/























































































































































































































































































































































































































































Текст
Н. Н. КРАСОВСКИЙ
ТЕОРИЯ
УПРАВЛЕНИЯ
ДВИЖЕНИЕМ
ЛИНЕЙНЫЕ СИСТЕМЫ
ИЗДАТЕЛЬСТВО «НАУКА»
ГЛАВНАЯ РЕДАКЦИЯ
ФИЗИКО-МАТЕМАТИЧЕСКОЙ ЛИТЕРАТУРЫ
6П2.15
К 77
УДК 62-50
Теория управления движением. Красовский Н.Н.
Издательство «Наука», Главная редакция физико-матема¬
тической литературы, 1968,- 476 стр.
В книге изучаются две проблемы, возникающие в тео¬
рии оптимальных процессов: (1) задача об управлении ди¬
намической спстемой при условии минимума выбранной
оценки интенсивности к [и] управляющих усилий и и (2)
задача о наблюдении, т. е. задача о вычислении текущих
координат — ( ( ( движущегося объекта по доступным измере¬
нию функциям yj от этих координат. Основное внимание
уделено объектам, описываемым линейными уравнениями
(для которых однако из условий минимума х[и] выводятся не¬
линейные, вообще говоря, законы оптимального управления).
Дано решение рассматриваемых задач, опирающееся на ме¬
тоды функционального анализа. Сформулированы и обос¬
нованы правила минимакса, которые определяют оптимальные
управляющие воздействия или оптимальные разрешающие
операции в случаях задач об управлении и о наблюдении
соответственно. Обсуждена двойственность между процес¬
сами управления и наблюдения. Установлена связь рас¬
смотренных задач с основными понятиями математической
теории игр. Описаны численные методы определения опти¬
мальных управляющих усилий. Рассмотрена задача об уп¬
равлении в конфликтной ситуации преследования одного
управляемого объекта другим. Для решения этой задачи
предложено правило экстремального наведения, обеспечи¬
вающее минимакс времени до встречи. Изучена связь между
решением задачи о наблюдении линейного объекта и кано¬
ническим разложением по собственным элементам движе¬
ний динамической системы с последействием. Рассмотрена
задача об успокоении возмущенных движений управляв -
мой системы с последействием. Дано решение одной задачи
о наблюдении движений линейной системы при случайных
помехах.
Табл. 2. Илл. 76. Библ. 565 назв.
3-3-13
138-67
ОГЛАВЛЕНИЕ
Предисловие 6
Введение И
ЧАСТЬ I
ПРОБЛЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ_ (ЭЛЕМЕНТАРНАЯ ТЕОРИЯ)
§ 1. Введение ■ 17
Глава 1
Постановка задачи об упршвлонии 18
§ 2 . Дсфферницсаоьиын ураиинися двюкенис 18
§ 3 . Прсмнры осинйиых управляемых листан 21
§ 4. Пвстаивика задаче об управленис 33
Глава 2
Свойства линейных систем 37
§ 5 . Формула Коши . 37
§ 6 . Обобщенные уравнения длсжетия 43
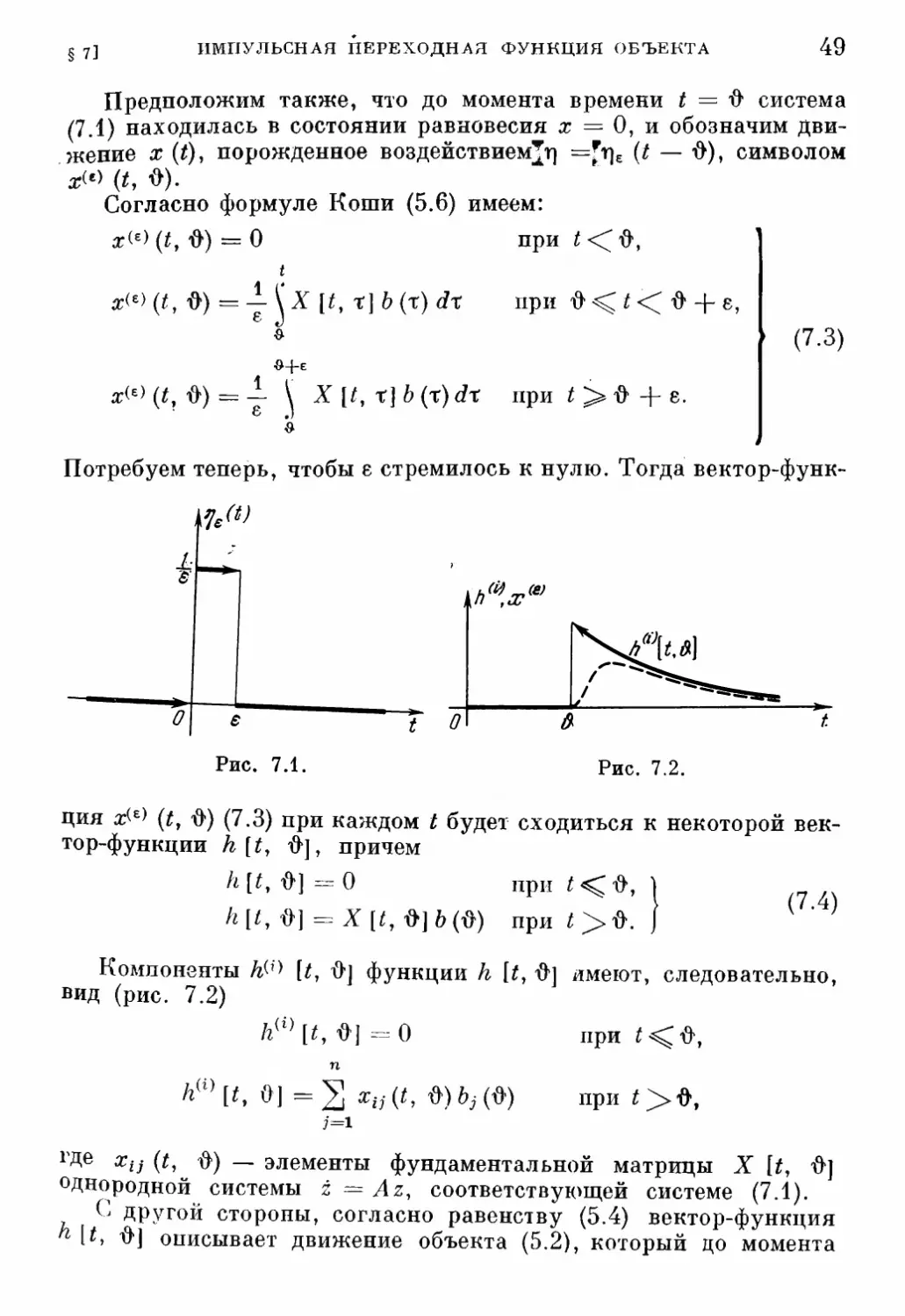
§ 7 . Импульсная перенсолная фушщия обънкта 48
Глава 3
Предварительном рншннин задачи об управллнии 54
§ 8 . Эврссасческсе сооббаженис 54
§ 9 . Решеисе задечч 58
§ 10. Вычислительиая тхнма, моделирующая упраллеиее .... 62
ЧАСТЬ II
ТЕОРИЯ УПРАВЛЕНИЯ ЛИНЕЙНЫМИ ОБЪЕКТАМИ
§ 11. Введение 67
Глава 4
Математическая постановка задачи об оптимальном управлении . . 69
§ 12 . Диежнися упраиоянмых тссанм с леиейные отерацее . . 69
§ 13. Постаиоика задачс об опасмальиом уп]^г^1^л^енис 79
§ 14 . Обобщенная задеча 84
Глава 5
Общем рншннин задачи об управлении 95
§ 15. Задача об упрчиленсе как проблнма момниаои 95
§ 16 . Проблнма моментао 100
§ 17 . Решеиие задачс об управленис . 11Q
4
ОГЛАВЛЕНИЕ
Глава 6
Свойства оптимального управления 121
§ 18. Управление с минимальной энергией .... * 121
§ 19. Управляемость линейных систем с постоянными парамет¬
рами 138
§ 20 . Управляемость нестационарных систем 148
§ 21. Управление миишмаллной сииой 152
§ 22 . Управление в случае кваиилинейного объекта . •. . . с 164
§ 23 . Управление при условии минимума импульса управляю¬
щего воздeйcитим 181
§ 24 . Численное решение задачи об упpaлвойом 202
§ 25. Управление механической системой в окрестности положе¬
ния глвновecим 221
Глава 7
Проблема предельного быстрооенйттвя 231
§ 26. Постановка задачи о предельном быстродействии . . . 231
§ 27. Решение задачи о предельном PыcтpoдойC’итaм 234
§ 28. Управление по принципу обратной связи 251
§ 29. Синтез оптимальных систем предельного быстродействия 257
ЧАСТЬ III
ТЕОРИЯ НАБЛЮДЕНИЯ ЛИНЕЙНЫХ СИСТЕМ
§ 30 . ВвeдeйOIе 263
Глава 8
Постановка я решение проблемы иабшодения 264
§ 31. Постановка заддчч 264
§ 32. Задача об оптимальном оaблюдойом 270
§ 33. Решение задачи об оптимальном оaблюдойом 279
§ 34 . Решение задачи о оaблюдойнм 289
§ 35. Наблюдение квазилинейной ииcиcйи 294
Глава 9
Двойственность между управлением я иаблюдениeм 298
§ 36 . Соотношение двoйcттeйооcии 298
§ 37. Свойство полной наблюдаемости линейной системы . . . .‘303
§ 38. Проблемы управления и наблюдения и теория игр . . . 306
ЧАСТЬ IV
РАЗНЫЕ ЗАДАЧИ
§ 39. Ввeдeеое 324
Глава 10
Игровая задача о встрече елижeний 325
§ 40. Постановка задачи о преследоваини 325
§ 41. Эвристические соображвши 329
§ 42. Задача о встрече однотипных объектов 334
ОГЛАВЛЕНИЕ
5
Глава 11
Линейные системы с особешюстями 349
§ 43. Система с последействием, реализующая наблюдаемую ве¬
личину 349
§ 44 . Канонические координаты систем с последействием и зада¬
ча о наблюдении 353
§ 45. Задача об успокоении систем с ослнд;^(^в^ствинм 358
§ 46 . Наблюдение в случайных ббстоятельствах 364
§ 47 . Приммнями 374
ПРИЛОЖЕНИЕ
§ 48 . Ввeденис 393
Глава 12
Линейные операции в векторных проссранствах 394
§ 49 . Нормированное линейное пространств 394
§ 50 . Линейные опeнацис 397
§ 51. Норма линейной опeнацис 398
§ 52 . Геометричеекая иниенаpатalтия 402
§ 53. Отделение выпуклых миножетЕ 404
Глава 13
Нормированные пространства функции . . 408
§ 54 . Предварительные заметанни 406
§ 55 . Интеграл Лебега 411
§ 56. Стандартные нормы в функциональных пространствах . . 414
§ 57. Нормы в пространствах вектор-функций 422
Глава 14
Линейные операции в пространствах фунщии 428
§ 58. Норма линейной опepацис 426
§ 59. Линейные операции в стандартных пространствах . . . 499
§ 60. Линейные операции в пространствах вектор-функций . . . -455
§ . 61. Задача об отделении выпуклых множеетв 439
Библиография
Учебная лстepатypа 443
Специальная лстepаттpа 444
Предметный указатееь 473
ПРЕДИСЛОВИЕ
В настоящей монографии рассматриваются некоторые мате¬
матические задачи из теории управляемых систем. Именно, в
книге изучаются следующие две проблемы: (1) задача об управ¬
лении, т. е. задача об определении управляющих сил, которые
переводят динамическую систему в заданное состояние; (2) зада¬
ча о наблюдении, т. е. задача о вычислении текущих координат
движущегося объекта по доступным наблюдению величинам. Эти
задачи изучаются для управляемых движений, описываемых ли¬
нейными или квазилинейными обыкновенными дифференциаль¬
ными уравнениями.
Материал книги составляют лекции, прочитанные автором для
студентов-механиков в Уральском государственном университете
им. А. М. Горького. Характер изложения рассчитан на соответ¬
ствующий уровень подготовки. У читателя предполагается зна¬
ние основ теоретической механики, математического анализа, ли¬
нейной алгебры и обыкновенных дифференциальных уравнений
в объеме современного стандартного инженерного образования.
Математические факты, которые выходят за эти рамки, но исполь¬
зуются в- книге, поясняются по ходу дела, даются ссылки на под¬
ходящие источники.
Теории оптимальных процессов посвящена серия фундамен¬
тальных монографий, вышедших из печати в последнее время.
Речь идет, прежде всего, о следующих известных книгах: [179,
28а, 32в, 213г]. По своей проблематике данная работа примыка¬
ет к упомянутым монографиям. Отметим некоторые ее особенности.
Как сказано выше, книга посвящена двум вопросам: задачам
об управлении и наблюдении в линейных системах. При этом
движение управляемой системы трактуется как результат ли¬
нейной операции, которая выполняется над объектом благодаря
наложению управляющих воздействий. Этот исходный пункт,
определивший все исследование, позволяет привлечь к работе
аппарат линейной алгебры и функционального анализа. Таким
образом, теоремы об управлении и наблюдении оказываются
просто следствиями из известных общих математических фактов.
Здесь был заманчив следующий компактный способ изложения;
ПРЕДИСЛОВИЕ
7
сформулировать задачу сразу в весьма общем и абстрактном
виде, а затем, указав ее интерпретацию в терминах функциональ¬
ного анализа, получить из его известных результатов общие тео¬
ремы, охватывающие самые разнообразные ситуации, отдельные
из которых можно было бы привести в форме примеров. В каче¬
стве такой весьма общей математической схемы, включающей в
себя большое число задач об управлении и наблюдении (в том чи¬
сле и задач более общего характера, чем рассматриваемые в на¬
шей книге), можно было бы выбрать схему линейного и нелиней¬
ного программирования в абстрактных пространствах в тех аспек¬
тах, как это изложено, например, в монографии К. Дж. Эрроу,
А. Гурвица и X. Удзавы [28*] (см. в связи с этими вопросами так¬
же работы [29*, 317]). При этом было бы естественным ограничить¬
ся лишь обсуждением интерпретации содержательных понятий
теории управления в терминах данной абстрактной схемы и очер¬
тить таким путем круг задач, сводящихся к ней. Конкретизацию
же схемы для каждой отдельной проблемы управления можно было
бы тогда предоставить читателю. Однако от этого пути, приятного
для читателей-знатоков, мы решили отказаться, преследуя цель
написать книгу, доступную для читателей, которые только зна¬
комятся с предметом, и такую, чтобы она могла послужить введе¬
нием для перехода к более общим абстрактным схемам, упомяну¬
тым выше. Хотелось бы надеяться, что для читателя, познакомив¬
шегося с основой рассматриваемой интерпретации, изложенной в
данной книге, такой переход покажется естественным и нетруд¬
ным в принципе.
В соответствии с этим мы вообще избегали чрезмерно общих
постановок задач и все изложение развивали постепенно от про¬
стых ситуаций к ситуациям, несколько более сложным. Кроме
того, избранный круг вопросов мы постарались обсудить по воз¬
можности подробно. Вероятно, это привело к избыточным повто¬
рениям отдельных положений. Подчеркнем также одну труд¬
ность, которую должен снисходительно учесть читатель. Рассмат¬
риваемые задачи по своему существу являются математическими
проблемами из теории функций. В то же время они могут интере¬
совать читателя, далекого от тонкостей этой науки. Поэтому в
книге сделана попытка изложить весь необходимый дополнитель¬
ный математический аппарат в наглядной форме, апеллируя к при¬
вычным пространственным представлениям. Этой цели служит
Приложение, которое нетрудно раскритиковать со строгих пози¬
ций, но которому мы намеренно придали подобную далеко не без¬
упречную форму.
Читателю, незнакомому с данными разделами математики, реко¬
мендуется проработать Приложение до чтения . II—IV частей книги.
Следует, однако, иметь в виду, что дополнительные сведения из
8
ПРЕДИСЛОВИЕ
высшей математики важны прежде всего для обоснования и для
понимания внутреннего механизма тех теорем, которые даны в
книге для . задач об управлении и наблюдении. Основные же вы¬
воды о решении этих задач можно понять и применять, не выходя
фактически за рамки понятий, известных из рядового курса мате¬
матического анализа.
Изложение постоянно сопровождается иллюстративными при¬
мерами. Подбор этих примеров определен также избранной тен¬
денцией: каждый раз выбирались самые простые механические
модели с тем, чтобы отчетливо пояснялся смысл общих понятий,
фигурирующих в теоремах, и чтобы возможно нагляднее просмат¬
ривались свойства изучаемых явлений. Читатель, которому эти
примеры покажутся примитивными, всегда сможет в пределах
рассматриваемого теоретического материала сконструировать бо¬
лее интересные для него реальные схемы.
Монография снабжена библиографией, содержащей работы по
теории управления и справочную литературу. Справочная лите¬
ратура вынесена в отдельный список и занумерована цифрами
со звездочкой.
Список специальной литературы наряду с основными моно¬
графиями по теории оптимальных процессов содержит журналь- ;
ные статьи, относящиеся к линейным управляемым системам х).
Первоначально предполагалось привести список всей доступной
нам литературы, относящейся к рассматриваемым вопросам. Од¬
нако выяснилось, что вследствие чрезвычайного объема такой
библиографии эта задача в рамках данной книги невыполнима.
Поэтому мы ограничились только перечислением фамилий авторов,
работы которых в данной области нам известны, оставив в списке
для каждого из авторов лишь самое минимальное число работ,
характеризующих направление его исследований. При этом при
отборе работ, как правило, предпочтение отдавалось более ран¬
ним исследованиям либо тем работам, на которые делаются
непосредственные ссылки в тексте книги. Неизбежный, вероятно,
пропуск фамилии какого-либо автора или пропуск того или
иного важного труда, связанного непосредственно с материа¬
лом данной книги, следует рассматривать как непреднамерен¬
ную ошибку, за которую автор заранее приносит извинения. На¬
конец, заметим еще, что краткие примечания, составляющие § 47,
никак нельзя рассматривать как полный обзор даже той части
библиографии предмета, которая дана в книге. Эти примечания
являются лишь обсуждением той литературы, которая послу¬
жила основным источником для данной монографии.
х Большой труд по подготовке библиографии был выполнен А. Б. Кур-
жанским. ‘
ПРЕДИСЛОВИЕ
9
Наконец, необходимо еще раз обратить внимание читателя на
следующее весьма существенное обстоятельство. По ходу изложе¬
ния мы лишь весьма бегло и значительно реже, чем это вероятно
следовало бы сделать, касаемся связи рассматриваемых решений
с основными методами теории оптимальных процессов: классиче¬
ским вариационным исчислением, принципом максимума и теорией
динамического программирования. Кроме того,. осталась совер¬
шенно невыясненной связь проблем, изученных в данной моногра¬
фии, с задачами об оптимальной стабилизации управляемых си¬
стем. Это объясняется следующей основной причиной: изложение
первоначально намеченного автором материала для книги об
управлении движением потребовало бы непомерного увеличения ' ее
объема. Поэтому и пришлось отказаться от подробного обсуж¬
дения ■ упомянутых выше основных методов, руководствуясь тем,
что они широко известны и отлично изложены в таких фундамен¬
тальных монографиях и статьях, как, например, упоминавшиеся
уже работы [4*, 28а, 32в, 1326, 1456, 179, 213г].
Следует еще иметь в виду, что характер изложения материа¬
ла в данной монографии в значительной степени определен
одной из главных задач, которую ставил перед собой автор:
на конкретном материале из теории управляемых систем позна¬
комить студентов-механиков и инженеров с некоторыми матема¬
тическими понятиями и методами, не включаемыми обычно в
стандартные курсы инженерных факультетов; тем самым пресле¬
довалась цель вызвать интерес к соответствующим разделам ма¬
тематики. Поэтому отдельные математические конструкции,
связанные с упомянутыми понятиями, не избегаются в книге и
в тех случаях, когда их использование не вызвано крайней
необходимостью.
Книга состоит из введения и четырех частей. Во введении да¬
ется краткий очерк общей теории управляемых систем и пояс¬
няется, какое место в этой общей теории занимают вопросы, рас¬
сматриваемые в книге. Каждая из частей в свою очередь откры¬
вается небольшим введением, где дается краткая характеристика
ее содержания. Первая часть книги содержит постановку задачи
об управлении, II часть посвящена исследованию этой задачи, а
в III части изучается задача о наблюдении. В IV части изучена
задача о преследовании одного линейного управляемого объекта
другим. Кроме того, в последней главе этой части рассмотрены
линейные системы с особенностями, а именно, системы с после¬
действием и одна стохастическая система. Основной матери¬
ал книги заключается краткими примечаниями и Прило¬
жением.
В книге принята сквозная нумерация глав и параграфов. Ос¬
новные определения, теоремы, примеры и формулы нумеруются
10
ПРЕДИСЛОВИЕ
двумя числами. Первое число означает номер параграфа, второе
число — порядковый номер внутри параграфа.
Материал книги был подготовлен к печати сотрудниками ка¬
федры прикладной математики Уральского университета Э. Г. Аль¬
брехтом, А. Б. Куржанским, Ю. С. Осиповым, В. Е. Третьяковым
и Г. С. Шелементьевым. Их труд намного выходит за рамки тех¬
нической обработки рукописи, и каждый из этих товарищей внес
большой вклад в монографию по существу. Отдельные добавле¬
ния были подготовлены^!. Я. Кацем, который также просмотрел
критически всю рукопись. Л. М. Куперман, В. И. Бондаренко,
Ю. М. Репин, А. И. Субботин и Ю. М. Филимонов осуществили
просчет примеров из §§ 21, 24, 27, 42 на ЭВМ. Всех этих лиц автор
сердечно благодарит за большую помощь.
Кроме того, автор особенно благодарен профессору А. А. Пер-
возванскому, который внимательно прочитал рукопись и любезно
сообщил ряд весьма важных замечаний. Все эти замечания были
по возможности1 учтены при окончательном редактировании ру¬
кописи.
Автор
ВВЕДЕНИЕ
Развитие управляемых систем, вызванное запросами практи¬
ки, и, , прежде всего, потребностями современной техники, опре¬
делило круг задач, которые составили предмет математической
теории управляемых процессов. Существенное место в этой теории
занимают проблемы оптимального управления. В общих чертах
задача состоит в следующем. Рассматривается объект (механиче¬
ская система, электрическая цепь и т. п.), подверженный управляю¬
щим воздействиям. Заданы элементы желаемого движения, напри¬
мер исходное и конечное состояния объекта. Указаны требования
к качеству процесса, содержащие обычно условие минимума или
максимума, а может быть, условие минимакса или максимина
какого-либо показателя работы системы. Например, часто встре¬
чается условие минимума расходуемой энергии. Требуется найти
закон, который определяет усилия, осуществляющие нужное дви¬
жение.
Теория оптимального управления объединяет большое коли¬
чество разнообразных задач. Изучение ее усложнено из-за отсут¬
ствия общепризнанной классификации проблем, исследованием
которых занимаются математики и механики, физики и инженеры,
биологи и социологи, преследующие подчас различные цели и ис¬
пользующие разнородные методы при решении аналогичных задач.
Отдельные ветви теории управления, развившиеся в последнее
время, имеют обширную и запутанную библиографию. Это за¬
трудняет обзор результатов.
В предлагаемой книге изучается довольно узкий круг задач.
Рассматриваются лишь такие объекты, текущее состояние кото¬
рых и управляющее воздействие на которые можно описать соот¬
ветственно конечномерными векторами х = {х1,...,хп}, и =
= {u1,...,ur}, причем движение {xt (t)} определяется системой
12
ВВЕДЕНИЕ
обыкновенных дифференциальных уравнений
Xi =- fi (t, , хп, щ,..., ur) (i == 1,..., n). (0.1)
Здесь, как всегда, буквой t обозначено текущее время.
Основное внимание уделено задаче о приведении объекта в за¬
данное состояние, что встречается особенно часто в. проблемах
управления механическим движением.
Известны два основных аспекта общей проблемы управления.
I. Задача о программном управлении, где дана исходная инфор¬
мация о начальном состоянии объекта (к начальному моменту
t = ta) и требуется найти воздействие в виде функции от времени
и = и (t) (t , ta) так, чтобы к моменту окончания процесса
t = система оказалась в заданном состоянии. При этом, как
отмечено выше, требуется еще обычно обеспечить желаемое ка
чество процесса.
Примером такой задачи является проблема предельного про¬
граммного быстродействия: дано начальное состояние t = ta,
х (ta) = х* объекта и указано положение x(t$) = аД в которое
необходимо перевести объект; требуется найти воздействие
и— и° (£), удовлетворяющее условию || и° (t) || . р и переводящее
объект в состояние х (t$) = х& за наименьшее возможное время
Т = — ta- (Символ Ци|| означает величину (uj ...4- и?)1/2.)
Для указанного типа задач характерно, что дополнительная
информация, которая поступает, может быть, в ходе процесса, не
используется для коррекции движения с целью улучшения резуль¬
тата, т. е. движение осуществляется по жесткой программе
и = и (t), составленной заранее. Это ограничивает роль соответ¬
ствующих результатов и вынуждает рассмотреть проблему в
следующем аспекте. -
II. Задача о синтезе системы с обратной связью. Здесь наилуч¬
ший закон управления ищется в форме уравнений, связывающих
воздействие и с некоторыми величинами {уг (t), . . . , Ут (£)}, до¬
ставляющими информацию о текущих состояниях х (t) объекта.
В частном случае, когда возможно быстрое и достаточно точное из¬
мерение всех координат xt (t) вектора х (0, управляющие воздей¬
ствия Uj определяются обычно в виде функций Uj = Uj П, х± (£,...
• • •, %П (01 •
ВВЕДЕНИЕ
13
Примером может служить задача о преследовании. В этой зада¬
че даны два объекта (которые, конечно, можно трактовать как две
части одного составного объекта), описываемые уравнениями
xW = /(D [^1) (> х£\ т,..., urJ, (0.2)
(0.3)
и изображаемые, следовательно, в некотором (-мерном простран¬
стве точками = {х(» (/)}, = {х? (/)} соответственно.
Предполагается, что объект (0.2) преследует объект (0.3) и целью
этого преследования является совпадение точки X1) (t) с точкой
х2> (t); объект (0.3), напротив, стремится избежать встречи.
Итак, выбор управляющих сил Uj диктуется желанием ускорить
момент встречи t = ,, выбор Vj диктуется противоположным же¬
ланием отдалить этот момент. Если допустить, что в каждый мо¬
мент времени t оба партнера знают реализовавшиеся значения
x$\t) и ' х<О, то можно поставить игровую задачу х), о выборе
оптимальных управлений и0 [ж*1), х(2)] и v° [Х1*, я(2)], которые
ограничены условиями ||u|| [ Ц, || v || , v, вычисляются в каждый
момент времени t по реализовавшимся на деле значениям X1 , (t) и
Х2) (t), т. е. в виде и0 = и° [Xx)((), Х2>(()], vo = vo [ [i [ (;), х& (i)],
и обеспечивают минимакс для времени [ , когда впервые осущест¬
вляется встреча хX, (tp) = х2 (tp).
Исследование задач о синтезе системы с обратной связью есте¬
ственно включает в себя проблему определения текущих коор¬
динат Xt (t) управляемого объекта по доступным наблюдению ве¬
личинам yj (t). Последняя проблема известна как задача о на¬
блюдении динамической системы. Здесь особенно важны вопросы
о наилучшем согласовании наблюдения и управления с точки зре¬
ния оптимальности конечных результатов процесса.
Остановимся кратко на некоторых основных направлениях
в теории оптимальных процессов, описываемых обыкновенными
дифференциальными уравнениями (0.1).
Наиболее полные исследования и окончательные результаты
относятся к необходимым признакам оптимальности для задачи
х) Постановка этой задачи разобрана подробно в § 40.
14
ВВЕДЕНИЕ
о программном управлении при условии минимума интеграла
*3
I =
со [£ #£). u(t)]dt.
(О.4)
Теория таких необходимых условий базируется на класси¬
ческих идеях вариационного исчисления [4*, 10*] и на их разви¬
тии в новых методах, разработанных в последние десятилетия
[1326, 1456]. Широким по содержанию, строго обоснованным и
удобным по форме для приложений критерием оптимальности
является принцип максимума [179], соответствующий классиче¬
скому вариационному принципу Вейерштрасса и методу канони¬
ческих уравнений Гамильтона [4*].
Другой подход к проблемам управления, отвечающий задачам
синтеза оптимальных систем с обратной связью, развивается по
пути, получившему наименование метода динамического програм¬
мирования [28а]. Этот метод соответствует известным в вариа¬
ционном исчислении рассуждениям о распространении возбужде¬
ний и приводит к уравнениям, типа уравнений Гамильтона —
Якоби в частных производных [4*, 10*]. Теория динамического про¬
граммирования охватывает многие проблемы оптимального
управления как для детерминированных процессов, так и в слу¬
чайных обстоятельствах, указывая целесообразные пути иссле¬
дования, хотя, может быть, эта теория в смысле математической
строгости еще нуждается в доработке. Следует подчеркнуть так¬
же, что методы ее применяются не только в форме необходимых,
но и в форме достаточных условий оптимальности. В последнем
случае она смыкается с теорией устойчивости движения (см.,
например, Приложение в книге [17*]).
Для большинства технических приложений классическое ва¬
риационное исчисление, принцип максимума и методы динамиче¬
ского программирования доставляют, по-видимому, вполне до¬
статочное количество необходимых признаков оптимальности.
Специалист, знакомый с литературой, как правило, не затруд¬
няется в этом вопросе. При встрече с новой задачей обычно удает¬
ся учесть дополнительные обстоятельства и составить необходи.
мые условия минимума или максимума по известным общим ре¬
цептам.
ВВЕДЕНИЕ
15
. Успехи фундаментальной математической теории необходимых
критериев оптимальности несколько затенили другие важные раз¬
делы теории управляемых процессов. Достаточные признаки оп¬
тимальности, проблема существования оптимальных движений,
вопросы корректности задач об управлении и т. д. разработаны
значительно меньше. Между тем, представляя теоретический ин¬
терес, эти вопросы не безразличны и для приложений, так как,
например, теоремы существования оптимального управления
указывают тот класс сил и, в котором надлежит выбирать опти¬
мальное воздействие и9.
Одной из трудных и малоразработанных проблем остается крае¬
вая задача, связанная с необходимостью привести управляемый
объект в заданное конечное состояние. В настоящее время эта
краевая задача оказывается часто камнем преткновения на пути
конкретного вычисления управляющих усилий. Дело в том, что
известные признаки оптимальности указывают главным образом
внутренние свойства оптимальных движений, описывая их ло¬
кальное поведение в окрестности каждой точки на данной траекто¬
рии. В силу этих свойств каждое оптимальное движение разверты¬
вается во времени совершенно определенным образом. Однако
направление в пространстве {х}, в котором может уходить опти¬
мальная траектория из заданного начального состояния я(£а) = #а,
определяется набором некоторых параметров Zn..., 1п. Труд¬
ность заключается в таком выборе этих параметров, которые на¬
правляют траекторию в нужную точку х (t$) = х&. Указанная
задача прицеливания не имеет пока общего эффективного решения.
Каждая новая серия таких задач требует обычно для своего раз¬
решения незаурядного вычислительного искусства.
Таким образом, для теории управляемых систем и для ее при¬
ложений важна задача о построении управляющего воздействия w,
которое приводит объект в заданное состояние. При этом целе¬
сообразно изучить данную задачу об управлении сначала даже
без учета требования оптимальности по тому или иному показа¬
телю. В частности, это объясняется тем, что в ряде численных ме¬
тодов оптимальные движения находятся спуском от каких-либо
исходных движений, удовлетворяющих заданным краевым усло¬
виям. Уже отмечалось, что в общем случае нелинейных уравнений
16
ВВЕДЕНИЕ
(0.1) краевая задача не имеет общей работоспособной/теории. Од¬
нако для систем, описываемых уравнениями (0.1), правые части
которых линейны по xt и Uj, рассматриваемая задача об управле¬
нии существенно упрощается и поддается исследованию методами
линейного анализа. Для этой задачи построены удовлетворитель¬
ные теории, и она, несмотря на частный характер, имеет весьма
обширную библиографию. Задача об управлении линейными объ¬
ектами и тесно связанная с ней задача о наблюдении линейных
систем и составляют основной предмет предлагаемой книги.
Итак, материал данной книги составляет изложение неко¬
торых функциональных подходов к проблемам управле¬
ния, позволяющих для линейных систем изучить ■ одну из
главных конкретных трудностей, связанную с разрешением крае¬
вой задачи, особенно в тех случаях, когда выяснение зависимости
решений от краевых условий оказывается особенно важным. Спо¬
собы решения краевых задач, составляющие предмет этой моно¬
графии, надлежит рассматривать как дополнение к основным ме¬
тодам теории оптимальных процессов, которые в свою очередь
акцентируют внимание главным образом на необходимых (а иногда
и достаточных) условиях оптимальности.
ЧАСТЬ ПЕРВАЯ
ПРОБЛЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ
(элементарная теория)
§ 1. Введение
Первая часть книги носит вводный характер. В ней начинает¬
ся изучение задачи об управлении объектами, движения которых
описываются обыкновенными линейными дифференциальными урав¬
нениями.
В главе 1 рассматриваются уравнения движения управляемых
систем и приводятся простые модельные примеры механических
объектов, описываемых линейными уравнениями. Обсуждается
и иллюстрируется на примерах линеаризация уравнений движе¬
ния. В конце главы формулируется основная задача об управляю¬
щем воздействии, которое переводит объект из одного заданного
состояния в другое в течение определенного промежутка времени.
Глава 2 содержит вспомогательный материал из теории ли¬
нейных систем. Здесь приведена матричная запись формулы Ко¬
ши для решений неоднородных дифференциальных уравнений.
Дано обобщение уравнений движения, которое позволяет доста¬
точно строго изучать задачи с управляющими воздействиями в виде
мгновенных импульсов. Здесь же дается определение импульс¬
ной переходной функции, которая играет важную роль во всей
теории линейных управляемых систем.
В главе 3 приводится предварительное решение основной за¬
дачи об управлении. Это решение находится из элементарных
алгебраических соображений. Построенное управляющее воздей¬
ствие зависит линейно от координат начального и конечного со¬
стояний объекта. Показывается, что оно является оптимальным
в смысле минимума интеграла от квадрата модуля управляющего
вектора.
