/





Автор: Майзельс Е.Н. Торгованов В.А.
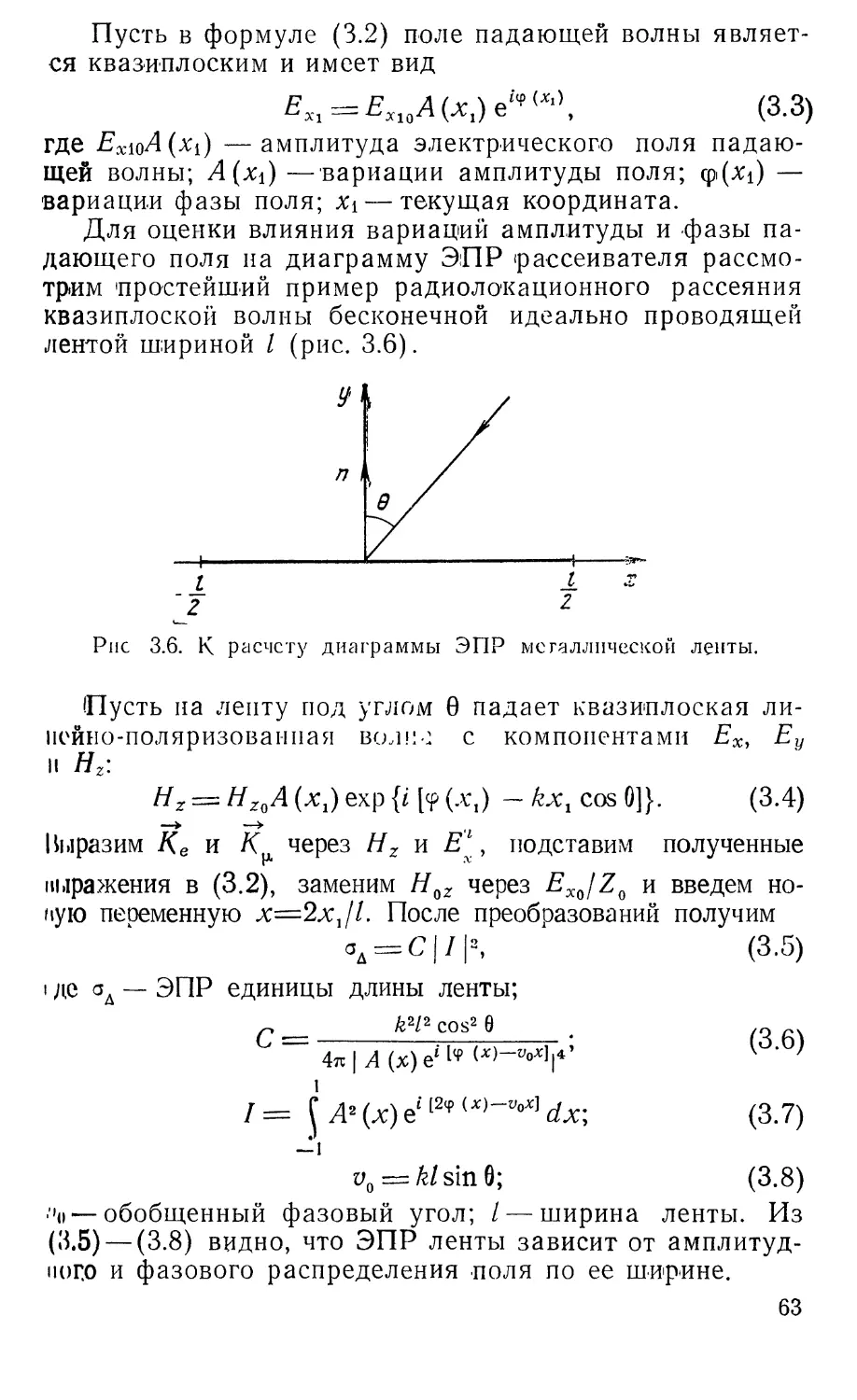
Теги: электротехника физика математическая физика радиофизика издательство советское радио
Год: 1972




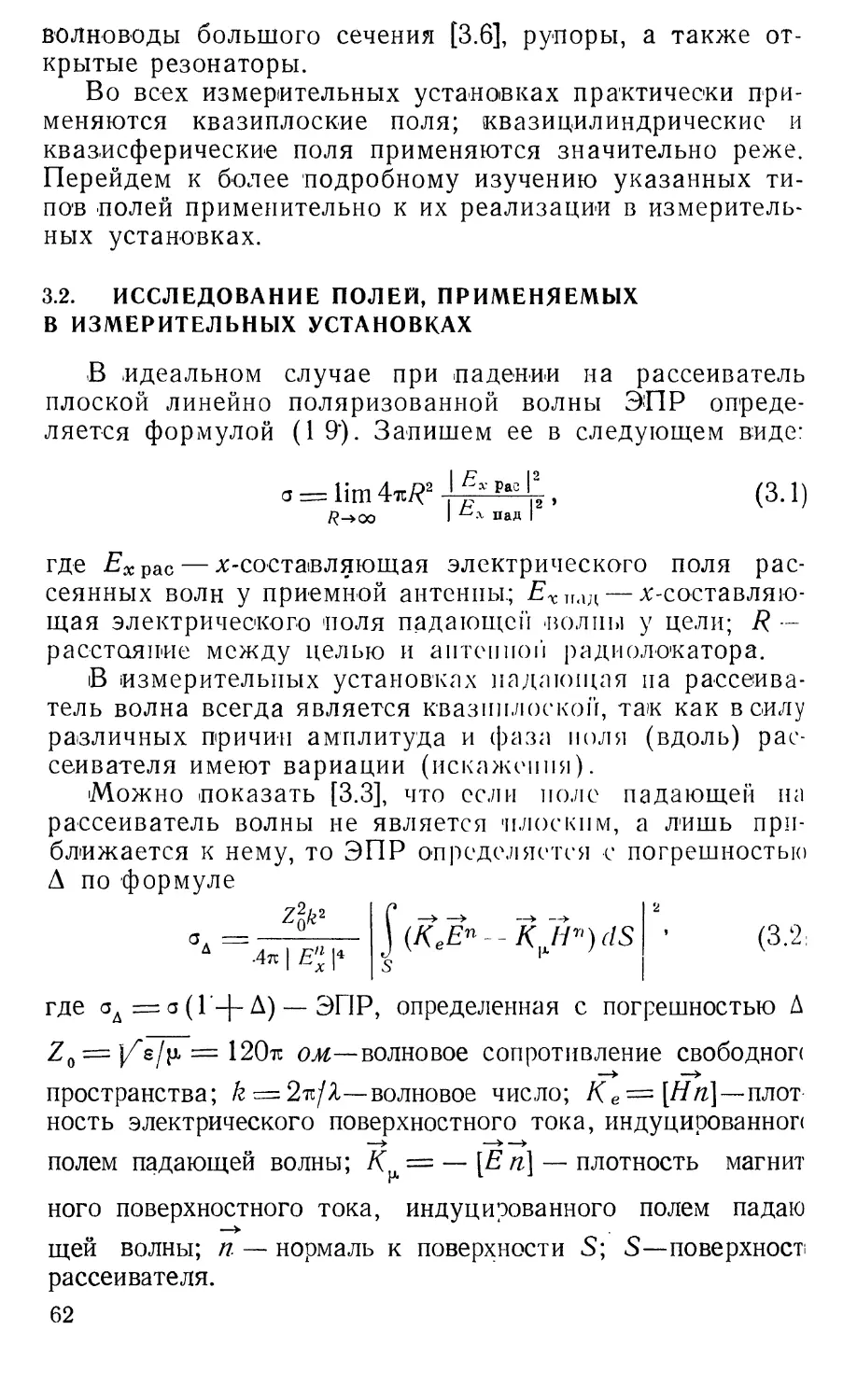
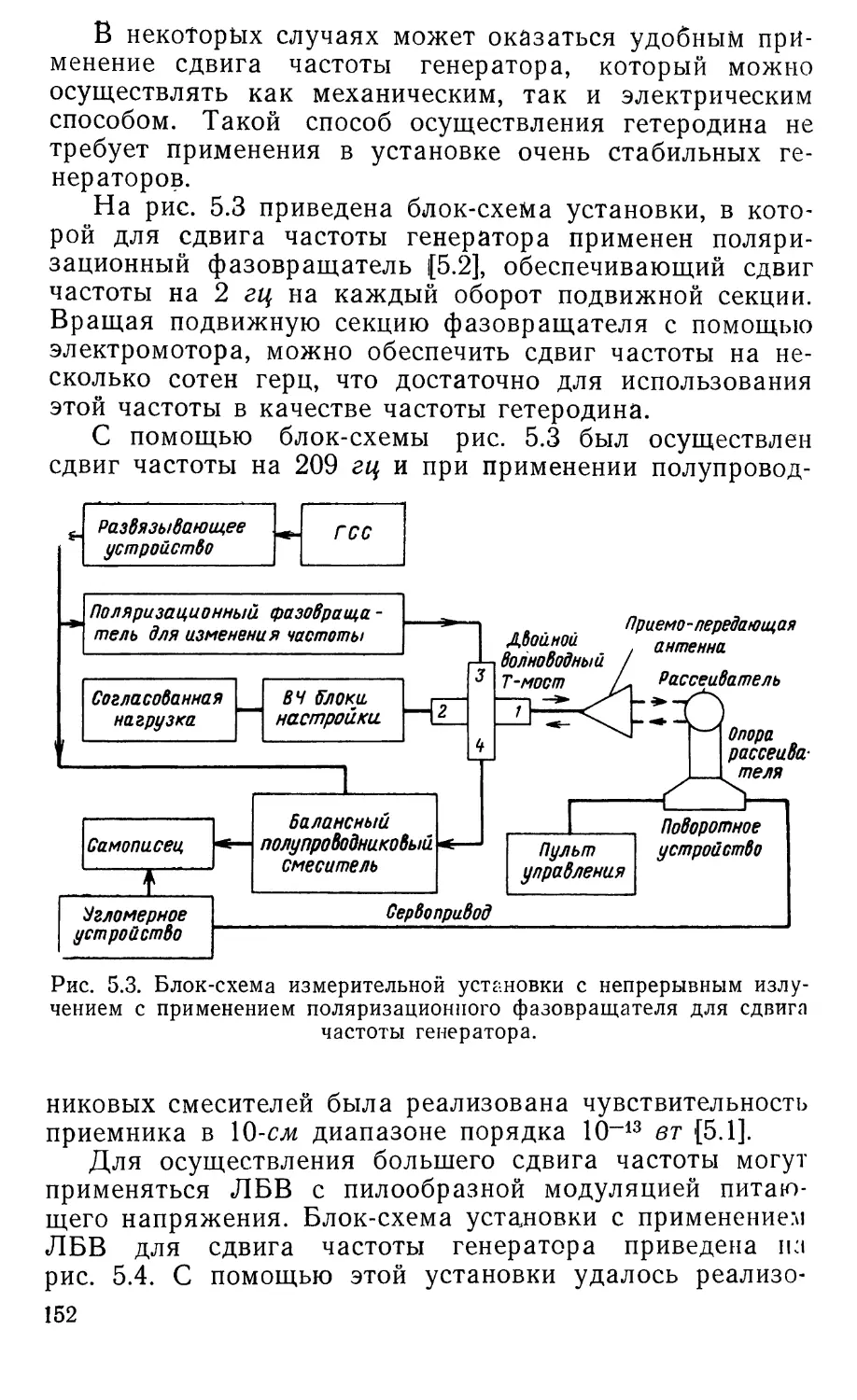
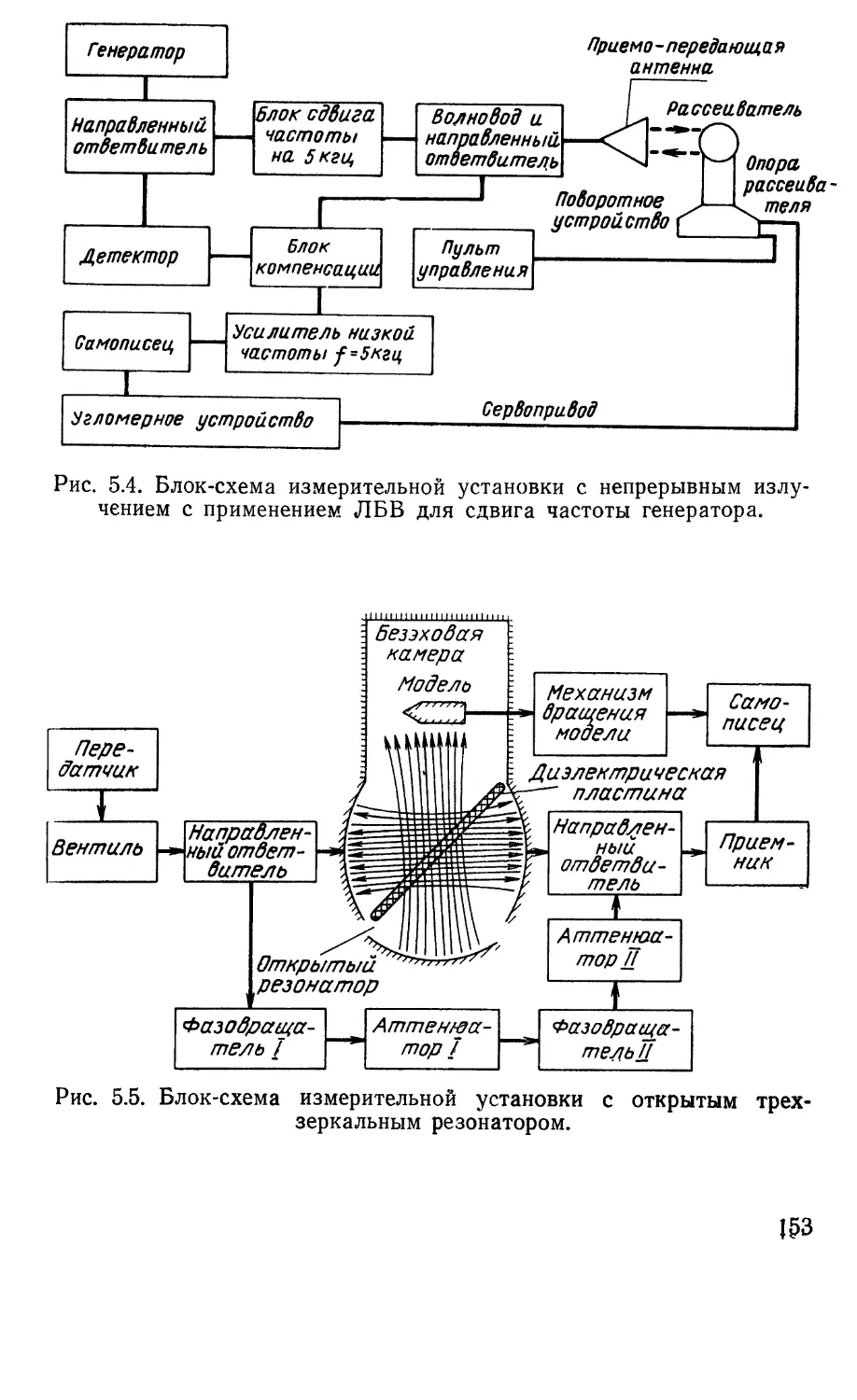
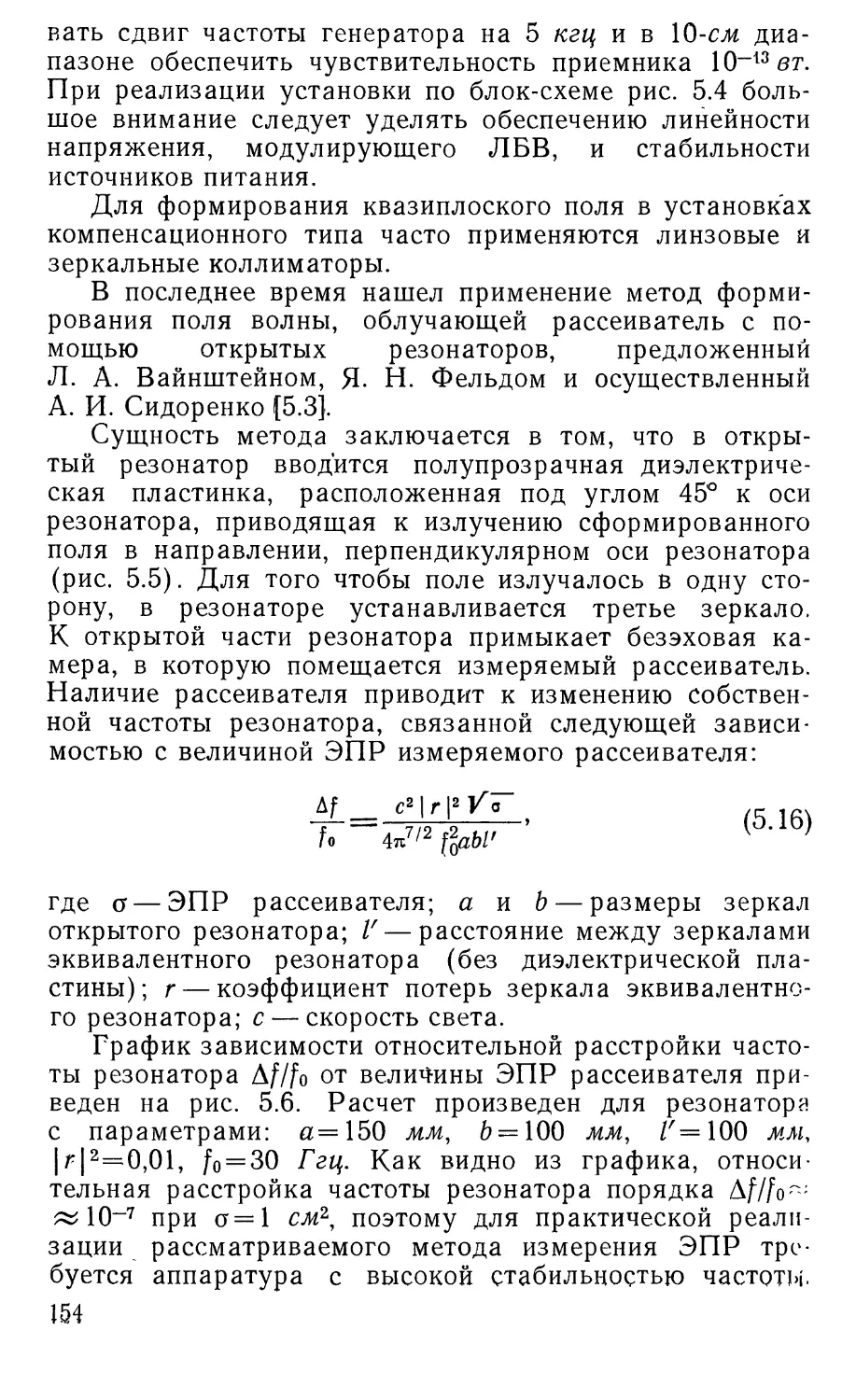
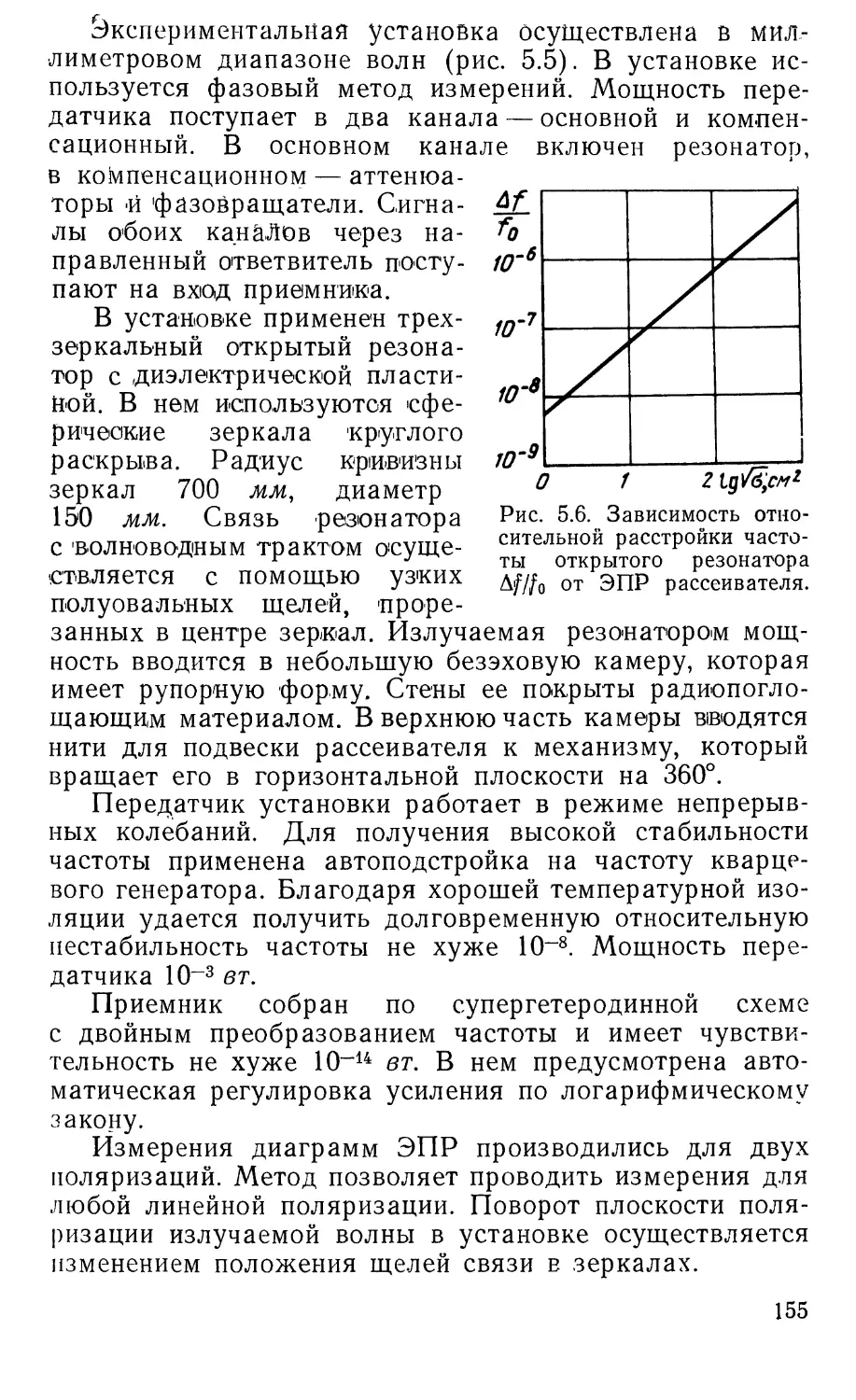
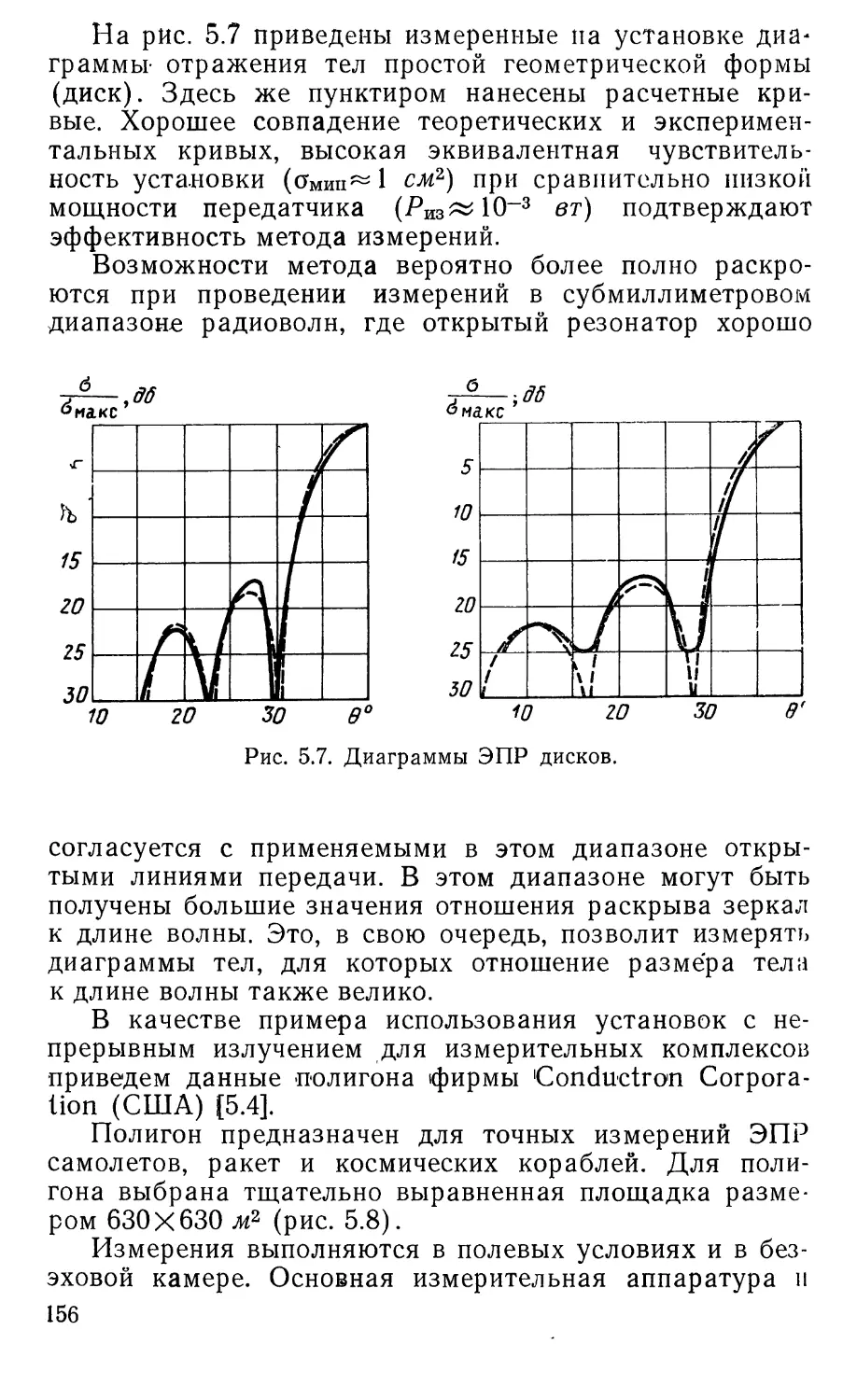
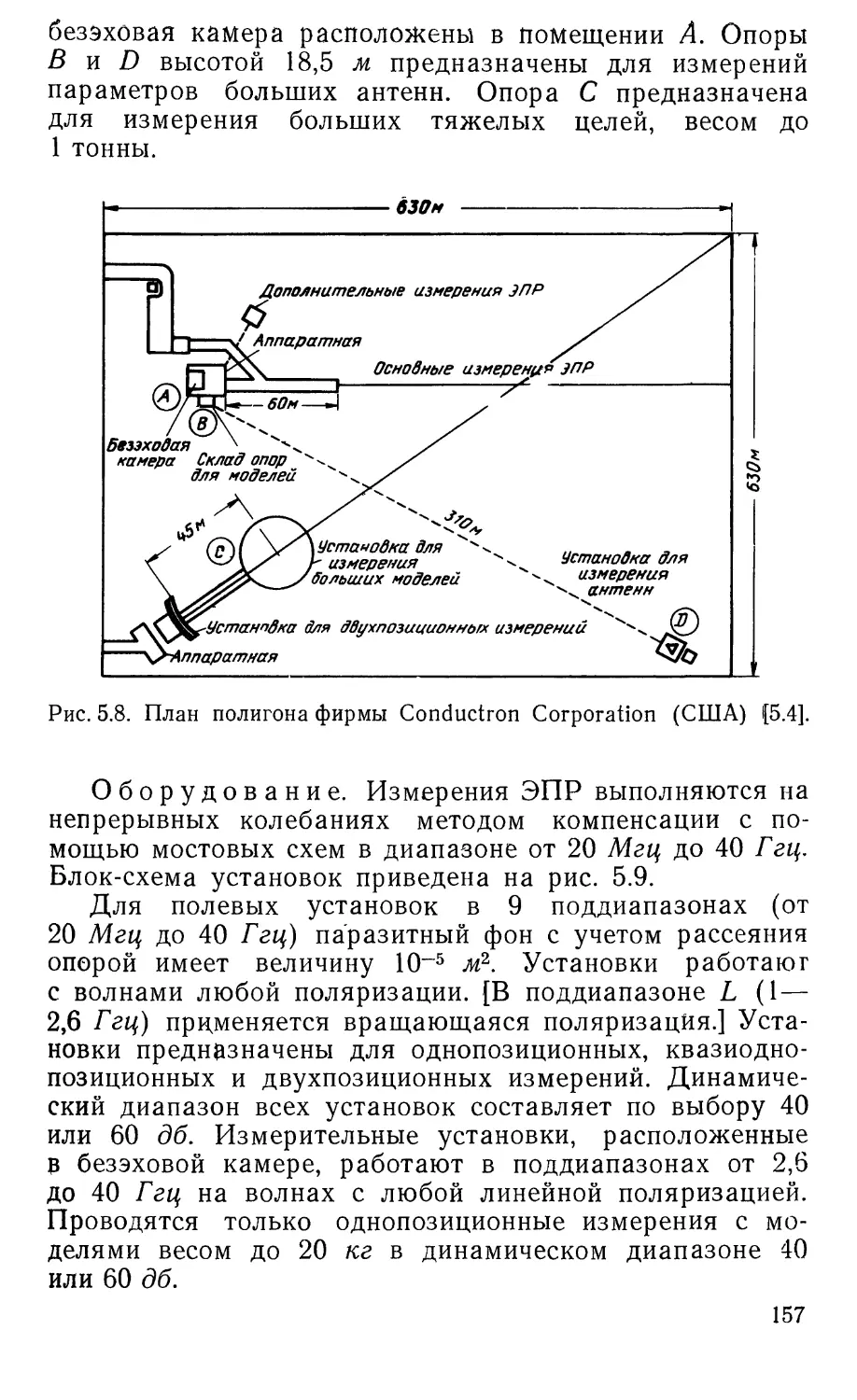
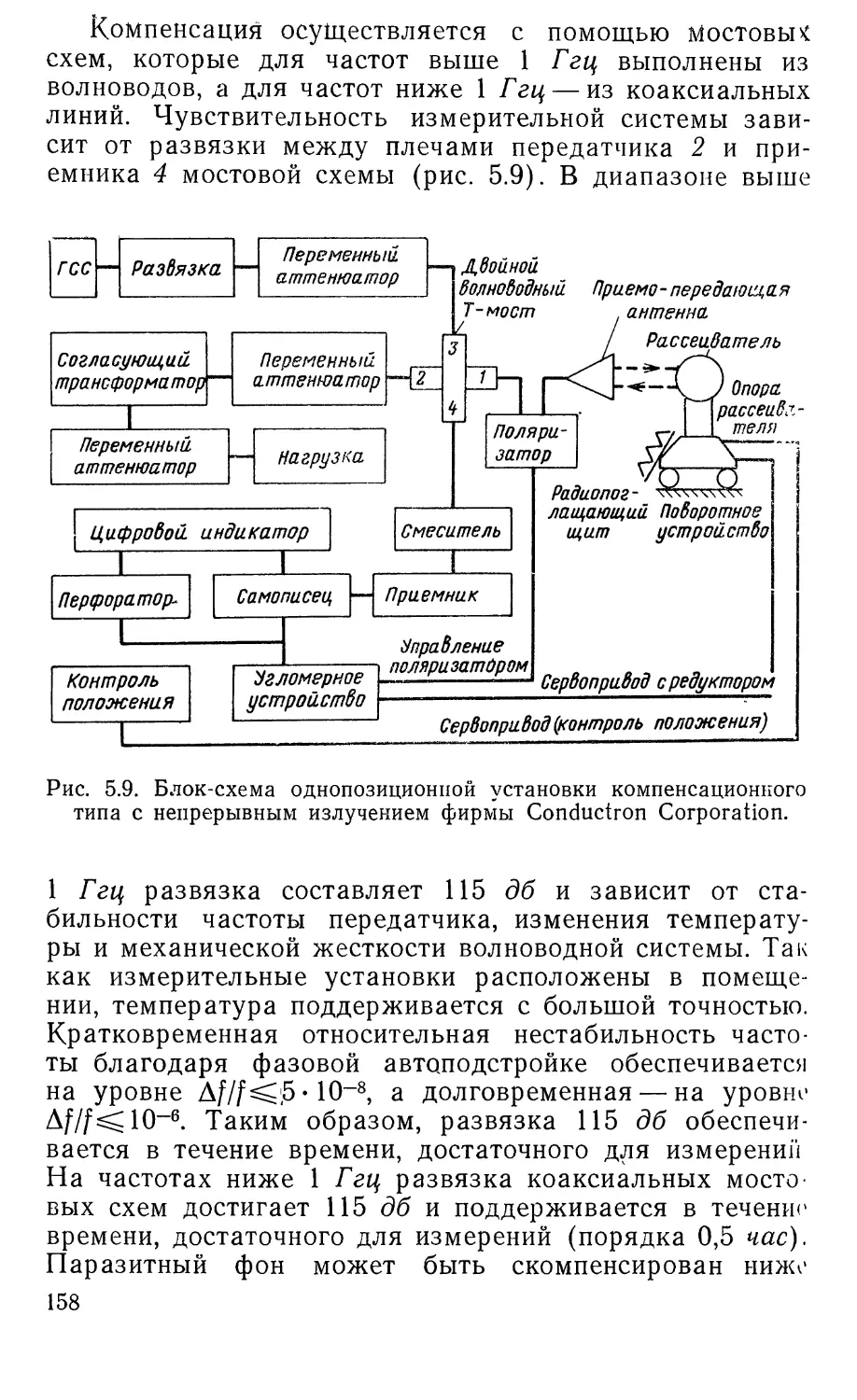
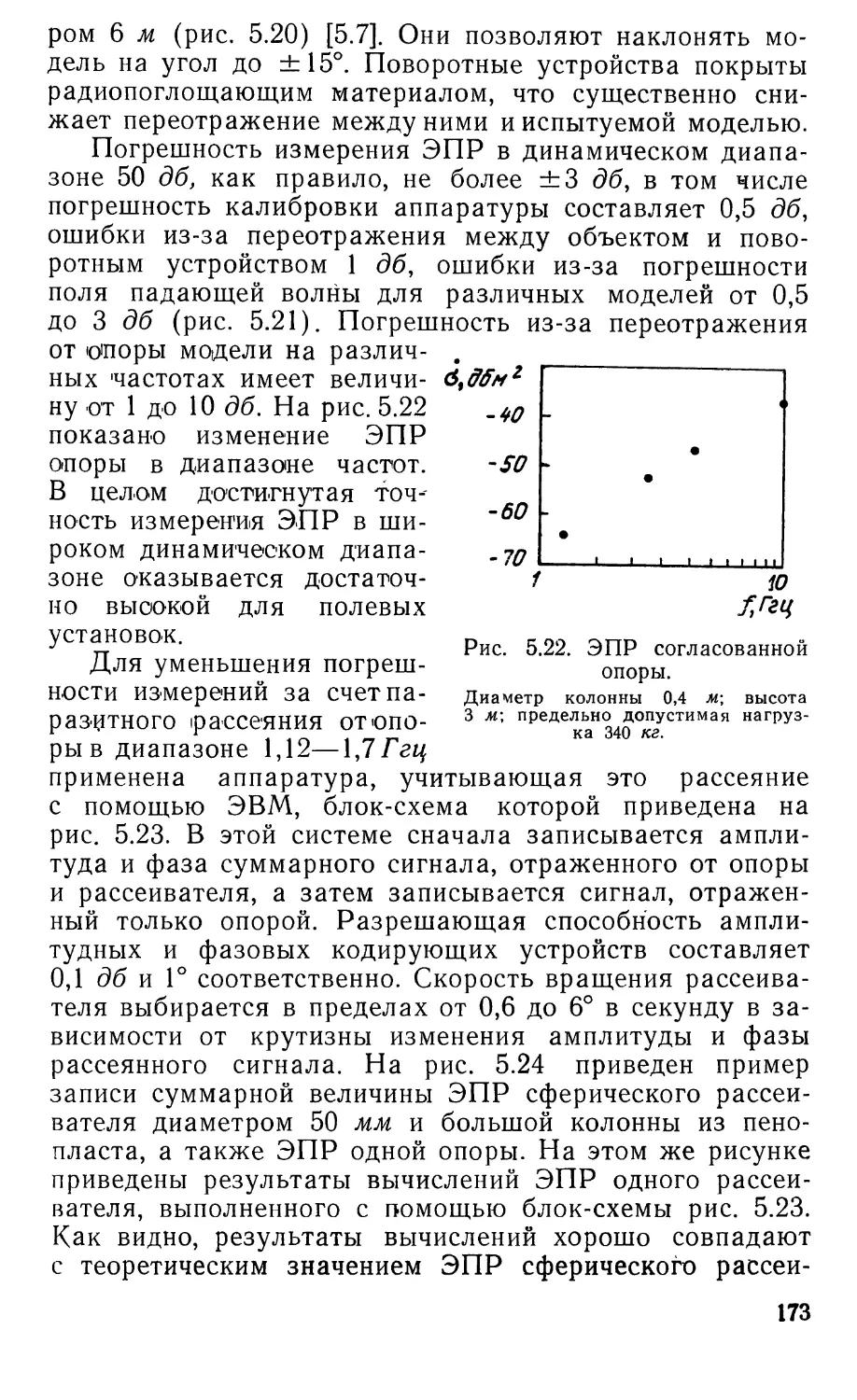
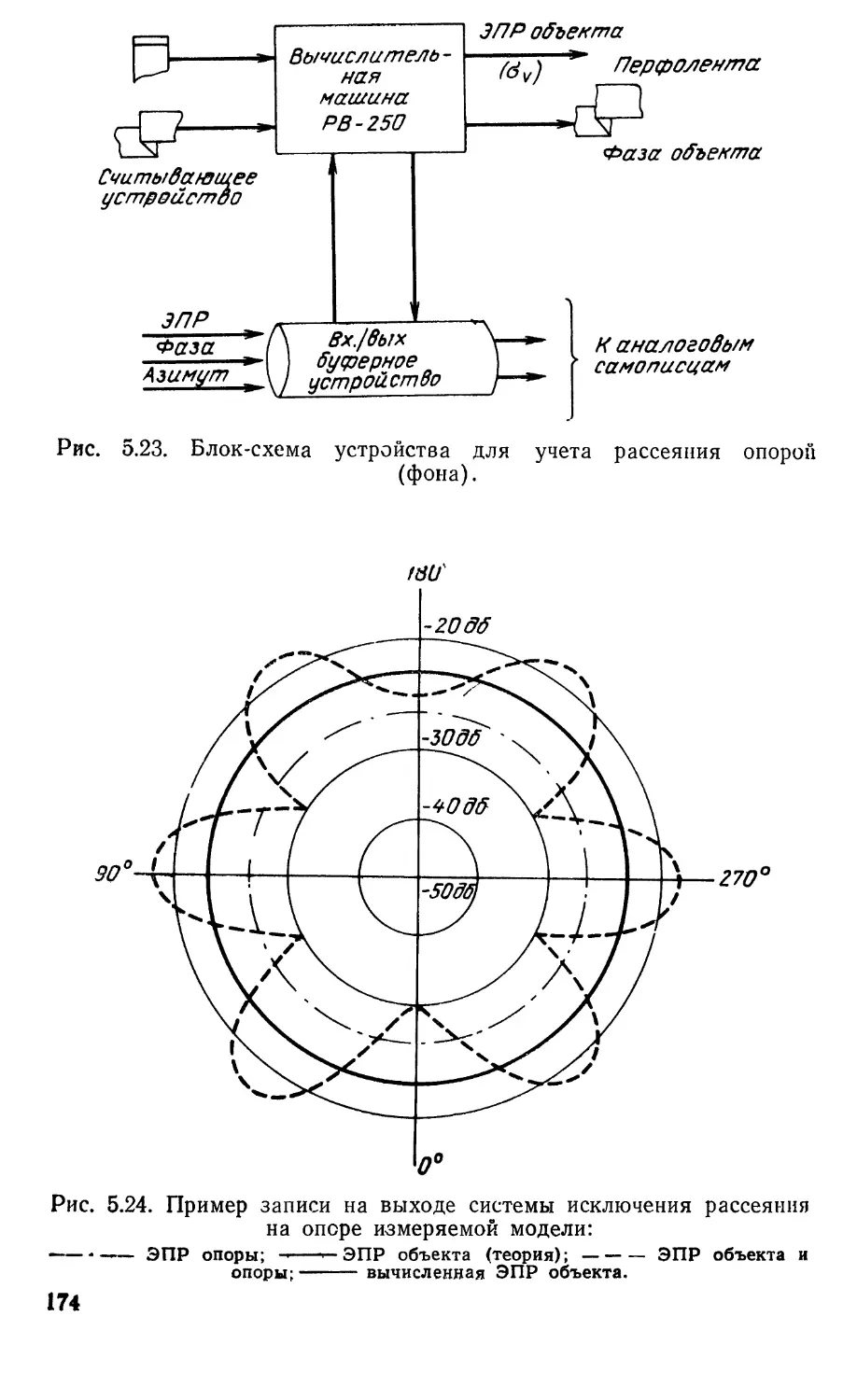
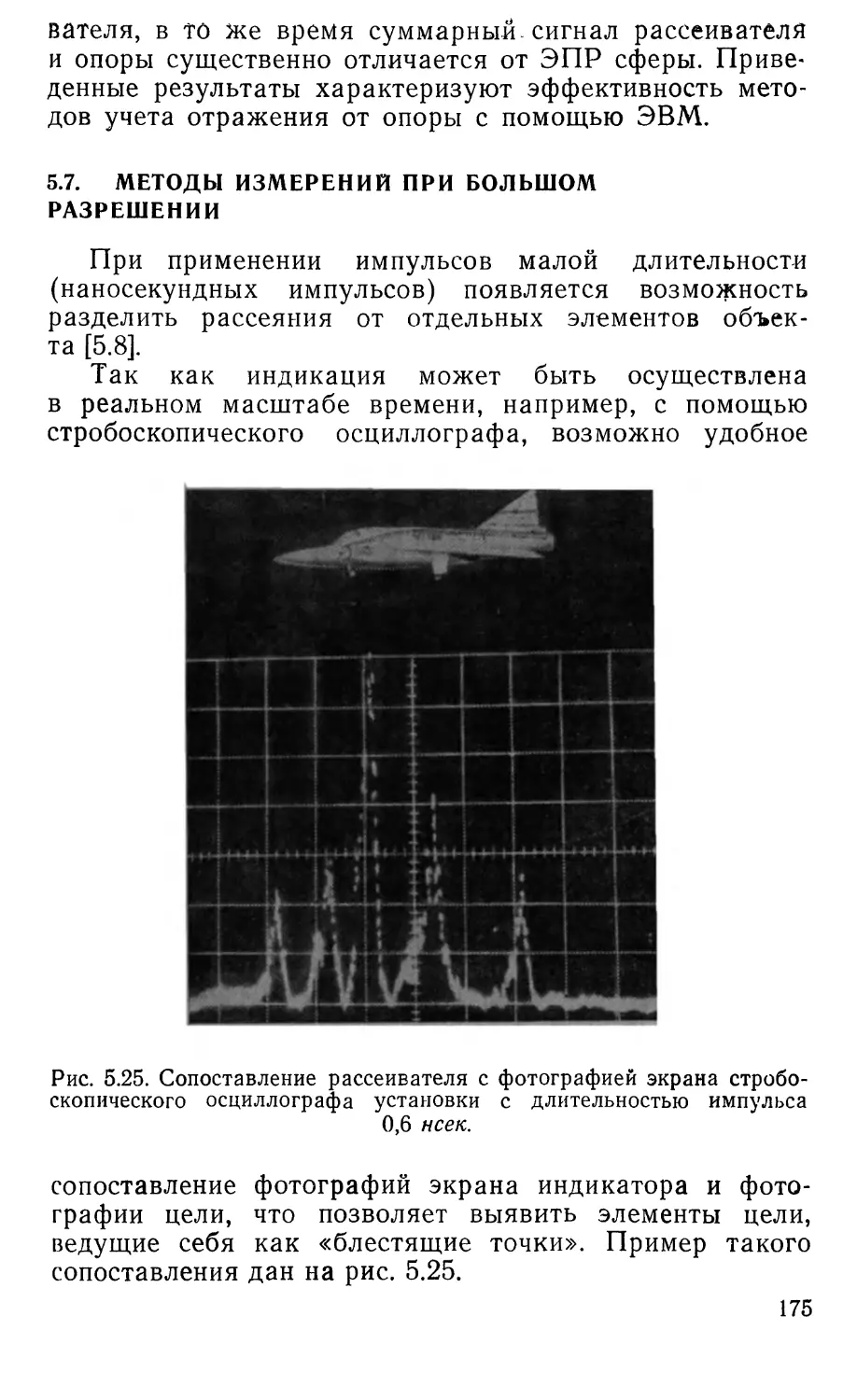
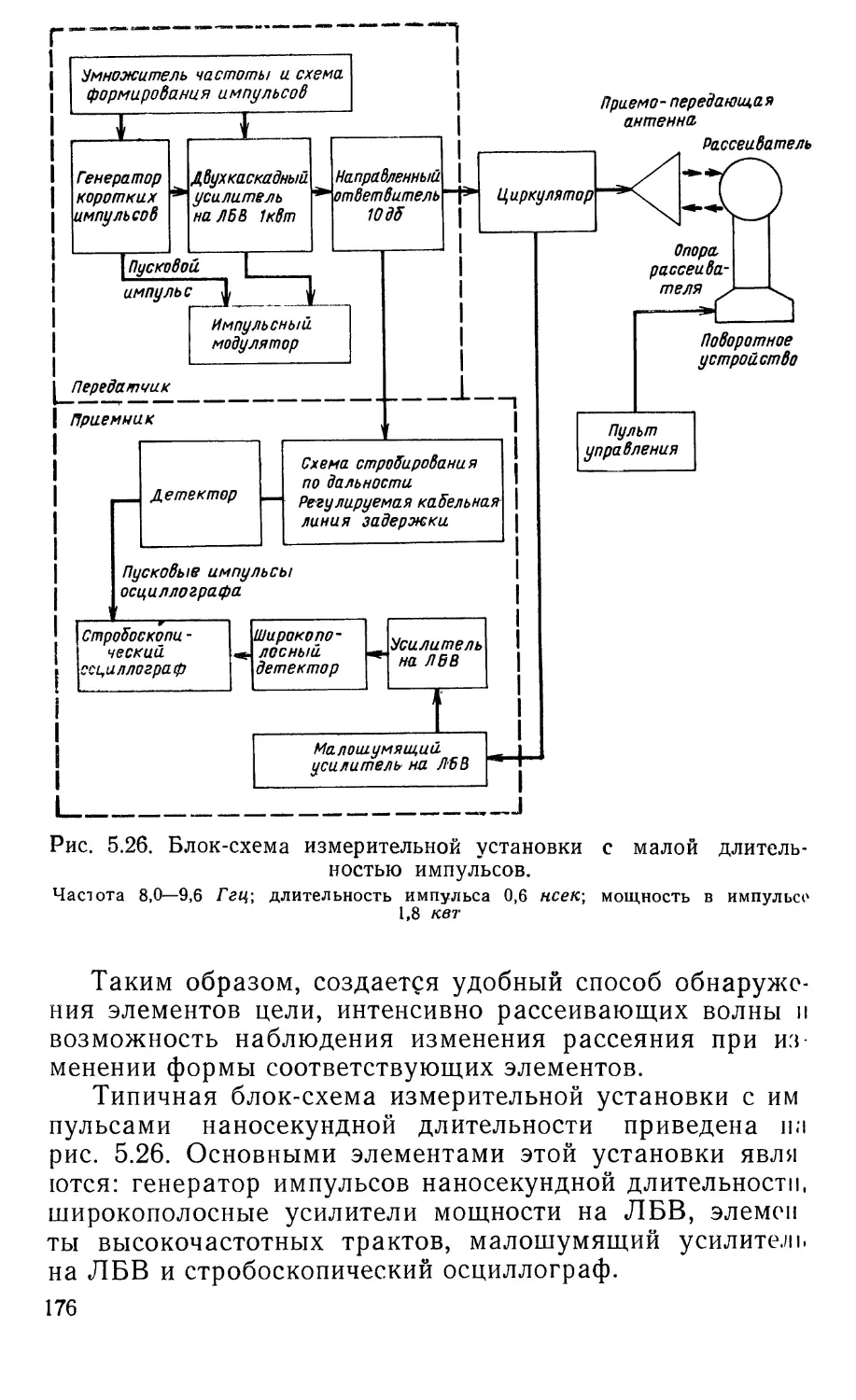
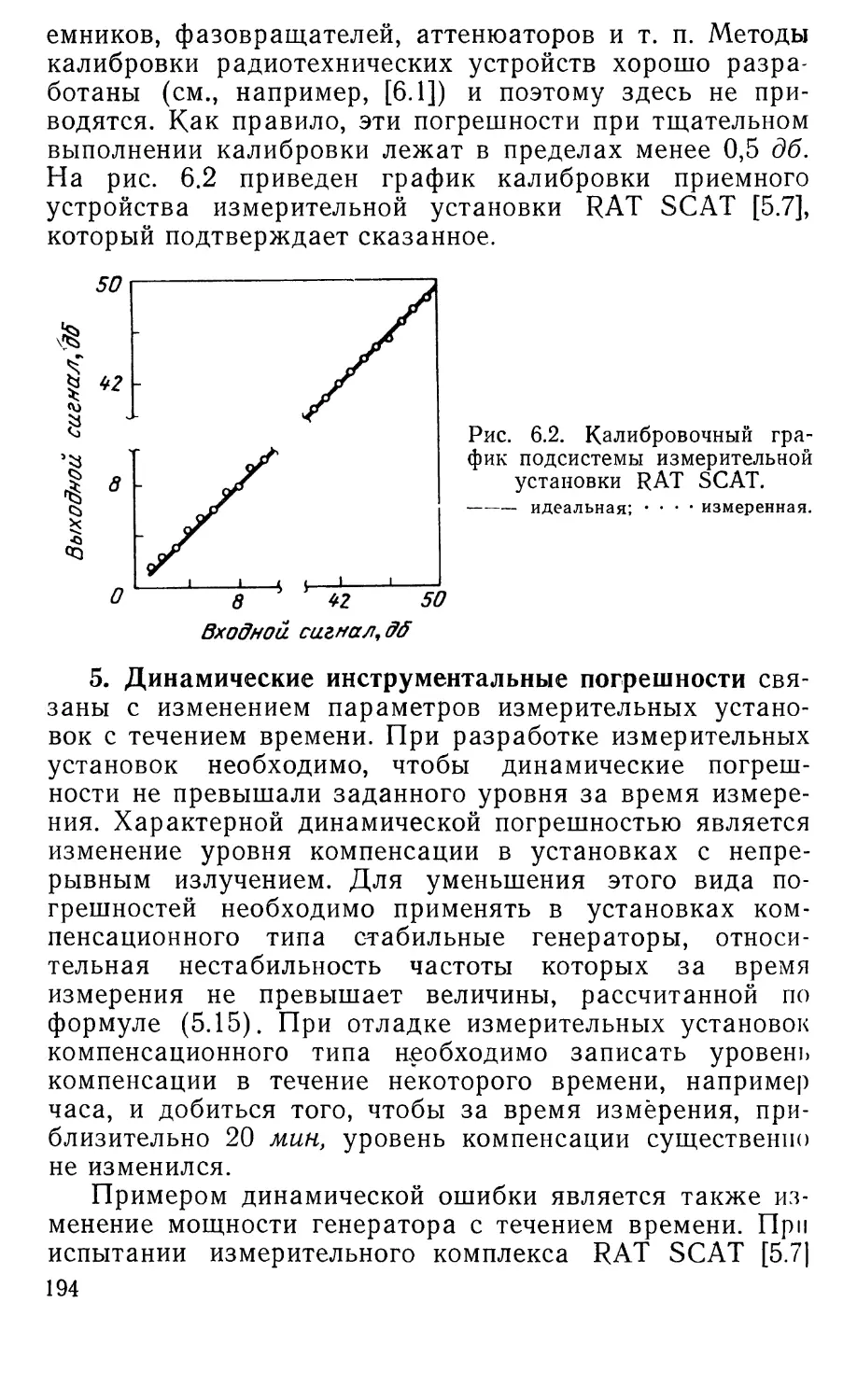
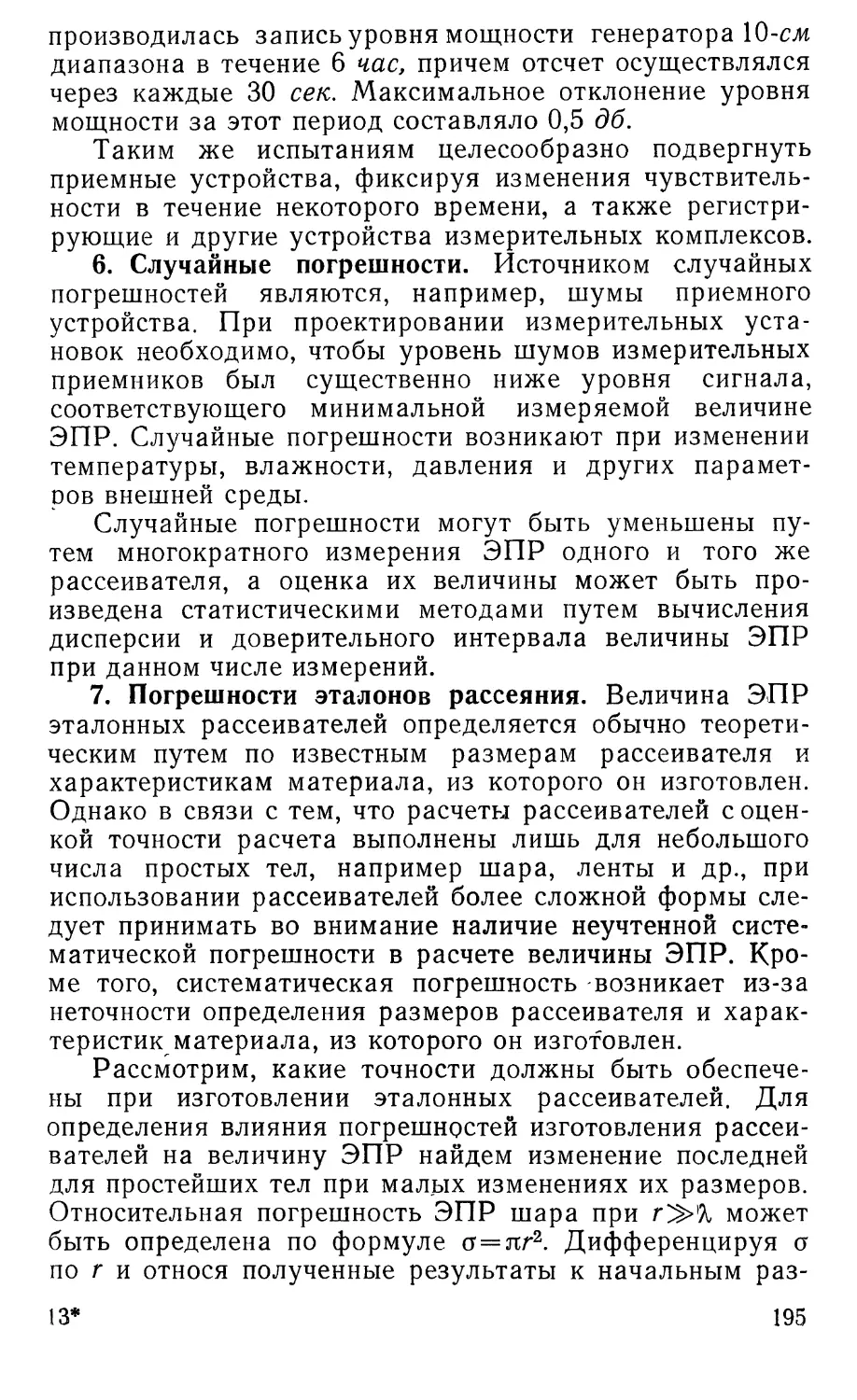
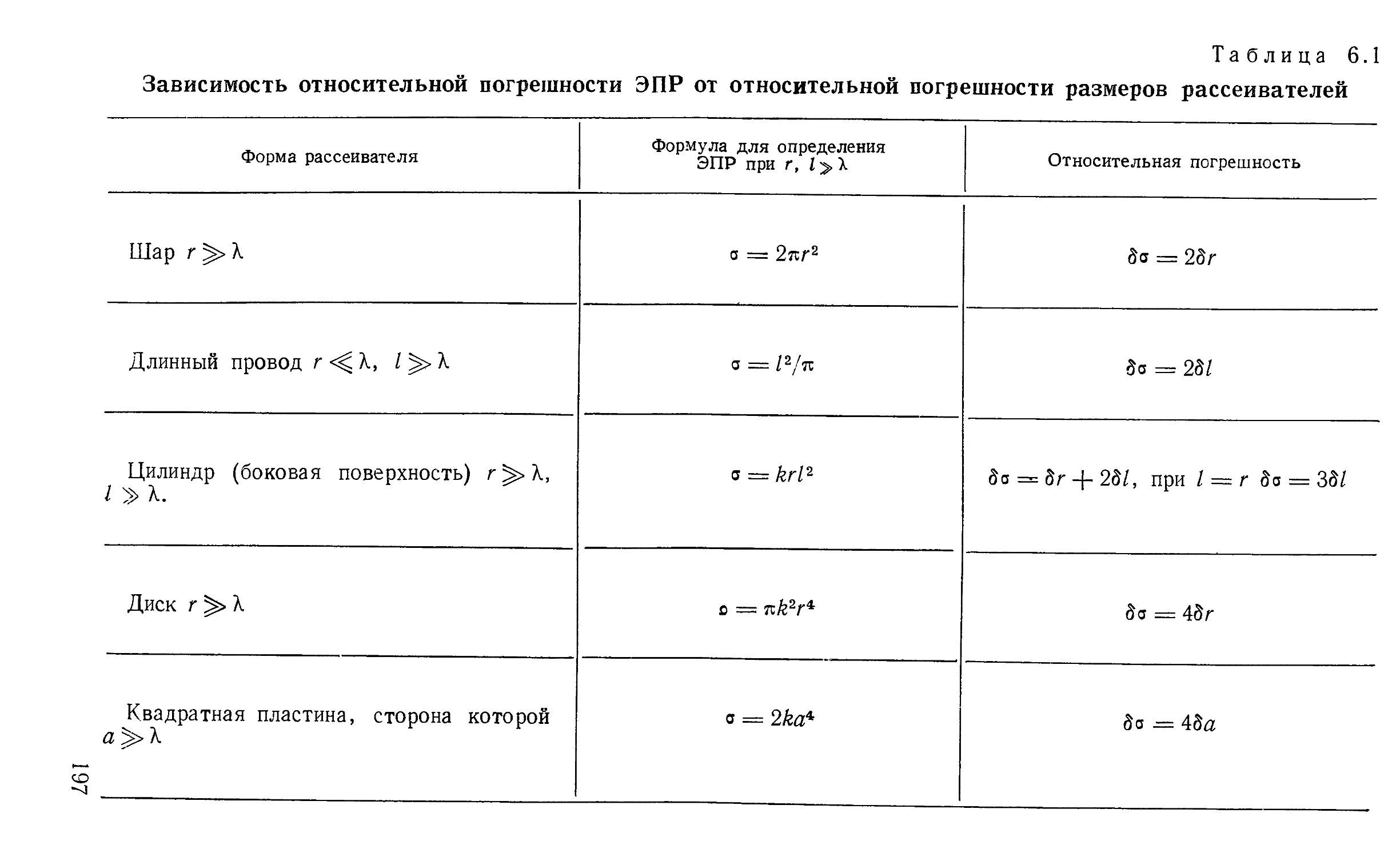
Текст
Е. Н. МАЙЗЕЛЬС, В. А. ТОРГОВАНОВ
ИЗМЕРЕНИЕ
ХАРАКТЕРИСТИК
РАССЕЯНИЯ
РАДИОЛОКАЦИОННЫХ
ЦЕЛЕЙ
Под редакцией
М. Л. КОЛОСОВА
Издательство «Советское радио»
Москва—1972
УДК 621.396.969.18
[Майзел ьс Е. Н.| , Торгованов В. А. Измерение
характеристик рассеяния радиолокационных целей. Под ред.
М. А. Колосова, М. Изд-во «Советское радио», 1972, 232 стр.,
т. 4 400 экз., ц. 64 коп.
Большинство характеристик рассеяния сложных
радиолокационных целей получают путем измерения их на полигонах
или в безэховых камерах.
В книге излагаются методы измерений, приводятся
измерительные установки для определения характеристик
радиолокационных целей, а также даны различные виды
моделирования на СВЧ, когерентных световых волнах и ультразвуке,
большое внимание уделяется анализу погрешностей измерений.
Рассматриваются новые методы измерений, например
установка с широкополосными сигналами, применение открытых
резонаторов и т. д.
Книга рассчитана на радиоинженеров, научных
работников, радиофизиков и студентов вузов, специализирующихся
в области распространения радиоволн, радиолокации и
радиоизмерений.
12 табл., 164 рис., библ. 75 назв.
|е. н. майзельс[, в. а. торгованов
Измерение характеристик
рассеяния радиолокационных целей
Редактор К. И. Кучумова
Художественный редактор 3. Е. Вен дрова
Художник О. В. Камаев
Технический редактор А. А. Белоус
Корректоры Е. П. Озерецкая, Н. Н. Алабин;
Сдано в набор 23/VIII-1971 г.
Подписано в печать 7/II-1972 г. Т-04021
Формат 84x108/32 Бумага типографская № 2
Объем 12,18 усл. п. л., J2,49 уч.-изд. л.
Тираж 4 400 экз. Цена 64 коп. Зак. 340
Издательство „Советское радио», Москва, Главпочтамт,
п/я 693.
Московская типография № 10 Главполиграфпрома
Комитета по печати при Совете Министров СССР.
Москва, Шлюзовая HaJL^JO
ВВЕДЕНИЕ
Широкое изучение дифракции и рассеяния радиоволн
стало необходимым из-за развития новых отраслей
техники— радиолокации, радиоастрономии и др.
Разработка новой техники и надежная эксплуатация
радиолокационных установок требуют знания особенностей
рассеяния радиоволн различными радиолокационными целями.
Необходимая информация становится все более
обшивной и не может быть получена без применения новых
методов теоретического и экспериментального изучения.
Методы расчета дифракции и рассеяния радиоволн
были существенно развиты за последние годы.
Необходимые сведения для металлических тел простой формы
(шар, диск, цилиндр) могут быть получены путем
теоретических расчетов [В. 1, В. 2, В. 3].
Для тел сложной формы, которыми является
большинство реальных радиолокационных целей, не
существует достаточно точных методов расчета и для них
информация о рассеивающих свойствах может быть
получена только путем измерений. Поэтому наряду с
развитием теории имеет место и широкое
экспериментальное изучение рассеяния и дифракции радиоволн, которое
привело к разработке новых методов измерений и к
созданию современных измерительных установок.
Техническое использование рассеянных радиоволн,
естественно, отразилось на выборе величин, подлежащих
измерениям. Измерение распределения амплитуды и
фазы электромагнитного поля на поверхности или в
объеме производится относительно редко. Более удобно
характеризовать рассеивающие свойства
радиолокационной цели эффективной поверхностью рассеяния (ЭПР)
или элементами матрицы рассеяния. Эти величины
однозначно характеризуют радиолокационные цели, если
расстояние до них настолько велико, что волны,
падающие на цель, и волны у приемной антенны можно
считать плоскими.
Первые попытки экспериментального определения
радиолокационных характеристик самолетов делались при
реальных полетах. При этом фиксировались так
называемые динамические диаграммы рассеяния, т. е.
изменение рассеивающих свойств цели при изменении ее по-
3
ложения по сложному закону движения. При
измерениях в реальных условиях оказалось невозможным
обеспечить нужную точность из-за трудности фиксирования
положения цели.
Необходимость получения большого объема
информации о рассеивающих свойствах целей заставила
искать новые пути измерений. Большинство измерений
было перенесено в наземные условия и стало проводиться
на полигонах или на установках, собранных в
помещениях с подавленным отражением от стен (безэховые
камеры). Широкое применение получили измерения на
моделях и натурных макетах статических диаграмм
рассеяния, т. е. зависимости рассеивающих свойств от угла
поворота цели. Динамические диаграммы рассеяния
строятся по статическим диаграммам с учетом закона
движения цели. Объем получаемой информации
настолько велик, что измерения должны быть
автоматизированы и выбраны методы, обеспечивающие получение
ее с минимальными затратами времени и средств.
Проблема измерений включает две основные задачи:
оптимальное проведение самих измерений, хранение it-
обработку их результатов. Сами измерения проводятся,
как правило, с использованием масштабного
моделирования на радиоволнах или с помощью немасштабного
моделирования на световых (некогерентных и
когерентных) и на ультразвуковых волнах. Основным из этих
методов является масштабное электродинамическое
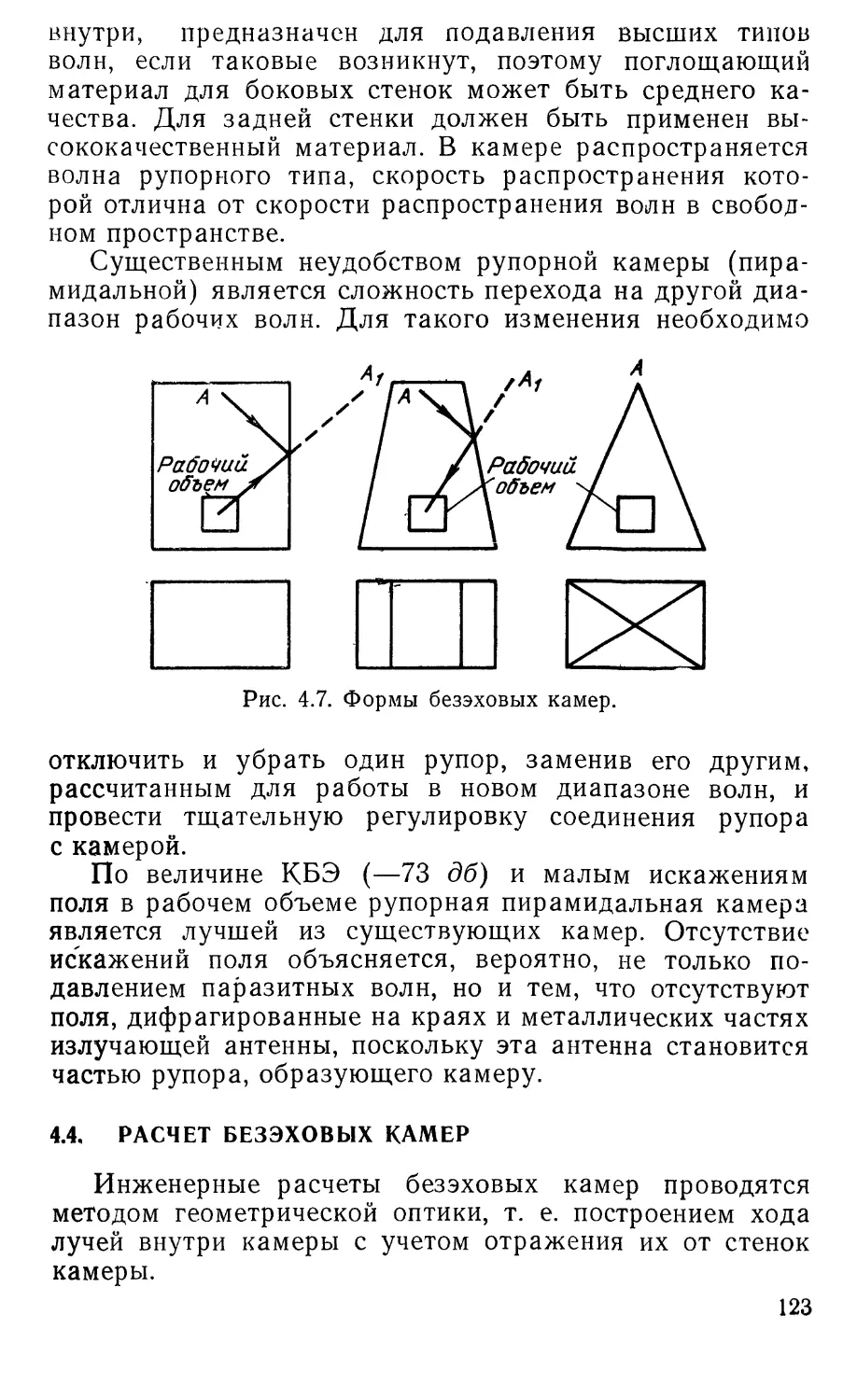
моделирование. В последнее время все большее значение
приобретает моделирование на когерентных световых
волнах (лазеры).
При измерении диаграммы рассеяния существенные
ошибки вносятся отражениями от окружающих
«предметов и, в частности, от опор, на которые крепятся
измеряемые модели. Подавление таких паразитных
отражений осуществляется выбором специальных конструкций
и опор и переносом измерений в безэховые камеры, т. е.
в помещения, в которых с помощью радиопоглощаю-
щих материалов подавлены отражения от стен.
Экранировка измерительных камер избавляет от помех и
исключает «засорение эфира».
Измерение в экранированных безэховых камерах
является наиболее прогрессивным методом, свободным
от погрешностей, вносимых метеоусловиями, паразитным
рассеянием и радиопомехами.
