая за стрелкой тестера, заметить отсчет /н по секундомеру на момент, когда стрелка тестера «замрет» в среднем положении, а затем отсчет /0 на момент ее последнего отклонения в сторону, соответствующую приему конечных сигналов;
д) вычислить количество начальных сигналов серии по формуле
п
*0
При наличии помех измерения производятся два-три раза, а затем вычисляется среднее число начальных сигналов, которое и учитывается для прокладки линии положения.
Наилучшие результаты счета сигналов секторных радиомаяков получаются при использовании корабельного приемоиндикатора КИ—55. Краткое описание КИ—55 приведено в гл. 6.
Перед измерениями скорость развертки индикатора должна быть отрегулирована так, чтобы светящееся пятно на экране индикатора совершало один полный оборот за фактическое время излучения радиомаяком 60 сигналов. Если такую регулировку по каким-либо причинам произвести нельзя, то для исключения ошибки в получаемом пеленге применяются два способа:
1) способ счета начальных сигналов по их изображениям на экране индикатора, т. е. способ получения числа пп без использования круговой шкалы;
2) способ ввода поправки.
Для определения поправки ДМ к числу начальных сигналов необходимо заметить отсчет п* начального числа их по номеру сектора против середины равносигнальной зоны и номер сектора Мо, в котором находится последний сигнал рабочего цикла. При этом, если последний сигнал совпадает с первым, вторым или третьим сектором, то величину Мо
348
Глава 13. Определение места по земным ориентирам
считаем равной 61, 62 и 63 соответственно. Поправка АЛ' вычисляется по формуле
Так, если ли 40 и NQ = 3, то ЛАГ = -40 = —2, и тогда
ян = 40 —2 = 38 сигналам.
Для определения поправки АЛГ можно использовать график, имеющийся в технической документации индикатора.
Вблизи продолжений базовых линий (линий расположения антенн радиомаяка) имеются нерабочие сектора по 60° каждый. Для обеспечения определения места в пределах этих секторов некоторые радиомаяки имеют по 5 антенн, расположенных на двух взаимно перпендикулярных базовых линиях, пересекающихся в точке установки средней антенны.
Антенны этих линий работают поочередно (по 3 мин), и при приеме сигналов таких радиомаяков следует по позывным фиксировать не только число принимаемых сигналов, но и работающую базу.
Зная число принятых сигналов и используя специальные таблицы, помещаемые в описаниях радиотехнических СНО, можно выбрать истинный ортодромический пеленг на корабль. Входными аргументами в такие таблицы являются:
— номер сектора, определяемый по карте или карте-схеме секторов, на которую наносится счислимое место корабля. При большой ошибке счислимого места сектор может быть определен по пеленгу на радиомаяк, проложенному на карте. Измеренный с помощью радиопеленгатора ортодромический пеленг должен быть предварительно исправлен ортодромической поправкой. Для обеспечения пеленгования радиомаяк после позывных излучает длинное тире;
— число сигналов — точек или тире.
Определение сектора, в котором находится корабль, следует всегда контролировать по роду начальных сигналов. При отсутствии ошибки в опознавании сектора начальные сигналы, принимаемые от радиомаяка, совпадают с показанными в секторе, в котором находится корабль.
Определение пеленгов на корабль по числу сигналов возможно при удалении от радиомаяка более 25 миль. В пределах до 25 миль секторные радиомаяки могут использоваться только как обычные круговые радиомаяки.
Когда на пути радиоволн от радиомаяка к кораблю расположены массивы суши, в особенности со значительными горами, наблюденные радиопеленги малодостоверны.
Радиомаяки с вращающейся характеристикой направленности имеют дальность действия до 100 миль; сигналы таких радиомаяков могут приниматься с помощью простейшего радиоприемника.
Пеленг на корабль получается путем подсчета числа принятых точек или тире после приема сигнала А или У. Установив номер точки или тире, при котором сигналы перестают быть слышимыми, входят с этим номером в специальную таблицу, имеющуюся в описании радиотехнических средств навигационного оборудования, и выбирают искомый ортодромический пеленг. Часть такой таблицы для радиомаяка Соя (Япония) приводится на стр, 349.
Для облегчения счета сигналов радиомаяков с вращающейся характеристикой направленности каждый десятый сигнал передается другим тоном.
Средняя квадратическая ошибка пеленга на корабль, определяемого при приеме сигналов этих радиомаяков, принимается равной Г.
$ 72. Определение места по пеленгам от береговых станций
349
Сигнал группы Истинный пеленг ! Сигнал группы Истинный пеленг
А (точек) У (точек) 1 А (точек) У (точек)
1 89 2° j 15 75 30°
2 88 4 16 74 32
3 87 6 17 73 34
Радиопеленгаторные станции, устанавливаемые на берегу, дают возможность измерять пеленги на корабль при условии, что корабельный радиопередатчик будет излучать сигналы на установленной частоте. Радиопеленгаторная станция измеряет ортодромический пеленг и передает его на корабль, сообщая, кроме того, время наблюдений и класс точности: А — 2°, В — 5° и С—10°. Указанные величины ошибок имеют вероятность не ниже 0,95.
Порядок передачи сигналов и работы корабельного радиопередатчика указывается в описании радиотехнических СНО.
Кроме рассмотренных средств, для измерения пеленгов на корабль могут применяться береговые радиолокационные станции, береговые теплопеленгаторы и гидроакустические установки, приемные устройства которых установлены вблизи берега. Эти средства имеют ограниченную дальность действия и используются, в частности, для проводки кораблей по прибрежным фарватерам.
Общим для всех средств и способов измерения пеленгов на корабль является то, что получаемые пеленги полностью свободны от систематических ошибок, что должно учитываться
при определении вероятного места.
Прокладка линий положения. Линин положения могут быть проложены на радионавигационных картах с сетками изолиний или на обычных навигационных картах.
Карты с сетками изолиний для определения места с помощью секторных радиомаяков издаются, как правило, в проекции Меркатора. Масштаб этих карт обычно не крупнее 1 :500 000. Изолинии нано
сятся различными цветами. Каждая изолиния соответствует числу сигналов, кратному 5, 10, 20 или 60, в зависимости от расстояния до радиомаяка. Утолщенные линии проводятся по границам секторов для начального момента цикла работы каждого радиомаяка. В секторах (рис. 169) показаны точки или тире, которые наблюдатель должен слышать в начале цикла до прихода равносигнальной зоны. Кроме того, приво-
дится условная нумерация секторов с возрастанием порядковых чисел в направлении вращения секторов.
Линии положения в виде отрезков прямых на радионавигационных картах прокладываются с интерполяцией между изолиниями на карте по числу начальных сигналов, показанных в данном секторе. Для облегчения интерполяции применяется палетка в виде углового масштаба (наносится на картах) или линейка с миллиметровыми делениями.
Прокладка линий положения, полученных с помощью радиомаяков с вращающейся характеристикой направленности, береговых радиопеленгаторных станций, береговых РЛС и теплопеленгаторов, а также гидроакустических установок производится на обычных навигационных
350 Глава 13. Определение места по земным ориентирам
картах. Локсодромические пеленги Р по измеренным ортодромическим пеленгам U вычисляются по формуле
Р =
где ф — ортодромическая поправка, вычисляемая для места радиомаяка по его координатам <рЕ и ХЕ и долготе счислимого места корабля. Поправку считают положительной при пеленге U< 180° и отрицательной при U > 180°; в южном полушарии знаки поправок обратны указанным.
Определение вероятного места. При измерении двух пеленгов место принимается в точке пересечения линии положения, удовлетворяющей второму пеленгу (числу начальных сигналов) и первой линии, смещенной по линии пути на расстояние, пройденное кораблем за время между моментами измерений.
При трех радиопеленгах вероятное место, удовлетворяющее минимуму суммы квадратов случайных ошибок линий положения, намечается всегда внутри треугольника погрешности применением центрографического приема или, при малом треугольнике, — на глаз.
Учитывая возможность появления довольно значительных случайных ошибок, связанных с отсчетом количества начальных сигналов, рекомен-. дуется при-всякой к тому возможности определять ряд мест, а затем находить наиболее вероятное из них путем осреднения.
Пример. Приближенное место <рс = 72° N, Хс = 33°40' Ost, /7Я*=90°, V — 18 уз. С помощью приемника радиопеленгатора приняли на слух сигналы от радиомаяков:
Канин 71 == 15 ч 20 мин, ол = 4,6, 35 точек и 20 тире;
Рыбачий Та = 15 ч 22 мин, ол = 5,2, 54 тире и 2 точки;
Панкратьев Тз = 15 ч 25 мин, ол = 6,1, 35 тире и 18 точек.
Определить место на момент Тз, поправка лага равна нулю.
Решение. 1) По счислимому месту и роду начальных сигналов определяем сектора, в которых находится корабль: для радиомаяка Канин—сектор К-3; для радиомаяка Рыбачий — сектор Р-5 и для радиомаяка Панкратьев — сектор П-4;
* хг 60—М
2) вычисляем поправки ДА\- = ——- к начальным сигналам серии и придаем их к принятым сигналам. Получаем, что при отсутствии ошибок измерений должно было быть принято:
— от радиомаяка Канин ДА\ = —~ 2Д 37,5 точек и 22,5 тире;
— от радиомаяка Рыбачий ДУ3 = —— = 2, 56 тире и 4 точки;
00_
— от радиомаяка Панкратьев Д#3——— = 3,5, 38,5 тире и 21,5 точки.
Для прокладки линий положения принимаем в расчет только начальные сигналы;
3) в указанных выше секторах прокладываем линии положения, удовлетворяющие числам начальных сигналов, и смещаем первую из них по курсу на Д51=ол3 — ОЛ1 = = 1,5 мили, а вторую на Д5з = ол3 — ол2 = 0,9 мили. В результате получаем треугольник погрешности, внутри которого намечаем на глаз обсервованное место <р0 = 71°57',5 N и Хо= 33°26',0 О*.
Вероятное место при прокладке пеленгов, измеренных с помощью радиомаяков с вращающейся характеристикой направленности, береговых радиопеленгаторных станций, береговых теплопеленгаторных станций, береговых РЛС или гидроакустических установок находится так же, как при использовании секторных радиомаяков без применения сеток изолиний.
Анализ точности измерения пеленгов и порядок вычисления средней квадратической ошибки получаемого места приводятся в гл. 16.
§ 73. Определение места по расстояниям
351
§ 73. ОПРЕДЕЛЕНИЕ МЕСТА ПО РАССТОЯНИЯМ
Для определения расстояний до ориентиров применяются:
— корабельные и береговые радиолокационные станции;
— импульсные дальномерные радионавигационные системы;
— корабельные гидроакустические станции;
— гидроакустические дальномерные системы;
— штурманские угломерные приборы.
Практическое выполнение способа
1. Выбрать ориентиры.
2. Последовательно и быстро, а если позволяют имеющиеся приборы, то одновременно измерить расстояния или величины, дающие возможность вычислить искомые расстояния.
3. Проложить линии положения.
4. Определить вероятное место и при необходимости оценить точность обсервации.
Выбор ориентиров. Для определения места по двум расстояниям направления на ориентиры должны отличаться на угол, возможно боле<’ близкий к 90° и, во всяком случае, не меньший 30°.
Для определения места по трем или четырем расстояниям ориентиры должны быть равномерно распределены по всему горизонту, так как при этом упрощается нахождение вероятного места и повышается его точность.
Измерение расстояний. Корабельные радиолокационные станции имеют дальность действия, незначительно превышающую геометрическую дальность видимости облучаемого ориентира с высоты антенны станции. Для расчета этой дальности можно применить формулу (1.35) или воспользоваться табл. 22-6 МТ—63. Фактическая дальность действия в зависимости от состояния атмосферы и отражательных свойств объекта может значительно отличаться от расчетной.
В качестве ориентиров для определения места по расстояниям могут использоваться мысы, острова малых размеров, естественные и искусственные сооружения (трубы, башни, маяки, знаки, отдельные здания), плавучие маяки, а также пассивные отражатели на знаках и радиолокационные маяки-ответчики.
Береговые РЛС используются для измерения расстояний до кораблей по их запросу.
Импульсные дальномерные радионавигационные системы работают в ультракоротковолновом диапазоне радиоволн, и дальность их действия также близка к геометрической дальности видимости антенны береговой установки с высоты антенны корабля.
Измерение расстояний до береговых опорных станций, являющихся ориентирами для определения места корабля, осуществляется способом «запрос — ответ». В систему входят корабельная задающая станция, излучающая сигналы запроса, и две береговые отражающие станции, излучающие ответные сигналы. Отражающие станции работают независимо друг от друга; отсчеты расстояний снимаются по шкалам корабельной аппаратуры.
Измеряемые расстояния исправляются поправками, определяемыми при выверке станции.
При соответствующей регулировке аппаратуры средняя квадратическая ошибка измерения расстояния с помощью импульсной дальномерной системы может быть сведена к нескольким метрам.
352
Г лава 13. Определение места по земным ориентирам
Корабельные гидроакустические станции, работающие в активном режиме, позволяют определять расстояния до характерных контуров морского дна, а также до специальных гидроакустических отражателей или ответчиков, установленных на грунте в заданных точках.
Дальность действия корабельных гидроакустических станций зависит от гидрологических условий и определяется опытным путем или по специальным пособиям, с учетом температуры и солености морской воды на различных горизонтах.
Точность определяемых расстояний указывается в технической документации.
Гидроакустические дальномерные системы дают возможность определять расстояния, доходящие до нескольких тысяч миль. В этих системах используются свойства подводного звукового канала.
Для получения больших дальностей действия системы необходимо, чтобы излучатель и приемник звука находились в пределах звукового канала.
Посылка звуковых сигналов в заранее намеченных точках, являющихся ориентирами для определения места корабля, производится по расписанию в строго назначенное время.
Прием сигналов и фиксация моментов их приема осуществляются с помощью гидроакустических приемников (гидрофонов), подключенных к самописцу (хронографу). Одно перо хронографа по сигналам, получаемым от контактного хронометра, записывает на ленте полусекундные отметки времени. Эти отметки имеют П-образную форму. Минутные отметки А и Б (рис. 170) фиксируются пропуском одной полусекундной отметки.
Другое перо самописца, называемое основным, записывает на той же ленте сигналы, принимаемые гидрофонами.
Для измерения промежутка времени между моментами посылки и приема сигналов следует:
а) вычислить приближенный момент Г' (по показаниям хронометра) приема сигналов для счислимого места корабля по формуле
Т' — Т'дос 4~ t
§ 73. Определение места по расстояниям
353
где Гпос — момент посылки сигналов по расписанию;
/' = ~~ — приближенное время распространения звука от фокуса до
счислимого места (сэ — скорость звука, Dc — расстояние между счислимым местом корабля и фокусом); это время обычно определяется по карте с сеткой изолиний;
и*р — поправка хронометра;
б) за 2—3 мин до момента Т' по хронометру при отсчете ТП , равном целому числу минут, включить самописец. При этом на ленте начнется запись отметок времени и сигналов, принимаемых гидрофонами (шумы);
в) при последующем ближайшем прохождении секундной стрелки хронометра через 0 вручную с помощью основного пера сделать на ленте точную начальную отметку Тп и записать момент Гн по хронометру и отсчет Гн по ленте самописца. Так, например, если пуск самописца произведен в момент Тп =21 ч 42 мин (приближенно), то на момент Гн = 21 ч 43 мин 00 сек соответствующий отсчет по ленте, как показано на рис. 170, будет Т'н = 12<< 42л$и« 01,2 сек\
г) после записи на ленте принятых сигналов выключить прибор, вынуть ленту и для максимальных пиковых записей а, Ь, с сигналов снять отсчеты Д/2> А/з моментов приема сигналов в минутах и секундах относительно начала ближайшей к моменту Т'н минутной отметки времени;
д) вычислить исправленные моменты приема сигналов по формуле
Л = -г ихр -г A/z ~г А/о,
где А/о = Тн — Т'н — алгебраическая разность между началом ближай-
шей минутной метки на ленте самописца и моментом Т'н (величина А/о при рассмотренном способе ее определения включает в себя поправку за несовпадение перьев самописца);
е) зная моменты 7\ посылки сигналов, вычислить разности
6 “ T'f T'nocr
Искомое расстояние до соответствующего фокуса будет Z)/ = с3 ti.
Запись момента Тн и моментов приема сигналов рекомендуется, делать при повышенной скорости движения ленты самописца; достаточная точность измерения обеспечивается при скорости около {Q мм/сек.
Для повышения точности определения горизонтальной скорости звука в воде могут быть использованы гидрологические карты с нанесенными на них областями равных скоростей звука. При наличии таких карт величина с3 рассчитывается по формуле среднего весового
4- сз2Ь 4-... 4- сзп^п
3 /t 4- /г 4- ... 4- /д ’
где с31, Сз2, . . . ,Сзл— частные значения горизонтальных скоростей звука
в отдельных областях, через которые проходит звуковой сигнал;
/2, . . . , /„ — расстояния, измеряемые по карте, как показано на рис. 171.
Характерная особенность навигационной гидроакустической системы состоит в том, что систематические ошибки в вычисляемых расстояниях,
23 Заказ 1833
354
Глава 13. Определение места по земным ориентирам
зависящие от ошибок в принятой скорости звука, приближенно одного порядка со случайными ошибками, что следует учитывать при опреде-
лении вероятного места.
Штурманские угломерные приборы высокой точности применяются для определения расстояний по измеренным вертикальным углам. Достоинством данного способа является его полная автономность и, кроме того, довольно высокая точность.
Возможны два случая решения задачи:
1) расстояние до ориентира превышает дальность видимого горизонта, т. е. основание ориентира скрыто видимым горизонтом;
2) расстояние до ориентира меньше дальности видимого горизонта, и наблюдатель видит основание ориентира или береговую черту.
Когда основание ориентира скрыто, наблюдатель, находящийся в точке А (рис. 172), при возвышении глаза над уровнем моря е видит вершину В' ориентира по направлению Л'В". Угол г между прямой А'В' и касательной А'В" к криволинейному лучу света называется земной рефракцией, которая вычисляется по формуле
г-4- (13-и)
где D—расстояние до ориентира в милях.
Угол г, вычисляемый по формуле (13. 11), получается в минутах.
Угол d между истинным горизонтом А'М и касательной A'N к криволинейному лучу света DA' называется наклонением видимого горизонта. Этот угол выбирается из табл. 11-6 МТ—63 по величине е.
С помощью секстана измеряется вертикальный угол NA'B" между
видимым горизонтом и вершиной ориентира. Получив отсчет угла ос, исправив его поправкой индекса и инструментальной поправкой (/ + $), получим наблюденный угол рн* Если из этого угла вычесть земную рефракцию г и наклонение видимого горизонта dt то получим угол р, под которым видна вершина В' над истинным горизонтом
р — ос (/ 4- s) — г — d. (13. 12)
Искомое расстояние D до ориентира в морских милях вычисляется по формуле
где Dz — расстояние от счислимого места до ориентира в милях.
$ 73. Определение места по расстояниям
355
Пример. Находясь в 30 милях от острова Пантеллерия, измерили вертикальный угол высоты h — 837 м над видимым горизонтом.
Вычислить расстояние D до высоты, приняв е = 10 м, ос = 0°58',0 и / 4- s = = -f-О',8.
Решение. 1) Вычисляем угол
ос = 0°58;0
/4-5=4- 0,8
3H = 0°58J8
r = -2;3 (r = 4rD‘)
5f,6 (табл. И-б МТ — 63)
* = 0°50;9
2) по формуле (13. 13) вычисляем искомое расстояние
0,5D* + 1,86 (h — е) 450 + 1,86 827
D =------В~Г?-------= 30 + 50,9 " = 24’6 МИЛИ'
Если вычисленное расстояние отличается от счислимого больше чем на 6—7 миль, следует повторить решение, учтя вместо счислимого полученное при первом решении расстояние D.
При большом расстоянии и малой высоте ориентира угол р может быть отрицательным. В таких случаях задача решается как обычно, но в знаменателе формулы (13.13) вместо суммы Dc р будет разность Dc-p.
Получение расстояния до ориентира рассмотренным способом с удовлетворительной точностью во многом зависит от состояния атмосферы. При ненормальном состоянии атмосферы, о чем можно судить по значительному расхождению табличного наклонения горизонта с наклонением, измеренным с помощью наклономера, полученное расстояние следует рассматривать как приближенное. Учет измеренного наклонения горизонта лишь незначительно повышает точность определения расстояния, так как вторая поправка измеренного угла — земная рефракция остается ошибочной.
Если наблюдатель видит основание ориентира, то измеряется вертикальный угол а между направлениями на береговую черту и вершину ориентира В' (рис. 173). Вследствие того, что расстояние до ориентира мало (меньше дальности видимого горизонта), измеренный криволинейный угол а можно считать равным плоскому углу.
Искомое расстояние D до ориентира в данном случае следует рассматривать как сумму трех отрезков:
— расстояния D' (рис. 174), соответствующего возвышению глаза наблюдателя е = 0и совпадению точек С и В (рис. 173), т. е. удалению ориентира от береговой черты, равному нулю;
— поправки Alb за возвышение глаза;
— поправки Д£)2 за удаление основания ориентира от береговой черты.
23*
356
Глава 13. Определение места по земным ориентирам
Для вычисления расстояния D' при известной высоте ориентира h применяется формула
Т^, h Ctg а
D = 1852 в МИЛЯХ.
Высота ориентира должна быть выражена в метрах.
По этой формуле составлена табл. 29 МТ—63.
Решая задачу с помощью логарифмической линейки, удобно применять формулу
£)' = 1,86 Д. а
Поправка AZ>i за счет возвышения глаза наблюдателя равна
дд, = ***=£)-tg а.
h — е
Так как tga и всегда правильные дроби, то ADj < е и, следовательно, этой поправкой можно пренебрегать.
Поправка &D2 за счет удаления / ориентира от береговой черты равна
д Г) _
h(D'—iy
Если I < А, то поправка Д/?2 не превышает 2е и ею также можно пренебрегать. Когда /> А, что бывает довольно часто, расстояние Df должно быть увеличено на поправку ДР2-
Пример. Измерен вертикальный угол между береговой чертой и вершиной ориентира.
Вычислить расстояние до ориентира, если угол а = 0оЗЗ',0, высота ориентира Л = 50 м, возвышение глаза е — 10 м и удаление I ориентира от береговой черты (измерено по карте) равно 1 миле.
Решение. 1) Вычисляем расстояние £)', соответствующее величинам е и /, равным нулю
Df — 1,86 -Д- — 2,8 мили; а
2) вычисляем поправку ДР3
лп eD>l Ю-2,8-1
Л°2 Л (О' — Г) 50 (2,8 — 1) ~ 0,3 МИЛИ'
Искомое расстояние D будет равно
D = D -J- := 2,8 0,3 = 3,1 мили.
Точность вычисляемого расстояния понижается с уменьшением угла а. Следовательно, при возможности выбора ориентиров нужно отдавать предпочтение тем из них, которые имеют большую угловую высоту. Кроме того, следует пользоваться ориентирами, высоты которых известны с минимальными ошибками, а на морях с приливами измерять угол не над береговой чертой, а над основанием ориентира.
Измерения с помощью корабельной РЛС, импульсных дальномерных систем и корабельных гидроакустических станций осуществляют операторы, обслуживающие аппаратуру. Штурман должен указать им последовательность измерений, а если необходимо, проконтролировать опознавание ориентиров.
Вертикальные углы для вычисления расстояний измеряет лично штурман. Независимо от применяемых способов порядок измерений должен обеспечить наиболее полное исключение влияния движения корабля.
§ 73. Определение места по расстояниям
357
Для этого первыми следует измерять расстояния, изменяющиеся более медленно, т. е. расстояния до ориентиров, расположенных ближе к траверзу.
При невозможности измерений с малыми интервалами времени, в особенности расстояний до близко расположенных ориентиров, предусматриваются три измерения до двух ориентиров и пять — до трех. Затем расстояния, симметричные относительно среднего момента, осред-няются.
Прокладка линий положения. Изостадии или линии положения, касательные к изостадиям, могут прокладываться на обычной навигационной карте или на карте (планшете) с сеткой изолиний.
При использовании обычной карты отрезки изолиний прокладываются с помощью циркуля, одна из ножек которого устанавливается в точке, соответствующей месту ориентира. Радиусы проводимых дуг окружностей должны быть равны измеренным расстояниям, снимаемым с боковой рамки карты.
Для уменьшения влияния искажений, свойственных проекции Меркатора, особенно в высоких широтах, нужно строго придерживаться правил пользования переменным масштабом на боковых рамках карты.
Стадиометрические сетки применяются в тех случаях, когда необходимо определять место через короткие промежутки времени, а также при измерении больших расстояний. Применение стадиометрических сеток помимо ускорения работы по прокладке линий положения дает возможность наиболее полно учесть сжатие Земли, а также и искажения, свойственные проекции, в которой составлена карта или планшет.
В простейшем случае, при наличии ориентиров на карте и небольших расстояниях до ориентиров, стадиометрическую сетку можно построить с помощью циркуля в виде двух или трех семейств концентрических окружностей (рис. 175). Чтобы облегчить пользование такой сеткой, изолинии следует проводить тушью разных цветов, а расстояния между соседними линиями делать кратными 0,5 или 1 миле, или километру, но не 'более 2 см.
Для гидроакустических дальномерных систем стадиометрические сетки на картах строятся при подготовке карт к изданию. На картах в нормальной проекции Меркатора при одних и тех же приращениях расстояний до ориентира расстояния между изолиниями неодинаковы и увеличиваются с увеличением широты места.
Линии положения длиной 1—3 см в зависимости от кривизны изолиний можно прокладывать в виде отрезков прямых, интерполируя между изолиниями. Для облегчения интерполяции рекомендуется использовать палетку (рис. 176).
358 Г лава 13. Определение места по земным ориентирам
Чтобы проложить линию положения на промежуточное значение дистанции между величинами Di и Р2, обозначенными на изолиниях, необходимо измерить расстояние между этими линиями на карте по произвольной прямой и найти на палетке две точки, например А тл В (рис. 176), соответствующие данному раствору ножек циркуля. Линия положения на карте должна быть проведена на удалении АК от изолинии с меньшей дистанцией; отрезок АК берется равным разности измеренной дистанции DK и ее меньшим значением Di по оцифровке на изостадиях. Аналогично наносится другая точка К', и через полученные точки К н К' проводится линия положения, как показано на рис. 177.
В В'
к 1 1 и'
I i । । । I । ।
А Рис. 177 А1
При определении места с помощью гидроакустической дальномерной системы проведение линии положения связано с вводом поправок за изменение скорости звука в воде и за смещение фокуса.
Поправка за изменение скорости звука. Эта поправка является следствием того, что при расчете стадиометрической сетки учитывается средняя скорость звука, отличающаяся от фактической, вычисленной, например, по данным гидрологической карты. И так как изолинии обычно оцифровываются промежутками времени то поправка за изменение скорости звука должна быть вычислена в секундах и придана со своим знаком к измеренному времени t прохождения звука от фокуса до корабля. Для определения поправки Д/с используется следующая формула:
(13.14)
где сз — фактическая скорость звука;
сэ скорость звука, учтенная при расчете сетки изолиний.
По формуле (13. 14) рассчитываются таблицы поправок Д/с, помещаемые на картах. Знак поправки зависит от знака разности с3 — с3.
Поправка за смещение фокуса системы. Данная поправка вводится также методом изменения измеренного промежутка времени t между моментами посылки и приема звукового сигнала. Для расчета этой поправки Д/ф необходимо знать направление на Фактический фокус F' относительно штатного его положения А, характеризуемое углом а (рис. 178), пеленг ИПна приближенное место корабля Кот штатного фокуса и величину Дг смещения. Отрезок Д£>, равный проекции смещения Дг на линию пеленга, соответствует смещению линии положения. Этот отрезок равен
Д£) = Дг cos а = Дг cos (ИП — А). (13. 15)
Знак поправки Д£> определяется по знаку cos а, т. е. при а<90° Д7) имеет знак плюс, а при а>90° — минус.
§ 73. Определение места по расстояниям
359
Поправка Д/ф получается делением Д£> на среднюю скорость звука. Для выборки поправки Д/ф используются специальные номограммы.
Определение вероятного места по расстояниям до двух и трех ориентиров. Двум расстояниям соответствуют две линии положения, в пересечении которых принимается искомое место. Если каждое из расстояний измерялось только по одному разу, то для получения вероятного места первая линия должна быть смещена по линии пути на расстояние Д5, пройденное кораблем за время между моментами наблюдений. Для этого место первого ориентира смещается на величину Д£ и расстояние Di прокладывается от смещенной точки Е'ь как показано на рис. 179.
При углах пересечения линий положения меньше 30° или больше
150° получаемое место должно считаться приближенным. Как исключе-
ние, при измерении расстояний с помощью высокоточных РНС допускаются углы пересечения линий положения 15°—20°.
При трех линиях положения, как правило, образуется треугольник погрешности, являющийся следствием наличия случайных и систематических ошибок линий положения. Случайные ошибки при определении расстояний с помощью РЛС, импульсных дальномерных радиотехнических средств и корабельных гидроакустических станций, как правило,
малы. Следовательно, треугольник по-
грешности при наличии только случайных ошибок имеет малые размеры (стороны его на путевых картах не превышают 5—6 мм). Вероятное
место должно приниматься в центре круга, вписанного в треугольник, или намечаться на глаз ближе к короткой стороне и углу, более близ-
кому к прямому.
Если расстояния определялись по вертикальному углу или с помощью гидроакустической дальномерной системы, то случайные ошибки линий положения вызывают появление треугольника погрешности значительных размеров — стороны его могут достигать 1,5—2 миль. Вероятное место в таких случаях должно находиться применением центрографического приема или, в частном случае, при равенстве ошибок линий положения — приема, связанного с проведением противомедиан.
Повторяющиеся ошибки могут иметь существенную величину при определении расстояний по вертикальным углам, измеряемым над видимым горизонтом вследствие ненормального состояния атмосферы, а также с помощью гидроакустической системы вследствие ошибки в принятой скорости звука в воде; наличие этих ошибок вызовет появление большого треугольника погрешности.
При равных систематических ошибках (что будет справедливо, если расстояния до ориентиров приближенно одинаковы) определение места, свободного от систематических ошибок, производится наиболее просто. Получив большой треугольник погрешности abc (рис. 180) и будучи уверенным в отсутствии промахов в измерениях или в опознавании ориентиров, следует изменить расстояния на одну и ту же величину и проложить новые линии положения. Этим линиям будет соответствовать новый треугольник а'Ь'с'. Искомое место должно быть принято в точке F пересечения биссектрис, т. е. прямых, проведенных через сходственные вершины двух треугольников. Изменение расстояний следует
360
Глава 13, Определение места по земным ориентирам
делать так, чтобы новый треугольник получился меньше первоначального.
При неодинаковых систематических ошибках для отыскания вероятного места проводятся взвешенные биссектрисы. Проведение взвешенных биссектрис в рассматриваемых способах определения места упрощается, так как с большой вероятностью можно считать, что система-
Рис. 180
тические ошибки прямо пропорциональны самим расстояниям. Поэтому, получив треугольник погрешности, следует повторить решение, изменив расстояния в указанном отношении. Так, если расстояния до ориентиров равны 150, 250 и 400 милям, то, изменив первое из них, например, на Д£>1 = 2 мили, второе и третье нужно изменить на
Д£)2 = 2--^ = 3,3 мили; z 150
Д£)3 = 2- 4^ = 5,3 мили.
Искомое место, как и в первом случае, принимается в точке переселения прямых, проведенных через сходственные вершины двух треугольников.
Для нахождения вероятного места при наличии как случайных, так и систематических ошибок применяются рекомендации, изложенные в §70.
Аналитическое определение координат места по двум измеренным расстояниям. Задача решается при повышенных требованиях к точности определяемого места, в частности при проверке планшетов со стадно-метрическими сетками.
Прямоугольные координаты л>, уР места, определяемого по двум расстояниям, вычисляются по формулам:
хр = хА + Да:;
Ур = У А + ДУ> где
Дх= Р(^в--ул) + й(Ул~Уд) .
Do
д Р (Ув~Уа) + h(xB~xA) у Do
здесь
_ + Dq — d|
Р “ 2Di ;
h = y
хА и ул, хв и ув — прямоугольные координаты опорных точек (ориентиров);
£>] и D2 — расстояния до ориентиров А и В соответственно;
Do — расстояние между ориентирами (база).
$ 74. Определение места по разностям расстояний
361
Обозначения пунктов А и В ставятся так, чтобы определяемая точка F была вправо от направления АВУ как показано на рис. 181.
Для проверки планшета берутся расстоя- А о в
ния Di и D2 до нескольких (3—5) точек Ft Д-------------2-------д
пересечения двух изолиний на планшете и \ /
по этим расстояниям вычисляются коорди- \ /
наты и yFi по приведенным выше форму- \ /
лам. Затем точки Ft наносятся на планшет. \ / 3
При отклонениях точек Fi и Ft друг от дру- \ /
га не более чем на 0,6 мм планшет считается ег
удовлетворительным, в противном случае он г
подлежит пересоставлению. Рис. 181
Порядок оценки точности определяемых расстояний и вычисления средней квадратической ошибки полученного места рассматриваются в гл. 16.
§ 74. ОПРЕДЕЛЕНИЕ МЕСТА ПО РАЗНОСТЯМ РАССТОЯНИЙ
Для определения разностей расстояний применяются: — импульсные разностно-дальномерные радионавигационные системы;
— фазовые разностно-дальномерные радионавигационные системы;
— импульсно-фазовые разностно-дальномерные радионавигационные системы;
— гидроакустические системы.
Практическое выполнение способа
1. Выбрать ориентиры — пары береговых станций радионавигационных систем или фокусов гидроакустических систем.
2. Одновременно или с минимальными промежутками времени измерить навигационные параметры, соответствующие разностям расстояний, заметить момент по часам и отсчет лага. Если промежутки времени между моментами измерений настолько значительны, что корабль проходит путь, превышающий 0,5—1 мм в масштабе карты, необходимо фиксировать моменты и отсчеты лага для измерения каждого навигационного параметра отдельно, чтобы привести линии положения к одному зениту (месту).
3. Исправить результаты измерений поправками и проложить линии положения.
4. Определить вероятное место и при необходимости оценить точность обсервации.
Выбор ориентиров. Ориентиры выбираются по карте с нанесенной сеткой изолиний так, чтобы для определения места:
— по двум линиям положения углы пересечения гипербол были по возможности ближе к 90°; при углах меньше 30° получаемые места будут ненадежными;
— по трем линиям положения углы пересечения гипербол были близкими к 60° или 120°, так как при этом случайные ошибки навигационных параметров имеют минимальное влияние, а при углах пересечения около 120°, кроме того, упрощается нахождение вероятного места.
При выборе пар станций импульсных и импульсно-фазовых разностно-дальномерных систем следует при возможности выбирать такие пары, от которых могут приниматься только поверхностные
362 Глава 13. Определение места по земным ориентирам
сигналы. Основным критерием для выбора таких пар являются расстояния до станций системы; величины этих расстояний приведены в § 38.
Измерение навигационных параметров. При использовании импульсных разностно-дальномерных радионавигационных систем типа Лоран-А. Навигационными параметрами являются разности расстояний до двух-трех пар станций; с помощью корабельного приемоиндикатора измеряются промежутки времени запаздывания приема сигналов ведомых станций относительно ведущих, соответствующие этим разностям. В зависимости от конструктивных особенностей корабельного приемоиндикатора, а также от несущих частот (длин радиоволн) излучаемых сигналов измерения могут быть последовательными или одновременными. Одновременные измерения возможны только при одной и той же несущей частоте, например для пар станций: 1L1 и 1L7, 2Н4 и 2L5 и т. д.
Для повышения надежности и упрощения измерений рекомендуется перед измерениями снимать с карты с сеткой гипербол приближенные значения навигационных параметров. Эти параметры, заранее установленные на отсчетном устройстве приемоиндикатора, дают возможность сократить время, затрачиваемое на измерения, и, кроме того, более просто опознать принадлежность сигналов к той или иной паре.
Время запаздывания приема сигналов от ведущей и ведомой станций во всех случаях измеряется в два этапа. Первый этап дает возможность получить приближенное значение навигационного параметра, а второй — уточнить его.
Порядок измерений и классификации (распознавания) сигналов (поверхностные или пространственные) изложены в § 38.
Если корабль находится в зоне, где возможен прием пространственных и поверхностных сигналов, то для обнаружения поверхностных сигналов рекомендуется ввести максимальное усиление; поверхностные сигналы, если они слабы, должны появиться на экране индикатора в виде незначительных подъемов оснований передних фронтов импульсов.
При нарушении синхронизации работы береговых станций излучаемые сигналы становятся мерцающими с периодом 1 сек. Кроме того, может применяться способ сигнализации, при котором навигационный параметр изменяется скачками на 1000 мксек. В случае нарушения синхронизации определять место корабля по сигналам РНС нельзя.
При использовании импульсно-фазовых разностно-дальномерных систем. Возможны два типа приемоиндикаторов для таких систем:
— с измерением по огибающей;
— с измерением по фазе.
Порядок измерения навигационных параметров с помощью индикатора без совмещения по фазе аналогичен рассмотренному выше для импульсных систем. Отличия состоят в следующем:
— приемник настраивается на длинные волны путем установки переключателя антенны в положение ДВ (длинные волны), а переключателя каналов — в положение, зависящее от длины радиоволны, на которой работает данная цепь станций;
— на экране приемоиндикатора видны пакеты сигналов как ведущей, так и ведомых станций; опознавание пакета от ведущей станции производится по количеству сигналов в пакете. Так, например, пакет сигналов от ведущей станции РНС Лоран-С состоит из девяти сигналов: восемь из них отстоят друг от друга на 1000 мксек, а девятый от восьмого на 2000 мксек (или меньше 1000 мксек). Пакеты сигналов от
§ 74. Определение места по разностям расстояний
363
ведомых станций состоят все из восьми сигналов. Опознавание пакетов сигналов ведомых станций проще всего производится по величине навигационного параметра, приближенная величина которого снимается с карты для счислимого места корабля;
— в процессе измерений на левые кромки пьедесталов можно устанавливать любые сигналы пакетов, лучше если номера их будут одинаковыми. В тех случаях, когда случайно будут использованы сигналы разных номеров, например первый сигнал пакета ведущей станции и второй сигнал пакета ведомой, отсчет измеряемого параметра будет отличаться от нужного для определения места точно на 1000 (2000, 3000 и т. д.) мксек, что легко обнаруживается и исключается путем соответствующего изменения снятого отсчета.
Приемоиндикаторы с измерением по фазе могут быть в двух вариантах:
— с визуальным совмещением фронтов по высокочастотному заполнению радиоимпульсов;
— с автоматическим измерением разности фаз несущих колебаний в «особой» точке радиоимпульсов.
В первом варианте оператор, наблюдая сигналы на экране индикатора, вручную совмещает их фронты по соответствующим периодам высокочастотного заполнения, не подверженным интерференции. Во втором варианте, наиболее совершенном, весь процесс измерений, начиная от поиска сигналов, полностью автоматизирован. Обязанностью оператора является установка перед началом измерений на отсчетном устройстве приближенной величины навигационного параметра с точностью, указываемой в технической документации.
В процессе работы береговых станций импульсно-фазовых РНС передается информация о нарушении синхронности излучаемых сигналов. Так, например, при нарушении синхронности ведущей станции цепи РНС Лоран-С девятый отдельно стоящий сигнал пакета становится мерцающим и незначительно перемещается вдоль развертки экрана приемо-индикатора. В случае нарушений в работе ведомых станций мерцающими становятся два первых сигнала их пакетов. В том и другом случаях измерения для определения места производить нельзя.
При использовании фазовых разностно-дальномерных систем. Навигационными параметрами являются также разности расстояний до нескольких пар береговых станций, измеренные с помощью приемоинди-катора как разности фаз. Процесс измерений полностью автоматизирован.
В зависимости от типа приемоиндикатора и особенностей системы в результате измерений можно- получить:
— разности фаз конечных фазовых углов на различных частотах сравнения без целого числа циклов. Целое число циклов находится на основе приближенного места корабля путем последовательного перехода от разности фаз, измеренной на низкой частоте сравнения, к разности фаз, полученной на более высокой частоте. При решении этой задачи применяются специальные графики, номограммы или таблицы;
— разности фаз полных фазовых углов на приведенной частоте с указанием целого числа циклов. Целое число циклов определяется автоматически также на основе измерений разностей фаз на частотах сравнения. Приведенная частота сравнения остается постоянной независимо от несущих частот, на которых излучаются сигналы береговых станций;
— разности фаз в долях фазового цикла, измеренные на несущей частоте. Целое число циклов в этом случае определяется привязкой
364
Глава 13. Определение места по земным ориентирам
места к береговой опорной сети или путем последовательного перехода от более грубых разностей фаз.
Фазовые приемоиндикаторы по сравнению с индикаторами импульсных систем более требовательны к предварительному прогреву блоков, управляющих выработкой опорного напряжения. Поэтому аппаратура таких индикаторов должна включаться на прогрев заблаговременно.
При использовании гидроакустических систем в разностно-дальномерном варианте. Гидроакустические дальномерные системы используются как разностно-дальномерные в тех случаях, когда на корабле по каким-либо причинам, например при утрате поправки часов (хронометра), нет возможности определить точное время приема сигналов. В таких случаях для определения линии положения измеряется разность моментов приема сигналов t и тогда искомая разность расстояний вычисляется по формуле
г = c3t, (13.16)
где с3 — скорость звука в воде.
Скорость звука в воде определяется так же, как в дальномерном варианте системы (см. § 73).
Для измерения промежутка времени запаздывания сигналов от фокусов системы применяется два способа:
— с помощью самописца, регистрирующего моменты приема сигналов на корабле;
— с помощью секундомера при приеме сигналов на слух.
Пример. В соответствии с расписанием сигналы навигационной гидроакустической системы поданы в моменты:
— от фокуса А ТА — 21 ч 35 мин 00 сек\
— от фокуса В Тв = 21 ч 36 мин 30 сек.
На корабле эти сигналы приняты с интервалом t' —4 мин 12,5 сек, причем первым принят сигнал от фокуса В.
Вычислить разность расстояний г, учтя -горизонтальную скорость звука в воде с3 =1458 м!сек.
Решение. 1) Вычисляем истинное время запаздывания сигналов
t = 4 мин 12,5 сек + (Тв — ТА) =5 мин 42,5 сек',
2) по формуле (13.16) вычисляем искомую разность расстояний
г = с31 — 342,5-1458 = 499 365 м или 499,4 км.
Данный способ предъявляет высокие требования как к точности определения горизонтальной скорости звука в воде, так и к точности фиксации разности моментов приема сигналов.
Случайные и повторяющиеся ошибки определяемых разностей расстояний в большинстве случаев имеют один порядок, что следует учитывать при определении вероятного места по разностям расстояний до трех пар станций.
Исправление результатов измерений, прокладка линий положения и определение вероятного места при использовании импульсных и импульсно-фазовых разностно-дальномерных радионавигационных систем. Отсчеты навигационных параметров, снимаемые с отсчетных устройств приемоиндикатора, исправляются при приеме поверхностных радиоволн инструментальными поправками (если они не равны нулю), а при приеме пространственных радиоволн, кроме того, поправками пространственных радиоволн.
Линии положения прокладываются обычно на радионавигационных картах с сетками изолиний или на обычных навигационных картах через определяющие точки.
$ 74. Определение места по разностям расстояний
365
Изолинии гиперболической сетки проводятся на картах через 2—2,5 см с интервалом 200, 100, 50, 20 или 10 мксек, и соответственно оцифровываются. Для зоны, в пределах которой возможен прием пространственных радиоволн, наносятся поправки, называемые поправками пространственных радиоволн. Эти поправки для импульсных систем отнесены к точкам пересечения меридианов и параллелей карты и приводятся только для случая, когда на корабле принимаются пространственные радиоволны как от ведущей, так и от ведомой станций.
Учет поправок пространственных радиоволн дает возможность получить время запаздывания, соответствующее приему на корабле поверх-
ностных радиоволн.
Если навигационные параметры измерены при приеме поверхностных радиоволн, то линии положения строятся непосредственно по этим параметрам с применением метода линейной интерполяции. При приеме пространственных радиоволн результаты измерений должны быть предварительно исправлены упомянутыми выше поправками. Поправки находят путем последовательных приближений. При этом необходимо:
а) рассчитать поправки для счислимого места корабля;
б) придать вычисленные поправки к измеренным разностям расстояний (соответствующим временам запаздывания) и проложить линии положения;
в) если полученное место пересечения линий положения отстоит от
счислимого на расстоянии, при котором изменение поправок превышает 2 мксек, определить новые значения поправок для полученного места
и, придав их к измеренным параметрам, снова проложить линии положения и найти новое место. В большинстве случаев бывает достаточно одного-двух приближений.
При определении поправок по карте применяется способ линейной интерполяции. Так, например, если необходимо найти поправку для точки С (рис. 182) по поправкам Д/ь Д/2, Д^з и Д/4, приведенным в ближайших точках пересечения параллелей и меридианов, то, интерполируя между поправками и Д/2, следует найти поправку Д/а для точки а, затем по поправкам Д/3 и Д/4 найти поправку Л/ь для точки Ь; точки а и b лежат на меридиане, проходящем через точку С. Результирующая поправка Д/с вычисляется по величинам Д/а и Д/й. Аналогично вместо точек а и b можно брать точки с и d, лежащие на меридианах.
Пример. Находясь в счислимой "точке ’?с = = 67°30'ЛГ; Хс = 3°55' W, с помощью корабельного приемоиндикатора измерили разности моментов приема пространственных радиоволн от двух пар станций Лоран-А. Получили: для пары 1L1 fnPj = 3097 мксек, для пары 1L7 fnPa = 3640 мксек.
Определить место на момент вторых измерений, учтя промежуток времени между наблюдениями, равный 3 мин, //Я =180° и скорость корабля V = 15 уз.
Решение. 1) Вычисляем поправки пространственных радиоволн для счислимого места. Получаем для пары 1L1 Д^ = +3 мксек, а для пары 1L7 Д/2== +14 мксек;
;2) придаем поправки Д^ и Д/2 к отсчетам измеренных разностей расстояний и получаем их исправленные значения:
— для пары JL1
— для пары 1L7
3) интерполируя между изолиниями, на карте прокладываем и ЪЪГ (рис. 183), удовлетворяющие исправленным величинам /1
ti = ^npt + Д^1 = 3100 мксек; t2 = ^прэ + = 3654 мксек;
линии положения аа' „ . . . --> . и t2;
4) смещаем первую линию положения по курсу 180° на расстояние Д$ = Vt = = 0,25’3 = 0,8 мили и в точке F пересечения первой смещенной и второй линий положения получаем искомое место с координатами <р0 = 67°23;8 N; Хо = 4°12,'0 IF.
366
Глава 13. Определение места по земным ориентирам
В пределах зон, ограниченных гиперболами, оцифровка которых отличается от оцифровки базовой линии на 50 мксек, расстояния между
гиперболами непропорциональны приращениям навигационного параметра и линейная интерполяция в этих зонах дает значительные ошибки Поэтому интерполяция для прокладки линий положения должна производиться с помощью нелинейного масштаба (рис. 185). Порядок использования этого масштаба показан на примере.
Пример. Счислимое место в точке С Фс==61° N, Хс = 3° W. Нанести линию положения вблизи счислимой точки для пары станций 1L7, £ = 5375 мксек.
Решение. 1) На ближайшей к счис-лимому месту гиперболе намечаем две
Рис. 185
Рис. 184
точки Л и В (рис. 184) на расстоянии 2—3 см одна от другой и из этих точек опускаем перпендикуляры на продолжение базовой линии;
2) находим разности навигационных параметров: соответствующего взятой гиперболе и измеренного относительно параметра на продолжении базовой линии. Получаем:
Д6 = 5395 — 5350 = 45, Д/2 = 5395 — 5375 = 20;
§ 74. Определение места по разностям расстояний
367
3) с помощью циркуля-измерителя на интерполяционном масштабе (рис. 185) вмещаем отрезок В'В между осью абсцисс и наклонной прямой, удовлетворяющей разности 45 мксек, а затем измеряем отрезок Вга' от оси абсцисс до наклонной прямой разности Af2 = 20 мксек. Отрезок В'а' прокладывается по прямой В’В на карте; в результате получаем определяющую точку а';
4) нанеся в аналогичном порядке точку а на прямой АА', проводим линию положения аа'.
При отсутствии карты с гиперболической сеткой линии положения могут быть проложены на обычной навигационной карте через определяющие точки. Координаты этих точек выбираются из специальных таблиц; каждый выпуск таблиц рассчитан на район действия пары станций Лоран и состоит из объяснительного текста, таблиц поправок и основных таблиц.
Координаты определяющих точек, т. е. точек пересечения гипербол с меридианами или параллелями, даны в основных таблицах для различных разностей моментов приема сигналов от станций данной пары. Часть такой таблицы приводится ниже.
т 4500 4520 4540 4560 4580 Т
Шир. N 32 31 30 29 28 27 26 Долгота О ° ' Д ° ' Д ° ' Д ° ' Д ° ' Д 136 52.4 4-78 137 08.0 4-78 137 23.6 4-79 137 39.3 4-79 137 55.2 4-79 136 53.2 74 137 08.0 74 137 22.9 75 137 37.8 75 137 52.8 75 136 54.0 4-70 137 08.0 4-70 137 22.1 4-71 137 36.3 4-71 137 50.6 4-72 136 54.8 66 137 08.1 67 137 21.5 67 137 34.9 67 137 48.4 68 136 55.7 63 137 08.2 63 137 20.9 63 137 33.5 64 137 46.3 64 136 56.5 59 137 08.4 59 137 20.3 60 137 32.2 60 137 44.3 60 136 57.4 55 137 08.6 56 137 19.7 56 137 31.0 56 137 42.3 57
Кроме координат точек, в основных таблицах приводятся измене: ия этих координат Д в сотых долях дуговых минут, приходящиеся на 1 мксек изменения навигационного параметра Т. Для зон, примыкающих к продолжениям базовой линии, где точная линейная интерполяция невозможна, величины Д не приводятся.
Для проведения линии положения вполне достаточно рассчитать координаты двух точек пересечения ее с меридианами или параллелями. Шаг таблиц выбран таким, чтобы кривизной линий положения между точками можно было пренебрегать без заметного ущерба для точности.
В таблицах поправок приводятся поправки пространственных радиоволн, которые отнесены к точкам пересечения меридианов и параллелей через 1° или 2°. Поправки для согласования поверхностной радиоволны от одной станции с пространственной радиоволной от другой станции для зон, где возможен такой вариант приема сигналов, даются в отдельной таблице.
Выбор координат определяющих точек производится в следующем порядке:
а) в основных таблицах отыскивается страница, на которой имеется столбец с навигационным параметром Г, ближайшим к Ти (измеренная разность времен, исправленная поправками);
б) в заполненном крайнем столбце таблиц берутся ближайшая меньшая и ближайшая большая к счислимой широта (в левом столбце) или долгота (в правом столбце). Для этих значений координат и времени Т (меньше Ги) выбираются табличные координаты: долготы ХТ1, ХТз, если задавались табличными широтами, и широты <рТр
368
Г лава 13. Определение места по земным ориентирам
<рТа, если задавались табличными долготами. Одновременно выбираются интерполяционные величины и Д2-
Искомые координаты определяющих точек вычисляются по формулам:
'•2 = ХтЛ(Г.<-7')Д2 или
‘Р2 = 'Ч + (Ги~ Г) +
Пример. Счислимое место в точке <рс = 46°22' N, Хс = 66°42' W. Измерена разность моментов приема поверхностных радиоволн станций пары 1НЗ (Нью-Йоркская цепь). Получили 7И = 1508 мксек.
Определить координаты двух определяющих точек для прокладки линии положения.
Решение. 1)В таблицах для пары станций 1НЗ находим столбец с параметром Т = 1500 мксек\
2) в таблице заполнен слева столбец широт. Следовательно, в дальнейшем будем, определять долготы точек пересечения линии положения с табличными параллелями. Задаемся табличными широтами ближайшей большей и ближайшей меньшей счислимой широты, т. е. <рТ1 = 46° Tv и <рТд = 46°30' TV;
3) для взятых широт и параметра Т == 1500 мксек выбираем долготы и величины А: для <рТ1 = 46° N, XTt = 66°38;6 W Aj = +30, т. е. +0J30,
для <?Та = 46°30' N, ХТа = 66°34',7 W Д2=+34, т. е. -+-0J34;
4) вычисляем долготы определяющих точек;
х1 = хТ1 + (тк~ т) д1 = бб°з8;б + 8-о,зо = 66°4i;o w,
Х2 = + (Ги — Т) Д2 = 66°34J7 + 8.0,34 = 66O37J4 W.
Через точки с координатами <?т, и <рт, Х2 проводится линия положения, удовлетворяющая измеренному параметру 7’и — 1508 мксек.
В отдельных выпусках таблиц для определения места судна при ломощи радионавигационной системы Лоран-А приводятся секторные диаграммы поправок за изменение или уточнение координат станций. Чтобы выбрать данную поправку, необходимо определить, в каком именно секторе находится место корабля. Поправка алгебраически придается к измеренному навигационному параметру.
При измерении трех разностей расстояний вероятное место находится центрографическим приемом или при малом треугольнике намечается на глаз.
При использовании импульсно-фазовых разностно-дальномерных систем линии положения прокладываются так же, как при использовании импульсных систем. Особенность состоит в том, что пространственные радиоволны от станций этих систем могут приниматься как днем, так и ночью. Поправки определяются по карте или выбираются из таблиц в соответствии с принимаемыми сигналами. Дневные поправки при приеме отраженных от ионосферы радиоволн отмечаются буквой D, а ночные — N. На картах и в таблицах приводятся также поправки пространственных радиоволн для случаев, когда один из сигналов поверхностный,
§ 74. Определение места по разностям расстояний
369
а другой пространственный. Так, например, если вблизи одной из точек пересечения меридиана и параллели на карте приведено:
SL1-X + 20D;
SL1-X + 13N;
SL1-YSG + 40D:
SL1-YSG + 58N.
то это значит, что в данной точке могут приниматься пространственные радиоволны пары станций Лоран-С SL1-X, их поправки днем равны +20 мксек, ночью +13 мксек; от пары станций SL1-Y могут приниматься пространственные радиоволны от ведущей станции, поверхностные радиоволны от ведомой станции. Поправка в последнем случае днем равна +40 мксек, а ночью +58 мксек. Если пространственные радиоволны принимаются от ведомой станции, а поверхностные от ведущей, то вместо сочетания SG на карте приводится GS.
В некоторых случаях при неблагоприятных условиях распространения радиоволн или при малой высоте приемной антенны сигналы ведущей станции могут быть настолько слабыми, что измерения промежутков времен, характеризующих запаздывание сигналов ведомой станции относительно ведущей, становятся невозможными.
В таких случаях можно определить место или получить хотя бы одну линию положения, измеряя запаздывание сигналов ведомых станций. Так, например, если на экране индикатора видны пакеты сигналов от станций X, Y и Z, то можно измерить разности моментов /х_у, tx-z или /у_г как расстояния между передними фронтами первых радиоимпульсов в пакетах. Чтобы определить место, необходимо на карте вблизи счислимой точки построить линии положения, удовлетворяющие минимум двум параметрам, например /х-у и /х_2. Параметры следует выбирать с таким расчетом, чтобы угол пересечения линий положения был возможно ближе к 90°.
Интересующие нас линии положения являются также гиперболами, и для их прокладки можно воспользоваться гиперболической сеткой на карте, нанесенной для нормального варианта использования данной системы.
Для упрощения прокладки линий положения, удовлетворяющих временам запаздывания приема сигналов ведомых станций, следует на карте провести две вспомогательные гиперболы, одна из которых должна соответствовать меньшей, а другая большей разностям моментов по сравнению с величиной измеренного параметра. Так, например, если измерен параметр /х_у— 12 520 мксек, то для прокладки линии положения следует предварительно провести отрезки гипербол для разностей fxy == 12500 мксек и /”_у = 12 550 мксек. Величины /х_у и /’_у должны находиться как разности оцифровок изолиний для пар, в которые входят станции X и Y. Линия положения, соответствующая параметру _у = 12 520 мксек, проводится путем линейной интерполяции между отрезками вспомогательных гипербол.
•Перед проведением вспомогательных гипербол следует из чисел, соответствующих оцифровкам гипербол тех пар станций, для которых согласно указаниям на карте отсчеты индикатора должны быть увеличены на полупериод посылки пакетов сигналов, вычесть эти полупериоды.
Пример. Координаты счислимого места <рс — 36°00' АГ; Хс== 16*30'0+
24 Заказ 1833
370
Г лава 13. Определение места по земным ориентирам
С помощью корабельного приемоиндикатора измерена разность моментов приема сигналов ведомых станций пар SL1-Y и SL1-Z Средиземноморской цели системы Лоран-С н получен отсчет по индикатору /у _ г =20 520 мксек.
Проложить линию положения.
Рис. 186
Решение. 1) Наносим на карту счислимое место С (рис. 186);
2) учтя, что на карте дано указание о необходимости увеличения отсчетов, снятых с приемоиндикатора для пары SL1-Z на 39 950 мксек, вычитаем этот промежуток из оцифровок изолиний пары вблизи счислимого места. Новые отсчеты оцифровок пишем на карте, как показано на рисунке (вместо 54 500—14 550, вместо 54 450 — 14 500 и т. д.);
3) вблизи счислимого места находим точку пересечения изолиний SL1-Y и SL1-Z, для которой разность оцифровок равна ry_z= 20 500 мксек. Такой точкой является точка Ъ, так как для нее ^у_ 2 = 35 000—14 500 = 20 500 мксек\
4) находим точку Ь', удовлетворяющую той же разности ty _ z, в пересечении изолиний SL1-Y 34 950 мксек и SL1-Z = 14 450 4~ 20 500 = 34 950 мксек-,
5) найдя аналогично точки Ь" и Ь'" для ty _ z = 20 550 мксек, проводим вспомогательные изолинии bb' и 6"У";
6) интерполируя между изолиниями bb' и b''b"', проводим линию положения аа', соответствующую измеренному навигационному параметру ty _ z = 20 520 мксек.
Для учета поправки пространственных радиоволн необходимо прежде всего выяснить, какие сигналы сопоставляются в процессе измерений. При этом может быть одно из трех сочетаний:
— оба сигнала поверхностные;
— оба сигнала пространственные;
— один сигнал поверхностный, а другой пространственный.
Когда оба сигнала пространственные, необходимо к измеренным навигационным параметрам алгебраически прибавлять поправки, вычисляемые по одной из формул:
для измерений ночью
Д/„ - 5,236 • - 333,333 (4 - В);
Аи
$ 74. Определение места по разностям расстояний
371
для измерений днем
Д/д - 3,694 - 280,280 (А - В).
Величины А и В, являющиеся функциями координат счислимого места <рс, Хс, а также станции, принятой за ведущую фвщ, Хвщ, и станции, принятой за ведомую срвм, Хвм, вычисляются по формулам:
Л = sin2 УвМ"2 — + cos <рс cos ?вм sin2 в-^—- ;
В — р/"sin2?811^ — -J- cos <?с cos ?Bmsin2~^2—С *
Когда один сигнал поверхностный, а другой пространственный, для вычисления поправки применяются формулы:
для измерений ночью
Д/д, = 0,02030 + ; (13. 17)
для измерений днем
Д/д = 0,0208D + -1^2.. (13. 18)
В формулах (13. 17) и (13. 18) D — расстояние в милях от корабля до станции, от которой принимались пространственные сигналы; поправка М при этом получается в микросекундах.
Расстояние D можно измерять на мелкомасштабной карте по локсодромии.
Поправку Д<» вычисляемую по формуле (13. 17) или (13. 18), считают положительной, если станция, от которой принимались пространственные сигналы, является ведущей. Если же пространственные сигналы принимались от станции, используемой в процессе измерений в качестве ведомой, то поправку считают отрицательной.
Пример. Находясь в счислимой точке <рс = 72° AZ, Хс = 0°, с помощью корабельного приемоиндикатора измерили разность моментов приема сигналов от ведомых станций северо-восточной Атлантической цепи РНС Лоран-С пар SL3-Z (о-в Ян-Майен) и SL3-X (Бу, Норвегия); в качестве ведущей использовалась станция Ян-Майен, сигналы от которой были поверхностными, а от станции Бу — пространственными.
Вычислить поправку МD для дневных условий.
Решение. 1) Наносим на мелкомасштабную карту счислимое место и место станции Бу по ее координатам, выбранным из описания радиотехнических средств навигационного оборудования восточной части Атлантического океана (ср = 68°38' М л=14°28' Osf) и измеряем расстояние до этой станции. Получаем D = 360 миль;
2) по формуле (13. 18) вычисляем поправку At D:
Мп = 0,0208-360 + = -58,9 мксек.
и dot)
Поправке Д/D приписан знак минус, так как станция Бу использовалась в качестве ведомой.
Применяя формулы (13. 17) и (13. 18), можно более просто (без вычисления величин Л и В) с достаточной для практики точностью получить поправку пространственных радиоволн для случая, когда оба
24*
372
Глава 13. Определение места по земным ориентирам
сигнала от ведомых станций были пространственными. Для этого следует:
— измерить расстояния до станций;
— вычислить поправки Д^или Д/D по указанным выше формулам в зависимости от времени суток; поправке для станции, принятой за ведущую, приписывается знак плюс, а для принятой за ведомую — минус;
— вычислить искомую результирующую поправку Д/ как алгебраическую сумму величин Д/, для ведущей и ведомой станций.
Так, например, если расстояния до станций были £>Вщ = 700 миль и DB>! — 500 миль, то для приема сигналов ночью по формуле (13.17) получим Д/вщ == +59,5 мксек, Д/вм = —78,0 мксек и результирующую поправку Д^ == +59,5 + (—78,0) — —18,5 мксек.
Измерение времени запаздывания сигналов от ведомых станций рекомендуется и в тех случаях, когда сигналы от ведущей станции достаточно интенсивны для получения третьей контрольной линии положения. Такой прием во многих случаях позволяет проконтролировать правильность опознавания сигналов. При отсутствии ошибки в опознавании сигналов (пространственные или поверхностные) стороны треугольника погрешностей не будут превышать величин, соответствующих случайным ошибкам навигационных параметров.
Одной из особенностей разностно-дальномерных радионавигационных систем является, как известно, наличие кодовой задержки, которая в исключительных случаях может быть изменена.
Для проверки или определения кодовой задержки следует:
— измерить навигационные параметры для определения места одним из точных способов и на этот же момент измерить промежуток /н времени запаздывания сигналов от станций выбранной пары;
— по измеренным параметрам нанести обсервованное место корабля па карту с гиперболической сеткой и снять отсчет t для этого места;
— вычислить разность t — = Д/н.
При неизменном времени кодовой задержки величина Д/н не должна превышать ее значения Д/р, рассчитанного по формуле
Ч = J/+? + (-^0,7М J2,
где mt — предельная ошибка измерения времени
Д/ — интервал оцифровок соседних гипербол вблизи места корабля в мксек',
Д/г — расстояние между гиперболами в милях;
Мо — предельная ошибка определения места корабля в милях, вычисленная с вероятностью не ниже 0,95.
Если расхождение Д/н и Д/р превышает указанную выше величину, следует определить Д/н 7—11 раз и в дальнейшем учитывать ее как поправку к измеряемому параметру для данной пары станций.
Прокладка линий положения и определение вероятного места при использовании фазовых разностно-дальномерных систем. Для исправления разностей фаз, измеряемых с помощью корабельных приемоиндикаторов, могут учитываться две поправки:
1) поправка за изменение фазовой скорости радиоволн как разность между реальной и принятой фазовой скоростью радиоволн;
2) поправка за искажение фазового поля при приеме радиоволн па рамку радиопеленгатора.
§ 74. Определение места по разностям расстояний
373
Поправки за изменение фазовой скорости радиоволн могут быть определены:
а) по данным, передаваемым на корабли по радио специальными центрами; штурман, нанеся величины поправок на карту района плавания для указанных точек, может вычислить и учесть их аналогично изложенному выше для поправок пространственных радиоволн, учитываемых при использовании импульсных РНС;
б) по данным, получаемым на корабле. Для этого необходимо:
— определить место наиболее точным из возможных способов и одновременно измерить разности фаз Ф/и для соответствующих пар станций фазовой РНС;
— нанести обсервованное место на карту и по оцифровкам изолиний снять для этого места полные разности фаз Т/ тех же пар станций;
— вычислить искомые поправки как разности величин, снятых с карты и измеренных с помощью приемоиндикатора
ДФ = Ф, - Ф, . ' »и
Полученные поправки следует учитывать при последующих определениях места, алгебраически суммируя их с измеренными разностями фаз.
Поправки за изменение фазовой скорости радиоволн изменяются как во времени, так и в пространстве. Длительность их учета после определения и площадь района действия должны определяться опытным путем; приближенные сведения об этом могут быть получены из технической документации системы или из специальных руководств.
Поправки за искажение фазового поля при приеме радиоволн на рамку радиопеленгатора возникают при некоторых курсовых углах на наземные станции системы вследствие того, что диаграмма приема рамки имеет четко выраженную направленность. Фаза принимаемого сигнала изменяется на 180° (0,5 цикла) при переходе через направление нулевого приема диаграммы направленности.
Если направления на ведущую и ведо-мую станции охватываются одним лепестком диаграммы направленности, то прием сигналов происходит так же, как на ненаправленную антенну. Если же одно из направлений попадает в другой * лепесток диаграммы направленности, то отсчеты по индикатору данной пары будут отличаться от истинных значений точно на 180°.
Порядок определения и ввода поправок за искажение фазового поля при приеме радиоволн на рамку радиопеленгатора зависит от особенностей данной радионавигационной системы и излагается в ее технической документации.
Вследствие того, что при приеме на рамку изменяется не только фаза, но и уровень принимаемых сигналов, использование рамки в качестве антенны приемоиндикаторов целесообразно только в подводном положении, когда применение других антенн затруднено.
Для прокладки линий положения, соответствующих измеренным навигационным параметрам, применяются карты или планшеты с гиперболическими изолиниями. Сетки таких изолиний могут быть:
— комбинированные, представляющие собой сочетание различных семейств гипербол, удовлетворяющих разностям фаз сигналов нескольких частот (двух-трех);
— для одной разностной частоты сравнения;
— для приведенной частоты;
— для одной несущей частоты, на которой производятся измерения разностей фаз сигналов данной пары станций.
374
Глава 13. Определение места по земным ориентирам
Комбинированные сетки применяются, в частности, на картах для радионавигационной системы Декка. Для каждой пары станций (ведущая— ведомая) этой системы гиперболические линии наносятся каким-либо одним цветом: красным, зеленым или фиолетовым.
Участок карты, ограниченный гиперболами одного цвета, в пределах которого укладывается один фазовый цикл по шкале точного отсчета, образует дорожку. Дорожки на картах объединяются в зоны, обозначаемые буквами от А до J. Каждая зона содержит строго определенное число точных дорожек: красная 24 дорожки с номерами от 0 до 24, зеленая 18 дорожек с номерами от 30 до 48 и фиолетовая 30 дорожек с номерами от 50 до 80. Оцифровка зон и дорожек производится от ведущей станции к ведомым.
Для определения места с помощью такой сетки необходимо:
а) определить зоны, в пределах которых находится место корабля для выбранных пар станций системы. Данная задача решается на основе известного счислимого места корабля, нанесенного на карту с сеткой изолиний, или места, полученного путем определения его каким-либо другим способом. При этом из двух букв, нанесенных на крайних изолиниях зоны, в которой находится корабль, следует брать более близкую к началу алфавита.
Буквы, обозначающие зоны пар станций, вручную выставляются на соответствующих шкалах приемоиндикатора;
б) снять отсчеты разностей фаз в долях фазовых циклов;
в) считать номера дорожек, в пределах которых должны быть проложены линии положения, удовлетворяющие отсчетам долей разностей фаз;
г) интерполируя между соседними изолиниями на полученные отсчеты разностей фаз, проложить отрезки линий положения; в пересечении этих линий принимается место корабля.
Если измерено три навигационных параметра, то искомое место намечается внутри треугольника погрешностей ближе к короткой стороне его и к углу, более близкому к прямому.
Автоматическое определение номеров дорожек с помощью корабельного приемоиндикатора возможно на расстояниях до 240 миль от места ведущей станции системы. Граница, за пределами которой определение дорожек становится неустойчивым, показывается на картах разрывом изолиний.
Сетки для одной разностной частоты сравнения, удовлетворяющие разностям фаз Vpp, соответствующим разностной частоте сравнения фаз сигналов, применяются в системе РСВТ-1. Положительным качеством таких сеток является независимость их ширины и неизменность оцифровок дорожек от несущей частоты (длины волны), на которой передаются сигналы ведущей и ведомых станций системы. Это обстоятельство дает возможность переходить на другой частотный канал без переоцифровки гипербол на карте в условиях определения места при наличии помех.
При двух парах станций в системе РСВТ-1 изолинии, образующие грубые разностные дорожки, наносятся на карты красным и зеленым цветами и оцифровываются целыми циклами разностей фаз (номерами дорожек) и их долями через 0,1—0,2 цикла.
Ширина грубых дорожек на базовой линии равна 0,5 длины волны для частоты сравнения фаз сигналов, что составляет около 12 км. По мере уменьшения позиционных углов между направлениями на береговые станции системы ширина дорожек увеличивается.
§ 74. Определение места по разностям расстояний 375
В процессе измерений с помощью фазового приемоиндикатора имеется возможность на любой момент получить текущие значения разностей фаз ЧГГР1 и на разностной частоте, а также разностей фаз Ч*т и ЧГТ сигналов точной сети. Номера грубых дорожек определяются по счислимому месту или с использованием разностей фаз сигналов еще более грубой (сверхгрубой) сети. Используя затем полные разности фаз Ч*гр и ТГРа, состоящие из отсчетов дробных частей циклов и целых циклов ДГГР1 и Д/pp^ можно определить номера точных дорожек и 7VTa из соотношения
дг । цг — цг А,
;vT r 'Г гр ,
где/т и /ГР — частоты, на которых сравниваются фазы сигналов при измерении разностей фаз Ч^ и Ч^р.
Приписав к измеренным разностям фаз Ч*т и Ч’т номера NT и /VT точных дорожек, получим полные разности фаз Ч*т и Ч’т. В свою очередь, полные разности фаз Ч*т и Ч*Та можно перевести в масштаб разностной частоты/ГР по формулам:
пг' _ пг ZOL
гр, т, /т и
По полученным величинам и ТрР прокладываются линии положения в соответствующих грубых дорожках, точка пересечения этих линий является искомым местом.
Номера грубых дорожек, увеличивающиеся от ведомых станций к ведущей, на картах показываются в разрывах гипербол, являющихся граничными в каждой дорожке. Из двух чисел, приведенных на этих границах, должно учитываться меньшее число.
Для упрощения определения номеров дорожек, а также для перевода точных разностей фаз в масштаб грубой разностной сетки используются специальные таблицы и номограммы, а также счетно-решающие устройства приемоиндикаторов.
Сетки для одной приведенной частоты, в частности на картах или планшетах для определения места с помощью РНС «Брас». Эти сетки сходны с сетками для одной разностной частоты сравнения. Ширина дорожек соответствует одному циклу разности фаз приведенной частоты; прокладку линии положения в дорожках производят по снятым с приемоиндикатора полным разностям фаз.
Сетки для одной несущей частоты, на которой производятся измерения разностей фаз сигналов данной пары станций, наносятся обычно на крупномасштабных картах или на планшетах для определения места с высокой точностью.
С помощью корабельного приемоиндикатора определяются две разности фаз и ф2 конечных фазовых углов (в пределах до одного цикла) сигналов, излучаемых ведущей и двумя ведомыми станциями.
376
Глава 13. Определение места по земным ориентирам
Изолинии, удовлетворяющие разностям фаз, отличающимся на один цикл, являются границами дорожек. Ширина дорожек на базовой линии соответствует половине длины радиоволны, на которой излучаются сигналы. По мере уменьшения позиционных углов между направлениями
на береговые станции от места корабля градиенты —2 sin-у-и gr3 =2 sin-у- гипербол уменьшаются, что приводит к увеличению ширины дорожек. Так, например, если частота принимаемых сигналов равна 1 Мгц, то дорожка на базовой линии будет иметь ширину около 150 м, а при угле ш = 60° она будет — = 300 м.
Разрешение неоднозначности, т. е. определение дорожек, в которых находится корабль, в данном случае возможно только привязкой места корабля к береговой опорной сети.
Определив место F (рис. 187) одним из точных способов (по горизонтальным углам, теодолитным засечкам с берега и проч.) и нанеся его
на карту или планшет, получают возможность определить дорожки по их номерам, нанесенным на граничных изолиниях. Далее эти номера можно выставить вручную на приемоиндика-торе и, снимая отсчеты текущих значений полных разностей фаз, определять место на любой заданный момент.
Для надежного определения дорожек средняя квадратическая ошибка определяемого при привязке места не должна превышать ]/б части ширины до-
рожки.
Приемоиндикатор на корабле и аппаратура береговых станций после геодезической привязки и до окончания работ должны функционировать без перерыва.
Фиксация циклов разностей фаз может осуществляться с помощью самописцев, подключаемых к приемоиндикатору. При наличии таких самописцев в случае кратковременного перерыва в работе береговых станций, пропущенное за время перерыва число циклов для соответствующей пары станций при условии постоянства элементов движения корабля может быть восстановлено по счислению.
Сетки гиперболических изолиний, отвечающих разностям фаз, измеренным на несущей высокой частоте сравнения, применяются также в системах, где измерения разностей фаз производятся на нескольких частотах, начиная от самой грубой разностной. В этом случае разреше-
ние неоднозначности отсчетов производится автоматически с помощью счетно-решающего устройства приемоиндикатора или с помощью номограмм и таблиц аналогично изложенному выше варианту обработки для РСВТ-1.
Если разрешение неоднозначности, т. е. определение номеров дорожек точной сети, производится счетно-решающим устройством приемоиндикатора, то линии положения прокладываются на картах или планшетах непосредственно по снятым отсчетам полных разностей фаз.
При разрешении неоднозначности с помощью карты на основе счислимого места отсчеты полных разностей фаз, необходимые для прокладки линий положения, получаются с помощью номограмм и таблиц,
§ 75. Определение места прямой, обратной и комбин. засечками
377
путем последовательного перехода от более низких частот сравнения к более высоким.
Прокладка линий положения и определение места по разностям рас* стояний, измеренным с помощью навигационных гидроакустических систем. В данном случае для прокладки линий положения применяются карты с нанесенными стадиометрическими сетками, используемыми в дальномерном варианте работы системы.
Для проведения отрезков гипербол необходимо провести плавные кривые линии через точки пересечения изостадий, удовлетворяющих одинаковым разностям расстояний.
Оценка точности измерения разностей расстояний и порядок вычисления средней квадратической ошибки получаемого места излагаются в гл. 16.
§ 75. ОПРЕДЕЛЕНИЕ МЕСТА ПРЯМОЙ, ОБРАТНОЙ И КОМБИНИРОВАННОЙ ЗАСЕЧКАМИ
Прямая засечка
Сущность способа состоит в одновременном измерении направлений (дирекционных углов) на корабль с двух, а иногда и с трех теодолитных постов, установленных на берегу. Места теодолитных постов определяются геодезическими способами с высокой точностью. Искомое место находится в точке пересечения двух или трех кратчайших линий, соответствующих измеренным направлениям.
Нули горизонтальных кругов теодолитов могут быть ориентированы по соседнему посту (рис. 188, а), когда посты взаимно видимы, или по ближайшим пунктам опорной сети (рис. 188, б), или по вспомогательному ориентиру (реперу Р), видимому с теодолитных постов (рис. 188, в), с таким расчетом, чтобы отсчеты углов соответствовали дирекционным углам в той системе счета, которая применена для оцифровки изолиний на планшете. Измерения с помощью теодолитов производятся личным составом обеспечивающего подразделения гидрографической службы.
Практическое выполнение способа
1. По командам с корабля, передаваемым по радио, произвести:
— проверку часов;
— измерение дирекционных углов;
— передачу измеренных углов на корабль в установленной последовательности.
378
Г лава 13. Определение места по земным ориентирам
2. Проложить линии положения и нанести место. При необходимости сделать оценку точности определения места.
Проверка часов. Штурман, пользуясь часами с секундной стрелкой, идущими по судовому времени, за 20—30 сек до сличения подает команду «Проверить время» и указывает упрежденный момент в целых минутах. За 5—10 сек до назначенного момента подается команда «Товсь», а затем в выбранный момент «Ноль». По команде «Ноль» наблюдатели у теодолитов пускают секундомеры.
Измерение дирекционных углов. По команде штурмана «Приготовиться» наблюдатели проверяют ориентировку горизонтальных кругов теодолитов, а затем по команде «Товсь» начинают визировать заранее обусловленную точку на корабле. Такой точкой может быть достаточно
мощная электролампа накаливания, зажигаемая на топе мачты, луч
прожектора, направленный на теодолитный пост или в зенит, а также
четко очерченная надстройка корабля, освещаемая прожектором.
По команде «Ноль» закрепляются алидады теодолитов и берутся отсчеты углов, которые по команде «Отсчет» передаются на корабль.
Моменты измерений фиксируются по секундомерам с учетом времени, указанного штурманом корабля при проверке часов. Неодновременность засечек с теодолитных постов не должна превышать 2 сек.
Прокладка линий положения и определение места. Для прокладки линий положения применяются планшеты в проекции Гаусса, на которых нанесены азимутальные сетки изолиний, представляющие собой
семейства радиальных прямых. Изолинии оцифровываются величинами углов а и р (рис. 189), которые могут отсчитываться как от северной части километровой линии у = const, так и от направления на ориентирную точку (соседний пост, ориентир и т. п.).
Обратная засечка
Искомое место определяется как точка пересечения двух изолиний — окружностей, вмещающих измеренные с корабля углы и проходящих через места двух пар ориентиров, между которыми измерялись углы. Измеряемые углы должны лежать в плоскости истинного горизонта наблюдателя.
Практическое выполнение способа
1. Выбрать ориентиры.
2. Подготовить секстан или два секстана к наблюдениям и измерить горизонтальные углы.
3. Исправить измеренные углы и нанести место. При необходимости сделать оценку точности определения места.
Выбор ориентиров. Ориентирами для определения места по двум углам могут быть:
— маяки, знаки и огни;
— знаки и огни специальной постройки;
— приметные пункты, координаты которых известны.
§ 75. Определение места прямой, обратной и комбин. засечками
379
При выборе ориентиров необходимо стремиться к выполнению следующих требований:
а) ориентиры должны быть хорошо видимы с корабля и иметь четко очерченные контуры или контрастную окраску, позволяющие наи-лучшим образом совместить в поле зрения трубы секстана прямовидимое изображение одного ориентира с дважды отраженным изображением другого;
б) средний ориентир должен быть возможно ближе к кораблю;
в) угол пересечения линий положения должен быть не меньше 30°.
Для определения угла 9 пересечения линий положения следует провести базовые линии и соединить места крайних ориентиров на карте со счислимым местом корабля К. Сумма углов Л и С (рис. 190) и будет искомым углом 6.
Комбинация ориентиров, при которой угол б близок к 0° или 180°, не позволяет определить место, так как это место и ориентиры лежат на окружности и решение задачи становится неопределенным. Случай неопределенности невозможен, когда:
— три ориентира расположены на одной прямой;
— средний ориентир ближе к кораблю, чем крайние;
— ориентиры распределены по всему горизонту.
Если три ориентира расположены так, что угол 6 пересечения линий положения меньше 30°, то следует использовать четыре ориентира, образующих две независимые пары. Для определения угла 6 в этом случае необходимо:
— измерить на карте углы а и р от счислимого места между намеченными парами ориентиров АВ и DE (рис. 191);
— провести базовые линии АВ и DE;
— построить перпендикуляры и N2b к серединам базовых линий;
— построить углы 90° — а и 90° — р с вершинами в местах ориентиров Л, или В, D, или Е соответственно и найти точки Oi и О2 пересечения границ этих углов с ранее проведенными прямыми N\a и N2b\ точки и О2 будут центрами окружностей, вмещающих углы аир. Если углы аир тупые, то центры и О2 окружностей будут лежать по другую сторону от базовых линий относительно места корабля и для получения мест этих центров необходимо построить углы а — 90° и р — 90°;
— провести прямые О\С и О2С и измерить угол 6 между этими прямыми.
В некоторых случаях при решении специальных задач основой для выбора ориентиров является величина допустимой ошибки определения места. В таких случаях выбирается такая комбинация ориентиров, при
380
Глава 13. Определение места по земным ориентирам
которой для заданного района величина предварительно вычисленной ошибки будет меньше предельно допустимой.
Для исключения необходимости введения поправок в измеренные наклонные углы для приведения их к горизонту необходимо выбирать такие ориентиры, которые имеют угловые высоты, близкие к 0°.
Подготовка секстанов к наблюдениям и измерение горизонтальных углов. Углы измеряются обычно двумя секстанами. При подготовке секстанов к наблюдениям следует:
— закрепить оптическую трубу и настроить ее окуляр на резкость по ориентиру;
— проверить перпендикулярность зеркал плоскости лимба;
— определить поправку индекса.
Порядок указанных проверок излагается в § 77. Для определения поправки индекса необходимо совмещать прямовидимое изображение ориентира или видимого горизонта с его же дважды отраженным изображением.
В процессе измерения углов в качестве прямовидимого должен выбираться хуже видимый ориентир.
С целью обеспечения одновременности измерений двумя наблюдателями визирование и совмещение ориентиров в поле зрения секстанов производятся до момента подачи команды «Ноль» старшим из наблюдателей или штурманом корабля. По этой команде визирование прекращается и наблюдатели докладывают штурману измеренные углы.
При многократных определениях места углы измеряют специально подготовленные угломерщики.
Для обычных навигационных определений, не требующих высокой точности определяемого места, допускается последовательное измерение углов одним наблюдателем. С целью уменьшения влияния движения корабля на определяемое место следует:
а) быстро измерить углы в намеченной последовательности;
б) первым измерить угол, изменяющийся более медленно;
в) первый угол измерить дважды — до и после измерения второго угла, а затем использовать его среднее значение.
Чтобы сократить время между моментами измерения углов одним наблюдателем, рекомендуется пользоваться двумя секстанами, на которых должны быть установлены приближенные величины углов.
