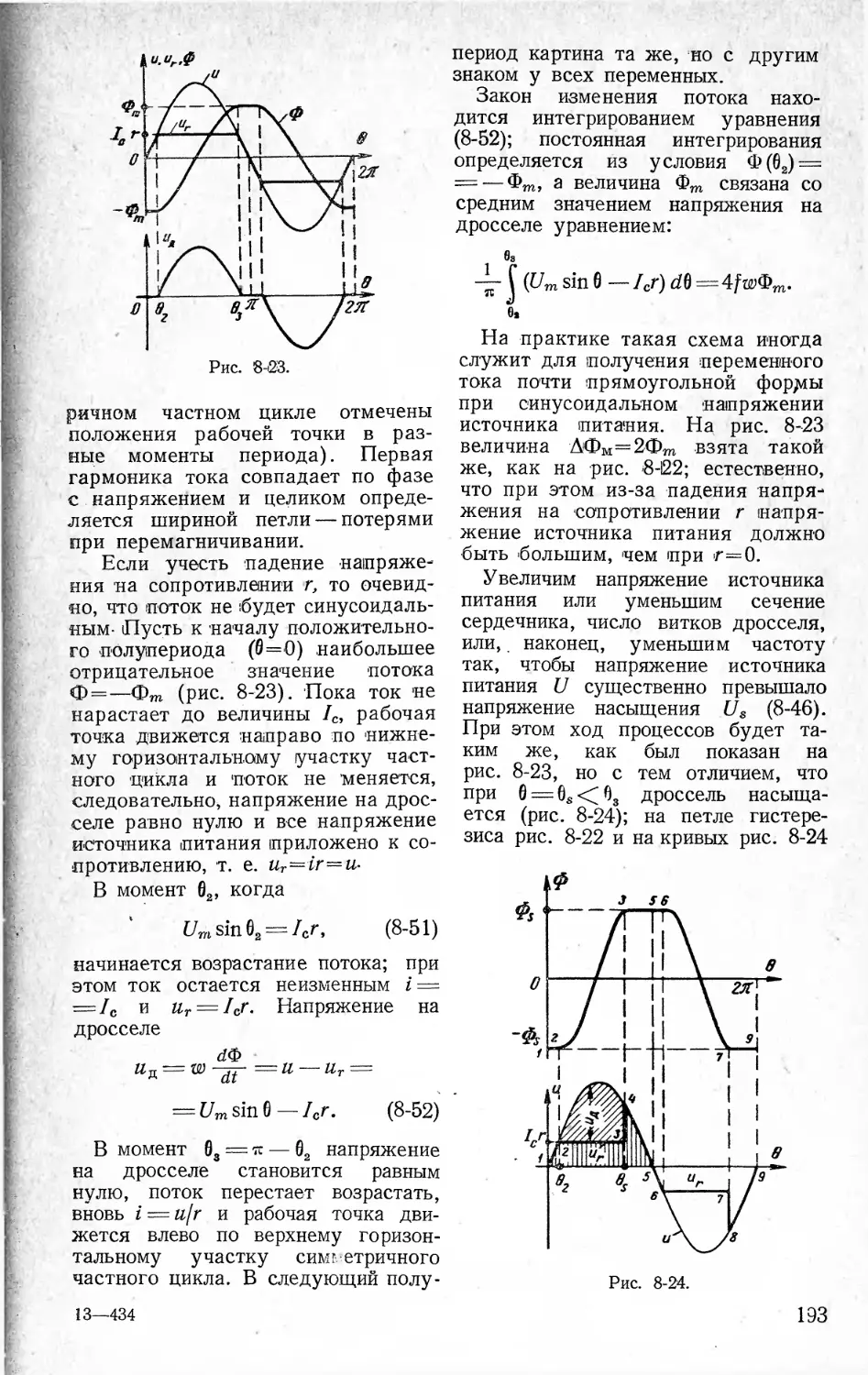
/



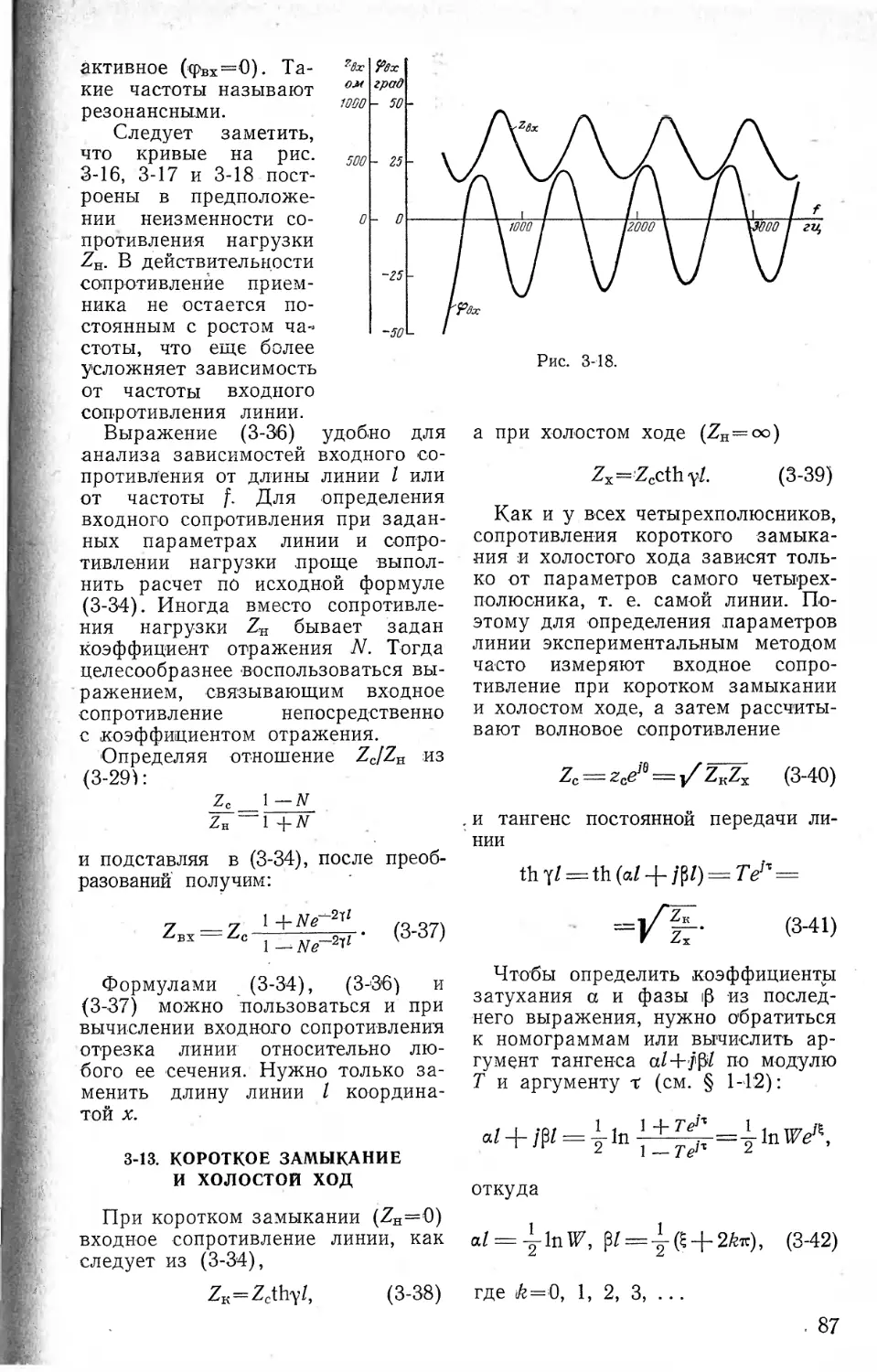



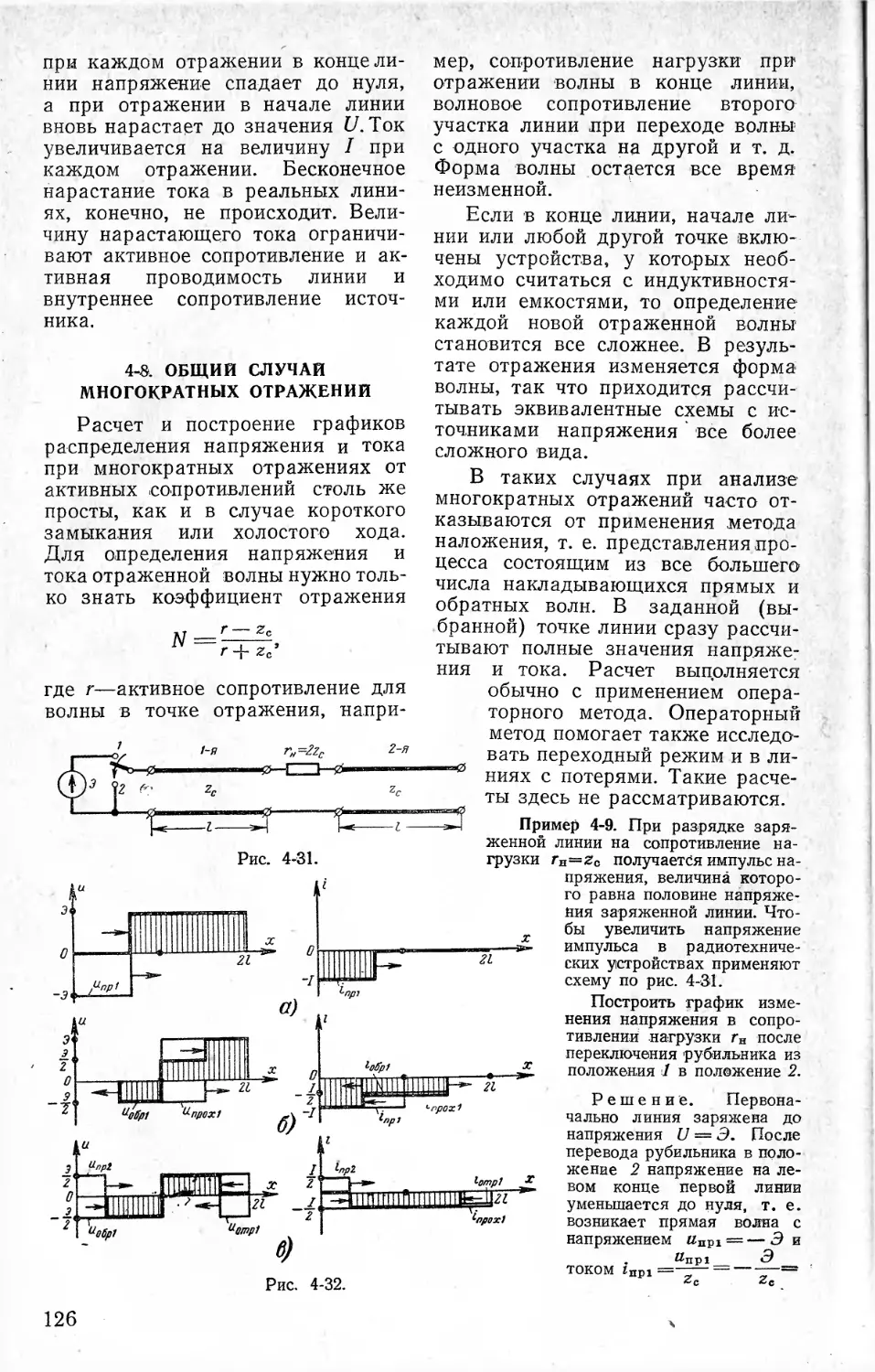
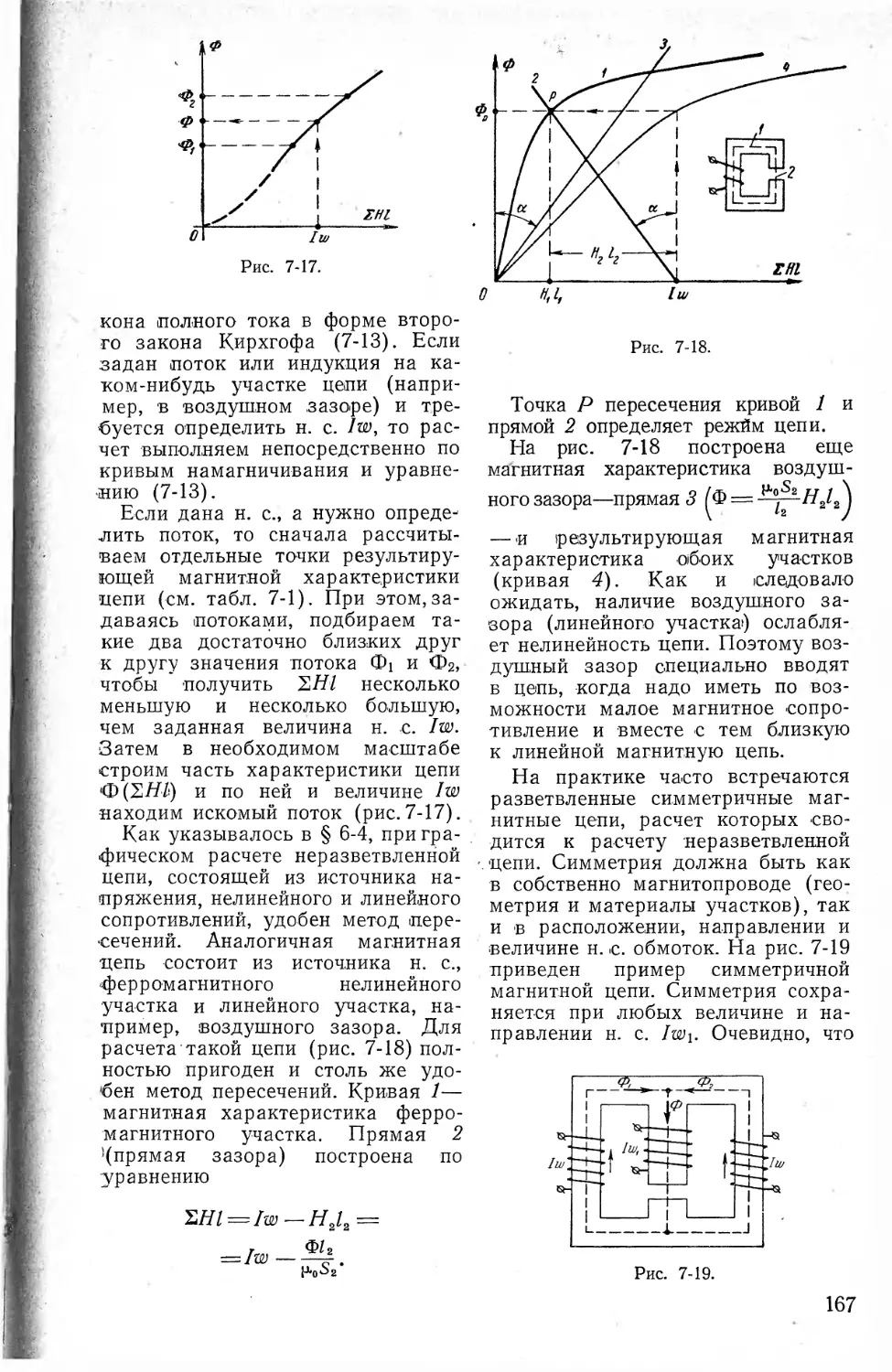




Текст
L
ТЕОРЕТИЧЕСКИЕ
ОСНОВЫ
ЭЛЕКТРОТЕХНИКИ
В ТРЕХ ЧАСТЯХ
Часть вторая
ИЗДАТЕЛЬСТВО «Э Н Е Р Г И Я»
МОСКВА
1965 ЛЕНИНГРАД
Б. я. ЖУХОВИЦКИЙ, И. Б. НЕГНЕВИЦКИЙ
ЧЕТЫРЕХПОЛЮСНИКИ
ДЛИННЫЕ ЛИНИИ,
НЕЛИНЕЙНЫЕ ЦЕПИ
Под общей редакцией
профессора К. М. ПОЛИВАНОВА
ИЗДАТЕЛЬСТВО «ЭНЕРГИЯ»
МОСКВА
1965 ЛЕНИНГРАД
Посвящается шестидесятилетию
Московского ордена Ленина
энергетического института
УДК 621.3.01
Ж 83
В книге рассматриваются вопросы длинных ли-
ний и нелинейных цепей; дано описание линий
с распределенными параметрами в установившемся
режиме и при переходных процессах, рассмотрены
четырехполюсники и фильтры. Нелинейные цепи
также рассматриваются как в установившемся ре-
жиме, так и при переходных процессах. Одна из
глав посвящена автоколебаниям и параметрическим
явлениям в цепях.
Книга представляет собой учебное пособие для
студентов всех электротехнических специальностей
втузов.
Жуховицкий Борис Яковлевич,
Негневицкий Иосиф Борисович
Теоретические основы электротехники, ч. II, Четырехполюсники,
длинные линии, нелинейные цепи,
М.—Л., 1965, издательство «Энергия", 240 с. с черт.
* * *
Редактор Б. Я» Жуховицкий Техн, редактор Т. Н. Царева
Сдано в набор 30/VI 1965 г. Подписано к печати 20/Х 1965 г.
Т-10141 Бумага 70X108V16 Печ. л. 21,0 Уч.-изд. л. 22,3
Тираж 33 000 экз. Цена пер. №7 — 1 р. 32 к. Зак. 434
Московская типография № 10 Главполиграфпрома
Государственного комитета Совета Министров СССР но печати.
Шлюзовая наб., 10.
ПРЕДИСЛОВИЕ
Эта'книга является второй частью курса теоретических основ элек-
тротехники. Первая часть; курса была рассмотрена в книге проф.
К. М. Поливанова «Теоретические основы электротехники, ч. I, Теория. ..
линейных электрических цепей с сосредоточенными параметрами». Во вто-
рой части рассмотрены симметричные и несимметричные четырехпо-
люсники, фильтры различных типов, установившиеся и переходные про-
цессы в длинных линиях, нелинейные цепи в установившихся: и пере-
ходных режимах.
• Содержание книги и уровень изложения соответствуют программе
курса теоретических основ электротехники, утвержденной для электро-
технических и радиотехнических специальностей Министерством выс-
шего и среднего специального образования СССР.
При изложении отдельных вопросов теории «особое внимание
обращалось на применение их к анализу конкретных задач и связь
с различными областями электротехники. Конкретные примеры, приве-
денные в книге, настолько помогают понять и закрепить понимание со-
ответствующего теоретического материала, что их изучение настоятель-
но рекомендуется читателю. К тому же значительная часть примеров
содержит много сведений, дополняющих основной теоретический ма-
териал. В ряде примеров приводится не только техника расчета, но и
методика подхода к решению задач данного типа и, что особенно важно
в нелинейных цепях, пути рациональных упрощений прц анализе и рас-
чете реальных элементов и устройств. В конце книги приведен список
литературы для более глубокого ознакомления с отдельными вопроса-
ми второй части курса.
Главы 1—4 написаны Б. Я. Жуховицким, 5—9 — И. Б. Негневицким.
В обсуждении рукописи участвовали сотрудники кафедры теоре-
тических основ электротехники Московского энергетического института:
проф. Г. В. Зевеке, старший преподаватель А. А. Брауде, доценты
В. Н’. Кудин, А. А. Мухин, Г. П. Андреев, Н. М. Бурдак, С. А. Левитан,
В. А. Кутяшов, Я. Н. Колли, ассистенты А. Л. Фрумкин и Л. А, Миро-
нов. Аспиранты У. Э. Зитар и Г. И. Бельцевич участвовали в решении
примеров. Всем поименованным товарищам по кафедре, авторы выра-
жают искреннюю благодарность.
Авторы
СОДЕРЖАНИЕ
Предисловие....................... 5
разделпервый
ЧЕТЫРЕХПОЛЮСНИКИ И ДЛИННЫЕ ЛИНИИ
Глава первая
Четырехполюсники
1-1. Введение . 9
1-2. Уравнения типа А............. 11
1-3. Приведенное сопротивление ... 12
1-4. Независимые коэффициенты ... 12
1-5. Определение коэффициентов че-
тырехполюсника .............. 13
1-6. Сопротивления короткого замы-
кания и холостого хода .... 15
1-7. Другие системы уравнений ... 17
1-8. Симметричный четырехполюсник 19
1-9. Характеристическое сопротивле-
ние симметричного четырехпо-
люсника ..................... 19
1-10. Постоянная передачи симметрич-
ного четырехполюсника.........20
1-11. Уравнения с гиперболическими
функциями.................... 23
1-12. Входное сопротивление симмет-
ричного четырехполюсника ... 23
1-13. Т- и П-образные четырехполюс-
ники ........................ 25
1-14. Мостовая схема.............. 28
1-15. Схемы замещения симметричного
четырехполюсника............. 29
1-16. Одноэлементные четырехполюс-
ники ........................ 30
1-17. Простейшие несимметричные че-
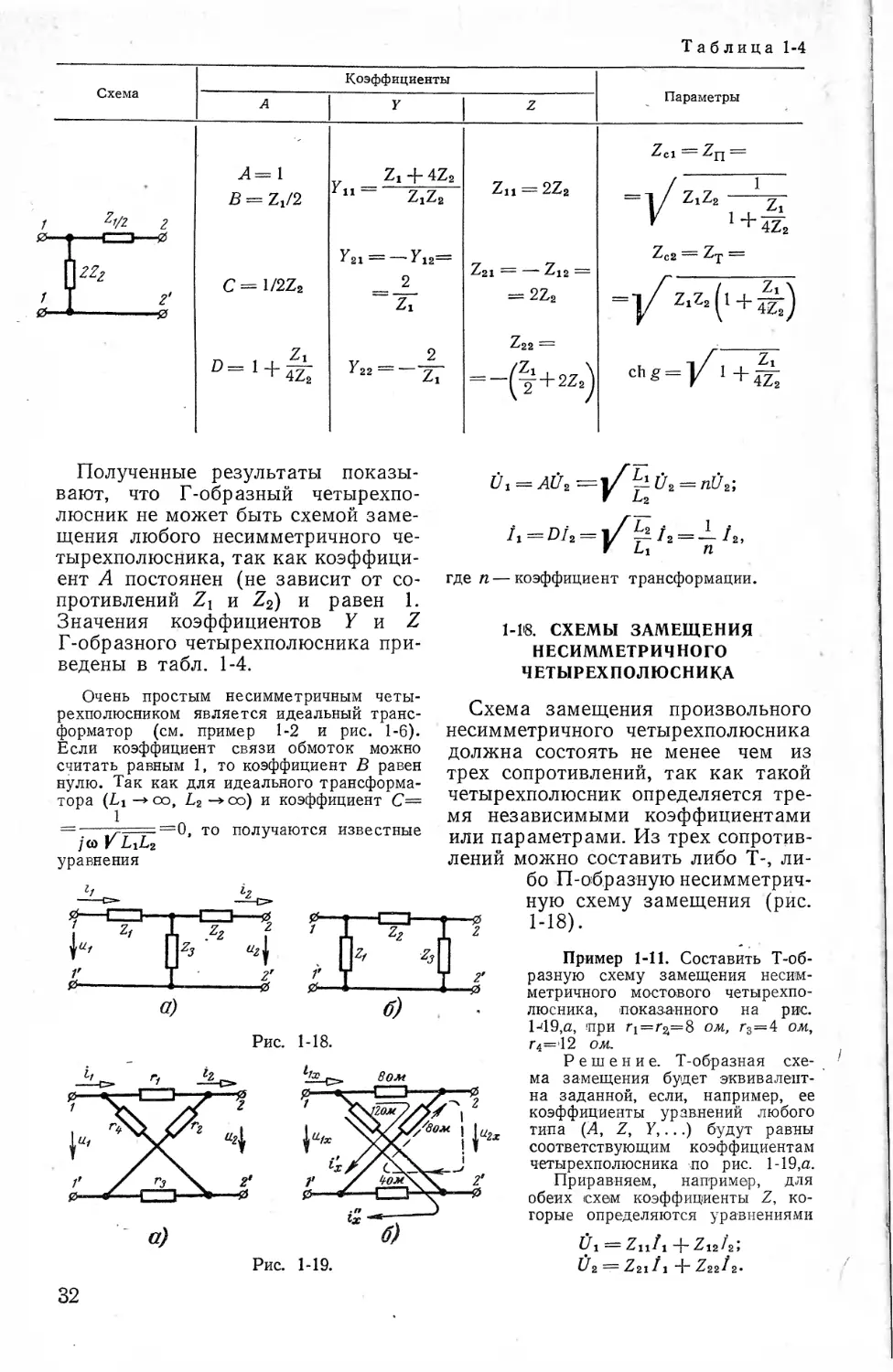
тырехполюсники .............. 31
1-18. Схемы замещения несимметрич-
• ного четырехполюсника......... 32
1-19. Вторичные параметры несиммёт-
ричных четырехполюсников ... 33
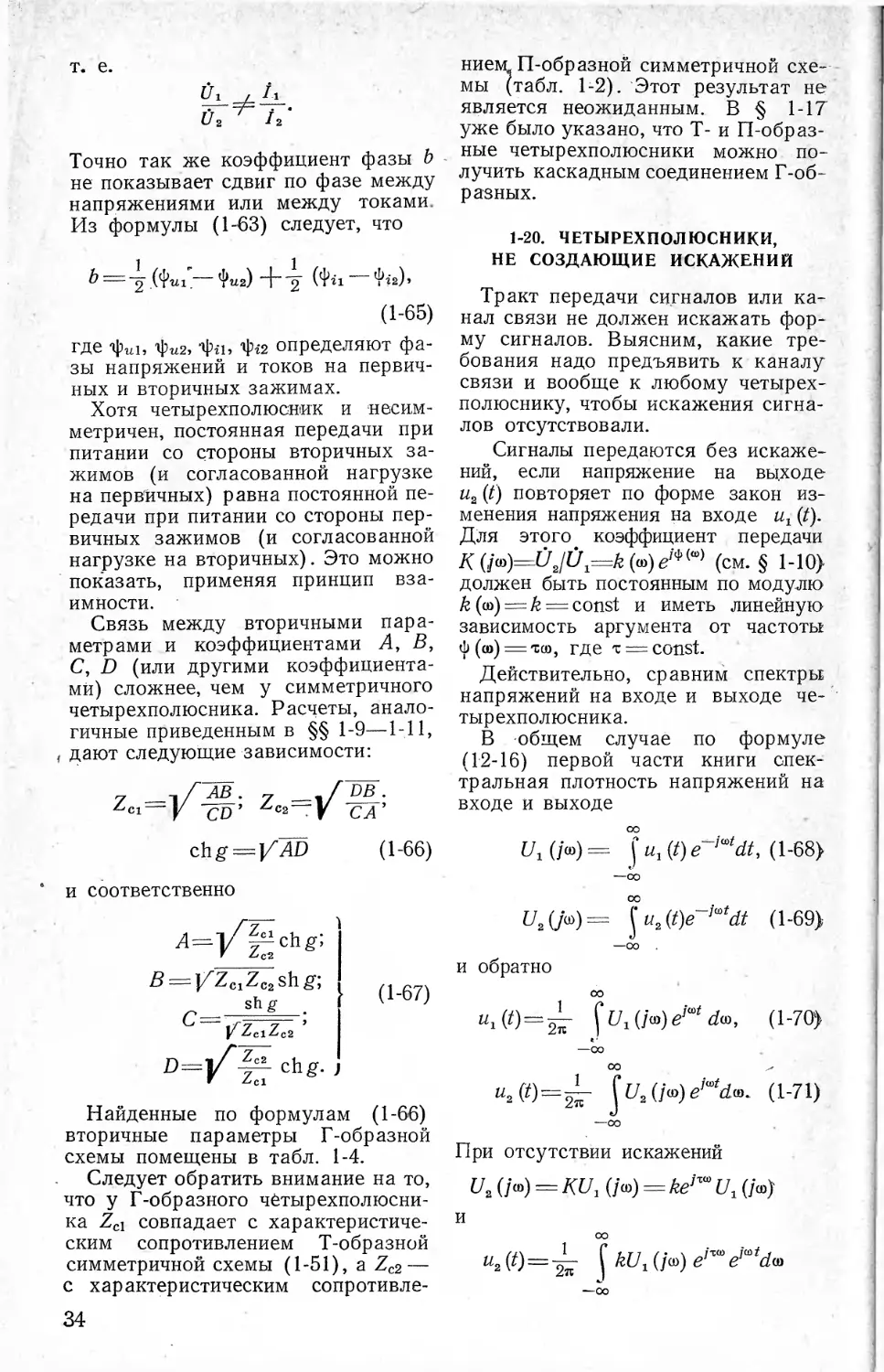
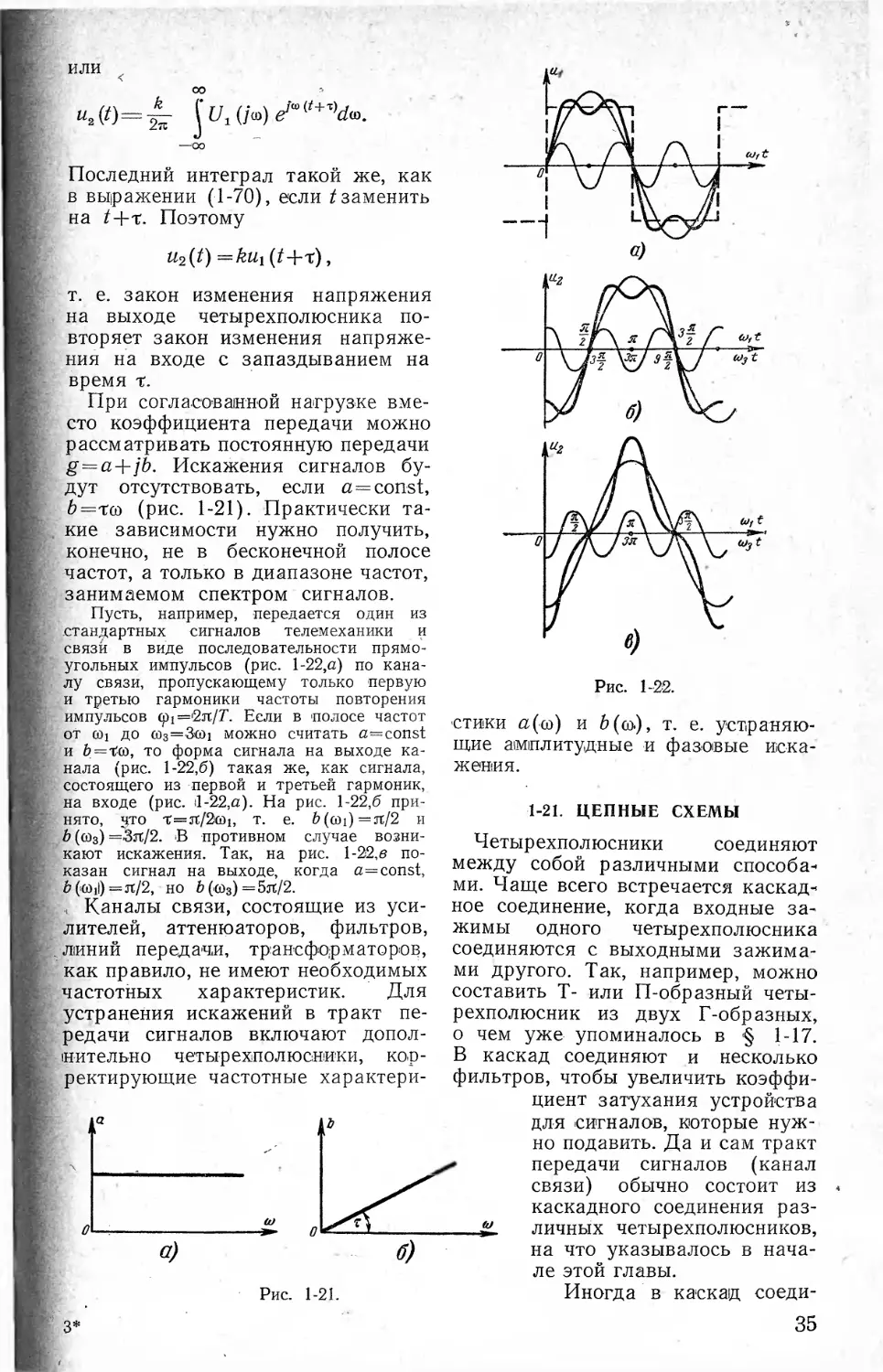
1-20. Четырехполюсники, не создаю-
щие искажений................ 34
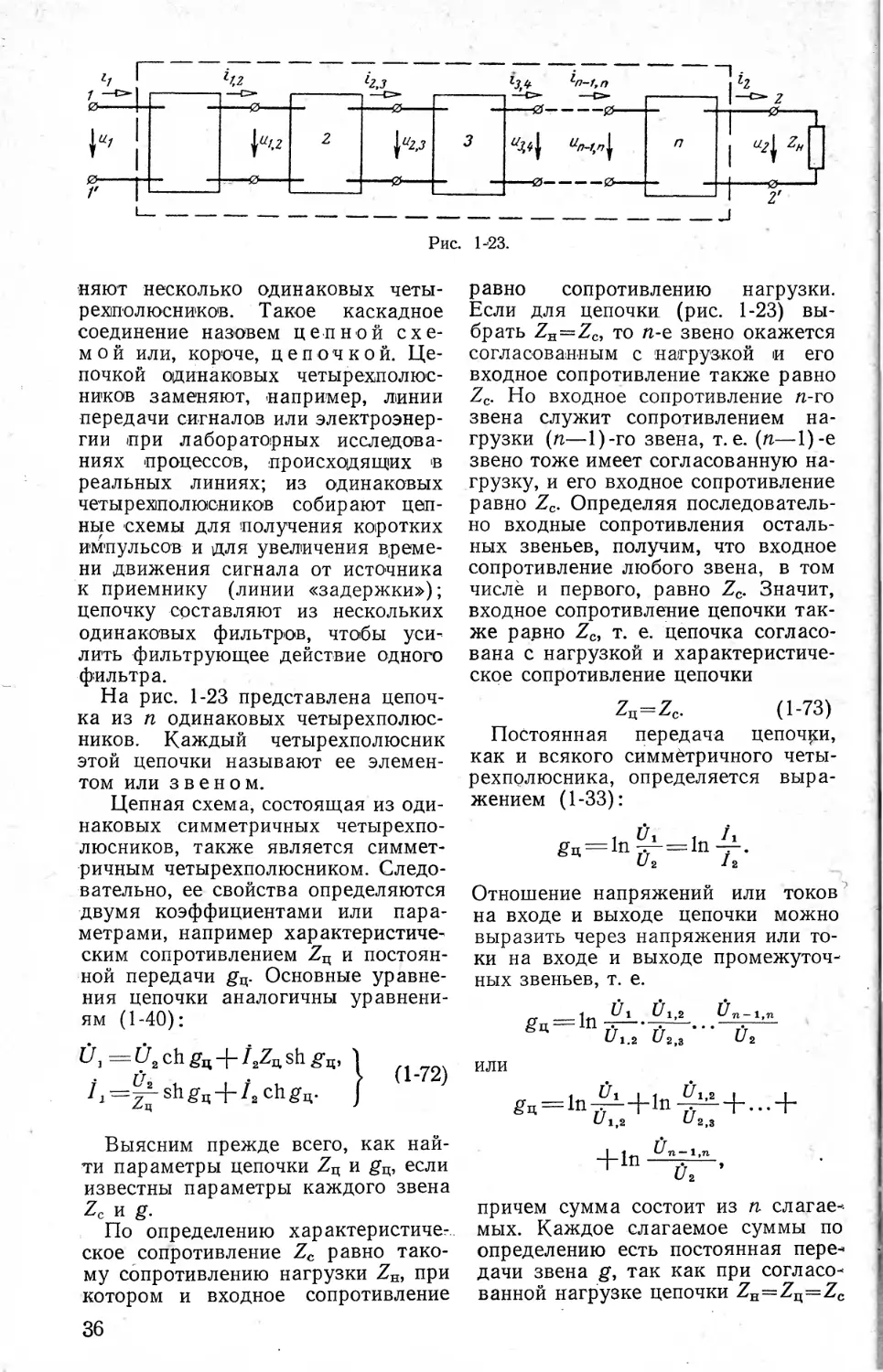
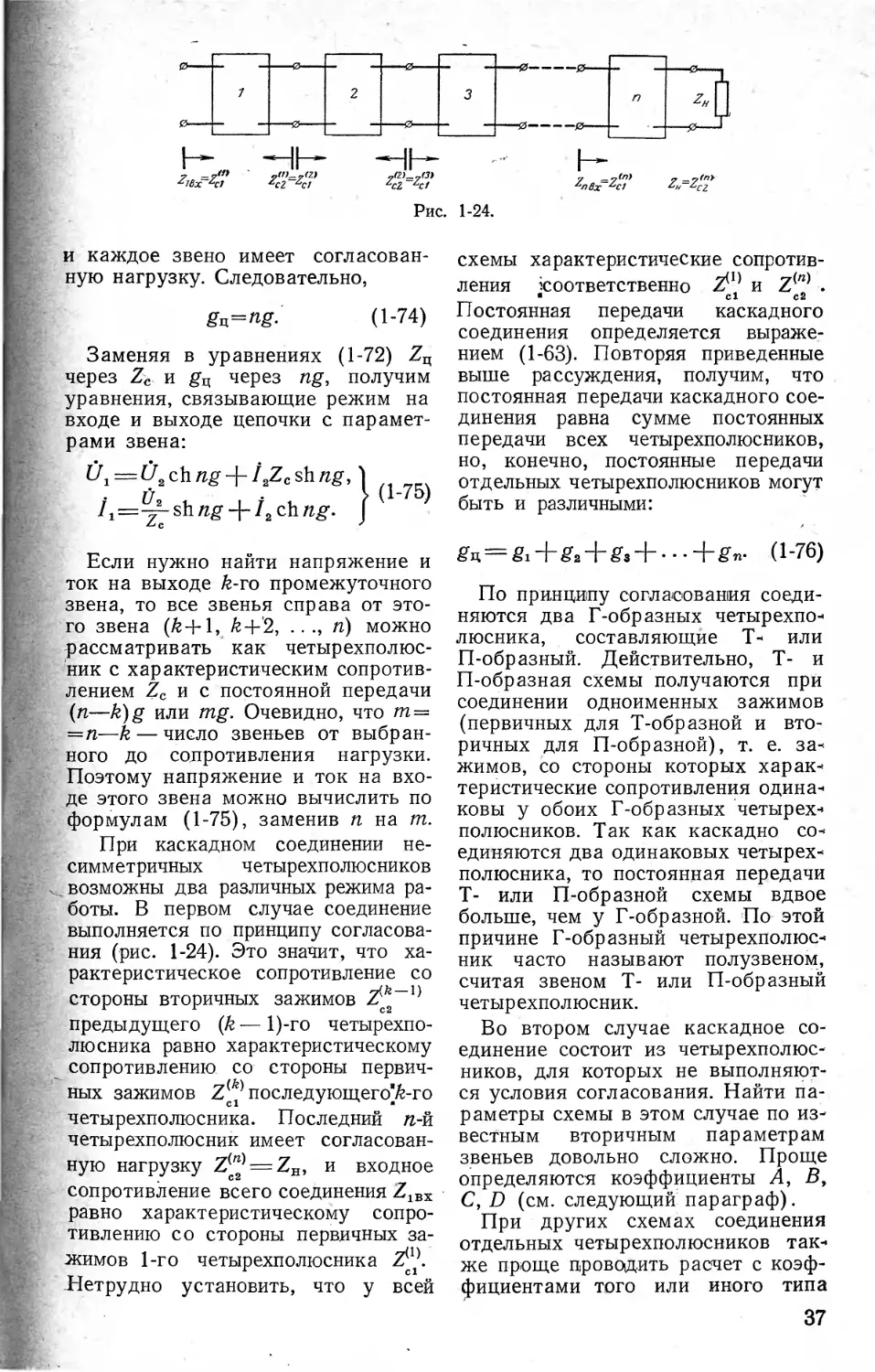
1-21. Цепные схемы................ 35
6
1-22. Применение матриц к расчету че-
тырехполюсников и их соедине-
ний .......................... 38
1-23. Рабочее затухание.......... 41
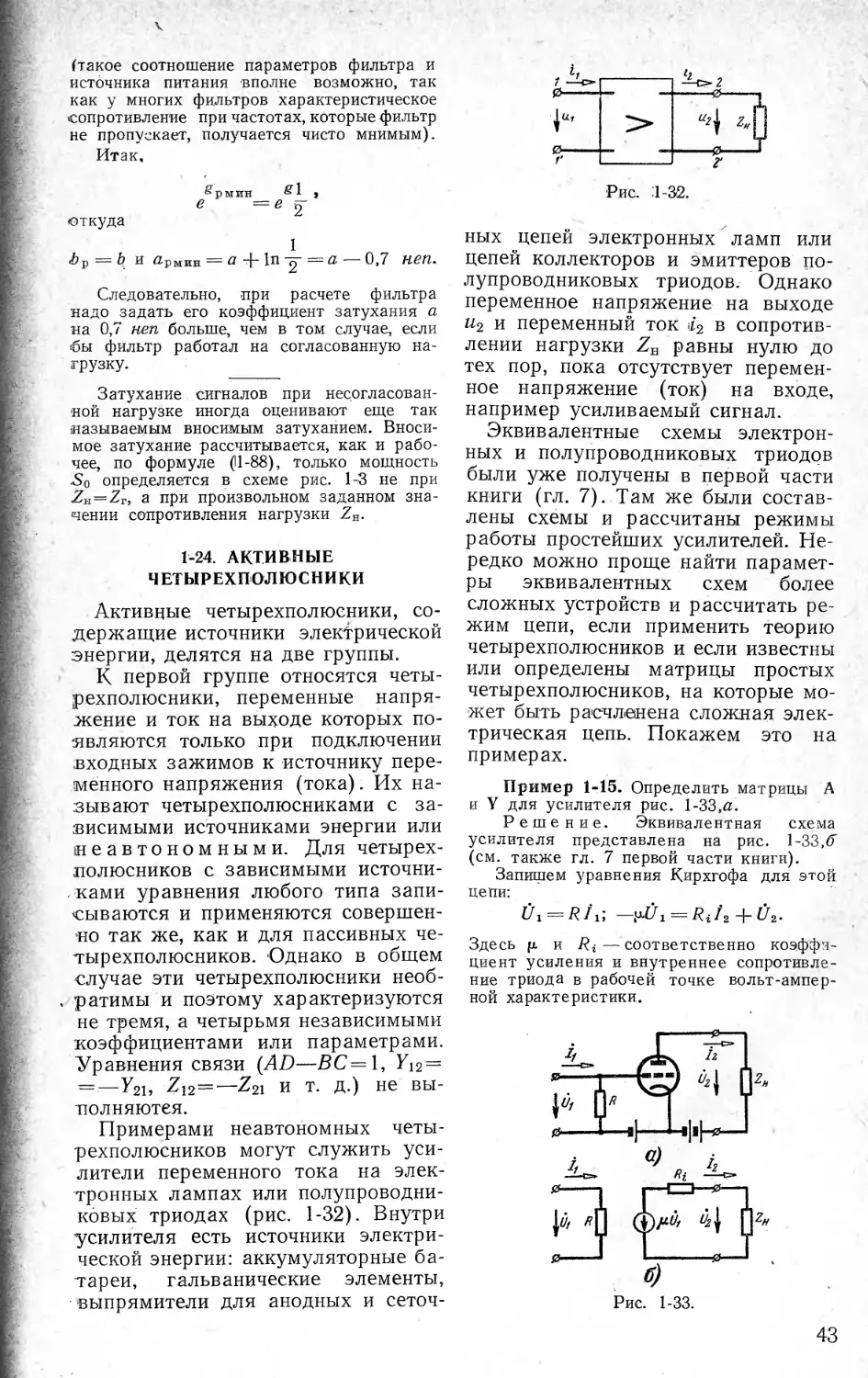
1-24. Активные четырехполюсники . . 43
Глава вторая
Фильтры
2-1. Введение.................... 46
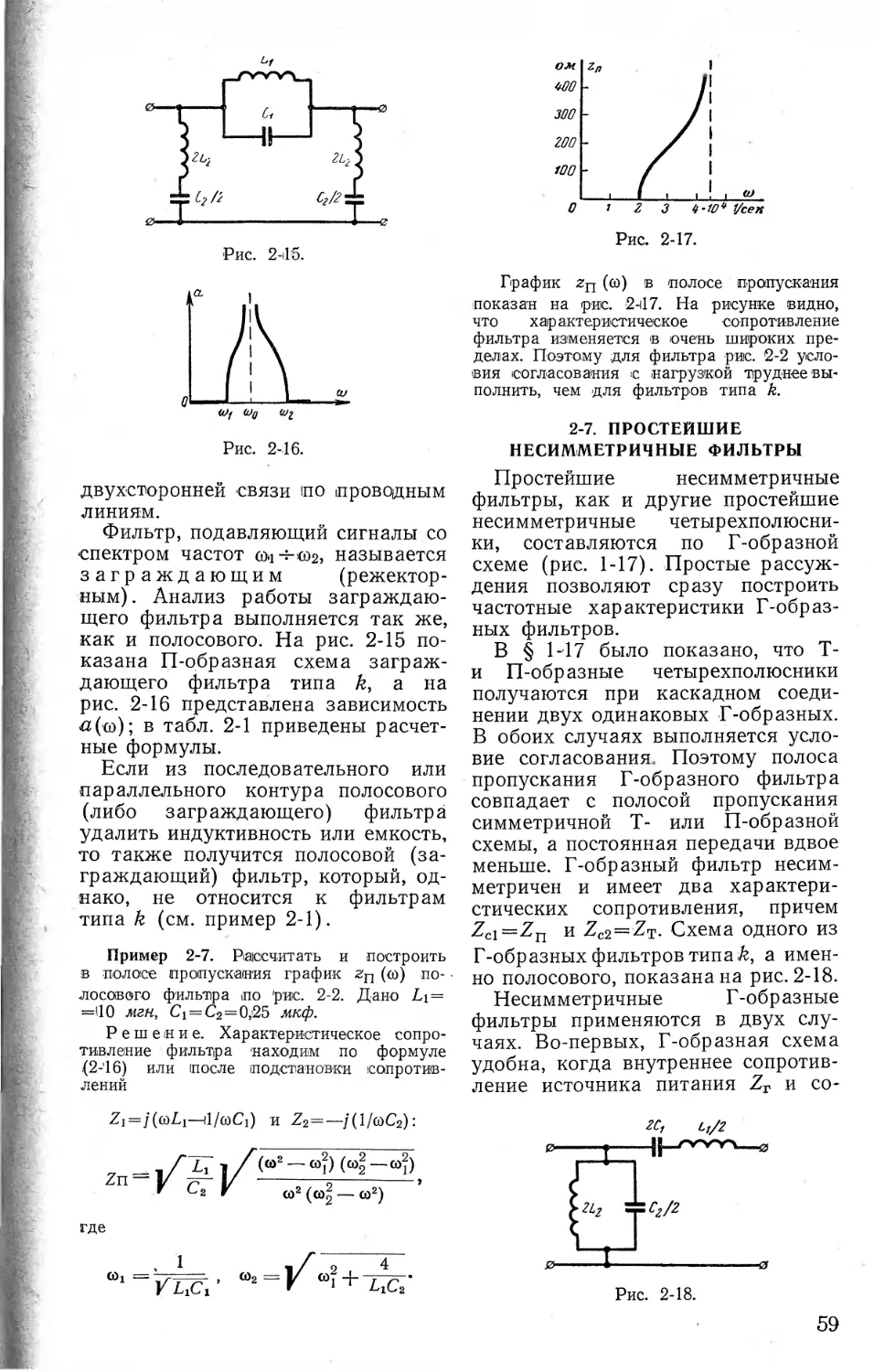
2-2. Полоса пропускания..........47
2-3. Коэффициент затухания.......49
2-4. Низкочастотный фильтр ..... 50
2-5. Согласованная нагрузка фильтра 52
2-6. Высокочастотный, полосовой и
заграждающий фильтры .... 54
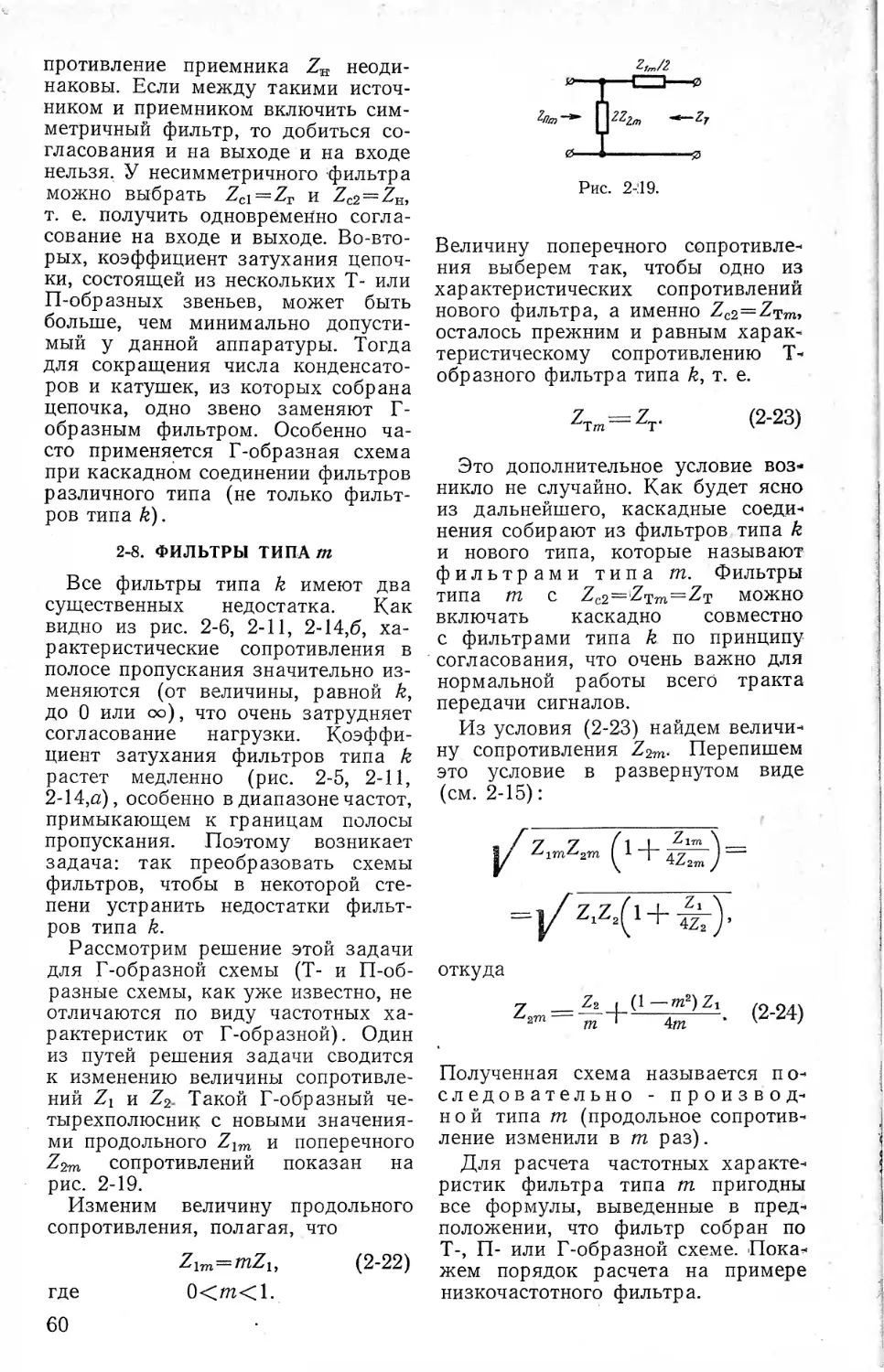
2-7. Простейшие несимметричные
фильтры ...................... 59
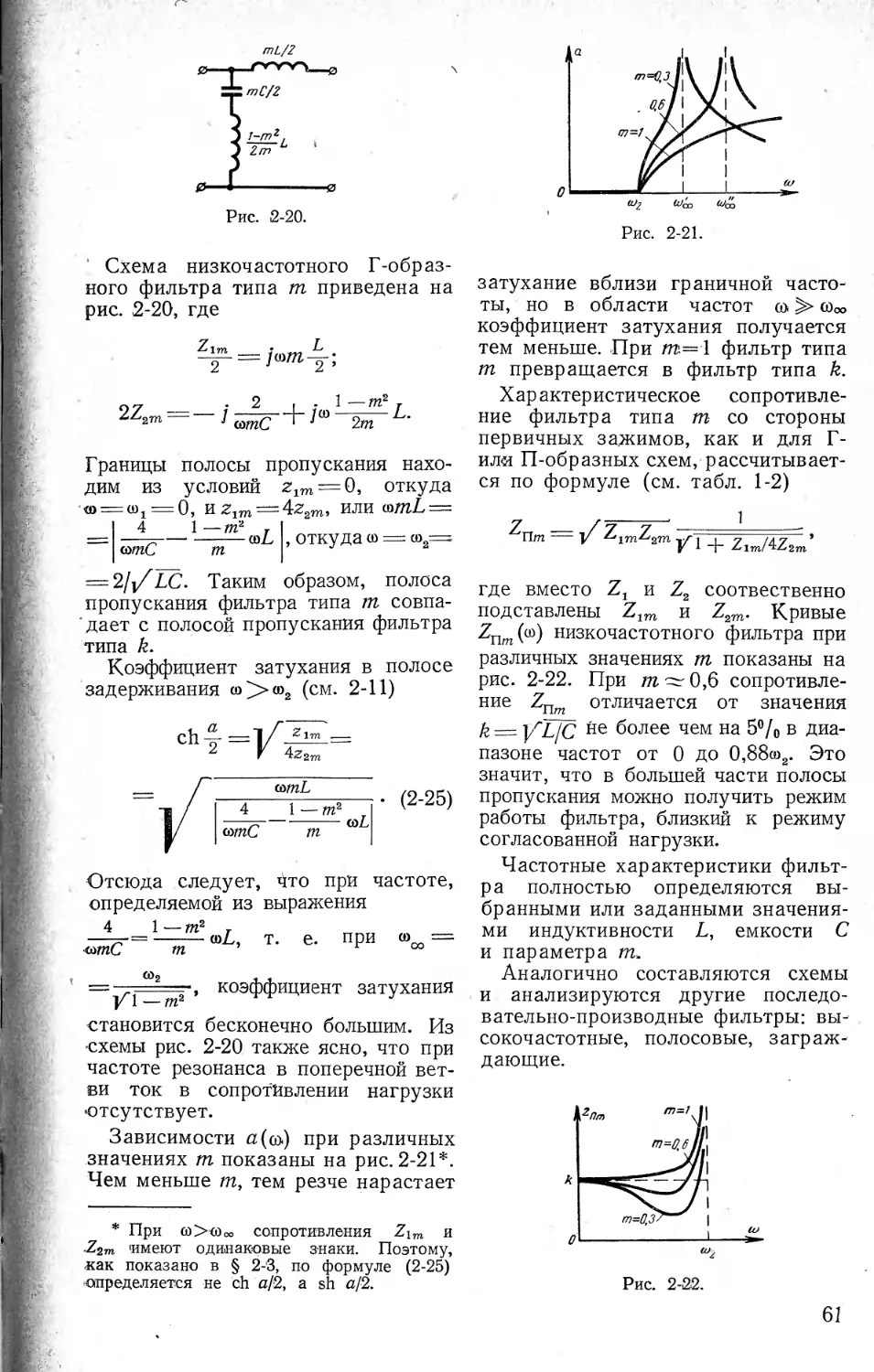
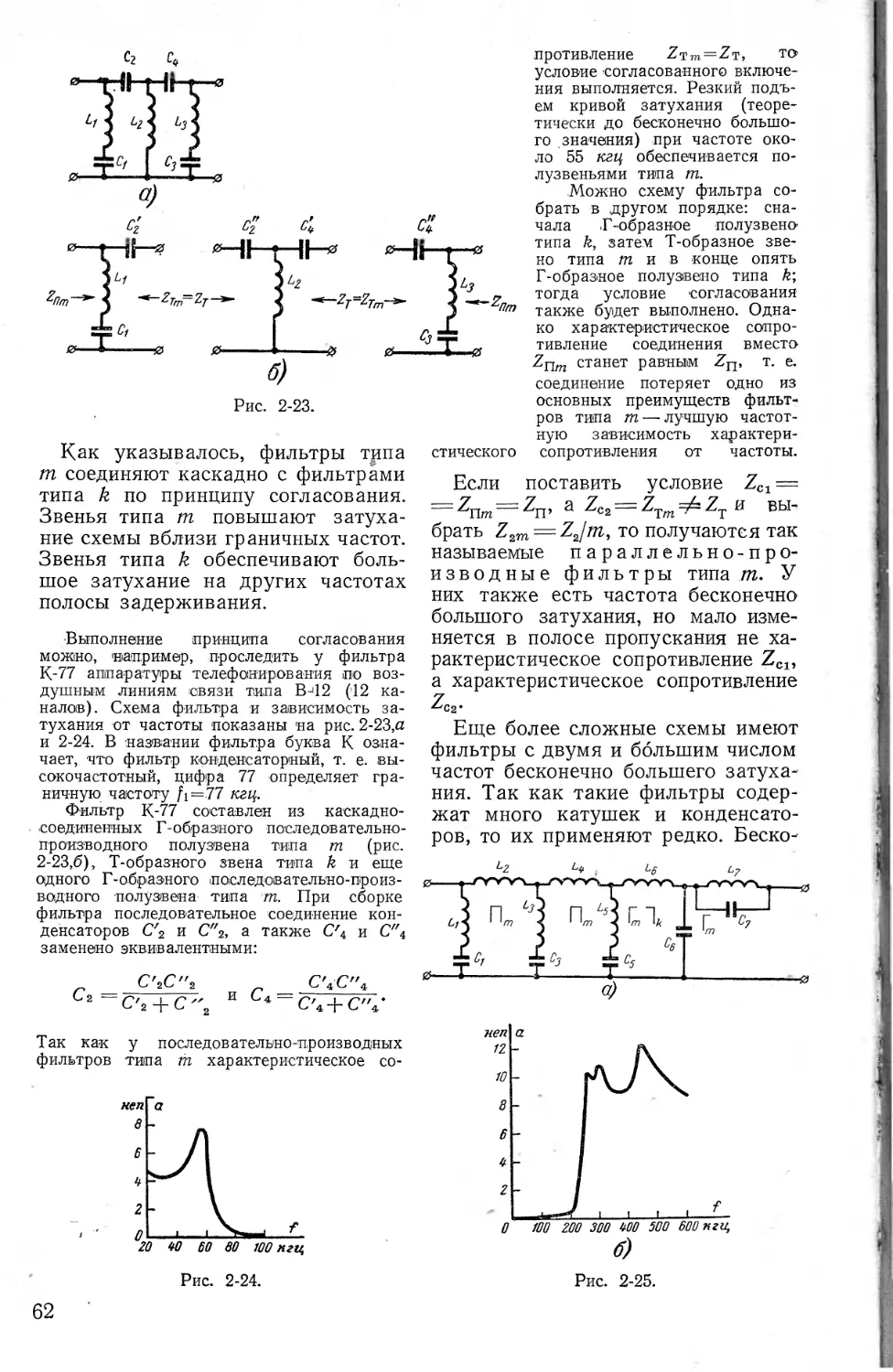
2-8. Фильтры типа т.............. 60
2-9. Фильтры — индуктивно связанные
контуры....................... 63
2-10. Мостовые фильтры........... 64
2-11. Электромеханические и безын-
дукционные фильтры ...... 66
Глава третья
Длинные линии
3-1. Введение................. 68
3-2. Линии передачи........... 68
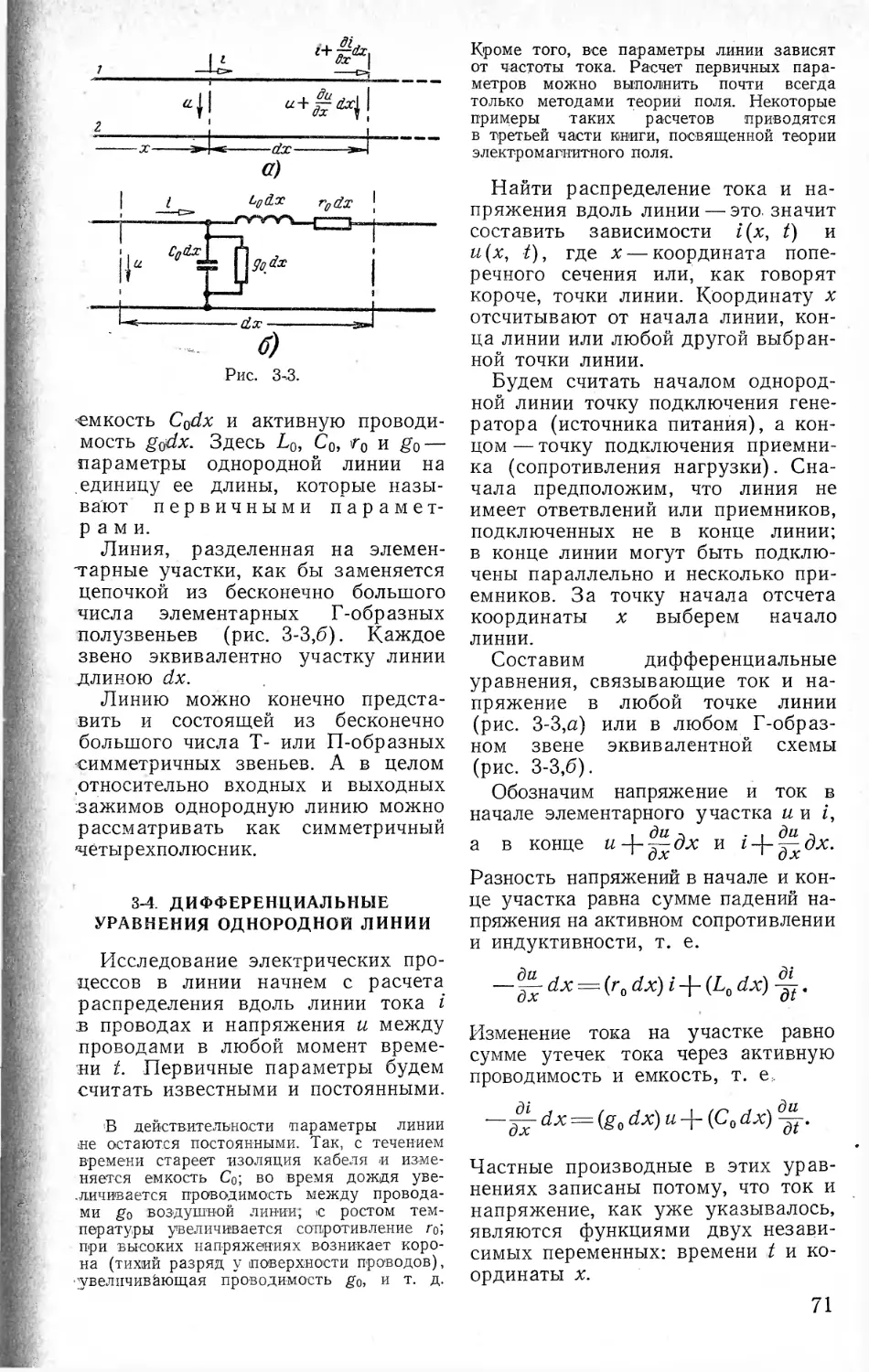
3-3. Упрощенная теория........ 70
3-4. Дифференциальные уравнения
однородной линии.............. 71
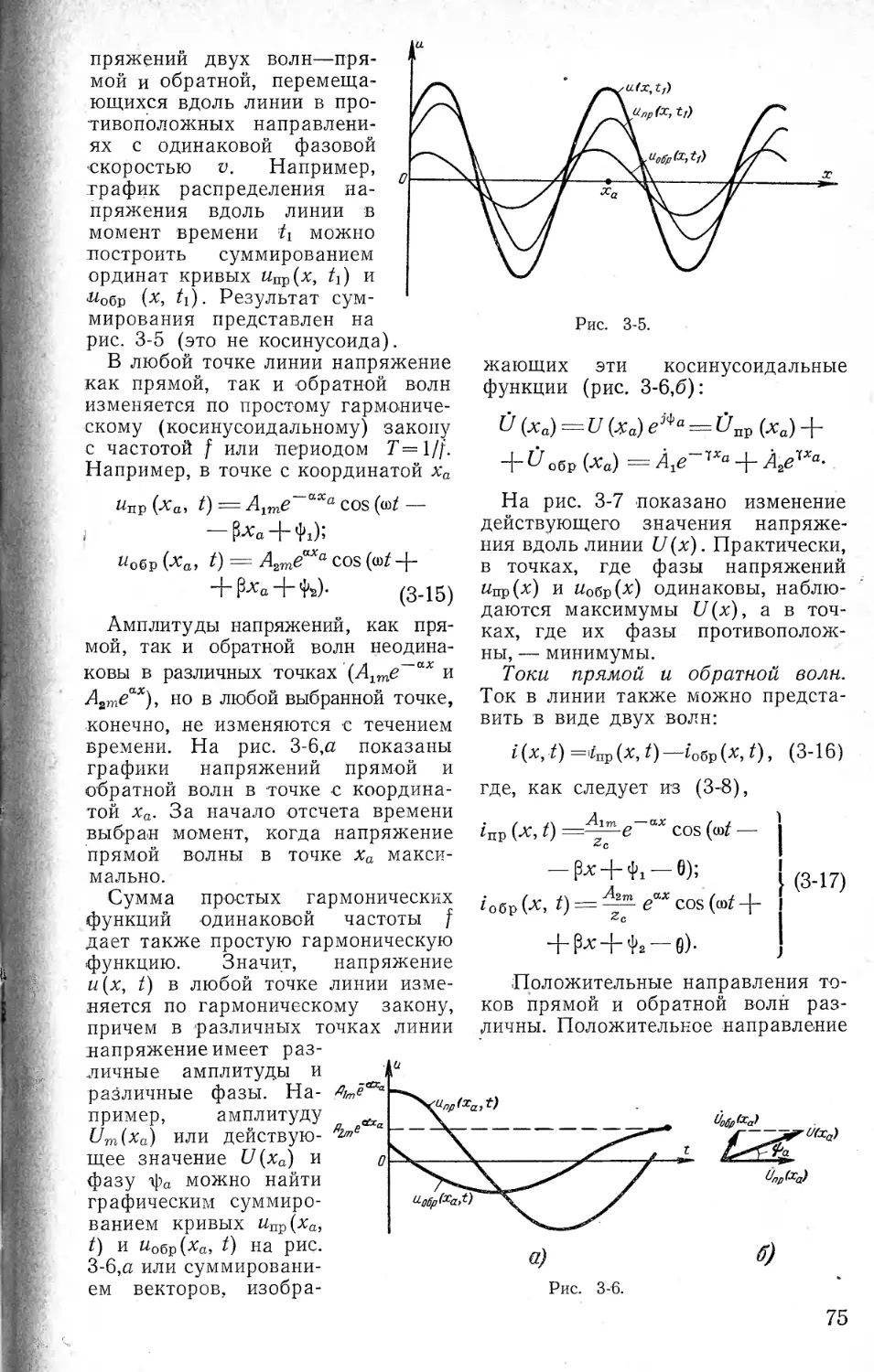
3-5. Синусоидальные напряжение и
ток........................... 72
3-6. Прямая и обратная волны ... 73
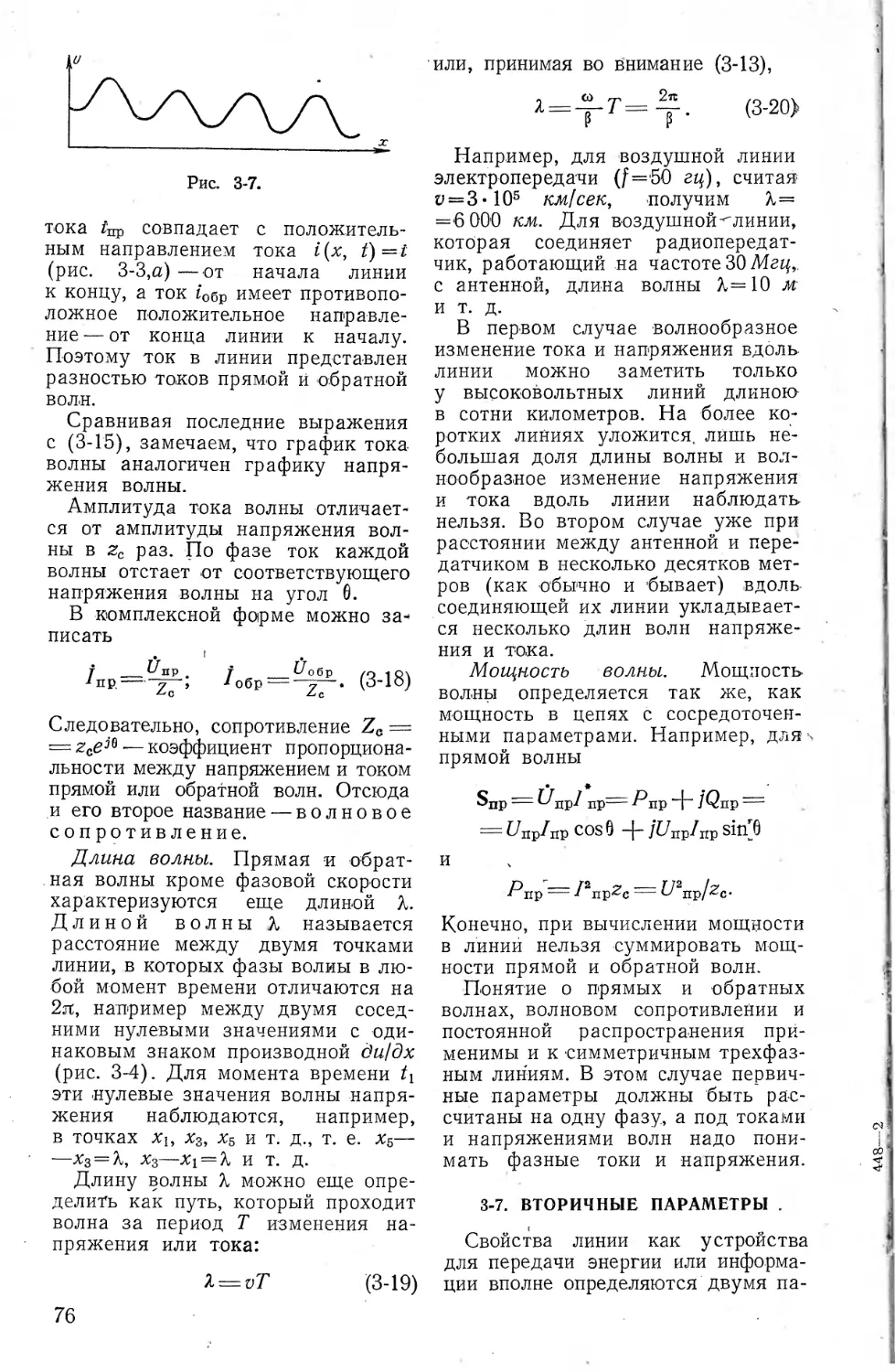
3-7. Вторичные параметры...... 76
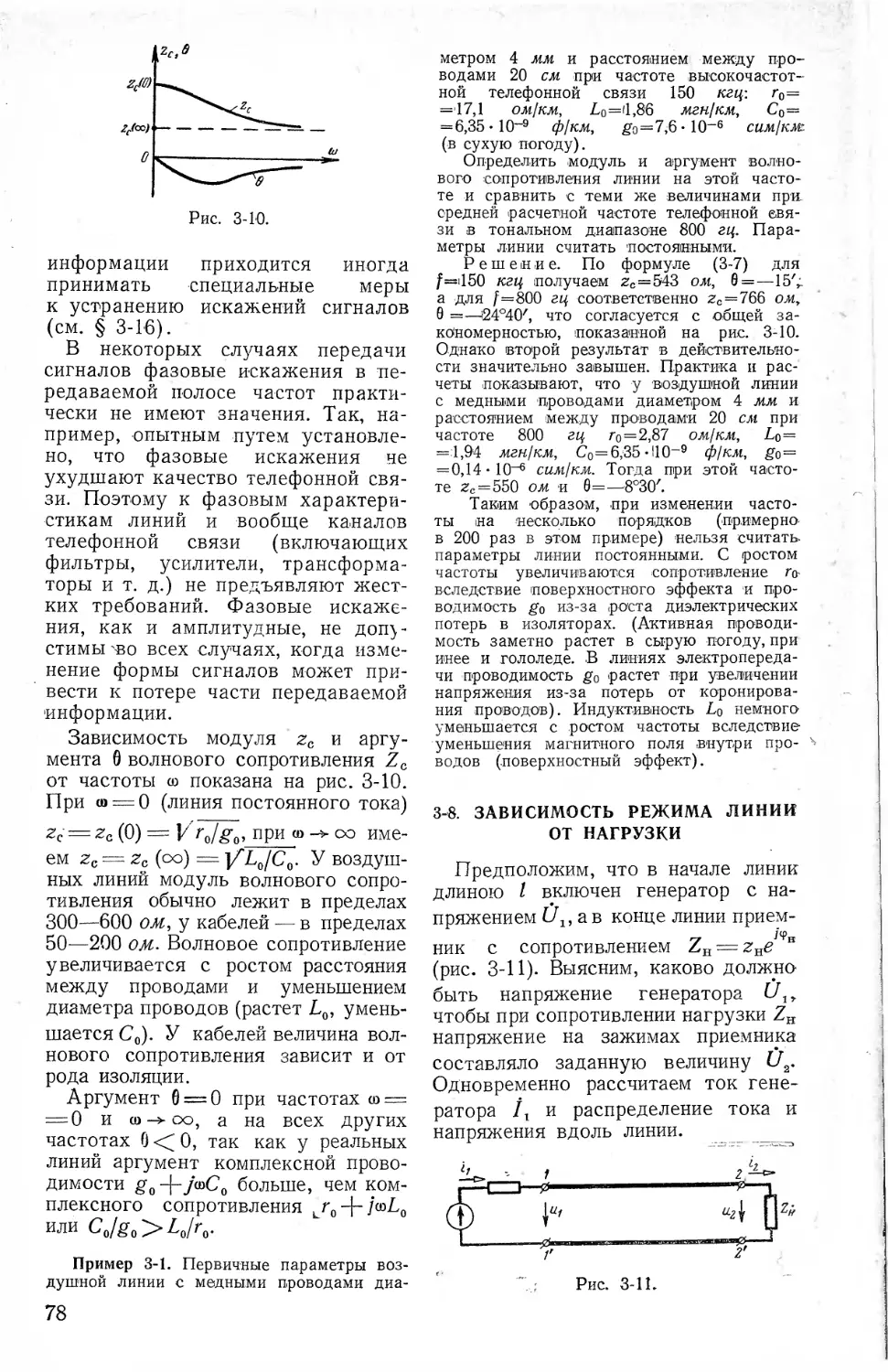
3-8. Зависимость режима линии от .
нагрузки................. 78
3-9. Длинная и короткая линйи ... 81
3-10. Несогласованная нагрузка .... 82
3-11. Согласованная нагрузка.. 83
3-12. Входное сопротивление... 84
3-13. Короткое замыкание и холостой
ход............................ 87
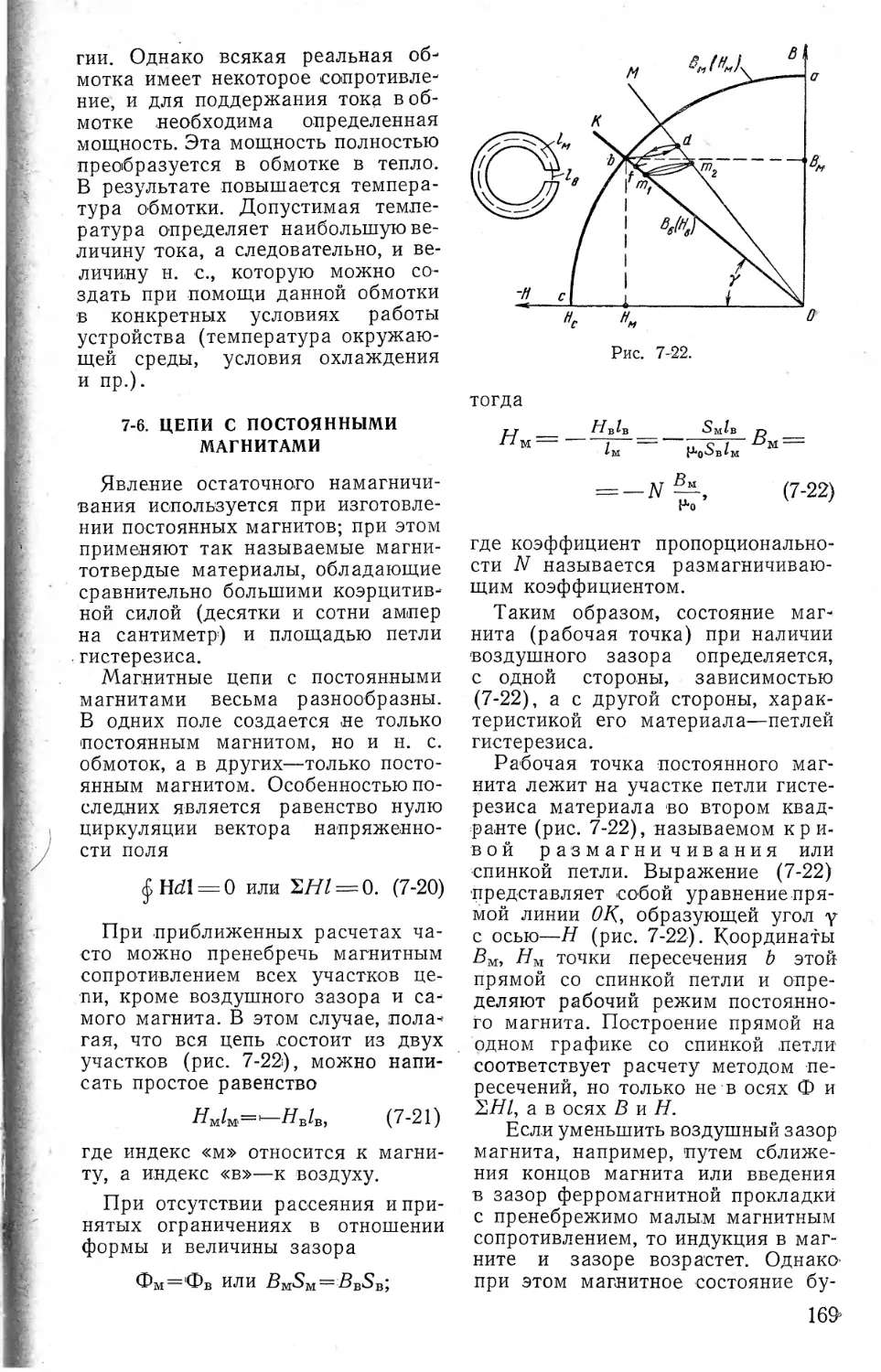
3-14. Схемы замещения............... 89
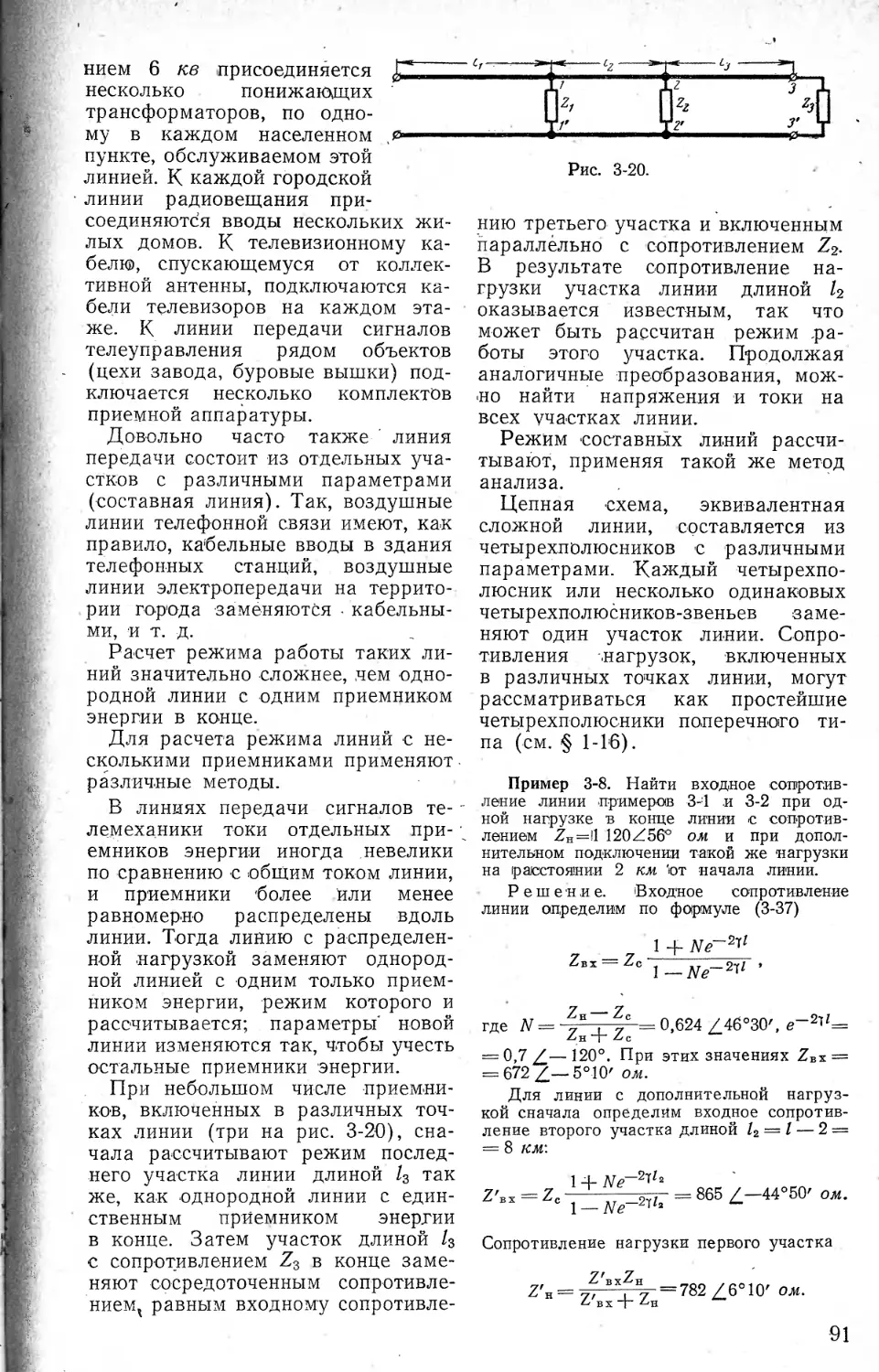
3-15. Сложная линия................. 90
3-16. Линия без искажений.......... 92
Г 3-17. Линия с малыми потерями ... 93
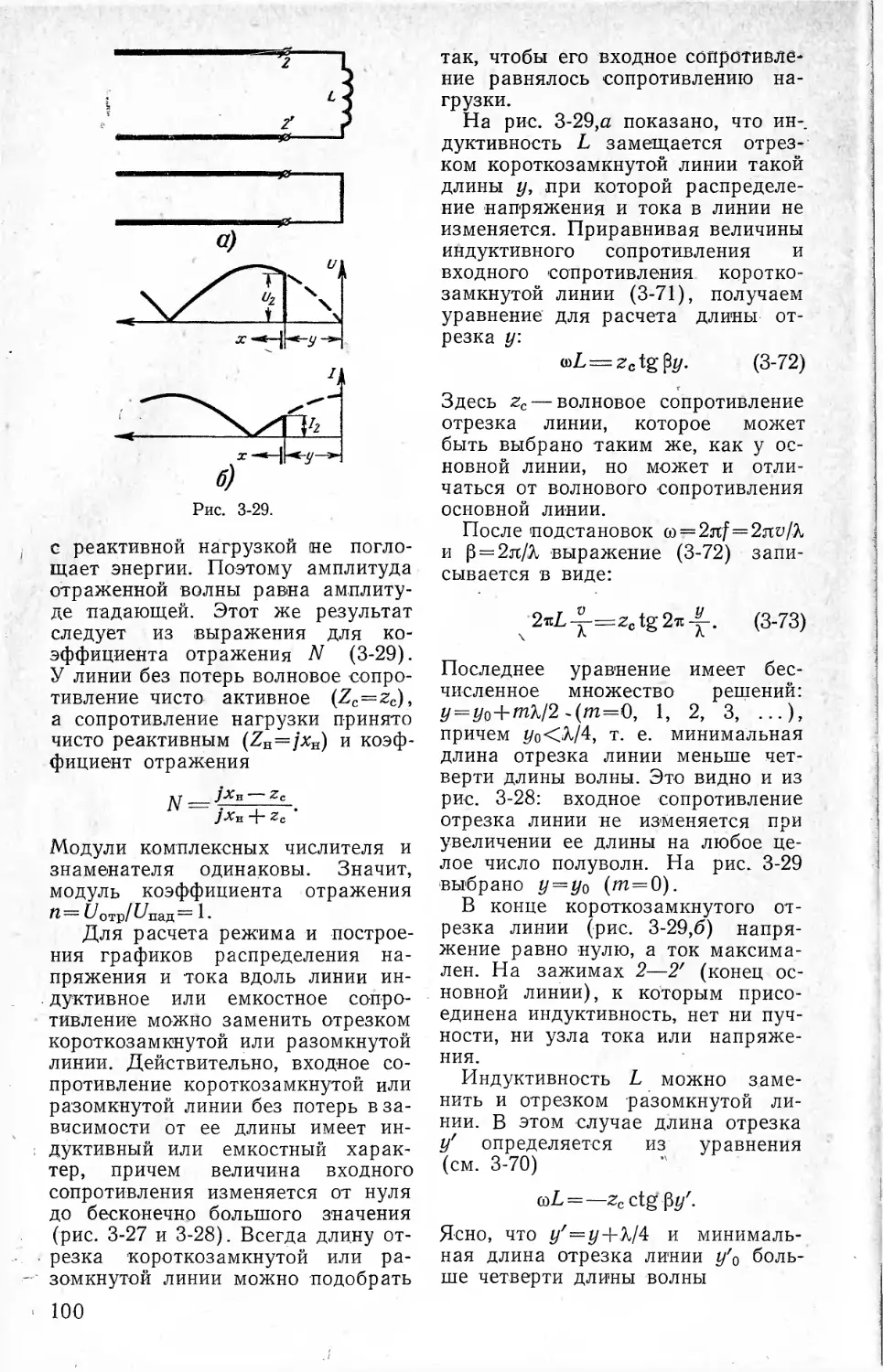
3*18. Линия без потерь.............. 94
3-19. Согласованная нагрузка линии
без потерь..................... 95
3-20. Холостой ход и короткое замы-
кание линии без потерь......... 96
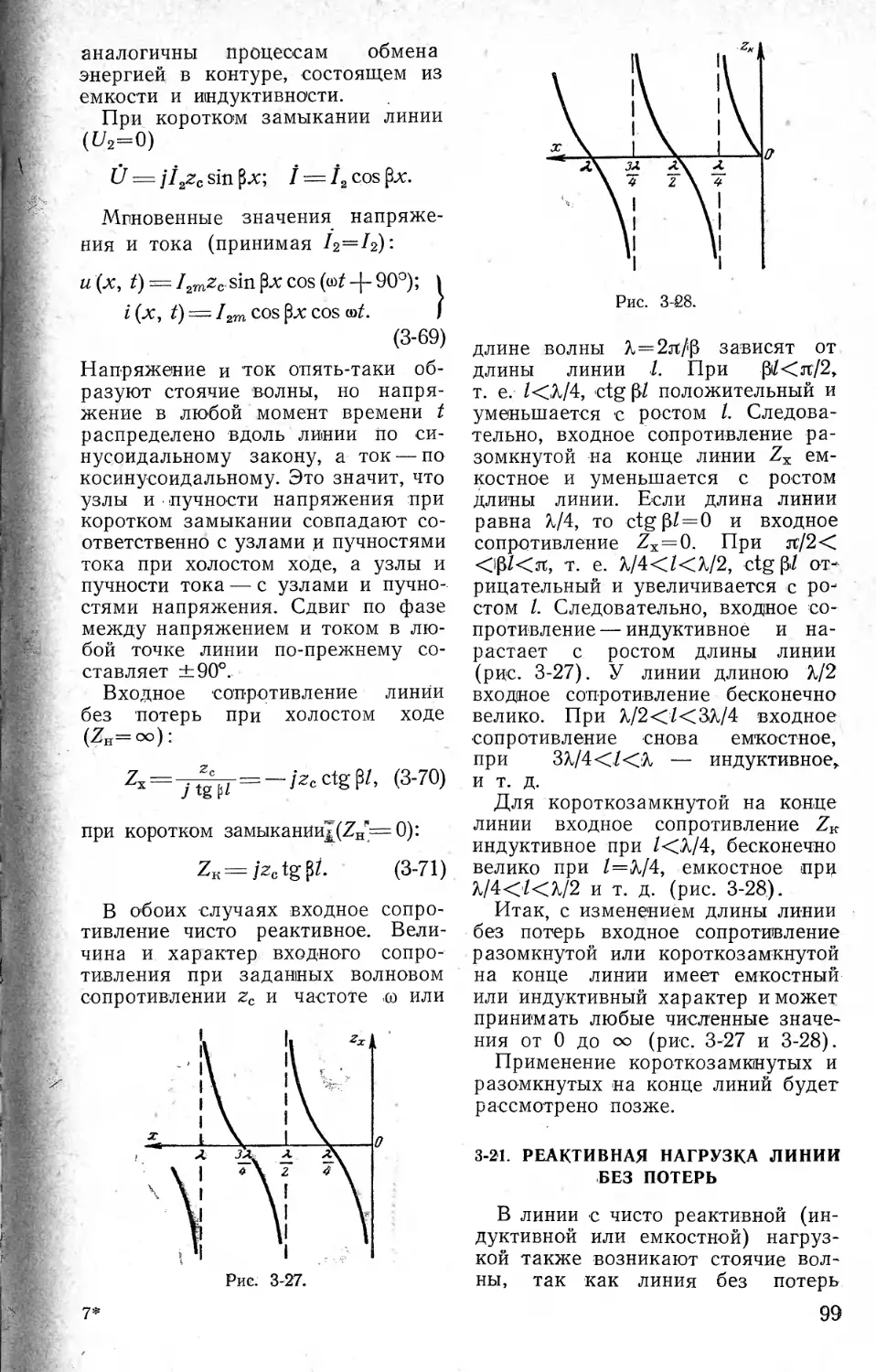
3-21. Реактивная нагрузка линии без
потерь....................... 99
3-22. Произвольная нагрузка линии без
потерь.........................101
3 23. Применение отрезков линии для
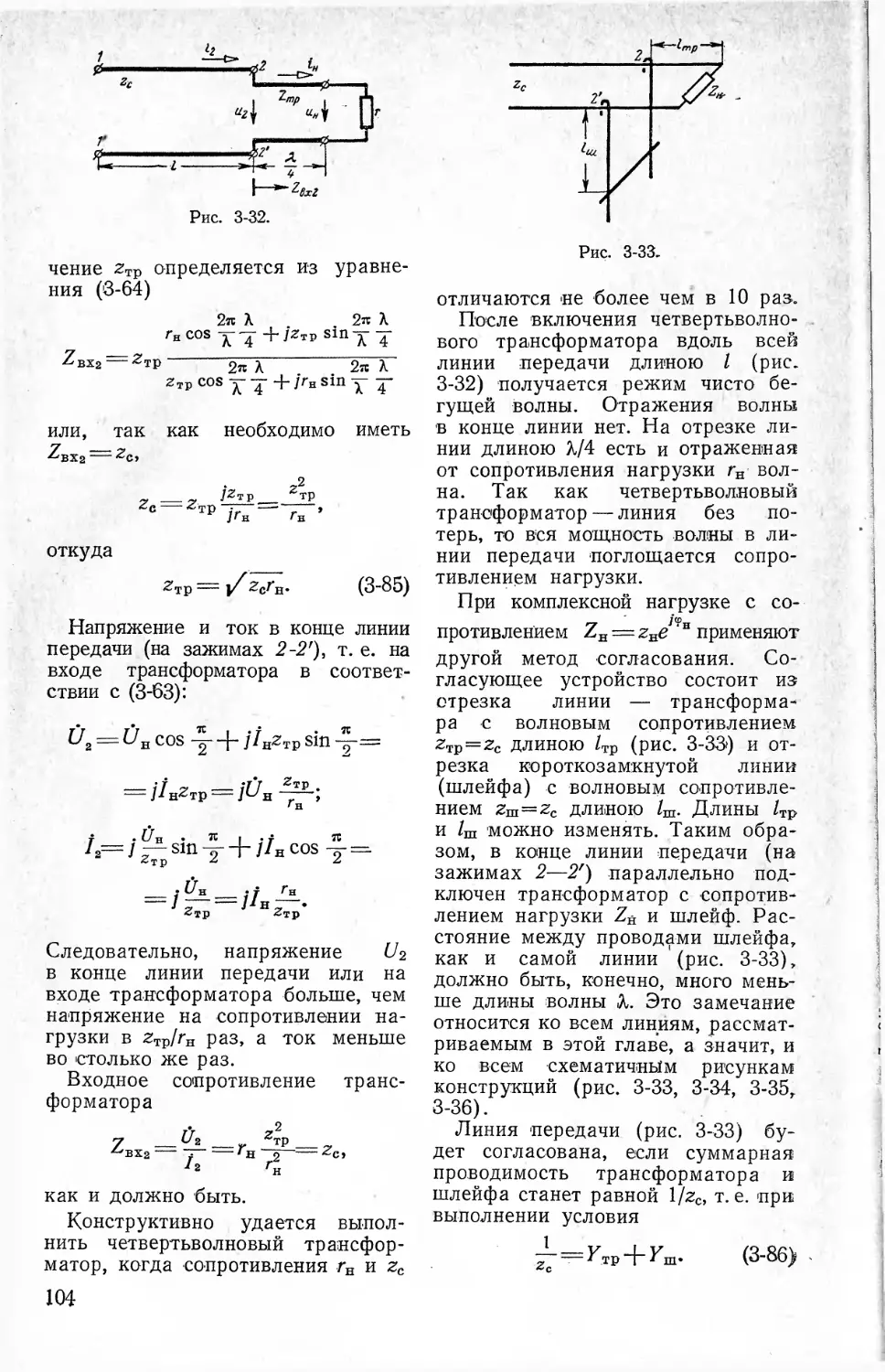
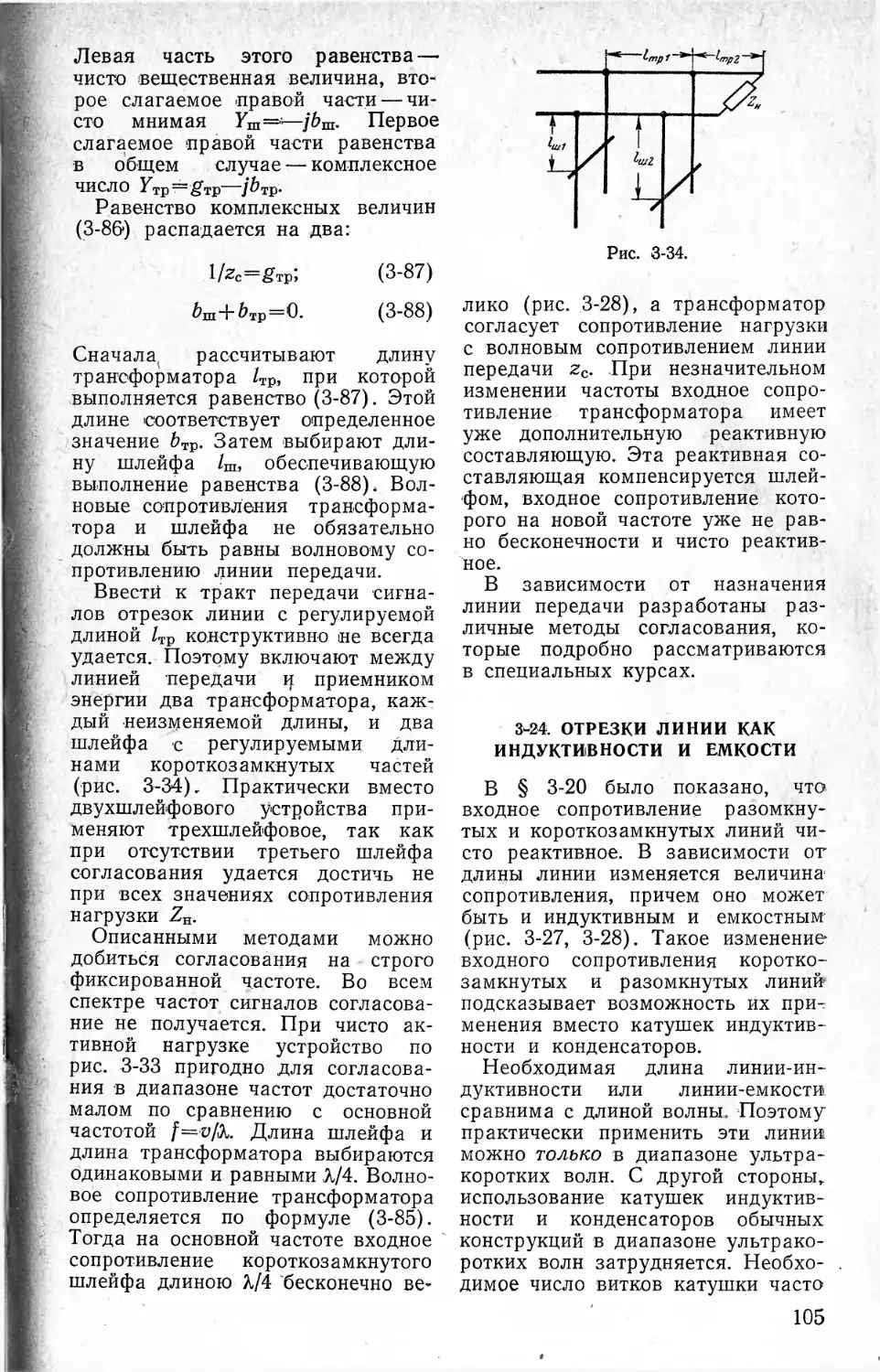
согласования нагрузки ........ 103
3-24. Отрезки линии как индуктивно-
сти и емкости..................105
3-25. Применение линий длиною Х/4 и
Х/2............................106
3-26. Измерительная линия..........108
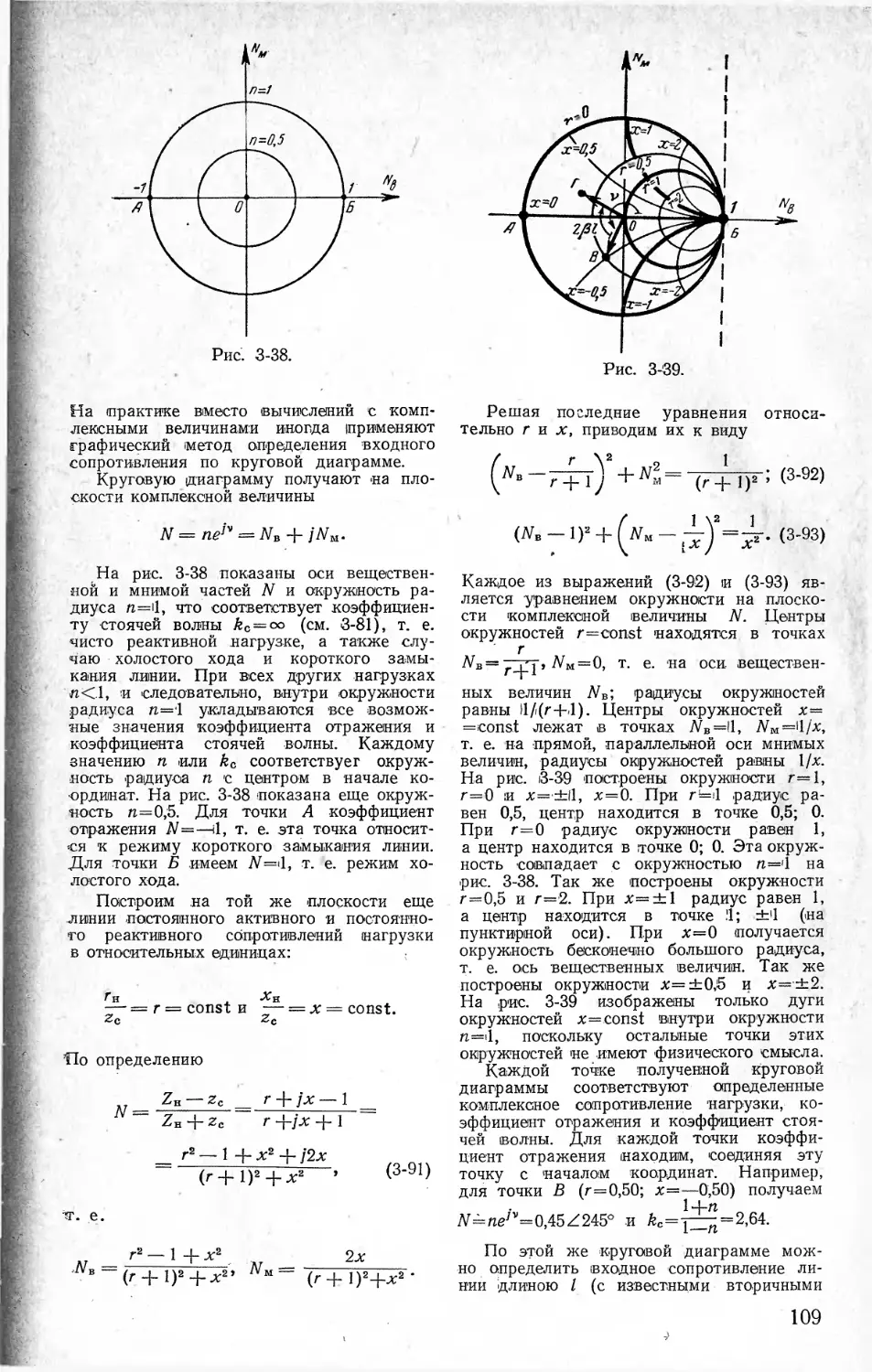
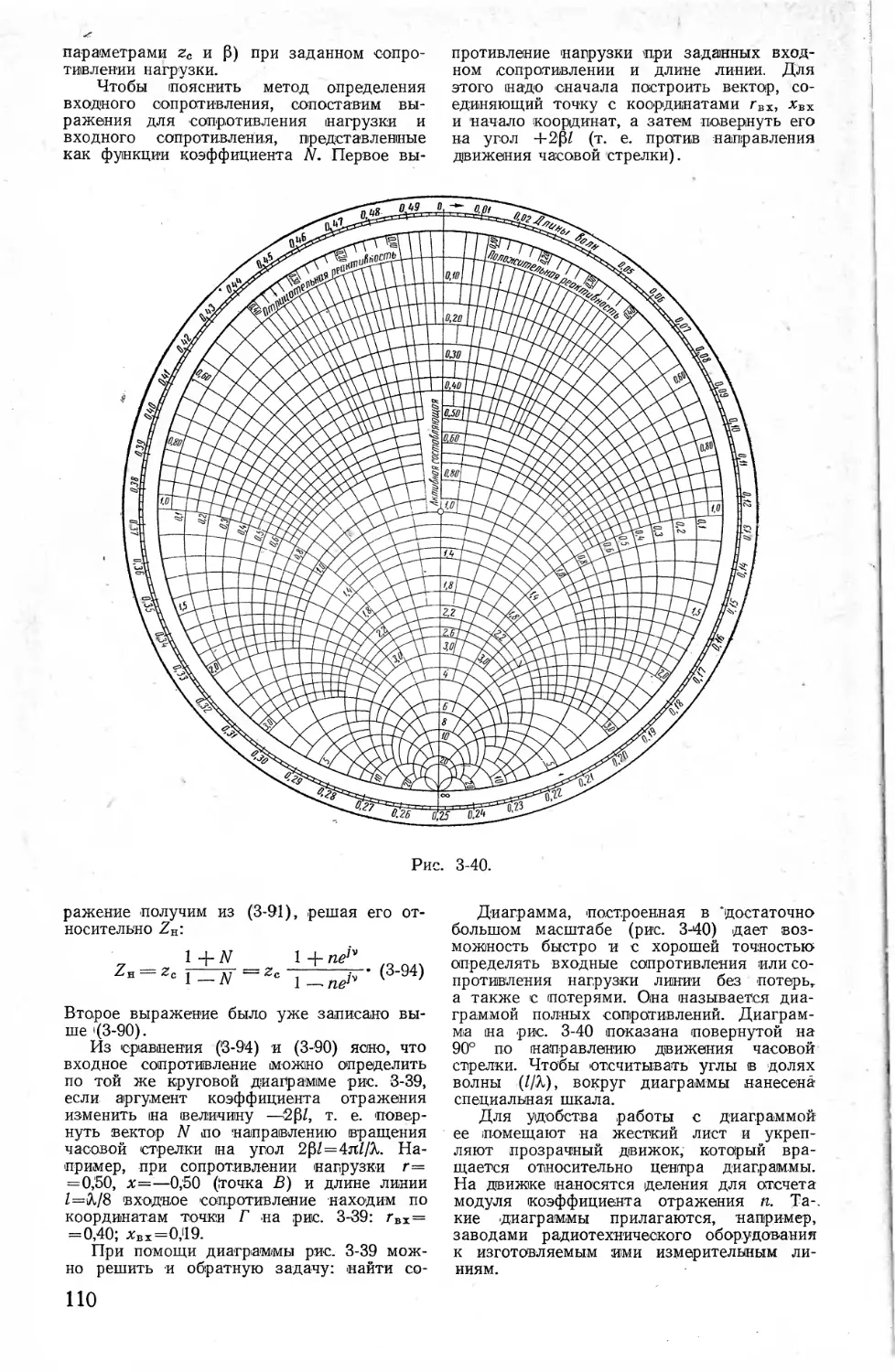
3-27. Круговая диаграмма для расчета
входного сопротивления.........108
Глава четвертая
Переходные процессы
в длинных линиях
4-1. Введение...................111
4-2. Прямая и обратная волны в одно-
родной линии..................111
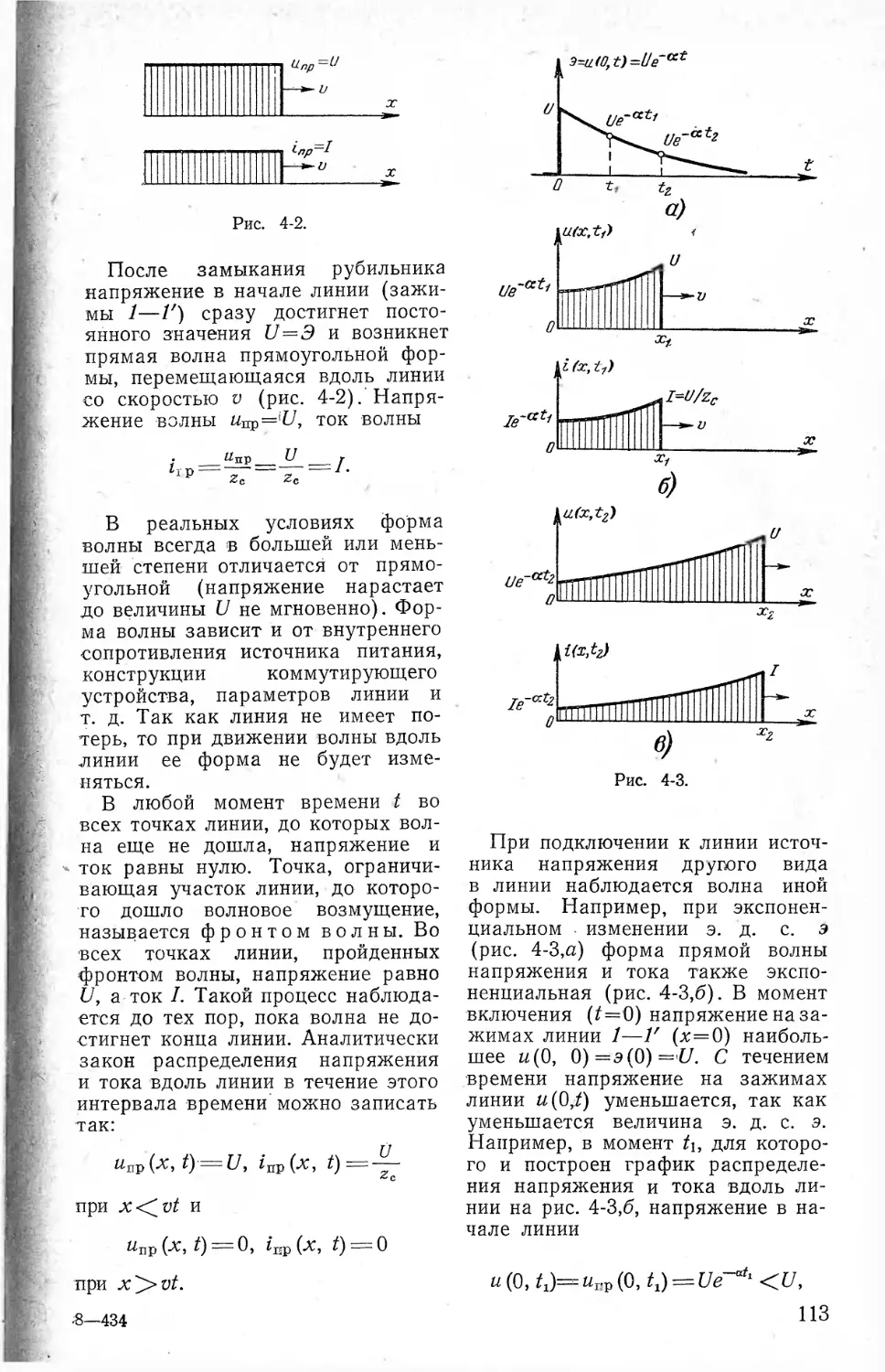
4-3. Прямая волна при подключении
к линии источника напряжения 112
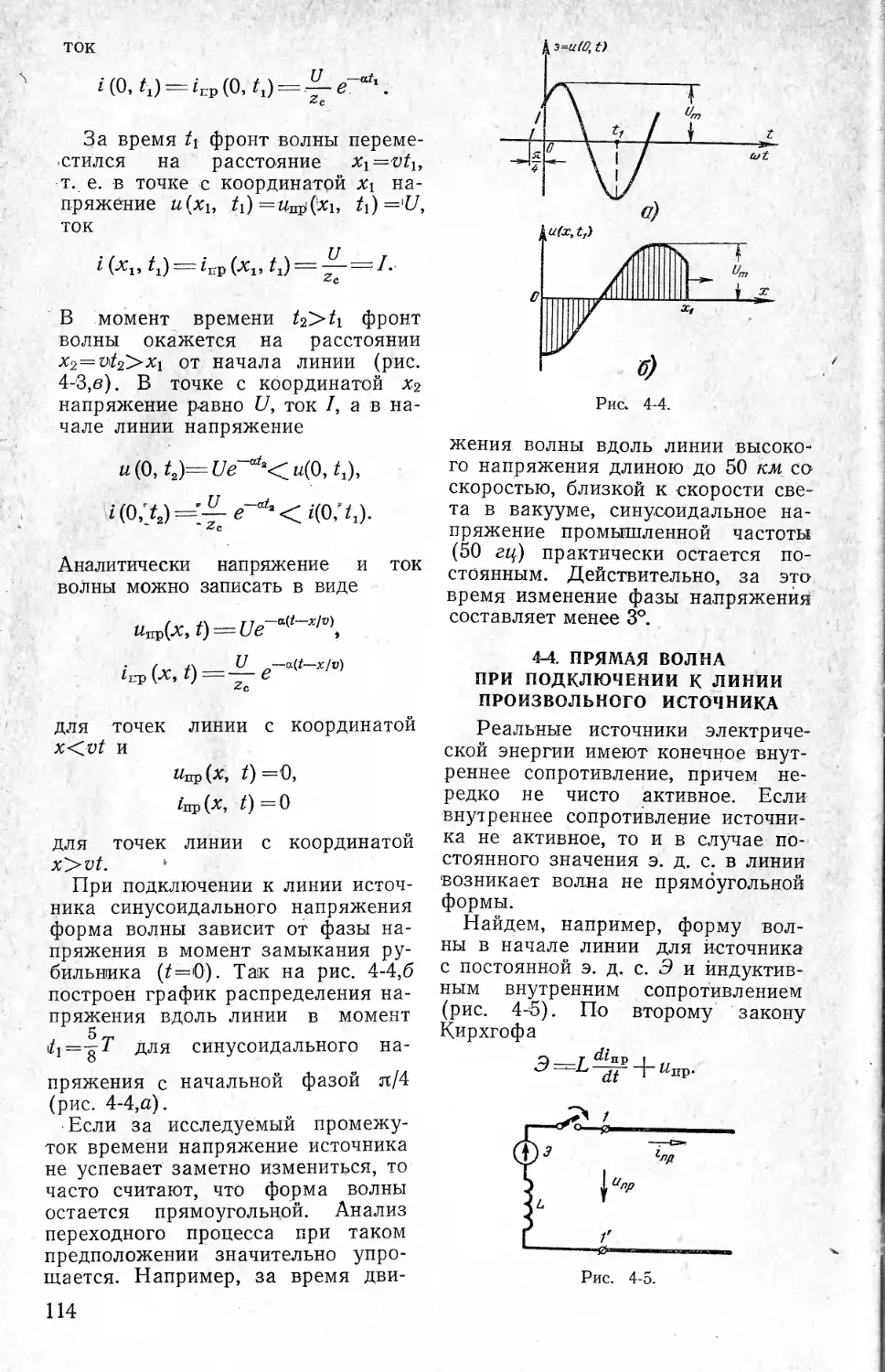
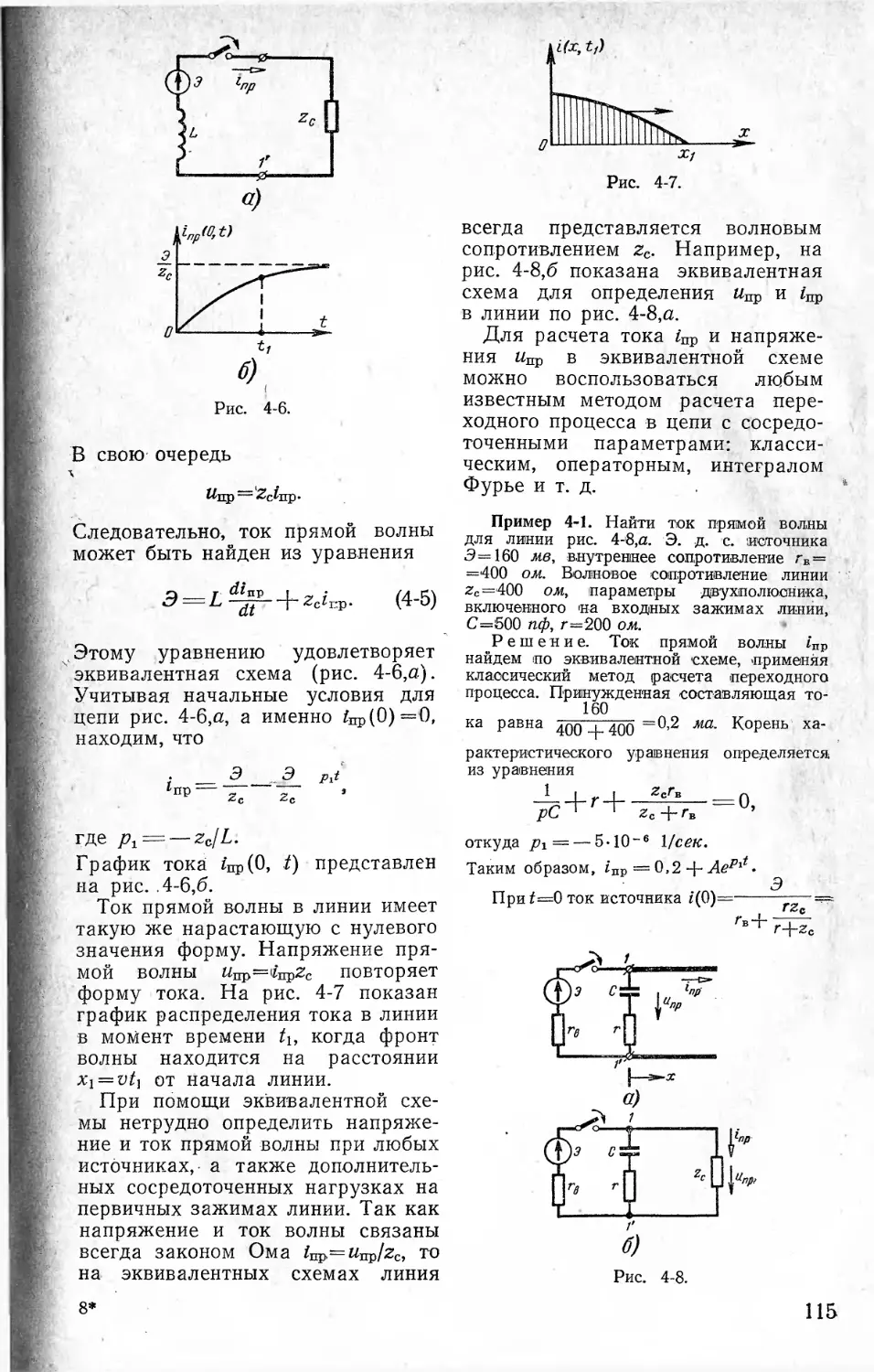
4-4. Прямая волна при подключении
к линии произвольного источ-
ника ......................... . . 114
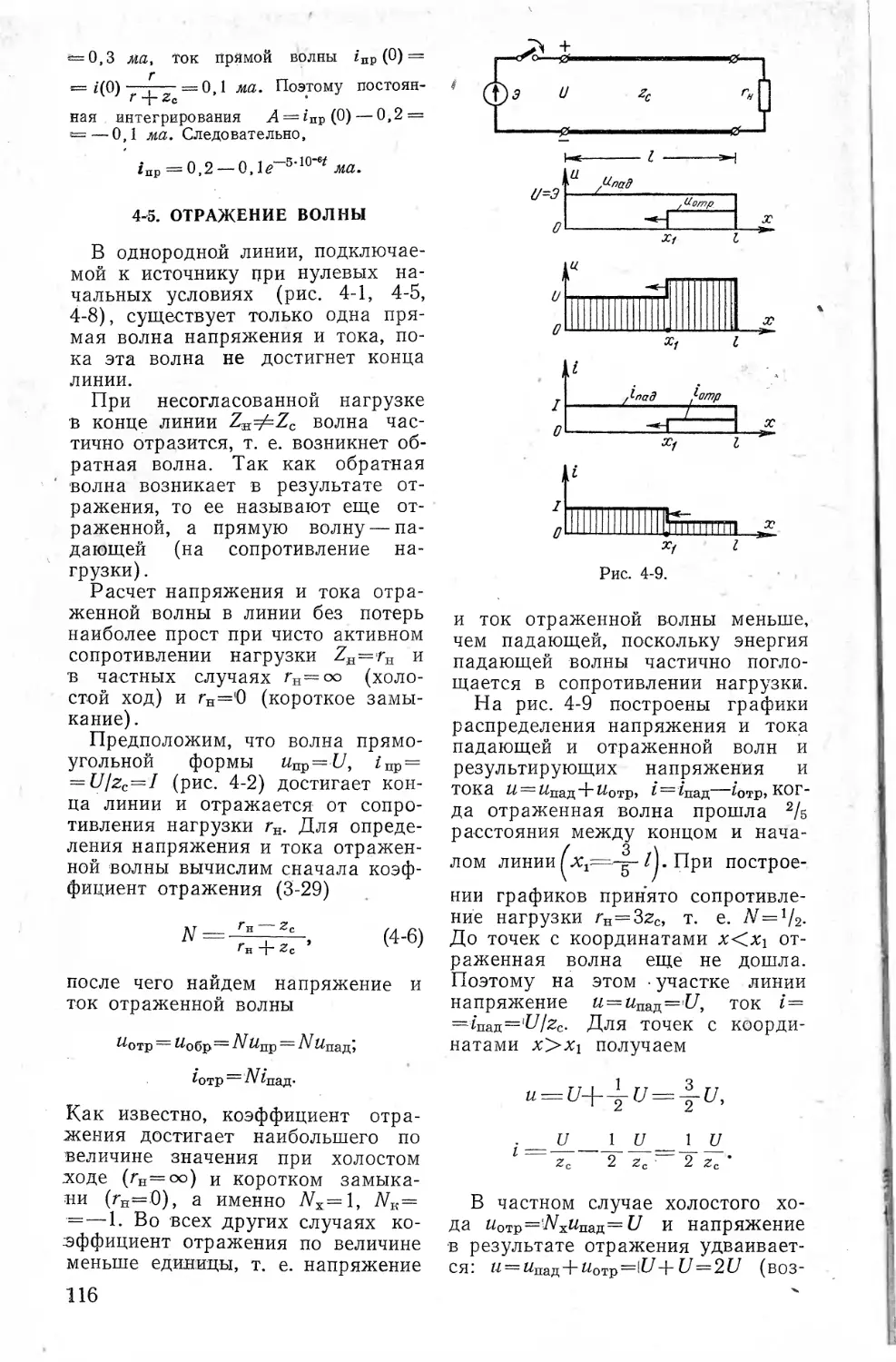
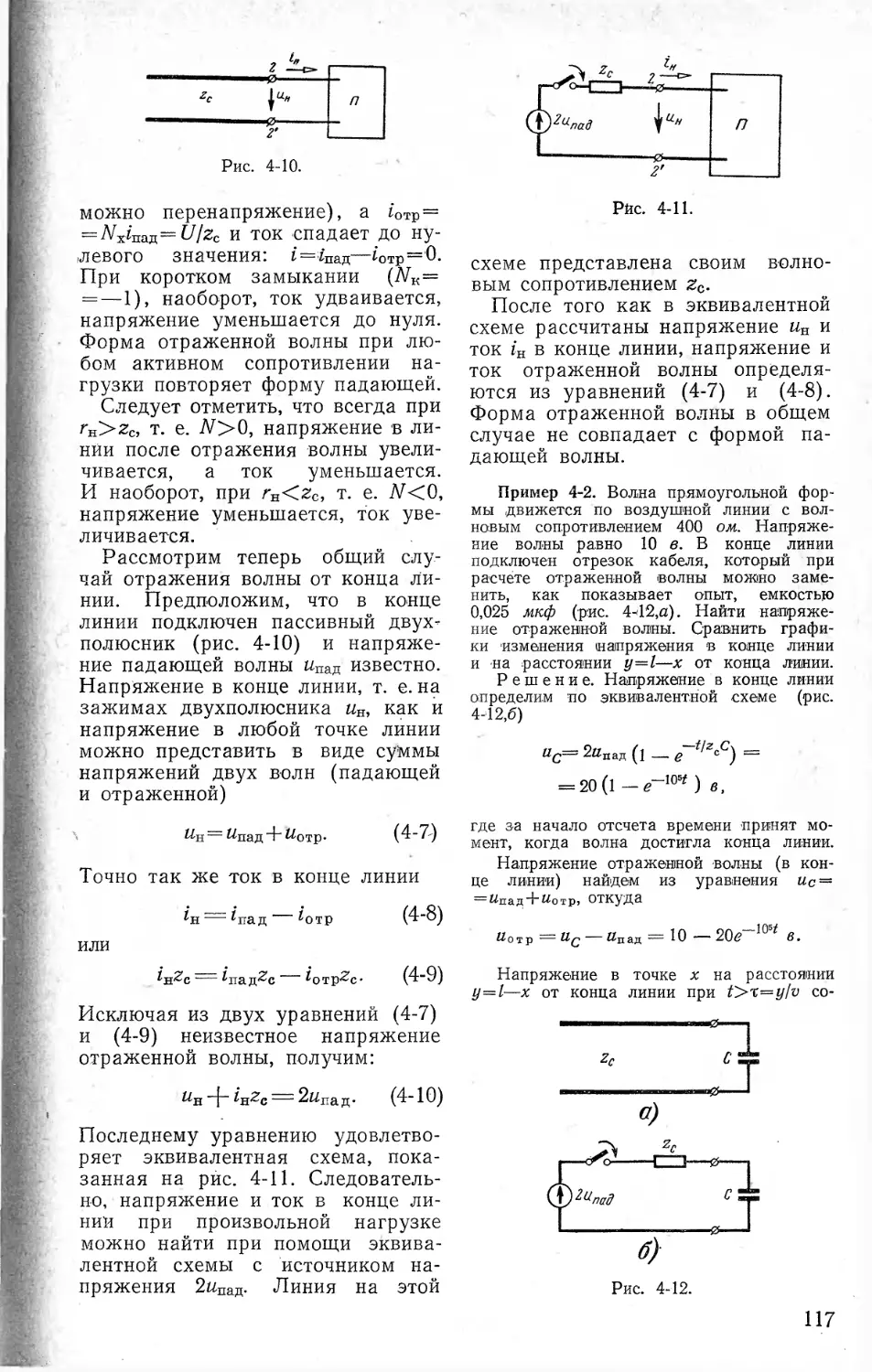
4-5. Отражение волны..............116
4-6. Возникновение волн при комму-
тациях на заряженной линии . . 122
4-7. Многократные отражения волн
в разомкнутой и короткозамкну-
той линиях....................124
4-8. Общий случай многократных от-
ражений ......................126
4-9. Блуждающие волны...........128
РАЗДЕЛ ВТОРОЙ
НЕЛИНЕЙНЫЕ ЭЛЕКТРИЧЕСКИЕ ЦЕПИ
Глава пятая
Общая характеристика
нелинейных цепей
5-1. Введение....................130
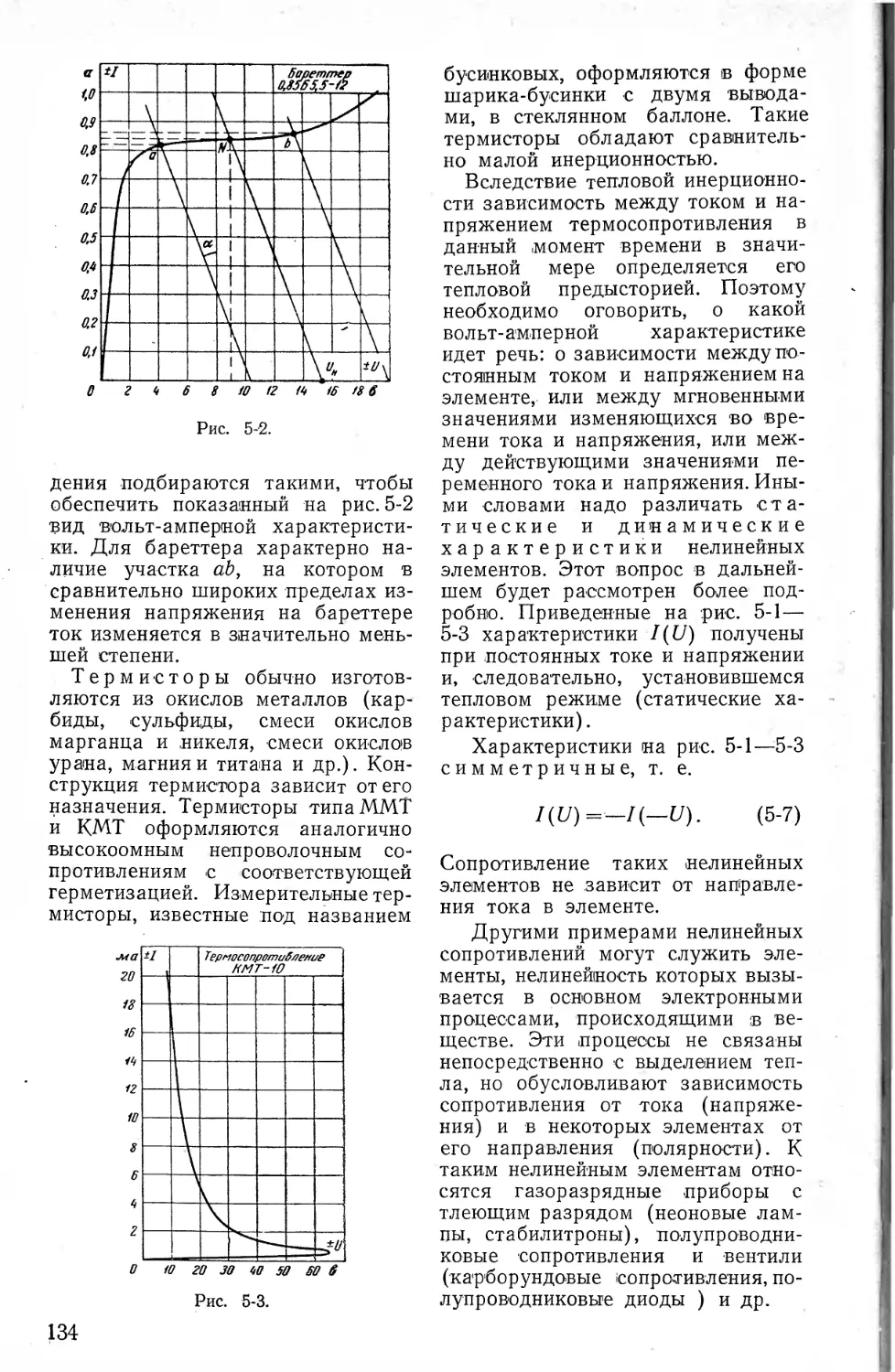
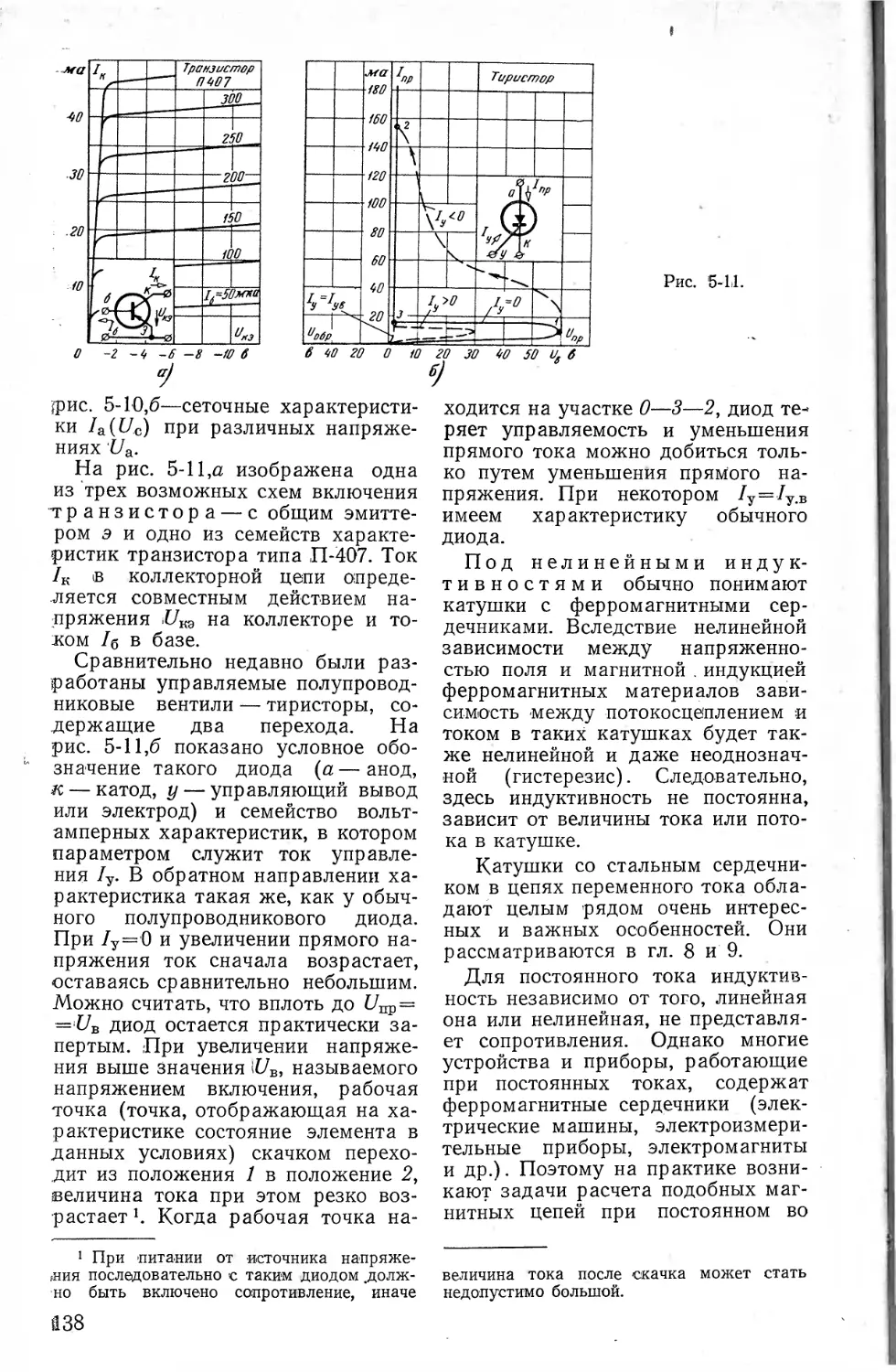
.5-2. Примеры нелинейных элементов
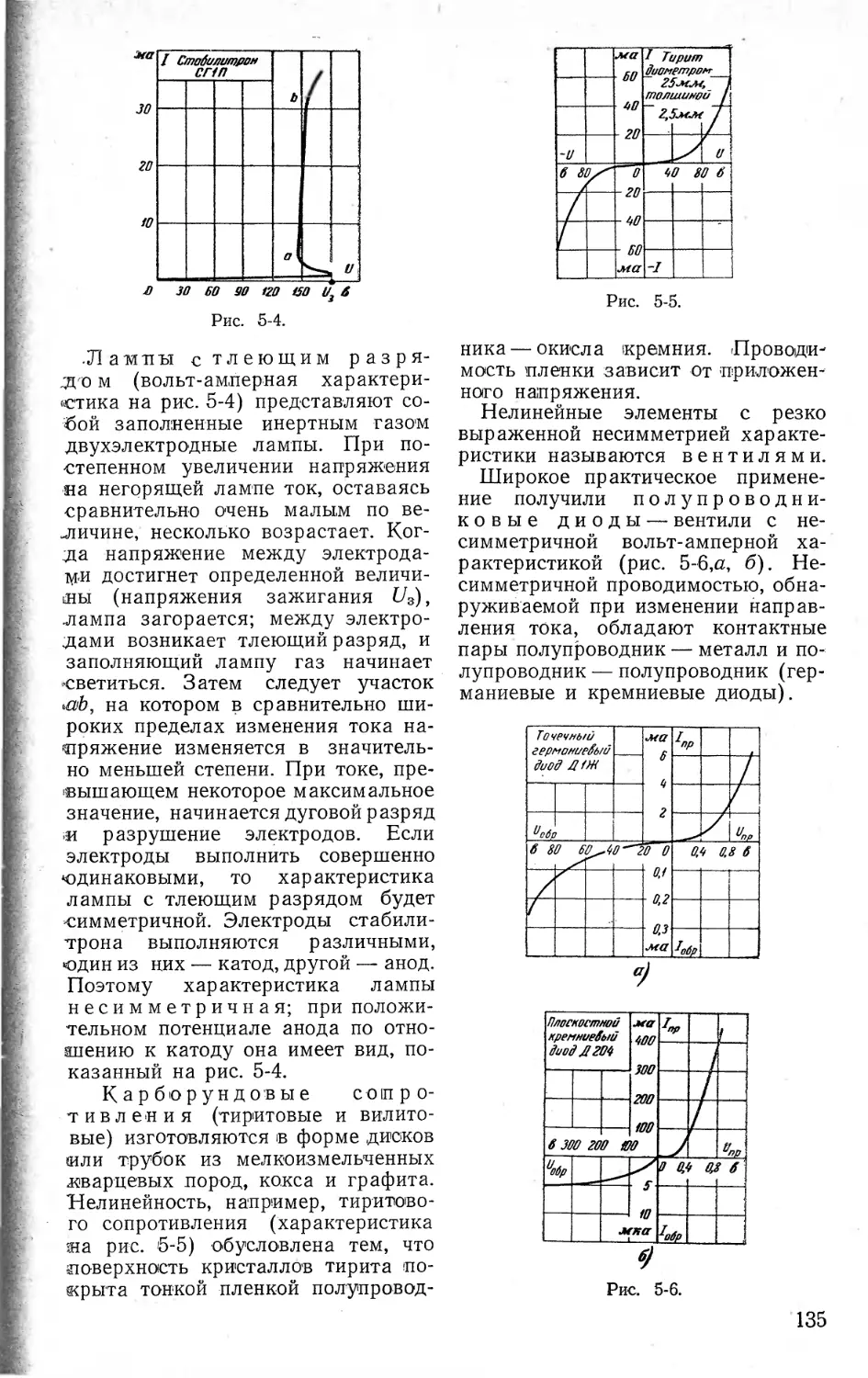
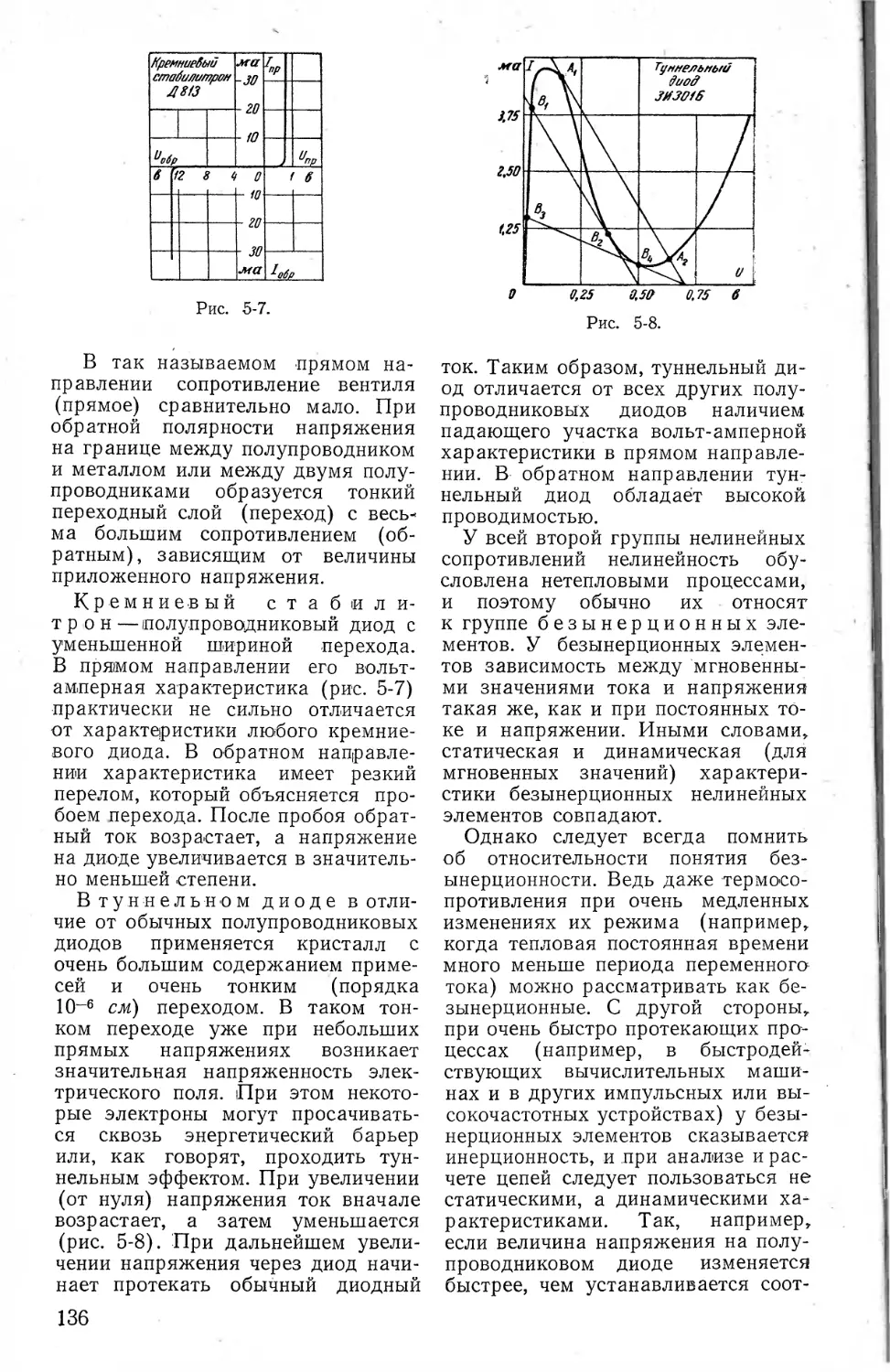
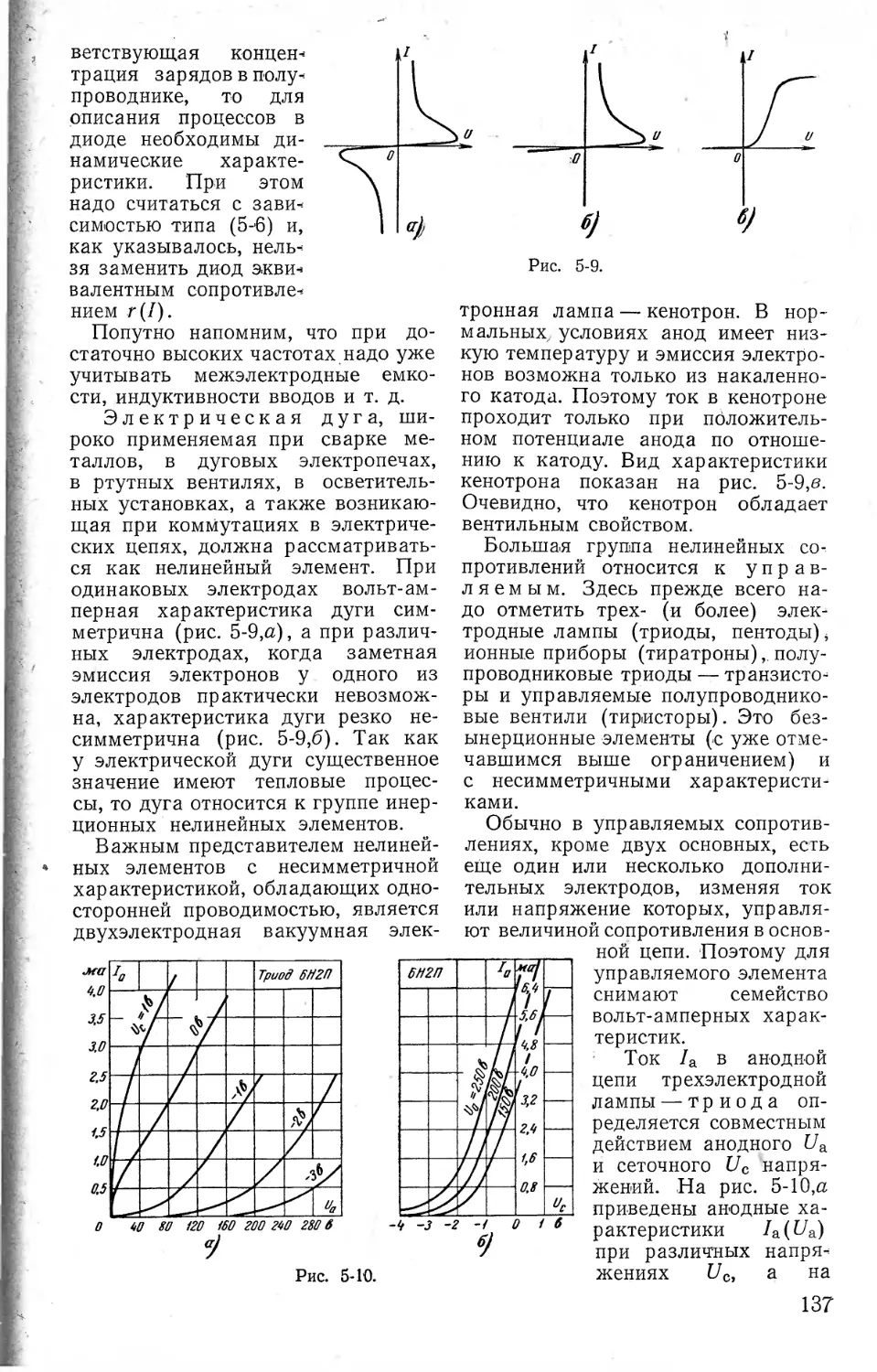
и их характеристик...........133
3-3. Основные явления в нелинейных
цепях и их особенности .... 139
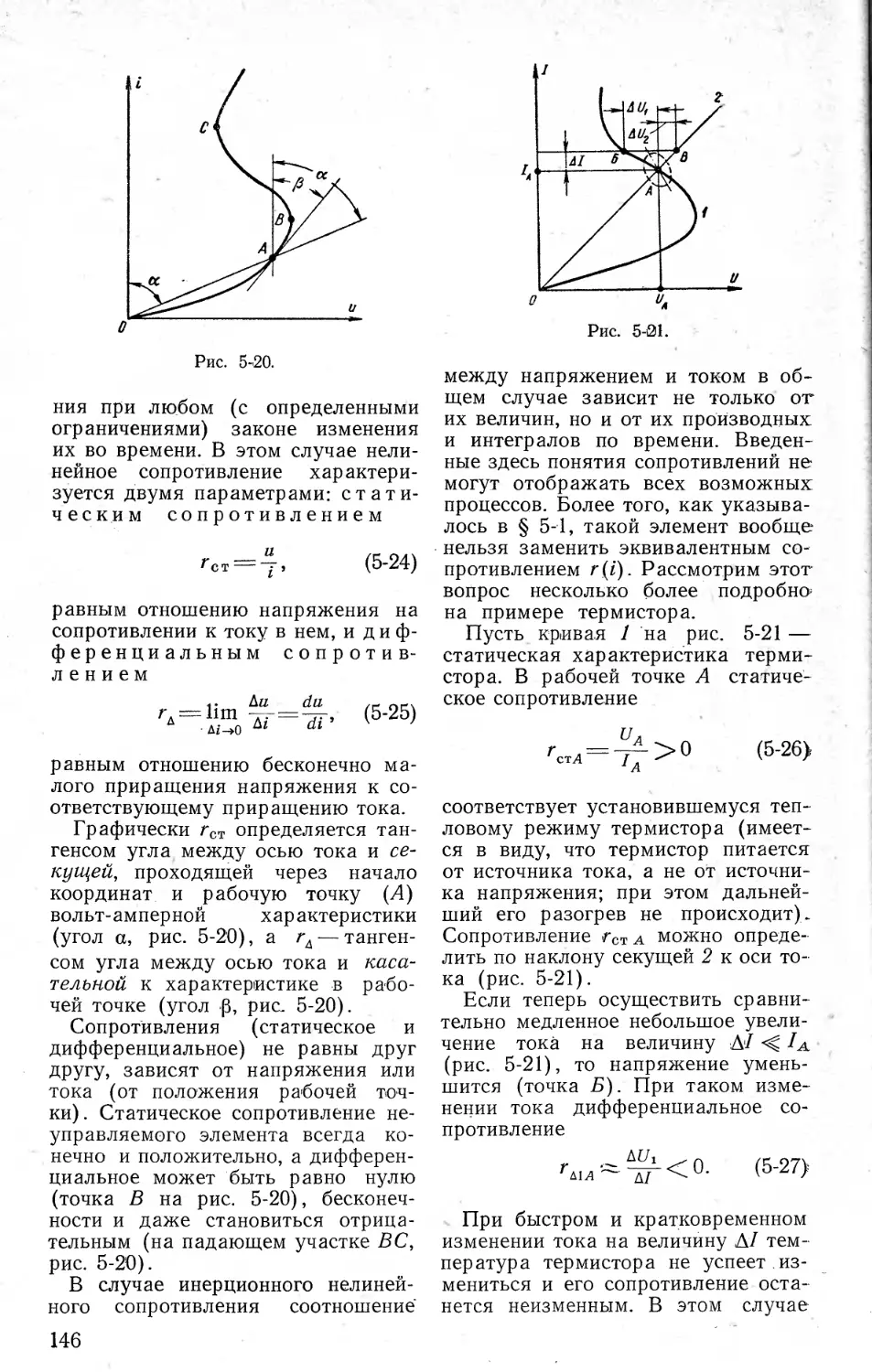
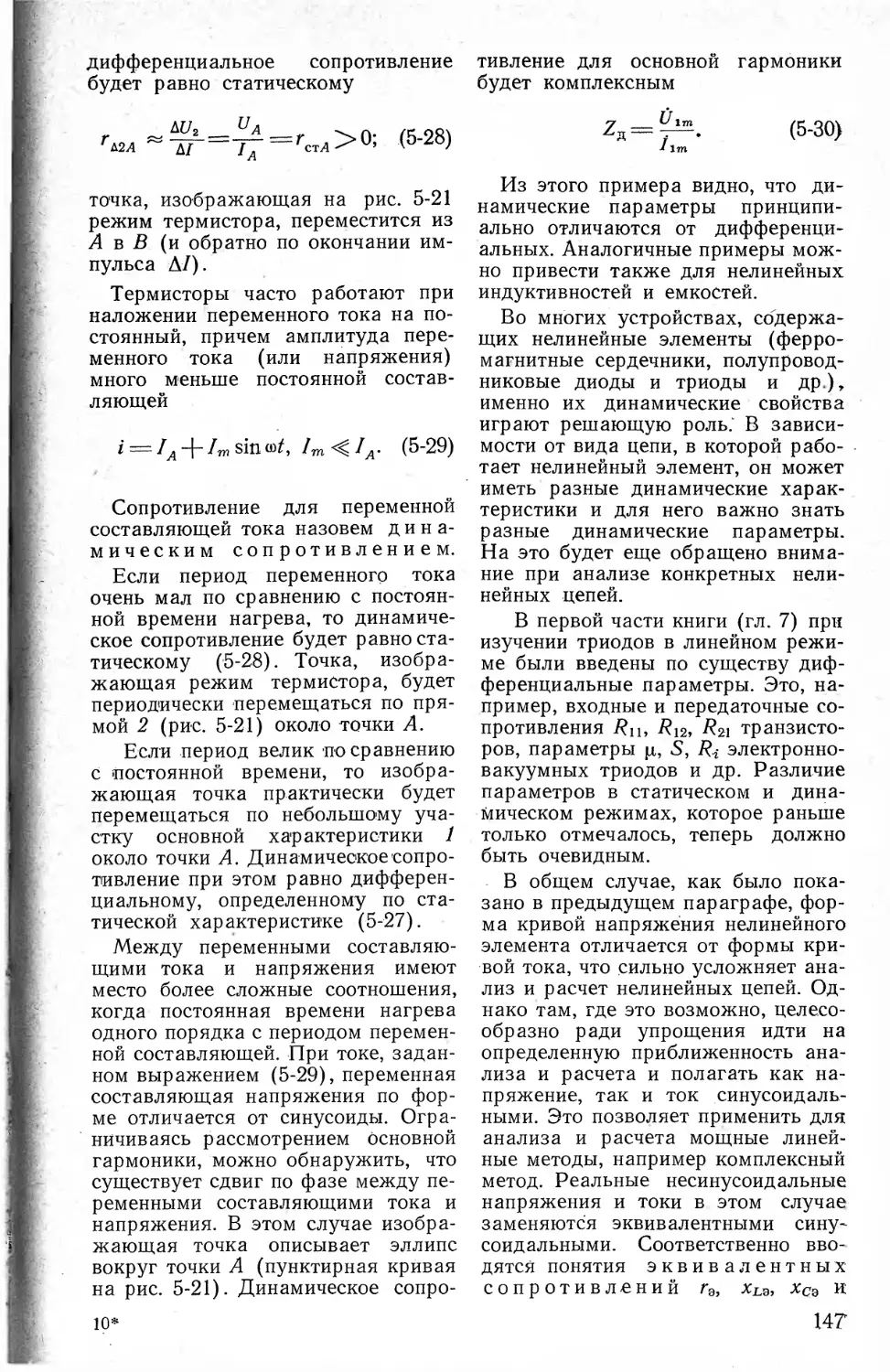
5-4. Статические, дифференциальные,
динамические и эквивалентные
параметры..................145
Г лава шестая
Нелинейные электрические
цепи постоянного тока
в установившемся режиме
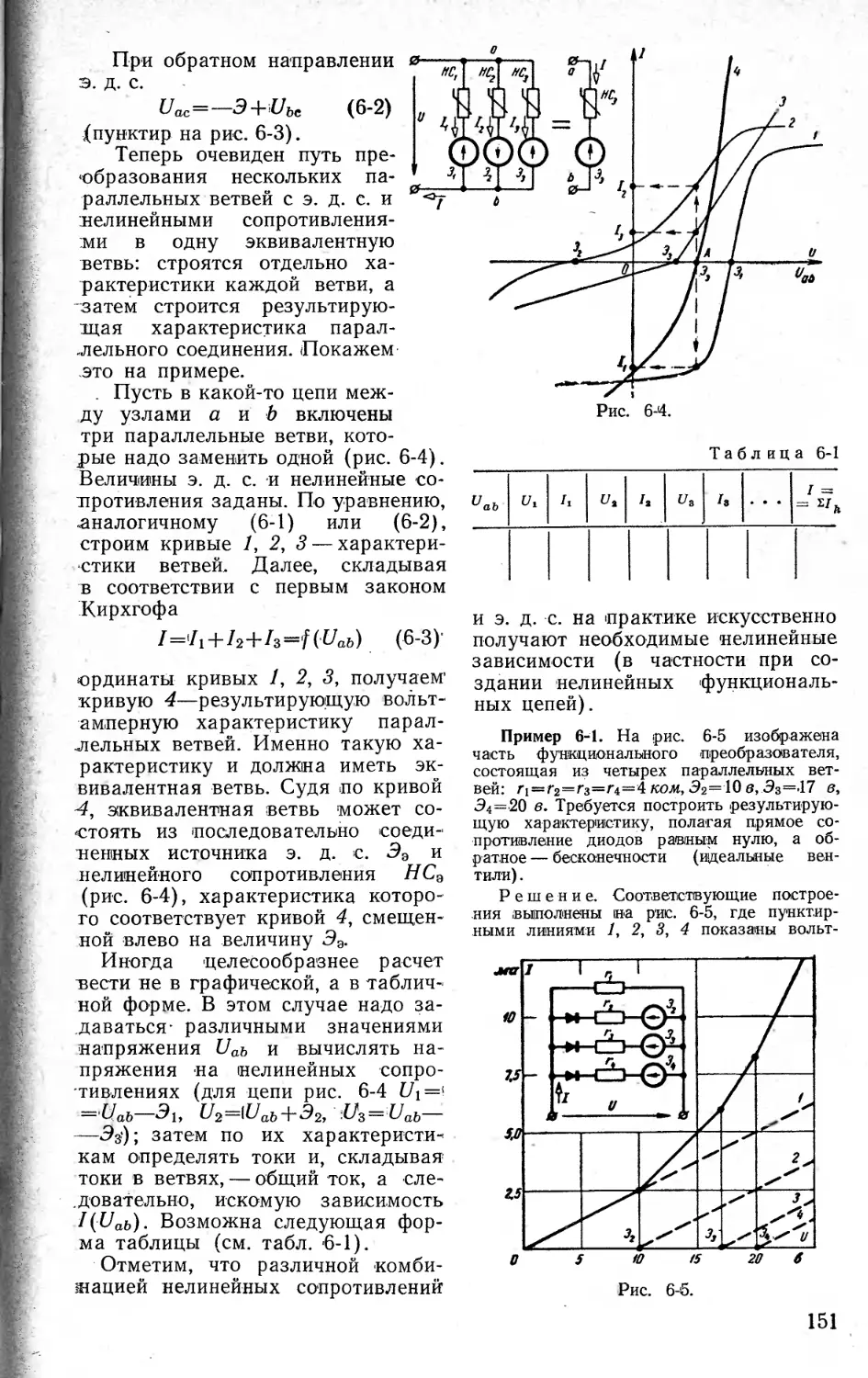
6-1. Введение.....................148
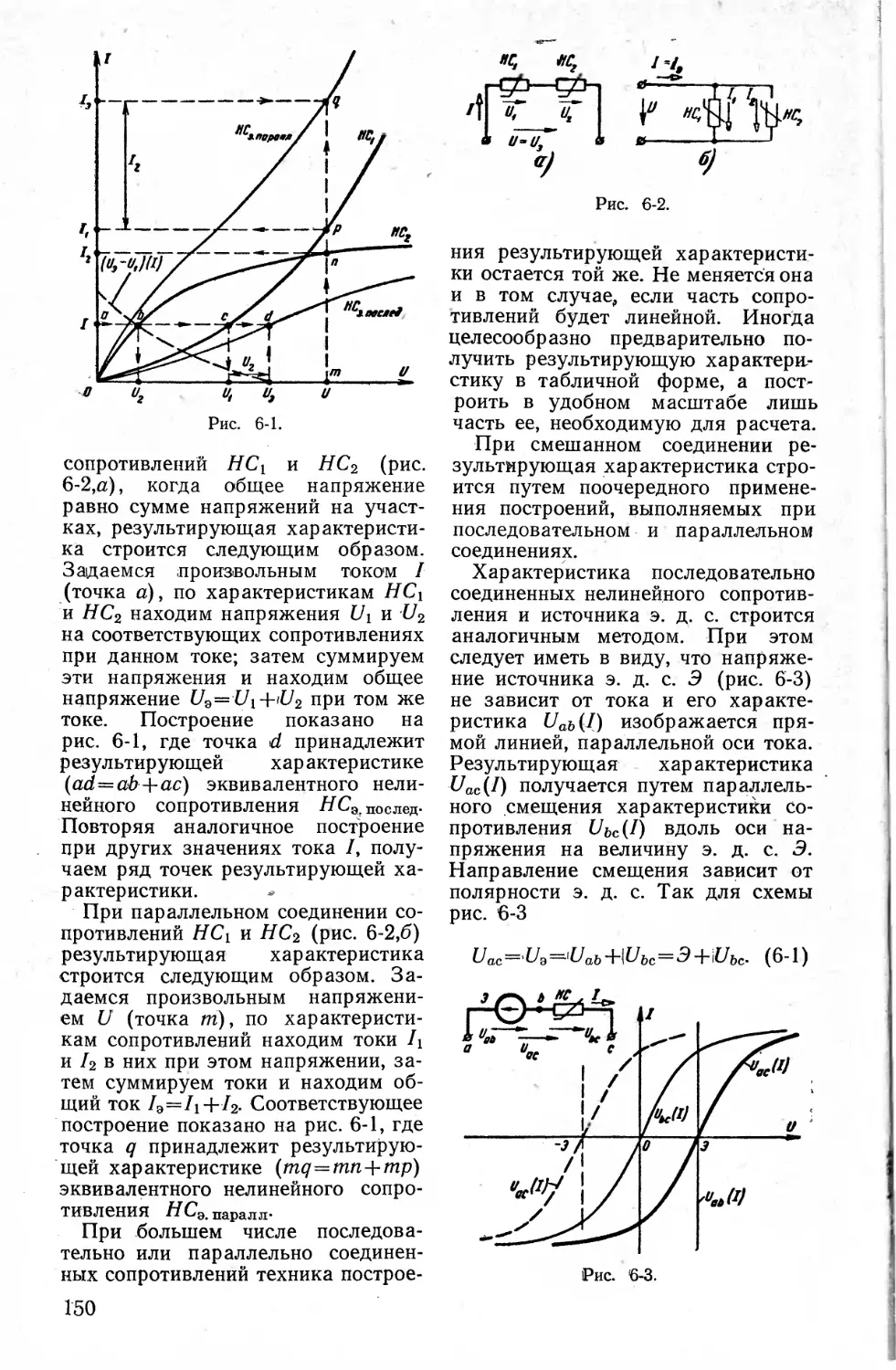
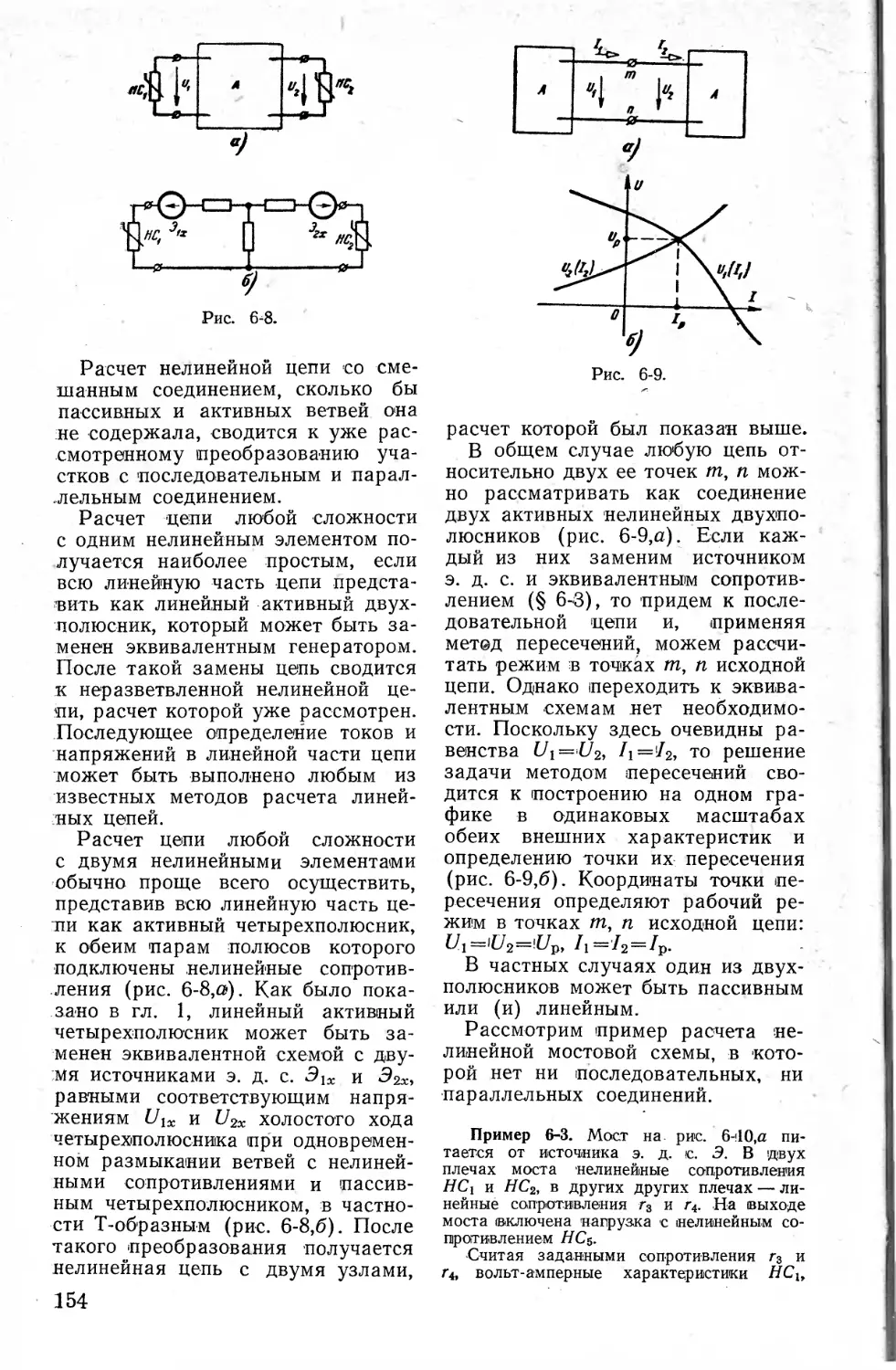
6-2. Преобразования нелинейных
электрических цепей...........149
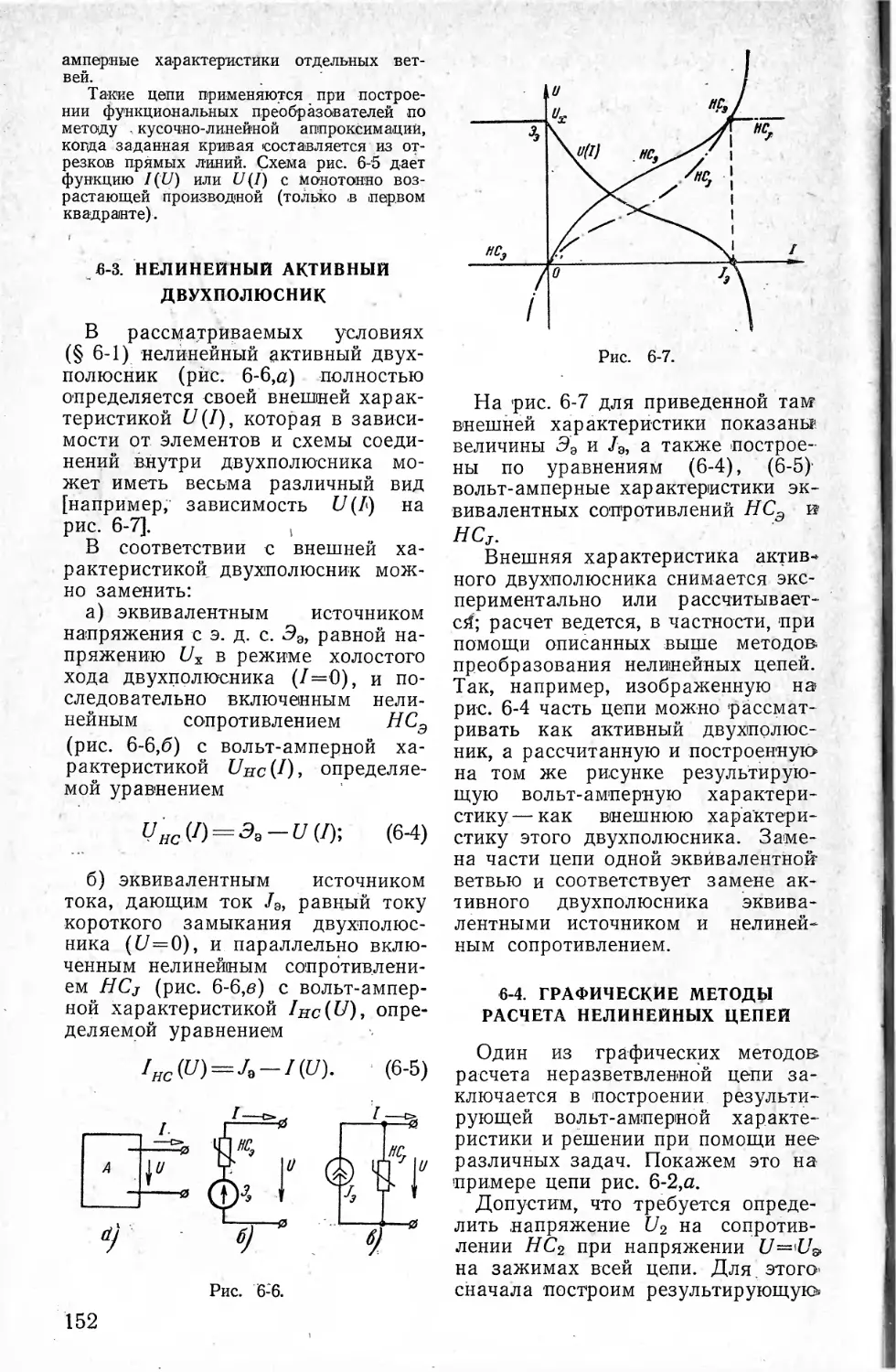
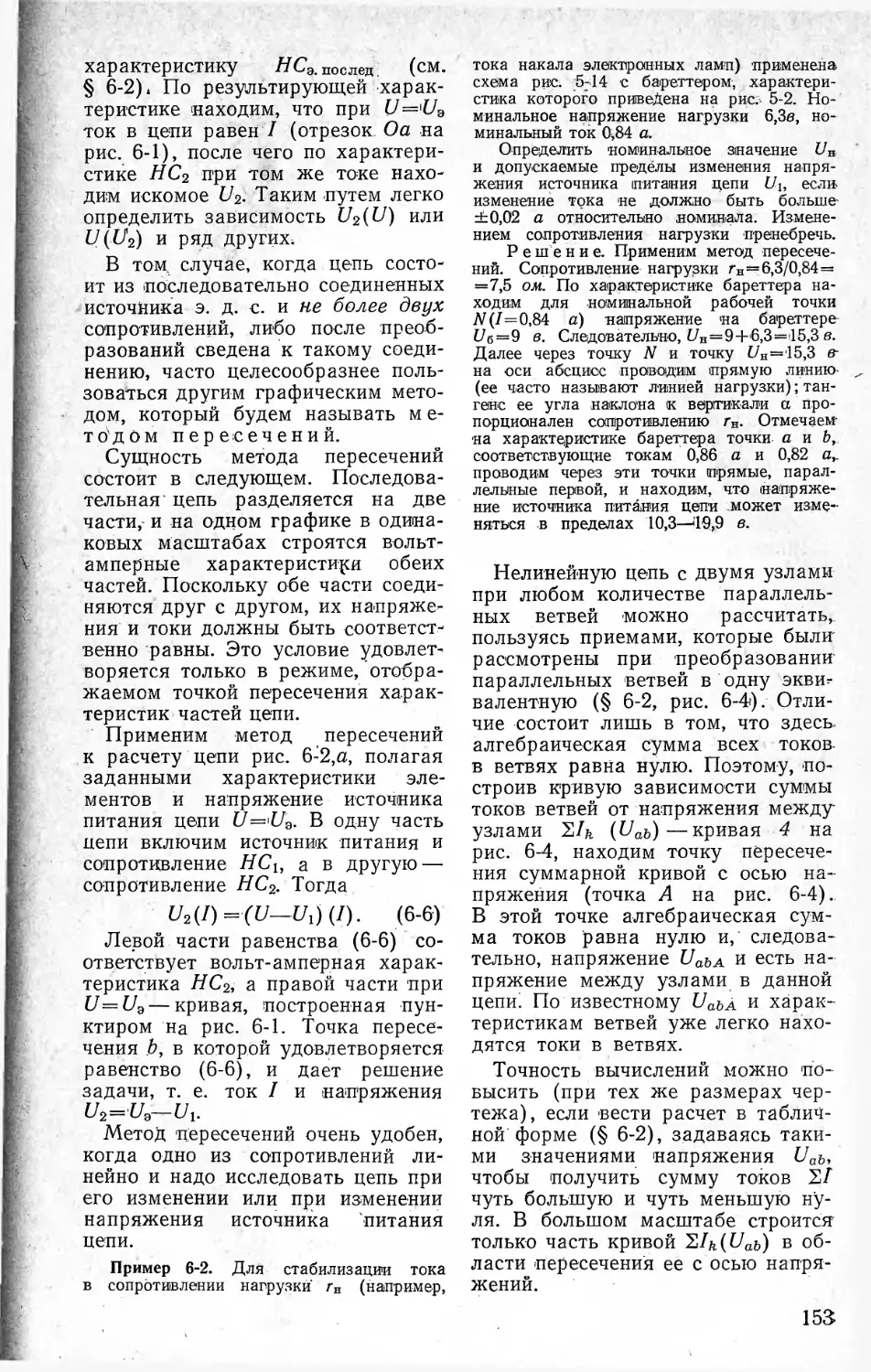
6-3. Нелинейный активный двухпо-
люсник .......................152
6-4. Графические методы расчета не-
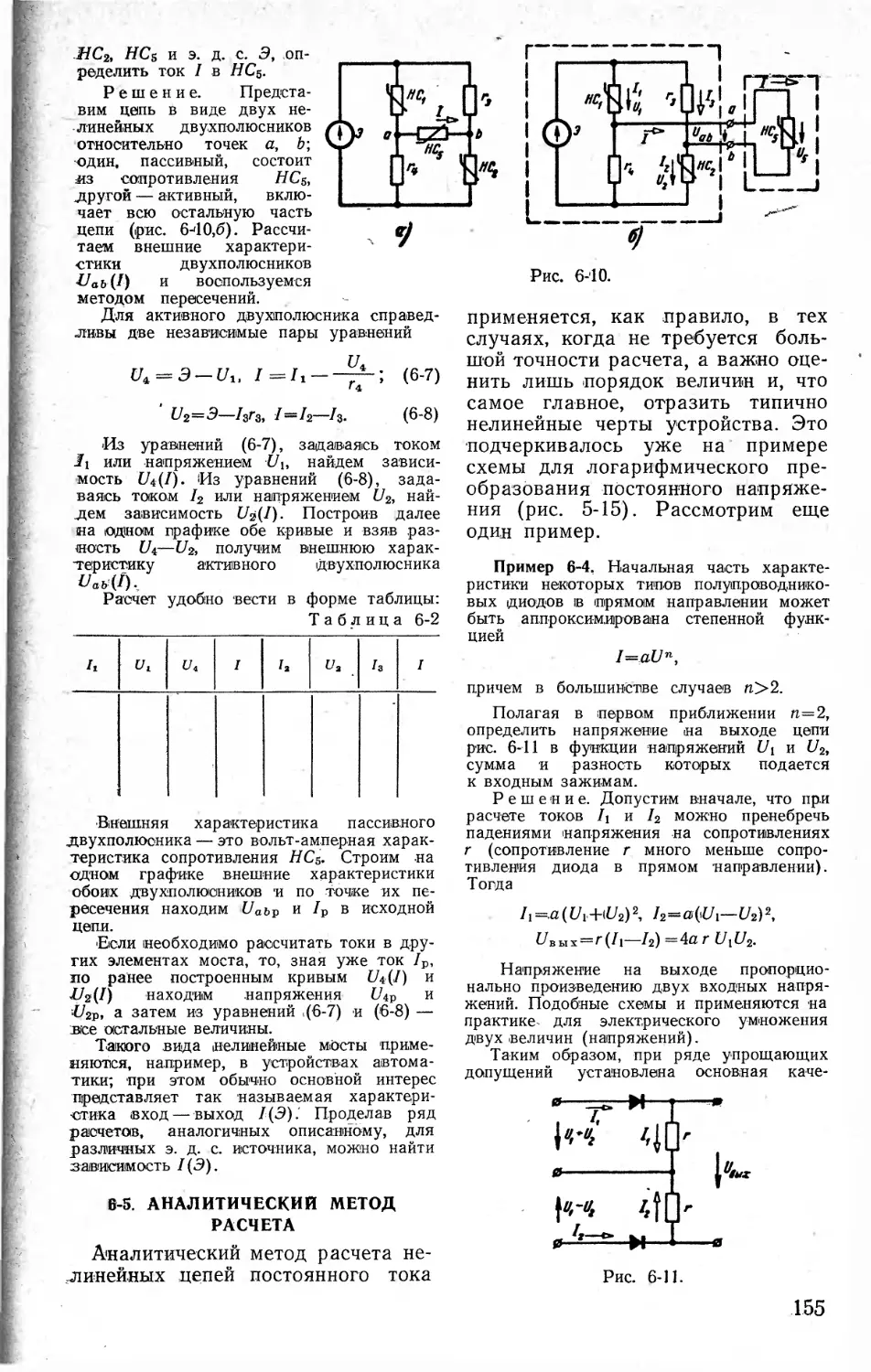
линейных цепей ........ 152
6-5. Аналитический метод расчета . . 155
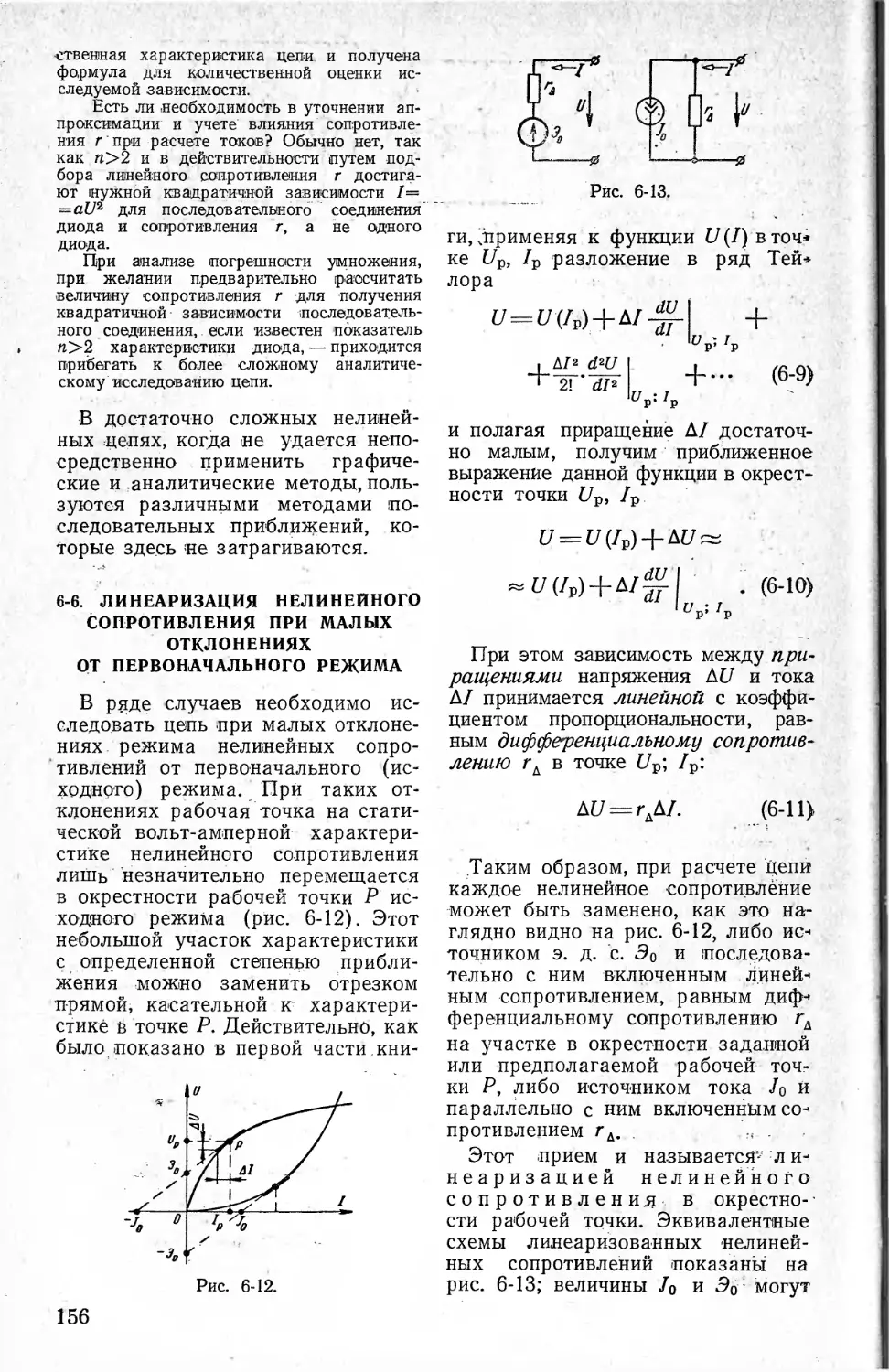
6’6. Линеаризация нелинейного со-
противления при малых отклоне-
ниях от первоначального режима 156
Глава седьмая
Нелинейные магнитные цепи
при неизменном во времени
магнитном потоке
7-1. Введение ....................158
7-2. Статические характеристики маг-
нитных материалов.............159
7-3. Основные законы и особенности