Основным методом получения и хранения
информации становится запись выходных сигналов на магнитную
ленту. Специальные устройства позволяют вводить эти
данные в ЭВМ и после необходимой обработки получать
диаграммы, напечатанные на бумажной ленте. Для
наглядности применяют картографические изображения
объемных диаграмм. В последнее время для
накапливания информации начали применять голографическую
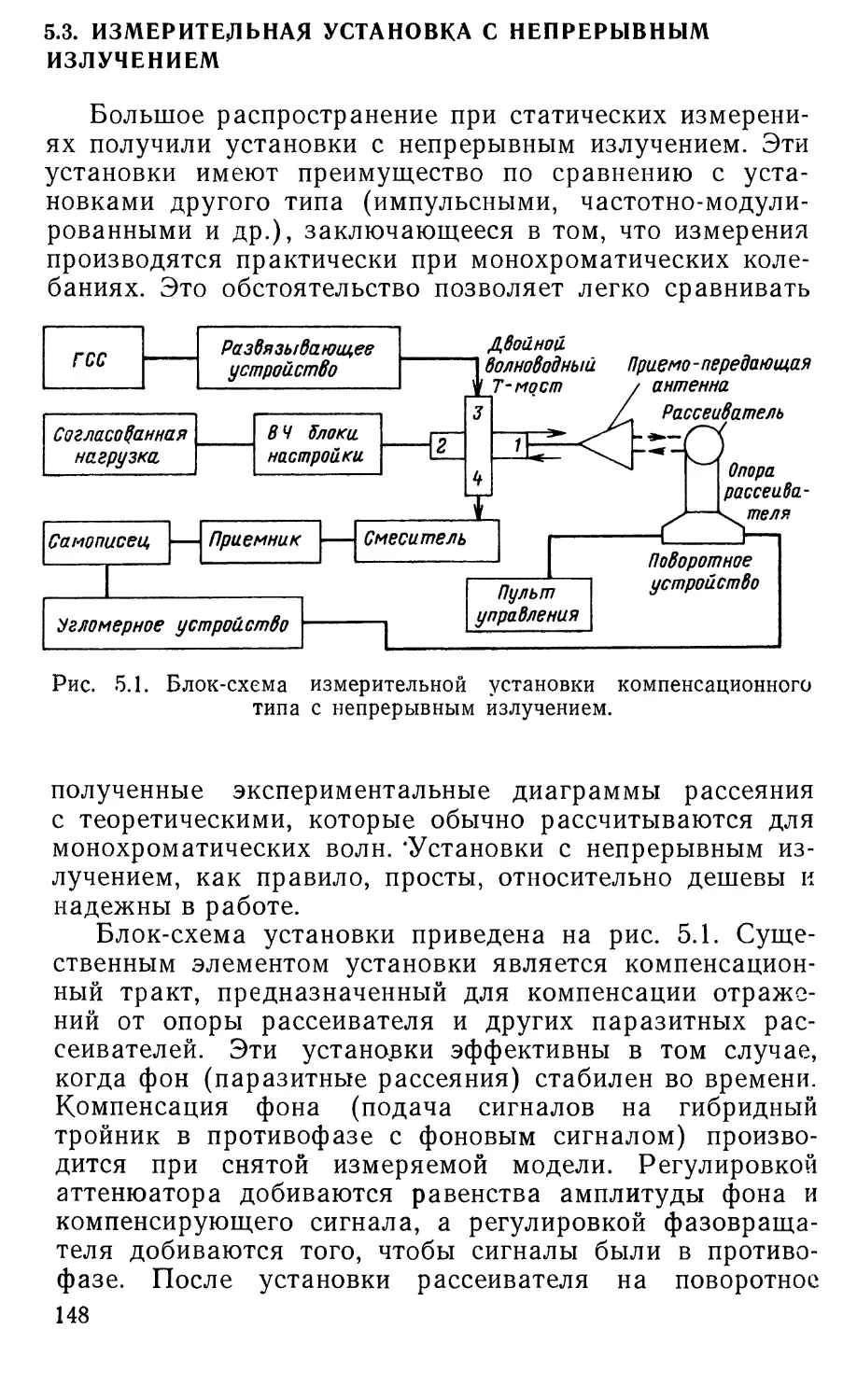
запись диаграмм и обработку их оптическими методами.
Большое внимание уделяется также методам
формирования поля падающей на рассеиватель волны, изучению
погрешностей измерений и методам калибровки
измерительных установок.
Все эти вопросы в современной технике измерений
разработаны достаточно подробно. В периодической
литературе появилось много работ, посвященных новым
направлениям исследования дифракции и рассеяния,
свидетельствующих о большом интересе -к этим вопросам.
Некоторые вопросы освещены в монографиях [В. 4, В. 5].
Настоящая книга имеет задачу познакомить
читателя с наиболее важными вопросами измерений
характеристик рассеяния радиолокационных целей.
Естественно, что небольшой объем книги не позволил осветить
рассматриваемые вопросы достаточно подробно. Однако
можно надеяться, что и в таком виде книга будет
полезна радиоинженерам, научным «работникам и студентам,
специализирующимся в области распространения
радиоволн, радиолокации, радиоастрономии и радиоизмерений.
Авторы будут признательны читателям за все замечания
и пожелания, которые просят направить в издательство
«Советское радио» по адресу: Москва,
Главпочтамт, п/я 693.
Литература
В.1. Уфимцев П. Я. Метод краевых волн в физической
теории дифракции. Йзднво '«'Советское,радио», 1902.
iB,2. Фельд Я. Н., |Бененсон Л. С. .Антенны
сантиметровых и дециметровых волн, Академия им. Жуковского, ч. I, 1955,
ч. II, 1969.
8.3. Me и т це р Дж. Р. Дифракция и рассеяние радиоволн. Пер.
с англ., под ред. 'Вайнштейна Л. А. Изд-во ^'Советское радио»,
1958.
8.4. Л е р ecia д а В. ОП. Радиолокационная видимость морских
объектов. Судпромгиз, 1961.
IB.6. К а и а р е й к и н Д. Б., Павлов Н. Ф., Потехин В. А.
Поляризация радиолокационных сигналов. Изд-во «Советское
радио», 1966.
Глава 1
ДИФРАКЦИЯ И РАССЕЯНИЕ
РАДИОВОЛН
1.1. ФИЗИЧЕСКИЕ ЯВЛЕНИЯ ПРИ ДИФРАКЦИИ
И РАССЕЯНИИ РАДИОВОЛН
Любое тело, помещенное на пути радиоволн,
вызывает изменение распределения поля радиоволн в
окружающем пространстве. Общим случаем является
дифракция на полупрозрачном теле. Радиоволны частично
преломляются, проходя сквозь тело, частично
рассеиваются. Если в материале тела имеются потери, то часть
энергии волн теряется; даже черное тело, т. е. тело,
целиком поглощающее падающую на него энергию,
рассеивает радиоволны. Рассеяние происходит из-за скачка
поля на граничном контуре тела [1.1].
Рассеивающие тела, являющиеся
радиолокационными целями, обычно находятся на столь больших
расстояниях от радиолокационных станций, что падающие на
них волны можно считать локально плоскими в области,
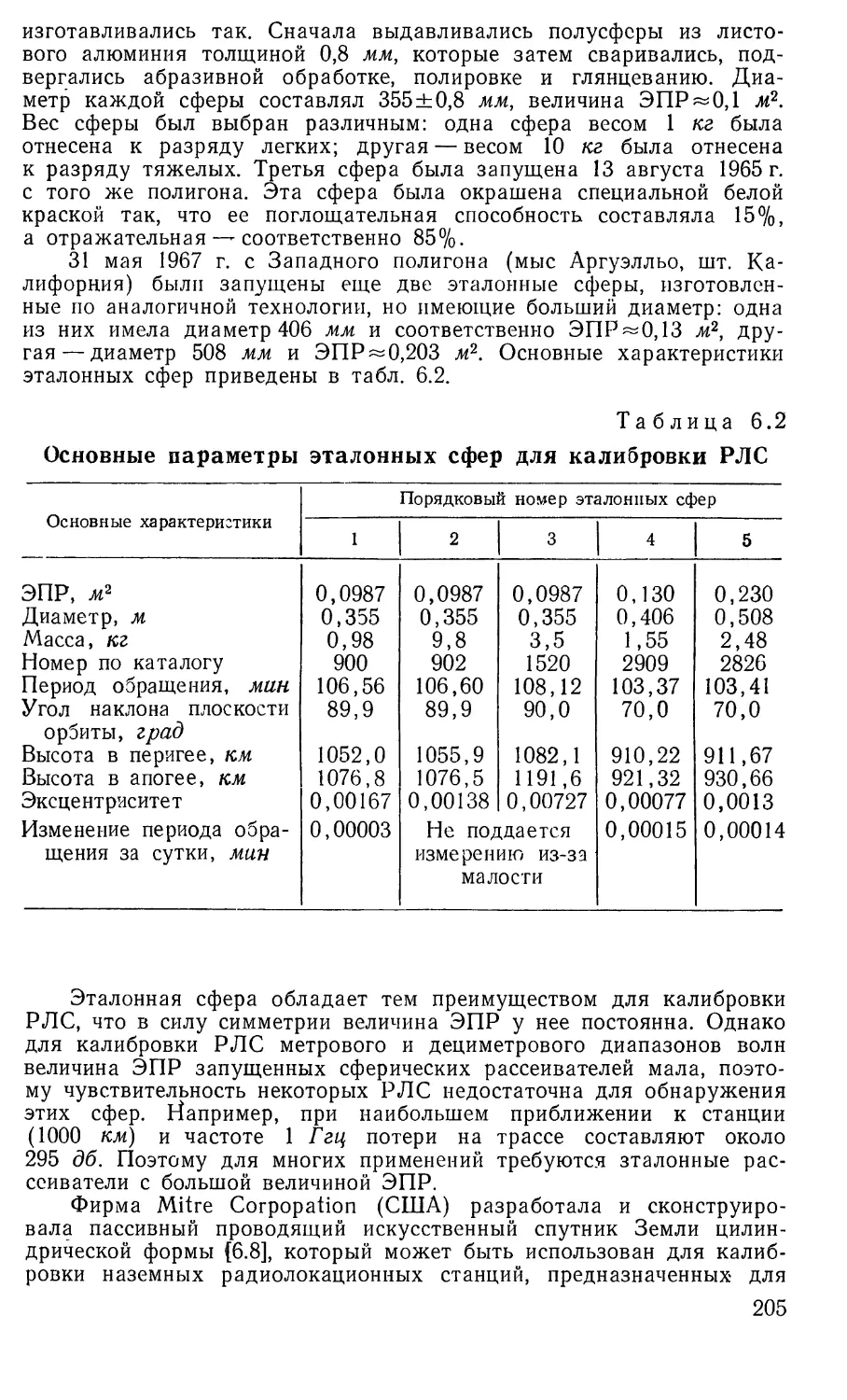
занимаемой телом. Локально плоскими называют волны,
фронты которых на небольшом рабочем участке
настолько мало отличаются от плоских, что все явления с
заданной точностью совпадают с явлениями при плоских
волнах. Этим и объясняется наибольший практический
интерес к изучению рассеяния плоских волн.
Из-за рассеяния радиоволн неоднородностями
атмосферы и земной поверхностью радиоволны у
радиолокационной цели могут заметно отличаться от плоских.
Эффект, вносимый на пути распространения радиоволн,
зависит от конкретных условий, в которых происходит
распространение, и его принято учитывать отдельно.
Поле плоской монохроматической волны
характеризуется эллипсом поляризации [1.2]. Это значит, что
годографом вектора поля волны является эллипс, лежащий
в плоскости,'нормальной к направлению
распространения волны. Электрический вектор поля может быть
записан через комплексные составляющие Ех и Еу или
6
с помощью геометрических параметров эллипса
поляризации. В матричной форме запись имеет вид:
Е= \х =
cos p — sin В
sin p
X
cos
(1.1)
Квадратичная матрица в выражении (1.1) описывает
поворот координат х, у на угол р по отношению к координатам,
направленным вдоль осей эллипса. Величина ?0 =
= Y I Ех |2 + | Еу |2 — амплитуда эллиптически
поляризованной волны; р — угол между большой осью эллипса и
осью абсцисс; a — угол эллиптичности, равный
a = arctgr; г —коэффициент эллиптичности, т. е.
отношение малой и большой осей эллипса. Величина а может
меняться в пределах —я/4^а^!я/4. При этом а = я/4
соответствует правой круговой поляризации, а = 0 —
линейной поляризации, а а = —я/4 — левой круговой
поляризации.
Использование записи поля эллиптически
поляризованной волны в виде матриц типа (1.1) находит все
более широкое применение в антенной и
радиолокационной технике.
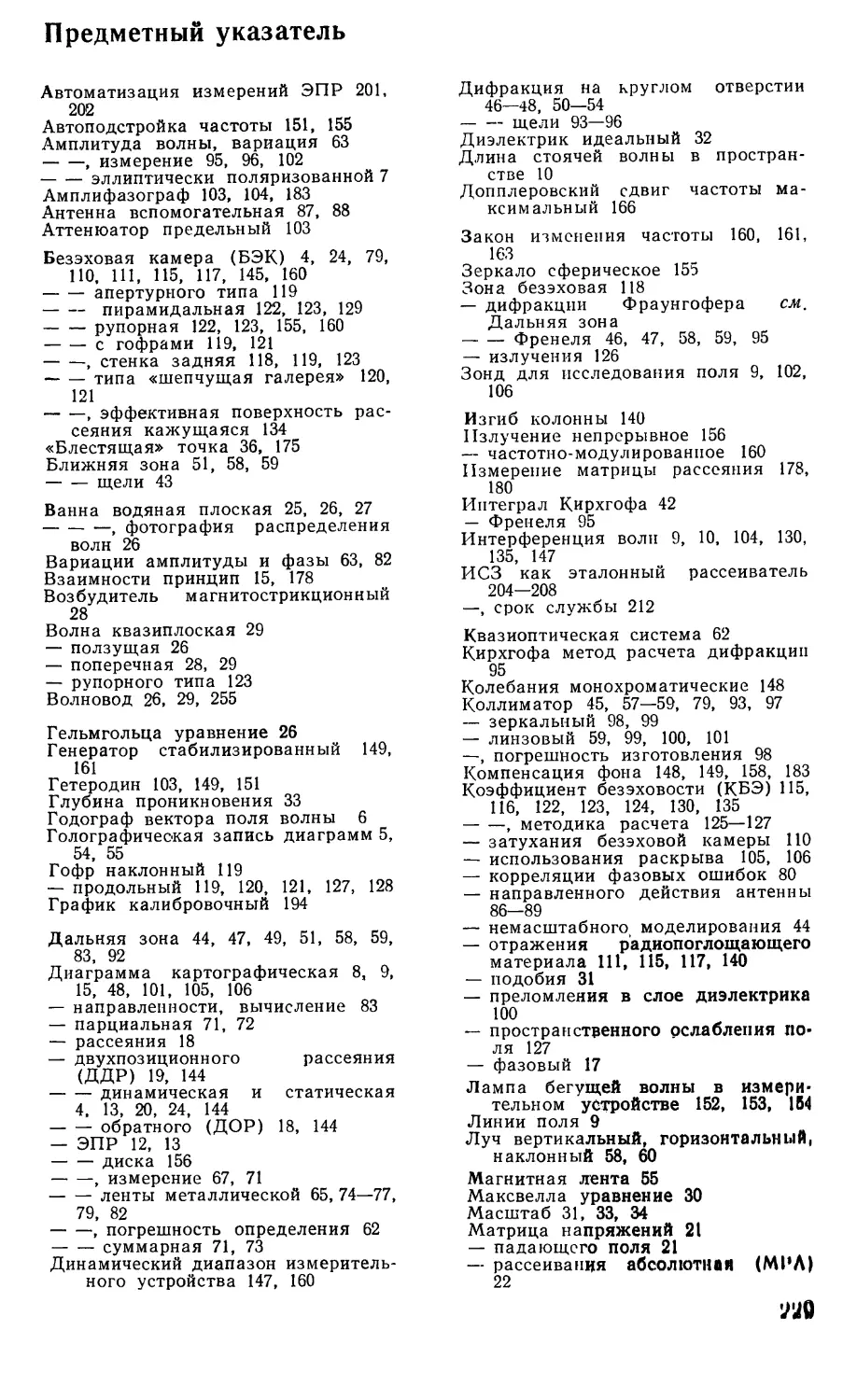
Современная техника измерения полей позволяет
сфотографировать распределение амплитуды поля на не-
(7/77 генератора
\л.--вч6мм)
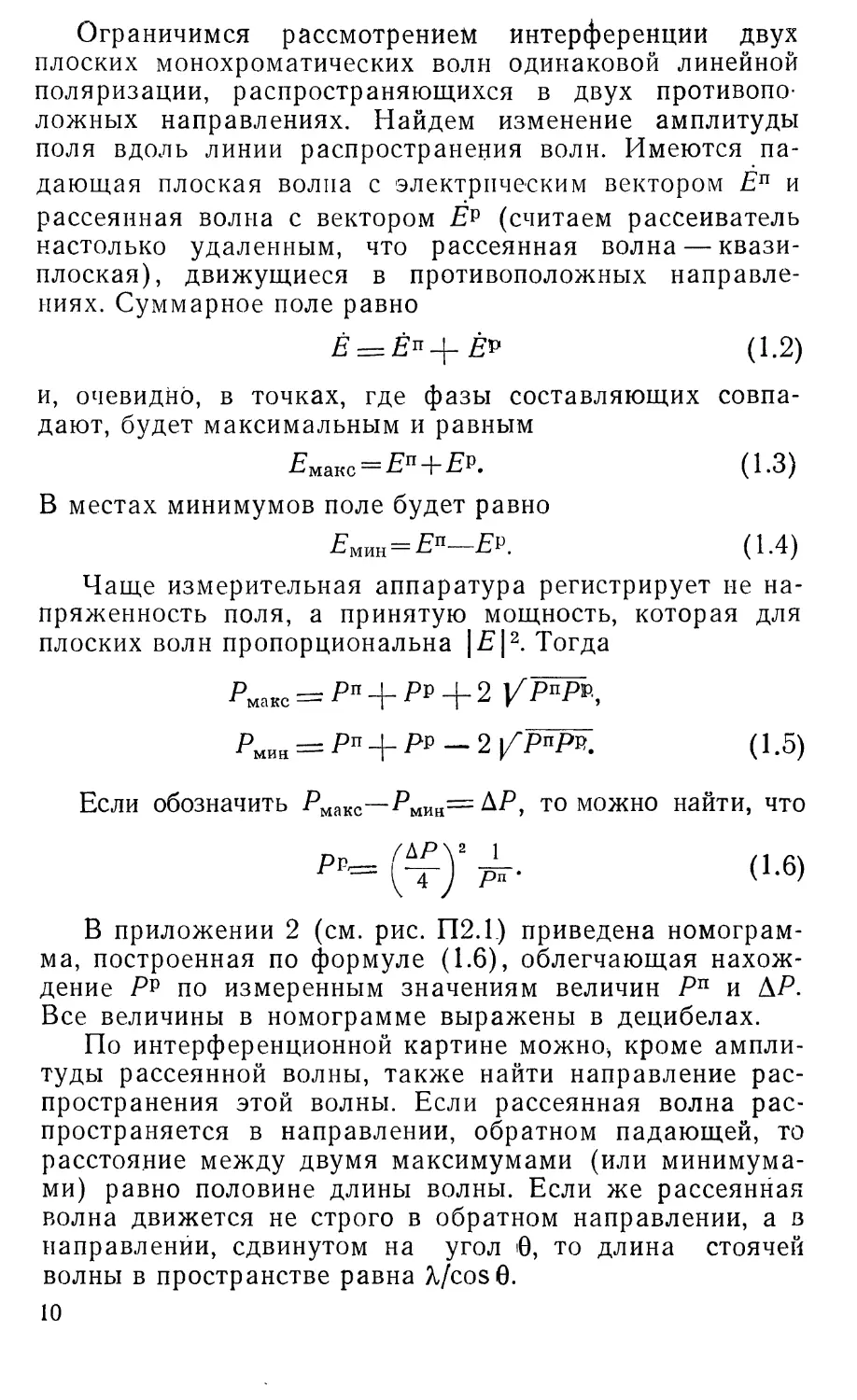
Рис. 1.1. Схема установки для СВЧ термографии:
/.--полиэтиленовая линза: диаметр 15 см., фокусное расстояние 20 см\ М —
мембрана преобразователя с поглощающим слоем W и слоем масла О; И —
нагреватель для испарения масла; PS — вольфрамовый точечный источник;
SM — полупрозрачное зеркало под углом 45°; А — круглая апертура; С — кон-
денсорная линза; ОХО2 — фокусирующие линзы; р — фотопластинка.
которой площадке. При этом затенение пластинки
пропорционально амплитуде поля. Примером методики
такого фотографирования может служить СВЧ
термография ([1.3]. Схема установи для СВЧ термографии
показана на рис. 1.1. Под действием падающего поля
фотопластинка р, покрытая тонким слоем поглощающего ма-
+10
-10
2213322 1
2222222 1
1 10
111111111
22 333 44444444 333 22
22 3 3 3 3 3 2 4 44444233333 22
22 22
222222222222222222222222
1 2233222 1 О
1 22222ZZ 1 О
01 110
111111111 0
0
0
0
0
0 0 000 000 00
000000011100000000000011000000 00110000000000001110000000
001111022211000000 0000001122201111 0.0
00 12222 2222100000 02333323333332333320 0 0 0 0 0 12 2 2 2 2 2 2 210 0
011222 220100 Z3 32 0010Z2 222110
012 2201 32 4 4 444 4 44 4444 44 23 1022 210
1-2- 32333 20133 44 44 33102 33323 21
20 3 44 44 3 02 3333333 20
4 5555555555 55 44
55555555556555 4
555555555 5 555555 4
555555555 5555555 4
555555555555 5555
55555 55555 4
55555 66 55555 4
55555 6 666 55555 4
55555 66 55555 4
55555 55555 4
5555555555555555 4
5 5.5555555555555 5 4
5555555 555555555 4
5 5555555555555 4
4 555555555555 >4
4 4 4 4.
44 44
444444444444 44
а 2
г
2 2
2
2
2
2
1 2
12
1 2
2
2
2
2
2 2
2
0 2
1
ззззззз
3332 3333 3
333333333
333 33
33 3
3 444 3
33 4444 3
33 4444 3
33 4 444 3
3 3 4444 3
33 4444 3
3 444 3
33 3
333 33
333333333
333233333
ззззззз
2 3 2 333
3 2
3 1 О Z
4 3 02
4 3 12
4 3 102
4 32 02
4 3 2 12
4 3 12
4 32 12
4 32 02
4 3102
4 3 12
4 3 0 2
3 10 2
3 2
3 02
3 3 102
333332333
3333333 3 3
33 333
444
4444
4444
4444
4444
4444
444
33
3
33
33
33
33
33
3
33
333
2 3
20 1 3
20 3
21 3
20 1 3
2 023
21 23
21 3
21 23
2023
201 3
21 3
20 3
201 3
2 3
20 З1
2 0 133
012 2201 32 444444444444 44 23 1022 210
011222 220100 23 32 001022 222110
0012 2,2 22222100000 02333323333332333 320 0000(7122222222100
00111102 22 11000000 000000112220111100
000000011100000000000 0 1100000000110000000000001110 0 0 0 0 00
0 0 СО О 0 00 0 0
0 111111111 0 222222222Z22222222222222 0 111111111 0
011 10022 22001 110
0 1 2222222 1 0 22 333332444444233333 22 О 1 2222222 1 О
0 1 2223322 1 О 22 333 44444444 333 22 0 1 2233222 1 О
333333333
3 33332333
ЗЗЗЗЗЗЗ
S 3325
2
22
2
2l
2
2
21
21
21
2
2
2
2
22
2
20
2 1
-20 -10 0 +10 +20
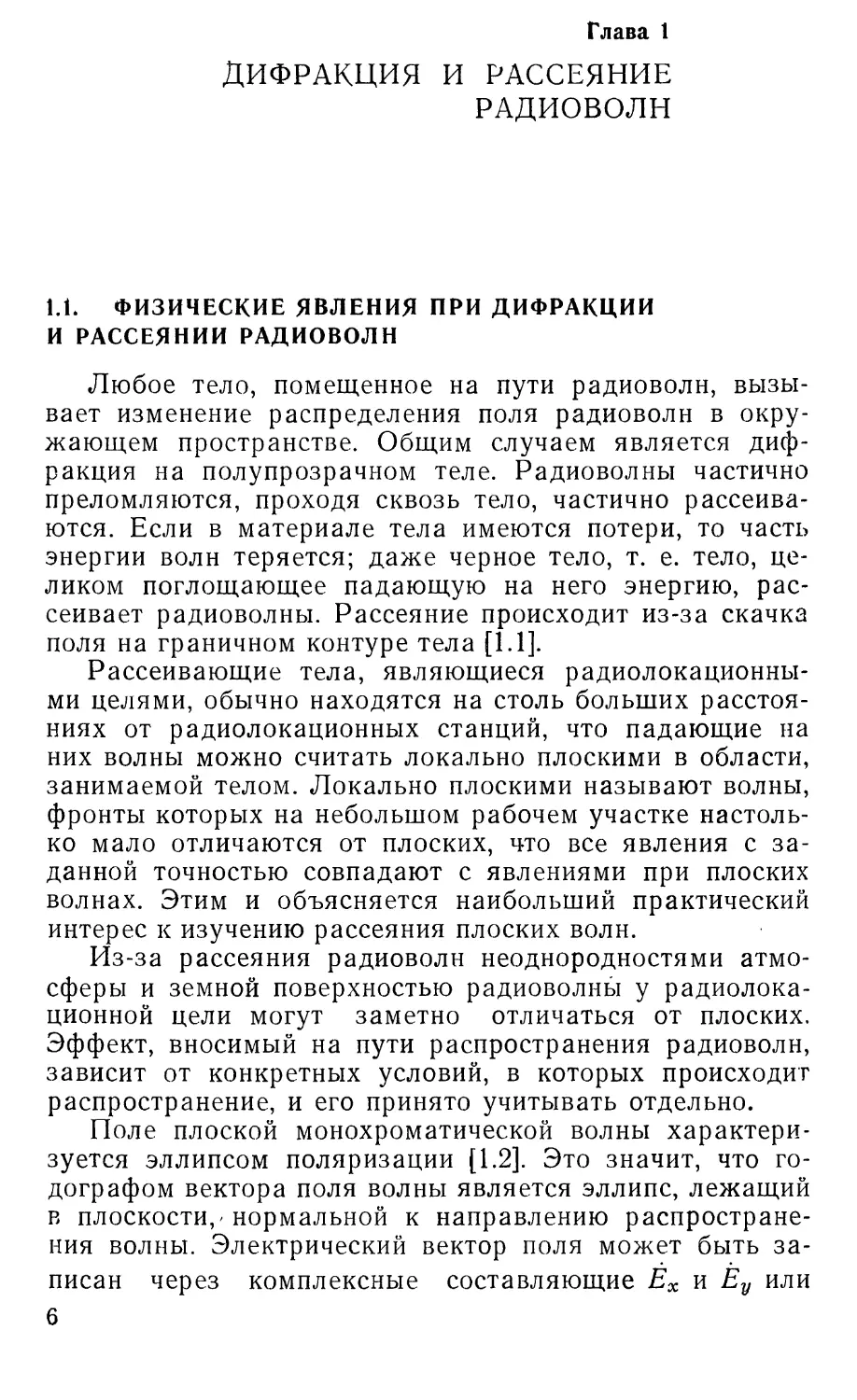
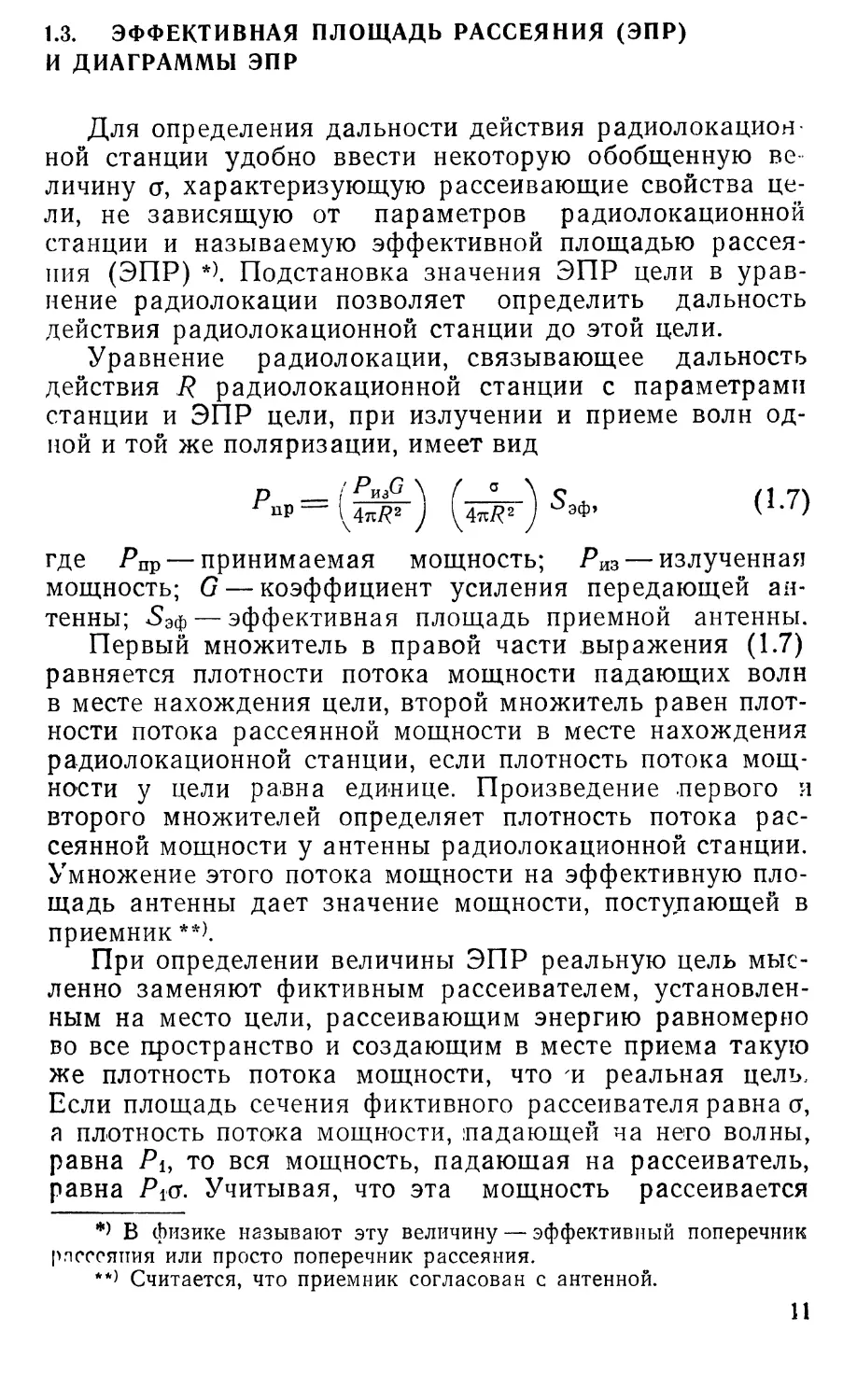
Рис. 1.2. Картографическая диаграмма амплитуды поля.
териала, разогревается больше в тех местах, где больше
плотность потока мощности поля. Тепловой рельеф
отображается на слое масла, напыленном на обратную
сторону пластинки. Пучок световых лучей, отраженный от
слоя масла, фиксирует на фотопластинке этот рельеф.
Основным недостатком метода СВЧ термографии и
аналогичных методов является малая точность
измерения величины амплитуды поля. По, существу, этими ме-
тодами пока удается получить только качественную
картину поля. Для получения количественного значения
амплитуды и фазы поля в некотором объеме
применяется метод измерения этих параметров с помощью
передвижного зонда, последовательно помещаемого в разные
точки изучаемого объема. Для измерения параметров
электрического вектора поля в качестве зондов
применяют короткие штыревые антенны или диполи. Для
измерения магнитного вектора поля применяют зонды
в виде маленькой рамки. Если количество измеренных
точек достаточно велико, то может быть построена
картина распределения эквипотенциальных и эквифазных
линий поля в картографическом изображении.
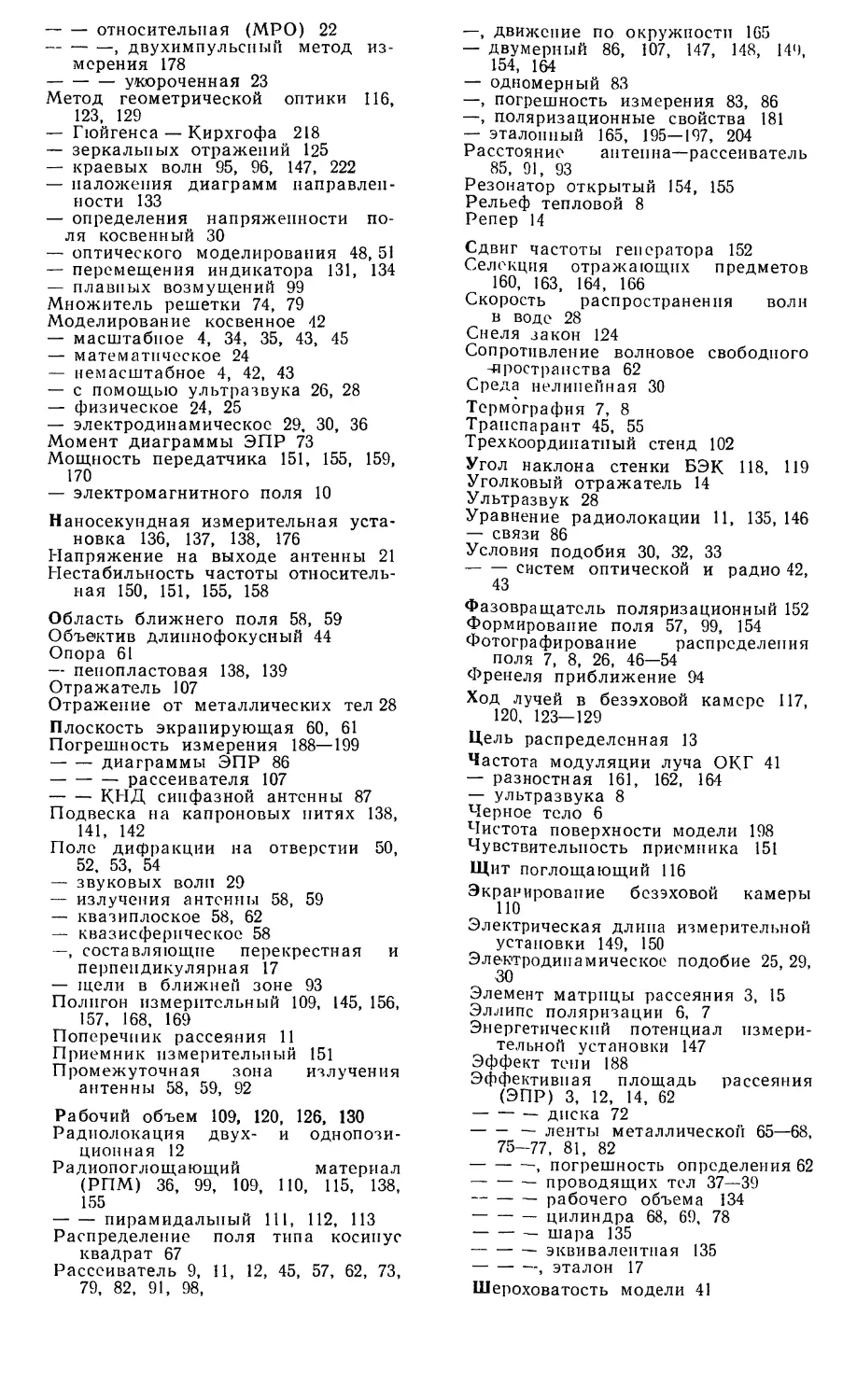
Построение картографической диаграммы поля по измеренным
точкам является весьма трудоемким процессом.
Разработаны измерительные установки, в которых в
процессе измерений непосредственно записывается
картографическая диаграмма поля или она строится с
помощью ЭВМ. Подробнее такие измерительные установки
будут рассмотрены в гл. 3. На рис. 1.2 для иллюстрации
приводится одна из таких диаграмм, построенная с
помощью ЭВМ.
1.2. ФИЗИЧЕСКИЕ ЯВЛЕНИЯ ПРИ ИНТЕРФЕРЕНЦИИ
РАДИОВОЛН
При наложении друг на друга двух полей одной к
той же частоты, как известно, наблюдается явление
интерференции, приводящее к чередованию в пространстве
максимумов и минимумов амплитуды поля. Вблизи рас-
сеивателя поле 'образуется сложением падающей и
рассеянной волн и поэтому имеет интерференционный
характер. При измерении полей рассеянных волн главной
задачей является выделение их из сложного поля,
созданного интерференцией падающих и рассеянных волн.
Кроме того, измерение поля, рассеянного
радиолокационной целью, практически всегда проводится при
наличии других рассеивателей, поля которых
интерферируют с измеряемым полем и тем самым приводят
к ошибкам измерений. К рассеивателям, создающим
паразитные рассеяния, относятся: опоры, на которых
устанавливается объект измерений, поверхность земли,
стены помещений (если измерения проводятся внутри
помещений) и др.
Ограничимся рассмотрением интерференции двух
плоских монохроматических волн одинаковой линейной
поляризации, распространяющихся в двух
противоположных направлениях. Найдем изменение амплитуды
поля вдоль линии распространения волн. Имеются
падающая плоская волна с электрическим вектором Еп и
рассеянная волна с вектором ?р (считаем рассеиватель
настолько удаленным, что рассеянная волна —
квазиплоская), движущиеся в противоположных
направлениях. Суммарное поле равно
и, очевидно, в точках, где фазы составляющих
совпадают, будет максимальным и равным
?макс = ?п + ?р. (1.3)
В местах минимумов поле будет равно
?мин = ?п-?р. (1.4)
Чаще измерительная аппаратура регистрирует не
напряженность поля, а принятую мощность, которая для
плоских волн пропорциональна \Е\2. Тогда
Рмиа = Рп _|_ рр _ 2 /рпрв. (1.5)
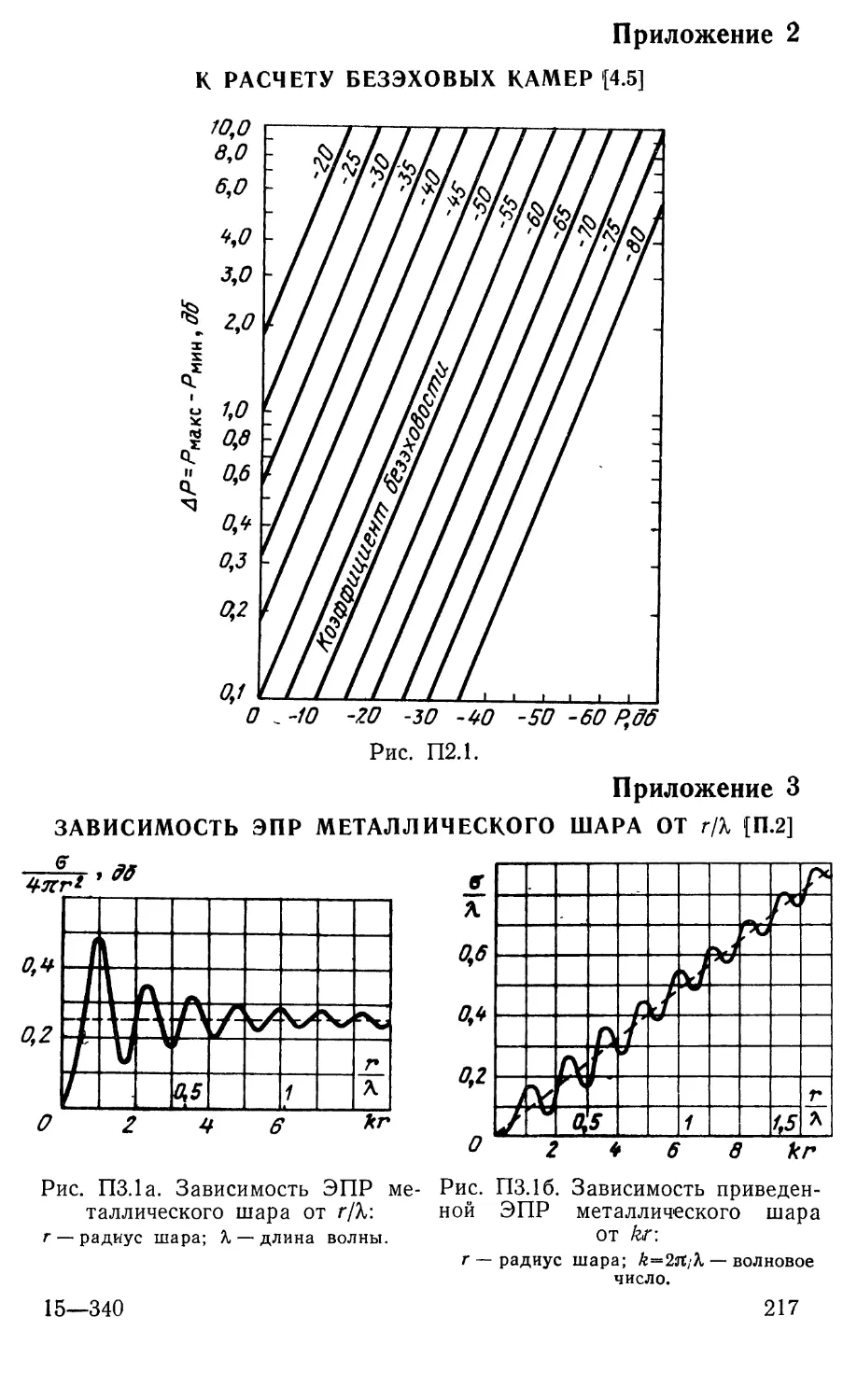
Если обозначить РмаКс—-Рмии^ Д^\ то можно найти, что
(у ±. (..6,
В приложении 2 (см. рис. П2.1) приведена
номограмма, построенная по формуле (1.6), облегчающая
нахождение Рр по измеренным значениям величин Рп и АР.
Все величины в номограмме выражены в децибелах.
По интерференционной картине можно, кроме
амплитуды рассеянной волны, также найти направление
распространения этой волны. Если рассеянная волна
распространяется в направлении, обратном падающей, то
расстояние между двумя максимумами (или
минимумами) равно половине длины волны. Если же рассеянная
волна движется не строго в обратном направлении, а в
направлении, сдвинутом на угол Э, то длина стоячей
волны в пространстве равна K/cosQ.
10
1.3. ЭФФЕКТИВНАЯ ПЛОЩАДЬ РАССЕЯНИЯ (ЭПР)
И ДИАГРАММЫ ЭПР
Для определения дальности действия
радиолокационной станции удобно ввести некоторую обобщенную ве
личину а, характеризующую рассеивающие свойства
цели, не зависящую от параметров радиолокационной
станции и называемую эффективной площадью
рассеяния (ЭПР) *). Подстановка значения ЭПР цели в
уравнение радиолокации позволяет определить дальность
действия радиолокационной станции до этой цели.
Уравнение радиолокации, связывающее дальность
действия Д радиолокационной станции с параметрами
станции и ЭПР цели, при излучении и приеме волн
одной и той же поляризации, имеет вид
\ f
где РПр — принимаемая мощность; Риз — излученная
мощность; G — коэффициент усиления передающей
антенны; 5Эф — эффективная площадь приемной антенны.
Первый множитель в правой части выражения (1.7)
равняется плотности потока мощности падающих волн
в месте нахождения цели, второй множитель равен
плотности потока рассеянной мощности в месте нахождения
радиолокационной станции, если плотность потока
мощности у цели равна единице. Произведение .первого и
второго множителей определяет плотность потока
рассеянной мощности у антенны радиолокационной станции.
Умножение этого потока мощности на эффективную
площадь антенны дает значение мощности, поступающей в
приемник**).
При определении величины ЭПР реальную цель
мысленно заменяют фиктивным рассеивателем,
установленным на место цели, рассеивающим энергию равномерно
во все пространство и создающим в месте приема такую
же плотность потока мощности, что -и реальная цель,
Если площадь сечения фиктивного рассеивателя равна сг,
а плотность потока мощности, задающей на него волны,
равна Pi, то вся мощность, падающая на рассеиватель,
равна Pier. Учитывая, что эта мощность рассеивается
*> В физике называют эту величину — эффективный поперечник
рлеесяпия или просто поперечник рассеяния.
**) Считается, что приемник согласован с антенной.
11
равномерно во всех направлениях, найдем, что
плотность потока мощности у приемной антенны равна
Из (1.8) легко находится выражение, определяющее
значения ЭПР. Его обычно записывают в таком виде:
a = lim47c/?2 §-. (1.9)
Величина сг зависит от формы и размеров рассеива-
теля, свойств материалов, из которых он изготовлен, и
от длины рабочей волны. В общем случае сг зависит
также и от расстояния до рассеивателя R. Однако если
R становится столь большим, что можно считать волны,
падающие на рассеиватель и на приемную антенну,
плоскими, то сг не зависит от расстояния.
Понятие ЭПР и выражение (1.9) действительны не
только для случая однопозиционной радиолокации, когда
передающая и приемная антенны совмещены, но и для
квазиоднопозиционного случая, когда прием и передача
производятся на две антенны, расположенные в
непосредственной близости одна от другой. Это понятие
действительно и в случае двухпозиционной радиолокации,
когда приемная часть станции удалена от передающей.
В этом случае уравнение радиолокации принимает вид
где Яш — расстояние от рассеивателя до излучателя
передающей станции; /?Пр — расстояние от рассеивателя до
приемной станции.
Диаграмму, показывающую зависимость ЭПР от
угла падения волн на рассеиватель, называют
диаграммой ЭПР. Для полной характеристики рассеивателя
требуется знание диаграммы ЭПР во всей сфере, т. е. в
секторе пространственных углов, равном 4л: стерадиан.
Так как диаграмма рассеяния зависит и от поляризации,
и от длины рабочей волны, то необходимая информация
для одного рассеивателя может состоять из
большого числа диаграмм. Проведение большого числа
измерений требует больших затрат времени и средств, и
поэтому стремятся обойтись минимальным объемом
измерений. Для некоторых целей существенно интересным
12
является только относительно узкий сектор углов и
можно ограничиться только измерением диаграмм ЭПР.
Задача облегчается, когда рассеивателем является одно из
осесимметричных тел, к которым относятся
цилиндрические и конические тела, эллипсоиды и другие тела
вращения. Диаграммы ЭПР таких тел также являются
телами вращения и поэтому достаточно для каждой
длины волны и для каждой поляризации измерить только
одну диаграмму в одной плоскости. Пространственная
диаграмма может быть получена вращением измеренной
диаграммы вокруг ее оси симметрии.
Для построения пространственной диаграммы ЭПР
сложного тела снимают диаграммы в азимутальных
плоскостях для нескольких углов места. По этим
диаграммам можно построить пространственную диаграмму
ЭПР в сферических координатах или картографическую
(рис. 1.2).
Понятие ЭПР и диаграммы ЭПР широко
применяется в радиолокационной практике. Пользование ими
вполне закономерно при условии достаточно большого
расстояния между рассеивателем и радиолокационной
станцией, когда цель может рассматриваться как
точечная, т.. е. малая лосравнению с пространственной
разрешающей способностью радиолокационной станции.
К распределенным целям относятся: земная
поверхность и большие искусственные сооружения. Большие
корабли должны рассматриваться как объемные
распределенные цели. Понятие ЭПР может быть
распространено и на распределенные (объемные и
поверхностные) цели введением удельной объемной ЭПР и
удельной поверхностной ЭПР, которые являются ЭПР
единицы объема ил'и единицы 'поверхности
('Соответственно).
В результате лабораторных измерений получают
информацию в виде статических диаграмм ЭПР,
показывающих, какое значение ЭПР соответствует данному
углу падения волн на цель. Если известно изменение во
времени положения цели и ее дальности, то, пользуясь
статической диаграммой, можно построить зависимость
от времени сигнала, принятого станцией. Полученная
диаграмма называется динамической диаграммой.
В большинстве случаев движение цели по отношению
к радиолокационной станции носит случайный характер
и динамическая диаграмма подлежит статистической об-
работке. Желающих подробно ознакомиться с
характером такой обработки отсылаем к монографии [1.5].
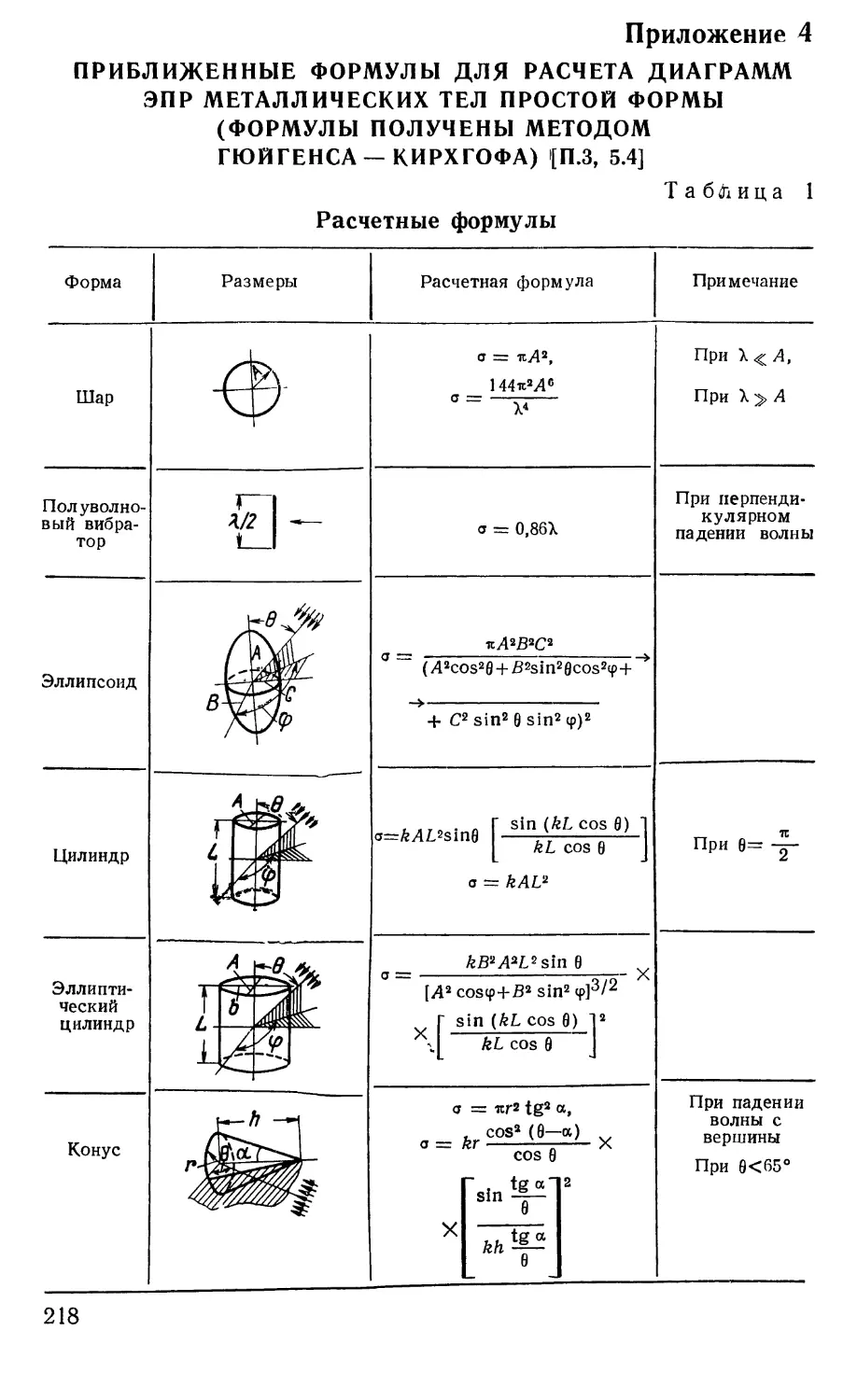
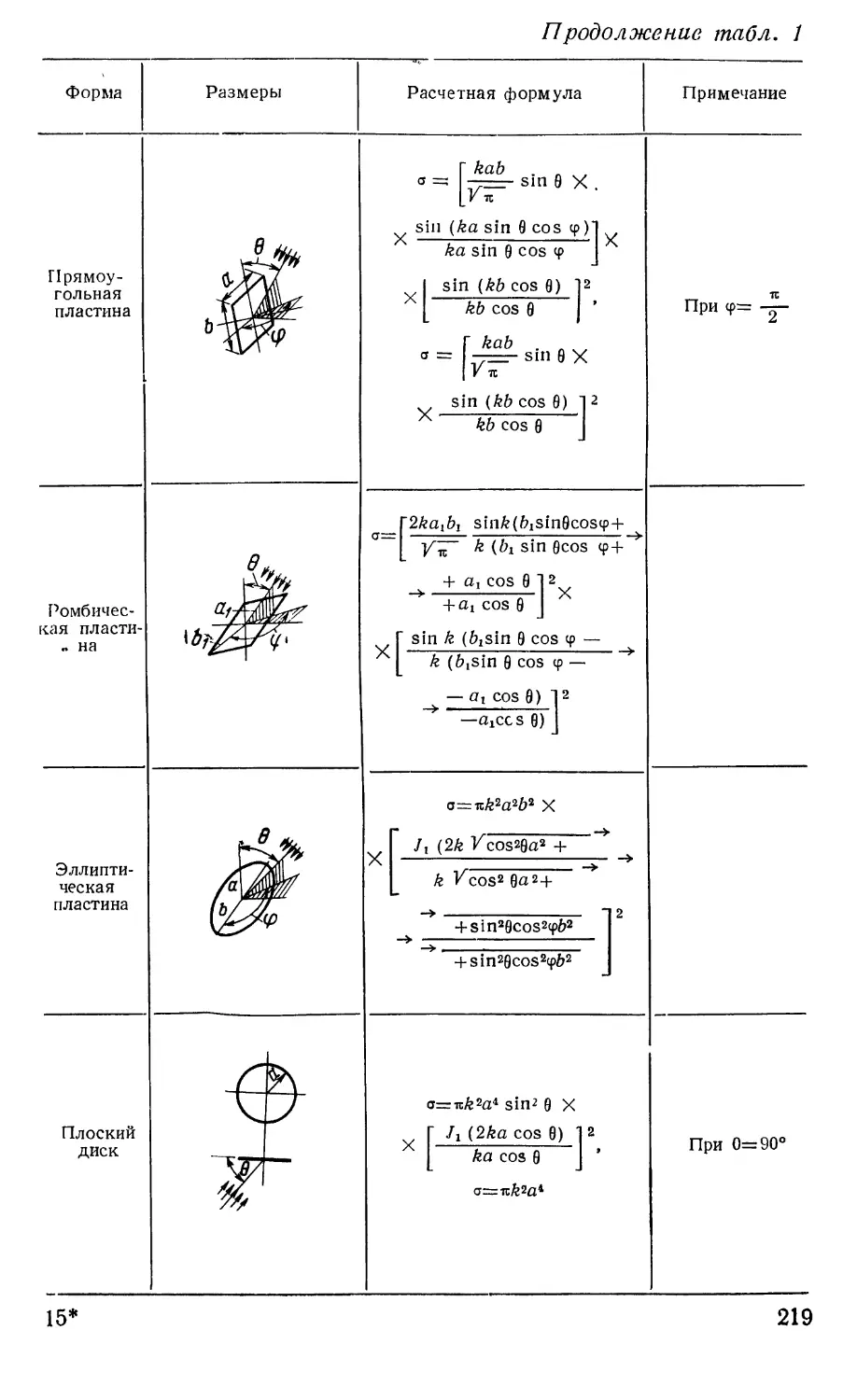
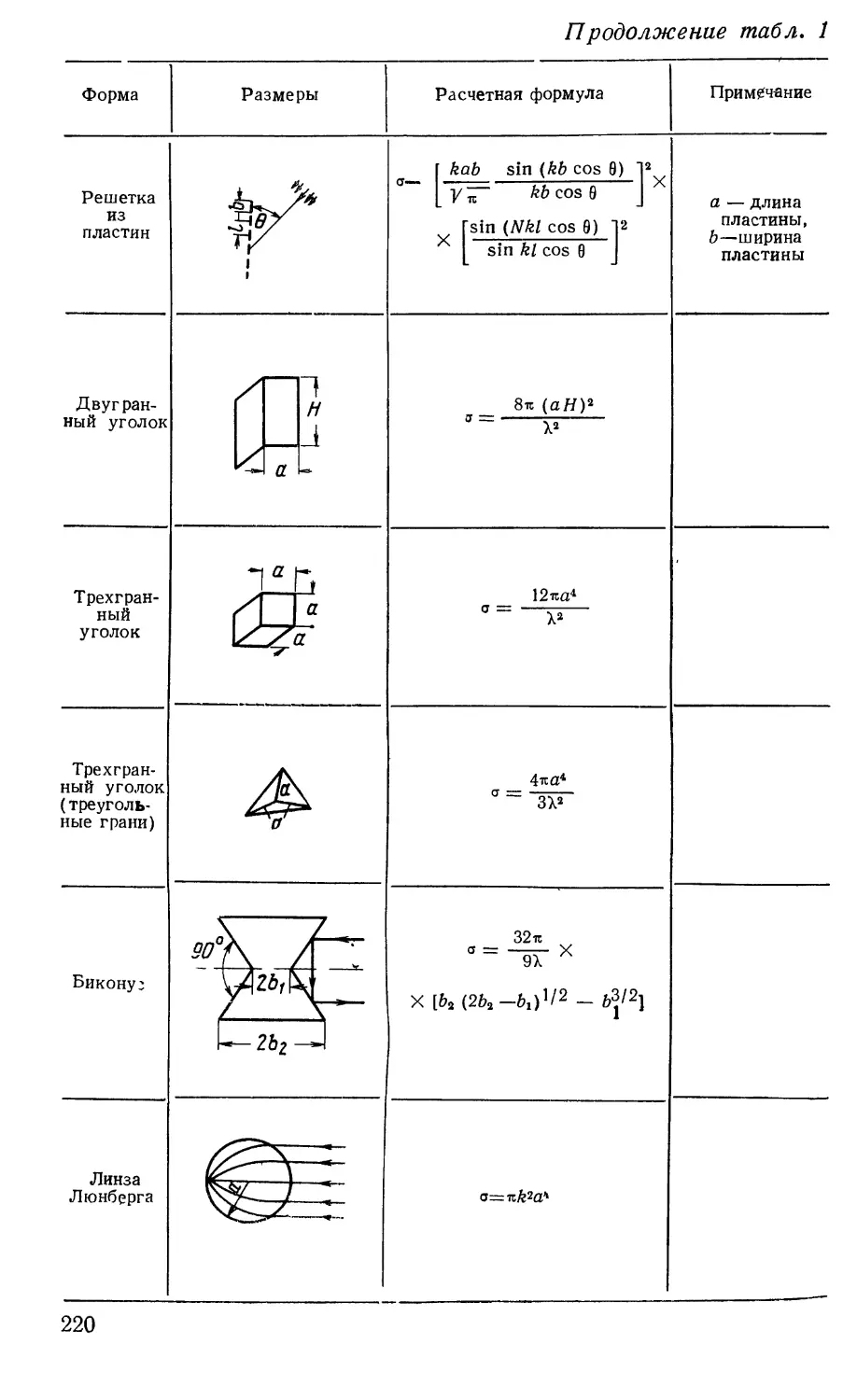
В приложении 4 приведены формулы, по которым
рассчитываются значения ЭПР ряда простых тел,
выполненных из металла с высокой проводимостью. Часть
этих тел применяется в качестве эталонов при
измерении диаграмм ЭПР сложных тел. Такие устройства, как
уголковые отражатели, находят применение в качестве
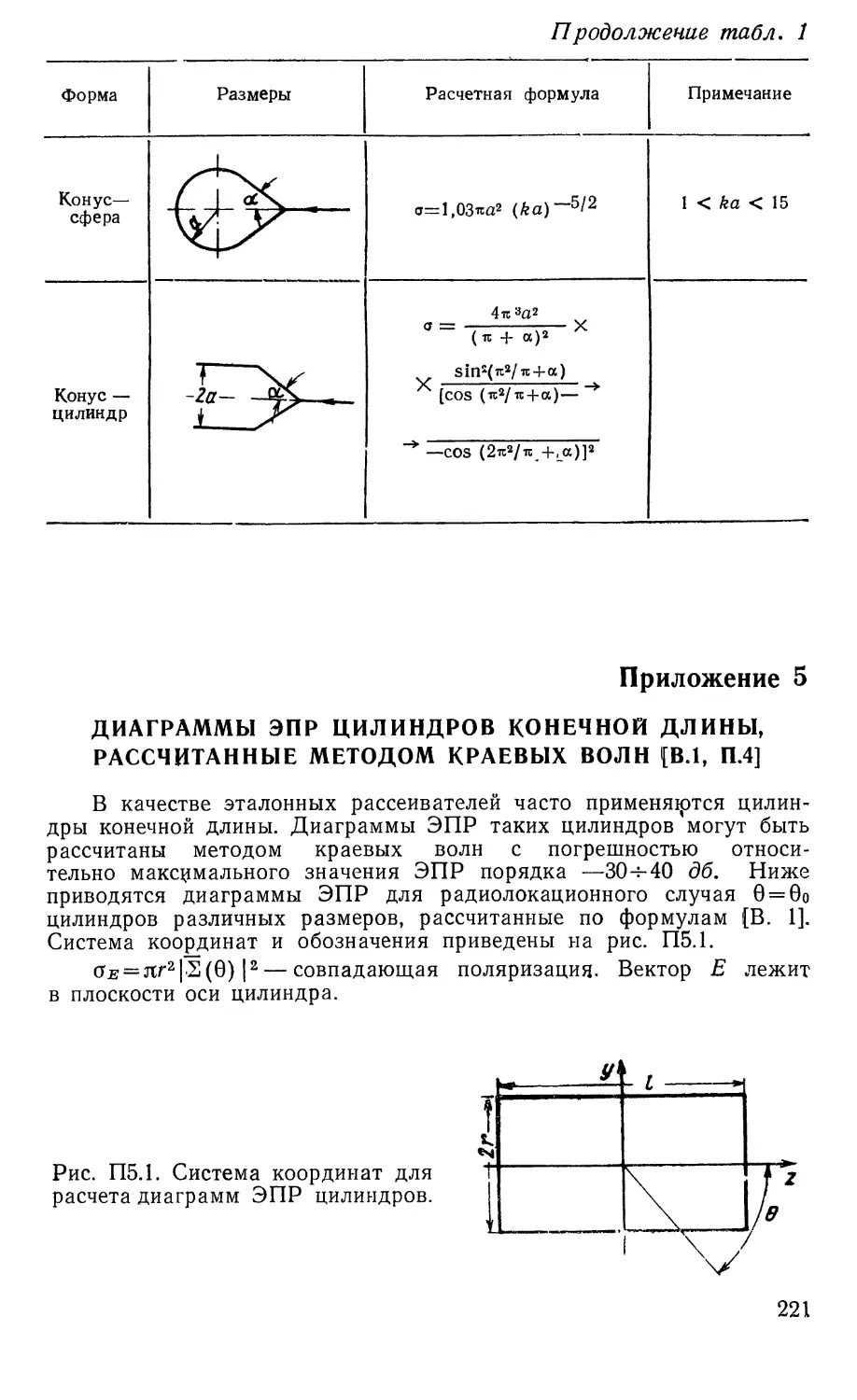
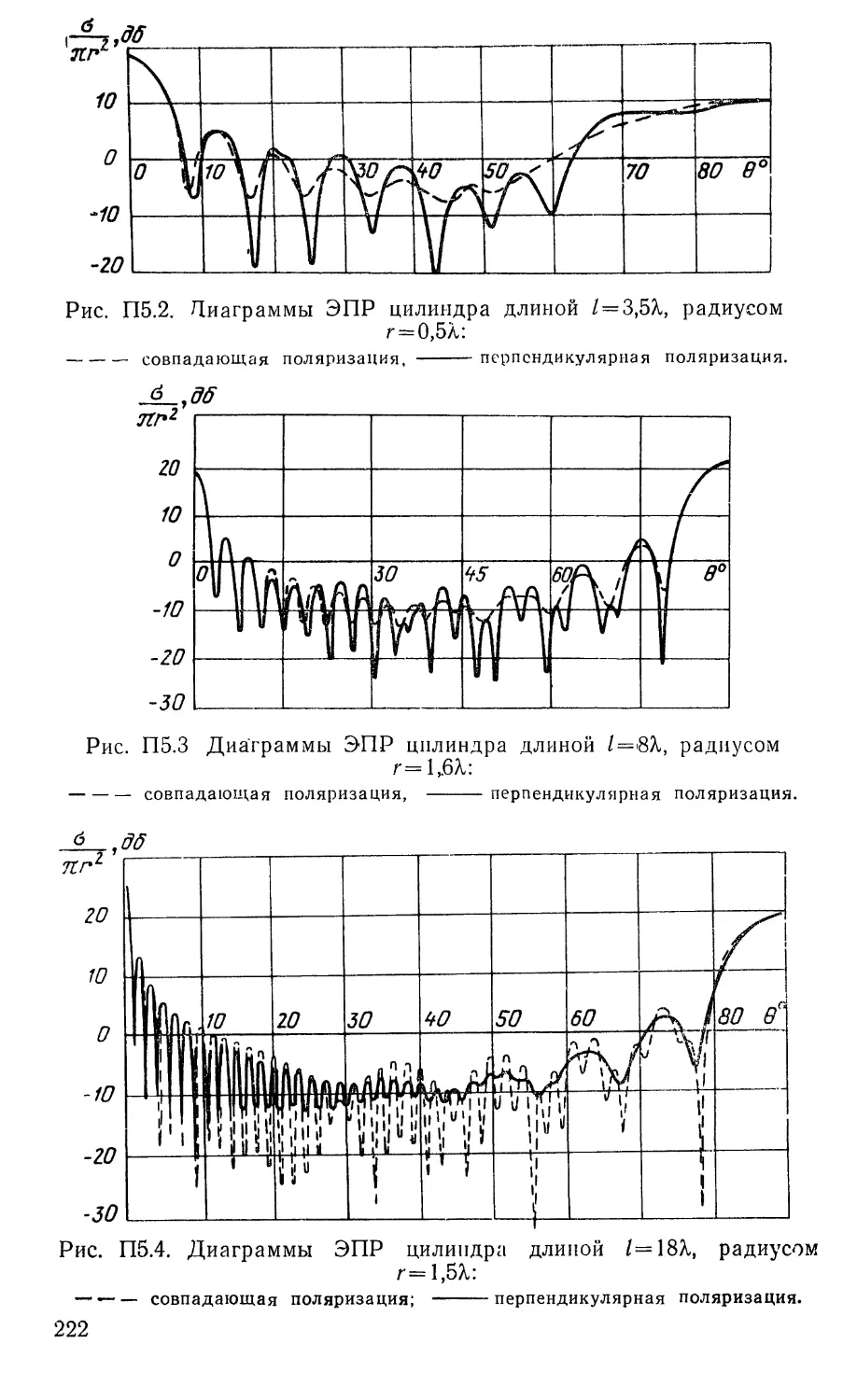
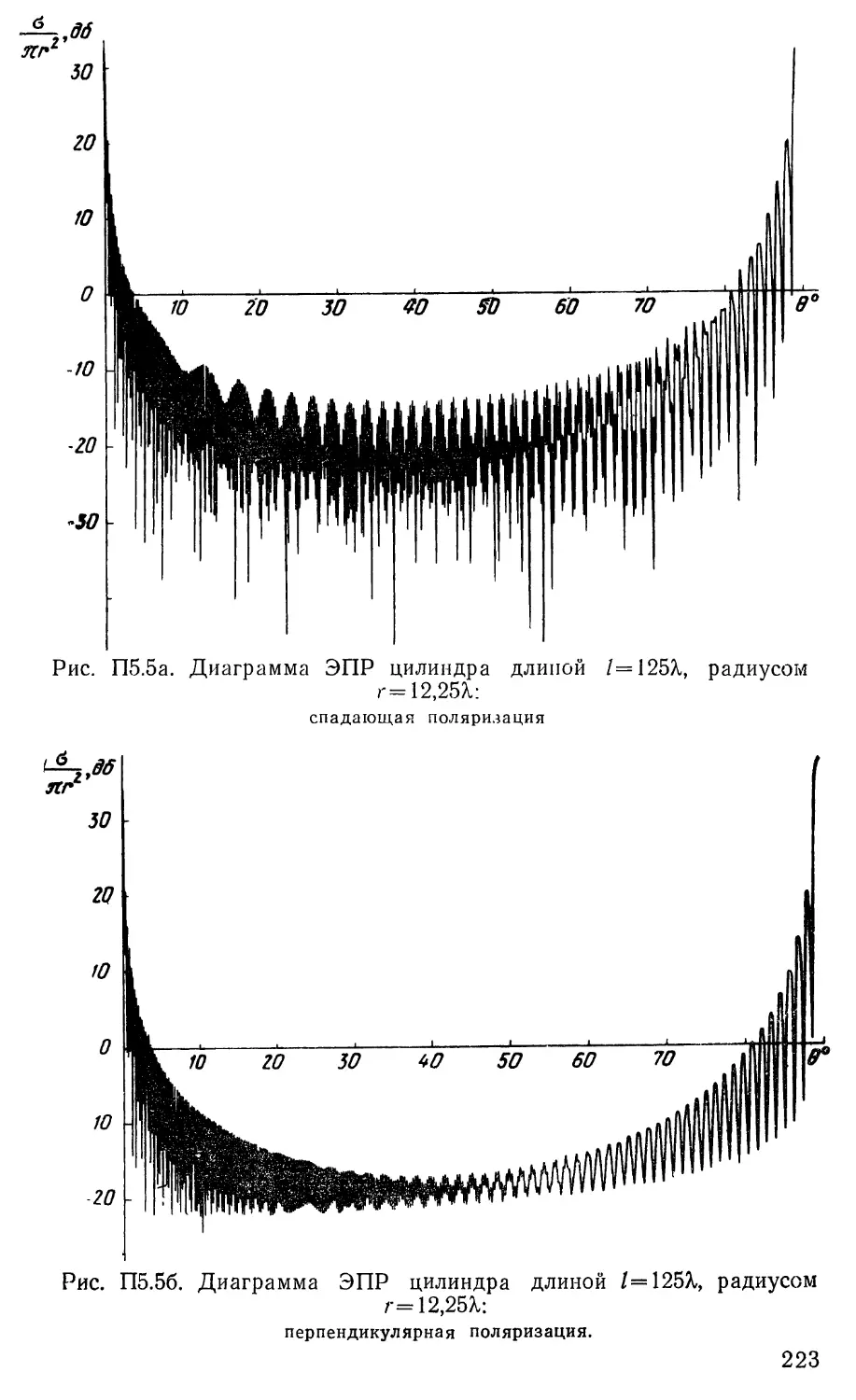
искусственных отражателей — реперов. В приложении 5
приведенььдиаграммы ЭПР простейших рассеивателей—
цилиндров.