В отдельных случаях горизонтальные углы могут быть получены как разности пеленгов трех ориентиров.
Нанесение места на карту или планшет. Для нанесения места измеренные углы должны быть исправлены поправками индексов и инструментальными поправками секстанов, выбираемыми из паспортов.
Нанесение места производится:
— при помощи протрактора или кальки;
— по гониометрической сетке;
— построением системы прямых линий.
Нанесение места протрактором состоит в следующем. Крайние линейки протрактора устанавливаются под измеренными углами по отношению к средней линейке, после чего протрактор передвигается по карте до тех пор, пока срезы всех линеек не пройдут через места ориентиров. Обсервованное место отмечается карандашом или накалы5 вается с помощью фиксатора в центре протрактора.
Отсчеты углов, устанавливаемых на протракторе, должны быть исправлены инструментальной поправкой, выбираемой из аттестата протрактора.
§ 75. Определение места прямой, обратной и комбин. засечками 381
Если измерялись несмежные углы между двумя парами независимых ориентиров АВ и CD (рис. 192), то для нанесения места необходимо:
— установить одну из линеек протрактора на отсчет угла а, наметить четыре точки a, b, с, d, удовлетворяющие этому углу, и провести через эти точки плавную кривую;
— установить линейку на отсчет угла £ и, перемещая центр протрактора по ранее проведенной кривой, подобрать на ней точку F, удовлетворяющую углу р. Эта точка и
будет искомым местом корабля.
Использование кальки аналогично использованию протрактора; на кальке должны быть предварительно построены измеренные углы аир, имеющие общую вершину.
Гониометрическая сетка применяется в тех случаях, когда необходимо определять большое количество мест через короткие промежутки времени. Изолинии проводятся цветной тушью; на каждой изолинии пи
шется значение угла, которому
она соответствует.
Для упрощения проведения отрезков линий положения между изолиниями сетки рекомендуется применять палетку (рис. 193), изготавливаемую на кальке или на тонком целлулоиде. Палетка накладывается на планшет вблизи предполагаемого места так, чтобы ее крайние лучи,
соответствующие интервалу сетки, совпали с соседними изолиниями; при этом прямые, секущие палетку, должны быть приближенно перпендикулярны изолиниям. Отсчитав число минут угла, накалывают точку а (рис. 194), а затем передвигают палетку на 2—3 см в точку а'. Через точки аиа' проводят линию положения.
Для нанесения места приемом, связанным с построением системы прямых линий, следует:
— от места среднего ориентира В (рис. 195) провести базовые линии на ориентиры А и С, а также прямые Ва и ВЬ под углами 90° — а и 90°—р к базовым линиям;
— из точек Л и С провести перпендикуляры к прямым АВ и СВ до пересечения с прямыми Ва и ВЬ\
— полученные вспомогательные точки а и b соединить прямой и из точки В опустить перпендикуляр на эту прямую. Основание перпендикуляра F и будет искомым местом.
382
Глава 13. Определение места по земным ориентирам
Если один из углов (например, ₽) тупой, то перпендикуляр СЬ проводится по другую сторону от базы, а точку b получают, проведя прямую ВЬ под углом р — 90° к базовой линии.
Способ, связанный с проведением системы прямых линий, является приближенным и применяется в случаях определения места по углам, полученным как разности пе-ленгов, измеренных с помо-А ~ - - _ , w щью пеленгатора. При измене- рении несмежных углов этот
\ / способ применять нельзя.
\ / При прокладке мест на
крупномасштабной карте, со-ог " г ставленной в проекции Мер-
катора, необходимо визмерен-Рис. 195 ные сферические углы аСф
вводить ортодромические поправки Да для получения плоских углов. Поправки Да вычисляются по формуле
Да = 0,5 (Хпр — Хлев) sin <рга,
где Хпр — долгота правого ориентира;
ллев — долгота левого ориентира;
<Рт — средняя широта.
Знак поправки Да совпадает со знаком разности долгот Хпр — Хлев.
Пример, Измерен горизонтальный угол аСф==72°00' между ориентирами Л (<Ра = 42°05' М Ха = 130°07' Ost) и В (?в = 42°09' У; Хв = 130°16' Ost).
Вычислить поправку Да и плоский угол для установки его на протракторе, учтя координаты приближенного места корабля Тс = 42°04' М Хс — 130°18' Ost.
является
Решение. 1) Ориентируясь по карте, определяем, левым, а ориентир В — правым;
2) вычисляем поправку Да и плоский угол апл;
Да == 0,5 <130°16' — 130°07') sin42°l = 4-3J0;
апл ®сф 4* До — 72°03'.
При использовании карт и планшетов в проекции Гаусса плоские углы равны измеренным сферическим.
Л
ЧТО
ориентир
команде, передаваемой
Комбинированная засечка
Искомое место F (рис. 196) получается в точке пересечения двух изолиний:
— кратчайшей линии Аа, соответствующей измеренному теодолитом углу Р;
— дуги окружности bb', проходящей через теодолитный пост А и вспомогательный ориентир В, вмещающей угол а, измеряемый на корабле.
Углы а и Р измеряются одновременно, по
по радио, или по исполнительному сигналу, подаваемому с корабля. Прокладка мест осуществляется на корабле.
Для упрощения прокладки линий положения используются планшеты с комбинированными азимутально-гониометрическими сетками, изготавливаемые гидрографической службой по заявкам. Планшеты составляются в проекции Гаусса.
Подготовка теодолитного поста и методика измерений те же, что при способе прямой засечки.
Глава 14
ОПРЕДЕЛЕНИЕ МЕСТА ПО СВЕТИЛАМ
§ 76. ОСНОВЫ ОПРЕДЕЛЕНИЯ МЕСТА КОРАБЛЯ ПО ВЫСОТАМ СВЕТИЛ
Высоте светила на небесной сфере соответствует изолиния — малый круг, который называется кругом равных зенитных расстояний; его центром является место светила.
На поверхности Земли высоте светила соответствует изолиния также в виде малого круга, называемого кругом равных высот. Центр круга равных высот находится в точке, именуемой полюсом освещения, географические координаты которой срп и Хп соответственно равны склонению 3 и гринвичскому часовому углу /Гр светила, т. е.
?п = 8. *п = АР. (14.1)
Сферический радиус этого круга равен 90°—А, зенитному расстоянию светила.
Кругу равных высот или равных зенитных расстояний соответствует уравнение, устанавливающее зависимость между координатами места наблюдателя <р0, и координатами светила А, о, /Гр
sin h = sin ср0 sin & 4- cos <p0 cos о cos /M, (14. 2)
nst где = /гр ± •
Для кругов равных высот двух светил можно написать систему уравнений:
sin /4 sin ?osin 4- cos ?ocos cos /Mj |
sin A2 = sincposin32 4-cos <pocos&2cosfMi j (^4.3)
Решение системы уравнений (14.3) относительно координат места можно выполнить аналитическим, графическим и графо-аналитическим способами.
Аналитический способ применяется при решении задач с помощью электронных вычислительных машин. При этом возможно как непосредственное вычисление координат места <р0 и Хо, так и вычисление поправок Дер и ДА, к счислимым координатам по формулам (12.34) или (12.36).
Графический способ применяется только в малых широтах при определении места по высотам Солнца, превышающим 88°. Искомое место находится в одной из точек пересечения кругов равных высот, проведенных из полюсов освещения как из центров сферическими радиусами 90° — А) и 90° — h2.
Графо-аналитический способ применяется при решении задач по специальным таблицам (ВАС—58, ТВА—57) или таблицам тригонометрических функций. В этом способе по вычисленным параметрам прокладываются на карте или листе бумаги в виде прямых линий отрезки кругов
384
Глава 14. Определение места по светилам
равных высот, называемые высотными линиями положения, пересечение которых дает место с координатами ср0 и Хо.
Независимо от способа решения системы уравнений (14.3) относительно координат места наблюдателя необходимо, чтобы как горизонт-ные, так и экваториальные координаты светил были отнесены к плоскостям, проходящим через одну общую точку. Такой точкой является центр Земли, с которым совмещается центр небесной сферы. Координаты светил, отнесенные к центру Земли, называются геоцентрическими.
Таким образом, при определении места по высотам светил и графоаналитическом способе обработки необходимо произвести:
— измерение высот;
— исправление измеренных высот;
— вычисление счислимых высот и азимутов светил и расчет параметров высотных линий положения;
— прокладку линий положения и определение координат места.
Порядок решения этих задач рассматривается в последующих параграфах.
§ 77. ИЗМЕРЕНИЕ ВЫСОТ СВЕТИЛ
Приборы для измерения высот светил
В корабельных условиях измерение высот светил может осуществляться при помощи следующих угломерных приборов:
— навигационного секстана;
— секстана с искусственным горизонтом (вертикалью).
По своему конструктивному оформлению навигационный секстан и секстан с искусственным горизонтом относятся к ручным приборам.
В отдельных случаях при нахождении корабля в базе или во льдах измерение высот светил может быть произведено теодолитом.
Навигационный секстан позволяет измерять углы до 140°. Линией начала отсчета высоты светила служит видимый горизонт.
Принцип измерения высоты, положенный в основу навигационного секстана, состоит в одновременном визировании изображений светила и горизонта с помощью двух зеркал и в определении угла между их плоскостями.
Навигационный секстан является высокоточным угломерным прибором. Опытный наблюдатель при хорошей видимости горизонта может измерить высоты Солнца и звезд со средними квадратическими ошибками, не превышающими соответственно О',5 и Г,0. Измерение высот светил при помощи секстана можно производить даже при значительной качке.
В зависимости от величины инструментальной поправки секстаны разделяются на классы А и Б, указываемые в формулярах.
Секстаны с искусственным горизонтом или вертикалью (ГИМС-3, ИМС-3) позволяют измерять высоту или зенитное расстояние светила над плоскостью искусственного горизонта, которая воспроизводится гировертикалью (гирогоризонтом) или сферическим уровнем.
Принцип измерения высоты, положенный в основу этих секстанов, состоит в одновременном визировании изображений светила и марки, дающей положение искусственного горизонта или вертикали места.
Секстан ГИМС-3 позволяет измерять высоты светил до 80°. Искусственный горизонт вырабатывается гироскопом. Время разгона ротора гироскопа 2 мин, продолжительность непрерывной работы 30 мин.
§ 77. Измерение высот светил
385
Осредняющий механизм имеет режимы работы 60, 120 и 180 сек. Средняя квадратическая ошибка измерения высоты светила при качке с амплитудой до 10° близка к 2'.
Секстан ИМС-3 позволяет измерять высоты светил до 80е. Искусственный горизонт в секстане воспроизводится сферическим уровнем. Секстан имеет осредняющий механизм с режимами работы 40, 120 и 200 сек. Средняя квадратическая ошибка измерения высоты светила при качке с амплитудой до 5° достигает 2,5—3'.
Теодолитом производят измерение зенитных расстояний светил относительно вертикали места, положение которой определяется с помощью точного уровня.
Измерение высот навигационным секстаном
Проверки навигационного секстана. Штурманом корабля производится проверка параллельности оптической оси трубы плоскости лимба, перпендикулярности зеркал плоскости лимба, а также определение поправки индекса и величины мертвого хода тангенциального винта.
Для определения инструментальных поправок секстан должен ежегодно сдаваться в мастерские Гидрографической службы ВМФ.
Проверки секстана, производимые штурманом, выполняются следующим образом.
Проверка параллельности оптической оси трубы плоскости лимба. Для осуществления этой проверки секстан ставится на неподвижное основание. Отфокусированная труба устанавливается так, чтобы одна пара нитей окуляра располагалась параллельно плоскости лимба.
На лимб секстана вдоль линии, параллельной оптической оси трубы, ставятся два диоптра (рис. 197). Визируя по их верхним срезам предмет, находящийся в расстоянии 10—12 м от наблюдателя, поворачивают секстан так, чтобы линия визирования проходила через середины срезов обоих диоптров и через выбранный предмет. Затем рассматривают в трубу, насколько точно наблюдаемый с помощью диоптров предмет совпадает с центром сетки нитей зрительной трубы. Если изображение предмета расположено выше или ниже центра сетки, то наклон трубы устраняется верхним и нижним винтами регулировочного кольца стойки трубы.
Указанный способ проверки обеспечивает установку трубы с погрешностью не более +5', что практически не будет сказываться на точности измерения высот.
25 Заказ 1833
386
Глава 14. Определение места по светилам
Проверка перпендикулярности большого зеркала плоскости лимба. Для выполнения проверки секстан устанавливается на столе или другой подставке. На делениях лимба около 0° и 130° ставятся диоптры, а алидада устанавливается на отсчет около 35—40°. Затем производят наблюдение диоптров со стороны большого зеркала (рис. 198) под углом к его плоскости, равным 25—30°. При этом левый диоптр наблюдается прямовидимым, а правый — отраженным в большом зеркале. Если их верхние срезы не составляют одну линию (рис. 199), то большое зеркало секстана имеет наклон к плоскости лимба. Для устранения этого наклона следует установить корректировочный ключ на винт, расположенный с обратной стороны зеркала, и, поворачивая его, добиться того, чтобы верхние срезы диоптров составляли прямую линию.
Рис. 200
Рис. 199
Указанным приемом большое зеркало устанавливается в положение, перпендикулярное плоскости лимба, с погрешностью не более +5', что
практически не влияет на точность измерения высот.
Неперпендикулярность большого зеркала можно обнаружить и без диоптров по излому лимба. Для этого секстан следует взять левой или правой рукой и повернуть большим зеркалом к себе. Затем произвести наблюдение прямовидимой и отраженной части лимба в большом зеркале под углом зрения 25—30° к его плоскости. Если кромка-лимба имеет излом (рис. 200), то зеркало неперпендикулярно лимбу. Устранять обнаруженную таким способом неперпендикулярность большого зеркала следует, как изложено выше при проверке с помощью диоптров.
Проверка перпендикулярности малого зер-
кала плоскости лимба. Проверка положения малого зеркала производится после проверки и устранения неперпендикулярности большого зеркала. Лучше всего эту проверку выполнять по светилам: днем — по Солнцу, а в сумерки или ночью — по звезде (не слишком яркой).
Для производства проверки на секстан устанавливается труба, а алидада ставится на отсчет, примерно равный нулю. Днем перед малым и большим зеркалами должны быть установлены цветные стекла. После этого труба секстана наводится на светило, в поле зрения которой будут наблюдаться два его изображения. Если при перемещении алидады прямовидимое и дважды отраженное изображения будут точно перекрывать друг друга, то малое зеркало перпендикулярно плоскости лимба. В противном случае малое зеркало имеет наклон относительно указанной плоскости. Для его устранения следует поворотом отсчетного барабана привести изображения светила на одну горизонтальную линию (рис. 201), установить корректировочный ключ на верхний винт малого зеркала и, поворачивая его, совместить изображения светила. При повороте ключа не следует нажимать на него, так как после снятия ключа изображения светила могут снова разойтись.
§ 77. Измерение высот светил
387
После устранения неперпендикулярности малого зеркала для контроля следует поворотом отсчетного барабана дважды отраженное изображение светила несколько раз перевести через прямовидимое. Если при этом изображения светила будут точно перекрывать друг друга, то малое зеркало установлено правильно. Если же точного совмещения нет, то проверку следует повторить.
Указанным приемом малое зеркало устанавливается относительно большого зеркала с погрешностью не более О',5, при которой его непер-пендикулярность плоскости лимба будет в пределах +5', что не скажется на точности измерения высот.
Определение поправки индекса. Поправкой индекса навигационного секстана называется алгебраическая разность между нулем и отсчетом по лимбу, полученным при совмещении прямовидимого и дважды отраженного изображений одного и того же предмета.
Для определения поправки индекса нужно установить алидаду на отсчет, примерно равный нулю, и навести трубу секстана на светило. В поле зрения трубы будут наблюдаться два изображения светила: прямовидимое и дважды отраженное. Поворачивая отсчетный барабан, следует точно совместить друг с другом оба изображения светила и снять отсчет а, который называется отсчетом поправки индекса.
Величина и знак поправки индекса определяются по формуле
I = 360° - а. (14. 4)
При определении поправки индекса по Солнцу, поскольку Солнце имеет значительный видимый диск, необходимо для повышения точности производить совмещение краев Солнца дважды — сначала одного края, затем другого — и при каждом совмещении снимать отсче*!. Средний из этих отсчетов будет равен отсчету поправки индекса, т. е.
_ oci + ос2 а- 2
Следовательно, поправка индекса при определении по Солнцу равна:
I = 360° - 0С1±^г (14.5)
или
Z = (14.6)
где х и у равны алгебраическим разностям:
х = 360° — осг, у = 360° — ос2.
Пример. 12 мая 1968 г. Отсчеты определения поправки индекса по Солнцу равны: oci = 360°32',8; ос2 = 359°29',2.
Определить поправку индекса.
Решение, х = 360° — 360°32',8 = —32',8;
у = 360° — 359°29',2 = -ЬЗО',8;
х-]-(/ = —2\0.
Поправка индекса равна i = —Г,0.
При наблюдениях Солнца нужно производить контроль определения поправки индекса путем сравнения его измеренного полудиаметра с истинным, который выбирается из МАЕ. Разность этих полудиаметров не должна превышать О',2; если она будет больше О',2, то наблюдения повторяются.
25»
388
Глава 14. Определение места по светилам
Величина измеренного полудиаметра Солнца равна сумме абсолютных значений х и у, деленной на четыре, т. е.
D - ।х I + IУI
Аизм 4
Пример. Для рассмотренного выше случая/?изм = (32',8 Ч-ЗО',8) : 4 == 15',9. Истинное значение полудиаметра Солнца из МАЕ /?Ист— 15',9. Таким образом, поправка индекса секстана определена правильно.
Определение поправки индекса рекомендуется производить серией из 3—5 измерений: днем — по Солнцу, ночью — по звездам средней яркости; для удобства работы подбираются звезды с малыми высотами.
Поправка индекса секстана должна держаться устойчиво: колебания не должны превышать 0,1—О',2. При больших колебаниях поправки необходимо проверить крепление зеркал. Если это не поможет, поправку индекса секстана надлежит определять при каждых наблюдениях дважды — до и после измерения высот — и при первой возможности заменить секстан.
Если поправка индекса секстана достигает 3—5', то для удобства вычислений ее следует уменьшить.
Уменьшение поправки индекса. Для уменьшения поправки индекса алидада устанавливается на отсчет, равный нулю, и труба секстана наводится на светило; в поле зрения трубы будут наблюдаться два изображения: прямовидимое и дважды отраженное. Далее корректировочный ключ устанавливается на нижний винт малого зеркала и его поворотом оба изображения светила совмещаются.
При уменьшении поправки индекса несколько нарушается перпендикулярность малого зеркала плоскости лимба секстана. Поэтому после выполнения указанной работы следует обязательно повторить проверку перпендикулярности малого зеркала плоскости лимба, а затем вновь определить остаточную поправку индекса.
Проверка наличия мертвого хода тангенциального винта. Мертвый ход тангенциального винта проявляется в том, что алидада несколько отстает в своем перемещении при изменении направления вращения винта.
Для выявления мертвого хода алидады необходимо сделать серию из 8—10 определений поправки индекса секстана, лучше по Солнцу; половина определений этой поправки производится при вращении отсчетного барабана только на увеличение отсчета, а вторая половина — при вращении только на уменьшение отсчета. Для каждого направления вращения отсчетного барабана нужно вычислить средние значения поправки индекса и сравнить их между собой. Разность этих средних поправок и представляет величину мертвого хода тангенциального винта. Допустимое его значение не должно превышать О',2.
Для исключения влияния мертвого хода тангенциального винта при всех измерениях высот и определениях поправки индекса секстана необходимо окончательное сведение изображения производить вращением барабана тангенциального винта всегда только в одну сторону (например, только по часовой стрелке).
Примечание. Указанным приемом исключается влияние равномерного мертвого хода. Если по необходимости приходится работать с секстаном, имеющим неодинаковый мертвый ход на различных участках лимба, то поправку индекса и высоту каждого светила необходимо измерять четное число раз. При этом полусерии измерений высот и поправки индекса следует выполнять при разносторонних вращениях отсчетного барабана, а для исправления средних отсчетов применять среднюю величину поправки индекса.
§ 77. Измерение высот светил
389
Правила обращения с навигационным секстаном. Секстан является высокоточным угломерным инструментом, и при обращении с ним необходимо соблюдать следующие правила:
1) секстан должен храниться в своем ящике в штурманской рубке или каюте. Из ящика секстан должен выниматься лишь на время наблюдения светил;
2) секстан следует брать только за рукоятку и переплет рамы; ставить секстан можно только на ножки;
3) при производстве проверок и регулировок, а также при измерениях высот светил не следует прилагать больших усилий для поворота винтов и перемещения различных деталей секстана. Во избежание нарушения установки малого зеркала алидаду секстана не следует ставить в крайнее левое положение;
4) нельзя допускать даже незначительных ударов по секстану; при наличии любых механических повреждений без проверки и переаттестации секстаном пользоваться не разрешается;
5) если секстан попал под дождь или был обрызган морской водой, то все его части, начиная с оптики, должны быть немедленно протерты мягкой чистой сухой ветошью. Если на поверхность стекол секстана осела соль, то ее смывают дистиллированной водой, а затем чистым спиртом протирают оптические части секстана;
6) зубчатую рейку на нижней поверхности алидады нужно тщательно очищать от пыли и грязи и смазывать костяным маслом. После чистки секстана все его металлические части нужно протирать чистой, слегка промасленной ветошью;
7) при укладке секстана в футляр как сам прибор, так и отдельные его детали должны быть закреплены замком и планками; крышка ящика должна закрываться без нажима.
Приготовление навигационного секстана к наблюдениям. При приготовлении секстана к наблюдениям следует:
1) вынуть секстан из ящика и произвести его внешний осмотр? опробовать плавность хода алидады;
2) проверить и, если это необходимо, устранить неперпендикуляр-ность зеркал к плоскости лимба.
Для проверки положения зеркал нужно установить алидаду на отсчет, равный нулю, и, держа секстан горизонтально, произвести наблюдение видимого горизонта. Если прямовидимая и дважды отраженная (в малом зеркале) части видимого горизонта составляют прямую линию, то оба зеркала перпендикулярны к плоскости лимба. Если же дважды отраженное изображение располагается выше или ниже прямовидимого, то одно из зеркал имеет наклон к плоскости лимба. Тогда нужно проверить положение большого зеркала по излому лимба: при наличии излома неперпендикулярно большое зеркало секстана, в противном случае наклон к плоскости лимба имеет малое зеркало. Неперпендикуляр-ность зеркал, обнаруженная указанным приемом, устраняется по правилам, изложенным выше;
3) вынуть из ящика трубу секстана; отфокусировать ее по глазу по линии видимого горизонта и установить на секстан; при ночных наблюдениях непосредственно перед наблюдениями произвести предварительное освещение секстана электролампой в 40 вт на расстоянии 0,5 м в течение около 5 лшн; при наблюдениях Солнца подобрать цветные стекла;
4) определить поправку индекса секстана.
390
Глава 14. Определение места по светилам
Измерение высот светил навигационным секстаном. Измерение высоты состоит в точном совмещении дважды отраженного изображения светила и линии видимого горизонта с одновременной фиксацией момента времени. Для этого необходимо выполнить следующие действия.
1. Привести изображение светила к горизонту, для чего:
а) при наблюдении звезд и планет:
— установить алидаду на отсчет, близкий к нулю;
— навести трубу на выбранное светило; плоскость лимба секстана удерживать в вертикале светила;
— освободить алидаду от зацепления с зубчатой рейкой и, опуская трубу к горизонту, передвигать левой рукой алидаду так, чтобы отраженное изображение светила все время оставалось в пределах поля зрения до появления в нем видимого горизонта;
б) при наблюдении Солнца:
— установить цветные стекла у большого зеркала, а при наличии бликов или яркого горизонта — и у малого зеркала;
— навести трубу на горизонт под Солнцем, удерживая секстан по возможности вертикально; после этого, не теряя из поля зрения линии горизонта, передвигают левой рукой алидаду в сторону увеличения отсчетов, покачивая при этом секстан около трубы, чтобы просматривать большую полосу небосвода; движение совершается до тех пор, пока в поле зрения трубы не появится отраженное цветное изображение Солнца.
Примечание. Приведение изображения Солнца к горизонту может выполняться также приемом, описанным для звезд, наблюдая изображение Солнца вдоль трубы через цветные стекла малого зеркала.
2. Произвести точное совмещение изображения светила или его края с линией горизонта и снять отсчет.
Так как высота измеряется дугой вертикала от линии горизонта до места светила, то для получения верного значения высоты лимб секстана в момент совмещения должен располагаться строго в плоскости вертикала светила; это достигается покачиванием секстана.
Покачивание секстана выполняется путем небольшого поворота секстана около оси трубы с одновременным малым перемещением по горизонту; тако-е комбинированное движение надо делать в обе стороны от вертикала светила. При покачивании секстана изображение светила описывает в поле зрения трубы дугу. Точка касания этой дуги с линией видимого горизонта (рис. 202) соответствует точному положению лимба
Рис. 202
ШШ.
Рис. 203 Рис. 204
секстана в вертикале светила. Производя покачивание секстана, необходимо следить за тем, чтобы касание светила (или его края) линии горизонта происходило в середине поля зрения трубы (рис. 203 и 204).
Примечание. Без покачивания секстана можно измерять малые (до 3—5°) и большие (более 85—87°) высоты светил.
§ 77. Измерение высот светил
391
Так как высота светила непрерывно изменяется, то при ее измерении необходимо поворотом отсчетного барабана изображения светил, расположенных в восточной части небесной сферы, переводить (притапли-вать), а изображения светил, расположенных в западной ее части, не доводить до линии горизонта. Величина притапливания (недоведения) изображения светила относительно линии видимого горизонта зависит от скорости изменения его высоты и навыка наблюдателя. Далее наблюдатель, покачивая секстан, ожидает, пока изображение светила не коснется линии видимого горизонта. После этого следует обязательно сделать еще одно-два покачивания секстана для контроля правильности измерения высоты и только после этого снять отсчет с лимба секстана.
3. В момент касания изображения светила горизонта заметить отсчет времени по секундомеру или палубным часам.
Если наблюдения производятся с помощником, то фиксация моментов времени выполняется помощником по команде «товсь» ... «ноль», причем исполнительная команда «ноль» подается в момент касания изображения светила горизонта, а «товсь» — за несколько секунд до этого.
Если наблюдения производятся одним человеком, то, чтобы заметить несколько моментов времени (без остановки секундомера), необходимо вести счет секунд, цель которого — дать возможность наблюдателю перенести глаза и внимание с секстана на секундомер (или часы). Выполняется счет следующим образом: в момент касания светилом горизонта наблюдатель командует себе «ноль» и начинает счет, «и раз. и два, и три...». Перенося глаза на секундомер (или часы) наблюдатель замечает ближайший момент (лучше кратный 5 сек) вперед и ведет счет до этого момента. Отняв из замеченного момента число сосчитанных секунд и записав результат, получим Тсек в момент измерения высоты светила. Особенно удобен 2-стрелочный секундомер, который позволяет, останавливая вторую стрелку, точно фиксировать моменты измерения высот без счета времени. Пуск секундомера производится по хронометру до начала наблюдений.
Для вычисления ТХр в момент измерения высоты время пуска секундомера по хронометру исправляется поправкой последнего, после чего к полученному результату прибавляется средний момент измерения высоты светила, рассчитанный по показаниям секундомера.
Пример. Момент пуска секундомера по хронометру Тхр = 7*10*00*. Поправка хронометра иХр— 4-1*48*.
Определить средний момент измерения серии высот светила, если средний отсчет времени по секундомеру ТСек == 10*41*.
Решение. 1) Находим исправленное показание хронометра на момент пуска секундомера
Тхр = 7*10*00* Цхр= +1*48* 7^=7*11*48*
2) вычисляем средний момент измерения серии высот светила
7^ = 7*11*48* Гсек- 10*41*
Тгр = 7*22*29*
При измерении высот светил моменты фиксируются с округлением до 1 сек, а при применении специальных фиксаторов — до 0,5 сек.
392
Глава 14. Определение места по светилам
Измерения высот светил необходимо производить сериями: не менее 3—5 высот для каждого наблюдаемого светила. Затем результаты измерений осредняются и в дальнейшие расчеты вводятся средние значения измеренных высот, отнесенные к средним моментам наблюдений.
Примечание. Измерение серии высот можно производить также через равные интервалы изменения высоты ДЛ. В этом случае при нечетном числе измерений в серии средний отсчет высоты и будет средним арифметическим, соответствующим среднему моменту наблюдений.
Величина принятого интервала ДЛ зависит от широты места, азимута светила и навыков наблюдателя; его значение определяется опытным путем и обычно равно 2—4'. В том случае, когда светило находится вблизи меридиана наблюдателя, этот прием применять не следует из-за медленного изменения высоты.
При наблюдении различных светил необходимо учитывать следующие особенности:
1) Солнце и Луна имеют значительный видимый диск. Поэтому производится измерение высоты их нижнего или верхнего края, для чего добиваются касания соответствующего края этих светил с линией видимого горизонта.
Наблюдая Солнце, более удобно, а во многих случаях и точнее измерять высоту его нижнего края, и лишь когда он закрыт облачностью,— верхнего. Когда Луна ущерблена, то измеряется высота ее неущерблен-ного края;
2) при измерении высот Солнца и Луны в поле зрения трубы наблюдается перевернутое изображение. Для измерения высоты нижнего края необходимо добиться такого положения, чтобы изображение светила касалось своим нижним краем линии горизонта (рис. 203). При измерении высоты верхнего края изображение светила должно касаться своим верхним краем линии горизонта (рис. 204). При покачивании секстана изображение светила описывает дугу в первом случае на фоне неба, а во втором случае на фоне воды и неба;
3) в том случае, когда Солнце видно через слоистую облачность в форме четкого пятна, но с размытыми краями, следует измерять высоту его центра. Для этого производится совмещение середины изображения Солнца с линией видимого горизонта;
4) если линия видимого горизонта, над которой находится светило, видна неотчетливо (затянута дымкой, туманом), а противоположная его часть четкая, следует производить измерение высоты через зенит. Измерение высоты через зенит возможно при ее значении, превышающем 40°;
5) измерение высот ярких звезд можно производить в начале гражданских сумерек вечером или же в конце сумерек утром, когда эти звезды невооруженным глазом не видны. Для этого следует при помощи звездного глобуса определить значение высоты и азимута намеченной звезды, установить алидаду секстана на отсчет, равный высоте звезды, и навести его трубу по пеленгу звезды на линию видимого горизонта. В поле зрения трубы у линии горизонта будет наблюдаться изображение звезды; высота ее измеряется обычным порядком. Днем аналогичным приемом можно измерить высоту Венеры.
Измерение высот секстанами с искусственным горизонтом
Приготовление секстанов с искусственным горизонтом к наблюдениям. При приготовлении секстана ГИМС-3 к наблюдениям необходимо:
1) установить зрительную трубу, снять гирогоризонт и определить контрольную поправку индекса 1К.
Для этого угломерное устройство устанавливается на нулевой отсчет (отсчет на 10-градусной шкале 0°, на угломерном барабане 7°), вклю
$ 77. Измерение высот светил
393
чается фрикционный механизм вращения угломерного барабана и секстан наводится на светило. В поле зрения трубы секстана будут наблюдаться два изображения светила, которые нужно совместить при помощи механизма вращения угломерного барабана и снять отсчет контрольной поправки индекса а по верньеру. Контрольная поправка индекса определяется по формуле
/к = 7°-а. (14.7)
При определении /к по Солнцу перед главным зеркалом секстана и объективом устанавливаются съемные светофильтры;
2) установить гирогоризонт на свое место;
3) установить режим работы т часового механизма. В зависимости от условий измерения высот светил режим работы следует брать равным: 60 сек при штилевой погоде, 120 сек при плавной качке с большим периодом и малой амплитудой, 180 сек при стремительной качке с малым периодом и большой амплитудой;
4) завести часовой механизм;
5) заземлить преобразователь и подключить его к судовой сети; секстан подключить к преобразователю;
6) включить преобразователь; включить и проверить освещение сеток и шкал секстана, отрегулировать освещение сетки коллиматора;
7) подвесить секстан за серьгу на карабин или установить его так, чтобы он опирался упором на специальную стойку;
8) запустить гироскоп; для этого переключатель, расположенный на ручке секстана, ставится в положение «гиро», после чего при горизонтальном положении секстана отвинчивается головка стопора гироскопа до свободного его опускания, при котором замыкается электрическая цепь гиромотора.
Через 5 мин после запуска секстан может быть использован для измерения высот светил.
При приготовлении секстана ИМС-3 к наблюдениям необходимо:
1) установить зрительную трубу и определить контрольную поправку индекса /к по формуле (14.7). При определении iK по Солнцу перед объективом и главным зеркалом устанавливаются съемные светофильтры;
2) установить режим работы т часового механизма 40,120 или 200 сек в зависимости от условий измерения высот, указанных для секстана ГИМС-3;
3) завести часовой механизм. При дневных наблюдениях установить матовый рассеиватель перед объективом, а перед главным зеркалом оставить светофильтры. При ночных наблюдениях подключить секстан к источнику питания; установить откидное зеркало для подсветки пузырька уровня и подобрать светофильтр для его окраски. Отрегулировать яркость освещения пузырька уровня;
4) подвесить секстан за серьгу на специальный тросик или установить его на специальный пружинный упор;
5) отрегулировать величину пузырька уровня. При наблюдениях Солнца внутренний просвет пузырька уровня должен быть равен диаметру Солнца, видимому в поле зрения трубы секстана, а при наблюдениях звезд примерно в два раза меньше. Для регулировки пузырька уровня нужно расположить секстан в вертикале светила и поворотом угломерного барабана ввести изображение светила в поле зрения трубы. После этого наклоном секстана пузырек уровня приводится к треугольному индексу и в этом положении регулируется его величина.
394
Глава ,14. Определение места по светилам
Рис. 205
Если пузырька уровня нет, то его необходимо «вызвать». Для этого следует приподнять переднюю часть секстана и вращать регулировочный винт в сторону увеличения пузырька уровня до его появления.
После регулировки величины пузырька уровня секстан готов к измерениям.
Измерение высот светил секстанами с искусственным горизонтом. Измерение высоты при помощи секстана ГИМС-3 состоит во вмещении изображения светила между штрихами сетки коллиматора и удержании его в этом положении в течение времени работы часового механизма. Для выполнения этого необходимо:
1) осторожно развернуть секстан в вертикал намеченного для наблюдений светила и установкой угломерного барабана на примерное значение высоты, снятое со звездного глобуса, привести изображение светила в поле зрения трубы. Если примерное значение высоты светила не определялось, то, наблюдая светило на просвет через главное зеркало, следует поворотом угломерного барабана подвести к нему штрихи сетки коллиматора; после этого производится наблюдение светила через зрительную трубу;
2) включить стопор рычага осредняющего механизма и поворотом угломерного баргаба-на вместить изображение звезды (планеты) между внутренними, а изображение Солнца (Луны) между внешними штрихами сетки коллиматора. Подать помощнику команду «товсь»;
3) нажатием на рычаг пустить часовой механизм и одновременно подать команду «ноль» для фиксации момента начала измерений. Затем удерживать изображение светила между соответствующими штрихами сетки коллиматора путем медленных поворотов угломер-этом небольшими наклонами секстана вправо и влево нужно добиваться того, чтобы воображаемая прямая между уголками марки совпадала с любым штрихом сетки коллиматора или была параллельна им (рис. 205). Измерение высоты заканчивается в момент остановки часового механизма, когда гаснет лампочка подсветки штрихов сетки коллиматора;
4) снять отсчет высоты светила. Для измерения следующей высоты вновь завести часовой механизм и повторить все действия, указанные в п.п. I—3.
За один запуск гироскопа, т. е. за 30 мин, можно измерить высоты 3—4 светил.
После измерения высот светил гироскоп останавливается. Для остановки гироскопа следует завести часовой механизм и выключить переключатель «гиро». Наблюдая в трубу сетку коллиматора, включать несколько раз этот переключатель в положение «тормоз» каждый раз не более чем на 15 сек. Когда сетка коллиматора начнет «мелькать» в поле зрения, следует выключить переключатель «гиро», зааретировать гироскоп, пустить часовой механизм, снять секстан с упора или карабина, отключить от преобразователя и уложить в футляр, установив угломерное устройство на отсчет около 70°. После этого выключить преобразователь.
Измерение высоты при помощи секстана ИМС-3 состоит в возможно более точном совмещении изображений светила и пузырька уровня и не
ного барабана. При
£ 78. Исправление измеренных высот светил
396
прерывном удержании их в совмещенном положении поворотом угломерного барабана в течение времени работы часового механизма.
Высота светила, измеренная секстанами ГИМС-3 и ИМС-3, относится к среднему моменту наблюдений, который равен моменту Гп пуска часового механизма плюс половина режима т его работы, т. е.
§ 78. ИСПРАВЛЕНИЕ ИЗМЕРЕННЫХ ВЫСОТ СВЕТИЛ
Поправки измеренных высот светил. Определение места корабля производится по истинным геоцентрическим высотам светил. Для их получения измеренные высоты должны быть исправлены следующими поправками:
1) для навигационного секстана:
— поправкой за наклонение видимого горизонта наблюдателя;
— поправкой за астрономическую рефракцию;
— поправкой за видимый полудиаметр светила;
— поправкой за параллакс;
2) для секстанов и других оптических угломерных приборов с искусственным горизонтом:
— поправкой за астрономическую рефракцию;
— поправкой за параллакс.
Поправки за наклонение видимого горизонта наблюдателя и видимый полудиаметр светила в данном случае не учитываются, потому что секстаны с искусственным горизонтом в результате измерений позволяют получать высоту центра светила над плоскостью истинного горизонта.
Независимо от типа секстана измеренная высота светила h' получается путем исправления отсчета высоты ос поправкой секстана, которая равна сумме поправки индекса i и инструментальной поправки s, выбираемой из аттестата, т. е.
h' = ос + i + s.
Поправка за наклонение видимого горизонта наблюдателя. Наклонением видимого горизонта наблюдателя называется угол между плоскостью истинного горизонта и направлением на видимый горизонт.
Видимый горизонт наблюдателя при нормальном состоянии атмосферы понижен, т. е. располагается ниже плоскости истинного горизонта; наклонение d видимого горизонта при этом считают положительной величиной. В некоторых случаях при аномальном состоянии атмосферы видимый горизонт может быть выше истинного; наклонение d видимого горизонта при этом считают отрицательным. Направления на видимый горизонт при положительном и отрицательном наклонении показаны на рис. 206 соответственно прямыми АВ и АВ'.
Высота светила над плоскостью истинного горизонта называется видимой высотой йв и находится из выражения
йв = h' — d.
Величина d в дуговых минутах вычисляется по формуле
</= 1,766/?, (14.8)
где е — возвышение глаза наблюдателя в метрах.
396
Г лава 14. Определение места по светилам
По этой формуле составлена табл. 11-6 МТ—63, которая дает наклонение видимого горизонта по возвышению глаза наблюдателя для нормального состояния атмосферы, когда коэффициент земной рефракции равен 0,16. Для того чтобы ошибка в выбираемой величине d не превышала 0',1, возвышение глаза наблюдателя нужно знать с ошибкой не более 0,3—0,4 м\ чем меньше возвышение глаза наблюдателя, тем точнее его необходимо учитывать.
Рис. 206
При изменении состояния атмосферы указанное выше значение коэффициента земной рефракции не соответствует действительной его величине, что приводит к изменению наклонения видимого горизонта. Практика показывает, что ошибка табличного наклонения видимого горизонта наблюдателя, достигающая 2'—3', явление довольно частое. При этом чем меньше возвышение глаза наблюдателя и чем спокойнее состояние атмосферы, тем больше может быть ошибка табличного наклонения видимого горизонта. Особенно часты значительные отклонения табличного наклонения видимого горизонта от действительного в закрытых морях, прибрежных районах и в районах встречи мощных океанских течений с различной температурой воды.
Поэтому для повышения надежности и точности астрономических определений следует при измерении высот светил производить измерение наклонения видимого горизонта и при исправлении высот учитывать полученное наклонение горизонта, а не выбранное из таблиц.
Измерение наклонения видимого горизонта наблюдателя производится с места измерения высот не более чем за 30 мин до или после наблюдения и выполняется (применительно к наклономеру Н-5) следующим образом:
— окуляр трубы наклономера наводится по горизонту на резкость;
— наклономер устанавливается так, чтобы щелевая диафрагма была направлена в сторону более освещенной части горизонта и располагалась слева от наблюдателя;
— поворотом кольца диафрагмы уравнивается яркость видимых в трубе противоположных частей горизонта, а поворотом накатного кольца достигается их совмещение;
— со шкалы прибора снимается отсчет aj с округлением до 0',1;
— наклономер разворачивается вокруг оси трубы на 180°, а наблюдатель поворачивается вокруг отвесной линии тоже на 180°; при этом щелевая диафрагма будет снова направлена в сторону более освещенной части горизонта, но будет расположена справа от наблюдателя;
§ 78. Исправление измеренных высот светил
397
— поворотом накатного кольца достигается совмещение видимых в трубе противоположных частей горизонта и со шкалы прибора снимается отсчет а2 с округлением до О',1.
Величина и знак наклонения d видимого горизонта наблюдателя определяются по формуле
Щ — а?
2
(14.9)
Рис. 207
и атмосферного давления Вв — 760 мм,
Средняя квадратическая ошибка измерения d наклономером около o;i.
Поправка за астрономическую рефракцию. Астрономической рефракцией называется явление преломления лучей, идущих от светила, в атмосфере Земли. Наблюдатель, находящийся на поверхности Земли, увидит светило не по действительному (истинному) направлению КС (рис. 207), а по направлению КС', называемому видимым.
Угол Д/гр между истинным и видимым направлениями на светило называется поправкой за астрономическую рефракцию. Эта поправка всегда отрицательна. После ее учета получается истинная высота светила (центра или его края).
Поправка А/гр зависит от видимой высоты /гв светила, температуры tB и давления Вв воздуха во время измерения высоты, причем главным фактором является видимая высота hB светила.
Астрономическая рефракция для средних условий состояния атмосферы, характеризуемых значениями температуры воздуха /в = +10°С называется средней астрономи
ческой рефракцией', она зависит только от видимой высоты hB светила. Поправка высоты светила за среднюю астрономическую рефракцию дается в табл. 12 МТ—63.
Изменение рефракции за счет отличия температуры и давления воздуха от средних условий учитывается вводом дополнительных поправок высоты за температуру &h( и давление Д/гв воздуха, которые приведены в табл. 14-а и 14-6 МТ—63 по аргументам соответственно Лв, tB и hB, Вв.
Примечание. В табл. 12 при видимой высоте светила большей 15° и в табл. 14-а и 14-6 при видимой высоте светила большей 3° можно входить с измеренной высотой.
Поправка за астрономическую рефракцию, определяемая по табл. 12, 14-а и 14-6 МТ—63 для малых высот светил, особенно в полярных районах и при низких температурах воздуха, может значительно отличаться от действительной; в средних же широтах для высоты Солнца, близкой к нулю, средняя квадратическая ошибка поправки около О',55, а для высоты в 10°—примерно 0',1. Из сказанного следует, что исправление высот светил меньших 2—3° не всегда является надежным и потому использования малых высот для определения места следует избегать.
398
Глава 14. Определение места по светилам
Поправка за видимый полудиаметр светила. Видимым полудиаметром светила называется половина угла, под которым виден его диск с земной поверхности. Поправка за видимый полудиаметр R учитывается только при исправлении высот Солнца и Луны, измеренных при помощи навигационного секстана. Для высоты нижнего края этих светил поправка положительна, а для высоты верхнего края отрицательна. После учета поправки за видимый полудиаметр светила получается высота центра светила.
Величина полудиаметра приведена в ежедневных таблицах МАЕ для Солнца на 0 ч, а для Луны на 0 и 24 ч всемирного времени каждых суток. Из этих таблиц полудиаметр Солнца нужно выбирать по дате, а полудиаметр Луны — с интерполяцией на всемирное время ее наблюдения.
В ежедневных таблицах МАЕ приведен геоцентрический полудиаметр, отнесенный к центру Земли. При исправлении высот необходимо учесть видимый полудиаметр, который соответствует поверхности Земли. Разность между ними Д/?д называется параллактическим увеличением полудиаметра и зависит от расстояния до светила и его видимой высоты. Для Солнца Д/?д = 0",05 и в мореходной астрономии не учитывается. Для Луны эта разность имеет заметную величину, определяемую формулой
Д/?; = 0,26 sin йв, (14. 10)
и учитывается при составлении таблиц поправок высот Луны.
Когда при исправлении высоты Луны потребуется учесть ее видимый полудиаметр отдельно, то нужно к полудиаметру R, выбранному из МАЕ, прибавить поправку Д/?д, рассчитанную по формуле (14.10).
Поправка за параллакс. Параллаксом светила называется угол, под которым с этого светила усматривается радиус Земли, отвечающий месту наблюдателя. Величина этого угла изменяется в течение суток в результате суточного вращения Земли; поэтому этот параллакс называется суточным параллаксом или параллаксом светила при высоте. Учетом суточного параллакса высота светила, измеренная с поверхности Земли (топоцентрическая высота), приводится к ее центру (геоцентрическая высота).
Поправка за параллакс, обозначаемая через Д/гр, всегда положительна. Ее величина определяется по формуле
Дйр = pcosAB, (14. 11)
где р—горизонтальный экваториальный параллакс светила, представляющий собой угол, под которым усматривается большая полуось земного эллипсоида со светила при высоте его, равной нулю.
Величина горизонтального экваториального параллакса приводится в ежедневных таблицах МАЕ для Солнца и планет на 0 ч, а для Луны на 0 и 24 ч всемирного времени каждых суток. Выбор значения р производится для Солнца и планет по дате без интерполяции, а для Луны — с интерполяцией на всемирное время ее наблюдения.
Поправка за параллакс учитывается при исправлении высот Солнца, Луны и двух планет: Венеры и Марса; для остальных светил эта поправка близка к нулю.
Исправление высот светил, измеренных навигационным секстаном. Переход от измеренной высоты светила к его истинной геоцентрической высоте называется исправлением высоты светила. Все необходимые поправки при исправлении высоты светила могут быть учтены раздельно или совместно.
§ 78. Исправление измеренных высот светил
399
При раздельном учете поправок вычисления выполняются по следующей формуле
h = h' + Mid 4- Айр + bht 4- Айв±/? + Дйр, где h' — измеренная высота светила (для Солнца и Луны
какого-либо края), равная h' = ос 4- Z 4- 5;
Дй^ — поправка за наклонение видимого горизонта наблюдателя, равная Дй^ = — d\
Дйр, Дй, и Дйв — поправки за среднюю астрономическую рефракцию, за температуру и давление воздуха;
R — видимый полудиаметр светила (для Солнца и Луны);
Дйр — поправка за параллакс (для Солнца, Луны, Венеры и Марса).
Раздельный учет поправок высот является сравнительно громоздким (особенно для Солнца и Луны) и требует довольно много времени и, кроме того, дает несколько пониженную точность результата за счет накопления ошибок округления и интерполирования.
Поэтому для исправления высот обычно пользуются совместным учетом поправок, который позволяет упростить все вычисления; в этом случае вычисления ведутся по формуле
й = h' 4- Дйо 4- Дйд,
где Дй0 — общая поправка высоты светила;
Айд — дополнительная поправка высоты светила.
При совместном учете поправок и использовании таблиц МТ—63 вычисления производятся следующим образом.
Общая поправка высоты выбирается:
— для Солнца из табл. 8-а по е и й';
— для звезд и планет из табл. 9-а по е и й';
— для Луны из табл. 10-а по йв.
Дополнительная поправка высоты выбирается:
— для нижнего края Солнца из табл. 8-6 по дате;
— для верхнего края Солнца из табл. 8-в по дате;
— для планет (только Венеры и Марса) из табл. 9-6 по й' и р;
— для нижнего края Луны из табл. 10-6 по йп и р;
— для верхнего края Луны из табл. 10-в по йв и р.
Если высота любого светила меньше 30°, то дополнительно должны учитываться поправки за температуру Ай, и давление Дйв воздуха, выбираемые из табл. 14-а и 14-6.
Пример. 11 мая 1968 г. навигационным секстаном измерена высота нижнего края Солнца: ос=12°37;8, / + s =—2J2, е — 12,5 м, fB=+18°C, Вв = 752 мм.
Исправить высоту Солнца по таблицам, помещенным в МТ—63.
Решение.
По таблицам общих поправок Раздельное исправление
ос i + s 12°3758 -2,2 ос i + 5 12°37,'8 -2,2
А' 12°35;6 А' 12°35,'6
ДАО +5,6 (табл. 8-а) ДЛ</ —6,2 (табл. 11-6)
ДАд —0,2 (табл. 8-6) Ав I2°29J4
ДА/ +0,1 (табл. 14-а)
ДЛЙ 0,0 (табл. 14-6) —4,1 (табл. 13-а)
И +15,9 (табл. 13-6)
А | i2°4i;i +0,1 (табл. 14-а)
ДЛВ 0,0 (табл. 14-6)
А 12°41;3
400
Глава 14. Определение места по светилам
Пример. И мая 1968 г. Тс — 19ч20л (поясное время), Хс — 152^30' Ost, навигационным секстаном измерена высота верхнего края Луны; ос = 30°09,'5» I 4- $ = 4-Г, 8,
е — 12,9 м. Исправить высоту Луны по таблицам, помещенным в МТ—63. Решение. 11/V Гс = 19ч20^ р — 61'1
Nost = —Ю R — 16J6
ц/V Trp — 9"20«
По таблицам общих поправок Раздельное исправление
ос 1 + s 30°09;5 ос 4-1,8 /4-5 30°09'5 4-1,8
h' зо°п;з h' зо°н;з
khd —6,4 (табл. 11-б) ^hd —6,4 (табл. 11-б)
Ав 30°04;9 he 30°04;9
Дй0 4-57,9 (табл. 10-а) —1,7 (табл. 12)
—23,3 (табл. 10-в) R' —16,7 (Я + ДЯА)
h 30°3915 ^hp 4-52,9 (р- cos Ав)
h 30°39J4
Пример. 12 мая 1968 г. навигационным секстаном измерена высота Юпитера: ос = 54°43Го, i 4- s = — 2J6, е = 10,2 м.
Исправить высоту Юпитера по таблицам, помещенным в МТ—63.
Решение.
По таблицам общих поправок Раздельное исправление
ос 54°43;0 ос 54°43;0
i + 5 —2,6 i + s —2,6
h' 54°40J4 h' 54°40J4
ДЛ0 —6,3 (табл. 9-а) Md —5,6 (табл. 11-6)
h 54°34J1 л„ 54°34;8
ДЛР —0,7 (табл. 12)
h 54с34'1
Таблицы для исправления высот, помещенные в ВАС—58 и ТВА—57, составлены несколько иначе, чем в МТ—63. Поэтому при пользовании этими таблицами вначале нужно обязательно ввести поправку за наклонение видимого горизонта наблюдателя, а затем остальные поправки следующим образом:
— для высот Солнца совместно учесть поправки за астрономическую рефракцию и параллакс по аргументу йв и отдельно за видимый полудиаметр;
— для высот Луны совместно учесть поправки за астрономическую рефракцию, параллакс и видимый полудиаметр по аргументам h3 и р\
— для высот звезд и планет учесть поправку за астрономическую рефракцию по аргументу Ав, а для планет также поправку за параллакс по аргументам hB и р\
— для высот всех светил менее 30° (ТВА—57) и менее 50—75° (ВАС—58) дополнительно учесть поправки за температуру Ай, и давление воздуха.
Когда при измерении высот светил производилось измерение наклонения видимого горизонта, то при исправлении высот по таблицам
§ 78, Исправление измеренных высот светил
401
ВАС—58 или ТВА—57 никаких особенностей не возникает, за исключением того, что наклонение видимого горизонта учитывают измеренное, а не выбранное из таблиц. При исправлении же высот по таблицам МТ—63 и совместном учете поправок следует после учета измеренного наклонения видимого горизонта в таблицы общих поправок входить с возвышением глаза наблюдателя е = 0, так как наклонение видимого горизонта уже учтено; остальные поправки вводятся как обычно.
Пример. 2 сентября 1968 г. в Тс около 4*40* в <рс = 43°03' и Хс = 16°30' W навигационным секстаном измерена высота звезды а Тельца: oc = 58°45J2, i + s — 4-2J0, е — 9,2 м.
Исправить высоту по таблицам, помещенным в ВАС—58. Решение.
ОС 1 4- s 58°45J2 4-2,0
Л' 58°47;2
Mtd -5,4
58°41J8
ЛА₽ -0.6
Л 58°4Г,2
Пример. 12 апреля 1968 г. навигационным секстаном измерена высота нижнего края Солнца: ос == 18°52'0, /4-^=4-0J4, наклономером измерено d =± +6',8, fв = -Ис С, Вв — 768 мм.
Исправить высоту по таблицам, помещенным в ТВА—57.
Решение.
ос 18°52',0
i + $ 4-0,4
h’ 18°5214
bhd —6,8
Лв 18°45;б
—2,7
*0 4-16,0
ДЛ/ -0,1
ДЛв 0,0
h 18°58',8
Исправление высот в особых случаях. При исправлении высот светил могут встретиться следующие случаи, особенности которых рассмотрены ниже.
И оправление высот светил, измеренных через зенит (рис. 208). Отсчет высоты исправляется поправкой секстана а затем поправкой d за наклонение видимого горизонта наблюдателя. В результате находится видимая высота светила через зенит (для Солнца и Луны — нижнего или верхнего края). Взяв дополнение этой высоты до 180°, получают видимую высоту светила (для Солнца и Луны — верхнего или нижнего края).
Дальнейшее исправление производится обычным порядком с той лишь разницей, что при использовании таблиц общих поправок МТ—63 в них следует входить с аргументом е — 0 (так как наклонение горизонта уже учтено) и при измерении высоты нижнего края Солнца (Луны) дополнительную поправку выбирать для высоты верхнего края, и наоборот.
26 Заказ 1833
402 Глава 14. Определение места по светилам
Пример. 12 мая 1968 г. навигационным секстаном измерена высота ннжнего края Солнца через зенит: ос — 116°45',5; i + з » -Ь2',5; е = 10 м.
Исправить высоту Солнца по таблицам, помещенным в МТ—63.
Решение.
116O45J5
I 4- s ~ 4-2,5
= 116°48;о
ДЛ^= —5,6 (табл. 11-б)
АВ02 = 116°42,'4
180° —Л- =А-= 63 17,6
ВОл В0
ДЛо == 4-15,6 (табл. 8-а для е = 0)
ДЛд== —31,9 (табл. 8-в)
63°0Г,3
Исправление высот светил, измеренных над береговой чертой. В практике возможны случаи измерения высот светил над береговой чертой, кромкой льда или даже над ватерлинией соседнего корабля. Все указанные случаи с точки зрения исправления высот являются одинаковыми.
Для исправления высот светил в этих случаях вначале необходимо учесть поправку за наклонение зрительного луча из табл. 11-а МТ—63 (в ТВ А—57 аналогичная таблица помещена под номером 16).
Поправка за наклонение зрительного луча всегда отрицательна. Ее учетом измеренная высота светила приводится к плоскости истинного горизонта, т. е. находится видимая высота Лв светила, которая должна быть затем исправлена всеми поправками, за исключением поправки за наклонение видимого горизонта наблюдателя. При этом, если исправление производится по таблицам общих поправок МТ—63, то поправка АЛ» должна выбираться на возвышение глаза наблюдателя е = 0.
Исправление малых высот. В Мореходных таблицах МТ—63 общие поправки ДЛо даны для высот от 3° до 90° (табл. 8-а и 9-а). Поэтому при использовании МТ—63 исправление высот Солнца и звезд меньше
§ 79. Вычисление счислимых высот и азимутов светил 403
3°, следует производить путем раздельного учета поправок. Для исправления высот Солнца можно также использовать табл. 13-а и 13-6.
Исправление высот светил, измеренных секстанами (угломерными приборами) с искусственным горизонтом. Угломерные приборы с искусственным горизонтом позволяют измерить высоту центра светила над плоскостью истинного горизонта. Поэтому после исправления отсчета высоты поправкой угломерного прибора получается видимая высота центра светила, которую далее нужно исправить поправками за астрономическую рефракцию и параллакс (высоты Солнца, планет и Луны) или только поправкой за астрономическую рефракцию (высоты звезд). Если высоты светил меньше 30°, то учитываются также поправки за температуру kht и давление ДЛВ вдздуха.
При исправлении высот светил, измеренных угломерным прибором (секстаном) с гирогоризонтом, кроме того, необходимо учитывать специальную поправку за влияние суточного вращения Земли. Эта поправка выбирается из таблицы, помещенной в формуляре прибора, по широте места и азимуту светила.
Пример. 12 мая 1968 г. 7*с == 22*30х, Хс=158°50' Ost. Секстаном ИМС-3 измерена высота Луны: ос = 60°0б;0; ZK=4-3J0; Д/ = +2J5, $ — — 0J5.
Исправить высоту Луны по таблицам, помещенным в МТ—63. Решение.
12/05 7*с = 22*30-* ос = 60°06',0
NQ$t== —11 4* 4* s =г +5,0
12/05 11*30* лв = бо°п;о
р= 61 £3 ДАр= —0,6 (табл. 12 МТ—63)
ДАр = 4-30,5 (форм. 14. 11)
Ас = 60°40;9
Вместо рассмотренного способа учета поправок можно ввести общую и дополнительную поправки (табл. 10-а и 10-6 МТ—63), а затем исключить полудиаметр Луны R (из МАЕ), исправленный поправкой ДЯЛ .
§ 79. ВЫЧИСЛЕНИЕ СЧИСЛИМЫХ ВЫСОТ И АЗИМУТОВ СВЕТИЛ
Счислимые высота hc и азимут Ас светила находятся путем решения параллактического треугольника, соответствующего счислимому месту корабля, по величинам срс, В и
Решение параллактического треугольника относительно счислимых hc и Ас обычно производится с помощью специальных таблиц (ВАС—58, ТВА—57) или непосредственно по формулам сферической тригонометрии.
Вычисление по формулам с помощью натуральных значений тригонометрических функций на малйх (настольных) вычислительных машинах, которое может выполняться без записи промежуточных результатов, производится очень быстро и просто.
Вычисление по формулам с помощью логарифмов тригонометрических функций является наиболее трудоемким, и к нему следует прибегать лишь в силу необходимости.
Точность всех указанных способов вычисления примерно одинакова и обеспечивает получение счислимой высоты со средней квадратической ошибкой не более О',1—О',2.
Вычисление высот и азимутов по таблицам ВАС—58. Таблицы высот и азимутов светил (ВАС—58) относятся к типу таблиц готовых ответов. Комплект таблиц состоит из четырех томов, каждый из которых охватывает широтную зону по 20°; таблицы позволяют вычислять высоты*
26*
404 Глава 14. Определение места по светилам
и азимуты светил в широтах от 0° до 80°30'. Каждый том состоит из основных таблиц и таблиц поправок.
В основных таблицах приведены результаты решения параллактических треугольников для определенных значений аргументов: широты <р места, склонения В и часового угла t светила, называемых табличными. Для этих аргументов в таблицах даны значения высот А, азимутов А и вспомогательных углов q светил, называемых также табличными.
Для получения счислимых высот Ас и азимутов Дс на заданные значения аргументов <рс, В и tM необходимо табличные значения высоты А и азимута А исправить поправками по формулам:
Ас = h 4- ДА? + ДАг + АА, + AAd;
Ас — А + ДА? 4" АД6 4" АД,, где АА?, АА5, АА,, AAd, АД?, АД5 и АД, — поправки высот и азимутов за разности между заданными и табличными значениями широты Аср, склонения AS и часового угла А/.
Для выборки указанных поправок служат таблицы поправок (табл. 1, 2 и 3). Поправка азимута АД, не табулирована и находится из основных таблиц интерполированием между смежными значениями азимута А по А/.
Таблица 1 служит для выборки поправок высоты и азимута АА?, АД?, АА8 и АДг за широту и склонение. Для нахождения поправок по значению высоты светила А открывается соответствующий диапазон таблицы, в котором по Д<р и Д выбираются поправки ДА? и АД?, а по AS и q — поправки ДЛ8 и АДб.
При выборке поправок производится интерполирование: поправки АА? за десятые доли градуса А непосредственно в табл. 1 и поправок ДА? и ДА6 за десятые доли минут Аср и AS — по вспомогательной табличке.
Знаки поправок или правила их определения указаны в таблице.
Таблица 2 служит для выборки поправки АА,. Для нахождения поправки по счислимой широте <рс открывается соответствующий диапазон таблицы, в котором по значению <р, ближайшему к срс, Ас и А/, выбирается поправка АА,. В необходимых случаях поправка интерполируется, по азимуту непосредственно в табл. 2 и за десятые доли минут А/ — по вспомогательной табличке. При вычислении Ас с максимальной точно-стью в табл. 2 нужно входить с величиной Дс--^(вместо Дс).
Знак поправки АА, противоположен знаку разности At
Таблица 3 служит для выборки дополнительной поправки ААа, которая выбирается по аргументам Д, А? и ДД5.« Знак поправки указан в таблице. Максимальное значение поправки ААд равно О',8.
Порядок вычисления счислимых высот и азимутов светил по таблицам ВАС—58 следующий:
1) в схему вычислений вносятся заданные аргументы срс, S и /м;
2) исходя из заданных намечаются табличные аргументы так, чтобы разности заданных и табличных величин не превышали 30';
3) образуются разности заданных и табличных аргументов А<р, AS и А/ со своими знаками;
4) по табличному значению ср открывается соответствующая секция основных таблиц и по табличным значениям S и i из нее выбираются табличные: высота А, азимут А и вспомогательный угол q. Кроме того, интерполяцией между смежными значениями азимута по А/ вычисляется
§ 79. Вычисление счислимых высот и азимутов светил
405
поправка азимута АД, и определяется знак поправки ДАг по изменению азимута для двух значений склонения (табличного и заданного);
5) из табл. 1 выбираются поправки высоты Д/^, ДЛ5 и азимута ДАф> ДАб за разности заданных и табличных значений широты места Д? и склонения светила Д8. Вычисляется счислимый азимут светила Ас = А4-2ДА и определяется его наименование: первая буква азимута всегда одноименна с широтой, вторая — с местным часовым углом в полукруговом счете;
6) из табл. 2 выбирается поправка высоты bht за разность заданного и табличного значений часового угла светила Д/ ^если нужна максимальная точность, то в табл. 2 входят с Ас — ;
7) из табл. 3 выбирается дополнительная поправка высоты светила ДАд;
8) вычисляется алгебраическая сумма поправок высоты 2ДЛ, придавая которую к табличной высоте, получают значение счислимой высоты светила пс = h + 2ДА.
Примечание. При входе в основные таблицы полезно сразу сравнить выбираемую высоту h с измеренной высотой Ао светила; если их разность невелика, то это означает, что предыдущие вычисления верны; если же разность указанных высот большая (несколько градусов или десятков градусов), то это означает, что в вычислениях допущена ошибка (неверно вычислен часовой угол или склонение светила или сделан неверный вход в основные таблицы).
Пример. фс = 23°29;2М Ь = 5°29;0М /м = 53°38;8 W.
Вычислить Ас и Ас по таблицам ВАС—58.
Apr. Задан. Табл. Задан, — табл. А 34°57'8 А 100?4
23°29J2 23° + 29J2 АЛ? —5,3 +0,3
5 29,0 5 +29,0 ДАв + 12,2 ДАв -0,5
53 38,8 54 -21,2 ' ДА, + 19,2 ДА, +0,2
Я 65 ДЛд +0,3 ЕДА 0,0
и S одноименные ЕДА +26,4 Ас 100?4.М7
Ас 35°24;2 А АА‘ Лс 2 Ю0°3
При использовании таблиц ВАС—58 удобно применять способ перемещенного места. Сущность этого способа состоит в следующем: счисли-мая широта срс округляется до ближайшего целого градуса, а счислимая долгота Хс изменяется так, чтобы местный часовой угол светила содержал только целые градусы; место, соответствующее измененным таким образом координатам, называется перемещенным местом (пм).
Так как основные таблицы ВАС—58 составлены для широт и часовых углов с интервалом через Г, то для перемещенного места ?Пм и /Пм всегда будут равны табличным и а значит
Д<Р = Тик - ? = о и Д/=/пм - / = 0.
406
Глава 14. Определение места по светилам
Поэтому поправки ДА?, ДАф, ДА,, ДА, и ДЛ0 будут также равны нулю и счислимая высота и азимут определятся по формулам:
Ас = h + ДАв лс = л + дл5
(14. 12)
Вычисления в этом случае значительно сокращаются.
Пример. Тс = 70°15;0М Хс = 33°45;0 Ost, &=19°22'7 2V, frp == 287o08J4 W.
Вычислить Ас и Ас по таблицам ВАС—58 способом перемещенного места.
Решение. 1) Вычисляем местный часовой угол светила. Для этого изменяем Хс в пределах ±30' так, чтобы ?пм = frp ± Хпм содержал только целые градусы
frp- 287°08J4 W
Хпм = +33°5Г,6 O5t
tnu = 321°00;0 W
tnM= 39°oo;o ost
2) вычисляем Ac и Ac по величинам: ?пм = 70° AT, & = 19°22;7 W и fnM — 39° O5t
Apr. Задан. Табл. Задан. - табл. h 33°52;о А 134°2
Тдг 7о°оо;о 70° — — —
19 22,7 19 +22J7 ДА6 4-21,9 дл6 -0,1
39 00,0 39 — ДА/ — ДА/ —
Я 15 ААд — ЕДА
<Р и & одноименные ЕДА Ас 134V1 NOst
Ас 34°13;9 дл, 2
Прокладку высотной линии положения производят от точки с координатами Тпм = 70°00;0 2V и Хпм == 33°5Ц6 Ost.
Если при работе с таблицами ВАС—58 встретятся случаи вычислений больших (превышающих 73°) и отрицательных высот, то эти вычисления выполняются следующим образом.
При высотах больше 73°, поскольку табл. 1 рассчитана для высот до 73°, вычисление счислимых высот и азимутов светил возможно только способом перемещенного места со следующими особенностями: в основных таблицах, кроме А, А и q, путем интерполяции находятся также величины ДД5 и Д^; затем из первого диапазона табл. 1 (А == 0°—22°) выбила
рается поправка высоты ДАе по аргументам ДВ и q' — q Ч—; искомые Ас и Ас вычисляются по формулам (14.12).
При отрицательных высотах (выбираемых из основных таблиц ниже горизонтальной черты при ср и В одноименных или выше горизонтальной черты при ср и В разноименных) вычисление счислимых высот и азимутов
§ 79. Вычисление счислимых высот и азимутов светил
407
светил можно производить общим способом или способом перемещенного места» но со следующими особенностями:
— знак минус у табличной высоты не ставится;
— для определения знака ДА6, величины и знака ДА, необходимо при сравнении брать азимут в той же четверти, в которой находится табличный азимут;
— знак поправки высоты &ht берется одинаковым со знаком Д/;
— у полученной счислимой высоты hc знак изменяется на обратный, а для определения счислимого азимута Ас берется дополнение полученного азимута до 180°.
Вычисление высот и азимутов по таблицам ТВ А—57. Таблицы ТВА—57 относятся к типу тригонометрических. Вычисление hc и Ас с помощью этих таблиц производится по логарифмическим формулам:
tgAe = s-S; (14.13)
tgA = '-^F; (14-14)
tg х = tg 8 sec fM; (14. 15)
y = 90° + (x^Tc), (14. 16)
которые выведены из двух прямоугольных сферических треугольников, полученных в результате деления параллактического треугольника сферическим перпендикуляром, опущенным из места светила на меридиан наблюдателя.
В этих формулах:
х — вспомогательная величина, являющаяся склонением (или его дополнением до 180°) основания сферического перпендикуляра; ее наименование всегда одинаково с наименованием склонения светила, причем, если tM больше 90°, то величина х тоже больше 90°;
знак — в формуле для у означает вычитание меньшей величины из большей, если они одноименные, и их сложение, если они разноименные. Для повышения точности и с целью действий только с положительными числами указанные формулы преобразованы; при этом принято: 7» - 104 *2 lg tg а 4-70725;
S(a) = 104-21g sec a.
После логарифмирования с учетом указанных обозначений формулы (14. 13)—(14. 15) примут вид:
7(Ас) = 7(у)-5(Ас);
Г(АС) = 7(0-$(*) +5(у);
7(х) = 7(8) + 5(0.
Порядок вычисления счислимых высот и азимутов по таблицам ТВА—57 следующий:
1) по аргументам 8 и /м из таблицы выбираются величины Т (В), 5 (0 и Т (t) и находится сумма величин Т (8) и 5 (/)♦ равная Т (х);
2) по Т (х) обратным входом в таблицу определяется вспомогательная величина х\ одновременно выбирается значение 5 (х) и образуется разность 7(0—5(х), равная Т(р);
408
Глава 14. Определение места по светилам
3) рассчитывается z/ — 90° + (х — ус) и по этой величине из таблицы выбираются значения Т (у) и 3 (у)\ пъымлжя. сумма Т (р) +S (у), равная Т (4с);
4) по Т(АС) обратным входом в таблицу определяется величина счислимого азимута светила Ас; одновременно выбирается значение 3(Д) и образуется разность T(y) — S(AC), равная Т (Ас);
«5) по Т (Лс) обратным входом в таблицу определяется Лс.
Азимут Ас выбирается в четвертном счете. Первая буква его наименования одноименна с ус только при х > ус и одноименных; во всех остальных случаях она разноименна с ус. Вторая буква наименования азимута одноименна с часовым углом светила в полукруговом (практическом) счете.
При у > 180° для дальнейших расчетов следует брать величину у — 180° и у Ас поставить знак минус, так как она будет отрицательной.
Пример. фс = 36°58' N, Ъ = 16°40;4 S, = 29°O459 W.
Вычислить Лс и Лс по таблицам ТВА—57.
16o40J4 Г(Ь) 1 60253 i
29°04;9 S(/) + 1171 r(0 65629
xs 18°55;i i 61424 S(x) 1 — 482
Тлг 36°58J0 T<J>) 65147
90° + (x~?c) 145°53',1 S(y) + 1640 ! Г(у) i 67342
Ac 32°26J1 sw T{AC) 66787 S(AC) —1473
Лс 29°45J5 Г(ЛС) 65869
При расчетах по таблицам. ТВА—57 возможны два частных случая: когда = 90° и когда х = <рс, что соответствует Ас = 90°. В этих случаях вычисление Лс и Ас производится по упрощенным схемам, приведенным в описании таблиц.
Вычисление высот и азимутов по формулам. При вычислении счислимых высот и азимутов по формулам сферической тригонометрии как по натуральным значениям тригонометрических функций (с помощью малых вычислительных машин), так и по логарифмам наиболее удобными являются формулы:
sin2^- — sin2 + cosус cos3sin2y;
sin Ас — cosS sin cosec zc;
Лс = 90° - zc.
(14. 17)
(14. 18)
(14. 19)
§ 79. Вычисление счислимых высот и азимутов светил
409
В формуле (14. 17) знак — означает, что при <рси5 одноименных из большей величины вычитается меньшая, а при разноименных — величины фС и & складываются.
Значения sin2у, sin2^y- и sin2у табулированы, так что при вычислении не нужно делить аргументы zCi 8 и /м и значения тригонометрических функций возводить в квадрат, — все эти действия выполнены в табл. 5-а, 5-6, 5-ж, 6-а и 6-6 МТ—63.
Производить исследование формулы (14. 17) на знаки тригонометрических функций не требуется, так как оба члена ее правой части всегда положительны.
Наименование счислимого азимута Дс, получаемого по формуле (14. 18) в четвертном счете, определяется по следующим правилам.
Таблица 29
Наименование б Величина б Величина Лс 1-я буква Ас 2-я буква Лс
Разноименно с Одноименно с у . То же W • Не имее Б < <р о < <р & > <р st значения Лс Ai Лс < Aj Не имеет значения Разноименна с у То же Одноименна с <р То же Всегда одноименна с (взятым в пре- делах от 0 до 180°)
Здесь Л1 — высота светила на первом вертикале (табл. 21 МТ—63).
Пример. <рс = 34°18;ом 8 = 8°3i;6S, /м = 16°07,'8ОЧ
Вычислить Лс и Лс по формулам (14. 17) —> (14. 19) при помощи малой вычислительной машины (арифмометра) и натуральных значений тригонометрических функций.
tost 16°07;8 ; sin2 0,01968 sin 0,27781
34 18,0 cos 0,82610 cosec zc 1,40275
8 31,6 cos 0,98895 cos 0,98895
42°49J6 0,01607 i
sin2 0,13329
sin2 у 0,14935 sin Лс 0,38539
Zc 45°28'2 Лс 22°7 SO“
Лс 44°3i;8
410
Глава 14, Определение места по светилам
Пример. <рс = 22°29;0 S, b = 19°28;3 S, = 6°49;4 О5*.
Вычислить Лс и Ас по формулам (14. 17) — (14. 19) при помощи таблиц лога рифмов тригонометрических функций.
1g lg lg
'os‘ 6°49J4 sin2 7,54918 sin 9,07484
22 29,0 cos 9,96567 cosec zc 0,91123
19 28,3 cos 9,97442 cos 9,97442
<Рс ~ Ь з°оо;7 sin 2 6,83921 II 7,48927
П 7,48927 a 0,08773
Apr. 0,65006 sin2 у 7,57700 i sin Ac 1 9,96049
zc 7°02'8 Ac 65°9 Nty*
hc 82°57J2
§ 80. ПРОКЛАДКА ВЫСОТНЫХ ЛИНИЯ ПОЛОЖЕНИЯ
Прокладка высотной линии положения производится по ее параметрам:
Ас — счислимому азимуту светила, определяющему напра-
вление переноса, и
АА — (А — Ас) — разности истинной геоцентрической и счислимой высот светила, определяющей величину переноса высотной линии положения относительно счислимой точки.
Рис. 209
может выполняться на бланке астрономических
морской вычислений.
Для прокладки высотной линии положения при счислимом месте корабля (рис. 209) проводится прямая под углом к меридиану, равным Лс. На этой прямой откладывается разность высот ДА= (А— Ас) по направлению на светило, если разность положительна, и от светила, если она отрицательна. Конец отрезка ДА называется определяющей точкой К. Через определяющую точку перпендикулярно линии азимута проводится прямая, которая и будет являться высотной линией положения.
Прокладка высотных линий положения рассмотренным способом карте в проекции Меркатора или на При этом допускаются методиче
§ 80. Прокладка высотных линий положения
411
ские погрешности, обусловленные как самим методом построения линий положения, так и свойствами карты в проекции Меркатора. Допуск метода построения линий положения заключается в пренебрежении их кривизной, а свойства карты в проекции Меркатора сказываются в том, что на ней линия азимута светила (ортодромия) изображается кривой линией, в то время как прокладывается она в виде отрезка прямой.
В обычных условиях эти погрешности не оказывают заметного влияния на определяемое место корабля. Однако при значительной величине переноса Д/i при прокладке способом перемещенного места или большой ошибке счисления, а также в высоких широтах или при больших высотах светил их влияние может быть значительным.
Для учета кривизны линии азимута светила необходимо из счислимого места С провести прямую СК (рис. 210) под углом т к меридиану и отложить на ней значение ДЛ.
Величина угла т определяется формулой
t = А + ъ
где 7 — схождение меридианов счислимой и определяющей точек.
Для вычисления угла 7 применяется формула
7 = (й — йс) sin Actg<pc (14.20)
или угол 7 может быть выбран из таблицы, помещенной на вкладыше к ВАС—58. Знак 7 одинаков со знаком ДЛ при полукруговом счете азимута.
Линия положения / — / проводится через точку К перпендикулярно линии СК.
Учет кривизны линии азимута целесообразен при величине 7, превышающей 0,2—0°,3.
Кривизна линии положения наиболее просто учитывается путем построения части круга равных высот по точкам, удаление которых xl — Х2 — а2Ь2} х3 = а3Ь3\ ... ; хп = ая£я(рис. 211) от линии положения /—/ рассчитывается по формуле
х = 0,000145 Z2(tgA~tg<pccosA), (14.21)
где I — расстояние до выбранных точек а от определяющей точки К\
Ас — счислимый азимут светила в полукруговом счете.
По формуле (14.21) составлена номограмма (рис. 212), на которой по величинам Z и вспомогательным величинам (т — п) находятся отрезки х.
412
Глава 14. Определение места по светилам
Рис. 212
§ 80. Прокладка высотных линий положения
413
Вспомогательная величина пг снимается с этой же номограммы по Л; знак m всегда положителен (+). Величина п снимается с номограммы по срс и Ас, знак п при Дс<90° отрицателен (—), при Дс>90° положителен (+). Если тип имеют одинаковые знаки, то они складываются, если разные, то из большей величины вычитается меньшая. Порядок пользования номограммой показан на самой номограмме. Положительные величины х откладываются от линии положения в сторону светила, а отрицательные — отсветила; знак х одинаков со знаком (/п—л).
Пример. <?с = 77° М Л —50°, Лс = 135° NO3*, Z — 40 миль.
Определить х.
Решение. 1) По h = 50° находим т = +0,17;
2) по Тс —77° и Лс —135° находим п— +0,46;
3) образуем (т ~ л) = +0,63;
4) по (т ~ л) = +0,63 и I — 40 находим х = +1,0 мили.
Учитывая сравнительно малую кривизну кругов равных высот, на практике достаточно небольшие их части заменять прямыми, проводимыми через пары точек Ь\, Ь% и fi, f2, взятых по обе стороны точки пересечения линий положения (рис. 213).
Для определения необходимости учета кривизны линий положения нужно после их прокладки обычным способом измерить отстояния /ь /2 полученного места Со (рис. 214) от определяющих точек Къ К2 и сравнить их величины с допустимым значением /доп этого состояния. Если h (/2) меньше /ДОп, то кривизну данной линии положения учитывать не надо.
Значения /доп по аргументу т — п приведены в табл. 30.
Таблица 30
т ~ л 0,02 0,04 0,06 0,08 0,10 0,20 0,30 0,40 0,50 0,60 0,70 0,80 0,90 1,00 1,50 1,70
^доп мили 100 71 58 50 45 32 26 22 20 18 17 16 15 14 12 11
В высоких широтах может потребоваться одновременный учет кри визны как линий азимутов, так и линий положения.
414
Глава t4. Определение места по светилам
Вместо учета кривизны линий азимутов и линий положения можно применить способ повторного вычисления, используя в качестве счислимых координаты места, полученного при прокладке линий положения
без учета кривизны.
Прокладка линий положения на бланке астрономических вычислений (или на листе бумаги) может выполняться с применением или без
применения углового масштаба.
Угловой масштаб строится по широте счислимого места срс, как показано на рис. 215, в достаточно крупном масштабе, например 1 см — Г.
Рис. 215
Значения Д/и и ДЛ2 для прокладки снимаются с наклонной прямой масштаба; эту же прямую используют для измерения разности широт Ду и отшествия. Разность долгот ДХ измеряется по горизонтальной прямой углового масштаба.
Если угловой масштаб не применяется, то после прокладки величин ДА1 и ДЛ2 снимаются для точки Со (рис. 216) в масштабе прокладки разность широт Дер = С0В и отшествие Aw = СВ. Разность долгот вычисляется на логарифмической линейке по формуле
ДХ — Дда sec <рс, выбирается из табл. 25-а МТ—63 или снимается с графика (рис. 217) в принятом масштабе.
Рис. 217
В случае применения способа перемещенного места прокладка высотных линий положения производится на карте или карте-сетке от точек <рпм и Хпм, координаты которых приняты для вычисления счислимых высот и азимутов светил. При этом число линий положения определяет число перемещенных мест. При определении места корабля по. одновре
§ 81. Определение места по высотам светил
415
менным наблюдениям светил широты српм точек перемещенных мест будут одинаковы. В случае разновременных наблюдений широты точек српм могут быть различными. Кроме того, в последнем случае первое перемещенное место ПМ1 для прокладки следует сместить на величину пройденного кораблем расстояния С\С2 (рис. 218) и прокладывать первую линию положения от точки пм'( по своим параметрам.
Для прокладки линий положения на картах в поперечной проекции Меркатора параметры ДА и Дс вычисляются обычным' способом. Угол Лс откладывается от истинного меридиана счислимого места; отрезок этого меридиана должен быть предварительно проведен на карте. Можно также вместо угла Лс использовать квазиазимут Л г измеряемый относительно квазимеридиана. Величина Aq вычисляется по приближенной формуле
Aq = Лс X,
Значение ДА снимается, как обычно, с боковой рамки карты.
При нахождении корабля вблизи Северного полюса Земли применяется способ перемещенного места, в качестве которого берется точка полюса. Параметры линий положения в этом случае будут равны
ДА-А-&; ЛС=ЧР-
Для учета кривизны высотных линий положения отрезки х вычисляются по формуле
х = 0,000145Z2 tg h (14.22)
или находятся с помощью номограммы рис. 212 по величинам m и /.
§ 81. ОПРЕДЕЛЕНИЕ МЕСТА ПО ВЫСОТАМ СВЕТИЛ
Характеристика способов определения места по высотам светил. В практике кораблевождения при определениях по высотам светил применяются способы определения места по одновременным наблюдениям четырех, трех, двух светил и по разновременным наблюдениям одного светила (Солнца). Определение места по высотам более чем четырех светил, при обработке наблюдений без применения электронных вычислительных машин, нецелесообразно, так как выигрыш в точности получается незначительный, а время обработки наблюдений, являющееся важным фактором, заметно возрастает.
Определение места по одновременным наблюдениям четырех светил возможно в темное время суток. Этот способ позволяет:
— получить наиболее точный результат;
— выявить промахи в измерениях или вычислениях, т. е. оценить надежность полученного места корабля;
— сделать заключение о характере преобладающих ошибок высотных линий положения.
Четыре светила для наблюдений нужно подбирать парами с разностью азимутов в каждой паре около 180° и между парами возможно ближе к 90°. Если секстан давно не проходил аттестования, то светила с противоположными азимутами нужно намечать примерно на одинаковых высотах.