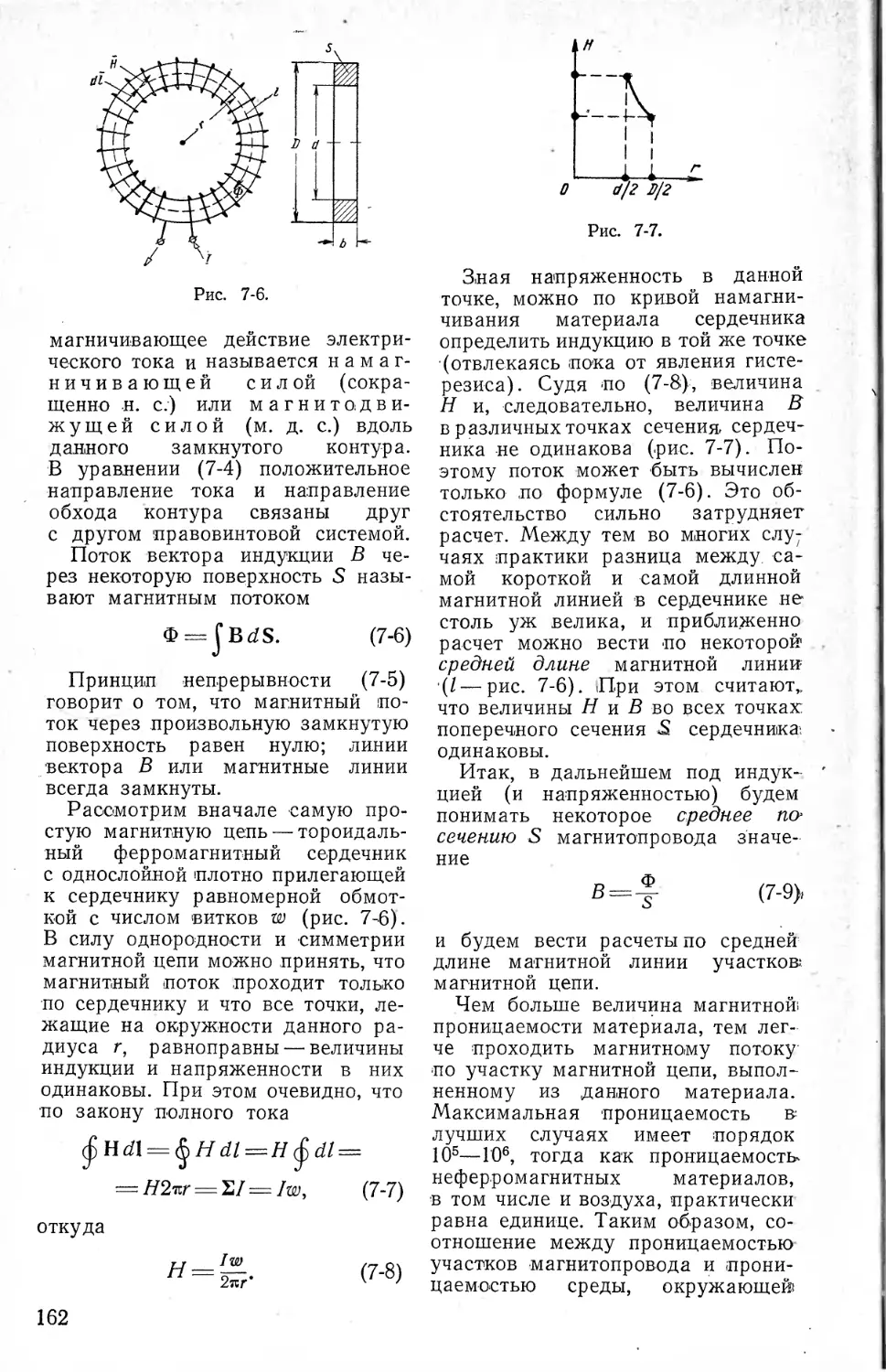
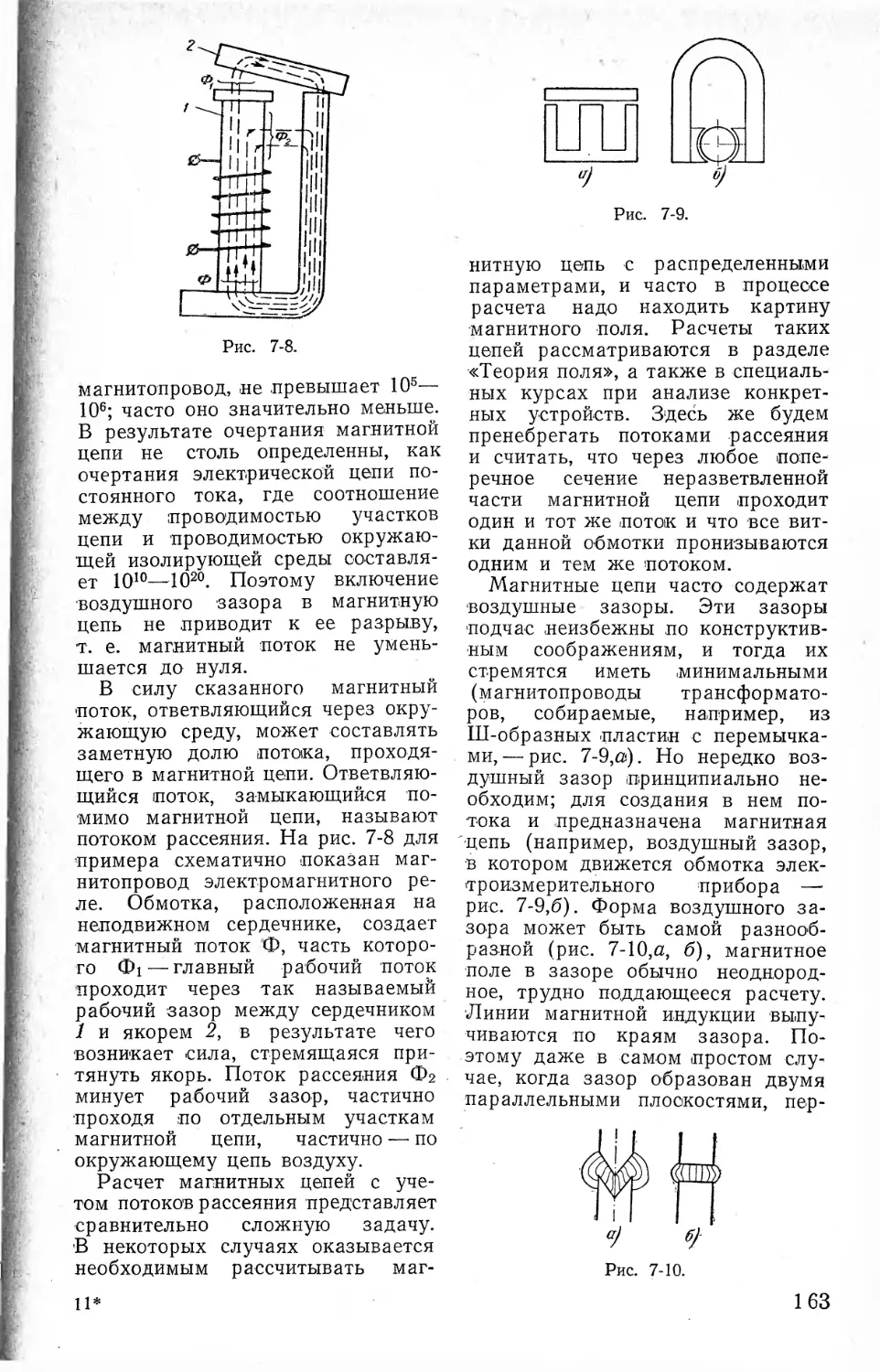
магнитной цепи................161
7-4. Законы Кирхгофа для магнитной
цепи. Аналогия между магнит-
ными и электрическими цепями 164
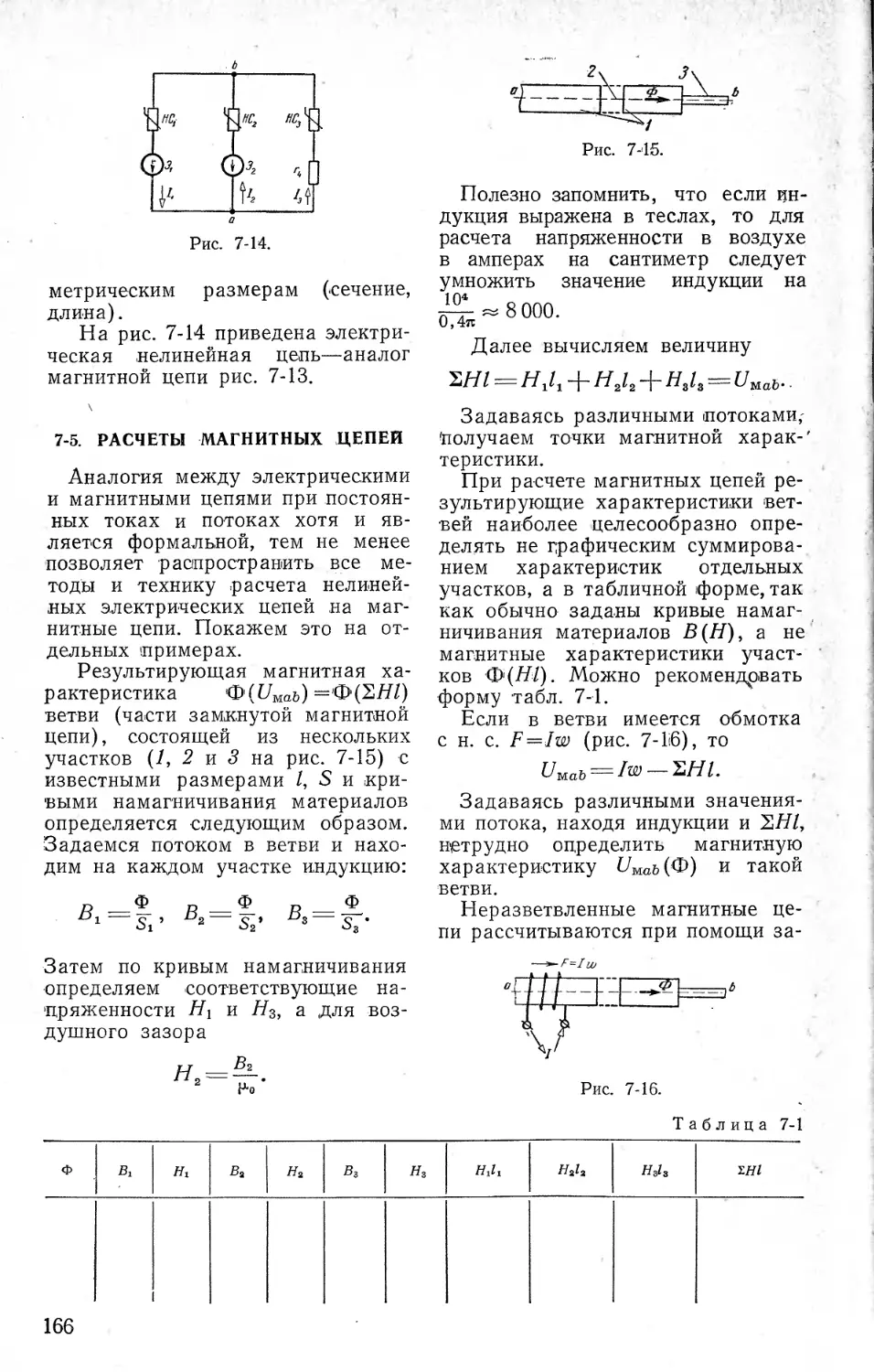
7-5. Расчеты магнитных цепей . . . 166
7-6. Цепи с постоянными магнитами 169
Глава восьмая
Нелинейные цепи переменного
тока
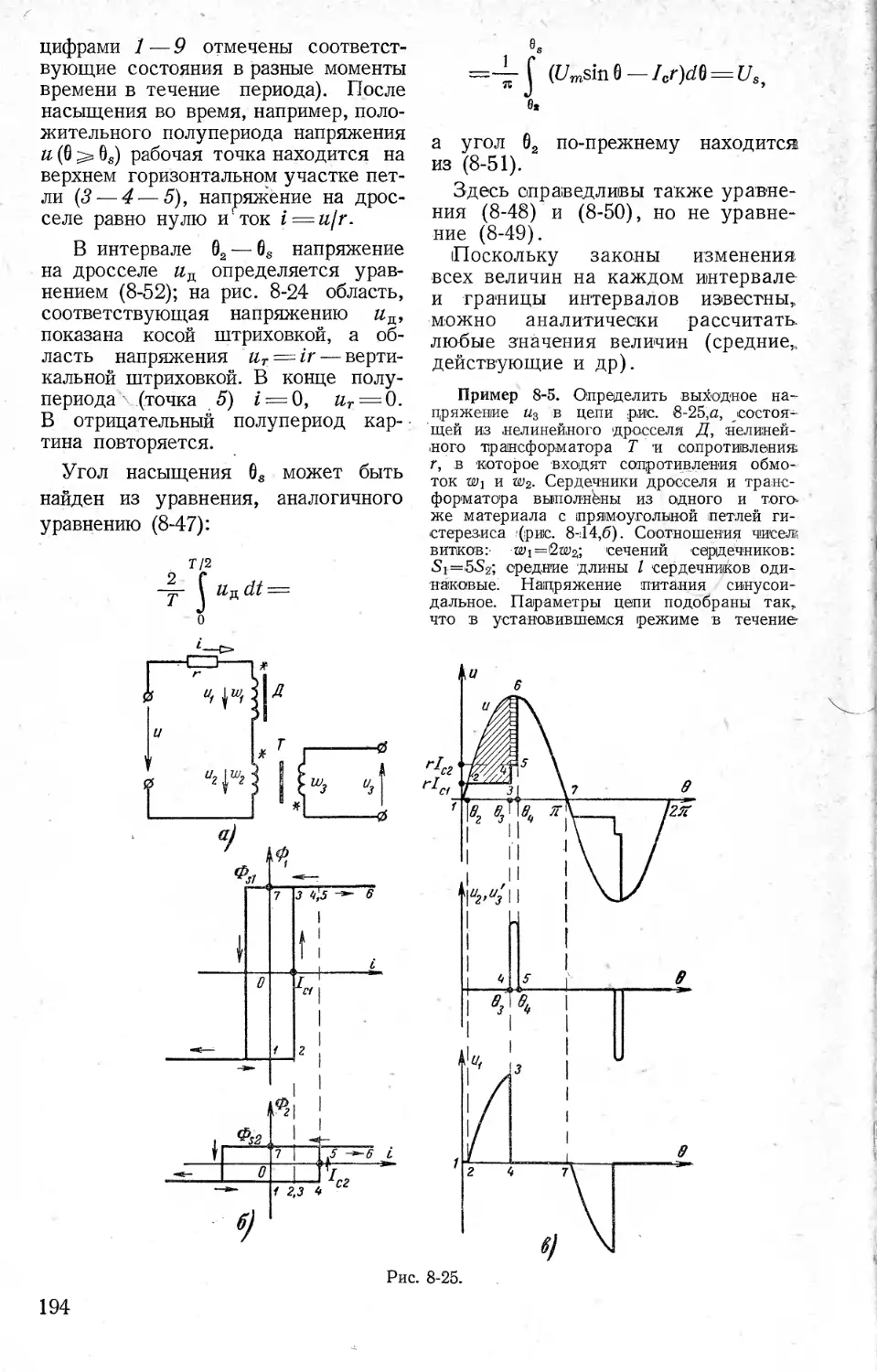
8-1. Введение....................170
8-2. Цепи с инерционными нелиней-
ными элементами..................170
8-3. Цепи, содержащие нелинейные
сопротивления с несимметричны-
ми характеристиками. Простей-
шие выпрямители....................172
8-4. Нелинейные индуктивности — ка-
тушки с ферромагнитными сер-
дечниками .........................176
8-5. Вихревые токи. Потери в стали.
Динамические петли гистере-
зиса ..............................181
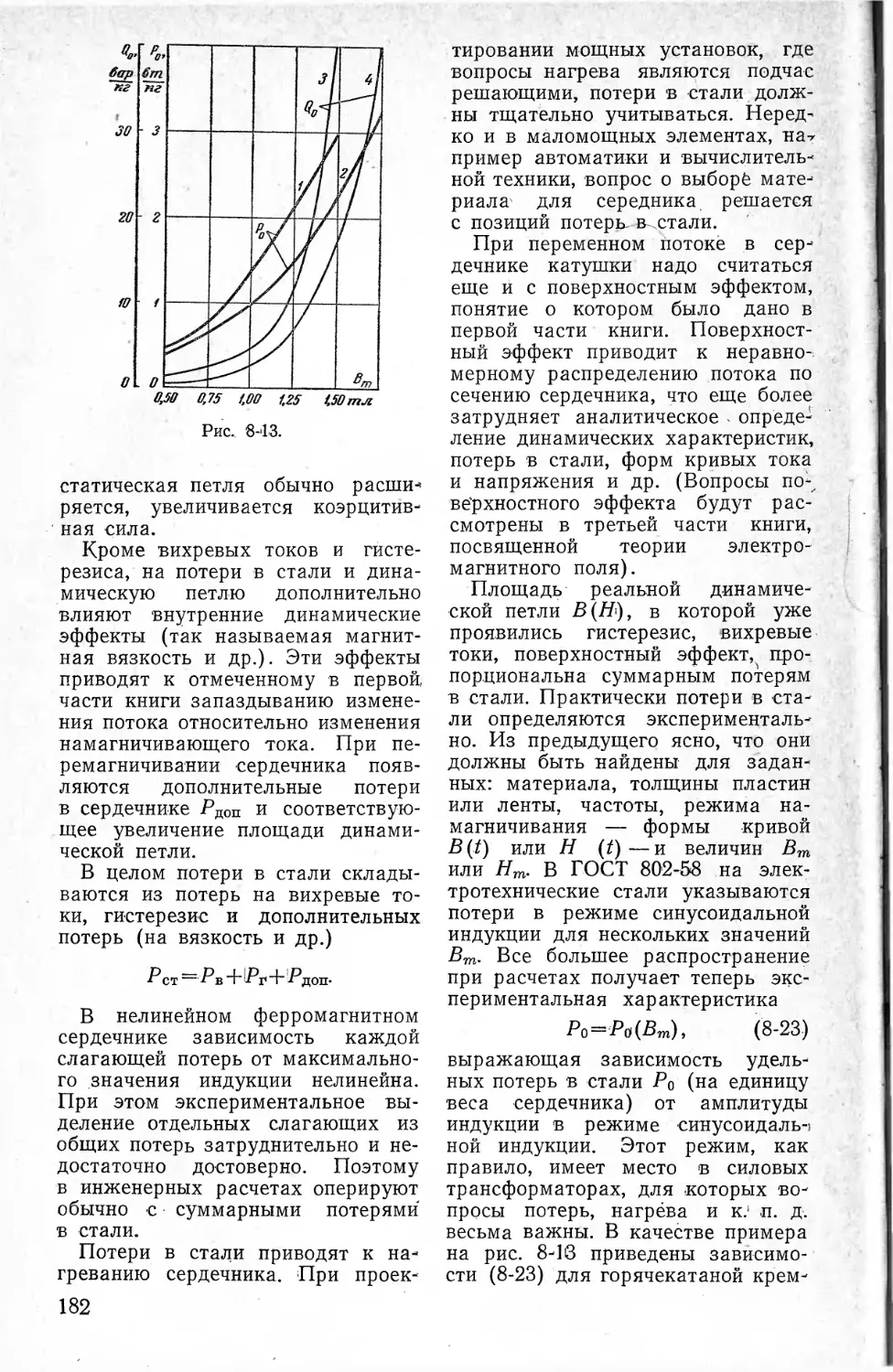
8-6. Нелинейные конденсаторы . . . 183
8-7. Методы анализа и расчета нели-
нейных цепей переменного тока 183
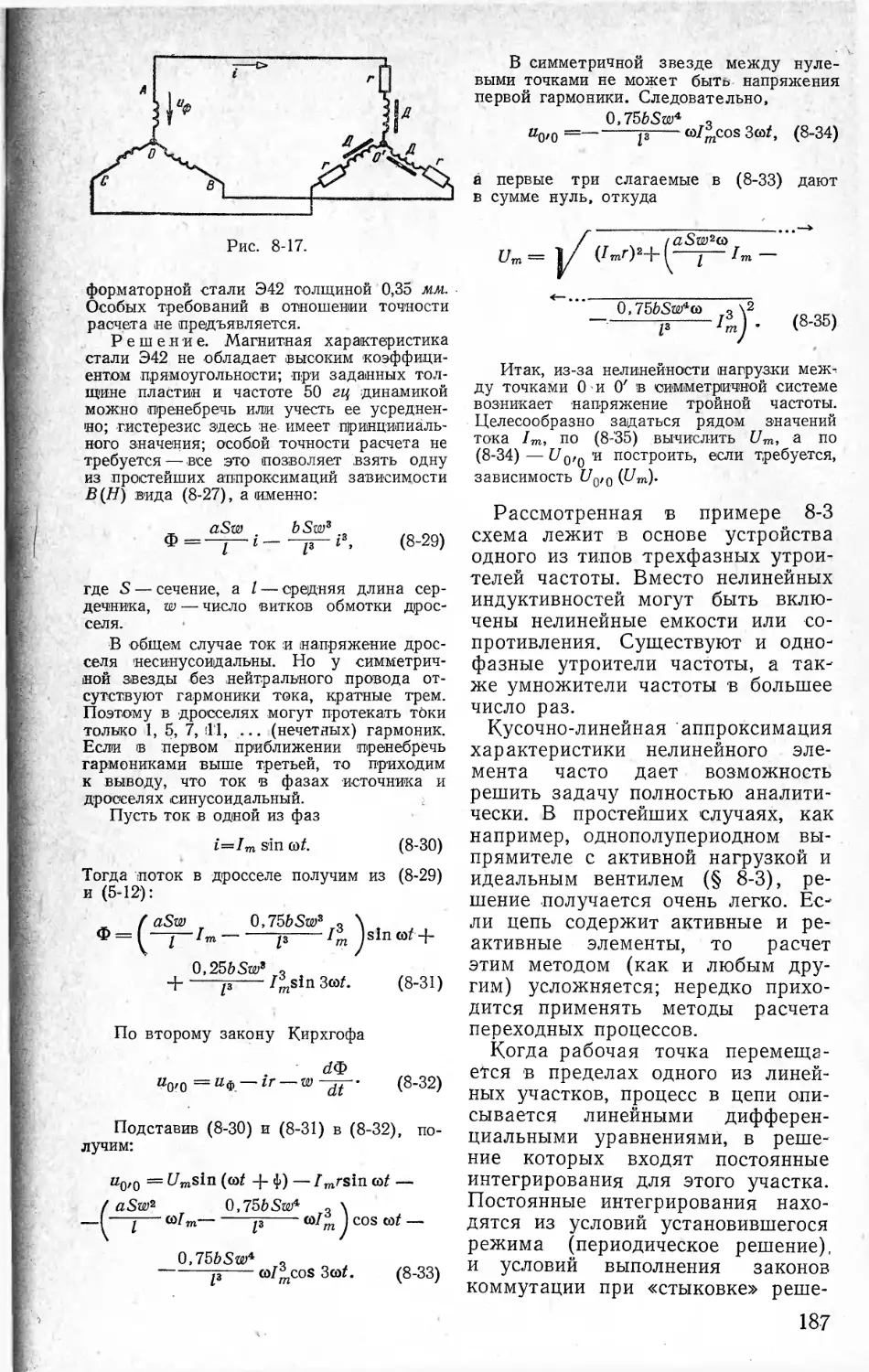
8-8. Аналитический метод с примене-
нием характеристик для мгновен-
ных значений и их аналитиче-
ской или кусочно-линейной ап-
проксимации .......................186
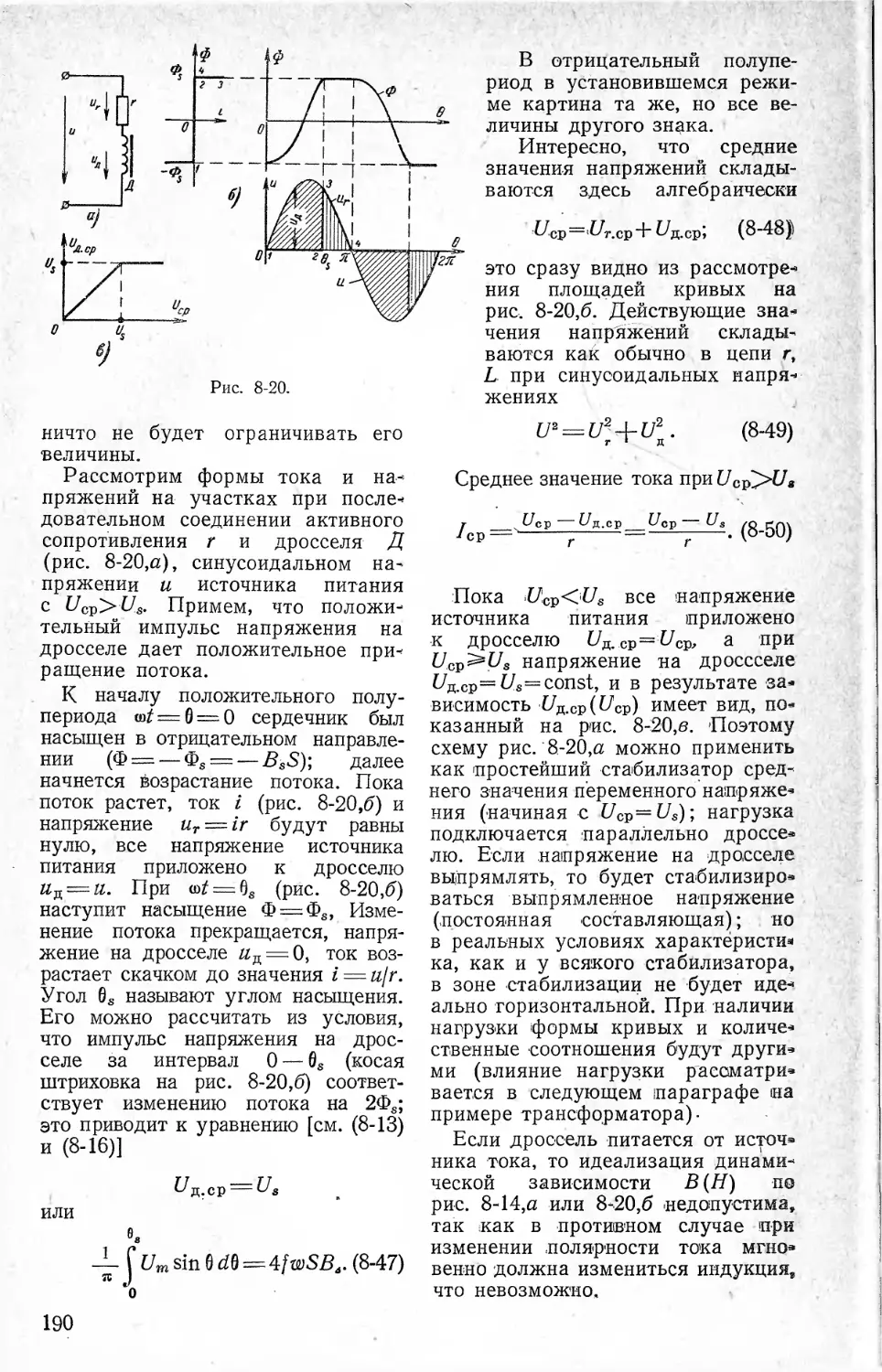
8-9. Дроссель с идеальной кривой
намагничивания................189
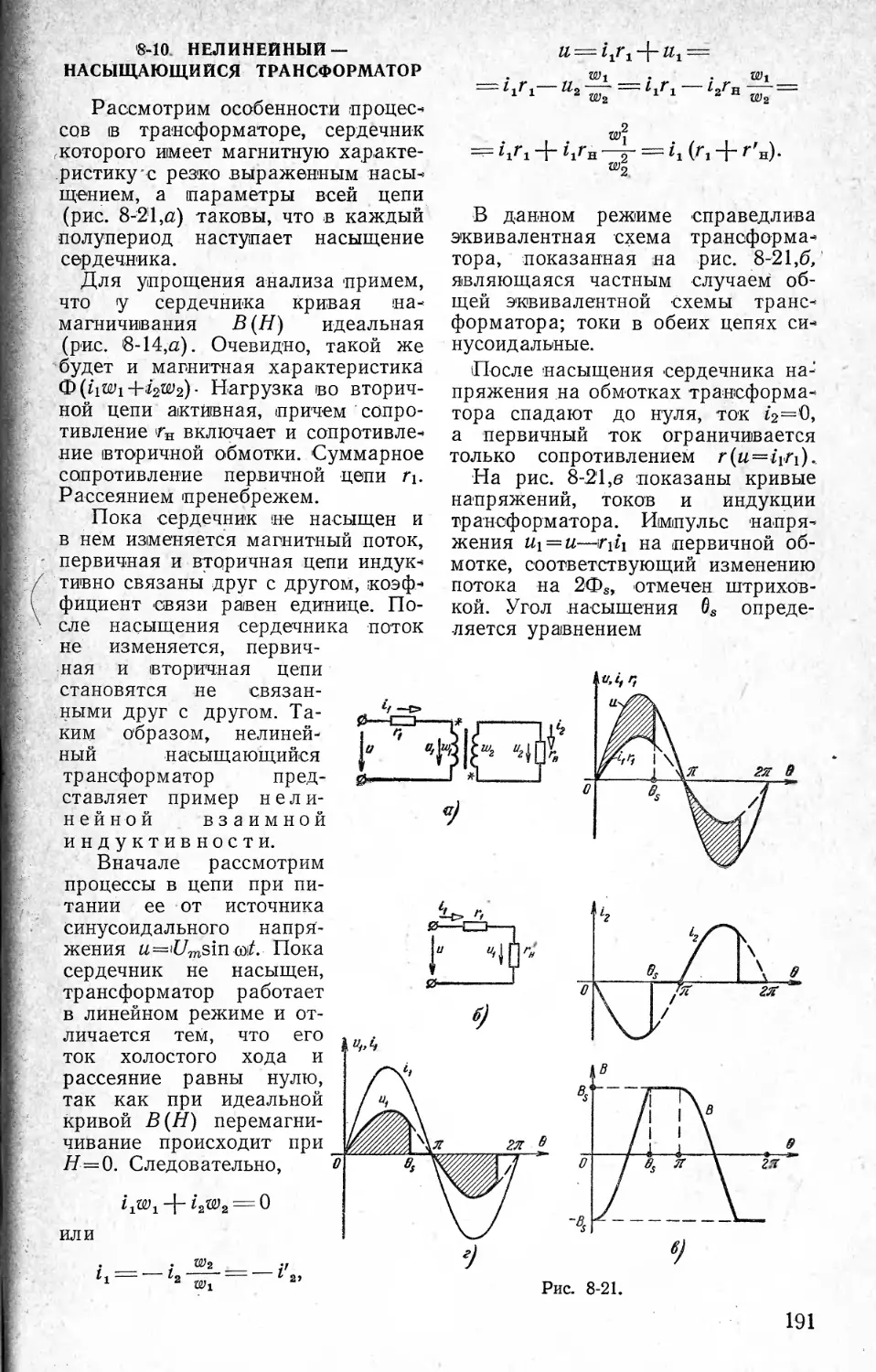
8-10. Нелинейный — насыщающийся
трансформатор.................191
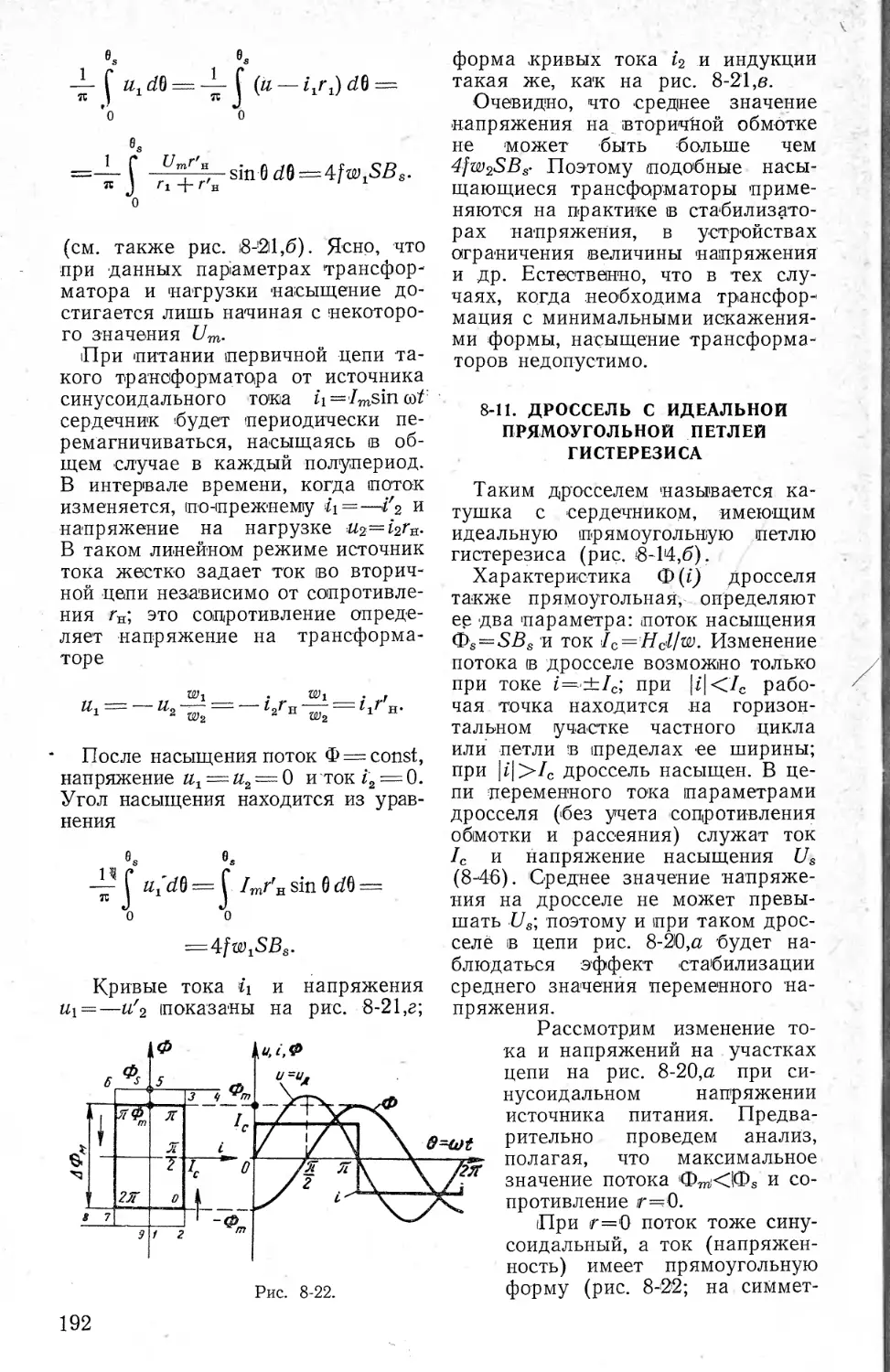
8-11. Дроссель с идеальной прямо-
угольной петлей гистерезиса . . 192
8-12. Исходные положения методов
расчета по действующим значе-
ниям .........................195
8-13. Эквивалентные параметры. Экви-
валентные схемы и векторные
диаграммы нелинейных катушки
со сталью и конденсатора ... 196
8-14. Расчеты по действующим значе-
ниям ..............................199
8-15. Цепи с нелинейными индуктив-
ностями и конденсаторами. Фер-
рорезонансные явления..............200
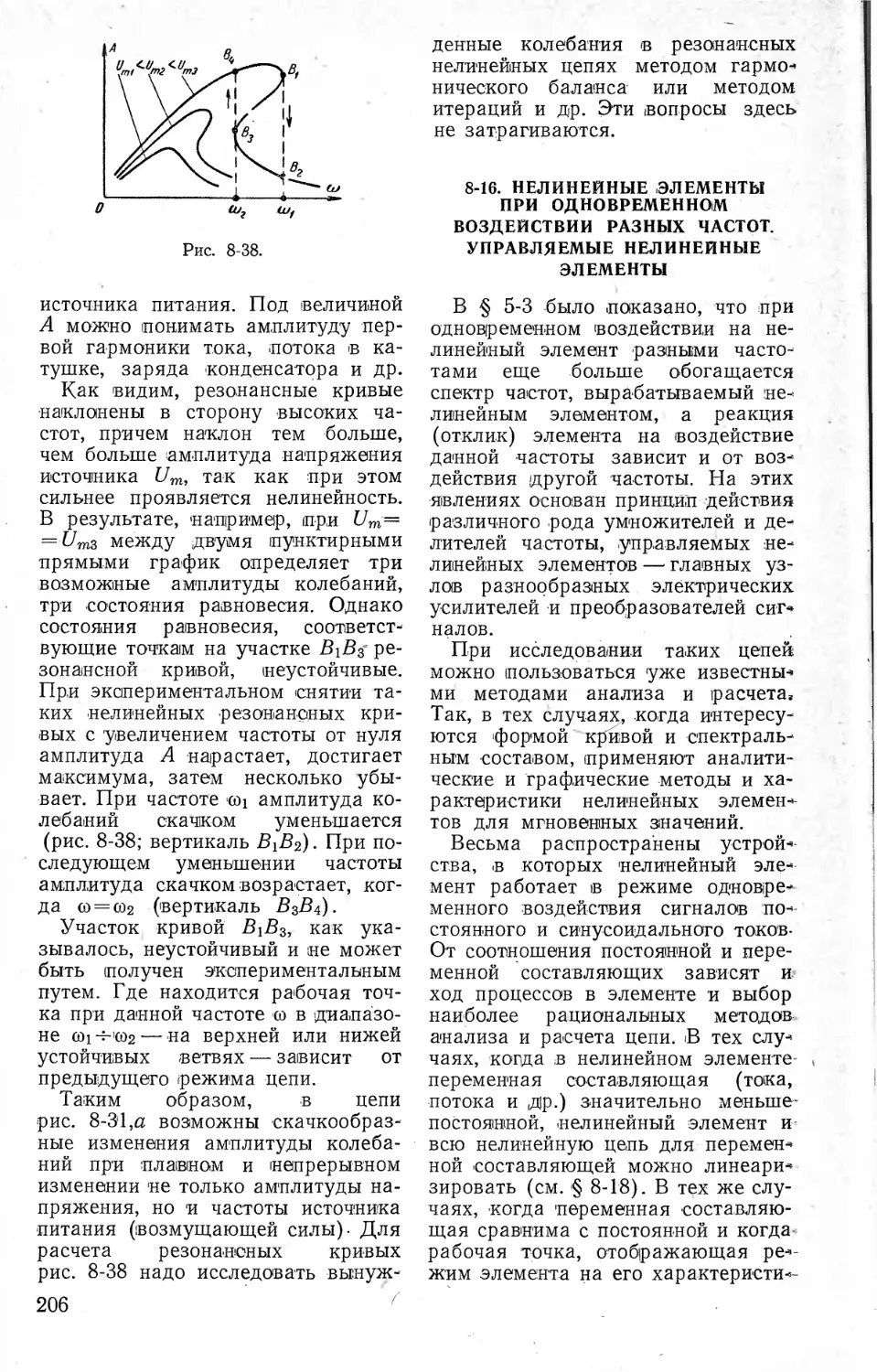
8-16. Нелинейные элементы при одно-
временном воздействии разных
частот. Управляемые нелиней-
ные элементы.......................206
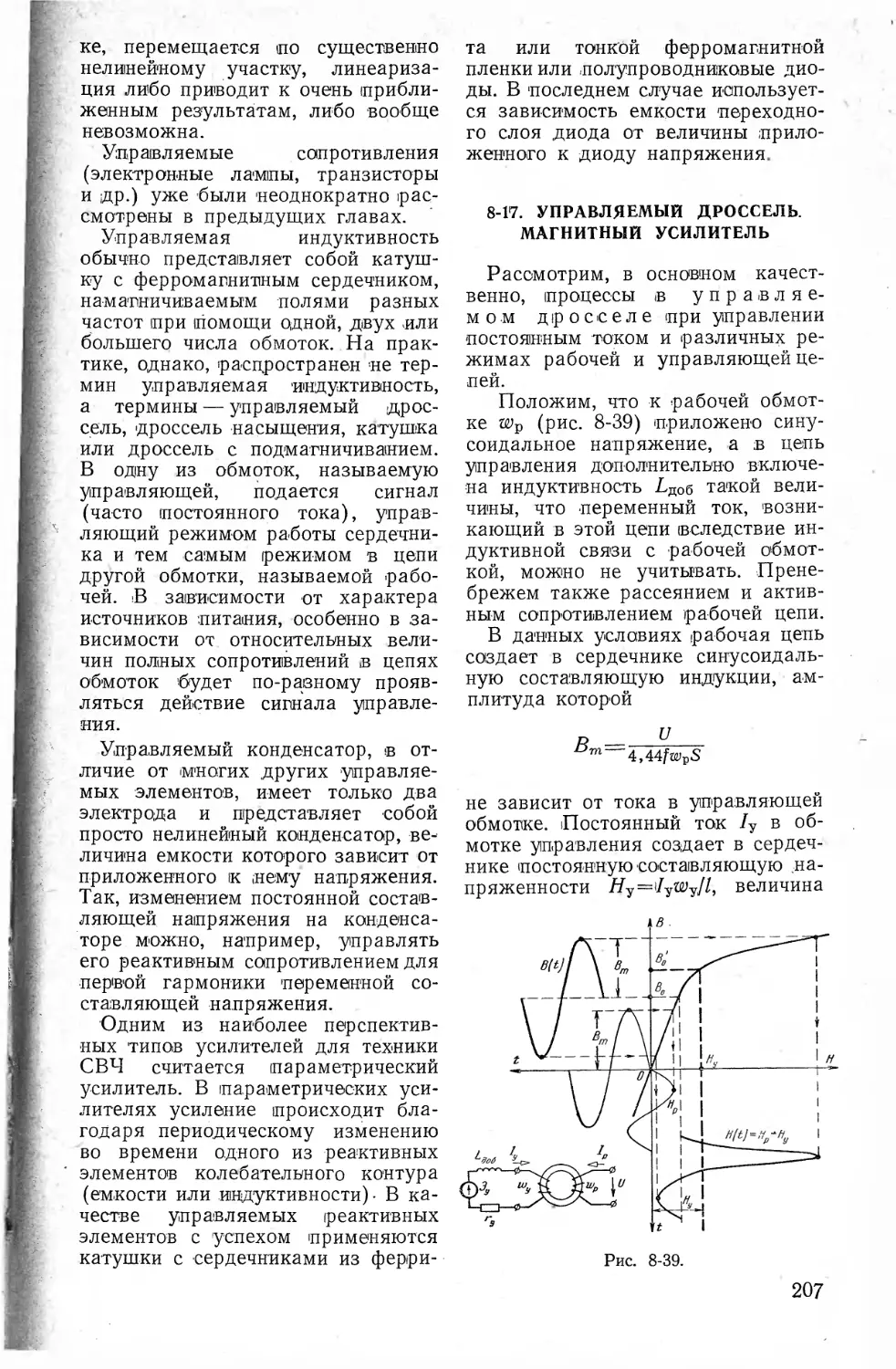
8-17. Управляемый дроссель. Магнит-
ный усилитель......................207
8-18. Линеаризация нелинейного эле-
мента, обладающего гистерези-
сом, при малых отклонениях от
данного режима.....................211
Глава девятая
Переходные процессы в нелинейных
цепях. Вопросы устойчивости
и автоколебаний
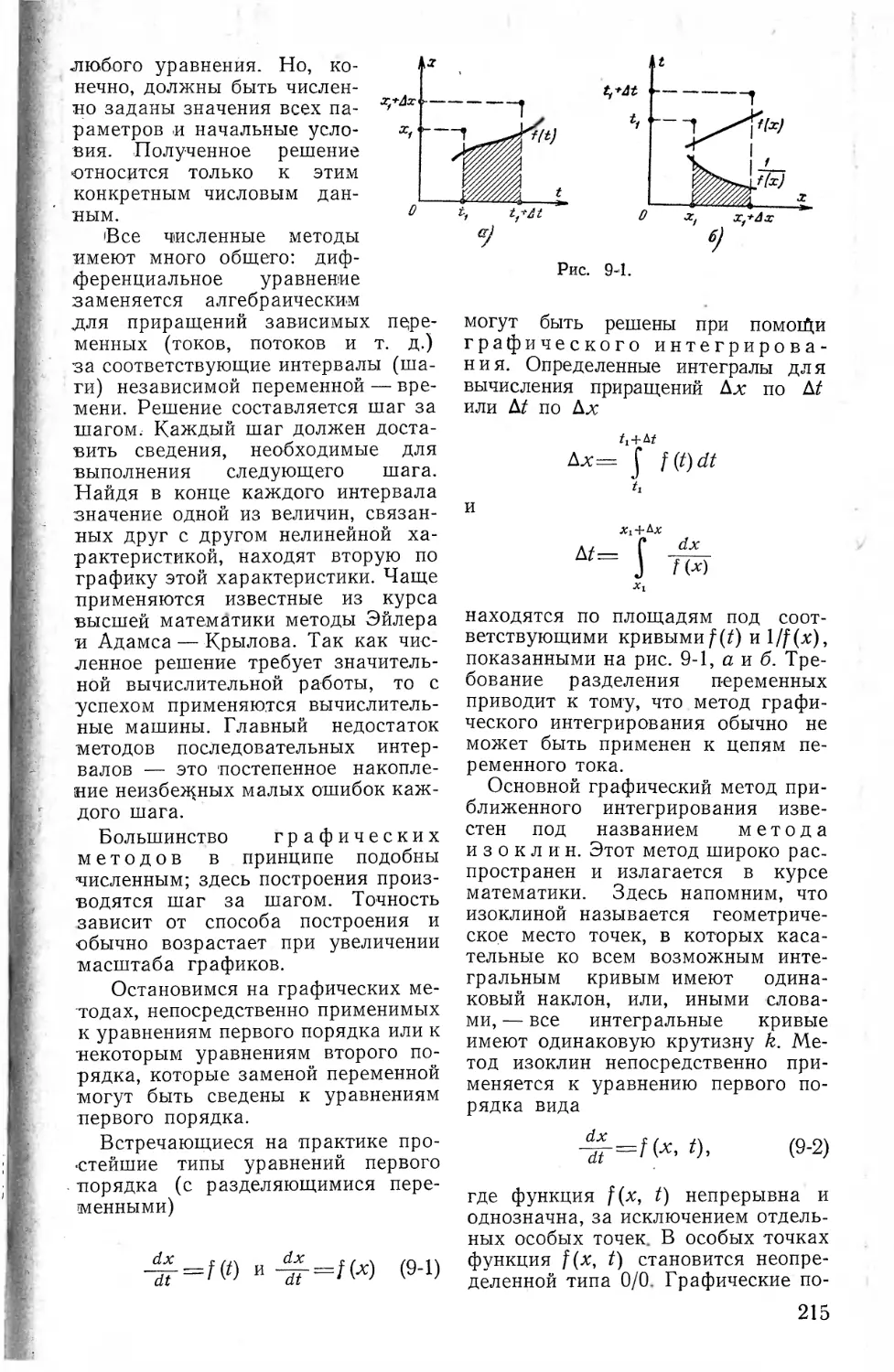
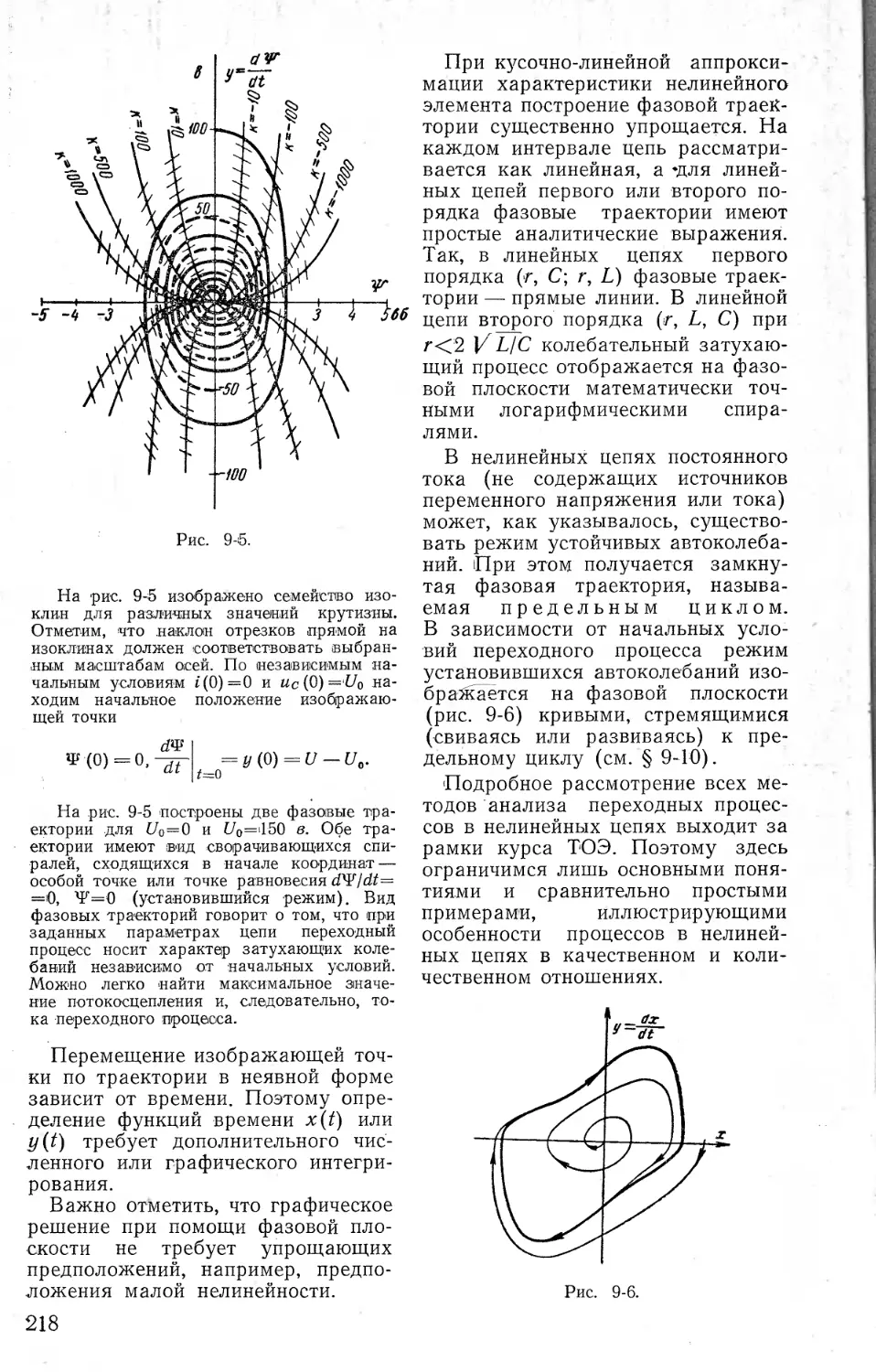
9-1. Введение . .................... 21В
9-2. Обзор методов расчета переход-
ных процессов в нелинейных це-
пях ..........................214
9-3. Включение дросселя со сталь-
ным сердечником на синусои-
дальное напряжение............219
9-4. Аналитический расчет с приме-
нением кусочно-линейной ап-
проксимации ..................221
9-5. Понятие об устойчивости режи-
мов в нелинейных цепях .... 224
9-6. Устойчивость цепей с обратной
связью......................... . 228
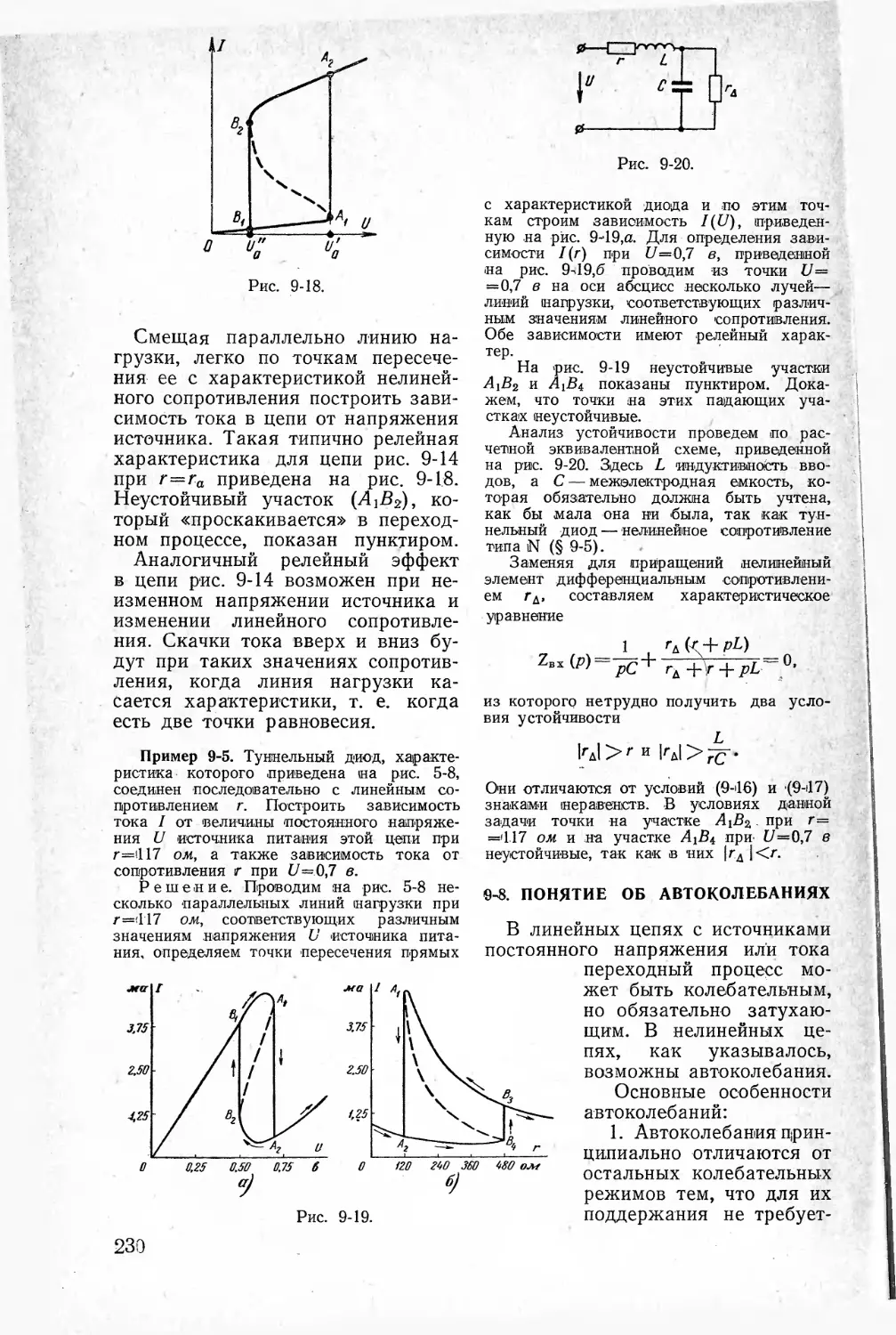
9-7. Релейные режимы..................229
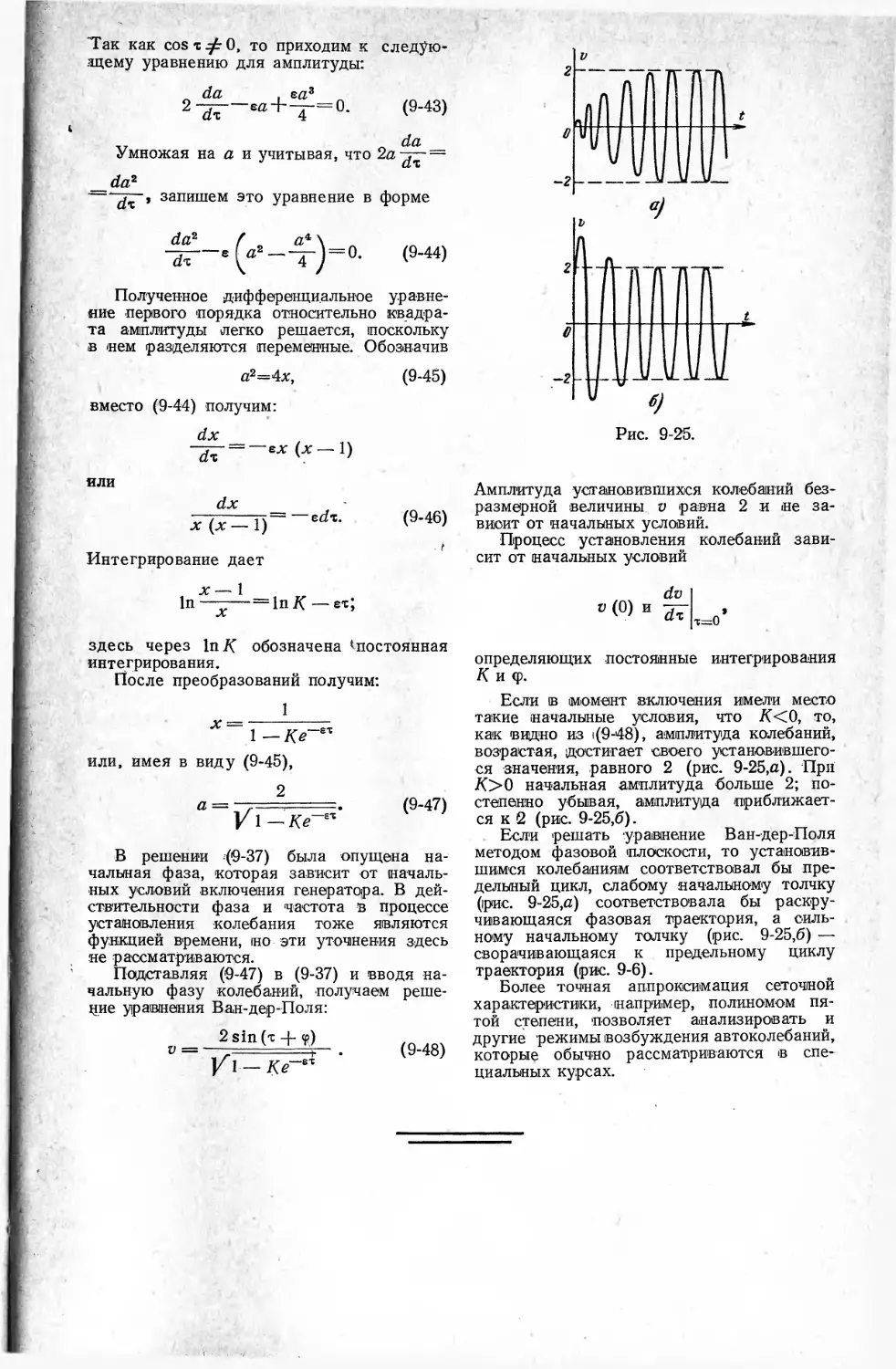
9-8. Понятие об автоколебаниях . . . 239
9-9. Нелинейное уравнение лампово-
го генератора ................233
9-10. Решение уравнения Ван-дер-По-
ля методом медленно меняю-
щихся амплитуд.............. 234
Литература к разделу первому .... 236
Литература к разделу второму . . . 236
Алфавитный указатель.............237
РАЗДЕЛ ПЕРВЫЙ
ЧЕТЫРЕХПОЛЮСНИКИ И ДЛИННЫЕ ЛИНИИ
Глава первая
ЧЕТЫРЕХПОЛЮСНИКИ
Ы. ВВЕДЕНИЕ
В первой части книги были рас-
смотрены общие методы расчета
линейных электрических цепей, на-*
пример, наложения, контурных то-
ков, узловых потенциалов. Приме-»
няя эти методы, можно найти ре-»
жим работы любой сколь угодно
сложной линейной цепи.
Однако, как уже говорилось, во
многих случаях важно знать токи
только некоторых ветвей и напря-
жения только между некоторыми
узлами.- В этом случае расчет цепи
упрощается, если цепь разделить
на отдельные части, каждая из ко-;
торых соединена с остальными
двумя, тремя, четырьмя или боль-
шим числом зажимов. Так, напри-^
мер, при определении режима
в одной-единственной ветви всю
остальную часть цепи можно рас-
сматривать как двухполюсник, ко-»
торый имеет два зажима для при-
соединения исследуемой ветви или
любой другой ветви, а также дру-
гого двухполюсника или части
электрической цепи. При расчете
цепи методом преобразования ино-
гда полезно выделить треуголь-*
ник сопротивлений, т. е. трехполюс-
ник (часть цепи, имеющая три
зажима для подключения к другим
участкам цепи), который можно
заменить трехлучевой звездой со-
противлений (также трехполюснИ"
ком). Анализ сложных электриче-
ских цепей нередко можно выпол-
нить проще, если выделить четы-
рехполюсники и многополюсники.
Цепи с двухполюсниками и трехпо-
люсниками, а также некоторые за-
дачи расчета четырехполюсников и
многополюсников были уже рас-
смотрены в первой части книги.
В различных областях электро-
техники, электросвязи, радиотехни-
ки, измерительной техники, автома-
тики и телемеханики особенно часто
применяются аппараты и устрой-
ства с двумя парами зажимов, при
помощи которых они соединяются
с другими участками электрической
цепи, т. е. четырехполюсни-
ки. Поэтому теория четырехполюс-
ников заслуживает выделения в от^
дельный раздел курса теоретиче-
ских основ электротехники.
На практике четырехполюсники
и цепи, которые целесообразно
представить состоящими из не-
скольких четырехполюсников, при-
меняются прежде всего для пере-
дачи и преобразования электриче-
ских сигналов, несущих информа-
цию (сведения, сообщения). Тракт
передачи информации или канал
связи, как правило, состоит из ря-
да четырехполюсников, включенных ...
между генератором (передатчиком),
сигналов и приемником сигналов. я
ъ
Рис. 1-1.
В тракт передачи обычно входят:
линия связи генератора и прием-
ника, находящихся часто на значи-
тельных расстояниях друг от друга;
усилители, в которых увеличивается
мощность или, как говорят, уро-
вень сигналов; аттенюаторы (осла-
бители) для снижения уровня сиг-
налов; фильтры для разделения
сигналов; корректирующие конту-
ры, включаемые для устранения
искажений сигналов; трансформа-
торы, при помощи которых изме-
няются сопротивления отдельных
участков /тракта передачи инфор--
мации и устраняется гальваниче-
ская связь между этими участками.
К четырехполюсникам относятся
также цепи обратной связи элек-
тронных генераторов и усилителей,
участки линий передачи электри-
ческой (электромагнитной) энер-
гии, цепи регулирования различных
параметров машин (скорости,
давления, напряжения) и т. д.
Таким образом, теория четырех-
полюсников дает возможность
пользоваться единым методом ана-
лиза систем, самых различных
по структуре и принципу действия.
Кроме того, сложная цепь расчле-
няется на простые части, характе-
ристики которых дают полное пред-
ставление о режиме работы всей
цепи.
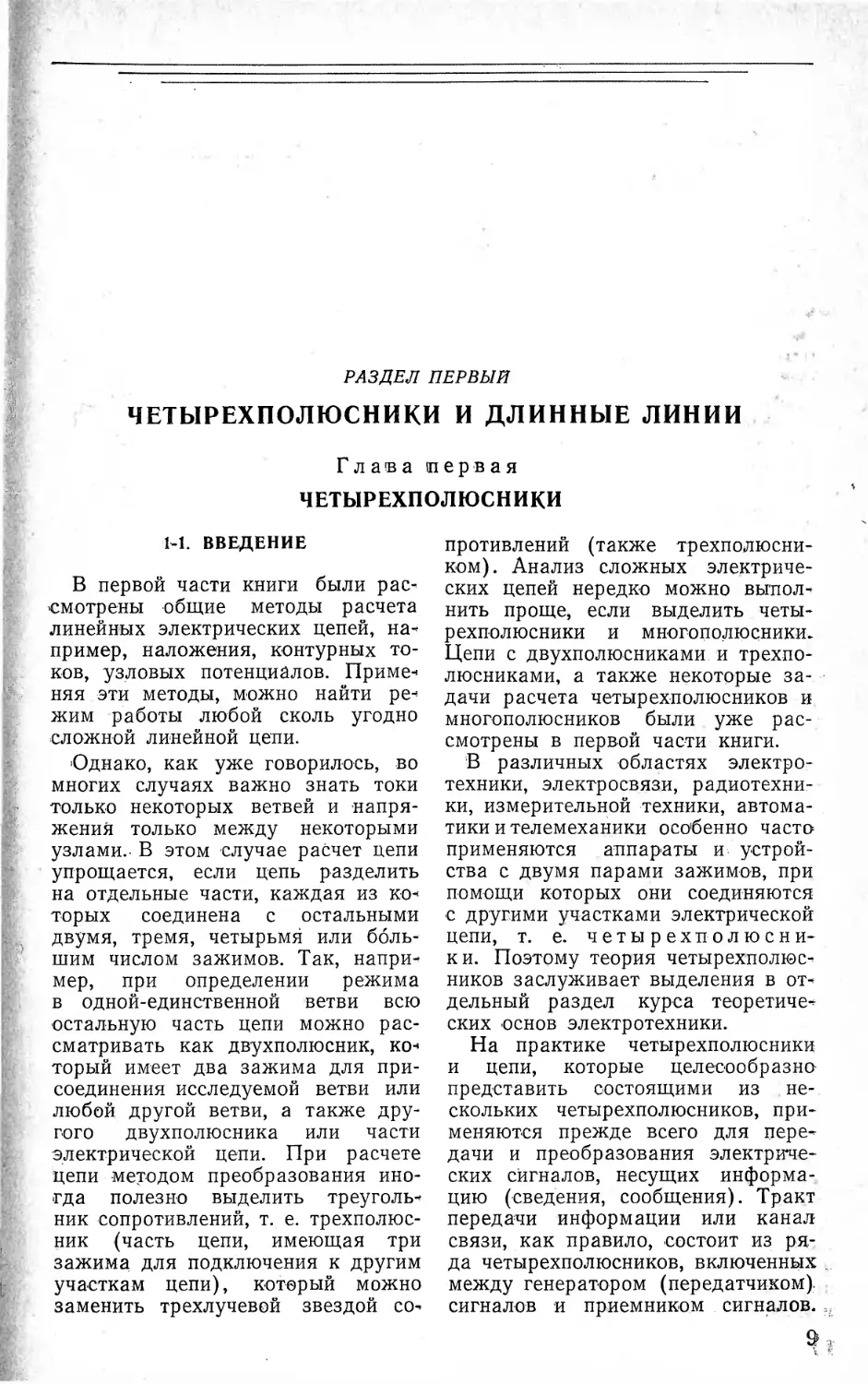
Условное изображение четырех-
полюсника показано на рис. 1-1.
Одну пару из четырех зажимов че-
тырехполюсника (четырех полюсов)
назовем первичной, а другую —
вторичной (и обозначим соот-
ветственно цифрами 1—1' и 2—2').
В простейшем случае между гене-
ратором и приемником может быть
включен один четырехполюсник
(рис. 1-2) или четырехполюсник,
эквивалентный любой сложной це-
пи, которая состоит из фильтров,
линий, трансформаторов и других
устройств. Генераторы, приемники,
двухполюсники, четырехполюсники
и любые участки электрической це-
Рис. 1-2.
пи присоединяются только к зажи-
мам, которые обозначены одинако-
выми цифрами. Поэтому и говорят,
что четырехполюсник имеет не че-
тыре зажима, а две пары зажимов,
и называют такие четырехполюс-
ники проходными.
Все четырехполюсники можно
разделить на две группы: пассив-
ные и активные. В пассивных
четырехполюсниках нет источников
энергии, активные четырех-
полюсники содержат источники
энергии.
Пассивными четырехполюсника-
ми являются линии передачи сиг-
налов, трансформаторы, аттенюато-
ры, фильтры. К активным относятся
усилители, собранные на электрон-
ных лампах или полупроводнико-
вых триодах, лампы бегущей волны
и др.
На практике устройства, кото-
рые анализируются как четырехпо-
люсники, чаще работают в цепях
несинусоидального тока, но встре-
чаются и в цепях синусоидального
тока и в цепях постоянного тока.
В этой главе (кроме последнего
параграфа) рассматривается при
синусоидальных напряжениях и то-
ках теория и расчет линейных пас-
сивных проходных четырехполюс-
ников, для которых выполняется
принцип взаимности. Такие четы-
рехполюсники называются обра-
тимыми.
Для применения полученных ре-
зультатов к цепям несинусоидаль-
ного тока необходимо исследовать
частотные зависимости основных
параметров четырехполюсников,
как это сделано в гл. 2 и 3 для
фильтров и длинных линий. Все
расчетные формулы и соотношения
могут быть отнесены и к цепям по-
стоянного тока, если положить ча-
стоту равной нулю.
10
1-2. УРАВНЕНИЯ ТИПА А
Для исследования четырехполюс-
ников необходимо прежде всего
установить зависимость между че-
тырьмя величинами, определяющи-
ми режим его работы: напряже-
ниями и токами на первичных и
вторичных зажимах.
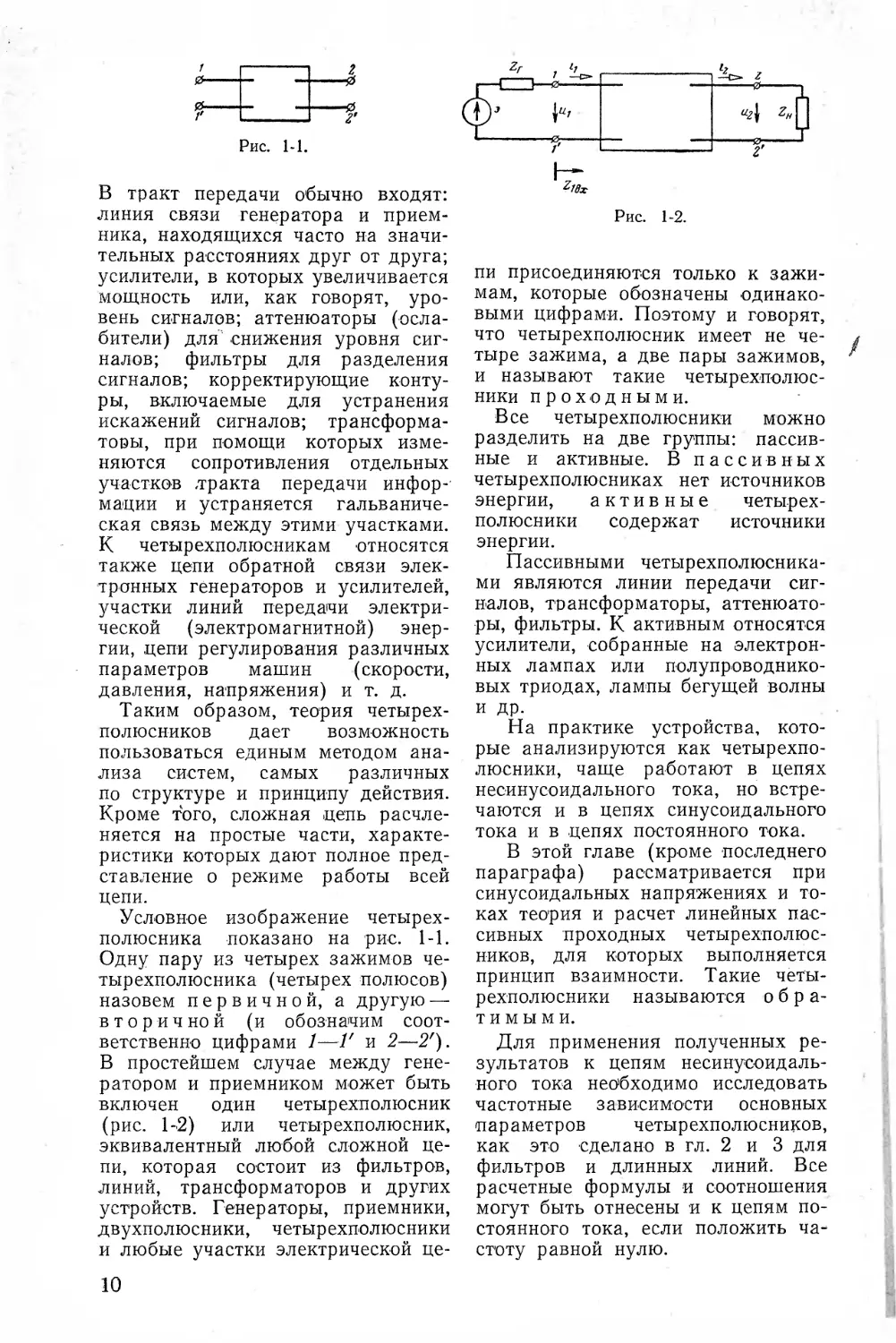
Предположим, что четырехпо-
люсник включен между источником
энергии ( генератором) с э. д. с. Э
и внутренним сопротивлением Zr и
приемником (нагрузкой) с сопро-
тивлением ZH (рис. 1-2). Положи-
тельные направления интересую-
щих нас величин (7Ь /ь U2, h
выберем, как показано на том же
рисунке. Положительные направле-
ния токов будем так выбирать в тех
случаях, когда электрические сиг-
налы или электрическая энергия
передаются слева направо, т. е. от
первичных зажимов 1—Г к вторич-
ным 2—2'. Первичные зажимы
в этом случае назовем входны-
ми, а вторичные выходными.
При других схемах питания могут
быть выбраны и другие положи-
тельные направления токов.
Режим работы четырехполюсника,
т. е. напряжения U1? U2 и токи /15 /2
зависят от э. д. с. и внутреннего
сопротивления источника энергии и
сопротивления нагрузки. Если по ка-
кой-либо причине сопротивления ZH
или Zr или э. д. с. Э изменятся, то
получится и другой режим работы
четырехполюсника.
Цепь, представленную на рис. 1-2,
можно рассматривать как линей-
ную электрическую цепь с перемен-
ными параметрами в двух ее вет-
вях, подключенных к первичным и
вторичным зажимам четырехполюс-
ника. У такой электрической цепи
между тремя любыми напряже-
ниями и токами существует линей-
ная зависимость вида
z=ax+by, (1-1)
где х, у, z— любые из токов и на-
пряжений цепи.