1.4. МАТРИЦА РАССЕЯНИЯ
ЭПР является только энергетической
характеристикой рассеивателя и не дает информации о фазе
рассеянного поля. Современные радиолокационные станции
становятся все более сложными и все чаще находит
применение одновременная работа на двух линейных или
круговых поляризациях. Для определения дальности
действия таких станций необходимо знать не только
амплитуды, но и фазы составляющих рассеянных волк.
Задача распознавания формы и размеров рассеивателя
по характеру рассеянного сигнала требует знания
амплитуды и фазы составляющих поля рассеянных волн.
В общем случае составляющие электрического
вектора рассеянного поля в любой ортогональной системе
координат (1, 2, 3) могут быть записаны с помощью
линейных зависимостей.
Е1=а3^ + а32Е1+а33Е». (1.11)
Здесь индекс п применяется для обрзначения полек
падающих воли, а индекс р — полей рассеянных волн.
Комплексные коэффициенты линейного
преобразования (1.11) могут быть записаны в виде квадратной
матрицы;
"а11 ttl2 aU
S= «2l'1>22 CC23 . (1.12)
<х31 а32 а38
]4
Для полного определения электромагнитного поля
необходимо написать аналогичную матрицу и для
магнитного поля. Матрица (1.12) определяет связь
рассеянного и падающего полей и поэтому называется
матрицей рассеяния (МР).
Когда рассеиватель находится настолько далеко от
радиолокационной станции, что рассеянные и падающие
волны можно считать плоскими, то остаются только по
две составляющие электрического и магнитного векторов
поля. При этом матрицы электрического и магнитного
полей имеют совершенно одинаковый вид и отличаются
только постоянным множителем. Если рассеянная
плоская волна распространяется вдоль координаты (3), то
электрический вектор имеет только составляющие по
осям (1) и (2) и матрица (1.12) принимает вид
ai2L (1.13)
l a22J
Элементы матрицы (1.13) являются комплексными
числами, которые характеризуют амплитуду и фазу
составляющих рассеянного поля. МР (1.13) является
функцией положения рассеивателя, а для двухпозиционного
случая зависит также от направления на точку
наблюдения. Если обозначить нормаль к фронту падающей
волны через мш а нормаль к фронту рассеянной волны
через Пр, то матрицу можно записать условно в виде,
показывающем зависимость от направления
распространения волн:
S = S(nny яр). (1.14)
Можно доказать, что МР удовлетворяет принципу
взаимности, который записывается в следующем виде:
S(nn, nv) = S(-np,-nu). (1.15)
Выражение (1.15) показывает, что если поменять
местами точку наблюдения и точку приема, то матрица S не
должна измениться.
Так как
S(-npy-7in)=~sCnn, "p), (1.16)
где ^ знак транспонирования, то
К, -.ПГ-п «.,1. (1Л7)
La2l «22 J Lai2 «22 J
15
Равенство (1.17) реализуется, если oti2—схгь т. е. МР
является симметричной.
Для рассматриваемого случая связь электрических
составляющих полей рассеянной и падающей волн
принимает вид
?Р "1 I El1 1
fc2 J L ^2 J
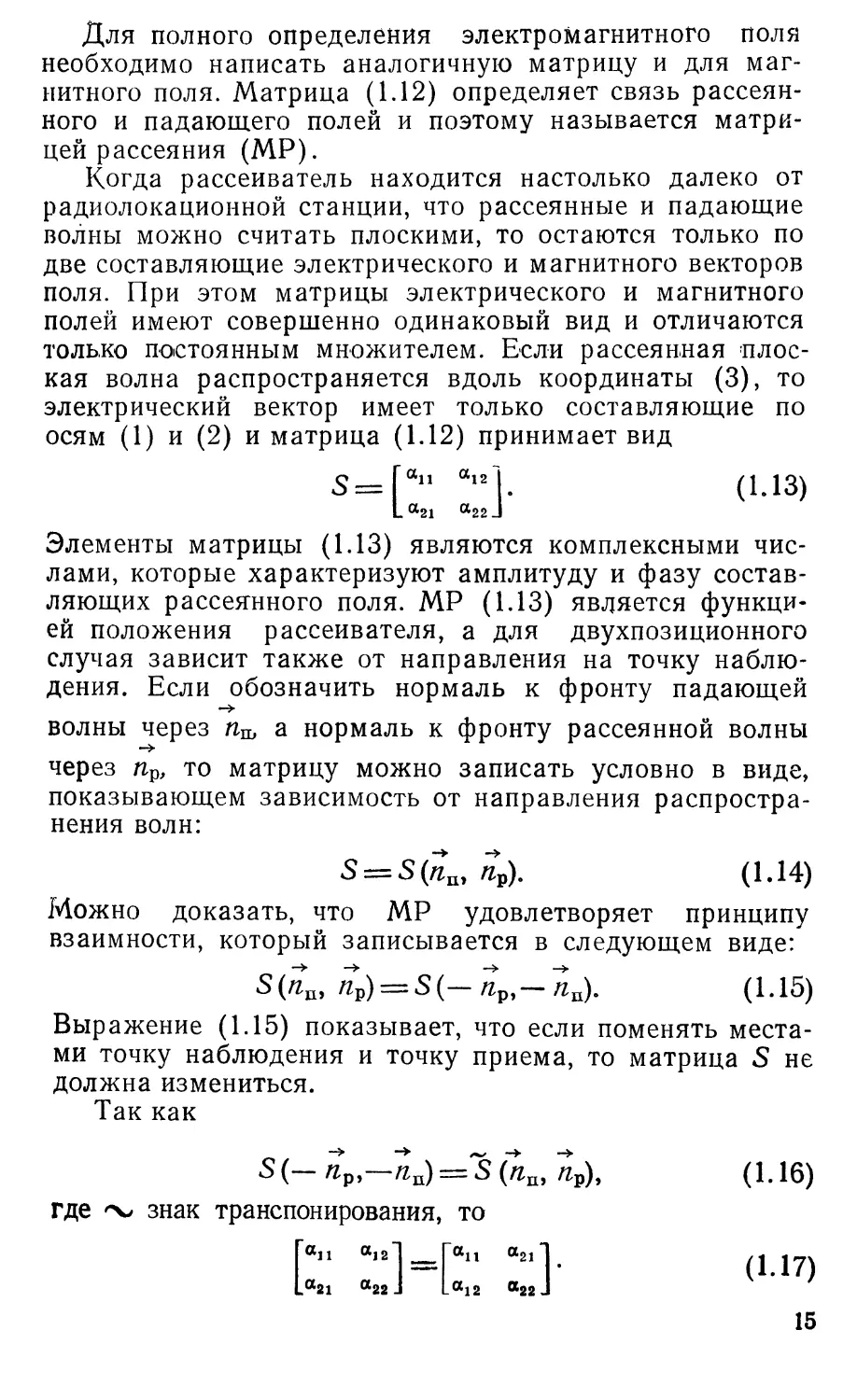
Применяются МР, записанные в декартовой или
сферической системе координат. Удобно пользоваться МР
в сферической системе координат (R, 6, q>) с началом,
Рис. 1.З. К расчету падающего и рассеянного полей.
совмещенным с радиолокационной станцией (рис. 1.3)
В этом случае МР принимает вид
А е/ЧГм Л
(1.19
Первая буква индекса при А показывает, какой коорди
нате параллелен вектор падающего поля, а вторая—по ка
кой координате направлен вектор рассеянного поля. Этс
16
т, что Ат определяет 9-ю составляющую рассеянного
поля, созданного 8-й составляющей падающего поля, а ЛОф
определяет у-ю составляющую рассеянного поля,
созданную той же 6-й составляющей падающего поля. Последняя
составляющая называется перпендикулярной, так как она
перпендикулярна к создающей ее составляющей падающего
ноля*).
Обозначения фазовых коэффициентов произведены по
аналогичной системе. Например, через WQ обозначена фаза
перпендикулярной составляющей, созданной 0-й
составляющей падающего поля, по отношению к некоторой
опорной фазе, в выборе которой мы, по существу, ничем
не ограничены.
Измерительная установка для измерений
комплексных элементов МР по своей схеме является
специализированной радиолокационной станцией. Усложнение
схемы вызвано тем, что измерения .проводятся
.последовательно для двух ортогональных поляризаций
излучаемого сигнала и при каждом измерении фиксируются
амплитуды и фазы .принятых сигналов-на
обеих-поляризациях. Для получения полной МР можно использовать
любую пару ортогонально поляризованных сигналов, но
обычно выбирают или вертикально и горизонтально
поляризованную пару или пару с правой и левой круговой
поляризацией. При излучении сигналов каждой из
поляризаций производятся измерения амплитуды и фазы
рассеянных сигналов совпадающей и перпендикулярной
поляризаций. Обычно измеряют только относительные
значения амплитуд, которые затем калибруют по
эталону с. известной величиной ЭПР. В качестве эталонов
используют металлические .сферы, рассеяние на которых
поддается строгому расчету, или цилиндры, которые
можно рассчитать методом краевых волн [В.1].
1.5. ДИАГРАММЫ РАССЕЯНИЯ
Элементы МР являются функциями угла, под
которым падают волны на рассеиватель, а также угла между
нормалями к фронтам падающих и рассеянных вол п.
Полной информацией мы располагаем, когда известны
диаграммы всех элементов МР, для всех углов падения
*> Эту составляющую часто называют также перекрестной или
«росс-поляризационной.
-340 17
волн на рассеиватель и для всех углов между напрая
лениями облучения и приема.
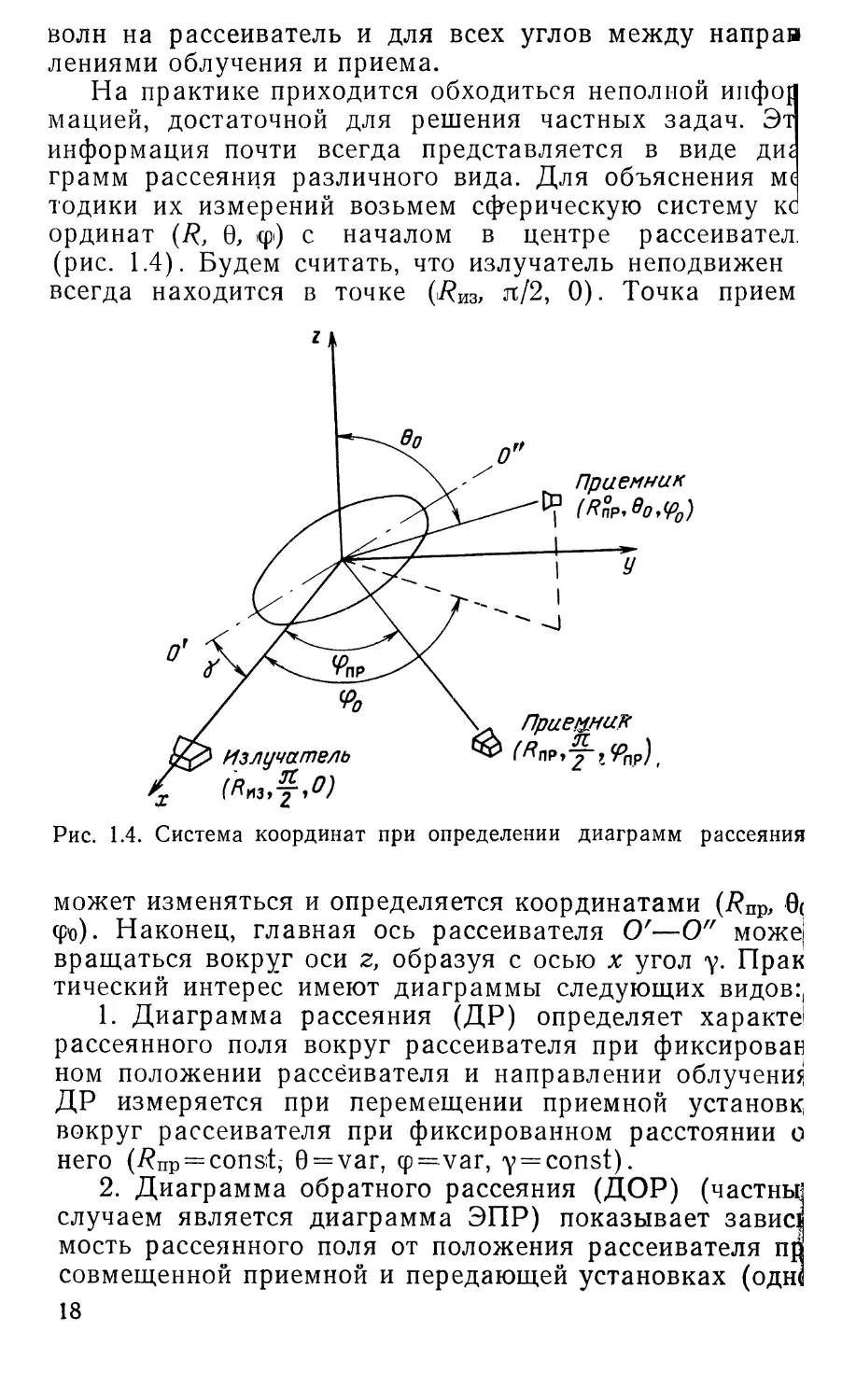
На практике приходится обходиться неполной инфо{
мацией, достаточной для решения частных задач. Эт
информация почти всегда представляется в виде диг
грамм рассеяния различного вида. Для объяснения м
тодики их измерений возьмем сферическую систему кс
ординат (R, 8, ф) с началом в центре рассеивател:
(рис. 1.4). Будем считать, что излучатель неподвижен
всегда находится в точке (Rm, я/2, 0). Точка прием
Ог
Рис. 1.4. Система координат при определении диаграмм рассеяния
может изменяться и определяется координатами (7?Пр, Щ
Фо). Наконец, главная ось рассеивателя О'—О" може!
вращаться вокруг оси г, образуя с осью х угол у. Прак
тический интерес имеют диаграммы следующих видов:
1. Диаграмма рассеяния (ДР) определяет характе
рассеянного поля вокруг рассеивателя при фиксирован
ном положении рассеивателя и направлении облученщ
ДР измеряется при перемещении приемной установи
вокруг рассеивателя при фиксированном расстоянии о
него (/?пр = const;; 8 = var, ф —var, Y = const).
2. Диаграмма обратного рассеяния (ДОР) (частны
случаем является диаграмма ЭПР) показывает завис!
мость рассеянного поля от положения рассеивателя nf
совмещенной приемной и передающей установках (одн
18
юзиционный случай) или расположенных в
непосредственной близости одна от другой (так называемый квази-
)днопозиционный случай). ДОР измеряется при враще-
!ии рассеивателя вокруг оси (^пр=1/?Из=const, бпр^я/2,
рир^О, v=var).
3. Диаграмма двухпозиционного рассеяния (ДДР)
юказывает зависимость рассеянного поля от ракурса
рассеивателя при разнесении приемной установки отно-
птельно передающей (двухпозиционный случай). ДДР
смеряется при вращении рассеивателя вокруг оси z и
>асположении приемной установки в точке (i/?np, во, фо).
)бычно при таких измерениях расстояние Дтф==Яш
(^пр=^из=const, 0пр==6о, ф11р=<р^ у=уаг). Для получе-
шя пространственной диаграммы передающая установ-
-to
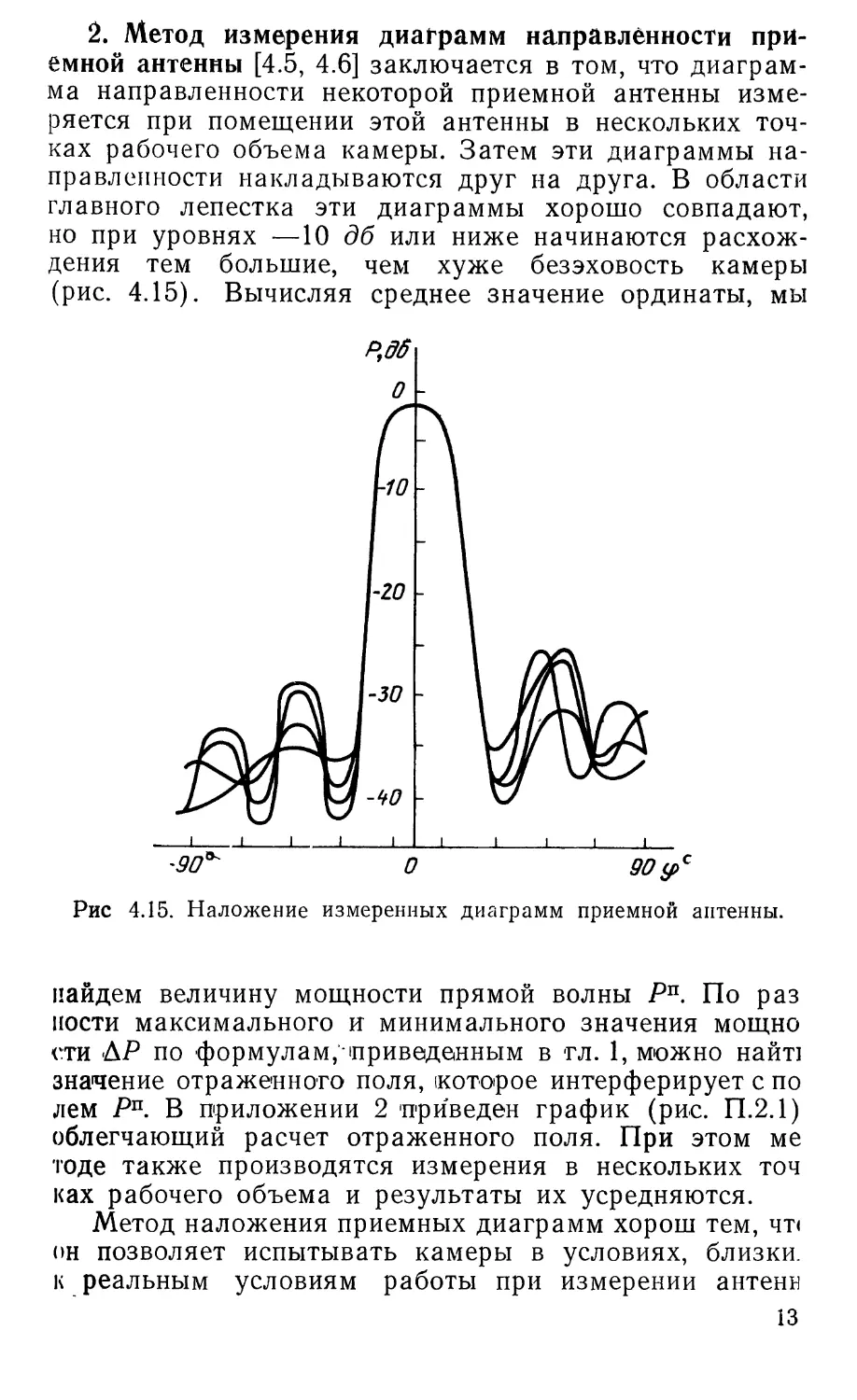
90 120 150 WO 210 2+0 270 300 ?Ю
|»ис. 1.5. Диаграмма ЭПР в декартовой системе координат цилиндра
длиной 10Х и диаметром ЗК.
;п помещается последовательно в нескольких точках
(лоскости ф=0 при разных значениях виз- При этом ве-
шчина /?из во всех точках одинакова. Для каждого из
iкачений ЭИз измеряют ДОР и по ним строится прост-
шпственная диаграмма обратного рассеяния.
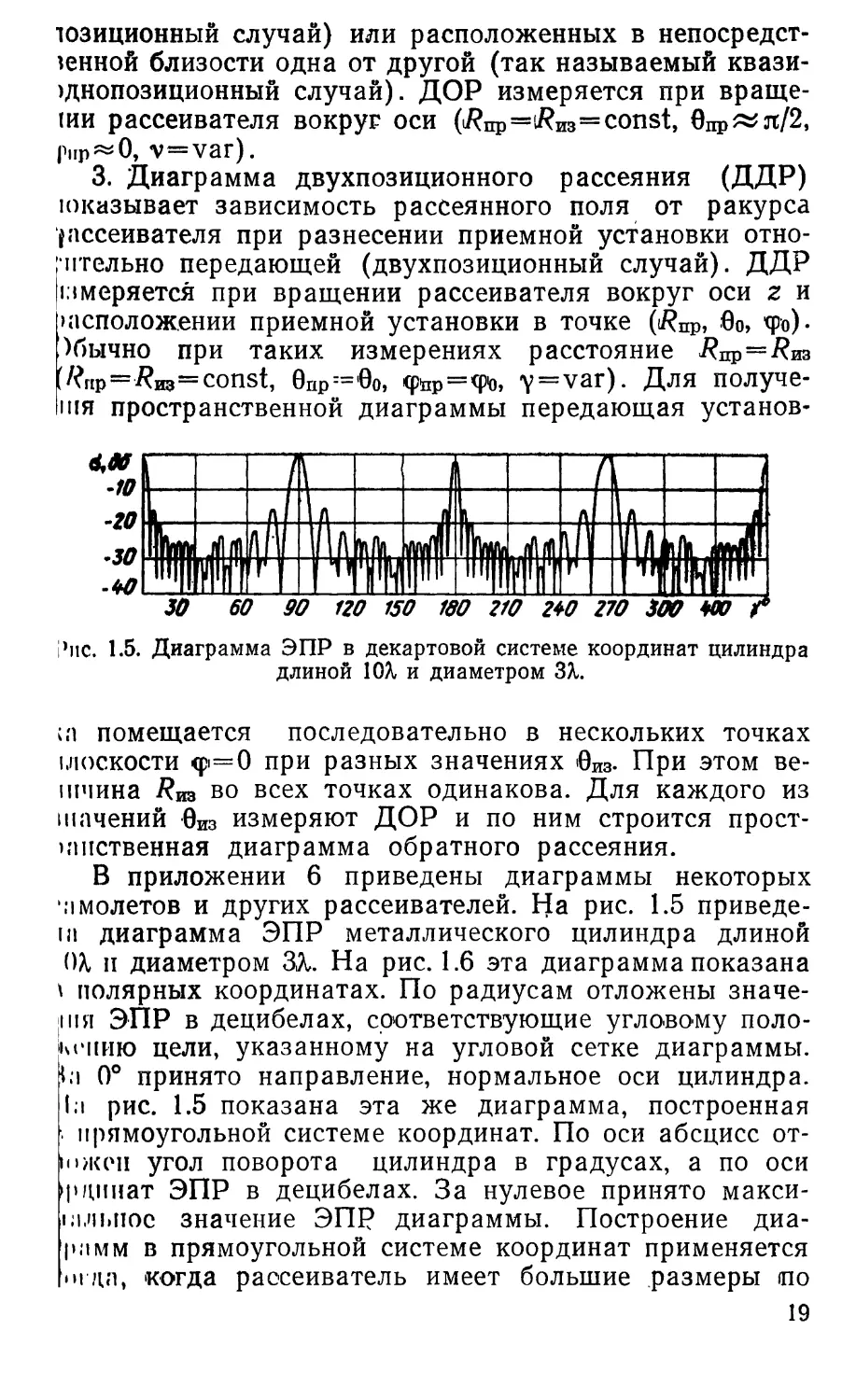
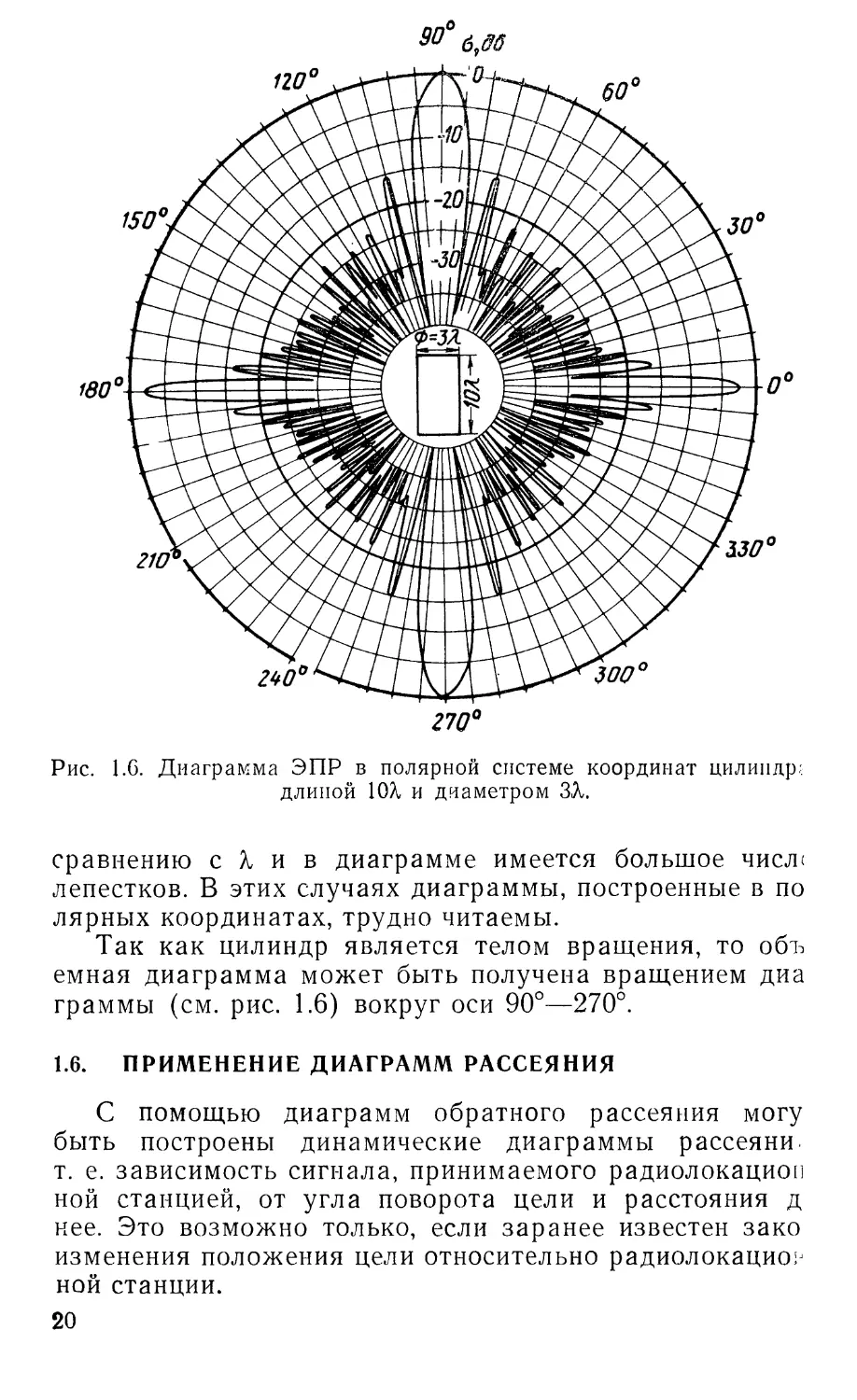
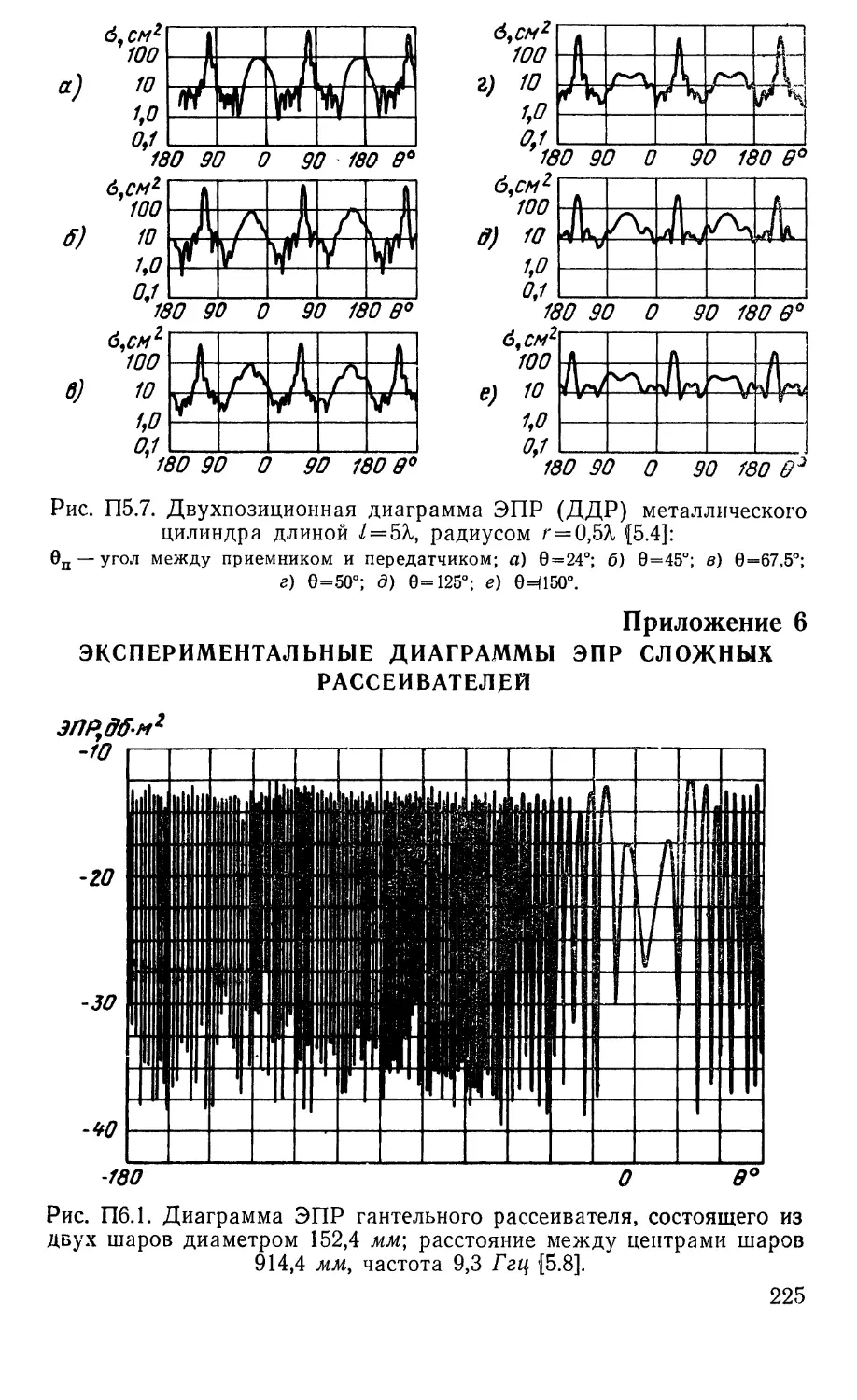
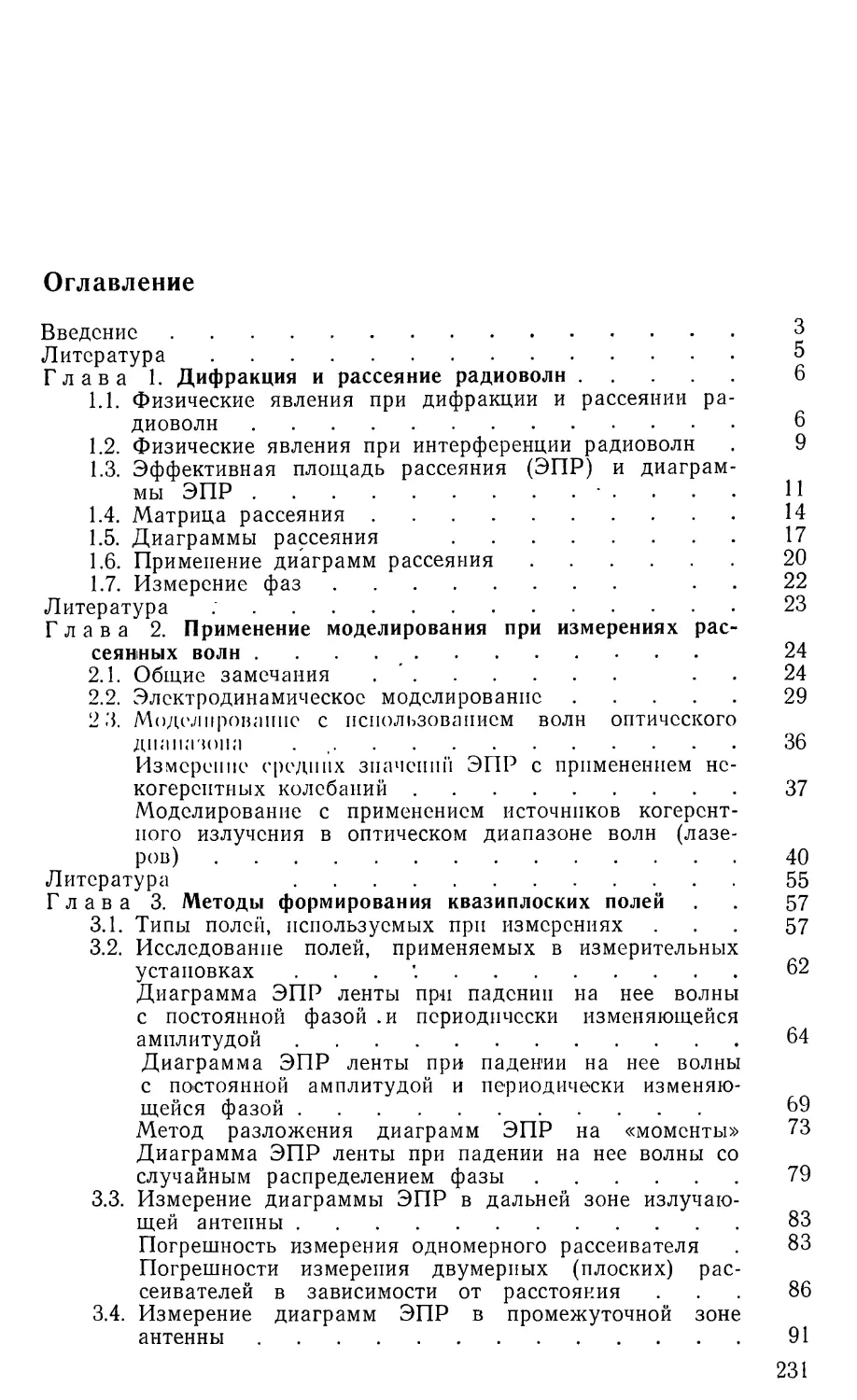
В приложении 6 приведены диаграммы некоторых
'.чмолетов и других рассеивателей. На рис. 1.5 приведе-
m диаграмма ЭПР металлического цилиндра длиной
ОА, и диаметром ЗА,. На рис. 1.6 эта диаграмма показана
) полярных координатах. По радиусам отложены
значения ЭПР в децибелах, соответствующие угловому поло-
мчшю цели, указанному на угловой сетке диаграммы.
\л 0° принято направление, нормальное оси цилиндра.
l;i рис. 1.5 показана эта же диаграмма, построенная
прямоугольной системе координат. По оси абсцисс от-
¦ижен угол поворота цилиндра в градусах, а по оси
¦рдинат ЭПР в децибелах. За нулевое принято макси-
1л,ч1»иое значение ЭПР диаграммы. Построение диа-
»ммм в прямоугольной системе координат применяется
чцл, когда рассеиватель имеет большие размеры то
19
120
150
гьо
60°
130°
300°
Рис. 1.6. Диаграмма ЭПР в полярной системе координат цилиндр-
длиной ЮЛ, и диаметром ЗЯ.
сравнению с X и в диаграмме имеется большое числ(
лепестков. В этих случаях диаграммы, построенные в по
лярных координатах, трудно читаемы.
Так как цилиндр является телом вращения, то объ
емная диаграмма может быть получена вращением диа
граммы (см. рис. 1.6) вокруг оси 90°—270°.
1.6. ПРИМЕНЕНИЕ ДИАГРАММ РАССЕЯНИЯ
С помощью диаграмм обратного рассеяния могу
быть построены динамические диаграммы рассеянш
т. е. зависимость сигнала, принимаемого радиолокацией]
ной станцией, от угла поворота цели и расстояния д
нее. Это возможно только, если заранее известен зако
изменения положения цели относительно радиолокацио^
ной станции.
20
Расчет динамической диаграммы начинается с на-
ожденйя матрицы падающего поля
(1.20)
)та матрица определяется в первую очередь свойствами
предающей антенны, которая всегда излучает в той или
шой мере эллиптически поляризованную волну. Матри-
1.ч (1.20) зависит также от свойств среды между псрс-
ипощей станцией и рассеивателем, т. е. от условий
распространения. При проведении измерений на лаборатор-
1ЫХ установках влияние распространения пренебрежимо
мило и можно считать, что характер матрицы (1.20) це-
чиком определяется параметрами передающей антенны.
Интересующей нас величиной является напряжение,
возникающее на выходе приемной антенны при
воздействии на последнюю сигнала, пришедшего от рассеива-
толя. Приемные антенны также всегда принимают
эллиптическую поляризацию и поэтому напряжение на выхо-
/|р может быть записано в виде матрицы
It» II nfi I От I nfl I n
и которой через VQ обозначено напряжение, возникающее
мод действием 6-й составляющей падающего поля, а Уф —
под действием ф-й составляющей поля. Учитывая (1.20),
мы можем написать выражение для матрицы
напряжений на выходе приемной антенны радиолокационной
станции
Мптрица напряжений V, равная произведению трех матриц,
может быть использована для построения динамической
/шаграммы рассеянного сигнала. При разработке
измерительных установок стремятся выполнить их так, чтобы
иитенны излучали и принимали только волны нужной
поляризации, т. е. чтобы поля паразитной поляризации
Г»ыли меньше допустимых.
21
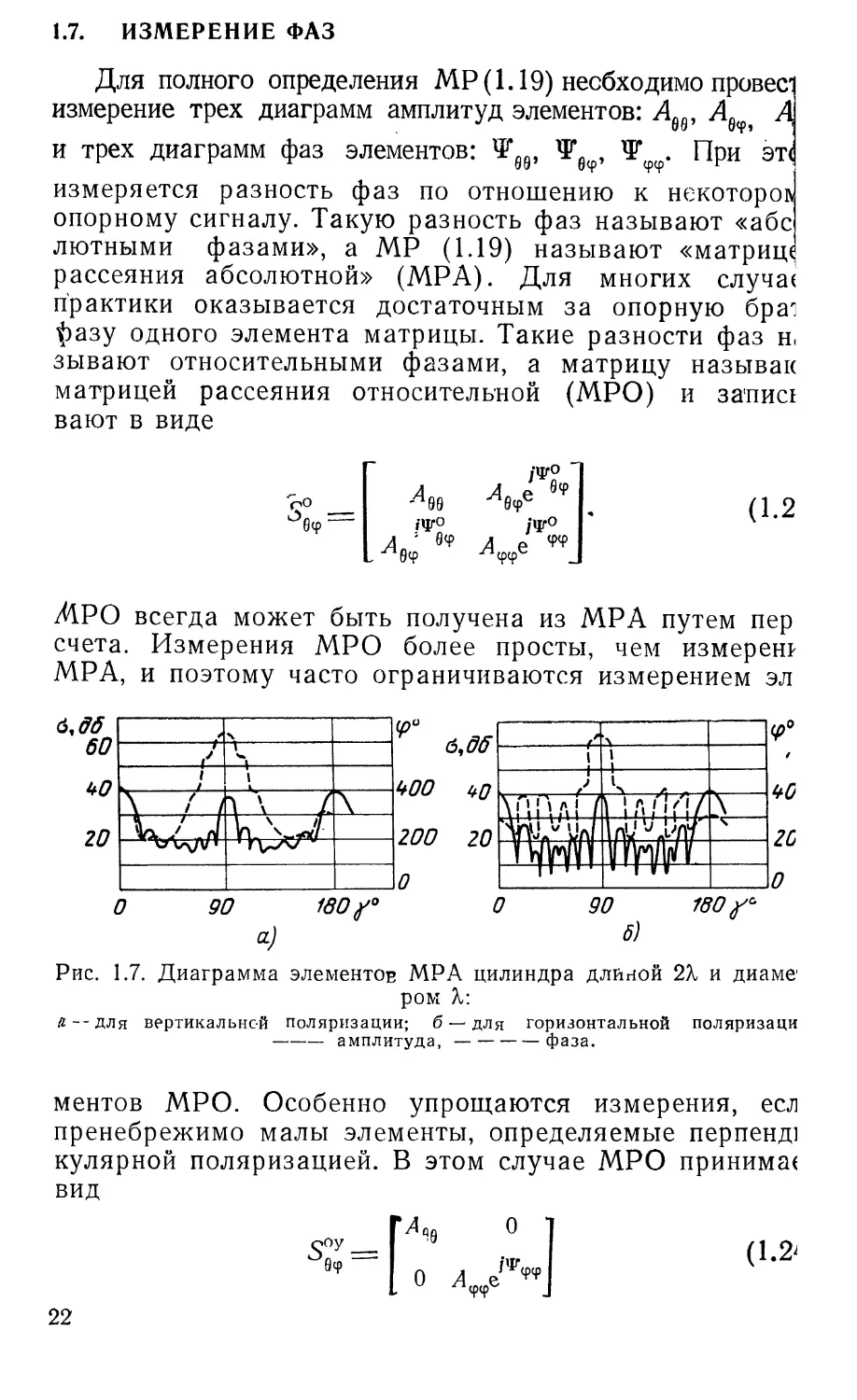
1.7. ИЗМЕРЕНИЕ ФАЗ
Для полного определения МР( 1.19) необходимо провес
измерение трех диаграмм амплитуд элементов: Afl, A At
и трех диаграмм фаз элементов: 4Tfl0, Wu , W . При эт<
00 Оф ФФ ^
измеряется разность фаз по отношению к некоторое
опорному сигналу. Такую разность фаз называют «абс
лютными фазами», а МР (1.19) называют «матриц*
рассеяния абсолютной» (МРА). Для многих случае
практики оказывается достаточным за опорную 6pai
фазу одного элемента матрицы. Такие разности фаз н;
зывают относительными фазами, а матрицу называк
матрицей рассеяния относительной (МРО) и зама
вают в виде
оо
Ао.<&
iW°
^бФ ^
(1.2
ЖРО всегда может быть получена из МРА путем пер
счета. Измерения МРО более просты, чем измерен*
МРА, и поэтому часто ограничиваются измерением эл
дб
60
20
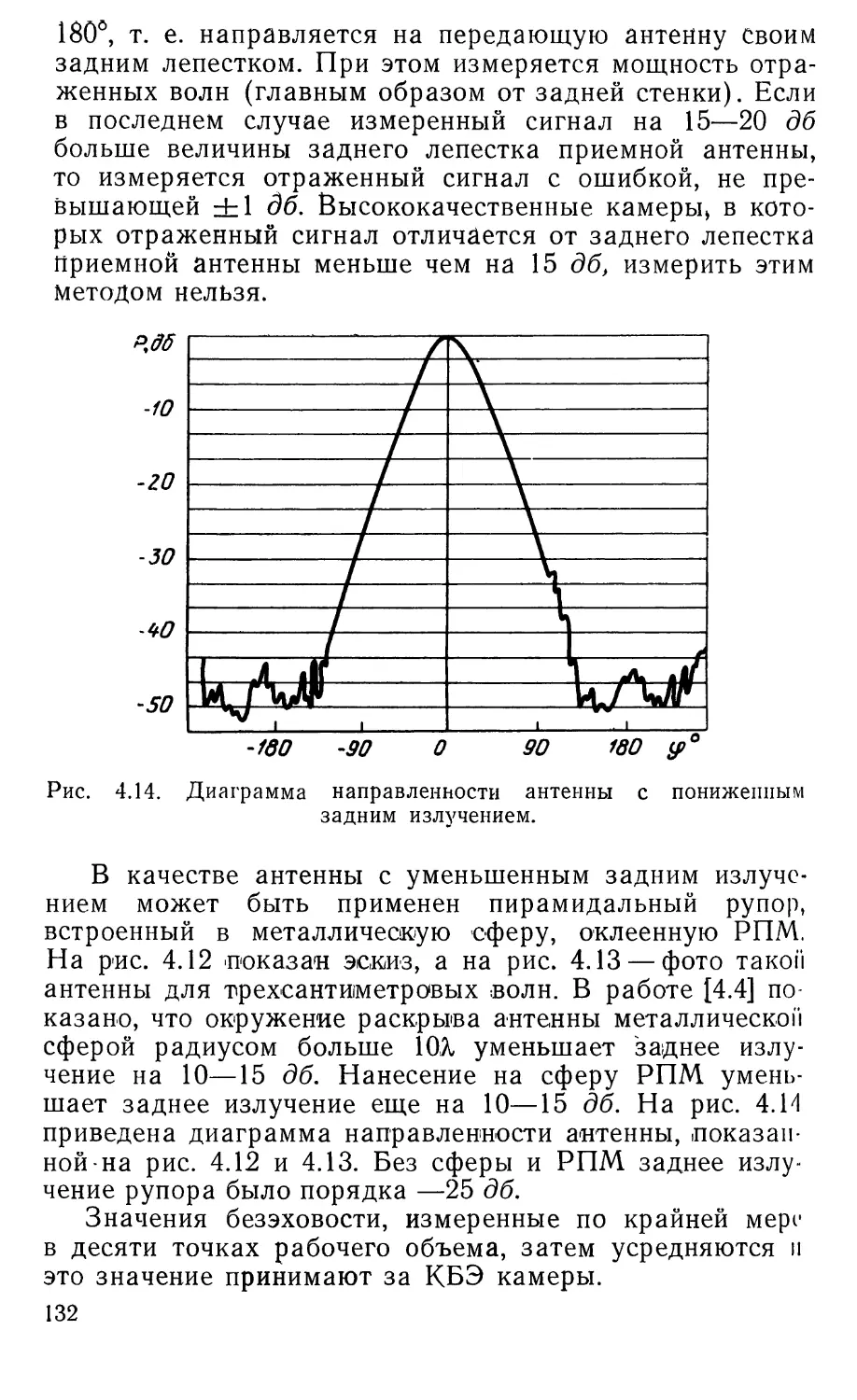
180 f*
О 90 160 /°
Рис. 1.7. Диаграмма элементов МРА цилиндра длиной 2% и диаме1
ром X:
#--для вертикальной поляризации; б —¦ для горизонтальной поляризаци
амплитуда, фаза.
ментов МРО. Особенно упрощаются измерения, есл
пренебрежимо малы элементы, определяемые перпенд]
кулярной поляризацией. В этом случае МРО принимав
вид
^9ср
22
fi называется укороченной матрицей рассеяния
относительной (УМРО). Для УМРО измерения
ограничиваются двумя диаграммами амплитудных элементов и одной
диаграммой разности фаз между ними.
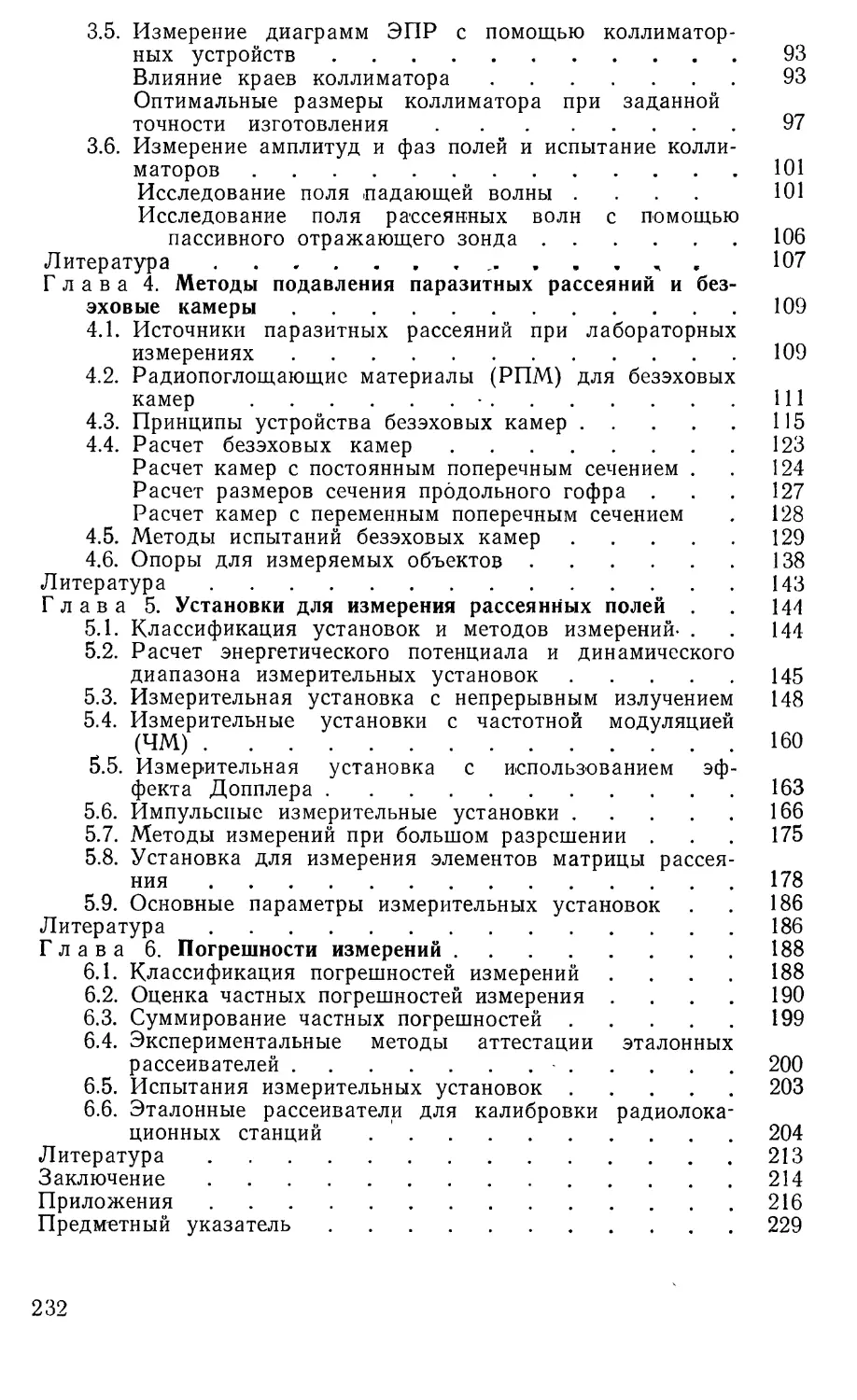
Для иллюстрации на рис. 1.7 показаны диаграммы
элементов МРА в плоскости, проходящей через ось ци-
пиндра длиной 2К и диаметром X, при горизонтальной и
»ертикальной поляризациях, рассчитанные методом
краевых волн. Так как перпендикулярные составляющие
несимметричных тел в плоскости, проходящей через ось,
1ав.ны нулю, МРА имеет только два амплитудных
элемента. Фазовые диаграммы имеют характерные скачки
ia 180° при переходе от одного лепестка к другому.
|1итература
1Л. Уф имиев 1П. Я. Дифракция электромагнитных волн на
ифйых телах и на -полупрозрачных 'пластинах. ^'Известия вузов»,
'ад'иоф'иэика. 'Изд. 'Горькавского университета, '1968, т. XI, !№ 6.
«1.2. К а н а р е й к и н Д. 1Б., О а в л о в >Н. Ф., О 'о т е х и н (В. А.
Голяризация радиолокационных сигналов. 'Издчво .«•Советское радио»,
ИЮб.
1.3. Кох, Эр те ль. ОВЧ термография. ТИИЭР, 1967, т. 55,
Nb3.
1.4. 3 у б ко в и ч С. Т. 'Статистические характеристики
радиосигналов, отраженных от земной 'поверхности. Изд-во «Советское
|)адио», 1968.
11:5. iB а к у т 'П. А. и др., под ред. Тартаковского Г. П.
Jопросы стат-истической теории радиолокации. Изд-во «Советское
)ПДИО», 1963, т. I; 1964, т. II.
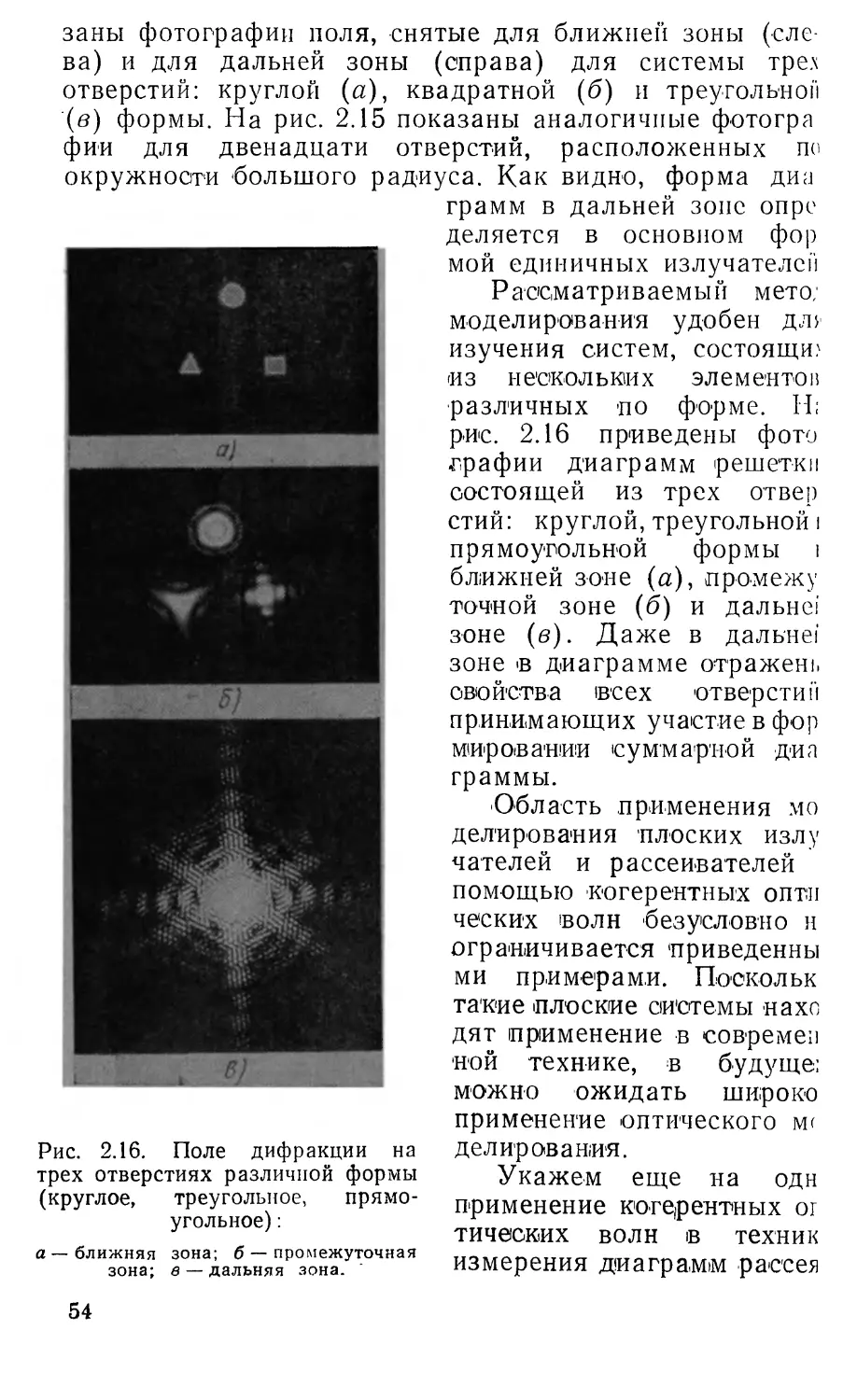
Глава 2
ПРИМЕНЕНИЕ МОДЕЛИРОВАНИЯ
ПРИ ИЗМЕРЕНИЯХ РАССЕЯННЫХ ВОЛН
2.1. ОБЩИЕ ЗАМЕЧАНИЯ
Измерение рассеивающих свойств различных воздул
ных, наземных и надводных . радиолокационных цело
в реальных условиях связано с большими затратам
времени и средств. Применение моделирования позъол*
ет получать требуемую информацию в короткие срок
с малыми затратами средств.
Для физического моделирования могут быть испол!
зованы любые волновые процессы, при которых явлени
рассеяния аналогичны рассеянию радиоволн. Например
для моделирования применяются звуковые, ультразвуке
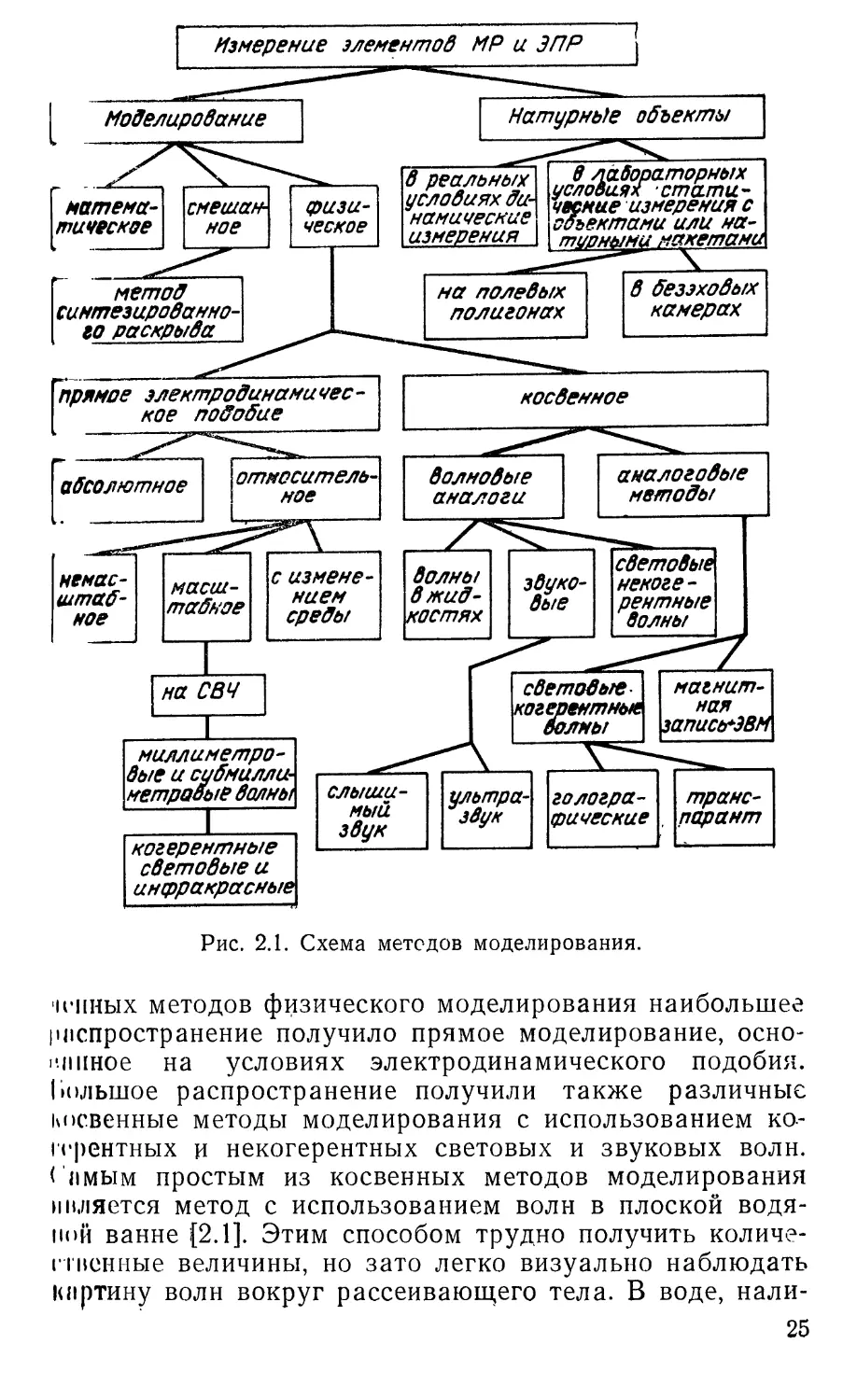
вые и световые волны. Основные методы измерения обоб
щены в виде схемы на рис. 2.1.
Все методы измерения диаграмм ЭПР и элементо
МР можно разделить на измерения с натурными объек
тами и измерения с моделями. В результате измерени!
натурных объектов, проводимых в реальных условия;
движения цели, получаются динамические диаграммы
Получить из этих диаграмм статические диаграммы, т. е
зависимости ЭПР или элементов МР от угла падени*
волн, крайне трудно из-за сложности точного определе
ния закона движения цели. При измерениях в реальны)
условиях ограничиваются измерением динамически;
диаграмм и определением статистических параметров
отраженного сигнала.
Часто диаграммы ЭПР самих целей или их макетос
в натуральную величину измеряют в лабораторных
условиях на полигонах или в безаховых камерах. При этом
измеряемые объекты приводятся в равномерное
вращение пр'и помощи малоотражающих поворотных устройств.
Математическое моделирование с помощью
аналоговых устройств или ЭВМ относится больше к методам
расчета и нами рассматриваться не будет. Из многочис-
24
Измерение элементов МР и ЭПР
Г мат ема-
\тическое
смешанное
физическое
в реальных
условиях
динамические
измерения
метод
синтезированно-
ю раскрыв а
в лабораторных
условиях стати-
чвсние измерения с
объектами или
напр я мое
электродинамическое подобие
p/i
немас-
штаб-
ное
масштабное
с
изменением
среды
долны
6жидкостях
звуковые
световые
некогерентные
волны
на СВЧ
миллиметровые и сибмилли-
метравые волны
световые
когерентные
волны
магнитная
запись+ЭВМ
когерентные
световые и
инфракрасные
слышимый
звук
ультразвук
гологра-
фические
транспарант
Рис. 2.1. Схема методов моделирования.
'К'иных методов физического моделирования наибольшее
мпспространение получило прямое моделирование, осно-
¦•.пиное на условиях электродинамического подобия.
Ьольшое распространение получили также различные
косвенные методы моделирования с использованием ко-
П'рентных и некогерентных световых и звуковых волн.
< имым простым из косвенных методов моделирования
ниляется метод с использованием волн в плоской
водяной ванне (2.1]. Этим способом трудно получить количе-
гтиенные величины, но зато легко визуально наблюдать
кпртину волн вокруг рассеивающего тела. В воде, нали-
25
той в ванну, возбуждаются волны поперечного типа.
Распространение таких волн описывается скалярным
уравнением Гельмгольца для гидромеханического
потенциала скоростей. Подобное уравнение для вектора Герца
является решением некоторых задач для радиоволн.
Такое сходство является весьма приближенным и не
может служить обоснованием подобия. Кроме того, волны
в водяной ванне по своим свойствам ближе к
радиоволнам в волноводах, чем к радиоволнам в свободном
пространстве.
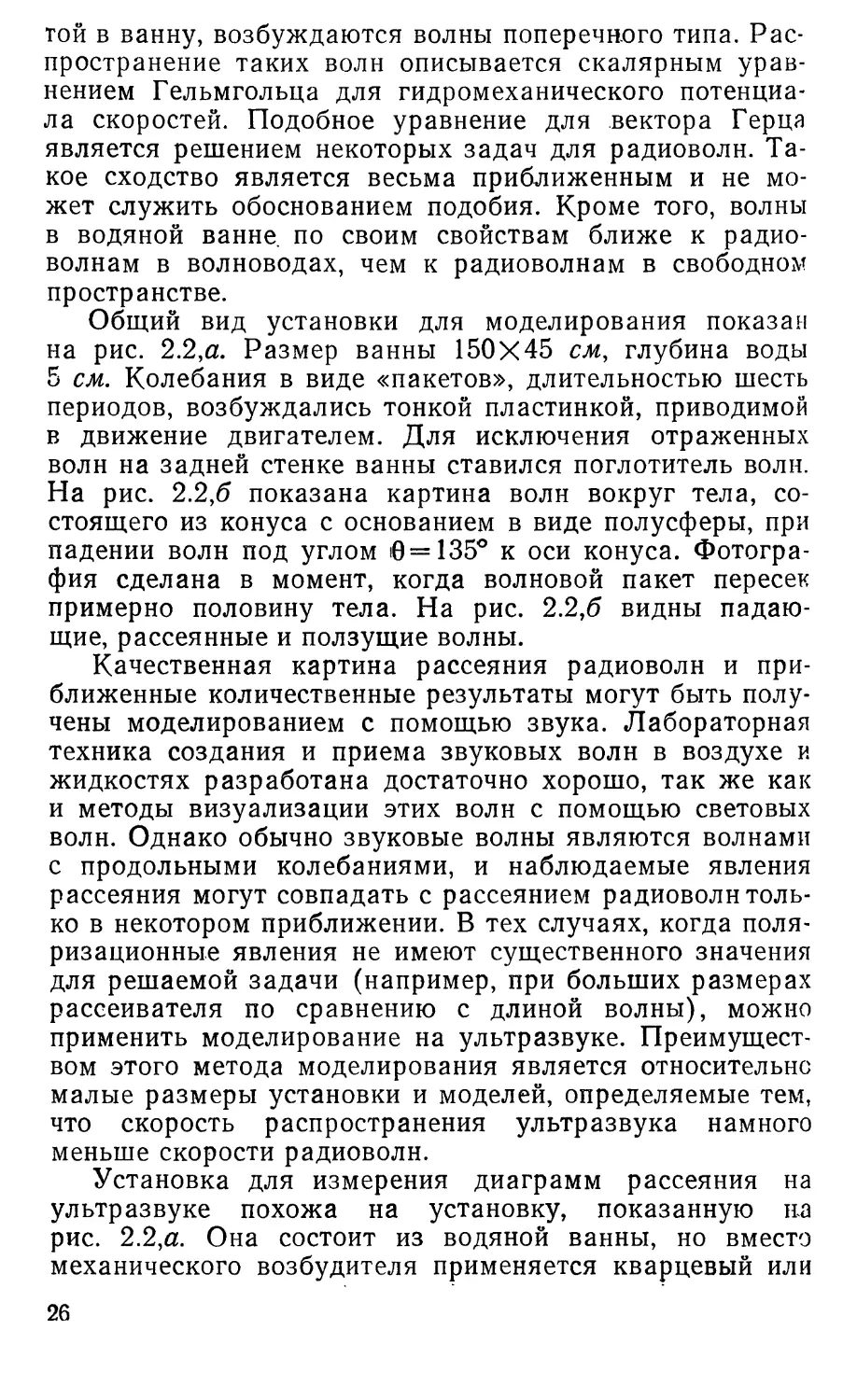
Общий вид установки для моделирования показан
на рис. 2.2,а. Размер ванны 150X45 см, глубина воды
5 см. Колебания в виде «пакетов», длительностью шесть
периодов, возбуждались тонкой пластинкой, приводимой
в движение двигателем. Для исключения отраженных
волн на задней стенке ванны ставился поглотитель волн.
На рис. 2.2,6 показана картина волн вокруг тела,
состоящего из конуса с основанием в виде полусферы, при
падении волн под углом 10=135° к оси конуса.
Фотография сделана в момент, когда волновой пакет пересек
примерно половину тела. На рис. 2.2,6 видны
падающие, рассеянные и ползущие волны.
Качественная картина рассеяния радиоволн и
приближенные количественные результаты могут быть
получены моделированием с помощью звука. Лабораторная
техника создания и приема звуковых волн в воздухе к
жидкостях разработана достаточно хорошо, так же как
и методы визуализации этих волн с помощью световых
волн. Однако обычно звуковые волны являются волнами
с продольными колебаниями, и наблюдаемые явления
рассеяния могут совпадать с рассеянием радиоволн
только в некотором приближении. В тех случаях, когда
поляризационные явления не имеют существенного значения
для решаемой задачи (например, при больших размерах
рассеивателя по сравнению с длиной волны), можно
применить моделирование на ультразвуке.
Преимуществом этого метода моделирования является относительно
малые размеры установки и моделей, определяемые тем,
что скорость распространения ультразвука намного
меньше скорости радиоволн.
Установка для измерения диаграмм рассеяния на
ультразвуке похожа на установку, показанную на
рис. 2.2,а. Она состоит из водяной ванны, но вместо
механического возбудителя применяется кварцевый или
26
Источник света
Фотоаппарат
Отражающий
экран
Возбудитель
импульсов
Вид ванны
сбоку
Глушители
Вид ванны
сверху
Рассеянная волна
\Исследуемая модель
б)
Рис. 2.2. К исследованию образования волн в водяной ванне:
измерительная установка; б — образование волн в окрестности тела
конус—сфера.
27
магнитострикционныи возбудитель волн продольного
типа. Такой же возбудитель применяется в качестве
приемника и располагается обычно рядом с излучателем.