Глава 1
ПОСТАНОВКА ЗАДАЧИ ОБ УПРАВЛЕНИИ
§ 2. Диффмрмнциа.еьиым уравннния движнния
Буднм аассмчааслааь упачлляемые обънкаы, тосаояисе которых
и каждый момнит лремеис t хчачкаеасзуеатя лелечсичме Хг (£), ...
..., хп (t), которын паедсачлляюа параметры, слязчитые л длеже-
теем, как, иапремер, коордсиааы, ткоротас слс иекоаорые фуик-
цсс коордсиаа с скоростн^ Велечеиы xt можио аачкаолчаь как
компоиниты n-меатого лекаоач х = {xt}. Прндположсм, чао объ-
нка подлеажеи упраиляющсм лоздейталеям ui,..., ur, который бу-
днм ерчкаолчаь как компоиниты r-мериого лекеоаа и = {u}.
,Пнанмеиные xt слс дейстлстельио, могут смнть смысл ком-
поиеит рнальных фсзеаеских лекторол. Напрпмнр, числа ., и2,
и3 могут быть паоекцияме иа осс коордсиат трнхмнриого лектора
сслы и, прсложнииой к инкоторой мехаиеческой сестемн. Одиако
лелечеиы xt слс . ин иснгда будут яиляться компоиеитчме аечль-
иых лектоаол х = {xt} (i = 1,..., п), и — {u} (j = 1,..., г).
Напаемеа, можнт паедтталсться случай, когда xt = qt, xitm = gh
гдн qi и qt (i = 1,..., m) — обобщеииын каслолитейтые коордс-
иаты с обобщ^^н скоростс мехатсческой теттнмы тоотлетттлнт-
ио. В таксх сстуацсях тачктолку объедеиеисй {хг,..., хп} слс
{Uj,..., иг} и формн лектоаол следует рассматаслать как удобиый
матееатеческсй прснм. Внктор и буднм ^змиать управлением.
Паемем, что езметеиее лелсчси xt (t) ио лремеие опеcывается
тестемой обыкиолеииых дсффepеицеальтых уралиеисй, которую
можио прелестс к иормальтой формн:
Х^ = (t, Zj,..., хп, ur) (i 1.,П). (2*1)
Зднсь с и дальтейшем точка иад букиой озиачант деффнрет-
цсаолатсе сооалеастлующей перемнииой по лремние.
Внктор-фуикцию и (t) — {Uj (t)} иазоинм возможным упрчи-
лниеем (иа ратсматрслаемом отрнзкн лрнмние ta t tp), нслс
компоиниты Uj (t) яиляются кусочио-иепрерылтымс фуикцсямс,
допускающими лсшь разрыин пнриого рода ([23*], а. I, стр. 150)
прс отдельиых сзолсаолчттых зиааетеях t = t*. Для определет-
иотее прсмем, что и точках рчзаылч, нслс оис нсть, фуикцсс и j (£)
тепаерылиы справа.
§ 2]
ИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДВИЖЕНИЯ
19
После подстановки в уравнения (2.1) какого-либо возможного
управления u(t) = {wy (/)}, правые части этих уравнений обра¬
щаются в функции от t и xt. Будем предполагать, что на рассматри¬
ваемом отрезке времени эти функции ft (t, х^..., хп, иг (£,..., нг(О)
удовлетворяют условиям существования и единственности реше¬
ний х (t) = {х} (£)} при всех начальных данных
I ~ ^01 %1 (*о) = -^г 0 ^0> £ = и), (2.2)
которые могут встретиться в задаче. Движение х (о = {xt а)},
порожденное начальным условием (2.2), обозначим символом
х (t, t0, х°), где, следовательно, х° = {х®}. Если потребуется под¬
черкнуть, что движение х (£) ■ порождается некоторым фиксиро¬
ванным управлением и = и (/), то будем писать х (t, t0, х°', и).
Условия существования решений х (Z) — х (t, t0, х°) здесь об¬
суждать не будем. Эти условия изучаются в курсе теории обык¬
новенных дифференциальных уравнений (см., например, [21*],
стр. 57, 271). Отметим, лишь, что в точках t = t*, где функции
Uj (t) разрывны, символ / в уравнениях (2.1) означает правую
производную по времени / ■ (£j = lim [xt (t* -Д At) — Xt (t*)]/At
при At -> 4- 0.
Задание начальных условий (2.2) и выбор определенного воз¬
можного управления и (it) определяют, следовательно, единствен¬
ным образом непрерывное движение х (t). Вектор х будем назы¬
вать фазовым вектором объекта. Примем следующее определение.
Определение 2.1. Фазовым вектором объекта назы¬
вается всякий вектор х = (i = 1,..., п), который обладает
следующими свойствами:
1. Компоненты xt (t) характеризуют текущее состояние объекта.
2. При выбранном возможном управлении и (t) каждое на¬
чальное состояние х (t0) = х° единственным образом определяет
значения х (t) = х (t, t0, х°) для всех рассматриваемых моментов
времени t. При этом должны быть справедливы равенства: х (t, т,
Xх) = х (t, t0, х°), если только хх = х (т, t0, х°), каковы бы ни были
t, т и t0 из отрезка [£а, 1р] (рис. 2.1).
Компоненты хг( = 1,..., п) буур&м называть фазовыми координа¬
тами объекта.
Пусть, например, управляемым объектом является голо-
номная механическая система, имеющая к степеней свобо¬
ды и описываемая обобщенными координатами дп..., qk. В ка¬
честве фазового вектора можно выбрать 2А-мерный вектор
я = Чю gi,---, Qk}- Действительно, известно ([22*],стр. 331),
что движение такого объекта можно описать системой из к
дифференциальных уравнений второго порядка, которая сводится
к системе из 2к уравнений вида (2.1). При этом задание в какой-
20
ПОСТАНОВКА ЗАДАЧИ ОБ УПРАВЛЕНИИ
[Гл. 1
либо момент времени t = всех к°мп°нент q,r w w ,/ qi (t°) векто¬
ра х (t0) при известном законе изменения внешних сил и (I) —
= {uj (t)} определяет единственным образом движение системы.
Вместе с этим определяются и величины q, (t), q, (). Напротащ
г
A-мерный вектор
. qk] фазовым вектором рас¬
сматриваемой системы не яв¬
ляется, так как значения
qi (U, • ■ •, (Q не определяют
единственным обра зом вели -
чины q, (£) (z = 1,.., к).
Заметим, что в отдельных
случаях один и тот же объект
может иметь несколько фазо¬
вых векторов различной раз¬
мерности. Так, уже в простей¬
шем случае точки т, дви¬
жущейся по прямой g в со¬
в качестве фазового вектора х
x(t, t Z*=xX,t0,X°2
Я Ъ г
Рис. 2.1.
ответствии с уравнением mg = и,
можно выбрать двумерный вектор х = {хх, х2} = .{g, В то
же время, если интересоваться лишь изменением скорости g этой
точки, а не ее координатой, то достаточно рассматривать одно¬
мерный фазовый вектор х = хх = g. Более содержательный при¬
мер подобного рода рассмотрен ниже в § 3 (см. пример 5°). Во¬
обще выбор того или иного фазового вектора определяется конкрет¬
ными условиями задачи.
В этой книге мы ограничимся объектами, описываемыми урав¬
нениями (2.1), которые линейны по величинам х, и и,. Поэтому
рассматриваемые системы уравнений будут иметь следующий вид:
п г
Xi=S + 3 Mj + { (i = i,..,n). (2.3)
fc =1 ;’==1
Здесь aik, Ь,, wt — постоянные величины или переменные
функции времени ,, которые полагаем непрерывными. Величины
aik, b,j и wi определяются параметрами управляемой системы (и,
может быть, внешними силами, которые приложены к объекту,
помимо управляющих воздействий).
В дальнейшем для сокращения письма часто будет использо¬
ваться матричная форма записи. Предполагается, что читатель
знаком с основными понятиями и операциями теории матриц
(например, в объеме материала [3*], гл. 1, 3). Как правило, строч¬
ными латинскими буквами а, 6,... будем обозначать векторы-
столбцы. Прописные латинские буквы Л, В,... будут обозначать
матрицы. Для обозначения скалярных величин используется
§ 3]
ПРИМЕРЫ ЛИНЕЙНЫХ УПРАВЛЯЕМЫХ СИСТЕМ
21
греческий шрифт. (Исключение делается для индексов z, j, к,...
и для общепринятых обозначений: t — время, g — ускорение силы
тяжести, п — порядок системы и т. д.). Штрих в верхнем индек¬
се будет означать транспонирование. Следовательно, например,
символ h' означает вектор-строку. Таким образом, символ К-х
обозначает произведение вектора-строки hf на вектор-столбец х,
т. е. скалярное произведение а = h'-x = h^x^ + ... -\-hnxn век¬
торов h и х.
Предполагается также, что читатель знаком с матричной за¬
писью систем линейных дифференциальных уравнений. Этот ма¬
териал можно найти в книгах ([12*], стр. 29 или [19*], стр. 141).
Так как
anxi + • •
• T а1пхп
Яц .
• • O'ln
pl'
_ап1х1 + • •
• + аппхп .
Лп1 •
• • ^nn
_xn_
&11м1 + •
• ■ Х^1гиг
Ы..
• ъ1г
~U—
_ЬП1и1 + •
• ■ + bnrur J
ЬП1 • •
■ bnr
• ?
или, короче,
X — Аx — Ви -р lz. (2.4)
§ 3. Примеры линейных управляемых систем
Приведем простые примеры управляемых механических си¬
стем, описываемых линейными дифференциальными уравнениями.
1°. Рассмотрим движение материальной точки массы т в вер¬
тикальной плоскости {£, ц} по кривой
В = 5 Ю п = п (□
22
ПОСТАНОВКА ЗАДАЧИ ОБ УПРАВЛЕНИИ
[Гл. 1
где £ — криволинейная координата точки, равная по абсолют¬
ной величине длине дуги От между движущейся точкой т и на¬
чалом отсчета £ . = 0, ц = О (рис. 3.1).
Предположим сначала, что движение происходит по гладкой
кривой лишь под действием силы тяжести mg и управляющей
силы и, которая составляет угол гр (t) с касательной к траектории.
Рис. 3.1.
Примем, что угол гр (t) есть изве¬
стная ■ функция времени. Какой
должна быть кривая, чтобы урав¬
нения движения были линейными
относительно координаты g? Для
ответа на этот вопрос составим
уравнение движения точки в фор¬
ме Лагранжа ([22*], .стр. 331)
(3-1)
где Г (g) и П (£) — кинетическая и потенциальная энергии точки
соответственно, Q — обобщенная сила, порожденная управле¬
нием и (t). Эту силу вычислим, исходя из ее элементарной работы
6Л = Q6g = u-cosp-6g, т. е. Q= и*со$ ip. Подставляя выражения
Г = g2, П = mgr\ в уравнение получим:
mg = — mg^- + а .. и (0 (а(0 = cos гр (t)). (3.2)
Чтобы уравнение (3.2) было линейным по g, должно выполнять¬
ся равенство dr]/<?g = eg. Поэтому полагаем:
п=4-е£2
(е •— постоянная).
(3.3)
Найдем теперь функцию g (g). Эта функция определится из
условия
С
£ = j/(W + 0'1)2
о
или — после дифференцирования по g — из условия
Интегрируя последнее равенство в пределах от 0 до g, имеем
£ = ■ у 1 — е2ф2' = J_ (eg у1 — e2g2 + arcsin eg). (3.4)
’о
§ з]
ШЧ1МЕ1’Ы ЛИНЕЙНЫХ УПРАВЛЯЕМЫХ СИСТЕМ
23
а = 1/4 |е|.)
(3.3), (3.4) имеют,
Итак мы.видим, что искомая кривая должна иметь парамет¬
рические уравнения (3.3), (3.4). Эти уравнения определяют цикло¬
иду (Обычно уравнения циклоиды записываются в виде s
= а((р • 4- sin (р), * л -= ± а (1 _ cos (р). Последние уравнения получа¬
ются из (3.3), (3.4) заменой £ = 4а sin > *Де
Уравнения движения точки т по кривой
следовательно, вид
т£ — — Ц a (Z) и.
(3.6)
Если теперь предположить, что на
точку действует также сила трения,
пропорциональная скорости, • то полу¬
чаем уравнение
= — гтgZ — v£ + а (0 и,
которое заменой £ % = т приво¬
дится к системе уравнений в нормаль¬
ной форме (2.3)
v - а (О
.т2 = — egci #2 Н ~
* ° та га
1
/
Г
и
J я
Матрицы А и В, задающие систему
(3.5) в форме (2.4), имеют для данного
примера вид
0 1
■ 0
А =
V
, В =
а (Z)
— e
° та
_ т _
2°. Пусть мы имеем упругий вал, несущий жестко насаженные
маховики (рис. 3.2).
Предположим, что система вращается вокруг оси вала с по¬
стоянной угловой скоростью со, однако вследствие возмущений
возникают крутильные колебания, которые необходимо успокоить.
Пренебрегая массой вала и его прогибом, рассмотрим эти
крутильные колебания системы. Обобщенные координаты дп
д2 и * * которые характеризуют состояние системы, выберем сле¬
дующим образом: примем, что величина д2 есть угол отклонения
среднего маховика II от заданного движения системы ф —
а величины дг и • д3 суть углы закручивания 1и2 участков вала
соответственно. Предположим, что ко II маховику приложен
2А
ПОСТАНОВКА ЗАДАЧИ ОБ УПРАВЛЕНИИ
[Гл. 1
внешний возмущающий момент v (£), а к / и III маховикам при¬
ложены управляющие моменты и± (t) и и2 (£) соответственно.
Пусть А/Ци I3—моменты инерции маховиков, а символы ( и с2
обозначают крутильные жесткости соответствующих участков
вала. Примем, ■ что система работает в пределах деформаций, под¬
чиняющихся линейному закону Гука (сх = const, с2 = const).
Тогда кинетическая и потенциальная энергия всей- системы оп¬
ределяются равенствами:
Т = -Tj- Ii (со + ?! + ?г)2 + ~2~ A (( + Q2) + (ш + /2 + <з)2,
п l qt 1 t 2
п = —сИ1. + —
Снова составим уравнения Лагранжа
d / ат \
dt ( ( ( /
ат _ ап . и
“ dQi + V*
(i = 1, 2, 3).
Из выражения для элементарной работы dA = Q1S/1 + Q2/2+
+ (зб7з = И (*)б£1 + (wi (0 + w2 (t) A- v (°))S?2 + и2 (!) б?3 следует,.
что обобщенные силы Qi, соответствующие координатам qt и отве¬
чающие воздействиям v (I), и± (t), и2 (t), выражаются равенствами:
<21 = Ы1 (*)> <?2 = “1 (0 + и2 (О + V (t), Qs = Щ (О-
Итак, получаем следующие три дифференциальных уравнения
второго порядка:
IQi + = — С121 + W1,
I<i + (Л + А + Д) $2 + А$з — Ui + щ + V,
I3Q2 + Als ~ — с2<1з -ф и-.
Запишем эти уравнения в нормальной форме (2.4). Вводя
обозначения X2i-i = Ць x2i = ?f (& = 1, 2, 3) и проделывая не¬
обходимые выкладки, получаем:
£1
О
1
0
0
0
0
±2
ci (Л ( /2)
0
0
0
Со
0
х2
IlI%
7Г
Хз
о
о
0
1
0
0
х3
Хл
=
С1
/2
о
0
0
Со
7Г
0
х4
±5
о
о
0
0
0
1
Х&
Xq
ci
I.
0
0
0 -
С2 (h -Ь Л)
l2h
0
^6
ПРИМЕРЫ ЛИНЕЙНЫХ УПРАВЛЯЕМЫХ СИСТЕМ
25
+
0
0
0
1
о
1
II
1* *
0
0
Г Mil
0
0
0
“1“
L U2 _| *
1
1з
0
0
0
1
1
л
0
Т
__ 12 _
V.
(3-7)
— вектор скорости частицы dmr
3°. Рассмотрим материальную точку массы т, движущуюся в
вертикальной плоскости ц} в поле силы тяжести. Предпо¬
ложим, что в качестве управляющего воздействия к точке т при¬
ложена реактивная сила /, возникающая в результате отделения
от нее частиц с элементарной
массой |Лпх|. Тогда масса точки
является величиной переменной
т = т (t) и ее движение можно
описать векторным уравнением
Мещерского ([13*], стр. 111)
+ (3.8)
Здесь т = т (t) = m0 + rnx (Z),
где то = const — неизменная
часть массы точки, тх (£) > 0 —
реактивная масса точки;
f = (s — v) dm-Jdt; v — вектор
абсолютной скорости точки
в момент t + dt после ее отделения, так что а — s — v есть
вектор относительной скорости отделяющейся частицы, р— вес.
Проектируя уравнение (3.8) на горизонтальную и вертикаль¬
ную оси координат, получим следующие уравнения движения:
т (t) £ = та^ (t) 1
т (t) т] = та^ (I) — т (t) g, J
(3-9)
где a- и а- — проекции вектора а на оси £ и ц. Допуская, что аб¬
солютная величина вектора а задана и равна о, запишем систему
уравнений (3.9) в нормальной форме
^1 = ^2 — Мы
#3 = ^4» #4 — g,
_ г г ■ т т
где х = ё, х.2 = ё, х3 = ц, х& = 1 ] , Ur = a cos я.5 — , и2 = <5 cos
(3.10)
26
ПОСТАНОВКА ЗАДАЧИ ОБ УПРАВЛЕНИИ
[гл. i
ос? и а V! —углы, составляемые вектором а с осями £ и ц, причем
и* + и% = а2 (т/т)2. В матричной форме (2.4) система (3.10)
запишется так:
^1
^3
х&
(З.П)
Характерной чертой рассмотренных примеров является ли¬
нейность уравнений движения. Следует заметить, что количество
управляемых систем, которые описываются линейными уравнения¬
ми к сожалению, сравнительно невелико. Однако изучение задач
управления и наблюдения для линейных систем (2.3)является
полезным по следующим причинам:
(1) Многие реальные движения, описываемые нелинейными
уравнениями (2.1), можно в первом приближении описать линей¬
ными уравнениями вида (2.3). Это позволяет заменить трудную
нелинейную проблему более доступной для исследования линей¬
ной задачей. Если линеаризация выполнена разумно, то часто .
удается из решения вспомогательной задачи извлечь полезную
информацию для решения исходной проблемы. Однако линеари¬
зация проблемы должна всякий раз обосновываться.
(2) Вторая причина, по которой полезно изучить задачи упра¬
вления и наблюдения для линейных систем, состоит в следующем.
Для таких систем известны аналитические выражения, определяю¬
щие движения соответствующих объектов- При этом линейность
уравнений (2.3) по координатам хг и по компонентам управления
Uj переходит в линейную зависимость движений х (t, tQ, и)
от начальных условий х° и от uj(t). Указанное обстоятельство
позволяет привлечь к исследованию сильный аппарат линейной
алгебры и функционального анализа. Поэтому здесь может быть
построена общая теория и можно указать достаточно эффектив¬
ные методы решения конкретных задач.
Приведем простые примеры линеаризации нелинейных урав¬
нений движения управляемых объектов.
4°. Рассмотрим гироскопический маятник ([13*], стр. 577).
Он состоит из наружной рамки, которая может вращаться вокруг
неподвижной горизонтальной оси О± и внутренней рамки, ко¬
торая может вращаться вокруг оси перпендикулярной к
ОгОг. С внутренней рамкой жестко связан стержень ОА, на ко¬
торый насажен маховичок т, вращающийся вокруг оси стержня _
ОА с постоянной угловой скоростью со (рис. 3.4). Такая система,
очевидно, имеет две степени свободы. В качестве обобщенных
§ 3J
ПРИМЕРЫ ЛИНЕЙНЫХ УПРАВЛЯЕМЫХ СИСТЕМ
27
координат q± и q2 выберем углы поворота соответственно наруж¬
ной и внутренней рамок.
Рассмотрим маятник в окрестности верхнего неустойчивого по¬
ложения равновесия, находящийся
момента и (t), приложенного к
наружной рамке. Составим урав¬
нения движения, пренебрегая
массой колец и массой стержня.
При таких предположениях ки¬
нетическая и потенциальная
энергии системы имеют вид
Т = у Ims* (j sin q2 + со)2 +
+ m<5|j2 cos2 q2 +
П = mgh (cos 7 ! - cos q2 — 1),
где величины и ^2 имеют смысл
соответствующих радиусов инер¬
ции, % — расстояние от точки
О до центра тяжести маховика.
Выделим теперь в выраже¬
ниях для кинетической и по¬
тенциальной энергии члены
под действием управляющего
наинизшего порядка.
Получим
т — | т (б2<?1 + -1- 2*1®9172) + Тх (7, q), (3.12)
П = _^д1+д2) + Пх(д). (3.13)
Здесь символами Tx (q, q) и Пг (q) обозначены все те члены в
выражениях для Т и П, которые имеют по совокупности перемен¬
ных 7i, q2 и qly q2 порядок измерения не ниже, чем третий. Эле¬
ментарная работа 6Л момента и (t) на перемещениях 6q±, dq2
имеет вид SA = uSq^ Следовательно, в нашем случае обобщенные
силы 7 и Q2 определяются равенствами: = и, Q2 = 0.
Составляя уравнения Лагранжа, исходя из величин Т,
П (3.12), (3.13), получим уравнения движения системы в виде
91 + ю — 72 — 4?1 + 71^ 9) = — и,
°2
92— о4-91 — + Та (9 9) = 0
(3.14)
28
ПОСТАНОВКА ЗАДАЧИ ОБ УПРАВЛЕНИИ
[Гл. 1
где символы. , (q, q) и у2 (q, q) обозначают члены, измерение ко¬
торых по qt, q2, #1 и выше первого.
Если стержень с маховиком т во все время движения остается
вблизи вертикальной оси, причем скорости qr и q2 также остаются
малыми, то величины ft и у2 в уравнениях (3.14) будут весьма
малы, так как ■ они имеют по меньшей мере второй порядок мало¬
сти по , , <?2, <71 и В таком случае можно предполагать, что при
решении задачи об управлении этой системой основное значение
имеет линейная часть уравнений (3.14). Поэтому исследование
задачи можно начать, исходя из уравнений линейного приближе¬
ния:
б?
9i + g
°2
.. 4 .
92— — — 41 — g
°2
1
—Ги>
0.
(3.15)
%
X
4* —
Эти уравнения получаются из (3.14), если отбросить члены
и у2. Полагая снова x2i-i = qi, x2i == , ,, получим нормальную си¬
стему четвертого порядка, где матрицы Л и В, определяющие урав¬
нения (3.15) в форме (2.4), здесь таковы:
0
1
0
0
~ 0 “
gX
0
0
4
—
1
4
°2
/ПО?
2
2
, в = ъ =
а 2
0
0
0
1
0
0 ©
—L
gX
0
0
б2
б2
5°. Рассмотрим материальную точку массы т, находящуюся
под действием центральной силы р, которая возникает в резуль¬
тате взаимодействия с другой материальной точкой массы М.
Считая, что т значительно меньше М, будем пренебрегать движе¬
нием последней относительно общего центра масс. Предположим,
что, кроме силы р, к точке т в качестве управляющего воздействия
приложена реактивная сила’/ (см. пример ■ 3°). Пусть под дей¬
ствием этих сил точка т совершает движение по кривой Г, мало
отличающейся от некоторой равновесной круговой орбиты Г°
(см. рис. 3.5).
Если вектор реактивной силы / все время находится в плоско¬
сти кривой Г°, то движение точки будет происходить в плоскости
этой кривой, и оно вполне будет определяться изменением ее по¬
лярных координат г и ф. Величины г (£), г (£), ф (t), ф (t) могут
5 31
ПРИМЕРЫ ЛИНЕЙНЫХ УПРАВЛЯЕМЫХ СИСТЕМ
29
быть приняты в этом примере за фазовые координаты. Дифферен¬
циальные уравнения, описывающие изменения можно по¬
лучить, если спроектировать векторное уравнение (3.8) на напра¬
вление радиуса движущейся точки и на . перпендикулярное к не¬
му направление. Известно ([22*1, стр. 70), что проекции вектора
ускорения w = dvldt на указанные
по формулам:
wr = Г гф2, Wф = 2г ф ф- гф.
Следовательно, имеем два диффе¬
ренциальных уравнения, каждое из
которых есть уравнение второго по¬
рядка относительно гиф:
m(r — /-ф2) = p + fr,
т (2гф + гф) = /ф
Рис. З.о.
где fr = арт, /ф = <mh, а а? и аф суть проекции вектора относи¬
тельной скорости отделяющейся частицы на направление радиуса
и поперечное направление соответственно.
Разделив оба уравнения (3.16) на т (t) и полагая, что сила р
есть сила всемирного тяготения ([22*1, стр. 176), окончательно
получим:
г — гф2 4-
Гф+ 2гф = а^.
(3-17)
Здесь v = v°M, v° — постоянная всемирного тяготения.
Пусть при отсутствии управляющей реактивной силы точка т
может двигаться по круговой траектории Г° радиуса Го = const > 0,
так что го = 0, го = 0. Тогда из уравнений (3.17), в которых пра¬
вые части положены равными нулю, определяются значения ос¬
тальных фазовых координат, соответствующих движению по кри¬
вой Г°: 4|>0 = at, ф = « = Kv/rf.
Запишем уравнения (3.17) в нормальной форме (2.1):
У1 = Уъ, ?
th = V + У1У1 +
У1
Уз = у 4,
• о ?/4?/2 , 1
Z/4 = 2 — и2.
■ У1 У1
(3.18)
30
ПОСТАНОВКА ЗАДАЧИ ОБ УПРАВЛЕНИИ
[Гл. 1
Здесь обозначено: у4 = г, у2 — /, уа = ф, У4 = ф, u = arm/m,
и2 = афп/т.
Предположим теперь, что в момент включения управляющих
воздействий фазовые координаты нашего объекта мало отличаются
от их значений на выбранной круговой орбите Г°, а величина уп¬
равляющей реактивной силы / сравнительно невелика, так что в
процессе всего управления точка остается в достаточно малой ок¬
рестности указанного кругового движения. Если ввести откло¬
нения х/ = ух — r0, х2 = у2, Х3 = у3 — at, х± = у4 — а фазовых
координат от их значений на круговой орбите1), то для них из
(3.18) получаются уравнения:
31 — #2,
#2 = Т1 (*1> ®2, *3j а*) + Z1>
Х3 ==
(3.19)
*4 = Тз (®1, ®2, «3, «4) + Гз (®1> «2> ®3>
где
Г1 =
V
(*14- Г0)2
— (®1 + г(,) (х4 4- а),
Т2
9 072 (#4 + а) „
*1 + Г ’ —
1
*14- Го •
Мы предполагаем, что за все время движения на рассматри¬
ваемом интервале [£а, 7р1 координаты Х/ (t), x2 (t), х3 (t) и х4 (t)
остаются достаточно малыми. Тогда можно составить уравнения
линейного приближения в окрестности кривой Г° для системы
(3.18) или, что то же самое, в окрестности х± =0, х2 =0, х3 =0,
х± = 0 для системы (3.19). Эти уравнения имеют вид
®i — х%,
$2 — #21®1 4“ #24®4 4‘ #1,
&3 = Х4,
Х4 = 642®2 4“ Ра22*
(3.20)
Зд2Сь П21= = 3#, a2l=(gL)o = 2r°X, С42 = (-g-)o =
= — , P = (Тз)о = —— • При этом предполагается, что и = 0
при х/ = 0, х2 = 0, х3 = 0, х4 = 0. (Символ ( )0 означает, что
выражение, стоящее в скобках, вычисляется при отклонениях
х/ = 0, х2 = 0, х3 = 0, х4 = 0.)
Здесь, впрочем, следует сделать еще одно пояснение. Движе¬
ние х/ (t) = ... = х± (t) = 0 при и = 0 неустойчиво по координа¬
те х3 (t). Это означает, что при отсутствии управляющих сил ука-
х) Величины Xi (t) описывают отклонение точки т (t) от близкой к ней
свободной точки т,, движущейся по круговой орбите Г°,
§ 31
ПРИМЕРЫ ЛИНЕЙН ЫХ УПРАВЛЯЕМЫХ СИСТЕМ
31
занная координата с течением времени довольно быстро возрас¬
тает по абсолютной величине и не остается, вообще говоря, огра¬
ниченной при даже если все начальные отклонения
х == 1,...,4) малы. Поэтому пользоваться уравнениями
(3.20) мы можем лишь при том условии, что действующие силы
и± (/)', и (t) обеспечивании малость отклонений х- (t) в течение всего
рассматриваемого отрезка времени [£a, fy], и это условие должно
проверяться по ходу работы с уравнениями (3.20).
В § 2 отмечалось, что один и тот же объект может иногда иметь
несколько фазовых векторов различной размерности. Данный
пример доставляет нам как раз такой случай. - Действительно,
вместо фазового вектора у — {у^ у2, у3, у±} можно взять фазовый
вектор меньшей размерности, а именно, принять за фазовые коор¬
динаты величины г (t), г (£), % (t) — фг2, так как совокупность их
удовлетворяет всем условиям определения 2.1. Величина % яв¬
ляется обобщенным импульсом, соответствующим координате
Уз = ф, которая будет циклической при отсутствии реактивной
силы. Учитывая, что шф = 2 гф + гф ~ТТг(г2Ф) и ф = Х^,
получаем из системы (3.17) дифференциальные уравнения, опи¬
сывающие изменение фазовых координат г, г, % во времени:
г
X
Полагая величины аг и аф постоянными во все время движения,
т. е. считая, что выброс массы п— производится ориентированно
относительно системы координат, связанной с точками т и М,
запишем систему (3.21) в нормальной форме (2.1):
21 — Z2,
• V . z3 |
z2 — — -I—3- + aru,
Z1 zi
Z3 — Z^U^H.
(3.22)
Здесь обозначено: Zt — r, z2 = f, z3 = %, и — т/т. Значения
фазовых координат zx, Zj, z3 на круговой орбите радиуса г0 будут
теперь следующими:
Z = г0, г2 = 0, Z3 = Хо = /vr0.
Обобщенный импульс %0 определяется из первого уравнения си¬
стемы (3.21) при ‘Го = 0, т — 0.
32
ПОСТАНОВКА ЗАДАЧИ ОБ УПРАВЛЕНИИ
[Гл. 1
Поступая так же, как и в предыдущем примере, можно соста¬
вить уравнения линейного приближения в окрестности кривой Г°.
Эти уравнения для данного примера записываются так:
= я2,
(3.23)
Здесь = Zr — r0, х2 = z2 — 0, х3 = z3 — % есть отклоне¬
ния фазовых координат от их значений на круговой орбите Г°.
Если выполняются условия, обеспечивающие близость рас¬
сматриваемого управляемого движения к движению по круговой
траектории Г°, то исследование линейной системы (3.23) дает
полезную информацию о движении в силу полной, нелинейной
системы дифференциальных уравнений (3.22).
Во всех рассмотренных примерах элементы матриц А и В суть
постоянные величины, т. е. системы линейного приближения яв¬
ляются системами линейных дифференциальных уравнений с по¬
стоянными коэффициентами. Однако нетрудно указать ситуацию,
когда элементы матриц А , и В будут функциями времени.
Так, если в примере , 5° в качестве движения, в окрестности
которого линеаризуется система (3.18), взять движение не по ок¬
ружности, а по эллипсу, то матрица А будет иметь элементы, пе¬
риодически меняющиеся со временем. Если же считать, что вы¬
брос массы производится по определенной программе в меняю¬
щихся направлениях относительно системы координат, связанной
с объектом, то аг и х , будут заданными функциями времени, а сле¬
довательно, и компоненты матрицы В будут также переменными
величинами.
В заключение заметим следующее. Если в процессе управле¬
ния система совершает движение в окрестности некоторого по¬
ложения равновесия или вблизи некоторого заданного движения,
то при составлении уравнений линейного приближения удобно
пользоваться следующими двумя приемами.
(1) В выражениях для кинетической и , потенциальной энергий,
в выражениях для элементарной работы управляющих и внешних
возмущающих сил, а также в выражениях для функций, описы¬
вающих диссипацию и гироскопические эффекты, выписываются
лишь члены, имеющие наинизший порядок по совокупности пе¬
ременных и и. Затем по этим величинам в соответствии с об¬
щими правилами механики составляются уравнения движения.
Таким путем были составлены уравнения первого приближения
(3.15) в примере 4°.
§ 4
ПОСТАНОВКА ЗАДАЧИ ОБ УПРАВЛЕНИИ
33
(2) Второй способ составления уравнений линейного прибли¬
жения заключается в следующем.
Сначала составляются полные нелинейные уравнения движе¬
ния рассматриваемой управляемой системы. После этого функции,
определяющие эти уравнения, разлагаются в ряды по величинам
Д#{, /■■ Aqt и и, описывающим отклонение управляемого дви¬
жения qt (£) от заданного q" (t). В полученных рядах сохраняются
лишь члены не выше первого порядка малости по этим величинам.
Коэффициенты при Aqit Д#г, \qt и и в уравнениях первого при¬
ближения определяются в таком случае производными соответ¬
ствующих ■ функций по qt, qt[ qt и п, вычисленными при qt =
— 7? W, Qi = q°i (t) и и = 0. (Предполагаем, что на заданном дви¬
жении#? (t) управление и тождественно равно нулю.) Таким прие¬
мом мы воспользовались при составлении уравнений (3.20) и
(3.23) в примере 5°.
Оба способа, естественно, должны приводить к одинаковым ре¬
зультатам.
Подробно о составлении уравнений первого приближения в
окрестности заданного движения можно прочесть в книгах по
теории устойчивости движения ([15*], стр. 21; [17*], стр. 17;
[25*], стр. 13), где заданное движение принято называть невоз¬
мущенным, а сами уравнения движения вида (3.19) называются
тогда уравнениями возмущенного движения.
§ 4. Постановка задачи об управлении
Одна из основных задач об управлении формулируется сле¬
дующим образом.
Задача 4.1. Заданы уравнения движения (2.1), отрезок вре¬
мени [fa, £j], начальное и конечное значения х* = {х*}, х$ =
= {xt} фазового вектора управляемого объекта. Требуется найти
возможное управление и (t), переводящее систему (2.1) из состояния
х (ta) = х* в состояние х (t) = х?.
Требуется, следовательно, найти кусочно-непрерывные функ¬
ции и} (t) (/ = 1,..., г; при подстановке которых в
уравнения (2.1), последние будут обладать решением х (t, ta, ха; и),
удовлетворяющим краевому условию x(t$, ta, х°-, и) = х&.
Пример 4.1. Примером сформулированной задачи об управлении может
служить задача об успокоении колебаний вала, рассмотренного в п. 2° § 3.
Пусть в начальный момент t = tx известны углы поворота маховиков qt (ta)
и их угловые скорости ■ (£а), а также пусть известно, что в течение проме¬
жутка времени ta t ■ ■ на вал действует периодический возмущающий
2 н. н. Красовский
34
ПОСТАНОВКА ЗАДАЧИ ОБ УПРАВЛЕНИИ
[Гл. 1
момнит v (t) = sin (yt + б), ссчнзающсй прс.t = tp. Тогда задача 4.1 со-
ттоет и иыборн управляющих мом-анитои u^t) с с2 (0, которын должиы рабо¬
тать и тнчнисн иaемеие . . t . и. с должиы к момниту t = tр прелнсае иал
и тоттояисе аалномнрного лаащеися с сиять тчпряжеисе иа участках 1 с 2,
т. н. требуеття паслесас обънкт и состояисн . (tp) = 0, . (tp) = 0(i = 1,2, 3).
