Автор: Исаков П.П.
Теги: оружие вооружение артиллерийско-техническое имущество бронированные машины и специальные средства транспорта стрелковое оружие личное оружие боеприпасы и боевые отравляющие вещества управляемые и неуправляемые ракеты и реактивные снаряды инженерия военная техника военное дело инженерное дело издательство машиностроение серия теория и конструкция танка
Год: 1989




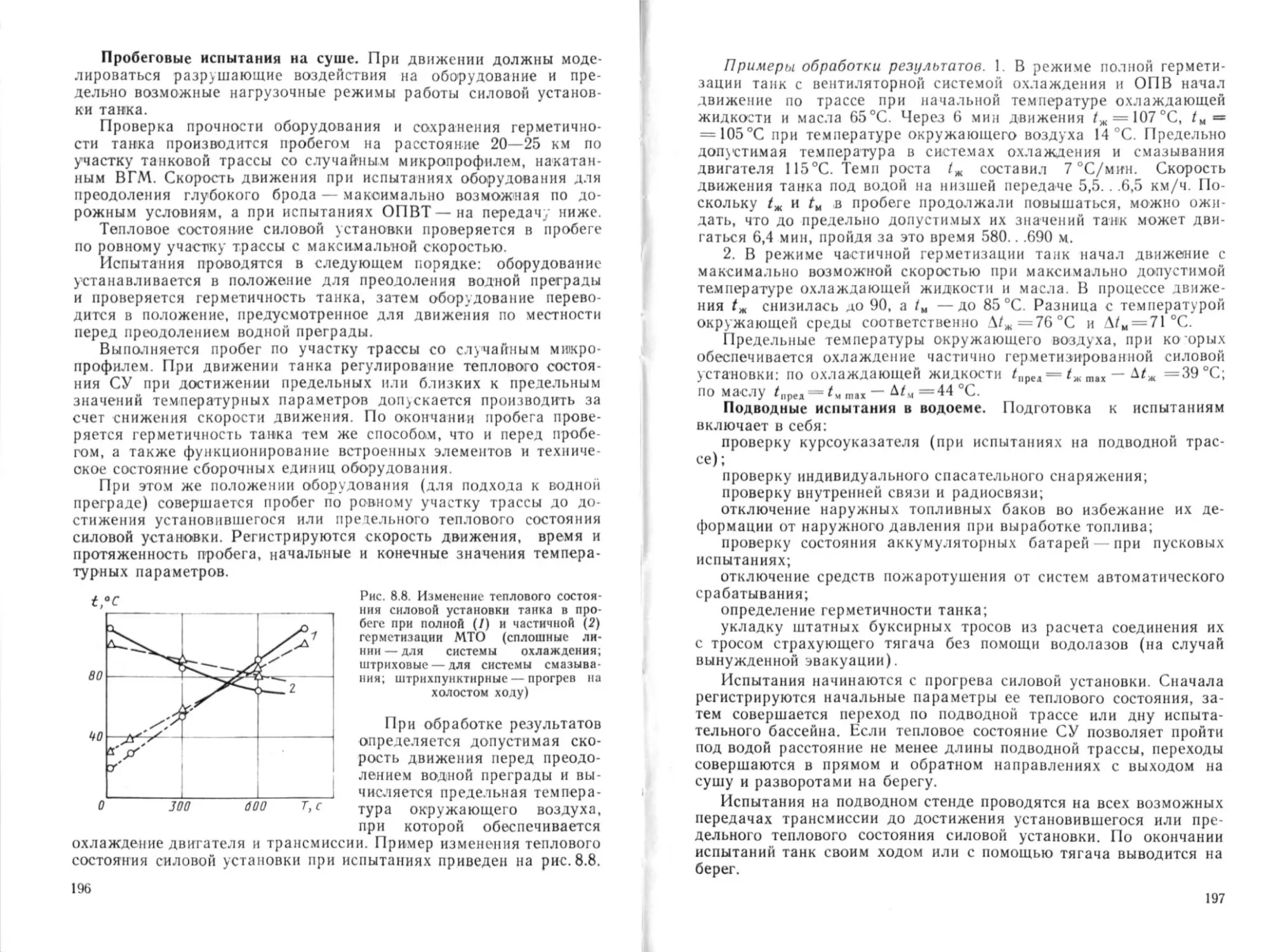
Пив.
I
I
И не. № 18560 т.1/.
И КОНСТРУКЦИЯ
д-ра техн, наук, проф. /7. П. ИСАКОВА
Том 10
Книга 1
ИСПЫТАНИЯ ВОЕННЫХ
ГУСЕНИЧНЫХ МАШИН
Редактор книги А. С. Толстых
Москва «МАШИНОСТРОЕНИЕ» 1989
УДК 623.438.3 001.4
Теория и конструкция танка. —Т. 10 Кн. 1 Испыта-
ния военных гусеничных машин. —М.: Машиностроение,
1989. 232 с.
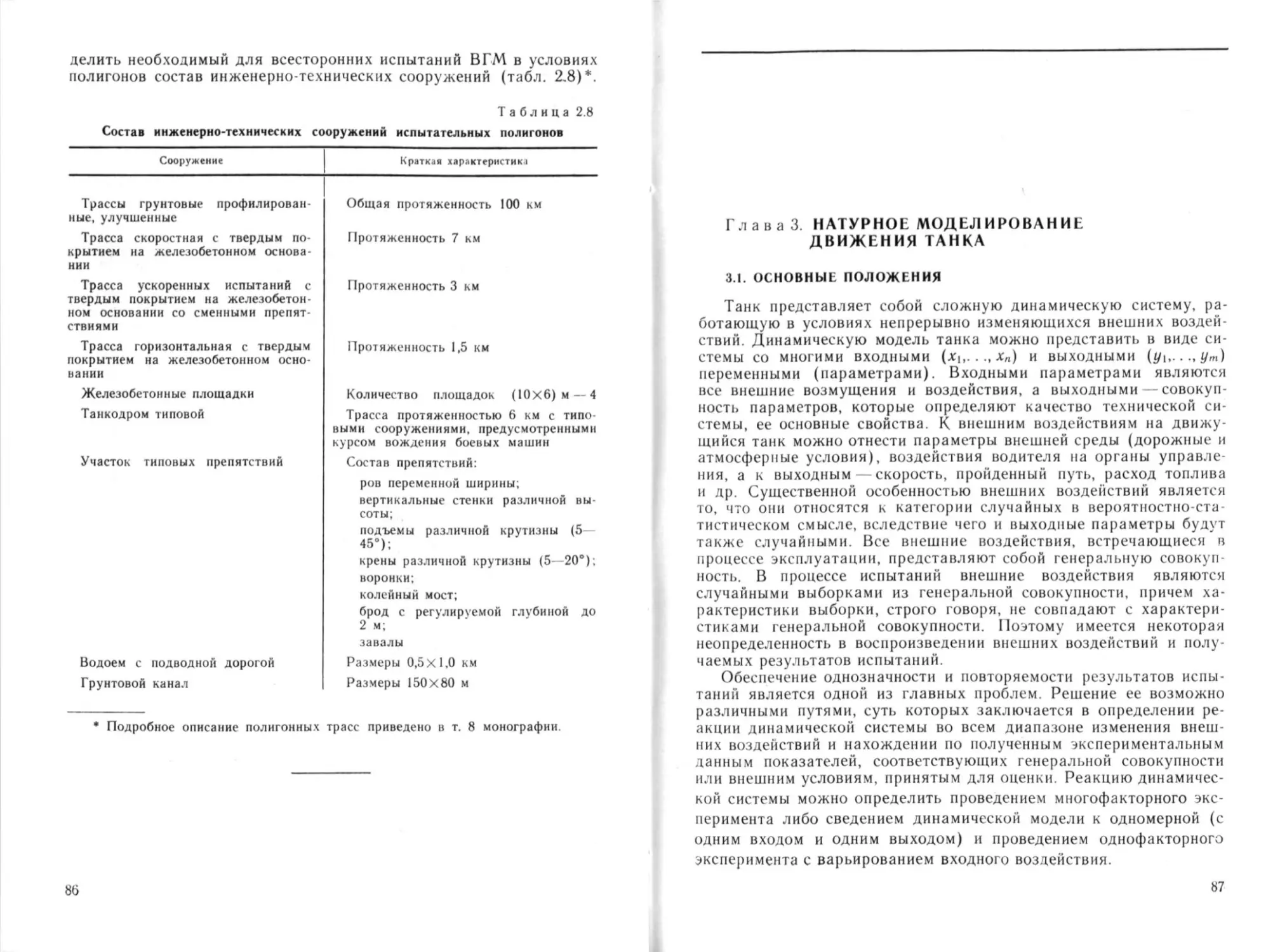
В книге рассмотрены организационные и научно-методические
основы испытаний военных гусеничных машин (ВГМ) в натурных
условиях и на общемашннных стендах, основные вопросы их метро
логического обеспечения и средства измерений, применяемые при
определении основных показателей подвижности ВГМ
Книга предназначена для научных и инженерно-технических ра
ботннков отрасли, а также может быть рекомендована в качестве
учебного пособия преподавателям, студентам вузов, слушателям и
курсантам военных академий и училищ соответствующего профиля
Ил. 59, табл. 33, список лит. 24 назв.
В книге пронумеровано 232 страницы.
ПРЕДИСЛОВИЕ
Испытания неотъемлемая часть научно-исследовательских и
опытно-конструкторских работ по созданию новых образцов воен-
ных гусеничных машин, а также технологического процесса их про-
изводства. Испытания являются также одной из важных информа-
ционных систем обратной связи, обеспечивающих оптимизацию ре-
шений управленческих задач, возникающих на различных этапах
жизненного цикла ВГМ.
Ускорение темпов совершенствования ВГМ на основе внедрения
достижений науки и техники определяет повышенные требования к
испытаниям.
Подробные сведения о роли испытаний в системе разработки и
постановки новых образцов ВГМ на серийное производство, о ка-
тегориях и видах испытаний машин и их составных частей приве-
дены в т. 1 настоящей монографии (гл. 4). Материалы о стендовых
испытаниях составных частей ВГМ (отдельных агрегатов, сбороч-
ных единиц, механизмов, систем и устройств) имеются в периоди-
ческой отраслевой печати, а также в т. 4. 9 монографии; испыта-
ниям комплекса танкового вооружения в натурных условиях посвя-
щен т. 3. Вопросы оценки живучести ВГМ по результатам испыта-
ний будут рассмотрены во второй книге т. 10.
Имеющиеся данные по вопросам организации испытаний, теоре-
тических предпосылок решения задач, связанных с их проведени-
ем, формирования единого подхода к испытаниям образцов ВГМ
на всех этапах их жизненного цикла требуют обобщения и систе-
матизации.
Научные основы, принципы методического и метрологического
обеспечения испытаний, способы обработки и анализа полученных
результатов являются общими при испытаниях машины в целом и
ее составных частей как на стенде, так и на движущейся машине,
при оценке любого из основных свойств ВГМ (огневой мощи, по-
движности, живучести, надежности).
Цель этой книги обобщить накопленный в отрасли опыт ис-
пытаний. Написана она на основе материалов по испытаниям опыт-
ных образцов ВГМ, проведенным за последние 20 лет; использова-
I* 3
на также литература по вопросам испытаний сложных технических
систем, нормативно-технические документы по вооружению, воен-
ной технике и ВГМ.
Авторами книги являются Т. И. Буздакова, В. В. Доронин,
1О. А. Кириллов, А. Н. Корнилов, Е. А. Лебедев, Ф. К. Магзумов.
В. А. Мафиннн, В. А. Рожко, А. М. Рожков, А. И. Савенков,
А. С. Толстых, А. А. Тульцев, В. Д. Штейн.
4
Глава 1 ОРГАНИЗАЦИОННЫЕ ОСНОВЫ
ИСПЫТАНИИ ВГМ
1.1. ОТРАСЛЕВАЯ СИСТЕМА ИСПЫТАНИИ
Под испытаниями понимают специально организованные и по-
ставленные эксперименты с целью получения информации о состоя-
нии объекта испытаний и особенностях его функционирования в
определенных, заранее заданных условиях. Эксперименты могут
выполняться на стендах, в натурных условиях и на комплексах на-
турно-математического моделирования, при этом объектом испыта-
ний могут быть как отдельные детали, системы, сборочные едини-
цы и изделия в целом, так и их математические модели.
Испытания ВГМ проводят на натурных образцах или натурных
моделях различных машин.
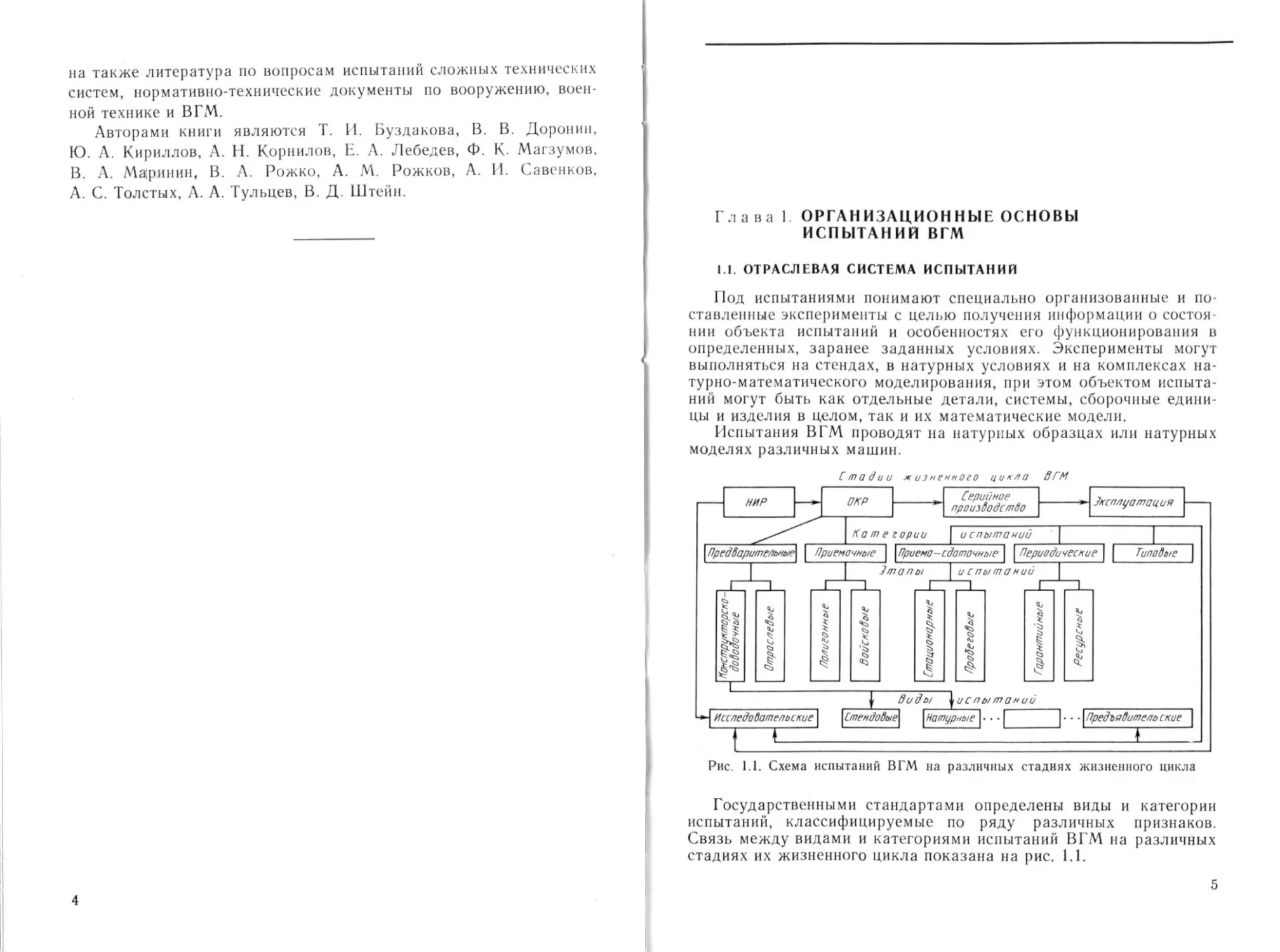
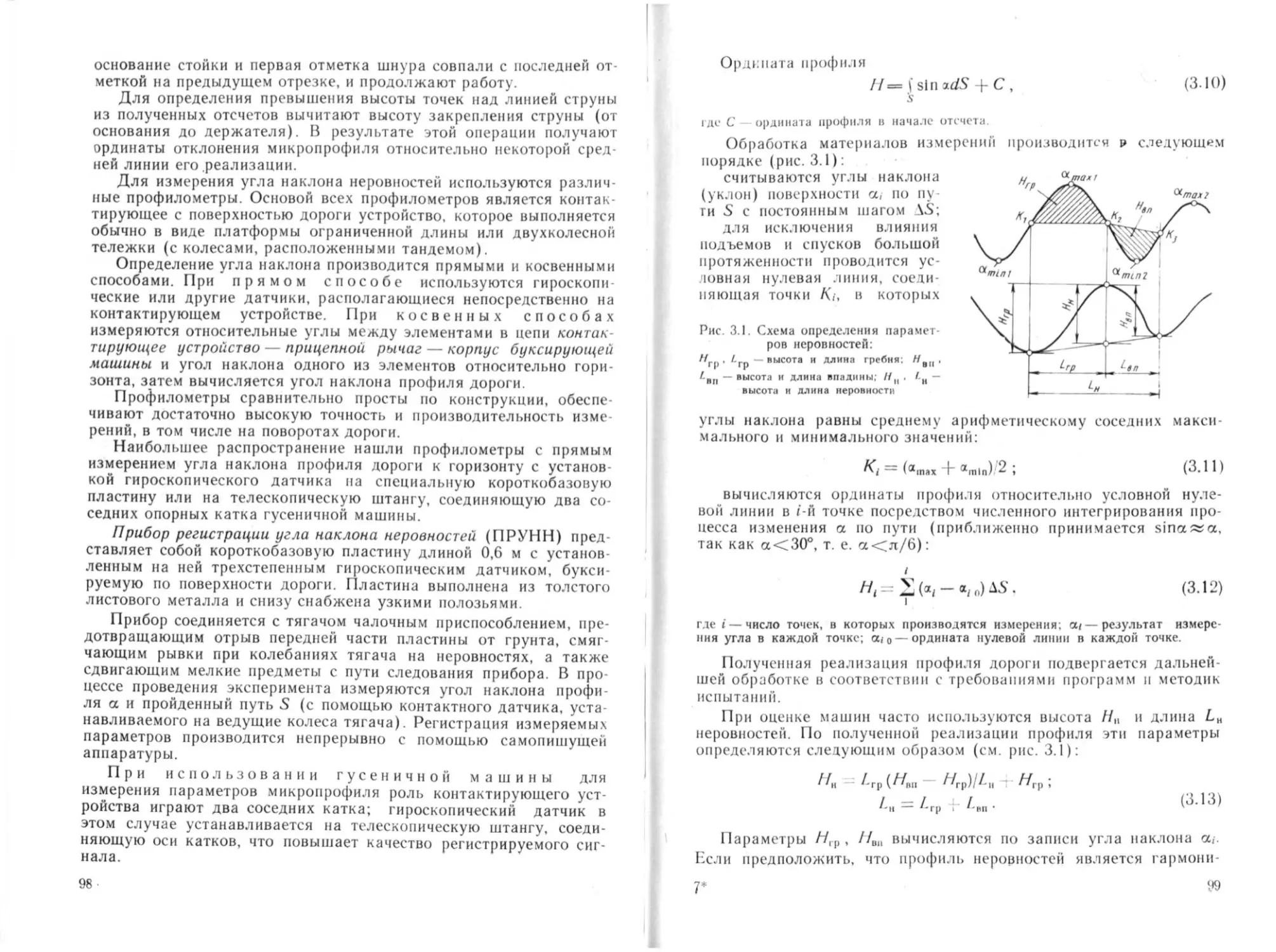
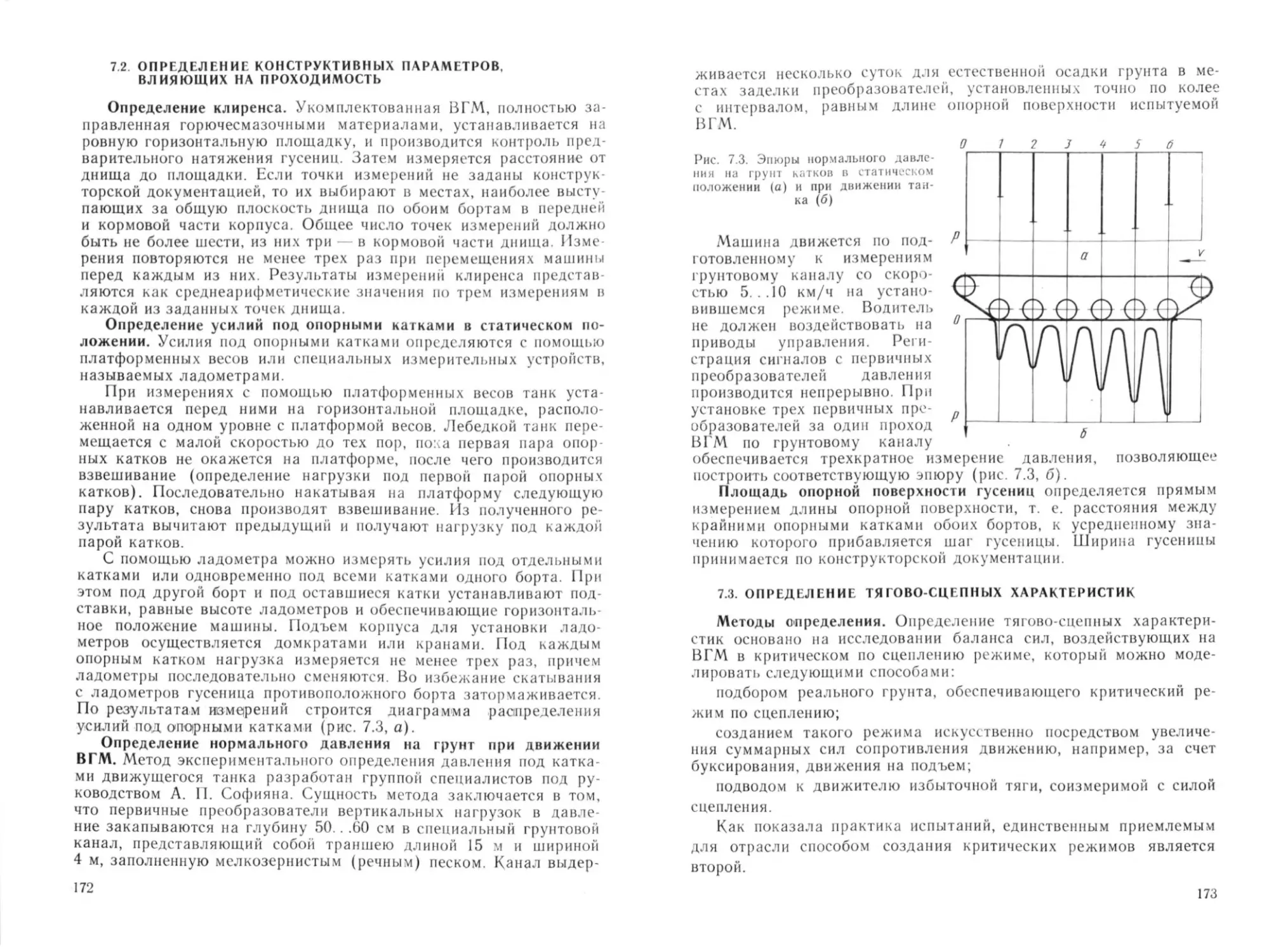
Рис. 1.1. Схема испытаний ВГМ на различных стадиях жизненного цикла
Государственными стандартами определены виды и категории
испытаний, классифицируемые по ряду различных признаков.
Связь между видами и категориями испытаний ВГМ на различных
стадиях их жизненного цикла показана на рис. 1.1.
5
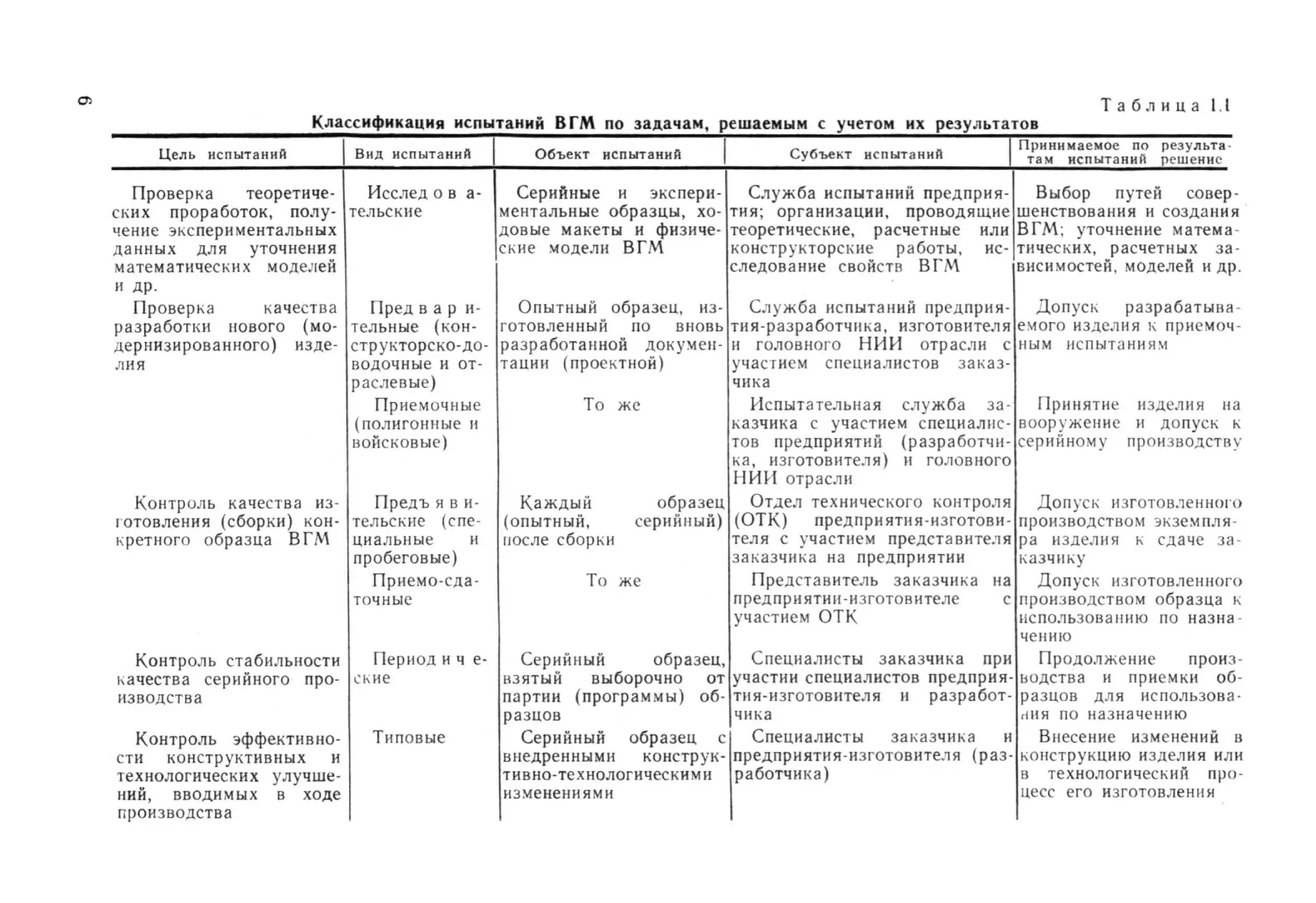
Таблица II
Классификация испытаний В ГМ по задачам, решаемым с учетом их результатов
Цель испытаний Вид испытаний Объект испытаний Субъект испытаний Принимаемое по результа там испытании ]> ппнть
Проверка теоретиче- Исслед о в а- Серийные и экспери- Служба испытаний предприя- Выбор путей совер-
ских проработок, полу- чение экспериментальных данных для уточнения математических моделей и др. тельские ментальные образцы, хо- довые макеты и физиче- ские модели В ГМ тия; организации, проводящие теоретические, расчетные или конструкторские работы, ис- следование свойств В ГМ шенствования и создания ВГМ; уточнение матема тнческих, расчетных за- висимостей. моделей и др.
Проверка качества Пред вари- Опытный образец, из- Служба испытаний предприя- Допуск разрабатыва
разработки нового (мо- тельные (кон- готовленный по вновь тия-разработчика, изготовителя емого изделия к приемоч-
дернизированного) изде- лия структорско-до- водочные и от- раслевые) Приемочные (полигонные и войсковые) разработанной докумен- тации (проектной) То же и головного НИИ отрасли с участием специалистов заказ- чика Испытательная служба за- казчика с участием специалис- тов предприятий (разработчи- ка, изготовителя) и головного НИИ отрасли ным испытаниям Принятие изделия на вооружение и допуск к серийному производству
Контроль качества из- Предъ я в и- Каждый образец Отдел технического контроля Допуск изготовленного
ютовления (сборки) кон- тельские (спе- (опытный, серийный) (ОТК) предприятия-изготови- производством экземпля
кретного образца В ГМ циальные и пробеговые) Приемо-сда- точные после сборки То же теля с участием представителя заказчика на предприятии Представитель заказчика на предприятии-изготовителе с участием ОТК ра изделия к сдаче за- казчику Допуск изготовленного производством образца к использованию по казна ченню
Контроль стабильности Период и ч е- Серийный образец, Специалисты заказчика при Продолжение произ-
качества серийного про- изводства ские взятый выборочно от партии (программы) об- разцов участии специалистов предприя- тия-изготовителя и разработ- чика водства и приемки об- разцов для использова- ния по назначению
Контроль эффективно- сти конструктивных и технологических улучше- ний, вводимых в ходе производства Типовые Серийный образец с внедренными конструк- тивно-технологическими изменениями Специалисты заказчика и предприятия-изготовителя (раз- работчика) Внесение изменений в конструкцию изделия или в технологический про- цесс его изготовления
При системном подходе испытания ВГМ можно рассматривать
как организационную систему, элементами которой являются:
субъекты испытаний — специалисты, участвующие в организа-
ции и проведении испытаний;
объекты испытаний—образцы ВГМ или их модели, подвергаю-
щиеся испытаниям;
средства испытаний — технические устройства, вещества и (или)
материалы для проведения испытаний, технические устройства для
воспроизведения условий испытаний (испытательное оборудова-
ние) ;
нормативно-технические документы (НТД)—организационная
и методическая документация, определяющая объем, порядок и
правила оптимального взаимодействия элементов системы;
материально-техническое обеспечение — совокупность матери-
альных и технических средств, необходимых для обеспечения функ-
ционирования системы.
Предлагаемые государственным стандартом классификацион-
ные признаки не дают возможности наглядно представить себе
структуру системы испытаний (СИс), сложившуюся в отрасли, по-
этому имеет смысл классифицировать испытания ВГМ по задачам,
которые решаются с учетом их результатов (табл. 1.1).
Приведенные данные показывают, что жизненный цикл ВГМ со-
провождается определенным комплексом испытаний, причем экспе-
риментальные и серийные ВГМ и их модели испытываются на ста-
дии НИР, опытные образцы ВГМ на стадии ОКР, а серийные ВГМ
на стадиях серийного производства и эксплуатации.
Главной задачей СИс является получение информации, необхо-
димой для выработки управляющих воздействий на систему разра-
ботки ВГМ, характер которых зависит от этапа жизненного цикла.
Для эффективного функционирования СИс необходима взаимо-
связь между ее элементами и элементами системы разработки.
Помимо управленческих в СИс действуют организационно-техниче-
ские связи, в основном обуславливаемые движением информацион-
ных потоков, необходимых для проведения испытаний и соответст-
венно для решения задач, предписанных функциональным элемен-
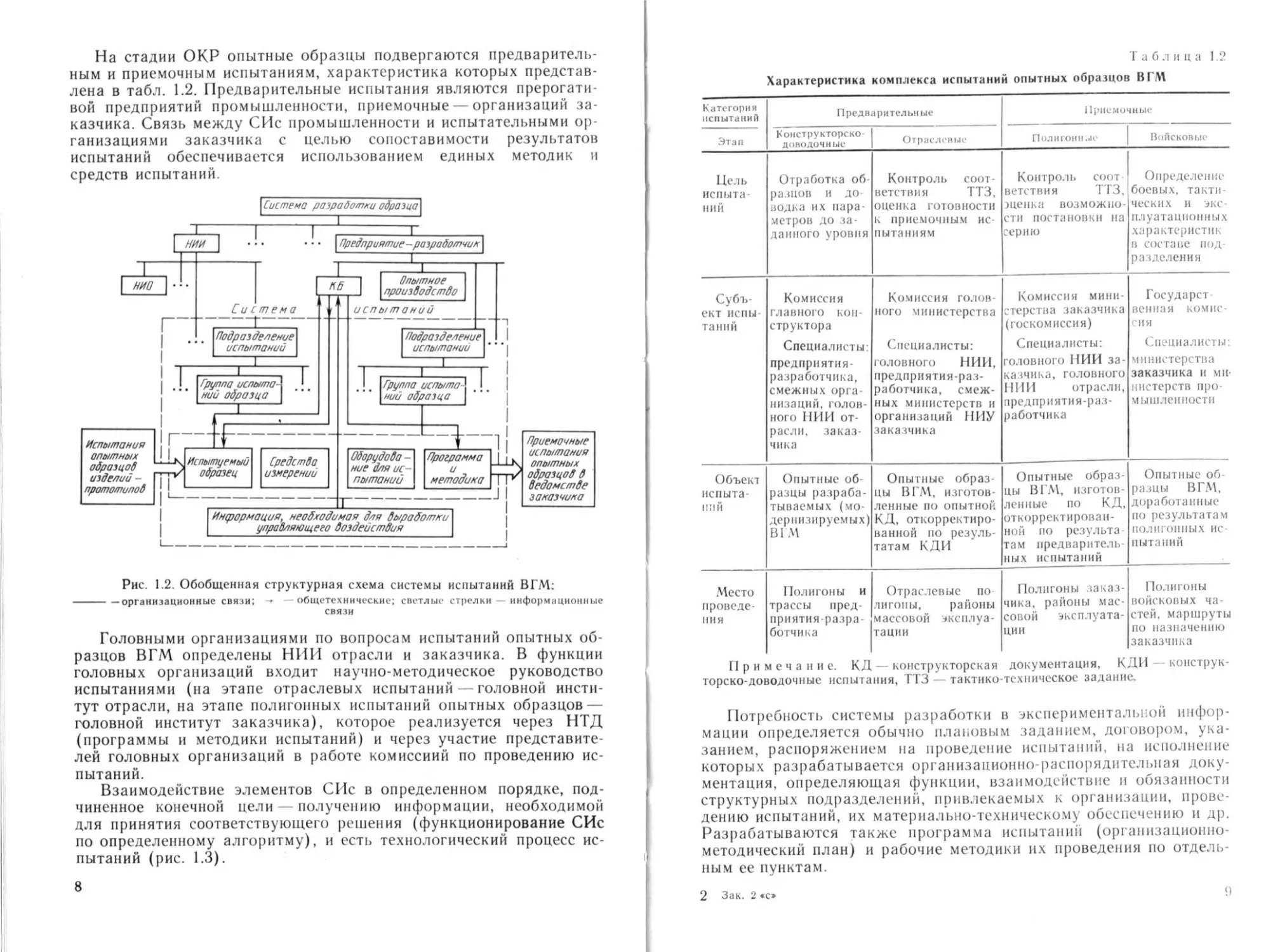
там системы разработки. Для испытаний необходима информация
о конструкции объекта, методах и результатах расчетной оценки
его характеристик, методах и результатах стендовых испытаний
сборочных единиц и систем объекта, для чего необходима связь
СИс с подразделениями, занимающимися проектированием, рас-
четными оценками, стендовыми испытаниями, изготовлением опыт-
ных образцов (рис. 1.2). Данные по испытаниям изделий-прототи-
пов и опытных образцов (на этапах ОКР) характеризуют инфор-
мационные связи между стадиями жизненного цикла ВГМ.
7
На стадии ОКР опытные образцы подвергаются предваритель-
ным и приемочным испытаниям, характеристика которых представ-
лена в табл. 1.2. Предварительные испытания являются прерогати-
вой предприятий промышленности, приемочные — организаций за-
казчика. Связь между СИс промышленности и испытательными ор-
ганизациями заказчика с целью сопоставимости результатов
испытаний обеспечивается использованием единых методик и
средств испытаний.
г wvg разработки
Рис. 1.2. Обобщенная структурная схема системы испытаний ВГМ;
------организационные связи; • общетехннческие; светлые стрелки информационные
связи
Головными организациями по вопросам испытаний опытных об-
разцов ВГМ определены НИИ отрасли и заказчика. В функции
головных организаций входит научно-методическое руководство
испытаниями (на этапе отраслевых испытаний — головной инсти-
тут отрасли, на этапе полигонных испытаний опытных образцов —
головной институт заказчика), которое реализуется через НТД
(программы и методики испытаний) и через участие представите-
лей головных организаций в работе комиссиий по проведению ис-
пытаний.
Взаимодействие элементов СИс в определенном порядке, под-
чиненное конечной цели — получению информации, необходимой
для принятия соответствующего решения (функционирование СИс
по определенному алгоритму), и есть технологический процесс ис-
пытаний (рис. 1.3).
8
Таблица 1.2
Характеристика комплекса испытаний опытных образцов ВГМ
Категория испытаний Предварительные Приемочные
Этап КонструктореКО доводочные Отраслевые ПОЛИГОН!! ,4С | Войсковые
Цель испыта НИЙ Отработка об разной и до- водка их пара- метров до за данного уровня Контроль соот- ветствия ТТЗ, оценка готовности к приемочным ис- пытаниям Контроль COOT ветствия ТТЗ, оценка возможно сти постановки на серию | Определение боевых, такти- ческих и экс- плуатационных характеристик в составе под ра зделеямя
Субъ ект испы- таний Комиссия главного кон- структора Специалисты, предприятия разработчика, смежных орга- низаций, голов- ного НИИ от- расли, заказ- чика Комиссия голов- ного министерства Специалисты: головного НИИ, предприятия-раз- работчика, смеж- ных министерств и организаций НИУ заказчика Комиссия мини стерства заказчика (госкомиссия) Специалисты: головного НИИ за- ка тчика, головного НИИ отрасли, предприятия-раз- работчика Государст венная комне сия Специалисты: министерства заказчика и ми- нистерств про мышленпости
Объект испыта- ний Опытные об- разцы разраба- тываемых (мо- дернизируемых) В1М Опытные образ цы ВГМ, изготов- ленные по опытной КД, откорректиро- ванной по резуль- татам КДИ Опытные образ цы ВГМ, изготов- ленные по КД, откорректирован- ной по результа там предварнтель пых испытаний Опытные об- разцы ВГМ. доработанные по результатам полигонных ис- пытаний
Место проведе- ния Полигоны и трассы пред- прнятия-разра- ботчика Отраслевые по лигопы, районы массовой эксплуа- тации Полигоны заказ- чика, районы мас- совой эксплуата- ции Полигоны войсковых ча- стей. маршруты по назначению заказчика
Примечание. КД конструкторская документация, КДИ конструк-
торско-доводочные испытания, ТТЗ — тактико-техническое задание.
Потребность системы разработки в экспериментальной инфор-
мации определяется обычно плановым заданием, договором, ука-
занием, распоряжением на проведение испытании, на исполнение
которых разрабатывается организационно-распорядительная доку-
ментация, определяющая функции, взаимодействие и обязанности
структурных подразделений, привлекаемых к организации, прове-
дению испытаний, их материально-техническому обеспечению и др.
Разрабатываются также программа испытаний (организационно
методический план) и рабочие методики их проведения по отдель-
ным ее пунктам.
2 Зак. 2 «с»
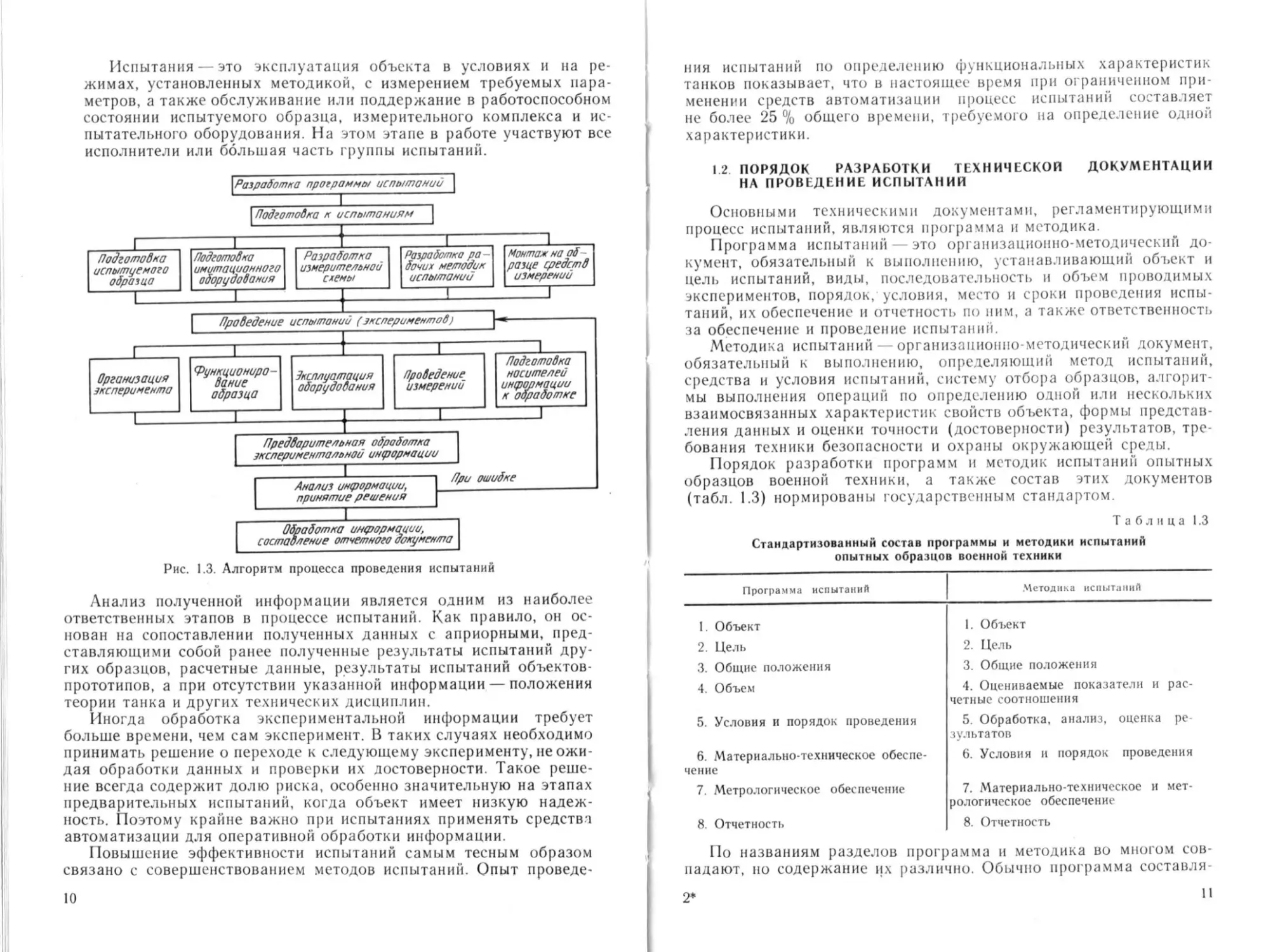
Испытания — это эксплуатация объекта в условиях и на ре-
жимах, установленных методикой, с измерением требуемых пара-
метров, а также обслуживание или поддержание в работоспособном
состоянии испытуемого образца, измерительного комплекса и ис-
пытательного оборудования. На этом этапе в работе участвуют все
исполнители или ббльшая часть группы испытаний.
^Разработка программы испытании ~|
^Подготовка к испытаниям |
Подготобка испытуемого образца Подготовка имитационного оборудования
Разработка
измерительной
схемы
Разработка ра- бочих методик испытаний Монтаж на об- разце средств измерений
Рис. 1.3. Алгоритм процесса проведения испытаний
Анализ полученной информации является одним из наиболее
ответственных этапов в процессе испытаний. Как правило, он ос-
нован на сопоставлении полученных данных с априорными, пред-
ставляющими собой ранее полученные результаты испытаний дру-
гих образцов, расчетные данные, результаты испытаний объектов-
прототипов, а при отсутствии указанной информации — положения
теории танка и других технических дисциплин.
Иногда обработка экспериментальной информации требует
больше времени, чем сам эксперимент. В таких случаях необходимо
принимать решение о переходе к следующему эксперименту, не ожи-
дая обработки данных и проверки их достоверности. Такое реше-
ние всегда содержит долю риска, особенно значительную на этапах
предварительных испытаний, когда объект имеет низкую надеж-
ность. Поэтому крайне важно при испытаниях применять средства
автоматизации для оперативной обработки информации.
Повышение эффективности испытаний самым тесным образом
связано с совершенствованием методов испытаний. Опыт проведе-
10
ния испытаний по определению функциональных характеристик
танков показывает, что в настоящее время при ограниченном при
менении средств автоматизации процесс испытании составляет
нс более 25 % общего времени, требуемого на определение одной
характеристики.
12 ПОРЯДОК РАЗРАБОТКИ ТЕХНИЧЕСКОЙ ДОКУМЕНТАЦИИ
НА ПРОВЕДЕНИЕ ИСПЫТАНИИ
Основными техническими документами, регламентирующими
процесс испытаний, являются программа и методика
Программа испытаний — это организационно-методический до-
кумент, обязательный к выполнению, устанавливающий объект и
цель испытаний, виды, последовательность и объем проводимых
экспериментов, порядок, условия, место и сроки проведения испы-
таний, их обеспечение и отчетность по ним, а также ответственность
за обеспечение и проведение испытаний
Методика испытаний — организационно-методический документ,
обязательный к выполнению, определяющий метод испытаний,
средства и условия испытаний, систему отбора образцов, алгорит-
мы выполнения операций по определению одной или нескольких
взаимосвязанных характеристик свойств объекта, формы представ-
ления данных и оценки точности (достоверности) результатов, тре-
бования техники безопасности и охраны окружающей среды.
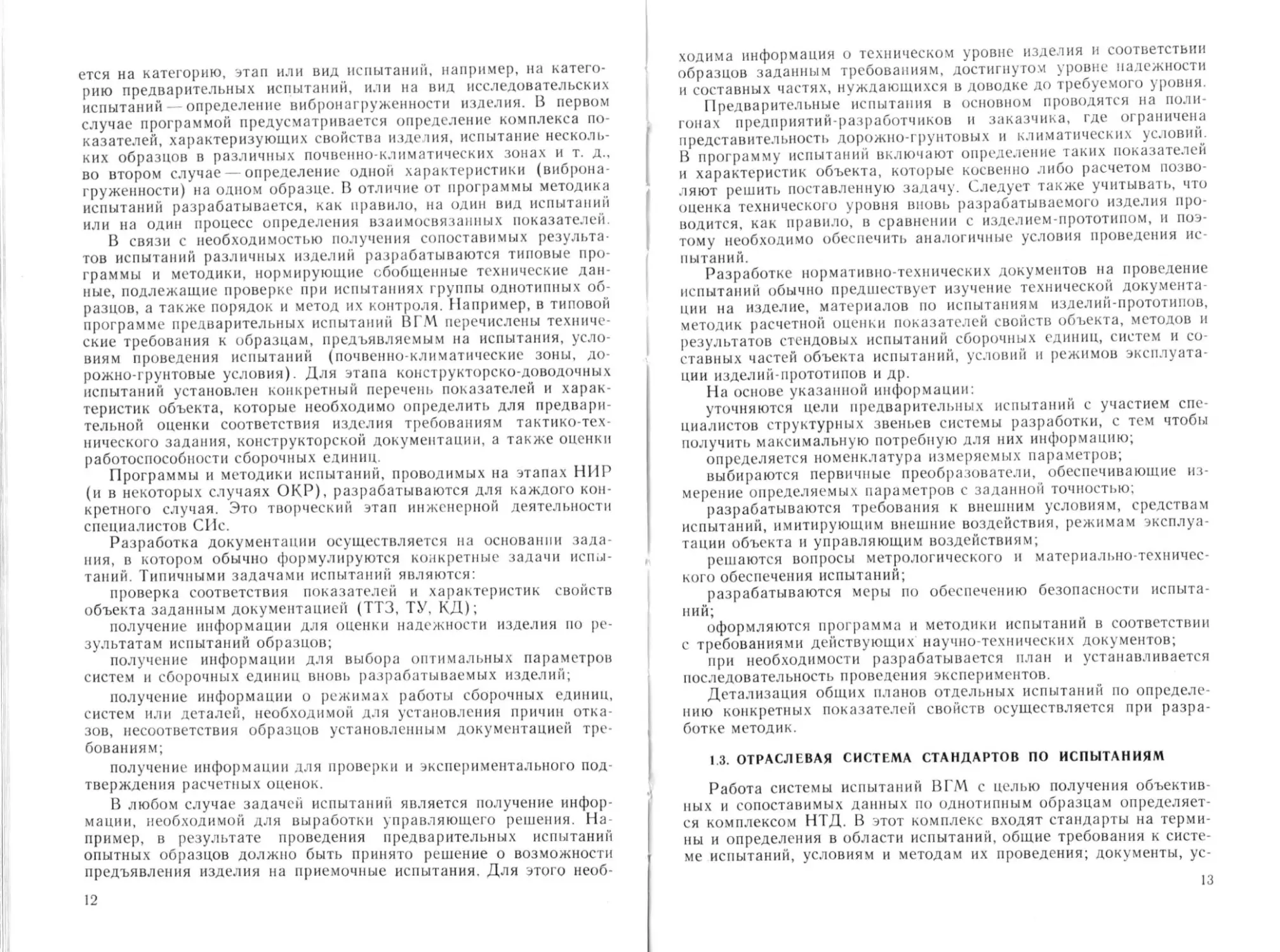
Порядок разработки программ и методик испытаний опытных
образцов военной техники, а также состав этих документов
(табл. 1.3) нормированы государственным стандартом.
Таблица 1.3
Стандартизованный состав программы и методики испытаний
опытных образцов военной техники
Программа испытаний Методика испытаний
1 Объект 2. Цель 3. Общие положения 4 Объем 5. Условия и порядок проведения 6. Материально-техническое обеспе- чение 7. Метрологическое обеспечение 8. Отчетность 1. Объект 2. Цель 3. Общие положения 4. Оцениваемые показатели и рас- четные соотношения 5 Обработка, анализ, оценка ре зультатов 6. Условия и порядок проведения 7. Материально-техническое и мет- рологическое обеспечение 8. Отчетность
По названиям разделов программа и методика во многом сов-
падают. но содержание их различно. Обычно программа составля-
ется на категорию, этап или вид испытаний, например, на катего-
рию предварительных испытаний, или на вид исследовательских
испытаний определение вибронагруженности изделия. В первом
случае программой предусматривается определение комплекса по-
казателей, характеризующих свойства изделия, испытание несколь-
ких образцов в различных почвенно-климатических зонах и т. д.,
во втором случае -определение одной характеристики (виброна-
груженности) на одном образце. В отличие от программы методика
испытаний разрабатывается, как правило, на один вид испытаний
или на один процесс определения взаимосвязанных показателей
В связи с необходимостью получения сопоставимых результа-
тов испытаний различных изделий разрабатываются типовые про
граммы и методики, нормирующие обобщенные технические дан-
ные, подлежащие проверке при испытаниях группы однотипных об-
разцов, а также порядок и метод их контроля. Например, в типовой
программе предварительных испытаний ВГМ перечислены техниче-
ские требования к образцам, предъявляемым на испытания, усло-
виям проведения испытаний (почвенно-климатические зоны, до-
рожно-грунтовые условия). Для этапа конструкторско-доводочных
испытаний установлен конкретный перечень показателей и харак-
теристик объекта, которые необходимо определить для предвари-
тельной оценки соответствия изделия требованиям тактико-тех-
нического задания, конструкторской документации, а также оценки
работоспособности сборочных единиц.
Программы и методики испытаний, проводимых на этапах НИР
(и в некоторых случаях ОКР), разрабатываются для каждого кон-
кретного случая. Это творческий этап инженерной деятельности
специалистов СИс.
Разработка документации осуществляется на основании зада-
ния, в котором обычно формулируются конкретные задачи испы-
таний. Типичными задачами испытаний являются:
проверка соответствия показателей и характеристик свойств
объекта заданным документацией (ТТЗ, ТУ, КД);
получение информации для оценки надежности изделия но ре-
зультатам испытаний образцов;
получение информации для выбора оптимальных параметров
систем и сборочных единиц вновь разрабатываемых изделий;
получение информации о режимах работы сборочных единиц,
систем или деталей, необходимой для установления причин отка-
зов, несоответствия образцов установленным документацией тре-
бованиям;
получение информации для проверки и экспериментального под-
тверждения расчетных оценок.
В любом случае задачей испытаний является получение инфор-
мации, необходимой для выработки управляющего решения. На
пример, в результате проведения предварительных испытаний
опытных образцов должно быть принято решение о возможности
предъявления изделия на приемочные испытания. Для этого необ-
12
ходима информация о техническом уровне изделия и соответствии
образцов заданным требованиям, достигнутом уровне надежности
и составных частях, нуждающихся в доводке до требуемого уровня.
Предварительные испытания в основном проводятся на поли-
гонах предприятий-разработчиков и заказчика, где ограничена
представительность дорожно-грунтовых и климатических условий.
В программу испытаний включают определение таких показателей
и характеристик объекта, которые косвенно либо расчетом лозво
ляют решить поставленную задачу. Следует также учитывать, что
оценка технического уровня вновь разрабатываемого изделия про-
водится. как правило, в сравнении с изделием-прототипом, и поэ-
тому необходимо обеспечить аналогичные условия проведения ис-
пытаний.
Разработке нормативно-технических документов на проведение
испытании обычно предшествует изучение технической документа
ции на изделие, материалов по испытаниям изделий-прототипов,
методик расчетной оценки показателей свойств объекта, методов и
результатов стендовых испытаний сборочных единиц, систем и со-
ставных частей объекта испытаний, условий и режимов эксплуата
ции изделий-прототипов и др.
На основе указанной информации:
уточняются цели предварительных испытаний с участием спе-
циалистов структурных звеньев системы разработки, с тем чтобы
получить максимальную потребную для них информацию;
определяется номенклатура измеряемых параметров;
выбираются первичные преобразователи, обеспечивающие из-
мерение определяемых параметров с заданной точностью;
разрабатываются требования к внешним условиям, средствам
испытаний, имитирующим внешние воздействия, режимам эксплуа-
тации объекта и управляющим воздействиям;
решаются вопросы метрологического и материально техничес-
кого обеспечения испытаний;
разрабатываются меры по обеспечению безопасности испыта
ний;
оформляются программа и методики испытаний в соответствии
с требованиями действующих научно-технических документов;
при необходимости разрабатывается план и устанавливается
последовательность проведения экспериментов.
Детализация общих планов отдельных испытаний по определе-
нию конкретных показателей свойств осуществляется при разра-
ботке методик.
1.3. ОТРАСЛЕВАЯ СИСТЕМА СТАНДАРТОВ ПО ИСПЫТАНИЯМ
Работа системы испытаний ВГМ с целью получения объектив-
ных и сопоставимых данных по однотипным образцам определяет-
ся комплексом НТД. В этот комплекс входят стандарты на терми
ны и определения в области испытаний, общие требования к систе-
ме испытаний, условиям и методам их проведения; документы, ус-
13
танавливающие правила испытаний, а также порядок разработки
документации на их проведение, требования по точности и вос-
производимости результатов испытаний, планированию и др.
НТД, применяемые в практике испытаний В ГМ, условно можно
подразделить на три группы:
первая документы, определяющие общие вопросы испытаний;
эта группа включает в себя государственные стандарты, отличаю-
щиеся достаточно широкой областью распространения. Например,
ГОСТ 16504—81 «Система государственных испытаний продукции.
Испытания и контроль качества продукции. Основные термины и
определения», ГОСТ В 15.210 -78 «Система создания и постановки
на производство военной техники. Испытания опытных образцов
изделий. Основные положения», ГОСТ В 24417 80 «Испытания
ВГМ БТТ. Основные положения», ГОСТ В 15.211—78 «Система
разработки и постановки на производство военной техники. Поря-
док разработки программ и методик испытаний опытных образцов
изделий. Общие положения»;
вторая типовые программы и методики различных категорий
и этапов испытаний (государственные и отраслевые стандарты).
Например, ГОСТ В 24418—80 «МГВ ВТТ. Типовая программа по-
лигонных испытаний», ГОСТ В 24419 80 «МГВ БТТ. Типовая про-
грамма войсковых испытаний», ОСТ В 3-5187—82 «БТТ. Ти-
повая программа конструкторско-доводочных испытаний»,
ОСТ В 3-1830—80 «Отраслевые испытания опытных образцов
комплексов танкового вооружения»;
третья документы, определяющие методы отдельных видов
испытаний, методы определения показателей свойств ВГМ и их
составных частей. В эту группу входят государственные и отрасле-
вые стандарты, типовые отраслевые методики, а также методики
испытаний конкретных ВГМ. НТД этой группы предусматривают
определение более 300 показателей, характеризующих основные
свойства ВГМ: подвижность, огневую мощь (например, эффектив-
ность стрельбы), живучесть и надежность (большей частью пара
метры долговечности сборочных единиц и составных частей ВГМ).
Большое число показателей, определяемых при испытаниях,
обусловлено тем, что основные свойства ВГМ могут оцениваться
только статистическими комплексными критериями, поскольку ус-
ловия возможного их боевого применения случайны. Натурное мо-
делирование условий реальной эксплуатации, необходимое для по-
лучения требуемых показателей, на полигонах с ограниченными
территориями практически невозможно. Поэтому в практике отрас-
ли основные свойства ВГМ оцениваются с помощью совокупности
частных показателей, определяемых экспериментально. Например,
для оценки подвижности определяются максимальная скорость
движения, разгонные, тормозные, топливно-экономические харак-
теристики и др. Этим обстоятельством объясняется большое число
методик испытаний третьей группы по определению различных по-
казателей при стационарных или фиксированных внешних воздей-
Н
ствиях, требования к которым могут быть однозначно заданы и
выполнение их обеспечено при проведении испытаний. Многие воз-
действия имитируются с помощью испытательных средств.
Вопросы оптимального формирования фонда НТД имеют важ-
ное значение для методического обеспечения испытаний и требуют
дальнейшего развития.
1.4. ИСПЫТАТЕЛЬНЫЕ СТЕНДЫ
Испытания танков на специально созданных общемашинных
стендах позволяют неоднократно воспроизводить заданное воздей-
ствие на различных режимах работы машины; обеспечивать экстре-
мальные воздействия, превышающие эксплуатационные; изучать
отдельные факторы; получать сравнимые результаты испытаний в
разное время.
На стендах обеспечивается возможность воспроизведения воз-
действий, эквивалентных эксплуатационным, для чего используются
различные нагружающие устройства. Поэтому испытывать на стен-
дах составные части в танке иногда целесообразнее, чем вне танка.
На основные части в танке воздействуют не только внешние на-
грузки, атмосферные условия, но и динамические нагрузки от дви-
гателя, трансмиссии и ходовой части, тепловое излучение от со-
седних деталей, собственное тепло и др. Имитация всех связей па
стендах для отдельных сборочных единиц приводит к значитель-
ному усложнению и удорожанию оборудования.
На общемашинных стендах не нужно замещать промежуточные
звенья связи между испытуемым и нагружающим устройством на-
турными и математическими аналогами, что позволяет обеспечить
с достаточной точностью воспроизведение эксплуатационных усло-
вий для исследуемого объекта.
На различных этапах разработки образца нового танка не тре-
буется сведений о всей совокупности воздействий на исследуемый
объект. Если характер закономерности воздействия известен, то
достаточно испытания на типовых или экстремальных режимах,
которые могут быть выявлены в процессе эксплуатации или уста-
новлены расчетным путем. Это позволяет ускорить исследование
функциональных характеристик. В реальных условиях эксплуата-
ции и натурных испытаний очень трудно добиться достаточно про-
должительного функционирования каждой сборочной единицы на
заданном режиме. Это обусловлено случайной природой воздей-
ствующих факторов, различным временем их действия, хаотичной
последовательностью их возникновения. При испытаниях же на
стенде, если режим воздействия известен и воспроизведение их тех
нически осуществимо, периодом и значениями воздействий на объ
ект испытания можно управлять, что также способствует ускорению
испытаний.
Между испытаниями танка на стенде и в реальных условиях
существует постоянная взаимосвязь, поскольку в том и другом слу-
чаях объектом испытания является непосредственно танк, а усло-
15
вия и режимы испытаний являются только моделью использования
танка в боевой обстановке.
Возможна следующая схема обеспечения связи испытаний тан-
ка на стенде и в натурных условиях:
изучение условий эксплуатации, получение информации об ус-
ловиях эксплуатации предшествующей серийной машины;
выбор представительных характеристик процессов для воспро-
изведения на стенде;
выбор и обоснование режимов работы стенда;
разработка технических устройств для воспроизведения выбран-
ных режимов работы;
получение па стенде характеристик серийной машины, адекват-
ных характеристикам, полученным в натурных условиях;
получение на стенде характеристик опытной машины в услови-
ях, соответствующих режимам работы и условиям эксплуатации
серийной машины;
сравнительный анализ характеристик машин в сопоставимых
условиях, принятие предварительною решения;
изучение условий эксплуатации, получение информации об
условиях и режимах эксплуатации новой машины в натурных ус-
ловиях;
корректировка условий и представительных характеристик для
воспроизведения на стенде.
Основные типы нагружающих устройств. Воспроизводимые на
стендах воздействия внешней среды могут отличаться от естествен-
ных; поэтому важно в этом случае получить результаты, тождест-
венные получаемым в реальной эксплуатации танка.
Между танком, установленным на стенде, и нагружающим уст-
ройством происходит постоянный обмен энергией: либо энергия
полностью поглощается устройством (при этом необходимо стре-
миться утилизировать ее), либо устройство обеспечивает приток
энергии к исполнительным механизмам машины.
В качестве нагружающих устройств, обеспечивающих варьиро-
вание нагрузочным режимом, используются тормоза (гидравличе-
ские, электрические и механические). Для согласования крутящего
момента и скорости вращения валов тормоза и танка стенд обору-
дуется дополнительными редукторами (обычно планетарными с си-
лоизмерительными устройствами), коробками передач, гусеничны-
ми движителями, которые используются в качестве бегущих доро-
жек стенда, и другими устройствами, поглощающими часть переда-
ваемой энергии.
Необходимость согласующей силовой передачи обуславливается
общим недостатком современных конструкций тормозов, не обеспе-
чивающих высоких значений крутящего момента (50. .100 кН -м)
при низкой угловой скорости рабочего вала (20.. .40 об/мин). Вы-
сокоточные силоизмерительные устройства тормозов не могут ис-
пользоваться непосредственно для измерения общей тормозной или
вырабатываемой энергии. Для измерения мощности, крутящего мо-
16
мента или тягового усилия используются другие средства, обеспе-
чивающие достаточную точность измерения (погрешность
±(3...10)%).
Выбор типа тормоза определяется задачами испытаний. Гид-
равлические и электрические тормоза подробно рассмотрены в спе-
циальной технической литературе.
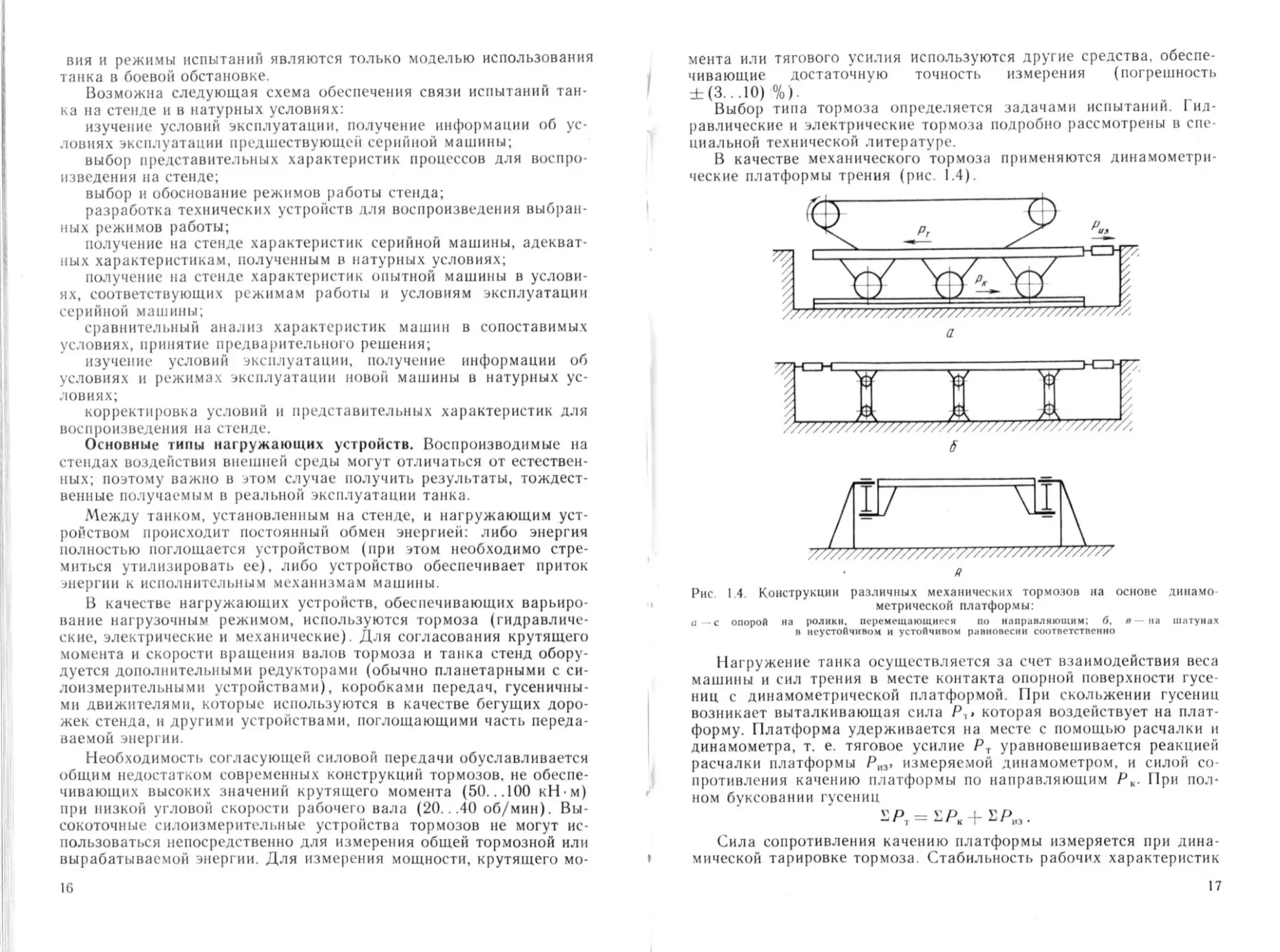
В качестве механического тормоза применяются динамометри-
ческие платформы трения (рис. 1.4).