Модель по своим размерам, измеренным в длинах
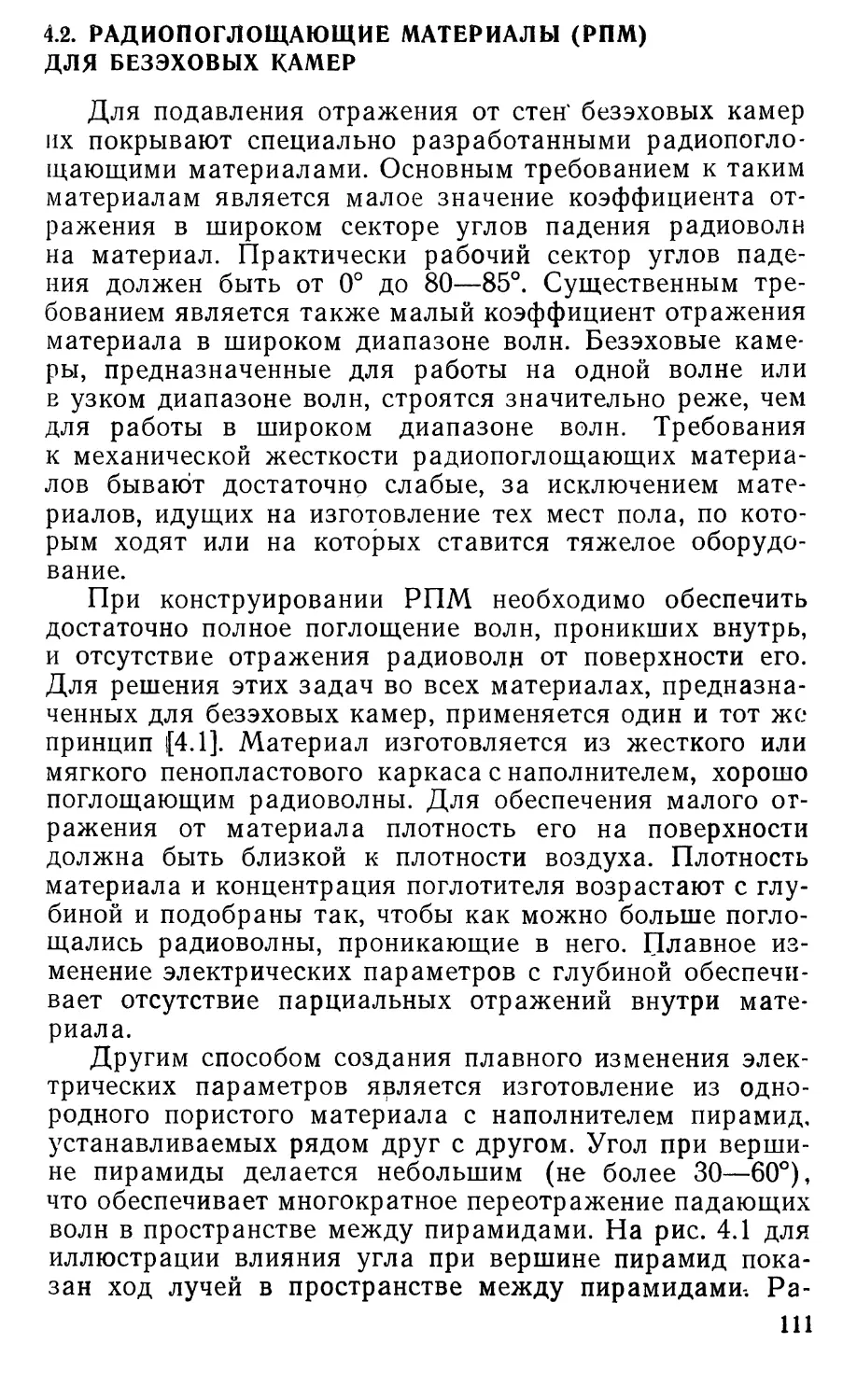
моделируемой волны, должна совпадать с размерами
образца в длинах рабочей волны. Например, если частота
ультразвука равна 1 Мгц (применяются частоты до
10 Мгц), то, учитывая, что скорость распространения
волн в воде равна ~1,5 км/сек, найдем, что длина
волны равна Xy3 = cff = 0,\5 см. Таким образом, при
моделировании с помощью ультразвука используются
миллиметровые и субмиллиметровые звуковые волны и мас-
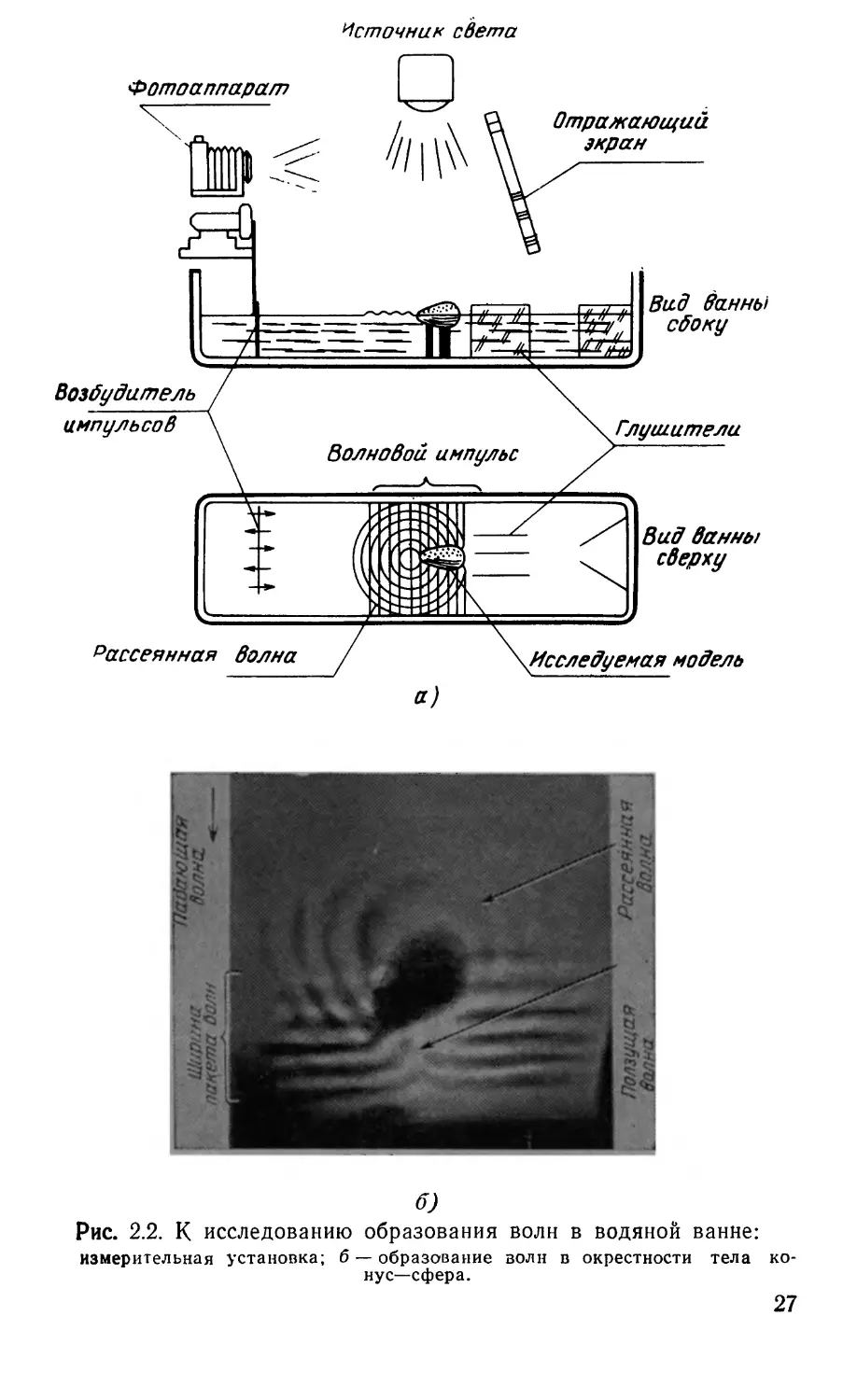
Рис. 2.3. Амплитуда и фаза полей волн, проходящих через линзу;
а —амплитуда; б — фронты волн.
штабы моделей должны быть 1 : 100 и даже меньше. При
изготовлении моделей возникают большие трудности
в подборе материала для обеспечения требуемых
граничных условий на их поверхностях. Известно, что
металлические тела практически целиком отражают
радиоволны, энергия внутрь тел не проникает. Создать та
кие условия на звуковых волнах невозможно из-за от
сутствия веществ, в которых не распространяется
ультразвук. Больше всего ультразвук затухает в газах, и
поэтому случай рассеяния радиоволн металлическим то
лом имитируется рассеянием ультразвука телом, поме
щенным в воду и выполненным в виде очень тонком
оболочки из металла, пластмассы или воска, наполнен
ной воздухом.
При определенных условиях могут быть созданы по
перечные звуковые волны. В настоящее время техника
создания поперечных ультразвуковых волн еще очеш.
28
несовершенна, и они не находят применений для
Моделирования. Кок [2.2] использовал явления образования
поперечных звуковых волн (подобных электрическим
нилнам в волноводах) при распространении звуковых
молн 'В трубах, размеры сечения которых сравнимы
i1 длиной волны. Им была создана установка,
работающая на частотах, близких к 10 кгц, позволяющая визу-
пльно наблюдать распространение волн в рупорах,
прохождение их через линзы различного типа и в ряде
других устройств, по своей конструкции подобных
радиотехническим устройствам. На рис. 2.3 показаны
амплитуда и фаза (положение фронтов волн) поля звуковых
Милн, проходящих через металлопластинчатую линзу.
V.2. ЭЛЕКТРОДИНАМИЧЕСКОЕ МОДЕЛИРОВАНИЕ
Моделирование в электродинамических системах,
I' частности при изучении явлений излучения, рассеяния
\\ дифракции радиоволн применяется с начала XX века.
Иимможность электродинамического моделирования
мигрвые была обоснована Абрагамом [2.3]. Начиная
г М-Х годов электродинамическое моделирование нашло
широкое применение при изучении антенн коротких и
WM/гракоротких волн [2.4], а с 50-х годов — при изучении
/ишграмм рассеяния различных радиолокационных целей
и диапазоне дециметровых и метровых волн. В настоя-
Hhv время моделирование является основным методом
определения ЭПР и элементов МР различных тел на
МИ1 в лабораторных условиях. Как будет показано
I* ivi. 3, для получения квазиплоской волны расстояние
/т измеряемого объекта размером L должно
удовлетворить условию
м'in, если выразить L в длинах волн, т. е. ввести ?х =
ЦК то
R > kll\ .
Iwim видно, при Lx = const необходимое расстояние прямо
Пропорционально длине волны и уменьшается при моде-
лмрпнании во столько раз, во сколько укорачивается
/пина волны. Благодаря измерению моделей на волнах,
|»п много раз более коротких, чем рабочая, удается зна-
29
ЧйТельйо уменьшить расстояние до измеряемой модел!
и выполнять измерения в помещении.
Теоретическое рассмотрение показывает, что можно
построить модель, которая будет отображать не только
конфигурацию поля вблизи образца в относительны*
единицах, но и абсолютные уровни мощности. С помо
щыо этой «абсолютной» модели можно проводить пря
мые измерения всех электромагнитных свойств заданной
системы, в том числе интенсивность падающего и
отраженного полей. Однако осуществление такой модели
оказывается настолько сложным, что в диапазоне СВЧ
практически применяется только относительное
моделирование, при котором моделируется лишь конфигурация
поля. Для определения абсолютных значений величин
напряженностей полей или мощностей в этом случае
необходимо применять косвенные методы, например
использование эталонов, параметры которых получены из
расчета или путем сложных прямых измерений.
Возможность создания модели заданной
электродинамической системы основывается на линейности
уравнений Максвелла, описывающих поля системы. Поэтому
нелинейные среды, такие, как ионосфера или
ферромагнетики, из рассмотрения должны быть исключены.
Приводимые условия электродинамического моделирования
действительны только для систем с линейными средами,
параметры которых могут быть как однородными, так
и неоднородными.
Рассмотрим пространство образца и пространство
модели. Необходимо найти условия относительного
электродинамического подобия, т. е. условия, при которых
величины векторов электромагнитного поля в каждой
точке пространства модели отличаются от этих величии
в соответствующей точке пространства образца толькс
постоянным численным множителем.
При доказательстве условий электродинамической:
подобия [2.4] будем исходить из уравнений Максвелла
? ^ = O, (2.1
^-Т? = 0. (2.2
Здесь jji — магнитная проницаемость среды; е — ди
электрическая проницаемость среды; у— проводимост
30
греды; Е и Я — векторы электрического и магнитного
полей соответственно.
Для получения зависимости от некоторых
безразмерных параметров воспользуемся равенствами
Ё=еЁ*0; #=/*#„;
S = S X * u, = u, X ' Y = Y S* (2 3)
длина равна t0Ly время равно t0T.
Здесь Ео, Яо, Хе, Xw, s, / и Т — числа, которыми
измеряются переменные поля в системе, в которой
единичными величинами являются е, h, eo, jio, у, /о и Т.
Последние являются, по сути дела, масштабами.
Подставляя (2.3) в уравнения (2.1) и (2.2), получим
rot Ео + аХт ~^ = 0; (2.4)
rot /Го — рхв ^. - 8 Д = 0, (2.5)
а==
р=^4-; 8=то/о4-- (2-6)
Величины а, |3 и б являются безразмерными
постоянными. Размер /о вошел в эти величины за счет диффе-
рсчщирования в выражении для rot по безразмерным па-
рлметрам.
Для того чтобы были подобными две
электродинамические системы, необходимо и достаточно, чтобы
коэффициенты а%т, 1$%е и 8s были в обоих случаях одинаковы.
Если ограничиться рассмотрением
монохроматических колебаний, за масштаб времени взять период коле-
Гшний х и заменить его через частоту /, то условия подо-
Оия можно записать в виде
jjbf/0 -A: = const, (2.7)
eflo^= const, (2.8)
у10-у = const (2.9)
31
Для большего удобства анализа перемножим (2.7),
(2.8) и (2.9) попарно и получим
= const, (2.10)
(2.11)
s^-(//0)2=. const. (2.12)
Начнем анализ для тел, выполненных из идеального
диэлектрика (ju, = 4jt« 10~7 гн1м, y = 0)- Обозначим все
величины, относящиеся к пространству модели, с помощью
индекса «м». Условия (2.10) — (2.12) можно переписать
в таком виде:
вК//„)2 = емМУом)\ (2.13;
/ /м
s-J-(//0)2=zSM-g-(y0M)2. (2.15:
Эти условия должны удовлетворяться во всем
пространстве, т. е. в телах и в среде, в которой находятся
тела. Заманчиво применить в качестве среды в
пространстве модели диэлектрик с высоким 8, например, воду или
твердый диэлектрик. Однако из-за потерь в воде
измерения делаются неточными, а измерения с твердым
диэлектриком практически трудно выполнимы и поэтом}
измерения на моделях всегда производятся в воздухе
Если средой и при натурных измерениях, и при модель
ных является воздух, то в среде удовлетворяются уело
вия 6= гм и [х = |хм. Это означает, что и для модели долж
ны удовлетворяться такие же условия.
Учитывая эти требования, можно окончательно напиг
сать условия подобия при модельных измерениях в
воздухе, вытекающие из выражения (2.13):
81= 8м, \Л== -{Ам»
В нашем случае проводимость как в воздухе, так i
в телах равна нулю и условия (2.14) и (2.15) удовле
творяются автоматически.
Выражение (2.16) позволяет сформулировать уело
вие электродинамического подобия для тела из идеаль
39.
иого диэлектрика. Измерения на модели будут точно
совпадать с измерениями в натуре, если модель точно
отображает образец и по электрическим'свойствам
материала и л о размерам в масштабе 1 : N\ и измерения
(производятся на частоте в N раз большей, чем рабочая частота.
Это условие называется условием масштабного
моделирования, которое является основным методом
моделирования, применяемым на практике.
Большинство измеряемых объектов бывает
выполнено из металла с большой проводимостью у. Глубина
проникновения электромагнитного поля СВЧ внутрь таких
металлов, как медь, серебро, алюминий, настолько мала,
что можно их проводимость приближенно считать
равной бесконечности. Если и образец и модель
изготовлены из материала с у—^°°> то условия (2.14) и (2.15)
можно не рассматривать, так как поле не проникает
внутрь тел, а для выполнения условия (2.13)
достаточно удовлетворить условию масштабного моделирования
(2.16).
Для анализа условий моделирования в случае
сложных образцов, изготовленных из материалов с потерями,
обратимся к выражениям (2.7) — (2.9) и перепишем их
в таком виде:
Л| = Ш»м ?-. (2.17)
Фо-jr =sMy0Mg-, (2.18)
Y^o ~~jf = Ym'om ^ • (2.19)
Вычитая из (2.18) выражение (2.19), умноженное
на /, заменив / на угловую частоту со, получим
< -F (s - 1 1) = ^* t (s« -'?•)• <2-20>
Из выражения (2.17) найдем, что
Ыо — = f4,VoM у-- (2.21)
Ограничимся случаем, когда е = ем, |я = |ям, и, кроме
того, удовлетворяется условие (2.16), которое мы
запишем в виде
ш/0 = «ьА*. (2.22)
3—340 33
Тогда из (2.21) вытекает, что
4ЧЬ <2-23>
т. е. отношения масштабов электрического и магнитного
полей в обеих системах равны, хотя hue могут быть не
равны hM и еш соответственно. Учитывая это, придадим
выражению (2. 20) окончательный вид
<
(• -'-?-)= «Л. («н- *У • (2-24)
Это выражение является наиболее общей
формулировкой условия масштабного моделирования. Из него
могут быть получены условия для идеального
диэлектрика и идеального проводника, полученные ранее.
Приравнивая действительные части (2.24), получим
условие (2.16), а при приравнивании мнимых частей —
условие для проводимостей
JL = ][«-. (2.25)
СО (Ом V '
Это условие показывает, что материал, из которого
выполнена модель, должен иметь проводимость, величина
которой меньше, чем проводимость образца, во столько
раз, во сколько частота при модельных измерениях
больше рабочей частоты.
Мы можем воспользоваться тем, что-^- = tg8, где tgo—
тангенс угла потерь, и придать выражению (2.24) вид
e<(l-itg8) = eMcDM/ol4(l-itg8M)> (2.26)
считая, что условие масштабного моделирования
eco/0^sM(oM/0M (2.27)
удовлетворяется, найдем дополнительное условие
моделирования при наличии проводимости в материале
образца
(2.28)
Найдем связь ЭПР модели и образца. Величина ЭПР
находится из выражения (1.9)
R-+00
34
Подставив в это выражение наши масштабы, получим
для образца
= lim Ы\ (4 ) ^_ = цт 4, Еф^ (Rl jll; (2.29)
«-и» oH° °°
'•¦¦
(2.30)
Из выражений (2.29) и (2.30) следует, что
Если модель выполнена в масштабе 1 : N, то
^о=<Тм Л^2, (2.32)
т. е. для получения значения ЭПР образца на рабочей
волне необходимо величину ЭПР, измеренную на
модели, умножить на i/V2.
При масштабном, моделировании измеряемые модели
должны быть геометрически подобны образцу, а все
размеры модели уменьшены в N раз. Частота, на которой
производится измерение моделей, должна быть в iV раз
больше частоты измерения образца.
Если образец выполнен из металла, то и модель
должна быть металлической, при этом для изготовления
модели применять тот же металл не обязательно. Если
материал образца не является хорошо проводящим
металлом, то й и |х в каждой точке модели должны быть
равны е и |х в подобных точках образца, а проводимость
в jV раз меньше, чем проводимость образца.
Точное моделирование образцов из материалов с
потерями трудно выполнимо из-за сложности подбора
проводимости модели и поэтому применяется редко. Однако
было показано [2.6], что покрытые радиопоглощающим
материалом цели могут быть измерены на моделях
с удовлетворительной для практики степенью точности.
При измерениях в диапазоне волн вне резонансной
области радиопоглощающего материала, покрывающего
модель, достаточно, чтобы коэффициенты отражения ра-
диопоглощающих материалов модели и реального
объекта совпадали при всех углах падения. При таких измере-
з* 35
ниях используются радиопоглощающие материалы в
виде тонких гибких листов.
Установлено, что при удовлетворении равенства
коэффициентов отражения достаточно правильно
измеряются амплитудные диаграммы. Однако доказательства
правильности измерения фазовых диаграмм при таком
моделировании неизвестны.
2.3. МОДЕЛИРОВАНИЕ С ИСПОЛЬЗОВАНИЕМ ВОЛН
ОПТИЧЕСКОГО ДИАПАЗОНА
Наравне со строгим электродинамическим
моделированием, все чаще находит применение моделирование
с помощью волн оптического диапазона. Оно позволяет
достаточно просто получить приближенные сведения об
отдельных параметрах рассеянных полей и поэтому
широко применяется для решения частных задач.
Например, световые волны с успехом применяются для
нахождения «блестящих точек», т. е. мест максимального
отражения радиоволн. Для их нахождения хорошо поли-
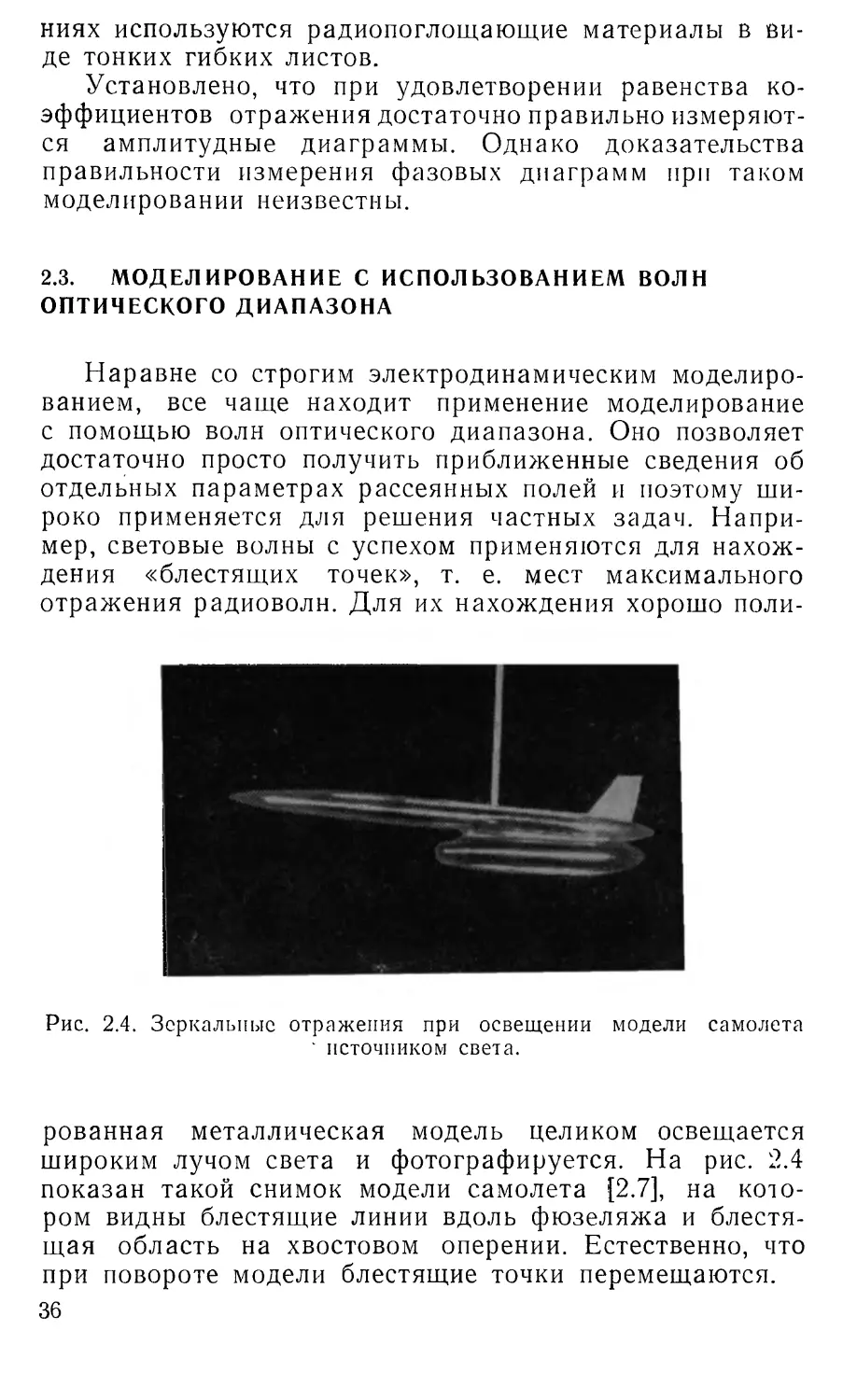
Рис. 2.4. Зеркальные отражения при освещении модели самолета
* источником света.
рованная металлическая модель целиком освещается
широким лучом света и фотографируется. На рис. 2.4
показан такой снимок модели самолета [2.7], на
котором видны блестящие линии вдоль фюзеляжа и
блестящая область на хвостовом оперении. Естественно, что
при повороте модели блестящие точки перемещаются.
36
Измерение средних значений ЭПР с применением
некогерентных колебаний
С помощью некогерентного белого пли
монохроматического света могут быть измерены не только
местоположения блестящих точек, но и диаграммы средних
значений ЭПР. Для этого необходимо облучать модель
пучком параллельных лучей и
принимать рассеянный свет
с помощью п/р'иемшика
световых волн, например с
помощью фотоэлемента. Дл я
удобства усиления
принятого сигнала можно
модулировать облучающий свет зву-
ковой частотой. / \
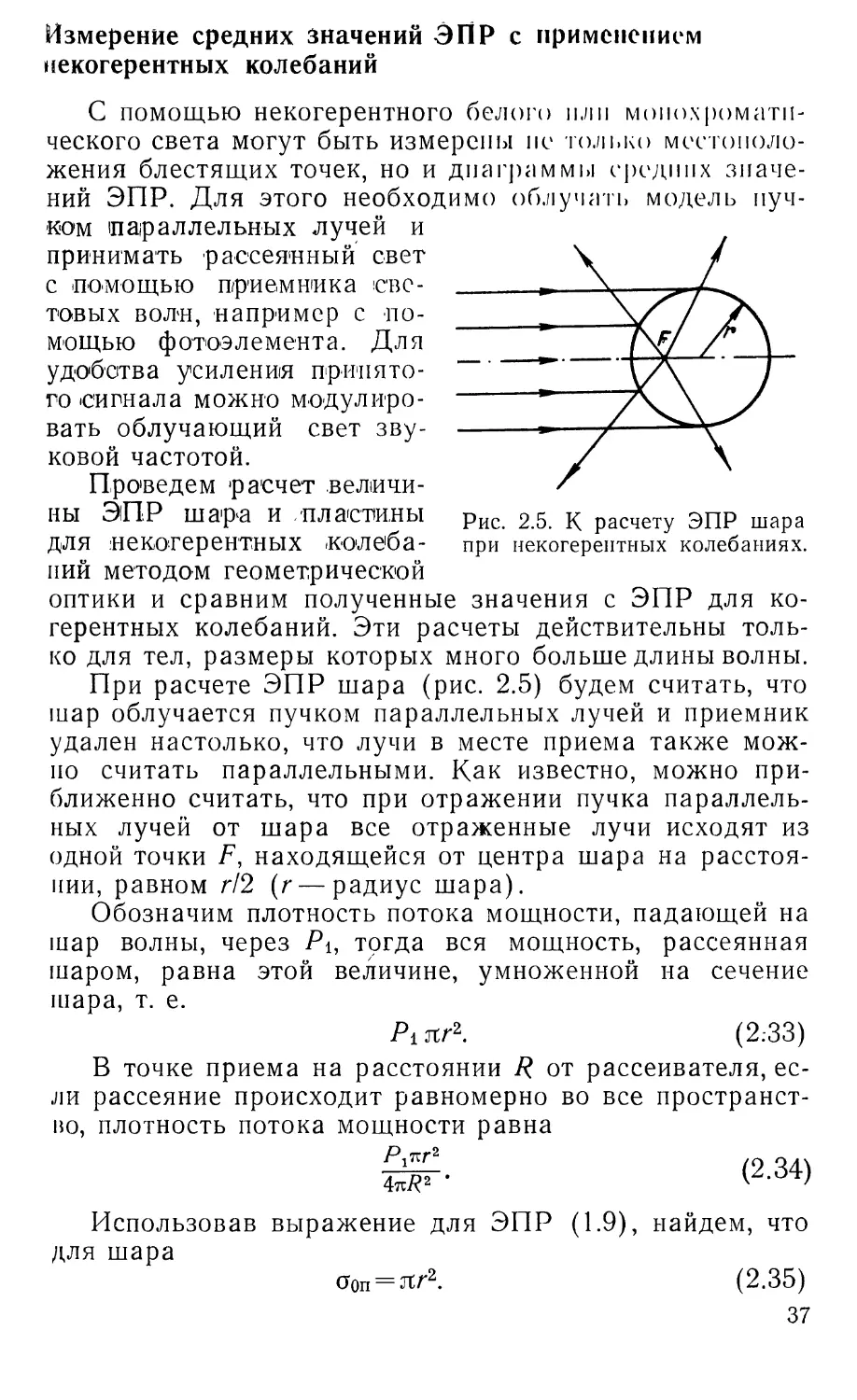
Проведем расчет величи- /
мы ЭПР шара и /пластины рис 25 К ^пр
ДЛЯ нешгерентаых «олеба- при^^когерентных^колебашях
нии методом геометрической
оптики и сравним полученные значения с ЭПР для
когерентных колебаний. Эти расчеты действительны
только для тел, размеры которых много больше длины волны.
При расчете ЭПР шара (рис. 2.5) будем считать, что
тар облучается пучком параллельных лучей и приемник
удален настолько, что лучи в месте приема также
можно считать параллельными. Как известно, можно
приближенно считать, что при отражении пучка
параллельных угучей от шара все отраженные лучи исходят из
одной точки F, находящейся от центра шара на
расстоянии, равном /72 (r—радиус шара).
Обозначим плотность потока мощности, падающей на
шар волны, через Ри тогда вся мощность, рассеянная
шаром, равна этой величине, умноженной на сечение
шара, т. е.
(2.-33)
В точке приема на расстоянии R от рассеивателя,
если рассеяние происходит равномерно во все
пространство, плотность потока мощности равна
Лтсг2
53?г- (2.34)
Использовав выражение для ЭПР (1.9), найдем, что
для шара
aOn = Jtr2. (2.35)
37
Таким образом, для шара значение ЭПР На
когерентных и некогерентных колебаниях одинаково. Иначе дело
обстоит для пластины. Если площадь пластины, на
которую лучи падают нормально, равна S, то рассеянная
мощность будет PiS, а плотность потока мощности
в месте приема
Р - p*s
2 — 4т:/?2 #
С помощью (1.9) найдем, что для пластины
аоп=5. (2.36)
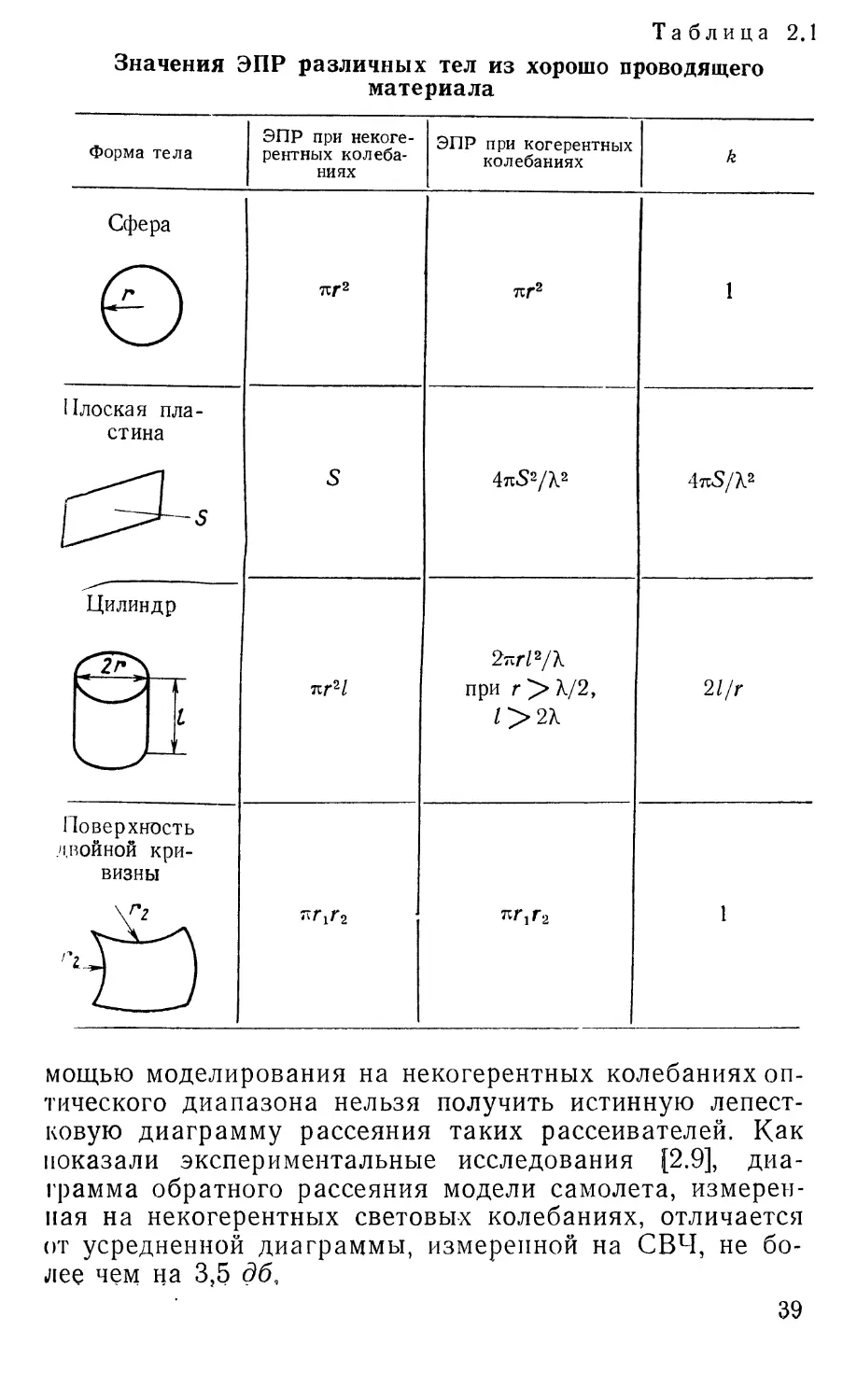
Аналогично рассчитывается аОп для цилиндров и тел
двойной кривизны, значения которых приведены
в табл. 2.1. В этой же таблице даны значения коэффи-
20г
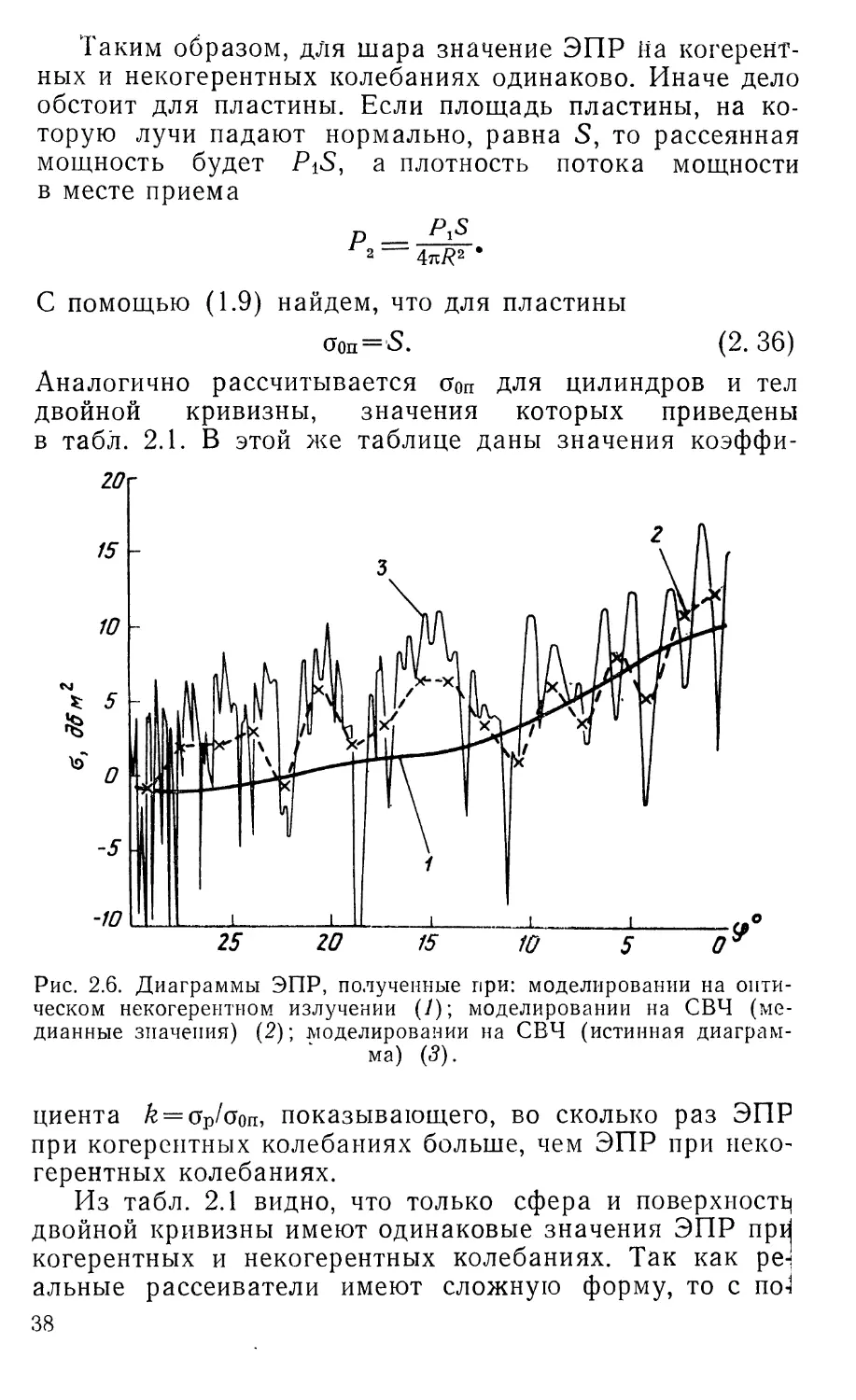
-ю
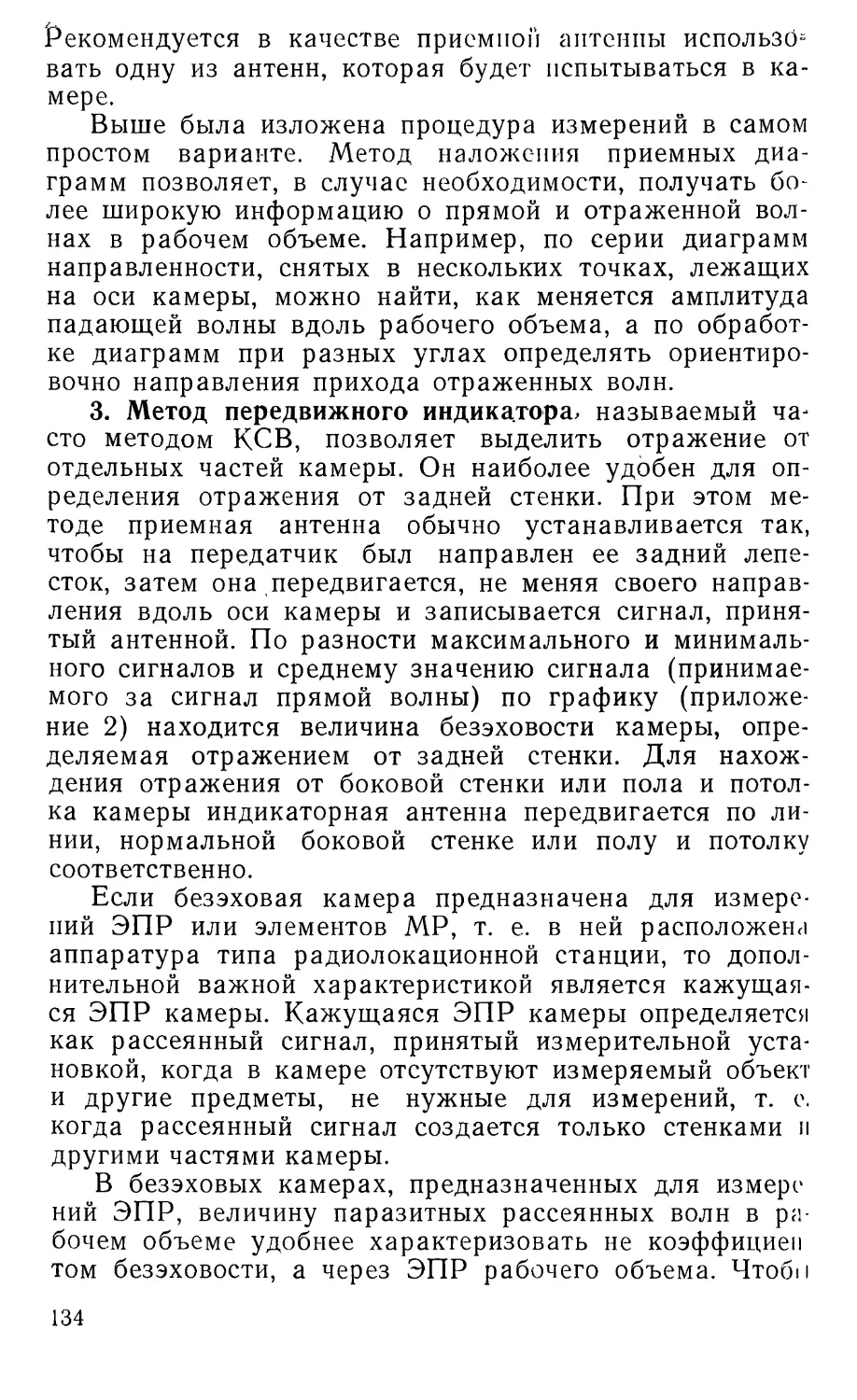
Рис. 2.6. Диаграммы ЭПР, полученные при: моделировании на
оптическом некогерентном излучении (У); моделировании на СВЧ
(медианные значения) (2); моделировании на СВЧ (истинная
диаграмма) (3).
циента & = ap/aon, показывающего, во сколько раз ЭПР
при когерентных колебаниях больше, чем ЭПР при
некогерентных колебаниях.
Из табл. 2.1 видно, что только сфера и поверхности
двойной кривизны имеют одинаковые значения ЭПР npri
когерентных и некогерентных колебаниях. Так как ре^
альные рассеиватели имеют сложную форму, то с по^
38
Таблица 2.1
Значения ЭПР различных тел из хорошо проводящего
материала
Форма тела
Сфера
Iлоская
пластина
Цилиндр
Р
1
Поверхность
июйной
кривизны
ft
ЭПР при
некогерентных
колебаниях
7СГ2
S
пгЧ
ЪГХГ2
ЭПР при когерентных
колебаниях
47Г52Д2
2*г/2Л
при г>Х/2,
/>2Х
k
1
4т:5/А2
2l/r
1
мощью моделирования на некогерентных колебаниях
оптического диапазона нельзя получить истинную
лепестковую диаграмму рассеяния таких рассеивателей. Как
показали экспериментальные исследования [2.9],
диаграмма обратного рассеяния модели самолета,
измеренная на некогерентных световых колебаниях, отличается
от усредненной диаграммы, измеренной на СВЧ, не
более чем на 3,5 дб,
39
Оптические измерения выполнялись с помощью
источника белого света и оптического конденсора.
Поверхность модели реактивного самолета в масштабе 1:35
была сделана зеркальной путем напыления алюминия
в вакууме. Масштаб был выбран таким, чтобы модель
помещалась целиком в световом пучке шириной 40 см.
Измерения проводились в интервале азимутальных углов
от 0 до 30°. Измерения для частоты 8,6 Ггц проводились
с моделью масштабом 1:4 на частоте 34,4 Ггц. На
рис. 2.6 показана диаграмма и медианные значения при
статистической обработке ее в интервале углов 1,66°.
Эти медианные значения приближенно совпадают с
результатами оптических измерений".
Естественно, что оптическое моделирование с
помощью некогерентных колебаний не позволяет выявить
тонкую структуру диаграммы рассеяния и измерить
фазы отраженных сигналов. Для самолетов такое
моделирование позволяет получить диаграмму средних
значений ЭПР. Установлено, что для самолетов
распределение вероятностей ЭПР близко к релеевскому, т. е.
рассеяние определяется совокупным действием нескольких
блестящих точек со случайными фазами. Для релеевско-
го распределения медианные и средние значения мало
отличаются друг от друга. Этим и объясняется, что при
оптических измерениях, которые фиксируют среднее
значение эффекта многих блестящих точек, результаты
совпадают с медианными значениями ЭПР, измеренными на
СВЧ. Отсюда следует, что законность измерения
средних значений ЭПР с помощью оптических некогерентных
колебаний для рассеивателей другой формы должна
быть доказана в каждом конкретном случае.
Моделирование с применением источников
когерентного излучения в оптическом диапазоне волн
(лазеров)
С появлением лазеров возможности моделирования
с использованием волн оптического диапазона
значительно расширились. Хотя сложность изготовления
моделей (и механизмов вращения исключительно большой
точности) не позволяет измерять диаграммы ЭПР, но
некоторые другие задачи оказываются разрешимыми.
Например, когерентные оптические волны были с успехом
40
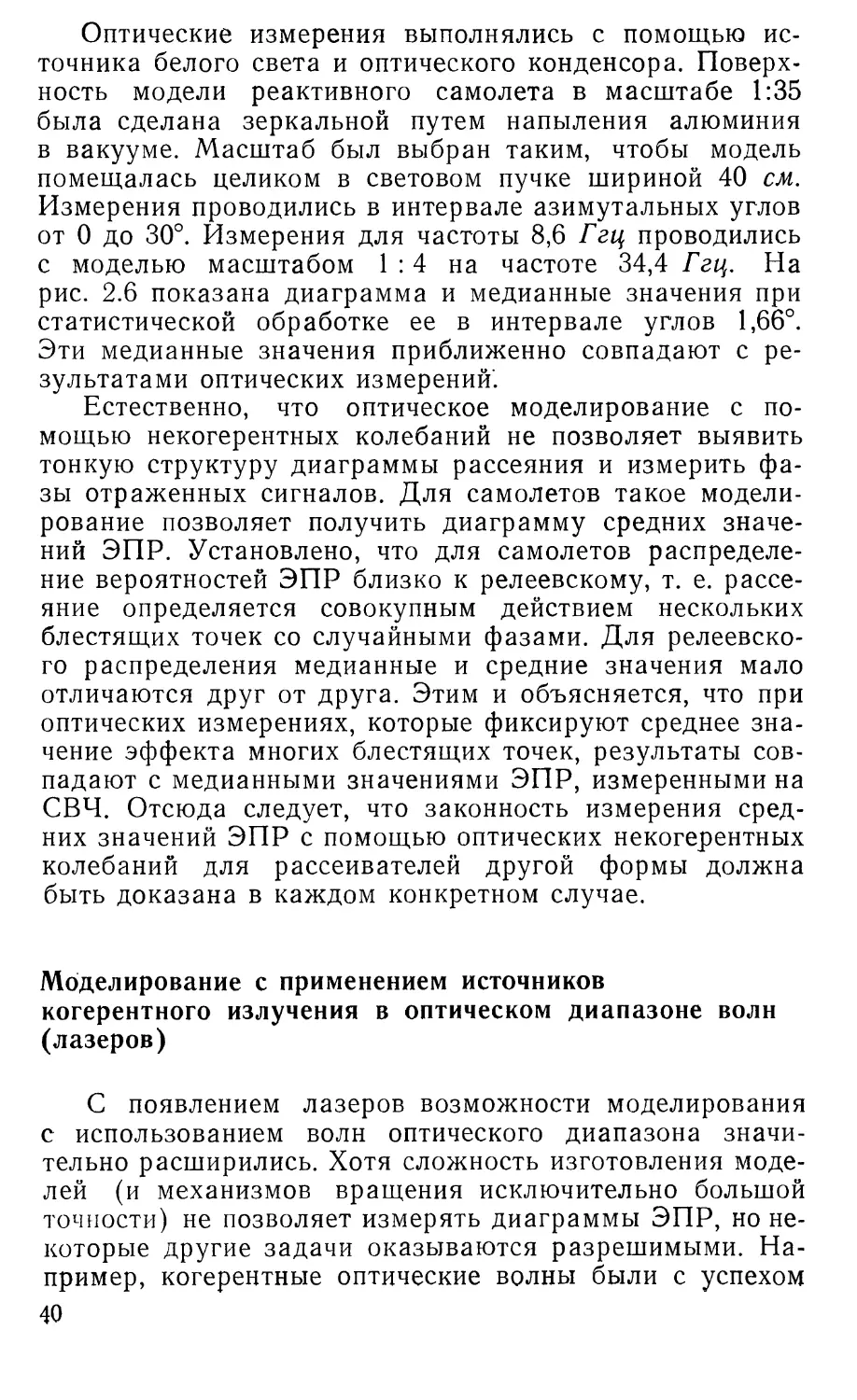
применены для моделирования рассеяния радиоволн
морской и лунной поверхностями [2. 10,]. Схема
измерительной установки показана на рис. 2.7. Источником
колебаний являлся гелий — неоновый лазер мощностью
около 10 мет, дававший луч диаметром 4 мм.
Рассеянная энергия попадает через коллиматор на
фотоумножитель. Луч лазера с помощью прерывателя
модулируется с частотой 13 гц и принятый сигнал усиливается на
этой частоте. Установка является квазиоднопозиционной
с углом разноса приемника от излучателя, изменяющим-
Усилитель
и
преобразователь
Прерыватель
Пишущий
осциллограф
Датчик
угла
^Фотоумножитель
Измеряемый
образец
'Поворотное
Лиафрагма [устройство
^ Гелий- неоновый
лазер
Рис. 2.7. Схема установки для исследования рассеяния оптических
волн от шероховатых поверхностей с помощью лазера.
ся в пределах от 5° до 90°. Измерения проводились на
трех волнах: 0,63; 1,15 и 3,39 мкм при вертикальной и
горизонтальной поляризациях.
Измеряемые модели подвергались различным
способам обработки для получения всевозможных
шероховатостей. Размеры шероховатостей тщательно измерялись.
Размеры образцов L составляли десятки сантиметров,
ширина луча а — несколько миллиметров и радиус
корреляции высоты шероховатостей / — десятки
микрометров. Таким образом, удовлетворялось требование, чтобы
все размеры были велики по сравнению с длиной волны
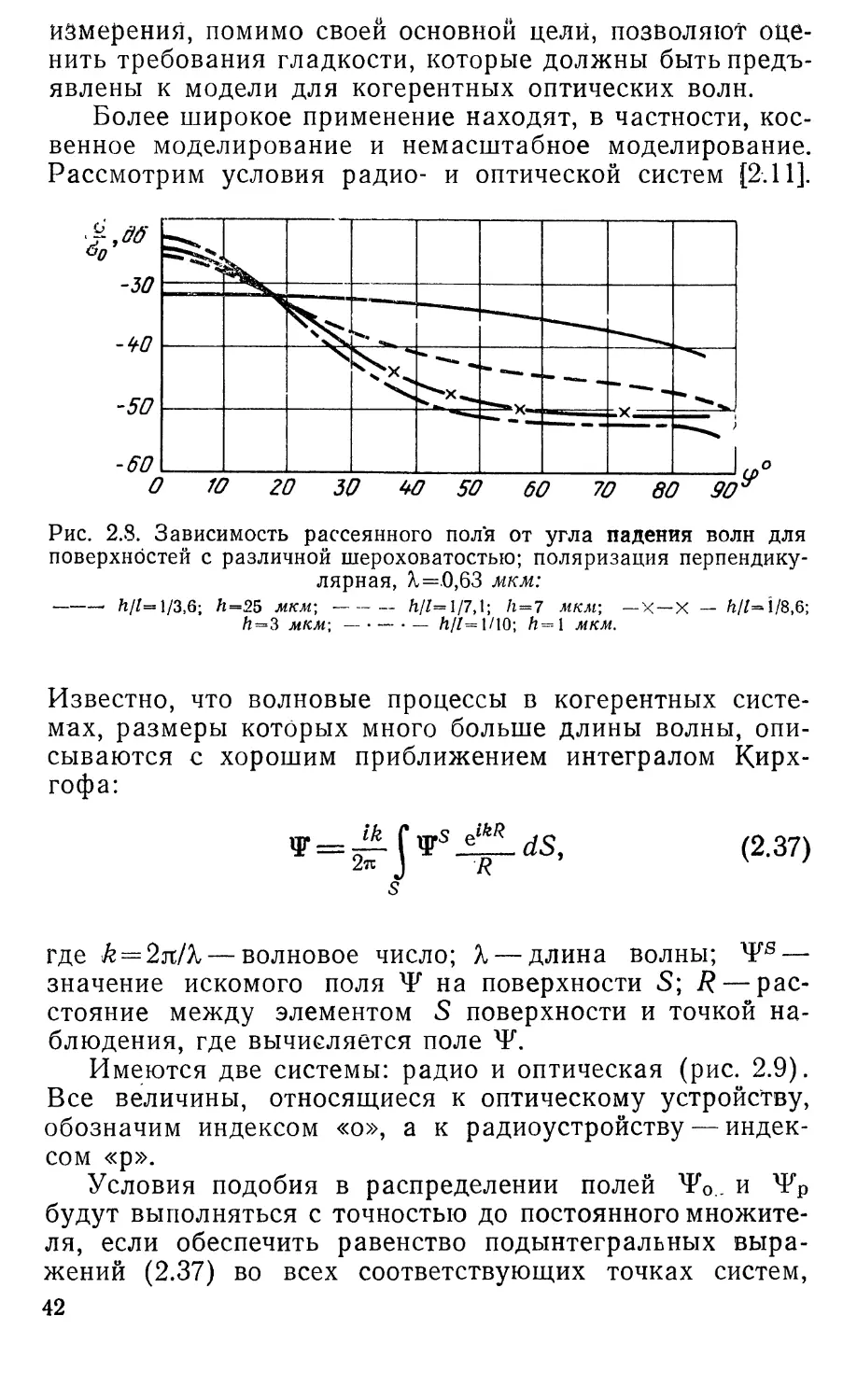
Средние значения высот шероховатостей h
находились в пределах от 1 до 25 мкм. На рис. 2.8 приведены
результаты измерений зависимости ЭПР образца ох
угла падения волн. За 0 дб принято значение ЭПР при
нормальном падении и абсолютно гладком образце. Эти
41
измерения, помимо своей основной цели, позволяют
оценить требования гладкости, которые должны быть
предъявлены к модели для когерентных оптических волн.
Более широкое применение находят, в частности,
косвенное моделирование и немасштабное моделирование.
Рассмотрим условия радио- и оптической систем [2.11].
-30
-50
-60
—— -
- —
— ¦
О 70 20 30 W 50 60 70 80 90*
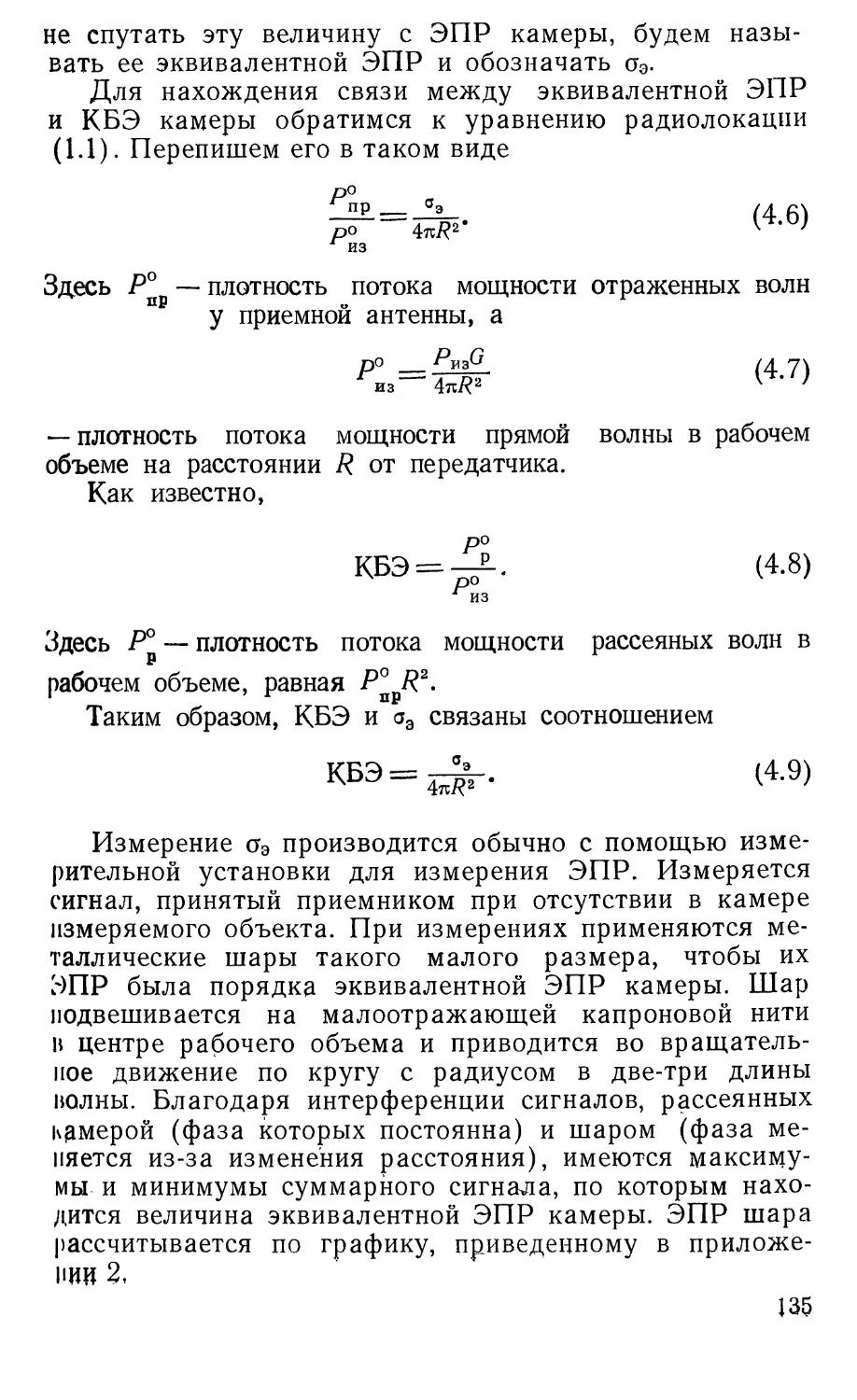
Рис. 2.8. Зависимость рассеянного поля от угла падения волн для
поверхностей с различной шероховатостью; поляризация
перпендикулярная, Я=.0,63 мкм:
. ft//=i/3,6; Л=25 мкм; ¦ Л//=» 1/7,1; /г=7 мкм; — X —X — Л//=» 1/8,6;
ft=3 мкм; — • — • — Л//= 1/10; Л="1 л/асж.
Известно, что волновые процессы в когерентных
системах, размеры которых много больше длины волны,
описываются с хорошим приближением интегралом
Кирхгофа:
(2.37)
где к = 2л/Х — волновое число; X — длина волны; Ws —
значение искомого поля УР на поверхности S; R —
расстояние между элементом S поверхности и точкой
наблюдения, где вычисляется поле W.
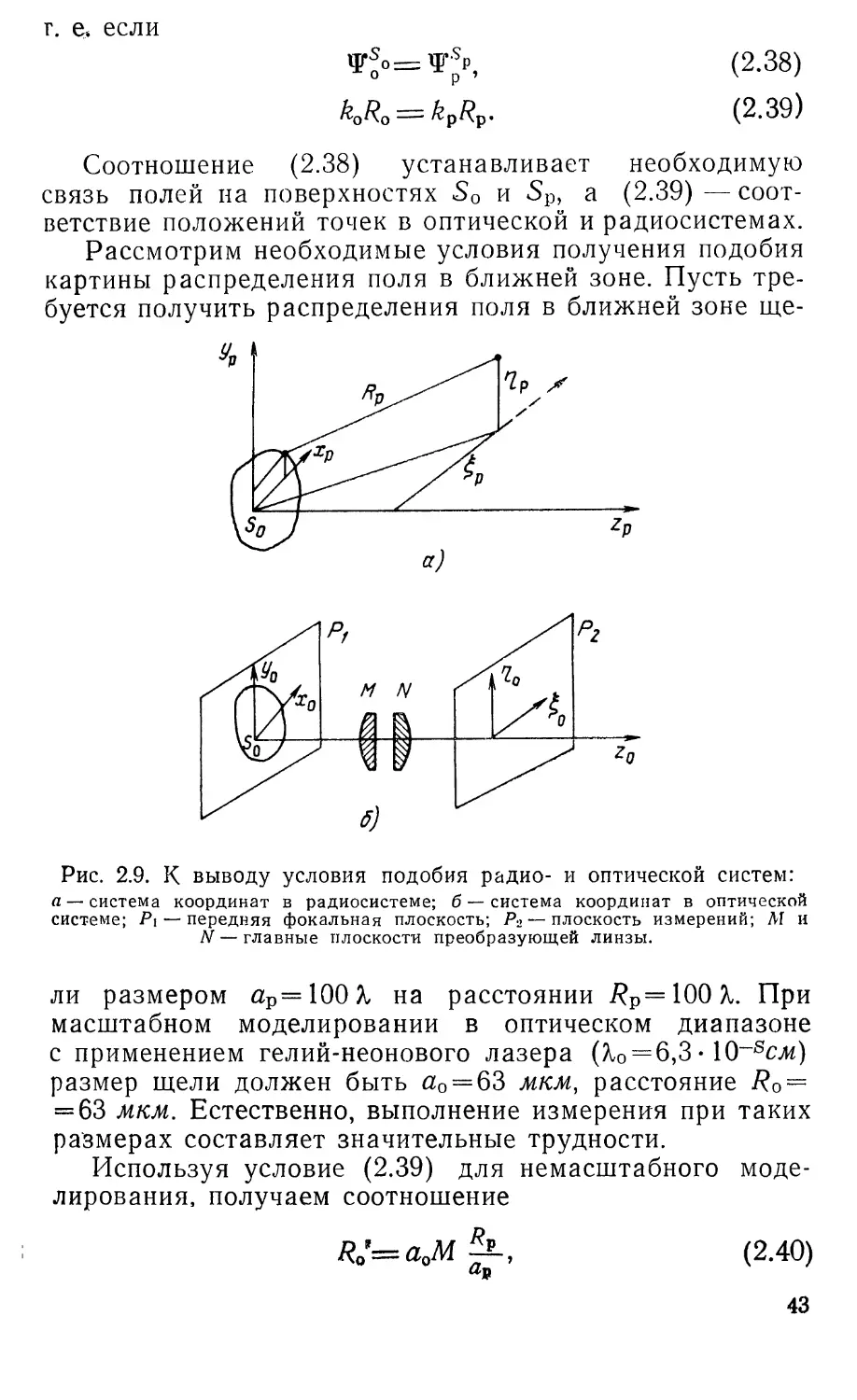
Имеются две системы: радио и оптическая (рис. 2.9).
Все величины, относящиеся к оптическому устройству,
обозначим индексом «о», а к радиоустройству —
индексом «р».
Условия подобия в распределении полей 4V, и Wp
будут выполняться с точностью до постоянного
множителя, если обеспечить равенство подынтегральных
выражений (2.37) во всех соответствующих точках систем,
42
г. ,е» если
ЧГо°=^р, (2.38)
k0R0 = k9Rv. (2.39)
Соотношение (2.38) устанавливает необходимую
связь полей на поверхностях So и Sp, a (2.39) —
соответствие положений точек в оптической и радиосистемах.
Рассмотрим необходимые условия получения подобия
картины распределения поля в ближней зоне. Пусть
требуется получить распределения поля в ближней зоне ще-
Рис. 2.9. К выводу условия подобия радио- и оптической систем:
а — система координат в радиосистеме; б — система координат в оптической
системе; Р\ — передняя фокальная плоскость; Р-> — плоскость измерений; ЛГ и
N — главные плоскости преобразующей линзы.
ли размером ар=100^ на расстоянии i?p=100X. При
масштабном моделировании в оптическом диапазоне
с применением гелий-неонового лазера (^0 = 6,3 • \O~scm)
размер щели должен быть ^0 = 63 мкм, расстояние /?0 =
= 63 мкм. Естественно, выполнение измерения при таких
размерах составляет значительные трудности.
Используя условие (2.39) для немасштабного
моделирования, получаем соотношение
(2.40)
43
где а0 — размер щели в оптическом диапазоне, выбираемый
произвольно; М = ~ -^ коэффициент немасштабного мо-
делирования.
Выберем щель размером 3 мм, тогда для
рассмотренного примера ар=100Ар; М= 6>3. icAio2 = 47>6 и
необходимое расстояние Ro, на котором получается
картина поля, определяется по формуле (2.23). Так как
/?p/#p=l, то Ro = 0,3 -47,6= 14,3 еж. При моделировании
с коэффициентом М = 47,6 получаем удобные для
выполнения размеры щели а = 3 мм и расстояние от
диафрагмы Ro= 143 мм.
Измерения полей в дальней зоне существенно
упрощаются при пользовании преобразующими линзами
[2.11]. Действие линзы сводится к внесению в
проходящее через нее световое поле дополнительного фазового
сдвига Р, зависящего от расстояния от оптической оси.
В этом случае условие (2.39) заменяется следующим:
ko(Ro—P)=kvRv. (2.41)
Если в качестве преобразователя выбрать
длиннофокусный астрономический объектив, преобразующий
падающую на него плоскую волну в сходящуюся сферическую
с центром в фокальной плоскости, то из геометрических
соображений получим
(2.42)
где Хо, у о — координаты точки в плоскости объекта, а/ —
фокусное расстояние. Если поверхности 5Р и So есть
плоскости гр = 0, zo = —/ (рис. 2.9) и координаты в этих
плоскостях связаны соотношением xv=mx0, Уъ>=[ту0, то,
разлагая в (2.41) выражения для /?р, Ro и Р в ряды и
приравнивая коэффициенты при первой и второй
степенях х0, у0, получим:
1 l X (2.43)
(2.44)
(2.45)
44
где ко, А,р — соответственно длины световой и радиоволн;
J-, у] — поперечные координаты точек наблюдения.
Предполагается, что отброшенные члены рядов для Л?р, Ro, P
малы по сравнению с А,р, к0. В оптической системе
указанное предположение справедливо для параксиальных
пучков и практически достигается путем правильного
выбора масштаба моделирования т и фокусного
расстояния линзы /.
Условие (2.43) означает, что если требуется
определить распределение радиополя на расстоянии zv от
раскрыва, необходимо измерить распределение
светового поля на расстоянии z0 от главной плоскости линзы.
Условия (2.44) и (2.45) показывают, что в
оптической системе поле сжато в пространстве в ко1тк^ раз по
сравнению с полем в радиосистеме. Следует отметить,
что подобие полей имеет место не только при
выполнении условия масштабного моделирования, когда m = VAp,
но и при произвольном т, т. е. при немасштабном
моделировании. Это обстоятельство весьма существенно при
моделировании излучающих и рассеивающих устройств,
так как позволяет выполнять модели приемлемых
размеров.
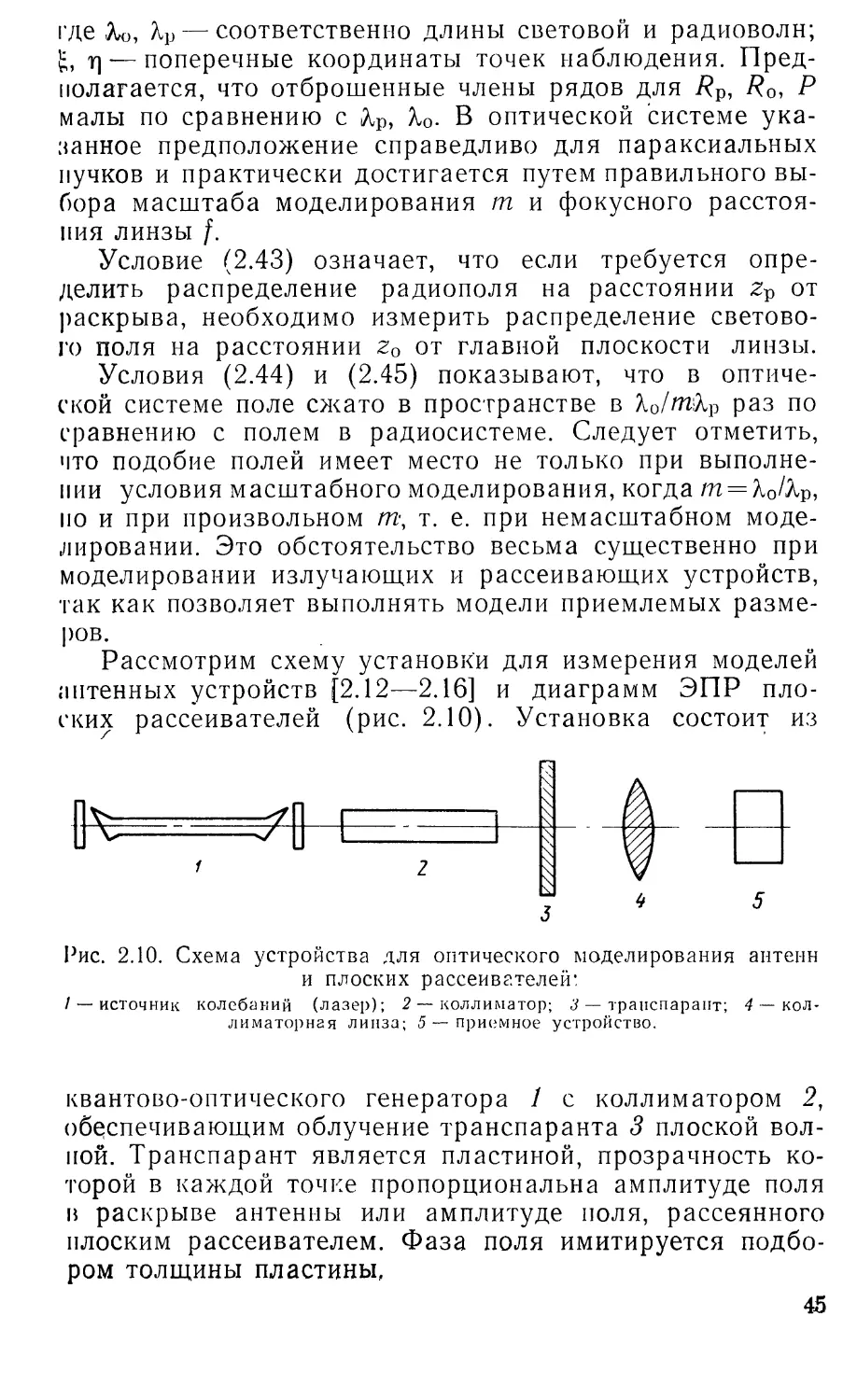
Рассмотрим схему установки для измерения моделей
питейных устройств [2.12—2.16] и диаграмм ЭПР
плоских рассеивателей (рис. 2.10). Установка состоит из
Рис. 2.10. Схема устройства для оптического моделирования антенн
и плоских рассеивателей:
/ — источник колебаний (лазер); 2 — коллиматор; 3 — транспарант; 4 — кол-
лиматорная линза; 5 — приемное устройство.