Рекомендуется для обеспечения полной надежности обсервации наблюдать контрольную (пятую) линию положения в промежуточном азимуте. Контрольная линия позволит исключить ошибочную линию и обрабатывается только в случае обнаружения промаха в наблюдениях. Определять место корабля по высотам четырех светил с азимутами в пределах половины горизонта следует только в крайнем случае, когда
416
Глава 14. Определение места по светилам
иного расположения светил по условиям видимости подобрать невозможно.
Определение места по одновременным наблюдениям трех светил возможно в темное время суток и днем — по высотам Солнца, Луны и Венеры. Этот способ позволяет получить суждение о характере преобладающих ошибок высотных линий положения и исключить одинаковую повторяющуюся ошибку. Наличие промаха в измерениях или вычислениях обнаружить практически невозможно. По точности этот способ уступает определению места по высотам четырех светил.
Для наблюдений нужно намечать светила с азимутами по всему горизонту. Наивыгоднейшая последовательная разность азимутов светил равна 120°. Если секстан давно не проходил аттестования, то светила нужно намечать примерно на одинаковых высотах.
Определять место корабля в темное время суток по высотам трех светил с азимутами в пределах половины горизонта следует только в случае, когда по условиям видимости других светил для наблюдений подобрать невозможно.
Днем Солнце, Луна и Венера имеют азимуты в пределах половины юризонта. Независимо от этого определение места корабля по высотам этих трех светил предпочтительнее определения места по высотам только Солнца и по высотам Солнца и Луны.
Определение места по одновременным наблюдениям двух светил возможно в темное время суток и днем по высотам Солнца и Луны, Солнца и Венеры, Луны и Венеры.
Этот способ не позволяет исключить повторяющуюся ошибку высотных линий положения и сделать обоснованное суждение о наличии промаха в измерениях или вычислениях и потому является малонадежным.
Два светила для наблюдений нужно намечать с разностью азимутов от 60 до 120° в случае измерения наклонения видимого горизонта и с разностью азимутов от 60 до 80°, если наклонение горизонта не измеряется.
Днем определение места по высотам Солнца и Луны, или Солнца и Венеры, или Луны и Венеры предпочтительнее определения места по высотам Солнца.
Определение места по разновременным наблюдениям одного светила производится по высотам Солнца. В зависимости от соотношения ошибок линий положения и счисления наиболее выгодная разность азимутов при разновременных наблюдениях Солнца лежит в пределах от 30—40° до 70—80°.
Подготовка к наблюдениям и вычислениям. Судовое время начала наблюдения светил для определения места корабля намечается, как правило, заблаговременно. Для случая измерения высот звезд (планет) навигационным секстаном оно равно началу навигационных сумерек утром и концу гражданских сумерек вечером. При использовании угломерных приборов с искусственным горизонтом время наблюдения выбирается в течение всей ночи, сообразуясь с видимостью светил, решаемой кораблем задачей и обстановкой. К намеченному моменту начала наблюдений прибавляется 5—10 мин, и на этот момент с карты снимаются координаты счислимого места срс, Хс, а также записываются путевой угол и скорость корабля.
Затем при помощи звездного глобуса, а при хорошем знании звезд-* ного неба непосредственно по небу производится подбор звезд для наблюдений.
Звездный глобус является моделью небесной сферы. При астрономических определениях места по звездному глобусу могут решаться следующие задачи:
— подбор звезд (планет) для наблюдений;
§ 81. Определение места по высотам светил
417
— определение названия отнаблюденной, но неопознанной звезды или планеты.
Для подбора по глобусу светил для наблюдений надлежит:
— нанести на глобус места светил (для Солнца, Луны и планет);
— установить глобус по широте места;
— установить глобус по времени наблюдений.
Места светил наносятся по их экваториальным координатам а и 3, которые определяются по ежедневным таблицам МАЕ. При этом значения а и о для Солнца и планет определяются только по дате, а для Луны — на всемирное время, соответствующее заданному судовому времени, округленному до ближайшего часа. Место Солнца на звездный глобус можно также нанести по дате, используя деления и основные точки У - А —1 А эклиптики и считая, что в сутки Солнце перемещается по ней на одно деление. Так, например, для нанесения Солнца на звездный глобус на 12 мая нужно отсчитать от точки летнего солнцестояния в сторону точки весеннего равноденствия 40 делений эклиптики (по числу дней разности дат) и отметить на ней место Солнца.
Для установки звездного глобуса на широту места следует:
— повышенный полюс мира (одноименный с широтой места) расположить над соответствующей частью (N или S) азимутального кольца;
— дугу вертикала, имеющую деления, совместить с кольцом, изображающим меридиан наблюдателя;
— точку повышенного полюса мира подвести под деление вертикада, равное широте места наблюдателя.
Для установки звездного глобуса по времени наблюдений нужно:
— на заданный момент судового времени вычислить звездное местное время = АГ и округлить его до целого градуса;
— найти значение if на небесном экваторе и, вращая глобус вокруг оси мира, подвести его под полуденную часть меридиана наблюдателя.
После этого по звездному глобусу подбираются соответствующим образом расположенные по азимуту и высоте светила и снимаются их высоты и азимуты по делениям вертикала и азимутального кольца.
27 Заказ 1833
418
Г лава 14. Определение места по светилам
Затем вычерчивается схема расположения выбранных для наблюдения светил относительно диаметральной плоскости корабля (рис. 219), на которой указываются наименования, высоты, азимуты, курсовые углы светил и очередность их наблюдений.
Для опознавания отнаблюденного светила звездный глобус устанавливается по широте места и времени наблюдений. После этого вертикал с градусными делениями ставится по пеленгу звезды, взятому с помощью пеленгатора, а индекс на этом вертикале — на отсчет измеренной высоты.
Наблюденная звезда должна быть вблизи острия индекса. Если вблизи индекса звезд нет или есть, но слабой яркости (в то время как наблюдалась яркая), то делается предположение, что было произведено наблюдение планеты. В этом случае нужно прочесть на глобусе наименование ближайшего созвездия и по специальной таблице МАЕ «Видимость планет» определить наименование планеты или снять с глобуса а и В точки, на которую показывает индекс, и сравнением их с координатами четырех планет, приведенными в ежедневных таблицах МАЕ, определить наименование планеты.
Звездный глобус, кроме задач по подбору и определению наименования звезд, позволяет также приближенно, ио быстро решать различные задачи на определение времени наступления явлений, связанных с суточным движением светил, например опре* деление времени восхода (захода), нахождения светила на заданном азимуте и т. п.
Для решения указанных задач необходимо:.
— нанести место светила на глобус (для Солнца, Луны и планет);
— установить глобус по широте места;
— установить глобус по заданному положению светила;
— снять с глобуса значение местного часового угла точки Овна^ (звездного времени) и по нему при помощи МАЕ вычислить судовое время данного явления.
При решении указанных задач, связанных с Луиой, необходимо применять метод последовательных приближений.
Пример. 11 мая 1968 г. ф = 4Г N, X — 32° W.
Определить судовое время нахождения Луны на азимуте 135° (в круговом счете).
Решение. 1) на 11 мая Ггр = 12* определяем: = t — ~
и наносим место Луны иа глобус;
2) устанавливаем глобус на широту места ф = 41° W и для заданного положения Луны А = 135°, снимаем с глобуса 170° и вычисляем округленное до целого часа всемирное время:
= 170°
X = +32° W
<Т = 202° H/V 77^22';
3) на Ггр = 22* находим = 219°, = 17°5 S и вторично решаем задачу:
= 174°
Х= + 32° IV
«Т = 206° гр
—199 44,6 11/V Г'р = 22’
Д/ = 6°15;4 25"
П/V Тгр = 22<<25м
ц/V 7С = 20’25-“
§ 81. Определение места по высотам светил
419
По окончании подбора светил для наблюдений рекомендуется произвести предварительные вычисления, которые позволят сократить время на вычисления после производства астрономических наблюдений и тем ускорить получение обсервованного места корабля. Для выполнения предварительных вычислений необходимо:
1) координаты счислимого места срс и Zc на судовое время начала наблюдений Гс вписать в бланк астрономических вычислений;
2) исходя из Тс» вычислить всемирное время Тгр и на ближайший меньший его час выбрать из МАЕ и вписать в бланк вычислений:
— табличный часовой угол точки Овна tдля случая наблюдения звезд;
_ — табличный часовой угол /гр, табличное склонение 8, квазиразность А и изменение склонения А для случая наблюдения Солнца, Луны и планет.
Кроме того, для звезд необходимо выбрать значение звездного дополнения т и склонение 8;
3) по схеме расчета часовых углов вычислить значения:
— для звезд /м = tJ + т;
— для Солнца, Луны и планет = ^гр ± .
Если будут применяться таблицы ВАС—58 в варианте перемещенного места, то долгрту места удобнее учитывать последней; поэтому для звезд предварительно следует вычислить ^£+т, а для Луны и планет только выбрать и записать frp, 8, Д и А;
4) в схему вычислений высот и азимутов светил:
— при использовании таблиц ВАС—58 вписать срс, 8 звезд, наметить табличные значения ср и 8, образовать разности Дер и Д8, а также проставить знаки поправок ДА* и ДА6;
— при использовании таблиц ТВА—57 вписать срс, 8 и Т (8) звезд;
5) выбрать или измерить d и вписать в схему вычислений поправку ДЛ^ за наклонение видимого горизонта и путь корабля.
Астрономические наблюдения. Перед измерением высот светил необходимо:
— рассчитать поправку хронометра на момент наблюдений;
— при наблюдениях с секундомером пустить его по хронометру; в случае использования палубных часов произвести сличение их с хронометром;
— проверить (по видимому горизонту) и, если необходимо, устранить неперпендикулярность зеркал плоскости лимба;
— определить поправку индекса секстана (в вечерние сумерки она определяется после измерения высот);
— измерить температуру и давление воздуха.
При производстве астрономических наблюдений надлежит:
— измерить 3—5 высот каждого светила, отмечая моменты измерений по секундомеру или палубным часам; на неопознанные светила взять пеленги;
— заметить на последний момент наблюдений судовое время, отсчет лага, а также курс и скорость корабля;
— повторно определить поправку индекса секстана (если по предыдущим определениям она держится недостаточно устойчиво);
— повторно сличить часы с хронометром или остановить секундомер по хронометру (для контроля).
В целях повышения точности астрономических определений рекомендуется:
420
Глава 14. Определение места по светилам
— измерять наклонение видимого горизонта наклономером (не более чем за 30 мин до или после измерения высот);
— следить за тем, чтобы сведение светила с горизонтом производилось в центре поля зрения трубы, и покачиванием секстана добиваться того, чтобы измерения выполнялись строго в вертикале светила;
— при всех измерениях высот и определениях поправки индекса секстана окончательное сведение изображений производить вращением барабана тангенциального винта всегда только в одну сторону (например, по часовой стрелке);
— выбирать место для наблюдений, защищенное от ветра; при расплывчатом горизонте производить наблюдения с меньшей высоты, а при качке располагаться возможно ближе к диаметральной плоскости корабля и делать наблюдения в моменты, когда нет крена;
— при значительном волнении, когда видимый горизонт представляется в виде зубчатой линии, измерение высот светил и наклонения горизонта производить над линией гребней волн по возможности при большем возвышении глаза наблюдателя;
— при наблюдении Солнца предпочтительно измерять высоту его нижнего края;
— избегать измерения высот менее 5°, так как при малых высотах ошибка поправки за астрономическую рефракцию может достигать заметных значений;
— в тех случаях, когда температура наружного воздуха резко отличается от температуры в штурманской рубке, выносить секстан к месту работы за 10—15 мин до наблюдений, но не держать его на Солнце.
Обработка астрономических наблюдений. Обработка наблюдений
производится в следующем порядке.
1. Вычисляются средние арифметические моменты времени Т передние арифметические отсчеты высот ос каждого светила.
После вывода осредненных результате тов необходимо произвести простейший
контроль правильности наблюдений. Та-/ ким контролем является то, что при рав-©/ номерных промежутках времени между
/ наблюдениями средние арифметические
из измеренных высот и замеченных моментов должны быть близки к средним наблюденным отсчетам и моментам, а при неравномерных промежутках— попадать в один интервал между их наблюденными значениями.
Когда такого совпадения нет, то сле-дует построить график измеренных высот данного светила (рис. 220), откладывая
Рис. 220 на оси абсцисс моменты времени, а на
оси ординат отсчеты секстана. Если на графике будет резкое (значительное) отклонение какой-либо одной высоты (например, 3 на рис. 220) от общего характера изменения высот, то значит она измерена неправильно и должна быть исключена из вычислений. Значительный разброс всех высот на графике означает, что вообще измерения данной серии выполнены недоброкачественно.
2. Вычисляются местные часовые углы tM и склонения 8 светил.
Если были сделаны предварительные вычисления, то для расчета местного часового угла каждой звезды выбирается поправка Д^ за минуты и секунды всемирного времени наблюдения относительно целого часа, для которого были сделаны расчеты. При вычислении часовых
§ 81. Определение места по высотам светил 421
углов Солнца, Луны и планет в этом случае выбираются поправки и Д2^ за указанный промежуток всемирного времени, а также находится поправка склонения Д8.
Вычисление местных часовых углов звезд можно упростить, если местный часовой угол точки Овна вычислять только на момент наблюдения первой звезды. Для моментов наблюдения следующих звезд эта величина находится путем учета поправки Д1/, выбранной из основных интерполяционных таблиц МАЕ, по разности моментов наблюдения первой и каждой из последующих звезд. При этом способе количество действий и вписываемых цифр меньше, чем при обычных расчетах.
Пример. 13 мая 1968 г. Гс = 41<55* ?с =34°10' N. Хс = 156°10' Ost, ыхр = +1х48с. измерены высоты трех звезд в средние моменты: 7, = 18ч46ж10с, Т2 — 18</49ж55с и Г3= 18ч54ж01с.
Вычислить местные часовые углы точки Овна tTt
Решение.
13/V гс = Nosl — 41/55* —10 Л = Ихр = 18“46ж10с + 1 48
12/V Т’гр = 18ч55* '-к ^2*0 II II II 18ч47лс58с 140°33;9 12 01,5 Д7\ = Зх45с дт2 = 7*51с
II II II 152°35|4 + 156 10,0(У' 308°45;4 Д^= 56J4 Д' = 309°4Ц8 Мд btf= 1°58'1 t? = 310°43;5 М3 ’
3. Производится исправление измеренных высот светил, в результате чего получают истинные геоцентрические высоты. Если исправление высот ведется с помощью таблиц ВАС — 58 или ТВА — 57, то для этого используются имеющиеся в них таблицы поправок. В случае вычислений по формулам исправление высот осуществляется с помощью таблиц поправок, помещенных в МТ — 63.
4. Вычисляются счислимые высоты hc и азимуты Ас светил. Вычисления производятся на стандартных бланках по специальным схемам. При производстве вычислений однотипные действия целесообразно выполнять параллельно для всех светил. Такой порядок вычислений позволяет сократить время по сравнению с последовательным вычислением каждого светила отдельно.
5. Производится приведение истинных геоцентрических высот к одному зениту. Приведение целесообразно делать к зениту наблюдения последнего светила или к зениту на заданное судовое время, близкое ко времени наблюдения светил.
Приведение к одному зениту можно выполнить графическим или аналитическим способом. Последний способ, не загромождающий прокладку линий положения, является более удобным.
При аналитическом способе приведения к одному зениту производится вычисление изменения высоты светила под влиянием перемещения корабля по формуле
ДЛ, = У^ДГ*, (14. 23)
где Vhz — скорость изменения высоты светила под влиянием перемещения корабля за 1 мин времени.
Величины Vhz выбираются по скорости корабля V и курсовому углу светила q= (А — ПУ) из таблиц, имеющихся в ВАС — 58, ТВА —57 и МТ —63 (табл. 16).
422
Глава 14. Определение места по светилам
6. Производится прокладка высотных линий положения и затем по определенным правилам (в зависимости от числа линий положения, соотношения ошибок и расположения светил по горизонту) находится обсервованное место корабля.
Определение места по одновременным наблюдениям двух светил. Для повышения надежности обсервации определение места по высотам двух светил рекомендуется производить одновременно двум наблюдателям независимо друг от друга. Сходимость обоих мест в пределах 2—3 миль будет свидетельствовать об отсутствии промахов во всех этапах, кроме поправки хронометра; поэтому нужно обратить особое внимание на смещение места по долготе.
Обсервованное место корабля находится в точке пересечения линий положения.
Определение места по одновременным наблюдениям трех светил. Вследствие ошибок параметров АЛь &h2 и АЛз высотных линий положения при их прокладке образуется треугольник погрешностей.
Ошибки высотных линий положения могут быть случайными и систематическими (повторяющимися). В зависимости от характера ошибок применяется соответствующий метод нахождения места корабля.
Если стороны треугольника погрешностей в среднем не превышают утроенной средней квадратической ошибки линий положения для данных условий наблюдений, то образование такого треугольника вероятнее отнести за счет случайных ошибок. В этом случае вероятное место корабля будет всегда внутри треугольника погрешностей. Для нахождения этого места нужно провести противомедианы треугольника или применить центрографический прием, выбирая веса вершин треугольника погрешностей по величинам его внутренних углов а из табл. 31.
Рис. 221
Пример. Получен треугольник погрешностей с углами 31, 72 и 77° (рис. 221).
Найти вероятное место центрографическим приемом.
Решение. Из табл. 31 выбираем веса вершин 3, 9 и 10. Складывая веса 3 и 9, получим равнодействующую с весом 12, точка приложения которой лежит на линии //—//, деля расстояние между вершинами в отношении I : 3. Складываем эту равнодействующую с весом 10 третьей вершины; для этого, разделив расстояние между ними в отношении 5:6, находим точку приложения окончательной равнодействующей, которая и является искомым вероятным местом корабля.
Достаточно точно вероятное место корабля можно найти глазомерно по правилу: удаления вероятного места от сторон треугольника должны быть пропорциональны их длинам.
$ 81. Определение места по высотам светил
423
Если стороны треугольника погрешностей превышают указанное выше значение, то появление треугольника следует отнести за счет систематических ошибок. В этом случае искомое место находится путем исключения одинаковой для всех линий положения систематической ошибки и может быть внутри и вне треугольника погрешностей, что зависит от расположения светил. Если азимуты светил располагаются по всему горизонту (рис. 222), то обсервованное место корабля будет всегда внутри треугольника погрешностей в точке пересечения биссектрис его внутренних углов. Если азимуты светил располагаются в пределах половины горизонта (рис. 223), то обсервованное место корабля будет вне треугольника погрешностей против линии положения среднего (по расположению) светила в точке пересечения биссектрис соответствующих углов (внутреннего и двух внешних).
В практике бывает трудно решить, какие ошибки линий положения (случайные или систематические) преобладают и, значит, каким приемом следует находить место корабля. Приведенное выше правило определения характера ошибок по размерам сторон треугольника является в известной степени условным. Поэтому три светила для определения места корабля по высотам следует выбирать так, чтобы их азимуты располагались по всему горизонту. В этом случае при наличии как случайных, так и систематических ошибок линий положения вероятное место корабля будет всегда внутри треугольника погрешностей. Это означает, что неверная оценка характера ошибок линий положения не вызовет заметной погрешности в определяемом месте корабля.
Если случится, что азимуты трех светил будут располагаться в пределах половины горизонта, то при получении треугольника, образование которого можно отнести и за счет случайных и за счет систематических ошибок линий положения, вероятное место находят как среднее из двух мест — полученного в пересечении противомедиан и в пересечении биссектрис.
Пример определения места по высотам трех светил, измеренным навигационным секстаном, приведен на стр. 424. Вычисления выполнены по таблицам ВАС — 58 с использованием перемещенного места. В схеме вычислений для упрощения расчетов вначале вычислен момент пуска секундомера с учетом поправки хронометра, и эта величина записана в строку Т для всех светил; в строку и схемы внесены значения зафиксированных по секундомеру ‘ моментов измерения высот светил. Кроме
424 Г лава 14. Определение места по светилам
/2 мая 1968 г. Ф| =4/<= 35' N Ъ = е — 15 м Ш-8 t, »= ч- /5°
Район: Тихий океан К, = 163е 15 0s' X, = V = /2 уз вв = 765 мм
Юпитер з С. Короны 1 Возничего Apr. Задан Табл. Зидин.-табл. h 57°ЗГ.7 А /4Г.0
1 1 линия Ц линия III линия IV линия tv , 42°00'10 42° 0 - ДА? -
Прнб. Тс 20" ьк /3 45.9 /4 -14.1 ДЛб — /2.6 йЛа + 0.2
£ я? -И /9 00.0 19 0 дл/ - ДА, -
Приб 7"гр 9- я 27 ДЛ<) - -ДА
Дата 12.05 , одно 1ДЛ Af N4C.2KW
т и ° именные Л<- 57° 19.1 i 1
Т &52*/4< 8*52*14* a/t, Ас --у
и + 6 35 +/0 02 +/4 56 Apr. Задан. Табл. Задан.-табл. h 36°26; 7 А 8446 ;
ТгР 8" 58м 49е 9802*/& 9*07*/0е V.V 42°00\0 42° 0 - *4
1т 20/с03\9 5°П',7 5°П',7 *v 26 49.0 27 -П.0 дл6 6.2 ДА6 » 0.2
д,/ /4 4/.3 34.1 / 47,8 lo 64 00.0 64 0 дл. ДА,
Д2/ 3.2 — — 4 56 длд ЕДА
/гр 2/5°48',4 5° 45'. 8 6°59’,5 . одно UAi ^с 84'.8b'Oil
* и ° pfl0t|0 нмепнме Ас ЗГ20\5
/26 39.5 28/ 25.4 А — Ас 2
*г₽ /32°25'.3 288?24\9 Apr. Задай. Табл. Задан.-табл. Й 27° 36.1 А 5lc.6
16УЧГ.6 163 34.7 163 35./ f.v 42°00’,0 42° 0 ДЛф “А, -
'г /9Р00\0 296500.0 92°00.0 Ь У 45 58,3 46 — 1,7 ДЛ^ -0.9 0.0
1о 64°00,0 92 00.0 92 0 дл. - ДА, -
-0.1 Я 57 ДЛ</ -- ЕДА
••г /3P46.0N . одно ЕДЛ Лс 5/°.6NW
f и о именные Лг 27°35',2 А -А Ас 2
До —0.1
13°45'.9N 26° 49'. ОК 45°58',3N Apr. Задан. Табл. Задан.-табл. Л А
Отсчет 5Л5<7;<? 36°/3’,6 27°39',4 Т ДА? •
. 1 + •$ — 1.2 —0.9 —0.8 & ДА» ДАг
Изм. h 57°48'.8 36°/2',7 27° 38',6 1 ДЛ, ДА,
ДЛ4 —6.8 —6.8 —6.8 Я дл^ ЕДА
Вид. Л 57°42.0 36°05',9 27°ЗГ,8 . одно ЕДЛ Лс
» и о именные разно Лг
Поправки I ДЛр -0.6 -1.3 — /,8 Ас-^-
Mif 0.0 Полярная | 1 линия 11 лнння Шлиния IV линия
6hB 0.0 1 попр. А круг. 2/6° 85° 308?
Ист. Л 574 Г,4 36°04.6 27°30\0 II попр. ПУ 135 /35 135
ДЛ; 0.0 -0.3 + /.4 Ill попр. А-ПУ 81° 50° /73° : -0.20
Прив. Л 57°4/',4 36°О4'.3 27°3/\ 4 ' ДЛ +о; 03 + 0./3
hf 57 /9./ 36 20,5 27 35.2 Прив. h ЬТ + 1м2 -2*3 -7Л2
, Л - Лг + 22’,3 — 16',2 -3.8 длг + 0,0 -0.3 4г/\4
Примечания: 1. Ас — первая буква наименования одноименна с широтой, вторая — с местным часовым углом, да
2- Аргумент Ас----используется только при расчете ht с максимальной точностью.
Вычислял; г
§ 81. Определение места по высотам светил
425
того, поскольку используется перемещенное место, долгота при расчете местных часовых углов светил учитывается последней; поэтому величины К и т в схеме переставлены местами.
Прокладка высотных линий положения показана на рис. 224, изображающем участок карты-сетки. Координаты обсервованного места корабля на 7^ = 20*00* равны <р0 = 41°31/,5 N; Хо = 163° 14',6 Ost.
Рис. 224
Определение места по одновременным наблюдениям четырех светил. При равномерном расположении светил по всему горизонту в результате прокладки четырех линий положения образуется четырехугольник погрешностей, который является следствием действия на высотные линии положения случайных и систематических ошибок, а иногда также и промахов. В этом случае при отсутствии промахов независимо от характера преобладающих ошибок обсервованное место корабля будет в точке пересечения биссектрис углов, образованных линиями положения противоположных светил; эти биссектрисы называются независимыми. Если фигура погрешности близка к прямоугольнику, ромбу или параллелограмму, то независимые биссектрисы заменяются прямыми, проведенными через середины противоположных сторон этих фигур (рис. 225).
Место корабля будет получено тем точнее, чем ближе к 90° угол пересечения независимых биссектрис. Оно будет свободно от систематической ошибки <7, величину и знак которой можно найти, опустив перпендикуляр из полученного места на линию положения (или взяв среднее из длин двух перпендикуляров до линий положения смежных светил).
Примечание. При азимутах четырех светил, расположенных в пределах одной половины горизонта, фигура погрешности может иметь сложный вид, а независимые биссектрисы будут пересекаться вне этой фигуры.
Для выявления промахов в обсервации после построения линий положения необходимо рассмотреть полученный четырехугольник погрешностей, руководствуясь следующим:
1) если стрелки, показывающие направления на светила, направлены в обеих парах одинаково, т. е. наружу или внутрь относительно обсервованного места (рис. 225), а стороны четырехугольника примерно одинаковы (в пределах случайных ошибок), то очевидно, что промахов ни в одной из линий положения нет;
426
Глава 14. Определение места по светилам
2) если стрелки, показывающие направления на светила, покажут сдвиг линий в разные стороны (в одной паре к светилу, в другой от светила), а сам четырехугольник погрешностей не мал (рис. 226, а), или если даже при одинаковом направлении стрелок величина четырехугольника погрешностей в одном направлении будет чрезмерно велика (рис. 226, б), то, вероятно, в одной из линий положения допущен промах.
Примечание. При малых размерах четырехугольника погрешностей стрелки в парах могут иметь разное направление, что будет говорить о преобладающем влиянии случайных ошибок линий положения, а не о наличии промаха.
В случае обнаружения промаха следует обработать и нанести контрольную (пятую) линию положения, которая, как правило, и покажет, какая из основных линий ошибочна. Так, из рассмотрения прокладки линий /, 77, III и IV, показанной на рис. 227, следует, что в какой-то линии положения допущен промах, так как стрелки в четырехугольнике направлены в разные стороны (в одной паре внутрь, в другой наружу).
Контрольная линия V в паре с линией II дает направление стрелок наружу, т. е. такое же, как и в паре линий I—III. Следовательно, ошибка допущена в линии IV. Верное место будет в точке С'о вместо точки Со.
Пример определения места по высотам четырех светил, измеренным навигационным секстаном, приведен на стр. 427. Вычисления выполнены по таблицам ВАС — 58 с предварительными вычислениями (величины, полученные при предварительных расчетах, в схеме заключены в рамки) ;
§ 81. Определение места по высотам светил
427
Ш-8
12 мая 1968 г. к, 42° 16' N Ф, = | g /g ж ] t„ ~
Район: Тихий океан А| — 158*15’ О5* X, = V ~ 12 уз Вв —
3 Пегаса Орла 3 М. Меде. а С. А'о-роны Apr. Задан. Табл. Задан.-таб л. А 40* 4 Г.9 А 86°.6
1 линия II линия Ill линия IV линия <P.V 42*16,0 42* ' +16\0 +0.9 + 0,3
i Прнб. тс 4" 27 54,3 28 —5,7 _ДА,_ —3.1 да4 + 0.1
Mv+ -11 го 58 56.6 59 -3.4 ДА, + 2.5 ДА, 0.0
Прнб. Трр 17- я 57 ДАа 0.0 ЕДА +0?.4
Дата 1Г05 . одно ЕДА + 0.3 Ае 87*0 NO*1
Т 17*00*00е Y разно и*сниис Ас 40Р42.2
и + 15 15 + 19*26* + 23*06* +27*11* Apr. Задан. Табл. Задан.-таб л. А 5F5O', 7 А 162*2
Г-Р 42° ! +16,6 1 -15.2 + 0.1
{Г 124*32,3 «V 8?46\7 =Lj -13,3 ААд -13.0 X _+ 0.1
№ 158 15,0 1о 9 39.1 10 -29.9 5ht + 4.6 ДА, +0.6
»т 282*47,3 282*47',3 282*47,3 282*47’3 я 13 ДАд 0.0 ЕДА +0*,8
т* 14 26,7 62 41.3 137 16.8 126 39.5 _ . . одно ЕДА —23',6 Ас !63?,0 NO1*
'м 297*1 4,0 345*28',6 60*04',! 49*26',8 т " ц |ЩЗЛЛ~ ""еины* Ас 55*27',! а — 162*7
Д(/ 3 49.4 4 52.3 5 47.4 6 48.9 Apr. Задан. Табл. Задан.-таб >л. А 1 46*ЗГ,0 А 2ОР.8 !
Аг/ — - - - T/v 42* + 16',0 ДА* +14,9 ДА, + 0.1
/ ! 301*03,4 350*20,9 65* 5 Г. 5 56*15,7 5.v 74*17,1 74*30' -12,9 +2.0 Д*г 0.3
*о 58° 56,6 9*39,1 - - 65 51,5 66 -8.5 ДА, +2.2 ДА, 0.0
1 4 я 99 ДАа 0.0 ЕДА +О*.4
1 ьг ж одно ЕДА + 19’,1 At 2Г.2 NW
у и о paj||0 именные
Ас 46*50,1 А -^1 Лс 2
& 27*54',3N 8*46',7N 74*17'JN 26*49',ON Apr. Задан. Табл. Задан.-тай >л. А 42*22,8 А 89*, 7
Отсчет 40*57,1 55°32’,8 47*05',8 42*12,9 *N 42* + 1б;о | Д\ +0.1 ДА, 1\0.3
i 4- т —2.0 -1.6 — 1.9 -1.9 26*49,0 27 -11.0 ДА{ -6.0 да8 У«.2
Изм. А 40*55’,! 5ГЗГ.2 47*03,9 42*П\0 56 15.7 56 + 15.7 ДА, -11.8 ДА, -0,2
1 -6.1 -6.1 -6.1 -6,1 Я 57 ДА, -0.1 ЕДА + (Р,3
Вид. А 40? 49,0 55*25',! 46*57',8 42*04,9 , одно ЕДА —П',8 Af 90*У0 NW
у и о pajji~ именные
Поправки 1 ДЛР —0.7 ! —0,9 -1.1 А, 42*05,0 Х'“Т
Полярная 1 линия II линия III линия IV линия
1 попр. А круг. 87* 163* 339*л 27Г
: Ист. А 40?47',9 55?24,4 46*56,9 42*03',8 II попр. ПУ 180 180 180 180
' ДА, -0.1 +2,! —1.3 0,0 Ill попр. А-ПУ 93* 17* 159? 90°
Прнв. А 40*47',8 55*26',5 46*55,6 42*03', 8 Е ДА -О',01 +0’,19 —О', 19 0'6
Аг 40 42.2 55 27,1 46 50.1 42 05,0 Прнв. А 5Т + 14*8 + НГ6 +Г9
A — hf +5',6 -О',6 +5',5 -1,2 То ДА, -0,1 +2',1 -Г,3 О',О
Примечания. I. Лг — первая буква наименования одноименна с широтой, вторая — с местным часовым углом.
2. Аргумент Ае-используется только при расчете hc с максимальной точностью,
Вычвелял^^Рв
428
Глава 14. Определение места по светилам
в строку и записаны минуты и секунды всемирного времени наблюдений, для целого часа которого сделаны предварительные вычисления.
Прокладка высотных линий положения показана на рис. 228. Из рассмотрения полученного четырехугольника погрешностей видно, что стрелки, показывающие направления на светила, направлены в одну сторону (наружу), т. е. промахов в линиях положения нет. Координаты обсервованного места на Гс —4*30* получены: сро = 42о20',4Л\Хо = == 158°19;5 05/.
Определение места по высотам Солнца. Для определения места корабля высоты Солнца измеряются дважды через промежуток времени, достаточный для изменения его азимута, как правило, не менее чем па 30°.
Особенность определения места корабля по высотам Солнца состоит в том, что параметры каждой линии положения вычисляются по своим счислимым координатам. При этом счислимые координаты XCj на
§ 81. Определение места по высотам светил
429
момент вторых наблюдений Солнца должны быть определены по счис-лимым координатам <рс, \ на момент его первых наблюдений графическим счислением на карте или аналитически; для получения <pCj и Хс можно использовать также автопрокладчик.
Прокладка обеих высотных линий положения производится при второй счислимой точке. Искомое место получается на момент вторых наблюдений Солнца.
Вычислением параметров высотных линий положения по своим счислимым координатам производится учет пройденного кораблем расстояния за промежуток времени между наблюдениями Солнца, т. е. достигается приведение линий положения к одному зениту.
При определении места по высотам Солнца получают счислимо-обсервованное место. Его точность зависит от ошибок высотных линий положения и в значительной мере от ошибок счисления за время между наблюдениями, а также от разности азимутов Солнца.
В общем случае вторые наблюдения Солнца производят через промежуток времени, когда его азимут изменится на угол от 30° до 70—80°. Существует также оптимальное значение угла б = А2 — Д, при котором ошибка места корабля будет минимальной при данных конкретных условиях. Угол б может быть снят с графика рис. 271 или 272 по отношению средней квадратической ошибки линий положения пгЛП к коэффициенту точности счисления
Для определения момента вторых наблюдений Солнца необходимо:
— определить по графикам рис. 271 или 272 наивыгоднейший угол О и вычислить азимут Солнца А2 на момент вторых наблюдений по формуле
Л2 = Д д-б,
где Л1 — азимут Солнца в момент первых наблюдений; определяется пеленгованием Солнца или берется из вычислений параметров первой линии положения;
— вычислить судовое время вторых наблюдений Солнца. Для этого обратным входом в основные таблицы ВАС — 58 в колонке, соответствующей 8 Солнца, по аргументу Д выбираем t2 и образуем разность bi — t2 — /t, которая соответствует изменению азимута Солнца на угол б.
Искомое судовое время Тс вторых наблюдений Солнца будет равно
Т = Т + ДС % ci
Значение Д/ можно определить и при помощи звездного глобуса. Непосредственно момент Тс можно определить также пеленгованием Солнца.
Пример. 12 мая 1968 г. ?1==52°10' N, — 19*15' W, ГС1 = 08*50* измерили высоты Солнца. В результате вычислений первой линии положения получили: 6 = 62°, Xj « 101° NO и *о = 18е N.
Определить судовое время вторых наблюдений Солнца, если ожидаемая ошибка 7плп =0',5, К = 0.8 и закон накопления ошибок счисления близок к KctQ’3.
Решение. I) Снимаем, с графика рис. 271 по аргументу тлп/Кс = 0,6 угол 6 = 70°;
2) определяем Л2 = 101° + 70° = 171°;
3) выбираем обратным входом из таблицы ВАС — 58, т. III по ? = 52°, Bq = == 18° ;V, А2 — 171° NO величину t2 — 6° и находим Д/=56° 3*44*;
= 08*50* + 3*44* = 12*34*.
430
Глава 14. Определение места по светилам
Пример определения места по разновременным высотам Солнца, измеренным навигационным секстаном, приведен на стр. 431. Вычисления выполнены по таблицам ВАС — 58 способом перемещенного места. Прокладка высотных линий положения показана на рис. 229. Координаты места корабля на rc=12,<00M; <р0 = 51°37',6 АГ и Хо == 19°ЗГ,6 W.
В промежутке времени между первыми и вторыми наблюдениями Солнца при ясной погоде целесообразно производить предвычисление его счислимых высоты и азимута на намеченный момент вторых наблюдений. В этом случае координаты определяемого места корабля могут быть получены через 3—4 мин после окончания измерения в намеченный момент времени.
При определении места по Солнцу нужно учитывать также следующие рекомендации. Если ненадежно работает лаг или в районе плавания наблюдается попутное или встречное течение, имеющее переменную скорость, то первое наблюдение целесообразно производить тогда, когда Солнце находится на траверзе корабля; в этом случае ошибка пройденного расстояния не окажет влияния на определяемое место корабля. Если ненадежно известен путевой угол (например, из-за бокового течения), то первое наблюдение целесообразно производить тогда, когда Солнце находится по носу или корме; в этом случае ошибка путевого угла не окажет влияния на определяемое место корабля. В любом случае, если первая линия положения параллельна сносу, то этот снос не будет влиять на определяемое место корабля.
При определении места корабля по высотам Солнца важно получить возможно большую разность азимутов за сравнительно короткий промежуток времени. Для достижения этого первые наблюдения Солнца следует производить до, а вторые после кульминации. Эта рекомендация верна для любых широт; в малых же широтах она приобретает особое значение.
При определении места корабля по высотам Солнца возможны следующие частные случаи прокладки линий положения.
1. В промежутке времени между наблюдениями Солнца была обсервация С, принятая для счисления (рис. 230). В этом случае счислимое
§ 81. Определение места по высотам светил
431
Ш-8 12 мая 1968 г. ъ^52°10 N. d, =+5'.О »5l039',4 N; d,^+5:2 (,= Район: Атл. океан А, = 19° 15' W; А, = I9?28',3 MZ; V = /0 уз. В, =
О О Apr. Задан Табл. 311вн.-т1бл. h 37° 44.0 А | П0?8
1 линия 11 линия III линия IV линия T.v 52°оо:о 52° 0 f длт i
Приб. Гс 1 8*50* /2*00* (поясное} 18 12.0 18 + 12.0 дла + 9.6 -0.!
4-/ + / f0 51 00.0 51 0 ; ДА/ ДА/
Приб. ЛГр 9*50* /3*00* 4 37 Дйа 1 ЕДА
Дата 12.05 12.05 , одно ГДЛ Ч0.71^Ои
f и <» именные лг 37°53:в
Т 9*52*58^ 1*03* 12е
и -3 0! -3 0/ Apr. Задан. Т абл. Змаи.-табл, i— 55P55J А !74°9
1 ^гр 9149* 57е 13*00* П< ?.v 52°00.0 52° 0 1 ДА,
I tT 315? 55:8 /5? 55'. 9 18 14.0 18 + 14,0 длг + 14.0 м, 0.0
Ы1 12 29.0 2.7 <0 3 00.0 3 0 ДЛ/ ДА/
1 ы 0.2 0.0 9 3 АЛ<> ЕДА
*Г|> 328° 25\0 15°58',6 ч одно £Д/< 1 А/. / 74°9NOU
* 19 25.0 18 58.6 56°09.1
/Г Apr. Задан Табл. Задан.~та6л. 1 h 1 А
I М,
ZUZ 309° 00.0 357*00:0 Q ДА.;
'о 5i°oo:o з°оо:о / ДА, ДА/
Д j + 0.6 9 ДЛй ЕДА
*г I8F4I'.5N /8°I4:ON . одно ЕДА Ас
V и о именные разно Лг
Д?. + 0.5 0.0 А — f
& I8?I2:ON I8°I4:ON Apr. Задан. Табл. | Зддэи.-табл. А А 1
| Отсчет 37°43'.6 56? l8',4 ф 1
i 1 + S + 1.2 4 0.9
1 Изм. А , 37с44’,8 56°19.3 t ДА/ ДА/
да4 —5.0 —5.2 ч ДЛэ ЕДА
| Вид. Л 37°39’.8 56°I4'J . одно ЕДА
ф и о именные разно Ле
Поправки | ДА„ . _ 1 р4 р i ~Л/ i -0.6 Ас~^-
R + 15.9 + 15.9 Полярная 1 ЛИНИЯ | II линия III линия | IV ЛИНИЯ!
1 попр. А круг. 1
Ист. Л И попр. ПУ 195°
ДА, Ill попр. А-ПУ
Прив. Л ! 37° 54'. 6 ' 56°29',4 1 ДЛ
h( 37 53^6 56 09.1 i I Прив. Л ДТ
h — tie + i:o + 20:3 1 1 То | ДЛг
Примечания 1- Af— первая буква наименования однонменна с-широтой. вторая _ . 5А/ lionuna 2. Аргумент Ае используется только при расчете hf с макси» Вычислял'. 4 — с месп (альной тс <ым часовым углом. >ч нос тью.
432
Г лава 14. Определение места по светилам
место на момент вторых наблюдений Солнца следует брать без учета этой обсервации в точке С'г, при которой и нужно выполнить прокладку обеих линий положения.
Рис. 230
Если для расчетов параметров второй линии положения взяты счис-лимые координаты точки С2 (с учетом обсервации) и при ней выполнена прокладка этих линий, то для определения места корабля первую линию положения следует переместить параллельно самой себе по направлению, обратному невязке СС^ на ее величину Д.
2. После вычисления параметров первой линии положения выяснено, что в счислении имеется значительная ошибка, и дальнейшее счисление начали вести от определяющей точки линии положения В этом случае обе высотные линии положения прокладываются при счислимой точке С2, но величина переноса Д/ij первой линии положения принимается равной нулю (рис. 231).
3. Если полученная невязка С2С0 превышает предельную ошибку определения места, возможную в данных условиях, а за несколько часов до наблюдений Солнца была точная обсервация О (рис. 232), то можно уточнить место корабля, полученное по высотам Солнца, одним из следующих приемов:
а) соединяются точки О и Со и по этому направлению переносится точка Ci до пересечения с линией С2С’О-, в результате получаем точку
§ 82. Особые случаи определения места по высотам светил 433
С2, при которой прокладывается первая линия положения по ее пара метрам^ДЛ1 и Л,;
б) первая линия положения, проложенная при точке С2, переносится параллельно самой себе по направлению невязки на величину Д — С2С'2, равную
д _ (7 с" Т2~Т'~
т2 —То ’
где То, Т\ и Т2 — судовое время в моменты нахождения корабля соответственно в точках О, Ci и С2.
При прокладке линий положения на бланках астрономических вычислений применим только второй прием, а при прокладке на карте — оба приема.
§ 82. ОСОБЫЕ СЛУЧАИ ОПРЕДЕЛЕНИЯ МЕСТА ПО ВЫСОТАМ СВЕТИЛ
Определение места по высотам Солнца, большим 88°. В тропических широтах при высотах Солнца, превышающих 88°, для получения достаточной разности азимутов между линиями положения необходим промежуток времени всего несколько (3—7) минут. Место корабля получается очень быстро и просто, но определенные трудности представляет измерение больших высот, близких к 90°.
Порядок работы при определении места корабля указанным способом следующий.
1. Определяется возможность применения способа. Для этого вычисляется судовое время верхней кульминации Солнца и по его склонению и широте счислимого места корабля вычисляется меридиональная высота. Данный способ определенйя места применим при меридиональной высоте, превышающей 88°.
2. Задавшись разностью азимутов Солнца в 50—60°, определяют промежуток времени между наблюдениями по табл. 32, в которой по меридиональной высоте Солнца и широте места корабля дана величина изменения его азимута за минуту времени.
Таблица 32
н 0° 10° 20°
88° 7?2 7?1 6^8
89 14,3 14,2 13,6
89,5 28,6 28,3 27,0
28 Заказ 1833
434
Глава 14. Определение места по светилам
Вследствие того что азимут Солнца изменяется очень быстро (промежутки времени между его наблюдениями могут составлять 3, 5, 7 мин), место корабля определяют обычно по трем линиям положения.
3. По судовому времени верхней кульминации Солнца и найденному промежутку времени между наблюдениями намечают судовое время начала наблюдений. При этом первые наблюдения Солнца намечают до, вторые около и третьи после его верхней кульминации.
4. Примерно за пять минут до намеченного времени начала наблюдений для ориентировки измеряются контрольные высоты Солнца без фиксации времени. Когда высота Солнца превысит значение 88°. производятся измерения высот первой серии, затем — второй и третьей через намеченные промежутки времени с точной фиксацией моментов измерения каждой высоты.
При измерении больших высот:
а) обычное покачивание секстана не делается, а наблюдатель сам немного поворачивается с секстаном вокруг вертикальной оси;
б) вертикальное положение секстана устанавливается «на глаз», что при достаточном опыте наблюдателя не сказывается на точности измерения высот.
5. Вычисляются средние отсчеты высот каждой серии и соответствующие им средние моменты времени Т , 7'ср#, Г . Производятся исправление высот и вычисление зенитных расстояний гь и z3.
6. Определяются географические координаты полюсов освещения Солнца поь пог и поз. Для этого на средний момент второй серии Гср> вычисляются гринвичский часовой угол и склонение Солнца, которые соответственно равны географическим долготе и широте полюса освещения на 7\п:
сра
t = * ;
гРа ПО3’
*2 = ?по,-
Поскольку склонение Солнца за промежуток времени между сериями высот изменяется не более чем на О',1, то широты полюсов освещения можно считать одинаковыми, т. е.
^noi ^ПОа ^ПО3 ?ПО ‘ ' ^2*
Для нахождения долгот ПО] и поз можно на соответствующие моменты времени вычислить /гр> и /гРз. Однако проще найти разности этих и второго моментов наблюдений, которые будут равны разностям долгот полюсов освещения:
дг, = rcPj - ГСР1 = + АХ, (к о*'); А7'2=Гср’-Г„=-ДХ2 (к W).
7. Производится прокладка линий положения на карте или карте-сетке масштабов 1:500 000 или 1:750 000. Для выполнения прокладки на карте следует провести параллель полюсов освещения по значению 32, нанести на ней точку по2 по величине /гр? а затем точки noi и по3 по ДХ1 и ДХ2. Точка noi располагается всегда восточнее, а точка по3 — западнее точки по2 (рис. 233).
После этого линии положения приводятся к одному зениту путем смещения соответствующих полюсов освещения по линии пути корабля. Так, для приведения к зениту второго наблюдения необходимо noi сме
§ 82. Особые случаи определения места по высотам светил
435
стить по направлению движения корабля, а по3 в противоположную сторону на расстояния:
- 1/ДЛ;
52 - 1/ДГ2.
Далее из полюсов освещения, приведенных к одному зениту, при помощи циркуля проводятся дуги окружностей радиусами zh z2 и z3, которые являются отрезками кругов равных высот. Их пересечение дает точку Со — обсервованное место корабля. При получении треугольника погрешностей место корабля находится по правилам, изложенным для определения места по наблюдениям высот трех светил.
Отрезки кругов равных высот (окружности) пересекаются в двух точках: севернее и южнее параллели полюсов освещения. Если в момент измерения высот Солнце находилось к югу от зенита наблюдателя (над южной частью горизонта), то обсервованное место будет севернее параллели полюсов освещения, и наоборот.
Прокладку изолиний можно выполнить на листе чистой бумаги. Масштаб построения обычно берут 1 миля в 5 мм или 1 миля в 2,5 мм. Для удобства работы следует применять угловой масштаб. Если угловой масштаб не применяется, то нанесение точек noi и по3 относительно пог долж-но производиться по отшествиям:
= Akj cos 32;
Aw2 = ДХ2 cos &2-
Координаты обсервованного места находятся из выражения:
4>о = <Рпо ± Д <₽,
'*'0 = ^по2 ± Д
Пример. 11 мая 1968 г. Тс = 12’00« ¥с=16°55' К, Хс = 89°50' 0s1, ПУ =80°, V = 12 уз, ол = 23,5, е=10лг, ихр = —0*09^; навигационным секстаном измерены высоты нижнего края Солнца над северной частью горизонта. Средние результаты измерений:
occpi =~ 88°19; 1; 7’ср| -=5ч52-*30с;
оссра = 88°54JO; Тср4 = 5"56л50г; i 4- s = 4-1J 2;
ос =88°23;3; = 6ч02-*0И.
ср3 ср3
Определит ь место корабля на момент второго наблюдения Солнца.
436
Глава 14. Определение места по светилам
Решение. 1) Исправляем высоты и находим зенитные расстояния:
.*==54,'5; z3=l°25,'2;
2) вычисляем географические координаты полюсов освещения:
11/V 12* — 6 Уср2 = 5*56*50' цхр — —9
11/V Угр ~ 6“ 7^ = 5*56*41' <р = 255°55;4 Д^ = 14 10,0 Д2/ = 4.0,3 д = о;з, Д=+0,6 Ь' = 17°53J7 N ДВ= +0,6
*гр2 == 270°057 W В = 17°54;3 N
Образуем разности:
Д/j = + 4*20' = + 1°05'; ДТ2 = — 5*11'= — 1O17J8,
следовательно:
<Рпо = 17°54;3 N, Хпо = 89°54;3 0s*,
Д)ч==+1°05', ДХ2 = —1 °17 ;8;
3) на листе бумаги (рис. 233) наносим полюса освещения и проводим дуги окружностей радиусами zit z2 и z3 из точек пор по2 и по3;
4) находим координаты обсервованного места Со на Тс=11*57*
?ПО^17°54,'3
Д«р = —54,0
Фо=17°00;3 N
ЛПО9 = 89°54,'3 СН'
ДХ = —9,0
ХО = 89°45;3 0s*
Определение места по высотам Солнца при малой разности азимутов (краткосрочные наблюдения). Краткосрочные наблюдения (через 15—30 мин в средних и высоких широтах) могут иметь практическое значение, когда метеорологические условия или навигационная обстановка не позволяют ждать наступления оптимального времени вторых наблюдений, а требуют незамедлительного получения места хотя бы и с пониженной точностью.
Поскольку при малой разности азимутов резко возрастает влияние случайных ошибок измерения высот и графических ошибок прокладки линий положения, то при определении места по краткосрочным наблюдениям необходимо выполнять следующие рекомендации.
1. Наблюдения производить весьма тщательно и, если возможно, одновременно нескольким наблюдателям. Серия высот должна состоять из 5—7 измерений. Поправку индекса секстана определять до и после измерения высот и в расчет вводить ее среднее значение. Наклонение видимого горизонта измерять наклономером серией из 3—5 измерений.
2. При вычислении истинных высот вывод средних отсчетов и исправление высот производить с точностью до О',01 (по таблицам, помещенным на вкладыше ВАС—58). Обязательно учитывать поправки за температуру и давление воздуха независимо от величины измеряемых высот.
§ 82. Особые случаи определения места по высотам светил
437
3. Определение координат обсервованного места корабля производить прокладкой эквивалентных линий положения (пересекающихся под углом 90°), параметры которых вычисляются по формулам:
(14.24)
ДА| 4* ДЛ2
2
6 sec-у;
(14. 25)
п =
m = АА?_ cosec Л > (14. 26)
где 6 = Д2 — А1 (в круговом счете).
Для прокладки эквивалентных линий положения необходимо при счислимой точке Сг на момент вторых наблюдений Солнца провести линию среднего азимута А (рис. 234) и отложить на ней величину параметра п по направлению на Солнце, если параметр имеет знак плюс, и от Солнца, если он имеет знак
минус. Затем через конец отрезка п провести перпендикулярно ему прямую и отложить на ней величину параметра т. Если параметр т имеет знак плюс, он откладывается по направлению А + 90°, если знак минус — по направлению А — 90°. Конец отрезка т и будет обсервованным местом корабля Со.
Пример. 12 мая 1968 г. 7^ = 13*55* (П = ЗО*‘), ?С( = 68°30'М Хс> = 9°35'<Х ПУ = 270°, 7=14 уз, ол1 = 61,3, Дд = 0, измерили серию высот нижнего края Солнца: средний отсчет высоты occpj = 39°26J68, 7’cpj = 10ч52ж55с, ихр — 4-2-* 15е, d = 4~5J 15, / 4* s = 4~ 1 >2; = 4-5°, = 764 мм*
Tc* — 14ч17Ж, = 68°30' N, X^ — 9°20J3 Ost, ол2 — 66,7, вторично измерили серию
высот нижнего края Солнца: средний отсчет высоты осср — 39°34'18, Тср = 11ч15-*0(У\ 4-5J2, / + $ = +1;05.
Определить место корабля на момент вторых наблюдений Солнца.
Решение. 1) Производим вычисление параметров высотных линий положения.
ДА1 = 4-2;50, ЛС( = 7°02’ SOst,
ДЛ2=4-1;90, Лс = 0°ЗГ$бЯ;
2) переводим азимуты Солнца в круговой счет Л| == 172°58', Л2 = 179°29’ и вычисляем параметры эквивалентных линий положения по формулам (14. 24) — (14. 26):
Л = 176°14’,
н = (+2;5> + (+1’а sec 3°15;5 =+2;2, = i;9)-(+2;5) cpsec 3о15;5 = _5;3.
3) производим прокладку эквивалентных линий положения (рис. 234) и определяем:
<р0 = 68°28;2 М Хо = 9°35;1 О*‘,
Тс= 14П7-*. од = 66,7.
Определение широты по высоте Полярной звезды. Обсервованная широта по высоте Полярной звезды может быть легко получена по формуле
?о = Л + 1 попр. + II попр. + 1П попр., (14. 27)
где h — истинная геоцентрическая высота Полярной звезды (приведенная к одному зениту);
438
Глава 14, Определение места по светилам
I попр., II попр. и III попр. — поправки высоты Полярной звезды; выбираются из таблиц МАЕ «Широта по высоте Полярной»:
I попр. — из табл. I по ;
II попр. — из табл. II по и Л;
III попр. — из табл. Ill по /J' и дате.
В случае, если отстояние / полученного места корабля от меридиана Хс при данном значении азимута Ас Полярной звезды будет превышать значения, указанные в табл. 33- то вместо обсервованной параллели ?0 должна быть построена высотная линия положения Полярной звезды.
Таблица 33
4 0,2 0,4 0,6 0,8 1,0 1.5 2,0 2,5 3,0 4,0
1, мили 30 15 10 8 6 4 3 2,5 2 1,5
Параметрами высотной линии положения Полярной звезды являются (рис. 235): разность обсервованной и счислимой широт места корабля — <рс и счисли-
мый азимут Ас (близкий к нулю). Счи-слимый азимут выбирается из таблицы МАЕ „Азимут Полярной“ по <рс и , а в широтах от 70°.¥до 74еN вычисляется по формуле
А°с = 0,9 sin /м sec <?с- (14. 28)
Наименование азимута, вычисленного по формуле (14. 28), определяется по правилу: первая буква наименования азимута всегда АГ; вторая буква — одинакова с наименованием /м.
Пример. 12 мая 1968 г. Тс = 21*, тс = 56°28',0 У, Хс—19°06J0 04 Тхр = 7Ч54-“12С, “хр — + 3Х56С, е — 12,7 м. Навигационным секстаном измерена высота Полярной звезды: средний отсчет осСр — 55°40',8, i + s— + 1^9.
Вычислить параметры линии положения Полярной звезды.
Решение. 1) Вычисляем местный часовой угол точки Овна и исправляем изме-
ренную высоту: 12/V 7'с= 21*
^-~1
12/V Ггр= 20*
7\р = 7Ч54Ж12С цхр = +3 56
Тгр == 19*58*08*
/ = 155°36;3 д,? = 14 34,4
2) вычисляем параметры
/гр= 170°Ю;7 Хс — +19 06,00*' гТ = 189°1б;7
линии положения:
I попр. = + 49,'4 П попр. = +0,1 III попр. = 0,0
осСр == 55с40'8 i + s ~ +1,9
h' = 55°42J7
ДА0 = —6,9
ДАд = 0,0
А= 55°35'8
Лс = 0?5МГ То = 56°25;3 Тс = 56 28,0
Е = + 49'5
h = 55°35J8
Д? = —2; 7
ТО = 56°25;3
§ 83. Особенности работы штурманской группы
439
§ 83. ОСОБЕННОСТИ РАБОТЫ ШТУРМАНСКОЙ ГРУППЫ ПРИ ОПРЕДЕЛЕНИИ МЕСТА КОРАБЛЯ
Штурманская группа, состоящая обычно из четырех наблюдателей, предназначена для производства астрономических наблюдений в случаях, когда необходимо повысить надежность или точность обсерваций.
При производстве измерений наблюдатели работают парами, причем каждая пара наблюдателей имеет свой секстан и секундомер.
Подготовка к наблюдениям и вычислениям. Для периода сумерек подготовка к наблюдениям состоит в выборе времени наблюдения светил и в их подборе; эту работу выполняет штурман корабля. Расположение подобранных светил показывается на схеме (рис. 219). В светлое время суток подготовка состоит в выборе времени первого и второго наблюдений Солнца.
Примерно за 30 мин до начала наблюдений штурманская группа вызывается в штурманскую рубку, где каждый наблюдатель производит предварительные вычисления, содержание которых изложено на стр. 419. За 5—10 мин до начала наблюдений производится пуск секундомеров по хронометру.
Наблюдения светил. В сумерки при ясном небе каждая пара наблюдателей должна начинать измерение высот светил, расположенных с разных бортов корабля, например, первая пара наблюдателей — с курсовых углов правого борта в направлении часовой стрелки, а вторая пара наблюдателей — с курсовых углов левого борта против часовой стрелки. Причем для сокращения времени наблюдений измерение высот каждого светила производится в каждой паре наблюдателей поочередно — сначала одним наблюдателем, затем высоты этого же светила измеряются другим наблюдателем. Когда часть намеченных для наблюдений светил закрыта облаками, производится измерение высот видихмых светил по указанию штурмана.
Высоты Солнца при определении по разновременным линиям положения измеряются наблюдателями из обеих пар одновременно. При этом для правильного вычисления расстояния, проходимого кораблем, необходимо в течение времени первого и второго наблюдений Солнца отсчеты лага фиксировать через 1 мин судового времени.
Обработка результатов наблюдений и определение вероятного места корабля. Перед началом обработки одновременных наблюдений штурман намечает судовое время Тс, к зениту которого должны быть приведены высоты светил. Каждый наблюдатель обрабатывает свои наблюдения, причем обработка наблюдений и нахождение вероятного места корабля должны производиться следующим образом.
1. В случае измерения наблюдателями высот одних и тех же светил наблюдатели доводят свои расчеты только до параметров высотных линий положения и докладывают их штурману, который вычисляет средний весовой высотный интервал Д/гв и средний арифметический азимут Лср для каждого светила по формулам:
ДА»=^-> л‘р=¥'- (14-29>
Затем штурман прокладывает по ним средние весовые линии положения и сразу находит вероятное (среднее весовое) место корабля. При определении места по высотам 3 и 4 светил для нахождения вероятного места рассматривается полученная фигура погрешности.
440
Глава 14. Определение места по светилам
Пример. Штурманская группа в составе 4 наблюдателей произвела измерения высот одних и тех же светил. В результате вычислений на Тс = 19400х получены следующие параметры.
Наблюдатели ДЛ! Ах ДЛ2 л2 ДА3 А3
1 —5;о \\$°3NO5t 4-8J2 99*5 МГ 4-0®1 3?0 NOst
2 -2,5 119,4 4-4,6 99,4 4-1.4 3,0
3 —4,5 119,4 4-5,3 99,4 4-3,4 3.0
4 —7,4 119,4 4-7,4 99,4 4-4,9 3,1
Рассчитать средние весовые значения ДАВ и средние азимуты А ср линий поло-жения, если веса линий положения каждого наблюдателя равны: р\«3,0, ро~ 1,3, pi = 1,0 и Р4 = 0,6.
Решение. 1) По формуле (14.29) получаем:
Светила 1 | 1 2 3
наблюдатели Pi ДА/ р/ДА/ Al 1 ДА/ р/ДА/ At ДА/ Р/ДА/ At
1 3,0 —5',0 —15,00 П9°з до* +8;2 4-24,60 99*5 MF 4-051 4-0,30 3°ONOst
2 1,3 -2,5 —3,25 119,4 4-4,6 4-5,98 99,4 4-1,4 4-1,82 3,0
3 1,0 —4,5 —4,50 119,4 4-5,3 4-5,30 >99,4 4-3,4 4-3,40 3,0
4 0,6 —7,4 —4,44 119,4 1 4-7,4 4-4,44 99,4 4-4,9 4-2,94 3,1
^Pi 5,9 Sp/ДА/ —27,19 Sp/Д А/ 4-40,32 лср2 | 4-8,46 ^cps
Средние Ч>, —4; 61 119?4 МУ1 ДА-в» 4-6583 99?4 W ДАИ Ва 4-Н43 3*0 NOst
Дальнейшая прокладка линий положения производится как обычно.
2. В случае измерения наблюдателями высот разных светил каждый наблюдатель доводит свои расчеты до определения координат места корабля и докладывает их штурману. Штурман анализирует прокладку линий положения каждого наблюдателя и находит координаты вероятного места корабля с учетом весов отдельных мест по формулам:
<?, Ч (14.30)
в ‘-‘Pl В 2р/ '
3. При определении места корабля по разновременным высотам Солнца каждый наблюдатель доводит свои вычисления до координат места корабля. Эти координаты совместно с судовым временем к которому они относятся, докладываются штурману. Штурман находит по формулам (14.30) координаты вероятного места с учетом весов отдельных мест, которые относятся к среднему весовому моменту судового времени, вычисляемому по формуле
'р с *Pi ‘
Этот прием не требует приведения отдельных мест корабля к одному судовому времени.
Глава 15
ОПРЕДЕЛЕНИЕ МЕСТА ПО РАЗНОВРЕМЕННЫМ И РАЗНОРОДНЫМ ЛИНИЯМ ПОЛОЖЕНИЯ
§ 84. ОПРЕДЕЛЕНИЕ МЕСТА ПО РАЗНОВРЕМЕННЫМ ЛИНИЯМ ПОЛОЖЕНИЯ
Для определения места по разновременным линиям положения необходимо, кроме параметров этих линий, знать элементы движения корабля. Геометрическое решение задачи на определение места в данном случае сводится к вмещению отрезка пути корабля между двумя непараллельными линиями положения. Длина вмещаемого отрезка должна быть равна расстоянию, пройденному кораблем относительно дна за время между моментами измерения навигационных параметров.
Вследствие того, что в процессе определения места используются не только результаты измерений навигационных параметров изолиний, но и элементы счисления, получаемое место называется счислимо-обсер-вованным, а сами способы называются крюйс-способами.
Так как практически при определении места корабля измерение навигационных параметров линий положения производится, как правило, не строго одновременно, то в общем случае счислимо-обсервованным следует называть такое место, при получении которого ошибка счисления за время между моментами измерений навигационных параметров превышает 0,3—0,5 величины ошибок линий положения.
Так, например, если ошибки линий положения равны 0,3 мили, то допустимая ошибка счисления, которой можно пренебречь и считать место обсервованным, будет в данном случае равна 0,1 мили; следовательно, допустимое время между моментами измерения навигационных параметров при коэффициенте точности счисления, равном, например,
Хс = 0,8 мили!ч’ь и 6 — 0,5, согласно формуле (16. 1) будет
, МС(П’2°’5 0,Ь1,41 ..
/доп = — = —078— = 0,18 ч = 11 мин.
Принципиально крюйс-способ может быть применен при наличии любых двух линий положения. Наиболее часто применяется способ крюйс-пеленга, когда для определения места последовательно измеряются пеленги одного или двух ориентиров. Определение места по последовательно измеряемым высотам Солнца или иного светила производится также крюйс-способом. Сравнительно редко применяются способы крюйс-расстояния, крюйс-угла и крюйс-изобаты.
При вмещении вектора плавания корабля в большинстве случаев допустимо пренебрегать кривизной изолиний. Учет этой кривизны необходим лишь тогда, когда замена изолинии отрезком прямой может оказать существенное влияние на точность определяемого места, например в способе крюйс-расстояния или крюйс-угла.
442 Г лава 15. Определ. места по разновременным и разнородным линиям положения
Способ крюйс-пеленга. Способ крюйс-пеленга может быть применен при измерении пеленгов с помощью любых технических средств.
Практическое выполнение способа
1. Измерить первый пеленг, заметить момент Ti по судовым часам и отсчет лага ол\.
2. Исправить измеренный пеленг необходимыми поправками и проложить его линию на карте.
3. Когда первоначальный пеленг изменится не менее чем на 30°, взять второй пеленг и заметить момент Т2 и отсчет лага ол2.
4. Исправить второй пеленг соответствующими поправками и проложить его линию на карте.
5. Сместить первую линию положения по линии пути на расстояние, пройденное кораблем за время между моментами пеленгования, и в точке пересечения линии второго пеленга со смещенной линией первого пеленга отметить счислимо-обсервованное место.
6. Оценить точность измерения пеленгов и точность счисления и вычислить среднюю квадратическую ошибку полученного места (при необходимости).
Для исправления пеленгов учитываются следующие поправки:
а) для пеленгов, измеренных визуально,— поправка курсоуказателя и ортодромическая поправка (если она превышает 0,2—0°,3);
б) для пеленгов, измеренных с помощью корабельного радиопеленгатора,— поправка курсоуказателя, радиодевиация и ортодромическая поправка (если она превышает 0,2—0°,3);
в) для пеленгов, измеренных с помощью гидроакустической станции,— поправка курсоуказателя, поправка курсового угла и иногда (при больших расстояниях) ортодромическая поправка.
Порядок учета этих поправок изложен в § 71.
Смещение первой линии положения в зависимости от элементов, учитываемых при счислении, производится различно.
При отсутствии дрейфа и сноса течением расстояние, пройденное кораблем, вычисляется по показаниям лага или по скорости и продолжительности плавания по формулам:
== (ол^ - олх) или Sqq == Vоб (г2 7\).
Отрезок Sji<o6) прокладывается по линии истинного курса от точки С (рис. 236) пересечения этой линии с линией первого пеленга. Прямая, параллельная линии первого пеленга, проводится через точку С'. Искомое счислимо-обсервованное место отмечается в точке F.
Невязка счислимого места показывается относительно точки С", нанесенной на линии курса по расстоянию 5^ (об), проложенному от последнего, нанесенного на карту счислимого или обсервованного места.
Отрезок 5Л(об) может быть проложен и не по линии истинного курса, а по линии, параллельной ем, от места пеленгуемого ориентира. Такой прием рекомендуется в тех случаях, когда место необходимо определять через короткие промежутки времени, например при подходе к берегу. Для определения ряда последовательных мест F2, F$... (рис. 237) следует на линии ЕЕ\ параллельной курсу, нанести точки Ki, Кь Кз, ..соответствующие отрезкам расстояний, проходимых кораблем на моменты измерения пеленгов. Проводя через каждую из этих точек прямую, параллельную первому пеленгу, а от ориентира Е прямые, соответствующие взятым в данные моменты пеленгам, получим .счислимо-обсервованные места
§ 84. Определение места по разновременным линиям положения
443
Если в течение промежутка времени между моментами измерения пеленгов корабль шел не одним курсом, а несколькими, то для определения места необходимо вмещать между пеленгами ломаную линию пути, тщательно вычерченную с учетом циркуляции. При большом количестве поворотов достоверность получаемого места понижается ввиду быстрого накопления ошибок счисления.
Рис. 236
Определение счислимо-обсервованного места при последовательном пеленговании различных ориентиров ничем не отличается от изложенного выше. Такой случай может быть при плавании в условиях пониженной видимости, когда первый ориентир скрывается раньше, чем взят его второй пеленг.
При учете дрейфа между линиями пеленгов вмещается вектор 5Л(Об) пройденного расстояния, прокладываемый по линии /7Уа, а не по линии
истинного курса.
При учете течения между линиями пеленгов необходимо вмещать вектор S пути корабля, равный геометрической сумме расстояния 5л(0б), пройденного по курсу, и переноса St течением за время между моментами измерения пеленгов. Для этого следует:
— от точки С (рис. 238) пересечения линии первого пеленга с линией курса проложить по курсу расстояние 5Л(об), вычисленное по показаниям лага или по скорости корабля;
— полученную на линии курса точку Ci снести по направлению течения на расстояние St = ^т(Л— Г1);
Рис. 238
— через конец отрезка St провести линию, параллельную первому пеленгу, и отметить счислимо-обсервованное место F.
Положение точки Сг может быть получено и без вычисления длины отрезка St--CiC' построением путевого треугольника СС\С', для чего из точки С проводится прямая, параллельная линии пути, до пересечения с прямой CjC', проведенной через точку Ci параллельно направлению
течения.
444 Г лава 15. Определ. места по разновременным, и разнородным линиям положения
При одновременном учете дрейфа и сноса течением первая линия положения должна быть также смещена по линии пути, как и при учете течения. Отличие от изложенного выше порядка решения задачи состоит лишь в том, что расстояние, пройденное кораблем относительно воды, должно прокладываться не по линии истинного курса, а по линии ПУа1 имеющей направление, вычисляемое по формуле
ПУа = ИК + а,
где а — угол дрейфа.
Способ крюйс-расстояния. Для определения места способом крюйс-расстояния измеряются последовательно расстояния D] и D2 до ориентира Е (рис. 239). Затем от места ориен-С__________5 л(об)____Г тира прокладывается линия курса и по ней
х I расстояние 5л(0б), пройденное кораблем за
X / время между измрениями расстояний Dx и
' I D2. Искомое счислимо-обсервованное место
iD на момент вторых наблюдений принимается 1 в точке F пересечения окружностей, имею-\ ' щих центрами точки Е и Е' и радиусами —
\ / расстояния соответственно D2 и Р|.
При учете дрейфа и сноса течением для /Г нахождения вектора пройденного кораблем -----------------Ab расстояния производятся те же построения, что и в способе крюйс-пеленга.
Рис 239 г
Способ крюйс-угла. Для определения места способом крюйс-угла вектор пройденного расстояния должен быть вмещен между окружностями, вмещающими измеренные углы и проходящими через места ориентиров Е{ и Е2.
Чтобы решить указанную задачу, сле-
дует из точки 7V, являющейся серединой базы Е\Е2 (рис. 240), восстановить перпендикуляр Na в общем направлении на корабль, если измеренные углы а и ? меньше 90°. Затем при точке Е| или Е2, строятся углы 90°—а и 90°—р. В результате такого построения находятся центры окружностей Oi и О2, вмещающих измеренные углы а и р, а также их радиусы и, г2. Если измеренный угол (или оба угла) превышают 90°, то перпендикуляр Na проводится в общем направлении от корабля по другую сторону от базы; в ту же сторону прокладываются
и граничные линии углов а — 90° и
__qqo Рис. 240
Для вмещения вектора 5л(0б) плава-
ния корабля этот вектор прокладывается от центра О! по линии пути, в результате чего получают смещенную точку O'v Искомое счислимо-
обсервованное место на момент вторых наблюдений принимается в точке F пересечения окружностей, имеющих центрами точки О2 и
а радиусами — отрезки соответственно г2 и Г{.
$ 85. Определение места по разнородным линиям положения
445
Приемы вмещения вектора плавания корабля при измерении других параметров ничем не отличаются от рассмотренных.
Наиболее выгодные углы между линиями положения могут быть определены с помощью графиков, приведенных на рис. 271 или 272, по отношению ошибок линий положения к коэффициенту точности счисления.
§ 85. ОПРЕДЕЛЕНИЕ МЕСТА ПО РАЗНОРОДНЫМ ЛИНИЯМ ПОЛОЖЕНИЯ
Для определения места корабля могут использоваться различные сочетания линий положения. Типовыми являются следующие способы: — по пеленгу и расстоянию;
— по пеленгу и горизонтальному углу;
— по створу и пеленгу или горизонтальному углу;
— по радиопеленгу и высоте светила;
— по разности расстояний и высоте светила;
— по высотам светил и разности их азимутов.
Определение места по пеленгу и расстоянию. Способ определения места по пеленгу и расстоянию наиболее распространен, так как для его осуществления вполне достаточно иметь в пределах видимости с корабля или в пределах дальности действия его технических средств только один ориентир. Возможность одновременного измерения пеленга и расстояния исключает необходимость приведения измеряемых величин к одному зениту.
Способ широко применяется при использовании РЛС, определении расстояния по вертикальному углу, измеряемому секстаном, использовании гидроакустических станций совместно с гидроакустическими отражателями и гидроакустическими маяками-ответчиками.
Практическое выполнение способа
1. Измерить пеленг и расстояние до ориентира, заметить момент Т по часам и отсчет лага ол.
2. Исправить пеленг и расстояние поправками, проложить линии положения и отметить обсервованное место.
3. Оценить точность измеренных навигационных параметров и вычислить среднюю квадратическую ошибку полученного места (при необходимости).
Измерение пеленга и расстояния (или вертикального угла для последующего вычисления расстояния) при всякой к тому возможности необходимо производить одновременно. Если одновременные измерения невозможны, то первым следует измерять параметр, изменяющийся более медленно:
— при ориентире, расположенном близко к траверзу, первым измерять расстояние, а затем пеленг;
— при ориентире, расположенном ближе к диаметральной плоскости корабля, первым измерять пеленг, а затем расстояние.
Измеренный пеленг исправляется поправкой курсоуказателя, а также ортодромической поправкой (если она превышает 0,2—0°,3); для пеленга, измеренного с помощью гидроакустической станции, кроме того, должна быть учтена поправка курсового угла. Порядок учета этих поправок изложен в § 71.
Измеренное расстояние исправляется поправкой измерительного прибора, а для маяков-ответчиков — также поправкой, выбираемой из их технической документации.
446 Глава 15. Определ. места по разновременным и разнородным линиям положения
Искомое обсервованное место принимается в точке F (рис. 241) пересечения линии пеленга, проложенной от места ориентира, и дуги окружности, соответствующей измеренному расстоянию.
Для упрощения и ускорения работы по нанесению места на карту рекомендуется пользоваться комбинированной азимутально-стадиометриче-ской сеткой (рис. 242), покрывающей заданный район. Такую сетку обычно применяют при выходе в заданную точку, для входа в узкость и т. п.
Рис. 242
Рис. 241
При использовании комбинированных радиомаяков, работающих синхронно с подводными отправителями звуковых сигналов, место F определяется по пеленгу на радиомаяк £i (рис. 243), измеренному с помощью радиопеленгатора, и по дистанции D до подводного отправителя Е2.
Для определения расстояния до подводного отправи-
£’ теля необходимо:
7 1. По описанию радиотехнических средств навига-
I ционного оборудования ознакомиться с режимом работы
। комбинированного радиомаяка.
। 2. Подготовить гидроакустическую станцию к рабо-
। £ те в режиме шумопеленгования.
• 3. Включить радиопеленгатор и во время передачи
. / радиомаяком длинного тире измерить радиопеленг.
/ 4. После приема короткого радиосигнала, фикси-
/ рующего момент отправления звука подводным отправи-' /° телем, начать счет радиотире, отмечающих промежутки
I / времени, за которые звуковой сигнал в воде проходит
/ расстояние 0,5 мили или 1 милю; оператор гидроакусти-ч. / ческой станции в это время должен слушать сигналы,
принимаемые станцией.
о* 5. В момент приема звукового сигнала по докладу
Рис. 243 оператора гидроакустической станции записать номер
тире, принятого от радиомаяка. Искомая дистанция до отправителя в милях или полумилях будет равна количеству этих тире.
Дальность действия комбинированных радиомаяков не превышает 15—20 миль.
Определение места по пеленгу и горизонтальному углу. Способ определения места по пеленгу и горизонтальному углу может быть применен в тех случаях, когда один из ориентиров закрыт для наблюдателя, находящегося у компаса (например, какой-либо надстройкой). Достоинством способа является то, что он дает возможность одновременного измерения двух навигационных параметров даже при наличии на корабле только одного пелоруса, что следует учитывать при определении места по близко расположенным ориентирам.
§ 85. Определение места по разнородным линиям положения 447
Практическое выполнение способа
1. Выбрать ориентиры, для которых разность пеленгов от места корабля не меньше 30°.
2. Одновременно двум наблюдателям измерить пеленг и горизонтальный угол.
3. Исправить компасный пеленг поправкой курсоуказателя и проложить его линию на карте.
4. Вычислить истинный пеленг ИП2 второго ориентира по известному первому пеленгу ИП\ и углу а: ИП2 — ИП\ а; знак плюс или минус берется в зависимости от того, где расположен второй ориентир — справа или слева от первого.
5. Проложить линию второго пеленга и в точке пересечения двух линий пеленгов наметить искомое обсервованное место.
Определение места по створу и пеленгу или по створу и горизонтальному углу. При пересечении кораблем створа или при следовании по створу место корабля может быть получено по створу и пеленгу или створу и горизонтальному углу.
Практическое выполнение способа
1. Находясь на створе, измерить пеленг или горизонтальный угол а между передним створным знаком Е2 (рис. 244) и вспомогательным ориентиром £3.
2. Исправить измеренный пеленг (или угол) соответствующими поправками.
3. Проложить линию пеленга на карте и в точке F пересечения ее с линией створа отметить обсервованное место. В случае измерения угла установить его значение на протракторе и передвигать центр и одну из
линии створа до тех пор, пока другая линейка не совпадет с местом ориентира £3. Искомое место корабля отметить в центре протрактора на линии створа.
Определение места по радиопеленгу и высоте светила. Способ определения места по сочетанию радиопеленгов и высот светил во многих случаях оказывается единственно возможным, в особенности при плавании в районах с недостаточным навигационным оборудованием. Радиопеленг может быть измерен с корабля на береговой или плавучий радиомаяк, вещательную радиостанцию или на корабль от берегового, например секторного, радиомаяка. Искомое место получают в точке пересечения высотной линии положения и линии положения, соответствующей измеренному пеленгу.
Практическое выполнение способа
1. Выбрать светило; наиболее подходящим светилом является такое, пеленг которого близок к прямому или обратному пеленгу радиомаяка; наибольшая разность радиопеленга и азимута светила не должна превышать 60°.
2. Измерить радиопеленг и серию высот светила; моменты измерения высот зафиксировать по часам, поправка которых известна; записать отсчеты лага на момент измерения радиопеленга и на средний момент измерения серии высот.
£, 4 I
Рис. 244
линеек протрактора вдоль
448 Глава 15. Определ. места по разновременным и разнородным линиям положения
3. Исправить радиопеленг радиодевиацией, поправкой курсоуказа-теля и ортодромической поправкой (если она превышает 0,2—0°,3); проложить линию локсодромического пеленга.
4. Вычислить счислимый азимут Ас и счислимую высоту hc светила.
5. Вычислить среднюю истинную геоцентрическую высоту h светила и найти разность ДА = h — hc.
6. Проложить линии положения, привести их к одному зениту и в пересечении линий отметить искомое место.
7. Оценить точность навигационных параметров и вычислить среднюю квадратическую ошибку полученного места (при необходимости).
В зависимости от промежутка времени между моментами измерения радиопеленга и серии высот светила точка пересечения линий положения может быть обсервованным или счислимо-обсервованным местом. Рас-
9С
3)
чет допустимого промежутка времени, при котором место можно считать обсервованным, изложен на стр. 441.
Пример. Находясь по счислению в точке <рс == 51°12' ЛГ, Хс = 25°15' W и идя истинным курсом ЯК = 30°, измерили радиопеленг на радиостанцию океанского судна службы погоды «Джулиетт» (позывные ЫЙХФ): отсчет радиопеленга А = 50°,5; остаточная радиодевиация f==—0°,7; поправка гирокомпаса ДГК = 0°,0. Через 5 мин в просветах между облаками измерили высоту Солнца и вычислили элементы высотной линии положения: азимут Ас — 255°,5, перенос ДА = —3',5. Определить место, если разность отсчетов лага рол » 2,2 мили и коэффициент лага кл = 1,025.
Решение. 1) Из описания Радиотехнических средств навигационного оборудования восточной части Атлантического океана для судна службы погоды «Джулиетт» выбираем координаты штатного места: vE = 52°30',0 N-, Х^ = 20°00',0
2) пользуясь планшетом для определения положения судна по дополнительным буквам ХФ в позывных, определяем, что судно «Джу-лнетт» во время пеленгования находилось в 30 милях к северу и в 50 милях к западу от станции (штатного места). Нанеся на карту-сетку указанные точки, определяем координаты судна: <?Е =53°00',0 Я; Х£ =21°23',1 F;
вычисляем ортодромическую поправку ф и локсодромический пеленг Р ф=Ц(Х£-Хс) sin?c = l(+3°9) sin 51°2—+1^5;
А = 50^5 /=-0,7 0,0 Ф = +1,5
Р = 5Г;3
4) вычисляем по способу широт (формулы 13.7 и 13.8) широту точки пересечения локсодромического пеленга с меридианом счислимого места:
Х£ — хс = 3°51 ',9 или ДХК( = 231 л9 lg 4XKi = 2.36530 De = 3745,4
lg ctg P = 9.90371 “ ADK = 185,8
lg ADK) = 2.26901 ’ DK = 3559,6
ADKi = 185,8 <pK*=51°05;5
“ ^ = 51 12,0
4<pKi = —6'5
§ 85. Определение места по разнородным линиям положения
449
5) прокладываем линии положения аа' и bb', как показано на рис. 245. Сместив первую линию по курсу 30° на расстояние AS • Р0Л — 1,025 • 2,2 — 2,3 мили, получим искомое место F с координатами:
<Ро = Фс + Д<? = 51°12;0—Г,9 = 5Г10;1 Аг,
Хо = Хс 4- ДХ = — 25°15;о 4-4'1 sec <рс = 25°08J5 U7.
Определение места по разности расстояний и высоте светила. Этот способ может быть использован при плавании корабля в зоне действия только одной пары станций любой фазовой РНС (например, Лоран-А, Лоран-С).
Практическое выполнение аналогично рассмотренному выше для способа, связанного с измерением радиопеленга и высоты светила.
Линии положения рекомендуется прокладывать на карте с сеткой изолиний соответствующей радионавигационной системы.
Определение места по высотам светил и разности их азимутов. Для определения места рассматриваемым способом необходимо иметь возможность измерять не только высоты светил, но с такой же высокой точностью и разность их азимутов. Способ применяется только в тех случаях, когда при ограниченном числе видимых светил нужно повысить точность получаемого места за счет третьей линии положения.
Практическое выполнение способа
1. Измерить высоты двух видимых светил и разность их азимутов АА; заметить момент Т по часам и отсчет лага ол.
2. Вычислить параметры ACi, A/ii и АС4, ДЛ2 высотных линий положения.
3. Вычислить параметры тип разностно-азимутальной линии положения.
4. Проложить на карте или на бланке для астрономических вычислений линии положения, привести их к одному зениту, нанести обсервованное место и при необходимости сделать оценку точности обсервации.