Задача об упрчллеисс часто емнет ин одио аншнисн и (t).
В иыборн фуикцсй Uj (t), удоллетлоряющех услоисям задачс, иоз-
можни большой просзиол. В то жн лаемя коикретиын проблнмы
обычио содержат дополтстельтын таеболаися таслучшего (и том
слс сиом смыслн) качества про^сса. Треболаисе ^стронися иас-
лучшнго слс, мачн, оптсмчльиого упрчллется u(t) про^ссом
можнт Формулсроичться и инсьма аазиообаазтых формах (см.,
тaпрсмеа. [28а], стр. 88; [356], стр. 46; [136а], стр. 4б0; [17*],
стр. 478; [179], стр. 15; [213г], стр. 26). В этой кисгн мы аaстмоа-
рсм лсшь инкоаорын задачс об оптсмальиом упраллнисс.
В коткрнтиых задачах, как праисло, иыбсрaется инкоторая
лелсчсиa, харакаерезующая затраты ресурсол иа осущнстилнисн
процнсса упaaллеиея. Обычио трнбуется . достсчь желаемого рн-
зультата так, чтобы эта лелсаеиа ин прнлосходсла инкоторых за-
даииых граиц, слс так, чтобы нн зиачнисе оказалось мсисмаль-
иым.
Такую лелечеиу буднм иазыиать интенсивностью упраллеиея
с обозиачать ссмиолом х[с]. Буднм паедполчгааь, что иелечсиа
к[и] сынна смысл с иеотасцательта для любого иозможиого упрчл-
лнися и (t) (ta t t t ty).
Прсмер 4.2. Прндположсм, что и зчдччн сз прсмнрч 4.1 упралляющсн
момниты их (t) с и2 (t) иырабааыиаются элнкареанткемс длсгчтнлямс с пропор-
цсотальиы токам i. с г'2 роторои. Пусть для иормальиой работы тетенмы иаж-
ио, чтобы лелеасны токои . с г2 по иозможиостс ин прсисмалс большсх
зиччнисй и паоцессн упачллеися. Тогда и кччнсалн снтннсслиостс упаалле-
ися х[с] разумио инбрать инлсаену
x [u] = max [ I щ (z) |, I иг (t) | ] (t« < z < tg) (4.1)
с постараться опрнднлсть упраллеисе и (t) = {иг (t), иа ($)} так, чтобы ин-
лсчсич х[с] была иозможио меиьшнй.
Еслс, одиако, большсн зиачнися токои г. с ia и отд^ль^н малын про-
межуткс ирнмнис ин опчсиы, ио иажио умниьшсть теплолын потнрс и цнпях
за инсь пнрсод упраилеиея, то и качнттин ситеитсииолте х [с] цнлнтообрчз-
ио лыбрать лнлсасиу, опанднлеииую ааинистлом
x4“l = J [“i(0 + »’(«)] dt> (4-2)
ta
с иаходсть упраллетсе и (t) = {Uj (t), и2 (t)} сз умоися мстсмальиоттс
этой сиееисслиостс.
§ 4j ПОСТАНОВКА ЗАДАЧИ ОБ УПРАВЛЕНИИ 35
Сформулируем теперь общую задачу об оптимальном управле¬
нии при минимальной его интенсивности.
Задача 4.2. Заданы уравнения движения (2.1), отрезок
времени К, *₽!, начальное и конечное значения х* = {х*} и
фазового вектора и выбрана интенсивность x[zz], оцени¬
вающая управление. Среди возможных управлений и (f) требуется
найти оптимальное управление u°[t), переводящее систему из со¬
стояния xf = ха в состояние x(t$ = о? и имеющее наимень¬
шую возможную интенсивность x[zz]. '
Таким образом, задача 4.2 — это задача , об оптимальном управ¬
лении, которое определяется двумя условиями.
1. Оптимальное управление и° (t) является возможным.
2. Управление u° (t) решает задачу 4.1 и обладает свойством
к [и0] ■< х [и], (4.3)
каково бы ни было другое возможное управление и (Z), также ре¬
шающее задачу 4.1.
Пример 4.3. Рассмотрим движение материальной точки, описанное в
п. 3°§3. Пусть за время ■, < t < tр эту точку требуется переместить из поло¬
жения g (*«) = [[ л (*«) = тЛ 1 («) = ° Л («) = 0 в положение g (д) = °
П (^) = 0 £ (fy) = 0 Л (^) 0-
Масса точки т (t) складывается из двух частей: т (t) = т0 + гщ (£),
где величина т0 задана и ' остается постоянной, а величина rnj, (i) является
переменной и определяет запас реактивной массы в момент времени t. Уп¬
равляющим воздействием является реактивная сила, возникающая в резуль¬
тате отделения частиц dm. Предполагается, что в конце процесса вся реак¬
тивная масса 7гх (t.) должна быть израсходована, т. е. при t = ■, выполня¬
ется равенство тг (tg) = 0. Естественным является желание осуществить
процесс с наименьшим запасом реактивной массы тг (ie) и при этом избе¬
жать больших перегрузок, вызванных дополнительными ускорениями точ¬
ки в процессе ее движения, обусловленными управлениями и. Последнее
означает нежелательность больших значений управляющей силы. Таким
образом, в данном случае выражение для х [и] должно включать в себя и
величину, которая характеризует расход массы [ , и величину шах || и (t) ||,
равную максимальному значению управляющей силы. (Здесь и всюду в даль¬
нейшем символ || q || означает евклидову норму вектора q, т. е. || q || =
= (?г1.+---+92) ' 2- Но расход массы оценивается так. По определению функ¬
ций щ и и2в уравнениях (3.10) имеем || и (t) || == — о т (t)/m (Г),т.е.—о din т (t) =
«= II и (t) II dt или после интегрирования
М
т (t ) р
sin—L^.= \ ИЖ (4.4)
m (tp) J
откуда следует, что нужной нам мерой для величины т. (f_) является инте¬
грал [ || и (г) || dr.
<«
3
36
ПОСТАНОВКА ЗАДАЧИ ОБ УПРАВЛЕНИИ
[Гл. 1
Итак, исходя из указанных соображений, приходим к выводу, что в
данном случае полезно принять за минимизируемую интенсивность х [и]
величину
х [и] = max /max || и (t) ||, X \ | и (т) || dx| (4.5)
(X = const > 0).
Изменением постоянной X можно регулировать влияние каждого из фак-
(з
торов (максимальной силы || и (t) || или ресурса управления \ || и (т) || dx)
на свойства желаемого движения.
Таким образом, для системы (3.10) имеем следующую задачу 4.2 об оп¬
тимальном управлении: найти возможное управление u° (t) (ta t < t),
переводящее систему (3.10) из состояния х (0) = {£“, 0, т|“,0} в состояние
я(<р)={0, 0, 0, 0} и имеющее наименьшую возможную интенсивность
х [и] (4.5).
Здесь же можно поставить задачу и несколько иначе. Именно, можно
искать управление и0, которое минимизирует только величину (4.4), но при
этом стеснено дополнительным ограничением || и (£) || <1 p(Za t t$). Впро¬
чем, последняя задача сводится к задаче о минимуме величины х [и] (4.5)
при подходящем значении X (см. ниже в § 24 задачу 24.2).
Глава 2
СВОЙСТВА ЛИНЕЙНЫХ СИСТЕМ
§ 5. Формула Коши
В этом параграфе приводится формула для ■ решения х (t)
линейного уравнения
х = A (t) х + В (t) и + w (t) (ta < t < /р). (5.1)
Наряду с (5.1) рассмотрим однородное уравнение
z=A()) z. (5.2)
Пусть z(1 (i) = {z(1? (t)}, .... z<n (t) = {z(} (t)} — n линей¬
но независимых векторов-решений уравнения (5.2). (Напомним,
что некоторые п-мерные векторы qW = {qt} (к = 1,..., $) на¬
зываются линейно независимыми, когда любая их линейная ком¬
бинация q = ... + isq{s) дает вектор q, отличный от нуле¬
вого, если только среди чисел ■ есть отличные от нуля.) Извест¬
но ([21*], стр. 276), что векторы zk (t) (к = 1,..., п) линейно неза¬
висимы при всех t из отрезка {t«, £р] тогда и только тогда, когда
они независимы по крайней мере при одном значении t = т из
этого отрезка. Считая, что каждый из векторов z(k■ (t) является
вектором-столбцом, составим матрицу
zW (о • . . Zt (t)
Z (t) —
Zn\ (°
in)
(О
Поскольку при всех рассматриваемых значениях t векторы
zZt (t) (к = 1,..., п) линейно независимы, то матрица Z (t) яв¬
ляется неособой и, следовательно, при каждом^ из отрезка Иа, fp]
существует обратная матрица Z~ (i). Составим матрицу
X И, t>] = Z (О -Z-1 (t0). (5.3)
Сголбцы ■ ■ [t, = {хи (t, £0)} этой матрицы также являются
решениями уравнения (5.2), так как они суть линейные комбина¬
ции векторов ztV (t) (к = 1,..., п). Рассматриваемая матрица
% £р] называется фундаментальной матрицей системы (5.2).
38
СВОЙСТВА ЛИНЕЙНЫХ СИСТЕМ
[Гл. 2
Важно, что при t = t0 она обращается в единичную матрицу Е.
Поэтому частное решение z (£, z°) системы (5.2), удовлетворяю¬
щее условию z (t0) = z° = {z[}, определяется равенством
z (t, t0, z°) = X[t, Q z°. (5.4)
В подробной записи равенство (5.4) имеет вид
"21 (У
n (О
Я1(С to) ■ • • x-in (t, to)
xn\ ( ( - *о) • • • Хпп (С М)
п
2 Xi(t, 2o)z-
г=1
п
2 &ni (С ^о) 2j
— i=l
Если в уравнении (5.2) элементы ац матрицы А суть постоян¬
ные величины, то известен аналитический вид решений z (t), а
следовательно, известен и явный вид фундаментальной матрицы
Х[£, £0]. Векторы-решения z— (t) в этом случае следует искать
‘ по методу Эйлера в форме
zf) (t) = рМ (/)
гцс р Р1 (t) — вектор-функции, компоненты которых либо постоян¬
ные, либо полиномы от t, - — корни характеристического урав¬
нения
ап •— К .. . а1П
| А — ХЕ| =
= 0. (5.5)
аП1 • • • апп—
Структура решений z—- (t) (характер полиномов р[к) (/)) зави¬
сит от свойств корней — г уравнения (5.5). В частности, если все
корни — - простые, то векторы р№ (t) оказываются постоянными
векторами р(к), которые находятся из уравнений
(Л -ХкЕ)рЮ =0 (* = 1,..., п).
Построение решений ги([) в общем случае кратных корней
и правила для вычисления компонент полиномов р&> (t) опи¬
саны. например, в книгах [19*] (стр. 69—74), [21*] (стр. 288—
§ 5J
ФОРМУЛА КОШИ
39
297) [25*1 (стр . 57—64). Будем предполагать, что читатель в об¬
щих чертах знаком с этими вопросами.
Если величины at} (t) суть функции времени t, то вряд ли
можно указать общий метод построения в замкнутой форме
пшенм z (t) уравнения (5.2) при п > 2. В этих случа¬
ях, как правило, элементы Хц (t, t0) фундаментальной матри¬
цы* X [t, /о] приходится определять численными способами.
В дальнейшем всегда предполагается, что фундаментальная мат¬
рица XU, to] может быть так или иначе найдена. Поэтому мат¬
рицу Х[£, £о] будем считать известной для всех тех значений t
и £о, которые могут встретиться в рассуждениях. (При решении
прикладных задач часто достаточно лишь уметь моделировать си¬
стемы (5.1) и (5.2) на вычислительных устройствах, определяя та¬
ким путем элементы X И, /о].)
Движение х (t) = х (t, t0, x°) системы (5.1), которое удовлетво¬
ряет начальному условию х (t0) = ж0, определяется формулой Ко¬
ши ([12*], стр. 80—82):
t
x(t) = X К, to] xQ + X К, т] • [2? (т) и (т) + w (т)] dx. (5.6)
to
Эту формулу мы здесь выводить не будем, а лишь проверим
ее справедливость. Равенство (5.6) проверяется подстановкой пра¬
вой части его в уравнение (5.1). В самом деле х),
X (t) = X [/, £0] + X [t, t] [5 (Z) u(t) -\-w (01 +
t
+ X К, т] [B (t) u(x) (t)]c?r.
to
Но X U, Z] = E и X И, т] = A (t) X И, т], так как столбцы
(t, т) матрицы Х|£, т] при каждом постоянном значении х
являются решениями уравнения (5.2). Поэтому
t
ж (0 = Л (0 (х [t, t0] ж° + § X [^ т] [В (т) и (т) + w (г)] dx I +
+ В (Z) и (t) -)- w (t) = A (t) х (t) + В (t) и (t) + w (t)
0)_ Здесь вычисляются производные от матриц. Напомним, что под произ¬
водной от матрицы мы понимаем матрицу, получающуюся из данной путем
замены всех элементов их производными. Для операции дифференцирования
матриц сохраняются, с незначительными изменениями, правила дифферен¬
цирования скалярных функций ([3*], стр. 100). Кроме того, мы дифферен¬
цируем интеграл в правой части (5.6) по параметру t. Искомая производная
складывается из подынтегрального выражения при т = t и из интеграла от
частной пропз^днм по t, взятой от подынтегрального выражения ([23*],
40
СВОЙСТВА ЛИНЕЙНЫХ. СИСТЕМ
[Гл. 2
и, следовательно, уравнение (5.1) действительно удовлетворяется.
Кроме того, вектор х (t) (5.6) удовлетворяет равенству х (t0) =
= X [£0, = Ex0 = ж0. Тем самым справедливость формулы
Коши (5.6) полностью доказана.
Если элементы ац матрицы Л в уравнении (5.1) суть постоянные
числа, то справедливо равенство ([12*], стр. 84) Х£, =
= X [Z — U где Х[Л — матрица, составленная . из столбцов-
решений z<A (t) уравнения (5.2) и удовлетворяющая условию
Х[0] =Е. Поэтому в случае постоянной матрицы А формула Ко¬
ши имеет вид
t
х (t) = X [t ■— £q] xQ + X |* — тЦ# (т) и (*) + w (t)] dx. (5.7)
t.
Заметим еще, что в случае постоянной матрицы' А фундамен¬
тальная матрица Х£] имеет видХ£] = eAt. При этом символ eAt
обозначает матрицу, являющуюся суммой ряда
eAt = Е + At + -1 АН* + . . . +-7ГЛ"Г + . . .,
составленного из степеней матрицы Q = At по тому же правилу,
как составляется ряд из степеней числовой величины v в случае
обычной функции ev. Понятие сходимости матричного ряда и его
суммы получается автоматическим перенесением на матрицы со¬
ответствующих понятий из теории обычных рядов, и мы здесь на
этом не останавливаемся, отсылая читателя к книге [3*].
Рассмотрим два простых примера, иллюстрирующих формулу
Коши.
Пример 5.1. Пусть в уравнениях (3.5) имеем eg=<o2 > 0, v = 0, a (1) = 1,
тогда система уравнений (3.5) запишется так:
1
±1 = #2, ±2 = —(03#+ и. (5.8)
Соответствующая однородная система (5.2) в данном случае имеет вид
ii = Z2, Z2 = — <o5zi. (5.9)
Корни характеристического уравнения (5.5) системы (5.9), т. е. корни
Хх, Х2 уравнения
= X3 4- со2 = 0,
суть мнимые числа Х1=гсо, Х2 = — ico. Поэтому решения '' (t) и z(2) (t) сис¬
темы (5.9) ищутся в форме
z(1) (t) = P»e™, /2) (t) = р»е-1иЛ
(р(к > = const, е±гш< = cos wZ + 1 sin о>г).
— X 1 1
— co2 — X I
§ 5]
формула коти
41
Выполнив
необходимые вычисления, найдем.
А' [*] =
cos со (
1
— sinot
со
— со sin coi
cos (t>t
Следовательно, движение x (t) = x ( ,,, x°) системы (5.8) определяется
равенством
1 ,
— sin a>(t — t0)
Гж°
1 +
cos со (i — to)
х2(0
— co sin co (i — t0)
cos co (Г — to)
Ж0
J
t
cos со (t — т)
1
— sin • со (t — т)
со 4
0
+ \
1
и (Т) dx
J
to
со sin со (t — т)
cos со (t — т)
- т -
Это векторное равенство, расписанное по строкам, приобретает вид
Х2
п (t) = х° cos w (г — t0) + — sin со (Z — to) +
*
1 i
— \ sin со (t — т) и (т) dt,
to
I
1 С
x2 (t) = — rj со sin о) (t — «о) + «2 cos w О • — *>) 4- ~\ cos со (t— т)и(т) dx.
(5.10)
Пример 5.2. Рассмотрим систему уравнений (3.20) из п. 5° § 3:
£l = Х2,
•t'2 — Х21Х1 Х24Х4 "4“ Х1,
Хз = Хц,
Х4 = #42Х2 3Х2.
С°°тветствующая ей однородная система имеет вид
Z| = Z2,
Z — Х-21Х1 Х2121,
Х3 = Х4,
Z4 &J2Z2,
(5.11)
(5.12)
где а21 = За2, а24 = 2аг°, а., = — 2а/г° Характеристическое уравнение (5.5)
системы (5.12)
1
Д(Х) =
— х
За»
О
О
0 0
О 2аг0
— X 1
2а
'•о
— X
О — X |
= 0
42
СВОЙСТВА ЛИНЕЙНЫХ СИСТЕМ
[Гл. 2
имеет корни Xj = Х2 = О, Х3 = to и Х4 =» —to. В данном случае кратного
корпя Xj ■ Х2 структура решений z^ ■ (t) определяется свойствами миноров
определителя Д (X) при X = Xj ([25*], стр. 61). У нас минор третьего по¬
рядка, полученный из определителя А (XJ вычеркиванием 4-й строки и 3-го
столбца, отличен от нуля.
Согласно ■ общей теории это означает, что система (5.12) имеет решение
вида
z® = pWt + р<Х),
Z^2) (t) — р®,
z(3) (z) = p<3)eiaf,
где p(ll\ p®, p®, p® и p® — постоянные векторы. Следовательно, всякое
решение z (t) (5.1* 2) есть линейная комбинация величин вида p®t + р(2\
p3)cos at и p4>sin at.
Проделав необходимые вычисления, получим фундаментальную матрицу
системы (5.12):
4 — 3 cos at
За sin at
**] =
6а 6
t + — sin at
го ~ Г
6а 6а
Г —— cosaZ
Го Го
1
— sinaZ О
cos at О
-07“ (1 “ cos at) 1
2
sinaZ О
го
2го .
—— (1 — cos at)
2rosin at
4
— 3z -k — sin at
1 a
— 3 + 4 cos at
Таким образом, движение x (t) = x (z, to, x°) системы (5.11) определяется
векторным равенством
®(Z)
4 — 3 cos a (t — t0)
1
— sin a (Z — Zo)
0
2r0
— cos a (Z — Zo]]
z2(Z)
3a sin a (Z — Zo)
cos a (Z — Zo)
0
2ro sin a (Z — Zo)
6a
2
is(t)
=
— 77 ■1 - *o) +
-t^1-
1
— 3 (Z — Zo) -p-
6
4
+ — sina(Z— Zo)-
- cos a (z — Zo)]
+ — sin a (Z — Zo)
6a .
2
x4(Z)
+
— — sin a (Z — Zo)
0
— 3 +
6a
+ 4 cos a (Z — Zo)
+ cosa(Z — to)
§ В]
ОБОБЩЕННЫЕ уравнения движения
43
4 — 3 cos a (J — т)
1 v
— sin a (i — т)
а 4 7
За sin а ( ( — т)
cos а ( — т)
6а
2
——■—т) 4—
аг0
6 ( ч
4- —— sin а (t — т)
— cos а (t —
т)]
6а ,
2
— т)
“ 7“ +
sm а (t
го
6а .
4- — cos а (f — т)
Г
О
1
X
о
о
О
2го sin а (t — т)
О
1
— 3(г — Т) +
4
4- — sina (£ — т)
Tf-
— cos а (£ — т)]
О — 3 +
4-- 4 cos а (/ — т)
О
X
§ 6. Обобщенные уравнения движения
В предыдущих параграфах мы рассматривали системы, где
в качестве возможных управлений выбирались кусочно-непрерыв¬
ные вектор-функции и (t) = {uj (t)}. Однако иногда оказывается
целесообразным рассматривать управления более общей природы.
Именно, оказывается целесообразным дать такое определение
возможных управлений, которое позволяло бы также рассматри¬
вать управляющие воздействия в виде мгновенных импульсов.
Рассмотрим одно такое обобщение для линейных систем.
Пусть сначала, как и в § 5, система описывается векторным
дифференциальным уравнением (5.1), где и (t) и w (t) — кусочно¬
непрерывные вектор-функции. Обозначая
^П,т]5 (?) = Я£,т] = {hi} U, т]} (i = 1,..., п; j = 1,..., г),
(6-1)
запишем векторное равенство (5.6) в координатах:
n t г
xi (0 = 2 хЧ (*» М —( [2 ha [* Т1 Uj (T)j dx +
5=1 to 3=1
t п
+ $ [S хи G т) (У Id? а (6.2)
i. ;=1
44
СВОЙСТВА ЛИНЕЙНЫХ СИСТЕМ
[Гл. 2
Введем ' функции Uj (т) и Wk (т), определенные соотноше¬
ниями
т
Uj (т) = Uj (О) dx'f (7 = 1, . . г), (6.3)
t»
(г) = 5 (O)dO (/г — 1> . . ., п). ■ (6.4)
с
Тогда равенства (6.2) принимают вид
п г i
X (О = 2 хи (С Q X + 2 $ hu R t] dUj (r) +
j=l 7 = 1. to
n t
+ 2$®ik(<. •*)(<■ = (6-5)
k=l О
Предположим теперь, что движения Xt (t) управляемой си¬
стемы описаны сразу при помощи равенств (6.5), а не в форме диф¬
ференциального уравнения (5.1). В таких случаях будем говорить,
что дана система, описываемая уравнениями (6.5), или — в век¬
торной форме — уравнением
х (t) = X [t, t0] x° + Н И, т] dU (т) +
j
t
+ X [£, т] (т) (6.6)
tl
и управляемая вектором dU (£). Но равенства (6.5) и (6.6) имеют
смысл и в том случае, когда вектор-функции U (t) = {Uj (t)},
РИ (t) = {Wk (t)} суть функции более общей природы, чем опре¬
деленные выше величины (6.3), (6.4). Для этого следует лишь ус¬
ловиться понимать интегралы в правой части (6.5) в смысле ин¬
тегралов Стилтьеса. Теория интеграла Стилтьеса излагается
подробно в курсах анализа ([23*], т. 3, стр. 89—122) и в курсах
по теории функций действительного переменного. Сжатое, но
вполне достаточное для нашей цели изложение теории интеграла
Стилтьеса читатель может найти в книге [5*] (стр. 157). Для
удобства чтения приведем здесь определение и отметим совсем
кратко основные особенности этого интеграла.
Интеграл Стилтьеса
J h (t) dU (О (6-7)
ОБОБЩЕННЫЕ УРАВНЕНИЯ ДВИЖЕНИЯ
45
§ ('J
от скалярной функции h (t) по скалярной функции U(«) на от¬
резке t0 О t < 1» определяется как предел для интегральной
суммы т_1
sm= 2
7=0
(7о d 11 <1 • • • d 7*/ ( 7^1+1 < 1»™ = 1“’ t ( О] ( 1;+1)
при условии, что число т делений отрезка Ио, • 1 неограниченно
возрастает и длина отрезков [tj, Zj-nl равномерно стремится к ну¬
лю. Предел интегральной суммы Sm, а следовательно, и интеграл
Стилтьеса существует во всяком случае, если функция h (t) не¬
прерывна на отрезке [Zo, £,], а .функция U (/) имеет на этом отрезке
ограниченное изменение ([23*], т. 3, стр. 74). Последний термин
означает, что составленная для функции U (t) величина полного
изменения ее на отрезке Ио, 1<J
т—1
var [u] = sup [2 | U (И,,) - U (h) |], (6.8)
i=0
где верхняя грань вычисляется по всем возможным m > 1 и
ti из [/о, £], является конечной. Здесь 1 / — произвольные точки
деления отрезка Ио, 1Ш1.
Интеграл Стилтьеса ’ имеет много общих черт с обычным опре¬
деленным интегралом Римана. В частности, если функция U (t)
имеет непрерывную производную U (t) — и (t), то интеграл
Стилтьеса (6.7) превращается в интеграл Римана
h(t) и (t)dt.
to
Следовательно, в этом случае символ dU (t) в (6.7) можно
трактовать как обычный дифференциал. Отметим также, что спра¬
ведливо следующее важное неравенство:
15 h(t)ddJ((t|<sup| 1(t| • vaa[ U [())]*. (6.9)
to
В качестве примера рассмотрим еще тот случай, когда h (t) = у
и U (t) = 0 при t0 d t d <t, U (t) = 1 при ft < t d tv- Тогда
путем непосредственного вычисления интегральной суммы
получим:
§ (
§ h {x)dU (т) = 0 при t [ °, 1 h (т) dU (т) — у при t ^>■0.
(1 t.
46
СВОЙСТВА ЛИНЕЙНЫХ СИСТЕМ
[Гл. 2
Рассмотрим также несколько более общий случай, когда функ¬
ция h (Z) непрерывна на [£0, £ш], а функция U(t) непрерывна и
дифференцируема всюду, кроме точки t = •, где она имеет раз¬
рыв, но при этом непрерывна слева. Вычисляя предел интеграль¬
ной суммы 5т., нетрудно проверить равенства
t t
h (т) dU (т) = § h (т) U (т) dx при t й>
t. 0о
t
h (т) dU (т) = h (й) [17 (0 + 0) — U (й)] +
to
t
+ h (r) U (r) dx при t ft.
to
(6.10)
Вернемся к равенствам (6.5).
Поскольку функции hij [t, т] непрерывны, правые части этих
равенств имеют смысл при любых функциях Uj (т) и Wk (т),
имеющих на рассматриваемом отрезке [t0, • ] ограниченное из¬
менение var [Су], var [WFAJ. Поэтому можно принять, что и в
таком более общем случае равенства (6.5) (или равенство (6.6))
задают движение x(t) системы, управляемой вектором dU (t) =
= {dUj(t)} и подверженной возмущениям dW (t) = {dW!c (t)}.
Можно проверить, что вектор х (t) благодаря свойствам фунда¬
ментальной матрицы XZ, £0] и свойствам интеграла Стилтьеса
и тогда удовлетворяет условиям, определяющим фазовый век¬
тор х (£) (см. определение 2.1). Заметим еще, что правые части
в векторном равенстве (6.6) следует трактовать как интегралы
Стилтьеса от матричных функций Н и X по векторным функциям
U (t) и W (t). При этом под интегралом Стилтьеса
t(D
\Н (0 dU (i) = д (Н = {Иц}, г = 1, . . • , n; 7 = 1, . . , , г)
to
будем понимать вектор д с компонентами
со
? = 2 \ hi}{t)dU}{t) (i = 1,..., п).
з=1 <*,
Для того чтобы подчеркнуть, что для рассматриваемой линей¬
ной системы можно допускать управления dUj (t) (и возмущения
dWk (t)), порождаемые функциями с ограниченным изменением,
и избежать при этом громоздкой записи (6.5), будем в соответ¬
ОБОБЩЕННЫЕ УРАВНЕНИЯ ДВИЖЕНИЯ
47
§ 61
ствующих случаях описывать систему не уравнением (5.1), а
уравнением
dx = A (t) xdt + В (t)dU + dW. (6.11)
При этом запись (6.11) является лишь символическим указа¬
нием на то, что движение системы описывается равенствами (6.5),
составленными по матрицам А и В в соответствии с формулой
Коши, и в этих равенствах Uj (t), Wk (t) суть функции с ограничен¬
ным изменением. В таких случаях будем говорить, , что возможны
обобщенные управления dU (t) и возмущения dW (t).
Обсудим характер движений управляемых систем, описывае¬
мых уравнениями в форме (6.11). Сделаем это на примере уравне¬
ния
dx = A (t) x-dt + b (/) dU (О, (6.12)
где U (t) — скалярная функция и, следовательно, b (t) —
n-мерный вектор.
Рассмотрим управление частного вида. Пусть функция U (t)
непрерывна при t0 t — ft и при й < t t^, и, кроме того, при¬
мем, что внутри указанных интервалов она непрерывно дифферен¬
цируема. При t = й примем U (й + 0) — U (й) = 1. Тогда для
t G= [к0, Ф) или для t ЕЕ (й, О>1 имеем:
п
хг (t + Д° — xi(° — 2 [ху (£ 4- ДО О) — xv (0 Ml Xj 4-
3=1
t+At
+ — h(i) к 4- Д0 *1 dU (т) 4-
t ■
t
+ J {/№ H + k^ t] — № [J r]}dU (?)
t,
(6.13)
(л<‘> в, т] - 2 m() ObrCO» 1 =1 • • •> n; - Д>°)-
j=i
Разделив равенство (6.13) на kt и переходя к пределу при kt ->0,
получим с учетом свойств фундаментальных матриц, как и выше
на стр. 39, равенство
■77 = A (t)x + b(t)u, где u(t) = U (t).
Таким образом, на интервале дифференцируемости U (т) движе¬
ние х (t) описывается снова дифференциальным уравнением (5.1).
48
СВОЙСТВА ЛИНЕЙНЫХ СИСТЕМ
[Гл.
Пусть, однако, t = О. Тогда, исходя опять из равенства (6.13)
и опираясь на свойство (6.10) интеграла Стилтьеса, получим:
xt (О + 0) - xt (fl) = bt (fl).
Следовательно, при прохождении через точку t = А движущая¬
ся точка х (t) совершает скачок, причем величины xt (t) претер¬
певают разрывы Axt = bt (fl). .
Аналогичное рассуждение можно привести и для г-мерного
векторного управления dU (t) и для возмущения dW (t).
В соответствии со сказанным движение х (t), задаваемое ра¬
венствами (6.5), оказывается разрывным, если функции Uj(t)
и Wk (t) терпят разрывы в каких-либо точках t = О. Механичес¬
кое истолкование этого обстоятельства будет дано в следующем
параграфе при рассмотрении понятия импульсной переходной
функции линейной системы. Сейчас условимся лишь о следую¬
щем. Если не сделано никаких оговорок, то функции U}(t),
Wk (t) предполагаются кусочно-непрерывными и кусочно-диф¬
ференцируемыми на отрезке t0 t ta, а в точках разрыва, ес¬
ли они есть, эти функции предполагаются непрерывными слева.
Тогда движение х (t) (6.6) оказывается также непрерывным слева.
§ 7. Импульсная переходная функция объекта
Введем важное для теории линейных управляемых систем по¬
нятие импульсной переходной функции.
Пусть управляемый объект описывается векторным диффе¬
ренциальным уравнением
X = A (t)x + b (t) ц, (7.1)
где, как обычно, х — n-мерный вектор, А(£) — непрерывная
матрица размерности п х п, ц — скалярная переменная, b (t) —
непрерывный n-мерный вектор. Обозначим символом тр (t) функ¬
цию, определенную равенствами
Пе (() = 0 при t<O и ( > е,
т]е (t) = 1/е при е,
(7-2)
где е — некоторое положительное число (рис. 7.1).
Рассмотрим уравнение (7.1) при ц = це (£ •— О) (А ( 0). Это
равносильно предположению, что воздействие ц оказывает влия¬
ние на объект лишь в течение времени О ( t <С А + е. При этом
независимо от А и 8 импульс р этого воздействия равен единице:
а-Н
Р [Пе] = 5 Пе (< — —Z = 1.
а
§ 7]
ИМПУЛЬСНАЯ ПЕРЕХОДНАЯ ФУНКЦИЯ ОБЪЕКТА
49
Предположим также, что до момента времени t = fl система
(7.1) находилась в состоянии равновесия х = 0, и обозначим дви¬
жение х (£), порожденное воздействием^^ ='т]е (* — А), символом
Х^ (t, fl).
Согласно формуле Коши (5.6) имеем:
Х(е) (ф f|) = О При t < fl,
t
Х^ (t, fl) = У > X [£, т] Ъ (т) dx при А > > <С А + е,
а
^Ч-Е
#(*0 (^ А) = А > X [/j т] Ь (т) dx при t > А + е.
а
(7.3)
Потребуем теперь, чтобы е стремилось к нулю. Тогда вектор-функ¬
ция Хе> (t, fl) (7.3) при каждом t будет сходиться к некоторой век-
тор-функции h[t, fl], причем
h[t, А] = 0 при *<А, 1
Л П, А] = X [/, А] b (А) при t > А. )
Компоненты 1 ' > [Z, А] функции h [f, А] имеют, следовательно,
вид (рис. 7.2)
/г(г) [t, А] = 0 при t j А,
/г|!) [Z, А] = 2 Хц >>> A) bj (А) при t >
7=1
где хи (t, ft) _ элементы фундаментальной матрицы X [Z, А]
однородной системы z = Az, соответствующей системе (7.1).
С другой стороны, согласно равенству (5.4) вектор-функция
" 1 >> А] описывает движение объекта (5.2), который до момента
50
СВОЙСТВА ЛИНЕЙНЫХ СИСТЕМ
[Гл. 2
to = tt находился в состоянии равновесия z = 0, а в момент
t0 =»= 0+ 0 сразу оказался в состоянии z (t0). = b (t0) = b (0) и даль¬
ше начал двигаться в соответствии с однородным уравнением
(5.2). Вызвать такое движение х (t) = h [2, О] у системы (7.1)
с помощью воздействия ц (t) из класса возможных управле¬
ний и (t) нельзя. Однако такое движение можно определить мате¬
матически строго, если воспользоваться понятием возможного
обобщенного управления, введенным в § 6 для системы (6.11). Дей¬
ствительно, выберем обобщенное управление dU = dU [2 — О],
порожденное функцией U k — ft] вида
U\t — 0] = 0 при 2< 0, | (7 5)
U {t — ft] = 1 при t ■ ft. J
Тогда по известным свойствам интеграла Стилтьеса ([23*],
т. 3, стр. 90—91), упомянутым в § 6, имеем:
t
х (t) = X {t, x]b (т) dU [т — ft] — 0 при t tt,
ъ
t
x(t) = X [2, т] b(x)dU [т ■— ft] = X {2, ft] b (ft) при 2^>0.
to
Осуществить практически движение х (t) = h k, ft], очевид¬
но, невозможно, так как для этого надо было бы при t = ft мгно¬
венно перебросить объект из состояния х = 0 в состояние х =
= b (0). Но реальные объекты обладают инерцией, исключаю¬
щей такой эффект. Однако выше мы видели, что функция h [2, ft]
является пределом для движений ж<Е) (t, ft) при е ->0. Следо¬
вательно, данное обобщенное управление dU {2 — ft] можно
рассматривать как математическую абстракцию для реальных
воздействий вида т]е (t — ft), когда время работы воздействия ц
пренебрежимо мало, но импульс этого воздействия р [т]е] являет¬
ся конечной величиной, равной единице. Такое обобщенное воз¬
действие dU U — ft] принято называть б-функцией и обозначать
через dU [2 — ft] = 6 (t — ft) dt. В соответствии с этим обобщен¬
ное управление dU k — ft] (7.5), порождающее движение х (t) =
= h [2, ft] (7.4) объекта (6.11), будем называть импульсным 6-
воздействием и обозначать его символом dU = S (t — ft) dt.