Для электрической цепи с четы-
рехполюсником (рис. 1-2) аналогич-
ные зависимости можно записать
между любыми-тремя величинами
из определяющих режим четырех-
полюсника комплексных напряже-
ний и токов (7Ь [72, /ь 12.
Выразим напряжение и ток на
входе через напряжение и ток на
выходе четырехполюсника:
Л=с^2+ш2.
(1-2)
Эти уравнения, связывающие пер-
вичные напряжение Ut и ток 11 с
вторичными напряжением U2 и током
/2, называют основными урав-
нениями четырехполюсника,
уравнениями передачи или системой
уравнений типа А.
Постоянные коэффициенты а и b
в уравнении (Ы) зависят только
от конфигурации цепи и значений
сопротивлений всех ветвей кроме
ветвей с изменяющимися парамет-
рами. Поэтому и комплексные
коэффициенты А, В, С, D постоян-
ны и определяются только структу-
рой четырехполюсника и парамет-
рами составляющих его элементов,
а не параметрами генератора
(Э, Zr) и приемника (ZH). Назовем
коэффициенты А, В, С, D коэф-
фициентами четырехпо-
люсника. Размерность коэффи-
циентов четырехполюсника раз-
лична: А и D — безразмерные
величины, В имеет размерность
сопротивления, С — проводимости.
Уравнения (1-2), выражающие
линейную зависимость между на-
пряжениями и токами, справедливы
независимо от того, каким путем на
первичных зажимах создано напря-
жение (/г и почему на вторичных
зажимах устанавливается напряже-
ние U2. Следовательно, эти уравне-
ния относятся не только к схеме
присоединения источника питания
и приемника, показанной на рис. 1-2,
но и к произвольному случаю вклю-
чения линейного пассивного четы-
рехполюсника в электрическую
цепь. При этОлМ часть электрической
цепи, присоединенную к первичным
зажимам, можно рассматривать как
активный двухполюсник с напряже-
нием холостого хода, равным Э, и
внутренним сопротивлением Zr,
11
а часть электрической цепи, под-
ключенную к вторичным зажи-
мам— как пассивный двухполюсник
с входным сопротивлением ZH.
С точки зрения режима на пер-
вичных и вторичных зажимах че-
тырехполюсники, имеющие одина-
ковые значения коэффициентов Л,
В, С, D, не отличимы, т. е. эквива-
лентны, хотя их внутренняя струк-
тура может быть совсем различной.
Таким образом, можно утверждать,
что четырехполюсник задан, если
известны его коэффициенты.
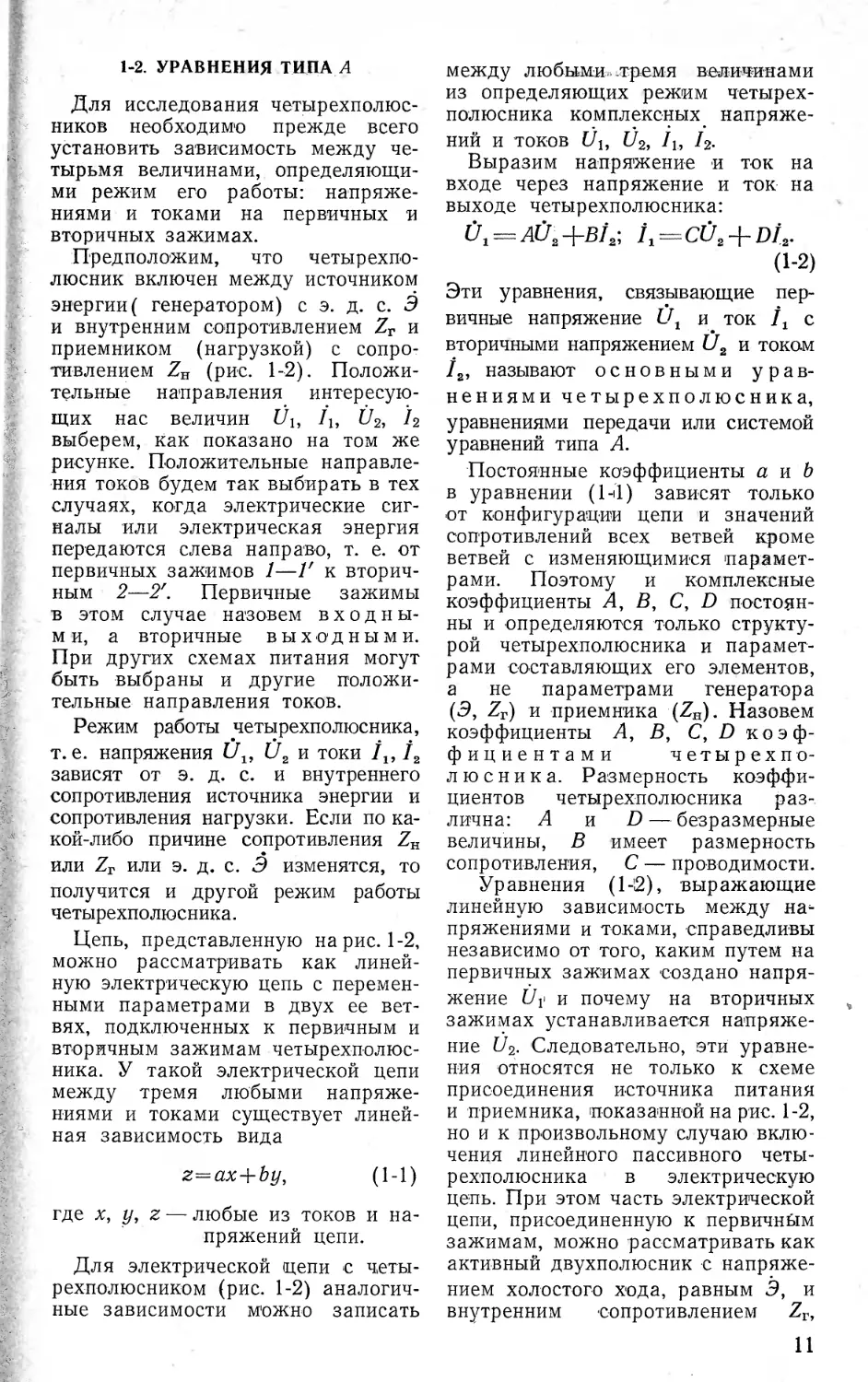
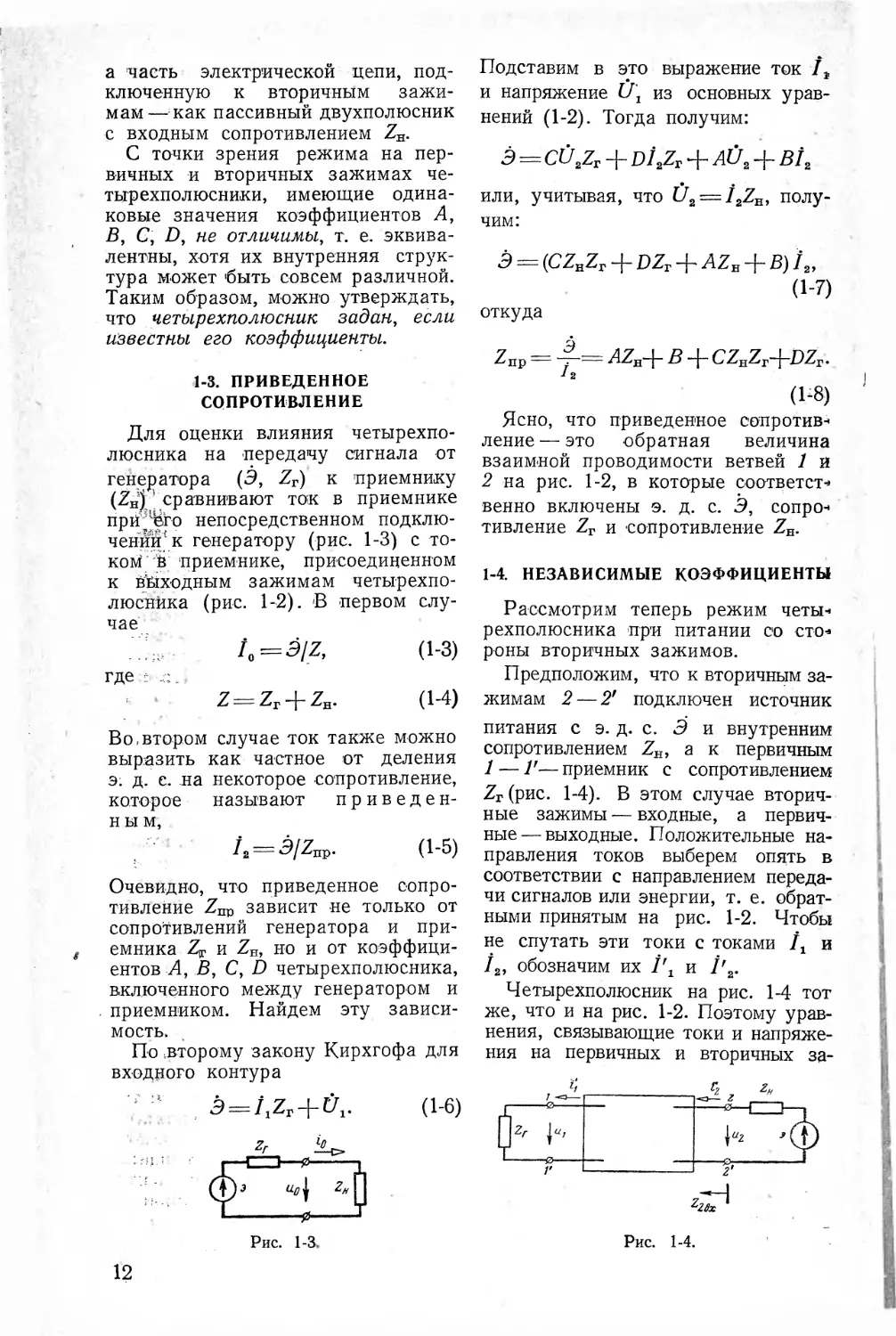
1-3. ПРИВЕДЕННОЕ
СОПРОТИВЛЕНИЕ
Для оценки влияния четырехпо-
люсника на передачу сигнала от
генератора (Э, Zr) к приемнику
(Zh)/ сравнивают ток в приемнике
прй^го непосредственном подклю-
чений, к генератору (рис. 1-3) с то-
ком ё приемнике, присоединенном
к выходным зажимам четырехпо-
люсника (рис. 1-2). -В первом слу-
чае
i^aiz, (1-3)
где :
Z=Zr4-ZH. (1-4)
В о, втором случае ток также можно
выразить как частное от деления
э. д. е. на некоторое сопротивление,
которое называют приведен-
н ы м,
z2=a/znp. (1-5)
Очевидно, что приведенное сопро-
тивление Znp зависит не только от
сопротивлений генератора и при-
емника Zr и ZH, но и от коэффици-
ентов Л, В, С, D четырехполюсника,
включенного между генератором и
приемником. Найдем эту зависи-
мость.
По .второму закону Кирхгофа для
входного контура
3 = /^ + ^- (1-6)
Рис. 1-3.
Подставим в это выражение ток
и напряжение U\ из основных урав-
нений (1-2). Тогда получим:
э=cu2zr+di2zt+au2+в12
или, учитывая, что U2 — 12ZB, полу-
чим:
Э = (CZHZr 4- DZr + AZB + В) i2,
(1-7)
откуда
Znp = -f-= AZB+ В + CZHZr+DZr.
(В8)
Ясно, что приведенное сопротив-
ление — это обратная величина
взаимной проводимости ветвей 1 и
2 на рис. 1-2, в которые соответст-
венно включены э. д. с. Э, сопро-
тивление Zr и сопротивление ZE.
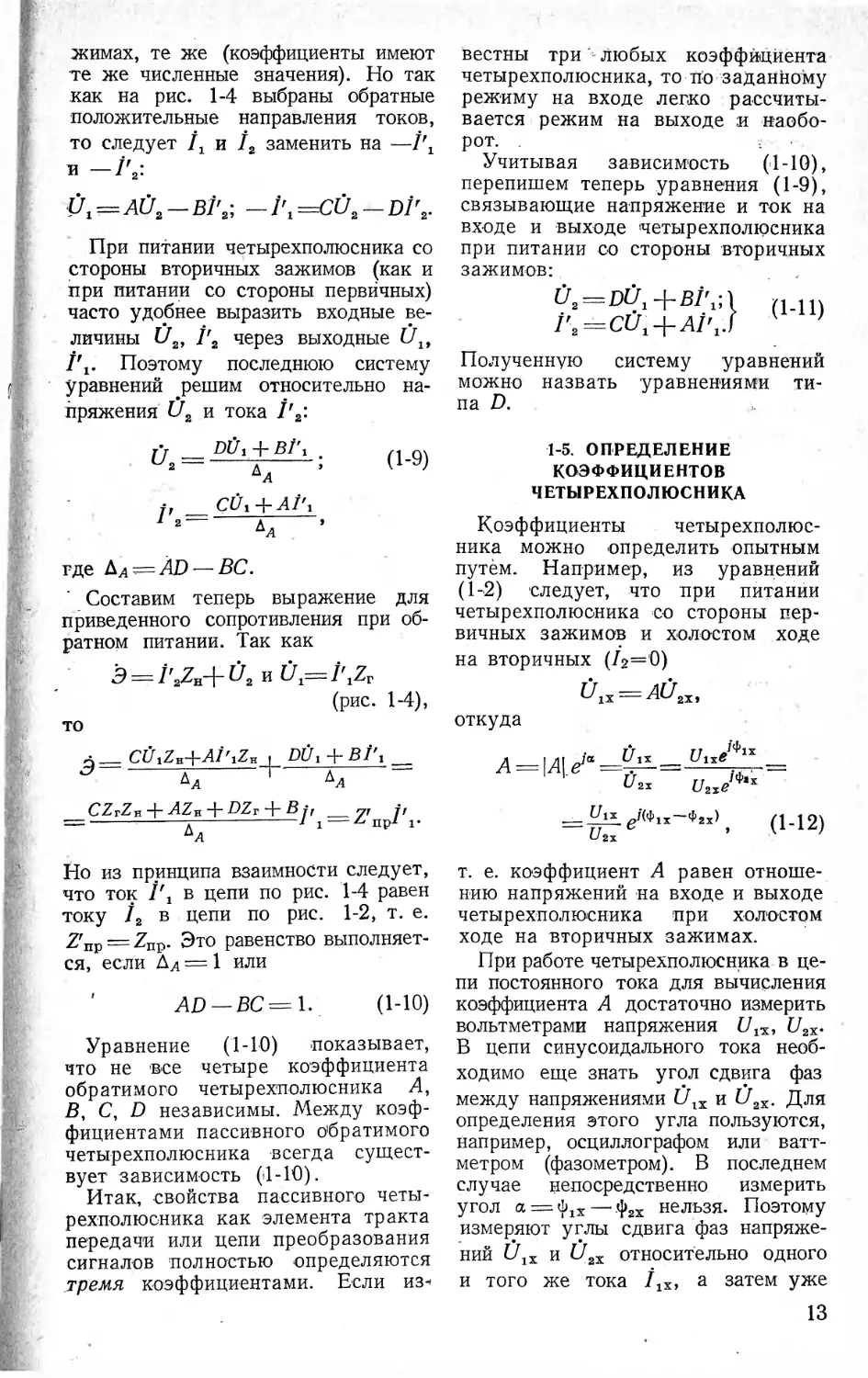
1-4. НЕЗАВИСИМЫЕ КОЭФФИЦИЕНТЫ
Рассмотрим теперь режим четы-
рехполюсника при питании со сто-
роны вторичных зажимов.
Предположим, что к вторичным за-
жимам 2 — 2' подключен источник
питания с э. д. с. Э и внутренним
сопротивлением ZH, а к первичным
1 — Г— приемник с сопротивлением
Zr (рис. 1-4). В этом случае вторич-
ные зажимы — входные, а первич-
ные— выходные. Положительные на-
правления токов выберем опять в
соответствии с направлением переда-
чи сигналов или энергии, т. е. обрат-
ными принятым на рис. 1-2. Чтобы
не спутать эти токи с токами Д и
/2, обозначим их и /'2.
Четырехполюсник на рис. 1-4 тот
же, что и на рис. 1-2. Поэтому урав-
нения, связывающие токи и напряже-
ния на первичных и вторичных за-
Рис. 1-4.
12
жимах, те же (коэффициенты имеют
те же численные значения). Но так
как на рис. 1-4 выбраны обратные
положительные направления токов,
то следует Д и /2 заменить на —
и —/'2:
и1===Д[72_В?2; — fr^cU2 — Dir2.
При питании четырехполюсника со
стороны вторичных зажимов (как и
при питании со стороны первичных)
часто удобнее выразить входные ве-
личины t/2, Г2 через выходные U19
1\. Поэтому последнюю систему
уравнений .решим относительно на-
пряжения U2 и тока Г2:
и2 = ^±^-- (1-9)
tr ол + лЛ
где Дд — AD— ВС.
Составим теперь выражение для
приведенного сопротивления при об-
ратном питании. Так как
э=/'2zH-[-и
(рис. 1-4),
то
CUtZn+Af^Zn 1 DU г + В Л
CZ?Zk + Л/н + DZt + В fr _jr
_--------------------J j----А пр7 J.
Но из принципа взаимности следует,
что ток в цепи по рис. 1-4 равен
току /2 в цепи по рис. 1-2, т. е.
Z'np==Znp. Это равенство выполняет-
ся, если Дд = 1 или
AD — ВС—1. (1-10)
Уравнение (1-10) показывает,
что не все четыре коэффициента
обратимого четырехполюсника А,
В, С, D независимы. Между коэф-
фициентами пассивного обратимого
четырехполюсника всегда сущест-
вует зависимость (1-10).
Итак, свойства пассивного четы-
рехполюсника как элемента тракта
передачи или цепи преобразования
сигналов полностью определяются
тремя коэффициентами. Если из^
вестны три ‘ любых коэффициента
четырехполюсника, то по заданному
режиму на входе легко рассчиты-
вается режим на выходе и наобо-
рот. .
Учитывая зависимость (1-10),
перепишем теперь уравнения (1-9),
связывающие напряжение и ток на
входе и выходе четырехполюсника
при питании со стороны вторичных
зажимов:
U2 = DU (1-11)
Л=сг/1+лг1.( }
Полученную систему уравнений
можно назвать уравнениями ти-
па D.
1-5. ОПРЕДЕЛЕНИЕ
КОЭФФИЦИЕНТОВ
ЧЕТЫРЕХПОЛЮСНИКА
Коэффициенты четырехполюс-
ника можно определить опытным
путём. Например, из уравнений
(1-2) следует, что при питании
четырехполюсника со стороны пер-
вичных зажимов и холостом ходе
на вторичных (7г—0)
U1X-= AU 2Х9
откуда
А = \А\.е1л=^-
U 2х
и^
Ун с/(фц—Фах)
t/гх
(Ы2)
т. е. коэффициент А равен отноше-
нию напряжений на входе и выходе
четырехполюсника при холостом
ходе на вторичных зажимах.
При работе четырехполюсника в це-
пи постоянного тока для вычисления
коэффициента А достаточно измерить
вольтметрами напряжения С71Х, П2Х.
В цепи синусоидального тока необ-
ходимо еще знать угол сдвига фаз
между напряжениями (7гх и U2X, Для
определения этого угла пользуются,
например, осциллографом или ватт-
метром (фазометром). В последнем
случае непосредственно измерить
угол а — ф1Х— ф2Х нельзя. Поэтому
измеряют углы сдвига фаз напряже-
ний U1X и U2X относительно одного
и того же тока /1Х, а затем уже
13
вычисляют угол сдвига фаз между
напряжениями.
Коэффициент С также можно
найти из уравнений (1-2) при хо-
лостом ходе на вторичных зажимах
С = (1-13)
и 2Х
т. е. нужно измерить ток напря-
жение U2x и сдвиг по фазе между
ними.
Для экспериментального опреде-
ления коэффициентов В и D можно
выполнить аналогичные измерения
при питании со стороны первичных
зажимов и коротком замыкании на
вторичных (U2 — 0)
B = D = (1-14)
I2к /гк
Коэффициенты четырехполюс-
ника нетрудно конечно найти и по
данным опытов холостого хода и
короткого замыкания при питании
•со стороны вторичных зажимов, т. е.
из уравнений (1-11).
С ростом частоты эксперимен-
тальное определение коэффициен-
тов А, В, С, D становится все более
трудным, так как измерение напря-
жений, токов, мощности и особен-
но углов сдвига по фазе услож-
няется. У четырехполюсников —
линий передачи сигналов экспери-
ментальное определение коэффици-
ентов по результатам двух опытов
практически вообще невозможно,
так как требует включения различ-
ных зажимов прибора, измеряю-
щего сдвиг фаз (ваттметр, осцил-
лограф), одновременно к входным
и выходным зажимам.
Если известна структура четы-
рехполюсника и величины состав-
ляющих его элементов (сопротив-
лений, индуктивностей, емкостей),
то определить коэффициенты четы-
рехполюсника можно и расчетом.
Покажем порядок расчета на при-
мерах.
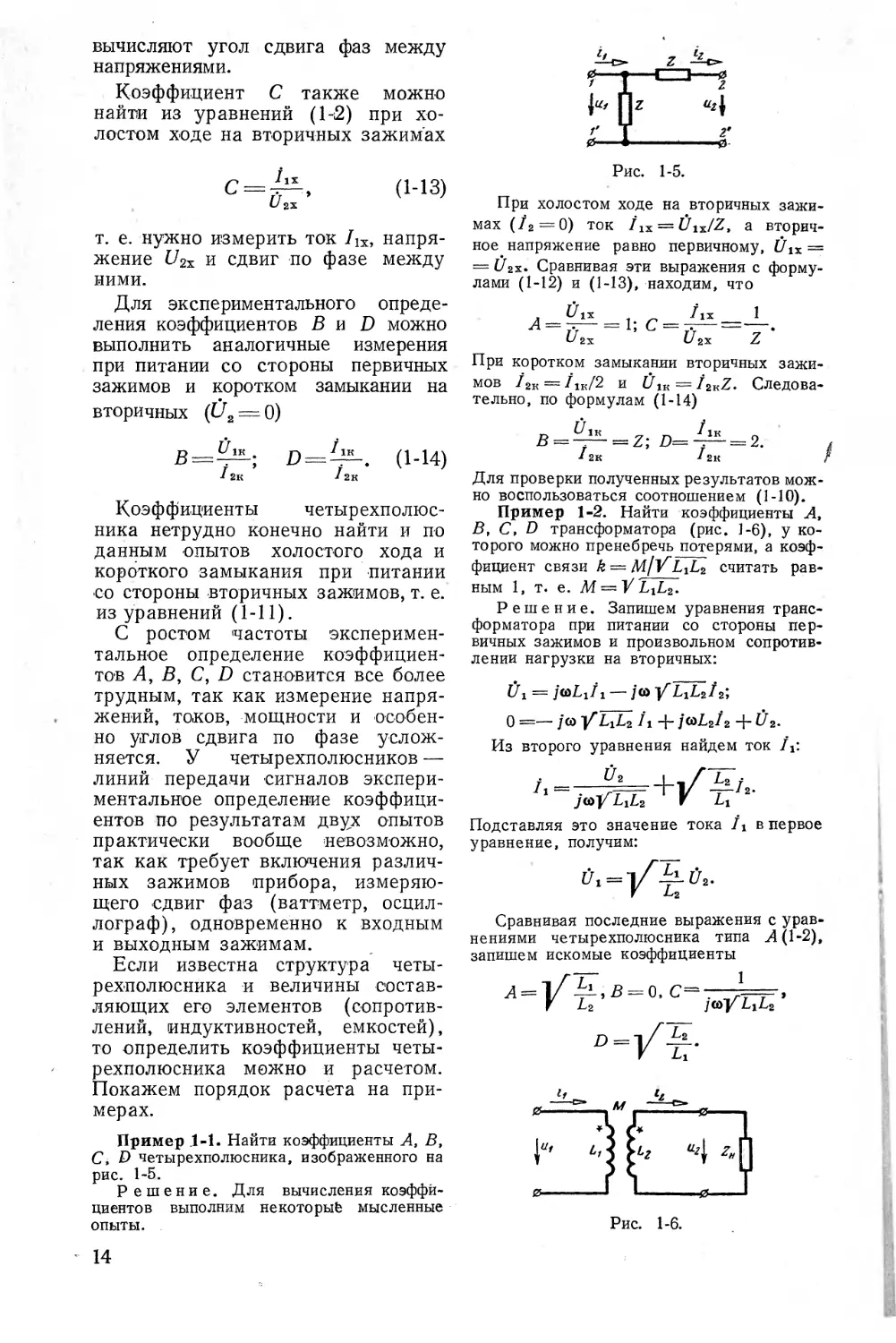
Пример 1-1. Найти коэффициенты А, В,
С, D четырехполюсника, изображенного на
рис. 1-5.
Р е ш е н и е. Для вычисления коэффи-
циентов выполним некоторый мысленные
опыты.
Рис. 1-5.
При холостом ходе на вторичных зажи-
мах (/2 = 0) ток = Ulx/Zt а вторич-
ное напряжение равно первичному, (71х =
= i/2x. Сравнивая эти выражения с форму-
лами (1-12) и (1-13), находим, что
Л = ^ = 1;С = -^=—.
В2х U 2Х Z
При коротком замыкании вторичных зажи-
мов /2к = 11к/2 и Uin = i2kZ. Следова-
тельно, по формулам (1-14)
B=^- = Z; D=~ = 2.
* 2К Лк <
Для проверки полученных результатов мож-
но воспользоваться соотношением (1-10).
Пример 1-2. Найти коэффициенты А,
В, С, D трансформатора (рис. 1-6), у ко-
торого можно пренебречь потерями, а коэф-
фициент связи k = MfVLrL2 считать рав-
ным 1, т. е. Af = J/'L1L2.
Решение. Запишем уравнения транс-
форматора при питании со стороны пер-
вичных зажимов и произвольном сопротив-
лении нагрузки на вторичных:
U1 — /(oZ/i/1 /со j/”JLijL2./2*i
0 =— /со LiL2 11 “h /соД2/2 U2-~
Из второго уравнения найдем ток 1^.
i —
1 LiLz V Li 2
Подставляя это значение тока /1 в первое
уравнение, получим:
F Ь2
Сравнивая последние выражения с урав-
нениями четырехполюсника типа Л (1-2),
запишем искомые коэффициенты
1
jcoyLiL,
в = о, С
Рис. 1-6.
14
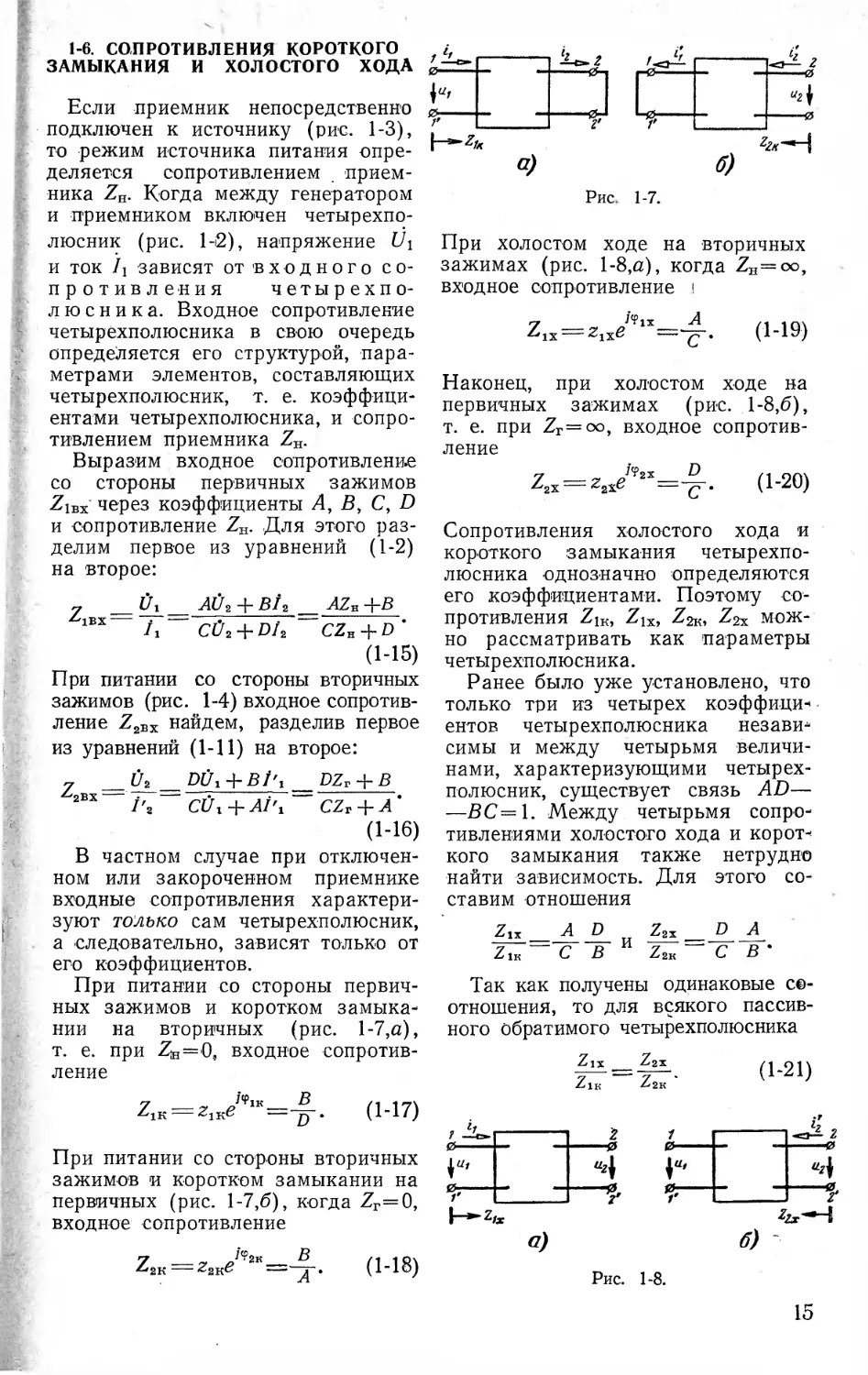
1-6. СОПРОТИВЛЕНИЯ короткого
ЗАМЫКАНИЯ И ХОЛОСТОГО ХОДА
Если приемник непосредственно
подключен к источнику (рис. 1-3),
то режим источника питания опре-
деляется сопротивлением . прием-
ника ZH. Когда между генератором
и приемником включен четырехпо-
люсник (рис. 1-2), напряжение U\
и ток Л -зависят от входного со-
противления четырехпо-
люсника. Входное сопротивление
четырехполюсника в свою очередь
J определяется его структурой, пара-
S метрами элементов, составляющих
четырехполюсник, т. е. коэффици-
ентами четырехполюсника, и сопро-
тивлением приемника ZH.
Выразим входное сопротивление
со стороны первичных зажимов
Zib£ через коэффициенты А, В, С, D
и сопротивление ZH. Для этого раз-
делим первое из уравнений (1-2)
на второе:
z = #i_ ~ Л&2 + В/2 —AZ* +в
,BS— Л ~ COi + DJi ~~CZ„ + D '
(1-15)
При питании со стороны вторичных
зажимов (рис. 1-4) входное сопротив-
ление Z2BX найдем, разделив первое
из уравнений (1-11) на второе:
Z + DZr + B
2ВХ 7'г CUi + Ai\ ~ CZ? +А'
(1-16)
В частном случае при отключен-
ном или закороченном приемнике
входные сопротивления характери-
зуют только сам четырехполюсник,
а следовательно, зависят только от
его коэффициентов.
При питании со стороны первич-
ных зажимов и коротком замыка-
нии на вторичных (рис. 1-7,а),
т. е. при Zto=0, входное сопротив-
ление
г1К=г1КЛ«=4. (1-17)
При питании со стороны вторичных
зажимов и коротком замыкании на
первичных (рис. 1-7,6), когда Zr=0,
входное сопротивление
z2K=22Ke/?2B==4- <1-18)
•Zi
Рис. 1-7.
При холостом ходе на вторичных
зажимах (рис. 1-8,а), когда ZH=oo,
входное сопротивление i
Zlx=z1XZ,x=4- (1-19)
Наконец, при холостом ходе на
первичных зажимах (рис. 1-8,6),
т. е. при Zr=oo, входное сопротив-
ление
Сопротивления холостого хода и
короткого замыкания четырехпо-
люсника однозначно определяются
его коэффициентами. Поэтому со-
противления Zin, Zix, Z2K, Z^ мож-
но рассматривать как параметры
четырехполюсника.
Ранее было уже установлено, что
только три из четырех коэффици-*
ентов четырехполюсника незави^
симы и между четырьмя величи-
нами, характеризующими четырех-
полюсник, существует связь AD—
—ВС=\. Между четырьмя сопро-
тивлениями холостого хода и корот-*
кого замыкания также нетрудно
найти зависимость. Для этого со-
ставим отношения
Zix A D Z2x D А
~Z^~~~C"~B Z2K~ с в*
Так как получены одинаковые со-
отношения, то для всякого пассив-
ного обратимого четырехполюсника
(1-21)
Z1k ^2К
О)
Рис. 1-8.
15
Рис. 1-9.
Сопротивления холостого хода и
короткого замыкания могут быть
измерены теми же методами, что и
любые, другие сопротивления, на-
пример при помощи измеритель-
ного моста или амперметра, вольт-
метра и ваттметра, включенных
только со стороны первичных или
только со стороны вторичных зажи-
мов. Поэтому для -большинства че-
тырехполюсников измерение сопро-
тивлений Zix, Zik, Z2x и Z2K можно
выполнить точнее и проще, чем из-
мерение коэффициентов четырехпо-
люсника Л, В, С, В, особенно на
высоких частотах.
Если известна схема четырехпо-
люсника, то сопротивления холо-
стого хода и короткого замыкания
могут быть найдены расчетом.
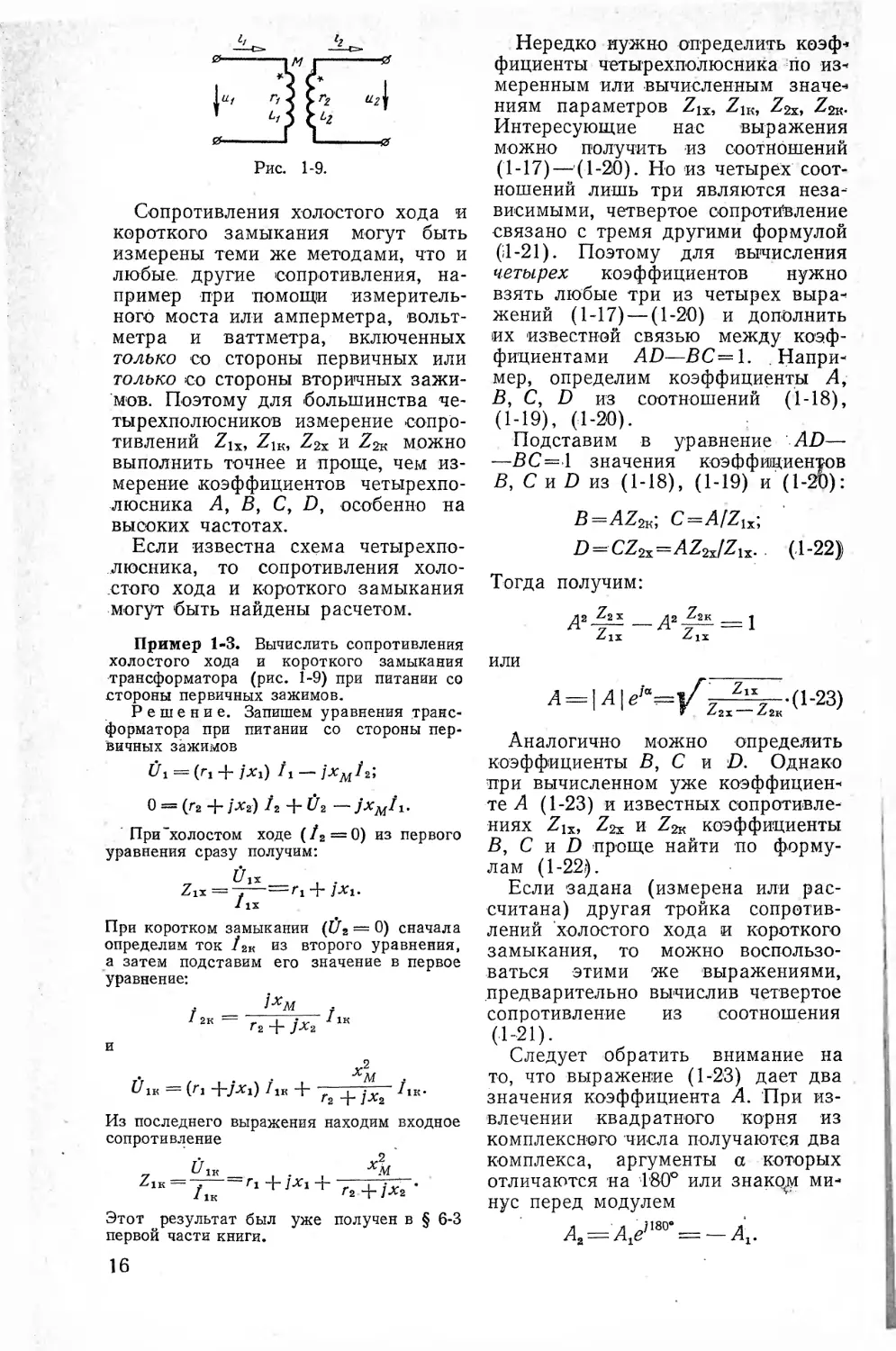
Пример 1-3. Вычислить сопротивления
холостого хода и короткого замыкания
трансформатора (рис. 1-9) при питании со
стороны первичных зажимов.
Решение. Запишем уравнения транс-
форматора при питании со стороны пер-
вичных зажимов
ЙГ1 = (Г1 + /Х1) Л— jxmJ
О = (Г2 + jx?) I2 + U2 -jXMl
' При ’холостом ходе (/2=0) из первого
уравнения сразу получим:
Zix = -7—=гх + JXl
1IX
При коротком замыкании (С7а = 0) сначала
определим ток /2к из второго уравнения,
а затем подставим его значение в первое
уравнение:
1 2к — г । : v < 1к
Г2 “Г Jxz
И
X1 2
Гт / I • ч f । м f
£Лк — 0*1 +/-V1) Лк + к f v I 1к*
'2 Т
Из последнего выражения находим входное
сопротивление
2
Z1K“/1K Г2+1Х2 •
Этот результат был уже получен в § 6-3
первой части книги.
16
Нередко нужно определить коэф-»
фициенты четырехполюсника до из-
меренным или вычисленным значе-
ниям параметров Zlx, ZjK, Z2x, Z21{.
Интересующие нас выражения
можно получить из соотношений
(1-17) — (1-20). Но из четырёх соот-
ношений лишь три являются неза-
висимыми, четвертое сопротивление
связано с тремя другими формулой
(il-21). Поэтому для вычисления
четырех коэффициентов нужно
взять любые три из четырех выра-
жений (1-17)— (1-20) и дополнить
их известной связью между коэф-
фициентами AD—ВС = 1. . Напри-
мер, определим коэффициенты Л,
В, С, D из соотношений (1-18),
(1-19), (1-20).
Подставим в уравнение AD—
—ВС—1 значения коэффициентов
В, С и D из (1-18), (1-19) и (1-20):
B=AZ^', C=AfZix;
D^CZ^AZ^fZ^.. (1-22)
Тогда получим:
Д2 ^х _ ^2 Z2K _ |
или
Л = |Л|е'“=/=|^.(1-23)
Аналогично можно определить
коэффициенты В, С и D. Однако
при вычисленном уже коэффициент
те Л (1-23) и известных сопротивле-
ниях Zix, Z^ и Z^ коэффициенты
В, С и D проще найти по форму-
лам (1-22).
Если задана (измерена или рас-
считана) другая тройка сопротив-
лений холостого хода и короткого
замыкания, то можно воспользо-
ваться этими же выражениями,
предварительно вычислив четвертое
сопротивление из соотношения
(1-21).
Следует обратить внимание на
то, что выражение (1-23) дает два
значения коэффициента Л. При из-
влечении квадратного корня из
комплексного числа получаются два
комплекса, аргументы а которых
отличаются на 180° или знако^м ми-
нус перед модулем
Д = Л/180° = —Д.
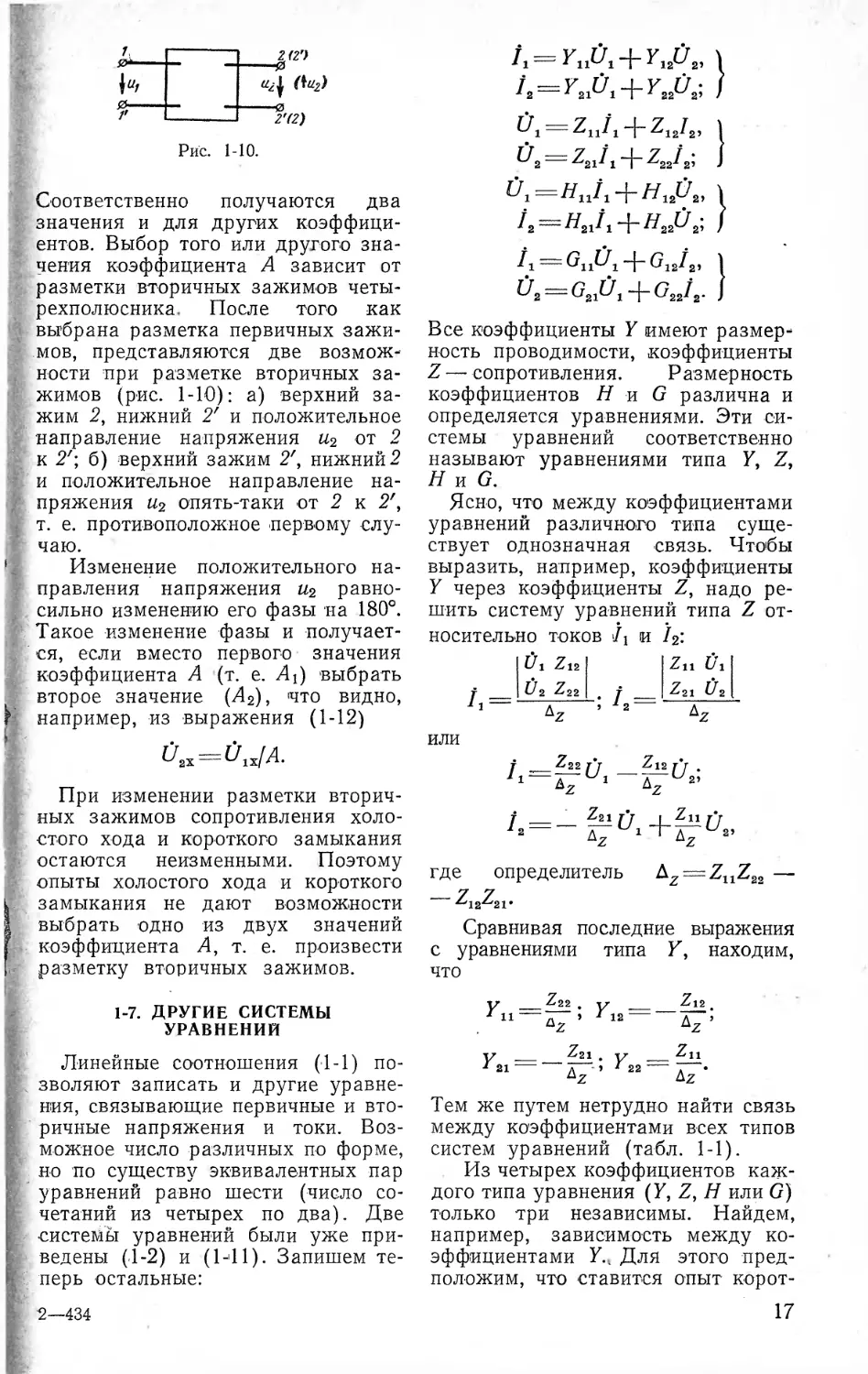
Рис. 1-10.
Соответственно получаются два
значения и для других коэффици-
ентов. Выбор того или другого зна-
чения коэффициента Д зависит от
разметки вторичных зажимов четы-
рехполюсника. После того как
выбрана разметка первичных зажи-
мов, представляются две возмож-
ности при разметке вторичных за-
жимов (рис. 1-10): а) верхний за-
жим 2, нижний 2Г и положительное
направление напряжения и2 от 2
к 2х; б) верхний зажим 2х, нижний 2
и положительное направление на-
пряжения и2 опять-таки от 2 к 2х,
। т. е. противоположное первому слу-
чаю.
Изменение положительного на-
правления напряжения и2 равно-
сильно изменению его фазы на 180°.
Такое изменение фазы и получает-
ся, если вместо первого значения
коэффициента А (т. е. ДД выбрать
второе значение (Д2), 'что видно,
Ц например, из выражения (1-12)
1 и2Х=й1Х[А.
При изменении разметки вторич-
ных зажимов сопротивления холо-
стого хода и короткого замыкания
остаются неизменными. Поэтому
опыты холостого хода и короткого
(замыкания не дают возможности
выбрать одно из двух значений
коэффициента Д, т. е. произвести
разметку вторичных зажимов.
1-7. ДРУГИЕ СИСТЕМЫ
УРАВНЕНИЙ
Линейные соотношения (1-1) по-
I зволяют записать и другие уравне-
ния, связывающие первичные и вто-
ричные напряжения и токи. Воз-
можное число различных по форме,
но по существу эквивалентных пар
уравнений равно шести (число со-
четаний из четырех по два). Две
системы уравнений были уже при-
ведены (.1-2) и (1-41). Запишем те-
ft перь остальные:
л-^д+^д,
/2 = ГаД + УгД;
^2-^21А ^22^2’
^1 = 12^2»
/2—h21i1+H2fl
^=g2a+g22/,
Все коэффициенты Y имеют размер-
ность проводимости, коэффициенты
Z —сопротивления. Размерность
коэффициентов Н и G различна и
определяется уравнениями. Эти си-
стемы уравнений соответственно
называют уравнениями типа У, Z,
Н и G.
Ясно, что между коэффициентами
уравнений различного типа суще-
ствует однозначная связь. Чтобы
выразить, например, коэффициенты
У через коэффициенты Z, надо ре-
шить систему уравнений типа Z от-
носительно токов It и 12.
I U1 Z121 Zu и 1
J I U2 Z22 [
• 1 _ I Z2I Us I
Az ’ 2 Az
ИЛИ
f ~__Z22 r’r Zi2T*r .
7 1 - A U1 A °2>
^Z nz
i =— 4.£21 и
^Z ^Z 2’
где определитель Az = ZxlZ22 —
__77
^12^21 •
Сравнивая последние выражения
с уравнениями типа Y, находим,
что
__^22 , у __ Z12
L—Z7’ —
_____^21 . у _ ^11
- л - » * 22 - А
^Z-------------^Z
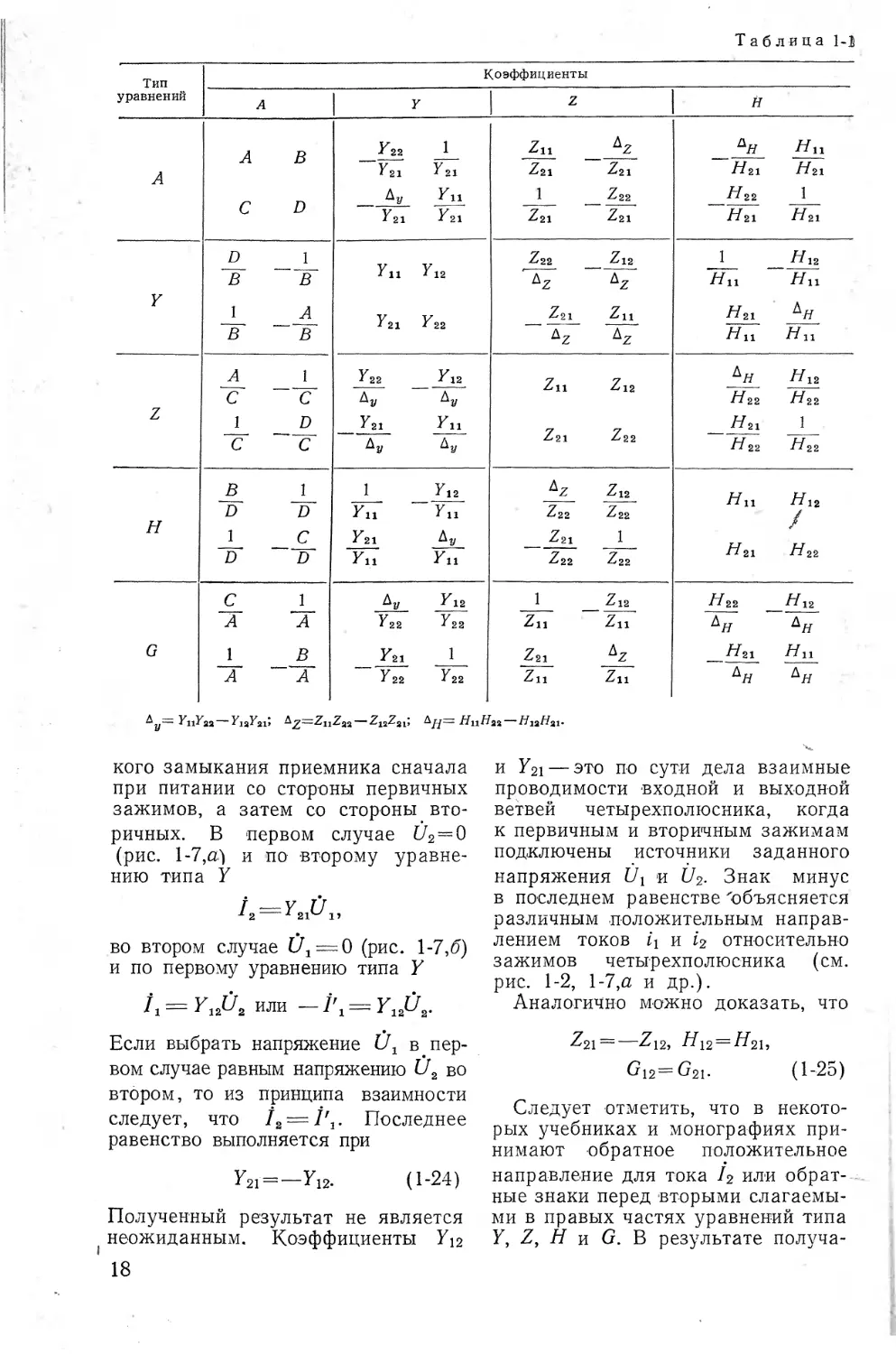
Тем же путем нетрудно найти связь
между коэффициентами всех типов
систем уравнений (табл. 1-1).
Из четырех коэффициентов каж-
дого типа уравнения (У, Z, Н или G)
только три независимы. Найдем,
например, зависимость между ко-
эффициентами У., Для этого пред-
положим, что ставится опыт корот-
2—434
17
Таблица 1-J
Тип уравнений Коэффициенты
А 1 Y 1 Z H
A R -Угг 1 <1
А 721 ^21 Z21 Z21 TAi H21
&у 7и 1 Z22 7/22 1
С D У21 У21 Z21 Z21 T/2i 7/21
D 1 Z22 712 1 _Я12
В В 7ц 712 Az Az Я11 //и
Y 1 А у у 72i 7ц //51
В ~ В ^z ^z Z/ц /7н
А 1 722 712 //и
С ~ С Ау &у --'ll "12 /722 //22
А 1 __ D 7 21 711 7 7 Я21 1
С ~С Ау ^у Z/21 -^22 BI 22 BI 22
В 1 1 У12 Az Z12
н D D Ун Ун Z22 Z22 2 - 11 1 2 12 /
1 С У21 ДУ Z21 1
D D Ги Ги CM CM n 1 CM CM N 772i 7/22
С 1 &у 712 1 Z18 Bi 22 H X2
А А 722 722 Z11 Z11
G 1 JL 721 1 NJ <1 CM N
А А 7г2 7г2 k= k=
Ду— ГнКаа Г1аУ21;
—-^11^22 — -^12^21’
Луу— Н11Н22 — //12^21-
кого замыкания приемника сначала
при питании со стороны первичных
зажимов, а затем со стороны вто-
ричных. В первом случае t/2 = 0
(рис. 1-7,а) и по второму уравне-
нию типа Y
i^Y^,
во втором случае С\ = 0 (рис. 1-7,6)
и по первому уравнению типа Y
1г = У12й2 или —/\ = Г12Ц2.
Если выбрать напряжение в пер-
вом случае равным напряжению О2 во
втором, то из принципа взаимности
следует, что = Последнее
равенство выполняется при
^21=—У12- (1-24)
Полученный результат не является
I неожиданным. Коэффициенты Y12
18
и У21 — это по сути дела взаимные
проводимости входной и выходной
ветвей четырехполюсника, когда
к первичным и вторичным зажимам
подключены источники заданного
напряжения [Д и Й2. Знак минус
в последнем равенстве ^объясняется
различным положительным направ-
лением токов fi и i2 относительно
зажимов четырехполюсника (см.
рис. 1-2, 1-7,а и др.).
Аналогично можно доказать, что
^21=----2’12» ^12 = ^21,
G12=G21. (1-25)
Следует отметить, что в некото-
рых учебниках и монографиях при-
нимают обратное положительное
направление для тока 72 или обрат-
ные знаки перед вторыми слагаемы-
ми в правых частях уравнений типа
У, Z, Н и G. В результате получа-
ются другие знаки в выражениях,
связывающих коэффициенты систем
уравнений, чем в табл. 1-1.
Пример 1-4. Найти коэффициенты Zn,
Z12, Z2i, Z22 линейного трансформатора
(рис. 1-9).
Решение. Запишем уравнения транс-
форматора при питании со стороны первич-
ных зажимов и произвольном сопротивле-
нии нагрузки на вторичных:
! — (Г1 + jXx) ii -
о = — jx^i 1 + (г2 + jx2) 12 + й
Сравнивая эти выражения с уравнениями
типа Z, сразу находим, что
Zu = Г1/jui; Z12 =—Z21 = —
Z22 — — (Х2 + /-^2)*
1-8. СИММЕТРИЧНЫЙ
ЧЕТЫРЕХПОЛЮСНИК
При обратном питании четырех-
полюсника (рис. 1-4) его режим
определяется уравнениями типа D
(1-П):
i'^cu^Ai'..
Сравним эти уравнения с уравне-
ниями типа А (1-2) при питании
четырехполюсника со стороны пер-
вичных зажимов. Из сопоставления
ясно, что при взаимной замене пер-
вичных и вторичных зажимов и
выбранных положительных направ-
лениях токов в уравнениях меня-
ются местами коэффициенты А и D.
Четырехполюсник, у которого при
замене первичных и вторичных за-
жимов режимы источника питания
и приемника не изменяются, назы-
вают симметричным. У такого
четырехполюсника, очевидно, равны
коэффициенты А и D.
В уравнениях типа Y и Z при об-
ратном питании нужно заменить токи
Ц и /2 токами—и —Г2. Нетрудно
установить, *что у симметричных
четырехполюсников Уи =—У22 и
=—Z22. Поэтому для симметрич-
ного четырехполюсника при любой
форме записи уравнений, опреде-
ляющих его режим, могут быть за-
даны независимо только два коэф-
фициента.
2*
1-9. ХАРАКТЕРИСТИЧЕСКОЕ
СОПРОТИВЛЕНИЕ СИММЕТРИЧНОГО
ЧЕТЫРЕХПОЛЮСНИКА
Довольно часто между источни-
ком питания и приемником включая
ют симметричный четырехполюсник.
Например, наружная телевизион-
ная приемная антенна (генератор
сигналов для телевизоров) подсо-
единяется к телевизору (приемник
сигналов) не непосредственно,
а при помощи симметричного четы-
рехполюсника — телевизионного ка-
беля. Отрезок кабеля имеет два
входных зажима 7—7х, которыми
он соединен с источником питания
(антенна), и два выходных зажима
2—2', к которым присоединяется
приемник (телевизор). Очень важ-
но правильно выбрать сопротивле-
ние приемника 2Н. Его подбирают
так, чтобы входное сопротивление
21вх четырехполюсника — кабеля на
зажимах 1—1' было одинаковым и
равным 2Н независимо от длины
кабеля. При одинаковых входных
сопротивлениях Z1BX кабелей раз-
ной длины все генераторы-антенны,
к которым присоединены кабели,
оказываются одинаково нагружен-
ными. Следовательно, конструкция
всех антенн может быть одинако-
вой, что очень важно при их серий-
ном изготовлении.
Аналогичные задачи подбора со-
противления нагрузки 2Н возникают
и в других установках с четырехпо-
люсниками — аттенюаторами, цеп-
ными схемами, фильтрами и т. д.
Эти четырехполюсники будут
в дальнейшем подробно исследо-
ваны.
Поставим вопрос о том, как же
надо нагрузить симметричный че-
тырехполюсник, чтобы его входное
сопротивление равнялось сопро-
тивлению нагрузки ZH?
У симметричного четырехполюс-
ника, как уже известно, любую
пару зажимов (7—7х или 2—2')
можно принять за входную, при
этом режимы источника питания и
приемника не изменятся. Присоеди^
ним для определенности источник
питания к первичным зажимам
7—7' (рис. 1-2). Тогда входное со-
противление Zibx=Zbx найдем по
19
формуле (1-15), учитывая, что для
симметричного четырехполюсника
0-26)
“Т“ 71
Нам необходимо иметь Z^ — Z^,
т. е. должно быть
rj AZ н В
' —czT+T*
Последнее выражение определяет
величину сопротивления нагрузки ZH,
при котором и входное сопротивле-
ние ZBX равно сопротивлению на-
грузки. Преобразуя последнее выра-
жение, найдем, что CZ^—B, откуда
ZH = /B/C.
Итак, если выбрать вполне опре-
деленное сопротивление приемника,
а именно, равное уВ!С. то и вход-
ное сопротивление четырехполюс-
ника равно этой величине. Входное
сопротивление четырехполюсника
при такой нагрузке зависит только
от коэффициентов четырехполюсни-
ка (В и С) и, значит, может быть
принято одним из параметров четы-
рехполюсника (как и коэффициенты
У, Z, Н, G или сопротивления холо-
стого хода и короткого замыка-
ния). Новый параметр нужно
знать, если возникает задача о вы-
боре нагрузки (ZH) для готового
четырехполюсника или наоборот,
если проектируют четырехполюсник
для совместной работы с заданной
нагрузкой.
Параметр УВ/С обозначают Zc и
называют характеристическим
сопротивлением симметричного
четырехполюсника:
Zc = zce/e = У А. (1-27)
Режим четырехполюсника при
Zn=y'BlC.— ZG, когда и входное
20
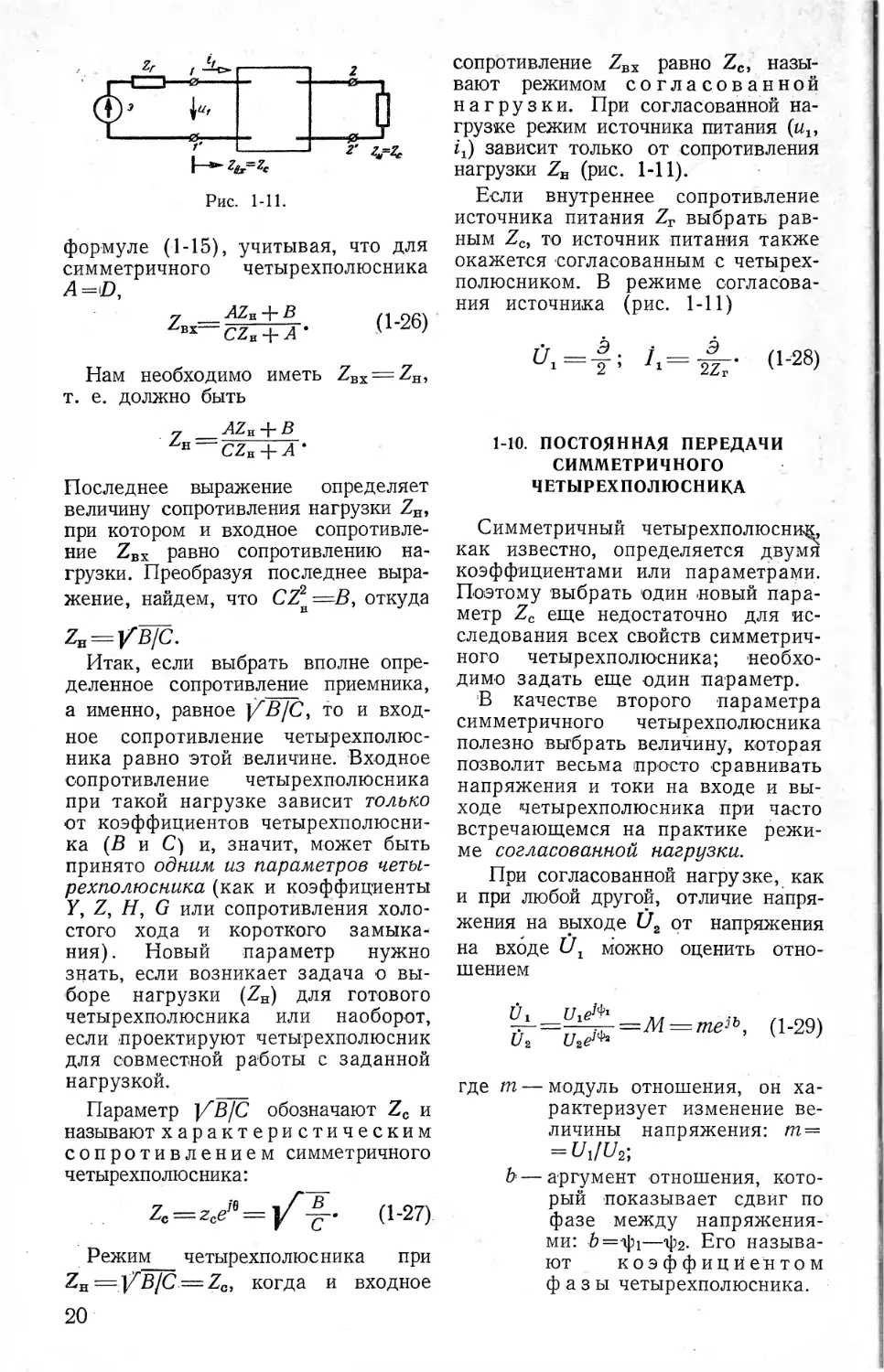
сопротивление ZBX равно Zc, назы-
вают режимом согласованной
нагрузки. При согласованной на-
грузке режим источника питания (и1?
ij) зависит только от сопротивления
нагрузки ZH (рис. 1-11).
Если внутреннее сопротивление
источника питания Zr выбрать рав-
ным Zc, то источник питания также
окажется согласованным с четырех-
полюсником. В режиме согласова-
ния источника (рис. 1-11)
<1-28)
1-10. ПОСТОЯННАЯ ПЕРЕДАЧИ
СИММЕТРИЧНОГО
ЧЕТЫРЕХПОЛЮСНИКА
Симметричный четырехполюсник,
как известно, определяется двумя
коэффициентами или параметрами.
Поэтому выбрать один новый пара-
метр Zc еще недостаточно для ис-
следования всех свойств симметрич-
ного четырехполюсника; необхо-
димо задать еще один параметр.
В качестве второго параметра
симметричного четырехполюсника
полезно выбрать величину, которая
позволит весьма просто сравнивать
напряжения и токи на входе и вы-
ходе четырехполюсника при часто
встречающемся на практике режи-
ме согласованной нагрузки.
При согласованной нагрузке, как
и при любой другой, отличие напря-
жения на выходе U2 от напряжения
на входе можно оценить отно-
шением
5r=^=A1="e,s' <'-29>
где пг — модуль отношения, он ха-
рактеризует изменение ве-
личины напряжения: пг =
b—аргумент отношения, кото-
рый показывает сдвиг по
фазе между напряжения-
ми: &=ф1—ф2. Его называ-
ют коэффициентом
фазы четырехполюсника.
Комплексную величину М. не следует
путать с коэффициентом передачи по на-
пряжению K=772/t7b который может быть
определен при любой заданной нагрузке
четырехполюсника. Коэффициент передачи
К нельзя считать параметром четырехпо-
люсника, так как его модуль и аргумент
зависят от сопротивления нагрузки. Ком-
плексная величина М определяется обяза-
тельно при согласованной нагрузке, т. е. при
сопротивлении нагрузки, равном одному из
параметров четырехполюсника — характери-
стическому сопротивлению. Поэтому ком-
плексную величину М следует считать пара-
метром четырехполюсника. В случае согла-
сованной нагрузки К=1/Л4.
Напряжение на выходе четырех-
полюсника нередко значительно
отличается по величине от напря-
жения на входе. У некоторых четы-
рехполюсников напряжение на вы-
ходе может отличаться от напря-
жения на входе даже на несколько
порядков. Например, на выходе
фильтра радиоприемника на часто-
те fx принимаемого сигнала напря-
жение U2 может равняться напря-
жению на входе 1/ь а на частоте fs
сигнала другой радиостанции мо-
жет быть в тысячи раз меньше
(чем меньше U2l тем лучше по-
давляется фильтром мешающий
сигнал второй радиостанции). По-
этому отношение напряжений на
входе и выходе четырехполюсников
принято оценивать в логарифмиче-
ском масштабе, для чего вместо
модуля отношения напряжений т
часто пользуются коэффициен-
том затухания или собст-
венным затуханием четырех-
полюсника
a=lnm = ln^-. (1-30)
О 2
Очевидно, что
т — ^-—еа.
с/2
Коэффициент затухания характе-
ризует отличие выходного напряже-
ния от входного или степень зату-
хания сигнала в четырехполюснике
при согласованной нагрузке (и толь-
ко при согласованной нагрузке!).
Коэффициент затухания — безраз-
мерная величина. Однако единице
коэффициента затухания, опреде-
ляемого выражением (1-30), при-
своено наименование непер (неп).
Затуханием в 1 неп обладает че-
тырехполюсник, у которого при
согласованной нагрузке напряже-
ние на выходе в е=2,72 раз мень-
ше, чем на входе.
При согласованной нагрузке
ZU 2 7 _7/
н — И
Следовательно, справедливо равен-
ство
_ L
С~2 /г
и коэффициент затухания характе-
ризует также отношение токов на
входных и выходных зажимах:
а=1п U-,
1 2
(1-31)
а коэффициент фазы b — сдвиг по
фазе между токами, равный сдвигу
по фазе между напряжениями.
Коэффициент затухания можно
вычислить и по известным полным,
активным или реактивным мощно-
стям на входных и выходных зажи-
мах. Действительно,
а । а 1 1 । 1 1 71
а~~~2 "Нг- Т 1пиг+т1п7Г—
. ЕЛЬ 1 . Si
— 2 1П U2I2~~ 2 Ш S2
ИЛИ
c°s е
а ~~ 2 ш U2I2~~ 2 ln U2I2 cos 6~
1 . UJ, sin 9 1 j Pi 1 , Q,
— 2 111 U2I2 sin 9“ 2 п Р2 — 2 ln Qg’
(1-32)
так как сдвиг по фазе 6 между на-
пряжением и током на входе и вы-
ходе один и тот же (ZBX - ZH =
= ZC — zce,e).
Полной мощности Si —U ilи стоящей
в числителе формулы для расчета коэф-
фициента затухания, можно дать и дру-
гое толкование.
Предположим, что требуется выяснить,
какую полную мощность получил бы при-
емник от заданного источника питания
(Э, Zr) в самых благоприятных условиях
работы? Наиболее благоприятными усло-
виями работы при передаче сигналов бу-
цем считать непосредственное подключение
приемника к источнику (рис. 1-3) с выпол-
нением условий согласования источника
ZH=Zr.
21
Напряжение и ток приемника в схеме
по р-ис. 1-3 при 7н=-2г:
, та-
1 на
и i
и* — 2 ’ 2о— ZB 2Zr
Эти напряжение и ток получились
кими же, как напряжение Ui и ток Ц
входе четырехполюсника при согласованной
нагрузке и согласованном источнике '(1-28),
т. е. UqIo==Sq—>Uj/i=Si.
Таким образом, коэффициент затухания
четырехполюсника характеризует отноше-
ние полных мощностей приемника в схеме
по рис. 1-3 с наиболее благоприятными
условиями передачи (So=lWo) и в реаль-
ной схеме передачи сигналов через четы-
рехполюсник (рис. 1-11) при согласовании
на входе и 'выходе (З^^-^Л):
i А
а — 2 П Зг ’
Точно так же коэффициент фазы b ра-
вен сдвигу по фазе между напряжениями
Uj и U2 (рис. 1-11) при согласованной на-
грузке или разности фаз напряжений Uq
(рис. >1-3) при ZH=Zr и U2 (рис. .1-11) при
согласованной нагрузке.
Запишем теперь выражение (1-29),
введя коэффициент затухания
М. — еае>ь = eg = ^-
и2
или
^a + ib = ^ = ln^
=1‘"Д7? 0-33)
Комплексное число g характери-
зует изменение напряжения или
тока как по величине, так и по фазе
и называется постоянной пере-
дачи четырехполюсника. 'Постоян-
ная передачи — второй параметр
симметричного четырехполюсника.
Хотя постоянная передачи в (1-33)
и выражена через напряжения и
токи на входе и выходе четырехпо-
люсника, но она полностью опреде-
ляется структурой четырехполюс-
ника и параметрами составляющих
его элементов.
Постоянную передачи можно, на-
пример, определить через коэффи-
циенты Д, В, С, D.
По выражению (1-33)
g = In = In —-2-ФЛ/а =
^2 ^2
= In (CZH + А) = In (С j/B/C +Д)=
= In (Д+/ВС). (1-34)
Характеристическое сопротивление
и постоянную передачи называют
вторичными параметрами че-
тырехполюсника.
Коэффициент затухания иногда вычис-
ляют не через 'натуральный логарифм, а че-
рез десятичный, полагая
Si СД К
fl = 1g-s;=21gw=21g7r-
Соответствующую единицу затухания на-
зывают бел. Бел—крупная единица. Прак-
тически пользуются единицей в 10 раз
меньшей — децибелом (дб), так что
Ui /1 Si
a=201g__=201g_=101g
(1-35)
причем
1 ^6=0,115 неп\ 1 wen=8,7 дб.
Отметим еще, что при вычислении по-
стоянной передачи по формуле \=a+jb
следует подставлять значение «а» в неперах
и «Ь» — в радианах.
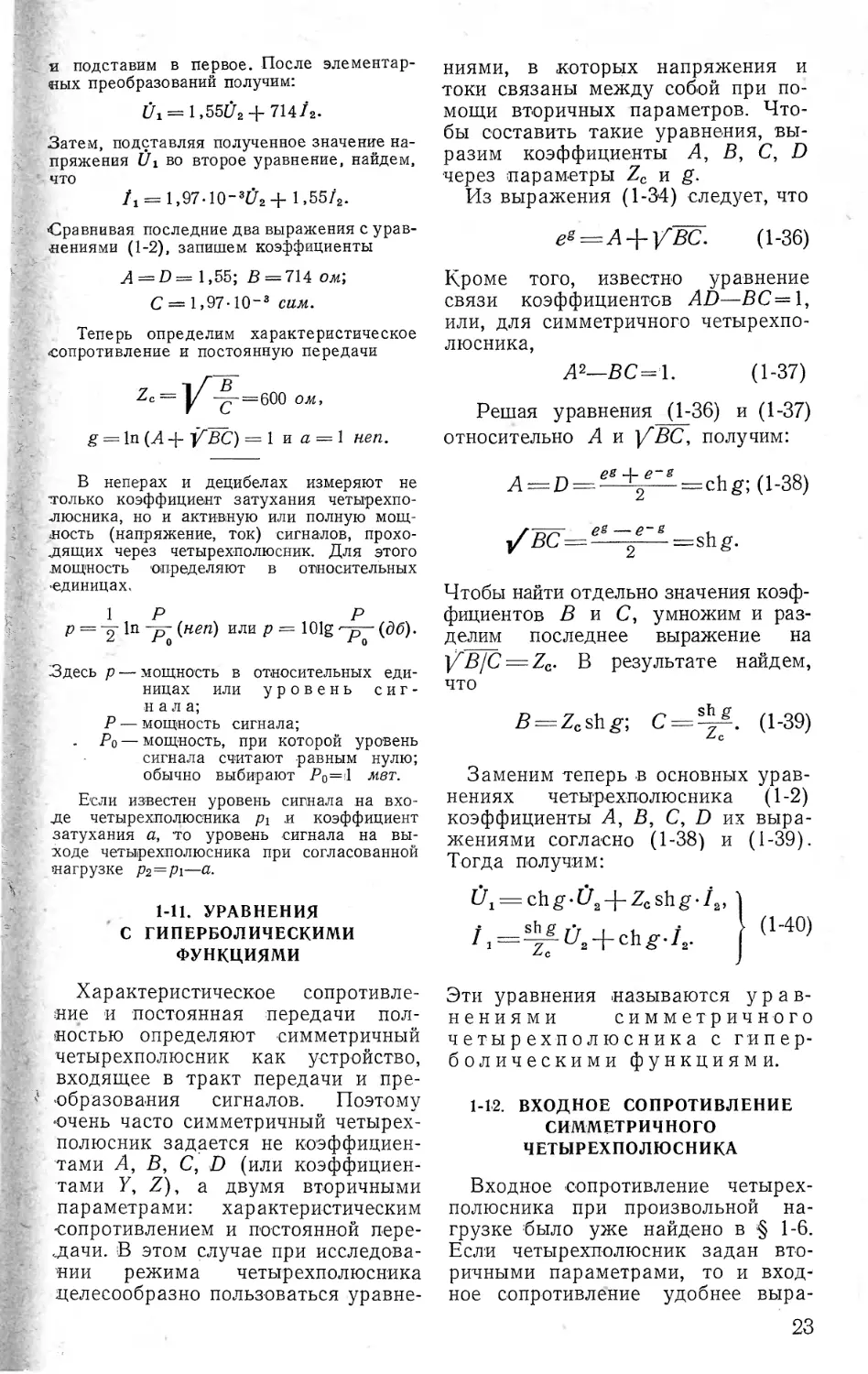
Пример 1-5. В трактах телефонных сиг-
налов аппаратуры телемеханики типа КП-59
установлены симметричные аттенюаторы,
схема которых показана на рис. 1-12.
Найти характеристическое сопротивле-
ние и коэффициент передачи аттенюатора.
Аттенюатор — это пассивный четырех-
полюсник, составленный из активных со-
противлений, который включают между ис-
точником питания и приемником для ча-
стичного подавления сигналов.
Решение. Для определения вторич-
ных параметров аттенюатора, вычислим
сначала коэффициенты А, Bt С> D. Соста-
вим уравнения по закону Кирхгофа для
внешнего и левого контуров схемы по
рис. 1-12:
£Л = 280Л + 280 /2+ В2;
йг =280/! 4-510 (/1— /2).
Приведем полученную систему уравнений
к виду (1-2). Для этого из второго уравне-
ния найдем ток
иг 4-510Л
790
МО ом
кОом
МОом h-o
Рис. 1-12.
я подставим в первое. После элементар-
ных преобразований получим:
t7i = l,55[/2 +71472.
Затем, подставляя полученное значение на-
пряжения £71 во второе уравнение, найдем,
что
= 1,97.10~3£72 + 1,55/2.
«Сравнивая последние два выражения с урав-
нениями (1-2), запишем коэффициенты
Л = Z) = 1,55; В = 714 ом;
С == 1,97-10~3 сим.
Теперь определим характеристическое
сопротивление и постоянную передачи
Zc— у -£- = 600 ом,
g = In (А -ф У"ВС) = 1 и а = 1 неп.
В неперах и децибелах измеряют не
только коэффициент затухания четырехпо-
люсника, но и активную или полную мощ-
| ность (напряжение, ток) сигналов, прохо-
ч дящих через четырехполюсник. Для этого
.мощность определяют в относительных
•единицах.
1 Р Р
р = In -р- (неп) или р = 101g г-р- (дб).
р — мощность в относительных еди-
ницах или уровень с и г -
н а л а;
Р — мощность сигнала;
Pq — мощность, при которой уровень
сигнала считают равным нулю;
обычно выбирают P0=d мет.
Если известен уровень сигнала на вхо-
де четырехполюсника рг и коэффициент
затухания а, то уровень сигнала на вы-
ходе четырехполюсника при согласованной
нагрузке p2=pi—а.
1.
1-11. УРАВНЕНИЯ
С ГИПЕРБОЛИЧЕСКИМИ
функциями
Характеристическое сопротивле-
ние и постоянная передачи пол-
ностью определяют симметричный
четырехполюсник как устройство,
входящее в тракт передачи и пре-
. * образования сигналов. Поэтому
очень часто симметричный четырех-
полюсник задается не коэффициен-
тами Л, В, С, D (или коэффициен-
тами У, Z), а двумя вторичными
параметрами: характеристическим
сопротивлением и постоянной пере-
дачи. В этом случае при исследова-
нии режима четырехполюсника
целесообразно пользоваться уравне-
I
ниями, в которых напряжения и
токи связаны между собой при по-
мощи вторичных параметров. Что-
бы составить такие уравнения, вы-
разим коэффициенты Л, В, С, D
через параметры Zc и g.
Из выражения (1-34) следует, что
= Л + (1-36)
Кроме того, известно уравнение
связи коэффициентов AD—ВС=\,
или, для симметричного четырехпо-
люсника,
Л2—ВС=1. (1-37)
Решая уравнения (1-36) и (1-37)
относительно Л и ]/ВС, получим:
Л —D = eg~l~2g~g—chg; (1-38)
Чтобы найти отдельно значения коэф-
фициентов В и С, умножим и раз-
делим последнее выражение на
YBIC = Zc. В результате найдем,
что
5 = Zcshg; С=^. (1-39)
Z-c
Заменим теперь в основных урав-
нениях четырехполюсника (1-2)
коэффициенты Л, В, С, D их выра-
жениями согласно (1-38) и (1-39).
Тогда получим:
U^chg-O^ZcShg-I^ '
i^s-^-u2+chg-i2.
(1-40)
Эти уравнения называются урав-
нениями симметричного
четырехполюсника с гипер-
болическими функциями.
1-12. ВХОДНОЕ СОПРОТИВЛЕНИЕ
СИММЕТРИЧНОГО
ЧЕТЫРЕХПОЛЮСНИКА
Входное сопротивление четырех-
полюсника при произвольной на-
грузке было уже найдено в § 1-6.
Если четырехполюсник задан вто-
ричными параметрами, то и вход-
ное сопротивление удобнее выра-
23
зить через вторичные параметры Zc
и g и сопротивление нагрузки ZH
при помощи уравнений (1-40):
7 ____171 ZH chg + Zeshg
вх—' /, ZaShg + ZcChg ’
(1-41)
Разделив числитель и знаменатель
на ch.g', получим другую форму за-
писи:
<М2>
В частности, при коротком замыка-
нии (ZH = 0)
ZK = Zcth^, (1-43)
при холостом ходе (ZH = oo)
Zx = Zc/th g = Zc cth g. (1 -44)
При сопротивлении нагрузки ZH=ZC
получаем ZBX = ZC, как и должно
быть по определению понятия о со-
гласованной нагрузке.
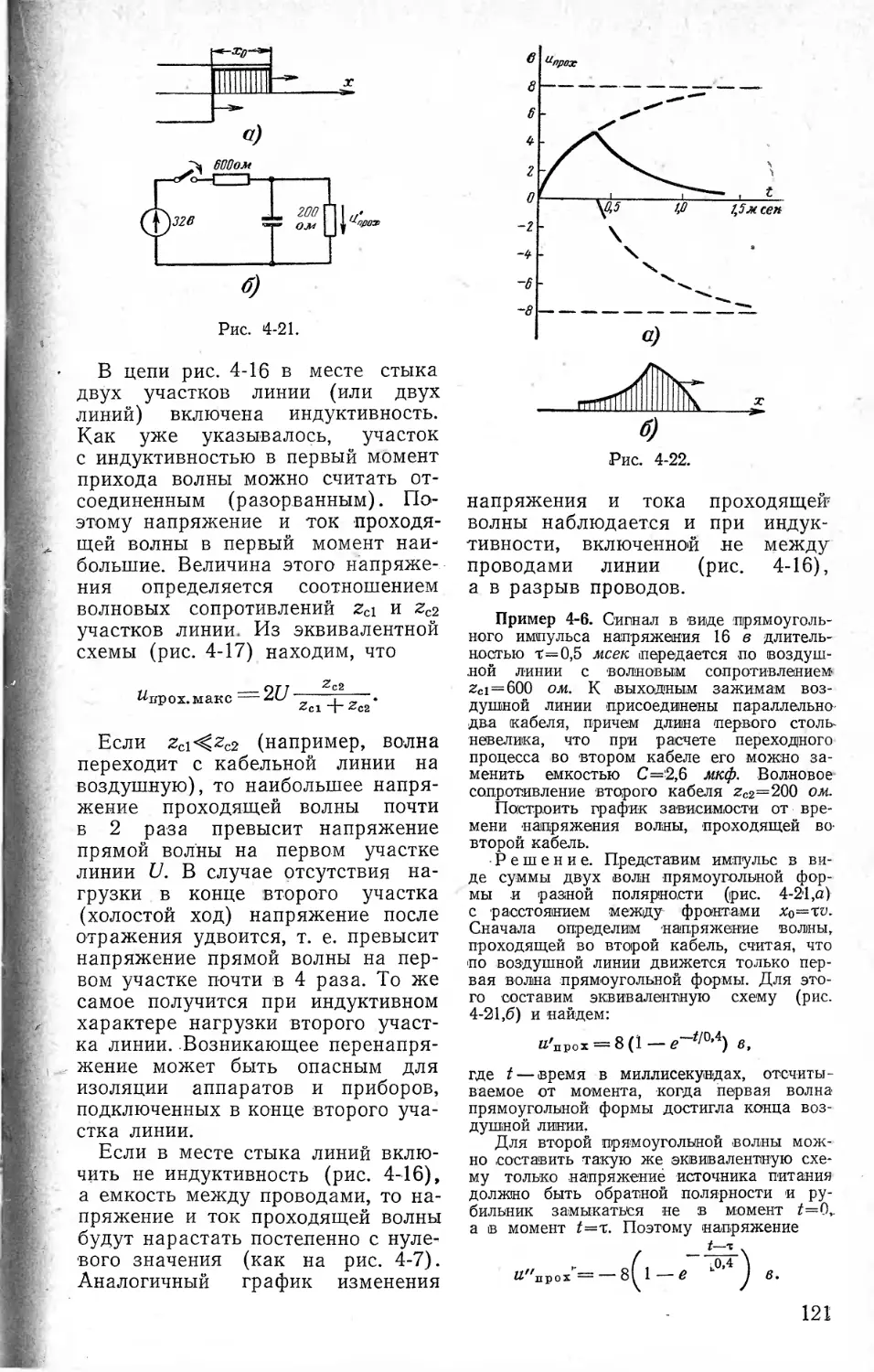
Пример 1-6. В аппаратуре многока-
нальной телефонной связи типа ТТ-12/16
между передатчиком (генератором) и
фильтром сигналов включен аттенюатор
с большим затуханием а=11,9 неп и харак-
теристическим сопротивлением гс=600 ом.
Найти входное сопротивление такого
аттенюатора, т. е. сопротивление нагрузки
передатчика, считая, что входное сопро-
тивление фильтра чисто активное и при
различных частотах сигналов изменяется
в пределах от 200 до 600 ом.
Решение. По формуле (.1-42) вход-
ное сопротивление аттенюатора
__ Гн + zcth а
/вх —£с 2с _|_ rHth а ’
где учтено, что коэффициент b атте-
нюатора, собранного из активных сопро-
тивлений, равен нулю.
При заданных параметрах
7 сап ги +600-0,96” .
ZBX— OUU 600+Гн.0>96 —Jbx
или, выделяя целую часть,
Ясно, что чем больше сопротивление на-
грузки гн, т. е. входное сопротивление
фильтра, тем больше и гвх.
Если гн=600 ом, то гвх=600 ом, как
и должно быть при согласованной нагруз-
ке; если гн =‘200 ом, то гвх=587 ом. Та-
ким образом, при изменении входного
сопротивления фильтра „в 3 раза входное
24
сопротивление аттенюатора, т. е. сопротив-
ление нагрузки генератора, изменяется
только на 2,1%. В аппаратуре типа
ТТ-12/16 аттенюатор является развязываю-
щим звеном; он стабилизирует •работу ге-
нератора.
Как указывалось в § 1-6, для
определения коэффициентов Л, В,
С, D по данным опытов часто
проще всего измерить сопротивле-
ния холостого хода и короткого за-
мыкания. Для экспериментального
определения вторичных параметров
также достаточно измерить сопро-
тивления ZK и Zx.
Действительно, перемножая вы-
ражения (1-43) и (1-44) найдем,
что
Zc = 2:cele=fZ^: (1-45)
Поделив (1-43) на (1-44), получим:
th g=th (а + jb) = TfF = l/
(1-46)
Чтобы вычислить коэффициенты
затухания а и фазы &, нужно обра-
титься к номограммам гиперболи-
ческого тангенса или вычислить ар-
гумент тангенса по его модулю Т
и аргументу т.
Заменяя thg* показательными
функциями, получим:
... 1 . \ + Teh
~lnW\ (1-47)
где W — модуль комплексного числа
1~т~^ ’ а * — аргумент того же
комплексного числа.
Следовательно, коэффициент за-
тухания
a = llnIF=ln/№
и коэффициент фазы
6 = 1 Ine^2"^ 1^ + 2?:)
добавлено, чтобы учесть два.
возможных значения при расчете по
этой формуле, т. е.
62 = 4+”)-
Итак, по данным измерений со-
противлений холостого хода и ко-
роткого замыкания коэффициент
фазы b определяется неоднозначно,
как и аргумент <х коэффициента А
при расчете по формуле (1-23).
Формулы (1-45) и (1-46) дают
два значения углов бит. Однако
выбрать одно из двух значений
угла 6 и угла т нетрудно, рассмат-
ривая физические процессы в четы-
рехполюснике.
При одном из двух значений
угла 0, например 02, отличающем-
ся от другого значения 0j на я, ве-
щественная часть характеристиче-
ского сопротивления получится от-
рицательной. При такой согласован-
ной нагрузке ZH=ZC и вещественная
часть входного сопротивления ZBX=
=ZC также будет отрицательной.
Значит, такую нагрузку четырехпо-
люсника нужно рассматривать не
как приемник энергии (сигналов), а
как источник энергии (генератор
сигналов). До сих пор мы считали
и в дальнейшем будем предпола-
гать, что к выходным зажимам че-
тырехполюсника подключается при-
емник. Поэтому из двух значений
угла О следует выбрать то, при
котором получается положительная
вещественная часть характеристиче-
ского сопротивления.
При одном из двух значений
угла т, например т2=Т1+я, коэффи-
циент затухания а получится отри-
цательным, чего не может быть,
когда к выходным зажимам под-
ключен приемник энергии. Для вся-
кого реального пассивного четырех-
полюсника активная мощность на
входе Pi больше (или равна) ак-
тивной мощности на выходе Р2, т. е.
а^О.
Пример 1-7. Найти Zc и g трансфор-
матора (рис. 1-9), если п=Г2=2 ом, х^ =
=х2=15 ом и коэффициент связи обмоток
Л=0,8.
Решение. Вычислим сначала сопро-
тивления холостого хода и короткого за-
мыкания (см. пример 1-3):
Zx=r1+/x1='15,15Z82o25, ом,
— Г1 + jXi -]-
х2
лм
Гг + /х2
== бЛб/.бЭ'ЧО' ом,
где хм = k Vx^Xz = 12 ом.
Характеристическое сопротивление
Zc = Vz^Zk = 9,95^71° ом.
При втором значении аргумента 6=—109°
вещественная часть Zc получается отрица-
тельной.
Тангенс постоянной передачи
thg=7’^.= l/<^-=0,653/.—И °22'.
Г Zx
По формуле (1-47) находим W = 4^3 и
Е = — 23°50'. Следовательно, а — In =
= 0,73 неп, b1 = %/2 =— 0,067л рад, Ь2=
= — 0,067л + тс рад.
Два значения коэффициента фазы полу-
чились из-за неопределенности разметки вто-
ричных зажимов при измерении сопротив-
лений холостого хода и короткого замыка-
ния (см. § 1-6). Если схема четырехполюс-
ника и разметка зажимов известны, как
в поставленной задаче, то можно по-
строить векторную диаграмму и выбрать
одно из двух значений коэффициента фа-
зы (при показанной на рис. 1-9 разметке
зажимов нужно выбрать b — bi).
М3. Т- И П-ОБРАЗНЫЕ
ЧЕТЫРЕХПОЛЮСНИКИ
На практике встречаются сим-
метричные четырехполюсники с са-
мыми разнообразными схемами со-
единения элементов, из которых со-
стоит четырехполюсник. Но, конечно,
всегда стремятся выбрать возмож-
но более простую схему четырехпо-
люсника из всех возможных, обес-
печивающих заданный режим раоо-
ты приемника.
Довольно часто четырехполюсни-
ки, особенно фильтры и аттенюато-
а)
Рис. 1-13.
25
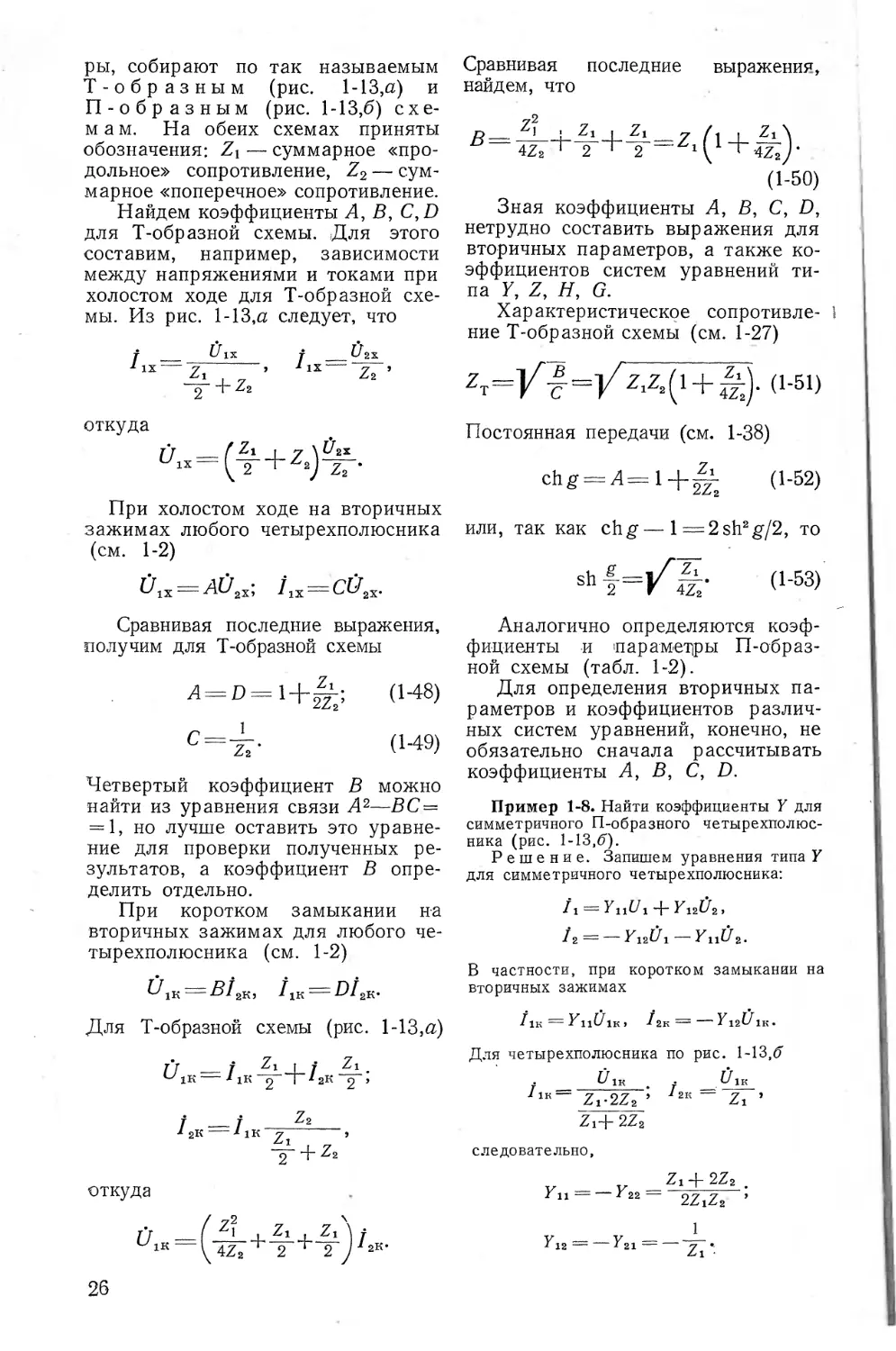
ры, собирают по так называемым
Т-образным (рис. 1-13, а) и
П-образным (рис. 1-13,6) схе-
мам. На обеих схемах приняты
обозначения: Zr — суммарное «про-
дольное» сопротивление, Z2 — сум-
марное «поперечное» сопротивление.
Найдем коэффициенты А, В, C,D
для Т-образной схемы. Для этого
составим, например, зависимости
между напряжениями и токами при
холостом ходе для Т-образной схе-
мы. Из рис. 1-13,62 следует, что
J UIX f U2Х
Сравнивая последние выражения,
найдем, что
(1-50)
Зная коэффициенты А, В, С, О,
нетрудно составить выражения для
вторичных параметров, а также ко-
эффициентов систем уравнений ти-
па У, Z, Я, G.
Характеристическое сопротивле- I
ние Т-образной схемы (см. 1-27)
ZT=/i=/z,Z,(l + 4^). (1-51)
откуда
Постоянная передачи (см. 1-38)
= (1-52)
При холостом ходе на вторичных
зажимах любого четырехполюсника
(см. 1-2)
= AU2X; CU2X.
или, так как chg—1 = 2sh2g/2, то
(1-53)
Сравнивая последние выражения,
получим для Т-образной схемы
A = D=1 +
2Z2’
с=4-
Z2
(1-48)
(1-49)
Четвертый коэффициент В можно
найти из уравнения связи А2—ВС =
= 1, но лучше оставить это уравне-
ние для проверки полученных ре-
зультатов, а коэффициент В опре-
делить отдельно.
При коротком замыкании на
вторичных зажимах для любого че-
тырехполюсника (см. 1-2)
^Ак^^ВДк, /1К = Т)/2к»
Для Т-образной схемы (рис. 1-13,я)
С-'1К— * 1К 2 I 22К 2 ’
1 11К
Z2
Z1
2 +z2
Аналогично определяются коэф-
фициенты и параметры П-образ-
ной схемы (табл. 1-2).
Для определения вторичных па-
раметров и коэффициентов различ-
ных систем уравнений, конечно, не
обязательно сначала рассчитывать
коэффициенты А, В, С, D.
Пример 1-8. Найти коэффициенты Y для
симметричного П-образного четырехполюс-
ника (рис. 1-13Д).
Решение. Запишем уравнения типа У
для симметричного четырехполюсника:
/1=У11^/1 + У 12^2 >
12==-у12и1-у11и2.
В частности, при коротком замыкании на
вторичных зажимах
Дк = У1Д1К, /2к =—У1261К.
Для четырехполюсника по рис. 1-13,б
/1К“ Z^2Z2 9 7гк ~ Zi ’
Zi+ 2Z2
следовательно,
откуда
>
__L_ 4. JE1 /
4Z2 * 2 ‘ 2 12К*
У12— — У21—— Zx’•
26
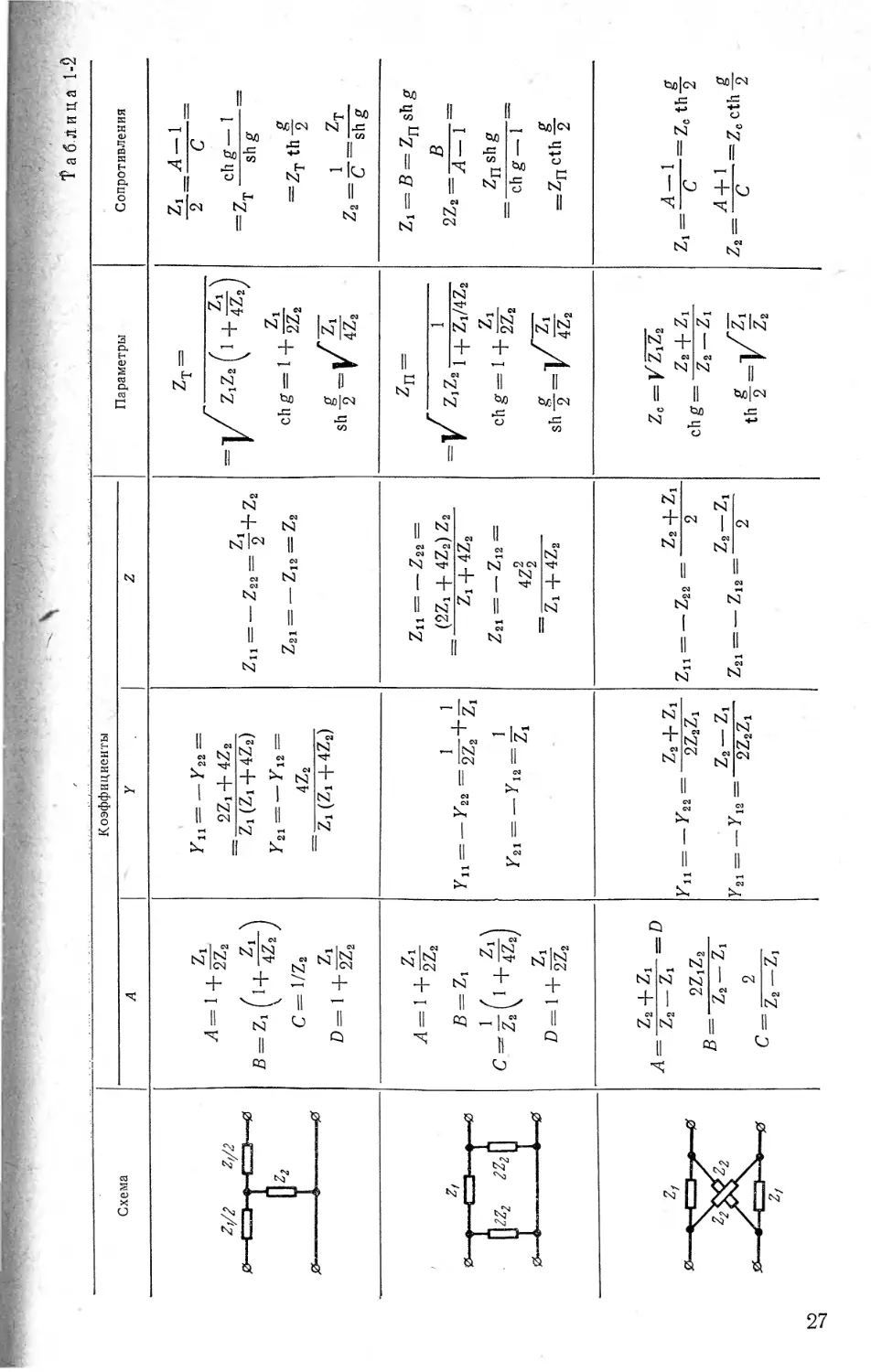
Ф а б.л ица 1-2
Схема Коэффициенты Параметры Сопротивления
А Y z
z/z у.? Л = 1 +§^ ru=-r22 = 2Zi -}- 4Z2 Zi (Zi 4Z2) y21 = _y12== 4Z2 Z. , _ zT = Zj __Л-1 _ 2 C = 7 chg— 1
= l/"ZiZ2 fl + 4^)
B = Z*(j+4zt С= 1/ZB ca S3 Ь N 1^ || II 2 ел N N | I II II 5 S N bo|osi oq 11 1 ^4 + 4^1 to 1 4 Nl-S Л= 5 II II II ’ N
D ~ 1 + 2Z2 Z, (Z.+4Z2)
Zf 0 -CZ3 -0 Д? П 71=1 +ё 1 > 1 yn = —r22 —2Z2+Z1 у _ Y _1 *21 •* 12 — Zu = — z22 = _ (2Zt + 4Z2)Z2 Zi -p 4Z2 Z21 = — ZJ2 = 4Zj Z1+4Z2 zn — Zi — В — Zj-j sh g 2Z в 2/2-л_ j Znshg “ chg — 1 “ 7 o + t, S = Zj-j cth 2
7. 7 1
B = Z: <?=z;(I +й) -y Z1Z21 + Zj/4Z2 Zi ch g = 1 4.2Zs sh-y=]/'
D=l+^
2^ л , ^2 + n Л— z2 —zt -D 2ZiZ2 6- z2-z. C 1— c~z2-z, У _ Y Г11-—Г22- 2Z2Zi Z2 —Zi z21 = —У12— 2ZaZi „ „ Z2+Z, -^11 -^22 — 2 7 _ 7 Z8 —Zi Z,21 — Z>12 — 2 . z2 4“ Zi Zi — Q ~ZC th 2 7 + V —.7 +1 A Z2 = q Zc cth 2
Z, 0 =Г (7C, ьэ|о^ | II, N MM N
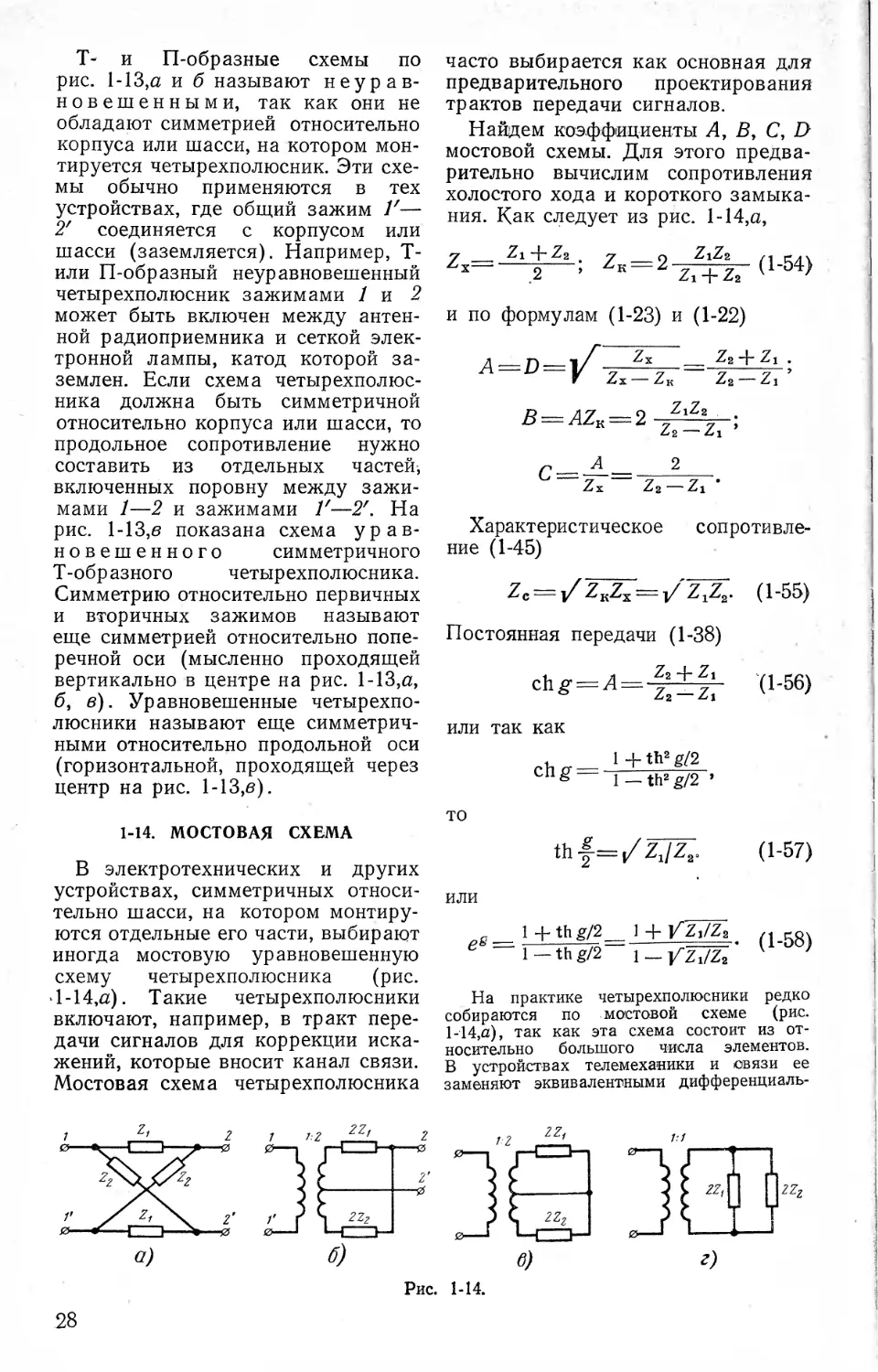
Т- и П-образные схемы по
рис. 1-13,а и б называют неурав-
новешенными, так как они не
обладают симметрией относительно
корпуса или шасси, на котором мон-
тируется четырехполюсник. Эти схе-
мы обычно применяются в тех
устройствах, где общий зажим Г—
2' соединяется с корпусом или
шасси (заземляется). Например, Т-
или П-образный неуравновешенный
четырехполюсник зажимами 1 и 2
может быть включен между антен-
ной радиоприемника и сеткой элек-
тронной лампы, катод которой за-
землен. Если схема четырехполюс-
ника должна быть симметричной
относительно корпуса или шасси, то
продольное сопротивление нужно
составить из отдельных частей-,
включенных поровну между зажи-
мами 1—2 и зажимами V—2'. На
рис. 1-13,в показана схема урав-
новешенного симметричного
Т-образного четырехполюсника.
Симметрию относительно первичных
и вторичных зажимов называют
еще симметрией относительно попе-
речной оси (мысленно проходящей
вертикально в центре на рис. 1-13,а,
б, в). Уравновешенные четырехпо-
люсники называют еще симметрич-
ными относительно продольной оси
(горизонтальной, проходящей через
центр на рис. 1-13,8).
1-14. МОСТОВАЯ СХЕМА
В электротехнических и других
устройствах, симметричных относи-
тельно шасси, на котором монтиру-
ются отдельные его части, выбирают
иногда мостовую уравновешенную
схему четырехполюсника (рис.
Л-14, а). Такие четырехполюсники
включают, например, в тракт пере-
дачи сигналов для коррекции иска-
жений, которые вносит канал связи.
Мостовая схема четырехполюсника
часто выбирается как основная для
предварительного проектирования
трактов передачи сигналов.
Найдем коэффициенты Д, В, С, D
мостовой схемы. Для этого предва-
рительно вычислим сопротивления
холостого хода и короткого замыка-
ния. Как следует из рис. 1-14,а,
и по формулам (1-23) и (1-22)
Z2 + Z2 .
Z2 —Zi ’
B = AZK = 2-^^-
Л 2
Zx
Характеристическое
ние (1-45)
сопротивле-
Zc = /7к7х = /гЛ- (1-55)
Постоянная передачи (1-38)
(1-56)
или так как
l-|-th2g/2
с11£ 1 —th2g/2 ’
ТО
(1-57)
или
es— L+thg/g^ 1 + /Zi/z2, ц_58.
е — i-thg/2 v f
На практике четырехполюсники редко
собираются по мостовой схеме (рис.
1-14,а), так как эта схема состоит из от-
носительно большого числа элементов.
В устройствах телемеханики и связи ее
заменяют эквивалентными дифференциаль-
Рис. 1-14.
28
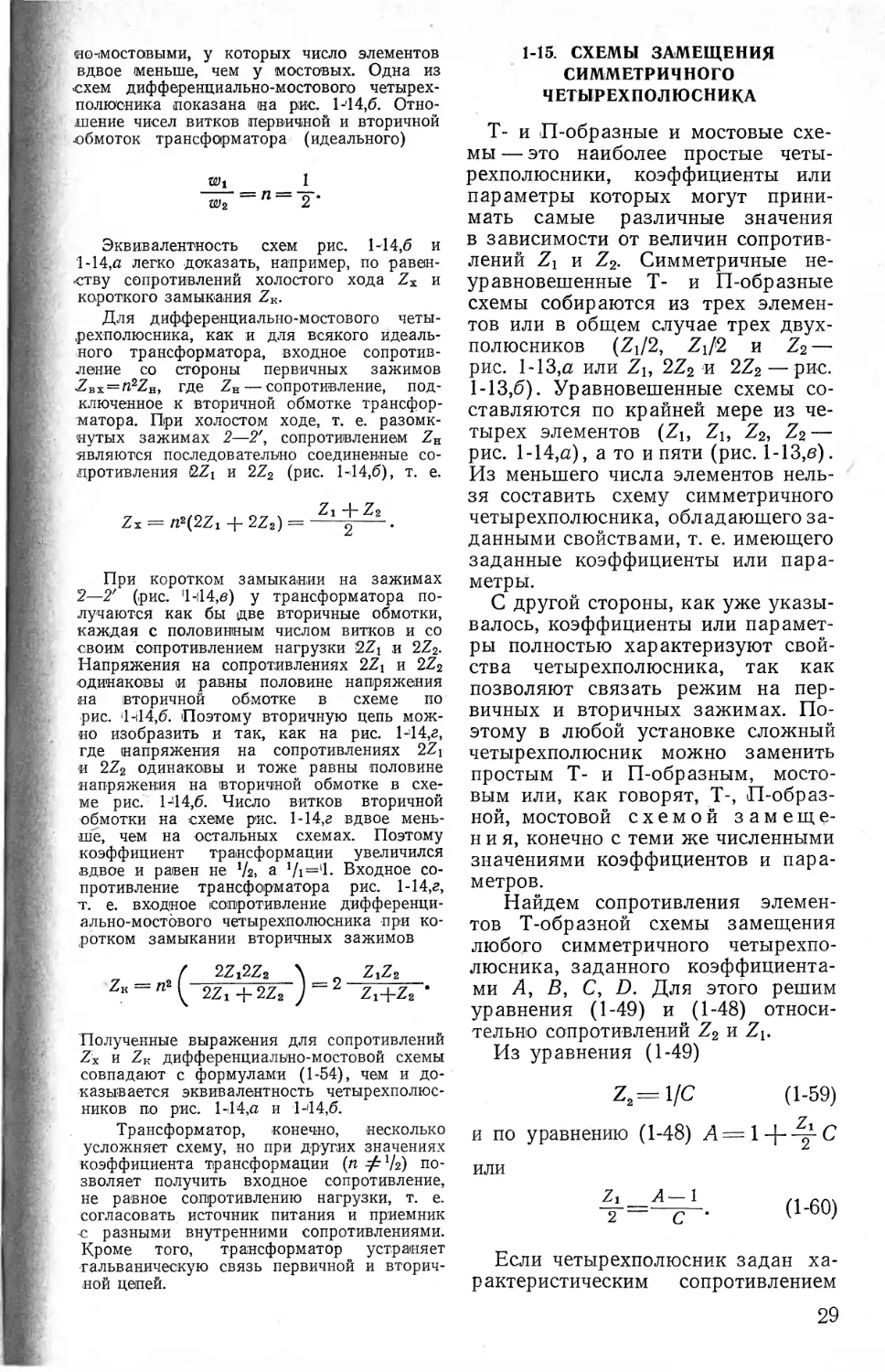
ио-мостовыми, у которых число элементов
вдвое (меньше, чем у мостовых. Одна из
схем дифференциально-мостового четырех-
полюсника показана на рис. 1-44,6. Отно-
шение чисел витков первичной и вторичной
обмоток трансформатора (идеального)
W1 1
— =П = у.
Эквивалентность схем рис. 1-14,6 и
*1~14,а легко доказать, например, по равен-
ству сопротивлений холостого хода Zx и
короткого замыкания ZK.
Для дифференциально-мостового четы-
рехполюсника, как и для всякого идеаль-
ного трансформатора, входное сопротив-
ление со стороны первичных зажимов
ZBX = n2ZH, где ZH — сопротивление, под-
ключенное к вторичной, обмотке трансфор-
матора. При холостом ходе, т. е. разомк-
нутых зажимах 2—2х, сопротивлением ZH
являются последовательно соединенные со-
противления 2Zi и 2Z2 (рис. 1-14,6), т. е.
Zi + Z2
Zx = n2(2Zi + 2Z2) =----.
При коротком замыкании на зажимах
2—2' (рис. 1-44,в) у трансформатора по-
лучаются как бы две вторичные обмотки,
каждая с половинным числом витков и со
своим сопротивлением нагрузки 2Z1 и 2Z2.
Напряжения на сопротивлениях 2Zj и 2Z2
одинаковы и равны половине напряжения
на вторичной обмотке в схеме по
рис. 4-44,6. Поэтому вторичную цепь мож-
но изобразить и так, как на рис. 1-44,г,
где напряжения на сопротивлениях 2Zx
и 2Z2 одинаковы и тоже равны половине
напряжения на вторичной обмотке в схе-
ме рис. 1-’14,6. Число витков вторичной
обмотки на схеме рис. 1-14,г вдвое мень-
ше, чем на остальных схемах. Поэтому
коэффициент трансформации увеличился
вдвое и равен не Vs, a Входное со-
противление трансформатора рис. 1-14,г,
т. е. входное сопротивление дифференци-
ально-мостового четырехполюсника при ко-
ротком замыкании вторичных зажимов
л / 2Zi2Z2 \ о ZiZ2
Zk = п 2Zi + 2Z2 J ~ 2 Zx+Z2 е
Полученные выражения для сопротивлений
Zx и ZK дифференциально-мостовой схемы
совпадают с формулами (1-54), чем и до-
казывается эквивалентность четырехполюс-
ников по рис. 1-4 4,а и 1-44,6.
Трансформатор, конечно, несколько
усложняет схему, но при других значениях
коэффициента трансформации (и -T^Vs) по-
зволяет получить входное сопротивление,
не равное сопротивлению нагрузки, т. е.
согласовать источник питания и приемник
•с разными внутренними сопротивлениями.
Кроме того, трансформатор устраняет
гальваническую связь первичной и вторич-
ной цепей.
1-15. СХЕМЫ ЗАМЕЩЕНИЯ
СИММЕТРИЧНОГО
ЧЕТЫРЕХПОЛЮСНИКА
Т- и П-образные и мостовые схе-
мы — это наиболее простые четы-
рехполюсники, коэффициенты или
параметры которых могут прини-
мать самые различные значения
в зависимости от величин сопротив-
лений Zi и Z2. Симметричные не-
уравновешенные Т- и П-образные
схемы собираются из трех элемен-
тов или в общем случае трех двух-
полюсников (Zi/2, Zi/2 и Z2—
рис. 1-13,а или Zi, 2Z2 и 2Z2 —рис.
1-13,6). Уравновешенные схемы со-
ставляются по крайней мере из че-
тырех элементов (Zb Zb Z2, Z2—
рис. l-14,6z), а то и пяти (рис. 1-13,в).
Из меньшего числа элементов нель-
зя составить схему симметричного
четырехполюсника, обладающего за-
данными свойствами, т. е. имеющего
заданные коэффициенты или пара-
метры.
С другой стороны, как уже указы-
валось, коэффициенты или парамет-
ры полностью характеризуют свой-
ства четырехполюсника, так как
позволяют связать режим на пер-
вичных и вторичных зажимах. По-
этому в любой установке сложный
четырехполюсник можно заменить
простым Т- и П-образным, мосто-
вым или, как говорят, Т-, П-образ-
ной, мостовой схемой замеще-
ния, конечно с теми же численными
значениями коэффициентов и пара-
метров.
Найдем сопротивления элемен-
тов Т-образной схемы замещения
любого симметричного четырехпо-
люсника, заданного коэффициента-
ми Л, В, С, В. Для этого решим
уравнения (1-49) и (1-48) относи-
тельно сопротивлений Z2 и Zb
Из уравнения (1-49)
Z2=l/C (1-59)
и по уравнению (1-48) А = 1 -1- --£ С
или
(1-60)
Если четырехполюсник задан ха-
р актеристическим сопротивлением
29
Рис. 1-15.
Zc и постоянной передачи g, то,
применяя подстановки C—shg/Zc и
A = chg’, получим:
____ chg —1 7 ____7 g '
2~~ shg с — z'cTn 2 ’
z- = sfe- (1-61)
Результаты аналогичных преобра-
зований для П-обр азной и мостовой
схем приведены в табл. 1-2.
Схемы замещения особенно часто
применяются при исследовании ре-
жима работы различных устройств
с четырехполюсниками в лаборатор-
ных условиях. Следует, однако, за-
метить, что Т- и П-образные схемы
не всегда можно физически реали-
зовать, так как у сопротивлений Zv
или Z2 могут быть получены отрица-
тельные вещественные части. Мо-
стовую схему замещения симметрич-
ного четырехполюсника всегда мож-
но физически реализовать.
Пример 1-9. Составить Т-образную и
мостовую схемы замещения для симметрич-
ного четырехполюсника, коэффициенты ко-
торого известны: X='£)=’l,il8Z—135°; В —
=7,10Z—80°50' ож, С=0,235Z—1135° сим.
Решение. Для Т-образной схемы по
формулам (1-60) и (1-59)
~2~~ —q— = 8 — /3 ом;
Z2 — 3 -ф- /3 ом.
Сопротивление Z2 физически нельзя реали-
зовать в цепи с пассивными элементами
(сопротивлениями, катушками, конденсато-
рами).
Для мостовой схемы по формулам
табл. 1-2
А—1
Zi — —— = 8 — /3 ом;
А -ф 1
Z2 q = 2 -ф- /3 ом.
> Пример 1-10. Между микрофонным уси-
лителем трансляционной установки и об-
щим усилителем с входным сопротивле-
нием г=500 ом включен аттенюатор
. (рис. 1-15). Уровень напряжения на
входе общего усилителя должен быть
меньше чем на выходе (Микрофонного
—0 усилителя: а)* на 20 дб; б) на 40 дб.
Составить П-образную симметрич-
ную схему аттенюатора (рис* 1-13,6).'
Сопротивления аттенюатора ча-
сто делают переменными для изме-
нения степени подавления сигналов. Но<
входное сопротивление аттенюатора долж-
но оставаться постоянным при регулиро-
вании уровня сигнала, чтобы не изменялся
режим работы источника питания (микро-
фонного усилителя в этом примере). Та-
кого режима можно добиться, если обес-
печить согласованную нагрузку при любой
степени подавления сигналов.
Решение. В рассматриваемом при-
мере получим режим согласованной на-
грузки, если характеристическое сопротив-
ление аттенюатора = для случаев
а и б останется одним и тем же и равным
500 ом.
а) Коэффициент затухания а—20 дб=
=2,3 неп, коэффициент фазы 6 = 0, по-
скольку аттенюатор собран из активных
сопротивлений. Сопротивления Zi=ri и*
2Z2=2r2 находим по формулам, приведен-
ным в табл. 1-2:
ri = Znsh <2=500 sh 2,3=2 470 ом;
Zn sh а
2r* = ch«—1=610 ом-
б) Коэффициент затухания <2 = 40 66=
= 4,6 неп, сопротивления Г] =24 870 ом,-.
2г2=5110 ом.
В первом случае напряжение на входе-
общего усилителя меньше, чем на выходе-
микрофонного, в 10 раз, во втором случае—
в 100 раз, что легко проверить по формуле
(1-35).
Ы-6. ОДНОЭЛЕМЕНТНЫЕ
ЧЕТЫРЕХПОЛЮСНИКИ
Самые простые симметричные четырех-
полюсники содержат всего по одному эле-
менту (рис. 1-16). Коэффициенты любой?
системы уравнений этих четырехполюсни-
ков можно составить тем же путем, что и
для других более сложных схем. 'Напри-
мер, записывая зависимость между напря-
жениями и токами на входе и выходе че-
тырехполюсника рис. 1-16,<2, сразу опреде-
лим коэффициенты А, В, С, D. Из-
рис. 1-16,а следует, что
U1 = U2 -ф- ZI2; /1 = /2.
4
1-16.
Z “г|
0-------
О)
Рис.
30
Таблица 1-3
Схема Коэффициенты
А Y | Z
Л=1, B = Z
С = 0, D=1
r“ = z ’ Г12 = - У
Y_______L Y - ~
*21 - 9 1 22-------
Z11==Z, z12 = — z
Z21 = Z, Z22 = — z
Поэтому
A=B=1; B=Z; C=0.
Значения других коэффициентов, а так-
же коэффициентов четырехполюсника по
схеме рис. 1-16,6 приведены в табл. 1-3.
Табл. 1-3 показывает, что три из четы-
рех коэффициентов Л, В, С, D имеют по-
стоянные значения, не зависящие от вели-
чины сопротивления Z. Следовательно, про-
стейший одноэлементный четырехполюсник
не может быть схемой замещения произ-
вольного сложного четырехполюсника. Так,
четырехполюсник по рис. 1-16,а мог бы за-
менить только такие симметричные четы-
рехполюсники, у которых коэффициенты А
щ D равны единице, а коэффициент С —
нулю.
Понятие о характеристическом сопро-
тивлении для одноэлементных четырехпо-
люсников ввести нельзя, так как ни при
каком значении сопротивления нагрузки
входное сопротивление не равно этому
значению. Рассматривать отдельные сопро-
тивления как четырехполюсники оказывает-
ся удобным, когда цепь можно представить
в виде той или иной схемы соединения
двух или большего числа четырехполюсни-
ков (см. подробнее в § 1-22).
Из двух сопротивлений (элементов) со-
ставить симметричный четырехполюсник
нельзя.
1-17. ПРОСТЕЙШИЕ
НЕСИММЕТРИЧНЫЕ
ЧЕТЫРЕХПОЛЮСНИКИ
Простейший несимметричный че-
тырехполюсник состоит из двух
элементов и называется Г- о б р а з-
ным (рис. 1-17). Обозначения «про-
дольного» и «поперечного» сопро-
тивлений можно было бы взять, ко-
нечно, и другими. Принятые на
рис. 1-17 обозначения сопротивле-
ний удобны тем, что позволяют рас-
сматривать Т- и П-образные четы-
рехполюсники (рис. 1-13,а и б) как
составленные из двух Г-образных.
Т-образная схема получится, если
два Г-образных четырехполюсника
соединить зажимами 1—Г, а П-об-
разная — зажимами 2—2'. Подоб-
ные соединения четырехполюсников,
а также получающиеся при соеди-
нении первичных зажимов одного
четырехполюсника с вторичными
зажимами другого называются кас-
кадными. Сам Г-образный четы-
рехполюсник можно представить
как каскадное соединение двух про-
стейших симметричных четырехпо-
люсников по схемам рис. 1-16,6 и
1-16,я.
Уравнения, связывающие напря-
жение и ток на первичных зажимах.
Г-образного четырехполюсника (рис.
1-17) с напряжением и током на
вторичных зажимах, нетрудно за-
писать сразу по второму и первому
законам Кирхгофа:
/ —-^i-4-Z =У—4-Л/ Ц-^А.
1 2Z^' ^ , J s'2Zz’
Сравнивая полученные уравнения,
с основными уравнениями (1-2), на-
ходим коэффициенты
Л=1; В=%, С=У
0 = 1+ У (1-62>
31.
Таблица 1-4
Схема Коэффициенты Параметры
А У z
7 Zi/2 2 0—♦ 0 А = 1 В = Zx/2 Z1 + 4Z2 “ “ z2z2 У21 = — Y12— II N d « N II 1 N 1 d N -1 w II " t II nT N nT II N II O Q N N II
1 I 2' 0—4 0 С = 1/2Z2 1 + ^- т^2 M 'll 11 1 n| to = 2Z2 Z22 = /Zi . \ = —(y + 2Z2J - j/ z.z2 + 42Q chg = ]/l+^
Полученные результаты показы-
вают, что Г-образный четырехпо-
люсник не может быть схемой заме-
щения любого несимметричного че-
тырехполюсника, так как коэффици-
ент А постоянен (не зависит от со-
противлений Zi и Z2) и равен 1.
Значения коэффициентов Y и Z
Г-образного четырехполюсника при-
ведены в табл. 1-4.
где п—коэффициент трансформации.
1-18. СХЕМЫ ЗАМЕЩЕНИЯ
НЕСИММЕТРИЧНОГО
ЧЕТЫРЕХПОЛЮСНИКА
Очень простым несимметричным четы-
рехполюсником является идеальный транс-
форматор (см. пример 1-2 и рис. 1-6).
Если коэффициент связи обмоток можно
считать равным 1, то коэффициент В равен
нулю. Так как для идеального трансформа-
тора (Li со, L2 —> со) и коэффициент С—
1
=----f----;=0, то получаются известные
/со V LiLz
уравнения
Рис. 1-18.
Схема замещения произвольного
несимметричного четырехполюсника
должна состоять не менее чем из
трех сопротивлений, так как такой
четырехполюсник определяется тре-
мя независимыми коэффициентами
или параметрами. Из трех сопротив-
лений можно составить либо Т-, ли-
бо П-образную несимметрич-
ную схему замещения (рис.
1-18).
Пример 1-11. Составить Т-об-
разную схему замещения несим-
метричного мостового четырехпо-
люсника, показанного на рис.
1Д9,а, при Г1=г%=8 ом, гз=4 ом,
г4=12 ом.
Рис. 1-19.
Решение. Т-образная схе-
ма замещения будет эквивалент-
на заданной, если, например, ее
коэффициенты уравнений любого
типа (A, Z, У,...) будут равны
соответствующим коэффициентам
четырехполюсника по рис. 1-19,а.
Приравняем, например, для
обеих схем коэффициенты Z, ко-
торые определяются уравнениями
U1 — Z\\t\ -f- 212Л '>
U^ — Zziti + Z2212*
32
Сначала рассчитаем коэффициенты Z за-
данного четырехполюсника.
При питании со стороны первичных за-
жимов и разомкнутых вторичных (холостой
ход)|/2=0 И (/ix—ZnAx, ==Z21/1X.
Из рис. 1-19 ясно, что для мостового че-
тырехполюсника ток Zix можно определить
сиз выражения
(г i+ fа) (гз 4~ г*)_
1ХГ1 + г2 + г34-г4
8/IX;
т. е. Zn = 8 ом.
Напряжение U2x определим из уравнения
по замкнутому контуру, показанному на
рис. 1-19,д' пунктиром. Для этого предва-
рительно вычислим токи /'х и в двух
параллельных ветвях: /'х = Лх/2; 7"х =
= Zix/2.
По второму закону Кирхгофа
/"хф4 — /'х*8 + С/2х — 9,
откуда
t/2x ~ 4 /'х == 2Z 1х,
т. е.
Z2i — — Z12 — 2 ом.