Параметры высотных линий положения Ас и A/i вычисляются как обычно. Параметры разностно-азимутальной линии положения тип вычисляются в следующем порядке:
1) на точно фиксированный момент измерения разности азимутов ДА светил вычисляются их местные часовые углы и счислимые азимуты А' и А' ; затем берется их разность ДАс = = А'а — А'( и находится разность измеренной и вычисленной разностей азимутов: &U = = ДА - ДАС;
2) по измеренным высотам определяются
градиенты направлений g\ и на полюса к Cl освещения светил: /2/Х.
g, = ctg z, = tg h,; P*c
gt = ctg Z, = tg л2; /
3) градиенты g, и g2 прокладываются на
маневренном планшете или миллиметровой Рис. 246
бумаге по направлениям счислимых азимутов
Ас, и соответственно в возможно более крупном масштабе (рис. 246) и измеряется величина градиента g^A разности азимутов (в масштабе, принятом для векторов g} и g2) и его направление, характеризуемое углом т'; направление вектора gLA во всех случаях берется от левого светила к правому (в сторону возрастания азимутов);
29 Заказ 1833
450 Г лава 15. Определ. места по разновременным и разнородным линиям положения
4) находится искомый параметр х из выражения т = т' — 90°;
5) вычисляется перенос п линии положения по формуле
Д(7_____ДЛ — ДЛС
ёьА ёь.А
Знак п совпадает со знаком AU.
Величины тип используются при прокладке разностно-азимутальной линии положения аналогично азимуту Ас и переносу A/i высотной линии положения. Приведение линий положения к одному зениту (как правило, на момент измерения последнего параметра) производится графическим способом. Обсервованное место намечается всегда внутри треугольника погрешностей центрографическим приемом или, при малом треугольнике,— на глаз.
Пример. Измерены высоты двух звезд и разность их азимутов; получены:
— исправленные высоты светил ht — 42°55',8 и h2 = 31°0)',0;
— разность азимутов ДЛ = 68°ЗИ,5.
На момент измерения АЛ вычислены местные часовые углы светил, а затем их счис-лимые азимуты Л^ — 124°08'^3 и ЛСп = 192°34',5.
Проложить разностно-азимутальную линию положения.
Решение. 1) Вычисляем разность счисли-
мых азимутов ДЛс и параметр At/ = АЛ — АЛС:
ДЛ = А' — а' = 68°26J2, Д(7= ДЛ —ДЛС = 4-5;3;
С Cg Vj 3 V J
2) вычисляем градиенты направлений gi и & и Г\
строим треугольник градиентов (рис. 246);
gx = = 0,93 минуты на милю, I
g2 = tgh2 = 0,60 минуты на милю; л
о | о*
получаем: £дл=0,90 минут на милю, т' = 266^2, — .-"
3) вычисляем перенос п линии положения:
ли +5;з , и п
п =----—------= Н-0,9 мили.
ёьл 0,90
Прокладка разностно-азимутальной линии положения аа' показана на рис. 247.
§ 86. ОСОБЕННОСТИ ОПРЕДЕЛЕНИЯ МЕСТА ПРИ ИСПОЛЬЗОВАНИИ РАДИОЛОКАЦИОННОЙ СТАНЦИИ
Способы определения места при использовании радиолокационной станции. Для определения места при использовании РЛС могут быть применены следующие способы:
— по радиолокационным расстояниям до двух или трех точечных ориентиров;
— по радиолокационному или визуальному пеленгу и радиолокационному расстоянию до точечного ориентира;
— по радиолокационным пеленгам на два или три ориентира;
— по крюйс-расстоянию;
— по пеленгам и расстояниям до берегов, не имеющих приметных ориентиров;
— при помощи блока совмещения.
Не рассматривая здесь порядка определения места первыми четырьмя способами, так как они изложены в § 71, 73, 84 и 85, укажем, что во всех способах, связанных с измерением расстояний до естествен
£ 86. Особенности определения места при использовании РЛС
451
ных береговых ориентиров (приметных пунктов), точность получаемых мест зависит главным образом от точности определения отражающей горизонтали облучаемого участка побережья. Ошибка места может быть большой, в особенности при низком береге и слабых его отражательных свойствах. Поэтому для повышения надежности определений при помощи РЛС необходимо изучать радиолокационные особенности побережья, а для обнаружения возможных ошибок и промахов в измерениях использовать способы, связанные с прокладкой трех линий положения.
Изучение радиолокационных особенностей побережья. Основной задачей изучения побережья является накопление материалов, позволяющих по изображению на экране РЛС опознать район плавания корабля, ориентиры и приметные пункты побережья и выбрать наиболее целесообразный способ определения места.
Начальным этапом является изучение материалов по радиолокационным особенностям побережья, помещенных в лоциях. Затем производится подготовка карт, в процессе которой на них цветными карандашами выделяются возвышенности, имеющиеся на береговой полосе, которые по предварительной оценке обладают хорошими отражательными свойствами и будут обнаруживаться на большом расстоянии. Ориентиры рекомендуется намечать в той последовательности, в какой они будут появляться на экране ИКО при приближении к берегу. Для определения этой последовательности рекомендуется подсчитать дальности обнаружения интересующих объектов в зависимости от их высот и высоты антенны РЛС. Для решения данной задачи можно воспользоваться формулой (1.35) или номограммой (приложение 1 МТ—63). Так, например, при высоте антенны h— 15 м и высоте объекта //=100 м можно ожидать, что данный объект при нормальной радиолокационной наблюдаемости может быть обнаружен на расстоянии не более
Дро = 2,224 (/15 + /100) = 30,8 мили.
Далее во время плавания в условиях хорошей видимости уточняются:
— очередность обнаружения объектов;
— фактические дальности обнаружения приметных объектов;
— ориентиры, которые дают наиболее четкое изображение и легко распознаются по изображению на экране;
— расстояния, при которых изображения участков береговой полосы становятся подобными изображениям их на карте.
Для проверки правильности опознавания ориентиров на экране индикатора РЛС следует, определяя место по визуальным измерениям и тщательно ведя счисление пути корабля, сравнивать пеленги и дистанции,, снятые с карты до различных ориентиров, с пеленгами и дистанциями, измеряемыми при помощи РЛС.
Особое внимание следует уделять:
— осушной части берега, которая при различных уровнях моря может принимать самые различные очертания;
— радиолокационному изображению отдельных островов, выдающихся мысов и возвышенностей;
— участкам побережья, не изображающимся на экране РЛС или затеняющимся другими объектами;
— радиолокационному изображению средств навигационного оборудования и участков побережья, примыкающих к местам их установки;
— радиолокационному изображению населенных пунктов и пунктов-базирования, так как там всегда можно выделить ряд приметных ориентиров, дающих точечное изображение;
29*
452 Глава 15. Определ. места по разновременным и разнородным линиям положения
— радиолокационному изображению участков скопления льда; при этом следует учитывать, что торосистый лед часто дает изображение, аналогичное для берегов, и поэтому места скопления льда, дающие чет
кие отраженные сигналы, должны отмечаться на карте.
Для установления более полной зависимости между действительной обстановкой и ее. изображением на экране РЛС рекомендуется перечис-
ленные выше элементы определять в различные времена года и при различной метеорологической обстановке.
В случае отсутствия в лоции достаточного количества иллюстраций с радиолокационным изображением участков побережья рекомендуется фотографировать изображения отдельных наиболее важных участков побережья на экране РЛС. При фотографировании необходимо определять место корабля для геометрической привязки фотоснимков. На фотографиях отдельным элементам обстановки приписываются соответствующие номера, обозначаемые также на карте. При отсутствии возможностей для фотографирования рекомендуется производить зарисовку изображений с экрана РЛС на кальку.
Фотографии и рисунки должны собираться в специальные альбомы и использоваться затем наряду со сведениями, помещенными в лоции, при ориентировке с помощью РЛС в условиях плохой видимости.
При опознании незнакомого побережья следует учитывать:
— на больших расстояних на экране РЛС появляются изображения
только тех ориентиров, которые находятся над радиолокационным горизонтом и хорошо отражают облучающие радиоимпульсы: низкие отлогие берега могут быть обнаружены лишь на малых расстояниях;
— контур низкого берега обычно просматривается плохо и значительно искажается; линия уреза воды может в действительности быть значительно ближе; особенно сильно искажаются изображения участков берега, облучаемых под острыми углами и расположенных на периферии экрана;
— наименьшие искажения имеют изображения участков, фронт которых наблюдается с корабля под углами, близкими к прямому;
— наиболее легко распознаются участки, имеющие специальное оборудование (маяки-ответчики, отражатели) или характерные ориентиры.
В тех случаях, когда в комплекте РЛС имеется блок совмещения типа «Пальма» или аналогичный ему, для опознавания ориентиров и участка побережья рекомендуется применять этот блок, и подбирая на карте вблизи счислимого места участок, который в наибольшей степени совпадает с его изображением на экране блока.
Если блок совмещения отсут
ствует, то для опознавания участка можно применить контур побережья, вычерченный на кальке по пеленгам и дистанциям, измеренным с помощью РЛС, до характерных точек побережья а, б, в..., как показано на рис. 248. Для построения контура вектора Db Z)2, ^з,- • • должны быть проложены от точек, лежащих на прямой, условно изображающей линию пути и удаленных друг от друга на расстояния, пройденные кораблем за соответствующие промежутки времени в масштабе карты.
При совмещении контуров калька должна быть ориентирована так, чтобы линии пути на кальке и на карте были параллельны друг другу.
$ 86. Особенности определения места при использовании РЛС
453
Определение места по пеленгам и расстояниям до берегов, не имеющих приметных ориентиров. Для определения места данным способом следует:
1) измерить расстояния й\ и й2 и соответствующие им пеленги на два участка побережья, имеющих направления, отличающиеся друг от друга не менее чем на 30°; при каждом измерении заметить момент по часам и отсчет лага;
2) от произвольных точек береговой линии или отражающей горизонтали проложить на карте отрезки прямых D\ и D2 по измеренным
направлениям так, чтобы начальные точки а и b этих отрезков находились вблизи счислимого места С (рис. 249);
3) с помощью кальки перенести изображения береговых линий или отражающих горизонталей, близких к конечным точкам отрезков £>i и £)2, в начальные их точки а и b и наметить искомое место F в точке пересечения проведенных кривых.
Если между моментами измерения расстояний прошло значительное время, то первую изолинию следует сместить по линии пути на расстояние, пройденное кораблем за время между моментами измерений.
Для получения уверенности в правильности
места рекомендуется произвести несколько определений.
Определение места при помощи блока совмещения. Блок совмещения может быть применен для определения места при расстояниях до берега до 15—20 миль и условии, что береговая линия имеет характерные очер
Рис. 250 установить масштаб, приведенный
тания и хорошие отражающие свойства. Применение блока особенно полезно при ориентировке в узкостях.
Практическое выполнение способа
1. Проверить правильность ориентирования развертки электроннолучевой трубки блока путем сличения положения отметки курса на экране с курсом по компасу.
2. Положить карту района плавания на стол под зеркало блока.
3. Привести в соответствие масштаб изображения с частным масштабом карты в районе плавания корабля; для согласования указанных масштабов следует на блоке в заголовке карты, а затем ручкой
плавной регулировки произвести совмещение кругов дальности на экране блока с соответствующими делениями на боковой рамке карты на широте района плавания корабля, как показано на рис. 250.
4. Включить РЛС и, перемещая карту, совместить прямовидимое через полупрозрачный экран изображение участка берега на карте с его изображением, проектируемым при помощи зеркала с экрана ИКО.
454 Глава 15. Определ. места по разновременным и разнородным линиям положения
В момент наилучшего согласования отметить место на карте в центре развертки в точке, соответствующей положению светящегося перекрестья.
Учитывая довольно сильные искажения изображения на экране блока, рекомендуется при совмещении отдавать предпочтение участкам побережья, облучаемым под углами, близкими к 90°. В случае невозможности полного совмещения изображений производится осреднение расхождений; для этого карта устанавливается в такое положение, при котором расхождения контуров были бы наименьшими и приближенно одинаковыми по всей площади изображения.
Вследствие сферичности экрана изменение положения глаза оператора приводит к некоторому смещению изображений. Поэтому в процессе определения места следует сохранять положение глаза по возможности постоянным, не допуская его смещения большем чем на 5—8 см.
На картах, используемых для определения места при помощи блока совмещения, рекомендуется цветным карандашом выделить береговую линию или отражающую горизонталь; наиболее удобным цветом является темно-коричневый.
Средняя квадратическая ошибка места, определяемого с помощью блока совмещения, близка к 1 мм в масштабе карты; при масштабе 1 :200000 эта ошибка равна примерно 1 кбт.
Ценным свойством блока совмещения является то, что точность определяемого места не зависит от ошибки в поправке компаса; наличие этой ошибки сказывается лишь на повороте изображения на экране блока и соответствующем повороте карты при совмещении изображений.
При отсутствии блока совмещения для определения места по совмещению радиолокационного изображения с картой может быть использована калька, на которую по ряду измеренных пеленгов и дистанций нанесен контур берега, как это показано на рис. 248. Порядок использования кальки такой же, как описанный выше для опознавания берегов.
Определение места с помощью береговых радиолокационных станций. Береговые радиолокационные станции, устанавливаемые на подходах к портам и в узкостях, могут использоваться для определения мест кораблей и проводки кораблей по фарватерам или рекомендованным курсам.
Место корабля по его запросу или в заранее назначенные моменты времени определяется береговой РЛС обычно по пеленгу и расстоянию; координаты места передаются на корабль по радио. При передаче координат применяется географическая система, когда указываются широта и долгота места корабля или полярная система, когда положение корабля указывается пеленгом и расстоянием от какой-либо заранее обусловленной точки.
Радиолокационная проводка кораблей по фарватерам или рекомендованным курсам производится путем непрерывного наблюдения за перемещением корабля и периодической передачи на корабль информации о его местоположении относительно оси фарватера (рекомендованного курса).
Порядок использования береговых РЛС для определения места и проводки излагается в лоциях и других официальных руководствах.
§ 87. ОПРЕДЕЛЕНИЕ МЕСТА С ПОМОЩЬЮ ГИДРОАКУСТИЧЕСКИХ СРЕДСТВ
Общая характеристика гидроакустических средств. Корабельные гидроакустические средства являются приборами для наблюдения подводной обстановки и предназначены для определения пеленгов и дистан
$ 87. Определение места с помощью гидроакустических средств 455
ций до различных ориентиров или объектов (надводных кораблей, подводных лодок, мин, подводных препятствий, специальных подводных ориентиров), звукоподводной связи и т. п. К гидроакустическим средствам, используемым для определения места корабля, относятся гидролокационные станции (ГЛС) и шумопеленгаторы.
Гидролокационные станции являются активными средствами наблюдения. В них направление на облучаемый объект определяется по положению вибратора относительно диаметральной плоскости корабля, а расстояние — по промежутку времени между моментами посылки сигнала и приема эха от объекта.
Регистрация момента приема отраженного сигнала производится с помощью регистратора, простейшим из которых является рекордер, действующий аналогично самописцу эхолота. На движущейся ленте рекордера (рис. 251) записываются моменты посылки сигналов (слева) и моменты приема эха (справа). Расстояние между левой и правой отметками пропорционально измеряемому расстоянию и снимается с помощью специальной шкалы. Изменение масштаба записи на ленте самописца осуществляется путем изменения ____
скорости движения записывающего пера по и - | j ...д
шта н ге. -----------—Г-----
Кроме рекордеров, в системах ГЛС широко применяются индикаторы кругового об- _ LU
зора подводной обстановки, на экране кото- н рых высвечивается положение облучаемых = объектов, а дистанция и пеленг определяют- н ЕЕ
ся так же, как при использовании индикато- н ра кругового обзора РЛС. -_________________
Дальность действия ГЛС зависит от мощности и направленности звукового излуче- Рис. 251
ния, от длительности посылки и частоты посылаемых сигналов, полосы пропускания и усиления приемного устройства и, в значительной мере, от гидрологических условий.
Дальность обнаружения объектов с помощью гидролокационной станции рассчитывается по специальным графикам и таблицам, составленным для различных гидрологических условий. Ее можно также определить опытным путем при отходе от какого-либо подводного ориентира, например от затонувшего корабля, и измеряя расстояния до полной потери контакта.
Шумопеленгаторы относятся к пассивным средствам подводного наблюдения и дают возможность обнаруживать объекты, излучающие звук в воде. Сами шумопеленгаторы являются неизлучающими устройствами, что делает их весьма ценными в условиях, требующих повышенной скрытности корабля, ведущего наблюдение. В качестве шумопеленгаторов часто используются корабельные ГЛС, работающие в режиме шумопеленгования.
Дальность обнаружения объектов с помощью шумопеленгаторов также зависит от гидрологических условий, однако принципиально она значительно превышает дальность действия ГЛС.
Средние квадратические ошибки измерения пеленгов и расстояний с помощью гидроакустических средств указываются в технической документации.
Способы определения места с помощью корабельных гидроакустических средств. Для определения места корабля с помощью корабельных гидроакустических средств применяются следующие способы:
— по пеленгу и расстоянию до точечного ориентира;
456 Г лава 15. Определ. места по разновременным и разнородным линиям положения
— по двум и более пеленгам на точечные ориентиры;
— по серии расстояний до отражающей изобаты.
В качестве точечных ориентиров могут использоваться:
а) при определении места по пеленгу и расстоянию:
— подводные акустические отражатели;
— подводные акустические маяки-ответчики;
— другие ориентиры, положение которых известно, например затонувшие суда, резкие возвышения дна, молы и т. д.;
б) при определении места по пеленгам — подводные звуковые маяки, устанавливаемые в заданных точках.
Так как способы определения места по пеленгу и расстоянию, а также по двум и более пеленгам были рассмотрены ранее (§ 71 и 85), то ниже рассматривается только способ определения места по серии расстояний до отражающей изобаты.
Определение места по серии расстояний до отражающей изобаты. Данный способ может быть применен при плавании в узкостях и вблизи берегов в условиях плохой видимости.
Практическое выполнение способа
1. Ориентировать вибратор гидролокационной станции по курсовому углу 90° в сторону берега.
2. Измерить серию расстояний до отражающей изобаты, фиксируя моменты по часам и отсчеты лага при каждом измерении; частота измерений должна быть тем больше, чем сложнее форма изобат.
3. Нанести на карту отражающую изобату, учтя углубление вибратора, гидрологические условия и расстояния до изобаты.
4. Провести на листе кальки линию пути корабля и нанести на ней точки /, 2, 3,... (рис. 252), соответствующие моментам измерения расстояний (в масштабе карты); от этих точек проложить векторы расстояний Z>i, D2, />з,... и концы их соединить плавной кривой, изображающей фактическую отражающую изобату.
5. Передвигая кальку по карте так, чтобы линия пути была параллельна линии пути на карте, совместить возможно полнее фактическую изобату с нанесенной на карте и отметить искомое место на момент последних измерений.
Наиболее важным в рассматриваемом способе является определение положения изобаты, отражающей облучающие дно импульсы гидролокационной станции. С наибольшей достоверностью эта изобата может быть нанесена заранее на крупномасштабную карту по измеренным расстояниям, проложенным от мест корабля, лежащих на линии пути. Линия пути должна быть нанесена на карту по результатам определения места одним из точных способов в условиях хорошей видимости береговых ориентиров. Вблизи нанесенной изобаты отмечаются дата и время наблюдений, а также углубление вибратора ГЛС. Кальки с карт с отра
$ 88. Определение места по рельефу дна 457
жающими изобатами рекомендуется собирать в специальные альбомы для последующего использования в аналогичных условиях при плохой видимости.
Точность места, определяемого по серии расстояний до отражающей изобаты, зависит главным образом от соответствия действительных гидрологических условий условиям, которые имели место при нанесении на карту отражающей изобаты. Так как различие этих условий может быть довольно значительным, то следует для контроля полученного места измерить глубину моря и сравнить ее с глубинами, показанными на карте.
§ 88. ОПРЕДЕЛЕНИЕ МЕСТА ПО РЕЛЬЕФУ ДНА
Определение места по рельефу дна с достаточно высокой степенью достоверности возможно в районах, имеющих характерные формы рельефа, и при наличии подробных карт. Информация о рельефе дна должна быть представлена в виде изобат на картах масштаба 1 : 250 000 и крупнее.
К районам, имеющим характерные формы рельефа, относятся участки дна океана (размерами от нескольких миль до нескольких десятков миль), представляющие собой поднятия или впадины (подводные горы, вулканы, каньоны), а также участки большей протяженности, имеющие резко расчлененную поверхность (подводные горные хребты, гряды подводных гор, холмов и т. п.).
Установление пригодности района для определения места по рельефу дна производят следующим образом:
— через середину района проводят два взаимно перпендикулярных, произвольно ориентированных отрезка длиной 15—20 миль в масштабе карты;
— вычисляют среднее значение перепада глубин по направлению каждого из указанных отрезков по формуле
п
___ 2w,twl
Д//к = -----L-------, (15. 1)
где Н—значение глубины, снятое с карты в точке пересечения отрезка с изобатой;
/ — порядковый номер пересечения;
L — длина отрезка;
п — число пересечений отрезка с изобатами (п должно быть > 3);
— из двух вычисленных значений ДЯК, соответствующих взаимно перпендикулярным направлениям, выбирают наименьшее;
— снимают с карты приближенное значение средней глубины Н в районе;
— по аргументам Д//к (наименьшее) и Н находят на графике (рис. 253) точку.
Район считается пригодным для определения места по рельефу дна, если точка находится выше линии пп.
Практическое выполнение способа
1. Наметить по карте район и оценить его пригодность для определения места по рельефу дна.
2. При подходе корабля к району, выбранному для определения места, включить самописец эхолота.
458 Глава 15. Определ. места по разновременным и разнородным линиям положения
3. Рассчитать поправки измеренных глубин по формуле
АЛ/ = Д//э + А//у-г (15.2)
где — инструментальная поправка эхолота;
АЛ/.,— поправка за отклонение скорости звука в воде от расчетной (выбирается из таблиц);
SH? — поправка за колебание уровня моря (всегда отрицательна и численно равна высоте прилива; выбирается из таблиц).
4. Наблюдая за записью глубин на самописце эхолота, заметить моменты пересечения кораблем изобат (с учетом поправок АН) и соот-
ветствующие этим моментам отсчеты лага; отметить на карте полученные счислимые точки (по световому перекрестию автопрокладчика) и надписать значения глубин.
5. Совместить линейку автопрокладчика с линией счислимого пути, перенести на линейку карандашом отметки, указанные в п. 4, и надписать значения глубин.
6. Параллельным перемещением линейки добиться минимального отклонения отметок на линейке от соответствующих изобат карты.
7. Снять обсервованные координаты, соответствующие последней отметке глубины на линейке автопрокладчика.
Примечание. При отсутствии на корабле автопрокладчика или при вынужденном изменении курса во время измерения глубин решение задачи производят с помощью кальки. Для этого на кальке проводят линию меридиана, переносят на кальку проложенный на карте участок пути вместе с точками, указанными в п. 4, и надписывают значения глубин. Наложив кальку на карту и перемещая ее так, чтобы линия меридиана кальки была параллельна меридианам карты, добиваются минимального отклонения отметок глубин на кальке от соответствующих изобат карты.
Пример. Счислимое место на 20ч00* <?с = 42°47',2 Af; Хс = 134°26',5 Ost, скорость Ул = 20 уз, курс К = 77°,0, отсчет лага ол « 5,0. Рельеф дна в районе местонахождения корабля изображен на рис. 254.
88. Определение места по рельефу дна
459
Определить место корабля по рельефу дна.
Решение. 1) Оцениваем пригодность района для определения места по рельефу дна:
— через середину выбранного района проводим на карте два взаимно перпендикулярных отрезка mm' и kk' (рис. 254) и снимаем длины отрезков и глубины в точках пересечения этих отрезков с изобатами:
— 25 миль Lkk> =20 миль
= 300 м А/Л1 = 1000 м
100 м 500 м
— 400 м Hkj = 500 м
100 м 100 я
— 500 м Hk^ = 400 я
500 м 100 я
=-- 1000 м Hk = 300 м
100 я
Hks = 200 я
— по формуле (15. 1) вычисляем средние значения перепада глубин по направлениям
-гп 100 + 100 + 500 по
ДАЛ, —---------------=-------= 28 метров на милю,
* (mm') 25 г
-гъ 500 + 100 + 100 + 100
д//Л =--------------—-------------= 40 метров на милю;
{fift ) 20
ДАЛ, . —^Нь , = 28 метров на милю;
*min “(mm’)
— выбираем с карты приближенное значение средней глубины района №500 л;
— находим на графике (рис.253) по A//*mjn = 28 м!миля и Н — 500 м точку; район пригоден для определения места по рельефу дна, так как точка лежит выше линии пп\
460 Глава 15. Определ. места по разновременным и разнородным линиям положения
2) Определим место по рельефу дна:
— включаем самописец эхолота;
— рассчитываем по формуле (15.2) таблицу поправок глубин, соответствующих изобатам, нанесенным на карту, которые предполагается пересечь:
^^2оо= +8 м; +11 м‘, +13 м;
— +14 м‘> A^iooo“ +21 м',
— замечаем по самописцу с учетом поправок ЛЯ моменты пересечения кораблем изобат и соответствующие этим моментам отсчеты лага:
„ лЛЛ 20.06 „ слл 20.15 1ЛЛЛ 20.57
Н= 400 м, -у-у- ; Н -1000 м,
и отмечаем на карте с помощью светового перекрестия автопрокладчика эти счисли-мые точки;
— совмещаем линейку автопрокладчика с линией счислимого пути и карандашом переносим на линейку отмеченные счислимые точки и значения глубин;
— параллельным перемещением линейки добиваемся минимального отклонения отметок на линейке от соответствующих изобат карты и снимаем обсервованные координаты на 20 ч 57 мин: <р0 = 42°57',0 М, Ло *= 134°57,,9 О*', ол = 24, 2, С = 37° — 7,0 мили.
Глава 16
ОЦЕНКА ТОЧНОСТИ ПЛАВАНИЯ КОРАБЛЯ
§ 89. ТОЧНОСТЬ СЧИСЛЕНИЯ
Учитываемые при счислении пути корабля истинный курс, пройденное расстояние, ветровой дрейф и элементы течения всегда известны с некоторыми ошибками, поэтому независимо от точности способов учета этих элементов счислимое место во всех случаях следует рассматривать как приближенное. Ошибка счислимого места возрастает по мере увеличения продолжительности плавания по счислению.
В настоящее время для оценки точности счисления применяются два принципиально различных способа, а именно:
— статический способ, связанный с совместным учетом всех факторов, влияющих на точность счисления;
— априорный способ, связанный с раздельным учетом ожидаемых ошибок в элементах счисления.
Оценка точности счисления статистическим способом. Данный способ является основным и применяется в большинстве случаев решения задач, связанных с оценкой точности счислимого места; он базируется на применении выводов теории случайных функций.
Средняя квадратическая ошибка Л4с(0 счисления за время t вычисляется по формулам:
— при продолжительности плавания до 2 ч
^(0 = ^*^ (16.1)
— при продолжительности плавания более 2 ч
= (16.2)
где i — продолжительность плавания в часах;
Кс — коэффициент точности счисления;
в — безразмерный параметр, определяющий скорость нарастания ошибки счисления с увеличением времени t.
Параметр 0 имеет величину от 0,3 до 0,8.
Величины-^тд при различных 0 приводятся ниже.
6... 0,3 0,4 0,5 0,6 0,7 0,8
1 2^ — ® 0,62 0,66 0,71 0,76 0,81 0,87
462
Г лава 16. Оценка точности плавания корабля
Ошибка Mc(t) определяет радиус круга, в пределах которого с вероятностью 0,683 находится счислимое место корабля, при условии, что ошибка исходной точки счисления равна нулю.
Средние значения коэффициентов Кс для кораблей различных классов и для различных условий плавания, а также для различных районов приводятся в официальных изданиях. Кроме того, эти коэффициенты могут быть вычислены по невязкам счислимых мест, полученным при обсервациях.
Для вычисления коэффициента Кс необходимо знать параметр 6; если этот параметр неизвестен, берут его среднее значение, равное 0,5. При необходимости получить более точный результат параметр 6 можно также вычислить по невязкам счислимых мест (стр. 465).
Ошибка счисления Мс (/) при продолжительности плавания более 2 ч вычисляется по формулам:
— при 6=0,5
А1с(/)=-К/’5; (16.3)
— при 6= 0,8
= К/'8. (16.4)
Вместо вычисления по приведенным формулам ошибки счисления Мс (0 могут быть получены: при 6=0,5 по номограмме рис. 255, при 6 = 0,8 по номограмме рис. 256.
При известном параметре 6 для вычисления коэффициента Кс следует:
1) выбрать из навигационного журнала невязки С/ счислимых мест, полученные при определениях места не менее чем через 2—3 ч плавания по счислению. В результате получаем ряд невязок С/ через определенные промежутки времени (которые округляем до 0,1 ч);
2) составить п уравнений наблюдений в виде:
I (16.5)
С == Kt* n /vc п )
3) решить полученную систему уравнений относительно Кс по способу наименьших квадратов. Для этого составляем одно нормальное уравнение
[С?] = Кс [?в];
из этого уравнения получаем
Кс = 1,13^. (16.6)
В последних уравнениях:
[С/Ч = + Q’ + ... + С л.
[/*]=/»+/?+ ... +е
Коэффициент 1,13 введен в формулу (16.6) для получения величины Кс с вероятностью 0,683.
Для определения наиболее достоверного коэффициента Кс следует: — использовать возможно большее количество невязок, объединяя данные, получаемые на однотипных кораблях в аналогичных условиях плавания;
$ 89. Точность счисления
463
Рис. 255
Рис. 256
Дано: / = 17 ч, /<с = 0,45 (0 = 0,8). Определить Mc(t). Ответ: Мс (/) = 4,4 мили
464
Глава 16. Оценка точности плавания корабля
— обрабатывать невязки, группируя их по районам и по условиям плавания, например, для надводного положения, для подводного положения, при ветре до 5 баллов, при ветре более 5 баллов и т. д.
Минимально необходимое число невязок для вычисления коэффициента Кс со средней квадратической ошибкой можно подсчитать по приближенной формуле
Так, например, при Кс= 1,2 мили/ч^ и = 0,1 мили1чОг> получим п = 43.
Для вычисления тк^ следует:
— вычисленный по невязкам коэффициент Kz подставить в уравнения (16. 5) и для тех же значений /0 вычислить невязки С';
— найти разности Д, = С, — С,;
— рассчитать искомую ошибку по формуле
"Ч = У (’6.8)
Практически о достоверности Кс можно судить по величине относи-
тельной ошибки коэффициента - Кс 100%, которая не должна превышать /Сс
8 - 10%.
Пример. Из навигационного журнала выбраны невязки на моменты 7\:
То — 16ч00х, Со = 0 (исходная обсервация); 7\ = 04ч30х, С<— 1,0 мили;
7'1 = 18 40, Cj = 1,4 мили; Т8 = 10 00, С5 = 2,4мили;
Т2 — 21 10, С2 = 2,0 мили; 7*0 — 20 10, Св = 3,8 мили.
7*3 = 02 20, С3 = 3,9 мили.
Вычислить и при 0 = 0,5.
Решение. 1) Вычисляем величины, необходимые для составления нормальных уравнений; результаты вычислений сводим в таблицу
С *0,5 С<0'5
2Ч7 1,4 мили 1,64 2,29
2^5 2,0 , 1,58 3,16
5,2 3,9 . 2,28 8,89
2,2 1,0 . 1,48 1,48
5,5 2,4 . 2,34 5,62
10,2 3,8 , 3,20 12,12
[;5«] = 28ч3 33,56= [Сг«]
2) составляем нормальное уравнение и вычисляем Кс 33,56 = 28,3/<с,
к с = 1,13-4^-= 1,34 мили/ч0-5;
>о
§ 89. Точность счисления
465
3) "используя коэффициент Кс, вычисляем невязки Ct и ошибку m
Kz
Выбирая невязки для вычисления Хс, следует исключать те из них, которые получены при недостаточно точных обсервациях; лучшим вариантом является такой, когда средние квадратические ошибки обсерво-ванных мест не превышают 20% от величин невязок.
Приближенный коэффициент Kz, вычисленный по ограниченному числу невязок nj, может быть использован в последующий период для оценки точности счисления (в том же районе). В этот же период штурман должен продолжать накопление невязок для расчета нового коэффициента. Вычислив этот коэффициент Kz при числе невязок пг, можно получить более точный коэффициент Хс по формуле среднего весового
„ _ «Лс, + «2^< Лс' zh + n2
(16. 9)
Аналогично учитываются последующие коэффициенты.
Для расчета параметра 6 по невязкам счисления уравнения наблюдений (16. 5) приводятся к виду:
Ci = lg + 0 lg h
lgG = lgKc + 91g<2 n(.
lgCn = lgKc + 91g«n
Применив способ наименьших квадратов, получим нормальные уравнения: ligq = nig/<c + 0[igt);
(IgClg/] = lgKc [1g/] + 9 [lg«f].
Расчетная формула для вычисления в из этих уравнений имеет вид
ilgClgZ1_te£LI!£ll
(16.11)
30 Заказ 1833
466
Глава 16. Оценка точности плавания корабля
Пример. Из навигационного журнала тельностям плавания по счислению:
9,7 ч, Cj ~ 1,4 мили;
t2 — 2,5 ч, С2 — 2,0 мили;
t3 - 5,2 ч, С3 — 3,9 мили;
выбраны невязки, отнесенные к продолжи-
— 2,2 ч, С4 — 1,0 мили;
/5 — 5.5 ч, С5--2,4 мили;
tG~ 10,2 ч, Сс--3,8 мили.
Вычислить параметр 6.
Решение. 1) Вычисляем величины, необходимые для составления уравнения (16.11).
t lg t 1g2* | с 1g С 1g С lg t
'Т1 0,4314 0,1861 1,4 мили 0,1461 0,0630
2’5 0,3979 0,1583 2,0 я 0.3010 0,1198
5,2 0,7160 0,5126 3,9 . 0,5911 0.4232
2,2 0,3424 0,1172 1,0 , 0,0000 0,0000
5,5 0,7404 0,5482 2.4 . 0,3802 0,2815
10,2 1,0086 1,0173 ' 3,8 . 0,5798 0,5848
V 3,6367 2,5397 S 1,9982 1,4723
[1g С] [1g /] = 7,2668; tlg с 1 *lg А — 1,2111,
[lgt]2= 13,2256; = 2,2043;
2) вычисляем по формуле (16.11) параметр 6:
6= 2SS3 =0’76 или' округляя'в ;=0’8-
Предельная ошибка счисления Л4с(0 вычисляется по формуле
(16.12)
где КР — коэффициент, выбираемый из табл. 3 приложения 2 по заданной вероятности Р предельной ошибки для отношения полуосей эллипса b : а == 1.
Чтобы определить возможность использования коэффицинта Кс в данном районе с заданной вероятностью оправдываемости, следует:
1) определить место корабля 7—10 раз через промежутки времени // не меньше 2—3 ч и снять с карты невязки Cf;
2) вычислить невязки Cj = К£ для тех же промежутков времени
3) найти разности Дх с их знаками по формуле
(16. 13)
4) подсчитать число q разностей с менее часто встречающимся знаком;
5) по величинам п (число невязок) и q нанести точку на график, приведенный на рис. 257. Если точка с координатами и и q расположена выше кривой, с заданной вероятностью оправдываемости коэффи
§ 89. Точность счисления
467
циента Лс, то этот коэффициент можно применять в дальнейшем; если же точка с координатами п и q окажется ниже кривой с заданной вероятностью, то учитываемый коэффициент Лс следует считать недостаточно надежным; при этом, если менее часто встречающийся знак разности плюс (+), то новый коэффициент должен быть меньше прежнего, а при знаке минус (—) больше прежнего.
Оценка точности счисления априорным способом. Этот способ связан с раздельным учетом ожидаемых ошибок в элементах счисления и имеет второстепенное значение. Он применяется для вычисления ожидаемых ошибок счисления как временная мера до накопления достаточного количества невязок счислимых мест и вычисления по ним величин 6 и Кс применительно к данному району и данным условиям плавания корабля.
Для вычисления средней квадратической ошибки Л4С (/) применяется формула (16.1) или (16.2) в зависимости от продолжительности плавания по счислению. Величина 6 принимается равной 0,5, тогда:
— при продолжительности плавания до 2 ч
Мс (/) - 0,7^/;
— при продолжительности плавания более 2 ч
При расчете коэффициента Лс точности счисления учитываются следующие ожидаемые ошибки:
^Пуа ~ в направлении движения корабля относительно воды;
mY — в скорости корабля относительно воды;
/пКт— в направлении течения;
/пГт — в скорости течения.
Для указанных составляющих рассчитываются коэффициенты Я*ПУг
* кт и характеризующие скорости накопления ошибок места: /Спу —по направлению, перпендикулярному линии ПУл (или ИК);
Kv — по направлению ПУл (уйм ИК);
ККу — по направлению, перпендикулярному учтенному течению;
/С^ — по направлению течения.
Коэффициент Кс вычисляется по формуле
К = V (^ПУ + ^ + Ч + ^т) 10-4 (16- 14)
Расчет составляющих К( производится в следующем порядке.
1. Коэффициент Кпу, зависящий от ошибки /пПУа в пути при дрейфе, вычисляется по формуле
/ ° \2
/ ^ПУ I , \2
^y = 2-10V*(^J =6ЛУЦт;Уа), (16.15)
где УЛ — скорость корабля в узлах относительно воды (по показаниям лага или по оборотам винтов).
Для расчета средней квадратической ошибки ^Пув в ПУТИ при дрейфе (или при отсутствии дрейфа в истинном курсе) применяется формула
«ПУ. ]Л»1гкп + + ml + трыс + (16- 16}
30*
468
Глава 16. Оценка точности плавания корабля
В этой формуле:
жДГкп ” средняя квадратическая ошибка определения постоянной поправки гирокомпаса; для магнитного компаса вместо ошибки /яДГКп учитывается ошибка /пдмк общей поправки. Для гирокомпаса ошибка /пДГКп находится в порядке, изложенном в § 52; при расчете ДГА'П по серии мгновенных поправок, определенных через 12—15 мин в течение 3 ч, ошибка л*ДГкп близка к 0,2—0°3. Для магнитного компаса ошибка /пдмк = j/^zn2 + mj зависит от ошибок md и магнитного склонения и девиации; при /nd^m5^0,5—0°7 средняя квадратическая ошибка тдмк близка к 0,7 —Г;
mN ~~ средняя квадратическая величина изменения постоянной поправки гирокомпаса, зависящая от широты места корабля; эта ошибка в средних широтах близка к 0,2—0°3;
та ~ средняя квадратическая ошибка в учете дрейфа; при дрейфе, определяемом способами, изложенными в § 66, ошибка /пв должна приниматься равной ’/?. от величины угла дрейфа; трыс — средняя квадратическая ошибка в пути вследствие зарыски-вания; определяется опытным путем из сравнения заданного курса со средним арифметическим, вычисленным по 10—15 мгновенным курсам, замеченным через равные промежутки времени (порядка 3—5 мин)\ учитывается только при графическом счислении, выполняемом вручную; величина /прЬ1С может достигать 1,5—2° и более;
тдпк “ средняя квадратическая ошибка отработки курса автопро-клйдчиком; величина тАПк указывается в технической документации и для современных автопрокладчиков близка к 0,2—0°3. При прокладке вручную вместо ^АП[( должна учитываться ошибка графики около 0°2.
Среднее значение /пПУв при /пДГКп = 0°2, mN -= 0°2, т* = 1°, /пАПк=-= 0°3 и использовании автопрокладчика будет 1°1, а при отсутствии дрейфа 0°4.
При скорости Уд = 20 уз и /пПУа = 1°1 Л^у = 6,1 • 202- (1,1)2 = 2952.
2. Коэффициент Kv, зависящий от ошибки mv* в скорости корабля относительно воды, вычисляется по формуле
/ ТПу % \ , . . ,9
Л» = 2- 10V’ = 2V* • (16. 17)
Значение mv при определении скорости по лагу рассчитывается по формуле (7.21) и близко к 0,5—1°/0; при определении скорости по оборотам винтов ошибка в зависимости от погоды принимается равной 1,5—3°/о от скорости.
При = 1°/0 и скорости УЛ = 20 уз Ку — 2-202-12 = 800.
3. Коэффициент Л^т, зависящий от ошибки в направлении течения /пКт, вычисляется по формуле
$ 89. Точность счисления
469
/^T-8.1044sin2-y^, (16. 18)
где г’т — скорость течения в узлах.
Средняя квадратическая ошибка в направлении течения принимается равной:
— при плавании в хорошо изученных районах, обеспеченных атласами течений, 20—30°;
— при плавании в океане 45°;
— при определении элементов течения с помощью гидроакустического лага или по невязкам счисления — в зависимости от ошибок исходных величин в соответствии с формулами (11.11) и (11. 13).
При /пКт = 20° и^т=1 уз, получим Л^т - 8-104-12-0,003 - 2400.
4. Коэффициент Л^т, зависящий от ошибки в скорости течения вычисляется по формуле
^т-2.104/п2т. (16. 19)
Средняя квадратическая ошибка в скорости течения тп^ принимается равной:
— при выборке элементов течения из навигационных пособий (атласов течений) — 7з от скорости течения;
— при определении элементов течения с помощью гидроакустического лага или по невязкам счисления — в зависимости от ошибок исходных величин в соответствии с формулой (11. 10) или (11. 12) соответственно.
В случае, если течение при счислении не учитывается, то средняя квадратическая ошибка принимается равной:
— при плавании в районах со значительными приливно-отливными течениями 0,5—1,0 уз\
— при плавании в районах, где по данным гидрометеорологических пособий течения отсутствуют 0,2—0,3 уз в прибрежных районах и 0,3—0,5 уз в открытой части океана.
Коэффициенты (без учета ошибки в угле дрейфа) и Kv характеризуют точность хранения координат комплексом навигационных приборов корабля, а коэффициент Кс, определяемый любым из рассмотренных способов, — скорость устаревания координат места корабля под влиянием всех причин.
Пример. На основе приближенной оценки средних квадратических ошибок в элементах счисления вычислены квадраты коэффициентов: Кру = 2952, Ку == 800, №Кт = 2400 и /^=1800.
Вычислить среднюю квадратическую ошибку счисления за время — 1,5 ч и — 8 ч.
Решение. 1) вычисляем по формуле (16. 14) коэффициент Кс
Кс = ^(2952 + 800 +24004-1800) 10“4 = 0,88;
2) вычисляем ошибки Л4С (/J и Л4С (tf2) за заданные промежутки времени:
Мс (it) =*0,7КсЛ = 0,7• 0,88-1,5 = 0,92 мили,
Л4С (ti) = Кс^’5 “ 0,88-2,83 — 2,5 мили.
470
Глава 16. Оценка точности плавания корабля
Ошибки счисления по меридиану и параллели. Среднюю квадратическую ошибку MG(t) можно рассматривать как геометрическую сумму двух составляющих:
— ошибки тп^ направленной по меридиану, и
— ошибки /nw, направленной по параллели.
Указанные ошибки, на основе принципа равного действия, определяются формулой
а ошибка в долготе !> (16.20)
пгк = 0,7Л1с (/) sec 4? |
Так, при Мс (/) = 4,4 мили и 60° получим: =- 0,7-4,4 =- 3'1;
/п. =ЗП sec60°=6;2.
Эллиптическая ошибка счисления. Параметры эллиптической ошибки, т. е. полуоси а и b и направление большой оси, характеризуемое углом а0, могут быть вычислены при известных коэффициентах ЛГпу* и Для этого следует: J
1) рассчитать для каждого курса \ПУа\ модули векториальных ошибок Z|, /2, /3 и /4, а также углы а,, а2, а3 и а4 по формулам:
— при продолжительности лежания на курсе до 2 ч
0,7Кпу/, а, = ПУа ± 90°;
/2 - 0,7 Kvt, а2 - /7Уа;
/з-0,7/<Кт/, а3 = Кт±90°;
Ц = 0,7^тЛ а, = /Ст;
— при продолжительности лежания на курсе больше 2 ч
А = “!-/7У«±90о;
/з = /СКт^" «3^ + 90°;
l, = K^Vi^ *< = КГ
В приведенных формулах для расчета углов а3 и а4 параметр Кт — учтенное направление течения. Коэффициенты Kv, и должны рассчитываться по формулам (16.15), (16. 17) — (16. 19) без множителя 104;
2) вычислить квадраты векториальных ошибок lt и удвоенные величины углов а/,
3) построить квадратичный полигон (приложение 2) и найти геометрическую сумму квадратов [Z2] векториальных ошибок; векторы 1} на полигоне должны строиться под удвоенными углами а, к меридиану;
4) снять с чертежа угол 2ао, характеризующий направление равнодействующего вектора [Z2]. Угол ао, равный половине измеренного угла, будет определять направление большой оси эллипса;
§ 89. Точность счисления
471
5) решить систему уравнений для получения искомых полуосей а и 6: а2 + ^ = [/2].
а* — Ь* = [Р1
Пример. На основе анализа точности элементов счисления определены средние квадратические ошибки /лПу*— 1.0; mv = 1%; = 30° и — 0,4 уз.
Вычислить элементы эллиптической ошибки счисления при плавании корабля курсами 150 и 210°, скорости корабля = 21 уз, времени лежания на первом курсе 1,5 ч, на втором 9 ч\ направление течения 100° (на первом курсе) и 130° (на втором курсе), скорость течения vT — 1,1 уз.
Решение. 1) вычисляем коэффициенты, характеризующие скорость накопления ошибки счисления:
__ ^°ПУ _ 1
*пу = V 2 V, --= 1'2 -21 =- 0,52 мили;
тУ °/о _ 1
«V = Г 2 V, = V 2.21-foo = 0,30 мили;
”кт
ККт у g sin —— — V 8 • 1,1 sin 15° — 0,81 мили;
Крт = У2 т^т = У? -0,4 = 0,57 мили;
2) вычисляем векториальные ошибки // и углы af:
Ошибки Расчетные формулы I a /2 2 a Примечание
Л ®’7^ПУ^1 0,55 60° 0,30 120° 1-й курс
h 0,7Krh 0,31 150 0,10 300
Is 0,7Кк/1 0,85 10 0,72 20
h 0.7/С^/, 0,60 100 0,36 200
Л ^пу V t2 1,56 120° 2,43 240° 2-й курс
4 %v Vh 0,90 210 0,81 60
h *кт F't? 2,43 40 5,90 80
Л Т' t2 1,71 130 2,92 260
E 13,54
3) строим квадратичный полигон, объединяя векториальные ошибки попарно, для чего вместо двух ошибок l] и /у, имеющих взаимообратные направления, прокладываем одну, равную их разности, по направлению большей ошибки (рис. 258). Получаем [/2] = 1,94; 2а0“94°;
4) составляем и решаем систему уравнений
+ Ь2 = [/2] = 13,54,
а2 _ 52 р] = 1,94,
получаем а — 2,78 мили, 6 = 2,40 мили и угол, характеризующий направление большой оси относительно меридиана а0 = 47°.
472
Глава 16. Оценка точности плавания корабля
Средние квадратические ошибки по меридиану и mw известных элементах эллиптической ошибки вычисляются по формулам:
N
по параллели при
т Уа2 cos2 <z0 + b2 sin2 <z0;
mw — V fl2 sin2 a0 + b2 cos2 a0, а ошибка в долготе — по формуле = mw sec ?•
Так, при а — 2,78 мили, Ь = 2,40 мили, oq ~ 47° и y = 60° получим:
=== V(2,78-0,68)2 + (2,40 0,73)2 --- 2,58 мили;
mw = V (2,78-0.73)2 + (2,40-0,68)2 == 2,60 мили;
— 2,60 sec 60° = 5J2.
§ 90. ТОЧНОСТЬ ОПРЕДЕЛЕНИЯ МЕСТА
Производя измерение навигационных параметров, необходимых для определения места, наблюдатель должен:
— применять приборы и инструменты, обеспечивающие наибольшую точность измерений;
— при всякой к тому возможности производить серию измерений каждого параметра, так как среднее арифметическое обладает более высокой точностью, чем каждое отдельное измерение;
— иметь надлежащие навыки измерений имеющимися на корабле приборами и инструментами и поддерживать эти навыки систематической тренировкой в различных условиях.
Однако даже при самом тщательном выполнении изложенных условий измеряемые параметры будут неизбежно отягощены как случайными, так и систематическими ошибками. Наличие этих ошибок приводит к смещениям линий положения относительно действительного места на величины, называемые ошибками линий положения. Поэтому действительное место в большинстве случаев не совпадает с полученным.
Оценивая точность определения места, находят характеристики, выражающие количественную сторону возникающей ошибки и ее вероятность. Такими характеристиками являются эллиптическая или средняя квадратическая ошибка, а также средние квадратические ошибки вычисленных координат места.
В общем случае для оценки точности определения места необходимо:
1) оценить ошибки навигационных параметров;
2) вычислить ошибки линий положения;
3) вычислить элементы эллиптической ошибки (размеры полуосей эллипса а и b и направление большой оси а0) или среднюю квадратическую ошибку, являющуюся радиусом круга М~\а2 + Ь\ в пределах которого находится действительное место корабля.
Ошибки навигационных параметров
Для характеристики точности навигационных параметров используются средние квадратические ошибки, величины которых должны определяться опытным путем по результатам возможно большего числа измерений. Получаемые при этом ошибки следует накапливать для
§ 90. Точность определения места
473
использования их в аналогичных условиях. В некоторых случаях могут использоваться средние квадратические ошибки, полученные на основе анализа точности измерений, произведенных другими наблюдателями в идентичной обстановке при помощи однотипных технических средств. Для примерной оценки можно использовать средние значения средних квадратических ошибок навигационных параметров, которые приведены в приложении 6.
Средняя квадратическая ошибка любого навигационного параметра состоит из двух составляющих: случайной проявляющейся только в данном измерении, и повторяющейся (систематической) ^^пов’ проявляющейся во всех измерениях одного или нескольких навигационных параметров.
Ошибки и мЬ’пов имеют случайное происхождение, независимы друг от друга и должны суммироваться квадратически по формуле
= Vmlc, rmla0, • (1 6- 21)
где ти — суммарная или результирующая средняя квадратическая ошибка навигационного параметра.
Для получения предельной ошибки средняя квадратическая ошибка irtv умножается на коэффициент Кр, выбираемый из табл. 2 приложения 2 по заданной вероятности предельной ошибки.
Случайная составляющая суммарной ошибки состоит из случайной ошибки измерения навигационного параметра ш и случайной ошибки поправок к результату измерений. Для расчета средней квадратической ошибки применяется формула
— 1/< + .
^сл V ин дсл
Расчет средней квадратической ошибки ти измерения данного параметра производится по формуле
(16.22)
где [ДА] = Д^ + Д; + Д* + ,.. . , 4- Д* — сумма квадратов уклонений результатов измерений от среднего арифметического;
п — число измерений.
Ошибку Шу приближенно можно вычислить также способом, связанным с использованием размаха /?, равного разности между наибольшим и наименьшим результатами измерений, и коэффициента размаха KR или KR » выбираемого из табл. 1 приложения 2 по числу измерений
м „ Я )
или . (16.23>
тиИ ^R
474
Глава 16. Оценка точности плавания корабля
Средняя квадратическая ошибка среднего арифметического шсг из п измерений, содержащих как случайные, так и повторяющиеся ошибки, вычисляется по формуле
-7Г+ЧЛ + ^ПОВ- (16.24)
Из последней формулы видно, что точность среднего арифметического параметра повышается только за счет уменьшения случайной составляющей пгП измерения; случайная ошибка пг. поправок и повто-и асл
ряющаяся ошибка тп., остаются неизменными.
ипов
Средняя квадратическая ошибка т поправок вычисляется по сл
формуле
Vт~^ + -..........+ ’
где — средние квадратические ошибки отдельных поправок, учитываемых при исправлении результата измерения данного навигационного параметра.
Ошибка тп вычисляется аналогично, но при этом должны быть с/пов
учтены средние квадратические ошибки поправок, являющихся общими для нескольких измеренных параметров. Так, например, при измерении горизонтальных углов с помощью секстана ошибки совмещения изображений ориентиров в поле зрения трубы и ошибки отсчета углов будут случайными, а ошибка в поправке индекса и ошибка инструментальной поправки — повторяющимися.
Величины ошибок, входящих в случайную и повторяющуюся составляющие, приближенно могут быть оценены в соответствии с данными, полученными на основе анализа формул, по которым вычислялись поправки, или на основе результатов специальных испытаний, а также результатов, полученных в процессе эксплуатации технических средств.
Наиболее точно суммарную ошибку mLr навигационного параметра
с учетом ошибок т,, и тП одновременно можно вычислить по ссл ипон
формуле
(16.25)
где [хх] ===== xj -I- х\ 4- 4-,..., 4- х2п — сумма квадратов истинных оши-
бок, т. е. отклонений результатов измерений, исправленных всеми необходимыми поправками, от истинного значения измеряемой величины, полученного путем его вычисления или измерения с помощью более точных измерительных средств;
п — число измерений.
На практике обычно применяется первый способ оценки суммарной ошибки ти по формуле (16. 21) с раздельным учетом ошибок и ти , Способ расчета суммарной ошибки тс по формуле (16. 25) ипов
применяется в процессе специальных исследований, а также для получения материалов, характеризующих суммарные ошибки навигационных параметров, измеренных в различных условиях.
§ 90. Точность определения места
475
Зная суммарную ошибку ти, вычисленную по формуле (16.25), и вычислив ошибку mL, измерения по формуле (16.22) или (16.23) по тому же ряду измерений, можно вычислить суммарную ошибку поправок по формуле
т> -= - ^пов - Vml - т1’И .
Эта формула позволяет также по известной суммарной ошибке поправок и одной из ее составляющих вычислить другую составляющую. Так, например, если по ряду измерений какого-либо навигационного параметра вычислены ошибки mL, -2^5 и ти = 1J2, то суммарная ошибка поправок будет равна --у 2,52 — 1,22 ---2J2. Если одна из поправок вводится в результаты всех измерений, то ошибка этой поправки будет повторяющейся; оценив эту ошибку и найдя ее равной, например, 1'8, получим случайную составляющую т. ~ ]/2,22- 1.82 = 1-2.
дсл
Для вычисления достаточно достоверной ошибки измерения навигационного параметра необходим ряд из 7—11 и, как минимум, из 5 измерений. Результаты измерений должны быть предварительно приведены к одному зениту (месту) наблюдателя и к одному моменту по формуле
Un^U+MJz~ (16.26)
где Д/7г = Vи^Т ~~ поправка навигационного параметра, являющаяся следствием движения корабля, здесь V v — скорость изменения параметра вследствие движения корабля;
MJr = VUt^Т — поправка навигационного параметра, являющаяся следствием собственного движения ориентира относительно наблюдателя,
здесь VСт — скорость изменения параметра вследствие собственного движения ориентира,
АГ — промежуток времени между моментом, к которому приводится измеряемый параметр, и моментом его измерения.
Поправки и Д(7Г должны вычисляться с учетом знаков скоростей Vи VUt> а также знаков промежутков времени ДГ.
Скорость изменения навигационного параметра вследствие движения корабля вычисляется по формуле
Vuz- Vgcos(t -ПУ), (16.27)
где V — скорость корабля;
g — градиент навигационного параметра;
(~ — ПУ) — угол между направлением градиента и направлением движения корабля.
Знак VUg зависит от величины угла (х —- ПУ)\ при (т — /7У)<90° скорость Vv положительна, а при -- ПУ) >90° — отрицательна.
Если скорость корабля V выражать в милях за одну минуту, а градиент в единицах навигационного параметра на милю, то размер
476
Глава 16. Оценка точности плавания корабля
ность будет в единицах навигационного параметра за одну минуту времени.
Скорость VUt изменения параметра вследствие собственного движения ориентира, учитываемая только при измерении высот и азимутов светил, вычисляется по формулам:
— при измерении высот светил
Vhr =- 15 cos <psin А мин дуг/мин; (16.28)
— при измерении азимутов светил
VАт =- 0,25 (sin? — cos ?tg h cos А) град/мин, (16. 29)
где — широта места наблюдателя;
А — азимут светила, считаемый от полуночной части меридиана наблюдателя в обе стороны от 0 до 180°.
Для определения Vh и УАт по формулам (16.28) и (16.29) рассчитаны таблицы соответственно 15-а, 15-6 и 15-г МТ — 63.
Скорость Vh положительна от восхода светила до его кульминации
и отрицательна от кульминации до захода.
Знак скорости VАт указан в табл. 15-г перед ее величиной.
Оценка точности измерения пеленгов. В зависимости от используемых средств средняя квадратическая ошибка пгА измеренного с корабля истинного пеленга вычисляется следующим образом.
При использовании гирокомпаса
тл = /дакп„ "г и2ДГкп + отгк т + т2а + т?а, (16. 30)
где /пкп — средняя квадратическая ошибка измерения компасного пеленга, являющаяся следствием ошибок: наведения пеленгатора, отсчета пеленга, люфта и наклона пеленгатора вокруг оси, совпадающей с направлением визирования, а также его эксцентриситета; имеет среднюю величину 0,4—0°6 и должна определяться опытным путем;
Юдгк “ средняя квадратическая ошибка определения постоянной поправки гирокомпаса; составляет величину 0,2—0°5; определяется опытным путем (см. § 52);
/пгк — средняя квадратическая ошибка, характеризующая устойчивость гирокомпаса в меридиане в данных условиях плавания; величина /пгк определяется опытным путем (см. § 52) или выбирается из технической документации гирокомпаса;
т# — средняя квадратическая величина изменения постоянной поправки гирокомпаса, зависящая от широты места; эта ошибка близка к 0,2—0°3;
тдп и /псв - средние квадратические ошибки установки пеленгаторного репитера в диаметральной плоскости корабля /пдп и точности синхронной связи /псв, приближенно равные соответственно 0,2 и 0°08; последней ошибкой в большинстве случаев можно пренебречь.
§ 90. Точность определения места
477
Суммарная ошибка поправки гирокомпаса
«ДГК - ]/Хгк„ “ '"гК + Т Ч> + '"‘си
входит во все пеленги, измеренные с небольшим интервалом по времени, и является повторяющейся ошибкой.
При использовании магнитного компаса
тк 4- (16. 31)
где /пкп —средняя квадратическая ошибка измерения компасного пеленга, имеющая порядок 0,4—1°2;
md и т. — средние квадратические ошибки учтенных величин магнитного склонения md и девиации магнитного компаса т^ эти ошибки близки к 0,5—1°0 каждая.
Суммарная средняя квадратическая ошибка поправки магнитного компаса /пдМК — ]/ m2d + /п? входит во все пеленги, измеренные на данном курсе, и является повторяющейся ошибкой.
Для определения средней квадратической ошибки /пКПи измерения компасного пеленга с помощью пеленгатора гирокомпаса или магнитного компаса следует:
1) измерить 5—11 пеленгов видимого ориентира, фиксируя моменты измерений по секундомеру;
2) на средний момент по карте или с помощью РЛС измерить расстояние до того же ориентира;
3) рассчитать скорость изменения пеленга вследствие движения корабля;
4) вычислить поправки г для приведения пеленгов к одному зениту;
5) привести пеленги к зениту среднего пеленга;
6) по формуле (16.22) или (16.23) вычислить ошибку /nKn^.
Пример. Путь корабля /7 «У = 320°, скорость V — 20 уз (0,333 мили в 1 мин).
Измерено 5 пеленгов маяка, моменты измерений фиксировались по секундомеру; получено:
7t = 00*00', КП. = 205е,7; Г4 -= 00*57', КП< = 204^4;
72 — 00 22, т- 205,2; Г5 - 01 18, А775 = 203,8.
73 = 00 40, Л773 = 204,7;
Вычислить среднюю квадратическую ошибку измерения компасного пеленга ткп , если средняя дистанция до маяка 72-7 миль.
Решение. 1) приняв А77ср —205;0, по формулам (12.8) и (12. 13) вычисляем модуль градиента пеленга g и )гол т:
57°3 57°3
g -= в ~ — —^— = 8:2 на милю,
г « А — 90° == 205°0 - 90° = 115°0;
2) вычисляем скорость VA изменения пеленга
VA? = Vg cos (t — ПУ) = 0,333-8.2 cos (115° — 320°) = —2,48 град!мин\
478
Г лава 16. Оценка точности плавания корабля
3) приводим измеренные пеленги к одному зениту (на момент средних наблюдений) и рассчитываем уклонения приведенных пеленгов от их среднего значения
КП Т ДГ дг ДСгг кпп Д Д2
20527 оо-*оос 4-40е +0м67 —К7 204.0 —0.7 0,49
205,2 00 22 + 18 + 0,30 0,7 204,5 —0.2 0,04
204,7 00 40 00 0,00 0,0 204,7 0,0 0,00
204,4 00 57 —17 —0,28 +0,7 205.1 +0,4 0,16
203,8 01 18 —38 -0,63 + 1,6 205,4 +0,7 0,49
Среднее = 20427 [ДД] = 1,18
4) вычисляем искомую среднюю квадратическую ошибку /икп одного измерения пеленга
1/ [дд] -|/Т7ПГ ткпи - |/ ТТЛ- “ V ~4~~ °-54;
решая задачу с использованием коэффициента размаха, получаем: /? = КПтдх — Л77т1п — 1 °4;
К.& == 2,33 и тпкп == Л • К& ~ 0°6.
При использовании корабельного радиопеленгатора
тА = УтгЯя + т2гк + + т} , (16. 32)
где mq — средняя квадратическая ошибка измерения радиокурсового угла; имеет среднюю величину порядка 0,5—1^0 днем и 0,5—3°0 ночью;
mf — средняя квадратическая ошибка радио девиации, равная приближенно 0,5—0®6; порядок ее определения из наблюдений изложен в § 54; остальные обозначения прежние.
Ошибка mq определяется опытным путем, аналогично определению ошибки /пкп компасного пеленга. Отсчеты радиокурсовых углов должны браться при одном и том же отсчете компасного курса или вычисляться по формуле
РКУ = РП-КК,
где РП — радиопеленг;
КК — компасный курс в момент взятия отсчета радиопеленга.
При отсутствии опытных данных приближенные величины ошибок mq* для радиопеленгаторов с гониометрами в зависимости от расстояний до радиомаяков могут быть вычислены по формуле
m =0?3+#, (16.33)
*и Дртс
где D — расстояние от корабля до радиомаяка;
Дртс ~ дальность действия радиомаяка, указанная в описании радиотехнических средств навигационного оборудования.
Ночью ошибки, вычисляемые по формуле (16.33), должны быть увеличены не менее чем на 5О°/о. Для визуальных радиопеленгаторов
§ 90. Точность определения места
479
с электронно-лучевыми индикаторами ошибки mq приближенно на 20—25% меньше рассчитанных для радиопеленгаторов с гониометрами.
Средние квадратические ошибки mq и относятся к случайным ошибкам истинного пеленга, а ошибка поправки гирокомпаса тдгк = I тгк "Ь тдгкп ~~ к повторяющимся.
При использовании гидроакустических и радиолокационных станций. Средние квадратические ошибки истинных пеленгов, измеренных с помощью гидроакустических и радиолокационных станций, вычисляются по формуле (16.32) с заменой в ней ошибки радиодевиации на ошибку /пдку поправки курсовых углов; величина этой ошибки определяется при выверке станции и указывается в технической документации.
Суммарная ошибка пгА истинного пеленга, измеренного любым способом, может вычисляться также по формуле (16.25). Необходимые для решения задачи истинные ошибки xt находятся как разности измеренных пеленгов, исправленных всеми поправками, и ортодромических пеленгов А, определенных по карте для точки, соответствующей точному месту корабля. Так как на карте в нормальной проекции Меркатора непосредственно измеряется локсодромический пеленг Р, то для получения ортодромического пеленга А следует применять формулу
А = Р— ф,
где ф —• ортодромическая поправка.
Обсервованное место, с которого измеряются пеленги на ориентир, должно определяться одним из точных способов.
При использовании секторных радиомаяков. Основными источниками ошибок при использовании секторных радиомаяков являются:
— наличие значительной равносигнальной зоны и сложность точного определения ее середины, соответствующей границе раздела двух секторов. Средняя квадратическая ошибка определения числа начальных сигналов составляет от 0,3 до 0,5 числа пропущенных сигналов, т. е. 1—2 сигнала днем и 2—3 сигнала ночью;
— искажение электромагнитного поля отраженными от ионосферы сигналами. Эти ошибки особенно заметны при расстояниях до радиомаяков от 200 до 500 миль и ночью близки к 2—3 сигналам;
— влияние суши.
Указанные ошибки имеют случайный характер и могут быть уменьшены, если для определения места учитывать средние отсчеты начальных сигналов, вычисленные по результатам двух-трехкратного счета;
Для определения средней квадратической ошибки измере-
ния пеленгов с помощью секторных радиомаяков следует:
1) произвести выбранным способом (для которого определяется ошибка измерения пеленгов) счет начальных и конечных сигналов в 5—7 циклах работы радиомаяка. При счете сигналов на слух вычислить поправки Алн счета и исправить ими наблюденные числа начальных сигналов;
2) вычислить модуль g и направление т вектора градиента;
3) привести числа начальных сигналов к одному зениту на момент средних наблюдений и по формуле (16.22) или (16.23) рассчитать среднюю квадратическую ошибку трп .
480
Глава 16. Оценка точности плавания корабля
В рассматриваемом случае ошибка /npn„ характеризует суммарную
среднюю квадратическую ошибку истинных пеленгов (случайную составляющую), так как ошибок поправок (ввиду отсутствия самих поправок измеренных пеленгов) в данном случае нет.
Более строгое решение, позволяющее учесть влияние нестабильности частоты радиомаяков, влияние рельефа земной поверхности, над которой распространяются радиоволны, нестабильности границ секторов, может быть выполнено по формуле (16.25). Истинные ошибки должны в этом случае находиться как разности между принятым и исправленным числом начальных сигналов и числом сигналов для обсервованного места корабля, полученного каким-либо точным способом.
Пример. Находясь в точке <р = 71° N, X — 39е Ost, при счете сигналов секторного радиомаяка Панкратьев получили:
— 00“00S 27 точек и 31 тире; Т4-03х00г, 21 точку и 31 тире;
Т2 = 01 00, 24 точки и 32 тире; Т5 = 04 00 , 26 точек и 30 тире.
Т3 = 02 00 , 23 точки и 30 тире;
Вычислить среднюю квадратическую ошибку znpn измерения пеленгов, если ПУ — 90° и V — 21 уз (0,35 мили в 1 мин).
Решение. 1) На карте для ближайших к счислимому месту изолиний измеряем кратчайшее расстояние Дл между ними и разность оцифровок At/; получаем Дп — 8,8 мили, Д£/= 5 знаков (точек);
2) ро формуле (12. 4) вычисляем модуль градиента
_ Д67 5
g~ tin ~ 8,8
— 0,57 знаков на милю;
3) измеряем направление вектора градиента по нормали к изолинии, соответствующей 30 точкам в сторону возрастания отсчета; получаем т = ЗЮ°;
4) по формуле (16.27) вычисляем скорость изменения отсчетов за 1 мин времени
= V£cos(t — 77У) = 0,35-0,57 cos (310° — 90°) =---0.15 знака/мин',
А 50 ------ (Лд + ПК)
5) исправляем отсчеты начальных сигналов поправками Длн =--------------------•
(где лн + лк— сумма начальных и конечных сигналов), приводим исправленные отсчеты к зениту средних наблюдений и вычисляем среднюю квадратическую ошибку /прп .
Г лн Лниспр АТ ДС7г лнп А Д2
знаки знаки знаки знаки
00*00с 27 28 +2* -0,3 27,7 + 1,0 1,00
01 00 24 26 + 1 -0,2 25,8 -0,9 0,81
02 00 23 26,5 0 0,0 26,5 —0,2 0,04
03 00 21 25 —1 +0,2 25,2 -1,5 2,25
04 00 26 28 —2 +0,3 28,3 + 1,6 2,56
Среднее 26,7 [ДА] = 6,66
1/6,66 1О
трпи= У — = 13 знака.
Для перехода от ошибки /пРПи» выраженной в числе знаков к ошибке ^рпи в градусах, следует войти в таблицу для определения радиопеленгов, имеющуюся в описании радиотехнических средств навигационного оборудования и в секторе, соответствующем месту корабля в строке для числа сигналов лн, выбрать цену
§ 90. Точность определения места
481
одного сигнала в градусах, по которой вычислить искомую ошибку пеленга. Так, для условий нашего примера получим: сектор ПЗ, средний пеленг РП— 239^8, цена одного сигнала 0^2 и средняя квадратическая ошибка тРПи = 0^2-1,3 = 0°2б.
Если при условиях того же примера принять, что для обсервованного места (полученного с помощью высокоточной РНС) на момент средних измерений с карты снят отсчет начальных сигналов лн — 28,5 точек, то, найдя истинные ошибки х; = лНп — Пц, получим: — — 0,8; х2 = — 2,7; х3 — — 2,0;. х4 = —3,3; л5 = — 0,2; [ах] = 22,86 и /ПрП = 2,2 знака или тРП = 0.2-2,2 — 0°44.
При использовании радиомаяков с вращающейся характеристикой направленности средние квадратические ошибки измеренных пеленгов принимаются равными 1°. Определение их из наблюдений производится в том же порядке, что и для секторных радиомаяков.
Оценка точности измерения расстояний. В зависимости от используемых средств средние квадратические ошибки измерения расстояний вычисляются следующим образом.
При использовании радиолокационных и гидроакустических станций. Средние значения средних квадратических или срединных ошибок измерения расстояний с помощью радиолокационных и гидроакустических станций до точечных ориентиров приводятся в технической документации станций. Эти же ошибки можно определить опытным путем в следующем порядке:
1) выбрать точечный ориентир, хорошо отражающий облучающие его импульсы;
2) измерить ряд (не менее 5) расстояний до выбранного ориентира, фиксируя моменты измерений по секундомеру; в момент измерения среднего расстояния взять пеленг ориентира;
3) определить угол т;
4) по формуле (16. 27) вычислить скорость VD изменения расстояния за одну минуту времени, учтя, что градиент 1;
5) привести измеренные расстояния к одному зениту и по формуле (16. 22) или (16. 23) вычислить искомую ошибку гпП , соответ-ствующую случайной составляющей средней квадратической ошибки измеренного расстояния.
Для получения суммарной средней "квадратической ошибки следует применить формулу (16. 25), вычисляя истинные ошибки как разности измеренных расстояний и расстояний, снимаемых с карты до ориентира от места корабля, определяемого каким-либо точным способом (например, по двум углам или с помощью высокоточной РНС); данная задача наиболее просто решается при стоянке корабля.
Пример. ИК — 320°, скорость V — 18 уз (0,3 мили в 1 мин). С помощью РЛС измерено 5 расстояний до точечного ориентира:
r^OO^OOS кбт; T4 = 01-*05S О4==89,1 кбт\
72 = 00 25, D2 = 90,l кбт\ Т8 = 01 24 , О5 = 88.4 кбт.
Т3 — 00 40, О3 = 89,5 кбт*.
Вычислить среднюю квадратическую ошибку измерения расстояния (случайную составляющую), если средний /777=275°.
Решение. 1) Определяем угол т, который в данном случае равен пеленгу от ориентира на корабль
т = /777ср ± 180° = 95°;
2) вычисляем скорость изменения расстояния вследствие движения корабля
VDz — Vg cos (' — ИК) = 0,3-1 cos (95° — 320°) — —0,21 мили}мин\
31 Заказ 1833
482
Г лава 16. Оценка точности плавания корабля
3) приводим измеренные расстояния к зениту средних измерений и вычисляем сумму квадратов уклонений отдельных измерений от среднего арифметического
Т D ДТ дт Dn Д Д2
00*00с кбт 90,6 +40f +0*67 кбт -1,41 кбт 89,19 —0,45 0,20
00 25 90,1 + 15 +0,25 -0,52 89,58 —0,06 0,00
00 40 89,5 00 0,00 0,00 89,50 -0,14 0,02
01 05 89,1 —25 —0,42 +0,88 89,98 +0,34 0,12
01 24 88,4 —44 —0,73 + 1,53 89,93 + 0,29 0,08
R 4) вычис. 1яем сре днюю ква, дратическ; т- Среднее = 89,64 ую ошибку mD : = jZ= 0,32 кбт [ДД] = 0,42
или
mD 100
"Чо/о==—= °’36%*
При определении расстояния по вертикальному углу средняя квадратическая ошибка mD может быть определена из наблюдений так же, как при использовании радиолокационных и гидролокационных станций или же рассчитана по формулам:
— если основание ориентира скрыто видимым горизонтом
Мр _ Dm'v g “ D + Р'
mD
(16. 34)
— если основание ориентира над видимым горизонтом OTz>H=1’86-^, (16.35)
где /Пр и тл — средние квадратические ошибки измеренных вертикальных углов;
D — расстояние до ориентира в милях;
р, а — вертикальный угол в минутах дуги;
Л — высота ориентира в метрах.
Величины тп по приведенным формулам получаются в морских милях.
Ошибки /Пр и тЛ зависят от видимости ориентира и горизонта (или береговой черты) и имеют среднюю величину от 0,5 до 2',0.
Для определения средней квадратической ошибки измерения вертикального угла следует:
1) нанести место корабля на карту;
2) измерить 5—7 вертикальных углов, фиксируя моменты измерений по секундомеру, и на момент, близкий к среднему измерению, взять пеленг ориентира;
3) вычислить по формуле (12.23) или (12.24) градиент угла (по расстоянию до ориентира, снятому с карты или полученному по измерен-
§ 90. Точность определения места 483
ному углу) и по формуле (16.27)—скорость изменения угла за одну минуту;
4) привести измеренные углы к одному зениту и по формуле (16. 22) или (16. 23) вычислить искомую ошибку пг^ (или /па).
Вычисленная рассмотренным способом ошибка (или /пв) не содержит повторяющейся составляющей, зависящей от ошибки в поправке индекса секстана и от ненормального состояния атмосферы. Ошибка, содержащая как случайную, так и повторяющуюся составляющие может быть вычислена по формуле (16.21) с учетом средних квадратических ошибок поправок или по формуле (16.25). В последнем случае необходимо:
1) углы, измеренные над видимым горизонтом, исправить поправками i 4- s, г —£>с*13 (земная рефракция) и за наклонение горизонта &hd, а углы, измеренные над береговой чертой, — поправками t + s;
2) вместо среднего отсчета для получения истинных ошибок использовать угол во или а0, вычисленный по формулам:
— при измерении углов над видимым горизонтом
₽0= 1,86-^--0,5£>, (16. 36>
— при измерении углов над основанием ориентира или над береговой чертой
а0= 1,86-^- • (16.37}
В приведенных формулах D — расстояние до ориентира (в милях), измеренное по карте от места корабля, определенного на момент измерения одного из углов каким-либо точным способом (например по трем расстояниям, двум углам, трем пеленгам).
Пример. Истинный курс корабля ИА* == 100°, скорость V = 24 уз (0,4 мили в 1 мин}. Измерены вертикальные углы ориентира над видимым горизонтом:
Т1==00-«00с, осх = 0°58',3; 7’4 = 02Л16с, ос4 = 0°56,'2;
7’2 = 00 47, ос2 = 0 57,1; 7’5 = 02 42, ос5 = 0 56,8.
73 = 01 25, ос3 = 0 56,8;
Вычислить среднюю квадратическую ошибку измерения расстояния mD , если на момент Т3 истинный пеленг ориентира 7777=250°, расстояние до ориентира (с карты) 25 миль, /4-$ = +0^4 и возвышение глаза наблюдателя е = 8 м. При расчете суммарной средней квадратической ошибки учесть средние значения ошибок: погрешности индекса mtd(,s = 0^2; наклонения горизонта и земной рефракции md — тг — 0>5.
Решение. 1) Вычисляем угол 0 над истинным горизонтом на момент Т$.
ос =
i 4- 5 = 4-0,4
?изм=0°57;2 г= —1,9 d= -5,0 р = 0°50;3;
2) вычисляем по формулам (12. 23) модуль градиента g и угол т g= = 25 t?°— = 3;о на милю, Т = ИП= 250°;
31»
484
Г лава 16. Оценка точности плавания корабля
3) вычисляем по формуле (16. 27) скорость изменения угла
Vp — Vgcos (т — ИК) = 0,4• 3,0cos (250° — 100°) — — 1 '04 в минуту;
4) приводим отсчеты углов к зениту средних измерений и вычисляем среднюю квадратическую ошибку (без учета ошибок поправок).
т ос ДГ ДГ оса Д Д2
00*00с 0°58;3 4-1*25с 4-1*42 —С5 0°5б;8 —о;2 о;о4
00 47 0 57,1 4-0 38 4-0,63 —0,7 0 56,4 -0,6 0,36
01 25 0 56,8 0 00 0,00 0,0 0 56,8 -0,2 0,04
02 16 0 56,2 -0 51 —0,85 4-0,9 0 57,1 4-0,1 0.01
02 42 0 56,8 —1 17 —1,28 4-1,3 0 58,1 4-1,1 1,21
Среднее = -о°57;о [ДД] = 1J66
т₽„=]/г^=о;6:
5) вычисляем среднюю квадратическую ошибку измеренного угла, учтя средние квадратические ошибки поправок ml+s, тг и md
т? « т2 + m*d= /0,'6» 4- О',2* + 0J52 4- 0J52 -1J0;
б) вычисляем по формуле (16. 34) среднюю квадратическую ошибку измерения расстояния
1 '0
тп =—- = -~г=0,3 мили.
g 3,0
При использовании навигационной гидроакустической системы в дальномерном варианте средняя квадратическая ошибка измеренного расстояния вычисляется по формуле
mD = У(tmj + (16. 38)
где с3 — горизонтальная скорость звука в воде, м;
пгСз — средняя квадратическая ошибка в принятой скорости звука сэ; близка к 1—2 м/сек;
t — промежуток времени между моментами посылки сигнала от фокуса системы и приема его на корабле, сек;
mt — средняя квадратическая ошибка наблюденного промежутка времени; возрастает с увеличением расстояния вследствие увеличения длительности сигнала в точке приема и большой его расплывчатости; имеет величину от 0,5 до 1 сек.
Пример. Вычислить величину и среднюю квадратическую ошибку расстояния £>, измеренного до фокуса гидроакустической системы, если 10 мин 40 сек (640 сек), с3 — 1450 м/сек, тСз = 1 м/сек и mt — 0,5 сек.
Решение. 1) D = c3t == 1450-640 = 928 000 м или 501,1 мили;
2) mD = ^(tme^2 4- (с3/и/)2 = 1^(640-1)2 4- (1450-0,5)2 — 967 м или 0,52 мили.
Средние квадратические ошибки mD измеренных расстояний по опытным данным определяются в следующем порядке. Измеренные расстояния, вычисленные по формуле Dt = c3th для получения истинных ошибок сравниваются с истинным расстоянием, вычисленным по координатам
§ 90. Точность определения места
485
мест корабля и фокуса гидроакустической системы. Для расчета mD применяется формула (16.25).
Оценка точности измерения разности расстояний. В зависимости от используемых средств средние квадратические ошибки разности расстояний (или соответствующих им измеряемых величин) вычисляются следующим образом.
При использовании импульсных или импульсно-фазовых разностнодальномерных радионавигационных систем (в режиме измерений совмещением по огибающей импульса) средняя квадратическая ошибка измеряемого навигационного параметра — разности моментов приема импульсов от ведущей и ведомой станций, — определяется по формулам:
1. При приеме поверхностных радиоволн
+ + С (16.39)
где t — наблюденное время запаздывания прихода сигналов на корабль от ведущей и ведомой станций без учета времени кодовой задержки /к и полупериода посылки импульсов;
с и тс — скорость и средняя квадратическая ошибка скорости распространения радиоволн, соответственно; среднее значение отношения (тс: с) близко к 7 • 10“б;
т} и т2 — средние квадратические ошибки синхронизации ведущей и ведомой станций; близки к 0,3—0,4 мксек для импульсных и 0,1 —0,2 мксек для импульсно-фазовух РНС;
/пин — средняя квадратическая аппаратурная ошибка, свойственная корабельному приемоиндикатору; имеет порядок 1 — 1,5 мксек.
Суммарная средняя квадратическая ошибка /п/пов при приеме поверхностных радиоволн имеет величину 1,5—2 мксек.
2. При приеме пространственных радиоволн как от ведущей, так и от ведомой станций
mtnf = , (16. 40)
где величины и m — средние квадратические ошибки, каждая из которых включает две составляющие, одна из которых равна рассмотренной выше ошибке т/пов для случая приема поверхностных радиоволн, а другая — т. — средняя квадратическая ошибка учиты-пр
ваемой пространственной поправки, зависящая от непостоянства высоты слоя ионосферы, отражающего сигналы. Для расчета тх применяется формула
т. = + т2 . (16.41)
‘i V пов пр
Ошибку /пд в мксек при известном расстоянии D в км между кораблем и станцией, от которой принимаются пространственные сигналы, можно вычислить по приближенной формуле
rn = 4300:7). (16.42)
пр
Суммарные ошибки т для различных расстояний 7)f, вместо вычисления по формулам, удобно определять по графику, приведенному на рис. 259.
Для квадратического сложения ошибок т можно применять график, приведенный на рис. 260.
486
Г лава 16. Оценка точности плавания корабля
При приеме пространственных сигналов от одной из станций (ведущей или ведомой) средняя квадратическая ошибка навигационного параметра вычисляется по формуле (16.41) или определяется по графику (рис. 259) по расстоянию D до станции, от которой принимаются пространственные радиоволны, т. е. считается, что пов
Рис. 259
. Дано; D=717 милям.
Определить тх (радиосигнал пространственный).
Ответ: = 3,6 мксек
Пример. Определить ожидаемую среднюю квадратическую ошибку т^пр измерения времени запаздывания сигналов, принимаемых от пары станций РНС Лоран-А, если оба сигнала пространственные, а расстояния до станций Dt = 520 миль и £)2 = 700 миль.
Решение. 1) По графику (рис. 259) для расстояний 520 и 700 миль определяем = 4,7 мксек, — 3,7 мксек',
2) по формуле (16. 40) или с помощью графика на рис. 260 находим искомую ошибку m,np = 6,0 мксек.
При известной ошибке mt навигационного параметра, выраженной в микросекундах, средняя квадратическая ошибка тг разности расстояний в милях вычисляется по формуле
тпг = cmt, (16.43)
где с — скорость распространения радиоволн, равная 0,1618 мили!мксек.
Для импульсно-фазовых РНС при измерениях по фазе средние квадратические ошибки mt при приеме поверхностных радиоволн составляют 0,5—0,7 мксек,', при приеме же пространственных радиоволн эти ошибки должны определяться так же, как для импульсных РНС.