квантово-оптического генератора / с коллиматором 2,
обеспечивающим облучение транспаранта 3 плоской
волной. Транспарант является пластиной, прозрачность
которой в каждой точке пропорциональна амплитуде поля
и раскрыве антенны или амплитуде поля, рассеянного
плоским рассеивателем. Фаза поля имитируется
подбором толщины пластины,
45
Приемное устройство 5 позволяет фотографировать
или измерять по точкам поле в ближней зоне а&
транспарантом. Для измерения поля в дальней зоне между
приемником и транспарантом помещается коллиматор-
ная линза 4, преобразующая падающие волны в плоские.
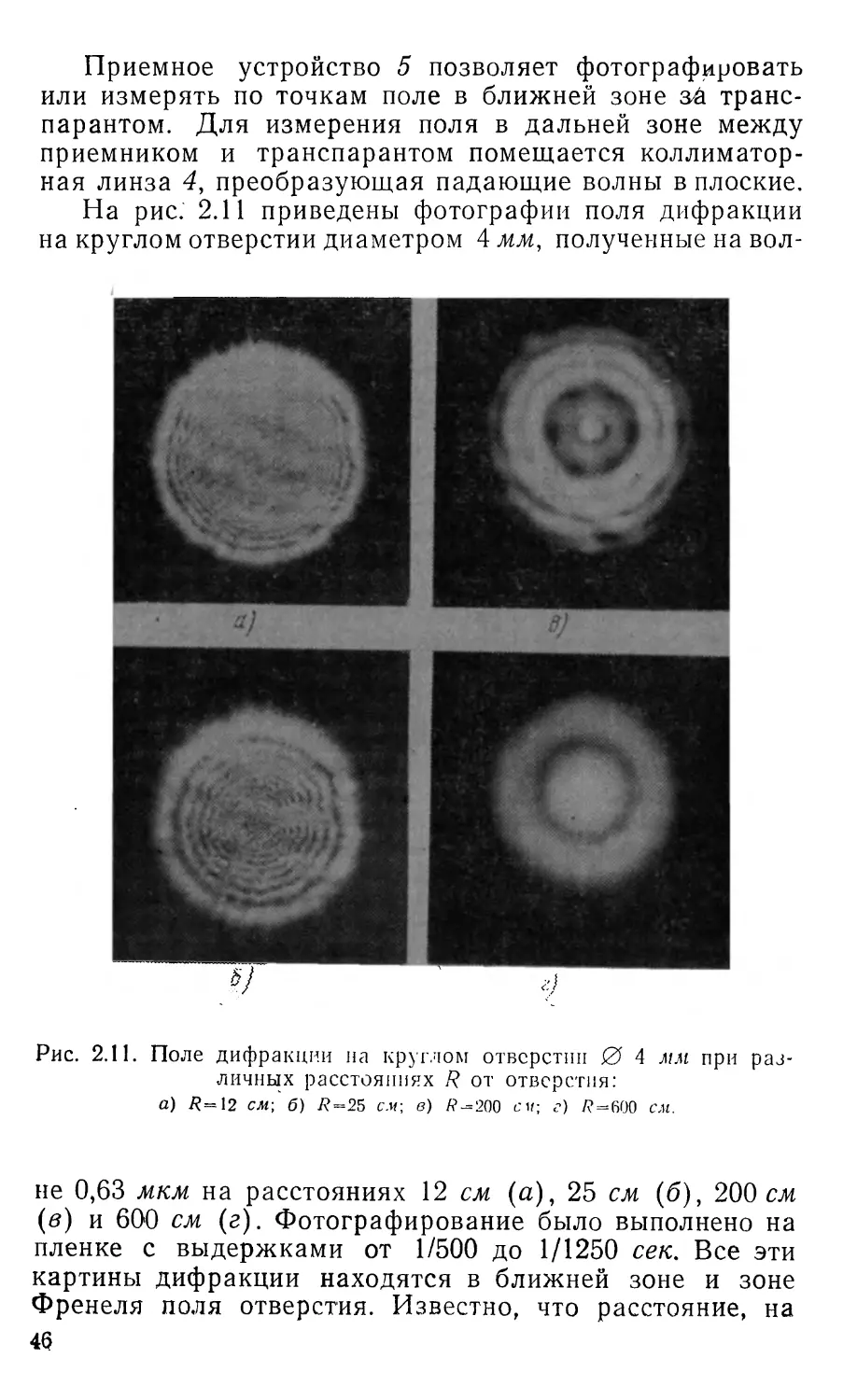
На рис. 2.11 приведены фотографии поля дифракции
на круглом отверстии диаметром 4 мм, полученные на вол-
Ю ' г)
Рис. 2.11. Поле дифракции на круглом отверстии 0 4 мм при
различных расстояниях R от отверстия:
а) #=12 см; б) R=26 см; в) /?-200 см; г) У? = 600 см.
не 0,63 мкм на расстояниях 12 см (а), 25 см (б), 200 см
(в) и 600 см (г). Фотографирование было выполнено на
пленке с выдержками от 1/500 до 1/1250 сек. Все эти
картины дифракции находятся в ближней зоне и зоне
Френеля поля отверстия. Известно, что расстояние, на
46
котором начинается дальняя зона, может быть найдено
из выражения
Здесь L — размер излучающего отверстия, в нашем
случае равный 4 мм, а % — длина волны, равная 0,63 мкм.
Подставляя эти цифры, найдем, что R = 50 ж, т. е.
дальняя зона начинается на расстоянии 50 м от отверстия.
На рис. 2.11 видно, как трансформируется поле,
Дифрагирующее на отверстии по мере увеличения
расстояния до последнего. По мере увеличения расстояния
уменьшается число зон Френеля и уменьшаются
искажения поля, вызванные неточностью изготовления краев
отверстия. Эти фотографии помогают понять
физическую сущность метода немасштабного моделирования,
рассмотренного выше. Картина поля в ближней зоне на
некотором расстоянии от отверстия данного размера
точно совпадает с картиной поля от подобного отверстия
другого размера, но на другом расстоянии, которое
находится по формулам (2.40) или (2.43) — (2.45).
На рис. 2.12 приведены такие же фотографии поля
дифракции на отверстии квадратной формы со стороной
4 мм, выполненные при освещении отверстия волнами
длиной 0,63 мкм. Для анализа трансформации поля
фотографии снимались на расстояниях 12 см (а), 25 сМ (б)
и 50 см (в). Кроме того, на рис. 2.12,г показана
фотография поля этого отверстия в дальней зоне,- снятая с
применением коллиматорной линзы, трансформирующей
падающие на нее волны в плоские. На этом рисунку
уместилась только центральная часть диаграммы поля,
В этом случае число лепестков диаграммы может бьп%
найдено по методике, известной из антенной техники;
число лепестков равно удвоеннному числу длин волн?
укладывающихся на раскрыве. В нашем случае число
лепестков должно быть равным 6380. На рис. 2.12,5 при^
иедена расчетная картографическая диаграмма.
Наконец, на рис. 2ЛЗ приведены такие же фотогра*
фи и для треугольного отверстия со стороной, равной
4 мм. Поле было сфотографировано на расстояния^
20 см (а), 80 см (б), 140 см (в), 260 см (г), 800 сМ (д)
и в дальней зоне, т. е. за коллиматором (е). Н&
рис 2ЛЗ,ж показана также в увеличенном масштабе
центральная часть диаграммы рис. 2.13,е. На рис. 2.13,з
приведена расчетная диаграмма в дальней зоне
47
при дифракции волн на треугольном отверстии [2.11].
Качественно измеренные и рассчитанные диаграммы
совпадают. Расчет распределения поля (картографических
диаграмм) для квадратных, треугольных отверстий и
отверстий более сложной формы весьма трудоемок из-за
необходимости выполнять расчеты для многих сечений.
Измерение на когерентных волнах оптического
диапазона выполняется достаточно просто и быстро, фотометри-
рование позволяет получить количественные оценки
[2.10], а результаты измерений представляются сразу
в двумерном картографическом изображении.
Анализ фотографий рис. 2.11, 2.12 и 2.13 позволяет
проследить изменение картины поля при переходе из
Рис. 2.12,а, б, в, г.
48
ближней зоны в зону Френеля и затем Фраунгофера,
т. е. в дальнюю зону. Этот анализ позволяет также
изучить возникновение краевых волн от сторон и вершин
Рис. 2.12. Поле дифракции на квадратном отверстии при различных
расстояниях R от отверстия:
a) R=12 см; б) Я=2Ъ см; с) /?==50 см; г) /?=оо; д) расчетная диаграмма.
4—340 49
Рис. 2.13,а, б, в, г, д, е, ж.
50
/щафрагм. и формирование бокового излучения в зоне
гени.
Помимо исследования диаграмм одиночных плоских
получателей и рассеивателей различной фсфмы метод
оптического моделирования находит применение ори изу-
Ч1ЧШИ систем, состоящих из многих излучателей,
расположенных на плоскости [2.12, 2.15]. На рис. 2.14 пока-
hie. 2.13. Поле дифракции на треугольном отверстии при различных
расстояниях R от отверстия:
.и /v>~20 см; б) Я«80 см; в) #«140 см; г) /?=260 см; д) ?-800 см; е) Я=оо;
ж) R=*ooi з) расчетная диаграмма.
51
Рис. 2.14. Поло дифракции и а трех отверстиях в ближней (слева) и
дальней (справа) зонах:
а — круглые отверстия; б — квадратные отверстия; в — треугольные отверстия
52
I'llC. 2.15. Поле дифракции на двенадцати отверстиях в ближней
(ivieBa) и дальней (справа) зонах, расположенных по окружности:
К- круглые отверстия; б — прямоугольные отверстия; в — треугольные
отверстия.
53
заны фотографии поля, снятые для ближней зоны
(слева) и для дальней зоны (оправа) для системы тре.х
отверстий: круглой (а), квадратной (б) и треугольной
'(в) формы. На рис. 2.15 показаны аналогичные фотогра
фии для двенадцати отверстий, расположенных по
окружности большого радиуса. Как видно, форма
диаграмм в дальней зоне опре
ш деляется в основном фор
мой единичных излучателей
Рассматриваемый мета;
моделирования удобен длу
изучения систем, состоящий
. из нескольких элементен
•различных по форме. II;
рис. 2.16 приведены фото
-г.рафии диаграмм «решетки
состоящей из трех от.вер
стий: круглой,треугольнойi
прямоугольной формы 1
ближней зоне (а), л ром еж у
точной зоне (б) и дальне!
зоне (в). Даже в дальне!
зоне © диаграмме отражен!»
свойства всех отверстии
принимающих участие в фор
миров ании су мм арной ди а
граммы.
Область применения мо
делирования плоских излу
чателей и рассеивателей
помощью когерентных опти
ческих волн безусловно н
ограничивается приведенны
ми примерами. Поскольк
та!кие плоские системы нахо
дят применение в совремеп
\ ной технике, в будуще;
; можно ожидать широко
применение оптического мг
Рис. 2.16. Поле дифракции на делирован.ИЯ.
трех отверстиях различной формы . Укажем еще на одн
(круглое, треугольное, прямо- применение когерентных or
\/ГП ТТЬНПР I '
у }' тических волн в техник
а-ближняя зона; б - промежуточная иомрпения тпиягпям.м пя.птра
зона; в — дальняя зона. измерения диаграмм рассея
54
им, которое может получить широкое развитие. Речь
икчг о применении голографических методов [2.11] для
.рлнения и обработки результатов измерений.
В заключение отметим, что современная техника не
•1ра«йичивается только получением отдельных диаграмм
,>ш*сеяния, но требует большого объема измерений и
iuuibuioro объема обработки гах на ЭВМ.
Результаты измерений, кроме записи на диаграммную
HiiTy, одновременно записываются на магнитную ленту.
Мпг-нитные ленты хранятся и, по мере надобности,
запись 'Подается на ЭВМ для статистической ил,и иной
(^работки. Голографические методы позволяют в не-
Г.ольщом объеме накопить большую информацию 'и удоб-
ш ее обработать. Для применения топографических мето-
н)М в случае, когда измерены диаграммы на радиовол-
1йх, необходимо их перетрансформировать в оптические
рлнспаранты, © которых содержатся амплитуды :и фазы
«смеренных диаграмм.
Литература
2.1. Б о гут. Моделирование обратного рассеяния радиоволн
.. шмгае. ТИ'ИЗР, 1965, т. 53, № 8.
12.2. Kock W. Ralated experiments with sound waves and elec-
iiMiiiagnetic waves. РЩЕ, '1959, v. 47, (№7.
12.3. Abraham M. Ein Satz uber Modelle von Antennen Mittlg
!и Phys. ges. Zurich, 1919, v. 19, S. '17.
2.4. iS i n e b a i r G. Theory of models of electromagnetic Systems.
Mine, of the IRE, 1948, v. 36, № 11.
12.6. С т p e т T о н Д. А. Теория электромагнетизма.- ОГИЗ,
и\н.
12.6. 1Б э'р э т, 'С лет тек. !Перс1пект»ивы 'йоследова'ний и разрабо-
mit IB области радиолокационного отражения. ТИИЭР, 1965, т. 53,
2.7. Б е ч м е н. Некоторые последние достижен'ия в техн-ике
имирений (радиоло^кационного поперечного 'сечения. ТИИЭР, 1965,
2J8. Hiaht R. IE., Senior Т. В. A., Weston V. H. A.
'•lucly of surface (roughness and as effect o.n the Backscattering cross
••«lion of Spheres. PIRE, I960, v. 48, № Ц2.
2.9. Розен дал. Сравнение .радиолокационных поперечных се-
м'И'пй,. полученных «методами оптического и ОВЧ моделирования.
ill'11'ЭР, '1965, т. 53, №8.
2.10. Ren аи I., Collins on I. Measurements of electromag-
hi'IIc back-scattering from known. Rough surfaces, the Bell System
Ifclmioal Journal, 1965, v. XLIV, (Nb 10.
2Л1. Бахрах Л. Д., Владимирова О. (Н., Куроч-
•'•1И А. П., Соболев 'Г. А., Фридман if. X. (Применение мето-
чом когерентной -оптики и голографии к задачам "антенной техники
55
и обработки информации 'В об «Антенны» Йзд-во «Связь», 196'
12.1'2. iM 'и р о в и ц к и и Д 'И., Торгованов ©. А., Ч е р к у
нова Г. (П. О закономерностях, характеризующих диаграммы на
гтравленности -м-ногоэлементных антенных систем больших размерoi
«Радиотехника и электроника», Изд-во «'Наука», 1969, т. XIV, № .
12.13. (Г е л ыф ip е й х Г. 1Б , К о р т а в и н А. Й Опгическо
моделирование антенн ОВЧ с отражателем переменного профиля
«Радиотехника и электроника». Изд-во «Наука», 1908, т. XIII
№7
'2.14. К и р е е в Е. 'К., Ки н б е р Б. 'Е. Излучение многоугольны
апертур «Радиотехника и электроника». Изднво «Наука», 197(
т XV, № 2
Й. 16. «М и ip о в и ц к и й Д. И., Т о ip г о в а н о в В. А., Ч е р к у
Иова 1Г. 1П. Исследование картографических диаграмм направлен
ности 'плоских многоэлементных антенн ъ дальней зюне методо
оптического моделирования. ^Радиотехника и электроника». Изд^
«Маука», 1969, т. XIV, № 10.
2Л6. iM и р о в и ц к и й Д. И., Торговаяов 'В. А., Ч е р к у
нова 1Г. П Оптическое моделирование отражения и рассеяния р;
диоволн ОВЧ диапазона «/Радиотехника и электроника». Изд-е
«•Ваука», 1970, т. XV, № 1.
Глава 3
МЕТОДЫ ФОРМИРОВАНИЯ
КВАЗИПЛОСКИХ ПОЛЕЙ
Я.1. ТИПЫ ПОЛЕЙ, ИСПОЛЬЗУЕМЫХ ПРИ ИЗМЕРЕНИЯХ
В главе рассматриваются требования,
предъявляемые «к полям, в которых должен находиться рассеива-
ггль при статических (модельных) измерениях.
Большое значение для точности измерения
рассеянных полей имеет то, насколько поле падающей #а рас-
п\иватель волны приближается к плоскому, .поэтому
щщросу формирования и исследования полей при раз-
риботке измерительных установок необходимо уделять
Л остаточное внимание.
Как было указано в гл. 1, большинство теоретических
и экспериментальных работ посвящено исследованию
лпаграмм рассеяния тел, находящихся в поле плоской
полны, 'вследствие чего при разработке измерительных
установок основной задачей является формирование
полей, максимально приближающихся к плоским.
Распространенным способом получения нужного
распределения поля является выбор такого расстояния от
литенны, на котором поле можно считать локально пло-
гким. Как правило, расстояние между антенной
измерительной установки ;и расоеивателем оказывается
чрезмерно большим in в некоторых случаях с трудом может
быть реализовано даже в полигонных условиях. При
••том возникают дополнительные трудности из-за
отражений от земной поверхности и местных предметов,
создающих паразитные поля, искажающие основное поле.
Отсюда вытекает важность исследования полей волн,
падающих «а рассеи.ватель, а также влияние искажений
чтих полей на точность измерений для того, чтобы
получить критерии для выбора расстояний в каждом
конкретном случае.
Устройством, позволяющим существенно сократить
необходимое расстояние до рассеивателя, является кол-
диматор [3.1], который преобразует сферическую или
57
цилиндрическую волну в плоскую (р,ис. 3.1).
Коллиматоры бывают линзовые (р>ис. 3.1,а) и зеркальные
(рис. 3.1,6).
Для изучения различных типов полей, в которых
может находиться рассеиватель, рассмотрим типичную
схему установки для измерения диаграмм ЭПР (рис. 3.2),
Она состоит из 'приемо-'передающей аппаратуры У,
антенны 2 и рассеивателя 3, находящегося на расстоянии
R от антенны.
Известно, что поле 'излучения антенны делится на
три основные зоны (рис. 3.3): ближнюю зону /,
промежуточную зону // (или зону дифракции Френеля) и
дальнюю зону /// (или зону дифракции Фраунгофера).
Ближняя зона, в свою очередь, делится на две: область
реактивного ближнего толя 1, которая находится на
расстоянии порядка длины волны от раскрыва антенны
и должны учитываться лишь как граница минимального
расстояния в измерительных установках, и область
излученного ближнего поля 2, которая находится на
расстоянии, сравнимом с раскрытом антенны.
В области излученного ближнего поля 2 апертурных
антенн (зеркальных и линзовых) 'поля являются
квазиплоскими и представляют собой интерференционную
картину, образованную полями краевых волн,
возникающих на краях антенны, а также на различных
конструктивных элементах, находящихся -вблизи апертуры. Поля
краевых волн могут быть значительными, так как
в ближней зоне антенны они затухают мало из-за
малости расстояния до источника. Ближняя зона антенны
в некоторых случаях может применяться в
измерительных установках с коллиматором [3.1, 3.3].
В промежуточной зоне // поля являются
квазисферическими и используются в измерительных 'установках
сравнительно редко. В основном они могут применяться
•при определении средних значений диаграмм ЭПР
сложных целей (типа самолетов) и для определения
интегрального закона распределения ЭОР [3.3].
В дальней зоне /// поля являются квазиплоскими
и тем больше приближаются к плоским, чем больше
расстояние от излучающей антенны.
В первых полевых установках с горизонтальным
лучом (ось диаграммы приемо-передающей антенны
направлена параллельно земле) для уменьшения поля,
отраженного, от земли, приемо-передающая антенна и
58
Рис. 3.1. Схема измерительной установки с коллиматором
линзовый коллиматор, б — зеркальный коллиматор, / — облучатель, 2-
коллиматор, 3 — рассеиватель
I'lic. 3.2. Схема установки для измерения диаграммы обратного
рассеяния:
/ — приемопередатчик; 2 — приемо-передающая антенна, 3 — рассе/иватель.
Рис. 3.3. Зоны поля антенны:
ближняя зона: 1 — область реактивного ближнего поля, 2 — область
излучённого ближнего поля; // — промежуточная зона; /// — дальняя зона.
59
рассеиватель располагались как можно выше над
землей, чтобы в точку зеркального отражения попадали
лишь боковые лепестки диаграммы (рис. 3.4,а). Однако
этот способ, несмотря на его техническую -сложность, не
обеспечивал создания поля, достаточно близкого к полю
плоской волны в месте расположения рассеивателя.
Позднее начали применять установки -с наклонным
лучом, в которых измеряемое тело поднималось на
большую высоту, чем приемо-передающая антенна
(рис. 3 4,6). При этом в зону зеркального отражения от
земли попадают дальние боковые лепестки антенны ма-
Рис. 3.4. Типы полевых измерительных установок:
о —с горизонтальным лучом; б —с наклонным лучом; в —с вертикальны!^
лучом; / — излучатель; 2 - рассеиватель.
лой интенсивности. Предельным случаем таких устано
вок является уста-новка с вертикальным лучом, в 'которой
измеряемое тело подвешивается над приемо-'передаю-
щей антенной, а ось диаграммы антенны
направлена'Вертикально (рис. 3.4,в)\
В последнее время нашли применение полевые
установки с экранирующей плоскостью (рис. 3.5,а). В таких
установках поверхность земли тщательно выравнивается
и отражения от нее используются для получения четко
сформированной диаграммы в месте -расположения рас
сеивателя. Антенна располагается вблизи 'Поверхности
60
<емли, благодаря чему с учетом отражения от земли
и вертикальной плоскости формируется достаточно ши-
роюий неискаженный лепесток [3.4].
Предельным случаем такого метода является
установка с зеркальной плоскостью (рис. 3.5,6). В установке
применяется металлическая плоскость, на которой
располагаются антенна и рассеиватель [3.2]. Обычно
используются рассеивател-и, имеющие плоскость симметрии.
Над металлической плоскостью помещается только одна
половина рассеивателя и антенны, так как в качестве
иторой -половины используется зеркальное изображение.
Важным преимуществом таких установок является то,'
что. проблема опор снимается полностью, а все
внешнее оборудование можно поместить под зеркальной пло-
'//S/S/S////////'////////'/////////
Рис 3 5 Типы измерительных установок:
с экранирующей плоскостью; б-с зеркальной плоскостью-
металлическими плоскостями (разрез).
в — с двумя
(•костью. Однако установка может работать только
г волнами вертикальной поляризации и применяется
'шшь для измерений рассеяния телами, имеющими
плоскость симметрии.
В некоторых частных случаях, например для
исследования осесимметричных тел, помещенных в простран-
гг-мё между двумя металлическими пластинами [3.5],
игиользуются квазицилиндрические волны (рис. 3.5,в)!
Изменение цилиндрических волн уменьшает
требование к потенциалу -измерительной установки и облегчает
шдачу формирования поля, сводя ее к задаче формиро-
пнния одномерного поля [3.2].
В последнее время находят применение
измерительные установки, использующие квазиоптические системы:
61
волноводы большого сечения [3.6], рупоры, а также
открытые резонаторы.
Во всех измерительных установках практически
применяются квазиплоские поля; квазицилиндрические и
квазисферически-е поля применяются значительно реже.
Перейдем к более подробному изучению указанных
типов полей применительно к их реализации в
измерительных установках.
3.2. ИССЛЕДОВАНИЕ ПОЛЕЙ, ПРИМЕНЯЕМЫХ
В ИЗМЕРИТЕЛЬНЫХ УСТАНОВКАХ
В .идеальном случае при .падении на рассеиватель
плоской линейно поляризованной волны ЭПР
определяется формулой (1 9"). Запишем ее в следующем виде:
'f1' (3.1)
где Ехрас — х-составляющая электрического поля
рассеянных волн у приемной антенны.; Ех1ищ—
л:-составляющая электрического поля падающей «полны у цели; R —
расстояние между целью и аптешюп радиолокатора.
iB измерительных установках падающая на
рассеиватель волна всегда является квазишюской, так как в силу
различных причин амплитуда и фаза поля (вдоль) рас-
сеивателя имеют вариации (искажения).
Можно показать [3.3], что если ноле падающей на
рассеиватель волны не является плоским, а лишь
приближается к нему, то ЭПР определяется с погрешностью
А по формуле
An I ЕЧ
х i
{KeE«-K~H»)dS
(3.2:
где ад =а(Г-|-А) — ЭПР, определенная с погрешностью А
Zo = |/*s/[jl = 120тт: ом—волновое сопротивление свободной
пространства; k -=2%]%—волновое число; /Се= Щп\—плот
ность электрического поверхностного тока, индуцированной
—¦> —>—>
полем падающей волны; К = — [Е п\ — плотность магнит
ного поверхностного тока, индуцированного полем падаю
—>.
щей волны; п. — нормаль к поверхности S; S—поверхноси
рассеивателя.
62
Пусть в формуле (3.2) поле падающей волны
является квазиплоским и имеет вид
ЕХ1=ЕХ1оА(Х1)е1^х>\ (3.3)
где EXioA(Xi) —амплитуда электрического поля
падающей волны; А(х\) —вариации амплитуды поля; <p(*i) —
вариации фазы поля; х\ — текущая координата.
Для оценки влияния вариаций амплитуды и фазы
падающего поля на диаграмму ЭПР «рассеивателя
рассмотрим 'простейший пример радиолокационного рассеяния
квазиплоской волны бесконечной идеально проводящей
лентой шириной / (рис. 3.6).
l 1 -
~J Z
Рис З.б. К расчету диаграммы ЭПР металлической ленты.
Пусть на ленту под углом 8 падает квазиплоская ли-
иойно-поляризованиая воля-: с компонентами Ех, Еу
и Hz:
Hz = HZoA (*,) exp {i [cp (л:,) - kxx cos в]}. (3.4)
выразим Re и К через Hz и Ё^, подставим полученные
иыражения в (3.2), заменим HoZ через EXQfZ0 и введем но-
мую переменную x=2xjl. После преобразований получим
ад = С|/|», (3.5)
| де ад — ЭПР единицы длины ленты;
с k*l* cos2 9
/= ^A*(x)et[2*{x)-VoX]dx; (3.7)
(3.8)
•:»o — обобщенный фазовый угол; / — ширина ленты. Из
(3.5) — (3.8) видно, что ЭПР ленты зависит от
амплитудного и фазового распределения поля по ее ширине.
63
Рассмотрим некоторые частные случаи вариаций,
характерные для .полей, -используемых в измерительных
установках.
Диаграмма ЭПР ленты при падении на нее волны
с постоянной фазой и периодически изменяющейся
амплитудой
Пусть фаза поля падающей на ленту волны
'постоянна <р(х) = const, а амплитуда А(х) —четная
периодическая функция с нормированным 'периодом T=2d/l, где
d — период.
Разложим А (х) в ряд Фурье
А (х) = Ло + JJ Ап cos ^, (3.9)
л=1
где
(3.10)
Подставляя (3.9) в (3.7), получим
—1 L л=1
i 2ппх
e~iv°xdx. (3.11)
Возводя в квадрат последний член в квадратных скобках
подынтегрального выражения (3.11) и используя, что
^ (3.12)
coskxcoskp = -^~ [cos(k-}-/?)x-f-cos(k — p) x],
после группировки членов получим
—1 I \ п=\ / д=1
64
cos 2« (» + ')*+CQS 2"("~
n=\
-COS
(3.13)
Вьшолним почленное .интегрирование в (3.13). После
интегрирования первого члена в -(3.13) получим
00 л2
(3.14)
Все остальные члены подынтегрального выражения
(3.13) однотипны, поэтому проинтегрируем для примера
лишь /г-й член ряда:
cos
2ппх
eiVoXdx
J
(3.15)
Заменяя cos по формуле Моавра и подставляя в (3.15),
после интегрирования получим выражение, аналогичное
/3.14):
sinvn
где
(3.16)
(3.17)
Bn — коэффициент перед соответствующим членом
(3.16).
Подставляя (3.16) и (3.14) в (3.5), получим
окончательное выражение для ЭПР ленты единичной длины
МО
(3.18)
65
где
f_Q / О О ft
(3.19)
00
Я=1
л V4 f sint>n+1 _¦_ ship,-, \ ¦ | у\А*п sint>2n,
(3.20)
п—\ п=\
Рассмотрим некоторые частные случаи.
1) В случае падения на ленту плоской волны
(Лп = 0) из (3.20) и (3.21) получается известная
формула для определения ЭПР ленты
2) Если ряд (3.9) состоит из двух членов, это
соответствует падению на ленту пяти плоских волн. В этом
случае в формулах (3.18) — (3.21) опускаются все
члены, кроме нулевого и первого.
КЛ2 . Л'
Ао+-—
Од _ _
Учитывая, что ип = У0 i "7~> ^==~' имеем
Суммарная диаграмма -представляет собой сумму
пяти парциальных диаграмм волн, падающих на ленту
под углами: 6 = 0, sin6 = ±A,/2<i, sin©=±ifc/d.
В зависимости от отношения периода d к ширине
ленты / возможно несколько случаев:
d^/. Период'изменения амплитуды равен ил*и
больше ширины ленты. Амплитуда тюля падающей на ленту
волны представляет собой известное в антенной технике
распределение типа «косинус». Так как при определении
диаграмм ЭПР >поле возводится в квадрат, это означает,
что в антенной технике аналогом будет диаграмма при
-SO -
to го зо to 9°
Рис. 3 7 Диаграмма ЭПР ленты, на которую падает волна с
распределением амплитуды типа «косинус» /=10А,
Лэ=1, Л,=0, — AJA0=l дб, — X— ЛГЛ0=3 дб
распределении поля типа «косинус квадрат», в которой
угол 0 уменьшен вдвое. На рис. 3.7 приведено
соответствующее распределение поля волны, падающей на ленту
шириной ЮЛ,, и диаграмма ЭПР при различных Ло и А\.
/1i=0 соответствует падение на ленту плоской волны.
Из сравнения диаграмм следует, что при всех i4i>0
диаграмма ЭПР с неоднородным распределением поля на
ленте имеет меньшее число более широких боковых
лепестков по сравнению со случаем Ai = 0, причем
огибающие лепестков уменьшаются примерно на величину
iMi/Ло.
d < / < Я. Диаграмма ЭПР состоит из пяти диаграмм с
отношением максимумов; 1; 2Л,/Л0; Л^/4Л^(рис. 3.8). Ди-
67
аграмма ЭПР отличается от случая аналогичной
диаграммы антенны тем, что максимум парциальной
диаграммы вдвое больше (примерно составляет величину
2А±/А0) и расположен под углом от главного максимума,
вдвое меньшим, чем в случае диаграммы аналогичной
-SO -40 -30 -20
О
10
10 30 UO 9е
Рис. 3.8. Диаграмма ЭПР ленты, на которую падает волна с
периодическим распределением амплитуды /=10А,:
Ло-1; Л1=0; •••• /11=0,01; Ai=0,l; — X— /li=0,5.
антенны. Кроме того, в диаграмме ЭПР появляется
максимум под тем же углом 6, что и в диаграмме антенны,
но со значительно меньшей амплитудой.
d<X. Случай, когда поле по ширине ленты
изменяется очень быстро, период изменения меньше длины
волны. Это приводит к изменению реактивного ближнего
поля и росту дальних боковых лепестков. Формально
в этом случае максимумы парциальных диаграмм
расположены под углами sin 6> 1, т. е. под мнимыми углами.
Реально этот случай мало вероятен.
Результаты аналогичных расчетов, выполненных
методом краевых волн [3.7], приведены на рис. 3.9 и 3.10
при падении на цилиндр неоднородных волн.
Качественно диаграммы ЭПР цилиндра и ленты совпадают.
Если ряд (3.9) состоит из п членов, при <^</<Я,
диаграмма ЭПР состоит из 2п -f- 1 парциальных диаграмм
с отношением максимумов: 1; 2AnjA0 и А2/4А20.
Максимальная погрешность в диаграмме ЭПР определяется
членом с наибольшей амплитудой Ап.
68
А_удб
го
10
V-°
If
го
30
IIII if If IА А а л
50
л/v
\М
70
пА
в° ц
J
А
-го
Рис. 3 9. Диаграмма ЭПР цилиндра, на который падает волна с
распределением амплитуды типа «косинус»- /=10А,.
падает плоская волна; спад амплитуды поля на краю
цилиндра составляет 1 дб
Диаграмма ЭПР ленты при падении на нее волны
с постоянной амплитудой и периодически
изменяющейся фазой
Пусть амплитуда поля, падающего на ленту, посто
янная А(х) = 1, а фаза <р(л;)—произвольная функция
с малым отклонением от случая синфазного поля
(x)g. Выражение для ад (3.5) принимает вид
где
з2 9
(3.24)
(3.25)
(3.26)
Пусть фазовое распределение ц)(х) является четной
периодической функцией с периодом T=2d/L Разложим
<|)«(л:) в ряд Фурье
i W1 2ппх
= ?o+2]?IlCOS-f-,
п=\
(3.27)
69
-10
-20
Рис. ЗЛО. Диаграмма ЭПР цилиндра, на который падает волна с периодическим распределением амплитуды
/=30А.:
2г=5Л; падает плоская волна; периодическое распределение амплитуды поля
где
IT
y$-^?-dx. (3.28)
После подстановки (3.27) в (3.26), получим
(00
VI 2ппх
ъ + Ъ »»cos-f-
/, = Г е v /z=1 J e~lVoXdx. (3.29)
—i
Если фазовые погрешности ф(х) малы, экспоненту
можно разложить в степенной ряд и ограничиться
первыми двумя членами
/ 1 i /2 ?0 + \^ ?п cos 2™ e~iv°x dx. (3.30)
— 1 L \ /2=1 /J
Использовав соотношение cos а = — (&и-\-е~1и), после
почленного интегрирования (3.30) получим
Беря модуль (3.31), получим:
/2=1
Учитывая, что T — 2d/l, получим
V (3.33)
Таким образом, при малых периодических фазовых
погрешностях получаем выражение, аналогичное
рассмотренному ранее (3.18). Суммарная диаграмма рассеяния
является суперпозицией парциальных диаграмм, макси-
71
мумы которых расположены под углами 9 = 0, sin 8 =
X/2d
Рассмотрим простейшие случаи.
1) фазовые ошибки отсутствуют, тогда все
коэффициенты фО=срп = 0; получаем известный случай
диаграммы ЭПР ленты при падении на нее плоской волны,
-so
Рис. З.П. Диаграмма ЭПР диска, на который падает полна с
квадратичным распределением фазы 2г=\0Х:
?Pi=0; — (р|=-Я/8; —••--•— cpi = jt/4.
6,dff
-SO -40 -30 -20
9°
Рис. 3.12. Диаграмма ЭПР ленты, на которую падает волна с
периодическим распределением фазы l—\0X:
ф,=0; • . • . срi = 0,1 рад\ — х— ср, = 0,5 рад
79,
2) фазовую характеристику можно представить
в виде
х) := fj cos —,-, (3.o4)
где ф! — максимальная величина фазовой погрешности.
Подставляя (3.34) в (3.24), получим
Wcos'6 rsln-o. , . sin-,,1 (3_35)
где
vx=l (fcsinfl
Как и в случае амплитудных погрешностей,
суммарная диаграмма ЭПР состоит из суммы парциальных
диаграмм (в данном случае из трех), максимумы
которых направлены соответственно под углами: 6 = 0,
sin9 = ±V2d. Максимум парциальной диаграммы будет
иметь величину фЬ где cpi — максимальная фазовая
погрешность в радианах. На рис. 3.11 и 3.12 приведены
диаграммы ЭПР при различных значениях <pi и А,/2^для
диска « для ленты соответственно.
Метод разложения диаграммы ЭПР на «моменты»
Рассмотренный в предыдущих разделах метод
разложения поля падающей на рассеиватель волны в угловой
спектр удобен, когда поле может быть представлено
небольшим числом плоских волн, например при анализе
периодических вариаций амплитуды и фазы поля.
Часто распределение фазы поля в падающей волне
бывает более сложным и зависит от координаты по
квадратичному, кубическому закону и законам более
ныооких степеней. В этом случае поле описывается
большим числом плоских волн, т. е. большим числом членов
ряда (3.27), поэтому более удобным может оказаться
«метод разложения диаграмм на моменты», широко
используемый в антенной технике [3.8].
Обозначим подынтегральную функцию в интеграле
(3.7) так:
A*(x)ei2*{x) = f(x), (3.36)
тогда интеграл (3.7) примет вид
/, =
л
(3.37)
73
где, как и прежде, vo= Iksinb. Если учесть, что
ах (о.оо)
и f(x) может быть разложена в степенной ряд, то
диаграмма ЭЛР в случае сложного распределения поля на
рассеивателе может быть записана в виде
(3.39)
/2=1
где Dn — производная /г-го порядка по v0;
является диаграммой, нормированной к единице при
возбуждении рассеивателя однородным синфазным
полем.
Приведем некоторые результаты расчетов по
формуле (3.39) с использованием [3.9] для различных
значений функции /(*). Напомним, что под f(x)
подразумевается квадрат поля падающей на рассеиватель
волны (3.36).
1) Амплитуда спадает к краям раскрыва по
квадратичному закону, фаза падающего поля постоянна ф(лг) =
= 0. В этом случае функция f(x) имеет вид
/(Х)=4_(1_Д)Х2 (3.40)
и интеграл (3.37) выражается так:
Л = г(»в) + (1-Д)^(о0). (3.41)
Диаграмма ЭПР имеет вид
*»/« cos* 8 [g(v9) + (l - А) Я«* (*§)]« /Q иоч
Зл = — я.11-(1-Д)х»|' ' (3'42)
2) Амплитуда периодически изменяется вдоль
рассеивателя, фаза постоянна. В этом случае можно считать,
что имеется решетка, составленная из п рассеивателей.
Для получения суммарной диаграммы необходимо
выражение (3.42) умножить на множитель решетки
__ fe2/2 cos2 9 sin* v0 [g (Vp) + (1 — A) D2g (v0) [2
Д"""" 7i n2 sin2 (vo/n) [1—(1—A)x°J2 '
74
/вО 360 540 %%?
180 360 540 ПО 9°
-5
-10
-15
-го
-25
-30
-35
-40
%
\
\
1 *
А
и' А
-35
-40
Рис. 3.13. Диаграмма ЭПР ленты, на которую падает Рис. 3.14. Диаграмма ЭПР ленты, на которую падает
волна с квадратичным распределением амплитуды типа
Д=0: — Д=0,25; Л=0,5.
волна с квадратичным периодическим распределением
амплитуды. На ширине ленты укладывается три
периода:
Д-0; А=0.85; • • • Л=0.5.
<*,й7я
Рис. 3 15. Диаграмма ЭПР ленты, на которую падает волна с
квадратичным распределением фазы /=1(R:
0=0; -X—Х- Р=ЭТ/8; ••• &=Я/4; P=3it/2; р = Я/2,
3) Амплитудные ошибки отсутствуют, имеются
квадратичные фазовые ошибки Максимальная фазовая
ошибка равна q>i. В этом случае
76
(3.44)
180 360
\
1
!\
\\
ц
\
1
¦
1
1
$ ч,
г л
к \
1 \
1 \
1
/
/
/ /
/?
"/
'Л
I/
I
I
5
*
•
\
i
»^7 72Z7
\
\
\
\
^-^ \
ч
\ \
W
• \ \
• \ !
7 1
/ 1
/ й
1 g
1 г-
I
1
•7
//
1/
j
/
I
9'
\
\
\
\
X
1
i
Рис 3 16 Диаграмма ЭПР ленты, на которую падает волна с
квадратичным периодическим распределением фазы;
Интеграл (3.37) вычисляется с помощью ряда:
(3.45)
77
"3! в
Рис. 3.17. Диаграмма ЭПР цилиндра, на который падает волна с квадратичным распределением фазы /=10А,:
2г=Ш; Дф=-0; — Лф = Л/4.
Окончательно получаем
°д= ^2/2со^91Л12. (3.46)
4) Амплитудные ошибки отсутствуют, имеются
периодические квадратичные фазовые ошибки вдоль раскры-
ва. В этом случае диаграмму ЭПР (3.46) необходимо
умножить на множитель решетки
п2 sin2 (vo/n) f
где п ~ число элементов решетки.
Тогда (3.46) примет вид
_Wcos»6 sin» 0,17,1»
Ha рис. 3.13—3.16 приведены диаграммы ЭПР ленты
мри падении на нее полей с различным распределением
фазы и амплитуды, рассчитанные по формулам (3.42) —
(3.47).
На рис. 3.17 приведена диаграмма ЭПР при падении
неоднородной волны с квадратичным распределением
фазы на цилиндр, длиной /=10^, диаметром 2г=\0'к.
Диаграмма ЭПР ленты при падении на нее волны
:о случайным распределением фазы
Случайные вариации амплитуды и фазы поля,
облучающего рассеиватель, могут вызываться различными
причинами. В полевых установках эти вариации
вызываются отражением поля от земли, не являющейся
идеально плоской. В установках, размещенных в безэховых
камерах, они вызываются многократными переотраже-
пиями от стен, суммарный эффект которых трудно учесть,
и изменения распределения поля можно рассматривать
как случайные и, наконец, поле, формируемое
коллиматором, имеет случайные вариации, обусловленные не-
иднородностями материала линзового коллиматора и
многократными переотражениями между его
поверхностями.
При наличии случайных вариаций поля диаграммы
ЭПР могут описываться статистическими методами. При
Этом картина поля в фокальной плоскости коллиматора
С точностью до постоянных множителей подобна полю
В дальней зоне при заданном статистическом законе
распределения поля волны, падающей на рассеиватель. Для
79
исследования этого случая применим;! методика [ЗЛО].
Приведем краткое изложение этой методики.
Будем считать амплитудное распределение поля,
падающего на рассеиватель, постоянным Л(х) = 1.
Фазовое распределение <f(x) будем считать нормальной
случайной функцией со средним значением <р (.*:) = 0,
дисперсией <?2 (х) = о2(х) и нормированным коэффициентом
корреляции
Тогда интеграл (3.7), входящий в выражение для <зд
(3.5), будет иметь вид
/,=
ei[2*ix)-v°{x)]dx
(3.49)
обозначим
2?(*) = <Кх), (3.50)
тогда
11Х |2 = JJе11Фix)-+ M] e~iv°{x~Xl) dxdxx. (3.51)
Для этого случая все операции с интегралом (3.51)
рассмотрены в [3.10] при допущениях:
1. Коэффициент корреляции фазовых ошибок зависит
лишь от разности координат х—х± и имеет вид
(3.52)
где с — нормированный радиус корреляции в
относительных единицах,
с = 2р/1; (3.53)
р — радиус корреляции.
2. Фазовые ошибки распределены равномерно
<?(*) = а. (3.54)
Учитывая сделанные допущения, можно получить для
малых фазовых ошибок
|7-р= s|5J4_(1 _а)+_^й/р(С) Оо> Оо) (3>55)
80
вд,рад
-30
db
-10
-20
-30
Ч
\
\
?
\
\
V
1
ft .
г
Г
i
\
\
\
5
II
1 в,рад
\
X
\%
Об
-10
-20
-30
\|
\
\
|
ь
i
[
\
\
/
1/
\
I
\
\
X
и
Ы
Рис. 3 18. Диаграмма ЭПР ленты,
на которую падает волна со
случайными вариациями фазы /=
= 10Я, радиус корреляции р=0,П:
а=0; • • • а=я/64; а=л/16;
— X — a=jt/8.
Рис. 3.19. Диаграмма ЭПР ленты,
на которую падает волна со
случайными вариациями фазы /=10Х,
радиус корреляции р=/:
а=0; • • • a=Jt/64; a=?t/16;
—X— а=л/8.
Рис. 3.20. Диаграмма ЭПР ленты,
на которую падает волна со
случайными вариациями фазы 1~ЮХ,
радиус корреляции р = 3/:
. —а=0; ••• а=я/64: — •— a-jt/16
_ X — a=Jt/8.
При с < 1 получим
Ip(c,v0, vo) = 2c\r^ = 4 [У'*. (3.56)
Таким образом, при р<С/ второе слагаемое в (3.55)
является постоянной величиной и представляет собой
почти постоянный фон бокового рассеяния.
Диаграмма ЭПР при произвольной величине с будет
выражаться так:
• -«=?* I*& I 1 " 4")+±Р.(с V,, ».)1, (3.57)
где vo = klsmQ, а |3 = 2а. Согласно (3.50) и (3.54) р —
удвоенная фазовая ошибка падающего поля, а /Р (с,
уо, v0)—табулированная функция (см. приложение 1).
На рис. 3.18—3.20 приведены диаграммы ЭПР при
различных радиусах корреляции р и величинах фазовых
ошибок падающего поля « = §/2.
Искажения диаграмм радиолокационного рассеяния
увеличиваются при уменьшении радиуса корреляции р
й увеличении фазовой погрешности р.
Анализируя результаты проведенных расчетов
диаграмм ЭПР, можно сделать следующие выводы:
1. Регулярные периодические вариации амплитуды
вдоль рассеивателя, если период вариации d<l,
вызывают существенные локальные искажения диаграммы
ЭПР (рис. 3.8, 3.10).
2. Если период d вариаций амплитуды больше
размера рассеивателя, происходит уменьшение амплитуды
боковых лепестков, пропорциональное 2А, где А —
максимальный спад амплитуды падающего поля на краю
рассеивателя, при этом минимумы боковых лепестков почти
не искажаются (рис. 3.9).
3. Регулярные вариации фазы с периодом d<l
вызывают существенные локальные искажения диаграммы
ЭПР (см. рис. 3.12).
4. Если период d вариаций фазы больше размера
рассеивателя /, происходит искажение минимумов
боковых лепестков тем больше, чем больше величина
фазового искажения щ на краю рассеивателя (см. рис. 3.11,
3.15,3.17).
5. При случайных вариациях фазы падающего поля
искажения диаграммы ЭПР увеличиваются с увеличе-
82
иием фазовых искажений р и уменьшением радиуса
корреляции р (рис. 3.18—3.20).
6. Если известна диаграмма излучения антенны с
плоским раскрывом (линейным, квадратным, круглым) и
распределением поля вдоль него типа
то диаграмма ЭПР плоского рассеивателя той же формы
II размера может быть вычислена, если падающее на
него поле положить равным
и обобщенный фазовый угол, равный в случае излучения
лнтенн voi= (kl/2) sin 0, удвоить, т. е. положить уОр="-
klsinQ.
,'1.3. ИЗМЕРЕНИЕ ДИАГРАММ ЭПР В ДАЛЬНЕЙ ЗОНЕ
ИЗЛУЧАЮЩЕЙ АНТЕННЫ
Погрешности измерения одномерного рассеивателя
Примером одномерного рассеивателя является
бесконечная лента, провод и т. д.
В большинстве случаев при измерениях диаграмм
Р в полевых условиях рассеиватель располагается
и дальней зоне (зоне дифракции Фраунгофера)
облучающей антенны.
Необходимым условием точности измерений является
устранение переотражений от земли, опоры
рассеивателя и местных предметов. Наличие переотраженных
полей можно выявить при измерении амплитуды и фазы
ноля в объеме, занимаемом рассеивателем.
Периодические с периодом d^Z\l вариации амплитуды и фазы поля
гмидетельствуют о наличии переотраженных полей (здесь
/ размер рассеивателя).
Рассмотрим случай, когда в объеме, занимаемом рас-
ггивателем, имеется лишь плавный спад амплитуды и
фнзы поля к краям рассеивателя, это случай d>l.
Определим допустимые искажения фазы и амплитуды поля
идоль максимального размера / рассеивателя и мини-
мнльное расстояние 7?Мин между приемо-передающей
антенной и рассеивателем, обеспечивающее измерения
I1 заданной погрешностью. Рассмотренная задача экви-
иилентна задаче вычисления диаграммы направленности
«итейны, решаемой обычно в два этапа [3.8]. В резуль-
83
тате первого этапа (решения внутренней задачи)
определяется распределение поля на раскрыве антенны Во
втором этапе это поле интегрируется по раскрыву и
вычисляется диаграмма направленности в дальней зоне.
В большинстве измерений диаграмм ЭПР (за
исключением измерения эталонных рассеивателей) можно
ограничиться измерением огибающей максимумов
бокового излучения с погрешностью 2 дб. Используя
результаты § 3.2 (см. рис. 3.9), получим, что спад амплитуды
поля для обеспечения такой погрешности не должен
превышать 1 дб. Этот критерий дает оценку максимальной
возможной погрешности. Указанную погрешность будут
иметь рассеиватели, имеющие прямолинейные
образующие с размером /макс- Для рассеивателей овальной
сглаженной формы, не имеющих прямолинейных образующих
или имеющих прямолинейные образующие меньшие чем
/макс, погрешность в измерении максимумов боковых
лепестков будет меньше.
Фазовые ошибки вызывают в основном искажения
хминимумов диаграмм ЭПР. Из рис. 3.15 видно, что
максимальная ошибка фазы, равная л:/16, вызывает
изменение минимумов, не превышающее ±2 дб.
Перейдем теперь к определению необходимых
расстояний, обеспечивающих измерение диаграмм ЭПР
с заданной погрешностью. Расстояние определяется,
исходя из двух критериев, а именно: ошибки фазы Аф и
амплитуды АЛ, которые на краю рассеивателя не
должны превышать допустимых величин Асрд и АЛД.
Первое условие, если раскрыв приемо-передающей
антенны L меньше размера рассеивателя /, выполняется
при соблюдении неравенства Дфд^&/2/8^, согласно
которому фазовая ошибка на краю рассеивателя из-за
сферичности волны не должна превышать допустимой Дфд,
откуда
где R — расстояние между антенной и рассеивателем,
/ — размер рассеивателя; Дфд — допустимая фазовая
ошибка на краю рассеивателя, рад.
Условие для амплитуды поля выполняется при
соблюдении неравенства
sm-s"^—т-5, 3.59
84
где 0 — угол, под которым виден рассеиватель из центра
антенны; ДЛД— допустимая погрешность амплитуды
поля на краю рассеивателя.
Выражая sin(9/2) «tg(9/2) через R и L/2 (рис. 3.21),
получим
sin4=^- (3.60)
Подставляя значения sin 9/2 в (3.59) и решая совместно
(3.59) и (3.58) относительно /, получим
"Г
Д(Рд
(3.61)
Задаваясь различными отношениями ДЛ/Дф, получим
необходимые отношения //L. Как правило, минимальные
погрешности диаграмм ЭПР получаются при численном
ТМИН
Рис.. 3.21. К расчету
расстояния между антенной и рассеи-
вателем.
Рис. 3.22. К расчету
минимального расстояния между
антенной и рассеивателем.
равенстве АЛ и Акр. Например, используя широко
распространенный в антенной технике критерий Д<р^-^-^
^0,4 рад и спад амплитуды поля на краю раскрыва
I дб (АЛ «0,36), получим
t<L. (3.62)
Ьернемся теперь к определению необходимого
расстояния между приемо-передающей антенной и
рассеивателем.
Наиболее приемлемым является критерий [3.2]
L2 л I*
(3.63)
85
который основывается на том, что эквивалентный
точечный источник расположен на расстоянии pL2/X от рас-
сеивателя и эквивалентном расстоянии ql2/X от антенны
(рис. 3.22). Если положить L&1,. окончательно
получим
^мин ^И \ •
(3.64)
В табл. 3.1 приводятся данные, рассчитанные по
формуле (3.64), при различных значениях р.
Таблица 3.1
Зависимость максимальных ошибок измерения диаграмм ЭПР
от расстояния
Максимальная
ошибка амплитуды
на краю рассей-
вателя ДЛ, дб
6
2
1
Максимальная
оиибка огибающей
боковых лепестков
диаграммы ЭПР
Д°бок' дб
3
1
0,5
Коэффициент р
в формуле (3.64)
1
2
4
Необходимое
расстояние Ямин
2/»/Х
4/2/Х
8/2А
Очевидно, в большинстве случаев следует выбирать
расстояние #мин=41,2Д, при этом максимальные
погрешности оказываются приемлемыми. Легко видеть, что
это расстояние вдвое превышает необходимое при
антенных измерениях.
Погрешности измерения двумерных (плоских)
рассеивателей в зависимости от расстояния
Предыдущие выводы о погрешностях измерения
диаграмм ЭПР были сделаны на основе анализа
одномерного рассеивателя (бесконечная лента). Анализ
погрешностей измерения максимального КНД антенн для
случая (двумерных, плоских) антенн и рассеивателей
выполнен в (3 И] путем анал-иза «уравнения связи»
пр
пер
(3.65)
где РПер — мощность в тракте передающей антенны;
^пр — мощность в тракте приемной антенны; R —
расстояние между антеннами; Gi, Gi — КНД первой и
второй антенн соответственно. Формулу (3.65) можно
рассматривать как первый член асимптотического разло-
86
жения т] по степеням l/\kR, а члены порядка (IJikR)2 и
(1/&/?)4 — как поправочные при конечной величине/?.
Для оценки погрешности в измерении КНД
синфазных антенн с плоским раскрывом и произвольным
контуром в [3.11] получена формула
где
; (3.67)
(3.68)
x = L2/?i— отношение раскрывом измеряемой и
вспомогательной антенн; F — заданная диаграмма;
и — kLsin6sin<p^kLy; v — kLcosb?&kL (^—
//, и — обобщенные фазовые углы.
Из (3.67) определяется расстояние /? , на котором отно-
ситефная погрешность измерения КНД антенны в главном
направлении, равная ц, выражается формулой
(3-69)
Применение формул (3.66)—(3.69) к различным типам
лнтенн и различным значениям к дает для определения R^
следующие оценки.
Для антенны с квадратным раскрывом и
равномерным распределением амплитуды А(х, у) = 1; —L/2^1^,
l/^L/2 получаем
т^2тг2{(Г~%4)0,0196+18/.2— 2(>с2+1)2] 0,0070}. (3.70)
Из (3.71) видно, что т зависит только от отношения
раскрывов x=L2/Li основной и вспомогательной антенн
(рис. 3.23, кривая 1). Минимальное расстояние Ry.%
получается при х = 0 (вспомогательная антенна очень
мала) и х=1 (размеры вспомогательной антенны равны
испытуемой), и определяется формулами:
^^). (3.71)
87
к
0,8
0,6
V-
'
——-
0
0,25
0,5
a 75
Рис 3 23 График зависимости Vx от х*
/ — антенна с квадратным раскрывом и равномерным освещением, 2 —
антенна с квадратным раскрывом и спадающим до нуля на краю раскрыва
распределением амплитуды; 3 — антенна с круглым раскрывом и равномерным осве
щениём.
Отношение необходимых расстояний R JR^ 0 примерно
равно 2,7.
Для антенны с квадратным раскрывом и
распределением амплитуды, спадающим до нуля на краю раскрыва,
А {х, у) = cos (•kx/L) x cos (ъу/L) yt
соответствующие формулы имеют вид
отношение R^JR^ 0^ 2,4. Наконец, для круглых раскры-
вов с равномерным освещением А (х, у)=1, 0 < х2 -\- уг <
2
рр
(L/2)2 получим
/г„>ол 0,22/^ (Г/Я),
(3.72)
(3.73)
а отношение
>»
Таким образом, фазовая погрешность на раскрыве
основной антенны увеличивается при увеличении размеров
вспомогательной антенны. При измерении КНД с
помощью вспомогательной антенны, размеры которой равны
6 8 x-j-.рад
Рис. 3.24. Диаграмма направленности двух круглых
оо равномерно освещенных антенн на расстоянии R=L2jX
диаграмма в дальней зоне; х=1, х=0
Фаза, град
О
-90
-ГвО
270
-360
-5*0
ч
8 10
Рис 3.25. Фазовые диаграммы двух круглых
равномерно освещенных антенн:
диаграмма в дальней зоне; х=0; /?=2
—X—X— И=0; R^DVk; х-1; R=D*/X.
-го
-30
\
\
1
/
1
1
1
\
\
V
\
\
А
/1
Рис. 3 26 Сравнение диаграммы ЭПР круглого рассеи-
вателя и круглой антенны R = \,5L2/X:
диаграмма в дальней зоне; — диаграмма ЭПР рас-
сеивателя диаметром L; • • • • диаграмма направленности
антенны диаметром L.
испытуемой, необходимое расстояние в 2—3 раза
больше, чем в случае малой вспомогательной антенны.
При обычных критериях для R, применяемых в
антенных измерениях,
и при х<С1 погрешность в определении КНД составляет
1—3%, а при х=1 увеличивается до 2ч-6%.
Для погрешности в максимумах боковых лепестком
в [3.11] получена формула
*, = ¦
(3.74)
(т — номер ботового лепестка), из которой следует, что
погрешность при заданном расстоянии /?ц уменьшаете»
90
-30
б в x=f,pad
Рис. 3.27. Диаграмма ЭПР квадратного рассеивателя R = 2L2/X
диаграмма в дальней зоне; x=//Z.=0; •••• x = //L=0,5.
v увеличением номера бокового лепестка [3.12]. На
|)ИС. 3.24—3.25 приведены ошибки в измерении
амплитуды и фазы боковых лепестков для х = 0 и х=1 при R =
12/XR 2L*/1
На рис. 3.26—3.28 приведены диаграммы ЭПР,
сравниваемые с диаграммами эквивалентных антенн, из
анализа которых видно, что для получения тех же точностей
при измерении диаграмм ЭПР необходимое расстояние
следует взять в два раза больше, чем при антенных
измерениях.
Й.4. ИЗМЕРЕНИЕ ДИАГРАММ ЭПР В ПРОМЕЖУТОЧНОЙ
ЛОНЕ АНТЕННЫ
Можно шжазать (3.3, 3.14], что если для измерения
диаграмм ЭПР применяются антенны, размеры которых
Оольше рассеивателя, то измерения можно производить
91
в промежуточной зоне на расстояниях, значительно
Меньших, чем 2/2Д
В промежуточной зоне большой антенны можно
найти такие области, где распределение амплитуды поля
является спадающим и на краях рассеивателя 1/2
удовлетворяется неравенство АЛ^,0,1, а фазовые
погрешности Дф|^1я/8. При этом погрешности измерения
диаграммы ЭПР можно определить из табл. 3.1.
Найдем необходимые размеры антенны по отношению
к размерам рассеивателя, при которых можно произво
дить измерения. Угловое расстояние а между точками
Р
Q,95\
0,9
0,85
0,8
Рис. 3.28. Зависимость
- КНД; 2 - ЭПР от и; #=
0,25
диаграммы, в которых амплитуда уменьшается до 0,(J
по сравнению с максимумом, дается формулой a=V2L.
На расстоянии Я от антенны необходимо, чтобы Ra^zl,
откуда следует, что L^Al (размеры антенны должны
быть в 4 раза больше размеров рассеивателя).
Измерения в .промежуточной зоне по сравнению с из
мерениями в дальней зоне при оптимальном отношении
размеров рассеивателя и антенны (1жЬ) не
обеспечивают увеличения чувствительности установки в связи с не
обходимостью выбирать большой размер облучающей
антенны. Однако в промежуточной зоне могут
измеряться небольшие рассеиватели. Это позволяет без измене
ния элементов измерительной установки (только за счет
уменьшения расстояния между антенной и рассеивате-
лем) увеличить ее чувствительность при измерении не
больших рассеивателей. Таким образом, одна и та же
установка может быть использована для измерения рас
сеивателей больших размеров на расстоянии R^2L2/'k и
рассеивателей с меньшими размерами на уменьшенных
расстояниях.
92
Хб* ИЗМЕРЕНИЕ ДИАГРАММ ЭПР С ПОМОЩЬЮ
КОЛЛИМАТОРНЫХ УСТРОЙСТВ
В [3.1] было показано, что измерения диаграмм ЭПР
могут выполняться с помощью линзовых коллиматоров.
При этом расстояние между приемо-передающей
установкой и рассеивателем в случае применения коллима
'юрного устройства значительно уменьшается по
сравнению с расстоянием, необходимым для измерения в
дальней зоне приемо-передающей антенны.
Дифракционное поле в фокальной плоскости
коллиматора с точностью до постоянных множителей
совпадает с полем в дальней зоне [3.14]. Коллиматоры могут
М(х,у)
Рис 3 29. К расчету поля щели
в ближней зоне
г успехом применяться для измерений диаграмм ЭПР.
При использовании коллиматоров различных типов сле-
лует иметь в виду погрешности поля, возникающие,
главным образом, из-за дифракции на краях коллиматора,
приводящей при некоторых условиях к значительным
вариациям амплитуды поля в ближней зоне. Кроме того,
поточность изготовления коллиматоров приводит к по-
инлению в поле коллиматора случайных фазовых и
амплитудных погрешностей, что ограничивает размеры
коллиматора при заданном допуске на точность его из-
ютовления
Влияние краев коллиматора
Для оценки влияния краев коллиматора на его
ближнее поле рассмотрим задачу о дифракции плоской волны
на бесконечной щели (рис. 3.29).
93
Поле в точке наблюдения за щелью выражается ни
тегралом
Е=- -^-(1 -fcos6) f E0A(t)^-^dx, (3.7C
где k = 2n/k — волновое число; г — расстояние от точк!
интегрирования до точки наблюдения.
В связи с тем, что нас интересует ближнее поле, не
обходимо в выражении для г в фазовом множителе ис
пользовать приближение Френеля, в котором удержива
ются квадратичные члены разложения
(3.76
=
В знаменателе подынтегральной функции (3.75) можне.
положить rzzR. Подставляя (3.76) в (3.75) и полагая
А (?) = 1, получим
+cos_9) е-*** | ,f [|/"| (,-t, Г
J е
J
-1/2
Обозначим
После подстановки (3.78) в (3.77) и преобразований
получим
" -!=-<¦
cos 6) e-ft* {[С (и) - С (у)] — i [5 (и) - S (v)]},
(3.79)
94
где
и
С («)=(" cos (*t2l2)dt,
о
— интегралы Френеля.
Для удобства расчетов выразим cos б через хну:
cos 8 =
+
Окончательные выражения для амплитуды и фазы поля
на расстоянии у, от щели имеют вид:
= aii. . S(u)-S(v)
где
ai = a/X. (3.81)
Если распределение амплитуды поля по щели косинусои-
даяьно
А (х) = cos (ях/1)х, (3.82)
то можно показать, что оно создается двумя плоскими
волнами, падающими на щель под углами 6/2 и —6/2,
где sin6 = 2/A. Поле в зоне Френеля в этом случае
выражается также через интегралы Френеля.
По формуле (3.80) были произведены расчеты
амплитуды и фазы поля за щелью шириной 100А, на
расстоянии 100А, от нее. Результаты расчета приведены на
рис. 3.30. Сравнение расчетов дифракции волны на двух
полуплоскостях по методу Кирхгофа с расчетами по ме-
краевых волн, выполненные отдельно, показывают
Фаза,
град
119
Рис. 3.30. Распределение амплитуды и фазы поля на расстоянии
100А, от щели шириной /=10(U при падении на нее плоской волны:
амплитуда, - — — фаза.
хорошее совпадение, поэтому данные, полученные по
формуле (3.80), можно считать достаточно точными. Из
рисунка видно, что поле плоской волны, дифрагировавшей
на щели, имеет интерференционный характер, причем
наибольшая неравномерность амплитуды и фазы поля
наблюдается у краев щели. Поле вблизи одной из
кромок представляет сумму полей волн, дифрагировавших
на первой и второй кромках. Первый горб имеет
периодические изменения с меньшими периодом и
амплитудой, вызванные действием второй кромки щели В
рассмотренном примере, даже в центре, амплитуда поля
имеет вариации более 0,1 Ло, что недопустимо при
измерениях (см. рис. 3.8).
Расчеты поля с косинусоидальным распределением
амплитуды на щели приведены на рис. 3.31. В этом
случае амплитуда и фаза поля вблизи щели практически
повторяют распределение на щели (вариации поля менее
0,01 Л).
Приведенный анализ показывает, что для
уменьшения краевых волн амплитуда поля на кромках
коллиматора должна быть мала,
Фаза,
град
12
6
0
Ех
Ео
-7,0-
-0,5
ЮЛ
зоя
50л
\
\
70Л
I
/
1
1
1
Ч-/
ч
i
1
\
90л
*Х.1
Рис. 3 31 Распределение амплитуды и фазы поля на расстоянии 100А,
от щели шириной /=100?, при падении па нее волны с косинусон-
дальным распределением амплитуды
амплитуда; — фаза
Оптимальные размеры коллиматора при заданной
точности изготовления
Коллиматорные устройства (зеркальные, линзовые
и др.) выполняются с определенной точностью,
зависящей от технологии изготовления. Обычно задается
точность изготовления поверхности зеркала по отношению
к его размерам |/L=10~m или однородность диэлектрика
и допуск на изготовление поверхности в линзовых
коллиматорах. При заданной точности изготовления можно
определить оптимальные размеры коллиматора,
обеспечивающие измерение диаграммы рассеивателей 'с
заданной точностью. Рассмотрим некоторые примеры.
Зеркальный коллиматор. Пусть поверхность
зеркального коллиматора выполнена с допуском ? и закон
распределения погрешностей изготовления нормальный.
Тогда среднеквадратичная погрешность изготовления
поверхности равна (7d = g/2,6, а среднеквадратичная
фазовая ошибка a =2kod.
В § 3.1 было показано, что погрешность при измерении
диаграммы рассеивателя кроме ^ "зависит еще от
относительного радиуса корреляции C = 2p/L (3.53).
Рассмотрим самый неблагоприятный случай, когда С <
< 1. В этом случае для получения приемлемой точности
измерения диаграммы рассеивателя необходимо иметь а/2 =
=V=:'rc/32 (ошцбка в мщимумах диаграммы меньше—22 дб).
7—340
97
При этом необходимая точность изготовления
поверхности коллиматора определяется так: 5= 1,3а Ik, С другой
стороны, максимальная точность изготовления
определена технологическими возможностями, которые можно
охарактеризовать соотношением g/L=10~m. Отсюда
определяется максимальный размер зеркального
коллиматора:
L^2-\0™~\l. (3.83)
Например, при т = 4 (жесткий допуск) аф = тг/32, 1=200Я,
Следует учесть также, что при использовании
зеркальных коллиматоров распределение амплитуды поля на
его раскрыве должно спадать до нуля на краях (ср.
рис. 3.30 и 3.31). При этом максимальный размер рас-
сеивателя определяется формулой
где АЛ — допустимый спад амплитуды поля на краю
рассеивателя.
Из (3.83) и (3.84) получаем максимальный размер
рассеивателя, диаграмма которого может быть измерена
с заданной погрешностью, при заданной точности
изготовления поверхности зеркального коллиматора
(3.85)
Например, при АЛ = 0,1, /я = 4, о — тс/32 из (3.85)
получаем
/ = 40Я.
Так, на волне Х = 3 см при максимальном размере
зеркала L = 6 м возможно осуществление измерения
диаграммы ЭПР рассеивателей размером 1,2 м. При этом
центральная часть поверхности зеркала (примерно 1,5 м)
должна быть изготовлена с допуском ± 1 мм, остальная
часть зеркала может быть изготовлена менее точно. Это
справедливо для поверхности с малым радиусом
корреляции ошибок р. При увеличении р могут быть либо
ослаблены допуски на изготовление поверхности, либо
увеличены размеры зеркала, а следовательно, и размеры
измеряемого рассеивателя.
Зеркальные коллиматорные устройства были
использованы экспериментально на волне 3 см [3.15].
Одно из коллиматорных устройств представляло
вобой круглый параболоид вращения диаметром 3,05 м
С фокусным расстоянием 75 см (F/D = 0,25). Коллиматор
был изготовлен с допуском ±0,5 мм [т«4 (3.85)]. С
помощью этого коллиматора осуществлялись измерения
параметров антенн и диаграммы ЭПР рассеивателей
с максимальным размером до 70 см [3.15].
Для формирования поля, падающего на измеряемые
объекты, коллиматор облучался открытым концом
волновода, который помещался в пирамидальный рупор,
стенки которого изнутри обклеивались радиопоглощаю-
щим материалом. Радиопоглощающий материал
уменьшает задние лепестки облучателя и расширяет его
диаграмму, что обеспечивает более равномерное освещение
зеркала вплоть до его краев.
Снаружи весь облучатель зеркала, его опора и
волноводы также покрывались радиопоглощающим
материалом для уменьшения искажений формируемого поля
из-за дифракции на облучателе и его опоре.
В коллиматорном устройстве использовалась лишь
верхняя часть зеркала с тем, чтобы облучатель не
затенял волны, отраженные от коллиматора, и не искажал
формируемое поле. Для уменьшения дифракции волн
на коллиматоре его края также защищались
радиопоглощающим материалом.
Другой тип коллиматорного устройства,
использовавшийся в экспериментах, выполнялся в виде параболиче-с
гкого цилиндра, размером 2,74X1,83 ж, который
облучался линейным рупорно-параболическим облучателем.
Параболический цилиндр был выполнен с допуском
:' 0,25 мм. Конструкция коллиматорногр устройства
аналогична предыдущему и с ним выполнялись те же
измерения.
Линзовый коллиматор. Пр>и прохождении
электромагнитной волны через линзовый коллиматор из-за
неоднородности диэлектрика и неточности изготовления
возникают случайные вариации амплитуды и фазы поля.
Для оценки среднего квадрата случайных вариаций фазы
о2 можно заменить линзу плоским слоем диэлектрика той
же толщины (рис. 3.32). Если неоднородности
диэлектрика велики по сравнению с длиной волны (крупно
масштабные неоднородности), для оценки о^ можно
использовать метод плавных возмущений [3.16].
99
Рис. 3.32. Линзовый коллиматор:
а — общий вид; б — параболоид, в котором рассеяние на неоднородностях
имеет существенное значение.
При этом если коэффициент преломления в слое
изменяется по закону
(3.86)
где Ъ(х)— случайная функция х со средним значением
5 (х) = О, то а2 на выходе из слоя толщиной х0 (х0 > Я)
определяется формулой (рис. 3.32)
(3.87)
где ?)==2Ях/тгр2 — волновой параметр; р—радиус
корреляции kp <^ 1.
Рассчитаем максимальный размер линзы, если
заданы (известны) | и р.. Из условия равенства
электрических длин двух лучей, прошедших через линзу, ее
раскрыв можно определить по формуле (3.16)
L = /х2 (п2 - 1) + 2fx {п — 1),
(3.88)
где п — коэффициент преломления; f — фокусное
расстояние; х — толщина линзы. Обычно f^>x и п«1,
поэтому в (3.88) можно опустить первое слагаемое под
100
корнем Определив х из (3.87), где положено р = А,, полу-
мим из (3.88) следующее выражение для раскрыва лин-
(3.89)
Например, для /г = 1,1, ?=10"2, аф = ^/32, / = 300Я
получим L^60A,. Для линзовых коллиматоров,
изготовленных из диэлектрика с малым п, освещение контура
может быть достаточно интенсивным, поэтому спад
амплитуды поля на краю линзы может быть незначителен и
размер рассеивателя можно выбирать сравнимым с рас-
крывом линзы: Z^L/1,5, l^AOX. Таким образом, при
заданной однородности диэлектрика ig=10~2 получим
размер линзы на волне длиной 3 см, L&2 м, с применением
которой можно измерять рассеиватели размером до 1 —
1,6 м. Размеры линзы и рассеивателя можно увеличить
при увеличении фокусного расстояния линзы.