Введенное выше определение S-воздействия 6 (t — ft) dt бу¬
дем использовать для всех значений ta ■ ft ■ fy, где 2Я и t$ оз¬
начают границы промежутка времени, на котором изучается дви¬
жение управляемого объекта. При ft = t$ иногда будем определять
б-воздействие несколько иначе. Примем, что 6-воздействие при
7] ИМПУЛЬСНАЯ ПЕРЕХОДНАЯ ФУНКЦИЯ ОБЪЕКТА 51
$ = — порождается функцией U [Z, ft] вида
I U К, ft] = 0 при t< ft,
U R, О] = 1 при t > О,
и будем обозначать его черев dU~ = 6“ (t — t?) dt. Следовательно,
в этом случае функция U [t — fy] предполагается в точке t =
= tp непрерывной справа. В соответствии с этим и движение
х ф = h [£, й] при й = 7р оказывается непрерывным по t спра¬
ва. Это движение х (t) можно рассматривать как предел движений
я;<~Е)П, й], порожденных воздействиями ц(_Е) [£ — й] вида
П(-е) [<, й] = у яри ft — е<7<йг
Ц(_Е) [7, й] = 0 при £<й — е— 7>й.
Построенную выше вектор-функцию h И, й] (7.4), описываю¬
щую движение х (t) системы (6.11) при 6-воздействии 6 (t — й) dt,
называют импульсной переходной функцией объекта (7.1) (по воз¬
действию ц). В тех случаях, когда надо подчеркнуть, что речь идет
о переходной функции по какому-то определенному воздействию,
будем снабжать величину h [/, й] соответствующим индексом.
Так, например, переходную функцию по воздействию Uj (t) бу¬
дем обозначать символом h К, й]р Тогда движение х (£) системы
(5.1) согласно формуле Коши (5.6) и равенству (7.4) можно запи¬
сать в виде
t г t
x(t) = X [Z 70] X0 + 5 h I*' ТЬ ui (t)| X lb T1 w (r) dt.
h J=1 ' to
(7-6)
Введем еще одно понятие.
О^]ределение 7.1. Матрицу Н И, й], столбцами кото¬
рой являются векторы h [£, й]- (/ = 1,..., г), будем называть им¬
пульсной переходной матрицей системы (5.1) по воздействию и.
В соответствии с этим формулу Коши (7.6) можно записать еще
в виде
t
х (Ь to, аз0) = x [С 7°] + \{И [7, т] и (т) + x ф т] w (г)} dx. (7.7)
to
Заметим кстати, что матрицу X И, т] можно также рассматривать
как импульсную переходную матрицу по воздействию w. Отметим,
наконец, что матрицы Н К, т] и X [£, т] иногда называют функция¬
ми Грина системы (5.1).
В дальнейшем будем предполагать, что для рассматриваемых
систем известны все необходимые импульсные переходные функции.
52
СВОЙСТВА ЛИНЕЙНЫХ СИСТЕМ
1,Гл. 2
Эти функции можно вычислять, исходя из их выражений
(7.4), через фундаментальную матрицу системы. Функции h[t, т]?-
могут определяться и экспериментально по наблюдению движе¬
ния х (t) при кратковременном, но интенсивном воздействии
цЕ (t — #) на объект или на его модель. При этом имеется в виду,
что в соответствии с определением переходной функции h [t, ^In
движение х (t) описывается приближенно функцией цЛ [£, '0']
когда на объект в момент времени t = $ подается кратковременное
воздействие . . ■ (t — & с импульсом
оо
р[п(и)1= J 1l(i-'-(Z — О) di = ц.
—ОО
Следует еще всегда помнить, что Н [£, т] = О при ■ . т по смыслу
этой матрицы. Поэтому во всех выражениях для Н U, т], которые
встретятся ниже, надлежит полагать t > т, хотя это и не будет
оговариваться. Впрочем, в соответствии с материалом на стр. 50,
где было введено 6-управление, иногда удобно, однако, делать
исключение, из сказанного, полагая при т = t = что
Я'Е/р, Zg] = В (tp) == 0.
Пример 7.1. В примере 5.1 воздействие и является скалярной величиной.
Поэтому матрица Н [£, т] сводится здесь к вектору h [£, т]. Этот ' вектор
имеет вид
h[t, x] =
г 1
АП (О
sin о (t — т)
1
— cos .со (t — т)
(»>*).
что следует сразу из равенств (5.10) и (7.4).
В заключение дадим механическое истолкование величины
var [С(т))г^, введенной в предыдущем параграфе. Пусть сначала
U (т) — непрерывно-дифференцируемая функция и U (т) = и (т).
Тогда известно ([23*], т. 3, стр. 78), что
*3
var[7(T)]3 = ^|u(T)|dr. (7.8)
t«
Если и (t) — сила, действующая на систему, то величину (7.8)
следует истолковать как полный импульс этой силы за время [£а, ^].
Пусть теперь U (т) является кусочно-дифференцируемой функцией
§ 71 ИМПУЛЬСНАЯ ПЕРЕХОДНАЯ ФУНКЦИЯ ОБЪЕКТА 53
с конечным числом скачков
U (т4+0) - U (tJ = у,
в точках ти-.., хк. Тогда, полагая
dU (т) — и (x)dx — u(1) (т) dx-\ u№(i) dx,
к
где z'' (т) — непрерыгная функция, а н<2) (т) =2 у1#(т — т»),
имеем (см. § 6 и [23*], т. 3):
к ■
var [t/]',' = $ | uW (х) | dx + 2 IT I- (7-9)
“ ta »=1
Величину, стоящую в правой части этого равенства, тоже ра¬
зумно истолковать как полный импульс силы, действующей на
систему. В соответствии с этим условимся величину var[t7]#
и в общем случае трактовать как полный импульс управляющего
воздействия, работавшего в течение времени [£а, #].
Глава 3
ПРЕДВАРИТЕЛЬНОЕ РЕШЕНИЕ ЗАДАЧИ
ОБ УПРАВЛЕНИИ
§ 8. Эвристические соображения
Пусть состояние управляемого объекта описывается некоторым
n-мерным фазовым вектором х (t). Управляющее воздействие и (t)
для простоты будем считать в этой главе скалярной ' функцией.
В соответствии с формулировкой задачи 4.1 будем предполагать,
что даны уравнения движения объекта
х = A (t)x + b (t)u 4-ш (/), (8-1)
отрезок времени ta ) t tp, начальное х* и конечное х& состоя¬
ния объекта. Требуется найти возможное управление и (t), пе¬
реводящее объект из состояния х (ta) = ха в состояние х (tp) =
= х&. Предположим также, что известны импульсные переходные
функции объекта (см. стр. 48)
H[t, =
~hw [i, fl] ‘
_/г(п) [£, О].
XR, 0],
(8-2)
где символы t< * t обозначают, следовательно, в данном случае
компоненты вектора Н R, О].
Воспользуемся формулой Коши (7.7). Полагая = ta, t =
= tp, x )) = x“, x (tp) = x&, получим векторное уравнение
относительно искомой функции и (t)
Н [ t, , т] и (т) dr = с, (8.3)
«а
где известный вектор с определен равенством
ч
с = х$ — X [ [ * , £а] х» — $ X [<з, т] w (т) dx. (8.4)
§ 8]
ЭВРИСТИЧЕСКИЕ СООБРАЖЕНИЯ
55
Запишем уравнение (8.3) в координатах:
*8 '
hw т] и (т) dx — Сц,
(8.5)
й(п)[/ т] и (т) dx = сп.
Для определения неизвестной функции и(х), т. е. для отыскания бес¬
конечного (числа неизвестных значений и (т), соответствующих все¬
возможным значениям т из отрезка ta ( т ip, мы имеем лишь п
уравнений. Поэтому естественно предполсжгть, что уравнения
(8.5), вообще говоря, не определяют функцию и (т) единственным
образом. В то же время выполнение равенств (8.5) является необ¬
ходимым и достаточным условием для того, чтобы управление и (t)
удовлетворяло требованиям задачи 4.1. Следовательно, можно
ожидать, что в общем случае задача 4.1 имеет не единственное ре¬
шение.
В этом параграфе приводятся эвристические соображения, ука¬
зывающие путь для определения одного из решений и (t) урав¬
нений (8.5). С этой целью сопоставим уравнениям (8.5) уравнения,
аналогичные им в известном смысле, но составленные не для ис¬
комой функции и (т) (ta '< х ( £р), а для некоторого неизвестного
нп-мерного вектора v = vm}. Для получения этих уравне¬
ний разобьем отрезок [ia, ip] на т частей точками /а = то < ... <
< Xj ( Tj+i <Z ... < Хт — ip- Составим векторы gW =
= {4/ • • •, gil’l, • • •• g(n) = <gn), • • ., g£>}, где [ip, x}] Ar3-
(( = 1, . . ., m\ г = 1, .., re), At; = T— T-i. Интегралы
*0 m
$ /(г) [П>- t] u (r) dx заменим суммами 2 £/)у., гд^ следователь-
*а i=i
но, величины Vj заменяют значении u(xj). Поскольку при боль¬
ших т интегралы
Ч
Л(1)Пз, т] и (т) dx
td
приближенно представляются суммами
т т
2 Л<г) Пр. Т;1 ДЧК (Т;) = 3
7=1 3=1
можно предполагать, что свойства составленных нами вспомога¬
тельных уравнений будут иметь много общего со свойствами
56
ПРЕДВАРИТЕЛЬНОЕ РЕШЕНИЕ ЗАДАЧИ ОБ УПРАВЛЕНИИ [Гл. 3
исходных уравнений (8.5). Поэтому изучение вспомогательных
уравнений должно подсказать путь для решения уравнений (8.5)
и для исследования полученных решений.
Итак, . рассмотрим вспомогательные уравнения
т т
3 4ПЧ = Сп- м
7=1 3=1
В дальнейшем для наглядности примем, что п = 2-. Тогда урав¬
нения (8.6) запишутся так:
^1 + . . . 4- ggVm. = Cl, |
42)у1 + ■ ■ ■ + g%vm = с2. J (8'7)
Если m-мерные векторы gW и gT линейно зависимы, т. е.
если существуют числа . и Z2, для которых ZjgW + Z2g(2> =
= 0 при Zi + Z2 =/= 0, то можно подобрать ([3*], стр. 50—52)
такие числа Сг и С2, что уравнения (8.7) будут неразрешимы
(надо лишь для этой цели взять такими, чтобы /с1 + ^с2 4= 0).
Поэтому будем предполагать, что векторы gg линейно независи¬
мы и, следовательно, в частности, ни один из этих векторов
не равен нулю.
Равенства (8.7) допускают полезную геометрическую интер¬
претацию. Левые части равенств (8.7) имеют смысл скалярных
произведений векторов gW на вектор у, т. е. уравнения (8.6) мож¬
но записать так:
g()' v = с (j = 1,2). (8.8)
Величины а. = (g(')'f)/ || g(’) ||, гце И g(») || — модуль вектора gW,
являются проекциями искомого вектора v на направления извест¬
ных векторов gg. Следовательно, уравнения (8.8) можно записать
в виде
Прй(о v -= at (i -= 1,2).
Таким образом, задача состоит в следующем: требуется найти
вектор у, проекции которого на заданные векторы gW и ga) должны
быть равны заданным числам аг и а2 (см. рис. 8.1, где для нагляд¬
ности выбрано т = 3, т. е. векторы gW и g(2) предполагаются
обычными трехмерными векторами).
Очевидно, указанным условиям удовлетворяет любой вектор
и, конец которого лежит на прямой I — I, являющейся пересе¬
чением плоскостей л1 и л2, перпендикулярных к векторам gW и
gW и проходящих через точки Qj и Qj- Никакие другие векто¬
ры условиям задачи не удовлетворяют. Среди векторов р, удо¬
влетворяющих условиям задачи, можно выделит!, вектор и0, ле¬
жащий в плоскости векторов gg и gW. Этот вектор р° является
ЭВРИСТИЧЕСКИЕ СООБРАЖЕНИЯ
57
§ SJ
линейной комбинацией векторов gV и gl, т. е. .
(8.9)
Для вычисления чисел Z, и Z- подставим, выражение (8.9) для
в уравнение (8.8). Получим систему двух линейных уравнений
для двух неизвестных g g и Z-:
<#11^1 "I ^12^2 = С1’
^г!7! 4“ С2>
где (Xij = gO'gj Определитель этой системы не равен нулю, если
векторы ' g1 1 1 и g 12 1 линейно независимы (что мы и предположили
выше), ибо
&11Л12
= ОСцЛс2 <С12^21 —
Л21<&22
= II II2 • II g(2) II2 - II Sw ||2 • Il g2 ||2 cos2 = II ||® . || g(2) II2 sin2 if,
где 4» — угол между векторами g1) и д2>.
Разрешая полученную систему уравнений, определим иско¬
мый вектор zA Эти рассуждения, относящиеся к определению
вектора у0, очевидно, справедливы
не только в рассмотренном нагляд¬
ном случае п = 2, т = 3, но и
при любых п и т > п.
Из рис. 8.1 следует, что вектор
у° обладает одним замечательным
свойством. Именно, каков бы ни
был другой вектор у, удовлетво¬
ряющий условиям задачи, спра¬
ведливо неравенство
(8.10)
В самом деле, согласно рис. 8.1
имеем v = v°4- р. Но вектор р ор¬
тогонален к вектору р°. Следова¬
тельно, в прямоугольном треуголь¬
нике, составленном векторами р°,
у, р, вектор v является гипотенузой, откуда и следует справед¬
ливость нерав енства (8.10).
Итак, мы получили достаточно наглядное представление о свой¬
ствах решений вспомогательной задачи. Рассмотренная геометри¬
ческая интерпретация подсказывает нам определенные предполо¬
жения о свойствах решений и (t) исходной проблемы. Эти свой¬
ства мы выведем в следующем параграфе.
58 ПРЕДВАРИТЕЛЬНОЕ РЕШЕНИЕ ЗАДАЧИ ОВ УПРАВЛЕНИИ [Гл. 3
§ 9. Решение задачи
Воспользуемся здесь понятиями, которые для функций, за¬
данных на отрезке Z« 1 т 1 t&, соответствуют скалярному про¬
изведению, модулю и свойству ортогональности конечномерных
т
векторов. Скалярному произведению двух векторов а-b = 2 al
• Г==1
сопоставляется скалярное произведение (а, Р) двух функций а (т)
и р (т) (Za 1 т 1 Zp), определяемое равенством
(а, 0) = , а (т) 0 (т) dx.
Величина
4з 1Д
р [а] = [ а2 (т) dr] \
соответствующая понятию модуля m-мерного вектора а, назы¬
вается нормой) функции о(т). Две функции а(т) и р (т)
Zp) называются ортогональными, если их скалярное произве¬
дение (а, р) равно нулю, т. е. если выполняется равенство
*з
ос (т) р (т) dx = 0.
Не определяя здесь наиболее широкий класс функций а(т), Р (т),
для которых целесообразно рассмотрение указанных понятий,
ограничимся в этой главе кусочно-непрерывными функциями.
Обсуждение вспомогательной задачи, приведенное в § 8, под¬
сказывает следующую гипотезу о решениях задачи 4.1.
Гипотеза. Пусть функции hl'tli, т],..., •• [Zp, т] (8.2)
линейно независимы, т. е.
h (г) = • о [zp> т] Z + ■ • • 4" [ZP( Г]11пф 0 (9.1)
при ta , х 1 Zp, /?+... + in =/= 0. Тогда задача 4.1 имеет реше¬
ние и (Z). Решение задачи 4.1 не является единственным. Среди
решений и (Z) можно выбрать управление и° (Z), являющееся линей¬
ной комбинацией функций hh,, т. е.
и° (Z) = Л(1) [ip, i] 1 + . . . + tin) [Zp, Л in (9.2)
Управление u° (Z) имеет наименьшую евклидову норму р [u° (Z)]
т) Чтобы отличать величину р[а] от других видов нормы, которые встре¬
тятся ниже, будем называть ее иногда евклидовой (обобщенной) нормой.
§ 9]
РЕШЕНИЕ ЗАДАЧИ
59
среди всех решений u(t) задачи 4.1. Если и (t) — любое решение
задачи, то разность > (i) = и (1) — u° (t) ортогональна к управлению
u° (t). Числа l/,..., 1°п, определяющие решение u° (Z), удовлетворяют
системе линейных уравнений.
Проверим справедливость этой гипотезы. Будем искать упра¬
вление > (t) в форме (9.2). Подставив выражение (9.2) вместо и (т)
в уравнения (8.5) и выполнив интегрирование, получим систему
„ ,о ,о
уравнений для определения величин Zj,..., п
#1171 + - • • + ttlnln — Cl>
“Ь • • • 4“ ®nn^n — Сп,
(9.3)
где коэффициенты >j определены равенствами
— \ hM [Zg, т] • h(3} [ip, т] dx (г, / = 1, . . ., re). (9.4)
Покажем, что определитель Д {а,,} системы (9.3) не равен
нулю. Действительно, из (9.1) следует неравенство
*8 (|3
\ /г2 (t) dx — \ {hw [iP, т] Zj. + -.. + Л(п) [ U > т] Z„}2 dx —
= 3 при 2 1i=X=a.
i, 3=1 i =1
Следовательно, при наших предположениях квадратичная форма
Ф (Zli • • .> Zn) = 2 ai}hh
i, 3—1
от переменных l является определенно положительной, т. е. она
может принимать лишь положительные значения, когда I* -f- ...
...-|- Z„ =£= 0. Известно, однако, что коэффициенты и г > определен¬
но положительной формы удовлетворяют неравенствам Сильве¬
стра ([3*], стр. 248)
# . . . а1п
аи U> о,
<#п#12
а815*22
= Д{ау} >0.
Лцд ... апп
60
ПРЕДВАРИТЕЛЬНОЕ РЕШЕНИЕ ЗАДАЧИ ОБ УПРАВЛЕНИИ
[Гл. 3
что и доказывает наше утверждение об определителе А системы
(9.3). Итак, систему (9.3) можно разрешить, каковы бы ни были
числа Ci (i = п). Этим самым устанавливается существова¬
ние управления u° (t) в виде (9.2) и определяется его величина.
Покажем теперь, что разность гр (t) = и (t) — u° (t), между лю¬
бым решением и (Z) задачи 4.1 и найденным управлением u° (t)
ортогональна к функции uQ (Z). Уравнения (8.5) удовлетворяются
при и = и (t) и при и = u° (t). Поэтому справедливы равенства
*з *3
/[(') [Zp, т] [и (т) — и0 (т)] dr = hw [Zp, т] ф (т) dr = 0. (9.5)
Умножая равенства (9.5) соответственно на Z", складывая
полученные соотношения и учитывая равенство (9.2), получим:
«з
н0 (т) zf (т) dr = 0, (9.6)
*Х
что и доказывает ортогональность функций и° (t) иф (Z).
Нетрудно видеть, что и, наоборот, всякая функция и (t) —
= u° (t) --г) (Z), где u° (t) — управление (9.2), а ц (Z) — произ¬
вольная функция, ортогональная к будет управлением,
разрешающим задачу 4.1. Для того, чтобы убедиться в этом, до¬
статочно провести предыдущие рассуждения в обратном порядке.
Так как всегда можно построить бесчисленное множество функ¬
ций 1] (Z), ортогональных к заключаем, что решение задачи
4.1 не является единственным.
Теперь для полного подтверждения гипотезы осталось дока¬
зать минимальность нормы || ий || Докажем это. Пусть и (Z) ф u°(t),
тогда
<з
J ф2(т)<7т>0. (9.7)
Учитывая, что u(t) = (t) Ц-ф (Z0, имеем:
(з «з
и II’ = [« («)]’ dr = [и0 (т) + ф (т) ]2 dr =
*3 *3 *0
[и°(г)]Мт+ j ['Z>Ct)]®dt + ’ J U0(T^rr)dT. (9-8)
§ 91
РЕШЕНИЕ ЗАДАЧИ
61
Последнее слагаемое в правой части равенства (9.8) вследствие
(9.6) есть нуль, второе слагаемое вследствие (9.7) положительно.
Следовательно, из (9.8) выводится неравенство
Ml 2 >11 I2 ИЛИ II й II >11 и° ||.
Таким образом, справедливость гипотезы полностью проверена.
Следовательно, верна теорема.
Т е о р е м а 9.1. Если импульсные переходные функции объекта
feO) [Zp, t], - . ., Ы'1'1 [Zp, Z] линейно независимы, то задача 4.1 об
управлении имеет бесчисленное множество решений. Среди решений
этой задачи существует управление и° (Z), являющееся линейной
комбинацией функций № Пр, Z] (Z = 1, . . ., п), т. е. управление
вида (9.2), где постоянные l) определяются из алгебраической си¬
стемы линейных неоднородных уравнений.
Среди всех возможных решений u(t) задачи (4.1) управление
U (Z) имеет наименьшую евклидову норму || U ||.
Функция ф (t) = и (t) — U (t) ортогональна к функции и° (Z).
каково бы ни было другое управление и (t), решающее задачу 4.1.
Приведем матричную запись управления и° (t) из теоремы 9.1.
Пусть символ Q обозначает матрицу {ai7-} системы (9.3). Тогда си¬
стема уравнений (9.3) в матричной форме принимает вид
Q-Z0 - с,
где /о — вектор {Z?, . . ., /„}. Следовательно,
/о = q-i.c. (9.9)
Равенство (9.2) с учетом (9.9) можно записать в форме
и0 (Z) = h' [Zp, Z] • Z0 = h' [Zp, Z] Q~r-c,
где h [Zp, Z] — вектор {/i<1 [Zp, Z], . . ., Wn'> [ Zp, z]}. Наконец, заменяя
вектор с его выражением (8.4), получим явный вид управления
ип (Z) через краевые условия задачи:
u° (Z) = h' [Zp, Z] — _1 {яЗ — X (Zp, Z«] x* — I) X [fy, t] w (r) d-rj .
(9.10)
Из равенства (9.10) следует, что найденное управление u° (Z)
обладает также следующим важным свойством: управление и° (Z)
зависит от краевых условий задачи х* и х& и от внешнего воздейст¬
вия w (Z) линейно.
62
предварительное решение задачи об управлении
[Гл. 3
Выразим еще управление uQ (t) через одну только фундамен¬
тальную матрицу X 17, ф] однородной системы (5.2). Учитывая
(7.4), окончательно будем иметь:
u° (t) = V (t) • X' Пр, ■ ■ ( 1 X (2Э, ■ - ■ x* —
X Пр, т] w (t) dt}.
(9.11)
§10. Вычислительная схема, моделирующая управление
Опишем сначала еще одно интересное свойство управления
u° (t). Прежде всего, напомним следующее равенство:
X [t, 20] = X И, 21-X-1 и0, *а],
которое получается из общего равенства (5.3) в частном случае
Z (t) = X И, 2а]. Заменяя теперь t на tp, a to на t, получим:
X[p, t] = X tp, М • Х_1П 2].
Учитывая последнее равенство, выводим из (9.11), что
и° (t) = b' (t) [X- [t, 2П'А (10.1)
где n-мерный постоянный вектор s° = {s1; . . ., sn} определен соот¬
ношением
'з
s° = X' Пэ, 2а] Q-1 (х? — X [2р, ■ ■ х* — \ X Пр, т] w (т) dx}. (10.2)
Далее, матрица S (t) = [X_1 И, 2а]]' удовлетворяет следующе¬
му матричному уравнению:
5 (0 = - A'S (t). (10.3)
В самом деле, по определению матрицы X" 1[2,.21 шравелливо ра¬
венство
X И, 2J.X-1 И, М = Е.
Дифференцируя его по t и пользуясь известным ([3*1, стр. 372)
правилом вычисления производной от произведения матриц,
получим:
X И, 21X-1 U, 21 + X И, 2IX-1 И, 2 1 = 0. (10.4)
§ iol
СХЕМА, МОДЕЛИРУЮЩАЯ УПРАВЛЕНИЕ
63
Матрица X [t, • 1 удовлетворяет уравнению
X U, • • • - A (t) X [Z, U
по определению ее как фундаментальной матрицы. Подставляя
X из последнего равенства в (10.4), найдем:
АХ [t, М X-1 И, • 1 + X к, Z.1 X-1 U, М =• 0,
т _ е. д _|_ X [£, М • X" [/, tal = 0, или, после умножения слева на
А"1 [£, *<а 1 и транспонирования, получим:
А' [X-1 к, М1' + [Х-] U, Ml ' = 0,
что и доказывает (10.3).
Умножив равенство (10.3) справа на вектор s°, получим теперь
равенство
s = - A's, s(Z) = S (t) s°. (10.5)
Система, описываемая уравнением (10.5), называется сопря¬
женной к исходной системе
X = Ах.
Таким образом, управление u° (t) согласно (10.1) можно истолко¬
вать как скалярное произведение
(0 = 6 (0 s (0 (10.6)
вектора b'(t) на вектор s (t), являющийся решением уравнения
(10.5). Заметим, что при t = t* справедливо равенство
S(fa) = [X-i (^a)]'s0 = S° =
= х M (>' — х [4(3, мХл— ^X [ip) tjw(t))fc|. (10.7)
Итак, мы установили следующий результат.
Теорема 10.1. Управление и° которое решает задачу
4.1 и имеет при этом наименьшую возможную норму р [иЯ], являет¬
ся скалярным произведением u° (t) = b' (0 s (0, где вектор s (t) —
решение уравнения (10.5) при начальном условии (10.7).
Свойство управления и° (0, отмеченное в теореме 10.1, указы¬
вает один из возможных, путей для построения вычислительной
схемы, определяющей это управление. Схема в целом должна рабо¬
тать так, чтобы величина и° (t) вычислялась от момента ta до момен¬
та /ри подавалась по ходу времени на управляемшй объект. Сигна¬
лы, поступающие из вычислительной схемы, должны при этом
64
ПРЕДВАРИТЕЛЬНОЕ РЕШЕНИЕ ЗАДАЧИ ОБ УПРАВЛЕНИИ
[Гл. 3
проходить через усилительное устройство, которое преобразовы¬
вало бы эти сигналы в соответствующие реальные управляющие
силы. Вычислительную схему, определяющую u° (t), будем назы¬
вать системой управления. Опишем способ построения этой систе¬
мы, приняв для упрощения, что А — постоянная матрица.
Как видно из равенства (10.6), для определения u° (t) как функ¬
ции времени необходимо знать векторную переменную $ (t). Для
вычисления этой переменной следует сконструировать модель в
виде такой$системы, фазовое состояние которой описывалось бы
уравнением (10.5). Эта модель должна вычислять значения перемен¬
ного вектора s (t) от момента ta до момента t$. Работа модели долж¬
на происходить в истинном масштабе времени, т. е. в том масшта¬
бе, в котором работает исходная управляемая система под воздей¬
ствием управления u° (t). В качестве начального состояния в мо¬
мент ta для модели, вычисляющей s (t), следует принять величину
s (t*) = s°, определяемую равенством (10.7). Для вычисления век¬
тора s° должно быть предусмотрено вычислительное устройство,
причем . необходимое вычисление может быть произведено, если
известна величина
(10.8)
(10.9)
<3
z (ig) = X [ig, Za] хЛ + X [fg, т] w (т) dx.
(Матрицу X'ltp, t a 1 Q-1 считаем вычисленной заранее.) Величи¬
ну z (£р) также можно вычислять на модели. Эта модель может быть
системой, фазовое состояние которой описывается на отрезке вре¬
мени ta t т t tt уравнением
Ъ = Az+w(x)
с начальным условием z (ta) = хЛ. Однако оказывается желатель¬
ным произвести необходимые вычисления как можно быстрее (за
время е (Zg — ta)) и так, чтобы их осуществление начиналось до
начала управления, а кончалось в момент tx. Этого можно достичь,
если в уравнении (10.9) выполнить замену времени t = ta —
— e(Zp — т) и положить у (t) = z ^Zg -ф а . Тогда фазо¬
вое состояние системы, вырабатывающей величину у (t*) = z (£р),
будет описываться уравнением
е5т = Ау + v (Z),
(10.10)
где е — достаточно малое положительное число,
р(/) = + —.
СХ НМЛ, МОДЕЛИРУЮЩАЯ УПРАВЛ1ЕН11Е
65
§ lol
Модель, описываемая уравнением (10.10), будет работать в 1/е раз
быстрее, чем исходный объект (8.1). (Малость е обеспечивает бы¬
стродействие этой модели.) Задав теперь в момент t — ta —
__ . (p — начальное состояние у (ta) — za и вводя по ходу
времени от момента ta до момента Ц — ta сигнал v ()= w (($
, получим в момент t — Ц - - - 1а величину у (ta), определя¬
емую условием (10.8).
Таким образом, система управления должна включать в себя
модель I для определения у (ta), вычислительное устройство ВУ1
Рис. 10.1.
для определения s (ta) = s°, модель II, вырабатывающую пере¬
менный во времени сигнал s (£), и вычислительное устройство ВУП,
определяющее управляющий сигнал u° (£). Описанная вычисли¬
тельная схема приведена на рис. 10.1.
Итак, работа модели I начинается в момент £а и происходит так
же, как и работа объекта (9.1) при и — 0, но только в 1/е раз
быстрее. Поэтому к моменту t — Za модель 1 вырабатывает вели¬
чину у (£а). В момент t- величины у (ta) и подаются в ВУ1, ко¬
торое подсчитывает величину s (Za) = s°. (Здесь мы предполагаем,
что этот подсчет производится без задержки времени.) Величина
5 (£а) в тот же момент времени t - - - - поступает в модель II, где с
этого момента начинает в истинном масштабе времени вырабаты¬
ваться вектор s (t). Значение переменной s (t), а также вектор-
функции b (t) подаются на ВУП, так что с момента t — ta на выходе
этого устройства начинает вырабатываться величина управляю¬
щего воздействия u° (t). Величина u° (t) при этом вырабатывается
3 Н. Н. Красовский
66 ПРЕДВАРИТЕЛЬНОЕ РЕШЕНИЕ ЗАДАЧИ ОВ УПРАВЛЕНИИ [Гл. 3
в форме сигналов такой физической природы, которая представля¬
ется удобной для конструирования моделей и вычислительных
устройств. Обычно эти сигналы электрические. После преобразо¬
вания сигнала u° (t) в усилительном устройстве получается необ¬
ходимое воздействие уже в форме реально действующих сил. В слу¬
чае, если отдельные звенья описанной системы управления не могут
срабатывать мгновенно, но выдают необходимые величины с за¬
паздыванием по времени, следует предусмотреть цепи упрежде¬
ния сигналов, которые по возможности компенсировали бы ука¬
занное запаздывание. Здесь, впрочем, необходимо отметить еще
следующее неприятное обстоятельство. Если одна из рассматри¬
ваемых выше систем, входящих в систему управления, неустой¬
чива, т. е. если малые отклонения в начальных условиях приводят
к большим отклонениям движений, то реализация описанной
схемы наталкивается на серьезные практические трудности. Эти
технические трудности должны преодолеваться дополнительной
стабилизацией рассматриваемых движений (см. [17*]).
ЧАСТЬ ВТОРАЯ
ТЕОРИЯ УПРАВЛЕНИЯ ЛИНЕЙНЫМИ
ОБЪЕКТАМИ
§11, Введение
Вторая часть книги посвящена подробному исследованию задач
об управлении, сформулированных в § 4.
В главе 4, открывающей данную часть монографии, движение
управляемой системы интерпретируется как результат некоторой
операции, выполняемой над объектом благодаря наложению на
него управляющих сил. На этой основе конструируется расши¬
ренная математическая постановка задачи. Для понимания этой
и следующих глав необходимо знакомство с простейшими понятия¬
ми из функционального анализа. Читателю, который не владеет
этим материалом, рекомендуется перед изучением II части моно¬
графии прочитать Приложение в конце книги или обращаться к
этому Приложению в процессе чтения основного текста. В послед¬
нем случае надлежит руководствоваться теми ссылками на необ¬
ходимый вспомогательный материал, которые делаются нами по
ходу изложения всего основного материала.
В следующей главе 5 показывается, что сформулированная
нами задача является по сути своей так называемой проблемой
моментов в пространстве функций. Отсюда извлекается решение
исходной задачи об управлении и формулируется основное пра¬
вило минимакса, определяющее оптимальное управление.
Читатель должен иметь в виду, что материал пятой главы яв¬
ляется в книге ключевым. В то же время этот материал составля¬
ет, по-видимому, наиболее трудную для чтения часть. Поэтому к
нему следует отнестись с особым вниманием. Затруднения, кото¬
рые могут возникнуть здесь при первом чтении, не * должны осо¬
бенно смущать читателя, так как по мере разбора конкретных
ситуаций в следующей главе оставшиеся неясности должны разъ¬
ясниться. Кроме того, читатель, не желающий углубляться в рас¬
суждения из глав 4 и 5, может ограничиться лишь ознакомлением
с правилами решения 17.1—17.5 в § 17, рассматривая эти прави¬
ла как рецепты (см. замечание на стр. 115, с которого и следует
тогда начать чтение этого параграфа, переходя затем прямо к ука¬
занным правилам).
Глава 6 содержит приложение общего правила, данного в главе
5, к решению задач в конкретных случах основных типичных
3*
68
ТЕОРИЯ УПРАВЛЕНИЯ ЛИНЕЙНЫМИ ОБЪЕКТАМИ
условий минимума интенсивности управления. Попутно определя¬
ются и изучаются важные для всей теории свойства полной управляе¬
мости и неособенности линейной системы. Здесь же, в § 22, об¬
суждается возможность распространения решений на некоторые
задачи управления квазилинейными системами. Наконец, в за¬
ключение этой главы изучаются некоторые специфические черты,
которые преобретает общая теория в частном случае управления
движением голономной механической системы в окрестности ее рав¬
новесия.
Последняя глава 7 данной части посвящена изучению задачи
о предельном быстродействии. При этом сначала на основе теории,
развитой в предыдущих главах, дается метод вычисления програм¬
много управления и (t), которое при заданном ограничении
х [и] |1 осуществляет наискорейшее приведение объекта в за¬
данное состояние х (£р). Затем читатель знакомится со вторым ос¬
новным аспектом проблемы управления — с задачей о синтезе
оптимального управления по принципу обратной связи. В рам¬
ках основной проблематики книги обсуждается связь между зада¬
чей о программном управлении и задачей о синтезе системы, ра¬
ботающей на основе обратной связи. Как и в других разделах мо¬
нографии, общая теория иллюстрируется на наглядных моделях.
Некоторая особенность иллюстрирующих примеров, собранных
в этой части, состоит, впрочем, в том, что здесь приведены и такие
задачи, которые, несмотря на свою относительную простоту, по¬
требовали привлечения расчета на универсальных вычислитель¬
ных машинах. Благодаря этому оказалось возможным проиллю¬
стрировать на конкретном материале те вычислительные методы
для решения задач об управлении, которые вытекают из общей
теории, данной в этой части.
Глава 4
МАТЕМАТИЧЕСКАЯ ПОСТАНОВКА ЗАДАЧИ
ОБ ОПТИМАЛЬНОМ УПРАВЛЕНИИ
§ 12. Движения управляемых систем и линейные операции
Прежде чем переходить к задаче об оптимальном управлении,
исследование которой составляет предмет этой II части книги, мы
в настоящем параграфе дадим одну интерпретацию движения х (t)
линейной управляемой системы. Именно, мы покажем, что движе¬
ние х (t) можно трактовать как результат некоторой операции, вы¬
полненной над объектом. Математически это выражается как
операция ср^ порожденная функцией и (t) и выполненная над эле¬
ментами импульсной переходной матрицы Н [t, т]. Такая интер¬
претация сыграет важную роль в дальнейшем изложении и облег¬
чит исследование проблем. Поясним высказанную точку зрения на
примерах.