Рис 1.4. Конструкции различных механических тормозов на основе динамо
метрической платформы:
а -с опорой на ролики, перемещающиеся по направляющим: б. в — на шатунах
в неустойчивом и устойчивом равновесии соответственно
Нагружение танка осуществляется за счет взаимодействия веса
машины и сил трения в месте контакта опорной поверхности гусе-
ниц с динамометрической платформой. При скольжении гусениц
возникает выталкивающая сила Р,» которая воздействует на плат
форму. Платформа удерживается на месте с помощью расчалки и
динамометра, т. е. тяговое усилие Рт уравновешивается реакцией
расчалки платформы Рпз, измеряемой динамометром, и силой со-
противления качению платформы по направляющим Р*. При пол-
ном буксовании гусениц
|-ГРмэ.
Сила сопротивления качению платформы измеряется при дина-
мической тарировке тормоза. Стабильность рабочих характеристик
17
тормоза в значительной мере зависит от состояния трущихся по
верхностей, ухода за устройством в процессе эксплуатации, массы
машины и скорости движения гусениц. Тепло от трущихся поверх
ностей отводится охлаждающей жидкостью или воздухом.
В настоящее время существуют различные конструкции дина-
мометрических платформ. Применение шатунов с подшипниками
качения закрытого типа позволяет значительно снизить потери на
преодоление сопротивления качению (EPJ.
Механический тормоз обладает следующими достоинствами:
простотой конструкции; относительной дешевизной; широким диа
пазоном нагрузочного режима; возможностью проведения испыта
ний в переменном режиме и автоматизированным процессом на
гружения. Его недостатками являются невозможность рекуперации
поглощаемой энергии и использования в качестве двигателя; по-
вышенный износ трущихся поверхностей.
Погрешность измерения Риз составляет ±(1.. .3) %.
Типы стендов для испытаний танков. Различают три типа ис-
пытательных стендов: безгусеничные, с непрерывной беговой до-
рожкой (гусеничные), с динамометрическими платформами
В безгусеничных стендах тормозные усилия передаются непо-
средственно на валы трансмиссии. С испытуемого танка снимаются
гусеницы и ведущие колеса, валы согласующих редукторов тормоз-
ного устройства стенда соединяются с валами трансмиссии маши-
ны. Это позволяет определять характеристики силовой установки
без учета затрат мощности в ходовой части. Кроме показанных на
рис. 1.5 составных частей в безгусеничный стенд входят системы
обслуживания (смазывания, охлаждения, отвода газов, топливная,
искусственного климата и др.), кабина управления с пультом и
регистрирующая аппаратура.
Рис. 1.5. Принципиальная схема бсзгусеннчного стенда:
/, 5 средства измерения; 2 — нагружающее устройство; 3 инерционная масса; 4 сог-
ласующий редуктор; 6 платформа для установки танка
18
Наиболее широким диапазоном воспроизводимых нагрузок об-
ладает стенд, оснащенный двумя электромашинами. Автоматизи
рованное управление нагрузочным устройством позволяет прово-
дить испытания в генераторном и моторном режимах, осуществлять
переход с одного режима в другой, обеспечивая исследование ха-
рактеристик танков в тяговом, тормозном и переходном режимах.
Применение ЭВМ в системе управления и обработки информации
позволяет воспроизводить на стенде сопротивление движению с уче-
том затрат мощности в элементах ходовой части и сил инерции
вращающихся масс на неустановившихся режимах.
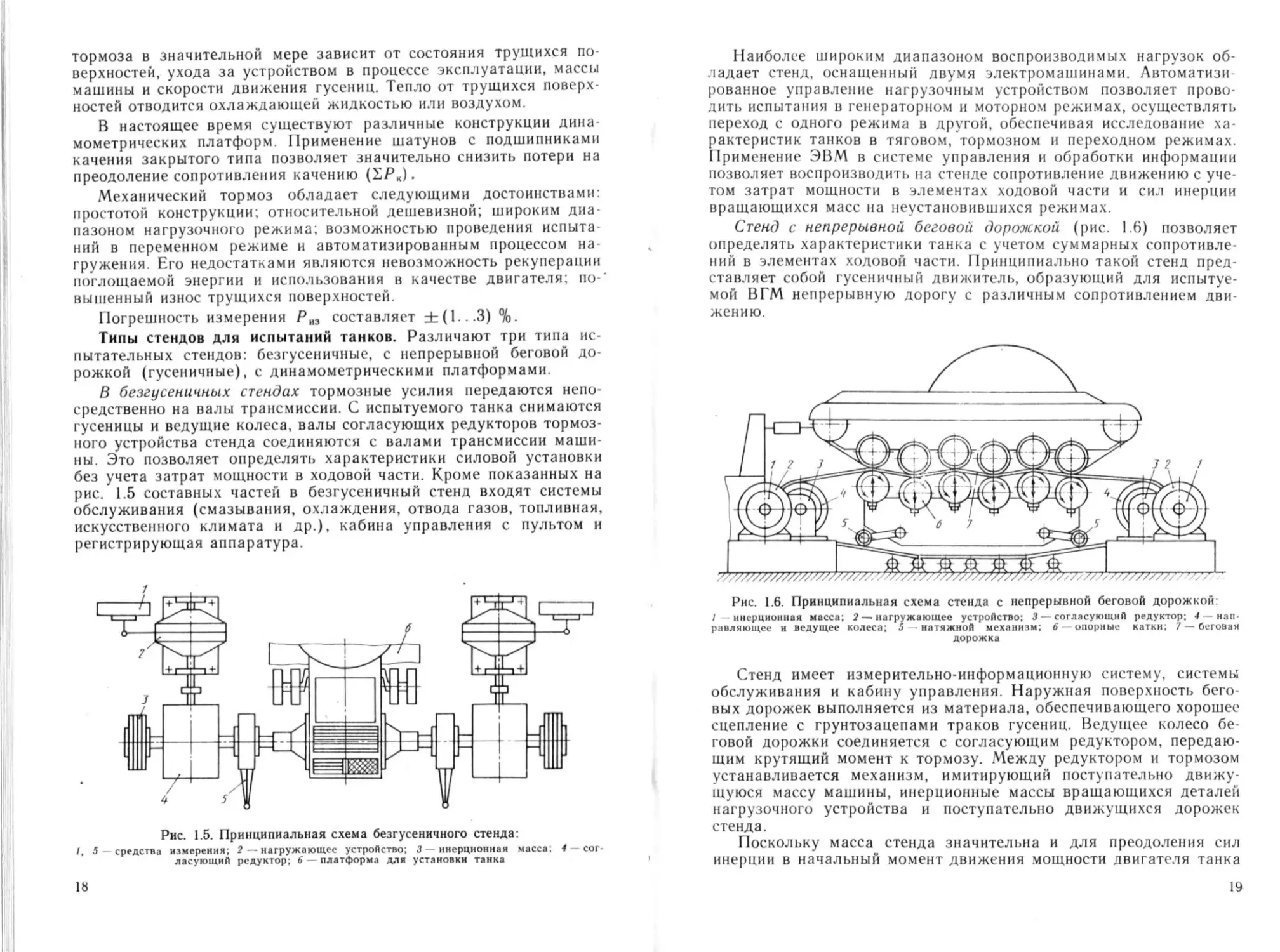
Стенд с непрерывной беговой дорожкой (рис. 1.6) позволяет
определять характеристики танка с учетом суммарных сопротивле-
ний в элементах ходовой части. Принципиально такой стенд пред-
ставляет собой гусеничный движитель, образующий для испытуе-
мой ВГМ непрерывную дорогу с различным сопротивлением дви-
жению.
Рис. 1.6. Принципиальная схема стенда с непрерывной беговой дорожкой:
/ инерционная масса: 2 — нагружающее устройство; 3 — согласующий редуктор; 4 нап-
равляющее и ведущее колеса; 5 — натяжной механизм; 6 опорные катки; 7 — беговая
дорожка
Стенд имеет измерительно-информационную систему, системы
обслуживания и кабину управления. Наружная поверхность бего-
вых дорожек выполняется из материала, обеспечивающего хорошее
сцепление с грунтозацепами траков гусениц. Ведущее колесо бе-
говой дорожки соединяется с согласующим редуктором, передаю-
щим крутящий момент к тормозу. Между редуктором и тормозом
устанавливается механизм, имитирующий поступательно движу-
щуюся массу машины, инерционные массы вращающихся деталей
нагрузочного устройства и поступательно движущихся дорожек
стенда.
Поскольку масса стенда значительна и для преодоления сил
инерции в начальный момент движения мощности двигателя танка
19
может оказаться недостаточной, в качестве нагрузочных устройств
лучше использовать электромашины постоянного тока либо подоб-
ные им устройства, сочетающие в себе достоинства двигатель-ге-
нераторного агрегата.
Технические возможности такого стенда можно повысить за
счет применения систем для подачи пыли различных фракций под
гусеницы танка и обдува корпуса воздухом с целью имитации дви-
жения машины по бездорожью.
Возможна работа стенда в следующих режимах:
дорожка стенда приводится в движение гусеницами испытуемой
машины в этом случае электромашина работает как тормоз в
генераторном режиме или как электродвигатель, снижая затраты
мощности двигателя танка на прокрутку беговых дорожек;
гусеницы машины приводятся в движение беговыми дорожками
стенда, т. е. силовая установка машины работает в тормозном ре-
жиме, а тормоз стенда в режиме электродвигателя
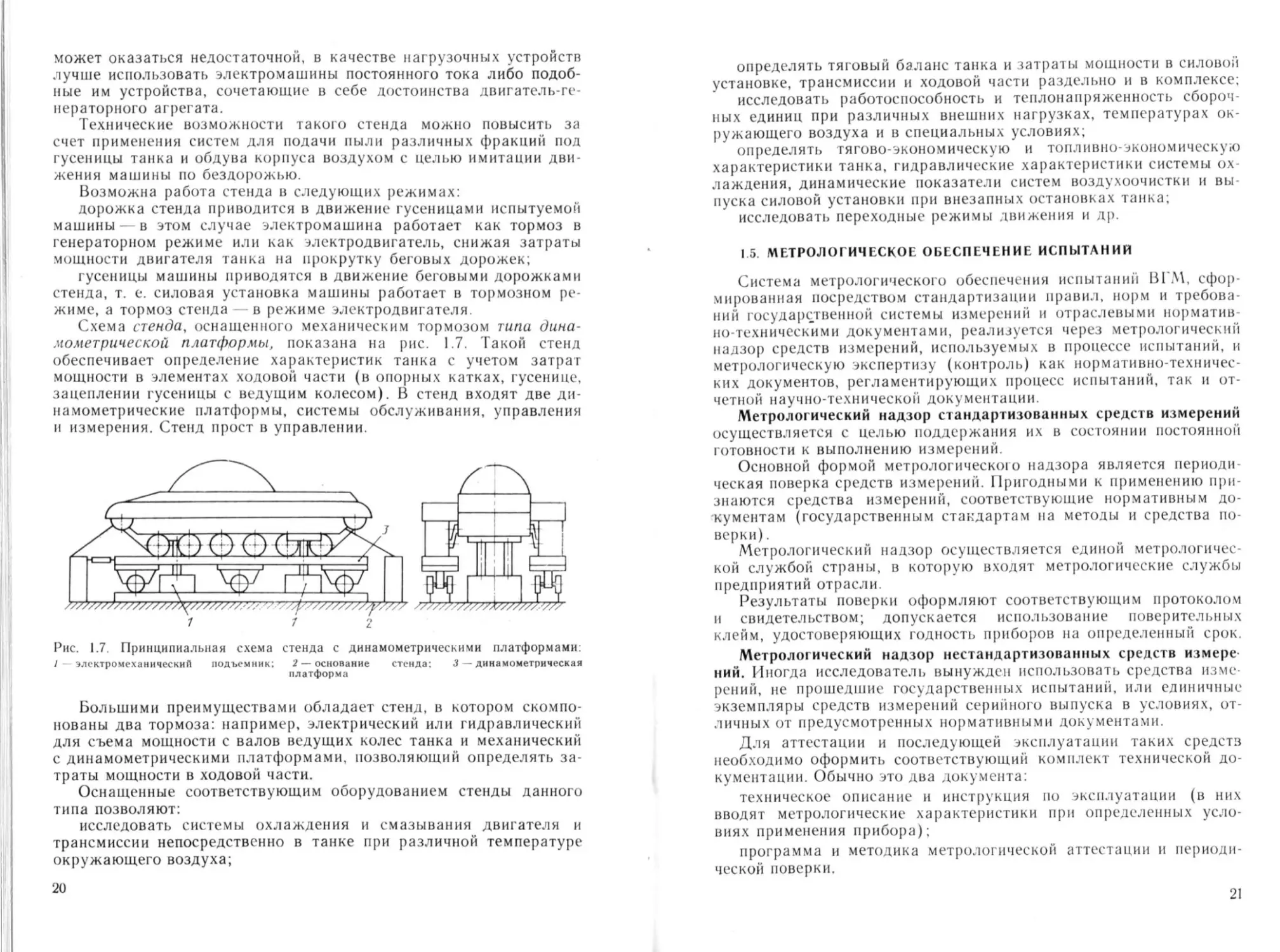
Схема стенда, оснащенного механическим тормозом типа дина-
мометрической платформы, показана на рис 1.7. Такой стенд
обеспечивает определение характеристик танка с учетом затрат
мощности в элементах ходовой части (в опорных катках, гусенице,
зацеплении гусеницы с ведущим колесом). В стенд входят две ди-
намометрические платформы, системы обслуживания, управления
и измерения. Стенд прост в управлении.
Рис. 1.7. Принципиальная схема стенда с динамометрическими платформами:
/ — электромеханический подъемник; 2- основание стенда. 3 динамометрическая
платформа
Большими преимуществами обладает стенд, в котором скомпо-
нованы два тормоза: например, электрический или гидравлический
для съема мощности с валов ведущих колес танка и механический
с динамометрическими платформами, позволяющий определять за-
траты мощности в ходовой части.
Оснащенные соответствующим оборудованием стенды данного
типа позволяют:
исследовать системы охлаждения и смазывания двигателя и
трансмиссии непосредственно в танке при различной температуре
окружающего воздуха;
20
определять тяговый баланс танка и затраты мощности в силовой
установке, трансмиссии и ходовой части раздельно и в комплексе;
исследовать работоспособность и теплонапряженность сбороч-
ных единиц при различных внешних нагрузках, температурах ок-
ружающего воздуха и в специальных условиях;
определять гягово-экономическую и топливно-экономическую
характеристики танка, гидравлические характеристики системы ох
лаждения, динамические показатели систем воздухоочистки и вы
пуска силовой установки при внезапных остановках танка;
исследовать переходные режимы движения и др.
1.5. МЕТРОЛОГИЧЕСКОЕ ОБЕСПЕЧЕНИЕ ИСПЫТАНИИ
Система метрологического обеспечения испытаний ВГМ. сфор-
мированная посредством стандартизации правил, норм и требова-
ний государственной системы измерений и отраслевыми норматив
но-техническими документами, реализуется через метрологический
надзор средств измерений, используемых в процессе испытаний, и
метрологическую экспертизу (контроль) как нормативно-техничес-
ких документов, регламентирующих процесс испытаний, так и от-
четной научно-технической документации
Метрологический надзор стандартизованных средств измерений
осуществляется с целью поддержания их в состоянии постоянной
готовности к выполнению измерений.
Основной формой метрологического надзора является периоди-
ческая поверка средств измерений. Пригодными к применению при-
знаются средства измерений, соответствующие нормативным до-
кументам (государственным стандартам на методы и средства по
верки).
Метрологический надзор осуществляется единой метрологичес-
кой службой страны, в которую входят метрологические службы
предприятий отрасли
Результаты поверки оформляют соответствующим протоколом
и свидетельством; допускается использование повернтельных
клейм, удостоверяющих годность приборов на определенный срок.
Метрологический надзор нестандартизованных средств измере
ний. Иногда исследователь вынужден использовать средства изме-
рений, не прошедшие государственных испытаний, или единичные
экземпляры средств измерений серийного выпуска в условиях, от-
личных от предусмотренных нормативными документами.
Для аттестации и последующей эксплуатации таких средств
необходимо оформить соответствующий комплект технической до-
кументации. Обычно это два документа:
техническое описание и инструкция по эксплуатации (в них
вводят метрологические характеристики при определенных усло-
виях применения прибора);
программа и методика метрологической аттестации и периоди-
ческой поверки.
21
Метрологическая аттестация заключается в определении мет-
рологических свойств средств измерений и оформлении соответст-
вующих протоколов и свидетельств. Метрологическая аттестация
проводится при выпуске нестанлартизованных средств измерений и
после их ремонта, периодическая поверка -в процессе эксплуа-
тации.
Метрологическая экспертиза (контроль) НТД на испытания
заключается в проверке номенклатуры параметров, подлежащих
измерению, норм, точности, методов и средств измерений, условий
их выполнения, последовательности выполнения и обработки ре-
зультатов измерений, данных о действительной погрешности изме-
рений.
В отчетной научно-технической документации оценивается пол-
нота и качество метрологического обеспечения измерений. При
этом учитываются современность и новизна научно-методических
идей, прогрессивность технических решений, регламентирующих
проведение измерений, обеспечение их единства и достоверность
результатов, факт метрологического надзора за использованными
средствами измерений. В приложении к отчету должны быть при-
ведены документы на нестандартизованные средства измерений и
все экспериментальные данные, полученные в процессе испытаний,
с указанием погрешности измерений.
Основные параметры могут быть представлены через номиналь-
ные значения и предельно допустимые отклонения (допуски); при
этом должно выполняться условие
3 = ЛД11Э-.
где в—допуск контролируемого параметра; Днам— погрешность измерения этого
параметра; k — коэффициент, гарантирующий достоверность однократного изме-
рительного контроля (должен быть не менее 2).
Средства измерений, применяемые при испытаниях ВГМ. В про-
цессе испытаний измеряются электрические, а также неэлектриче
ские величины, которые с помощью первичных измерительных пре-
образователей (датчиков) различных типов преобразуются в элек-
трические сигналы Первичные преобразователи могут быть
электромеханические, резистивные (реостатные, контактные, тен-
зорезисторные), индуктивные, тепловые, генераторные, электрон-
ные. Сигналы с первичных преобразователей в необходимых слу-
чаях усиливаются и преобразуются в форму, удобную для
регистрации с помощью промежуточных измерительных преобра
зователей, которые также позволяют согласовывать выход первич-
ных преобразователей с входом регистрирующих средств изме-
рений.
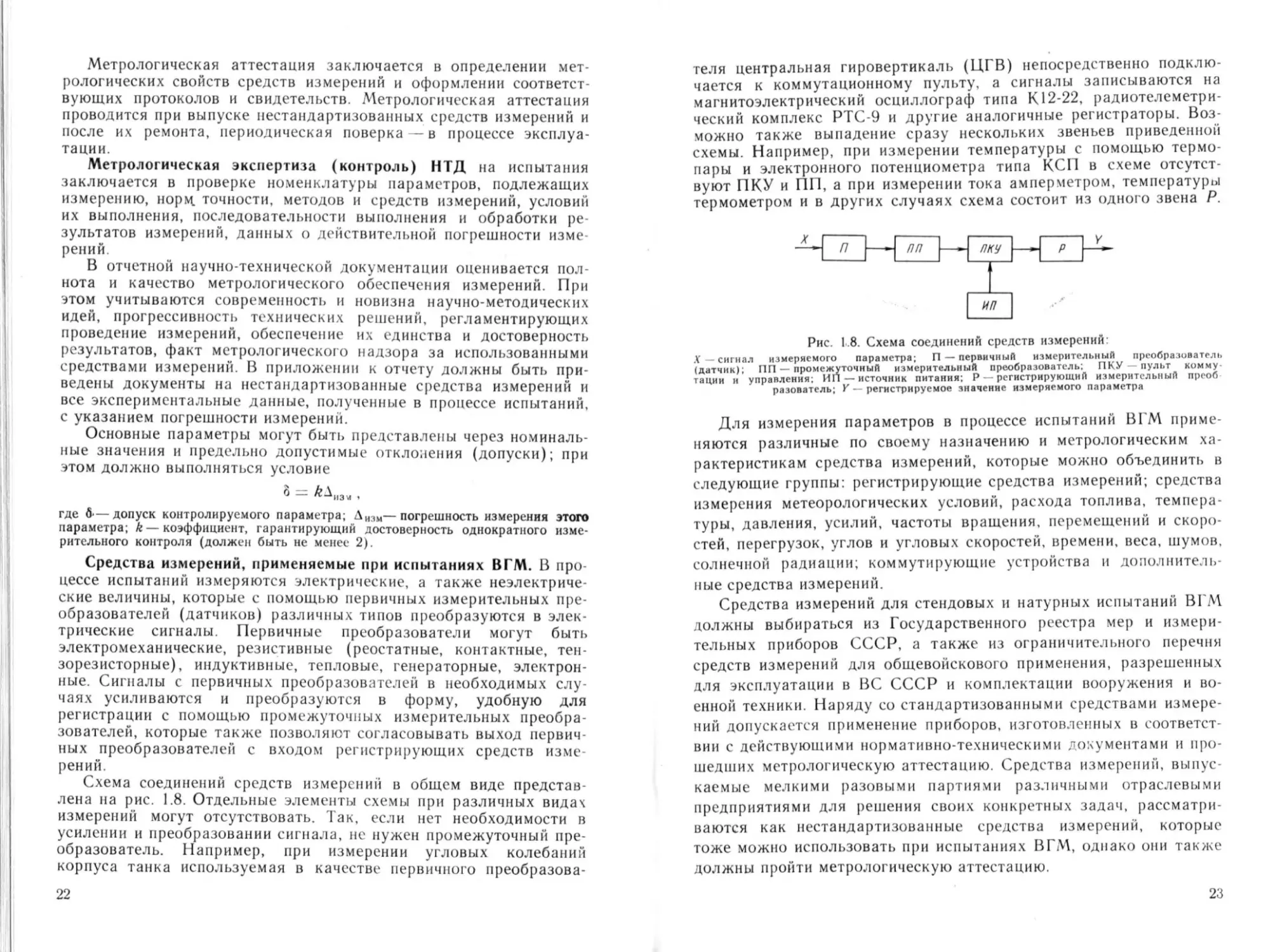
Схема соединений средств измерений в общем виде представ-
лена на рис. 1.8. Отдельные элементы схемы при различных видах
измерений могут отсутствовать. Так. если нет необходимости в
усилении и преобразовании сигнала, не нужен промежуточный пре-
образователь. Например, при измерении угловых колебаний
корпуса танка используемая в качестве первичного преобразова-
22
теля центральная гировертикаль (ЦГВ) непосредственно подклю-
чается к коммутационному пульту, а сигналы записываются на
магнитоэлектрический осциллограф типа К12-22, радиотелеметри-
ческий комплекс РТС-9 и другие аналогичные регистраторы. Воз
можно также выпадение сразу нескольких звеньев приведенной
схемы. Например, при измерении температуры с помощью термо-
пары и электронного потенциометра типа КСП в схеме отсутст-
вуют ПКУ и П11, а при измерении тока амперметром, температуры
термометром и в других случаях схема состоит из одного звена Р.
Рис. 1.8. Схема соединений средств измерений:
X — сигнал измеряемого параметра; П — первичный измерительный преобразователь
(датчик); ПП — промежуточный измерительный преобразователь; ПКУ пульт комму
тации и управления; ИП — источник питания; Р — регистрирующий измерительный преоб
разователь; Г регистрируемое значение измеряемого параметра
Для измерения параметров в процессе испытаний ВГМ приме-
няются различные по своему назначению и метрологическим ха-
рактеристикам средства измерений, которые можно объединить в
следующие группы: регистрирующие средства измерений; средства
измерения метеорологических условий, расхода топлива, темпера-
туры, давления, усилий, частоты вращения, перемещений и скоро-
стей, перегрузок, углов и угловых скоростей, времени, веса, шумов,
солнечной радиации; коммутирующие устройства и дополнитель-
ные средства измерении.
Средства измерений для стендовых и натурных испытаний ВГМ
должны выбираться из Государственного реестра мер и измери-
тельных приборов СССР, а также из ограничительного перечня
средств измерений для общевойскового применения, разрешенных
для эксплуатации в ВС СССР и комплектации вооружения и во-
енной техники. Наряду со стандартизованными средствами измере-
ний допускается применение приборов, изготовленных в соответст-
вии с действующими нормативно-техническими документами и про-
шедших метрологическую аттестацию. Средства измерений, выпус-
каемые мелкими разовыми партиями различными отраслевыми
предприятиями для решения своих конкретных задач, рассматри-
ваются как нестандартизованные средства измерений, которые
тоже можно использовать при испытаниях ВГМ, однако они также
должны пройти метрологическую аттестацию.
23
Выбранные средства измерений должны иметь точность изме-
рений и поеделы изменения оцениваемых параметров, соответст-
вующие общим техническим требованиям, заданным нормативно-
техническими документами.
Средства измерений должны соответствовать условиям эксплуа
тации, что обеспечит их работоспособность при испытаниях. При
этом должны выполняться требования по прочности и устойчивости
к климатическим и механическим воздействиям, стойкости к воз
действию специальных сред, ионизирующего излучения, влиянию
магнитных полей, а также требования по надежности
Предельные значения параметров, характерные для соответст-
вующих условий эксплуатации, устанавливаются нормативно-тех-
ническими документами для аппаратуры военного назначения
(группа гусеничных и колесных машин). Конкретные для данного
вида испытаний условия эксплуатации средств измерений (устано-
вившиеся и переходные режимы, вибрации и др.) должны оговари
ваться также в технических заданиях или методиках испытаний.
Следует учитывать, что градуировка (тарировка) всего измери-
тельного тракта в целом, включающего в себя первичный, промежу-
точный и регистрирующий преобразователи, приводит в больший
стве случаев к уменьшению погрешности измерений.
В зависимости от цели испытаний одни и те же параметры могут
определяться различными методами и соответственно разными
средствами измерений. Например, один и тот же параметр можно
определить с помощью прямых и косвенных измерений.
Примерами прямых измерений являются измерения скорости
движения спидометром или радарными приборами, температуры
термометром, длины—линейкой, тока амперметром и др.; в этих
случаях величины определяются по шкалам и циферблатам изме-
рительных средств.
Примером косвенных измерений является определение скорости
движения по формуле
v vein} Г,
где п — число отметок отметчика оборотов ведущего колеса за промежуток време-
ни Т, деленное на число отметок за один оборот; d диаметр начальной окруж-
ности звездочки ведущего колеса изделия (определяется из конструкторской до-
кументации или обмером ведущего колеса с учетом его износа); /—время, оп-
ределяемое по отметкам магнитоэлектрического осциллографа
Регистрирующие средства измерений. В качестве регистрирую-
щих средств измерений при испытаниях в натурных и стендовых
условиях применяются магнитоэлектрические осциллографы ти-
па К12-22, К20-22, а также радиотелеметрическая система РТС-9,
предназначенная для дистанционной регистрации параметров, при
этом электрические сигналы с первичных преобразователей преоб-
разуются в специальный код, необходимый для дистанционной пе-
24
редачи информации. Для стендовых испытаний применяются так
же и осциллографы типа Н-115*.
Средства измерений метеорологических условий. При оценке
метеоусловий измеряются следующие параметры: температура ок-
ружающего воздуха, скорость и направление ветра, атмосферное
давление, относительная влажность. Для этого используются: де
сантный метеорологический комплект (ДМК); дистанционная ме-
теорологическая станция М-49, барометр-анероид М-67, дождемер
полевой М-99; анемометр МС-13; анеморумбомер М-47**.
Средства измерений расхода топлива при натурных испытаниях
ВГМ предназначены для определения объема топлива, израсходо-
ванного двигателем, а номенклатура их зависит от вида испытаний
и конкретных задач, решаемых на данном этапе.
Все виды испытаний, при которых производится измерение рас-
хода топлива, с точки зрения оптимального выбора средств изме-
рения, можно разбить на три группы.
К первой группе относятся пробеги, отличающиеся значитель-
ной протяженностью (более 100 км). При подобных испытаниях,
как правило, интерес представляет только реальный запас хода
ВГМ по топливу. Объем израсходованного топлива при этом оп-
ределяется методом долива топливных баков ВГМ с помощью ат-
тестованной емкости или специального счетчика.
При пробегах протяженностью от 10 до 100 км рекомендуется
использовать мерный бак. Этот метод является частным случаем
метода долива.
Если мощность двигателя ВГМ выше 700 кВт, можно исполь-
зовать датчик расхода топлива тина ДО-ОЗ-2, пред-
назначенный для измерения суммарного объемного расхода топ
лива в пределах от 30 до 300 л/ч с погрешностью не выше ±1,5 %.
По принципу действия этот датчик объемно-ротационный. Измере
ние расхода топлива сводится к регистрации импульсов тока, со-
ответствующих определенному числу оборотов чашки мерной си-
стемы, приводимой в движение потоком топлива, поступающего в
двигатель. За каждый оборот чашки переносится определенный
объем топлива. Импульсы электрического тока (цена деления
0,1 л/ч) передаются на регистрирующий прибор (магнитоэлектри-
ческий осциллограф, счетчик, телеметрическую станцию и др.).
Большой интерес вызывает изменение расхода топлива в про
цессе испытаний, но отечественная промышленность не выпускает
соответствующих датчиков. В отрасли разработан специальный
датчик типа ДРТС для ВГМ, пригодный для любых ис-
следовательских работ. Выходной сигнал с датчика при пробегах
протяженностью менее 10 км регистрируется магнитоэлектрическим
осциллографом или РТС-9, а при длительных пробегах — электро
механическим или электронным счетчиком. Существует восемь ва
* Принцип действия и основные технические данные указанных регистри-
рующих средств измерений рассмотрены в т 3 монографии.
*• Подробно эти приборы рассмотрены в т. 3 монографии.
25
риантов этого датчика, отличающихся друг от друга ценой выход-
ного импульса и диапазоном измерения: 40.. .400; 30.. .300; 25.. .250;
20 ..200; 15. ..150; 10 100; 8.. .80 л/ч. Погрешность прибора
не превышает ±1 %.
Датчик устанавливается в топливную систему после фильтра
грубой очистки перед подкачивающим насосом двигателя. Для
исключения влияния дренажного топлива на показания датчика
выход дренажа из двигателя подсоединяется на вход подкачиваю-
щего насоса.
Под напором потока топлива, потребляемого двигателем, рото-
ры вращаются, обеспечивая поочередное заполнение и опорожнение
мерительных камер датчика — объемов между корпусом и рото-
рами.
Вращение роторов преобразуется в электрические импульсы,
частота которых пропорциональна расходу.
Для измерения расхода топлива на стенде с более высокой точ-
ностью разработан прибор массового расхода топлива
в диапазоне от 5 до 300 кг/ч. Прибор работает в комплекте с ве-
сами типа ВНЦ, его погрешность при применении технических
гирь четвертого класса и секундомера типа С-1-2а не превыша-
ет 0,2%.
Средства измерения давления. Малогабаритные датчики дав
ления типа МДД и МДДС предназначены для измерения давления
жидких и газообразных агрессивных и неагрессивных сред в на-
турных и стендовых условиях в диапазоне от 0 до 1,2 МПа. Прин-
цип действия датчика основан на упругой деформации мембранных
коробок под действием давления. Основная погрешность их не пре-
вышает ±2 %.
Датчики МДД могут применяться для измерения давления ох-
лаждающей жидкости и масла в двигателе и трансмиссии при
оценке эффективности и работоспособности систем охлаждения,
а также для измерения давления воздуха при оценке параметров
микроклимата, испытаниях изделий на плаву, преодолении ими
глубокого брода и хождении под водой.
Для дистанционного измерения давления масла в двигателе и
трансмиссии при испытаниях систем смазывания и гидроуправле-
ния на стенде м в натурных условиях может применяться также
и электрический дистанционный манометр ти-
па ТЭМ-15, который состоит из датчика и указателя. Манометр
измеряет давление в диапазоне от 0 до 1,5 МПа с основной погреш
ностью, не превышающей ±6 %.
Принцип действия манометра основан на том, что перемещение
мембраны датчика, пропорциональное давлению, передается рео-
статному преобразователю, включенному в схему магнитоэлектри-
ческого логометра.
Датчик манометра ТЭМ-15 можно использовать в качестве пер-
вичного преобразователя давления с последующей регистрацией
26
на магнитоэлектрические осциллографы или радиотелеметрический
комплекс типа РТС-9
Электрический двухстрелочный дистанцион-
ный манометр типа 2ЭДММ-30 применяется для измере-
ния избыточного давления масла в системах смазывания и гидро-
управления трансмиссией в натурных и стендовых условиях. Прин
цип его действия основан на преобразовании перемещения центра
мембраны датчика, пропорционального давлению, в перемещение
движка реостатного преобразователя, включенного в схему магни-
тоэлектрического логометра, который имеет две шкалы для пра-
вого и левого манометров с пределами измерений от 0 до 3 МПа.
Основная погрешность прибора ±6 %.
Электрический дистанционный манометр уни-
фицированны и (ЭДМУ) предназначен для измерения пульси-
рующего давления жидкостей и газов, а также может применяться
для измерения давления масла в двигателе и трансмиссии при ис-
пытаниях систем охлаждения и смазывания ВГМ в натурных и
стендовых условиях.
Принцип действия этого манометра аналогичен принципу дей-
ствия манометров типа 2ЭДММ-30. Существует несколько вариан-
тов таких манометров с пределами измерений от 0 до 8 МПа; ос-
новная погрешность прибора не превышает ±4 %.
Малогабаритные датчики давления повышен-
ной точности типа МД-Т предназначены для дистанци-
онного измерения давления жидкости типа меланжа, амидола, а
также неагрессивных жидкостей и газов.
Эти датчики обладают достаточно большим диапазоном изме-
рений, выдерживают большие нагрузки и применяются в качестве
первичных измерительных преобразователей в системе гидроприво-
да управления поворотом при оценке характеристик поворота, тя-
говых характеристик, работоспособности системы охлаждения ВГМ
Принцип действия их основан на преобразовании перемещения
центра мембраны датчика, которое пропорционально давлению,
в электрический сигнал с помощью реостатного преобразователя
с сопротивлением 900. ..3 000 Ом. Датчики выпускаются в несколь-
ких вариантах с пределами измерений от 0 до 60 МПа.
Датчик давления тензометрический типа ЛХ-412
предназначен для измерения быстроменяющегося (с частотой от 0
до 1500 Гц) давления жидких и газообразных сред в диапазоне
от 0 до 60 МПа. Основная их погрешность ±0,8 %.
Принцип действия этих датчиков основан на преобразовании
деформации чувствительного элемента с наклеенными тензомет-
рами с сопротивлением 700 Ом в электрический сигнал. Тензомет-
ры соединены по мостовой схеме.
Датчики могут применяться для измерения давления жидкости
в гидроамортизаторах и в гидропневматической подвеске при ис-
пытаниях ВГМ в натурных и стендовых условиях. Они работают в
комплекте с усилителями типа ЛХ-5515 и другими преобразовате-
27
лями. Регистрация выходного сигнала осуществляется магнито
электрическим осциллографом и радиотелеметрической станцией
РТС-9.
Дифференциальные U-oбразныеманометры пред
назначены для измерения разности давлений в стендовых условиях
при оценке работоспособности систем охлаждения и теплонапря-
женности сборочных единиц. Перепад давлений определяется по
разности высот столбов рабочей жидкости, залитой в манометр;
погрешность измерений не превышает 1 мм.
Пневмометрическая нормальная трубка с по-
лусферической головкой (трубка Прандтля) предназначена для
измерения среднего давления и средней скорости в любой точке
потока жидкости или газа с температурой до 600°C и скоростью
до 5 м/с.
Трубку можно применять при исследованиях изделий с ГТД в
стендовых условиях.
Средства измерения частоты вращения коленчатого вала дви-
гателя. Для измерения частоты вращения двигателя в диапазоне
от 500 до 3000 об/мин (8,3.. .50 с ') при большинстве видов йены
таний в натурных и стендовых условиях используются тахомет-
ры дистанционные электрические типа ТЭ-ЗВ,
ТЭ-ЗМ и др. Их основная погрешность не превышает 1,5%. Тахо
метр состоит из двух основных узлов: датчика и измерителя. Дат-
чик тахометра типа ДТ-5М, преобразующий обороты вала в элек
трический сигнал, воспринимаемый указателем оборотов, представ-
ляет собой трехфазный генератор переменного тока.
В ходовых условиях для точных измерений отбирают электри-
ческий сигнал с первичного измерительного преобразователя типа
ДТ-5М, установленного на образце, и регистрируют его осцилло-
графом типа KI2-22, Н-115; при этом возможна как дискретная,
так и аналоговая форма записи. Для осуществления аналоговой
записи необходимо согласующее устройство, представляющее со-
бой трехфазный выпрямитель.
Для более точных измерений в стационарных условиях при
меняются тахометры типа ТСФУ-1, ИСТ-1 и ИСТ-2 с первичными
измерительными преобразователями типа ДТ-5М и другими, вхо-
дящими в комплекты тахометров тина ТЭ-ЗВ, ТЭ-ЗМ.
Унифицированный тахометр типа ТСФУ-1 пред-
назначен для измерения частоты вращения в стендовых условиях
в диапазоне от 500 до 2750 об/мин (39,6.. .45,8 с1) Основная по
грешность их составляет ±0,2%. Этот тахометр ферродинамиче
ский, измеряет электрическое напряжение, пропорциональное ча
стоте вращения вала. Датчиком является генератор переменного
тока ДТЭ-2. Тахометр может работать параллельно с указателем
ИТЭ-1 и отдельно.
Тахометры ИСТ-1 и ИСТ-2 предназначены для измере-
ния частоты вращения вала двигателя в диапазоне от 0 до
28
3000 об/мин (0. ..50 с1) Основная погрешность их не превышает
0,5%.
Принцип действия этих тахометров основан на передаче вра-
щения вала двигателя на вал магнитно-индукционного измерителя
с последующим преобразованием его в угловое перемещение стрел-
ки, пропорциональное числу оборотов.
При исследовании пуска двигателей в различных условиях при
меняют датчики числа оборотов типа ИС-445 и ИС 513
с регистрацией на магнитоэлектрический осциллограф. Это индук-
тивные преобразователи частоты вращения вала в электрические
импульсы; устанавливаются они вблизи вращающейся детали, на
которой крепятся один или несколько стальных штырей (флаж-
ков) .
Вследствие изменения магнитного потока в момент прохождения
штыря в обмотках преобразователя индуктируются двухполярные
электрические импульсы, частота следования которых пропорцио-
нальна скорости вращения вала.
При регистрации на радиотелеметрический комплекс РТС-9
сигнал с индукционных датчиков усиливается и преобразуется пре
образователями типа ИС-1164 и ИС-1165.
Средства измерения температуры. Для измерения температуры
поверхности твердых тел, газов и жидкостей применяются термо-
метры сопротивления и термопары. Их сигналы могут регистриро-
ваться магнитоэлектрическими осциллографами типа К12-22, Н 115,
радиотелеметрическим комплексом РТС-9, электронными мостами
типов КСМ, ЭМП-209МЗ (термометры сопротивления) и электрон-
ными потенциометрами типа КСП и ЭПП-09 (термопары).
Термопары и термометры сопротивления выпускаются различ-
ных типов.
При испытаниях ВГМ применяются термометры сопротивления
для транспортных установок, термометры термоэлектрические, тер-
мопары ХК (хромель—копель) и ХА (хромель—алюмель)*.
Первичные преобразователи температур выбираются в зависи-
мости от вида измеряемой среды, пределов измерения температу-
ры, скорости потоков жидкостей и газов и погрешностей измерений
При регистрации температуры радиотелеметрическим комплек-
сом РТС-9 используются промежуточные измерительные преобра-
зователи типа «Термит-32», ПС-523, ПС-1241 для усиления и со-
гласования сигналов. Для измерения термоэдс термопар может
применяться потенциометр постоянного тока ИП-63 класса точ-
ности 0,5.
Термометры сопротивления типа ИС (ИС-447,
ИС 502, ИС-543ВС и др.) предназначены для измерения темпера-
туры поверхности тел, на которые они наклеиваются. Этими термо-
метрами можно измерять температуру в диапазоне от 215 до
1500 °C.
* Основные технические данные термометров сопротивления типа ИС-45 н
термопар ХК и ХА приведены в т. 3 монографии
29
Электронные автоматические мосты постоян-
ного тока ЭМП-209МЗ в комплекте с термометрами сопротив-
ления используются в стендовых условиях.
Измерительное устройство мостов следит за изменением темпе-
ратуры в диапазоне от 200 до 650 СС (основная погрешность
±0,5 %) и непрерывно записывает ее на движущейся диаграммной
ленте Измерять температуру можно одновременно в 24 точках.
Электронный автоматический потенциометр
ЭПП-09 в комплекте с термопарами ХК, ХА, 1111-1, ПР-30/6 пред
назначен для записи температуры и ее регулирования (при нали
чии регулирующего устройства) в диапазоне от —50 до 1800 °C
(основная погрешность ±0,5%).
Измерительная схема этого потенциометра представляет собой
четырехплечий мост, питающийся от источника постоянного тока,
включенного в одну из диагоналей. В другую диагональ включа-
ется последовательно с электронным усилителем датчик темпера-
туры (термопара).
Потенциометры самопишущие типа КСП2, осно-
ванные на компенсационном методе измерения напряжения, при-
менякися для замера температуры в диапазоне от —50 до 1800 °C
с помощью термоэлектрических термометров (термопар) в стацио-
нарных условиях.
Уравновешенный мост типа КСМ2 применяется в
стендовых условиях для измерения температуры в диапазоне от
—200 до 500 °C (основная погрешность не более ±1 %). Прибор
основан на нулевом методе измерения сопротивления. Выпускается
он в различных модификациях и может контролировать одновре-
менно 3, 6, 12 точек. В комплекте с мостом применяются термомет-
ры сопротивления гр. 21 и 23, 1011, 50П, 100П, 50М, 100М.
Преобразователь «Термит-32» используется в систе-
мах измерения температуры при регистрации ее станцией РТС-9.
Принцип действия прибора основан на усилении сигналов, про-
порциональных измеряемым параметрам, и преобразовании их в
форму, удобную для регистрации. Производится автоматическая
коммутация 32 параметров на один измерительный канал.
Электрический термометр сопротивления ТУЭ-48
и ТУЭ-48Т применяется в основном для контроля температуры мас-
ла и охлаждающей жидкости в системах охлаждения и смазыва
ния двигателя и трансмиссии при преодолении брода, подъемах и
спусках, а также для измерения температуры топлива при опреде-
лении предельной скорости движения в различных дорожных ус-
ловиях и при оценке поворотливости машин. Термометры предназ-
начены для измерения температуры в диапазонах от 0 до 120 °C и
от 50 до 150 °C (основная погрешность их не выше ±4,5 °C).
Термометр ТЭУ-48 состоит из двух основных частей: измерителя
и приемника. Измерителем является логометр, к которому подклю-
чено сопротивление чувствительного элемента приемника.
30.
Термометр стартера термоэлектрический т и-
п а ТСТ-29 предназначен для измерения температуры жидкости и
газа в диапазоне от 0 до 900 °C (погрешность не более ±27°C) в
натурных и стендовых условиях
Принцип действия заключается в измерении электродвижущей
силы, возникающей в термопарах термоприемников Т-9. Темпера
туру показывает стрелочный измеритель, входящий в комплект при
бора.
Термоприемник Т-9 может быть подключен к осциллографу, на-
пример, при измерении температуры газа в выпускном патрубке
ГТД при преодолении танком брода.
Термометр выпускных газов ТВГ 11 предназначен
для дистанционного измерения температуры в диапазоне от 300
до 900 °C (погрешность не более ±25 ПС) в натурных и стендовых
условиях. Прибор состоит из измерителя, приемника и соединяю-
щих проводов.
Термоприемник может быть использован отдельно в качестве
первичного измерительного преобразователя с записью температу
ры на ленту магнитоэлектрического осциллографа
Средства измерения перемещений и скорости. Датчики ма-
лых перемещений ЛХ-704.. .ЛХ-708 предназначены для из
мерения перемещений в диапазонах от 0 до 15, 30, 60, 100, 150 мм
и применяются для измерения хода педалей подачи топлива, тор-
моза и сцепления при оценке поворотливости и управляемости ВГМ
в натурных и стендовых условиях.
Отметчик рычага включенной передачи пред-
ставляет собой контактное устройство, состоящее из микровыклю-
чателей. замыкающихся рычагом избирателя передач.
Отметчик оборотов ведущего колеса предназначен
для измерения скорости движения ВГМ косвенным методом в на-
турных и стендовых условиях. Он представляет собой контактный
преобразователь, который устанавливается непосредственно на вы
ходном валу и преобразует его частоту вращения в электрические
импульсы. Диапазон измерения отметчика от 0 до 100 об/мин
(16,66 с ’), что соответствует скорости движения от 0 до 100 км/ч
(число импульсов на один оборот ведущего колеса 1, 2, 4, 8 для
разных вариантов отметчика)
Прибор для измерения пути и скорости движе-
ния используется при оценке тягово сцепных свойств ВГМ, дви
жущихся по мерным участкам, а также при оценке поворотливости
их на плаву.
Прибор представляет собой электромеханический преобразова
тель, состоящий из мерного шкива, подматывающего барабана с
имеющимся на нем мерным тросиком и генератора типа ТГП I
Спидометры СП-106, СП-110 предназначены для измерения
скорости, развиваемой машиной в данный момент, и пройденного
пути в натурных условиях.
31
Спидометры состоят из датчика, указателя со шкалой до 80 или
100 км/ч и механического счетчика (до 99999,9 км).
Измеритель скорости движения плавающих
объектов позволяет измерить радиальную составляющую ско-
рости в диапазоне от 1,5 до 6 м/с (погрешность ±2,5% для анало-
гового выхода и ±1 % для цифрового) на дальности от 2 до 500 м.
Принцип действия измерителя основан на использовании доппле
ровского эффекта. Плавающий объект должен быть оборудован
трехграниым уголковым отражателем с ребром 700 мм.
Теодолиты типа ТБ-1 могут применяться при оценке уп-
равляемости и поворотливости ВГМ на плаву, в частности для
определения тактического диаметра циркуляции косвенным мето
дом. Это оптический прибор, измерительными элементами которого
являются стеклянные лимбы и оптический микрометр.
Средняя квадратическая ошибка измерения угла равна ±3,5"
по горизонтальному лимбу и ±5" по вертикальному.
Буссоль типа БС-2 также может применяться при оценке
управляемости и поворотливости ВГМ на плаву, а также для оп-
ределения румбов, азимутов и измерения горизонтальных углов в
полевых условиях.
Наличие лимба с вращающейся алидадой в БС-2 обуславлива-
ет точность измерения углов и азимутов 5', т. е. значительно выше,
чем у других типов буссолей.
Средства измерения линейных ускорений. При испытаниях на
плавность хода, при определении предельной и средней скоростей
движения, оценке энергоемкости и теплонанряженности гидроамор-
тизаторов в ходовых условиях, а также при оценке поворотливости
машин применяются акселерометр однокомпонентный компенсаци-
онный типа АДИС-2; виброизмерительная аппаратура ВИ6-6ТН с
датчиком ускорения ДУ-5С; тензометрический датчик перегрузок
МП-02 и др.
Т ензометрический датчик перегрузок МП-02 с диа-
пазонами измерений ±60 и ±150 м/с2 является прибором сейсми-
ческого типа с резонансными частотами от 40 до 60 Гц и от 80 до
100 Гц соответственно (основная погрешность не более ±2%).
Виброизмерительная индуктивная аппаратура
ВИ6-6ТН в комплекте с датчиками предназначена для измерения
вибраций, давления и перемещений одновременно в шести точках
(основная погрешность ±3%). В основе работы аппаратуры ле-
жит принцип амплитудной модуляции несущей частоты индуктив
ными датчиками, включенными по дифференциально-трансформа-
торной схеме. Сменные фильтры обеспечивают диапазоны измере-
ний от 0 до 30 Гц и от 0 до 200 Гц.
Датчик ускорений типа ДУ-5С с диапазонами измерений
от 1 до 200, от 2 до 500 и от 4 до 1000 м/с2 применяется в частот
ном диапазоне измеряемых процессов от 0 до 200 Гц. Датчик ра-
ботает в комплекте с виброаппаратурой типа ВИ6-6ТН; является
индуктивным преобразователем измеряемых величин в электриче-
32
ский сигнал и выполнен по дифференциально трансформаторной
схеме.
Акселерометр однокомпонентный компенсаци-
онный АДИС-2 предназначен для измерений линейных ускорений
в диапазонах ±11,2; ±16; от —31,5 до 63 и от —31,5 до 100 м/с2
с частотным диапазоном измерений от 0 до 5 Гц, при этом неравно-
мерность амплитудно-частотной характеристики не превышает
±5%.
Принцип действия акселерометра основан на том, что под дей-
ствием измеряемого ускорения происходит смещение чувствитель-
ного элемента, одна из поверхностей которого является подвижной
пластиной плоского воздушного конденсатора, включенного в один
из двух резисторно-емкостных делителей напряжения генератора
высокой частоты, что определяет изменение напряжения на выходе.
Акселерометры АДИС-2 применяются при испытаниях ВГМ
в натурных условиях.
Средства измерения углов и угловых скоростей. Централь-
ная гировертикаль типа ЦГВ предназначена для измерения
углов колебаний корпуса ВГМ относительно продольной и попе-
речной осей при оценке плавности хода, определения скорости дви-
жения, исследования устойчивости гусеничной ленты, движения на
плаву и преодоления брода. Гировертикаль типа ЦГВ-2 имеет
пределы измерений ±10, ±30, ±45, ±70, ±80°, а ЦГВ-9 — ±30°.
Центральная гировертикаль ЦГВ-9 является основой прибора
регистрации угла наклона неровностей (ПРУНН), который ис-
пользуется для оценки дорожных условий при определении скоро-
сти и топливно-экономической характеристики ВГМ. Гироверти
каль представляет собой двухгироскопную платформу с силовой
стабилизацией, корректируемую по вертикали жидкостным маят-
никовым элементом. Съем сигналов, пропорциональных углам на-
клона, производится с потенциометрических устройств, установлен-
ных на измерительных осях. Гировертикаль обладает повышенной
точностью.
Свободный гироскоп типа СГ-3 применяется для изме-
рения углов поворота ВГМ в горизонтальной плоскости и углов
отклонения по курсу; его диапазоны измерений ±9, ±20, ±30,
±45, ±60, ±80, ±120°.
Съем электрических сигналов, пропорциональных углам, про
изводится с потенциометрических устройств, связанных с внутрен-
ней и внешней рамками карданного подвеса гироскопа.
Уход внешней рамки гироскопа не превышает ±Г за минуту,
а внутренней ±1,5°.
Датчик угловых скоростей малогабаритный
(ДУСМ) применяется для измерения угловой скорости корпуса
ВГМ по трем координатным осям при оценке плавности хода и
средней скорости движения ВГМ.
Принцип действия датчика основан на свойстве гироскопа с
двумя степенями свободы совмещать ось свободного вращения с
3 Зак. 2 <о
33
осью вынужденного вращения с последующим преобразованием
угловой скорости в электрический сигнал. Его диапазоны измерений
±6, ±15, ±18, ±30, ±37, ±45, ±56, 60, L 75, J 90, • 112,
± 150°/с.
Средства измерений усилий. Л а до метр, предназначенный
для измерения усилия сжатия в диапазоне от 500 до 50 000 Н (по
грешность 5%) при определении нагрузок под катками, является
первичным измерительным преобразователем тензометрического
типа.
Принцип его действия основан на преобразовании деформации
чувствительного элемента в электрический сигнал, передающийся
на мост типа ЦТМ-3.
Мост цифровой тензометрический типа ЦТМ-3 класса точности
0,2 предназначен для измерения статической деформации при по-
мощи тензорезисторов; это лабораторный прибор настольного типа
Динамометры пружинные указывающего типа
ДПУ 1-го и 2-го классов точности предназначены для измерения
растягивающих усилий в диапазоне от 0,1 до 100 кН. Они приме
няются для определения усилий на органах управления при испы
таниях ВГМ на поворотливость, а также для определения момента
проворачивания катков при определении их работоспособности в
условиях низкой температуры, силы тяги водоходных движителей
при испытаниях на плаву и усилия буксировки.
Датчик усилий тензометрический ТПЛ предназначен
для измерения статических усилий сжатия от 0,5 до 2000 кН (ос-
новная погрешность не превышает ±0,9%). Он может быть ис-
пользован и для определения усилия буксировки при опенке тягово-
сцепных характеристик; с помощью специального приспособления
усилие сжатия преобразуется в усилие растяжения.
Преобразователь ЛХ-5515 служит для приема сигналов
с мостовых схем тензодатчиков при измерениях усилия, давления,
моментов, деформации одновременно по четырем каналам с реги
страцией их магнитоэлектрическим осциллографом или радиотеле
метрической станцией РТС-9 и является промежуточным измери-
тельным преобразователем при испытаниях в стендовых и натурных
условиях.
Принцип действия преобразователя заключается в усилении
сигнала, пропорционального измеряемому параметру, и преобразо-
вании его в форму, удобную для регистрации
Наличие сменных фильтров обеспечивает возможность записи
процессов в диапазонах частот от 0 до 20, 50, 100, 150, 200 и 500 Гц
(основная погрешность не превышает ±3,5% за 15 мин работы).
Средства измерения времени. В ходе испытаний обычно фикси
руются текущее (астрономическое) время и временные интервалы
между отдельными событиями и явлениями, происходящими в про
цессе испытаний. Для фиксации астрономического времени при-
меняются разного рода календари и часы, измеряющие его суточ-
ный ход.
34
При визуальном наблюдении исследуемого явления или про-
цесса для измерения временных интервалов обычно используются
часы, секундомеры и счетчики времени с отображением информа-
ции на стрелочных и цифровых индикаторах; для быстроменяющих-
ся процессов используют отметчики времени, генераторы часто-
ты и др
При записи процесса на магнитоэлектрический осциллограф
типа К12-22 применяют электромеханические часы тина МЧ-62 с
отметкой времени через 0,1 и 1 с (в нормальных условиях сохра
няется постоянство тарировки в пределах ±1 % в течение 10 ч).
На осциллографе К20-22 имеется встроенный отметчик времени,
производящий отметки через 10; 1; 0,1 и 0,01 с (погрешность
±2%). При регистрации осциллографом 11 115 отметка времени
производится встроенным оптико-механическим линующим отмет
чиком через 2; 0,2; 0,02 и 0,002 с. При регистрации параметров ра-
диотел еметрическ им комплексом РТС-9 отметка производится квар-
цевым генератором импульсов через 1 и 0,1 с с высокой точностью
Для некоторых видов испытаний применяются серийные меха-
нические секундомеры типа С-1-2а и С-П-16.
Средства измерения шума. Прецезионный импульсный измери-
тель уровня звука типа PS1-202 фирмы RFT (ГДР) предназначен
для измерения уровней звукового давления (громкости) от 24 до
135 дБ и спектров акустических шумов и вибраций подвижных объ-
ектов в воздушной1 среде в частотном диапазоне от 20 Гц до
12 кГц, а также для измерения демаскирующих шумов.
Высокочастотный шумомер используется в комплекте с октав
ным фильтром ТОЛ-111, низкочастотной приставкой OZ-101, виб-
рометром SM-24I. С его помощью возможно также определить им-
пульсный шум. Шумомер является электронным прибором, прин-
цип действия которого основан на преобразовании звукового дав
ления в электрические сигналы при помощи микрофона Прибор
имеет выход для записи на магнитную ленту.
Средства измерения интенсивности солнечной радиации. Пира-
нометр универсальный типа М-80 предназначен для изме-
рения поверхностной плотности потока солнечного излучения (сум-
марного и прямого) в пределах от 69.8 до 1396 Вт/м2 (от 0,1 до
2 кал см2 мин ’) и применяется при испытаниях ВГМ на обитае-
мость.
Пиранометр состоит из головки и приемной части, представля-
ющей собой термобатарею на манганиновых и константановых лен-
точках, спаянных между собой последовательно. Поверхность тер-
мобатареи покрывается сажей и магнезией (четные и нечетные
слои разного цвета). Выводы термобатареи подводятся к клеммам,
к которым подключаются провода от стрелочного гальванометра
типа ГСА-1.
Средства измерения массы. Автомобильные циферблат-
ные весы типа РС-бОЦВАс служат для измерения массы в
пределах от 3 до 60 т (приведенная погрешность ±0,05%). Весы
3*
35
стационарные, устанавливаются на фундаменте; состоят из грузо-
подъемной части с габаритными размерами 15X4 м, весового
платформенного механизма и указательного прибора.
Коммутирующие устройства. Универсальные коммутационные
пульты типа УКП-1 и УКП-2 применяются при использовании маг-
нитоэлектрических осциллографов типа К12-22 или радиотелемет-
рической станции типа РТС-9. К пульту УКП-1 одновременно мож-
но подключить 20 первичных преобразователей, а к пульту
УКП-2 —32 (контактных, реостатных, генераторных, индукцион-
ных и др.), что важно для сокращения сроков разработки и изго-
товления измерительных схем, а также для обеспечения оператив-
ности при замене средств измерений.
Дополнительные средства измерений — это различные инстру-
менты и приспособления, изготовленные в соответствии с действую-
щей научно-технической документацией. Для измерения статиче-
ских углов применяются квадранты оптические и квадранты меха-
нические с уровнем; для измерения длины — линейка измеритель-
ная металлическая, рулетка измерительная металлическая.
Для измерения температуры применяются термометры стеклян-
ные; для измерения плотности электролита — ареометр. Для изме
рений усилий и давления используются шунты силоизмерительные,
мановакуумметры, вакуумметры и манометры.
Для визуального отсчета числа импульсов применяются элек-
тромагнитные и релейные счетчики импульсов типа МЭС-54; для
измерения расхода воздуха—сопло Вентури и мерные шайбы.
Для улавливания пыли с целью определения ее массы в 1 м3
воздуха используется привес Аллонжа; для определения временных
моментов или фиксированных положений перемещающихся дета-
лей применяются контактные устройства: кулачковые переключа-
тели ПКМ, малогабаритные кнопки КМ, двухполюсные кнопки
П2КА-2 и др.
Оценка погрешности измерений. Испытания нельзя считать за-
конченными без оценки интервала неопределенности результатов
измерений, сводящейся к оценке их погрешности с заданной ве-
роятностью.
При прямых измерениях значения величин определяют непо-
средственно из опытных данных. При этом результат измерений
является следствием нескольких преобразований, например, пер-
вичный преобразователь преобразует измеряемую физическую ве-
личину в силу электрического тока, которая промежуточными пре-
образователями переводится в угол поворота стрелки измеритель-
ного прибора, перемещение светового луча осциллографа или пера
самопишущего потенциометра. Современные преобразователи несо-
вершенны, т. е. любое преобразование происходит с искажениями,
поэтому конечный результат отличается от истинного значения из-
меряемой величины.
Инструментальная составляющая погрешности измеренич
характеризуется классом точности выпускаемых средств измерений
36
и состоит из основной и дополнительных погрешностей. Законы рас-
пределения составляющих инструментальной погрешности не нор-
мируются.
Методическая составляющая погрешности измерения возникает
вследствие того, что на выходе измерительного преобразователя
используется не та величина, которая измеряется, а отражающая
ее лишь приблизительно, которая проще реализуется, что позво-
ляет создавать простые и надежные измерительные устройства и
системы.
Динамическая составляющая погрешности измерения обуслав
ливается в основном инерционными свойствами измерительных
преобразователей (в первую очередь, первичных) и определяется
как разность между погрешностью прибора при его использовании
для регистрации динамического процесса (для измерения перемен-
ной во времени физической величины) и его погрешностью при из-
мерении статического процесса (постоянной величины).
В техническом описании (в паспорте) прибора данные о его
точности приводятся в виде основной и дополнительных погрешно-
стей измерений.
Основная погрешность средства измерений - это его предельно
допустимая погрешность при эксплуатации в нормальных условиях,
которая выражается в процентах от нормирующего значения. Нор-
мирующее значение для приборов с односторонней шкалой прини-
мается равным верхнему пределу измерения; для приборов с двух-
сторонней шкалой (с нулевой точкой в пределах шкалы) —сумме
абсолютных значений верхнего и нижнего пределов; для приборов
с безнулевой шкалой — разности верхнего и нижнего пределов.
Соответствующая относительная погрешность измерения, отнесен-
ная к значению измеряемой величины, будет тем больше, чем
ближе она к началу шкалы. Так, для автоматического потенцио-
метра с пределами измерений температуры 0...200°C значение ос-
новной погрешности равно 0,5 %, т. е. с такой погрешностью изме-
ряется температура, равная 200 °C; при температуре 100 °C отно-
сительная погрешность становится равной 1 %, при 50 °C —2%;
при стремлении температуры к 0 относительная погрешность стре-
мится к бесконечности.
Абсолютное значение основной погрешности прибора
До=±Л8о/100, (1.1)
где во —основная погрешность, в %; А нормирующее значение в единицах из-
меряемой величины.
Дополнительные погрешности средства измерений — это пре-
дельно допустимые изменения его погрешности при эксплуатации
в условиях, отличных от нормальных.
37
/Хбсолютное значение дополнительной погрешности от /го влия-
ющего фактора
A,/ = 4S>(z-zo)/l00, (1.2)
где 6/ — коэффициент влияния /-го фактора на погрешность прибора в процентах,
отнесенных к единице влияющего фактора; г, г0--соответственно значения влия-
ющего фактора в условиях проведения измерений и в нормальных условиях.
Если значения влияющих факторов в условиях проведения из-
мерений неизвестны, то вычисление дополнительных погрешностей
необходимо проводить для предельных значений этих факторов,
приводимых в эксплуатационной документации на приборы или в
технических условиях на их изготовление.
Обобщенное выражение для оценки погрешности прямых изме-
рений на основе характеристик используемых средств измерений
имеет вид
Г~п Л I
(1.3)
где Лс.« — абсолютное значение неисключенной систематической погрешности из-
мерения в единицах измеряемой величины; k — коэффициент, определяемый при
пятым значением доверительной вероятности (At— 1,1 для доверительной вероят
ности Р—0,95 и k- 1,4 для Р=0,99); п число измерительных преобразователей;
/л<—число влияющих факторов на т-й преобразователь; / - число составляющих
методической погрешности; Дм — основные погрешности измерительных преобра
зоватслей; А*// — дополнительные погрешности измерительных преобразователен,
А» / — методические составляющие погрешности измерений.
Приведенная формула справедлива, когда случайная состав-
ляющая погрешности пренебрежимо мала по сравнению с компози-
цией предельно допустимых составляющих погрешностей исполь-
зуемых средств измерений. В этом случае исследователь, повторно
наблюдая измеряемую величину, получает ее значение с разбро-
сом, который не превышает Лс.и, а в большинстве случаев разброс
вообще отсутствует.
Если измеряемая величина во время наблюдения изменяет свое
значение, обработка результатов производится статистическими ме-
тодами, для чего необходимо иметь выборку наблюдений не ме-
нее 15 (л^15) Грубые погрешности (промахи) в составе выборки
должны исключаться. Результатом измерения является среднее
арифметическое наблюдений
(1.4)
где Х{ — результат »-го наблюдения измеряемой величины; п —общее число на-
блюдений.
Среднеквадратичное отклонение результата измерений
5'Й) - |/i(^--4)!/l«(« 1)1- (15)
38
Далее необходимо проверить принадлежность результатов на-
блюдений нормальному закону распределения. Для выборок на-
блюдений я>50 проверка проводится по ГОСТ 11.006—74, а для
выборок 50>>я> 15 по ГОСТ 8.207 76 При л^15 принадлеж-
ность к нормальному распределению не проверяется. Использовать
положения нормального закона для опенки границ случайной по-
грешности результата измерений допустимо только в том случае,
если заранее известно (например, из предыдущего опыта), что
результаты наблюдений принадлежат нормальному закону.
Доверительные границы случайной погрешности результата из-
мерений
Л=/3(А), (1.6)
где t коэффициент распределения Стьюдента, учитывающий число наблюдений
н выборке (при л^20 / = 2 для доверительной вероятности Р=0,95 и 1 = 2,8 для
Р=0,99).
Опенка погрешностей по формулам теории вероятностей доста-
точно надежна, если число наблюдений п^20. Но уже при
20>я>10 экспериментальное значение S (А) существенно отли-
чается от теоретического о на величину
34 100 3 (А)/1<2(« — 1).
Для п = 2, 3, 8, 10, 20, 50 соответственно погрешность Si = 70,
50, 27, 24, 16, 10 %. Для ограниченного числа наблюдений оценка
погрешности считается надежной, если S»=S(A)/4. Это условие
выполняется при л^8, т. е 8 минимальное число наблюдений.
При п<20 рекомендуется пользоваться распределением Стью-
деита и формулой (1.6). При п>20 коэффициент распределения
Стьюдента t совпадает с коэффициентом е нормального закона
распределения, а доверительные границы случайной погрешности
результата измерений соответствуют
Д — eS (А).
При доверительной вероятности Р=0,95 существует следующая
зависимость значения / от числа наблюдений п:
п. ... 2 3 4 5 6 7—8 9 10 11-14 15—20 25—30
t. . . . 12.7 4,3 3,2 2.8 2,6 2,4 2,3 2.2 2,1 2.0
Если ДС11/5(А) <0,5, то неисключенной систематической со-
ставляющей погрешности Лс.|( можно пренебречь и погрешностью
измерений считать случайную составляющую погрешности, т. е.
Л=Д.
Если Дс.и/5(А) <8, то можно пренебречь случайной состав
ляющей и считать Л—Дс „.
Если 0,5^Лс.и/3(АХ8, то Д= 0,8( Дс и -f- А), где составляющие
Де и и А определены при одном и том же значении доверительной
вероятности.
39
Если систематическая ошибка Лс и существенно больше слу-
чайной, то повторное измерение достаточно выполнить одни раз,
если же случайная ошибка является определяющей, то измерения
проводятся несколько раз.
Результаты измерений получают в форме, регламентированной
МИ 1317-86, т. е. Л+Л; Р.
Неисключенная систематическая погрешность прямых измере-
ний существенно уменьшается, если средства измерений индиви-
дуально градуировать с помощью образцовых средств измерений
в условиях, соответствующих реальным условиям эксплуатации
ВГМ.
Оценка погрешности косвенных измерений. Пусть между иско-
мой величиной А и измеряемыми аргументами Л|, Д2..A/t..., Am
существует функциональная зависимость
Д=/(Л; Л,; ...; Л„). (1.7)
Наиболее достоверным значением косвенно измеряемой вели-
чины А будет значение А, получаемое подстановкой_в формулу
(1.7) результатов прямых измерений аргументов, т. е. Ль А2,. . .Ат.