Использовались также линзовые коллиматоры,
выполненные из пенополистирола. Впервые такой коллима-
чор диаметром 1 м был .использован Ментцером [В.З]
для измерения диаграмм ЭПР рассеивателей. Позднее
использовались коллиматоры диаметром до 1,5 м,
выполненные из пенополистирола с диэлектрической
проницаемостью е«1,2. С помощью таких коллиматоров
мыполнялись измерения диаграмм ЭПР рассеивателей
размером до 70 см. Общий вид линзового коллиматора
приведен на рис. 3.32,а.
1.6. ИЗМЕРЕНИЕ АМПЛИТУД И ФАЗ ПОЛЕЙ
И ИСПЫТАНИЕ КОЛЛИМАТОРОВ
Исследование поля падающей волны
При испытании измерительных установок необходимо
прежде всего исследовать падающее на рассеиватель
иоле в объеме, занимаемом рассеивателем при его
вращении.
В некоторых случаях можно ограничиться измерением
ноля в трех главных сечениях. Однако полная
информация об амплитуде и фазе поля может быть получена
лишь путем измерения картографических диаграмм (3.17]
поля в нескольких плоскостях во всем заданном объеме.
01
Для выполнения измерений прежде всего необходимо
Ёыбрать тип зонда. Зонд должен иметь размеры, малые
по сравнению с длиной волны. В то же время он должен
иметь диаграмму направленности с основным лепестком,
расположенным в переднем полупространстве, для
получения достаточной чувствительности и пространственной
избирательности к направлению прихода волны.
Направленность обеспечивает прием падающей волны с фронта
и малую чувствительность зонда к волнам, приходящим
с боковых и задних направлений^ Это позволяет
уменьшить влияние волн, отраженных от элементов конструк-
Рис. 3.33. Зонд для исследования поля:
/ — волновод; 2 — диэлектрический стержень.
ции механизма перемещения зонда. Малые размеры зон
да необходимы для того, чтобы усреднение амплитуды
и фазы поля происходило на небольшой площади.
В коротковолновой части диапазона СВЧ широк!
применяется зонд в виде волновода, сужающегося п<
широкой стенке и заканчивающегося диэлектрическим
стержнем небольшой длины и ширины (рис. 3.33).
Для исследования квазиплоских полей удобно при
менять трехкоординатные стенды, обеспечивающие перс
мещение зонда по трем декартовым координатам и вря
Рис. 3.34. Схема стенда для измерения распределения
амплитуды и фазы поля в заданном объеме.
102
щение его вокруг продольной оси для изменения
поляризации (рис. 3.34).
В качестве измерительной аппаратуры целесообразно
применять прибор типа амплифазографа [3.18],
блок-схема которого приведена на рис. 3.35. В амплифазографе
Исполнитель ныи
двигатель
следящей системы с
редукторами
Усилитель
следящей
системы „фаза
Измерительный
фазовраща -
тель
Усилитель
промежуто чной
час тот bi
усилитель
следящей системы
„Амплитуда."
ФазоВый
детектор
Вход измеряемого
сигнала
Смесительная
камера.
Усилитель
промежуточной
Усилитель
следящей
системы
Исполнительный моторе
редуктором
Сельсин-
приемник
Исполнитель ный
двигатель
следящей системы с
редукторами.
Вход сельсина,-
приемника
Рис. 3.35. Блок-схема амплифазографа.
применены следящие двигатели, связанные с ними
аттенюаторы предельного типа с малым начальным затуха-
1|иш и широкодиапазонный СВЧ фазовращатель для
питоматического поддержания на входе приемника по-
юянной амплитуды измеряемого СВЧ сигнала и разно-
щ фаз между измеряемым и опорным СВЧ сигналами.
Ио позволяет одновременно измерять амплитуды и фазы
шков СВЧ с высокой точностью. Опорный сигнал про-
«идит последовательно через фазовращатель поляриза-
нюиного типа, смеситель и усилитель промежуточной
иктоты Измеряемый сигнал проходит соответственно
и'|)СЗ аттенюатор предельного типа, смеситель и усили-
103
тель промежуточной частоты. Оба смесителя питаются
от одного гетеродина. Фазовращатель и аттенюатор
связаны механически с исполнительными двигателями
следящих систем, которые реагируют на разницу амплитуд
и фаз в обоих каналах. Усилитель следящей системы
«Амплитуда» подключен к выходам амплитудных
детекторов УПЧ. Усилитель следящей системы «Фаза»
подключен к выходу фазового детектора, 'питаемого
усилителями.
Примеры измерений, выполненных с помощью ампли-
фазографа, приведены на рис. 3.36—3.40.
На рис. 3.36 приведено измерение распределения
амплитуды поля в раскрыве плоскопараболической
антенны размером 20А,. Как видно, дифракция на облучател"
/
/
/
т
-А
Г
п
\
\
\
-10
-го
-30
О 30 60 90 19си
Рис. 3.36. Распределение амплитуды поля в раскрыве плоскопарабо
лической антенны размером 20А.
приводит к сильной интерференции волн (провал в цен
тре диаграммы), и поэтому нецелесообразно применят!
антенны с облучателем в центре в качестве коллиматор
ных устройств.
На рис. 3.37 приведено распределение амплитуды i
фазы поля на основной и амплитуды поля на перпенди
кулярной поляризациях в главном сечении рупорно-парл
болической антенны размером 20А,. Характер распредг
ления амплитуды и фазы поля качественно совпади»1'
с распределением поля на щели (ср. с рис. 3.30). Уч;1
сток поля, в котором флюктуации амплитуды не превы
шают ±0,5 дб и флюктуации фазы ±10°, составляет при
мерно 0,3 раскрыва антенны. Рупорно-параболически-
антенны и несимметричные зеркала с вынесенным об./1\
104
Фаза,град
10
О ?0 *0 60 80 100 1,см
1'ис. 3 37 Распределение амплитуды и фазы поля на основной и
|Мплитуды поля на перпендикулярной поляризации у раскрыва
рупорно-параболической антенны разменом 20Х:
амплитуда, — фаза; —X—X—X амплитуда перпендикулярной
поляризации.
-40 -30 -20 -10 О 10 20 30 1,см
I'm1-. 3.38. Картографическая диаграмма распределения амплитуды
шля параболической антенны. Цифры соответствуют относительной
амплитуде поля в децибелах.
-40-30 -20 -10 О 10 20 30 1,см
Гиг. 3.39. Картографическая диаграмма распределения фазы поля
параболической антенны.
105
чателем принципиально могут применяться в качества
коллиматорных устройств, однако коэффициент
использования раскрыва у них невелик. Кроме того,
переотражения между рассеивателем и зеркалом значительно
больше, чем в случае применения линзовых
коллиматоров. На рис. 3.38 приведена картографическая
диаграмма распределения амплитуды, а на рис. 3.39 —
распределения фазы поля в раскрыве параболической антенны,
Шкала для Шкала дли
кривой 1 кривой 3
Рис. 3.40. Диаграмма
распределения амплитуды и фазы поля
линзовой антенны, измеренная
с помощью приемного зонда:
распределение фазы за
коллиматором; распределение
фазы без коллиматора; ——
распределение амплитуды за
коллиматором.
10
v
/'
i
I
\
\
%
¦
35
Г0
-35
-70
i°J
140
560
МО
280
140
°«<
-по
4
1
2
X
J
/
/
/
\
-30
3D 1,см
которые подтверждают сделанные замечания. На
рис. 3.40 приведены диаграммы распределения
амплитуды и фазы линзовой антенны диаметром 50А,.
Коэффициент использования раскрыва линзового коллиматора
составляет величину порядка 0,8, что совпадает с
выводами § 3.4 о линзовых коллиматорах.
Приведенная методика исследования поля падающем
волны может применяться в любой зоне антенны
(ближней, промежуточной и дальней).
Исследование поля рассеянных волн с помощью
пассивного отражающего зонда
Если установка для измерения диаграммы рассеяния
содержит приемную аппаратуру для измерения
амплитуды и фазы отраженного поля, то при измерениях
распределения поля могут быть использованы пассивные
отражающие зонды типа шара, уголкового отражателя
и др.
Для измерения распределения амплитуды и фазы
отражатель необходимо перемещать в плоскости, парал-
106
лельной фронту падающей волны. В результате
измерений получается картографическая диаграмма, представ-
•пяющая* собой произведение диаграмм антенны при
работе ее на передачу и прием. Эта диаграмма
характеризует неоднородность падающего и отраженного полей.
При измерении амплитуды поля пассивный
отражатель (шар или биконический уголковый отражатель)
можно перемещать по окружности радиусом, равным
половине максимального размера рассеивателя. Такое
перемещение удобно выполнить с помощью поворотного
устройства, имеющегося в комплекте любой
измерительной установки.
Приведенные результаты расчетов и измерений полей
показывают, что погрешность измерения диаграммы рас-
сеивателей в большой степени связана с характером
поля падающей волны, формируемого передающей
антенной измерительной ^установки, и с диаграммой
направленности приемной антенны.
Литература
61 (Mentzer I. R. The use of dielectric lenses in reflection
measurements. Proc. IRE, 1959, v. 41, № 2.
¦3 2. Блэк'смит TI., X а й а т т Р. Е., Мак Р. В. Введение
и методы измерения радиолокационного поперечного сечения цели.
ТИИЭ'Р, И965, т. 53, № 8.
13 3. К у ю м д ж а н, Питере. Требования к расстоянию при
измерениях 'радиолокационного поперечного сечения. ТИИЭР, 1965,
I. 53, № 8
34 Мерло у, Ва н-Х озер, Ф р и н и. Комплекс RAT SCAT
лля измерения •радиолокационного поперечного <сечения целей.
ТИИЭР, 1965, т. 53, 0У|Ь 8.
3 S. К и н г Р. и У Т а й - ц з у н ь. Рассеяние и дифракция
электромагнитных волн. Изд-В'О иностранной литературы, 1962.
3 6. 'Г ^ не. Устройство для определения 'поперечного сечения
рассеяния, использующее линию передачи. ТИИЭР, 1965, т. 53,
№ 8.
37. Уфимцев П. Я- Метод краевых волн в физической
теории дифракции- 'Изд-во «Советское [радио», 1962.
6.8. (Ф е л ь д Я. !Н. и 'Б е н е !н с о и Л. С Антенны сантиметровых
и дециметровых волн, ч. I. 'Изд. В'В'ИА им Н Е. Жуковского,
1056.
3 9. М-ялн. Труды конференции -по антеннам для
радиолокаторов морского флота. Лондон, '1950.
1310. Ш и ф р и н Я. С. (Вопросы статистической теории антенн.
Пзд-во ^Советское радио», 1970.
13.41. iK и н б ер >В. Ё., Цейтлин В. Б. О погрешности
измерения коэффициента направленного действия и диаграммы на-
107
правлешюоти антенны на близких расстояниях. «'Радиотехника и
электроника». 1964, т IX, № 9.
3.12. Цейтлин В. Б. Об 'измерении 'бокового излучения и
фазовых диаграмм антенн ов ближней зоне. «Радиотехника и
электроника», 1965, т. X, № 6
3.13. Ц е й т л и н В Б , К и н б е р Б Е. Об ошибках измерения
диаграмм рассеяния в зоне Френеля. «Радиотехника и электроника»,
1967, т. XII, № 3.
3.14. Шер,ман Д. iB. Свойства раскрьгвов, сфокусированных
в зоне Френеля. IRE Trans, 1962, VII, v АР-10, № 4.
3.15. Johnson iR. С, Ecker H. A., Moore R. A. Compact
range technigues and measurements. IEEE transactions on Antennas
and propagation, '1969, v. AP-47, № 5.
3.16. Рыто в С. >М. Введение в статистическую (радиофизику.
Изд-во «Наука», 1966.
3.17. Фрадин А. 3. Антенны сверхвысоких частот. Изд-во
«Советское радио», 1957.
3.18. К у л и г и н И. Н., Фадеев И. К. Автоматическое
устройство для записи амплитудных и фазовых характеристик
диаграмм направленности антенн. Авт. свидетельство № 163224.
Бюллетень изобретений и товарных знаков, 1964, № 12.
Глава 4
МЕТОДЫ ПОДАВЛЕНИЯ ПАРАЗИТНЫХ
РАССЕЯНИЙ И БЕЗЭХОВЫЕ КАМЕРЫ
4.1. ИСТОЧНИКИ ПАРАЗИТНЫХ РАССЕЯНИЙ
ПРИ ЛАБОРАТОРНЫХ ИЗМЕРЕНИЯХ
Первой задачей, с которой сталкивается
экспериментатор при измерении диатрамм рассеяния, является
необходимость создания в рабочем объеме, т. е. в
пространстве, в котором устанавливается измеряемый объект,
такого распределения поля, которое близко к полю
квазиплоской волны. Это достигается подбором расстояния
цо измерительной установки или применением коллима-
горных устройств.
Однако вблизи рабочего объема могут находиться
различные предметы, рассеивающие волны. Волны,
рассеянные этими предметами, искажают поля в рабочем
объеме и приводят к погрешностям измерений.
Подавление такого рода паразитных рассеяний является
важной задачей при разработке установок для измерений
диаграмм рассеяния радиолокационных целей и
диаграмм направленности антенн. Полностью подавить
паразитные рассеяния часто невозможно, но свести их до
некоторого допустимого минимума является хоть и
сложной, но вполне разрешимой задачей.
Рассмотрим основные источники паразитных
рассеяний. При измерениях невозможно обойтись без опоры, на
которой закрепляется измеряемый объект. Для
измерения диаграмм опора с объектом устанавливается на
поворотном устройстве. Опора и поворотное устройство
рассеивают радиоволны. Рассмотрению методов
уменьшения паразитного рассеяния от опор посвящен
специальный параграф в конце данной главы.
На полигонах большую опасность представляют
паразитные рассеяния поверхностью почвы. В гл. 3 были
рассмотрены возможности уменьшения влияния
подобного рассеяния за счет выбора расположения модели и
измерительной аппаратуры над поверхностью почвы.
В особых случаях бывает оправданным покрытие
поверхности почвы в области зеркального отражения радиопо-
глощающими материалами. Кроме того, на полигонах
109
паразитные рассеяния вызываются рассеивателями в
виде строений, деревьев, кустарников, находящимися
вблизи измерительной площадки. Применение импульсной
работы и временной селекции позволяет исключить эта
сигналы.
Плохие метеорологические условия затрудняют
измерения на полигонах и часто делают их невозможными.
Для увеличения эффективности измерений их стали пере-
носить в закрытые помещения. Измерения внутри
помещений возможны только при условии подавления
паразитных рассеяний от стен помещения, в котором
проводятся измерения. Современные измерителкные установки
помещают в специальные помещения, в которых приняты
необходимые меры для подавления рассеяния от стен.
Эти помещения называются безэховыми камерами.
Безэховые камеры обычно бывают прямоугольного
сечения или рупорной формы, размерами от нескольких
метров до нескольких десятков метров. Для построения
безэховых камер длиной в несколько сотен метров тех-
нических препятствий нет.
Большинство безэховых камер делается
экранированными (коэффициент затухания 80—100 дб и выше).
Экранировка защищает измерения от внешних помех и
одновременно является единственным средством борьбы
с так называемой «электрической несовместимостью»,
т. е. с собственным излучением в пространство, которое
создает помехи расположенным вблизи установкам.
Основными факторами, определяющими качество
безэховых камер, являются:
1) размеры камеры,
2) качество примененного радиопоглощающего
материала,
3) форма камеры.
Как правило, чем больше размеры и чем выше
качество радиопоглощающих материалов, тем лучше безэхо-
вая камера. Ее можно также значительно улучшить
подбором формы сечения.
На полигонах не удается достичь столь малой
величины паразитных сигналов, как в безэховых камерах.
Таким образом, измерения в безэховых камерах не
только более удобны и производительны, но и более точны.
Этим объясняется постепенное вытеснение полигонных
измерительных комплексов установками,
расположенными в безэховых камерах.
110
4.2. РАДИОПОГЛОЩАЮЩИЕ МАТЕРИАЛЫ (РПМ)
ДЛЯ БЕЗЭХОВЫХ КАМЕР
Для подавления отражения от стен' безэховых камер
их покрывают специально разработанными радиопогло-
щающими материалами. Основным требованием к таким
материалам является малое значение коэффициента
отражения в широком секторе углов падения радиоволн
на материал. Практически рабочий сектор углов
падения должен быть от 0° до 80—85°. Существенным
требованием является также малый коэффициент отражения
материала в широком диапазоне волн. Безэховые
камеры, предназначенные для работы на одной волне или
в узком диапазоне волн, строятся значительно реже, чем
для работы в широком диапазоне волн. Требования
к механической жесткости радиопоглощающих
материалов бывают достаточно слабые, за исключением
материалов, идущих на изготовление тех мест пола, по
которым ходят или на которых ставится тяжелое
оборудование.
При конструировании РПМ необходимо обеспечить
достаточно полное поглощение волн, проникших внутрь,
и отсутствие отражения радиоволц от поверхности его.
Для решения этих задач во всех материалах,
предназначенных для безэховых камер, применяется один и тот же
принцип [4.1]. Материал изготовляется из жесткого или
мягкого пенопластового каркаса с наполнителем, хорошо
поглощающим радиоволны. Для обеспечения малого
отражения от материала плотность его на поверхности
должна быть близкой к плотности воздуха. Плотность
материала и концентрация поглотителя возрастают с
глубиной и подобраны так, чтобы как можно больше
поглощались радиоволны, проникающие в него. Плавное
изменение электрических параметров с глубиной
обеспечивает отсутствие парциальных отражений внутри
материала.
Другим способом создания плавного изменения
электрических параметров является изготовление из
однородного пористого материала с наполнителем пирамид,
устанавливаемых рядом друг с другом. Угол при
вершине пирамиды делается небольшим (не более 30—60°),
что обеспечивает многократное переотражение падающих
волн в пространстве между пирамидами. На рис. 4.1 для
иллюстрации влияния угла при вершине пирамид
показан ход лучей в пространстве между пирамидами, Ра-
111
диопоглощающие материалы пирамидального типа
являются наиболее совершенными и удобными для
применения в безэхоЁых камерах. Они постепенно вытесняют
другие типы РПМ, за исключением предназначенных для
решения специальных задач, например поглощение
больших мощностей и т. п.
В табл. 4.1 приведены параметры некоторых
современных РПМ, выпускаемых за рубежом. Эти параметры
можно рассматривать как типовые. На рис. 4.2 показаны
зависимости коэффициента отражения по мощности
(&м) пирамидальных материалов различной высоты (h)
\7 у У У
'7777777777777777777777777777777 777777777777777.
а) б)
Рис, 4.1. Отражение радиоволн от пирамид:
а — угол при вершине 90°, б — при 30°.
от частоты. Приведенные значения kM сохраняются до
углов падения порядка 75—80°. В области более низких
частот kM уменьшается пропорционально f2, но с
повышением частоты из-за дифракции уменьшение kM
замедляется. Несмотря на это, радиопоглощающий материал
достаточно хорошо работает в области миллиметровых
волн. Более существенно то, что с уменьшением частоты
коэффициент отражения всех материалов увеличивается
и поэтому параметры безэховых камер ухудшаются
с уменьшением частоты.
Хорошие пирамидальные радиопоглощающие
материалы имеют достаточно большую толщину. Например,
для получения kM равным —50 дб высота пирамид
должна быть не менее 7—10 X. Значительно легче получить
/см порядка —20 дб. Такая величина может быть
получена уже при высоте пирамид 0,5—0,6 X. Несмотря на
пирамидальную форму материала в блоках площадью
2—4 ж2, он, как установлено опытами, рассеивает
радиоволны как большая ровная поверхность и вполне
допустимо пользоваться понятием коэффициента отражения
Это не означает, что при падении волн на такой
материал не наблюдается явления диффузного рассеяния
волн на неоднородностях материала, а также дифракции
112
Радиопоглощающие материалы для безэховых камер [1]
Таблица 4.1
Марка материала
CV-6
CV-9
CV-12
CV-18
FR-330
FR-340
FR-350
FRL-330
FRL-340
FRL-350
Краткая характеристика
Пеноматериал, диэлектрик, не горит,
1 м2 весит 4 кг (CV-6) и 6 юг (CV-9).
Пеноматериал, диэлектрик, не горит,
жесткий, 1 м2 весит 8 кг (CV-12) и 12 кг
(CV-18)
Твердый пеноматериал,
водонепроницаем, не горит, окрашен в белый цвет
(материал FR-M) имеет те же параметры, но
выдерживает температуру до 180°, 1 м2
весит соответственно 2,4; 5; 10 кг
Материал для покрытия полов
(модификация материала типа FR), 1 м2 весит
соответственно 3,5; 6 и 10 кг
Диапазон
волн, см
<4
<32
<66
СО CM CD
—¦ СО CD
<32
<бб
Отраженная
мощность, %
0,01
0,01
0,01
0,01
1
1
1
to to to
Размер
блоков, м
CD CD CD CD
ХХХХ
CD CD CD CD
0,9X0,3
0,9X0,3
0,9X0,3
1X0,3
1X0,3
1X0,3
Толщина,
MM
152
228
305
457
50
100
200
50
100
200
Продолжение табл. 4.
Марка материала
CHW-590
CHW-580
CHW-570
CHW-560
НТ-98
НТ-99
НТ-101
НТ-102
СН-445
СН-460
СН-475
СН-490
Краткая характеристика
Пеноматериал, твердый, с пленкой из
стеклопластика, выдерживает нагрузку до
2 кг/см2. Материал 580 и 590—пеноблоки,
560 и 570—пирамиды. Модификация CHW-H
выдерживает температуру до 180°, 1 м2
весит соответственно 2,7; 3,6; 6,8; 9,5 кг
Керамический пеноматериал, интервал
рабочих температур от —60 до +650°
поглощает высокие уровни энергии, 1 мг
весит соответственно 10,14, 29 и 40 кг
Изготовляется на основе животного
волоса; вес соответственно 1; 2,5; 4; 7,5 кг
Диапазон
волн, см
<100
<150
<300
<600
<11
<32
<100
<7
<32
<66
Отраженная
мощность, %
1
1
1
1
1
1
1
1
1
1
1
1
Размер
блоков, м
0,6X0,6
0,6X0,6
0,6X0,6
0,6X0,6
0,43X0,28
0,9X0,3
Толщина,
мм
300
450
900
1830
38
76
152
305
25
50
100
200
ка вершинах пирамид. Дифрагированное и диффузнс-
рассеянное поля должны учитываться только при
выполнении высококачественных камер, в которых паразитные
рассеяния должны быть меньше —60-^—70 дб.
Таким образом, для построения безэховых камер
имеются радиопоглощающие материалы, обеспечивающие
их работу в диапазоне сантиметровых и дециметровых
№5см 60см
Ь*190см/75см \Ь5см30см 22.5см км
L [ t 0,01
0,001
0,0001
-50
50 100 200
0,0000
Рис. 4 2. Зависимость коэффициента отражения от частоты для
пирамидальных материалов.
молн. Для метровых волн качество РПМ значительно
хуже. Радиопоглощающий материал, выполненный с
черной поверхностью, кроме радиоволн 'Способен также
vopoino поглощать инфракрасные и световые волны
излучения.
4.3. ПРИНЦИПЫ УСТРОЙСТВА БЕЗЭХОВЫХ КАМЕР
Основным параметром, определяющим качество
безэховых камер, является коэффициент без^ховости
(КБЭ). Чем меньше значение паразитных рассеянных
115
полей, тем меньше коэффициент Гх\г-штости и тем
лучше качество камеры. Приводимые и литературе значения
КБЭ камер были определены следующим методом.
КБЭ в точке определяется как отношение потока
мощности паразитного рассеяния в этой точке к потоку
мощности прямого излучения' передатчика. КБЭ камеры
определяется как среднее, вычисленное по значениям
КБЭ в нескольких точках рабочего объема. КБЭ
измеряют в децибелах. Так как облучение стенок зависит от
диаграммы направленности передающей антенны, то
КБЭ должен определяться при заданной диаграмме
излучающей антенны. Для безэховых камер
сантиметрового диапазона необходимо чтобы КБЭ равнялся —50-;-
—60 дб. Камеры для измерения диаграмм рассеяния
ь дециметровом диапазоне волн могут иметь КБЭ
несколько меньше (—40-;—50 дб). Эти цифры
выбираются из условия, что для измерения диаграмм рассеяния
с точностью ±1 дб, как было показано в гл. 3,
паразитные сигналы должны быть меньше основного сигнала на
20 дб.
Следовательно, при КБЭ, равном —50 дб, можно
измерять диаграммы рассеяний с точностью ±1 дб в
динамическом диапазоне 30 дб.
Требования к КБЭ камер для антенных измерений
бывают более легкими. При измерениях входных
сопротивлений антенн можно обходиться простыми безэховы-
ми устройствами, такими, как поглощающие щиты или
колпаки, одеваемые на раскрыв антенны. При
измерении диаграмм направленности антенн с точностью
±1 дб КБЭ камеры должен быть на 10—15 дб меньше
измеряемых амплитуд боковых лепестков. Безэховые
камеры с КБЭ, равным —40-=—50 дб, относятся к
категории хороших камер для антенных измерений.
Для особо точных измерений могут быть созданы
камеры с КБЭ меньше названных выше величин. Уже
имеется камера длиной 27 ж с КБЭ, равным:—73 дб
на частоте 10 Ггц и —30 дб на частоте 120 Мгц [4.2].
Определим наиболее опасные с точки зрения
паразитных отражений места в безэховых камерах. Для этого
методом геометрической оптики рассмотрим ход лучей
в камере. На рис. 4.3 показано продольное сечение по
мещёния, в котором расположена измерительная
установка и показан ход лучей, попадающих в рабочий обь-
ем. Кроме прямых лучей / в рабочий объем или зону
116
безэховости попадают лучи, отраженные от задней
стенки 2 и от областей зеркального отражения на боковых
стенках 3 и 4 (показаны две области из общего числа
четырех).
Из рис. 4.3 видно, что главной задачей является
борьба с отражением от задней стенки и от мест зеркального
отражения на боковых стенках *). Помимо этих лучей
ошибки могут вызвать и лучи, отраженные в других
местах, которые попадают в рабочий объем после много-
Измерительная
установка
Рис. 4.3. Ход лучей в безэховой камере.
кратных отражений, и даже лучи, переотраженные
измеряемым объектом на стенку и обратно на объект. Все
эти лучи намного слабее зеркально отраженных и могут
учитываться во вторую очередь.
Если требуемый КБЗ камеры больше коэффициента
отражения РПМ, то безэховость может быть создана
покрытием всей площади стен внутри помещения радио-
поглощающим материалом. Практически такие камеры
удается создавать для сантиметровых волн с КБЭ
порядка —40 дб. Камеру можно улучшить за счет выбора
такой формы внутренних поверхностей, при которой
в рабочий объем лучи из опасных областей или вообще
не попадают или попадают после нескольких отражений.
Известно, что после одного отражения плотность потока
мощности радиоволны равна
где i?i — полный путь волны, a kM — коэффициент
отражения по мощности.
*> Для сокращения здесь и далее будем считать, что в термин*
отражения от боковых стенок входит также отражение от пола и
потолка.
117
После п отражений поток мощности равен
р — Л1*"1"
(4.2)
и во много раз уменьшается как за счет того, что при
каждом отражении умножается на km, так и за счет
возрастания длины пути Rn.
Устройство задней стенки в значительной мере
определяет качество безэховой камеры. Большое внимание
должно быть уделено хорошему выполнению задней
стенки. Наилучшие формы задней стенки, позволившие
значительно уменьшить паразитное отражение, показаны на
ч
Задняя
стенка
Вид сбоку
Вид сбоку
6)
Рис. 4.4. Вид задних стенок:
а — наклонная стенка; б — наклонная стенка с гофром
рис. 4.4. Наклон стенки на угол 10—15° (рис. 4.4,а)
приводит к тому, что лучи, падающие на стенку,
отражаются на верхнюю стенку и претерпевают по крайней мере
еще одно отражение, прежде чем попадут в рабочий
объем. Рабочий объем называют также безэховой зоной.
Из выражения (4.2) следует, что если наклонную и
верхнюю стенки покрыть РПМ с &м=10-4 (—40 дб), то
после двух отражений сигнал по величине должен быть
меньше на —80 дб. Пра-ктически из-за дифракционных
явлений и диффузного рассеяния на РПМ суммарное
ослабление при двукратности отражений в этом случае
бывает меньше и отраженный сигнал будет иметь
величину —55-;—60 дб. Если измерительная установка
работает на одной фиксированной частоте, то отраженный
сигнал может быть еще уменьшен подбором угла
наклона стенки с помощью специального механизма. Угол
наклона стенки подбирают так, чтобы один из минимумов
118
дифракционной диаграммы рассеяния стенки был на*
правлен на рабочий объем. Процедура подбора
положения стенки достаточно длительна и поэтому в
установках, работающих в диапазоне частот, задние стенки
с регулирозкой положения стараются не применять.
На рис. 4.4,6 показана форма задней стенки,
выполненной в виде наклонного гофра. На рисунке изображен
ход одного луча, показывающий, что при этой
конструкции лучи, попадающие в рабочий объем, имеют большее
число отражений по сравнению с плоской стенкой.
Оптимальные условия имеют место при угле наклона гофра
10—15° и при угле раскрыва гофра 20—30°.
Расстояние рабочего объема от задней стенки
стараются делать как можно больше и во всяком случае
больше размера стенки. Желательно подбирать расстояние
таким, чтобы лучи, отраженные от стенки и потолка, про-
хрдили мимо рабочего объема.
В начальный период разработок безэховых камер
были испробованы способы задержания лучей,
отраженных от боковых стенок с помощью поперечных
перегородок. Примером таких камер являются камеры апертур-
ного типа и камеры с поперечными гофрами. В апертур-
ной камере между измерительной аппаратурой и
измеряемым объектом установлена поперечная стенка с
отверстием в середине. Размер отверстия таков, что стенка
пропускает прямые лучи и задерживает зеркально
отраженные лучи. Из-за того что на краях отверстия
возникают дифрагированные волны, КБЭ камеры оказался
значительно хуже ожидаемого. В камерах с поперечными
гофрами препятствием для зеркально отраженных лучей
является несколько рядов поперечных гофров. Несмотря
на то, что для уменьшения дифракционных полей
вершины гофров делались изрезанными, поля дифракции
были значительными и достичь высокого качества камер
не удалось. В настоящее время камеры апертурного типа
и с поперечными гофрами не строят.
Наиболее часто для борьбы с паразитными
рассеяниями на боковых стенках устанавливают продольные
гофры, отклоняющие в сторону лучи, идущие в рабочий
объем. Рассмотрим принципы выбора сечения гофров.
Можно поставить задачу подобрать такую форму
камеры, чтобы лучи, выходящие из некоторой точки,
попадали бы в рабочий объем, отразившись не менее п раз
от стенок. Для примера рассмотрим плоскую задачу от-
119
ражения волн ot цилиндрической поверхности, сечение
которой составлено из отрезков эллипсов с фокусами /i
и /2 (рис. 4.5). Если поместить источник излучения в
точке |fi, то все лучи пройдут через /2 и попадут в рабочий
объем только после двух отражений. Можно построить
прямоугольную камеру с продольными графами вдоль
всей длины камеры, имеющими сечение рис. 4.5, с
точкой излучения в /ч, расположенной в начале камеры, и
рабочим объемом S — в конце камеры. Лучи, показанные
Рис. 4.5. Отражение лучей от
эллиптических поверхностей.
на .рисунке, теперь будут проекциями лучей, идущих
вдоль камеры. Форма сечения камеры, обеспечивающая
два отражения, может быть составлена не только из
эллиптических поверхностей, но и из других, например
из параболических.
Используя явление прижимания лучей к
поверхности (принцип «шепчущей галереи»), можно рассчитать
форму камеры, в которой отраженные лучи вообще не
попадают в рабочий объем. Как показано в [4.3], такая
камера должна быть телом вращения отрезка спирали.
Сечение камеры показано на рис. 4.6,а. Все лучи
собираются в вершине камеры, где должно находиться
устройство, поглощающее радиоволны.
120
Гофры эллиптического сечения сложны в
изготовлении и поэтому не применяются. Профиль гофров
выполняется из отрезков прямых (рис. 4.6,6), а размеры
гофров выбираются в зависимости, от размеров рабочего
объема и зоны излучения (объем, в котором может
находиться излучающая антенна). Преимущества продоль-
Зона
излучения
Рис. 4.6. Формы камер:
а—'камера типа «шепчущей галереи»; б — камера с продольными гофрами.
ных гофров заключаются также в том, что поле
дифракции при падении волн в направлении вдоль гофра
намного меньше поля дифракции при падении волн в
поперечном направлении. Применение продольных гофроз
позволяет создать камеры для работы в сантиметровом
диапазоне волн с КБЭ, равном —60-f-—65 дб, при ко-
121
эффициенте отражения радиопоглощающего материала
—40 дб.
Эффективное уменьшение влияния отражения от
боковых стенок может быть осуществлено переходом к
камере рупорного типа. Известно, что при распространении
радиоволн над проводящей плоскостью, благодаря
интерференции прямой и отраженной вдлн, образуется
лепестковая диаграмма. Суммарный вектор электрического
поля равен
(4.3)
где hi — высота излучателя над плоскостью; h2 — высота
точки наблюдения; X — длина волны; R — расстояние
между излучателем и точкой наблюдения.
Из выражения (4.3) видно, что у плоскости поле
всегда равно нулю, а по мере увеличения высоты точки
наблюдений чередуются максимумы и минимумы. При
больших значениях hi/h вариации поля имеют малый
период, но по мере уменьшения этой величины период
вариаций увеличивается. Если мы будем приближать
излучатель к стенке, то период вариаций будет
увеличиваться и, наконец, в рабочем объеме уложится только часть
периода вариации, т. е. искажения поля будут мало
существенны. Приблизить излучатель к стенке можно,
выполнив камеру в виде усеченного рупора (рис. 4.7) с
излучателем, устанавливаемым вблизи вершины рупора.
Камера в виде усеченного рупора помимо меньшего
влияния отражения от стенок имеет еще ряд
преимуществ. При том же расстоянии от измерительной
аппаратуры до измеряемого объекта камера имеет меньшие
площади и объем, для изготовления требуется меньшее
количество РПМ. Камеры могут иметь форму усеченного
пирамидального рупора, но чаще из-за удобства работы
в ней применяют камеры в виде усеченного
секторального рупора с параллельными верхней и нижней
стенками. В камерах этого типа могут быть применены
продольные гофры. Самой совершенной камерой в
настоящее время является безэховая камера в виде
пирамидального рупора [4.2]. Эта камера имеет КЁЭ, равный
—73 дб при частоте 10 Ггц и уменьшающийся до —30 дб
на частоте 120 Мгц. Рупорная антенна измерительной
установки устанавливается в вершине камеры и должна
быть очень тщательно состыкована с самой камерой.
Радиопоглощающий материал, которым покрыта камера
122
внутри, предназначен для подавления высших типов
волн, если таковые возникнут, поэтому поглощающий
материал для боковых стенок может быть среднего
качества. Для задней стенки должен быть применен
высококачественный материал. В камере распространяется
волна рупорного типа, скорость распространения
которой отлична от скорости распространения волн в
свободном пространстве.
Существенным неудобством рупорной камеры
(пирамидальной) является сложность перехода на другой
диапазон рабочих волн. Для такого изменения необходимо
Рабочий У
объем X
ЁГ
Рис. 4.7. Формы безэховых камер.
отключить и убрать один рупор, заменив его другим,
рассчитанным для работы в новом диапазоне волн, и
провести тщательную регулировку соединения рупора
с камерой.
По величине КБЭ (—73 дб) и малым искажениям
поля в рабочем объеме рупорная пирамидальная камера
является лучшей из существующих камер. Отсутствие
искажений поля объясняется, вероятно, не только
подавлением паразитных волн, но и тем, что отсутствуют
поля, дифрагированные на краях и металлических частях
излучающей антенны, поскольку эта антенна становится
частью рупора, образующего камеру.
4.4. РАСЧЕТ БЕЗЭХОВЫХ КАМЕР
Инженерные расчеты безэховых камер проводятся
методом геометрической оптики, т. е. построением хода
лучей внутри камеры с учетом отражения их от стенок
камеры.
123
Необходимость использовать дифракционные Методы
расчета возникает тогда, когда ihvu*tch расчет
высококачественных камер (КБЭ меньше —50 Об), в которых
необходимо учитывать рассеяние волн па вершинах
пирамид или на хребтах гофров.
Большинство современных безэховых камер для
антенных измерений имеет коэффициент безэховости
—40-^—50 дб [4.5, 4.6]. Геометрооптический метод
расчета позволяет полностью рассчитывать параметры
таких камер. К камерам для измерения диаграмм
рассеяния предъявляются более высокие требования: КБЭ
должен быть —60-^—70 дб [4.2]. Для таких камер
методом геометрической оптики может быть произведен
выбор формы сечения камеры и- проведена оценка
ожидаемого коэффициента безэховости. Точный расчет
высококачественных камер невозможен без учета
дифракционных явлений.
Расчеты могут быть выполнены аналитическим или
графо-аналитическим методами. При аналитических
расчетах записывается выражение для луча в зависимости
от угловых координат и расстояний и решается задача
о ходе'лучей в камере (иногда с помощью ЭВМ).
При графо-аналитическом расчете производится
графическое построение лучей и аналитически определяется
поток мощности падающей волны. Ниже
рассматривается этот метод на примере расчета разных типов камер.
Расчет камер с постоянным поперечным сечением
Основой расчета является построение хода лучей,
выходящих из излучателя и отражающихся от стенок
камеры. Лучи строятся так, чтобы в точке отражения
выполнялся закон Снеля о равенстве угла падения углу
отражения (рис. 4.8). Расчет облегчается тем, что вместо
расчета пространственного хода лучей, показанного на
рис. 4.8,а, можно строить проекции этих лучей на
плоскость, нормальную оси камеры, как это показано на
рис. 4.8,6. Можно показать, что если выполняется закон
Снеля для самих лучей, то он выполняется и для
проекций лучей на плоскость, нормальную отражающей
плоскости. Следует иметь в виду, что каждая линия,
например Оа на рис. 4.8,6, является проекцией веера
лучей, концы которых лежат на линии, параллельной оси
камеры, проходящей через точку а. Для разделения
этих лучей необходимо обратиться к продольному раз-
124
резу камеры, показанному на рис. 4.8,в. На этом рисунке
каждая линия, например Оа, является проекцией веера
лучей, кончающихся на линии, нормальной оси камеры,
и проходящих через точку а. Построение позволяет
найти те из лучей, которые после одного или нескольких
отражений попадают в рабочий объем.
Построение хода лучей производится графически.
Графическое построение сильно облегчает применение
«метода зеркальных отражений». Для построения луча,
отраженного от стенки АБ (рис. 4.8), находят точку
зеркального отражения О' опусканием перпендикуляра из
1
°я 1
V
/
\
\
*)
г 5 \
V I \
г.—j—л.
Излучатель
Д
Л
Рабочий
¦v y oh ем
б)
Рис. 4.8. К расчету безэховых камер:
ч — ход лучей в пространстве; б — поперечное сечение; в — продольное
сечение.
точки О на линию АБ. Отраженный луч 1 как бы
выходит из этой точки. При падении луча на стенку БВ
отраженный луч как бы выходит из точки О",
являющейся точкой зеркального отражения О' от плоскости
ИВ. Процесс построения может быть продолжен для
определения дальнейших отражений.
Перейдем к рассмотрению методики расчета КБЭ.
Предположим, что размеры камеры и размер рабочей
125
безэховой зоны заданы. Излучение происходит из одной
определенной точки *>. Тогда легко иайти_ области
поверхности камеры, при отражении от которых лучи
попадают в рабочую зону. Две таких области
заштрихованы на рис. 4.8,6. Напомним, что в действительности
таких областей четыре (по одной на каждой стенке).
Область I наиболее опасная: уже после первого отражения
луч попадает в рабочий объем. Из области // луч
попадает в рабочий объем после двух отражений и,
наконец, из области /// — после трех отражений. Остальные
лучи претерпевают больше трех отражений.
После того, как построены лучи, можно определить
величину поля в рабочем объеме. Для этого надо с
помощью рис. 8,6 найти те лучи, которые попадают в
рабочий объем. Сразу видно, что все лучи, отражающиеся
правее области /, могут попасть в рабочий объем только
после отражения от задней стенки. Из рис. 4.8,в видно,
что в рабочий объем приходят лучи, отраженные в
области / и, кроме того, лучи, которые отразятся два раза
(луч огд) и большее число раз, прежде чем попадут
в рабочий ббъем. Лучи, отразившиеся от углов камеры,
тоже попадают в рабочий объем после двух отражений.
Если не учитывать лучи, имеющие более двух отражений,
то общая мощность отраженного сигнала в рабочем
объеме составляется из:
— плотности потока мощности вдоль луча,
отраженного в области /,
— плотности потока мощности вдоль луча, отраженного
в области //,
Рп = ^Р2па2; (4.4)
— плотности потока мощности вдоль луча огд *
Р =kukMP a ;
— плотности потока мощности вдоль луча от задней стенки
з саз с»
-*"^8е * з саз с»
*) Если излучатель может находиться в нескольких точках неко
торого объема (зона излучения), то расчет должен быть повторен
для каждой из точек этого объема. Обычно выбирают крайние точки
объема.
126
Здесь через kM с индексом обозначены коэффициенты
отражения по мощности в точках падения лучей, а
через а — коэффициенты пространственного ослабления
поля за счет того, что путь отраженного луча всегда
больше пути прямого. Коэффициенты а равняются
отношению квадрата пути прямого луча ООГ к квадрату
полного пути отраженного луча ОАБО' (рис. 4.9).
Из-за неоднородности материала и неполной
симметрии камеры лучи приходят в рабочий объем со
случайными фазами и для нахождения суммарной мощности
Излучатель
О
Рабочий объем
Рис. 4.9. К расчету коэффициента ослабления а.
надо сложить мощности отдельных лучей. Учитывая, что
лучи отражаются от всех четырех стенок, можем
написать выражение для полной мощности отраженного сиг-
пала
^в р «= 4 (Р, + Рп + Рогд + Р3 с). (4.5)
Вели излучающая антенна —направленная, то значения
первых трех составляющих в правой части (4.5)
уменьшатся пропорционально ординатам диаграммы
направленности антенны. Сужение диаграммы направленности
мало сказывается на отражении от задней стенки и для
(то подавления необходимо принимать специальные
меры.
Расчет размеров сечения продольного гофра
На рис. 4.10 показано сечение камеры с продольным
тфром и ход нескольких лучей. Рисунок иллюстрирует
позможность подбора такой формы гофров, при которой
И рабочий объем це могут попасть лучи, отражённые о г
127
стенок, меньше заданного количества раз. Основание
гофров должно быть несколько шире, чем зона опасных
отраженных лучей, а высота выбирается минимальной,
но такой, чтобы ни один отраженный от гофра луч не
попал в рабочий объем с меньшим заданного числа
отражений. Обычно заданное число отражений бывает
равным трем.
Для камер с продольными гофрами расчет величины
коэффициента безэховости методом геометрической опти-
Рис. 4.10. Выбор размеров гофра.
ки является только приближенным. Этим методом
можно разумно выбирать форму и размеры сечения камеры.
Для определения величины КБЭ необходимо рассчитать
поле, дифрагированное на клине из материала с
комплексными диэлектрической и магнитной проницаемостя-
ми. Такой расчет весьма сложен и определение
безэховости камер с гофрами производится экспериментально,
Расчет камер с переменным поперечным сечением
Метод расчета применим и тогда, когда камеры
выполняются в виде усеченных рупоров. На рис. 4.11
показана камера, выполненная в виде усеченного
секторного рупора со сходящимися боковыми стенками. В этом
случае порядок расчета остается прежним, но при
отражении лучей на боковых стенках необходимо
определять точку отражения на продольном сечении и
переносить ее на поперечное. При сложных законах
128
N
I
1
¦к
4-
>
1
1
1
пения поперечного сечения такие графические построения
становятся настолько сложными, что необходимо
переходить к аналитическим расчетам с привлечением ЭВМ.
Методы расчета камер пирамидального типа еще не
разработаны. Методы геометрической оптики в этом
случае не применяются. Можно предполагать, что
наибольший успех будет получен путем
решения задачи о возбуждении волн
в «пирамидальном рупоре с
комплексными граничными условиями на
стенках, а)
4.5. МЕТОДЫ ИСПЫТАНИЯ
БЕЗЭХОВЫХ КАМЕР
Целью 'испытания безэховой
камеры 'Является измерение ее КБЭ.
Выше было приведено широко
применяемое определение КБЭ, как
некоторой усредненной величины,
характеризующей искажения
электромагнитного поля .во ©сем рабочем #j
объеме. Направлению прихода
паразитных -волн и характеру
распределения их -полей 'по объему не
придается значение. Усредненная
'величина КБЭ может характеризовать
оигиб-ки измерения ЭПР достаточно
гладких тел, «е имеющих областей
повышенного рассеяния. Кроме того,
предполагается; что паразитное
рассеяние одинаково искажает
результаты, независимо от угла
прихода.
При современных повышенных требованиях к
точности измерений элементов матрицы рассеяния,
определение усредненного значения КБЭ становится часто
недостаточным. Для характеристики камеры бывает
необходимым определить направления прихода паразитных
волн, а также распределение КБЭ по рабочему объему.
Для полной аттестации камеры необходимо измерять
диаграмму КБЭ, т. е. зависимость КБЭ в некоторой
точке рабочего объема от направления прихода паразитных
волн. Такие диаграммы должны быть измерены в
нескольких точках рабочего объема, Большим удобством
!)—340 129
Рис. 4.11. Ход луча
в камере с
переменным сечением:
а — поперечное сечечие;
б — продольное сечение.
диаграммы КБЭ является возможность определения по
ним усредненного КБЭ при любой излучающей антенне.
Для такого определения необходимо перемножить
диаграмму КБЭ и диаграмму направленности антенны и
определить истинные значения потока мощности
паразитных волн, попадающих в рабочий объем. Измерение
диаграммы КБЭ может быть осуществлено с помощью
наноимпульснои измерительной установки (см. гл. 5).
Помимо паразитных отражений излученного сигнала
ошибки в измерения вносят паразитные сигналы
отраженные излучаемым объектом и переотраженные
обратно стенками. С помощью наноимпульснои установки,
расположенной в рабочем объеме, может быть измерена
величина таких переотражений. Методика измерений
сходна с методикой измерения диаграмм КБЭ и поэтому
подробно не описывается. Необходимость фиксировать
малый отраженный сигнал на фоне сильного прямого
сигнала осложняет измерения КБЭ. Для таких измерений
обычно используют явление интерференции (см. гл. 1),
отраженный сигнал определяют по пространственному
изменению суммарного сигнала. По формуле (1.2)
можно вычислить изменение суммарного сигнала для
различных КБЭ камеры. Результаты таких вычислений
приведены в табл. 4.2. Они иллюстрируют, насколько малы
величины, которые должны быть измерены.
Таблица 4.2
Р°/Рп, КБЭ, дб
—55
—50
—45
—40
—35
—30
рм/рп
1,003560
1,006335
1,011278
1,020010
1,035882
1,064245
Рм— Рп, дб
0,016
0,027
0,044
0,086
0,155
0,271
Примечание. Р° — поток мощности отраженной волны: Рп —
поток мощности прямой волны; Ры — максимальный суммарный поток
мощности.
Для измерения коэффициента безэховости
применяются следующие методы:
1) метод непосредственного измерения прямого и
рассеянного сигналов;
130
2) метод наложения диаграмм направленности
приемной антенны;
3) метод перемещающегося индикатора (метод
КСВ).
1. Метод непосредственных измерений является
наиболее простым, но точность его достаточна только при
испытании камер с КБЭ —40-;—30 дб. При этом мето-
Металли ческа я
сфера
"РИМ
6)
Рис. 4.12. Эскиз антенны с пониженным задним излучением
(Х~3 см):
а — разрез; б — вид спереди.
де используется приемная антенна, имеющая малые
задние лепестки диаграммы направленности. Для волн
трехсантиметрового диапазона удается выполнить
антенну, у которой величина
заднего излучения порядка
—55 дб.
Измерение КБЭ
производится следующим образом.
В -нескольких точках
рабочего объема камеры
устанавливается приемная антенна
с уменьшенным задним
излучением и измеряется
мощность прямой волны, для
чело раскрыв антенны на-
ира;вляется на излучающую
Л'Итенну. Затем приемная
штенна поворачивается на
Рис. 4.13. Антенна с
пониженным задним излучением.
131
180°, т. е. направляется на передающую антенну своим
задним лепестком. При этом измеряется мощность
отраженных волн (главным образом от задней стенки). Если
в последнем случае измеренный сигнал на 15—20 дб
больше величины заднего лепестка приемной антенны,
то измеряется отраженный сигнал с ошибкой, не
превышающей ±1 дб. Высококачественные камеры» в
которых отраженный сигнал отличается от заднего лепестка
Приемной антенны меньше чем на 15 дб, измерить этим
методом нельзя.
-10
-го
-30
40
-SO
г
/
/
/
/
/
/
/
/
/
/
/
у
I Л. ill
\
\
\
\
\
\
\
\
\
\
\
S
-90
90
180
Рис. 4.14. Диаграмма направленности антенны с пониженным
задним излучением.
В качестве антенны с уменьшенным задним
излучением может быть применен пирамидальный рупор,
встроенный в металлическую сферу, оклеенную РПМ.
На рис. 4.12 показав эскиз, а на рис. 4.13 — фото такой
антенны для трехсантаметровых болн. В работе [4.4]
показано, что окружение раскрыта антенны металлическом
сферой радиусом больше 10А, уменьшает заднее
излучение на 10—15 дб. Нанесение на сферу РПМ
уменьшает заднее излучение еще на 10—15 дб. На рис. 4.И
приведена диаграмма направленности антенны,
показанной-на рис. 4.12 и 4.13. Без сферы и РПМ заднее
излучение рупора было порядка —25 дб.
Значения безэховости, измеренные по крайней мерс1
в десяти точках рабочего объема, затем усредняются и
это значение принимают за КБЭ камеры.
132
2. Метод измерения диаграмм направленности
приемной антенны [4.5, 4.6] заключается в том, что
диаграмма направленности некоторой приемной антенны
измеряется при помещении этой антенны в нескольких
точках рабочего объема камеры. Затем эти диаграммы
направленности накладываются друг на друга. В области
главного лепестка эти диаграммы хорошо совпадают,
но при уровнях —10 дб или ниже начинаются
расхождения тем большие, чем хуже безэховость камеры
(рис. 4.15). Вычисляя среднее значение ординаты, мы
О 90у>с
Рис 4.15. Наложение измеренных диаграмм приемной антенны.
найдем величину мощности прямой волны Рп. По раз
иости максимального и минимального значения мощно
сти АР по формулам,1приведенным в гл. 1, можно найт!
значение отраженного поля, которое интерферирует с по
лем Рп. В приложении 2 'приведен график (рис. П.2.1)
облегчающий расчет отраженного поля. При этом ме
годе также производятся измерения в нескольких точ
ках рабочего объема и результаты их усредняются.
Метод наложения приемных диаграмм хорош тем, чт<
он позволяет испытывать камеры в условиях, близки,
к реальным условиям работы при измерении антенк
13
Рекомендуется в качестве приемной антенны использб-
вать одну из антенн, которая будет пспытываться в
камере.
Выше была изложена процедура измерений в самом
простом варианте. Метод наложения приемных
диаграмм позволяет, в случае необходимости, получать
более широкую информацию о прямой и отраженной
волнах в рабочем объеме. Например, по серии диаграмм
направленности, снятых в нескольких точках, лежащих
на оси камеры, можно найти, как меняется амплитуда
падающей волны вдоль рабочего объема, а по
обработке диаграмм при разных углах определять
ориентировочно направления прихода отраженных волн.
3. Метод передвижного индикатора, называемый ча^
сто методом КСВ, позволяет выделить отражение от
отдельных частей камеры. Он наиболее удобен для
определения отражения от задней стенки. При этом
методе приемная антенна обычно устанавливается так,
чтобы на передатчик был направлен ее задний
лепесток, затем она передвигается, не меняя своего
направления вдоль оси камеры и записывается сигнал,
принятый антенной. По разности максимального и
минимального сигналов и среднему значению сигнала
(принимаемого за сигнал прямой волны) по графику
(приложение 2) находится величина безэховости камеры,
определяемая отражением от задней стенки. Для
нахождения отражения от боковой стенки или пола и
потолка камеры индикаторная антенна передвигается по
линии, нормальной боковой стенке или полу и потолку
соответственно.
Если безэховая камера предназначена для
измерений ЭПР или элементов МР, т. е. в ней расположена
аппаратура типа радиолокационной станции, то
дополнительной важной характеристикой является
кажущаяся ЭПР камеры. Кажущаяся ЭПР камеры определяется
как рассеянный сигнал, принятый измерительной
установкой, когда в камере отсутствуют измеряемый объект
и другие предметы, не нужные для измерений, т. о.
когда рассеянный сигнал создается только стенками и
другими частями камеры.
В безэховых камерах, предназначенных для измерь
ний ЭПР, величину паразитных рассеянных волн в
рабочем объеме удобнее характеризовать не коэффициеп
том безэховости, а через ЭПР рабочего объема. Чтоби
134
не спутать эту величину с ЭПР камеры, будем
называть ее эквивалентной ЭПР и обозначать аэ.
Для нахождения связи между эквивалентной ЭПР
и КБЭ камеры обратимся к уравнению радиолокации
(1.1). Перепишем его в таком виде
ро
'из
(4.6)
Здесь Р°р — плотность потока мощности отраженных волн
у приемной антенны, а
р°
и
4nR2
(4.7)
— плотность потока мощности прямой волны в рабочем
объеме на расстоянии R от передатчика.
Как известно,
(4.8)
Здесь Р° — плотность потока мощности рассеяных волн в
рабочем объеме, равная Р° R2.
Таким образом, КБЭ и аэ связаны соотношением
КБЭ =
(4.9)
Измерение аэ производится обычно с помощью
измерительной установки для измерения ЭПР. Измеряется
сигнал, принятый приемником при отсутствии в камере
измеряемого объекта. При измерениях применяются
металлические шары такого малого размера, чтобы их
ЭПР была порядка эквивалентной ЭПР камеры. Шар
подвешивается на малоотражающей капроновой нити
\\ центре рабочего объема и приводится во
вращательное движение по кругу с радиусом в две-три длины
полны. Благодаря интерференции сигналов, рассеянных
камерой (фаза которых постоянна) и шаром (фаза
меняется из-за изменения расстояния), имеются
максимумы и минимумы суммарного сигнала, по которым
находится величина эквивалентной ЭПР камеры. ЭПР шара
рассчитывается по графику, приведенному в приложе-
135
Измеренная таким образом величина ЭПР не может
быть приписана только одному рассеянному полю в
рабочем объеме. В принимаемый сигнал входит еще
составляющая, вызванная прямым попаданием энергии
из передающей системы в приемную. Для выделения
этого сигнала, жестко скрепленные передающая и
приемная антенны передвигаются вдоль оси камеры. При
таком передвижении фаза прямого сигнала не меняется,
Отражение
от задней стенки
от
пенопластового
цилиндра
Рис. 4.16. Вид отраженных импульсов на трубке индикатора нано-
импульсной установки.
а фаза отраженного меняется; по максимальному и
минимальному суммарному сигналам находят величины
прямого или отраженного сигналов. Так как заранее
не известны величины прямого или отраженного
сигналов, то необходимо повторить измерения, искусственно
увеличив величину прямого сигнала. Тот сигнал,
который оказался одинаковым в обоих измерениях, есть
отраженный сигнал и по нему может быть определена
эквивалентная ЭПР камеры.
В последнее время в связи с успехами наноимпульс-
ной техники для испытаний безэховых камер стали
применяться установки с импульсами в несколько
136
секунд и даже до 0,6 нсек |[4.7]. При таких длинах
импульса пакет волн в пространстве имеет длину
несколько десятков сантиметров и позволяет зондировать
малые участки поверхности камеры.
Наноимпульсная радиолокационная установка
является удобным средством «диагностики» безэховых
камер. Если применить малонаправлеиные антенны на
передающей и приемной частях установки и сделать
развертку индикатора типа А для расстояний от нуля
до нескольких десятков метров, то на трубке
индикатора будут видны импульсы, отраженные от различных
Безэховая камера
Передатчик
наносекундных
импульсов
Приемник
Отраженный
луч
Рис. 417. Схема измерения диаграммы КБЭ с помощью нано-
импульсной установки (прием прямого луча подавляется стробиро-
ванием).
неоднородностей камеры. На рис. 4.16 приведено
изображение на индикаторе при измерении на А, = 3,2 см
при длине импульса 6 нсек в камере длиной 12 м. На
этом же рисунке, кроме мощных отражений от задней
стенки, хорошо видны отражения от отогнутых краев
опоры рассеивателя (пенопластового цилиндра) и от
провода, выходящего из пола. На основании «наноим-
пульсной диагностики» легко находить погрешности и
проводить отладку камер. г
Наноимпульсная установка позволяет провести
наиболее полное испытание безэховых камер. Для этого
приемная часть аппаратуры устанавливается в рабочем
объеме, применяются остронаправленные антенны и
ггробирование принимаемого импульса. С помощью
этой аппаратуры по схеме рис. 4.17 производится
измерение диаграммы рассеяния безэховой камеры. Антенна
передающей части аппаратуры направляется на
выбранную точку поверхности камеры. На эту же точку на-
137
правляется и антенна приемника и с помощью
временного стробирования выделяется сигнал, отраженный от
области вокруг выбранной точки. Измеряя отражения от
точек в различных местах внутренней поверхности
камеры, можно построить полную диаграмму рассеяния
камеры.
Метод измерения диаграммы рассеяния камеры
с помощью наносекундной техники является в
настоящее время наиболее совершенным методом определения
качества БЭК сантиметрового диапазона.
4.6. ОПОРЫ ДЛЯ ИЗМЕРЯЕМЫХ ОБЪЕКТОВ
В технике измерений рассеивающих свойств различных
радиолокационных целей вопросу об устройстве опор, на которых
закрепляются измеряемые объекты, уделяется много внимания. Опоры
предназначены для закрепления измеряемого объекта в рабочем
объеме и для измерения диаграмм рассеяния вращением его с по
мощью поворотных устройств. Основная проблема, которая
должна быть решена при разработке опоры, — это достижение малой
величины сигнала, рассеянного опорой при достаточной механиче
ской жесткости ее.
Для полевых установок, когда вес измеряемых объектов велик
(до нескольких тонн), опоры выполняются из металлических мачт,
покрытых Р'П'М, или из нескольких наклонных толстых пенопласго
вых колонн (рис. 4.18,а). Покрытие металлических колонн РПМ
уменьшает рассеянный сигнал, но не позволяет получить необходп
мый минимум его. Подбор угла наклона мачты заметно уменьшаем1
рассеянный сигнал.
Опоры из пенопластовых колонн, показанные на рис. 4.18,6, п
[4.8], позволяют закреплять объекты большего 'веса, но рассеянный
ими сигнал превышает допустимую величину и поэтому применяем
ся следующий метод исключения этого сигнала: записывается
амплитуда и фаза сигнала, рассеянного одной опорой, а затем -
суммарного сигнала от опоры и цели. С помощью ЭВМ произво
дится вычитание сигнала от опоры и, таким образом, получаю i
«чистую» диаграмму рассеяния цели. Подробнее этот метод опи
сан в гл. 5.
Для моделей небольшой величины и объектов малого веем
наибольшее распространение получили опоры двух типов: 'пеноп.л;1
стовые колонны (рис. 4.18,г) и подвеска на капроновых нитях
При проектировании таких устройств исходят из требования, что
бы опора выдерживала объекты заданного веса и чтобы
рассеянный сигнал был меньше заданной величины. Эта величина зависш
от минимальных значений измеряемых ЭПР раосеивателя, и если
она на 10 дб меньше измеряемых величин, то среднеквадратична
ошибка составляет 1,6 дб, а максимальная 3,2 дб. Чтобы макси
мальная ошибка была меньше 1 дб, а среднеквадратичная 0,5 i)nt
измеряемая ЭПР рассеивателя должна быть на 20 дб больше ЭПР
опоры '[3.2, 4,11].
Для изготовления колонн применяется пенопласт малой пло1
ности, имеющий диэлектрическую проницаемость е= 1,03ч-1,1. II •
138
Рис. 4.18. Типы пенопластовых опор:
а — опора для тяжелых объектов (полигон RAT SCAT США); б — опора
П виде колонны (фирма Conductron Corporation США); в, г — опора для
модели самолета convair 9?0 (полигон фирмы Conductron Corporation США), д —
установка рассеивателя на опору в бе^эховой камере (фирма Conduclron
Corporation США).
139
вестно, что коэффициент отражения радиоволн тем меньше, чем
меньше отличается 8 материала от s воздуха, равного единице.
Придание колонне формы цилиндра уменьшает рассеянный
сигнал и, наконец, если диаметр цилиндра может быть сделан
равным нескольким длинам волн, то подбором величины диаметра
рассеянный сигнал может быть значительно уменьшен.
Расчет рассеяния волн от диэлектрического цилиндра,
имеющего 8, незначительно* отличающуюся от единицы, приведен
в [4.8 и 4.9]. Для цилиндрической колонны диаметром d с
диэлектрической проницаемостью е, близкой к ео, где ео — диэлектрическая
проницаемость воздуха, ЭПР равна
где d — диаметр колонны; L — длина колонны; ko — волновое
число; /i — бесселева функция первого порядка..
Проведенные расчеты показали, что при увеличении диаметра
колонны ЭПР ее вначале возрастает но закону Релея, а затем
приобретает осциллирующий характер с глубокими миниму-
10
О
-10
•ZO
-30
-U0
•50
Релеевская область
\ А
А
Д
У Минимум
W
fed
Рис. 4.!9. Нормированное значение ЭПР колонны в виде кругового
цилиндра из пенопласта:
теория; О — эксперимент (вертикальная поляризация); Л — эксперимент
(горизонтальн-ая поляризация).
мами. Эта зависимость показана на рис. 4.19. При работе на одном
фиксированной 'волне диаметр колонны может быть 'подобран так,
чтобы рассеянный сигнал был уменьшен на 30—40 дб.
Для расчета механической нагрузки, выдерживаемой колонной,
применяется формула, выведенная из предположения, что колонии
работает на продольный изгиб:
р/4
M^H • (4Л1)
140
Здесь Wt — вес измеряемого объек- |
та; Е — модуль упругости; L — длина |
колонны. S
Эксперименты показали [4.9], что |
для пеностирола предельная постоянная :
нагрузка соответствует ?=108 кг/см2. \
Легко убедиться расчетом, что, напри- !
мер, при длине колонны L = l,5 м, диа- !
метре d=460 мм вес устанавливае- j
мого объекта может быть не более
2 250 кг \
Подвеска на нейлоновых нитях |
обеспечивает получение очень малого ]
рассеянного сигнала от опоры, но не ;
обеопечивает высокую механическую j
устойчивость. Несмотря на это, опоры
в -виде подвесок на нейлоновых нитях !
или канатиков нтолучили широкое при- ¦
менение Одна из конструкций такой
подвески показана на рис. 4..20. Малое
отражение радиоволн обусловлено тем,
что нити берутся как можно тоньше и,
по возможности, -натягиваются под
углом к электрическому вектору
падающего поля
При малых диаметрах нити,
применяя асимптотическое выражение для рис> 4.20. Конструкция
цилиндрической функции, можно из подвески на нитях.
(4.10) получить расчетную формулу
в виде
. = ^t'(8-l)4W. (4.12)
Здесь тс же-обозначения, что и в (4.10).
На рис. 4.21 показана зависимость ЭПР единицы длины
нейлоновой нити от ее диаметра. Все данные относятся к частоте 35 Ггц
и вертикальной поляризации. Точками на рисунке показаны
результаты эксперимента. Из кривой видно, что при малых диаметрах
нити рассеянный ею сигнал очень мал.
Для определения веса объекта, который можно закрепить
нитями заданного диаметра, построены кривые на рис. 4.22. Для
сравнения на рисунке приведены сведения для нейлоновых, а также
для стальных и стеклянных нитей.
В последнее время опоры стали делать из диэлектрических
труб. ЭПР такой трубы может быть определено по формуле
(4ЛЗ)
где а — внешний диаметр; b — внутренний диаметр трубы.
Сравнивая (4.10) и (4.13), можно убедиться, что при вынолне
нии условия
J^)1} (4.14)
141
ЭПР сплошной колонны и трубы одинакового диаметра равны.
Здесь 8СП — диэлектрическая проницаемость материала сплошной
колонны; еТр — диэлектрическая проницаемость материала трубы.
Применение колонн из диэлектрических труб перспективно в случае
работы установки на фиксированной частоте.
Желание полностью избавиться от рассеяния, вызванного
опорой, привело к разработке способов поддержки объектов с по-
дб
10
0
-го
¦30
-ьо
•50
У
/
, /°
о
0 ° °
о
о
I
0,1
W
Рис. 4.21. Нормированные значения 3IIF вертикально натянутых
нейлоновых нитей
теория, ООО — эксперимент
разрь/0,
|
10000
1000
100
-
¦¦ж
W
' / It..
у/
• .I...I . ...i...i
/ 10 100
Диаметр шнура с?,мм
Рис 4 22. Зависимость допустимого веса объекта от диаметра нигем
из разного материала.
142
мощью вертикальной струи воздуха. Очевидно, что такая опора спб*
собна выдерживать только очень легкие устройства. Она
применялась для прецизионных измерений полых шаров. К таким же
методам относится и «метод вращающегося волчка», при котором
измеряемый объект приводится в быстрое вращение и отпускается.
Измерения проводят при свободном падении его в поле антенны
измерительной установки.
Литература
4.1. Ш н е й д е р <м а н Я. А Радиопоглощающие материалы.
«Зарубежная радиоэлектроника», 1965, № 4
4.2 Эмерсон, С е ф т о н. Улучшенная конструкция безэховой
камеры. TH'HOP,U965, т. 53, '№ 8
¦4.3. <К'и н б ер Б. Е, Левин М. JVL, Дергачев а А. Ф. и
Зайцев Ю. А. Б-езэхо<вая камера для измерения параметров
излучателей Авт. свидетельство № 201476 от 21 июня 1967 г.
Официальный бюллетень i№ 18, 1967 г. Комитета по делам изобретений и
открытий ори Совете Мин истцов OOGP. Изобретения,
промышленные образцы, товарные знаки.
4.4 Белкина М Г. и Вайнштейн Л А О влиянии
металлической оболочки на заднее излучение направленных антенн.
«Радиотехника и электроника», 1959, т. IV, выл 4.
4.5. Buckley 'E. F. Outline of Evaluation Procedures for
Microwave Anechoic Chambers Microwave J, 19G3. v. 6, '№ 8.
4.6. Buckley E. F. Design Evalution and Performance of
Modern Microwave Anechoic Chambers for Antenna Measurements
Electronic Components , 1965, v. 6, № ,12
4.7. Б е ч м е н. 'Некоторые ишследние достижения в технике
измерений радиолокационного (поперечного сечения. ТЙИЭР, 1965,
т. 53,1№ 8.
4.8. Tang С. Н Biackscattering from dielectric coated infinite
cylindrical obstacles J Appl. Phys, 1957, y. 28
4.9. Фри'ни. Параметры огшр целей, связанные с измерениями
их отражательной ^способности. ТЙИЭР, 1965, т. 53, 1№ 8.
4.10. Senior Т. В. A. Designing foamed plastic target supports.
Microwaves, 1964, (№ 12.
4.11. Соломон. Измерения радиолокационного поперечного
сечения цели и их точность. «Электроника», 1962, № 29.
Глава 5
УСТАНОВКИ ДЛЯ ИЗМЕРЕНИЯ
РАССЕЯННЫХ ПОЛЕЙ
5.1. КЛАССИФИКАЦИЯ УСТАНОВОК И МЕТОДОВ
ИЗМЕРЕНИЙ
В соответствии с классификацией, приведенной
в гл. 1, в данной главе рассматриваются установки для
измерения диаграмм рассеяния (ДР), в том числе
однопозиционных и двухпозиционных диаграмм
рассеяния (ДОР и ДДР). С точки зрения методики измерений
и аппаратуры отличия между установками для
измерения ДОР и ДДР несущественны, поэтому описание
измерительных установок проводится применительно
к измерению ДОР. Сначала рассматриваются установки
для измерения диаграмм ЭПР, а затем приводятся
примеры установок для измерения поляризационных
характеристик рассеянных полей и диаграмм элементов
матрицы рассеяния.
Измерения могут выполняться в натурных условиях,
например при полете самолета. Такие измерения
называются динамическими, а получаемая при этом
зависимость изменения рассеивающих свойств цели при
изменении ее ракурса называется динамической диаграммой
рассеяния [5.1].
Статической диаграммой рассеяния называется
диаграмма, показывающая зависимость рассеивающих
свойств модели цели от ее угла поворота при
неизменном расстоянии между измерительной установкой и рас-
сеивателем.
При измерении динамических диаграмм пользуются
обычными радиолокационными станциями.
Динамические измерения дают возможность исследовать
различные особенности, недоступные при статических
измерениях, а именно: модуляцию ЭПР при вращении винта
самолета, при вибрациях самолетов и ракет, наличие
отражения от струи реактивных двигателей и плазмы
и т. д. Однако натурные (динамические) измерения име-
144
Ют и ряд недостатков: дороговизна измерений,
ограниченность программы, возможность получить лишь
неполные диаграммы ЭПР, зависимость измерений от
расстояния до объекта, трудность определения истинного
положения цели относительно луча радиолокатора и др.
Вследствие перечисленных причин наибольшее
распространение получили статические измерения на
полигонах и в безэховых камерах, при которых
используются модели или макеты в натуральную величину.