Коэффициент Z22 найдем, записав урав-
нения при питании со стороны вторичных
зажимов и разомкнутых первичных зажимах
ft(/lx==0), сохраняя.прежнее положительное
направление тока /2:
UIX— Z12/2X, t72X = Z22/2X
4 для определения Z22 можно, конечно, вос-
пользоваться опытом короткого замыкания
на вторичных зажимах, но потребуются
несколько более сложные преобразова-
ния). Для мостового четырехполюсника
Дрис. 1-19, а)
fr f (rl + r4) (Г2 + Г8) _
t/2X 1 2X „ । „ । r । _
П + Г2“Г Г 3 ”Г Г4
= — 7,5/2X,
t. e. Z22 = — 7,5 ом.
Теперь составим коэффициенты Z для
схемы замещения (рис. 1-18,а).
При питании со стороны первичных за-
жимов и разомкнутых вторичных
i/ix = (Z1 4- Z3) /1Х, ^/2X = Z3/lx-
-Следовательно,
Zii == Zi -j- Z3, Z2i = Z8.
При питании со стороны вторичных за-
зжимов и разомкнутых первичных
С/2х = — /2х (Z2 -j- Z3),
Z22---7,5 ом = — (Z2 4~ Z3).
Из этих трех уравнений находим: Z3=2 ом,
Zi~6 ом; Z2 — 5,5 ом, и задача решена.
1-19. ВТОРИЧНЫЕ ПАРАМЕТРЫ
НЕСИММЕТРИЧНЫХ
ЧЕТЫРЕХПОЛЮСНИКОВ
Несимметричные четырехполюс-
ники определяются тремя независи-
мыми коэффициентами любого типа
уравнений. Поэтому и вторичных
параметров у несимметричного че-
тырехполюсника три: характеристи-
ческое сопротивление со стороны
первичных зажимов Zcb характери-
стическое сопротивление со стороны
вторичных зажимов Zc2 и постоян-
ная передачи g.
Характеристические сопротивле-
ния несимметричного четырехполюс-
ника определяются следующим об-
разом. Характеристическое сопро-
тивление Zc2 равно такому сопро-
тивлению нагрузки ZH, подключен-
ному к вторичным зажимам, при
котором входное сопротивление со
стороны первичных зажимов равно
ZC1 (рис. 1-20,а). Короче говоря,
при ZH=Zc2 имеем ZiBX=Zcl. Анало-
гично при сопротивлении нагрузки
на первичных зажимах Zr=Zcl полу-
чим Z2bx=2C2 (рис. 1-20,6).
Постоянная передачи
g = (1-63)
z l/2/2
и коэффициент затухания
а—-lln-^ф- [неп] (1-64)
не могут быть выражены только че-
рез напряжения или только через
токи, как у симметричных четырех-
полюсников. Действительно, при
питании со стороны первичных за-
жимов и согласованной нагрузке на
вторичных ZH=Zc2 получим:
ZZ1 ry Гу 2 ry гу
Z== ^1ВХ И ^С2>
11 1 2
е.
Z22 — — (Z2 + Z3).
Сопоставим коэффициенты
Z обеих схем*
Zu = 8 ом = Zi 4~ Z3;
Z2i = 2 ом = Z3;
-3—434
33
т. е.
tfi. Л.
#2 /г*
Точно так же коэффициент фазы b
не показывает сдвиг по фазе между
напряжениями или между токами.
Из формулы (1-63) следует, что
6=4 'М + 4 —
(1-65)
где фчи, tyu2, “фп, tyi2 определяют фа-
зы напряжений и токов на первич-
ных и вторичных зажимах.
Хотя четырехполюсник и несим-
метричен, постоянная передачи при
питании со стороны вторичных за-
жимов (и согласованной нагрузке
на первичных) равна постоянной пе-
редачи при питании со стороны пер-
вичных зажимов (и согласованной
нагрузке на вторичных). Это можно
показать, применяя принцип вза-
имности.
Связь между вторичными пара-
метрами и коэффициентами А, В,
С, D (или другими коэффициента-
ми) сложнее, чем у симметричного
четырехполюсника. Расчеты, анало-
гичные приведенным в §§ 1-9—1-11,
f дают следующие зависимости:
z —Z РР-,
chg = j/'AD (1-66)
в и соответственно
5 = jZZeiZC2 sh
shg I1’67)
Найденные по формулам (1-66)
вторичные параметры Г-образной
схемы помещены в табл. 1-4.
Следует обратить внимание на то,
что у Г-образного чётырехполюсни-
ка ZC1 совпадает с характеристиче-
ским сопротивлением Т-образной
симметричной схемы (1-51), a Zc2—
с характеристическим сопротивле-
нием* П-образной симметричной схе-
мы (табл. 1-2). Этот результат не
является неожиданным. В § 1-17
уже было указано, что Т- и П-образ-
ные четырехполюсники можно по-
лучить каскадным соединением Г-об-
разных.
1-20. ЧЕТЫРЕХПОЛЮСНИКИ,
НЕ СОЗДАЮЩИЕ ИСКАЖЕНИЙ
Тракт передачи сигналов или ка-
нал связи не должен искажать фор-
му сигналов. Выясним, какие тре-
бования надо предъявить к каналу
связи и вообще к любому четырех-
полюснику, чтобы искажения сигна-
лов отсутствовали.
Сигналы передаются без искаже-
ний, если напряжение на выходе
ц2 (I) повторяет по форме закон из-
менения напряжения на входе иг (/).
Для этого. коэффициент передачи
К (j(i))=U2lU1=k (со) е/ф(<0) (см. § 1-10)
должен быть постоянным по модулю
k (со) = k = const и иметь линейную
зависимость аргумента от частоты
ф (со) = тсо, где т = const.
Действительно, сравним спектры
напряжений на входе и выходе че-'
тырехполюсника.
В общем случае по формуле
(12-16) первой части книги спек-
тральная плотность напряжений на
входе и выходе
U, (» = J«, (/) e4atdt, (1-68}
—оо
и2 W = У w2
—оо
и обратно
00
«i = §4 fe’wt dw’
—оо
оо
«2 СО — 2Г J ^2 (/“’) e'^dw.
—оо
При отсутствии искажений
t/2 (/со) = КС/3 (/со) = keiw Ur
и
оо
«2(0 = i ^kU^e^e^dv
—00
(1-69)
(1-70)
(Ь71)
34
или
со а
—оо
Последний интеграл такой же, как
в выражении (1-70), если / заменить
на /+т. Поэтому
&2(£) = (/+т),
т. е. закон изменения напряжения
на выходе четырехполюсника по-
вторяет закон изменения напряже-
ния на входе с запаздыванием на
время т.
При согласованной нагрузке вме-
сто коэффициента передачи можно
рассматривать постоянную передачи
g=a+jb. Искажения сигналов бу-
дут отсутствовать, если а = const,
6=тсо (рис. 1-21). Практически та-
кие зависимости нужно получить,
конечно, не в бесконечной полосе
частот, а только в диапазоне частот,
занимаемом спектром сигналов.
Пусть, например, передается один из
.стандартных сигналов телемеханики и
связи в виде последовательности прямо-
угольных импульсов (рис. 1-22,я) по кана-
лу связи, пропускающему только первую
и третью гармоники частоты повторения
импульсов (р1=(2л/Т. Если в полосе частот
от coi до С0з=3(01 можно считать a—const
и 6=tto, то форма сигнала на выходе ка-
нала (рис. 1-22,6) такая же, как сигнала,
состоящего из первой и третьей гармоник,
на входе (рис. il-22,a). На рис. 1-22,6 при-
нято, что T=jt/2coi, т. е. 6(coi)=n/2 и
6(to3)=&rt/2. В противном случае возни-
кают искажения. Так, на рис. 1-22,в по-
казан сигнал на выходе, когда а== const,
6 (coil) = Jt/2, но 6(to3)=5jt/2.
.< Каналы связи, состоящие из уси-
лителей, аттенюаторов, фильтров,
линий пер ед ач.и, транс фор м ато ров,
как правило, не имеют необходимых
частотных характеристик. Для
устранения искажений в тракт пе-
редачи сигналов включают допол-
ните л ьн о ч еты р ехп о л ю сынки, кор -
ректирующие частотные характери-
Р
/71—--------------------О*------------1------
а) б)
Рис. 1-21.
3*
Рис. 1-22.
стики я (со) и 6 (со.), т. е. устраняю-
щие амплитудные и фазовые иска-
жения.
1-21. ЦЕПНЫЕ СХЕМЫ
Четырехполюсники соединяют
между собой различными способа-
ми. Чаще всего встречается каскад-
ное соединение, когда входные за-
жимы одного четырехполюсника
соединяются с выходными зажима-
ми другого. Так, например, можно
составить Т- или П-образный четы-
рехполюсник из двух Г-образных,
о чем уже упоминалось в § 1-17.
В каскад соединяют и несколько
фильтров, чтобы увеличить коэффи-
циент затухания устройства
для сигналов, которые нуж-
но подавить. Да и сам тракт
* передачи сигналов (канал
связи) обычно состоит из
каскадного соединения раз-
личных четырехполюсников,
на что указывалось в нача-
ле этой главы.
Иногда в каскад соеди-
35
•няют несколько одинаковых четы-
рехполюсников. Такое каскадное
соединение назовем цепной схе-
мой или, короче, цепочкой. Це-
почкой одинаковых четырехполюс-
ников заменяют, например, линии
передачи сигналов или электроэнер-
гии при лабораторных исследова-
ниях процессов, происходящих в
реальных линиях; из одинаковых
четырехполюсников собирают цеп-
ные схемы для получения коротких
импульсов и для увеличения време-
ни движения сигнала от источника
к приемнику (линии «задержки»);
цепочку составляют из нескольких
одинаковых фильтров, чтобы уси-
лить фильтрующее действие одного
фильтра.
На рис. 1-23 представлена цепоч-
ка из п одинаковых четырехполюс-
ников. Каждый четырехполюсник
этой цепочки называют ее элемен-
том или звеном.
Цепная схема, состоящая из оди-
наковых симметричных четырехпо-
люсников, также является симмет-
ричным четырехполюсником. Следо-
вательно, ее свойства определяются
двумя коэффициентами или пара-
метрами, например характеристиче-
ским сопротивлением Z4 и постоян-
ной передачи gw Основные уравне-
ния цепочки аналогичны уравнени-
ям (1-40):
и, = U2 ch gK+/2гц sh gK, ]
fr- • г (1-/2)
Z1=^shg4 + /2chgIt. J
Выясним прежде всего, как най-
ти параметры цепочки 2Ц и £ц, если
известны параметры каждого звена
2С и g.
По определению характеристичен
ское сопротивление Zc равно тако-
му сопротивлению нагрузки ZH, при
котором и входное сопротивление
равно сопротивлению нагрузки.
Если для цепочки (рис. 1-23) вы-
брать ZH=ZC, то n-е звено окажется
согласованным с нагрузкой и его
входное сопротивление также равно
Zc. Но входное сопротивление п-го
звена служит сопротивлением на-
грузки (п—1)-го звена, т.е. (п—1)-е
звено тоже имеет согласованную на-
грузку, и его входное сопротивление
равно Zc. Определяя последователь-
но входные сопротивления осталь-
ных звеньев, получим, что входное
сопротивление любого звена, в том
числе и первого, равно Zc. Значит,
входное сопротивление цепочки так-
же равно Zc, т. е. цепочка согласо-
вана с нагрузкой и характеристиче-
ское сопротивление цепочки
Z4=ZC. (1-73)
передача цепочки,
как и всякого симметричного
рехполюсника, определяется
жением (1-33):
Постоянная
четы-
выра-
1 Ut . h
§4 = 111-^ = 111-^-.
О 2 •* 2
токов
можно
Отношение напряжений или
на входе и выходе цепочки
выразить через напряжения или то-
ки на входе и выходе
ных звеньев, т. е.
Вц = 1пг------
1.2 U2,3
ИЛИ
§ц = 1П-^- + 1п
о 1,2
промежуточ-
Un-г
#1,2 .
#2,3 ~Г
причем сумма состоит из п слагав--
мых. Каждое слагаемое суммы по
определению есть постоянная пере-
дачи звена g, так как при согласо-
ванной нагрузке цепочки ZH=Z4=ZC
36
и каждое звено имеет согласован-
ную нагрузку. Следовательно,
^ц=п^.' (1-74)
Заменяя в уравнениях (1-72) Z4
через Zc и g4 через ng, получим
уравнения, связывающие режим на
входе и выходе цепочки с парамет-
рами звена:
U1 — U2chng-\-i2Zcshng, ]
t Us й , j . ? t1’75)
Л= Z^sh7zg-|-72chn£-. J
Если нужно найти напряжение и
ток на выходе #-го промежуточного
звена, то все звенья справа от это-
го звена (#+1, #+'2, .. ., п) можно
рассматривать как четырехполюс-
ник с характеристическим сопротив-
лением Zc и с постоянной передачи
(п—k)g или mg. Очевидно, что т =
=п—k — число звеньев от выбран-
ного до сопротивления нагрузки.
Поэтому напряжение и ток на вхо-
де этого звена можно вычислить по
формулам (1-75), заменив п на т.
При каскадном соединении не-
симметричных четырехполюсников
^возможны два различных режима ра-
боты. В первом случае соединение
выполняется по принципу согласова-
ния (рис. 1-24). Это значит, что ха-
рактеристическое сопротивление со
стороны вторичных зажимов Z^~X}
предыдущего (k—1)-го четырехпо-
люсника равно характеристическому
сопротивлению со стороны первич-
ных зажимов Z^ последующего'#-™
четырехполюсника. Последний п-й
четырехполюсник имеет согласован-
ную нагрузку Z(c") = ZH, и входное
сопротивление всего соединения Z1BX
равно характеристическому сопро-
тивлению со стороны первичных за-
жимов 1-го четырехполюсника Z^.
-Нетрудно установить, что у всей
схемы характеристические сопротив-
ления ^соответственно Z(1) и Z(n) .
cl с2
Постоянная передачи каскадного
соединения определяется выраже-
нием (1-63). Повторяя приведенные
выше рассуждения, получим, что
постоянная передачи каскадного сое-
динения равна сумме постоянных
передачи всех четырехполюсников,
но, конечно, постоянные передачи
отдельных четырехполюсников могут
быть и различными:
£д = £1 + £2 + £» + -••+&«• (1-76)
По принципу согласования соеди-
няются два Г-образных четырехпо-
люсника, составляющие Т- или
П-образный. Действительно, Т- и
П-образная схемы получаются при
соединении одноименных зажимов
(первичных для Т-образной и вто-
ричных для П-образной), т. е. за-
жимов, со стороны которых харак-
теристические сопротивления одина-
ковы у обоих Г-образных четырех-*
полюсников. Так как каскадно со-
единяются два одинаковых четырех-
полюсника, то постоянная передачи
Т- или П-образной схемы вдвое
больше, чем у Г-обр азной. По этой
причине Г-образный четырехполюс-
ник часто называют полузвеном,
считая звеном Т- или П-образный
четырехполюсник.
Во втором случае каскадное со-
единение состоит из четырехполюс-
ников, для которых не выполняют-
ся условия согласования. Найти па-
раметры схемы в этом случае по из-
вестным вторичным параметрам
звеньев довольно сложно. Проще
определяются коэффициенты Д, В,
С, D (см. следующий: параграф).
При других схемах соединения
отдельных четырехполюсников так-
же проще проводить расчет с коэф-
фициентами того или иного типа
37
уравнений. Особенно наглядными
получаются расчеты при матричной
форме записи уравнений четырехпо-
люсника.
1-22. ПРИМЕНЕНИЕ МАТРИЦ
К РАСЧЕТУ ЧЕТЫРЕХПОЛЮСНИКОВ
И ИХ СОЕДИНЕНИЙ
При каскадном соединении четырехпо-
люсников без соблюдения принципа согла-
сования; при параллельном, последователь-
ном и др. видах соединений четырехполюс-
ников параметры соединения или эквива-
лентного четырехполюсника проще рассчи-
тываются при матричной форме записи
уравнений.
Для расчета параметров четырехполюс-
ника, эквивалентного каскадному соедине-
нию, например, двух любых четырехполюс-
ников (рис/ 1-25), следует воспользоваться
системой уравнений типа Л.
Будем считать известными коэффициен-
ты Ль Bi, Ci, Di первого четырехполюсника
и Л 2, В2, С2, Р2 — второго. Запишем
уравнения типа Л обоих четырехполюсни-
ков:
U'i — AiU'2 4~ z2; 1
— CiU'2 + 2?i ir2j J
1 — ЛгС7^ “Ь В21"2\ I
l''l — 4“ J
или сокращенно в матричной форме
где
Из рис. 1-25 ясно, что /7'2=[7"1 и Г2=
= /"1. Поэтому в первой системе уравне-
ний (1-77) можно заменить й'2 и /'2 равными
им величинами из второй системы. Тогда по-
лучим:
г t/'il Г О”21
(1-78)
Теперь запишем уравнения в матрич-
ной форме для эквивалентного четырех-
полюсника:
причем очевидно
= h = i'i, й2 = й"2, /2=/"2.
Сравнивая системы уравнений (1-78) и
(1-79), заключаем, что матрица
[Л] = [Л'ИЛ'1
или в развернутой форме:
Л ______ГЛ1 Bi ~| ГЛ2 В21 I
С D] ~~ |_С1 DiJ [с2 £>2-14
откуда по правилу умножения матриц
(строка на столбец)
Л = Л1Л2 4~ ^iC2; 'j
В = Л1В2 -j- B\D2\ \
С — С1Л2 4~ CjC2; I
D == CiB2 4- Д1Т?2’
(1-80)
В частности, при каскадном соединении
двух одинаковых симметричных четырех-
полюсников (цепочка из двух четырехпо-
люсников)
л = 5 = 4+ВЛ, В = 2Л,ВЪ
С = 2Я1С1.
Заменяя коэффициенты Alt Bi и их вы-
ражениями через вторичные параметры
(1-38, 1-39), получим:
sh g
А = D = chg-chg 4-Zcshg-^----
= ch2 g 4- sh2 g = ch 2g;
В = 2 ch g-Zc sh g = Zc sh 2g;
sh g
C = 2chg-^-
sh2g
Zc
что совпадает с коэффициентами уравне-
ний (1-75) при п=2.
В случае каскадного соединения не-
скольких четырехполюсников нужно, при-
меняя это правило, последовательно заме-
нять эквивалентными четырехполюсниками
соседние пары заданных четырехполюсни-
ков. Перемножаемые матрицы следует за-
писывать в том же порядке, в котором со-
единены четырехполюсники.
Рассмотрим теперь параллельное соедине-
ние двух четырехполюсников (рис. 1-26).
Как следует из рисунка, в этом случае
иг = й\ = й2 = йг2 = й"2;
= 1'1 4“ 1"ъ lz = 1Г2 4" /„Й
и для расчета параметров эквивалентного
четырехполюсника удобна система уравне-
(1-79)
Рис. 1-25.
38
Рис. 1-26.
ний типа У. Действительно, в матричной
форме для заданных четырехполюсников
ника проще всего воспользоваться уравне-
ниями типа Z. Для заданных четырехпо-
люсников
1И
й'2 J ’
(1-81)
& для эквивалентного четырехполюсника
(1-85)
(1-82)
для эквивалентного
^Складывая левые и правые части
яий (1-81), получим:
уравне-
Так как
а Д == /2 = /'2 = Z"2, то
(1-86)
[Z] = [Z']+[Z"],
(1-83)
или в развернутой форме
тде учтено равенство напряжений. Из сопо-
ставления уравнений (1-82) и (1-83) най-
дем,. что матрица проводимостей эквива-
лентного четырехполюсника равна сумме
матриц проводимостей, параллельно со-
единенных:
-или в развернутой форме
У'и + У"и У'12 + У''12
У'21 + У" 21 У'22 + У" 22.
(1-84)
При последовательном соединении двух
четырехполюсников (рис. 1-27) для расчета
параметров эквивалентного четырехполюс-
rZii Z12l __ rz'n + Z"n Z'i24-Z"i2”I
L.Z2I Z22J \_Zf2i Z'f21 Z'22 ~y Z'f22 J
(1-87)
Другие возможные соединения четырех-
полюсников: последовательно-параллельное
(первичные зажимы соединены, как на
рис. 1-27, вторичные — как на рис. 1-26) и
параллельно-последовательное — применя-
ются редко. При расчете параметров экви-
валентных схем таких соединений проще
пользоваться уравнениями типа Н и G.
Как было отмечено выше, применение
матриц возможно при каскадном соедине-
нии любых четырехполюсников. Для всех
остальных типов соединений должно вы-
полняться так называемое условие регу-
лярности. Это значит, что после со-
единения четырехполюсников через оба
первичных (J и 7'1) и оба вторичных
(2 и 2У) зажима каждого из четырехпо-
люсников должны протекать соответствен-
Рис. 1-27.
39
но равные по величине и обратные по на-
правлению токи. Например, у верхнего из
четырехполюсников рис. 1-26 через оба
первичных зажима проходит ток i'j, через
вторичные — ток iz2, у нижнего — токи
и i"2, как и показано на рисунке.
Можно указать простое правило про-
верки регулярности параллельного соедине-
ния. Надо соединить параллельно пер-
вичные зажимы двух четырехполюсников
(рис. 1-28,а) и замкнуть накоротко вто-
ричные зажимы каждого четырехполюс-
ника, затем соединить параллельно вторич-
ные и замкнуть накоротко первичные
(рис. 1-28,6). В обеих схемах напряжение
между закороченными зажимами (U'
и U") должно быть равно нулю.
Всегда регулярны параллельные со-
единения уравновешенных четырехполюсни-
ков, «подобных» четырехполюсников (схе-
мы одинаковы, величины элементов соот-
ветственно пропорциональны), четырехпо-
люсников, у которых зажимы 1' и 2'
соединены накоротко (например П- и Т-об-
разных).
Для проверки регулярности последова-
тельного соединения нужно определить на-
пряжения U' и U" в схемах рис. 1-29,аи6.
Если оба напряжения равны нулю, то со-
единение регулярное.
Всегда регулярно последовательное со-
единение четырехполюсников, у которых со-
ответственно зажимы 1' и 2' первого и
1 и 2 второго' соединены накоротко (на-
пример Т- или П-образного и переверну-
того Т- или П-образного).
Рис. 1-29.
Матричная форма записи уравнений
применяется и для определения параметров
четырехполюсника со сложной структурой,
если можно такой четырехполюсник пред-
ставить в виде сочетания двух или не-
скольких простых.
Пример 1-12. Найти напряжение на
вторичных разомкнутых зажимах Т-образ-
ного мостового четырехполюсника (рис. 1-30)
при известном токе на входе.
Решение. Напряжение U2x легко опре-
делить из уравнения I\^—CU2^ если изве-
стен коэффициент С четырехполюсника.
Этот коэффициент можно рассчитать
известными уже методами, но можно-'
найти, представив Т-образный мостовой че-
тырехполюсник как последовательное со-
единение П-образного (рис. .1-13,6), и одно-
элементного (рис. 1-16,6).
Выпишем матрицы Z обоих составляю-
щих четырехполюсников. Для П-образного
по табл. 1-2 с учетом принятых обозначе-
ний
[Z'] =
— р —
(221+2«)-2-
Zi +2Я ~Z1 + 2R
R2 tfZi+ZR)-^
Z,+2« Z, +2R
Для одноэлементного по табл. 1-3
^=[z, ~z,]-
г
Следовательно,
[Z] =
r (Z,+7?)j? R?
= Zi+2fl ‘rZ1 Zi+2/? Z1 _
& . _ (Zt+fi)* 7
_ Z1+27?n-Z1 Z, + 2R Z1_
= rZu Z12-|
L-Z21 Z22J
По табл. 1-1
r__ 1 ^Zi+2/?
C Z21 (Zi+£)2*
Пример 1-13. В генераторах синусои-
дальных колебаний аппаратуры телемеха-
ники и связи для изменения фазы напря-
жения применяют двойной Т-образный че-
тырехполюсник (мост), схема которого
приведена на рис. 1-31,а.
Найти сдвиг по фазе между напряже-
ниями 61 и [/2 при -^г = г и сопротивле-
нии нагрузки ZH = г.
40
Решение. Двойной Т-образный
мост можно рассматривать как параллель-
ное соединение двух Т-образных схем.
Поэтому найдем параметры соединения,
сложив матрицы Y двух Т-образных схем.
По табл. 1-2
П1=-У22
2Zj+4Z2
Zi (Zi+4Z2)’
__ 4Z2
У21--У12 Z1(Z1+4Z2)-
В нашем случае для первого четырех-
1
полюсника Zi = г, Z2= —/ = —/г. для
I
второго Zi = — j —jr, = г.
Следовательно для первого четырехпо-
люсника *
2 1 —/2 2 —/2
Гп=— пф ^=7-т=74>
Двойной Т-образный четырехполюсник;
рассматривать как параллельное соедине-
ние двух Т-образных схем можно, по-
скольку параллельное соединение Т- и»
П-образных схем всегда регулярно. Если?
же у второго Т-образного четырехполюс-
ника поменять местами зажимы 1 и Г,
а также 2 и 2' (рис. 1-31,6), то соединение
уже перестает быть регулярным.
Действительно, при такой замене зажи-
мов все коэффициенты второго четырехпо-
люсника остаются прежними. Следователь-
но, если рассматривать двойной Т-образ-
ный мост как параллельное соединение
двух Т-образных схем, то, кажется, полу-
чим прежнее значение сдвига по фазе
15°30'. Однако из рис. 1-31,6 ясно, что-
сдвига по фазе между напряжениями
и U2 нет. Это и значит, что соединение
Т-образных схем по рис. 1-31,6 нерегулярно-
и суммировать матрицы Y нельзя.
1-23. РАБОЧЕЕ ЗАТУХАНИЕ
для второго
2
—2-н. _2 —2
1 +/4 ’ У"21— Г 1 + /4-
Для двойного Т-образного четырехполюс-
ника
Уп=Г'и+У"11
_ 2 11 +/11.
г 17 ’
У21 ==У'21+У"21
_ 2 ;б + /6
г 17 •
По табл. 1-1
А
+/П
Г21 У21 6+/6 ’
В устройствах передачи сигналов до-
вольно часто отдельные четырехполюсники
и цепочки не работают в режиме согласо-
ванной нагрузки. В этом случае для оценки
степени затухания сигнала при его пере-
даче через четырехполюсник или цепочку
вводят новые параметры, которые назы-
вают эксплуатационными. Важнейшим ив
эксплуатационных параметров является
рабочее затухание.
Напомним, что при согласованной на-
грузке коэффициент затухания можно
определить по формуле
1 Si 1 So
а -2’^n или а ~ "2
__ 1 __ 8,5г
В~Г21 6+/6-
Напряжения на входе и выходе четырехпо-
люсника при произвольной нагрузке свя-
заны уравнением
(1г = Ай2 + В12 =
откуда
и2
в
Z
19,5 + /11
6 +76
2,62/—15°30'.
Итак, напряжение U2 опережает по
фазе напряжение U\ на угол Г5°30'.
где £2==СУ2 — полная мощность приемника
или полная мощность на выходе четырех-
полюсника при согласованной нагрузке
ZH=ZC для симметричного четырехполюс-
ника (рис. 1-111) или ZH=Zc2 для несимме-
тричного; Si—UJ1 — полная мощность на
входе четырехполюсника при согласованной
нагрузке; So=’Wo— полная мощность
приемника, подключенного непосредственно
к зажимам источника питания (рис. 1-3),
когда ZH=Zr.
При несогласованной нагрузке затуха-
ние сигнала — рабочее затухание четырех-
полюсника вычисляют по последней фор-
муле
Др = у In -jr- =у In . (1-88)
Рис. 1-31.
Но в случае несогласованной на-
грузки входное сопротивление че-
тырехполюсника не равно харак-
теристическому, ZBX^ ° 2 у сим-
метричного четырехполюсника или
У1вх у несимметричного, и
следовательно, полная мощность
So не равна уже полной мощности
на входе четырехполюсника Sb
Полная мощность S2 также иная,
так как нагрузка несогласован-
ная.
Если в (1-88) вместо моду-
лей напряжений и токов подста-
41
вить их комплексные значения, то будет
вычислена рабочая п о ст о я-н н а я,
перед а чи
£р =#р + /&р = ту In . . . (1-89)
Z U212
Мнимую часть 6Р рабочей постоянной пере-
дачи называют рабочей фазовой
мерой передачи.
Рабочую постоянную, передачи и рабо-
чее затухание нетрудно рассчитать, если
кроме сопротивлений ZH и ZT известно при-
веденное сопротивление Znp=3ll2=AZn+
4-В + CZrZn+DZr (см. 1 -8).
Действительно, выполняя подстановки
э э
2 2Zr ’
Л / —р7_____^-7
U212 — ^ZH— ^н»
Znp
шолучим:
=Д _£пр
2 ln 4Zr
, гпр
Яр |п —
2]Лгг2н
(1-91)
Ясно, что в отличие от коэффициента
.затухания четырехполюсника рабочее за-
тухание определяется не только параметра-
ми четырехполюсника, но и параметрами
источника питания (Zr) и приемника (ZH|).
‘Один и тот же четырехполюсник при со-
вместной работе с различными генераторами
.и приемниками создает неодинаковое ра-
бочее затухание для сигнала.
Четырехполюсники, входящие в тракт
^передачи сигналов, а именно линии пере-
дачи, аттенюаторы, фильтры и т._ д. почти
всегда бывают заданы не коэффициентами
.Л, В, С, D (или У, Z, Н, G), а вторичными
параметрами. В этом случае расчетные
-формулы получаются после замены коэф-
фициентов Л, В, С, D в выражении для со-
противления Znp их значениями из (1-38)
и (1-39) для симметричного четырехполюс-
ника или (1-67) для несимметричного. По-
меле довольно длинных преобразований фор-
мула (1-90) приводится к виду:
г'"г+1п17О
Z | z
+ 1П Л/Л4+1П (1-92)
Z у ZC2ZH
шли
I 1 1 < 1 1 г
8>=ln -rzv?+-2ln
+ In (1 — NiN2e-2e), (1-93)
кт Zr Zet , _ZH — ZC2
де /Vi гт- । гт у -ZV-2 гт iv так
Zci"i“Zr zC2 ~г Zh
•называемые коэффициенты отражения на
•42
входе и выходё четырехполюсника, кото-
рые указывают степень несогласованности
сопротивлений генератора Zr и приемника
ZH с характеристическими сопротивлениями
четырехполюсника Zci и ZC2.
При согласованной нагрузке (ZH—Zc2)
и режиме согласования на входе четырех-
полюсника (Zr=Zci) рабочая постоянная
передачи gp (рабочее затухание ар1), как
следует из выражения (1-92), равна по-
стоянной передачи g (коэффициенту зату-
хания а)./ Второе слагаемое в выражениях
(1-92) и (1-93) показывает изменение за-
тухания сигнала из-за рассогласования на
входе четырехполюсника (М^О), третье
слагаемое — изменение затухания из-за
рассогласования на выходе четырехполюс-
ника (^2-^0). Если четырехполюсник со-
гласован на входе или выходе, то соот-
ветствующее слагаемое (второе или третье)
в формулах (1-92) и (1-931) равно» нулю.
Последнее слагаемое в тех же формулах
равно нулю, если четырехполюсник согла-’
сов ан хотя бы с одной стороны.
Если коэффициент затухания четырех-
полюсника а больше 1,5 неп, последним
слагаемым в выражениях (1-92) и (1-93)
можно пренебречь. Действительно, в этом
случае б,“2°<^0,05 и так как 1 и
|М2|«С1, то последнее слагаемое по мо-
дулю меньше In (1 4-0,05) = 0,046 неп.
Для симметричного четырехполюсника
справедливы те же формулы и выводы, но
только надо принять Zcl=Zc2=Zc.
Пример 1-14. Симметричный .четырехпо-
люсник включен в аппаратуре, связи между
источником и приемником сигналов. Он
должен не пропускать определенную полосу
спектра сигналов, т. е. работать как фильтр.
Считая внутренние сопротивления источ-
ника и приемника активными и одинако-
выми, найти, какое минимальное рабочее
затухание может быть у фильтра по
сравнению с его коэффициентом затуха-
ния а. При расчете принять я>1,5 неп.
Решение. Рабочее затухание четы-
рехполюсника яр может быть меньше коэф-
фициента затухания я, т. е. затухания сиг-
нала при согласованной нагрузке. Поэтому
фильтрующие свойства рассматриваемого
четырехполюсника при несогласованной на-
грузке могут ухудшиться. В задаче тре-
буется оценить это возможное ухудшение.
Запишем рабочую постоянную /передачи
(1-92), пренебрегая последним слагаемым
(я>1,5 неп) и учитывая, что ZC] = ZC2=ZC
и Zr=ZH=r:
Zc+r
или
^р = её
(Zc + r)* _
±Zzr
Выражение в скобках минимально и равно
2, если
Zc___ г
~~~ 9 т. е. Zc=z:
Г Lt с
(такое соотношение параметров фильтра и
источника питания вполне возможно, так
как у многих фильтров характеристическое
сопротивление при частотах, которые фильтр
не пропускает, получается чисто мнимым).
Итак.
& р М ИН 1 »
е ==е 2~
откуда
1
2>р — b и Дрмин = я + In -g- = а — 0,7 неп.
Следовательно, при расчете фильтра
надо задать его коэффициент затухания а
на 0,7 неп больше, чем в том случае, если
бы фильтр работал на согласованную на-
грузку.
Затухание сигналов при несогласован-
ной нагрузке иногда оценивают еще так
называемым вносимым затуханием. Вноси-
мое затухание рассчитывается, как и рабо-
чее, по формуле (И-88), только мощность
.So определяется в схеме рис. 1-3 не при
ZH = Zr, а при произвольном заданном зна-
чении сопротивления нагрузки ZH.
1-24. АКТИВНЫЕ
ЧЕТЫРЕХПОЛЮСНИКИ
Активные четырехполюсники, со-
держащие источники электрической
энергии, делятся на две группы.
К первой группе относятся четы-
рехполюсники, переменные напря-
жение и ток на выходе которых по-
являются только при подключении
входных зажимов к источнику пере-
менного напряжения (тока). Их на-
зывают четырехполюсниками с за-
висимыми источниками энергии или
неавтономными. Для четырех-
полюсников с зависимыми источни-
. ками уравнения любого типа запи-
сываются и применяются совершен-
но так же, как и для пассивных че-
тырехполюсников. Однако в общем
случае эти четырехполюсники необ-
ратимы и поэтому характеризуются
не тремя, а четырьмя независимыми
коэффициентами или параметрами.
Уравнения связи (AD—ВС=\, У12 =
— —У21, Z12=—Z2i и т. д.) не вы-
полняются.
Примерами неавтономных четы-
рехполюсников могут служить уси-
лители переменного тока на элек-
тронных лампах или полупроводни-
кдвых триодах (рис. 1-32). Внутри
усилителя есть источники электри-
ческой энергии: аккумуляторные ба-
тареи, гальванические элементы,
выпрямители для анодных и сеточ-
Рис. .1-32.
ных цепей электронных ламп или
цепей коллекторов и эмиттеров по-
лупроводниковых триодов. Однако
переменное напряжение на выходе
и переменный ток £2 в сопротив-
лении нагрузки ZH равны нулю до
тех пор, пока отсутствует перемен-
ное напряжение (ток) на входе,
например усиливаемый сигнал.
Эквивалентные схемы электрон-
ных и полупроводниковых триодов
были уже получены в первой части
книги (гл. 7). Там же были состав-
лены схемы и рассчитаны режимы
работы простейших усилителей. Не-
редко можно проще найти парамет-
ры эквивалентных схем более
сложных устройств и рассчитать ре-
жим цепи, если применить теорию
четырехполюсников и если известны
или определены матрицы простых
четырехполюсников, на которые мо-
жет быть расчленена сложная элек-
трическая цепь. Покажем это на
примерах.
Пример 1-15. Определить матрицы А
и Y для усилителя рис. 1-33,а.
Решение. Эквивалентная схема
усилителя представлена на рис. 1-33,б'
(см. также гл. 7 первой части книги).
Запишем уравнения Кирхгофа для этой
цепи:
Ui = R/i; —
Здесь р и Rt—соответственно коэффи-
циент усиления и внутреннее сопротивле-
ние триода в рабочей точке вольт-ампер-
ной характеристики.
Рис. 1-33.
43
Приведем последние выражения к виду
уравнений типа А (1-2). Из второго выра^
же ния
[Л S
где S = p/Ri — крутизна вольт-амперной
характеристики,
и из первого
= SR/2-
Таким образом, А — — 1/р*; В ==— 1/S;
С=_ 1/pj?; D = —1/SR; AD — BC = 0 и
четырехполюсник рис. 1-33,л необратимый.
Приведем теперь уравнения Кирхгофа
к виду уравнений типа Y (§ 1-7):
I2 — —su 1 t/2.
Следовательно,
Г11 = 4"; ^21 = —
1
К22 = — и г12#--г21.
Пример 1-16. Составить уравнения, свя-
зывающие режим на входе и выходе уси-
лительного каскада (рис. 1-34,а), у кото-
рого нужно учесть емкость С между ано-
дом и сеткой триода (источники питания
анодной и сеточной цепей на этом рисунке
не показаны). Емкости между сеткой и ка-
тодом и между анодом и катодом входят
соответственно в величины сопротивлений
Zj и ZH.
Решение. Четырехполюсник рис. 1-34,а
можно представить состоящим из двух па-
раллельно включенных: усилителя без ем-
кости С (рис. 1-33,а) и одноэлементного
четырехполюсника (рис. 1-34,б|).
При параллельном соединении четырех-
полюсников складываются матрицы Y. Ма-
Рис. 1-34.
трица Y усилителя без емкости С получе-
на в примере 1-15:
У'и = ^7 , К'12 = о, У'21 = — S,
1
У22 = — R_,
матрица одноэлементного четырехполюсни-
ка приведена в табл. 1-3:
У^У'^/шС, У,,12=У,,22=— joC.
Суммируя матрицы Y, запишем сразу
уравнения типа У для четырехполюсника
рис. 1-34,а:
\ th — jtoCUz,
f2 = (j&C — S) - (^- + /<ос) C/2-
Пример 1-17. В § 7-3 первой части
книги были получены уравнения линейного
режима полупроводникового триода для
схемы с общим основанием (рис. 1-35):
(А = 7пЛ 4-Zi272;
U 2 — Z2i /1 + Z22/2,
где Zu = Гд -|- г0j Zi2 = — г0; Z2i— гг-{-Го£
Z22 = — (rK “l” Го).
Для полупроводниковых триодов осо-
бенно часто применяется система уравне-
ний типа Н. Пользуясь связью матриц Н
и Z, составить уравнения типа Н при сле-
дующих параметрах одного из типовых
плоскостных триодов: гр = 500 ом, гг =
= 1,9 Мом, гэ = 50 ом, гк = 2 Мом.
Решение. Из табл. 1-1 находим»,
что
ZnZ22 — Z12Z21
^0 (Га Гк — Гг) 4~ ГчкГэ
Г к + Г о
75 ом*,
0,95;
^-=7-^7-= 0,25.10-’;
Zz22 Гт- —~
_ Z21
z22
1
//12
Н21
_ 1
//22 7
^22
Теперь запишем уравнения типа Н:
U1 = 7511+0t^A0-3U2;
/2 = 0,95Л —0,5-10-6£72.
——0,5-10-6 сим\..
Рис. 1 -35.
44
Рис. 1-36.
Рис. 1-37.
Ко второй группе активных четы-
рехполюсников относятся четырех-
полюсники с независимыми источни-
ками, которые называют авто-
номными. На первичных и вто-
ричных зажимах таких четырехпо-
люсников напряжения и токи возни-
кают и при отсутствии внешних сиг-
налов.
В первой части книги было пока-
зано, что уравнения активного мно-
гополюсника с независимыми источ-
никами, а значит, в частности, и че-
тырехполюсника, отличаются от
уравнений пассивного свободными
членами в правой части. Смысл сво-
бодных членов зависит от выбран-
ного типа уравнений.
Запишем, например, уравнения
типа А, дополнив их свободными
членами М и N;
и1=Аи2+гв12+М; |
Свободные члены определим, пред-
положив, что первичные и вторич-
ные зажимы активного автономного
четырехполюсника короткозамкнуты
(£71 = 0, £72=0). Из уравнений
(Ь94) найдем, что
7И = BI2^ N = 11К DI2k.
Подставив свободные члены М и
W в (1-94), получим уравнения ти-
па А автономного четырехполюс-
ника:
tf1 = Atf2 + £(/2-/2K);
/1-/iK = CLT2-|-D(/8 -4к).
(1-95)
На рис. 1-36 изображен активный
автономный четырехполюсник с на-
пряжениями U1 и О2 и токами Ц и
/2 соответственно на первичных и
вторичных зажимах. На том же ри-
сунке показано, что активный четы-
рехполюсник можно заменить пас-
сивным с теми же коэффициентами
Л, В, С, D, что и у активного, но
с токами /-l — /1К и 12 — /2К вместо
Л и Ц и двумя источниками тока
Лк и /2К. В свою очередь пассивный
четырехполюсник можно предста-
вить любой известной схемой заме-
щения (например, Т- или П-образ-
ной, мостовой). Если для получен-
ного пассивного четырехполюсника
справедливо уравнение связи AD—
—ВС==\ (обратимый четырехпо-
люсник), то оно выполняется и для
активного автономного четырехпо-
люсника.
Свободные члены уравнений (1-94)
можно определить и из опыта холо-
стого хода одновременно на первич-
ных и вторичных зажимах (Л —0,
/2=0). В этом случае из уравнений
(1-94) находим, что
M = U1X — AU2X, N = — CU2X,
и уравнения типа А автономного че-
тырехполюсника запишем в другой
форме:
t7-C7lx=A(f72-{y2X)+B72;|
/1=C((72-f72K) + D/2. J
Этим уравнениям соответствует эк-
вивалентная схема активного четы-
рехполюсника с источниками напря-
жения или э. д. с. Э1Х = £71Х и
Э2Х = С72Х, показанная на рис. 1-37.
Из полученных уравнений (1-95) и
(1-96) следует, что активный четы-
рехполюсник с независимыми источ-
никами характеризуется пятью пара-
метрами: тремя независимыми коэф-
фициентами (из четырех Л, В, С, D)
и двумя э. д. с. или токами источ-
ников. Конечно, между токами /1К,
/2К и э. д. с. 31Х, 32Х должна быть
простая связь.
45.
Предположим, например, что ве-
личины э. д. с. Э1Х, и Э2Х известны,
т. е. рассчитаны или измерены на-
пряжения U1X и U2X при одновре-
менном холостом ходе на первич-
ных и вторичных зажимах. Тре-
буется найти токи источников в схе-
ме рис. 1-36.
Из уравнений (1-96), переписан-
ных для режима короткого замыка-
ния на первичных и вторичных зажи-
мах (4 = /^, /2 = /2К),находим, что
Дк=“£“
Ак==—сэ2Х-|- D/2K«
Применяя уравнения активного-
автономного четырехполюсника,,
можно, например, исследовать рабо-
ту двух генераторов (электростан-
ций), включенных совместно с дру-
гими генераторами в общую элек-
трическую сеть.
Глава вторая
ФИЛЬТРЫ
2-1. ВВЕДЕНИЕ
В электрических, радиотехниче-
ских и телемеханических установках
и устройствах связи часто ставится
задача: из многих сигналов, зани-
мающих широкий спектр частот, вы-
делить один или несколько сигна-
лов с более узким спектром.
Сигналы (напряжения и токи) за-
данной полосы частот выделяют
при помощи электрических
фильтров. Так, в радиоприемнц-
ке из сигналов многочисленных ра-
диостанций фильтры выделяют сиг-
нал одной, принимаемой станции.
В энергетических системах при пе-
редаче сигналов телеуправления, те-
леизмерения и автоконтроля по ли-
ниям электропередачи высокого на-
пряжения фильтры отделяют эти
сигналы от тока промышленной ча-
стоты (50 гц). В установках частот-
ного телеуправления многими объ-
ектами, например на газопроводе,
фильтры выделяют сигналы управ-
ления, предназначенные каждому
объекту. При организации по воз-
душным линиям электропроводной
связи нескольких одновременных те-
лефонных разговоров (высокоча-
Рис. 2-1.
стотная телефонная связь) на при-
емной станции устанавливают филь-
тры для разделения телефонных сиг-
налов отдельных абонентов. Многие
электроизмерительные приборы име-
ют фильтры, устраняющие электри-
ческие помехи, в радиопередатчиках
монтируют фильтры, подавляющие
излучение нежелательных электро-
магнитных колебаний, и т. д.
Один из простейших фильтров
состоит из катушки и конденсатора,
включенных последовательно или
па|раллельно, т. е. представляет со-
бой последовательный или парал-
лельный колебательный {контур.
Если между источником сигна-
лов и приемником включен такой
фильтр (рис. 2-1), то из всех сиг-
налов с различной полосой частот
в приемник будут поступать токи
более или менее узкого спектра ча-
стот, ширина которого определяется
добротностью контура.
Схемы рис. 2-1 можно анализиро-
вать как одноэлементные четырёх-
полюсники, однако нагляднее их ча-
стотные свойства выявляются в тео-
рии двухполюсников. Частотные ха-
рактеристики простых колебатель-
ных контуров и более сложных
двухполюсников были уже
рассмотрены в гл. 5 пер-
вой части книги. В устрой-
ствах телемеханики, радио-
техники и электросвязи в
качестве фильтров чаще
применяются пассивные че-
тырехполюсники, для кото-
рых проще решается одна
46
из важнейших задач — задача со-
гласования нагрузки, и получаются
лучшие частотные характеристики.
К электрическим фильтрам раз-
личной аппаратуры предъявляются
неодинаковые и даже противоречи-
вые требования. В одной части по-
лосы частот фильтр должен иметь
затухание не выше допустимого
значения (полоса пропускания), а
в другой части затухание не должно
снижаться ниже определенной ве-
личины (полоса непропускания).
На частотную зависимость характе-
ристического сопротивления филь-
тра накладываются ограничения,
обусловленные необходимостью со-
гласования нагрузки в достаточно
широком диапазоне частот. Часто
дополнительно накладываются опре-
деленные условия на вид фазовой
характеристики.
По виду основных частотных ха-
рактеристик фильтры-четырехпо-
люсники можно разделить на ряд
типов. Среди этих фильтров наи-
большее практическое значение име-
ют Т-, П- и - Г-образные филь-
тры типа k, у которых произведе-
ние продольного Zi и поперечного
Z2 сопротивлений не зависит от ча-
стоты, фильтры типа т, ко-
торые получаются как производные
из фильтров типа k, и мостовые
фильтры.
К фильтрам предъявляются и кон-
структивные требования в. отноше-
нии их габаритов, веса, используе-
мых материалов. Эти требования
могут оказать решающее влияние на
выбор одного из вариантов, экви-
валентных по частотным характери-
стикам. ।
На практике часто приходится
решать задачу синтеза электриче-
ского фильтра по его заданным ча-
стотным характеристикам. Эта за-
дача в общем случае сводится к по-
строению такого четырехполюсни-
ка, который удовлетворяет постав-
ленным условиям и состоит из ми-
нимально возможного числа элемен-
тов. В основу решения задачи син-
теза положены методы теории наи-
лучшего приближения функций и
общей теории реактивных четырех-
полюсников, которая сводится
прежде всего к изучению мостовых
схем и дает возможность перехода
к Т- и П-образным схемам на
основе эквивалентных преобразо-
ваний.
Частотные характеристики раз-
личных фильтров тесно связаны
друг с другом. Поэтому можно рас-
пространить решение любой зада-
чи, относящейся, например, к низ-
кочастотному фильтру, на другие
фильтры (высокочастотные, поло-
совые, заграждающие). При этом
одна из задач — задача о наилуч-
шем выборе частот бесконечного за-
тухания, т. е. о минимальном числе
таких частот, обеспечивающих тре-
буемое затухание, решается мето-
дами аппроксимации, которые раз-
работал выдающийся русский мате-
матик П. Л. Чебышев. Необходимое
затухание в задачах синтеза рас-
сматривается как рабочее, посколь-
ку характеристическое сопротивле-
ние фильтра на различных частотах
не одинаково по величине и харак-
теру, а сопротивление нагрузки:
большей частью активное, постоян-^
ное.
Решение задач синтеза в этой
книге не рассматривается. В сле-
дующих параграфах проводится:
анализ преимущественно в наиболее
простом для исследования режиме
работы на согласованную нагрузку,,
чтобы сосредоточить внимание на
основных принципах теории фильт-
ров.
2-2. ПОЛОСА ПРОПУСКАНИЯ
Основное назначение электриче-
ского фильтра — пропустить сигна-
лы одних частот и подавить (за-
держать) сигналы других частот..
Поэтому коэффициент затухания:
фильтра должен изменяться с ро-
стом частоты по определенному'
заданному закону. В диапазоне ча-
стот пропускаемого сигнала коэф-
фициент затухания должен быть
возможно меньшим и даже равным
нулю. Этот диапазон частот назы-
вают полосой пропускания
или полосой прозрачности фильтра.
В интервале частот подавляемого
сигнала необходим достаточно боль-
шой коэффициент затухания.
47
Фильтр можно было бы назвать
идеальным, если бы удалось до-
биться равного нулю коэффициента
затухания в полосе пропускания и
бесконечно большого — в остальном
диапазоне частот. Практически ко-
нечно создать идеальный фильтр
нельзя, но можно получить в поло-
се пропускания очень малый, теоре-
тически равный нулю коэффициент
затухания.
Коэффициент затухания может
в некотором диапазоне частот рав-
няться нулю в том случае, если
фильтр составлен из чисто реактив-
ных элементов — конденсаторов и
катушек без потерь. Чем заметнее
потери в катушках и конденсаторах,
тем меньше их добротности, а коэф-
фициент затухания в полосе про-
пускания больше. Практически при-
меняются конденсаторы и катушки
с достаточно большими добротно-
стями (Qc>l ООО, Qr>50). Поэтому
при анализе работы таких фильтров
потерями в конденсаторах и катуш-
ках часто пренебрегают, т. е. счи-
тают фильтры состоящими из чисто
реактивных элементов.
Прежде всего выясним, как рас-
считывается полоса пропускания сим-
метричных Т- и П-образных фильт-
ров.
Всякий симметричный четырехпо-
люсник, в том числе и фильтр опре-
деляется двумя параметрами: харак-
теристическим сопротивлением Zc —
= l/ BjC и постоянной передачи
g = a +/&, причем каку Т-образ-
ной (рис. 1-13,бг), так и у П-образ-
•ной (рис. 1-13,0 схемы [см. (1-52) и
табл. 1-2]
ch g= ch (a +jb) = А = 1 + Д,
(2-1)
где Z1=zh/z1 и Z2=±jz2 (фильтр
состоит из чисто реактивных эле-
ментов).
В полосе пропускания коэффи-
циент затухания равен нулю
а = 0, т. е. иг = иг,
и
ch g = ch/6 = cos 6 = 1 4-^-. (2-2)
Но косинус изменяется в пределах
от —1 до 4-1. Это значит, что
условие (2-2) выполняется до тех
пор, пока сопротивления Zr и Z2
связаны соотношением
т.е. -2<§-<0
££>2 £.L>2
ИЛИ
zx
4Z2
(2-3)
Из последнего выражения следует,
что в полосе пропускания характер
сопротивлений Zr — и Z2 =
— должен быть различным.
Если 21 = 4~/г1» т- е- имеет индук-
тивный характер, то Z2 должно быть
емкостным: Z2 —— jz2 или наоборот,
т. е. должно быть
— 1<
Z1
4z2
Значит, величины сопротивлений
должны удовлетворять условию
2х<4г2. Граничные частоты
полосы пропускания определяются
уравнениями
т. е.
z1 = 0 или г2 = сю, (2-4)
и
т. е.
гх=4г2. (2-5)
В полосе пропускания коэффи-
циент фазы b не остается постоян-
ным и может быть найден из урав-
нения (2-2) или
cos 6=1--^-. (2-6)
Так как cosfc=l—2sin2-|-, то ко-
эффициент фазы может быть найден
по уравнению
(2-7)
Оба последних уравнения не опреде-
ляют знак коэффициента фазы. Вы-
бор положительного или отрицатель-
48
Рис. 2-2.
него знака будет пояснен далее при-
менительно к схемам конкретных
фильтров.
Пример 2-1. Найти граничные частоты
фильтра риё. 2-2, если Li=10 мгн, Ci~
='С2=0,25 мкф.
Решение: Для заданного фильтра
/ 1 \ . 1
Zi = / I coLi — J, Z2 — — J соС2*
Граничные частот^ определяются усло-
виями (2-4) и (2-5). Первую граничную ча-
стоту найдем из уравнения z^ = 0 или
^L*-i=0- откуда =
= 2,0-104 \[сек. Эта частота совпадает
с частотой резонанса напряжений в про-
дольной ветви со0 = Уравнение
22 = со или 1/(оС2=0 дает решение (0^=0,
которое не подходит для фильтра рис. 2-2.
Действительно, сопротивление Z2 полу-
чается емкостным при любой частоте. -Со-
противление Zi имеет емкостный харак-
тер, при частотах меньше резонансной
<o0=‘cd1 (рис. 2-3). Следовательно, диапа-
зон частот от о/у=0 до (i>i=2,0 • 104 }фсек
не относится к полосе пропускания.
Вторую граничную частоту найдем из
уравнения
Zi=’4z2
или
I 1 I 1
“соС, j - 4 <оС2 ’
ю2 = у о? + j 1 = 4,48 • 10* Мсек.
Т и Ь1С2
Частоты со>(о2 также не относятся к по-
лосе пропускания, так как Zi>4z2. По-
лоса пропускания находится в интервале
частот от (01 до со2 (рис. 2-3).
2-3. КОЭФФИЦИЕНТ ЗАТУХАНИЯ
Составим теперь зависимости,
позволяющие рассчитать коэффи-
циент затухания фильтра вне его
полосы пропускания или, как гово-
рят, в полосе задерживания.
У фильтров из чисто реактивных
сопротивлений (Zi—>±jzx, Z2=='
=!±/г2) полосой задерживания бу-
дем считать весь диапазон частот,
для которого Расчетные за-
висимости для полосы задерживания
найдем из уравнения (2-1), которое
перепишем, подставляя значения Zx
и Z2:
chacos&-P/shasin&= l:±z—. -
* 2z2
(2-8)
Знак плюс в правой части получает-
ся, когда Zj и Z2 имеют оба индук-
тивный или оба емкостный харак-
тер. Знак минус — когда Zx индук-
тивное, a Z2 емкостное сопротивле-
ние или наоборот. Но во всех слу-
чаях правая часть этого уравне-
ния— вещественное число. Поэтому
и левая часть уравнения (2-8) при
любой частоте должна быть вещест-
венным числом, что выполняется,
если
sh а • sin b= 0.
В полосе задерживания а^=0
и sha^O, т. е. справедливы урав-
нения для коэффициента фазы
sin 6=0 (2-9)
и для коэффициента затухания
ch a cos = 1
где при sinfe = 0 имеем:
1) cosb=+'l (6 = 0)
или
2) cos 6 =—1 (£='±л:).
Первое условие получается при
одинаковом характере сопротивле-
ний Zi и Z2, так что коэффициент
затухания определяется уравне-
нием
cha = 1
I zi
* %z2
Условие cos 6 =—1 при одинаковом
характере сопротивлений ZA и Z2 не
подходит (гиперболический косинус
49
4-434
от вещественного аргумента поло-
жительный и по модулю больше
единицы). Так как ch а — 1 =
= 2sh2-|-, то коэффициент затуха-
ния можно найти и по формуле
sh 4- +• (2-Ю)
2 V 4z2 v 7
Решение. Граничные частотна
(01 со2
фильтра fi =2^" = 3,19 кгц и
— 7,14 кгц. Следовательно, нужно найтгг
коэффициент а пои частотах f3i —3,19—-
—0,9=2,29 кгц и f32 =7,14+ 0,9=8,04 кгц.
В первом случае коэффициент затуха-
ния найдем по формуле (2-10), так как при
частотах f<Cfi сопротивления Zi и Z2 ем-
костные (рис. 2-3):
Второе условие соответствует
полосе частот, в которой сопротив-
ления Zr и Z2 имеют разный харак-
тер (как и в полосе пропускания),
но z± ^4z2. Коэффициент затухания
определяется уравнением
— chtf= 1 — -г1-
at___iSTtfsibi — 1/2тг/31С1|
sh-^-y 4/2^3iC2
Г\ 144 — 2781 _
V 1 ПО
0,347 и лх = 0,68 неп~
Во втором случае коэффициент затуха-
ния найдем по формуле (2-11), так как
при частотах f^>f2 сопротивления Zi и Za-
имеют различный характер (рис. 2-3):
Так как ch(Z-j- 1 = 2ch2-^-, то ко-
эффициент затухания можно найти
по формуле
л2 ,/ 12^1,1 — 1/2^3^11
2 V 4/2^32С2 “
1 / 506 —
V 324
= 1,15 и а2 — 1,08 неп.
<241>
2-4. НИЗКОЧАСТОТНЫЙ ФИЛЬТР
У реальных фильтров вследствие
потерь и в полосе пропускаемых
сигналов я=+'0, т. е. [72¥='^ъ но
различие между напряжениями
должно быть достаточно мало.
Четкой границы полосы пропуска-
ния нет. Граничный диапазон частот
между полосами пропускаемых и
непропускаемых сигналов называют
иногда полосой перехода.
Самые простые Т- и П-образные
симметричные фильтры получаются,
если Zi и Z2 — простейшие чисто
реактивные двухполюсники, т. е. со-
ответственно индуктивность и ем-
кость или наоборот. В общем слу-
чае каждое из сопротивлений Z\
и Z2 может быть входным сопротив-
лением двухполюсника, состоящего
из нескольких индуктивностей и ем-
костей. Как было показано выше,
фильтр нельзя собрать только из
катушек индуктивности или только
из конденсаторов: четырехполюсник,
состоящий из реактивных элементов
одного типа, не имеет полосы про--
пускания.
Пример 2-2. Рассчитать коэффициент
затухания фильтра рис. 2-2 для двух ча-
стот полосы задерживания, отличающихся
от граничных на 0,9 кгц (см. пример 2-1).
Рассмотрим сначала простейшие
Т- и П-образные симметричные
фильтры, у которых Zx = /coL = /zt
и/2 = —/ + = —Д2 (рис. 2-4).
Полосу пропускания обеих схем
найдем из условий (2-4) и (2-5).
Сопротивление равно нулю при
граничной частоте ш = о)1 = 0. Из
условия zx=4z2 или wL=Al^C опре-
деляем вторую граничную частоту:
Выше частоты <о2 начинается полоса
задерживания.
Итак, фильтр пропускает сигналы
в полосе частот 0-~2/|/£С и назы-
вается низкочастотным. В этой
полосе частот коэффициент затуха-
ния (2 = 0, а коэффициент фазы
Рис. 2-4.
50
определяется уравнениями (2-6) или
(2-7):
ch b = 1 — -^- = 1 —
2z2
со2£С
2
= 1—2
(2-13)
На граничной частоте ад1 = 0 полу-
чаем cos b = 1 и 6 = 0, на второй
граничной частоте со2=2/|/*£С имеем
cos b — —1 и 6 = т: (180°) или 6 =
= — тс. В первом случае коэффици-
ент фазы, изменяясь от значения 0
до д, остается положительным, т. е.
напряжение на первичных зажимах
Ui опережает по фазе напряжение
на вторичных зажимах U2. Во вто-
ром случае коэффициент фазы отри-
цательный. Для низкочастотных Т-
и П-образных фильтров последнее
решение не подходит, так как у всех
четырехполюсников с чисто реак-
тивными элементами выполняется
неравенство db[d(&>Q. Этот же вы-
вод подтверждается далее вектор-
ной диаграммой.
Найдем теперь зависимость ко-
эффициента затухания от частоты
а (со.) в полосе задерживания. Обра-
тим внимание на то, что у обеих
схем рис. 2-4 произведение ZjZ2 =
= LIC=k2 не зависит от частоты,
т. е. это фильтры типа k. Такие
фильтры, как и другие фильтры
типа k, собираются из «обратных»
двухполюсников, т. е. двухполюсни-
ков с различным характером вход-
ных сопротивлений на любой часто-
те. Поэтому коэффициент затухания
фильтров типа бив частности рас-
сматриваемых низкочастотных Т-
и П-образных фильтров определяет-
ся выражением (2-11), а не (2-10):
ch-^=l/= (2-14)
2 г 4г2 г 4 со2 v 7
Зависимость а(о>) показана на
рис. 2-5.
Коэффициент фазы b в полосе
задерживания остается постоянным
(2-9) и равным д.
Напомним, что постоянная пере-
дачи четырехполюсника, а значит,
4*
и коэффициенты затухания и фазы
фильтра определяются при согла-
сованной нагрузке. Следовательно,
зависимости а(ш.) и Ь (со) на рис. 2-5
построены в предположении, что
нагрузка фильтра согласована.
Если заданы граничная частота
<d2 = 2/j/LC или /2=со2/2тс=1/тс]/ LC
и параметр к — УЦС. то индуктив-
ность и емкость фильтра можно
найти по формулам:
£ —. г—,
тс/2’ rfzk
Коэффициент затухания одного
фильтра часто оказывается недоста-
точно большим для подавления всех
сигналов, которые не должны по-
ступить в приемник. В этом случае
применяют каскадное соединение
нескольких фильтров. Полоса про-
пускания цепочки из одинаковых
фильтров-звеньев такая же, как и
одного фильтра, коэффициент за-
тухания цепочки больше, чем одно-
го фильтра, в п раз, где п — число
звеньев.
Низкочастотные фильтры приме-
няют, например, для подавления
помех радиоприему и передаче ин-
формации по воздушным линиям,
которые создают промышленные
установки и электрический транс-
порт (электрические генераторы
для нагрева материалов токами
с частотой более 50 гц, электриче-
ские двигатели, устройства с по-
движными контактами). Низкоча-
стотные фильтры включают для
устранения помех, которые создает
аппаратура телемеханизации на ли-
ниях телефонной связи, и т. д.
Пример 2-3. Найти индуктивность L и
емкость С низкочастотного П-образного
фильтра, у которого параметр & = 600 ом,
а коэффициент затухания на частоте 10я:гг|
равен 40 дб. Определить граничную ча-
стоту и отношение напряжений на входе-
51
(7i и выходе U2 при частоте 10 кгц, счи-
тая фильтр согласованным с нагрузкой.
Решение. Коэффициент затухания
определяется выражением (2-14)
‘2_==/7= •
где при /2 = 40 3^= 40-0,115 = 4,6 неп и
f — 10 000 гц имеем ch я/2 = 5,04. Пара-
метр k — У"L/C = 600 ом.
Из двух уравнений относительно L и С
находим эти величины: L = 96 мгн, С —
= 26,6*10~2 мкф. Граничная высота f2 =
= 1/л VlC = 2 кгц. Отношение напряже-
ний нетрудно определить из выражения
а = 201g ц— , откуда = 100
2-5. СОГЛАСОВАННАЯ НАГРУЗКА
ФИЛЬТРА
Поставим теперь вопрос о том,
как добиться согласованной на-
грузки фильтра. Для этого прежде
всего найдем частотные зависимо-
сти характеристических сопротив-
лений Т-образной схемы ZT и П-
обр азной схемы Zn.
Выражения для характеристиче-
ских сопротивлений Т- и П-образ-
ных четырехполюсников были полу-
чены в предыдущей главе [см. (1-51)
и табл. 1-2]:
Z6 = ZT = /Z1Z2'j/l + ^; (2-15)
Zg —Zn = j/Z^ -г 1 :=. (2-16)
п F 1 V1 + 21/4Z2 ’
Для низкочастотного фильтра
(z1 = /ojL, Z2 = — /^c)
(2-17)
=1/ - 1
п г с j/i — со2£С/4
г. 1 (2-18)
С ]/1 — ы2/^
'При т. е. в полосе пропуска-
ния, ZT и Zn — активные сопротив-
ления (под корнем положительная
величина). При а>><02, т. е. вне
S2
полосы пропускания, ZT и Zn •—
реактивные сопротивления.
Хотя каждая из формул (2-17)
и (2-18) при g>><d2 дает два значе-
ния реактивного сопротивления —-
индуктивное и емкостное, характе-
ристическое сопротивление Т-образ-
ной схемы надо выбрать индуктив-
ным, а П-образной схемы — емкост-
ным. В противном случае коэффи-
циент а получится отрицательным,
т. е. в полосе задерживания '
(аОсог) напряжение и ток на выхо-
де фильтра больше, чем на входе.
При активном характеристиче-
ском сопротивлении коэффициент
затухания, конечно, не может быть
отрицательным. Это следует из вы-
ражения (1-32):
а 2 П Р2 ~ 2 111 S2 — 11
Если гх<0, то активная мощность на
входе Pi меньше, чем на выходе Р2,
что противоречит физике процессов
в электрической цепи. Но при чисто
реактивном характеристическом со-
противлении, т. е. согласованной
реактивной нагрузке, Р2—0 и Р\~
=0, а полная мощность S2 может
быть и больше Si, например в слу-
чае резонанса.
На возможность двух значений
коэффициента а (положительного и
отрицательного) указывает и из-
вестное свойство гиперболического
косинуса:
ch(+-l-)=ch(—!)•
Графики Zt(cd) и Zn(<o) представ-
лены на рис. 2-6. Из рис. 2-5 и 2-6
видно, что для Т-образного фильтра
Рис. 2-7.
можно получить непрерывную по-
лосу пропускания (а — 0) , только
в том блучае, если сопротивление
нагрузки активно (ZH —гн) и изме-
няется с ростом частоты так же,
как и характеристическое сопротив-
ление— от значения k = VL/C при
<d = (d1 = 0 до нуля при (п = ю2. Ана-
логичный вывод справедлив и для
П-образного фильтра (изменение от
значения k до оо).
Реально осуществить такую изме-
няющуюся с ростом частоты актив-
ную нагрузку нельзя, а при
о>>со2 сопротивление согласованной
нагрузки должно вовсе стать ре-
активным. Поэтому часто выбирают
активное сопротивление, близкое
к значению k, так как в довольно
широком диапазоне частот полосы
пропускания хар актеристические
сопротивления ZT и Zn мало отли-
чаются от этого значения.
При постоянном сопротивлении
нагрузки гн точное согласование
получается только на одной частоте
полосы пропускания. На других ча-
стотах напряжения и токи на входе
и выходе различны: ‘UX^U2,
и степень подавления сигна-
лов следует оценивать величиной
рабочего затухания. При том же ак-
тивном сопротивлении нагрузки гн
отношение напряжений Ux/U2 и
токов /1//2 в полосе задерживания
тем более нельзя находить по гра-
фику коэффициента затухания rz (со)
на рис. 2-5. Зависимость между на-
пряжениями и токами на входе и
выходе фильтра при несогласован-
ной нагрузке определяется уравне-
ниями четырехполюсника (1 -40).
,График рис. 2-5 показывает в этом
случае только общий характер ча-
стотных зависимостей.
Если с ростом частоты сопротив-
ление нагрузки гн (рис. 2-7) изме-
нять так же, как изменяется харак-
теристическое сопротивление ZT
(рис. 2-6), то входное сопротивле-
Рис. 2-8.
ние фильтраZBX=ZT остается в пре-
делах полосы пропускания актив-
ным. Это значит, что напряжение
Ux и ток Zi совпадают по фазе —
цепь настроена в резонанс. На-
стройка в резонанс во всей полосе
пропускания достигается здесь не-
прерывным изменением сопротивле-
ния гя. Напомним, что и простой
параллельный контур можно на-
страивать в резонанс изменением
активных сопротивлений, включен-
ных последовательно с катушкой и
конденсатором.
На рис. 2-8,а показана векторная
диаграмма токов и напряжений Т-
образного фильтра (рис. 2-7) для
одной из частот полосы пропускания
при согласованной активной на-
грузке (’ГН=2Т). При построении
диаграммы учтено, что в полосе
пропускания UX = U2, Ix=Iz и век-
торы Ux и Л совпадают по фазе. Из
диаграммы видно, что напряжение
Ux опережает по фазе напряжение
£72, т. е. что коэффициент фазы
&>0. На рис. 2-8,6 построена век-
торная диаграмма того же фильтра
53
при согласованной индуктивной на-
грузке для одной из частот полосы
задерживания. При построении диа-
граммы учтено, что в полосе задер-
живания Uy>V2 и Л>/2- Из диа-
граммы. определяется значение ко-
эффициента фазы Ь — л, которое
было уже ранее найдено аналити-
чески.
Пример 2-4. Фильтр примера 2-3 нагру-
жен на постоянное активное сопротивление
Гн=600 ом.
Сравнить отношение напряжений на
входе и выходе фильтра в диапазоне ча-
стот до 10 кгц при заданной нагрузке и
при согласованной нагрузке.
Решение. При согласованной на-
грузке в полосе пропускания от Л = 0 до
f2=2 кгц коэффициент затухания а=0 и,
следовательно, t/i = t/2. В полосе задержи-
вания затухание фильтра определяется
выражением (2-14)
ухудшается. При одинаковом напряжении
на входе Ui у двух фильтров — одного
с согласованной нагрузкой и другого
с несогласованной — напряжение на вы-
ходе U2 второго фильтра в полосе пропу-
скания меньше, а в полосе задерживания —
больше.
Пример 2-5. Определить, при какой ча-
стоте полосы задерживания Т-образного
низкочастотного фильтра типа k характе-
ристическое сопротивление по модулю рав-
но параметру k — УЬ/С. Найти: а) зату-
хание фильтра при этой частоте и б) ча-
стоту, начиная с которой затухание фильт-
ра больше 2,2 неп.
Решение. Для низкочастотного Т-об-
разного фильтра по формуле (2-17)
/ СО \2
а) Очевидно, что zT — k при — ) =2,
1 \ СО2 J
т. е. со = )/"2(о2. На этой частоте затухание
фильтра определим по формуле (2-14)
а
Chy =
и, V3J г
ch ~о~~ — 2 и а = 1,76 неп.
z со2
и связь напряжений — формулами
б) При a — 2,2 неп ch-^-=1,67, t. e.
« и. иг
а-т-тт- или -тг — еа.
и 2 С/2
При постоянном сопротивлении нагруз-
ки расчет нужно выполнить по уравнениям,
связывающим режим на входе и выходе
любого симметричного четырехполюсника,
например по первому уравнению с гипер-
болическими функциями
U\ = U2 ch g 12ZC sh g,
л>2,2 неп для co >1,67 co2.
2-6. ВЫСОКОЧАСТОТНЫЙ,
ПОЛОСОВОЙ И ЗАГРАЖДАЮЩИЙ
ФИЛЬТРЫ
На рис. 2-10 показаны Т- и П-об-
разная схемы фильтра, у которого
Z± — — i~^C’ Z,z=jwL. Условия (2-5)
54
Рис. 2-10.
0,1 5мкф 0,15мпф
5/,
(5—II----I -|f—g
0,15мкф 0,15мпф
Рис. 2-12.
(2-4) определяют граничные ча-
стоты. При 1/<оС = 4а>£ получаем
граничную частоту (n—cn^l/2 ]/£С,
при 1 /шС — 0 граничная частота ф =
•— о)2 = оо. Следовательно, фильтр
пропускает полосу частот от
1/2|/ЬСдооо и называется высоко-
частотным фильтром типа k
^(ZjZa = L]C = k2). Частотные зави-
симости а (с»), 6 (ад), Zt(co) и Zn(<o)
рассчитываются тем же методом,
что и для низкочастотного фильтра.
Юни приведены на рис. 2-11,а рас-
четные формулы — в табл. 2-1.
Высокочастотные фильтры при-
меняются, например, для подавле-
ния фона 50 или 100 гц, который
создают выпрямители, и пропуска-
ния более высоких звуковых частот.
Пример 2-6. В системе связи по рас-
пределительным электрическим сетям пе-
редающую и приемную аппаратуру защи-
щают от напряжения сети 500 в уравно-
вешенным Т-образным высокочастотным
«фильтром типа k. Емкость каждого кон-
..денсатора фильтра 4С=0,45 мкф, харак-
теристическое сопротивление с увеличени-
ем частоты приближается к значению
600 ом.
Найти граничную частоту фильтра.
Определить напряжение сети на выходе
фильтра, считая нагрузку согласованной.
Решение. Прежде всего составим
схему фильтра и рассчитаем индуктивность
L. Уравновешенная Т-образная схема по-
казана на рис. 2-12. При увеличении ча-
стоты характеристическое сопротивление
фильтра приближается к величине пара-
метра k (рис. 2-Ф1). Следовательно, k=
—У L/C=600, откуда £=113 мгн. Гранич-
ная частота высокочастотного фильтр-а
1
•и по табл. 2-il при
сети f=50 гц
t а fl
chy = -у- = 72;
При согласованной
•или Ur=Ui е~а=500-
' = 3,6 кгц,
частоте напряжения
я — 8,94 неп.
нагрузке а=1п -щ
1,44 • 10~4=72 мв.
На практике чаще требуются не
низкочастотные и высокочастотные
фильтры, а полосовые, пропус-
кающие полосу частот от coq=0=O
до со25^ °°. Особенно много таких
фильтров содержат установки для
передачи сигналов нескольких гене-
раторов, когда каждый сигнал дол-
жен быть принят одним приемником
(многоканальная связь).
Полосовой Т- или П-образный
фильтр типа k получается, если Zx
представляет собой входное сопро-
тивление последовательного конту-
ра Li, Ci, a Z2 — параллельного
контура Л2, С2, резонансные часто-
ты соо которых совпадают:
1______ 1
j/"£iCi ^£26*2
(2-19)
На рис. 2-13 показана Т-образная
схема такого фильтра, причем
Zi=/ (“Л— =
— ’ 1 /а2 1\.
(ОС1 ^2
v 1 _ — У<о£2
2 “ J (<*С2 - 1/<о£2) “ со*/*,2 1 ’
а параметр ^2=Z1Z2 = L2/C’i или,
с учетом равенства LlCi = L2C2,
&=ЩС2.
55
Таблица 2-1
Коэффи- циент за- тухания Коэффи- циент фазь Характеристическое сопротивление Параметры
Г <2 |<М О и см е сч д=4 ^/2 с = — где k^VL/C
cos b — 1 — уСЕ 1
fl/f 1 ' 8rc2LCf2 1 — L ~ 4nf, с = -^- G 4nfiZ? ’ где fe = /Z7c'
II « |сч о II со о О /А L v с /1 - ff/f2
-.. w
Название
Схема
Полоса пропускания
Полосовой
/1,2 — fo (Г"Л“ “F 1 + п)
f =_______U=-
'• 2it/£iCi
1
fo= Зи/ДС?
L2 Ci
п2-ГГсГ
h=VfJ7
сл
Заграждаю-
щий
с’/1
f 2 < f < С»
fl,2 =
=^- (Г16П2 + 1 т 1)
f =________!_=
/0 2^J/'L1C1
_ 1
2rc j/'L2C2
fo = Vflf2
-.1 I >.ш дадам ..jjwul .1 г .
\ ”
Продолжение табл. 2-1
Коэффи- циент за- тухания Коэффи- циент фазы Характеристическое сопротивление Параметры
<М
л-«(/2-Л)
г LlzlL
Cl~4rtf2M
Ls" 4^2fx
r ____!___
С2“"(?2-Ш ’
где
k —. У LdC i
41 - ^xf2
1
C1=4^(f2-f>)
L _______A____
Г
C-2= „A(f2_fl) >
где
k = VLjC~2
Li/2 2С1 2^ Ltf2
Рис. 2-13.
т. e. граничные частоты удовлетво-
ряют выражению
ш = ±/г«)0±|/ 7Z2CDo+a)^
Физический смысл имеют только по-
ложительные частоты
1 —п);
На любой частоте сопротивления
Z\ и Z2 имеют различный характер:
если Zi — емкостное сопротивление,
то Z2 — индуктивное и наоборот.
Этот же вывод нетрудно сделать,
рассматривая частотные харак-
теристики Zi(co) и Z2(co<), которые
показаны на рис. 5-50 первой
части книги.
Можно построить множество по-
лосовых фильтров типа k с одним и
тем же значением резонансной ча-
стоты *соо, изменяя отношение
Х2/Л1=|С1/С2=п2. От величины п,
как сейчас будет показано, зависит
полоса пропускания фильтра.
Запишем условие (2-5) для поло-
сового фильтра:
1
coCi
=4оЛ2
1
1<О2/(о2 —1|
ИЛИ
(<о2/<о* — 1)2 = 4ш212С1
И
((В2 ---оф2 =
Извлекая квадратный корень, полу-
чим уравнение для граничных ча-
стот:
= % (Vп2 + 1 + я), (2-20)
причем
<1)^2 = 0)2
или
= (2-21)
Условие (2-4) ^ = 0, т. е.
со<Л—1/соС1=0, дает частоту со — сою.
Но coo здесь не является граничной
частотой; как следует из выражения
(2-21), частота соо находится внутри
полосы пропускания. Это значит,
что коэффициент фазы \Ь в полосе
пропускания изменяется не от зна-
чения 0 до я (рис. 2-5) или от —я
до 0 (рис. 2-11), а от —я до я,
проходя значение 0 при частоте о>о
(рис. 2-14,а). Из схемы рис. 2-13,
также ясно, что при частоте со = сою
наступает резонанс напряжений
в последовательных ветвях и резо-
нанс токов в параллельном контуре;
поэтому £72=iC7i, /2=/! или а=0 и
частота соо относится к полосе про-
пускания.
Частотные зависимости а(со«),
Zt(cd) и Zn (со.) показаны на
рис. 2-14. Расчетные формулы при-
ведены в табл. 2-1. Они выводятся
о2 2/г<о0со
2 П
Фо=0
тем же методом, что и для низко-
частотного фильтра.
Иногда ставится
задача: подавить один
или несколько сигна-
лов, занимающих
спектр частот от coi^O
до со2=7^=оо. Так, напри-
мер, может потребо-
ваться подавить сигна-
лы одной мощной тер-
риториально близко
р аоположенной р адио-
станции или напряже-
ние несущей частоты
своего генератора при
58
Рис. 2-115.
Рис. 2-17.
Рис. 2-16.
двухсторонней СВЯЗИ МО ПрОВОДНЫМ
линиям.
Фильтр, подавляющий сигналы со
спектром частот соа-ч-соз, называется
заграждающим (режектор-
ным). Анализ работы заграждаю-
щего фильтра выполняется так же,
как и полосового. На рис. 2-15 по-
казана П-образная схема заграж-
дающего фильтра типа k, а на
рис. 2-16 представлена зависимость
zz(co); в табл. 2-1 приведены расчет-
ные формулы.
Если из последовательного или
параллельного контура полосового
(либо заграждающего) фильтра
удалить индуктивность или емкость,
то также получится полосовой (за-
граждающий) фильтр, который, од-
нако, не относится к фильтрам
типа k (см. пример 2-1).
Пример 2-7. Рассчитать и построить
в полосе пропускания график (со) по-
лосового фильтра по 'рис. 2-2. Дано Ц =
==40 мгн, С1 = С2 = 0,25 мкф.
Решение. Характеристическое сопро-
тивление фильтра находим по формуле
(2-16) или после подстановки сопротив-
лений
График zn (со) в полосе пропускания
показан на рис. 2-117. На рисунке видно,
что характеристическое сопротивление
фильтра изменяется в очень широких пре-
делах. Поэтому для фильтра рис. 2-2 усло-
вия согласования с нагрузкой труднее вы-
полнить, чем для фильтров типа Л.
2-7. ПРОСТЕЙШИЕ
НЕСИММЕТРИЧНЫЕ ФИЛЬТРЫ
Простейшие несимметричные
фильтры, как и другие простейшие
несимметричные четырехполюсни-
ки, составляются по Г-обр азной
схеме (рис. 1-17). Простые рассуж-
дения позволяют сразу построить
частотные характеристики Г-образ-
ных фильтров.
В § 1-17 было показано, что Т-
и П-образные четырехполюсники
получаются при каскадном соеди-
нении двух одинаковых Г-образных.
В обоих случаях выполняется усло-
вие согласования. Поэтому полоса
пропускания Г-образного фильтра
совпадает с полосой пропускания
симметричной Т- или П-образной
схемы, а постоянная передачи вдвое
меньше. Г-образный фильтр несим-
метричен и имеет два характери-
стических сопротивления, причем
Zcl=Zn и Zc2=ZT. Схема одного из
Г-образных фильтров типа k, а имен-
но полосового, показана на рис. 2-18.
Несимметричные Г-образные
фильтры применяются в двух слу-
чаях. Во-первых, Г-образная схема
удобна, когда внутреннее сопротив-
ление источника питания Zr и со-
X]—/(со7^1—il/coCi) и Z2——
1
4
где
СО! =
со2
2^1 Li/2
Рис. 2-18.
59
противление приемника ZH неоди-
наковы. Если между такими источ-
ником и приемником включить сим-
метричный фильтр, то добиться со-
гласования и на выходе и на входе
нельзя. У несимметричного фильтра
можно выбрать Zci=Zr и Zc2=ZH,
т. е. получить одновременно согла-
сование на входе и выходе. Во-вто-
рых, коэффициент затухания цепоч-
ки, состоящей из нескольких Т- или
П-образных звеньев, может быть
больше, чем минимально допусти-
мый у данной аппаратуры. Тогда
для сокращения числа конденсато-
ров и катушек, из которых собрана
цепочка, одно звено заменяют Г-
образным фильтром. Особенно ча-
сто применяется Г-образная схема
при каскадном соединении фильтров
различного типа (не только фильт-
ров типа k),
2-8. ФИЛЬТРЫ ТИПА Ш
Все фильтры типа k имеют два
существенных недостатка. Как
видно из рис. 2-6, 2-11, 2-14,6, ха-
рактеристические сопротивления в
полосе пропускания значительно из-
меняются (от величины, равной k,
до 0 или оо), что очень затрудняет
согласование нагрузки. Коэффи-
циент затухания фильтров типа k
растет медленно (рис. 2-5, 2-11,
2-14,а), особенно в диапазоне частот,
примыкающем к границам полосы
пропускания. Поэтому возникает
задача: так преобразовать схемы
фильтров, чтобы в некоторой сте-
пени устранить недостатки фильт-
ров типа k.
Рассмотрим решение этой задачи
для Г-образной схемы (Т- и П-об-
разные схемы, как уже известно, не
отличаются по виду частотных ха-
рактеристик от Г-образной). Один
из путей решения задачи сводится
к изменению величины сопротивле-
ний Zi и Z2. Такой Г-образкый че-
тырехполюсник с новыми значения-
ми продольного Z17n и поперечного
сопротивлений показан на
рис. 2-19.
Изменим величину продольного
сопротивления, полагая, что
Ziw=mZi, (2-22)
где 0<т<1.
Zfm/2
~*—Z7
----------0
Рис. 2-:19.
Величину поперечного сопротивле-
ния выберем так, чтобы одно из
хар актеристических сопротивлений
нового фильтра, а именно Zc2=ZTw,
осталось прежним и равным харак-
теристическому сопротивлению Т-
образного фильтра типа k, т. е.
/Т„ = 2Т. (2-23)
Это дополнительное условие воз-
никло не случайно. Как будет ясно
из дальнейшего, каскадные соеди-
нения собирают из фильтров типа k
и нового типа, которые называют
фильтрами типа т. Фильтры
типа т с Zc2=ZTw=ZT можно
включать каскадно совместно
с фильтрами типа k по принципу
согласования, что очень важно для
нормальной работы всего тракта
передачи сигналов.
Из условия (2-23) найдем величи-
ну сопротивления Z2w. Перепишем
это условие в развернутом виде
(см. 2-15):
откуда
Z — 4-(2-24)
Полученная схема называется по-
следовательно - производ-
ной типа т (продольное сопротив-
ление изменили в т раз).
Для расчета частотных характе-
ристик фильтра типа т пригодны
все формулы, выведенные в пред-
положении, что фильтр собран по
Т-, П- или Г-образной схеме. Пока-
жем порядок расчета на примере
низкочастотного фильтра.
60
mL/Z
Рис. 2-20.
Схема низкочастотного Г-образ-
ного фильтра типа т приведена на
рис. 2-20, где
¥ = '”4:
2Zam = — j (- /и —
Границы полосы пропускания нахо-
дим из условий г1ТО = 0, откуда
<О = (1)1 = о, И Zjm = 4z2m, или wmL —
4 1 —rr? Т I
= —-----------cnL , откуда о) = cd =
шпС m I
— Z^LC. Таким образом, полоса
пропускания фильтра типа т совпа-
дает с полосой пропускания фильтра
типа k.
Коэффициент затухания в полосе
задерживания <о>со2 (см. 2-11)
• (2-25)
Отсюда следует, что при частоте,
определяемой из выражения
Л 1 ____fvZ
—тг=-------т. е. при со —
<ыпС т ’ г оо
(О2
т. е.
=^==-, коэффициент затухания
становится бесконечно большим. Из
схемы рис. 2-20 также ясно, что при
частоте резонанса в поперечной вет-
ви ток в сопротивлении нагрузки
отсутствует.
Зависимости бх(о) при различных
значениях т показаны на рис. 2-21*.
Чем меньше т, тем резче нарастает
* При 6)><0оо сопротивления и
имеют одинаковые знаки. Поэтому,
как показано в § 2-3, по формуле (2-25)
определяется не ch а/2, a sh я/2.
затухание вблизи граничной часто-
ты, но в области частот > сооо
коэффициент затухания получается
тем меньше. При т= 1 фильтр типа
т превращается в фильтр типа k.
Характеристическое сопротивле-
ние фильтра типа т со стороны
первичных за.жимов, как и для Г-
или П-образных схем, рассчитывает-
ся по формуле (см. табл. 1-2)
Zn« — /Zimz2m + Zim/4Z2m>
где вместо Z2 и Z2 соотвественно
подставлены Zim и Z2W. Кривые
Znm(<n) низкочастотного фильтра при
различных значениях т показаны на
рис. 2-22. При пъ 0,6 сопротивле-
ние Znm отличается от значения
k = ]/rL]C fie более чем на 5% в диа-
пазоне частот от 0 до 0,88cd2. Это
значит, что в большей части полосы
пропускания можно получить режим
работы фильтра, близкий к режиму
согласованной нагрузки.
Частотные характеристики фильт-
ра полностью определяются вы-
бранными или заданными значения-
ми индуктивности L, емкости С
и параметра т.
Аналогично составляются схемы
и анализируются другие последо-
вательно-производные фильтры: вы-
сокочастотные, полосовые, заграж-
дающие.
61
б)
Рис. 2-23.
Как указывалось, фильтры типа
т соединяют каскадно с фильтрами
типа k по принципу согласования.
Звенья типа т повышают затуха-
ние схемы вблизи граничных частот.
Звенья типа k обеспечивают боль-
шое затухание на других частотах
полосы задерживания.
•Выполнение принципа согласования
можно, 'например, проследить у фильтра
К-77 аппаратуры телефонирования по воз-
душным линиям связи типа В-42 ('12 ка-
налов). Схема фильтра и зависимость за-
тухания от частоты показаны на рис. 2-23,а
и 2-24. В названии фильтра буква К озна-
чает, что фильтр конденсаторный, т. е. вы-
сокочастотный, цифра 77 определяет гра-
ничную частоту fi=77 кгц.
Фильтр К-77 составлен из каскадно-
соединенных Г-образного последовательно-
производного полузвена типа т (рис.
2-23,6), Т-образного звена типа k и еще
одного Г-образного 1последовательно-произ-
водного полузвена типа т. При сборке
фильтра последовательное соединение кон-
денсаторов CZ2 и С"2, а также С'4 и С"4
заменено эквивалентными:
С'2С"2 С'4С"4
~C'S + C"2 и С4-С'4+С"4'
противление Ztw=^t, то
условие согласованного включе-
ния выполняется. Резкий подъ-
ем кривой затухания (теоре-
тически до бесконечно большо-
го значения) при частоте око-
ло 55 кгц обеспечивается по-
лузвеньями типа т.
Можно схему фильтра со-
брать в другом порядке: сна-
чала Г-образное полузвено*
типа k, затем Т-образное зве-
но типа т и в конце опять
Г-образное полузвено типа Л;
тогда условие согласования
также будет выполнено. Одна-
ко характеристическое сопро-
тивление соединения вместо
Znm станет равным Zn, т. е.
соединение потеряет одно из
основных преимуществ фильт-
ров типа т — лучшую частот-
ную зависимость характери-
стического сопротивления от частоты.
Если поставить условие ZC1 —
= ^nm = ^n’ а ^С2 = и вы-
брать Z2m = Z2//77, то получаются так
называемые параллельно-про-
изводные фильтры типа т. У
них также есть частота бесконечно
большого затухания, но мало изме-
няется в полосе пропускания не ха-
рактеристическое сопротивление ZC1,
а характеристическое сопротивление
ZC2.
Еще более сложные схемы имеют
фильтры с двумя и большим числом
частот бесконечно большего затуха-
ния. Так как такие фильтры содер-
жат много катушек и конденсато-
ров, то их применяют редко. Веско-'
Так как у последовательно-производных
фильтров типа т характеристическое со-
Рис. 2-24.
Рис. 2-25.
62
нечно большое затухание на не-
скольких частотах практически
обеспечивают каскадным соедине-
нием фильтров с различными зна-
чениями параметра т отдельных
звеньев.
Так, .например, фильтр Д-200 (дрос-
сельный, т. е. (низкочастотный) аппарату-
ры В-112 имеет три частоты теоретически
бесконечно большого затухания (рис. 2-25).
Фильтр состоит из двух последовательно-
производных П-образных звеньев и одного
Г-образного полузвена типа т, Г-образно-
го полузвена типа k и параллельно-произ-
водного Г-образного полузвена типа т.
Характеристическое сопротивление
2-9. ФИЛЬТРЫ — ИНДУКТИВНО
СВЯЗАННЫЕ КОНТУРЫ
На рис. 2-26 показаны два последова-
тельные индуктивно связанные контура,
Такие контуры применяются в радиоап-
паратуре, при передаче сигналов телеизме-
рения и телеуправления по линиям элек-
тропередачи и .в других установках в ка-
честве полосовых фильтров. В отличие от
других типов полосовых фильтров они
устраняют гальваническую связь первичной
•и вторичной цепей.
Предположим для упрощения анализа,
что контуры одинаковы, и обозначим =
= L>2 = Cl = С2 %С; Zi = Zg ==
= j (aL — ZM = jtoM; w0 = l/yTC-
Характеристическое сопротивление фильт-
ра найдем по формуле Zc = j2zKZXj а по-
стоянную передачи — из выражения chg =
= А.
При холостом ходе
t7ix = /ixZi/2; 0 =— Ах/дд ф- ^2х,
откуда t/ix = ^2x71/27^ или
X-chg^ol1-. (2-26)
7с = Г2к2х = 1/ ^_-z2(/(2-27)
Найдем полосу пропускания фильтра из-
выражения (2-26)
ch g = ch а ♦ cos b ф- j sh a * sin b —
j (g>L — 1 /coC) __ co/,— 1/coC
j2<nM ktoL ’
где k —
M
уцц
2M
L *
В полосе пропускания a = 0, т. e. shzz=O,.
ch a = 1 и
col — 1/coC
cos6=—kml—•
Косинус изменяется в пределах^от —1 до-
ф-1. Предельные значения определяют гра-
ничные частоты. При cos b =—1 находим,,
что
(О = «! = = > 0; [ (2-28У
при cos b = ф- 1 получаем:
со = со2
«О
Входное сопротивление Zx = Zi/2.
При коротком замыкании
U 1к = i ikZi/2 ^2kZ^ •
о — — Ii2к ^*/2,
У*1 — k
(2-29)
т. е. фильтр действительно полосовой.
В полосе задерживания a ф 0, т. е.
sh#^O. Но sh a -sin b = 0, так как
со/, — 1/соС
----------при любой частоте вещественное
число. Следовательно, sin 6 = 0, cos 6 =
= + 1 и
откуда
со/, — 1/соС
cha= ± kwL
(2-30)
Знак плюс относится к полосе частот со>
> со2, когда со/, > 1/соС, знак минус — к по-
лосе частот со <^ ©!, где со/, 1/соС (напом-
ним, что ch а всегда положителен). На
рис. 2-27 представлены графики а (со) и
6 (<>)•
По формуле (2-27) на рис. 2-28 постро-
ена зависимость Zc (со) в полосе пропуска-
ния. Наибольшее значение ZC = R =
63»
получается при частоте со' —
полагая, что фильтр собран из чисто
реактивных элементов, т. е.
^1-----Т- ^2 —— /^2*
В полосе пропускания
sha = 0, chа—\ и
cos 6 =
Z2 + Zx
z2 — Zi •
(2 = 0,
(2-34)
— Усохсоа. Изменяя коэффициент связи ка-
тушек k, можно получить фильтры с более
широкой и более узкой полосой пропуска-
ния. При малых значениях коэффициента
связи полоса пропускания пропорциональ-
на k.
Если заданы граничная частота сох (со2),
• частота <оо и параметр R, то расчет фильт-
ра выполняется по формулам
2
C6q k \
При различных параметрах первичного
и вторичного контуров получаются анало-
гичные результаты. Применяются и фильт-
ры с автотрансформаторной или емкост-
ной связью между контурами.
Фильтры, устанавливаемые в радиотех-
нической аппаратуре, работают при напря-
жениях порядка долей вольта и даже мил-
ливольта. .Поэтому их размеры невелики.
Эти фильтры помещаются в металлические
экраны диаметром и высотой порядка не-
скольких сантиметров. Фильтры, применяе-
мые для выделения сигналов телемехани-
ки и диспетчерской связи, которые пере-
даются по линиям высокого напряжения,
имеют очень внушительные размеры и вес.
Так, например, конденсатор фильтра
при передаче сигналов по линии электро-
передачи 400 кв весит около тонны, его
высота 1,4 м.
2-10. МОСТОВЫЕ ФИЛЬТРЫ
Фильтры типа т обеспечивают
бесконечно большое затухание на
одной или нескольких частотах. Та-
ких же результатов можно добить-
ся, применяя мостовые фильтры.
Характеристическое сопротивле-
ние и постоянная передачи симме-
тричного мостового четырехполюс-
ника (рис. 1-14,а) были уже най-
дены в § 1-14:
ZC = VZ^, (2-32)
ch^* = cha-cos& + /sha-sin& =
__ Z2 + Zj
Z2 — Z1 •
Найдем прежде всего полосу про-
пускания мостового фильтра, пред-
64
Так как cos b не может быть боль-
ше 1, то в полосе пропускания ре-
активные сопротивления Zr и Z2 дол-
жны иметь различные знаки: если
Zx = /Zx — индуктивное, то Z2 =
=— /z2— емкостное, и наоборот. Гра-
ничные частоты полосы пропускания
получаются при крайних значениях
косинуса: cos 6 = 4-1 и cos 6 =—1
или при
гх = 0 и г2 = 0. (2-35)
В полосе задерживания а=^=0, sha=^=
0. Но правая часть выражения
(2-33)—вещественное число, поэтому
sh#-sin6 = 0 или sin& = 0 hcos& =
= ±1. Коэффициент затухания
определяется из формулы
^2 - /<1
Так как cha^l, то в полосе задер-
живания знаки Zx и Z2 должны быть
одинаковы, т. е. сопротивления оба
индуктивные или оба емкостные,
Z^/?!, Z2 = /z2 или Zj = —/X,
Z2 = —/X и
ch а =
~2 Ч~ ~1
г2 — 21
(2-36)
Затухание бесконечно велико на тех
частотах, при которых z2=zb
Итак, полоса пропускания фильт-
ра совпадает с диапазоном частот,
где сопротивления Zx и Z2 различны
по знаку.
Простейший мостовой четырехпо-
люсник получается, если Zx = и
Z2 =— j или наоборот (рис. 2-29).
Однако у этих четырехполюсников
сопротивления Zx и Z2 различны по
знаку при любой частоте. Значит,
такие четырехполюсники не явля-
ются фильтрами, так как они про-
пускают сигналы всех частот без за-
Рис. 2’29.
тухания. Схемы рис. 2-29 и анало-
гичные, состоящие из большего
числа элементов, применяются как
четырехполюсники, корректирую-
щие фазовую характеристику трак-
та передачи сигналов.
Пример 2-8. Построить фазовую харак-
теристику четырехполюсника (рис. 2-29,6).
Решение. Коэффициент фазы опре-
деляется из выражения (2-34)
caL — 1/соС
cos 6 = <•>/. 4- 1/<оС ‘
При со = О получаем cos b —— 1, b =— 180°;
при со = со0 = \1УLC имеем cos& = 0 и
6 =— 90°, при со —» со получаем cos b —> 1
и Ь—>0 (здесь выбрано отрицательное зна-
чение коэффициента фазы, чтобы получить
db/d<& > 0). Зависимость b (со) построена
на рис. 2-30.
Рис. 2-30.
Для этого в общей системе коорди-
нат нужно построить частотные ха-
рактеристики реактивных сопротив-
лений, т. е. для фильтра рис. 2-31
сопротивлений и х2=
= соД2—1/соС2 (рис. 2-32). В диапа-
зоне частот 0-ьсо2 сопротивления
Xf и х2 имеют различные знаки, т. е.
фильтр пропускает.
Коэффициент затухания фильтра
рассчитаем по формуле (2-36)
ch а —
22 ^1
22 —21
соГ2 — 1/(оС*2 Ч~
соЛ2 — 1/<оС2 — соЛх
При о> = “00=1//Ц2 — Lt)C2 за-
тухание бесконечно велико. График
представлен на рис. 2-33. Точ-
ка бесконечного затухания у фильт-
ра отсутствует, если выбрать
Характеристическое сопротивление
фильтра
Zc = ГL.L, («I — <о2)
активное в полосе пропускания и
изменяется от значения /? = Zc(0) =
У мостового фильтра двухполюс-
ники Zx и Z2 должны состоять из
различного числа элементов (кату-
шек и конденсаторов) или при чис-
ле элементов более двух двухполюс-
ники должны иметь разные резо-
нансные частоты. Например, можно
выбрать
Z: = jwL1; Z2 = / (o>L2 — 1/wCa).
Схема такого фильтра показана на
рис. 2-31.
Полоса пропускания определяется
условиями (2-35): <г1 = 0 или ш =
= «?х = 0 и г2 = 0 или со = со2 =
= 1/угЛ2С2. Следовательно, фильтр
по рис. 2-31 низкочастотный.
Полосы пропускания фильтров
можно определить и графически.
Щ ^со
Рис. 2-33.
5—434
65
CJ2
Рис. 2-34.
= j/"LrL^2 — VЦ]С2 при о) = 0 до О
При (D =0)2.
Выбирая значения индуктивно-
стей Lb L2 и емкости С2, можно
получить заданную полосу пропус-
кания фильтра (со2), бесконечно
большое затухание на одной из
частот (<0оо) и необходимую вели-
чину параметра 7?. Практически
мостовые фильтры чаще выполня-
ют по дифференциально-мостовой
схеме.
Пример 2-9. Составить дифференциаль-
но-мостовую схему для низкочастотного
мостового фильтра, показанного на рис. 2-31.
Выяснить, как будут отличаться характе-
ристические сопротивления дифференциаль-
но-мостового фильтра со стороны первич-
ных и вторичных зажимов, если коэффи-
циент трансформации выбрать равным не
V2, a V4.
Решение. Схема дифференциально-
мостового фильтра показана на рис. 2-34.
При уменьшении коэффициента транс-
. формации вдвое характеристическое сопро-
тивление Zci станет в 4 раза меньше Zc2,
так как входное сопротивление идеально-
го трансформатора пропорционально квад-
рату коэффициента трансформации.
2-11. ЭЛЕКТРОМЕХАНИЧЕСКИЕ
И БЕЗЫНДУКЦИОННЫЕ ФИЛЬТРЫ
При одновременной и независи-
мой передаче сигналов от несколь-
ких генераторов к нескольким при-
емникам (многоканальная связь)
выделяемые полосы частот для от-
дельных сигналов обычно относи-
тельно узкие и близко примыкают
друг к другу. Так, например, в ти-
повой аппаратуре для междугород-
ной телефонной связи в диапазоне
частот от 92 до 140 кгц размещается
12 каналов одного направления. На
каждый канал отводится полоса
частот 3,1 кгц и между соседними
каналами остается защитная полоса
частот 900 гц. Для устранения вза-
имных помех фильтры, выделяю-
щие сигналы каждого канала, долж-
ны иметь резко возрастающую
у граничной, частоты зависимость
а (со), или, как говорят, крутой срез.
В полосе 900 гц, составляющей
в относительных единицах менее
1 % от частот сигналов (92—
140 кгц), затухание должно возра-
сти примерно на 6 неп. Такой кру-
той срез удается получить у фильт-
ров с пьезокристаллами, например
с кварцевыми резонаторами.
Кварцевая пластинка резонатора
зажимается между двумя металли-
ческими пластинками или две ее
стороны металлизируются. Как и
всякое твердое тело, она обладает
упругостью и инерцией, а следова-
тельно, имеет собственную частоту
колебаний. Если частота приложен-
ного напряжения совпадает с соб-
ственной частотой пластинки, на-
ступает резонанс. В общем случае
резонанс возникает на нескольких
частотах, но при определенном спо-
собе выреза пластины из кристалла
кварца преобладает резонанс на
одной частоте.
Электрическая схема замещения
такой пластины состоит из последо-
вательно включенных индуктивно-
сти L и емкости С. Активным со-
противлением в схеме замещения
можно пренебречь, так как доброт-
ность последовательного контура L„
С достигает 10 000 и более. Вели-
чины индуктивности L и емкости С
зависят от размеров пластины и ее
пьезоэлектрических свойств. /Метал-
лические электроды резонатора
образуют конденсатор . с емкостью-
Со, диэлектриком которого являет-
ся кварц.
Таким образом, схема замещения
кварцевого резонатора (двухполюс-
ник) состоит из трех элементов
(рис. 2-35,а). На рис. 2-35,6 показа-
на частотная характеристика реак-
тивного сопротивления этого двух-
полюсника. Частоты последователь-
66
Рис. 2-36.
Рис. 2-38.
ного и параллельного резонансов
очень близки, так как практически
емкость Со в 100 — 200 раз больше
емкости С.
Фильтры с кварцевыми резонато-
рами чаще всего выполняют по мо-
стовой или дифференциально-мосто-
вой схемам. На рис. 2-36 показана
мостовая схема, а на рис. 2-37 —
частотные характеристики реактив-
ных сопротивлений хДсо) и х2(о>) и
зависимость коэффициента затуха-
ния фильтра от частоты. Полоса про-
пускания, как и у всякого мостово-
го фильтра, получается в диапа-
z зоне частот, где’ хл и х2 имеют раз-
личные знаки. При Xi=x2 коэффи-
циент затухания а=оо. Из графи-
ков ясно, что в случае четырех оди-
наковых резонаторов (Zi=Z2) схема
теряет фильтрующие свойства (нет
диапазона частот, где знаки реак-
тивных сопротивлений различны).
Так как частоты последовательно-
го и параллельного резонансов
близки, то практически получается
полоса пропускания порядка 0,4%
от резонансной частоты. Для увели-
чения полосы пропускания последо-
вательно или параллельно резона-
торам включают катушки индуктив-
Рис. 2-37.
ности. Подключение емкости еще
больше сужает полосу пропускания.
Возможность получения быстрого
нарастания коэффициента затуха-
ния вблизи граничных частот иллю-
стрирует график зависимости рабо-
чего затухания от частоты, пред-
ставленный на рис. 2-38. Такую ча-
стотную характеристику имеет ши-
рокополосный кварцевый фильтр
(совместно с кварцевым корректо-
ром) аппаратуры для передачи про-
грамм вещания по линиям высоко-
частотного телефонирования. Прав-
да, для получения такого резкого
среза фильтр собирается из 4 мосто-
вых звеньев с дополнительными ка-
тушками индуктивности и конденса-
торами и всего содержит 16 кварце-
вых резонаторов, 16 катушек, 16
конденсаторов постоянной емкости
и 16 подстроечных полупеременных
конденсаторов. Для получения ста-
бильной частотной характеристики
фильтр помещен в герметически за-
крытый кожух, перед настройкой
его подвергают специальной темпе-
ратурной тренировке.
В последнее время выпускаются
резонаторы с искусственными пьезо-
электрическими кристаллами. В ап-
паратуре телемеханики и связи
применяются и магнитострикцион-
ные фильтры. Принцип их действия
основан на свойстве ферромагнит-
ных материалов совершать механи-
ческие колебания в переменном маг-
нитном поле.
Безындукционные фильтры, как
ясно из названия, не содержат ка-
тушек индуктивности. Их заменяют
активные сопротивления. Такие
фильтры чаще всего применяются
как низкочастотные с узкой полосой
пропускания и работают совместно
с ламповыми усилителями. Для
5
67
фильтров из чисто реактивных эле-
ментов в этом случае нужны очень
большие индуктивности, т. е. доро-
гие катушки, громоздкие и обла-
дающие малой добротностью.
Схема низкочастотного Г-образ-
ного безындукционного фильтра по-
казана на рис. 2-39,а. Рядом по-
строен график зависимости In U\IU2
от частоты, когда нагрузкой фильт-
ра служит входная цепь усилителя
с большим по сравнению с г вход-
ным сопротивлением. Конечно,
фильтр с активным сопротивлением
не имеет диапазона частот, в кото-
ром затухание отсутствует. Гранич-
ной частотой (Дгр полосы пропуска-
ния считают частоту, на которой
выполняется равенство >г=1/соС.
Из активных сопротивлений и
конденсаторов можно составить
также высокочастотные, полосовые
и заграждающие фильтры.
Глава третья
ДЛИННЫЕ ЛИНИИ
3-1. ВВЕДЕНИЕ
В предыдущих главах рассматри-
вались электрические цепи, которые
называют цепями с сосредото-
ченны ми параметрами.
При исследовании таких цепей
считают, что электрическое поле со-
средоточено только на отдельных
участках цепи, например в конден-
саторах. Эти участки были пред-
ставлены на схемах емкостями
(см. § 1-2 первой части книги).
Электрическое поле на участке цепи
не учитывалось, если оно не оказы-
вало существенного влияния на
распределение токов и напряжений.
Точно так же ранее были выделены
отдельные участки электрической
цепи, например катушки индуктив-
ности, трансформаторы, в которых
сосредоточено магнитное поле. Эти
участки на схемах изображались
индуктивностями. Наконец, участки
электрической цепи, в которых су-
щественное значение имеет необра-
тимое преобразование электромаг-
нитной (электрической) энергии в
тепловую, химическую или механи-
ческую, на схемах были представ-
лены сопротивлениями.
В электротехнике, однако, часто
приходится встречаться и с такими
электрическими цепями, в которых
нельзя выделить участки сосредото-
ченного электрического поля, маг-
68
нитного поля или необратимого пре-
образования электрической энергии.
Эти цепи называют цепями с рас-
пределенными параметр а-
м и, так как электрическое поле,
магнитное поле и потери энергии
распределены равномерно или не-
равномерно вдоль всех участков
цепи.
В цепях с распределенными пара-
метрами напряжения и токи раз-
личны не только на отдельных
участках, но и изменяются в пре-
делах каждого участка, т. е. зависят
от пространственной координаты
каждого участка. К цепям с рас-
пределенными параметрами отно-
сятся длинные линии электропере-
дачи, линии телеграфной и теле-
фонной связи, линии телеуправле-
ния и телеизмерения, антенны ра-
диопередатчиков и радиоприемни-
ков, обмотки электрических машин
и трансформаторов, линии для фор-
мирования коротких импульсов, ли-
нии — элементы настройки конту-
ров, линии — фильтры, линии —
трансформаторы и др.
3-2. ЛИНИИ ПЕРЕДАЧИ
Среди цепей с распределенными
параметрами главное значение име-
ют линии передачи, изучению
процессов в которых и будут посвя-
щены первые параграфы этой
главы.
По своему назначению все линии
передачи можно разделить на две
группы. Линии передачи электриче-
ской энергии (электропередачи) со-
единяют электрические станции и
подстанции с потребителями элек-
трической энергии — городами, за-
водами, шахтами, жилыми домами
и т. д. При проектировании, монта-
же и эксплуатации этих линий
стремятся обеспечить прежде всего
передачу электрической энергии
с достаточно малыми потерями, т. е.
с высоким к. п. д. Для передачи
энергии применяется либо перемен-
ный (синусоидальный) ток промыш-
ленной частоты (большей частью
50—60 гц), либо постоянный ток.
Телефонные и телеграфные линии
(линии электропроводной связи),
а также линии телеуправления, те-
леизмерения и сигнализации (линии
телемеханики) предназначены для
передачи информации (сообщений,
сведений) на большие расстояния
при помощи электрических сигна-
лов. Форма электрических сигналов
бывает самой разнообразной. Это
и импульсы постоянного тока раз-
личной длины (например точки и
тире азбуки Морзе), и модулирован-
ные по амплитуде синусоидальные
токи (междугородняя телефонная
связь), и импульсы синусоидального
тока различной частоты (сигналы
телеуправления). Линии передачи
информации должны быть выполне-
ны так, чтобы искажения переда-
ваемых сигналов не были слишком
велики. При заметных искажениях
сигнала теряется часть информации,
которую переносит сигнал. Задача
уменьшения потерь энергии переда-
ваемого сигнала, т. е. получения вы-
сокого к. п. д. линии, часто не ста-
вится. Но, если увеличить мощность
сигнала и правильно выбрать метод
передачи информации, т. е. вид сиг-
налов, то можно уменьшить иска-
жения.
а)
Рис. 3-1,
69
а) б)
Рис. 3-2.
По конструкции линии передачи
делятся на воздушные и кабельные.
Голые (без изоляции) провода воз-
душных линий подвешиваются при
помощи изоляторов к металличе-
ским или деревянным опорам (мач-
там, столбам). Два типа воздушных
линий показаны на рис. 3-1,а и б.
На рис. 3-1,а представлена трехфаз-
ная линия электропередачи высоко-
го напряжения с металлическими
мачтами (линейное напряжение
220 кв), на рис. 3-1,6 — линия теле-
фонной связи на деревянных стол-
бах с несколькими парами прово-
дов. Кабельные линии чаще про-
кладываются под землей или под
водой, но иногда и подвешивают на
опорах. Провода кабеля изолируют
и помещают в экранирующую и за-
щитную металлическую оболочку.
Для передачи электрической энер-
гии при высоком напряжении при-
меняют трехфазные кабели с тремя
изолированными проводами — жи-
лами. Сигналы с частотами до 150—
200 кгц передают по симметричным
кабелям с одной или несколькими
парами жил (рис. 3-2,а), а сигналы
очень высоких частот, например те-
левизионные (до 7 7Игг{), — по коак-
сиальным кабелям (рис. 3-2,6), в
которых одним проводом линии слу-
жит центральная жила, а другим —
оболочка.
3-3. УПРОЩЕННАЯ ТЕОРИЯ
Так как электрическое и магнит-
ное поле линии распределено меж-
ду проводами и внутри проводов, то
для исследования процессов в ли-
ниях передачи необходимо, строго
говоря, пользоваться не теорией
электрических цепей, а теорией элек-
тромагнитного поля. Передачу элек-
трической энергии или сигналов
следует рассматривать как рас-
пространение электромагнитных
волн с различными значениями на-
пряженностей электрического и маг-
нитного полей в отдельных точках
поперечного сечения ли-
нии и учитывать конеч-
ную скорость движения
волн.
•С точки зрения теории
поля линия .передачи —
это направляющая система, кото-
рая 'обеспечивает передачу энергии
электромагнитных волн в заданном
направлении. Основной поток энер-
гии передается вдоль линии между
ее проводами в диэлектрической
среде, а часть энергии проникает
в провода. Обычно только неболь-
шая доля энергии преобразуется
в тепло *в проводах и несовершен-
ном диэлектрике.
Исследование процессов в линиях
методами теории электромагнитно-
го поля — достаточно сложная за-
дача. Такие задачи будут рассмот-
рены в третьей части книги. В этой
главе изложена упрощенная теория
длинных линий. Упрощенная теория
не затрагивает исследования элек-
тромагнитного поля между прово-
дами и в проводах, а основывается
на уже известных понятиях о на-
пряжениях, токах, сопротивлениях,
индуктивностях и емкостях.
Применение упрощенной теории
возможно, когда расстояние между
проводами линии много меньше
длины волны электромагнитных ко-
лебаний между проводами. Выводы
упрощенной теории практически
оказываются достаточными для про-
ектирования и эксплуатации линий.
Эти выводы дополняются и уточня-
ются экспериментальными данными.
Для исследования процессов в ли-
нии введем дополнительное условие
о равномерном распределении вдоль
линии ее параметров: индуктивно-
сти, емкости, сопротивления, а так-
же активной проводимости между
проводами. Такую линию назовем
однородной. Линию с неравно-
мерным распределением параметров
можно часто разбить на однородные
участки.
Рассмотрим двухпроводную од-
нородную линию.
Каждый элементарный участок
однородной линии длиной dx
(рис. 3-3,а) имеет индуктивность
Lodx, активное сопротивление rGdx,
70
Рис. 3-3.
’емкость CGdx и активную проводи-
мость g$dx. Здесь Lo, Со, и g0—
параметры однородной линии на
.единицу ее длины, которые назы-
вают первичными парамет-
рами.
Линия, разделенная на элемен-
тарные участки, как бы заменяется
цепочкой из бесконечно большого
числа элементарных Г-образных
полузвеньев (рис. 3-3,6). Каждое
звено эквивалентно участку линии
длиною dx.
Линию можно конечно предста-
вить и состоящей из бесконечно
большого числа Т- или П-образных
симметричных звеньев. А в целом
относительно входных и выходных
зажимов однородную линию можно
рассматривать как симметричный
’четырехполюсник.
3-4. ДИФФЕРЕНЦИАЛЬНЫЕ
УРАВНЕНИЯ ОДНОРОДНОЙ ЛИНИИ
Исследование электрических про-
цессов в линии начнем с расчета
распределения вдоль линии тока i
в проводах и напряжения и между
проводами в любой момент време-
ни t. Первичные параметры будем
считать известными и постоянными.
В действительности параметры линии
ле остаются постоянными. Так, с течением
времени стареет изоляция кабеля -и изме-
няется емкость Со; во время дождя уве-
.личивается проводимость между провода-
ми go воздушной линии; tc ростом тем-
пературы увеличивается сопротивление го’,
при высоких напряжениях возникает коро-
на (тихий разряд у поверхности проводов),
•увеличивающая проводимость go, и т. д.
Кроме того, все параметры линии зависят
от частоты тока. Расчет первичных пара-
метров можно выполнить почти всегда
только методами теорий поля. Некоторые
примеры таких расчетов приводятся
в третьей части книги, посвященной теории
электромагнитного поля.
Найти распределение тока и на-
пряжения вдоль линии — это. значит
составить зависимости i(x, t) и
и(х, I), где х — координата попе-
речного сечения или, как говорят
короче, точки линии. Координату х
отсчитывают от начала линии, кон-
ца линии или любой другой выбран-
ной точки линии.
Будем считать началом однород-
ной линии точку подключения гене-
ратора (источника питания), а кон-
цом — точку подключения приемни-
ка (сопротивления нагрузки). Сна-
чала предположим, что линия не
имеет ответвлений или приемников,
подключенных не в конце линии;
в конце линии могут быть подклю-
чены параллельно и несколько при-
емников. За точку начала отсчета
координаты х выберем начало
линии.
Составим дифференциальные
уравнения, связывающие ток и на-
пряжение в любой точке линии
(рис. 3-3,а) или в любом Г-образ-
ном звене эквивалентной схемы
(рис. 3-3,6).
Обозначим напряжение и ток в
начале элементарного участка и и z,
ди л . . ди
а в конце и i-]~^-dx.
о л и л
Разность напряжений в начале и кон-
це участка равна сумме падений на-
пряжения на активном сопротивлении
и индуктивности, т. е.
—dx = (r0 dx) i + (Lo dx) .
Изменение тока на участке равно
сумме утечек тока через активную
проводимость и емкость, т. е>
~^-dx = (g0 dx) и + (Со dx)
Частные производные в этих урав-
нениях записаны потому, что ток и
напряжение, как уже указывалось,
являются функциями двух незави-
симых переменных: времени t и ко-
ординаты х.
71
Последние уравнения перепишем
в виде так называемых теле-
графных уравнений — исход-
ных уравнений при анализе про-
цессов в линиях:
(3-1)
Если за начало отсчета координаты х
принять конец линии, то получаются
аналогичные уравнения, но только
в левой части уравнений изменится
знак:
Совместное решение уравнений
(3-1) или (3-2) и дает искомые за-
висимости z = f(x, t) п и=и{х, t).
3-5. СИНУСОИДАЛЬНЫЕ
НАПРЯЖЕНИЕ И ТОК
При питании линии от источника
синусоидального напряжения (или
тока) с частотой f ток и напряжение
установившегося режима также из-
меняются синусоидально в любой
точке линии. В этом случае, как и
для цепей с сосредоточенными пара-
метрами, все расчеты значительно
упростятся, если применить симво-
лический метод.
Перепишем уравнения (3-1), за-
меняя мгновенные значения тока и
напряжения комплексными/(х) =/х,
U (х) = Ux или, короче, I и U, а опе-
рацию дифференцирования по вре-
мени— множителем /Ъ=/2лД
-^=rJ + LJ.i = Zj-,
где Zo и Yo — продольное сопротив-
ление и поперечная проводимость
единицы длины линии. В этих диф-
ференциальных уравнениях комплек-
сы U и 1, как и все комплексные
величины, введенные ранее, не яв-
ляются функциями времени t. Поэто-
му частные производные в левых
частях уравнения заменены полными.
Из системы уравнений (3-3) не-
трудно исключить либо ток, либо
напряжение и получить соответ-
ственно дифференциальное уравне-
ние для напряжения или тока. Ис-
ключим, например, ток /.
Дифференцируя первое уравнение
и подставляя значение dlfdx из
второго, найдем, что
или
= (3-4)
где
у=V ZX=/(Го+/ш4) (Яо+OQ-
(3-5>
Общее решение однородного ли-
нейного дифференциального урав-
нения второго порядка (3-4), как
известно, записывается в виде сум-
мы двух экспоненциальных (или
тригонометрических) функций:
О=Ахе тх + Детл:> (3-6>
где U — комплексное напряжение в
линий на расстоянии х от
ее начала,
у и —- у — корни характеристичес-
кого уравнения р2— у2=0г
Д к Л2 — постоянные интегрирова-
ния.
Комплексный ток можно теперь
найти прямо из первого уравнения
(3-3):
1=-
Zq ил Z0
или, подставляя значение у,
Комплексное выражение l/j/^-p-
зависит от первичных параметров
линии и имеет размерность сопро-
тивления (ом)\ обозначим его Zc и
назовем характеристическим
сопротивлением линии:
Zc = zce^ = Y
/Гд + /соД, .
Sa + jtoCa
(3-7)
72
Физический смысл сопротивления
Zc, а также коэффициента у будет
пояснен немного позже.
Итак, для тока получается зави-
симость
i = 4^e~'[x -ф-Л*. (3-8)
Постоянные интегрирования не-
трудно найти, если заданы два гра-
ничных условия, например напряже-
ние и ток в конце линии, ток в на-
чале линии и ток в конце линии, на-
пряжение в начале линии и ком-
плексное сопротивление нагрузки в
конце линии и т. д. Однако прежде
чем рассматривать режим линии
при различных граничных условиях,
выясним физический смысл полу-
ченных решений (3-6) и (3-8).
3-6. ПРЯМАЯ И ОБРАТНАЯ ВОЛНЫ
Для выяснения физического смыс-
ла слагающих напряжения в урав-
нении (3-6)
U^A.e-^ + A^
перейдем к мгновенному значению
и (х, /). При этом учтем, что и по-
стоянные интегрирования Д и Л2 —
комплексные числа
д — д . д д
xlj ZljCz 9 Zig Zlgtz.
и коэффициент у — также комплек-
сная величина
Y = V(ПМРП^+hC^= a-j- /₽.
(3-9)
Мгновенное значение напряжения
и(х, t) = и на расстоянии х от нача-
ла линии в момент времени t пред-
ставляется суммой двух слагаемых
и = Re [Д ^2e^e~axe~i?x ejat +
= е~ах cos (со/ — рх -ф-
4" А2т е х cos (со/ -|- fix -{- ф2)=
= wnp(x, t)A-uo6^(x, /). (3-10)
Напряжение прямой волны. На
рис. 3-4,<2 показаны графики перво-
го слагаемого напряжения цПр (а:, 0
для двух моментов времени /х и /2=
=Д4-А/:
^пр (а:, Л) = Агте ах cos (со/г — рх 4*
+ Ф1)>
^пр (a:, t2) = Aime~ax cos (<о/2 — рх 4*
+ ФО-
Как видно из последних выражений
и графиков, в моменты времени /19
/2 и любые другие первое слагаемое
напряжения в линии цпр представ-
ляет собой гармоническую функцию
координаты х. При этом амплитуда
косинусоиды А1ГПе~ах (пунктир на
рис. 3-4,а) не остается постоянной,
а уменьшается с ростом х, т. е.
амплитуда, наибольшая в начале ли-
нии, из-за потери энергии постепен-
но уменьшается к концу линии. В
начале линии амплитуда напряжения
^пр равна А1т.
В момент /х напряжение &пр (х, Д)
равно нулю в тех точках линии х3,
х2, х3, ... , где cos (со/х—Pa44i) = 0
или
co/i 441 — fix = kTt/2 (3-11)
при k = 1,2,3, ...
В момент /2 напряжение wnp(x, /2)
равно нулю в тех точках х\, х'2,
х'3, ... , где cos (со/2 — рх' 4- ф1) = 6
или
+ — fixr = kn/2. (3-12)
73
Поскольку то из сравнения
(3-11) и (3-12) следует, что xzi>xb
xz2>X2i • • •, как показано на рис. 3-4.
Таким образом, ипр— напряжение
волны, которая за время Д/=‘/2—ti
перемещается на расстояние Дх =
= Х\—Xi = Xf2—Х2 = х'з—Х3. . . В СТО-
РОНУ возрастающих значений х, т. е.
от начала к концу линии. Эту волну
назовем прямой.
Фазовая скорость и коэффициент
распространения. Фаза напряжения
волны (например нулевое значение)
определяется аргументом со/—|3х+'
+ф1 косинусоидальной функции.
При движении волны одна и та же
фаза наблюдается в точках, коор-
дината которых х становится все
больше (рис. 3-4,а). Через время А/
в момент времени <:£+Д/ та же фаза
со:/—рх+ф1 наблюдается в точке
с координатой х+Дх, т. е.
«со»/—fix Ч- ф i — о (t + Л/) —{3 (х + Д х) + ф 1
или
0 = —рДх.
Отсюда следует, что волна переме-
щается к концу линии со скоростью
dx о
(3-13)
которая называется фазовой
•скоростью волны.
Наибольшая скорость движения
волн получается в воздушной ли-
нии, потерями энергии в которой
можно пренебречь, v = c=
= 3-г05 км/сек (см. § 3-18). В воз-
душной линии с потерями фазовая
скорость меньше, но практически
близка к с. В кабеле без потерь
фазовая скорость значительно
меньше:
v = (3-14)
У ер.
где 8 и р, — диэлектрическая и маг-
нитная проницаемости кабеля.
В кабеле с потерями фазовая ско-
рость еще меньше.
Например, для линии электропередачи
высокого напряжения с параметрами Го=
= 0,08 ом/км, Lq=1,34 мгн/км, Со=
= 8,6-10-9 ф/км, ^о=3,75 • 10-8 jcum/km
при частоте 50 гц фазовая скорость рав-
на 2,94 • 105 км/сек-, воздушной линии
связи с параметрами го='17,1 ом/км, Lo=
74
= 1,86 мгн/км, Со—6,35 • 10~9 ф/км, gQ—
=7,6 • 10~6 сим!км при частоте высокоча-
стотной телефонной связи 150 кгц фазовая
скорость равна 2,90 • 105 км/сек-, для те-
левизионного коаксиального кабеля с поли-
этиленовой изоляцией на частотах телеви-
зионного сигнала 60—70 Мгц фазовая ско-
рость равна 1,93 -Ю5 км/сек.
Из выражений (3-10) и (3-13)
ясно выступает и физический смысл
вещественной а и мнимой р частей
комплекса у. Величина «а характе-
ризует быстроту изменения ампли-
туды волны при ее движении вдоль
линии. Ее называют коэффи-
циентом затухания. Величи-
на р показывает отличие фаз напря-
жения волны в различных точках
линии и называется коэффи-
циентом фазы. Комплексную
величину у называют коэффи-
циентом или постоянной
распространения (волны)’.
Если первичные параметры вычис-
лены на километр длины линии
(г0 в ом/км, Lq в гн/км, gQ в сим/км,
Со в ф/км), то а измеряется
в неп/км, а р в рад/км.
Обратная волна напряжения.
Амплитуда А27?геах второго слагае-
мого напряжения г/Обр (*, t) увели-
чивается с ростом координаты х,
т. е. эта амплитуда наибольшая
в конце линии. Фаза напряжения
определяется аргументом о/+₽х+
:+ф2- Так как перед вторым слагае-
мым аргумента (рх) стоит знак
плюс, а не минус, то волна с напря-
жением ^обр перемещается с той же
скоростью v в обратном направле-
нии, т. е. к началу линии (рис. 3-4, б).
Поэтому эту волну назовем обрат-
ной.
Прямую и обратную волны назы-
вают еще бегущими, чтобы под-
черкнуть движение волн вдоль ли-
нии.
Представление напряжения
и (х, /) в виде суммы прямой и
обратной волн означает, что поло-
жительные направления обоих на-
пряжений выбраны одинаково — от
первого провода ко второму, как и
напряжения и (рис. 3-3,а).
Наложение волн. Распределение
напряжения вдоль линии в любой
момент времени можно рассматри-
вать как результат наложения на*
пряжений двух волн—пря-
мой и обратной, перемеща-
ющихся вдоль линии в про-
тивоположных направлени-
ях с одинаковой фазовой
-скоростью v. Например,
трафик распределения на-
пряжения вдоль линии в
момент времени ti можно
построить суммированием
ординат кривых £/Пр(х, Л) и
(^обр (х, /1). Результат сум-
мирования представлен на
рис. 3-5 (это не косинусоида).
В любой точке линии напряжение
как прямой, так и обратной волн
изменяется по простому гармониче-
скому (косинусоидальному) закону
с частотой f или периодом T=l/f.
Например, в точке с координатой ха
Иир (ха, t) = Aime~aXa COS (at —
I — $xa + Ф1);
uo6p (xa, t) = A2me“Xa cos (at +
+ (3-15)
Амплитуды напряжений, как пря-
мой, так и обратной волн неодина-
ковы в различных точках (А1те и
А2теах), но в любой выбранной точке,
конечно, не изменяются с течением
времени. На рис. 3-6,а показаны
графики напряжений прямой и
обратной волн в точке с координа-
той ха. За начало отсчета времени
выбран момент, когда напряжение
прямой волны в точке ха макси-
мально.