Для оценки погрешности результата измерений необходимо рас-
смотреть корреляционные связи между аргументами зависимости
(1.7). Корреляция имеет место, если измерения производятся од-
новременно однотипными средствами, когда изменения внешних
воздействий (электрических, магнитных, температурных и других
полей, энергетических условий и др.) оказывают влияние на
формирование погрешностей измерений. Если исходные величины
измеряют различными средствами, то результаты измерений кор-
релированы слабо, и значениями коэффициентов корреляции мож
но пренебречь. Случай косвенных измерений, когда результаты
прямых измерений независимы, т. е. значения коэффициентов кор-
реляции равны нулю, является наиболее распространенным.
Среднеквадратичное отклонение результатов многократных из-
мерений
5(A)- |/ 2oV/Ws(A)2. (1-8)
где df/дА/ — значение частной производной зависимости (1.7) по аргументу Л/
при Ai=Ah называемое коэффициентом влияния; 5(4Л — значение среднеквадра-
тичного отклонения результата измерения аргумента А,.
Доверительная граница случайной погрешности результата кос-
венного измерения
где tq — коэффициент Стьюдента, зависящий от выборки аргумента, которому
соответствует наименьшее число наблюдений лт1п
10
Если результаты измерений аргументов получены посредством
однократных измерений и известны их неисключенные системати-
ческие погрешности с одной и той же соответствующей им довери-
тельной вероятностью, то неисключенная систематическая погреш-
ность результатов косвенных измерений
дс,- \/ (1.9)
где Дд — неисключенная систематическая погрешность измерения аргумента А/.
Доверительные границы погрешности результата измерения
tqzS*(A),
где lq £ — коэффициент, зависящий От доверительной вероятности. S£ (4) —
среднеквадратичное отклонение общей погрешности результата измерения
Для определения параметров lqi и 5г (Л) используются сле-
дующие формулы:
Ае.«/(^/3) + 5(Л)
S:(A)^-V S*(A) + b' ./(ЗА1),
где k — коэффициент из формулы (1.3).
Относительная погрешность измерений (в %)
8. = 100Дк1/Л.
Если результат измерений
А = Ьх 4- су 4- dt -г ..., (1.10)
где Ь, с. d — числовые коэффициенты; х, у, г—величины, измеряемые прямым
методом,
то абсолютная погрешность результата измерений
Ал = /(MJ’ + (rA,)» + (dA,)« + .... (1.11)
где Дж, Др, Д, — абсолютные погрешности измерений аргументов х, у, г.
Если результат измерений
А - kxbyczd...,
то относительная погрешность измерений
| ..., (1.12)
Уде 6ж-Дж/х; бр = Др/(/. 6ж=Дж/г
Пример оценки погрешности однократных прямых измерений.
Исходные данные: измеренная температура масла при установив-
4 Зак. 2 «с» 41
шемся режиме работы двигателя 100°C; температура окружающе-
го воздуха (20±15)°С; относительная влажность окружающей
среды (60±30) %; напряжение питания средств измерении
(220±20) В; на рабочем месте испытателя напряженность магнит-
ного поля не превышает норм техники безопасности; вибрационные
нагрузки отсутствуют.
В соответствии с условиями измерений выбран следующий ком-
плект средств измерений: первичный измерительный преобразова-
тель (МП) — термопара ХК (ГОСТ 3044—84); вторичный измери-
тельный преобразователь — регистрирующий прибор ЭПП 09 с пре
делом измерения 150°С; соединительные линии--термоэлектрод-
ные (компенсационные) провода по ГОСТ 1791 67.
Согласно ГОСТ 3044—84, погрешность ИП в диапазоне темпе
ратуры (-50.. .300) °C Л, = ±2.4 °C.
Основная погрешность потенциометра Э1II1-09 при нормальных
условиях (/=(20±5)°С, относительная влажность окружающей
среды 60%, Г = 220 В) составляет 0,5 % от верхнего предела пз
мерения. Абсолютное значение основной погрешности:
Л>=±0,5-150/100= ±0,75 °C.
Абсолютные значения дополнительных составляющих погреш-
ности определяются по формуле (1.2) и приведены в табл. 1.4.
Таблица 1.4
Дополнительные составляющие погрешности потенциометра 9 П П-09
Влияющий фактор Изменение влияющего фактора относительно нормальных условий, % Дополнительная со сбавляющая погрет ностн
нормируемое ДсЙСГВИ тельное Обо ан а чекне Значение. °C
Изменение: температуры на 10 ®С 0.2 0.2 Аз о.з
влажности на 10% 0.15 0,45 0.7
напряжения электрического 0,25 0.25 А 0,4
тока на 10 % (показания) 0.5 0,5 А; 0 75
Магнитное поле (скорость протяжки) 0,5 0,5 As 0,75
Примечание. 11оскольку нормируемые изменении влияющих факторов
даны не на единицу, а на 10 единиц влияющего фактора, параметры z и ги
в формуле (1.2) должны приравниваться к значению влияющего фактора, делен
ному на 10.
По ГОСТ 1791—67, в паре между линиями термоэлектродных,
проводов ХК допускается отклонение ЭДС, равное ±0,2 мВ, что
по ГОСТ 3044—84 соответствует погрешности измерений
Л8=±3,0°С.
42
Абсолютная суммарная погрешность измерения температуры
масла при доверительной вероятности Р 0,95 по формуле (1.3)
равна
Д, 1.1 |/ 2 Л•'= ±М /2,4- + 3- 0,752н 0,32±-0,7’-±0,4а ±- З2 =
= 4.7 С (5 С).
Результат измерений можно представить в следующем виде:
/„ = 100 °C; Д=±5°С; Р - 0,95
Пример оценки погрешности косвенных измерений. Измеренная
мощность двигателя (в кВт)
Л'|13м 736 -10 Рп, (1.13)
где Р — показания используемого нагружающего устройства, II (при условии,
что рабочее плечо нагружающего устройства составляет 0,716 м); « — частота
вращения вала двигателя, об/мин
В соответствии с (1.12) относительная погрешность измерения
мощности
где Йр — относительная погрешность измерения усилия нагружающим устройст-
вом, %; 6,— относительная погрешность измерения частоты вращения вала дви
гатсля, %.
При использовании современных средств измерений на режиме
максимальной мощности двигателя значения параметров 6р=0,8 и
6„ = 0,5. При этом инструментальная составляющая погрешности
измерения мощности двигателя не превышает 1 %.
Средства автоматизации процесса обработки информации.
Аппаратура «Силуэт» выбирает для обработки одну из двух-трех
непересекающихся кривых; возможно считывание и запись на одну
перфоленту обеих кривых одновременно посредством поочередной
выдачи их ординат.
Специализированное автоматическое устройство преобразовании
графиков (САУПГ) предназначено для автоматического и полуав-
томатического преобразования графической информации с осцил-
лограмм в цифровой код. Оно считывает за один цикл до 12 орди-
нат одной точки абсциссы, относящихся к разным кривым, заре-
гистрированным одновременно.
Радиотелеметрическая система РТС-9 применяется для регист-
рации и обработки информации, поступающей от первичных пре-
образователей. Первичная информация от датчиков поступает к
бортовой аппаратуре, преобразуется ею в напряжения и передает
ся на приемо-регистрирующую станцию. Информация, записанная
на магнитном носителе н обработанная на специализированной вы-
числительной машине М0-9М, может вводиться в ЭВМ ряда ЕС
для дальнейшей обработки.
4* 43
Специализированная вычислительная машина обработки теле-
метрической информации М0-9М переводит относительные значе-
ния величин в абсолютные, находит характерные точки исследуе-
мых функций, определяет время прохождения команд, усредняет
результаты измерений и др. Эта машина обрабатывает телеметри-
ческие данные, полученные с выходных устройств систем РТС-9,
РТС-8 и систем «Трал», выдавая результаты обработки в виде гра-
фиков и таблиц.
Обработка результатов телеметрических измерений является
составной частью испытаний и производится поэтапно.
При подготовке объекта к испытаниям производится установка
различного вида датчиков и их тарировка, подготавливаются ис-
ходные данные для обработки результатов телеизмерений в виде
перфокарт.
Для составления программы обработки результаты измерений,
занесенные на магнитную ленту, переписываются в виде графиков,
что необходимо для предварительного их анализа; одновременно
производится частичная обработка результатов по одной группе
каналов с внесением всех возможных поправок на нелинейность и
приведением полученной информации к машинному масштабу с
учетом изменений телеметрической шкалы. Результаты такой об-
работки регистрируются в виде вторичной магнитной записи, а
также в виде графиков. Трудоемкость проведения испытаний и до-
стоверность получаемых при этом результатов в значительной сте-
пени определяются количеством первичной информации, получен-
ной в условиях воздействия различных внешних факторов на шас-
си ВГМ. Автоматизация процесса обработки экспериментальных
данных, совмещение циклов их регистрации и обработки являются
одним из направлений повышения качества и снижения трудоемко-
сти испытаний ВГМ.
В общем балансе времени, затрачиваемом на испытания шасси
ВГМ, основная часть приходится на пробеговые испытания, а наи-
более трудоемким процессом обработки экспериментальных дан-
ных является статистическое описание различных процессов.
Из средств автоматизации процессов регистрации и обработки
экспериментальных данных при испытаниях шасси ВГМ наиболь-
шее распространение получили магнитоэлектрические осциллогра-
фы типа К20-22 и К12-22 с подготовкой данных для ввода в ЭВМ
на аппаратуре «Силуэт» или специализированном автоматическом
устройстве преобразования графиков; радиотелеметрическая систе-
ма типа РТС-9 со специализированной машиной обработки МО-9,
регистрирующей параметры на магнитофоне для последующей об-
работки на универсальной ЭВМ; аппаратура статистических ис-
следований (режимомеры и бортовые измерительно-вычислитель
ные комплексы).
По данным предварительного анализа составляется программа
обработки результатов радиотелеметрических измерений, предва-
рительно переписанных на магнитную ленту в виде групп парамет-
44
ров, приведенных к машинному масштабу и прошедших частичную
обработку с внесением поправок на нелинейность.
Результаты обработки размножаются в требуемом количестве
экземпляров для последующего анализа.
В вычислительной машине обработки телеизмерений МО-9М
предусмотрены два основных режима работы: приведение измере
ний к единому машинному масштабу с учетом изменений телемет-
рического масштаба, а также с внесением поправок на нелиней-
ность и получение результатов измерений в требуемом для анализа
виде в соответствии с программой обработки. Третий режим явля-
ется контрольным: результаты обработки выводятся на пульт уп-
равления и визуального контроля в виде цифр или таблиц.
Для полной автоматической обработки телеметрическая инфор
мания, полученная на машине М0-9М, вводится в электронновы
числительную машину ЕС-1033. В стойке магнитной регистрации
17С06-17С07 монтируется согласующее устройство, приводящее
последовательность импульсов кода телеметрической информации
к соответствующим уровням напряжений, принятых в ЭВМ ряда
ЕС. Во время ввода телеметрической информации в ЭВМ произ-
водится фильтрация сбойных (неформатных) кадров и проверка
разрядов поступающей информации, что повышает ее достовер-
ность. При этом каждый массив чисел, вводимый в ЭВМ, сопро-
вождается необходимыми комментариями в виде номера пленки,
даты эксперимента, номера заезда и др.
Введенная таким образом телеметрическая информация запи-
сывается на магнитном носителе ЭВМ и в дальнейшем обрабаты-
вается по программе пользователя.
Оперативная обработка первичных результатов измерений воз
можно с помощью режимомеров, определяющих средние значения
параметров за весь пробег ВГМ либо статистические характери
стики каждого из них.
Наибольшее распространение получили рсжимомеры, в которых
в качестве накопителей информации используются электромехани-
ческие счетчики, обрабатывающие импульсные сигналы.
Бортовая многоканальная измерительная система предназна-
чена для сбора, кодирования и первичной обработки случайных
импульсных или аналоговых сигналов одновременно по нескольким
независимым каналам. Система представляет собой набор моду-
лей, число которых равно числу обрабатываемых параметров.
Каждый модуль квантует сигнал по уровню и дискретизирует его
по времени. Модуль состоит из согласующего устройства, делителя
частоты (кванта), счетчика квантов, оперативного запоминающего
устройства (ОЗУ), дешифратора и выделителя десятого импульса
по амплитуде.
Сигнал от датчика поступает на согласующее устройство, где
проходит его преобразование (дискретный — нормируется по фор-
ме и длительности, аналоговый —преобразуется в частоту, пропор
циональную значению измеряемого параметра). С выхода согла-
45
сующего устройства нормированный сигнал поступает на делитель
частоты. Модули для различных параметров отличаются квантом
и типом согласующего устройства. Каждый модуль управляется
двумя сигналами от специального генератора: тактовым и сигна
лом установки в нуль. После установки в нуль нормированный сиг
нал заполняет квант, а счетчик квантов колирует их число до при-
хода очередного тактового сигнала.
Двоичный код счетчика квантов, соответствующий номеру
уровня, фиксируется в ОЗУ тактовым сигналом, дешифруется и
поступает на регистратор. Затем показания счетчиков снова уста-
навливаются в нуль и процесс повторяется.
Таким образом, каждый модуль непрерывно и автоматически
вычисляет среднее значение параметра в течение секунды, опреле
ляет номер уровня, к которому относится результат вычисления, и
выдает на регистратор сигнал, пропорциональный уровню кванто-
вания. Насыщение системы модулями различного назначения поз-
воляет решать различные задачи испытаний.
Выделитель десятого импульса позволяет обрабатывать неболь-
шие массивы импульсной информации по несложному алгоритму.
При необходимости частоту сигнала, поступающего на выделитель,
можно понизить с помощью триггерных счетчиков.
Выходной сигнал с дешифратора и выделителя десятого им-
пульса регистрируется с помощью любого накопителя информации
(при условии согласования выхода модуля с входом регистра).
Группировка уровней с одинаковыми номерами позволяет по-
строить двумерную матрицу распределения, с помощью которой оп-
ределяются корреляционные зависимости обрабатываемых пара-
метров.
В последнее время в области автоматизации процесса обработ-
ки экспериментальных данных появилось новое направление, воз-
никновение и развитие которого обусловлено достижениями микро
электроники. Новая элементная база позволила создать сравни
тельно недорогие вычислительные машины мини-ЭВМ, которые
при малых габаритных размерах обладают значительной вычисли-
тельной мощностью. Мини-ЭВМ позволяют создавать измеритель
но-вычислительные комплексы, резко расширяющие возможности
обработки экспериментальных данных с помощью микропроцессо-
ров, выполненных в виде большой интегральной схемы. В каждом
таком комплексе имеются два самостоятельных устройства: борто-
вое устройство сбора и кодирования информации (БУСК), уста
навливаемое на шасси ВГМ, и полустационарное устройство обра-
ботки закодированной информации (УОЗИ).
В состав этих устройств входят: центральный процессор, непо-
средственно выполняющий арифметические и логические операции;
постоянное запоминающее устройство, хранящее программы коди-
рования информации; оперативное запоминающее устройство, хра-
нящее результаты промежуточных вычислений; внешнее энерго
независимое запоминающее устройство, хранящее закодированную
46
информацию; порты ввода первичной информации с согласующих
устройств первичных преобразователей, приводящих электрические
сигналы первичных преобразователей к виду, пригодному для ввода
в центральный процессор; порты вывода закодированной информа-
ции; вспомогательные устройства (тактовый генератор, устройство
управления и др.).
БУСК получает информацию от датчиков, кодирует ее и вы-
водит для хранения во внешнее запоминающее устройство, а УОЗИ,
в свою очередь, выводит закодированную информацию из запоми-
нающего устройства, обрабатывает ее и передает через порты вы-
вода на дисплей, цифропечатающее устройство, графопостроитель,
магнитофон или перфоратор в виде таблиц, графиков, распределе-
ний и др.
16. СИСТЕМА ИСПЫТАНИИ ВГМ ЗА РУБЕЖОМ
В капиталистических странах натурные испытания считаются
одним из важнейших этапов создания новых образцов ВГМ. Они
применяются при выработке тактико-технических требований на
новую машину и выборе прототипа для се создания, при отработке
опытного образца и оценке эффективности внедрения новых конст-
руктивных мероприятий. Так, при разработке танка «Леопард-2*
(ФРГ) на испытания затрачено II лет из 12 (рис. 1.9). В США.
| , "1 - прорктиройание испытании
Рис 1.9 График разработки танка «Лсопард-2» по годам (без учета работ,
проведенных в 1963—1968 гг., результаты которых были использованы на после
дующих этапах)
ФРГ, Великобритании, Франции и других развитых капиталисти-
ческих странах созданы испытательные центры с современным
оборудованием, располагающие большим набором дорожных трасе
с различными искусственными покрытиями. Эти центры разраба-
тывают регламентированные системы испытаний, стандарты и раз-
личные методики.
47
В испытательных центрах периодически проводятся совещания
и симпозиумы по вопросам испытаний ВГМ с участием ученых и
инженеров данной страны, а также с привлечением специалистоз
из других стран. Основное внимание на них уделяется вопросам
повышения эффективности испытаний, а также их методическому
обеспечению.
Министерство обороны США располагает шестью полигонами
для проведения технических испытаний ВГМ, шестью центрами для
проведения войсковых испытаний и тремя климатическими цент
рами для проведения испытаний в экстремальных условиях (тро-
пических, арктических и пылевых); кроме того, испытательные по-
лигоны имеются у каждой фирмы-разработчика.
Абердинский полигон является головным и наделен правом
выдавать заключение о возможности постановки нового образца на
серийное производство и вооружение армии.
Порядок планирования испытаний ВГМ в США регламентиро-
ван (табл. 1.5), что позволяет заранее определить необходимое
число опытных образцов для решения поставленных перед испыта-
ниями задач в заданные сроки.
Таблица 1.5
Порядок планирования испытаний опытных образцов ВГМ в США
Этап
1. Рассмотрение тактико-тех-
нических требований (ТТТ) к
ВГМ
II. Разработка общей про-
граммы испытаний
111 Разработка детальных
рабочих планов
IV. Составление общего ко-
ординационного плана
Краткое содержание разрабатываемых документов
Перечень ТТТ, которые подвергаются про-
верке на возможность их выполнения
Конкретные задачи для всех организаций и
групп участников испытаний (первичная общая
программа)
Конкретные программа и цели испытаний для
каждой группы, участвующей в испытании
Объединенные индивидуальные планы, пе-
речень методик проведения испытаний
Автобронетанковое управление (командование) армии США
(ТАСОМ) в 1976 г. было разделено на две организации:
TARADCOM (командование НИОКР, занимающееся также испы
таниями опытных образцов) и TARCOM (командование боеготов-
ности, отвечающее за серийное производство и испытания серийные
образцов). Координация вопросов, связанных с испытаниями опыт
ных образцов, была возложена на отдел испытаний (Test Manage
ment Office) управления (командования) НИОКР.
На полигонах и центрах TARADCOM приняты следующие ре-
жимы проведения испытаний опытных образцов:
нормальный (односменная работа);
ускоренный (двухсменная работа с одним выходным днем в не-
делю) ;
48
весьма ускоренный (трехсменная работа без выходных дней).
Нормальный режим испытаний наиболее близок к реальной
эксплуатации (не нарушаются обычные процессы разогрева и ох-
лаждения машины, износа и коррозии ее деталей)
Испытания сопровождают все этапы разработки нового образца
ВГМ
На этапе выработки концепции испытываются макеты, а также
модернизированные образцы предыдущего поколения машин с це-
лью разработки тактико-технических требований, определения об-
ласти технического риска, выбора альтернативных вариантов, а
также определения путей решения материально технического снаб
жения в войсках и др.
На этапе приглашения к разработке испытания проводятся по
ускоренной программе на заводе-изготовителе либо на полигоне
заказчика, а иногда в обеих организациях одновременно. Испита
ниям подвергаются составные части ВГМ и ходовые макеты с
целью определения технической возможности выполнения заданных
требований
На этапе подтверждения сначала проводятся сравнительные ис-
пытания образцов, созданных фирмами-участниками разработки с
целью определения их боевых свойств и некоторых технических
характеристик, затем проверяются параметры надежности образ-
цов.
На этапе разработки образцов в полном объеме испытания под-
разделяются на три категории.
Испытания I категории вначале производятся на ходовых ма-
кетах, а затем на экспериментальных образцах. Проводятся они
подрядчиком (или для подрядчика) на полигоне завода фирмы-
изготовителя либо на полигонах (испытательных центрах) заказ-
чика. Испытания начинаются при выработке концепции и захваты-
вают начальный период опытно-конструкторских работ; проводятся
они с целью проверки функционирования и надежности составных
частей и машины в целом, а также для определения в наиболее
характерных условиях основных параметров и их соответствия ТТТ
Испытания II категории — это основной этап испытаний опыт-
ных образцов в процессе создания новой машины. Их целью явля-
ется комплексная проверка и оценка конструкции, работоспособ-
ности машины в целом, соответствия ее ТТТ, подтверждение ре-
зультатов испытаний I категории. Различают несколько видов ис-
пытаний этой категории.
Опытно-конструкторские испытания проводятся
фирмой-подрядчиком с целью определения основных характери-
стик машины и выполнения требований контракта на разработку
опытного образца.
Технические испытания проводятся управлением
TARADCOM на полигонах и в испытательных центрах. Оценива-
ются боевые свойства, эксплуатационные параметры и ресурс об-
49
разиа; разрабатываются мероприятия по устранению выявленных
недостатков.
Расширенные войсковые испытания проводятся
военными специалистами (воинскими экипажами) в реальных или
близких к реальным натурных условиях (с имитацией боевых дей-
ствий). Кроме соответствия характеристик опытного образца за-
данным проверяется его соответствие принципам организации, так
тики, возможностям материально-технического обеспечения и др.
По результатам этих испытаний даются рекомендации по принятию
машины на вооружение.
Контрольные испытания проводятся после технических
или войсковых испытаний для проверки эффективности внедренных
мероприятий по устранению недостатков.
Предсерииные испытания являются разновидностью
технических испытаний образцов, изготовленных по технической
документации и технологии, принятой для серийного производства.
Испытания первых серийных образцов являются
заключительным этапом испытаний II категории Проводятся они
с целью проверки соответствия ТТХ образцов заданным ТТТ и тре-
бованиям к их качеству при серийном производстве.
Отчет об испытаниях 11 категории является официальной оцен-
кой заказчиком нового образца; в нем содержатся также рекомен-
дации разработчикам по устранению выявленных недостатков.
Испытания III категории проводятся в реальных условиях экс-
плуатации и боевого применения ВГМ командованием сухопутных
войск или для него. Новые образцы машин проходят испытания в
составе штатных подразделений (частей) с целью оценки боевых
и организационных принципов их использования, а также с целью
получения дополнительной информации по тактическим и техниче-
ским вопросам, необходимой для разработки более эффективной
тактики применения нового образца, в том числе при взаимодей-
ствии с подразделениями других родов войск.
В ФРГ опытные образцы проходят испытания трех видов: за-
водские, технические и войсковые.
В процессе заводских испытаний проверяется соответ-
ствие образцов требованиям, изложенным в контракте. Испытания
проводятся фирмами-разработчиками в присутствии представите-
лей заказчика техническую помощь оказывают испытательные
центры заказчика.
В процессе технических испытаний определяется соот-
ветствие опытных образцов тактико-техническим требованиям. Эти
испытания проводятся сотрудниками испытательных центров на по-
лигонах заказчика в натурных и лабораторных условиях.
Войсковым испытаниям перед запуском в серийное
производство подвергаются первые серийные (так называемые
предсерийные) образцы ВГМ. Эти испытания являются завершаю-
щим этапом стадии опытно-конструкторской разработки. Прово-
дятся они обычно на полигонах военных училищ под руководством
50
командования сухопутных войск с участием представителей войско-
вых частей.
В отчете о войсковых испытаниях наряду с обшей оценкой об-
разца даются предложения по созданию семейства модификаций
машин на его базе и направлениям его модернизации в будущем.
Большое внимание за рубежом уделяется методическому обе '
печению испытаний ВГМ. Например, в США организатором разра-
ботки методических материалов является командование по испыта-
ниям и оценке боевой техники (ТЕСОМ), которое периодически
(раз в 9—10 лет) переиздает указатель методик испытаний (по-
следний указатель был издан для общего пользования без ограни-
чения в октябре 1981 г). Указатель объединяет действующие ме-
тодики проведения испытаний, изложенные в десяти томах. Разра
ботчиками этих методик являются штаб ТЕСОМ, испытательные
полигоны (Абердинский, Юмаский, Дагуэский). • ентры испытаний
в условиях холодного и тропического климата
В первом томе этого указателя приведены документы, отражаю-
щие общие положения испытаний для различных видов боевой
техники, например, документ, в котором описывается оборудование
Абердинского испытательного полигона для испытаний колесных и
гусеничных машин, а также документ, посвященный методу плани-
рования и проведения испытаний на долговечность. Во втором
томе («Колесные и гусеничные транспортные средства») приведены
методики испытаний танков, а методики испытаний систем воору-
жения танков и других боевых машин изложены в третьем томе
(«Боевая техника и личное оружие»), В остальных семи томах при
ведены методики испытаний боеприпасов и взрывчатых веществ,
реактивного оружия и ракетных систем, а также других видов во-
енной техники.
Все методики испытаний подразделяются на четыре типа: орга-
низационные, рабочие, системные и специальные.
Организационные методики посвящены общим вопросам прове-
дения отдельных видов испытаний, их немного.
Рабочие методики составляют главную долю библиотеки мето-
дик, они посвящены определению конкретных характеристик объ
екта, например, разгонных характеристик, скорости движения, по-
движности и др В каждой методике оговариваются объем испы-
таний, оборудование и измерительная аппаратура, порядок прове-
дения испытаний, способы обработки получаемой информации.
В приложении приводятся формы протоколов испытаний и алго-
ритмы обработки экспериментальных данных.
Системные методики составлены на стандартные и дополни-
тельные испытания, необходимые для оценки технических возмож
ностей объектов данной категории. Например, имеется единая ме-
тодика определения тягового усилия на крюке военных машин
колесных и гусеничных, передвигающихся по суше и по воде (т. е.
для плавающих машин). Специфические особенности учитываются
в разделе, касающемся порядка проведения испытаний, где име-
51
ются соответствующие подразделы о машинах, движущихся по до-
роге с твердым покрытием и по грунтовой неукатанной дороге, на
плаву и на швартовах.
Специальные методики разрабатываются на специфические ви-
ды испытаний, например, на испытания боеприпасов, светящихся
бомб, ракет, приборов наблюдения, радиопеленгаторов и др.
Зарубежные специалисты уделяют большое внимание совер-
шенствованию аппаратуры регистрации и обработки информации.
Разрабатываются и внедряются в практику испытаний бортовые
измерительно-вычислительные комплексы. Так, фирма «Краус—
Маффей» (ФРГ) применяет для оценки технического состояния
системы управления огнем собранных танков «Леолард-2» элек
тронное вычислительное устройство фирмы SEL
Для исследования эксплуатационных факторов, влияющих на
топливную экономичность машин, фирмой «Роквелл Интернэйшнл»
(США) разработана бортовая аппаратура «Tripmaster», состоящая
из бортового компьютера, комплекта датчиков и блока управляю-
щего дисплея. Работа аппаратуры обеспечивается программой
сбора информации, ее предварительной обработки, выбора и ком-
плектации, хранения и последующего обобщения и анализа.
В состав аппаратуры также входит нормативный блок для осу-
ществления выборки необходимой информации из запоминающего
устройства и записи ее на магнитную ленту.
В ФРГ на испытаниях военных гусеничных и колесных машин
на полигоне в Трире применяется динамометрическая машина
MF-60, созданная на конкурсных началах фирмой «Эрхард Лаус-
тер», которая оснащена измерительной аппаратурой, позволяющей
регистрировать информацию одновременно о 50 параметрах. Реги-
страция может осуществляться с помощью магнитной записи и
осциллографа.
Машина MF-60 позволяет определять следующие характери-
стики: тяговые и тормозные усилия при скорости движения маши-
ны от 0 до 70 км/ч; коэффициент сцепления на различных грунтах;
сопротивление движению; работоспособность систем силовой уста-
новки; разгонные и тормозные характеристики и др.
В США подвижные испытательные лаборатории используются
для определения эксплуатационных параметров агрегатов движу-
щейся машины. Для определения скорости движения и ускорений
машин в различных дорожных условиях фирма «Аллисон» разра-
ботала и применяет специальную радиолокационную установку.
Для ускоренной оценки надежности агрегатов и машины в це-
лом создаются высокоэффективные стенды. Так, фирмой «Форд»
создан стенд, моделирующий различные дорожные воздействия на
макетные образцы.
52
Глава 2 НАУЧНО-МЕТОДИЧЕСКИЕ ОСНОВЫ
ИСПЫТАНИИ ВГМ
2.1. ОСНОВЫ ТЕОРИИ ИСПЫТАНИИ
Научно-теоретические основы испытаний сложных технических
систем в настоящее время формируются в самостоятельное научное
направление.
Теория испытаний изучает закономерности построения и функ
нионирования систем испытаний. Основные научные проблемы этой
теории связаны с разработкой и исследованием моделей объектов,
средств и процесса испытаний. Теоретической базой решений этих
проблем являются разделы физико-математических и системных
наук: теория вероятностей и математическая статистика; теория и
анализ систем; исследование операций; системотехника; а также
теории эффективности, надежности, идентификации, подобия и мо-
делирования, контроля и диагностики, чувствительности, информа-
ции, массового обслуживания и др.
Испытания в целом представляют собой весьма сложный про-
цесс, характеризующийся огромной разнородностью решаемых за-
дач, большим числом этапов испытаний, неоднородностью инфор
мационных потоков, циркулирующих в самой системе испытаний,
многообразием оцениваемых характеристик испытуемых систем,
наличием ограниченного числа образцов, выделяемых на проведе-
ние испытаний и др.
В любом испытании можно выделить четыре этапа: планирова-
ние эксперимента, проведение испытания, обработка результатов,
анализ результатов испытаний и выработка решения.
Планирование заключается в составлении программы действий
в пространстве и времени. В процессе планирования решаются во
просы распределения и использования материальных, временных,
финансовых и людских ресурсов. Естественным является требова-
ние, чтобы план функционирования системы был наилучшим. Но,
к сожалению, он не может учесть всех особенностей функциониро-
вания системы, ввиду отсутствия полной априорной информации
о ней и условиях ее применения. Поэтому к разрабатываемым пла-
нам предъявляются требования нечувствительности и гибкости.
Нечувствительность означает малое изменение плана при непред
виденном изменении характеристик системы и условий ее исполь-
53
зования; гибкость плана связана со способностью системы опера-
тивно перестраивать программу своих действий с целью компен-
сации незапланированных «возмущений» плана. Указанные свой-
ства плана могут быть обеспечены при так называемом адаптив
ном планировании*.
В настоящее время в основу планирования любой операции, как
правило, закладывается принцип оптимальности. Для реализации
этого принципа необходимо выбрать и обосновать показатели и
критерии эффективности испытаний, а также построить математи
ческую модель испытаний и испытуемой технической системы
(объекта).
Модель испытуемого объекта используется на этапе планирова
ния для выбора и обоснования видов, объемов и последовательно-
сти испытаний, для выбора измеряемых и контролируемых пара
метров, для обоснования вида и характеристик тестовых сигналов
и др.
При проведении испытаний необходимо получить максимум ин-
формации при ограниченных материальных и временных ресурсах.
Поскольку система испытаний функционирует как организацией
но-техническая система, подход к оценке ее эффективности может
основываться на положениях общей теории управления.
Принято различать понятия функциональной и экономической
эффективности Функциональная эффективность характеризуется
прямым эффектом, получаемым в процессе функционирования си
стемы; эхономическая эффективность отражает такие свойства си-
стемы, как доходность, рентабельность и др., которые не очень
существенны для военно-технических систем, используемых в целях
поддержания международного престижа
Пусть К<л> = 1У|» Уа УлГ—вектор показателей, характер»!
зующих качество процесса испытаний. Показатели могут в зави-
симости от цели испытаний отражать, например, погрешность ре-
зультатов испытаний («/»), их достоверност»» (у2), стоимост»» (ул),
длительность (^4) и др.
Далее, пусть Глч = |Уь Уз»-. у«|т—вектор допустимых зна
чений показателей у\, у2....уп качества процесса испытаний.
Тогда равенство Y п = Y* п означает, что качество процесс»
испытаний отвечает предъявляемым к нему требованиям.
Поскольку в общем случае оба вектора К<я> и Г'я> являются
случайными и большинство их компонент имеют непрерывные
распределения, вероятность указанного равенства равна нулю, и,
следовательно, оно не может быт», использовано для оценки кач?
ства процесса испытаний непосредственно.
* Акофф Р. Планирование в больших экономических системах. М.: Совет-
ское радио, 1972. 224 с.
54
Критерий пригодности процесса испытаний Gt с учетом сто-
хастнчности векторов К „ , Y* я> рассчитывается по формуле
G,: Г „ ). <2>)
Поскольку показатели и критерии должны характеризовать
эффективность процесса (системы) испытаний, а не отдельной
его реализации, то соотношение (2.1) само по себе непригодно
для их определения. Поэтому в качестве показателя эффективно-
сти испытаний должна приниматься вероятность выполнения за-
дачи испытаний, т. е. вероятность достижения их цели:
Л.3“А»(Г €|У\ ]). (2.2)
Если требования к качеству ограничивают его показатели
сверху (или снизу), то критерий (2.1) может быть задан в форме
неравенства
G', : Г п < V „ л (у, < v,),
/—I
из которого следует, что компоненты вектора V. п> — это пре
дельно допустимые значения показателей у\, у2, ...,уп, определя-
ющие границы области [У<я>] и обычно называемые необходи-
мыми значениями.
В результате выражение (2.2) примет следующий вид:
Рвз= P(Y п <V „ ). (2.3)
Если законы распределения векторов Y. п и И я известны,
то
P(Y . < V' „ ) f”! (V . )dF (I/ . );
°° п я (2.4)
Р(И . > Г п ) -• I Я (Y„)dFr (Г,).
— ею — оо * П } п
Вероятность выполнения задачи Ряз является мерой эффек-
тивности процесса испытаний, оценка которой должна произво-
диться по критериям пригодности G2 или оптимальности О2:
О, О2:/>.,Э = Р.,
Лишь совокупность показателей Y п , Ро 3 и критериев G(,
G2 (О2) позволяет произвести объективную оценку качества и эф-
фективности системы испытаний. Использовать вероятность Р„. 3
55
для оценки эффективности СИс трудно из-за отсутствия инфор-
мации о законах распределения векторов Y п и V. п . Поэто-
му для этого иногда используют числовые характеристики век-
тора У<я> или разность ДГ п — Y п — V. п , причем наиболее
распространенной характеристикой является математическое
ожидание.
СИс можно рассматривать как субсистему системы разработ-
ки. Несобственные критерии и показатели эффективности испы-
таний должны выбираться исходя из целен, критериев и показа-
телей эффективности суперсистемы (системы разработки). Эф-
фективность испытаний должна увязываться с эффективностью
использования испытываемого объекта, причем характеристики
испытаний должны согласовываться с показателями качества со-
здаваемой технической системы, определяющими ее так называе-
мую потенциальную эффективность. По данным Юсупова, показа-
телями эффективности испытаний могут быть следующие величины:
/>,.,=р (4^ <2-5)
где ДЭ — общий эффект от применения системы, полученный вследствие проведе-
ния испытаний; С —стоимость проведения испытаний; [V'i] — область допустимых
значений Q( отношения \Э/С\
где ДРН — вероятность безотказной (надежной) работы испытуемой системы
в процессе ее функционирования, равная разности Ря -Р^(Ри—вероятность без-
отказной работы испытанной, а —неиспытанной систем);
Qa = //HOt Qi = /{C,
где / — количество информации о состоянии системы, полученной в процессе ее
испытаний, Но — первоначальная энтропия системы. С —стоимость испытаний
или стоимость получения информации.
С ростом требований, предъявляемых к современным техниче-
ским системам и устройствам, значительно возрастают затраты на
проведение испытаний. Поэтому все чаще ставится вопрос о необ-
ходимости организации процесса как планируемого научного экс-
перимента. Решение его связывается с применением для оптимиза-
ции процесса теории планирования эксперимента.
В математической теории планирования эксперимента выделя-
ют два основных направления: планирование экстремальных экс-
периментов и планирование экспериментов по выяснению меха-
низма явлений.
В случае необходимости выяснить условия, при которых про-
цесс испытаний удовлетворяет некоторому критерию оптимально-
56
сти, прибегают к применению первого направления. Второе на-
правление планирования при определенных условиях может быть
применено для исследования степени влияния тех или иных фак-
торов на показатели, характеризующие эффективность процесса
испытаний.
В качестве примера оптимального планирования процесса ис-
пытаний приведем результаты работы А. Д. Левитануса по созда
нию модели системы доводочных испытаний тракторов (ДИТ).
Целевая функция системы ДИТ представляется в виде
"м яз % "т
ti + SGI-} Gy-min, (2.6)
у-1 /-1 /-I j-1
где — общая длительность доводочных испытаний; /у — длительность опреде-
ленного этапа доводочных испытаний при /м его повторении; индексы: «м» ис-
пытаний макетных образцов, «з» предварительные (заводские), «в»—ведомст-
венные, «г* — государственные
Целевая функция является основой разработки математической
модели системы.
В общем виде структуру математической модели можно пред-
ставить системой следующих уравнений:
h ~ t* + G + G + G-min ;
G и/ (А/ лм, м » Очяо. м ) j G = JЛМ. :i , О я о, J ) i
tu -f(M ям.» , о яо... ); G-/(Af лм.г , О яо.г ):
Р|К»м.д>^м.т|>Р,м.т....
, G)-min; )
Pme-/(Pm Яям>)>Рм1т.... Лх=/(Рг v )>Я£Т;
(2-7)
(2-8)
(2.9)
(2.10)
•r I — я^г )'С*г£т»«*. > ®м X —л£м •) (2.1 1)
где M лм иО no —соответственно n-мерные векторы методического и орга
низационного планов на различных этапах испытаний, «и» — испытания; «д> —
доводка; К, — q ti единичный показатель качества испытуемого изделия на соот-
ветствующем этапе испытаний, фактический при доводке (индекс «д>), либо тре-
буемое значение (индекс «т»); /( — длительность i-ro этапа испытаний; Р п и
е „х> — п мерные векторы, значения которых характеризуют факторы, влияю-
щие соответственно на достоверность и точность результатов испытаний на раз-
личных этапах.
Достоверность результатов испытаний оценивается вероятно-
стью того, что значение показателя, полученное экспериментально
по данной методике, будет соответствовать значению, определен-
ному по достаточно большой выборке изделий, используемых по-
требителем. Первый индекс при вероятности Р<яр> соответствует
этапу испытаний, второй — обозначает итоговое (по результатам
57
испытаний нескольких видов) значение, а третий — требуемое
То же относится к погрешности е результатов испытаний
Уравнения (2.7) выражают условия минимизации суммарной
длительности всех этапов испытаний.
Уравнения (2.8) соответствуют требованию, чтобы вероятность
получения значений показателей качества на определенном этапе
испытаний и доводки была не ниже заданной. В этих уравнениях
/(М „ми| , Л1 „м , , , .
Уравнения (2.9) выражают условия минимизации объема ис-
пытаний.
Уравнении (2.10) и (2.11) соответствуют условиям обеспечения
требуемых уровней достоверности и точности результатов испыта-
ний. В этих уравнениях
Р. .Pi -/(О-
Общая продолжительность всех испытаний определяется дли-
тельностью доводки до заданных значений показателей надежно-
сти. При доводочных испытаниях в объеме заданного ресурса на
дежность трактора принято характеризовать средней наработкой
на отказ
7'=аГН1|д7и г(а-/»Гк)е-^|, (2.12)
где Гн — начальное значение наработки на отказ; а, b — коэффициенты аппрокси
мацни, характеризующие скорость изменения / — время доводки.
Математическая модель динамики доводки (2.12) позволяет
объективно планировать показатели безотказности, которые необ
ходимо достигнуть на каждом этапе доводочных испытаний, с тем
чтобы на приемочных испытаниях были обеспечены оптимальные
их значения.
Расчеты экономического эффекта 3XS новой модели трактора
с учетом значений К и Тн (коэффициент готовности К может за-
даваться или нормироваться) позволяют оптимизировать процесс
доводки по времени, т. е. определить срок, при котором целесооб-
разна постановка новой модели трактора на серийное производство
с продолжением доводочных работ в его процессе. За оптимальное
можно принять время, при котором 3Xi максимальный.
Для детализации общей модели системы испытаний необходимо
описать основные методические и организационные факторы, опре
деляющие процесс испытаний, ограничения на их изменение.
Все объекты, которые могут быть направлены на испытания,
нумеруются, и после этого вводится методический вектор
......хл|, (2.13)
I 0, если i-й объект не будет испытываться;
|де | если будет испытываться d, штук образцов »-го объекта.
Виды испытаний, обеспечивающих получение необходимой ин
формации о всех оценочных показателях объекта (например, стен-
58
довые, полигонные, эксплуатационные и др.), описываются мето-
дическими факторами:
.... х.(, /|, 1.2....... Н, (2.14)
( I, если Xz>l. j А вид испытаний проводится;
le X,i I 0, х»—0. /-Й вид испытаний нс проводится,
/V —число различных объектов испытаний; nt — число видов испытаний, которым
может подвергаться /-Й объект.
Выбор методик, с помощью которых могут быть осуществлены
указанные в формулах (2.13) и (2.14) виды испытаний, характе-
ризуется вектором
xiki »•••' хла/1 ’ (2.15)
где /—1,2.... N ; k 1,2...., Л/,
{1 при > 1 , Лд, I , j-я методика используется;
О — в одном из противных случаев.
К числу организационных факторов относятся, например, по-
следовательность выполнения выбранных видов испытаний, очеред-
ность выбора объектов для испытаний, методы ускоренных йены
таний за счет рациональной их организации (например, сокраще-
ние простоев объектов испытаний по причинам нетехнического
характера), методы ускоренного поступления информации и при
нятия решения о виде корректирующих воздействий на процесс ис-
пытаний и др.
Организационно-методические факторы значительно сложнее
поддаются математической формализации, однако принципиально
эта задача разрешима. Например, последовательность выбора объ
ектов для испытаний, определяемая необходимой очередностью по-
лучения требуемой информации для разработки методик и непре-
рывного осуществления запланированного комплекса испытаний,
описывается вектором
Z=\zlt z2........ZN\, (2.16)
где г, — номер очереди, в которую i-й объект направляется на ис-
пытания.
Очередность проведения t-го вида испытаний на /-м объекте,
определяемая предполагаемой длительностью каждого вида йены
таний, соответствует
Yi - 1Ун, Уао-, У^Ь (2.17)
где уц — номер очереди, в которую / А объект ставится на испытания /-го вида
Первая группа ограничений уровень качества:
.................... JC".v.v",v'v) . / = 1. 2,.... г,. (2.18)
где г{ — число показателей, характеризующих качество испытуемой машины.
В группу ограничений по качеству могут входить такие показа
тели объекта испытаний, как безотказность. КПД, масса, топлив-
59
ная экономичность, плавность хода и др. Функция f<!> (...) слева
от знака неравенства позволяет определить ожидаемое значение
соответствующих показателей качества при заданных значениях
методических и организационно-методических факторов. Числа /(уп
определяют уровень качества, который необходимо достичь на дан-
ном этапе испытаний.
Вторая группа ограничений—уровень достоверности результа-
тов испытаний:
.... i= >-2.....гг. (2.19)
В эту группу ограничений входит достоверность результатов
различных видов испытаний или групп испытаний; числами ха-
рактеризуется минимально допустимая достоверность каждого
этапа испытаний.
Третья группа ограничений—уровень точности результатов ис-
пытаний:
......>/'/’ >-'-2...............<220>
В эту группу ограничений аналогично предыдущей входят ожи-
даемые погрешности результатов испытаний.
Четвертая группа ограничений - объем испытаний:
ПРИ >=1*2...... N- (2-21)
Эти ограничения лимитируют число X/ образцов каждого из
объектов и продолжительность их испытаний //.
Приведенная модель системы ДИТ может быть принята за ос-
нову при решении задач оптимального планирования предвари-
тельных испытаний опытных образцов ВГМ и процесса доводки
изделий до оптимальных значений заданных показателей, при ко-
торых целесообразна постановка изделий на серийное производст-
во. При этом основными вопросами, требующими научно-теорети-
ческих исследований, являются планирование эксперимента, обра-
ботка и анализ результатов испытаний.
2.2. ЭКСПРЕССНЫЕ МЕТОДЫ СТАТИСТИЧЕСКОЙ ОБРАБОТКИ
Классические методы статистической обработки результатов ис-
пытаний широко освещены в отечественной технической литера-
туре, закреплены в стандартах государственной и отраслевой сис-
тем обеспечения единства измерений и реализованы в программах
ЭВМ, поэтому в настоящей книге они не рассматриваются. Интерес
представляют экспрессные методы статистической обработки дан-
ных, требующие для выполнения расчетов гораздо меньше време-
ни, что очень важно при предварительной обработке и анализе ре-
зультатов испытаний даже с помощью систем автоматизированной
обработки на базе средств вычислительной техники.
60
Экспрессные методы обработки отличаются от классических
размахом так называемых доверительных интервалов, т. е. вероят-
ных границ, в которых заключено истинное значение измеряемой
величины: они определяются с некоторым запасом по сравнению с
классическими методами
Вычисление средних результатов измерений, исключение вы-
скакивающих вариант. Результаты отдельных опытов, измерений в
общем случае могут называться вариантами. Для ускорения рас-
четов необходима определенная предварительная техническая об
работка данных, например, расположение в порядке возрастания
(убывания) численных значений вариант.
Прежде чем приступить к вычислению среднего значения, необ-
ходимо обязательно проверить совокупность данных на присутст-
вие так называемых выскакивающих вариант, являющихся, как
правило, следствием какой-либо грубой ошибки в процессе изме-
рения, не замеченной экспериментатором. Существует очень быст-
рый способ проверки, основанный на оценке различий крайних ва
риапт совокупности.
Если варианты х, расположены в порядке возрастания числен-
ных значений (|=1, 2....л), то выскакивающими будут крайние
(наибольшие или наименьшие) из всей совокупности. Проверка ва-
рианты с большим порядковым номером производится по формуле
(*„ “ - х,) - Д (2.22)
Полученная величина А оценивается с помощью табл. 2.1, в ко-
торой для известного числа вариант п при двух уровнях достовер
ности оценки приведены граничные значения отношений. Если А
больше табличного значения отношения при уровне достоверности
99 %, то варианту хп следует считать выскакивающей и исключить
ее из последующего расчета. Если отношение А окажется между
граничными значениями для обоих уровней достоверности, нельзя
безоговорочно исключать варианту хп, можно лишь отметить гру-
бость ошибки ее определения. В этом случае обрабатывается вся
совокупность и дополнительно совокупность с исключенной крайней
вариантой. Наконец, если значение А меньше граничного значения
для уровня достоверности 95%, возможность исключения крайней
варианты отвергается.
Так же точно проверяется и наименьшая варианта совокупности
по отношению
(х2-х,)/(хя-х,)=. А. (2.23)
В табл. 2.1 представлены граничные значения и для других при-
емов оценки выскакивающих вариант. Так, отношение (хл
—хя_,)/(хя—х2) используется, если предполагаются выскакиваю-
щими одновременно две варианты (наибольшая и наименьшая)
Иногда возникает положение, когда для проверяемой совокупности
вычислены три описанных вида отношений и лишь одно из них пре
вышает граничное для уровня достоверности 99%. В этом случае
крайняя варианта безоговорочно исключается.
01
Таблица 2.!
Граничные значения отношений А для исключения выскакивающих вариант
Уровень достоверности оценки. М
С 95 99
3 ХЯ хп-\ . ХП ~ХЯ 1 ХЯ ~ ХЯ-2 ХЯ хЯ-1 . ХЯ ~ХЯ~1
ХЛ~Х1 ’ ХЯ ХЧ ' хя х\ хя Х1 хя - Х2 ’ ХЯ Х1
1 л,-ж. X* — *1 *3 — Л| Х2 — JCt Х1 ~ *1 ха~ х,
э* ХЯ Х1 хя - Х3 хп~х\ хя -* хя “ Х3 хя~ Х1
3 0,941 1,000 1,000 0,988 1,000 1,000
1 0,765 0,955 0967 0,889 0591 0,992
5 0,642 0.807 0,845 0.780 0,916 0,929
6 0,560 0.689 0,736 0.698 0,805 0,836
7 0,507 0,610 0,661 0.637 0,740 0,778
8 0,468 0 554 0,607 0,590 0,683 0,710
9 0,437 0,512 0,565 0,555 0,635 0,667
10 0,412 0,477 0,531 0,527 0,597 0,632
И 0.392 0,450 0.504 0502 0,566 0,603
12 0,376 0,428 0,481 0,482 0,541 0,579
1.5 0,338 0,381 0,430 0,438 0,486 0,522
20 0,300 0,334 0.372 0.391 0 430 0,464
24 0,281 0,309 0,347 0,367 0,400 0,434
.30 0,260 0 283 0,322 0.341 0,369 0,402
После исключения выскакивающих вариант рассчитывается
среднее арифметическое значение измеренной величины.
Оценка варьирования данных и границ доверительных интерва-
лов средних значений. Основой многих важных операций по ста-
тистической обработке экспериментальных данных является вычис-
ление показателей, характеризующих степень случайного варьиро-
вания данных, например, среднеквадратичного отклонения о. Экс-
прессный метод расчета этой величины также основан на оценке
различий между значениями крайних вариант в совокупности с
числом вариант л^20.
Расчет осуществляется по формуле
где №„ = *„—г, — размах варьирования, равный разности между крайними вари
антами в упорядоченном ряду; t/, — коэффициент, определяемый по табл. 2.2 для
соответствующего значения л.
Экспрессный метод позволяет быстро оценить границы довери-
тельных интервалов средних значений. Так, верхняя и нижняя гра-
ницы среднего арифметического соответствуют x-\-kvWn и
62
х—kvWn, где kv коэффициент, определяемый по табл. 2.3. Гра
ницы доверительного интервала определяются таким способом с
некоторой «перестраховкой» по сравнению с классическим методом.
Таблица 2.2 Значение коэффициента dn для оценки стандартного отклонения Таблица 2.3. Значения коэффициента 4* для расчета границ доверительных интервалов, средних по размаху варьирования
по размаху варьирования
Уровень достоверно Уровень достоверно
п п dn стн оценки, Ч стн оценки. *
— 95 99 95 99
2 1,128 12 3.258
3 1,693 13 3,336 3 1,30 3,00 12 0.19 0.28
4 2,059 14 3,407 4 0,72 1.32 13 0,18 0,26
5 2,326 15 3,472 г 0,51 0,84 14 0,17 0,24
6 2,534 16 3.532 6 0,40 0,63 15 0.1b 0,22
7 2,704 17 3,588 7 0,33 0.51 16 0,15 0,21
8 2,847 18 3,640 8 0,29 0,43 17 0.1 1 0,20
9 2.970 19 3,689 9 0,25 037 18 0 11 0,19
10 3,078 20 3,735 10 0,23 0,33 19 0.13 0,18
II 3.173 II 0,21 0,30 20 0,13 0,17
Фрагменты дисперсионного анализа. Дисперсионный анализ яв-
ляется одним из самых совершенных и эффективных методов ста
тистической обработки данных, особенно при одновременном изу-
чении влияния ряда факторов на то или иное явление.
Существуют приемы быстрого осуществления отдельных фраг-
ментов дисперсионного анализа, позволяющих убедиться в том. что
экспериментальные данные заслуживают обработки по полной схе-
ме ^того анализа.
Например, по данным, приведенным в табл. 2.4, тщетно пы
таться доказывать достоверность различий между средними значе-
ниями, так как каждое из них опирается лишь на две варианты, и,
следовательно, показатели варьирования каждой совокупности
очень велики.
Дисперсионный анализ позволяет привлечь для оценки случай-
ного варьирования все совокупности данных и тем самым сущест-
венно повысить достоверность оценки.
Рассчитаем средний размах варьирования по всем совокупно-
стям:
UZ = (2 гЗ + 2 + 4-| 0 + 3)6 2,33. (2.24)
Далее оценим число степеней свободы / по формуле / = /(п—1),
где I — число групп повторных определений значений в одинаковых
условиях; п число вариант в таких группах. В данном примере
/ = 6(2 1)=6.
63
Таблица 2.4
Результаты измерений условной величины М при различных значениях
изучаемого фактора В
Лналнзируе мые денные Фактор В. уел. ед.
4-6 10-14 25-30 45-50 60—70 80-90
Номер ва- рианты: 1 11 10 6 3 4 5
2 13 7 8 7 4 2
X 12 8.5 7 5 4 3.5
2 3 2 4 0 3
Средние можно считать достоверными, если выполняется ус-
ловие
|ХЛ xb\>kKWidn. (2.25)
Здесь слева — абсолютное значение разности сравниваемых сред-
них; dn — коэффициент из табл. 2.2; W — средний размах варьиро-
вания; kN — коэффициент, равный /ДЛ2//< где 0 — критерий Стью-
дента для числа степеней свободы /; Л/— численность вариант в
группах, для которых рассчитаны сравниваемые средние; в частном
случае N = n. В приведенном примере dn= 1,128; kN для уровня до-
стоверности 95 % составляет 2,45, а для уровня достоверности
99 % —3,71. Отсюда kNW/dn равно соответственно 5,1 и 7,7.
Как видно из примера, некоторые разности сравниваемых сред-
них превышают эти значения, но тем не менее полученные резуль-
таты свидетельствуют, что имеет смысл провести дисперсионный
анализ по полной схеме, поскольку вероятность доказать влияние
на величину М изучаемого фактора В достаточно высока. При
этом дополнительных измерений не требуется. Таким же точно спо-
собом может быть оценена достаточность полученных данных для
дисперсионного анализа по полной схеме без повторений экспери-
мента для многофакторных комплексов
2.3 ТЕОРИЯ ПЛАНИРОВАНИЯ ЭКСПЕРИМЕНТОВ
Планирование эксперимента, как и любое планирование, пред-
полагает поиск рациональной последовательности получения дан
ных о свойствах изучаемых объектов или явлений. Теория плани-
рования эксперимента основана на математической статистике. При
статистической обработке результатов наблюдений количественно
му анализу отводится пассивная роль, поскольку данные получают
при случайном сочетании условий, а при планировании экспери-
мента тот же анализ играет активную роль, диктуя жесткую схему
эксперимента.
64
Назовем цель эксперимента выходом изучаемого процесса.
Исследуемые свойства могут быть не зависящими от времени и
изменяющимися в нем. В первом случае под выходом следует по
нимать само свойство, во втором — фундаментальные параметры,
характеризующие закон изменения свойств, но сами не зависящие
от времени. Во втором случае следует подвергать процесс кинети-
ческому анализу, используя в качестве его выхода константы ско
ростей, характеризующих ход процесса во времени. Константа ско
рости процесса позволяет количественно оценить свойство объекта
наблюдений в любой момент времени. Цель исследования и под
ходы могут быть сформулированы по-другому, однако во всех
случаях в качестве выхода процесса следует использовать пара-
метр, не зависящий от времени и имеющий четкую количественную
связь с условиями (факторами). Особенности планирования экспе
римента определяются значением факторов в исследовании.
Так. в простейшем случае, предполагающем изучение выхода
процесса при фиксированном сочетании изменяющихся факторов,
основная задача планирования состоит в определении необходимого
числа экспериментов, позволяющего получить достоверные резуль
тэты. Такой план является необходимой составной частью более
сложного, предполагающего изучение выхода или выходов изучав
мого процесса при различных уровнях и сочетаниях факторов с
целью отыскания его оптимума.
Оценка необходимого числа экспериментов. Проблема досто
верности в экспериментальных работах всегда была и является ак
туальной. что связано, с одной стороны, с неизбежной погрешно-
стью измерений, а, с другой стороны, с гетерогенностью свойств
объектов исследования. Если же учесть, что в многофакторных си-
стемах, как правило, не удается поддержать значение всех факто-
ров на строго постоянных уровнях, то очевидным является получе-
ние отличающихся значений выхода при повторных измерениях
Так как вариабельность результатов определяется разнообразными
причинами и их числом, то распределение полученных данных чаще
всего подчиняется нормальному (или близкому к нему) закону
распределения, что учитывается в дальнейших. рассуждениях.
На практике для оценки выхода изучаемого процесса исполь-
зуется среднее арифметическое (истинное) значение х,|СТ ограни-
ченного числа измерений п, степень вариабельности которых учи
тывается по размахам варьирования W/dn-.
x„„~x±tpln 1|SW, (2.26)
где 6>[л— 1J — значение критерия Стьюдента для вероятности Р при числе изме-
рений п (определяется по справочникам); S[xJ=B7/(</« \ л) — погрешность сред
него значения
Произведение /₽[л 1 ]S[x] является не чем иным, как довери
тельным интервалом, на который с вероятностью Р истинное зна
чение хмст может отличаться от х. Отсюда следует, что среднее
арифметическое тем определеннее отражает истинное значение,
чем меньше этот доверительный интервал:
/р = -Ь=/я|л 1|. (2.27)
Из приведенной формулы видно, что увеличивая произвольно чис-
ло измерений, можно уменьшить /₽ до любых пределов.
Выражение (2.27) можно преобразовать следующим образом:
d»|m —i|
т I 1 _ "I и
^Р ^Р
(2.28)
М'« 1|
где ; /Р- задаваемое с вероятностью Р максимально допусти
4l'm
мое отклонение среднего значения от истинного; т — число измерений в вредна
рнтелыюм эксперименте, проводимом ,1ля оценки точности данного метода
Практически, чтобы воспользоваться выражением (2.28), необ
ходимо в предварительных экспериментах оценить степень вариа
бельности результатов измерений Wm/dm при выбранном методе
исследования. Предполагается, что истинная степень вариабель-
ности измерений, которая могла бы быть получена при проведении
всех экспериментов, с достоверностью 68 % лежит в пределах
S|^L,-S|v,l - Szfeb- (229)
У 2т
Подставляя (2.29) в (2.28), получим
т^ткУ' / | 1 V
(2.30)
п
Если погрешность метода исследования определяется традици-
онны м способом как среднеквадратичное отклонение =
:=я1/*Е(л
У ———р—, уравнение для расчета необходимого числа изме
рений имеет вид
л-5’|х,|?я|т 1|(ц.‘ +-2=)//’. (2.31)
'• -т У 2 т'
Формулы (2.27) — (2.30) при принятых допущениях дают лиш
ний запас надежности по сравнению с классическими методами
Формулы (2.30) и (2.31) показывают, что выбор величин гп и п
определяется конкретными условиями исследования
Метод планирования двух-, трехфакторного эксперимента по
Зейделю— Гауссу. Определив необходимое для обеспечения задан-
ной точности (достоверности) число измерений при строго фикси-
рованных значениях факторов, можно перейти к исследованию вли-
яния одного из факторов на выход процесса. Изменение фактора
в каждом эксперименте (единица варьирования X) должно быть
таким, чтобы изменение выхода было бы меньше заданного дове-
66
рительного интервала его определения. Необоснованное увеличе
ние единицы варьирования может привести к тому, что не будут
выявлены характерные участки изучаемой зависимости (например,
экстремальные точки). Как показывает опыт работы, при числе
определений п, обеспечивающем достаточную точность измерений,
величина X должна давать ожидаемое изменение выхода процесса
(6 8) S|x,|.
Выход процесса редко зависит только от одного фактора. Изу
чая влияние двух факторов, необходимо провести и серию экспери
ментов при разных уровнях другого фактора
Зависимость выхода процесса от двух факторов представляет
собой в геометрической интерпретации поверхность отклика в трех
мерном пространстве. При графическом изображении результатов
двухфачторного эксперимента приходится ограничиваться семей
ством кривых, отражающих зависимость выхода процесса от од
кого фактора при фиксированных значениях второго, или, другими
словами, вертикальными сечениями поверхности отклика на разных
уровнях одного из факторов.
Попытки получения полной картины влекут за собой необхо-
димость постановки большого числа экспериментов. Так, если, на-
пример, влияние каждого фактора изучается на 10 уровнях, то тре-
буется постановка 100 экспериментов по п определений в каждом.
На практике отыскивают оптимум, прибегая к сокращенным
схемам исследования. Если число факторов более двух, использу-
ются методы многофакторного планирования экстремальных экспе-
риментов, позволяющие уменьшить число наблюдений без ущерба
для достоверности получаемых данных.
Методы многофакторного планирования. Таких методов извест-
но несколько — это полный факторный эксперимент и дробные реп-
лики, крутое восхождение по поверхности отклика, описание опти-
мальной области, отсеивающие эксперименты и др.; подробно с
ними можно ознакомиться в специальной литературе. В данной
книге ограничимся изложением основ полного факторного экспе-
римента
Задача формулируется следующим образом: нужно получить
представление о поверхности отклика факторов в виде функции
*/ = ?(-*.. ....х„), (2.32)
где I) выход процесса, т. с. параметр, подлежащий изучению и оптимизации;
X|, xit ., хп — известные и изучаемые переменные факторы, которые можно
варьировать при постановке эксперимента
Не зная точно вида функции q, при решении экстремальных
задач можно ограничиться ее разложением в степенной ряд.
Если условия какого-либо процесса не оптимальны (а так всег-
да бывает в начале исследования), то выход процесса описывается
степенным рядом, не содержащим переменных второго и выше по-
рядков.
5*
67
После эксперимента определяют коэффициенты регрессии, и,
если неоптимальность процесса подтверждается, намечают про-
грамму крутого восхождения по поверхности отклика с целью на
хождения оптимума. Если же анализ покажет, что условия про-
цесса оптимальны, то для описания области оптимума следует ис-
пользовать степенной ряд, содержащий члены высших порядков
Итак, процесс в первом приближении может быть описан сле-
дующим степенным рядом:
Т1 = ?о + 2 “Ь 2 • (2.33)
В результате эксперимента могут быть получены лишь выбороч-
ные коэффициенты Ьо, Ь,, Ьц, которые являются оценкой теорети-
ческих коэффициентов регрессии р(). 01( 0,/, для некоторой генераль-
ной совокупности, состоящей из всех возможных ответов:
= ± ES;
“ hj ± ; (2.34)
4- ••• Н ,
где S — ошибка, связанная с неучтенными факторами и погрешностью метода.
!>/ н btl коэффициенты, состоящие из коэффициентов регрессии исследуемых
(*< и X/) и не учтенных в эксперименте факторов; Ьо — совместная оценка теорс
тического свободного члена уравнения, суммы коэффициентов при членах выс-
ших порядков и суммы ошибок (определяется экспериментально)
Уравнение регрессии с учетом результатов эксперимента имеет
вид
№ + X М + £ buxtxj. С2 ®)
где у— выборочная оценка для >]. b0. b>, bt, - выборочные оценки для 0О. р<,
Определив коэффициенты регрессии этого уравнения, получим
представление о влиянии факторов на исследуемый процесс,
а также о взаимодействии этих факторов и направлении дви-
жения их к оптимальной области.
Полный факторный эксперимент включает в себя следующие
операции:
выбор уравнения регрессии;
составление плана полного факторного эксперимента;
расчет коэффициентов регрессии;
оценку значимости этих коэффициентов;
анализ уравнения регрессии.
Выбор уравнения регрессии. Вид уравнения регрессии без чле-
нов высших порядков зависит от числа изучаемых факторов, на-
пример, для двух факторов
у = -г b\x\ -f- Ь,х2 + bXi 2Х\Х-,, (2.36)
68
а для трех —
у - b0 + biXi -г Ь2х2 4- Ь3хя 4 . 2х2х2 4- b,, 3xtx3 4- b, ,х2х3 4-
+ 2. з^^г^з (2.37)
(аналогичным образом записываются уравнения для большего
числа факторов).
Составление плана многофакторного эксперимента. Опыты оп-
ределения коэффициентов регрессии должны быть поставлены по
строгому плану. Для каждого фактора выбирается условный нуле-
вой уровень Oxi, т. с. такие значения переменных, при которых на-
чинается изучение процесса с целью получения его направления к
оптимальным значениям факторов. Если выбор не диктуется ка-
кими-либо теоретическими соображениями, то он может быть со-
вершенно произвольным.
Для каждого фактора выбираются единицы варьирования kt,
т. е. шаги увеличения или уменьшения от нулевого уровня. Выбор
единиц д,— это один из самых ответственных моментов. Малые
единицы варьирования могут не оказать влияния на процесс, по-
скольку эффект будет ниже ошибки измерения его выхода. При
слишком больших единицах варьирования возникает опасность не-
возможности описать исследуемую поверхность отклика уравнени-
ем без членов второй, третьей и выше степеней. В каждом конкрет-
ном случае для выбора единиц варьирования требуются опыт и
интуиция исследователя
Уровни факторов при составлении плана кодируются символами
или знаками, например: —X, — «—1» или «—»; O.Vj4-X, — «4-1»
или «4-».
Далее составляется матрица планирования, в которой должны
быть исчерпаны все возможные комбинации факторов, варьируе-
мых на верхнем и нижнем уровнях (табл. 2.5) .Необходимое число
вариантов опыта равно N 2'. где i — число исследуемых фак-
торов.
Т а б л и ц а 2.5
Матрица планирования для двух факторов, включающая в себя четыре варианта
Номер варианта Планирование Расчет Выход
JT9 «г» х.ж, yN
1 4-1 1 -1 4-1 yi
2 4 1 4-1 —1 -1 Уз
3 4-1 - 1 -bl -1 Уз
4 4-1 4-1 4-1 4-1 У<
Фиктивная переменная х0=4-1 вводится формально для рас-
четов Ьо. В третьем и четвертом столбцах матрицы помещаются
69
значения переменных х1 и х2 (они образуют собственно планирова-
ние). Значения произведения (расчетные XiX2) вводятся в матрицу
для последующего вычисления коэффициентов регрессии />!,_• В ше-
стом столбце помещаются результаты наблюдений каждого опыта.
Первая строка матрицы соответствует первому варианту опыта,
в котором обе переменные находятся на нижнем уровне и т. д.
Для трех факторов х>, х2, х3 матрицу планирования получим,
повторив дважды матрицу для двух факторов (один раз при зна-
чении х3 на нижнем уровне, второй раз при значении х3 на верхнем
уровне), т е. имеем восемь вариантов опытов; затем дополняем
столбцы расчетных значений произведениями переменных х^э, х2х3
И XjX2X3.
Матрица для четырех факторов получается повторением матри-
цы для трех факторов (для уровней х< = — I и х< = + 1) с соответ-
ствующим добавлением столбцов с расчетными значениями про-
изведений.
Использовать полный факторный эксперимент для числа фак-
торов более четырех нецелесообразно, так как число необходимых
опытов растет по показательной функции 2', и для 1=5 их нужно
уже 32. При большом числе исследуемых факторов целесообразно
пользоваться дробным факторным планированием.
Расчет коэффициентов регрессии. Пользуясь двухфакторным
планом, можно вычислить коэффициенты регрессии уравнения, со-
держащего четыре члена (60. два линейных эффекта 6|Х|, 62х2 и
взаимодействие факторов 6|.2Х|,?) Трехфакторный план позволяет
вычислить коэффициенты регрессии уравнения, содержащего во-
семь членов. В общем случае при исследовании i переменных урав-
нение содержит N = 2' члена. Из них один — b0, i членов — линей-
ные эффекты, а остальные — парные, тройные, четверные и т, д.
взаимодействия.