Наиболее точный способ определения средних квадратических ошибок tnt из наблюдений состоит в следующем:
1) идя вблизи берега, имеющего хорошее навигационное оборудование, следует определять место корабля с наибольшей возможной точностью (например, по двум углам, трем визуальным пеленгам или по трем расстояниям до точечных ориентиров), фиксируя моменты определений по секундомеру;
2) в этот же период с помощью корабельного приемоиндикатора произвести 7—11 измерений промежутков времени запаздывания принимаемых сигналов, также замечая время измерений по секундо
§ 90. Точность определения места
487
меру; род сигналов (поверхностные или пространственные) должен быть определен заблаговременно;
3) на момент измерения каждого параметра th интерполируя между обсервованными точками, нанесенными на радионавигационную карту с гиперболическими изолиниями, снять истинные значения /0 промежутков времени запаздывания принимаемых сигналов;
4) вычислить истинные ошибки x — iL— tQ и по формуле (16.25) рассчитать искомую ошибку mt.
Рис. 260
Дано: т_ — 3,7 мксек, т_ — 4,0 мксек. ’I "2
Определить т/пр.
Ответ: /и^пр = 5,5 мксек
В тех случаях, когда принимались пространственные сигналы, измеренные с,помощью индикатора параметры вперед образованием разностей х должны быть исправлены поправками пространственных радиоволн.
Ошибка mt измеряемого параметра может быть также вычислена по отклонениям измеренных промежутков времени tt от среднего арифметического. При этом общая продолжительность измерений должна быть не меньше периода колебаний (изменения высоты) отражающего слоя ионосферы, т. е. 8—15 мин.
488
Глава 16. Оценка точности плавания корабля
Если продолжительность измерений будет меньше указанной, то вычисленная величина mt будет характеризовать лишь суммарную ошибку для случая приема поверхностных радиоволн.
Пример. 9 = 67° N, X = 10° ТГ, ПУ — 25°, V ==• 18 уз (0,3 мили в 1 мин). Ночью произвели измерения разностей расстояний (времен t запаздывания приема сигналов) от пары станций Лоран-А; 1L1; моменты измерений фиксировались по секундомеру:
7*1 = 00*00*, = 3170 мксек;
Т2 — 01 12, t2 = 3164 мксек;
7*3 = 02 24 , /3 = 3166 мксек;
Т5 = 05*35*» t5 — 3157 мксек;
Ть = 07 12, te = 3163 мксек; 7*7 = 08 50 , t7 — 3165 мксек.
7*4 = 03 15, f4 = 3161 мксек;
Вычислить среднюю квадратическую ошибку пг;.
Решение. 1) По карте измеряем кратчайшее расстояние Дп между изолиниями, ближайшими к счислимому месту корабля, и разность Д/ оцифровок этих изолиний; получаем Дп = 14,0 мили, Д/ — 50 мксек;
М 50 „ __
2) вычисляем модуль градиента g — = 3,57 мксек на милю;
3) измеряем направление градиента по нормали к изолинии t — 3200 в сторону возрастания отсчетов; получаем г = 175°;
4) вычисляем скорость изменения навигационного параметра под влиянием движения корабля
Vtz — Vg cos (т — ПУ) — 0,3-3,57 cos (175° — 25°) = —0,93 мксек/мин;
5) приводим результаты измерений к зениту среднего измерения и рассчитываем ошибку mt
т t Д7* Д7* д^ Д Д2
мксек мксек мксек
00*00* 3170 +3*15* +3*25 -3,0 3167,0 +2,5 6,25
01 12 3164 +2 03 +2,05 -1,9 3162,1 —2,4 5,76
02 24 3166 + 0 51 +0,85 -0,8 3165,2 + 0,7 0,49
03 15 3161 0 00 0,00 0,0 3161,0 -3,5 12,25
05 35 3157 —2 20 —2,33 + 2,2 3159,2 —5,3 28,09
07 12 3163 —3 57 —3,95 + 3,7 3166,7 +2,2 4,84
08 50 3165 —5 35 —5,58 + 5,2 3170.2 + 5,7 32,49
Среднее 3164,5 [ДД] = 90,17
= 3,9 мксек.
При использовании фазовых разностно-дальномерных систем непосредственно измеряемыми параметрами являются разности фаз. Ошибки этих разностей зависят от следующих факторов:
— личных ошибок наблюдателя, сказывающихся, например, в неточностях снятия отсчетов по шкалам фазоиндикатора;
— инструментальных ошибок, зависящих от несовершенства и неточности синхронизации береговых станций и корабельного фазоиндикатора; указанные ошибки изменяются, в частности, от изменения эксплуатационного режима индикатора и поэтому соблюдению установленного режима в процессе измерений должно уделяться самое серьезное внимание;
§ 90. Точность определения места
489
— влияния электрических неоднородностей поверхности Земли по линии распространения радиоволн;
— влияния отражающего слоя ионосферы (ночной эффект).
Личные ошибки малы и ими в большинстве случаев пренебрегают.
Инструментальные ошибки содержат как систематические, так и случайные составляющие. Систематические составляющие обычно исключаются при регулировке системы, случайные же составляющие, характеризуемые средней квадратической величиной тип, определяются опытным путем и указываются в технической документации аппаратуры. Для современных фазовых РНС ошибки в разности расстояний имеют величину порядка 0,005 ф. ц., что в зависимости от длины волн составляет от 3 до 30 м.
Влияние неоднородности поверхности Земли по линии распространения радиоволн сказывается в появлении изменений фазы электромагнитного поля в точке приема; эти изменения могут быть определены и введены в виде поправок в результаты измерений. Остаточная ошибка пгс в разности расстояний зависит от точности определения поправочных величин и указывается в специальных руководствах; ошибки пгс достигают 0,020 — 0,025 ф. ц. и при длине волны А, = 3000 м лежат в пределах от 25 до 70 м, увеличиваясь с увеличением длины волн. Для определения поправок измеряемых разностей фаз необходимо периодически определять место корабля с наибольшей возможной точностью и в моменты определений измерять разности фаз. Искомые поправки вычисляются как разности снятых с карты по сетке изолиний значений навигационного параметра и отсчетов по индикатору, исправленных известными инструментальными поправками.
Наибольшее значение имеют ошибки, являющиеся следствием влияния отражающего слоя ионосферы. Средняя квадратическая ошибка щЭф разности расстояний, возникающая под влиянием ионосферы, лежит в пределах от 0,05 до 0,1 ф. ц. и может достигать 300 м и более; эти ошибки в наибольшей степени сказываются в ночное время и в сумерки.
Суммарные ошибки измеряемых разностей фаз достигают 0,05 цикла днем и до 0,1 цикла ночью. При длине волны А, = 3000 м указанным ошибкам будут соответствовать средние квадратические ошибки шг разностей расстояний 150—300 м. При наличии помех указанные ошибки увеличиваются в 1,5—2 раза.
Оценка точности измерения горизонтальных углов. Средние квадратические ошибки измерения горизонтальных углов секстаном зависят от следующих факторов:
— качества подготовки секстана к наблюдениям, т. е. проверки и устранения неперпендикулярности зеркал и непараллельности оптической трубы плоскости лимба;
— точности определения поправки индекса;
— точности совмещения изображений, точности снятия отсчетов, наклона секстана относительно горизонта при совмещении изображений и др.
Суммарная средняя квадратическая ошибка та измерения горизонтальных углов у достаточно тренированных наблюдателей не должна превышать 2'.
Определение данной ошибки из наблюдений производится в порядке, изложенном для других навигационных параметров. Модуль градиента угла (в минутах дуги на 1 м) и угол т, необходимые для вычисления скорости изменения угла за 1 мин времени, определяются графическим или аналитическим путем, как указано в § 69.
490
Г лава 16. Оценка точности плавания корабля
Оценка точности измерения высот светил. В зависимости от используемых средств средние квадратические ошибки измерения высот светил вычисляются следующим образом.
При использовании навигационного секстана случайные ошибки измерения высот зависят от следующих основных причин:
— нечеткости видимого горизонта (/пГор = 0,3— Г,0);
— неточности приведения светила на линию видимого горизонта (я?сов == 0,2 — О',7) ;
— ошибок отсчета (/пОтс = 0,1—О', 15);
— наклона секстана относительно вертикала светила (/пн = = 0,1—О',5);
— ошибки в учтенной астрономической рефракции (/пр =0,1 —О',2);
— ошибки в учтенном параллаксе (для Луны тр = 0,1—О',2).
Нечеткость видимого горизонта является основной причиной появления случайных ошибок измерения высот светил в сумерки и ночью; численную характеристику тпГОр нечеткости видимого горизонта в данных конкретных условиях можно найти по 3—7 отсчетам секстана при совмещении прямовидимого и дважды отраженного изображений горизонта; расчет /Пгор производится по формуле (16.22) или (16.23).
Средняя квадратическая величина случайной составляющей ошибки высоты вычисляется по формуле
тлсл = 0:3 + mrop. (16.44)
Так, если при совмещении прямовидимого и дважды отраженного изображений видимого горизонта в поле зрения секстана получены отсчеты 359°55'8, 359°56!2 и 359°57;8, то размах R равен 2'0, 1,69
(из табл. 1 приложения 2), /пгор = 1'2 и mhcji = 1;5.
Средняя квадратическая величина случайной составляющей ошибки в измеренной высоте светила mhcji = тЛи и при достаточно четком видимом горизонте близка к 0,4—1'4.
Систематическая (повторяющаяся) составляющая ошибки высоты светила зависит от величин ошибок поправок, учтенных при исправлении высоты; такими ошибками являются:
— субъективная, являющаяся личной ошибкой наблюдателя (/Псуб :==: 0,1 — О',7.);
— ошибка поправки индекса (т1 = 0,1 — О',2);
— ошибка инструментальной поправки секстана (т5 = 0,1- 0;3 в зависимости от срока, прошедшего после проверки секстана);
— ошибка в наклонении видимого горизонта (при выборке из таблиц md — 0,5 — О',6; при использовании наклономера md=0,l—О',2).
Средняя квадратическая величина повторяющейся составляющей ошибки высоты светила /^лп08 колеблется в пределах 0,2—Г,0.
Суммарная средняя квадратическая ошибка средней арифметической высоты из серии высот вычисляется по формуле
тн = ]/ -jt + т2 + т£ . (16. 45)
Г П “ЛСЛ ПОВ
Если случайные и систематические ошибки одинаковы, то при пяти измерениях в серии средняя высота будет примерно на 40—45% точнее каждой отдельной высоты только за счет случайной составляющей, так как при осреднении высот систематическая ошибка не уменьшается.
При использовании секстана с искусственным горизонтом основные причины появления как случайных, так и систематических ошибок изме
§ 90. Точность определения места
491
ряемых высот остаются теми же, что и для навигационного секстана, за исключением ошибок, зависящих от нечеткости и наклонения видимого горизонта. Вместо них появляется ошибка направления гирогоризонта, указываемая в технической документации прибора, которая является систематической. Суммарная средняя квадратическая ошибка высот светил, измеряемых с помощью секстана с искусственным горизонтом, близка к 2—2',5.
Для определения средней квадратической ошибки измерения высот светил из наблюдений следует:
1) измерить 5—7 высот светила, фиксируя моменты измерений по секундомеру, и в это же время или сразу после измерения высот взять пеленг светила с помощью пеленгатора;
2) вычислить скорость изменения высоты светила за одну минуту времени за счет движения корабля Vhz и за счет суточного вращения Земли Vhr по формулам (16. 27) и (16. 28) в виде:
Vhz = l/cos(A - ПУ)\
VhT = locos sin Л.
Величины Vhz и Vhr обычно выбираются из табл. 16 и 15-а МТ—63; 3) вычислить алгебраическую сумму скоростей Vhz и Vhr
4) привести высоты к одному моменту и к одному зениту, соответствующим, например, моменту измерения средней в ряду высоты; поправки за приведение высот вычисляются по формуле
ДЛ, = дг„
где АТ*, — Т — 7} — промежутки времени между моментом Г, к которому приводятся высоты, и моментами измерений Г/, 5) вычислить среднюю из приведенных высот Лср, найти разности
А/ —Л, —Лср и по формуле (16.22) или (16.23) рассчитать среднюю квадратическую ошибку одного измерения высоты.
Пример. Широта места корабля = 46°44' N, ПУ — 10°, V = 21 уз (0,35 мили в I мин). Измерено 5 высот звезды; моменты измерений фиксировались по секундомеру; получены следующие результаты:
7\ = 00*00с, oct = 24°49J3; Т4 = 01*30с, ос, = 24°58 ;2;
7’2 = 00 46, ос2 = 24 53,7; Г5 = 02 07 , ос5 = 25 04,0.
7*3 = 01 15 , ос3 = 24 56,0;
Вычислить средние квадратические ошибки одного измерения высоты и средней арифметической высоты /7цср, если азимут звезды Л = 45°.
Решение. 1) Вычисляем скорости изменения высоты и V^
Vhg = V cos (Л — ПУ) — 0,35 cos (45° — 10°) = 4-0 J 29 в минуту,
VhT— 15 cosf sin Л = 15cos46°44' sin 45° = +7J29 в минуту;
2) вычисляем суммарную скорость изменения высоты = Vhg 4- VhT~ = 4-7^6 в минуту;
492
Глава 16. Оценка точности плавания корабля
3) приводим высоты к одному зениту и моменту
т ос ДГ дг ДЛ Ли д Д2
00*00^ 24°49J3 + l*15f + 1*25 4-9J5 24O58J8 +1,6 2,56
00 46 53,7 +0 29 +0.48 +3,6 57,3 +0,1 0,01
01 15 56,0 0 00 0,00 0,0 56,0 —1,2 1,44
01 30 58,2 -0 15 -0,25 -1,9 56,3 -0,9 0,81
02 07 25 04,0 —0 52 —0,87 —6,6 57,4 +0,2 0,04
4) вычис. ляем иско мые ошибк: '”»«= 1 и % и Среднее = 1Лср - 24C57J2 i; i. [ДД] = 4,86
m 1Л (уч
/ПЛгп — —0,0,
с₽ /5 У 5
Вычисление средней квадратической ошибки измерения высот светил можно упростить, если применить способ, связанный с использованием размаха R между наибольшим и наименьшим значениями высот. Величину размаха при этом удобно определять графоаналитическим путем без приведения высот к одному моменту и зениту. Для этого следует:
1) нанести на график в прямоугольной системе координат измеренные высоты светил по времени, как показано на рис. 261 для условий решенного выше примера;
Рис. 261
2) вычислить скорости Vhz и Vhr изменения высоты светила за одну минуту времени (или выбрать их значения из МТ—63) и найти их алгебраическую сумму V
3) на оси абсцисс графика взять отрезок, соответствующий по длине одной минуте времени, и в конце его по перпендикуляру к этой оси
§ 90. Точность определения места 493
отложить в масштабе высот суммарную скорость Vвверх, если V положительна и вниз, если она отрицательна;
4) провести замыкающую прямую ab через начало отрезка времени и конец отрезка V
5) через две точки, удовлетворяющие значениям высот, провести прямые, параллельные отрезку так, чтобы все остальные точки оказались между этими прямыми;
6) измерить размах 7? по перпендикуляру к оси абсцисс в масштабе высот; для условий нашего примера 7?=3;О. Средняя квадратическая ошибка /пЛсл, вычисленная по формуле (16.23), в нашем случае будет тАсл = 3'0:2,33 = 1J3.
Для определения суммарной ошибки тА, включающей не только случайную, но и повторяющуюся составляющие, необходимо:
1) определить место с ошибкой, не превышающей 0,2—0,3 мили;
2) измерить серию из 5—И высот светила, фиксируя моменты измерений по часам, поправка которых относительно гринвичского времени известна;
3) исправить измеренные высоты поправками и найти значения истинных геоцентрических высот
4) вычислить часовые углы светила на моменты измерения высот и счислимые высоты Лс. с использованием обсервованных координат;
5) найти разности ЛС/— ht и по формуле (16.25) рассчитать суммарную среднюю квадратическую ошибку
Суммарная ошибка mh может быть также получена по формуле (16. 45).
Ошибки линий положения
Наличие ошибок навигационных параметров неизбежно приводит к появлению ошибок линий положения. Средние квадратические ошибки /Плп линий положения вычисляются по формуле
тлп = ^, (16.46)
О
где mv — средняя квадратическая ошибка навигационного параметра; g — градиент навигационного параметра.
Ошибку тлп можно также получить, проложив на карте две линии положения для навигационных параметров, численно отличающихся друг от друга на величину ошибка тЛП измеряется в масштабе карты вблизи места корабля.
Если на планшете или на карте нанесена сетка изолиний, то для определения ошибки тлп следует:
1) измерить кратчайшее расстояние Ди между изолиниями вблизи счислимого или обсервованного места;
2) снять разность оцифровок Д(7 навигационного параметра для взятых изолиний;
3) рассчитать ошибку линии положения, соответствующую ошибке ту навигационного параметра, по формуле
тлп = ’
Средняя квадратическая ошибка линии положения с учетом ошибки И40р в положении ориентира должна вычисляться по формуле
(16. 48)
(16. 47)
<=/<+0.5^,
494
Глава 16. Оценка точности плавания корабля
Пример. Вычислить среднюю квадратическую ошибку /плп линии положения, если объектом наблюдений является радиостанция корабля службы погоды, находящегося на расстоянии D==100 миль, при средней квадратической ошибке Afop = 2 мили и средней квадратической ошибке истинного пеленга на радиостанцию тА = 1°2.
Решение. 1) Вычисляем по формуле (16.46) ошибку тлп линии положения,
57°3 соответствующую ошибке тил==1°2, учитывая, что градиент пеленга g ——~—
ти 100-1,2 О1
тлп = -у = - 57~3 = 2,1 мили;
2) вычисляем по формуле (16. 48) ошибку тплп:
'"лп = У^лп + °»5^ор = F 4,4 + 0,5-4 = 2,5 мили.
Ошибки определения места
Ошибки линий положения неизбежно влекут за собой появление ошибок .места, определяемого этими линиями положения. Так, если две
линии положения I—I и II—II, удовлетворяющие навигационным параметрам £71 и £72, в пересечении дают место F (рис. 262), то случайные ошибки этих параметров вызовут ошибки линий положения, средние квадратические значения которых будут равны:
лп
mUx g\
mu> g2
(16. 49)
где gi и gz—градиенты навигационных параметров.
Отрезки FR = FR' —1\ и FK — — FK' — l2 являются векториальными ошибками, действующими по направлениям линий положения, и характе-
ризуют возможное распределение точки по направлениям этих линий.
т
При известном угле пересечения линий положения 9 векториальные ошибки /| и I2 будут равны:
_ '”лп, gi sin в sin О
mU3 ______ тлп.2
g2 sin 6 — sin 0
(16. 50)
Наличие векториальных ошибок приводит к появлению фигуры погрешности определяемого места — эллипсу ошибок. Параметрами эллипса являются большая а и малая b полуоси, а также угол ао, характеризующий направление большой оси.
Таким образом, общее решение задачи на определение эллиптической ошибки места состоит в нахождении векториальных ошибок lt и в последующем их сложении для вычисления элементов а, b и ао.
§ 90. Точность определения места
495
При суммировании векториальных ошибок обычно применяется графоаналитический прием, при котором полуоси эллипса вычисляются из системы уравнений
а2 + b2 = [Z2] 1
г-i (16.51)
а2 - b2 = [l2] ) v
/2] = 4- /2 + , ..+ Й — сумма квадратов векториальных ошибок; /2] — геометрическая сумма квадратов векториальных ошибок, проведенных под двойными углами, характеризующими их направления. Это суммирование осуществляется построе-
где
нием так называемого квадратичного полигона, которое производится, как указано в приложении 2.
Большая ось эллипса направлена по биссектрисе угла 2а0 между
исходным направлением и направлением замыкающего вектора [/2].
Углы а,, характеризующие направления векториальных ошибок, должны соответствовать направлениям повернутых на 90° по часовой
стрелке градиентов навигационных параметров.
Если для определения места измерялись параметры трех и более линий положения, то полуоси эллиптической ошибки вычисляются из соотношений
ГЛп.п
1
V Р max
(16. 52)
(16. 53)
где Лиш и Ртах — веса эквивалентных линий положения, т. е. таких фиктивных линий, которые заменяют п действительных линий положения и пересекаются под углом 90° в вероятном месте. Эти веса вычисляются в результате решения системы уравнений
Рmax 4“ Рmin ” [Р]
Ртах Pmln “ [Р.
где [р] р\ 4- рч 4-, .• •» 4- рп — сумма весов линий положения;
[р] — геометрическая сумма весов линий положения, получаемая на квадратичном полигоне, аналогично сумме [/2].
Веса Pi линий положения вычисляются по формуле (12.30) или (12.31), как величины, обратные квадратам средних квадратических ошибок тп2 . лп^
Размерность полуосей эллипса при вычислении их по формулам (16.52) совпадает с размерностью ошибок /плп линий положения в формуле для вычисления весов р.
Если полуоси эллиптической ошибки вычислены по средним квадратическим величинам векториальных ошибок, то вероятность такого эллипса равна 0,393. Эллипс, построенный на удвоенных полуосях, имеет вероятность 0,865, а на утроенных полуосях имеет почти полную вероятность и называется предельным. Эллипс, вычисленный по срединным ошибкам, называется единичным и обладает вероятностью 0,203.
Векториальные ошибки 1\ и /2> вычисленные по формулам (16.50), являются сопряженными полуосями эллипса ошибок и обладают следующим свойством:
_2 । 1.2 Л । Л
(L 4~ v = /1 т *2 •
496
Глава 16. Оценка точности плавания корабля
При оценке точности определения места, кроме эллиптической ошибки, широко применяется средняя квадратическая ошибка места/Йо1, являющаяся радиусом круга вероятного положения точки.
Величина /Ио вычисляется по формуле
или
Л4о + *2 = 1/ > +
r ' max ~ mln
_____
М 0 = 1 / • I
(16. 54)
В последней формуле
[/%] = Рлщ + РЛПя + »••♦» + РЛП ~ сумма весов линий положения;
[А] “ЛпАп/^б, 2 ^PM/misin4,3+ - • • •• + s,n’%,_!>, п -
— сумма весов точек пересечения линий положения в вершинах фигуры погрешностей;
fy, — углы пересечения линий положения.
Для упрощения расчетов весов линий положения рлп и весов вершин фигуры погрешностей р9 может быть применена номограмма 1 приложения 3. Средняя квадратическая ошибка Мо места по суммам весов [ряп] и [р0] определяется по номограмме 2 приложения 3.
При ошибках линий положения, отличающихся друг от друга не более чем на 30—5О°/о, расчетная формула (16. 54) приводится к виду
,и. = —•
УМ
(16. 55)
где /пЛПср — среднее арифметическое значение ошибок линий положения;
[А] = sln2 % 2 “Ь sin2 02, з + ♦ • • sIn2 я ~ сумма весов вершин фигуры погрешностей.
По формуле (16.55) составлена номограмма 3 приложения 3 Для /пЛПср = 1.
Для двух линий положения, пересекающихся под углом 0, формула (16. Й) имеет вид:
или
< = У ll + ll м°-~^Ут™Лт'У
(16. 56)
При ошибках /илП1 и тлп? отличающихся друг от друга до 30—50%, последняя формула приводится к виду
141^лпео
—агА <16-57>
где тл„ср =
тлп, 4 ^лп, 2
1 Для обозначения средней квадратической ошибки места Л40 = Yа2 + Ь2 в лите-
ратуре иногда применяется также термин — радиальная средняя квадратическая ошибка места.
§ 90. Точность определения места
497
Вероятность того, что действительное место будет в круге радиуса Л10 зависит от соотношения полуосей эллипса b : а и колеблется в пределах от 0,632 до 0,683.
Предельная ошибка Мо места вычисляется по формуле (28) приложения 2
Коэффициент выбирается из табл. 3 того же приложения по заданной вероятности Р предельной ошибки и отношению полуосей b :а среднего квадратического эллипса или — при двух линиях положения — из табл. 4 по заданной вероятности Р и углу б пересечения линий положения. Если при оценке точности места, полученного по трем и более линиям положения, полуоси эллипса не вычислялись, то коэффициент выбирается из табл. 3 по Ь:а=1 или из табл. 4 по углу б = 90°.
Для вычисления эллиптической или средней квадратической ошибки места учитываются:
1) при определении места по трем и более линиям положения без исключения повторяющейся ошибки (т. е. без проведения биссектрис углов), а также по двум линиям положения — суммарные ошибки навигационных параметров, равные корню квадратному из суммы квадратов как случайных, так и повторяющихся ошибок;
2) при определении места по трем и более линиям положения с исключением повторяющихся ошибок (путем проведения биссектрис углов) и при условии, что градиенты линий расположены по всему горизонту — только случайные составляющие суммарной ошибки;
3) при определении места по трем и более линиям положения с исключением повторяющейся ошибки (путем проведения биссектрис углов) при условии, что направления векторов градиентов сосредоточены в одной половине горизонта — суммарная ошибка, равная корню квадратному из суммы квадратов случайных ошибок и половины повторяющейся ошибки
/72 Ш гг
V + ”L + (°-5"«...)^ <16-58’
Согласно принципу наименьших квадратов при расчете средних квадратических ошибок определения места должны учитываться случайные составляющие суммарных векториальных ошибок линий положения. На практике же в большинстве случаев ошибки линий положения являются смешанными, т. е. состоят из случайных тЛПсл и повторяющихся тЛПповсоставляющих. Учет этих составляющих можно произвести следующими способами:
1. При двух линиях положения.
1 вариант — раздельный учет составляющих
Для расчета суммарной средней квадратической ошибки Мо места следует:
I) Рассчитать среднюю квадратическую ошибку места являющуюся следствием только случайных ошибок тлп и /плп , по формуле сл * сл
ЛЕ——?—1/ (m' V + (т* I2 —2#1 /и* cosAt ,
°* sin Ат Г ' Лпсл/ \ лпсл/ 1(2 лпсл лпсл
где Ат —угол между градиентами навигационных параметров (линий положения);
2 *“ коэффициент связи (коэффициент корреляции) случайных ошибок.
32 Заказ 1833
498
Глава 16, Оценка точности плавания корабля
Для расчета klf 2 применяется формула [Д,Дг] 1,2 (п — ’
где [Д1Д2] — сумма попарных произведений отклонений отсчетов навигационных параметров от их средних значений;
п — число пар измерений;
и ти2—средние квадратические ошибки измерения навигационных параметров.
Так, например, если с приемоиндикатора импульсной разностно-дальномерной РНС типа Лоран-А сняты отсчеты разностей расстояний для пяти измерений и получены результаты:
t} = 2365 мксек, t\ — 4455 мксек,
/{’ =2370 . 4' =4456 .
/[“ = 2367 . /“* = 4453 .
/{v = 2364 . 4v = 4452 .
/^ =2364 , /J =4454 .
то средние арифметические значения из результатов измерений будут /12366 мксек, h = 4454 мксек\ отклонения для первого ряда: —1, 4-4, -f-1, —2, —2, для второго ряда 4-1, 4-2, —1, —2, 0; сумма попарных произведений [Д1А2] = 4-Ю; средние квадратические ошибки одного измерения т > = 2,4 и т - — 1,9; тогда
и1 и2
* =----------------= ±12 = +0,55.
1,2 (п — \)тЦ1тиг 18,2
Коэффициент связи может быть в пределах от 0 до ±1. При Л] 2=0 ошибки независимы, а при ki 2 = 1 — зависимость полная.
2) Рассчитать среднюю квадратическую ошибку AfOg места, являющуюся следствием повторяющихся ошибок тЛП и тлп , по формуле пов пов
А!о = -Д- 1/ (т'П V 4- (тлпI2 —2тлпcosAt . °а sin Ат у Лппов/ \ лппов) ппов лппов
3) Рассчитать суммарную среднюю квадратическую ошибку Мо, квадратически суммируя независимые ошибки А!л и Л1о , по формуле
м0 = ум201 + м1.
2 вариант — совместный учет составляющих Суммарная средняя квадратическая ошибка определения места в данном варианте вычисляется по формуле
Ма “ Y + “ 2А*’ 2п’лп,'плп,с“4т
где Дт — угол между градиентами линий положения;
/пЛП1, тЛПд-суммарные средние квадратические ошибки линий положения, вычисляемые по формулам (16.49);
£1>2 — коэффициент связи между случайными и повторяющимися составляющими. Для расчета 2 применяется формула
Практически, учитывая необходимость упрощения расчетов ошибки, применяют наиболее простой способ совместного учета составляющих через суммарные средние ква-
§ 90. Точность определения места
499
дратические ошибки линий положения, считая 2—&if 2=0. При этом пользуются формулой (16.56) и получают несколько завышенные ошибки, что с точки зрения обеспечения безопасности кораблевождения традиционно считается более правильным.
При тЛПпов<тЛпсл последний способ равноценен с рассмотренными выше двумя вариантами.
2. При трех и более линиях положения.
Ввиду возможности исключения повторяющейся ошибки ошибка определения места должна рассчитываться с учетом только случайных ошибок линий положения. Практически же достаточно полное исключение повторяющейся ошибки может быть сделано только в случаях, когда ориентиры или их пары (для разностно-дальномерных систем) расположены по всему горизонту. Во всех других случаях повторяющаяся ошибка частично остается неисключенной, что и явилось основанием для изложенного выше способа ее учета.
Ошибки обработки результатов измерений
При аналитическом решении задачи на определение места ошибки обработки зависят от допусков и упрощений, которые применены в процессе вычислений. Эти ошибки могут быть пренебрежимо малы, если для решения задачи соответствующим образом подобраны как расчетные формулы, так и значность величин, получающихся в процессе решения.
При графическом и графоаналитическом способах ошибки обработки зависят не только от точности вычислений, связанных с исправлением навигационных параметров, но также и от точности графических построений, производимых на карте или на листе бумаги при прокладке линий положения и определении вероятного места.
Средние квадратические ошибки построения линий положения принимаются обычно равными 0,5 мм в масштабе планшета или карты. Этой величине в натуре соответствует ошибка /пгр линии положения, называемая ошибкой графики и вычисляемая по формуле
тпгр = 5-10“4С, Л£, или приближенно
тпгр =- 3-10“7С, миль,
где С — знаменатель масштаба карты в месте определения.
Так, при масштабе карты 1:200000 средняя квадратическая ошибка /игр = 5-10“4-200000 = 100 м или 0,054 мили.
Ошибки /п)р построения линий положения при оценке точности определения места могут быть учтены двумя способами:
1) суммированием их с ошибками тЛп линий положения, зависящими от ошибок навигационных параметров;
2) расчетом средней квадратической ошибки 7Игр получаемого места и последующим суммированием полученной величины с ошибкой 7И0, зависящей от ошибок навигационных параметров.
Применяя первый способ для расчета средней квадратической ошибки определяемого места, учитываются ошибки т'лп линий положения, численно равные
Чп = + Ч •
Во втором способе результирующая ошибка Л/' места вычисляется по формуле
<16-59)
Ошибка <р рассчитывается аналогично ошибке но с учетом* только величин /игр линий положения. Так, например, если место опре
32*
500
Глава 16. Оценка точности плавания корабля
делилось по двум линиям положения на карте масштаба 1:200000 и угол пересечения линий положения был равен 45°, то mrp == 0,06 мили
1 -I г~2--i--5“ /2-0,06
и М*р = ЮТ V mrp, + m?t>, = -0,71 = 0112 мили-
На практике Afrp обычно не вычисляется: во всех случаях, когда необходимо учесть эту величину, в расчет принимается ее среднее значение, равное 0,7 мм в масштабе карты (планшета), что будет соответствовать ошибке в натуре, равной:
Л/гр = 7-10-4С, м. или приближенно
7Игр == 4- 10~7С, мили t
(16. 60)
Необходимость учета Afrp возникает в тех случаях, когда ее величина становится больше 0,5Afo, т. е. при применении достаточно точных способов определения места и использовании мелкомасштабных карт.
Решения, задач на оценку точности определения места основными способами
Задача L Вычислить среднюю квадратическую ошибку определения места корабля по визуальным пеленгам (измеренным с помощью оптического пеленгатора) маяков Цып-Наволокский ИГЦ = 160° и Лазаревский ИП2 = 212° в точке 9 = 69с55' N, X = 32°55' О', если средние квадратические ошибки: измерения компасного пеленга ткп = 0°4, определения постоянной поправки гирокомпаса тдгк = 0°3, устойчивости гирокомпаса в меридиане wrK = 0°75 (из технической документации), изменения постоянной поправки с широтой = 0°3 и установки пеленгаторного репитера в диаметральной плоскости корабля тдп = 0®2.
Решение задачи выполняем в следующем порядке:
1) вычисляем по формуле (16.30) суммарную среднюю квадратическую ошибку истинных пеленгов
тА = У 0,42 + 0,32 + 0,752 4- 0,32 + 0,22 = 0°97;
2) снимаем с карты расстояния до маяков Цып-Наволокский Di = = 11,5 мили и Лазаревский D2 — 8,5 мили и вычисляем по формуле (16.46) средние квадратические ошибки линий положения, учитывая, что градиент пеленга g = -yj-:
/71 — —— —
лщ gi
^лн, ~ ~
57,3
0,97-11,5 л 1П
= —— =; 0,19 мили, и/
0,97-8,5
57,3 — 57,3 — 0,14 МИЛИ
3) находим угол 0° = ИП2 — ИГЦ = 52° и вычисляем по фор муле (16. 56) искомую ошибку Мо
= ЮТ V= ЮТ2^ /0,19= + 0,14= = 0,31 мили.
Решая задачу по номограмме 3 приложения 3, получим /пЛПср = = 0,16 мили, р'ь — 6,0, Мн =- 1,8 мили и Л1о — 1,8-0,16 — 0,3 мили.
Ошибки линий положения могут быть также получены с помощью номограммы, приведенной на рис. 263, которая вычислена для ошибки /Иа=1°,0. При других величинах тА определенную по номограмме ошибку /плп следует умножить на фактическую ошибку пеленга.
$ 90. Точность определения места
501
В тех случаях, когда расстояния до ориентиров незначительно отличаются друг от друга (до 30—50%), для вычисления средней квадратической ошибки Мо можно применять приближенную формулу
Мо =
l-4Dcp»n°A 57,3 sin О
= 0,0246 ,
sin 0
(16. 61)
где Dcp — среднее арифметическое из расстояний до ориентиров.
Дано: D = 65 милям. Определить тЯП (при тА — 1°). Ответ: тЛп — 1,12 мили
По формуле (16.61) составлена номограмма (рис. 264). Решая задачу по этой номограмме, получим Dcp = 10 миль и MQ = 0,3 мили.
Задача 2. Вычислить среднюю квадратическую ошибку определения места корабля днем по пеленгам радиомаяков Териберский, Сеть-Наволокский и Цып-Наволокский в точке <р=70° М X-= 34° 05/, учтя средние квадратические ошибки: радиокурсовых углов — в соответствии с формулой (16.33), радиодевиации znz = 0°5, гирокомпаса /пДгк = 0°2, /пгк = 0°5 и mN = 0,3. Место определялось с исключением повторяющейся ошибки, при ориентирах, сосредоточенных в одной половине горизонта.
Решение задачи выполняем в следующем порядке:
1) снимаем с карты истинные пеленги и расстояния до радиомаяков Териберский ИП\ = 152°, Di = 51 миля, Сеть-Наволокский ИПъ — 195°, £>2 = 38 миль, Цып-Наволокский ИП$= 230°, £>3 = 25 миль;
2) выбираем из описания радиотехнических средств навигационного оборудования дальности действия радиомаяков; получаем соответственно Д\ = 150 миль, Д2 = Дз = 75 миль;
Рис. 264
Дано: Dcp — И милям, 0 = 55°, тА = 1°5. Определить М*
Ответ: — 0,52 мили
Глава 16. Оценка точности плавания корабля
§ 90. Точность определения места
503
3) вычисляем по формуле (16.33) средние квадратические ошибки измерения радиокурсовых углов:
т</1 = о°з + g = 0°з + = 0°6,
тя, = 0°3 + ^ = 0^3 + ^ = 0°8,
т,, = 0°3 + ^ = 0°3 + ^ = 0°6;
4) вычисляем суммарные средние квадратические ошибки радиопеленгов по формуле (16.32), с учетом формулы (16.58), так как место определено с исключением повторяющейся ошибки при ориентирах, сосредоточенных в одной половине горизонта:
ОТЛ, = тк, = V т\ + + °-25 (т1гкп + отгк + =
= У 0,62 + 0,52 + 0,25 (0,22 + 0,52 + 0,32) = 0?84;
аналогично тк = 1°0;
5) находим с помощью номограммы (рис. 263) средние квадратические ошибки линий положения и среднюю из них
/Плп, = 0,90-0,84 = 0,76 мили, тЛПз = 0,44-0,84 = 0,37 мили,
тл^ = 0,66-1,00 = 0,66 мили, /плпср = 0,60 мили;
6) вычисляем разности пеленгов (углы пересечения линий положения) :
0Ь2 = ИП2 - ИП, = 43°, з - ИПг - ИП2 == 35°, 61(3 =ИП2- ИП,^7&\
7) находим по номограмме 3 приложения 3 для приведенных выше углов 6 веса вершин 2 = 4,5, р02 = 3,3, р'^ 3 =» 9,4 и сумму весов [А] = 17,2;
8) по сумме весов для трех линий положения с номограммы снимаем ошибку места Л1н = 1,3 (для /плПср = 1);
9) вычисляем Мо -= Л1н/пЛПср = 1,3-0,60 = 0,78 мили.
Эта же задача по номограммам 1 и 2 приложения 3 решается в следующем порядке:
1) по ошибкам линий положения с помощью шкал 1 и 2 номограммы 1 определяем веса линий положения:
А™. = 1-7, Р.,„, = 2.3. Р™, = 7,4, сумма весов [рлп] = 11,4;
2) по ошибкам линий положения и углам фигуры погрешностей определяем с помощью номограммы 1 веса вершин:
- Для тлп, = 0,76, тл„, = 0,66 и 0, 2 = 43° д, 2 = 2,0,
- Для далп, = °.66- тлП, = °’37 и ем = 35° 8 = 6,0,
— для тЛПх = 0,76, znЛПз = 0,37 и 91>3 = 78° g = 13,0; сумма ве-
сов вершин [pj = 21,0;
3) по суммам весов [рлп] и [р0] с помощью номограммы 2 определяем Мо = 0,75 мили.
Задача 3. Вычислить среднюю квадратическую ошибку определения места корабля по расстояниям, измеренным с помощью РЛС, до
504
Глава 16. Оценка точности плавания корабля
двух приметных точек берега, если £>i=15,8 мили и £)2= 18,6 мили, а пеленги на эти точки, снятые с карты, равны ИП} = 125° и Я/72 = 180°.
Решение задачи выполняем в следующем порядке:
1) вычисляем средние квадратические ошибки линий положения, принимая точность измерения расстояний равной 1 % от D (из формуляра РЛС), а ошибку в определении положения отражающей горизонтали на карте для обрывистого берега, равной 0,2 мили:
mDi = 0,16 мили, mDj = 0,19 мили,
/пЛП1 = У0,162 + 0,22 = 0,26 мили, /Плпа =К0,192 + 0,22 = 0,28 мили;
2) вычисляем угол пересечения линий положения 0 = Я/72— ИП\ — = 55°;
3) вычисляем по формуле (16.56) ошибку Мо
М„ = —Vo,262 + 0,282 = 0,47 мили, sin 00
Тот же результат получается при решении по номограмме 3 приложения 3 по среднему значению ошибок линий положения Мо = — 1,75*0,27 = 0,47 мили.
Задача 4. Вычислить среднюю квадратическую ошибку определения места корабля по пеленгу и расстоянию, определенному по вертикальному углу, измеренному с помощью секстана при скрытом основании ориентира, если (3 = 0*11',7, D = 65,5 мили, а пеленг измерялся с помощью обыкновенного пеленгатора магнитного компаса.
Решение задачи выполняем в следующем порядке:
1) вычисляем по формуле (16.34) среднюю квадратическую ошибку расстояния, принимая среднюю квадратическую ошибку измерения вертикального угла секстаном /Пр= Г,0
S 65,5-1 n QC
/п = mr> = = л -е й/ = fig й .-11 >7 = °’85 мили;
ЛП1 S D 4- р' оо,5 4- 11,7
2) вычисляем по формуле (16.31) среднюю квадратическую ошибку истинного пеленга (для средних условий)
= V ткпИ + md + т1 = У 0,52 + 0,72 + 0,72 = 1°1;
3) вычисляем среднюю квадратическую ошибку линии пеленга
/Плпа — 65,5 5¥з = мили;
4) вычисляем по формуле (16.56) искомую ошибку Мо (при 9 =90°)
Мо = /0,852 + 1,22 = 1,5 мили.
Ошибку Мо при определении места по пеленгу и расстоянию можно легко получить с помощью номограммы (рис. 265) по рассчитанным (или заданным) ошибкам тк и tnD,
Задача 5. Вычислить среднюю квадратическую ошибку определения места корабля по РНС Лоран-А (пары 1L1 и 1L7) в точке ср = 66° N, X = 5°де при приеме поверхностных радиоволн.
Рис. 265
Дано: D —52 милям, mA = 1°0, /пр = 0,5 мили. Определить Af0.
Ответ: Мо = 1,1 мили
§ 90. Точность определения места
§
506
Глава 16. Оценка точности плавания корабля
Решение задачи выполняем в следующем порядке:
1) так как от всех станций принимались поверхностные радиоволны, то среднюю квадратическую ошибку навигационных параметров принимаем равной = 2 мксек;
2) на карте вблизи счислимого
места находим точку С (рис. 266) пересечения гипербол заданных пар станций и измеряем угол пересечения их 6 = 40°;
3) измеряем кратчайшие расстояния и Дл2 между ближайшими к заданной точке гиперболами:
— для пары 1L1 = 12 миль,
Д/j = 50 мксек,
— для пары 1L7 Дл2 = 8 миль, Д/2 = 50 мксек;
4) вычисляем средние квадратические ошибки линий положения и среднюю из них
... ДП|Ш? 12-2 Л hn2mt 8-2 п
= “5Q- = 0,48 мили, /плп, = 36- = о,32 мили,
^лпср = 0.4 мили;
5) определяем по номограмме 3 приложения 3 вес р\ = 4 и ошибку Л4Н = 2,25;
6) вычисляем ошибку определения места /Ио = Л/нтЛПср = 2,25-0,4 = = 0,9 мили.
Если учесть среднюю квадратическую ошибку графики, которая по формуле (16.60) для масштаба 1:1000000 равна Л4гр = 0,4 мили, то по формуле (16. 59) получим среднюю квадратическую ошибку места М о == V 0,92 + 0,42 == 1 миле.
Для оценки точности определения места при приеме пространственных или пространственных и поверхностных (разнородных) радиоволн от станций РНС Лоран-А или Лоран-С, средние квадратические ошибки навигационных параметров /п/пр находятся с помощью номограмм рис. 259 и 260, если эти ошибки не определены по результатам измерений.
Задача 6. Вычислить среднюю квадратическую ошибку определения места корабля с помощью РНС РСВТ-1 днем в точке <f> = 72° N, Х = 42° Ost при работе системы в навигационном варианте, с учетом средней квадратической ошибки разностей фаз = 0,006 ф. ц. сигналов грубой разностной сетки.
Решение задачи выполняем в следующем порядке:
1) на карте вблизи заданного места измеряем кратчайшие расстояния Дп между соседними гиперболами:
— для красных изолиний ДП1 = 4,2 мили, Дф1 = 0,200 ф. ц.,
— для зеленых изолиний Дп2 = 5,2 мили, Дф2 = 0,200 ф. ц.;
2) вычисляем средние квадратические ошибки линий положения:
4,2-0,006
= - ДТГ = 0,200 = °’13 МИЛИ’
Дл2тФ 5,2-0,006
= - Д4Г = 07200- = °’16 мили:
$ 90. Точность определения места
507
3) измеряем угол пересечения гипербол, ближайших к заданному месту 6 = 33°;
4) вычисляем по формуле (16.56) среднюю квадратическую ошибку определения места
Л10 = 7^753 /0,132 + 0,162 = 0,37 мили.
Sin им
При решении по номограмме 3 приложения 3 получим: /иЛПср = = 0,14 мили, р'ь = 3,0; = 2,6 и Мо = Л4н/плп = 0,36 мили, т. е.
практически тот же результат.
Средняя квадратическая ошибка графики в соответствии с формулой (16.60) при масштабе карты 1:500 ОСЮ будет Afrp = 0,2 мили; резуль-тирующая средняя квадратическая ошибка места по формуле (16. 59) Л10 = V 0,372 -И 0,22 = 0,42 мили.
j | Задача 7. Вычислить среднюю квадратическую ошибку определения места корабля по высотам двух звезд, измеренным с помощью навигационного секстана, если азимуты звезд Л, = 153°5 NOst, А2 = = 160° NW и средние квадратические ошибки: инструментальной поправки ms = 0^2 (высоты звезд приближенно одинаковы), поправки индекса /nz = 0;i5, наклонения горизонта (выбираемого из таблиц поправок) md = 0;5, измерения одной высоты (по прежним определениям) mhii = 07. При вычислении Л40 учесть, что для определения места использовались средние высоты, полученные по сериям из трех измерений.
Решение задачи выполняем в следующем порядке:
1) вычисляем по формуле (16.45) суммарную среднюю квадратическую ошибку среднего арифметического из серии высот
+ т2 + т* + тп2 =
+ 0,22 + 0,152 + 0,52 = О',7;
2) вычисляем по формуле (16.57) среднюю квадратическую ошибку определения места
М,
1.41тлп 1,41-0,7 , .
о = --^"2- = • = 1,4 МИЛИ.
0 sin 6 sin 46.5
Решая задачу по номограмме 3 приложения 3, получим: р’ = 4,8, Л4Н = 2,1 мили и Мо = Л4нтпЛПср = 1,5 мили.
Задача 8. Вычислить среднюю квадратическую ошибку определения места корабля по высотам четырех звезд, азимуты которых по круговой системе счета равны Л1=106°, Л2=167°, Л3 = 251° и Л4 = 355°, а средние квадратические ошибки линий положения одинаковы и равны Щлп=1\2 (учтены только случайные составляющие, так как светила расположены по всему горизонту и вероятное место находилось с исключением повторяющейся ошибки).
Решение задачи выполняем в следующем порядке:
1) вычисляем углы пересечения линий положения:
6, = 61°, 62 = 35°, 63 = 69°, = 84э, 05 - 8°, 0б = 76°;
2) находим по шкалам 1 и 2 номограммы 1 приложения 3 веса линий положения
P^=Pm, = Pm> = Pnt = Q’7'’ сУмма весов [Лп] = 4-0,7-2,8;
508
Глава 16. Оценка точности плавания корабля
3) нанеся на шкале 3 той же номограммы точку, соответствующую тпЛПр = ^лп = Н2 и соединяя эту точку последовательно со штрихами, соответствующими величинам углов % на шкале 6, считываем со шкалы 5 веса вершин фигуры погрешностей: = 0,40; = 0,16; Рвз =
= 0,45; р0< = 0,50; р^ = 0,01 и р0# = 0,48; сумма весов [р0] = 2,00;
4) определяем по номограмме 2 приложения 3 по суммам весов линий положения и вершин ошибку Мо — 1,2 мили.
При равенстве средних квадратических ошибок четырех линий положения среднюю квадратическую ошибку определяемого места можно вычислить по формуле
где и 02 - углы пересечения линий положения в парах линий положения;
7 — угол пересечения биссектрис, равный разности полусумм азимутов светил в парах линий положения.
Из всех возможных комбинаций биссектрис следует брать такую, при которой эти биссектрисы пересекаются под углом, близким к прямому.
Для условий последней задачи следует брать биссектрисы углов, под которыми пересекаются первая с третьей и вторая с четвертой линии положения. При этом получим:
0, = А3- Д = 145°;
02- Д4-Д2= 172°;
_ И| + Ла _ А2 -ь А4 _ 357° _ 16250 __ д_Ос _ оп°5
I — 2 2 — 2 2 или у oz,o.
м 0,7.1,2 т/-1 “Т . о
- sin82?5 V 0,91 + 1 “ 1,2 мили-
Если средние квадратические ошибки линий положения отличаются друг от друга до 20—30%, то в приведенной выше формуле должно быть учтено среднее арифметическое значение из величин /пЛП/.
Задача 9. Вычислить среднюю квадратическую ошибку определения места корабля по высотам двух звезд и разности их азимутов, если высоты звезд hx = 37°09;7, й2 = 42°12'0, азимуты звезд Д, = = 35°4Г, А2= 100э44' (по круговой системе счета), средние квадратические ошибки высотных линий положения mh = mh* = 1'2 и средние квадратические ошибки измерения азимутов светил тк = mKi = 1'2 (из формуляра прибора).
Решение задачи выполняем в следующем порядке:
1) вычисляем среднюю квадратическую ошибку т^А разности азимутов
/п.А = 1/ + т\ = У~2 = 17;
2) вычисляем модули градиентов направлений по формулам:
gx = etg (90° - М = tg hx = 0,758, g2 s etg (90° — h2) = tgh2 = 0,907;
§ 90. Точность определения места
509
3) строим треугольник градиентов (рис. 267); на чертеже измеряем направление повернутого градиента £ДА разности азимутов относительно меридиана; получаем угол Д' == 152°;
4) измеряем (или вычисляем по формуле косинусов) модуль градиента разности азимутов
SiA = -Г- £1 — 2gj^2cos ДА = 0J904 на милю;
5) вычисляем градиенты и веса линий положения: — для высотных линий
gk, = ^*,= 1; Pi = Рг = 172? = 0,695;
углы ai и а2, характеризующие направления повернутых градиентов высотных линий положения, равны:
а, -- Д1 + 90° - 1257, 2а, = 251?4;
а2- Д2 + 90° — 190?7, 2а2 = 21^4;
— для разностно-азимутальной линии положения (сферической изогоны)
£ДА 0;904 на милю; = °^2^- = 0,282,
тДА
я3 - А' = 152° и 2я3 = 304°;
6) строим полигон весов (рис. 268) и составляем систему уравнений: Ртах+ Pmin=[p]= 1,672, Pmax-Pmln=[P] =0,860;
решая эту систему, получаем Ртах = 1,266 и Рт1п0,406;
7) вычисляем полуоси а и b эллиптической ошибки и искомую среднюю квадратическую ошибку Мо:
а = *— — = 1,56 мили; b -= 1-— = = 0,88 мили;
О’64 VPmn ’’13
Мо = ]/а2 + Ь2 = 1,8 мили.
510
Глава 16. Оценка точности плавания корабля
Решения задач на оценку точности определения места способами прямой, обратной и комбинированной засечек
В способе прямой засечки место корабля получается как точка пересечения двух и реже трех линий положения, соответствующих теодолитным засечкам с берега.
При двух линиях положения средняя квадратическая ошибка Л4О определения места в метрах вычисляется по формуле
_ 0.42РсХ ° sin 0 ’
(16. 62)
где т* — средняя квадратическая ошибка теодолитных засечек с берега; принимается равной 1';
£>ср — среднее арифметическое из расстояний до ориентиров в километрах;
6 ™ угол пересечения линий положения, измеряемый на карте или планшете.
Задача 1. Вычислить среднюю квадратическую ошибку определения места способом прямой засечки при расстояниях до теодолитных постов D} = 10 км, D2 — 16 км, угле 6 =35°, та=\' с учетом графической ошибки прокладки линий положения (засечек), построение которых производится на планшете масштаба 1 : 25 000.
Решение задачи выполняем в следующем порядке:
1) вычисляем по формуле (16.62) среднюю квадратическую ошибку определения места Мо
° sin 6 0,574 ’
2) принимая ошибку графики равной 0,7 мм в масштабе планшета, по формуле (16. 60) получаем МГо = 17,5 м\
3) вычисляем по формуле (16. 59) искомую ошибку определения места с учетом ошибки графики M’Q
М’ = VМ1 + М1Р = У9,52 + 17,52 = 20 м.
При трех линиях положения следует применить номограмму 3 приложения 3. Необходимые при использовании номограммы средние квадратические ошибки линий положения /иЛп вычисляются по формуле
тЛ lOOODm* отлп = у = 3438 •
В способе обратной засечки место корабля определяется по двум линиям положения, удовлетворяющим измеренным углам. Поэтому для оценки точности определяемого места следует применять формулу (16.56) в виде
<1е-63)
или, учитывая, что тпЛП1 = а/пЛПз = ~ , то при одинаковых ошибках та и /пр измерения углов, равных /па, получаем
М, = 1/-А- + ~А. (16. 64)
у g^sm 8 gpm о
§ 90. Точность определения места
511
где k — масштабный коэффициент, принимаемый обычно равным 30 или 15;
g* и —градиенты углов.
Модули градиентов углов ga и определяются графоаналитическим способом, для чего необходимо:
1) вычислить по формуле g = или выбрать из табл. 34 (для k = 15) градиенты засечек g по расстояниям D до ориентиров;
а'
Рис. 269 Рис. 270
2) проложить от произвольной точки на листе бумаги векторы градиентов засечек g2 и g3 (рис. 269) по направлениям, отличающимся друг от друга на величины измеренных углов аир между ориентирами; величины градиентов и измеряются на чертеже в масштабе, принятом для градиентов засечек.
Таблица 34
D, км g, см D, км g, см D, км см D, км g, см
1,0 51,6 2,5 20,6 6,0 8,6 12,0 4,3
1.2 43,0 3,0 17,2 7.0 7,4 13,0 4,0
1,4 36,9 3,5 14,7 8.0 6,4 14,0 3,7
1,6 32,3 4,0 12,9 9,0 5,7 20,0 2,6
1,8 28,7 4,5 11,5 10,0 5,2 25,0 2,1
2,0 25,8 5,0 10,3 11,0 4,7 30,0 1.7
Вследствие того что градиенты засечек g отложены по направлениям на ориентиры, т. е. повернуты, градиенты углов g* и g^ будут также повернуты. Но повернутые градиенты всегда параллельны линиям положения в определяемом месте, поэтому угол А'ЕгС' между градиентами углов будет соответствовать углу 6 пересечения линий положения.
Расчет ошибки Мо определения места по двум горизонтальным углам можно упростить, учтя, что произведения gasin6 и являются высотами h} и й3 треугольника градиентов А'В'С' (называемого также инверсионным треугольником), опущенными из вершин А' и С'; при этом формула (16. 64) принимает вид:
512
Глава 16. Оценка точности плавания корабля
Величины hx и Л3 измеряются на чертеже в масштабе, принятом для градиентов засечек. Средняя квадратическая ошибка Л40 в метрах по высотам и Л3 в сантиметрах выбирается из табл. 35, составленной для ошибки измерения углов та — 2' и коэффициента k = 15; если ошибка та не равна 2', то выбранную из таблицы величину Мо необходимо умножить на отношение (/п':2).
Таблица 35
fl см 10 9 8 7 6 5 4 3,5 3 2,5 2 1.8 1,6 1.2 1,0
10 4 4,5 5,0 5,0 6,0 6,5 8,0 9,0 10,5 12,5 15,5 17,0 19,0 25,5 30,0
9 4,5 5,0 5,5 6,0 7,0 8,0 9,0 10,5 12,5 15,5 17,0 19,0 25,5 30.0
8 5,5 6,0 6,5 7,2 8,5 9,5 10,5 12,5 15,5 17,0 19,0 25,5 30,0
7 6,0 6,5 7,5 8,5 9,5 11,0 13,0 16,0 17,0 19,0 25,5 30,5
6 7,0 8,0 9,0 10,0 11,0 13,0 16,0 17,5 19,5 25,5 30,5
5 8,5 9,5 10,5 11,5 13,5 17,0 18,0 19,5 26,0 30.5
4 10,5 11,5 12,5 14,0 18,0 18,5 20,0 26,0 31,0
3,5 12,0 13,0 15,0 18,0 19,0 20,5 26,5 31,0
3 14,5 15,5 18,5 19,5 21,0 27,0 31,5
2,5 17,0 19,0 20,5 22,5 28,0 32,5
2 21,0 22,5 24,0 29,5 33,5
1,8 23,5 25,0 30,0 34.5
1,6 26,5 31,5 35,5
1.2 35,5 39,0
1 42,0
Задача 2. Вычислить среднюю квадратическую ошибку определения места способом обратной засечки по углам а=24° и 3 — 15°, при расстояниях до ориентиров Di = 12,0 км, D2 = 23,0 км, D3 = 8,9 км и 3'; вычисление произвести с учетом ошибок графики, если место наносилось на планшет масштаба 1 : 25 000.
Решение задачи выполняем в следующем порядке:
1) выбираем из табл. 34 градиенты засечек:
gj = 4,3 см, g2 = 2,3 см и g3 = 5,8 см\
2) строим треугольник градиентов, как показано на рис. 269, приняв для величин g2 и g3 масштаб 1:1;
измерив высоты h\ и Л3, получаем:
hx = 2,3 см\ А3 = 3,5 см\
3) выбираем из табл. 35 по высотам hx и Л3 величину Мо = 16,2 м (для Я1а = 2'); следовательно, для тл = 3' ошибка будет равна
ЛГ0= 16,2’4= 24,3 м-
4) приняв ошибку графики равной 0,7 мм в масштабе планшета, по формуле (16, 60) получаем Л4гр = 17,5 м и результирующая ошибка будет равна ____________
м; = + М2р = у 24,32 + 17,52 - 30,0 м.
Рассмотренный способ определения Л40 может применяться при измерении как смежных, так и несмежных углов. Так, если измерены углы а
§ 90. Точность определения места 513
и по которым будет определяться место корабля по четырем ориентирам и снят с карты угол 7 (рис. 270), то, проложив градиенты засечек gi, Яг» Яз и g4 по соответствующим направлениям, получим градиенты углов ga=A'B' Hgp=C'E'. Для построения инверсионного треугольника отрезок С'Е' как вектор следует перенести началом в точку В'. Высоты hi и h3 в полученном треугольнике А'В'Е" измеряются как обычно.
Среднюю квадратическую ошибку определения места по двум смежным углам можно также вычислить по формуле
где D2 и £>3 — расстояния до ориентиров, соответственно левого, среднего и правого;
А и С — углы между базовыми линиями и прямыми, соединяющими место корабля с крайними ориентирами; сумма углов Д и С равна углу 0 пересечения окружностей, вмещающих измеренные углы в определяемом месте;
ах и а2 — базы, т. е. расстояния между левой и правой парами ориентиров.
При определении места по двум несмежным углам расчетная формула имеет вид
Мо = . 1/(£Л)2 + (ад? (16. 67)
0 sin (.Д + С — *f) г \ at ; ' \ а2 j v 7
Угол 7 между средними ориентирами, как и углы А и С, измеряется на карте.
В формулах (16.66) и (16.67) величины Af0 получаются в метрах при расстояниях Dt и at в километрах и т* в минутах дуги.
В комбинированной засечке для расчета средней квадратической ошибки Мо определяемого места применяется формула
Ма ~ Й Va2 -г , (16. 68)
где D — расстояние от корабля до вспомогательного ориентира, в километрах;
а — база, т. е. расстояние между теодолитным постом и вспомогательным ориентиром в километрах;
а — угол, измеренный секстаном на корабле, между теодолитным постом и вспомогательным ориентиром.
В формуле (16.68) величина Мо получается в метрах при расстояниях D и а в километрах для средних квадратических ошибок теодолитной засечки Г и измерения горизонтального угла секстаном 2'.
Задача 3. Вычислить среднюю квадратическую ошибку определения места способом комбинированной засечки, если а —7 км, £>=15 км и угол, измеренный секстаном а = 30° при прокладке места на планшете в масштабе 1 : 25 000.
Решение задачи выполняем в следующем порядке:
1) вычисляем по формуле (16.68) среднюю квадратическую ошибку определения места Мо
=18,5 ж;
33 Заказ 1833
§ 90. Точность определения места 513
и по которым будет определяться место корабля по четырем ориентирам и снят с карты угол 7 (рис. 270), то, проложив градиенты засечек £1, £2, £з и g4 по соответствующим направлениям, получим градиенты углов ga=A'B' и gp=C'E'. Для построения инверсионного треугольника отрезок С'Е' как вектор следует перенести началом в точку В'. Высоты hi и h3 в полученном треугольнике А'В'Е" измеряются как обычно.
Среднюю квадратическую ошибку определения места по двум смежным углам можно также вычислить по формуле
". - • <ж»
где D2 и £>3 — расстояния до ориентиров, соответственно левого, среднего и правого;
А и С — углы между базовыми линиями и прямыми, соединяющими место корабля с крайними ориентирами; сумма углов Д и С равна углу 0 пересечения окружностей, вмещающих измеренные углы в определяемом месте;
ах и а2 — базы, т. е. расстояния между левой и правой парами ориентиров.
При определении места по двум несмежным углам расчетная формула имеет вид
Мо = . 1/(£Л)2 + (ад? (16. 67)
0 sin (.Д + С — *f) г \ at ; ' \ а2 j v 7
Угол 7 между средними ориентирами, как и углы А и С, измеряется на карте.
В формулах (16.66) и (16.67) величины Af0 получаются в метрах при расстояниях Dt и at в километрах и т* в минутах дуги.
В комбинированной засечке для расчета средней квадратической ошибки Мо определяемого места применяется формула
Ма ~ Й Va2 -г , (16. 68)
где D — расстояние от корабля до вспомогательного ориентира, в километрах;
а — база, т. е. расстояние между теодолитным постом и вспомогательным ориентиром в километрах;
а — угол, измеренный секстаном на корабле, между теодолитным постом и вспомогательным ориентиром.
В формуле (16.68) величина Мо получается в метрах при расстояниях D и а в километрах для средних квадратических ошибок теодолитной засечки Г и измерения горизонтального угла секстаном 2'.
Задача 3. Вычислить среднюю квадратическую ошибку определения места способом комбинированной засечки, если а —7 км, £>=15 км и угол, измеренный секстаном а = 30° при прокладке места на планшете в масштабе 1 : 25 000.
Решение задачи выполняем в следующем порядке:
1) вычисляем по формуле (16.68) среднюю квадратическую ошибку определения места Мо
=18,5 ж;
33 Заказ 1833
§ 90. Точность определения места
515
Определить 6.
Ответ: 6 — 70°
Определить б.
Ответ: б = 64°
Оценка точности вероятного места. Если вероятное место получено как среднее весовое по ряду мест, приведенных к одному моменту, то средняя квадратическая ошибка Мв этого места вычисляется по формуле
1
/И ’
Жв =
(16. 70}
где [р] = 4- р2 4-... 4- рп — сумма весов отдельных мест.
Пример. Вычислить среднюю квадратическую ошибку вероятного места, если для его определения использованы три места со средними квадратическими ошибками: Mi = 1,5 мили, Mi = 2,0 мили и Ма == 0,8 мили.
33*
516
Глава 16. Оценка точности плавания корабля
Решение. 1) Вычисляем веса отдельных мест
Р' = Т52 = 0,45; = ‘Ця = 0,25 Н /’ЗТ='б^2^= 1,5б;
2) находим сумму весов и среднюю квадратическую ошибку вероятного (среднего весового) места
[/>1=2,26;
тд — ——— 0,67 мили.
/2,26
§ 91. ТОЧНОСТЬ ПЛАВАНИЯ КОРАБЛЯ И РАСЧЕТ ДОПУСТИМОГО ВРЕМЕНИ ПЛАВАНИЯ ПО СЧИСЛЕНИЮ
Оценка точности текущего места. При оценке точности текущего места корабля необходимо учитывать:
— среднюю квадратическую ошибку Мо обсервованного места, принятого за основу для счисления;
— среднюю квадратическую ошибку Мс (t) последующего счисления.
Вследствие того, что ошибки Мо и Afc (t) независимы, результирующая средняя квадратическая ошибка Мс счислимого места должна вычисляться по формуле
Afc=)/X-|-Af^). (16.71)
В тех случаях, когда вместо средней квадратической ошибки 7ИС необходимо знать предельную ошибку Мс, последнюю вычисляют по формуле
Мс = КрМс, (16.72)
где Л/ — коэффициент, зависящий от заданной вероятности Р предельной ошибки; выбирается из табл. 3 приложения 2 (для соотношения b: а = 1).
Средняя квадратическая ошибка Мо обсервации вычисляется в зависимости от способа определения места и ошибок измерения навигационных параметров; в необходимых случаях учитываются также ошибки МгР графической обработки. Порядок решения этой задачи рассматривается в § 90.
Средняя квадратическая ошибка Мс (/) счисления вычисляется в зависимости от продолжительности плавания по счислению. Порядок решения этой задачи рассматривается в § 89.
Пример. Вычислить среднюю квадратическую и предельную ошибки текущего •счислимого места корабля (для вероятности Р — 0,99), если средняя квадратическая -ошибка последнего обсервованного места Af0 = 2,0 мили, продолжительность плавания ло счислению / = 5 ч и коэффициент точности счисления Кс — 0,35 мили/ч°‘Ъ (6 = 0,8).
Решение. 1) Вычисляем по формуле (16.4) среднюю квадратическую ошибку счисления
Мс (*) = Кс*0'8 = 0.35-50-8;
1g 5°>8 = 0,81g5 = 0,8 • 0,699 = 0,559; 50'8 = 3,6;
Мс (0 — 0,35-3,6 = 1,26 мили;
2) вычисляем среднюю квадратическую ошибку счислимого места
Alc = J/’jMo + А<с (О = /2* + = 2'4 мили;
§ 91. Точность плавания и расчет допустимого времени плавания по счислению 517
3) выбираем из табл. 3 приложения 2 для заданной вероятности Р = 0,99 н b:a*= 1 коэффициент А'р —2,15 и вычисляем искомую предельную ошибку места
— КрМс = 2,15-2,4 = 5,2 мили.
Для определения эллиптической ошибки текущего места применяется графоаналитический прием сложения векториальных ошибок, равных полуосям эллипса, характеризующего ошибку последнего обсервован-ного места с векториальными ошибками, равными полуосям эллипса, характеризующего точность счисления за последующий промежуток времени.
Пример. Определить эллиптическую ошибку текущего места корабля, если эллиптические ошибки исходной обсервации и последующего счисления равны:
— для исходной обсервации: ао — 1,5 мили, Ьо = 1,0 мили, угол между направлением большой оси и меридианом а0 = 50°;
— для счисления: ас — 2,0 мили, bc = 1,0 мили, угол между направлением большой оси и меридианом яс— 120°.
Решение. 1) Выписываем параметры векториальных ошибок
Л == «о ~ 1.5 мили, <xj = а0 — 50°,
/2 — — 1,0 мили, а2 =. а0 4- 90° — 140°,
/3 — дс = 2,0 мили, а3 ~ ас = 120°,
/41= Ьс = 1,0 мили, а4 = ас 4- 90° — 30е;
2) вычисляем квадраты модулей векториальных вующих им удвоенных углов
ошибок и величины соответст-
/J — 2,25, 2aj — 100°;
/2=1,00, 2я2- 280°;
/2 - 4,00, 2а3 - 240°;
/2=1,00, 2а4 = 60°.
{/2] = 8,25
Для геометрического суммирования находим разности квадратов взаимнообратных ошибок и их направления:
/2 _ /2 — 1,25, 23,-100°,
/2 — /2^3,00, 2<х3 = 240°;
3) построив квадратичный полигон (рис._273), измеряем суммарный вектор [72] == 2,2 и направление этого вектора
2?О = 218 ;
4) составляем систему уравнений вида (16.51):
а2 4- Ь2 = 8,25, а2 & = 2,20;
5) решаем полученную систему уравнений и находим полуоси эллипса, характеризующего ошибку текущего счислимого места:
а = 2,3 мили, b = 1,7 мили;
направление большой оси эллипса а0 = 109°.
Определение допустимой ошибки места и вероятности нахождения корабля в заданной полосе или районе. Допустимой ошибкой места корабля называют такую наибольшую ошибку, при наличии которой еще сохраняются с заданной вероятностью навигационная безопасность плавания, а также возможность выполнения решаемой кораблем задачи.
518
Глава 16. Оценка точности плавания корабля
Данная ошибка определяется обычно для двух типовых задач кораблевождения, связанных с расчетом допустимой ошибки места для обеспечения нахождения корабля с заданной вероятностью, во-первых, в заданной полосе и, во-вторых, в заданном районе.
Первая из поставленных задач по расчету допустимой ошибки места для обеспечения нахождения корабля с заданной вероятностью в заданной полосе наиболее просто решается на основе закона Релея. В соответствии с этим законом вероятность того, что точка, положение которой определено со средней квадратической ошибкой Л4, не будет иметь отклонений, превышающих z в направлении, перпендикулярном заданному, определяется выражением
Р=\-е~ж\ (16.73)
Из формулы (16.73), задавшись вероятностью Р, можно вычислить допустимую среднюю квадратическую ошибку Мдоп
(,6-74>
Переходя к десятичным логарифмам, получим:
= (16.75)
Последняя формула может быть написана в виде
= (16.76)
„ 1 / 0,4343
где Кг- |/
Величины коэффициентов Кг для различных вероятностей Р приведены в табл. 36.
Таблица 36
р 0,683 0,900 0,950 0,990 0,993 0,997
Кг 0,94 0,66 0,58 0,47 0,45 0,42
Способ, связанный с применением закона Релея, дает удовлетворительное решение только в частном случае, при движении корабля посредине заданной полосы, когда z равно полуширине полосы В. Если удаления от границ полосы различны, то возможно лишь приближенное решение, при котором величина z принимается равной меньшему из расстояний.
Пример. Вычислить допустимую среднюю квадратическую ошибку места, обеспечивающую движение корабля посредине заданной полосы шириной В — 2 мили с вероятностью Р — 0,99.
Решение. Из табл. 36 по Р — 0,99 выбираем ^—0,47 и по формуле (16.76) вычисляем искомую ошибку при z = (В : 2) «=» 1
Мдоп — zKz — 1 -0.47 — 0,47 мили.
При движении по линии рекомендованного курса величина z должна приниматься равной расстоянию до ближайшей навигационной
$ 91. Точность плавания и расчет допустимого времени плавания по счислению 519
опасности от линии рекомендованного курса. В некоторых случаях допустимое отклонение z от линии курса задается в документах на поход.
Задача по расчету вероятности нахождения корабля посредине заданной полосы при известной средней квадратической ошибке его места решается по формуле (16.73).
В общем случае задачу по оценке вероятности нахождения корабля в заданной полосе, имеющей ширину В (рис. 274), можно решить по формуле
Р = 0,5 [ф (₽,)— Ф (р2)], (16. 77)
где 0(pj) и Ф (₽2) — приведенные функции Лапласа;
₽==€ ₽2 = ^,
здесь zx = ОКХ и г2 = ОК? — расстояния от заданной
1 точки (центра рассеивания) до границ полосы;
Ег = CW — срединное отклонение точки по направлению, перпендикулярному заданной полосе.
Величины Ф (₽/) для некоторых значений & приведены в табл. 37.
Таблица 37
Ф(р) Ф(р) ’‘-й Ф(3) Ф(3)
0,1 0,054 1,2 0,582 1 2,3 0,879 3,4 0,978
0,2 0,107 1.3 0,619 2,4 0,894 3,5 0,982
0,3 0,160 1,4 0,655 2,5 0,908 3,6 0,984
0,4 0,213 1,5 0,688 2,6 0,920 3,7 0,987
0,5 0,265 1,6 0,719 2,7 0,930 3,8 0,990
0,6 0,314 1,7 0,748 2,8 0,941 3,9 л л 0,992 Л ООО
0,7 0,363 1,8 0,775 2,9 0,950 4,и 4,2 О j УУо 0,996
0,8 0,411 1,9 0,800 3,0 0,957 4,4 0,997
0,9 0,456 2,0 0,823 3,1 0,963 4,8 0,999
1,0 0,500 2,1 0,843 3,2 0,969 5,0 0,9993
1,1 0,542 2,2 0,862 3,3 0,974 5,4 0,9997
Если центр рассеивания О (место корабля) полосы В, то формула (16.77) принимает вид
лежит в пределах
Р = 0,5 [ф (₽,)-}- Ф(₽2)]. (16.78)
В частном случае, когда точка О (место корабля) расположена на равных удалениях z = (В :2) от границ полосы, то
Р^Ф$).
(16. 79)
520
Г лава 16. Оценка точности плавания корабля
Срединное отклонение Ez центра рассеивания (принятого места корабля) при известной эллиптической ошибке зависит от величин полуосей а и b эллипса, а также от угла а между направлением заданной полосы и направлением большой полуоси а. Так как проекции полуосей эллипса на направление, перпендикулярное заданной полосе, являются векториальными ошибками, то их следует суммировать квадратически и, следовательно, величина Ez — ON (рис. 274) должна вычисляться по формуле
Ег = V+ = Fa2 sin2a + &!cos2a , (16. 80)
где а и b — срединные величины полуосей эллипса ошибок.
Так, например, если заданная полоса имеет направление 50—230°, срединные величины полуосей эллипса равны а = 2 мили и b = 1 миле, а направление большой оси относительно меридиана определяется углом аи = 90°, то получим:
а = 90° — 50° - 40° и
Ez = V22sin240° -h l2cos240° = 1,5 мили.
В тех случаях, когда известны не срединные, а средние квадратические величины полуосей эллипса ошибок, последние для получения Ez по приведенной формуле должны быть предварительно умножены на коэффициент, равный 0,67.
Если текущее место корабля охарактеризовано средней квадратической ошибкой Л1, то на основе принципа равного действия составляющих этой ошибки по направлению, совпадающему с заданной полосой и перпендикулярному ему, для вычисления Ez должна применяться формула
Ez = 0,67-0,7М = 0,47Л1. (16. 81)
Пример. Корабль по счислению вышел на середину заданной полосы, имеющей ширину В = 3,0 мили, со средней квадратической ошибкой М — 1 миля.
Вычислить вероятность нахождения корабля в заданной полосе.
Решение. 1) Ez = 0.47Л1 — 0,47 мили;
2) г, = z2 = В : 2 = 1,5 мили;
3) 3 = -g- = 3,2;
4) применяя формулу (16.79) выбираем из табл. 37 искомую вероятность Р — 0,969 или 96,9%.
Пример. Корабль по счислению вышел в заданную полосу, имеющую ширину В = 2 мили в точку, удаленную от границ полосы иа расстояния Zj — 0,7 мили И Z2 = 1,3 мили.
Вычислить вероятность нахождения корабля в данной полосе, если средняя квадратическая ошибка места М — 0,7 мили.
Решение. 1) Ez — 0,47Af = 0,47• 0,7 — 0,33 мили;
2)₽'=£з = 2-12’ ^=-(Й=4'0:
3) из табл. 37 по и выбираем Ф(3») —0,847 и Ф (32) = 0,993;
4) по формуле (16.78) вычисляем
Р = 0,5 (0,847 + 0,993) = 0,920 или 92%.
Определение вероятности нахождения корабля в заданном районе производится на основе закона нормального распределения с использованием приведенных функций Лапласа.
Заданный район, имеющий обычно форму прямоугольника или квадрата, рассматривается как область пересечения двух полос, имеющих ширину а и Ь. Вероятность Р нахождения корабля в заданном районе,
§ 91. Точность плавания и расчет допустимого времени плавания по счислению 521
как вероятность одновременного нахождения его в двух пересекающихся полосах, равна произведению вероятностей Р\ и Р2 нахождения корабля в полосе айв полосе b соответственно, т. е.
Р=РХР2. (16.82)
Величины Р| и Р2 выбираются из табл. 37 по отношениям полуширин полос а:2 и Ь:2 к срединным отклонениям Ех и Еу места корабля по направлениям, перпендикулярным соответствующим полосам.
В тех случаях, когда точность места характеризуется не эллиптической, а средней квадратической ошибкой, величины Ех и Еу равны друг цругу и вычисляются по формуле (16.81).
Пример. Вычислить вероятность нахождения корабля в районе, имеющем форму прямоугольника со сторонами а = 5 миль и b — 3 мили, если счислимое место совпадает со срединой района, а средняя квадратическая ошибка этого места М — 2 мили.
Решение. 1) Вычисляем по формуле (16.81) срединные отклонения счислимого места по взаимно перпендикулярным направлениям
Ех = Еv = 0,47Л! — 0,94 мили; л У
2) вычисляем полуширину полос zx = у — 2,5 мили и ц — — 1,5 мили и на-
ходим отношения
₽'=1;=ЙГ4=2’67’ ₽г=^=й=1,6:
3) выбираем из табл. 37 вероятности Pi и Р2 нахождения корабля в полосах
Р, = 0,927 и Р2 = 0,719;
4) находим по формуле (16.82) искомую вероятность Р нахождения корабля в заданном районе
Р= Р,Р2 =г 0,927 -0,719 = 0,67 или 67%.
Если счислимое место не совпадает со средней точкой заданного района, то для расчета вероятностей Р} и Р2 применяется формула (16.78).
Решение задачи по расчету допустимой ошибки места, обеспечивающей заданную вероятность нахождения корабля в заданном районе, возможно по табл. 37, только в том случае, когда заданный район имеет форму квадрата. При этом по заданной вероятности Р можно легко рассчитать вероятности Pi и Р2, так как они равны друг другу; из формулы (16.82) получаем
Л Л = VP-
(16. 83)
По найденным величинам Pi — Р2 из табл. 37 выбирается отношение z: Ег = Э, а затем вычисляется допустимое срединное отклонение Ег и допустимая средняя квадратическая ошибка.
Пример. Вычислить допустимую среднюю квадратическую ошибку места, при которой корабль находился бы в заданном районе, имеющем форму квадрата со сторонами а — 5 миль, с вероятностью Р = 0,95.
Решение. 1) Pj = Р2 — У Р = }^0,95 = 0,974;
2) выбираем из табл. 37 по Pj = Р2 £ = = 3,3;
3) находим z = а: 2 = 2,5 мили и Ех = Еу = -5- — — 0,76 мили;
Л р 0,0
4) вычисляем по формуле (16.81) допустимую среднюю квадратическую ошибку места
Л4Д0П — Ех • 0,47 = 0,76: 0,47 — 1,6 мили.
Сложность решения аналогичной задачи при а Ф b состоит в том, что заданную вероятность Р можно получить в практически неограниченном количестве сочетаний различных величин Р\ и Р2. Однознач
522
Г лава 16. Оценка точности плавания корабля
ное решение возможно для некоторых постоянных отношений а: b с помощью графика, приведенного на рис. 275.
На оси абсцисс графика влево от нуля нанесена шкала заданных вероятностей Р нахождения корабля в заданном районе; вправо от нуля нанесена шкала отношений а: М, деления и оцифровка которой произ-
1. Дано: Р = 0,70,4 = 1,5. 2. Дано: -£ 3,2,4 - 3.
b Mb
Определить . Определить Р.
н М Ответ: Р~0,52
Ответ: = 2,5
М
ошибки по взаимно перпендикулярным направлениям и с переходом от срединной к средней квадратической ошибке места. В правой части графика нанесены кривые фиксированных отношений размеров сторон заданного прямоугольника a:b— 1, а: b = 1,5, а:Ь — 2 и а: 6 = 3. На левом поле графика по диагонали нанесена вспомогательная прямая.
Порядок пользования графиком поясним на примерах.
Пример. Задан район в виде прямоугольника со сторонами а = 5 миль и 6 = 3,3 мили.
Вычислить среднюю квадратическую ошибку, при которой вероятность Р нахождения корабля вблизи центральной точки района была бы не ниже 0,80.
Решение. 1) Находим отношение а : b = 5 : 3,3 = 1,5;
2) слева на шкале вероятностей находим деление, соответствующее Р = 0,80, и от него по оси ординат идем до вспомогательной прямой и далее от нее по оси абсцисс вправо до пересечения с кривой —1,5; для этой точки на правой шкале считываем отношение а : М — 2,9;
3) вычисляем искомую среднюю квадратическую ошибку М = 5 : 2,9 — 1,7 мили.
Пример. Задан район, имеющий форму прямоугольника со сторонами а — 10 миль я b “ 5 миль.
Определить вероятность нахождения корабля в данном районе, если средняя квадратическая ошибка места М == 2,5 мили.
$ 91. Точность плавания и расчет допустимого времени плавания по счислению 523
Решение. 1) Вычисляем аргументы для входа в график а : b «= 2, а : М = 4;
2) на шкале а: М находим деление, соответствующее отношению 4, и от него идем по оси ординат до пересечения с кривой а: Ь = 2 и далее в левую часть графика до пересечения со вспомогательной прямой; для этой точки на шкале Р считываем искомую вероятность Р = 0,84.
Из рассмотрения графика рис. 275 видно, что при отношениях (а : М) > 5 и (а: 6) <2 вероятность нахождения в данном районе можно считать полной.
Расчет допустимого времени плавания по счислению. Допустимым временем плавания по счислению называют такой его наибольший промежуток, при котором непрерывно увеличивающаяся ошибка текущего места не будет превышать установленной величины.
Допустимую среднюю квадратическую ошибку места Л4Д0П корабля следует рассматривать как величину, зависящую от средних квадратических ошибок последнего определения места Мо и последующего счисления /Ис (/), т. е.
Промежуток времени между моментами определений места будет зависеть от ошибки 7И0 и скорости нарастания ошибки счисления. Из последней формулы можно написать
Мс(О = /^оп-М*. (16.84)
В левую часть формулы (16.84) можно подставить выражения, определяющие нарастание ошибки счисления; в соответствии с формулами (16.1) и (16.2) получим:
= К Кп - <:
К/ = К- М20.
Отсюда следуют формулы, позволяющие рассчитать допустимое время плавания по счислению:
— при продолжительности плавания до 2 ч
' к :
— при продолжительности плавания более 2 ч
Из формулы (16.86) получим:
— при 0 = 0,5
М2 — М2
*Г~ ’ — при 6 — 0,8
(16. 85)
(16. 86)
(16. 87)
(16. 88)
524
Глава 16. Оценка точности плавания корабля
Пример. Для плавания по рекомендованному курсу вычислена допустимая средняя квадратическая ошибка текущего места корабля Л4Д0П== 1,5 мили.
Вычислить допустимый промежуток времени между моментами определений места, если в районе плавания имеется возможность определять место со средней квадратической ошибкой Л40 = 0,5 мили, а коэффициент точности счисления Кс = ОД мили/ч^5.
Решение. По формуле (16.87) получаем
Л12 — М2. 1.52 — 0.52
Z = —55Ц—=-----------=---= 2,5 ч.