Сумма простых гармонических
функций одинаковой частоты f
дает также простую гармоническую
функцию. Значит, напряжение
ц(х, /) в любой точке линии изме-
няется по гармоническому закону,
причем в различных точках линии
напряжение имеет раз-
личные амплитуды и
различные фазы. На-
пример, амплитуду
Um(xa) или действую-
щее значение U (ха) и
фазу можно найти
графическим суммиро-
ванием кривых ^цр(ха,
О И Цобр (Ха, /) на рис.
3-6,а или суммировани-
ем векторов, изобра-
жающих эти косинусоидальные
функции (рис. 3-6,6):
0 (Ха) = U (Ха) еЗФа = йпр (ха) +
+ # обр (ха) = + А^Ха-
На рис. 3-7 показано изменение
действующего значения напряже-
ния вдоль линии Практически,
в точках, где фазы напряжений
^пр(х) и ^обр(х) одинаковы, наблю-
даются максимумы -С7(х), а в точ-
ках, где их фазы противополож-
ны, — минимумы.
Токи прямой и обратной волн.
Ток в линии также можно предста-
вить в виде двух волн:
/ (%, /) =,/цр (X, /) ^обр (X, /), (3-16)
где, как следует из (3-8),
/пр (х, /) cos (со/ —
— ₽^+Ф1 —0); .(3-17)
/обрС*, t) = ^eaxcos(at-\-
+ рх + <|>2 —9).
Положительные направления то-
ков прямой и обратной волн раз-
личны. Положительное направление
75
Рис. 3-7.
тока /пр совпадает с положитель-
ным направлением тока i(x, t)=i
(рис. 3-3, а) — от начала линии
к концу, а ток гОбР имеет противопо-
ложное положительное направле-
ние— от конца линии к началу.
Поэтому ток в линии представлен
разностью токов прямой й обратной
волн.
Сравнивая последние выражения
с (3-Г5), замечаем, что график тока-
волны аналогичен графику напря-
жения волны.
Амплитуда тока волны отличает-
ся от амплитуды напряжения вол-
ны в zc раз. По фазе ток каждой
волны отстает от соответствующего
напряжения волны на угол 6.
В комплексной форме можно за-
писать
• 1
Т ___^ПР . Т V06p /о 1 Q\
7пр. 70бр = —. (3-10)
Следовательно, сопротивление Zc —
— — коэффициент пропорциона-
льности между напряжением и током
прямой или обратной волн. Отсюда
и его второе название — волновое
сопротивление.
Длина волны. Прямая и обрат-
ная волны кроме фазовой скорости
характеризуются еще длиной X.
Длиной волны X называется
расстояние между двумя точками
линии, в которых фазы волны в лю-
бой момент времени отличаются на
2л, например между двумя сосед-
ними нулевыми значениями с оди-
наковым знаком производной ди/дх
(рис. 3-4). Для момента времени
эти нулевые значения волны напря-
жения наблюдаются, например,
в точках %i, х3, х5 и т. д., т. е. х5—
—х3 = Х, х3—%i = X и т. д.
Длину волны % можно еще опре-
делить как путь, который проходит
волна за период Т изменения на-
пряжения или тока:
l = vT (3-19)
или, принимая во внимание (3-13),
Х = ^-Т=^-. (3-20)
Например, для воздушной линии
электропередачи (f=50 гц), считая
и = 3-105 км!сек, -получим
=6 000 км. Для воздушной-"линии,
которая соединяет радиопередат-
чик, работающий на частоте 30 Мгц,.
с антенной, длина волны %=10 м
и т. д.
В первом случае волнообразное
изменение тока и напряжения вдоль
линии можно заметить только
у высоковольтных линий длиною
в сотни километров. На более ко-
ротких линиях уложится, лишь не-
большая доля длины волны и вол-
нообразное изменение напряжения
и тока вдоль линии наблюдать
нельзя. Во втором случае уже при
расстоянии между антенной и пере-
датчиком в несколько десятков мет-
ров (как обычно и 'бывает) вдоль
соединяющей их линии укладывает-
ся несколько длин волн напряже-
ния и тока.
Мощность волны. Мощность
волны определяется так же, как
мощность в цепях с сосредоточен-
ными параметрами. Например, для-
прямой волны
$пр ^пр/ пр= Рпр /Qnp
= Uпр/пр cos 6 Д- jUпр/пр sinO
и
Рпр === /2пр^с == £Дпр/^С*
Конечно, при вычислении мощности
в линии нельзя суммировать мощ-
ности прямой и обратной волн.
Понятие о прямых и обратных
волнах, волновом сопротивлении и
постоянной распространения при-
менимы и к -симметричным трехфаз-
ным линиям. В этом случае первич-
ные параметры должны быть рас-
считаны на одну фазу, а под токами
и напряжениями волн надо пони-
мать фазные токи и напряжения.
3-7. ВТОРИЧНЫЕ ПАРАМЕТРЫ .
Свойства линии как устройства
для передачи энергии или информа-
ции вполне определяются двумя па-
76
Рис. 3-9.
раметрами: коэффициентом распро-
странения
Y = а + = V (/'o+/<u^o)feo + /“Со)
и характеристическим сопротивлени-
ем Zz—zcejQ=l/^. Эти вели-
F g0+ J<bCQ
чины зависят от первичных парамет-
ров линии r0, Zo, g0, Со и частоты
и называются вторичными па-
раметрами или волновыми
постоянными.
Для выяснения зависимости аир
от частоты выделим вещественную
и мнимую части комплексной вели-
чины V(г0 +'/^о) (£о + /^о)- После
преобразований получим:
—|—V(го (1)2Ьо) (go -р №)] ’ (3-21)
₽=/4ис0с 0- rogo+
4~ l^(d) 0)2 Lg) (go + ф2Со)] (3-22)
Считая по-прежнему первичные па-
раметры не зависящими от частоты,
построим зависимости а (со) и р (<в)
(рис. 3-8). Из рис. 3-8 и формул
(3-21) и (3-22) следует, что коэф-
фициент затухания увеличивается с
ростом частоты от значения
ао = )/Го^оПри ю = 0 до аоо =
=4/£+4/4пр“
Таким образом, волны разных частот
затухают в одной и той же. линии
по разному.1 Коэффициент фазы р
изменяется не пропорционально Час-
тоте, только в пределе при со -> сю
получаем р = ш]/£0С0. При этом сле-
дует подчеркнуть, что для высоких
частот зависимости рис. 3-8 имеют,
конечно, условный характер, так как
с ростом частоты остается все мень-
ше оснований считать первичные па-
раметры постоянными.
Фазовая скорость у = <о/р также
зависит от частоты напряжения и
тока и только при со -> оо получаем
Vqq = 1/ ]/L0C0= const. Изменение фа-
зовой скорости с ростом частоты
для различных типов воздушных ли-
ний показано на рис. 3-9.
Зависимость коэффициента зату-
хания а и коэффициента фазы р,
т. е. фазовой скорости vy от частоты
имеет очень большое практическое
значение. В линиях передачи ин-
формации, как указывалось, сигна-
лы (напряжения и токи) несинусо-
идальны и достаточно сложны по
форме. Дискретный или непрерыв-
ный спектр таких сигналов может
быть довольно широким. При пере-
даче сигналов волны отдельных
гармонических составляющих спек-
тра движутся по линии с разными
фазовыми скоростями и неодина-
ково затухают.
Например, при передаче периодической
последовательности импульсов с равной
длительностью ,посылок и пауз 112,5 мсек,
по воздушной линии хсвязи с параметрами
Lo—il,94 .мгн/км, Со—6,25 • 10~3 мкф/км,
г0—2,84 ом/км, go=O,7O • 10-6 сим/км фазо-
вая скорость первой гармоники (40 ги)
равна '1,85-105 км!сек и коэффициент за-
тухания 1,73 • 10~3 неп/км, а третьей гар-
моники (120 гц)—2,38-105 км/сек и
2,23-'10-3 неп/км.
В результате сигнал искажается:
форма принимаемого сигнала
(в конце линии) получается отлич-
ной от формы передаваемого сиг-
нала (в начале линии) {см. также
§ 1-20]. Поэтому в линиях передачи
77
информации приходится иногда
принимать специальные меры
к устранению искажений сигналов
(см. § 3-16).
В некоторых случаях передачи
сигналов фазовые искажения в пе-
редаваемой полосе частот практи-
чески не имеют значения. Так, на-
пример, опытным путем установле-
но, что фазовые искажения не
ухудшают качество телефонной свя-
зи. Поэтому к фазовым характери-
стикам линий и вообще каналов
телефонной связи (включающих
фильтры, усилители, трансформа-
торы и т. д.) не предъявляют жест-
ких требований. Фазовые искаже-
ния, как и амплитудные, не допу-
стимы 'во всех случаях, когда изме-
нение формы сигналов может при-
вести к потере части передаваемой
•информации.
Зависимость модуля zc и аргу-
мента 9 волнового сопротивления Zc
от частоты со показана на рис. 3-10.
При со = 0 (линия постоянного тока)
гс = гс (0) = V rQ/gQ, при (» -> оо име-
ем zc— zc (оо) = У воздуш-
ных линий модуль волнового сопро-
тивления обычно лежит в пределах
300—600 ом, у кабелей — в пределах
50—200 ом. Волновое сопротивление
увеличивается с ростом расстояния
между проводами и уменьшением
диаметра проводов (растет Lo, умень-
шается Со). У кабелей величина вол-
нового сопротивления зависит и от
рода изоляции.
Аргумент 9 = 0 при частотах со =
= 0 и со —> оо, а на всех других
частотах 0 0, так как у реальных
линий аргумент комплексной прово-
димости g0-[-j^C0 больше, чем ком-
плексного сопротивления Lr0-|-/coL0
или CJg^LJr*.
Пример 3-1. Первичные параметры воз-
душной линии с медными проводами диа-
78
метром 4 мм и расстоянием между про-
водами 20 см при частоте высокочастот-
ной телефонной связи 150 кгц: г0=
= 17,1 ом[км, L0='l,86 мгн/км, Со=
= 6,35-10-9 ф}км, go=7,6-10-6 cumIkmz
(в сухую погоду).
Определить модуль и аргумент волно-
вого сопротивления линии на этой часто-
те и сравнить с теми же величинами при
средней расчетной частоте телефонной свя-
зи в тональном диапазоне 800 гц. Пара-
метры линии считать постоянными.
Решение. По формуле (3-7) для
f=i!50 кгц получаем гс=543 ом, 6 =—15'^
а для /=800 гц соответственно гс = 766 ом,
9 =—<24°40z, что согласуется с общей за-
кономерностью, показанной на рис. 3-10.
Однако второй результат в действительно-
сти значительно завышен. Практика и рас-
четы показывают, что у воздушной линии
с медными проводами диаметром 4 мм и
расстоянием между проводами 20 см при
частоте 800 гц Го=2,87 ом! км, Lq=
= 1,94 мгн!км, С0=б,35 -110~9 ф!км, go=
= 0,14 • 10-6 сим) км. Тогда при этой часто-
те гс=550 ом и 6=—^ЗО'.
Таким -образом, -при изменении часто-
ты на -несколько порядков (примерно-
в 200 раз в этом примере) нельзя считать-
параметры линии постоянными. С ростом
частоты увеличиваются сопротивление гд
вследствие поверхностного эффекта и про-
водимость go из-за роста диэлектрических
потерь в изоляторах. (Активная проводи-
мость заметно растет в сырую погоду, при
инее и гололеде. В линиях электропереда-
чи проводимость go растет при увеличении
напряжения из-за потерь от коронирова-
ния проводов). Индуктивность Lo немного
уменьшается с ростом частоты вследствие
уменьшения магнитного поля внутри про-
водов (поверхностный эффект).
3-8. ЗАВИСИМОСТЬ РЕЖИМА ЛИНИИ
ОТ НАГРУЗКИ
Предположим, что в начале линии
длиною I включен генератор с на-
пряжением а в конце линии прием-
ник с сопротивлением ZH = zHgJ4>B
(рис. 3-11). Выясним, каково должно-
быть напряжение генератора
чтобы при сопротивлении нагрузки ZH
напряжение на зажимах приемника
составляло заданную величину и2.
Одновременно рассчитаем ток гене-
ратора /г и распределение тока и
напряжения вдоль линии.
По. заданным величинам напряже-
ния U2 и сопротивления нагрузки ZH
ток /2 в конце линии сразу опреде-
ляется: Ц = От. е. режим в
конце линии (и2, /2) известен. Тре-
буется рассчитать режим в любой
точке (£7, /) и, в частности, в начале
линии (U1, Ц).
Расчетные формулы запишутся
проще, если начало отсчета коорди-
наты х перенести из начала линии
в конец, т. е. заменить в выраже-
ниях (3-6) и (3-8) х на I—х. Тогда
получим:
U=A1e-((l-x^A^l-x\
f__А —T(Z—х) А2_ 1(1—х)
1 7 7
с -^с
или, обозначая А^^В^ А2е*1=В2,
где Вт и В2 — новые постоянные ин-
тегрирования,
или
=Uz ch ул 4" i2Zc sh ух;
/ = sh ул + /2 ch ул.
2/С
)
Последние выражения позволяют
вычислить напряжение и ток в лю-
бой точке линии, если известны на-
пряжение и ток (или сопротивле-
ние) нагрузки. Для численных
расчетов пользуются номограммами
гиперболических функций от ком-
плексного аргумента или таблицами
показательных функций.
Можно пользоваться и таблицами
функций при вещественном аргу-
менте, имея в виду, что
ch (а 4" /&) —ch a-cos& + J sha-sin&;
sh(а-ф-/6) = sha-cos&4-/ch а-sin b;
th (« + /&) =
sh 2a + j sin 2b
ch 2a + cos 2b
Для конца линии (х — 0) имеем U =
= U2 и / = /2 или
Z-f с
Напряжение и ток в начале линии
(х = /)
p1 = t72chy/ + /2Zcshy/;'|
/1==^-shyZ + /2chy/ f (3’27)
откуда
ИЛИ
__U2 h j2^с . Ь U2 /2ZC
~~2 9 2 — 2~
(3-24)
Следовательно, напряжение и ток
в линии:
I 7 Пр Iобр
___^2 + I2% с
— 2ZC
__&2 12%с
2zc е
(3-25)
П1 = ^2 (chy/ + ^shy/);
Л = ^2 (4 sh у/ -|- Ц- ch y/j.
(3-28)
Как показывают эти формулы, для
одной и той же линии (при неизмен-
ных Zc, у, /) режим генератора за-
висит от сопротивления приемника
ZH, а в случае одинаковых прием-
ников, подключаемых в конце раз-
личных линий —от параметров и
длины линии.
Мощность генератора и приемни-
ка соответственно
s2=Z72/2.
Напряжения и токи в начале и
конце линии связаны уравнениями
79
Напряжения прямой и обратной волн (3-25)
(3-27), аналогичными уравнениям
четырехполюсника с гиперболиче-
скими функциями (1-410), причем
постоянная распространения всей
линии yl соответствует постоянной
передачи g четырехполюсника.
В этой аналогии нет ничего удиви-
тельного— ведь относительно зажи-
мов генератора 1-Г (первичных за-
жимов) и зажимов приемника 2-2'
(вторичных зажимов) однородная
линия —один из примеров симме-
тричного четырехполюсника. При
исследовании режима линии в раз-
личных точках (3-26) однородную
линию также можно рассматривать
как симметричный четырехполюс-
ник. Только в зависимости от коор-
динаты х изменяется постоянная
передачи четырехполюсника ух.
Для расчета режима генератора
линию с сопротивлением нагрузки
ZH в конце можно заменить ее вход-
ным сопротивлением относительно
зажимов 1-1'.
Пример 3-2. Длина линии примера 3-4
равна 10 км. При частоте 150 кгц напря-
жение >в начале линии £Л=/12 в, сопротив-
ление нагрузки в конце линии ZH=
=4 120 Z56° ом.
Найти фазовую скорость волны. По-
строить графики распределения прямой и
обратной волн «Пр-(х, t) и «Обр(*, Z)
в момент, когда фаза прямой волны рав-
на нулю в конце линии. Определить дей-
ствующее значение напряжения U в* точ-
ке, находящейся на расстоянии 5 км от
конца линии, если нагрузка в конце линии
отсутствует.
Решение. Вторичные параметры ли-
нии при частоте 150 кгц определим по
формулам (3-7) и (3-9):
Zc — 543 /—15' ом,
у = 0,0178 + /3,24 \/км
и
у/= 0,178 + /32,4.
= 8,7^-/37°^ в;
Гг
и обр — 2
= 5,4e]S°e в.
Мгновенные значения напряжений:
«пр (х, t) — 8,7 рг2б>ах cos (coZ + —37°) в;
«обр (х, f)= 5,4 У 2е cos (coZ—fx+8°) в.
При расчете было принято Z7i=+i, т. е.
напряжение в начале линии с нулевой на-
чальной фазой. Графики напряжения надо
построить, когда нулевую начальную фазу
имеет напряжение прямой волны в конце
линии, т. е. (в любой момент времени Zo,
для которого coZo+px—37°=0 при х=0.
Графики нПр-(х, Zo) и «обр(я, Zo) построены
на рис. 3-12 и 3-13.
При холостом ходе в конце линии
(ZH=oo)
^=^=23’°^~17°в-
Рис. 3-12.
Длина волны
2л 2л
А — g 1,93 км.
Фазовая скорость
v — е>/р _ 291 000 км!сек.
Для построения графиков распределения
напряжения вдоль линии найдем напряже-
ние U2 в конце линии. По формуламДЗ-28):
U2 =---------g-------=13,1/—20° в.
ch yZ + у- sh т/
Рис. 3-13.
80
Напряжение прямой и обратной волн на
расстоянии х = 5 км от конца линии
= =12,5^11,5’ в;
(7о6р = U-j- e~tx = 10,4^—45,5° в.
Действующее значение напряжения в той
же точке
U = ] i/np + Uобр | == 20,2 в.
3-Ю. ДЛИННАЯ И короткая ЛИНИИ
Линию, протяженность которой
соизмерима с длиной волны, часто
называют длинной линией. Так
как длина -волны зависит от часто-
ты тока f, то одна и та же линия
в зависимости от частоты f, и тем
самым длины волны X, в одних слу-
чаях должна рассчитываться как
длинная, а в других может считать-
ся короткой.
Длинную линию всегда рассма-
тривают как цепь с распределенны-
ми параметрами, но и процессы
в коротких линиях часто необхо-
димо рассчитывать, как в цепях
с распределенными параметрами,
т. е. при помощи уравнений длинной
линии. Поэтому правильнее отнести
к коротким те линии, режим работы
которых с достаточной точностью
можно определить, пренебрегая из-
менением тока (или напряжения)
вдоль линии.
Так, например, линию постоян-
ного тока (Х=-оо) нельзя всегда
считать короткой. Если необходимо
учесть различие токов в начале и
конце линии вследствие утечки
между проводами, то такую линию
постоянного тока следует рассма-
тривать как цепь с распределенны-
ми параметрами.
К коротким линиям относят мно-
гие линии электропередачи. У линии
электропередачи длиной до 100—
200 км при напряжении до 35 кв
токами утечки (через проводимость
изоляции и емкость между прово-
дами) обычно пренебрегают. Экви-
валентная схема линии в этом
случае значительно упрощается
(3-14,а). Ток во всех сечениях та-
кой линии один и тот же. Понятие
о волнах неприменимо. Если нужно
6—434
Рис. 3-14.
знать только режим в начале и
в конце линии, то все сопротивле-
ния и индуктивности можно просум-^
мировать, заменив линию комплекс-
ным сопротивлением г01+jwLqI,
где I — длина линии (рис. 3-14,6).
Ток утечки между проводами ко-
роткой линии часто учитывают упро-
щенно на схеме с сосредоточенными
параметрами, включая между вход-
ными и выходными зажимами равные
комплексные проводимости
3-14,в). В этом случае
линия будет представлена П-образ-
ным четырехполюсником, который,
конечно, можно заменить и Т-образ-
ным (рис. 3-14,а).
Необходимо заметить, что в тех-
нике электропроводной связи при-
нято другое определение длинной
линии. Линию считают тем длиннее,
чем больше ее затухание а/.
Пример 3-3. Линия электропередачи
высокого напряжения длиною 200 км име-
ет следующие параметры (на фазу): г0=
=0,08 omIkm, L0==l,34 мгн/км, Со—
= 8,6-10-9 ф!км, go—3,75 • 10~8 сим/км.
81
Фазное напряжение и конце линии 220 кв,
ток 455 а при cos фн=4.
Найти напряжение и ток в начале ли-
нии. Сравнить полученные значения с на-
пряжением и током, вычисленными: 1) без
учета активной и емкостной утечек-
(рис. 3-44,6), 2) с учетом проводимости
между входными и между выходными за-
жимами (рис. 3-44,в).
Решение. Вторичные параметры ли-
нии при частоте 50 гц: Zc—397 Z—5°23z ом,
у=0,1007 • 10-3+/1,068 • НО-3 1/км и у/=
— 0,245 Z84°37/.
По формулам (3-27) получаем:
^ = 222/10° кв, Л = 460д15°10' а.
1) Без учета активной и емкостной уте-
чек (g0 = 0 и Со = 0) расчет значительно
упрощается:
Л = /2 = 455 а,
U1 == /2 (хо 4~ 7^7»О) 4~ й2 — 230 / 9°35z кв„
2) По схеме рис. 3-14,в
£Л = С2 +
4~2 + i 2 + ^2J (ro^ + 7g>l0Z);
71=^^+/^+
+ ^2 + + А.
откуда
Ui = 227^9°57' кв,
Л = 459/,12°05' а.
Как видно из полученных результатов,
погрешность определения напряжения и
тойа на входных зажимах без учета актив-
ной и емкостной утечек получилась не
очень значительной. Это объясняется не-
большой длиной линии по сравнению
с длиной волны (Л—6000 км). Расчет по
схеме рис. 3-14,в дает уже очень хорошее
приближение.
Если для рассматриваемой линии со-
ставить П-образную (или Т-образную)
схему замещения на частоте 50 гц, как для
всякого симметричного четырехполюсника
(см. § 3-44), то расчет по схеме замеще-
ния будет совершенно точным. Схема по
рис. 3-44,в является не схемой замещения,
а схемой с сосредоточенными параметра-
ми, приближенно учитывающей ток утеч-
ки. С увеличением длины линии I при не-
изменных остальных параметрах погреш-
ность расчета по схеме рис. 3-44,в стано-
вится все больше.
3-10. НЕСОГЛАСОВАННАЯ НАГРУЗКА
В однородной линии с -генерато-
ром в начале и приемником в кон-
це (рис. 3-11) обратная волна
возникает, когда нагрузка не согла-
сована: 7jj-/-Zc.
Отношение комплексного напряже-
ния (тока) обратной волны в конце
линии Uобр(0) = 52 к комплексному
напряжению (току) прямой волны
17 л р (0) = Вг называют коэффи-
циентом отражения:
Подставляя значения Вг и В2 (3-24),
найдем, что
____„sX*__ и % i%Zc __Zh Zc
iN—ne — — Zh + Zc ,
(3-29)
т. e. зависит от соотношения между
сопротивлением нагрузки и волно-
вым сопротивлением линии.
Наибольшее рассогласование по-
лучается при коротком замыкании
и холостом ходе в конце линии.
При коротком замыкании (Zn=0)
коэффициент отражения N =—1,
при холостом ходе (ZH=oo) полу-
чаем N=4. При согласованной на-
грузке В2=!0 и 7V=0. Чем больше
коэффициент отражения (по моду-
лю п), тем заметнее влияние обрат-
ной волны, тем менее равномерно
распределяются напряжение и ток
вдоль линии и яснее выражены
максимумы и минимумы у кривой
действующего значения напряжения
(рис. 3-7) и тока. В случае несогла-
сованной нагрузки не вся мощность,
которую способна перенести прямая
волна, поглощается сопротивлением
нагрузки. С обратной волной часть
мощности возвращается генера-
тору.
Важно отметить, что при неси-
нусоидальных напряжениях и то-
ках сопротивление нагрузки, а так-
же волновое сопротивление для
различных гармонических состав-
ляющих могут быть не одинако-
выми. Поэтому степень согласова-
ния для различных гармонических
составляющих получается разной.
Итак, обратная волна в одно-
родной линии с генератором в на-
чале и приемником в конце возни-
кает при несогласованной нагрузке,
когда коэффициент отражения не
равен нулю. Поэтому такую волну
называют еще отраженной.
Прямую волну в этом 'случае назы-
вают еще падающей.
82
Пример 3-4. Выяснить, при каком наи-
меньшем по модулю сопротивлении на-
грузки модуль коэффициента отражения
линии примеров 3-1 и 3-2 не превосходит
0,05 (напряжение обратной волны состав-
ляет не более 5% напряжения прямой).
Решение. Из выражения (3-29)
1 + ЛГ
ZH - ZC J _ N 9
где по заданным условиям | N | = п «С 0,05.
Поэтому
1 +0,05^ т
1—0,05^***
Наименьшее по модулю значение ZH полу-
чится при минимуме модуля дроби, т. е.
У — к. Тогда
1—0,05
ZH — 543 ] । q gg 488
3-11. СОГЛАСОВАННАЯ НАГРУЗКА
Линии передачи информации с ге-
нератором в начале линии и прием-
ником в конце (рис. 3-11) довольно
часто работают в режиме согла-
сованной нагрузки, т. е. при
сопротивлении приемника, равном
волновому сопротивлению линии:
ZH = Ze = zcelb или (72//2 = Zc.
При согласованной нагрузке коэф-
фициент B2=^(U2— 12ZC) равен ну-
лю. Следовательно, в линии отсут-
ствует обратная волна
i7o6p=b>-^ = o,
Уравнения линии значительно упро-
щаются:
у=и^=в^х= '
Ц2 +
или для мгновенных значений (при-
нимая фазу напряжения на нагрузке
за нулевую):
и (х, /) = U2nLeax cos (со/ fix);
i (х, t) = I2We?x cos (со/ -f- px — 9).
(3-31)
Действующие значения напряже-
ния и тока из-за потерь в линии,
как и в общем случае, не остаются
постоянными. Но закон изменения
напряжения и тока очень прост:
действующие значения напряжения
и тока постепенно уменьшаются
к концу линии (рис. 3-15):
U = U2ea,x\ 1=12е*х.
В частности, в начале линии
или соответственно
U, = U2eal; Д = I2eal = — X
ZC
tyui фй2 + Фи — Ф?2 ”h
Из последних уравнений можно вы-
разить коэффициент затухания всей
линии al —а и коэффициент фазы
всей линии $1 — Ь через напряжения
и токи на входных и выходных за-
жимах при согласованной нагрузке
al— In —=ln —,
U2 12
р/ = фги Фгг2 z==^ ¥u Фг2
и коэффициент распространения или
постоянную передачи всей линии
y/=g==ln^-^ln4£. (3-32)
С/ 2 ^2
Мощность в любом сечении Линики
s=c/z=p+/q.
&
83
Активная мощность
P = t//cos0, (3-33)
так как в любом сечении линии ток
отстает по фазе от напряжения на
угол 0 (см. 3-31). Мощность, пере-
даваемая по линии при согласован-
ной нагрузке, называется естествен-
ной или натуральной.
Активная мощность генератора
Рг — U1I1 cos <рвх — t/iA cos 0 —
г/2
и2 2а/ л
—----е cos 0.
2С
Активная мощность нагрузки, полу-
чаемая от линии,
P2 = t72/2cos <?н =
и2
=U2I2 cos 0== —5- cos 0,
2с
и коэффициент затухания всей линии
выражается через мощности:
а/ — 2 In р^— 2 In^— 2 In .
Мощность потерь в линии
К- П. д. линии
Рг
Ч=р-=е .
Итак, при согласованной нагруз-
ке вся мощность волны, достигшей
конца линии, поглощается в на-
грузке. Обратной волны нет, что во
многих случаях передачи информа-
ции очень важно для нормальной
работы передающей и приемной
аппаратуры.
Если нагрузка недостаточно хоро-
шо согласована с линией передачи,
возникает отраженный сигнал, ко-
торый перемещается по линии и
поступает в передающую аппара-
туру. При отсутствии согласования
в начале линии, т. е. в тех случаях,
когда внутреннее сопротивление ге-
нератора отличается от волнового
сопротивления линии, происходит
повторное отражение сигнала. От-
раженный от начала линии сигнал
84
движется к приемнику. Для прием-
ной аппаратуры этот сигнал —
ложный. Так, в системах междуго-
родной телефонной связи большой
протяженности повторно поступаю-
щий сигнал ухудшает разборчи-
вость речи, в аппаратуре телемеха-
ники может ^вызвать ошибочное сра-
батывание реле, при телевизионных
передачах ухудшает четкость изо-
бражения или даже создает много-
контурность. Поэтому согласование
нагрузки—-одна из главных задач,
которую приходится решать при
организации передачи информации.
Пример 3-5. Сравнить напряжение в
конце линии примеров 3-1 и 3-2 при со-
противлении нагрузки Zn — 1 120^/56° ом и
согласованной нагрузке.
Реше н и е. При ZH = 1 120/, 56° ом в
примере 3-2 было уже найдено напряжение
прямой и обратной волн в конце линии:
#2пр = 8,7/-37° в; #2обр=5,4/8° в.
Напряжение
£?2 f^2np + ^/аобр = 13>2 Z— 20° 6.
При согласованной нагрузке и [Jt =
= 12 в напряжение в конце линии (см. 3-30)
[72 = [7^-^ = 10,0^—60° в.
3-12. ВХОДНОЕ СОПРОТИВЛЕНИЕ
Входное сопротивление
линии ZBX равно сопротивлению
двухполюсника, который нужно вклю-
чить на зажимы 1-Г вместо линии,
чтобы режим генератора Ц) не
изменился. При известных напряже-
нии и токе генератора входное со-
противление линии легко определить
по уравнениям (3-28)
у ____Рх __ у -J- Zc th yZ zq q . .
77^Zc zc + zHthYz*
Это выражение показывает, что
входное сопротивление линии зави-
сит как от параметров линии и ее
длины, так и от сопротивления на-
грузки в конце линии.
Выясним зависимость входного
сопротивления от длины линии и
частоты при неизменном сопро-
тивлении приемника ZH, - для чего
запишем выражение (3-34) в более
удобной форме.
Обозначим ZH/Zc=th7W или
М — m, + /т2 = 4- in 1 + /“77
(3-35)
Тогда
7 ___ ________7 thM-j- th?Z
zBX—zBXe -£c i+otflTj -
= Zcth(Y/ + /W) =
= Zc th [(aZ 4- mJ J- j (pZ + m2)].
(3-36)
Из (3-36) следует, что с ростом
длины линии / изменяется как мо-
дуль zBX, так и аргумент <рвх вход-
ного сопротивления линии, т. е.
вещественная rBX = 2BX.cos фвх и мни-
мая xBX = 2BXsin<p'BX части сопро-
тивления ZB.X.
Для' иллюстрации этой зависи-
мости на рис. 3-16 приведен график
вещественной- и мнимой частей
входного сопротивления линии с па-
раметрами Го = 2,87 ом!км, Lq=
= 1,94 жгн/кж, go==O,14 • IO-6 сим! км,
Со=6,35-10~9 ф[км при частоте f =
=800 гц и сопротивлении нагрузки
ZH=1 000Z60° ом. Рис. 3-17 иллю-
стрирует изменение модуля zBX и
аргумента <рвх входного сопротивле-
ния той же линии. Аналогичные
графики получаются и при других
условиях работы линий.
Построенные графики, как и по-
дробный анализ выражения (3-36),
показывают, что входное сопротив-
ление линии изменяется не моно-
тонно, а с колебаниями. С ростом
длины линии размах колебаний
становится все меньше. Действи-
тельно, при увеличении длины ли-
нии прямая волна затухает все
заметнее, и в конце линии возни-
кает отраженная волна с меньшей
амплитудой, которая затухает так-
же все заметнее. В результате
влияние отраженной волны на ре-
жим в начале линии становится
все менее значительным. Входное
сопротивление линии все ’более
.определяется напряжением и током
•падающей волны. В пределе при
/ —> оо входное сопротивление, как
это следует из выражения (3-34),
равно волновому сопротивлению.
Действительно, при бесконечном
увеличении длины линии
lim ch у/ — lim sh у/ = eyl/2
1-+CQ
ИЛИ
lim th у/=1 и ZBX = ZC.
Z~>oo
Колебания входного сопротивления
линии происходят относительно это-
го предельного значения.
85
Рис. 3-17.
Чем больше затухание линии а,
тем размах колебаний меньше, так
как увеличение затухания приводит
к тем же результатам, что и увели-
чение длины линии I [и в формулу
для входного сопротивления линии
(3-36) входит произведение al].
Размах колебаний зависит, конеч-
но, и от сопротивления нагрузки ZH,
т. е. коэффициента отражения вол-
ны N. Чем меньше отличается со-
противление нагрузки ZH от волно-
вого -сопротивления Zc, тем колеба-
ния входного сопротивления линии
менее заметны. Если сопротивление
нагрузки равно волновому сопро-
тивлению линии, то отраженной
волны нет, и при любой длине ли-
нии входное сопротивление одина-
ково и равно волновому: ZBX=ZC.
Последнее равенство непосредствен-
но следует из выражения (3-34) при
Zh^Zc.
Из графиков рис. 3-16 и 3-17 -сле-
дует также, что при некоторых зна-
чениях длины линии входное со-
противление оказывается чисто
активным (хвх=0, фвх = 0)- Длину
линии, при которой входное сопро-
тивление активное, называют резо-
нансной.
Колебательный характер измене-
ния входного сопротивления линии
обусловливается изменением сдвига
86
по фазе между напряжениями и
между токами прямой и обратной
волн на входных зажимах. Матема-
тически колебательный характер
объясняется изменением мнимой
части комплексного аргумента ги-
перболического тангенса в выраже-
нии (3-36). /
Аналогичное изменение аргумен-
та получается и при изменении
не длины линии, а частоты напря-
жения генератора. С ростом ча-
стоты изменяется и вещественная
и мнимая части ’ аргумента (а/ +
+ пгг)+] (pZ+ т2), так как увеличи-
ваются коэффициент затухания а и
коэффициент фазы (-р (см. рис. 3-8)
и изменяются пц и ш2 вследствие
зависимости волнового сопротивле-
ния Zc от частоты (рис. 3-10).
На рис. 3-.18 представлен график
изменения с ростом частоты вход-
ного сопротивления той же линии,
что и на рис. 3-16, 3-17 при длине
/=ЙОО км. Кривые опять имеют
ярко выраженный колебательный
характер. Размах колебаний при
увеличении частоты уменьшается*
(затухание волн становится замет-
нее), а величина входного сопро-
тивления линии приближается
к значению волнового сопротивле-
ния. При некоторых частотах вход-
ное сопротивление линии чисто
активное (фвХ=О). Та-
кие частоты называют
резонансными.
Следует заметить,
что кривые на рис.
3-16, 3-17 и 3-18 пост-
роены в предположе-
нии неизменности со-
противления нагрузки
ZH. В действительности
сопротивление прием-
ника не остается по-
стоянным с ростом ча-
стоты, что еще более
усложняет зависимость
от частоты входного
сопротивления линии.
Выражение (3-36) удобно для
анализа зависимостей входного со-
противления от длины линии I или
от частоты Д Для определения
входного сопротивления при задан-
ных параметрах линии и сопро-
тивлении нагрузки проще выпол-
нить расчет по исходной формуле
(3-34). Иногда вместо сопротивле-
ния нагрузки ZH бывает задан
коэффициент отражения N. Тогда
целесообразнее воспользоваться вы-
ражением, связывающим входное
•сопротивление непосредственно
с коэффициентом отражения.
Определяя отношение ZC/ZH из
(3-29):
Zc 1
ZH —1
и подставляя в (3-34), после преоб-
разований получим:
а при холостом ходе (ZH = oo)
Zx=ZccthY/. (3-39)
Как и у всех четырехполюсников,
сопротивления короткого замыка-
ния и холостого хода зависят толь-
ко от параметров самого четырех-
полюсника, т. е. самой линии. По-
этому для определения параметров
линии экспериментальным методом
часто измеряют входное сопро-
тивление при коротком замыкании
и холостом ходе, а затем рассчиты-
вают волновое сопротивление
Zc = zce18 = (3-40)
, и тангенс постоянной передачи ли-
НИИ
th yZ=th (а/ + /₽/)= Те!'=
Z —Z 1 2т/ (3-37)
(3-41)
Формулами (3-34), (3-36) и
(3-37) можно пользоваться и при
вычислении входного сопротивления
отрезка линии относительно лю-
бого ее сечения. Нужно только за-
менить длину линии I координа-
той х.
3-13. КОРОТКОЕ ЗАМЫКАНИЕ
И ХОЛОСТОЙ ХОД
При коротком замыкании (ZH=0)
входное сопротивление линии, как
следует из (3-34),
ZK=ZcthYZ, (3-38)
Чтобы определить коэффициенты
затухания а и фазы i£ из послед-
него выражения, нужно обратиться
к номограммам или вычислить ар-
гумент тангенса aZ-h/'pZ по модулю
Т и аргументу т (см. § 1-12):
а/ + j₽Z = 1 In In We\
откуда
al = X In W, pZ = 1(^ + 2^), (3-42)
где </?=0, 1, 2, 3, ...
87
Для четырехполюсников с сосре-
доточенными параметрами (гл. 1
и 2), основываясь только на опы-
тах холостого хода и короткого за-
мыкания, нельзя было выбрать
одно из двух возможных значений
коэффициента фазы Ъ. Для длин-
ных линий опыты холостого хода и
короткого замыкания не определя-
ют величину k, т. е. числа полуволн
%/2, укладывающихся вдоль иссле-
дуемой линии. Конечно, при вычи-
слении сдвига по фазе между на-
пряжениями в начале и в конце
получаются только два значения р/,
отличающиеся друг от друга на
угол л. Но для расчета по экспери-
ментальным данным коэффициента
фазы р необходимо знать число k.
Относительно двух возможных
значений аргументов бит можно
сделать те же замечания, какие
были обсуждены в § 1-12.
Через известные значения вторич-
ных параметров линии нетрудно
выразить ее первичные параметры
при помощи основных формул (3-5)
и (3-7):
r0 = zc (a cos 9 — р sin 6);
toL0 — zc (р cos 6 4~ а sin 6);
а cos 6 4- 8 sin 8
:
В cos 8 — a sin 8
<°c°=-------Tc-----•
Входное сопротивление линии при
любом сопротивлении нагрузки ZH
также можно определить по из-
вестным значениям сопротивлений
холостого хода и короткого замы-
кания.
Действительно, подставляя (3-38)
и (3-39) в (3-34), получим:
= (3-43)
Пример 3-6. По воздушной линии осу-
ществляется диспетчерская связь на ча-
стоте 100 кгц. Передающий и приемный
аппараты связи находятся на расстоянии
20 км. На этой частоте были измерены
сопротивления холостого хода и коротко-
го замыкания линии: Zx=767Z4°30/ ом и
ZK=735Z—4°30/ ом.
Рассчитать вторичные и первичные па-
раметры линии связи.
88
Решение. Характеристическое сопро-
тивление (3-40)
Zc = /ZKZx = 760/0° ом.
Постоянную передачи линии определим по
выражению
th (а/+ /₽/) = 1/=0,975/—4°30',
т Zx
т. е. 7=0,975, Ti =—4°30/. Второе значе-
ние угла 't2=il75o30/ не подходит, так как
при дальнейших расчетах приводит к от-
рицательному значению коэффициента за-
тухания al.
По формулам (3-42) IT=25,4, g= — 37° и
= ~2 In W = 1,6 неп,
fZ = ту (£ + 2£л) = (—0,2т + km) рад.
В воздушной линии с потерями фазовая
скорость v меньше скорости света в ваку-
уме с. Поэтому длина волны X меньше
длины волны в вакууме Ло = с/f = 3 км
для электромагнитных колебаний с часто-
той 100 кгц.
п -> Z 20
Если принять Л = Л0, то
= 13,3, и получаем &=13, а при
число k может быть и более 13, т. е.
вдоль линии может уложиться целое число
полуволн Ъ = 13, или k2 = 14, или kz = 15,
и т. д. Для полученных чисел k находим
ряд возможных значений коэффициента
фазы PiZ = — 0,2л + 13л = 12,8л рад, p2Z=
= 13,8л рад, p3Z = 14,8л рад и т. д.
Каждому значению pZ соответствуют
определенные величины фазовой скорости о
и длины волны Л:
= w/Pi = 3,13-105 км/сек,
ц2 = 2,90-105 км/сек,
vz = 2,71 • 105 км/сек,
у4 = 2,53-10s км/сек и т. д.,
Xi == гл/f = 2л/рг = 3,13 км,
Х2 = 2,90 км,
Л3 = 2,71 км,
Л4 = 2,53 км и т. д.
Очевидно, что первое решение следует
отбросить. Сделать выбор среди остальных
решений, основываясь только на данных
измерения сопротивлений холостого хода
и короткого замыкания, нельзя.
Найдем первичные параметры линии, вы-
бирая второе решение, т. е. а2 = а =
= 0,08 неп/км, р2—2,17 рад/км или у2 =
= 0,08+/2,17 = 2,17/87°53' 1/км. В этом
случае г0 = гса2 = 60 ом/км, соЛ0 = гср2 =
= 1 630 ом/км и Lq = 2,6 мгн/км, g0 =
= aa/zc = 1,06-10-4 сим/км, <оС0,= $г/гс =
=2,89-10-3 сим/км и Со=4,6-10 ~3 мкф/км.
Для следующего решения, т. е. а3 =
= а = 0,08 неп/км, рз = 2,33 рад/км, полу-
чим: г0 = 60 ом/км, Lo = 2,79 мгн/км,
gQ = 1,06• 10~4 сим/км и, наконец, Со =
= 4,94-10-3 мкф/км и т. д.
3-14. СХЕМЫ ЗАМЕЩЕНИЯ
Выше уже было отмечено, что
однородную линию можно рассма-
тривать как один из примеров 'Сим-
метричного четырехполюсника с ха-
рактеристическим сопротивлением Zc
и постоянной передачи у/. Следова-
тельно, при исследовании режимов
генератора и приемника линию
можно заменить эквивалентной
симметричной схемой Т-, П-образ-
ной или мостовой. Сопротивления
элементов Т-образной схемы заме-
щения рассчитываются при любой
заданной частоте синусоидальных
напряжений и токов по формулам
(1-61) с заменой g на yl и ZT на Zc:
А._у ch 7/ 1 _7 11 yZ #
_____с shyZ — АДП 2 , ,
й- Ч -gri 2«-~1ЙгГ:
ь—- -— ------г -г
сопротивления элементов П-образной
схемы—по формулам табл. 1-2:
Z1 = Zcshy/;
07 __ ZcshyZ _ Zc
Z 2 chyZ—1 ~thyZ/2;
сопротивления элементов мостовой
схемы—по формулам той же таб-
лицы:
7 —7 th • 7 —
А—АНД 2 , ^2 —thYZ/2-
При расчете схем замещения однород-
ных линий иногда удобно выразить 'сопро-
тивление Zi через известное продольное
сопротивление линии на единицу длины
/0=Го+М£0, a Z2—через поперечную про-
водимость Уо=£.о+/соС0. С этой целью вве-
дем коэффициенты:
ch yZ — 1 _th yZ/2e shyZ
yZshyZ -- yZ ’ = yZ
(3-44)
и, например, для Т-образной схемы заме-
щения получим:
Zi
~ 7 с Y 1Н1 =
V Z.YJH, = zoihi;
7 b - 1
Za - H^l YoIH2 •
(3-45)
Аналогичные выражения можно записать
для П-образной и мостовой схем.
Для линий электропередачи вычисление
коэффициентов Нх и Н2 часто упрощают,
представив гиперболические тангенс и си-
нус в виду рядов
th yZ/2_ 1 (yZ)2 (yZ)*
yZ 2 24 “* 240
W I .
2 370”*"
(3-46)
sh yZ
ЫГ , (V)4
3! "r 5!
w
7!
По формулам (3-46) легко оценить ошибку,
которая получится, если отбросить все
члены ряда со степенью произведения
большей шести или большей четырех, или
большей двух, или даже при замене ко-
эффициентов Я) одной второй и Я2—еди-
ницей.
Такой метод расчета можно применить
не только к линиям электропередачи, но
и к любым другим, если напряжения и
токи практически синусоидальны.
Пример 3-7. Составить Т-образную схе-
му замещения для линии примера 3:3 по
точным (3-44) и приближенным (3-46)
формулам, отбрасывая члены ряда со сте-
пенью произведения, большей чем: а) 6;
б) 4; в) 2; г) считая Нх=х12, H2—i.
Решение. Вторичные параметры ли-
нии были уже найдены в примере 3-3:
ZC = 397Z—5W ом, yZ=0,215Z84°37'.
По точным формулам .(3-44.) получим:
ZI/2=='43,1 Z79°22z ом; Z2=>1 845Z— 89°38' ом.
По приближенным формулам ZJ2:
a) 42,86Z79H7Z; б) 42,86Z79Q15';
в) 42,86Z79°41/; г) 42,70Z79313/ ом и Z2:
а) 1 862Z—89°58'; б) 1 862Z—89°59';
в) 1 862Z—90°; г) 1851Z—90° ом.
Из расчета следует, что для линии элек-
тропередачи длиною 200 км (пример 3-3)
•практически получаются одинаковые схемы
замещения, составленные как по точным
формулам, так даже и при самом значи-
тельном приближении.
Последнее приближение означает, что
линия представлена Т-образной схемой
с параметрами Zi = Z0Z= rQl + jcoLoZ и Z2=
‘1 1
= (рис> 3’14'г)- т’ е-
может рассматриваться как короткая. Для
линий большей длины с увеличением числа
сохраняемых членов ряда (3-46) получается
все более точное решение задачи.
В отличие от токов и напряже-
ний линий электропередачи -напря-
жения и токи (сигналы) линий пе-
редачи информации, как правило,
несинусоидальны.
При несинусоидальных напряже-
ниях и токах заменить линию Т-,
П-образной или мостовой схемой
нельзя почти всегда. Для различ-
ных гармонических составляющих
89
сигнала значения со-
противлений элементов
схем замещения полу-
чаются разными. Это
объясняется зависи-
мостью вторичных па-
раметров линии Zc и у
от частоты.
Чем длиннее линия,
теристическое сопротивление звена (и всей
цепочки) определяется по формуле (1-51)
тем резче выражена
зависимость элементов схем заме-
щения от частоты, так как значи-
тельнее изменяется аргумент у/ ги-
перболических функций. Прак-
тически реализовать сопротивления
элементов схем замещения с тре-
буемой зависимостью их от часто--
ты оказывается невозможным. По-
= Z
этому схемы замещения остаются
пригодными (с допустимым откло-
нением параметров) в тём большем
диапазоне частот, чем меньше дли-
на линии. Линию значительной, дли-
ны (по сравнению с длиной вол-
ны наивысшей Гармонической со-
ставляющей сигнала) разбивают на
участки, для каждого из которых
уже составляется эквивалентная
схема. В результате однородная ли-
ния заменяется цепочкой или, как
говорят, искусственной лини-
ей.
С увеличением числа звеньев це-
почки ее частотная характеристика
все больше приближается к частот-
ной характеристике реальной ли-
нии.
Рассмотрим для примера цепочку Т-об-
разных звеньев, каждое из -которых заме-
щает отрезок линии настолько малой дли-
ны х, что можно считать
ух ух
shyx^yx;
Тогда сопротивления одного звена схемы
замещения (рис. 3-19,а)
2 ZcXn 2 ^Zc 2 2
* rQ + /<о£о
2 x;
„_____Zc Zc
2 ~~ sh yx yx
_ 1 _ 1
yox “ (go +i^CQ)x •
(3-47)
Звено цепочки с такими сопротивлениями
показано на рис. 3-19,6. При этом харак-
а постЪянная передачи определяется из вы-
ражения (1-53)
sh 2 V 4Z2 ~ 2 ’
и так как shyx^yx, то g=yx, т. е. ча-
стотная характеристика постоянной пере-
дачи звена (рис. 3-19) и цепочки совпа-
дает с частотной характеристикой коэффи-'
циента распространения линии у.
Предположим, что вся линия длиною
/ заменена цепочкой из п звеньев, по
рис. 3-19. Тогда каждое звено"'заменяет
участок линии длиною х=11п и характе-
ристическое сопротивление звена
Если число звеньев п настолько велико,
что можно приближенно- положить 14-.
+|(yZ/2n)2~il (что и получается при sh ух~
—ух), то частотная зависимость характери-
стического сопротивления цепочки Zt
практически совпадает с частотной ха-
рактеристикой волнового сопротивления
линии Zc.
Искусственные линии — цепоч-
ки собираются в лабораториях
для исследования различных режи-
мов работы линий передачи элек-
троэнергии и информации. В радио-
технике и импульсной технике ис-
кусственные линии применяются
для формирования коротких им-
пульсов и создания цепей запазды-
вания сигналов.
3-15. СЛОЖНАЯ ЛИНИЯ
Значительная часть линий пере-
дачи питает не один, а несколько
приемников. Например, к сельской
линии электропередачи напряже-
90
нием 6 кв .присоединяется
несколько понижающих
трансформаторов, по одно-
му в каждом населенном
пункте, обслуживаемом этой
линией. К каждой городской
• линии радиовещания при-
соединяются вводы нескольких жи-
лых домов. К телевизионному ка-
белю, спускающемуся от коллек-
тивной антенны, подключаются ка-
бели телевизоров на каждом эта-
же. К линии передачи сигналов
телеуправления рядом объектов
(цехи завода, буровые вышки) под-
ключается несколько комплектов
приемной аппаратуры.
Довольно часто также ' линия
передачи состоит из отдельных уча-
стков с различными параметрами
(составная линия). Так, воздушные
линии телефонной связи имеют, как
правило, кабельные вводы в здания
телефонных станций, воздушные
линии электропередачи на террито-
рии города заменяются • кабельны-
ми, и т. д.
Расчет режима работы таких ли-
ний значительно сложнее, .чем одно-
родной линии с одним приемником
энергии в конце.
Для расчета режима линий с не-
сколькими приемниками применяют-
различные методы.
В линиях передачи сигналов те- -
лемеханики токи отдельных при-;
емников энергии иногда невелики
по сравнению с общим током линии,
и приемники более или менее
равномерно распределены вдоль
линии. Тогда линию с распределен-
ной нагрузкой заменяют однород-
ной линией с одним только прием-
ником энергии, режим которого и
рассчитывается; параметры' новой
линии изменяются так, чтобы учесть
остальные приемники энергии.
При небольшом числе приемни-
ков, включенных в различных точ-
ках линии (три на рис. 3-20), сна-
чала рассчитывают режим послед-
него участка линии длиной /3 так
же, как однородной линии с един-
ственным приемником энергии
в конце. Затем участок длиной /3
с сопротивлением Z3 в конце заме-
няют сосредоточенным сопротивле-
ниемк равным входному сопротивле-
Рис. 3-20.
нию третьего участка и включенным
параллельно с сопротивлением Z2.
В результате сопротивление на-
грузки участка линии длиной /2
оказывается известным, так что
может быть рассчитан режим ра-
боты этого участка. Продолжая
аналогичные преобразования, мож-
но найти напряжения и токи на
всех участках линии.
Режим составных линий рассчи-
тывают, применяя такой же метод
анализа.
Цепная схема, эквивалентная
сложной линии, составляется из
четырехполюсников с различными
параметрами. Каждый четырехпо-
люсник или несколько одинаковых
четырехполюсников-звеньев заме-
няют один участок линии. Сопро-
тивления нагрузок, включенных
в различных точках линии, могут
рассматриваться как простейшие
четырехполюсники поперечного ти-
па (см. § 1-16).
Пример 3-8. Найти входное сопротив-
ление линии примеров 3-1 .и 3-2 при од-
ной нагрузке в конце линии с сопротив-
лением Zn—ll 120Z560 ом и при допол-
нительном подключении такой же нагрузки
на расстоянии 2 км 'ют начала линии.
Решение. Входное сопротивление
линии определим по формуле (3-37)
_ 1 + Ne-2''1
Z**~Z° x_Ne-2fi >
где N = ус = 0,624 / 46°ЗО', е~2^=
Z-н Г
= 0,7 21—120°. При этих значениях ZBx =
= 672/;—5° 10' ом.
Для линии с дополнительной нагруз-
кой сначала определим входное сопротив-
ление второго участка длиной 12 = I — 2 =
= 8 км\
1 ДГ^>—2TZ2
Z'BX = zc —-----= 865 /—44°50' ом.
с 1 — Ne-2^
Сопротивление нагрузки первого участка
Z'H = Z^rV = 782/6°10' ом.
£ вх“Г
91
Входное сопротивление первого участка
длиной Z1 = 2 км, а значит, и всей линии
Zbx == Zc
1 +N’e-W1
--- _2 , • == 780 /—1°50' ом,
1 — N'e 2111 д’
Здесь
Ar, Z'H — Zc
N - Z'H+Ze-
3-16. ЛИНИЯ БЕЗ ИСКАЖЕНИИ
Как уже отмечалось, сигналы,
передаваемые по линии, искажа-
ются, если различны затухание и
фазовая скорость отдельных гармо-
нических составляющих сигнала.
Для устранения амплитудных иска-
жений необходимо добиться по-
стоянства коэффициента затухания
линии (a=-const), т. е. постоянной
амплитудной характеристики ли-
нии. Фазовые искажения отсутст-
вуют при постоянной фазовой ско-
рости (и = const), т. е. линейной
зависимости коэффициента фазы от
частоты р='со./у или, короче говоря,
линейной фазовой характеристики
линии. В линиях передачи информа-
ции обычных конструкций как воз-
душных, так и кабельных возника-
ют и амплитудные и фазовые иска-
жения.
Найдем условия, которым долж-
ны удовлетворить параметры одно-
родной линии передачи, чтобы
искажения сигналов не возникали.
Такую линию называют неиска-
жающей.
В § 3-7 были уже получены зави-
симости коэффициентов а и ip от
частоты. Однако для анализа фор-
мулы (3-21) и (3-22) достаточно
сложны. Более удобный вид они
получают, если ввести понятие об
углах потерь 61 и б2, так что
& 1 coL0 ’ & 2 со Со
и обозначить
. ^1 - ^2
sin--g-
Р =----
01 + О2
sln^—
. ^2
sin---2“
^1ТЙ2
cos----2—
Подставляя значения углов потерь
и 62 в выражения (3-21) и (3-22),
после преобразований получим:
₽=<»/14^(3-48)
92
Последние вьшажения сразу позво-
ляют найти условия, при которых
коэффициент затухания а постоянен
(не зависит от частоты), а коэффи-
циент фазы р увеличивается ли-
нейно с ростом частоты. Это усло-
вия р=0 и <7=0 или 61=62, т. е.
Г о/со/-о = ^о/соСо
Г0 _ go
Lo С о
При выполнении условия
т. е. для неискажающей линии,
a-=V‘rog^ ₽ = ш/10С0 (3-50)
и фазовая скорость
или
(3-49)
(3-49),
Волновое сопротивление такой линии
чисто активное и не зависит от ча-
стоты. Действительно,
7 р / Г0 4“ /СОДО
С~ go+>Co“
__1/Со (г0/С0 + j^),_j/ (q
-V CA^+W)-y С7' (3'52)
У воздушных линий электропро-
водной связи отношение в не-
сколько раз 'больше • отношения
go/Co- У кабелей расстояние между
проводами меньше, чем у воздуш-
ных линий. Поэтому- индуктивность
Lo на единицу длины кабельной
линии меньше, чем у воздушной,
а емкость Со, наоборот, больше.
Активная проводимость go между
проводами кабеля обычно значи-
тельно меньше, чем у воздушной
линии. В результате у кабельных
линий условие (3-49) еще более
далеко от выполнения, чем у воз-
душных линий.
Чтобы добиться выполнения ус-
ловия (3-49), следовало бы увели-
чивать диаметр проводов линии
(уменьшить г0)- Однако стоимость
линии значительно возрастает, так
что такой путь устранения искаже-
ний экономически нецелесообразен’.
Увеличение проводимости g0 хотя и
приближает к условию (3-49), ног
конечно, недопустимо, так как уве-
личивает затухание -сигналов в ли-
нии. Емкость Со можно уменьшить,
увеличив расстояние между прово-
дами. Однако конструкция линии
усложняется и стоимость растет.
Одновременно в -воздушных линиях
и у многожильных кабелей увели-
чиваются так называемые пере-
крестные помехи, т. е. помехи, соз-
даваемые соседними линиями пере-
дачи информации.
Для приближения реальных линий
к неискажающим иногда искусст-
венно увеличивают их индуктив-
ность. У воздушных и кабельных
линий индуктивность Lq на единицу
длины линии увеличивают, включая
в линию через равные промежутки
специально изготавливаемые ка-
тушки индуктивности. В кабелях
для увеличения индуктивности, кро-
ме того, обвивают жилы лентой из
ферромагнитного материала.
С увеличением индуктивности Со
фазовая скорость v (3-51) умень-
шается. Следовательно, растет вре-
мя движения сигнала между пунк-
том передачи и пунктом приема.
При телефонной связи и в системах
телемеханики время передачи
нельзя увеличивать выше опреде-
ленных норм. Поэтому на .протя-
женных, например междугородних,
линиях электропроводной связи
искусственное увеличение индуктив-
ности не применяется.
Большинство линий передачи
информации не относятся к типу
неискажающих. Искажения сигна-
лов устраняют при помощи специ-
альных четырехполюсников и кор-
ректирующих контуров сразу для
всего тракта передачи сигналов,
который состоит не только из ли-
нии, но и фильтров, усилителей,
трансформаторов, аттенюаторов и
других устройств.
Первая из формул (3-48) пока-
зывает, что при заданных значениях
го и go коэффициент затухания а
получается наименьшим при том
же условии р = 0, которое обеспечи-
вает отсутствие амплитудных иска-
жений. Значит, неискажающая ли-
ния является одновременно и ли-
нией с минимально возможным
затуханием при заданных пара-
метрах Го и go.
3-17. ЛИНИЯ С МАЛЫМИ ПОТЕРЯМИ
Расчет вторичных параметров
линии для многих практически
важных случаев можно значитель-
но упростить, заменив выражения
(3-5) и (3-7) приближенными.
Часто оказывается, что
<3-53)
как, например, у воздушных линий
высокочастотной телефонной связи
(диапазон частот 6—15'0 кгц) с мед-
ными проводами диаметром не
менее 4 мм. Это значит, что линии
имеют хорошую изоляцию, а потери
в проводах малы.
Составим расчетные формулы для
коэффициента распространения и вол-
нового сопротивления при сделанных
допущениях. Запйшем коэффициент
распространения, выделив отдельным
множителем уj&L0- j^CQ:
Y = ТЖ + /“A,) (g0 + /“G) ==
Так как справедливы условия (3-53),
то приближенно
или
''ogo
4(0 УLqCq
Последним слагаемым при тех же
допущениях можно пренебречь, т. е.
принять, что
v___го I I
I— 2 V Ьол 2 V Со *
'V' (3-54)
Следовательно, для линий с малыми
потерями коэффициент затухания
93
и коэффициент фазы
Р=ш/£0С0- (3-56)
Первое слагаемое выражения (3-55)
оценивает затухание вследствие по-
терь в проводах линии, второе сла-
гаемое— затухание из-за несовер-
шенства изоляции.
Так как у линии с малыми поте-
рями коэффициент фазы пропор-
ционален частоте, то теоретически
искажения сигналов нет. Практи-
чески это значит, что искажения
сигналов невелики.
При выполнении условий (3-53)
мнимой частью волнового сопро-
тивления можно пренебречь по
сравнению с вещественной:
7 _l/ro+>Lo_
с г £о + >Со
]/% 1/ 14-г0/>Л)
Г Со г l+g0/>C0 ~ Г Со’
(3-57)
т. е. считать волновое сопротивле-
ние чисто активным.
Полученные в этом параграфе
формулы для вторичных параметров
линии дают достаточную для боль-
шинства расчетов точность, если
^->5 и ^>5.
Го go
Пример 3-9. Сравнить значения коэф-
фициентов аир, вычисленные по точным
и приближенным формулам (малые поте-
ри) для двух линий: 1) линии связи при-
мера 3-1, 2) линии электропередачи при-
мера 3-3.
Решение. Для линии примера 3-1 точ-
ные значения коэффициентов аир были уже
получены: а=0,0178=неп/км, (3 — 3,24 рад/км.
По приближенным формулам (3-55) и
(3-56) получаются такие же значения. Это-
го и следовало ожидать, так как ^Ь^/г^>
>100, «Co/g0>700.
Для линии примера 3-3 точные значе-
ния коэффициентов -а и Р также уже най-
дены: а=0,1007 мнеп/км, 0=1,068 мрад/км.
По .приближенным формулам а=0,1087
мнеп/км, 3=1,068 мрад/км. И здесь хоро-
шее совпадение с точными значениями, так
как соС0/го=5,25, соС0/^о>00.
3-1'8. ЛИНИЯ БЕЗ ПОТЕРЬ
В линиях, соединяющих радио-
передатчики и радиоприемники
с антеннами, мощность потерь весь-
ма мала по сравнению с мощно-
стью нагрузки. При исследовании
режима работы этих и других ана-
логичных линий потерями целесо-
образно пренебречь, чтобы упро-
стить анализ и расчетные форму-
лы. В линиях-фильтрах, линиях-
трансформаторах, линиях-элемен-
тах настройки контуров (см. далее
§ 3-23, 3-24, 3-25) потери энергии
столь незначительны, что могут не
приниматься во внимание при объ-
яснении принципа действия этих
устройств.
Потери в линии отсутствуют, ес-
ли активное сопротивление Го = О и
активная проводимость go=O.
Практически это значит, что ак-
тивным сопротивлением проводов
можно пренебречь по ’ сравнению
с индуктивным и активной прово-
димостью между проводами — по
сравнению с емкостной. Такую ли-
нию называют линией без по-
терь.
Например, для медного коаксиального
кабеля с волновым сопротивлением 70 ом.
при частоте 1 Мгц получаем го~ЗО ом/км\
coL0—1 600 ом/км\ go~3O’lО"6 сим/км*
«Со—30 • 10-2 сим/км.
У линии без потерь волновое со-
противление чисто активное и не
зависит от частоты: •
коэффициент затухания равен нулю,
а коэффициент фазы пропорционален
частоте:
Y=«+/₽=V iwLo i<»c0=
= h-/7^C0 (3-59)
или
а = 0; ₽ = (3-60)
Фазовая скорость в линии без потерь
постоянная:
со 1
Следовательно, линия без потерь
не искажает сигналов.
При любой конструкции воздуш-
ной линии без потерь между ее
первичными параметрами Lq и Со
94
существует одно и то же соотноше-
ние LoC’o=l/c2, где с — скорость
света (электромагнитных волн)
в вакууме.
В частности, для воздушной двухпро-
водной линии без учета влияния земли
9 2D тге0
= т: Пп > Со — 2JJ » (3-61)
где D — расстояние между проводами;
d — диаметр провода.
Следовательно, LqCq = р-оео = 1/с2, так как
по определению электрическая постоянная
е0== 1/р-оС2.
Фазовая скорость в воздушной
линии совпадает со скоростью
электромагнитных волн в вакууме
(воздухе), т. е. наибольшая, на что
уже было обращено внимание
в § 3-6:
1CLqCo jAsqJXq
= £ 3-105 км{сек.
Для кабеля фазовая скорость
равна скорости электромагнитных
волн в его диэлектрике, т. е. меньше
скорости света в вакууме в /ер. раз:
V LqCq ер.
Так, например, для коаксиального кабеля
г2 2тсее0
<о=-^Г’ с3-62)
1П7Г
где Г1 — радиус жилы,
г2 — внутренний радиус оболочки.
Следовательно, ЦС0 = р-р-0еео = ер./с2.
Уравнения однородной линии
с гиперболическими функциями от
комплексного аргумента (3-26) за-
меняются для линии без потерь
уравнения с круговыми функциями
от вещественного аргумента. Про-
изводя подстановку
ch ух — ch jpx = cos px;
sh ух = sh jfix = j sin px
и Zc = zc, получаем:
U = U2 cos px sin |
u • ! (3-63)
I = j — sin Px +I2 cos px. I
J
Напряжение и ток в линии без
потерь, как и в общем случае, мож-
но представить в виде двух волн:
прямой и обратной. Только ампли-
туда каждой волны остается посто-
янной вдоль всей линии, так как
потерь энергии нет (а=0). Напря-
жение и ток каждой волны совпа-
дают по фазе, так как волновое
сопротивление чисто активное
(9 =0).
Входное сопротивление линии
без потерь:
7 U1 ~ ZH ~4~ jzc tg р/
ВХ — 7, “ 4 + JZB tg ₽/ —
1 + Ne~W
Режим линии без потерь, как и
линии с потерями, определяется не
только свойствами самой линии, но
и нагрузкой на ее конце. Рассмот-
рим теперь режим линии без по-
терь при различных нагрузках.
3-И9. СОГЛАСОВАННАЯ НАГРУЗКА
ЛИНИИ БЕЗ ПОТЕРЬ
При согласованной (активной) на-
грузке ZH — ze — LJC0 напряже-
ние и ток линии:
U — U2 cos px + /^2 sin px = |
1 =z jlz sin px + Ц cos px = I (3 65)
= Ie^x
2 2е )
Обратной (отраженной) волны нет
(Х = 0), т. е.
17^{7Пр(х); / = /пр(х).
Выбирая начальную фазу напря-
жения в конце линии равной нулю
(772 = [/2), запишем мгновенные зна-
чения напряжения и тока прямой
(бегущей) волны:
u(x, t) = U2m cos (W-|- px);
i (x, t) - lzm COS (w/-|-px) —
cos
(3-66)
95
Напряжение и ток вдоль линии
в любой момент времени распреде-
лены по косинусоидальному зако-
ну. На рис. 3-21 показаны мгновен-
ные значения напряжения и тока
в произвольный момент времени Л.
Из рисунка видно, что фаза напря-
жения и тока волны в различных
точках линии неодинакова. В мо-
мент времени фаза волны в точ-
ке с координатой xt равна нулю:
г/ (л\, /J = U2m cos (со^ -ф- pxj =
--U2т COS 0 —
в точке с координатой х2 фаза вол-
ны равна тс/2:
(*2> ti)=U2m COS (а)^+
+ px2) = /72™cosy = 0 и т. д.
В любой точке линии с коорди-
натой х напряжение и ток также
изменяются косинусоидально и
синфазно. Поскольку амплитуды
напряжения и тока вдоль линии не
затухают, а отраженная волна от-
сутствует, то действующие значе-
ния напряжения и тока не зависят
от координаты х (рис. 3-22):
г 7 Uт Ц2т
~У2~^2 * В
1т ,12т U2т U
В частности, напряжение на зажи-
мах генератора 1-1' (рис. 3-1 Г)
равно напряжению на зажимах
приемника (2-27).
Мощность волны, бегущей от ге-
нератора к приемнику,
Р = [7/=72гс = —
Zc
___
7
Рис. 3-22.
целиком поглощается в активном
сопротивлении нагрузки.
Энергия, передаваемая по линии
и поглощаемая сопротивлением на-
грузки, складывается поровну из
энергии электрического и магнит-
ного полей между проводами ли-
нии. Действительно,
U U2 Ц
—=z^Vt или 7Г=С7’
откуда максимальные значения энер-
гии
Ц12т _ CcUzm
2 2
Входное сопротивление (3-64)
линии, имеющей согласованную на-
грузку ZH=2C, при любой длине ли-
нии равно волновому сопротивле-
нию (или сопротивлению приемни-
ка). Следовательно, линия без по-
терь с согласованной нагрузкой
представляет для генератора чисто
активную нагрузку. Такой же ре-
зультат был получен в- § 1-12 для
симметричного четырехполюсника.
3-20. ХОЛОСТОЙ ХОД И КОРОТКОЕ
замыкание линии
БЕЗ ПОТЕРЬ
Чем значительней отличается со-
противление нагрузки ZH от волно-
вого сопротивления гс, тем замет-
нее становится отраженная волна.
Наибольшего значения коэффици-
ент отражения, а значит, и ампли-
туда отраженной волны, достигают
при ZH=0 (короткое замыкание) и
ZH=oo (холостой ход). Как уже
отмечалось, при коротком замыка-
нии Мк=—1, а при холостом ходе
7VX= + 1.
Напряжение и ток в линии без
потерь при холостом ходе:
U = U2 cos рл; I = j — sin рх.
96
и
Рис. 3-23.
Мгновенные значения напряжения
и тока (считая Цг = £72):
и (х, t) = Re [t/2m cos px efat ] =
= Uzm cos px cos wt;
i (Л> t) = Re[^sin px e/90° e,at]=
L
sin px cos (u>t 4- 90°).
~c
(3-67)
В любой момент времени напряже-
ние распределяется вдоль линии по
косинусоидальному закону. Напри-
мер, в момент, времени /15 для ко-
торого 0)^ = 0, т. е. 008(0^ = 1,
распределение напряжения вдоль ли-
нии показано сплошной линией на
рис. 3-23. В конце линии (х=0) на-
пряжение максимально (cos fix — 1).
С ростом координаты х напряжение
уменьшается и при л = 2/4 напря-
жение равно нулю, так как рх =
= •^-—=-77 и cos Вл = 0. - Затем в
интервале 2/4 х < 32/4 косинус
становится отрицательным и т. д.
Функция cos со/ не может быть боль-
ше единицы, поэтому график и (х,
на рис. 3-23 показывает наиболь-
шие возможные (максимальные)
значения напряжений в разных
точках линии; Для момента време-
ни /2-=/1+Д/ имеем- cosco/2<l и
напряжение во всех точках линии
уменьшается (пунктирная линия
на рис. 3-23). В момент времени
т
^3 = ^i+~j-имеем cosco/$=0, т. е. на-
пряжение во всех точках линии спа-
дает до нуля. Затем напряжение
снова увеличивается \и(х, /4) на
7—434
т
рис. 3-23]. При £5=1/3 +-^напряже-
ние вновь достигает максимально
возможных значений (обратных по
знаку значениям в момент време-
ни /1). Пульсирующее напряжение
в х линии называют стоячей вол-
ной.
При любом х, например в точке
с координатой х19 напряжение изме-
няется по гармоническому (косину-
соидальному) закону:
ц(х1? /) = U2m cos fixr cos о/ —
— Um (A) COS со/
с амплитудой Um (хг) = U2m cos
(рис. 3-24), где за начало отсчета
времени выбран момент /1 = 0. В дру-
гой точке с коордийатой х2 напря-
жение изменяется в фазе с напря-
жением в точке х15 но имеет дру-
гую амплитуду Um(x2):
u(X2, t) — U2m COS fix2 COS W =
= Um (x2) cos co/.
Таким образом, напряжения во
всех точках линии имеют одну и
ту же фазу (одновременно дости-
гают максимальных значений, нуле-
вых значений и т. д.) или отлича-
ются по фазе на те. Амплитуды на-
пряжений в разных точках различны.
В точках с координатами х = 0,
2/2, 2 и т. д. амплитуда наиболь-
шая — пучности напряжения;
при х = 2/4, 32/4; 52/4 и т. д. ам-
плитуда равна нулю — узлы на-
пряжения. Действующее значе-
ние напряжения в различных точках
также неодинаково, в пучностях —
наибольшее U^4n=~^—U29 в уз-
г 2
лах равно нулю. На .рис. 3-25 пока-
зан график распределения действую-
97
Рис. 3-25.
При холостом ходе коэффициент
отражения 7VX=1. Поэтому ампли-
туда отраженной волны равна ам-
плитуде падающей волны, и стоя-
чую волну можно представить как
получающуюся в результате нало-
жения двух бегущих волн с рав-
ными амплитудами:
щего значения напряжения вдоль
линии.
Ток f(x, t) в любой момент вре-
мени t распределен вдоль линии не
по косинусоидальному, а по сину-
соидальному закону (3-67); следо-
вательно, узлы напряжения совпа-
дают с пучностями тока и наобо-
рот. Ток и напряжение изменяются
не синфазно. Как видно из выра-
жений (3-67), сдвиг по фазе между
напряжением и током в любой точ-
ке линии составляет ±90°. Это зна-
чит, что в момент времени ti, когда
напряжение достигает всюду ма-
ксимальных значений, ток равен
нулю (рис. 3-26) и наоборот в мо-
мент /з, когда напряжение равно
нулю, ток достигает всюду макси-
мально возможных значений.
График распределения действую-
щих значений тока вдоль линии
приведен на рис. 3-25.
Ток в пучности, т. е. наиболь-
шее значение тока найдем из
(3-67), принимая sin 1 (х==Х/4,
3%/4, ...),
Т _____V2 ^пучн
/пучн— — —
откуда следует, что отношение ма-
ксимальных значений напряжения
и тока равно волновому сопротив-
лению линии
(3-68)
Гпучн __
__^с.
-< пучн
и (х, = cos (wZ + px) 4-
COS (wt — px) =
= «np(X, t) + Wo6p (x, tyr
i (x, t) — cos (atf 4- Px) -—
— COS (mt — px) =
= Zjrp (Л, /) -- z’o6p (-^5 0
ИЛИ
== ^rp (-V) 4- ^обр (-^)»
/ ^2 JV* U2 —ft*
1 — 2zc 1 2zc
== i лр (-^)—io бр C^)«
При согласованной нагрузке по
линии передается мощность Р =
— UI. В случае стоячей волны пере-
дачи мощности вдоль линии нет,
так как и в узлах напряжения и
в узлах тока Р=0. Это ясно также
из чисто физических соображений:
линия потерь не имеет, а приемник
энергии отсутствует, следователь-
но, генератор не может отдавать
мощность в такую линию. На каж-
дом участке линии длиною Х/4
(между узлами напряжения и то-
ка) происходит только обмен за-
пасенной энергией между электри-
ческим и магнитным полями. Когда
напряжение достигает во всех точ-
ках линии наибольших значений,,
а ток равен нулю, вся запасенная
энергия сосредоточена в электри-
ческом поле. Когда напряжение
спадает до нуля, ток достигает ма-
ксимально возможных значений, и
запасенная энергия сосредоточена
в* магнитном поле. В этом смысле
процессы, которые происходят на
каждом участке линии длиною Х/4,
98
аналогичны процессам обмена
энергией в контуре, состоящем из
емкости и индуктивности.
При коротком замыкании линии
(U2=0)
U — /72гс sin I — I2 cos рс.
Мгновенные значения напряже-
ния и тока (принимая /2=^2) •
и (х, /) = sin fix cos (at 90°); 1
i (x, t) — I2m cos £x cos f
(3-69)
Напряжение и ток опять-таки об-
разуют стоячие волны, но напря-
жение в любой момент времени t
распределено вдоль линии по си-
нусоидальному закону, а ток — по
косинусоидальному. Это значит, что
узлы и • пучности напряжения при
коротком замыкании совпадают со-
ответственно с узлами и пучностями
тока при холостом ходе, а узлы и
пучности тока — с узлами и пучно-
стями напряжения. Сдвиг по фазе
между напряжением и током в лю-
бой точке линии по-прежнему со-
ставляет ±90°.
Входное сопротивление линии
без потерь при холостом ходе
(ZH=oo):
Zx=7W=~/>c ctg ’ (3’70)
при коротком замыкании£(7/= 0):
ZK = /zctg^ (3-71)
В обоих случаях входное сопро-
тивление чисто реактивное. Вели-
чина и характер входного сопро-
тивления при заданных волновом
сопротивлении гс и частоте со или
Рис. 3-28.
длине волны Х=2л/р зависят от
длины линии /. При pi/<jt/2,
т. е. ctg р/ положительный и
уменьшается с ростом /. Следова-
тельно, входное сопротивление ра-
зомкнутой на конце линии Zx ем-
костное и уменьшается с ростом
длины линии. Если длина линии
равна Х/4, то ctgpZ = O и входное
сопротивление Zx=0. При зт/2<
<ipZ<3T, т. е. %/4</<Х/2, ctgp/ от-
рицательный и увеличивается с ро-
стом /. Следовательно, входное со-
противление — индуктивное и на-
растает с ростом длины линии
(рис. 3-27). У линии длиною Х/2
входное сопротивление бесконечно
велико. При %/2</<ЗХ/4 входное
сопротивление снова емкостное,
при 3%/4<Z<^ — индуктивное»
и т. д.
Для короткозамкнутой на конце
линии входное сопротивление ZK
индуктивное при бесконечно
велико при 1=^1^ емкостное прц
Z/4</<Z/2 и т. д. (рис. 3-28).
Итак, с изменением длины линии
без потерь входное сопротивление
разомкнутой или короткозамкнутой
на конце линии имеет емкостный
или индуктивный характер и может
принимать любые численные значе-
ния от 0 до оо (рис. 3-27 и 3-28).
Применение короткозамкнутых и
разомкнутых на конце линий будет
рассмотрено позже.
3-21. РЕАКТИВНАЯ НАГРУЗКА ЛИНИИ
БЕЗ ПОТЕРЬ
В линии с чисто реактивной (ин-
дуктивной или емкостной) нагруз-
кой также возникают стоячие вол-
ны, так как линия без потерь
99
7*
Рис. 3-29.
с реактивной нагрузкой не погло-
щает энергии. Поэтому амплитуда
отраженной волны равна амплиту-
де падающей. Этот же результат
следует из выражения для ко-
эффициента отражения N (3-29).
У линии без потерь волновое сопро-
тивление чисто активное (Zc=zc)9
а сопротивление нагрузки принято
чисто реактивным (ZH=/xH) и коэф-
фициент отражения
V . zc
Jxn + Zc •
Модули комплексных числителя и
знаменателя одинаковы. Значит,
модуль коэффициента отражения
n~U отр/ Uлад ~ 1 •
Для расчета режима и построе-
ния графиков распределения на-
пряжения и тока вдоль линии ин-
. дуктивное или емкостное сопро-
тивление можно заменить отрезком
короткозамкнутой или разомкнутой
линии. Действительно, входное со-
противление короткозамкнутой или
разомкнутой линии без потерь в за-
висимости от ее длины имеет ин-
: дуктивный или емкостный харак-
тер, причем величина входного
сопротивления изменяется от нуля
до бесконечно большого значения
(рис. 3-27 и 3-28). Всегда длину от-
• резка короткозамкнутой или ра-
' зомкнутой линии можно подобрать
так, чтобы его входное сопротивле-
ние равнялось сопротивлению на-
грузки.
На рис. 3-29,а показано, что ин-
дуктивность L замещается отрез-;
ком короткозамкнутой линии такой
длины у, при которой распределе-
ние напряжения и тока в линии не
изменяется. Приравнивая величины
индуктивного сопротивления и
входного сопротивления коротко-
замкнутой линии (3-71), получаем
уравнение для расчета длины от-
резка у:
vbL=zaXg$y. (3-72)
Здесь zc — волновое сопротивление
отрезка линии, которое может
быть выбрано таким же, как у ос-
новной линии, но может и отли-
чаться от волнового сопротивления
основной линии.
После подстановок со = 2д/= 2nv/K
и р = 2л/% выражение (3-72) запи-
сывается в виде:
2«L^-=zctg2z-(-. (3-73)
Последнее уравнение имеет бес-
численное множество решений:
У=Уо+т‘к/21, 2, 3, ...),
причем t/o<^/4, т. е. минимальная
длина отрезка линии меньше чет-
верти длины волны. Это видно и из
рис. 3-28: входное сопротивление
отрезка линии не изменяется при
увеличении ее длины на любое це-
лое число полуволн. На рис. 3-29
выбрано у—уо (т = 0).
В конце короткозамкнутого от-
резка линии (рис. 3-29,6) напря-
жение равно нулю, а ток максима-
лен. На зажимах 2—2' (конец ос-
новной линии), к которым присо-
единена индуктивность, нет ни пуч-
ности, ни узла тока или напряже-
ния.
Индуктивность L можно заме-
нить и отрезком разомкнутой ли-
нии. В этом случае длина отрезка
у' определяется из уравнения
(см. 3-70)
= —zcctgp/.
Ясно, что y,=z/+X/4 и минималь-
ная длина отрезка линии у'о боль-
ше четверти длины волны
100
Емкость также можно заменить
отрезком короткозамкнутой или
разомкнутой линии. Только мини-
мальная длина разомкнутого от-
резка получается меньше четверти
длины волны, а ‘ короткозамкнуто-
го— больше. В случае применения
разомкнутого отрезка его длина
определяется из уравнения
-^-=zcctgpr/, (3-74)
длина короткозамкнутого отрезка —•
из уравнения
3-22. ПРОИЗВОЛЬНАЯ НАГРУЗКА
ЛИНИИ БЕЗ ПОТЕРЬ
Рассмотрим режим линии без
потерь при произвольном сопро-
тивлении нагрузки Zh¥=2c.
В этом случае, как и при холо-
стом ходе и коротком замыкании,
напряжение и ток в любой точке
^>pfx2)
г)
Рис. 3-30.
линии можно представить состоя-
щими из двух бегущих волн:
= ^ер (-v) Ч- йобр (я);
I = /др С^) — /обр (-^)*
Но в отличие от ранее рассмотрен-
ных случаев модуль п коэффици-
ента отражения N (3-29) меньше 1
(неполное отражение). Поэтому
амплитуды (или действующие зна-
чения) напряжения и тока обрат-
ной волны не равны амплитудам
(или действующим значениям) на-
пряжения и тока прямой волны.
В частности, в конце линии
/2Обр = -^/2ПР
(3-75)
и в любой точке линии
#Пр = #2Пр^; и0бр = и20бре~^-,
/лр=^= Апр J /обр—-Добр^ 5
(3-76)
причем
Uпр Црбр U2пр U2обр
-^Пр Абр 12пр J20бр
(3-77)
На рис. 3-30,а показана векторная
диаграмма напряжений и токов
прямой и обратной волн в конце
линии. Так как линия без потерь,
то Zc — активное сопротивление
(0 =0) и напряжение каждой вол-*
101
ны совпадает по фазе с током этой
же волны. Угол сдвига по фазе
между напряжениями или токами
прямой и обратной волн равен ар-
гументу v коэффициента отражения
N (см. 3-75).
Чтобы построить аналогичную
векторную диаграмму в любой точ-
ке линии, отстоящей от конца ли-
нии на расстояние х, нужно повер-
нуть векторы прямой волны на
угол $х, а векторы обратной вол-
ны — на угол — (рис. 3-30,6).
Длины векторов не изменяются.
В точке с координатой где фазы
напряжений и токов прямой и об-
ратной волн отличаются на л, на-
пряжение линии минимально, а ток
максимален (рис. 3-30,в):
^МИН=^(А) = ^Г2ПР -t^2o6pj ] /о Л7О\
г, ___Г( .___г . т } (3-7о)
'макс—1 (Xj)—Лг'РтЛобр* J
В точке с координатой х2 = х1-|-
I те .Л
+ = Xj -ф- — напряжение линии
максимально, а ток минимален
(рис. 3-30,г):
^макс —U (Х2) —£/2пр“[~ ^2обр>’
Лмин = I (х2) = Дпр —Добр-
(3-79)
Минимумы (узлы) напряжения и
максимумы (пучности) тока на-
блюдаются во .всех точках с коор-
динатами x=xi +mjt/₽==x1 + m)%/2,
где m=0, 1, 2, 3, ... Максимумы
напряжения и минимумы тока на-
блюдаются в точках с координата-
ми х=х2+т<Х/2. График распреде-
ления напряжения вдоль линии по-
казан на рис. 3-31.
Рис. 3-31.
Действующие значения напря-
жения (тока) не одинаковы в раз-
личных точках линии, как у бегу-
щей волны (рис. 3-22), а изменяют-
ся вдоль линии волнообразно, как
у стоячей волны. Но действующие
значения напряжения и тока рас-
пределены не по синусоидальному
закону, а минимальное значение не
равно нулю. Такой режим в линии
можно формально представить по-
лученным в результате наложения
прямой — бегущей и -стоячей волн.
Отношение минимального напря-
жения к максимальному оценивает
степень согласования нагрузки и
называется коэффициентом
бегущей волны:
__ Um-r-r _Г2пр—f/гобр _
Омаке О2пр + С/2обр
__1 —62обр/^2пр __1 — М /о ол\
1 +-(72о6р/с/2пр — Г+ТР
где п — модуль коэффициента отра-
жения.
Обратную величину называют
коэффициентом стоячей
волны:
^ = -±=*^==1+^ (3-81)
Г.МИН 1 ---------- Л
Коэффициент бегущей волны в за-
висимости от согласованности на-
грузки может принимать значения
от 0 ({Диин=0 при холостом ходе и
коротком замыкании) до 1 (£/Мин=
= при согласованной на-
грузке) . Соответственно коэффи-
циент стоячей волны изменяется
в пределах от оо до 1. У реальных
линий передачи информации коэф-
фициента бегущей волны обычно
не меньше 0,5—0,6.
Коэффициент бегущей волны
можно выразить и через макси-
мальное и минимальное значения
тока. Для этого числитель и знаме-
натель (3-80) надо поделить на
^с‘
1 ^2пр /20бр I-M.TS.R. СО\
^б = т Х7 = 7 . (о-о2)
Найдем теперь входное сопротив-
ление участков линии длиной или
л = х14~тЯ/2, на входе которых
102
«фазы напряжения U (xj и тока / (х,)
совпадают (рис. 3-30,в):
ZbxW —/(Х1)—/(Х1) —
= (3-83)
1 макс i макс
Входное сопротивление участков
линии длиной х2 или х — xz-\-ml[2
7 ( и(х2) и макс
_ZCI м акс
мин
(3-84)
Таким образом, входное сопротив-
ление линии относительно всех то-
чек, в которых напряжения и токи
максимальны или минимальны, чи-
сто активное. Относительно других
точек -получаются комплексные
значения входного сопротивления.
Этот результат нетрудно получить
и из общей формулы для входного
сопротивления- (3-64).
Пример 3-10. Для коаксиального кабе-
ля с волновым сопротивлением Zc=rc==
=75 ом и полиэтиленовой изоляцией
(8=2,4) найти первые две точки от кон-
ца, относительно которых входное сопро-
тивление чисто активное. Известно, что
при частоте f=70 Мгц сопротивление на-
грузки ZH=;100Z20° ом.
Решение. В-общем случае входное
сопротивление — комплексная величина
(3-64):
7 _ 1
ZBX—2Cj_^_w_v) •
Входное сопротивление будет активным
при e~^l~v)= + 1 или 20/ — v = kn. Сле-
довательно,
V +&7U
1==~20 ’
где угол v — аргумент коэффициента отра-
жения
W= neiv = = 0,226/,.49’30',
т. е. v = 49°30'= 0,86 рад.
Коэффициент фазы
со 2rcf
₽ = = 2 280 рад,км-
Первая точка находится на расстоянии
/1= */20 = 0,19 м, вторая точка—на рас-
у + ти
стоянии Z2 = — =0,88 м.
По . расстоянию точек линии
с максимальным или минимальным
напряжением от ее конца и величи-
не коэффициента бегущей волны
можно рассчитать сопротивление
нагрузки линии ZH. Такие расчеты
выполняют, например, при опре-
делении нагрузок радиолокацион-
ных линий передач или диэлектри-
ческой и магнитной проницаемо-
стей различных материалов. Под-
робнее этот вопрос рассмотрен
в § 3-26.
3-23. ПРИМЕНЕНИЕ ОТРЕЗКОВ
ЛИНИИ ДЛЯ СОГЛАСОВАНИЯ
НАГРУЗКИ
Согласованная нагрузка получа-
ется при равенстве сопротивления
нагрузки волновому сопротивлению
линии. В технике приходится
встречаться с приемниками, имею-
щими самые различные сопротив-
ления, активные или комплексные.
Величину этих сопротивлений
обычно нельзя регулировать. Вол-
новое сопротивление как воздуш-
ных, так и кабельных линий без
потерь чисто активное и по величи-
не для всех практически реализуе-
мых конструкций заключено в до-
вольно узкие границы. Кроме того,
промышленность выпускает кабе-
ли с несколькими стандартными
значениями волнового сопротивле-
ния. Поэтому редко удается полу-
чить режим согласованной нагруз-
ки без применения специальных
согласующих устройств.
В диапазоне ультравысоких ча-
стот (Л<10 м) согласующее устрой-
ство состоит обычно из отрезков
линий. Рассмотрим несколько ме-
тодов согласования.
При чисто активной нагрузке
с сопротивлением ZH=:rH¥=^c для со-
гласования включают между при-
емником энергии (например, антен-
ной) и линией передачи отрезок
линии длиною %/4 (рис. 3-32). Этот
отрезок линии называют чет-
вертьволновым трансфор-
матором. Волновое сопротивле-
ние гтр четвертьволнового транс-
форматора выбирают так, чтобы
входное сопротивление нагружен-
ного трансформатора ZBx2 равня-
лось волновому сопротивлению ли-
нии передачи гс. Необходимое зна-
103
чение zTp определяется из уравне-
ния (3-64)
X , 2п Л
rH cos *5^'4' + s*nX ~4
^вх2 — 2!тр 2»ГЛ —- — 2я х
2тр cos 7? ~Т Т" /гн sin
или, так как необходимо
^ВХ2 :==‘ ^С>
иметь
откуда
2С--^тр
/2тр 2тр
/Гц ГН
£тр---У Н’
(3-85)
Напряжение и ток в конце линии
передачи (на зажимах 2-2'), т. е. на
входе трансформатора в соответ-
ствии с (3-63):
172 = н cos + jiHzTP sin -|-=
= //н2тр = ]LJS ;
• н
т • U н • ТС I • / 7С
Ц=1 — sin-^+j/н COS -=- =
^тр 2тр
Следовательно, напряжение U2
в конце линии передачи или на
входе трансформатора больше, чем
напряжение на сопротивлении на-
грузки в раз, а ток меньше
во столько же раз.
Входное сопротивление транс-
форматора
7 ^2 гтр
^вх2 7“ ' н ~~2
12 Гп
как и должно быть.
Конструктивно удается выпол-
нить четвертьволновый трансфор-
матор, когда сопротивления гн и zc
104
отличаются не более чем в 10 раз»
После включения четвертьволно-
вого трансформатора вдоль всей
линии передачи длиною I (рис.
3-32) получается режим чисто бе-
гущей волны. Отражения волны
в конце линии нет. На отрезке ли-
нии длиною %/4 есть и отраженная
от сопротивления нагрузки гн вол-
на. Так как четвертьволновый
трансформатор — линия без по-
терь, то вся мощность волны в ли-
нии передачи поглощается сопро-
тивлением нагрузки.
При комплексной нагрузке с со-
противлением ZH = zHe ‘н применяют
другой метод согласования. Со-
гласующее устройство состоит из
отрезка линии — трансформа-
ра с волновым сопротивлением
^тр=^с длиною ZTp (рис. 3-33) и от-
резка короткозамкнутой линии
(шлейфа) с волновым сопротивле-
нием гш=гс длиною /ш. Длины /тр
и /ш можно изменять. Таким обра-
зом, в конце линии передачи (на
зажимах 2—2') параллельно под-
ключен трансформатор с сопротив-
лением нагрузки Zfi и шлейф. Рас-
стояние между проводами шлейфа,
как и самой линии ' (рис. 3-33),
должно быть, конечно, много мень-
ше длины волны Л. Это замечание
относится ко всем линиям, рассмат-
риваемым в этой главе, а значит, и
ко всем схематичным рисункам
конструкций (рис. 3-33, 3-34, 3-35,
3-36).
Линия передачи (рис. 3-33) бу-
дет согласована, если суммарная
проводимость трансформатора и
шлейфа станет равной l/zc, т. е. при
выполнении условия
7-=^₽ + Гш. (3-86) .
Левая часть этого равенства —
чисто вещественная величина, вто-
рое слагаемое -правой части — чи-
сто мнимая Уш—’’—/6Ш. Первое
слагаемое правой части равенства
в общем случае — комплексное
ЧИСЛО У^тр = ^тр /^тр*
Равенство комплексных величин
(3-8&) распадается на два:
1/^с=^тр5 (3-87)
6Ш+ &тр=|0. (3-88)
Сначала^ рассчитывают длину
трансформатора /Тр, при которой
выполняется равенство (3-87). Этой
длине соответствует определенное
значение 6Тр. Затем выбирают дли-
ну шлейфа /ш, обеспечивающую
выполнение равенства (3-88). Вол-
новые сопротивления трансформа-
тора и шлейфа не обязательно
должны быть равны волновому со-
противлению линии передачи.
Ввестй к тракт передачи сигна-
лов отрезок линии с регулируемой
длиной /тр конструктивно не всегда
удается. Поэтому включают между
линией передачи и приемником
энергии два трансформатора, каж-
дый неизменяемой длины, и два
шлейфа с регулируемыми дли-
нами короткозамкнутых частей
(рис. 3-34). Практически вместо
двухшлейфового устройства при-
меняют трехшлейфовое, так как
при отсутствии третьего шлейфа
согласования удается достичь не
при всех значениях сопротивления
нагрузки ZH.
Описанными методами можно
добиться согласования на строго
фиксированной частоте. Во всем
спектре частот сигналов согласова-
ние не получается. При чисто ак-
тивной нагрузке устройство по
рис. 3-33 пригодно для согласова-
ния в диапазоне частот достаточно
малом по сравнению с основной
частотой f~v/h. Длина шлейфа и
длина трансформатора выбираются
одинаковыми и равными А/4. Волно-
вое сопротивление трансформатора
определяется по формуле (3-85).
Тогда на основной частоте входное
сопротивление короткозамкнутого
шлейфа длиною Х/4 бесконечно ве-
лико (рис. 3-28), а трансформатор
согласует сопротивление нагрузки
с волновым сопротивлением линии
передачи zc. При незначительном
изменении частоты входное сопро-
тивление трансформатора имеет
уже дополнительную реактивную
составляющую. Эта реактивная со-
ставляющая компенсируется шлей-
фом, входное сопротивление кото-
рого на новой частоте уже не рав-
но бесконечности и чисто реактив-
ное.
В зависимости от назначения
линии передачи разработаны раз-
личные методы согласования, ко-
торые подробно рассматриваются
в специальных курсах.
3-24. ОТРЕЗКИ ЛИНИИ КАК
ИНДУКТИВНОСТИ И ЕМКОСТИ
В § 3-20 было показано, что
входное сопротивление разомкну-
тых и короткозамкнутых линий чи-
сто реактивное. В зависимости от
длины линии изменяется величина
сопротивления, причем оно может
быть и индуктивным и емкостным
(рис. 3-27, 3-28). Такое изменение
входного сопротивления коротко-
замкнутых и разомкнутых линий
подсказывает возможность их при-
менения вместо катушек индуктив-
ности и конденсаторов.
Необходимая длина линии-ин-
дуктивности или линии-емкости
сравнима с длиной волны. Поэтому
практически применить эти линии
можно только в диапазоне ультра-
коротких волн. С другой стороны,,
использование катушек индуктив-
ности и конденсаторов обычных
конструкций в диапазоне ультрако-
ротких волн затрудняется. Необхо-
димое число витков катушки часто
105
получается меньше единицы; у кон-
денсаторов слишком заметной ста-
новится индуктивность выводов.
Одно и то же индуктивное (или
емкостное) сопротивление получа-
ется у линий, длины которых отли-
чаются на целое число полуволн.
Ясно, что нет смысла увеличивать
длину линии — растут потери в ли-
нии, усложняется конструкция.
Практически выбирают длину ли-
нии возможно меньшей.
Линии — индуктивности колеба-
тельного контура монтируют в ра-
диопередатчиках дециметровых
волн (емкость контура состоит из
междуэлектродных емкостей гене-
раторной лампы и емкости монта-
жа). Из линий — индуктивностей и
-линий — емкостей собирают филь-
тры телевизионных передатчиков.
При создании переменных индук-
тивностей и емкостей следует
учесть, что выполнить короткоза-
мкнутый отрезок линии переменной
длины конструктивно проще, чем
разомкнутый. Кроме того, у ра-
зомкнутого отрезка потери больше
из-за частичного излучения элек-
тромагнитной энергии.
Пример 3-11. Контур генератора метро-
вых волн, работающего на частоте
150 Мгц, состоит из отрезка короткозамк-
нутой линии, которая служит индуктив-
ностью контура. Линия выполнена из мед-
ных трубок с внешним диаметром 6 лш,
находящихся на расстоянии 90 мм друг
от .друга. Короткозамыкающее устройство
может перемещаться. Емкость контура
40 пф получается как сумма междуэлек-
тродной емкости лампы и емкости мон-
тажа.
Рассчитать, на каком расстоянии от
начала линии должен находиться коротко-
замыкатель, чтобы контур был настроен
на генерируемую частоту.
Решение. Длину короткозамкнутой
линии найдем из выражения (3-73), где не-
обходимая индуктивность L определяется
из уравнения coL = 1/соС, длина волны
= c/f. Волновое сопротивление линии без
потерь zc =уLq/Cq, причем для воздушной
1±0 2D
двухпроводной линии Lq = In CQ=
7ueft
----2d" (см* 3-61), т. е.
1п~г
,/Ч . 2D 2D 2D
г‘ = У 7Г1пТ=1201пТ = 276
При -заданных размерах линии волновое
сопротивление zc=408 ом, необходимая ин-
дуктивность L=|1,«1H мкгн, длина волны
%=2 м и наименьшая длина линий уо^=
=38 см:
3-25. ПРИМЕНЕНИЕ ЛИНИЙ ДЛИНОЮ
Х/4 и.Х/2
Входное сопротивление коротко-
замкнутой линии длиною «Х/4 беско-
нечно велико (рис. 3-28). Следова-
тельно, такая линия может слу-
жить металлическим изолятором.
Устройство металлического изоля-
тора для крепления внутреннего
провода коаксиальной линии пока-
зано на рис. 3-35. Свойства линии
с металлическими изоляторами луч-
ше, чем с диэлектрическими шай-
бами.
Короткозамкнутый шлейф дли-
ною Х/4 применяется при измерении
распределения напряжения вдоль
воздушной линии (рис. 3-36). В ко-
роткозамыкающую перемычку
шлейфа помещают подогреватель
термопары. Э. д. с. термопары за-
висит от тока в перемычке, она
измеряется вольтметром. Так как
шлейф короткозамкнут, то ток в пе-
ремычке максимален (пучность то-
ка). На входе шлейфа ток равен
нулю (узел тока), а напряжение
максимальное для шлейфа (пуч-
ность) и равно напряжению линии
в месте подключения шлейфа.
По величине тока перемычки
нетрудно вычислить напряжение
в линии, так как соотношение меж-
ду напряжением и током в пучно-
стях (шлейфа) известно (3-68):
^пучн = Дгучн^пь
где 2Ш — волновое сопротивление
шлейфа, которое может и не совпа-
дать с волновым сопротивлением
линии передачи.
Короткозамкнутую линию дли-
ною Х/4 применяют для фильтрации
четных гармоник основной частоты
Рис. 3-35.
106
радиопередатчика. Высокий к. п. д.
ламповых генераторов получается
не при синусоидальном анодном то-
ке лампы, а при импульсах тока,
содержащих высшие гармоники.
Высшие гармоники, если их не по-
давить, проникают в антенну, излу-
чаются и создают помехи другим
радиостанциям. Короткозамкнутая
линия длиною Х/4, которую вклю-
чают на выходе генератора, на ос-
новной частоте имеет бесконечно
большое (практически достаточно
большое) сопротивление. Для чет-
ных гармоник ее длина равна уже
не Z/4, а Х/2 для второй гармоники,
Л,— для четвертой и т. д. Входное
сопротивление короткозамкнутой
линии, длина которой составляет
целое число полуволн, равно нулю
(рис. 3-28). Поэтому все четные
гармоники практически накоротко
замыкаются этой линией.
Линию длиной Л/2 применяют
для подключения симметричной
антенны (вибратора) к коаксиаль-
ному (несимметричному) кабелю
(рис. 3-37). Отрезок коаксиального
кабеля, изогнутого в виде буквы U
(/7-колено) соединяет две полови-
ны вибратора. Разность фаз напря-
жений на концах /7-колена длиною
Л,/2 составляет 180°, как и требует-
ся для питания симметричного виб-
ратора.
При склейке деревянных изделий
токами высокой частоты пресс,
в котором зажимается изделие, не
всегда удобно размещать вплотную
с генератором высокочастотных ко-
лебаний. Между генератором и
прессом может быть проложена
коаксиальная линия. Если генера-
тор настроить, когда пресс нахо-
дится рядом, а затем пресс отодви-
нуть и соединить с генератором
кабелем, то в общем случае на-
стройка нарушится. Если же вы-
брать длину соединяющей линии
равной целому числу полуволн, то
входное сопротивление нагружен-
ного кабеля Zbx будет равно сопро-
тивлению нагрузки ZH, и генератор
останется настроенным. Действи-
тельно, по формуле (3-64) сопро-
тивление линии длиною, например,
Х/2
2к A X
ZH cos у- у + jzc sin у J
ЙГХ ; 2л X =Zh-
zc cos 2 + /ZHsin 2
В этом параграфе рассмотрены,
конечно, только некоторые случаи
применения линии длиною Я/4 и /1/2.
Пример 3-1*2. Найти входное сопротив-
ление короткозамкнутого отрезка линии
длиною А/4 на частоте 110 Мгц, учитывая
активное сопротивление проводов Го=
=0,087 ом)м (такое сопротивление имеет
двухпроводная воздушная линия с диа-
метром медных проводов 3 мм и расстоя-
нием между проводами 20 мм). Проводи-
мостью go пренебречь, волновое сопротив-
ление 585 ом считать чисто активным.
Решение. При учете активного со-
противления проводов отрезок линии мож-
но рассматривать как линию с малыми по-
терями (§ 3-117). Действительно, у задан-
ной линии £о=8,48 •10~7 гн)м и <оАо=
=53,4 ом)м, т. е. условие (3-53) го «С
<jcoLo на частоте 10 Мгц, конечно, выпол-
няется. Как указывалась в § 347, линия
с малыми потерями имеет практически
чисто активное волновое сопротивление
(для заданной линии аргумент 9 по абсо-
лютной величине меньше Зл).
Входное сопротивление короткозамкну-
той линии с потерями (3-38)
ZK=ZC th yl=zc th (al+jfil)
или
sh a/ cos PZ + / ch а/ sin ₽Z
Zbx Zc ch cos j sh s|n .
При I =A/4 получаем cos pZ=O, sin pl=\
BX — thaZ ’
107
a — “7Г
где по формуле (3-55)
а=-у-|/*^-=^- = 0,743-ю-4 неп1м.
Л с
а / = -^-=-^- = 7,5 м.
Так как aZ=5,57 • 10~4 неп мало, то можно
принять th aZ=»aZ. Тогда входное сопро-
тивление короткозамкнутого отрезка
2Bx=2c/aZ=il,06- '106 ojh=U,06 Мом.
Итак, при учете потерь входное сопро-
тивление не равно бесконечности, но очень
велико. Чем меньше потери, тем входное
сопротивление больше.
3-26. ИЗМЕРИТЕЛЬНАЯ ЛИНИЯ
Для измерения сопротивления
нагрузки ZH в диапазоне ультрако-
.ротких волн часто применяют так
называемую измерительную
линию. К концу измерительной
линии присоединяют сопротивление
ZH (рис. 3-31). Затем отмечают по-
ложение ближайшего к сопротивле-
нию нагрузки минимума напряже-
ния (%1) и величины максимального
Ермаке и минимального JVmhh напря-
жений.
Входное сопротивление относи-
тельно точки с координатой %i
(3-64)
7 —
вх С zc+/ZHtggxi ’
С другой стороны, в точке с мини-
мальным напряжением имеем
(3-83)
Zbx = ^c^6j
где коэффициент бегущей волны
^б=^мин/^макс. Приравнивая пра-
вые части обоих равенств, находим,
что
= • (3-89)
Таким образом, измерив-расстоя-
ние Xi и определив коэффициент
бегущей волны можно рассчи-
тать модуль и аргумент сопротив^
ления нагрузки измерительной ли-
нии.
Практически такие линии приме₽
няют для измерения сопротивлений
в диапазоне дециметровых и санти-
метровых волн. Измерительные
линии выполняют в виде коакси-
альной конструкции с прорезью*
в оболочке, вдоль которой может
передвигаться специальная карет-
ка. В каретке смонтирована вы-
прямляющая схема. Напряжение-
на выпрямляющую схему подво-
дится от штырька-антенны, прохо-
дящего сквозь прорезь внутрь ли-
нии. Это напряжение пропорцио-
нально напряжению U между жи-
лой и оболочкой в том сечении
линии, где находится штырь. Вы-
прямленный ток измеряется мил-
лиамперметром.
При измерении параметров ис-
следуемого материала в качестве
сопротивления ZH служит входное
сопротивление отрезка кабеля, за-
полненного этим материалом.
‘Предположим, например, что длина у
заполненного ферромагнитным материалом
кабеля много меньше длины волны X в ма-
териале и что измерено сопротивление ZH,
при замкнутом накоротко отрезке кабеля.
Тогда
ZH=ZK—Zm th ум У,
где ZM = ]Zzo/To — волновое сопротивле-
ние кабеля, заполненного исследуемым ма-
териалом, ум == V Zoyo— коэффициент J рас-
пространения (волны) в этом кабеле.
Так как #<^Х, то можно принять, что
th тм^==ум£/ и
Zh = Vz^n VZJtf = zoy=
= К + №о)У = i^y.
Здесь Lo — комплексная индуктивность ка-
беля на единицу длины, учитывающая по-
тери в ферромагнитном материале, причем
по (3-62)
io= 2^Woln—,
где р. — определяемая комплексная маг-
нитная проницаемость материала.
Вычислив по (3-89) сопротивление ZH>
находим Lo и ц.
3-27. КРУГОВАЯ ДИАГРАММА
ДЛЯ РАСЧЕТА ВХОДНОГО
СОПРОТИВЛЕНИЯ
Входное сопротивление линии без по-
терь при любых заданных Длине и сопро-
тивлении нагрузки можно рассчитать по
формуле (3-64):
_ zH+/zctgEZ
BX-Zc zc+/ZBtg₽Z
1 + aei^-2₽/)
- Zc 1 ^nef(—2?D‘
(3-90)
108
Рис. 3-39.
На (практике вместо вычислений с комп-
лексными величинами иногда применяют
графический (метод определения входного
сопротивления по круговой диаграмме.
Круговую диаграмму получают на пло-
скости комплексной величины
N == nefv = NB + /ЛГМ.
На рис. 3-38 показаны оси веществен-
ной и мнимой частей N и окружность ра-
диуса n=il, что соответствует коэффициен-
ту стоячей волны kc — oo (см. 3-81), т. е.
чисто реактивной нагрузке, а также слу-
чаю холостого хода и короткого замы-
кания линии. При всех других нагрузках
п<.1, и следовательно, внутри окружности
радиуса п=1 укладываются все возмож-
ные значения коэффициента отражения и
коэффициента стоячей волны. Каждому
значению п или kc соответствуег окруж-
ность радиуса п с центром в начале ко-
ординат. На рис. 3-38 показана еще окруж-
ность п=0,5. Для точки А коэффициент
отражения N=—il, т. е. эта точка относит-
ся к режиму короткого замыкания линии.
Для точки Б имеем 7V=4, т. е. режим хо-
лостого хода.
Построим .на той же плоскости еще
линии постоянного активного и постоянно-
го реактивного сопротивлений нагрузки
в относительных единицах:
— =r=constH — = х — const.
zc zc
Но определению
__ ZH —zc _ r + 7* — l
ZH z с г -f-'/x -f-1
г2 — 1 4- х2 4- jlx
= (г + 1)* + х* ' <3’91>
jt. е.
г2 — 1 4~ х2 2х
Nb = (r + l)2 + x2'> = (г+ 1)2+х2 •
Решая последние уравнения относи-
тельно тих, приводим их к виду
/ г \2 |
(*в-Fpr) + Nl = -(7+j)2 ; (3-92)
/ 1 \2 1
(NB - I)2 + (3-93)
Каждое из выражений (3-92) и (3-93) яв-
ляется уравнением окружности на плоско-
сти комплексной величины N. Центры
окружностей г=const находятся в точках
г
Л^в= ^м=0, т- е- ‘на оси? веществен-
ных величин JVB; радиусы окружностей
равны 11/(г-Н). Центры окружностей х=
=cons.t лежат в точках 7VB=!1, Л^м=Ч/х,
т. е. на прямой, параллельной оси мнимых
величин, радиусы окружностей равны 1/х.
На рис. 3-39 построены окружности г=1,
г=0 :и х=±11, х=0. При г—d радиус ра-
вен 0,5, центр находится в точке 0,5; 0.
При г=0 радиус окружности равен 1,
а центр находится в точке 0; 0. Эта окруж-
ность совпадает с окружностью n=d на
рис. 3-38. Так же построены окружности
г=0,5 и г=2. При х=±1 радиус равен 1,
а центр находится в точке !1; ±4 (на
пунктирной оси). При х=0 получается
окружность бесконечно большого радиуса,
т. е. ось вещественных величин. Так же
построены окружности х=±0,5 и х—±2.
На рис. 3-39 изображены только дуги
окружностей х—const внутри окружности
n=d, поскольку остальные точки этих
окружностей не имеют физического смысла.
Каждой точке полученной круговой
диаграммы соответствуют определенные
комплексное сопротивление нагрузки, ко-
эффициент отражения и коэффициент стоя-
чей волны. Для каждой точки коэффи-
циент отражения находим, соединяя эту
точку с началом координат. Например,
для точки В (г=0,50; х=—0,50) получаем
14-п
ЛГ=0,45 Z 245° и ^С=Ц^=2,64.
По этой же круговой диаграмме мож-
но определить входное сопротивление ли-
нии длиною I (с известными вторичными
109
параметрами zc и Р) при заданном сопро-
тивлении нагрузки.
Чтобы (пояснить метод определения
входного сопротивления, сопоставим вы-
ражения для сопротивления (нагрузки и
входного сопротивления, представленные
как функции коэффициента Первое вы-
противление 'нагрузки при заданных вход-
ном сопротивлении и длине линии. Для
этого надо сначала построить вектор, со-
единяющий точку с координатами гвх, *вх
и начало координат, а затем повернуть его
на угол +2-р/ (т. е. против направления
движения часовой стрелки).
Рис. 3-40.
ражение получим из (3-91), решая его от-
носительно ZH:
1 + W 1 + пеь
Z^ — zci_N—zc 1 • (3-94)
Второе выражение было уже записано вы-
ше '(3-90).
Из сравнения (3-94) и (3-90) ясно, что
входное сопротивление можно определить
по той же круговой диаграмме рис. 3-39,
если аргумент коэффициента отражения
изменить на (величину —2£Z, т. е. повер-
нуть вектор W по направлению вращения
часовой стрелки на угол 2(3/=4л7/Х. На-
пример, при сопротивлении нагрузки г—
=0,50, х——0,50 (Точка В) и длине линии
входное сопротивление находим по
координатам точки Г на рис. 3-39: гвх=
=0,40; хвх=0Д9.
При помощи диаграммы рис. 3-39 мож-
но решить и обратную задачу: найти со-
Диаграмма, построенная в ‘достаточно
большом масштабе (рис. 3-40) дает воз-
можность быстро и с хорошей точностью
определять входные сопротивления или со-
противления нагрузки линии без потерь,,
а также с потерями. Она называется диа-
граммой полных сопротивлений. Диаграм-
ма на рис. 3-40 показана повернутой на
90° по направлению движения часовой
стрелки. Чтобы отсчитывать углы в долях
волны (Z/X), вокруг диаграммы нанесена
специальная шкала.
Для удобства работы с диаграммой
ее помещают на жесткий лист и укреп-
ляют прозрачный движок, который вра-
щается относительно центра диаграммы.
На движке наносятся деления для отсчета
модуля коэффициента отражения п. Та-,
кие диаграммы прилагаются, например,
заводами радиотехнического оборудования
к изготовляемым ими измерительным ли-
ниям.
110
Глава четвертая
ПЕРЕХОДНЫЕ ПРОЦЕССЫ В ДЛИННЫХ ЛИНИЯХ
4-1. ВВЕДЕНИЕ
В длинных линиях, так же как и
в цепях с сосредоточенными пара-
метрами, после коммутаций,
т. е. включений и отключений ис-
точников питания, приемников
энергии и отдельных участков, не
сразу получается установившийся
режим. Кроме того, установивший-
ся режим нарушается при обрывах
и коротких замыканиях линии, ко-
торые можно считать аварийными
коммутациями.
Переходный режим в линии, как
и в цепях с сосредоточенными па-
раметрами продолжается теорети-
чески бесконечно долго. Практиче-
ски длительность переходного про-
цесса зависит от величин парамет-
ров самой линии (сопротивления
Го, индуктивности £0, емкости Со и
проводимости g0 на единицу дли-
ны, длины /) и входных (внутрен-
них) сопротивлений источников и
приемников. При этом влияние по-
терь (г0, go) сказывается даже то-
гда, когда в установившемся режи-
ме ими можно пренебречь.
Как бы ни мала была длитель-
ность переходного процесса, при
анализе работы многих установок,
содержащих длинные линии, необ-
ходимо его учитывать. В линиях
электропередачи высокого напря-
жения во время переходного режи-
ма возможны перенапряжения и
сверхтоки, в линиях связи — нару-
шения нормальной передачи сигна-
лов. При. неправильном выборе обо-
рудования перенапряжения могут
привести к пробою изоляции,
к разряду между отдельными ча-
стями . установок; сверхтоки —
к срабатыванию защиты и отклю-
чению установок, к перегоранию
приборов и аппаратов, обгоранию
контактов; нарушение нормальной
передачи сигналов — к потери ин-
формации и в результате к испол-
нению ошибочных команд в систе-
мах телеуправления, получению
искаженных данных в системах те-
леизмерения и т. д.
Переходный процесс в линии-на-
блюдается и при действии источни-
ков непериодических э. д. с.. Такие
э. д. с. создаются в аппаратуре те-
леграфной и телефонной связи, те-
лемеханики, телевидения, радиове-
щания, в устройствах импульсной
техники, измерительной аппаратуре
и др. Непериодические э. д. с. воз-
никают в воздушных линиях при
грозовых разрядах, наводятся в ли-
ниях передачи информации при ком-
мутациях в параллельно проходя-
щих линиях электропередачи и т. д.
4-2. ПРЯМАЯ И ОБРАТНАЯ ВОЛНЫ
В ОДНОРОДНОЙ ЛИНИИ
При анализе переходных процес-
сов в однородных длинных линиях
будем основываться на дифферен-
циальных уравнениях (3-1), полу-
ченных в предыдущей главе:
ди . । т di
— з— — W “r“L0—<7;
дх ° 1 0 dt’
(4-1).
di , ди
где за начало отсчета координаты:
х принято начало- линии.
Эти уравнения, как и дифферен-
циальные уравнения цепей с сосре-
доточенными параметрами, пригод-
ны для исследования не только
установившегося, но и переходного-
режима.
Для расчета установившегося
режима длинной линии нужно-
знать граничные условия. Гранич-
ные условия, например сопротивле-
ние приемника и напряжение в кон-
це линии, считались заданными при
расчете распределения синусои-
дальных напряжения и тока
в § 3-8. Во время переходного про-
цесса характер изменения напря-
жения и тока зависит не только от
граничных, но и от начальных
условий, т. е. величин напряжений
и токов в момент коммутации или
возникновения непериодической
э. д. с.
Таким образом, задача расчета-
переходного процесса сводится
lit
к составлению общего решения
уравнений (4-1), которое удовле-
творяет начальным (/=()) и гранич-
ным (х=0, x=Z) условиям, а так-
же значениям напряжений и токов
в тех точках линии, где они зада-
ны (например, действуют источни-
ки напряжения и тока).
Решение дифференциальных
уравнений в частных производных
(4-1) в общем виде достаточно
сложно. Ограничимся расчетом пе-
реходных процессов в линиях без
потерь (го=О, go=O). Как указы-
валось в предыдущей главе, к та-
ким линиям можно отнести линии-
трансформаторы, линии-фильтры,
линии-элементы настройки конту-
ров, линии для формирования им-
пульсов, линии передачи информа-
ции небольшой протяженности и
др.; в линиях электропередач по-
терями можно пренебречь при
анализе начальных стадий пере-
ходного процесса, часто наиболее
важных при определении возмож-
ных перенапряжений и сверхтоков.
Для исследования переходных
процессов в линии без потерь не-
обходимо знать общее решение си-
стемы уравнений:
__ди __г di. _di _du
dx~b{i'd'v дх~~С^дГ
или
д2и_ 1 д2и_^ d2i 1 d2i n
dx2 v2 dt2 U’ dx2 v2 dt2
(4-2)
Последней системе уравнений удов-
летворяет решение
и(х, t) = f1(x — vt) + f8 (x + vt)-,j
itx — Mx + vQ i
V } Zc ' Zc J
(4-3)
или
u(x, = + +
ВОГО фронта или сокращенно ско-
рость волны, zc =J/ — волновое
сопротивление.
Первая слагающая напряжения
fi(x—vt) или тока /1(х—vt)lzc пред-
ставляет собой напряжение или
ток волны, движущейся от начала
к концу линии, так как с течением
времени одно и то же значение ар-
гумента х—vt наблюдается в точ-
ках, координаты х которых растут
линейно. Такая волна была ранее
(гл. 3) названа прямой. Очевидно,
что -вторая слагающая напряжения
или тока представляет собой вол-
ну, движущуюся . от конца линии
к началу, т. е. обратную волну. По-
этому сокращенно можно запи-
сать:
U (х, t) = и = 4/Пр Ч” ^обр5
f(x, Z) = I — /пр — Z06p — (4-4)
__^пр __#обр
zc ~zT
и переходный процесс в линии
представить, как и установившийся,
в виде наложения напряжения и
тока прямой и обратной волн. Вид
функций fi и f2, т. е. формы напря-
жения и тока прямой и обратной
волн, зависит от граничных и на-
чальных условий и сохраняется не-
изменным при движении волн
вдоль однородной линии без потерь
с источниками и приемниками,
включенными только в начале и
конце линии.
4-3. ПРЯМАЯ ВОЛНА
ПРИ ПОДКЛЮЧЕНИИ К ЛИНИИ
ИСТОЧНИКА НАПРЯЖЕНИЯ
Рассмотрим, возникновение и
движение прямой волны при под-
ключении в начале однородной
линии с волновым сопротивлением
zc источника постоянного напряже-
ния (рис. 4-1) с э. д. с. Э.
ВОЛНО-
Рис. 4-1.
112
а)
Рис. 4-2.
После замыкания рубильника
напряжение в начале линии (зажи-
мы 1—Г) сразу достигнет посто-
янного значения U=9 и возникнет
прямая волна прямоугольной фор-
мы, перемещающаяся вдоль линии
со скоростью v (рис. 4-2).'Напря-
жение волны Wnp='i7, ток волны
______^пр __ U
нр— • —
L(Xtty)
б)
zc zc
В реальных условиях форма
волны всегда в большей или мень-
шей степени отличается от прямо-
угольной (напряжение нарастает
до величины U не мгновенно). Фор-
ма волны зависит и от внутреннего
сопротивления источника питания,
конструкции коммутирующего
устройства, параметров линии и
т. д. Так как линия не имеет по-
терь, то при движении волны вдоль
линии ее форма не будет изме-
няться.
В любой момент времени t во
всех точках линии, до которых вол-
на еще не дошла, напряжение и
* ток равны нулю. Точка, ограничи-
вающая участок линии, до которо-
го дошло волновое возмущение,
называется фронтом волны. Во
всех точках линии, пройденных
фронтом волны, напряжение равно
17, а ток /. Такой процесс наблюда-
ется до тех пор, пока волна не до-
стигнет конца линии. Аналитически
закон распределения напряжения
и тока вдоль линии в течение этого
интервала времени' можно записать
так:
^пр /)’= U, Znp («^> 0 =
Zc
при x<^vt и
^пр 0----Аф 0 — О
при x>vt.
U.(x,tz)
Рис. 4-3.
При подключении к линии источ-
ника напряжения другого вида
в линии наблюдается волна иной
формы. Например, при экспонен-
циальном • изменении э. д. с. э
(рис. 4-3,а) форма прямой волны
напряжения и тока также экспо-
ненциальная (рис. 4-3,6). В момент
включения (/=0) напряжение на за-
жимах линии 1—Г (х=0) наиболь-
шее ц(0, 0) = э(0) =17. С течением
времени напряжение на зажимах
линии &(0,/) уменьшается, так как
уменьшается величина э. д. с. э.
Например, в момент ti, для которо-
го и построен график распределе-
ния напряжения и тока вдоль ли-
нии на рис. 4-3,6, напряжение в на-
чале линии
и (0, ипр (0, fx) = Ue~atl <и,
в—434
ИЗ
ток
i(0,M=-rrp(0, ^=.^-3^;
За время /j фронт волны переме-
стился на расстояние xx==vtu
т. е. в точке с координатой Х\ на-
пряжение U(xb /1) =Ццр!(!Хь
ток
i (-^i> ^1) z== ^1ф («^1» := ~ •
zc
В момент времени t2>t\ фронт
волны окажется на расстоянии
х2=у./2>х1 от начала линии (рис.
4-3,в). В точке с координатой х2
напряжение р^авно U, ток /, а в на-
чале линии напряжение
и (О, 4)= Ue °*2<С н(0, ^),
чоз2)=^^а<г(о:/1).
Аналитически напряжение и ток
волны можно записать в виде
ua^x,t) = Ue-a{t-x,o\
Zc
для точек линии с координатой
x<vt и
iZnp(x, /) =0,
Лгр (х, t) — 0
для точек линии с координатой
x>vt. к
При подключении к линии источ-
ника синусоидального напряжения
форма волны зависит от фазы на-
пряжения в момент замыкания ру-
бильника (/=0). Так на рис. 4-4,6
построен график распределения на-
пряжения вдоль линии в момент
для синусоидального на-
пряжения с начальной фазой л/4
(рис. 4-4,а).
Если за исследуемый промежу-
ток времени напряжение источника
не успевает заметно измениться, то
часто считают, что форма волны
остается прямоугольной. Анализ
переходного процесса при таком
предположении значительно упро-
щается. Например, за время дви-
Рис. 4-4.
жения волны вдоль линии высоко-
го напряжения длиною до 50 км со
скоростью, близкой к скорости све-
та в вакууме, синусоидальное на-
пряжение промышленной частоты
(50 гц) практически остается по-
стоянным. Действительно, за это
время изменение фазы напряжения
составляет менее 3°.
4-4. ПРЯМАЯ ВОЛНА
ПРИ ПОДКЛЮЧЕНИИ к линии
ПРОИЗВОЛЬНОГО ИСТОЧНИКА
Реальные источники электриче-
ской энергии имеют конечное внут-
реннее сопротивление, причем не-
редко не чисто активное. Если
внутреннее сопротивление источни-
ка не активное, то и в случае по-
стоянного значения э. д. с. в линии
возникает волна не прямоугольной
формы.
Найдем, например, форму вол-
ны в начале линии для источника
с постоянной э. д. с. Э и индуктив-
ным внутренним сопротивлением
(рис. 4-5). По второму закону
Кирхгофа
9 —7 ^др I и
dt
114
В свою очередь
л
^пр“^пр-
Следовательно, ток прямой волны
может быть найден из уравнения
Э = £^ + гс/ср. (4-5)
Этому уравнению удовлетворяет
4 эквивалентная схема (рис. 4-6,а).
Учитывая начальные условия для
цепи рис. 4-6,а, а именно /пр(0)=0,
находим, что
; _ Э Э PS
*пр— - — »
где p1 — — z€JL.
График тока /пр(0, t) представлен
на рис. ,4-6,6.
Ток прямой волны в линии имеет
такую же нарастающую с нулевого
значения форму. Напряжение пря-
мой волны Цпр=’/пр2с повторяет
форму тока. На рис. 4-7 показан
график распределения тока в линии
в момент времени когда фронт
волны находится на расстоянии
xi = vt] от начала линии.
При помощи эквивалентной схе-
мы нетрудно определить напряже-
ние и ток прямой волны при любых
источниках,- а также дополнитель-
ных сосредоточенных нагрузках на
первичных зажимах линии. Так как
напряжение и ток волны связаны
всегда законом Ома /пр=^пр/2с, то
на эквивалентных схемах линия
всегда представляется волновым
сопротивлением zc. Например, на
рис. 4-8,6 показана эквивалентная
схема для определения г/пр и /щ,
в линии по рис. 4-8,а.
Для расчета тока /Пр и напряже-
ния &пр в эквивалентной схеме
можно воспользоваться любым
известным методом расчета пере-
ходного процесса в цепи с сосредо-
точенными параметрами: класси-
ческим, операторным, интегралом
Фурье и т. д.
Пример 4-1. Найти ток прямой волны
для линии рис. 4-8,а. Э. д. с. источника
«9=160 мв, внутреннее сопротивление гв =
=400 ом. Волновое сопротивление линии
2с='4ОО ом, параметры двухполюсника,
включенного на входных зажимах линйи,
С=500 пф, г=200 ом.
Решение. Ток прямой волны /Пр
найдем по эквивалентной -схеме, применяя
классический метод расчета переходного
процесса. Принужденная составляющая то-
160
ка равна 400 400 ма- Корень ха-
рактеристического уравнения определяется
из уравнения
-L-J-r-J----______= о
рС^'^ Ze+Гв U’
откуда рг = — 5-10-6 \1сек.
Таким образом, /пр = 0,2 + AePlt •
Э
При /=0 ток источника f(0)=-----—— =
Гв+т+7?
Рис. 4-8.
8*
115
= 0,3 ма, ток прямой волны znp (0) =
== *(0)
г
г + zc
= 0,1 ма.
Поэтому
постоян-
ная интегрирования Л — *пр (0)— 0,2 =
*=— 0,1 ма. Следовательно,
Znp = 0,2 — O.le"5'10^ ма.
4-5. ОТРАЖЕНИЕ ВОЛНЫ
В однородной линии, подключае-
мой к источнику при нулевых на-
чальных условиях (рис. 4-1, 4-5,
4-8), существует только одна пря-
мая волна напряжения и тока, по-
ка эта волна не достигнет конца
линии.
При несогласованной нагрузке
в конце линии Z^^=ZC волна час-
тично отразится, т. е. возникнет об-
ратная волна. Так как обратная
волна возникает в результате от-
ражения, то ее называют еще от-
раженной, а прямую волну — па-
дающей (на сопротивление на-
грузки) .
Расчет напряжения и тока отра-
женной волны в линии без потерь
наиболее прост при чисто активном
сопротивлении нагрузки и
в частных случаях гн=оо (холо-
стой ход) и гн—0 (короткое замы-
кание).
Предположим, что волна прямо-
угольной фОрМЫ Unj?=U, /цр =
= Ulzc=I (рис. 4-2) достигает кон-
ца линии и отражается от сопро-
тивления нагрузки гн. Для опреде-
ления напряжения и тока отражен-
ной волны вычислим сначала коэф-
фициент отражения (3-29)
м —. г * —z с
ГН + ’
(4-6)
после чего найдем напряжение и
ток отраженной волны
Z/отр ~ ^обр = N^пр= N&пад j
£*отр == N inaji, •
Как известно, коэффициент отра-
жения достигает наибольшего по
величине значения при холостом
ходе (гн=оо) и коротком замыка-
ли (гн=0), а именно Afx=l, N^==
= — 1. Во всех других случаях ко-
эффициент отражения по величине
меньше единицы, т. е. напряжение
116
и ток отраженной волны меньше,
чем падающей, поскольку энергия
падающей волны частично погло-
щается в сопротивлении нагрузки.