Расчет коэффициентов регрессии ведется по следующим фор-
мулам:
-4г2уи"; ьи =* 4г 2у=4г 2у*ло» (2,38)
где у» — значения среднего выхода процесса н Л/-м варианте; х^—значение
данного фактора в <V-m варианте
После определения коэффициентов регрессии составляется
уравнение регрессии или так называемая математическая модель
процесса.
Оценка значимости коэффициентов регрессии. Оценка значи-
мости коэффициентов регрессии производится по их выборочной
дисперсии S2[d,] и критерию Сгьюдента. Для определения S2[feJ
по экспериментальным данным вычисляются:
построчные дисперсии
52KvJ (2.39)
(здесь/? число повторностей в определении
70
дисперсия воспроизводимости S2[i/] =££2[</vJ/jV — средняя
арифметическая из дисперсий выходов всех N вариантов опыта
(усредненная дисперсия);
дисперсия среднего значения S2[y] =S2[i/]/А’.
дисперсия коэффициентов регрессии £2[6(] =S2[y]/AT
Если в каждом варианте был проведен только один опыт (Л=1),
то дисперсия среднего значения совпадает с дисперсией метода из-
мерения в предварительных экспериментах, т. е. за S2[y] прини-
мался ошибка, возведенная в квадрат. Если дисперсия метода S2
известна из проведенных ранее опытов, то S^[ft/]=S2/N и
S[6(]=S/J N (т. e. погрешность коэффициента регрессии в I N
раз меньше погрешности используемого метода, что является од-
ним из достоинств многофакторной схемы эксперимента).
Для оценки значимости коэффициентов регрессии составляем
следующее неравенство:
(2.40)
где — погрешность коэффициента регрессии; tP(f} — коэффициент Стьюден-
та (табличные значения при заданной достоверности); l=>N(k 1) число степе
ней свободы, с которыми были определены коэффициенты регрессии.
Выполнение этого неравенства свидетельствует о значимости
коэффициентов регрессии. Незначимые коэффициенты для выбран
ной достоверности исключают из уравнения регрессии или прово
дят дополнительное исследование, изменив единицу варьирования
факторов.
Анализ уравнения регрессии. В заключение необходимо прове-
рить принятую гипотезу о линейности системы, т. е. о том, что вы
ход процесса может списываться уравнением без квадратичных
членов и, возможно, без членов, учитывающих парные и выше
взаимодействия.
Если гипотеза справедлива, то Ьо является чистой оценкой fjo.
Чтобы это проверить, необходим дополнительный опыт с г повтор-
ностями при всех факторах на нулевом уровне. Вычисленное сред-
нее значение у0 будет чистой оценкой а разность |у„ bv | —
— |Ро—(0о I Х0<<) | = S0u оценкой суммы коэффициентов регрес-
сии при членах высших порядков. Если эта разность незначитель-
на, то выход процесса может быть описан уравнением без квадра
тичных членов.
_ Зная Ьо и 32[/>oJ =S2[b(], для оценки значимости разности
| у0 — Ьо| воспользуемся формулой
| у0 - Ь„ | > k S2 /(Л-Ьг) Лг/Р(/), (2.41)
(N 1)л«|М (г l)S»|70|
где --------дг । г__о--------— среднее взвешенное из двух дис-
персий; Ьо - свободный член в уравнении регрессии, вычисленный после много-
факторного эксперимента по N = 2‘ вариантам; S2(b|] — дисперсия коэффициента
71
регрессии; у0— среднее значение из z повторностей в опыте с переменными Х|,
х».. .х(, находящимися на нулевом уровне; S2[</o] — дисперсия
у^/г(г— •); /р(f) — значение критерия Стьюдента для выбранного
уровня вероятности; (N+z—2) —f — числа степеней свободы (по справочным
таблицам).
Если это неравенство выполняется, то разность |у0—&ol зна-
чима и, следовательно, квадратичные члены в уравнении регрес-
сии отбрасывать нельзя. Это указывает на значительную кривизну
поверхности отклика вблизи оптимума: факторный эксперимент
нужно выполнять с меньшими единицами варьирования. Если же
|t/o—А>1 незначимо отличается от нуля, то принятое предположе-
ние о возможности описания выхода процесса без членов высших
порядков справедливо. В этом случае желательна также (для уп-
рощения математической модели процесса) проверка возможности
описания выхода процесса только линейными членами, без их пар-
ных взаимодействий.
По уравнению регрессии с отброшенными членами парных взаи-
модействий для значений факторов хь х2......х„ соответствующих
каждому варианту, рассчитывают выход z/v и разности |yjV — y,v |
и |yv — y<v |-для каждого из N вариантов. Дисперсия неадекват-
ности данной модели (без парных взаимодействий)
= (2-42)
где (N—i—I)—число отброшенных взаимодействий, равное (2<—4—-1)
Сравнив с S2[i/] (дисперсией воспроизводимости), по кри-
терию Фишера оценим возможность отбрасывания членов парных
взаимодействий:
(2.43)
Значение fpat4 определяется по справочным таблицам для сте-
пеней свободы fi и /2 (здесь fi = N—i— 1 и 1).
Если ГракЧ больше табличного значения F(/h f2), то члены пар-
ных взаимодействий отбрасывать нельзя, т. е. линейное приближе-
ние неадекватно. В противном случае выход может достаточно
точно описываться полученным уравнением без парных взаимодей-
ствий.
2.4. ПЛАНИРОВАНИЕ ЭКСПЕРИМЕНТОВ ДЛЯ ОПРЕДЕЛЕНИЯ
ФУНКЦИОНАЛЬНЫХ ЗАВИСИМОСТЕЙ
Влияние схемы организации эксперимента на его погрешность.
Погрешность эксперимента определяется среднеквадратичным от-
клонением результатов измерений S,, которое для краткости назо-
вем ошибкой эксперимента.
72
Конечный результат эксперимента (у) часто представляет со-
бой функцию одного или нескольких выходов процесса (у/). Это
значение случайное, погрешность которого вычисляется по закону
сложения ошибок.
Методы определения ошибки эксперимента S, зависят от схемы
его организации, что можно показать на примере определения у при
различных значениях х (рис. 2.1).
В многофакторной задаче число
опытных точек и= 1, 2,..., JV; чис-
ло дублирующих опытов, образую-
щих серию (все опыты в серии соот-
ветствуют измеренной опытной точ
ке, но представляют собой полное
Рис. 2 1. Схема определения зависимоегн
у(х) по Лг опытным точкам
воспроизведение эксперимента) о=1, 2, ..., л; в каждом опыте
может быть w серий измерений (о/ = 1, 2, .... гл).
Возможны следующие схемы организаций эксперимента в каж-
дой м-й точке:
1 — один опыт с одним измерением, в результате чего будет по-
лучен один выход процесса уи;
II — один опыт с т измерениями, в результате чего будет полу-
чено т значений yuw со средним уМ|Ш. и дисперсией S«|W, характе-
ризующей рассеяние в серии измерений:
(2.44)
о 1 —
*$« । • = । и УикУ;
(2.45)
III—серия из п дублирующих опытов с одним измерением в
каждом, в результате чего будет получено л значений yuv со сред-
ним уи и дисперсией S«|r, характеризующей рассеяние в серии
опытов, т е. их воспроизводимость:
~ 1 V
У" I * - л & Уи”'
) I *• ___
1 *' п - 1 ^у« । v ~ ;
(2-46)
(2.47)
IV — серия из л дублирующих опытов с m=const измерений в
каждом, в результате чего будет получено лги значений yUVV)', в каж-
б Зак. 2 <с>
73
дом v-м опыте можно найти значения среднего t/U:-|w и дисперсии
Su»|w, характеризующей рассеяние измерений в этом опыте:
yuv ।» = Jb Уиуш < (2.48)
। w = (Уии । w У и vwV • (2.49)
По всей м-й серии измерений можно найти значения среднего
yU|pw и дисперсии S«iv, характеризующей воспроизводимость опы-
тов:
У и । vw = “7Г IrJ1 I • Тил ’ (2.50)
•й I v — п — 1 ^Уи I VW “ Уиъ ।»)’ • (2.51)
Таким образом, в погрешности эксперимента Ss следует разли-
чать ошибки по измерениям и воспроизводимости S,p.
При определении точечных значений функций необходимо бо-
роться с ошибками, для чего используются следующие методы:
планирование с позиций анализа ошибок, выбор интервалов между
экспериментальными данными, назначение порядка проведения экс-
перимента и др.
Расчет погрешности определения произвольной функции. Пред
ставим результат измерения R в виде функции двух измеряемых
переменных хну:
+ Дг, = f(xc 4- Axt; ус + Ду,), (2.52)
• де Rt, хс, ус — точные, известные или средние значения; Дг(, Лх(, \у, отклоне-
ния от средних значений, обусловленные случайными ошибками измерений
Если эта функция непрерывна и дифференцируема, то ее можно
разложить в ряд Тейлора. Взяв первые два члена ряда и возведя
во вторую степень уравнение для Ал, получим среднеквадратичное
отклонение произвольной функции в следующем виде:
4^ = (-^-),Л5-+(-э^)д5?- <253>
Для определения показателя точности, характеризующего от-
носительную ошибку результата (в долях единицы или в процен-
тах), возьмем отношение среднеквадратичного отклонения к точ-
ному результату:
(2.54)
При корректном планировании и проведении эксперимента по-
грешности измеряемых величин и ASy не должны быть более
74
абсолютных погрешностей измерительных приборов, поэтому мож-
но записать
+ <2-55>
где Дх-Д$ж,
Для функций вида R = Kxy/z погрешность результата измере-
ний определяется по формуле
Д$,//?с = ]/Д’лс/л® + A*y/yJ -Ь Д2г/г£. (2.56)
Уравнения (2.55) и (2.56) позволяют прогнозировать погреш-
ность общего результата при известной погрешности приборов, ис-
пользуемых для измерений.
Определение интервалов между экспериментальными точками.
Выбор экспериментальных точек обусловлен относительной точ-
ностью данных в различных областях исследуемых значений и ха-
рактером экспериментальной функции.
Если на каком-то участке исследуемой кривой данные вызыва-
ют сомнение, то на этом участке берется большее число точек, по-
скольку четыре точки дают вдвое, а девять втрое большую точ-
ность, чем одна.
Если ожидается, что неизвестная функция будет простой, то ее
стараются преобразовать к линейному виду. Например, функцию
вида
A/? Kyv-12, (2.57)
выражающую зависимость давления от скорости .можно преобра-
зовать к виду
In \р = 1пКр/2 ! 2 In -г/.
Взяв одинаковые интервалы по In v, можно получить функцию
с равномерным расположением точек.
При известном характере функции определяются значения не-
зависимой переменной, между которыми будут находиться равные
отрезки кривой AS. Для функции (2.57), как для любой непрерыв-
ной дифференцируемой функции,
AS (l+A'W)12^-
Если между двумя заданными точками интервал Аоь то следующий
интервал при AS| = AS2
/ШЭ- «•>
F I 1
Определяя таким путем интервал за интервалом, получаем ком-
пактный и логически обоснованный график экспериментальной
функции.
6*
75
Порядок проведения эксперимента. Рандомизированные планы.
В технике часто встречаются так называемые невоспроизводимые
эксперименты, которые протекают во времени необратимо без воз-
можности их изменения или повторения Это объясняется тем, что
в процессе эксперимента могут изменяться внешние условия (ат-
мосферное давление, температура воздуха), работоспособность опе-
ратора (совершенствование навыка, утомляемость), а также от
механических воздействий может изменяться техническое состоя-
ние объекта испытаний.
Эти обстоятельства нельзя не учитывать при планировании экс-
перимента.
Можно выделить два основных плана проведения эксперимента:
последовательный и рандомизированный (случайный)
Если считают, что изменения, вносимые в процесс эксперимен-
та действием различных факторов, пренебрежимо малы, то исполь-
зуют последовательный план проведения. При этом берется одно
(верхнее или нижнее) предельное значение независимой перемен-
ной и изменяется до другого.
При рандомизированном плане эксперимента значения незави
симой переменной чередуют случайным образом. Для большинства
инженерных экспериментов лучше всего подходит частично или
полностью рандомизированный план. Для рандомизации многих
экспериментов используется игровой метод, например, выбранные
комбинации условий можно пронумеровать, а номера вытаскивать,
как при жеребьевке.
Можно достигнуть частичной или полной рандомизации экспе
римента с помощью специальных «блочных» планов.
Простейший эксперимент, имеющий одну независимую или ре-
гулируемую переменную х и однофакторный результат R, может
находиться под влиянием других нерегулируемых, или внешних пе-
ременных. Влияние внешних переменных лучше всего компенсиро-
вать посредством рандомизации эксперимента, что способствует
равномерному распределению этого влияния по всему экспери-
менту.
Допустим, требуется определить зависимость скорости движе-
ния от высоты неровностей, преодолеваемых ВГМ при уровне вер
тикальных ускорений на месте водителя не выше допустимого. По
существу, это однофакторный эксперимент, в котором независимой
переменной является высота неровности. Из априорной информа-
ции известно, что скорость движения по неровностям зависит от
квалификации водителя и его состояния.
Выберем для проведения эксперимента четырех водителей (Я,
В, С, D) и составим план эксперимента таким образом, чтобы по-
следовательность их участия в эксперименте была случайной. Экс-
перимент проведем при четырех значениях высоты неровностей,
пронумеровав их Hi, Нг, Н3 и Н^. С учетом выбранных обозначений
составим следующий план:
76
Высота неровностей Последовательность заездов (опытов)
Н,......................................4 В С D
Н.................................. В A D С
Нл................................. С D А В
Ht................................. D С В А
Такой план обеспечивает полную рандомизацию эксперимента
по внешней переменной (человеческому фактору), так как в каж-
дой последовательности заездов каждый из водителей осущест-
вляет только один заезд при одной высоте неровности, и такое
условие соблюдается при любой последовательности опытов. При
реализации этого плана по каждой из его строк может быть полу
чено среднее значение скорости преодоления неровностей. Если для
обеспечения достоверности необходимо увеличить число опытных
точек, то план можно повторить; в таком случае его можно рассмат-
ривать как рандомизированный блок.
Существуют и другие методы составления рандомизированных
планов, широко освещенные в различных работах по математиче-
ской статистике.
2 5 ОСОБЕННОСТИ СИСТЕМЫ Ч ЕЛ О ВЕК - МАШ ИН А - СРЕДА,
УЧИТЫВАЕМЫЕ ПРИ ИСПЫТАНИЯХ
С позиций системного подхода основные свойства ВГМ реали-
зуются во взаимодействии элементов системы человек—машина-
среда (ЧМС). Испытания ВГМ как один из способов ее оценки
должны учитывать это взаимодействие, что необходимо для обес-
печения достоверности и сопоставимости получаемых результатов.
Свойства ВГМ реализуются под влиянием целого ряда факто-
ров, обусловленных техническим состоянием машины (КПД сило-
вой установки, конструкция движителя, укомплектованность, ре-
гулировочные параметры и др.), психофизиологическими харак
теристиками человека-оператора (способность принимать опти-
мальные решения, быстрота реакции, профессиональные навыки
и др ), а также параметрами внешней среды (атмосферные и до-
рожные условия, климат и др.)*.
Среди перечисленных факторов только параметры атмосфер-
ных условий не зависят от системы ЧМС. Остальные (в том числе
и параметры дорожных условий) являются результатом взаимо-
действия основных элементов этой системы. Например, воздейст-
вию на педаль тормоза при необходимости снижения скорости дви
жения обычно сопутствует перемещение привода управления пода-
чей топлива, что в свою очередь вызывает переменный режим
работы двигателя, систем силовой установки и трансмиссии, изме-
нение их КПД, появление относительных перемещений подрессо-
ренных масс и, как следствие, изменение нагрузок под опорными
катками и др.
* Подробнее рассмотрено в т. I н других томах монографии.
77
Значимость влияния различных факторов на выходные пара-
метры системы ЧМ.С различна. Соответственно их значимости они
должны учитываться при моделировании внешних и управляющих
воздействий, при разработке требований к техническому состоя-
нию и комплектации объектов, подвергаемых испытаниям.
На практике обеспечить точный учет всех факторов не пред-
ставляется возможным, поэтому часто их воздействие стремятся
исключить либо компенсировать. Для этого при испытаниях ВГМ
используются следующие приемы:
ограничение условий испытаний или режимов функционирова-
ния системы ЧМС (нормализация условий испытаний);
проведение испытаний при фиксированных положениях органов
управления, определенных значениях воздействий и др.;
рандомизирование планов проведения экспериментов для оп-
ределения статистических характеристик, детерминированных за-
висимостей и др.
В зависимости от используемых приемов различают стацио-
нарные, специальные и пробеговые испытания.
Нод стационарными испытаниями понимают эксперименты на
неподвижной машине с моделированием постоянных (стационар-
ных) воздействий среды и фиксированных управляющих воздей-
ствий. Получаемые при этом результаты отражают свойства ма-
шин в строго определенных (нормированных) условиях и состав-
ляют ее техническую характеристику. При стационарных испыта-
ниях исключаются случайные воздействия среды и человека.
Специальные испытания проводятся в условиях использования
машины по назначению при ограниченных или нормированных воз-
действиях среды и человека. Случайные воздействия в этом случае
компенсируются рандомизированием планов проведения испыта-
ний. Получаемые результаты отражают возможности машины и
также входят в ее техническую характеристику.
Пробеговые испытания моделируют использование машины по
назначению при случайных воздействиях среды, описываемых ста-
тистическими характеристиками. Управляющие воздействия опре-
деляются при этом выполняемой задачей, требованиями эксплуа-
тационной документации и условиями безопасности. Для компен-
сации случайных воздействий широко используются рандомизация
планов испытаний и статистическая обработка их результатов. Ре-
зультаты испытаний отражают реализацию технических возможно-
стей машины и представляют собой ее эксплуатационные парамет-
ры (эксплуатационно-технические характеристики).
Подвижность ВГМ обеспечивается моторно-трансмиссионной
установкой, системами контроля и обеспечения ее нормального
функционирования и реализуется через взаимодействие ходовой
части с грунтом и управляющие воздействия человека-оператора
(водителя). Возможны различные уровни использования энергети-
ческих возможностей машины и нагруженности сборочных единиц.
Контроль и поддержание необходимого состояния и режимов функ-
78
ционирования машины осуществляются автоматически или вруч-
ную.
Основными элементами управления движением ВГМ являются
приводы управления подачей топлива, переключением передач, ме-
ханизмами поворота. Воздействие на любой из указанных органов
управления приводит к изменению скорости движения. Положение
же органов управления не всегда однозначно определяет режим
работы двигателя и сборочных единиц трансмиссии. Так, для
обеспечения установившегося режима движения требуется
не только удерживать педаль подачи топлива в постоянном поло-
жении, но и обеспечить неизменность параметров дорожных усло-
вий, исключающих необходимость управляющих воздействий на
другие органы управления движением объекта. В тех случаях, ког-
да выполнить это условие невозможно, следует свести к минимуму
изменение параметров дорожных условий и число управляющих
воздействий. Воздействия на органы управления движением вы-
зывают переходные режимы работы двигателя, на которых сни-
жается его топливная экономичность и соответственно мощность
(по сравнению со стационарными режимами). Особенно ощутимо
изменение мощности в этом случае при быстроменяющихся перс
ходных процессах.
Характеристики переходных процессов зависят не только от
управляющих воздействий. На них также влияет регулировка при
водов управления, «свободные» ходы, характеристики исполнитель-
ных механизмов систем управления и др. В конструкторской доку-
ментации требования к воздействиям на органы управления
задаются в основном качественно (например, «быстро, но плавно
отпустить педаль сцепления»). Такое воздействие зависит от на-
выков водителей, от их индивидуальных особенностей и, следова-
тельно, случайным образом может повлиять на определяемые при
испытаниях параметры системы ЧМС.
Допустим, требуется измерить какие-то параметры при движе-
нии ВГМ по прямой горизонтальной дороге на установившейся
скорости. При этом ставится условие минимального использования
органов управления поворотом на мерном участке (на протяжен-
ных участках избежать этого нельзя). Водители пользуются орга-
нами управления поворотом по-разному. Для одних характерны
многократные непродолжительные воздействия на привод управ-
ления с использованием полного рабочего хода, для других — по-
иск положения привода, при котором обеспечивается поворот с
нужным радиусом или на заданный угол. При неумелом управле-
нии вместо требуемого прямолинейного фактически будет движе-
ние с криволинейной траекторией в пределах ширины дорожного
полотна.
Для компенсации влияния субъективных факторов на определе-
ние разгонных характеристик ВГМ используют различные приемы:
в испытаниях участвует несколько водителей; из характеристики
79
процесса разгона исключается время на переключение передач; ха-
рактеристики разгона на каждой передаче определяются отдельно.
На результаты испытаний может повлиять также техническое
состояние и комплектация испытуемых образцов. Так, потери мощ-
ности в движителе зависят от предварительного натяжения гусе-
ниц, изменяющегося в процессе эксплуатации. Для гусениц с ре-
зино-металлическим шарниром от этого зависят также зацепление
с ведущими колесами и устойчивость их в обводе. Контроль натя-
жения гусениц в процессе эксплуатации в настоящее время осу
ществляется по геометрическим параметрам (прогиб участка цепи
между двумя опорами); для испытаний метод недостаточно точен.
В процессе эксплуатации может изменяться также энергоем-
кость подвесок за счет изменения объема рабочей жидкости в гид-
роамортизаторах и появления остаточной деформации упругих эле-
ментов. Изменяется и масса испытуемой машины за счет расходо-
вания горюче-смазочных материалов, составляющих 2,5.. .4,5 %
массы полностью укомплектованного образца. Поэтому необходимо
устанавливать допустимый предел расходования горюче-смазочных
материалов в процессе испытаний.
При испытаниях плавающих ВГМ следует знать, что вода, про-
никающая внутрь корпуса вследствие недостаточной его герметич-
ности или по иным причинам, может скапливаться в местах, недо-
ступных для откачки, образуя неоткачиваемый остаток, что при-
водит к увеличению осадки машины или изменению начальных
крена и дифферента и, в конечном счете, вызовет увеличение сопро-
тивления и ухудшение ее ходкости. Различие в натяжении гусениц
даже в допустимых пределах или незначительное отличие формы
бортовых щитков может привести к повышенному уводу машины
на плаву, т. е. исказить траекторию ее движения, что вынуждает
экипаж пользоваться органами управления для поддержания пря-
молинейности движения, в результате чего скорость движения сни-
жается.
Как правило, техническое состояние сборочных единиц и систем
шасси нужно проверять до начала испытаний, в процессе их про-
ведения и после.
Управление машиной в общем случае состоит в организации
процесса ее взаимодействия с внешней средой и заключается в вы-
боре и поддержании необходимого состояния и режимов функцио-
нирования составных частей машины. Роль человека-оператора
здесь состоит в получении и переработке разнообразной информа-
ции о внешней среде, состоянии объекта управления, его поведении.
Восприятие реакции машины на внутренние и внешние возмуще-
ния, а также на управляющие воздействия осуществляет водитель
органами зрения, слуха и в значительной степени через ощущение
положения машины, ее скорости и ускорения посредством вести-
булярного аппарата и различных рецепторов. На основании полу-
ченной таким образом информации оператор принимает решение
и реализует его, воздействуя на органы управления.
80
Отличия при управлении ВГМ разными водителями обуславли-
ваются различными способностями количественной онен’ и пара-
метров внешней среды, скоростью восприятия, оценки внешней об-
становки и выполнения управляющих воздействий и. вероятно, са-
мое основное — разницей в знаниях и опыте.
В определенных условиях движения элементом системы ЧМС,
ограничивающим реализацию энергетических свойств объекта, яв-
ляется сам человек.
По данным Р. В. Ротенберга и Н. И. Бурлаченко, для человека
естественным видом периодического воздействия являются возму-
щения с частотой 1 3 Гц, характерные для ходьбы и бега. Поэто-
му на транспорте рекомендуются в качестве допустимых по плав-
ности хода следующие ускорения:
±0,25# — границы удобной езды, соответствующие ходьбе ус-
коренным темном (g —ускорение свободного падения);
±(1,1.. I,7)g — пределы ускорений, допустимые непродолЖи
тельное время и соответствующие переходу от ходьбы к бегу;
± (2,8.. 3,0)g — допустимые ускорения при единичном воздей
ствии, соответствующие ускорениям, воспринимаемым человеком
при спрыгивании с небольшой высоты.
Системы подрессоривания ВГМ не позволяют двигаться по
неровностям без ограничения скорости. При максимально возмож-
ной скорости ускорения на
месте размещения водителя
достигают 7 g. Такие ускоре-
ния возникают вследствие уда-
ров балансиров передних под-
весок в ограничители хода при
ошибке водителя в выборе ско-
ростного режима преодоления
неровностей. Число совершае-
мых ошибок и скорость движе-
ния по неровным дорогам за-
висят от квалификации води
Рис. 2.2. Зависимость вертикальных
ускорений на месте сиденья водителя
ге.» от скорости движения танка v
по искусственным неровностям высо
rot 150 (/) н 200 .мм (2) при рассто
янни между вершинами 8 м
теля. Режим преодоления неровности выбирается водителем зара-
нее, так как это достаточно быстротечный процесс (1.. 1,5с), а
ВГМ обладает еще и высокой инерцией. Экспериментально уста-
новлено, что увеличение высоты неровностей со 150 до 200 мм при
прочих равных условиях приводит к возрастанию ускорений бо-
лее чем в два раза (рис. 2.2). При значениях ускорений, близких
81
Таблица 2.6
Показатели дорожно-грунтовых условий в различных почвенно-климатических районах СССР,
полученные при проведении испытаний в разные годы
Показатель Летне-осенний период Зимний период
Юго-запад европейской части СССР (1973, 1976, 1978, 1979, 1984 гг.) При- амурье (1979 г.) Районы Средней Азии (1981, 1982 гг.) Север европей- ской час- ти СССР (1979 г.) Западная Сибирь (1983 г.) При- амурье (1981 г.) Забайкалье (1980 г.)
горно- полупус- тынные горные песчано- пустынные
Пробег машины, км 1500 - 4000 1800 2000—2500 1000 1000-1500 1000 1600 2200 1800—2200
Протяженность трасс, км - 2000 900 400 40 - 200 135 425 350 1050
Высота над уровнем моря, м Рельеф, %: до 200 150—400 400-1200 1700-2200 100-120 100-300 150 -300 150 -400 600—1000
равнинный 75-80 65 75 — 100 — 50 50 30
холмистый, пересе- ченный 20-25 30 25 — —* 15 50 50 50
горный Дороги, %: — 5 — 100 — 85 — — 20
с твердым покры- тием до 20 30 — — — 15 — — 3
укатанные полевые, грунтовые и засне- женные 45-55 35 90 25 — — 70 30 80
разбитые трассы по- лигонов 15-20 15 — 40 — — 20 10 3
местность (пашня, барханы, целина, бо- лота и др.) 5-10 5 10 — 100 10 10 25 11
извилистые, лесные, горные 5 15 — — — — — 35 < 1
каменистые, щебе- ночные — — — 35 — 75 — — 2
Грунт, %: чернозем, снежный покров 0,2 м от 15—40 - — — — 15 50 60 10
песок влагонасыщен- ный {лёсс) от 10—70 — — — 40 — 5 35 —
суглинок, лёссовый, торфяной, супесь, мерзлый 5 1С0 85 35 60 — 45 5 (кочкар- ник) 70
каменистый, щебеноч- ный - — 15 65 — 85 — — 20
Препятствия: повороты, 1/км 1,5-2 1,0 < 1,0 6,0 1,0-1,5 7,6 1.0 2-7 1.4
мосты, броды, пере- езды, узости, 1/км 0,8 0,5 0,2 1,0 0,02 7.4 0.3 0.3 0,2
населенные пункты, % 10 2 — — — — 1 1 3
ос
к допустимым (2.. .3) g. приращению скорости 0,5 м/с соответству-
ет возрастание ускорений на (3.. .4) g, т. е. ошибки водителей в
выборе скоростного режима преодоления неровностей, ограничи-
вающих скорость движения, могут быть весьма ощутимы. Как по-
казывает опыт, при максимально возможной скорости движения
не избегают ошибок и квалифицированные водители.
Общепринятым приемом снижения скорости в момент преодоле-
ния вершины неровности является уменьшение подачи топлива,
в момент же выхода из впадины подачу топлива резко увеличива
ют. При этом максимально используются возможности силовой ус-
тановки и уменьшаются параметры колебаний корпуса. Вертикаль-
ные ускорения на корпусе достигают максимальных значений в
момент наибольшего сжатия упругих элементов передних подвесок.
Чтобы получить максимально возможную скорость движения по
дороге, необходимо каждую неровность преодолевать с полным
использованием ходов подвесок. Как показывает опыт, такая за-
дача для водителей практически недостижима: высококвалифици-
рованные водители добиваются использования полного хода лишь
на 70—80%.
Несколько иной характер приобретает взаимное влияние звень-
ев системы ЧМС при эксплуатации машин в водной среде. Непри-
вычные условия управления машиной при подводном вождении
(отсутствие визуального восприятия внешних условий, невозмож-
ность проконтролировать реакцию объекта на управляющие воз-
действия, отсутствие или ухудшение обзорности у водителя, стес-
няющее действие индивидуальных спасательных средств и другие
факторы) предъявляют повышенные требования к морально-пси-
хологической и специальной подготовке не только водителей, но
и всего экипажа, так как в процессах восприятия внешней обста-
новки, выработке управляющих воздействий, наблюдении за реак-
цией объекта на эти воздействия участвуют все.
При движении на плаву появляются дрейф, снос на течении,
снос при циркуляции в направлении первоначального движения
(выдвиг) и др. Отсутствие четких ориентиров для управления и
запаздывание реакции машины на управляющие воздействия тре-
буют предварительной тренировки экипажа, участвующего в ис-
пытаниях.
Моделирование воздействий внешней среды при испытаниях яв-
ляется одной из самых сложных проблем. Для характеристики до-
рожных условий на маршрутах большой протяженности использу-
ются качественные и количественные показатели: результаты изме-
рения протяженности отдельных участков; визуальная их оценка
(тип дороги, состояние поверхности движения, тип грунта); геомет-
рические параметры поверхности движения и препятствий, а также
характеристика рельефа местности по топографическим картам.
Совокупность указанных показателей (табл. 2.6) может быть ис-
пользована в качестве основы при разработке модели эксплуата-
ции ВГМ на марше.
84
Следует обратить внимание на то, что дорожные условия изме
няются в процессе испытаний ВГМ. Для естественных грунтов
характерен интенсивный процесс разрушения поверхностного слоя
(с образованием выбоин) при прохождении машин, особенно за-
метный на грунтах с низкой несущей способностью и несвязных
грунтах со слабым дерновым покровом.
Влияние многократного прохождения танков по одному и тому
же маршруту на их среднюю скорость и расход топлива иллюстри-
руют экспериментальные данные (табл. 2.7).
Таблица 2.7
Изменение средней скорости движения и расхода топлива при совершении
танковым подразделением марша по маршруту протяженностью 50 км
Дата испытания Числи проходов по маршруту (к середине суточного перехода) Средняя скорость двилкеимя, км м ’всход топлива
UУТГНОЙ. ЛИМ часомин,
25.08.84 13 29.6 4.3 119
26.08.84 33 30,8 4Д 124
27.08.84 28.08.84 55 60 31.2 29,0 4,7 135
02.09.84 96 28,0 5,1 145
03.09.84 106 26,6 5.2 136
04 09 84 115 25,5 5,45 133
Особым видом препятствий, влияющих на подвижность ВГМ,
являются водные преграды, которые характеризуются совокуп-
ностью следующих параметров:
гидравлических (размеры, скорость потока);
метеорологических (состояние водной поверхности, действие
ветра, паводков, половодья);
морфометрических (тип прилегающей местности, крутизна бе
регов, типы грунтов дна и окружающей долины).
Эти параметры являются статистическими по природе и тре-
буют соответственно статистических методов экспериментальной
оценки водоходных свойств ВГМ.
Предварительные испытания опытных образцов ВГМ прово-
дятся в основном в условиях полигонов. Поскольку в настоящее
время нет возможности моделирования на них статистически пред-
ставительных дорожных условий, воздействие среды имитируется
с помощью искусственных сооружений, что позволяет обеспечить
требуемую точность определения показателей подвижности.
Анализ опыта испытаний ВГМ, состава используемых трасс и
сооружений (в том числе полигонов зарубежных стран и испыта-
тельных полигонов для автотракторной техники) позволяет опре
85
делить необходимый для всесторонних испытаний ВГМ в условиях
полигонов состав инженерно технических сооружений (табл. 2.8)*.
Таблица 2.8
Состав инженерно-технических сооружений испытательных полигонов
Сооружение Краткая характеристика
Трассы грунтовые профилирован- ные, улучшенные Трасса скоростная с твердым по- крытием на железобетонном основа- нии Трасса ускоренных испытаний с твердым покрытием на железобетон- ном основании со сменными препят- ствиями Трасса горизонтальная с твердым покрытием на железобетонном осно- вании Железобетонные площадки Танкодром типовой Общая протяженность 100 км Протяженность 7 км Протяженность 3 км Протяженность 1,5 км Количество площадок (10x6) м —4 Трасса протяженностью 6 км с типо- выми сооружениями, предусмотренными курсом вождения боевых машин
Участок типовых препятствий Состав препятствий: ров переменной ширины; вертикальные стенки различной вы- соты; подъемы различной крутизны (5 45’); крены различной крутизны (5 20°); воронки; колейный мост; брод с регулируемой глубиной до 2 м; завалы
Водоем с подводной дорогой Грунтовой канал Размеры 0.5X 1,0 км Размеры 150x80 м
* Подробное описание полигонных трасс приведено в т. 8 монографии.
86
Глава 3. НАТУРНОЕ МОДЕЛИРОВАНИЕ
ДВИЖЕНИЯ ТАНКА
3.1. ОСНОВНЫЕ ПОЛОЖЕНИЯ
Танк представляет собой сложную динамическую систему, ра-
ботающую в условиях непрерывно изменяющихся внешних воздей-
ствий. Динамическую модель танка можно представить в виде си-
стемы СО МНОГИМИ ВХОДНЫМИ (Xj.Х„) И ВЫХОДНЫМИ (у\,.. ., Ут)
переменными (параметрами). Входными параметрами являются
все внешние возмущения и воздействия, а выходными — совокуп-
ность параметров, которые определяют качество технической си-
стемы, ее основные свойства. К внешним воздействиям на движу-
щийся танк можно отнести параметры внешней среды (дорожные и
атмосферные условия), воздействия водителя на органы управле
ния, а к выходным—скорость, пройденный путь, расход топлива
и др. Существенной особенностью внешних воздействий является
то, что они относятся к категории случайных в вероятностно-ста
тистическом смысле, вследствие чего и выходные параметры будут
также случайными. Все внешние воздействия, встречающиеся в
процессе эксплуатации, представляют собой генеральную совокуп-
ность. В процессе испытаний внешние воздействия являются
случайными выборками из генеральной совокупности, причем ха-
рактеристики выборки, строго говоря, не совпадают с характери-
стиками генеральной совокупности. Поэтому имеется некоторая
неопределенность в воспроизведении внешних воздействий и полу
чаемых результатов испытаний.
Обеспечение однозначности и повторяемости результатов испы-
таний является одной из главных проблем. Решение ее возможно
различными путями, суть которых заключается в определении ре-
акции динамической системы во всем диапазоне изменения внеш-
них воздействий и нахождении по полученным экспериментальным
данным показателей, соответствующих генеральной совокупности
или внешним условиям, принятым для оценки. Реакцию динамичес-
кой системы можно определить проведением многофакторного экс-
перимента либо сведением динамической модели к одномерной (с
одним входом и одним выходом) и проведением од кофакторного
эксперимента с варьированием входного воздействия.
87
Внешние воздействия в процессе испытаний моделируются по-
средством выбора из всей совокупности и физического воспроизве
дения таких условий, которые наиболее полно отвечали бы постав-
ленным задачам. При этом должна быть обеспечена многократная
воспроизводимость модели возмущений. Стабильность воспроизве-
дения модели влияет на точность определяемых характеристик, в
частности от нее зависит методическая погрешность испытаний
В практике испытаний танков чаще используются детерминиро
ванные и стохастические модели. Первые предполагают отсутствие
случайных воздействий, вторые отражают вероятностные процессы
и события. Испытания, в которых используются модели первого
типа, считаются проведенными в стационарных условиях (стендо-
вые испытания и пробеговые на стандартных трассах); испытания
в случайных условиях наиболее полно отражают возможные усло-
вия эксплуатации — это, например, пробеги (марши) по маршру-
там различных регионов страны.
Хотя при испытаниях танков необходимо моделировать весь
комплекс внешних воздействий, в каждом случае можно выделить
основные факторы, воздействие которых изучается, и сопутствую-
щие факторы, реакция на которые не исследуется. Требования к
моделированию основных и сопутствующих факторов различны.
Моделирование основных факторов должно обеспечивать возмож-
ность изучения реакции машины на них в требуемом диапазоне их
изменения. Сопутствующие факторы моделируются таким образом,
чтобы их изменение при многократном воспроизведении и влияние
на изучаемый процесс были минимальными.
Движение танка заключается в перемещении его центра тя-
жести в горизонтальной и вертикальной плоскостях и вращении
его материальных точек вокруг продольной, поперечной и верти-
кальной осей, проходящих через центр тяжести. В общем случае
движение танка характеризуется обобщенными перемещениями по
обобщенным координатам X, У, Z, Ф, Y, Q. Обобщенные перемеще-
ния зависят от обобщенных сил равнодействующих всех сил
(внутренних и внешних) по направлениям перемещений Обобщен-
ные силы со стороны внешних возмущений обуславливаются коэф-
фициентом сопротивления движению, максимальным коэффициен
том сопротивления повороту, коэффициентом сцепления, характе-
ризующими взаимодействие гусеничного движителя с грунтом, па-
раметрами микропрофиля, возбуждающими колебания подрессо-
ренных масс корпуса, параметрами поворотов и шириной проезжей
части дороги, определяющими криволинейное движение, а также
управляющими воздействиями водителя и атмосферными усло-
виями.
Прямолинейное движение. На прямолинейных участках опреде-
ляются характеристики танка, обусловленные энергетическими воз-
можностями его силовой установки и системой подрессоривания,
проходимостью по грунтам со слабой несущей способностью, сцеп-
ными свойствами и др. Для моделирования процесса прямолиней-
на
ного движения используется плоская модель (при условии, что
танк не совершает поворотов и под обеими гусеницами одинаковый
микропрофиль).
Траектория прямолинейного движения задается проезжей ча-
стью дороги, при этом ширина дороги не лимитируется и возможен
естественный увод машины Для удержания машины на проезжей
части дороги допускаются минимально необходимые управляющие
воздействия водителя на органы управления поворотом. В ряде
случаев, например, при движении по грунтам со слабой несущей
способностью или в тормозном режиме воздействия на органы уп-
равления поворотом недопустимы.
Дорожные условия и другие внешние возмущения задаются в
зависимости от цели испытаний.
При определении характеристик, обусловленных энергетически-
ми возможностями ВГМ, выдвигаются жесткие требования по обес-
печению стабильности коэффициента сопротивления движению и
качества проезжей части прямолинейного участка. Такие испыта
ния, как правило, проводятся лишь на дорогах с твердым покрыти
ем, так как на грунтовых дорогах из-за флуктуаций коэффициента
сопротивления и непостоянного мнкропрофиля возрастает методи
ческая погрешность измерений. Положение педали подачи топлива
устанавливается постоянным, за исключением моментов переклю-
чения передач. Переключение передач производится рациональны-
ми приемами, для чего привлекаются опытные водители. Для уст
ранения влияния на результаты индивидуальных особенностей во-
дителей в испытаниях участвует представительная группа. Пара-
метры атмосферных условий задаются в пределах, где их влиянием
на выходные характеристики можно пренебречь.
При определении характеристик, обусловленных системой под
рессоривания, жесткие требования предъявляются к моделирова
нию микропрофиля, параметры которого должны воспроизводиться
с минимальными погрешностями. Это достигается либо использо-
ванием искусственных неровностей, которые изготавливаются с за
данной точностью и устанавливаются на дороге с твердым покры-
тием, либо выбором для испытаний грунтовых дорог с разной ин-
тенсивностью микропрофиля. Приемы управления силовой установ-
кой в этом случае регламентируются; педаль подачи топлива
удерживается в постоянном положении или используются рацио-
нальные приемы управления. Для коэффициента сопротивления
движению и атмосферных условий задаются области допустимых
значений, в которых их влиянием на выходные характеристики
можно пренебречь.
Подход к моделированию режимов движения и внешних воздей-
ствий при определении других характеристик танка на прямоли
ценных участках дороги аналогичен: с минимальными погрешно-
стями воспроизводятся основные факторы, а сопутствующие зада-
ются таким образом, чтобы их влиянием можно было пренебречь.
89
Криволинейное движение. При моделировании криволинейного
движения воспроизводятся перемещения и силы, действующие по
координатам У, Q, X; при этом стремятся, чтобы сила, воздействую
щая со стороны дороги (по координате X), давала возможность
двигаться машине с требуемой скоростью. На поворотах воспроиз
водятся движение с предельной скоростью и специальные режимы,
например, при максимальном или промежуточном отклонении ор-
гана управления поворотом, повороты на косогоре и др.
При моделировании движения танка с предельной скоростью в
повороте траектория его криволинейного движения определяется
полотном проезжен части дороги. Повороты выбираются на трас-
сах испытаний или же проезжая часть размечается на специальных
площадках с помощью вех. При этом в соответствии с заданными
требованиями воспроизводятся радиус, угол поворота, ширина про
езжей части, боковые препятствия (кюветы, деревья и другие объ-
екты за пределами дороги) и задается максимальный коэффициент
сопротивления повороту . Точное его значение на грунтовых
трассах создать невозможно, к тому же на поворотах малых ра-
диусов грунтовые дороги разрушаются, что также приводит к из-
менению цШ1Х от опыта к опыту. Поэтому испытания проводятся
при нескольких значениях цшах, в том числе, больше и меньше
требуемого. На дорогах с твердым покрытием коэффициент «л1П1Х
практически стабилен.
Значения атмосферных условий и коэффициента сопротивления
движению задаются в пределах, в которых их влиянием на выход-
ные характеристики можно пренебречь.
Воспроизведение движения в повороте с предельной скоростью
осуществляется методом последовательных приближений: скорость
постепенно увеличивается до предельного значения. В процессе
преодоления поворотов необходимо использовать рациональные
приемы управления танком, что достигается привлечением к испы-
таниям квалифицированных водителей.
Принципиальный подход к моделированию других режимов
движения машины в повороте аналогичен: основными возмущаю-
щими факторами могут быть, например, управляющие воздействия
водителя при определении зависимости радиуса поворота танка
от перемещения органа управления поворотом, угол наклона пло-
скости косогора и цтах при проверке поворачиваемости танка на
косогоре. Их воспроизведение должно быть достаточно точным; со-
путствующие факторы (атмосферные условия, коэффициент сопро-
тивления движению) задаются и воспроизводятся в таких преде-
лах, чтобы их влиянием можно было пренебречь.
Общий случай движения. Действие всех случайных внешних
возмущений используется для определения и оценки комплексных
и дифференцированных показателей свойств танка на фоне случай
ных условий испытаний.
При моделировании общего случая движения танк перемеща-
ется с максимально возможной в данных дорожных условиях ско-
90
ростью, движется в колонне и т. д. На практике не представляется
возможным с достаточной степенью точности обеспечить воспроиз-
ведение одних и тех же условий испытаний (особенно дорожных).
Поэтому при моделировании задаются и воспроизводятся условия
разного типа. Например, ровные дороги и неровные, умеренные кли-
матические условия, жаркие, холодные и др. Фактические значе-
ния параметров, описывающих условия, при проведении различных
испытаний могут колебаться в пределах, характерных для каждого
конкретного типа.
Комплексные свойства танка оцениваются не только абсолют-
ными, но и относительными показателями (например, отношением
средней скорости движения опытного образца к средней скорости
эталонного танка), которые стабильны в пределах одного типа
условий испытаний. Дифференцированные показатели определи
ются на участках, где движение может быть представлено в виде
одномерных моделей, позволяющих исследовать влияние того
или иного свойства изделия на выходной комплексный показа
тель. Например, для определения динамико-скоростной ха-
рактеристики используется модель с одним входом (сопротивление
движению) и одним выходом (скорость движения). На сопутствую-
щие факторы в пределах каждой модели накладываются ограни
чения, при которых их влияние на выходную характеристику со-
ответствует влиянию генеральной совокупности, или назначаются
области изменения, в пределах которых влиянием сопутствующих
факторов можно пренебречь.
Параметры, измеряемые в процессе проведения экспериментов,
можно разделить на две группы: оценочные и контролируемые.
Оценочными параметрами характеризуются реакции машины на
основные внешние возмущения и степень интенсивности этих воз-
мущений. Так, при определении разгонной характеристики к оце
ночным параметрам можно отнести путь, время и коэффициент
сопротивления движению участка дороги, на котором проводятся
испытания.
Контролируемыми являются параметры, характеризующие со-
путствующие факторы внешних возмущений и степень их интенсив-
ности. В примере с разгонной характеристикой к контролируемым
параметрам относятся перемещения педали подачи топлива, орга-
нов управления поворотом, рычага переключения передачи, темпе-
ратура окружающего воздуха и атмосферное давление.
Перечень параметров и способы их измерения выбираются так,
чтобы получить требуемую характеристику с приемлемой методи-
ческой погрешностью. Методическая погрешность измерений обус-
лавливается тем, что в ряде случаев вместо реальных параметров
измеряются параметры моделируемого процесса. Например, прой-
денный путь отождествляется с длиной циклоиды, описанной на
этом пути точкой, расположенной на делительной окружности ве-
дущего колеса, расход топлива двигателем с расходом через се-
чение в подводящем трубопроводе и др.
91
Рассмотрим в качестве примера некоторые особенности изме-
рения перемещений танка по обобщенным координатам.
Измерение перемещений по координате X (или пройденного
пути) производят с помощью датчиков от кинематических звеньев
в цепи двигатель — ходовая часть (например, датчик частоты вра
щения ведущего колеса) или некоторыми другими способами (на-
пример, мерной линейкой, специальным датчиком пути и др.). При
использовании первого способа следует иметь в виду, что на пере-
мещение кинематических звеньев влияют также перемещения по
координатам Z и Ф (вследствие внутренних связей) и перемещение
гусениц относительно грунта (буксование и юз), поэтому такой
способ целесообразно применять в тех случаях, когда можно пре-
небречь пробуксовкой (юзом) гусениц, и для определения выход-
ных характеристик могут быть использованы осредненные значе-
ния параметров (на пути 8. . .10 м и более).
Причиной появления методической погрешности при измерении
вертикальных перемещений (по координате Z) и, в частности, вер-
тикальных ускорений может быть неправильная установка датчи-
ка, например, в результате недостаточной жесткости кронштейна.
Фактическую траекторию криволинейного движения танка це-
лесообразно определять методом непосредственного измерения про-
тяженности следов гусениц.
3.2. ОПРЕДЕЛЕНИЕ ПАРАМЕТРОВ ВНЕШНЕЙ СРЕДЫ
В зависимости от цели испытаний определяют обобщенную ха-
рактеристику внешних условий либо реализации параметров сре-
ды. Обобщенная характеристика является иллюстрацией общего
фона, на котором проводятся испытания; реализации используются
для решения задач по оценке свойств машины во взаимосвязи с
условиями испытаний. Требования к точности измерений в первом
случае существенно ниже, чем во втором; в зависимости от требуе-
мой точности используются различные способы измерений пара-
метров.
Наименьшей точностью обладают методы экспертной оценки
внешних условий, предусматривающие их качественное описание
Эти методы применяются при длительных испытаниях ВГМ.
Более точными являются методы инструментальной оценки.
Для оценки атмосферных условий используются данные сетевых
метеостанций или производятся измерения параметров непосред-
ственно в местах проведения испытаний с использованием прибо
ров, приспособленных для полевых условий (передвижные и пере-
носные метеостанции, термографы, барографы и др.)*.
Оценка физико-механических свойств грунта производится кос-
венными и натурными методами Косвенные методы основаны на
измерении сопротивления грунта вертикальной, продольной и по-
перечной сдвиговой деформации. Сопротивление вертикальной де-
• Подробнее это рассмотрено в т. 3 н 8 монографии.
92
формации определяется посредством пенетранионных испытаний
или динамического зондирования грунта, а сдвиговой -- измерени
ем момента при проворачивании четырехлопастной крыльчатки.
К косвенным методам относится и метод натурного моделирования,
заключающийся в воспроизведении натуральной траектории движе-
ния по грунту уменьшенной модели единичного трака в процессе
поворота с измерением усилий, затрачиваемых на его перемещение.
Косвенными методами оперативно обследуются трассы в районах
испытаний с целью их обобщенной оценки. Натурные методы
в общем случае основаны на использовании одной ВГМ в ка
честве средства, воспроизводящего взаимодействие гусеничного
движителя другой (исследуемой) ВГМ с грунтом. Эти методы яв-
ляются наиболее точными, они применяются для количественной
оценки влияния дорожных условий на показатели подвижности
Геометрические параметры трасс движения определяются, как
правило, методами инструментальных измерений. Это геодезичес
кие методы построения продольного профиля, плана трассы и об-
мера микропрофиля; методы обмера микропрофиля с использова
нием динамических масс и профилирующей каретки; методы об-
мера микропрофиля трассы и параметров поворота с использова-
нием гироскопических датчиков. Наибольшей точностью обладают
геодезические методы измерения; другие методы менее точны, но
обладают большей производительностью.
Определение обобщенного коэффициента сопротивления дви-
жению. Обобщенный коэффициент сопротивления движению /в„
включает в себя составляющие сопротивления грунта, уклонов до-
роги и поворотов. Этот показатель характеризует энергоемкость
дорожного сопротивления и используется при оценке подвижности
ВГМ.
В практике натурных испытаний этот параметр определяется
методом динамометрирования ведущих колес и методом энерго-
затрат, основанными на использовании самой гусеничной машины
в качестве средства измерений. При этом следует иметь в виду
зависимость одной из составляющих этого параметра (сопротивле
ния движению грунта frp ) от конструктивных параметров машины:
ее массы, опорной поверхности, числа и диаметра опорных катков,
звенчатости гусениц, высоты грунтозацепов, угла наклона лобовых
ветвей и натяжения гусениц Первые четыре фактора проявляются
через давление на грунт, определяющее затраты энергии на прес-
сование его при движении машины. Это давление неодинаково у
машин различных категорий по массе. Разница в значениях обоб-
щенного коэффициента сопротивления движению у машин различ-
ных категорий по массе может достигать нескольких процентов,
например, на грунтовых дорогах при испытаниях танка Т-64А и
БМП-1 она составляет 7 %.
Целесообразно для измерения иметь единую специализи-
рованную машину (передвижную лабораторию) и определять зна-
93
чения этого коэффициента для ВГМ других категорий по массе
с помощью переходных коэффициентов.
Метод динамометрирования основан на измерении крутящего
момента на ведущих колесах изделия при самопередвижении по
оцениваемой и эталонной* дорогам. Коэффициент сопротивления
движению
f - f 4- ~А<о) *г И П
где f0 — коэффициент сопротивления движению на эталонной дороге. Af0 —
крутящий момент на ведущих колесах при движении ВГМ но оцениваемой и
эталонной дорогам соответственно; kr — коэффициент силовых потерь в гусеницах;
— радиус ведущих колес; т0 — масса машины, g — ускорение свободного
падения
Метод динамометрирования по принципиальным моментам ана
логичен методу энергозатрат, разница состоит лишь в месте и
способе измерения потока мощности в кинематической цепи два
гатель — ходовая часть.
Метод энергозатрат предусматривает определение коэффици
ента сопротивления движению по разности мощности, расходуемой
на самопередвижение по оцениваемой и эталонной дорогам:
/со — Д/ео — /о»
(3.2)
где Afco— 13(М₽— No)/(m^gv) — разность между коэффициентами сопротивления
движению по оцениваемой и эталонной дорогам; .Vrp, No — мощность, затрачивав
мая на преодоление сопротивления при движении по оцениваемой и эталонной
дорогам соответственно, кВт; о — скорость движения машины, м/с.
Метод энергозатрат принципиально может быть реализован в
танках с любыми типами двигателя и трансмиссии, но наименьшие
методические погрешности возникают при использовании танка с
дизельным двигателем и механической трансмиссией.
Разность мощностей Nrp —No определяется по измеренным рас-
ходу топлива, частоте вращения вала двигателя и его нагрузочным
характеристикам.
При использовании метода энергозатрат необходимо соблюдать
одинаковую скорость движения по эталонной и оцениваемой до-
рогам.
Представим мощности Nrp и No в следующем виде:
Лгр = 1(Л^Ггр Л/тр Гр)Л1р — Л/г.Гр)Аг — ; (3.3)
М> = К*, о - АГлр 0) Z?Tp - Ч 0J kr - NK, (3.4)
где гр, Ne0 мощность на выходном валу двигателя при движении по оцени-
ваемой и эталонной дорогам соответственно; NT— затраты мощности на перема-
тывание гусениц; /VTP— затраты мощности на прокручивание трансмиссии; NK —
затраты мощности на перекатывание катков по гусеницам; kTP, kt — коэффициен-
ты силовых потерь (составляющие КПД) в трансмиссии и гусенице.
* Эталонной считается дорога с известным стабильным коэффициентом со-
противления движению, например дорога с бетонным покрытием.
94
При движении по оцениваемой и бетонной дорогам на одной и
той же передаче с одинаковой скоростью величины ^тр гр, Лтр„,
М.гр и Afro будут попарно равны, и формула (3.2) примет вид
Л о = /о + 13 (Ne rp - Ne „) kjpkr!(m,tgv) • (3.5)
Мощности Л/,Гр и являются функциями частоты вращения
вала двигателя и часового (массового) расхода топлива и могут
определяться по нагрузочным характеристикам двигателя, которые
для известной частоты вращения вала двигателя аппроксимируются
кусочно-линейной функцией вида
Л' + + (3.6)
где Kt — коэффициент пропорциональности между расходом топлива и мощностью
двигателя иа <-м участке; Qml — максимальный массовый расход топлива на »-м
участке; Qm — массовый расход топлива, соответствующий N и условию Qm<i-i)<
CQm<Qmo Qx.*— массовый расход топлива на холостом ходу
Рабочая формула для вычисления обобщенного коэффициента
сопротивления движению методом энергозатрат имеет вид
Л. = Л + — Qm0) + К)ц (Qm (i+n — +
+ ... + K,(Q„,f- <?-»..->». (3.7)
где Qm r₽, Qm о — расход топлива при движении по оцениваемой и эталонной до-
рогам соответственно; Qml — верхняя граница /-го участка, удовлетворяющего
УСЛОВИЮ Qm(/-l)<QmO<Qm/
При проведении испытаний измеряемыми параметрами явля-
ются: путь S; время Г; объемный расход топлива Qv\ температура
топлива, проходящего через датчик расхода, /7; частота вращения
вала двигателя п10 ; номер включенной передачи »тр; отметка яв-
ления; положение педали тормоза ST; положение органов управле-
ния поворотом Зоул•
Параметры пи, ST и отметка явления предназначены для конт-
роля правильности проведения эксперимента и привязки участков
дорог к местности.
В качестве регистрирующего прибора используется шлейфный
осциллограф или другое устройство, позволяющее непрерывно фик-
сировать измеряемые параметры.
При подготовке к испытаниям:
определяется нагрузочная характеристика двигателя, установ-
ленного на машине (при необходимости можно воспользоваться
обобщенной характеристикой данного типа двигателя);
определяется масса машины;
устанавливается комплект измерительной аппаратуры;
определяется расход топлива на эталонной дороге при различ
ной скорости установившегося движения на низших передачах (1
и II) в пределах (5. ..15) км/ч;
определяется плотность топлива и зависимость ее от темпера-
туры.
95
В процессе испытаний машина движется с постоянной скоро-
стью по оцениваемой дороге на II передаче. В случае значитель
ного увеличения сопротивления движению производится переклю-
чение на I передачу, но частота вращения вала двигателя остается
такой же. Прохождение поворотов осуществляется по оси дороги,
траектория движения обеспечивается системой управления ВГМ
В журнале испытаний фиксируется температура топлива, прохо-
дящего через датчик расхода.
В процессе обработки результатов измерений определяются:
время ДТ, за которое израсходован объем топлива AQe, приня
тый за единичный (минимальный единичный объем соответствует
одному импульсу датчика расхода топлива; единичный объем на
значается исходя из требований методики испытаний и принимает-
ся равным объему, выработанному на участке, для которого опре-
деляется feu);
путь AS, пройденный машиной за время АГ;
плотность топлива р,, прошедшего через датчик расхода;
скорость движения i»=AS/AT;
часовой массовый расход топлива Qm = 3,6 f.r&Qv/&T (где Qm —
в кг/ч; рт — в г/см3; AQv — в см3; ДТ — вс);
часовой массовый расход топлива Qm0 на эталонной дороге;
обобщенный коэффициент сопротивления движению, вычисляе-
мый по формуле (3.7).
Определение максимального коэффициента сопротивления по-
вороту. Сопротивление повороту машины слагается из различных
по своей природе составляющих. К ним относятся: трение поверхно-
стей траков о грунт при угловом перемещении опорных ветвей гу
сениц относительно полюса поворота; суммарная реакция смятия,
сдвига и среза грунта торцевыми и выступающими частями траков;
сопротивление перемещению валика грунта, нагребаемого гусени-
цами и катками. Эти составляющие зависят от радиуса поворота,
давления на грунт, а также от угловой скорости поворота. Экспе
риментально установлено, что наибольшее сопротивление возни-
кает на поворотах машины с малыми радиусами, сопровождающих-
ся большими перемещениями поверхностей траков по грунту, при
малой угловой скорости, уменьшающей влияние центробежных сил.
Максимальный коэффициент сопротивления повороту ртах соот-
ветствует повороту машины вокруг заторможенной гусеницы. Эта
величина определяется двумя методами: динамометрированием ве-
дущих колес и вычислением разности сопротивления движению при
повороте и прямолинейном движении
Динамометрированием измеряются моменты на веду-
щих колесах обеих гусениц при повороте вокруг одной из них,
тогда
2В(Л1в к2*?- Мв К1)
—- (3-8>
где Af, «1, М, кг — моменты на ведущих колесах заторможенной и забегающей
гусениц; г. ,а — радиус ведущего колеса; В — ширина колеи машины; Lon —
длина опорной поверхности.
96
Метод разности сопротивлений движению за-
ключается в определении коэффициентов сопротивления движению
при повороте машины вокруг заторможенной гусеницы и ее
прямолинейном движении f(t тогда
|Хт,х^т£'^со т)- (39)
Коэффициенты /с0 и /с определяются методом энергозатрат.
Испытания проводятся на участках трассы, качественно отли
чающихся друг от друга видом, состоянием, плотностью грунта.
Сначала определяется коэффициент сопротивления при прямоли-
нейном движении, а затем выполняются повороты на I передаче
Торможение отстающей гусеницы выполняется перемещением ры
чага поворота в крайнее положение. При этом машину разворачи
вают на угол не менее 360°. Регистрация измеряемых параметров
производится после выхода на установившийся режим поворота.
Обработка материалов испытаний производится в соответствии
с изложенной выше методикой определения /С1).
Определение параметров микропрофиля. Микропрофиль харак-
теризует отклонение пути от некоторого среднего уровня. В прак-
тике проведения испытаний ВГМ используется измерение пара
метров микропрофиля: высоты неровностей дорог относительно
базовой линии либо угла их наклона к горизонту. Из методов из-
мерения высоты относительно базовой линии наибольшее распро-
странение получили геодезический, сущность которого состоит
в последовательном измерении превышения точек дорожной по-
верхности относительно некоторой горизонтальной плоскости, за-
даваемой нивелиром или теодолитом, и метод натянутой струны,
по которому измеряется превышение дорожной поверхности отно-
сительно струны, натянутой между двух стоек. Для обоих методов
характерна большая точность, однако они весьма трудоемки. Их
применяют для оценки точности других методов, а также для
обмера сравнительно коротких участков трасс (до I км).
Для второго метода измерении используется комплект, вклю-
чающий в себя легкую капроновую струну длиной 25 м, две стойки
(одна из которых оборудована подпружиненным держателем),
шнур такой же длины, как струна, размеченный через каждый
метр, мерительную линейку. Порядок работы следующий:
струна натягивается между стойками на одинаковой высоте от
основания, при этом подпружиненный держатель, к которому при-
креплен один конец струны, обеспечивает ее постоянное натяжение;
между стойками прокладывается шнур так, чтобы первая от-
метка совпала с основанием стойки;
линейкой последовательно измеряют расстояние от первой, вто-
рой и других отметок на шнуре до струны и записывают результаты
измерений;
после снятия отсчета на последней отметке стойки со струной и
шнур переносят по ходу движения и устанавливают так, чтобы
7 Зак. 2 «с»
97
основание стойки и первая отметка шнура совпали с последней от
меткой на предыдущем отрезке, и продолжают работу.
Для определения превышения высоты точек над линией струны
из полученных отсчетов вычитают высоту закрепления струны (от
основания до держателя). В результате этой операции получают
ординаты отклонения микропрофиля относительно некоторой сред
ней линии его реализации.
Для измерения угла наклона неровностей используются различ-
ные профилометры. Основой всех профилометров является контак
тирующее с поверхностью дороги устройство, которое выполняется
обычно в виде платформы ограниченной длины или двухколесной
тележки (с колесами, расположенными тандемом).
Определение угла наклона производится прямыми и косвенными
способами. При прямом способе используются гироскопи
ческие или другие датчики, располагающиеся непосредственно на
контактирующем устройстве. При косвенных способах
измеряются относительные углы между элементами в цепи контак
тирующее устройство — прицепной рычаг — корпус буксирующей
машины и угол наклона одного из элементов относительно гори-
зонта, затем вычисляется угол наклона профиля дороги
Профилометры сравнительно просты по конструкции, обеспе-
чивают достаточно высокую точность и производительность изме
рений, в том числе на поворотах дороги.
Наибольшее распространение нашли профилометры с прямым
измерением угла наклона профиля дороги к горизонту с установ-
кой гироскопического датчика па специальную короткобазовую
пластину или на телескопическую штангу, соединяющую два со-
седних опорных катка гусеничной машины.
Прибор регистрации угла наклона неровностей (ПРУНН) пред-
ставляет собой короткобазовую пластину длиной 0,6 м с уставов
ленным на ней трехстепенным гироскопическим датчиком, букси-
руемую по поверхности дороги. Пластина выполнена из толстого
листового металла и снизу снабжена узкими полозьями.
Прибор соединяется с тягачом чалочным приспособлением, пре-
дотвращающим отрыв передней части пластины от грунта, смяг-
чающим рывки при колебаниях тягача на неровностях, а также
сдвигающим мелкие предметы с пути следования прибора. В про
цессе проведения эксперимента измеряются угол наклона профи-
ля а и пройденный путь S (с помощью контактного датчика, уста-
навливаемого на ведущие колеса тягача). Регистрация измеряемых
параметров производится непрерывно с помощью самопишущей
аппаратуры.
При использовании гусеничной машины для
измерения параметров микропрофиля роль контактирующего уст-
ройства играют два соседних катка; гироскопический датчик в
этом случае устанавливается на телескопическую штангу, соеди-
няющую оси катков, что повышает качество регистрируемого сиг-
нала.
98
Ордината профиля
Н= » sin idS + С ,
s
(3.10)
где С ордината профиля н начале отсчета.
Обработка материалов измерений производится ₽ следующем
порядке (рис. 3.1):
считываются углы наклона
(уклон) поверхности а, по пу-
ти S с постоянным шагом AS;
для исключения влияния
подъемов и спусков большой
протяженности проводится ус-
ювная нулевая линия, соеди-
няющая точки Ki, в которых
Рис. 3.1. Схема определения парамет
ров неровностей:
«гр. Z.rp высота н длина гребня; Н>(| .
£вп высота и длина впадины; Н „ . —
высота и длина неровности
углы наклона равны среднему арифметическому соседних макси-
мального и минимального значений:
Kt = (am„ 4- «.„>„) 2; (3.11)
вычисляются ординаты профиля относительно условной нуле-
вой линии в /й точке посредством численного интегрирования про-
цесса изменения а по пути (приближенно принимается sina«<x,
так как а<30°, т. е. а<л/6):
=2 («,-«,.) as.
(3.12)
где » — число точек, в которых производятся измерения; а/—результат измере-
ния угла в каждой точке; а<0— ордината нулевой линии в каждой точке.
Полученная реализация профиля дороги подвергается дальней-
шей обработке в соответствии с требованиями программ и методик
испытаний.
При оценке машин часто используются высота Нп и длина
неровностей. По полученной реализации профиля эти параметры
определяются следующим образом (см. рис. 3.1):
L„ = L„\-Lm. (3-13)
Параметры Н,р, //В1| вычисляются по записи угла наклона а/.
Если предположить, что профиль неровностей является гармони-
7* У9
ческим (а это подтверждается результатами исследований), то вы-
сота гребня (впадины)
£ . ,
гр(вп)
7/гр(ип)~У (®тн ®о) Sin-у ds = 0,637Lrp (вп)(®тах ®о)« (3-14)
0 гр (ел)
где Lrp(ra) — расстояние между соседними точками Ki на нулевой линии, м,
ат»»—«о — максимальное отклонение измеренного значения угла а от нулевой
линии в рассматриваемом интервале, рад.
Определение параметров поворота. Поворот характеризуется
углом а|10, и радиусом R. В процессе испытаний измеряют угол и
длину дуги Lre, различными способами, а радиус рассчитывают по
формуле
Апо./апов. (3.15)
При геодезическом методе угол поворота измеряется
с помощью теодолита или буссоли; длина дуги измеряется мерной
лентой по оси поворота или с помощью землемерного циркуля. Ос-
новной недостаток этого способа — низкая производительность.
Используются также для измерения специальные тележ-
к и, оборудованные гироскопическим датчиком угла поворота и
датчиком пройденного пути, что позволяет измерить параметры
поворотов с достаточной для практики точностью при большой про
изводительности. В отрасли для этой цели используются сами гу-
сеничные машины. В процессе обмера трассы машина движется с
постоянной скоростью (12. ..15 км/ч), максимально приближаясь
к осевой линии дороги.
Угол поворота определяется по показаниям датчика угла по-
ворота (как разность показаний до и после поворота, зафиксиро-
ванного регистрирующей аппаратурой); длина дуги поворота при-
нимается равной полусумме пути, пройденного левой и правой гу-
сеницами, который определяется по числу оборотов ведущих колес.
Радиус поворота вычисляется по формуле (3.15).
Погрешность определения параметров дорожных условий с по-
мощью передвижной гусеничной лаборатории. При испытаниях в
качестве лаборатории использовался танк Т-62, оборудованный
комплектом измерительной аппаратуры, прошедший специальную
техническую подготовку, в процессе которой были сняты на стенде
нагрузочные характеристики двигателя танка, а также проверено
и приведено в соответствие с требованиями инструкций техниче-
ское состояние всей его материальной части. Погрешность измере-
ния регистрируемых параметров входящими в комплект аппара-
туры средствами измерений представлена в табл. 3.1
Относительная погрешность измерения параметров дорожных
условий с помощью передвижной лаборатории
8 = Д/Пср. (3.16)
где Д— абсолютная погрешность, определяемая по результатам трех измерений;
Пер —среднее значение параметра дорожных условий, измеряемого прямым спо-
собом.