К2 0,92
Пример. Для плавания в заданном районе с заданной вероятностью вычислена допустимая средняя квадратическая ошибка места Л4ДОП = 2,0 мили.
В ы*ч и с л и т ь допустимый промежуток времени между моментами определений места, если ожидаемая средняя квадратическая ошибка определения места Л40= 1,0 мили и Кс = 0,5 мили/ч°’8.
Решение. Логарифмируя формулу (16.88), получаем
у 'Идоп-^о }4— 1 1,7
|g t = 1,25lg-----j,------= 1,25 lg -i-Qg— = 1,25 lg ;
'c * ’
lg t = 1,25 lg 3,4 = 1,25-0,531 = 0,664; отсюда t = 4,6 ч.
Вычисляемые по приведенным формулам промежутки времени являются максимально допустимыми и во многих случаях они должны быть сокращены в два и более раза, чтобы повысить вероятность успешного решения поставленной кораблю задачи.
Часть V
РАСЧЕТЫ МАНЕВРИРОВАНИЯ КОРАБЛЕЙ
Глава 17
ОБЩИЕ ОСНОВЫ МАНЕВРИРОВАНИЯ
§ 92. ОСНОВНЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ
Корабль, выполняющий маневр относительно какого-либо объекта, называется маневрирующим.
Объект, относительно которого маневрирующий корабль изменяет свое положение, называется объектом маневра.
Положение маневрирующего корабля относительно объекта маневра называется позицией. Позиция маневрирующего корабля избирается исходя из поставленной задачи и возможностей корабля для ее выполнения. Она определяется полярными координатами: пеленгом или курсовым углом объекта маневра и дистанцией до него, которые называются элементами позиции.
Скорость изменения элементов позиции в процессе маневрирования кораблей относительно друг друга характеризуется основными элементами маневрирования: общей величиной изменения расстояния (ОВИР), общей величиной бокового перемещения (ОБП) и величиной изменения пеленга (ВИП),
ОВИР и ОБП выражаются в кабельтовах, а ВИП — в градусах за одну минуту времени.
Если известны скорости маневрирующего корабля VM и объекта маневра Vк и их курсовые углы qM и qK, а также дистанции D между кораблями, основные элементы маневрирования можно получить по следующим формулам:
ОВИР = ВИРМ± ВИРК = -{VMCQsqM^VKcosqK)\ (17. 1)
ОБП = БПМ + БПК = VM sin qM -г Vх sin qK\ (17. 2)
ВИП =-9^-. (17.3)
Элементы ОВИР, ОБП и ВИП, соответствующие текущим величинам VM, VK, qM, qK и D, вырабатывают обычно автоматы. Для
решения задач вручную используют таблицы, например, ;табл. 33-а, б, в МТ—63.
При маневрировании корабля относительно неподвижного объекта маневра изменение элементов позиции определяется собственным движением корабля относительно местности.
Для расчетов маневрирования относительно подвижного объекта необходимо знать изменение элементов позиции в результате как собственного движения корабля, так и движения объекта маневра. Примене
528
Глава 17. Общие основы маневрирования
ние законов механики об относительном движении позволяет легко и быстро рассчитать маневр по единой для всех задач методике.
Применяя теорию относительного движения к маневрированию кораблей, устанавливают следующие основные понятия и определения: — объект маневра рассматривается как начало подвижной системы координат; собственное движение объекта маневра относительно местности учитывается как переносное движение;
— собственное движение маневрирующего корабля относительно местности считается результирующим или «абсолютным» движением;
— перемещение маневрирующего корабля относительно объекта маневра учитывается как относительное движение.
Теорема кинематики о сложном движении применительно к маневрированию кораблей может быть написана в следующем виде:
+ (17.4)
т. е. вектор скорости маневрирующего корабля V м равен геометрической сумме векторов скорости объекта маневра Vк и относительной скорости И .
Рассматривая перемещение кораблей за некоторый промежуток времени /, аналогично получим
= + (17.5)
т. е. вектор пути маневрирующего корабля SM равен геометрической сумме векторов пути объекта маневра и относительного пути Sp. Рассмотрим перемещение маневрирующего корабля относительно подвижного объекта маневра в общем виде.
Маневрирующий корабль находится в начальной позиции (рис. 276) и идет курсом Км со скоростью Vм. Объект маневра, находящийся в начальной позиции KQ, идет курсом Кк со скоростью VK. В начальный момент их взаимное положение определяется пеленгом /70, курсовыми углами и qи дистанцией Do.
Через промежуток времени t маневрирующий корабль и объект маневра переместились соответственно в позиции и К\. Взаимное положение их определяется новыми пеленгом /7Ь курсовыми углами и qK^ и дистанцией Dv
§ 93. Общая методика решения задач маневрирования
529
Чтобы определить, как изменялось взаимное положение маневрирующего корабля и объекта маневра в процессе маневрирования, найдем направление и величину относительного пути *Sp за время маневра t. Из формулы (17.5) следует
S = SM - 3... р л! л
Произведя геометрическое вычитание, как показано на рис. 276, получим вектор Sp = MQM'V
Положение точки относительно позиции /Со определяется теми же полярными координатами, что и положение точки Mi относительно точки Ki. Точка Мг является новой позицией маневрирующего корабля, отнесенной к начальной позиции объекта Маневра, или текущей относительной позицией маневрирующего корабля.
Треугольник KqMqMJ называется треугольником позиций, так как его вершины представляют собой позиции маневрирующих кораблей.
Треугольник Л10Л11Л1р стороны которого представляют собой векторы путей маневрирующих кораблей и вектор относительного пути, называется треугольником путей или путевым треугольником, Треугольник позиций и треугольник путей всегда имеют общую сторону Af0AfJ==Sp> являющуюся геометрическим местом позиций маневрирующего корабля относительно объекта маневра.
Направление линии, на которой располагаются относительные позиции маневрирующего корабля, характеризуется относительным курсом /Ср, а скорость перемещения этой позиции по относительному курсу соответствует относительной скорости Vp.
Если промежуток времени, для которого построен треугольник путей, принять за единицу, то этот треугольник обратится в треугольник скоростей, называемый также скоростным треугольником.
§ 93. ОБЩАЯ МЕТОДИКА РЕШЕНИЯ ЗАДАЧ МАНЕВРИРОВАНИЯ
Расчеты маневрирования могут производиться аналитически по формулам, таблицам или номограммам и графически.
Аналитическое решение по формулам вручную применяется лишь для научно-исследовательских целей. Таблицы и номограммы применяются при расчете некоторых наиболее характерных для данного класса корабля маневров.
Аналитическое решение задач маневрирования производится также в электронных вычислительных машинах и управляющих системах, результаты решения высвечиваются на световых табло и документируются на лентах записывающих устройств.
Графический способ расчета маневров является основным при отсутствии на корабле специализированных вычислительных машин и систем, а при наличии таких машин и систем он применяется в качестве резервного.
Этот способ обладает наглядностью и дает возможность достаточно просто контролировать и корректировать расчеты в процессе выполнения маневра.
Графическим способом можно одинаково успешно решать задачи на карте, маневренном планшете или на чистом листе бумаги по единой методике расчетов. Непринципиальные отличия решения задач на карте и маневренном планшете состоят лишь в месте и приеме построения треугольника скоростей. Единая методика базируется
34 Заказ 1833
530
Глава 17. Общие основы маневрирования
на применении законов относительного движения к маневрированию кораблей.
При решении задач по этой методике треугольник скоростей всегда строится при начальной позиции объекта маневра Ло приемом прямого построения. В этом случае векторы скоростей маневрирующего корабля VM (рис. 277) и объекта маневра V к прокладываются из точки Ко
по направлению линий их курсов, а вектор относительной скорости всегда направлен из конца вектора V к в конец вектора VM.
Скорости при расчете маневра рекомендуется выражать в кабельтовах в минуту. Для перевода узлов в кабельтовы в минуту необходимо число узлов разделить на шесть, так, например, 15 уз соответствуют 2,5 кбт!мин. Для этой же цели можно воспользоваться табл. 37 МТ—63.
Расстояния и пути кораблей берут в кабельтовах, таким образом время маневра, рассчитываемое делением пути на скорость, получается в минутах.
Решая задачи маневрирования графическим способом, предпочтение следует отда-
вать маневренному планшету с сеткой полярных координат, при этом сокращается время расчетов и упрощается процесс решения. Начальную позицию объекта маневра во всех случаях, кроме определения элементов движения объектов и расчета маневра расхождения по данным РЛС, следует совмещать с центром планшета. Рассчитывая элементы движения объектов по пеленгам и дистанциям и маневры расхождения по данным РЛС, с центром планшета рекомендуется совмещать начальную позицию маневрирующего корабля, так как изображения обстановки на планшете и на экране РЛС будут идентичными.
Масштаб треугольника скоростей при решении задач на маневренном планшете берется всегда одинаковым. Расстояние между двумя концентрическими окружностями на планшете, называемое единицей планшета, принимается равным 1 кбт!мин.
Масштаб расстояний зависит от начальной дистанции между кораблями. В каждом конкретном случае выбирается наиболее крупный масштаб. Обычными являются масштабы расстояний, при которых в единице планшета содержится 10 кбт или 10 миль.
§ 94. ОПРЕДЕЛЕНИЕ КООРДИНАТ МАНЕВРИРУЮЩЕГО КОРАБЛЯ
Определение относительных координат. Для определения относительного положения маневрирующего корабля необходимо рассчитать его относительный курс.
При позиции объекта маневра Ко (рис. 278) строится треугольник скоростей КоаЬ приемом прямого построения. Направление вектора относительной скорости V определит относительный курс К9 маневрирующего корабля. Линия относительного курса проводится из позиции Мо и используется при решении ряда задач, например:
— расчет времени прихода маневрирующего корабля на заданную дистанцию или заданный пеленг;
— расчет курсовых углов кораблей на заданный момент или через заданный промежуток времени;
— расчет времени пересечения курса объекта маневра маневрирующим кораблем и определение дистанции до объекта маневра в момент пересечения;
$ 94. Определение координат маневрирующего корабля
531
— расчет кратчайшего расстояния между кораблями;
— определение основных элементов маневрирования на заданный момент.
Расчет времени прихода маневрирующего корабля ,на заданную дистанцию Di или на заданный пеленг П\ (рис. 278). Для нахождения относительной позиции маневрирующего корабля на момент заданной дистанции из точки Ко отрезком Ко^', равным заданной дистанции, засекается относительный курс в точке Время сближения на заданную дистанцию рассчитывается по формуле
Аналогично рассчитывается время прихода маневрирующего корабля на заданный пеленг. Относительная позиция М\ находится в точке пересечения линии относительного курса с линией заданного пеленга П\, проложенного из точки Ко.
Расчет курсовых углов кораблей на заданный момент или через заданный промежуток времени t2. Вначале вычисляется относительный путь Spj (рис. 278), который пройдет маневрирующий корабль через заданный промежуток времени по формуле
\ = УЛ
Ра Р 2
Отрезок Sp2 откладывается от позиции М[ по относительному курсу и находится точка Л12, которая является искомой относительной позицией. Курсовой угол объекта маневра qK измеряется при точке KQ между линией курса объекта маневра и линией пеленга KQM2 (на рис. 278 qK левого борта); курсовой угол маневрирующего корабля qM отсчитывается от линии курса до продолжения линии пеленга M2KQ (на рис. 278 qM правого борта).
34*
532
Глава 17. Общие основы маневрирования
Расчет времени пересечения курса объекта маневра маневрирующим кораблем и определение дистанции до объекта маневра в момент пересечения. В момент пересечения маневрирующим кораблем курса объекта маневра линия пеленга на объект маневра совпадает с линией его курса. Точка М'3 (рис. 278), в которой линия пеленга пересекает относительный курс, и будет искомой относительной позицией. Отрезок А^Л/д равен дистанции D3 до объекта маневра в момент пересечения курса.
Время пересечения курса рассчитывается по формуле
. Sp8 Af0Af3
3 ~ ’ р р
Определив, как указано выше, курсовой угол объекта маневра, видим, что Уд = 0°.
Следовательно, маневрирующий корабль пересекает курс объекта маневра по носу. Аналогично решается задача по определению положения точки М'4 пересечения объектом маневра линии курса маневрирующего корабля. Определив курсовой угол маневрирующего корабля в момент пересечения курса объектом маневра, видим, что ум = 180°. Следовательно, объект маневра пересекает курс маневрирующего корабля по корме.
Расчет кратчайшего расстояния между кораблями. Кратчайшее расстояние между кораблями, маневрирующими на прямых курсах, будет в момент относительного траверза.
Для решения задачи из точки Ко проводится перпендикуляр к линии относительного курса. Точка М'5 (рис. 278) будет относительной позицией маневрирующего корабля на момент кратчайшего расстояния РКр; это расстояние равно отрезку КоМ'5.
Время маневра находится по формуле
_ AfX
*5 “ тг ~ v0 • р р
Определение основных элементов маневрирования на заданный момент. Определим основные элементы маневрирования для относительной позиции М3 (рис. 278). ОВИР равен проекции вектора относительной скорости на линию пеленга. Знак ОВИР определяется по направлению этой проекции. Если проекция направлена от объекта маневра, ОВИР имеет знак плюс, если она направлена на объект, знак минус.
ОБП равно проекции вектора относительной скорости на направление, перпендикулярное линии пеленга; знак ОБП зависит от стороны изменения пеленга. Если пеленг изменяется вправо, ОБП имеет знак плюс, если пеленг изменяется влево, знак минус.
ОВИР и ОБП получают в тех единицах, в которых отложен вектор относительной скорости 1/р (в кабельтовах в минуту или в узлах). На рис. 278 ОВИР — М3е отрицателен, а ОБП = ес положительно.
Для определения ВИП вектор Ир = М'3с откладывается от точки Afg в масштабе расстояний и конец этого вектора соединяется с точкой Ко. Угол M3KQc и будет равен ВИП. Знак ВИП одинаков со знаком ОБП.
Пример (рис. 279). Объект маневра идет курсом Кд^ —120° со скоростью Уд-= 18 уз = 3 кбт!мин. Маневрирующий корабль идет курсом «10° со скоростью V^| = 21 уз = 3,5 кбт1мин.
Пеленг с маневрирующего корабля на объект маневра Пм^д = 320°, а дистанция до объекта маневра 115 кбт.
§ 94. Определение координат манедрирующего корабля
533
Определить: а) относительный курс и относительную скорость маневрирующего корабля;
б) промежуток времени, через который пеленг на объект маневра будет 310°, дистанцию до объекта маневра н основные элементы маневрирования в момент выхода на пеленг 310°;
в) промежуток времени, через который маневрирующий корабль разойдется с объектом маневра, расстояние между кораблями и курсовые углы кораблей в момент расхождения.
Решение. 1) Построив треугольник скоростей К^аЬ, снимают относительный курс = 338° и величину Vp — 5,3 кбт/мин',
2) находят точку Л41 пересечения линии заданного^пеленга 310° с линией относительного курса К , проведенной из точки Л1о, и снимают относительный путь
, Р‘ 42
S = MqM} — 42 кбт. Время маневра /1==у^ = 8 мин.
Рис. 279
Дистанция до объекта маневра в момент выхода на пеленг равна КоМj = 76 кбт. Спроектировав вектор Vp — 5,3 кбт/мин, проведенный из точки на линию пеленга, и направление, перпендикулярное ей, измеряют ОВИР = —4,7 кбт/мин и ОБП =—2,5 кбт/мин. Прокладывают отрезок е, равный относительной скорости «5,3 кбт/мин в масштабе расстояний. Соединив точку е с точкой Ко, снимают ВИП = —Г/мин-,
534
Глава 17. Общие основы маневрирования
3) момент расхождения кораблей определяется кратчайшим расстоянием DKp между ними. Находят позицию маневрирующего корабля М2 на момент относительного траверза и снимают DKp = 36 кбт и Spa — Л41ЛГ2= 67 кбт.
67
Время маневра t2 — f—5 = 12,6 мин.
0,0
Курсовые углы кораблей в момент расхождения будут qK — 52° л/б; — 122° л/б.
Определение координат маневрирующих кораблей относительно местности. Для определения положения маневрирующих кораблей в процессе маневра относительно местности необходимо перейти от относительного движения к «абсолютному» с помощью треугольника путей, который строится в масштабе расстояний, принятом для решения задачи.
Методика построения треугольника путей для любой относительной позиции одинакова. Рассмотрим его построение для позиции (рис. 278). Из начальной позиции А40 проводится линия курса маневрирующего корабля Км. Из относительной позиции М'5 проводится линия, параллельная курсу объекта маневра до пересечения с линией курса Км. Точка М5 пересечения этих линий и будет местом маневрирующего корабля относительно местности на момент кратчайшего расстояния между кораблями.
Треугольник Af0Af5Afg, сторонами которого являются векторы путей = Л40Л15, = М'5М5 и Sps = ^о^5’ и будет треугольником путей.
Для определения положения объекта маневра К$ относительно местности необходимо вектор отложить от точки Ко по курсу Я*х.
Глава 18
МАНЕВРИРОВАНИЕ ДЛЯ ЗАНЯТИЯ ПОЗИЦИИ
§ 95. МАНЕВРИРОВАНИЕ ДЛЯ ЗАНЯТИЯ ЗАДАННОЙ ПОЗИЦИИ
Чтобы рассчитать маневр для занятия назначенной позиции, необходимо знать исходные относительные координаты объекта маневра и элементы его движения. Если маневрирующий корабль имеет непосредственный контакт с объектом маневра, то эти параметры определяются по текущим пеленгам и дистанциям или только по пеленгам. Если же маневрирующий корабль не имеет контакта с объектом маневра, то все необходимые сведения должны поступать от внешнего источника информации.
Прежде чем рассчитывать маневр, следует привести место маневрирующего корабля и объекта маневра к одному моменту. Этим моментом может быть момент начала выполнения маневра.
Различают две группы задач на занятие позиции:
1) занятие позиции на заданных пеленге (курсовом угле) и дистанции;
2) занятие позиции на заданной дистанции в кратчайший срок.
Методика решения этих задач принципиально одинакова и состоит в следующем:
— наносятся исходные позиции объекта маневра и маневрирующего корабля,
— определяется относительный курс маневрирующего корабля, удовлетворяющий поставленной задаче,
— строится треугольник скоростей, из которого определяются курс маневрирующего корабля и относительная скорость,
— вычисляется время маневра как частное от деления относительного перемещения на относительную скорость. Учитываемое относительное перемещение соответствует расстоянию между исходной и новой относительными позициями маневрирующего корабля,
— осуществляется переход от относительного движения к «абсолютному» построением треугольника путей и находятся места кораблей на линиях курсов.
Задачу по занятию заданной позиции в зависимости от скорости маневрирующего корабля можно решить для оптимальной скорости, минимальной скорости и для скорости, позволяющей занять заданную позицию в заданный срок.
Расчет маневрирования на занятие заданной позиции оптимальной скоростью. Оптимальная скорость для выполнения маневра при плавании в составе соединения определяется официальными документами. Она обычно превышает назначенный соединению полный ход на установленное число узлов и соответствует термину «самый полный ход». В отдельных случаях оптимальная скорость на время маневра может
536
Глава 18. Маневрирование для занятия позиции
выбираться вплоть до максимально возможной, исходя из решаемой тактической задачи и обстановки в районе ее выполнения.
Пусть объект маневра, находящийся в позиции Ко (рис. 280), идет курсом Кк со скоростью MQ — исходная позиция маневрирующего корабля; AfJ — относительная позиция, которую необходимо
Соединив точки MQ и М\ прямой, получим величину и направление вектора Sp относительного перемещения. Этот вектор всегда направлен от исходной позиции к позиции Л/р которую необходимо занять. Чтобы определить курс выполнения маневра, строится треугольник скоростей для оптимальной скорости Ум маневрирующего корабля, для чего из конца вектора V* (точка а) проводится линия относительного курса Я, параллельная вектору Sp, которая засекается из точки KQ вектором скорости УА1 . Соединив точку KQ с точкой Ь, получим курс Км маневрирующего корабля для занятия позиции Л4р
Время маневра рассчитывается по формуле
Sp _ MQM\
1 VP> ab ‘
Построив путевой треугольник найдем места маневрирую-
щего корабля Л/i и объекта маневра К\ на линиях курсов в момент занятия позиции.
Расчет маневрирования на занятие позиции минимальной скоростью. Рассчитать минимальную скорость V’Afmln (рис. 280) для занятия заданной позиции M’v Относительный курс и относительное перемещение определяются так же, как и в первом случае.
Чтобы определить скорость V\mIn и курс маневра, строится треугольник скоростей Коас, для чего из точки Ко опускается перпендикуляр на линию относительного курса К, проведенную из конца вектора Ук. Направление перпендикуляра определит курс маневрирующего корабля Км> а его длина—величину минимальной скорости V’Almln.
$ 95. Маневрирование для занятия заданной позиции
537
Время маневра рассчитывается по формуле sp _ мом[ 2 •
Построив треугольник путей Л10/И;/И2, найдем места маневрирующего корабля М2 и объекта маневра К2 на линиях курсов к концу маневра.
Расчет маневрирования на занятие позиции в заданный срок. Если позицию необходимо занять к определенному моменту Т3, то, кроме курса, следует рассчитать также скорость маневрирующего корабля (рис. 280) для занятия заданной позиции к назначенному моменту. Относительный курс Кр и относительное перемещение Sp определяются так же, как и в предыдущих вариантах.
Зная время Ti начала маневра, следует вначале рассчитать промежуток времени /3, в течение которого должен быть осуществлен маневр
^з=Л-Л.
По известным относительному перемещению Sp = и времени 13 вычисляется относительная скорость Урз для занятия позиции к назначенному сроку
I/ = А _ '3 *3 *
Отложив от точки а по относительному курсу Кр отрезок ае = получим треугольник скоростей К^ае. Направление отрезка KQe определит курс маневрирующего корабля Км^ а длина — искомую скорость Vм.
Построив треугольник путей /И0Л^Л13, найдем места маневрирующего корабля М3 и объекта маневра Л3 на линиях курсов к концу маневра.
Пример (рис. 281). Объект маневра идет курсом 30° со скоростью 24 уз = 4 кбт/мин. Маневрирующему кораблю из исходной позиции Л<о, находящейся на курсовом угле объекта маневра Я к0 = 55° п/б в дистанции £>о — 100 кбт, необходимо занять позицию Mi на курсовом угле ЯKi = 100е п/б в дистанции D\ = 50 кбт от него.
Определить: а) курс и время маневра для занятия заданной позиции оптимальной скоростью Vjf = 30 уз =s 5 кбт/мин-,
б) минимальную скорость, курс и время маневра для занятия той же позиции; в) курс и скорость для занятия заданной позиции за 14 мин.
Решение. 1) В центре планшета принимаем позицию объекта маневра Ко-По заданным элементам наносим исходную позицию маневрирующего корабля Л40 и заданную позицию (Afj. Соединив точки Мо и прямой, получим направление относительного курса Кр и величину относительного перемещения Sp = М0М1 — 74 кбт. Для определения курса маневра, при котором маневрирующий корабль будет перемещаться рассчитанным относительным курсом Кр, при центре планшета приемом прямого построения строим треугольник скоростей. По направлению 30° откладываем вектор У# = 4 кбт/мин. Через конец вектора VK проводим прямую, параллельную вектору Sp, до пересечения в точке b с пятой окружностью, так как = 5 кбт/мин. Снимаем искомый курс маневра Км =256°. Измеряем относительную скорость Уо = ab = 8,3 кбт/мин и рассчитываем время маневра
«,=^ = 8,9 мин;
2) из точки Ко опускаем перпендикуляр на линию относительного курса, проведенного из конца вектора V^. Величина этого перпендикуляра равна минимальной
538
Глава 18. Маневрирование для занятия позиции
скорости min кбт!мин или 10,5 уз; курс маневрирующего корабля
#^ = 326°, относительная скорость Vfa = ac = 3,6 кбт/мин и время маневра
74
t2 = — = 20,5 мин\
О V О
3) вычисляем относительную скорость Урз для занятия заданной позиции за 14 мин.
74
V. = -w = 5,3 кбт!мин. Рз 14
Откладываем по линии К?, проведенной из точки а. Отрезок К$е определит величину искомой скорости VM = 2,4 кбт!мин = 14,4 уз» Курс для выполнения маневра Км# — 283°.
Рис. 281
В частном случае позицию М'] можно задавать на первоначальном пеленге или на первоначальной дистанции, т. е. так, чтобы в процессе маневра изменялась лишь одна координата. Порядок решения задач в этом случае не отличается от изложенного.
Расчеты маневрирования для занятия позиции на заданной дистанции в кратчайший срок. В некоторых случаях возникает необходимость в кратчайший срок изменить дистанцию до объекта маневра и при этом пеленг или курсовой угол на момент окончания маневра существенного значения не имеет.
Заданная дистанция может быть меньше или больше первоначальной.
§ Ж Маневрирование для занятия заданной позиции
539
Расчеты маневрирования производятся с помощью вспомогательной величины Л, которая находится по формуле
X~D3^, (18.1)
где D3 — заданная дистанция;
Уд. — скорость объекта маневра;
VM — скорость маневрирующего корабля.
Рис. 282
При расчете маневрирования для сближения на заданную дистанцию в кратчайший срок производятся следующие построения. Наносятся исходные позиции Ко и Мо (рис. 282) объекта маневра и маневрирующего корабля. Затем вычисляется отрезок Х=КоС и прокладывается от исходной позиции объекта маневра Ко по направлению, обратному его курсу. Соединив позицию Afo с точкой С, получают относительный курс для выполнения маневра. Точка М\ пересечения этого курса с окружностью радиуса D3 определит величину вектора $р — М0М[ относительного перемещения. Соединив прямой точку М[ с точкой Ко и продолжив ее, получим искомый курс Км маневрирующего корабля, который соответствует направлению прямой M[KQ. Отложив от точки Ко по линиям курсов Км и Кк векторы скоростей VM и Уд, получим треугольник скоростей КоаЬ, сторона которого ab является вектором Ур. Этот вектор должен быть параллелен вектору Sp.
Время маневра вычисляется по формуле
t _
Построив треугольник путей M^M\MV найдем места маневрирующего корабля Mi и объекта маневра Ki на линиях курсов к концу
540
Глава 18. Маневрирование для занятия позиции
маневра. В момент сближения на дистанцию D3 курсовой угол маневрирующего корабля будет равен 0°. Следовательно, объект маневра будет пересекать курс маневрирующего корабля впереди в расстоя-нии£>Э1 -/г
Пример (рис. 283). Объект маневра идет курсом 110° со скоростью Уд-==24 уз = ~ &кбт/мин. Исходная позиция Мо маневрирующего корабля находится на курсовом угле объекта маневра <7^= 30° о пр/б в дистанции Do =120 кбт. Маневрирующему кораблю поставлена задача сблизиться на дистанцию Р3==бб кбт в кратчайший срок при скорости VM — 18 уз = $ кбт/мин. 1 с
Определить курс маневрирующего корабля и время маневра.
Решение. 1) В центре планшета принимаем позицию Ко объекта маневра. По заданным элементам наносим исходную позицию маневрирующего корабля Мо и рассчитываем вспомогательный отрезок Х = 60 — = 80 кбт, который откладываем по направлению 290е; 7 <<<<.” •/✓
2) соединяем точку Мо с точкой С прямой, которая является линией относительного курса К?. Точка Mt пересечения этой линии с окружностью радиуса Р3*и будет относительной позицией маневрирующего корабля в момент сближения на дистанцию 60 кбт;
3) продолжив из точки линию получим искомый курс маневрирующего корабля /ГМ = 332О;
§ 95. Маневрирование для занятия заданной позиции
541
4) снимаем с планшета относительное перемещение Sp — MQMl — 63 кбт\
5) построив треугольник скоростей КъаЬ, снимаем с планшета величину Ур = ab == = 6,6 кбт/мин и рассчитываем время маневра
При расчете маневрирования для удаления на заданную дистанцию в кратчайший срок величина X вычисляется по формуле (18. 1) и откладывается от точки Kq (рис. 284) по линии курса объекта маневра. Соединив точку С с точкой Л1о прямой СЛ10 и продолжив эту прямую, получим линию относительного курса Хр для выполнения маневра. Для определения курса маневра линия относительного курса засекается из точки KQ дистанцией D3; прямая определит искомый курс Км. Отрезок Л40/И; соответствует величине относительного пути 5р.
Отложив затем от точки Хо по линиям курсов Км и скорости VM и Vк, получим треугольник скоростей К^аЬ, из которого определяется вектор относительной скорости Vp = ab. Этот вектор должен быть параллелен вектору 50.
. Время маневра находим по формуле
Построив треугольник путей найдем места маневрирую-
щего корабля Mi и объекта маневра К\ на линиях курсов к концу маневра.
Курсовой угол маневрирующего корабля в момент выхода на заданную дистанцию равен 180° и, следовательно, в этот момент объект маневра будет пересекать его курс по корме в расстоянии D3.
542
Глава 18. Маневрирование для занятия позиции
Пример (рис. 285). Объект маневра идет курсом 55° со скоростью 24 уз = 4 кбт/мин. Исходная позиция Мо маневрирующего корабля находится на курсовом угле объекта маневра ЯКо= 65° пр/б в дистанции Do = 50 кбт от него.
Определить курс и время маневра для увеличения дистанции до объекта маневра до 90 кбт в кратчайший срок при скорости 1^=30 уз = 5 кбт/мин.
Рис. 285
Решение. 1) В центре планшета принимаем позицию Ко объекта маневра и по заданным элементам наносим исходную позицию Afo маневрирующего корабля;
2) рассчитываем отрезок X =90 72 кбт и откладываем его от центра планшета
ои
по линии курса = 55°;
3) соединяем точку С прямой с точкой Л40 и получаем относительный курс К , который проводим до пересечения с окружностью радиуса D3 = 90 кбт в точке Alp Прямая определит искомый курс маневра /f^ = 161o;
4) измеряем относительное перемещение Sp = MQM1 = 62 кбт’,
5) отложив от точки Kq по направлению Кк = 55° вектор V= 4 кбт/мин, а по направлению /^=161° вектор 1/^ = 5 кбт/мин, получаем треугольник скоростей Ktfib, из которого определяем Ур = ab = 7,2 кбт/мин',
§ 96. Контроль маневра
543
6) рассчитываем время маневра
, 62 о с
t — = 8 > 6 мин.
§ 96. КОНТРОЛЬ МАНЕВРА
При безошибочных расчетах и правильном выполнении маневра наносимые по пеленгам и дистанциям фактические относительные позиции должны лежать на линии расчетного относительного курса. Однако на практике добиться точного совпадения фактического и расчетного относительных курсов достаточно трудно.
Причинами, вызывающими отклонение фактического относительного курса от расчетного, являются:
— неучет циркуляции корабля при расчете маневра;
— ошибки в определении относительных координат (пеленга и дистанции);
— снос ветром и течением, по разному воздействующий на маневрирующие корабли;
— несоответствие действительных величин курса и скорости объекта маневра, принятым при решении задачи.
Рис. 286
Правильность маневра можно проконтролировать в тех случаях, когда на маневрирующем корабле имеется возможность получить информацию о его координатах относительно объекта маневра. Если отклонение фактического относительного курса от расчетного вызывается первыми тремя причинами, то корректура маневра осуществляется способом последовательного уточнения своего курса. Так, если маневрирующий корабль занимает позицию (рис. 286) курсом Км^ со скоростью V м, то при отсутствии ошибок в этом курсе относительные позиции • • • Должны лежать на линии Sp или вблизи нее, откло-
няясь незначительно за счет случайных ошибок измерения пеленгов и дистанций. Систематически увеличивающееся уклонение получаемых мест от линии Sp свидетельствует о необходимости корректуры курса.
Для расчета уточненного курса Км следует на линии фактического относительного курса нанести упрежденную точку М'6 и соединить ее
544 Глава 18. Маневрирование для занятия позиции
прямой с точкой Мд. В результате получим новый относительный курс для занятия назначенной позиции Мд.
Курс маневрирующего корабля ведущий в заданную позицию Мд, находится в результате построения треугольника скоростей КоаЬ. В процессе нанесения относительных позиций М?, М& и этот курс можно также уточнить.
Если скорость маневрирующего корабля больше скорости объекта маневра, для уточнения курса маневра может быть применен также способ подбора курса. При этом используется метод последовательных приближений, когда первая корректура курса делается равной 5 или 10° в такую сторону, в какую необходимо сместить относительные позиции, чтобы приблизить их к линии относительного курса. Так, если наблюдается систематический уход относительных позиций влево от относительного курса, то курс маневрирующего корабля изменяют вправо на 10°. Получив в дальнейшем отклонение относительных мест вправо, отворачивают влево на 5° и т. д.; уточнение курса прекращают введя последнюю корректуру в 1 или 2°.
Если отклонение фактического относительного курса от расчетного произошло вследствие ошибок в элементах движения цели, то правильное решение задачи по расчету и выполнению маневра станет возможным только после уточнения этих элементов.
§ 97. УЧЕТ ЦИРКУЛЯЦИИ ПРИ РАСЧЕТЕ МАНЕВРА
Циркуляцию при расчете маневра целесообразно учитывать только в тех случаях, когда курс и скорость объекта маневра известны с доста-
точно высокой точностью, например, при совместном плавании. В других случаях необходимые поправки в курс и время маневра вводятся на основе сопоставления фактического и расчетного относительных путей маневрирующего корабля.
Циркуляция при расчете маневра может быть учтена следующим способом.
Если рассчитан курс/f^, ведущий из позиции Мо в позицию Mi (рис. 287) без учета циркуляции, то для выхода в точку Mi с учетом циркуляции в начале и в конце маневра этот курс должен быть исправлен поправкой а
При повороте вправо поправка а имеет знак плюс, при повороте влево—минус. Из рис. 287 видно также, что путь маневрирующего корабля S'M на прямолинейном участке пути должен быть меньше пути SM на
величину AS = SM — S'M.
Если курсы Км и Км не параллельны, то а и S’M определяются путем графических построений, как показано на рис. 287. В частном случае,
g
ш
% S
i
Поправки к курсу (углу отворота) маневрирующего корабля за циркуляцию (радиус циркуляции 3 кбт)
с кбт \ 10° 20° 30° 40° 50е 60° 70° 80° 90° 100° 110° 120° 130° 140° 150° 160° 170° 180° С / 5Af / кбт
10 1 3 7 15 29 — — — — — — 100 88 80 73 67 62 10
И 0 2 6 12 22 39 — — — — — 95 85 78 72 67 62 57 11
12 0 2 6 10 18 30 46 66 90 86 82 78 73 69 64 61 57 53 12
13 0 2 5 9 16 25 36 49 59 66 68 67 65 63 60 57 53 50 13
14 0 2 4 8 14 21 30 40 49 55 58 59 58 57 55 52 49 46 14
15 0 1 4 7 12 19 26 34 42 48 51 53 53 52 51 49 46 43 15
16 0 1 4 7 11 16 22 30 37 42 46 48 49 46 47 45 43 41 16
18 0 1 3 6 9 14 18 25 30 35 38 40 41 42 41 40 39 37 18
20 0 1 3 5 8 12 16 21 25 29 32 35 37 39 37 36 35 33 20
25 0 1 2 4 6 9 12 15 18 21 24 26 27 28 29 28 28 28 25
30 0 1 2 3 5 7 9 12 14 17 19 21 22 23 23 24 23 23 30
35 0 1 1 3 4 6 8 10 12 14 16 17 18 19 20 20 20 19 35
40 0 1 1 2 3 5 7 8 10 12 13 15 16 17 17 17 17 17 40
45 0 0 1 2 3 4 6 7 9 10 12 13 ‘ 14 15 15 15 15 15 45
50 0 0 1 2 3 4 5 6 8 9 10 11 12 13 14 14 14 14 50
60 0 0 1 1 2 3 4 5 6 7 8 9 10 11 11 11 11 11 60
70 0 0 1 1 2 3 3 4 5 6 7 8 9 9 10 10 10 10 70
80 0 0 1 1 2 2 3 4 5 5 6 7 7 8 8 8 9 9 80
90 0 0 0 1 1 2 3 3 4 5 5 6 7 7 7 8 8 8 90
100 0 0 0 1 1 2 2 3 4 5 5 5 6 6 7 7 7 7 100
§ 97. Учет циркуляции при расчете маневра
Поправки к пути маневрирующего корабля за циркуляцию, кбт
х. с кбт 10° 20° 30° 40° 50° 60° 70° 80° 90° 100° 110° 120° 130° 140й 150° 160° 170° 180° С / у/ S кбт
10 1 2,5 3,5 5 7 — — — — — 7 5 3,5 ’ 2,5 1 0 10
11 1 2,5 3,5 5 6,5 8,5 — — — — 8,5 6,5 5 3,5 2,5 1 0 11
12 1 2,5 3,5 5 6.5 7,5 9 10,5 10,5 9 7,5 6,5 5 3,5 2,5 1 0 12
13 1 2,5 3,5 4,5 6 7 8,5 9 9,5 9 8,5 7 6 4.5 3,5 2,5 1 0 13
14 I 2 3,5 4,5 6 7 8 8,5 8,5 8,5 8 7 6 4,5 3,5 2 1 0 14
15 I 2 3,5 4,5 5,5 6,5 7,5 8 8,5 8 7,5 6,5 5,5 4,5 3,5 2 1 0 15
16 1 2 3,5 4.5 5,5 6,5 7 8 8 8 7 6,5 5,5 4,5 3,5 2 1 0 16
18 I 2 3,5 4,5 5,5 6 7 7,5 7,5 7,5 7 6 5,5 4,5 3,5 2 1 0 18
20 1 2 3,5 4,5 5,5 6 6,5 7 7,5 7 6,5 6 5,5 4.5 3,5 2 1 0 20
25 1 2 3,5 4 5 6 6,5 7 7 7 6,5 6 5 4 3,5 2 1 0 25
30—50 1 2 3 4 4,5 5,5 6 6,5 6,5 6,5 6 5,5 4,5 4 3 2 1 0 30—50
60—100 1 2 3 4 4,5 5,5 6 6 6,5 6 6 5,5 4.5 4 3 2 1 0 60-100
Глава 18.. Маневрирование для занятия позиции
§ 98. Определение возможностей для сближения с быстроходным кораблем 547
когда маневрирующий корабль перед поворотом на рассчитанный курс лежал на курсе, параллельном курсу объекта маневра и после занятия назначенной позиции будет идти этим же курсом, величины а и AS могут быть выбраны из табл. 38.
Определение поправок и времени маневра производится в следующем порядке:
а) рассчитывают маневр без учета циркуляции и определяют курс маневрирующего корабля Км и время маневра tM = ;
б) находят аргументы для входа в таблицы поправок. Этими аргументами являются разность курсов маневрирующего корабля и объекта маневра С -= — Кк и путь, проходимый маневрирующим кораблем SM.
Путь может быть найден как произведение или построе-
нием треугольника путей. В последнем случае величину SM снимают с чертежа;
в) по С и SM из табл. 38, рассчитанной для радиуса циркуляции /?ц = 3 кбт, выбирают поправки к курсу а и к пути Д5.
Поправка а всегда имеет тот же знак, что и угол I. Поправка при углах отворота180° всегда имеет знак минус;
г) находят курс К’м маневрирующего корабля с учетом циркуляции по формуле
К'м=«м + ^
д) вычисляют время t'M лежания на прямом курсе для выполнения маневра с учетом циркуляции
_ SM-AS
Ум •
Пример. Объект маневра идет курсом А'Л ~ 30° со скоростью VK — 18 уз. Маневрирующий корабль имеет скорость VM — 24 уз = 4 кбт!мин. Рассчитаны курс маневрирующего корабля Л'д, —270° и время маневра t^^=5 мин для занятия назначенной позиции без учета циркуляции.
Определить курс и время маневра для занятия маневрирующим кораблем назначенной позиции с учетом циркуляции, если радиус циркуляции /сц = 3 кбт.
Ре шение. 1) Рассчитываем разность курсов и путь маневрирующего корабля. Получаем £ = 270° — (360° + 30°) = —120°;
—4,0-5 —20 кбт;
2) из табл. 38 выбираем поправки к углу отворота и к пройденному расстоянию: а — —35°, Д5 -- —6 кбт;
3) рассчитываем исправленные курс и время маневра:
К'м - 270° — 35° = 235°;
/ 20 — 6 о_
'Af = 4— = 3,5 мин.
§ 98. ОПРЕДЕЛЕНИЕ ВОЗМОЖНОСТЕЙ ДЛЯ СБЛИЖЕНИЯ С БЫСТРОХОДНЫМ КОРАБЛЕМ
Когда скорость маневрирующего корабля превышает скорость V к объекта маневра, относительный курс маневрирующего корабля может располагаться в любом направлении. Поэтому можно всегда найти такой курс маневрирующего корабля, который будет вести в любую заданную позицию.
35*
548
Глава 18. Маневрирование для занятия позиции
Если скорость маневрирующего корабля меньше скорости объекта маневра, относительные курсы маневрирующего корабля могут располагаться только в определенном секторе. За пределами этого сектора треугольник скоростей построить нельзя.
Рассмотрим, как будут располагаться возможные относительные курсы маневрирующего корабля, если его скорость меньше скорости объекта маневра. Пусть объект маневра, находящийся в позиции Ко (рис. 288), идет курсом Кк со скоростью VK. Маневрирующий корабль, находящийся в позиции Л40, имеет скорость VM.
Отложим от точки Ко по курсу объекта маневра вектор скорости Ук=Коа и проведем из точки Ко окружность радиусом, равным скорости Ум в масштабе скорости V*. Прямые ап и ат, касательные к окружности, проведенные из конца вектора V\, будут ограничивать сектор man, в пределах которого возможно расположить все относительные курсы маневрирующего корабля. Этот сектор равен двум углам Q. Угол Q, называемый критическим курсовым углом, можно измерить на карте или планшете или вычислить по формуле
sin Q = .
v к
Проводим из позиции 7И0 относительные курсы К и параллельные векторам Vpi = ап и V = ат.
§ 98. Определение возможностей для сближения с быстроходным кораблем 549
Поскольку все возможные относительные курсы маневрирующего корабля, находящегося в позиции ЛГо» могут располагаться лишь в секторе, ограниченном относительными курсами и Я* , то все позиции, которые лежат внутри сектора, могут быть им заняты. Этот сектор называют сектором доступных позиций. Все позиции, лежащие за пределами сектора доступных позиций, маневрирующий корабль, имеющий скорость VM < V к, из позиции Afo занять не может.
Любую позицию, лежащую внутри сектора, можно занять двумя курсами. Иапример, позицию М'3 можно занять курсами ЯЛ1з и Из двух курсов выбирается тот, который быстрее приводит к цели, т. е. тот, при котором относительная скорость занятия позиции будет больше. Так как скорость Vf9 = ab больше скорости И = аеУ следует выбрать курс КМз.
Если будет изменяться пеленг на объект маневра или дистанция до объекта маневра, то сектор, не изменяя своей величины, перемещается так, что его вершина всегда будет находиться в текущей позиции маневрирующего корабля.
Особого внимания заслуживают относительные курсы К и К являющиеся границами сектора доступных позиций. Курс к предоставляет маневрирующему кораблю максимальные возможности для сближения с быстроходным объектом маневра. Для того чтобы в относительном движении перемещаться этим курсом, маневрирующий корабль в «абсолютном» движении должен идти курсом Км, перпендикулярным границе критического угла того борта, на котором находится начальная позиция маневрирующего корабля.
Если маневрирующий корабль ляжет на этот курс, то из позиции Л4о он сблизится с объектом маневра на дистанцию £>кр = ЯГ0Л1р Сблизиться на меньшую дистанцию невозможно, так как для этого необходимо, чтобы относительный курс проходил вне сектора доступных позиций.
Относительный курс дает маневрирующему кораблю максимальные возможности для расхождения с быстроходным объектом маневра. Чтобы в относительном движении перемещаться этим курсом, маневрирующий корабль в «абсолютном» движении должен идти курсом Км, перпендикулярным границе критического угла, борта противоположного борту нахождения начальной позиции Af0. Идя этим курсом, маневрирующий корабль разойдется с объектом маневра на предельной дистанции Z)np = Дистанция в момент расхождения не может быть больше Dnp, так как для этого также необходимо, чтобы относительный курс проходил вне сектора доступных позиций.
Если продолжительность маневра корабля ограничена по времени, то сектор доступных позиций ограничивается дугой окружности встреч. Для нахождения точки О — центра окружности встреч — рассчитывается путь объекта маневра за заданный промежуток времени t по формуле SK = Vи этот путь откладывается от позиции Мо по направлению, обратному курсу объекта маневра. Затем из точки О радиусом, равным пути маневрирующего корабля, за заданный промежуток времени SM = = VMt проводится дуга cf, замыкающая линии относительных курсов
И .
Pi ₽»
Таким образом, если время маневра ограничено заданным промежутком времени t, то маневрирующий корабль может занять только позиции, лежащие внутри площади Mofc.
550
Глава 18. Маневрирование для занятия позиции
Для сближения с быстроходным объектом маневра необходимо знать наиболее выгодное направление относительного курса маневрирующего корабля. Направление этого относительного курса зависит только от соотношения скоростей маневрирующего корабля и объекта маневра. Поэтому для его нахождения достаточно построить критический угол Q.
Пусть объект маневра, находящийся в позиции KQ (рис. 289), идет курсом К., со скоростью Vк. Построим треугольник скоростей при точке Ко. Для этого из точки Ко проводим дугу аа' радиусом, равным вектору скорости маневрирующего корабля Ум. Из конца вектора Ук (точка о) проведем касательную к дуге аа'. Положение этой касательной (вектора У ) определит направление относительного курса Кр маневрирующего корабля, дающего максимальные возможности для сближения.
Соединив точку Ко с точкой касания Ь, получим курс маневрирующего корабля Км, идя которым он будет перемещаться по относительному курсу К . Зная относительный курс Kp , можно судить о максимальных возможностях маневрирующего корабля для сближения с быстроходным объектом маневра:
а) если начальная позиция маневрирующего корабля лежит в пределах критического угла qK < Q, то, проведя из нее относительный курс Кр , видим, что он пересекает курс объекта маневра впереди в расстоянии Dmax -= KQM\.
Это самое большое расстояние, в котором маневрирующий корабль может пересечь курс объекта маневра по носу. Пересечение курса в расстоянии Ртах и будет максимальной возможностью маневрирующего корабля для сближения из позиции
Время маневра рассчитывается по формуле t = ^.
' vf
Построив треугольник путей МХМ[М5, найдем места маневрирующего корабля М5 и объекта маневра К\ на линиях курсов в момент пересечения курса;
$ 98. Определение возможностей для сближения с быстроходным кораблем 551
б) если начальная позиция маневрирующего корабля М2 лежит на границе критического угла qк = Q, то, проведя из нее относительный курс К , видим, что он проходит через позицию Kq. Это значит, что максимальной возможностью для сближения является сближение с объектом маневра вплотную.
Время маневра находится по формуле
у __ Ра __ z
2 Vp ~ ОВИР’
Построив треугольник путей M2KoM6, найдем место маневрирующего корабля Мб и объекта маневра К2 в момент сближения вплотную;
в) если начальная позиция маневрирующего корабля М3 лежит за пределами критического угла^Кз>(?, то, проведя из этой позиции относительный курс К?, видим, что маневрирующий корабль может сблизиться с объектом маневра лишь на кратчайшее расстояние DKp =
Время сближения на расстояние £>Кр находим по формуле
/ — 5р;<
3 - Vf .
Построив треугольник путей М3МдМ4, найдем места маневрирующего корабля М4 и объекта маневра Х4 на линиях курсов в момент сближения на кратчайшее расстояние.
При VM < Ул. маневрирующий корабль удержать кратчайшее расстояние не сможет и если он будет продолжать Лежать на прежнем курсе, то пересечет курс объекта маневра по корме в минимальном расстоянии DmIn = К0^4.
Пример (рис. 290). Объект маневра идет курсом /Cz< = 80е со скоростью VK = 24 уз — 4 кбт!мин. Маневрирующий корабль имеет скорость VM = 12 уз = = 2 квт)мин.
Определить: а) величину критического угла Q, относительный и «абсолютный» курсы маневрирующего корабля, которые дают максимальные возможности для сближения с объектом маневра;
б) максимальные возможности маневрирующего корабля для сближения с объектом маневра, если начальная позиция маневрирующего корабля будет находиться по пеленгу от объекта маневра:
— 94° в дистанции 100 миль;
— 110° в дистанции 75 миль;
— 130° в дистанции 90 миль.
Решение. 1) Отложив по направлению 80° вектор скорости объекта маневра VK = 4 кбт/мин, из его конца проводим касательную к окружности радиуса VM — ~ 2 кбт!мин.
Чтобы уточнить положение точки касания, рекомендуется вектор Ук разделить пополам и из его середины (точки О) радиусом, равным половине этого вектора, засечь касательную в точке Ь. Критический угол Q = 30°. Относительный и .абсолютный” курсы будут ^=290° и —20° соответственно. Курсы Я* и Км не зависят от начальной позиции маневрирующего корабля;
2) наносим по исходным данным начальные позиции маневрирующего корабля Л1[, М2 и М$. Из них проводим рассчитанный относительный курс = 290° и определим для каждой из заданных позиций максимальные возможности для сближения с объектом маневра.
Из позиции Мх максимальной возможностью для сближения является пересечение курса объекта маневра впереди в расстоянии Z)max = K0AfJ “ 52 милям ~ 520 кбт. Курс маневрирующего корабля Я^ = 20°; Ир = ab = 3,4 кбт!мин\ = = 51 миле = 510 кбт.
510
Время маневра 150 мин = 2 ч 30 мин.
о > 4
552
Глава 18. Маневрирование для занятия позиции
Из позиции Мз максимальной возможностью маневрирующего корабля для сближения будет сближение вплотную, так как относительный курс проходит через точку /Со. Курс маневрирующего корабля= 20*; «at = 3,4 кбт[мин\ S^MiKq = = 75 милям = 750 кбт.
Рис. 290
мин — 3 ч 40 мин.
возможностью маневрирующего корабля будет
750
Время“маневра = 220
Из позиции Л43 максимальной сближение на кратчайшее’ расстояние DKp =/CqA^ = 30 милям = 300 кбт. Курс маневрирующего корабля А^ = 20°; S =^3^3= 85 милям = 850 кбт.
850 Рз
Время маневра /3 = у^- = 250 мин —4 ч 10 мин.
Если после сближения на расстояние £)кр маневрирующий корабль продолжает идти курсом А’Л1 = 20°, то он, пройдя путь Sp< = 515 кбт. пересечет курс объекта маневра по корме в расстоянии Dm!n = 60 милям. Это произойдет через промежуток времени после сближения на расстояние £)кр
tt = 4т = >52 мин = 2 ч 32 мин.
и >4
Определение возможности сближения на заданное расстояние с быстроходным объектом маневра. Пусть объект маневра, находящийся в позиции KQ (рис. 291), идет курсом Кк со скоростью VK,
$ 98. Определение возможностей для сближения с быстроходным кораблем 553
Маневрирующий корабль имеет скорость Построив треугольник скоростей К^аЬ, находим относительный курс К > который дает маневрирующему кораблю максимальные возможности для сближения. Проведем относительный курс tfpi так, чтобы он в точке М'2 касался дуги тп окружности радиуса, равного заданному расстоянию Z)3, проведенной из точки Ко.
Из всех позиций, лежащих между относительным курсом К и курсом Кк объекта маневра, можно сблизиться на заданную дистанцию А-
Возможность сближения на дистанцию D3 зависит не только от соотношения скоростей, но и от начальной дистанции Do до объекта маневра. Засечем в точке М2 линию А’Р1 дугой ее окружности радиуса, равного начальной дистанции Do, проведенной из точки /Со. Если маневрирующий корабль окажется на курсовом угле объекта маневра то он может еще сблизиться на заданную дистанцию. Этот угол называется предельным и обозначается Qnp.
Предельный угол представляет собой наибольшее значение курсового угла быстроходного корабля, при котором корабль, обладающий меньшей скоростью, еще может сблизиться на заданное расстояние.
Аналитически предельный угол может быть найден по формуле
где
Qnp — Q AQ»
Q = arcsin -77- ;
VK
AQ = arcsin .
554
Глава 18. Маневрирование для занятия позиции
Зная величину предельного угла, можно судить о возможности сближения на заданное расстояние:
а) если начальная позиция маневрирующего корабля Mi лежит внутри предельного угла < Qnp), то сближение на заданное расстояние возможно. Линия относительного курса tfpi, проведенная по касательной к дуге тп окружности радиуса £>3, отсекает на продолжении курса объекта маневра отрезок
f
Рис. 292
Поэтому, если необходимо решить задачу сближения на дистанцию D3 в кратчайший срок, то для нахождения относительного курса достаточно соединить прямой начальную позицию М\ маневрирующего корабля с точкой с\
б) если начальная позиция маневрирующего корабля Л12 лежит на границе предельного угла = Qnp), то сближение на заданное расстояние возможно и только одним курсом Км, перпендикулярным границе критического угла. В этом случае заданное расстояние одновременно будет и кратчайшим;
§ 99. Маневрирование при уклонении
555
в) если начальная позиция маневрирующего корабля М3 лежит вне предельного угла > Qnp), то сближение на заданное расстояние
невозможно, так как оно будет меньше, чем возможное в данных условиях кратчайшее расстояние £>кр = KQM'3.
Пример (рис. 292). Объект маневра идет курсом = 110° со скоростью V к — == 30 уз — 5 кбт1мин. Исходная позиция маневрирующего корабля находится по пеленгу от объекта маневра 175° в дистанции D0=100 милям. Скорость маневрирующего корабля -18 уз — 3 кбт!мин.
Определить: а) может ли маневрирующий корабль сблизиться на дистанцию D3 == 20 милям;
б) предельный угол Qnp для сближения на дистанцию D3 — 20 милям;
в) минимальную скорость маневрирующего корабля для сближения на дистанцию D3 — 20 милям и время маневра.
Решение. 1) В центре планшета принимаем позицию /<0 объекта маневра и наносим исходную позицию маневрирующего корабля MQ.
Из конца вектора VK проводим касательную к окружности радиуса VM и находим направление предельного относительного курса К. Проводим этот курс из позиции Мо и видим, что он не пересекает окружность радиуса D3 — 20 милям. Следовательно, сближение скоростью 18 уз на дистанцию 20 миль невозможно;
2) проводим линию ab, параллельную линии К , так чтобы она касалась окружности радиуса 20 миль и продолжим ее до пересечения в точке а с окружностью радиуса 100 миль. Соединив точку а с точкой прямой, снимаем угол фпр — 48°;
3) из точки проводим по касательной к окружности радиуса 20 миль относительный курс К, перемещаясь по которому маневрирующий корабль в позиции М’2 сблизится с объектом маневра на дистанцию 20 миль. Из конца вектора Vк проводим прямую ет, параллельную линии . Из точки /<0 проводим перпендикуляр к этой линии. Направление перпендикуляра определит искомый курс — 75°, а его величина — минимальную скорость маневрирующего корабля ^Afmin“4 кбт[мин или 24 уз. Измеряем путь Spj = Л4ОЛ42 = 990 кбт и скорость Vpj — ет — 2,9 кбт!мин.
990 1
Время маневра — — мин — 5 ч 41 мин.
§ 99. МАНЕВРИРОВАНИЕ ПРИ УКЛОНЕНИИ
Возможность уклонения зависит от соотношения скоростей маневрирующего корабля 1/м и объекта маневра V
Если V м < Vто уклонение от сближения на дистанцию не менее заданной возможно лишь в случае, если объект маневра не ставит себе целью сблизиться с маневрирующим кораблем, а идет постоянными курсом и скоростью.
Если!/^ > Vк, то маневрирующий корабль всегда может уклониться от сближения с объектом маневра на любую заданную дистанцию.
Рассмотрим расчеты маневрирования при уклонении, имея в виду следующие частные случаи:
— уклонение от сближения вплотную с тихоходным объектом маневра;
— уклонение от сближения с тихоходным объектом маневра на заданную дистанцию;
— выход в кратчайший срок из полосы, просматриваемой быстроходным объектом маневра и расхождение с ним на предельной дистанции;
— расхождение с быстроходным объектом маневра на заданной дистанции.
Уклонение от сближения вплотную с тихоходным объектом маневра. Для уклонения от сближения вплотную необходимо привести объект маневра за границу своего критического угла.
Графический расчет сектора опасных курсов производится следующим образом. Пусть объект маневра обнаружен в точке Ко (рис. 293)
556
Глава 18. Маневрирование для занятия позиции
по пеленгу аЛо- Для сближения вплотную необходимо (независимо от начальной дистанции между кораблями), чтобы относительный курс маневрирующего корабля совпадал с линией пеленга. Чтобы рассчитать сектор опасных курсов, в пределах которого маневрирующий корабль не должен располагать свои курсы, построим треугольники скоростей Коша и Коеп. Для этого проведем из точки Ко векторы скорости объекта маневра V к, перпендикулярные линии пеленга, и из концов этих векторов проведем линии относительных курсов, параллельные вектору Sp (линии пеленга), до пересечения в точках а и е с дугой bb' радиуса, равного скорости маневрирующего корабля VM. проведенной из точки Ко.
Соединив точку Ко с точками а и е, получим курсы маневрирующего корабля KMi и Км^ при которых он сблизится вплотную, если объект маневра пойдет самым выгодным курсом сближения. Сектор, образованный курсами Км и Км, является сектором, опасных курсов (сок).
Если маневрирующий корабль стремится избежать сближения вплотную с объектом маневра, его курсы должны располагаться за пределами этого сектора.
Пример (рис. 294). Объект маневра имеет скорость Vк =9 уз — 1,5 кбт/мин. Маневрирующий корабль, идущий со скоростью =24 уз— 4 кбт/мин, обнаружил объект маневра по пеленгу 340°.
Определить сектор опасных курсов маневрирующего корабля, при которых возможно сближение вплотную.
Решение. Строим два треугольника скоростей и получаем искомый сектор опасных курсов 318° — (г — 2°.
Уклонение от сближения с тихоходным объектом маневра на заданную дистанцию. Для уклонения от сближения на заданную дистанцию необходимо привести объект маневра за границу своего предельного угла. Графический расчет сектора опасных курсов производится следующим образом. Пусть объект маневра находится в позиции Ко (рис. 295) и имеет скорость VМаневрирующий корабль находится в исходной позиции Л40 и ему поставлена задача уклониться от сближения с объектом маневра на заданную дистанцию D3. Скорость маневрирующего корабля VM. Если за объектом маневра не ведется систематического наблюдения и сведения о нем поступают через большие проме
$ 99. Маневрирование при уклонении
557
жутки времени, то маневр уклонения необходимо рассчитывать на самые неблагоприятные условия. Курс, перпендикулярный границе критического угла маневрирующего корабля, дает объекту маневра максимальные возможности для сближения с маневрирующим кораблем. На этот курс и производится расчет.
Чтобы дистанция до объекта маневра была не менее заданной D3, относительный курс маневрирующего корабля должен проходить по касательной к окружности радиуса D3 « £)кр, проведенной из точки Ко. Проводим из точки относительные курсы К и удовлетворяющие этому требованию. На перпендикулярах к этим курсам от точки KQ отложим векторы V а из концов векторов Vк проведем прямые, параллельные линиям относительных курсов и до пересечения*их в точках типе дугой ааг окружности радиуса VM. Соединив точку KQ с точками т и я, получим ^курсы KMi и Км, идя которыми маневрирующий корабль разойдется на заданной дистанции с объектом маневра.
Сектор, образованный этими курсами, является сектором опасных курсов. Если маневрирующий корабль стремится избежать сближения
558
Глава 18. Маневрирование для занятия позиции
с объектом маневра на дистанцию менее заданной, он не должен располагать свои курсы в этом секторе.
Момент расхождения с объектом маневра определяется кратчайшим расстоянием DKp = D3 между ними. Время маневра рассчитывается по формуле
Рис. 295
Если наблюдение за объектом маневра ведется систематически и данные о нем поступают достаточно часто, то расчет уклонения можно произвести на фактический курс объекта маневра по этой же методике.
Время окончания уклонения рассчитывается следующим образом.
На рис. (296) показан расчет курса уклонения Км на самый выгодный курс объекта маневра KKi для сближения с маневрирующим кораблем.
§ 99. Маневрирование при уклонении
559
Пусть маневрирующий корабль после уклонения должен лечь на курс Км. Отложим по линии этого курса вектор скорости и из его конца проведем касательную к дуге окружности ее', проведенной радиусом из точки Вектор V к, проведенный из точки KQ в точку касания п, определит курс объекта маневра , идя которым он заставляет маневрирующий корабль лежать на курсе уклонения максимальное время. Относительная скорость в этом случае определится вектором Ир/ Проведя параллельно этому вектору линию относительного курса по касательной к окружности радиуса D3, получим геометрическое место позиций, в которых маневр уклонения можно считать оконченным. Если из любой позиции, лежащей на этом курсе, повернуть на курс Км, то дистанция до объекта маневра менее величины D3 не будет.
Если объект маневра с началом уклонения сразу пойдет курсом АЛд9, то относительное перемещение маневрирующего корабля определится вектором Ирз = па, который можно получить, соединив точку п с точкой а, построив скоростной треугольник К^па. Точка М'2 пересечения относительных курсов и является относительной позицией, в которой маневр уклонения можно считать оконченным.
Время окончания уклонения определяется по формуле
t =
где Sp. =
Пример (рис. 297). Объект маневра имеет скорость V = 12 уз —2 кбт/мин. Пеленг с маневрирующего корабля на объект маневра 290°, а дистанция до него 100 кбт. Маневрирующий корабль, имеющий скорость 24 уз = 4 кбт/мин, уклоняется от сближения с объектом маневра на дистанцию менее 50 кбт.
Определить: а) курс уклонения, при котором объект маневра останется слева; б) время окончания уклонения, если после уклонения маневрирующий корабль должен лечь на курс 310°.
Решение. 1) В центре планшета принимаем позицию объекта маневра Ко и по заданным элементам наносим исходную позицию Мо маневрирующего корабля. Проведя из точки Мо касательную к окружности радиуса D3 = 5Q кбт, получим относительный курс уклонения А"Р1 = 320°. Курс объекта маневра, дающий ему максимальные возможности для сближения, /f^=50°. Построив для курсов К и треугольник скоростей Ко ab, получим курс уклонения 350°; Spi = Л40М87 кбт\ 87
Vpi — ab — 3,5 кбт/мин и время расхождения с объектом маневра -= = 25 мин\
2) откладываем по направлению А'^ — 310° вектор скорости маневрирующего корабля VM — 4 кбт/мин. Из конца вектора VM проводим касательную к окружности радиуса Vк. Точка касания т определит курс объекта маневра Кк — 10°, идя которым объект маневра удерживает маневрирующий корабль на курсе уклонения максимальное время.
Проводим относительный курс — 280е, параллельный вектору Ур == тп, по касательной к окружности радиуса 50 кбт. Соединив точку т с точкой а, получим вектор относительной скорости = та = 2,2 кбт/мин, если объект маневра с начала уклонения пойдет курсом Кк .
Проведя из точки Л40 линию относительного курса — 332°, параллельную вектору V?a, получим Spa — Л40 == 84 кбт.
Время окончания уклонения
— 22 — 38 мин.
560
Глава 18. Маневрирование для занятия позиции
Рис. 297
Выход в кратчайший срок из полосы, просматриваемой быстроходным объектом маневра и расхождение с ним на предельной дистанции. Пусть объект маневра, находящийся в точке Ко (рис. 298), идет курсом Кк со скоростью V Маневрирующий корабль, находящийся в позиции Мо, имеет скорость VM.
Объект маневра просматривает полосу шириной Ш\ линия mm' является границей просматриваемой полосы, параллельной курсу объекта маневра.
Чтобы в кратчайший срок выйти из просматриваемой полосы, маневрирующий корабль должен идти курсом Кмс перпендикулярным границе просматриваемой полосы, так как в этом случае его путь будет минимальным.
Построив для этого курса треугольник скоростей К^ас, найдем вектор относительной скорости У == ас. Проведем из точки линию
относительного курса К , параллельную вектору-У₽1. Точка пере-
сечения этого курса с линией тт' и будет относительной позицией маневрирующего корабля в момент выхода из просматриваемой полосы. Дистанция до объекта маневра в этот момент равна Dr = M[KQ.
$ 99, Маневрирование при уклонении
561
Время выхода из просматриваемой полосы определяется по формуле SP) _ м^м\
Уй ~ Уй • Pl Pl
Если маневрирующий корабль и дальше будет лежать на этом курсе, то он разойдется с объектом маневра на дистанции £>кр = Любой
другой путь выхода из просматриваемой полосы не позволит выполнить маневр в кратчайший срок. При движении курсом перпендикулярным границе критического угла Q, маневрирующий корабль будет перемещаться с относительной скоростью = ab. Точка М2 пересечения линии относительного курса К с границей просматриваемой полосы шт' будет относительной позицией маневрирующего корабля в момент выхода из этой полосы. Дистанция до объекта маневра в этот момент будет D2 = KqM'2; она всегда больше дистанции
Время выхода из просматриваемой полосы рассчитывается по формуле
^р, ^0 ^2
Г2 “ -у~~ — у * Р2 Р2
t2 > так как SM> > SMi.
Если после выхода из просматриваемой полосы маневрирующий корабль продолжает идти курсом Км, он разойдется с объектом маневра на предельной дистанции Dnp = KQ Al'.
Время расхождения на предельной дистанции рассчитывается по формуле
3 ~ •
Построив треугольник путей Л^А^Мр найдем места маневрирующего корабля Aft и объекта маневра Ki на линиях курсов в момент выхода из полосы в кратчайший срок.
Аналогично находят места кораблей на линиях курсов в моменты выхода из полосы на максимальной дистанции до объекта маневра
36 Заказ 1833
562
Глава 18. Маневрирование для занятия позиции
(треугольник путей и расхождения с объектом маневра на
предельной дистанции (треугольник путей .
Пример (рис. 299). Объект маневра идет курсом К* — 105® со скоростью Уд= = 24 уз = 4 кбт/мин. Исходная позиция маневрирующего корабля находится на курсовом угле объекта маневра Я& = 11е пр/б в дистанции 110 миль. Скорость маневрирующего корабля 15 уз = 2,5 кбт. Объект маневра просматривает площадь радиусом 50 миль.
Рис. 299
Определить: а) курс, время маневра и дистанцию до объекта маневра в момент выхода, если маневрирующему кораблю необходимо выйти из просматриваемой полосы в кратчайший срок, а также величину кратчайшего расстояния;
б) курс, время маневра и дистанцию до объекта маневра в момент выхода, если маневрирующему кораблю необходимо выйти из просматриваемой полосы на максимальной дистанции до объекта.
Решение: 1) В центре планшета принимаем позицию объекта маневра Ко (рис. 299) и по заданным элементам наносим исходную позицию маневрирующего корабля Mq.
Произведя расчеты по методике, указанной выше, получим курс для выхода из просматриваемой полосы в кратчайший срок KMi«=195 . Дистанция до объекта маневра в этот момент D1==78 милям. Относительное перемещение 5^=^^ = = 55 милям или 550 кбт, относительная скорость Vpj = ас — 4,8 кбт/мин.
$ 99. Маневрирование при уклонении 563
Время выхода из просматриваемой полосы fi = т! ~ мин в * 4 мин>
2) курс маневрирующего корабля Км = 155°. Дистанция в момент выхода из просматриваемой полосы D2 = 88 милям, Spa = ЛГ0ЛГ2 == 46 милям = 460 кбт\ Vp = = а6 = 3,0 кбт!мин. Время выхода из полосы
460 f3 = ^=!53 мин = 2 к 33 мин.
Предельная дистанция расхождения маневрирующего корабля с объектом маневра Dnp = Ко^з =-84 милям; Spa — ЛГ^з в 23 милям = 230 кбт.
Время расхождения с объектом маневра после выхода из просматриваемой полосы
/3 = = 77 мин = 1 « 17 мин.
Расхождение с быстроходным объектом маневра на заданной дистанции. Пусть объект маневра, находящийся в позиции Ко (рис. 300), идет курсом со скоростью VМаневрирующий корабль, находящийся в позиции Л40, имеет скорость < Vк и ему = необходимо разойтись с объектом маневра на заданной дистанции D3.
Рис. 300
Для расхождения на этой дистанции необходимо, чтобы относитель ные курсы маневрирующего корабля проходили по касательной к окружности радиуса £>3, проведенной из точки Ко-
Проведем из точки относительные курсы Kpi и К , удовлетворяющие этому требованию. Из конца вектора VK (точки а) проведем линии ас и ае, параллельные относительным курсам и до пересечения с окружностью радиуса Ум, проведенной из точки /<0.
36*
564 Глава 18. Маневрирование для занятия позиции
Проведем из точки Ко в точки Ь, с, е и пг пересечения проведенных линий со скоростной окружностью векторы скоростей VM. Направление этих векторов определяет четыре курса маневрирующего корабля Км t и Кмг идя которыми маневрирующий корабль разойдется с объектом маневра точно на заданной дистанции. Эти курсы образуют четыре сектора.
Определим секторы опасных и безопасных курсов. Для этого возьмем в каждом секторе произвольный курс и построим для него треугольник скоростей. Определив направление вектора относительной скорости, проведем из точки Л40 относительный курс, параллельный этому вектору. Если относительный курс не пересекает окружность радиуса D3, то это сектор безопасных курсов, а если пересекает, то это сектор опасных курсов.
Рассмотрим, например, сектор, образованный курсами Км и Км в котором проложен произвольный курс КМл. Из треугольника скоростей Коап, построенного для курса Км, находим вектор относительной скорости
Проведем из точки Л40 относительный курс параллельный вектору . Курс Я не пересекает окружность радиуса D3 и, следовательно, это сектор безопасных курсов. Исследовав по этой же методике остальные секторы, убедимся, что два из них, образованные курсами Км — Км и Км — опасные. В них маневрирующий корабль не может располагать свои курсы, если он стремится избежать сближения на дистанцию менее D3. Сектор, образованный курсами Км — Кмг является сектором безопасных курсов.
Время расхождения определяется по формуле
где Spi = MQM'V a Vfi = ас.
Маневр уклонения можно считать оконченным тогда, когда при следовании избранным после уклонения курсом дистанция до объекта маневра не будет меньше заданной.
На рис. (301) показан расчет курса уклонения Км> для расхождения с объектом маневра на дистанции £)3. После уклонения маневрирующему кораблю необходимо идти курсом Построив скоростной треугольник К^аЬ, найдем направление вектора относительной скорости У Рз и проведем линию относительного курса параллельного вектору Vpa по касательной к окружности радиуса Z>3. Точка М'2 пересечения относительных курсов К? и Я будет относительной позицией окончания уклонения.
Время окончания уклонения определяется по формуле
, — ^Ра _ ^0^2
• 2 ~ Vo ~~ ае *
pi
Пример (рис. 302). Объект маневра идет курсом Ад-=160° со скоростью 27 уз = = 4,5 кбт/мин. Исходная позиция маневрирующего корабля находится на курсовом угле объекта маневра 10° л/б в дистанции 95 миль. Скорость маневрирующего корабля 12 уз = 2 кбт/мин. Маневрирующий корабль должен разойтись с объектом маневра на дистанции D3 = 40 милям.
Определить: а) курс маневрирующего корабля и время расхождения с объектом маневра без пересечения его курса;
§ 99. Маневрирование при уклонении
565
нг
Рис. 302
566 Глава 18. Маневрирование для занятия позиции
б) время окончания уклонения, если маневрирующий корабль по окончании уклонения должен лечь на курс #5^= 260°.
Решение: 1)В центре планшета принимаем позицию объекта маневра Ко и по заданным элементам наносим исходную позицию маневрирующего корабля Mq.
Из позиции Мо проводим касательную к окружности радиуса D3 — 40 милям так, чтобы она не пересекала курса Кк и получим относительный курс A*pi для расхождения с объектом маневра без пересечения его курса. Построив треугольник скоростей Ktfib, получим курс маневрирующего корабля для расхождения Км — 30°;
=Л40М; = 86 милям или 860 кбт\ V?i = ад = 6,0 кбт!мин.
Время расхождения с «объектом манёвра
f ] = = 143 мин = 2 ч 23 мин.
Построив треугольник путей найдем места маневрирующего корабля Afi
и объекта маневра Ki на линиях курсов в момент расхождения;
2) построим треугольник скоростей Коас и определим направление вектора V Параллельно вектору Vfa проведем относительный курс Я*ря по касательной к окружности радиуса 40 миль и найдем точку М2, которая является относительной позицией окончания уклонения; Spi = Л4ОЛ42 = 100 милям = 1000 кбт.
Время окончания уклонения
t2 == 1522 — 167 мин = 2 ч 47 мин.
Построив треугольник путей Af0Af2Af2> найдем места маневрирующего корабля Afj и объекта маневра Ki на линиях курсов в момент окончания уклонения.
Глава 19
МАНЕВРИРОВАНИЕ ПРИ ВЫПОЛНЕНИИ СПЕЦИАЛЬНЫХ ЗАДАЧ
§ 100. МАНЕВРИРОВАНИЕ ПРИ ПОИСКЕ
Наиболее рациональным строем поиска является строй фронта с расстоянием между кораблями, обеспечивающим обнаружение объекта с заданной вероятностью.
Построение в строй поиска производится:
— способом одновременного поворота;
— способом последовательных поворотов;
— способом занятия назначенной позиции в кратчайший срок.
При любом из этих способов построения для удобства управления группой поисковых кораблей после построения в строй поиска командир группы должен находиться на корабле № 2 или № 3. Если он находится на корабле № 1, то при перестроении должен занять место корабля № 2 или № 3.
Построение в строй поиска способом одновременного поворота. Корабли, следующие в назначенный район поиска в строю кильватера (рис. 303), при расстояниях между кораблями, предусмотренных для походных строев, предварительно перестраиваются в разомкнутый строй кильватера.
568
Глава 19, Маневрирование при выполнении специальных задач
Расстояния между кораблями должны быть равными расстояниям между ними в строю поиска.
Линия АС одновременного поворота должна отстоять от границы района поиска на расстояние Di, обеспечивающее выравнивание кораблей после поворота и изменение скорости до назначенной при поиске.
Построение в разомкнутый строй кильватера должно заканчиваться к моменту прихода головного корабля в точку А. Точка В начала построения в строй поиска определяется величиной пути S головного корабля, который рассчитывается по формуле
? ^-1) ynx(D-d)
° Vnx-HMX
где N — число кораблей;
Ужх и Уцд — скорости полного и малого ходов;
D — расстояние между кораблями в строю поиска;
d — расстояние между кораблями в походном строю.
Путь S откладывается от точки А по линиям курсов кораблей, в результате чего находится точка В, в которой начинается построение в разомкнутый строй кильватера.
Из точки В до точки А головной корабль следует полным ходом. Остальные корабли дают малый ход и увеличивают его снова до полного при достижении заданного расстояния до впереди идущего корабля.
С приходом головного корабля в точку А все корабли одновременно поворачивают на курс поиска, дают поисковый ход, выравнивают строй и с приходом на границу района поиска начинают поиск.
Рис. 304
Построение в строй поиска способом последовательных поворотов. Головной корабль и все последующие корабли (рис. 304) поворачивают на курс построения в строй поиска в одной точке А. Угол а отворота от генерального курса К„ поиска равен 42° или 60°.
§ JOO. Маневрирование при поиске
569
Корабли с нечетными номерами поворачивают вправо, с четными — влево. Корабль, первым начавший поворот, идет в более удаленную позицию строя поиска.
При угле отворота а — 42° генеральная скорость кораблей равна среднему ходу, а при а = 60°— малому ходу.
Время -маневра для каждого корабля рассчитывается по формулам:
1,5
при угле отворота а = 42° t = —;
1,15(D'—Яц)
при угле отворота а = 60 t =-----р-----,
* пх
где D' — отстояние корабля в строю поиска от средней точки строя;
/?ц —радиус циркуляции.
Пролежав на курсе расхождения рассчитанное время, каждый корабль самостоятельно ложится на генеральный курс поиска и дает ход, равный генеральной скорости при построении. Придя на линию ВС, корабли не будут точно находиться в строю фронта.
Наибольшее смещение кораблей относительно друг друга при а = 42° равно 0,75 расстояния между ними в строю кильватера, а при а = 60° равно 0,5 этого расстояния. Строй выравнивается по головному кораблю до прихода на границу района поиска.
Отстояние R точки А начала построения в строй поиска от границы района рассчитывается по формулам:
для а = 42° /? —0,56L+ Di;
для а — 60° R = 0,29 L + В\> где L = ВС —ширина строя поиска.
Построение в строй поиска способом занятия назначенных позиций в кратчайший срок. В расстоянии D} (рис. 305) проводится линия АВ, параллельная границе района поиска, и на этой линии наносятся позиции /, 2, 3,..., которые должны занять корабли, осуществляющие поиск.
570
Г лава 19. Маневрирование при выполнении специальных задач
Назначается точка Мо, из которой корабли будут занимать указанные позиции. Линии, соединяющие эту точку с назначенными позициями, и будут линиями курсов кораблей.
Головной корабль ложится на курс для занятия наиболее удаленной позиции и идет максимальной скоростью VM . На остальных кораблях рассчитывают скорости для занятия назначенных позиций одновременно с головным кораблем. Для этого, отложив по курсу головного корабля вектор скорости VM .проводят из его конца линию ab, параллельную АВ. Эта линия отсечет на курсах построения в строй поиска векторы скоростей VM и т. д. Идя этими скоростями, все корабли займут назначенные позиции одновременно, после чего поворачивают на генеральный курс, выравнивают строй и дают ход, назначенный для поиска.
Изменение расстояний между кораблями в процессе поиска. Маневр для изменения расстояний между кораблями в строю выполняется одновременным поворотом всех кораблей на углы 42° или 60°.
Для увеличения расстояний (рис. 306) производится поворот «все вдруг» во внешнюю сторону строя, при уменьшении расстояний — во внутреннюю сторону строя. По мере прихода на заданное расстояние корабли самостоятельно ложатся на генеральный курс поиска и дают скорость, равную генеральной скорости при перестроении.
Время выполнения маневра каждым кораблем рассчитывается по формулам:
I Яц\ 1,5 р'-дГ * для а = 42е t ----------г?-------;
V пх
1,15(0' - d' - Яц)
для а — 60 t -----------V--------,
ипх
где D' — расстояние от корабля до средней точки строя в строю с большими расстояниями между кораблями;
$ 100. Маневрирование при поиске
571
d' — расстояние от корабля до средней точки строя в строю с меньшими расстояниями между кораблями;
— радиус циркуляции.
Когда все корабли закончат выполнение маневра и выровнят строй, они дают назначенный для поиска ход.
Изменение курса при поиске. Изменение курса в строю поиска производится:
— способом захождения;
— способом двух полуповоротов;
— способом поискового поворота;
— способом поискового поворота с предварительным изменением курса на 180°.
При изменении курса способом захождения каждый корабль поворачивает на новый курс, находясь на одной и той же прямой линии.
— — — — Самый полный ход
------------- Полный ход
------------Средний ход
Рис. 307
Пусть кораблям, идущим в строю фронта курсом Км (рис. 307) со скоростью Упх, необходимо повернуть_ на курс Расчет поворота выполняется следующим образом.
Из места внутреннего относительно стороны поворота корабля (точка Ко) под углом к линии строя, равным половине угла поворота проводится линия поворота (ЛП).
Корабль № 5 по сигналу о повороте сразу ложится на новый курсЯм и дает малый ход. Он является уравнителем при выполнении поворота. Остальные корабли следуют прежним курсом до линии поворота. Корабли, находящиеся от середины строя с внешней стороны поворота (№ 1 и № 2), увеличивают ход до самого полного, корабли, находящиеся с внутренней стороны поворота (№ 4), уменьшают ход до среднего, а средний корабль строя хода не изменяет. Придя на линию поворота, каждый корабль поворачивает на новый курс и занимает на этом курсе свое место в строю относительно корабля, повернувшего первым,
572
Глава 19. Маневрирование при выполнении специальных задач
а затем уменьшает ход до малого. С окончанием построения в строй фронта на новом курсе все корабли дают полный ход.
Наибольшее время для поворота требуется крайнему кораблю (№ I) внешней стороны поворота. Это время рассчитывается как сумма времен Zj и /2, равных:
где /j — время выхода корабля № 1 на линию поворота;
— его путь до линии поворота;
t2 — время занятия кораблем № 1 своего места в строю на новом курсе;
S — относительный путь для занятия своего места в строю на новом курсе;
V = Vcox — Имх — относительная скорость при занятии своего места в строю.
Для расчета пути Spi находится путь корабля № 5 за время по формуле SK& = V^i,.
Отложив этот путь по линии курса находят точку — позицию корабля № 5 к моменту выхода корабля № 1 на линию поворота. Отрезок AfiKi определяет пеленг /70 и дистанцию Do между кораблями на этот момент. Корабль № 1 должен выйти в относительную позицию относительный путь Sp для занятия этой позиции после поворота на курс [Км равен отрезку
Аналогично рассчитывается время поворота для остальных кораблей. Поворот способом захождения занимает значительное время, которое увеличивается с увеличением угла поворота. Изменение курса этим способом производится, как правило, на угол не более 60°.
§ 100. Маневрирование при поиске
573
За счет выполнения поворота способом захождения линия нового курса смещается в направлении курса Км на величину С (рис. 308). Если поворот на курс Км , ведущий в точку А, начать в точке то средний корабль (или средняя точка строя) пройдет до поворота-на новый курс путь Л11Л1з и циркуляция начнется в точке М3. Величина отрезка AfiAf3 определит смещение С нового курса за счет поворота. Закончив циркуляцию в точке ЛГ4 и пройдя путь S, средний корабль вместо заданной точки А придет в точку В, а строй расположится на линии bb.
Величина С находится по формуле
C = 0,5Ztg|,
где L = М0К0 — (рис. 307) ширина строя;
а — угол поворота.
Для того чтобы средний корабль после поворота прошел через точку Д, необходимо начинать поворот раньше в точке Л10, которая отстоит от точки М[ на величину С.
------------------ Полный ход ------------------Средний ход
111,1 1 Малый ход
Рис. 309
При четном числе кораблей средний корабль заменяется средней фиктивной точкой.
При изменении курса способом двух полуповоротов каждый корабль, проходя через общую для всех кораблей линию первого поворота, изменяет свой курс на половину угла поворота и затем, проходя через линию второго поворота, ложится на заданный новый курс.