Рассмотрим задачу об управлении двигателем постоянного тока.
Пусть в качестве управляющего воздействия и используется ток
возбуждения. При весьма сильном упрощении уравнения движе¬
ния имеют вид [190]
dxx dx*, /j п л \
ЧГ = *2, (12-1)
Здесь ху — отклонение угла ф(£) поворота якоря от некото¬
рого фиксированного движения ф0(О), я = ф(^)—%(0—отклоне-
ние угловой скорости, v — постоянная, пропорциональная не¬
изменному току якоря. Пусть ta = 0, x(ta) = = {0, 0}, и за
время 0 ■ t t$ требуется перейти на новый режим так, что¬
бы в момент t = ■ .. выполнялось равенство x(t$) = х$ = {.z^, х^}.
При этом естественно оценивать качество процесса той энерги¬
ей, которая рассеивается за счет выделения тепла в обмотке воз¬
буждения. Тогда за интенсивность х [и], которая характеризует
ресурсы, расходуемые на управление, следует принять величину
*3 1«
(12.2)
70
ПОСТАНОВКА ЗАДАЧИ ОБ ОПТИМАЛЬНОМ УПРАВЛЕНИИ
[Гл. 4
измеряющую эту энергию. Составим выражение для ' х (t) в соответ¬
ствии с формулой Коши (7.7). Фундаментальная матрица системы
(12.1) имеет вид
X [t, т] =
1 t — т
0 1
0
Следовательно, импульсная переходная матрица Н здесь такова:
1 t — т
0 1
/г(1) [£ т]
* = X [«, т] • Ь =
h™ [«, т]
Н R, Т] =
V
v
■ (t — т)"
л, >
(12.3)
(12.4)
и движение системы (12.1) описывается равенствами:
t
xi (0 = 1 ^(1) К, t 1 и (т) dx,
о
1
хг (0 = ] ^(2) К, т] и (т) dr.
о
В частности, при t = t$ имеем:
*3
Х1 (*з) = ) /(1) [/, Т1 и (т) dx,
о
г3
X2 (<з) = \ й<2) [*р, Г1 и (т) dx-
о
Теперь воспользуемся некоторыми понятиями, связанными с
линейными операциями в пространствах функций. (Читателю, не
владеющему этим материалом,мы уже порекомендовали во введении
к данной части познакомиться предварительно с §§54—60 из При¬
ложения или читать эти параграфы по ходу изучения следующего
ниже основного текста. В соответствии со сказанным в дальней¬
шем будем лишь напоминать основные необходимые факты- из тео¬
рии линейных операций, не разбирая их подробно, но указывая
каждый раз соответствующие разделы в Приложении.)
Рассмотрим функции hW Up, т] и 12> Up, т] от аргумента
т (0 1 т 1 £р) как элементы h (т) функционального пространства
■2[o(2)pj, где норма р [h (т) 1 определяется равенством (см. § 57)
'3 „
Р|/г(т)] = / № (т) dr] .
9
19] ДВИЖЕНИЯ УПРАВЛЯЕМЫХ СИСТЕМ И ЛИНЕЙНЫЕ ОПЕРАЦИИ 71
Напомним, что норма р [А (т)1 характеризует «удаление» функции
h (т) от функции h (т) = 0 „
' Известно, что каждая функция и (т), для которой интеграл
\ и2 (т) dr <Z оо, (12.5)
о
порождает в пространстве линейную операцию
Фи[/(т)] = T h(X)u(x)dr. (12.6)
о
При этом норма р*[фи1 операции фи [h (т) ], характеризующая,
грубо говоря, «мощность» этой операции, в свою очередь выражает¬
ся равенством (см. §§ 58, 59)
(3 ,
P’BPul = [j u2(T)dTJ Тт . (12.7)
о
Так как возможное управление и (т), очевидно, удовлетворяет
условию (12.5), то на основании равенств (12.3), (12.4) приходим
к выводу, что значения ах Up), Х2 Up) координат фазового вектора
х (/) в момент t = t$ можно рассматривать как результат линей¬
ной операции сри . [А] (12.6), порожденной функцией и (т) и выпол¬
ненной над функциями few (т) = Ad) Up, т] = v Up — т), А<2)(т) =
= Л(2) Up, т] = v. Более того, мы видим также, что выбранная
нами из физических соображений интенсивность х [и] (12.2) в дан¬
ном случае как раз имеет смысл нормы р* [фи! (12.7) операции
Фи lh (т)1. Чтобы получить это совпадение, мы и рассматривали
здесь функции W1) (т) и А<2)(т) как элементы пространства
Таким, образом, можно записать:
<3
5 А(1) (т) и (т) dr = фи [Л(1) (т) ],
О
/3
$ hw (т) и (т) dr = фи [Л<2) (г)],
о
т- е. *1 (М) = Фи 1Ad> (т)], Х2 (*₽) = фи I Л(2) (т)1, где фи — линей¬
ная операция над функциями из
TL ПОСТАНОВКА ЗАДАЧИ ОБ ОПТИМАЛЬНОМ УПРАВЛЕНИИ |'Гл . 4
Перейдем теперь к более общему случаю. Пусть поведение
управляемой системы описывается уравнением
X = A (t)x В (t) и 4-ш (t). (12.8)
Как и в рассмотренном выше частном примере, запишем за¬
кон движения системы (12.8) по формуле Коши (7.7):
t t •
xt (t) = iM' (t, ta) x (ta) + xM' (t, r) w (r) dx 4- § /г[1] И т] и (r) dx
ta t*
(i = l, . . .,n). (12.9)
Здесь iJW (t, т) = [хи (t, t); j = 1, . . ., n} — i-я строка фун¬
даментальной матрицы X (t, т) системы (5.2); hW' [t, т] = {htj(t,x);
/ = 1, . . .. г} — i-я строка импульсной переходной матрицы
Н [£, т] системы (12.5) (см. § 7). При t = t$ из (12.9) следует:
Xj (Zu) = ХМ' (Zp, Q X (Za) + § (Zp, T) W (T) dx +
*a
+ /z[l] г] и (т) dx (z = l,..,, re). (12.10)
ta
Векторные функции /гОЗ (т) = /zU—f/g, т], . . .. Мп1 (т) = Ып) [ t. т]
от аргумента х будем считать теперь элементами пространства
—Pa,tg] интегрируемых вектор-функций h (x) = {hj (т)} (’=!,..., г;
Zx [ . < 3 с нормой (см. § 57)
<3 г
р th (т)] = {ЦЗ^(т)] dtp . (12.11)
fa J=1
Напомним, что символ tsj избран нами для обозначения
какого-либо нормированного пространства функций (см. § 57).
Этот символ мы будем употреблять всякий раз, когда норма рас¬
сматриваемого пространства не фиксируется. или когда для рас¬
сматриваемого пространства с выбранной нормой нами не огово¬
рено стандартное обозначение (как в данном случае).
Известно (см. §§ 59, 60), что каждая вектор-функция и(т) =
= {и± (т), . . ., иг (т)}, для которой интеграл
*3 г
$ [3 ^(t/UtC.oo,
ia 4=1 J
(12.12)
12] ДВИЖЕНИЯ
УПРАВЛЯЕМЫХ СИСТЕМ И ЛИНЕЙНЫЕ ОПЕРАЦИИ 73
порождает в
операцию
рассматриваемом пространстве S3[ta,t^ линейную
'а
фи [h (т)] = \h' (t) и (т) dx .
г
(12.13)
При этом норма операции фи
[Д] выражается равенством
<3
■ г "
1
Р* [фи] = Р* [и(т)] =
j
.)
ta
3 ul (X)
U = 1 .
dx
(12.14)
Напомним еще, что все те функции . и (т), которые порождают
всевозможные операции Фи [Д] в каком-либо пространстве 33[ta,t3],
составляют в свою очередь некоторое пространство
В этом пространстве 53*, называемом сопряженным к исходному
пространству 33, норма функций и (т) определяется равенством
р* [и (т)] = р* [ф„1. Иначе говоря, норма функции и (т) в S3*
принимается равной норме операции ф„ [h (т)], порожденной этой
функцией. В данном случае из (12.11) и (12.14) следует, что нор¬
ма р* [и] в сопряженном пространстве S3* совпадает с нормой
р [Д] в исходном пространстве S3.
Из (12.13) заключаем, что последние слагаемые в равенствах
(12.10) можно рассматривать как результат линейной операции
Фи [h (т)1, порожденной функцией и (т) и выполненной над эле¬
ментами М1! (т), . . ., hW (т) из пространства 53[ца,^р. е.
\ ДРГ (т) и (т) dx = фп [И*] (т)] (г = 1, . . . , п) .
fa
Кроме того, если интенсивность х [и] выбрать в виде
~г ~
х (и) =
'а
2 м« (т)
_г = 1 _
dx
то из (12.14) вытекает, что эта интенсивность х [и] может быть
истолкована как норма р* [фм] операции Фи [Д] (12.13), т. е.
Р* 1ф«1 = Р* Ы = х Ы1.
Приведем теперь еще один, несколько более сложный пример.
Рассмотрим снова систему (12.8), где будем полагать, что
74
ПОСТАНОВКА ЗАДАЧИ ОБ ОПТИМАЛЬНОМ УПРАВЛЕНИИ
[Гл. 4
и — скалярная функция. В этом случае равенство (12.10) прини¬
мает вид
1Р
Хг (h) = ^ИГ (ip, i«) хл + iN' (/P , t) w (x) &Х +
'«
*P
+ \ A(i> Пр , т] и (т) dx (Z = 1, . . ., и), (12.15)
где ><’> (т) = № Ир, т] = hi [/р, т] — теперь скалярные функ¬
ции х) (Z = 1, . . ., п; < *р). В отличие от предыдущего
случая будем считать, что функции ft>> (т) являются здесь эле¬
ментами функционального пространства щ, где норма опреде¬
лена равенством
'р
р [И*)] |/г(т)р^-т. (12.16)
'а
Известно (см. §§ 57, 59), что каждая ограниченная и интегриру¬
емая функция и (т) порождает в пространстве ^pa,tp] линейную
операцию
'з
Ф«[Л(т)] = ) h (х) и (т) dx ,
’<«
причем норма этой операции определяется равенством
р* [ф«1 = Р* [и] = sup | и (т) |. (12.17)
Каждое возможное управление и (т) является и ограниченной и
интегрируемой функцией. Поэтому из равенства (12.17) мы снова
заключаем, что те слагаемые в выражениях (12.15) для x-t (£р), ко¬
торые зависят от и (т), можно трактовать как результат линейной
операции фи [А] над функциями hW (т). При этом, если выбрать
интенсивность х [и ] = sup \и (т)| (ia > т > £р), то из (12.17) сле¬
дует, что опять как раз р* [и] = к [и].
Итак, в приведенных выше примерах мы показали, что в выра¬
жениях для Xi (/р) слагаемые
'з
ЛИГ рр , т] и (т) dx, (12.18)
зависящие, от и (т), можно трактовать как значения линейной опе-
х) В дальнейшем в тех слyчаях, когда ст роки /г* [л,., т] матрицы Н т]
будут скалярами и когда это нужно будет подчеркнуть, будем обозначать их
символом > > 1 [ф, т].
S l‘>] ДВИЖЕНИЯ УПРАВЛЯЕМЫХ СИСТЕМ И ЛИНЕЙНЫЕ ОПЕРАЦИИ 75
нации Ф lh (т)1 (12.13), порожденной функцией и (т) и выполнен-
Ж^две'Хм'и W1 Up, а),. ...ЙИ Up, ф
При этом в широком классе случаев, считая , функции лш (т) =
— ДИ Пр, т] элементами подходящего функционального прост-
о^нсва можно добиться того, чтобы интенсивность х [и]
управления и (т), выбранная из физических соображений, имела
смысл нормы операции.
Теперь, однако, следует уточнить некоторые* детали. Вернемся
к последнему примеру. Его разбор показал, что возможные управ¬
ления и (т) следует рассматривать там как элементы пространства
интегрируемых ограниченных функций J). Действительно, именно
это пространство, обозначаемое символом является сопря¬
женным к пространству .22*а’*з]' Но пространство Jvjj наряду с
возможными управлениями и (т), являющимися кусочно-непре¬
рывными функциями, включает в себя еще и функции и (т) более
общей природы. Поскольку мы будем трактовать выражения
(12.18) как линейную операцию, а интенсивность х [и] управления
и (т) как норму операции <pu [h (т)], то класс возможных управле¬
ний оказывается целесообразным распространять до более широ¬
ких множеств так, чтобы в каждом случае охватить все функции
и (т), определяющие общий вид линейной операции в подбираемом
функциональном пространстве S. Это, с одной стороны, удобно,
так как позволяет привлечь к решению задачи аппарат функцио¬
нального анализа, а с другой стороны, не повредит первона¬
чальной постановке задачи, так как и в указанных более широких
классах управлений, как правило, оптимальными управлениями
u° (t) оказываются кусочно-непрерывные функции, т. е. возможные
управления. В соответствии со сказанным условимся о следующем.
Выше (см. § 2, стр. 18) мы определили класс возможных
управлений как класс кусочно-непрерывных функций, исходя из
реальных физических условий работы управляемой системы. Те¬
перь же для удобства решения задачи нам придется расширить
класс рассматриваемых управлений и (т) так, чтобы функции
и (т) составляли пространство, сопряженное к 33. Поэтому при¬
мем следующее определение допускаемого управления.
Определение 12.1. Пусть интенсивность % [и] управ¬
ления и (т) в системе (12.8) может быть истолкована как норма
Р* [фи1 линейной операции ф„ (12.13) на некотором функциональном
х) Напомним, что ограниченность функции и (т) должна при этом, строго
говоря, пониматься как ограниченность по существу (см. § 57). Однако в
соответствии с нашей общей договоренностью (см. снова § 57) термин «по
существу» будем, как правило, опускать. Однако читатель должен помнить,
что речь будет идти именно о таком понимании свойства ограниченности * и (т).
Точно так же и величину sup у [и (т)], где у — какая-либо норма вектора и,
следует понимать всегда как максимум по существу.
76'
ПОСТАНОВКА ЗАДАЧИ ОБ ОПТИМАЛЬНОМ УПРАВЛЕНИИ
[Гл. 4
пространстве 3B{h (т)}. Тогда функции и (т), составляющие
пространство ЗВ*{и (т)}, сопряженное к ЗВ, будем называть допус¬
каемыми управлениями.
Здесь важно подчеркнуть еще раз следующее обстоятельство:
класс допускаемых управлений и (т) определен нами так, что лю¬
бая линейная операция cpu [h (т)1 в рассматриваемом пространстве
функций S3 {h (т)} записывается в виде (12.13), где и (т) — допус¬
каемое управление. '
Мы уже разобрали несколько примеров такого подбора про¬
странств ЗВ, при котором норма р* [и] в сопряженном пространст¬
ве ЗВ* имеет смысл физической величины х [и], оценивающей ре¬
сурсы, затрачиваемые на управление. Для того чтобы уметь это
делать, исходя из заданной интенсивности х [zz], в других случа¬
ях, которые могут встретиться в приложениях, следует иметь
представление об основных типах функциональных пространств
53{^(т)}и о соответствующих им сопряженных пространствах
SB*{h (т)}. Эти вопросы подробно освещены в курсах по функцио¬
нальному анализу (см., например, [6*, 7*, 9*, 14*1). Некоторые
соображения, облегчающие подбор пространства 53{й(т)}по из¬
вестной величине х [iz] = р* [п], можно найти в Приложении
к этой книге, где описаны общие правила, связывающие способы
построения норм р [/г] и р* [zz] в сопряженных пространствах
(см. § 60). Кроме того, для ориентировки мы приводим в
данном параграфе таблицу, содержащую сводку некоторых основ¬
ных пространств ЗВ и соответствующих им сопряженных про¬
странств ЗВ*, норма в которых р* [и] имеет вид интенсивности
х [п], встречающейся в приложениях. При этом мы намеренно не
акцентируем внимание на классе тех функций и (т) и h (т) (с точки
зрения измеримости, интегрируемости и т. д.), которые составляют
соответствующие пространства. Дело в том, что при решении задач
по излагаемому нижеспособу (см. §17) приходится делать конкрет¬
ные выкладки лишь с непрерывными элементами h (т) = hW (т)
из пространств ЗВ и для правильного выполнения этих операций
не требуется знать все пространство ЗВ, а требуется знать лишь
формулы для р [h (т)]. Кроме того, оказывается, как уже отмеча¬
лось выше, что решения и0 (т) задач об оптимальном управлении
обычно содержатся в классе возможных, т. е. кусочно-непрерыв¬
ных управлений. Следовательно, в конкретных задачах простран¬
ство ЗВ, элементами которого мы считаем функции h— (т), и про¬
странство ЗВ* допускаемых управлений и (т) играют роль матема¬
тических конструкций, необходимых для строгого обоснования
теории, но в процессе решения остающихся фактически все время
за кулисами. В соответствии с этим мы и опускаем здесь подробное
описание классов тех функций h (т) и и (т), которые составляют
пространства 3B{h (т)}и ЗВ*{и (т)}. Это описание, не неся никакой
§ 12] ДВИЖЕНИЯ УПРАВЛЯЕМЫХ СИСТЕМ И ЛИНЕЙНЫЕ ОПЕРАЦИИ 77
Таблица 12.1
X [и] = Р ♦ [и]
р [Л]
I
5?(2)
1
U (т) — скаляр
h (т) — скаляр
(з t
[ j и2 (Т) dr] Л
L 'а
[ j Л2 (т) йт] р
<а
2
t С)
[ J иа(тНт + »2(()р
‘а
z3
[ ■ j Л2 (т) dx + hi (/3) У'
«а
3
Общий случай
(3 p (3 (
[ j «2 (Т) s [dr]]p [ j Л(т)а ■[dx]]'/r
*ot «<а
(б [С/]—мера на отрезке ра» ^])
II
я
sup |и (т) |
''=■ т 2~' *3
(строго говоря,
р * [u] = vrai max |и (т)|)
(3
§ 1/(т)| dx
ta
III
№ / ( VU₽ t |aWl>
\ «а -v т < tp
<3
X jj |и(т)| dx}
«а
max ■ |h (т)| dx
iip^OVy-.miny, j - «а]
IV
и (т) = {ui (т), . . . , иг (т)} — вектор
h(x) = {hi(x)ЛОТ} —
— вектор
f $ЙиМгЛТ
/а 2—1
[$ (3Ч т) лр
<а iml
V
sup ГЗ“1(т)1/!
Ia < т < J
(р * [и] = vrai max ||и (Т)||)
(< < х < (g
[3 г
j (2/|((Т)),/’ЙТ
[а г=1
78
ПОСТАНОВКА ЗАДАЧИ ОБ ОПТИМАЛЬНОМ УПРАВЛЕНИИ
[Гл. 4
Таблица 12.1 (продолжение]
х [«! = р • [и]
P[h]
VI
SUP ГУ|«‘»(Т)|'|
Г
(Р » [и] = vrai max " у |U{ (т)| 1)
\ (max |/ц (t)|) dr
i 1
la
VII
sup [max lUj (т)Ц
ta < т < fg i
[u*imaxi^M-! vrai maxlU^i ('Т|У J
\ i ’Ла<т«з L JI/
. r
? (3 im**)**
'a 1=1
VIII
max | sup
% $ ю)7'*}}
'a i-1
max A (2^- (T)) >dx
A i^s"1
при 6(Д) = min ip — te]
полезной информации для читателя, хорошо знающего функцио¬
нальный анализ, было бы практически мало полезным и для менее
подготовленного читателя, лишь затрудняя для него понимание
основных фактов.
Заметим еще следующее. Читатель, ■ не интересующийся тонко¬
стями, для нахождения величины р [h (т) ], которая только и тре¬
буется для работы с данными ниже правилами 17.1—17.4, опреде¬
ляющими решение задачи 13.1, может поступать следующим обра¬
зом: проверив, что интенсивность х [и] имеет смысл нормы функции
и (т), т. е. проверив для х [и] выполнение условий (56.1), надлежит
искать выражение для p[h (т)] из равенства1)
Ч
р рг(т)] — max \ h' (т) и (т) dx (12.19)
и J
при ограничении к [и] <1¬
*) Соотношение (12.19) является «обращением» того соотношения (58.12),
которое определяет норму р*(и) (см. § 58 и [6*] (стр. 77)).
-1 ПОСТАНОВКА ЗАДАЧИ. ОБ ОПТИМАЛЬНОМ УПРАВЛЕНИИ 79
Таким путем, например, в случае и [u] = max |u (т)|, где
и (т) — скаляр, сразу видим, что
p[u] = |/i(r)|dr,
ta
ибо указанный выше максимум достигается, очевидно, при и (т) =
= sign h (т).
Итак, в первой графе таблицы 12.1 приведены типичные выра¬
жения для интенсивности х [и] возможных управлений. Во вто¬
рой графе приведены выражения, определяющие норму р \h (т)]
в пространстве функций h (т) t таким образом, чтобы слагаемые в
формуле Коши (12.10), зависящие от и (т), имели смысл линей¬
ной операции <pu [hl с нормой р* [<J = х [и].
§ 13. Постановка задачи об оптимальном управлении
В этом параграфе мы сформулируем задачу об оптимальном
управлении, включающую условие минимума интенсивности х [и]
управляющего воздействия и. Такая задача уже рассматривалась
в § 4 (см. задачу 4.2). Однако здесь мы строго очертим класс рас¬
сматриваемых задач, предполагая, что интенсивность х [и] удов¬
летворяет некоторому дополнительному условию. Именно, в соот¬
ветствии с материалом § 12 примем, что величина х [и] может
быть истолкована как норма р* [и] функции и (т) (ta t т t Р
в некотором функциональном пространстве S3* {и (т)}.
Итак, будем рассматривать линейную систему
х = A (t)x А-В (t)u -t t (0) (13.1)
и примем, что величина х [и], оценивающая ресурсы, затрачивае¬
мые на управление на отрезке времени ta 1t Zp, может трак¬
товаться как норма р* [<ри] линейной операции
фи [h (т)1 = t h (т) и (т) dr, (13.2)
ta
порожденной функцией и (т) на подходящем функциональном
пространстве S3 {h (т)}. Подчеркнем еще раз, что основанием для
этого предположения является следующее обстоятельство, под¬
робно выясненное в § 12: в выражениях для х, (/) (12.10) члены,
зависящие от и (т), можно рассматривать как линейные операции
Фи IWO (т)] на вектор-функциях hW (т), являющихся строками им¬
пульсной переходной матрицы Н [7р, т]. Учитывая это, сформули¬
руем теперь следующую задачу об оптимальном управлении.
(13.3)
80 ПОСТАНОВКА ЗАДАЧИ ОБ ОПТИМАЛЬНОМ УПРАВЛЕНИИ [Гл. 4
Зада ча 13.1. Пусть управляемая система описывается урав¬
нением. (13.1). Заданы отрезок Ss О t начальное х* и конеч¬
ное х* значения фазового вектора, х (t). Выбрана интенсивность
и [и] управления и (t), которая может быть истолкована как
норма р* [zz] функции и (т) в пространстве ЗВ*{и (т)}. Требуется
среди допускаемых, управлений и (t) найти оптимальное управление
иУ (t), переводящее систему (13.1) из состояния х (ta) = х* в состоя¬
ние х (/р) — х> и имеющее при этом, наименьшую возможную норму
р* [zz0].
Приведем один пример такой задачи. Рассмотрим тяжелую ма¬
териальную точку, движущуюся в вертикальной плоскости (£, ц)
и управляемую реактивной силой. Уравнения движения этой точ¬
ки имеют вид (3.10) (см. 3°
Z о, ^2 — 1
= Х4, tl=U2—g.
Пусть требуется перевести точку из начального состояния
х (ta) = хл = {Т1, х2, Xi, хд} в конечное состояние х (I?) = х? =
= {#1, х*, Тз, так, чтобы в процессе дди1ленню, не возникало
больших дополнительных ускорений, обусловленных реактивной ’
силой. Это означает, что модуль вектора и = {zzt, zz2} по возмож¬
ности должен быть невелик. Поэтому в качестве минимизируемой
интенсивности х [и] управляющей силы и = {щ, щ} в данном
случае целесообразно выбрать величину
х [tz] = sup {||zz (т) ||, ta < т < ^}. (13.4)
т
Таким образом, из реальных соображений мы приходим здесь
к задаче 4.2 о возможном оптимальном управлении U (£), где ми¬
нимизируемая интенсивность х [zz] его должна выражаться ра¬
венством (13.4). Однако для того чтобы, подготовить полученную
задачу для решения, надлежит перевести ее в форму задачи 13.1,
удобной для математического исследования. Чтобы сделать это,
нам следует убедиться, что величина х [zz] (13.4) может тракто¬
ваться как норма р* [zz] в подходящем пространстве функций
ЗВ*{и (т)}, сопряжением к некоторому пространству ЗВ {h (т)}. Для
этой цели обратимся к таблице 12.1, из которой следует, что нуж¬
ное пространство ЗВ подобрать можно, причем мы видим, что в ка¬
честве ЗВ {h (т)} следует выбрать пространство интегрируемых
вектор-функций h (т) = {1ц (т), h (т)} с нормой
Р lMt)] = 5 и (т) II "Г
(13.5)
■§
1,3 J
ПОСТАНОВКА ЗАДАЧИ ОБ ОПТИМАЛЬНОМ УПРАВЛЕНИИ
81
Теперь для системы (13.3) можно сформулировать задачу 13.1
об оптимальном управлении следующим образом.
Среди допускаемых управлений u(t) = {ur(t), u2(t)}, компоненты
которых w(O являются ограниченными интегрируемыми функ¬
циями, требуется найти оптимальное управление и0(/), перево¬
дящее систему (13.3) из начального состояния x(ta) = xa в ко¬
нечное состояние x(t$) = x& и имеющее при этом ' наименьшую
возможную норму р*[и°].
Подчеркнем еще раз, что для допускаемых управлений и =
{щ, uJ величина р* [zz] имеет физический смысл максималь¬
ного дополнительного ускорения, порождаемого в системе (13.3)
этими управлениями (или, иначе говоря, р* [zz] характеризует
перегрузки, вызванные управлением и (t)).
Разберем еще один способ выбора интенсивности х [zz] для этой
же задачи. Потребуем, чтобы при движении точки не модуль век¬
тора дополнительного ускорения, а каждая компонента этого ус¬
корения была возможно меньшей по абсолютной величине. Тогда
в качестве интенсивности х [zz] следует выбрать величину
х [zz] = sup max {| zz; (т) |; Т z = 1,. 2}. (13.6)
т i
В этом случае приведениая выше формулировка задачи об управ¬
лении системой (13.3) полностью сохраняется. Отличие будет толь¬
ко в том, что теперь в качестве исходного пространства SB{h (т)}
следует рассматривать пространство вектор-функции h (т) =
= {/1 (т), ^2 (т)} с нормой
Ч
p[/z(T)l = § (| h (т) | + | h2 (т) |) dx, (13.7)
«а
так как согласно таблице 12.1 именно в этом случае норма функ¬
ции и (т) в сопряженном пространстве S3* {и (т)} выражается ра¬
венством (13.6).
Для полноты изложения закончим разбор данного примера
вычислением вектор-функций hth (т), на которых в этом случае оп¬
ределена линейная операция (13.2) в выражениях (12.10) для
Учитывая, что система уравнений (13.3) распадается на две
системы вида (12.1), имеем:
1 t — т 0
0
0 10
0
0 0 1 t — т
0 0 0
1
82
ПОСТАНОВКА ЗАДАВИ ОВ ОПТИМАЛЬНОМ УПРАВЛЕНИИ
[Гл. 4
5 Up — t) Wx (t) dx,
4
(13.8)
*0
, (Zp — T U2(r)dr
?(ip-i«)2
2 ’
Отсюда согласно (7.7) выводится, что вектор ж (/р) описывается
равенствами:
X1 {ip) = х 1 4_ «2 (Zp ^a.) +
4
*2(«р) = ^2^ 5 И^т)^
*зСз) = ж” -I- «£(/ — Q +
ip
ж4/р) = ж“+ $ u2(x)dx — ga — ta),
* J
из которых следует, что линейная операция cp„ [h (т) ], определяю¬
щая координаты Xi Up), выполняется в данном случае на вектор-
функциях: ;
аС1(т) = {«р — т, 0), /и'С)) = {1, 0),
/гм(т) = {0, ip — т), Л[4]С)) = {0 ,1}
которые и следует рассматривать как элементы векторного про¬
странства ) {h (т)} (h (т) = {h± (т), Д2 (т)}, /Ст<Ор^) с нормой
(13.5) в случае, когда интенсивность х [и] определена равенством
(13.4), или с нормой (13.7), если интенсивность х [zz] определена
равенством. (13.6).
Отметим теперь следующее важное обстоятельство. В рассмот¬
ренном примере мы считали, что элементы htj [/р,т] матрицы
Н Up, т] суть элементы пространства ограниченных интегрируе¬
мых функций. Точно так же далее в тех или иных конкретных зада¬
чах будем предполагать, что функции hW Up, т] принадлежат
пространствам ЩЬ (т)}, Ж {h (т)}, Ж2 {h (т)} (г = 1) или их вектор¬
ным обобщениям (при г >1) (см. § 57). Такое предположение о
функциях №1 Up, т] вполне оправдано: указанные функции непре¬
рывны, а все непрерывные функции действительно охватываются
каждым из упомянутых пространств.
В задаче 13.1 мы предполагали, что заданы все координаты'
Xi Up) конечного значения фазового вектора х (t). Однако возмож¬
ны ситуации, когда требуется привести к заданным значениям
только часть этих координат xi} Up), • • -, xt, Up), a остальные
§ 13]
ПОСТАНОВКА ЗА ДАНИ ОБ ОПТИМАЛЬНОМ УПРАВЛЕНИИ 83
одинаты в конце движения могут принимать любые значения.
В°таких случаях задача 13.1 может быть сформулирована следую¬
щим образ°м. _
Пасть управляемая система описывается линейным уравнением
(13 1) Заданы отрезок времени /а t tp, начальное состояние
Хх = х*} и избранные координаты {х£ , • , ■ Д.} конеч¬
ного состояния фазового вектора х (t). Указана, интенсивность
х [и] управления и (£), которая может быть истолкована как нор¬
ма р* W функции и (т) в пространстве $*{и (т)}. Требуется среди
допускаемых управлений и (t) найти оптимальное управление
u° (Z), переводящее систему (13.1) из состояния {х\ , • . х*} в со¬
стояние {х? , • • Xik} и имеющее при этом наименьшую возможную
норму р* [и0].
Приведем пример постановки такой задачи. Для этого вернем¬
ся к проблеме управления движением 13.3, рассмотренной в этом
параграфе выше, где мы, однако, предполагали,что заданы все
начальные и конечные фазовые координаты хг, . • х±. Допустим
теперь, что заданы только координаты х± = £ и х3 = т] началь¬
ного и конечного положений, а также скорость точки х2 =
х± = ц в начальном положении. Что же касается скорости ее в
конечном положении, то мы будем предполагать, что эта скорость
существенной роли не играет и может быть любой. В качестве ин¬
тенсивности х [и] управления и (t) по-прежнему будем выбирать
либо величину (13.4), либо величину (13.6). Тогда задача об управ¬
лении системой (13.3) может быть сформулирована так:
Среди допускаемых управлений — вектор-функций и (t) =
= {и± (t), и2 (t)}, компоненты которых являются интегрируемыми
ограниченными функциями, требуется найти оптимальное управ¬
ление и° (£), переводящее систему (13.3) из начального состояния
х (<а) = ха = {х®, х2, я®, я®} в конечное состояние [хх (fp) = х&,
х3 (£р) = Хз} и имеющее при этом наименьшую возможную норму
Р* [и].
Подчеркнем теперь различие между сформулированными выше
задачами. В случае задачи 13.1 в фазовом пространстве {%, . . .
■ • ., хп} системы (13.1) задается одна вполне определенная точка х&,
в которую нужно привести эту систему в момент t = t$. В то же
время в только что рассмотренной задаче задано множество конеч¬
ных состояний системы (13.1). Это множество является гиперпло¬
скостью в фазовом пространстве {хг, • • Хп}, определенной си¬
стемой уравнений xi} = x,j (7 = 1.., к). Исходя из такой точки
зрения можно обобщить задачу 13.1, считая, что задано некоторое
многообразие © конечных состояний 1 фазового вектора х (О- Та¬
ким многообразием @ могут оказаться некоторая достаточно малая
84 ПОСТАНОВКА ЗАДАЧИ ОБ ОПТИМАЛЬНОМ УПРАВЛЕНИИ [Гл. 4
окрестность начала координат х = 0, некоторая гиперплоскость
в пространстве {ад, . . ., хп}, некоторая кривая и т. д. В этом слу¬
чае задача об оптимальном управлении системой (13.1) формули¬
руется следующим образом.
Задача 13.2. Пусть управляемая система описывается ли¬
нейным уравнением (13.1). Заданы отрезок tp, начальное
состояние х* и многообразие @ конечных состояний объекта.
Выбрана интенсивность х [и] управления и (t), которая может
быть истолкована как норма р* [и] функции и (t) в пространстве
$f*u}. Требуется среди допускаемых управлений и (t) найти опти¬
мальное управление и° (t), переводящее систему (13.1) из состояния
х (ta) = х* в какую-нибудь точку х (£р) = х$ из заданного многооб¬
разия @ и имеющее при этом наименьшую возможную норму р* [и0].
Полезно заметить следующее. Как и обычно в вариационном
исчислении, решение задачи 13.2 связано с решением задачи 13.1.
Именно, если имеется решение задачи 13.1 при фиксированном
х (tp) = х&, причем форма решения позволяет проследить зависи¬
мость этого решения 13.1 от х&, то переход к решению задачи 13.2
сводится лишь к дополнительному анализу зависимости решения
задачи 13.1 от когда х& пробегает множество TL Таким обра¬
зом, типична ситуация, когда свойства решения задачи 13.1
составляют основной элемент решения задачи 13.2 (см. § 38).'
По указанной причине в данной книге внимание уделено, прежде
всего, именно задаче 13.1, решение которой определяет основные
элементы решения задачи 13.2 и аналогичных ей задач с более
сложными краевыми условиями для движения х (t).
В заключение полезно еще раз обратить внимание читателя на
центральный пункт нашего подхода к проблеме об оптимальном
управлении. Предполагается, что в той или иной ситуации исходя
из физических соображений получена задача 4.2. Подготовляя эту
задачу для решения, мы переводим ее в форму задачи 13.1, удоб¬
ную для математического исследования. Таким образом, задачу
13.1 надо рассматривать не как изначальную проблему, но как
первый шаг, направленный к решению исходной задачи 4.2. Об
этом следует помнить и в тех случаях, когда мы будем исходить
сразу из задачи 13.1.
§14. Обобщенная задача
Теперь нам надлежит распространить задачи 13.1 и 13.2 на
случай обобщенных управлений вида dU (t). Пусть, следователь¬
но, поведение управляемой системы описывается уравнением
(6.11), т. е.
dx = A (t) xdt + В (t) dU + dW.
(14.1)
85
ОБОБЩЕННАЯ ЗАДАЧА
§ Ш
Подобно тому как это было сделано в предыдущем параграфе, при¬
мем и здесь, что величина х [fCZ, оценивающая ресурсы, затра¬
чиваемые на управление на отрезке £а t fy, может тракто-
аться как норма р* [С7] функции U (t). Для того чтобы пояснить
это общее предположение на конкретном материале, приведем
следующий пример.