100
Таблица 3.1
Погрешность измерения регистрируемых параметров аппаратурой
передвижной гусеничной лаборатории
Параметр Первичный преобразователь Погрешность и >мере НИЙ, не более
Время Отметчик времени осциллографа К-20-22 1 %
Частота вращения ве- дущих колес, пройденный путь Номер включенной пе- редачи Отметчик числа оборотов с контактным преобразователем Контактный преобразователь ±0,5 импульса
Расход топлива Датчик расхода топлива типа ДО-ОЗ-2 ТУ 8850115 ±4,5 %
Угол поворота в гори- зонтальной плоскости Датчик угла типа СГ-3-2Р 3 %
Угол наклона профиля дороги к горизонту Датчик угла типа ЦГВ-9 5 %
Температура топлива, проходящего через дат- чик расхода Датчик температуры 2ТУЭ-1 (приемник типа П-1) ±3 °C
Масштабная отметка контроля напряжения Контактное устройство типа Д701 ±0,5 мм
Здесь
д 1(111-п;) + (11,_||;) + (п1- п;))/з, (3.17)
где П(, — результаты измерения параметра прямым способом и с помощью
лаборатории соответственно.
Погрешность определения коэффициента сопротивления при
прямолинейном движении оценивается по разности внешних сопро-
тивлений при движении машины в прямом и обратном направле-
ниях по участку бетонной дороги с уклоном, которая определяется
с помощью лаборатории и по измеренному углу наклона дороги а
(Д/с = 2sina).
Оценка погрешности измерения максимального коэффициента
сопротивления повороту производится по разности внешних сопро-
тивлений, действующих на танк-лабораторию при повороте вокруг
заторможенной гусеницы. При этом для сравнения использовался
способ прямого измерения этой разности с помощью динамометра,
соединяющего отстающую гусеницу с корпусом машины. Макси-
мальный коэффициент сопротивления повороту
4 Д ( Рл /с ч
’ Lon \ + 2 J ’
где Ра—показания динамометра
101
Погрешность определения параметров микропрофнля оценива-
ется посредством сравнения результатов измерений высоты и дли
ны искусственных неровностей, устанавливавшихся на бетонной
дороге, с помощью танка-лаборатории и геодезическим методом
(с помощью нивелира и мерной рейки)
Погрешность определения параметров поворота оценивается
по результатам измерения радиуса поворота с помощью лабора-
тории и прямым способом непосредственно по следу отстающей
гусеницы, при этом R=(P 4Л*)/(8ЛС) -Ь(^4-Ь)/2,
где /, Лс — длина хорды и высота сегмента следа отстающей гусеницы; В, b
ширина колен лаборатории и следа отстающей гусеницы
Результаты оценки погрешности определения параметров до-
рожных условий с помощью танка-лаборатории приведены в
табл. 3.2.
Таблица 3.2.
Погрешность определения пара мп ров дорожных условий
Параметр Пределы измерения Погрешность, % (не более)
Коэффициент сопротивления прямо- линейному движению 0,01 и более 5,0
Высота неровностей 0,15-0,37 м 8,0
Длина неровностей До 4 м 14
8-14 м 5,0
Радиус поворотов До 20 м 9,0
20—100 м 3,0
Максимальный коэффициент сопро- тивления повороту 0.3 и более 9.0
102
Глава 4. ИСПЫТАНИЯ ПО ОПРЕДЕЛЕНИЮ
ПОКАЗАТЕЛЕЙ БЫСТРОХОДНОСТИ
И АВТОНОМНОСТИ ВГМ В УСЛОВИЯХ
СТАЦИОНАРНЫХ ВНЕШНИХ ВОЗДЕЙСТВИЙ
4 1 СТЕНДОВЫЕ ИСПЫТАНИЯ
По особенностям нагружения и измерений различают три груп-
пы стендовых испытаний. В первую группу можно объединить ис-
следовательские испытания, связанные с оценкой загрузки двига-
теля танка при различных внешних воздействиях. Особенностью
таких испытаний является необходимость количественной характе-
ристики входных воздействий, определяющих условия эксплуата-
ции, с целью получения соответствующих им выходных показате-
лей, характеризующих свойства машины Методики проведения
этих испытаний предусматривают определение тяговых, мощност-
ных, топливно-экономических показателей, затрат мощности и КПД
отдельных сборочных единиц или шасси танка в целом.
Во вторую группу входят испытания по определению функцио-
нальных характеристик и условий функционирования сборочных
единиц в танке. Особенностью этой группы является необходимость
оценки двигателя как основного источника теплоты в танке. При
проведении таких испытаний используются отраслевые стандарты
и типовые методики, позволяющие оценить эффективность системы
охлаждения, теплонапряженность сборочных единиц силовой уста
новки, а также гидро- и аэродинамические характеристики систем
охлаждения, питания воздухом и выпуска газов в экстремальных
условиях.
К третьей группе относятся исследования переходных процессов
в двигателе, трансмиссии или в их системах. Сущность методов
заключается в создании начального установившегося режима и из-
мерении параметров переменного процесса после того, как произ-
ведено воздействие на объект испытаний. Таких испытаний в на-
стоящее время проводится немного, что объясняется слабой осна-
щенностью существующих стендов тормозным оборудованием, спо-
собным создавать переменные режимы с необходимой амплитудно-
частотной характеристикой, и отсутствием автоматизированных
систем управления ими.
103
Определение тягово-экономической характеристики. Это зави-
симость расхода топлива двигателем от тягового усилия на гусе-
ницах (на ведущих колесах) и частоты вращения вала двигателя
или скорости движения гусениц на каждой передаче трансмиссии
при установившемся движении.
Для определения тягово-экономической характеристики на об-
щемашинном стенде с динамометрическими платформами измеря-
ют тяговое усилие на этих платформах, расход топлива двигате-
лем, частоту вращения коленчатого вала поршневого двигателя
или валов турбокомпрессора первого и второго каскадов, а также
силовой турбины газотурбинного двигателя (ГТД). Одновременно
определяются параметры, характеризующие условия работы и тех-
ническое состояние сборочных единиц силовой установки ВГМ:
мощность (усилие, момент);
расход масла на смазывание двигателя и трансмиссии;
температура жидкости в системе охлаждения (на выходе из
двигателя), масла в системах смазывания (на выходе из двигателя
и трансмиссии), топлива, воздуха на входе в радиаторы системы
охлаждения и систему воздухоочистки;
давление масла в системах смазывания двигателя и трансмис-
сии, топлива на входе в топливную систему и отработавших газов
двигателя;
разрежение воздуха на входе в двигатель и в картере двига-
теля;
напряжение и сила тока на клеммах генератора;
температура и относительная влажность окружающего воздуха,
атмосферное давление.
Частота вращения вала двигателя измеряется тахо-
метрами, погрешность которых соответствует требованиям отрасле-
вого стандарта.
Рис. 4.1. Схема подключении тахометра
ИСТ-2 в измерительную сеть:
I — генератор; 2 — указатель иа приборном пульте
водителя; 3 — тахометр на пульте управления
стендом
Серийно выпускаемые тахомет-
ры типа ТСФУ-1 и ИСТ-2 позволя-
ют непрерывно контролировать ча-
стоту вращения вала двигателя,
причем два самостоятельных изме-
рителя могут работать от одного
генератора трехфазного тока испы-
туемого объекта.
Порядок установки, эксплуатации и поверки тахометров и гене-
ратора определяется инструкциями по их эксплуатации; схема
подключения измерителя к генератору приведена на рис. 4.1.
104
Тяговое усилие определяется с помощью измерительной
системы динамометр—преобразователь—осциллограф (рис. 4.2).
Рис. 4 2. Структурная схема измерения тягового усилия
В качестве динамометра в этом случае используются тензомет-
рические датчики усилий типа ТПА совместно с преобразователями
ИС-3358, ЛХ-7000, ЛХ-7002, ЛХ-5515.
Расход топлива определяется с помощью автоматизиро-
ванной весовой установки (рис. 4.3). Она состоит из весов, подъ-
емно-управляющего механизма, электронного блока и дистанцион-
ного пульта управления с отметчиком времени. На товарной плат-
форме весов установлен расходный бак вместимостью 10 л, на
грузовой — уравновешивающие грузы и сменная стандартная гиря.
Под платформами на отдельных кронштейнах закреплены конце-
вые выключатели. В уравновешивающих грузах имеется отверстие,
в котором свободно перемещается регулируемый по длине захват
для гирь, закрепленный на винтовом штоке подъемно-управляю
щего механизма, перемещающемся возвратно-поступательно. За-
мер массы израсходованного топлива производится в момент пере-
крытия стрелкой весов светового потока между фоторезистором и
осветителем. Топливо подается в двигатель танка из основного
стендового бака по топливной магистрали, а во время замера
из расходного бака по трубопроводу, который используется и для
заполнения расходного бака топливом из основного. В топливную
магистраль к двигателю устанавливаются датчик непрерывного
контроля расхода топлива и топливоподкачивающий насос с кла-
паном постоянного давления. Переключение магистралей осущест-
вляется электронным блоком автоматически с помощью гидрокла-
панов обоих баков и дренажной системы или вручную с пульта
управления. Пульт оборудован сигнальными лампами, позволяю-
щими визуально контролировать работу всей установки, и регист-
рирующим прибором непрерывного контроля за расходом топлива.
Весовая установка работает от постоянного тока напряжением
27 В± 10 %.
8 Зак. 2 «с»
105
Расчет относительной погрешности измерения расхода топлива
производится с учетом погрешности всех звеньев, включенных в
измерительную цепь, т. е. погрешности определения массы топли-
ва, весов (по ГОСТ 23676, 23711—79), секундомера и отсчета по
его шкале.
Рис. 4.3. Схема автоматизированной весовой установки для определения расхода
топлива двигателем ВГМ:
/ — расходный топливный бак; 2 весы; 3 осветитель; 4 фоторезиетор; 5 подъемно
управляющий механизм; 6 — двигатель; 7 — уравновешивающие грузы; 8. 9 — блоки управ
леиия установкой; 10 блок управления дополнительными приборами; II подогреватель
топлива; 12 гоплнвоподкачнвающнй насос; 13 — расходомер; Кн1. Кн4 концевые
выключатели (кнопки)
При измерении расхода топлива с использованием весов типа
ВНЦ-10, гири пятого класса массой в I кг по ГОСТ 7328—82 и
106
секундомера-таймера типа СТЦ-1 относительная систематическая
погрешность составляет 4-0,2 %.
Результаты испытаний представляются графически (рис. 4.4).
Рис. 4 4 Зависимости силы тяги Р, и расхода топлива Qm от частоты вращения
вала двигателя лд, (а) при различной внешней нагрузке (/—7) и расхода топ
лива от силы тяги (б) при различной частоте вращения вала двигателя (/—б)
Рис. 4.5. Топливно-экономическая характеристика танка (II VII передачи
трансмиссии)
По тягово-экономической характеристике, снятой на стенде,
может быть построена топливно-экономическая харак-
теристика (рис. 4.5), представляющая собой зависимость пу
8’
107
тевого расхода топлива от скорости движения танка и коэффици-
ента сопротивления движению fQ =Р,/т0, где /По—масса танка.
Экспериментально доказана удовлетворительная сходимость ре-
зультатов стендовых и дорожных испытаний.
Метод определения потерь мощности в отдельных
сборочных единицах заключается в сравнении тягово-экономиче-
ской характеристики танка при наличии испытуемой сборочной
единицы и без нее при равных условиях испытаний.
Мощность двигателя определяется с помощью нагрузочной ха-
рактеристики типа N=f(Qm, Лдв), полученной на стенде для ис-
пытания двигателей или расчетом по известным эмпирическим фор-
мулам.
Достоверность экспериментальных исследований обеспечивает-
ся при выполнении следующих условий:
техническое состояние двигателя, систем охлаждения и возду-
хоочистки должно контролироваться и поддерживаться на посто-
янном уровне;
топливо и масло должны соответствовать требованиям ГОСТ;
испытания двигателя на моторном стенде и танка на общема-
шинном проводятся при одинаковом тепловом состоянии силовой
установки, для чего должны быть одинаковыми значения темпера
туры охлаждающей жидкости, масла, отработавших газов и возду-
ха внутри моторно-трансмиссионного отделения, а также противо-
давления в газовыпускных системах; температуры топлива на входе
в насосы высокого давления и воздуха на входе в воздухоочисти-
тель или систему воздухоочистки, разрежения на входе в систему
питания воздухом двигателя.
Для измерения расхода топлива и частоты вращения вала дви-
гателя на обоих стендах должна использоваться аппаратура оди-
наковой точности.
Определение объектовой мощности генераторной установки
танка производится при загрузке двигателя, составляющей 80—
90 % от максимальной на нижнем эксплуатационном пределе ча-
стоты вращения вала, и при максимально допустимой температуре
охлаждающей жидкости и масла на выходе из двигателя. Продол
жительность испытаний должна быть такой, чтобы температура
элементов генератора за 30 мин изменялась нс более чем на 2 °C.
Определение эксплуатационных характеристик сборочных еди-
ниц танка. Для определения эффективности системы
охлаждения силовой установки и трансмиссии измеряется
температура охлаждающей жидкости и газа при включении наибо-
лее теплонапряженной передачи трансмиссии. Эта передача выби-
рается предварительно на стенде испытаний трансмиссий по наи
большей температуре масла в системе смазывания. Испытания на
общемашинно.м стенде производятся при трех нагрузочных режи-
мах (при мощности, равной 60, 80 и 100% от максимального зна-
чения) и пяти значениях скорости, соответствующих делению экс-
108
плуатационного диапазона частот вращения вала на равные ин-
тервалы.
Температура окружающего воздуха при этом должна быть
не ниже 30 СС, а все сборочные единицы танка должны быть подго-
товлены для работы в условиях летней эксплуатации.
В процессе испытаний измеряют:
расход топлива;
частоту вращения вала двигателя;
температуру охлаждающей жидкости на входе и выходе дви-
гателя и трансмиссии, воздуха над радиаторами и топлива на
выходе двигателя;
давление наддува;
разрежение на впуске и противодавление на выпуске двига
теля;
температуру отработавших газов на выпуске двигателя;
плотность топлива;
температуру, влажность и давление окружающего воздуха
Результаты испытаний представляются в виде таблиц и графи
ков зависимости температуры охлаждающей жидкости и масла
от нагрузочного и скоростного режимов работы двигателя
При испытаниях по оценке теплонапряженности сбо-
рочных единиц моторно-трансмиссионной уста-
новки дополнительно к приведенным выше параметрам измеря-
ется температура их поверхностей и (при необходимости) отдель-
ных деталей.
Рабочее состояние сборочных единиц в процессе проведения из-
мерений должно соответствовать их максимальной тепловой отда-
че. Например, генераторная установка должна работать под на
грузкой, близкой к максимальной. Для этого стенд оборудуется
внешним нагрузочным реостатом, позволяющим изменять силу
тока.
Регистрация измеряемых параметров производится с интерва-
лом в 5 мин до трехкратного повторения какого-либо значения.
Определение предельных характеристик систем
двигателя при внезапных его остановках под нагруз-
кой производится после достижения предельно допустимой темпе-
ратуры охлаждающей жидкости в системе охлаждения или масла
в системе смазывания. Двигатель останавливается посредством
прекращения подачи топлива; при этом строго соблюдаются меры,
исключающие выход его из строя.
В период подготовки танка к испытаниям проверяются герме
тичность и давление открытия паровоздушного клапана системы
охлаждения в соответствии с техническими условиями на регули-
ровку.
Испытания повторяются с 10-минутным интервалом до прекра-
щения выброса охлаждающей жидкости через паровоздушный кла-
пан. Затем посредством долива определяют объем выброшенной
жидкости. Кроме того при работе двигателя и после его остановки
109
измеряются следующие параметры: расход топлива; частота вра-
щения вала двигателя; температура охлаждающей жидкости и
масла на выходе двигателя и трансмиссии; давление в различных
точках системы охлаждения (в том числе в месте установки паро-
воздушного клапана); число остановок двигателя до прекращения
выброса охлаждающей жидкости; предельно допустимая темпера
тура охлаждающей жидкости на выходе из двигателя.
Определение допустимой не дозаправки систем
охлаждения и смазывания двигателя и трансмиссии производится
с целью выявления возможных изменений их работоспособности
при движении тапка по пересеченной местности
Испытания производятся на нагрузочном стенде, обеспечиваю-
щем горизонтальное положение, крен и дифферент корпуса ма-
шины. Системы охлаждения и смазывания предварительно полно-
стью заправляются в соответствии с требованиями инструкции по
эксплуатации. Затем производится частичный слив жидкости или
масла и проводятся повторные испытания. При горизонтальном
положении корпуса двигатель работает вхолостую и при макси-
мальной нагрузке; на кренах и дифферентах — вхолостую и при
нагрузках, определяемых техническими возможностями стенда.
Скоростные режимы испытаний должны включать в себя значения
частоты вращения вала двигателя, соответствующие максималь-
ной мощности и максимальному крутящему моменту.
Допустимая недозаправка систем охлаждения и смазывания
определяется стабильностью циркуляционного расхода охлаждаю-
щей жидкости и масла, а при невозможности его измерения - до-
пустимым давлением в гидросистемах.
В процессе испытаний измеряются следующие параметры: рас-
ход топлива; частота вращения вала двигателя; температура ох-
лаждающей жидкости и масла на выходе из двигателя и трансмис-
сии; давление в различных точках системы охлаждения (в том
числе перед паровоздушным клапаном); давление в системах сма-
зывания двигателя и трансмиссии; объемы охлаждающей жидкости
и масла, при которых наступают срывы их потока в соответствую-
щих системах; угол подъема (спуска) или крена, при котором на-
ступает срыв потока жидкости или масла в соответствующей си-
стеме.
4.2 ОПРЕДЕЛЕНИЕ ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК
Общие положения. Способность ВГМ изменять скорость дви
жения в различных дорожных условиях зависит от их динамиче-
ских характеристик, к которым относятся:
максимальная скорость движения ;
разгонные характеристики - зависимости скорости движения
от времени и пути разгона с места с последовательным переключе-
нием передач и на отдельных передачах;
тормозные характеристики —зависимости скорости движения
от времени и пути при торможении двигателем с различных на-
110
чальных скоростей и на отдельных передачах, а также при исполь-
зовании остановочных тормозов;
время разгона с места до заданной скорости движения ГР(рз) ;
время прохождения заданного отрезка пути в режиме разгона
с места TP(s3)i
тяговая характеристика — зависимость удельной силы тяги /м
на опорных ветвях гусениц от скорости движения на установив-
шихся режимах с максимальной подачей топлива.
Динамические характеристики танка определяют важные со-
ставляющие быстроходности (динамичность и управляемость), за-
висящие от мощности танкового двигателя и его приемистости, ха-
рактеризуемой коэффициентом приспособляемости, а также раз-
гонных и тормозных характеристик.
Большое число показателей и зависимостей, характеризующих
динамические свойства машины, позволяет выбрать те из них, ко-
торые можно полечить с минимальными затратами сил и средств.
Например, для сравнительной оценки динамических свойств тан-
ков в США и ФРГ используются показатели ?₽($ > или 7'Р(»3>, для
определения которых требуется мерный участок дороги с твердым
покрытием и измерение всего лишь одного параметра — времени.
Основными показателями динамических свойств считаются мак-
симальная скорость, разгонные и тормозные характеристики.
Основные положения отраслевой методики испытаний. Испы
тания проводятся на прямолинейной горизонтальной дороге с твер-
дым покрытием (типа бетонного шоссе) длиной не менее 1,5 км и
шириной не менее 8 м (допускается уклон не более 20')
Атмосферные условия должны быть следующими: температура
воздуха от 0 до 20 °C, давление — от 730 до 780 мм рт. ст.
(97,3. 102,7 кПа), относительная влажность воздуха не более
90%.
Образец танка перед началом испытаний должен быть полно-
стью заправлен топливом н маслом; изменение массы образца в
результате расхода ГСМ в процессе испытаний не должно превы
шать 1,5 %; силовая установка должна быть предварительно про-
грета (для чего совершается пробег протяженностью 10. .15 км).
В процессе испытаний измеряются (регистрируются) следую-
щие параметры: время Г; путь S; частота вращения вала двига-
теля лЛВ; перемещение педали подачи топлива Зпт; перемещение
педали сцепления (слива) 3П1 ; перемещение педали остановочного
тормоза Зо.т.
Параметры Т и 3 используются непосредственно для определе-
ния динамических характеристик, остальные -для контроля пра-
вильности выпатнения управляющих воздействий водителя.
Управляющие воздействия при трогании с места и переключе-
нии передач должны осуществляться в соответствии с инструкцией
по эксплуатации танка. Разгон на каждой передаче производится
при нажатии до отказа педали подачи топлива. Включение оче-
111
редкой передачи производится при достижении максимальной экс-
плуатационной частоты вращения вала двигателя; движение в ус-
тановившемся режиме на промежуточных передачах не допуска-
ется. Разгон продолжается до установившегося скоростного ре-
жима на высшей передаче. Заезды проводятся во взаимно проти-
воположных направлениях.
Перед началом испытаний по определению тор-мозных харак-
теристик ручной привод подачи топлива устанавливается в поло-
жение, обеспечивающее наиболее эффективное торможение двига-
телем. Торможение производится при достижении танком заданной
начальной скорости и прекращается при достижении минимальной
эксплуатационной частоты вращения вала поршневого двигателя
(для газотурбинного двигателя — частоты, соответствующей за-
данному режиму движения). В процессе торможения двигателем
нельзя допускать никаких управляющих воздействий.
При определении тормозного пути ST и времени торможения Тт
танк разгоняется до скорости (8,3±1,4) м/с, т. е. (30±5) км/ч,
за 30—50 м до начала отмеченного створными знаками участка
дороги. При прохождении границы этого участка производится
отметка явления (момента времени) и начинается торможение в
режиме экстренной остановки. В момент остановки танка делается
повторная отметка явления, затем измеряется путь, пройденный от
границы участка до остановки.
Максимальная скорость движения определяется на участке до-
роги, протяженность которого зависит от точности средств измере-
ний. Например, для определения ит„ с погрешностью не более I %
при использовании ручного механического секундомера (возмож
ная ошибка измерения времени 0,4 с) протяженность участка
должна быть не менее 800 м. Установившийся режим движения на
высшей передаче должен достигаться за 50—100 м до начала мер-
ного участка.
Обработка результатов измерений, определение оценочных по-
казателей и построение зависимостей производятся в следующем
порядке. Временные показатели определяются, как правило, по от-
меткам времени, а пройденный путь — по отметкам оборотов ве-
дущих колес на носителях информации.
Скорость движения определяется по пройденному пути в со-
ответствующий интервал времени или прямым ее измерением с ис-
пользованием первичных преобразователей.
За начало отсчета пути и времени разгона принимается «нуле-
вой» уровень, соответствующий полному отпусканию педали сцеп-
ления, а за окончание— момент достижения максимальной часто-
ты вращения вала двигателя. Результаты обработки представля-
ются графически в виде зависимостей v(Tp), o(Sp), усредненных
по заездам, выполненным при соблюдении условий проведения ис-
пытаний. По этим графикам определяются численные значения
времени разгона на отрезках пути 100 и 400 м, т.е. TpUl9 и Гр<оп.
112
За начало отсчета пути и времени торможения двигателем при
нимается «нулевой уровень>, соответствующий полному отпуска-
нию педали подачи топлива, за окончание — момент достижения
минимальной частоты вращения вала.
При торможении остановочными тормозами определяется путь
от границы мерного участка до момента начала торможения (мо-
мента нажатия на педаль) Фактическое значение $т для каждого
заезда подсчитывается как разность пути от границы мерного
участка до полной остановки танка и пути от границы мерного
участка до начала торможения. Аналогично определяется значе-
ние Тт, затем полученные данные усредняются.
Значение vm„ определяется как среднеарифметическое измерений
при движении танка во взаимно противоположных направлениях.
Оценка результатов испытаний. Испытаниям подвергались опыт
ные и серийные образцы ВГМ, а также натурные (ходовые) ма
кеты на базе основных танков, отличающиеся массой, параметра-
ми и конструктивным исполнением МТУ и ходовой части
(табл. 4.1).
Экспериментальные данные, полученные при испытаниях неко-
торых ВГМ, приведены на рис. 4.6* и 4.7.
По графикам рис. 4.6 можно определить временные параметры
разгона Гр(г) и 7р($а) (табл. 4.2) с целью их сравнения.
Анализ полученных данных показывает, что существует нели-
нейная связь между 7Ууж и Гр при более высоких значениях и
5, (55 км/ч и 400 м). На значения параметров 7'рЗО и Гр1(Ю су-
щественно влияют переходные процессы при переключениях пере
дач, зависящие от характера управляющих воздействий. Разгон-
ные характеристики танков № 14 и 10 пересекаются при скорости
движения ~40 км/ч, что могло бы остаться незамеченным,
если бы определялось только время разгона до заданной скорости
30 км/ч или по заданному пути 100 м.
Чувствительность метода определения динамических характе-
ристик к изменению параметров и характеристик систем и сбо-
рочных единиц шасси танков может быть оценена по эксперимен-
тальным данным, приведенным на рис. 4.7. Танки № 1—3
(см. рис. 4.7, а) при почти одинаковой удельной мощности отлича-
ются друг от друга характеристиками МТУ (тип и мощность дви-
гателя, система охлаждения, наличие согласующего редуктора в
трансмиссиях). Время разгона танков № 1 и 2 до скорости
~ 14 м/с (~50 км/ч) одинаково; разгонные характеристики тан-
ка № 3 хуже, что может быть объяснено более значительными по-
терями мощности в системе охлаждения.
По данным рис. 4.7, б можно оценить влияние удельной мощ-
ности и коэффициента приспособляемости на разгонные характе-
ристики танков. Наилучшие показатели имеет танк № 7 с наиболь-
шей удельной мощностью; показатели же танка № 5 на 5—12 %
* Здесь и далее нумерация танков соответствует принятой в табл 4.1.
113
Таблица 4.1
Характеристики некоторых испытуемых танков
Параметр Условный номер танка
1 2 3 4 5 6 7 8 9 10 П 12 13 н
Масса, т 36,5 36,9 37,9 37,3 40.5 40,5 40,5 404 41,0 41,0 36,8 42 5 43,0 39,0
Тип двигателя Порш- невой, двух- такт- ный Поршн четы такт евой, рех- кый Пс >ршнев< эй, дву хтактн! □ай ГТД Порш) четь такт *евой, ipex- ный ГТД Порш невой, четы- рех- такт- ный Поршне- вой, двух- тактный
Мощность двигателя, кВт 493 530 530 515 736 736 880 550 736 573 426 810 617 515
Коэффициент приспо- собляемости 1,1 1,15 1.15 1,1 1.1 1,39 1,08 1.1 1.66 1.12 1,14 1,66 1,13 1.1
Удельная мощность, кВт/т Тип системы охлажде- ния 13,5 Эжек на 14,3 цион- я 14,0 Вен- тиля- торная 13,8 Э 18,2 ж е к ц 18.2 И О н н 21,7 а я 13,6 17,9 В е» 14,0 «тиля 11,6 торн 19,0 а я 14.3 13,2 Эжек ционная
Число передач КП 7 7 7 7 7 7 7 7 4 7 5 4 7 7
Максимальная ско- рость отах, км/ч 65 65 65 60 70 70 70 60 70 60 55 70 60 60
Динамический ход опорных катков Лд, мм 1 — — 200 275 — — — 240 250 — — 270 1
ниже, чем у танка № 6 за счет разницы коэффициентов присно
собляемости при одинаковой удельной мощности.
О 10 20 30 40 50 тв,с
К '
Рис. 4.6. Изменение скорости танков при разгоне в зависимости от пути (а)
и времени (б):
1 — танк № 9; 2 — танк № 10; 3 — танк № 14; 4 — танк № 11
У танков № 4 и 8 (см. рис. 4.7, в) при однотипных МТУ раз-
личная конструкция ходовой части; у танка № 8 больше ее масса,
а следовательно, несколько больше потери мощности. Из графика
видно, что при скорости до 30 км/ч разгонные характеристики тан-
ков отличаются примерно на 18%, а при более высокой — всего
на 2 %. Этот пример еще раз подтверждает, что для всесторонней
оценки динамических характеристик танков необходимо их испы-
тывать в полном диапазоне скорости движения или же определять
показатели ) и T9{S > при двух заданных значениях скорости
(30 и 55 км/ч) и пути (100 и 400 м).
115
\1,м/с
Рис. 4.7. Разгонные характеристики танков, отличающихся параметрами силовых
установок (а), двигателя (о), ходовой части (в) (номера кривых соответствуют
условным номерам танков по табл. 4.1)
116
Таблица 4.2
Временные параметры разгона основных серийных танков
Условны А номер танка по табл. 4.1 Удельная МОЩНОСТЬ .Vyj(. кВт/т Время движения, с
до ладанной скорости Т'3 по <аданному пути •$,
Грзп Гр м ' р 1<к> Гр »<»•
14 13,2 11,6 32 14,4 37,0
9 17,9 8.5 24,2 13,8 34,0
10 14,0 13,0 29,8 14,8 37,4
11 11,6 18,5 18,5 46,0
Особенности определения динамических характеристик танков
за рубежом. Динамическим характеристикам ВГМ, которые счи-
таются составляющими не только подвижности, но и защищенно-
сти от поражения противником, зарубежные специалисты уделяют
большое внимание. Испытания для их определения производятся
не только на дорогах с твердым покрытием, но и в других усло-
виях. Оценочным критерием разгона является время прохождения
машиной пути длиной 100 и 500 м, а торможение оценивается пу-
тем, пройденным с начала торможения при трех значениях скоро-
сти движения (20, 40 км/ч и до полной остановки.
Используются также и новые методы испытаний, предназна-
ченные для определения способности машины осуществлять быст-
рые маневры с целью уменьшения вероятности поражения ее при-
цельным огнем противника. Для этого на пересеченной местности
выбираются две трассы, имитирующие типичные тактические си-
туации: одна для движения по прямой с ускорениями и замедле-
ниями, другая для движения зигзагами. Движение по первой трас-
се осуществляется циклично: ускорение следует за замедлением.
Протяженность трассы для испытаний танка М-60А1 выбирается
таким образом, чтобы ее можно было пройти за 15—20 с. Перед
наводчиком «противника» при этом ставится задача попасть в
танк с помощью кинофотопул ем ета.
4.3 . ОПРЕДЕЛЕНИЕ ТОПЛИВНО-ЭКОНОМИЧЕСКОЙ
ХАРАКТЕРИСТИКИ
Отличительной особенностью установившихся режимов движе-
ния ВГМ является постоянство соотношений между мощностью,
развиваемой двигателем, и суммой затрат ее на преодоление сил
сопротивления движению и потери в МТУ и ходовой части. При
работе двигателя на установившихся режимах устанавливаются
также определенные соотношения между развиваемой мощностью
и часовым расходом топлива Это обстоятельство используется
для определения мощности двигателя в условиях объекта, так как
117
измерить расход топлива и частот} вращения вала двигателя зна-
чительно проще, чем, например, крутящий момент на валу двига-
теля или перемещение органов регулирования топливоподачи
(рейки топливного насоса и др.). Кроме того, расход топлива мо-
жет определяться с меньшей инструментальной погрешностью,
чем перемещения и деформации.
Зависимость мощности N от частоты вращения коленчатого
вала лдв при различных значениях удельного часового расхода
топлива ge называется топливно-экономической характеристикой
двигателя *.
Метод исследования энергетического баланса танка, позволяю-
щий исследовать потери мощности в системе силовой установки,
трансмиссии и ходовой части, разработан И. Н. Корнилаевым и
широко применяется в практике испытаний. Для относительной
оценки энергетического баланса используется зависимость часо-
вого объемного расхода топлива Qv от скорости движения танка
в установившемся режиме.
Установившиеся режимы работы двигателя могут быть обес-
печены при неизменных во времени параметрах внешней среды и
отсутствии управляющих воздействий. Как и при оценке динами
ческих характеристик, сопоставимые результаты испытаний могут
быть получены при постоянных значениях параметров дорожных
условий (в том числе коэффициента сопротивления движению) и
в ограниченном диапазоне параметров атмосферных условий.
Сравнительные испытания танков могут проводиться и на грун-
товых дорогах, удовлетворяющих следующим требованиям: про-
тяженность прямолинейного участка—не менее 1,5 км; продоль-
ный уклон мерного участка дороги--не более 0,01745 рад; отсут-
ствие на мерном участке неровностей глубиной более 0,07 м и дли-
ной менее 15 м.
В процессе испытаний измеряются следующие параметры:
пройденный путь S (по отметкам ведущего колеса или по протя-
женности мерного участка); время 7\; расход топлива Qy; частота
вращения вала двигателя пяв ; перемещение педали подачи топ-
лива Sn.T; температура топлива на входе в расходомер /т.
Параметры плл и Sn.T регистрируются с целью контроля уста-
новившихся режимов работы двигателя. Температура топлива и
его плотность используются для оценки условий испытаний при
необходимости сравнения их результатов с результатами испыта-
ний других образцов ВГМ.
Скоростные режимы движения задаются таким образом, чтобы
на каждой передаче получить не менее четырех значений Qv. Удоб-
нее задавать скоростные режимы по частоте вращения вала дви-
гателя одинаково на всех передачах.
При движении машины по мерному участку педаль подачи
топлива следует удерживать в постоянном положении (для обес-
* Подробные сведения о топливно-экономических характеристиках двигателей
отечественных танков приведены в т. 5 монографии.
118
печения безопасности целесообразно использовать ручной привод
с фиксацией его положения). Заезды проводятся ви взаимно про
тивоположных направлениях (по 2—4 на каждом скоростном ре-
жиме) для компенсации влияния уклонов дороги и ветровой на-
грузки. По полученным данным строятся зависимости Qv(o).
О возможностях применения метода для решения различных
практических задач можно судить по рис. 4.8 и 4.9. Из рис. 4.8
видно, что расход топлива танком с ГТД (образец № 9) значи-
тельно выше, чем танком с поршневым двигателем. В танке № 10
по сравнению с танком К? 14 расход топлива существенно меньше
при скорости движения до 30 км/ч (8,3 м/с), а при скорости более
40 км/ч (11 м/с) уже больше. С ростом скорости движения воз-
растают потери мощности в ходовой части, увеличивается загрузка
двигателя и, как следствие, изменяются внутренние потерн в си-
стемах силовой установки и трансмиссии (если учесть, что эти по-
тери в большей мере зависят от частоты вращения вала двигателя,
а не от его загрузки, то их влиянием на расход топлива можно
пренебречь). Изменение соотношений расхода топлива при раз-
личных скоростях движения определяется в основном более высо-
кими потерями мощности в ходовой части (танк № 10) и турбо
наддувом (танк № 14). По полученным характеристикам можно
сделать вывод, что при эксплуатации на плотных грунтах при
скорости до 35 40 км/ч в танке № 10 расход топлива будет мень-
ше, чем в танке № 14.
Данные рис. 4.9 иллюстрируют чувствительность метода опре-
деления топливно-экономических характеристик к изменению па-
119
Qm.xH4
в
раметров сборочных единиц шасси танков. Увеличение мощности
двигателя приводит к существенному увеличению расхода топли-
ва (танки № I, 7 и 8).
Танк № 3 испытывался при установке вентилятора системы ох-
лаждения на пониженную и повышенную ступени (за счет измене-
ния передаточного числа привода вентилятора); танки № 5, 6, 7
имели разные характеристики двигателей (мощность и коэффи-
циент приспособляемости). Полученные результаты показали, что
изменение характеристик силовой установки и двигателя без изме-
нения номинальной мощности мало сказывается на топливной
экономичности ВГМ.
4.4 МЕТОДИКА ОЦЕНКИ ПЛАВНОСТИ ХОДА
НА ИСКУССТВЕННОМ МИКРОПРОФИЛЕ
Искусственный продольный микропрофиль создается на ровной
дороге посредством установки искусственных неровностей опреде-
ленного профиля и заданных геометрических размеров. Испытания
на искусственном микропрофиле позволяют сравнивать машины
при стабильных параметрах внешних воздействий, обеспечивающих
вынужденные колебания подрессоренных масс, характерные для
стационарных режимов. Экспериментально установлено, что для
исследования низкочастотных колебаний достаточно трех пар не-
ровностей одного размера; для создания высокочастотных воздей-
ствий (тряски) число пар неровностей должно быть на два больше
числа опорных катков одного борта танка.
Форма неровностей для возбуждения низкочастотных колеба-
ний, близких к гармоническим, должна имитировать волну сину-
соиды // = //тах sin(nx/L) (рис. 4.10, а), а для возбуждения тряски
форма неровностей берется треугольной (рис. 4.10, б). Неровности
изготавливаются из сухой древесины любой породы и обшиваются
стальными листами толщиной 10 мм.
Рис. 4.10. Форма искусственных неровностей для возбуждения низкочастотных
(а) и высокочастотных (б) колебаний
Размеры неровностей (максимальная высота Нтах и длина
основания L) должны быть представительны для реальных грун-
товых дорог и вместе с тем обеспечивать высокую чувствительность
121
метода испытании к изменению параметров систем подрессорива-
ния танков, т. е неровности должны вызывать резонансные коле-
бания подрессоренных масс. Длина неровностей должна быть соиз
мерима с длиной опорной поверхности гусениц или с базой ВГМ
(расстоянием между осями крайних опорных катков одного бор
та). Длина неровностей, изображенных на рис. 4.10.а 4 м, а на
рис. 4.10,6 0,5 м. Выбор высоты неровностей был длительное
время дискуссионным вопросом. В настоящее время по результа-
там исследований продольного профиля реальных трасс выбран
диапазон высоты 150 200 мм для возбуждения низкочастотных
колебаний и 0,5 м для высокочастотных.
Искусственные неровности устанавливают на дороге с твердым
покрытием с шагом А, кратным базе танка Lo. Оценочным пара
метром плавности хода является проходная высота неровностей
при наиболее неблагоприятном шаге Лн» преодолеваемая танком
во всем диапазоне скоростей без превышения допустимого уровня
вертикальных ускорений на сиденье водителя (zCB), равного 3g
(30 м/с2).
Оценочным критерием тряски является среднее значение уско-
рения zc.B, наибольшее в диапазоне скорости движения, оговари
ваемом методикой, при преодолении препятствий, изображенных
на рис. 4.10, б.
В процессе испытаний измеряются следующие параметры: вер-
тикальные ускорения на сиденье водителя (гс.в) и в центре тя-
жести (г0); продольно-угловое перемещение корпуса <р; скорость
движения v или пройденный путь и время (соответственно лв.ж и Т).
Как правило, перед испытаниями и после них контролируются
параметры подвесок (углы выставки балансиров, статические и
динамические ходы подвесок) и определяются характеристики гид-
роамортизаторов на стенде.
Испытания начинаются на профиле из неровностей высотой
150 мм, установленных на дороге с шагом А = 1,5L<.
Машина предварительно «прогревается» посредством пробега
по другим участкам дороги в течение 20 30 мин. Затем произво-
дятся зачетные заезды по искусственному профилю во взаимно
противоположных направлениях со скоростями от 2,8 до 15,3 м/с
(от 10 до 55 км/ч) с интервалом 0,6—1,4 м/с (2—5 км/ч). На
каждой скорости проводится не менее двух заездов. При этом во
дитель должен удерживать педаль подачи топлива в постоянном
положении. Средства измерения включаются приблизительно за
30 м до начала профиля и выключаются при полном «успокоении»
корпуса, т. е. через 30—50 м после съезда с последней неровности.
При появлении воздействий ударного характера, возникающих при
пробоях подвесок или ударах частей корпуса о неровности, испы-
тания прекращаются или уменьшается высота неровностей. Если
исходный профиль преодолевается машиной, то шаг профиля сна-
чала увеличивается до А — 2Ц, а затем до Л=2,5£0-
122
По результатам этого этапа испытаний определяется наиболее
неблагоприятный шаг профиля Лв. и при этом шаге последова-
тельно проводятся испытания на неровностях высотой на 10,
20,... мм больше исходной до появления пробоя подвесок.
Для оценки уровня zc при тряске испытания производятся ня
искусственном профиле из неровностей высотой 50 мм, установлен-
ных с шагом А. равным среднему расстоянию между соседними
опорными катками одного борта. Порядок проведения испытаний
аналогичен рассмотренному выше.
При обработке экспериментальных данных на осциллограмме
каждого заезда выделяется участок пути, равный протяженности
профиля Snp =2A+Lo с добавлением с обоих концов по 10 12 м
(границы должны совпадать с отметками оборотов ведущего коле-
са); на выбранном участке подсчитываются путь, время и скорость
движения; затем определяются наибольшие из максимальных за
каждый период колебаний корпуса ускорения гс.в и Zo, а также
средний размах колебаний <рх. По полученным данным строятся
графики, показанные на рис 4.11.
Рис. 4.11. К определению оценочного критерия плавности хода:
и - зависимости *с в (V), полученные при испытаниях на искусственном профиле с шагом
/ — А — 1,5 L„ ; 2 - Л = 1,75 Да; 3 А — 2 Z.,; 4 - Д —2.5 б -- зависимость максимальных
для профилей 1-4 значений в от их шага А (шаг Ан соответствует максимуму указан
ной зависимости); в — зависимость п от высоты неровностей Н* при шаге профиля А—А*
(НПр— допустимая, т е. проходная высота неровности)
Оценочный критерий тряски определяется следующим обра-
зом: на каждом кадре записи определяются значения гс.в,с одним
знаком, максимальные за каждый период колебаний (число пе
риодов колебаний равно 2л, где л число опорных катков одного
борта); измеренным значениям zc,B присваиваются индексы, соот
ветствующие числу пар катков, одновременно наезжающих на не-
ровности (zc В| одна пара катков, 2^.в2—две пары катков и т. д.)
Если задана закономерность распределения одновременных на-
ездов катков на неровности, то в соответствии с ней определяется
123
среднеарифметическое значение. В остальных случаях определя-
ется средневзвешенное значение исходя из гипотезы равной ве-
роятности событий:
-гс.»= ./ (2 л).
Результаты обработки данных представляются зависимостью
гСфВ(т») или гс.,(/в). где /в — частота вынужденных колебаний
корпуса при движении по искусственным неровностям.
Рис 4 12. Влияние на плавность хода танков состояния гидроамортизаторов до
(а) и после (б) приведения их характеристик к номинальным по конструктор-
ской документации:
I, 2. 3 соответственно танки № 9. 10 и II, испытанные ня неровностях высотой ISO мм,
расставленных с шагом Я м
Рис 4.13. Влияние на плавность хода типа двигателя (а) и характеристик гид-
роамортнзаторов передних подвесок (б):
/ — натурная модель (на базе танка № I) с газотурбинным двигателем; 2 танк № I с
поршневым двигателем; 3, 4 — клапан прямого хода гндроамортнзатора, отрегулированный
на усилие 610 и 700 кН соответственно
124
Оценочные критерии, полученные по описанной методике, не
могут быть использованы для оценки подвижности машины, но
они достаточно чувствительны к изменению параметров составных
частей шасси (рис. 4.12 и 4.13) и хорошо согласуются со статисти-
ческими характеристиками плавности хода, являясь по существу
их частными случаями.
Приведенные примеры показывают большие возможности при
менения рассмотренного метода для решения всевозможных прак-
тических задач.
4.5. ИСПЫТАНИЯ НА ПОВОРОТЛИВОСТЬ
Поворотливость (способность совершать поворот в заданных
условиях) характеризует управляемость ВГМ, свойство, являюще-
еся одной из составляющих быстроходности. Известно, что ско-
рость ВГМ в повороте* зависит не только от удельной мощности,
но и от других технических характеристик (размеры опорных по-
верхностей гусениц; давление на грунт; радиусы поворота, обеспе
чиваемые механизмами поворота; сцепные свойства; устойчивость
гусениц в обводе и др.), а также от дорожных условий (радиус
поворота, коэффициенты сопротивления движению и повороту).
Кроме того, на скорость в повороте оказывают влияние такие
факторы, как несовпадение радиусов поворота дорог с обеспечи-
ваемыми механизмами поворота (МП), необходимость поворота
на заданный угол, неопределенность траектории движения при ча-
стичном перемещении органа управления поворотом (ОУП), соот-
ношение между внешними габаритными размерами ВГМ и шири-
ной проезжей части дороги и др.
Экспериментальное определение поворотливости транспортных
машин (колесных и гусеничных), как правило, основывается на
моделировании внешних воздействий с помощью типичных траек-
торий. Так, например, поворотливость автомобилей оценивается их
скоростью в повороте со стандартным радиусом и способностью к
маневрированию «на переставке» стандартных размеров (со сме-
ной полосы движения)
При испытаниях ВГМ на поворотливость применяется специаль-
ная трасса, где повороты различных радиусов чередуются с пря-
молинейными участками. Поворотливость оценивается по средней
скорости движения на этой трассе.
Возможны повороты, на которых движение ВГМ совершается
с полной реализацией мощности двигателя, но чаще повороты,
встречающиеся в реальной эксплуатации, требуют дополнительных
действий водителя, например, снижения скорости движения во из-
бежание съезда с проезжей части дороги. При движении с макси
мально возможной скоростью оценка водителем поворотов дороги
* Анализ процесса поворота приведен в т. 5 монографии.
125
и выбор режима их преодоления (скорости входа в поворот) в зна-
чительной мере определяются радиусом поворота (табл. 4.3)
Таблица 4.3
Скорость входа в поворот различных танков, км/ч
Радиус поворота, м Условный иомер танка по табл. 4.1
II 14 10 Я
5-20 15,0-22,0 23,5—29,5 23,0- 28,5 14,0—20.3
20-40 17,0-32,5 27,0-32,0 26.0-34,0 17.0 30.0
40-60 26.0—35,0 29,0-41.0 30,5—39,5 27,5-43.0
60—80 31.0—36,0 32,0-41,0 33,0-43,0 32.5—45.0
80-100 28,0-35,0 33.5-39,0 35,0-42,0 32,0-41,0
100—150 32,5—34,0 36.5- 37.5 34,0-43,0 33,5—48,0
Из приведенных данных видно, что с увеличением радиуса ско-
рость входа в поворот возрастает, а при радиусе более 60 м ско-
рость движения практически не зависит от этого параметра.
Рассмотрим влияние геометрических параметров дороги и тан
ка на формирование режима его движения в повороте (рис. 4.14).
Рнс. 4.14. Геометрические параметры поворота дороги и машины:
/?, апов радиус и угол поворота; радиус внутренней дуги дороги; $доп-- допустимый
прямолинейный путь в повороте, возможный за счет ширины дороги; Фе— ограннчи
вающий угол, в пределах которого машина уже не может двигаться только прямолиней
ио; L длина танка; Z.JB3 зазор по внутренней дуге поворота
Очевидно, что при небольшом запасе по ширине (разнице между
шириной дороги Вл и танка Вт) заданная и возможная траектории
движения в повороте будут отличаться несущественно. а с увели*
126
чением ширины дороги это отличие будет возрастать (рис. 4.15)
На участке дороги, характеризуемом параметрами ф0 и Sion . во-
дитель должен выполнять управляющие воздействия для уточне
ния траектории движения в повороте. В соответствии со схемой
(см. рис. 4.14)
= arccos /?,н^||иВт д'”'; (4.1)
SM„ (/?.н4-*т)81п*в-£т/2, (4.2)
где , flT , , LT в м ; £мэ 0,4 м
Рис 4 15. Заданная (радиусом /?) и возможные (радиусами R\ и /?2) траекто
рин движения ВГМ в повороте
Для оценки влияния геометрических параметров дороги и ВГМ
на формирование скорости прохождения ею поворотов проанали-
зируем зависимость параметров фо и SWn от ширины дороги и ра-
диуса поворота, а также данные о времени прохождения Sa0I1 ВГМ
средней категории по массе на дороге шириной 6 м (табл. 4 4 и
4.5).
Таблица 4.4
Значения i|0 (над чертой, в градусах) и 5ДО„ (под чертой, в м)
при различных геометрических параметрах дороги
Ширина Дороги, м Радиус поворота, и
10 20 40 яо 120 150
21 16 12 8,8 7.2 6.3
g 2.2 3.7 6.2 9,9 12,5 13,9
6 29 22.5 17 12,3 10,2 8,8
4.5 6.7 10,2 15,1 19,2 20,7
34,5 27 20,5 15 12,5 11.2
7 64 9,0 13,2 19,2 24,5 27,1
127
Таблица 4.5
Время движения ВГМ по допустимому прямолинейному пути S*o„
при различной скорости прохождения поворота, с
Скорость движения, м с Радиус поворота, М
10 20 40 80 120 150
5 0,90 1.34 2.04 3,02 3.84 4,14
10 0,45 0,67 1.02 1.51 1,92 2,07
15 0,30 045 0,68 1.01 1.28 1,38
20 0,22 0,34 051 0,76 0,96 1.04
VMa при;
И mix -0,4 0,72 0,76 081 0,86 088 0,85
Pm.x-0,6 0 58 0.60 067 0.70 0,72 0.70
Pm*.-0,8 0,51 0.54 0.58 0,61 0,62 0.60
Примечание. Здесь р1ая — скорость, предельная по заносу на повороте;
1’заи = где Нпах— максимальный коэффициент сопротивления поворо
ту; g — ускорение свободного падения.
Приведенные данные показывают, что ограничение по углу на-
ступает раньше на поворотах с большим радиусом и усиливается
с уменьшением ширины дороги. При углах больше ф0 уменьшение
ширины или радиуса поворота дороги приводит к уменьшению
5’Mon . а следовательно, к ужесточению условий выдерживания за-
данной траектории. Время, которым располагает водитель для вы
полнения управляющих воздействий, зависит от скорости движе-
ния машины и равно 0,1...5,4 с. При прохождении поворота со
скоростью, предельной по заносу и сцеплению, это время значи-
тельно меньше и составляет 0,58.. .0,72 с для дороги с R —
= 10... 150 м, Вл =6 м, цтах =0,6.
Кинематические возможности МП определяют действительную
траекторию движения ВГМ при повороте в заданных условиях
Обеспечиваемый ступенчатым МП кинематический радиус поворо-
та находится в пределах 2,6.. .13,9 м; при скорости машины более
25 км/ч (6,94 м/с) он составляет 8,6. . .10,2 м. При повороте с ра
диусом более 15 м МП включается циклично, т. е. на краткое вре
мя, но неоднократно (рис. 4.16), работая при этом в переходном
режиме от прямолинейного движения до поворота с фиксирован-
ным радиусом и наоборот. Началом первого переходного процесса
можно считать начало перемещения органа управления поворотом,
концом выход на фиксированный радиус или возврат ОУП к ис-
ходному положению (для движения прямо) Началом второго пе-
реходного процесса можно считать начало перемещения ОУП к ис-
ходному положению, концом выход на прямолинейное движение
или обратное перемещение ОУП в положение, соответствующее
минимальному (фиксированному) радиусу поворота.
12b
Время запаздывания реакции машины на перемещение ОУП
делает поворотливость зависимой от быстродействия приводных
элементов механизма поворота и индивидуальных особенностей
водителя, который должен обладать практическими навыками экс-
плуатации испытуемого образца. Таким образом, при испытаниях
на поворотливость необходимо учитывать, что это свойство форми-
руется параметрами дорожных условий, возможностями приводных
элементов МП, характеристиками МП и ВГМ в целом.
Рис. 4.16. Осциллограммы поворота ВГМ со ступенчатым механизмом поворота:
а— ₽-Я0 м; б — Я—50 м; в—/?= 15 м; / перемещение правого рычага («,): 2 - угло-
вая скорость «; 3 перемещение левого рычага (<Ч)
Основные положения методики испытаний. Для оценки пово-
ротливости изделий при испытаниях определяются следующие по-
казатели и характеристики:
предельные скорости движения в повороте по точности движе-
ния, заносу и сцеплению, а также по маневрированию «змейкой»;
9 Зак. 2 «с»
129
действительные и теоретические (кинематические) радиусы
поворота;
характеристика МП по коэффициенту стабильности и тяге дви-
гателя;
статическая и динамическая характеристики приводных эле-
ментов управления механизмами поворота;
скоростная характеристика на поворотах (зависимость скоро-
сти движения от радиуса поворота)
Скоростная характеристика ВГМ на поворотах реальных дорог
является комплексной, учитывающей поворотливость машины, под-
рессоренность корпуса и тяговые возможности двигателя (см.
разд. 5.3).
Точностью движения называется зависимость предельной ско-
рости преодоления поворотов машиной от ширины полосы движе-
ния. Признаком бокового заноса является наложение следов от
стающей и забегающей гусениц, а недостаточная устойчивость гу-
сениц в обводе при маневрировании проявляется в проскакивании
траков на ведущих колесах и выходе их гребней из проемов опор-
ных катков. Определение предельной скорости по заносу основано
на измерении боковой перегрузки ВГМ при повороте, поскольку
известно, что усилие сдвига грунта уменьшается при увеличении
скорости его деформирования.
Кинематические возможности механизма поворота характери-
зуются зависимостью радиуса поворота от положения органов уп-
равления. Радиусы, которые обеспечивает МП при отсутствии за-
грузки на ведущих колесах, называются теоретическими (Ry), при
наличии загрузки — кинематическими (₽к), а реализуемые при
движении ВГМ — действительными (/?*). Влияние на поворот на-
грузки на ведущих колесах оценивается отношением а взаи-
модействие гусениц с грунтом - отношением Способность
МП обеспечивать минимальные радиусы поворота в различных
дорожных условиях оценивается коэффициентом стабильности Kr,
представляющим собой отношение действительных радиусов
поворота при различных коэффициентах сопротивления по-
вороту.
Характеристика МП по тяге двигателя представляет собой за-
висимость энергозатрат на поворот от скорости движения машины
и радиуса поворота; энергозатраты на поворот рассчитываются как
разность мощностей, затрачиваемых при повороте и прямолиней-
ном движении.
Статическая и динамическая характеристики приводных элемен-
тов управления МП представляют собой зависимость усилий, за
трачиваемых на перемещение рукоятки ОУП, и давления в гидро-
приводе от положения органов управления поворотом.
Для получения перечисленных выше показателей и характери-
стик в процессе испытаний измеряются следующие параметры:
пройденный путь (по числу оборотов ведущих колес);
время Г;
130
частота вращения вала двигателя;
номер включенной передачи;
перемещение педали подачи топлива, органов управления по-
воротом и педали тормоза;
угол поворота ВГМ в горизонтальной плоскости;
угловая скорость в горизонтальной плоскости;
линейные ускорения в поперечном и продольном направле-
ниях;
расход топлива;
давление рабочей жидкости в системе управления поворотом;
усилия на органе управления поворотом;
температура топлива, проходящего через расходомер.
Испытания начинают с определения характеристик приводных
элементов механизмов поворота. При этом танк должен быть не-
подвижным с работающим двигателем (при необходимости с ве-
дущих колес снимаются гусеницы). С помощью динамометра в
средней части рукоятки рычагов управления движением измеряют
усилия, направленные по касательной к траектории перемещения
ОУП. Измерения производятся при 10—12 промежуточных поло-
жениях ОУП. Одновременно измеряется давление в гидроприводе.
По результатам этих измерений строятся зависимости усилий (дав-
лений) от линейных перемещений ОУП.
Кинематические возможности механизма поворота и время сра-
батывания его приводных элементов определяются на стационар-
ном режиме с работающим двигателем при снятых с ведущих ко-
лес гусеницах.
Время срабатывания привода 7\pa6 измеряется от начала пе-
ремещения ОУП до установившейся реакции МП (при отсутствии
внешней загрузки).
Время запаздывания поворота Гэ,п — это время от начала пе
ремещения ОУП до начала поворота, определяемого по угловой
скорости. Измерения производятся не менее трех раз на всех пере-
дачах трансмиссии.
Испытания движущейся ВГМ проводятся в следующем поряд-
ке. Устанавливается начальный режим работы (по номеру вклю-
ченной передачи и частоте вращения вала двигателя); ОУП быст-
ро (для штурвала за 0,1.. .0,2 с; для рычагов за 0,2. . .0,3 с) пере-
мещается в заданное положение и удерживается в нем не менее
7 с, затем возвращается в исходное положение. В процессе испы-
таний производится регистрация измеряемых параметров.
Промежуточные положения ОУП задаются с учетом конструк-
тивных особенностей приводных элементов, а также возможного
изменения усилий, перемещений и давления в системе управления.
Число промежуточных положений должно быть не менее пяти.
Для удержания ОУП в заданном положении применяются спе-
циальные устройства (типа ограничивающих упоров).
Реакция МП на управляющее воздействие определяется по раз-
нице значений частоты вращения ведущих колес «B.Kt и лв.ц2«
9* 131
Теоретический радиус
/?т - Я(л, «, + л..«5)/[2(лв,К1 — пВ (,а)], (4.3)
где л..«|, л. » г — частота вращения или число полных оборотов ведущих колес
за один и тот же интервал времени, об/мин; В — ширина колеи ВГМ, м.
По результатам испытаний для каждой из передач строятся
зависимости Rr и Гсра6 от перемещения ОУП (5оуп)-
Определение , R3 и Гзап производится при повороте танка
с разной скоростью на угол 90° на ровной площадке измерением
траектории его движения по следу на грунте. В процессе движения
поддерживается постоянная частота вращения вала двигателя. При
появлении признаков заноса или недостаточной устойчивости гу-
сениц в обводе заезды с более высокой скоростью или с большим
перемещением ОУП не проводят.
Действительный радиус поворота (минимально возможный по
дорожным условиям)
= Uw + 4 Л?.г)/(8 А«г) + (О + Ь)/2, (4.4)
где /Жор—длина хорды дуги поворота, м; Лс«г — высота сегмента, соответствую-
щего хорде, м; Ь — ширина следа отстающей гусеницы, м.
По результатам испытаний строятся зависимости /?к(-$оуп).
/?д(<$оуп), Л.п(5оуп); рассчитываются отношения и RK!Ra
Стабильность минимальных радиусов поворота, обеспечиваемая
МП, проверяется на поверхностях с бетонным покрытием, песча-
ным и плотным связным грунтом, для которых одновременно опре-
деляются значения коэффициентов сопротивления /гр и |*т1х. Ко-
эффициент стабильности
(4.5)
где /?д 1 — действительный радиус поворота на сухом бетоне; /?я i — действитель-
ный радиус поворота на грунте (например, при p»ui"*0,65)
Энергозатраты на повороты с заданным радиусом определяются
по методике, изложенной в гл. 3.
Испытания производятся на трассе с твердым покрытием, на
которой полоса движения шириной Вл — £т+1,5 (2,0) м обознача-
ется вехами. Повороты радиусом 10, 15, 20 и 30 м выполняются на
угол не менее 72(г при постоянном положении педали подачи топ-
лива, обеспечивающем требуемый режим движения с различной
скоростью, начиная с 8 км/ч (2,2 м/с) с последующим ее увеличе-
нием на 3. . .5 км/ч (0,8. .1,4 м/с) вплоть до выхода машины на
повороте за пределы полосы движения.
Скорость движения вычисляется по времени и длине пройден-
ной дуги заданного радиуса. Из мощности Wn0B. затрачиваемой на
поворот танка и рассчитываемой по массовому расходу топлива и
частоте вращения вала двигателя, вычитается мощность Afnp, зат-
рачиваемая на прямолинейное движение. Полученная раз-
ность (приращение мощности на повороте) делится на мас-
су машины, и строятся зависимости удельных приращений мощ-
•132
ности от скорости движения и радиуса поворота. По полученным
данным оцениваются ограничения поворотливости по тяге двига-
теля и производится сравнение различных ВГМ.
Чем выше кинематические возможности машины по формиро
ванию траектории движения, тем большая скорость может быть
реализована на повороте с боковыми ограничениями. Для харак
теристики точности движения производятся испытания на грунто-
вой площадке, при которых танк совершает повороты на 90°. При
этом ширина полосы движения изменяется: к Вт поочередно при-
бавляется 1,5; 2; 2,5 и 3 м; радиус поворота тоже изменяется — он
соответственно будет 20, 30, 40. 60 м. Предельная скорость преодо-
ления поворота определяется при различных значениях В д
и R. Каждый опыт повторяется не менее трех раз. Испытания за
канчиваются, когда достигается скорость, при которой танк про-
ходит поворот, полностью реализуя мощность двигателя. По полу-
ченным данным строятся зависимости предельных скоростей от
радиуса поворота и ширины полосы движения.
ВГМ сравниваются по предельным скоростям и так называе-
мым коэффициентам точности движения:
^т.д = ®ь/^7» (4.6)
где Vg, vy — предельные скорости движения в повороте при Вл, ранной 5 и 7 м
соответственно.
Возможно ускоренное получение этой характеристики посред-
ством сопоставления скорости преодоления поворота различными
ВГМ при определенной ширине полосы движения, например
Вл - £т4-1,5 м (испытания на «стандартные повороты»).
Скорость поворота, предельная по заносу и сцеплению, опреде-
ляется летом на бетонной, а зимой на твердой площадке с пони-
женными сцепными свойствами (на льду). Траектория движения
задается радиусом поворота и ограничена с внутренней стороны
вехами; зазор между машиной и вехами должен быть не более 1 м
Поворот выполняется при постоянном положении педали подачи
топлива; положение ОУП не оговаривается. Испытания начина-
ются на скорости, обеспечивающей уверенное преодоление поворо-
та, затем скорость увеличивается на 1,5. . 2 км/ч (0,4.. .0,6 м/с)
вплоть до появления признаков бокового заноса (боковой зазор
более 2 м). Должно быть проверено не менее пяти значений ско-
рости при двух-трех значениях радиуса поворота (например, 20.
30, 40 м); каждый опыт повторяется не менее трех раз.
По полученным данным определяются средние горизонтальные
ускорения у, воздействующие на танк при повороте в направлении,
поперечном движению, и соответствующие им значения скорости
движения, рассчитываемые по заданному радиусу, углу и времени.
Для каждого радиуса строится зависимость у(у)\ скорость, пре
дельная по заносу, соответствует максимальному ускорению на
графиках этой зависимости.
133
Результаты испытаний представляются в виде графика зави-
симости скорости узан, предельной по заносу, от радиуса поворота;
на поле графика указывается осредненное значение коэффици-
ента цтах-
Оценка ВГМ проводится по коэффициенту
Kr — v^V^gR. (47)
Предельная скорость маневрирования «змейкой» определяется
на прямолинейных участках дорог с сухим бетонным покрытием
и укатанным суглинком.
Траектория движения в этом случае задается (с помощью вех)
поочередно смещенными в разные стороны от оси дороги створами
шириной Вц = Вт+\ м. Четыре створа устанавливаются друг от
друга на одинаковом расстоянии /зм. которое в разных опытах на
бетонной дороге равно 20, 30, 40, 60, 80 м, а на грунте —20, 25,
30 и 40 м В начале и конце участка необходимо предусмотреть
место для разгона и торможения машины.
Таблица 4.6
Результаты испытаний органов управления поворотом
некоторых опытных образцов ВГМ
Условный номер образца (краткая характеристика) Тип коробки передач Тип меха иизма по ворота Параметры органов управления поворотом
радиус г, м макси мальяый угол по- ворота ?,... • макси мальное переме щение 5тах • м максн мальное усилие "оупн
15 (на базе БМП-1) ЦКП Фрик- ционный ПМП 0,150 45 0,120 100
16 (вариант на базе № 15) ЦКП Двухпо- точный с ГОП 0,180 45 0,140 100
17 (ходовой макет сред- ней категории по массе) ЦКП Двухпо- точный фрикци- онный 0,180 60 0,190 100
18 (макет на базе танка № 12 по табл. 4.1) 4 БКП Двухпо- точный с ГОП 0,145 30 0,075 250 200
10 5 12 (по табл. 4.1) БКП БКП 0,385 40 о, о 200 100 100
Примечание. ЦКП — центральная коробка передач; БКП бортовая
коробка передач; ПМП — планетарный механизм поворота; ГОП — гидрообъем-
ная передача.
134
(4.8)
Наращивая скорость движения от заезда к заезду, определяют
наибольшую скорость преодоления участка без съезда за пределы
дороги и сбивания ограничивающих створов. Каждый опыт повто-
ряется не менее трех раз.
Скорость преодоления участка
= 3 /зм/Т'зч •
где Т1И — время движения от первого створа до четвертого, с.
Полученные данные представляются в виде зависимости пре-
дельных скоростей движения от расстояний между ограничиваю-
щими створами при определенных значениях коэффициентов и
Ртах •
Для сравнения ВГМ сопоставляют их скорости при одинаковой
расстановке створов и близких по характеристикам грунта дорож-
ных условиях.
Примеры анализа результатов испытаний. Усилия, необходимые
для перемещения ОУП, приведены в табл. 4.6.
Экспериментально установлено,
что управлять поворотом танка
№ 5 значительно легче, чем танка
№ 10 (рис. 4.17). Во-первых, для
перемещения ОУП танка № 10 тре-
буется усилие, вдвое большее, чем
в танке № 5, во-вторых, из-за рез-
кого снижения усилия в диапазоне
перемещений, составляющих
30.. .50 % от максимального, про-
исходит переход ОУП за зону, в ко-
торой возможен поворот машины
со свободным радиусом. Цикличное
регулирование радиуса поворота
также затруднено при больших уси-
лиях на ОУП.
В танке № 5 приращение усилия
на ОУП соответствует увеличению
давления в гидропроводе, что поз
воляет регулировать радиус поворо-
та даже на высокой скорости от
свободного до минимального (фик-
сированного).
Рис. 4.17. Зависимость давления в гидро-
проводе системы управления (а) и усилия
перемещения ОУП (б) в танках № 10 (/)
и № 5 (2) от отношения S/Smax (сплошные
линии — прямой ход; штриховая — обрат-
ный)
135
Экспериментальные данные о зависимости кинематических ра-
диусов поворота от линейного перемещения ОУП (рис. 4.18) дают
представление о диапазоне возможного регулирования траектории
поворота ВГМ без учета юза
и буксования (взаимодействия
гусениц с грунтом). Однако
необходимо отметить, что эти
возможности не всегда реали-
зуются. Рассмотрим это на
примере танка № 5 (кривые 6
и 7). Заставить его начать
поворот со свободным радиу-
сом, равным ~ 100 м, можно,
лишь переместив рычаг пово-
Рис 4.18. Зависимость кинематиче-
ского радиуса поворота /?« от линей-
ного перемещения ОУП:
/—танк № 16 на II—IV передачах; 2 —
танк № 18 на I и II передачах; 3. 4, 5 -
танк № 17 на II 1V передачах соответст
венно; 6, 7 — танк .* 5 на V и VI пере-
дачах
рота почти на 120 мм. Затем в узком диапазоне перемещений ры-
чага (~25 мм) происходит уменьшение радиуса от 100 до 20 м,
дальнейшее перемещение рычага приводит лишь к незначитель-
ному уменьшению радиуса до 15 м или до /?min в зависимости от
номера передачи.