Допустим, что пять кораблей, идущих строем фронта курсом KMi (рис. 309), должны повернуть на курс Км*. Для изменения курса способом двух полуповоротов производится следующий расчет.
574
Глава 19. Маневрирование при выполнении специальных задач
Первый вариант. Проводят линию строя АВ, которая одновременно является линией первого полуповорота. От линии АВ при точке В откладывают угол поворота а и проводят линию строя ВК на новом курсе
Из точки А проводят линию курса, отличающегося от предыдущего курса на половину угла поворота 00» и по не^ от точки К откладывают отрезок КС — АК. Затем из точки С проводят линию, параллельную КВ, до пересечения с линией BD, параллельной АС. Линия CD является линией строя кораблей на новом курсе Км и одновременно это линия, на которой производится второй полуповорот.
На линии CD наносят места кораблей, которые соединяют с местами тех же кораблей на линии первого полуповорота. Отрезки АС, № 2 № 2'„ № 3 № 3', № 4 № 4' и BD являются путями кораблей от момента первого до момента второго полуповорота.
Второй вариант. Продолжают линию строя АВ в сторону поворота и откладывают по ней от точки В отрезок ВО, равный ширине строя АВ. Затем из точки О под углом а проводят линию второго полуповорота ОС. Из точки О, как из центра, проводят дуги АС, № 2 № 2'г № 3 № 3', № 4 № 4' и DB.
Хорды этих дуг и будут путями кораблей от момента первого полуповорота до момента второго полуповорота. Дальнейшие расчеты одинаковы для обоих вариантов.
Соединив крайнюю точку С строя на новом курсе со средней точкой F строя на прежнем курсе, получают первую линию перемены ходов FC. Корабли с линии первого полуповорота до прихода на эту линию должны идти полным ходом, а затем до момента прихода на линию второго полуповорота — средним ходом.
Соединив крайнюю точку В строя на старом курсе с средней точкой Е строя на новом курсе, получают вторую линию перемены ходов BE. С момента первого полуповорота до этой линии корабли должны идти средним ходом, а затем от этой линии до линии второго полуповорота — малым ходом.
При выполнении поворота этим способом каждый из кораблей, изменяющий скорость в процессе поворота, может контролировать момент перемены ходов по изменению пеленга на соседний корабль, который выполняет поворот без изменения хода. Пеленг на этот корабль от момента первого полуповорота до момента перемены хода изменяется на величину угла поворота а. Ломаная линия КН показывает линии пеленгов между кораблями в моменты перемены ходов.
Следуя указанными ходами, все корабли приходят на линию второго полуповорота одновременно. Выполнив одновременно второй полуповорот, все корабли окажутся в строю фронта на новом курсе.
Поворот данным способом занимает длительное время, которое увеличивается с увеличением угла поворота и его рекомендуется применять при углах поворота до 60°.
За счет изменения курса способом двух полуповоротов средняя точка строя сместится в направлении курса Км* (рис. 310) на величину С, которая находится по формуле
С= l,5Atgy,
где L — ширина строя;
а — угол поворота.
Чтобы избежать смещения, необходимо начинать поворот в точке Мо, отстоящей от расчетной точки поворота на величину С. В этом слу-
§ 100. Маневрирование при поиске
575
О
А
С
Рис. 310
чае корабли выйдут на рассчитанный курс в точке Мз и далее пройдут через заданную точку А.
При изменении курса способом поискового поворота все корабли ложатся на новый курс, находясь на линии поворота.
Пусть четыре корабля, идущие строем фронта курсом Км (рис. 311), должны повернуть на курс км.‘
По исполнительному сигналу крайний корабль (№ 1) внешней стороны поворота сразу же ложится на новый курс (рис. 311). Остальные корабли продолжают движение прежним курсом Км до прихода на линию поворота Л/7, которая является биссектрисой угла поворота а, проведенной из места корабля, первым начинающего поворот.
Придя на линию поворота, каждый корабль самостоятельно ложится на новый курс. В момент окончания поворота последним
кораблем все корабли оказываются в строю фронта на новом курсе. При этом после поворота фланги строя меняются местами.
Скорость хода во время поворота не изменяется.
Время tn поворота строя определяется временем поворота корабля, проходящего максимальное расстояние до линии поворота, и находится по формуле
sM £ctgy п ~ “ vnx ’
Где L — ширина строя;
а — угол поворота.
По этой же формуле можно рассчитать время поворота любого корабля, подставляя вместо L расстояние от него до корабля, начавшего поворот первым.
Поворачивать на малые углы данным способом не выгодно по двум причинам:
— при малых углах по-
ворота время поворота велико и оно тем больше, чем меньше угол поворота;
— не обеспечивается безопасность маневра, так как при повороте на угол менее 90° все корабли пересекают курс корабля, повернувшего первым.
576 Глава 19. Маневрирование при выполнении специальных задач
За счет изменения курса способом поискового поворота средняя точка строя сместится по направлению курса KMi (рис. 312) на величину С и корабли придут в точку 3.
Величина смещения находится по формуле
С = 0,5/. etg у, где L — ширина строя; а — угол поворота.
Рис. 312
Рис. ЗГЗ
Для того чтобы после поворота попасть в заданную точку Л, необходимо поворот начинать в точке Мо, отстоящей от точки М\ на величину С.
Поворот способом поискового поворота с предварительным изменением курса на 180° можно применить в том случае, когда необходимо
изменить курс на малый угол.
Пусть четырем кораблям, идущим строем фронта курсом KMi (рис. 313), необходимо повернуть на курс Км .
По исполнительному сигналу корабли одновременно поворачивают на обратный курс кМз, а затем поворачивают на курсЯ^ по правилам изменения курса способом поискового поворота. Поворот на обратный курс следует всегда производить в сторону, обратную стороне изменения курса, так как в этом случае корабли поворачивают на меньший угол.
При изменении курса данным способом линия нового курса сместится в направлении, обратном старому курсу, на величину С (рис. 314), рассчитываемую по формуле
С = 0,5£tgy,
где L — ширина строя;
а — угол поворота.
Для того чтобы попасть после поворота в заданную точку А, необходимо поворот начинать в точке М], пройдя по старому курсу от расчетной точки поворота Мо путь, равный С,
$ 101. Маневрирование при выходе из строя для выполнения задач 577
Для быстрого определения способа поворота в табл. 39 указаны углы поворота, при которых время поворота способами поискового поворота и поискового поворота с предварительным изменением курса на 180° равно.
Таблица 39
их уз L, кбт
10 20 30 40 50 60 70 80 90 100
12 73° 81° 84° 86° 86° 87° 88° 88° 88° 88°
14 71 80 83 85 86 87 87 87 88 88
16 68 79 82 84 85 87 87 87 87 88
18 66 77 82 84 85 86 86 87 87 87
20 63 75 80 83 84 85 86 86 86 87
22 61 74 80 82 84 85 86 86 86 87
24 59 73 79 81 83 84 85 86 86 87
26 57 72 78 81 82 84 85 85 86 86
28 55 71 77 80 82 83 84 84 85 86
30 53 69 75 79 81 82 84 84 85 86
При углах поворота более табличных изменение курса производится способом поискового поворота.
При углах поворота менее табличных изменение курса производится способом поискового поворота с предварительным изменением курса на 180°.
§ 101. МАНЕВРИРОВАНИЕ ПРИ ВЫХОДЕ ИЗ ОРДЕРА ИЛИ СТРОЯ ДЛЯ ВЫПОЛНЕНИЯ СПЕЦИАЛЬНЫХ ЗАДАЧ
При совместном плавании любому кораблю может быть поставлена задача, выполнение которой связано с выходом из ордера или строя и возвращением на заданную позицию. Район выполнения поставленной задачи обычно задают:
— пеленгом и дистанцией от уравнителя, центра ордера или от маневрирующего корабля;
— географическими координатами;
— пеленгом и дистанцией от любого приметного пункта.
Вне зависимости от того как будет задан район, его всегда следует рассматривать не как относительную позицию, а как позицию, фиксированную на местности.
Возможны следующие варианты задач, связанных с выходом из ордера или строя:
— выход в заданную точку и возвращение к соединению;
— выход по заданному направлению на заданный срок;
— выход в заданную точку с расчетом отсутствовать на своем месте в ордере минимальное время.
Выход в заданную точку и возвращение к соединению. Такая задача ставится в том случае, когда необходимо в кратчайший срок прибыть в указанный район.
Расчет маневра показан на рис. 315. Ордер (строй) идет курсом Кк со скоростью VK. Кораблю, находящемуся в точке Af0 на курсовом угле
37 Заказ 1833
578
Глава 19. Маневрирование при выполнении специальных задач
охраняемого корабля qк и дистанции Do, необходимо выйти в точку N, находящуюся от уравнителя по пеленгу П в дистанции D. Скорость корабля при выполнении маневра VM. Определить курс и время прихода в заданный район.
Соединив точку 2И0 с точкой N, получим вектор пути маневрирую’ щего корабля, который определит курс (путь) Км для выхода в заданный район.
Построим для этого курса треугольник скоростей К^аЬ и определим вектор относительной скорости V?.
Построив треугольник путей MQNN', определим относительную позицию N' на момент прихода маневрирующего корабля в назначенный район.
Время маневра определяется по формуле
у _ sMt _ SP1
1 vm “ ’
где Spi = MJT.
Если маневрирующий корабль без задержки возвращается на свое место в ордере, то относительное перемещение 5ра для возвращения будет равно Spi по величине и направлено в обратную сторону. Построив треугольник скоростей KQaf, находим курс возвращения Км и относительную скорость Upa. Построив треугольник путей определим точку ТИ2, в которой маневрирующий корабль займет свое место в ордере.
Время возвращения находим по формуле t — — s₽>
2 ~ Ум УРа ’ где \ = МИ; = MJT.
Если для выполнения поставленной задачи маневрирующий корабль задержался на промежуток времени /3, то его относительное пере-
§ 101. Маневрирование при выходе из строя для выполнения задач 579
метение за время /3 будет равно по величине пути уравнителя SK = VKt3 и направлено в сторону, обратную курсу Кк. Отложив отрезок SKa от точки в указанном направлении, найдем точку Соединив точку ЛГ с точкой Мо, получим относительное перемещение Spa для возвращения на свое место в ордере. Построив для него треугольник скоростей К^ас, определим курс маневрирующего корабля КМа и величину относительной скорости ира.
Время маневра рассчитывается по формуле
Если после выполнения задачи маневрирующему кораблю необходимо занять новое место в ордере, то должна быть решена задача по занятию новой позиции, например, позиции как показано на рисунке.
Выход по заданному направлению на заданный срок. Направление выхода задают от того корабля охранения, которому ставится задача. Если направление будет задано относительно уравнителя или другой точки, задача решения не имеет.
Рис. 316
Пусть уравнитель ордера, находящийся в точке Ко (рис. 316), идет* курсом со скоростью V к. Кораблю охранения, находящемуся в позиции Мо, поставлена задача обследовать район по направлению МоМ| со-скоростью V м в течение промежутка времени /3 и затем снова занять свое место в ордере.
37*
580 Глава 19. Маневрирование при выполнении специальных задач
Курс выхода Км будет равен заданному пеленгу. Проведем курс Км из точки KQ и, построив треугольник скоростей К^аЬ, определим вектор относительной скорости 1Л . Продолжив его в обратную сторону до пересечения с окружностью радиуса VM в точке с и соединив точку Ко с этой точкой, найдем курс маневрирующего корабля Км* для возвращения и величину относительной скорости У — Ьс.
Рассчитаем путь уравнителя за промежуток времени /3 по формуле SK — VKt3 и отложим этот путь от точки Мо по линии, параллельной курсу Кк. В результате получим точку Л12, в которой корабль охранения должен занять свое место в ордере. Проведем из точки М2 линию, параллельную курсу Км, до пересечения с линией курса Км в точке Afj. Эта точка определит момент поворота маневрирующего корабля на курс возвращения.
Построив треугольник путей М0М'1Л11 для выхода и для
.возвращения, находим относительные пути S и Sp/
Время ix выхода и t2 возвращения рассчитывается по формулам:
/ _ _ 5Pj .
*
Для контроля правильности расчетов используется формула + tz — tz-
Если в процессе выполнения поставленной задачи произойдет задержка по времени или если после выполнения задачи нужно занять новое место в ордере, то все расчеты производятся так же, как и в предыдущем случае, при этом время отсутствия на своем месте в ордере неизбежно увеличится.
Выход в заданную точку с расчетом отсутствовать на своем месте в ордере минимальное время. При такой постановке задачи момент выхода из ордера определяется на маневрирующем корабле.
Пусть уравнитель ордера идет курсом Кк (рис. 317) со скоростью Vк. Кораблю охранения, находящемуся в точке Мо, поставлена задача выйти в точку 7V, имея скорость V м и при этом отсутствовать на своем месте в ордере минимальное время. Для выполнения поставленного условия необходимо, чтобы относительные курсы выхода из ордера и возвращения на свое место были перпендикулярны курсу уравнителя. Опустив из точки N перпендикуляр на линию, проведенную параллельно курсу А^, получим относительный путь Sp для выхода из ордера и возвращения на прежнее место. Построив треугольники скоростей К^аЬ и Коас, найдем курсы выхода из ордера Км и возвращения на свое место Км. Проведем из точки N линии, параллельные курсам Км и Км, до пересечения с линией М0М3. Треугольники путей для выхода из ордера М2 и возвращения на место 7VМ'2М3 дают возможность определить пути SMi и SM.
Время выхода и возвращения находим по формуле
f f „ sMt __ sm3 _ 5p _ 5P
1 2 “ Ки “ vM - vPi - Vp, ‘
§ 102. Маневрирование при использов. РЛС для расхождения с кораблями 581
Момент выхода из ордера определяется по формуле
Если корабль задержится в точке N или если после выполнения задачи нужно будет занять новое место в ордере, то все расчеты производятся так, как это было указано для выхода в заданную точку.
§ 102. МАНЕВРИРОВАНИЕ ПРИ ИСПОЛЬЗОВАНИИ РАДИОЛОКАЦИОННОЙ СТАНЦИИ ДЛЯ РАСХОЖДЕНИЯ С КОРАБЛЯМИ В МОРЕ
Основой расчетов расхождения с кораблями в море является ведение прокладки относительных курсов обнаруженных целей и выбор такого курса маневрирующего корабля, при котором относительные курсы целей проходили бы от него в безопасном расстоянии.
Следует иметь в виду, что правила 18—24 ППСС, регламентирующие характер маневрирования для предупреждения столкновений, относятся только к кораблям, находящимся друг от друга на дистанции визуальной видимости. При использовании РЛС маневр уклонения, если он необходим, должен начинаться заблаговременно и во всяком случае до того, как будет услышан туманный сигнал встречного корабля или этот корабль будет обнаружен визуально, т. е. до того, как вступят в силу правила 18—24 ППСС.
Использование РЛС не освобождает от выполнения правила 16 ППСС, согласно которому в условиях малой видимости корабль должен идти умеренным ходом, тщательно сообразуясь с существующими обстоятельствами и условиями плавания.
Умеренным ходом считается такой ход, который позволит заблаговременно обнаружить встречный корабль, оценить обстановку, рассчи
582
Глава 19. Маневрирование при выполнении специальных задач
тать и осуществить маневр расхождения. Для корабля, не ведущего радиолокационного наблюдения, умеренным ходом будет такой, при котором он сможет полностью остановиться в пределах расстояния, равного половине дальности визуальной видимости.
Указанный принцип не может быть применен к кораблю, ведущему радиолокационное наблюдение, так как в этом случае умеренная скорость для подавляющего большинства кораблей была бы равна их полному ходу, что противоречит духу ППСС. Кроме того, нельзя быть уверенным в том, что на встречных кораблях имеются РЛС, и что на пути не встретятся корабли или суда, не обнаруживаемые РЛС, особенно при сильном волнении.
Согласно рекомендациям по использованию радиолокационной информации для предотвращения столкновений судов в море информацию, полученную с помощью РЛС, необходимо принимать в расчет при назначении умеренной скорости. Использование РЛС позволяет иметь более широкий диапазон умеренных скоростей. Верхний предел этого диапазона устанавливается исходя из тактико-технических данных РЛС, радиолокационной наблюдаемости, подготовленности личного состава к использованию информации, полученной от РЛС, характеристики района плавания (интенсивность судоходства, сила течений, вероятность встречи корабля, стоящего на якоре).
Нижний предел диапазона умеренных скоростей обычно определяется условиями визуальной видимости. Но при обнаружении кораблей на небольших расстояниях, особенно на острых курсовых углах, скорость должна немедленно уменьшаться ниже этого предела.
Особо важен выбор безопасной дистанции между расходящимися кораблями в момент расхождения при первоначальном расстоянии, значительно превышающем визуальную дальность обнаружения и дальность слышимости туманных сигналов. Если навигационная обстановка позволяет разойтись на любом расстоянии, то безопасной следует считать дистанцию расхождения 25—30 кбт, так как в этом случае даже при описании коордоната навстречу друг другу на 90° в момент расхождения корабли не столкнутся. Кроме того, на этой дистанции туманные сигналы встречного судна не будут услышаны и не вступит в силу правило 16 ППСС п. (6), согласно которому судно, услышав впереди своего траверза туманный сигнал другого судна, положение которого не определено, должно застопорить машины и затем идти с осторожностью, пока не минует опасность столкновения.
Согласно п. 3 «Рекомендаций по использованию радиолокационной информации для предотвращения столкновений судов в море» при плавании в условиях ограниченной видимости только лишь радиолокационные расстояние и пеленг не являются определением положения другого судна, достаточным для освобождения от выполнения правила 16 п. (6) ППСС.
Если суда расходятся в узкости, то необходимо выполнять правило 25 ППСС, согласно которому судно должно придерживаться стороны фарватера или прохода, находящейся с правого борта судна. При этом, если позволяет обстановка, желательно иметь дистанцию расхождения не менее 10 кбт, что обеспечивает уклонение от плавающего льда или других плавающих предметов в момент расхождения кораблей.
Относительный курс цели не должен проходить через «мертвую» зону РЛС. В этом случае цель будет потеряна, что увеличивает вероятность столкновения.
В ограниченную видимость при получении радиолокационного контакта с целью необходимо определить ее курс и скорость для точного расчета маневра расхождения с обнаруженной целью. Расчеты расхож
§ 102. Маневрирование при исполъзов. РЛС для расхождения с кораблями 583
дения должны производиться на маневренном планшете, что убыстряет их и делает более надежными.
Маневрирующий корабль целесообразно поместить в центре планшета. В этом случае обстановка на планшете будет соответствовать изображению обстановки на экране радиолокационной станции или ВИКО.
Для однократного определения элементов движения цели (ЭДЦ) необходимо и достаточно два измерения пеленга и дистанции. Измеренные пеленги и дистанции прокладывают из центра планшета (рис. 318) и получают относительные позиции цели Кг и К'2. Эти позиции соединяют прямой; отрезок /<г/<2 является относительным путем Sp цели за промежуток времени ^_2 между измерениями.
Относительная скорость цели определяется по формуле
искомый
курс цели, а вели-
По НМ’ VM> Kf и ПРИ центре планшета строится треугольник скоростей MQab.
Теорема сложения движений для этого случая может быть написана в следующем виде:
У к = + V,
Направление вектора Vк определ! чина — ее скорость.
Полученные ЭДЦ могут служить основанием для расчета расхождения. Однако не следует ограничиваться однократным определением ЭДЦ, а по мере поступления новой информации о цели все время их уточнять. Не следует также осреднять полученные при многократных определениях элементы движения цели, так как нет никакой уверенности в том, что в процессе маневра цель не изменила курс или скорость или то и другое одновременно. Для расчета расхождения необходимо использовать ЭДЦ, определенные по двум последним измерениям пеленгов и дистанций.
Расчеты расхождения с одиночной целью. При обнаружении одиночной цели следует в первую очередь определить необходимость расчета и выполнения маневра для расхождения с нею.
Пусть маневрирующий корабль (рис. 319), идущий курсом Км со скоростью VM, обнаружил с помощью РЛС цель по пеленгу П[ в дистанции D\. Измерив дважды пеленги и дистанции, определяют ЭДЦ. Продолжив линию относительного курса К , определяют кратчайшее расстояние £>Кр до цели, которое будет в момент относительного траверза.
Если это расстояние больше, чем безопасная дистанция расхождения Рб» то маневрирующий корабль может следовать прежним курсом
584
Глава 19. Маневрирование при выполнении специальных задач
и скоростью, продолжая следить за целью. Для этого необходимо, по мере поступления информации, наносить относительные позиции цели, определять по ним ЭДЦ и уточнять ожидаемое расстояние до цели в момент расхождения с ней.
Если относительные позиции цели будут лежать на линии относительного курса К , то это значит, что дистанция расхождения с целью не изменяется. Если же при нанесении очередной относительной позиции получится «вынос», необходимо через минуту снова измерить пеленг и дистанцию. Если новая относительная позиция будет вынесена в другую сторону или будет снова лежать на линии относительного курса, то следует считать, что «выносы» произошли от случайных ошибок или промахов при измерении пеленга и дистанции. Если же наносимые относительные позиции будут уклоняться в одну и ту же сторону, то следует считать, что цель изменила элементы своего движения.
Когда скорость цели меньше скорости маневрирующего корабля, расчет окончания расхождения производится следующим образом.
Строится треугольник скоростей М^аЬ и находится относительный курс цели при котором создаются максимальные возможности для сближения с маневрирующим кораблем.
Для получения относительной позиции К'ъ окончания расхождения по касательной к дуге АА, проведенной из точки Л40 радиусом £)6, проводится линия, параллельная V 9 до пересечения с линией . При выходе цели в позицию дистанция до маневрирующего корабля меньше D6 быть не может.
Если же скорость цели больше скорости маневрирующего корабля, такой гарантии дать нельзя. Наблюдение за целью должно производиться до потери контакта с нею или до прихода цели на курсовой угол маневрирующего корабля ^0°.
В тех случаях, когда курс цели ведет к сближению на дистанцию меньше безопасной, необходимо рассчитать маневр расхождения.
§ 102. Маневрирование при использов. РЛС для расхождения с кораблями 585
Маневрирующий корабль (рис. 320), идущий курсом Км со скоростью VM1 обнаружил по пеленгу /71 в дистанции Dx цель. По двум измерениям пеленга и дистанции определены элементы ее движения Кк и VK. Поскольку пеленг не изменяется (позиции Кх и К2 лежат на линии пеленга), то при дальнейшем сближении курсом Км произойдет столкновение.
Рассчитывается исходная позиция на момент начала расхождения. Для этого от точки К2 откладывается относительный путь 5рз за время /эдц, необходимое для определения ЭДЦ и время tp расчетов расхождения, относительный путь вычисляется по формуле
S = V (t + t ), р» к рД эдц 1 *'рг
где Ур — относительная скорость цели.
Рис. 320
Когда цель будет в позиции К3, маневрирующий корабль должен начать поворот на курс расхождения.
Для того чтобы дистанция до цели была менее безопасной, относительный курс цели должен проходить по касательной к окружности радиуса £>б, проведенной из точки Мо. Касательную необходимо выбрать так, чтобы в процессе расхождения не пересекать курс цели по носу.
Этому требованию соответствует относительный курс К . Построив для него треугольник скоростей МоеЬ, получают курс маневрирующего корабля КМл, при котором относительное перемещение цели будет иметь заданное направление. Если же рассчитанный курс расхождения Км ведет к навигационной опасности, то следует рассчитывать курс расхождения для относительного курса, являющегося касательной к окружности радиуса £>б с другой стороны. В этом случае маневрирующий корабль вынужден будет пересечь курс цели по носу, но дистанция до нее в момент пересечения будет больше £)б.
586 Глава 19. Маневрирование при выполнении специальных задач
Когда цель придет в позицию маневрирующий корабль ложится на курс По относительным позициям и JC7 находится новый относительный курс объекта маневра и, если это необходимо, определяется новый курс маневрирующего корабля, обеспечивающий безопасное расхождение.
Оптимальный курс расхождения выбирается так, чтобы при избранном относительном курсе относительная скорость расхождения была максимальной.
Для определения минимальной скорости выполнения маневра расхождения необходимо из точки Л10 опустить перпендикуляр на линию относительного курса, проведенную из конца вектора VK. Величина перпендикуляра (отрезок Л4ос) определит минимальную скорость У’Л1т|п> при которой еще возможно расхождение на безопасной дистанции. Направление перпендикуляра определит курс Км для расхождения.
Если VM < Vк и дистанция до цели близка к безопасной, маневрирующий корабль должен разойтись с целью на самой большой из возможных (предельной) дистанций.
Расчет расхождения на предельной дистанции показан на рис. 321. Пусть цель в процессе маневра расхождения оказалась в позиции на дистанции Dx < D6. Курс цели Кк, ее скорость Vк. Определим курс маневрирующего корабля, имеющего скорость который дает максимальные возможности для расхождения с целью. Для этого из конца вектора Vк проведем касательную к дуге АА окружности радиуса VM, Точка касания b определит курс маневрирующего корабля Км для расхождения на предельной дистанции. Проведя из позиции К3 линию
§ 102. Маневрирование при исполъзов. РЛС для расхождения с кораблями 587
относительного курса, параллельную вектору V , найдем предельную дистанцию расхождения £>пр = MQK'9.
Расчеты расхождения с несколькими целями. При обнаружении нескольких целей рекомендуется следующая методика расчетов расхождения:
— на маневренном планшете ведется прокладка для определения относительных курсов всех целей в течение времени, необходимого для анализа обстановки, принятия решения и расчетов расхождения;
— по относительным курсам определяются дистанции расхождения со всеми целями и выявляются наиболее опасные (с точки зрения расхождения) цели;
— производятся расчеты расхождения с ближайшей из опасных целей. Если расстояние между ближайшими опасными целями 50 кбт и более, то рассчитывается курс для последовательного расхождения с ними. Если это расстояние меньше 50 кбт, то рассчитывается курс для одновременного расхождения со всеми опасными целями:
— оцениваются условия расхождения со всеми остальными целями после поворота маневрирующего корабля на курс расхождения с наиболее опасной целью;
— если обнаруживается, что после поворота на новый курс возникнут условия опасного расхождения с другими целями, то подбирается такое маневрирование, которое обеспечивает последовательное или одновременное расхождение со всеми целями на безопасных дистанциях;
— определяются элементы движения остальных целей;
— ведется постоянное наблюдение и прокладка относительных курсов всех целей.
Пусть маневрирующий корабль (рис. 322), идущий курсом Км со скоростью V обнаружил в точке X} цель № 1, идущую курсом со скоростью VXK.
Для расхождения избран относительный курс цели ХЧ Для этого курса строится треугольник скоростей Моае и определяется курс маневрирующего корабля Км для расхождения с целью № 1. Когда цель пришла в точку маневрирующий корабль лег на этот курс. В этот момент обнаружена цель № 2 в точке Х31 и определены ее курс и скорость V™.
Выбирается относительный курс, позволяющий разойтись с обеими целями на безопасных дистанциях D6. Для этого определяется исходная позиция К"5 цели № 2, из которой проводится касательная к окружности радиуса D6. Эта касательная определит относительный курс цели XJJ для расхождения. Затем строится треугольник скоростей M^cf и определяется курс маневрирующего корабля Км для расхождения. Определяется относительная позиция цели № 1 Х5 на момент поворота маневрирующего корабля на этот курс.
Для этого строится треугольник скоростей MQaf и находится вектор относительной скорости V , с которой цель № 1 будет перемещаться относительно маневрирующего корабля. Из позиции проводится относительный курс Л^, параллельный вектору V , и определяется дистанция D5 расхождения с целью № 1. Она больше безопасной дистанции D6, следовательно, курс Км^ обеспечивает расхождение с обеими целями.
Если же одновременно обнаружено более двух целей, то методика выбора курса расхождения со всеми целями остается такой же.
588
Глава 19. Маневрирование при выполнении специальных задач
Рис. 322
§ 102. Маневрирование при использов. РЛС для расхождения с кораблями 589
Использование для расчетов расхождения блока совмещения навигационных РЛС. В районах интенсивного судоходства на экране РЛС может быть одновременно обнаружено большое число целей. Радиолокационная приставка (блок совмещения) типа «Пальма» к навигационной РЛС помогает быстро проанализировать обстановку, определить наиболее опасные цели и последовательность расхождения с ними. Эта приставка дает возможность совместить изображение обстановки на экране РЛС с картой или маневренным планшетом.
Использование маневренного планшета позволяет быстрее оценить обстановку в районе плавания и рассчитать расхождение с наиболее опасными целями. Центр планшета совмещается с центром радиолокационной развертки, а ее масштабные кольца согласуются с окружностями дальностей на маневренном планшете. После согласования масштаба на окружностях планшета надписываются дистанции и масштабные кольца могут быть выключены.
Методика расчетов в этом случае ничем не отличается от изложенной методики для расхождения с несколькими целями.
Пусть корабль, идущий курсом Кк (рис. 323), обнаружил с помощью РЛС восемь целей. Используя блок совмещения с маневренным планшетом, получают на планшете изображение обнаруженных целей. Маневрирующий корабль находится в центре развертки (точка Мо). По световым пятнам, обозначающим места целей, отмечаются через 1 мин относительные позиции всех целей и по ним определяются их относительные курсы (на рис. 323 сплошные линии). Эти курсы мысленно или с помощью линейки продолжаются (пунктирные линии) и определяются наиболее опасные (с точки зрения расхождения) цели.
Цели № 1, 2, 4, 5, 7 и 8 особой опасности не представляют, так как дистанции в моменты относительного траверза обеспечивают безопасное рас
590
Глава 19. Маневрирование при выполнении специальных задач
хождение. Относительный курс цели № 3, находящейся на носовых курсовых углах, проходит в опасной близости от корабля. От этой цели необходимо уклоняться в первую очередь. Для этого должны быть определены по указанной ранее методике элементы движения цели и рассчитан курс для расхождения с ней на безопасной дистанции.
Цель № 6, находящаяся на кормовом курсовом угле, сближается с кораблем вплотную, но относительная скорость сближения невелика. За этой целью необходимо тщательно наблюдать, и если будет продолжаться сближение, то от нее также необходимо уклониться.
Использование для расчетов расхождения индикаторов истинного движения. Некоторые типы радиолокационных станций имеют индикаторы, работающие в режимах относительного (ОД) и истинного (ИД) движений. На индикаторах этих станций при работе в режиме ИД, как ранее указано, отметки корабля, ведущего наблюдение, и отметки обнаруженных целей перемещаются по своим истинным курсам, а радиолокационное изображение береговой черты остается неподвижным. Поскольку центр развертки индикатора ИД может смещаться по экрану РЛС в любом направлении, механические визиры для него заменены электронными, центр которых всегда совпадает с центром развертки.
При работе РЛС в режиме ИД имеется возможность непосредственно определять истинные элементы движения встречных целей, быстро обнаруживать их изменение и легко выявлять неподвижные цели. На индикаторе ИД дистанция, на которой корабль разойдется с обнаруженной целью, и время расхождения могут быть определены с большим трудом и только приблизительно. Для точного определения этих величин необходимо переходить на режим относительного движения.
Расхождение со встречными судами при работе РЛС в режиме ИД производится так же, как и при визуальном наблюдении. Однако при этом следует помнить, что на встречном судне радиолокационное наблюдение может и не вестись и поэтому ожидать от него соблюдения правил расхождения не следует.
Режим ИД дает возможность быстро оценить обстановку в районе плавания и в совокупности с режимом относительного движения рассчитать рациональное маневрирование для расхождения с обнаруженными целями, используя изложенную ранее методику этих расчетов.
Часть VI
ДОПОЛНИТЕЛЬНЫЕ ВОПРОСЫ
Глава 20
КОРАБЛЕВОЖДЕНИЕ В ОСОБЫХ УСЛОВИЯХ ПЛАВАНИЯ
§ 103. КОРАБЛЕВОЖДЕНИЕ В РАЙОНАХ, СТЕСНЕННЫХ В НАВИГАЦИОННОМ ОТНОШЕНИИ
Стесненными в навигационном отношении называют районы, где плавание кораблей возможно, но маневрирование ограничено близостью берегов, береговых сооружений, выступающих в море, рифов, отмелей, камней или минных полей. Сюда относятся проливы, каналы, акватории портов, фарватеры в районах, опасных от мин, шхеры и устья судоходных рек.
Факторами, влияющими на безопасность плавания в стесненном районе, являются:
— ширина фарватера, радиусы изгибов его колен, глубины и рельеф дна;
— степень. изученности, а также обеспеченность навигационными картами и руководствами для плавания;
— наличие средств навигационного оборудования;
— наличие течений и колебания уровня моря;
— господствующие ветры и условия видимости;
— интенсивность движения кораблей и судов.
Особенности кораблевождения, свойственные стесненным районам, в наибольшей мере проявляются в шхерах. Шхерами называют скопления островов, островков, надводных и подводных скал и камней, окаймляющих побережья некоторых морей и озер. Шхеры имеются в Финском и Ботническом заливах Балтийского моря, у берегов Норвегии, Исландии, Шотландии, Кореи, в Ладожском озере и в других районах. В шхерах наблюдается, как правило, сложный рельеф дна с резкими скачками глубин и каменистым грунтом. Шхерные районы особо опасны в навигационном отношении, так как в них можно встретить какие угодно малые глубины, не обнаруженные при промере.
Шхерные районы до настоящего времени изучены недостаточно, и карты их могут иметь значительные погрешности. Лучше изучены лишь участки шхер, примыкающие непосредственно к фарватерам, что ограничивает возможность выбора пути и использования для ориентировки удаленных от фарватеров естественных ориентиров. Особенно опасны для плавания шхеры в районах с приливо-отливными течениями, так как течения в узкостях имеют большие скорости и резко изменяющиеся направления.
Плавание в шхерах, как и в большинстве стесненных районов, осуществляется по фарватерам. В зависимости от степени изученности и полноты сведений, содержащихся в руководствах для плавания, фарватеры делят на лоцманские и рекомендованные. По лоцманским фарватерам плавают, как правило, под проводкой лоцмана, знающего пути
38 Заказ 1833
594
Глава 20. Кораблевождение в особых условиях плавания
безопасного прохода кораблей. Описания лоцманских фарватеров в руководствах для плавания приводятся лишь в общем виде, и ограниченность этих сведений не может обеспечить безопасное плавание мореплавателям, впервые попавшим в данный район.
Рекомендованные фарватеры подробно описаны в соответствующих пособиях и руководствах, и плавание по ним возможно без лоцмана, при особо тщательной подготовке и в светлое время суток. Типичным рекомендованным фарватером является фарватер Инрелейя в Норвежском море.
В зависимости от направления относительно материкового берега и назначения фарватеры могут быть:
— продольные, ведущие вдоль материкового побережья;
— поперечные, ведущие в общем направлении к материковому берегу;
— соединительные, ведущие от одного фарватера к другому;
— входные, ведущие с моря в глубину шхер или стесненного района.
В зависимости от характера навигационного оборудования фарватеры делятся на три вида:
— оборудованные для плавания как днем, так и ночью;
— оборудованные для плавания только днем;
— необорудованные.
Для обеспечения плавания днем фарватеры оборудуются створами, а также другими средствами навигационного оборудования, позволяющими ориентироваться при помощи зрительных средств наблюдения. В качестве створных знаков могут использоваться не только знаки специальной постройки, но и различные строения, а также естественные резко очерченные ориентиры ограниченных размеров и знаки в виде пятен, накрашенных на скалах. При длине фарватеров более 3 миль часто выставляются прямой и обратный створы.
Знаки могут быть самой разнообразной формы — кучи камней, пятна, накрашенные на скалах, деревянные пирамиды и треугольники, металлические стержни (трубы) и т. д. Для отличия знаков, имеющих одинаковую форму, широко применяются шары или конусы.
Описание системы плавучего ограждения фарватеров приводится в руководстве «Огни и знаки» («Огни»).
Для обеспечения плавания ночью фарватеры оборудуют световыми маяками, светящими знаками, огнями, буями, а также створными радиомаяками. При достаточно большой ширине судового хода устанавливают секторные огни; сектор белого цвета указывает направление безопасного прохода, а красный и зеленый секторы — сторону уклонения корабля от безопасного пути.
Другие стесненные районы характеризуются принципиально теми же особенностями, что и шхеры, но эти особенности проявляются в меньшей степени.
Плавание по каналам и некоторым проливам регламентируется особыми правилами и международными соглашениями, обязательными для всех судов. Такие правила в частности изданы для плавания проливами Босфор и Дарданеллы, Суэцким каналом, Кильским каналом, Панамским каналом, проливом Хайнань, Магеллановым проливом, а также проливами Зунд, Большой и Малый Бельты.
В соответствии с Корабельным уставом в районах, где местными правилами плавание без лоцмана запрещено, командир военного корабля может брать лоцмана, а при отсутствии такового — местных жителей (рыбаков, судоводителей) и, пользуясь их указаниями и сообщениями, вести корабль самостоятельно. Вручая проводку своего
§ 103. Кораблевождение в районах, стесненных в навигационном отношении 595
корабля лоцману, командир корабля должен принять все меры, необходимые для обеспечения навигационной безопасности.
Командир корабля не несет ответственности за навигационную аварию своего корабля, идущего под проводкой лоцмана, только в тех случаях, когда навигационная авария произошла от местных условий, известных только лоцману. Если командир корабля обнаружит, что лоцман ведет корабль к явной опасности или вообще не знает своего дела, он обязан отстранить его от управления маневрами корабля (ст. ст. 148, 149 КУ—1959 г.).
Плавая в узкостях, вблизи берегов и отмелей или приближаясь к ним, командир корабля должен соблюдать все меры предосторожности, выработанные морской практикой. К таким мерам в частности относятся:
— уменьшение хода или остановка машин;
— задраивание и проверка люков и горловин;
— тщательный контроль прохождения мысов, буев и ориентиров;
— сверка курса по различным курсоуказателям.
Обязанности штурмана при плавании в узкостях изложены в § 59.
Подготовка к плаванию. Важнейшим мероприятием, обеспечивающим безопасность плавания в районах, стесненных в навигационном отношении, является тщательная предварительная подготовка. Подготовка должна быть настолько полной и детальной, чтобы в процессе плавания можно было ограничиваться только обеспечением движения корабля по выбранному пути и учетом этого движения.
В большинстве случаев при плавании в стесненных районах лаг не используется и пройденные кораблем расстояния вычисляют по скорости и продолжительности плавания. Поэтому в период подготовки к походу должны быть проведены проверочные испытания для уточнения зависимости между числом оборотов винтов или мощностью главных механизмов и скоростью хода корабля. Проверочные испытания особенно необходимы в тех случаях, когда имеющаяся таблица соответствия скоростей хода числу оборотов винтов устарела.
Общими задачами предварительной подготовки являются:
— подбор и корректура навигационных карт и руководств для плавания;
— изучение района предстоящего перехода;
— предварительная прокладка;
— подготовка технических средств кораблевождения и инструктаж личного состава, принимающего участие в наблюдении за обстановкой и в решении задач кораблевождения.
Подбор и корректура карт и руководств для плавания. Карты для плавания в стесненном районе следует подбирать возможно более крупного масштаба — желательно не мельче 1:50000. Подбирают обычна по два оттиска карт каждого номера; один из них находится на ходовом мостике для ориентировки командира, вахтенного офицера и наблюдателей, а другой — в штурманской рубке для ведения навигационной прокладки.
Кроме карт, подбирают лоции, альбомы зарисовок и снимков изображений обстановки на экране радиолокационной станции, наставления и руководства для плавания по всему маршруту перехода. Все подобранные материалы должны быть откорректированы по день выхода в море по извещениям мореплавателям, а в дальнейшем корректироваться по НАВИМ и НАВИП, передаваемым по радио. Наиболее важные сведения или указания страниц документов, содержащих эти сведения,, вписывают в таблицу курсов.
596
Глава 20. Кораблевождение в особых условиях плавания
Изучение района предстоящего перехода. При изучении района предстоящего перехода уделять особое внимание выяснению:
1) глубин моря, наличия фарватеров и рекомендованных курсов и их доступности для данного корабля; терминология глубин, применяемая в руководствах и пособиях для плавания приведена в приложении 7;
2) рельефа дна и характера донного грунта;
3) наличия средств навигационного оборудования и естественных ориентиров и возможности их использования при различных условиях видимости;
4) возможных способов (основных и дублирующих) определения места с повышенной точностью на наиболее важных участках перехода;
5) внешнего вида средств навигационного оборудования и естественных ориентиров;
6) возможности использования радиолокационных и гидроакустических станций для обеспечения навигационной безопасности плавания;
7) мест якорной стоянки;
8) гидрометеорологических условий, в частности, колебаний уровня моря, течений, господствующих ветров, видимости, радиолокационной наблюдаемости и осадков. При изучении гидрометеорологической характеристики должны быть учтены сведения, помещаемые в лоциях, а также сведения, содержащиеся в прогнозе погоды на период плавания.
Знание основных особенностей района перехода и рекомендаций о порядке плавания в нем обязательно не только для командира корабля и штурмана, но и для всех других лиц, участвующих в решении задач кораблевождения.
Предварительная прокладка. При выполнении предварительной прокладки необходимо:
1. Курсы перехода выбирать в соответствии с рекомендациями лоции или наставления для плавания. Предпочтение отдавать таким фарватерам или рекомендованным курсам, которые наиболее свободны от навигационных опасностей и надежно обеспечены створами или на которых с наибольшей надежностью можно использовать радиолокационную станцию. Если ведущих створов нет, подобрать ориентиры, лежащие на линии пути по носу или по корме корабля. На участках со сложным рельефом дна и при наличии нескольких фарватеров предпочтение отдавать фарватерам, протраленным гидрографическим тралом. На таких фарватерах, нанесенных на карту, указывается глубина, на которую протрален фарватер. Более надежны фарватеры, протраленные жестким тралом.
2. Точки поворота с одного курса на другой рассчитывать с учетом тактического диаметра циркуляции. Углы отклонения руля для поворота подбирать в соответствии с шириной фарватера и крутизной поворотов так, чтобы корабль во время поворота не вышел за пределы чистого от опасностей пространства.
Для уточнения положения точек, в которых необходимо подавать команды об отклонении руля, должны быть подобраны секущие створы или секущие пеленги ориентиров. Наивыгоднейшим является створ или пеленг, направление которого параллельно линии пути корабля после поворота. Поворот рассчитывают в следующем порядке:
— от точки О (рис. 324) пересечения линий старого и нового путей откладывают отрезки ch, равные расстояниям до нового курса. Величины di выбирают из таблицы циркуляции по углу поворота. Полученные точки Ki и Kt будут точками начала и конца поворота;
— от точки начала поворота в сторону, обратную движению корабля, откладывают расстояние К\А = VtM, проходимое кораблем
$ 103. Кораблевождение в районах, стесненных в навигационном отношении 597
за маневренный (мертвый) промежуток времени В полученной точке А должна быть подана команда рулевому об отклонении руля;
— подбирают ориентир Е, от которого прокладывают линию ЕМ,
параллельную линии пути в конце поворота, и измеряют расстояние 5 = МА;
— рассчитывают промежуток времени t, сек, за который корабль при данной скорости пройдет путь S.
В момент прихода в точку М, определяемый по пеленгу ориентира Е, пускают в ход секундомер и через время t, сек, подают команду рулевому об отклонении руля.
Поворот, рассчитанный в изложенном порядке, обеспечивает выход корабля на линию нового курса (пути) даже в том случае, когда линия
фактического движения до поворота была отклонена от проложенной на карте.
Повороты на углы меньше 30° целесообразно обеспечивать секущими пеленгами, перпендикулярными линии начального пути (курса).
3. При расчете поворотов учитывать наличие дрейфа на циркуляции, вследствие которого ширина полосы, занимаемой кораблем во время пово-
Рис. 324
рота, возрастает и поэтому корму корабля может занести на мель или на камни. На таких участках следует намечать повороты с изменением режима работы машин, стопоря одну машину или давая ей задний ход. Кроме того, на участках, где имеется сильное течение, для избежания посадки на мель можно стравить с кормы несколько смычек якорной цепи, которая будет удерживать корму от сильных заносов при
повороте.
4. Для участков, где маневрирование корабля стеснено, а также для участков ночного плавания предусматривать движение уменьшенным ходом; точки изменения хода отмечают на карте.
5. На участках пути в узкостях, огражденных секторными огнями, предусмотреть измерение пеленгов для исключения ошибок вследствие
наличия углов полусвета между секторами.
6. Намечая ориентиры для определения места, избегать использования плавучих средств навигационного оборудования, так как они могут быть не на своих штатных местах.
7. Если район плавания обеспечивается высокоточной радионавигационной системой, то на случай невозможности ее использования, например, вследствие помех, предусмотреть резервные способы, обеспечивающие необходимую точность при минимальном времени для определения места.
8. На участках, где ночное плавание невозможно, заранее выбрать места якорных стоянок в соответствии с рекомендациями лоции и так, чтобы к этим местам можно было подойти до наступления темноты. Эти же места могут быть использованы для якорной стоянки при ухудшении видимости.
9. Для ускорения работы по нанесению определяемых мест на отдельных участках пути, как правило, предшествующих входу в узкость, нанести на карты сетки изолиний в соответствии с выбранными способами определения места.
598 Глава 20. Кораблевождение в особых условиях плавания
10. Чтобы исключить пропуск проходимых ориентиров и потерю ориентировки, подготовить схему расположения ориентиров с показом их внешнего вида. Для фиксации прохождения ориентиров выделить специальных наблюдателей.
11. Для обеспечения безопасного плавания вблизи навигационных опасностей в быстроменяющейся обстановке рассчитать параметры ограждающих изолиний. Ограждающие изолинии должны строиться на картах крупного масштаба с таким расчетом, чтобы эти изолинии ограничивали опасную или безопасную зону.
Навигационный параметр, которому соответствует ограждающая изолиния, называется ограждающим параметром, например, ограждающее расстояние, ограждающий пеленг, ограждающий горизонтальный угол и т. д.
Ограждающее расстояние применяется в тех случаях, когда вблизи опасности имеется ориентир, указанный на карте. Место ориентира принимается за центр окружности, радиус которой подбирается так, чтобы дуга окружности аа\ (рис. 325) охватывала участок, опасный для плавания. Радиус D окружности и будет минимально допустимым расстоянием до ориентира.
Если ориентир, проложенная линия пути и опасность расположены так, как показано на рис. 326 то, проведя дугу окружности аа\, получим максимально допустимое расстояние до ориентира. Сектор 6, в котором необходимо контролировать действительные расстояния, ограничивается линиями пеленгов ЕА и ЕС; величины пеленгов снимают с карты. Для измерения расстояния до ориентира могут быть применены радиолокационная станция, оптический дальномер или, в случае использования подводного ориентира, — гидроакустическая станция. При отсутствии РЛС или оптического дальномера непосредственное измерение расстояния может быть заменено измерением вертикального угла секстаном при условии, что высота ориентира известна.
Вертикальный угол а, соответствующий расстоянию D, вычисляется по формуле
tg« = -g, (16.37)
где И — высота ориентира.
Величины Н и D должны быть выражены в одной мере; угол а вычисляется до 0х,1.
§ 103. Кораблевождение в районах, стесненных в навигационном отношении 599
Погрешность индекса I секстана рекомендуется свести к нулю. Для этого алидаду секстана устанавливают на отсчет 0°00',0 и регулировочным винтом малого зеркала совмещают прямовидимое и дважды отраженное изображения видимого горизонта в поле зрения трубы.
Если радиус D соответствует минимально допустимому расстоянию, то измеряемый секстаном угол а должен быть меньше вычисленного по формуле (16. 37). При D, соответствующем максимально допустимому расстоянию, измеряемый угол а должен быть больше вычисленного.
находилась между этими лини-
Ограждающий пеленг применяется наиболее часто, так как никаких предварительных расчетов не требуется, а измерения производятся при помощи компаса.
Если корабль должен пройти узкость по линиям KiK2 и Л3Л4 (рис. 327), минуя опасность, то следует провести линии пеленгов двух ориентиров Е} и Е2 так, чтобы опасность ями, как показано на рисунке; измеренные на карте пеленги переводят в компасные.
При движении по линии К1К2 корабль будет вне опасности, пока измеряемый пеленг ориентира Е] будет меньше снятого с карты. Поворот на курс ЕзЛч может быть совершен после пересечения линии пеленга ориентира £2- Идя курсом ХзХ^, следует наблюдать за тем, чтобы измеряемый пеленг ориентира Е2 не стал больше снятого с карты.
Ограждающий горизонтальный угол. На карте провести окружность, ограничивающую опасную (или безопасную) зону
и проходящую через два ориентира Е\ и Е2 (рис. 328). Измерив угол а на карте и следя с помощью секстана за его изменением и величиной, можно, корректируя курс, безопасно провести корабль по линии
600
Глава 20. Кораблевождение в особых условиях плавания
Чтобы построить окружность, ограничивающую опасность, следует: — соединить места ориентиров прямой ЕХЕ2 и из середины этой прямой провести перпендикуляр ab к ней;
— передвигая одну из ножек циркуля по перпендикуляру ab и изменяя раствор его ножек так, чтобы проводимая окружность проходила через места ориентиров и одновременно вмещала опасность, путем последовательных приближений найти центр окружности О;
— построив окружность или ее часть вблизи опасности, измерить протрактором ограждающий угол а.
Работа штурмана при плавании в стесненном районе. При плавании в стесненном районе навигационная прокладка ведется особенно тщательно. На участках, на которых имеется относительная свобода маневрирования (перед входом в узкости, на плесах), следует, определяя места и обнаруживая уклонения от предварительно проложенного пути, подправлять курс так, чтобы устранять эти уклонения. Для упрощения определений места рекомендуется применять заранее подготовленные сетки изолиний. Для одновременного измерения навигационных параметров выделить специально подготовленных наблюдателей.
При плавании в самой узкости необходимо:
1. Следить за тем, чтобы корабль непрерывно с максимально возможной точностью шел по линии предварительно проложенного пути. Если имеется ведущий створ, корабль удерживается на линии створа. При отсутствии ведущего створа правильность движения контролируется, как правило, по постоянству пеленга ориентира, расположенного по носу или за кормой на продолжении линии пути. На отдельных участках, где нет створов или ориентиров, расположенных на продолжении линии пути, рулевой правит по компасу. При этом надо периодически сличать показания различных курсоуказателей. Допустимые расхождения истинных курсов не должны превышать суммы предельных ошибок их поправок, взятых с вероятностью 0,997. Удерживая корабль на линии пеленга ориентира при наличии значительного сноса, рулевой должен править только по компасу. Если ориентир удерживать на постоянном курсовом угле, траектория движения корабля будет представлять собой логарифмическую спираль и может значительно отклониться от намеченного прямолинейного пути.
Курс, заданный рулевому, корректировать так, чтобы корабль оставался на линии пеленга ориентира.
2. Прохождение ориентиров по траверзу отмечать на карте черточками на линии пути и здесь же записывать моменты их прохождения. Наблюдать за прохождением ориентиров должны не только штурман и вахтенный офицер, но и специально выставленные наблюдатели, которые должны использовать для опознавания ориентиров заготовленную при подготовке к походу схему навигационного оборудования района.
3. Повороты с одного курса на другой осуществлять в строгом соответствии с предварительными расчетами, не допуская срезания углов и излишнего приближения к берегу.
4. В районах со сложным рельефом дна и достаточно большими глубинами для предупреждения навигационной аварии, особенно в условиях пониженной видимости, обследовать зону впереди по курсу с помощью гидроакустической станции.
5. Проходя вблизи опасностей, корректировать курс, используя ограждающие линии положения. Использование этих линий требует непрерывного измерения расстояния, пеленга или угла. Необходимые корректуры курса должны быть небольшими и настолько заблаговременными, чтобы корабль не мог пересечь ограждающую изолинию.
§ 103. Кораблевождение в районах, стесненных в навигационном отношении 601
6. При наличии РЛС использовать блок совмещения. Изменения курса вводят при обнаружении отклонения светящегося перекрестия от проложенной на карте линии пути. Для исключения ошибки в опознавании ориентиров следует совмещать прямовидимые и отраженные изображения возможно большего количества ориентиров.
Используя РЛС без блока совмещения, можно корректировать курс, добиваясь того, чтобы отметка курса на экране ИКО проходила относительно изображения ориентиров так же, как проходит линия курса на карте с предварительной прокладкой.
Проходя вблизи опасности, подвижный круг дальности на экране ИКО устанавливать на расстояние Dmin, снятое с карты от линии проложенного пути до ближайшего ориентира, дающего четкий эхо-сигнал. Корректируя курс, следует добиваться того, чтобы отметка ориентира на экране не пересекала круга дальности.
Используя для ориентировки РЛС, для исключения промахов следует при всякой к тому возможности контролировать получаемые места по навигационным параметрам, измеряемым визуально.
7. Если используется высокоточная радионавигационная система, курс корректируют в соответствии с отклонениями мест, наносимых на карту или планшет с сеткой изолиний.
8. На мелководье и в узких каналах скорость корректировать так, чтобы исключить увеличение осадки до опасной, а также возникновение чрезмерного волнения, которое может разрушить прибрежные сооружения.
Увеличение средней осадки ДТСр при заданной скорости V (в м/сек) можно предварительно подсчитать по одной из формул:
— при отношении глубины моря Н к осадке корабля Г, меньшем 1,4 или равном 1,4
лт __ (А2 —1) V2 .
/ср — 2g ’
— при 1,5 < у < 4
А/ср - У н 2g
где g = 9,81 — ускорение силы тяжести;
k — коэффициент, выбираемый из табл. 40 по отношению длины корабля L к ширине В.
Таблица 40
L В 4 6 8 12
А... 1.3 1,2 1,2 1.1
Таблица 41
L В 3,5-5 5—7 7-9
а . .. 1,5-1,25 1,25-1,1 1,1
Приращение осадки кормой
ДГК вычисляется по формуле
ДГК = ДГсра, где-а — коэффициент, выбираемый из табл. 41 по отношению длины корабля L к ширине В.
Так, при скорости V = 15 уз (7,7 м/сек), Н = 10 м, Т = 4 м,~ = 5 получим k = 1,25 и у = 2,5. По вышеприведенным формулам находим ДГср = 1 м и ДТК = 1,25 м.
602
Глава 20. Кораблевождение в особых условиях плавания
9. При лоцманской проводке наличие лоцмана не освобождает командира корабля от ответственности за навигационную аварию, за исключением случая, указанного в основных положениях настоящего параграфа, и лоцман должен рассматриваться лишь как советник. Для обеспечения навигационной безопасности плавания на корабле надлежит принять все указанные выше меры предосторожности. В первую очередь следует вести тщательную навигационную прокладку, а проход вблизи опасностей обеспечивать с помощью ограждающих линий положения. Эти мероприятия позволят осуществить объективный контроль за деятельностью лоцмана.
Лоцмана необходимо проинформировать о поправке компаса и лага, если он не убран, а также о маневренных особенностях корабля и, в частности, о диаметре циркуляции, маневренном (мертвом) промежутке времени и управляемости корабля. В свою очередь лоцман должен сообщить командиру корабля все особенности проводки.
§ 104. КОРАБЛЕВОЖДЕНИЕ В УСЛОВИЯХ МАЛОЙ ВИДИМОСТИ
Общие положения. В морской практике принято называть малой видимостью видимость не более 2 миль.
Дальность видимости объектов в море зависит от прозрачности атмосферы, которая изменяется в зависимости от количества взвешенных в ней частиц. В туман дальность видимости объектов часто уменьшается до нуля. Осадки, дождь и снег, также уменьшают видимость. Особенно сильное влияние на дальность видимости оказывает снег при штиле, падающий вертикально.
Осадки при сильном ветре выпадают обычно зарядами и дальность видимости в самое короткое время изменяется очень резко, в пределах от нескольких десятков метров до 2—3 миль. Наличие дождя и снега уменьшает также радиолокационную наблюдаемость объектов.
Вследствие большой вероятности уменьшения дальности видимости даже в кратковременном плавании, мореплаватель должен всегда ориентироваться на возможное минимальное ее значение.
Плавание в условиях малой видимости, особенно в прибрежной зоне, наиболее сложное и требует от всего личного состава, участвующего в решении задач кораблевождения, большого напряжения.
Перед приближением тумана, мглы, дождя, снегопада и других явлений, уменьшающих видимость, следует:
— подготовить к использованию радиолокационную и гидроакустическую станции и эхолот;
— уменьшить ход до умеренного в соответствии с требованием ППСС. Это требование является обязательным для всех судов, в том числе и для имеющих РЛС;
— определить как можно точнее место корабля, а если возможно, то и поправку курсоуказателя. iVtecTO определяет не только штурман, но и командир корабля. При отсутствии возможности для определения места следует тщательно проверить счисление от момента последней обсервации;
— независимо от времени суток включить ходовые огни;
— приступить к подаче туманных сигналов;
— усилить зрительное и слуховое наблюдение, для чего выставить дополнительных наблюдателей на различных возвышениях над уровнем моря;
— предупредить электромеханическую часть о немедленной готовности к резким изменениям скорости корабля;
— повысить готовность корабля к борьбе за живучесть.
§ 104. Кораблевождение в условиях малой видимости
603
Способы ориентировки и определения места корабля. При плавании в прибрежной зоне в условиях малой видимости курсы следует прокладывать так, чтобы минимальные расстояния до опасностей превышали средние квадратические ошибки счислимых мест на подходе к этим опасностям не менее чем в три-пять раз. Расчет этих ошибок производится в порядке, изложенном в § 91. Кроме того, прокладывая курсы, рекомендуется выбирать их так, чтобы линии путей не приближались к берегу ближе какой-либо заранее намеченной глубины. Это даст возможность, систематически измеряя глубины, считать себя на желательном расстоянии от берега, пока измеренные глубины не меньше предварительно намеченных.
Для определения места в условиях малой видимости применяются способы, связанные с использованием радиотехнических, гидроакустических и радиоакустических средств.
Применение гидроакустических станций дает особенно хорошие результаты при наличии в районе плавания корабля специальных подводных излучателей или отражателей.
В зависимости от особенностей этих ориентиров место можно определить по пеленгам двух-трех ориентиров или по пеленгу и дистанции.
Для приближенной ориентировки и опознавания места, а в некоторых случаях и определения места могут быть использованы измеренные глубины (см. § 88).
В отдельных районах, обычно примыкающих к портам, для приближенной ориентировки можно использовать звукосигнальные средства: сирены, наутофоны, колокола и проч. В период малой видимости эти средства дают сигналы, характер которых указан в описании средств навигационного оборудования. Однако звуковые сигналы лишь отчасти обеспечивают ориентировку, так как звук в тумане и иной неоднородной среде распространяется, сильно отклоняясь как в горизонтальном, так и в вертикальном направлениях. Вследствие этого слышимость сигнала может сильно изменяться.
Препятствия в виде выдающихся в море мысов или островов, встречающиеся на пути звука, также искажают направление его распространения и уменьшают силу сигнала. Поэтому по силе звука никоим образом нельзя судить о расстоянии до источника звука.
Находясь в зоне действия любого звукосигнального средства и не слыша его сигналов, принято считать это средство недействующим и прибегать к ориентировке по глубинам, если нет возможности применить для определения места более точный способ.
Для облегчения плавания по фарватерам и рекомендованным курсам, а также для входа в пункты базирования и на рейды применяются створные радиомаяки и ведущий кабель.
Створный радиомаяк излучает переплетающиеся сигналы Н ( — •) и А (••"), Б — Ж или Е — Т. В пределах равносигнальной зоны, имеющей угловую величину около 1°, с помощью радиоприемника прослушивается непрерывный звук. Равносигнальная зона при установке радиомаяка совмещается с осью фарватера или рекомендованного курса. Находясь за пределами равносигнальной зоны, наблюдатель будет слышать тот или другой сигнал в зависимости от стороны отклонения.
Ширина полосы, в пределах которой движется корабль, ориентируясь по сигналам створного радиомаяка, зависит от субъективных ошибок и натренированности штурмана в приеме сигналов, условий приема, а также от скорости и управляемости корабля. С увеличением скорости корабля и уменьшением угловой скорости циркуляции отклонения от оси равносигнальной зоны увеличиваются.
604
Глава 20. Кораблевождение в особых условиях плавания
Наиболее выгодные скорость и угол отклонения руля для плавания по фарватеру, оборудованному створным радиомаяком, должны подбираться опытным путем.
На ось равносигнальной зоны следует выходить при курсовом угле на радиомаяк, близком к 0° или 180°, так как при этом амплитуда отклонений корабля от оси створа будет минимальной.
Вход в гавань в условиях малой видимости можно также обеспечить с помощью РЛС или ГАС. Используя ГАС, необходимо обследовать зону по направлению входа; корабль должен периодически стопорить ход или идти самым малым ходом, имея якорь изготовленным к отдаче.
Организация радиолокационного наблюдения. Радиолокационное наблюдение при плавании в условиях малой видимости в соответствии с ППСС является необходимой мерой предосторожности, обеспечивающей в сочетании с визуально-слуховым наблюдением безопасность корабля от столкновения с другим кораблем (судном). Оно может быть непрерывным и периодическим.
Непрерывное наблюдение ведется в районах с интенсивным движением судов, а также в прибрежных водах, где берега и острова препятствуют обнаружению целей на больших расстояниях. Периодическое наблюдение допускается только при плавании вдали от берегов, в таких районах, где вероятность встречи с другими судами сравнительно мала.
Периодичность наблюдения должна быть такой, чтобы любое встречное судно было обнаружено до того, как оно станет видимым визуально или будут услышаны его звуковые сигналы.
Учитывая самый неблагоприятный случай, когда суда будут сближаться встречными курсами, наибольший допустимый перерыв между наблюдениями обстановки /тах, мин, можно вычислить по формуле
т^-бо.
где D — надежная дальность обнаружения судов, с которыми возможна встреча в данном районе, мили;
d — минимально допустимое расстояние обнаружения встречного судна впереди траверза, мили;
VK и ~~ скорости кораблей, уз.
При вычислении времени /шах следует:
1. Скорость VK встречного судна принимать равной полной скорости хода современных судов (15—25 уз) и во всяком случае не меньше скорости своего корабля.
2. Надежную дальность D обнаружения судов с помощью корабельной РЛС принимать равной величине, определяемой опытным путем при различной обстановке. Густой туман, ливневые осадки и снежные заряды понижают дальность надежного обнаружения целей с помощью РЛС до 50% и более. При интенсивном волнении деревянные суда малых размеров часто вообще не обнаруживаются до сближения с ними вплотную.
3. Минимально допустимое расстояние d принимать несколько большим, чем две длины пути корабля, необходимого для погашения инерции переднего хода, но не меньше 2 миль. Если на экране РЛС наблюдается значительная засветка от волнения, то величина d должна приниматься равной радиусу этой засветки (если он не меньше 2 миль).
§ 105. Кораблевождение при плавании во льдах
605
Промежутки времени /гаах, мин, по разности D — d и сумме 1/л + VM приведены в табл. 42.
Таблица 42
VK + vM уз D — d, мили
1 2 3 4 5 6 7 8
20 3 6 9 12 15 18 21 24
25 2 4 7 9 12 14 19 19
30 2 4 6 8 10 12 14 16
35 1 3 5 6 8 10 12 13
40 1 3 4 6 7 9 10 12
Первоначальные наблюдения с помощью РЛС производят на шкале дальности 3—5 миль. Затем переходят на шкалу средней дальности (10—15 миль) и шкалу большой дальности.
В открытом море наблюдение должно вестись преимущественно на шкале средней дальности с периодическим просмотром на шкалах крупного и мелкого масштабов. При плавании в прибрежной зоне наблюдение ведется преимущественно на шкале крупного масштаба.
Обнаружив встречное судно, следует начать прокладку его пути по пеленгам и расстояниям на карте или маневренном планшете с тем, чтобы своевременно принять меры, предупреждающие столкновение.
Порядок расчетов маневрирования для избежания столкновения изложен в гл. 19.
§ 105. КОРАБЛЕВОЖДЕНИЕ ПРИ ПЛАВАНИИ ВО ЛЬДАХ
Возможность плавания во льдах, относящегося к числу наиболее сложных видов плавания, зависит от типа корабля, состояния его корпуса и движителей, состояния погоды и от проходимости льда.
Проходимость льда обусловливается его толщиной, прочностью и сплоченностью. Сплоченность льда, т. е. общая площадь, занимаемая льдом в пределах видимого пространства, выражается в баллах от 0 до 10.
Принята следующая классификация льдов:
Редкий лед Разреженный лед Сплоченный лед Сплошной или очень сплоченный лед
Сплоченность, °/0 Баллы
30 1-3
50 4—6
80 7—9
100 10
Наибольшую прочность лед имеет в период его образования, т. е. в осенне-зимний период. Этот лед имеет чистый зеленоватый оттенок. Весной, в период таяния, лед становится грязно-серым и прочность его минимальна. *
В зависимости от конкретных условий плавание во льдах может осуществляться самостоятельно или под проводкой ледоколов. Малые корабли со сравнительно слабым корпусом могут самостоятельно плавать только в молодом льду (сало, шуга, блинчатый лед, нилас), толщина которого не превышает 10 см. Корабли среднего водоизмещения могут самостоятельно плавать в сплошном льду толщиной до 10—15 см
606
Глава 20. Кораблевождение в особых условиях плавания
и в разреженном льду большей толщины. Плавание в сплошном льду толщиной более 10—15 см возможно только под проводкой ледоколов.
Нормы сплоченности льда и формы ледовых образований, допускающие самостоятельное плавание кораблей различных классов, устанавливаются официальными документами.
Самостоятельное плавание во льдах, как правило, допускается лишь в течение короткого срока.
Оценка ледовой обстановки в районе плавания кораблей и возможности плавания производится на основании материалов ледовой разведки, а также специальных ледовых прогнозов. Ледовая информация поступает на корабли в виде специальных ледовых карт, составляемых на основании материалов ледовой разведки, сведений, передаваемых по радио, или донесений от самолета-разведчика. Эта информация содержит следующие основные сведения:
— положение и состояние кромки льда;
— общую характеристику ледовых условий на всем протяжении района;
— предполагаемые изменения ледовых условий на ближайший срок;
— рекомендации о наиболее выгодном общем направлении движения кораблей (судов).
В необходимых случаях сбор и обработка ледовой информации осуществляются специальными центрами. Эти центры непосредственно руководят прохождением кораблей (судов); проводка ледоколами организуется в наиболее труднопроходимых районах.
На всех кораблях, находящихся во льдах, должны вестись систематические наблюдения за состоянием ледового покрова. Результаты наблюдений передаются в центры сбора и обработки ледовой информации и используются для уточнения сведений, характеризующих район плавания.
Подготовка корабля к плаванию во льдах. При подготовке корабля к плаванию во льдах должны быть проведены следующие мероприятия, повышающие живучесть корабля, а также живучесть технических средств кораблевождения:
— дополнительное крепление набора корпуса в носовой части корабля аварийными брусьями;
— пополнение запасов аварийно-спасательного имущества на постах, находящихся в местах наибольшего давления льда, т. е. в носовой и кормовой частях корабля, а также в районе мидель-шпангоута;
— распределение личного состава для борьбы с обледенением механизмов, палубы, вооружения и надстроек корабля;
— установление постов в нижних помещениях для обнаружения возможного поступления воды;
— уборка выступающего за пределы корпуса оборудования — приемных трубок лагов, вибраторов ГАС, рулей-успокоителей качки и подкильных концов;
— дополнительный обогрев помещений и, в частности гиропоста, для предупреждения замерзания воды в трубопроводах и поддерживающей жидкости гирокомпаса;
— увеличение дифферента на корму для защиты винтов и рулей от повреждения льдом;
— закрепление браги или иного устройства для крепления буксиров.
При подготовке к длительному плаванию во льдах корпус корабля осматривается в доке, а обнаруженные дефекты устраняются. Кроме того, бронзовые винты заменяются стальными со съемными лопастями; для обеспечения возможной замены создается необходимый запас лопастей на корабле.
§ 105. Кораблевождение при плавании во льдах 607
Корабли с недостаточно прочными корпусами при подготовке к длительному плаванию во льдах могут снабжаться специальными укрепляющими поясами в виде дополнительной металлической или деревянной обшивки («шубы»).
Гидрографическая служба развертывает дополнительную сеть средств навигационного оборудования с целью обеспечения возможно более частых определений места кораблей, находящихся во льдах.
Признаки приближения к кромке льдов. Основные признаки приближения корабля к кромке льдов со стороны моря, свободного от льда, следующие:
1. При наличии облачности в направлении льдов появляется белесоватый отблеск льда на облаках, называемый ледяным небом. По мере приближения к кромке льда этот отблеск постепенно увеличивается как по высоте, так и по горизонту.
Если небо безоблачно, окраска небосвода со стороны льда становится белесоватой.
2. С приближением к кромке льда земная рефракция значительно возрастает, что может быть обнаружено измерением наклонения видимого горизонта наклономером. Кроме того, увеличивающаяся земная рефракция позволяет видеть льды над горизонтом в виде блестящей белой полосы на фоне неба. Такое явление наблюдается при безоблачном небе и ветре со стороны льда.
3. Если теплый ветер дует по направлению к кромке льдов и небо безоблачно, то на горизонте над льдом появляется полоса тумана, так как теплый воздух, проходя над более холодной подстилающей поверхностью, насыщается влагой.
Если при ясном небе дует относительно холодный ветер, то это свидетельствует о наличии льда в том направлении, откуда дует ветер.
4. Туман, поднимающийся со всех сторон, свидетельствует о том, что если впереди по курсу и имеется лед, то он не сплошной, а со значительными разводьями.
5. Уменьшение зыби с наветренной стороны при наличии сильного ветра свидетельствует о появлении льда по направлению, откуда дует ветер, так как лед мешает волнообразованию. Если же ветер дует с моря, то в районе, близком к кромке льда, появляется толчея вследствие наложения на ветровое волнение отраженных волн.
6. Понижение температуры воды. Данный признак справедлив только в тех случаях, когда лед был длительное время неподвижен или перемещался в сторону от наблюдателя.
7. Появление мелких льдин, когда ветер дует со стороны льда.
Приведенные признаки следует иметь в виду и при наличии на корабле РЛС, так как с помощью РЛС уверенно обнаруживаются только торосистые льды и обломки айсбергов.
Признаками приближения к кромке льдов при выходе из зоны льда являются:
— наличие «водяного» неба, т. е. темных пятен на облаках в направлении чистой от льда воды;
— появление зыби;
— появление мелкобитого льда, взломанного близким волнением.
Выбор пути при плавании во льдах. Во время предварительной прокладки, производимой с учетом ледовой информации и ледовых прогнозов, на карты наносят удобные для входа в лед участки. Кроме того, на карты наносят линии общего направления движения корабля (соединения), так как заранее наметить все частные курсы невозможно.
608
Глава 20. Кораблевождение в особых условиях плавания
Частные курсы должны уточняться в процессе перехода по непосредственным наблюдениям ледовой обстановки, а также в соответствии с указаниями центра, управляющего переходом кораблей. При этом вместо кратчайшего пути выбирается более легкий путь, который по продолжительности перехода оказывается наиболее выгодным, хотя и располагается по ломаной линии.
Плавание без ледоколов осуществляется, как правило, по разводьям. Общее направление разводий должно совпадать с линией генерального курса, и разводья должны сообщаться друг с другом, или, в крайнем случае, разделяться слабыми перемычками.
Для обеспечения выбора таких разводий должно быть организовано наблюдение за состоянием льдов с наиболее возвышающегося над уровнем моря поста корабля.
Счисление при плавании во льдах. Счисление пути основывается на тех же правилах, что и при плавании на чистой воде. Особенностями счисления являются необходимость учета многочисленных изменений курса и скорости корабля, а также невозможность использования лагов, имеющих выдвижные приемные устройства. При навигационной прокладке должно быть учтено перемещение корабля по всем частным курсам, а также снос или дрейф корабля вместе со льдом.
Пройденное расстояние может быть определено по показаниям лага или по скорости хода и продолжительности плавания.
Использование лага возможно только в том случае, если он имеет штевневое приемное устройство. Однако следует считаться с возможностью появления значительных погрешностей в показаниях лага вследствие забивания приемного отверстия мелкобитым льдом и снежурой.
Если лаг использовать невозможно, скорость хода определяют:
— по времени прохождения кораблем расстояния, равного фиксированной базе;
— с помощью стробоскопического лага;
— глазомерно.
Для определения скорости хода первым способом следует:
— отметить марками на палубе корабля базу известной длины L; такой базой может быть длина корабля;
— сбросить на лед вперед по курсу какой-либо предмет;
— по сигналу наблюдателя (отмашка флажком или свисток) в момент, когда сброшенный предмет придет на траверз носовой марки, пустить в ход секундомер; секундомер останавливается по сигналу второго наблюдателя в момент, когда предмет придет на траверз кормовой марки;
— зная базу L (м) и время t (сек), вычислить скорость корабля в узлах по формуле
v t ’
При длине базы L, равной 30,9, 46,4 или 61,8 м, расчетные формулы соответственно будут:
V =
y = J2o t •
Данный способ обеспечивает точность определения скорости хода, характеризуемую предельной ошибкой не более 10%.
§ 105. Кораблевождение при плавании во льдах
609
Более рационален способ, при котором база и время ее прохождения определяются с помощью уголкового визира.
Уголковый визир (рис. 329) представляет собой три скрепленные друг с другом рейки, образующие треугольник с известным углом р в одной из вершин О. Треугольник закрепляется на крыле мостика так, чтобы биссектриса угла р возможно точ- 0
нее совпадала с отвесной линией. л
Визируя по направлениям ОА' и OB', на поверхности воды или льда можно за- / \
метить базу L — AB, величина которой / • \
при известной высоте h точки О вычи- лу ] \д«
сляется по формуле / ' \
Z = 2Atg4- / \
Измерение высоты h должно произво- —------------1---------
диться не реже чем через каждые 4 ч.
Скорость V определяется по времени ис‘
прохождения вычисленной базы L. Это время фиксируется по моментам прохождения какой-либо приметной точки на льду или на воде через линии визирования ОА и ОВ.
Определяя скорость по времени прохождения расстояния между обсервованными точками, для определения места следует применять наиболее точные способы.
При использовании РЛС места могут определяться по точечным ориентирам — как нанесенным на карту, так и не нанесенным на нее. В последнем случае два относительных места должны быть определены по пеленгам и расстояниям до одного и того же ориентира (массива льда, отдельной льдины). Измеряемые пеленги и расстояния прокладывают от произвольной точки на карте или на маневренном планшете от его центра.
Стробоскопический лаг, называемый также оптическим лагом, имеет в своей основе многоугольное зеркало, вращаемое электромотором; скорость вращения зеркала можно изменять в широких пределах.
Для измерения скорости следует, наблюдая в окуляры прибора за отраженным в зеркале изображением поверхности воды или льда вблизи корпуса корабля и изменяя скорость вращения зеркала, добиться неподвижности видимого изображения. Искомая скорость считывается по шкале прибора.
Рассмотренные инструментальные способы определения скорости корабля применяются периодически один-три раза в час. В промежутках между этими определениями применяется глазомерный способ. Точность глазомерного способа зависит от натренированности штурмана.
Снос корабля под действием течения или ветра вместе со льдом определяется по невязкам, получаемым при определении места.
Вследствие малой точности счислимых мест получаемые по пятисеми невязкам скорость и направление сноса осредняются.
При наличии на корабле гидроакустического лага вектор сноса можно определить по составляющим скорости Vx (по направлению диаметральной плоскости корабля) и Уу (по направлению, перпендикулярному диаметральной плоскости). Измерение величин Ух и Vy следует производить во время стоянки корабля. Расчет скорости и направления сноса производится по формулам (11.7) и (11.8) с учетом величины УЛ = 0.
39 Заказ 1833
610 Глава 20. Кораблевождение в особых условиях плавания
Прокладка пути корабля вручную осуществляется прокладкой пройденных расстояний по линии каждого курса или по линиям генеральных курсов.
Первый способ применяется при сравнительно редких изменениях курса, как правило, не чаще чем через 10—15 мин. Такая прокладка ничем не отличается от применяемой на чистой от льда воде. Снос корабля учитывается как дополнительное плавание один раз в час или через 30 мин\ величина вектора сноса рассчитывается по формуле
где г’т — скорость сноса;
С — невязка;
t — промежуток времени между моментами ввода поправки — настоящим и предшествующим.
Второй способ, называемый в практике ледового плавания способом 5-минутной прокладки, применяется при более частых изменениях курса, когда прокладка линий всех курсов сильно затруднена или невозможна.
Для определения генеральных направлений и пройденных по ним расстояний в таких случаях необходимо:
— в конце каждой пятой минуты часа, т. е. 12 раз в час, заметить курсы корабля с точностью до целого градуса;
— для каждого 5-минутного курса определить скорость в узлах; скорость определяют два-три раза одним из рассмотренных выше инструментальных способов, а на остальных курсах — глазомерно. При этом должна оцениваться не скорость в конце или в начале 5-минутного промежутка времени, а ее значение за большую часть этого промежутка.
Результаты наблюдений за элементами счисления сводятся в таблицу, примерная форма которой приводится ниже.
Время КК V уз S мили Л'А'ср ЛГА* ИКС? 1 Sv мили Снос
16ч05* 30° 3,5 0,3 30° +1;0 31° 0,5
10 55 3,5 0,3 53 + 1.0 54 0,8
15 15 2,0 0,2 15 + 1.0 16 0,7
20 25 Форсирование льда
30 15 2,4 0,2 — — — — 190°—1,2 у?
35 45 4,0 0,3 — — — -
40 75 5,0 0,4 78 + 1,0 79 0,9
45 80 5,5 0,5 — — — —
50 60 3,0 0,2 — — —
55 15 3,5 0,3 — — — —
17ч00« 30 2,5 0,2 • — — —
Записи элементов счисления за один час или за 30 мин обрабатывают в следующем порядке:
— рассчитывают пройденные расстояния за каждые 5 мин\
— одинаковые и близкие друг к другу значения курсов сводят в группы; плавание по курсу, общему для группы, принимается равным сумме вычисленных ранее пройденных расстояний;
§ 105, Кораблевождение при плавании во льдах
611
— из курсов, лежащих в пределах сектора 15—20°, выводят средние, и пройденные по ним расстояния суммируют;
— полученные в результате такой обработки курсы исправляют поправкой курсоуказателя и прокладывают на карте. По каждому истинному курсу прокладывают соответствующие пройденные расстояния;
— снос (дрейф) вместе со льдом учитывается как отдельный курс.
Прокладка пути за время с 16.00 до 17.00 показана на рис. 330.
Для счисления с помощью автопрокладчика независимо от частоты изменений курса скорость корабля, определяемая при каждом ее изме
нении инструментально или на глаз, вводится в прибор вручную.
Вектор сноса можно учитывать двояко:
— на автопрокладчике, не имеющем узла для учета течения, — методом смещения каретки с карандашом по направлению сноса аналогично тому, как это указано для прокладки, выполняемой вручную;
— на автопрокладчике, имеющем узел для учета течения, — по элементам течения, устанавливаемым на приборе.
Прокладка пути ведется на карте или на карте-сетке наиболее крупного масштаба; желателен масштаб не мельче 1 : 100 000.
Если указанных карт нет, прокладку можно выполнять в постоянном масштабе на листе миллиметровой бумаги. Счислимые места каждый час или на любое заданное время переносят на карту района
плавания по пеленгам и расстояниям от предшествующих точек.
Рассмотренные приемы ведения счисления вследствие значительных быстронарастающих ошибок весьма приближенны. Они могут обеспечить навигационную безопасность плавания и выполнение поставленной
задачи только в тех случаях, когда счисление сочетается с возможно более частыми определениями места корабля.
При плавании соединения (обычно в строю кильватера) или группы кораблей более точные координаты счислимого места флагманского корабля (ведущего), а следовательно, и всего соединения могут быть рассчитаны с учетом координат мест отдельных кораблей в порядке, изложенном в § 70.
Проводка кораблей ледоколами. Когда ледовая обстановка исключает самостоятельное плавание кораблей, переходы осуществляются под проводкой ледоколов в составе каравана. Небольшие караваны (один, два проводимых корабля) формируются обычно в тяжелой ледовой обстановке, а также при маломощных ледоколах. Караван называют простым, если в его проводке участвует один ледокол; если между проводимыми кораблями идет еще один или несколько ледоколов, то караван называется сложным.
Общая длина каравана зависит от длины и ширины канала, остающегося доступным для плавания. Заполнение льдом канала, пробиваемого ледоколами, происходит тем быстрее, чем тяжелее лед и чем больше его дрейф.
Проводимые корабли идут в прокладываемом ледоколами канале, как правило, своим ходом, соблюдая назначенные дистанции. Эти дис
39*
612 Глава 20. Кораблевождение в особых условиях плавания
танции должны быть минимальными, но вместе с тем достаточными для погашения инерции при внезапной остановке впереди идущего корабля или ледокола.
Надобность в буксировке возникает при проводке в сплоченных льдах, во время сжатия льдов, а также при повреждениях винтов или рулей проводимых кораблей.
Выбор курсов производится на головном ледоколе, где ведется основная прокладка пути каравана. Кроме того, счисление пути должно вестись на всех проводимых кораблях. С целью взаимного контроля организуется периодическая информация о местах кораблей на назначенные моменты времени.
Связь ледоколов с проводимыми кораблями осуществляется по радио или при помощи гудков (сирен) по таблице условных сигналов.
ПРИЛОЖЕНИЯ
ПРИЛОЖЕНИЕ 1
НЕКОТОРЫЕ СПРАВОЧНЫЕ СВЕДЕНИЯ ПО МАТЕМАТИКЕ
1. Тригонометрические функции малых углов. Если угол х выражен в долях радиуса, то
sin х = х —4- J20 — • • ♦
X2 X4
COS X = 1---у + “24 ~ ‘ '
. , х3 , 2x5
tgX — X -г 3 4- J5 + • • • , 1 х х3 2х5
Ctg Х “ "х ~ “3 ~ 45 945
. х2 . 5х4 , sec X 1 -г -у 4 24” " *
1.x. 7х3 ( cosecx = - + -g-+ 360 +...
2. Разложение бинома (1 4-х)™ при х < 1
(I 4- х)т - I 4- тх 4-} х2 4- —-—---------------х3 4-• • •
, т(т — 1) ... (m —л + I)
” * I-2-3 ... л Х *
3. Разложение In (I +х) при х< I
In (I zb х) = ± х — у х2 4= у х3 — ~ х4 ± ...
lg(l ±x) = Hln(l ±х) = ±ил-
где у- = 0,4343 — модуль для перехода от натуральных логарифмов к десятичным.