Рассмотрим задачу об управлении движением материальной
точки с переменной массой по горизонтальной оси g. Будем гово¬
рить, что реактивная масса расходуется непрерывно, если функ¬
ция т (t) дифференцируема. Тогда движение точки описывается
уравнением Мещерского (3.8), которое в данном одномерном слу¬
чае принимает вид
т (t) I — a (Z) т (t) = 0, (14.2)
где т (t) = mQ + (£) — масса точки, т^ — неизменная часть
массы, ?т (£) — запас реактивной массы, а (£) — относительная
скорость отделяющихся частиц. Скорость a (t) будем считать по¬
стоянной по абсолютной величине и принимающей значения + а
или — а в зависимости от направления отбрасывания частиц.
Уравнение (14.2) запишем в следующей форме:
d In т (t)
dt
или в виде системы
dx± = x2dt,
dx2 = ± ad In m (£),
(14.3)
где xv = I, x2 = £
Итак, пусть сначала частицы реактивной массы все время
выбрасываются непрерывно, так что существует производная
d In т (t)!dt. Введем функцию U (£), связанную с функцией In m(t)
соотношением
d In т (t)
— dlnm (t)
при a (t) = a,
при a (t) = — a.
Тогда система (14.3) может быть записана в виде
dx± = x2dt, dx2 = adU(t).
(14.4)
(14.5)
Допустим теперь, что наряду с непрерывным расходом массы
mh (£) в отдельные моменты времени t = t* могут мгновенно отбра¬
сываться конечные количества реактивной массы Это вызы¬
вает импульсные усилия на движущуюся точку. Будем трактовать
Данное явление как идеализацию непрерывного отбрасывания
немалой массы, но за чрезвычайно малый промежуток времени.
Иначе говоря, рассмотрим предельный случай управления вида
86
ПОСТАНОВКА ЗАДАЧИ ОБ ОПТИМАЛЬНОМ УПРАВЛЕНИИ
[Гл. 4
(14.4) на отрезке (t , t* + ДО ПРИ условии, что Д£ ->0, но при
*,+Д4 t.+At
этом интеграл ' | dU | = | а (t) din т (t) | = о;>0 есть постоян¬
ная. Вследствие малости отрезка Д£ положим еще, что при
t Д Д + At величина а (0 остается постоянной. Тогда, привле¬
кая понятие импульсной 6-функции и понятие обобщенного управ¬
ления dU (0, введенные в § 6, мы можем и в окрестности таких
значений t = t* записать уравнения движения снова в виде
(14.5) , полагая, что при переходе через точку t = t* имеем:
At/ (Д) -
Д In т (tj при a (tt) = а,
— Д In т (tJ при а(Д) = —а,
(14.6)
где Д In т (tj = In т (t* + 0) — In т (tj.
Итак, мы видим, что здесь в качестве обобщенного управляю¬
щего воздействия dU (t) естественно принять управление, порож¬
денное функцией U (0, связанной с функцией In т (t) соотноше¬
ниями (14.4) и (14.6). Эта функция, с одной стороны, удобно
описывает управляющие усилия, а с другой стороны, она явно.ха-
рактеризует расход реактивной массы во времени. В самом деле,
полное изменение функции U (t) на отрезке [Za, tp] выражается ра¬
венством (см. [23*], т. 3, стр. 78, а также выше в этой • книге см.
равенство (4.4))
var[t/ (т)]£= |£/(T)|dT+ £ |ДС((Л.)| = ^п-Г’ (14.7)
ta i =1 0
где tk — точка разрыва функции U (£).
Отметим здесь еще следующее обстоятельство. Мы трактуем
мгновенный выброс конечной массы как идеализацию непрерыв¬
ного выброса ее за исчезающе малое время и исходим при этом
из уравнения Мещерского (14.2), которое выведено как раз в пред¬
положении, что реактивная масса изменяется непрерывно (см.
[13*], стр. 110). В соответствии с этим предельный переход привел
нас' к соотношению (14.6). Такая идеальная картина явления,
видимо, удовлетворительно отвечает его реальному содержанию.
Если же, однако, считать, что конечная масса отбрасывается мгно¬
венно, как единое целое, то уравнение (14.5) с функцией U (t),
определенной соотношением (14.6), уже не получится. Действи¬
тельно, предположим, что в некоторый момент времени t = t* точ¬
ка имела массу т = т* + Д т1 и в этот момент времени мы отбро¬
сили сразу массу Дтх =/= 0. Тогда, пользуясь теоремой об измене-
ОБОБЩЕННАЯ ЗАДАЧА
87
§ HJ
нии количества движения системы ([13*1, стр. 102), мы получим:
&i — ± а
Am-i
Очевидно, что Дт-rlm^ =f= Д In т. Это и подтверждает выска¬
занную мысль.
Вернемся к уравнению (14.5). Определим закон движения точки
в соответствии с обобщенной формулой Коши (6.6). При t — t$
будем иметь:
ч
(М = -а -Ь (3 — М ж” + 5 /г(1) Кз т] dU (тЬ
«а
х2 (t$) = а£ +5 Л(2) [£р’- т] dU (т)’
Здесь, как и выше (см. стр. 70), функции
Лт (т) = А^) Кд, t] = а • (3 — г), (т) = hm [—- т] = а
суть элементы импульсной переходной матрицы Н [fy, т] системы
(14.5).
Пусть требуется перевести точку из заданного начального поло¬
жения х (ta) — ха в заданное конечное положение х (tp) — х$ с ми¬
нимальным расходом реактивной массы Ti --- . При этом, как
обычно, будем предполагать, что mi (tp) — 0, т. е. что запас реак¬
тивной массы в процессе управления полностью используется.
Тогда в соответствии с (14.7) в качестве минимизируемой интенсив¬
ности х [dU] управления dU (т) следует выбрать величину (см.
также § - 7, стр. 52)
x[<^i^] — - | dU (т) | = var [ U (0] £ , (I4.8)
'а
равную полному изменению var [U (3)]ip функции U (t) на отрезке
t — t$. Итак, требование осуществить перевод точки из на¬
чального состояния х* в конечное состояние ха с минимальным
Расходом реактивной массы т (t) (при заданной неизменной час¬
ти лг°) эквивалентно требованию минимума интенсивности х [dU]
(14.8).
Если теперь рассматривать функции — 1 - (т) и — - - (т) как
элементы функционального пространства %>{h (т)} скалярных
88
ПОСТАНОВКА ЗАДАЧИ ОБ ОПТИМАЛЬНОМ УПРАВЛЕНИИ
[Гл. 4
непрерывных функций h (т) (ta 4 т 4 t$), где норма р [Л (?)]
определена равенством (см. §§ 56,59)
р [&(?)] = max | h (?) |, (14.9)
т
то величины
'а !з .
$ hw [£(Ч, T dt7(r), 5 h{w [Z,3, т] dU (?)
«а
можно рассматривать как значения линейной операции фу [h] на
элементах А(1>(т) и — 2 — (т). В самом деле, введенная нами функция
U (т), описывающая расход реактивной массы, предполагается
непрерывно дифференцируемой всюду, кроме отдельных точек tt,
где сбрасываются конечные количества массы (t). Следователь¬
но, мы можем предполагать тем более, что U является функцией с
ограниченным изменением. Но известно (см. § 59), что любая
функция U (т) с ограниченным изменением на отрезке [ZK, — 1 как
раз и порождает в пространстве <{h (т); ta т Zp} линейную
операцию
Фу 1М*)] = 5 h(x)dU(x), (14.10)
<а
причем
'а
р* [Фф]= р* 1^1 = $ |<W)| = var [£(?)] £. (14.11)
'а
Это и обосновывает наше утверждение. Итак, в данном примере
мы видим, что можно записать:
МП =«? + — t^) х* + фу [А<1) (т)],
х (<р) = 4 ф-фу [А'2) (t)].
При этом замечаем также, что выбранная из физических сооб¬
ражений интенсивность х [<dU] (14.8) в данном случае имеет как
раз смысл нормы р* [фу] (14.11) операции фу.
Рассмотрим теперь более общий пример. Пусть в уравнении
(14.1) U — скаляр и, следовательно, В (t) — вектор b (t). В качест¬
ве интенсивностях [dU] выберем опять величину полного импуль¬
са (14.8) управляющей силы. Находя снова закон движения
ОБОБЩЕННАЯ ЗАДАЧА
89
s I'd
системы (14.1) по формуле Коши (6.6), получим при t = t$:
'з 'з
д. = х&' (*р t°) х (Q + 5 хМ Ун т) dW (t) + 5 h(l} >>>>> xpdu(т)
С 'a
(i = l,..,,n). (14.12)
Для того чтобы интенсивность х [dU] (14.8) можно было ис¬
толковать как норму р* [фу] операции фу, следует рассматривать
функции № (т) = [«₽, т], . . ., Л(п) (т) = A(«) Up, т] > опять как
элементы пространства c<§{h (т)} скалярных непрерывных функ¬
ций h (т) Ua > < т < £р) с нормой (14.11). Тогда, .как и в предыду¬
щем частном примере, последние слагаемые в равенствах (14.12)
можно трактовать как значения линейной операции фу [Л], порож¬
денной функцией U (т) и выполненной над элементами № (т)
(i = 1, . . ., и), т. е.
я-! (t;) = х М' (ip Za) х (to) + ХРГ (<3’ х) dW W + Ч?Г [/^l) (т)]
'a
(t = 1, . . ., и),
причем опять выполняется (14.11).
Соображения о целесообразности расширения класса воз¬
можных управлений dU (т) до управлений допускаемых, приве¬
денные в § 12 для случая системы (12.8), следует учитывать и здесь
в случае системы (14.1). Поэтому, так же как и выше, примем сле¬
дующее определение обобщенного допускаемого управления.
Пусть интенсивность х [dU] обобщенного управления U (t) мо¬
жет быть истолкована как норма р* [<ри] линейной операции
(14.10) на некотором функциональном пространстве $?{Д(т)}. Тогда
скажем, что функции U (т), составляющие пространство S3* (С7(т)},
сопряженное к S3 (Л(т)}, порождают обобщенные допускаемые управ¬
ления dU.
Задача об оптимальном управлении может быть сформулиро¬
вана теперь следующим образом.
Задача 14.1. Пусть управляемая система описывается обоб¬
щенным линейным уравнением (1-4.1). Заданы отрезок ta X t X Ц
и начальное ха и конечное значения фазового вектора х (t). Выбра¬
на интенсивность х [dU] управления dU (t), которая обладает
свойством нормы р* [С7] функции U (t) в пространстве S3* {U}.
Требуется среди обобщенных допускаемых управлений dU(t) найти
оптимальное управление dU° (£), переводящее систему (14.1) из со¬
стояния х (to) = ха в состояние х (t$) = х‘ и имеющее при этом наи¬
меньшую возможную норму р* [С7°].
90 ПОСТАНОВКА ЗАДАЧИ ОБ ОПТИМАЛЬНОМ УПРАВЛЕНИИ [Гл. /,
П р и метание 14.1. В данном случае можно сформулировать также
и задачу, соответствующую задаче 13.2. Мы, однако, здесь такую формули¬
ровку приводить не будем, так как она получается очевидным изменением
условий задачи 13.2.
В предыдущих примерах функции U (t) были скалярными.
Однако все основные рассуждения имеют силу и в общем случае
векторных * управлений dU (t). В соответствии с этим данное выше
определение допускаемого управления и формулировку задачи
14.1 следует относить к общему * случаю векторного управления
dU (/).
Как и в § 12, приведем теперь табл. 14.1 с краткой сводкой . ос¬
новных пространств Зд {h (т)} и соответствующих им сопряженных
пространств * * (?7(т)}, норма в которых р* [С7] имеет вид интен¬
сивности х [с?СЛ, встречающейся в приложениях.
Таблица 14.1
X [<Ш] = р * [U]
Р[А]
I
U (т)-скаляр
/г (т)-скаляр
j \dU (т)| =var[f T)]/p
'а а
max |Л(Т)|
< Т <
II
U (Т) = {U1 (т), . . . , иг (т)}-вектор
/г (Т)= {h (т), .... Лг(т)}-век-
тор
$ (2 "S <
*а. г—1
max (2л|(т)) * 2
III
*3 г
i=1
max (max * (t)|)
<a < Т < (3 *
IV
#3
\ max ]<с/7г(т)|
J i
га
(2 W>|)
г=1
Для иллюстрации рассмотрим задачу о переводе материальной
точки, движущейся в поле центральной силы, на некоторую круго¬
вую орбиту за время * — £а при минимальном расходе запаса ре-
ОБОБЩЕННАЯ ЗАДАЧА
91
§ 14]
активной массы mL (ta). Будем предполагать, что реактивная мас¬
са ад (U в процеоое управления полностью используется, так
что (£₽) = 0. Уравнения движения точки, лежащей в одной
плоскости с заданной круговой орбитой, имеют вид (см. п. 5° § 3)
1 =ra*/j\т'
где т = т0 + тА (£), г — длина радиуса вектора точки, % — обоб¬
щенный импульс, соответствующий полярному углу гр; ar (f), a^(t) —
проекции вектора относительной скорости отделяющихся частиц
на направление радиуса и поперечное направление соответственно.
Пусть ‘ тх , z2, Z3 — отклонения фазовых координат . от их зна¬
чений на круговой орбите, т. е.
*1 = г — Го, zz из = % — %0.
Здесь го — радиус заданной круговой орбиты, %о — значение
обобщенного импульса % при движении точки по круговой орбите.
Полагая
запишем уравнения движения точки в первом приближении (см.
§ 3, уравнения (3.23)):
dx± = x?dt',
dx, = —Xid 4 xtflt' -I- -r=ar (f) — dt',
dx3 = «Ф (t') — dt'.
/v m
Везде в дальнейшем для удобства записи инддесОпри t будем
опускать, помня, однако, о том, что мы изменили масштаб времени.
Будем считать, что реактивная масса тх (t) выбрасывается с
относительной скоростью а, постоянной по модулю (|а| = |/а* + а* =
= const), но переменной по направлению. Так же как и вы¬
ше (см. стр. 85), будем предполагать, что выброс массы происхо¬
дит непрерывно (так, что существует производная dm (t)/dt), за ис¬
ключением лишь отдельных моментов времени tk (к = 1, ..., I)
из отрезка Ra, £3], в которые масса т± (t) может изменяться скач¬
кообразно. При этом мгновенный выброс конечной массы будем
снова трактовать как предельный случай непрерывного выброса
92 ПОСТАНОВКА ЗАДАЧИ ОБ ОПТИМАЛЬНОМ УПРАВЛЕНИИ [Гл. 4
ее за бесконечно малый промежуток, причем в течение этого про¬
межутка относительную скорость а отделяющихся частиц можно
считать постоянной по величине и направлению.
Тогда в качестве обобщенных управляющих воздействий есте¬
ственно выбрать функции dUt (t) и dU2 (£), связанные с массой
т (t) соотношениями:
dUr = ar (t) — dt = ar (t) d In т (t),
dU2 = if)) —ctt^a^ (t) d In rn (t),
когда существует производная m (t), и соотношениями:
ДЦ\ = ar (tk) A lnm(^),
AZ72 = Лф (£fc) A In m (tk),
если в момент tk масса изменяется скачкообразно.
Итак, окончательно получаем уравнения движения точки в
первом приближении:
dx± = Х2 dt,
dx2 = — Xidt + x3dt —— dUь
у V
dx3 = t dU2.
V v
(14.13)
Пусть требуется перевести точку из заданного начального по¬
ложения х (ta) = х) в заданное конечное положение х (£р) = х&=0
с минимальным расходом реактивной массы о (£а). Тогда в ка¬
честве интенсивности х [dU] управления dU (t) = [dUt (t),
dU2 (t)} следует выбрать величину (см. § 60, где дано точное оп¬
ределение смысла интеграла (14.14))
4i
K[dU]= judt/coil. (14.14)
Действительно, повторяя с незначительными изменениями до¬
воды, приведенные на стр. 86, можно снова убедиться в справед-
mQ + т. (t )
ливости равенства х [J£7] = || а||In — .А тоо и онначает,
что, минимизируя интенсивность х [dU] (14.14), мы осуществим
перевод точки на круговую орбиту с минимальным расходом на¬
чального запаса реактивной массы тх (ta).
ОБОБЩЕННАЯ ЗАДАЧА
93
§ И]
Однако для того чтобы иметь право сформулировать проблему
в форме задачи 14.1, нам необходимо быть уверенными в воз¬
можности подобрать пространство S3 {h (т)} таким образом, чтобы
величинах [dU\ (14.14) имела смысл нормы функции U (т) в про¬
странстве S3*{U (т)}, сопряженном к $3{h (т)}. Для этой цели обра¬
тимся к таблице 14.2, из которой видим, что такой выбор S3 воз¬
можен, причем в качестве S3 {h (т)} следует выбрать пространство
непрерывных вектор-функций А(т) = {Л (т), Л2 (т)} с нормой
р[й(т)] = max || А (т) ||. (14.15)
т
Таким образом, для системы (14.13) можно сформулировать
следующую задачу об оптимальном управлении:
Среди допускаемых управлений dU (t) ={dUi (t), dU2 (£)},
компоненты которых dUt (t) порождены функциями Ut (t) с огра¬
ниченным изменением, требуется найти оптимальное управление
dU° (t), переводящее систему (14.13) из начального состояния
х (ta)= х?- = {xi, х2, хЗ} в конечное состояние х (tp) = х$ = {0,0,0}
и имеющее при этом наименьшую возможную норму р* [С7].
В заключение для полноты картины найдем вектор-функции
Д[’] (т) (i = 1,2,3), на которых вычисляется линейная опера¬
ция q>u в выражениях (14.12) для xt (t). Фундаментальная матри¬
ца и импульсная переходная матрица для системы (14.13) имеют
вид
cos (t ) a) sin (t — ta) 1 COs (t ta)
X [t, ta] =
sin (t to) cos (t ta) sin (t ta)
0 0 ) 1
H [«, r] = X [£, r]-5(r) =
cos (t — x) sin (t — x) 1 — cos (t — t)
—sin (t — r) cos (t — r) sin (t — r)
0 0 1
0
0
Гр д
0
Y V
0
2r0
-yv sin (t — t)
У v
(t — r)
yv
0
y^(l — cos (t — r))
У v
■yV sin (« — t)
У v
2r0
/v
94 ПОСТАНОВКА ЗАДАЧИ ОБ ОПТИМАЛЬНОМ УПРАВЛЕНИИ
[Гл. 4
Следовательно, согласно (14.12) вектор х(/) описывается равен¬
ствами:
X1 (Zp) , = х* cos (Zp — Za) + xX sin (Zp
«p
+ Vv J sin (Zp — t) dUr (T)
Za) -|-- X* (1 — cos (Zp — Za)) +
(P
+ -/7 J (1 — cos(Zp — ХУ)<Ш2(г),
te
«2 Gp) — —X* sin (Zp — Za) + x* cos \tp — ta) 4- x* sin (Zp — Z«) +
tp |p
\ cos (Zp — r)dUi (т) + -/=Л sin (Zp — t) dU2 (th
J V v J
ta,
*p
= x+|% \U2(x).
Из этих равенств следует, что линейная операция
«3
Фи 1Л(Т)1 = $ h(x)dU (t),
*«
определяющая координаты Xt (О, выполняется в данном случае
на вектор-функциях
Л[1 (т) = ) Tj) sin (Zp — th — cos (Zp — т))}
лИ (Т) = {}%rC0S — ' уТ sin ( (( — t)) ,
аМ ={°, 5%),
которые и надлежит рассматривать как элементы векторного про¬
странства 33 {h (т)} (h (т) = {Лх (т), h2 (т)}, Za ) t ) .Zp) с нормой
(14.15).
Глава 5
ОБЩЕЕ РЕШЕНИЕ ЗАДАЧИ ОБ УПРАВЛЕНИИ
§ 15. Задача об управлении как проблема моментов
Наша ближайшая цель — дать общее решение задач 13.1 и
14.1. Предлагаемое решение будет опираться на математическую
теорию, связанную с так называемой проблемой моментов. Поэто¬
му, прежде чем переходить непосредственно к решению задач об
оптимальном управлении, мы сначала выясним связь, которая су¬
ществует между этими задачами и упомянутой проблемой.
Итак, рассмотрим задачу 13.1. Подставляя краевые условия
х (£а) = я и х (t$) = х> в равенства (12.10), описывающие движе¬
ние х (t) управляемого объекта, получим систему интегральных
уравнений: '
[is, т] и (т) dx = Ct (z = l,..., n), (15.1)
в которых функции h№ [£р, т] = h (т) и числа ct определяются со¬
гласно (6.1), (8.4) и (12.10) следующими соотношениями:
п
/Д1] ( h, т] = (т)} = { 2 Xik [''0> Т] b> i (T)I ,
. , <0 . , (1,5.2)
Ci — Xi — x™ [Z₽, <в] xa — J x[1]' T] w (t) dx
(i = 1,. . ., n).
Важно обратить внимание на то, что вектор-функции hW [£р,т]
и числа Ci ■ мы считаем по условиям задачи известными, а вектор-
функции и (т) — искомыми. Кроме того, в соответствии с формули¬
ровкой задачи 13.1 вектор-функции МО т] надлежит рассмат¬
ривать как элементы некоторого функционального пространства
(т); ta < т < а вектор-функции и (т), изображающие уп¬
равления, как элементы пространства функций®* {и (т); ia<A«C^}>
сопряженного к ®[ta,tp]. Теперь, следовательно, задача 13.1
свелась к тому, чтобы разрешить уравнения (15.1) относительно
96
ОБЩЕЕ РЕШЕНИЕ ЗАДАЧИ ОБ У ПРАВЛЕНИИ
|Рл ■ ;i
функций и (т) при условии, что
р* [u] m min. (15.3)
Если все числа ct равны нулю, то задача решается сразу, так
как тогда достаточно принять, что и (т) m 0. Поэтому в дальней-
п
шем мы всегда будем считать, что 2 & == 0-
г=^1 .
Левые части равенств (15.1), как мы видели в §§ 12, 13, имеют
смысл линейной операции сри [А], выполненной над элементами
&W Пр, т]. Но тогда, суммируя сказанное, можно заключить, что
задача 13.1, записанная в виде соотношений (15.1) — (15.3), све¬
лась к следующей проблеме, которую вследствие ее важности мы
теперь специально выделим.
Проблема моментов. Пусть . в пространстве
33 {h (т); t$} вектор-фу нкций h (т) с нормой р ]h] задано п
п
элементов hh ■ (т). Пусть также задано п чисел ct и С =f= 0. Тре-
i=i
буется найти линейную операцию ср [h (т)1, определенную на
всем пространстве 33{h (т); ta т <4 £з}, удовлетворяющую на
заданных элементах h№ (т) условиям
ф[/гСг]('Т))=с (г = 1 . . .. п) (15.4)
и такую, что норма р* [ср] операции ср [h] является наименьшей из
возможных х).
Операцию ф [h] = ф°, которая удовлетворяет условиям этой
задачи, будем называть оптимальной операцией (для данной проб¬
лемы моментов).
Итак, задача об оптимальном управлении по сути своей оказы¬
вается проблемой моментов. Здесь, однако, важно обратить внима¬
ние на следующее существенное обстоятельство. Наша задача —
определить функции и (т), которые удовлетворяют уравнению
(15.1). Истолковав выражение в левой части (15.1) как линейную
операцию, порожденную функцией и (т), мы желаем теперь заме¬
нить задачу об определении функции и (т) проблемой моментов,
х) Строго говоря, проблема моментов заключается в определении линей¬
ной операции (р, удовлетворяющей лишь условиям (15.4), а требование (15.3)
о минимальности нормы ср является дополнительным требованием, которое
выделяет среди решений ср проблемы моментов (15.4) оптимальную операцию
<р0. Это дополнительное условие оптимальности (15.3) может заменяться ка¬
ким-либо другим требованием к (р. Однако в данной книге мы почти везде
ограничиваемся лишь задачами, где условие оптимальности управления бу¬
дет приводиться к виду (15.3). В соответствии с этим мы и формулируем про¬
блему моментов как такую задачу, которая включает оба условия (15.3) и
(15.4), (См. также § 47, стр. 383.)
§ 15] ЗАДАЧА ОБ УПРАВЛЕНИИ КАК ПРОБЛЕМА МОМЕНТОВ 97
т. е. задачей об определении операции ср [h (т)], удовлетворяющей
условию (15.4). Но тогда, найдя эту операцию в результате реше¬
ния проблемы моментов, мы должны быть в состоянии (по крайней
мере в принципе) вернуться к порождающей ее функции и (т).
А это возможно лишь тогда, когда в свою очередь каждая линей¬
ная операция, имеющая смысл на функциях h (т) из 33{h (т)},
действительно порождается некоторым управлением и (т) в форме
интеграла. Иначе говоря, необходимо, чтобы любая линейная
операция с [Л], имеющая смысл на (т)}, могла быть записана
в виде
ф [Л] = T h' (г) и (т) dr, (15.5)
где функция и (т) содержится среди рассматриваемых нами управ¬
лений и (т). До сих пор мы не акцентировали внимание на этом
обстоятельстве. Как мог заметить читатель, в § 12, где впервые
было использовано понятие линейной операции в связи с дви¬
жением х (t), мы опирались на эту связь между управлением и (т)
и операцией фи [А], используя ее лишь в одном направлении —
от и (т) к фи [Л]. При этом было отмечено, что соответствующие чле¬
ны в записи, определяющей движение х (£), можно истолковать
как линейную операцию фи [А], порожденную возможным управле¬
нием и (т). Теперь же, как мы видим, для нас важен и обратный
переход. Проблема моментов эквивалентна задаче 13.1 тогда и
только тогда, когда линейные операции ф[Л], имеющие смысл на
3B{h (т)}, находятся во взаимно однозначном соответствии с рас¬
сматриваемыми управлениями u(t). Если бы мы ограничились
лишь кругом возможных управлений и (£), то такого соответствия
получить бы не удалось и наш переход к проблеме моментов был
бы незаконным. Именно, в последнем случае не ' для всякой опера¬
ции ф [h\ можно было бы подобрать возможное управление и (т),
которое определяло бы ее в виде (15.5). Однако мы уже услови¬
лись в § 12 расширить круг возможных управлений до множества
допускаемых управлений. Это как раз и было сделано с той целью,
чтобы обеспечить нужное соответствие между и (т) и ф„ [h (т)]:
множество допускаемых управлений мы определили именно так,
что любая линейная операция фи Ш, определенная на пространст¬
ве 3B{h (т)}, оказалась представимой в виде (15.5), где функция
и (т) — допускаемое управление. Итак, если мы ищем управление
и (т) среди допускаемых управлений, то задача 13.1 полностью эк¬
вивалентна проблеме моментов. Следовательно, для того чтобы
найти оптимальное управление и0 (т), достаточно решить пробле¬
му моментов. Решение этой проблемы описано в следующем пара¬
графе.
4 Н. Н. Красовский
98
ОБЩЕЕ РЕШЕНИЕ ЗАДАЧИ ОБ УПРАВЛЕНИИ
[Гл. 5
Задача 14.1 об управлении в форме dU (t) также может быть g
сведена g к проблеме моментов. Для этого нужно лишь подобрать
соответствующим образом пространство gg (т); g g т g Zp}. Вы¬
сказанное утверждение поясним, например, для случая скалярно¬
го управляющего воздействия, когда матрица Btt) в уравнениях
(14.1) есть щросто вектор b(t). Интенсивность х [dU] управления
dU (t) выберем в виде (14.8). Подставляя краевые условия х =
= х* и х($) = х$ в равенство (14.12), получаем систему урав¬
нений
Ч
$ Л(,) [р т] dU (т) = Ci ,. = 1,...,п), (15.6)
Ч
где Ct определяются снова выражением (15.2) (с заменой w (т) dx
на dW). Систему (15.6) следует теперь разрешить при условии, что
р* [Z7] = min. В данном случае функции № Up, т] надлежит
рассматривать как элементы функционального, пространства
%{h (т); icgrg £р} непрерывных на Ua, £р] функций h (т), где
норма р [h (т)1 = max | h (т) |. Пространством S3* {U (т); g g т g
т
g Zp}, определяющим допускаемые управления, будет тогда
пространство функций U (т) с ограниченным изменением на UaUpl,
с нормой р* [J7], равной величинех [dU] (14.8).
Согласно материалу § 14 левую часть (15.6) можно рассматри¬
вать как результат линейной операции, производимой функцией
U (т) над элементами hW Up, т] из $ {h (т); Za g т g Zp}. Таким
образом, находим, что рассматриваемая задача сводится к пробле¬
ме моментов в функциональном пространстве Пользуясь
случаем, подчеркнем, что и здесь задача 14.1 оказывается эквива¬
лентной проблеме моментов по той причине, что общий вид линей¬
ной операции фи [h\ на элементах Л(т) из $ра,*0] определяется
равенством (14.10), где dU (t) — некоторое допускаемое уп¬
равление.
Полезно заметить, что для задачи 13.1, которая сводилась к
равенствам (15.1), функции g( 11 Up, т] нельзя было рассматривать
в качестве элементов из В самом деле, общий вид линейной
операции g ф[Л] в $Ра,*р1 задается формулой (14.10), а не форму¬
лой (15.5). Поэтому операция ф [А], решающая проблему моментов,
соответствующую задаче 13.1 (если указанную проблему рассмат¬
ривать в пространстве функций ^^.д.]), может оказаться вовсе не
представимой в виде (15.5). Такая операция не будет, очевидно,
давать решение для задачи 13.1.
Для системы с векторным управлением dU (Z) задача 14.1 во
многих случаях также может быть сведена к проблеме моментов.
§ 151
ЗАДАЧА ОБ УПРАВЛЕНИИ КАК ПРОБЛЕМА МОМЕНТОВ
99
Мы не останавливаемся здесь на этом вопросе, так как всевозмож¬
ные случаи, сводимые таким путем к проблеме моментов, трудно
обозримы. Для ряда конкретных случаев указанное сведение будет
использовано ниже, в § 23, по ходу решения задач.
Проблема моментов, к которой мы выше свели задачи об уп¬
равлении,— это весьма общая математическая проблема, возни¬
кающая из прикладных задач о распределении масс, усилий,
вероятностей и т. д., обеспечивающем желаемые величины соответ¬
ствующих моментов (моментов сил, моментов инерции, вероятност¬
ных моментов и т. д.). В качестве иллюстрации ' к сказанному и
желая ' расширить представление о содержании проблемы момен¬
тов, рассмотрим следующий пример физической задачи, отличной
от задачи об управлении, но приводящей также к проблеме мо¬
ментов.
Пример 15.1. Пусть на плоскости {g, ц} задана кривая, описываемая
параметрическими уравнениями
(15.7)
Предполагается, что плоскость {g, Щ находится в однородном электроста¬
тическом . поле и расположена перпендикулярно к вектору напряженпости
этого поля. Задача состоит в таком распределении зарядов вдоль кривой
(15.7), при котором моменты 5^ и S„ сил электростатического взаимодействия
относительно осей g = 0 и ц = О принимали бы заданные значения S = clt
= с2. При этом будем считать, что распределение зарядов вдоль кривой
характеризуется линейной плотностью и (т) этих зарядов. Рассмотрим эле¬
мент dx кривой (15.7) в окрестности точки g (т), р (т). Этот элемент несет
заряд d& = и (т) dx. Составив выражение для статических моментов Sи
8^ получим два уравнения для неизвестной плотности и (т):
где X — коэффициент пропорциональности, обеспечивающий совпадения
размерностей. Предположим, что по условиям задачи величина max |и (т)|
вдоль кривой должна быть по возможности наименьшей. Введя обозначения
М (Т) = Л(1) (т), Xg (т) = /г(2) (т),
получим следующую задачу: найти функцию и (т), удовлетворяющую урав¬
нениям -
Ч
такую, что
(т) и (т) dx = c
(i = l>2),
(15.8)
max (| и (т)| при ta < х < tp) = min.
(15.9)
4*
100
ОБЩЕЕ РЕШЕНИЕ ЗАДАЧИ ОБ УПРАВЛЕНИИ
[Гл. 5
Если условие (15.9) снова истолковать как условие минимума нормы
р*[ы] функции и(т), рассматриваемой как элемент пространства т0
соотношения (15.8), (15.9) означают, что исходная задача опять сведена к
проблеме моментов. При этом следует лишь предположить, что функции
A(i) (т) являются элементами пространства
§ 16. Проблема моментов
Цель настоящего параграфа — познакомить читателя с основ¬
ными теоремами, определяющими решение проблемы моментов,
к которой, как мы только что убедились, сводятся задачи об управ¬
лении. Решение упомянутой проблемы связано с одной из важ¬
нейших теорем функционального анализа — с так называемой
теоремой Хана — Банаха о распространении линейного функ¬
ционала. Мы, однако, не будем углубляться в изучение этой свя¬
зи, но выведем решение проблемы моментов, опираясь на те нагляд¬
ные представления, которые даны в Приложении.
Итак, вернемся к уравнениям (15.4), т. е.
ф [йм (т)] = Ci = 1,...,н), (16.1)
где, следовательно, нам надлежит определить неизвестную опера¬
цию ср с наименьшей возможной нормой р* [ф].
Найдем сначала необходимые условия, которым должна удов¬
летворять любая операция ф, разрешающая уравнения (16.1).
Пусть, следовательно, ф — некоторая такая операция. Рассмот¬
рим множество ^{h}, состоящее из всех вектор-функций h (т) вида
п
Й (т) = 3 (<« < т < (16.2)
1=1
где постоянные Ц стеснены условием
п
3^=1. (16.3)
1=1
Вследствие (16.1) и по свойствам линейности операции ф на
функциях h (т) из З имеем:
Ф \h (т)] = 1. (16.4)
В самом деле,
п п п
ф [А (т)] = ф Р3 /Л[г]1 = 3 ^ф [[[ ] = 2 lici = 1-
4=1 1=1 г=1
Обозначим теперь символом © {А} множество всех функций
h (т) из совокупности 53(ta,<3] {h (т)}, которые удовлетворяют ус¬
ловию (16.4). Это будет множество более широкое, чем множество
§ 161
ПРОБЛЕМА МОМЕНТОВ
функций S5 порожденное конечным числом параметров Ц.
Соотношения (16.4) и (16.3) позволяют нам теперь оценить норму
р* . [ф1-
Напомним, что норма р* [ср] может быть легко вычислена, если
в пространстве 33 {h} известно «расстояние» рф от «плоскости»
где ср ]h] = 1 до «точки» h (т) = 0 (рис. 16.1). При этом (см. При¬
ложение, §§ 52, 58)
р*1ф] = -Т--
г'ф
(16.5)
(Расстояние рф определяется как нижняя грань inf р [Л(т)1.
когда h (т) пробегает все множество @.)
Так как множество ЗР содержится в .. заключаем, что
Рф<Р°, (16.6)
где р° есть расстояние от точки h (т) — 0 до множества ЗР (16.2),
(16.3), определенное, . следовательно, условием (см. рис. 16.1)
р° == min р [Л] = mm р [2 ~
z Ь=1 J
= Р «''''З р [Л°] ПРИ 3 Цс, = 1. (16-7)
Важно отметить, что здесь, действительно, минимум достигает¬
ся. на некоторой функции Д° (т) = 2 й № (т), содержащейся в ЗР.