Узкий (30.. .35 мм) диапазон перемещения ОУП, приводящий
к изменению радиуса поворота от свободного до минимального,
не позволяет реализовать (по данным Л. А. Кондакова, Г. А. Ни-
китина и др.) кинематические возможности МП. Так, ощутимое
водителем перемещение рук без визуального контроля за их дви-
жением составляет 20. . .50 мм. Поэтому водитель не может плавно
регулировать радиус поворота и циклично воздействует на ОУП.
У образца № 15 (кривые /, 2) зона регулирования радиуса по-
ворота по диапазону перемещения штурвала тоже незначительна.
Однако небольшое усилие на ОУП позволяет перемещать штурвал
с большой частотой, что несколько расширяет возможности регу-
лирования радиуса поворота.
Лучшую приспособленность к регулированию радиуса поворота
имеет танк № 17: радиус поворота машины изменяется от 120 до
4 м при перемещении штурвала на 35. .190 мм, что позволяет
выбрать несколько положений ОУП, при которых обеспечивается
различная траектория движения. У машин № 16 и 18 возможности
обеспечения радиусов более 30 м очень ограничены (перемещение
ОУП менее 25 мм). При полном диапазоне перемещения, равном
76 мм, установка ОУП в положение, соответствующее заданной
траектории движения, затруднена, и требуется периодическая ее
136
корректировка, т. е. даже при наличии гидрообъемного привода МП
имеются предпосылки сохранения цикличного характера воздейст
вия на ОУП.
Время запаздывания поворота образца № 15 (рис. 4.19) обрат-
но пропорционально перемещению штурвала и увеличивается с
ростом скорости входа в поворот. Такой характер зависимости оп-
ределяет большие перемещения штурвала при цикличном харак
тере воздействий на пего при преодолении поворотов.
Характеристика точности движения танка № 8 (рис. 4.20) по-
казывает, что увеличение ширины дороги более 8 м практически
не дает прироста скорости на повороте; ее незначительное увели-
чение возможно лишь с увеличением радиуса поворота. Уменьше-
ние ширины дороги на 3 м обуславливает значительное (почти
вдвое) снижение скорости машины при входе в поворот радиусом
15 .30 м.
Рис. 4.19. Зависимость времени запал
дывания поворота образца Кт 15 от
перемещения ОУП
1 —V — 20 км ч на III передаче; 2 —
V—35 км/ч на IV передаче; 3— v-25 км ч
на III передаче; 4—©—40 км ч на IV пе-
редаче
Рис. 4.20. Характеристика точности
движения танка № 8 по дороге ши
риной 5 (/), 6 (2) и 8 м (<?)
Дополнительные затраты мощ-
ности двигателя при изменении ус-
ловий движения в повороте иллю-
стрирует рис. 4.21, получить подоб-
ные данные можно при проведении
испытаний на площадках со слабо-
деформируемым грунтом, позволяю-
щим многократное движение по од-
ному месту.
Рис. 4.21. Влияние поворота на затраты
мощности двигателя танка № 4:
L 2 — радиус поворота соответственно 10 и 15 м
IQ Зак. 2 «с»
137
Экспериментальные данные о предельных по заносу и сцепле
нию скоростях поворота образцов легкой (№ 15) и средней (№ 4)
категорий по массе приведены на рис. 4.22. Испытания проводи
лись в разное время и в разных грунтовых условиях. По формуле
(4.7) рассчитаем коэффициенты для различных радиусов по-
ворота:
радиус поворота, м
образца № 15 .
ганка №4 . .
Рис 4.22. К определению у,
скорости поворота, пре-
дельной по сцеплению и
заносу (справа) танка № 4 25
(/) и образца .Vs 15 (2):
-------эксперимент;---------—
расчет; горизонтальное ускоре 2,0
ние у (слева) определялось при
/?-28 м н %,„-0.22 (/). а
также при R — 20 м и Ртах —
-0.41 (2)
О Ю 20 30 R,"
Приведенные данные свидетельствуют о том, что испытанные
образцы имеют резервы повышения скорости от Ю до 19%.
Предельные значения ско-
рости маневрирования «змей-
кой» серийного (№ 12) и опыт-
ного (№ 18) танков на бетон-
ной дороге приведены на
рис. 4.23. Опытный образец
превосходит серийный танк по
этому показателю на 22.. .38 %
летом и на 20 .. .60 % зимой,
Рис. 4.23. Зависимость предельной
скорости маневрирования «змейкой»
серийного (/) и опытного (2) танков
от /,и (сплошные линии — летом при
р—0,31. .0,35; штриховые — зимой
при ц — 0,15.. .0,18)
что объясняется меньшим временем запаздывания поворота опыт-
ного образца Тзап =0,15. .0,32 (0,32.. .0,7 с серийного танка) и
более высокими возможностями формирования траектории движе-
ния с помощью гидрообъемного привода в механизме поворота.
Как видно из приведенных примеров, испытания на поворотли-
вость в натурных условиях позволяют оценить конструктивные из-
менения сборочных единиц в механизме поворота и выявить на-
правления дальнейшего технического совершенствования ВГМ.
138
Глава 5 ИСПЫТАНИЯ ПО ОПРЕДЕЛЕН ИЮ
ПОКАЗАТЕЛЕЙ БЫСТРОХОДНОСТИ ВГМ
В УСЛОВИЯХ случайных внешних
ВОЗДЕЙСТВИЙ
5.1. ОБЩИЕ ПОЛОЖЕНИЯ
На этапе НИОКР целесообразно определять показатели быст-
роходности ВГМ посредством испытаний на полигонах и исполь
зовать их для оценки подвижности. С этой целью исследуется
формирование скоростных режимов движения под влиянием раз-
личных факторов внешней среды.
Расчетный метод оценки быстроходности с использованием
экспериментальной информации сводится к следующему: рассчи-
тывают тяговую характеристику прямолинейного движения, ско-
ростную характеристику движения по гармоническому профилю
с предельным использованием системы подрессоривания (зависи-
мость скорости от высоты неровностей) и зависимость скорости
движения от радиуса поворота. Используя эмпирические распре-
деления коэффициента дорожного сопротивления, высоты неров-
ностей и радиусов поворота на реальных трассах, получают рас-
четно-эмпирические распределения скорости движения по прямо-
линейным участкам дорог, по неровностям и на поворотах. Анало-
гично при экспериментальной оценке быстроходности строят
зависимости скорость — коэффициент дорожного сопротивления,
скорость — высота неровностей и скорость — радиус поворота с
использованием эмпирических распределений параметров дорож-
ных условий. Получаемые таким образом статистические харак-
теристики могут использоваться непосредственно для оценки влия
ния параметров систем и сборочных единиц шасси (МТУ, систем
управления поворотом, систем подрессоривания) па скоростные
возможности ВГМ, а при наличии соответствующих расчетных мо-
делей для заданных условий — на среднюю скорость движения пср.
При экспериментальных методах определения параметров быст-
роходности главной проблемой является разработка модели внеш-
них воздействий. В настоящее время отдается предпочтение спо-
10*
139
собам поэлементного моделирования внешних воздействий на су-
ществующих трассах полигонов, при котором основные параметры
дорожных условий определяются методами, описанными в гл. 3.
52. МЕТОДИКА ОЦЕНКИ ПЛАВНОСТИ ХОДА
НА ГРУНТОВЫХ ДОРОГАХ
Плавность хода характеризует способность системы человек —
машина к движению по неровностям дорог и местности с макси
мально возможной скоростью, ограничиваемой динамическими воз
действиями на членов экипажа (преимущественно вертикальными
ускорениями). Методика определения плавности хода основана на
использовании одномерной модели движения танка, в которой
варьируемым входным фйктором является микропрофиль, а вы
ходным - скорость движения при динамических воздействиях, со-
ответствующих верхнему пределу комфортной зоны по условиям
обитаемости. Сопутствующие факторы внешней среды регламенти-
руются, их влиянием пренебрегают.
Анализ реализаций продольного микропрофиля трасс полиго-
нов, расположенных в различных районах страны, параметры ко-
торых приведены в табл. 5.1, показал:
реализации микропрофиля при протяженности 240.. .600 м об-
ладают признаками стационарных случайных процессов;
распределение высоты неровностей подчиняется нормальному
закону;
все реализации с одинаковыми (или близкими) значениями
высоты неровностей при длине больше 6 м относятся к одной со-
вокупности независимо от района расположения полигона;
между высотой и длиной неровностей корреляционная связь
слабо выражена.
Для характеристики микропрофиля Ф. П. Шпаком пред-
ложен обобщенный статистический показатель h (интенсивность
микропрофиля), связывающий параметры неровностей:
Л = к77^/(4ТН),
где LH — среднеквадратичсскнс значения высоты н длины неровностей на
определенном участке, м.
Для обоснования требований к управляющим воздействиям при
движении по неровностям проводились специальные исследования.
Так, в одних и тех же дорожных условиях исследовались режимы
движения ВГМ при постоянном положении педали подачи топлива
и при управляющих воздействиях водителя, обеспечивающих ми-
нимальное колебание корпуса машины при преодолении неровно-
стей. Полученные данные показали, что при постоянном положении
педали подачи топлива значения вертикальных ускорений значи-
тельно выше: например, при скорости 33 км/ч среднеарифметиче-
ские значения ускорений соответственно составляют 1,3g и 1g.
140
Таблица 5.1
Статистические характеристики микропрофиля грунтовых полигонных дорог
Средние вы- сота и длина неровностей, и Среднеквад- ратичные от- клонения вы- соты и длины неровностей, ч Интенсив ность микро- профиля 1«. м Коэффициент вариации Коэффи- циент кор- реляции Х£и Местонахожде ние дороги (об- ласть. союзная республика)
"н £н X X ч 1ч
0,246 8,65 0.136 1,96 0,0055 0,557 0,227 0,140 Ленинградская
0,172 9,30 0,113 1,94 0,0034 0,655 0,208 0,012 >
0,135 9,77 0.088 1,77 0,0015 0,655 0,181 0,110 »
0,105 8,50 0,087 2.10 0,0010 0,831 0,240 0,017 >
0,125 10,30 0,065 2.46 0,0012 0,536 0,238 0,002 »
0,120 11,10 0,068 2,80 0,0010 0,567 0,252 0,012 »
0,157 9,90 0,082 1,53 0,0020 0,525 0,154 0,008 >
0,195 9,80 0,108 2,73 0,0030 0,555 0,279 0,130 »
0,220 9,80 0,112 2,50 0,0039 0,510 0,255 0,135 >
0,185 8,80 0,092 2,30 0,0030 0,495 0,260 0,010 Псковская
0.100 11,60 0,058 4,42 0,0007 0,580 0,381 0,012 >
0,135 9,10 0,067 2,27 0,0016 0,495 0,249 0,009 >
0,155 9,20 0,078 3,05 0,0020 0,502 0,332 0,016 >
0,250 9,10 0,111 2,12 0,0054 0,446 0,233 0,024 Ленинградская
0,060 8,96 0,052 2,86 0,0003 0,863 0,319 0,184 >
0,137 8,30 0,091 2,44 0,0018 0,664 0,293 0,005 »
0,172 8,93 0,114 2,30 0,0026 0.664 0,258 0,009 >
0,170 8,56 0,084 1,47 0,0026 0,494 0,172 0,011 »
0,240 8,19 0,140 2,10 0,0055 0,584 0.256 0,024 »
0,210 8.10 0,138 2,17 0,0043 0,661 0,268 0,148 >
0,140 8,60 0,090 1,49 0,0018 0,642 0,173 0,460 Харьковская
0,135 8,90 0,081 1,65 0,0016 0,605 0,186 0,110 »
0.080 8,20 0,059 2,38 0,0006 0,741 0,290 0,620 >
0,306 7,90 0,088 1.74 0,0093 0,289 0,220 0,140 »
0,174 8,20 0,045 1,20 0,0029 0,260 0,147 0,089 Московская
0,082 8,33 0.044 2,52 0,0006 0,525 0,303 0.020
0,114 7,68 С,077 2,60 0,0013 0.676 0,338 0,004 БССР
0,159 9,20 0,171 4,20 0,0022 0,715 0,457 0,042 »
0,095 8,10 0,53 2,50 0,0009 0,555 0,308 0,320 Псковская
0,170 8,62 0,149 2,97 0,0026 0,871 0,344 0,011 »
0,124 6,80 0,088 3,40 0,0018 0,708 0,708 0,043 Ашхабадская
0,137 10,00 0.098 7,10 0,0015 0,715 0,710 0,090 Свердловская
0,181 7,84 0,128 5,55 0,0033 0,708 0,705 0,005 БССР
141
Разница в скорости движения одного и того же танка по одним
и тем же участкам трасс при вождении его тремя водителями
одинаковой квалификации не превышала 5 % при близких средних
арифметических значениях ускорений, что свидетельствует о воз-
можности проведения испытаний с одним водителем высокой ква-
лификации при предъявлении некоторых требований к режимам
движения (следовательно, и к управляющим воздействиям) на от-
дельных участках.
Основные положения методики испытаний. Плавность хода one
нивается по зависимости скорости движения от показателя 1ь при
постоянном уровне динамического воздействия на водителя, т. е.
при средних вертикальных ускорениях на месте его расположения.
Испытания проводятся на 3—5 участках реальных грунтовых до-
рог, отличающихся параметрами продольного профиля 1ь =
= 0,0005. . .0,001; 0,0015.. .0,002; 0,003. . .0,004; 0,005.. .0,006 и
0,0065.. .0,007 м. Протяженность участков выбирается в пределах
240. . .600 м; поверхностный слой грунта должен быть достаточно
плотным (укатанным в процессе движения машин). Дополнительно
к микропрофилю трасс предъявляются следующие требования:
максимальная высота неровностей //Hmax -< Нп-\- 3a/f , но не
более 0,8 м;
максимальная длина неровностей <.L№ + 3sz ;
не допускаются повороты на угол более 10°, а также подъемы
и спуски более Г.
В процессе испытаний измеряются (регистрируются) следующие
параметры: путь S, м; время движения Т, с; вертикальные ускоре-
ния на сиденье водителя zc.B, м/с2; продольно-угловые перемеще-
ния корпуса <р, рад.
Перед началом испытаний на каждом участке проводится конт-
рольный заезд с максимально возможной скоростью движения;
определяется средняя скорость движения иср и назначаются 4—5
промежуточных скоростных режимов (с интервалом 2.. .3 км/ч)
Испытания на каждом из участков начинаются с наименьшей
скорости движения и заканчиваются при максимально возможной.
На каждом скоростном режиме проводится не менее двух заездов
во взаимно противоположных направлениях.
При каждом заезде водителю задается скорость движения (по
спидометру или номеру включенной передачи и указателю частоты
вращения вала двигателя). Движение по участку должно осущест-
вляться по возможности с постоянной скоростью: при преодолении
отдельных неровностей она может снижаться по усмотрению води-
теля до значений, допустимых в пределах возможностей системы
подрессоривания. При движении с максимально возможной ско-
ростью водитель должен соблюдать правила безопасности. Если
движение с заданной скоростью приводит к частым пробоям под-
вески или ударам о грунт, испытания на участке прекращаются.
142
По результатам каждого заезда определяются: средняя ско-
рость движения по участку м/с; среднеарифметическое значе-
ние вертикальных ускорений zc.„, м/с2; среднеарифметическое зна
чение амплитуды продольно-угловых перемещений корпуса фг ,
в градусах.
По полученным данным строятся зависимости zca(0i) при раз-
личных значениях /» (рис. 5.1, а) и <рг (о<); затем по значениям v,
соответствующим среднеарифметическому значению ускорения,
заданному методикой (0,9g), строится зависимость скорости дви
жения от интенсивности микропрофиля (рис. 5.1,6). Чем выше
по ординате графика располагается кривая, тем плавнее ход ВГМ.
Аналогичную зависимость можно построить при фиксированных
значениях <р1( которая будет вспомогательной при оценке плавно-
сти хода машины.
Рис. 5.1. Зависимость гс., от скорости движения при различной интенсивности
микропрофнля (а) и влияние интенсивности мнкропрофиля на скорость движе-
ния при Zc.. = 8,8 м/с1 (б):
/, 2, 3, 4 — ~ 0.0055. 0.0027 ; 0.0016 и 0.0010 м
Таблица 5.2
Условный номер танка Удельная мощность кВт Динамический ход первой под- вески Лд, м Жесткость торсиона первой подвески С, к) Гм Усилие сопротивления гидро амортизатора первой под вески. кН
на прямом ^пр на обратном Х°АУ '’обр
4 13,9 0,200 230 55,4 13,7
10 14,0 0.250 275 14.7 24,5
5 18,2 0,275 245 62.3 13,7
9 17,9 0.240 216 71.1 32.3
Примеры использования данной методики испытаний. Резуль-
таты испытаний четырех танков (табл. 5.2) показывают, что при
143
малых значениях /» (^0,0015 м) плавность хода у всех машин оди-
накова (рис. 5.2). С увеличением 1>. скорость движения уменьша-
ется по-разному: максимально — у танка № 9, минимально —у тан
ка № 5, что обуславливается влиянием характеристик системы
подрессоривания. Кроме того, при движении по неровностям резко
возрастает частота воздейст-
вий на органы управления по-
дачей топлива, тормозами.
МТУ с газотурбинным двига-
телем (танк № 9) является
более инерционной системой,
чем МТУ с дизельным двига-
телем (танк № 5).
Рис. 5.2. Характеристика плавности
хода танков при гс ,—8,8 м/с1:
/ танк М S; 4; J - М 10; 4 - J* 9
При движении по неровностям с /*<0,0015 м скорость движе-
ния танков не зависит от системы подрессоривания; при /« >
>0,0015 м плавность хода существенно зависит от изменения па-
раметров систем подрессоривания ВГМ. Например, уменьшение
сопротивления прямого и обратного ходов гидроамортизатора с
увеличением Л обуславливает снижение скорости движения
(рис. 5.3).
Примером использования данного метода для оценки эффектив
пости изменения динамического хода подвесок могут служить ре-
зультаты испытаний танка № 10 и натурной модели на его базе при
zCB=8,8 м/с2 (рис. 5.4).
Многочисленные испытания ВГМ и их составных частей, отли-
чающихся конструктивными параметрами, позволили накопить ма
териал для статистического обобщения его с целью построения
эмпирической математической модели движения ВГМ средней ка-
тегории по массе по дорогам с продольным случайным микропро
филем. В соответствии с теорией планирования эксперимента си-
стема человек — машина — среда рассматривается как сложная,
с вероятностно-статистическим характером протекающих в пен
процессов. В качестве выходного параметра системы берется сред-
няя скорость прямолинейного движения при постоянном среднем
уровне динамического воздействия на водителя. Методом случай
ного баланса выбираются следующие входные факторы: интенсив
ность микропрофиля (дорожное воздействие) h (м), динамический
ход подвески й* (м), модуль жесткости торсиона С (кН/м), усилие
сопротивления прямого и обратного ходов гидроамортизаторов
^пР и ^обр (кН) первой подвески. Значимость других параметров
ВГМ (масса, момент инерции подрессоренных масс, длина опорной
поверхности гусениц, число опорных катков и амортизаторов,
144
удельная мощность двигателя) является незначительной вследст-
вие малого их отличия внутри одной категории по массе. Пределы
значений выбранных факторов устанавливаются на основании ап
Рис. 5.3. Влияние характеристик гид
роамортизаторов передних подвесок
на плавность хода танков № 4
(сплошные линии) и № 9 (штрихо-
вые) :
' - Ровр - 50 кН; 2-Робр " 25 кН; 3-
Рпр- 100 кН; 4- Рпр-»0 кН
риорной информации. Основная формула полученной математиче-
ской модели имеет следующий вид:
v = 6,57 /Д’23 ^*Роб71(С0>24/50’22),
Рис. 5 4. Влияние динамического хода
подвесок на плавность хода:
/-танка № 10 (Лд - 0,25 и); 2 —натур
ной модели ( Лд — 0,32 м)
где о-в м/с.
Данная модель позволяет решать различные практические за-
дачи, например, используется для оптимизации параметров систем
подрессоривания.
53 МЕТОДИКА ЭКСПЕРИМЕНТАЛЬНОГО ОПРЕДЕЛЕНИЯ
ПРЕДЕЛЬНОЙ скорости движения
в различных дорожных условиях
Движение ВГМ с максимально возможной скоростью предус-
матривает полную реализацию ее технических возможностей. На
реальных трассах скорость ограничивается дорожным сопротив
лением, неровностями или поворотами. Влияние ограничивающих
факторов на предельную скорость движения машины оценивается
тремя скоростными характеристиками: динамико-скоростной, ско-
ростными характеристиками на неровностях и поворотах.
145
Динамико-скоростная характеристика представляет собой за-
висимость скорости ВГМ от обобщенного коэффициента сопротив-
ления движению в циклах разгон — установившееся движение —
торможение (динамические участки дорог).
Скоростная характеристика на неровностях представляет собой
зависимость скорости движения ВГМ от высоты неровностей для
тех участков дорог, где скорость ограничивается пробоями под-
весок.
Скоростная характеристика на поворотах представляет собой
зависимость скорости ВГМ от радиуса поворотов на участках, где
скорость ограничивается возможностью съезда с проезжей части
дороги.
При таком подходе моделирование внешних воздействий при
испытаниях производится не по всей совокупности условий, а по
отдельным их элементам, что облегчает решение задачи.
Для определения скоростных характеристик используются три
одномерные модели, входными варьируемыми факторами которых
являются коэффициент сопротивления движению fc0, радиус по-
ворота /?„, высота неровностей //„, а выходными — максимальная
скорость движения. При этом на сопутствующие факторы наклады-
ваются такие ограничения, чтобы при минимальном объеме ис-
пытаний их влияние на скорость движения соответствовало гене-
ральной совокупности.
Для обоснования возможного ограничения выборки событий
при сохранении их статистической представительности проводилось
исследование формирования скорости ВГМ в различных дорожных
условиях на реальных трассах полигонов, расположенных в Псков-
ской и Смоленской областях, а также в Туркменской ССР. Полу-
ченные данные позволили рекомендовать условия проведения про-
беговых испытаний и требования к выборкам, обеспечивающим
статистическую представительность данных.
Трасса для испытаний должна включать в себя участки ровные
прямолинейные, неровные и криволинейные. На ровных прямоли-
нейных участках скорость машин должна ограничиваться только
их тяговыми возможностями, обусловленными конструкцией шасси
(признаком ограничения является то, что частота вращения вала
двигателя при движении с полностью нажатой педалью подачи
топлива не увеличивается). На неровных участках высота неров-
ностей должна быть от 0,1 до 0,5 м при их длине 7.. .11 м.
На криволинейных участках должны быть повороты радиусом
от 10 до 150 м при угле поворота от 30 до 180°.
Наиболее целесообразно использовать трассу длиной 10.. .15 км,
накатанную ВГМ, и автомобильные проселочные извилистые до-
роги протяженностью 10.. .15 км.
Испытания следует проводить в светлое время суток при по-
ходном положении водителя. При этом не должно быть резких
изменений физико-механических свойств грунта и ограничений ви-
146
димости по метеоусловиям (туман, снег, дождь) Испытания прово-
дятся квалифицированными водителями (не менее двух человек).
Перед началом испытаний проводится контроль технического
состояния испытуемого образца в соответствии с конструкторской
документацией и обслуживание системы воздухоочистки в объеме
ТО-2, для чего определяются динамические характеристики ВГМ
и проходная высота неровностей.
Трасса пробеговых испытаний размечается контрольными зна-
ками (вехами) через каждые 500 м по всей протяженности. Каж-
дый водитель на испытуемом образце проводит один заезд для
ознакомления с особенностями трассы.
Пробеговые испытания состоят из заездов с максимально воз-
можной скоростью во взаимно противоположных направлениях.
В процессе испытаний измеряются (регистрируются) следующие
параметры: число оборотов ведущих колес (пройденный путь);
время; частота вращения вала двигателя; номер включенной пе-
редачи; угловая скорость поворота корпуса в горизонтальной пло-
скости; вертикальные ускорения на сиденье водителя; положение
педали подачи топлива; положение педали тормоза.
При прохождении контрольных вех производится отметка яв-
ления; в этот же день проводится регистрация параметров дорож-
ных условий.
Порядок обработки экспериментальных данных и их оценка.
Осциллограммы с записью режимов движения и параметров до-
рожных условий синхронизируют по пути (по записи отметок обо-
ротов ведущих колес и отметок явлений). С учетом управляющих
воздействий водителя на осциллограммах выделяются три вида
участков, соответствующих движению с полной реализацией тя-
гово-динамических характеристик, системы подрессоривания и си-
стемы поворота.
На участках первого вида, где машина хотя бы кратковременно
двигалась на пределе тяговых возможностей (при полностью на-
жатой педали подачи топлива частота вращения вала двигателя
не увеличивается), начальная скорость движения должна состав-
лять не менее 0,5г>тяг (т,тяг определяется по расчетной тяговой ха-
рактеристике для удельной силы тяги, равной коэффициенту со-
противления на данном участке); протяженность участков должна
быть при fc0>0,12 не менее 100 м, при fc0 =0,05. . .0,12 —не менее
200 м, при /с0 <0,05 — не менее 400 м.
Число неровностей на участках второго вида должно быть рав-
но 3 5; средняя их длина должна быть в пределах 7. .11 м, ко-
эффициент сопротивления движению не более 0,1; вертикальные
ускорения на месте сиденья водителя составляют 1,8.. .3,0 g.
На участках третьего вида угол поворота должен быть не менее
30°, а радиус не более 150 м; движение машины в процессе пово-
рота должно осуществляться без разгона более чем на половине
его протяженности.
147
Выделение участков записей на осциллограммах производится
на основании управляющих воздействий водителя и режима дви-
жения и при сопоставлении их с параметрами дорожных условий.
На участках первого вида определяют скорость движения и,-,
обобщенный коэффициент сопротивления движению fс0» протя-
женность участка S/, скорость движения в начале (ии< ) и койне
участка vKi .
На участках второго вида определяет скорость движения и,,
среднюю высоту и длину неровностей Нн и , обобщенный ко-
эффициент сопротивления движению fe0, максимальные вертикаль-
ные ускорения на сиденье водителя гс в.
На участках третьего вида определяют скорость движения vit
обобщенный коэффициент сопротивления движению fc0, радиус
/?п< и угол поворота ап/>
По полученным данным строят (не менее чем по 20 точкам)
скоростные характеристики v = F(fen)' v~F(HM) и v = F(Rn).
Кроме того, для оценки результатов испытаний целесообразно
иметь следующие дополнительные данные (в табличной форме):
среднюю протяженность цикла; среднюю начальную скорость на
динамических участках; среднюю длину неровностей и средний
коэффициент сопротивления на неровных участках; средние данные
по углу поворота, ширине проезжей части дороги и обобщенному
коэффициенту сопротивления движению на криволинейных участ-
ках. В качестве примера на рис. 5.5 приведены скоростные харак-
148
теристики серийных танков № 9, 10, 11 и 14, полученные при срав
нительных испытаниях в зимних условиях. Они дают представление
о скоростных возможностях ВГМ в широком диапазоне изменения
дорожных условий. Сравнивая между собой скоростные характе-
ристики разных машин, следует иметь в виду, что каждая из них
формируется под влиянием всех систем машины. Скорость на ди-
намических участках зависит прежде всего от тяговых и тормозных
характеристик, но на нее также оказывают влияние и система
подрессоривания, и система поворота (через формирование на-
чальной и конечной скоростей цикла и его протяженность). Поэ-
тому скорость машины увеличивается с ростом ее удельной мощ-
ности, однако не строго пропорционально. Скорость на неровно-
стях зависит, в первую очередь, от параметров системы подрессо-
ривания (динамического хода подвески, энергоемкости амортиза
торов и др.); с повышением характеристик системы подрессорива-
ния наблюдается улучшение скоростной характеристики На ско-
рость движения также оказывает влияние дополнительное демпфи
рование корпуса за счет силовой установки.
Скорость прохождения поворотов определяется характеристи-
ками системы управления поворотом и тяговыми возможностями
машины, которым соответствуют две разные ветви на скоростной
характеристике — крутая и пологая. Чем выше тяговые возможно-
сти машины, тем выше по ординате располагается пологая ветвь и
шире диапазон радиусов поворота, преодолеваемых на понижен
ной скорости вследствие наличия опасности съезда с дороги.
149
Глава 6 ОПРЕДЕЛЕНИЕ СРЕДНЕЙ СКОРОСТИ
ДВИЖЕНИЯ И ЗАПАСА ХОДА ВГМ
6.1. ОБЩИЕ ПОЛОЖЕНИЯ
Средняя скорость движения иср и запас хода по топливу ST
(или путевой расход топлива qn) являются показателями быстро
ходности и автономности, т. е. свойств ВГМ, формирующих их
подвижность; они входят в тактико-техническую характеристику
(ТТХ) ВГМ и нормируются тактико-техническим заданием (ТТЗ)
на разработку нового образца. Быстроходность и автономность
это сложные взаимосвязанные свойства, зависящие от многих тех
нических и эргономических факторов, а также от условий внешней
среды, поэтому показатели qn и t>fp являются статистическими, что
требует для экспериментального их определения комплексного мо
делирования условий реальной эксплуатации (боевого применения)
ВГМ. Степень обобщения полученных в процессе испытаний зна-
чений с\р и qn определяется статистической представительностью
условий испытаний, имитирующих возможное боевое применение.
В мирное время ВГМ используются в основном для обучения лич
ного состава подразделений бронетанковых войск. Условия и
режимы эксплуатации машин при этом определяются требования
ми наставлений по выполнению упражнений (учений); эксплуата-
ция большей частью производится на ограниченных по площади
территориях полигонов войсковых частей; режимы эксплуатации
отличаются низкой скоростью движения, относительно высокой на-
работкой составных частей шасси на стоянке, частой повторяемо-
стью (или цикличностью) одинаковых внешних возмущающих и
управляющих воздействий.
Создать единую модель эксплуатации ВГМ в мирное время и
в боевых условиях не представляется возможным, поэтому прибе-
гают к поэлементному ее моделированию в соответствии с целями
испытаний, которыми являются проверка соответствия значений
т>сР и qn тактико-техническому заданию, сравнительная оценка раз-
ных типов или модификаций ВГМ, косвенная оценка условий
эксплуатации или эксплуатационных возможностей ВГМ.
В настоящее время единственным видом испытаний, макси-
мально приближенных к условиям боевого применения ВГМ, яв-
150
ляются марши по маршрутам большой протяженности, обеспечи
вающим статистическую представительность определенных дорож-
но-грунтовых условий (определенного почвенно-климатического
района). Марши проводятся на этапах приемочных испытаний
опытных образцов и испытаний серийных (или модернизирован-
ных) ВГМ.
На этапах НИР и предварительных испытаний опытных образ-
цов основное внимание уделяется сравнительной оценке исследуе-
мых вариантов конструкций, а также статистическим зависимо-
стям скорости движения от параметров, характеризующих воздей-
ствие внешней среды; испытания с этой целью проводятся на
трассах ограниченной протяженности.
Для оценки влияния параметров шасси на скорость движения
и проверки эффективности мероприятий, направленных на повы
шение подвижности, организуются пробеговые испытания ВГМ на
трассах ограниченной протяженности, но с характерными дорож-
ными условиями, которые могут быть имитированы и на трассах
полигонов.
6.2. ИСПЫТАНИЯ МАРШЕМ ПО МАРШРУТАМ
БОЛЬШОЙ ПРОТЯЖЕННОСТИ
Порядок проведения маршей. Для проведения маршей назна-
чаются маршруты протяженностью 900—1200 км, по сочетанию
внешних условий являющиеся типичными для определенного ре-
гиона. Марши совершаются за 3—4 суточных перехода. Основными
характеристиками марша являются:
протяженность суточного перехода или средняя скорость дви-
жения колонны на марше;
режим движения и остановок колонны для отдыха личного со-
става и технического обслуживания машин (например, через каж-
дые 3 4 ч движения остановка длительностью до 1 ч, одна из ос-
тановок до 2 ч, в конце перехода остановка на ночной или днев
ной отдых);
инженерное обеспечение маршрута;
способы управления движением колонны;
условия безопасности движения (дистанция между машинами,
порядок остановки и трогания и др ).
Марши проводятся в составе подразделений однотипных образ-
цов, обычно в составе роты.
Перед началом марша определяется вырабатываемый объем
топлива и контролируется работоспособность счетчиков пути и
времени работы двигателей.
При испытаниях нескольких типов ВГМ (для сопоставимости
результатов) подразделения направляются по одному и тому же
маршруту, в одно и то же время суток, с временными интервалами
выхода колонн, исключающими возможность задержки одного под-
разделения другим; при этом по переходам обеспечивается следо-
вание подразделений в порядке чередования.
151
Подразделениям ставится задача (и контролируется ее испол-
нение) прибыть в назначенный район за минимальное время, из-
бегая потерь времени на плановых и случайных остановках и до
биваясь максимально возможной скорости, допускаемой дорожны
ми условиями, с соблюдением мер безопасности, правил эксплуа-
тации и режима движения, установленного планом марша.
Марши имитируют условия выдвижения ВГМ из глубины тер
ритории (т. е. вне угрозы столкновения с противником) или усло-
вия вероятной встречи с противником, соответственно танки экс-
плуатируются в походном и боевом режимах.
Оцениваемые показатели. В процессе совершения маршей ре
гистрируются следующие показатели:
время начала и окончания переходов, плановых и случайных
остановок колонн (отдельных машин) продолжительностью более
1 мин;
время прохождения контрольных пунктов (рубежей регулиро
вания),
показания счетчиков пути и времени работы двигателей перед
началом движения и на остановках;
объем дозаправляемого топлива и масла на привалах и при про
ведении ежедневного технического обслуживания после переходов
по показаниям счетчиков топливомаслозаправщиков или иных
средств заправки;
время прохождения характерных участков трасс и их протя
женность;
другие показатели, установленные программой и методиками
испытаний;
качественные и количественные характеристики дорожных ус-
ловий.
Средняя скорость движения ВГМ
г„(, (6.1)
где S* — протяженность i-ro участка маршрута; ТЖ1( — время движения по i-му
участку маршрута.
Средний расход топлива
«.= 2 <?,</£$«, (6.2)
1-1 1-1
где Qti— объем дозаправленного (израсходованного) топлива за переход по
t-му участку.
Для ориентировочной оценки загрузки двигателей определяется
средний часовой расход топлива
7^)1
Qv = —------------------------, (6.3)
/^1
152
где Qv —часовой расход топлива при работе двигателя на холостом ходу;
Г, ( — срсдняя продолжительность эксплуатации двигателей на переходе
Значения ®cp; q„ и Qy определяются как средние по подраз-
делению, при этом в расчет не принимаются данные о машинах,
которые по каким-либо причинам совершали переход вне колонны
подразделения.
Оценка результатов испытаний. По изложенной методике в
70—80-х гг. испытывались серийные танки, опытные образцы и
натурные модели, выполненные на базе серийных машин средней
категории по массе; технические характеристики всех объектов
испытаний приведены в табл. 4.1.
Испытания проводились в разное время года в почвенно-клима-
тических зонах, дорожно-грунтовые условия которых приведены
в табл. 1.5. В разные годы испытания проводились по одним и
тем же маршрутам в каждом регионе, если оценивалась эффектив
ность мероприятий, направленных на повышение подвижности
ВГМ.
Для примера на рис. 6.1 приведена схема маршрутов, по ко-
торым проводились марши в Забайкалье в 1979—1980 и 1983
1984 гг. (в условиях безлесной холмисто-равнинной местности, пе
ресекаемой горными хребтами и их отрогами).
Рис 6.1. Примеры маршрутов маршей в Забайкалье в разные годы
Результаты испытаний, приведенные в табл. 6.1, свидетельст-
вуют о достаточной чувствительности показателей подвижности
ВГМ к внешним условиям и изменению параметров шасси: каждо
му почвенно-климатическому району присуще свое сочетание зна-
чений показателей, которое может быть улучшено за счет совер-
шенствования тех систем танка, на которые особенно влияют до-
рожно-грунтовые условия. Например, увеличение динамического
хода катков и энергоемкости гидроамортизаторов танка № 13 по
сравнению с его предшественником (танком № 10) позволило
значительно повысить иср в горных условиях Средней Азии (см.
153
Таблица 6.1
Экспериментальные значения показателей подвижности некоторых танков на марше
Почвенно-кл и магический район Год проведе- ния нспыта НИЙ т’ср • км 4 Qn • » км Qv , л/ч
№ 12 № 14 № 10 № 12 № 14 № 10 № |2 .V? 14 № 10
Летне-осенний период
Юго-запад Европейской ча- 1973 35,9* — — 5,49* — — 197* — —
сти СССР 1976 35.2* 27,5 31,7 6,42* 4,04 3,57 221* 112 114
1978 35,1* 28,7 328 7.03* 4,20 3,71 237* 119 121
1979 36,7 27,9 33,4 6,45 3,88 3,58 228 109 120
Приамурье (осень) 1979 34,4 28,3 30,2 7,26 3,97 3,78 233 ПО 117
Полупустыни Средней Азии 1981 36 1 27,9 35,0 5,69 3,66 3.24 196 98 114
1982 36,1 28,9 36,9** 5,67 3,91 3,23** 194 109 118**
Горные районы Средней Азии 1981 25,6 20,7 24,4 7,29 4,39 3,84 178 89 93
1982*** 27,3 20,6 29,3** 6,25 4,45 3,49** 160 88 102**
Песчано-пустынные районы 1973 31,5* — — 5,95* — — 188* — —
Средней Азии 1981 30,2 21.4 28,8 6,75 5,04 4,29 204 105 124
1982*** 36,0 23 1 35,8** 6,29 4,40 3,75** 219 100 133**
Зимний период
Заполярье 1979 21,9 19,3 21,1 9,05 4.32 3,90 186 82 82
Западная Сибирь 1983 42,0 293 38,8** 5,79 3,50 3,30** 244 103 130
Дальний Восток 1981 36,4 — 35,6 6,38 — 3,46 202 — 112
Забайкалье 1979 48,1 35.4 43,0 5,53 3,38 3,00 231 ПО 119
1980 49,3 •— 45,5 4.90 — 2.81 237 — 128
1984 50,7 35,6 44.8** 4,65 2,74 2.67** 230 96 120**
* Результаты испытаний до 1979 г. танка № 9.
** С 1982 г. танка № 13.
*** Облегченный маршрут (исключены горные трассы).
результаты испытаний 1982 г.), где микропрофиль примерно треть-
ей части трассы представляет собой короткие (длина 3. . .5 м, вы-
сота 0,15.. .0,30 м) неровности, ограничивающие скорость движения
системой подрессоривания. Совершенствование топливорегулирую-
щей аппаратуры позволило улучшить топливно-экономическую ха-
рактеристику танка № 12: если в 1979 г. соотношения путевых и
часовых расходов топлива танков № 12 и 10 в сопоставимых усло-
виях испытаний равнялись 1,84 и 1,94 в Забайкалье, 1,92 и 1,99 на
Дальнем Востоке, то в 1980—1981 гг. они снизились до 1,74 и 1,85
в Забайкалье, а на Дальнем Востоке до 1,83 и 1,80 соответственно.
В тех случаях, когда по совокупности внешних условий региона
не удавалось выявить разницу в технических свойствах испытуе-
мых машин, использовались результаты их испытаний в типичных
или характерных для данного региона условиях (табл. 6.2).
Таблица 6.2
Результаты испытаний танков в характерных условиях региона
Почвенно-климатиче ский район Характеристики местности Суммарная протяжен ность участ ков. км Номер танка V ср' км/ч
Забайкалье Холмисто-равнинная (рав- нинной 65 %; холмистой 35%) 520 12 10 55,3 52,4
♦ г ' Равнинная с пересечени- ем горными хребтами (рав- нинной 85%; горной 15%) 310 12 10 49,7 42,2
Предгорье (холмистой 45%; предгорий, отрогов, хребтов 55 %) 400 12 10 45,7 40,8
Дальний Восток Пересеченная (равнинной 50%; холмистой 50%) 245 12 10 43,5 40,1
Лесная (лесных дорог 80 %) 510 12 10 32,6 33,2
Из данных табл. 6.2 следует, что танк с большей удельной мощ-
ностью (№ 12) имеет преимущества на местности с затяжными
подъемами, т. е. при преодолении участков, пересеченных горными
хребтами и их отрогами (предгорьями). При движении же по лес-
ным дорогам с частыми поворотами и узкими проходами между
деревьями скоростные возможности танков с разной удельной мощ-
ностью нивелируются, поскольку в этих условиях основное влияние
на оср оказывают система управления поворотом и приемистость
двигателя.
155
Зависимость показателей т?ср и qn от заданного режима дви-
жения танков прослеживается при сравнении двух маршей в оди-
наковых внешних условиях по одному маршруту протяженностью
320 км (по холмисто-равнинной местности в Забайкалье), один из
которых совершался батальонной колонной трех типов танков
(№ 12, 13, 14) со скоростью 25.. .30 км/ч, а другой выполнялся
ротными колоннами однотипных танков, движущихся с технически
возможной скоростью (табл. 6.3).
Таблица 6.3
Результаты испытаний колонн танков, движущихся с различной скоростью
Ротная колонна одно- типных машин Батальонная колонна разно тмпных машин Относительное изменение показателей
h Рср • V X * ср QV‘ %’ s' , э.х °СР Q’v % s'
км/ч л/ч л/км км км/ч л/ч д/км КМ ‘’ср W *п
12 57,2 228 4,30 421 27,9 139 5,09 356 0.49 0,61 1.18 0,85
13 49,5 129 2,64 434 27,9 74 2.62 438 0,56 0,57 0.99 1,01
14 39.5 97 2,62 500 27.9 80 2,89 453 0,71 0,82 1.1 0,91
Из приведенных данных видно, что снижение скорости колонн
влечет за собой заметное увеличение путевого расхода qa и умень-
шение запаса хода Ss.x у танка № 12, в меньшей степени влияние
режима движения на показатели проявляется у танка № 14 и прак-
тически незаметно у танка № 13.
Приведенный пример показывает, что модель эксплуатации,
принятая при экспериментальной оценке показателей подвижно-
сти, должна содержать требования не только к дорожно-грунто-
вым и климатическим условиям, но и к режиму эксплуатаций ВГМ.
Предварительным (конструкторско-доводочным и отраслевым)
и приемочным испытаниям (полигонным) подвергается обычно ма-
лое число опытных образцов, но при определении показателей
г/ср и qn используется та же модель эксплуатации, т. е. пробег,
имитирующий марш в представительных по внешним условиям
районах испытаний.
63 СРАВНИТЕЛЬНЫЕ ИСПЫТАНИЯ ТАНКОВ
НА ТРАССАХ ПОЛИГОНОВ
Определение статистических распределений и средних значений
скорости движения и путевого расхода топлива на трассах ограни-
ченной протяженности. Испытания проводятся в дневное время на
грунтовых дорогах (протяженностью не менее 10 км) двух типов:
дорога с различным сопротивлением и неровностями, поворо-
тами, спусками, подъемами, на которых сравниваемый танк раз-
156
вивает среднюю скорость, составляющую 55. ..100 % значения, за-
данного ТТЗ для грунтовых дорог;
дорога с различным сопротивлением и большим числом неров-
ностей и выбоин, на которой сравниваемый танк развивает сред-
нюю скорость порядка 50.. .70 % от заданной ТТЗ.
К вождению танков (в походном режиме) привлекаются опыт
ные водители (не менее трех). На каждой машине каждый води-
тель проходит трассу в прямом и обратном направлении с макси-
мально возможной скоростью.
Испытания сравниваемых танков проводятся в один день; за-
езды осуществляются последовательно или одновременно при со-
блюдении дистанции, обеспечивающей их независимое движение;
каждая машина проходит не менее 50—70 км.
Результаты испытаний обрабатываются в следующей последо-
вательности:
производится разбивка скоростного диапазона на интервалы
(не менее 7);
определяется частость движения объекта со скоростями, нахо-
дящимися в каждом интервале, по одной из формул:
^=^/7,
где т/ — число измерений в »-м интервале; N — общее число измерений; Ti — вре-
мя движения с »-й скоростью; Т — общее время движения
Числа /п, и N, время Г, и Т определяются по осциллограммам
с записью пройденного пути и времени, либо по показаниям прой-
денного пути и времени, или по показаниям счетчиков режимо-
мерной аппаратуры с фиксацией пройденного пути за постоянный
для данных испытаний интервал времени АГ, не превышающий
30 с.
Затем определяют плотность распределения скорости в каждом
интервале До:
IFj/Av;
функцию распределения
Fr == V UZ.;
1 ।
среднее значение скорости движения
*>сР = i ’
где vt — значение скорости в i-м интервале;
среднеквадратичное отклонение
Sto-^p)2
По полученным данным строятся гистограммы и кумулятив-
ная кривая с указанием на них средней скорости движения танков.
157
Определение скорости движения танков в характерных дорож-
ных условиях. Трассы для испытаний должны иметь участки, на
которых скорость ограничивается следующими основными факто-
рами: тягово-динамическими характеристиками, плавностью хода,
управляемостью и устойчивостью движения при повороте.
К первым относятся ровные участки, безопасные для движе-
ния; ко вторым — участки трасс, продольный профиль которых об-
разован последовательно чередующимися неровностями высотой
150.. .400 мм и длиной 6. .12 м; к третьим — извилистые дороги
с суммарной протяженностью поворотов не менее 50 % при плот-
ности их не менее пяти на километр.
Общая протяженность испытательных трасс обычно составляет
30.. .70 км; пройденный путь в процессе испытаний должен состав
лять не менее 100 км. Танки могут двигаться поодиночке или ко-
лонной; в последнем случае испытания одновременно рассматрива
ются как выполнение упражнения по курсу вождения боевых
машин.
Перед началом пробега машины заправляются топливом, фик-
сируются показания счетчиков пути и времени работы двигателей.
В процессе пробега регистрируется время прохождения обозначен-
ных указателями участков трасс (производятся отметки на носи-
телях информации). После пробега танки устанавливаются на ис
ходную позицию, где повторно производится их заправка топливом,
фиксируются показания счетчиков пути и времени работы двига-
телей.
По результатам испытаний для каждого танка определяют:
пройденный путь (по показаниям счетчиков пути); общее время
работы двигателей за пробег; время движения (по часам); время
прохождения каждого участка трассы, обозначенного указателями;
объем израсходованного топлива. По этим данным подсчитывают
средние для каждого типа танков показатели vcp и qn , а также
скорость движения на выделенных участках трасс. Результаты
испытаний представляют в табличной форме вместе с характери-
стикой дорожных условий.
Примеры использования методик определения г\.р и qn. Напри-
мер, для исследования влияния внешних условий на подвижность
испытывались танки четырех типов при разной температуре окру-
жающего воздуха, но в одинаковых дорожно-грунтовых условиях
пустынной местности Средней Азии. Пробеги совершались с мак-
симально возможной скоростью по трассе, не имеющей ограниче-
ний по системам подрессоривания и управления поворотом; режим
158
движения ограничивался лишь тепловым состоянием силовой ус-
тановки (при достижении предельных температур скорость дви-
жения снижалась).
Результаты проведения испытаний (табл. 6.4) показывают, что
с повышением температуры окружающего воздуха на 12 . 16°С
при высокой солнечной радиации скорость движения танков сни-
жается на II...22%; одновременно заметно уменьшается часовой
расход топлива, что свидетельствует о снижении загрузки дви-
гателей. Такие испытания позволяют определить предельные ско-
ростные возможности танков в конкретных дорожных и климати-
ческих условиях.
Таблица 6.4
Влияние температуры воздуха на показатели подвижности танков
Номер тайка Температура окружающего воздуха 'МД ’ С Показатели подвижности
Г’ . км/ч СР
12 20 41,6 271
36.5 35,4 199
14 24 27,6 118
36 21.5 92
5 22 36,0 164
36 28,6 129
13 20 37,9 145
36,5 33,6 122
Аналогично можно исследовать влияние на подвижность ВГМ
высоты над уровнем моря и пылеобразующих свойств грунта, для
учета воздействия которых предусматриваются соответствующие
регулирующие устройства.
Для исследования влияния конструкции венцов ведущих колес
на подвижность танков № 13 проводились сравнительные испыта-
ния на полигоне в Западной Сибири (1983—1984 гг.). Опытные
венцы отличались увеличенным числом зубьев, повышающим ки-
нематическую скорость перематывания гусениц на 7%. Пробег
проводился по слабопересеченной местности с неглубоким снежным
покровом; протяженность трассы составляла 125 км.
Результаты испытаний показали, что установка опытных вен-
цов привела к повышению оср на 4%, а ит„ на 6%.
Показатели т/ср и qa достаточно чувствительны к изменению
технических характеристик шасси, а также к особенностям дорож-
но-грунтовых и климатических условий (табл. 6.5).
159
Таблица 6.5
Результаты определения средней скорости движения танков
на трассах учебных центров (1976 г.), км/ч
Место испытаний, дорожные условия Номера танков
9 10 14
На трассе в целом
НУЦ (50 км) 26,3 23,0 20,2
ИУЦ (50 км) 30,3 26,6 23,6
СКУЦ (36 км) 40,1 35,0 33,3
На характерных участках трасс
Ровные укатанные дороги: СКУЦ 55,0 41,5 38,4
НУЦ 56,0 40.0 34,6
ИУЦ 54,0 44,0 40,4
Ровные дороги с взрыхленным верхним слоем грунта:
СКУЦ 45 1 37,8 35,6
НУЦ 41.6 35,6 32.2
ИУЦ 50.0 37,0 30,0
Участки дорог с отдельными препятствиями (ямами):
СКУЦ 28,1 24,4 24,4
ИУЦ 30.0 27,4 26,4
Лесная дорога с поворотами (СКУЦ) 23,5 24,4 25,2
Разбитая трасса со случайным продольным 22.1 20,5 16,0
профилем (НУЦ)
Примечание. НУЦ, ИУЦ, СКУЦ — сокращенные названия новомосков-
ского, игнатпольского и стругокрасненского учебных центров соответственно.
6.4. ОСОБЕННОСТИ ОПРЕДЕЛЕНИЯ ОСНОВНЫХ ПОКАЗАТЕЛЕЙ
ПОДВИЖНОСТИ ВГМ ЗА РУБЕЖОМ
Как известно, зарубежные военные специалисты различают
оперативную и тактическую подвижность танков.
Под оперативной подвижностью подразумевают движение ма-
шины к месту боя, которое характеризуется протяженностью пе-
реброски и возможностью выбора местности с лучшей проходи-
мостью. Тактическая подвижность характеризует возможности пе-
редвижения ВГМ на поле боя (короткие пробеги, частые разгоны
и торможения машин до полной остановки, ограниченные возмож-
ности выбора маршрута). При этом большое внимание уделяется
определению разгонных характеристик в условиях бездорожья,
160
Зак. 2 «с»
Таблица 6.6
Условия боевого использования различных видов ВГМ за рубежом
Дорожно-грунтовые условия Бронетанковая техника Ракетно-артиллерийская техника Инженерные машины Транспортные машины
Скорость движения, м/с С1 Скорость движения, м/с С_1 С корость движения, м/с ci Скорость движения, м/с С1
по про- бегу по продол- жительно- сти боево- го дня по про- бегу по продол жительно- сти боево го дня по про бегу по продол жнтельно- сти боево го дня по про- бегу по продол- жительно сти боево Го дня
Дороги с твер- дым покрытием (шоссе) 9,4—11,1 0.18 0 9,4-11,1 0,23 0 13,3—15,6 0,75 0,5 13,3—15,6 0,3 0,3
Разбитые грун- товые дороги 4,5—6,7 0,18 0.2 4,5—6,7 0,23 0.85 6.7—9,4 0,2 0,3 6,7-9,4 0,3 0.3
Пересеченная местность 0,8—3,6 0,64 0,4 0,8—3,6 0,54 0,1 2,2-4,4 0,05 0,1 2,2—4,4 0,4 0,3
Стоянка на бое- вой позиции с ра- ботающим двигате- лем 0 0 0.4 0 0 0,05 0 0 0,1 0 0 0.1
Примечание. С< — коэффициент, характеризующий вероятность использования различных дорожно-грунтовых
условий.
так как, по мнению зарубежных специалистов, от них зависит эф
фективность смены позиций на поле боя в минимально возможное
время.
В качестве основных показателей подвижности так же, как и
у нас, используются средняя скорость движения и расход топлива
в различных дорожно-грунтовых условиях.
В процессе испытаний совершаются марши протяженностью
300 км (65% по дорогам с твердым покрытием и 35% по грун-
товым). Движение на марше в основном осуществляется днем и
только 25% времени—ночью, с использованием обычных фар.
Испытания по оценке тактической подвижности проводятся в
условиях, имитирующих боевое применение ВГМ. Для этой цели
проводятся пробеги с имитацией «боевого дня» и специальные ис-
пытания, называемые оценкой динамических качеств (терминоло-
гия, принятая в США).
Условия движения различных типов ВГМ при совершении про
бегов, имитирующих боевое применение, приведены в табл. 6.6.
Необходимо отметить, что продолжительность боевого дня в по-
следние годы увеличилась с 18 до 24 ч.
Характерной особенностью боевого дня является движение ма-
шины без дозаправки топливом по дорогам и местности, ведение
Таблица 6.7
Трассы Абердинского полигона, пролегающие по пересеченной местности
Условное обо значение Характеристика Протяженность.
Испытательная площадка .Perryman- (равнинная пересеченная местность)
1 Умеренно неровная, естественный грунт, сугли- нок с гравийными и каменистыми участками 8,3
2 Умеренно неровная, естественный суглинок с дроблеными камнями 2,9
3 Неровная, естественный суглинок 5.3
4 С большими неровностями, естественный сугли- нок, естественный болотный грунт 4.0
Л Вспомогательная дорога, естественный грунт 3.8
В Вспомогательная дорога, речной гравий с кам- нями 5.1
Испытательная площадка .Churchville" (холмистая пересеченная местность)
Л Местность лесистая с каменистыми участками, пнями, боковыми скатами, оврагами 6,25
В Естественный суглинок с каменистыми участка- ми, подъемами и спусками крутизной до 27 %
С Холмистая трасса вспомогательного назначения (подъемы и спуски до 10 %) 2,4
162
наступления (обороны). В процессе боевого дня машина должна
эксплуатироваться не менее 7 ч в условиях воздействия оружия
массового поражения.
За рубежом в настоящее время отсутствует четкое определение
пересеченной местности. Поскольку в США натурные испытания в
основном проводятся на Абердинском полигоне, его трассы, про-
ходящие по пересеченной местности, можно принять за основу
(табл. 6.7).
Для оценки тактической подвижности ВГМ испытываются в
условиях, характеристика которых приведена в табл. 6.8.
Таблица 6.8
Условия испытаний по оценке тактической подвижности ВГМ в США
Обозначс- Протяжен
ние упраж • ность пробега,
нения км
Вид боевого применения
Дорожно грунтовые условия
Дневное время
I 10-15 Развертывание танка из походного в боевой порядок Грунтовая дорога (на-
чальный период), бездо
рожье (последний кило-
метр)
2 2—3 Наступление или выход в исходный район Пересеченная местность
3 2—3 То же То же
4 0,5-0,8 Смена боевой позиции »
5 0,5—0,8 Атака с боевой позиции Ночное время >
А 8 Движение колонны Грунтовая дорога
В 1,5-2 Движение одиночной ма- шины Пересеченная местность
Методы определения запаса хода машины по топливу, харак-
теризующего топливно-экономические характеристики ВГМ, отли-
чаются от принятых в нашей стране. Ранее за рубежом запас хода
являлся мерой боевого дня, в настоящее же время американские
специалисты определяют три вида запаса хода: условный, эталон
ный, фактический (табл. 6.9).
Фактический запас хода для каждого типа дорожных условий
рассчитывается с использованием экспериментальных данных по
следующему уравнению:
, ф.«. = V'./CC.Q, C2Q.: + ... + C,Q,),
где Vr — вместимость топливных баков, л; С,- - табличные данные (см. табл. 6.6);
Qi —объемный расход топлива, л/км (путевой) или л/ч (часовой).
И
163
2
Таблица 6.9
Методические основы определения в США различных видов запаса хода ВГМ
Вид запаса хода На каком этапе определяется Основные методические положения Дорожно-грунтовые условия Целевое назначение
Условный Специальные испы- тания Определяется расход топли- ва при установившемся движе- нии одиночной машины с за- данной скоростью Дорога с твердым покрыти- ем (шоссе) Реклама, для сравне- ния с машинами иност- ранных марок
Эталонный Технические испы- тания; приемочные испытания; гарантий- ные испытания Определяется расход топлива при движении одиночной ма- шины по стандартной (эталон- ной) трассе, включающей в се- бя стабильную совокупность дорожных условий, характер- ных для испытательного поли- гона Специальная трасса Абердин- ского полигона протяженно- стью 2,4 км (65 % бетонной до- роги, 35 % грунтовой, 17 % трассы при 5%<а<30%, ос- тальная часть при а<1 %) Контролируемая так- тико-техническая харак- теристика
Фактиче- ский* Войсковые испыта- ния, учения и локаль- ные конфликты Определяется в различных боевых условиях в составе подразделений в зависимости от тактики и режимов их ис- пользования (условия и режим движения см. в табл. 6.8) Дорога с твердым покрыти- ем (шоссе), разбитые грунто- вые дороги, пересеченная мест- ность Исходный материал для планирования мар шей и перемещения ВГМ в ходе боевых действий, при моделировании бое- вых действий
Определяется обычно на Форт-Нокском полигоне.
Одним из основных видов испытаний боевой техники в ведущих
капиталистических странах являются сравнительные испытания
ВГМ.
В зарубежной практике создания опытных образцов сравни-
тельные испытания проводятся неоднократно: на этапе выработки
концепции в целях подтверждения преимуществ того или другого
технического решения; на этапе подтверждения — для получения
информации, необходимой для принятия решения о выборе прото-
типа для следующего этапа разработки образца в полном объеме.
На этапе подтверждения сравнительным испытаниям подверга-
ются образцы, созданные фирмами, приглашенными к разработке
на конкурсных началах. В последние годы таким испытаниям под-
вергались западно-германские и американские танки МВТ-70,
ХМ-803, «Леопард-2» и опытные образцы американского танка М-1,
разработанные одновременно фирмами «Крайслер» и «Дженерал
Моторе» (с газотурбинным и поршневым двигателями).
При проведении сравнительных испытаний танка М-1 с разными
типами двигателей одновременно испытаниям подвергался серий-
ный танк М-60А1. Испытания были длительными: из II —12 запла-
нированных на испытания месяцев три месяца отводилось на про-
ведение стрельбовых и ходовых испытаний и два месяца на анализ
полученных результатов. К эксплуатации испытуемых изделий при-
влекались шесть экипажей: два для работы на опытном танке М-1,
два на серийном танке М-60А1 и два для работы на обоих танках.
В процессе испытаний экипажи сравниваемых машин менялись
местами. Сравнительные испытания позволяют не только получить
данные по подвижности в условиях, приближенных к боевым (для
этой цели разработан ряд специальных упражнений), но и по сов-
местному использованию (так называемой совместимости) опытных
образцов ВГМ с различными серийными машинами: БМП, танками
М-60А1, мостоукладчиками, ремонтно-эвакуационными машинами
с транспортными средствами перевозки танков.
В связи с тем, что зарубежные специалисты рассматривают ди-
намические свойства ВГМ как характеристику защиты машины от
поражения ее противником, производятся специальные сравнитель-
ные испытания для оценки этих свойств. При этом определяются
вероятность попадания снарядов противника в ВГМ, время нахож-
дения ее в поле зрения прицела противника, удобство управления
машиной.
Для проведения сравнительных испытаний каждая фирма-раз-
работчик поставляет прототипы новой машины (по два опытных
образца, по одному ходовому макету, корпусу и башне).
Для получения сравнительных данных в процессе доработки
танка М-1 испытывались два серийных танка М-60А1 (Standard
Perfomanse Test). В процессе этих испытаний определяются тя-
говые характеристики, параметры поворотливости, управляемости,
проходимость, разгонные и тормозные характеристики, способность
преодоления подъемов, спусков и препятствий (вертикальные
165
стенки, окопы, рвы), эффективность системы охлаждения. Одно-
временно испытаниям подвергаются вооружение машины и система
управления огнем, а также проверяются эргономические параметры
системы экипаж— машина.
Сравнительные испытания предусматривают также проверку
опытного танка в различных климатических условиях, в том числе
в пустыне штата Аризона и на Аляске.
По результатам сравнительных испытаний осуществляется вы-
бор образца, наиболее удовлетворяющего заданным тактико-тех-
ническим требованиям, после чего фирма-победитель заключает
договор с министерством обороны США.
Сравнительные испытания проводятся также и для оценки эф-
фективности новых конструкторско-технических решении при со-
здании новых составных частей для серийных ВГМ. Например,
при создании новых видов гусениц для танков М-60А1 и М-551 оце-
нивалась их долговечность в сравнении с серийными. Одновременно
определялись и сравнивались разгонная и тормозная характери
стики танка М-551, его тяговая характеристика, максимальная ско-
рость, характеристики преодолеваемых подъемов и косогоров, па-
раметры плавности хода, расход топлива
Анализ методического подхода зарубежных военных специали-
стов к сравнительным испытаниям и оценке их результатов пока-
зывает, что не всегда они обеспечивают достоверность полученных
данных. Так, при сравнительных испытаниях западно-германского
танка «Леопард-2АУ» и американского M l был использован упро-
щенный метод оценки (балльный) по 13 параметрам американских
ТТТ к новому танку. По этому методу танк М-1 получил 12 по-
ложительных оценок, а «Леопард-2АУ» — только 5, что объясня-
ется произвольным выбором номенклатуры показателей, характе-
ризующих преимущества и недостатки сравниваемых танков, а не
их свойствами.
166
Глава 7. ИСПЫТАНИЯ ВГМ НА ПРОХОДИМОСТЬ
7.1. ОБЩИЕ ПОЛОЖЕНИЯ
Известно, что проходимость ВГМ является сложным свойством
подвижности, формируемым более простыми составляющими:
опорно-сцепной и геометрической проходимостью, а также водо-
ходными свойствами машины (водоходным свойствам посвящена
гл. 8). Испытания по оценке геометрической проходимости сво-
дился к проверке возможности преодоления искусственных и ес-
тественных препятствий, заданных ТТЗ; методика этих испытаний
достаточно проста и в настоящей монографии не рассматривается.
Опорно-сцепная проходимость характеризует приспособленность
машины к дорожным условиям и определяется совокупностью
опорных и тягово-сцепных характеристик, а также конструктив-
ными параметрами ходовой части ВГМ
Оценочными параметрами опорных характеристик
являются: клиренс, усилия под опорными катками, площадь опор-
ной поверхности гусениц, давление на грунт. Усилия под опорными
катками (реакция грунта) определяются весом машины в стати-
ческом положении. В движении происходит их перераспределение
за счет внешних сил и тяги на ведущих колесах. При установив-
шемся движении тяга уравновешивает сопротивление движению и
потери в ходовой части; составляющая силы тяги, приведенная к
оси ведущего колеса, создает момент, поворачивающий корпус в
продольной вертикальной плоскости в направлении кормы. В ре-
зультате усилия под передними катками уменьшаются, а под зад-
ними увеличиваются. На распределение давления вдоль гусеницы
влияют также связи между катками и элементами гусениц под
ними*.
Сцепные характеристики являются результатом взаи-
модействия гусеничного движителя с поверхностью движения.
Уравнение баланса сил при этом имеет следующий вид:
(7.1)
где Рт — сила тяги на опорных ветвях гусениц; Pf — суммарная сила сопротивле-
ния движению; Р/— сила инерции, приведенная к опорным поверхностям гусе-
ниц; Рсц сила сцепления гусениц с грунтом.
* Подробнее это рассмотрено в т. 6 монографии
167
Сцепные характеристики ВГМ оцениваются коэффициентом
сцепления <рсц, равным отношению силы сцепления гусениц с грун-
том к весу машины. Машина сохраняет способность к движению,
если обобщенный суммарный коэффициент сопротивления движе-
нию fe0 меньше <рСц- Значение фСцт«х определяется физико-меха-
ническими свойствами грунтов.*
Конструктивные параметры влияют и на опорные, и на сцеп
ные характеристики. Это объясняется тем, что помимо опорной
поверхности гусениц с грунтом могут также контактировать перед-
ние наклонные ветви гусениц, поверхность днища и даже часть
нижнего лобового листа корпуса, опорные катки и балансиры под-
весок (при глубокой колее).
Степень зависимости коэффициента фсит.х от конструктивных
параметров еще недостаточно изучена; однозначно установлена его
связь с конструкцией и формой опорной поверхности траков. Как
известно, проходимость различных ВГМ может оцениваться кри-
терием П, пропорциональным коэффициенту буксования гусенич-
ного движителя б**. Буксованием называют перемещение контак-
тирующих с грунтом частей движителя относительно неподвижно-
го основания:
6 = (ST-S,)/Sr,
где ST, S*—путь теоретический (по числу оборотов ведущего колеса) и дейст-
вительный (расстояние между двумя точками).
Зависимость <рСц от $ может быть объяснена взаимодействием
грунта, перемещаемого скользящими гусеницами, с неподвижным
грунтом. В тех случаях, когда наблюдается заполнение опорных
поверхностей траков грунтом до уровня верхних кромок грунто-
зацепов, сцепные свойства определяются внутренним трением
грунта; коэффициент сцепления в этом случае значительно ниже,
чем у гусеницы с самоочищающейся поверхностью.
Наибольшее снижение проходимости ВГМ наблюдается на лег-
кодеформируемых поверхностях: заболоченной местности, толстом
слое песка или снега, увлажненной суглинистой и глинистой почве
в естественном состоянии, пахоте.
Образующаяся при движении машин на слабых по прочности и
переувлажненных грунтах колея зависит от их физико-механиче-
ских свойств (см. т. 8 монографии).
Оценить состояние большинства грунтов можно, определив
экспериментально их плотность и влажность, для чего использу-
ется специальный комплект переносных приборов.
Сцепные характеристики ВГМ зависят от способности грунтов
сопротивляться деформации сдвига. В зависимости от влажности
грунты могут быть в течение года твердой, пластичной и текучей
консистенции. По характеру взаимодействия поверхности движения
с ходовой частью машин можно выделить несколько основных
* Подробнее это рассмотрено в т. 8 монографии
*• Подробнее рассмотрено в т 6 монографии
168
групп дорожных условий, представляющих интерес при испыта-
ниях ВГМ на проходимость.
Дороги с твердым покрытием. К этой группе относятся шоссе
бетонные, асфальто-бетонные, с булыжным покрытием, участки
местности с выходами скальных пород. Малый коэффициент сопро-
тивления движению на этих дорогах позволяет развивать высокую
скорость. Скоростные возможности на поворотах и в режимах тор-
можения остановочными тормозами определяются недостаточными
сцепными характеристиками. Сцепление обеспечивается силами
трения опорных поверхностей гусениц о поверхность дорожного
покрытия и незначительно зависит от давления, расположения ве-
дущих колес и других факторов. Для металлических гусениц ко-
эффициент сцепления с бетоном составляет 0,29.. .0,32, для гусениц
с обрезиненной опорной поверхностью 0,7. . .0,75.