Измерительные установки для статических измерений
диаграмм рассеяния оказываются значительно проще
обычных радиолокационных станций в связи с тем, что
отпадает необходимость определения координат цели и
время измерения не имеет существенных ограничений.
Однако требование точности измерений, наличие фона
(паразитного рассеяния), вызванного отражениями от
земли, опоры рассеивателя и других посторонних
отражателей, приводит к некоторым особенностям
измерительных установок, связанным главным образом с
методами выделения рассеянных объектом полей на фоне
паразитных рассеяний. Измерительные установки
можно классифицировать по этому признаку. Наибольшее
распространение получили следующие измерительные
установки:
1) с непрерывным излучением и компенсацией фона;
2) с частотной модуляцией;
3) с использованием эффекта Допплера;
4) импульсные;
5) с большим разрешением.
5.2. РАСЧЕТ ЭНЕРГЕТИЧЕСКОГО ПОТЕНЦИАЛА
И ДИНАМИЧЕСКОГО ДИАПАЗОНА ИЗМЕРИТЕЛЬНЫХ
УСТАНОВОК
При проектировании измерительной установки
любого типа необходимо определить ее «энергетический
потенциал» и динамический диапазон.
Энергетическим потенциалом установки будем
называть отношение излученной мощности передатчика
к чувствительности приемника. Необходимый
энергетический пртенциал установки зависит от различных
факторов, основными из которых являются размеры и форма
измеряемых тел (а также необходимая точность
измерений). Энергетический потенциал измерительной уста-
Ю-1-340 145
новки можно определить из формулы радиолокаций
(1.7)
где Gnp — коэффициент усиления приемной антенны;
Сиз — коэффициент усиления передающей антенны;
остальные обозначения прежние (1.7).
Пусть рабочий объем измерительной установки
имеет форму шара диаметром 2г. Определим максимальную
величину ЭПР тела, помещаемого в измеряемый объем.
Таким телом будет диск радиусом г (см. приложение 3),
ЭПР которого, если г»Я, выражается формулой
о = п№гК (5.2)
Оценим приближенно потенциал установки, выбирая
диаграмму направленности антенны так, чтобы главный
лепесток диаграммы облучал рассеиватель со спадом
амплитуды на краях на 1 дб. При этом ошибки в
измерении ЭПР будут в допустимых пределах (см. табл. 3.1).
При использовании измерительных антенн с
диаграммами типа smxlx ширина диаграммы между точками
со спадом амплитуды 1 дб по отношению к максимуму
определяется так:
е_ш = е_ЗЛ5/2=г/я, (5.3)
а коэффициент усиления соответственно
9<>,5<Р0,5
Полагая 9о,5=«ро,5 и подставляя (5.2) и (5.4) в (5.1),
получим
Лтер^ЮРдр. (5.5)
Обычно рассеиватели занимают только часть
рабочего объема измерительной установки. Например, при
измерении диаграммы ЭПР цилиндра с образующей
L = 2r и радиусом а — г/п максимум ЭПР определяется
формулой
а отношение ЭПР диска радиуса г к ЭПР этого
цилиндра выражается так:
при п= 10 и гД = 50 имеем ад/(Тц~35 дб.
146
Считая цилиндр типичным рассеивателем, для
энергетического потенциала при измерении максимума ЭПР
получаем величину
Япер/Япр^ (10 + 35) дбъАЬ дб. (5.6)
Рассмотрим факторы, определяющие динамический
диапазон измерительных установок. Если формируемое
поле занимает объем шара диаметром 2г, то из всех
тел, помещенных в этом объеме, наибольшую величину
ЭПР будет иметь круглый диск, величина ЭПР
которого определяется формулой (5.2). Наименьшую величину
ЭПР будет иметь шар того же радиуса, величина ЭПР
которого ani=rtir2 равна площади поперечного сечения..
Отношение ЭПР диска к ЭПР шара характеризует
величину динамического диапазона у установки, так как
максимальные величины ЭПР тел других форм будут
меньше. ЭПР диска и больше ЭПР шара (см.
приложение 3):
(5.7)
Из формулы (5.7) следует, что необходимый
энергетический потенциал установки зависит от размеров тела
относительно длины волны. Например, для измерения
ЭПР тел размером 100А, динамический диапазон
установки должен быть не менее 50 дб.
При измерении диаграмм ЭПР следует иметь в виду
их изрезанный характер, связанный с интерференцией
волн, отраженных неоднородностями (краями) рассеи-
вателя. В приложении 5 приведены характерные
диаграммы ЭПР цилиндров конечных размеров,
рассчитанные методом краевых волн. Анализ диаграмм
показывает, что их динамический диапазон (отношение
максимальной величины ЭПР к минимальной) зависит от
размера цилиндра, выраженного в длинах волн, и для
цилиндров размером менее 100А, находится в пределах
50—60 дб. Необходимо также учесть, что минимально
измеряемая величина ЭПР должна превышать фон
паразитного рассеяния на 15 дб с тем, чтобы погрешность
ее измерения не превосходила ±1 дб (см. § 6.2).
Суммируя сказанное, можно сделать вывод, что
энергетический потенциал высокочувствительной измерительной
установки должен составлять величину порядка
[45+(50±10) + 15] 56=110 дб±Ю дб.
10* 147
5.3. ИЗМЕРИТЕЛЬНАЯ УСТАНОВКА С НЕПРЕРЫВНЫМ
ИЗЛУЧЕНИЕМ
Большое распространение при статических
измерениях получили установки с непрерывным излучением. Эти
установки имеют преимущество по сравнению с
установками другого типа (импульсными,
частотно-модулированными и др.)» заключающееся в том, что измерения
производятся практически при монохроматических
колебаниях. Это обстоятельство позволяет легко сравнивать
гсс
Развязывающее
устройство
Двойной
волноводный
Т-мост
Согласованная
нагрузка
Самописеи,
Приемник
Смеситель
Приемо - передающая
антенна
Рассеиватель
-¦Л
Опора
россеива-
s Ки
Угломерное устройство
Пульт
управления
Поворотное
устройство
Рис. 5.1. Блок-схема измерительной установки компенсационного
типа с непрерывным излучением.
полученные экспериментальные диаграммы рассеяния
с теоретическими, которые обычно рассчитываются для
монохроматических волн. 'Установки с непрерывным
излучением, как правило, просты, относительно дешевы к
надежны в работе.
Блок-схема установки приведена на рис. 5.1.
Существенным элементом установки является
компенсационный тракт, предназначенный для компенсации
отражений от опоры рассеивателя и других паразитных рас-
сеивателей. Эти установки эффективны в том случае,
когда фон (паразитные рассеяния) стабилен во времени.
Компенсация фона (подача сигналов на гибридный
тройник в противофазе с фоновым сигналом)
производится при снятой измеряемой модели. Регулировкой
аттенюатора добиваются равенства амплитуды фона и
компенсирующего сигнала, а регулировкой
фазовращателя добиваются того, чтобы сигналы были в
противофазе. После установки рассеивателя на поворотное
148
устройство в тракте приемника (если пренебречь
эффектом тени) существует лишь сигнал, рассеянный
измеряемой моделью, который регистрируется при вращении
модели на 360°. После этого производится калибровка
установки путем регистрации сигнала от эталонного
рассеивателя. Отношение энергии, остающейся после
компенсации в плече тройника, к которому присоединен
приемник, к энергии в плече тройника с передатчиком,
обычно называют степенью развязки системы. Эта
величина служит удобной мерой уровня компенсации.
Применение компенсации для подавления фона
предъявляет определенные требования к стабильности
частоты генератора и постоянству «электрической
длины» установки — удвоенному расстоянию от передатчика
до рассеивателя. Требования к стабильности частоты
генератора могут быть определены по заданной
величине компенсации. Пусть заданная величина
компенсации составляет у дб. Для обеспечения такой
компенсации необходимо, чтобы разность напряжений в
смесителе от фона и компенсационного тракта была меньше
заданной величины
(Пт/20 (5.8)
при изменении частоты. Напряжение фона в смесителе
на частоте f зависит от «электрической длины»
установки и может быть выражено так:
их=и^ э, (5.9)
где i?9 —«электрическая длтша» установки.
При изменении частоты на Af напряжение в
смесителе изменится и будет выражаться
. (5.10)
Определим разность между их и и2
и1-и1 = аве-'**-(1-е~'4**'). (5.11)
Беря действительную часть выражения (5.11) и опуская
постоянные множители, получим
иг — и2 = 1 - cos Д?/?э = 2sin2 (^-) • (5.12)
Для малых аргументов получим
149
Для обеспечения развязки необходимо удовлетворить
неравенству
Ui—п2^ц. (5.14)
Деля на k, заменяя в (5.13) Ak/k на Af/f и подставляя
вместо и его значение из (5.8), после преобразований
окончательно получим:
f
(5.15)
где Af/f — относительная нестабильность частоты
передатчика; у — необходимый уровень компенсации; Яэ —
«электрическая длина» установки — удвоенное
расстояние от передатчика до опоры рассеивателя.
f
10"
W
10'
10'
-5
-8
ч
ч
ч
ч
ч
ч
ч
ч
ч
ч
ч
ч
ч
ч
ч
ч
ч
ч
ч
ч
ч
ч
ч
ч
ч
ч
ч
ч
ч
ч
ч
ч
ч
ч
ч
ч
ч
ч
ч
ч
ч
ч
ч
ч
ч
ч
ч
ч
ч
ч
ч
ч
ч
ч
ч
ч
ч
ч
ч^
ч
ч
ч
ч
ч
ч
ч
ч
ч
ч
ч
ч
ч
ч
ч
ч
ч
ч
ч
ч
ч
s
ч
ч
ч
ч
ч
ч
ч
ч
ч
ч
ч
ч
ч
ч
ч
ч
ч,
ч
ч
ч
30
100
300
1000
3000
юооо
30000
юооос
10
w
60 80 100 ПО №
Рис. 5.2. График зависимости относительной нестабильности частоты
генератора Aflf от уровня компенсации v и «электрической
длины^ RQ установки.
Масштаб логарифмический.
График зависимости допустимой относительной
нестабильности частоты генератора от заданного уровня
компенсации и «электрической длины» приведен на
рис. 5.2.
Рассмотрим пример расчета измерительной
установки компенсационного типа, расположенной в безэховой
150
камере. Пусть установка предназначена для измерений
на волне 3 см диаграмм ЭПР рассеивателей с
максимальным размером 10А, с точностью ±2 дб.
Необходимый потенциал установки определяется так:
динамический диапазон изменения ЭПР должен
составить не менее 50 дб. При заданной точности измерения
±2 дб уровень фона должен быть на 15 дб ниже
минимальной измеряемой величины ЭПР (см. § 6.2).
Облучение рассеивателя на краях должно спадать не более
чем на 1 дб по отношению к центру и измеряемые тела
могут иметь размеры в пределах 2—10А,. При этих
условиях к динамическому диапазону установки
необходимо прибавить 45 дб. Тогда энергетический
потенциал должен иметь величину
7^50 + 45+15-110 дб.
При проектировании измерительных установок
с целью биологической защиты, уменьшения засорения
эфира и экономии энергии желательно применять
маломощные передатчики и чувствительные приемники.
Измерительные приемники имеют чувствительность
порядка РПр = Ю~12 вт, поэтому для обеспечения
энергетического потенциала ПО дб мощность передатчика
должна составлять РПер=Ю0 мет.
Необходимая относительная нестабильность частоты,
определенная по формуле (5.15), при у=1\0-дб и Яэ =
= 12 м имеет величину порядка
Для обеспечения такой относительной нестабильности
частоты необходимо применять стабильные генераторы,
например с фазовой автоподстройкой частоты или с
другими методами стабилизации.
В связи с необходимой высокой чувствительностью
приемника РПр~Ю~12 вт в измерительной установке
следует применять супергетеродинные приемники. Если
в приемнике применяется независимый гетеродин, то
требования к стабильности частоты передатчика и
гетеродина должны быть более жесткими, так как
разностная частота будет иметь меньшую стабильность, чем
каждая частота (генератора и гетеродина) в
отдельности. Для увеличения стабильности разностной
частоты можно применять автоматическую подстройку
частоты гетеродина на частоту генератора.
151
В некоторых случаях может оказаться удобным
применение сдвига частоты генератора, который можно
осуществлять как механическим, так и электрическим
способом. Такой способ осуществления гетеродина не
требует применения в установке очень стабильных
генераторов.
На рис. 5.3 приведена блок-схема установки, в
которой для сдвига частоты генератора применен
поляризационный фазовращатель [5.2], обеспечивающий сдвиг
частоты на 2 гц на каждый оборот подвижной секции.
Вращая подвижную секцию фазовращателя с помощью
электромотора, можно обеспечить сдвиг частоты на
несколько сотен герц, что достаточно для использования
этой частоты в качестве частоты гетеродина.
С помощью блок-схемы рис. 5.3 был осуществлен
сдвиг частоты на 209 гц и при применении полупровод-
РазВязыдающее
устройство
ГСС
Поляризационный фазобраща -
те ль для изменения частоты
Согласованная
нагрузка
ВЧ блоки,
настройки
Приемо-передающая
АЬоиной антенна
болнододныи
Т-мост
Самописец
Балансный
полупроводниковый
смеситель
Рассеиватель
рассеиВа-
теля
Угломерное
устройство
Сервопривод
Рис. 5.3. Блок-схема измерительной установки с непрерывным
излучением с применением поляризационного фазовращателя для сдвига
частоты генератора.
никовых смесителей была реализована чувствительность
приемника в 10-см диапазоне порядка 10~13 вт [5.1].
Для осуществления большего сдвига частоты могут
применяться ЛБВ с пилообразной модуляцией
питающего напряжения. Блок-схема установки с применением
ЛБВ для сдвига частоты генератора приведена ii:i
рис. 5.4. С помощью этой установки удалось реализо-
152
Генератор
Направленный
отдетбитель
блок сдвига
частоты
на 5 кг и,
Волновод и
направленный,
отдетвитель
Приемо-передающая
антенна
Рассеиватель
Опора
рассеива-
ч. теля
Детектор
Блок
компенсации
Пульт
\управления
Поворотное j
устройство (_
Самописец
Усилитель низкой
частоты /=5кгц
Угломерное устройство
Сервопривод
Рис. 5.4. Блок-схема измерительной установки с непрерывным
излучением с применением ЛБВ для сдвига частоты генератора.
Передатчик
Безэховая
камера
Модель
Вентиль
Направленный ответ-
вите/tb
Открытый
резонатор
Механизм
вращения
модели
Самописец
Диэлектрическая
пластина
Направленный
ответви-
тель
Приемник
±
Аттенюатор и
Фазовращатель I
Аттенюатор 7
Фазовращатель!!
Рис. 5.5. Блок-схема измерительной установки с открытым трех-
зеркальным резонатором.
153
вать сдвиг частоты генератора на 5 кгц и в Ю-см
диапазоне обеспечить чувствительность приемника 10~13вт.
При реализации установки по блок-схеме рис. 5.4
большое внимание следует уделять обеспечению линейности
напряжения, модулирующего ЛБВ, и стабильности
источников питания.
Для формирования квазиплоского поля в установках
компенсационного типа часто применяются линзовые и
зеркальные коллиматоры.
В последнее время нашел применение метод
формирования поля волны, облучающей рассеиватель с
помощью открытых резонаторов, предложенный
Л. А. Вайнштейном, Я. Н. Фельдом и осуществленный
А. И. Сидоренко [5.3].
Сущность метода заключается в том, что в
открытый резонатор вводится полупрозрачная
диэлектрическая пластинка, расположенная под углом 45° к оси
резонатора, приводящая к излучению сформированного
поля в направлении, перпендикулярном оси резонатора
(рис. 5.5). Для того чтобы поле излучалось в одну
сторону, в резонаторе устанавливается третье зеркало.
К открытой части резонатора примыкает безэховая
камера, в которую помещается измеряемый рассеиватель.
Наличие рассеивателя приводит к изменению
собственной частоты резонатора, связанной следующей
зависимостью с величиной ЭПР измеряемого рассеивателя:
Af= с*\г\*УГ (5 16)
где а — ЭПР рассеивателя; а и Ь — размеры зеркал
открытого резонатора; V — расстояние между зеркалами
эквивалентного резонатора (без диэлектрической
пластины); г — коэффициент потерь зеркала
эквивалентного резонатора; с — скорость света.
График зависимости относительной расстройки
частоты резонатора Af/fo от величины ЭПР рассеивателя
приведен на рис. 5.6. Расчет произведен для резонатора
с параметрами: #=150 мм, 6 = 100 мм, Г=100 мм,
|/^|2=0,01, fo = 3O Ггц. Как видно из графика,
относительная расстройка частоты резонатора порядка Af/fo~;
^10~~7 при а=1 см2, поэтому для практической
реализации рассматриваемого метода измерения ЭПР
требуется аппаратура с высокой стабильностью частоты.
154
fo
10"6
-7
10
0 1
Рис. 5.6. Зависимость
относительной расстройки
частоты открытого резонатора
Af//o от ЭПР рассеивателя.
Экспериментальная установка Осуществлена в
миллиметровом диапазоне волн (рис. 5.5). В установке
используется фазовый метод измерений. Мощность
передатчика поступает в два канала — основной и
компенсационный. В основном канале включен резонатор,
в компенсационном —
аттенюаторы -и фазовращатели.
Сигналы обоих каналов через
направленный ответвитель
поступают на вход приемника.
В установке применен трех-
зеркальный открытый
резонатор с диэлектрической пласти-
йой. В нем используются
сферические зеркала круглого
раскрыта. Радиус кривизны
зеркал 700 мм, диаметр
150 мм. Связь резонатора
с ъолноводным трактом
осуществляется с помощью уз'ких
полуовальных щелей,
-прорезанных в центре зеркал. Излучаемая резонатором
мощность вводится в небольшую безэховую камеру, которая
имеет рупорную форму. Стены ее покрыты радиопогло-
щающи,м материалом. В верхнюю часть камеры вводятся
нити для подвески рассеивателя к механизму, который
вращает его в горизонтальной плоскости на 360°.
Передатчик установки работает в режиме
непрерывных колебаний. Для получения высокой стабильности
частоты применена автоподстройка на частоту
кварцевого генератора. Благодаря хорошей температурной
изоляции удается получить долговременную относительную
нестабильность частоты не хуже 10~8. Мощность
передатчика 10~3 вт.
Приемник собран по супергетеродинной схеме
с двойным преобразованием частоты и имеет
чувствительность не хуже Ю-14 вт. В нем предусмотрена
автоматическая регулировка усиления по логарифмическому
закону.
Измерения диаграмм ЭПР производились для двух
поляризаций. Метод позволяет проводить измерения для
любой линейной поляризации. Поворот плоскости
поляризации излучаемой волны в установке осуществляется
изменением положения щелей связи в зеркалах.
155
На рис. 5.7 приведены измеренные па установке
диаграммы- отражения тел простой геометрической формы
(диск). Здесь же пунктиром нанесены расчетные
кривые. Хорошее совпадение теоретических и
экспериментальных кривых, высокая эквивалентная
чувствительность установки (амин— 1 см2) при сравнительно низкой
мощности передатчика (РИз~Ю-3 вт) подтверждают
эффективность метода измерений.
Возможности метода вероятно более полно
раскроются при проведении измерений в субмиллиметровом
диапазона радиоволн, где открытый резонатор хорошо
15
ZO
25
30
I
1
\
f\\l
V I
V
f
5
W
15
ZO
Z5
30
/
/
/
A
Xf
Л 1
f
if
^ 1
У
\l
/
10
ZO
30
9°
20
30
Рис. 5.7. Диаграммы ЭПР дисков.
согласуется с применяемыми в этом диапазоне
открытыми линиями передачи. В этом диапазоне могут быть
получены большие значения отношения раскрыва зеркал
к длине волны. Это, в свою очередь, позволит измерять
диаграммы тел, для которых отношение размера тела
к длине волны также велико.
В качестве примера использования установок с
непрерывным излучением для измерительных комплексов
приведем данные полигона фирмы 'Conductron
Corporation (США) [5.4].
Полигон предназначен для точных измерений ЭПР
самолетов, ракет и космических кораблей. Для
полигона выбрана тщательно выравненная площадка
размером 630X630 м2 (рис. 5.8).
Измерения выполняются в полевых условиях и в без-
эховой камере. Основная измерительная аппаратура и
156
безэховая камера расположены в помещении А. Опоры
В и D высотой 18,5 м предназначены для измерений
параметров больших антенн. Опора С предназначена
для измерения больших тяжелых целей, весом до
1 тонны.
•630*
Безэховая
камера Склад опор
для моделей
установка для
- измерения
'больших моделей
Установка для
измерения
^ антенн
d/тя двухпозиционных измерений
ппаратная
Рис. 5.8. План полигона фирмы Conductron Corporation (США) (5.4].
Оборудование. Измерения ЭПР выполняются на
непрерывных колебаниях методом компенсации с
помощью мостовых схем в диапазоне от 20 Мгц до 40 Ггц.
Блок-схема установок приведена на рис. 5.9.
Для полевых установок в 9 поддиапазонах (от
20 Мгц до 40 Ггц) паразитный фон с учетом рассеяния
опорой имеет величину 10~5 м2. Установки работают
с волнами любой поляризации. [В поддиапазоне L (1 —
2,6 Ггц) применяется вращающаяся поляризация.]
Установки предназначены для однопозиционных, квазиодно-
позиционных и двухпозиционных измерений.
Динамический диапазон всех установок составляет по выбору 40
или 60 дб. Измерительные установки, расположенные
р безэховой камере, работают в поддиапазонах от 2,6
до 40 Ггц на волнах с любой линейной поляризацией.
Проводятся только однопозиционные измерения с
моделями весом до 20 кг в динамическом диапазоне 40
или 60 дб.
157
Компенсация осуществляется с помощью мостовых
схем, которые для частот выше 1 Ггц выполнены из
волноводов, а для частот ниже 1 Ггц — из коаксиальных
линий. Чувствительность измерительной системы
зависит от развязки между плечами передатчика 2 и
приемника 4 мостовой схемы (рис. 5.9). В диапазоне выше
гсс
Развязка
Переменный
аттенюатор
—j Двойной
волноводный Приемо- передающая
Т-мост антенна
Рассеиватель
Опора
рассеид.г-
телл
Цифровой индикатор
Смеситель
Перфоратор-
Самописец
Контроль
положения
JL
Приемник
Угломерное
устройство
Управление
поляризатором
Радиолог-
лащающий Поворотное
щит устройство
Сервопривод с редуктором
Сер вопри вод (контроль положения)
Рис. 5.9. Блок-схема однопозиционной установки компенсационного
типа с непрерывным излучением фирмы Conductron Corporation.
1 Ггц развязка составляет 115 дб и зависит от
стабильности частоты передатчика, изменения
температуры и механической жесткости волноводной системы. Так
как измерительные установки расположены в
помещении, температура поддерживается с большой точностью.
Кратковременная относительная нестабильность
частоты благодаря фазовой автолодстройке обеспечивается
на уровне Д/У/^б-10~8, а долговременная — на уровно
Af/f^lO"6. Таким образом, развязка 115 дб
обеспечивается в течение времени, достаточного для измерении
На частотах ниже 1 Ггц развязка коаксиальных
мостовых схем достигает 115 дб и поддерживается в течение
времени, достаточного для измерений (порядка 0,5 час).
Паразитный фон может быть скомпенсирован нижо
158
уровня собственных шумов приемника. Применяется
кварцевая стабилизация частоты с последующим
умножением. Мощность передатчиков 0,1—0,3 вт. Для двух-
позиционных измерений применяется схема, приведенная
на рис. 5.10, которая отличается от схемы рис. 5.9
в основном тем, что передача и прием производятся на
разные антенны. Благодаря этому увеличивается
развязка между каналами передатчика и приемника и уве-
Передаюш,ая
антенна
Направленный
отбешдит&ль 20 дб
ГСС
Согласующий
трансформатор
Приемная Поворотное
антенна устройство
Цифр обой
индикатор
Самописец
! Перфоратор
Лрисмник
L
1
Смеситель
Угломерное
устройство
J
Рис. 5.10. Блок-схема дв^хпозиционной установки компенсационного
типа с непрерывным излучением фирмы Conductron Corporation.
личивается время, в течение которого компенсация
сохраняется на уровне, необходимом для измерения.
Чувствительность приемных устройств приведена в табл. 5.1.
Таблица 5,1
Параметры приемных устройств
Диапазон частот, Ггц
20-10-3—2
2—4
4—12
12—16
16—28
28—36
Ч у вствительность
приемника, вт
Ю-13
Ю-14
10-13
Ю-12
Ю-12
Ю-12
159
Динамический диапазон приемников 40—60 дб (по
выбору). Линейность характеристики выдерживается
с погрешностью ±0,2 дб. Фаза между двумя
независимыми сигналами (двумя поляризациями) измеряется
с точностью ±5°. Регистрирующая система состоит из
самописцев, записывающих диаграммы в аналоговой
форме в логарифмическом масштабе с точностью
±0,15 дб. Применяется также цифровая запись
результатов измерений на перфоленту, осуществляемая с
угловыми шагами 0,1°; 0,18°; 0,36° при вращении модели
в горизонтальной плоскости. Эта запись при
необходимости может быть превращена в аналоговую для
сравнения. Точность цифровой записи ±0,24 дб в
динамическом диапазоне 60 дб.
Безэховая камера. Измерения легких моделей
весом до 20 кг выполняются в безэховой камере,
имеющей размеры 12X6X3 м3. Пол камеры выложен
прочным ферритовым радиопоглощающим материалом.
Измерения в камере производятся на частотах от 2,6 до
75 Ггц. Паразитный фон камеры на частоте 10 Ггц при
установке поворотного устройства для моделей на
расстоянии 2,25 м от измерительной установки составляет
5-Ю"8 ж2.
Калибровка всех измерительных установок
осуществляется с помощью хорошо изготовленных
металлических сфер, для которых на различных частотах
рассчитаны таблицы ЭПР с относительной точностью
Ю-з—10-4.
5.4. ИЗМЕРИТЕЛЬНЫЕ УСТАНОВКИ С ЧАСТОТНОЙ
МОДУЛЯЦИЕЙ (ЧМ)
В отличие от установок с непрерывным излучением
измерительные установки с частотной модуляцией (ЧМ)
позволяют осуществлять селекцию отражающих
предметов по дальности, что обеспечивает снижение
паразитных (фоновых) сигналов от наиболее
неблагоприятных, вредных отражателей.
В измерительных ЧМ установках применяется
сигнал, модулированный по частоте. Наибольшее
распространение получили установки с изменением частоты
по линейному и синусоидальному законам.
При частотной модуляции сигнал с частотой f0,
переданный в момент t0 и отраженный рассеивателем, уда-
J60
ленным на расстояние R от измерительной установки,
возвратится к приемнику через время x = 2\R/c сек, где
с — скорость света. Пусть частота излучаемого сигнала
изменяется со скоростью df/dt гц/сек. Тогда частота
принятого сигнала будет
I — /o-hT dt —/0 -f- с df
Если в качестве частоты гетеродина использовать
частоту излученного сигнала /0 и смешать ее с
принятым сигналом частоты f, то получится разностная
частота
/p = f-f. = T"3r- <5'17)
Сигналы, отраженные от мешающих объектов,
расположенных на расстояниях, отличных от R, дадут
другие значения разностных частот /р. Эти паразитные
сигналы могут быть подавлены резонансными усилителями
и фильтрами с высокой избирательностью,
настроенными на частоту /р.
Наиболее удобно применять пилообразный закон
модуляции, при котором в пределах периода модуляции
скорость изменения частоты постоянна. Если
максимальная девиация частоты А/ осуществляется за время
1М, то этот цикл повторяется /м=1/*м раз в 1 сек и
разностная частота равна
(5.18)
Прнт разложении разностной частоты в ряд Фурье
получается некоторый спектр частот, состоящий из
основной частоты модуляции и гармоник частоты
повторения /м. Путем подбора R и А/ можно добиться того,
чтобы максимум любой гармоники соответствовал
требуемому расстоянию /?0:
где No — номер требуемой гармоники. Так как энергия
каждой гармоники занимает некоторую полосу частот
и соответствует некоторому интервалу расстояний,
подавить полностью вредные гармоники с помощью узко-
11—340 161
полосных фильтров не удается, а можно лишь
несколько ослабить. Наиболее опасные паразитные рассеяния
можно подавить путем такого подбора девиации
частоты А/, при которой нуль спектра располагался бы на
том же расстоянии, что и мешающий объект.
Паразитная амплитудная модуляция, имеющая тот
же период, должна быть сведена к минимуму.
Энергетический спектр при амплитудной модуляции
сконцентрирован в области низших гармоник частоты
повторения, поэтому для измерений выгодно использовать
высшие гармоники. Отсюда вытекает, что измерять на
установках ЧМ небольшие модели на малых расстояниях
Модулятор
Клистронный
импульсный
передатчик
Согласованная
нагрузка
Блок
настройка
Двойной
болноводный
Приемо -
передающая антенна.
Рассеиватель
Опора
рассеива-
теля
Смеситель
Избирательный
фильтр
Поворотное
устройство
Самописец, или
осциллограф
Резонансный
усилитель
Пульт
'продления
Угломерное
устройство
Рис. 5.11. Блок-схема измерительной установки с частотной
модуляцией.
невыгодно, так как разностная частота в этом случае
находится вблизи низших- гармоник, т. е. как раз там,
где помехи за счет паразитной амплитудной модуляции
наиболее сильны. В этих условиях применение ЧМ вмг
сто непрерывного излучения нецелесообразно.
Для измерения больших моделей на больших
расстояниях в ЧМ установках требуется значительно меиь
шая степень развязки между передатчиком и прием
ником, чем в системах непрерывного излучения. Типич
162
ная схема установки с частотной модуляцией
изображена на рис. 5.11.
Ниже для примера приводятся параметры
установки 3-см диапазона волн с пилообразной модуляцией:
/=10 Ггц, Д/=100 Мгц, # = 60 ж, /р//м = 40 при /м =
= 1 кгц, /р = 40 кгц.
Для уменьшения паразитных рассеяний от
предметов, находящихся на небольших расстояниях, более
эффективно применять синусоидальную модуляцию
частоты, при которой амплитуда высших гармоник близка
к нулю на малых расстояниях от установки.
5.5. ИЗМЕРИТЕЛЬНАЯ УСТАНОВКА С ИСПОЛЬЗОВАНИЕМ
ЭФФЕКТА ДОППЛЕРА
Для выделения сигнала, отраженного от объекта,
на фоне мешающих рассеяний окружающими
предметами можно использовать изменение частоты из-за
движения источника электромагнитного излучения (эффект
Допплера).
Известно, что частота электромагнитного излучения,
движущегося по направлению к неподвижному
наблюдателю или от него, отличается от частоты
неподвижного источника излученного сигнала и связана с ней при
следующей зависимостью:
^, (5.20)
где /о — Частота сигнала, излученного неподвижным
источником; / — частота того же источника,
перемещающегося относительно наблюдателя; vr — проекция
вектора скорости перемещения источника на линию,
соединяющую источник и наблюдателя; с — скорость
света.
При перемещении рассеивателя относительно
неподвижного приемо-передающего устройства формула (5.20)
принимает вид
(^) (5.21)
а допплеровское изменение частоты, связанное с
движением рассеивателя по направлению к измерительной
установке, соответственно равно
Д/ = /о^=^1. (5.22)
II* 163
Одна из первых установок, использующая эффект
Допплера для измерения ЭПР симметричных тел (шар
цилиндр), описана в [В.4]. В ней применялось
прямолинейное поступательное движение рассеивателя. Схема
установки приведена на рис. 5.12.
Установка состоит из малоотражающей деревянной
опоры, на которую устанавливался измеряемый объект.
L помощью специального механизма объект на опоре
| Генератор
I
| Смеситель
Аттенюатор I
\Усилитель наЮгц\
I
Прием о - передающая
антенна
Самописец
Рассеиватель
Опора
антенны
Опора _^
рассеивателя
Двигатель
Направляющие
Рис. 5 12. Блок-схема измерительной установки с использованием
эффекта Допплера.
перемещался по направлению к измерительной
установке и обратно со скоростью 16 см/сек при движении на
1,5 м туда и обратно. Так как-измерения выполнялись
на волне 3,22 см, допплеровское смещение частоты
составляло 10 гц (5.22).
Радиотехническая схема позволяла выделить сигнал
разностной частоты, рассеянный исследуемым объектом,
амплитуда которого пропорциональна напряженности'
поля. Отражения от неподвижных предметов
селектировались узкополосным усилителем низкой частоты.
Небольшая скорость перемещения испытуемого объекта
приводила в описанной установке к малой величине
допплеровского сдвига частот, что вызывало трудности
при разработке узкополосного усилителя низкой
частоты. Кроме того, требовалось значительное время для
выполнения измерений.
Скорость перемещения испытуемого объекта может
быть значительно увеличена с помощью кривошипно-
шатун'ных механизмов, превращающих вращательное
движение в поступательное, или при применении
колебательного движения объектов, подвешенных на нитях.
Для увеличения скорости измерений может быть при-
164
менено движение испытуемого объекта по некоторой
окружности (5.5]. Такой принцип был использован в
измерительной установке, описанной в [5.6], блок-схема
которой приведена на рис. 5.13. Так как испытуемое
тело движется по окружности, то величина радиальной
составляющей вектора скорости, вызывающая доппле-
Нагрузка
Передатчик
непрерывного
излучения
Блок „
настройки
X
Двойной
олнобод-
ныи
Т- мост
X
Смеситель
X
Усилитель
X
Катодный
повторитель
Ключ
Исследуемый
объект
К нулям
диаграммы
направленности Эталонный
антенны объект
Выпрямитель
и интегратор
I *L Выпрямитель
и интегратор
—
лв
лв
Информация от коммутатора
Рис. 5.13. Блок-схема измерительной установки с использованием
эффекта Допплера при движении рассеивателя по окружности.
ровское смещение частоты, изменяется во времени по
закону
(5.23)
где vr — проекция вектора скор„ости объекта на линию,
соединяющую объект и приемопередатчик; v —
окружная скорость движения объекта; Э — угол между vr и
v (изменяющийся за время измерения в пределах от
я/2 до —я/2).
Кроме испытуемого объекта на диаметрально
противоположном конце опоры механизма вращения
размещается также эталонный рассеиватель,
вращающийся вместе с испытуемым объектом.
165
Максимальное значение допплеровского сдвига
частоты в установке определяется формулой
где qy об/мин — скорость вращения объекта; г —
расстояние испытуемого объекта от центра вращения; К —
длина волны.
Передающая антенна выбирается так, чтобы ее
главный лепесток своим максимумом был направлен на
испытуемый объект, находящийся на расстоянии г от
центра вращения, а нулем — на центр вращения.
Для выделения отражений от объекта и эталона
применяется коммутатор, который обеспечивает в каждый
момент времени облучение только одного объекта.
Описанные установки позволяют измерять ЭПР
только осесимметричных тел. Для измерения ЭПР не осе-
симметричных тел необходимо применять
дополнительный механизм вращения объекта.
Измерительные установки с использованием эффекта
Допплера позволяют значительно уменьшить отражения
от неподвижных объектов. Кроме того, влияние
неоднородности поля, облучающего объект, на погрешность
измерения также несколько уменьшается, так как при
перемещении объекта поле усредняется и влияние
случайных вариаций поля исключаются. Этот метод не
требует сложной радиотехнической аппаратуры, за
исключением узкополосных усилителей низкой частоты.
Однако механическая система перемещения
испытуемых объектов, получается слишком сложной и
громоздкой, особенно для тяжелых объектов, а время,
необходимое для измерений, существенно увеличивается по
сравнению с другими методами. Практически на таких
установках можно измерять только диаграммы простых
тел небольшого размера. Поэтому измерительные
установки с использованием эффекта Допплера не нашли
широкого применения.
5.6. ИМПУЛЬСНЫЕ ИЗМЕРИТЕЛЬНЫЕ УСТАНОВКИ
Импульсные измерительные установки позволяют
наиболее удобно осуществлять селекцию (разделение)
рассеяний измеряемой модели и паразитных рассеива-
телей, находящихся в ее окрестности. Естественно, что
при укорочении импульса селектирующая способность
166
измерительных установок улучшается, однако выбирать
ямпульсы очень короткими нельзя из-за того, что при
этом измеренная величина ЭПР рассеивателя будет
существенно отличаться от ЭПР, измеренной в поле
монохроматической волны. Для того чтобы измерения имели
несущественную погрешность, необходимо выбирать
длительность импульса такой, чтобы
Т^31/с, (5.25)
где / — наибольший размер исследуемой модели; с —
скорость света.
Формулу (5.25) можно пояснить, используя
концепцию краевых волн [В.1], согласно которой суммарное
Усилитель
пусковых
импульсов
Генератор
импульсов и
временной,
развертки
Передающая
антенна.
Стро5ируепый
усилитель
Сервоусилитель
Скорость
Серводвигатель
приводи пера
аттенюатора.
демфирования V. > ЯриВод пера
-^Осциллограф I
еа,1
Пульт
управления
Угломерное
устройство
Поворотное
устройство
Сервопривод
Рис. 5.14. Блок-схема импульсной измерительной установки.
рассеяние объектами есть бесконечная сумма волн,
многократно переотраженных от их краев.
В большинстве практических случаев существенную
величину имеют лишь волны, однократцо и двукратно
167
переотраженные каждым краем рассеивателя. Для того
чтобы эти волны принимались измерительной
установкой, необходимо время для трехкратного пробега волны
вдоль максимального размера модели, откуда и следует
формула (5.25). Блок-схема импульсной измерительной
установки приведена на рис. 5.14.
Типичным примером измерительного полигона с
использованием полевых импульсных измерительных уста-
Поворотное
устройство
Дороги для
двухпозиционных
измерений
Повороупные
устройства Дорога для
двухпозиционных
измерений
-1250м-
I
Рис. 5.15. План полигона RAT SCAT.
новок является комплекс RAT SCAT (Radar Target
Scatter Site) — крупнейший в США измерительный
полигон [5.7].
RAT SCAT предназначен для измерения диаграмм
ЭПР моделей космических кораблей в натуральную
величину весом до 4,5 т. На полигоне осуществляют одно-
позиционные (радиолокационные) и
168
Кривая равной
напряженности
поля
V Кривая
4 равных фая
Зеркальное изодратение антенны
Рис. 5.16. Распределение полей в вертикальной плоскости установок
на полигоне RAT SCAT:
а) конфигурация поля; б) /=«1,216 Ггц, ^=2,9 м; в) /=9,472 Ггц, ^а=2,1 м;
1 теория; ? — горизонтальная поляризация; Л — вертикальная
поляризация.
ВЧ
смеситель
У/77
бОМгц
Опорный
аттенюатйр
Схема
стро&ироВания
Лете к тор
ошибки.
Усилитель
Цифровая аппаратура
кодирующего устройства
Придод
И>
Схема
стробироВания
*- К аппаратуре записи
Времязадающие цепи.
j ж Генератор
л vi опорного сигнала
Рис. 5.17. Блок-схема йриемников измерительных установок на
полигоне RAT SCAT.
169
(до угла 120°) измерения диаграмм ЭПР в диапазоне
частот 0,1—12 Ггц при любой линейной поляризации
приемника и передатчика. Расстояние между
измеряемыми моделями и измерительными установками 150,
360, 750 м (рис. 5.15). Для формирования диаграммы
в вертикальной плоскости применена схема с
экранирующей плоскостью (см. гл. 3). Измеренные и
рассчитанные диаграммы в вертикальной плоскости при
горизонтальной и вертикальной поляризациях показаны на
рис. 5.16.
В комплект аппаратуры входит 7 импульсных
измерительных установок. Передатчики пяти установок
собраны на ЛБВ. Длительность импульсов передатчиков
может изменяться от 0,1 до 1 мксек. Частота повторения
импульсов 500—5 000 имп/сек. Максимальная средняя
мощность передатчиков 5 вг.
Для измерений обычно используется импульс
длительностью 0,2 мксек при частоте повторения 1 кгц; при
этом разрешающая способность по дальности
составляет 30 м, что превышает максимальный размер модели
в 4 раза.
В измерительных установках используются
приемники супергетеродинного типа с промежуточной частотой,,
равной 60 Мгц и полосой пропускания 2 или 10 Мгц..
На входе приемников установлены прецезионные
аттенюаторы (рис. 5.17), связанные со следящей системой,
использующей в качестве напряжения ошибки
разностный сигнал между опорным и отраженным от модели.
Следящая система отрабатывает сигнал ошибки; по
положению оси опорного аттенюатора определяется
величина сигнала, пропорциональная ЭПР (в децибелах).
Применена схема стробирования, открывающая
приемник на 0,1 мксек. Система следящего аттенюатора
обеспечивает линейность амплитудной характеристики
преемника в динамическом диапазоне измерений, равном 50 дб
с погрешностью измерений ±0,5 дб. Чувствительность
установок на различных частотах приведена на рис. 5.18.
В качестве антенн используется комплект из 6 пар
круглых параболоидов диаметром 0,6; 0,9; 1,8; 3; 4,8; 9 ж
с комплектом сменных облучателей. Для приема и
передачи используются отдельные антенны, каждая из
которых имеет два ортогонально поляризованных
облучателя. Развязка между ними составляет не менее 20 дб.
Между приемной и передающей антеннами установлен.
170
ft*
6,0
I
I
f,2
R=150m
= 750м
30
50
60
70 .
<
^ :
90
100
I
10
Частота, Ггц
Рис. 5.18. Чувствительность измерительной установки на трех
фиксированных расстояниях:
¦ максимальный размер объекта в горизонтальной плоскости;
чувствительность.
к передатчику
ала
I
К облучателю
с горизонтальной
поляризацией
К облучателю
с вертикальной
поляризацией
Рис. 5.19. Схема блока поляризации.
металлический экран для увеличения развязки.
Ортогонально поляризованные облучатели соединены с
передатчиком и приемником через блоки, обеспечивающие
излучение и прием заданной поляризации (рис. 5.19).
Для установки испытуемых рассеивателей используется
три поворотных устройства с изменяющейся высотой
диаметром 5,2 м, расположенные в углублении диамет-
171
Рис. 5.20. Поворотное устройство.
10
в
б
и
г
•
-
\
X
\
\12Ггц
Yre(^?^5W
^ -W
\^-Мб ,2дб
2 « 6 ВА
if
-J
I"
44 о
^ р
е
в
0,5 1 1,5 Z,0 2,5 3,0
Д/шна цилиндра, м
Рис. 5.21. Ошибки из-за неплоского поля:
a — R — расстояние до объекта; /га — высота антенны; /в — максимальный
размер объекта в вертикальней плоскости; 1Т — максимальный размер объекгм
в горизонтальной плоскости; Е — кривая равных ошибок; б — зависимое п.
ошибки от длины измеряемого цилиндра (/=1,5 Ггц, диаметр цилиндра
406 мм); А — расчет; ? — измерение.
172
ром 6 м (рис. 5.20) [5.7]. Они позволяют наклонять
модель на угол до ±15°. Поворотные устройства покрыты
радиопоглощающим материалом, что существенно
снижает переотражение между ними и испытуемой моделью.
Погрешность измерения ЭПР в динамическом
диапазоне 50 дб, как правило, не более ±3 дб, в том числе
погрешность калибровки аппаратуры составляет 0,5 дб,
ошибки из-за переотражения между объектом и
поворотным устройством 1 дб, ошибки из-за погрешности
поля падающей волны для различных моделей от 0,5
до 3 дб (рис. 5.21). Погрешность из-за переотражения
от ошры модели на различ-
ных 'частотах имеет величи-
ну от 1 до 10 дб. На рис. 5.22
показано изменение ЭПР
о-поры в диапазоне частот.
В целом достигнутая
точность измерения ЭПР в
широком динамическом
диапазоне оказывается
достаточно высокой для полевых
установок.
Для уменьшения
погрешности измерений за счет
паразитного рассеяния от
опоры в диапазоне 1,12—1,7Ггц
применена аппаратура, учитывающая это рассеяние
с помощью ЭВМ, блок-схема которой приведена на
рис. 5.23. В этой системе сначала записывается
амплитуда и фаза суммарного сигнала, отраженного от опоры
и рассеивателя, а затем записывается сигнал,
отраженный только опорой. Разрешающая способность
амплитудных и фазовых кодирующих устройств составляет
0,1 дб и Г соответственно. Скорость вращения
рассеивателя выбирается в пределах от 0,6 до 6° в секунду в
зависимости от крутизны изменения амплитуды и фазы
рассеянного сигнала. На рис. 5.24 приведен пример
записи суммарной величины ЭПР сферического
рассеивателя диаметром 50 мм и большой колонны из
пенопласта, а также ЭПР одной опоры. На этом же рисунке
приведены результаты вычислений ЭПР одного
рассеивателя, выполненного с помощью блок-схемы рис. 5.23.
Как видно, результаты вычислений хорошо совпадают
с теоретическим значением ЭПР сферического рассеи-
173
-70
Рис. 5.22. ЭПР согласованной
опоры.
Диаметр колонны 0,4 м\ высота
3 м\ предельно допустимая
нагрузка 340 кг.
р
Вычислитель -
ная
машина
РВ-250
Считывающее
устройство
ЭПР
ЭПР объекта
^) *" Перфолента
Фаза
Вх./вых
-ii буферное
Азимут __ \ I у$тройство
Фаза объекта
И аналоговым
самописцам
Рис. 5.23. Блок-схема устройства для учета рассеяния опорой
(фона).
270е
Рис. 5.24. Пример записи на выходе системы исключения рассеяния
на опоре измеряемой модели:
——- —— ЗПР опоры; "- ЭПР объекта (теория); ЭПР объекта и
опоры; вычисленная ЭПР объекта.
174
вателя, в то же время суммарный, сигнал рассеивателя
и опоры существенно отличается от ЭПР сферы.
Приведенные результаты характеризуют эффективность
методов учета отражения от опоры с помощью ЭВМ.
5.7. МЕТОДЫ ИЗМЕРЕНИЙ ПРИ БОЛЬШОМ
РАЗРЕШЕНИИ
При применении импульсов малой длительности
(наносекундных импульсов) появляется возможность
разделить рассеяния от отдельных элементов
объекта [5.8].
Так как индикация может быть осуществлена
в реальном масштабе времени, например, с помощью
стробоскопического осциллографа, возможно удобное
Рис. 5.25. Сопоставление рассеивателя с фотографией экрана
стробоскопического осциллографа установки с длительностью импульса
0,6 нсек.
сопоставление фотографий экрана индикатора и
фотографии цели, что позволяет выявить элементы цели,
ведущие себя как «блестящие точки». Пример такого
сопоставления дан на рис. 5.25.
175
Умножитель частоты и схема
формирования импульсов
Приема- передающая
антенна
Рассеибатель
Дбухкаскадный
усилитель
на ЛБВ 1квт
I Передатчик
Приемник
Схема стробировани я
по дальности
Регулируемая кабельная
линия задер ук к и
Пусковые импульсы
осциллографа
Стробоскопи -
ческип
осциллограф
Широкополосный
детектор
Усилитель
на ЛВВ
Малошумящий
усилитель на ЛЬ В
Рис. 5.26. Блок-схема измерительной установки с малой
длительностью импульсов.
Частота 8,0—9,6 Ггц\ длительность импульса 0,6 нсек; мощность в импульсо
1,8 квг
Таким образом, создается удобный способ
обнаружения элементов цели, интенсивно рассеивающих волны и
возможность наблюдения изменения рассеяния при
изменении формы соответствующих элементов.
Типичная блок-схема измерительной установки с им
пульсами наносекундной длительности приведена ii;i
рис. 5.26. Основными элементами этой установки явля
ются: генератор импульсов наносекундной длительности,
широкополосные усилители мощности на ЛБВ, элемом
ты высокочастотных трактов, малошумящий усилитель
на ЛБВ и стробоскопический осциллограф.
176
170°
180° 190°
гоо°
Рис. 5.27. Диаграмма ЭПР двух сфер при широкополосном сигнале.
Особо жесткие требования предъявляются к
широкополосное™ высокочастотных устройств приемо-передаю-
щего тракта. Полоса частот, в которой фазо-частотная
характеристика (зависимость фазы от частоты) должна
быть линейна и должно обеспечиваться постоянство
усиления при импульсах длительностью в 1 нсек,
должна быть порядка 1 Ггц, что составляет 10% от несущей
частоты. Если в пределах полосы фаза изменяется не по
линейному закону или усиление не постоянно, то
амплитуда огибающей импульса уменьшается и рядом с
импульсом появляются «временные боковые лепестки».
Это хорошо видно на рис. 5.27. Интерференция
наблюдается лишь в пределах длительности импульса (12° или
18 см, что соответствует импульсу 0,6 нсек), рядом
имеются лепестки такой же ширины, но меньшей
амплитуды.
12—340 177
5.8. УСТАНОВКА ДЛЯ ИЗМЕРЕНИЯ ЭЛЕМЕНТОВ
МАТРИЦЫ РАССЕЯНИЯ
В общем случае для двухпозиционных установок МРА
несимметрична, поэтому необходимо измерять четыре
амплитуды и четыре фазы. Так как абсолютная фаза
существенно зависит от расстояния до рассеивателя, то
измерения МРА широкого применения не нашли.
Если в МРА за опорную фазу принять любую из
четырех, то останется три разности фаз между фазой,
принятой за опорную, и остальными. Такая матрица
рассеяния называется относительной (МРО). Измерения
элементов МРО нашли широкое применение в однопо-
зиционных установках. В этом случае в силу теоремы
взаимности диагональные члены равны и необходимо
измерять всего пять элементов МРО: три амплитуды и
две фазы (одна фаза принята за опорную). Такие
измерения называются прямыми [5.9]. Измерение элементов
МРО можно осуществить с помощью двухимпульсного
метода, при котором в первом импульсе излучается,
например, горизонтально поляризованная, а во втором —
вертикально поляризованная волна. При излучении
пары сигналов производятся измерения амплитуды и
фазы рассеянных сигналов — совпадающей и
перпендикулярной поляризации. Измеряют только относительные
значения амплитуд, которые затем пересчитывают
в ЭПР или другие значения, калибровкой по сигналу,
рассеянному эталоном с известными рассеивающими
свойствами.
Блок-схема одной из установок для прямых
измерений матрицы рассеяния показана на рис. 5.28. Опорный
сигнал берется от когерентного опорного генератора
(КОГ), частота которого совпадает с промежуточной
частотой (ПЧ) приемйиков. Сигнал от КОГ
смешивается с сигналом гетеродина, а промежуточный сигнал
высокой частоты, когерентный с сигналом КОГ,
усиливается мощным усилителем с импульсной модуляцией и
затем излучается. Принятый сигнал от рассеивателя
после УПЧ подается на амплитудный и фазовый
детекторы, куда одновременно поступает сигнал от КОГ.
Выходной сигнал фазового детектора пропорционален
разности фаз между сигналами, поданными на детектор,
а выходной сигнал амплитудного детектора
пропорционален амплитуде рассеянного поля. Здесь сигнал от КОГ
178
упч
Смеситель
Фазовый
детектор
Амплитудный
детектор
Гибридный
узел
Элементы
вертикальной
поляризации
Элементы
горизонтальной
поляризации
кЧ_ Гибридный
г\ узел
L_
Импульсный
модулятор
Мощный
усилитель
Мощный
усилитель
Смеситель
гночная антенная
система с двойной
поляризацией
УПЧ
СТЛГ*
Фазовый
детектор
Амплитудный
детектор
Данные о. фазе при
горизонтальной
поляризации
Данные об амплитуде
при горизонтальной
поляризации
Данные о фазе
при
вертикальной поляри
зации
Данные об ампли
туде при
вертикальной
поляризации
Чередующиеся
импульсы
VuH
Смесителб
Опорный
сигнал fc
Рис. 5.28. Блок-схема установки для прямого измерения элементов
матрицы рассеяния.
используется в качестве опорного. На имеющиеся в
установке два мощных усилителя попеременно подаются
отпирающие и запирающие импульсы, благодаря чему
осуществляется попеременное излучение сигналов через
антенны с вертикальной или с горизонтальной
поляризацией. Рассеянные сигналы принимаются на оба
приемника установки и фиксируются амплитуды и фазы
принятых сигналов на совпадающей и
перпендикулярной поляризациях.
12* 179
Совпадение амплитуды и фазы перпендикулярно
поляризованных сигналов, измеренных при вертикальной
и горизонтальной поляризациях излученных сигналов,
вытекающее из симметрии МР, может служить
проверкой правильности измерения. Использование
опирающих и запирающих импульсов для разделения выходных
сигналов установки позволяет измерять амплитуды и
фазы принятых сигналов обеих поляризаций через очень
малый интервал времени, т. е. практически
одновременно. Для получения достаточной точности измерений
необходимо обеспечить высокую стабильность работы всей
установки и особенно генератора опорных сигналов.
90 72 36 О 36 72 в0
Рис. 5.29. Амплитудные диаграммы при различных поляризациях:
круговая; наклон-
вертикальная; — горизонтальная; • •
ная 45°.
Кроме прямого метода измерений МРО, при котором
измеряются и амплитуды и фазы элементов матрицы
рассеяния, можно проводить косвенные измерения. При
этом измеряются только амплитуды при различных
комбинациях поляризаций передающей и приемной антенн
и по их величине вычисляются фазы. Естественно,
косвенные измерения МРО выполняются более просто, чем
прямые'в связи с тем, что можно ограничиться лишь
измерениями амплитуд и использовать любые типы
измерительных установок, включая установки с
непрерывным излучением. Хойнен [5.10] предлагает для этих
измерений следующий набор поляризаций: снимаются
амплитудные диаграммы при линейной поляризации для
180
углов ориентации излучателя 0, 45 и 90° при приеме на
параллельные поляризации, а затем амплитудную
диаграмму при излучении круговой поляризации (любого
направления) и приеме линейной поляризации (рис. 5.29).
По этим измерениям можно найти амплитуды и фазы
всех элементов МРО.
Интерес к изучению поляризационных свойств поля
рассеивателя объясняется тем, что поляризация
является важным параметром, который может быть положен
в основу распознавания образа рассеивателя. Поэтому
помимо измерения элементов МР много внимания
уделяется экспериментальному изучению поляризационных
УгломерЗбО
К вращающемуся
соединению
Перехдб
Тефлоновая
вставка
Фазосддигающий
элемент с поворотом
фазы на 90°
с круглого на
прямоугольный
волновод
Рис. 5.30. Конструкция устройства для измерения поляризации
излучения.
свойств рассеянных полей. Измерительные установки
для этих измерений значительно проще установок для
измерения МРО. При измерениях основное внимание
уделяется нахождению в рассеянных полях
перпендикулярных составляющих, а также нахождению таких
поляризаций излученного сигнала, при которых рассеянный
сигнал равен нулю («нулевые поляризации») или
максимален («максимальные поляризации»). Для
проведения поляризационных исследований созданы
измерительные' установки компенсационного типа, главной
частью которых является поляризатор, позволяющий
создавать любые поляризации, и антенна, излучающая
и принимающая волны с любой, наперед заданной
поляризацией [5.10]. Антенна состоит из зеркала в виде
параболоида вращения, в фокусе которого находится
облучатель — рупор круглого сечения. В волноводную
181
Усилитель
мощности.
на ЛБВ
Кдад ратный
болнобод и,
направленные
отдетВители
блок компенсации
вертикальной
поляризации
Блок компенсации
горизонтальной
поляризации
Прием о - передают, ая
антенна.
Рассеидатель
Опора
рассей 6а-
теля
Поворщте
устройство
Угломерное
Самописец
А мплифа зограф.
Вертикальная
поляризация
L— Самописец
А мплифа зограф.
Горизонтальная
поляризация
Сервопривод
Рис. 5.31. Блок-схема установки для измерения укороченной
матрицы рассеяния осесимметричных рассеивателей.
систему, через которую передается энергия в виде двух
ортогональных составляющих поля, включены
аттенюаторы и фазовращатели (рис. 5.30), с помощью которых
поляризация излучаемых волн может быть сделана
линейной с любым углом наклона, или эллиптической или
круговой правого и левого направления вращения. Такие
установки являются удобным инструментом для
изучения поляризационных свойств различных рассеивателей.
Ранее (гл. 1) было показано, что при измерении
осесимметричных тел, при вращении рассеивателя
в плоскости, содержащей ось симметрии, матрица
рассеяния содержит только диагональные элементы:
о
о
(5.26)
В этом случае можно ограничиться измерением только
трех элементов МР — двух амплитуд и одной фазы меж
ду перпендикулярными составляющими поля. При этом
измерения могут эыполняться на установке с непрерыв
182
60
50
40
30
25
20
15
10
ным излучением* блок-
схема которой приведена
на рис. 5.31. Установка
компенсационного тип а
состоит .из стабильного
генератора,
высокочастотного тракта,
обеспечивающего излучение
любой поляризации
(линейной, эллиптической,
круговой) и прием двух
ортогональных линейных
поляризаций. Кроме того,
имеется два
компенсационных тракта,
позволяющих компенсировать
паразитный фон яри приеме
вертикально и
горизонтально поляризованных
волн. В установку ©ходят
два амплифазографа
[3.17], обеспечивающие
измерение амилитуд
горизонтально й вертикально 'поляризованных
составляющих поля и разности фаз между ними. Измеренные
диаграммы амплитуды и фазы с помощью
преобразователя аналог — код преобразуются в дискретную
информацию, которая после записи на магнитную ленту может
быть введена в ЭВМ.
2250
2000
1750
1500
1250
1000
750
500
250
/
:
:
j
Ф
?\
1
.1
iiin
h
V
п
1 '¦•¦
90
Рис. 5.32. Диаграммы элементов
укороченной МРА диска:
амплитуда; • • • • фаза.
Фаза, град
560
90 9°
Рис. 5.33. Диаграмма элементов укороченной МРО цилиндра.
— фаза между перпендикулярными составляющими поля; • • • • амплитуда
оставляющей поля, совпадающей с осью цилиндра; амплитуда
составляющей поля, перпендикулярной оси цилиндра.
183
Параметры измерительных установок
Таблица 5.2
П. П.
1
2
3
4
5
6
Основные параметры
измерительных установок
Диапазон рабочих длин
волн (рабочих частот)
Максимальный размер
измеряемых объектов
Вес измеряемых
объектов
Измеряемые величины
Тип установки
Поляризация
Динамический диапазон
измеряемых величин:
амплитуда
фаза
Полевой измерительный
комплекс RAT SCAT
300—2,5 CM
0,1—12 Ггц
90X300 см2
До 4,5 т
Однопозиционные
диаграммы ЭПР
Двухпозициовные
диаграммы ЭПР до
углов 120р
Элементы УМРО
Импульсная
(длительность импульса
0,1—1 мксек)
Любая линейная
50 дб
360*
Conductron <
полевой измерительный
комплекс
15 м—0,77 СМ
20 Мгц—40 Ггц
До 1 т
Однопозиционные
диаграммы ЭПР
Двухпозиционные
диаграммы ЭПР
Элементы УМРО
С непрерывным
излучением
Любая линейная,
вращающаяся в
диапазоне 1—2,6 Ггц
40 дб; 60 дб
360°
Corporation
измерительный комплекс
в безэховой камере
11,5—0,4 СМ
2,6—75 Ггц
До 20 кг
Однопозиционные
диаграммы ЭПР
Элементы УМРО
С непрерывным
излучением
Любая линейная
40 дб; 60 дб
360°
Продолженш табл. 5-2
№
п. п.
7
8
9
10
11
Основные параметры
измерительных установок
Чувствительность
установки (уровень фона;
Относительная
погрешность измерений
Способ регистрации
измеряемых величин
Энергетический
потенциал установки
Параметры элементов
измерительной
установки:
мощность
передатчика
относительная
нестабильность частоты
Чувствительность
приемника
Полевой измерительный
комплекс RAT SCAT
Ю-4—10-7 м2
±3 дб
Запись на
диаграммную ленту
<V,lO12
Средняя 5 вт
10-" вт
Conductron Corporation
полевой измерительный
комплекс
Ю-5—10-7 М2
Запись на
диаграммную ленту
Цифровая запись
^1012
0,1—3 вт
Кратковременная
5-Ю-8
Долговременная
Ю-6
Ю-»—Ю-1* вт
измерительный комплекс
в безэховой камере
Ю-7 М2
Запись на
диаграммную ленту
Цифровая запись
^1012
1 вт
Кратковременная
5-Ю-8
Долговременная
ю-«
Ю-12 вт
Примечание. Перед вводом измерительной установки
образцу табл. 5.1.
в эксплуатацию необходимо составить ее паспорт по
Диаграммы элементов МРА диска приведены на
рис. 5.32. Видно, что при переходе с одного лепестка
амплитудной диаграммы на другой фаза изменяется
на 180°.
На рис. 5.33 приведены диаграммы элементов
укороченной относительной матрицы рассеяния цилиндра.
В пределах основных лепестков (0 и 90°) амплитуды
составляющих поля совпадают, а фаза практически
имеет постоянную величину. В области боковых
лепестков фаза имеет изрезанный характер в связи с тем, что
максимумы и минимумы боковых лепестков
составляющих поля не совпадают. Данные, полученные при
измерении элементов матрицы рассеяния, могут
использоваться для распознавания рассеивателей [5.11].
5.9. ОСНОВНЫЕ ПАРАМЕТРЫ ИЗМЕРИТЕЛЬНЫХ
УСТАНОВОК
Основные параметры измерительных установок
должны быть определены 'перед их разработкой лри
составлении технического задания. При проектировании
некоторые параметры определяются как компромиссное
решение между взаимно противоречащими
требованиями. Примером может быть выбор размера измеряемых
рассеивателей и погрешность измерений и т. д. В
процессе разработки параметры уточняются и, наконец,
после изготовления образцов измерительных установок
производится их аттестация (измерение основных
параметров). Для -примера в табл. 5.2 приводятся основные
параметры некоторых измерительных установок.
Литература
5.1. О л ч н. Динамические измерения радиолокационных
поперечных сечений. ТИИЗР, 1965, т«. 53, № 8.
5.S. Fox А. С. An adjustable wave-guide phase changer. Proc.
IRE, 1947, v. 35, №> 12.
5.3. С и д о ip e ih к о A. Hv Применение открытых 'резонаторов
для измерения эффективной площади рассеяния тел. «Радиотехника
и электроника». 1969, XIV, № 5.
5.4. Edited by I. W. Crispin, Ir. and К. М. Siegel.
Methods of Radar Cross-section Analysis. Academic-press, New-York,
London, 1968.
5.5. Scharfrnan H. and King D. D. Antenna scattering
measurements by modulation of the Scatterer. Proc. IRE, 1954, v. .42,
№5.
5.6. Кинг Р., (У Тай-цзунь. Рассеяние и дифракция
электромагнитных волн. Изд-во иностранной литературы, 1961,
186
5.7, М а р л о у, Ёатсон й В а н - X о з е р. Комплекс RAT SCAT
для измерения радиолокационного поперечного сечений целей.
ТИИОР, 1965, т. 53, №> 8.
5.'8. Б е ч м е.н. Некоторые 'последние достижения в технике
измерений радиолокационного поперечного сечения. ТИИЭР, 1965,
т. 53, 1№ 8.
5.9. X о й н е н. Измерение матрицы рассеяния цели, ТИИЭР,
1965, т. 93, № 8.
5.10. Хойнен. Новый подход к измерениям эффективной
площади радиолокационного рассеяния. «Зарубежная
.радиоэлектроника», 1963, № 7.
5.11. Л о у и ш усе. Применение матрицы рассеяния. ТИИЭР,
1965, т. 53, № 8.
Глава 6
ПОГРЕШНОСТИ ИЗМЕРЕНИЙ
6.1. КЛАССИФИКАЦИЯ ПОГРЕШНОСТЕЙ ИЗМЕРЕНИЙ
При измерении диаграмм ЭПР и диаграмм
элементов матрицы рассеяния возникают погрешности,
имеющие систематический или случайныйхарактер.
Основным источником систематических погрешностей
является отличие падающей на рассеиватель волны от
идеально-плоской, которая отличается от плоской из-за
конечного расстояния между измерительной установкой
и рассеивателем, из-за отражения падающей волны от
земли и местных предметов, из-за переотражения между
рассеивателем и опорой и других причин, имеющих
существенное значение в полевых измерительных
установках. В лабораторных установках, расположенных в без-
эховых камерах, существенными являются те же
причины, а также переотражения между рассеивателем и
антенной измерительной установки, и «эффект тени» *),
особенно проявляющийся в установках
компенсационного типа. Систематические погрешности, возникающие
из-за облучения рассеивателя квазиплоской волной,
учесть чрезвычайно трудное связи с тем, что искажения
в диаграмме ЭПР существенно зависят от формы
рассеивателя. При оценке погрешностей измерительной
установки приходится ограничиваться «оценкой сверху»,
определяя погрешности диаграммы рассеяния
простейших рассеивателей типа ленты, цилиндра, диска и т. д.
при падении на них квазиплоской волны с известным
законом распределения амплитуды и фазы. Как
правило, эти погрешности зависят от динамического
диапазона измерения ЭПР и увеличиваются с уменьшением
величины измеряемой ЭПР. В некоторых случаях
удается компенсировать систематические погрешности или,
*> Эффектом тени называют нарушение компенсации сигнала,
рассеянного задней стенкой, вызванное тем, что объект
установленный на опору, закрывает путь части энергии, падающей на заднюю
стенку.
188
превратив их в случайные, уменьшить путем
многократного измерения диаграммы ЭПР и определения средней
из большого числа измерений. Систематическая
погрешность зависит также от эталонных рассеивателей, с
помощью которых производится калибровка
измерительной установки. Теоретически наиболее точно известна
величина ЭПР металлической сферы. Поэтому
погрешность калибровки с помощью сферического отражателя
зависит лишь от точности выполнения и от состояния ее
поверхности. Однако применение сферы обеспечивает
калибровку лишь малых величин ЭПР. Для калибровки
больших величин ЭПР применяют рассеиватели типа
цилиндра и диска, величина ЭПР которых
рассчитывается хотя и приближенно, но с достаточной для
практики точностью. Погрешность в определении величины ЭПР
таких рассеивателей, кроме погрешности расчета,
зависит также от точности измерения их геометрических
размеров, состояния поверхности и имеет, как правило,
систематический характер.
Систематические погрешности связаны также с
методом измерений и поэтому иногда эти погрешности
•называют методическими. Например, в установках с
непрерывным излучением компенсационного типа
методические погрешности связаны с уровнем компенсации
фона и зависят от «эффекта тени». В импульсных
установках методическая ошибка связана с длительностью
импульса р его формой. Она существенно возрастает,
когда длительность импульса Т<31/с, где / —
максимальный размер рассеивателя, а с — скорость света.
В установках с частотной модуляцией методическая
ошибка связана с крутизной модуляционной
характеристики.
При оценке систематических погрешностей
необходимо учитывать систематические инструментальные
погрешности, связанные с неточностью калибровки
приемников, фазовращателей, аттенюаторов и других
элементов измерительных установок.
Необходимо учитывать также динамические
инструментальные ошибки, связанные с изменением
характеристик аппаратуры за некоторый отрезок времени.
Например, в установках компенсационного типа
динамическая ошибка уровня компенсации существенно зависит
от долговременной стабильности частоты генератора,
стабильности «электрической длины» высокочастотного
189
тракта, изменяющейся при изменении температуры,
и других причин.
При измерении элементов матрицы рассеяния
существенную роль играет развязка между каналами,
измеряющими перпендикулярные составляющие поля.
Из-за конечной величины развязки между каналами
возникает систематическая ошибка в измерении
элементов матрицы рассеяния, если частота генератора не
изменяется. При изменении частоты генератора изменяется
также и развязка, что приводит к появлению случайных
ошибок в измерениях.
Существенную величину во всех измерительных
установках имеют случайные погрешности. Источником
случайных погрешностей я'вляются шумы приемников,
изменение температуры окружающей среды,
приводящей к изменению параметров измерительных установок
и величины ЭПР эталонных отражателей,
нестабильность источников питания, колебания рассеивателей
из-за ветра в полевых измерительных установках и
другие причины.
Учет перечисленных погрешностей необходим при
оценке точности измерительных установок. Ниже
приводятся примеры оценки погрешностей измерительных
установок и рассматриваются методы их уменьшения.
6.2. ОЦЕНКА ЧАСТНЫХ ПОГРЕШНОСТЕЙ ИЗМЕРЕНИЯ
1. Погрешности из-за наличия фона. При измерении
диаграммы ЭПР кроме объекта облучается также опора,
земля и окружающие предметы в полевых-установках
или стены безэховой камеры, так что поле у приемника
Еи является суммой поля, рассеянного моделью Ем, и
суммарного фона Еф, имеющего случайный характер.
Будем считать, что приемная антенна принимает только
одну поляризацию, например вертикальную (вдоль
оси у). Суммарное поле этой лоляризации у приемника
имеет вид
?п = ау (Еы + Ёф) = Еи(1+ se\ (6.
где
190
9 — относительная разность фаз между Еи и ?ф; ау —
единичный вектор, параллельный оси у; Ем — составляющая
поля рассеивателя, параллельная ау.
Измеренная величина ЭПР рассеивателя ап
определяется так:
ап = kEuE\ = ам (1 + 2scos 9 + s2),
(6.2)
где k — коэффициент пропорциональности; сгм —
истинное значение ЭПР рассеивателя.
Максимальная погрешность измерения ам
получается при ф=0, я. Подставляя эти значения в (6.2),
получаем
или
где
0>ш дб =
(6.3)
(6.4)
его, d6=101g(l+2scos<p+s2). (6.5)
График Go, определяющий в децибелах максимальную
погрешность измерения в зависимости от величины
фона, приведен на рис. 6.1. Из графика следует, например,
что для определения ЭПР с максимальной погрешностью
не более ± 1 дб уровень фона должен быть на 20 дб
ниже измеряемой величины ЭПР. В связи с тем, что фон
V)
1
I
I
Рис.
?00
100
50
О
го
40
60
80
90
So
as
=5
f+2S0+S02
-"
00**
4 -
-
._. _ -
\ ;
0,02 0,04 OJO 0.2S OS .
• 1 1 | 1 1 1 1 1 1 1 1 1 1 1 | 1 1 1 ) 1 1 1 | 1 1 1 | 1 1 1 j 1 1 1 1 1 1 1 1
1,0
о
-г,о
-6,0
-8,0
-10,0
А
-ьо -36 -32 -гв -г1* -го -16 -п -е -« о ев
6.1. Максимальная погрешность измерения ЭПР в зависимости
от уровня фона.