На рис. 4-9 построены графики
распределения напряжения и тока
падающей и отраженной волн и
результирующих напряжения и
ТОКа U — i/дад “Ь ^отр, ^~^пад ^*отр, КОГ-
да отраженная волна прошла 2/б
расстояния между концом и нача-
лом линии /j. При построе-
нии графиков принято сопротивле-
ние нагрузки rH=3zc, т. е. N=42.
До точек с координатами x<xi от-
раженная волна еще не дошла.
Поэтому на этом -участке линии
напряжение ток
=х^пад=,П/гс. Для точек с коорди-
натами х>%1 получаем
u = U+±U = ^-U,
. _и____L_E._
zc 2 zc ' 2 zc ’
В частном случае холостого хо-
да ^отр = ^х^пад ~ U и напряжение
в результате отражения удваивает-
ся: /7 = ^пад+^отр=(П+С7=2С7 (воз-
Рис. 4-10.
можно перенапряжение), a iOTp =
= Nxina^=U/zc и ток спадает до ну-
левого значения: £=;Гпад ^отр=,9.
При коротком замыкании (#к=
=—1), наоборот, ток удваивается,
напряжение уменьшается до нуля.
Форма отраженной волны при лю-
бом активном сопротивлении на-
грузки повторяет форму падающей.
Следует отметить, что всегда при
^н>^с, т. е. 7V>0, напряжение в ли-
нии после отражения волны увели-
чивается, а ток уменьшается.
И наоборот, при гн<£с, т. е. N<0,
напряжение уменьшается, ток уве-
личивается.
Рассмотрим теперь общий слу-
чай отражения волны от конца ли-
нии. Предположим, что в конце
линии подключен пассивный двух-
полюсник (рис. 4-10) и напряже-
ние падающей волны цПад известно.
Напряжение в конце линии, т. е. на
зажимах двухполюсника us, как и
напряжение в любой точке линии
можно представить в виде суммы
напряжений двух волн (падающей
и отраженной)
~ ^пад + ^отр • (4-7-)
Точно так же ток в конце линии
== ^пад ^отр (4“8)
ИЛИ
— ^пад^с ^отр^С’ (4-9)
Исключая из двух уравнений (4-7)
и (4-9) неизвестное напряжение
отраженной волны, получим:
Цд -ф- д. (4-10)
Последнему уравнению удовлетво-
ряет эквивалентная схема, пока-
занная на рис. 4-11. Следователь-
но, напряжение и ток в конце ли-
нии при произвольной нагрузке
можно найти при помощи эквива-
лентной схемы с источником на-
пряжения 2^пад- Линия на этой
Рйс. 4-11.
схеме представлена своим волно-
вым сопротивлением zc.
После того как в эквивалентной
схеме рассчитаны напряжение ин и
ток z’H в конце линии, напряжение и
ток отраженной волны определя-
ются из уравнений (4-7) и (4-8).
Форма отраженной волны в общем
случае не совпадает с формой па-
дающей волны.
Пример 4-2. Волна прямоугольной фор-
мы движется по воздушной линии с вол-
новым сопротивлением 400 ом. Напряже-
ние волны равно 10 в. В конце линии
подключен отрезок кабеля, который при
расчете отраженной волны можно заме-
нить, как показывает опыт, емкостью
0,025 мкф (рис. 442,а). Найти напряже-
ние отраженной волны. Сравнить графи-
ки изменения напряжения в конце линии
и на расстоянии у=1—х от конца линии.
Решение. Напряжение в конце линии
определим по эквивалентной схеме (рис.
442,6)
2йпад (1 — g =
= 20(1-^) в,
где за начало отсчета времени принят мо-
мент, когда волна достигла конца линии.
Напряжение отраженной волны (в кон-
це линии) найдем из уравнения ис —
= «пад + ^отр, откуда
Ио т р == Hq — Иц ад ==:: 10 — 20& в.
Напряжение в точке х на расстоянии
у=1—х от конца линии при t>x=y!v со-
117
6 ILC
ставим как сумму падающей и отражен-
ной волн
И (х, t) = ^пад “Т* тр ==
= 10 + [10 — 20(?-10s(Z_т)] в.
Здесь при записи отраженной волны на
расстоянии у от конца линии принято во
внимание, что отраженная волна придет
в эту точку с запозданием относительно
момента возникновения ее в конце линии
на время т.
На рис. 4-13 показаны графики изме-
нения напряжения в конце линии ис и
на расстоянии у от конца. Напряжение
и(х, t) до момента т состоит только из
одной падающей волны прямоугольной
формы. Поэтому до этого момента напря-
жение и(х, остается постоянным и рав-
ным 10 в.
Характер полученной зависимости не-
трудно объяснить. Как известно, незаря-
женная емкость -в первый момент переход-
ного процесса аналогична короткому за-
мыканию. Поэтому напряжение ис начи-
нает увеличиваться по мере зарядки с ну-
левого значения.
Пример 4-3. Волна прямоугольной фор-
мы достигает конца линии, где подключе-
на активно-индуктивная нагрузка (рис.
4-14,а). Построить графики распределения
напряжения и тока вдоль линии, когда
отраженная волна пройдет половину пути
между концом и началом линии. Дано:
/=200 км; 2С=200 ом; кв; г=
=110 ом, L—7 гн.
Решение. Эквивалентная схема для
расчета напряжения и тока в конце линии
показана на рис. 4-14,6. По этой схеме
сразу находим:
2^пад /
= + г
= 60 (1 — е~зы) а.
Из уравнения гн = «пад—г'отр получаем
/01р = -^2- _ /н = 31,5 - 60 (1 - г-30*) =
= —28,5 + 60<?“3W а.
Напряжение отраженной волны
Иотр = /отр^-с=—5,7 4-42,0 в кв.
На рис. 4-45 качественно построены
графики напряжения и тока падающей и
отраженной волн, а также результирующие
напряжение и ток.
В момент, когда падающая волна до-
стигает конца линии, напряжение удваи-
вается, а ток спадает до нулевого зна-
чения. Это объясняется тем, что ток в ин-
дуктивности не может измениться скачком.
Таким образом, в первый момент отраже-
ние происходит так же, как от разомкну-
того конца линии. Затем ток постепенно
увеличивается, а напряжение уменьшается.
Волну, возникающую в резуль-
тате отражения от произвольной
нагрузки, можно найти и при по-
мощи коэффициента отражения
в операторной форме.
Если известно Т7Пад(р)—оператор-
ное изображение напряжения па-
дающей волны и вычислен коэф-
Рис. 4-14.
118
фициент отражения в операторной
форме N(p), то операторное изо-
бражение напряжения отраженной
волны
^отр(р) —N (р) ^/пад(р) •
Пример 4-4. Найти .напряжение отра-
женной волны примера 4-3, применяя по-
нятие о коэффициенте отражения в опе-
раторной форме.
Решение. Для постоянного напряже-
ния иПад=6,3 кв операторное изображение
^пад(р) =6,3/р. Полное сопротивление на-
грузки в операторной форме ZH(p)=^4-
+pL—«10+р • 7. Следов ательно,
— 190 +р-7
^(^)— 210 +.р-7
и
_6,3—ЮО+р-7
troip(/’)— р 210+^3-7 *
Оригинал можно найти по теореме разло-
жения или по таблице операторных соот-
ветствий (§ 11-4 первой части книги), пред-
ставив t/отр (р) в виде суммы
—171 , _ 1
^отр (р) — р^р + зо) + 6’3 р + зо-
Так как
л * 1
---------— 1 z> — a t и --ттгг л — a t
Р(р + а) ’ 1 е Р + а • е ’
ТО
Иотр = — 5,7 (1 — г-30*) + 6,3г~30* кв,
что совпадает с ранее полученным резуль-
татом.
Отражение волны происходит не
только в конце линии, но и в каж-
дой точке линии между ее началом
и концом, где подключена сосредо-
точенная нагрузка, а также в точ-
ках соединения участков’ линий
е различными волновыми сопро-
тивлениями и вообще при любых
нарушениях однородности линии.
В этом случае при помощи экви-
валентной схемы можно опреде-
лить как отраженную волну для
первого участка линии (первой ли-
нии), так и волну, проходящую во
Рис. 4-16.
Рис. 4-17.
второй участок линии (вторую ли-
нию). Расчет переходного процесса
в эквивалентной схеме можно
опять-таки выполнить любым из-
вестным методом.,
Пример 4-5. Построить график распре-
деления напряжения на втором участке
воздушной линии (рис. 4-16), когда волна,
отразившись от конца линии, пройдет путь
3 л/. Линия подключается к источнику по-
стоянного напряжения 17=10 в. Парамет-
ры линии и нагрузок /1=40 ж, /2—5 м,
2ci==2c2=2c=200 ом, L=\l мкгн, С=И00 пф.
Решение. Прежде всего найдем на-
пряжение .волны, проходящей во второй
участок линии. Для этого составим экви-
валентную схему первого отражения в точ-
ке 'Присоединения индуктивности (рис.
4-47). На этой схеме второй1 участок, как
и первый, представлен волновым сопро-
тивлением 2С. Емкость в схему не входит,
так как волна еще не дошла до конца
линии.
В этой схеме
+ = " (1 - ePlt) = 0,1(1 - е~т ) а.
diL
*^ПрОХ == == Юг в,
причем время t отсчитывается от момента,
когда прямая волна первого участка ли-
нии достигнет индуктивности. График на-
пряжения проходящей волны, т. е. прямой
волны на втором участке линии, показан
на рис. 4-18.
Для оцределения напряжения волны,
отраженной от конца линии, составим вто-
рую эквивалентную схему (рис. 4-19).
В этой схеме действует источник экспо-
ненциального напряжения 2мПрох. Напря-
жение в конце второго участка линии ис
найдем, например, операторным методом:
1 ‘ Э(р) 1
2е2 + 1/рс 7С=
Э(Р)
1 +рС^с2 *
Рис 4-18.
119
Рис. 4-19.
где Э (р)—операторное изображение на-
пряжения 2ttnpox, т. е.
10
Э(р) —2 р_|_108.
Так как СгС2 —2-Ю-8, то
20 1
р4-108,1 +2-10-sp
= 107 (p + 10s)(p +0,5.10s)’
По таблице операторных соответствий
(§ 11-4 первой части книги) находим, что
изображению
1
(р+«) (р + О
соответствует оригинал
-L-b{e-bt_e-aty
Поэтому
Ис=20(й-°-5',08/ -<Гт) в.
Напряжение отраженной волны в конце
второго участка линии
^отр — &Q ^прох —1 20# * —
-зо^-104 в,
причем в двух последних выражениях вре-
мя отсчитывается от момента начала от-
ражения волны © конце второго участка
линии, так как только с этого момента
времени имеет смысл 'эквивалентная схе-
ма, показанная на рис. 4-49. Если начало
отсчета времени оставить с момента, когда
прямая волна на первом участке линии до-
стигает индуктивности, то в последних -вы-
ражениях время t нужно заменить време-
нем t—т2, где т2=/2/^— время перемеще-
ния фронта волны от начала до конца
второго участка.
Напряжение отраженной волны можно
определить и сразу по коэффициенту от-
ражения -в операторной форме (4-11)
.. . l/X? — zc2 __1— р-2-10-8
UpC+zc2 l+p-2-10-8’
Искомое напряжение
UOnp (р) = N (р) £7Прох(р) =
__1—р-2-10-8 10
1 + р-2- 10-8’р+ 108 ~
(р + 50- 107)(р + 108)
(р + 5.107) (р + Ю8)-
Теперь по
гинал.
График
таблице нетрудно найти ори-
распределения напряжения
строим в момент ^i=~~~ 34Q5 —Ю~8£^
где #1=3 м— расстояние от конца линии.
В момент t=b, когда проходящая или
прямая волна на втором участке линии
достигла его конца, ее напряжение
^прох(О)—JO в. Напряжение отраженной
волны в этот момент иОтр(0)=—Й0 в,
а суммарное напряжение равно нулю (на-
пряжение на емкости). В. момент напря-
жение проходящей волны в конце линии
(#=0) станет меньше
«прох (0, /,) = 10<?~,0Ч‘ =3,67 в
(рис. 4-18 и 4-20, а).
В этот же момент напряжение проходя-
щей волны «Прох(#> /1) тем меньше, чем.
ближе точка к началу второго участка,
т. е. чем, больше у (рис. 4-20,а), так как
проходящая волна имеет экспоненциальную'
форму. Например, на расстоянии #1=3 м
от конца линии напряжение этой волны
составит:
10<?-1()8ft+j'1/v)= 1,35 в.
В момент /j фронт отраженной волны
по условию задачи достиг точки, лежащей
на расстоянии #1=3 м от конца линии,
т. е. там напряжение отраженной волны
такое же, как в конце линии в момент t—
=0, а именно — 10 в ((рис. 4-20,а). В конце
линии в этот момент напряжение отражен-
ной волны
иотр (о, /1) = 2о^°’5'1О8/1—
— 30<?“,04i= 1,1 в.
На рис. 4-20,б показано результирующее
напряжение
120
Рис. 4-21.
В цепи рис. 4-16 в месте стыка
двух участков линии (или двух
линий) включена индуктивность.
Как уже указывалось, участок
с индуктивностью в первый момент
прихода волны можно считать от-
соединенным (разорванным). По-
этому напряжение и ток проходя-
щей волны в первый момент наи-
большие. Величина этого напряже-
ния определяется соотношением
волновых сопротивлений zci и гс2
участков линии. Из эквивалентной
схемы (рис. 4-17) находим, что
^прох.макс—2С7 . .
ZC1 “Г ^С2
Если гС1<гс2 (например, волна
переходит с кабельной линии на
воздушную), то наибольшее напря-
жение проходящей волны почти
в 2 раза превысит напряжение
прямой волны на первом участке
линии V, В случае отсутствия на-
грузки в конце второго участка
(холостой ход) напряжение после
отражения удвоится, т. е. превысит
напряжение прямой волны на пер-
вом участке почти =в 4 раза. То же
самое получится при индуктивном
характере нагрузки второго участ-
ка линии. .Возникающее перенапря-
жение может быть опасным для
изоляции аппаратов и приборов,
подключенных в конце второго уча-
стка линии.
Если в месте стыка линий вклю-
чить не индуктивность (рис. 4-16),
а емкость между проводами, то на-
пряжение и ток проходящей волны
будут нарастать постепенно с нуле-
вого значения (как на рис. 4-7).
Аналогичный график изменения
Рис. 4-22.
проходящей?
при
не
(рис. 4-16),
индук-
между
напряжения и тока
волны наблюдается и
тивности, включенной
проводами линии
а в разрыв проводов.
Пример 4-6. Сигнал в виде прямоуголь-
ного импульса напряжения 16 в длитель-
ностью т=0,5 мсек передается по (воздуш-
ной линии с волновым сопротивлением
zc1=600 ом. К выходным зажимам воз-
душной линии присоединены параллельно
два кабеля, причем длина первого столь
невелика, что при расчете переходного
процесса во втором кабеле его можно за-
менить емкостью С=2,6 мкф. Волновое
сопротивление второго кабеля zc2=200 ом.
Построить график зависимости от вре-
мени напряжения волны, проходящей во-
второй кабель.
Решение. Представим импульс в ви-
де суммы двух волн прямоугольной фор-
мы и разной полярности (рис. 4-2*1, а)
с расстоянием между фронтами xQ—tv.
Сначала определим напряжение волны,
проходящей во второй кабель, считая, что
по воздушной линии движется только пер-
вая волна прямоугольной формы. Для это-
го составим эквивалентную схему (рис.
4-21,6) и найдем:
н'Про1 = 8(1 — в,
где t — время в миллисекундах, отсчиты-
ваемое от момента, когда первая волна
прямоугольной формы достигла конца воз-
душной линии.
Для второй прямоугольной волны мож-
но составить такую же эквивалентную схе-
му только напряжениё источника питания
должно быть обратной полярности и ру-
бильник замыкаться не в момент £=0,.
а в момент t—т. Поэтому напряжение
— 81I-—£ L°’4
в.
121
График изменения напряжения «Прох=
=«,npox4-w<<npox построен ма рис. 4-22,а,
причем при /<т напряжение r/'прох, конеч-
но, равно нулю. На рис. 4-22,6 показана
форма волны, перемещающейся от начала
к концу .второго кабеля. Как и следовало
предполагать, напряжение проходящей
волны увеличивается постепенно, -начиная
с нулевого значения (емкость С в первый
момент равносильна короткому замыка-
нию) .
4-6. ВОЗНИКНОВЕНИЕ ВОЛН
ПРИ КОММУТАЦИЯХ
НА ЗАРЯЖЕННОЙ ЛИНИИ
Волны’ в линии возникают не
только при подключении источни-
ков питания и отражении из-за от-
сутствия согласования, но и при
всякого рода коммутациях на ли-
ниях, находящихся под напряже-
нием.
Рассмотрим сначала возникно-
вение волны при подключении со-
противления нагрузки гн- в конце
линии (рис. 4-23).
Предположим опять, что поте-
рями в линии можно пренебречь
и что в начале линии включен ис-
точник постоянного напряжения
Тогда до коммутации ток
в линии был равен нулю, а напря-
жение на линии равно U.
После коммутации возникает
обратная волна, перемещающаяся
рт конца линии к ее началу. Най-
дем напряжение и ток этой волны,
принимая во внимание граничные
условия.
Во-первых,, алгебраическая сум-
ма токов в конце линии равна ну-
лю, т. е. ток нагрузки равен току
обратной волны:
^н+^обр=!0. (4-12)
Во-вторых, напряжение в конце
линии (которое складывается из ра-
нее существовавшего напряжения
и напряжения обратной волны) рав-
но напряжению на сопротивлении
нагрузки, т. е.
^o6p~^H« (4-13)
Кроме того,
^обр = ^обр/^с?
а
н.
Рис. 4-23.
Подставляя значения токов /н и
^обр в уравнение (4-12), находим,
что
или
откуда
__
«Обр— Гн + гс •
Переходный процесс в линии
рис. 4-23 отличается от ранее рас-
смотренных тем, что к моменту ком-
мутации начальные условия цепи
ненулевые. Как и в цепях с сосре-
доточенными параметрами опреде-
ление переходного процесса в ли-
нии можно свести к расчету цепи
при нулевых начальных условиях.'
Для этого, как известно (см. §11-7
первой части книги), надо на ре-
жим, существовавший до коммута-
ции, наложить режим, который по-
лучается при включении на зажи-
мы рубильника источника напря-
жения, равного напряжению на за-
жимах до коммутации. Напряжение
и ток, которые накладываются на
ранее существовавшие, как раз и
образуют вновь возникающую вол-
ну. Напряжение и ток возникаю-
щей волны рассчитываются при
нулевых начальных условиях, т. е.'
при отсутствии в цепи запасенной
энергии и источников, кроме вклю-
чаемого на зажимы рубильника.
В цепи рис. 4-23 напряжение на
рубильнике до коммутации было
равно U. Поэтому напряжение и
ток возникающей обратной волны
можно рассчитать в цепи рис. 4-24,а.
Эта цепь аналогична рассмотрен-
ным ранее, например ^показанной
на рис. 4-5. Расчет возникающей
122
Рис. 4-24.
Рис. 4-26.
волны выполняется при помощи эк-
вивалентной -схемы (рис. 4-24,6), на
которой линия представлена вол-
новым сопротивлением zc. Для схе-
мы рис. 4-24,6 сразу находим:
• __
1об₽— Гн+гс;
^обр----^обр^С----
Uzc
Гн+ Zc*
Метод сведения к нулевым на-
чальным условиям позволяет легко
определять напряжения и токи воз-
никающих волн без анализа гра-
ничных условий. Ясно, что его мож-
но применять не только при под-
ключении нагрузки в конце линии,
но при любых подключениях на-
грузок и участков линии.
При отключении сопротивлений
нагрузки или участков линии для
расчета напряжений и токов возни-
кающих волн также можно пользо-
ваться методом сведения к нуле-
вым начальным условиям. Как из-
вестно (§ 11-7 первой части кни-
ги), в этом случае на зажимы ру-
бильника следует включить источ-
ник тока. Ток источника должен
быть равен току, ранее протекав-
шему в ветви рубильника.
Пример 4-7. Линия без потерь с со-
противлением нагрузки в конце гн нахо-
дится под постоянным напряжением U.
Найти напряжения и токи -волн, возникаю-
щих при подключении к линии дополни-
тельного приемника с сопротивлением г
(рис. 4-25,а).
Решение. Напряжение на зажимах
рубильника было равно (Поэтому состав-
ляем эквивалентную схему с источником на-
пряжения , (рис. 4-25,6). По эквивалентной
схеме находим токи и напряжения вновь
возникающих волн: прямой, движущейся
к концу линии, и обратной, бегущей к нача-
лу линии. Из схемы рис. 4-25
• ± и _ и
«пр — «обр - — 2 г+ zJ2~ 2r + zc>
Uzc
Wnp—&обр—^пр^с — — 2г | Zc'
Эти токи и напряжения накладываются
на ток I=U!rn и напряжение U (рис. 4-26).
Пример 4-8. В линии предыдущего
примера сопротивление г не подключается,
а отключается. Найти напряжения и токи
возникающих волн.
Решение. До отключения в сопро-
тивлении г протекал ток I—Ujr. Поэтому
напряжения и токи возникающих волн най-
дем при помощи эквивалентной схемы
с источником тока J—I (рис. 4-27):
___L=SL.
*пр — ^обр — л 9„ »
Цпр — ^обр — £пр^с •—
Рис. 4-25.
Рис. 4-27.
123
4-7. МНОГОКРАТНЫЕ ОТРАЖЕНИЯ
ВОЛН В РАЗОМКНУТОЙ
И КОРОТКОЗАМКНУТОЙ линиях
В подавляющем числе случаев
переходный процесс в линии состоит
из многократных отражений волн.
Например, в однородной линии
(рис. 4-9) отраженная (обратная
волна), достигнув начала* линии,
вновь отражается. В результате
возникает третья волна, состав-
ляющая вместе с первой суммар-
ную прямую волну в линии. Третья
волна, достигнув конца линии, так-
же отражается. Возникает четвер-
тая волна, образующая вместе jco
второй суммарную обратную волну
в линии и т. д.
Рассмотрим многократные от-
ражения сначала для двух наибо-
лее простых случаев: подключение
источника постоянного напряжения
к разомкнутой
ние источника
линии и подключе-
постоянного напря-
г)
Рис. 4-28.
жения к короткозамкнутой линии.
На рис. 4-28,а показаны графи-
ки распределения напряжения и
тока вдоль линии, когда возникшая
при подключении источника волна
не достигла еще конца линии. На-
пряжение первой прямой волны
^npi=i^, ток Эти зна-
чения имеют напряжение и ток при
любой нагрузке в конце линии и,
в частности, при холостом ходе, так
как волна еще не достигла конца
линии и условия в конце линии не
могут влиять на происходящий про-
цесс.
Коэффициент отражения в кон-
це разомкнутой линии N2=N^=1.
Поэтому напряжение и ток первой
обратной волны равны напряже-
нию и току первой прямой волны
(рис. 4-28,6) uO6pi=:^;io6pi=(/. Вре-
зультате напряжение в линии уд-
ваивается, ток спадает до нуля. Так
и ~
в
должно
конце
быть. Ведь нагрузки
линии нет (ток равен ну-
лю), и энергия магнитно-
го поля волны переходит.
в энергию электрического
поля.
Когда первая обрат-
ная волна достигнет на-
чала линии, она отразит-
ся, возникнет вторая пря-
мая волна. Так как вну-
треннее сопротивление ис-
точника принято равным
нулю (источник напряже-
ния), то коэффициент от-
ражения волны в начале
линии N}=NK=—il. Сле-
довательно,
^Пр2 NК^ОбР1 :==z--U 5
_____ Р2 _- U г
1 ПР 2 ---------------_ — '
zc
По линии начинает пере-
мещаться третья волна
(-рис. 4-28,в), наклады-
вающаяся на две первые.
Напряжение в линии
уменьшается до значения
U. Это можно объяснить
и граничными условиями:
в начале линии включен
источник постоянного на-
пряжения, который под-
держивает напряжение
равным U.
124
После отражения третьей волны
в конце линии возникнет вторая
обратная волна с напряжением
^Обр2 = -Л^цр2==—И ТОКОМ Z’o6p2=
=^х^пр2=—I- Эта волна наклады-
вается на предыдущие (рис.4-28,г).
Когда вторая обратная волна до-
стигнет начала линии, напряжение
и ток в линии всюду окажутся рав-
ными нулю, как и было до подклю-
чения источника напряжения. Сле-
довательно, с этого момента .пере-
ходный процесс в линии будет по-
вторяться (рис. 4-28,а, б, в, г). Пе-
риод повторения процессов Т равен
времени четырехкратного пробега
волны вдоль линии:
Т = —
v
В каждой точке линии напря-
жение и ток изменяются периоди-
чески, но кривые изменения в раз-
личных точках не одина-
ковы. Например, на рис.
4-29 показаны графики на-
пряжения в конце линии
(4-29, а) и в середине
(4-29,6). Напряжение в
конце линии изменяется
скачком до значения +
+ ^обр1=2(7, когда первая
прямая волна достигает
конца линии. Это напря-
жение сохраняется в кон-
це линии до прихода вто-
рой прямой волны, когда
напряжение уменьшается
до нуля и т. д. Аналогич-
но можно объяснить
вид графика рис. 4-29,6.
Реальные линии имеют потери,
хотя бы и малые. Поэтому напря-
жение волны по мере ее движения
вдоль линии уменьшается. Так, на-
пример, напряжение в конце линии
после первого отражения равно не
2С7, а меньше. Далее при каждом
новом отражении будут получаться
напряжения, все менее отличаю-
щиеся от среднего значения на-
пряжения, равного U и показан-
ного на рис. 4-29,а пунктирной ли-
нией. Таким образом, уровень на-
пряжения в конце линии постепен-
но приближается к величине на-
пряжения источника питания (тео-
ретически этот процесс продолжает-
ся бесконечно долго). Аналогичное
«выравнивание» напряжения про-
исходит во всех точках линии.
В случае короткозамкнутой в
конце линии первая прямая волна
такая же, как и при разомкнутой
(рис. 4-30,а): u=u^==\U, =
=I=Ulzc. Но коэффициент отраже-
ния в конце линии N2=:N^=—1.
ПОЭТОМУ W06pl= — U, *обр1=—I
(рис. 4-30,6). В результате напря-
жение в линии уменьшается дону-
ля: u=uTq?i + u0Qpl=\U—U—0, каки
должно быть при коротком замыка-
нии. Ток удваивается: /=’inpi—
—z*o6pi — 21.
Когда первая обратная волна
достигнет начала линии, возникнет
вторая прямая волна «пр2=
=AKizO6pi=77, Znp2=N-tfLQfypi — I. На-
пряжение в линии вновь становит-
ся равным £7, а ток увеличивается
до значения 3/ (рис.4-30,в). Далее
Рис. 4-30.
125
при каждом отражении в конце ли-
нии напряжение спадает до нуля,
а при отражении в начале линии
вновь нарастает до значения £7. Ток
увеличивается на величину / при
каждом отражении. Бесконечное
нарастание тока в реальных лини-
ях, конечно, не происходит. Вели-
чину нарастающего тока ограничи-
вают активное сопротивление и ак-
тивная проводимость линии и
внутреннее сопротивление источ-
ника.
4-8. ОБЩИЙ СЛУЧАЙ
МНОГОКРАТНЫХ ОТРАЖЕНИЙ
Расчет и построение графиков
распределения напряжения и тока
при многократных отражениях от
активных сопротивлений столь же
просты, как и в случае короткого
замыкания или холостого хода.
Для определения напряжения и
тока отраженной волны нужно толь-
ко знать коэффициент отражения
где г—активное сопротивление для
волны в точке отражения, напри-
мер, сопротивление нагрузки при
отражении волны в конце линии,
волновое сопротивление второго
участка линии .при переходе волны
с одного участка на другой и т. д.
Форма волны остается все время
неизменной.
Если в конце линии, начале ли-
нии или любой другой точке вклю-
чены устройства, у которых необ-
ходимо считаться с индуктивностя-
ми или емкостями, то определение
каждой новой отраженной волны
становится все сложнее. В резуль-
тате отражения изменяется форма
волны, так что приходится рассчи-
тывать эквивалентные схемы с ис-
точниками напряжения ‘ все более
сложного вида.
В таких случаях при анализе
многократных отражений часто от-
казываются от применения метода
наложения, т. е. представленияпро-
цесса состоящим из все большего
числа накладывающихся прямых и
обратных волн. В заданной (вы-
бранной) точке линии сразу рассчи-
тывают полные значения напряже;
ния и тока. Расчет выполняется
обычно с применением опера-
торного метода. Операторный
метод помогает также исследо-
вать переходный режим и в ли-
ниях с потерями. Такие расче-
ты здесь не рассматриваются.
Пример 4-9. При разрядке заря-
женной линии на сопротивление на-
грузки гЕ=гс получается импульс на-
пряжения, величина которо-
го равна половине напряже-
ния заряженной линии. Что-
х бы увеличить напряжение
. йв- импульса в радиотехниче-
ских устройствах применяют
схему по рис. 4-31.
Построить график изме-
нения напряжения в сопро-
тивлении нагрузки гн после
переключения рубильника из
положения 1 в положение 2.
Решение. Первона-
чально линия заряжена до
напряжения U = Э. После
перевода рубильника в поло-
жение 2 напряжение на ле-
вом конце первой линии
уменьшается до нуля, т. е.
возникает прямая волна с
напряжением йпр1 = —Эи
. ^пр1 Э
током *npi=-z—=== ——=
126
Рис. 4-33.
== — I. Во второй линии остается напряже-
ние, равное Э, и ток, равный нулю (рис.
4-32,а).
Через время = Z/v волна достигнет
правого конца первой линии и частично
отразится, частично пройдет во вторую
линию. Отраженную волну в первой ли-
нии и проходящую во вторую можно найти
по эквивалентной схеме (рис. 4-33):
2кПр1 2Э Э
Znpoxi = 2Zc _|~ Гн 4zc ~ 2zc ~~
_2_.
, 2 ’
э э_.
#npoxi-----2^ ----2 ’
Э , ч 3
= — 2^с (Гн “Ь — — 2 —
— #npi +«o6Pi;
_______ А О’ I Q -
^Обр1 -------------------------- -#Пр1 - - 2 * &_
2 ;
Э _ I
гобр1 = — 2z<; 2-
Пока эти волны движутся одна к началу
первой линии, другая к концу второй
(рис. 4-32,6) через сопротивление гн про-
ходит- ток inpoxi, а напряжение
&H = ZnpOXl • Гн =—Э.
Такое напряжение сохранится до тех пор,
пока вновь возникшие отраженные волны
в начале первой линии и в конце второй
не достигнут ’ точки подключений сопротив-
ления гн. Так как в начале первой линии
короткое замыкание, то N}=NK=— i и
цПр2=^1«обр1 = *Э/2; /пР2=Э/2 2С- Эта волна
накладывается на ранее возникшие, т. е.
напряжение и ток в первой линии спада-
ют до нуля. В конце второй линии холо-
стой ход, т.* е. Лг2=-^х==1, и напряжение
1
т к
отраженной волны «Отр1 =—Э/2, ток iOTpi =
——Э!2хс——1/2. Напряжение иОтрх и ток
Zotpi накладываются на напряжение «прохг
и ток Znpoxb Суммарные напряжение и
ток во второй линии, так же как и в пер-
вой, становятся равными нулю (рис. 4-32,в).
Когда эти последние волны достигнут со-
противления гн, напряжение и ток обеих,
линий равны нулю. Значит, вся энергия
заряженной линии поглотилась сопротив-
лением нагрузки и дальнейших отраже-
ний от точки присоединения сопротивлении
rn=2zc при таком его специально подоб-
ранном значении нет. Ток в сопротивлении
гн исчезает и напряжение импульса спа-
дает до нуля.
Таким образом, напряжение us неиз-
менно' и равно —Э с момента прихода
первой прямой волны и до прихода второй
прямой волны (рис. 4-34, где за начало*
отсчета времени выбран момент замыка-
ния рубильника). Длительность импульса
x=2llv, где v — скорость движения волны..
Пример 4-10. В импульсных устрой-
ствах для формирования прямоугольных
импульсов применяется схема, показанная
на рис.- 4-35. Источник тока 7=const —
это открываемый триод, Ri— его внутрен-
нее сопротивление, гн — сопротивление на-
грузки, в которой надо получить прямо-
угольный импульс заданной длительности.
Волновые сопротивления первой и третьей
линий равны zCi а второй вдвое меньше,
^H — Ri — ^c-
Найтй напряжение ин на сопротивле-
нии нагрузки.
Решение. С момента, когда откры-
вается триод, в первой линии возникает
волна прямоугольной формы с током'
йпр 1=7/2 (так как Ri=zc) и напряжением'
ц1пр1=гс7/2. Эта волна падает на узел А.
Ток и напряжение волн, проходящих;
во вторую и третью линии, нетрудно рас-
считать по эквивалентной схеме рис. 4-36-:?
, 7 , zc _____J
^2npl = &2ПР1 = ^2пр1 ~2 4* ^c’
____7
^зпр! - 4 > ^зпр! -J3npi^C - 4 Zc.
Рис. 4-34.
Рис. 4-36.
127
Рис. <4-37.
Волна, движущаяся по третьей линии,
достигает нагрузки [и не отражается, так
жак Гн = гс. С этого ^момента ^напряжение
ла нагрузке ин*== мзпр1 = — гс. Волна, дви-
жущаяся по второй Плинии, отражается от
короткозамкнутого конца, причем й2обр1=
= — ^2npi = — zc. Когда волна с напря-
жением «2обр1 достигнет узла А, в третьей
линии возникнет вторая прямая волна, ток
А пр 2 и напряжение кзпР2 которой можно
Рассчитать по схеме рис. 4-37:
„ L
^ЗПР2----КзПр2----------4 ZC-
Рис. 4-38.
."Эта волна суммируется с первой прямой
волной. Суммарный ток и напряжение
•в третьей линии ^зпр=^пр1+^зпр2=0; иЗПр =
— ^Зпр 1 "Ь ^Зпр2 == 0.
Когда вторая прямая волна достигнет
•конца третьей линии, напряжение на со-
пл всованной нагрузке ин = «зпр i4-«зпр2
уменьшиться до нуля. График напряжения
показан на рис. 4-3'8, где начало отсчета
времени выбрано с момента, когда первая
прямая волна в третьей линии достигнет
-ее конца. Длительность импульса х равна
времени двойного пробега волны вдоль
второй линии. Отражение обратной волны
в начале первой линии учитывать не нуж-
но, так как для этой волны в начале пер-
вой линии нагрузка согласована (T?2=zc).
Рис. 4-39.
например, отрицательно, индукти-
рует на ближайших к ней участках
линии положительные заряды (рис.
4-39). Эти положительные заряды
находятся в связанном состоянии
с зарядами тучи и могут быть со-
средоточены на небольшом участ-
ке, а свободные отрицательные за-
ряды по мере возникновения рас-
пространяются вдоль проводов ли-
нии. Действие их обычно не замет-
но благодаря малой плотности. По-
сле грозового разряда положитель-
ные заряды уже не удерживаются
в связанном состоянии. В результа-
те от места накопления зарядов
пойдут волны, которые называют
блуждающими.
На рис. 4-40 для нескольких мо-
ментов времени показано распреде-
ление напряжения волн, движущих-
ся к началу и концу линии. В на-
чальный момент времени t=Q (за-
ряды еще неподвижны) ток в ли-
нии равен нулю
i (х, 0) = гПр (х, 0) — г'обр (х, 0) =
__#пр (Х, 0)_ &0бр (х, 0) _~
Zc
а напряжение не равно нулю
4-9. БЛУЖДАЮЩИЕ ВОЛНЫ
ц (х, 0) — цпр (х, 0) 4- ^обр (•£, 0).
Волны в линиях электропереда-
чи и связи возникают и под дейст-
вием атмосферных явлений. Снего-
пад, дождь, воздушные потоки мо-
гут привести к накоплению элек-
трических зарядов на изолирован-
ных проводах линии.
Наиболее значительные заряды
образуются в том случае, когда
вблизи линии находится грозовая
туча. Грозовая туча, заряженная,
128
Рис. 4-40.
Из этих уравнений следует, что
/ и (х, 0)
^пр (-£, 0) — ^обр (•£» 0) — 2 >
т. е. напряжение каждой из волн
составляет половину напряжения,
обусловленного индуктированными
зарядами.
Итак, накопленные заряды по-
сле их освобождения от удержи-
вающих -сил (от влияния грозовой
тучи) образуют две одинаковые по
форме волны (прямую и обратную)
с половинными значениями напря-
жений. Прямая и обратная волны
перемещаются независимо друг от
друга. Они отражаются в точках
нарушения однородности линии, в
частности в начале и конце линии,
так же как и волны, возникшие по-
сле коммутации.
9—434
РАЗДЕЛ ВТОРОЙ
НЕЛИНЕЙНЫЕ ЭЛЕКТРИЧЕСКИЕ ЦЕПИ
Глава вятая
ОБЩАЯ ХАРАКТЕРИСТИКА НЕЛИНЕЙНЫХ ЦЕПЕЙ
5-1. ВВЕДЕНИЕ
Электрические цепи, параметры
которых зависят от тока или напря-
жения, называются нелинейны-
м и.
Нелинейные цепи обладают ря-
дом специфических особенностей,
которые часто необходимо прини-
мать во внимание, приступая к ана-
лизу цепи. Поэтому целесообразно
сначала обсудить ряд общих
свойств и основные особенности не-
линейных цепей, а затем перейти
к изучению методов расчета и про-
цессов в различных типах этих це-
пей. Соответственно часть положе-
ний обосновывается более строго и
иллюстрируется примерами лишь
в последующих главах.
В предыдущих главах рассматри-
вались линейные электрические це-
пи. В частности и цепи, содержа-
щие элементы с явно выраженной
нелинейностью (катушки с ферро-
магнитными сердечниками, триоды
ламповые и полупроводниковые
и др.), рассматривались только в
линейном режиме. Однако строго
линейных цепей не существует.
Всякая реальная цепь—нелинейна.
Как только токи и напряжения в
цепи, которая принята линейной,
достигнут достаточно больших ве-
личин, начинают сказываться не-
линейные эффекты: ферромагнит-
130
ные сердечники насыщаются; нару-
шается пропорциональность между
поляризацией и приложенным по-
лем в диэлектриках; изменяется
температура, а значит и сопротив-
ление проводников, геометрические
размеры конденсаторов, магнитные
свойства ферромагнетиков и пр.
В простейших случаях вместо
линейных элементов цепи нужно го-
ворить о нелинейном сопро-
тивлении r(z) или r(w), нели-
нейной индуктивности L(I)
или Л(Ф) и нелинейной емко-
сти С(ис) или C(Q). Напряжение
на ветви, содержащей последова-
тельно включенные нелинейные эле-
менты г, L, С, можно записать в ви-
де
w==/'(Z)/ + w+z/c (54>
ИЛИ
(5-2)
Выразим напряжение на индуктив-
ности через ток и величину индук-
тивности:
ul— dt
^ЛТ,+ ‘“-Чг
di
dt ’
(5-3)
а ток в емкости — через напряжение
и величину емкости:
dt
с
. _ d \исС (ас)] _ duc
lC — dt dt "+
• di
dC (Цс)
[C du^~
dar
~dT (5-4)
— С (ис) -\-и(
Сложность этих выражений по
сравнению с простыми и всегда
верными основными формулами
. __dQ
UL-- dt ' lC dt
привела к тому, что при расчете
цепей с ^нелинейными катушками
индуктивности и конденсаторами
часто не пользуются понятиями ин-
дуктивности и емкости.
Не имеет смысла представлять
элемент в виде сопротивления г (О,
индуктивности L(i) или емкости
С (и)' и в тех случаях, когда, на-
пример, напряжение на нем зави-
сит от двух токов Ui(Zi; i2) или от
двух напряжений ^i(wa; иь), как это
часто бывает в управляемых нели-
нейных элементах — электронной
лампе, транзисторе и др.
Если напряжение на нелинейном
элементе, который полагают нели-
нейным сопротивлением, зависит не
только от величины тока, но и от
скорости его изменения
или от величины заряда, прошедше-
го через элемент,
и = и р; J i dt j, (5-6)
то вообще нельзя заменить такой
элемент эквивалентным сопротив-
лением г(г), индуктивностью L(r)
или емкостью С (и) (более подроб-
но этот вопрос рассматривается в
§5-4).
Уравнения (5-1) — (5-4) —нели-
нейные. Напомним, что нелиней-
ными называются уравнения, со-
держащие неизвестные переменные
и их производные в степени выше
первой или (и) члены с произвел
дением переменных или произведе-
нием переменных и их производи
ных. Уравнения с трансцендентны-
ми функциями неизвестной пере-
менной также нелинейны.
Общих методов решения нелиней-
ных уравнений нет. Лишь для не-
большого числа случаев могут быть
найдены точные решения, выражен-
ные известными функциями. К этим
уравнениям, а значит, и к нелиней-
ным цепям неприменим принцип на-
ложения.
С другой стороны, теория линей-
ных алгебраических и линейных
дифференциальных уравнений с по-
стоянными коэффициентами, кото-
рыми описываются процессы в ли-
нейных электрических цепях с по-
стоянными параметрами, очень де-
тально разработана. Существуют
сравнительно простые методы ре-
шения таких уравнений (например,
символический—комплексный ме-
тод) и мощные общие методы (на-
пример, оператор Лапласа, интег-
ралы Дюамеля и Фурье), основан-
ные на применении принципа нало-
жения. Именно применимость прин-
ципа наложения может служить оп-
ределением линейной цепи. Поэто-
му там, где возможно, т. е. где это
не приводит к недопустимым ка-
чественным изменениям или коли-
чественным погрешностям, следует
описывать процессы линейными за-
висимостями. Однако, конечно, воз-
можность пренебречь нелиней-
ностью зависит от свойств (харак-
теристик) и режима работы эле-
ментов, входящих в цепь, и от кон-
кретных особенностей цепи.
Иллюстрируем сказанное одним
примером. Пусть в цепи, содержа-
щей только источники постоянного
и синусоидального напряжения ча-
стоты f, имеется катушка индуктив-
ности (или конденсатор), работаю-
щая в таком режиме, что относи-
тельное изменение индуктивности
(или емкости) весьма мало. Как
будет показано далее, в такой цепи
в составе тока могут быть, кроме
составляющей основной частоты f,
также составляющие кратных ча-
стот: 2f, 3f и др. Если степень не-
9*
131
линейности невелика, то амплитуды
высших гармоник сравнительно
малы;
Можно ли в данном случае пре-
небречь нелинейностью и, следова-
тельно, высшими гармониками? Да,
если цепь не предназначена для
преобразования (например, усиле-
ния) напряжений без искажения
формы; в противном 'случае нели-
нейность вносит так называемые
нелинейные искажения, и
для их анализа нелинейностью пре-
небречь нельзя. Да, если в этой це-
пи нет условий для резонанса на
какой-либо из высших гармоник; в
противном случае (при достаточной
добротности) может возникнуть на-
пряжение или ток этой гармоники
такой величины, что пренебречь им
нельзя. Если же считать цепь ли-
нейной, можно упустить важные
в количественном (а может быть
и в качественном) отношении явле-
ния.
Приведенный пример показыва-
ет, что нельзя пренебрегать нели-
нейностью в случае малых прира-
щений параметров, основываясь
лишь на факте малости прираще-
ний. Только анализ цепи с учетом
нелинейности покажет, можно ли
пренебречь нелинейностью. С дру-
гой стороны, существуют цепи, ли-
неаризованное описание явлений
в которых совсем лишено смысла
(см. § 5-3).
Нелинейности могут быть вред-
ными, когда они играют отрица-
тельную роль и крайне нежелатель-
ны. В области передачи и преобра-
зования энергии примерами отри-
цательных нелинейных эффектов
могут служить: насыщение транс-
форматоров и связанные с этим ис-
кажения формы кривых тока и на-
пряжения, увеличение намагничи-
вающего тока и потерь; образова-
ние так называемых субгармониче-
ских колебаний (колебания на
частотах, более низких, чем частота
источника), ведущих к перенапря-
жениям в длинных линиях электро-
передачи. В области передачи и
преобразования информации из-
вестна отрицательная роль нели-
нейных искажений сигналов.
Нелинейности могут быть полез-
ными, когда они играют положи-
тельную роль. Например, только
при помощи нелинейных эффектов
могут быть созданы важнейшие
электротехнические устройства
(стабилизаторы, преобразователи
частоты, выпрямители, генераторы
и др.). Отметим, что развитие авто-
матики, телемеханики, радиотехни-
ки, вычислительной техники и др.
вообще было бы невозможно без
применения нелинейных цепей и раз-
работки все новых нелинейных эле-
ментов.
Физические процессы, определяю-
щие характеристики элементов, ча-
сто настолько сложны, что не удает-
ся установить аналитическое выра-
жение характеристик и получить
уравнения, описывающие цепь. В
этих случаях приходится тем или
иным путем, часто на основе экс-
периментальных данных (получен-
ных с некоторой погрешностью),
прибегнуть к приближенному ана-
литическому или графическому вы-
ражению нелинейных зависимо-
стей. Здесь рациональное упроще-
ние, т. е. идеализация, очень важ-
ный момент, определяющий подчас
возможность теоретического анали-
за цепи.
Вследствие огромного многооб-
разия нелинейных элементов и не-
линейных цепей невозможно, к со-
жалению, указать какие-либо стан-
дартные правила" идеализации. При
идеализации нужно сохранить все
характерные черты изучаемого про-
цесса, и в то же время ради упро-
щения исследования должны быть
исключены все несущественные для
изучаемого явления факторы. На-
пример, как будет показано в даль-
нейшем, при анализе феррорезо-
нансного стабилизатора напряже-
ния нет необходимости принимать
во внимание гистерезис, так как ра-
бота стабилизатора не основана
на применении гистерезиса и, кро-
ме того, гистерезис мало влияет на
количественные соотношения. Но
при анализе устройств для магнит-
ной записи, информации на ферро-
магнитной ленте нельзя пренебречь
гистерезисом, так как именно на
явлении гистерезиса и основана
здесь запись.
132
Чем точнее отображаются ха-
рактеристики нелинейной цепи, тем
сложнее оказываются уравнения,
описывающие эту цепь, и обычно
тем более приближенным решением
приходится довольствоваться. С
другой стороны, ограничившись
приближенным представлением ха-
рактеристик нелинейной цепи, мож-
но получить достаточно точное ре-
шение упрощенных уравнений (ана-
литическими методами, либо при
помощи вычислительных машин).
Конечно, не всегда удается сра-
зу правильно решить вопрос о том,
какими факторами можно пренеб-
речь при анализе данной нелиней-
ной цепи. Поэтому, как правило,
осуществляют экспериментальную
проверку выводов теории, а затем
уточняют теорию и пределы ее при-
менимости.
Надо отметить также и то, что
х ар а кт ер истики о т д е л ьных образ-
цов нелинейных элементов одного и
того же типа всегда в той или иной
мере отличаются друг от друга. Так,
например, параметры электронной
лампы или транзистора могут от-
личаться от номинальных значений
на ±20%’. Поэтому часто не имеет
смысла добиваться высокой точно-
сти при количественных расчетах
нелинейной цепи.
Возможность во многих случаях
лишь приближенного анализа не
должна расхолаживать изучающе-
го нелинейные цепи. Наоборот, за-
дачи исследования нелинейных си-
стем тем и привлекательны, что
здесь еще многое не изведано. Под-
час очень простая на вид нелиней-
ная цепь таит в себе целый комп-
лекс интереснейших и полезных для
практики возможностей.
В курсе теоретических основ
электротехники рассматриваются
начала теории нелинейных цепей.
При этом основное внимание уде-
ляется физическим процессам и
специфическим явлениям в типич-
ных примерах таких цепей.
Изучение этого раздела начнем
с простейших нелинейных элемен-
тов и их характеристик, затем рас-
смотрим нелинейные цепи при по-
стоянных и периодических возму-
щениях (токах, напряжениях) в ус-
тановившемся режиме и, наконец,
при переходных процессах.
5-2. ПРИМЕРЫ НЕЛИНЕЙНЫХ
ЭЛЕМЕНТОВ И ИХ ХАРАКТЕРИСТИК
В качестве первого примера не-
линейных сопротивлений рассмот-
рим термо сопротивления,
нелинейность которых вызывается
в основном нагревом при протека-
нии тока.
Термосопротивления бывают ме-
таллические (лампы накаливания,
бареттеры) и полупроводниковые
(термисторы). Так как изменения
теплового режима не происходят
мгновенно, то всякое термо-сопро-
тивление обладает тепловой инер-
цией, которую можно характеризо-
вать постоянной времени нагрева.
Поэтому такие нелинейные элемен-
ты называют инерционными.
На рис. 5-1 изображены вольт-
амперные характеристики лампы
накаливания с металлической
(вольфрамовой) нитью и лампы на-
каливания с угольной нитью, обла-
дающей отрицательным темпера-
турным коэффициентом, на рис. 5-2
—бареттера, на рис. 5-3—терми-
стора.
У бареттера железная нить
находится в стеклянном баллоне,
наполненном водородом. При изме-
нении тока в нити изменяется ее
сопротивление. Размеры и матери-
ал нити, а также условия ее охлаж-
133
Рис. 5-2.
дения подбираются такими, чтобы
обеспечить показанный на рис. 5-2
вид вольт-амперной характеристи-
ки. Для бареттера характерно на-
личие участка ab, на котором в
сравнительно широких пределах из-
менения напряжения на бареттере
ток изменяется в значительно мень-
шей степени.
Термисторы обычно изготов-
ляются из окислов металлов (кар-
биды, сульфиды, смеси окислов
марганца и никеля, смеси окислов
урана, магния и титана и др.). Кон-
струкция термистора зависит отего
назначения. Термисторы типаММТ
и КМТ оформляются аналогично
высокоомным непроволочным со-
противлениям с соответствующей
герметизацией. Измерительные тер-
мисторы, известные под названием
бусинковых, оформляются «в форме
шарика-бусинки с двумя вывода-
ми, в стеклянном баллоне. Такие
термисторы обладают сравнитель-
но малой инерционностью.
Вследствие тепловой инерционно-
сти зависимость между током и на-
пряжением термосопротивления в
данный .момент времени в значи-
тельной мере определяется его
тепловой предысторией. Поэтому
необходимо оговорить, о какой
вольт-амперной характеристике
идет речь: о зависимости между по-
стоянным током и напряжением на
элементе,, или между мгновенными
значениями изменяющихся во вре-
мени тока и напряжения, или меж-
ду действующими значениями пе-
ременного тока и напряжения. Ины-
ми словами надо различать ста-
тические и динамические
характеристики нелинейных
элементов. Этот вопрос в дальней-
шем будет рассмотрен более под-
робно. Приведенные на рис. 5-1 —
5-3 характеристики I(U) получены
при постоянных токе и напряжении
и, следовательно, установившемся
тепловом режиме (статические ха-
рактеристики).
Характеристики на рис. 5-1—5-3
симметричные, т. е.
ци)=-ц-и). (5-7)
Сопротивление таких нелинейных
элементов не зависит от направле-
ния тока в элементе.
Другими примерами нелинейных
сопротивлений могут служить эле-
менты, нелинейность которых вызы-
вается в основном электронными
процессами, происходящими в ве-
ществе. Эти процессы не связаны
непосредственно с выделением теп-
ла, но обусловливают зависимость
сопротивления от тока (напряже-
ния) и в некоторых элементах от
его направления (полярности). К
таким нелинейным элементам отно-
сятся газоразрядные приборы с
тлеющим разрядом (неоновые лам-
пы, стабилитроны), полупроводни-
ковые сопротивления и вентили
(карборундовые сопротивления, по-
лупроводниковые диоды ) и др.
134
Лаюы с тлеющим разря-
да м (вольт-амперная характери-
стика на рис. 5-4) представляют со-
бой заполненные инертным газом
двухэлектродные лампы. При по-
степенном увеличении напряжения
на негорящей лампе ток, оставаясь
сравнительно очень малым по ве-
личине, несколько возрастает. Ког-
да напряжение между электрода-
ми достигнет определенной величи-
ны (напряжения зажигания U3),
лампа загорается; между электро-
дами возникает тлеющий разряд, и
заполняющий лампу газ начинает
светиться. Затем следует участок
*а<Ь, на котором в сравнительно ши-
роких пределах изменения тока на-
пряжение изменяется в значитель-
но меньшей степени. При токе, пре-
вышающем некоторое максимальное
значение, начинается дуговой разряд
разрушение электродов. Если
электроды выполнить совершенно
одинаковыми, то характеристика
лампы с тлеющим разрядом будет
симметричной. Электроды стабили-
трона выполняются различными,
один из них — катод, другой — анод.
Поэтому характеристика лампы
несимметричная; при положи-
тельном потенциале анода по отно-
апению к катоду она имеет вид, по-
казанный на рис. 5-4.
Карборундовые сопро-
тивления (тиритовые и вилито-
вые) изготовляются в форме дисков
?или трубок из мелкоизмельченных
кварцевых пород, кокса и графита.
Нелинейность, например, тиритово-
го сопротивления (характеристика
на рис. 5-5) обусловлена тем, что
поверхность кристаллов тирита по-
крыта тонкой пленкой полупровод-
ника — окисла кремния. Проводи-
мость пленки зависит от приложен-
ного напряжения.
Нелинейные элементы с резко
выраженной несимметрией характе-
ристики называются вентилями.
Широкое практическое примене-
ние получили полупроводни-
ковые диоды — вентили с не-
симметричной вольт-амперной ха-
рактеристикой (рис. 5-6,а, б). Не-
симметричной проводимостью, обна-
руживаемой при изменении направ-
ления тока, обладают контактные
пары полупроводник — металл и по-
лупроводник — полупроводник (гер-
маниевые и кремниевые диоды).
Рис. 5-6.
135
В так называемом прямом на-
правлении сопротивление вентиля
(прямое) сравнительно мало. При
обратной полярности напряжения
на границе между полупроводником
и металлом или между двумя полу-
проводниками образуется тонкий
переходный слой (переход) с весь^
ма большим сопротивлением (об-
ратным), зависящим от величины
приложенного напряжения.
Кремниевый стабили-
трон — полупроводниковый диод с
уменьшенной шириной перехода.
В прямом направлении его вольт-
амперная характеристика (рис. 5-7)
практически не сильно отличается
от характеристики любого кремние-
вого диода. В обратном направле-
нии характеристика имеет резкий
перелом, который объясняется про-
боем перехода. После пробоя обрат-
ный ток возрастает, а напряжение
на диоде увеличивается в значитель-
но меньшей степени.
В туннельном диоде в отли-
чие от обычных полупроводниковых
диодов применяется кристалл с
очень большим содержанием приме-
сей и очень тонким (порядка
10“6 см) переходом. В таком тон-
ком переходе уже при небольших
прямых напряжениях возникает
значительная напряженность элек-
трического поля. При этом некото-
рые электроны могут просачивать-
ся сквозь энергетический барьер
или, как говорят, проходить тун-
нельным эффектом. При увеличении
(от нуля) напряжения ток вначале
возрастает, а затем уменьшается
(рис. 5-8). При дальнейшем увели-
чении напряжения через диод начи-
нает протекать обычный диодный
136
ток. Таким образом, туннельный ди-
од отличается от всех других полу-
проводниковых диодов наличием
падающего участка вольт-амперной
характеристики в прямом направле-
нии. В обратном направлении тун-
нельный диод обладает высокой
проводимостью.
У всей второй группы нелинейных
сопротивлений нелинейность обу-
словлена нетепловыми процессами,
и поэтому обычно их относят
к группе безынерционных эле-
ментов. У безынерционных элемен-
тов зависимость между мгновенны-
ми значениями тока и напряжения
такая же, как и при постоянных то-
ке и напряжении. Иными словами»
статическая и динамическая (для
мгновенных значений) характери-
стики безынерционных нелинейных
элементов совпадают.
Однако следует всегда помнить
об относительности понятия без-
ынерционное™. Ведь даже термосо-
противления при очень медленных
изменениях их режима (например»
когда тепловая постоянная времени
много меньше периода переменного
тока) можно рассматривать как бе-
зынерционные. С другой стороны»
при очень быстро протекающих про-
цессах (например, в быстродей-
ствующих вычислительных маши-
нах и в других импульсных или вы-
сокочастотных устройствах) у безы-
нерционных элементов сказывается
инерционность, и при анализе и рас-
чете цепей следует пользоваться не
статическими, а динамическими ха-
рактеристиками. Так, например»
если величина напряжения на полу-
проводниковом диоде изменяется
быстрее, чем устанавливается соот-
ветствующая концен-*
трация зарядов в полу-:
проводнике, то для
описания процессов в
диоде необходимы ди-
намические характе-
ристики. При этом
надо считаться с зави-
симостью типа (5-6) и,
как указывалось, нель-
зя заменить диод экви*
Рис. 5-9.
валентным сопротивле*
нием г(/).
Попутно напомним, что при до-
статочно высоких частотах надо уже
учитывать межэлектродные емко-
сти, индуктивности вводов и т. д.
Электрическая дуга, ши-
роко применяемая при сварке ме-
таллов, в дуговых электропечах,
в ртутных вентилях, в осветитель-
ных установках, а также возникаю-
щая при коммутациях в электриче-
ских цепях, должна рассматривать-
ся как нелинейный элемент. При
одинаковых электродах вольт-ам-
перная характеристика дуги сим-
метрична (рис. 5-9,а), а при различ-
ных электродах, когда заметная
эмиссия электронов у одного из
электродов практически невозмож-
на, характеристика дуги резко не-
симметрична (рис. 5-9,6). Так как
у электрической дуги существенное
значение имеют тепловые процес-
сы, то дуга относится к группе инер-
ционных нелинейных элементов.
Важным представителем нелиней-
ных элементов с несимметричной
характеристикой, обладающих одно-
сторонней проводимостью, является
двухэлектродная вакуумная элек-
тронная лампа — кенотрон. В нор-
мальных условиях анод имеет низ-
кую температуру и эмиссия электро-
нов возможна только из накаленно-
го катода. Поэтому ток в кенотроне
проходит только при положитель-
ном потенциале анода по отноше-
нию к катоду. Вид характеристики
кенотрона показан на рис. 5-9,в.
Очевидно, что кенотрон обладает
вентильным свойством.
Большая группа нелинейных со-
противлений относится к управ-
ляемым. Здесь прежде всего на-
до отметить трех- (и более) элек-
тродные лампы (триоды, пентоды) >
ионные приборы (тиратроны),, полу-
проводниковые триоды — транзисто-
ры и управляемые полупроводнико-
вые вентили (тиристоры). Это без-
ынерционные элементы (-с уже отме-
чавшимся выше ограничением) и
с несимметричными характеристи-
ками.
Обычно в управляемых сопротив-
лениях, кроме двух основных, есть
еще один или несколько дополни-
тельных электродов, изменяя ток
или напряжение которых, управля-
ют величиной сопротивления в основ-
ной цепи. Поэтому для
управляемого элемента
снимают семейство
вольт-амперных харак-
теристик.
Ток /а в анодной
цепи трехэлектродной
лампы — триода оп-
ределяется совместным
действием анодного 17а
и сеточного Uc напря-
жений. На рис. 5-10,бх
приведены анодные ха-
рактеристики /а ( Uа)
при различных напря-
жениях U с, а на
137
Рис. 5-11.
Грис. 5-10,6—сеточные характеристи-
ки 7а(£/с) при различных напряже-
ниях *[/а.
На рис. 5-11,« изображена одна
из трех возможных схем включения
транзистора — с общим эмитте-
ром э и одно из семейств характе-
ристик транзистора типа П-407. Ток
/к в коллекторной цепи опреде-
ляется совместным действием на-
пряжения iC7K3 на коллекторе и то-
ком /б в базе.
Сравнительно недавно были раз-
работаны управляемые полупровод-
никовые вентили — тиристоры, со-
держащие два перехода. На
рис. 5-11,6 показано условное обо-
значение такого диода (а — анод,
к — катод, у — управляющий вывод
или электрод) и семейство вольт-
амперных характеристик, в котором
параметром служит ток управле-
ния /у. В обратном направлении ха-
рактеристика такая же, как у обыч-
ного полупроводникового диода.
При /у—0 и увеличении прямого на-
пряжения ток сначала возрастает,
оставаясь сравнительно небольшим.
Можно считать, что вплоть до £/цр =
= t7B диод остается практически за-
пертым. При увеличении напряже-
ния выше значения lUB, называемого
напряжением включения, рабочая
точка (точка, отображающая на ха-
рактеристике состояние элемента в
данных условиях) скачком перехо-
дит из положения 1 в положение 2,
величина тока при этом резко воз-
растает1. Когда рабочая точка на-
ходится на участке 0—3—2, диод те^
ряет управляемость и уменьшения
прямого тока можно добиться толь-
ко путем уменьшения прямого на-
пряжения. При некотором /у=/у.в
имеем характеристику обычного
диода.
Под нелинейными индук-
тивностями обычно понимают
катушки с ферромагнитными сер-
дечниками. Вследствие нелинейной
зависимости между напряженно-
стью поля и магнитной . индукцией
ферромагнитных материалов зави-
симость между потокосцеплением и
током в таких катушках будет так-
же нелинейной и даже неоднознач-
ной (гистерезис). Следовательно,
здесь индуктивность не постоянна,
зависит от величины тока или пото-
ка в катушке.
Катушки со стальным сердечни-
ком в цепях переменного тока обла-
дают целым рядом очень интерес-
ных и важных особенностей. Они
рассматриваются в гл. 8 и 9.
Для постоянного тока индуктив-
ность независимо от того, линейная
она или нелинейная, не представля-
ет сопротивления. Однако многие
устройства и приборы, работающие
при постоянных токах, содержат
ферромагнитные сердечники (элек-
трические машины, электроизмери-
тельные приборы, электромагниты
и др.). Поэтому на практике возни-
кают задачи расчета подобных маг-
нитных цепей при постоянном во
1 При -питании от источника напряже-
ния последовательно с таки-м диодом .долж-
но быть включено сопротивление, иначе
величина тока после скачка может стать
недопустимо большой.
fl 38
«времени магнитном потоке. Эти во-
просы будут рассмотрены в гл. 7.
В некоторых диэлектриках зави-
симость между напряженностью
электрического поля и электриче-
ским смещением резко нелинейная.
'Эти материалы называют сегнето-
электриками, поскольку впервые не-
.линейные свойства были обнаруже-
ны у кристаллов сегнетовой соли.
Конденсатор с сегнетоэлектриком
обладает нелинейной зависимостью
>между зарядом и напряжением на
обкладках и, следовательно, пред-
ставляет собой нелинейную ем-
кость. Такие конденсаторы назы-
вают варикондами. Свойства сегне-
тоэлектриков во многом аналогич-
ны свойствам ферромагнетиков.
Они также обладают гистеризисны-
•ми явлениями.
Нелинейных индуктивностей и ем-
костей с природной несимметрией
характеристик соответственно Ф(0
ад Q(u) нет. Несимметрия здесь до-
стигается искусственными метода-
ми, обеспечивающими смещение —
несимметричное расположение ра-
бочего участка на характеристике
относительно начала координат.
Теперь после рассмотрения кон-
кретных элементов становится ясной
ад возможность их классификации по
общим свойствам, которые упоми-
нались выше:
1. Инерционные и безынерцион-
ные. Обычно нелинейные индуктив-
ности и емкости считают безынер-
ционными. Однако если учитывать
изменение геометрии и свойств фер-
ромагнитных сердечников и диэлек-
триков конденсаторов под влиянием
тепла, выделившегося в них и в
окружающих их проводниках, то
придется считать такие индуктивно-
сти и емкости инерционными.
2. С симметричными и несиммет-
ричными характеристиками.
3. С однозначной и неоднозначной
характеристиками. Неоднозначность
характеристики y = f(x) какого-ли-
бо элемента означает, что при од-
ном и том же значении величины х
• могут быть два (три) различных зна-
чения величины у или наоборот. Для
нелинейных сопротивлений неодно-
значность обычно связана с наличи-
ем падающего участка (du/di<0)
на характеристике (рис. 5-4, 5-8,
5-9,а, б, 5-11,6), а для нелинейных
индуктивностей и емкостей — с ги-
стерезисом.
4. Неуправляемые и управляемые.
5-3. ОСНОВНЫЕ ЯВЛЕНИЯ
В НЕЛИНЕЙНЫХ ЦЕПЯХ
И ИХ ОСОБЕННОСТИ
В нелинейных цепях могут быть
получены явления, принципиаль-
но недостижимые в линейных цепях.
Часть из них будет очень кратко
рассмотрена ниже (при этом оче-
редность изложения не характери-
зует практической важности яв-
ления). Подробный анализ и расчет
многих конкретных устройств дают-
ся в специальных курсах.
Усиление мощности. Управляемые
нелинейные сопротивления, индук-
тивности и емкости позволяют соз-
дать усилители мощности,
основной принцип которых поясняет
условная схема рис. 5-12. Нелиней-
ный элемент НЭ включен в цепь на-
грузки гн и достаточно мощного ис-
точника питания Э. В зависимости
от величины сопротивления нели-
нейного элемента (активного или
реактивного) в сопротивлении гн бу-
дет получаться большая или мень-
шая мощность от источника Э. Со-
противлением НЭ управляет вход-
ной сигнал.
В усилителе мощности для изме-
нения режима работы НЭ (его со-
противления) требуется значитель-
но меньшая мощность входного сиг-
нала, чем получаемое при этом при-
ращение мощности в нагрузке. Под-
черкнем, что в нагрузку мощность
поступает не от источника входного
сигнала, а от источника Э. Входной
сигнал лишь управляет той мощно-
стью, которую нагрузка получает от
источника Э (подобно тому, как, по-
ворачивая с небольшим усилием во-
139
дяной кран, можно управлять
сравнительно мощной струей воды).
В линейной цепи с постоянными па-
раметрами нельзя получить эффек-
та усиления мощности.
Нелинейный элемент может быть
управляемым сопротивлением (лам-
па, транзистор). Такие усилители
называются ламповыми, транзи-
сторными. При этом источник Э мо-
жет быть как постоянного, так и пе-
ременного тока. Нелинейный эле-
мент может быть управляемой ин-*
дуктивностью (в магнитных усили-
телях). или управляемой емкостью
(в диэлектрических усилителях).
В обоих случаях источник Э обяза-
тельно должен .быть переменного то-
ка, так как только для переменного
тока индуктивность и емкость пред-
ставляют конечное сопротивление,
которым можно в определенных
пределах управлять. Входной сиг-
нал может быть как постоянного,
так и переменного тока.
Усилители на ламповых и полу--
проводниковых триодах в квазили-
нейном режиме, т. е. при достаточно
малых приращениях сигналов, были
рассмотрены в первой части книги
(гл. 7). Естественно, что ряд важ-
ных для практики вопросов не мо-
жет быть решен с позиций линейной
теории. Так, например, не решает-
ся вопрос искажений формы выход-
ного сигнала по сравнению с фор-
мой входного сигнала, вызванных
нелинейностью хар актеристики
вход — выход усилителя (нелиней-
ные искажения).
Генерирование колебаний. Само-
стоятельно возникающие колебания
называются автоколебаниями.
Цепь, в которой возникают автоко-
лебания, называется по физической
терминологии автоколебательной си-
стемой, а с точки зрения техники она
является просто генератором коле-
баний. Автоколебательная система
подчинена, разумеется, закону со-
хранения энергии — она содержит
источник постоянного тока и лишь
преобразует его энергию в энергию
переменного тока.
Широко применяются ламповые и
транзисторные генераторы. Но
иногда автоколебания, возникающие
в системе, вредны, и их необходимо
140
подавить. Области электротехники^
где эти вопросы получили наиболь-
шее развитие, — это прежде всего
радиотехника и теория автоматиче-
ского регулирования.
В первой части книги был рас-
смотрен в линейном приближении
простейший ламповый генератор
гармонических колебаний. Автоко-
лебания в нем возникают вслед-
ствие введения обратной связи
в ламповом усилителе. Однако ли-
нейное приближение может отве-
тить лишь на вопрос, при каких
условиях в цепи возникнут автоко-
лебания (условия возбуждения).
Только с позиций нелинейной тео-
рии можно найти амплитуду коле-
баний, искажение формы кривой,
определить устойчивость колебаний
и др.
Устойчивые автоколебания могут
быть только в нелинейной цепи.
В линейной цепи с постоянными па-
раметрами, содержащей источники
только постоянного тока, возникаю-
щие колебания обязательно зату-
хают, иначе они должны неограни-
ченно возрастать, что, конечно, не-
возможно. В реальных генераторах
именно нелинейность ограничивает
амплитуду колебаний. Автоколеба-
ния более подробно рассматривают-
ся в гл. 9.
Стабилизация напряжения и то-
ка. Стабилизатором напря-
жения (тока) называется устрой-
ство, обеспечивающее в той или
иной степени постоянство напряже-
ния (тока) на выходе, т. е. на на-
грузке, при изменении напряжения
питания устройства или сопротивле-
ния нагрузки. Очевидно, что в ста-
билизаторе относительное измене-
ние напряжения (тока) на выходе
должно быть меньше относительно-
го изменения напряжения на входе.
Для стабилизации постоянного на-
пряжения часто применяют стаби-
литрон. На рис. 5-13 показана про-
стейшая схема стабилизатора на-
пряжения. Нагрузка гн подключает-
ся параллельно стабилитрону Ст.
Если рабочая точка стабилитрона
находится на участке ab вольт-ам-
перной характеристики (рис. 5-4),
то напряжение Ц2 на нагрузке (на
выходе стабилизатора) будет под-
0
4-4
Рис. '5-13.
Рис. 5-14.
Однако
должно
зажига-
держиваться постоянным,
(напряжение на входе .771
быть больше напряжения
иия 773, иначе при подключении це-
пи к источнику питания стабилитрон
не зажжется и не будет стабилизи-
ровать. Для ограничения тока ста-
билитрона включается ограничи-
тельное (балластное) сопротивле-
ние г0; вообще без сопротивления
Го схема рис. 5-13 как стабилизатор
не работала бы. На этом сопротив-
лении гасится подавляющая часть
изменения напряжения на входе.
Если, например, из-за увеличения
напряжения U\ или сопротивления
•нагрузки незначительно увеличится
напряжение на стабилитроне и, сле-
довательно, на выходе, то это при-
ведет к значительно более резкому
увеличению тока 7С стабилитрона и
тока 71 и соответствующему увели-
чению падения напряжения на со-
противлении rQ. В результате полу-
чается лишь незначительное изме-
нение напряжения на выходе. Ана-
логично применяется и полупровод-
никовый кремниевый стабилитрон
(рис. 5-7).
Качество стабилизатора принято
оценивать величиной коэффици-
ента стабилизации, равного
отношению относительных прираще-
ний напряжений на входе и выходе
Для стабилизации тока (постоян-
ного или действующего значения пе-
ременного) можно применить барет-
тер, простейшая схема включения
которого приведена на рис. 5-14.
Если рабочая точка бареттера ле-
жит на участке ab характеристики
(рис. 5-2), то при изменении напря-
жения питания или сопротивления
нагрузки ток в нагрузке изменяется
в значительно меньшей степени. Так
как бареттер сравнительно инер-
ционный элемент, то он стабилизи-
рует ток только при достаточно мед-
ленных изменениях входного напря-
жения. Внезапные, резкие колеба-
ния не сглаживаются и передаются
в нагрузку.
Стабилизаторы на нелинейных ре-
активных элементах будут рассмот-
рены в § 8-15.
Функциональное преобразование.
Нелинейные цепи широко применя-
ются для получения определенной
функциональной зависимости меж-
ду выходной и входной величинами.
•Один из методов построения за-
данной функции состоит в том, что
•выбирается нелинейный элемент,
характеристика которого в нужном
интервале в первом приближении
близка к функции; этот элемент
включается в такую цепь, чтобы ре-
зультирующая характеристика цепи
уже достаточно хорошо совпадала
с заданной функцией.
Пусть, например, требуется осу-
ществить логарифмическое преобра-
зование постоянного напряжения U\
lg Uy (5-9)
Исследования показали, что харак-
теристика полупроводникового вен-
тиля в прямом направлении в ши-
роком диапазоне может быть выра-
жена зависимостью
i£/B = a 1g 4-
Для некоторых германиевых вен-
тилей этот закон сохраняется в ин-
тервале изменения тока в 10 000 раз.
Из последнего выражения следу-
ет, что для получения логарифмиче-
ской характеристики ток должен
быть независимой переменной. По-
этому надо питать цепь от источни-
ка тока. Практически последователь-
но с вентилем включают настолько
большое добавочное сопротивление
гд, что ток 7 с достаточной точно-
стью определяется этим сопротивле-
141 е
Рис. 5-15.
нием и входным напряжением Ui и
не зависит от прямого сопротивле-
ния вентиля. Выходное напряжение
U2 должно сниматься непосредствен-
но с вентиля. Так получается про-
стейшая схема логарифмического
преобразования, показанная на
рис. 5-15. Подбором характеристи-
ки вентиля и сопротивлений гд и
гн добиваются удовлетворительного
выполнения условия (5-9).
Релейные эффекты. Эффект скач-
кообразного изменения, например
увеличения, выходной величины
устройства при плавном изменении,
например увеличении, входной вели-
чины называется релейным или
триггерным. На рис. 5-16 пока-
зан один из видов релейной харак-
теристики цепи. Для определенности
в качестве входной и выходной ве-
личин приняты напряжения. Когда
напряжение на входе увеличивается
от нуля и достигает значения 17вхь
рабочая точка скачком переходит из
•состояния 1 в состояние 2; происхо-
дит, как говорят, срабатывание ре-
ле, и выходная величина скачком
возрастает. Не следует, конечно,
понимать под скачком мгновенное
изменение во времени. На переход
из точки 1 в точку 2 всегда требует-
ся определенное время, зависящее
от параметров цепи. Скачок надо
понимать в статическом смысле—•
переход по вертикальному участку
на статической характеристике
вход — выход, т. е. на характеристи-
ке, изображающей зависимость
между входной и выходной величи-
нами в установившемся режиме.
Обратный скачок или, как гово-
рят, отпускание реле — переход
скачком из точки 4 в точку 5 — про-
исходит обычно при меньшей вход-
ной величине /7вх2-
Релейные эффекты могут быть
только при наличии падающего
участка в характеристике всей цепи
142
'Рис. 5-16.
и естественно невозможны в линей-
ных цепях. Очевидно, что линеари-
зованное описание явлений в цепях
с релейными режимами лишено
смысла.
Ряд важных общих особенностей
нелинейных цепей переменного то-
ка выявим, рассматривая, пока чи-
сто формально, реакцию — отклик у
некоторой нелинейной цепи (эле-
мента) на различные воздействия х~
Для примера возьмем безынерцион-
ную симметричную однозначную
цепь и будем полагать, что в опре-
деленном интервале изменения х
справедливо выражение
у(х) —ах+Ъх2. (5-10)
Начнем со случая синусоидально-
го воздействия
х=Д1 sin со/. (5-11)
Подставляя (5-11) в (5-10) и разла-
гая куб синуса по формуле
sin3 а = 0,75 sin а — 0,25 sin За,
получим:
у = (аА1 -j- 0,75Mi) sin со/—
— 0,25&ДЗ sin 3^t = B1sinco/-[~
+ B3sin3co/. (5-12)
Ha рис. 5-17 показаны графиче-
ские построения, соответствующие
уравнениям (5-ГО) —(5-12) при
6>0. Ординаты кривой х(со/) сно-
сятся на кривую у (х); при этом для
соответствующих значений со/ опре-
деляются значения у кривой у (со/).
На рис. 5-17 дополнительно показа-
ны первая и третья гармоники функ-
ции у (со/); они могут быть построе-
ны либо по уравнению (5-12), либо
путем разложения на гармоники
кривой у (со/). с
Рис. 5-17.
Чтобы точнее отобразить нелиней-
ность, нужно вместо (5-10) взять
полином пятой степени, тогда при
подстановке (5-11) получится сла-
гаемое, содержащее синус в пятой
степени, и в (5-12) появится не толь-
ко третья, но и пятая гармоника.
Отсюда следует важный вывод,
что присутствие нелинейного эле-
мента в цепи переменного тока при-
водит к изменению частотного со-
става спектра колебаний. Нелиней-
ный элемент может рассматривать-
ся как генератор гармоник, которых
нет у источников питания. И в ли-
нейной цепи с постоянными пара-
метрами может изменяться форма
кривой тока или напряжения, но
только вследствие изменения на-
чальных фаз и величины амплитуд
гармоник спектра. Новые гармони-
ческие составляющие, которых нет
в спектре напряжений (токов) ис-
точников питания, возникнуть не мо-
гут.
При симметричном периодиче-
ском воздействии на нелинейный
элемент с симметричной характери-
стикой у(х) =—у(—х) возникают
только нечетные гармоники. Дей-
ствительно, степенной полином,
представляющий симметричную ха-
рактеристику у(х) [например, поли-
ном (5-10)], может содержать толь-
ко члены с нечетными степенями х.
А нечетные степени синусоидальной
функции преобразуются в суммы
только нечетных гармоник, причем
наивысший порядок гармоники ра-
вен наивысшей степени синуса.
При несимметричном периодиче-
ском воздействии на элемент с Сим-
метричной характеристикой или при
симметричном воздействии на эле-
мент с несимметричной характери-
стикой в общем случае возникают
нечетные и четные гармоники, в том
числе и постоянная составляющая..
Возникновение постоянной состав-
ляющей при отсутствии ее в воз-
мущающем воздействии (напряже-
нии, токе), т. е. преобразование пе-
ременного тока в постоянный, на-
зывают выпрямлением. Обычно
это преобразование осуществляется
при помощи нелинейных сопротив-
лений с несимметричной характери-
стикой — вентилей (полупроводни-
ковых диодов, кенотронов и др.).
Устройства,- предназначенные для
такого преобразования, называют-
ся выпрямителями.
Выпрямители играют исключи-
тельно важную роль в технике. Це-
пи с вентилями и простейшие вы-
прямители рассматриваются в гл.
Несимметрию характеристики для:
переменной составляющей тока илй
напряжения можно часто ввести:
искусственно, воздействуя, напри-
мер, одновременно синусоидальной/;
и постоянной составляющими. Рас-*-
смотрим этот случай.
Независимая переменная изме-
няется теперь по закону
х=А0+А1 sin со/. (5-13)*
Можно подставить выражение*
(5-13) в уравнение (5-10) и путем:
разложения степеней синуса на про-
стые гармонические составляющие*
определить у (со/). Однако, как было
показано в первой части книги,
[гл. 4], операции с полным комплекс-
ным представлением
(5-14)
дают возможность выполнения ана-
литических выводов без закончен-
ных тригонометрических преобразо-
ваний в промежуточных выражени-
ях. Поэтому функцию г/(со/) найдем,,
пользуясь представлением (5-14).
Подставляя (5-14) в (5-10), после*
простых преобразований получим:
о , ЗМ0Л? ,
-----2-^-+
143.
аА1 + ЗМ2А1 +
3bA0A% /е№ _|_ е—№'
2 I 2
ЬА? /е№ _ e-№>t
~4\ 2/ .
откуда
y = aA0 + bA\+\£bA0A\ +
+ (аД + 3b A2 A, + 0,75b A3) sin —
— 1,56ЛОД^ cos 2a>f — 0,256/P sin 3®t=
= C 0 —j— C j sin —{— C2 cos 2<o/ —|—
+ C3sin3o)Z. (5-16)
На рис. 5-18 показаны графиче-
ские построения, соответствующие
уравнению (5-10) при Ь<0 и урав-
нениям (5-13), (5-16); переменные
составляющие изображены подня-
тыми на величину Со. Рабочая точ-
ка перемещается теперь по несим-
метричной части аб кривой у(х), и,
кроме нечетных, появляется и чет-
ная— вторая гармоника.
На рассмотренных выше явлениях
изменения спектрального состава
колебаний нелинейными элементами
строятся умножители часто-
т ы (утроители, удвоители «и
др.), а также преобразовате-
ли формы кривой тока или на-
„144
пряжения. Этими явлениями объяс-
няются и нелинейные искажения.
Кроме того, полученное выраже-
ние (5-16) показывает, что посто-
янная составляющая Со реакции
(функции) зависит не только от
постоянной До, но и от переменной
Д1 составляющей воздействия (ар-
гумента). Первая и вторая гармо-
ники реакции зависят не только от
переменной, но и от постоянной со-
ставляющей воздействия. Это еще
раз подтверждает неприменимость
принципа наложения к нелинейным
цепям. Из взаимной зависимости
гармоник разных частот следует
возможность управления пе-
ременной составляющей в нелиней-
ной цепи (элементе) при помощи по-
стоянной составляющей (в общем
случае — при помощи сигнала дру-
гой частоты) или наоборот.
Эти возможности и реализуются
в управляемых индуктивностях и
емкостях, магнитных и диэлектри-
ческих усилителях, преобразовате-
лях— модуляторах слабых сигна-
лов постоянного тока в сигналы пе-
ременного тока и других устрой-
ствах.
Рассмотрим теперь случай, когда
на нелинейный элемент действуют
две синусоидальные величины с
разными частотами, т. е.
х=Дх sin (О1/+Л2зт(со2/+ф2). (5-17)
Подставляя (5-17) в (5-10) и раз-
лагая степени синуса и произведе-
ния синусов разных степеней на
простые гармонические составляю-
щие, либо пользуясь полным ком-
плексным представлением
у_д . А2е^-А2е~^
2/ + 2/
(5-18)
где
Л2 = Л2Л\ Л2 = Де-/ф\ (5-19)
получим:
у = В, sin + В2 sin 4- ф 2) +
4* В3 sin 3®4 -J- В4 sin (Зс»2£ + 3<Ь2) 4“
+ В5 cos [(и j — ®2) t — ф2] +
+ Въ cos [(«»! J- ш2) 14- ф2] 4-
4- В, sin [(ш2 — 14- ф2] 4-
+ ^8 S*n [(Ю2 + 2Ш1) + Ф2] +
+ ^9 s*n [(ш1 — 2^2) + 2ф2] +
+ B1Q sin IK +2<d2) Н~2ф2]. (5-20)
Помимо кратных гармоник ncoq и
m<o2 (в данном случае только пер-
вой и третьей кратности), получили
еще серию так называемых комби-
национных частот
= +^6)2, (5-21)
где пит — целые положительные
или отрицательные числа, не рав-
ные нулю (в данном случае п= ± 1,2
и т=±1,2). Комбинационные ча-
стоты могут быть как выше, так и
ниже исходных частот. Последнее
явление ранее не встречалось.
Отметим еще одну особенность,
возникающую лишь при условии, что
<02=2(01. При этом одна из гармоник
в (5-20), а именно
В7 sin[(c>2—2<oi) t+тр2], (5-22)
переходит в постоянную составляю-
щую Bq, величина которой
Во — В7 sin ф2 = — 0,75&Л2Д2 sin Ф2
(5-23)
зависит от амплитуд воздействую-
щих синусоид и разности их началь-
ных фаз [в (5-17) начальная фаза
составляющей с частотой cdi приня-
та равной нулю].
На рис. 5-19 показано графиче-
ское п о стр о ение, со отв етству юще е
уравнениям (5-10) при b>Q, (5-17)
и (5-20) для случая 0)2=2(01, фг^ЭО0,
Л2 = 0,5Аь Наглядно видно, что на
элемент с симметричной характери-
стикой оказывается несимметричное
воздействие (рабочий участок аб).
Если нелинейный элемент — со-
противление, х — напряжение и у —
ток, то ясно, что получается эффект
своеобразного выпрямления на эле-
менте с симметричной характеристи-
кой (например, тирите). Этот эф-
фект применяется, в частности, при
построении высокочувствительных
магнитных усилителей.
Много устройств в технике осно-
вано на применении явления гисте-
резиса ферромагнитных материа-
лов: постоянные магниты, так назы-
ваемые гистерезисные двигатели,
счетчики импульсов, магнитные эле-
менты вычислительных машин ди-
скретного действия и др.
Приведенный перечень особенно-
стей и явлений в нелинейных цепях
далеко не полный. Частично он бу-
дет дополнен в следующих главах.
Разработка новых нелинейных эле-
ментов со своими своеобразными
характеристиками все время про-
должается.
5-4. СТАТИЧЕСКИЕ,
ДИФФЕРЕНЦИАЛЬНЫЕ,
ДИНАМИЧЕСКИЕ
И ЭКВИВАЛЕНТНЫЕ ПАРАМЕТРЫ
У нелинейных элементов нет пря-
мой пропорциональности между на-
пряжением и током, либо между
потокосцеплением и током или заря-
дом и напряжением. Поэтому, стро-
го говоря, нельзя пользоваться из-
вестными уже понятиями сопротив-
ления, индуктивности и емкости. Не-
линейные элементы нельзя охарак-
теризовать одним параметром.
В зависимости от типа нелиней-
ного элемента и от условий, в кото-
рых от работает, а также от того,
какие величины и какие соотноше-
ния важны при анализе данной це-
пи, вводят различные параметры.
Если нелинейное сопротивление
принимается безынерционным, то его
статическая вольт-амперная харак-
теристика, снятая при постоянных
токе и напряжении, совпадает с ди-
намической характеристикой, ото-
бражающей связь между мгновен-
ными значениями тока и напряже-
10—434
145
Рис. 5-20.
ния при любом (с определенными
ограничениями) законе изменения
их во времени. В этом случае нели-
нейное сопротивление характери-
зуется двумя параметрами: стати-
ч е с к и м сопротивлением
= (5-24)
равным отношению напряжения на
сопротивлении к току в нем, и д и ф-
ференциальным сопротив-
лением
гд = Ит (5-25)
д Д/-.0 dl
равным отношению бесконечно ма-
лого приращения напряжения к со-
ответствующему приращению тока.
Графически гСт определяется тан-
генсом угла между осью тока и се-
кущей, проходящей через начало
координат и рабочую точку (Л)
вольт-амперной характеристики
(угол а, рис. 5-20), а — танген-
сом угла между осью тока и каса-
тельной к характеристике в рабо-
чей точке (угол р, рис. 5-20).
Сопротивления (статическое и
дифференциальное) не равны друг
Другу, зависят от напряжения или
тока (от положения рабочей точ-
ки) . Статическое сопротивление не-
управляемого элемента всегда ко-
нечно и положительно, а дифферен-
циальное может быть равно нулю
(точка В на рис. 5-20), бесконеч-
ности и даже становиться отрица-
тельным (на падающем участке ВС,
рис. 5-20).
В случае инерционного нелиней-
ного сопротивления соотношение
между напряжением и током в об-
щем случае зависит не только от
их величин, но и от их производных
и интегралов по времени. Введен-
ные здесь понятия сопротивлений не
могут отображать всех возможных
процессов. Более того, как указыва-
лось в § 5-1, такой элемент вообще
нельзя заменить эквивалентным со-
противлением r(f). Рассмотрим этот
вопрос несколько более подробно*
на примере термистора.
Пусть кривая 1 на рис. 5-21 —
статическая характеристика терми-
стора. В рабочей точке А статиче-
ское сопротивление
t/д
(5-26>
Л А
соответствует установившемуся теп-
ловому режиму термистора (имеет-
ся в виду, что термистор питается
от источника тока, а не от источни-
ка напряжения; при этом дальней-
ший его разогрев не происходит).
Сопротивление гста можно опреде-
лить по наклону секущей 2 к оси то-
ка (рис. 5-21).
Если теперь осуществить сравни-
тельно медленное небольшое увели-
чение тока на величину А/ << 1а
(рис. 5-21), то напряжение умень-
шится (точка Б). При таком изме-
нении тока дифференциальное со-
противление
'•*м==^Г<0- (5'27>
При быстром и кратковременном
изменении тока на величину А/ тем-
пература термистора не успеет , из-
мениться и его сопротивление оста-
нется неизменным. В этом случае
146
дифференциальное сопротивление
будет равно статическому
<5-28)
точка, изображающая на рис. 5-21
режим термистора, переместится из
А в В (и обратно по окончании им-
пульса А/).
Термисторы часто работают при
наложении переменного тока на по-
стоянный, причем амплитуда пере-
менного тока (или напряжения)
много меньше постоянной состав-
ляющей
z=^ + /wsin<o/, (5-29)
Сопротивление для переменной
составляющей тока назовем дина-
мическим сопротивлением.
Если период переменного тока
очень мал по сравнению с постоян-
ной времени нагрева, то динамиче-
ское сопротивление будет равно ста-
тическому (5-28). Точка, изобра-
жающая режим термистора, будет
периодически перемещаться по пря-
мой 2 (рис. 5-21) около точки А.
Если период велик по сравнению
с постоянной времени, то изобра-
жающая точка практически будет
перемещаться по небольшому уча-
стку основной характеристики 1
около точки А. Динамическое сопро-
тивление при этом равно дифферен-
циальному, определенному по ста-
тической характеристике (5-27).
Между переменными составляю-
щими тока и напряжения имеют
место более сложные соотношения,
когда постоянная времени нагрева
одного порядка с периодом перемен-
ной составляющей. При токе, задан-
ном выражением (5-29), переменная
составляющая напряжения по фор-
ме отличается от синусоиды. Огра-
ничиваясь рассмотрением основной
гармоники, можно обнаружить, что
существует сдвиг по фазе между пе-
ременными составляющими тока и
напряжения. В этом случае изобра-
жающая точка описывает эллипс
вокруг точки А (пунктирная кривая
на рис. 5-21). Динамическое сопро-
тивление для основной гармоники
будет комплексным
гд=^. (5-зо)
717И
Из этого примера видно, что ди-
намические параметры принципи-
ально отличаются от дифференци-
альных. Аналогичные примеры мож-
но привести также для нелинейных
индуктивностей и емкостей.
Во многих устройствах, содержа-
щих нелинейные элементы (ферро-
магнитные сердечники, полупровод-
никовые диоды и триоды и Др),
именно их динамические свойства
играют решающую роль/ В зависи-
мости от вида цепи, в которой рабо-
тает нелинейный элемент, он может
иметь разные динамические харак-
теристики и для него важно знать
разные динамические параметры.
На это будет еще обращено внима-
ние при анализе конкретных нели-
нейных цепей.
В первой части книги (гл. 7) при
изучении триодов в линейном режи-
ме были введены по существу диф-
ференциальные параметры. Это, на-
пример, входные и передаточные со-
противления /?ц, /?12, T?2i транзисто-
ров, параметры ц, S, электронно-
вакуумных триодов и др. Различие
параметров в статическом и дина-
мическом режимах, которое раньше
только отмечалось, теперь должно
быть очевидным.
В общем случае, как было пока-
зано в предыдущем параграфе, фор-
ма кривой напряжения нелинейного
элемента отличается от формы кри-
вой тока, что сильно усложняет ана-
лиз и расчет нелинейных цепей. Од-
нако там, где это возможно, целесо-
образно ради упрощения идти на
определенную приближенность ана-
лиза и расчета и полагать как на-
пряжение, так и ток синусоидаль-
ными. Это позволяет применить для
анализа и расчета мощные линей-
ные методы, например комплексный
метод. Реальные несинусоидальные
напряжения и токи в этом случае
заменяются эквивалентными сину-
соидальными. Соответственно вво-
дятся понятия эквивалентных
сопротивлений г9, хЬ9, Хсэ и
10*
147
экви-валентных (динамиче-
с к их) параметров гэ, £э, Сэ.
Эквивалентные параметры — это
тем или иным образом усредненные
динамич'еские параметры. Так часто
пользуются эквивалентными величи-
нами,. определяемыми по действую-
щим .значениям напряжения и тока
£э = ^; (5-31)
^.=-г- А = ^-(М2)
Если в расчетах интересуются
только основными (первыми) гармо-
никами, то пользуются эквивалент-
ными параметрами, определяемыми
,по первым гармоникам, например,
х81=^-. ЛЭ1 = ^. (5-33)
В нелинейной радиотехнике та-
кие эквивалентные параметры на-
зывают средними (например,
средняя крутизна электронной лам-
пы). Определение средних пара-
Рис. 5-23.
метров связано с расчетом первой
гармоники периодического отклика
нелинейной системы на синусои-
дальное воздействие.
Обычно те или иные эквивалент-
ные параметры находят либо по
экспериментальным характеристи-
кам (например, по вольт-амперным
характеристикам для действующих
значений или для первых гармоник),
либо аналитически, если известно
аналитическое выражение характе-
ристики нелинейного элемента.
Не следует, конечно, забывать,
что данное значение эквивалентного
параметра соответствует лишь опре-
деленному режиму нелинейного эле-
мента. При изменении 'режима ра-
боты элемента (формы кривой и
величины напряжения или тока,
магнитного потока или тока, заря-
да или- напряжения) получается
другое значение эквивалентного па-
раметра.
На рис. 5-22 для примера пока-
заны вольт-амперная характеристи-
ка (кривая 1) тирита или катушки
с ферромагнитным сердечником
(действующие значения) и соответ-
ствующая зависимость эквивалент-
ного активного или индуктивного
сопротивления (кривая 2).
На рис. 5-23 показаны условные
обозначения на схемах: а — нели-
нейного сопротивления, б - - нели-
нейной емкости, в — нелинейной ин-
дуктивности.
Глава шестая
НЕЛИНЕЙНЫЕ ЭЛЕКТРИЧЕСКИЕ ЦЕПИ ПОСТОЯННОГО ТОКА
В УСТАНОВИВШЕМСЯ РЕЖИМЕ
6-1. ВВЕДЕНИЕ
. Рассмотрим расчет цепей, содер-
жащих только нелинейные сопро-
тивления с однозначной характери-
стикой (без падающего участка),
а также нелинейные источники энер-
гии — источники с нелинейной внеш-
148
ней характеристикой (тоже одно-
значной) .
В цепях с элементами с падающей ха-
рактеристикой, т. е. с отрицательным диф-
ференциальным сопротивлением, при од-
ном и том же напряжении возможны раз-
личные значения тока, -или наоборот. Часть
состояний устойчива, часть неустойчива,
вследствие чего и возможны, .в цепи (релей-
ные эффекты. Очевидно, что анализ ’ таких
цепей требует изучения вопросов устой-
чивости, т. е.. переходных процессов в не-
линейных цепях (гл. 9).
Законы Кирхгофа справедливы,
конечно, и для нелинейных цепей.
Составляя для электрической цепи
постоянного тока в установившемся
режиме уравнения по законам Кирх-
гофа, получаем систему нелинейных
алгебраических уравнений. Но не-
применимость принципа наложения
не позволяет применять многие ме:
тоды расчета, разработанные для
линейных цепей на основе законов
Кирхгофа. Так, например, нельзя
пользоваться методом контурных
токов и методом подобия (пропор-
циональных величин). Общих ана-
литических методов расчета нели-
нейная теория пока не знает. Ряд
специальных приемов и методов
имеют различные возможности и
области применения. Сколь угодно
сложная нелинейная цепь может
быть-рассчитан а лишь тем или иным
методом последовательных прибли-
жений. Часто расчет оказывается
настолько громоздким, что предпо-
читают применять эксперименталь-
ные методы исследования цепей или
вести расчет на математических
машинах, среди которых для реше-
ния нелинейных задач особенно под-
ходят аналоговые машины.
При выполнении некоторых огра-
ничений система нелинейных алгеб-
раических уравнений может быть
решена:
а) графическими метода-
ми, когда характеристики нелиней-
ных и -линейных элементов пред-
ставляются графически, а система
алгебраических уравнений по> зако-
нам Кирхгофа решается графиче-
скими построениями на плоскости;
б) аналитическими мето-
да м и, когда характеристики нели-
нейных элементов, известные обыч-
но. из опыта и заданные графиком
или табличными данными, аппрок-
симируются аналитическими функ-
циями.
Аппроксимация нелинейной ха-
рактеристики является важной опе-
рацией в нелинейной теории. Ап-
проксимация должна'по возможно-
сти удовлетворять следующим тре-
бованиям: достаточно точно пред-
ставлять действительную зависи-
мость, допускать выполнение необ-
ходимых математических операций
и быть как можно более простой.
Удовлетворить одновременно всем
этим требованиям практически ча-
сто не удается. Но во всяком случае
приближение должно быть доста-
точным, чтобы правильно отобра-
зить хотя бы основные качественные
черты явления. Применяют в основ-
ном три метода аппроксимации: сте-
пенным многочленом, ломаной ли-
нией (кусочно-линейная аппрокси-
мация), трансцендентными функ-
циями (экспоненциальными, гипер-
болическими и Др.).
Имеются и комбинированные —
графоаналитические методы
расчета, нередко наиболее рацио-
нальные.
При всех дальнейших расчетах
будем считать статические вольт-
амперные характеристики нелиней-
ных сопротивлений и источников
известными.
6-2. ПРЕОБРАЗОВАНИЯ
НЕЛИНЕЙНЫХ ЭЛЕКТРИЧЕСКИХ
ЦЕПЕЙ
В предыдущих .разделах курса
было показано, что целесообразное
преобразование схемы может суще-
ственно облегчить ее расчет. Поэто-
му прежде чем перейти непосред-
ственно к расчету различных нели-
нейных цепей, рассмотрим, как осу-
ществляются их основные преобра-
зования — свертывание схемы при
параллельном, последовательном и
смешанном соединениях, замена не-
скольких параллельных ветвей, со-
держащих нелинейные сопротивле-
ния и источники э. д. с., одной экви-
валентной ветвью.
Преобразования ветвей с линей-
ными и нелинейными сопротивле-
ниями соответствуют замене их не-
которым эквивалентным нелиней-
ным сопротивлением с эквивалент-
ной или результирующей вольтам-
перной характеристикой. -- -
На рис. 6-1 показаны вольт-ам-
перные характеристики двух нели-
нейных сопротивлений НСХ и Н.С2.
При последовательном соединении
149
Рис. 6-1.
сопротивлений НСГ и НС2 (рис.
6-2, а), когда общее напряжение
равно сумме напряжений на участ-
ках, результирующая характеристи-
ка строится следующим образом.
Задаемся .произвольным током /
(точка а), по характеристикам НС\
и НС2 находим напряжения Ui и -U2
на соответствующих сопротивлениях
при данном токе; затем суммируем
эти напряжения и находим общее
напряжение Uq=Ui+<U2 при том же
токе. Построение показано на
рис. 6-1, где точка d принадлежит
результирующей характеристике
(ad—ab + ac) эквивалентного нели-
нейного СОПрОТИВЛенИЯ НС^ послед-
Повторяя аналогичное построение
при других значениях тока Ц полу-
чаем ряд точек результирующей ха-
рактеристики.
При параллельном соединении со-
противлений HCi и НС2 (рис. 6-2,6)
результирующая характеристика
строится следующим образом. За-
даемся произвольным напряжени-
ем U (точка т), по характеристи-
кам сопротивлений находим токи /1
и 12 в них при этом напряжении, за-
тем суммируем токи и находим об-
щий ток /э=/1+/2- Соответствующее
построение показано на рис. 6-1, где
точка q принадлежит результирую-
щей характеристике (m7=mn4-mp)
эквивалентного нелинейного сопро-
тивления ЯСэ.паралл-
При большем числе последова-
тельно или параллельно соединен-
ных сопротивлений техника построе-
Рис. 6-2.
ния результирующей характеристи-
ки остается той же. Не меняется она
и в том случае, если часть сопро-
тивлений будет линейной. Иногда
целесообразно предварительно по-
лучить результирующую характери-
стику в табличной форме, а пост-
роить в удобном масштабе лишь
часть ее, необходимую для расчета.
При смешанном соединении ре-
зультирующая характеристика стро-
ится путем поочередного примене-
ния построений, выполняемых при
последовательном и параллельном
соединениях.
Характеристика последовательно
соединенных нелинейного сопротив-
ления и источника э. д. с. строится
аналогичным методом. При этом
следует иметь в виду, что напряже-
ние источника э. д. с. Э (рис. 6-3)
не зависит от тока и его характе-
ристика Uab(I) изображается пря-
мой линией, параллельной оси тока.
Результирующая хар актер истика
Uac(I) получается путем параллель-
ного смещения характеристики со-
противления Ubc(I) вдоль оси на-
пряжения на величину э. д. с. Э,
Направление смещения зависит от
полярности э. д. с. Так для схемы
рис. 6-3
иас^и^иаЪ+\иЪс=Э+\иЪс- (6-1)
150
При обратном направлении
э. д. с.
Uac=— Э+иЪе (6-2)
(пунктир на рис. 6-3).
Теперь очевиден путь пре-
образования нескольких па-
раллельных ветвей с э. д. с. и
нелинейными сопротивления-
ми в одну эквивалентную
ветвь: строятся отдельно ха-
рактеристики каждой ветви, а
-затем строится результирую-
щая характеристика парал-
лельного соединения. Покажем
это на примере.
. Пусть в какой-то цепи меж-
ду узлами а и Ь включены
три параллельные ветви, кото-
рые надо заменить одной (рис. 6-4).
Величины э. д. с. и нелинейные со-
противления заданы. По уравнению,
аналогичному (6-1) или (6-2),
строим кривые /, 2, 3— характери-
стики ветвей. Далее, складывая
в соответствии с первым законом
Кирхгофа
/=‘Л+/2+ЛЧ(^Ь) (6-3)
ординаты кривых /, 2, 3, получаем’
кривую 4—результирующую вольт-
амперную характеристику парал-
лельных ветвей. Именно такую ха-
рактеристику и должна иметь эк-
вивалентная ветвь. Судя по кривой
4, эквивалентная ветвь ’может со-
стоять из последовательно соеди-
ненных источника э. д. с. Ээ и
нелинейного сопротивления HCQ
(рис. 6-4), характеристика которо-
го соответствует кривой 4, смещен-
ной влево на величину Ээ,
Иногда целесообразнее расчет
нести не в графической, а в таблич-
ной форме. В этом случае надо за-
даваться* различными значениями
напряжения иаъ и вычислять на-
пряжения на нелинейных сопро-
тивлениях (для цепи рис. 6-4 t7i={
—'ЦаЪ—*51, U% — ^аЬ~\~32, 4J^~4Jab—
—Э3‘); затем по их характеристи-
кам определять токи и, складывая
токи в ветвях, — общий ток, а сле-
довательно, искомую зависимость
I(Uab). Возможна следующая фор-
ма таблицы (см. табл. -6-1).
Отметим, что различной комби-
нацией нелинейных сопротивлений
Рис. 6-4.
и э. д. с. на практике искусственно
получают необходимые нелинейные
зависимости (в частности при со-
здании нелинейных функциональ-
ных цепей).
Пример 6-1. На рис. 6-5 изображена
часть функционального -преобразователя,
состоящая из четырех параллельных вет-
вей: г1==г2=Гз=Г4—4 ком, Э2= 10 в,лЭ3='17 в,
Э4=‘2О в. Требуется построить результирую-
щую характеристику, полагая прямое со-
противление диодов равным нулю, а об-
ратное — бесконечности (идеальные вен-
тили) .
Решение. Соответствующие построе-
ния выполнены на рис. 6-5, где пунктир-
151
амперные характеристики отдельных вет-
вей.
Такие цепи применяются при построе-
нии функциональных преобразователей по
методу .. кусочно-л инейной аппроксимаций,
когда заданная кривая составляется из от-
резков прямых линий. Схема рис. 6-5 дает
функцию I(U) или U(I) с монотонно воз-
растающей производной (только в первом
квадранте).
6-3. НЕЛИНЕЙНЫЙ АКТИВНЫЙ
ДВУХПОЛЮСНИК
В рассматриваемых условиях
(§ 6-1) нелинейный активный двух-
полюсник (рис. 6-6,а) полностью
определяется своей внешней харак-
теристикой Щ1), которая в зависи-
мости от элементов и схемы соеди-
нений внутри двухполюсника мо-
жет иметь весьма различный вид
[например, зависимость U(/<) на
рис. 6-7]. i
В соответствии с внешней ха-
рактеристикой двухполюсник мож-
но заменить:
а) эквивалентным источником
напряжения с э. д. с. Ээ, равной на-
пряжению Ux в режиме холостого
хода двухполюсника (/=0), и по-
следовательно включенным нели-
нейным сопротивлением НСЭ
(рис. 6-6,6) с вольт-амперной ха-
рактеристикой Uнс (Г), определяе-
мой уравнением
= (6-4)
б) эквивалентным источником
тока, дающим ток 7Э, равный току
короткого замыкания двухполюс-
ника ((7=0), и параллельно вклю-
ченным нелинейным сопротивлени-
ем HCj (рис. 6-6,в) с вольт-ампер-
ной характеристикой 1нс(U), опре-
деляемой уравнением
IHC(U)=Ja-I(U). (6-5)
Рис. 6-6.
На рис. 6-7 для приведенной там
внешней характеристики показаны-
величины Эд и 7Э, а также построе-
ны по уравнениям (6-4), (6-5)’
вольт-амперные характеристики эк-
вивалентных сопротивлений НСЭ и
HCj.
Внешняя характеристика актив-
ного двухполюсника снимается экс-
периментально или рассчитывает-
ся; расчет ведется, в частности, при
помощи описанных выше методов
преобразования нелинейных цепей.
Так, например, изображенную на
рис. 6-4 часть цепи можно рассмат-
ривать как активный двухполюс-
ник, а рассчитанную и построенную
на том же рисунке результирую-
щую вольт-амперную характери-
стику — как внешнюю характери-
стику этого двухполюсника. Заме-
на части цепи одной эквивалентной*
ветвью и соответствует замене ак-
тивного двухполюсника эквива-
лентными источником и нелиней-
ным сопротивлением.
6-4. ГРАФИЧЕСКИЕ МЕТОДЫ
РАСЧЕТА НЕЛИНЕЙНЫХ ЦЕПЕЙ
Один из графических методов
расчета неразветвленной цепи за-
ключается в построении результи-
рующей вольт-амперной характе-
ристики и решении при помощи нее
различных задач. Покажем это на
примере цепи рис. 6-2,а.
Допустим, что требуется опреде-
лить напряжение U2 на сопротив-
лении НС2 при напряжении
на зажимах всей цепи. Для. этого*
сначала построим результирующую
152
характеристику НСЪ. послед. (см.
§ 6-2)* По результирующей харак-
теристике находим, что при
ток в цепи равен / (отрезок, Оа на
рис. 6-1), после чего по характери-
стике НС2 при том же токе нахо-
дим искомое U2. Таким путем легко
определить зависимость U2(U) или
t/(t/2) и ряд других.
В томч случае, когда цепь состо-
ит из последовательно соединенных
источника э. д. с. и не более двух
сопротивлений, либо после преоб-
разований сведена к такому соеди-
нению, часто целесообразнее поль-
зоваться другим графическим мето-
дом, который будем называть м е-
тодом пересечений.
Сущность метода пересечений
состоит в следующем. Последова-
тельная’ цепь разделяется на две
части, и на одном графике в одина-
ковых масштабах строятся вольт-
амперные характеристики обеих
частей. Поскольку обе части соеди-
няются друг с другом, их напряже-
ния и токи должны быть соответст-
венно равны. Это условие удовлет-
воряется только в режиме, отобра-
жаемом точкой пересечения харак-
теристик частей цепи.
Применим метод пересечений
к расчету цепи рис. 6-2,а, полагая
заданными характеристики эле-
ментов и напряжение источника
питания цепи В одну часть
цепи включим источник питания и
сопротивление НС^ а в другую —
сопротивление НС2. Тогда
С72(/)=(^-^)(/). (6-6)
Левой части равенства (6-6) со-
ответствует вольт-амперная харак-
теристика НС2, а правой части при
U= иэ — кривая, построенная пун-
ктиром на рис. 6-1. Точка пересе-
чения Ь, в которой удовлетворяется
равенство (6-6), и дает решение
задачи, т. е. ток I и напряжения
и2=иэ— иь
Метод пересечений очень удобен,
когда одно из сопротивлений ли-
нейно и надо исследовать цепь при
его изменении или при изменении
напряжения источника питания
цепи.
Пример 6-2. Для стабилизации тока
в сопротивлении нагрузки гн (например,
тока накала электронных ламп) применена
схема рис. 5-14 с бареттером, характери-
стика которого приведена на рис.- 5-2. Но-
минальное напряжение нагрузки 6,Зе, но-
минальный ток 0,84 а.
Определить номинальное значение £7В
и допускаемые пределы изменения напря-
жения источника питания цепи Uh если
изменение тока не должно быть больше
±0,02 а относительно номинала. Измене-
нием сопротивления нагрузки пренебречь.
Решение. Применим метод пересече-
ний. Сопротивление нагрузки гв—6,3/0,84=
=7,5 ом. По характеристике бареттера на-
ходим для номинальной рабочей точки
N (1=0,84 а) напряжение на бареттере
U^=9 в. Следовательно, Un=9+6,3=45,3 в.
Далее через точку N и точку t7H^’15,3 &
на оси абсцисс проводим прямую линию*
(ее часто называют линией нагрузки); тан-
генс ее угла наклона к вертикали а про-
порционален сопротивлению гв. Отмечаем
на характеристике бареттера точки а и Ь,
соответствующие токам 0,86 а и 0,82
проводим через эти точки прямые, парал-
лельные первой, и находим, что напряже-
ние источника питания цепи может изме-
няться в пределах 10,3—'19,9 в.
Нелинейную цепь с двумя узлами
при любом количестве параллель-
ных ветвей можно рассчитать,
пользуясь приемами, которые были'
рассмотрены при преобразовании
параллельных ветвей в одну экви-
валентную (§ 6-2, рис. 6-4). Отли-
чие состоит лишь в том, что здесь
алгебраическая сумма всех токов-
в ветвях равна нулю. Поэтому, по-
строив кривую зависимости суммы
токов ветвей от напряжения между
узлами ИД ((7аь)—кривая 4 на
рис. 6-4, находим точку пересече-
ния суммарной кривой с осью на-
пряжения (точка А на рис. 6-4).
В этой точке алгебраическая сум-
ма токов равна нулю и, следова-
тельно, напряжение UabA и есть на-
пряжение между узлами в данной
цепи’ По известному иаЬА и харак-
теристикам ветвей уже легко нахо-
дятся токи в ветвях.
Точность вычислений можно по-
высить (при тех же размерах чер-
тежа), если вести расчет в таблич-
ной форме (§ 6-2), задаваясь таки-
ми значениями напряжения Uab,
чтобы получить сумму токов 2/
чуть большую и чуть меньшую ну-
ля. В большом масштабе строится
ТОЛЬКО ЧаСТЬ КрИВОЙ 2/fe(t/ab) в °б-
ласти пересечения ее с осью напря-
жений.
153
Расчет нелинейной цепи со сме-
шанным соединением, сколько бы
пассивных и активных ветвей она
не содержала, сводится к уже рас-
смотренному преобразованию уча-
стков с последовательным и парал-
лельным соединением.
Расчет цепи любой сложности
с одним нелинейным элементом по-
лучается наиболее простым, если
всю линейную часть цепи предста-
вить как линейный активный двух-
полюсник, который может быть за-
менен эквивалентным генератором.
После такой замены цепь сводится
к неразветвленной нелинейной це-
пи, расчет которой уже рассмотрен.
.Последующее определение токов и
напряжений в линейной части цепи
может быть выполнено любым из
известных методов расчета линей-
ных цепей.
Расчет цепи любой сложности
с двумя нелинейными элементами
обычно проще всего осуществить,
представив всю линейную часть це-
пи как активный четырехполюсник,
к обеим парам полюсов которого
•подключены нелинейные сопротив-
ления (рис. 6-8,а). Как было пока-
зано в гл. 1, линейный активный
четырехполюсник может быть за-
менен эквивалентной схемой с дву-
мя источниками э. д. с. Э1х и
равными соответствующим напря-
жениям Ulx и U2x холостого хода
четырехполюсника при одновремен-
ном размыкании ветвей с нелиней-
ными сопротивлениями и пассив-
ным четырехполюсником, в частно-
сти Т-образным (рис. 6-8,6). После
такого преобразования получается
нелинейная цель с двумя узлами,
154
Рис. 6-9.
расчет которой был показан выше.
В общем случае любую цепь от-
носительно двух ее точек т, п мож-
но рассматривать как соединение
двух активных нелинейных двухпо-
люсников (рис. 6-9,л). Если каж-
дый из них заменим источником
э. д. с. и эквивалентным сопротив-
лением (§ 6-3), то придем к после-
довательной цепи и, применяя
метод пересечений, можем рассчи-
тать режим в точках т, п исходной
цепи. Однако переходить к эквива-
лентным схемам нет необходимо-
сти. Поскольку здесь очевидны ра-
венства Ul=U2, то решение
задачи методом пересечений сво-
дится к построению на одном гра-
фике в одинаковых масштабах
обеих внешних характеристик и
определению точки их пересечения
(рис. 6-9,6). Координаты точки пе-
ресечения определяют рабочий ре-
жим в точках т, п исходной цепи:
ил^и2=>и», Л=/2=/р.
В частных случаях один из двух-
полюсников может быть пассивным
или (и) линейным.
Рассмотрим пример расчета не-
линейной мостовой схемы, в кото-
рой нет ни последовательных, ни
параллельных соединений.
Пример 6-3. Мост на рис. 6-;10,а пи-
тается от источника э. д. <с. Э. В двух
плечах моста нелинейные сопротивления
НСХ и НС2, в других других плечах — ли-
нейные сопротивления г3 и г4. На (выходе
моста ©ключена нагрузка с нелинейным со-
противлением НС$.
Считая заданными сопротивления г3 и
г4, вольт-амперные характеристики НСЬ
HC2, HC$ и э. д. с. 3, оп-
ределить ток I в НС$.
Решение. Предста-
вим цепь в виде двух не-
линейных двухполюсников
относительно точек а, Ь;
•один, пассивный, состоит
:йз сопротивления НС$,
другой — активный, вклю-
чает всю остальную часть
цепи (рис. 6-(10,б). Рассчи-
таем внешние характери-
стики двухполюсников
УаъЩ и воспользуемся
методом пересечений.
Для активного двухполюсника справед-
ливы две независимые пары уравнений
и^ = Э — Ult 1=^1г
’ t/2=3—Z3r3, (6-8)
<Из уравнений (6-7), задаваясь током
Ji или напряжением £/ь найдем зависи-
мость (74(7). Из уравнений (6-8), зада-
ваясь током /2 или напряжением (72, най-
дем зависимость UzfJ). Построив далее
на одном графике обе кривые и взяв раз-
ность U—U2, получим внешнюю харак-
теристику активного двухполюсника
Расчет удобно вести в форме таблицы:
•Внешняя характеристика пассивного
двухполюсника — это вольт-амперная харак-
теристика сопротивления НС5. Строим на
одном графике внешние характеристики
обоих двухполюсников и по точке их пе-
ресечения находим Uа Ър и /р в исходной
цепи.
'Если необходимо рассчитать токи в дру-
гих элементах моста, то, зная уже ток /р,
по ранее построенным кривым и
V2(I) находим напряжения t/4p и
£72р, а затем из уравнений <(6-7) и (6-8) —
все остальные величины.
Такого вида нелинейные мосты приме-
няются, например, в устройствах автома-
тики; при этом обычно основной интерес
представляет так называемая характери-
стика вход — выход 1{Эу. Проделав ряд
расчетов, аналогичных описанному, для
различных э. д. с. источника, можно найти
зависимость 7(3).
В-5. АНАЛИТИЧЕСКИЙ МЕТОД
РАСЧЕТА
Аналитический метод расчета не-
линейных цепей постоянного тока
Рис. 6-10.
применяется, как правило, в тех
случаях, когда не требуется боль-
шой точности расчета, а важно оце-
нить лишь порядок величин и, что
самое главное, отразить типично
нелинейные черты устройства. Это
подчеркивалось уже на примере
схемы для логарифмического пре-
образования постоянного напряже-
ния (рис. 5-15). Рассмотрим еще
один пример.
Пример 6-4. Начальная часть характе-
ристики некоторых типов полупроводнико-
вых диодов в прямом направлении может
быть аппроксимирована степенной функ-
цией
I-aUn,
причем в большинстве случаев и>2.
Полагая в первом приближении п=2,
определить напряжение на выходе цепи
рис. 6-11 в функции напряжений и £72,
сумма и разность которых подается
к входным зажимам.
Решение. Допустим вначале, что при
расчете токов /1 и 72 можно пренебречь
падениями напряжения на сопротивлениях
г (сопротивление г много меньше сопро-
тивления диода в прямом направлении).
Тогда
I2—a(Vi—U2)2t
^вЫХ=г(/1-/2)=4аг£/1{72.
Напряжение на выходе пропорцио-
нально произведению двух входных напря-
жений. Подобные схемы и применяются на
практике^ для электрического умножения
двух величин (напряжений).
Таким образом, при ряде упрощающих
допущений установлена основная каче-
Рис. 6-11.
155
ственная характеристика целя, и получена
формула для количественной оценки ис-
следуемой зависимости.
Есть ли необходимость в уточнении ап-
проксимации и учете' влияния сопротивле-
ния г’при расчете токов? Обычно нет, так
как п>2 и в действительности путем под-
бора линейного сопротивления г достига-
ют нужной квадратичной зависимости /==
=aU2 для последовательного соединения
диода и сопротивления г, а не одного
диода.
При анализе погрешности умножения,
при желании предварительно рассчитать
величину сопротивления г для получения
квадратичной зависимости последователь-
ного соединения,. если известен показатель
п>2 характеристики диода, — приходится
прибегать к более сложному аналитиче-
скому исследованию цепи.
В достаточно сложных нелиней-
ных цепях, когда не удается непо-
средственно применить графиче-
ские и .аналитические методы, поль-
зуются различными методами по-
следовательных приближений, ко-
торые здесь не затрагиваются.
6-6. ЛИНЕАРИЗАЦИЯ НЕЛИНЕЙНОГО
СОПРОТИВЛЕНИЯ ПРИ МАЛЫХ
ОТКЛОНЕНИЯХ
ОТ ПЕРВОНАЧАЛЬНОГО РЕЖИМА
В ряде случаев необходимо ис-
следовать цепь при малых отклоне-
ниях. режима нелинейных сопро-
тивлений от первоначального (ис-
ходного) режима. При таких от-
клонениях рабочая точка на стати-
ческой вольт-амперной характери-
стике нелинейного сопротивления
лишь незначительно перемещается
в окрестности рабочей точки Р ис-
ходного режима (рис. 6-12). Этот
небольшой участок характеристики
с; определенной степенью прибли-
жения -.можно заменить отрезком
прямой, касательной ю характери-
стике в точке Р. Действительно, как
было показано в первой части.кни-
Рис. 6-13.
ги, ^применяя к функции U (7) в точ*
ке С7р, 7Р разложение в ряд Тей*
лора
t7 = t7(7p) + A/-g^
№ d4J
2! ’ diz
(6-9)
и полагая приращение Д7 достаточ-
но малым, получим ‘ приближенное
выражение данной функции в окрест-
ности точки t/р, /р
f/(/p)+A7^
(6-10)
При этом зависимость между при-
ращениями напряжения tdJ и тока
Д7 принимается линейной с коэффи-
циентом пропорциональности, рав*
ным дифференциальному сопротив-
лению гд в точке С7Р; 7Р:
Д[7 = гдД7. (6-11)
Таким образом, при расчете цепи
каждое нелинейное сопротивление
может быть заменено, как это на-
глядно видно на рис. 6-12, либо ис-
точником э. д. с. Эо и последова-
тельно с ним включенным линей-*
ным сопротивлением, равным диф*
ференциальному сопротивлению
на участке в окрестности заданной
или предполагаемой рабочей точ-
ки Р, либо источником тока 70 й
параллельно с ним включенным со-
противлением Гд. \ .
Этот прием и называется7 :л и-
неаризацией нелине й н ого
сопротивления в окрестно-’
сти рабочей точки. Эквивалентные
схемы линеаризованных нелиней-
ных сопротивлений показаны на
рис. 6-13; величины /0 и Эо; могут
156
Рис. 6-14.
быть как положительными, так и
отрицательными (рис. 6-12). После
такой замены вся цепь становится
линейной, и для ее расчета пригод-
ны все методы линейной теории.
Необходимо подчеркнуть, что до-
статочно малыми должны, быть не
только величины А/ или АС/, но и
в целом слагаемые с производными
высших порядков в разложении
(6-9) по сравнению с линейной ча-
стью приращения, т. е. вольт-ам-
перная характеристика в окрестно-
сти первоначальной рабочей точки
должна быть достаточно плавной.
Например, линеаризация квадра-
тичной характеристики U=al2
в точке С7=0, /=0 невозможна, так
как здесь dUJdI=$, a d2UjdI2=^Q\
в любой другой точке линеариза-
ция возможна.
В случае, когда первоначальный
режим известен и требуется рас-
считать лишь приращения токов и
напряжений, вызванные изменения-
ми э; д. с. и токов источников, це-
лесообразно составлять упрощен-
ные эквивалентные схемы для при-
ращений. Для этого в соответствии
с уравнением (6-11) нужно: 1) все
э. д. с. источников напряжения и
токи источников тока заменить их
приращениями; 2) нелинейные со-
противления заменить дифферен-
циальными в рабочих точках.
Величина любого тока или на-
пряжения в цепи равна алгебраиче-
ской сумме тока или напряжения
в первоначальном режиме и прира-
щения, рассчитанного методом ли-
неаризации.
Пример 6-5. Для стабилизатора (напря-
жения по схеме рис. 5-13 известны напря-
жения номинального режима Г/1Н и Г/21Н
при данных параметрах элементов и диф-
ференциальное сопротивление гд стабили-
трона при напряжении Г/21Н. Определить
приращение At72 при сравнительно малом
приращении и коэффициент стабили-
и
Рис. 6-15.
зации, а также составить полную эквива-
лентную линейную схему для анализа цепи.
Решение. Составим эквивалентную
схему для приращений, пользуясь методом
линеаризации (рис. 6-14,а).
Из ©той схемы сразу находим:
ГдГи
Д(72 — АГ/1 r г \ г г \ г г
Г0ГД Т Г0ГВ Т' дГн
Коэффициент стабилизации (5-8)
/Уд +ГрГн + гдгн и2п
= rLrn и1п
>
По характеристике стабилитрона
(рис. 5-4) определяем э. д.. с. Эо и составля-
ем линейную схему (рис. 6-14,6).
' . Подчеркнем, что для нелиней-
ных сопротивлений с положительны-
ми диф'ференциальными сопротивле-
ниями (рис. 6-12) положительное
приращение AU или А/ вызывает
дополнительные потери энергии
в элементе. Поэтому как для при-
ращений, так и в целом такие со-
противления — потребители энер-
гии.
Иначе обстоит дело в случае не-
линейных сопротивлений, имеющих
падающий участок вольт-амперной
характеристики (рис. 6-15). Диф-
ференциальное сопротивление на
этом участке отрицательное; здесь
для приращений токов и напряже-
ний нелинейный элемент не потре-
битель энергии, а наоборот, источ-
ник энергии (если по теореме ком-
пенсации заменить сопротивление
<0 источником э. д. с., то на-
правления э. д. с. и тока в источ-
нике будут совпадать). Конечно, и
в этом случае элемент в целом (не
157
для приращений) потребляет энер-
гию.
Отметим, что с позиций отрица-
тельного дифференциального (ди-
намического) сопротивления, «вы-
рабатывающего» энергию, могут
быть объяснены скачки тока или
напряжения и генерация колеба-
ний.
В случае управляемого нелиней-
ного сопротивления, зависящего от
двух переменных, когда, как ука-
зывалось в § 5-1, лишено смысла
заменять его одним эквивалентным
сопротивлением, линеаризация осу-
ществляется в соответствии с раз-
ложением в ряд Тейлора функции
двух переменных при аналогичных
ограничениях. Так, в первой части
книги было показано, что, напри-
мер, у электронно-вакуумного три-
ода, где анодный ток зависит от
анодного' и сеточного напряжений
(рис. 5-10), приращение анодного
тока при достаточно малых откло-
нениях от исходного режима
Д/а = ДС/а^+ДС/с^=
=Л_Д£/а+5Д(7с. (6-12>
Здесь внутреннее сопротивление Rt
триода и крутизна S его анодно-се-
точной характеристики — диффе-
ренциальные параметры триода,
в данной рабочей точке. Линеари-
зация дает возможность перейти:
к линейным эквивалентным схемам,
триода, которые представляют со-
бой неавтономные необратимые
четырехполюсники г(§ 1-24). Под-
черкнем еще раз, что при линеари-
зации нелинейного элемента для:
малых приращений параметры ли-
неаризации (гд,Э0, /0, Ri, S и др.)
зависят от исходного рабочего ре-
жима.
Глава седьмая
НЕЛИНЕЙНЫЕ МАГНИТНЫЕ ЦЕПИ ПРИ НЕИЗМЕННОМ
ВО ВРЕМЕНИ МАГНИТНОМ ПОТОКЕ
7-1. ВВЕДЕНИЕ
Для увеличения магнитного по-
тока при данной намагничивающей
силе, а также для концентрации
магнитного поля и придания ему
желаемой конфигурации в опреде-
ленном месте электротехнической
установки части ее выполняют из
ферромагнитных материалов. Эти
ферромагнитные части обычно на-
зывают магнитопроводами
или сердечниками, они име-
ют самые разнообразные формы и
размеры. Так, например, магнито-
проводы электромагнитов бывают
миниатюрные в медицинских ин-
струментах и огромные в ускорите-
лях элементарных частиц.
В цепях переменного тока фер-
ромагнитные сердечники нужны
также для получения целого ряда
особых явлений (гл. 8)..
Магнитный поток в большинстве
случаев создается токами, .проте-
кающими по системе проводов, ко-
торую часто называют обмоткой
158
(катушкой) устройства (машины*,
электромагнита и др.).
Систему ферромагнитных тел,,
предназначенную для усиления^
надлежащего направления и кон-
центрации магнитного потока, ко-
торый создается токами обмоток
или постоянными магнитами, назы- ~
вают м а гнитной цепью. О маг-
нитной цепи говорят в тех случаях,,
когда главная часть магнитного
потока проходит по замкнутой или
почти замкнутой системе ферромаг-
нитных тел с большой проницаемо-
стью.
В этой главе рассматриваются
основные особенности магнитных
цепей и элементы их расчета при
постоянных во времени токах и
магнитных потоках, когда не воз-
никают э. д. с. само- и взаимоин-
дукции. Большинство вводимых
здесь понятий и законов справед-
ливо и при переменных во времени
магнитных потоках. Поэтому, по-
мимо самостоятельного значения,
эта глава служит подготовительной
для дальнейшего изучения нели-
нейных цепей.
Напомним, что в системе единиц СИ
магнитная индукция измеряется в теслах
(тл) или, что то же самое, в веберах на
•квадратный метр (вб/м2). Напряженность
магнитного поля измеряют в а/м или
в а) см. Магнитная постоянная ;ц0 имеет
размерность генри на метр и рав|на р-о=
—4л-'10~7 гн!м. Магнитный поток и пото-
косцепление измеряются в веберах (вб)
или, что то же самое, в вольт-секундах
(в • сек).