Деформируемые грунты. Это почвы средней плотности, на ко-
торых движущаяся ВГМ образует неглубокую колею. Силы сцеп-
ления гусениц с грунтом обеспечиваются силами трения РТрОгрунт
поверхности гусениц и прилипшего к ним грунта и силами зацеп
ления Рзац грунтозацепов или выступающих площадей гусеницы
вследствие возникновения упорных реакций:
А» -Ар А« а- I р/\, 7.2)
где Атр — коэффициент трения гусеницы о грунт; р- — сопротивление (напряже-
ние) сдвигу; F, — сумма вертикальных проекций упорных поверхностей всех
грунтозацепов, находящихся в данный момент в соприкосновении с грунтом;
т0 — масса ВГМ.
Сопротивление сдвигу
+ (7.3)
где р— нормальное давление на грунт; ф. — угол внутреннего трения грунта;
tg ф»—коэффициент внутреннего трепня грунта; < модуль сдвига, характери-
зующий сцепные свойства (сцепление) грунта
Связные грунты. К этой группе относятся глины, суглинки, су-
песи, лесс, задерненные и незадерненные зональные почвы (чер-
нозем, каштановые, сероземы), состояние которых существенно за-
висит от влажности (рис. 7.1).
Как видно из графиков, сопротивление сдвигу с увеличением
влажности грунта уменьшается: липкость грунта достигает макси-
мального значения при влажности 30. .35%, а при се дальнейшем
увеличении стремится к нулю. Следует отметить, что в литературе
нет сведений о том. при какой влажности грунта для того или
иного типа гусениц коэффициент сцепления принимает наименьшее
значение. Многочисленные случаи потерн проходимости на связных
грунтах из-за недостаточного сцепления свидетельствуют о том,
что при этом, как правило, наблюдается залипание опорной по-
верхности гусениц. Поэтому испытания необходимо проводить при
влажности грунта, соответствующей его максимальной липкости
Известно, что и на сухих связных грунтах самоочищаемость
опорной поверхности траков может быть неудовлетворительной:
12 Зак. 2 «с»
169
уплотненный грунт на поверхности траков существенно уменьшает
площадь вертикальных проекций опорных поверхностей (F,), что
приводит к ухудшению сцепных характеристик. Учитывая это, ис-
пытания лучше проводить на грунтах с влажностью 20. . .25%, при
которой сопротивление сдвиг}' р принимает максимальные зна-
чения.
Рис. 7.1. Зависимость липкости X (о), коэффициента сцепления (|си и угла внут-
реннего трения ф» (б) плотного суглинка от влажности IV
Несвязные грунты. К этой группе относятся пески, щебень,
галька, гравий, некоторые снежные образования, в которых внут-
ренние силы сцепления практически отсутствуют или носят вре-
менный характер, т. е.
Р- Р • (7-4)
Экспериментально установлено, что сцепные характеристики
гусениц различной конструкции на таких грунтах практически оди-
наковы, т. е. проводить испытания ВГМ на них не имеет смысла.
Мерзлые грунты. В эту группу входят мерзлые связные грунты
и обледенелые (заснеженные) дороги с песчаным и гравийным по
крытием, сцепление гусениц с которыми обеспечивается касатель-
ными усилиями на их опорную поверхность:
Л = *,р(гу-Р,) + ^. (7.5)
где Р*— касательное усилие на опорной поверхности гусениц; kTf — коэффици-
ент трения грунтозацепов о грунт; Рц нормальная нагрузка на грунтозацеп;
Р„ — выталкивающая реакция мерзлого грунта; Р* — сопротивление мерзлого
грунта разрушению.
В свою очередь, значение Рх прямо пропорционально показа-
телю твердости грунта — глубине погружения и ширине грунто-
зацепов. С увеличением твердости мерзлого грунта силы сцепле-
ния уменьшаются и при определенном значении становятся посто-
янными, т. е. характер взаимодействия гусениц с обледенелым
грунтом такой же. как с бетонным покрытием. В целом сцепные
170
характеристики гусениц на мерзлых грунтах зависят от формы
грунтозацепов и давления на грунт.
Грунты с низкой несущей способностью. Это снег и болотные
почвы, практически неуплотняющиеся, легко выдавливаемые под
нагрузкой с образованием колеи, предельно вязкие.
Наиболее слабыми несущими свойствами отличаются неосу-
шенные болота, представляющие собой торф с относительной
влажностью более 82% во всех горизонтах, лежащий на твердом
основании и сверху обычно заросший травяной или травянисто-
кустарниковой растительностью, образующей верхний дерновой
покров болота. Состояние и свойства торфа как несущего основа-
ния для движущихся машин на практике чаще всего оценивают
двумя показателями: влажностью U7 и степенью разложения торфа
При въезде ВГМ на болото происходит смятие поверхностного
(дернового) слоя и образование колеи под опорными поверхно-
стями гусениц. С увеличением глубины болота дерновой слой про-
резается гусеницами и продавливается в торф. Если глубина бо-
лота больше клиренса ВГМ, происходит постепенная осадка кор-
пуса на поверхностный слой болота под днищем. Первоначально
в контакт с поверхностью болота вступает кормовая часть, так как
при образовании колеи корпус машины наклоняется приблизи-
тельно на 1,5° в сторону кормы. С увеличением глубины болота
осадка корпуса увеличивается, и в контакт с грунтом вступает все
большая часть днища, под которым грунт деформируется, уплот-
няется и может выдавливаться в свободное пространство ходовой
части, образующееся при погружении ее в грунт. Суммарное дав
ление на грунт со стороны опорных поверхностей гусениц снижа-
ется. Положение ВГМ в момент движения по болоту можно пред-
ставить по схеме, приведенной на рис. 7.2.
Рис. 7.2. Схема движения ВГМ по
болоту:
/ растительный слой (дерн); 2 торф;
3 — плотное основание
Движение по болоту ВОЗМОЖНО пока /со < ©сцтах •
Опорно-сцепная проходимость лимитирует скорость движения
ВГМ не только на грунтах с низкой несущей способностью. Кри-
тическими по возможности реализации требуемой для движения
тяги на опорных поверхностях гусениц по сцеплению могут быть
уклоны на местности, повороты, обледенелые и заснеженные по-
верхности грунта на местности и дорогах. Учитывая сложность
моделирования дорожных условий по сцеплению, проводят срав-
нительные испытания опытных образцов ВГМ и их прототипов, по
которым накоплен большой опыт эксплуатации на различных
грунтах.
12*
171
7.2. ОПРЕДЕЛЕНИЕ КОНСТРУКТИВНЫХ ПАРАМЕТРОВ.
ВЛИЯЮЩИХ НА ПРОХОДИМОСТЬ
Определение клиренса. Укомплектованная ВГМ, полностью за-
правленная горючесмазочными материалами, устанавливается на
ровную горизонтальную площадку, и производится контроль прел
варительного натяжения гусениц. Затем измеряется расстояние от
днища до площадки. Если точки измерений не заданы конструк
торской документацией, то их выбирают в местах, наиболее высту-
пающих за общую плоскость днища по обоим бортам в передней
и кормовой части корпуса. Общее число точек измерений должно
быть не более шести, из них три — в кормовой части днища. Изме
рения повторяются не менее трех раз при перемещениях машины
перед каждым из них. Результаты измерении клиренса представ
ляются как среднеарифметические значения по трем измерениям в
каждой из заданных точек днища.
Определение усилий под опорными катками в статическом по-
ложении. Усилия под опорными катками определяются с помощью
платформенных весов или специальных измерительных устройств,
называемых ладометрами.
При измерениях с помощью платформенных весов танк уста
навливается перед ними на горизонтальной площадке, располо-
женной на одном уровне с платформой весов. Лебедкой танк пере
мещается с малой скоростью до тех пор, по\а первая пара опор
ных катков не окажется на платформе, после чего производится
взвешивание (определение нагрузки под первой парой опорных
катков). Последовательно накатывая на платформу следующую
пару катков, снова производят взвешивание. Из полученного ре-
зультата вычитают предыдущий и получают нагрузку под каждой
парой катков.
С помощью ладометра можно измерять усилия под отдельными
катками или одновременно под всеми катками одного борта. При
этом под другой борт и под оставшиеся катки устанавливают под-
ставки, равные высоте ладометров и обеспечивающие горизонталь
ное положение машины. Подъем корпуса для установки ладо-
метров осуществляется домкратами или кранами. Под каждым
опорным катком нагрузка измеряется не менее трех раз, причем
ладометры последовательно сменяются. Во избежание скатывания
с ладометров гусеница противоположного борта затормаживается.
По результатам измерений строится диаграмма распределения
усилий под опорными катками (рис. 7.3, а).
Определение нормального давления на грунт при движении
ВГМ. Метод экспериментального определения давления под катка
ми движущегося танка разработан группой специалистов под ру
ководством А. П. Софияна. Сущность метода заключается в том,
что первичные преобразователи вертикальных нагрузок в давле
ние закапываются на глубину 50 . .60 см в специальный грунтовой
канал, представляющий собой траншею длиной 15 м и шириной
4 м, заполненную мелкозернистым (речным) песком. Канал выдер-
172
живается несколько суток для естественной осадки грунта в ме-
стах заделки преобразователей, установленных точно по колее
с интервалом, равным длине опорной поверхности испытуемой
ВГМ.
Рис. 7.3. Эпюры нормального давлс
ния на грунт катков в статическом
положении (а) и при движении тан-
ка (б)
Машина движется по под-
готовленному к измерениям
грунтовому каналу со скоро-
стью 5. ..10 км/ч на устано-
вившемся режиме. Водитель
не должен воздействовать на
приводы управления. Peru
страция сигналов с первичных
преобразователей давления
производится непрерывно. При
установке трех первичных пре
ибразователей за один проход
ВГМ по грунтовому каналу
обеспечивается трехкратное измерение давления, позволяющее
построить соответствующую эпюру (рис. 7.3, б).
Площадь опорной поверхности гусениц определяется прямым
измерением длины опорной поверхности, т. е. расстояния между
крайними опорными катками обоих бортов, к усредненному зна-
чению которого прибавляется шаг гусеницы. Ширина гусеницы
принимается по конструкторской документации.
7.3. ОПРЕДЕЛЕНИЕ ТЯГОВО-СЦЕПНЫХ ХАРАКТЕРИСТИК
Методы определения. Определение тягово-сцепных характери-
стик основано на исследовании баланса сил, воздействующих на
ВГМ в критическом но сцеплению режиме, который можно моде-
лировать следующими способами:
подбором реального грунта, обеспечивающего критический ре-
жим по сцеплению;
созданием такого режима искусственно посредством увеличе-
ния суммарных сил сопротивления движению, например, за счет
буксирования, движения на подъем;
подводом к движителю избыточной тяги, соизмеримой с силой
сцепления.
Как показала практика испытаний, единственным приемлемым
для отрасли способом создания критических режимов является
второй.
173
В смежных отраслях техники, а также при испытаниях ВГМ
в зарубежных странах (США, ФРГ) этот способ реализуется при-
менением в качестве буксира динамометрической машины, позво-
ляющей изменять нагрузку на крюке Ркр в широком диапазоне,
т. е. получать различные коэффициенты буксования 6 на различных
типах покрытий.
Создание динамометрической машины является сложной за-
дачей, так как ее тяговые и тормозные характеристики должны
быть соизмеримы с характеристиками ВГМ и иметь сцепные ха-
рактеристики на уровне гусеничных движителей
По методу В. А. Балдина гусеница принудительно вытаскива-
ется из-под опорных катков машины, перемещающейся в проти-
воположную сторону. Коэффициент сцепления при этом
феи — 2 PM3M/(«i0g). (7.6)
где Р„,м — сила, потребная для вытаскивания гусеницы из-под ВГМ: mog — вес
машины.
Этот метод обеспечивает достаточно высокую степень прибли-
жения модели взаимодействия с грунтом к реальным критическим
по сцеплению условиям, а также прямое измерение силы сцепле-
ния, однако он нс нашел широкого применения из-за трудоемко-
сти и сложности проведения испытаний.
Довольно простым является метод сравнительной оценки ВГМ
по коэффициенту сцепления в режиме полного буксования движи-
телей (6=100%). В качестве загружающего устройства в этом
случае используется ВГМ, способная при ее буксировании в затор-
моженном состоянии перевести испытуемую ВГМ в режим полного
буксования. Недостатком этого метода является невозможность
определить фсцп,ах • Между тем, некоторые особенности конструк-
ции гусениц могут проявиться именно через этот показатель. На-
пример, на бетоне гусеницы с резинометаллическим и металличе-
ским шарниром имеют одинаковые значения фец при полном бук-
совании, а ихфсцт1Х различаются на 20%
В настоящее время общепринятым является метод сравнитель-
ных испытаний ВГМ по коэффициенту сцепления в прямом и по-
перечном направлениях буксирования.
Методика сравнительных испытаний. Показателями тягово-
сцепных характеристик сравниваемых ВГМ являются фсцтах —
максимальный коэффициент сцепления при определенном значс
нии коэффициента буксования гусениц в процессе прямолинейного
движения и фсиу коэффициент сцепления при перемещении ис-
пытуемой ВГМ с заторможенными гусеницами в поперечном на-
правлении. Эти показатели определяют по экспериментальным
значениям составляющих баланса сил.
Испытания проводятся на разнообразных грунтах, не ограни-
чивающих подвижность по опорной проходимости, т. е. на дороге
с бетонным покрытием, связном грунте (суглинке) с влажностью
20—25 и 30- 35%, мерзлом связном грунте (суглинке), заснежен-
I74
ной укатанной дороге, обледенелой дороге (с гравийным или
песчаным покрытием).
При этом к поверхностям движения предъявляются следующие
требования:
поверхность бетонного покрытия должна быть сухой и очищен-
ной от грязи;
твердость мерзлого грунта по данным динамического зонди
рования должна быть не менее 120 ударов ударником ДОРНИИ;
поверхность мерзлого грунта должна быть очищена от снеж-
ного покрова, если толщина слоя снега более 2 см;
на заснеженных укатанных дорогах плотность снега должна
быть не более 0,5 г/см3 при толщине слоя не более 5 см;
на обледенелых дорогах толщина слоя должна быть не более
2 см.
Испытания на мерзлых грунтах и обледенелых дорогах сле-
дует проводить при температуре окружающего воздуха не выше
—4 °C; на заснеженных дорогах не ниже —5 °C.
Износ грунтозацепов гусениц испытуемых ВГМ не должен пре-
вышать 20% от допустимых значений; ходовая часть перед нача-
лом испытаний должна быть очищена от грязи.
На каждом из выбранных типов дорожных условий проводится
не менее четырех опытов. Предварительно в аналогичных условиях
проводится пробег на 1—2 км для того, чтобы состояние опорной
поверхности траков было характерным по степени залипаемости
для данного грунта.
В процессе испытаний ВГМ движется в одном направлении и
каждый раз по новой колее. При этом измеряются следующие па
раметры:
сила сопротивления перекатыванию изделия Р/, Н,
сила сопротивления на «крюке» Ркр, Н;
действительный путь 5Л, м;
«теоретический» путь ST, м;
сила, затрачиваемая на перемещение изделия в поперечном
направлении, Рсцу» Н;
время Т, с;
относительная влажность грунта на глубине от 0 до 15 см;
твердость грунта, ударов ударником ДОРНИИ;
плотность снега, г/см3;
толщина слоя льда (снега), см;
температура окружающего воздуха, °C.
Для определения силы Pf ВГМ буксируется лебедкой с дина-
мометрическим устройством, установленным в сцепку, со скоро-
стью не более 1 м/с.
Сила Ркр определяется с помощью динамометрического уст-
ройства, установленного в сцепку испытуемой ВГМ с другой бук-
сируемой машиной, обеспечивающей загрузку испытуемой ВГМ
до полного буксования.
175
На испытуемую ВГМ устанавливается устройство для измере-
ния действительного пути, на буксируемой машине привод управ-
ления трансмиссией устанавливается в «нейтральное» положение.
Испытуемая ВГМ начинает движение на низшей передаче и до
начала мерного участка на ней достигается частота вращения
вала двигателя, соответствующая максимальной мощности. При
прохождении границы мерного участка включается регистрирую-
щая аппаратура и буксируемая машина переводится в режим
торможения посредством плавного включения низшей передачи
без подачи топлива в двигатель и дополнительного включения
остановочного тормоза с плавным изменением тормозного усилия
вплоть до полной остановки испытуемой ВГМ.
Если испытуемая ВГМ не останавливается, следует увеличить
загрузку за счет использования машины большей массы либо од-
новременной буксировки двух машин.
Измерение силы РСЦу производится перемещением испытуемой
ВГМ с заторможенными гусеницами в поперечном направлении
лебедкой с динамометрическим устройством в сцепке на расстоя-
нии не менее 30 см.
Результаты измерений получают в виде записи процессов изме-
нения параметров Pf, Ркр, , <$т и на носителях информа-
ции (осциллограммах, магнитной ленте и др.).
Для каждого опыта подсчитывается среднее значение Pf-, по
результатам не менее двух опытов для каждого типа дорожных
условий подсчитывается среднеарифметическое значение Pf.
Значение РСЦу для каждого опыта определяется как среднее
в интервале 40—60% времени измерения; среднеарифметическое
значение РСЦу для каждого типа дорожных условий определяется
по результатам не менее двух опытов.
Графически определяется момент начала расхождения функций
5Т(Г) и 5Д(Г), соответствующий началу буксования. Момент ос-
тановки испытуемой ВГМ за счет буксования соответствует коэф-
фициенту буксования 6=100%. В интервале времени, соответст-
вующем 6= (5.. .100) %, находят максимальное значение Ркр по
огибающей или по усредняющей кривой процесса Ркр (Г).
Оценочные параметры <рСЦтах и ?сцу подсчитываются по сле-
дующим формулам:
®cu max = (^/ “Ь ^кр) » ?сцу в: •
Примеры использования методики определения тягово-сцепных
характеристик. Экспериментальные значения коэффициентов сцеп-
ления ВГМ, полученные при испытаниях в различных дорожных
условиях, приведены на рис. 7.4. Наиболее представительный по
дорожным условиям экспериментальный материал получен при
сравнительных испытаниях БМП (2) и натурной модели на се
базе (4), отличающейся конструкцией ходовой части. Тягово-сцеп-
ные характеристики ВГМ легкой категории по массе мало отлича-
176
ются на болоте, снегу, песчаном гранте; ощутимой разница стано-
вится на связном грунте, особенно на влажном, что можно объяс-
нить различной самоочищаемостью опорной поверхности траков.
В целом наибольший разброс значений фсц наблюдается на грун-
тах с низкой несущей способностью (болото, снег, мерзлый грунт,
лед) и на связном грунте средней и высокой влажности. Песчаный
грунт наименее чувствителен к изменению конструктивных пара-
метров ВГМ.
/ танк №1: 2 БМП; 3 танк № 9; 4 — натурная модель на базе БМП. 5 - танк № II:
6 - танк .V? 10
Сцепные свойства существенно зависят от состояния грунта.
Например, для ташка № 4 значения коэффициента сцепления на
снегу 0,35 и 0,45, а на льду 0,07 и 0,23, причем меньшие значения
на льду получены при положительной температуре окружающего
воздуха, а на снегу — при отрицательной.
Приведенные данные в некоторой мере подтверждают обосно-
ванность требований к внешним условиям, устанавливаемых мето-
дикой испытаний.
7.4. ИСПЫТАНИЯ НА ПРОХОДИМОСТЬ ПО ГРУНТАМ
С НИЗКОЙ НЕСУЩЕЙ СПОСОБНОСТЬЮ
Испытания на проходимость по болоту. Проходимость ВГМ по
болоту оценивается совокупностью показателей, к которым отно-
сятся следующие:
177
глубина преодолеваемого болота Н6- см;
число проходов по одной колее без застревания лпр;
число застреваний при первом заезде
коэффициент сцепления <рсц при глубине болота 60. ..70 см;
коэффициент буксования 6;
суммарный обобщенный коэффициент сопротивления движе-
нию /со;
максимально возможная скорость движения по болоту без за-
стревания Об maxi км/ч;
возможность выполнения маневров (задний ход с места застре-
вания, повороты).
Для испытаний выбираются участки болот различных типов,
отличающиеся плотностью грунта (несущей способностью), водо-
насыщенностью, растительным и дерновым покровом, глубиной
залегания торфа.
Участки для испытаний должны удовлетворять следующим тре-
бованиям:
растительный покров и дерновой слой должны быть однород-
ными, глубина залегания торфа должна изменяться постепенно
(плавно);
размеры участков должны обеспечивать проведение не менее
двух заездов каждой из испытуемых ВГМ по грунту с ненарушен-
ной структурой;
обеспечение безопасности испытаний, в том числе возможности
эвакуации застрявших ВГМ.
По однородности поверхностного слоя приемлемыми являются
болота с травяно-моховым или травяным покровом. Наличие кус-
тарниковой растительности или деревьев свидетельствует о неод-
нородности болота по несущей способности. Глубина залегания
торфа измеряется мерным щупом в различных точках; несущая
способность грунта по горизонтам определяется, как правило, с по-
мощью пенетрационных устройств, в частности пенетрометром
конструкции ЦНИИ им. Д. М. Карбышева с конусным наконеч-
ником.
В процессе испытаний измеряются следующие параметры:
теоретический и действительный путь ST и м;
расход топлива Qv, л/ч;
частота вращения вала двигателя лдв, об/мин;
глубина колеи Нкол, м;
тяга сна крюке» испытуемой ВГМ Ркр • Н;
сила сопротивления перекатыванию Pf, Н.
Кроме того, фиксируются результаты наблюдения за характе-
ром движения ВГМ и образованием колеи, за состоянием болота
в местах застревания, налипанием грунта на опорные поверхности
гусениц и прониканием в проемы ходовой части.
Заезды производятся на установившихся режимах со скоростью
5.. .7 км/ч (1,4. ..1,9 м/с). В пределах мерных участков воздейст-
178
вие на приводы управления поворотом нс допускается, так как это
может привести к буксованию движителя.
Каждый заезд выполняется следующим образом:
ВГМ устанавливается на кромке болота в направлении задан-
ного «коридора» движения;
до подхода к границе мерного участка устанавливается тре-
буемый режим движения; регистрирующая аппаратура включается
в режим записи за 1—2 с до границы участка;
в момент прохождения разметочных знаков на границах участ-
ков болота различной глубины производятся отметки «явления» на
носителях информации;
при проходе участка без застревания ВГМ возвращается в объ-
езд к началу участка; заезды повторяются до 15 раз (как пока-
зывает практика испытаний, в течение 15 проходов стабилизиру-
ется процесс образования колеи).
В случае застревания измеряются глубина колеи и расстояние
до ближайшего разметочного знака, оценивается характер нали-
пания грунта на опорные поверхности траков и проникания его в
проемы ходовой части. Если не удается вывести ВГМ с места за-
стревания задним ходом, производится ее эвакуация средствами
технического обеспечения испытаний.
Испытания с целью определения сил Р/ и Рир производятся на
участках болота глубиной 70. . .90 см, не ограничивающей движе-
ние по опорной проходимости. Силу Pf можно определять методом
буксирования лебедкой (при нейтральном положении трансмиссии)
или косвенно (по расходу топлива и частоте вращения вала дви-
гателя).
При определении силы Р„р методом буксирования в качестве
загружающей целесообразно использовать ВГМ, обладающую
лучшей (по сравнению с испытуемой) проходимостью.
Скорость max также определяется на участках болота, где при
однократном проходе не должно быть ограничения по опорной
проходимости. Из-за большого сопротивления движению по болоту
при заезде отсутствует возможность переключения передач. Зна-
чение скорости предварительно оценивается по фактическому зна-
чению fc0 и тяговой характеристике испытуемой ВГМ; необходи-
мая передача устанавливается до входа на болото. Если в резуль-
тате заезда выявляется неполная загрузка двигателя на выбран-
ном режиме, то движение осуществляется на более высокой пере-
даче.
Испытания на проходимость по снегу. Для этих испытаний еще
труднее моделировать внешние воздействия в условиях реальной
местности. Это объясняется разнообразием характеристик снеж-
ного покрова и их существенной зависимостью от атмосферных
условий. Застревание ВГМ обычно связано с преодолением снеж-
ных наносов, заснеженных подъемов и др. По этим причинам ис-
пытания на проходимость по снегу всегда носят сравнительный
характер.
179
В отрасли стремятся найти способ оценки проходимости ВГМ
по снегу с помощью определенных критериев, например, предло-
жен критерий проходимости
II =(1-ВД, (7.7)
где 4> = fc«//o — отношение коэффициентов сопротивления движению соответст-
венно по снегу н бетону; б — коэффициент буксования.
При обеспечении необходимой точности определения значений
коэффициентов ф, /сн, f0, б и характеристик снежного покрова дан-
ный критерий позволяет исключить сравнительные испытания для
оценки проходимости по снегу.
Примеры оценки проходимости по результатам испытаний. На
испытаниях установлено, что показатели <рС11 и б достаточно чув-
ствигельны к изменению параметров ВГМ (рис. 7.5). Например,
выявлен резкий переход от
значений 6=10. ..15% к пол-
ному буксованию (потере
проходимости), который име-
ет место для БМП при глуби-
не болота 60 см, а для моде-
ли — при глубине 75 см (до
глубины 60 см кривые изме-
нения 6 практически совпада-
ли). Поскольку глубина ко-
леи зависит от глубины бо
лота, объяснить разницу в
п .. хх и проходимости ВГМ можно
Рис. 7.5. Изменение глубины болота Me г
(/) и коэффициента буксования б по отличием параметров, обус-
пути для БМП (2) и натурной модели лавлнвающих опорную про-
на базе БМП (3) * 3 ’
ходимость, т. е. показатели <р,ц
и 6 в большей мере характеризуют сцепные свойства, а не проходи-
мость в целом. О проходимости ВГМ можно судить только по со-
вокупности данных, полученных при обеспечении статистической
представительности параметров дорожных условий.
Сравнительные изпытания пяти ВГМ средней категории по мас-
се, дополнительные конструктивные параметры которых приведены
в табл. 7.1, проводились на болотах трех типов:
травяно-моховое болото переходного типа (торфяная залежь)
с однородным торфяным слоем малой степени разложения и сла-
бым дерновым покровом (различная степень водонасыщонности;
несущая способность 196,2. . .392,4 кПа; глубина болота до 1,5 м);
травяное болото низинного типа с достаточно развитым дерно-
вым покровом, расположенное в пойме ручья, с большой степенью
разложения торфа и большим количеством наносных минеральных
частиц (глубина болота до 0,9 м; несущая способность
490,5.. 588,6 кПа);
180
травяное (хвощовое) болото низинного типа в состоянии мак-
симальной водонасыщенности со средней (и выше средней) сте-
пенью разложения торфа, с рыхлым поверхностным слоем (глу-
бина болота до 1,5 м; несущая способность 392,4. . .441,5 кПа;
слой верховой воды до 0,3 м.
Таблица 7.1
Конструктивные параметры некоторых танков
Параметр Номер танка
4 Й 9 10 11
Среднее давление опор- 78,5 79,5 83.5 82,5 76,5
ной поверхности на грунт, кПа (кгс/сма) (0,80) (0.81) (0,85) (0,84) (0,78)
Диаметр опорного кат- ка. м 0,555 0,670 0,670 0,750 0.830
Участки для испытаний были однородными по растительному
слою, глубине, несущей способности и водонасыщенности. Для
прохода каждой ВГМ размечались коридоры шириной 8 м; про-
тяженность мерных участков составляла от 35 до 70 м.
Таблица 7.2
Обобщенные результаты сравнительных испытаний танков на проходимость
Показатель Номер танка
4 8 9 10 и
На болоте глубиной до 150 см:
число заездов 6 6 7 6 7
число застревании На болоте глубиной до 90 см (многократное движение по од- ной колее): 0 1 2 2 6
число заездов 5 4 6 6 6
число застреваний 0 1 1 2 5
Коэффициент буксования 6, % 3,3-12,6 6.0 нет дан- ных 5,4- 22 7,9 24,9 10-23.6
Коэффициент сцепления <рС1, 0,28 0,21 0,25 0.20 0.14
Максимальная скорость Уб max- км/ч 17,3 18 22,1 1 1 г. 5,К
181
Из анализа полученных данных (табл. 7.2) следует, что танк
№ 4 имеет несколько лучшую проходимость; танки № 8, 9 и 10
практически одинаковы; танк № 11 значительно уступает осталь-
ным, т. е. оценка проходимости носит качественный характер. Ее
правомерность не вызывает сомнений, так как экспериментальные
данные достаточно представительны по числу проведенных опы
тов и числу полученных количественных показателей. Для коли-
чественной оценки проходимости этих данных недостаточно.
182
Глава 8 ИСПЫТАНИЯ НА ПРЕОДОЛЕНИЕ
ВОДНЫХ ПРЕГРАД ВГМ
8.1. ПОКАЗАТЕЛИ ВОДОХОДНЫХ СВОЙСТВ
И ПРОХОДИМОСТИ ПО ДНУ ВОДОЕМОВ
Самостоятельное преодоление военными гусеничными машина-
ми водных преград осуществляется движением на плаву или по
дну водоема. Способность двигаться на плаву обеспечивается кон-
струкцией машины (плавающие ВГМ) или оснащением неплаваю-
щей ВГМ специальными плавсредствами. Для преодоления водных
преград по дну водоема предусматривается специальное оборудо-
вание подводного вождения танка (ОПВТ) и оборудование для
преодоления глубокого брода. Способность гусеничных машин
преодолевать водные преграды на плаву характеризуется их во-
доходными свойствами (водоходностью): плавучестью, остойчиво-
стью, непотопляемостью, ходкостью, управляемостью, способ-
ностью преодолевать волнение заданной балльности.
Плавучесть — способность машины держаться на поверхности
воды в заданном положении оценивается следующими показате-
лями:
запасом плавучести, характеризующим способность машины
погрузиться до нижней точней затопляемости и затем всплыть в
результате приложения и последующего снятия дополнительной
нагрузки (определяется как отношение объема надводной части
водонепроницаемого корпуса к полному водоизмещению ВГМ);
осадкой машины по корпусу (/к) или ходовой части /ХеЧ» т. е.
максимальной глубиной их погружения;
статическими углами крена (ВсТ) и дифферента (ф<т ), харак-
теризующими начальное положение машины на плаву.
Остойчивость—способность машины сопротивляться воздейст-
вию внешних сил, выводящих ее из положения равновесия, оцени-
вается следующими показателями:
статическим и динамическим кренящими моментами (А/вст.
.Мь) и соответствующими предельными углами крена (6CT.npei.
®A.«»pei) по условиям опрокидывания или заливаемости;
максимально допустимым по условиям затопляемости стати-
ческим дифферентом на нос или корму (фпред) •
183
Производными показателями остойчивости являются креня
щий и дифферентирующий (на 1°) моменты.
Ходкость — способность машины прямолинейно двигаться по
воде оценивается следующими показателями:
максимальной скоростью движения итах по спокойной глубо-
кой воде;
скоростью буксирования сбтах, предельной по условиям зали-
ваемости;
запасом хода Sx на спокойной воде при максимальной скоро-
сти;
скоростью заднего хода у3.х •
Управляемость — способность машины совершать маневры на
плаву имеет следующие показатели:
тактический диаметр циркуляции с/т—расстояние между по-
ложениями продольной плоскости машины в начале поворота и
после изменения курса на 180°;
дрейф (выдвиг) / — расстояние, на которое смещается центр
тяжести машины по курсу при повороте на 90°;
угловая скорость поворота ш (вокруг вертикальной оси маши-
ны);
диаметр установившейся циркуляции da на спокойной воде;
период (Гц) и полупериод (Тщд циркуляции время поворота
на 360 и 180°;
путь и время разгона 5р, 7'р и торможения 5Т, 7Т (с места до
максимальной скорости и наоборот).
Способность преодолевать волнение акватории оценивается
следующими показателями:
предельной (или заданной) высотой волн (балльностью), при
которых машина может преодолевать акваторию, сохранив боего-
товность после выхода на берег (можно также оценивать степень
снижения скорости при движении с различными курсовыми угла
ми к направлению волны, или предельно допустимые параметры
качки, выводящие из строя экипаж);
предельной высотой волн, при которой на плаву возможна при-
цельная стрельба из основного оружия.
Непотопляемость (живучесть) зависит от запаса птавучестн
и остойчивости, а также от эффективности (подачи) водооткачи-
вающих средств, герметичности корпуса (характеризующейся ин-
тенсивностью проникания воды внутрь корпуса), объема (массы)
неоткачиваемого остатка воды, определяемого конструктивным ис-
полнением машины.
Иногда показателем непотопляемости считают суммарную пло-
щадь пробоин в днище, при которой машина способна выполнять
боевые задачи, что нецелесообразно, поскольку в этом (аварий
ном) случае машина становится неисправной, и ее нормальная
эксплуатация маловероятна.
Способность преодоления водных преград по дну оценивается
следующими основными показателями:
184
временем подготовки к преодолению водной преграды;
временем приведения ВГМ в боевую готовность после преодо-
ления водной преграды;
глубиной преодолеваемой водной преграды;
возможностью выхода экипажа из затопленной ВГМ на по-
верхность при аварийных ситуациях;
состоянием рабочей среды в обитаемом отделении;
герметичностью машины с ОПВТ, приведенным в рабочее со-
стояние;
эффективностью водооткачивающих средств;
точностью средств к>рсоуказания;
работоспособностью силовой установки ВГМ с ОПВТ в рабо-
чем состоянии на суше и под водой;
прочностью элементов оборудования.
Подготовка к преодолению водной преграды осуществляется
в три этапа:
I — техническое обслуживание и предварительные мероприя-
тия, предполагающие возможность преодоления водной преграды;
II — установка съемных частей оборудования;
III — приведение оборудования в рабочее положение.
Время подготовки к преодолению водной
преграды включает в себя продолжительность II и III этапов.
Приведение ВГМ в боевую готовность после преодоления вод-
ной преграды производится сбросом съемных и выводом встроен-
ных элементов оборудования из рабочего состояния без выхода
экипажа наружу или демонтажем съемного оборудования и уста-
новкой его в транспортное положение с выходом экипажа из ВГМ,
переводом встроенных элементов из рабочего состояния в исход-
ное.
Время приведения ВГМ в боевую готовность
после преодоления водной преграды определяется для каждого из
этих способов отдельно. Глубина водной преграды, оп-
ределяющая высоту воздухозаборных устройств, должна быть
больше суммы максимальной высоты водяного столба на трассе
переправы, глубины погружения гусениц в грунт и высоты волне-
ния на поверхности воды.
Аварийный выход экипажа неизбежен при застревании ВГМ
под водой и угрозе пребывания в неисправной машине под водой
больше 1 ч. Возможность безопасного выхода экипажа
из затопленного танка на поверхность определяется его
конструкцией (оценивается размерами люков в свету, габарит-
ными размерами индивидуального спасательного снаряжения и
обмундирования и др ).
Показателями, определяющими состояние рабочей
среды в обитаемом отделении, являются:
185
температура поверхностей, контактирующих с открытыми уча-
стками тела операторов;
давление внутри обитаемого отделения;
концентрация кислорода, двуокиси и окиси углерода.
Показателем герметичности машины является интенсив-
ность проникания воды во внутреннее пространство корпуса ма-
шины (в л/мин) при стоянке на заданной глубине. Иногда о гер-
метичности судят по понижению давления внутри танка за счет
отбора воздуха из герметизированного пространства воздухоотка-
чивающим устройством.
Эффективность водооткачивающих средств
характеризуется их подачей на заданной глубине.
Точность средств курсоуказания характеризуется
уходом катушки курсоуказ а тел я.
Показателями работоспособности силовой установки
являются:
температура охлаждающей жидкости, масла и поверхности ох-
лаждаемых деталей и агрегатов силовой установки (СУ);
предельная температура окружающего воздуха, при которой
охлаждается СУ;
тяговые усилия на опорной поверхности гусениц при движении
под водой;
возможность пуска двигателя под водой (глубина, на которой
возможен пуск, и параметры системы пуска).
Прочность элементов оборудования для прео-
доления водных преград должна быть достаточной для движения
машины по прилегающей местности со случайным микропрофилем
с заданной скоростью на расстояние не менее 20 км.
82. СРЕДСТВА ИСПЫТАНИЙ
Испытания оборудования, обеспечивающего преодоление вод-
ных преград, проводятся в естественных или искусственных водо
емах, на стендах для испытаний ВГМ либо в специально оборудо-
ванных бассейнах.
Водоемы для испытаний танков с оборудованием для движения
по дну. Для испытаний оборудования подводного вождения и глу-
бокого брода используются искусственные бетонные бассейны,
имеющие регулируемый уровень воды, максимальную глубину
6.. .8 м, длину донной части от 30 до 100 м, входы и выходы кру-
тизной 10. ..30°. Такие бассейны существуют как в нашей стране,
так и за рубежом. Их общим недостатком является ограничен-
ность размеров и невозможность длительного вождения танков
под водой.
В этом отношении перспективен отечественный проект бас-
сейна, позволяющего при буксовании ВГМ под водой на металли-
186
чеоких беговых дорожках за счет изменения сцепных характери-
стик (с помощью прижимных ферм) моделировать различные ре-
жимы движения (рис. 8.1).
Рис. 8.1. Бассейн для испытаний танков с ОПВТ:
а — фронтальный разрез, б — профильный; /—бетонное основание. 2 — металлические бе-
говые дорожки; 3 напорная и сливная емкости; -I — прижимные фермы
Рис. 8.2. Подводный нагрузочный
стенд:
I — сигнальная веха; 2 — раструб; 3 —
кронштейн; -/ — полая емкость (понтон);
5 — беговые дорожкн: 6 платформа;
7 отбойник, предотвращающий зарыва
ние в грунт при буксировании; 8 — бук
сирный рым; 9 — продувочные горловины;
10 затопляемый отсек; II — воздушный
ящик; 12 — трубопровод с арматурой
Более простым средством
воспроизведения длительных
подводных режимов является
нагрузочный стенд (рис. 8.2).
Такой стенд может применять-
ся в любых внутренних водое-
мах: его буксируют на плаву
(за рымы 5) к месту испыта-
ний, ориентир) ют в направле-
нии входа на него испытуемого
танка, затапливают (заполняя
водой отсеки 10) и обозначают
сигнальными вехами. Танк зача-
ливается тросом со страхующим тягачом или лебедкой, которые
187
затормаживаются при входе его на стенд (рис. 8.3). Поступа-
тельное движение танка переходит в буксование на металлической
платформе стенда, что равноценно преодолению сопротивления
движению, которое варьируется за счет переключения передач
трансмиссии и изменения частоты вращения ведущих колес.
Рис. 8.3. Положение испытуемого танка и тягача на подводном стенде до и
после испытаний (а) и в процессе испытаний (б)
Для проверки работоспособности силовой установки при дви-
жении под водой, а также для определения состояния рабочей
среды внутри ВГМ и для других целей используются стенды
комплексных испытаний гусеничных машин; окончательная про-
верка производится в водоемах заданной глубины и протяженно-
сти, для чего в них оснащается специальная подводная трасса.
Трасса должна иметь следующие характеристики:
твердый или песчаный грунт;
ровные берега с крутизной входа не более 25° летом и 15° зи-
мой, выхода — не более 15° летом и 10° зимой;
пологое дно с крутизной подъемов не более 12°;
длина не менее 50 м и ширина не менее 40 м;
скорость течения не более 2м/с;
буйки или вехи по всей длине трассы.
На трассе не должно быть уступов высотой более 0,4 м, ям диа-
метром более 2 м, крупных камней высотой более 0,3 м, топкого
грунта дна или слоя ила более 0,3 м.
Водоемы для испытаний плавающих машин. Испытания по
определению статических параметров плавучести, запаса плаву-
чести, остойчивости проводятся в специально оборудованном гид-
робассейне или на участке водоема с пологим дном и спокойной
188
водой (без течения), закрытом от воздействия ветра, где глубина
не более чем на 0,5 м превышает максимальную осадку машины
(рис. 8.4).
Рис. 8.4. Бассейн для определения остойчивости и запаса плавучести:
/, 6 лебедки; 2. в - анкеры; 3 — испытуемая ВГМ; 4 — кран; 5, to - тросы: 7 динамо
метр; 9 линейки
Определение показателей ходкости и управляемости произво-
дится, как правило, на тихой воде естественных или искусственных
водоемов, оборудованных дистанционными и курсовыми створны-
ми знаками, а также с удобным входом в воду. Схема размещения
типовых элементов оборудования такого водоема приведена на
рис. 8.5.
Рис. 8.5. Схема размещения типовых элементов оборудования водоема для ис-
пытании плавающих ВГМ:
I — площадка для подготовки испытуемых образцов и размещения средств технического
обеспечения; 2 - бассейн для определения запаса плавучести и остойчивости; 3 участок
для испытаний на мелководье; 4 — участок для испытаний на качку; 5 — водная директ
риса. 6 буи. створные знаки, вехи, 7 участок для швартовных испытаний. 8 участок
для испытаний на вход и выход; У—участок для ходовых испытаний
189
Наиболее сложно выбрать водоем для испытаний на волнении,
так как характер и степень волнения зависят от размеров водного
пространства, открытого для разгона волн, скорости и направле-
ния ветра, глубины водоема, а также характера прилегающих бе-
регов.
При выборе водоема для ислыганий на волнении необходимо
добиваться его соответствия преобладающим условиям эксплуата
ции испытуемого образца. В любом случае должен быть преду-
смотрен защищенный от волнения участок побережья для без-
опасного входа и выхода машины на берег.
8 3 ИСПЫТАНИЯ ТАНКОВ С ОБОРУДОВАНИЕМ
ДЛЯ ДВИЖЕНИЯ ПО ДНУ
Танки с оборудованием для движения по дну испытываются в
определенной последовательности, предписанной отраслевым стан
дартом. Сначала в стационарных условиях определяются показа-
тели, характеризующие живучесть машины и возможность спасе-
ния экипажа в аварийных ситуациях (эффективность водооткачи-
вающих средств, герметичность корпуса, возможность перемещения
членов экипажа внутри танка и выхода из него, функционирова-
ние встроенных элементов посредством многократного перевода их
из транспортного положения в рабочее и обратно), а также пока-
затели, характеризующие длительность и трудоемкость под-
готовки танка к преодолению водной преграды и последующего
приведения его в боеготовность.
Далее пробегом по суше проверяется прочность элементов
ОПВТ и работоспособность силовой установки. Завершающим
этапом являются испытания на подводном нагрузочном стенде,
в испытательном бассейне или на подводной трассе водоема.
Проверка теплового состояния и работоспособность силовой
установки. Испытуемый танк устанавливается на общемашинный
стенд; положение ОПВТ должно соответствовать исследуемым ус-
ловиям движения (по суше или под водой). Силовая установка
танка прогревается в результате работы без нагрузки или с ча-
стичной нагрузкой, затем имитируются наиболее вероятные усло-
вия ее эксплуатации: нагрузка, соответствующая 60, 80 и 100%
максимальной мощности двигателя, при частоте вращения, соот-
ветствующей максимальному крутящему моменту, максимальной
мощности и мощности, рекомендуемой для движения под водой по
результатам стендовых испытаний двигателя.
Через каждые 3—5 мин измеряют температуру охлаждающей
жидкости, масла и поверхности сборочных единиц силовой уста-
новки, а также тяговое усилие на опорной поверхности гусениц
или крутящий момент на валах ведущих колес. Измерения про-
должаются до установившегося теплового состояния систем сило-
вой установки или до достижения одним из измеряемых парамет-
ров предельно допустимого значения.
190
Тепловое состояние считается установившимся, если при трех
последовательных измерениях зафиксирована одинаковая (в пре-
делах погрешности измерений) разность температур деталей сило-
вой установки и окружающего воздуха.
Для танков без выпускной трубы (с выпуском газов в воду) с
помощью технологических устройств имитируется противодавление
водной преграды на выпуске и испытания повторяются.
Предельная температура окружающего воздуха, при которой
эффективна система охлаждения ВГМ,
(81)
где ti— предельно допустимое значение температурного параметра, определяю-
щего тепловое состояние силовой установки; Л/ = /, —/<>«₽; измеренная тем-
пература параметра; /о«₽ — температура воздуха при испытаниях.
При определении тягового усилия учитываются потери в согла-
сующих устройствах стенда и ходовой части ВГМ, рассчитанные
по методике, принятой на данном стенде. По результатам измере-
ний строится график зависимости тягового усилия от скорости пе
рематывания гусениц на суше и под водой.
Определение состояния рабочей среды внутри обитаемого от-
деления танка. Состояние рабочей среды обычно проверяется од-
новременно с работоспособностью силовой установки на комплекс-
ном общемашинном стенде (движение по суше) и подводном на
грузочном стенде (движение под водой).
Танк при подготовке к испытаниям оборудуется датчиками для
измерения температуры поверхностей деталей, средствами измере-
ний барометрического давления и отбора проб воздуха для опре-
деления концентрации кислорода и окислов углерода.
Барометрическое давление измеряется на переходных режи-
мах силовой установки, при пуске двигателя, резком изменении
частоты вращения вала двигателя в диапазоне от минимального
до максимального значений, остановке двигателя, минимальной
частоте вращения вала двигателя в танке без экипажа в момент
открывания и закрывания люков водителя и других членов эки-
пажа.
Для обеспечения безопасности участников испытаний скорость
изменения давления не должна превышать установленные нормы,
для чего следует производить пуск и остановку двигателя при от-
крытом люке, постепенно изменять частоту вращеч»ия вала двига-
теля, открывать и закрывать люки при остановленном двигателе
или минимальной частоте вращения его вала.
Температура, давление и состав газов на рабочих местах эки-
пажа измеряются при максимальной загрузке силовой установки
на режимах движения по суше (частичная герметизация танка) и
под водой (полная герметизация) с противодавлением на выпуске
и без него.
Определение герметичности корпуса. Испытания на герметич-
ность проводятся двумя способами: погружением танка под воду
191
или снижением давления внутри его корпуса за счет отбора воз-
духа собственным двигателем либо посторонним воздухооткачи
вающнм устройством.
Первым способом определяют количественные характеристики
герметичности, вторым — проверяют качество герметизации.
Погруженный под воду танк выдерживается определенное вре
мя на заданной глубине, затем выводится на берег; проникшая в
корпус вода сливается в мерную или технологическую емкость.
Герметичность оценивается интенсивностью проникания воды
в корпус:
<?.= ИВ/Г, (8.2)
где Q. — в л/мин (м’/с); V. — объем проникшей в корпус волы. л (м3); 7 —
время выдержки танка в воде, мин (с)
Качество герметизации оценивается при понижении давления
внутри корпуса по характерному звуку подсасываемого воздуха
в местах разгерметизации. Испытания с использованием воздухо-
откачивающего устройства продолжаются до тех пор, пока после
устранения нарушений герме-
тизации не будет получено ус-
тановившееся значение пони-
женного давления внутри объ-
екта, по которому с помощью
номограммы (рис. 8.6) опреде-
ляется герметичность.
При отборе воздуха собст-
венным двигателем качество
герметизации считается удов-
летворительным, если в корпу-
се танка отсутствует (устра-
нен) подсос воздуха.
Определение подачи (эф-
фективности) водооткачиваю-
щих средств. Испытания прово-
дятся на суше. В корпус танка
заливается вода до безопас-
Рнс. 8.6. Номограмма для оценки
герметичности танка с ОПВТ:
/, 1, 3 — при давлении снаружи корпуса
5. 3 и 2 тыс. мм вод. ст. (49; 29,4 и
19,6 кПа) соответственно. 4 при 1 тыс. мм
вод. ст. (9,8 кПа); Др разность давле
ний внутри и снаружи корпуса
ного уровня по условиям сохранения работоспособности сборочных
единиц и систем. Затем определяется подача каждого в отдельно-
сти водооткачивающего насоса посредством откачивания воды в
технологическую емкость и измерения ее объема мерной посудой.
Кроме того, определяется неоткачиваемый остаток воды при трех
192
положениях танка: горизонтальном, дифференте на корму и на нос
по 15°. Оставшуюся в корпусе после откачивания воду через люч-
ки и пробки днища также сливают в технологическую емкость до
прекращения струйной течи и измеряют ее объем.
Испытания всех насосов выполняются сначала при горизон-
тальном положении танка, затем при дифференте на нос и корму.
Подача насосов рассчитывается делением объема удаленной с их
помощью воды на время откачивания.
Определение возможности выхода членов экипажа из затоп-
ленного танка. Испытания проводятся в три этапа:
1 — в стационарных условиях на суше;
И — под водой на малой глубине;
III —под водой на предельной глубине, предусмотренной ТТХ.
На I этапе испытаний определяются возможность демонтажа
сборочных единиц и последовательность действий каждого члена
экипажа при выходе из танка через свой люк или переходе на дру-
гое рабочее место в индивидуальном спасательном снаряжении, в
летнем и зимнем обмундировании
На II этапе испытаний под водой определяются способы без
опасного для экипажа затопления танка через шахты смотровых
приборов; на III этапе — время затопления танка и выхода эки-
пажа на поверхность.
Перед испытаниями проводятся занятия с экипажем по легко
водолазной подготовке. Испытания начинаются с определения воз-
можности выхода каждого члена экипажа в индивидуальном спа-
сательном снаряжении через свой люк, удобства выхода и после-
до вательности действий при этом.
Следует отметить положение вооружения, при котором возмо
жен выход водителя через свой люк и переход в боевое отделение.
Далее выполняются переходы членов экипажа внутри обитае-
мого отделения, необходимые в случае, если выход через тот или
иной люк невозможен. При этом особое внимание уделяется обес-
печению целости индивидуального спасательного снаряжения.
На люки танка устанавливаются технологические трубы-лазы,
размеры которых должны соответствовать размерам люков, а вы-
сота равна 0,9. 1м.
Подготовленный к испытаниям танк устанавливается в водоем
так, чтобы смотровые приборы исследуемого рабочего места на-
ходились под поверхностью воды на глубине 0,1.. .0,2 м. При этом
в танке может находиться лишь один оператор на своем рабочем
месте.
Танк устанавливают в водоем с помощью буксира, скатывая его
по наклонному спуску или регулируя уровень воды в испытатель-
ном бассейне. Через трубу-лаз (рис. 8.7) другие участники испы-
таний ведут наблюдение за действиями оператора, поддерживают
с ним связь, контролир}ют самочувствие и фотографируют харак-
терные моменты.
3 Зак. 2 «о
193
Оператор в снаряжении, приведенном в рабочее состояние, сни-
мает смотровой прибор и затопляет танк; при этом определяются
характер воздействия струи воды на оператора и его индивидуаль-
ное спасательное снаряжение, что позволяет выбрать положение,
при котором исключается попадание струи воды на дыхательный
мешок и возможность баротравмы легких.
Рис. 8.7. Танк с технологическими трубами-лазами в бассейне
По мере затопления танка оператор приобретает положитель-
ную плавучесть и должен прилагать усилия, чтобы сохранить рав-
новесие и устойчивое положение в танке, что особенно важно учи-
тывать при выполнении переходов в затопленном танке. По окон
чании опыта танк эвакуируют из водоема для слива воды и
подготовки к следующим экспериментам. Испытания повторяют
для каждого оператора; по результатам испытаний определяют
возможные варианты затопления танка и составляют инструкцию
по их выполнению.
По подготовленной инструкции тренируют экипаж полного со-
става на суше, затем та-пк с экипажем устанавливают в водоем на
предельную глубину. При первом погружении индивидуальное спа-
сательное снаряжение экипажа должно быть приведено в рабочее
(боевое) состояние, при последующих погружениях оно должно
быть надето.
Производят затопление танка и определяют время затопления
(до заполнения воздухопитающей трубы). Затем осуществляют
выход экипажа из затопленного танка с определением времени для
каждого способа выхода (от подачи команды на эвакуацию из
танка до выхода на поверхность последнего члена экипажа). Воз-
194
можность выхода экипажа из танка оценивается следующими кри
териями: «Выход всзможен без ограничений», «Выход возможен
с ограничениями», «Выход невозможен».
Оценочный критерий «Выход возможен без ограничений» озна-
чает, что для переходов и выхода всех членов экипажа в любом
штатном обмундировании и с любым штатным видом индивиду-
ального аварийно-спасательного снаряжения в танке, находящем-
ся под водой, не требуются демонтаж отдельных деталей или сбо-
рочных единиц и изменение их положения
Критерий «Выход возможен с ограничениями» означает, что для
обеспечения переходов внутри танка и выхода экипажа требуется
проведение несложных демонтажных работ или изменение поло-
жения систем танка, либо члены экипажа должны находиться в
танке только в определенном обмундировании или с определенным
видом спасательного снаряжения, либо перемещаться внутри
танка и покидать его только в определенном положении и только
через определенный люк.
Критерий «Выход невозможен» означает, что для обеспечения
переходов и выхода необходимо проведение демонтажных работ
с использованием ЗИПа или привлечение аварийно-спасательной
службы.
Проверка функционирования встроенных элементов. Проверка
функционирования производится многократным (до 100 циклов)
переводом встроенных элементов оборудования из походного по-
ложения в рабочее и обратно.
В начале и по окончании испытаний измеряются усилия на ор-
ганах управления встроенными элементами оборудования и про-
веряется герметичность танка с оборудованием, установленным в
рабочее положение.
Если при выполнении заданного числа циклов не отмечено из-
менение технического состояния и нарушение взаимодействия
встроенных элементов, а усилия на органах управления и герме-
тичность объекта остались в заданных пределах, то функциони-
рование оборудования признается нормальным
При определении времени подготовки танка к преодолению
водной преграды и последующего приведения его в боевую готов-
ность производится хронометраж трехкратного выполнения эки-
пажем всех необходимых операций.
Испытания проводятся в следующем порядке: составляется
полный перечень операций, выполняемых последовательно одним
и несколькими членами экипажа; выбирается оптимальный вари-
ант выполнения каждой операции (минимальные затраты времени
при наименьшем составе участников). Операции распределяются
среди членов экипажа с учетом их функциональных обязанностей.
Затем составляются операционные карты, по которым работы вы-
полняются трижды, после чего производится зачетная работа, на-
чинающаяся с подачи команды и завершающаяся последней опе-
рацией.
Пробеговые испытания на суше. При движении должны моде-
лироваться разрушающие воздействия на оборудование и пре-
дельно возможные нагрузочные режимы работы силовой установ-
ки танка.
Проверка прочности оборудования и сохранения герметично-
сти танка производится пробегом на расстояние 20—25 км по
участку танковой трассы со случайным микропрофилем, накатан-
ным ВГМ. Скорость движения при испытаниях оборудования для
преодоления глубокого брода — максимально возможная по до-
рожным условиям, а при испытаниях ОПВТ—на передачу ниже.
Тепловое состояние силовой установки проверяется в пробеге
по ровному участку трассы с максимальной скоростью.
Испытания проводятся в следующем порядке: оборудование
устанавливается в положение для преодоления водной преграды
и проверяется герметичность танка, затем оборудование перево-
дится в положение, предусмотренное для движения по местности
перед преодолением водной преграды.
Выполняется пробег по участку трассы со случайным микро-
профилем. При движении танка регулирование теплового состоя-
ния СУ при достижении предельных или близких к предельным
значений температурных параметров допускается производить за
счет снижения скорости движения. По окончании пробега прове-
ряется герметичность танка тем же способам, что и перед пробе
гом, а также функционирование встроенных элементов и техниче-
ское состояние сборочных единиц оборудования
При этом же положении оборудования (для подхода к водной
преграде) совершается пробег по ровному участку трассы до до-
стижения установившегося или предельного теплового состояния
силовой установки. Регистрируются скорость движения, время и
протяженность пробега, начальные и конечные значения темпера-
турных параметров.
Рис. 8.8. Изменение теплового состоя-
ния силовой установки танка в про-
беге при полной (/) и частичной (2)
герметизации МТО (сплошные ли-
нии — для системы охлаждения;
штриховые — для системы смазыва-
ния; штрихпунктнрные — прогрев на
холостом ходу)
При обработке результатов
определяется допустимая ско-
рость движения перед преодо-
лением водной преграды и вы
числяется предельная темпера-
тура окружающего воздуха,
при которой обеспечивается
охлаждение двигателя и трансмиссии. Пример изменения теплового
состояния силовой установки при испытаниях приведен на рис. 8.8.
196
Примеры обработки результатов. 1. В режиме полной гермети-
зации танк с вентиляторной системой охлаждения и ОПВ начал
движение по трассе при начальной температуре охлаждающей
жидкости и .масла 65°C. Через 6 мин движения /ж = 107°С, /м =
= 105°C при температуре окружающего воздуха 14 °C. Предельно
допустимая температура в системах охлаждения и смазывания
двигателя 115°С. Темп роста /ж составил 7°С/мин. Скорость
движения танка под водой на низшей передаче 5,5.. .6,5 км/ч. По-
скольку /ж и в пробеге продолжали повышаться, можно ожи-
дать, что до предельно допустимых их значений танк может дви-
гаться 6,4 мин, пройдя за это время 580.. .690 м.
2. В режиме частичной герметизации танк начал движе<ние с
максимально возможной скоростью при максимально допустимой
температуре охлаждающей жидкости и масла. В процессе движе-
ния tM снизилась до 90, а —до 85 °C. Разница с температурой
окружающей среды соответственно Д/ж = 76 °C и Л/М=71°С.
Предельные температуры окружающего воздуха, при коорых
обеспечивается охлаждение частично герметизированной силовой
установки: по охлаждающей жидкости /пред =/жт.ж — А/ж = 39 °C;
по маслу /„ред /м mix - АЛ. =44 °C.
Подводные испытания в водоеме. Подготовка к испытаниям
включает в себя:
проверку курсоуказателя (при испытаниях на подводной трас-
се);
проверку индивидуального спасательного снаряжения;
проверку внутренней связи и радиосвязи;
отключение наружных топливных баков во избежание их де-
формации от наружного давления при выработке топлива;
проверку состояния аккумуляторных батарей — при пусковых
испытаниях;
отключение средств пожаротушения от систем автоматического
срабатывания;
определение герметичности танка;
укладку штатных буксирных тросов из расчета соединения их
с тросом страхующего тягача без помощи водолазов (на случай
вынужденной эвакуации).
Испытания начинаются с прогрева силовой установки. Сначала
регистрируются начальные параметры ее теплового состояния, за-
тем совершается переход по подводной трассе или дну испыта-
тельного бассейна. Если тепловое состояние СУ позволяет пройти
под водой расстояние не менее длины подводной трассы, переходы
совершаются в прямом и обратном направлениях с выходом на
сушу и разворотами на берегу.
Испытания на подводном стенде проводятся на всех возможных
передачах трансмиссии до достижения установившегося или пре-
дельного теплового состояния силовой установки. По окончании
испытаний танк своим ходом или с помощью тягача выводится на
берег.
197
Испытания по определению возможности пуска и параметров
системы пуска (пусковые испытания) для танков с выпуском га
зов в воду проводятся с последовательным увеличением глубины
погружения, а при выпуске газов в атмосферу (при наличии вы-
пускной трубы) — только на предельной глубине.
Пуск двигателя производят поочередно каждой из систем в от-
дельности (электропуск, воздухопуск) или совместно.
По результатам визуальных наблюдений, кино- и фотосъемок
определяется защищенность воздухозаборного устройства от по
падания в него воды на предельной глубине (при движении и
остановке танка) и при выходе из воды на берег (с остановкой на
подъеме), т. е. в наиболее неблагоприятных положениях, когда
устройство оказывается вблизи буруна, образуемого выпускными
газами. Кроме того, при низкой температуре воздуха оценивается
возможность обмерзания входных отверстий.
Возможность пуска двигателя под водой оценивается его на-
дежностью, продолжительностью пуска, пусковой характеристи-
кой, максимальной глубиной погружения, при которой он возмо-
жен, напряжением бортовой сети при работе системы электропуска
или давлением в баллонах воздушной системы.
8.4. ИСПЫТАНИЯ ПЛАВАЮЩИХ МАШИН
Методы определения показателей водоходных свойств плаваю-
щих машин можно разделить на две основные группы.
К первой группе относятся методы, когда для оценки конструк
тивного совершенства машин из модели эксплуатации исключают-
ся субъективные и переменные возмущающие факторы, действую-
щие в системе человек—машина—среда (квалификация водителя,
гидравлические и метеорологические параметры водной среды и
др.). Испытания проводятся на тихой воде (без течения и волне-
ния) в стационарных условиях, на установившихся режимах с за-
данным положением органов управления. Такими методами опре-
деляются статические показатели плавучести и устойчивости, тяго-
водинамические характеристики, показатели управляемости.
В методах второй группы влияние внешней среды на поведение
плавающей машины исследуется посредством моделирования воз
мущающего воздействия характеристик водных преград (течения,
волнения, глубины, состояния дна и берегов) с учетом управляю-
щих воздействий операторов, компенсирующих или уточняющих
реакцию машины на воздействие среды.
Определение герметичности корпуса и эффективности водоот-
качивающих средств. Проверке на герметичность подвергаются
корпус, а также бортовые передачи, ходовая часть (полости опор
ных катков, направляющих колес и др ). Машина своим ходом
или скатыванием погружается в воду и выдерживается на плаву
в течение 40—60 мин (при отсутствии аварийных течей) без вклю
чения водооткачивающих средств. Испытания водооткачивающих
198
средств возможны на мелководье или на плаву без имитации про-
тиводавления на трассе выброса воды.
Определение статических характеристик танка на плаву. Испы
тания проводятся на спокойной воде в безветренную погоду. При
этом определяют положение ватерлинии, осадку машины по кор-
пусу и ходовой части, статический крен и дифферент.
Для измерения углов крена и дифферента выбирают на кор-
пусе или внутри него контрольную площадку и определяют углы
ее наклона в продольной и поперечной плоскостях относительно
основной плоскости машины — плоскости днища. Положение дни-
ща определяют при установке машины днищем на технологиче-
ские опоры либо путем измерения углов наклона поверочной ли-
нейки, соприкасающейся с ним.
Углы наклона контрольной площадки рассчитываются по сле-
дующим формулам:
♦„); (8-3)
»„= ±»L-( J М. (8-4)
где ®пл • Iпл ’ ~соотвстствснно углы наклона контрольной площадки
и днища, измеренные по отношению к горизонту
Знак «-}-> принимается при наклоне днища и площадки в про-
дольной плоскости на корму, в поперечной — на левый борт;
«—» — на нос и правый борт.
После входа машины в воду, полной ее остановки и прекра-
щения колебаний отмечается положение ватерлинии на корпусе.
На суше по отметкам на корпусе водостойкой краской наносят
ватерлинию для контроля положения машины на плаву.
Осадка по ходовой части измеряется с обоих бортов машины
и при необходимости в нескольких точках. Осадка по корпусу мо-
жет быть определена на суше — после нанесения ватерлинии.
С целью исключения влияния на положение машины на плаву
дополнительной нагрузки нанесение ватерлинии и измерение осад-
ки производятся с постороннего плавсредства.
Углы крена и дифферента на плаву измеряют по положению
контрольной площадки при статическом положении машины и в
движении при установившихся режимах.
Дифферент и крен танка определяются по следующим форму
лам:
I ± Фнам —(±Ю; (8-5)
0=± 0изм-(±6пл). (8.6)
Определение запаса плавучести. Испытания проводятся в гид-
робассейне или открытом водоеме на спокойной воде вблизи обо
рудованного участка берега. При отсутствии водопроницаемых
мест в корпусе погружение машины производится до верхней
кромки корпуса. Заливание крыши корпуса при этом недопустимо.
199
В процессе испытаний определяется суммарная масса балласт-
ного груза, при укладке которого объект погружается в воду до
водопроницаемых мест.
Запас плавучести определяется как отношение массы дополни-
тельного груза к массе машины (в %).
Определение характеристик начальной остойчивости танка.
Различают остойчивость при малых (начальная остойчивость) и
больших наклонениях.
При оценке начальной остойчивости экспериментально опреде-
ляется зависимость углов наклонения от приложенного момента
Испытания проводятся в гидробассейне или открытом водоеме
на спокойной воде при глубине не более 1,5 осадок ВГМ (вблизи
берега). Машина наклоняется с помощью балластных грузов, об-
щая масса которых (за исключением имитаторов массы членов
экипажа) должна быть не более 10% массы машины Грузы ук-
ладываются внутри и снаружи корпуса.
Углы наклона корпуса при переносе грузов определяют с по-
мощью квадранта на контрольной площадке после прекращения
колебаний корпуса.
По результатам измерений строят графики зависимости крена
и дифферента от приложенных моментов, равных произведению
массы дополнительного груза на расстояние от него до диамет-
ральной или поперечной плоскостей, проходящих через центр тя-
жести машины.
Определение тягово-динамических характеристик танка на
плаву. Определение тяги водоходных движителей. В общем случае
тяга (упор) водоходного движителя при движении машины на
плаву характеризуется силой
Рш = m (фп — v)l А Т - p.Svn (vn - v), (8.7)
где р., tn, va — соответственно плотность, масса и скорость потока воды, отбра-
сываемой движителем, и — скорость потока воды перед движителем (принима-
ется равной скорости движения танка); 5—площадь гидравлического (рабоче-
го) сечения движителя, Г —время.
Экспериментально определить скорость потока ип очень труд-
но, поэтому тягу определяют в швартовном режиме (о=0):
Рш. = РгЧ2. (8.8)
откуда
Рп- - «),
т. е. тяга при движении машины меньше (на 20. . 30%), чем в
швартовном режиме.
Испытуемая ВГМ, расположенная на расстоянии не менее 50 м
от берега, крепится тросом к неподвижному анкеру. Глубина во-
доема в месте установки машины должна быть не менее трех ее
осадок. В процессе испытаний измеряют тягу водоходных движи-
телей, частоту вращения их рабочих органов и определяют метео-
рологические условия.
200
Результаты испытаний представляют графически (рис. 8.9).
Определение максимальной скорости движения. Скорость дви-
жения ВГМ на плаву существенно зависит от глубины водоема,
действия ветра и волнения.
Результаты испытаний макета, выполненного на базе серий-
ной плавающей .машины, и с корпусом, оборудованным плавсред-
ствами в виде носового и кормового обтекаемых понтонов, улуч-
шающих его обводы, показывают (рис. 8.10), что даже при сла-
бом волнении скорость движения плавающих машин снижается
(на 8. ..13% при плохом обтекании корпуса; на 6. . .8% при улуч-
шении обводов). Очевидно, что при определении максимальной
скорости влияние волнения необходимо исключить.
Рис. 8.9. Зависимость тяги на швар-
товах Рш, от частоты вращения ра
бочих колес водометов лР к
Рис. 8.10. Влияние волнения на ско-
рость движения плавающей машины
с серийным корпусом (/) и усовер-
шенствованным (2): сплошные ли-
нии — для спокойной воды; штрихо-
вые — для волнения до 1 балла
Еще большее влияние на скорость движения оказывает мелко-
водье, что обусловлено увеличением местных скоростей потока
под днищем вследствие уменьшения площади сечения и изме-
нением характера волнообразования. Чтобы обеспечить единооб-
разие оценки скоростных характеристик плавающей машины, а
значит, и сопоставимость результатов испытаний в различных во-
доемах, используют достаточные глубины (в судостроении, напри-
мер, порядка 8 -10 осадок). В танкостроении целесообразен дру-
гой путь — учет влияния глубины через поправочные коэффициен
ты влияния мелководья на скорость и на тягу водоходных движи
телей на швартовах:
К, = «/«„: Кр - Р!Рн- (8.9)
где V, Р — скорость и сила тяги на швартовах на глубокой воде; Рн — на
мелководье.
|4 Зак. 2 «с»
201
Коэффициенты Kv и Кр в зависимости от отношения глубины
водоема Н к осадке машины по ходовой части для максималь-
ной скорости движения и тяги на швартовах различных типов
боевых плавающих машин приведены на рис. 8.11.