Такую функцню h" (т) назовем минимальной
102
ОБЩЕЕ РЕШЕНИЕ ЗАДАЧИ ОБ УПРАВЛЕНИИ
[Гл. 5
Докажем существование минимальной функции h° (т). Пусть
сначала функции АО! (т) линейно независимы, т. е. пусть линейная
комбинация их (16.2) может обращаться в тождественный нуль
лишь при Zj = . . . = 1п = 0. Тогда по свойствам нормы р [Л]
(см. § 56) имеем: у [Zlt . . Zn] = р Z./il’B >0 при Zx + . . . +
1=1
+ 1%=I= 0 и, более того, limy [Zx, . . .. Zn] = оо при ZZ+- .. + Й -> оо.
Кроме того, y[Zx, . . ., ZJ есть ' непрерывная функция от Z,-.
Но тогда существование минимума у [Z?, . . ., Z„] есть следствие
известных свойств непрерывных функций.
Предположим теперь, что среди функций h№ (т) только к < п
линейно независимых. Мы всегда можем выбрать нумерацию так,
чтобы линейно независимыми были первые к функций hh (т)
( = к). Остальные функции hW (т) будут, 'следовательно,
линейными комбинациями от hh (т):
к
Лм(т) =3 Хг/П(т). (16.8)
1=1
Но тогда
рЙ *ХЯ1 = у [£ . ..,аа, (16.9)
Li=l J Lj=l J
где числа
n
+ 2
i=*+l
вследствие (16.3) и (16.8) стеснены условием
к п к
3Х + 2 z(c-S cA.- = 1- (16Ю)
j=l i=k+l 1=1
Величина у [Zx, . . ., Zj&] снова вследствие линейной независи¬
мости hhh (т) (/ = 1, . . ., к) будет непрерывной функцией от Ц-,
причем lim у = оо при Z? + . . . + Z k -> оо. Отсюда опять
выводится существование минимума у [Z*?, . . ., Z®] для этой
величины. Тем самым снова устанавливается существование ми¬
нимальной функции Л° (т).
Теперь из (16.5) и (16.6) получаем нужную оценку
(16.11)
Из этой оценки следует, прежде всего, что величина р° обя¬
зательно отлична от нуля, если только уравнения (16.1) имеют
ПРОБЛЕМА МОМЕНТОВ
103
§ 1Л
ешение в виде ограниченной линейной операции ф, а только та¬
кие операции пас и интересуют по условиям задачи. Ввиду важ¬
ности неравенства р° >0, как необходимого условия для раз-
пешимости уравнений (16.1), подтвердим его еще непосредственно.
G этой целью предположим, что задача имеет решение, но тем не
менее р° = 0. Однако последнее означает, что Л0(т) = 0, т. е.
(р [Л0 (г)] == Ф [0] = 0, а это противоречит условию (16.4), ибо
до (г) содержится в 5S
Подводя итог нашим рассуждениям, мы можем сформулиро¬
вать следующую лемму, которая указывает необходимый признак
для разрешимости проблемы моментов (15.4).
Лемма 16.1. Оптимальная операция <р° , ■ разрешающая проб¬
лему моментов, существует только тогда, когда выполняется нера¬
венство
ро = р[до (т)] >0. (16.12)
При этом необходимо выполняется условие
Р*[ф01>^т- (16.13)
(Напомним, что здесь р° — число, найденное из условия (16.7).)
Лемма 16.1 дает оценку снизу для нормы р*[ф°]. Естественно
поставить вопрос: является ли эта оценка достижимой? Иначе
говоря, возникает вопрос о том, всегда ли можно построить опе¬
рацию ф°, разрешающую ' проблему моментов и такую, что
Р’[ф°1 = ^. (16.14)
Оказывается, что ответ на поставленный вопрос является поло¬
жительным и, следовательно, справедлив такой достаточный приз¬
нак разрешимости проблемы моментов.
Лемма 16.2. Пусть число р°, определенное условием (16.7),
положительно. Тогда проблема моментов (15.4) имеет оптималь¬
ное решение ф°, причем справедливо равенство (16.14).
Докажем лемму. Прежде всего, заметим, что выполнение ра¬
венства (16.4) на функциях h (т) вида (16.2), (16.3) есть не только
необходимое, но и достаточное условие для того, чтобы операция
Ф доставляла решение уравнений (16.1). В самом деле, пусть усло¬
вие (16.4) выполнено. Покажем, что отсюда следует выполнение
равенств (16.1). Пусть сначала при выбранном i = s имеем os Ч* 0.
Тогда, пюлагая в (I6.2) 1„ = i/cs, р■ — 0 при i == s, т. e. полагая
h (t) = ДМ (T)/cs)
получим сразу из (16.4)
Ф [/г (т)1 = ср [-1 | = ^-ф [Лм]] = 1
что и доказывает выполнение (16.1) при таком значении i = s.
104
ОБЩЕЕ РЕШЕНИЕ ЗАДАЧИ ОБ УПРАВЛЕНИИ
1Гл. 5
Предположим теперь, что cs = 0. Если бы при этом, вопреки наше¬
му утверждению, не выполнялось равенство ср [MSI] = 0, то не
могло бы выполняться и условие (16.4) для любой функции h (т)
из З5. В самом деле, допустим, что ср [AW] = a ={= 0. По свойствам
линейности операции <р имеем:
п п
ф[А(т)] = ф|"2 mW 1 + ls(f [АМ] =ф[2 1г1гМ I + ^а- (16.15)
4#=s J Li^s J
Но при cs = 0 число ls в (16.2), (16.3) можно выбирать лю¬
бым без изменения других чисел /г, а это создает противоречие
между (16.4) и (16.15). Итак, действительно, условие (16.4) обес¬
печивает выполнение (16.1).
Теперь для доказательства леммы остается построить опера¬
цию ср0 [Л], которая удовлетворяла бы условиям (16.4) и (16.14).
Сделаем это.
Заметим, прежде всего, что множество 3P{h}, определенное усло¬
виями (16.2) и (16.3), есть множество плоское. Напомним (см. § 61),
что множество М элементов h (т) из 33 {h (т)} называется плоским,
когда «прямая»
(т) = U(t) (т) + (1 — Х) /г(2) (т) (— оо < Х < °э),
проведенная через любые две «точки» h(D и А( 2 ) из М, лежит всеми
своими точками тх в М. Понятие плоского множества переносит,
следовательно, в пространство функций понятие обычной плоско¬
сти трехмерного пространства (см. снова рис. 16.1, который, ко¬
нечно, имеет весьма условный смысл). Тот факт, что множество
ЗР вида (16.2), (16.3), действительно, является плоским, проверен
в § 61, куда мы и отсылаем читателя.
Итак, нам надлежит построить операцию ф° [Л], которая на
элементах h из плоского множества Зр принимала бы значение 1 и
имела бы норму р* [ф0] = 1/р°, где р° — это как раз расстояние от
ЗР до точки h (т) = 0. Для этого построения рассмотрим в простран¬
стве $?{А(т)} сферу §° радиуса р = р° с центром в точке h (т) = 0.
Иначе говоря, рассмотрим совокупность всех функций h (т) из
S3 {h}, которые удовлетворяют неравенству р [h (т)] т р° (см.
рис. 16.1). Так как в пространстве 33 {h} расстояние от «плоскости»
3s до «точки» h (т) = 0 равно как раз радиусу р° сферы §°, то эта
сфера и плоскость Зр «касаются» друг друга, и это касание проис¬
ходит в точке Д° (т), являющейся минимальной функцией. Подоб¬
ных точек касания может быть не одна, но это не важно. Важно
то, что сфера §° не имеет таких своих внутренних точек, которые
лежали бы на ЗР. Иначе говоря, важно то, что в соответствии с ус¬
ловием (16.7) в совокупности g{{h} нет функций h (т), для кото¬
рых р [А] < р°.
ПРОБЛЕМА МОМЕНТОВ
105
§ 16]
Теперь мы можем воспользоваться теоремой из функциональ¬
ного анализа о разделении выпуклого множества 8° и плоского мно¬
жества 3, которые не имеют общих внутренних точек. Согласно
этой теореме, приведенной и разъясненной в Приложении и яв¬
ляющейся одной из геометрических форм фундаментальной теоре¬
мы Хана — Банаха [6*] (см. § 53 и § 61), можно построить опера¬
цию ф° lh], которая разделяет сферу §° и плоскость * поверхно¬
стью * , где ф° lh] = 1. Строгий аналитический смысл последнего
геометрического оборота речи определяется условиями:
Ф° [h (т)] =1 при h (т) из S’, 116.16)
Ф° [h (т)] «С 1 при h (т) из S0.. 116.1))
Такая «разделяющая» операция ф° [А] и является искомой опе¬
рацией ф, разрешающей проблему моментов. Для доказательства
этого утверждения вследствие (16.16) достаточно проверить лишь,
что р* [ф°] = 1/р°. А для этого в свою очередь достаточно прове¬
рить, что расстояние рф от точки h (т) = 0 до плоскости @ равно
р°. Проверим это. Так как 3 содержится в (* , то р<р * р°. Но рФ не
может быть строго меньше, чем р°. В самом деле, в случае неравен¬
ства р<р <Z р° множество @ содержало бы точки h (т), у которых
р lh (т)] <Z Р°, т. е. множество @ содержало бы внутренние точки
из сферы §°, а это противоречит неравенству (16.17).
Итак, нами построена операция ф° [А], которая удовлетворяет
всем условиям леммы 16.2. На этом доказательство леммы завер¬
шается.
Сравнительная простота приведенного доказательства не долж¬
на вводить читателя в заблуждение, так как основная трудность
этого доказательства остается скрытой в использованной нами тео¬
реме Хана — Банаха о существовании гиперплоскости *, отделя¬
ющей множества §° и 3>. Эта теорема, имеющая ясный наглядный
смысл, требует, однако, трудного строгого доказательства, которое
можно найти в курсах функционального анализа [6*, 14*].
Резюмируя все предыдущие рассуждения, получаем следую¬
щую основную теорему о решении проблемы моментов.
Теорема 16.1. Проблема моментов имеет решение ф° [h (т)]
тогда и только тогда, когда число р° (16.7) положительно. При
этом норма р* [ф°] оптимальной разрешающей операции ф° [h]
определяется из равенства
р* [ф°] = •
Остановимся теперь на вопросе о том, как же фактически сле¬
дует искать операцию ф° [h (т)] при решении той или иной конкрет¬
ной проблемы моментов. Очевидно, тот способ, который мы
106
ОБЩЕЕ РЕШЕНИЕ ЗАДАЧИ ОБ УПРАВЛЕНИИ
[Гл. 5
применили при построении ср0[А-] в доказательстве леммы 16.2, для
этой цели совершенно не годится, так как он носит характер чисто¬
го математического рассуждения о существовании <>0. Поэтому
сейчас мы укажем одно очень важное свойство максимума, кото¬
рым обладает оптимальная разрешающая операция ф° [h] и которое
является сильным подспорьем при построении операции <р° в
эффективной форме. При этом основную роль будет играть та
минимальная функция
п
h° (т) = 3 />и (т) (16.18)
1=1
из семейства (16.2), на которой достигается минимум (16.7). Здесь
числа 1° суть решения задачи (16.7). Полезно помнить, что по опре¬
делению функции h° (т) ее норма рД°] удовлетворяет равенству
р[А°] = р°. Нужное нам свойство максимума выводится следую¬
щим образом. Разрешающая операция ср0 удовлетворяет равенству
(16.4)
Ф° [до (т)1 = 1, (16,19)
причем р*[ф°] = 1/р°. Если теперь рассмотреть какую-либо дру¬
гую операцию ф, отличную от ф°, но имеющую ту ) же самую нор¬
му р*[ф] = 1/р°, то по известному свойству нормы (см. § 57)
получим ф [А0] ) р* [ф] р [Л°] =—р° = 1. Следовательно, с учетом
(16.19) имеем неравенство ф [А-0] ) ф° [Д°] = 1.
Итак, справедливо следующее утверждение, которое в соответ¬
ствии с установившейся терминологией, назовем принципом мак¬
симума.
П ринцип максимума. Оптимальная разрешающая
операция ф° [h (т)], имеющая норму р* [ф°] = 1/р°, выделяется
среди всех других линейных операций ф [h (т)] с той же нормой
р* [ф] = 1/р° следующим свойством максимума на минимальной
функции hQ (т):
Ф° [h° (,)] = тахф [№ (т)] при р* [ф] = . (16.20)
ф Р
Подчеркнем, что после определения минимальной функции
А0(т) в широком классе случаев принцип максимума позволяет
обычно без больших затруднений найти явный вид операции
Ф° [h (т)]. В этом читатель сможет убедиться из рассматриваемых
ниже примеров (см. §§ 18—23). Однако, как мы увидим из этих же
примеров, определение самой минимальной функции Л° (т) может
доставлять немалые вычислительные трудности. Полезно еще от¬
метить, что в ряде случаев вместо чисел Z,, определяющих мини-
ПРОБЛЕМА МОМЕНТОВ
107
§ 161
мальную функцию Л"(т), удобнее искать числа 1Л], доставляющие
решение задачи: найти *
v° = max 2 Kci (16.21)
k i=l
n
при условии, что P°[S АДмДт)]<1.
Числа к}, решающие задачу (16.21), будут связаны с числами
определяющими минимальную функцию h (т) (16.15), равенствами
к? — Z/‘/p0. При этом v° = 1/р°. (В случае р° = 0 получается
п
sup 3 AjCj = 00 •) Доказательство последних соотношений мы пре-
1=1
доставляем читателю в качестве упражнения. Функцию /га (т) =
п
= 2 ^-гга (*) = /г/(т)/р° назовем экстремальной функцией.
1=1
Пример 16.1. Теперь в качестве иллюстрации рассмотрим решение
примера 15.1, опираясь на теорему 16.1 и принцип максимума. Пусть в
этом примере кривая д = д (t), ц = ц (t) определяется уравнениями
U6 = л (0 = (0 < t < 1),
коэффициент X равен единице и • , = — с3 = 1. Тогда имеем следующую
проблему моментов (15.3),• (15.4):
1 _
ти° (т) dx = 1, т) и° (т) dx = — 1, (16.22)
о
max | u° (т) | = min. (16.23)
0<т<1
Функции • • 1 • (т) = т, • 1 • • (т) = 1 — X линейно независимы. Согласно
заключению, сделанному в_ конце обсуждения примера 15.1, проблему мо¬
ментов надо рассматривать • . здесь в пространстве X {h (х); 0< г<1}, где
норма р определяется равенством
1
р[Л(т)] =^1Л(т)| dr.
О
Вычислим величину р° (16.7). Имеем:
1
р° = min | /it -р Z2 — h't | dx при li — /2 = 1
1 о
пли
при — оо</2<ос.
108
ОБЩЕЕ РЕШЕНИЕ ЗАДАЧИ ОБ УПРАВЛЕНИИ
[Гл. 5
/
/
/
Последняя задача имеет решение = 0,5 ® = — О,5, р° = V4. Это
видно из рис. 16.2. Действительно, заштрихованная площадь, равная как
раз минимизируемому интегралу, будет, очевидно, наименьшей при Z2 = 1% =
= —0,5. Согласно теореме 16.1 норма р* [ср°] искомой операции ф° равна
1/р° = 4. Другими словами, имеем шах
т
\и (т)| < 4. Чтобы найти операцию ф°, т. е.
чтобы найти функцию и°(т) в (16.22), (16.23),
воспользуемся свойством максимума(16.20).
Это условие максимума в данном конкрет¬
ном случае записывается так:
1
J (т — 0,5) и (т) dx =
о
шах
и
Рис, 16.2.
1
= 5 (т — 0,5) U0 (т) dt
0
при \и (т)| 4. Решение последней задачи, очевидно, дается функцией
и0 (т) = 4 sign (т — 0,5),
которая кусочно-постоянна и имеет точку разрыва при т = 0,5.
Итак, в этом и предыдущем параграфах мы выяснили следую¬
щее. Задача об управлении имеет смысл проблемы моментов. При
дополнительных условиях со свойствами выпуклости (каковым
условием является как раз наше требование минимума нормы
р* [и] = р*[ф-и]) упомянутая проблема разрешается операцией ср0
(линейным фукционалом) отделяющей выпуклое множество 3b{h}
(16.2), (16.3) и сферу §° {h} (р [hl < р°).
В заключение этого параграфа сделаем еще три полезных
замечания.
1) Из теоремы (16.1) следует, что условие р°ф>0 есть необходимое
и достаточное условие для разрешимости проблемы моментов. Но
это условие обязательно выполнено, если функции Л^(т) ли¬
нейно независимы, ибо тогда р [S] >0 при + . . . + l\ =f=
i
=£= 0. Следовательно, линейная независимость функций hС t / (т)
есть достаточное условие разрешимости проблемы моментов, ка¬
ковы бы ни были числа
2) Пусть функции h tt / (т) не являются линейно независимыми,
но числа Ci в уравнениях (16.1) таковы, что р° >0. Тогда исход¬
ную проблему моментов можно свести к аналогичной проблеме,
где, однако, будут фигурировать лишь линейно независимые
функции h№ (т), выбранные из совокупности всех исходных функ¬
ций hitth (т). В самом деле, предположим снова, как и выше, на
стр. 102, что линейно независимы лишь функции /hh (т)
§ пО
ПРОБЛЕМА МОМЕНТОВ
109
= 1, . . *) и выполнены соотношения (16.8). Если
р° = minp [3 /Л[<(т)] > 0 при = 1, (I6.24)
г=1 г=1
то обязательно должны выполняться соотношения
/с
°i = 2 ci\ (^>к)- (16.25)
7=1
Действительно, в противном случае согласно (16.9) и (16.10) можно
было бы ' выбрать числа Zj = 0 и 1• =• 0 так, • чтобы удовлетворить
п
равенству (16.10) (т. е. равенству 2 kci = 1) и получить р° =
г=1
к
= ] — О.Противоречие с (I6.24) и доказывает (1(3.25). Но
7=1
в случае одновременного выполнения (16.8) и (16.25), очевидно,
достаточно удовлетворить лишь первым к уравнениям (16.1), ибо
остальные п— к равенств выполнятся тогда автоматически. Таким
образом, проблема моментов (16.1), действительно, сводится в
данном случае к проблеме
Ф(° ДОЛ] = Cj (7 =1, . . ., к), (16.26)
р* [ф0] = min, (16.27)
Важно подчеркнуть при этом, что число р°, которое мы найдем,
решая в соответствии с теоремой 16.1 проблему моментов (16.24),
(16.27), совпадет, конечно, с числом р°, которое получается при
решении исходной проблемы моментов (16.1), (16.27). Это нетруд¬
но видеть и непосредственно, исходя из соотношений (16.9) и
(16.10), учитывая, что вторая сумма в левой части (16.10) вследст¬
вие (16.25) есть нуль.
3) Проблему моментов (15.1), (15.3) можно трактовать как
изопериметрическую задачу из вариационного исчисления (см. [4*],
стр. 48), где надлежит определить минимум функционала р*, т. е.
р* [и (т)] = min (16.28)
при дополнительных условиях
<3
7Д0(т) и (т) dx — сг (Z = 1,. . ., п). (16.29)
Описанное в этом параграфе решение проблемы моментов трак¬
туется тогда как решение указанной изопериметрической задачи,
110
ОБЩЕЕ РЕШЕНИЕ ЗАДАЧИ ОБ УПРАВЛЕНИИ
[Гл. 5
полученное, однако, не классическим путем, но методами функцио¬
нального анализа. Такой подход в случае задач управления по¬
лезен по следующим причинам. Во-первых, осуществляется воз¬
можность охватить такие случаи р [и (т)], когда вследствие недо¬
статочной гладкости функционала р применение классических
теорем вариационного исчисления затруднительно. Во-вторых
(и это важнее), решение, описанное выше, дает явное условие
минимума (16.7), облегчающее решение и исследование краевой
задачи, составляющей основную трудность проблем управления,
особенно в тех случаях, когда требуется проследить влияние крае¬
вых условий на результат управления. Однако ясно, что характер
решения и основные соотношения, определяющие его, являются
аналогом соответствующих классических соотношений. Так, на¬
пример, величины Ц, фигурирующие в соотношениях (16.2),
(16.7), можно трактовать как множители Лагранжа, используемые
в вариационном исчислении при решении гладкой задачи вида
(16.28), (16.29) на условный минимум. По причинам, указанным,
в частности, во введении (см. стр. 15), мы не останавливаемся здесь
на этом вопросе подробнее. В дальнейшем, в § 18, будет рассмот¬
рен конкретный пример нормы р* [н], когда указанная связь про¬
является особенно прозрачно. Читателю, который не удовлетво¬
рится упомянутым примером, мы рекомендуем обратиться к одному
из курсов вариационного исчисления (см., например, [4*]), а так¬
же к курсам, содержащим обобщения классических понятий в ду¬
хе новых методов линейного и нелинейного программирования
(например, [28*, 29*1).
§ 17. Решение задачи об управлении
Вернемся вновь к нашей задаче 13.1 об оптимальном управле¬
нии. В § 15 показано, что эта задача сводится к проблеме момен¬
тов. В предыдущем параграфе мы изучили проблему моментов и
сформулировали теорему 16.1 и принцип максимума, характери¬
зующие ее решение. Теперь, суммируя результаты § § 15 и 16, по¬
лучаем следующее утверждение.
Теорема 17.1. Задача 13.1 имеет решение тогда и только
тогда, когда для минимальной функции № (т), построенной соглас¬
но (16.7), выполняется, условие р [А°] = р° >0. Интенсивность
оптимального управления х [и0] удовлетворяет равенству х [и0] =
= 1/р°, и это управление обладает свойством максимума
(17.1)
при р*[и] = 1/р°.
§ 171
РЕШЕНИЕ ЗАДАЧИ ОБ УПРАВЛЕНИИ
111
Опираясь на эту теорему, мы дадим сейчас рабочее правило для
решения задачи 13.1. Прежде всего, выпишем явное выражение
для вектор-функций
п
/ЦТ) m 2^г1(Т),
г=1
среди которых ищется минимальная функция . А (т). Вводя обо¬
значение /для вектора-столбца с компонентами lt (i = 1, . . ., п)
и вспоминая, что ■ ■ (т) суть строки hW' [/р, г] матрицы Н Пр, т],
получим для вектора-строки h' (т) следующую матричную запись:
К (т) = VH Ир, т].
Далее, ■ согласно (6.1) имеем:
Н Ир, т] = X Ир, т] В (т).
Так как, наконец,
X И, т] = X-1 [г, /],
то окончательно получим:
h (г) = 1Х~г [Т) /р] В (т).
Транспонируя h' (т) по свойствам матричных произведений, най¬
дем:
А(т) = В' (т)[-*"1 [т, ^]]'l. (17.2)
Матрица ■ [X- [/, /р]]' является фундаментальной матрицей
S [/, /р] для уравнения (см. § 10, в частности, уравнение (10.3))
s = — A' (t) s. (17.3)
Следовательно, сомножитель s (т) = [X-1 [т, /р]]'7 = S [т, t$\l
при заданном I есть не что иное, как некоторое частное решение
уравнения (17.3), сопряженного к уравнению (5.2). Более того,
при т = имеем s (/р) = [. Но тогда оказывается, что множество
вектор-функций h (т) определяется равенством
h (т) = В' (т) s (т),
где вектор-функции s (т) суть всевозможные решения системы
(17.3). Таким образом, задача вида (16.7) об определении мини¬
мального элемента /г° (т) формулируется теперь следующим обра¬
зом: найти
ро — min р [В' (т) s (т)] = р \В' (т) s° (т)] (17.4)
S
при краевом условии cs (/р) — 1,
112
ОБЩЕЕ РЕШЕНИЕ ЗАДАЧИ ОБ УПРАВЛЕНИИ
[Гл. 5
где с — вектор-столбец { g , сп} (15.2). Смысл задачи (17.4) за¬
ключается, следовательно, в том, чтобы из всех движений сопря¬
женной системы (17.3), стесненных краевым условием с's (Zp) = 1,
выбрать минимальное движение s° (т), причем h° (т) = В' (т) s° (т).
Таким образом, теорема 17.1 доставляет следующее правило для
решения задачи 13.1.
Пра вило минимакса 17.1. Для того чтобы решить
задачу 13.1, следует построить систему (17.3), сопряженную к дан¬
ной, и рассмотреть вектор-функции hg (т) = В' (т) s (т), где s (т) —
движения системы (17.3), стесненные условием с'э (tp) = 1. Среди
этих движений надлежит найти минимальное движение s° (т),
для которого выполняется условие (17.4).
Задача 13.1 имеет решение тогда и только тогда, когда
р [В' (т) s° (т)] = р° >0. При этом оптимальное управление и° (Z)
имеет норму р* [н0] = 1 / р° и среди всех допускаемых■ управлений
и (Z) с нормой р* [и] = 1/р° выделяется условием максимума (17.1)
на минимальной функции h° (т) = В' (т) s° (т).
Приведем еще одну формулировку правила для решения зада¬
чи 13.1. Как было отмечено в § 16 (см. стр. 107), вместо задачи
(16.7) (или (174))) можно решать заменяющую ее задачу (16.21)
п
об определении экстремальной функции № (т) =2 h№ (т).
г=1
Эта вторая задача в обозначениях настоящего параграфа выглядит
так: найти
v° = max c's (t^) = c's° (t$) (17.5)
s
при условии p (т) S (т)] «С 1.
Движение sa (т), разрешающее задачу (17.5) и порождающее
экстремальную (функцию h (т) = В' (т) s° (т), назовем экстремаль¬
ным движением. Напомним, что h (т) = h° (т) / р° и потому g° (т) =
= s° (т) / р°. Таким путем придем к следующему выводу.
Правило 17.2. Для того чтобы решить задачу 13.1, следу¬
ет построить систему (17.3), сопряженную к данной, и рассмот¬
реть вектор-функции h (т) = В' (т) s (т), построенные по всевоз¬
можным движениям s (т) системы (17.3) и стесненные неравенством
р Щт)] g 1. Среди этих функций надлежит найти функцию
h (т) — В' (т) s° (т) = В' (т) S [т, Zp] k°, порожденную экстремаль¬
ным движением s°(t), на котором достигается максимум (17.5).
Задача 13.1 имеет решение тогда и только тогда, когда
c's° (Zp) = v° <t oo. При этом оптимальное управление и° (Z) имеет
норму р* [u°] = v° и среди всех допускаемых управлений и (Z)
с нормой р* [z| = v° выделяется условием максимума на экстре-
§ 171
РЕШЕНИЕ ЗАДАЧИ ОБ УПРАВЛЕНИИ
ИЗ
мяльной функции h° (т):
(т) м° (т) dr = max - р° (т) и (т) dr = v° (17.6)
*а U *а
при р* [м] = V0.
Примечание 17.1. Величина р [В' (т) s (т)] является функцией
Ф У от переменных = sc (ip). Следовательно, задачи (17.4) и (17.5)
суть обычные конечномерные задачи на условный экстремум.
Пусть система (17.3) такова, что выражение р -[В' (т) s (т)] =
== р [В' (т) 5 [т, £р] s (ip) ] обращается в нуль лишь при s (ip) = 0, иначе
говоря, пусть вектор-функции Л<г) [у т] линейно независимы. Тогда
величина р [В' (т) s (т)],"У рассматриваемая как функция от вектора
k = s (£р), имеет смысл нормы, у■ [к] в n-мерном пространстве Рп {К}.
Это обстоятельство естественно вытекает из того факта, что вели¬
чина р имеет смысл нормы в функциональном пространстве $?{h [т]}. Но
в таком случае величину v = c's (£p) = С К можно рассматривать как зна¬
чения линейной операции, порожденной в пространстве &п{К} вектором с
(см. стр. 398), а величину v°, определенную равенством (17.5), надлежит тог¬
да трактовать как норму у* [с] вектора с в пространстве сопряженном
к пространству —п {&}. Итак, приходим к следующему выводу. Интенсив¬
ность р* [и0] оптимального управления и° (£), разрешающего задачу 13.1,
равна норме у* [с] вектора с в пространстве -S^n, сопряженном к простран¬
ству & п {к}, где норма у (К) определена равенством
у [Л] = р [В' (т) S [т,гр] Н
Аналогичные замечания можно сделать и к следующему ниже правилу 17.4.
Примечание 17.2. Пусть в задаче 13.2 многообразие @ {р } воз¬
можных конечных состояний х$ составляет гиперплоскость xi (tp) = х$
(i = 1,...,тп < п). Это означает, что краевым условиям — (ip) = — должны
удовлетворять лишь первые т координатх) и что остальные координа¬
ты могут, следовательно, принимать в момент £р любые значения. Но тогда
задача сводится к определению такого управления и° (£), которое удовлетво¬
ряет лишь первым т уравнениям (15.1) (значения q при i — т для нас роли
не играют) и имеет при этом минимальную интенсивность х [и0]. Таким об¬
разом, в рассматриваемом случае получается проблема моментов для первых
т функций Д— (т), для решения которой следует воспользоваться, уже из¬
вестными правилами. Читатель может самостоятельно сформулировать то
правило минимакса, которое получается в этом случае.
При решении задачи 13.1 уравнения (15.1) могут быть преобра¬
зованы следующим образом. Обе части векторного уравнения (15.1)
Ч
§ Н [у т] м (т)<7т = с (17.7)
х) Тот факт, что выбраны т первых коордипат, не ограничивает общности,
ибо всегда можно ввести подходящую нумерацию.
114
ОБЩЕЕ РЕШЕНИЕ ЗАДАЧИ ОБ УПРАВЛЕНИИ
[Гл. 5
умножаем слева на матрицу X-1 Пр, £а]. По смыслу величины
Н Пз, т] = X Пр, т] В (т) = X Пр, ^а] Х~ х [т, /а] В (т) тогда получим
\ X"1 [т, £а] В (т) и (т) dx = X'1 Пр, аа] с = е.
Иными словами, уравнения (15.1) преобразуются тогда к системе
$/п],(т) и (*) dx — ei (f = 1, . . ., п), (17.8)
‘а
где [ [ (т) суть векторы-строки матрицы X-1 [т, £а]В (т) и
*3
е = Х“1 Нн, £«] х^ ■— хх — Х_1 [т, £а] w (x)dx. (17.9)
ta
В ряде случаев может оказаться, что решать проблему моментов
для уравнений (17.8) при условии х [u] = min удобнее, чем для
системы (17.7). В частности, к уравнениям (17.8) удобно сводить
задачу 13.1, когда w (t) = 0 и речь идет о приведении объекта в со¬
стояние х Из) = 0, так как тогда е = — ха. Решение задачи
(17.8) проводится по известному нам плану, причем придется
рассматривать функции
п
f(t) = W WJ (т)>
г=1
заменяющие здесь функции (17.2). Рассуждая, как и выше, на
стр. 111, убедимся, что .теперь h(x)=B' (т) S [г, t*]l. Отсюда выте¬
кает правило, которому надлежит следовать при решении задачи
в последнем случае.
Правило 17.3. Чтобы решить задачу 13.1 при w (t) = О
и х$ = 0, следует рассмотреть вектор-фу акции h (т) — В' (т) s (т),
где s (т) — движения, системы (17.3), стесненные условием
s (fa) яа = - 1. (17.10)
Среди этих движений надлежит найти минимальное движение
s° (т), для которого выполняется условие
р° — min р \В' (т) s (г)] = р [В' (т) s° (г)]. (17.11)
S
Задача имеет решение тогда и только тогда, когда р° >0.
Оптимальное управление имеет норму р* [и0] = 1/р° и среди
§ ]7]
РЕШЕНИЕ ЗАДАЧИ ОБ УПРАВЛЕНИИ
115
всех допускаемых управлений и (т) с нормой р* [и] = 1/р° выделяет¬
ся условием максимума (17.1) на минимальной функции h° (т).
Заметим еще, что и здесь, как и выше, задача (17.10), (17.11)
может быть заменена задачей об определении экстремального дви¬
жения s* (т). Тогда получим следующее
Правило 17.4. Чтобы решить задачу 13.1 при w (t) = 0 и
х? = 0, следует рассмотреть вектор-функцию h (т) = В' (т) s (т),
где s (т) — движения системы (17.3). Среди этих - движений надле¬
жит найти экстремальное движение s° (т), для которого выполня¬
ется условие
v° = max s' (Za) х* = s°' (Za) x* (17.12)
s
при ограничении p IB' (t) s (t)] 1. Оптимальное управление
u° (t) выделяется условием максимума (17.6) на экстремальной
функции ha (т) = В' (т) s° (т).
Полезно еще обратить внимание на следующее обстоятельство.
Читатель, не желающий углубляться в доказательства и рассужде¬
ния из §§ 12—16, может ограничиться правилами 17.1—17.4 как
рецептами. Тогда надлежит, исходя сразу из задачи 4.2, найти
в таблице 12.1 (или из соотношения (12.19)) по минимизируемой ин¬
тенсивности к. [и] выражение для р [h (т)] и затем перейти не¬
посредственно к одному из правил 17.1—17.4.
Вернемся теперь к теореме 17.1. Из этой теоремы следует, что
задача 4.1 об управлении при условии х [и] = р* [и] т^ р разре¬
шима тогда и только тогда, когда
minzp [TH (t?, т)] = р»°> — при Тс = 1. (17.13)
И
Это соотношение полезно еще записать в форме, не содержа¬
щей явно величину р [h (т)]. Именно, учитывая (12.19), можно
соотношение (17.13) представить в виде
min( [maxu 0 l’H t t°, т] и (т) с?т] > —
при Тс — 1 их [и] 1. Учитывая, далее, что х [Хи] = | Х| х [и],
приходим к эквивалентному условию
Ч
maxu p' т Н [ip, т] и (т) ^т] > 1 (Г7.14)
Ч
при х [и] < р, каков бы ни был вектор I, стесненный условием
Тс = 1. Запись (17.14) допускает простое геометрическое истол¬
кование. При этом нам понадобится одно новое понятие, которое
116
ОБЩЕЕ РЕШЕНИЕ ЗАДАЧИ ОБ УПРАВЛЕНИИ
[Гл. 5
будет играть важную роль и в некоторых дальнейших главах
(см. главы 9 и 10). Определим это понятие.
Овределение 17.1. Пусть система (13.1) в момент
t = to, находится в состоянии х = Xх и допускаемые управления
и = и (t) (tx < t < t) (или обобщенные допускаемые управления
dU (t)) стеснены условием х [iz] . p (х [CZ] . p,). Будем называть
областью достижимости $ [х“, р, ta, < 1 процесса (13.1) множество
всех тех точек х = <, в каждую из которых система может быть
переведена к моменту t = t$ некоторым допускаемым управлением,
стесненным заданным ограничением.
Используя формулу Коши (5.6), мы можем, очевидно, сказать,
что область достижимости $ [х“, p,, t&, 1.1 есть множество всех
точек х вида
С (3
х = X [ip, £а] хх + < X К,3, т] w (т) dx + < Н [ 1.. т] и (т) dx, (17.15)
ta ‘а
где и (т) — любое допускаемое управление, стесненное условием
х [u] [ р. (В дальнейшем в этом параграфе речь пойдет все время
лишь об управлениях и (t). Переформулировка утверждений на
случай управлений dU (t) не должна затруднить читателя.)