До сих пор в практике часто можно
встретиться с измерением магнитных вели-
чин в единицах симметричной системы
СГС: индукции—в гауссах (>1 гс=|10~4^тл),
напряженности — в эрстедах ('1 э=
— 0,8 а!см), потока «и потокосцепления —
в максвеллах (1 мкс—10~8 вб).
7-2. СТАТИЧЕСКИЕ ХАРАКТЕРИСТИКИ
МАГНИТНЫХ МАТЕРИАЛОВ
Свойства магнитных материалов
обычно характеризуют зависи-
мостью между индукцией В и на-
пряженностью Н магнитного поля,
которая аналитически точно не вы-
ражается, определяется экспери-
ментально и задается графически
или в табличной форме.
Как известно, при одном и том
же значении напряженности ин-
дукция может иметь различные
значения в зависимости от пред-
шествующего магнитного состоя-
ния материала или, как говорят, от
магнитной предыстории.
Если в полностью размагничен-
ном ферромагнитном материале
монотонно увеличивать напряжен-
ность и определять индукцию в ус-
тановившемся режиме, то зависи-
мость В (Я), называемая кривой
начального намагничива-
ния, будет иметь вид, показанный
на рис. 7-1. Статическая магнитная
проницаемость материала
не постоянна. Кривая ц(Я) пока-
зана на том же рисунке.
Наклон касательной в начале
кривой В(Н>) определяет началь-
ную проницаемость .Цнач (в литера-
туре ее часто обозначают, как и
магнитную постоянную, через go)-
Касательная к кривой В(Н), про-
веденная из начала координат,
определяет значение максимальной
проницаемости р,макс. С увеличени-
ем напряженности поля сверх зна-
чения, При котором Ц = Рмакс, рОСТ
индукции замедляется, магнитное
состояние приближается к насыще-
нию, а магнитная проницаемость
уменьшается.
Изменение магнитного состояния
при положительных и отрицатель-
ных приращениях поля происходит
совершенно по-разному, что объяс-
няется частичной необратимостью
процессов намагничивания. Соот-
ветственно отличаются значения,
дифференциальной магнитной про-
ницаемости при возрастании поля
и при его убывании
">»• “-<»•
Характерные зависимости этих
проницаемостей от напряженности
показаны-на рис. 7-1. .
Вследствие необратимости про-
цессов намагничивания магнитное
состояние зависит от предшествую-
щих воздействий, оставляющих бо-
159
лее или менее глубокий след, по-
степенно стирающийся под влия-
нием новых воздействий. Такое
свойство — сохр анять след пред-
шествующих воздействий — назы-
вают гистерезисом.
После ряда повторных достаточ-
но медленных изменений напря-
женности поля в пределах ±Ямакс
устанавливается (стабилизируется)
статическая симметричная петля
гистерезиса (рис. 7-2). Принято
считать, что стабилизация дости-
гается примерно на десятом цикле.
На рис. 7-2 показано семейство
симметричных петель гистерезиса,
полученных при различных значе-
ниях 77Макс. По мере роста 7/макс
увеличивается, ширина петли и ме-
няется ее форма. Когда же достиг-
нуто некоторое предельное значе-
ние Ямакс, форма собственно петли
уже не изменяется, а растут только
безгистерезисные участки в обла-
сти насыщения. Соответствующая
петля носит название предель-
ной петли гистерезиса.
Характерными точками на петле
гистерезиса являются: значение ин-
дукции при напряженности, равной
нулю, .называемое остаточной
индукцией Вг; значение на-
пряженности поля при индукции,
равной нулю, называемое коэр-
цитивной силой Нс. Таким об-
разом, коэрцитивная сила — напря-
женность магнитного поля, необ-
ходимая для того, чтобы довести
магнитную индукцию в предвари-
тельно намагниченном материале
до нуля. Когда говорят о петле
гистерезиса материала, а также об
160
остаточной индукции и коэрцитив-
ной силе, то обычно имеют в виду
предельную или достаточно близ-
кую к ней петлю. Остальные воз-
можные петли носят название час-
тных циклов (или частных пе-
тель). Частные циклы могут быть
симметричными и несимметричны-
ми (рис. 7-2).
При наличии гистерезиса стати-
ческая проницаемость по (7-1) те-
ряет смысл. Однако дифференци-
альная проницаемость характери-
зует процессы намагничивания так
же, как и при первоначальном на-
магничивании. Говоря о дифферен-
циальной проницаемости на петле
гистерезиса, ’обычно имеют в виду
значение
_ dB
^ — ^dH
(7-2)
при dH>Q для восходящей ветви
петли и при dH<$ для нисходящей
(рис. 7-2). Типичный вид зависи-
мости цд (И) показан на рис. 7-3.
Таким образом, даже в статйче-
ских условиях нелинейный магнит-
ный элемент обладает совершенно
различными характеристиками и
параметрами в зависимости от маг-
нитной предыстории. Поэтому при-
нято характеризовать магнитные
материалы основной кривой
намагничивания — геомет-
рическим местом вершин симмет-
ричных петель гистерезиса, полу-
чающихся при различных макси-
мальных значениях напряженности
магнитного поля (рис. 7-2). Основ-
ная кривая намагничивания одно-
значна, вполне определенна для
данного материала и легче все-
го снимается экспериментально.
В справочной литературе, а также
в ГОСТ 802-58 ряд параметров
.указан по основной кривой намаг-
ничивания. Так начальная *цНач и
максимальная цМакс -проницаемости
определяются по основной кривой.
Начальная и основная кривые
намагничивания обычно близки
друг к другу. Опыт показывает, что
для многих практических задач
можно вести расчеты по основ-
ной кривой. .Однако необходимо
четко представлять, что основная
кривая намагничивания — это лишь
геометрическое место вершин
5Макс(Ямакс) симметричных петель
гистерезиса. Она не отображает свя-
зи В(Н) при последовательно-не-
прерывной смене магнитных со-
стояний, как кривая начального
намагничивания и петли гистере-
зиса.
Характеристики различных маг-
нитных материалов могут сильно
отличаться друг от друга. На
рис. 7-4 для примера показаны ос-
новные кривые намагничивания
электротехнической стали марки
Э42 (сплав железа с кремнием) и
железо-никелевого сплава 79НМ—
так называемого молибденового
пермаллоя. На рис. 7-5 показаны
петли гистерезиса сплавов 79НМ и
34НКМП. Последний имеет почти
прямоугольную петлю (на что ука-
зывает прибавление буквы П в кон-
це обозначения сплава). Материа-
лы с прямоугольной петлей широко
применяются в различных устрой-
ствах автоматики, вычислительной
техники и др. Одной из характери-
стик прямоугольности петли гисте-
резиса служит коэффициент пря-
моугольности
(7-3)
Dm
где Вт — максимальная индукция
при напряженности, в определен-:
ное число раз - (5—10) превышаю-
щей коэрцитивную силу.
В зависимости от технического
назначения ферромагнетику прида-
ют состав и структуру, обеспечи-
вающие ту или иную форму кривой
намагничивания и петли гистере-
зиса. С другой стороны, назначе-
ние ферромагнетика определяет,
какие его характеристики и пара-
метры представляют наибольший
интерес.
7-3. ОСНОВНЫЕ ЗАКОНЫ
И ОСОБЕННОСТИ МАГНИТНОЙ ЦЕПИ
При расчете магнитных цепей ос-
новываются на законе полного
тока,
= (7-4)
I
и принципе непрерывности
магнитного потока, кото-
рый математически формулируется
в виде
§BdS = 0. (7-5)
S
Закон полного тока (7-4) гово-
рит о том, что линейный интеграл
(циркуляция) вектора напряженно-
сти Я вдоль произвольного замкну-
того контура I равен алгебраиче-
ской сумме токов, пронизывающих
этот контур. Линейный интеграл
напряженности характеризует на-
11—434
161
Рис. 7-6.
магничивающее действие электри-
ческого тока и называется намаг-
ничивающей силой (сокра-
щенно н. с.) или магнитодви-
жущей силой (м. д. с.) вдоль
данного замкнутого контура.
В уравнении (7-4) положительное
направление тока и направление
обхода контура связаны друг
с другом правовинтовой системой.
Поток вектора индукции В че-
рез некоторую поверхность S назы-
вают магнитным потоком
Ф=^ВЙ5. (7-6)
Принцип непрерывности (7-5)
говорит о том, что магнитный по-
ток через произвольную замкнутую
поверхность равен нулю; линии
вектора В или магнитные линии
всегда замкнуты.
Рассмотрим вначале самую про-
стую магнитную цепь — тороидаль-
ный ферромагнитный сердечник
с однослойной плотно прилегающей
к сердечнику равномерной обмот-
кой с числом витков w (рис. 7-6).
В силу однородности и симметрии
магнитной цепи можно принять, что
магнитный поток проходит только
по сердечнику и что все точки, ле-
жащие на окружности данного ра-
диуса г, равноправны — величины
индукции и напряженности в них
одинаковы. При этом очевидно, что
по закону полного тока
Hdl = §Hdl=H§dl =
= Н2т.г = S/ = /w, (7-7)
откуда
H = (7-8)
О d/2 2/2
Рис. 7-7.
Зная напряженность в данной
точке, можно по кривой намагни-
чивания материала сердечника
определить индукцию в той же точке
(отвлекаясь пока от явления гисте-
резиса). Судя по (7-8), величина
Н и, следовательно, величина В
в различных точках сечения, сердеч-
ника не одинакова (.рис. 7-7). По-
этому поток может быть вычислен
только по формуле (7-6). Это об-
стоятельство сильно затрудняет
расчет. Между тем во многих слу;
чаях практики разница между, са-
мой короткой и самой длинной
магнитной линией в сердечнике не
столь уж велика, и приближенно
расчет можно вести по некоторой
средней длине магнитной линии
(/ — рис. 7-6). При этом считают,,
что величины Н и В во всех точках
поперечного сечения S сердечника:
одинаковы.
Итак, в дальнейшем под индук-
цией (и напряженностью) будем
понимать некоторое среднее па
сечению S магнитопровода значе-
ние
в—J (7-9>
и будем вести расчеты по средней
длине магнитной линии участков:,
магнитной цепи.
Чем больше величина магнитной
проницаемости материала, тем лег-
че проходить магнитному потоку
по участку магнитной цепи, выпол-
ненному из данного материала.
Максимальная проницаемость и
лучших случаях имеет порядок
105—ГО6, тогда как проницаемость
неферромагнитных материалов,
в том числе и воздуха, практически
равна единице. Таким образом, со-
отношение между проницаемостью
участков магнитопровода и прони-
цаемостью среды, окружающей
162
Рис. 7-8.
магнитопровод, -не .превышает 105—
106; часто оно значительно меньше.
В результате очертания магнитной
цепи не столь определенны, как
очертания электрической цепи по-
стоянного тока, где соотношение
между проводимостью участков
цепи и проводимостью окружаю-
щей изолирующей среды составля-
ет 1010—1020. Поэтому включение
•воздушного зазора в магнитную
цепь не .приводит к ее разрыву,
т. е. магнитный поток не умень-
шается до нуля.
В силу сказанного магнитный
•поток, ответвляющийся через окру-
жающую среду, может составлять
заметную долю потока, проходя-
щего в магнитной цепи. Ответвляю-
щийся поток, замыкающийся по-
мимо магнитной цепи, называют
потоком рассеяния. На рис. 7-8 для
примера схематично показан маг-
нитопровод электромагнитного ре-
ле. Обмотка, расположенная на
неподвижном сердечнике, создает
магнитный поток Ф, часть которо-
го Ф1 — главный рабочий поток
проходит через так называемый
рабочий зазор между сердечником
1 и якорем 2, в результате чего
возникает сила, стремящаяся при-
тянуть якорь. Поток рассеяния Ф2
минует рабочий зазор, частично
проходя по отдельным участкам
магнитной цепи, частично — по
окружающему цепь воздуху.
Расчет магнитных цепей с уче-
том потоков рассеяния представляет
сравнительно сложную задачу.
•В некоторых случаях оказывается
необходимым рассчитывать маг-
Рис. 7-9.
нитную цепь с распределенными
параметрами, и часто в процессе
расчета надо находить картину
магнитного поля. Расчеты таких
цепей рассматриваются в разделе
«Теория поля», а также в специаль-
ных курсах при анализе конкрет-
ных устройств. Здесь же будем
пренебрегать потоками рассеяния
и считать, что через любое попе-
речное сечение неразветвленной
части магнитной цепи проходит
один и тот же поток и что все вит-
ки данной обмотки пронизываются
одним и тем же потоком.
Магнитные цепи часто содержат
воздушные зазоры. Эти зазоры
подчас неизбежны по конструктив-
ным соображениям, и тогда их
стремятся иметь минимальными
(магнитопроводы трансформато-
ров, собираемые, например, из
Ш-образных пластин с перемычка-
ми,— рис. 7-9,а). Но нередко воз-
душный зазор принципиально не-
обходим; для создания в нем по-
тока и предназначена магнитная
цепь (например, воздушный зазор,
в котором движется обмотка элек-
троизмерительного прибора —
рис. 7-9,6). Форма воздушного за-
зора может быть самой разнооб-
разной (рис. 7-10,«, б), магнитное
поле в зазоре обычно неоднород-
ное, трудно поддающееся расчету.
Линии магнитной индукции выпу-
чиваются по краям зазора. По-
этому даже в самом простом слу-
чае, когда зазор образован двумя
параллельными плоскостями, пер-
Рис. 7-10.
11*
163
пендикулярными оси участка маг^
нитопровода, выпучивание иска-
жает поле, делая его неравномер-
ным (рис. 7-ГО,б). Если поперечные
размеры зазора велики по сравне-
нию с его длиной, то можно пре-
небречь выпучиванием.
Ограничимся здесь расчетами
магнитных цепей, воздушные зазо-
ры в которых по форме такие, как
на рис. 7-10,6 и длина которых ма-
ла по сравнению с поперечными
размерами. При этом поле в зазоре
приближенно будем считать одно-
родным, и тогда Ф = BS.
7-4. ЗАКОНЫ КИРХГОФА
ДЛЯ МАГНИТНОЙ ЦЕПИ.
АНАЛОГИЯ МЕЖДУ МАГНИТНЫМИ
И ЭЛЕКТРИЧЕСКИМИ ЦЕПЯМИ
С учетом принятых выше огра-
ничений очертания магнитной цепи
становятся вполне определенными.
Можно четко различать развет-
вленные и неразветвленные цепи и
установить для них чисто «цепные»
(а не «полевые») понятия и за-
коны.
Из принципа непрерывности маг-
нитного потока (7-5) следует, что
для узла магнитной цепи справед-
ливо уравнение
2Ф = 0, (7-10)
выражающее магнитный аналог
первого закона Кирхгофа: алге-
браическая сумма магнитных пото-
ков в узле равна нулю.
Понятие положительного направ-
ления применимо для магнитного
потока так же, как и для электри-
ческого тока. Условимся в уравне-
нии (7-10) писать со знаком плюс
потоки, выходящие из узла. При
этом, например, для узла на
рис. 7-11 первый закон Кирхгофа
запишется в виде
—Ф14-Ф2+Ф3 — 0.
Линейный интеграл напряжен-
ности вдоль участка ab цепи пазы-
Рис. 7-11.
Рис. 7-12.
вается магнитным напряже-
нием на участке
jHdl = f7Mab. (7-11)
аЪ
Произведение тока в обмотке на
ее число витков составляет н. с.
обмотки (катушки)
F=Iw, (7-12)
которую измеряют в амперах. На-
правления намотки, тока и н. с. свя-
заны друг с другом правилом пра-
воходового винта (рис. 7-12)=.
Из закона полного тока (7-4)
следует магнитный аналог второго
закона Кирхгофа: алгебраическая
сумма н. с. обмоток в замкнутом
контуре магнитной цепи равна ал-
гебраической сумме магнитных на-
пряжений на отдельных участках
контура
или
SE=S[7M. (7-13)
Если направление обхода конту-
ра совпадает с направлением н. с.,
то эта н. >с. пишется со знаком
плюс, в противном случае— со зна-
ком минус. Если направление маг-
нитного потока в участке совпада-
ет с направлением обхода контура,
то напряжение UM=Hl на этом
участке пишется со знаком плюс,
в противном случае — со знаком
минус.
Рис. 7-13.
164
Составим уравнения по законам
Кирхгофа для магнитной цепи
рис. 7-13. Если направления пото-
ков и н. с. не заданы, то предвари-
тельно выберем произвольно их по-
ложительные направления. Далее
определим ветви цепи и наметим
среднюю линию каждой ветви; за-
тем разобьем цепь на участки
(участки ветви могут отличаться
друг от друга материалом или по*
перечным сечением, или тем и дру-
гим) и вы-берем независимые кон-
туры и направления их обхода.
Пусть ветвь amb есть участок /;
ab — 2; (ad+bc)—3\ cd — 4. По
первому закону Кирхгофа для уз-
ла а
-Фх + Ф2 + Ф3 = 0. (7-14)
По второму закону Кирхгофа
для наружного (участки 1—3—4)
и правого (участки 2—3—4) кон-
туров, обходя их против направле-
ния движения часовой стрелки, по-
лучим:
=Л=#Л+н313+я4/4,
(7-15)
/2йУ2 = Л=-^3^ + Я4/4 — Н212.
(7-16)
Отметим, что пренебрегая рас-
сеянием, принимаем равенство
Ф4 = Ф3, а пренебрегая выпучива-
нием— равенство S3=<S4.
Очевидно, что между магнитны-
ми и электрическими цепями име-
ет место явная аналогия. При этом
аналогичны следующие величины
и уравнения
27 = 0^2Ф = 0;
S3 = ZU ъ SF = SC7M = БЯ/;
Ф^/; U^U.
По аналогии может быть введено
и понятие магнитного сопро-
тивления участка цепи
г м
_U„ U
— ф I
(7-17)
или сопротивления всей неразвет-
вленной цепи
F • э
Магнитные сопротивления и прово-
димость участка
gM ——Г“
вычисляются также, как сопротив-
ление г и проводимость g участка
электрической цепи такой же фор*
мы при замене удельной проводи-
мости о магнитной проницаемо*
стью рр0. Вообще при подобии
геометрических форм
или
Единицей измерения магнитной
проводимости служит генри.
Суммарное магнитное сопротив*
ление двух участков неразветвлен*
ной ветви
rM=rMi+rM2. (7-19)
У неферромагнитного участка
(воздух, медь и т. п.) магнитное
сопротивление линейное и в ц раз
больше, чем сопротивление такого
же ферромагнитного участка с про*
ницаемостью ц.
Сопротивление воздушного уча-
стка (зазора) рассчитывается по
формуле (7-18) лишь при приня-
тых существенных упрощениях; во-
обще же оно определяется по кар*
тине магнитного поля.
Так как магнитная проницаемость
ферромагнитного участка зависит
от индукции, то его магнитное со-
противление нелинейно. Поэтому
Даще расчеты ведут, не пользуясь
понятиями проницаемое™ и маг*
нитного сопротивления, а при по*
мощи магнитных характери-
стик участков, аналогичных
вольт-амперным характеристикам
нелинейных сопротивлений. Маг-
нитной характеристикой участка
цепи будем называть зависимость
Ф(С/М) или Ф(Я/)> она легко опре-
деляется по кривой намагничива*
ния материала участка и его гео*
165
метрическим размерам (-сечение,
длина).
На рис. 7-14 приведена электри-
ческая нелинейная цепь—аналог
магнитной цепи рис. 7-13.
\
7-5. РАСЧЕТЫ МАГНИТНЫХ ЦЕПЕЙ
Аналогия между электрическими
и магнитными цепями при постоян-
ных токах и потоках хотя и яв-
ляется формальной, тем не менее
позволяет распространить все ме-
тоды и технику расчета нелиней-
ных электрических цепей на маг-
нитные цепи. Покажем это на от-
дельных примерах.
Результирующая магнитная ха-
рактеристика 'Ф!(^ма&) =Ф(2Я/)
ветви (части замкнутой магнитной
цепи), состоящей из нескольких
участков (/, 2 и 3 на рис. 7-15) с
известными размерами /, S и кри-
выми намагничивания материалов
определяется следующим образом.
Задаемся потоком в ветви и нахо-
дим на каждом участке индукцию:
D _Ф О _ Ф О _ Ф
Затем по кривым намагничивания
определяем соответствующие на-
пряженности и Я3, а для воз-
душного зазора
2
3
Рис. 7~15.
Полезно запомнить, что
дукция выражена в теслах,
расчета напряженности в
в амперах на сантиметр
умножить значение
Ю4
8 000.
0,4тг
Далее вычисляем величину
если ин-
то для
воздухе
следует
индукции на
*Hl — --Uwab- •
Задаваясь различными потоками;
Цолучаем точки магнитной харак-'
теристики.
При расчете магнитных цепей ре-
зультирующие характеристики вет-
вей наиболее целесообразно опре-
делять не графическим суммирова-
нием характеристик отдельных
участков, а в табличной форме, так
как обычно заданы кривые намаг-
ничивания материалов В(Н), а не
магнитные характеристики участ-
ков Ф'(Я/). Можно рекомендовать
форму табл. 7-1.
Если в ветви имеется обмотка
с н. с. F=Iw (рис. 7-16), то
Я маь = Iw ЪН1.
Задаваясь различными значения-
ми потока, находя индукции и
нетрудно определить магнитную
характеристику Яма&(Ф) и такой
ветви.
Неразветвленные магнитные це-
пи рассчитываются при помощи за-
Рис. 7-16.
166
кона полного тока в форме второ-
го закона Кирхгофа (7-13). Если
задан поток или индукция на ка-
ком-нибудь участке цепи (напри-
мер, в воздушном зазоре) и тре-
буется определить н. с. /ш, то рас-
чет выполняем непосредственно по
кривым намагничивания и уравне-
нию (7-13).
Если дана н. с., а нужно опреде-
лить поток, то сначала рассчиты-
ваем отдельные точки результиру-
ющей магнитной характеристики
цепи (см. табл. 7-1). При этом, за-
даваясь потоками, подбираем та-
кие два достаточно близких друг
к другу значения потока Ф1 и Ф2,
чтобы получить несколько
меньшую и несколько большую,
чем заданная величина н. с. Iw.
Затем в необходимом масштабе
«строим часть характеристики цепи
Ф(2/й) и по ней и величине Iw
находим искомый поток (рис. 7-17).
Как указывалось в § 6-4, при гра-
фическом расчете неразветвленной
цепи, состоящей из источника на-
пряжения, нелинейного и линейного
сопротивлений, удобен метод пере-
сечений. Аналогичная магнитная
цель состоит из источника н. с.,
ферромагнитного нелинейного
участка и линейного участка, на-
пример, воздушного зазора. Для
расчета такой цепи (рис. 7-18) пол-
ностью пригоден и столь же удо-
бен метод пересечений. Кри-вая 1—
магнитная характеристика ферро-
магнитного участка. Прямая 2
5(прямая зазора) построена по
уравнению
^Hl = Iw—H2l2 =
Рис. 7-18.
Точка Р пересечения кривой 1 и
прямой 2 определяет режйм цепи.
На рис. 7-18 построена еще
магнитная характеристика воздуш-
ного зазора—прямая 5 — ^^-Н212^
— и результирующая магнитная
характеристика обоих участков
(кривая 4). Как и следовало
ожидать, наличие воздушного за-
зора (линейного участка?) ослабля-
ет нелинейность цепи. Поэтому воз-
душный зазор специально вводят
в цепь, когда надо иметь по воз-
можности малое магнитное -сопро-
тивление и вместе -с тем близкую
к линейной магнитную цепь.
На практике часто встречаются
разветвленные симметричные маг-
нитные цепи, расчет которых сво-
дится к расчету неразветвленной
цепи. Симметрия должна быть как
в собственно магнитопроводе (гео-
метрия и материалы участков), так
и в расположении, направлении и
величине н. с. обмоток. На рис. 7-19
приведен пример симметричной
магнитной цепи. Симметрия сохра-
няется при любых величине и на-
правлении н. с. Iwi. Очевидно, что
167
ф1=ф2=Ф/2, и расчет цепи может
быть проведен по уравнению Кирх-
гофа, составленному для одного из
контуров (левого или правого). На
рис. 7-20 показан еще один при-
мер симметричной цепи—магнит-
ная цепь четырехполюсной элек-
трической машины.
При расчете разветвленных маг-
нитных цепей возникают те же
трудности, что и при расчете раз-
ветвленных нелинейных электриче-
ских цепей (гл. 6). В некоторых
частных случаях, например цепи с
двумя узлами, расчет сравнительно
несложен. Конечно, многое еще за-
висит и от постановки задачи: что
считается заданным, известным и
что надо определить в результате
расчета. Рассмотрим два примера.
Пример 7-1. Для магнитной цепи на
рис. 7-13 известны размеры участков 7, 2,
5, 4, материалы и их кривые намагничи-
вания.
Определить, какая необходима н. с. Fi
при заданной н. с. Д2, чтобы обеспечить
в воздушном зазоре индукцию В4, направ-
ленную от точки d к точке с.
Решение. По величине индукции В4
находим напряженность Н4 и поток Ф4=
=Ф3=<В454. По потоку Ф3 находим ин-
дукцию В3 и по кривой намагничивания
материала участка 3— напряженность Я3.
Далее вычисляем сумму Нг13+Н414 и из
уравнения (7-16), составленного для пра-
вого контура цепи рис. 7-13, определяем
произведение Н212, а затем напряженность
Я2. По кривой намагничивания материала
участка 2 определяем индукцию В2 и за-
тем поток Ф2. Из уравнения (7-44), состав*
ленного для узла а, находим поток Фь да-
лее— индукцию Bi, напряженность Hi и
произведение Hili. Наконец, по уравнению
(7-15), составленному для левого контура,
определяем н. с. Fb
Пример 7-2. Для магнитной цепи на
рис. 7-13 известны размеры участков, ма-
териалы и их кривые намагничивания.
Определить индукцию в воздушном за-
зоре при заданных н. с. Fi и F*
Решение. При данной постановке за-
дачи простой (прямой) путь решения, к со-
жалению, невозможен. Здесь целесообразен
графоаналитический метод расчета нели-
нейной цепи с двумя узлами (гл. 6). Рас-
считаем магнитные характеристики ветвей
Ф1 = Г1 (^М аЬ) = Л (Fi-7/Л),
Ф2 = Г2 (J7Mab) = f2(F2+/72Z2), ’
Ф3 = /3 (^MOb) = fs (ЯЛ+ЯЛ).
Для этого задаемся потоком Ф3, рассчиты-
ваем 77 м оЬ, а затем по 77м аъ находим
Ф1 и Ф2. Результаты вычислений сводим
в табл. 7-2, в последней колонке которой
в соответствии с первым законом Кирхгофа
(7-14) записываем сумму потоков.
Алгебраическая сумма потоков должна
равняться нулю (7-14), поэтому получаю-
щаяся в последней колонке величина ХФ
указывает, каким значением потока Ф3
следует далее задаваться. Целесообразна
выбрать два таких близких друг к другу
значения потока Ф3 и соответственно на-
пряжения Uwab, ПрИ ОДНОМ ИЗ КОТОрЫХ
ХФ > 0, а при другом ХФ<^ 0. Тогда можно
в необходимом масштабе построить часть
зависимости Хф (Ф3) или ХФ(77Маь) и по
точке пересечения ее с осью абсцисс
(рис. 7-21) найти решение задачи.
Может сложиться впечатление,
что для поддержания магнитного
потока необходима н. с., но совер-
шенно не требуется затраты энер-
168
гии. Однако всякая реальная об-
мотка имеет некоторое сопротивле-
ние, и для поддержания тока в об-
мотке необходима определенная
мощность. Эта мощность полностью
преобразуется в обмотке в тепло.
В результате повышается темпера-
тура обмотки. Допустимая темпе-
ратура определяет наибольшую ве-
личину тока, а следовательно, и ве-
личину н. с., которую можно со-
здать при помощи данной обмотки
в конкретных условиях работы
устройства (температура окружаю-
щей среды, условия охлаждения
и пр.).
7-6. ЦЕПИ С ПОСТОЯННЫМИ
МАГНИТАМИ
Явление остаточного намагничи-
вания используется при изготовле-
нии постоянных магнитов; при этом
применяют так называемые магни-
тотвердые материалы, обладающие
сравнительно большими коэрцитив-
ной силой (десятки и сотни ампер
на сантиметр) и площадью петли
гистерезиса.
Магнитные цепи с постоянными
магнитами весьма разнообразны.
В одних поле создается не только
постоянным магнитом, но и н. с.
обмоток, а в других—только посто-
янным магнитом. Особенностью по-
следних является равенство нулю
циркуляции вектора напряженно-
сти поля
£Hdl = 0 или 2Я/ = 0. (7-20)
При приближенных расчетах ча-
сто можно пренебречь магнитным
сопротивлением всех участков це-
пи, кроме воздушного зазора и са-
мого магнита. В этом случае, пола-;
гая, что вся цепь состоит из двух
участков (рис. 7-22), можно напи-
сать простое равенство
7/в/в, (7-21)
где индекс «м» относится к магни-
ту, а индекс «в»—к воздуху.
При отсутствии рассеяния и при-
нятых ограничениях в отношении
формы и величины зазора
Фм = Фв ИЛИ B^SM = .3BSB;
где коэффициент пропорционально-
сти N называется размагничиваю-
щим коэффициентом.
Таким образом, состояние маг-
нита (рабочая точка) при наличии
воздушного зазора определяется,
с одной стороны, зависимостью
(7-22), а с другой стороны, харак-
теристикой его материала—петлей
гистерезиса.
Рабочая точка постоянного маг-
нита лежит на участке петли гисте-
резиса материала во втором квад-
ранте (рис. 7-22), называемом кри-
вой размагничивания или
•спинкой петли. Выражение (7-22)
представляет собой уравнение пря-
мой линии ОК, образующей угол у
с осью—Н (рис. 7-22). Координаты
Дм, точки пересечения b этой
прямой со спинкой петли и опре-
деляют рабочий режим постоянно-
го магнита. Построение прямой на
одном графике со спинкой петли
соответствует расчету методом пе-
ресечений, но только не в осях Ф и
а в осях В и Н.
Если уменьшить воздушный зазор
магнита, например, путем сближе-
ния концов магнита или введения
в зазор ферромагнитной прокладки
с пренебрежимо малым магнитным
сопротивлением, то индукция в маг-
ните и зазоре возрастет. Однако>
при этом магнитное состояние бу-
16»'
дет изменяться по восходящей вет-
ви bd некоторого частного цикла,
называемого возвратным. Точ-
ка d лежит на прямой ОМ, соответ-
ствующей меньшему зазору. Если
теперь снова увеличить зазор до
прежней величины, то индукция
будет уменьшаться по ветви част-
ного цикла df. При повторных из-
менениях зазора в тех же пределах
можно считать, что магнитное со-
стояние будет изменяться по уста-
новившемуся частному циклу, ко-
торый обычно сравнительно узкий
и при расчетах заменяется прямой
mim2, называемой прямой воз-
врата.
Весьма сходные изменения маг-
нитного состояния цепи с постоян-
ным магнитом возникают при по-
вторных наложении и снятии отно-
сительно небольшого размагничи-
вающего поля, создаваемого, на-
пример, н. с. специальной обмотки.
Повторяющиеся изменения воз-
душного зазора и дополнительного
поля имеют место во многих прак-
тических устройствах, содержащих
постоянные магниты (электриче-
ские машинные генераторы, поля-
ризованные реле и др.). Тогда в
расчетах надо принимать во вни-
мание изменение магнитного состоя-
ния по возвратным циклам.
В заключение отметим, что рас-
четы рассмотренных в предыдущих
параграфах магнитных цепей, не
содержащих постоянных магнитов,
как таковых, но с учетом гистере-
зиса, ничем в принципе не отлича-
ются от приведенного в этом пара-
графе расчета.
Глава в о сь'м а я
НЕЛИНЕЙНЫЕ ЦЕПИ ПЕРЕМЕННОГО ТОКА
8-Г. ВВЕДЕНИЕ
Рассмотрим нелинейные цепи пе-
ременного тока в установившемся
режиме. Частный случай, когда ча-
стота напряжения или тока источ-
ников равна нулю (постоянный
ток), был рассмотрен в предыду-
щих главах.
В нелинейных цепях переменно-
го тока возникает, как было отме-
чено, в § 5-3, ряд специфичных яв-
лений, лежащих в основе прин-
ципа действия многих важных для
практики устройств. Рассматривая
установившийся режим, необходи-
мо всегда помнить о динамических
свойствах нелинейных элементов и
в каждом конкретном случае ре-
шать, следует ли и как считаться
с инерционностью элемента. Всего
многообразия цепей и режимов рас-
смотреть, естественно, нельзя; огра-
ничимся типовыми случаями, на ко-
торых покажем специфику и раз-
личные методы анализа и расчета
нелинейных цепей переменного то-
ка. Легче всего поддаются анализу
цепи, которые при той или иной
степени идеализации можно счи-
тать содержащими или только со-
170
противления, или только индуктив-
ности, или только емкости. Цепи,
содержащие сопротивления и реак-
тивные элементы, в этом отноше-
нии обычно сложнее.
Выделим здесь три группы це-
пей: а—цепи с существенно инерци-
онными нелинейными элементами;
б —цепи с активными сопротивле-
ниями, имеющими несимметричные
характеристики; в — цепи с реактив-
ными нелинейными элементами. В
такой очередности их и будем рас-
сматривать, тем более, что это со-
ответствует переходу от более про-
стых случаев к более сложным.
Разумеется, сложные цепи' пере-
менного тока могут содержать од-
новременно и нелинейные реактив-
ные элементы, и сопротивления с
несимметричными характеристика-
ми и иные нелинейные элементы.
8-2. ЦЕПИ С ИНЕРЦИОННЫМИ
НЕЛИНЕЙНЫМИ ЭЛЕМЕНТАМИ
В § 5-4 на примере термистора
было показано, что в общем случае
динамические процессы в инерци-
онных нелинейных элементах до-
статочно сложны. Поэтому уело-
вимся в дальнейшем счи-
тать инерционными нели- 0——
нейные элементы с постоян- 1
ной времени, характеры- L
зующей инерционные свой- ь
-ства, много большей пе- 1
риода переменного тока ис-
точников питания. В этом
случае параметры элемента ______
ва полупериод изменяются
столь незначительно, что /
можно изменениями пара-
метров пренебречь и при-
ближенно считать их по-
стоянными. Так, при изме-
нении тока с промышленной
частотой 50 гц температура
нити осветительной лампы накали-
вания, обладающей значительной
тепловой постоянной времени, и со-
ответственно ее сопротивление
практически не изменяются в те-
чение периода. Величина сопротив-
ления лампы определяется дейст-
вующим значением тока.
Очевидно, что в любом устано-
вившемся режиме такой инерцион-
ный нелинейный элемент ведет себя
как линейный. При синусоидальном
токе и напряжение на элементе си-
нусоидальное. Но для различных
действующих значений тока (на-
пряжения) установившегося режи-
ма параметры элемента будут не
одинаковы, хотя и неизменными
в пределах периода.
Таким образом, у инерционных
нелинейных элементов зависимость
между действующими значениями
величин (напряжения и тока в со-
противлении, потока и тока в ин-
дуктивности, заряда и напряжения
в конденсаторе) нелинейная, а меж-
ду мгновенными значениями—ли-
нейная. Эквивалентное линейное со-
противление (индуктивность, ем-
кость) для мгновенных значений
равно отношению действующих зна-
чений напряжения и тока (потока
и тока, заряда и напряжения).Ха-
рактеристики элементов U (Z), Ф (/),
Q(t7) для действующих значений
при переменном токе (напряже-
нии) часто незначительно отлича-
ются от характеристик при посто-
янных токе и напряжении.
Расчет нелинейных цепей пере-
менного тока, содержащих только
инерционные сопротивления или
только инерционные индуктивности
и емкости, по действующим значе-
ниям синусоидальных токов и на-
пряжений ничем не отличается от
расчета нелинейных цепей при по-
стоянных токах (гл. 6), или маг-
нитных потоках (гл. 7) и зарядах.
Расчет цепей переменного тока
с инерционными нелинейными со-
противлениями и реактивными эле-
ментами представляет большие
трудности. В общем случае прихо-
дится учитывать нелинейность ак-
тивной и реактивной частей сопро-
тивления элемента, а также скла-
дывать токи и напряжения, нахо-
дящиеся в квадратуре. Здесь иног-
да полезно применить символиче-
ский методи векторные диаграммы.
Пример 8-1. Рассчитать и построить за-
висимость для цепи рис. 8-1,а, со-
стоящей из последовательно соединенных
конденсатора С=1 мкф и нелинейного со-
противления— термистора. Напряжение Ui
синусоидальное с частотой 60 гц. Вольт-
амперная характеристика термистора для
действующих значений U$(I) приведена на
рис. 8-4,6; постоянная времени термистора
z^80 сек.
Решение. Так как термистор при
заданных условиях можно считать инер-
ционным нелинейным элементом, то ток
и все напряжения будут синусоидальными.
Расчет проще всего здесь вести в таблич-
ной форме.
Задаемся величиной тока, по характе-
ристике термистора находим напряжение
U 2, вычисляем напряжение на емкости
Uc — хс1 и напряжение на входе £71 =
= ]/' . На рис. 8-1,6 приведены
рассчитанные таким образом зависимости
£71(7) и U2(77,).
171
Инерционность индуктивности
или емкости может быть обуслов-
лена инерционным изменением гео-
метрии катушки и конденсатора,
а также инерционным изменением
характеристик ферромагнитного
сердечника катушки или диэлек-;
трика конденсатора. Такие изме-
нения возникают при нагреве вслед-
ствие потерь в ферромагнетике или
диэлектрике, находящемся в пере-
менном магнитном или электриче-
ском поле. Инерционное изменение
«геометрии» катушек и конденса-
торов встречается в некоторых элек-
тромеханических системах, напри-
мер, в электромагнитных устройст-
вах с подвижными сердечниками,
в электростатическом вольтметре
и др.
При несинусоидальных э. д. с. и
токах источников расчеты цепей
с инерционными нелинейными эле-
ментами существенно усложняют-^
ся. Несмотря на линейность цепи
для мгновенных значений, вести
расчет по отдельным гармоникам
нельзя, так как принцип наложе-
ния неприменим. Рассмотрение та-
ких цепей выходит за рамки этой
книги.
8-3. ЦЕПИ, СОДЕРЖАЩИЕ
НЕЛИНЕЙНЫЕ СОПРОТИВЛЕНИЯ
С НЕСИММЕТРИЧНЫМИ
ХАРАКТЕРИСТИКАМИ.
ПРОСТЕЙШИЕ ВЫПРЯМИТЕЛИ
Типичными представителями не-
линейных сопротивлений с несим-
метричной вольт-амперной харак-
теристикой являются вентили (по--
лупроводниковые диоды, вакуум-
ные—кенотроны, ионные—газотро-:
ны и др.). Ограничимся рассмотре-
нием таких режимов, когда можно
считать вентиль безынерционным
элементом и пренебрегать межэлек-
тродной емкостью. В этом случае
характеристики, снятые при посто-
янном токе, совпадают с характе-
ристиками для мгновенных значе-
ний переменного тока. Иными сло-
вами, статические и динамические
характеристики совпадают.
Сделанные допущения, сущест-
венно упрощающие анализ и рас-
чет цепей, могут быть приняты, ес-
172
ли частота'напряжений
или токов источников
0--Ы--0
а
о
Рис. 8-2.
питания ср авнительно
низкая, а в импульс-
ных цепях — при до-
статочно малой кру-
тизне фронтов и боль-
шой длительности им-
пульсов напряжение
и тока. Решение во-
проса о том, можно ли прене-
бречь емкостью вентиля, зависит
и от параметров цепи, в которую
он включен. Для ориентировки ука-
жем, что емкость селеновых венти-
лей составляет 0,01—0,02 мкф на-
квадратный сантиметр активной
площади элемента, германиевые'
точечные диоды имеют емкость по-
рядка 1 пф. Точечные кремниевые
диоды обычно можно считать безы-
нерционными при частотах до не-
скольких сотен килогерц.
Вольт-амперные характеристики»
некоторых полупроводниковых дио-
дов были показаны н^ рис. 5-6,
б. На рис. 8-2 приведена характе-
ристика идеального вентиля,
там же показано условное изобра-
жение вентиля—полупроводнико-
вого диода. У идеального вентиля
падение напряжения в прямом на-
правлении ггПр и ток в обратном на-
правлении /Обр равны нулю; или
иначе: прямое сопротивление 'Гпр и
межэлектродная емкость равны
нулю, а обратное сопротивление-
ГобР—бесконечности.
Как отмечалось в § 5-3, при по-
мощи несимметричных- нелинейных
сопротивлений можно получить эф-
фект выпрямления — преобра-
зования переменного напряжения
в постоянное.
Рассмотрим процессы и основные
количественные соотношения в про-
стейших цепях с вентилями, пола-
гая вначале вентили идеальными..
На рис. 8-3,а приведена схема
однополупериодного выпрямителя
с активной линейной нагрузкой гн-
В полупериод, когда w>0, вентиль
проводит ток (говорят: вентиль от-
крыт) и, так как он идеальный, то
&в='О и все напряжение источника
питания прикладывается к сопро-
тивлению нагрузки и=и^ а ток
i=ulr-B_. В конце этого полупериода
Рис. 8-3.
и = 0 и 1—0. Затем напряжение из-
меняет знак (и<0), к вентилю под-
водится отрицательное напряжение
и он запирается; здесь ив = и, i=0,
ин=0. На рис. 8-3,6 приведены кри-
вые напряжений и, ив и тока I.
Напряжение (и ток) на нагрузке
пульсирующее, содержит постоян-
ную составляющую, первую и все
четные гармоники. Действительно,
разложение -в ряд Фурье кривой
ин — Um sin
&Е = 0, к < со/ < 2т:
дает следующее выражение:
uH=—-j-^psinW —
11 л 1 2
1 Л 4- \ \
cos 4«)f -4-...).
о*0 J
(8-2)
Таким образом, при активной на-
грузке и идеальном однополупериод-
ном выпрямлении постоянные со-
ставляющие напряжения на нагрузке
и тока равны соответственно
Г ___ U ТП у ____Um
0 л ’ 0 гв лгн*
(8-3)
Действующее значение напряже-
ния проще всего вычислить, поль-
зуясь непосредственно определением
действующего значения
и =
и аналитическим выражением иа
(8-1). Легко убедиться в том, что
Активная мощность нагрузки и,
следовательно, всей цепи, так как
в вентиле нет потерь,
р=Ргл = ив1=^^.
Полная мощность источника пи-
тания
I т
Коэффициент мощности выпрями-
теля (всей цепи)
COS0 =-^-=^—- = 0,707.
о Л
Низкий коэффициент мощности
говорит о плохом использовании
источника питания и объясняется не
наличием реактивной мощности (она
здесь равна нулю), а тем, что в один
из полупериодов напряжение источ-
ника отлично от нуля, а ток равен
нулю. Так как формы кривых тока
и напряжения источника отличаются
друг от друга, то мощность иска-
жения источника
T=ys2 — Р2 — Q2
не равна нулю.
Построить кривую тока в актив-
ном сопротивлении нагрузки (рис.
8-3,0,) с учетом прямого падения
напряжения и обратного тока ре-
ального вентиля можно графиче-
ским методом. Поскольку вольт-
амперные характеристики для мгно-
венных значений суммируются как
при постоянном токе (гл. 6), легко
получить эквивалентную характе-
ристику всей цепи, и построениями,
аналогичными показанным на
173
рис. 5-17, определить кривую тока
•в цепи.
Для анализа и расчета цепей
с вентилями их характеристики
приходится тем или иным путем
аппроксимировать. В § 6-5 было
указано, что начальный участок ха-
рактеристики полупроводниковых
вентилей в прямом направлении
можно представить, например, сте-
пенной функцией. Широкое рас-
пространение получила кусочно-
линейная аппроксимация, когда ре-
альная характеристика заменяет-
ся отрезками прямых; частным слу-
чаем ее является характеристика
идеального вентиля (рис. 8-2). На
рис. 8-4,а показана часто приме-
няемая для полупроводниковых
вентилей аппроксимация: обратный
ток отсутствует, нелинейный уча-
сток (рис. 5-6,6) представлен от-
резком Оа оси абсцисс до так
называемого опорного или порого-
вого напряжения Un и отрезком ab,.
наклон которого соответствует
усредненному дифференциальному
прямому сопротивлению гд. Экви-
валентная схема вентиля для этого
случая приведена на рис. 8-4,а;
здесь и в подобных схемах вентиль
В уже идеальный. Учет межэлек-
тродной емкости и дополнительно
постоянных прямого и обратного,
сопротивлений гПр и гОбр приводит
к эквивалентным схемам на
рис. 8-4,6. Тогда из-за наличия ем-
кости, сопротивление которой зави-
сит от частоты, не существует од-
ной неизменной вольт-амперной ха-
рактеристики, даже если прене-
бречь внутренними динамическими
процессами в диоде.
Пример 8-2. Для однополупериодного
выпрямителя (рис. 8-3,а) дано: вентиль —
диод Д204, характеристика его приведена
174
на рис. 5-6,6; емкость диода С ^20 пф;
напряжение источника питания синусои-
дальное U = 200 в, f = 2 400 гц-, нагрузка
гн = 1 ком.
Определить постоянную составляю-
щую тока 10.
Решение. При заданных условиях
можно пренебречь внутренними динамиче-
скими процессами в диоде. Так как пря-
мое падение напряжения на диоде не пре-
вышает 1 в (рис. 5-6,6), то им по сравне-
нию с напряжением источника питания
можно пренебречь. Тогда максимальный
Um 200 V2 ’
прямой ток равен ——=—f~OQQ =0,28 а.
Из характеристики диода видно, что даже
если Принять Иобр. макс = Um = 280 в,
обратный ток диода не будет превышать
5 мка. Поэтому при расчете величины 10,
конечно, можно пренебречь обратным то-
ком. Емкость диода несколько увеличит
обратный ток, но по условиям задачи
1/соС > гн и при расчете величины Za.
можно влиянием емкости пренебречь.
Итак, при заданных условиях вентиль-
можно считать идеальным. Тогда
г
2 т
0,28
тс
0,09 а.
Однополупериодное выпрямление-
имеет два основных недостатка —
плохое использование источника пи-
тания и относительно -большая пе-
ременная составляющая, (большие
пульсации).
В двухполупериодных выпрями-
телях эти недостатки значительно
ослаблены. На рис. 8-5,а приведе-
на схема двухполупериодного вы-
прямителя с трансформатором со-
средней точкой и активной нагруз-
кой. В качестве вентилей работают
кенотроны.
В каждый полупериод открыт
один из вентилей, напряжение, на
нагрузке равно напряжению •на по-
ловине вторичной обмотки транс-
форматора. ив=и, а к другому вен-
тилю приложено отрицательное на-
пряжение ив='(и+ин) и он за-
перт. На рис. 8-5,6 приведены кри-
вые синусоидального -напряжения
и, напряжений на вентилях ив2"
и на нагрузке ин, а также кривые-
токов нагрузки 1В, вентилей и, и
источника питания i для случая ак-
тивной нагрузки и идеальных вен-
тилей и трансформатора.
Напряжение на активной нагруз-
ке при двухполупериодном выпрям-
лении (рис. 8-5,6)
йн — | t/^sin W |
вентилей В3 и В4 приложено отри-
цательное напряжение, равное на-
пряжению источника питания, и они
заперты. В следующий полупериод
открыты вентили В3 и В4, а венти-
ли Bi и В2 заперты. На рис. 8-6,6
показаны кривые напряжений источ-
ника питания, на вентилях wBi =
=-ив2 и ивз=^в4 и на нагрузке,
а также кривые токов источника, на-
грузки и вентилей /1 = 1*2 и /3=1*4-
Выпрямленные напряжение и ток:
911 V /7
70 = TV(8-5)
/ и-
Выбор вентилей производится по
среднему значению прямого тока /в.о
и по максимальному обратному на-
пряжению. Для однополупериодной
СХеМЫ /во“'Л)> ^обр.макс У ДВУХ-
полупериодной со средней точкой
/в.0 = — ? ^обр.макс :=l2l/w,
Рис. 8-5.
не содержит первой гармоники; по-
стоянная составляющая и четные
гармоники вдвое больше, чем при
однололупериодном выпрямлении
(при одинаковых Um).
На рис. 8-6,а изображена схема
мостового двухполупериодного вы-
прямителя, не требующего обяза-
тельного применения трансформа-
тора. К диагонали 1—2 моста, в
каждое плечо которого включен
вентиль, прикладывается перемен-
ное напряжение и, а к другой диа-
гонали подключается сопротивление
нагрузки.
Рассмотрим работу схемы при
активной нагрузке, синусоидальном
напряжении источника питания и
идеальных вентилях. В положитель-
ный полупериод (u;>iO) открыты
вентили Bi и В2, а к каждому из
Рис. 8-7.
у МОСТОВОЙ
Лзо ==z~^' » ^обр.макс r===‘Um*
В тех случаях, когда надо умень-
шить пульсацию выпрямленного на-
пряжения (сгладить), между вы-
прямителем и нагрузкой включа-
ют низкочастотный фильтр. При
двухполупериодном выпрямлении
фильтр имеет меньшие размеры, чем
при однололупериодном (и прочих
равных условиях), так как в пер-
вом случае фильтр рассчитан на по-
лосу запирания, начиная только со
второй гармоники (2со) и выше. При
анализе и расчете выпрямителя с
-фильтром необходимо учитывать
емкость и индуктивность фильтра.
Если при чисто активной нагрузке
периодические открывания и запи-
рания вентиля, равносильные замы-
каниям и размыканиям ключа в ме-
сте, где стоит вентиль, не приводят
к возникновению процессов, сходных
с переходными, то при наличии
•емкости и индуктивности фильтра
такие процессы возникают. Поэтому
анализ цепей с вентилями в этих
совсем особых режимах обычно ве-
дут с применением методов расчета
переходных процессов (§ 9-4).
На .практике для питания постоянным
током сравнительно мощных цепей приме-
няют трехфазные выпрямители. На рис.
8-7,а приведена -схема трехфазного вы-
прямителя, требующая источника с выве-
денной нулевой точкой.
Если вентиль, например ВА, заперт, то
к нему приложено напряжение
он будет оставаться запертым до тех пор,
пока цв_а<0. В это время может быть от-
крыт вентиль В в или Вс и ив—ив или
&н = ис. Следовательно, вентиль ВА откры-
вается при выполнении двух условий:
иА>ив и иА>ис.
При аналогичных условиях открываются
вентили В в и Вс-
На рис. 8-7,6 показаны, кривые фазных
напряжений, утолщенно отмечены участки,
когда через вентиль данной фазы проходит
ток. Эти участки в сумме и изображают
кривую напряжения на нагрузке, постоян-
ная составляющая которого
5Г/12 —
г/. =4- j Umsm<otdt=^-Un.
Выпрямленное напряжение здесь еще
более сглаженное, чем в двухполупериод-
ной схеме.
Существуют и более сложные
схемы выпрямителей. Подчеркнем,
что получить эффект выпрямления
переменного напряжения можно
только при наличии нелинейного со-
противления Если сопротивление
в цепи линейно и неизменно, то при
любом реактивном нелинейном эле-
менте выпрямление невозможно.
8-4. НЕЛИНЕЙНЫЕ
ИНДУКТИВНОСТИ — КАТУШКИ
С ФЕРРОМАГНИТНЫМИ
СЕРДЕЧНИКАМИ
В катушке с ферромагнитным сер-
дечником, которую более кратко
будем называть катушкой со
сталью или дросселем со сталью,
нелинейность обусловлена свойства-
ми ферромагнитного материала и
1 Выпрямление можно получить и при
помощи переменного во времени сопротив-
ления, изменяющегося под воздействием
того или иного внешнего фактора. Напри-
мер, на практике применяют так называе-
мый механический выпрямитель, который
схематично представляет собой электро-
магнит, питаемый от независимого пере-
менного напряжения. Контакты электро-
магнита периодически замыкаются и раз-
мыкаются, создавая в цепи переменного
тока, где они включены, эффект выпрям-
ления.
176
в первом приближении не связана
с инерционными процессами. Однако
даже при неизменной «геометрии»
катушки и сердечника имеются фак-
торы, обусловливающие инерцион-
ность такой нелинейной индуктивно-
сти. Во-первых, это изменение маг-
нитных характеристик и сопротив-
ления для вихревых токов сердеч-
ника, вызванное потерями в сердеч-
нике при переменном магнитном
поле. В последующем изложении
будем пренебрегать влиянием инер-
ционных тепловых процессов. Во-
вторых, статическая и динамическая
зависимости В(Н) сердечника могут
резко отличаться друг от друга из-
за вихревых токов в сердечнике и
внутренних динамических эффек-
тов, приводящих к дополнительному
запаздыванию изменения намагни-
ченности (потока) по отношению к
изменению напряженности внешнего
магнитного поля, создаваемого то-
ками в обмотках.
Рассмотрим основные процессы
и количественные соотношения для
катушки со сталью в цепи перемен-
ного тока. Как и в гл. 7, под индук-
цией и напряженностью будем по-
нимать их средние по сечению сер-
дечника значения, а расчеты вести
по средней длине сердечника. Меж-
витковую емкость обмотки учиты-
вать не будем.
Напряжение на зажимах ка-
тушки - •
здесь г — активное сопротивление
обмотки катушки, Т7 — общее пото-
косцепление, которое можно раз-
бить- на основное потоко-
сцепление Т и потокосцеп-
ление рассеяния 4fs. Поток
рассеяния значительную часть пути
проходит по воздуху, поэтому в пер-
вом приближении примем-, что он
пропорционален току катушки. Со-
ответственно будем пользоваться
понятием линейной индуктивности
рассеяния 1
Д = (8-7)
1 Фактически при одном и том же токе
поток рассеяния зависит от степени насы-
щения сердечника. Чем больше насыщение,
Положим, что все витки обмотки
пронизываются основным потоком Ф
и запишем уравнение (8-6) в виде
. г di . d&
tl=lr+Ls^r+w—=
• \ f т I ^Ф \ di /o Qx
= ir + ^Ls + w4rj-^r. (8-8)
Поскольку зависимость Ф(г) нели-
нейная и достаточно сложная,
нельзя непосредственно из (8-8)
определить закон изменения тока и
потока во времени при известном
напряжении w(£). Поэтому вначале
примем ряд упрощающих допуще-
ний, чтобы легче выявить сущность
основных процессов в катушке, а
затем постепенно введем различ-
ные уточнения.
Допустим, что падениями напря-
жения на сопротивлении обмотки и
индуктивности рассеяния по сравне-
нию с величиной приложенного на-
пряжения u(t) можно пренебречь.
Тогда
Теперь уже при известных на-
чальных условиях из (8-9) нетрудно
определить поток по заданному на-
пряжению, или наоборот. Так, если
напряжение простое гармоническое,
то при условии отсутствия в потоке
постоянной составляющей поток то-
же синусоидален и отстает по фазе
от напряжения на 9'0°
zz = Um cos <о/,
ф = JZztl sin = Owsin mt. (8-10)
В установившемся режиме цепи
переменного тока постоянная
составляющая потока может быть
или вследствии магнитной предысто-
рии (гистерезис) или при наличии
вентилей в цепи. Эти случаи здесь
не рассматриваются.
Итак, получен очень важный ре-
зультат: если можно пренебречь со-
противлением обмотки и рассея-
нием, то изменение потока в ка-
тем большую долю от общего потока со-
ставляет поток рассеяния. Индуктивность
рассеяния при более точном анализе долж-
на считаться нелинейной.
12—434
177
тушке связано только с приложен-
ным к ней напряжением и не
зависит от магнитной характерна
стики сердечника.
Приращение потока ЛФ за интер-
вал времени —12 определяется так
называемым импульсом напряжения
за этот интервал
4
ДФ = -ЦрЛ. (8-11)
h
На рис. 8-8 заштрихована вольт-
секундная площадь кривой u(t) —
импульс/ соответствующий показан-
ному приращению ЛФ.
Импульс переменного, не содер-
жащего постоянной составляющей
напряжения любой формы за один
полупериод равен по величине и
противоположен по знаку импульсу
за другой полупериод. При этом
наибольшие по абсолютной вели-
чине минимальное ^и максимальное
значения потока равны друг другу.
Второй пример кривых напряжения
и потока показан на рис. 8-9. Ва-
риант на рис. 8-8 отличается т^м,
что здесь можно так разбить ось
времени на полупериоды, чтобы
в пределах каждого полупериода
поток изменялся монотонно. Такой
случай наиболее часто встречается
на практике.
Максимальный перепад потока
ДФМ пропорционален максималь-
ному импульсу напряжения за рав-
ный полупериоду интервал времени
(8-12)
При выбранных на рис. 8-8 и 8-9
началах координат и при отсчете
полупериодов от начала координат
импульс напряжения (8-12) можно
вычислять в первом случае — за
любой из полупериодов, по втором
случае — за интервал, равный Т/2
и отмеченный утолщенным отрезком
(конечно, если на рис. 8-9 сместить
начало координат в точку а, то
тогда можно будет вычислять им-
пульс напряжения за любой из по-
лупериодов) .
Импульс напряжения за указан-
ный интервал пропорционален ма- 4
ксим альному среднему значению пе-
ременного напряжения
U
ср---
2
т
(8-13)
которое, кстати, легче поддается
измерению, чем непосредственно им-
пульс. Подставляя (8-13) вф(8-12),
получаем:
или
£/Ср = 2/Ъ)ДФм. (8-14)
Так как в рассматриваемых ус-
ловиях ДФм = 2Фт, то
Ф”=Т5- (8-15)
Все полученные формулы справед-
ливы и для среднего по речению
значения индукции, поскольку Ф =
— BS. Поэтому из (8-15) имеем:
Bm==~Tf^ или
U ср=4fwSBm. (8-16)
Эти соотношения между нерепа*
дом или максимальным значением
178
индукции (потока) и средним зна-
чением переменного напряжения на
обмотке (напомним: если можно
пренебречь сопротивлением обмотки
и рассеянием) очень важны для
практических расчетов. Из них,
в частности, вытекает способ кос-
венного измерения величин Вт
и Фти при любой нелинейности ка-
тушки: измеряют среднее значение
напряжения, наведенного изменяю-
щимся потоком, и по (8-16) рассчи-
тывают Отметим, что измере-
ние С7ср нередко представляет зна-
чительные технические трудности.
Для действующего значения на-
пряжения получим:
U==2\fk$wSABm
или
U=4fk*wSBm, ' (8-17)
где — коэффициент формы кри-
вой напряжения.
Чтобы рассчитать ДВМ или Вт
по измеренному действующему зна-
чению несинусоидального напряже-
ния на катушке, надо дополнитель-
но найти коэффициент формы кри-
вой напряжения, а это на практике
не всегда возможно.
Если поток и напряжение синусо-
идальны (&ф=|1,11), то получается
широко' распространенная при рас-
четах катушек формула
U=4,44fwSBm. (8-18)
Когда индукция измеряется в тес-
лах, напряжение в вольтах, частота
в герцах, а сечение в квадратных
сантиметрах, в формулах везде ря-
дом с индукцией надо добавить
множитель 10~4.
При заданном напряжении на ка-
тушке и, следовательно, заданном
потоке (индукции) в катушке дина-
мическая магнитная характеристи-
ка В(Н) определяет напряженность
Н и ток,в обмотке катушки
Вначале, не учитывая динамику,
будем считать, что зависимость
Рис. 8-10.
между мгновенными значениями
В(Н) сердечника или Ф(0 катушки
определяется данной (квазистати-
ческой) петлей гистерезиса (рис.
8-Ю)-
На рис. 8-10 построена кривая
Ф(£) или B(t) при косинусоидаль-
ном напряжении [см. (8-10)], а по
ней и данной петле Ф(£) построена
кривая i(t) или H(t). Ход построе-
ния ясен из рисунка. Для нагляд-
ности на всех кривых одинаковыми
цифрами обозначены три соответ-
ствующие друг другу точки. На-
помним, что перемещение рабочей
точки по петле происходит против
направления движения часовой
стрелки.
Как видно из рисунка, максиму-
мы В и Н и максимумы Фи/ на-
ступают одновременно, но через
нуль индукция или поток проходят
несколько позже, чем напряжен-
ность или ток. Такое «отставание»
обусловлено гистерезисом. Если
разложить кривую тока в ряд
Фурье, то первая гармоника будет
несколько опережать поток, а от
напряжения она будет отставать на
угол, меньший 90°. Последнее гово-
рит о потреблении активной мощ-
ности катушкой даже в предполо-
жении, что г=0. Действительно,
на периодическое перемагничивание
сердечника затрачивается опреде-
ленная мощность, равная в рассма-
триваемых условиях потерям на
12*
179
Рис. 8-11.
гистерезис. Кривая тока имеет
заостренную форму и содержит
третью и другие нечетные гармо-
ники.
Если коэрцитивная сила Нс мала
по сравнению с максимальной на-
пряженностью Ям (рЦс. 8-40), мож-
но при построении кривой тока
пренебречь гистерезисом и заменить
петлю основной к^вой намагничи-
вания. Кривая тока будет содер-
жать нечетные гармоники, причем
первая гармоника тока будет отста-
вать по фазе от напряжения на 90р.
Активная мощность такой катушки
равна нулю. Катушку можно счи-
тать чисто реактивным нелинейным
элементом, а ток, потребляемый
ею,— намагничивающим то-
ком. Зависимость г(Ф) или Н(В)
в первом приближении (для каче-
ственного анализа) можно анали-
тически представить в виде (5-10),
понимая под х либо Ф, либо В,
а под у—i или Н. Коэффициенты a
и b находятся по данным экспери-
мента и параметрам катушки. При
синусоидальной индукции (потоке)
н апр яженно сть (ток) р ассчитыв а -
ются по формуле (5-12).
Если питать катушку от источ-
ника тока и тем самым задавать за-
кон изменения напряженности поля,
то теперь в свою очередь закон
изменения индукции (потока) опре-
деляется петлей В(Н) или Ф'(0-
Здесь надо оговорить, что в данных
условиях нельзя допускать в кри-
вой тока скачков, поскольку прене-
брежение динамикой перемагничи-
вания приводит при этом к скачко-
образному изменению индукции и
потока. Физические же законы (за-
коны коммутации) скачков потока
не допускают1.
На рис. 8-1Д построена кривая
B(t) по заданной синусоидальной
кривой H(t) и кривой намагничива-
ния В(Н) без учета гистерезиса.
Индукция и поток несинусоидальны,
в сравнении с синусоидой их кривая
имеет притупленную форму. Опре-
деляя напряжение по (8-9), найдем,
что оно тоже будет несинусоидаль-
ным, причем заостренной формы.
Итак, в катушке со сталью при
Синусоидальном напряжении ток не-
синусоидальный и наоборот. Чем
больше напряжение (ток), тем силь-
нее насыщается сердечник и более
несинусоидальна —• заострена кри-
вая тока (напряжения). Это еще раз
иллюстрирует уже высказанное
утверждение, что нелинейный эле-
мент в цепи переменного тока вы-
ступает в роли генератора гармо-
ник. С другой стороны, это явление
лежит в основе процессов во многих
практических устройствах. Напри-
мер, возможность получения корот-
ких острых импульсов напряжения
реализуется в так называемых пик-
трансформаторах; ряд других при-
меров будет отмечен ниже. В реаль-
ных устройствах часто и напряже-
ние и ток катушки несинусо-
идальны.
При сравнительно малых значе-
ниях амплитуды синусоидальной
индукции форма частной симме-
тричной петли гистерезиса близка
к эллипсу, и форма кривой напря-
женности близка к синусоидальной.
Соответственно синусоидальны, но
сдвинуты по фазе напряжение и ток
катушки.
Действительно, уравнения
ф = фт sin о/,
f=/msin (со!/+б) (8-20)
или
jB = Bwsin щ/,
H=Hmsm (^+б) (8-21)
1 Если принимать во -внимание вихре-
вые токи (§ 8-5), то- скачки тока в катуш-
ке могут быть; возникающие при этом
скачком вихревые токи обеспечивают
условия отсутствия скачков индукции.
180
•— это параметрические уравнения
эллипса. Таким образом, при доста-
точно слабых магнитных полях ка-
тушка со сталью часто может рас-
сматриваться как линейная.
Перейдем теперь к более точному
исследованию процессов в катушке
со сталью.
8-5. ВИХРЕВЫЕ ТОКИ.
ПОТЕРИ В СТАЛИ.
ДИНАМИЧЕСКИЕ ПЕТЛИ
ГИСТЕРЕЗИСА
В первой части книги было отме-
чено, что под действием перемен-
ного магнитного потока в сердеч-
нике наводится э. д. с. (закон элек-
тромагнитной индукции), которая
вызывает токи, носящие название
вихревых токов. Вихревые токи по
закону Ленца стремятся воспрепят-
ствовать тем изменениям потока,
которые их вызвали. При намагни-
чивании они оказывают размагни-
чивающее действие.
Протекание вихревых токов при-
водит к выделению тепла в сердеч-
нике. Соответствующая мощность
называется потерями на ви-
хревые токи Рв.
Потери на вихревые токи в сер-
дечнике пропорциональны произве-
дению квадрата наведенной э. д. с.
и проводимости контура вихревых
токов. Наведенная э. д. с. при сину-
соидальном потоке пропорциональ-
на амплитуде потока или индукции
и частоте. Проводимость контура
зависит от его формы, размеров и
пропорциональна удельной электри-
ческой проводимости ст материала
сердечника^
Таким образом,
ps=kof2B2m G, (8-22)
где G — вес сердечника,
k — эмпирический коэффици-
ент пропорциональности.
Возникновение вихревых токов
представляет собой частный случай
явления взаимной индукции. Как
в трансформаторе ток вторичной
цепи оказывает размагничивающее
действие, и при неизменном пер-
вичном напряжении вызывает уве-
личение первичного тока, так и
в катушке вихревые токи при дан-
ном потоке (напряжении) вызыва-
Рис. 8-12.
ют увеличение тока катушки. При
заданном токе появление вихревых
токов приводит к уменьшению по-
тока в катушке.
Наличие вихревых токов изменя-
ет зависимость В (Я): динамиче-
ская петля шире статической. Чем
больше частота при прочих равных
условиях, тем шире петля. Более
того, форма и размеры петли зави-
сят от формы кривой B(t) или
Я(’й). Так как при заданной сину-
соидальной напряженности (токе)
кривая индукции (потока) несину-
соидальна и содержит высшие гар-
моники, а вихревые токи пропор-
циональны квадрату частоты, то
динамическая петля В (Я) при си-
нусоидальной напряженности шире
и иная по форме, чем при синусои-
дальной индукции. На рис. 8-12
для иллюстрации приведены ста-
тическая петля (/) и динами-
ческие петли тороидального сер-
дечника при синусоидальных
индукции (2—f=50 гц) или напря-
женности (3—f=l50 гц; 4—f=
=400 гц}. Сердечник выполнен из
ленты пермаллоя с прямоугольной
петлей гистерезиса (типа 50 НП)
толщиной 0,05 мм.
Потери на гистерезис за один
цикл перемагничивания пропор-
циональны площади статической
петли гистерезиса сердечника,
а при периодическом перемагничи-
вании пропорциональны и частоте.
Следует также иметь в виду, что
с уменьшением толщины пластин
или ленты (с целью уменьшения
вихревых токов и их последствий)
181
статическая петля обычно расши-
ряется, увеличивается коэрцитив-
ная сила.
Кроме вихревых токов и гисте-
резиса, на потери в стали и дина-
мическую петлю дополнительно
влияют внутренние динамические
эффекты (так называемая магнит-
ная вязкость и др.). Эти эффекты
приводят к отмеченному в первой,
части книги запаздыванию измене-
ния потока относительно изменения
намагничивающего тока. При пе-
ремагничивании сердечника появ-
ляются дополнительные потери
в сердечнике Рдоп и соответствую-
щее увеличение площади динами-
ческой петли.
В целом потери в стали склады-
ваются из потерь на вихревые то-
ки, гистерезис и дополнительных
потерь (на вязкость и др.)
Р ст — Р в 4" Pi* 4“ Р доп-
В нелинейном ферромагнитном
сердечнике зависимость каждой
слагающей потерь от максимально-
го значения индукции нелинейна.
При этом экспериментальное вы-
деление отдельных слагающих из
общих потерь затруднительно и не-
достаточно достоверно. Поэтому
в инженерных расчетах оперируют
обычно с суммарными потерями
в стали.
Потери в стали приводят к на-
греванию сердечника. При проек-
182
тировании мощных установок, где
вопросы нагрева являются подчас
решающими, потери в стали, долж-
ны тщательно учитываться. Неред-
ко и в маломощных элементах, на^
пример автоматики и вычислитель-
ной техники, вопрос о выборё мате-
риала' для середника. решается
с позиций потерь влетали.
При переменном потокё в сер-
дечнике катушки надо считаться
еще и с поверхностным эффектом,
понятие о котором было дано в
первой части книги. Поверхност-
ный эффект приводит к неравно-,
мерному распределению потока по
сечению сердечника, что еще более
затрудняет аналитическое опреде-
ление динамических характеристик,
потерь в стали, форм кривых тока
и напряжения и др. (Вопросы по^
ве'рхностного эффекта будут рас-
смотрены в третьей части книги,
посвященной теории электро-
магнитного поля).
Площадь реальной динамиче-
ской петли В (//=), в которой уже
проявились гистерезис, вихревые
токи, поверхностный эффект, про-
порциональна суммарным потерям
в стали. Практически потери в ста-
ли определяются эксперименталь-
но. Из предыдущего ясно, что они
должны быть найдены для задан-
ных: материала, толщины пластин
или ленты, частоты, режима на-
магничивания — формы кривой
B(t) или Н (t)—и величин Вт
или Нт. В ГОСТ 802-58 на элек-
тротехнические стали указываются
потери в режиме синусоидальной
индукции для нескольких значений
Вт. Все большее распространение
при расчетах получает теперь экс-
периментальная характеристика
Po=Pv(Bm), (8-23)
выражающая зависимость удель-
ных потерь в стали Pq (на единицу
веса сердечника) от амплитуды
индукции в режиме синусоидаль-}
ной индукции. Этот режим, как
правило, имеет место в силовых
трансформаторах, для которых во-
просы потерь, нагрева и к? п. д.
весьма важны. В качестве примера
на рис. 8-13 приведены зависимо-
сти (8-23) для горячекатаной крем-
нистой трансформаторной стали
марки Э41 (кривая /) и холодно-
катаной стали с повышенной про-
нициемостью марки Э310 (кри-
вая 2), толщиной 0,35 мм при ча-
стоте 50 гц, когда поверхностный
эффект выражен слабо.
В заключение подчеркнем одно
из отличий'магнитной цепи пере-
менного тока от магнитной цепи
постоянного тока. В последней ис-
точник питания задает напряжен-
ность поля на участках цепи, а ве-
личины индукции и потока опреде-
ляются уже статической магнитной
характеристикой участка. В маг-
нитной цепи переменного тока при
питании катушки от источника на-
пряжения источник задает индук-
цию и поток (если пренебречь со-
противлением обмотки и рассеяни-
ем), а какой будет напряженность
и ток — это определяется уже ди-
намической магнитной характери-
стикой.
8-6. НЕЛИНЕЙНЫЕ КОНДЕНСАТОРЫ
Нелинейные конденсаторы — ва-
риконды, диэлектриком которых
служат сегнетоэлектрики, во мно-
гом, как указывалось в § 5-2, ана-
логичны катушкам индуктивности.
У сегнетоэлектриков нелинейная
характеристика D(E) имеет такой
же вид, как характеристика В(Н)
ферромагнетиков. Полностью сход-
ны зависимости проницаемостей от
напряженности поля: 8(f) и р,(Я).
Потерям в стали соответствуют
здесь потери в сегнетоэлектрике
(диэлектрические потери). Поэто-
му своеобразные особенности элек-
трических цепей, обусловленные
нелинейными магнитными характе-
ристиками сердечников катушек, .
проявляются и в цепях с варикон-
дами. Очевидно, что при помощи
варикондов можно создать точно
такие же устройства, как и при по-
мощи катушек со сталью1. Так
например, разработаны диэлектри-
ческие умножители и делители ча-
стоты, усилители, стабилизаторы
и др.
1 К сожалению, диэлектрического ана-
лога электромагнитного трансформатора не
существует.
Однако на сегодняшний день ва-
риконды обладают рядом серьез-
ных недостатков — ср авнительно
высоки диэлектрические потери, за-
висимость характеристик от темпе-
ратуры, нестабильность характери-
стик во времени и др. Эти недо-
статки во многом определяют до-
вольно узкое применение варикон-
дов и в примерах настоящей главы
нелинейные конденсаторы почти
не будут встречаться.
8-7. МЕТОДЫ АНАЛИЗА И РАСЧЕТА
НЕЛИНЕЙНЫХ ЦЕПЕЙ
ПЕРЕМЕННОГО ТОКА
В § 8-2 был уже дан расчет це-
пей с инерционными нелинейными
элементами. Анализ и расчет цепей
значительно усложняются при на-
личии безынерционных нелинейных
элементов, особенно когда надо
учитывать их динамические харак-
теристики. Основная трудность со-
стоит в том, что одной определен-
ной динамической . характеристики
не существует. Это было показано
на примерах нелинейного сопротив-
ления— термистора (§ 5-4) и не-
линейной индуктивности (§ 8-5).
Трудности расчета видны при
анализе простейшей схемы, состоя-
щей из последовательно соединен-
ных линейного активного сопротив-
ления и нелинейной индуктивности,
подключенных к источнику задан-
ного напряжения. Ток в цепи и на-
пряжение на элементах нельзя
рассчитать, не зная динамической
магнитной характеристики катуш-
ки, а она, в свою очередь, не из-
вестна, пока не найдены напряже-
ние или ток катушки (по величине,
форме). Кроме того, практически
невозможно иметь большое число
экспериментальных динамических
характёристик для различных
условий работы нелинейнЬго эле-
мента.
Итак, не зная наперед нужной
характеристики элемента, нельзя
проанализировать работу цепи и
рассчитать ее. Поэтому часто, на-
чиная анализ или расчет нелиней-
ной цепи переменного тока, прихо-
дится предварительно задать ту
или иную динамическую хар акте-
183
Рис. 8-14.
ристку элемента. Одновременно
(как указывалось в § 5-1) прихо-
дится приближенно _ аналитически
или графически выразить нужные
нелинейные зависимости. Рацио-
нальное упрощение — идеализация
характеристики нелинейного эле-
мента — один из важнейших мо-
ментов анализа нелинейных цепей
переменного тока.
Примеры различной идеализации
характеристики диода были приве-
дены на рис. 8-2 и 8-4. Рассмотрим
теперь идеализацию характеристик
нелинейной индуктивности.
Реальную зависимость В(Н) или
Ф(£) можно аппроксимировать тем
или иным графиком или аналити-
ческим выражением. На рис. 8-14,а
показана так называемая идеаль-
ная кривая намагничива-
ния. Здесь ширина петли равна
нулю (Яс=0), до насыщения диф-
ференциальная проницаемость рав-
на бесконечности, а после насыще-
ния — нулю. При изменении индук-
ции напряженность Я = 0, а когда
|Я|>0, индукция Если
считать и для мгновенных значе-
ний зависимость В(Н) такой же,
как на рис. 8-14,а, то это будет
означать, что вихревыми токами и
динамическими процессами прене-'
брегают, Такая кусочно-линейная
аппроксимация, единственным па-
раметром которой служит индук-
ция насыщения Bs, наиболее про-
ста, но позволяет аналитически ре-
шить целый ряд задач со сравни-
тельно хорошими качественными и
количественными результатами.
. На рис. 8-14,6 показана так на-
зываемая идеальная прямо-
угольная петля гистерезиса;
184
здесь Яс=т^0, коэффициент прямо-
угольное™ (7-3) &п=1. Пока на-
пряженность | Н | < Яс, индукция
изменяться не может. Увеличение
индукции происходит при неиз-
менной напряженности - Н—Нс,
а уменьшение индукции — при Я=’
=—Нс. Для расчета конкретных
устройств в качестве Нс можно
брать коэрцитивную силу некото-
рой средней экспериментальной
динамической петли. Тем' самым
приближенно будет учтена и дина-
мика. Такая неоднозначная кусоч-
но-линейная аппроксимация тоже
с успехом применяется на практи-
ке. На рис. 8-14,6 показаны также
нередко выбираемые аппроксима-
ции симметричных и несимметрич-
ных частных циклов.
Поскольку вихревые токи тем
больше, чем больше скорость изме-
нения потока, то для лучшего уче-
та динамики иногда принимают,
что прямоугольная петля как бы
«дышит» — ширина ее зависит от
производной dBJdi^. например, ли-
нейно
Hc—Ho+k dB/dt, (8-24)
здесь Н и dBldt должны быть од-
ного знака (£>0).
Весьма важная идеализация пет-
ли — представление ее эллипсом
(рис. 8-15), когда при синусоидаль-
ной индукции напряженность тоже
синусоидальна, как и у линейной
индуктивности (см. § 8-4). Естест-
венно, что это существенно упро-
щает расчеты цепей с нелинейны-
ми индуктивностями при синусои-
дальных напряжениях или токах
источников питания. Наличие сдви-
га по фазе между В и Н определя-
ет потери на перемагничивание —
потери в стали. Эллиптический
характер петля приобретает не
только в слабых полях, но и при
увеличении частоты (в значитель-
ной мере вследствие возрастающе-
го влияния вихревых токов и дина-
мических эффектов). Замена экви-
валентным эллипсом более сложной1
петли служит основанием для пред-
ставления индуктивной катушки
с ферромагнитным сердечником
эквивалентной электрической ли-
нейной схемой. Эквивалентные схе-
мы и соответствующие методы рас-
чета рассматриваются в § 8-12 —
8-14.
Характерными точками эллипти-
ческой петли являются прежде все-
го точки Вт (точка 1, рис. 8-15) и
Нт (точка 2), не совпадающие од-
на с другой, как у статической
петли. Обозначая через 6 угол, на
который синусоидальная индукция
отстает по фазе от синусоидальной
напряженности, запишем коорди-
наты первой точки
Ву^^Вт, -/71— cos б
и координаты второй точки
В2 ==:B^yi COS б,
. Характерны также точка оста-
точной индукции
Br=Bm sin б
и коэрцитивной СИЛЫ1
//c = #mSin6.
Площадь петли равна потерям
энергии в единице объема ферро-
магнетика за один цикл (период)
перемагничивания. Площадь эл-
липтической петли легко найти,
выполняя интегрирование
wQ = <^шв =
t+T
J /7wsin cos (со/ — 8) daat =
t
8. (8-25)
Мощность потерь в стали в еди-
нице объема
HmBm . *
А = -/- = <» sm 8 =
= со/7дВд sin 8; (8-26)
здесь через Нд и Вд и в
обозначены действую-
щие значения синусои- j
дальных напряженно- /
сти и индукции. ___/___/
Очевидно, что три ве- / о i
личины, например Вт, /
Нт, б, /полностью опре-
деляют эллиптическую
петлю. При замене ре-
альной петли эквива- Рис- 8"116-
лентной эллиптической
обычно исходят из условия неиз-
менности потерь в -стали (площади
петли) и неизменности действую-
щих, либо максимальных, либо ам-
плитудных по первой гармонике
значений В и Я. Если пренебречь
гистерезисом, то зависимость меж-
ду мгновенными (или так или ина-
че усредненными) значениями В и Н
или Ф и I можно аппроксимировать
нечетными функциями: степенным
рядом
В = аН—ЬН3+,,. (8-27)
или
Н=а1В + Ь1В3 + ..„
гиперболическим синусом
77=la-sh₽B (8-28)
и* др. Коэффициенты а, Ь, ... или
а, р можно найти по некоторой
экспериментальной динамической
зависимости В(Н), снятой в опре-
деленных условиях. Так, это мо-
жет быть зависимость между ам-
плитудами или действующими зна-
чениями первых гармоник В и Н
при синусоидальной индукции или
синусоидальной напряженности и
при фиксированной частоте. Это
может быть зависимость между
максимальным значением индук-
ции и максимальным, средним или
действующим значением напряжен-
ности при синусоидальной индук-
ции и соответственно несинусои-
дальной напряженности, или
наоборот. Экспериментальное опре-
деление таких характеристик произ-
водится в специальных схемах. Их
вид показан сплошной кривой на
рис. 8-16; частный случай кусочно-
линейной аппроксимации показан
пунктиром.
185
В ряде случаев удобно пользо-
ваться вольт-амперными характе-
ристиками катушки со сталью (ис-
ключая обычно падение напряже-
ния на активном сопротивлении ее
обмотки). Здесь, как и в случае
линейной индуктивности, не может
быть речи о вольт-амперной харак-
теристике для мгновенных значе-
ний— для каждого вида кривой
u(t) или /(/) она будет разной.
Можно говорить, например, о
вольт-амперной характеристике для
первых гармоник или для дейст-
вующих, или для средних значе-
ний тока и напряжения. Снимают
их, задавая либо форму кривой
напряжения (обычно синусоидаль-
ную) , либо форму кривой токла.
При расчете применяют ту харак-
теристику, которая более подходит
по конкретным условиям работы
катушки. Вид этих характеристик
такой же, как у кривой на рис. 8-16,
поскольку ток и напряженность
линейно связаны законом полного
тока, а напряжение и максималь-
ная индукция—уравнением (8-17).
Все сказанное полностью отно-
сится и к нелинейным конденсато-
рам.
Для анализа процессов в нели-
нейных цепях переменного тока и
их расчета применяются графиче-
ские и аналитические методы. До-
стоинством аналитических методов
является возможность проведения
анализа в общем виде и выявления
влияния отдельных параметров и
их изменений. Однако аналитиче-
ский метод часто менее точен, чем
графический, и не всегда возможен
из-за чисто математических труд-
ностей. Аналитические методы тре-
буют либо аналитического выра-
жения всего рабочего участка ха-
рактеристики нелинейного элемен-
та, либо той или иной кусочно-ли-
нейной аппроксимации рабочего
участка.
Результаты анализа и расчета
получаются приближенными, так
как сами методы или (и) исполь-
зуемые характеристики нелиней-
ных элементов приближенны. По-
этому 'на практике, как правило,
конкретные нелинейные цепи пере-
менного тока тщательно исследуй
186
ются экспериментально с целью
уточнения результатов анализа,
проверки допустимости принятых
упрощений или, наоборот — с це-
лью выявления 'факторов, которы-
ми можно пренебречь. При разра-
ботке того или иного устройства,
помимо расчета, стремятся по воз-
можности шире осуществить моде-
лирование и макетирование, чтобы
уточнить расчет, определить попра-
вочные коэффициенты и т. п.
В следующих параграфах рас-
смотрим с иллюстрацией примера-
ми аналитический и графический
методы с применением характери-
стик для мгновенных и действую-
щих значений. Графический метод
с применением характеристик для
мгновенных значений был по суще-
ству показан при определении тока
в катушке по заданному закону из-
менения потока и известной петле
гистерезиса (рис. 8-10).
8-8. АНАЛИТИЧЕСКИЙ МЕТОД
С ПРИМЕНЕНИЕМ ХАРАКТЕРИСТИК
ДЛЯ МГНОВЕННЫХ ЗНАЧЕНИЙ
И ИХ АНАЛИТИЧЕСКОЙ
ИЛИ КУСОЧНО-ЛИНЕЙНОЙ
АППРОКСИМАЦИИ
Применяя этот метод для задан-
ной цепи, составляют дифферен-
циальные уравнения по законам
Кирхгофа и ищут решение, исполь-
зуя аналитические или кусочно-ли-
нейные выражения характеристик
нелинейных элементов. При этом
обычно должен быть известен (за-
дан или вытекает из физических
условий данной цепи) закон изме-
нения во времени одной из вели-
чин, определяющих работу нели-
нейного элемента. У сопротивления
определяющим является ток или
напряжение, у катушки со сталью—
поток или ток, у конденсатора—-
заряд или напряжение.
Пример 8-3. В каждой фазе симметрич-
ной трехфазной цепи (рис. 8-17) (включе-
ны последовательно активное сопротивле-
ние г и нелинейный дроссель со сталью Д.
Выяснить, есть ли напряжение между ну-
левыми точками uq,q и, если есть, то как
зависит его 1величина ют параметров дрос-
селя и фазного синусоидального напряже-
ния источника w$ = t/m!sin (314/+ф). Сер-
дечник дросселя собран из пластин транс-
форматорной стали Э42 толщиной 0,35 мм.
Особых требований в отношении точности
расчета не предъявляется.
Решение. Магнитная характеристика
стали Э42 не обладает высоким коэффици-
ентом прямоугольности; при заданных тол-
щине пластин и частоте 50 гц динамикой
можно пренебречь или учесть ее усреднен-
ие; гистерезис здесь не< имеет принципиаль-
ного значения; особой точности расчета не
требуется — все это позволяет взять одну
из простейших аппроксимаций зависимости
В(Н) вида (8-27), а (именно:
aSw . bSw* ,e
~1 ’
Ф
(8-29)
где S — сечение, а I — средняя длина сер-
дечника, w — число витков обмотки дрос-
селя.
•В общем случае ток и напряжение дрос-
селя несинусоидальны. Но у симметрич-
ной звезды без нейтрального провода от-
сутствуют гармоники тока, кратные трем.
Поэтому в дросселях могут протекать токи
только 1, 5, 7, :11, ... (нечетных) гармоник.
Если в первом приближении пренебречь
гармониками выше третьей, то приходим
к выводу, что ток в фазах источника и
дросселях синусоидальный.
Пусть ток в одной из фаз
i—Im, sin со/. (8-30)
Тогда поток в дросселе получим из (8-29)
и (5-12):
aSw 0,756 So;3 « X
—j—Im — -------р------1^ jslnG)/-|-
0,256Soy8 о
+------р----/^sin 3at.
(8-31)
По второму закону Кирхгофа
аФ
«0'0 =Яф —• ir—-w (8-32)
Подставив (8-30) и (8-31) в (8-32), по-
лучим:
tt0'0 = ^mSin (о/ + ф) — Zmrsin со/ —
' aSw2 O^SbSw* о \
---1-tolm— ----р----1 COS со/ —
0,756Sw4 о
----------coZ^cos Зсо/. (8-33)
В симметричной звезде между нуле-
выми точками не может быть- напряжения
первой гармоники. Следовательно,
0,756Sw4 о
й0'0 =—----р---* cos Зсо/, (8-34)
а первые три слагаемые в (8-33) дают
в сумме нуль, откуда
ч /aSw2a>
(7тГ)24д' I Дп —
(8 35)
Итак, из-за нелинейности нагрузки меж-
ду точками 0'И 0z в симметричной системе
возникает напряжение тройной частоты.
Целесообразно задаться рядом значений
тока Iтп> по (8-35) вычислить a по
(8-34) — /70,0 и построить, если требуется,
зависимость /70,0 (Цт).
Рассмотренная в примере 8-3
схема лежит в основе устройства
одного из типов трехфазных утрои-
телей частоты. Вместо нелинейных
индуктивностей могут быть вклю-
чены нелинейные емкости или со-
противления. Существуют и одно-
фазные утроители частоты, а так-
же умножители частоты в большее
число раз.
Кусочно-линейная аппроксимация
характеристики нелинейного эле-
мента часто дает возможность
решить задачу полностью аналити-
чески. В простейших случаях, как
например, однополупериодном вы-
прямителе с активной нагрузкой и
идеальным вентилем (§ 8-3), ре-
шение получается очень легко. Ес-
ли цепь содержит активные и ре-
активные элементы, то расчет
этим методом (как и любым дру-
гим) усложняется; нередко прихо-
дится применять методы расчета
переходных процессов.
Когда рабочая точка перемеща-
ется в пределах одного из линей-
ных участков, процесс в цепи опи-
сывается линейными дифферен-
циальными уравнениями, в реше-
ние которых входят постоянные
интегрирования для этого участка.
Постоянные интегрирования нахо-
дятся из условий установившегося
режима (периодическое решение),
и условий выполнения законов
коммутации при «стыковке» реше-
187
ний в месте перехода с одного ли-
нейного участка на другой.
Пример 8-4. К цепи .на рис. 8-d8,6X при-
ложено переменное напряжение и прямо-
угольной формы. Динамическая магнитная
характеристика нелинейной катушки ин-.
дуктивности аппроксимирована тремя от-
резками прямых (рис. 848,б). Рассчитать
кривую тока в установившемся режиме,
если t7=100 в, f=50 гц, r=il00 ом, 1Ъ =
=0,185 а, дифференциальная индуктив-
ность на участках Ьс и ad магнитной ха-
рактеристики Li=0,333 гн, а на участке ab
характеристики Л2—1,67 гн.
Решем е. Прежде всего определим,
заходит ли рабочая точка на участки Ьс
и ad магнитной характеристики при задан-
ных значениях параметров цепи. Для этого
оценим, каким должно быть среднее зна-
чение напряжения источника, если потоко-
сцепление изменяется только в диапазоне
—Чгь4-+Чгь [см. (8-14)]. Из уравнения
t/cp=rZcp+<AT • 2/=г7ср+,2Чгь • 2f
следует, что для расчета Ucp надо знать
среднее значение тока, т. е. знать форму
кривой тока. Очевидно, что когда |т| =
=Чгь, ток достигает своей наибольшей аб-
солютной величины 1Ъ (рис. 8-18,6), а в ос-
тальные моменты времени в пределах пе-
риода |/|<7ь. Положим с явным превы-
шением /Ср=/ь. Тогда получим:
f/cP<r/b+4/:Tb =
=100 • 0Д85+4 • 50 • 0,31 = 80,5 в.
иЛ
Рис. 8-19.
Среднее напряжение источника 100 в. Ясно,
что перепад потокосцепления АЧ/>2Чгь.
Поэтому рабочая точка перемещается по
всем трем, участкам магнитной характе-
ристики.
Полезно вначале представить кривую
тока, исходя в основном из качественных
рассуждений. Положим, что к концу от-
рицательного полупериода напряжения
ц(/=0, рис. 849,а) ток достиг наибольше-
го по абсолютной величине отрицательно-
го значения — а потокосцепление—
Далее с изменением полярности напряже-
ния и приращение потокосцепления будет
положительным, рабочая точка переме-
щается по линейному участку da магнит-
ной характеристики. Соответственно ток,
уменьшаясь по абсолютной величине, из-
меняется по экспоненциальному закону
(как всегда в линейной цепи г, L при по-
стоянном напряжении на зажимах)
:«=-Т-+АеЛ', (8-36)
где Pi=—r/Li, Xi — постоянная интегриро-
вания.
Когда ток спадет до значения
—/&(/=Л, рис. 8-119,(2), рабочая точка будет
далее перемещаться по участку ab, и ток
i = -~ + A2ep'J, (8-37)
где р2~—А2— постоянная интегриро-
вания. Здесь процесс будет более медлен-
ным, так как L2>Lb
Начиная с момента t=t2, когда ток до-
стигает положительного значения /ь(Т=
=Чрь), рабочая точка перемещается по
участку Ьс. Следовательно, дальнейшее бо-
лее ускоренное . возрастание тока будет
происходить по закону
г=-у- + Л^. (8-38)
Поскольку требуется рассчитать уста-
новившийся периодический режим,. когда
Тгмакс=4гт, а Чгмин = — 4*™, то к концу
положительного полупериода напряжения
(/=7/2) ток достигнет величины 1т
(рис. 84<9,а). В силу симмет-
рии напряжения и, а также
симметрии и однозначности
магнитной характеристики про-
цесс в следующий полупериод
протекает совершенно анало-
гично (рис. 8-49,а).
Для количественного рас-
чета кривой тока необходимо
определить Im, t\, t2, Аь А2,
А3. Эти величины найдем из
условий симметрии процесса
в периодическом режиме в на-
чале и конце полупериода и
из условий отсутствия скач-
ков тока на стыках отрезков
прямых магнитной характери-
стики.
188
При 4=0 из уравнения (8-36) имеем:
U
-Лп = —+ Л* (8-39)
При t=ti, осуществляя «стыковку» ре-
шений (8-36) и (8-37), получаем:
— Ib—~rJr Aiepltl, (8-40)
I
Л2еР‘(', (8-41)
•• а осуществляя „стыковку" решений (8-37)
и (8-38) при t = t2
Ib=-y~ + А2еР^, (8-42)
I ъ = ~^~ + АгеР1*2. (8-43)
При t = 7/2 из уравнения (8-38) имеем
I / 1т = -у- + А3еР1Т12. (8-44)
Решая совместно уравнения (8-39) —
(8-44), получаем:
/ U \ -PiT/2
I ? Im j &
-------------------- Д/’а /М (^2 ^1)
и------------------~е
— +Лп
Последнее трансцендентное уравнение
решим графически, перейдя прёдвари-
I т
тельно к относительным величинам ~тп—
U/r
h — ti.
и .
(8-45)
Построим кривую зависимости левой
части уравнения (8-45) от относительной
величины rlmlU (кривая 1 на рис. 849,6)
и кривую зависимости правой части урав-
нения (8-45) от относительной величины
(^—^1)2/7 (кривая 2). По координатам
точки пересечения Р этих кривых, в кото-
рой удовлетворяется уравнение (8-45),
определяем величины /т=0,63 а и t2—h =
=6,3 мсек. Теперь уже легко найти все
остальные неизвестные величины и постро-
ить .кривую тока (рис. 849,а).
По известным аналитическим выраже-
ниям тока на отдельных участках можно
рассчитать, например, среднее или дей-
ствующее значение тока.
Наиболее простые решения полу-
чаются при аппроксимации харак-
теристики нелинейного элемента
отрезками прямых, параллельных
осям координат. -При этом диффе-
ренциальный параметр нелинейно-
го элемента на одних участках
равен нулю, а на других — беско-
нечности. Такие аппроксимации
зависимости В(Н) были приведе-
ны на рис. 8-14, а, б. Примеры при-
менения аналитического метода
анализа установившегося режима
при подобной кусочно-линейной
аппроксимации выделены в сле-
дующие три параграфа ввиду са-
мостоятельного значения вопросов,
рассматриваемых в этих примерах.
'8-9. ДРОССЕЛЬ С ИДЕАЛЬНОЙ
КРИВОЙ НАМАГНИЧИВАНИЯ
Таким дросселем называется ка-
тушка с сердечником, кривая на-
магничивания которого идеальна
(рис. 8-14,а). Характеристика Ф(£)
дросселя имеет такой же вид, как
кривая намагничивания. Единст-
венным параметром дросселя в це-
пи переменного тока (если не учи-
тывать сопротивление обмотки и
рассеяние) служит напряжение
насыщения
Us=4fwSBs, * (8-46)
равное тому среднему значению
переменного напряжения на дрос-
селе, при котором индукция в сер-
дечнике изменяется в пределах
—Bs-?-+Bs [см. (8-16)]. Важно под-
черкнуть, что среднее значение на-
пряжения на дросселе не может
превышать E7S, так как максималь-
ная индукция Вт не может быть
больше Bs.
Если среднее значение напряже-
ния источника питания Ucp больше
величины Us дросселя, то при лю-
бой аппроксимации с коэффициен-
том прямоугольности &ц=1 обяза-
тельно надо учитывать наличие
последовательных с дросселем со-
противлений (активного сопротив-
ления, индуктивного сопротивления
рассеяния или др.). Иначе, когда
дроссель насытится, ток станет
равным бесконечности, так как
189
Рис. 8-20.
В отрицательный полупе-
риод в установившемся режи-
ме картина та же, но все ве-
личины другого знака.
Интересно, что средние
значения напряжений склады-
ваются здесь алгебраически
^ср==!^г.ср+^д.ср5 (8-48J
это сразу видно из рассмотрев
ния площадей кривых на
рис, 8-20,6. Действующие зна-
чения напряжений склады-
ваются как обычно в цепи г,
L при синусоидальных напря-
жениях
ничто не будет ограничивать его
величины.
Рассмотрим формы тока и на-
пряжений на участках при после-
довательном соединении активного
сопротивления г и дросселя Д
(рис. 8-20,а), синусоидальном на-
пряжении и источника питания
с £/Cp>f/s. Примем, что положи-
тельный импульс напряжения на
дросселе дает положительное при-
ращение потока.
К началу положительного полу-
периода ш/ = 0 = О сердечник был
насыщен в отрицательном направле-
нии (Ф — — Ф8 = — 2?sS); далее
начнется возрастание потока. Пока
поток растет, ток i (рис. 8-20,6) и
напряжение ur = ir будут равны
нулю, все напряжение источника
питания приложено к дросселю
— При = (рис. 8-20,6)
наступит насыщение Ф = Ф5, Изме-
нение потока прекращается, напря-
жение на дросселе = 0, ток воз-
растает скачком до значения i = й/г.
Угол 0S называют углом насыщения.
Его можно рассчитать из условия,
что импульс напряжения на дрос-
селе за интервал 0 — 05 (косая
штриховка на рис. 8-20,6) соответ-
ствует изменению потока на 2Ф8;
это приводит к уравнению [см. (8-13)
и (8-16)]
£/д.ср = *Л
ИЛИ
-Д J Um sin е d0 = 4fwSBi. (8-47)
о
(8-49)
Среднее значение тока при{7Ср>СЛ
/ср У Д. (8-50)
Пока U.cp<>Us все напряжение
источника питания приложено
к дросселю Пд.ср=?7срл а при
UC^US напряжение на дроссселе
t/H.cP=t/s=const, и в результате за-
висимость /7д.ср(^ср) имеет вид, по-
казанный на рис. 8-20,8. Поэтому
схему рис. '8-20,а можно применить
как простейший стабилизатор сред-
него значения переменного напряже-
ния (начиная с t/cp=[/s); нагрузка
подключается параллельно дроссе-
лю. Если напряжение на дросселе
выпрямлять, то будет стабилизиро-
ваться выпрямленное напряжение
(постоянная составляющая); но
в реальных условиях характеристик
ка, как и у всякого стабилизатора,
в зоне стабилизации не будет иде-
ально горизонтальной. При. наличии
нагрузки формы кривых и количе-
ственные соотношения будут други-
ми (влияние нагрузки рассматри-
вается в следующем параграфе на
примере трансформатора) -
Если дроссель питается от источ-
ника тока, то идеализация динами-
ческой зависимости В (Н) по
рис. 8-14,62 или 8-20,6 недопустима,
так как в противном случае при
изменении полярности тока мгнсн
венно должна измениться индукция^
что невозможно.
190
<8-10 НЕЛИНЕЙНЫЙ —
НАСЫЩАЮЩИЙСЯ ТРАНСФОРМАТОР
Рассмотрим особенности процес-
сов в трансформаторе, сердечник
которого имеет магнитную характе-
ристику’с резко выраженным насы-
щением, а параметры всей цепи
(рис. 8-21,а) таковы, что в каждый
полупериод наступает насыщение
сердечника.
Для упрощения анализа примем,
что у сердечника кривая на-
магничивания В (Н) идеальная
(рис. 8-14,а). Очевидно, такой же
будет и магнитная характеристика
Ф(й^1+4^2)- Нагрузка во вторич-
ной цепи активная, причем сопро-
тивление включает и сопротивле-
ние вторичной обмотки. Суммарное
сопротивление первичной цепи и.
Рассеянием пренебрежем.
Пока сердечник не насыщен и
в нем изменяется магнитный поток,
первичная и вторичная цепи индук-
тивно связаны друг с другом, коэф-
фициент связи равен единице. По-
сле насыщения сердечника поток
не изменяется, первич-
ная и вторичная цепи
становятся не связан-
ными друг с другом. Та-
ким образом, нелиней-
ный насыщающийся
трансформатор пред-
ставляет пример нели-
нейной взаимной
индуктивности.
Вначале рассмотрим
процессы в цепи при пи-
тании ее от источника
синусоидального напря-
жения ^==it7msincoit Пока
сердечник не насыщен,
трансформатор работает
в линейном режиме и от-
личается тем, что его
ток холостого хода и
рассеяние равны нулю,
так как при идеальной
кривой В (Н) перемагни-
чивание происходит при
Н=0. Следовательно,
или
*2>
. w2
11 — —12 —
1 2 W!
и = i±r
Wi • . Wi
— t1r1— u2 — — t1r1 — l2rn----=
11 2 w2 11 2 w2
= i1r1 + = i, (^ + r'H).
^2
В данном режиме справедлива
эквивалентная схема трансформа-
тора, показанная на рис. 8-21,6,
являющаяся частным случаем об-
щей эквивалентной схемы транс-
форматора; токи в обеих цепях си-
нусоидальные.
После насыщения сердечника на-
пряжения на обмотках трансформа-
тора спадают до нуля, ток 12=0,
а первичный ток ограничивается
только сопротивлением г(^=4Г1).
На рис. 8-21,в показаны кривые
напряжений, токов и индукции
тр ансф орм атор а. Импульс напря-
жения щ = и—rill на первичной об-
мотке, соответствующий изменению
потока на 2<DS, отмечен штрихов-
кой. Угол насыщения 6S опреде-
ляется уравнением
191
es es
A f H1£Z0=:-1-J (« —z1r1)d6 =
'о 0
8,
=-И sin6Je^4fw1SBs.
я J Г1 ‘ r H
0
(см. также рис. (8-21,6). Ясно, что
при данных параметрах трансфор-
матора и нагрузки -насыщение до-
стигается лишь начиная с некоторо-
го значения Um.
При питании первичной цепи та-
кого трансформатора от источника
синусоидального тока ii =Imsin со/:
сердечник -будет периодически пе-
ремагничиваться, насыщаясь в об-
щем -случае в каждый полупериод.
В интервале времени, когда поток
изменяется, по-прежнему —/2 и
напряжение на нагрузке
В таком линейном режиме источник
тока жестко задает ток во вторич-
ной цепи независимо от сопротивле-
ния гн; это сопротивление опреде-
ляет напряжение на трансформа-
торе
W-, Wi . г
и.— — u2—± = — z2rH — = 1-.Г н.
1 2 w2 2 ы w2 1
После насыщения поток Ф —const,
напряжение — и2 — 0 и ток i2 — 0.
Угол насыщения находится из урав-
нения
6S 8S
11^0 = ^ /w/Hsin6dO =
о о
— 'kfWiSBs.
Кривые тока и напряжения
Ui =—и'2 показаны на рис. 8-21,а;
форма кривых тока /2 и индукции
такая же, как на рис. 8-21,в.
Очевидно, что -среднее значение
напряжения на вторичйой обмотке
не может быть больше чем
4fw2SBs- Поэтому подобные насы-
щающиеся трансформаторы приме-
няются на практике в стабилизато-
рах напряжения, в устройствах
ограничения величины напряжения
и др. Естественно, что в тех слу-
чаях, когда необходима трансфор-
мация с минимальными искажения-
ми формы, насыщение трансформа-
торов недопустимо.
8-11. ДРОССЕЛЬ С ИДЕАЛЬНОЙ
ПРЯМОУГОЛЬНОЙ ПЕТЛЕЙ
ГИСТЕРЕЗИСА
Таким дросселем называется ка-
тушка с сердечником, имеющим
идеальную прямоугольную петлю
гистерезиса (рис. (8-14,6).
Характеристика Ф(0 дросселя
также прямоугольная, определяют
ее два параметра: поток насыщения
d>s=SBs и ток 'Ic=Hcl[w. Изменение
потока ib дросселе возможно только
при токе i=±Ic; при |х|<7с рабо-
чая точка находится на горизон-
тальном участке частного цикла
или петли в пределах ее ширины;
при |/|>/с Дроссель насыщен. В це-
пи переменного тока параметрами
дросселя (без учета сопротивления
обмотки и рассеяния) служат ток
1С и напряжение насыщения Us
(8-46). Среднее значение напряже-
ния на дросселе не может превы-
шать C7S; поэтому и при таком дрос-
селе (в цепи рис. 8-20,а будет на-
блюдаться эффект стабилизации
среднего значения переменного на-
пряжения.
Рассмотрим изменение то-
ка и напряжений на участках
цепи на рис. 8-20,а при си-
нусоидальном напряжении
источника питания. Предва-
рительно проведем анализ,
полагая, что максимальное
значение потока фш<ф5 и со-
противление г—0.
При !Г=0 поток тоже сину-
соидальный, а ток (напряжен-
ность) имеет прямоугольную
форму (рис. 8-22; на симмет-
192
ричном частном цикле отмечены
положения рабочей точки в раз-
ные моменты периода). Первая
гармоника тока совпадает по фазе
с напряжением и целиком опреде-
ляется шириной петли — потерями
при перемагничивании.
Если учесть падение напряже-
ния на сопротивлении г, то очевид-
но, что поток не будет синусоидаль-
ным- Пусть к началу положительно-
го полупериода (6=0) наибольшее
отрицательное значение потока
ф =—Фт (рис. 8-23). Пока ток не
нарастает до величины /с, рабочая
точка движется направо по нижне-
му горизонтальному участку част-
ного цикла и поток не 'меняется,
следовательно, напряжение на дрос-
селе равно нулю и все напряжение
источника питания приложено к со-
противлению, т. е. цг=гг=и-
В момент 62, когда
Um sin 62 = 1сг, (8-51)
начинается возрастание потока; при
этом ток остается неизменным i =
= 1С и ит = 1сГ. Напряжение на
дросселе
йд — W = и — иг —
= Um sin 0 — Icr. (8-52)
В момент 63 — тс — 62 напряжение
на дросселе становится равным
нулю, поток перестает возрастать,
вновь i — а/г и рабочая точка дви-
жется влево по верхнему горизон-
тальному участку симметричного
частного цикла. В следующий полу-
период картина та же, но с другим
знаком у всех переменных.
Закон изменения потока нахо-
дится интегрированием уравнения
(8-52); постоянная интегрирования
определяется из условия Ф(02) =
= — Фт, а величина Фш связана со
средним значением напряжения на
дросселе уравнением:
ба
4" J (f/m sin 0 — /сг) d0 =^4fw®m.
На практике такая схема иногда
служит для получения переменного
тока почти прямоугольной фордоы
при синусоидальном напряжении
источника питания. На рис. 8-23
величина АФМ=2ФШ взята такой
же, как на рис. 8-22; естественно,
что при этом из-за падения напря-
жения на сопротивлении г напря-
жение источника питания должно
быть большим, чем при г=0.
Увеличим напряжение источника
питания или уменьшим сечение
сердечника, число витков дросселя,
или,. наконец, уменьшим частоту
так, чтобы напряжение источника
питания U существенно превышало
напряжение насыщения Us (8-46).
При этом ход процессов будет та-
ким же, как был показан на
рис. 8-23, но с тем отличием, что
при 0 = 0S < 63 дроссель насыща-
ется (рис. 8-24); на петле гистере-
зиса рис. 8-22 и на кривых рис. 8-24
13—434
193
цифрами 1 — 9 отмечены соответст-
вующие состояния в разные моменты
времени в течение периода). После
насыщения во время, например, поло-
жительного полупериода напряжения
и (6 > 6S) рабочая точка находится на
верхнем горизонтальном участке пет-
ли (5 — 4 — 5), напряжение на дрос-
селе равно нулю и!ток i = ujr.
В интервале 02— 6S напряжение
на дросселе йд определяется урав-
нением (8-52); на рис. 8-24 область,
соответствующая напряжению йд,
показана косой штриховкой, а об-
ласть напряжения ur — ir — верти-
кальной штриховкой. В конце полу-
периода \ (точка 5) i = 0, иг = 0.
В отрицательный полу период кар-
тина повторяется.
Угол насыщения 0S может быть
найден из уравнения, аналогичного
уравнению (8-47):
0S
—(t/msin6— Icr)M = USy
6»
а угол 62 по-прежнему находится
из (8-51).
Здесь справедливы также уравне-
ния (8-48) и (8-50), но не уравне-
ние (8-49).
Поскольку законы изменения
всех величин на каждом интервале
и границы интервалов известны,
можно аналитически рассчитать
любые значения величин (средние,,
действующие и др).
Пример 8-5. Определить выходное на-
пряжение и3 в цепи рис. 8-25,а, состоя-
щей из нелинейного дросселя Д, нелиней-
ного трансформатора Т -и сопротивления;
г, в -которое входят сопротивления обмо-
ток W] и w2. Сердечники дросселя и транс-
форматора выполнены из одного и тога
же материала с прямоугольной петлей ги-
стерезиса -(рис. 8-: 14,6). Соотношения чисещ
витков? Wi=2w2;; сечений сердечников:
Si—,5S2; средние длины / сердечников оди-
наковые; Напряжение питания синусои-
дальное. Параметры цепи подобраны так,,
что в установившемся режиме в течение-
Рис. 8-25.
194
одного полупериода оба сердечника насы-
щаются в положительном направлении,
а в течение другого — в отрицательном.
Решение. Ток Дь при котором из-
меняется магнитное состояние сердечника
дросселя, вдвое меньше тока /С2, при ко-
тором изменяется магнитное состояние сер-
дечника трансформатора, работающего
в режиме холостого хода. Напряжение
насыщения дросселя Usi в 10 раз больше
напряжения насыщения трансформатора
Z7s2, так как wiSi=ilO^2S2. Пока трансфор-
матор не .насыщен он работает как иде-
альный, и u2/u3=w2/w3.
В конце отрицательного по лупер иода
напряжения и и начале положительного
(0 =0) сердечники находятся в состоянии
отрицательного насыщения. Этому состоя-
нию соответствуют точки 1 на петлях
(рис. 8-25,6) и на кривых (рис. 8-25,в).
В начале положительного полупвриода оба
сердечника насыщены (Ф1=—Фвь Фг=
——Фв2), напряжения щ = и2=®, а ток
ограничивается только сопротивлением г,
т. е. u—ir. К моменту 82 ток увеличивает-
ся до значения
= = (8-53)
после чего при i=Ic\ = const начнет возра-
стать поток Ф1 дросселя (рис. 8-25,6). По-
ток трансформатора Ф2=—Ф^еще постоя-
нен, так как Z<ZC2, поэтому г/2=0 и Мз=0.
К моменту 03 дроссель насыщается
ф1==ф81 (соответствующий импульс на-
пряжения на дросселе показан на рис. 8-25,в
хкосой штриховкой), напряжение на нем
г/i скачком падает до нуля и ток стре-
мится скачком увеличиться до значения и/г.
Однако как только он достигнет значе-
ния /с2, начнется перемагничивание транс-
форматора и ток будет оставаться неиз-
менным i—Ic2. Для полного перемагни-
чивания трансформатора нужен сравни-
тельно небольшой (в 10 раз меньший, чем
для дросселя) импульс напряжения (гори-
зонтальная штриховка на рис. 8-25,в).
В момент 64 трансформатор насыщается,
напряжение и2 и выходное напряжение izs
падают до нуля, ток в цепи ограничива-
ется только сопротивлением г, т. е.
i = и/г. В течение следующего полупе-
риода процесс повторяется с переменой
знаков.
Итак, в интервалах 0 — 03 и 04 — тс
выходное напряжение равно нулю, а в ин-
тервале 03 — 04
ПУ3 о>3
«3 = «2 (^sln 6 — IС2Г)-
(8-54)
Угол 02 находится из (8-53), а углы
03 и 04 из трансцендентных уравнений
_1_
тс
08
(Um sin 0 — I clr) dti ==US1,
9a
04
l c
— I (t/msin 0 — Zc2r) J0 = C7s2.
S3
Схема на рис. 8-25,а применяется на
практике для получения коротких импуль-
сов напряжения при синусоидальном на-
пряжении источника питания. Соответст-
вующим выбором параметров схемы можно
сделать угол 03 чуть меньшим 90°, а угол
04 — чуть большим 90°, и тогда форма
импульсов будет близка к прямоуголь-
ной.
8-12. ИСХОДНЫЕ ПОЛОЖЕНИЯ
МЕТОДОВ РАСЧЕТА
ПО ДЕЙСТВУЮЩИМ ЗНАЧЕНИЯМ
При анализе и расчете нелиней-
ной цепи с -синусоидальными на-
пряжениями или токами источников
по действующим значениям все не-
синусоидальные величины (токи,
напряжения, потоки, заряды) заме-
няются эквивалентными синусои-
дальными. Понятие об эквивалент-
ных синусоидах было дано .в первой
части книги. Напомним условия
эквивалентности при замене неси-
нусоидальных величин в элементе
цепи эквивалентными синусоидами:
неизменность действующих значе*
ний тока, напряжения и потерь
в этом элементе. Если пренебречь
потерями в нелинейном элементе, то
эквивалентные синусоиды опреде-
ляются лишь по действующим зна-
чениям несинусоидальных величин.
Поскольку все величины прини-
маются синусоидальными, то тем
самым для мгновенных значений
цепь полагается линейной. Но ме-
жду действующими значениями за-
висимость нелинейная, соответст-
вующая характеристике элемента
для действующих значений (§ 8-7).
Формально получается цепь, в кото*
рой много сходного с цепью, содер-
жащей инерционные нелинейные
элементы (§ 8-2). Аналогичны и ме-
тоды расчета. Переход к эквивалент-»
ным -синусоидам позволяет приме*
нить символический метод и век-
торные диаграммы, составлять
эквивалентные схемы с эквивалент-
ными параметрами гэ, Ld, Сэ, М3
(§ 5-4). Трудности анализа и ра-сче*
та связаны с тем, что значения этих
параметров заранее не известны, и
зависят от действующего значения
13*
195
гока, 'потока, заряда и других ве-
личин в нелинейных элементах.
Подобные расчеты приближенны
не только из-за перехода от реаль-
ных кривых к эквивалентным сину-
соидам, но и вследствие того, что
характеристики элементов снимают-
ся в условиях, в той или иной мере
отличающихся от условий в реаль-
ной цепи.
Условимся в нелинейных сопро-
тивлениях учитывать только сопро-
тивление >гэ, в нелинейных катуш-
ках—Лэ, гэ, в конденсаторах—Сэ, гэ.
Переход к эквивалентным сину-
соидам равносилен замене реаль-
ных динамических петель гистере-
зиса В(Н) или Ф(0> £*(£) или
q(U) эквивалентными эллипсами.
Площадь эллипса зависит от сдви-
га по фазе б между этими парами
величин (§ 8-7).
Остановимся прежде на эквива-
лентных параметрах и схемах нели-
нейных катушки со сталью и кон-
денсатора, а затем рассмотрим соб-
ственно методику расчета по дейст-
вующим значениям.
8-13. ЭКВИВАЛЕНТНЫЕ ПАРАМЕТРЫ,
ЭКВИВАЛЕНТНЫЕ СХЕМЫ
И ВЕКТОРНЫЕ ДИАГРАММЫ
НЕЛИНЕЙНЫХ КАТУШКИ
СО СТАЛЬЮ И КОНДЕНСАТОРА
Вначале не будем учитывать со-
противление обмотки и рассеяние
катушки со сталью и будем пола-
гать, что воздушный зазор в сер-
дечнике отсутствует (рис. 8-26,а).
Вследствие потерь в стали эквива-
лентная синусоида тока должна
отставать от синусоиды напряже-
ния на угол, меньший 90°. Поток
отстает от напряжения на 90°
(8-10). Векторная диаграмма такой
катушки изображена на рис- 8-26,6.
Напряженность магнитного поля
совпадает по фазе с током и опере-
жает индукцию на угол б. Ампли-
туда потока (индукции) связана
с напряжением соотношением
(8-18).
Намагничивающий ток катушки
/р можно разложить на две состав-
ляющие: активную /а, обусловлен-
ную потерями в стали, и реактив-
ную /р, как бы непосредственно свя-
196
Рис. 8-26.
занную с магнитным потоком. Та-
кому представлению тока (^,—
=/а+/р) соответствует эквивалент-
ная схема катушки на ри-Q. 8-26,в,
где уже нелинейная катушка идеа-
лизирована — без потерь.
Параметры эквивалентной схемы
£э, Ьэ зависят не только от обмо-
точных данных катушки и свойств
сердечника, но и от величины и ча-
стоты приложенного напряжения,
т. е. от режима работы катушки- X
Потери в -стали сердечника выра-
жаются через удельные потери Р^
зависящие от магнитного материа-
ла, толщины пластин или ленты,
индукции Вт и частоты (§ 8-5).
С другой стороны,
PCT = P0G=t//a=t/2g-9 =
=i(4,44fwSBm)2g3, (8-55)
где G — вес стали.
Параметр gQ можно определить,
пользуясь соотношениями (8-55).
Для этого надо знать вес и сечение
сердечника, число витков обмотки,
частоту и индукцию Вт, по которой
находится и величина Ро (рис. 8-13).
Слагающую тока /р обычно рас-
считывают по так называемой на-
магничивающей реактивной мощно-
сти
Q = [Др= Wa=’(4,44f^SBw)2&a.
(8-56)
Намагничивающая мощность
Q-QoG, (8-57)
т. е. выражается через вес сер-
дечника и удельную на-
магничивающую мощ-
ность Qo, которая зависит от
тех же факторов, от каких за-
висит Pq. Экспериментальная
хар актеристика Qo СД™) сни-
мается обычно в режиме сину-
соидальной индукции. На рис.
8-13 показаны зависимости
Qo(IBw) для сталей Э41 (кри-
вая 3) и Э310 (кривая 4), толщи-
ной 0,35 мм при частоте 50 гц.
Параметр bQ можно определить,
пользуясь соотношениями (8-56).
Применение удельных величин
Pq и для расчета параметров
&э, ёэ и токов /а, 7Р имеет то преи-
мущество, что величины Pq и Qo не
зависят ст обмоточных данных ка-
тушки и размеров сердечника (по-
скольку было принято, что расчеты
можно вести по средней по сечению
индукции и средней длине сердеч-
ника) .
Рассмотрим качественно, как за-
висят эквивалентные проводимости
ёэ и bQ или обратные им- эквива-
лентные сопротивления гэ=1/ёэ и
хэ=(оАэ=11/&э от напряжения, при-
ложенного к катушке, при прочих
неизменных параметрах. Потери на
вихревые токи пропорциональны
квадрату индукции i(8-22) и, следо-
вательно, в данных условиях про-
порциональны квадрату напряже-
ния. Если бы потерь на гистерезис
не было, то тогда,, судя по (8-55),
надо было считать проводимость
ёэ постоянной. Потери на гистере-
зис в общем случае не пропорцио-
нальны квадрату индукций и поэто-
му с изменением напряжения прово-
димость тоже меняется. В тех
случаях, когда большую часть по-
терь в стали составляют поте-
ри на вихревые токи, величину ёэ
с достаточной для практики точно-
стью можно считать постоянной.
Зависимость Н(В) и, следова-
тельно, в рассматриваемых условиях
зависимость /р(17) существенно не-
линейны. С увеличением напряже-
ния и индукции Вт величина тока
Рис. 8-27.
тоже возрастает, но значительно
более резко. Это приводит к увели-
чению проводимости &э или к умень-
шению сопротивления хэ.‘ Именно
зависимости b^{U) и xQ(U) (послед-
няя упоминалась в § 5-4, рис. 5-22)
в основном отражают нелинейный
характер вольт-амперной характери-
стики катушки (рис. 846).
Итак, эквивалентное индуктивное
сопротивление хэ и индуктивность
катушки Lq с увеличением напряже-
ния или тока, т. е. с увеличением
насыщения катушки, уменьша-
ютсял.
Возможна и последовательная
эквивалентная схема катушки
(рис. 8-26,г). Здесь с увеличением
напряжения на катушке, с увеличе-
нием степени насыщения ее умень-
шаются оба параметра r'Q и
Уменьшение r'Q объясняется тем,
что с увеличением степени насыще-
ния квадрат тока растет более рез-
ко, чем возрастают потери в стали.
Если теперь учесть сопротивле-
ние обмотки и рассеяние, то экви-
валентная схема и векторная диа-
грамма катушки со сталью примут
вид, показанный на рис. 8-27, а и б.
Здесь xs — wLs — индуктивное со-
противление рассеяния, г — активное
сопротивление обмотки. Напряжение
U— это то напряжение, которое
непосредственно связано с измене-
нием основного магнитного потока,
только им обусловлено и определя-
1 Отметим, что часто динамические
характеристики катушек таковы, что в об-
ласти достаточно малых индукций наблю-
дается вначале увеличение хэ.
197
Рис. 8-28.
ется соотношением (8-18). Реактив-
ная слагающая намагничивающего
тока /р отстает по фазе на 90° от
напряжения U^. Слагающая тока /а,
обусловленная потерями в сердеч-
нике при данном основном потоке,
совпадает по фазе с U^. Если пре-
небречь сопротивлением обмотки и
рассеянием, то t/ =f7. Для ка-
г*
тушки в целом пригодна также по-
следовательная эквивалентная схе-
ма (рис- 8-26,а). Индуктивность рас-
сеяния определяется (расчетно или
экспериментально) обычно в усло-
виях номинального режима и пола-
гается неизменной. Однако при бо-
лее точных расчетах приходится
учитывать изменение Ls с измене-
нием степени насыщения сердечни-
ка или с изменением воздушных
зазоров на пути основного потока.
Рассмотрим теперь случай, когда
сердечник катушки имеет воздуш-
ный зазор длиной /в. В отношении
зазора и конфигурации магнитного
поля в нем примем допущения, ко-
торые были введены в гл. 7.
Воздушный зазор увеличивает
магнитное сопротивление и для со-
здания того же магнитного потока
требуется большая н. с.
= H-qqIq + Н^В1В. (8-58)
Поэтому реактивная слагающая
тока /р станет больше
Т _ *1 Р.С^С | Р.в^в _ Т | Г
. ——ур-с + ур.в;
(8-59)
здесь ток /р.с по-прежнему связан
с удельной намагничивающей мощ-
ностью
/р.с = -^, (8-60)
а .ток /р.в и есть приращение реак-
тивной слагающей намагничиваю-
щего тока, обусловленное воздуш-
ным зазором.
В рассматриваемых условиях по-
ток в зазоре равен основному по-
току, который связан с напряжени-
ем U,, известными соотношениями:
и*
й^ — (8-61)
C/H=4,44fwSBm.
Эквивалентная схема катушки при
наличии воздушного зазора в сер-
дечнике будет отличаться от схем на
рис. 8-26,в и 8-27,а дополнительным
линейным индуктивным сопротив-
лением хв, включенным, как это
следует из (8-59), параллельно вет-
ви с эквивалентным индуктивным
сопротивлением хэ (рис. 8-28).
Величина сопротивления хв опре-
деляется соотношением
г _____ 7/р.в^В Ф^В
Р-в w i^0Sw
~ хв
откуда
(8-62)
(8-63)
Лв = а>—
Очевидно, что введение воздушного
зазора уменьшает эквивалентное
сопротивление катушки со сталью.
Катушки с регулируемым зазо-
ром (дроссели) применяются на
практике для измененйя^еличины
переменного тока в различных це-
пях. Отметим, что .первичная цепь
трансформатора со стальным сер-
дечником в режиме холостого хода
ничем не отличается от рассмот-
ренной катушки и тоже может быть
представлена эвивалентной схемой
рис. 8-28-
Эквивалентная схема и векторная
диаграмма нелинейного конденсато-
в-198
ра (вариконда) изображены на
рис. 8-29,а и б. Активная проводи-
мость gQ учитывает потери ib кон-
денсаторе (на гистерезис, из-за то-
ков утечки и др.), а емкость Сэ—не-
линейная. Вследствие потерь в кон-
денсаторе эквивалентная синусоида
тока опережает эквивалентную си-
нусоиду напряжения на угол, мень-
ший 9-0°. 'Напряженность Ё совпа-
дает по фазе с напряжением, а за-
ряд q и вектор D отстают по фазе
ют тока на 90°, а от напряжения —
на угол 6.
£-14. РАСЧЕТЫ ПО ДЕЙСТВУЮЩИМ
ЗНАЧЕНИЯМ
Методика расчетов • нелинейных
цепей по действующим значениям
(как и’ расчета цепей с инерционны-
ми нелинейными элементами)
в сущности не отличается от мето-
дики расчета нелинейных цепей при
постоянных токах и магнитных по-
токах (гл. 6, 7). Нелинейная цепь
заменяется эквивалентной схемой.
Параметры схемы либо представле-
ны аналитически или графически
в функции одной из величин, опре-
деляющих работу нелинейного эле-
мента, либо, если это необходимо,
могут быть найдены по другим ха-
рактеристикам элемента, например
W), Ф(/), Po(Bm), Qo(Bm) и др.
После того как составлена схема,
задача сводится к аналитическому
или графическому решению уравне-
ний, записанных по законам Кирх-
гофа для комплексных э. д. с., на-
пряжений, токов, магнитных пото-
ков и др.
Если цепь состоит только из со-
противлений, только из индуктивно-
стей, только из емкостей (послед-
ние два случая возможны при пре-
небрежении всеми потерями), то
суммирование характеристик эле-
ментов и весь расчет
ведутся точно так же,
как при постоянных
токах и потоках. Если
цепь содержит актив-
ные и реактивные со-
противления, то мето-
дика расчета сохра-
няется, но, как уже
указывалось в § 8-2,
приходится в общем случае учи-
тывать нелинейность активного и
реактивного параметров элемен-
та, а также суммировать токи и
напряжения, сдвинутые друг отно-
сительно друга по фазе. Последние
операции удобно производить сим-
волическим методом или при помо-
щи векторных диаграмм.
Ограничимся здесь расчетом це-
пей с одним нелинейным элементом,
обладающим двумя эквивалентны-
ми параметрами g9, Ьд.
Цепь с одним нелинейным эле-
ментом (НЭ) представим, как и
в аналогичном случае в § 6-4,
активным линейным двухполюсни-
ком и подключенным к нему НЭ
(рис. 8-30, а). Заменяя активный
двухполюсник источником синусои-
дальной э. д. с. Э и входным сопро-
тивлением Z, получим простую не-
разветвленную цепь (рис- 8-30,6).
Возможны две постановки задачи
при расчете этой цепи:
а) задана одна из величин, -опре-
деляющих работу НЭ (например,
ток для сопротивления, магнитный
поток или индукция для катушки
и т. п.) и входное сопротивление Z;
необходимо рассчитать э. д. с. Э
(напряжение источника питания);
б) заданы э. д- с. Э и спротивле-
ние Z; необходимо найти все вели-
чины, характеризующие режим ра-
боты НЭ (ток, напряжение, поток
и др.).
В первом случае, заменив НЭ
эквивалентной схемой, находим при
помощи характеристик НЭ напря-
жение, ток НЭ и сдвиг по фазе
между ними, а затем э. д. с.
э^и-yiz.
Во втором случае задаемся ря-
дом значений одной из величин,
определяющих работу НЭ, решаем
199
Таблица 8-И
Up. 8 тл Ро, вт/кг СО ° Qo, вар/кг Q, вар /а. “ р.с’ а р.в» а а U, в
180 1,7 2,95 9,75 34,0 112 0,054 0,623 0,238 0,86.1 ' 214
160 1,5 2,20 7,27 17,5 57,8 0,045 0,360 0,212 0,572 183
171 1,6 2,54 8,40 24,5 81,0 0,049 0,473 0,227 0,700 199
далее для каждого из этих значе-
ний первую задачу и находим э. д. с'.
Э. Построив график зависимости
Э от заданной величины, например,
от напряжения U на НЭ, отклады-
ваем на графике известное значе-
ние Э и определяем напряжение U
(рис. 8-30,в), а затем и другие ве-
личины, характеризующие режим
НЭ. Целесообразно вести расчет
в табличной форме и построить
лишь часть зависимости 9(U)
в области заданной величины Э.