4. Решение квадратного уравнения вида ах2 4* Ьх 4- с — 0.
Корнями этого уравнения являются:
— Ь ± УЬ2 — 4ас
Х ~ 2а
5. Основные формулы сферической тригонометрии. Углы треугольника Л, В, Е и противолежащие стороны а, Ь, е выражены в дуговой мере.
Формула синусов. Синусы сторон сферического треугольника пропорциональны синусам противолежащих углов sin а sin b sin е sin А ~ sin В sin Е ’
Формула косинуса стороны. Косинус стороны сферического треугольника равен произведению косинусов двух других сторон, сложенному с произведением синусов тех же сторон, на косинус угла между ними: cos а == cos b cos е 4- sin b sin е cos Л;
616
Приложение 1
cos b == cos e cos a + sin e sin a cos B\
cos e == cos a cos b 4- sin a sin b cos E.
Формула котангенсов (четырех рядом лежащих элементов). Произведение котангенса крайнего угла на синус среднего угла равно произведению котангенса крайней стороны на синус средней стороны без произведения косинусов средних элементов — стороны и угла:
ctg A sin В — ctg a sin е — cos е cos В*
ctg В sin Е = ctg b sin а — cos a cos Е\ ctg Е sin А = ctg е sin b — cos b cos А.
Формула косинуса угла. Косинус угла сферического треугольника равен минус произведению косинусов двух других углов плюс произведение синусов тех же углов на косинус стороны между ними:
cos А = — cosB cosE + sinBsinE cosa;
cos В = — cosE cos?l + sinEsin^A cos&;
cos E == —cosjA cosB + sin A sin В cose.
Для прямоугольного сферического треугольника с углами А, В и Е (угол А — прямой) и сторонами, лежащими против соответствующих углов:
cos а = cos b cos е;
cos В = cos b sin Е;
cos Е == cos е sin 5;
sin b — sin a sin E;
sin e == sin a sin E;
cos a = ctg В ctg E;
cos В — ctg a tg e;
cos E = ctgatg^;
sin b = tgectgE;
sin e = tg 6ctgE.
ПРИЛОЖЕНИЕ 2
ОСНОВНЫЕ СВЕДЕНИЯ ИЗ ТЕОРИИ ВЕРОЯТНОСТЕЙ
1. Теория вероятностей является областью математики, рассматривающей закономерности, которым подчинены случайные явления, события или величины.
2. Случайными величинами называются такие переменные величины, которые в процессе опыта могут принимать какие-либо конкретные, заранее неизвестные значения. Получение того или иного результата измерения или действия относится к разряду случайных явлений, сам же результат является случайной величиной.
3. Вероятностью случайного события называют меру объективной возможности его наступления в определенных, могущих повторяться неограниченное число раз условиях. Математическая теория вероятностей применима только там, где вероятность допускает количественное ее выражение в виде числа.
Численное значение вероятности определяется как отношение числа случаев п испытаний, благоприятствующих появлению данного события к общему числу N испытаний
0)
Вероятность выражается либо в процентах, либо правильной дробью. Ее величина определяется на основании материалов, полученных опытным путем (апостериорно) или на основании известных законов, которым подчинено распределение данных событий величин или явлений (априорно).
Вероятность достоверного события, которое неизбежно происходит в каждом испытании, равна 1.
Численное значение вероятности проявляется в большом, практически неограниченном ряду испытаний.
4. События называют зависимыми, если появление или непоявление одного из них вызывает изменение вероятности появления другого. Если же появление или непоявление одного события не изменяет вероятности появления другого события, то такие события называют независимыми.
5. Вероятность одновременного появления любого числа независимых событий равна произведению вероятностей этих событий
Р(АВ,С.......К) = Р{А)Р(В)Р(С), Р(К). (2)
6. Вероятность появления хотя бы одного события из ряда независимых событий вычисляется по формуле
р- 1 -[1 -Р(Л)][1 -Р(Я)] ... [I -Р(ЮЬ (3)
7. При измерении одной и той же величины получаемые результаты в большинстве случаев отличаются друг от друга. Причинами их отличия являются:
— несовершенство органов чувств наблюдателя;
— несовершенство измерительных инструментов;
— влияние внешних условий.
Измерения, произведенные одним и тем же наблюдателем, при одних и тех же условиях и с помощью одного и того же инструмента называются равноточными. Ошибки равноточных измерений не абсолютно одинаковы, но имеют один и тот же порядок.
618
Приложение 2
8. Разность между каким-либо результатом измерения и истинным значением измеряемой величины называется истинной ошибкой. Вследствие того что истинное значение измеряемой величины определить нельзя, ошибки измерений определяют относительно вероятного значения искомой.
9. Ошибки измерений делятся на случайные, систематические и смешанные.
Случайные ошибки являются следствием совокупного влияния самых различных факторов, учесть которые не представляется возможным. Эти ошибки содержатся в подавляющем большинстве измерений.
Случайные ошибки обладают следующими свойствами, проявляющимися в большом ряду измерений:
— равные по абсолютной величине, но противоположные по знаку ошибки равновероятны; при увеличении числа измерений сумма случайных ошибок стремится к нулю;
— малые ошибки более вероятны, чем большие.
10. Систематические ошибки обусловливаются факторами, искажающими результаты измерений по определенному закону и в определенном направлении. Эти ошибки могут быть:
— постоянными, т. е. одинаковыми во всех измерениях;
— переменными прогрессивного типа, т. е. такими, которые в данном ряду последовательных измерений только возрастают или только уменьшаются;
— периодическими, изменяющимися по какому-либо периодическому закону;
— односторонне действующими. При наличии односторонне действующих ошибок результаты измерений отличаются от действительного значения измеряемой величины в одну сторону, но на различные величины.
Систематические ошибки во многих случаях могут быть учтены определением поправки измерительного прибора или исключены особыми приемами обработки результатов измерений.
Смешанные ошибки представляют собой сочетание случайных и систематических ошибок. Эти ошибки свойственны большинству измерений, производимых штурманом.
Ошибки, проявляющиеся в каждом измерении данного ряда, называются повторяющимися ошибками. Повторяющиеся ошибки могут действовать как систематические (при малой продолжительности измерений) или как случайные (при продолжительности измерений, соизмеримой с периодом изменения повторяющейся ошибки).
И. Кроме ошибок, в процессе измерений могут быть промахи. Исключение промаха возможно только тщательным повторением изме-* рения.
12. Случайные ошибки измерений не хаотичны. Они подчиняются вполне определенным законам распределения. В практике кораблевождения наибольшее применение имеет нормальный закон или закон Гаусса, характеристиками которого являются:
а) частота у появления ошибок х повышается с уменьшением самих ошибок и определяется следующим выражением:
y = f(x) = ^e-^,
где h — постоянный параметр, называемый мерой точности.
Графически закон Гаусса изображается кривой (рис. 1), называемой кривой ошибок или кривой нормального распределения;
Основные сведения из теории вероятностей
619
б) вероятность того, что ошибка измерения лежит в пределах от Х] до х2, определяется интегралом вида
Р-=4= te^dx.
V " J
Xi
Эта вероятность графически изображается площадью, ограниченной кривой ошибок, осью абсцисс и двумя ординатами (рис. 1). При Xi — — ст и х2 = + со вероятность Р = 1;
в) вероятное значение искомой величины Д, называемое математическим ее ожиданием, при п равноточных измерений равно среднему арифметическому из полученных результатов измерений Ц1» Un
А = М (X) = а‘ + + а" . (4)
Повышение точности среднего
арифметического при данной точ- Рис. 1
ности измерений возможно только
за счет увеличения числа этих измерений, однако при любом числе измерений ошибка среднего арифметического не может быть меньше систематической ошибки.
Для оценки точности измерений приняты показатели их точности, к которым относятся:
— средняя квадратическая ошибка (отклонение);
— вероятная, или срединная ошибка (отклонение);
— средняя ошибка (отклонение).
Средняя квадратическая ошибка m одного измерения в данном их ряду для нормального закона распределения соответствует абсциссе точки перегиба кривой ошибок, и при минимальной величине эта ошибка обладает максимальной вероятностью, равной 0,683.
Для вычисления средней квадратической ошибки применяются следующие формулы:
— при значении искомой, полученном с помощью более точного измерительного инструмента или вычисленном по соответствующей формуле, обеспечивающей высокую точность результата
(5)
— при вероятном значении искомой, равном среднему арифметическому из результатов измерений
'“-УМ W
где [хх] = xj + х; + Хд + . . . + х2п — сумма квадратов истинных ошибок;
[ДА] = Д* -ь Д2 4- Д| -Ь . . . 4- Д* — сумма квадратов уклонений результатов измерений от среднего арифметического.
При большом числе измерений (п> 10—15) формулы (5) и (6) равноценны.
620
Приложение 2
Для вычисления средней квадратической ошибки применяется также формула
„ <2тах — Лт1п .
/д = ------- -------- ;
ИЛИ
Ш (#max #пЯп)
(7)
(8)
где «тах — — «размах*, т. е. разность между наибольшим и наи-
меньшим результатами измерений;
Krh ----------коэффициенты, выбираемые из табл. 1 по числу п
измерений.
Таблица 1
п . . . 3 4 5 6 7 8 9 10 15
KR. . . . 1,69 2,06 2,33 2,53 2,70 2,85 2,97 3,08 3,47
KR. . . . 0,59 0,49 0,43 0,40 0,38 0,35 0,34 0,33 0,29
Так, например, если при измерениях получены такие величины: 27 = 5°10'0; а2 = 5°12;0; a3 = 5°li;8; a4-5o12J5 и а5 = 5°13;2, то ^max ^mln ~ 3^2, — 0,43 И Ш = 1,4.
Формулы (7) и (8) дают удовлетворительный результат только в тех случаях, когда ряд измерений строго подчинен нормальному закону.
Погрешность вычисляемой средней квадратической ошибки в зависимости от числа измерений п определяется формулой
Дот = Й- <9)
При п=10—И относительная погрешность \т\т составляет 20—25% и поэтому среднюю квадратическую ошибку обычно вычисляют с таким же числом десятичных знаков, какое удерживается в результатах измерений.
Средняя квадратическая ошибка среднего арифметического вычисляется по формуле
= (10)
где т— средняя квадратическая ошибка одного измерения.
Из формулы (10) видно, что ошибка среднего арифметического быстро убывает только при небольшом числе измерений; по мере увеличения числа измерений интенсивность убывания падает. Поэтому на практике обычно ограничиваются 5—7 наблюдениями, уменьшая среднюю квадратическую ошибку среднего арифметического по сравнению с ошибкой одного измерения в 2—3 раза.
Предельная ошибка т в зависимости от заданной ее вероятности вычисляется по формуле:
т KPl пг'
(11)
где Кр — коэффициент, выбираемый из табл. 2.
Основные сведения из теории вероятностей
621
Таблица 2
р. . . 0,950 0,990 0,993 0,997 0,9973
к,, 1,96 2,58 2,70 2,97 3,00
Срединная ошибка р делит все случайные ошибки данного ряда на две равные части, из которых одна больше р, а другая — меньше р.
Вероятность срединной ошибки 0,50 или 50%.
Зависимость между срединной и средней квадратической ошибками определяется формулой
2
Р = -у тп = 0,67 m (12)
О
или пг = 1,5р. (13)
Средняя ошибка одного измерения равна среднему арифметическому из абсолютных величин всех ошибок ряда измерений
_ I Д1 | 4- [ Д21 4- . . . + | | (14)
или __
= m j/-^- 0,8/и. (15)
Вероятность средней ошибки около 57%. Ее применяют для определения подчиненности данного ряда измерений закону нормального распределения; критерием такой подчиненности служит соотношение между т] и пг в соответствии с формулой (15).
13. Для определения средней квадратической ошибки величины А == /(В, С, D, . . .), вычисляемой по какой-либо формуле, содержащей ряд переменных с известными средними квадратическими ошибками mB> mCf mDt . . . , применяется общая формула
тА= I (55)2/ne + (^)2/nc + (^)2ffi2D+. • • , (16)
где дВ' ЪЬ~~ частные производные от функции по переменным. Так, например, если искомое вычисляется по формуле
sin Л == 2 cos2 В 4- sin С,
то в соответствии с формулой (16)
cos AdA = —4 cos В sin BdB 4- cos CdC, отсюда
m. == 1/ cos2 £sin2£m2 4- cos2Cm2 .
л cos А у о C
14. При не равноточных измерениях, когда известны результаты измерений аи a2i а$, . . ап, отягощенные средними квадратическими ошибками mi, т2, т3, . . ., тп, вероятное значение искомой А, назы
622
Приложение 2
ваемое средним взвешенным или средним весовым, вычисляется по формуле
А = а'р' + а2Р2 + а'АР’Л + * - ♦ + а^Рп _ /17\
Р Л+ р2+р3+ ... +Рп [р] ’
где Pi —«веса» отдельных измерений.
Для вычисления весов применяется формула
Л = 4- (18)
т1
Для оценки точности среднего весового на основе формулы (16) получаем
В последней формуле [р] = pi + р2 +р3-|- • • - + рп— сумма весов отдельных измерений.
15. В тех случаях, когда искомая величина или ряд искомых величин вычисляются по формулам, связывающим их с результатами измерения известными зависимостями, измерения называют косвенными. В практике кораблевождения преобладают именно косвенные измерения.
Если искомые х и у связаны с измеряемым параметром / уравнением ах Ь by = Ц
то, произведя ряд измерений, можно написать ряд уравнений наблюдений:
а}х 4- bxy = li
а2х 4- Ь>у = 12
а2х 4- Ь2у = /3 (20)
«Л + ЬпУ
При п, равном числу искомых, вычисление их производится обычным решением соответствующей системы уравнений. Однако такое решение дает лишь приближенные значения искомых, так как случайные ошибки измерений параметров Zf- не учитываются.
Для нахождения наилучшего значения искомых необходимо иметь число уравнений, превышающее число искомых, а совместное решение этих уравнений должно производиться по способу наименьших квадратов.
Все уравнения системы (20) умножают на коэффициенты а\, а2, а2, . . ., ап при первом неизвестном. Затем полученные уравнения суммируют, в результате чего получают первое нормальное уравнение вида
[аа\ х 4- [аб] у = [а/]. (21)
Далее все уравнения системы (20) умножают на коэффициенты при втором неизвестном (Ь\, Ь2, Ь$, . . ., Ьп) и, суммируя полученные уравнения, получают второе нормальное уравнение
[ab]x\-[bb]y^[bl]. (22)
Аналогично составляется столько нормальных уравнений, сколько неизвестных содержится в уравнениях наблюдений.
Основные сведения из теории вероятностей 623
В уравнениях (21) и (22):
[аа] ---- aj + а2 а2 + + а2.
[ab] - axbx -Ь а2Ь2 + a3Z?3 + . . . + апЬп\ [bb]^b^bl^bl+^.+b^
[aZ] = ах1х ^2Z2 + л3/3 + . . . -{-ап1п\
[/>/] — bxlx + b2l2 + Ь313 Н~ • • • + Ьп1п.
Нормальные уравнения (21) и (22) для вычисления искомых х и у решаются обычным путем.
Полученные рассмотренным способом величины искомых удовлетворяют минимуму суммы квадратов ошибок измерений параметров /х>.
Если наилучшие значения искомых подставить в уравнения наблюдений, то можно вычислить наиболее вероятные параметры Z', Z3,. . l’n и ошибки их измерения:
= А —
^2 ~ ^2 ^2»
Д = Z — Г п п п*
Средние квадратические ошибки mh mx и my величин Z, х и у соответственно вычисляются по формулам:
(23)
= mi ; (24)
' [66j
{25)
1 [аа\ где k — число искомых.
При определении одного неизвестного из нормального уравнения
\аа\ х = [aZ]
средняя квадратическая ошибка тх должна вычисляться по формуле
т.----------
Х V [аа]
16. Случайные ошибки, графически изображаемые двумя взаимно обратными векторами, называются векториальными ошибками, которые обозначаются соответствующей буквой или буквами с двойной стрел-
44- 44
кой, например, Z или АВ. Модули векториальных ошибок могут быть равны средним квадратическим, срединным, средним или предельным ошибкам, а направления совпадают с общим направлением изменения измеряемой величины.
624
Приложение 2
Векториальные ошибки, действующие по одному направлению, складываются квадратически. Для вычисления модуля суммарной ошибки L при известных отдельных ошибках применяется формула
L = У 1^+11 + 11+...+ 1^.
Результирующая ошибка L имеет то же направление, что и отдельные ошибки /й и характеризует распределение точки по этому направлению, т. е. длину отрезка прямой, в пределах которого с вероятностью ошибок li расположена заданная точка.
Вместо векториальных ошибок могут рассматриваться их проекции на любые координатные оси.
Сложение векториальных ошибок, действующих в одной плоскости, но по различным направлениям, дает эллипс, в пределах которого находится вероятное место точки.
Вероятность эллипса, размеры которого вычислены по средним квадратическим ошибкам, равна 0,393; для удвоенного среднего квадратического эллипса вероятность около 0,865, а для утроенного она практически равна единице (0,989).
Эллипс с размерами, вычисленными по срединным ошибкам, называется единичным или срединным и имеет вероятность 0,203.
Для сложения векториальных ошибок, действующих в одной плоскости по разным направлениям, применяется графоаналитический прием, в соответствии с которым большая полуось а и малая полуось b эллипса вычисляются при совместном решении системы уравнений:
й2± = [Z2] |
(26)
где [Z2] = Z2 + 1% + II + . . . 4-Z2 — сумма квадратов модулей векториальных ошибок;
[/2] — геометрическая сумма квадратов векториальных ошибок, проведенных под двойными углами, характеризующими их направления.
Это суммирование осуществляется построением так называемого квадратичного полигона.
Так, например, если даны векториальные ошибки 1Ь действующие под углами a-i относительно истинного меридиана:
то получим:
Zt = 2,2 мили, а! = 50°;
Z2 = 1,5 мили, а2 = 110°;
Z3 = 2,0 мили, а3 = 310°,
ZJ = 4,84, 204=100°;
II = 2,25, 2а2 = 220°;
Z| = 4,00, 2а. = 260°; о 1 О ’
& + 11,09;
а2 — д2 = 3,30.
Квадратичный полигон для геометрического суммирования показан на рис. 2.
Основные сведения из теории вероятностей
625
Решая последние уравнения совместно, получаем: а 2,7 мили;
b = 2,0 мили.
Большая ось эллипса имеет направление, соответствующее биссектрисе угла 2ао между меридианом и суммарным вектором [Z2].
Для условий нашего примера 2ао = 190° и ао = 95°.
Простейший прием построения эллипса состоит в следующем:
— через заданную точку О (рис. 3) проводят две взаимно перпендикулярные прямые КЕ и GF, совпадающие с направлениями осей эллипса;
— из точки О как из центра проводят две окружности, радиусы которых равны большой и малой полуосям эллипса;
— из точек /, 2, 3 и 4 пересечения большей окружности с прямыми КЕ и GF радиусом, равным полуоси а, засекают точки 5, 6, 7, 8, 9, 10, 11 и 12 на большей окружности. Затем на меньшей окружности наносят точки пересечения ее с радиусами, проходящими через полученные точки (5, 6, 7, . . ., /2);
— через точки, лежащие на малой окружности, проводят отрезки прямых, параллельные большой оси эллипса, а через точки, лежащие на большей окружности, — прямые, параллельные малой оси эллипса. Эллипс проводят через точки /, 2', 3 и 4' и точки пересечения отрезков вспомогательных прямых.
Приближенно эллипс можно провести от руки, вмещая его в прямоугольник со сторонами 2а и 2Ь.
17. Более простой фигурой, характеризующей область расположения точки, является круг. Радиус этого круга равен геометрической сумме полуосей эллипса.
Если радиус круга получен в результате суммирования средних квадратических векториальных ошибок, то его называют средней квадратической (или радиальной средней квадратической) ошибкой положения точки и обозначают через М. Величину М вычисляют по формуле
Л1 = |/г55+Т2 = |Л/? + /22 + /|+. .- + С . (27)
Кроме средней квадратической ошибки М, применяются срединная Е и предельная М (радиальные) ошибки.
40 Заказ 1833
626
Приложение 2
Вероятность средней квадратической ошибки М зависит от отношения полуосей эллипса и изменяется в пределах от 0,683 (при 6:а = 0,1) до 0,632 (при b : а— 1).
Предельная ошибка М для заданной ее вероятности Р вычисляется по формуле
М = КРлМ, (28)
где Кр — коэффициент, выбираемый из табл. 3 по соотношению полуосей b : а эллипса и заданной вероятности Р,
При определении средней квадратической ошибки М по двум векториальным ошибкам коэффициент КРз выбирается из табл. 4 по заданной вероятности Р предельной ошибки и углу 9 между векториальными ошибками.
Таблица 3
р b: а
0,1 0,2 0,4 0,6 0,8 1
0,950 1,96 1,93 1,86 1,79 1.74 1,73
0,990 2,57 2,54 2,43 2,29 2,18 2.15
0,993 2,69 2,66 2,52 2,38 2,27 2,23
0,997 2,96 2,92 2,78 2,61 2,47 2,41
Таблица 4
Р 0
[0° 1 ! 20° 30° 40° 50° 70° 90°
0,950 1,96 1,93 1,91 1,89 1,84 1,76 1,73
0,990 2,58 2,54 2,50 2,44 2,78 2,26 2,15
0,993 2,70 2,66 2,61 2,56 2,48 2,34 2,23
0,997 3,00 2,94 2,88 2,82 2,73 2,54 2,41
18. Ошибка по заданному направлению характеризуется векториальным отклонением d по этому направлению.
Если известны полуоси а, Ьу угол а0 и задано направление ошибки, характеризуемое углом ан относительно меридиана (рис. 4), искомое векториальное отклонение d = ОЕ == OF можно получить, проведя касательные к эллипсу, перпендикулярные направлению заданной прямой.
Рассматривая полуоси эллипса как векториальные ошибки и проектируя их на прямую FE, получим
d = V(OBy + (ОС)2 или
d = У a2 cos2 а 4- 62sin2a. (29)
В приведенной формуле а — угол между большой осью эллипса ошибок и заданным направлением.
Основные сведения из теории вероятностей
627
При известной средней квадратической ошибке М ошибка по заданному направлению должна вычисляться так, чтобы фигура погрешности положения точки — круг оставалась неизменной. Для этого среднюю квадратическую ошибку М заменяют равными друг другу составляющими Мх и Л1у. При этом обеспечивается равенство
м = у м2х + м2у
и
Му = Мх - 0,71 М. (30)
Формула (30) является выражением принципа равного действия составляющих средней квадратической ошибки.
19. Кроме закона Гаусса в кораблевождении применяются:
— закон равномерного распределения;
— закон треугольника;
— закон Релея;
— закон редких событий, или закон Пуассона.
Закон равномерного распределения применяется при оценке ошибок, происходящих от округления отсчетов по шкалам, а также от округления чисел, выбираемых из таблиц или вносимых в таблицы при их составлении.
Средняя квадратическая ошибка отсчета вычисляется по формуле
^ = -4=, (3D
Г
где I — половина минимального, уверенно различимого деления шкалы или ее части.
Величину I принимают равной:
0,5 — при округлении чисел до целой единицы последнего знака;
0°,5 — при отсчете пеленгов или курсов по картушке компаса, имеющей градусные деления;
цены минимального деления шкалы — при отсчете расстояния по боковой рамке карты или при снятии координат точки с карты.
40*
628
Приложение 2
Следовательно, средняя квадратическая ошибка:
— логарифма или любой другой табличной величины, округляемой при составлении таблиц до целого знака
т = 0,29 единицы последнего знака;
— отсчета пеленга или курса по картушке с градусными делениями т = 0°29;
или приближенно
т = 0°,25;
— отсчета расстояния по боковой рамке карты или снятия координат точки с карты
т = 0'06, если минимальные деления рамки 0J5;
™ = о;12 „ „ КО.
Закон треугольника применяется при оценке точности величин, выбираемых из различных таблиц, на промежуточное значение аргумента.
Средняя квадратическая ошибка интерполяции согласно этому закону равна 0,23 единицы последнего знака (разряда).
С учетом ошибок округления любая табличная величина, выбираемая на промежуточное значение аргумента, обладает средней квадратической ошибкой 0,37 единицы последнего знака.
Закон Релея применяется для определения вероятности попадания в круг радиуса г случайной точки, имеющей круговое рассеяние со средней квадратической ошибкой о по заданному направлению. Эта вероятность определяется формулой
(32)
средней квадратической __ м_
V 2 ’
(33)
Закон редких событий (закон Пуассона) применяется для оценки вероятности какого-либо события, например, обнаружения объекта, в зависимости от величины параметра Q, определяемого опытным путем или априорно на основе анализа обстановки.
Между параметром Q и вероятностью Р установлена зависимость
Р = \ . (34)
_ z1 Р^\-е 2»’
Учтя, что величина <з при известной ошибке М идентична отклонению Мх = 0,7
D __ 1 _ z> М'
ПРИЛОЖЕНИЕ 3
НОМОГРАММЫ ДЛЯ РАСЧЕТА СРЕДНИХ КВАДРАТИЧЕСКИХ ОШИБОК
ОПРЕДЕЛЕНИЯ МЕСТА
Номограмма 1
тлп( Рдп тппр тпп? Ps
3.0 — г о,// 3,0 -ч 3,0 — С о.ооон
= 0,00015
— =- 0,0002
—
- 0./5 ftОООJ
2.5 - 2,5 - 2,5 у 0.0004
- - =2,5 мили Е- 0 0005
“ 02 0,0007
- - - ООО/
2.0 — Г 0,25 2,0 — /2.0 — 0.00/5
- Г- 0.002
“ о.з - / 0.003
0 004
~ 0 005
=- 0.4
1,5 — Е_ /,5 - / 15 - g С.007
=- 05 =: o,oi
- =1.32 мили =- 0,0/5
=- 0,6 \ -Н!р - J Ё- 0.02
Ё~ 07 Е_ o s F- 0,03 =- 0,04
Z °'05
=—0.9 ~ 0,07
i.o — 1.0 у /.о — t.O — S о 1 -4
0.9-“ 0,9 — 0,9 — 1 Ри -0.10миЛи F 0,15 Ь
F 0.2 \
— — 1 5 •* ^—0 3
0.8 -т 0,8 Ч 0.8 -1 =- 0.4 \
“ /т л п =0.7 мили £ “05 х
О 7-= “-2,0 07 -= 07 -= 1ШИ
~ 25
o.ft-= 0,6 -Ё Об -4 Г г.
~ Т.О
- Е- зо
—* =- 4.0
0,5 -= |- чо 0,5 -= 0.5 -= 50
- =; 7.0
— 5.0 Ю
—
°4~ ~ 6,0 0,* 0.4-^ =• /5 г~ 20
=- 40 Ё- 30
L. g o “ 40
=- 50
=- 9,0 Е: ?с
10,0 100
0J — L П.О 0;3 - 0,3 -J с /20
е°
6 -
? -
а -
9 "
/О —
111111.111 -И JU.llLLlUj.iJ.1 ILLI LZ.I..lL
6
630
Приложение 3
Вес Рлп считывается по шкале 2 номограммы против значения ошибки тЛп на шкале /.
Для определения веса р9 следует:
соединить прямой точки, соответствующие величинам ошибок /иЛП1 и на шкалах 1 и 4 и отметить точку на шкале 3 в пересечении ее с проведенной прямой;
— точку на шкале 3 соединить прямой со штрихом угла В на шкале 6 и в пересечении проведенной прямой со шкалой 5 считать вес р9.
Д а н о: тлщ = 0,7 мили, /пЛПа = 2,5 мили, 6 = 34°.
Ответ: /?лгч = 2,04 мили'2, рЛПа = 0,16 мили'2, р9 = 0,10 мили“\
Номограммы для расчета ср, кв. ошибок определения места
631
Номограмма 2
[рлгфед.веса М0/лин.ед. [p0],ed.eeca
0,01 -л 0,01 -^3 e: 100
0,015 -= 0,0/5 T 4 70
0,02 4 0,02 4 50
— 40
о,оз 4 0,03 4 30
0,04 4 0,04 4
0,05 4 0,05 4 1-20
°'07 Z 0,07 Г >5
0,1 4 0’1 “ 4 10
0,15 -Е 0,15 I 4 7^o
0,2 4 0,2 4 =- 5,0
— 4 0
0,3 Ч о,з 4 —
4 3,0
0,4 -= о,5 4 0,4 4 0,5 4 [ Pq'J =1,9мили 4 4 2,0
0,7 4 0,7 4 г 1,5
1,0 -= A0 4
1,5 I /,5 -E 0-7
2,0 4 2.0^ MQ =i,9 мили F 0,5
4 0,4
з,о 4 4,0 4 I о о inlniilii |- 0,3
5,0 4 5,0 T I" 0,2
7,0 [Pnn] томили’2 7>° ~ 0,15
10 4 /0 4 O.f
15 i. /5 °'07
20 4 20 -f 4 0,05
•— 4 0,04
30 4 30 4
40 4 40 4 r 0,03
50 4 50 4 4 0,02
70 H 70 4 4 0,0/5
100 /00 3 — 0,01
Средняя квадратическая ошибка места Мо считывается по суммам весов [рлп] и [ps] со средней шкалы номограммы в пересечении ее прямой, проведенной через точки, удовлетворяющие суммам весов на крайних шкалах.
Дано: [Рлп] =7,0 мили"*2, [Л] = 1,9 мили”4.
Ответ: Л10=1,9 мили.
52
Приложение 3
Номограмма 3
Для определения средней квадратической ошибки Мо при ошибках линий положения, отличающихся друг от друга не более чем на 30— 50%, следует:
— рассчитать средние квадратические ошибки /пЛП/ линий положения и среднюю из них мЛПср;
— вычислить или измерить на карте углы пересечения линий положения в/; ,
— по углам О, считать по шкале веса рв и найти их сумму |д|;
Номограммы для расчета ср. кв. ошибок определения места 633
— от деления шкалы на оси ординат, равного сумме весов [pj], перейти по горизонтали до наклонной прямой, соответствующей числу линий положения, а затем по нижней шкале считать величину Мн для шяп = 1;
— для получения ошибки MQ умножить величину на ошибку /плп линий положения: Л40 = 7Ин/плп ; размерность Мо определяется размерностью ^ЛПср*
Дано: /пЛП1 = 1,4 мили, /плп==2,0 мили, /плПз = 1,7 мили; 91>2 -=65°, 923 = 45°, 013 = 70°.
Решение: mл =1,7мили; р’, =8,2, К -4,7, p't =8,8; [р,1=21,7; UU 1,0 L 1
4=1-2.
Ответ: М== Мтп, = 1,2-1,7 = 2,0 мили.
О П Л11|*р
ПРИЛОЖЕНИЕ 4
ТАБЛИЦА ДЛЯ РАСЧЕТА ДИРЕКЦИОННЫХ УГЛОВ (в тыс, диет.) И ДИСТАНЦИЙ <в саженях)
4- Дх — Ду 45—00 46-00 47-00 48—00 49—00 50-00 51-00 52-00 4- Дх — Ду
— Ду — Дх 30- 00 31-00 32—00 33—00 34—00 35—00 36- -00 37- -00 — Ду — Дх
— Дх + Ду 15- 00 16- 00 17- 00 18—00 19—00 20-00 21—00 22- -00 — Дх + Ду
+ Ду 4- Дх 0- 00 1- -00 2- 00 3- 00 4-00 5- -00 6- 00 7- -00 + Ду + Дх
D Т С Т С Т С Т С Т с Т С т с Т С
if 0, ... 0, ... 0, ... 0, ... 0, ... 0, ... 0, ... 0, ... 0, ... 0, ... 0, ... 0, ... 0, ... 0, ... 0, ... 0, ... К
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18
00 ООО 547 105 550 213 559 325 575 445 599 577 631 726 676 900 736 100
02 002 547 107 550 215 559 327 575 448 599 580 632 730 677 904 737 98
04 004 547 109 550 217 560 330 576 450 600 583 633 733 678 908 739 96
06 006 547 112 550 219 560 332 576 453 600 586 634 736 679 912 740 94
08 008 547 114 550 221 560 334 577 455 601 589 635 739 680 916 741 92
10 010 547 116 550 224 560 336 577 458 601 591 635 743 681 920 743 90
12 013 547 118 551 226 561 339 577 460 602 594 636 746 682 923 744 88
14 015 547 120 551 228 561 341 578 463 603 597 637 749 683 927 746 86
16 017 547 122 551 230 561 344 578 466 603 600 638 752 684 931 747 84
18 019 547 124 551 232 561 346 579 468 604 603 638 756 685 935 749 82
20 021 547 126 551 234 562 348 579 471 604 606 639 759 686 939 750 80
22 023 547 128 551 237 562 351 579 473 605 608 640 762 688 943 752 78
24 025 547 131 551 239 562 353 580 476 606 611 641 766 689 947 753 76
26 027 547 133 552 241 563 355 580 478 606 614 642 769 690 951 755 74
28 029 547 135 552 243 563 358 581 481 607 617 643 772 691 955 756 72
30 031 547 137 552 246 563 360 581 483 607 620 643 776 692 959 758 70
32 034 547 139 552 248 564 362 582 486 608 623 644 779 693 963 759 68
34 036 547 141 552 250 564 365 582 489 608 626 645 782 694 967 761 66
36 038 547 143 552 252 564 367 583 491 609 629 646 786 696 971 762 64
38 040 547 146 553 254 564 370 583 494 609 632 647 789 697 975 764 62
40 042 547 148 553 257 565 372 583 496 610 635 648 793 698 979 765 60
42 044 547 150 553 259 565 374 584 499 611 638 648 796 699 983 767 58
44 046 547 152 553 261 565 377 584 502 612 640 649 799 700 988 768 56
46 048 548 154 553 264 566 379 585 504 612 643 650 803 701 992 770 54
48 050 548 156 553 266 566 382 585 507 613 646 651 806 703 996 772 52
50 052 548 158 554 268 566 384 586 510 614 649 652 810 704 1000 773 50
1 1 1 1
g
52 054 548 160 554 270 566 386 586 512 614 652 653 813 705 48
54 057 548 163 554 272 567 389 587 515 615 655 654 817 706 46
56 059 548 165 554 275 567 391 587 518 616 658 655 820 707 44
58 60 061 548 167 554 277 567 394 588 520 616 661 656 824 708 42
063 548 169 555 279 568 396 588 523 617 664 657 827 710 40
62 065 548 171 555 282 568 398 589 526 617 667 657 831 711 38
64 067 548 173 555 284 568 401 589 528 618 670 658 834 712 36
66 069 548 176 555 286 569 403 590 531 619 673 659 838 713 34
68 071 548 178 555 288 569 406 590 534 620 676 660 842 715 32
70 073 548 180 556 290 569 408 591 536 620 680 661 845 716 30
72 076 548 182 556 293 570 410 591 539 621 683 662 849 717 28
74 078 548 184 556 295 570 413 592 542 621 686 663 852 718 26
76 080 549 186 556 297 570 415 592 544 622 689 664 856 720 24 ПЛ
7R 082 549 189 556 300 571 418 593 547 623 692 665 860 721 22
80 084 549 191 557 302 571 420 593 550 624 695 666 863 722 20
82 086 549 193 557 304 572 423 594 552 625 698' 667 867 724 18
84 088 549 195 557 306 572 425 594 555 625 701 668 870 725 16 1 л
О*Т 86 090 549 197 557 309 572 428 595 558 626 704 669 874 726 14 1 о
ои 88 092 549 200 558 311 573 430 595 561 627 708 670 878 728 12
иО 90 094 549 202 558 313 573 433 596 564 628 711 671 882 729 10
92 097 549 204 558 316 573 435 596 566 628 714 672 885 730 08
94 099 549 206 558 318 574 438 597 569 629 717 673 889 731 06
96 101 550 208 559 320 574 440 597 572 630 720 674 893 733 04
98 103 550 210 559 323 575 443 598 575 631 723 675 897 734 02
J7O 100 105 550 213 559 325 575 445 599 577 631 726 676 900 736 00
+ Дх + Ду 14- -00 13-00 12—00 11—00 10—00 9—00 8—00 7- -00 ‘ + Дх + Ду
+ Ду — Дх 29—00 28- -00 27- -00 26- -00 25—00 24—00 23-00 22- -00 + Ду — Дх
— Дх — Ду 44- -00 43-00 42- -00 41- -00 40—00 39—00 38- -00 37- -00 — Дх — &У
— Ду I + Дх 1 59- 00 58- -00 57- -00 56-00 55—00 54—00 53—00 52- -00 — Ду + Дх
т _. tg Р = (--1 или = (-Л-1 — меньшую разность координат делить на большую.
5 \Ду/ \Дх/
или = (Дх) С — умножить на С большую разность координат.
если^£ или — находятся в нижней части таблицы, то десятки и единицы тыс. диет, выбирать из 18 столбца. Ду Дх
ПРИЛОЖЕНИЕ 5
ВЫДЕРЖКИ ИЗ МОРСКОГО АСТРОНОМИЧЕСКОГО ЕЖЕГОДНИКА НА 1968 г.
Выдержки из Морского астрономического ежегодника на 1968 г. (звезды и ежедневные таблицы на 11, 12 и 13 мая) даны для решения астрономических задач, помещенных в настоящем пособии.
Основные интерполяционные таблицы, которые необходимы для расчета часовых углов и склонений светил на промежуточные моменты, следует использовать из Морского астрономического ежегодника на любой год.
Звезды
Видимые места на 1968 г.
а № по порядку Название звезды Звездное дополнение т* Собственное имя Склонение б
май 1 июнь 1 май 1 июнь 1
04ч34ж 24 а Тельца 291° 28;9 28 J9 Альдебаран W 16° 26J9 26J9
05 14 28 а Возничего 281 25,4 25,3 Капелла 45 58,3 58,2
И 02 72 а Б. Медведицы 194 32,7 32,9 Дуббе W 61 55,6 55,7
11 47 74 3 Льва 183 08,2 08,2 Денеболя 14 45,0 45,0
14 51 106 3 М. Медведицы 137 16,8 16,9 Кокаб 74 17,0 17,2
15 33 111 я Сев. Короны 126 39,5 39,4 Альфакка 26 49,0 49,1
18 36 139 а Лиры 81 01,9 01,7 Вега W 38 44,8 44,9
19 49 146 а Орла 62 41,4 41,2 Альтаир W 08 46,7 46,8
23 02 158 £ Пегаса 14 26,8 26,6 Сеат W 27 54,3 54,4
Выдержки из Морского астрономического ежегодника на 1968 г.
637
1968 г.
Май 11 (132)
Суббота
Лр У Точка Восх. 0 Зах. 0 Сут. иэм. Прод. сум.
’ Овна солнце L лун a Сут. иэм. Гр»ЖД. маииг.
(гр (>^гр) Ггр 6 *гр д t д Л'74°
00ч 1 EZZZ3 1 1
228с50:4 180с55.3 Л’17°50:5 2'2 44'. 8 - 5 1 Г d46'-24 lfi,. 72 £ 1 I" "1 ’ 1
01 02 03 04 05 06 07 08 09 10 11 12 13 14 15 16 17 18 19 20 21 22 23 243 52 8 258 55.3 273 57.8 289 00.2 304 02.7 319 05.1 334 07.6 .349 10.1 1 12.5 19 15 0 34 17.5 49 19.9 64 22 4 79 24.9 94 27.3 109 29.8 124 32.3 139 34.7 154 37.2 169 39.6 184 42.1 199 44.6 214 47.0 195 55 3 17 51.2 210 55.3 17 51.8 225 55.3 17 52.5 240 55.4 17 53.1 255 55.4 17 53.7 270 55.4 17 54.4 285 55.4 17 55.0 300 55.4 17 55.7 315 55 5 17 56.3 330 55.5 17 56.9 345 55 5 17 57.6 0 55.5 17 58.2 15 55.5 17 58.8 30 55.5 17 59.5 45 55.6 18 00.1 60 55.6 18 00.8 75 55.6 18 01.4 90 .55.6 18 02.0 105 55.6 18 02.7 120 556 18 03.3 135.55.7 18 03.9 150 55.7 18 (М.6 165 55.7 XI8 05.2 А — 0.3 4-0.5 37 12. 51 40 66 08. 80 35. 95 03. 109 30. 123 58. 138 25. 152 52. 167 19. 181 46. 196 13. 210 39. 225 06. 239 32. 253 59. 268 25. 282 51. 297 17. 311 43. 326 09. 340 35. 355 00.< 5 2 8 4 Ч 4 3 8 4 9 2 5 > 5 5 3 3 5 -л: |2 st 9+'6 и; м i-:! + 'з 15 31.01 !о43?Ь'3’ 467 17 32 | rHS si7 46.7:;4^ 70 68 66 54 62 60 58 56 54 52 50 45 40 30 20 МО 0 S 10 20 30 40 45 50 52 54 56 58 S 60 0!ч24м - 02 09 - 02 38 - 03 01 . 03 18 . 03 33 - 03 45 - 03 55 04 05 - 04 13 . 04 20 04 36 04 49 05 09 . 05 26 - 05 40 05 53 06 06 06 19 06 35 • 06 55 - 07 07 07 21 - 07 28 07 36 07 44 07 53 . 08 04 Им t-5 < 4 • 3 тЗ - 2 -Г 2 г-2 г 1 - 1 Г1 0 0 0 0 1 -1 -1 -1 _ 2 -2 -2 -2 1 22ч37м -9м 21 48 -5 21 18 -4 20 55 -4 20 37 _з 20 22 -з 20 09 -з 19 59 -2 19 49 -2 ' 19 41 -2 19 33 -2 19 17 _2 19 (М -1 18 44 -1 18 27 о 18 13 о 18 00 о )7 47 о 17 33 о 17 17 о 16 58 -н 16 46 +j 16 31 -л 16 24 +1 16 16 42 16 08 - 2 15 59 -и 15 48 4-2 И! И! Ill 1ч28“ 1 11 1 01 0 54 0 49 0 45 0 41 0 39 0 34 0 30 0 26 0 24 0 22 0 22 0 22 0 23 0 25 0 29 0 32 0 35 0 37 0 39 0 42 0 45 0 48 /// /// /// /// /// /// 2Ч23“ 2 01 I 47 1 37 1 30 1 16 1 06 0 57 0 51 0 48 0 47 0 48 0 50 0 54 1 02 1 07 1 14 1 18 ) 22 1 27 1 33 1 40
Гк 08'43* 7„ 11'56*8 23 56 н р 15'9 О'./5 /0'53*н 23 2/ 8 0ч 24' /? р 16.6 60'9 /6.7 6/ 3
ЛР 2 Венера —3.4 о‘< Марс + 1 .7 2/ Юпитер —1.7 Сатурн 1 +0.9 <р Восх. £ Сут. иэм Зах € Сут. иэм.
00ч 01 02 03 04 05 06 07 08 09 10 11 12 13 14 15 16 17 18 19 20 21 22 23 19|°23:3 М3°33',7 206 22.8 13 34.7 221 22.3 13 35.8 236 21.8 13 36.8 25121.3 13 37.8 266 20.8 13 38.9 28! 20.3 13 39.9 29G 19.8 13 40.9 31) 19.2 13 42.0 326 18.7 13 43.0 341 18.2 13 44.0 356 17.7 13 45.0 11 17.2 13 46.1 2616.7 1347.1 41 16.2 13 48.1 56 15.6 13 49.1 71 15.1 13 50.2 86 14.6 13 51.2 101 14.1 13 52.2 116 13.6 13 53.2 131 13.0 13 54.2 146 12.5 13 55.3 161 12.0 13 56.3 176 11.5 V13 57.3 А - 0.5 Л .1.0 Ггр * 169°20'.4 V20°52’.9 18421.0 2053.2 199 21.6 20 53 6 214 22.3 20 54.0 229 22.9 20 54.4 244 23.5 20 54.7 259 24.) 20 55.1 274 24.8 20 55.5 289 25.4 20 55.9 304 26.0 20 56.2 319 26.6 20 56.6 33427.3 20 57.0 349 27.9 20 57.4 4 28.5 20 57.7 19 29.2 20 58.1 34 29.8 20 58.5 49 30.4 20 58.9 64 31.0 20 59.2 79 31.7 20 59.6 94 32.3 21 00.0 109 32.9 21 00.3 124 33.6 21 00.7 139 34.2 21 01.1 154 34.8 V21 01.5 Д+1.6 Д-г0.4 ;Г| 79°49'.5 < 94 51.8 109 54.2 124 .56.5 139 58.8 155 01.1 170 03.5 185 058 200 08.1 215 10.4 230 12.8 245 151 260 17.4 275 19.7 290 22.1 305 24.4 320 26.7 335 29.0 350 31.4 5 33.7 20 36.0 35 38.3 50 40.7 65 43.0 . а -4-3.3 6 VI 3 е 47'.8 13 47.7 13 47.7 13 47.6 13 47.5 13 47.5 13 47.4 13 47.4 13 47.3 13 47.3 13 47.2 13 47.2 13 47.1 13 47.0 13 47.0 13 46.9 13 46.9 13 46.8 13 46.8 13 46.7 13 46.7 13 46.6 13 46.5 V13 46.5 А 0.1 Сгр 6 2О9°45'.О Л'5О37'.7 224 47.2 5 37.8 239 49.4 5 37.9 254 51.6 5 38.1 269 53.8 5 38.2 284 55.9 5 38.3 29958.1 538.4 315 00.3 5 38.5 330 02 5 5 38.6 345 04.7 5 38.7 0 06.9 5 38.8 15 09.1 5 38.9 30 11.3 5 39.0 45 13.5 5 39.) 60 15.7 5 39.2 75 17.9 5 39.3 90 20.1 5 39.4 105 22.3 5 39.5 120 24.5 5 39 6 135 26.7 5 39.7 150 28.9 5 39.8 16531.1 539.9 180 33.3 5 40.0 195 35.5 V 5 40.1 А 1 3.2 д +0.1 Л'74с 72 . 70 68 66 64 62 60 58 56 54 52 50 45 40 30 20 .V10 0 S 10 20 30 40 45 50 52 22Ч6 21.2 20.6 202 19.8 19.5 19.3 19.1 19.0 18.8 18.7 18.6 18.3 18.1 17.8 17.6 17.3 17.1 16.9 16.7 16.5 16.2 16.0 15.8 15.7 ч -2.6 -2.3 -2.0 -1.9 - 1.8 -1.7 -1.6 -1.6 -1.6 -1.4 -1.4 -1.2 -1.1 -1.0 -0.9 -0.9 -0.8 -0.7 -0.6 -0.5 -0.4 -0.3 01’з 1йл|+1'5 02.1 +о.8 02.3 +о.5 02.6 +о.з 02.8-0.2 02.9+о.1 03.1 о.о 03.2 -од 03.3 —о. I 03.4 -0.2 03.5-0.2 03.6-о з 03.7 -0.4 03.9-0.5 04.1 -0.6 (М. 3-0.7 04.5 -0.8 04.6 -0.9 04.8 -го 05.0 -1.1 05.2-1.2 05.4-1,3 05.6-1,4 05.8-1.5 05.9-1.5
7ц а р Н'/5* 02'30* 0'./ а р /2'42* 03'58* О'/ 7 к а Р /8'38* 09'56* О'.О а р /0'00* 0/'/6* О'.О 54 56 58 S 60 15.5 15.4 15.2 15.1 -0.3 -0.2 -01 -0.1 06.0 -1.6 06.1 -1.7 06.2-1.7 06.3-1.8
638
Приложение 5
1968 г.
Май 12 (133)
Воскресенье
^гр У Точка ’ Овна 0 Солнце £ Луна <9 Восх. Q Сут. мм.* Зах. 0 Прод. сум.
Суг. изм. гражд. навиг.
00ч 01 02 03 04 05 06 07 08 09 10 11 12 13 14 15 16 17 18 19 20 21 22 23 'гр' (Srp) 229°49'5 244 52.0 259 54.4 274 56.9 289 59.4 305 01.8 320 04.3 335 06.8 330 09.2 5 11.7 20 14.1 35 16 6 50 19.1 65 21.5 80 24.0 95 26 5 НО 28.9 125 31.4 140 33.9 155 36.3 170 .38.8 185 41.2 200 43.7 215 46.2 * 180°55'7 №8сО5'.8 195 55.7 18 06.4 210 55.7 18 07.1 225 557 18 07.7 240 55.8 18 08.3 255 55 8 18 09.0 270 55.8 18 09.6 285 55.8 18 10.2 300 55.8 18 10.8 315 55.8 18 11.5 330 55.8 18 12.1 345 55.8 18 12 7 0 55.9 18 13.4 15 55.9 18 14.0 30 55.9 18 14.6 45 55.9 18 15.2 60 55.9 18 15.8 75 559 18 16.5 90 55.9 18 17.1 105 55.9 18 17.7 120 55.9 18 18.3 135 55.9 18 19.0 150 56.0 18 19.6 165 56.0 ЛЧ8 20.2 4 +0.3 4 +0.6 /гр 3 t А 9°26'.О .6Ч 5 18°0НЗ , 14.4 23 51.4" j 18 15.7 ;14 4 38 16.6 Л । 18 30.1j.42 52 41.7 ;б;0 18 44.3 +14Л 67 06.7 ТЛ 18 58.41Па 8)31.6^7 19 12.3 j 95 56.3 ,S7 19 26.2 , НО 21.0 \ 5 19 39.9 Л,' 124 45.5 ;s 5 19 53.5 If, ; 139 10.0 ТЛ 20 06.9 13 4 153 34.3 ТЛ 20 20.3 L31 167 58.4 ^) 20 33.4 ;13л 182 22.5,3 0 20 46.5 . 12 9 196 46.5 Т4 g 20 59.4 ^, 8 211 10.3 t4g 21 12.21 г! 225 34.1 ;4 6 21 24.8;12;4 239 57.7 Т4 * 21 37.2 ;223 254 21.2 tl4 21 49.51,2 2 268 44.6 х4 ч 2201.7,., й 283 07.9 , 4 \ 22 13.7^( 0 297 31.1 Т4 , 22 25.6 4П 7 311 54.2 Л » 22 37.з!,! г 326 17.1 9 22 48.81и'з 340 40.0 ;з я S 23 00 1 T1L2 ^74O 72 70 68 66 64 62 60 58 56 54 52 50 45 40 30 20 N10 0 3 10 20 30 40 45 50 52 54 56 58 5 60 ЕЕ? 01415м +9М 02 04 +б 02 34 +4 02 57 +4 03 15 +з 03 30 +з 03 43 +з 03 53 + 2 04 03 04 И +2 04 19 +2 04 35 +1 04 48 +1 05 09 +1 05 25 +j 05 40 + 1 05 53 о 06 06 о 06 20 о 06 36 -1 06 56 -1 07 08 -1 07 23 -1 07 30 -2 07 37 -2 07 46 -2 07 55 -2 ОН 06 -2 22ч47"-юм 21 53 -о 21 22 -4 20 58 -з 20 39 —з •20 24 - з 20 12 —з 20 01 -2 19 51 _ -2 19 42 -2 19 35 -2 19 19 -2 19 05 -1 18 44 -| 18 28 о 18 13 о 18 00 о 17 47 о 17 33 о 17 17 о 16 57 +1 16 45 +J 16 30 +1 16 23 +1 16 15 +2 16 06 +2 15 57 +2 15 45 +2
' □ 1 1
1 | | |
Hl /// III Г‘31м 1 12 1 02 0 54 0 49 0 45 0 42 0 39 0 34 0 30 0 26 0 24 0 22 0 22 0 22 0 23 0 25 0 29 0 32 0 36 0 38 0 40 0 42 0 45 0 48 /// /// И! И! /// /// 9426* 2 03 1 49 1 38 1 30 1 16 1 08 0 57 0 52 0 48 0 47 0 48 0 50 0 54 1 02 1 07 1 14 1 18 1 22 1 28 1 34 1 40
Ук 08'39" У К R р /1'56“ в 15.9 0.15 23 56 н Ук в Р Н'50»н О' /6.7 6Г.З - в 24' /6 7 6/4
Угр 2 Венера —3 4 о" Марс + 1 7 2/ Юпитер —1 7 Сатурн ч-0 9 V Восх. C Сут ИЗМ. Зах. С Сут. нам.
00ч 01 02 03 04 05 06 07 08 09 10 11 12 13 14 15 16 17 18 19 20 21 22 23 191°1 1:0 Л'13°58!3 206 10.4 13 59.3 221 09.9 14 00.4 236 09.4 14 01.4 251 08 9 14 02.4 265 08 3 14 03.4 281 07.8 14 04.4 296 07.3 14 05.5 311 06.8 14 06.5 326 06.2 14 07.5 341 05.7 14 08.5 356 052 14 09.5 11 04.7 14 10.5 26 04.1 14 11 5 41 93.6 14 12.6 56 03.1 14 13.6 7! 02.6 14 14.6 86 02 0 14 15.6 101 01.5 14 16.6 116 01.0 14 17.6 131 00 4 14 18.6 145 59.9 14 19.6 160 59.4 14 20.6 175 58.8 АЧ4 21.6 A + 0.5 4+1.0 /гр в 169°35:4 W2i°0l'.8 184 36.1 21 02.2 199 36.7 21 02.6 214 37.3 21 02.9 229 38.0 21 03.3 244 38.6 21 03.7 259 39.2 21 04.0 274 39.8 21 04.4 289 40.5 21 04.8 304 41.1 21 05.1 319 41.7 21 05.5 334 42.3 21 05.9 349 43.0 21 06.2 4 43.6 21 06.6 19 44.2 21 07.0 34 44.9 21 07.3 49 45.5 21 07.7 64 461 21 08.1 79 46 7 21 08.4 94 47.4 21 08.8 10948.0 2109.1 124 48.6 21 09.5 139 49.2 21 09.9 154 49.9 N2I 10.2 Л +1.6 4+0 1 'гр 4 80°45'.3 АН3°46'.4 9547.6 1346.4 НО 49.9 13 46.3 125 52.3 13 46.3 140 54.6 13 46.2 155 56.9 13 46.1 170 59.2 13 46.1 186 01.5 13 46.0 201 03.9 13 46.0 216 06.2 13 45.9 231 08.5 13 45.9 246 10.8 13 45.8 261 13.) 13 45 7 276 15.5 13 45.7 291 17.8 13 45.6 30620.1 1345.6 321 22.4 13 45.5 336 24.7 13 45.4 351 27.0 13 45.4 6 29.4 13 45.3 21 31 7 13 45.3 36 34.0 13 45.2 51 36.3 13 45.2 66 38.6 Д'13 45.1 й +3.3 4 -0.1 'гр 4 210o37I7 W5°40'.2 225 39.9 5 40.3 240 42.1 5 40.4 255 44.3 5 40.5 270 46.5 5 40.6 285 48.7 5 40.7 300 50.9 5 40.8 315 53.1 5 40.9 330 35.3 5 41.0 34557.5 541.1 0 59.7 5 41.2 16 01 9 5 41.3 31 04.1 5 41.4 46 06.3 5 41.5 61 08.5 5 41.6 76 40.7 5 41.7 91 12.9 5 41.8 106 15.1 5 41.9 121 17.3 5 42.0 13619.5 542.1 15121.7 542.2 166 23.8 5 42.3 181 26.0 5 42.4 196 28.2 Лг5 42 5 д ; J..’ д +0 1 N74c 72 70 68 66 64 62 60 58 56 54 52 50 45 40 30 20 Л/ 10 0 S 10 20 30 40 45 <50 52 54 56 58 S 60 ван 23.2 22.3 ч 21.7 -2.3 21.3 -2.0 21.6-1.9 20.8 -J.7 20.5-1.7 20.3 -1.5 20.2 - 1 5 19.8 -1.5 19.5 -j.4 19.1 -из 18.7 -1.2 18.4 . 1.1 18.1 -1.0 17.9 -1.0 17.6-9.9 17 2 -0.8 16.8 -0.7 16.5 - 0.6 16.2 -0.5 16.0 -0.4 15.9-0 4 15.7 -0.3 15.4 -0.2 15.2-0.1 ОНО 017 02.2 +0?7 О2‘о +о.з 02,8 +Од 03.1 о.о 03.3.0.! 03.4 —0,2 03.6-о.з 0.3.7 -о.з 03.9 -ол 04.2 -0.5 04.4 -0.6 04.7 -ол 05.0 -0.8 05.3 -о.з 05.6 -но 05.8 -го 06.1 -I.J 06.4 -1.2 06.8-1.3 07.0-1.4 07.3-1.5 07.4 -1.6 07.6-1.6 07.8-1.7 08.0-1.8 08.2-2.0
Ук з Р Н'Ч6“ 02'35“ 0.1 Ук ’ Р /2'41“ 04'01“ 0.1 Ук * Р /8'34“ 09'56“ 0.0 У к ’ Р 09'56" 0/'/7" 0.0
Выдержки из Морского астрономического ежегодника на 1968 г.
639
1968 г
Май 13 (134)
Понедельник
TVp У Точка т Овна 0 С о л н и е £ Луна
00ч 01 02 03 04 05 06 07 08 09 10 П 12 13 14 15 16 17 18 19 20 2! 22 23 *гр (5гр) 230°48'.6 245 51.1 260 53.6 275 56.0 290 58.5 306 01.0 321 03.4 3.36 05.9 351 08.4 6 10.8 21 13.3 36 15.7 51 18.2 66 20.7 81 23.1 96 25.6 III 28.1 126 30.5 141 33.0 156 <35.5 171 37.9 186 40.4 201 42.9 216 45.3 tfp ' 180°56:0 ЛЧ8°20'.8 195 56.0 18 21.4 210 56.0 18 22.0 225 56 0 18 22.7 240 56.0 18 23.3 255 56.0 18 23.9 270 56.0 18 24.5 285 56.0 18 25.1 300 56.0 18 25.7 315 56.0 18 26.4 330 56.0 18 27.0 345 56 0 18 27 6 0 56.1 18 28.2 15 56 I 18 28.8 30 561 18 29.4 45 56.1 18 30.0 60 56 1 18 30 6 75 56 1 18 31.3 90 56.1 18 31.9 105 56.1 18 32.5 120 56.1 18 33.1 135 56.1 18 33.7 150 56.1 18 34.3 165 56 1 V18 34 .9 4+0.1 1 ‘0.6 /гр i ' з 3554)2:8 ,3,6 5 2з°и:з^и.| 9 25.4 t’ ' 23 22.4 Jp, 23 4R 0 . , . 23 33.21 X , 38 10.4 23 43.9 * 1’, 52 32.8 *32 23 54.4 *о3 66550*3’2 24 04.71;;-2 81 17.2 +3 0 24 14.9 шо 95 39.2 ^ ° 24 24.9 *J92 ПО 01.2 J ? 24 34.7 *5" 124 23.0 *22 8 24 44.3 *2 < 138 44.8 *,, 24 53.7 7 153 Об 5 *о^ 25 02 9 , 167 28.1 .* < 25 12.0 ,В8 181 49 6 *, , 25 20.8 *в . 196 11.1^2 4 25 29.5 *8 5 210 32.5 ,2 2 25 38.0 4 224 53.7 "22 25 46.2 ,о| 239 14.9 25 54.3 *7Л 253 36.1 26 02 2 б 267 57.1 ... 26 09.8 282 18.1 .on 26 17.3 '3 296 39.1 'м 26 24.6 +7 0 310 59.9 *> о 26 31.6 . б g 325 20.8 tj"; 5 26 38 5
Гц 08^35» \ R Р Ич56»в 15.9 О' 15 23 56 н 7. ft p 00l21**e O'* 16.7 6Г.4 12 52 н 24" 16 7 61 1
? Всех. 0 Сут изм Зах 0 Cvt KJ4. Прод. сум.
гражд. и»нг.
N 74° 72 70 68 66 64 62 60 58 56 54 52 50 45 40 30 20 Л'10 0 S 10 20 30 40 45 50 52 54 56 58 S60 01ч05*Ч1ом 01 58 -,-е 02 30 -4 02 54 43 03 13 03 26 .з 03 40 4-3 03 51 <-2 04 01 4 2 04 10 4'2 04 17 + 2 04 34 4 1 04 47 -.1 05 08 4i 05 25 4-1 05 39 41 05 53 о 06 06 0 06 20 П 06 36 о 06 50 и 07 09 -1 07 24 -« 07 31 _1 07 39 -1 07 48 -1 07 57 -2 08 08 -2 22ч58м-12м 21 59 -б 21 26 -4 21 01 -1 20 42 -3 20 27 -з 20 14 -2 20 02 -? 19 53 -2 19 44 -2 19 .36 _ ? 19 20 -1 19 06 _) 18 45 -1 18 28 о 18 13 о 18 00 о 17 47 о 17 32 о 17 16 41 16 56 41 16 44 -1 16 28 41 16 21 +1 16 13 4? 16 04 +? 15 55 +-2 15 43 +2
1 ( CZZZ1
/// /// /// 1 434м 1 13 1 02 0 55 0 49 0 45 0 42 0 39 0 34 0 31 0 26 0 24 0 22 0 22 0 22 0 23 0 25 0 29 0 32 0 36 0 38 0 40 0 42 0 45 0 49 L 1 /// /// /// /// /// /// 2ч30“ 2 05 1 50 1 39 1 31 1 17 1 08 0 57 0 52 0 48 0 47 0 48 0 50 0 54 1 02 1 07 1 15 1 19 1 23 i 28 1 34 1 41
ГП> 9 Венера —3.4 д' Марс + 1 7 2/ Юпитер —1 7 1 1, Сатурн +0.9 i
00” 0! 02 03 04 05 06 07 08 09 10 11 12 13 14 15 16 17 18 19 20 21 22 23 & 190°58-.3 А'14°22'.6 205 57.8 14 23.6 220 57.3 14 24.6 235 56.7 14 25.6 250 56.2 14 26.6 265 55 7 14 27.6 28055.1 1428.6 295 54.6 14 29.6 310 54.0 14 30.6 325 53.5 14 31.6 340 53.0 14 32.6 355 52.4 14 33.6 10 51.9 14 34.6 25 51.4 14 35.6 40 50.8 14 36.6 55 50.3 14 37.6 70 49.8 14 38.6 85 49.2 14 .39.6 100 48.7 14 40.6 115 48.1 14 41.6 1.30 47.6 l i 42.6 14547.1 И 43.6 160 46.5 14 44.6 175 46.0 .V 14 45.6 4 + 0.5 4+10 frp Й 169°50’.5 N21°!0:б 184 51.1 21 11 0 19951.7 21 11.3 214 52.4 21 11.7 229 53.0 21 12.0 ‘244 53.6 21 12.4 259 54.3 21 Г2.8 274 54.9 21 13.1 289 55.5 21 13.5 304 56.1 21 13.8 319 56.8 21 14.2 334 57.4 21 14.5 349 58.0 21 14.9 4 58.6 21 15.3 19 59.3 21 15.6 34 59.9 21 16.0 50 00.5 21 16.3 65 01.1 21 16.7 80 01.8 21 17.0 95 02.4 21 17.4 НО 03.0 21 17.7 125 03.6 21 18.1 140 04.3 21 18.5 155 04.9 А21 18.8 1 4+1.6 4+0.4 | *гр 4 81°4О'.9 Л'13°45:0 96 43.3 13 45.0 111 45.6 13 44.9 126 47.9 13 44.9 141 50.2 13 44.8 156 52.5 13 44.7 171 54.8 13 44.7 186 57.1 13 44.6 201 59.5 13 44.6 217 01.8 13 44.5 23204.1 1344.4 247 06 4 13 44.4 262 08.7 13 44.3 27711.0 1344.3 292 13.3 13 44.2 307 15-6 13 44.1 322 18.0 13 44.1 337 203 13 44.0 352 22.6 13 44.0 7 24.9 13 43.9 22 27.2 13 43.8 37 29.5 13 43.8 52 31.8 13 43.7 67 34.1 А'13 43.7 4 -f-3.3 4 -0. 1 /гр 4 2П°ЗО'.4 N5°42'.7 226 32.6 5 42.8 241 34.8 5 42.9 256 37.0 5 43.0 27139.2 543.1 286 41 4 5 43.2 301 43.6 5 43.3 316 45.8 5 43.4 331 48.0 5 43.5 346 50.2 5 43.6 1 52.4 5 43.7 16 54.6 5 43.8 31 56.8 5 43.9 46 59.0 5 44.0 62 01.2 5 44.1 77 03.4 5 44.2 92 05.6 5 44.3 107 07.8 5 44.4 122 10.0 5 44.5 13712.2 544.6 152 14.4 5 44.7 167 16.6 5 44.8 182 18.8 5 44.9 197 21.0 Лг5 45.0 4 +3„2 4+0.1
Л ’ Р 11" 17** 0'2''39^ 0.1 7\ ч р 12'40» 04"04" 0.1 7\ а р 18"30» 09457* 0.0 Ц 1 Р 09ч53* 0ГЧГ* 0.0
Bocx. £ Сут. ИЗЫ. Зах. £ Сут. азы.
A’74° B^B В^В
72
70 в^м вн
68 МВ
66 01.2
(И а 02.2
62 24 J u 02.7 +оч.?
60 23.3 -и 03.1 _0.1
58 22 9 -17 03.4 -0 2
56 22.5 -1.6 03.7 _о’3
54 22.2 -1..-, 04.0 -0.4
52 21 У -1.5 04.2 -0.5
50 21.7-1.5 04.3-о б
45 21..3-1 4 04.7 _0.7
40 20 9 -1.3 05 О-о.;
.30 20.4 —1.2 05.5 -о.»
‘20 19.9 -1.2 05.9 -о.о
A4() 19.5-1.1 06.2 -го
0 19.2-1.1 06.6 -со
S 10 18.9-1.0 06.9_r.i
20 18 5 -1.0 07.2 -1.1
.30 18.1 -го 07.6 -| 2
40 17.5 -0.9 08.1 —1.3
45 17.2-0.9 08.4 -1.4
50 16.8 -0.8 08.9 -1.4
52 16.5 -0.7 09.1 -1.5
54 16.3 -0.6 09.3-1.6
56 16.0 -0.5 09.6-1.7
58 15.7 -о.з 09.9-1.8
S 60 15.3 -0.2 10.3-2.0
ПРИЛОЖЕНИЕ 6
СРЕДНИЕ ЗНАЧЕНИЯ СРЕДНИХ КВАДРАТИЧЕСКИХ ОШИБОК НАВИГАЦИОННЫХ ПАРАМЕТРОВ
Случайная составляющая ошибки Повторяющаяся составляющая ошибки Суммарная ошибка
название величина название величина
Средние квадратиче< а) наведения пелен- гатора 7ПВИЗ б) отсчета пеленга ^отс в) за наклон репитера тп г) за люфт пеленгатора тл д) за эксцентриситет пеленгатора /лэк :кие ошибки из оптического 0,1— 0*2 0*25 0*1 0,2—0^3 0,2—о;з мерения визуальных пе пеленгатора гирокомш а) определения постоянной поправки гирокомпаса 7пДгк б) неустойчивость гирокомпаса в меридиане /71гк в) установки репитера в диаметральной плоскости /пдп г) синхронной связи 7ИСВ д) за изменение положения равновесия гирокомпаса с изменением широты ленгов при исп ica 0,2—0*5 0,3-1 *5 022 0*08 0,2—0*3 юльзованни 0,6—157
Суммарная величина /”кпи /Ид сл Средние квадратичес а) наведения пеленгатора 7Пви3 б) отсчета пеленга ^отс в) за наклон котелка тн г) за люфт пеленгатора тЛ д) за эксцентриситет пеленгатора /иэк е) за неустойчивость картушки в меридиане тН 0,4—026 0 :кие ошибки из пеленгат 0,2—0^3 0*3 0,1— 0*2 0,2—023 0,2—0^3 0,2—1*0 Суммарная величина /Ид лпов мерения визуальных пе ора магнитного компаса а) в магнитном склонении md б) в девиации ms в) установки компаса в диаметральной ПЛОСКОСТИ /Идп 0,5-1*6 ленгов при исп 1 0,5—1*0 0,5—1*0 0,3-0*4 ользованни 0,9—1*9
Суммарная величина /Пкпи сл 0,4—1?2 0 Суммарная величина лпов 0,8—155
Средние значения ср. кв. ошибок навигационных параметров
641
Продолжение
Случайная составляющая ошибки * Повторяющаяся составляющая ошибки Суммарная ошибка
название величина название величина^
Средние квадратически а) измерения'радио-курсового угла mQfi б) радиодевиации т; е ошибки изме сопряже 0,5—1<0 днем 0,5—3,0 ночью 0,5—0^6 рения радиопеленгов с иного с гирокомпасом поправки гирокомпаса лидгк помощью ради 0,4—1^6 опеленгатора, 0,7—Ц9 днем 0,8—3^5 ночью
Суммарная величина сл Средние’квадратик навигах а) наведения^ визира ^виз б) отсчета пеленга лиОтс в) эксцентриситета визира и развертки zn3K г) поправок курсовых углов /ПдКу 0,5—1°0 днем 0,5—3^0 ночью 0,5—0°6 1еские ошибки лионных РЛС и 0,3—0,6 0°25 0,3—0^8 0,2—0^3 Суммарная величина тА пов пеленгования точечных ГАС, сопряженных с i а) поправки гирокомпаса Юдгк 0,4—1?6 ориентиров с ирокомпасом 0,4—Цб помощью 0,8—2;0
Суммарная величина . сл Средние квадр (на слух, с пс а) счета ^сигналов тотс б) за влияние ионосферы т Эф 0,6—1^2 0,2—0°3 атические оши( >мощью КИ-55, 0,3—0,5 от числа пропущенных сигналов 1—1,5 сигнала днем и 2—5 сигналов ночью Суммарная величина тА лпов 5ки приема сигналов се осциллографа или стре Практически нет 0,4—1^6 кторных радио; лочного индика маяков iTOpa) 1—2 сигнала днем и 2—5 сигналов ночью
Суммарная величина /пРп 1*и т& сл 1—2 сигнала днем и 2—5 сигналов ночью 0,0
41 Заказ 1833
642
Приложение 6
Продолжение
Случайная составляющая ошибки Повторяющаяся составляющая ошибки Суммарная 'сшибка
название величина название величина
Средние квадратические ошибки измерения расстояний с помощью навигационных РЛС
а) наведения подвижного круга дальности ^нав 0,5—1,0% ОТ расстояния до точечного ориентира и 0,5—-3,0*% от расстояния до береговой линии калибровки откл 0,02 мили 0,6—1,00/0 от расстояния до точечного ориентира и 0,6—3,0% от расстояния до береговой линии
Та же Отр поя 0,02 мили
"Чл 0
Средние квадратические ошибки измерения разности расстояний с помощью импульсных и импульсно-фазовых радионавигационных систем (при использовании приемоиндикаторов с измерением по огибающей)
а) инструментальная ^ИН б) поправки пространственной волны т& пр 1—1,5 мксек 2—10 мксек скорости распространения радиоволн отс 0—2 мксек 1,5—2,5 мксек при приеме поверхностных сигналов и 3—10 мксек при приеме пространствен-ных сигналов
Суммарная величина "Ч 1—1,5 мксек Суммарная величина ОТ/ что в 0—2 мксек
2,5—10 мксек при приеме пространственных сигналов
Средние квадратические ошибки измерения разности расстояний с помощью фазовых радионавигационных систем
а) инструментальная б) за влияние ионосферы ОТэф 0,005 фазового цикла 0,05 фазового цикла днем и 0,1 фазового цикла ночью скорости распространения радиоволн отс 0,020—0,025 фазового цикла днем 0,05 и ночью до 0,1 фазового цикла на частоте сравнения
Суммарная величина от,, ''и 0,05 фазового цикла днем и 0,1 фазового цикла ночью Суммарная величина пг, ^пов 0,02 фазового цикла
"Чл 0
Средние квадратические ошибки измерения высот светил навигационным секстаном
а) за нечеткость горизонта отгор о.з—i;o а) субъективная отсуб 0,1—О',7
б) совмещения изображений тС03 0,2—0J7 б) поправки индекса ОТ£ о, 1—о;2
Средние значения ср. кв. ошибок навигационных параметров
643
Продолжение
Случайная составляющая ошибки Повторяющаяся составляющая ошибки Суммарная ошибка
название величина название величина
в) отсчета тотс г) за наклон секстана тн д) за нецентровку изображения тпц е) за неточную астрономическую рефракцию ж) приведения к одному зениту тДЛ з) за неточный параллакс (для Луны) тр и) счислимой высоты (для разности высот) mhc ол— о; 15 о,1—о;5 о, 1—о;з 0,1—О',2 о; 1 ол—о;2 о,1— о;з в) инструментальной поправки ms г) в наклонении горизонта md 0,1—о;з 0,1— 0J2 при измерении наклономером и 0,5—0'6 при выборке наклонения из таблиц 0,6—17
Суммарная величина т*и тД СЛ Средние квадрати с а) совмещения изображений лгсов б) отсчета /потс 0.4-1 ;4 0.2-0J4 ческие ошибки екстаном (при 0,5—1 ;о ол— о; 15 Суммарная величина '«Лпов измерения вертикальны видимом основании ори а) поправки индекса mi б) инструментальной поправки ms 0,2—0^8 при измерении наклонения наклономером и 0.5—1,'0 при использовании таблиц [х углов навига ентира) о, 1—о;2 ол—о;з щионным 0,5—1; 1
Суммарная величина ”4 Средние квадратически а) совмещения изображений лгсов б) отсчета тотс в) за нецентровку изображения /пц г) за наклон секстана тп 0,5-1 ;о 0,0 ie ошибки измер 1—2' 0,1—0\15 о, 1—о;з 0,1—0J5 Суммарная величина пов ения горизонтальных уг< а) поправки индек- са mt б) инструментальной поправки ms о, 1 —о;4 лов навигацион) 0,1—о;2 ол—о;з 4ым секстаном 1-2J2
Суммарная величина "Ч %. 1—2;i 0 Суммарная величина тп “лов 0,2—03
41*
644
ПРИЛОЖЕНИЕ 7
ТЕРМИНОЛОГИЯ ГЛУБИН, ПРИМЕНЯЕМАЯ В РУКОВОДСТВАХ И ПОСОБИЯХ ДЛЯ ПЛАВАНИЯ
№ п.п. Термины Примеры применения Примечания
1 Наименьшая глубина
— самая малая глубина на банке, рифе, баре и других возвышениях дна, а также на фарватере, в канале — от принятого для данного района нуля глубин .Банка с наименьшей глубиной 17 м находится в 9 милях к О от мыса Колош* .Через бар прорыт канал с наименьшей глубиной 2,1 м‘ .Наименьшая глубина на фарватере 9,4 м (1964 г.)“ .Наименьшая глубина судового хода в гирле 7,2 м* В советских руковод-ствахдля плавания встречаются термины глубин: контрольная, лимитирующая, нормирующая, проходная и т. п., которые равнозначны термину наименьшая глубина
2 Отличительная глубина
— глубина, отличающаяся в большую или меньшую сторону от окружающих глубин (не менее чем на 1О°/о при ровном рельефе и на 2О°/о при неровном рельефе дна) .В 4 милях к S от мыса Идокопас обнаружена отличительная глубина 125 м среди глубин 140 мл .В 10 милях к О от мыса Ахии обнаружена отличительная глубина 80 м среди глубин 100— 130 м*
3 Глубина, на которую протрален район
— глубина траления, приведенная к принятому для данного района нулю глубин. (Глубина траления— расстояние от поверхности моря до нижней кромки гидрографического трала) .Фарватер протрален на глубину 10 м‘ .Северная часть залива протралена на глубину 7,5 м*
4 Проектная глубина
— глубина в каналах, бассейнах, у причалов и т. п., устанавливаемая при проектировании гидротехнических сооружений, от принятого для данного района нуля глубин .Проектная глубина канала 10 ми .Проектная глубина в бассейне Ройал 8,5 м* Проектная глубина не всегда соответствует фактической глубине. В этих случаях могут быть приведены обе глубины, например: .Глубина канала Ла-Канья 8 м. С окончанием строительства канал будет углублен до проектной глубины 10 м‘
Терминология глубин, применяемая в руководствах и пособиях
645
Продолжение
н п.п. Термины Примеры применения Примечания
5 Глубины порта
— глубина в ведущем в порт канале (на фарватере) и в основных гаванях (бассейнах) порта, которая характеризует доступность порта при установленном в данном районе нуле глубин. Глубины во второстепенных частях порта и у отдельных причальных сооружений могут быть меньше глубины порта Термин „глубина порта" употребляется в эксплуатационных и других справочниках
6 Гарантированная глубина
— наименьшая глубина в канале или на речном фарватере (судовом ходе), поддержание которой обеспечивается в течение всей навигации ,Г арантированная -глубина во входном канале 1,8 мл .Сведения о гарантированных глубинах на фарватере реки ежегодно публикуются в извещениях мореплавателям" .Гарантированная глубина судового хода реки 5,4 м‘
7 Транзитная глубина
— фактическая или гарантированная наименьшая глубина на всем протяжении прибрежного (продольного) фарватера или внутреннего водного пути Ответвления от транзитного водного пути (подходы к портам, рейдам и т. п.) при определении транзитной глубины в расчет не принимаются
СПИСОК ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ
Аксютин Л. Р„ Большаков-В. С. Гидрометеорологическая служба на морских судах. М., «Транспорт», 1964.
Андерсон Э. Принципы навигации. М., Воениздат, 1968.
Б а лашков И. В. Автосчислители и автопрокладчики. Л., «Судостроение», 1968.
Бычков С. И., Лукьянов Д. П., Назим о к Е. Н., Олянок П. В., Сергеев Н. К., Шебшаевич В. С., Юрков Ю. А. Космические радиотехнические комплексы. М., «Сов. радио», 1967.
Вейхман В. В. Нахождение вероятного места при определении по трем звездам. «Мор. флот», 1966, № 8.
Власов И. В., Вольпин С. А., Кацман Г. А., Сара вайе кий Л. А., Щелкунов К- М. Гидродинамические лаги. Л., «Судостроение», 1967.
Егоров Н. И. Физическая океанография. Л., Гидрометеоиздат, 1966.
Зверев А. С. Синоптическая метеорология и основы предвычисления погоды. Л., Гидрометеоиздат, 1968.
Каманин В. И., Емец К. А., С е л и т р е н н и к о в Г. В., Скворцов М. И., Глебов Е. П., Лаврентьев А. В., Эрдман Д. Э.,
С куб ко Р. А. Справочник штурмана. М., Воениздат, 1968.
Код для передачи результатов наблюдений за состоянием погоды и моря в советские и иностранные центры сбора метеосведений (сокращенная схема) КН-09-С (междунар. индекс М — 22А). М., Гидрометеоиздат, 1965.
Кондрашихин В. И. Влияние повторяющихся ошибок на точность обсерваций. «Труды ЦНИИМФ», вып. 64, 1965.
Курс кораблевождения. В 6-ти т. Л., ГУ МО, 1958—1967.
Т. 1. Попеко Г. П. и Соломатин Е. П. Навигация. 1961.
Т. 2. С к о р о д у м о в П. П. Мореходная астрономия. 1963.
Т. 3. 3 а г у р ь я н о в А. К. Основы маневрирования. 1958.
Т. 4. Глин ков Е. Г. Навигационные пособия. 1960.
Т. 5. Кн. 1. С и гачев Н. И., Глебов Е. П., Я куш ен ко в А. А. Гирокомпасы и другие гироскопические приборы. 1961;
кн. 2. Терехов И. Н. и Вешняков Н. И. Магнитные компасы. 1959;
кн. 3. И т е н б е р г С. И., Дворников А. П., Балашков И. В. Лаги и автосчислители. 1964;
кн. 4. Федоров И. И. Эхолоты и другие гидроакустические средства. 1960;
кн. 5. Смирновский А. Ф. Радионавигационные средства. 1967;
кн. 6. С а м о х в а л о в Д. А., Николаев Б. В. Секстаны, измерители времени. 1960.
Т. 6. Егоров Н. И., Безуглый И. М„ Снежинский В. А. Морская гидрометеорология. 1962.
Лифшиц В. М., Хованский Б. А. Справочник для судоводителей по гидрометеорологии. Плавание наивыгоднейшнми путями. М., «Транспорт», 1967.
Метеорология для моряков. Сокр. пер. с англ. Л. Г. Соболева. Под ред. В. А. Снежинского. Л., Гидрометеоиздат, 1964.
Паластров В. Ф., Николаев А. В., Цибиногин А. Т., Скворцов М. И., Правдюк В. В,, С тан и ше веки й И. А. Навигация. М., Воениздат, 1967.
Правила наблюдения на кораблях и судах ВМФ за гидрометеорологической обстановкой (ПНГМО-К—67).
Практическое руководство для штурманов. Под ред. А. И. Щетининой. М., «Транспорт», 1965.
648
Список использованной литературы
Проничкин А. П., Чуприков М. К., Скворцов М. И., Попов Г. И., Ткач В. Т., Гор ш к о в Г. С. Справочник вахтенного офицера. М., Воениз-дат, 1967.
Раховецкий А. И. Нахождение обсервованного места при определении по высотам трех звезд, расположенных в одной половине горизонта. Инф. сборник ЦНИИМФ, № 32 (143), 1965.
Родионов А. И. Автоматизация судовождения. М., «Транспорт», 1966.
Руководство по оценке точности кораблевождения. Л., ГУ МО, 1970.
Селезнев В. П. Навигационные устройства. М., Оборонгиз, 1961.
S к в о р ц о в М. И., Юхов И. В., Землянов Б. И., Абчук В. А., Мры-кин О. А. Основы маневрирования кораблей. М., Воениздат, 1966.
Скубко Р. А., Филатов Н. В. Мореходная астрономия. М., Воениздат, 1966.
Трубчанин Г. П., Архангельский И. В., Девятко Н. Д., Каманин В. И., Семенов М. М. Кораблевождение. М., Воениздат, 1967.
Федяевский К. К., Соболев Г. В. Управляемость корабля. Л., Судпромгиз, 1963.
Холостое Д. И. Средства кораблевождения подводных атомоходов. М., Воениздат, 1967.
Для внутриведомственной продажи цена 3 р. 35 к.
Редактор И. П. Курбатов
Технический редактор Н. А. Зубкова
Сдано в набор 11/VI 1971 г. Подписано к печати 23/VI 1972 г.
Формат 70X108V16
Г-16067. Печ. л. 40*/г (условн. л. 56,7) + вклейка. Изд. № 85. Заказ № 1833.
Картфабрика ВМФ