191
играет существенную роль в обеспечении точности
измерений ЭПР, при отладке измерительных установок
прежде всего необходимо принять все возможные меры
для максимального уменьшения уровня фона.
2. Погрешности из-за отличия падающей на рассеи-
ватель волны от плоской. Если поле падающей на рас-
сеиватель волны отличается от плоского, в измерении
диаграмм ЭПР рассеивателей возникают
систематические погрешности, которые не могут быть исключены
расчетным путем, так как их величина существенно за-
висит от формы рассеивателя. Можно лишь указать,
что при заданных вариациях амплитуды и фазы поля
погрешности будут максимальными у рассеивателей,
имеющих плоские участки (например, торец цилиндра)
и прямолинейные образующие (например, образующая
конуса или цилиндра). Базируясь на этом положении,
в гл. 3 были произведены оценки максимальных
погрешностей ЭПР ленты и цилиндра при падении на них
квазиплоских волн с различными вариациями амплитуды и
фазы. Наибольшие локальные погрешности вызывают
периодические вариации амплитуды и фазы поля
падающей волны, если период вариаций d меньше размера
рассеивателя I и больше длины волны. То же имеет
место при случайных вариациях амплитуды и фазы
поля, если радиус корреляции р меньше размера
рассеивателя. Периодические вариации поля свидетельствуют
о наличии паразитных рассеивателей в измерительной
установке.
Источником паразитных рассеяний являются области
зеркального отражения от земли в полевых
измерительных установках или стены в безэховых камерах, а
также края коллиматорного устройства и др. При
определении местоположения источников паразитных
рассеяний можно использовать формулы (3.23), (3.33), (3.35),
(3.43), (3.47), (3.55). При отладке измерительных
установок необходимо тщательно проанализировать
источники, вызывающие периодические вариации падающего
поля, и различными мерами уменьшить рассеяние. Это
можно осуществить применением высококачественных
радиопоглощающих материалов, подбором формы ди;ь
граммы приемо-передающей антенны, изменением коп
тура коллиматора и другими мерами. Можно считать,
что установка пригодна для измерений, если максимум
периодических вариаций амплитуды и фазы поля пл
192
дающей волны не превышает ±0,05 среднего уровня
этого поля.
Оценка максимальных погрешностей измерения ЭПР
при плавном изменении амплитуды и фазы поля падаю
щей волны может быть сделана с помощью табл. 3.1,
из которой, например, следует, что для того чтобы
ошибки в максимумах боковых лепестков не превышали 1 дб,
спад амплитуды поля к краям рассеивателя не должен
превышать 0,5 дб, а для того чтобы погрешности в
минимумах диаграммы ЭПР не превышали 2 дб,
погрешность фазы поля на краю рассеивателя не должна
превышать 10°. Как видно из приведенного примера,
требования к однородности поля падающей волны весьма
жесткие и при отладке измерительных установок для их
выполнения необходимо провести тщательные измерения
поля в объеме, занимаемом рассеивателем, по методике,
описанной в § 3.6, а затем оценить максимальные
погрешности в измерении ЭПР рассеивателя.
3. Методические погрешности измерений связаны
в основном с принятым методом измерений ЭПР.
Например, в установках с непрерывным излучением
компенсационного типа к таким ошибкам может привести
большой уровень фо-на. Ка<к следует из рис. 6.1, для
'получения максимальной погрешности ±1 дб уровень не-
скомпенсированного фона не более ± 1 дб должен быть
на 20 дб ниже минимально измеряемой величины ЭПР.
А это накладывает определенные требования к
энергетическому потенциалу установки и стабильности
частоты генератора (см. § 5.2).
В импульсных измерительных установках
методическая ошибка возникает при применении импульсов
малой длительности, сравнимой со временем
распространения волны вдоль максимального размера
рассеивателя. Эта погрешность может быть оценена путем
вычисления (методом краевых волн [В. 1]) поправки из-за
многократных отражений от неоднородностей
рассеивателя. Как правило, погрешность мала, если
длительность импульса удовлетворяет условию (6.6)
Т>31/С. (6.6)
4. Систематические инструментальные погрешности
возникают из-за неточности калибровки элементов
измерительных установок, например при калибровке при-
13—340 193
емников, фазовращателей, аттенюаторов и т. п. Методы
калибровки радиотехнических устройств хорошо
разработаны (см., например, [6.1]) и поэтому здесь не
приводятся. Как правило, эти погрешности при тщательном
выполнении калибровки лежат в пределах менее 0,5 дб.
На рис. 6.2 приведен график калибровки приемного
устройства измерительной установки RAT SCAT [5.7],
который подтверждает сказанное.
Рис. 6.2. Калибровочный
график подсистемы измерительной
установки RAT SCAT.
—— идеальная;
измеренная.
в ' П 50
Входной сигнал, дб
5. Динамические инструментальные погрешности
связаны с изменением параметров измерительных
установок с течением времени. При разработке измерительных
установок необходимо, чтобы динамические
погрешности не превышали заданного уровня за время
измерения. Характерной динамической погрешностью является
изменение уровня компенсации в установках с
непрерывным излучением. Для уменьшения этого вида
погрешностей необходимо применять в установках
компенсационного типа стабильные генераторы,
относительная нестабильность частоты которых за время
измерения не превышает величины, рассчитанной по
формуле (5.15). При отладке измерительных установок
компенсационного типа необходимо записать уровень
компенсации в течение некоторого времени, например
часа, и добиться того, чтобы за время измерения,
приблизительно 20 мин, уровень компенсации существенно
не изменился.
Примером динамической ошибки является также
изменение мощности генератора с течением времени. При
испытании измерительного комплекса RAT SCAT [5.7|
194
производилась запись уровня мощности генератора Ю-см
диапазона в течение 6 час, причем отсчет осуществлялся
через каждые 30 сек. Максимальное отклонение уровня
мощности за этот период составляло 0,5 дб.
Таким же испытаниям целесообразно подвергнуть
приемные устройства, фиксируя изменения
чувствительности в течение некоторого времени, а также
регистрирующие и другие устройства измерительных комплексов.
6. Случайные погрешности. Источником случайных
погрешностей являются, например, шумы приемного
устройства. При проектировании измерительных
установок необходимо, чтобы уровень шумов измерительных
приемников был существенно ниже уровня сигнала,
соответствующего минимальной измеряемой величине
ЭПР. Случайные погрешности возникают при изменении
температуры, влажности, давления и других
параметров внешней среды.
Случайные погрешности могут быть уменьшены
путем многократного измерения ЭПР одного и того же
рассеивателя, а оценка их величины может быть
произведена статистическими методами путем вычисления
дисперсии и доверительного интервала величины ЭПР
при данном числе измерений.
7. Погрешности эталонов рассеяния. Величина ЭПР
эталонных рассеивателей определяется обычно
теоретическим путем по известным размерам рассеивателя и
характеристикам материала, из которого он изготовлен.
Однако в связи с тем, что расчеты рассеивателей с
оценкой точности расчета выполнены лишь для небольшого
числа простых тел, например шара, ленты и др., при
использовании рассеивателей более сложной формы
следует принимать во внимание наличие неучтенной
систематической погрешности в расчете величины ЭПР.
Кроме того, систематическая погрешность возникает из-за
неточности определения размеров рассеивателя и
характеристик материала, из которого он изготовлен.
Рассмотрим, какие точности должны быть
обеспечены при изготовлении эталонных рассеивателей. Для
определения влияния погрешностей изготовления
рассеивателей на величину ЭПР найдем изменение последней
для простейших тел при малых изменениях их размеров.
Относительная погрешность ЭПР шара при г»Я может
быть определена по формуле а=пг2. Дифференцируя а
по г и относя полученные результаты к начальным раз-
13* 195
мерам, найдем, что относительная погрешность ба равна
(6.7)
Аналогично можно определить относительные
погрешности для длинного провода, цилиндра, диска и других
тел. Полученные результаты сведены в табл. 6.1.
Из табл. 6.1 следует, что относительная погрешность
любых тел зависит от относительной погрешности их
размеров и определяется по формуле
всг=я1&/, (6.8)
где /2 = 2, 3, 4. Например, для обеспечения относительной
погрешности ЭПР порядка бсг= 10~^ эталонного рассеи-
вателя размером 1=10% необходимо выдержать размеры
бцдб
г
0
2
-=* -< ^¦--д
W7 О
-г
Рис. 6.3. ЭПР шара с шероховатой поверхностью.
а) Я=10,5 см; б) А,=3,1 см, в) Я=1,3 см.
с относительной погрешностью б/ = (5-^2,5) 10~2Я. Для
длины волны Я = 3 см абсолютная погрешность размеров
эталона должна быть не более 1 мм. Из приведенного
примера видно, что точность изготовления эталонных
рассеивателей должна быть высокой.
196
Таблица 6.1
Зависимость относительной погрешности ЭПР от относительной погрешности размеров рассеивателей
Форма рассеивателя
Шар г > \
Длинный провод г <^ Л, / ^> А
Цилиндр (боковая поверхность) г ^> X,
1 > А.
Диск г ^> А.
Квадратная пластина, сторона которой
Формула для определения
ЭПР при г, 1у\
а = 2пг2
с = 2ka4:
Относительная погрешность
да = 5г + 25/, при / = г 5о = 35/
5а = 45г
§о = 45а
Для определения необходимой чистоты поверхности
при изготовлении моделей были выполнены
специальные теоретические и экспериментальные
исследования [6.2].
Расчеты и измерения показали, что если
неоднородность поверхности металлического шара меньше Х~2, то
погрешность ЭПР не больше 0,1 дб. На рис. 6.3
показаны изменения ЭПР шара при его вращении при
неоднородности (шероховатости) поверхности глубиной
0,7 мм периодом 3 мм. Для определения зависимости
погрешности диаграмм ЭПР от величины неоднород-
ностей (шероховатостей) поверхности эталонного рас-
сеивателя можно воспользоваться результатами,
полученными в гл. 3. Анализ рис. 3.18—3.20 позволяет
сделать вывод, что наибольшие погрешности диаграммы
ЭПР возникают в минимумах, наименьшие — в
максимумах лепестков. Для оценки среднеквадратичной
относительной погрешности диаграммы ЭПР можно
воспользоваться приближенной эмпирической формулой
где iAi/ — высота неоднородности (шероховатостей)
эталонного рассеивателя.
Для точного воспроизведения минимумов боковых
лепестков диаграмм ЭПР неоднородности не должны
превышать значения Я~3. Например, для измерений на
волне 1 = 3 см неровность поверхности не должна
превышать 30 мкм.
Наиболее часто для моделирования - применяются
сантиметровые волны. Масштабы моделей часто бывают
1 : 100 и даже меньше. С такими моделями получают
информацию для дециметрового и метрового диапазонов
волн. Для изучения на моделях рассеяния в диапазоне
сантиметровых волн применяют миллиметровые волны.
Наконец, в связи с развитием когерентных световых
(лазерных) генераторов стали применяться
когерентные световые и инфракрасные колебания для прямого
моделирования рассеивателей больших размеров
длиной в сотни и тысячи длин волн. Основной трудностью
при таком моделировании является изготовление
моделей. Разъяснение этих трудностей проведем на одном
примере. Предположим, что необходимо измерить диа-
19а
грамму ЭПР самолета размером 60 м для волны длиной
Х,= 1 см. Выберем для моделирования волну А,= 1 мкм.
Масштаб модели должен быть равен 1 : 10 000 и размер
модели должен быть равен 5 мм. Надо изготовить
модель такого размера, отражающую все существенные
подробности реального самолета, и отполировать ее так,
чтобы шероховатости поверхности не превышали 0,1 мкм
(0,1Л). Практически изготовление такой модели не
осуществимо. Кроме того, число лепестков диаграммы ЭПР
равно по порядку учетверенному числу длин волн,
укладывающихся на длине рассеивателя. В нашем случае,
как можно подсчитать, ширина лепестков оказывается
порядка 10 угл. сек, т. е. настолько малой, что
измерение их является сложной задачей, требующей создания
исключительно сложных механизмов вращения,
обеспечивающих равномерность очень медленного вращения
с точностью выше одной угловой секунды.
Этот пример показывает, что применение
когерентных (лазерных) колебаний в диапазоне световых и
инфракрасных волн (X до 10 мкм) для измерения
диаграмм ЭПР на моделях при соблюдении условия
масштабного моделирования встречает большие трудности.
Изменение температуры внешней среды приводит
к случайному изменению размеров рассеивателя, а
следовательно, и к изменению величины ЭПР. Эти ошибки
могут заметно проявиться в случае, когда эталонный и
измеряемый рассеиватели изготовлены из различных
материалов.
Наличие систематических погрешностей в величине
ЭПР эталонных рассеивателей, определенной
теоретическим путем, приводит к необходимости определения
ЭПР экспериментальным путем и необходимости
разработки методов их аттестации.
6.3. СУММИРОВАНИЕ ЧАСТНЫХ ПОГРЕШНОСТЕЙ
Суммирование частных погрешностей зависит от их
законов распределения. В большинстве случаев число
частных погрешностей велико, они имеют сравнимые и
независимые друг от друга величины. Для таких
условий можно считать, что погрешности распределены по
нормальному закону. Тогда суммирование постоянных
(систематических) погрешностей 0* производится алге-
199
браически с учетом знака [6.3]
8S = S 6*. (6.10)
Случайные погрешности суммируются так:
Суммарная относительная среднеквадратичная
погрешность as равна корню квадратному из суммы дисперсий для
независимых частных погрешностей. В некоторых
случаях, когда погрешности распределены по закону,
заметно отличающемуся от нормального, суммарная
относительная среднеквадратичная погрешность
вычисляется по формуле
(6.12)
i=\
где k — коэффициент, определяемый из таблиц,
приведенных в [6.3], для различных законов распределения.
6.4. ЭКСПЕРИМЕНТАЛЬНЫЕ МЕТОДЫ АТТЕСТАЦИИ
ЭТАЛОННЫХ РАССЕИВАТЕЛЕЙ
При аттестации эталонных рассеивателей
экспериментальным методом необходимо определить их
диаграммы ЭПР. При этом наибольшую трудность
представляет выявление систематических погрешностей в
измерениях. Если рассеиватель при измерениях вращается
так, что ось вращения остается неподвижной в
пространстве, многократные измерения диаграммы ЭПР не
приводят к ее уточнению. Для компенсации
систематических погрешностей необходимо смещать рассеиватель
относительно элементов измерительной установки и
опоры на расстояние, равное Я/4 и (К/2 [6.4, 6.5]. Если
измерения диаграммы ЭПР производятся в безэховой
камере, приемная антенна и приемник принимают
полный вектор рассеянного поля v, который можно
разложить на несколько составляющих:
ир — поле от рассеивателя;
уРз — поле двукратно рассеянное рассеивателем и
задней стенкой;
200
уРб — поле двукратно рассеянное рассеивателем и
боковыми стенками;
v3 — поле от задней стенки;
v§— поле, рассеянное боковыми стенками;
уар — поле, двукратно рассеянное антенной и
рассеивателем;
vK — поле, рассеянное краями антенны;
vK—поле, переотраженное более чем два раза
рассеивателем и стенками камеры.
При измерении определяют полное поле при
расположении рассеивателя в точке Л, а затем в точке В, на-
Рис. 6.4. Перемещение рассеивателя в безэховой камере:
а — перемещение рассеивателя на расстояние ЛВ = А,/4; б — перемещение
рассеивателя на расстояние AC=hJQ,.
ходящейся на оси камеры, но сдвинутой относительно
точки А на расстояние, равное Я/4 (рис. 6.4,а). При этом
фаза векторов оар, ^рз изменится на я и при сложении
векторов v (А) и v(B) эти составляющие исключаются.
Фаза вектора иРб изменится примерно на я/2. При
перемещении рассеивателя в точку С, находящуюся от А
на расстоянии К/2 по перпендикуляру к оси камеры
(рис. 6.4,6), фаза векторов оРб и Уб изменится на я и
при сложении векторов v (А) и v (С) эти составляющие
исключаются. Остальные составляющие при векторном
сложении уменьшаются.
Таким образом, при перемещении рассеивателя
относительно измерительной установки на Я/2 и Я/4 часть
паразитных рассеяний компенсируется, а другая часть
превращается в случайные погрешности и может быть
уменьшена при суммировании результатов
многократных измерений. Процесс измерения диаграммы ЭПР
можно автоматизировать, перемещая ось вращения рас-
14—340 201
сеивателя во время измерения по окружности радиуса
Х/4 и одновременно перемещая ее относительно
приемопередающей антенны за каждый оборот рассеивателя
на расстояние немного меньше А,/4 вдоль оси камеры
(рис. 6.5). Фиксируя результаты измерения ЭПР
рассеивателя на магнитную ленту и производя
статистическую обработку на ЭВМ, можно получить существенное
л
А
\J
1_с<|<м
t
Рис. 6.5. Траектория перемещения оси вращения рассеивателя.
уточнение результатов измерений. При обработке
результатов определяют среднюю диаграмму из
некоторого числа измерений, которая будет существенно точнее
диаграммы каждого индивидуального измерения:
основные систематические погрешности измерения
оказываются скомпенсированными, а случайные —
уменьшаются в Уп раз, где п — число измерений. Дисперсия
будет характеризовать точность измерений. Особо
точные измерения при аттестации эталонных рассеивателей
90у>°
Рис. 6.6. Экспериментальная диаграмма ЭПР цилиндра:
диаграмма, рассчитанная методом краевых волн; —X — X— экспери
ментальные точки.
202
должны производиться многократно при изменении
радиуса вращения оси рассеивателя и высоты его подвеса.
Определяя среднюю диаграмму ЭПР из серии
измерений, можно получить ее уточнение, мерой которого
является дисперсия. При выполнении измерений
необходимо, чтобы опора или подвеска модели не вносила
погрешностей в результате измерений; для этого
величина ЭПР опоры должна быть на 2—3 порядка меньше
минимально измеряемой величины ЭПР. Такому
условию удовлетворяют подвески из капроновых нитей.
На рис. 6.6 приведена диаграмма ЭПР цилиндра,
измеренная по указанной методике, которая
сравнивается с диаграммой, рассчитанной теоретически методом
краевых волн. Из рисунка видно, что теоретическая
диаграмма и экспериментальные точки нигде не отличаются
больше чем на 3 дб.
Для аттестации эталонного рассеивателя
целесообразно произвести измерение его диаграммы ЭПР на
различных установках и усреднить полученные
результаты. В связи с тем, ч1ю систематические погрешности
различных установок некоррелированы, при усреднении
результатов можно считать, что имеются лишь
случайные погрешности. Поэтому многократные измерения на
различных установках приводят к уточнению
диаграммы ЭПР эталонного рассеивателя.
6.5. ИСПЫТАНИЯ ИЗМЕРИТЕЛЬНЫХ УСТАНОВОК
Перед каждым измерением или перед серией
однотипных измерений на полевых измерительных
установках или на установках, расположенных в безэховых
камерах целесообразно выполнить следующие проверки
и испытания.
1. Необходимо удостовериться, что измерения
производятся в дальней зоне, для чего необходимо, чтобы
расстояние между рассеивателем с максимальным
размером / и облучающей антенной с размером L
удовлетворяло условию
2. Необходимо исследовать распределение
амплитуды и фазы поля падающей волны в рабочем объеме,
измерительной установки. Результат можно считать удов-
14* 203
летворительным, если вариации амплитуды поля в
рабочем объеме не превышают 0,5 дб, а вариации фазы— 10°.
3. Целесообразно измерить отражение от опоры рас-
сеивателя. Эквивалентная ЭПР опоры должна быть на
50 дб меньше ЭПР измеряемого рассеивателя.
4. Для проверки поля в рабочем объеме на опору
устанавливаются сферы различных диаметров,
эксцентрично относительно оси вращения. При вращении
сферы вариации их ЭПР не должны превышать 0,5 дб.
5. Измеряется ЭПР сферы при изменении
направления линейной поляризации. Линейная поляризация
изменяется на 360°, так как ЭПР сферы не зависит от
поляризации. Результат может считаться
удовлетворительным, если ЭПР изменяется при вращении
поляризации не более чем на 0,5 дб.
6. Измеряется-диаграмма ЭПР эталонного цилиндра.
Размеры цилиндра выбираются так, чтобы его торец
был соизмерим с площадью плоской части измеряемого
рассеивателя, а образующая равна максимальному
размеру рассеивателя. Результат считается
удовлетворительным, если в динамическом диапазоне 40 дб
измеренная и эталонная диаграммы цилиндра совпадают
с точностью не хуже ±2 дб.
7. Производится измерение рассеивателя. Для
устранения случайных погрешностей измерения повторяются
3—10 раз в зависимости от необходимой точности. Для
устранения систематических погрешностей измерения
рассеивателя производятся в трех точках рабочего
объема, находящихся друг от друга на расстоянии Я/4.
8. Результаты индивидуальных измерений
обрабатываются статистически.
6.6. ЭТАЛОННЫЕ РАССЕИВАТЕЛИ ДЛЯ КАЛИБРОВКИ
РАДИОЛОКАЦИОННЫХ СТАНЦИЙ
Для калибровки радиолокационных станций и для определения
вероятности обнаружения космических целей радиолокационными
станциями в США с 1964 г. запускаются искусственные спутники
Земли, являющиеся эталонными рассеивателями (6.6, 6.7]. Удобными
эталонными рассеивателями являются сферы, ЭПР которых могут
быть вычислены точно (см. приложение 3). В приложении 4 приве
дены приближенные формулы для расчета диаграмм ЭПР тел
простой формы, полученные методом Гюйгенса—Кирхгофа.
Две эталонные сферы были запущены на полярные орбиты
6 октября 1964 г. с мыса Аргуэлльо, штат Калифорния. Эти сферы
204
изготавливались так. Сначала выдавливались полусферы из
листового алюминия толщиной 0,8 мм, которые затем сваривались,
подвергались абразивной обработке, полировке и глянцеванию.
Диаметр каждой сферы составлял 355±0,8 мм, величина ЭПР^ОД м2.
Вес сферы был выбран различным: одна сфера весом 1 кг была
отнесена к разряду легких; другая — весом 10 кг была отнесена
к разряду тяжелых. Третья сфера была запущена 13 августа 1965 г.
с того же полигона. Эта сфера была окрашена специальной белой
краской так, что ее поглощательная способность составляла 15%,
а отражательная —- соответственно 85%.
31 мая 1967 г. с Западного полигона (мыс Аргуэлльо, шт.
Калифорния) были запущены еще две эталонные сферы,
изготовленные по аналогичной технологии, но имеющие больший диаметр: одна
из них имела диаметр 406 мм и соответственно ЭПР~0,13 м2,
другая— диаметр 508 мм и ЭПР — 0,203 м2. Основные характеристики
эталонных сфер приведены в табл. 6.2.
Таблица 6.2
Основные параметры эталонных сфер для калибровки РЛС
Основные характеристики
ЭПР, м2
Диаметр, м
Масса, кг
Номер по каталогу
Период обращения, мин
Угол наклона плоскости
орбиты, град
Высота в перигее, км
Высота в апогее, км
Эксцентриситет
Изменение периода
обращения за сутки, мин
1
0,0987
0,355
0,98
900
106,56
89,9
1052,0
1076,8
0,00167
0,00003
Порядковы
2
0,0987
0,355
9,8
902
106,60
89,9
1055,9
1076,5
0,00138
5 номер эталонных сфер
3
0,0987
0,355
3,5
1520
108,12
90,0
1082,1
1191,6
0,00727
Не поддается
измерению из-за
малости
4
0,130
0,406
1,55
2909
103,37
70,0
910,22
921,32
0,00077
0,00015
5
0,230
0,508
2,48
2826
103,41
70,0
911,67
930,66
0,0013
0,00014
Эталонная сфера обладает тем преимуществом для калибровки
РЛС, что в силу симметрии величина ЭПР у нее постоянна. Однако
для калибровки РЛС метрового и дециметрового диапазонов волн
величина ЭПР запущенных сферических рассеивателей мала,
поэтому чувствительность некоторых РЛС недостаточна для обнаружения
этих сфер. Например, при наибольшем приближении к станции
(1000 км) и частоте 1 Ггц потери на трассе составляют около
295 дб. Поэтому для многих применений требуются эталонные рас-
сеиватели с большой величиной ЭПР.
Фирма Mitre Corpopation (США) разработала и
сконструировала пассивный проводящий искусственный спутник Земли
цилиндрической формы {6.8], который может быть использован для
калибровки наземных радиолокационных станций, предназначенных для
205
наблюдения за космическими объектами и для оценки ориентации
радиолокационных целей.
В приложении 5 приведены диаграммы ЭПР цилиндров
конечной длины, рассчитанные методом краевых волн (В. 1].
Для измерения ЭПР цели жел-ательно с большой точностью
знать характеристики сигнала, излучаемого радиолокационной
станцией, т. е. поляризацию и модуляционные характеристики
зондирующего сигнала. Хотя эти величины могут быть измерены и
измеряются в наземных условиях, большие размеры антенных устройств
и большая длительность зондирующих сигналов часто делают такие
измерения затруднительными, что может привести к искажению
результатов измерений. Поэтому желательно использовать для этих
измерений удаленную точечную цель с большой и точно известной
величиной ЭПР. Эта цель не должна также вызывать
деполяризацию рассеянного в обратном направлении сигнала, который должен
быть точной ослабленной копией зондирующего сигнала. По данным
о деполяризации отраженных сигналов определяются ошибки в
поляризации зондирующего сигнала, а по уровню боковых лепестков
автокорреляционной функции принимаемых сигналов можно также
обнаружить ошибки в модуляции зондирующего сигнала. Так как
эти ошибки должны быть малыми, то для их измерения
необходимо использовать эталонный рассеиватель с большой величиной ЭПР.
В качестве эталонного рассеивателя можно использовать
прямой круговой цилиндр. При боковом (перпендикулярно оси)
облучении прямого кругового цилиндра диаметром >1,2 м и длиной 2,4 м
он ведет себя в дециметровом диапазоне волн почти как точечная
цель с эффективной площадью рассеяния около 100 ж2. Если такой
цилиндр вывести на околоземную орбиту и заставить его
кувыркаться, то дважды за каждый период кувыркания его ось будет
перпендикулярна направлению на наземную станцию. Дальнейшие
измерения при ориентации цилиндра вблизи от этого направления могут
позволить уточнить калибровку радиолокационной станции.
Так как для успешного применения тела цилиндрической формы
при калибровке необходимо придать ему кувыркательное движение,
то следует внимательно произвести механический расчет цели. Это
необходимо для гарантии того, что такое движение не прекратится
слишком быстро и что спутник останется на орбите в течение
сравнительно длительного времени. Выполнение этих требовании
приводит к необходимости изготовления цилиндра из диэлектрика,
покрытого тонким металлическим слоем, причем цилиндр должен
иметь определенный вес и моменты инерции, а также должен быть
выведен на орбиту с определенной высотой над землей.
Эталонный спутник предназначен для решения трех основных
калибровочных задач, абсолютной калибровки радиолокационных
станций по величине ЭПР, калибровки модуляции в станциях с
короткими широкополосными зондирующими импульсами и калибровки
поляризационной матрицы рассеяния в станциях, излучающих
сигналы с различной поляризацией.
1. Амплитуда электромагнитной волны, рассеянной целью,
пропорциональна размерам рассеивающего элемента. Ошибки в
определении амплитуды рассеянного сигнала приводят к ошибке в
оценке размеров спутника. Так, например, ЭПР гладкой выпуклой цели
больших размеров в приближении геометрической оптики
определяются соотношением
а = пг\Г2, (6.13)
206
где Г\ и г2 — главные радиусы кривизны поверхности цели. Ошибки
в определении 6 будут вызывать ошибки в оценке гауссовой
кривизны объекта.
2. Радиолокационные станции с короткими зондирующими
импульсами представляют особый интерес, поскольку короткие
импульсы могут быть использованы для выделения или разрешения
блестящих точек сложной цели. Возможности укорочения импульса при
конечной импульсной мощности передатчика ограничиваются
величиной энергии, заключенной в коротком импульсе. Другой метод,
который позволяет реализовать «короткие импульсы» при
значительно большей энергии в каждом импульсе, состоит в
использовании широкополосных систем со сжатием импульсов.
В системах со сжатием импульса обычно применяется сложная
фазовая или амплитудная модуляция, которая должна быть
тщательно рассчитана для того, чтобы обеспечить низкий уровень
боковых лепестков автокорреляционной функции сигнала. Хотя на
низком уровне мощности требуемый сигнал может быть сформирован
с высокой точностью, при прохождении сигнала через каскады
радиолокационного передатчика структура сигнала будет несколько
нарушаться. Эти нарушения будут вызывать повышение уровня
боковых лепестков, что приведет к ухудшению разрешающей
способности радиолокационной станции и обратное рассеяние точечной
целью не будет давать идеального отображения зондирующего
сигнала. Принятый в этих условиях сигнал может быть использован
для определения фактического закона модуляции зондирующего
сигнала. Хотя цилиндр при облучении в направлении,
перпендикулярном его оси, будет вносить в рассеянный сигнал некоторую
передаточную функцию, зависящую от частоты, вид этой функции
известен и се воздействие на сигнал может быть скомпенсировано.
Более важно в данном случае то, что цилиндр имеет преимущество,
заключающееся в большой величине его ЭПР.
3. Третий вид испытания (поляризационная матрица рассеяния)
важен для радиолокационных станций, которые попеременно
излучают сигналы с ортогональными поляризациями и измеряют
составляющие принимаемого сигнала на обоих ортогональных
поляризациях каждого зондирующего сигнала. Матрица рассеяния состоит
из четырех комплексных элементов:
S") (6.14)
где первая цифра индекса обозначает поляризацию принимаемого
сигнала, а вторая — поляризацию зондирующего сигнала. При
использовании цели с известной матрицей рассеяния S можно
определить ошибки в измеряемой матрице рассеяния 5 этой цели
Существуют по крайней мере два способа, при помощи которых
можно попытаться уменьшить ошибки измерения матрицы
рассеяния целей. Первый из них состоит в том, что необходимо
отрегулировать радиолокационную станцию так, чтобы разница между
матрицами S и S была достаточно малой; вторая заключается в
определении соотношения между матрицами S n S и использовании
его для соответствующего преобразования всех измеренных матриц
рассеяния.
ЭПР прямого кругового цилиндра конечной длины в отличие
207
от сферы определяется двумя геометрическими параметрами,
длиной и радиусом основания. Кроме того, она является функцией
частоты. Для сферического рассеивателя имеет место независимость
ЭПР от поляризации падающего излучения. Дл,я цилиндра
эффективные площади рассеяния для горизонтальной внн и
вертикальной Gvv поляризации одинаковы; в этом случае элементы главной
диагонали и поляризационной матрицы рассеяния при круговой
поляризации не равны нулю. Для тел вращения имеются только два
различных значения поляризационной матрицы при круговой
поляризации, так как диагональные элементы матрицы либо одинаковы,
либо равны модулю:
. V (6Л5)
где
и 0 — угол прецессии, характеризующий ориентацию оси вращения
тела в плоскости, перпендикулярной к линии визирования.
Для сферы Ohh = Ow и фян = фту, так что элементы главной
диагонали матрицы рассеяния равны нулю, а остальные равны.
Для определения влияния величины радиуса цилиндра на
характеристики поляризационной матрицы рассеяния была составлена
программа для точного вычисления на ЭВМ характеристик
рассеяния. Поскольку для сферы деполяризация равна нулю, то в качестве
критерия для выбора размеров цилиндра было выбрано значение
деполяризации. Исходя из этого критерия, радиус цилиндра выбран
равным ЗХ, что соответствует для рассматриваемого участка
дециметрового диапазона волн г=1,2 м.
Если считать, что в этом диапазоне минимальная величина
ЭПР, необходимая для калибровки радиолокационных станций,
равна 100 ж2, то при выбранном радиусе цилиндра его длина должна
быть равна 2,4 м. Краевое рассеяние на основании цилиндра
вызывает появление значительных сигналов с перекрестной поляризацией,
что делает невозможным использование результатов расчета
величины деполяризации, выполненных для цилиндров бесконечной
длины. Для сведения к минимуму влияния краевого рассеяния
необходимо, чтобы на концах цилиндра были сделаны плавные
переходы. Первоначально эти переходы были сделаны в виде полусфер.
В дальнейшем, для того чтобы сохранить величину эффективной
площади рассеяния цилиндра при облучении в направлении,
перпендикулярном его оси, полусферы были заменены сфероидами с
отношением радиусов 2:1. Это ^привело к тому, что общая длина
объекта уменьшилась на 0,6 м и составила 3 м вместо 3,6 м.
Измерения характеристик рассеяния эталонного спутника были
проведены с помощью аппаратуры радиолокационного полигона
Fort Worth фи'рмы General Dynamics Corporation.
Измерения при длинных импульсах были выполнены в
дециметровом и сантиметровом диапазонах волн (/=1,28; 2,85 и 5,65 Ггц)
при наклонной (под углом 45°) 'поляризации.
В табл. 6.3 приведены результаты сравнения экспериментальных
и теоретических данных. Приводится число точек, когда разность
экспериментальных и теоретических данных превышает заданную
величину.
208
Сравнение экспериментальных и теоретических данных
Таблица 6.3
Разность,
дб
Угол прецессии, град
0
60
120 | 180
240 | 300
Разность,
град
Угол прецессии, град
0 | 60
120
180
240
300
±0,5
±1,0
±1,5
±2,0
1701
607
242
109
1134
247
ПО
54
757
184
68
36
3365
2769
1661
653
Ча
1620
140
17
14
сто та
3527
3235
1718
175
1,28 Ггц
±10 2345
±15
±30
±45
1537
146
106
1888
616
75
60
2855
2189
869
270
849
240
58
58
2584
652
120
114
±0,5
±1,0 1
±1,5
±2,0
3052
1045
573
316
2543
946
583
364
3051
1174
483
227
1969
920
512
277
Частота
2454*)
1571*)
1038*)
2788*)
2876
1003
517
308
2,85 Г
±10
±15
±30
±45
гц
859
444
119
81
871
412
126
94
3532
3435
1270
274
1618
970
196
127
3387*)
3301*)
2950*)
2678*)
*) Данные для азимута 358° (всего 3580 точек).
1717
211
82
81
2488
1729
388
162
±0,5
±1,0
±1,5
±2,0
1296
425
193
104
2094
1213
720
482
1651
565
263
128
2236
932
551
352
Чг
1354
667
438
305
i с т о та
3055
2795
2644
2479
5,65 Ггц
±10
±15
±30
±45
3487
3367
1782
609
2783
2318
1182
683
1368
642
150
109
2694
2164
642
290
2443
2027
1202
746
2813
2452
1675
1192
Таблица 6.4
Средние значения и дисперсия ЭПР
Поляризация приема и передачи
Среднее значение
ЭПР, дб
Дисперсия ЭПР, дб
Частота 1.
Горизонтальна я—горизон-
тальная (НИ)
Вертикальная—ве ртикаль-
ная (VV)
Перекрестная (VH)
Наклонная
45°—наклонная 45° (я/4, те/4)
Ггц
23,12
23,58
—8,91
23,75
Горизонтальная—горизонтальная (НИ)
Вертикальная—вертикальная (VV)
Перекрестная (VH)
Наклонная 45°—наклонная
45° (tl/4, л/4)
Частота 2,85 Гг ц
26,00
25,91
—7,54
26,34
Частота 5,
Горизонт
альная—горизонтальная (НИ)
Вертикальная—вертикальная (VV)
Перекрестная (VH)
Наклонная 45°—наклонная
45° (те/4, те/4)
56 Ггц
27,59
27,53
—5,45
27,61
0,52
0,40
2,49
0,50
0,29
0,42
3,28
0,27
0,19
0,25
10,18
0,22
В табл. 6.4 приведены средние значения и дисперсии ЭПР обьек-
та при направлении облучения, перпендикулярном к его оси, на трех
частотах в указанных выше диапазонах для четырех видов
поляризации: горизонтальной (##), вертикальной (W), наклонной под
углом 45° (я/4, я/4) и (Перекрестной (VH). Каждая цифра в
таблице базируется на результатах 12 измерений.
В табл. 6.5 приведены значения элементов поляризационной
матрицы рассеяния цели в дециметровом диапазоне волн (/ =
= 1,28 Ггц) для основного лепестка диаграммы рассеяния через
интервалы в 0,1° по азимуту (6.8].
В приложении 6 приведены экспериментальные диаграммы ЭПР
сложных рассеивателей.
Условия космического пространства предъявляют определенные
требования к проектированию искусственных спутников Земли.
Если орбита недостаточно удалена от земли, то земная атмосфера
разрушит спутник за непродолжительное время. Переход иа более
высокие орбиты приведет к уменьшению уровня принимаемого сиг-
210
Таблица 6.5
Элементы поляризационной матрицы рассеяния
Угол относительно
перпендикуляра
к оси цилиндра,
град
0,0
0,1
0,2
0,3
0,4
0,5
0,Ь
0,7
0,8
0,9
1,0
1,1
1,2
1,3
1,4
1,5
1,6
1,7
1,8
1,9
2,0
2,1
2,2
2,3
2,4
2,5
2,6
2,7
2,8
2,9
3,0
°нн
22,5
22,4
22,3
22,3
22,1
22,0
21,6
21,4
21,1
20,7
20,5
20,2
19,8
18,8
18,5
17,6
16,6
15,9
15,1
14,0
12,7
10,8
9,6
7,3
5,8
3,9
1,9
0,0
0,1
2,4
4,2
фнн
326
324
324
324
322
322
322
321
320
320
320
319
318
317
316
314
312
311
310
308
305
302
298
292
286
273
260
247
226
185
173
avv
23,6
23,5
23,4
23,4
23,3
23,0
23,0
22,6
22,2
22,0
21,8
21,1
20,8
19,6
19/0
18,2
17,4
16,6
15,8
14,8
13,0
11,6
10,1
8,8
7,8
5,8
4,1
2,3
2,4
3,8
4,9
ФуУ
327
327
327
325
324
322
321
323
324
324
323
320
317
314
314
314
314
314
309
303
296
291
289
286
284
276
261
236
216
177
171
нала и требует применения спутника с большими размерами.
Предельные возможности техники и ограниченное пространство,
пригодное для размещения спутника на борту ракеты-носителя,
определяют верхнюю границу для размеров испытательного спутника
[6.9].
Если в качестве испытательной цели будет использоваться
цилиндр, то ему должно быть задано кувыркательное движение так,
что его продольная ось будет ориентирована перпендикулярно
линии визирования радиолокационной станции по несколько раз
в пределах одного пролета (одного оборота вокруг Земли).
Кувыркающийся металлический цилиндр, находящийся в магнитном поле
Земли, будет вести себя как электрический мотор и по закону Ленца
211
наведенные в нем токи будут стремиться уменьшить скорость
кувыркания. Кроме того, необходимо выбрать соответствующие
моменты инерции такого спутника для обеспечения необходимого ку-
выркательиого движения цилиндра.
Лобовое сопротивление атмосферы [6.9], действующее на
вращающееся тело, вызывает вековые изменения параметров вращения.
Исходя из уравнений Эйлера и имея в виду, что цилиндрический
испытательный спутник представляет собой тело вращения,
имеющее только два независимых момента инерции, можно для
конического угла прецессии |3 с начальным значением (Зо получить
следующее вражение:
ctg р = ctg рое~~ р. (6.16)
Изменение этого угла зависит от знака постоянной времени в
приведенном выражении. Если ^я^О, то ctg р (^) —¦ 0 и р—» 0, причем
значение р = 0 соответствует „чистому* вращению, а значение р =
= п/2 соответствует кувырканию без вращения. Постоянная времени
Тр связана со значениями постоянных времени для „чистого"
кувыркания xQ и для „чистого" вращения тф соотношением
1 1 1
"V=T~~V (6Л7)
Величины Тд и и определяются из выражений
где gi и gz — функции геометрических параметров спутника и
орбиты; /i и /з — поперечный и продольный моменты инерции
цилиндрического спутника соответственно. Учитывая требование, чтобы
Тр ^0, и используя приближенные выражения для gi и gz, можно
определить граничное условие, накладываемое на отношение
моментов инерции, которое имеет вид hlh^b. Влияние вихревых токов
на кувыркающийся цилиндр, иначе говоря на его тонкую
металлическую оболочку, наилучшим образом может быть
охарактеризовано постоянной времени затухания режима кувыркания:
/i//s>5, Xo = kI/hH2, (6.19)
где / — момент инерции цилиндра относительно оси кувыркания; h—
толщина металлической оболочки; Н — напряженность магнитного
поля; k — постоянный коэффициент, зависящий от геометрических
параметров.
Магнитное поле Земли по мере увеличения высоты уменьшается,
поэтому желательно вывести спутник на возможно более высокую
орбиту. Уменьшение толщины металлического слоя само по себе не
приводит к увеличению постоянной времени, поскольку момент
инерции / при малых h изменяется почти пропорционально h.
Расчет показывает, что полое тело с одной оболочкой практически
любой толщины при высоте орбиты около 830 км имеет постоянную
времени затухания кувыркания, равную 1,3 недели. Введение
второй внутренней оболочки, изготовленной из диэлектрика, например
из майлара, вызовет возрастание момента инерции То, так как //
может быть мало, а / тем не менее велико (6.8].
Оценки показывают, что скорость кувыркания будет умень
шаться до 1/20 от своего первоначального значения за время, рав-
212
ное утроенной величине постоянной времени. Первоначальное
значение скорости кувыркания выбирается так, чтобы за время
пятилетнего срока службы спутника период кувыркания не превысил
10 мин. Для этого следует использовать двухоболочечную
конструкцию спутника, у которого внешняя металлическая оболочка имеет
толщину 0,002 см, а внутренняя пластмассовая 0,5 см. Оболочка
изготовлена из материала с удельным весом 1,5 г/см3. Постоянная
времени кувыркания цилиндра такой конструкции равна 3,5 годам.
Вес цилиндрического спутника равен приблизительно 90 кг.
Описанная конструкция удовлетворяет рассмотренным выше
аэродинамическим требованиям к стабильности режима кувыркания.
Срок службы орбитального объекта зависит от геометрических
параметров орбиты, веса и формы спутника и может быть
определен расчетным путем. Зная величину площади поперечного сечения
спутника в направлении его движения по орбите и имея в виду, что
вес спутника равен 90 кг, а высота орбиты 830 км, получаем, что
для спутника цилиндрической формы срок службы на орбите
равен 2160 дням [6.8].
Литература
6.1. '«Проверка |радиоизмерителыных приборов». Сборник
инструкций, издание официальное. Стандартгиз, 1961.
6.2. Hiaht R. Е., Senior Т. В., We s ton V. Н. A study of
surface roughness and an effect on the backscattering cross section
of spheres. Pros of «the IRE, (1960, v. 48, № 12.
6.3. P а б и iH о !в и ч. Методы суммирования частных
погрешностей. «Вопросы (радиоэлектроники», сер. VI, 1961, вьш. 4.
6.4. Халберштейн, Фрич. Исключение мешающих
отражений от -стен безэховых камер методом сдвига на А,/4 и Х/2. ТИИЭР,
1964, т. 52, № 112
6 5. Фрич, X а р т. Но'вый (метод измерения малых эффективных
отражающих поверхностей с помощью цифрового вычитания
векторов поля ТИИЭР, 1964, т. 52, № 5.
6 6. 3 и р м, И с т о н, К а ч е к, Р о ъ и н с к и. Калибровочные
сферы 'научно-исследовательской лаборатории BiMC. ТИИЭР, 1966, т. 54,
№ 3
6 7. 3 и р м Два калибровочных спутника сферической формы.
ТИИЭР, 1968, т. 56, № 9
68 Kaplan L J,Ormsby I. F. A., Fowle E. N..
Johnson К R, (Bates R. H Т., В i ckel S. H. Radar oolibration test
satellite UEEE Trans , 1969, AEE-5, E№ 4.
6.9. Johnson K. R. Effect of dissipative aero-dynamic torgue
on satellite rotation, J. Spacecraft and Rokets, 1968, v. 5, № 4.
Заключение
Техника измерения характеристик рассеяния
радиолокационных целей находится на достаточно высоком
уровне.
Установлены основные величины, характеризующие
рассеяние при измерении на монохроматических и
квазимонохроматических волнах: эффективная площадь
рассеяния, элементы матрицы рассеяния, поляризацион1-
ные характеристики и др. Можно считать
установившимися такие параметры измерительных установок, как
чувствительность (минимальная измеряемая величина
ЭПР), динамический диапазон измеряемых ЭПР,
максимальный размер измеряемых рассеивателей и т. п.
Для измерения радиолокационных характеристик
созданы измерительные комплексы, обеспечивающие
измерение основных характеристик различных
радиолокационных целей в широком диапазоне частот. Однако
оценка погрешностей измерений до сих пор
производится относительно редко, что не позволяет сравнивать
экспериментальные результаты и оценивать их
достоверность. Важной задачей дальнейшего развития техники
измерений является разработка методики анализа и
оценки погрешностей измерений и улучшение точности
измерений.
Существенным шагом в улучшении точности
измерений является разработка измерительных комплексов
в безэховых камерах. Уже в настоящее время большое
количество точных измерений выполняется в безэховых
камерах. Успехи в разработке радиопоглощающих
материалов и конструкций безэховых камер позволяют
рассчитывать на то, что постепенно большинство
измерений будет выполняться в таких камерах.
Осуществление камер с безэховосТью порядка —60-;—75 дб [4.2]
не является проблемой. Дальнейшее развитие
конструкций безэховых камер должно предусматривать
уменьшение их стоимости и увеличение размеров.
214
Из различных типов измерительных установок
наиболее перспективными являются импульсные установки.
С помощью этих установок и применения стробирова-
ния осуществляется подавление помех от паразитных рас-
сеивателей из-за возможности селекции по расстоянию.
Кроме того, они позволяют с помощью черезимпульсной
работы проводить практически одновременно измерения
на нескольких частотах и поляризациях. Такое
уплотнение времени значительно увеличивает
производительность установок и увеличивает информативность
получаемых результатов измерений. Применение
импульсных установок с очень короткими импульсами позволяет
выявить рассеяния от отдельных элементов цели,
интенсивно рассеивающих волны, и наблюдать изменение
рассеяния при изменении формы соответствующих
элементов рассеивателя. Такие установки в. сочетании
с остронаправленными антеннами удобны также для
исследования безэховых камер.
Важной задачей дальнейшего развития техники
измерений является ускорение измерений и обработки их
результатов. Увеличение объема и связанное с этим
ускорение процесса измерений возможно только при
широком применении методов моделирования.
Электродинамическое моделирование будет и в дальнейшем
находить широкое применение, особенно в сочетании
с обработкой результатов измерений на ЭВМ. По
мнению зарубежных авторов ограничением здесь является
необходимость построчного измерения двумерных
диаграмм рассеяния сложных радиолокационных целей
(типа построения телевизионного изображения). В связи
с этим перспективным является применение для
измерения диаграмм рассеяния когерентных световых волн
(лазеров). Измерительные установки с применением
лазеров 'позволяют (быстро измерить и зафиксировать
двумерные картографические диаграммы рассеяния, а
оптические методы обработки позволяют получить
необходимые величины из двумерных диаграмм рассеяния.
Приложение 1
К РАСЧЕТУ ДИАГРАММ ЭПР ЛЕНТЫ ПРИ ПАДЕНИИ НА НЕЕ ВОЛНЫ СО СЛУЧАЙНЫМ
РАСПРЕДЕЛЕНИЕМ ФАЗЫ [П. 1]
Значения интеграла /р (с, v0J v0)
Таблица 1
с
0,05
0,2
0,5
1
2
3
4
5
6
0
0,175
0,669
1,522
2,546
3,446
3,730
3,840
3,895
3,927
0,5
0,175
0,667
1,503
2,451
3,223
3,455
3,549
3,593
3,619
1
0,174
0,663
1,455
2,184
2,628
2,717
2,778
2,797
2,808
2
0,174
0,664
1,236
1,380
1,097
0,968
0,911
0,857
0,848
3
0,174
0,615
0,956
0,659
0,238
0,102
0,077
0,055
0,037
4
0,173
0,576
0,671
0,269
0,121
0,124
0,130
0,132
0,135
5
0,172
0,529
0,431
0,123
0,113
0,130
0,135
0,139
0,140
6
0,171
0,478
0,258
0,070
0,046
0,029
0,021
0,017
0,015
7
0,170
0,423
0,147
0,047
0,036
0,034
0,034
0,034
0,035
8
0,168
0,368
0,084
0,035
0,043
0,056
0,055
0,057
0,058
9
0,165
0,314
0,049
0,027
0,020
0,016
0,013
0,011
0,011
10
0,167
0,264
0,032
0,021
0,016
0,014
0,013
0,013
0,012
Приложение 2
К РАСЧЕТУ БЕЗЭХОВЫХ КАМЕР [4.5]
О . -/О -20 -30 -W -50 -60 Р,дб
Рис. П2.1.
Приложение 3
ЗАВИСИМОСТЬ ЭПР МЕТАЛЛИЧЕСКОГО ШАРА ОТ r/Х [П.2]
i 96
0,2
1
А
/\к
/И
1
Ч/
г»
Л
J
Л
Г
Ч 0,5
/
/
/
Су
\
1
Г
г
Л
кг
Рис. П3.1а. Зависимость ЭПР ме- Рис. П3.16. Зависимость приведен-
таллического шара от г/к: ной ЭПР металлического шара
г — радиус шара; А, — длина волны. ОТ ш\
г — радиус шара; k=2TCjK — волновое
число.
15—340 217
Приложение 4
ПРИБЛИЖЕННЫЕ ФОРМУЛЫ ДЛЯ РАСЧЕТА ДИАГРАММ
ЭПР МЕТАЛЛИЧЕСКИХ ТЕЛ ПРОСТОЙ ФОРМЫ
(ФОРМУЛЫ ПОЛУЧЕНЫ МЕТОДОМ
ГЮЙГЕНСА —КИРХГОФА) [П.З, 5.4]
Таблица 1
Расчетные формулы
Форма
Размеры
Расчетная формула
Примечание
Шар
о = -гсЛ2,
__ 144тсМ6
При X < А,
При X > А
Полуволно-
вый
вибратор
Эллипсоид
Цилиндр
Эллиптический
цилиндр
Конус
Я/2
а = 0,86Х
При
перпендикулярном
падении волны
+ С2 sin2 9 sin29)2
Г sin (kL cos 0) 1
П9 [ kL cos 0 J
a = kAL*
При 0= -?-
kB*A*L*sln 0
sin (kL cos 0) "I2
kL cos 0
a = icr2 tg2 a,
sin
kh
cos 0
tg a"
При падении
волны с
вершины
При 0<65°
tg a
218
Продолжение табл. 1
Форма
Размеры
Расчетная формула
Примечание
Прямоугольная
пластина
Ромбическая пласти-
« на
Эллиптическая
пластина
Плоский
диск
15*
Г kab .
[Уте
sin (ka sin 8 cos cp)1
&a sin 8 cos ф J
1 sin (&frcos 8) ]2
X [ kbcosB ) '
sin (^6 cos 8) "I 2
kb cos 8
^~ Л (&i sin 8cos
+flicos9]a
+ at cos 8
sin ife (^sin 8 cos cp —
k (friSin 8 cos ф —
^ ~~q* cos 8> I2
=h
2 8a 2+
+sina8cos:
g^ I2
(2^acos8) 12
^a cos 8 J '
При ф= —
При 0=90°
219
Продолжение табл. 1
Форма
Размеры
Расчетная формула
Примечание
Решетка
из
пластин
kab sin
? cos 8)
у ~ kb cos 8
sin (Nkl cos 8)
sin kl cos 8
a — длина
пластины,
b—ширина
пластины
Двугранный уголок
1
Н
8тс (аН)2
Трехгранный
уголок
Трехгранный уголок
(треугольные грани)
Бикону:
32тс
a = —7^- X
Линза
Люнберга
220
Форма
Конус-
сфера
Конус —
цилиндр
Размеры
Расчетная
sin2(n:2/
[cos (и2/7
"" —cos (2тс2/
Продолжение табл. 1
формула
?а\— 5/2
¦^— X
*'""¦
Примечание
1 < ka < 15
Приложение 5
ДИАГРАММЫ ЭПР ЦИЛИНДРОВ КОНЕЧНОЙ ДЛИНЫ,
РАССЧИТАННЫЕ МЕТОДОМ КРАЕВЫХ ВОЛН [В.1, П.4]
В качестве эталонных рассеивателей часто применяется
цилиндры конечной длины. Диаграммы ЭПР таких цилиндров'могут быть
рассчитаны методом краевых волн с погрешностью
относительно максимального значения ЭПР порядка —30-f-40 дб. Ниже
приводятся диаграммы ЭПР для радиолокационного случая 0 = 0о
цилиндров различных размеров, рассчитанные по формулам [В. 1].
Система координат и обозначения приведены на рис. П5.1.
aE = jtr2|S(9) |2 — совпадающая поляризация. Вектор Е лежит
в плоскости оси цилиндра.
Рис. П5.1. Система координат для
расчета диаграмм ЭПР цилиндров.
221
-20
Рис. П5.2. Диаграммы ЭПР цилиндра длиной / = 3,5а, радиусом
г = 0,5а:
совпадающая поляризация, перпендикулярная поляризация.
Рис. П5.3 Диаграммы ЭПР цилиндра длиной /='8а, радиусом
совпадающая поляризация, перпендикулярная поляризация.
-20
-30
Рис. П5.4. Диаграммы ЭПР цилиндра длиной /=18^, радиусом
г=1,5А,:
— совпадающая поляризация; перпендикулярная поляризация.
222
10 20 30 40
Рис. П5.5а. Диаграмма ЭПР цилиндра длиной /=125^, радиусом
г=12,25А.:
спадающая поляризация
10
-20 I
Рис. П5.56. Диаграмма ЭПР цилиндра длиной /= 125Л,, радиусом
г =12,25 А,:
перпендикулярная поляризация.
223
6чд6
90
Рис. П5.6. Экспериментальная диаграмма ЭПР цилиндра,
измеренная аппаратурой фирмы Conductron Corporation (США) {5.4].
ан = яг2|2(6) |2 — перпендикулярная поляризация. Вектор Е
перпендикулярен плоскости, содержащей ось цилиндра, где
=* ШЛ
(v)] e
ikl cos
- f [/1 (v) - iJ2 (v)] e
"ikl cos
е-Шс05 9,
(6) = [MI, (v) + iNJ2 (v)) eikl c™t-g [I, (v) - U2 (v)] е
Jlt 12 — функции Бесселя первого и второго порядка u = 2&rsin9,
k 2/\
l
k =
М
м
(ъ/п)
1
cos (п/п) — cos (n — 20/п)
1
cos (n/n) — cos (20/л) у
sin (те/л) / 2
N j
cos (тс/п) —
cos (тс/я) — cos (к — 20/л.)
sin (n/n) f 1
г cos (тс/л) — cos (20/я)
1
cos (n/n) — 1 + cos (тс/л) — cos (тс + 29/л)
3_
2 e
На рис. П5.2—П5.7 приводятся диаграммы ЭПР цилиндров
различных размеров, "рассчитанные по приведенным формулам. Следует
обратить внимание на то, что динамический диапазон изменения
ЭПР всех цилиндров не превышает 60 дб.
224
«)
б)
в)
6,см2
100
г) ю
1,0
90 180 9°
'180 90 О 90 180 ff°
100
W
ио
0,1
1
А
Л
1
Д
V
Jv
/Л
V 1
|i
/1
180 90 О 90 180 9°
A
V
А
А
100
10
и
0,1
1
л
л
Л
Л
/
А
100
0,1
180 90 О 90 180 в
6, см2
180 90 О 90 180 9°
100
е) Ю
1,0
0,1
180 90 О 90 180 9*
Рис. П5.7. Двухпозиционная диаграмма ЭПР (ДДР) металлического
цилиндра длиной 1 = 5Х, радиусом г=0,5Я {5.4]:
0п — угол между приемником и передатчиком; а) 0=24°; б) 0=45°; в) 0=67,5°;
г) 0-50°; д) 0=125°; е) 04150°.
Приложение 6
ЭКСПЕРИМЕНТАЛЬНЫЕ ДИАГРАММЫ ЭПР СЛОЖНЫХ
РАССЕИВАТЕЛЕЙ
-10
-20
-30
-40
III I
liTlifliiffl^ii
iiiMJiiiiiittiiM
ш
ш
|
lilSiliflllllilffl
1
HiJiuil
iilllil!
\.\\щ
, IJilll j . i
Г. Hil'llll.iLL Lh.ll
-180
e°
Рис. П6Л. Диаграмма ЭПР гантельного рассеивателя, состоящего из
двух шаров диаметром 152,4 мм; расстояние между центрами шаров
914,4 мм, частота 9,3 Ггц [5.8].
225
9°
Рис. П6.2. Расчетные и экспериментальные диаграммы ЭПР
реактивного бомбардировщика В-47 [П. 5]:
расчетные: частота 330 Мгц, частота 600 Мгц, — X—X—
частота 150 Мгц,
экспериментальная ¦" частота 195 Мгц,
Рис. П6 3. Экспериментальная диаграмма ЭПР модели реактивного
истребителя, полученная в оптическом диапазоне волн [П 5].
226
ъю
50°
210
180е
Рис. П6.4. Диаграмма ЭПР самолета В-26, длина волны А,= 10 см,
угол места 6 = 0° [П. 5].
-10
-20
-30
ц
"Jr
I' ,
. . . , . ,
III
ш Ik J
щ
1 1 •III* I.I
1
90 О 90 9°
Рис. П-6 5а. Экспериментальная диаграмма ЭПР самолета Соп-
vair-990: вертикальная поляризация [5.4].
90
Рис. П6.56. Экспериментальная диаграмма ЭПР самолета Соп-
vair-990: горизонтальная поляризация.
Литература
П.1. Шифрин Я. С Вопросы статистической теории антенн.
Изд-во «Советское радио», 1970.
П.2. В о л ь п е р т А. Р., Потехин' А, И. Дифракционное
поле идеально-проводящего шара. ЖЭТФ, 1947Г№ 9.
П.З. Пересада В. П. Радиолокационная видимость морских
объектов. Судпромгиз, 1961.
П.4. Мировицкий Д. И., Торгов а нов В. А., Черку-
н о в а Г. П. Оптическое моделирование отражения и рассеяния
радиоволн СВЧ диапазона. «Радиотехника и электроника», 1970,
т. 15, № 1.
П.5. Мищенко Ю. А. Радиолокационные цели. Воениздат,
1966.
Предметный указатель
Автоматизация измерений ЭПР 201,
202
Автоподстройка частоты 151, 155
Амплитуда волны, вариация 63
, измерение 95, 96, 102
— — эллиптически поляризованной 7
Амплифазограф 103, 104, 183
Антенна вспомогательная 87, 88
Аттенюатор предельный 103
Безэховая камера (БЭК) 4, 24, 79,
ПО, 111, 115, 117, 145, 160
апертурного типа 119
пирамидальная 122, 123, 129
рупорная 122, 123, 155, 160
с гофрами 119, 121
, стенка задняя 118, 119, 123
типа «шепчущая галерея» 120,
121
, эффективная поверхность
рассеяния кажущаяся 134
«Блестящая» точка 36, 175
Ближняя зона 51, 58, 59
щели 43
Ванна водяная плоская 25, 26, 27
, фотография распределения
волн 26
Вариации амплитуды и фазы 63, 82
Взаимности принцип 15, 178
Возбудитель магнитострикционный
28
Волна квазиплоская 29
— ползущая 26
— поперечная 28, 29
— рупорного типа 123
Волновод 26, 29, 255
Гельмгольца уравнение 26
Генератор стабилизированный 149,
161
Гетеродин 103, 149, 151
Глубина проникновения 33
Годограф вектора поля волны 6
Голографическая запись диаграмм 5,
54, 55
Гофр наклонный 119
— продольный 119, 120, 121, 127, 128
График калибровочный 194
Дальняя зона 44, 47, 49, 51, 58, 59,
83, 92
Диаграмма картографическая 8, 9,
15, 48, 101, 105, 106
— направленности, вычисление 83
— парциальная 71, 72
— рассеяния 18
— двухпозиционного рассеяния
(ДДР) 19, 144
динамическая и статическая
4. 13, 20, 24, 144
обратного (ДОР) 18, 144
— ЭПР 12, 13
диска 156
, измерение 67, 71
ленты металлической 65, 74—77,
79, 82
, погрешность определения 62
суммарная 71, 73
Динамический диапазон
измерительного устройства 147, 160
Дифракция на круглом отверстии
46—48, 50—54
щели 93—96
Диэлектрик идеальный 32
Длина стоячей волны в
пространстве 10
Допплеровский сдвиг частоты
максимальный 166
Закон изменения частоты 160, 161,
163
Зеркало сферическое 155
Зона безэховая 118
— дифракции Фраунгофера см.
Дальняя зона
Френеля 46, 47, 58, 59, 95
— излучения 126
Зонд для исследования поля 9, 102,
106
Изгиб колонны 140
Излучение непрерывное 156
— частотно-модулированное 160
Измерение матрицы рассеяния 178,
180
Интеграл Кирхгофа 42
— Френеля 95
Интерференция волн 9, 10, 104, 130,
135, 147
ИСЗ как эталонный рассеиватель
204—208
—, срок службы 212
Квазиоптическая система 62
Кирхгофа метод расчета дифракции
95
Колебания монохроматические 148
Коллиматор 45, 57—59, 79, 93, 97
— зеркальный 98, 99
— линзовый 59, 99, 100, 101
—, погрешность изготовления 98
Компенсация фона 148, 149, 158, 183
Коэффициент безэховости (КБЭ) 115,
116, 122, 123, 124, 130, 135
, методика расчета 125—127
— затухания безэховой камеры ПО
— использования раскрыва 105, 106
— корреляции фазовых ошибок 80
— направленного действия антенны
86—89
— немасштабною моделирования 44
— отражения радиопоглшцающего
материала 111, 115, 117, 140
— подобия 31
— преломления в слое диэлектрика
100
— пространственного ослабления
поля 127
— фазовый 17
Лампа бегущей волны в
измерительном устройстве 152, 153, 164
Линии поля 9
Луч вертикальный, горизонтальный,
наклонный 58, 60
Магнитная лента 55
Максвелла уравнение 30
Масштаб 31, 33, 34
Матрица напряжений 21
— падающего поля 21
— рассеивания абсолютная (МРЛ)
22
относительная (МРО) 22
, двухимпульсный метод
измерения 178
укороченная 23
Метод геометрической оптики 116,
123, 129
— Гюйгенса — Кирхгофа 218
— зеркальных отражений 125
— краевых волн 95, 96, 147, 222
— наложения диаграмм
направленности 133
— определения напряженности
поля косвенный 30
— оптического моделирования 48, 51
— перемещения индикатора 131, 134
— плавных возмущений 99
Множитель решетки 74, 79
Моделирование косвенное 42
— масштабное 4, 34, 35, 43, 45
— математическое 24
— немасштабное 4, 42, 43
— с помощью ультразвука 26, 28
— физическое 24, 25
— электродинамическое 29, 30, 36
Момент диаграммы ЭПР 73
Мощность передатчика 151, 155, 159,
170
— электромагнитного поля 10
Наносекундная измерительная
установка 136, 137, 138, 176
Напряжение на выходе антенны 21
Нестабильность частоты
относительная 150, 151, 155, 158
Область ближнего поля 58, 59
Объектив длиннофокусный 44
Опора 61
— пенопластовая 138, 139
Отражатель 107
Отражение от металлических тел 28
Плоскость экранирующая 60, 61
Погрешность измерения 188—199
диаграммы ЭПР 86
рассеивателя 107
КНД синфазной антенны 87
Подвеска на капроновых нитях 138,
141, 142
Поле дифракции на отверстии 50,
52, 53, 54
— звуковых воли 29
— излучения антенны 58, 59
— квазиплоское 58, 62
— квазисферическое 58
—, составляющие перекрестная и
перпендикулярная 17
— щели в ближней зоне 93
Полигон измерительный 109, 145, 156,
157, 168, 169
Поперечник рассеяния 11
Приемник измерительный 151
Промежуточная зона излучения
антенны 58, 59, 92
Рабочий объем 109, 120, 126, 130
Радиолокация двух- и однопози-
ционная 12
Радиопоглощающий материал
(РПМ) 36, 99, 109, 110, 115, 138,
155
пирамидальный 111, 112, 113
Распределение поля типа косинус
квадрат 67
Рассеиватель 9, 11, 12, 45, 57, 62, 73,
79, 82, 91, 98,
—, движение по окружности 1G5
— двумерный 86, 107, 147, 148, 144,
154, 164
— одномерный 83
—, погрешность измерения 83, 86
—, поляризационные свойства 181
— эталонный 165, 195—197, 204
Расстояние антенна—рассеиватель
85, 91, 93
Резонатор открытый 154, 155
Рельеф тепловой 8
Репер 14
Сдвиг частоты генератора 152
Селекция отражающих предметов
160, 163, 164, 166
Скорость распространения волн
в воде 28
Снеля закон 124
Сопротивление волновое свободного
пространства 62
Среда нелинейная 30
Термография 7, 8
Транспарант 45, 55
Трехкоордипатный стенд 102
Угол наклона стенки БЭК 118, 119
Уголковый отражатель 14
Ультразвук 28
Уравнение радиолокации 11, 135, 146
— связи 86
Условия подобия 30, 32, 33
систем оптической и радио 42,
43
Фазовращатель поляризационный 152
Формирование поля 57, 99, 154
Фотографирование распределения
поля 7, 8, 26, 46—54
Френеля приближение 94
Ход лучей в безэховой камере 117,
120. 123—129
Цель распределенная 13
Частота модуляции луча ОКГ 41
— разностная 161, 162, 164
— ультразвука 8
Черное тело 6
Чистота поверхности модели 198
Чувствительность приемника 151
Щит поглощающий 116
Экранирование безэховой камеры
НО
Электрическая длина измерительной
установки 149, 150
Электродинамическое подобие 25, 29,
30
Элемент матрицы рассеяния 3, 15
Эллипс поляризации 6, 7
Энергетический потенциал
измерительной установки 147
Эффект тени 188
Эффективная площадь рассеяния
(ЭПР) 3, 12, 14, 62
— диска 72
— ленты металлической 65—68,
75—77, 81, 82
, погрешность определения 62
— проводящих тел 37—39
— рабочего объема 134
цилиндра 68, 69, 78
— шара 135
эквивалентная 135
, эталон 17
Шероховатость модели 41
Оглавление
Введение 3
Литература 5
Глава 1. Дифракция и рассеяние радиоволн 6
1.1. Физические явления при дифракции и рассеянии
радиоволн 6
1.2. Физические явления при интерференции радиоволн . 9
1.3. Эффективная площадь рассеяния (ЭПР) и
диаграммы ЭПР - .... И
1.4. Матрица рассеяния 14
1.5. Диаграммы рассеяния 17
1.6. Применение диаграмм рассеяния 20
1.7. Измерение фаз . 22
Литература 23
Глава 2. Применение моделирования при измерениях
рассеянных волн 24
2.1. Общие замечания . 24
2.2. Электродинамическое моделирование 29
Ч'Л. Моделирование с использованием волн оптического
ДИ.'ШЛ'ИНШ 36
Измерение средних значении ЭПР с применением
некогерентных колебаний 37
Моделирование с применением источников
когерентного излучения в оптическом диапазоне волн
(лазеров) 40
Литература 55
Глава 3. Методы формирования квазиплоских полей . . 57
3.1. Типы полей, используемых при измерениях ... 57
3.2. Исследование полей, применяемых в измерительных
установках . 62
Диаграмма ЭПР ленты пр>п падении на нее волны
с постоянной фазой .и периодически изменяющейся
амплитудой 64
Диаграмма ЭПР ленты при падении на нее волны
с постоянной амплитудой и периодически
изменяющейся фазой 69
Метод разложения диаграмм ЭПР на «моменты» 73
Диаграмма ЭПР ленты при падении на нее волны со
случайным распределением фазы 79
3.3. Измерение диаграммы ЭПР в дальней зоне
излучающей антенны 83
Погрешность измерения одномерного рассеивателя . 83
Погрешности измерения двумерных (плоских) рас-
сеивателей в зависимости от расстояния ... 86
3.4. Измерение диаграмм ЭПР в промежуточной зоне
антенны 91
231
3.5. Измерение диаграмм ЭПР с помощью коллиматор-
ных устройств 93
Влияние краев коллиматора 93
Оптимальные размеры коллиматора при заданной
точности изготовления 97
3.6. Измерение амплитуд и фаз полей и испытание
коллиматоров 101
Исследование поля .падающей волны . . . . 101
Исследование поля рассеянных волн с помощью
пассивного отражающего зонда 106
Литература ...„,„ 107
Глава 4. Методы подавления паразитных рассеяний и без-
эховые камеры 109
4.1. Источники паразитных рассеяний при лабораторных
измерениях 109
4.2. Радиопоглощающие материалы (РПМ) для безэховых
камер • 111
4.3. Принципы устройства безэховых камер 115
4.4. Расчет безэховых камер 123
Расчет камер с постоянным поперечным сечением . . 124
Расчет размеров сечения продольного гофра . . . 127
Расчет камер с переменным поперечным сечением . 128
4.5. Методы испытаний безэховых камер 129
4.6. Опоры для измеряемых объектов 138
Литература 143
Глава 5. Установки для измерения рассеянных полей . . 144
5.1. Классификация установок и методов измерений- . . 144
5.2. Расчет энергетического потенциала и динамического
диапазона измерительных установок 145
5.3. Измерительная установка с непрерывным излучением 148
5.4. Измерительные установки с частотной модуляцией
(ЧМ) 160
5.5. Измерительная установка с использованием
эффекта Допплера 163
5.6. Импульсные измерительные установки 166
5.7. Методы измерений при большом разрешении . . . 175
5.8. Установка для измерения элементов матрицы
рассеяния 178
5.9. Основные параметры измерительных установок . . 186
Литература 186
Глава 6. Погрешности измерений 188
6.1. Классификация погрешностей измерений . . . . 188
6.2. Оценка частных погрешностей измерения . . . . 190
6.3. Суммирование частных погрешностей 199
6.4. Экспериментальные методы аттестации эталонных
рассеивателей - 200
6.5. Испытания измерительных установок 203
6.6. Эталонные рассеиватели для калибровки
радиолокационных станций 204
Литература 213
Заключение 214
Приложения 216
Предметный указатель 229
232