Случаи, когда нелинейный эле-
мент имеет индуктивный характер,
а сопротивление Z содержит ем-
кость (или наоборот) рассмотрим
далее отдельно (§ 8-15), так как
в таких нелинейных цепях возника-
ют -своеобразные резонансные явле-
ния.
Пример 8-5. Определить индукцию В?п,
потери в стали и ток дросселя при напря-
жении питания цепи £/=200 в, f—50 гц.
Число витков обмотки w=400. Сердечник
собран из пластин стали Э310, толщиной
0,35 мм, сечение стали S=;12 см2, средняя
длина сердечника /=3'4,5 см. Кривые
Ро(Вт) и приведены на рис. 8-13.
Активное сопротивление обмотки r=il0 ом,
индуктивное сопротивление рассеяния xs=
=40 ом. Удельный вес стали у.=7,8 Г!см3.
Длина воздушного зазора ОД мм.
Решение. Расчет ведем по действую-
щим значениям, пользуясь эквивалентной
схемой рис. 8-28. Задаемся напряжением
Up, по формуле (8-48) вычисляем индук-
цию Вт, из кривых 2 и 4 рис. 8--13 нахо-
дим Ро и Qo. Вес сердечника G=Sly=
=3,3 кГ, потери в стали Pct = GP0; намаг-
ничивающая мощность Q=Q0G. По фор-
муле (8-63) находим хв=755 ом.
Далее вычисляем токи:
г Р™ Т___________Т
Up ’ lp-c~Up ; 7р-в“ хв
и намагничивающий ток =
+ /(/р.с+4р.в)«. Напряжение на зажи-
мах цепи U = Up + (7а + Др) (г + jx8) =
= £7^¥« В качестве первого приближе-
ния величину Up берем несколько мень-
шую, чем U (например, 0.977), так как
при отсутствии в цепи емкостей всегда
Up<U. Результаты вычислений заносим
в табл. 8-1.
Приняв зависимость U^iU) в интер-
вале £7^=160—183 в линейной, 'находим,,
что при U = 200 в напряжение £7^^171 в.
В третьей строке таблицы приведены все
расчетные величины при Up = 171 в; оче-
видно, что дальнейшее уточнение расчета
не нужно.
8-1'5. ЦЕПИ С НЕЛИНЕЙНЫМИ
индуктивностями
И КОНДЕНСАТОРАМИ.
ФЕРРОРЕЗОНАНСНЫЕ ЯВЛЕНИЯ
Феррорезонанс напряжений. В це-
пи, содержащей последовательно
или параллельно соединенные нели-
нейную катушку и линейный кон-
денсатор, при монотонном измене-
нии действующего значения^ напря-
жения или тока «источника питания
могут происходить скачкообразные
изменения действующего значения
соответственно тока или напряже-
ния. Такие явления релейного ха-
рактера (*§ 5-3), конечно, невозмож-
ны -в линейных цепях-
При исследовании -цепей, содер-
жащих нелинейную катушку и кон-
’денсатор, основное внимание уде-
лим качественной стороне явлений
и примерам их практического при-
менения. Поэтому ради наглядно-
сти и простоты решения не будем
стремиться к излишней точности
и строгости. Естественно, что
решение не будет точным и должно
быть подвергнуто эксперименталь-
ной проверке. В -связи с этим зара-
нее оговорим, что с качественной
точки зрения все полученные здесь
результаты находятся в полном со-
ответствии с данными опыта.
При синусоидальном напряжении
или токе источников питания таких
цепей токи и напряжения на от-
дельных участках щепи косинусои-
дальны. Будем интересоваться толь-
200
ко действующими значениями вели-
чин, в связи с чем перейдем от не-
синусоидальных кривых к эквива-
лентным синусоидам.
Р ассмотрим (последовательное
соединение катушки и конденсато-
ра (рис. 8-31,а), (пренебрегая вна-
чале всеми потерями- Тогда экви-
валентные сопротивления катушки
-и конденсатора (для эквивалентных
синусоид U и /) чисто реактивные,
и
U=UL + UC
или
U = \UL-UC\-, (8-64)
векторная диаграмма предельно
проста (рис. 8-31,6).
На рис. 8-31,в изображены вольт-
амперные характеристики катушки
/7ь(7) и конденсатора Uc (/) для
действующих значений. Вольт-ам-
перную характеристику всей цепи
изображенную на том же ри-
сунке, построим, ВЫЧИСЛЯЯ (В 'Соот-
ветствии с (8-64) разности ординат
характеристик катушки и конденса-
тора при одинаковых значениях то-
ка. Характеристика всей цепи имеет
две особенности:
а) равенство нулю напряжения
в точке р,
б) наличие падающего участка Ьр.
Точка р соответствует режиму ре-
зонанса напряжений. В отличие от
линейной цепи резонанс здесь мо-
жет быть достигнут не только (изме-
нением параметров катушки и
емкости конденсатора, но и изме-
нением напряжения питания (7- При
изменении напряжения U меняется
режим работы катушки и ее «ин-
Рис. 8-31.
дуктивность», чем и достигается на-^
стройка в резонанс.
Отмеченное явление резонанса
в последовательной цепи, состоя-
щей из катушки со сталью и кон-
денсатора, называется ферроре-
зонансом напряжений.
Если от эквивалентных синусоид
вернуться к реальным несинусои-
дальным кривым, то здесь следует
говорить о резонансе на первой
(основной) гармонике. При прене-
брежении потерями и синусоидаль-
ном напряжении источника питания
все высшие гармоники напряжения
на катушке в любом режиме равны
и противоположны по знаку тем же
высшим гармоникам напряжения
на конденсаторе. В этих условиях
при резонансе на основной часто-.
те общее напряжение равно ну-
лю независимо от наличия высших
гармоник напряжений на элемен-
тах.
В реальной цепи всегда есть ак-
тивное сопротивление обм’отки ка-
тушки. Кроме потерь в этом сопро-
тивлении, имеются потери в стали
катушки и в конденсаторе. Учет
потерь существенно упрощается,
если все потери в цепи отобразить
в эквивалентной схеме одним по-
следовательным активным линей-
ным сопротивлением г. Тогда в ре-
жиме феррорезонанса напряжений
общее (синусоидальное) напряже-
ние, как и в линейном последова-
тельном контуре, не равно нулю-
Общее напряжение можно вычи-
слить по формуле
U2=(lr)2+(UL—Uc)2.
Вольт-амперная характеристика
всей цепи при наличии сопротивле-
ния г показана на рис. 8-32. Точка
р минимума напряжения здесь,
строго говоря, получается не в ре-
жиме резонанса. Однако практиче-
ски можно считать, что в точке р
имеет место резонанс.
Легко заметить, что феррорезо-
нанс возможен, если характеристи-
ки катушки и конденсатора пересе-
каются (рис. 8-31,в). Только в этом
случае на общей характеристике
[/(/) будет падающий участок Ьр~
•При питании цепи от источника
напряжения получается неустойчи-
201
вый режим, если рабочая точка на-
ходится на падающем участке
вольт-амперной характеристики;
обычно, упрощая, говорят, что точки
на падающем участке — неустойчи-
вые. Например, при напряжении ис-
точника питания Ui возможны три
рабочие точки /, 2, 3 (рис. 8-32),
иначе три различных значения то-
ка. Точка 2 — неустойчивая, так как
не может быть установившегося ре-
жима, соответствующего точке 2.
При напряжениях и Up возмож-
ны два -устойчивых режима, а при
U>Ub и U<UP — один.
Дадим здесь упрощенное объяс-
нение неустойчивости режима на
падающем участке Ьр характери-
стики рис. 8-32.
Предположим, что при питании
цепи от источника напряжения ве-
личина тока по какой-либо причи-
не не соответствует тому значению,
которое должно быть при заданном
напряжении источника питания и
данной вольт-амперной характери-
стике цепи. Тогда, очевидно, избы-
ток напряжения источника питания
AU будет стремиться устранить это
несоответствие. Так, если избыток
А(7>0, то он стремится увеличить
ток, а если А(/<0 — уменьшить
ток
Допустим, что при [7= (7i = const
рабочая точка находится в точке 2
(рис. 8-33). Казалось бы, здесь
А(7 = 0 и нет причины для измене-
ния режима. Однако в реальных
условиях всегда возникают под дей-
ствием различного рода (случайных
1 Здесь сопоставляются различные уста-
новившиеся режимы. В переходном про-
цессе возникают такие свободные слагаю-
щие напряжений на элементах, что законы
Кирхгофа, конечно, соблюдаются, и нет ни-
каких «избытков» напряжений.
'202
причин небольшие отклонения
('флуктуации) от данного режима-
Тогда случайное увеличение тока
от значения /2 приведет к появле-
нию избытка напряжения А(7>0,
который в свою очередь вызовет
дальнейшее увеличение тока. Как
видно из рис. 8-33, с увеличением
тока избыток А(7 вначале возра-
стает, лотом убывает и становится
равным нулю -в точке 3. Аналогич-
но, при случайном уменьшении тока
от значения /2 появляется избыток
А(7<0, который вызывает дальней-
шее уменьшение тока, и Д(7=0
только в точке 7. Таким образом,
точка 2 неустойчивая.
Точки 3 и 1 устойчивые. Дейст-
вительно, небольшие отклонения то-
ка от значений 1\ или /з в ту или
другую сторону ведут к появлению
таких избытков 'напряжения А(7,
которые возвращают рабочую точку
в исходное состояние.
Конечно, подобные чисто качест-
венные рассуждения не могут слу-
жить строгим доказательством
устойчивости или 1 неустойчивости
рабочей точки. Характеристика для
действующих значений и, в частно-
сти, ее участок Ьр не отражает ни-
каких соотношений в переходном
процессе. Между тем ясно, что ре-
шение вопроса об устойчивости то-
го или иного режима связано с. ана-
лизом переходного процесса.
Итак, при заданном напряжении
питания (71 =const установившийся
режим, соответствующий точке 2,
невозможен. Самопроизвольный
процесс в цепи переведет рабочую
точку в точку 1 или 3. Если плавно,
начиная с нуля, увеличивать напря-
жение источника питания (7, то ра-*
бочая точка будет сначала переме-
щаться по устойчивому участку ха-
рактеристики Ob (рис. 8-32). Здесь
UL>UC и -цепь в целом имеет ин-
дуктивный характер. При бесконеч-
но малом увеличении напряжения
от величины Ub (произойдет скачок
из точки b в точку а, сопровождаю-
щийся режим увеличением тока от
h до 1а и так называемым опроки-
дыванием фазы: характер цепи
в целом вместо индуктивного ста-
нет емкостным (Uc>'UL)- Дальней-
шее увеличение напряжения сопро-
вождается плавным увеличением
тока (участок ас характеристики).
Если затем (после №>'Ub) умень-
шать напряжение вплоть до значе-
ния Up, то рабочая точка переме-
щается по устойчивому участку ха-
рактеристики cap. При бесконечно
малом уменьшении напряжения от
значения Up произойдет скачок из
точки р в точку d, сопровождаю-
щийся резким уменьшением тока от
1р до Id н обратным опрокидыва-
нием фазы.
Одновременно со скачками тока
изменяются скачком и напряжения
на катушке и конденсаторе. На
рис. 8-34 показаны зависимости /,
UL и Uс от напряжения U. Не-
устойчивый участок Ьр кривой
I(U) показан здесь пунктиром,
а скачок Ъ-+ а и p->d сплошными
линиями. Кривые. .UL(U) и UC(U)
построены по кривой I(U) и харак-
теристикам UL (I) и UcSI).
Характеристики на рис. 8-34 ти-
пично релейные (см. рис. 5-16),
а цепь рис. 8-31,а может рассматри-
ваться как схема бесконтактного
феррорезонансного , реле, входной
величиной которого служит напря-
жение источника питания U, а вы-
ходной; например напряжение на
емкости. Когда напряжение на вхо-
де U превысит величину Ub, реле
«сработает», выходная величина
скачком возрастает. Напряжение
Up — это напряжение «отпускания»-
Подобные • феррорезонансные реле
применяются на практике.
Термин «скачок» здесь не следует
понимать как скачок во времени.
Переход от установившегося режи-
ма, например, в точке Ь к устано-
вившемуся режиму в точке а про-
исходит, конечно, не мгновенно.
Когда рабочая точка попадает на не-
устойчивый участок, начинается пе-
реходный процесс, длительность ко-
торого зависит от параметров нели-
нейной цепи. Скачок имеется в виду
в том смысле, что переход от одно-
го установившегося режима тока
к другому происходит самопроиз-
вольно, без какого-либо внешнего
вмешательства (изменение напря-
жения источника питания, емкости
конденсатора и др.). При этом на
статической, т. е. для установив-
шихся режимов, характеристике,
например I(U), имеются вертикаль-
ные участки. Еще раз отметим, что
характеристика I(U) дает зависи-
мость (между действующими значе-
ниями в установившемся режиме и
совершенно не отражает каких-ли-
бо связей в переходном процессе.
Поэтому не следует думать, что,
например, при скачке из b в а ра-
бочая точка пробегает участок Ьра.
Неустойчивый участок Ьр (на^
рис. 8-34 показан пунктиром) по-
лучить экспериментально при пита-
нии цепи рис. 8-31,а от источника
напряжения нельзя. Можно снять
только релейную характеристику со
скачками. Если включить последо-
вательно в цепь, например, линей-
ное добавочное сопротивление
"доб (рис. 8-35), то можно подо-
брать его величину такой, чтобы
характеристика всей цепи не имела
падающего участка — участка с от-
р ицател ьным диф фер енци а л ьным
сопротивлением для действующих
значений (рис. 8-35, гДОб^^2>П)-
Тогда при изменении напряжения U
скачков тока и напряжений UL и
Uс не будет. Измеряя ток и напря-
жение ULC на катушке и конденса-
203
Рис. 8-35-
торе, можно экспериментально снять
все участки N-образной кривой
ULC(J). Следует иметь б ©иду, что
при различных сопротивлениях гДОб
будут получаться несколько отли-
чающиеся зависимости так
как формы кривых тока и напря-
жений на участках зависят от -вели-
чины до б ав очного сопр отивл ения.
Стабилизация напряжения. Из
рассмотрения кривой UL(U) на
рис. 8-34 следует, что цепь
рис. 8-31,а может служить в каче-
стве простейшего стабилизатора
действующего значения переменно-
го напряжения. Действительно,
если считать «входным напряжением
напряжение источника питания U,
а выходным — напряжение на ка-
тушке UBblx=UL, то, как показано
на рис. 8-34, А^/Вых<Д^. Эффект
стабилизации наблюдается, если
напряжение источника 1)>йъ- При
этом условии катушка достаточно
глубоко насыщена, что собственно
и обеспечивает небольшие измене-
ния напряжения на ней (и на выхо-
де). При увеличении, например, на-
пряжения на ©ходе U напряжение
на катушке [7ВЫХ из-за насыщения
увеличивается сравнительно мало,
а подавляющая часть приращения
входного напряжения падает на
конденсаторе. Чтобы получить эф-
фект стабилизации напряжения,
нужно обязательно включить после-
довательно с нелинейным элемен-
том какое-либо (активное или ре-
активное) .сопротивление. На это
было уже обращено внимание при
исследовании стабилизатора посто-
янного напряжения со стабилитро-
ном (§ 5-3). В цепи рис. 8-31,я та-
ким сопротивлением служит кон-
204
денсатор. Стабилизаторы, основной
частью которых являются нелиней-
ная катушка и конденсатор, назы-
ваются ф ерр ор е з о н а нс н ы м и
стабилизатор ами. Разнооб-
разные типы их широко применя-
ются на практике-
Вместо конденсатора последова-
тельно с нелинейной катушкой
можно включить активное сопро-
тивление или линейную катушку.
Первое, -очевидно, экономически не-
выгодно, а линейную катушку на
практике применяют, когда в дан-
ных конкретных условиях нель-
зя применить конденсатор. На
рис. 8-31,в пунктиром показана
вольт-амперная характеристика
ULL (/) последовательного соедине-
ния линейной и нелинейной кату-
шек. Из нее видно, что в зоне ста-
билизации входное напряжение ULl
должно быть существенно больше,
чем .входное напряжение U в цепи
с конденсатором. Это обстоятельст-
во, само по себе являющееся недо-
статком, ведет еще и к снижению
коэффициента стабилизации (5-8),
так как при одинаковых прираще-
ниях А(7Вх обе схемы дают пример-
но одинаковые А£/ВЫх-
Работа стабилизатора была
проанализирована в режиме холос-
того хода, поскольку все характе-
ристики строились для цепи
рис. 8-31,а, где нагрузка параллель-
но катушке со сталью не подключе-
на (гн==сю). Присоединение линей-
ного сопротивления параллельно ка-
тушке сглаживает нелинейность
цепи и, следовательно, ухудшает ко-
эффициент стабилизации.
Феррорезонанс токов. Рассмот-
рим теперь параллельное соедине-
ние катушки со сталью и линейного
конденсатора. На рис. 8-36,а и б
приведены схема цепи и ее вектор-
ная диаграмма для эквивалентных
синусоид, когда потери не учиты-
ваются. При синусоидальном напря-
жении источника питания ток© кон-
денсаторе тоже синусоидальный.
Общий ток /=7ь+/сИЛи/= |/ь—/с|.
На рис- 8-36,в построены вольт-
амперные характеристики для дей-
ствующих значений токов и напря-
жений катушки, конденсатора и
всей цепи. В точке р —
феррорезонанс то-
ков, которого можно до-
стичь изменением напряже-
ния U источника питания.
Однако в действитель-
ности даже при пренебре-
жении потерями общий ток
в режиме феррорезонанса не
равен нулю, так как ток
в катушке содержит выс-
шие гармоники. Кроме то-
го, из-за потерь в катушке
имеется еще активная составляю-
щая первой гармоники тока /ьа-
В режиме феррорезонанса токов
компенсируют друг друга ток кон-
денсатора и реактивная составляю-
щая первой гармоники тока катуш-
ки. Общий ток при резонансе
/=К4+4+4---
Таким образом, наличие актив-
ного сопротивления обмотки катуш-
ки, -потерь в стали и высших гармо-
ник в токе катушки приводит к то-
му, что характеристика цепи имеет
вид, показанный на рис. 8-37- Здесь
тоже есть падающий участок Ьр.
Однако теперь при питании цепи от
источника напряжения этот уча-
сток не будет неустойчивым. Дей-
ствительно, при питании от источ-
ника напряжения обе ветви совер-
шенно независимы друг от друга,
их токи просто складываются, об-
разуя общий ток. Устойчивость
цепи видна и из вольт-амперной ха*
рактерис’тики: любому значению на-
пряжения соответствует только
одна рабочая точка.
Другие явления возникают в це-
пи при наличии достаточного по ве-
личине сопротивления, включенно-
го последовательно с источником
(в пределе — при питании цепи от
источника тока). Например, при
токе I=Ii возможны три различных
напряжения, соответствующие трем
рабочим точкам 1, 2, 3 (рис- 8-37).
Можно показать, что в данных ус-
ловиях точка 2 и весь участок Ьр
неустойчивые. Следовательно, и
в цепи рис. 8-36,а имеют место ре-
лейные режимы. Объяснить* не-
устойчивость падающего участка Ьр
можно таким же образом, как
в случае последовательной феррр-
резонансной цепи, применяя здесь
понятие избытка тока Д/. При плав-
ном от нуля увеличении тока про-
изойдет скачок напряжения на па-
раллельном соединении от значе-
ния Ub до значения Ua, когда ток
достигнет значения 1ъ. Последую-
щее плавное уменьшение тока до
величины !р вызывает скачкообраз-
ное уменьшение напряжения от
значения Up до значения Ud-
В цепях, содержащих нелиней-
ные конденсаторы и линейные ка-
тушки или оба нелинейных элемен-
та, могут возникать аналогичные
резонансные и релейные эффекты.
Ни по явлениям, ни по методам
анализа эти цепи не отличаются
от рассмотренных феррорезонане-
ных цепей.
Частотные характеристики. Крат-
ко остановимся на частотных ха-
рактеристиках нелинейной последо-
вательной резонансной цепи. Резо-
нансные кривые цепи с нелинейной
индуктивностью или с нелинейной
емкостью качественно одинаковы.
На рис- 8-38 показан вид семейства
резонансных кривых Л (-со) при раз-
личных амплитудах напряжения
Рис. 8-37.
205
источника питания. Под величиной
А можно понимать амплитуду пер-
вой гармоники тока, потока в ка-
тушке, заряда конденсатора и др.
Как видим, резонансные кривые
наклонены в сторону высоких ча-
стот, причем наклон тем больше,
чем больше -амплитуда напряжения
источника так как при этом
сильнее проявляется нелинейность.
В результате, например, при Um=
= Um3 между двумя пунктирными
прямыми график определяет три
возможные амплитуды колебаний,
три -состояния равновесия. Однако
состояния равновесия, соответст-
вующие точкам на участке В\В3 ре-
зонансной кривой, неустойчивые.
При экспериментальном снятии та-
ких нелинейных резонансных кри-
вых с увеличением частоты от нуля
амплитуда А нарастает, достигает
максимума, затем несколько убы-
вает. При частоте тц амплитуда ко-
лебаний скачком уменьшается
(рис. 8-38; вертикаль BiB2). При по-
следующем уменьшении частоты
амплитуда скачком возрастает, ког-
да со = со2 (вертикаль В3В4).
Участок кривой В1В3, как ука-
зывалось, неустойчивый и не может
быть получен экспериментальным
путем. Где находится рабочая точ-
ка при данной частоте со в диапазо-
не сох -мсо2 — на верхней или нижей
устойчивых ветвях — зависит от
предыдущего режима цепи.
Таким образом, в цепи
рис. 8-31,а возможны скачкообраз-
ные изменения амплитуды колеба-
ний при плавном и непрерывном
изменении не только амплитуды на-
пряжения, но и частоты источника
питания (возмущающей силы)- Для
расчета резонансных кривых
рис. 8-38 надо исследовать вынуж-
206
денные колебания в резонансных
нелинейных цепях методом гармо*
нического баланса или методом
итераций и др. Эти вопросы здесь
не затрагиваются.
8-16. НЕЛИНЕЙНЫЕ ЭЛЕМЕНТЫ
ПРИ ОДНОВРЕМЕННОМ
ВОЗДЕЙСТВИИ РАЗНЫХ ЧАСТОТ.
УПРАВЛЯЕМЫЕ НЕЛИНЕЙНЫЕ
ЭЛЕМЕНТЫ
В § 5-3 было показано, что при
одновременном воздействии на не-
линейный элемент разными часто-
тами еще больше обогащается
спектр частот, вырабатываемый не-
линейным элементом, а реакция
(отклик) элемента на воздействие
данной частоты зависит и от воз-
действия другой частоты. На этих
явлениях основан принцип действия
различного рода умножителей и де-
лителей частоты, -управляемых не-
линейных элементов — главных уз-
лов разнообразных электрических
усилителей и преобразователей сиг-*
налов.
При исследовании таких цепей
можно пользоваться уже известны*
ми методами анализа и расчета.
Так, в тех случаях, когда интересу-
ются формой кривой и спектраль-
ным составом, применяют аналити-
ческие и графические методы и ха-
рактеристики нелинейных элемен*-
тов для мгновенных значений.
Весьма распространены устрой-
ства, в которых нелинейный эле-
мент работает в режиме однов|ре-
менного воздействия сигналов по^-
стоянного и синусоидального токов-
От соотношения постоянной и пере-
менной составляющих зависят и
ход процессов в элементе и выбор
наиболее рациональных методов
анализа и расчета цепи. В тех слу*
чаях, когда в нелинейном элементе-
переменная составляющая (тока,
потока и др.) значительно меньше-
постоянной, нелинейный элемент и
всю нелинейную цепь для перемен*
ной составляющей можно линеари*
зировать (см. § 8-18). В тех же слу-
чаях, когда переменная составляю-
щая сравнима с постоянной и когда-
рабочая точка, отображающая ре-*-
жим элемента на его характеристик-
ке, перемещается по существенно
нелинейному участку, линеариза-
ция либо приводит к очень (прибли-
женным результатам, либо вообще
невозможна.
Управляемые сопротивления
(электронные лампы, транзисторы
и др.) уже были неоднократно рас-
смотрены в предыдущих главах.
Управляемая индуктивность
обычно представляет собой катуш-
ку с ферромагнитным сердечником,
намагничиваемым полями разных
частот при помощи одной, двух или
большего числа обмоток. На прак-
тике, однако, распространен не тер-
мин управляемая ‘индуктивность,
а термины — управляемый дрос-
сель, дроссель насыщения, катушка
или дроссель с подмагничиванием.
В одну из обмоток, называемую
управляющей, подается сигнал
(часто постоянного тока), управ-
ляющий режимом работы сердечни-
ка и тем самым режимом в цепи
другой обмотки, называемой рабо-
чей. В зависимости от характера
источников питания, особенно в за-
висимости от относительных вели-
чин полных сопротивлений в цепях
обмоток будет по-разному прояв-
ляться действие сигнала управле-
ния.
Управляемый конденсатор, в от-
личие от многих других управляе-
мых элементов, имеет только два
электрода и представляет -собой
просто нелинейный конденсатор, ве-
личина емкости которого зависит от
приложенного к нему напряжения.
Так, изменением постоянной состав-
ляющей напряжения на конденса-
торе можно, например, управлять
его реактивным сопротивлением для
первой гармоники переменной со-
ставляющей напряжения.
Одним из наиболее перспектив-
ных типов усилителей для техники
СВЧ считается параметрический
усилитель. В параметрических уси-
лителях усиление происходит бла-
годаря периодическому изменению
во времени одного из реактивных
элементов колебательного контура
(емкости или .индуктивности) • В ка-
честве управляемых реактивных
элементов с успехом применяются
катушки с сердечниками из ферри-
та или тонкой ферромагнитной
пленки или полупроводниковые дио-
ды. В последнем случае использует-
ся зависимость емкости переходно-
го слоя диода от величины прило-
женного к диоду напряжения.
8-17. УПРАВЛЯЕМЫЙ ДРОССЕЛЬ.
МАГНИТНЫЙ УСИЛИТЕЛЬ
Рассмотрим, в основном качест-
венно, процессы в управляе-
мом дрос-селе при управлении
постоянным током и различных ре-
жимах рабочей и управляющей це-
пей.
Положим, что к рабочей обмот-
ке wp (рис. 8-39) приложено сину-
соидальное напряжение, а в цепь
управления дополнительно включе-
на индуктивность £Доб такой вели-
чины, что переменный ток, возни-
кающий в этой цепи вследствие ин-
дуктивной связи с рабочей обмот-
кой, можно не учитывать. Прене-
брежем также рассеянием и актив-
ным сопротивлением рабочей цепи.
В данных условиях рабочая цепь
создает в сердечнике синусоидаль-
ную составляющую индукции, ам-
плитуда которой
>т 4,44fwpS
не зависит от тока в управляющей
обмотке. Постоянный ток /у в об-
мотке управления создает в сердеч-
нике постоянную составляющую на-
пряженности 7/у=|/у^у//, величина
207
которой не зависит от параметров
рабочей цепи.
На рис. 8-39 приведены графи-
ческие построения, поясняющие
влияние постоянного подмагничива-
ния на процессы в рабочей цепи.
Гистерезис не учитывается, посколь-
ку здесь он не влияет на качествен-
ную сторону явлений. При токе
управления /у=0 и заданной вели-
чине амплитуды индукции Вт на-
пряженность Нр и ток в рабочей
цепи сравнительно малы.
Ток управления подмагничивает
сердечник, смещает рабочий уча-
сток на характеристике сердечника
в область больших насыщений, что
приводит к увеличению напряжен-
ности поля в сердечнике и тока /р
в рабочей цепи.
Постоянная составляющая индук-
ции Bq определяется не только по-
стоянной составляющей напряжен-
ности Яу, но и переменной состав-
ляющей индукции Вт. При Вт=О
имеем Bq=B'q. Определить величи-
ну Во при данных значениях Ну и
Вт непосредственно не представ-
ляется возможным, так как извест-
ны лишь две «разнохарактерные»
величины: Вт и Ну. Поэтому графи-
ческие построения выполним сле-
дующим образом: зададимся ка-
ким-либо значением индукции
Bq<B'q и, зная Вт, построим кри-
вую В(/), а по ней и кривой
В(Н) —кривую суммарной напря-
женности H(t) =ЯР+Яу. Среднее
за период значение суммарной на-
пряженности Н как раз равно тому
значению Яу, при котором получит-
ся выбранное значение Во (рис. 8-39) •
Разность H(t)—определяет кри-
вую //р(/), пропорциональную кри-
вой тока По последней не-
трудно найти действующее или
среднее значение рабочего тока.
Если полученное значение Ну не
равно заданному, надо повторить
построения при ином значении Bq.
Все эти зависимости можно по-
лучить аналитическим методом,
если дано или найдено аналитиче-
ское выражение характеристики
В(Н). Так, например, если в урав-
нении (5-10) под х понимать, индук-
цию В, а под у — напряженность
Я=ЯР+ЯУ (при этом коэффициент
&>0), то, полагая B = BQi+Bmsin at
из выражения (5-16) легко найдем
напряженность поля управления
Ну = аВй + ЬВ*0 +1,5&В0^,
амплитуды гармоник 7YP1, 77Р2 и
/7р3, действующее значение рабочего
тока /р = уг/2-]-/2 -f-J2 . В токе
ip есть составляющая двойной ча-
стоты (четные гармоники).
Итак, при данном напряжении
на рабочей обмотке величиной ра-
бочего тока можно управлять пу-
тем изменения постоянного тока
в -обмотке управления. Увеличение
тока управления увеличивает рабо-
чий ток, что соответствует умень-
шению эквивалентного индуктивно-
го сопротивления дросселя-
Рассмотрим теперь случай пита-
ния рабочей цепи от источника си-
нусоидального тока. При этом за-
даны напряженности Ну и Яр==-
=77wsin<o/, а изменение индукции
определяется кривой В(Н). Если
в уравнении (5-10) под х понимать
напряженность Я=ЯР+ЯУ, а под
у — индукцию В (коэффициент
Ь<0), то, полагая H^Hy+Hmsinc&t,
по выражению (5-16) 1 прямо рас-
считаем все составляющие индук-
ции и, следовательно^ напряжения
на рабочей обмотке дросселя и=
—WpSdB/dt. Кривые на рис. 5-18
построены как раз для такого слу-
чая. С увеличением напряженности
Ну перепад индукции в сердечнике
и, следовательно, напряжение на
рабочей обмотке уменьшается, что
также соответствует уменьшению
эквивалентного индуктивного со-
противления дросёеля хэ. На
рис. 8-40 качественно показана за-
висимость сопротивления х9 от тока
управления.
208
Отметим возникновение четных
гармоник индукции и 'напряжения
на рабочей обмотке, позволяющее
выделить их и получить магнитный
удвоитель частоты.
Если последовательно с рабочей
обмоткой wp управляемого дроссе-
ля (рис. 8-39) включить сопротив-
ление нагрузки и питать рабочую
цепь от источника переменного на-
пряжения, то можно регулировать
ток и мощность нагрузки, изменяя
ток управления. Такое устройство
называют простейшим магнит-
ным усилителем. Однако
в этом случае ток и напряжение на
рабочей обмотке несинусоидальные,
что существенно затрудняет анализ
и расчет усилителя. В первом при-
ближении для эквивалентных сину-
соид и например активной нагруз-
ки ток
График хэ(/у) был приведен . на
рис. 8-40- Зависимость тока нагруз-
ки от тока управления имеет вид
кривой рис. 8-4'1. Изменение поляр-
ности (знака) тока управления
лишь изменяет фазу четных гармо-
ник на 180°; это наглядно видно
из выражения (5-16). Можно пока-
зать, что на рабочем участке ab
характеристики /н(^у) при правиль-
но выбранных параметрах рабочей
и управляющей цепей приращение
мощности нагрузки больше соответ-
ствующего приращения мощности
управления. Именно поэтому дан-
ное устройство и называется усили-
телем.
Наличие дополнительной индук-
тивности в цепи управления ЛДОб
ухудшает динамические свойства
усилителя — увеличивает его инер-
ционность. Если индуктивность за-
Рис. 8-41.
Рис. 8-42.
менить активным сопротивлением,
то это приведет к дополнительным
потерям мощности управления и су-
щественному уменьшению усиле-
ния. Без всяких же добавочных со-
противлений в цепи управления
схема как усилитель работает не-
эффективно из-за влияния индук-
тивной связи между рабочей и
управляющей цепями.
При практическом выполнении
магнитных усилителей такого типа
для устранения указанных недо-
статков обычно применяют два со-
вершенно одинаковых управляемых
дросселя, обмотки которых соеди-
няют, как показано на рис. 8-42.
Условия намагничивания обоих
дросселей отличаются только по-
лярностью (знаком) постоянной со-
ставляющей магнитного поля, а при
этом, как уже отмечалось, изме-
няется только фаза четных гармо-
ник на 180°. Таким образом, вслед-
ствие встречного включения обмо-
ток управления основная и все
остальные нечетные гармоники
э. д. с., наведенных на обмотках
управления, взаимно компенсиру-
ются, а четные гармоники склады-
ваются. Токи четных гармоник в це-
пи управления не оказывают суще-
ственного влияния на количествен-
ные соотношения в усилителе. По-
этому в подобных схемах магнит-
ных усилителей нет необходимости
в создании ‘большого сопротивления
цепи управления для переменной
составляющей тока.
Рассмотренную пару дросселей
в целом тоже принято называть
управляемым дросселем.
Если питать рабочую цепь от ис-
точника переменного тока, то на-
грузку можно включить парал-
лельно управляемому дросселю
(рис. 8-43). Здесь при /у=0 сопро-
тивление дросселя хэ максимально
209
14—434
и в -сопротивление гн нагрузки от-
ветвляется наибольший ток. С уве-
личением тока управления сопро-
тивление хэ уменьшается и все
меньшая часть тока источника пи-
тания I ответвляется .в сопротивле-
ние нагрузки. Вид характеристики
/н(/у) такого усилителя показан
пунктиром на рис. 8-41.
В случае питания рабочей -обмот-
ки переменным током напряжение
на ней изменяется, когда изменяет-
ся ток управления. Поэтому воз-
можно подключение нагрузки к от-
дельной вторичной рабочей обмот-
ке (рис. 8-44).
Сердечники управляемого дроссе-
ля (рис. 8-4'2—8-44) часто характе-
ризуют семейством кривых одновре-
менного намагничивания, представ-
ляющих зависимость переменной
составляющей индукции от пере-
менной составляющей напряженно-
сти для разных значений напря-
женности постоянного поля. При
различных формах кривой перемен-
ной составляющей индукции или
напряженности и при различных
. сопротивлениях цепи управления
для четных гармоник получаются
различные семейства кривых. Их
вид зависит и от того, для каких
значений напряженности и индук-
ции (амплитудных, действующих,
средних) -строятся кривые.
Если даже пренебречь рассеяни-
ем и активным сопротивлением об-
моток, то при синусоидальном сум-
марном напряжении на рабочих
Рис. 8-44.
обмотках и наличии постоянного
поля переменная составляющая ин-
дукции В~ в каждом сердечнике
будет существенно несинусоидаль-
ной. Однако суммарное потокосцеп-
ление 4f=4fi + 4r2 обоих сердечни-
ков с витками рабочих обмоток бу-
дет -синусоидальным, так как и—
='dx¥Jdt и напряжение синусоидаль-
ное. Кривые одновременного намаг-
ничивания снимают эксперимен-
тально для цепи с двумя сердечни-
ками. При этом, говоря о перемен-
ной составляющей индукции, имеют
в виду некоторую условную усред-
ненную индукцию, -определяемую
по суммарному потокосцеплению
рабочих обмоток. При выбранных
положительных направлениях токов
и потоков на рис. 8-42 суммарная
постоянная составляющая потоко-
сцепления рабочих обмоток равна
нулю и при суммировании полу-
чается лишь переменная составляю-
щая усредненной индукции (обмот-
ки управления включены встречно}
^=-1 + Ф2 ^-В1 + В2 ; (8-65)
здесь Ф1 + Ф+ S._
1,2 w-p Wp ’
площадь сечения одного сердеч-
ника.
Покажем качественно, какой вид
должны иметь кривые такого се-
мейства. Пусть динамическая за-
висимость В(Н} каждого сердечни-
ка дросселя изображается кривой
В (Я) на рис. 8-45. Сопротивление
цепи управления для четных гармо-
ник ради упрощения рассуждений
положим 'бесконечно большим.
Тогда по обмоткам управления про-
текает только постоянный ток, соз-
210
дающий в одном сердечнике по-
стоянную напряженность + Ну,
а в другом —Ну. Зависимость -меж-
ду мгновенными значениями индук-
ции в сердечнике и переменной со-
ставляющей напряженности Н~ бу-
дет изображаться такой же кривой,
как при Ну=0, но смещенной по
оси абсцисс на величину Ну. На
рис. -8-45 показаны смещенные кри-
вые Bi(H~) и В2(Н_) при Hy—2HS
(Hs — напряженность поля, при ко-
торой наступает насыщение). В со-
ответствии ;с (8-65) по ним построе-
на одна из кривых В~(Н~) семей-
ства. Из этой кривой видно, что
при Hy=2Hs и питании рабочей
цепи синусоидальным током пере-
менная составляющая индукции по-
явится только при амплитуде
Hrn^>Hs.
Реальные кривые одновременно-
го намагничивания имеют такой же
вид, но обычно приводятся для ре-
жима практически синусоидальной
индукции В~ и относительно мало-
го сопротивления цепи управления
для четных гармоник; по осям от-
кладываются амплитуда индукции
Вт и среднее значение переменной
составляющей напряженности ЯСр-
На рис. 8-46 приведены для приме-
ра кривые одновременного намаг-
ничивания тороидальных ленточных
сердечников из холоднокатаной ста-
ли Э32О толщиной 0,35 мм при ча-
стоте 50 гц, синусоидальной индук-
ции и малом сопротивлении цепи
управления (подмагничивания) для
четных гармоник.' Такие кривые
используются при расчете магнит-;
ных усилителей.
8-18. ЛИНЕАРИЗАЦИЯ НЕЛИНЕЙНОГО
ЭЛЕМЕНТА, ОБЛАДАЮЩЕГО
ГИСТЕРЕЗИСОМ, ПРИ МАЛЫХ
ОТКЛОНЕНИЯХ ОТ ДАННОГО
РЕЖИМА
Линеаризация нелинейного ак-
тивного сопротивления (в том чис-
ле управляемого) при малых откло-
нениях от данного режима была
уже рассмотрена в первой части
книги и в § 6-6.
В нелинейных элементах, обла-
дающих гистерезисом, процессы при
периодических малых отклонениях
от заданного режима оказываются
более сложными. Рассмотрим воз-
никающие особенности на примере
дросселя с ферромагнитным сердеч-
ником. В конденсаторах с сегнето-
электриками имеют место анало-
гичные явления.
Пусть по обмотке дросселя про-
текает ток
z — Д —Д^, sin Дп Д?
создающий напряженность магнит-
ного поля
Я = /Д + Нт sin со/, Нт < /Д.
Примем для определенности, что
при отсутствии переменной состав-
ляющей рабочая точка находится
на кривой начального намагничи-
вания (точка а, рис. 8-47). При дей-
ствии с некоторого момента сину-
соидального тока рабочая точка
в первую четверть периода будет
перемещаться по кривой начально-
го намагничивания (участок ab).
В следующий полупериод, когда
напряженность суммарного поля Н
уменьшается до своего минималь-
ного значения /Д—Нт, магнитное
состояние определяется верхней ча-
14*
211
стью частного гистерезисного цикла
(участок Ьс). Затем напряженность
и индукция вновь увеличиваются
(участок cd) и т. д. Примерно че-
рез 5—15 (периодов достигается ста-
бильный частный цикл тп.
Итак, в результате наложения
слабого переменного поля на по-
стоянное увеличилась постоянная
составляющая индукции: В,о>Во
(рис. 8-47). Это вызвано не соб-
ственно нелинейностью кривой на-
магничивания, а гистерезисными
эффектами.
Площадь частного цикла соот-
ветствует потерям в сердечнике
при заданной переменной состав-
ляющей тока. При достаточно ма-
лых амплитудах переменного поля
установившийся цикл может быть
представлен малым эллипсом, ко-
торый определяет комплексное со-
противление дросселя для перемен-
ной составляющей тока.
Если пренебречь потерями, то
можно в расчетах заменить част-
ный цикл средней прямой ли-
нией, наклон которой (угол а,
рис. 8-47) определяет так на-
зываемую о бр ат им ую про-
ницаемость цОбр- .
Обратимая проницаемость
максимальна, когда материал °"
размагничен и подмагничиваю-
щее поле Но отсутствует; при
возрастании поля HQ она
уменьшается (рис. 8-48). Важ-
но отметить, что величина цОбр
меньше статической и диффе-
ренциальной магнитных про-
ницаемостей.
В режиме намагничивания
постоянным полем и сравни-
тельно небольшим переменным
полем работают сердечники
дросселей фильтров, включае-
мых после выпрямителей с
целью уменьшения пульсации
(рис. 8-49,а), подмагниченные
сердечники катушек телефонных
электромагнитов и звуковых репро-
дукторов-динамиков (рис. 8-49,6)
сердечники выходных трансформа-
торов некоторых усилительных кас-
кадов (рис. 8-49,в) и др. Расчет ин-
дуктивности, например, дросселя
фильтра должен быть проведен
именно по обратимой проницае-
мости.
Чем больше проницаемость р,Обр
сердечника дросселя, тем меньши-
ми могут быть его размеры. Между
тем из-за больших постоянных по-
лей проницаемость цОбр сравнитель-
но невелика. Оказывается, для уве-
личения индуктивности целесооб-
разно в сердечник дросселя ввести,
как это ни странно на первый
взгляд, воздушный зазор.
Считая дроссель линейным для
переменных малых составляющих
тока i и потока Ф, найдем его ин-
дуктивность
<8'66)
где w—число витков обмотки дрос-
селя, гм—магнитное сопротивление
неразветвледаой магнитной цепи
с воздушным зазором, равное [см.
(7-19) и (7-18)]
Рис. 8-49.
&> <8-67)
212
здесь Zc и /в—средние длины сер-
дечника и зазора.
Максимальная величина индук-
тивности будет при минимуме вели-
чины магнитного сопротивления.
Введение зазора увеличивает вто-
рое слагаемое .в (’8-67), но одновре-
менно существенно уменьшает на-
пряженность ПОСТОЯННОГО поля Но.
Последнее приводит к увеличению
проницаемости р,Обр ((рис. 8-48) и
уменьшению первого слагаемого.
Очевидно, имеется оптимальная ве-
личина зазора, при которой индук-
тивность дросселя будет наиболь-
шей.
В заключение напомним, что ли-
неаризация не позволяет решить
вопросов, принципиально связан-
ных с нелинейностью цепи. Так, при
линеаризации ' нельзя определить
нелинейные искажения усилителя,
амплитуду колебаний лампового ге-
нератора ИТ. д.
Глава девятая
ПЕРЕХОДНЫЕ ПРОЦЕССЫ В НЕЛИНЕЙНЫХ ЦЕПЯХ.
ВОПРОСЫ УСТОЙЧИВОСТИ И АВТОКОЛЕБАНИЙ
9-1. ВВЕДЕНИЕ
В предыдущих главах было пока-
зано, насколько сложнее и разнооб-
разнее физические процессы в уста-
новившемся режиме в нелинейных
цепях, чем в линейных. То же мож-
но сказать и о переходных режи-
мах. Так, в некоторых нелинейных
цепях, . питаемых источниками по-
стоянного напряжения или тока,
во время переходного процесса воз-
никают и не затухают колебания
той или иной частоты — так назы-
ваемые автоколебания. Более
того, оказывается, что автоколеба-
ния могут возникнуть даже в нели-
нейных цепях, описываемых одним
нелинейным дифференциальным
уравнением первого порядка. В ли-
нейных цепях первого порядка, пи-
таемых от источников постоянного
напряжения или тока, колебания
принципиально невозможны, а в це-
пях более высокого порядка при
наличии потерь колебания, если
они возникнут, обязательно зату-
хают.
В тех случаях, когда в аналогич-
ных линейных и нелинейных цепях
переходные процессы качественно
сходны, в последних могут быть су-
щественные отличия в количествен-
ном отношении. Например, пиковые
значения тока или напряжения мо-
гут во много раз превосходить ма-
ксимальные значения установивше-
гося режима, возможно затягива-
ние или ускорение процесса на раз-
личных его этапах и др.
В ряде случаев и установившийся
режим в цепях с источниками пере-
менных напряжений и токов оказы-
вается целесообразным рассматри-
вать как ряд переходных процес-
сов, последовательно возникающих
в данной цепи при сравнительно
резких периодических изменениях
п ар а м етров нел инейных э л ем ентов.
Вопрос устойчивости данного ре-
жима нелинейной цепи, не раз уже
возникавший при изложении мате-
риала предыдущих глав, может
быть достаточно строго рассмотрен
лишь путем анализа переходных
процессов в цепи.
Переходные .процессы в нелиней-
ных цепях описываются нелинейны-
ми дифференциальными уравнения-
ми, для которых не существует об-
щих методов решения. Непримени-
мость принципа наложения очень
осложняет анализ. В нелинейных
цепях невозможны разложение ре-
альных величин на принужденные
и свободные составляющие, что
весьма облегчает расчет переход-
ных процессов в линейных цепях,
а также применение интегралов
Дюамеля и Фурье, основанных на
принципе наложения. Все это обу-
словило разработку большого чис-
ла разнообразных методов, пригод-
ных для решения различных типов
нелинейных уравнений, в зависимо-
сти от характера цепи и от вида
внешних воздействий (источники
питания). Зачастую для анализа
одной и той же цепи приходится
применять даже несколько методов,
213
каждый из которых наилучшим об-
разом выявляет ту или иную сторо-
ну ‘Процесса.
Какой бы метод ни был выбран
для расчета переходного процесса,
необходимо знать соответствующую
динамическую характеристику не-
линейного элемента. Между тем,
как неоднократно отмечалось
выше, динамическая характеристи-
ка в свою очередь -зависит от про-
цессов в элементе, <в частности от
скорости изменения величин, опре-
деляющих режим элемента. Поэто-
му решение задачи для переходно-
го процесса всегда будет в той или
иной мере приближенным. Конечно,
при достаточно медленных процес-
сах можно вести (расчеты по стати-
ческим характеристикам.
9-2. ОБЗОР МЕТОДОВ РАСЧЕТА
ПЕРЕХОДНЫХ ПРОЦЕССОВ
В НЕЛИНЕЙНЫХ ЦЕПЯХ
При расчете переходных процес-
сов в нелинейных цепях применяют-
ся многие из тех расчетных прие-
мов, которые были показаны при ис-
следовании установившихся режи-
мов.
Аналитические методы
предполагают либо аналитическое
выражение характеристики нелиней-
ного элемента, либо ее кусочно-ли-
нейную аппроксимацию.
Лишь для небольшого числа'Ти-
пов нелинейных дифференциальных
уравнений могут быть найдены точ-
ные решения, выраженные извест-
ными элементарными функциями.
Такие уравнения получаются для
простейших нелинейных цепей при
«удачном» аналитическом выраже-
нии характеристики нелинейного
элемента. Обычно же возможно
только приближенное решение, и
это решение может применяться с
достаточной точностью лишь при
определенных режимах работы. Так,
в тех случаях, когда влияние нели-
нейности сравнительно невелико и
в уравнениях цепи нелинейные чле-
ны связаны с относительно малым
параметром, приближенное решение
можно получить аналитическими
методами, объединяемыми общим
названием — методы малого
214
параметра. Ниже будет рас-
смотрен только один из них —- метод
медленно меняющихся амплитуд,
особенно удобный для анализа ко-
лебательных систем и систем, нахо-
дящихся под действием внешних пе-
риодических возмущений (нелиней-
ные цепи переменного тока).
Весьма плодотворным является
аналитический метод с примене-
нием кусочно-линейной
аппроксимации. Метод в
принципе применим к любым нели-
нейным цепям, независимо от «сте-
пени» нелинейности, в частности он
позволяет достаточно просто учесть
гистерезис. Пока рабочая точка,
изображающая состояние нелиней-
ного элемента (или рабочие точки
в случае нескольких элементов), пе-
ремещается в пределах одного ли-
нейного участка его характеристики,
вся цепь описывается линейным
дифференциальным уравнением.
При движении по другим линейным
участкам в другой интервал времени
изменяются лишь . коэффициенты
уравнения в соответствии с иными
наклонами1 участков характеристи-
ки. Решения линейных уравнений
нужно «сшить» («припасовать») на
границах интервалов; так, значения
тока в ветви с индуктивностью и на-
пряжения на конденсаторе в нача-
ле каждого интервала времени
должны быть равны их значениям в
конце предшествующего интервала
времени. Из этих условий опреде-
ляются постоянные интегрирования
и границы временных интервалов
работы на каждом линейном участ-
ке характеристики, причем прихо-
дится решать трансцендентные
уравнения. Здесь много общего с
применением данного метода для
расчета установившегося режима
(§ 8-8).
В системах третьего и более вы-
соких порядков преимущественно
применяется именно метод кусочно-
линейной аппроксимации.
Существенно нелинейные уравне-
ния могут быть решены при помо-
щи численных или графических ме-
тодов. Численные методы
или иначе методы последо-
вательных интервалов в
принципе пригодны для решения
Gi-asi
любого уравнения. Но, ко-
нечно, должны быть числен-
но заданы значения всех па-
раметров и начальные усло-
вия. Полученное решение
относится только к этим
конкретным числовым дан-
ным.
’Все численные методы
имеют много общего: диф-
ференциальное уравнение
заменяется алгебраическим
для приращений зависимых пере-
менных (токов, потоков и т. д.)
за соответствующие интервалы (ша-
ги) независимой переменной — вре-
мени. Решение составляется шаг за
шагом. Каждый шаг должен доста-
вить сведения, необходимые для
выполнения следующего шага.
Найдя в конце каждого интервала
значение одной из величин, связан-
ных друг с другом нелинейной ха-
рактеристикой, находят вторую по
графику этой характеристики. Чаще
применяются известные из курса
высшей математики методы Эйлера
и Адамса — Крылова. Так как чис-
ленное решение требует значитель-
ной вычислительной работы, то с
успехом применяются вычислитель-
ные машины. Главный недостаток
методов последовательных интер-
валов — это постепенное накопле-
ние неизбежных малых ошибок каж-
дого шага.
Болыпинство графических
методов в принципе подобны
численным; здесь построения произ-
водятся шаг за шагом. Точность
зависит от способа построения и
обычно возрастает при увеличении
масштаба графиков.
Остановимся на графических ме-
тодах, непосредственно применимых
к уравнениям первого порядка или к
некоторым уравнениям второго по-
рядка, которые заменой переменной
могут быть сведены к уравнениям
первого порядка.
Встречающиеся на практике про-
стейшие типы уравнений первого
порядка (с разделяющимися пере-
менными)
и (9-1)
могут быть решены при помоги
графического интегрирова-
ния. Определенные интегралы для
вычисления приращений Дх по Lt
или Lt по Lx
и
dx
7 W
находятся по площадям под соот-
ветствующими кривыми/^/) и l/f(x),
показанными на рис. 9-1, а и б. Тре-
бование разделения переменных
приводит к тому, что метод графи-
ческого интегрирования обычно не
может быть применен к цепям пе-
ременного тока.
Основной графический метод при-
ближенного интегрирования изве-
стен под названием метода
изоклин. Этот метод широко рас-
пространен и излагается в курсе
математики. Здесь напомним, что
изоклиной называется геометриче-
ское место точек, в которых каса-
тельные ко всем возможным инте-
гральным кривым имеют одина-
ковый наклон, или, иными слова-
ми, — все интегральные кривые
имеют одинаковую крутизну k. Ме-
тод изоклин непосредственно при-
меняется к уравнению первого по-
рядка вида
(9-2)
где функция f(x, /) непрерывна и
однозначна, за исключением отдель-
ных особых точек. В особых точках
функция f(x, t) становится неопре-
деленной типа 0/0. Графические по-
215
строения выполняются в координа-
тах х и решение получается в ви-
де, кривой х(/), называемой инте-
гральной. Все параметры цепи или
иначе все параметры, входящие в
функцию f(x, /), должны быть зада-
ны численно 1.
Данному значению крутизны k
соответствует алгебраическое урав-
нение
f(x, /)=£, (9-3)
представляющее собой уравнение
изоклины.
Обычно порядок графических по-
строений следующий. В плоскости
(х, t) строятся по уравнению (9-3)
изоклины для различных заданных
значений k (рис. 9-2). Вдоль каж-
дой изоклины наносятся короткие
отрезки прямых с наклоном, соот-
ветствующим значению k. По задан-
ному начальному условию х(0) на-
ходится начальная точка конкрет-
ной интегральной кривой. От этой
точки строится интегральная кривая
так, чтобы ее наклон в точке пере-
сечения с данной изоклиной равнял-
ся наклону отрезков прямых, нане-
сенных на этой изоклине (рис. 9-2).
Разные начальные условия в общем
случае приводят к различным инте-
гральным кривым. Через особую
точку может проходить бесконечное
число интегральных кривых, а в
регулярных точках интегральные
кривые пересекаться не могут.
В общем случае уравнение выс-
шего порядка не может быть реше-
но методом изоклин. Существуют,
однако, уравнения второго порядка,
которые могут быть решены этим
1 Это существенный недостаток всех
методов численного интегрирования, огра-
ничивающий общность результатов и за-
трудняющий обозрение хода процессов при
различных значениях и комбинациях пара-
метров.
216
методом. «Примером служит урав-
нение
§-+/(#• *)=<>• м
Уравнение, в которое независимая
переменная t не входит явно, назы-
вается автономным. Автономные
уравнения второго порядка легка
решаются графически. Они сво-
дятся к уравнению первого порядка
путем введения переменной у =
—dx/dt. Тогда (P-x/dP^ydy/dx и
уравнение (9-4) принимает вид
(9-5)
здесь уже х — независимая пере-
менная и можно применить метод
изоклин.
К таким уравнениям приводит
исследование различных электриче-
ских, радиотехнических и механи-
ческих систем. Так, например, по-
следовательный контур, содержа-
щий линейные г и С, нелинейную
ИНДУКТИВНОСТЬ L = f]‘(4r) и источник
постоянной э. д. с., описывается
уравнением
idt — Э
или
d [fi (Ф)] 6/Ф । । Л(Ф)П
d^ dt ' dt2 * * *' С
Полагая y — dW/dt и обозначая
/2(У)—получаем уравнение
первого порядка вида (9-5):
я—^m+AFb <9'6>
в котором потокосцепление Ф — не-
зависимая переменная. Интеграль-
d^
ные кривые =f (Т) могут быть
вычерчены в поле изоклин (dy/d^P =
= const), если для каждой из кри-
вых задана ее начальная точка, т. е.
начальные условия цепи ЧТ (0) и
d^
Графическое изображение скоро-
сти dW/dt как функции Т* или вооб-
ще скорости у=dx/dt как функций
х называют фазовой тра-
екторией, а плоскость у, х—
фазовой плоскостью.
Мгновенные значения у и х
характеризуют состояние си-
стемы в данный момент; соот-
ветствующая им точка на фа-
зовой, траектории называется
изображающей.
Построение фазовой траек-
тории дает представление о ха-
рактере процесса в цепи без
интегрирования дифференци-
ального уравнения. В общем слу-
чае по семейству фазовых траек-
торий можно судить об основных
общих свойствах исследуемой це-
пи: о влиянии начальных уело*
вий на ход переходного процесса;
об устойчивости или неустойчиво-
сти данного режима; устанавли-
ваются ли при заданных значениях
параметров автоколебания в цепи и
если устанавливаются, то какова их
частота, форма и др. Этот графиче-
ский метод анализа переходных
процессов называют методом
фазовой плоскости.
Если цепь описывается дифферен-
циальным уравнением первого по-
рядка, то все фазовые траектории
лежат на одной кривой. Положение
начальной точки траектории опреде-
ляется начальными условиями.
Пример 9-1. Построить фазовую траек-
торию для напряжения на конденсаторе
при его зарядке от источника постоянной
э. д. с. через полупроводниковый диод
(рис. 9-3,а). Характеристика диода в пря-
мом направлении представляется выраже-
нием u^=aV I. Начальное напряжение на
конденсаторе UqO.
Решение. Найдем уравнение фазовой
траектории ducldt=f\uc). Для цепи рис.
9-3,а
Э — u^+uc = a\fi + ис =
откуда
dac Э2 — 2Эис + «2
а^С 1
(9-7)
На рис. 9-3,6 по уравнению (9-7) по-
строена фазовдя трактория. Точка d на
оси абсцисс, где duddt=b — это точка рав-
новесия (установившийся режим); здесь
ис=Э. При Uq=—0,53 движение изобра-
жающей точки по фазовой траектории на-
чинается с точки bi, при £/о=О,5Э—с точки
Ь% и т. д.
Если цепь описывается диффе-
ренциальным уравнением второго
порядка, то в зависимости от на-
чальных условий начальное поло-
жение изображающей точки может
быть, вообще говоря, в любом месте
фазовой плоскости. Соответственно
существует и бесконечно большое
число фазовых траекторий.
Пример 9-2. Построить фазовые траек-
тории для потокосцепления нелинейной ка-
тушки индуктивности в цепи рис. 9-4 при
включении цепи на постоянное напряже-
ние. Характеристика катушки задана: i—
=0,<1Чгз, где ток выражен в амперах, а по-
токосцепление— «в веберах; £/=«100 в,
= 100 мкф, г=25 ом. Начальное напряже-
ние на конденсаторе Uo может быть раз-
личным.
Решение. Фазовые траектории по-
строим методом изоклин. Воспользуемся
уравнением (9-6), полученным для рас-
сматриваемой цепи, где
f=f1(4r) =0Д W3,
d
и
dy d(dW/dt)
dlP dW
7,5Ф2 4
103Ф3 \
У J
(9-8)
Выбирая в (9-8) постоянное значение
крутизны k — dyld^S = const, получаем
уравнение изоклины
103Ф3
У — — ^_|_7,5ф-2 • (9‘9)!
Рис. 9-4.
217
Рис. 9-5.
На рис. 9-5 изображено семейство изо-
клин для различных значений крутизны.
Отметим, что .наклон отрезков прямой на
изоклинах должен соответствовать выбран-
ным масштабам осей. По независимым на-
чальным условиям i(0) =0 и uc(O) — Uo на-
ходим начальное положение изображаю-
щей точки
с№
Ф(0)=0,—тт- = y(0)=U — Ue.
ai t=o
На рис. 9-5 построены две фазовые тра-
ектории для Z7o=0 и £7о=!150 в. Обе тра-
ектории имеют вид сворачивающихся спи-
ралей, сходящихся в начале координат —
особой точке или точке равновесия d^ldt—
=0, Чг=0 (установившийся режим). Вид
фазовых траекторий говорит о том, что при
заданных параметрах цепи переходный
процесс носит характер затухающих коле-
баний независимо от начальных условий.
Можно легко найти максимальное значе-
ние потокосцепления и, следовательно, то-
ка переходного процесса.
Перемещение изображающей точ-
ки по траектории в неявной форме
зависит от времени. Поэтому опре-
деление функций времени х(/) или
y(t) требует дополнительного чис-
ленного или графического интегри-
рования.
Важно отметить, что графическое
решение при помощи фазовой пло-
скости не требует упрощающих
предположений, например, предпо-
ложения малой нелинейности.
При кусочно-линейной аппрокси-
мации характеристики нелинейного
элемента построение фазовой траек-
тории существенно упрощается. На
каждом интервале цепь рассматри-
вается как линейная, а *для линей-
ных цепей первого или второго по-
рядка фазовые траектории имеют
простые аналитические выражения.
Так, в линейных цепях первого
порядка (г, С; г, L) фазовые траек-
тории — прямые линии. В линейной
цепи второго порядка (;г, L, С) при
г<2 V L/C колебательный затухаю-
щий процесс отображается на фазо-
вой плоскости математически точ-
ными логарифмическими спира-
лями.
В нелинейных цепях постоянного
тока (не содержащих источников
переменного напряжения или тока)
может, как указывалось, существо-
вать режим устойчивых автоколеба-
ний. При этом получается замкну-
тая фазовая траектория, называ-
емая предельным циклом.
В зависимости от начальных усло-
вий переходного процесса режим
установившихся автоколебаний изо-
бражается на фазовой плоскости
(рис. 9-6) кривыми, стремящимися
(свиваясь или развиваясь) к пре-
дельному циклу (см. § 9-10).
Подробное рассмотрение всех ме-
тодов анализа переходных процес-
сов в нелинейных цепях выходит за
рамки курса ТОЭ. Поэтому здесь
ограничимся лишь основными поня-
тиями и сравнительно простыми
примерами, иллюстрирующими
особенности процессов в нелиней-
ных цепях в качественном и коли-
чественном отношениях.
218
9-3. ВКЛЮЧЕНИЕ ДРОССЕЛЯ
СО СТАЛЬНЫМ СЕРДЕЧНИКОМ
НА СИНУСОИДАЛЬНОЕ
напряжение
Переходный процесс при включе-
нии дросселя со стальным сердеч-
ником на синусоидальное напряже-
ние (рис. 9-7) представляет практи-
ческий интерес; он возникает, на-
пример, при включении ненагру-
женного трансформатора (транс-
форматора на холостом ходу).
Дифференциальное уравнение це-
пи запишем в виде
—U™ sJn (<»t + a) (9-10)
ИЛИ
^-Fr-^-=t/TOsin(®/+a). (9-11)
Это уравнение нелинейное, по-
скольку нелинейна связь потоко-
сцепления с током (L = 4r/f=#const),
правая•часть является периодиче-
ской функцией времени, что сущест-
венно затрудняет решение задачи.
Применение метода кусочно-линей-
ной аппроксимации характеристики
катушки потребовало бы очень
большой вычислительной работы,
так как пришлось бы на протяже-
нии нескольких периодов несколько
раз за период (не менее шести)
«сшивать» решения, определяя по-
стоянные из трансцендентных урав-
нений. Поэтому здесь наиболее при-
годен метод последовательных
интервалов.
Решим задачу приближенно, вве-
дя ряд упрощающих допущений.
Пренебрежем гистерезисом и вооб-
ще потерями в стали; тогда можно
принять, что кривая на рис. 9-8,а
представляет динамическую харак-
теристику дросселя.
Рис. 9-7.
В тех случаях, когда в устано-
вившемся режиме справедливо не-
равенство
с№
Lm dt
мак с
(9-12)
(обычно в цепях энергетических
систем), влияние члена ir в урав-
нении (9-10) на закон изменения
Ч1* будет невелико. Следовательно,
можно внести в слагаемое ir неко-
торую неточность, чтобы значитель-
но упростить решение задачи, не
рискуя сильно исказить результат.
Так, пренебрежем нелинейностью
члена ir, т. е. примем, что индук-
тивность L в уравнении (9-11) не
зависит от потока (в этом и будет
заключаться упомянутая неточ-
ность). Совсем пренебречь сопро-
тивлением цепи при расчете пере-
ходного процесса нельзя, так как
тогда затухание будет отсутство-
вать, и нельзя будет рассчитать пе-
реход к установившемуся режиму.
При расчете же установившегося
режима и принятом условии (9-12)
можно пренебречь падением напря-
жения на сопротивлении.
В предположении Л = const урав-
нение (9-11) становится линейным
и легко решается; учитывая, что
здесь W(0) =0, имеем:
== ’J’np + ’S’cb = — cos (arf-J-a)-)-
__ r—
+ TTOcosae~L. (9-13)
Принужденная и свободная со-
ставляющие в момент включения
будут наибольшими, если а=0 (или
а=л); при этом максимальное зна-
чение потокосцепления в переход-
ном процессе будет также наиболь-
шим (рис 9-8,6).
219
Рис. 9-9.
Зависимость тока от времени на-
ходим графически по найденной за-
висимости ЧД/) и кривой /(Ч7). На
рис. 9-9 показан график i(t) при
а = 0. Как видно из рис. 9-8 и 9-9,
максимальное значение тока /макс
переходного процесса может во мно-
го раз превышать значение ампли-
туды тока 1т в установившемся ре-
жиме, тогда как в аналогичной ли-
нейной цепи /макс<2/т. В этом су-
щественное отличие в количествен-
ном отношении между нелинейной
и.линейной цепями.
Необходимо еще выяснить, какое
значение индуктивности L следует
подставить в выражение (9-13).
Чем больше Л, тем медленнее зату-
хает свободная составляющая по-
токосцепления и тем больше воз-
можное значение ЧгМакс и, следова-
тельно, тока /макс- Для оценки ма-
ксимальных длительности переход-
ного процесса и величины так на-
зываемого ударного тока /макс надо
подставлять наибольшее возможное
значение А, определяемое по харак-
теристике дросселя (рис. 9-8,а) на
начальном линейном участке. Оче-
видно, что резкое увеличение тока
/макс будет лишь в том случае, если
при Чг=Чгмакс рабочая точка на ха-
рактеристике катушки (рис. 9-8,а)
достаточно далеко заходит в об-
ласть насыщения. В силовых транс-
форматорах с целью уменьшения их
размеров, веса и стоимости устано-
вившийся режим рассчитывается
обычно так, чтобы максимальное
значение индукции находилось
вблизи насыщения. При этом и про-
исходит резкое возрастание тока в
переходном режиме.
В реальных условиях броски тока
уменьшаются вследствие влияния
рассеяния и вихревых токов. Тем
не менее ток при включении йена-
груокенного трансформатора может
в несколько раз превысить ампли-
220
туду тока при номинальной нагруз-
ке. В большинстве случаев броски-
тока опасны не своим тепловым-
воздействием на обмотки, приборы
и пр., а возникающими при этом
в них механическими (электродина-
мическими) усилиями.
Наличие гистерезиса может при-
вести еще к более резкому увеличе-
нию тока переходного процесса.
Действительно, если перед включе-
нием дросселя было остаточное по-
токосцепление 4Jo>0, то при а=О
начальное значение свободной со-
ставляющей потокосцепления уве-
личится до Ч^+ЧД и соответствен-
но увеличатся значения Ч^акс и
^макс*
При достаточно большом сопро-
тивлении в цепи, когда вместо
(9-12) имеем обратное неравенство
Imr>ULm=-^
макс
можно принять, что влияние члена
dW/dt в уравнении (9-110) на закон
изменения тока невелико. Пренеб-
регая теперь нелинейностью этого
члена и положив L = const, получим
линейное уравнение для тока
ir+L = Um sin №+
откуда
/макс
2Um
r ’
Кривую ¥(/) находим по кривым
/(/) и ЧД/).
Аналогичные процессы возникают
при подключении нелинейного кон-
денсатора к источнику синусоидаль-
ного напряжения. Здесь при доста-
точно большой емкости, когда в
установившемся режиме
во время переходного процесса мо-
гут быть значительные перенапря-
жения на конденсаторе (по сравне-
нию с UCm)-
Остановимся теперь на специфике
рассматриваемого процесса в слу-
чае дросселя с прямоугольной пет-
лей гистерезиса (§ 8-11). Кусочно-
линейная аппроксимация его ха-
рактеристики отрезками прямых,
параллельных осям координат,,
предельно упрощает анализ. При
движении рабочей точки
по горизонтальным участ-
кам, где ц=0 и Л=0, в
цепи рис. 9-7 остается од-
но сопротивление г и со-
ответствующий режим ус-
танавливается сразу; при
движении по вертикаль-
ным участкам, где р=оо
и Л=оо, «постоянная
времени» бесконечно ве-
лика и ток остается не-
изменным, таким, каким
он был в самом, начале
движения по вертикаль-
ному участку.
Условимся, что поло-
жительный импульс на-
пряжения на дросселе
создает положительное
приращение потокосцеп-
ления ДТ*. На рис. 9-10
показаны кривые измене-
ния напряжения на со-
противлении 1г (в другом
масштабе — тока) и на-
пряжения источника пи-
тания ^(а=0) для трех различных
значений начального потокосцепле-;
ния: а) б) Ч%=0, в) Ч^о=
= —4%. Параметры цепи таковы, что
максимальный перепад потокосцеп-
ления ДЧГМ, пропорциональный ма-
ксимальному импульсу напряжения
на дросселе (косая штриховка на
рис. 9-10), меньше, чем 2ЧГ<3. На кри-
вых и на частных циклах одинако-
выми цифрами обозначены соответ-
ствующие друг другу положения ра-
бочей точки.
Максимальная длительность пе-
реходного процесса при любых зна-
чениях То не превышает одного по-
лупериода напряжения и (при а =
=0). Эта характерная особенность
элементов с прямоугольной петлей
используется в ряде устройств ди-
скретной вычислительной техники.
При То = —Ts переходный процесс
вообще отсутствует. При Чго#=—4rs
в течение части (или всего) перво-
го полупериода величина тока
ограничивается только сопротивле-
нием и тоже может значительно
превышать максимальное значение
тока в установившемся режиме.
При выбранной аппроксимации
задача решается точно при любых
значениях г. Получить все количе-
ственные соотношения нетрудно,
пользуясь результатами, приведен-
ными в § 8-1’1.
Отметим, что в рассматриваемых
условиях в установившемся режиме
остается постоянная составляющая
потокосцепления (ее не будет толь-
ко при Чг0=—ДЧ^/З и при ДЧГМ==
=24rs). В реальных условиях при
достаточно больших ДТ’м постоян-
ная составляющая потокосцепления
равна нулю. Это объясняется тем,
что реальные динамические циклы
не имеют вертикальных боковых
сторон и цикл постепенно стяги-
вается (вниз или вверх) к симмет-
ричному частному циклу.
9-4. АНАЛИТИЧЕСКИЙ РАСЧЕТ
С ПРИМЕНЕНИЕМ
КУСОЧНО-ЛИНЕЙНОЙ
АППРОКСИМАЦИИ
Рассмотрим в качестве примера
переходный процесс при включении
на синусоидальное напряжение &==
= Um sin (cD'Z + a) однополупериод-
ного выпрямителя с активной нагруз-
кой и сглаживающим конденсато-
ром (емкостным фильтром), пола-
221
Рис. 9-11.
гая, что индуктивностей в цепи нет
(рис. 9-11).
Ограничимся случаем сравнитель-
но небольших частот и скоростей
изменения напряжения на конден-
саторе, когда можно пренебречь
межэлектродной емкостью вентиля
и считать его безынерционным эле-
ментом, т. е. скорость установления
внутренних процессов в вентиле
бесконечно большой. Кроме того,
пренебрежем прямым сопротивле-
нием и обратными токами, короче —
будем считать вентиль идеальным.
При этих допущениях решать зада-
чу можно лишь при таких началь-
ных фазах а напряжения источника
питания, при которых w(0)<0, так
как в противном случае в момент
включения был бы бесконечно
большой ток. Примем в дальнейшем
<а = 0.
В первый (положительный) полу-
период после замыкания рубильни-
ка вентиль открывается \ обе па-
раллельные ветви подключаются к
источнику напряжения, не оказывая
друг на друга никакого влияния.
Очевидно, здесь зарядка конденса-
тора будет идти без переходного
процесса. Напряжение нагрузки
ив=ис = и= Um sin at, ток нагрузки
/ —sjn ад/
Н Гн
а в емкости
ic= ®)CUm cos со/.
Ток через вентиль (рис. 9-1,1)
i—
в момент времени ti становится рав-
ным нулю и далее стремится про-
текать в противоположном направ-
лении. Но вентиль не пропускает
ток в обратном направлении; по-
1 При а<0 вентиль будет заперт до на-
чала первого положительного полупериода.
этому в момент вентиль запи-
рается и ток остается равным ну-
лю. Из условия 1=0 находим мо-
мент t\
= _ wCum cos (9-14)
Как только вентиль запрется, за-
рядка конденсатора прекратится и
он начнет разряжаться через сопро-
тивление нагрузки. Напряжение
Иц — н — U777, sin н .
Графики токов и напряжений пока-*
заны на рис. 9-12.
Конденсатор разряжается, и вен-
тиль остается запертым до тех пор,,
пока к вентилю приложено отрица-
тельное напряжение:
ив = и—ын<0.
Ясно, что весь второй (отрицатель-
ный) полупериод вентиль будет
заперт, а в следующий полупериодг
где и>0, наступит момент времени
/2, когда напряжение на вентиле ив
станет равным нулю и далее стре-
мится быть положительным. Но как
только напряжение на вентиле
станет больше нуля, вентиль открой
ется. Конденсатор начнет дополни-
тельно заряжаться, опять-таки без.
переходного процесса, поскольку
при t=t2 напряжение на конденсат-
тор е ис = и. Ток нагрузки iB=ulrB.-
Так как определяющее момент t%
уравнение
ив — ti z/g — Г^ттт, sin
— sin ГнС = 0
222
Рис. 9-13.
не решается аналитически относи-
тельно t2, то момент t2 находим гра-
фически по точке пересечения экс-
поненты ин=ис и синусоиды и
(рис. 9-Г2).
В момент •/3=/i + T вентиль снова
запрется, и далее процесс повто-
ряется.
Очевидно, какой бы ни была по-
стоянная времени т=(гнС, устано-
вившийся режим наступает к концу
первого полупериода после включе-
ния (при начальной фазе а<0 — к
концу первого периода).
Зная аналитические выражения
напряжения на нагрузке на всех
интервалах и границы интервалов,
нетрудно вычислить постоянную со-
ставляющую напряжения <70. Кон-
денсатор не только уменьшает
пульсации напряжения на нагрузке,
но и увеличивает Uo. Как следует из
уравнения (9-14)
tg m/; = — wrHC — —
и, следовательно, чем больше отно-
шение постоянной времени т к пе-
риоду напряжения источника пита-
ния, тем ближе угол со/д к 90°, тем
меньше пульсации и больше Е/о.
В пределе U0~^Um; такое выпрям-
ление называют амплитудным.
Амплитудное выпрямление лежит в
основе принципа действия некото-
рых амплитудных (пиковых) лам-
повых вольтметров.
Рассмотренный пример иллюст-
рирует также анализ установивше-
гося режима методами расчета ряда
переходных процессов, последова-
тельно возникающих в цепи при
резких изменениях параметров не-
линейного элемента на отдельных
интервалах периода установившего-
ся режима. В данном случае имеет
место изменение сопротивления вен-
тиля от нуля до бесконечности и
наоборот.
Пример 9-3. Цепь, состоящая из после-
довательно соединенных нелинейного дрос-
селя и активного сопротивления нагрузки,
подключается к источнику однополярных
импульсов напряжения прямоугольной фор-
мы высотой U с длительностью перио-
дом Т и скважностью T/ti (рис. 9-13, где
скважность равна 2). Число витков обмот-
ки дросселя w, сопротивление гн. Сер-
дечник дросселя с .сечением S и средней
длиной I выполнен из материала с пря-
моугольной статической петлей гистерези-
са (Bs, Нс). Частные циклы прямоуголь-
ные, симметричные — шириной 2Нс, несим-
метричные — шириной Нс или 2ЯС.
Построить кривую изменения напряже-
ния нагрузки ив во времени, полагая, что:
1) среднее за период значение напряжения
источника питания U/2 мало по сравнению
с напряжением насыщения дросселя (8-46);
2) положительный импульс напряжения на
дросселе создает положительное прираще-
ние индукции; 3) начальное условие В (0) =
Реше н и е. При сравнительно малых
напряжениях источника питания сравни-
тельно .мала скорость изменения индукции
и в первом приближении можно принять
динамические зависимости В(Н) совпа-
дающими со статическими. Кусочно-линей-
ная аппроксимация зависимости В(Н) от-
223
резками прямых, параллельных осям коор-
динат, позволяет легко найти решение ана-
литически.
Пока идет перемагничивание, ток i
остается неизменным, равным
НС1
При этом напряжение на дросселе и ско-
рость возрастания индукции постоянны
dB
Ид wS и — Iс Гд.
Один импульс напряжения на дросселе
{вольт-секундная площадь) создает прира-
щение индукции
1 Г
ЬВ wS J —
о
За время действия импульса источника
питания магнитное состояние изменяется
по небольшому несимметричному частному
циклу. Во время паузы индукция сохра-
няет то значение, которого она достигла
ж концу предшествующего импульса
(рис. 9-13).
Допустим, что
где п — целое число. Тогда очевидно, что
к концу n-го импульса индукция B = +BSr
а во время (n-Hl)-ro импульса индукция
уже не будет изменяться и .практически
все напряжение питания (так как г гн)
падает на сопротивлении нагрузки
(рис. 9-13). Подбором параметров можно
достигнуть значительной разницы уровней
напряжения на нагрузке до и после насы-
щения дросселя. Таким образом, суще-
ственное напряжение на нагрузке un=U
появляется лишь по истечении времени t=
=пТ.
Подобные простые узлы применяются
при построении бесконтактных счетчиков
импульсов, устройств для задержки сиг-
- налов во времени и др.
Рис. 9-14.
чески неосуществим. Это значит,
что данный режим электрического
равновесия, при котором удовле-
творяются уравнения Кирхгофа, со-
ставленные для установившегося
режима расчетной схемы, в реаль-
ной цепи осуществить невозможно.
Принято такие режимы равновесия
называть неустойчивыми. Но
в рассматриваемых условиях при
тех же источниках питания и соот-
ношениях параметров всей цепи
обязательно есть еще (кроме не-
устойчивого) не менее одного ре-
жима электрического равновесия—
расчетного установившегося режи-
ма, который в принципе физически
осуществим и который называется
устойчивым. Например, в цепи
с неодназначной вольт-амперной
характеристикой, когда получается
несколько расчетных установивших-
ся режимов, часть этих режимов
может быть неустойчивой.
На рис. 9-14 приведена S-образ-
ная статическая вольт-амперная ха-
рактеристика нелинейного сопро-
тивления (например, неоновой лам-
9-5. ПОНЯТИЕ ОБ УСТОЙЧИВОСТИ
РЕЖИМОВ В НЕЛИНЕЙНЫХ ЦЕПЯХ
Наличие в цепи с источниками
•постоянного напряжения или тока
хотя бы одного нелинейного элемен-
та с вольт-амперной характеристи-
кой, имеющей участок с отрицатель-
ным дифференциальным сопротив-
лением, может при определенных
соотношениях параметров цепи при-
вести к тому, что рассчитанный
установившийся режим будет физи-
224
пы, электрической дуги — см. § 5-2)
«л (^л) • При последовательном
соединении его с линейным сопро-
тивлением г и питании цепи от
источника постоянного напряжения
U режим цепи легко рассчитывается
методом пересечений (§ 6-4). Про-
водя линию «нагрузки» (рис. 9-14),
находим, что при u=Ua и >г=га воз-
можны три точки пересечения —
три состояния (точки) равновесия,
причем только точка 2 находится на
падающем участке. При u=Ub и
г=гъ на падающем участке распо-
ложены две точки 2' и 3', а при
и=(/с и г=гс получается единствен-
ная точка пересечения — точка 3".
На рис. 9-15 приведена N-образ-
ная статическая вольт-амперная ха-
рактеристика нелинейного сопро-
тивления (например, .туннельного
диода — см. § 5-2). При последова-
тельном соединении такого нели-
нейного и линейного сопротивлений
и питании цепи от источника по-
стоянного напряжения u—U, а так-
же при параллельном соединении
их и питании от источника тока
имеются аналогичные точки равно-
весия (рис. 9-15).
Конечно, возможны и другие ва-
рианты расположения линии на-
грузки и точек равновесия. Еще
большее разнообразие наблюдается
при соединении двух или более не-
линейных сопротивлений.
В цепях с источниками постоян-
ного напряжения или тока первые
и вторые производные по времени
(скорости, ускорения)' токов и на-
пряжений, входящие в дифферен-
циальные ураънения, которые опи-
сывают режим цепи, в состоянии
равновесия обращаются в нуль
(о режиме автоколебаний см. §9-8).
Но во всякой физической системе
возникают сравнительно малые не-
регулярные силы, например, флук-
туационного характера. Поэтому
реальная электрическая цепь ни-
когда не может находиться точно
в состоянии равновесия и совер-
шает малые движения вблизи со-
стояния равновесия.
При отклонении • от состояния
равновесия в цепи возникают вну-
тренние силы, которые могут либо
возвращать систему к состоянию
равновесия, либо еще удалять от
состояния равновесия. В первом
случае равновесие устойчиво, а во
втором — неустойчиво.
Таким образом, решение вопроса
об устойчивости связано с опреде-
лением тех явлений, которые имеют
место, если цепь вывести из равно-
весного состояния. Сами по себе
простейшие расчетные схемы, на-
пример, на рис. 9-14 и 9-15, не мо-
гут дать представления об устойчи-
вости. Необходимо учесть в схеме
дополнительно накопители энер-
гии — емкости или индуктивности,
создающие инерционность и позво-
ляющие найти закон изменения со-
стояния цепи. В реальных цепях
всегда присутствуют такие инер-
ционные элементы — межэлектрод-
ные и другие емкости, индуктивно-
сти контуров, вводов и др. Величи-
ны дополнительных параметров —
емкостей и индуктивностей обычно
относительно малы, в связи с чем
их принято называть малыми
параметрами; ими, как пра-
вило, пренебрегают при расчете
установившегося режима, но они
могут сыграть основную роль при
решении вопроса об устойчивости
состояния равновесия. (Строго го-
воря, речь должна идти о малости
коэффициентов дополнительных чле-
нов дифференциальных уравнений,
появляющихся при учете того или
иного малого параметра.)
Какие малые параметры необхо-
димо учитывать при анализе цепи
и какие не играют существенной
роли? Для сопротивлений разного
типа — S (рис. 9-14) и N (рис.
9-15) 1 — различны и малые параме-
тры, которые необходимо учитывать
при анализе устойчивости. В сопро-
тивлении типа S ток является не-
однозначной функцией напряжения,
и при питании его от источника на-
пряжения казалось бы возможны
скачки тока. Однако в реальных
условиях всегда имеется (пусть
даже очень малая) индуктивность,
и скачков тока не может быть. По-
этому в расчетную схему необхо-
1 Речь идет, конечно, о сопротивлениях,
имеющих S-образную или N-образную
вольт-амперную характеристику при дан-
ном расположении осей координат.
15—434
225
димо вводить последовательно с не-
линейным сопротивлением типа S
малую индуктивность. Рассуждая
аналогично, придем к выводу, что
в случае сопротивления типа N
в расчетную схему необходимо вве-
сти параллельно этому сопротивле-
нию малую емкость.
Существуют различные определе-
ния устойчивости, каждое из кото-
рых более рационально применять
при анализе систем того или иного
типа. Остановимся здесь только на
наиболее распространенном усло-
вии устойчивости А. М. Ляпунова —
устойчивости для малых отклонений
от положения равновесия (устойчи-
вость «в малом»). Эта устойчивость
именно и важна, когда исследуют
возможность данного состояния
равновесия: если оно устойчиво по
Ляпунову, то оно физически осу-
ществимо, если нет, то не осуще-
ствимо. В последнем случае при
любых сколь угодно малых началь-
ных отклонениях процесс в цепи
будет самопроизвольно развиваться
в направлении дальнейшего отхода
от. такого состояния равновесия,
пока система не придет в новое, но
уже устойчивое состояние равнове-
сия.
Согласно Ляпунову, нелинейная
цепь линеаризуется для малых при-
ращений в области исследуемой
точки. При анализе режима цепи
для приращений нелинейные сопро-
тивления заменяются их дифферен-
циальными сопротивлениями, кото-
рые могут быть положительными и
отрицательными {§ 6-6). Для полу-
ченной таким образом линейной
цепи составляется характеристиче-
ское уравнение и исследуются его
корни. Если вещественные части
всех корней отрицательны, то воз-
никшие малые приращения (сво-
бодные составляющие) будут со
временем - затухать, что свидетель-
ствует об устойчивости режима.
Если хотя бы один корень имеет
положительную вещественную часть,
то приращения будут не затухать,
а нарастать, что свидетельствует
о неустойчивости режима.
Корни с положительной веще-
ственной частью могут быть только
при наличии в цепи нелинейных
226
сопротивлений с падающими участ-
ками вольтамперных характеристик
(типа S или N), т. е. с отрицатель-
ным дифференциальным сопротив-
лением. Действительно, если бы
в линейной цепи был такой корень,
то все переменные (токи, напряже-
ния и др.) в цепи возрастали бы
неограниченно. В результате в лю-
бом реальном устройстве движу-
щиеся механические детали дошли
бы до упоров или сломались, а эле-
менты электрических цепей пришли
в режим насыщения или же сго-
рели. Это лишний раз показывает,
что всякая реальная цепь может
рассматриваться как линейная
только в известных пределах.
По мере отхода от точки равно-
весия будет изменяться дифферен-
циальное сопротивление нелиней-
ного сопротивления, что собственно’
и приведет к ограничению возрас-
тания приращений, и установится
новое устойчивое состояние. Однако
при этом возникает вопрос, дей-
ствительно ли исследование устой-
чивости по приближенным линей-
ным -уравнениям дает точное суж-
дение об устойчивости реальной
нелинейной цепи в данной точке
равновесия. Ляпунов доказал, что
если все вещественные части корней
отрицательны, то локально («в ма-
лом») ’ устойчива не только линей-
ная приближенная система, но и
исходная нелинейная.
Так; для системы второго поряд-
ка. характеристическое уравнение
имеет вид
#оР2 + а1р + ^2==6
и оба корня будут иметь отрица-
тельную вещественную часть, если
все коэффициенты afe(£=0^ 1, 2)
положительны. Система неустой-
чива, если один из коэффициентов-
отрицательный.
Решение характеристического*
уравнения высокого порядка может
оказаться весьма трудоемкой зада-
чей. Однако при решении только
вопроса устойчивости нет необходи-
мости вычислять значения корней»
достаточно определить только зна-
ки их вещественных частей. Для
этого применяют либо аналитиче-
ский критерий Рауса-Гурвица, осно-
ванный на свойствах определителей,
'составленных из коэффициентов ak,
либо графический критерий Най-
квиста, которые здесь не рассма-
t триваются.
Для иллюстрации анализа устой-
чивости по Ляпунову рассмотрим
j ставший классическим пример цепи
с неоновой лампой (или электриче-
ской дугой).
Пример 9-4. В цепи рис. 9-16 при пи-
тании ее от источника постоянного напря-
К жения состояниями равновесия (diLldt=
=0, ducldt=ty являются точки пересече-
k ния статической характеристики неоно-
вой лампы цл (*л) типа S (рис. 9-14)
р с линией нагрузки u^ = U—ir. Требуется
исследовать устойчивость состояний рав-
г, новесия в различных .режимах и при из-
менении величин L и С, полагая динами-
ке ческую характеристику • лампы совпадаю-
щей со статической.
Решение. Заменяя для приращений
- нелинейный элемент дифференциальным
£ сопротивлением гд, составляем характери-
стическое уравнение
Zbx (р) = Гд + pLA~г \/рС
или
Р*+~Г (т^+ га)+?Ес (г + Гд) = °-
(9-15)
Характер корней зависит от значений
четырех параметров: г, С, £, гд; при этом
i? г, £, С могут принимать только положи-
тельные, а Гд — как положительные, так
и отрицательные значения.
Из (9-15) видно, что все состояния рав-?
новесия, где гд>0 (точки 7, Г, 5 и т. д.
на рис. 9-14) устойчивы при любых соот-
ношениях параметров, так как все коэф-
фициенты ak уравнения (9-15) положи-
тельны. На падающем участке, где гд<0,
состояния будут устойчивы, если все коэф-
фициенты ak останутся положительными.
* Отсюда два условия устойчивости на па-
L дающем участке, которые должны удов-
; летворяться одновременно
|гд|<г (9-16)
! и
кд! < или L > |гд| гС. (9-17)
Точки 2 и 2' неустойчивы, так как
здесь не выполняется условие (9416). Точ-
ки 3' и 3", где условие (9-16) выполняет-
ся, могут быть устойчивыми или неустой-
чивыми, в зависимости от того, выпол-
няется ли условие (9-17) при данных зна-
чениях £ и С.
15*
Рис. 9-16.
Если состояние устойчиво, то очевид-
но, что уменьшение емкости не изменяет
его. В этом смысле малость величины ем-
кости .в данной схеме не существенна для
устойчивости состояний. Наоборот, умень-
шение емкости {(если оно практически воз-
можно) может привести к устойчивости
точек равновесия 3' и 3". Иным оказы-
вается влияние индуктивности; уменьшение
ее все более затрудняет выполнение усло-
вия (9-17). -При достаточно малой индук-
тивности и при том, что любая схема об-
ладает некоторой, пусть малой, емкостью,
состояния 3' :и 3" будут неустойчивыми.
Между тем, если вообще в цепи рис. 9-16
при С положим £=0 (пренебрежем
данным малым параметром), то придем
к ошибочному выводу об устойчивости
этих точек равновесия. Действительно, при
£=0 характеристическое уравнение цепи
имеет единственный корень р=—(гЧ-
+ гд)/£ггд» который отрицателен для со-
стояний равновесия 3' и 3".
Рассмотренный пример иллюстрирует,
в частности, отмеченное выше положение,
что при анализе устойчивости цепи, со-
держащей S-образное нелинейное сопро-
тивление, следует учитывать индуктивность
цепи.
Необходимо также отметить, что иссле-
дование состояний равновесия здесь вы-
полнялось по статической характеристике
неоновой лампы (электрической дуги). По-
этому полученные результаты будут удов-
летворительными только при достаточно
медленных изменениях режима в нелиней-
ном сопротивлении, которое получается при
достаточно больших £ или С. Если же £
и С малы .и в схеме имеют место быстрые
изменения режима, то инерционность про-
цессов (ионных) в нелинейном сопротив-
лении играет существенную роль, и нужно
пользоваться динамической характеристи-
кой, учитывающей с той или иной сте-
пенью точности динамику тлеющего или
дугового разряда. Так, инерционность ду-
гового разряда приводит к тому, что и без
всякой индуктивности в цепи дуги состоя-
ния в точках 3' и 3" на падающем участ-
ке будут устойчивы (поскольку инерцион-
ность эквивалентна некоторой индуктивно-
сти).
Итак, при определенных соотно-
шениях параметров цепи с источ-
никами постоянного напряжения
или тока некоторые состояния рав-
новесия неустойчивы. Это приводит
227
к релейным эффектам в ряде
устройств (§ 9-7). Но что же будет
происходить в цепи, если есть
только одна точка равновесия и
она неустойчивая (точка 3" на
рис. 9-14)? Оказывается, в этом
случае (а также в целом ряде дру-
гих) возникает режим автоколеба-
ний (§ 9-8).
Здесь рассматривались цепи, со-
держащие нелинейные сопротивле-
ния. Это объясняется тем, что
в цепях с источниками питания по-
стоянного напряжения и тока и не-
линейными индуктивностями или
емкостями (без нелинейных сопро-
тивлений) нет нескольких точек рав-
новесия. -Следовательно, при этом и
не возникает вопрос об устойчиво-
сти и, тем более, автоколебаниях.
Значительно более сложен ана-
лиз устойчивости режимов в нели-
нейных цепях переменного тока
(например, в феррорезонансных).
J9-6. УСТОЙЧИВОСТЬ ЦЕПЕЙ
С ОБРАТНОЙ СВЯЗЬЮ
Понятие о цепях с обратной
связью было дано в первой части
книги. Остановимся теперь на влия-
нии обратной связи на устойчивость
и на некоторых, связанных с этим,
особенностях цепей с обратной
связью. ч
Пусть четырехполюсник (звено)
с передаточной функцией W\ (р)
охвачен обратной связью (рис. 9-17),
т. е. к выходу четырехполюсника
присоединяется другой четырехпо-
люсник (звено) с передаточной
функцией ТГ2 (р), выход которого
соединяется с входом первого, куда,
кроме того, поступает основной
входной сигнал. Четырехполюсник
с передаточной функцией Й71(р)
обычно на практике активный (на-
пример, усилитель) а четырехпо-
Рис. 9-17.
люсник обратной связи — часто
пассивный
Входные и выходные величины
могут быть напряжениями или то-
ками, постоянными или перемен-
ными, причем в последнем случае
может быть и постоянная состав-
ляющая. Так, например, когда на
вход звена обратной связи подает-
ся напряжение с выхода основного
звена, говорят, что введена обрат-
ная связь по напряжению.
Считая в общем случае оба четы-
рехполюсника нелинейными, под
передаточными функциями будем
понимать передаточные функции
для относительно малых прираще-
ний, определяемые по дифферен-
циальным . (или динамическим) па-
раметрам нелинейных элементов.
При этом и под входными и под
выходными величинами, которые
для общности обозначим через х,
будем понимать приращения (при-
ращения величин напряжений, то-
ков или комплексных амплитуд на-
пряжений, токов).
Схема цепи с обратной связью на
рис. 9-17 показана сугубо принци-
пиально, с отображением лишь
структуры цепи — звеньев и связей
между ними (такие схемы и при-
нято называть структурными).
Сигналы хвх и х2 могут друг
с другом складываться (положи-
тельная обратная связь) или вычи-
таться (отрицательная обратная
связь), что на рис. 9-17 условно
отображено соответствующим зна-
ком в кружке.
Решая совместно уравненйя цепи
ХВЫХ(Р) =^1(Р)^1(Р); '
X2(p) = W2(p) •
ХвЫХ (р);
Х1(р)=Хвх(р)й=Х2(р), (9-18)
получаем:
А'вых (/’)=1±ТГ1 (р) (Р) =
= ^(р)*вх(Р), (9-19)
где W(р) — передаточная функция
всей цепи; знак плюс в знаменателе
берется при отрицательной, а знак
1 Наряду с термином «передаточная
функция» применяют термин «коэффициент
передачи», обозначая его через К (гл. 1).
228
минус —при положительной обрат-
ной связи.
Устойчивость цепи определяется
при отсутствии какого-либо внеш-
него сигнала, т. е. при хвх=0. В этом
случае уравнение (9-19) принимает
вид:
Хвых (р)[1±Г1(р)Г2(р)]=0,
(9-20)
и его решение
k
где — постоянные, зависящие от
начальных условий, a pk— корни
характеристического уравнения
l±W1(p)W2(p)=O. (9-21)
Цепь с обратной связью устой-
чива, если приращение хВых со вре-
менем стремится к нулю. Для этого
все корни уравнения (9-2’1) должны
иметь отрицательную вещественную
часть.
И здесь k линейное приближение
лишь указывает на устойчивость
или неустойчивость цепи. В слу-
чае неустойчивости линейное при-
ближение не может указать, какой
по окончании переходного процесса
наступит режим. По мере роста
приращения хвых вследствие нели-
нейности изменяются передаточные
функции для приращений и, следо-
вательно, корни характеристиче-
ского уравнения (9-21). Это приве-
дет в конце концов к затуханию
приращений, но уже в новом ре-
жиме, в новой (устойчивой) точке
равновесия. При определенных усло-
виях в цепи с обратной связью мо-
гут возникнуть незатухающие коле-
бания — автоколебания (§ 9-8).
Введением соответствующей об-
ратной связи можно устойчивую
цепь сделать неустойчивой и, на-
оборот, неустойчивую — устойчивой.
Так и поступают на практике, ког-
да хотят, например возбудить в це-
пи автоколебания или, наоборот,
стабилизировать, недопустить воз-
никновения в ней автоколебаний.
19-7. РЕЛЕЙНЫЕ РЕЖИМЫ
Рассмотрим простейшие нелиней-
ные цепи, состоящие из последова-
тельно соединенных нелинейного и
линейного сопротивлений и источ-
ника постоянного напряжения или
тока, и работающие в релейном
режиме. Этот режим, в общих чер-
тах описанный в § 5-3, получается,
когда статическая вольт-амперная
характеристика всей цепи неодно-
значна и имеет петлевой вид, так
что при одном и том же напряже-
нии (токе) могут быть различные
токи (напряжения). При этом мо-
нотонное изменение, например, на-
пряжения сопровождается скачко-
образным изменением тока. Здесь
имеются в виду не скачки во вре-
мени, а скачки, соответствующие
горизонтальным или вертикальным
участкам на статической характери-
стике цепи.
Очевидно, что такие режимы воз-
можны только при нелинейных со-
противлениях с падающим участ-
ком вольт-амперной характеристики,
когда при определенных соотноше-
ниях параметров цепи и напряже-
ниях или токах источника питания
есть несколько состояний равнове-
сия, одно из которых неустойчивое-
Так, например, в цепи рис. 9-14
при г=га и u=-U а точка 2 неустой-
чивая, а точки 1 и 3 устойчивые
(§ 9-5). Находится ли рабочая точ-
ка в точке 1 или 3— зависит от
предшествующих состояний, от того,
как осуществлялся подход к ре-
жиму ti=Ua и г=га- Действительно,
если повышать напряжение питания
от нуля, то рабочие точки (устой-
чивые) будут находиться на участке
О—1—При U—Ufa, когда линия
нагрузки касательна к характери-
стике в точке Ль получаются два
состояния равновесия: стоит напря-
жению увеличиться на бесконечно
малую величину, как рабочая точка
скачком перейдет из Ai в Л2, скач-
ком увеличится ток в цепи. При по-
следующем уменьшении напряже-
ния рабочая точка движется по
устойчивому участку Л2—3—В2.
При u,= U"a, когда линия нагрузки
касательна к характеристике в точ-
ке В2, опять два состояния равно-
весия; стоит напряжению умень-
шиться на бесконечно малую вели-
чину, как рабочая точка скачком
перейдет из В2 в Вь скачком умень-
шится ток в цепи.
229
Смещая параллельно линию на-
грузки, легко по точкам пересече-
ния ее с характеристикой нелиней-
ного сопротивления построить зави-
симость тока в цепи от напряжения
источника. Такая типично релейная
характеристика для цепи рис. 9-14
при г=га приведена на рис. 9-18.
Неустойчивый участок (Д]В2), ко-
торый «проскакивается» в переход-
ном процессе, показан пунктиром.
Аналогичный релейный эффект
в цепи рис. 9-14 возможен при не-
изменном напряжении источника и
изменении линейного сопротивле-
ния. Скачки тока вверх и вниз бу-
дут при таких значениях сопротив-
ления, когда линия нагрузки ка-
сается характеристики, т. е. когда
есть две точки равновесия.
Пример 9-5. Туннельный диод, характе-
ристика которого приведена на рис. 5-8,
соединен последовательно с линейным со-
противлением г. Построить зависимость
тока I от величины постоянного напряже-
ния U источника питания этой цепи при
г=417 ом, а также зависимость тока от
сопротивления г при £/=0,7 в.
Решение. Проводим на рис. 5-8 не-
сколько параллельных линий нагрузки при
г=417 ом, соответствующих различным
значениям напряжения V источника пита-
ния, определяем точки пересечения прямых
Рис. 9-20.
с характеристикой диода и по этим точ-
кам строим зависимость I(U), приведен-
ную на рис. 9-19,а. Для определения зави-
симости 1(г) при £/=0,7 в, приведенной
на рис. 949,6 проводим из точки U—
=0,7 в на оси абсцисс несколько лучей—
линий нагрузки, соответствующих различ-
ным значениям линейного сопротивления.
Обе зависимости имеют релейный харак-
тер.
На рис. 9-19 неустойчивые участки
Л1В2 и Д1В4 показаны пунктиром. Дока-
жем, что точки на этих падающих уча-
стках неустойчивые.
Анализ устойчивости проведем по рас-
четной эквивалентной схеме, приведенной
на рис. 9-20. Здесь L индуктивность вво-
дов, а С — межэлектродная емкость, ко-
торая обязательно должна быть учтена,
как бы мала она ни была, так как тун-
нельный диод — нелинейное сопротивление
типа N (§ 9-5).
Заменяя для приращений нелинейный
элемент дифференциальным сопротивлени-
ем гд, составляем характеристическое
уравнение
1 , гд (<+ PL)
Zbx (Р) - рс+ Гд +k + pL ~ °-
из которого нетрудно получить два усло-
вия устойчивости
L
г 11 кд! >
Они отличаются от условий (9-46) и ‘(9-117)
знаками неравенств. В условиях данной
задачи точки на участке А\В%. при г—
=417 ом и на участке Д1В4 при- £/=0,7 в
неустойчивые, так как в них |гд 1<л
9-8. ПОНЯТИЕ ОБ АВТОКОЛЕБАНИЯХ
В линейных цепях с источниками
постоянного напряжения или тока
переходный процесс мо-
жет быть колебательным,
но обязательно затухаю-
щим. В нелинейных це-
пях, как указывалось,
возможны автоколебания.
Основные особенности
автоколебаний:
1. Автоколебания прин-
ципиально отличаются от
остальных колебательных
режимов тем, что для их
поддержания не требует-
230
ся периодической возмущающей си-
лы — источников переменного на-
пряжения или тока. Источник пита-
ния постоянного напряжения или
тока необходим для восполнения
noTeipb энергии при колебаниях;
2. Частота и амплитуда устано-
вившихся автоколебаний непосред-
ственно не зависят от источников
питания;
3. Фаза автоколебаний произ-
вольная.
Напомним, что при- свободных
колебаниях в цепи частота опреде-
ляется параметрами цепи, а ампли-
туда и фаза — начальными усло-
виями; при вынужденных колеба-
ниях частота задается источниками
питания, а амплитуда и фаза опре-
деляются источниками и цепью.
Автоколебания могут быть весь-
ма разнообразной формы: от почти
синусоидальных, до резко несину-
соидальных— релаксационных, раз-
рывных, когда сравнительно мед-
ленные изменения состояния цепи
чередуются с весьма быстрыми,
скачкообразными.
Почти синусоидальные автоколе-
бания возникают в цепях, содержа-
щих не менее двух накопителей
энергии (например, конденсатор и
катушку индуктивности или два
конденсатора). Колебания здесь
сводятся к попеременному переходу
энергии из одного накопителя в дру-
гой и обратно. При малых потерях
в колебательном контуре этот обмен
играет основную роль, а приток
энергии за период извне (в конеч-
ном итоге— от источника питания)
невелик.
Так, в цепи, показанной на
рис. 9-16, возможны близкие к си-
нусоидальным автоколебания. При
этом положительное затухание
вследствие потерь в цепи как бы
компенсируется отрицательным, об-
условленным отрицательным диф-
ференциальным сопротивлением не-
линейного элемента с падающей
характеристикой. Возможны раз-
личные варианты автоколебатель-
ных цепей с нелинейным сопротив-
лением с падающей характеристи-
кой.
Однако на практике наиболее
распространены колебательные не-
пи, автоколебания в которых воз-
никают (вредные или специально '
вызванные — полезные) вследствие
наличия в* цепи обратной связи
(§ 9^6). Большинство автогенера-
торов синусоидальных колебаний
(ламповых, полупроводниковых)
строится на базе усилителей с об-
ратной связью. Необходимость в це-
пи не менее двух накопителей при
этом сохраняется. Сигнал обратной
связи поступает в такой фазе,
что помогает колебаниям, подавая
в такт энергию для компенсации
потерь.
В релаксационной цепи автоко-
лебания имеют существенно иную
природу. Здесь второй накопитель
не играет принципиальной роли.
При этом колебания сводятся по
существу к следующему обмену
энергией: сначала накопитель (на-
пример, конденсатор) получает
энергию из части цепи, содержащей
источник, af затем отдает энергию
в другую часть цепи. Нелинейное
сопротивление выполняет роль клю-
ча, периодически подключающего
накопитель «на зарядку» и «на раз-
рядку». Очевидно, что переключе-
ние должно происходить при раз-
личных значениях энергии накопи-
теля, следовательно, этот перепад
энергии связан с характеристикой
нелинейного сопротивления. Таким
образом, сопротивление нелиней-
ного элемента при одном значении
энергии накопителя должно возрас-
тать, а при другом — уменьшаться.
Эти сугубо качественные рассужде-
ния приводят к выводу, что в цепи
первого порядка автоколебания воз-
можны, если нелинейный элемент
имеет неоднозначную характери-
стику. к этому же выводу придем,
рассматривая в общем виде нели-
нейное дифференциальное уравне-
ние первого порядка
действительно, если в цепи имеет
место периодический процесс, то
режим цепи дважды проходит через
одно и 1о же значение х в противо-
положных направлениях, т. е. с дву-
мя различными значениями скоро-
сти dx/dt. Это возможно только при
231
неоднозначности функции f(x), хотя
бы на некотором интервале измене-
ния х.
Из предыдущего следует, что
размах релаксационных колебаний
определяется только нелинейным
сопротивлением, а частота колеба-
ний— скоростью накопления и рас-
ходования энергии накопителем,
т. е. зависит от параметров всей
цепи.
Пример 9-6. Рассмотреть процесс авто-
колебаний в цепи с неоновой лампой
(рис. ’9-16) при г=гс, когда единственная
точка равновесия—точка 3" на рис. 9-14—
неустойчивая. Индуктивность L ничтожно
мала. Током в лампе до ее зажигания
можно пренебречь, и принять ее статиче-
скую вольт-амперную характеристику та-
кой, как показано на рис. 9-2'1 сплошной
линией.
Решение. Индуктивность, как бы
мала она ни была, необходимо учитывать
при решении ibопроса об устойчивости, но
коль скоро уже выяснено, что точка 3''
неустойчивая (§ 9-5), то при дальнейшем
анализе процессов в цепи малой индуктив-
ностью можно пренебречь. При этом при-
ходим к схеме, показанной на рис. 9-22,
с одним накопителем, нелинейным сопро-'
тивлением с неоднозначной характеристи-
кой и неустойчивым статическим состояни-
ем равновесия. Очевидно, в этой цепи бу-
дут автоколебания, причем релаксацион-
ного типа (о влиянии сопротивления на-
грузки, показанном пунктиром на рис. 9-22,
сказано ниже).
Рассмотрим процессы в цепи при вклю-
чении ее на постоянное напряжение U>UU
полагая, что динамическая характеристи-
ка лампы совпадает со статической. При
Рис. 9-22.
этом допущении, когда напряжение на
лампе достигнет величины Ui, она заж-
жется, и ток в ней скачком увеличится от
нуля до значения Ц (рис. 9-21). При по-
следующем уменьшении напряжения на
лампе до величины U2 она погаснет.
При включении цепи, пока ис = ил<
<Z7i, лампа не горит, гл=0 и конденсатор
заряжается по закону
г,( л гС А
ис =U 1 — е J .
График uc(t) показан на рис. 9-23.
В момент ^i, когда uc~Ui, лампа за-
жигается, напряжение на ней скачком не
изменяется, а ток скачком достигает зна-
U—Ur>
чения /ь При этом общий, ток i=--------г
в рассматриваемой цепи скачком изменить-
ся не может. ‘Следовательно, скачком изме-
няется величина и знак тока в емкости^
т. е. конденсатор начинает разряжаться
через сравнительно небольшое сопротивле-
ние горящей лампы. Процесс разрядки
описывается нелинейным дифференциаль-
ным уравнением, но если верхний участок
характеристики лампы приближенно при-
нять линейным «л=’^о+^д (рис. 9-21 ),„
то нетрудно найти уравнение разрядки?
конденсатора. Отсчитывая теперь время от
момента при начальном условии
«с = ^1, получаем:
и» +
14-0 +
Го + РС7 \
1+P J
(1+р)?
е г*с , (9-22>
где р=гд/г; в практических схемах часто
Р^1.
Через промежуток времени ЛА напря-
жение на конденсаторе упадет до значения-
U2), и лампа погаснет. Подставив в (9-22)
Uc = U2 при /=Л/1, найдем ЛА-
Далее конденсатор начнет снова заря-
жаться. При начальном условии /=0, ис =
=iJ^ напряжение на конденсаторе нара-
стает по закону
___i
uc = U — (U —иг) е гС, (9-23>
где начало отсчета времени выбрано в мо-
мент /1+А/ь
232
При Uc — Ui лампа вновь зажжется и
далее процесс разрядки «и зарядки будет
повторяться (рис. 9-23). Подставив в (9-23)
uc = Ui при t=&t2, найдем Д/2,
Период колебаний T=A/i+AZ2 зависит
от параметров цепи, в том числе и от
величины напряжения питания. Размах
колебаний Ui—U2 определяется только ха-
рактеристикой лампы.
Процесс колебаний устанавливается уже
со второго периода.
Подобные генераторы релаксационных
колебаний ^широко применяются на прак-
тике в качестве источников пилообразно-
го напряжения. Сопротивление нагрузки
гн подключается параллельно конденсато-
ру. На размах колебаний нагрузка не по-
влияет, а на частоте колебаний, конечно,
скажется.
Принятые здесь допущения пригодны
при достаточно больших емкостях, т. е.
при не очень быстрых колебаниях, когда
практически не оказывается инерционность
ионных процессов в лампе.
Ограничимся изложенным поня-
тием об автоколебаниях. Более
подробно условия возникновения
автоколебаний, их устойчивость,
амплитуда и частота, зависимость
от параметров, а также методы по-
давления вредных автоколебаний
изучаются в курсах электронной и
полупроводниковой техники и тео-
рии автоматического регулирова-
ния.
необходимо отказаться от линеаризации
нелинейного элемента — лампы.
С целью упрощения анализа примем
следующие допущения:
1. Анодный ток /а зависит только от
сеточного напряжения ис.
2. Сеточный ток iG равен нулю.
3. Средние за период колебаний состав-
ляющие анодного тока, напряжения на ем-
кости и др. постоянны.
4. Динамические характеристики лампы
совпадают со статическими.
5. Для переменных составляющих не-
линейная зависимость анодного тока га от
напряжения на сетке ис (сеточная харак-
теристика) в определенных пределах пред-
ставляется полиномом
Za=,arzc—pu3c. (9-24}
6. Генератор работает на холостом хо-
ду гн=оо, /н = 0.
Составим уравнения по законам Кирх-
гофа
= + (9-25)
di^
L + riL — uc^ (9-26}
dlr
u^M~dT' (9-27}
При заданной аппроксимации сеточной
характеристики (9-24) удобно систему
уравнений (9-24)—(9-27) решить относи-
тельно напряжения ис-
Дифференцируя (9-26) по t и пользуясь
(9-25), получаем:
9-9. НЕЛИНЕЙНОЕ УРАВНЕНИЕ
ЛАМПОВОГО ГЕНЕРАТОРА
На рис. 9-24 приведена простейшая схе-
ма генератора с колебательным контуром
в анодной цепи, рассмотренная в линейном
приближении в первой части книги (§ 7-4).
Автоколебания здесь возникают благода-
ря обратной связи, осуществляемой катуш-
кой взаимной индуктивности. Колебания
в контуре (на выходе) через цепь обрат-
ной связи передаются на сетку лампы (на
вход). При правильном включении катуш-
ки обратной связи и выполнении опреде-
ленных количественных соотношений мощ-
ность батареи компенсирует потери в кон-
туре и мощность нагрузки; в результате
в цепи возникают незатухающие колеба-
ния.
Для описания процесов установления
колебаний и определения их амплитуды
d2ij dir ip 1
-C^lY (9-28>
Из (9-27) следует:
_ Uc
dt ~~ M 9
d2i^ 1 duc
~dtr==1~M~dr9
(9-29}
а из (9-24)
di a dt a du c
dt dac dt
П CllLc
(a —) ~dt~‘ C9’30)'
Подставляя (9-29) в (9-28), дифферен-
цируя затем по t и пользуясь (9-30), полу-
чаем нелинейное уравнение лампового ге-
нератора:
d2uc I г
dt2 L
Обозначим:
“ — 3₽ис , Ис _ п
CL/M ] dt LC
(9-31>
7^=4 £=*• (9-32}
233
Тогда
^-(ао^И - 23 - -+
+ й>0^с =0.
Вводя „безразмерное® время
t = gV, (9-33)
.„безразмерное® напряжение
(9-34)
и обозначая через s относительную вели-
чину
асОд/И — 28
—<».- =* (9'35>
получаем классическое нелинейное диф-
ференциальное уравнение второго порядка,
которое называют уравнением В а н -
дер-Поля
d2y dv .
-^-6(1 _v*)^+v = 0. (9-36)
Применение -«безразмерных» относитель-
ных величин ц, т, е делает его решение
универсальным: переход к значениям на-
пряжения на сетке, анодного тока, напря-
жения на емкости н т. д. легко осуще-
ствляется путем умножения величины v
на соответствующий коэффициент.
Уравнение Ван-дер-Поля описывает ко-
лебательную систему с переменным коэф-
фициентом затухания (коэффициентом при
dvfdx). При малых значениях v коэффици-
ент затухания отрицательный (поскольку
8>0), при больших — положительный. Ка-
чественный характер колебании, .описывае-
мых этим уравнением, зависит от значе-
ния параметра 8. При >8 1 колебания
имеют почти синусоидальную форму, а при
1 —существенно несинусоидальную.
Уравнение (9-36) можно решить толь-
ко приближенно. В следующем параграфе
рассмотрен приближенный аналитический
метод решения, наиболее пригодный при
сравнительно малых значениях параметра
•8(8 <4).
9-10. РЕШЕНИЕ УРАВНЕНИЯ
ВАН-ДЕР-ПОЛЯ МЕТОДОМ
МЕДЛЕННО МЕНЯЮЩИХСЯ
АМПЛИТУД
Суть этого метода, называемого также
методом Ван-дер-Поля, состоит в том, что
решение уравнения (9-36) при достаточно
малых значениях параметра 8 ищется
в виде
v=a(x) sin т, (9-37)
’предполагающем существование колебаний
с частотой й)0 (9-32) и «медленно» изме-
няющейся во времени амплитудой а(х).
Именно при малых значениях параметра
8>0, что практически достигается при от-
носительно малых потерях в контуре (кон-
тур с высокой добротностью), справедливы
эти исходные положения о частоте и мед-
ленности установления амплитуды колеба-
ний.
Условие медленности состоит в требо-
вании малости относительного изменения
амплитуды за период колебаний Т=2л/<Оо,
т. е.
1 da da а ______________
о- ~dF т 1 или ~dt~ 2аГ* (9’38)
Для определения функции а (т) подста-
вим выражение (9-37) в уравнение (9-36).
о dv d2v dv
Предварительно найдем и v
учитывая условие (9-38):
cost+ ^-sinт; (9-39)
d2v da
^F=2 cos ’ - a sin 'c +
b sin т — a sin т + 2 cos т;
(9-4Q)
dv _ 1 d (vz) __
4 ST-T dt "°
=4 [а3 (t sin sln 3’) ]
0,325 (a3 sin t) = 0,25 a3 cos t+
+ 0,75a2—7— sint. (9-41)
Слагаемое c d2a[dx2 в. (9-40) отброше-
но, так как вторая производная (медленно
меняющейся функции есть величина второго
порядка малости; слагаемое с sin Зт
в (9-411) отброшено, так как добротность
контура велика и он настроен на основ-
ную гармонику (too), т. е. в первом при-
ближении расчет ведется по медленно ме-
няющейся первой гармонике/
Подставляя (9-39)—(9-41) в (9-36), по-
лучаем:
da , ел3
2 cos т — еа cos т-t—j— cos ъ
। Зел2 da .
sinT-J---j---j^-sinT = 0. (9-42)
При е<^1 последними двумя слагае-
мыми можно пренебречь. Тогда
2—т——6^T-r I cos т = 0.
ат 4 у
234
Так как cos т ф 0, то приходим к следую-
щему уравнению для амплитуды:
Л da , ед3
2"й----«^+^=0. (9-43)
Умножая на а и учитывая, что Ъа~^~
__da2
—запишем это уравнение в форме
da2 / а*\
~а~х—е — “у=°- (9-44)
Полученное дифференциальное уравне-
ние первого порядка относительно квадра-
та амплитуды легко решается, поскольку
в нем разделяются переменные. Обозначив
а2=4х, (9-45)
вместо (9-44) получим:
dx
(х —1)
или
dx
х(х—1)-----e<R <9’46)
Интегрирование дает
х — 1
In——=1п/С — е*с;
здесь через In К обозначена ^постоянная
интегрирования.
После преобразований получим:
Х==Т—Ке~^
или, имея в виду (9-45),
2
= =. (9-47)
В решении (9-37) была опущена на-
чальная фаза, которая зависит от началь-
ных условий включения генератора. В дей-
ствительности фаза и частота в процессе
установления колебания тоже являются
функцией времени, но эти уточнения здесь
не рассматриваются.
Подставляя (9-47) в (9-37) и вводя на-
чальную фазу колебаний, получаем реше-
ние уравнения Ван-дер-Поля:
2 sin (т + ф)
у 1 — /Се”8’
(9-48)
V
Рис. 9-25.
Амплитуда установившихся колебаний без-
размерной величины v равна 2 и не за-
висит от начальных условий.
Процесс установления колебаний зави-
сит от начальных условий
dv I
0(0)0 ^=о’
определяющих постоянные интегрирования
К и <р.
Если в момент включения имели место
такие начальные условия, что К<0, то,
как видно из i(9-48), амплитуда колебаний,
возрастая, достигает своего установившего-
ся значения, равного 2 (рис. 9-25,а). При
К>0 начальная амплитуда больше 2; по-
степенно убывая, амплитуда приближает-
ся к 2 (рис. 9-25,6).
Если решать уравнение В ан-дер-Поля
методом фазовой плоскости, то установив-
шимся колебаниям соответствовал бы пре-
дельный цикл, слабому начальному толчку
(рис. 9-25,а) соответствовала бы раскру-
чивающаяся фазовая траектория, а силь-
ному начальному толчку (рис. 9-25,6) —
сворачивающаяся к предельному циклу
траектория (рис. 9-6).
Более точная аппроксимация сеточной
характеристики, например, полиномом пя-
той степени, позволяет анализировать и
другие режимы возбуждения автоколебаний,
которые обычно рассматриваются в спе-
циальных курсах.
Литература к разделу первому
1. Атабеков Г. И., Теория линейных электрических целей, изд-во «Советское
;радио», 1960.
2. Б а е в Н. А. и У д а л о в А. П., Лекции по теории цепей с сосредоточенными
элементами, Связьиздат, 1955.
3. Балабан ян Н., Синтез электрических цепей, Госэнергоиздат, 1964.
4. Г а р н о в с к и й Н. Н., Теоретические основы электропроводной связи, ч. 1
и 2, Связьиздат, 195'6 и 1959.
5. Караев Р. И., Переходные процессы в линиях большой протяженности. Гос-
энергоиздат, 1963.
6. Кощеев И. А., Основы теории электрической связи, Связьиздат, 1954.
7. Шим о ни К., Теоретическая электротехника, изд-во «Мир», 1964.
Литература к разделу второму
1. Андронов А. А., Витт А. А. и Хайкин С. Э., Теория колебаний, Физ-
м атгиз, 1959.
2. Б е с с о н о в Л. А., Нелинейные электрические цепи, изд-во «Высшая школа»,
1964.
3. Г и н з б у р г С. А., Нелинейные цепи и их функциональные характеристики,
Госэнергоиздат, 1958.
4. Поливанов К. М., Ферромагнетики, Госэнергоиздат, 1958.
5. Фельдбаум А. А., -Введение в теорию нелинейных цепей, Госэнергоиздат,
1948.
6. Физические основы электротехники, под ред. К. М. Поливанова, Госэнергоиз-
дат, 1950.
7. Харкевич А. А., Нелинейные и параметрические явления в радиотехнике,
Гос. изд. технико-теоретической литературы, 1956.
алфавитный указатель
А 3
Автоколебания 140, 213, 230 Закон полного тока 161
Аттенюатор 22, 30 — электромагнитной индукции 161
г * Затухание рабочее 41
Б — собственное 21, 24, 33
Бареттер 133 И
В Изображающая точка 217
Векторная диаграмма 53, 101, 196 Импульс напряжения 478
Вентиль ‘1'35, 172, 222 Индуктивность линии 70, 88
Взаимная индуктивность нелинейная 191 — нелинейная 430, 138, 148, 176, 196
Волна бегущая 74 — рассеяния 177, 197
— обратная 74, 83, 101, 111 Искажения амплитудные 35, 92
— отраженная 82, 1 Гб, 434 — нелинейные 132
— падающая 82, 116 — проходящая 119 — фазовые 35, 92
— прямая 73, 83, 101, 111 К
— стоячая 97 Кабель коаксиальный 70, 95
Волны блуждающие 128 Кенотрон 137, 174
Волны длина 76 Колебания релаксационные 231
— скорость (142 — синусоидальные 231
— фронт 113 Коэрцитивная сила 160
Выпрямитель 143, 172 Коэффициент бегущей волны 102
г — затухания 21, 24, 33, 49, 74, 77, 92, 93
— мощности 171
Генератор ламповый 233 — отражения 82, 100, 116, 118
Гиперболические функции 79, 95 — передачи 21, 34
Гистерезис 160 — прямоугольности 161
Д — распространения 74 — стабилизации 141
.Двухполюсник активный 152,. 199 — стоячей волны 102
Децибел 22 — фазы 20, 24, 74, 77, 92, 94
.Диод полупроводниковый 135 — формы 179 Кривая намагничивания основная 160
— туннельный 136, 225
.Дроссель 189, 192, 220 — первоначального намагничивания 160
— управляемый 207 — размагничивания 169
Дуга электрическая 137, 224 Кривые одновременного намагничивания 211
Е Л
лЕмкость линии 7:1, 88 Линеаризация 456
— нелинейная 130, 139, 148, 183, 498 Линии дифференциальные уравнения 71,111
V 237
Линии короткое замыкание 99
— круговая диаграмма 108
— схема замещения 89, L15, 1*17
уравнения с гиперболическими функция-
ми 79
— холостой ход 96
Линия без потерь 94
— воздушная 70, 94
— длинная 68, 81
---емкость 105
— измерительная 108
---индуктивность 105
— искусственная 90
— кабельная 70, 95
— короткая 81
— неискажающая 92
— однородная 70, 411
— передачи 68
— с малыми потерями 93
— сложная 90
М
Магнитная индукция 159, 162
--- остаточная 160
— проницаемость дифференциальная 159
---обратимая 212
— — статическая 159
Магнитное напряжение 164
— сопротивление 165
Магнитный поток 162, 178
---насыщения 190
---рассеяния 163
Магнитопровод 162
Матрица 38
Метод аналитический <149,11'55, 166, 186, 221
— графический 149, 152, 166, 215
— изоклин 215
— кусочно-линейной аппроксимации 174,
186, 214, 221
— малого параметра 214
— медленно меняющихся амплитуд 234
— пересечений 153
— фазовой плоскости 217
Мощность активная 173
— волны 76, 96
— естественная 84
— искажения 173
— линии 83
— намагничивания 197
— полная 173
— потерь в линии 84
-------стали 182, 185
---на вихревые токи 181
------- гистерезис 180
Н
Наложение волн 74
Намагничивающая сила 162
Напряжение насыщения 189
— среднее ,178
Напряженность магнитного поля 159
Нелинейный элемент 133, '139, 170, 199
Непер 21
О
Основная кривая намагничивания 160
П
Параметры вторичные 22, 33, 76
— динамические 145
— дифференциальные 145
— малые 225
— первичные 71, 111
— распределенные 68
— сосредоточенные 68
— средние 148
— статические 145
— эквивалентные 145, 196
Передаточная функция 228
Петля гистерезиса 160
---идеальная 184, 192, 221
---эллиптическая 180, 184
---динамическая 181
— статическая 160, 181
Полоса задерживания 49
— пропускания (прозрачности) 47, 61 . «-
Постоянная передачи 20, 33, 36
---рабочая 42
Потокосцепление 477
Преобразователь функциональный 141
Принцип согласования 37, 62
Проводимость линии 71, 88
Прямая возврата 470
Пучность 97, 102
Р
Регулярность 39
Резонатор кварцевый 66
Релейный эффект 142, 229
С
Связь индуктивная 63
— обратная 228
Сигнала искажения 34, 92
— уровень 23
Скорость волны 112
— фазовая 74, 92, 94
Согласованная нагрузка 20, 52, 83, 95, 103
Согласующее устройство 103
Соединение четырехполюсников 31, 38
Сопротивление безынерционное 136
— волновое 76, 112
— динамическое 147
— дифференциальное 146, 156
— инерционное 133, 170
— короткого замыкания и холостого хода
15, 24, 87, 99
238
Сопротивление линии 70, 88
---входное 84, 88, 95, 104, 107, 108
’— магнитное 165
— нелинейное 130, 148
— отрицательное 446, 157, 224
— приведенное 12, 42
— статическое 146
— управляемое 137, 206
— характеристическое 19, 24, 33, 36, 52, 72,
78, 92, 94
— четырехполюсника входное 15, 23
— эквивалентное 147, 150
Стабилизатор 140, 190, 204
Стабилитрон 136
Схема замещения 29, 32, 89
— эквивалентная 196
Т
Термистор 134
Термосопротивление 133
Ток намагничивающий 480
Транзистор 437
Трансформатор идеальный 28
—нелинейный 191
— четвертьволновый 104
Триод 137
У
Угол насыщения 190
Узел 97, 102
Усилитель магнитный 207,
— мощности 139
Устойчивость 224, 228
Ф
Фазовая траектория 217
Феррорезонанс напряжений 200
— токов 204
Феррорезонансный стабилизатор 204
Фильтр безындукционный 67
— высокочастотный 54
— заграждающий 54
— идеальный 48
— кварцевый 66
— мостовой 64
— несимметричный 59
— низкочастотный 50
— полосовой 54, 63
— типа k 47, 51
.— типа т 60
— электрический 46
— электромеханический 66
X
Характеристика вольт-амперная 133, 150,
201, 224
— динамическая '134, 183
— магнитная 165, 183
— несимметричная 135, 172
— симметричная 134
— статическая 134, 183
Характеристика типа S и N 224
— частотная 35, 51, 61, 65, 77, 185, 205
Ц
Цепочка 35, 90
Цепочки звено 36
Цепь нелинейная 130, 149
Цикл возвратный 170
— предельный 218
Ч
Частный цикл 160
Частота граничная 48, 50, 55, 58, 61, 64-
Четырехполюсник 9
— автономный 45
— активный/10, 43, 154
— Г-образный 31
— двойной Т-образный 40
— дифференциально-мостовой 28
— мостовой 28
— неавтономный 43
— неискажающий 34
— несимметричный 31
— неуравновешенный 28
— обратимый 10
— одноэлементный 30
— пассивный 10
— П-образный 25
— проходной 10
— симметричный 19, 29
— Т-образный 25
---мостовой 40
— уравновешенный 28
Четырехполюсника коэффициенты 11, 13, 18,
34, 38
— основные уравнения 11
— системы уравнений 11, 17
— схема замещения 29, 32
— уравнения с гиперболическими функция-
ми 23
Четырехполюсников соединения 31, 38
ОПЕЧАТКИ
к книге К- М. Поливанова „Теоретические основы электротехники, ч. 1,
Линейные электрические цепи с сосредоточенными постоянными 1965.
Стра- ница Колонка Строка Напечатано Должно быть
69 Правая 3 снизу 2,80 —2,80
70 Левая 3 сверху 2,80 —2,80
70 Левая 7 сверху 0,175 —0,175
70 Левая 8 сверху 1,475 1,225
169 Левая 8 снизу рис. 5-61,а рис. 5-63,а
208 Правая 6 снизу Ък/п 2тш
221 Левая 2 снизу uiBj U в = ? в!
268 Левая 13 сверху (правой) (левой)
278 Правая 21 снизу г + jc&L — (г +
278 Правая 18 снизу r + PiL — (г + piL) ‘
317 Правая 15 снизу в миллисекундах в микросекундах