Рис. 8 11. Коэффициенты влияния
мелководья на тягу на швартовах
(штриховые линии) и скорость
(сплошные линии) боевых плавающих
машин:
I, 4 гусеничных с водометными движн
гелями (н том числе с изменяемым или
рейсом), 2 колесных с водометным дви
жителем (с независимой подвеской); 3,
5 — гусеничных с гусеничным водоходным
движителем
Максимальная скорость
движения ВГМ на плаву опре-
деляется по времени прохож-
дения мерного участка в во-
доеме на установившемся ре-
жиме работы двигателя. Мерный участок должен иметь постоян-
ную глубину не менее шести осадок по ходовой части ВГМ.
По результатам испытаний строится графическая зависимость
скорости движения от частоты вращения рабочих органов водо-
ходного движителя, по которой определяются максимальная ско-
рость и соответствующий ей режим работы двигателя.
Если глубина водоема меньше шести осадок машины по хо-
довой части, полученное значение максимальной скорости умно-
жают на коэффициент влияния мелководья Kv.
Аналогично определяется максимальная тяга на швартовах.
Определение сопротивления воды (буксировочного сопротивле-
ния). Суммарное сопротивление воды, включающее в себя сопро-
тивления формы, трения и волновое, равно тяговому усилию бук-
сирования машины с заданной скоростью. Буксирование возмож-
но двумя способами: буксирной лебедкой и плавающим буксиров-
щиком.
Условия проведения испытаний (глубина и состояние поверх-
ности), диапазон скоростей, методы измерения такие же, как и при
самоходном движении. При использовании плавающего буксиров-
щика длина буксирного троса должна быть такой, чтобы исклю-
чить влияние струи воды водоходного движителя буксировщика на
испытуемую машину. В процессе испытаний измеряют тяговое
усилие и скорость буксирования ов; полученные результаты
представляются в графической форме (рис. 8.12).
Определение показателей управляемости. Движение машины
по криволинейной траектории под воздействием поворачивающего
момента, создаваемого водоходными движителями или рулевыми
устройствами, принято называть циркуляцией. Управляемость ма-
шины оценивается параметрами циркуляции, определяемыми раз-
личными способами.
202
Наиболее приемлемым является способ измерения угловых ко-
ординат машины на циркуляции двумя или тремя пеленгаторами,
разнесенными на фиксированное расстояние друг от друга, с по-
следующим графическим воспроизведением траектории в масштабе
или с аналитическим расчетом элементов траектории. Этот спо-
соб достаточно трудоемок, но обеспечивает приемлемую точность
измерений даже в условиях течения. Одновременно с измерением
координат измеряются и другие параметры: угол курса, крен ма-
шины, время.
Рис. 8.12 Сопротивление воды дви-
жению ВГМ легкой категории по
массе при буксировании
Достаточной для практи-
ческих целей точностью при
испытаниях на спокойной воде
обладает и способ измерения
с помощью двух дрейфомеров
скорости в точках, жестко
связанных с корпусом маши-
ны. По углам дрейфа опреде-
ляется положение мгновенного
центра скоростей в подвижной
системе отсчета, начало кото-
рой располагается в центре
тяжести машины. Одновремен-
но регистрируются углы курса,
крена, дифферента. Этот способ
основан на известном из теоретической механики положении: в лю-
бой момент времени при плоскопараллельном движении твердого
тела скорости его точек распределяются так, как если бы тело
вращалось вокруг мгновенного центра скоростей.
Испытания на управляемость проводятся при установившемся
скоростном режиме работы двигателя, как правило, максималь-
ном, и фиксированных положениях органов поворота; повороты
выполняются в обе стороны.
Координаты точек определяются графически или аналитически.
Графическое построение траектории по угловым координатам,
измеренным с помощью пеленгаторов (рис. 8.13), заключается в
последовательном нанесении на план бассейна точек пересечения
лучей углов а, и р( для всех положений машины на циркуляции
(от базовой линии АВ).
Значение тактического диаметра
dr = k У .
1
(8.10)
где d, t — диаметр i-й циркуляции; п — число циркуляций, k — масштаб графи-
ческого построения
14*
203
Кроме основных параметров циркуляции по результатам испы-
таний определяется зависимость этих параметров от скоростного
режима работы двигателя и положения органов управления пово-
ротом.
Рис. 8.13. Схема построения траектории циркуляции
А, Б — приборы для измерения углов
Определение разгонных и тормозных характеристик. Разгон-
ные. тормозные характеристики и инерционный выбег (путь и вре-
мя движения до полной остановки или достижения заданного зна-
чения скорости) определяются посредством записи параметров
регистрирующими приборами. Обычно датчики времени и пути
движения для этих испытаний изготовляются индивидуально, а ре-
гистрирующая аппаратура стандартная.
По результатам испытаний строятся графики зависимости ско-
рости и пути от времени разгона и торможения.
Испытания в условиях волнения и течения. Водоемы, подвер-
женные воздействию ветра, волнения, течений, с резкими и часты-
ми изменениями глубины, принято называть открытыми; это при
брежные районы морей, крупные озера, водохранилища, реки.
Испытания в таких водоемах дают возможность оценить влия
ние на показатели управляемости и скоростные характеристики
машины возмущающих факторов водной среды.
Испытания в условиях волнения. При эксплуатации плавающих
машин на волнении под воздействием волн возникают качка, за-
ливание корпуса водой, гидродинамические уда<ры волн.
Результаты испытаний при волнении с высотой волн до I м
(до 3 баллов) показали, что наибольшая амплитуда качки наблю-
дается при попутном волнении (набегании волны на корму) под
углом 45°: этот курс наиболее вероятен при подходе плавающих
машин к берегу и выходе на него. На встречном волнении скорость
снижается в меньшей степени, меньше амплитуда качки, но залн-
204
вает крышу корпуса волной и появляются динамические удары
волн о носовую часть машины (слемминг).
Показатели управляемости на волнении и течении определяют
методом пеленгации положения машины через определенные про-
межутки времени (с помощью двух пеленгаторов).
Возможность эксплуатации машин на волнении в значительной
мере зависит от работоспособности систем силовой установки: при
перекатывании волн через корпус происходит интенсивное залива-
ние радиаторов и эжектора системы охлаждения забортной водой;
через трассы вентиляции МТО и боевого отделения вода попадает
внутрь корпуса. Температура охлаждающей жидкости (при отсут-
ствии термостата) и масла падает ниже эксплуатационных преде-
лов, двигатель теряет мощность. Одна из опытных ВГМ, например,
через полчаса после выхода на волнение потеряла способность дви
гаться и управляться; боевое отделение оказалось чрезвычайно за-
газованным, а внутри корпуса скопилось около 1000 л воды.
Для предварительной оценки работоспособности систем сило-
вой установки в подобных условиях на этапах конструкторско-до-
водочных и отраслевых испытаний может быть использован метод
моделирования морского волнения: при движении объекта со сло-
женным волноотражательным щитком за счет периодического
включения и выключения водоходного движителя производится
раскачка корпуса и его периодическое заливание забортной водой
при погружении (заныривании) носовой или кормовой частей ма-
шины. Таким образом на спокойной воде удается воспроизвести
условия движения на волнении с различными курсовыми углами
к волне.
Определение средних показателей подвижности на плаву. Ис-
пытания по определению показателей подвижности на плаву про-
водятся, как правило, на естественных открытых водоемах — ре-
ках, озерах, морях. На реках испытания проводятся при различ-
ной скорости течения. Протяженность доступных для выхода участ-
ков берега выбирается с учетом сноса машины. В крупных водое-
мах (озерах, морях) испытания проводятся в прибрежных районах
при различном состоянии водной поверхности. Протяженность
трассы проплыва должна составлять 3—5 км; ее границы и пово-
роты обозначаются створными знаками. По мерному участку дви-
жение осуществляется во взаимно противоположных направле-
ниях.
В процессе длительных проплывов определяют средние скоро-
сти движения при различных состояниях водной поверхности, сред-
ние расходы топлива, исследуют тепловое состояние систем сило-
вой установки и условия работы экипажа (удобство наблюдения
и управления, укачиваемость).
Методы измерения параметров и их обработка аналогичны
применяемым при испытаниях танков на суше. Дополнительно к
параметрам подвижности регистрируются параметры качки и из-
менения курса.
205
Определение углов входа в воду и выхода на берег. Испытания
проводятся для определения максимальных углов наклона берега
или аппарели десантного корабля, преодолеваемых машиной без
ограничения по тяге, сцеплению, заливанию водопроницаемых от-
верстий на корпусе и башне.
Определяются также курсовые углы подхода к берегу и выхода
на него, отрабатываются приемы управления машиной.
Максимальные углы входа и выхода определяются при испыта-
ниях на спокойной воде в бассейнах или испытательных водоемах,
имеющих входы различной крутизны, уклоны которых увеличива-
ются последовательно через 5—10°. Испытания проводятся при
входе в воду носом и кормой (своим ходом и скатыванием) и при
выходе на берег с максимально возможной скоростью. Процессы
входа и выхода машины фото- или кинографируются для точной
фиксации степени заливания корпуса. Испытания продолжаются
до достижения предельного значения одного из ограничивающих
факторов.
Испытания на течении. При испытаниях на течении заранее
рассчитывают наиболее выгодные курсовые углы с учетом скоро-
сти течения. При этом необходимо иметь в виду, что в процессе
входа и выхода, когда кормовая или носовая части машины нахо-
дятся в сцеплении с берегом, противоположную ее часть сносит
течением. Поэтому в общем случае входить в воду надо под углом
к берегу против течения, выходить—под углом к берегу по тече-
нию, избегая разворота машины бортом к берегу. В каждом конк-
ретном случае углы входа определяются с учетом ширины и глу-
бины водоема (реки), крутизны берегов, волнения. Наиболее вы-
годные курсовые углы определяются последовательным их изме-
нением при испытаниях.
206
Глава О РЕШЕНИЕ ЗАДАЧ ОБЕСПЕЧЕНИЯ
И ОЦЕНКИ НАДЕЖНОСТИ ВГМ НА ЭТАПАХ
ПРЕДВАРИТЕЛЬНЫХ ИСПЫТАНИЙ
9 1 ОБЩИЕ ПОЛОЖЕНИЯ
Надежность — свойство ВГМ сохранять во времени в установ-
ленных пределах значения всех параметров, характеризующих
способность выполнять требуемые функции в заданных режимах и
условиях применения. Это сложное свойство, состоящее из соче-
тания более простых свойств (долговечности, безотказности, ре-
монтопригодности и сохраняемости); их проявление в процессе со-
здания и эксплуатации ВГМ оценивается системой показателей
(табл. 9.1), отдельные из которых включаются в тактико-техниче-
ские требования к ВГМ.
Особенностью оценки надежности ВГМ является необходимость
обеспечения статистической представительности факторов, влияю-
щих на ее составляющие, а также обработка результатов испыта
ний с помощью теории вероятностей, математической статистики,
теории случайных процессов и др., поскольку многие показатели
надежности являются вероятностными, например, вероятность от-
каза (вероятность безотказной работы), вероятность восстановле-
ния работоспособности (боеспособность) за установленное время.
Количественная оценка безотказности заключается в определении
гарантийной наработки, которой соответствует определенная ве-
роятность сохранения работоспособности по всем функциям. Дол-
говечность оценивается ресурсом наработкой до достижения ка-
кой-либо сборочной единицей предельного состояния, требующего
ее ремонта или замены. Ремонтопригодность определяется време-
нем, затрачиваемым на диагностику отказа, являющегося случай-
ным событием, и замену отказавшего элемента.
Задачи обеспечения и опенки надежности решаются на всех
этапах жизненного цикла ВГМ, начиная с момента формирования
тактико-технических требований к новому образцу и кончая сня-
тием машины с эксплуатации. Решение этих задач связано с полу-
чением разнообразной информации: статистических данных для
оценки показателей надежности, экспериментальных данных для
натурно-математических методов оценки надежности, характери-
стик нагруженности и напряженности элементов конструкции,
207
данных о взаимодействии сборочных единиц и деталей и др. Ис-
точниками информации являются расчеты, испытания и наблюде-
ния, причем относительное значение каждого из них в общем
объеме информации меняется на различных этапах создания ма-
шины. После изготовления опытных образцов главным источником
информации становятся их испытания.
Показатели надежности ВГМ
Таблица 9.1
Свойство Показатель Свойство Показатель
Долго- вечность Безотказ- ность Ремонто- пригодность Назначенный ресурс до капитального ремонта /?«₽, км Гамма-процентный ресурс /?г км Параметр потока отказов ш, 1/тыс. км Вероятность безотказной работы Р Время диагностики отка- за тя, ч Время замены сборочной единицы заданной номен- клатуры Т», ч Удельное время техниче- ского обслуживания Т1Л, ч/тыс. км Наработка до номерного вида технического обслужи- вания Зоб, км Продолжительность еже- дневного технического об- служивания /сто, ч Безотказ- ность + ре- монтопри- годность Сохраняе- мость Среднее время устра- нения отказа т, ч Коэффициент готовно- сти kr Срок хранения /, ч Допустимое ухудше- ние технического пара- метра за время Г-ДЛГ(О Допустимое ухудше- ние показателя надеж- ности за время /—Aw(/), Суммарное время рег- ламентных работ при хранении Тг , ч Суммарная трудоем- кость регламентных ра- бот при хранении 6£, ч
Экспериментальные данные для оценки показателей долговеч-
ности, безотказности и ремонтопригодности получают в процессе
функционирования испытуемых образцов, а их значения зависят
от условий эксплуатации: внешней среды, режимов эксплуатации,
квалификации экипажей, качества технического обслуживания.
Общие требования к надежности военной техники устанавлива-
ются с учетом положений ГОСТ В 20.39.103—77 для типовой мо-
дели эксплуатации, которая должна воспроизводиться при испы-
таниях. При испытаниях нормируются параметры внешней среды
и режимов эксплуатации, определяющие нагруженность сбороч-
ных единиц и систем машины.
208
В настоящее время планирование предварительных испытании
опытных образцов ВГМ (сроки проведения, число испытуемых об-
разцов) осуществляется на стадии разработки ТТЗ на ОКР, т. е.
является априорным. В процессе предварительных испытаний оп-
ределяется соответствие свойств машины ТТТ, и при необходимо-
сти производится их доводка до требуемого уровня. На это рас-
ходуется часть ресурса опытных образцов; остальной ресурс ис-
пользуется на исследовательские испытания (выявление причин
дефектов), проверку эффективности доработки, а также на полу-
чение экспериментальных данных для оценки показателей надеж
ности (испытания на надежность). При ограниченном числе об-
разцов, планируемых на предварительные испытания, и разнообра-
зии возможных условий эксплуатации машин объем получаемой
информации для оценки показателей надежности недостаточен,
поэтому оценка надежности по данным предварительных испыта-
ний носит прогнозный характер и является сложной научно-техни-
ческой проблемой.
9.2. ОБЩИЕ УСЛОВИЯ ИСПЫТАНИИ ОПЫТНЫХ ОБРАЗЦОВ
Условия испытаний по оценке функциональных свойств ВГМ
конкретизируются методиками их проведения. В программах, раз-
рабатываемых на этап или категорию предварительных испыта-
ний, устанавливаются условия и режимы, при которых должна
быть получена информация по надежности. Для этой цели преж-
де всего используются пробеговые испытания при различных
внешних условиях. В настоящее время дорожные условия каждого
из этапов предварительных испытаний и режимы эксплуатации
ВГМ при этом нормированы отраслевыми стандартами (табл. 9.2
9.4).
Испытания в каждом регионе организуются так, чтобы оце-
нить надежность сборочных единиц, наиболее зависимых от внеш-
них воздействий зоны. Например, в условиях жаркого климата
исследуются тепловое состояние деталей и сборочных единиц (дви-
гателя, трансмиссии, шин опорных катков и др.), влияние на них
температуры окружающего воздуха, солнечной радиации, дорож-
ных условий и др.
За исключением случаев, предусмотренных методиками испы-
таний, пробеги проводятся с максимально возможной скоростью,
допускаемой дорожными условиями и обстановкой. Особенности
испытаний (движение одиночной машины в большинстве случаев,
209
высокая квалификация водителей) определяют более высокую
скорость движения машины, чем при эксплуатации в войсках, сле-
довательно, более тяжелые нагрузочные режимы систем и сбороч-
ных единиц шасси.
Таблиц* 92
Распределение пробегов (в %) в зависимости от дорожных условий
при конструкторско-доводочных испытаниях (ОСТ В 3-5187—82)
Район и период испытаний
Местность
(снежная
целина,
пески,
пашня)
Дороги
ПОЛИГОНОВ
ро .ные
Дорожные условия
Горные
трассы
Такыр
Дороги с
твердым
покры
тиеы
Среднеевропейская
часть страны (осень —
зима или весна—лето)
Среднеазиатская
часть страны (лето)
Западносибирская и
восточносибирская часть
страны (зима)
Горные районы страны
(лето — осень)
Район предприятия-
разработчика (изготови-
теля) образца (в любое
время)
Таблица 9.3
Распределение пробегов в зависимости от дорожных и почвенно-климатических
условий при отраслевых испытаниях (ОСТ В 3-15.9—83)
Район испытаний Доля заданного ресурса, % Период испытаний (календарное время года)
Равнинные трассы среднеевропей- ской части СССР 100 15 03—15.05; 01.09—30.10
Пустынные трассы среднеазиатской части СССР 100* 01.05—15.09
Зимние трассы западносибирский части СССР 20 01 12—01.03
Трассы в условиях высокогорья и каменистых грунтов 80 01.06-01.10
По барханным трассам — 40 %, по такыру — 60 %.
210
Таблица 94
Режимы эксплуатации опытных образцов на предварительных испытаниях
Режим 1 этап <КДИ) II этап (ОН)
Суточный марш протяженностью 300—350 км 1 на 1000 км Проводятся в соот- ветствии с програм- мой
Безостановочный пробег с вклю- ченной аппаратурой комплекса во- оружения, средств защиты и потре- бителей электроэнергии в боевом по- ложении 100 км на 1000 км нара- ботки Продолжитель- ность в соответствии с ТТЗ
Пробег в ночных условиях с ис- пользованием ночных приборов на- блюдения 50—100 км на 1000 км Не проводится
400-км пробег в походном положе- нии 1 на 1 000 км Не проводится
100-км пробег с расстопоренными пушкой и башней (на ручных при- ходах) 1 на 1000 км Не проводится
Пробег на полную выработку топ- лива Не проводится Проводится в со- ответствии с про- граммой
Движение с расстопоренной баш ней с боковым креном образца и по- воротами башни на 180” в стороны подъема и спуска Не проводится 50 км
Пробег при имитации упражнений курса стрельб Не проводится 3 % ресурса
Длительное движение на плаву Не проводится 20—80 % расчетно- го времени работы двигателя до полной выработки топлива
Пробеги в ночное время Не проводятся Не более 30 % ресурса
Буксировка однотипного образца Не более 20 км ~20 км
Движение на буксире Не более 20 км ~20 км
Движение задним ходом В сумме 20 км ~ 10 км
Пробег с установленным оборудо- ванием для подводного вождения ганка Не более 25 км ~25 км
Преодоление водной преграды для танков с ОПВТ В объеме ТТЗ В объеме ТТЗ
Движение на плаву В сумме не бо- лее 20 ч В сумме время, по- требное для опреде- ления характеристик на плаву
Движение по трассе (упражнение -V» 6 курса вождения боевых машин) Не более 30 км Не проводятся
211
9.3. ИССЛЕДОВАТЕЛЬСКИЕ ИСПЫТАНИЯ ОПЫТНЫХ ОБРАЗЦОВ
Испытания опытных образцов ВГМ проводятся в пределах за-
данной наработки с заменой отказавших сборочных единиц. При-
чины отказов сборочных единиц в процессе испытаний выясняют-
ся, и принимаются меры к их устранению. В тех случаях, когда
информации для анализа причин недостаточно, прибегают к иссле-
довательским испытаниям. Такие испытания могут быть трудоем-
кими и продолжительными по времени. Например, при доводке
одного из танков (отличающегося принципиально новым конст-
руктивным исполнением систем и сборочных единиц шасси) до за-
данного уровня надежности исследовались напряжение приводов
нагнетателя двигателя, нагрузочные режимы балансиров подве-
сок, теплонапряженность гидроамортизаторов подвесок, оценива-
лась эффективность системы воздухоочистки двигателя и др.
Для исследовательских испытаний были разработаны специ-
альные средства измерений, детали исследуемых систем и сбо-
рочных единиц были приспособлены для установки первичных пре-
образователей и прокладки соединительных элементов измеритель-
ных схем, разработаны методики исследования и изготовлены
специальные сооружения для имитации внешних воздействий.
Опыт создания новых изделий и модернизации серийных образ
нов показал, что большую часть необходимой информации можно
получить в процессе предварительных испытаний опытных образ
цов, несколько увеличив номенклатуру измеряемых параметров
Например, при определении динамических характеристик ВГМ
можно получить информацию о режимах работы двигателя, систем
управления, трансмиссии и других агрегатов при максимальной
загрузке двигателя, переходных процессах во время переключе-
ния передач и во всем диапазоне скоростей движения. Режимы
разгона и переключения передач являются представительными для
условий реальной эксплуатации и поэтому используются при оцен
ке надежности систем и сборочных единиц силовой установки и
трансмиссии. Измеряя частоту вращения вала двигателя, входных
и выходных звеньев трансмиссии, ход рейки топливного насоса или
расход топлива, перемещение приводов управления подачей топ-
лива, переключением передач и поворотом, а также параметры
рабочих процессов в исполнительных элементах приводов управ-
ления, можно получить информацию о кинематических и нагру-
зочных режимах двигателя, сборочных единиц трансмиссии и си-
ловой установки. Эта информация необходима для выяснения при-
чин отказов сборочных единиц МТУ и отработки мероприятий по
их устранению.
Большую часть исследовательских испытаний следует прово-
дить на этапе конструкторско-доводочных испытаний в соответст-
вии с табл. 9.5. Своевременное проведение таких испытаний долж-
но способствовать повышению эффективности процесса ОКР в
целом.
212
Таблица 9.5
Перечень рекомендуемых исследовательских испытаний опытных образцов
на этапе КД И
Наименование
Задача
Исследование тягово-сцепных характеристик
образца, в том числе при движении в усло-
виях реальной местности
Исследование кинематических и нагрузоч-
ных режимов сборочных единиц МТУ в раз-
личных дорожных и климатических условиях
Исследование теплонапряженности сбороч-
ных единиц МТУ при высокой температуре
окружающего воздуха и максимально возмож-
ной по дорожным условиям нагрузке
Исследование параметров микроклимата а
обитаемом отделении образца при стрельбе из
различных видов оружия, преодолении водных
преград, эксплуатации в условиях предельной
температуры, повышенной запыленности, сра-
батывании систем коллективной защиты и про-
тивопожарного оборудования
Исследование теплового состояния СУ при
внезапной остановке двигателя
Прогноз опорно-сцепной про-
ходимости
Получение данных для ана-
лиза причий отказов сбором
ных единиц шасси
Оценка работоспособности
сборочных единиц в экстре
мальных условиях
Оценка условий обитаемости
экипажа
Исследование аэродинамических характери-
стик и коэффициента пропуска пыли системы
воздухоочистки при повышенной запыленности
воздуха
Исследование теплонапряженности сбороч-
ных единиц ходовой части в различных до
рожных условиях при высокой температуре
окружающего воздуха и солнечной радиации
Исследование условий работы средств свя-
зи в составе образца
Исследование эксплуатационных парамет-
ров СУ при преодолении водной преграды (по
дну водоема или на плаву)
Исследование проходимости образца на
грунтах с низкой несущей способностью и по
снегу, в том числе вытаскивание образцов при
застревании
Исследование электромагнитной совмести
мости системы электроснабжения и радио-
электронной аппаратуры
Прогноз сохранения работо-
способности СУ при неквали
фицированных управляющих
воздействиях водителя
Получение информации для
отработки системы воздухо-
очистки
Прогноз надежности сбороч-
ных единиц ходовой части
Оценка надежности средств
связи
Прогноз надежности СУ
Прогноз подвижности
Оценка надежности радио-
электронной аппаратуры
213
Например, кинематические и нагрузочные режимы сборочных
единиц МТУ исследуются при определении интегральных значений
средней скорости движения и запаса хода ВГМ. Для этого перио-
дически регистрируются по серийным приборам на щитке водителя
следующие параметры: используемая передача, скорость движе-
ния или частота вращения вала двигателя, температура охлаждаю-
щей жидкости и масла. Этой информации мало, и поэтому в от-
расли применяется специально разрабатываемая режимомерная
аппаратура, возможности которой характеризует табл. 9.6.
Таблица 9.6
Перечень параметров, измеряемых и регистрируемых с помощью режимомера
Параметр
измеряемый регистрируемый
Число оборотов ведущего колеса Число отметок времени Объем расходуемого топлива Включенная передача Частота вращения вала двигателя Перемещение педали подачи топ- лива Перемещение рычагов управления поворотом Перемещение педали сцепления Перемещение педали тормоза Перемещение балансира подвески первого опорного катка Пройденный путь Время движения Расход топлива (путевой и часовой) Путь и время движения на передачах То же при максимальной загрузке, на холостом ходу То же Число воздействий на привод, путь и время движения в повороте Число воздействий на привод То же Путь и время движения по неровным дорогам
Более детальное исследование возможно с помощью непрерыв-
ных или выборочных измерений параметров в виде реализаций
процессов, характеризующих их количественно (по амплитудным
и временным значениям). Поскольку такие измерения и обработка
полученной информации трудоемки, применяется выборочная ре-
гистрация в характерных условиях эксплуатации либо моделиру-
ются характерные для эксплуатации внешние и управляющие воз-
действия. Примером подобного рода исследований является иссле-
дование крутильных колебаний в моторно-трансмиссионной уста-
новке ВГМ средней категории по массе.
Методика определения параметров крутильных колебаний в
МТУ ВГМ средней категории по массе Целью испытаний является
экспериментальное исследование динамической нагруженности эле-
ментов моторно-трансмиссионной установки от крутильных коле-
баний и нагрузок, возникающих во время нестационарных режи-
мов движения.
214
Динамическая нагруженность моторно-трансмиссионной уста-
новки определяется амплитудно-частотными характеристиками
(АЧХ) стационарных крутильных колебаний, возбуждаемых дви
гателем на различных передачах в прямолинейном движении и на
повороте, а также изменением крутильных колебаний во время
разгонов, торможений, поворотов, переключений передач, преодо-
ления препятствий и других нестационарных режимов движения.
Получаемые характеристики представляют собой зависимость кру
тящих моментов сил упругости в различных элементах МТУ от
частоты вращения вала двигателя и времени, а также изменение
во времени угловой скорости звеньев бортовой коробки передач
(БКП), скорости ВГМ, положения органов управления и др.
Первичными измерительными преобразователями крутящих
моментов являются тензорезисторы, наклеенные на вал соединения
двигателя с входным редуктором (ВР), вал соединения ВР с ле-
вой БКП, муфту соединения ВР с правой БКП, входной вал ле-
вого бортового редуктора, шестерню конического редуктора при-
вода вентилятора, зубчатый венец ведущего колеса.
Частота вращения элементов МТУ измеряется с помощью от-
метчиков оборотов. Угловое ускорение ведущего колеса измеряет-
ся с помощью установленного на нем акселерометра угловых ус-
корений. Положение органов управления определяется с помощью
преобразователей перемещений, устанавливаемых в отделении уп-
равления. Давление в магистралях системы управления измеряет-
ся с помощью преобразователей, устанавливаемых на распредели-
тельных коробках левой и правой БКП. Угловые перемещения
корпуса ВГМ измеряются с помощью центральной гировертикали.
При проведении испытаний моделируются следующие режимы
эксплуатации ВГМ:
пуск двигателя от электрической и воздушной систем;
прокручивание двигателя стартером и воздухом без подачи
топлива (при нажатой кнопке маслозакачивающего насоса двига-
теля);
остановка двигателя;
плавный разгон на каждой из передач от минимально устойчи-
вой до максимально возможной частоты вращения коленчатого ва-
ла двигателя;
плавное замедление (торможение двигателем) на каждой из
передач от максимально возможной до минимально устойчивой
частоты вращения двигателя;
плавный разгон и замедление движения в процессе поворотов
при крайних положениях рычагов на каждой передаче;
разгоны и замедления движения со ступенчатым изменением
частоты вращения вала двигателя;
трогание с места на 1, II передачах и передаче заднего хода,
а также интенсивный разгон до максимальной скорости;
интенсивное торможение от максимальной скорости движения
до остановки (торможение двигателем) на каждой из передач;
215
переключение передач с низших на высшие и наоборот при
движении по бетонной и грунтовым дорогам различного состояния,
повороты на каждой из передач со свободным радиусом при
средних и крайних положениях рычагов в различных дорожных
условиях;
движение по неровным дорогам (с максимально возможной
скоростью) и по трассам для упражнений «Курса вождения бое-
вых машин»;
работа в режиме самоокапывания с использованием встроен-
ного оборудования;
стрельба из пушек с ходу при движении по директрисе учеб-
ного центра.
Испытания начинаются с градуировки тензометров, наклеенных
на зубцы левого ведущего колеса, при равномерном прямолиней-
ном движении ВГМ по бетонной дороге. Остальные операции могут
выполняться в любой последовательности.
Измерения рекомендуется выполнять в следующей последова-
тельности:
включить аппаратуру в соответствии с правилами эксплуата-
ции, проверить ее исправность;
подключить к тензоусилителям образцовую тензобалочку;
проверить нуль на каждом из каналов усилителей; установить
пределы измерений, превышающие ожидаемые максимальные зна-
чения нагрузок при выполнении заданного режима, и провести ба-
лансировку усилителей;
записать тарировочные импульсы каждого тензоусилителя и
градуировку образцовой тензобалочки для определения масштабов
ее деформации;
подключить к тензоусилителям измерительные цепи, проверить
установку нуля и записать тарировочные импульсы;
произвести необходимые измерения при выполнении заданного
опыта.
Каждый опыт выполняется при установке на осциллограф оче-
редной кассеты после стоянки машины продолжительностью более
15 мин и повторяется не менее трех раз.
Обработка, анализ и оценка результатов испытаний. Первичная
информация представляет собой осциллографическую запись раз-
личных процессов в аналоговой форме.
При обработке осциллограмм крутящие моменты определяются
по формуле
Л1 = АЛЛ,/Л2, (9.1)
где h — отклонение зафиксированной кривой процесса от нулевого уровня, мм;
k масштаб записи процесса, Н-м/мм; kt - масштаб деформации
тензометрической балки, определяемый для каждого кадра осциллограммы во
время испытаний, мм/м.м; kt— масштаб деформации тензометрической балки,
определяемый во время градуировки вала, мм/мм
Для тензометрической аппаратуры ПВН1-28-78, ПСВ1-28-77 Л,
и k2 представляют собой значения тарировочных импульсов, запи-
216
санных во время испытаний и при градуировке вала соответст-
венно.
Для крутящих моментов на ведущем колесе масштаб
*..« = v2 (9.2)
т т
где = *Бр У ЛБр / (f) Л,.к| (Г) dr ; Лвк1(Г) и ЛБР t(T) ~.i-e отрезки
кривых на осциллограмме, соответствующие процессам на валу бортового ре-
дуктора и зубцах ведущего колеса при равномерном прямолинейном движении
по трассе с постоянным дорожным сопротивлением (бетонная дорога), мм; л —
число участков осциллограммы: Г—выбранный для интегрирования отрезок
времени, с.
Угловое ускорение левого ведущего колеса
(9.3)
где Л, —значение углового ускорения, считываемое с осциллограммы, мм.
Л, — масштаб углового ускорения, определяемый при градуировке на стенде,
1/(са-мм); Ли—масштаб деформации тензометрической балки, определяемый
во время испытаний, мм; k2t—масштаб деформации тензометрической балки,
определяемый при градуировке акселерометра, мм
Частота вращения элементов МТУ
л = 60г(^/Л)(/т/АГ), (9.4)
где г — число импульсов за один оборот элемента; V — число импульсов соот-
ветствующего отметчика оборотов в исследуемом временндм интервале; 1т дли-
на временного интервала на осциллограмме, мм; 1М — длина записи импульсов
на осциллограмме, мм; Д7 — временной интервал, кратный целому числу отме-
ток времени на осциллограмме, с.
Частота вращения ведущих звеньев БКП (входа)
лм = 1,416лд>, (9.5)
где лд, — частота вращения вала двигателя, об/мин
Скорость движения изделия (в км/ч)
v — 0,0575 (л., к. я+ «•.«.„)» (9-6)
а относительные перемещения органов управления
5 = Л1/Ла, (9.7)
где Л| —— значение перемещения на осциллограмме, мм; Л» — максимальное зна-
чение перемещения, мм.
Давление в системе управления
Р kphp, (9.8)
где kp — масштаб, Па/мм. hp — значение, снятое с осциллограммы процесса из-
менения давления, мм.
Обработанную информацию представляют в виде графиков и
таблиц.
217
АЧХ крутильных колебаний строят для каждого элемента МТУ,
выбирая участки осциллограмм с постоянной частотой вращения
вала двигателя и с кинематически замкнутыми звеньями БКП.
Построение АЧХ ведут с шагом по частоте, обеспечивающим вы
явление резонансов.
Характеристики переходных процессов представляют собой
графики зависимости от времени параметров динамической на
груженности и кинематического состояния МТУ, положения орга-
нов управления и давления в системе управления.
Максимальные значения динамических нагрузок записывают в
таблице вместе со значениями параметров, при которых они полу-
чены. При анализе и оценке полученных данных могут быть ис-
пользованы для сравнения результаты расчетных и стендовых ис-
следований крутильных колебаний и переходных процессов в МТУ
ВГМ.
94. ИНФОРМАЦИОННОЕ ОБЕСПЕЧЕНИЕ ОЦЕНКИ НАДЕЖНОСТИ
НА ПРЕДВАРИТЕЛЬНЫХ ИСПЫТАНИЯХ
По результатам предварительных испытаний опытных образцов
намечаются мероприятия по доработке ВГМ с целью обеспечения
их надежности, что невозможно без ее контроля или оценки. Ин-
формационным обеспечением оценки надежности являются данные
по изменению технического состояния деталей и сборочных единиц
в процессе испытаний. При этом объем экспериментальной инфор-
мации (или объем испытаний, необходимый для оценки надежно
сти) определяется требованиями ТТЗ и зависит от методики оцен-
ки надежности. В тех случаях, когда в ТТЗ учитываются требова-
ния методики оценки надежности, последняя используется для
планирования объема испытаний опытных образцов, который свя-
зан с числом образцов и воспроизводимых режимов эксплуатации
при различных внешних условиях.
Основными методами оценки надежности по результатам испы-
таний в настоящее время являются статистические, позволяющие
обеспечить точность и достоверность ее показателей. Эти методы
являются составной частью общей теории надежности технических
систем и нашли широкое практическое применение; они отражены
в нормативно-технических документах (государственных и отрас-
левых стандартах) и отраслевых публикациях [19].
Однако требования методик оценки показателей надежности
(особенно долговечности и безотказности) не учитываются в пол-
ной мере в ТТЗ на разработку новых образцов, в частности, пла-
нируемое число образцов для испытаний недостаточно для объек-
тивной оценки показателей надежности. Например, для оценки
долговечности по OCT B3-2173—74 требуется испытать в объеме
ресурса по 16 образцов в каждом из заданных районов эксплуата-
ции. До настоящего времени для предварительных испытаний пла-
нировалось не более 4- 6 образцов. Принимая во внимание высо-
кую стоимость и техническую сложность машин, их относительно
218
низкий ресурс, многообразие условий эксплуатации, а также огра
ничения по срокам и производственным мощностям предприятий
отрасли, следует отметить, что объемы испытаний для информаци-
онного обеспечения надежности в перспективе существенно не из-
менятся. Поэтому методы оценки надежности и соответственно
планирования информационного обеспечения в процессе испыта-
ний должны совершенствоваться на основе использования зако-
номерностей формирования показателей надежности ВГМ, макси-
мального учета конкретных данных о разрабатываемом образце и
особенностях процесса его разработки.
Для примера рассмотрим, как решается задача информацион-
ного обеспечения оценки надежности в настоящее время по мето-
дике, разработанной Б Г. Поляковым.
Методические положения этой методики основаны на использо-
вании предварительной (или априорной) информации и примене-
нии математической модели динамики надежности в процессе ис-
пытаний и доводки ВГМ (отработанной по результатам испыта-
ний изделий четырех марок). Установленные в ТТЗ требования по
надежности образца должны быть подтверждены в процессе прие-
мочных испытаний; оперативный контроль отработки образца в
процессе предварительных испытаний осуществляется по назна-
ченным промежуточным уровням показателей безотказности ч
долговечности: проверяется соответствие установленного и до-
стигнутого на данном этапе уровней.
Промежуточные уровни показателей безотказности и долговом
ности рассчитываются по следующим зависимостям:
©уст — 0,5 «о 4- (Ш1 — 0,5 ш0) е~вГ, (9.9)
где установленный уровень безотказности на момент времени отрабог
ки Т\ Ш| параметр потока отказов по результатам испытаний первых опытных
образцов; <о0—значение, установленное ТТЗ; а — показатель повышения уров-
ня безотказности, равный
То - заданный (директивный) срок отработки образца;
«й'-л/У+ («£’-«»')/777;, (9.Ю)
где /?9о — 90-процснтный ресурс; остальные обозначения аналогичны принятым
в формуле (9.9).
Фактически достигнутые на определенной стадии испытаний
значения параметра потока отказов образца <о(Т) сравниваются
с установленным для данного этапа уровнем (оуст (Г). Аналогич-
но осуществляется оценка надежности по уровням показателей
долговечности.
Для решения задач планирования испытаний может быть ис-
пользована зависимость
2г = А$>-р, (9.11)
где 2l — накопленное значение показателя безотказности за суммарную
наработку Ss; А, 0— параметры аппроксимирующей зависимости.
219
Приведенная зависимость хорошо согласуется с фактическими
данными. С использованием этой зависимости могут решаться сле-
дующие задачи: прогнозирование сроков доводки; определение
потребного числа опытных образцов и объема их испытаний для
достижения заданного уровня надежности. При этом показатель
темпа повышения характеристик надежности принимается близким
к 0,5. Оценив начальный уровень надежности (по результатам ис-
следовательских испытаний) и сделав предположение о значе-
нии 0, можно определить Si, при котором о) станет равным тре-
буемому значению ыуст . Затем по суммарному объему испытаний
могут быть определены число испытуемых образцов и объем ис-
пытаний каждого из них. Из зависимости (9.11) следует, что, на-
чиная с первых опытных образцов, необходимо организовать
тщательный и квалифицированный сбор информации о надежно-
сти, увеличивая по возможности объем испытаний каждого образ-
ца, что позволит уменьшить потребное число опытных образцов и
сократить сроки их доводки.
9.5. УСКОРЕННЫЕ ИСПЫТАНИЯ
Проблема ускоренных испытаний ВГМ является в настоящее
время одной из наиболее сложных и наименее разработанных. Су-
ществуют различные способы сокращения продолжительности ис-
пытаний. Например, можно применять ускоренные методы опреде-
ления единичных показателей. При этом существенное влияние на
получение необходимой информации в сжатые сроки оказывает
уровень автоматизации процессов регистрации и отработки экспе-
риментальных данных.
Продолжительность испытаний опытных образцов зависит от
степени их доводки, так как просчеты в проектировании и техно-
логии изготовления нового изделия вызывают необходимость опре-
деления причин отказов при испытаниях и проверки эффективно-
сти мероприятий, направленных на их устранение. Кроме того,
значительное влияние на продолжительность испытаний оказывает
уровень их организации.
Различают следующие виды ускоренных испытаний: форсиро-
ванные, сокращенные, направленные и комплексные.
Форсированные испытания основаны на интенсификации про-
цессов, вызывающих отказы или повреждения, ужесточением их»
условий (повышением нагрузок, температуры, увеличением ско-
рости и др.).
Сокращенные испытания — это испытания без интенсификации
процессов, вызывающих отказы; уменьшение их продолжительно-
сти достигается использованием дополнительной информации, при-
менением методов экстраполяции и др. Этим видам испытаний
подвергаются составные части ВГМ.
Направленным и комплексным испытаниям подвергаются ма-
шины в целом. В первом случае машина используется в качестве
стенда, на котором в натурных условиях испытывается какая-либо
220
опытная сборочная единица (натурные испытания объекта), а при
комплексных ускоренных испытаниях оцениваются общемашинные
характеристики.
Основным критерием эффективности ускоренных испытаний яв-
ляются коэффициент ускорения А>1, представляющий собой от-
ношение продолжительности испытаний в нормальном режиме к
времени, затраченному на ускоренные испытания.
Коэффициент ускорения можно определять не только по про-
должительности испытаний, но и по наработке испытуемого изде-
лия. Такой коэффициент не зависит от степени организации испы-
таний.
Эффективность ускоренных испытаний может быть оценена
также коэффициентом сокращения сроков отработки и коэффици-
ентом экономической эффективности.
Для оценки испытаний на уровне категории предварительных
используются дополнительно следующие критерии:
календарная длительность всего комплекса испытаний и
доводки;
степень доведенности конструкции изделия к моменту начала
его серийного производства;
трудоемкость и себестоимость проводимых испытаний.
Натурные испытания объекта подразделяются на пробеговые и
специальные. Пути ускорения их различны.
Ускорение пробеговых испытаний. Пробеговые испытания про-
водятся в основном с целью определения показателен подвижно-
сти (скорости движения, расхода топлива и масла и др.) и надеж-
ности (безотказности, долговечности и др.).
Существенное влияние на такие показатели оказывают возму-
щающее воздействие внешней среды и скорость движения, зави-
сящая от управляющих воздействий водителя.
Математическое описание зависимости нагрузочных режимов
элементов ВГМ от возмущающих воздействии можно представить
в виде уравнения
$'(Р) --- I + I W'w(«₽)|*Sw(^' <912'
где S,np(P) —энергетические спектры возмущения и управления;
^'.оэ(«А’> I, | W\np(tr) | — модули передаточных функций динамических систем,
в которых формируются приложенные к рассматриваемому элементу (детали)
воздействия от возмущения и управления.
Главной характеристикой пробеговых испытаний является их
длительность, поэтому основной способ их ускорения — определе-
ние минимального пробега, необходимого для получения парамет-
ров с заданной точностью.
Методика определения минимально необходимого пробега ав-
томобиля, разработанная в ЦНИИ ГА, предусматривает проведе-
ние нескольких серий экспериментальных заездов различной про-
должительности (например, 10, 30, 60 км с числом экспериментов
до шести) на одной и тей же дороге, по результатам которых оп-
ределяется дисперсия изучаемых параметров.
221
Минимально необходимый пробег можно определить при ис-
пользовании следующего выражения:
(9.13)
где п — число изменений измеряемого параметра, необходимое для обеспечения
заданной точности при заданной доверительной вероятности; п' число нзмс
нений измеряемого параметра в процессе предварительного заезда протяжен-
ностью S.
Есть разные способы, позволяющие достаточно точно опреде-
лить минимальное время измерений величины в зависимости от
дисперсии отклонения оценки, но все они очень трудоемки.
Для приближенного определения минимально необходимого
пробега достаточно охарактеризовать случайный процесс измене-
ния исследуемого параметра коэффициентом его изменчивости, на
пример, скорость движения машины коэффициентом неравно-
мерности движения
(9.14)
Корреляционное уравнение зависимости между Smin и Лн, ха-
рактеризующее пробег автомашины по различным дорогам (от
асфальтового шоссе до разбитой лесной грунтовой дороги), имеет
следующий вид:
Smln = 0,18 k\ - 83,6 k„ + 835. (9.15)
Подобные формулы могут быть получены и для ВГМ.
Испытания на надежность могут быть ускорены также за счет
комбинированных и имитационных испытаний.
Комбинированные испытания проводятся в стендовых и натур-
ных условиях, например, по схеме деталь сборочная едини-
ца—агрегат—машина. Такая схема испытаний, как показывает
отечественный опыт, наиболее экономична и эффективна, так как
надежность машины обеспечивается использованием проверенных
на стендах и доведенных составных частей. Относительный объем
стендовых и натурных испытаний зависит от имеющихся испыта-
тельных средств. По мере развития техники и создания соответст-
вующего оборудования объем натурных испытаний должен сокра
щаться, а стендовых — расти; причем стендовые и натурные испы-
тания не исключают, а дополняют друг друга.
Имитационные испытания широко распространены в автомо-
бильной и тракторной промышленности. Они, как правило, допол-
няют натурные испытания и проводятся на специальных полиго
нах с имитацией эксплуатационных нагрузок, возникающих в про-
цессе движения машины от неровностей дороги и рельефа
местности.
Тяговые нагрузки моделируют с помощью специальных нагру-
жающих машин, а вертикальные динамические нагрузки — распо
лагая на трековой дорожке искусственные препятствия.
Программа имитационных испытаний предусматривает перио-
дические остановки и пуски двигателя, переключение передач,
разгон, торможение и др.
222
Другим видом имитационных испытаний, имеющим широкое
распространение в отечественной и зарубежной автомобильной
промышленности, являются испытания на искусственных дорогах
с повышенным повреждающим воздействием (с покрытием из
крупного булыжника; с выступами прямоугольной формы, распо
ложенными в шашечном порядке; с косыми волнами синусоидаль-
ного и прямоугольного профилей и др.). В этом случае форсиро
вание усталостных разрушений достигается приложением только
тех нагрузок, которые в наибольшей степени действуют на маши
ну, что позволяет исключить воздействие неопасных нагрузок и
перерывов, характерных для значительной части пробега в реаль-
ных эксплуатационных условиях.
Выбор номенклатуры специальных дорог весьма сложная
задача, требующая поиска оптимальных решений. В практике ис-
пытаний ВГМ выбираются участки дорог и местности с повышен-
ным повреждающим воздействием. Например, на участках дорог
с непрерывным случайным микропрофилем обеспечиваются повы
шейные динамические нагрузки на сборочные единицы систем под
рессоривания и других восприимчивых к нагрузкам сборочных
единиц машин; на участках местности с высокой пылеобразующей
способностью грунта — повышенные пылевые нагрузки на сбором
ные единицы силовой установки; на участках местности и дорогах
с песчаным грунтом — повышенное абразивное воздействие на
сборочные единицы ходовой части.
Одним из перспективных направлений сокращения продолжи
тельности испытаний ВГМ с целью определения надежности яв
ляется пробег по дорогам, представляющим собой выборку типич-
ных условий реальной эксплуатации. При моделировании этой
выборки необходимо учитывать, что чрезмерное форсирование,
обусловленное стремлением получить результаты как можно ско-
рее и при минимальных затратах, может привести к искажению
результатов испытаний.
Сложность решения задачи сокращения продолжительности ис-
пытаний заключается в том, что форсированный режим для одной
составной части машины является легким режимом для другой
Например, испытания в районе с повышенной запыленностью и
высокой температурой окружающего воздуха (в Средней Азии)
являются форсированными для моторно-трансмиссионной установ
ки и сравнительно легкими для ходовой части. Невозможно со-
здать такую испытательную трассу, которая позволит создать
форсированный режим для всех элементов машины Очевидно,
решение должно быть компромиссным: следует подобрать опти-
мальный комплекс испытательных дорог таким образом, чтобы
условия испытаний были форсированными для всех испытуемых
элементов машины. При решении этой задачи применяются мето-
ды линейного программирования.
Некоторые пути ускоренного определения показателей подвиж-
ности ВГМ (разгонных и тормозных характеристик, параметров
223
плавности хода, показателей водоходных свойств и др.). Испыта-
ния с этой целью не требуют проведения длительных пробегов.
Возможны следующие пути их ускорения: создание рациональных
программ, исключающих дублирование определения одних и
тех же характеристик на различных этапах испытаний; минимиза-
ция параметрического описания испытуемого образца; внедрение
в практику планирования экспериментов математическими мето-
дами.
При этом необходимо применять надежные расчетные методы
вместо эксперимента, а также совершенствовать методику испыта-
ний. Например, исследование влияния различных факторов на
формирование средней скорости прямолинейного движения явля-
ется многофакторной задачей, описываемой следующей функцио-
нальной зависимостью:
и=/(Лд. Лф> Л,бР> ^уД, /4, /с0), (9.16)
где и — скорость движения; йд — динамический ход первой подвески; С — жест-
кость торсиона; Рп₽, Ровр—усилия прямого и обратного хода гидроамортизато-
ров; Nya. — удельная мощность машины; /4 — интенсивность микропрофиля;
ft о — обобщенный суммарный коэффициент сопротивления движению.
Методы планирования эксперимента позволяют сократить чис-
ло опытов в несколько раз. Так, если при традиционном (однофак-
торном) методе исследования необходимо провести л=27=
= 128 опытов, то при многофакторном методе с использованием
матрицы планирования N — (при дробном факторном экспе-
рименте) необходимо только 8 экспериментов по предварительно
составленной специальной программе.
9.6. ОСОБЕННОСТИ ИСПЫТАНИЙ ВГМ
НА ДОЛГОВЕЧНОСТЬ В США
Методика испытаний на долговечность в СЩА является единой
для военных гусеничных и колесных машин. Эти испытания про-
водятся в различных дорожно-грунтовых условиях, выбор которых
обусловлен местом проведения испытаний. Дорожно-грунтовые ус-
ловия характеризуются контуром и протяженностью испытатель-
ной трассы, длиной и крутизной подъемов, типом, плотностью и
влажностью грунта. Профиль трассы описывается удельной спект-
ральной плотностью неровностей. Несмотря на возможность про-
ведения испытаний на долговечность в произвольно выбранных
условиях, методика рекомендует условия стандартных испытатель-
ных трасс, в качестве которых в США используются трассы Абер-
динского полигона (табл. 9.7).
При испытаниях на долговечность используется также горная
64-км трасса с твердым покрытием, расположенная на территории
Абердинского полигона.
Требования методики к дорожно-грунтовым условиям не всегда
строго выполняются (табл. 9.8).
224
|5 Зак. 2 «с»
Таблица 9.7
Условия движения ВГМ по стандартным трассам при испытаниях на долговечность
Тип машины Число циклов испытаний Пробег на цикл, км Общая протяжен- ность пробега, км Общее время проведения дополнитель- ных испыта- ний, ч Дополнительные условия испытаний
Дорога с твердым покрытием Грунтовая дорога Пересеченная мест- ность
ровная холми- стая
Танк, самоход- ное орудие 4 360 360 640 640 8000 — Стрельба из оружия
Гусеничный транспортер-тягач 4 560 560 640 640 9600 10 Половина пробеговых испы- таний проводится с буксируе- мым прицепом; возможно про- ведение испытаний на воде
Боевая машина пехоты 4 360 360 640 640 8000 — Периодическая проверка функционирования отдельных систем; половина пробега про- водится с требуемой нагрузкой
Плавающая ма- шина 4 360 360 640 640 8000 100 Испытания на воде с провер- кой функционирования систем
КЗ
8
Таблица 9.8
Условия проведения испытаний ВГМ на долговечность
Тип поверхности движения Требования методики испытаний. % Фактически пройденный путь при испытаниях. Ч
гарантийных на долю веч ность опытной гусеницы танка M-60AI опытной гусеницы тапка М-551
Дорога с твердым покры- тием 25 18 21 15
Грунтовые дороги с гра- вийным покрытием 25 18 33 21
Пересеченная местность: 50 64 46 64
равнинная — 32 17 33
холмистая — 32 29 31
Испытания на долговечность составных частей ВГМ проводятся
в один или несколько этапов и совмещаются с определением дина
мических и топливно-экономических характеристик машины, а в
некоторых случаях (как, например, при испытаниях опытной арк-
тической гусеницы танка М-551) объем и номенклатура сравни
тельных испытаний значительно расширяются.
Испытания на долговечность опытных гусениц на танках типа
М-60 проводились в два этапа: на первом этапе машина прошла
8045 км (~5000 миль), на втором 6434 км (~4000 миль). При
этом последний был разделен на два подэтапа по 3216 км каж
дый. На первом подэтапе определялись динамические и топливно-
экономические характеристики машин с серийными и опытными
гусеницами, а затем продолжались испытания на долговечность.
Задачей второго подэтапа являлось определение остаточного ре
сурса опытных гусениц, потребного объема технического обслужи
вания и расхода запасных частей.
Все машины, оснащенные опытными составными частями, пред-
варительно подвергаются обкатке на гравийной дороге продолжи-
тельностью 80 км (50 миль). Режим движения при обкатке сле-
дующий: первые 24 км (15 миль) машина проходит со скоростью
16 км/ч, затем 24 км -со скоростью 24 км/ч и последние 32 км
со скоростью 32 км/ч.
Продолжительность испытаний на долговечность опытных гу-
сениц при пробеге, равном 6400 км, составила в США II—13 ме-
сяцев. Это объясняется тем, что определенная часть времени за-
трачивается на восстановление машины, так как в большинстве
случаев испытываются машины, имеющие весьма значительную
наработку (5000—6000 км).
226
ЗАКЛЮЧЕНИЕ
Испытания ВГМ на всех стадиях их жизненного цикла явля-
ются сложным процессом, состоящим из большого числа разнооб-
разных проверок и исследований. Этим обуславливается множест-
во проблем, стоящих на пути повышения научно-технического
уровня испытаний. Главной целью развития испытаний ВГМ яв-
ляется повышение их эффективности на базе научно-технического
прогресса. Одной из основных проблем является необходимость
максимального совпадения условий испытаний ВГМ с условиями
их реальной эксплуатации. Выполнение этого требования, особенно
на этапах предварительных испытаний опытных образцов на поли-
гонах с ограниченными территориями, практически невозможно.
Возможно лишь моделирование некоторых элементов реальной
эксплуатации машин в мирное время.
Практическим выходом из создавшейся ситуации является со-
здание комплекса моделей эксплуатации ВГМ, с помощью кото-
рого возможны разработка методик ускоренных испытаний и обес-
печение единства оценки свойств вновь разрабатываемых образ-
цов на всех стадиях их жизненного цикла.
В настоящее время в практике испытаний наибольшее распро-
странение получили способы косвенной оценки свойств машины по
единичным показателям, а обеспечение сопоставимости результа-
тов испытаний различных машин осуществляется посредством
имитации одинаковых внешних воздействий.
Более достоверные экспериментальные данные могут быть по-
лучены (при наличии модели эксплуатации ВГМ) натурно-мате-
матическими (опытно-теоретическими) методами испытаний. На-
ряду с этим направлением необходимо развивать методы экспери-
ментального определения статистических параметров, характери-
зующих свойства ВГМ.
Для сложных технических систем, функционирующих в усло-
виях случайных внешних воздействий, получаемый при испытани-
ях статистический материал, как правило, недостаточен по объему
и неоднороден по составу, поэтому для оценки их свойств должны
использоваться априорная информация и данные теоретических
расчетов. Достоверность этой информации зависит от точности
принятой при исследованиях математической модели исследуемого
объекта. Чем точнее математическая модель к началу испытаний,
15* 227
тем достовернее накопленная информация, и, следовательно, для
оценки свойств образца требуется меньший объем натурных испы-
таний.
Перспектива сокращения сроков и стоимости разработки новых
образцов во многом определяется рациональной организацией ис-
пытаний, для чего в первую очередь необходимо их оптимальное
планирование.
Наиболее детально проработаны и освещены в научно-техниче-
ской литературе методические основы планирования единичных ис-
пытаний, позволяющие обеспечивать необходимую точность ре-
зультатов при минимальном числе экспериментов в процессе иссле
дования многофакторных систем.
Меньше всего отработаны методы планирования испытаний на
уровне категории, т. е. совокупности единичных испытаний. План
испытаний можно охарактеризовать количеством необходимой ин-
формации, временем и интенсивностью процесса ее получения. Ко-
личеством информации обеспечивается требуемая полнота и до-
стоверность экспериментальных данных. Этот показатель должен
быть задан. Интенсивность получения информации определяется
возможностями используемых для испытаний организационно-эко
номических структур. Следовательно, расчетным показателем пла-
на испытании является их продолжительность, т. е. время, необхо-
димое для получения нужного количества информации.
В практике испытаний ВГМ уже при разработке ТТЗ на про-
ведение ОКР чаще всего планируются сроки проведения каждой
категории (этапа) испытании опытных образцов и число испытуе-
мых образцов. Это нарушает сбалансированность показателей пла-
на и отражается на количестве информации, получаемой в резуль-
тате испытаний. Произвольное уменьшение числа образцов или
продолжительности испытаний приводит к снижению достоверно-
сти оценки всех показателей свойств или их части и, как правило,
к уменьшению их числа. Поэтому планирование испытаний долж-
но быть научно обоснованным. Доказано, что применение опти-
мальных планов испытаний позволяет сократить общие затраты на
доработку опытных образцов на 10—20 %.
Количество информации, получаемое при проведении испыта
ний, определяется числом показателей свойств и требуемой точно-
стью их определения, которые, в свою очередь, зависят от числа
опытов и числа одновременно измеряемых параметров. В рамках
категорий испытаний воздействие на эти факторы может осущест-
вляться через методы испытаний, кроме того, немаловажное зна-
чение имеет рациональное распределение видов испытаний по ка-
тегориям (этапам).
Число испытуемых образцов определяет возможности парал-
лельного проведения единичных испытаний и, что крайне важно,
позволяет исследовать влияние конструктивно-технологических па-
раметров на свойства ВГМ. Чем больше число испытуемых образ-
цов, тем выше достоверность получаемых результатов. Однако вы-
228
сокая стоимость опытных образцов и ограниченные, как правило,
возможности опытного производства предприятий разработчиков
вынуждают сводить его к минимуму. Поэтому необходимо тща-
тельно исследовать этот вопрос и разрабатывать рекомендации по
оптимальному выбору числа образцов, продолжительности испы-
таний, количеству экспериментальной информации, обеспечиваю
щих необходимую точность результатов испытаний. Кроме того,
добиваться сокращения продолжительности испытаний следует по-
средством разработки методов одновременного получения инфор-
мации для оценки различных свойств машины, в том числе надеж-
ности. При решении этого вопроса основной проблемой является
производительность средств измерений.
В настоящее время в практику испытаний ВГМ только начина-
ют внедряться средства измерений, позволяющие одновременно
регистрировать большое число параметров (РТС и магнитографы
с цифровым кодированием информации по 60 каналам). Необхо-
димость ориентации на существующие средства измерений застав-
ляет отдавать предпочтение методам и принципам организации
испытаний, требующим наименьшего объема одновременно реги-
стрируемой информации. Следует осваивать опыт, накопленный
в других отраслях техники (например, авиации), использующих
более совершенные средства измерений. Применение универсаль-
ных средств измерений позволяет сократить продолжительность
испытаний за счет совмещения единичных испытаний, требующих
одинаковых условий (например, определения топливно-экономи-
ческих характеристик ВГМ, вибронагруженности элементов их
конструкции, разрешающей способности оптических приборов на-
блюдения, уровня акустических шумов и др.). В настоящее время
единичные испытания проводятся отдельно с использованием спе-
циальных средств измерений.
Для использования методов совмещенного определения показа-
телей свойств опытных образцов потребуется переподготовка кад-
ров испытателей.
Перспективы дальнейшего развития испытаний ВГМ, таким
образом, связаны с развитием теории испытаний, повышением их
качества (прежде всего с повышением количества и достоверно-
сти информации), интенсификацией процесса испытаний, использо-
ванием совершенного стендового оборудования и прогрессивных
средств измерений. Направления развития охватывают вопросы
научно-методического, организационного и метрологического обес
печения испытаний. В каждом из них имеются резервы, использо-
вание которых позволит повысить в конечном итоге боевую эффек-
тивность отечественной бронетанковой техники.
229
СПИСОК ЛИТЕРАТУРЫ
I. Армейские автомобили Кн. I. Теория / Под ред. А. С. Антонова. М.:
Воениздат, 1970. 526 с.
2. Натурный эксперимент. Информационное обеспечение экспериментальных
исследований / Под ред. Н. И. Баклашова. М.: Радио и связь, 1982. 303 с.
3. Безверхий С. Ф , Диденко М Н., Яценко Н Н. Новые методы планиро
вания испытаний автомобильных трансмиссий на автополигоне. М.: Изд. Центр,
научн.-нсслед. автополигона НАМИ, 1977, 61 с.
4. Беккер М. Г. Введение в теорию систем местность—машина. М.: Маши-
ностроение, 1973. 520 с.
5. Быстроходность танков / Под род. Л. В. Сергеева. М : Изд. АБТВ, 1965.
188 с.
6. Гире И В., Русецкий А. А., Нецветаев Ю. А. Испытания мореходных ка-
честв судов / Справочник. Л.: Судостроение, 1977. 191 с.
7. Элементы теории испытаний и контроля технических систем / Под ред.
Р. М. Юсупова. Л : Энергия, 1978, 354 с.
8. Забавников Н. А. Основы теории транспортных гусеничных машин. М э
Машиностроение, 1975. 448 с.
9. Кардашевский С В., Погорелый Л В , Фудиман Г. М и др. Испытании
сельскохозяйственной техники. М.: Машиностроение, 1979. 228 с.
10. Кассандрова О. Н., Лебедев В. В Обработка результатов наблюдении
М.: Наука, 1970 104 с.
II. Кринецкий Е. И., Александровская Л. Н , Шаронов А. В , Голубков А. С.
Летные испытания ракет н космических аппаратов / Под ред. Е. И. Кринецко-
го. М.: Машиностроение, 1979. 461 с.
12. Крят В. М. Методика оценки водных преград. М.: Воениздат, 1978. 159 с
13. Кугель Р В Испытания на надежность машин и их элементов М.: Ма
шиностроение, 1982. 181 с.
14 Львов Е. Д. Теория трактора М Машгиз, I960. 252 с.
15. Мнленко Н. П , Сердюк А. В Моделирование испытаний ЖРД. М.: Ма-
шиностроение, 1975. 184 с.
16. Прочность и долговечность автомобиля / Под ред. д-ра техн, наук,
проф. Б. В.Гольда. М Машиностроение, 1974. 328 с.
17. Пустыльник Е. И. Статистические методы анализа и обработки наблю
дений. М.: Наука, 1968. 288 с.
18. Рабинович С. Г. Погрешности измерений. М.-Л.: Энергия, 1978. 261 с.
19. Развалов А. С., Платонова Л. Г. Надежность военных гусеничных ма-
шин. М : ЦНИИ информации, 1982. 156 с.
20. Скотников В А . Пономарев А Б., Климанов А. В. Проходимость ма
шин. Минск: Наука и техника, 1982. 328 с.
21. Софиян А. II Об оценке проходимости колесных и гусеничных машин
Вестник бронетанковой техники, 1965, № 3, с 1—5.
22. Фаробин Я. Е. Теория поворота транспортных машин М.: Машинострое-
ние, 1970. 176 с
23. Шаракшанэ А. С , Железнов И. Г. Испытания сложных систем. М.: Выс-
шая школа, 1974. 183 с.
24. Шенк X. Теория инженерного эксперимента. М.: Мир, 1972. 382 с.
230
ОГЛАВЛЕНИЕ
Стр
Предисловие.................................................. .... 3
Глава 1. Организационные основы испытаний ВГМ 5
1.1 Отраслевая система испытаний.................................. 5
1.2. Порядок разработки технической документации на проведение
испытаний................................................. ... 11
1.3. Отраслевая система стандартрв до.испытаниям.................. 13
1.4. Испытательные стенды......................................... 15
1.5. Метрологическое обеспечение испытаний ....................... 21
1.6. Система испытаний ВГМ за рубежом............................. 47
Глава 2. Научно-методические основы испытаний ВГМ .
2.1. Основы теории испытаний..................................
2.2. Экспрессные методы статистической обработки
2.3. Теория планирования экспериментов........................
2.4. Планирозанне экспериментов для определения функциональных
зависимостей................. ....................................
2.5. Особенности системы человек—машина—среда, учитываемые при
испытаниях...................................................... 77
Глава 3. Натурное моделирование движения танка 57
3.1. Основные положения........................................... 87
3.2. Определение параметрон внешней среды.................. ... 92
Глава 4 Испытания по определению показателей быстроходности и
автономности ВГМ в условиях стационарных внешних воз-
действий ........................................................... юз
Й
4.1. Стендовые испытания........................................... ЮЗ
4.2. Определение динамических характеристик .................... НО
4.3. Определение топливно-экономической характеристики............. 47
4.4. Методика оценки плавности хода на искусственном микропрофиле 121
4.5. Испытания на поворотливость ....'............................ 125
Глава 5. Испытания по определению показателей быстроходности ВГМ
в условиях случайных внешних воздействий . . 13‘Э
5.1. Общие положения.............................................. 139
5.2. Методика оценки плавности хода на грунтовых дорогах . . 140
5.3. Методика экспериментального определения предельной скорости
движении в различных дорожных условиях............................ 145
231
Глава 6. Определение средней скорости движения и запаса хода ВГМ 150
6.1. Общие положения............................................. J50
6.2. Испытания маршем по маршрутам большой протяженности . . 151
6.3. Сравнительные испытания танков на трассах полигонов .... 155
6.4. Особенности определения основных показателей подвижности
ВГМ за рубежом.................................................. 160
Глава 7. Испытания ВГМ на проходимость .............................. 167
7.1. Общие положения............................................. 167
7.2. Определение конструктивных параметров, влияющих на прохо-
димость .*...................................................... 172
7.3. Определение тягово-сцепных характеристик ........... 173
7.4. Испытания на проходимость по грунтам с низкой несущей спо-
собностью .................................................... 177
Глава 8. Испытания на преодоление водных преград ВГМ......... 133
8.1. Показатели водоходных свойств и проходимости по дну водоемов 183
8.2. Средства испытаний.......................................... 136
8.3. Испытания танков с оборудованием для движения по дну . . . 190
8.4. Испытания плавающих машин................................... 198
Глава 9. Решение задач обеспечения и оценки надежности ВГМ на
этапах предварительных испытаний..................................... 207
9.1. Общие положения . . . ...................................... 207
9.2. Общие условия испытаний опытных образцов.................... 209
9.3. Исследовательские испытания опытных образцов’............... 212
9.4. Информационное обеспечение оценки надежности на предвари-
тельных испытаниях.............................................. 218
9.5. Ускоренные испытания....................................... 220
9.6. Особенности испытаний ВГМ на долговечность в США .... 224
Заключение........................................................... 227
Список литературы.................................................... 230
Редактор В. Н. Махова
Технический редактор И. Н. Скотникова Корректор Л. Е. Сонюшкина
Сдано в набор 18.10.88. Подписано в печать 15.08.89.
Формат 60х90’/1б. Бумага типографская № 1. Гарнитура литературная.
Печать высокая. Усл. печ. л. 14,5. Усл. кр.-отт. 14 5. Уч.-изд. л. 15,5.
Заказ 2 «с»
Ордена Трудового Красного Знамени издательство «Машиностроение»
107076, Москва, Стромынский пер., 4.
Типография ведомственная
232