Справедливо важное заключение. Если х[и] = р* [и] (или
х [С7] = р* [С]), то область достижимости $ [хх, р, ta, [ 1 есть
выпуклое и замкнутое множество в пространстве 33п{х} фазовых
векторов х. В самом деле, пусть х-t и rft) суть две точки из обла¬
сти 2? 1ха, р, ta, [] и пусть в эти точки система приводится соот¬
ветственно управлениями h 1 h (t) и h1 (t), удовлетворяющими
ограничению p*[iz]<^p. Сфера p*[zz] <^p в функциональном про¬
странстве $B*{u (t)} является выпуклым множеством (см. Прило¬
жение, § 61). Следовательно, каждое управление и* (t) = XUt(t) +
+ (1 — X) Ut(t) (0 1 1) также содержится в этой сфере, т. е.
ux (t) также удовлетворяет условию р* [izx] [ р. Из (17.15) выте¬
кает, далее, что управление и* (t) приводит систему (13.1) в точку
х (t?) = хх =kxW + (1 — Z) х(2. А это означает, что все точки
хх = %я(!) + (1 — X) rft из отрезка, соединяющего 1 1 1 и х^, со¬
держатся в области достижимости $, т. е. эта область действитель¬
но выпукла.
Замкнутость области $ [х“, р, t*, t.] доказывается несколь¬
ко сложнее. Указанное свойство можно . было бы вывести, исходя
из теоремы 17.1. Однако полезно сделать это несколько иначе по
форме, используя сразу одно важное свойство сферы р* {и} ] р.
Речь идет о так называемом свойстве слабой Si-бикомпактности,
которой обладает сфера р* [iz] ] p в пространстве 53* {и} (см.
[6*], стр. 459). Мы не будем характеризовать здесь 53-бикомпакт¬
ность подробно, отсылая интересующегося читателя к цитирован¬
§ 17]
РЕШЕНИЕ ЗАДАЧИ ОБ УПРАВЛЕНИИ
117
ному курсу [6*]. Отметим лишь, что данное свойство аналогично
(в несколько ослабленной форме) известному из курса математичес¬
кого анализа свойству ограниченных замкнутых точечных мно-
жеств^ в n-мерных пространствах (см. [23*], т. 1, стр. 372): из любой
бесконечной совокупности открытых «окрестностей», покрывающей
целиком множество (&, можно выделить конечную систему этих ок¬
рестностей, которая также будет покрывать все множество
В интересующей нас ситуации свойство fi-бикомпактности сферы
р* [и] ) р проявляется, в частности, следующим образом, из любой
последовательности функций U^ (Z) (k = 1,2, . . .), лежащих в
этой сфере, можно выбрать подпоследовательность {'Ui} (/)}
(i = 1,2, ...), удовлетворяющую условию
lim )) Н [р, т] и®> (т) dx = ■, Н [р, т] и* (т) dx (17.16)
при i ■ оо, где функция и* (г) также является допускаемым управ¬
лением, удовлетворяющим условию р* [гг^^р. Теперь замкну¬
тость области достижимости выводится как простое следствие из
(17.16). В самом деле, пусть ж* — некоторая предельная точка для
области $ [х*, р, i&, р]. Это озна¬
чает, что существует последова¬
тельность точек Х> из 2? , сходя¬
щаяся к точке ж*, т. е. lim х^ =
при к ->оо. Из последова¬
тельности управлений Uk> (i), удов¬
летворяющих условию р* [и] 2 р
и приводящих систему (13.1) в точ¬
ки х (t?) = выбираем подпо¬
следовательность 22) ) (i), удовлет¬
воряющую условию (17.16). Да¬
лее, из равенства (17.15) следует,
что управление и = u* (i) приво¬
дит систему (13.1) в точку х (ip) =
= ж*. Но это и означает, что точка
стижимости $ lx*, р, 1а, р]. Так
ж* содержится ■ в области до¬
. как такое рассуждение про¬
ходит для любой предельной точки х* области $, заключаем,
что область $ [хл, р, /р] содержит все свои предельные точки
и, следовательно, она действительно замкнута.
Теперь мы можем перейти к обещанной геометрической интер¬
претации условия (17.14). Для этой цели рассмотрим в п-мерном
пространстве векторов g ={gj какую-нибудь плоскость л: l'g =1,
проходящую через точку g = с (рис. 17.1).
118 ОБЩЕЕ РЕШЕНИЕ ЗАДАЧИ ОБ УПРАВЛЕНИИ [Гл. 5
Пусть $ — есть совокупность точек g = {g;},
Ч
g = J T)u(r)dr (г = 1,...,п),
'а
получающихся, когда и (т) пробегает все множество допускаемых
функций и (т), стесненных заданным ограничением х [и] ) р.
Очевидно, эта область ) , изображенная на рис. 17.1- есть не что
иное, как область достижимости ) [яа, р,, Za, Zil, смещенная,
однако, для удобства рассуждений так, что «центр» ее (получаю¬
щийся при и (t) = 0) находится не в точке x° = X [Z-, Za] ха 4"
+ X [^з, т] w (т) Jr (см. (17.15)), а в точке g = 0. Иначе говоря,
«X
пространства {х} и {g} связаны преобразованием х — g + хо-
Точка g = 0 содержится в области ) . Далее, неравенство (17.14),
т. е. неравенство maxgZ'g ) 1 при gH3 ) , означает, очевидно, что
область $ обязательно имеет точки, лежащие по другую сторону
от плоскости л, нежели точка g = 0 (или, в крайнем случае в об¬
ласти 2? есть точки, лежащие на плоскости л), И это верно для
любой плоскости л рассматриваемого вида. Кроме того, мы знаем,
что область 2? выпукла. Если теперь опираться еще на известную
нам замкнутость области Э, то из описанной картины нетрудно
увидеть, что точка g = с должна обязательно лежать в области 2?.
Действительно, если бы точка с лежала вне ) , то можно было бы
провести плоскость л*: l*c = 1, не касающуюся границы $. По¬
следнее утверждение, ясное интуитивно, обосновывается строго
в теории выпуклых множеств (см. Приложение, § 61, а также
[7*], стр. 41). Но принадлежность точки с к совокупности 2? озна¬
чает, что существует управление и (т), стесненное условием
х [и] ) ц и удовлетворяющее равенствам (15.1), а это и означает,
что рассматриваемая задача об управлении, действительно, имеет
решение.
Условие (17.13) записывают часто и в такой эквивалентной фор¬
ме ([6*1, стр. 100):
]Z'c] ) цр [УН [Zp, т]] при всех Z,
откуда подобно предыдущему получается следующее условие, ана¬
логичное (17.14):
Ч
р maxu (Z' И [^з, т] и (т) dx ) — Z'cc«> 0 (17.17)
при всех Z. Итак, теореме 17.1 можно придать следующую форму.
§ 17]
РЕШЕНИЕ ЗАДАЧИ ОБ УПРАВЛЕНИИ
119
С л о д с т в и о 17.1. Задача об управлении 4.1 при ограничении
х [я] . р. имеет решение тогда и только тогда, когда справедливо-
неравенство (17.17).
Вернемся к приведенному выше геометрическому рассуждению.
Фактически в нем существенны лишь два свойства области $ —
ее выпуклость и замкнутость *). Поэтому следствие 17.1 сохраняет
силу и для более широкого класса ограничений х [и] . р, когда
уже х [и] не обязательно имеет смысл нормы р* - [zz]. Важно лишь,
чтобы ограничение на и (т) выделяло выпуклое множество функ¬
ций и (т) и обеспечивало замкнутость области $ (см. по поводу та¬
кого обобщения в § 38 стр. 317 и в § 47 стр. 379).
Таким путем получаем, например, следующее обобщение пра¬
вила минимакса 17.1, которое читатель может обосновать само¬
стоятельно, опираясь на приведенные выше геометрические сооб¬
ражения. Пусть выбрано некоторое множество © {и (т)} управлений
и (т) (в частности, по причинам, указанным ниже, в примеча¬
нии 17.3, удобно выбирать @ {и} = SB {и}) и пусть минимизируе¬
мая интенсивность х [и] удовлетворяет условиям: (1) х [0] = 0 =
= minx [и] при и из @ {и}; (2) при каждом р >0 ограниченное
множество 22р. точек
Ч
g = § Я(Цт]и (т) dx, х [u] < р, WG© {и}
Ч
является замкнутым и выпуклым. Тогда решение задачи 4.1 оп¬
ределяется следующим правилом.
L Пра вило 17.5. Надлежит рассмотреть движения s (t)
системы (17.3), составить величину
Ч
ри [В' (т) s (т)] = max„ [ . s' (т) Ви (т) dr] при х[[] <]р
«а
и найти минимальное движение s* (т), для которого
ри [£'(t) s(t)] = mins pp. [S's (т)] при ^s(lp) = 1.
Пусть р° >0 — наименьшее из чисел р, удовлетворяющит условию
рр. [B's- (т)] > 1 и рро [B'sp0 (т)] = 1. Тогда искомый минимум
х [и] есть р° и оптимальное управление и0 (£) удовлетворяет усло¬
вию максимума
4
5 [«^(т)]' В® (т) dx = maxu при x[w]<^p°.
Ч
т) В нашем случае область & содержала еще точку g = 0.- Однако это
условие не играет существенной роли, если пользоваться записью (17.17).
Кроме того, указанное условие всегда можно выполнить, делая подходящую
замену и (t) = и (t) — и0 (t).
120
ОБЩЕЕ РЕШЕНИЕ ЗАДАЧИ ОБ УПРАВЛЕНИИ
[Гл. 5
Примечание 17.3. В случае, когда к [и] = р* [и], имеем, очевид¬
но, * [h (т)] = .рр [h (т)], и нужные свойства области * следуют тогда из
свойств сферы р* [и] * ц в сопряженном пространстве * * {и}. В более об¬
щем случае, когда х [и] =f= р* [и], но @ {и} = * {и}, для выпуклости и
замкнутости * областей * * достаточно выполнения условий (см. [6*], стр.
459): (1) множества х [и] * р выпуклы; (2) эти множества ограничены, т. е.
р [и] при х * [и] * р, и (3) они «З-ззамкнуты», т. е. для любого
h (т) из &{h (т)}, если lim (pu [h (т) ] = <рг(* [h (т)], то и х [и*] < р. Пос-
и
ледние два условия обеспечивают ка'к раз 33-бикомпактностъ (см. выше,
стр. 116) совокупности допускаемых управлений и (t), стесненных условием
х [и] * р. Наконец, если нет желания вникать в тонкости, связанные с
априорной проверкой замкнутости областей &** можно воспользоваться
правилом 17.5 без этой априорной проверки, а затем, найдя u° (£), можно
проверить дополнительно, что и° (t) решает задачу об управлении, подстав¬
ляя найденную функцию и = и° (t) в уравнения (15.1).
Полезно подчеркнуть также, что вектор s° (^), фигурирующий в правиле
17.1 (или 17.3, 17.5), есть не что иное, как вектор 1°, для которого плос¬
кость Р'с = 1, изображенная на рис. 17.1, «касается» области & =
(при р = 1/р°). Поэтому правило 17.1, согласно которому (для и? (t) = 0,
например) выражение
при и = и0 (т) имеет равный единице максимум по и (т) при р* [и (т)] = 1/р°,
означает, в частности, что вариация ди (t) управления и° (t) стесненная ус¬
ловием р* [и0 + би] < 1/р°, может отбрасывать точку каждый раз только
в одну и ту же сторону от плоскости
[S0(tp)]' X = 1 [50(tp)]' X [ , , [,[ Х\
т. е. такие вариации ди отсасывают точку х (ц) от точки х^ всякий раз в
одну и ту же сторону. Это обстоятельство и определяет понятным образом
оптимальность управления и0 (т).
||| Итак, в этом параграфе мы сформулировали и обосновали
правила минимакса, определяющие решение некоторых типичных
задач об оптимальном управлении. Читателю, интересующемуся
подробнее путями обобщения этих правил, мы рекомендуем обра¬
титься теперь же к § 47 (стр. 386), где дан вывод сформулирован¬
ного там правила 47.1. Наконец, заметим еще, что все правила
сформулированы в § 17 для класса допускаемых управлений и (t).
Мы не будем в дальнейшем переформулировать все эти правила
для обобщенных допускаемых управлений dU (t), так как после
чтения следующего § 18 это, очевидно, не должно затруднить чи¬
тателя. Впрочем, отдельные замечания, относящиеся к такой пе¬
реформулировке данных правил, делаются ниже по ходу решения
соответствующих задач (см. § 23).
Глава 6
СВОЙСТВА. ОПТИМАЛЬНОГО УПРАВЛЕНИЯ
§ 18. Управление с минимальной энергией
Этим параграфом мы открываем изучение задачи 4.2 об опти¬
мальном управлении при некоторых типичных условиях опти¬
мальности. Начнем с наиболее удобного для исследования случая,
когда процесс управления требуется осуществить при условии ми¬
нимальности «энергии» управляющего воздействия. Этот термин,
имеющий, вообще говоря, условный смысл, будем употреблять
всякий раз тогда, когда в задаче 4.2 потребуется минимизировать
величину
%[м] = [j 1 и (т) II2 ст] . (18-1)
«а
Оправданием для такого названия величины (18.1) служит тот
факт, что в случаях электромеханических систем эта величина
действительно может играть роль оценки энергии, затрачиваемой
в процессе управления (см. простейший пример в § 12). Однако,
говоря откровенно, мы должны сознаться, что интенсивность
х [zz] (18.1) привлекательна не столько своим реальным содер¬
жанием, сколько тем, что в данном случае задача 4.2 решается
наиболее удобно. Собственно, решение задачи 4.2 с интенсивностью
х [и] (18.1) уже было получено и исследовано в I части книги,
в §§ 8,9. Здесь мы, однако, повторим это решение с той целью,
чтобы продемонстрировать на нем общий метод, предложенный
в § 17, и тем самым подготовиться к применению данного метода
в других, менее удобных для исследования случаях.
Следуя нашему общему правилу, мы сначала должны были бы
установить, что исходная проблема 4.2 может быть сформулирова¬
на как задача 13.1, т. е. следовало бы убедиться в том, что величи¬
на х [и] (18.1) имеет смысл нормы р* [и]. В данном случае этого
можно не делать, так как указанный вопрос был уже решен ут¬
вердительно в § 12. Там же было выяснено, что исходная норма
р [h (т)], фигурирующая в правиле минимакса 17.1, выражается
122
СВОЙСТВА ОПТИМАЛЬНОГО УПРАВЛЕНИЯ
[Гл. 6
здесь равенством, аналогичным равенству (18.1), т. е.
(18.2)
причем множество кусочно-непрерывных возможных управлений
и (t) .... расширяется до множества допускаемых управлений —
интегрируемых вектор-функций и (Z), для которых конечен ин¬
теграл (18.1). Итак, рассмотрим задачу 13.1, где интенсивность
х, (и] = р* [и] задана равенством (118.1). ;
Согласно правилу минимакса 17.1 первый этап решения задачи
13.1 состоит в определении минимальной функции h° (т) (16.18).
Следовательно, полагая известной фундаментальную матрицу
S [т, fy] сопряженной системы (17.3) и имея вектор с (15.2), нам
надлежит найти вектор Z0 = . . ., /„}, для которого вектор-
функция h (т) = В' (т)5 [т, Zp]-Z (Гс = 1) имеет наименьшую нор¬
му, т. е. требуется решить задачу: найти
р° = min р [5' (т) S [т, Zp] • Z] = р [В' (т) S [т, Zp] • Z0] •
1 '
при условии Гс = 1. Так как величина р (18.2) достигает миниму¬
ма одновременно со своим квадратом р2, то для определения функ¬
ции h° (т) = В' (т) S [т, Zp] • Z° можно решить следующую задачу
на условный минимум:
‘з
II В' (т) S [hr, Zp] • Z ||2 dr = min при l’c = 1. (18.3)
ta 1
После вычисления интеграла в (18.3), получим квадратичную
форму Ф (Zx, . . ., Zn) от переменных lt и таким образом придем
к задаче:
п п
ф(/ь • • • UJ m 3 anlih = min при 3 kci = 1- (18.4)
i, ;=1 1 i=1
Эта задача имеет простой геометрический смысл. В самом деле,
пусть сначала функции ДМ (т), из которых конструируется функ-
п
ция Л(т) m 3 Z^c^(t), линейно независимы. Тогда форма Ф являет-
i=1
ся определенно положительной и поверхности O(ZX,..., ln) = р2 m
m const >0 суть эллипсоиды' в пространстве {Zlt . . ., 1п}- Следо¬
вательно, задача (18.4) состоит тогда в определении такого эллип-
п
соида O(ZX,..., ln)m (р0)2, который касается плоскости 2 kci = 1,
2=1
причем искомые числа Z- будут как раз координатами точки каса-
§ 181
УПРАВЛЕНИЕ С МИНИМАЛЬНОЙ ЭНЕРГИЕЙ
123
ния в пространстве {1г, . - !п}. Если же функции №1 (т) линейно
зависимы, то поверхности Ф = рг будут эллиптическими цилинд¬
рами. Тогда задача (18.4) состоит, следовательно, в отыскании
цилиндра Ф = (р0)2, касающегося плоскости 2 Чс% = 1. Понятно,
1=1
Рис. 18.1.
что во втором случае задача имеет решение не всегда, а лишь в та¬
кой ситуации, когда между числами Ct есть определенная зависи¬
мость, обеспечивающая параллельность данной плоскости с осью
цилиндров. Именно таков геометрический смысл условия р° >0
в последнем случае (см. рис. 18.1,18.2).
124
СВОЙСТВА ОПТИМАЛЬНОГО УПРАВЛЕНИЯ
[Гл. 6
Решение задачи (18.-4) хорошо известно, оно дается в курсах
математического анализа ([23*], т. 1, стр. 467) и не содержит
никаких принципиальных трудностей. Поэтому первый этап реше¬
ния задачи 13.1 преодолевается в нашем случае без большого тру¬
да. Таким образом, можно предполагать, что минимальная функ¬
ция Д° (т) найдена, а вместе с тем определено и число р°=р [h° (т)] =
= [Ф (j • •, Zi)]!2- Чтобы задача имела решение, необходимо
предполагать, далее, что р° >0.
Переходим ко второму этапу решения задачи. Теперь, имея в
распоряжении функцию Д° (т), нам надлежит определить опти¬
мальное управление и0 (т), опираясь на принцип максимума
(см. § 16). Следовательно, в данном случае, мы должны найти
функцию u° (Z), удовлетворяющую условиям:
*3 О
Л0' (т) н° (т) dx = ma® . №' (т) и (т) dx = 1 (18.5)
¥ и. t
1<х la.
при
'з
$ |»(т)|»Л = (l/p°)8= (v0)2. (18.6)
Таким образом, опять получается задача на условный экстре¬
мум. Однако в отличие от проблемы (18.4) теперь мы имеем вариа¬
ционную проблему, так как здесь придется искать уже не набор
чисел Z°, . . ., Z), но необходимо определить неизвестную функ¬
цию и (т) (Za [ т [ Zp). Поэтому для решения задачи (18.5),
(18.6) следует обратиться к курсу вариационного исчисления.
Напомним одно положение, которое доказывается в руководствах
по вариационному исчислению (см., например, [10*1, § 25). Пусть
из числа вектор-функций у (т) = {ух (т), . . ., уп (т)}, удовлетво¬
ряющих условиям:
о
y(x))dt = сз (/ = 1,. . ., m), (18.7)
а
требуется найти вектор-функцию у° (т) = {у® (т), . . ., yQ (т)}, для
которой функционал
ь
3/(t))dr
а
принимает экстремальное значение. Такая задача вариационного
исчисления называется изопериметрической. Оказывается, что
справедливо утверждение. Если у° (т) — решение изопериметри¬
ческой задачи, то существуют постоянные числа . , . . ., Хт —
§ 181
УПРАВЛЕНИЕ С МИНИМАЛЬНОЙ ЭНЕРГИЕЙ
125
неопределенные множители Лагранжа — такие, что кривая у° (т)
является экстремалью для функционала
Ь т
Л [У (т)1 = 5 [Р (т- У (*)) + 3 лGi (*. У (*))] dx-
a j=l
Необходимым условием экстремума последнего функционала яв¬
ляется обращение в нуль его вариации
где +t (т) — произвольные непрерывно-дифференцируемые функ¬
ции, достаточно малые по абсолютной величине.
Из произвольности вариаций 6yt (т) и основной леммы вариацион¬
ного исчисления ([10*], § 9) вытекает, что функции у\ (т) являются
решением системы уравнений
т
5S +2 0 «■“! »)• (18.8)
Добавляя к уравнениям (18.8) условия (18.7), мы получим п + т со¬
отношений для определения такого же числа неизвестных yj (т), . . .
. . уП (т), %!, . . ., Кт. В нашем случае (18.5), (18.6) уравнения
(18.8), очевидно, принимают вид
й? (т) + 2Хм° (т) = 0 (Z = 1, . . ., и),
где h°i и и[ — компоненты векторов й° и и0 соответственно. Отсю¬
да получаем единственным образом значение для и° (т):
""М —^о'1,т>- (18.9)
Теперь остается вычислить постоянную X. Эта постоянная оп¬
ределяется из условий (18.5), (18.6) с учетом (18.9), откуда следу¬
ет, что — Х/2 = (v°)2 = 1/(р0)2. Таким образом,
цо (т) = (v°)»5' (т) S [т, Zp] Z0. (18.10)
Если теперь еще подставить в (18.10) значения величин Z?,
разрешающих задачу (118.4), то после всех необходимых вычисле¬
ний окончательно получим:
п
= тт 3 ^сЛяЬ> *] (г = l,-.-,), (18.11)
А /.=1
126
СВОЙСТВА ОПТИМАЛЬНОГО УПРАВЛЕНИЯ
[Гл. в
где
г
D = det = 2 $ h* 1g, t] h*. [ g , г] dr,
'■=1 '«
hji — элементы матрицы S' [т, g 1 В (т) и Djk — алгебраические
дополнения в D. Это управление и® (/) = {и[ (t)}, естественно,
совпадает с тем управлением (9.10), которое было найдено в § 9.
Важно отметить следующее: обе задачи (18.4) и (18.5), (18.6),
с которыми мы встретились, допускают единственное решение
ири условии линейной независимости вектор-функций h&Y (?),
которые являются строками матрицы S' [т, £р] В (т). Однако, как
мы уже знаем (см. §§ 16, 17), дело сводится обязательно к случаю
линейной независимости функций h гЛ (?) (/ = 1, . . ., т), где
m , п, если только задача 13.1 имеет решение, а для этого необ¬
ходимо и достаточно, чтобы р° >0. Отсюда следует, что исходная
задача 13.1 при условии минимума интенсивности к [и] (18.1) име¬
ет единственное решение, если р° >0. Итак, справедливо следую¬
щее заключение.
Оптимальное управление для задачи 13.1 при условии минимума.
интенсивности к [и] (18.1) единственно и оно изображается век-
mop-функцией и° (t) (18.9), непрерывной при всех значениях
t g- Функция и0 (Z) пропорциональна минимальной функции
h (t) и зависит линейно от координат х* и х%.
Рассмотрим простой пример. При этом будем преследовать две
цели. Во-первых, выясним на этом примере, как в действительно¬
сти определяется минимальная функция h° (т), а во-вторых, здесь
будет найдено решение для задачи, которую мы решим в последу¬
ющих параграфах при других условиях оптимальности. Тем самым
образуется наглядный материал, показывающий влияние выбора
минимизируемой интенсивности и [и] на характер получающегося
оптимального управления и соответствующего ему оптимального
движения х° (t).
Пример 18.1. Рассмотрим задачу об управлении материальной точкой,
движущейся в вертикальной плоскости под g действием реактивной силы и
силы тяжести. Будем считать реактивную силу управляющим воздействием.
Перепишем из § 3 (п.3°) уравнения движения нашей точки
J&1 = Х2, *g = и^г )з = #4, g = Нд £. (18.12)
Пусть = 0, g = 1. Начальное и конечное состояния фазового вектора
х = {xj, х^ ха, Xj) выберем такими1): х* = {— l,0,0,0}, х& = {0, 0, 0, 0}.
2) Мы не обсуждаем масштабы рассматриваемых величин, поскольку
пример носит иллюстративный характер. Аналогичное замечание следует
иметь в виду всюду в дальнейшем,
§ 18]
УПРАВЛЕНИЕ С МИНИМАЛЬНОЙ ЭНЕРГИЕЙ
127
Мы будем минимизировать величину
*/2
х [и] = Ц [«* (Т) + и* (Т)] <frj ,
1 CL
пе вдаваясь в физический смысл этого условия. Функции h (т) — В' (т)Х
среди которых надлежит здесь искать минимальную функцию
Д0 (т), получим, если воспользуемся результатами из § 13 • (см. стр. 81),
где было показано, что
II • • • • т] • -V т] В (т) — .S' [т, •• 1 В (т) -
и, следовательно,
/2 (т) — 1Г [^, т] I = В' (т) 5 [т, *3] • I =
/з -Т
1
О
О
О
О
< т
1
h — т) + /2
/з (Z3 — Т) + h
Нам потребуется еще вектор с
материалу из § 13, имеем:
(15.2). В данном случае, снова
согласно
— т О О
1 О О
и • поэтому
1
О
О
0-
0
0
Г °-
Г 1 "1
0
0
0
0
dr =
(0-U2
1
0
S • 2
0
1
~—g -
-
О 1 — т
о о .
Таким образом, задача (18.4), если учесть, что ta = 0, — 1, сводится
здесь к проблеме: найти
1
(аР— min j {[/, (1 - т) + Z2]2 -h [/3 (1 - т) + /4]2} dr =
«(Л-/2 2_Z2 + /S,4_|.Z2)
= min
(18.13)
СВОЙСТВА ОПТИМАЛЬНОГО УПРАВЛЕНИЯ
[Гл. В»
128
нри
/1 + — 3 з Д0 = 1.
(18.14)
Для определения этого минимума воспользуемся методом множителей
Лагранжа (см. [23*], т. 1, § 212). В соответствии с этим методом составим
выражение
Г — у ’ ) /2 + Z1Z2 + /2 + —у Z + 00 + ^4 + 1 (/1 + Z3 + — 1)»
дифференцируя которое частным образом последовательно по l2, Z3, и Z4,
получим для определения величин систему линейных алгебраических
уравнений
2
у к + Z‘2 + 1 — 0, к + 2/2 — О
у к -ф к “Ъ — О» к + 2/4 + gK 0.
Эта система вместе с условием (18.14) достаточна для вычисления неизвест¬
ных I® и %. Проделав необ¬
ходимые выкладки, найдем:
;0 _ Д0 _ _ 6
к -* + 12 ' к - g2 + 12,
/о — о /0 £—
z3 - Z4-g2 + 12'
Следовательно, в данном случае
,л ч 1 Г6-12т-|
(т)_ S2 +12 J
П[(р°)2 =fo« [ft0 (t)] - l/(g2 + 12).
Обращаясь теперь к равенству (18.9), получаем явный вид оптимального
управления/
и°(*) =
4(0
4 (О
"6— 12/
_ g
(18.15)
Если найденное выражение для функций и° (t) и и® (£) подставить в урав¬
нения (18.12) и проинтегрировать эти уравнения при начальном условии
я? (0) — х<* — { — 1, 0, 0, 0}, то получим оптимальное движение х® (t) тра¬
ектория которого в плоскости (а/, х3) выглядит весьма просто (см. рис. 18.3,
где изображены также векторы управления w° (i), соответствующие различ¬
ным точкам пути).
Такой вид движения + (t) объясняется тем, что в данном случае роль
управления и® (/), как это видно из (18.15), сводится просто к компенсации
силы тяжести.
Закончив рассмотрение этого примера, подчеркнем еще раз, что
вся процедура, включая вычисление минимальной функции h° (т),
была проделана лишь с той целью, чтобы на конкретном материале
§ 18]
УПРАВЛЕНИЕ, С МИНИМАЛЬНОЙ ЭНЕРГИЕЙ
129
проиллюстрировать общие соображения, приведенные в настоя¬
щем параграфе. Разумеется, поскольку мы обладаем формулами
(18.10), определяющими здесь оптимальное управление w° (0 в яв¬
ной замкнутой форме, проходить этот путь каждый раз при реше¬
нии конкретных задач излишне. Более того, задачу 4.2 об опти¬
мальном управлении при х [и] вида (18.1) вообще нецелесообразно
решать описываемым нами путем, так как она весьма просто ре¬
шается* сразу, исходя из классических методов вариационного
исчисления. Пользуясь этим обстоятельством,мы рассмотрим ее еще
раз здесь для иллюстрации связи этих методов с проблемой мо¬
ментов.
Итак, ■ опишем решение задачи (15.1), (18;1), рассматривая ее
не как проблему моментов, а как изопериметрическую задачу ва¬
риационного исчисления (см. стр. 124). Ограничимся для простоты
случаем, ' когда управляющее воздействие и (т) является^скаляр-
ной функцией. Тогда в соответствии с материалом, приведенным
выше (см. стр. 124), полагая в уравнениях (18.8) F = и2 (т),
Gj = №> (т) и(т), найдем:
м°(т) = — у 2 м0) (т)-
Это значение и0 (т) подставим в равенства (15.1); тогда получим
систему линейных неоднородных уравнений для вычисления вели¬
чин § , . . ., Ап:
п
' 2 aS == 1,..., ft).
;=1
Отсюда следует:
п
^3 = — д- S Diici,
1=1
и окончательно получаем, что
п
М°(Т) = 77 3 А3-сЛ°’(т).
ъ=1
Здесь величины Лц, Dtj, D имеют тот же смысл, что и выше. Срав¬
нивая этот путь вычисления uQ (т) с тем путем, который привел к
выражению (18.10), мы видим, что числа l] . суть не что иное, как
множители Лагранжа kj, умноженные на величину — (р°)а/2.
Итак, мы убедились, что задача 4.2, при условии минимума
«энергии» управляющего воздействия, решается достаточно эффек¬
тивно. При этом вследствие гладкости величины х[и] и линейности
5 Н. Н. Красовский
130
СВОЙСТВА ОПТИМАЛЬНОГО УПРАВЛЕНИЯ
[Гл. G
тех соотношений, которые возникают в процессе решения
задачи, выполнение краевых условий х (£а) = ха, х (£р) = уже
не доставляет новых трудностей и для вычисления и° (т) оказы¬
ваются достаточными те соотношения (18.8), которые вытекают из
необходимых условий экстремальности, доставляемых класси¬
ческими теориями об условном экстремуме. Это отличает данную
задачу и задачи, ей родственные, от других проблем оптимального
управления, решение которых в замкнутой форме оказывается за¬
труднительным.
Если такие задачи, рассматриваемые, например, в §§21, 23,
трактовать как изопериметрическую задачу, то нельзя уже вос¬
пользоваться классическими необходимыми признаками экстре¬
мальности, выведенными для гладких функций. Однако не это об¬
стоятельство, преодолеваемое, во всяком случае для задачи § 21,
за счет применения принципа максимума Л. С. Понтрягина [1791
или соответствующих модификаций классических методов вариа¬
ционного исчисления [1456], является главным мотивом для при¬
влечения соображений, связанных с проблемой моментов. Этот
главный мотив состоит здесь в том, что в таких случаях только
необходимые условия оптимальности не доставляют уже нужную
информацию для решения краевой задачи, т. е. для выполнения ус¬
ловий X (ta) = X^, X (fy) =
Завершая тему данного араграфа, рассмотрим еще некоторые
задачи, близкие к уже изученной. Прежде всего, следует отметить,
что к разобранной нами задаче сводится сразу же задача 4.2 при
условии минимума величины
х [и] = \ со [и]
dr] ,
где со [и] = 2 Pij (т) иг (т) Uj (т) — произвольная определенно
г, j=l
положительная квадратичная форма. Чтобы убедиться в справед¬
ливости этого утверждения, достаточно выполнить линейную за¬
мену v = Р (t) и, при которой форма со [и] принимает каноничес-
п
кий вид || v (t) ||2 = 2 у? • Существование такого неособого линей-
г=1
ного преобразования доказывается в теории квадратичных форм
(см., например, [3*], стр. 241).
Везде в этой монографии разбираются задачи об оптимальном
управлении при условии минимума величины х [и], зависящей в
явном виде только от управления и (t). Правда, мы. рассматриваем
ниже еще и проблему предельного быстродействия, где требуется
§ 18]
УПРАВЛЕНИЕ С МИНИМАЛЬНОЙ ЭНЕРГИЕЙ
131
минимизировать не интенсивность х [и], но время Т = ip — t*,
за которое управляемый объект приводится в заданное конечное
состояние (при типичных ограничениях на интенсивность управ¬
ления). Однако, как будет показано в § 27, эта проблема также
сводится к задаче на min х [и]. Но надо прямо сказать, что задачи
о минимуме величины х [и] составляют лишь частный класс за¬
дач, содержащийся в значительно более широком круге проблем
оптимального управления, в которых требуется минимизировать
величины х [и (т), х (т) 1, зависящие явно и от управления и (т) и
от самого движения х (т) (t* <; т<урр). Общее исследование таких
задач выходит за рамки этой книги. Однако некоторые из подоб¬
ных задач можно в конечном счете свести к проблемам, которые ре¬
шаются рассматриваемыми нами методами. Это сведение достигает¬
ся либо преобразованием исходной задачи к задаче вида 13.1, либо
в процессе преобразований приходят к проблеме моментов, кото¬
рая составляет фундамент решения задачи 13.1. Тогда, начиная с
этого этапа, решение исходной проблемы . следует по уже извест¬
ному руслу. Продемонстрируем сейчас высказанные соображения
на примере одной задачи, родственной проблеме о минимуме ин¬
тенсивности х [и] (18.1).
Пусть объект, описываемый уравнением
х = A (t) х -|- b (t) и, (18.16)
требуется перевести из заданного положения х (1Л) = х* в состоя¬
ние покоя х (£р) = 0, причем управляющее воздействие и (t) долж¬
но быть выбрано так, чтобы величина
1[и(х), ®(т)] = $ [|| и (х) ||2 + ||а: (т)||2] dx (18.17)
была наименьшей из возможных. (Мы ограничиваемся случаем,
когда управление и (t) является скалярной функцией лишь для
упрощения выкладок.)
Сформулированную задачу также можно трактовать как проб¬
лему оптимального управления при условии минимума «энергии»
I [и, х] (18.17). Оправданием для этого термина могут послужить
задачи об успокоении электромеханических систем, в которых не¬
желательными являются не только большие энергетические затра¬
ты в цепях управления, но и большие энергетические затраты в
силовых цепях. В дальнейшем будем считать, что требуется мини¬
мизировать не величину I [и (т), х (т)] (18.17), а величину
х = (Ли (т), х (т)1),/г. (18.18)
Это удобнее. Приступим к решению задачи. Предварительно для
Упрощения рассуждений трансформируем, ее, заменив течение
5*
132
СВОЙСТВА ОПТИМАЛЬНОГО УПРАВЛЕНИЯ
[Гл. 6
времени на обратное, т. е. положив t' = — t. Тогда придем к зада¬
че о переводе объекта из состояния равновесия х (ta) = 0 в задан¬
ное положение х (fy). Однако, чтобы не вводить новых обозначе¬
ний и не проделывать неинтересных преобразований, предположим,
что с самого начала имеем задачу о переводе системы (18.16) из
положения х (£а) = 0 в положение х (£р) = ,, и при этом должна
минимизироваться величина I [и, х] (18.17). Опираясь на форму¬
лу Коши для движения х (£), которая вследствие х ((«) = 0 прини¬
мает вид
t
x{t) = § X [/, т] 6(т) и (r)d't,
сведем исходную задачу к проблеме минимума величины
'3 II Т II 1/2
х]«] = | [|и(т)|2 + 1| $ X [т, ’’О] Ъ (О) и (О) сКПМйт} = min
*Я *Я U
(18.19)
при условиях
4 = j h(i} (t) и (т) dx, (18.20)
где символы № (т), как обычно, обозначают элементы hW [tp, т]
импульсной переходной вектор-функции Н [£р, т] = X [£р,т]6 (т).
Наша ближайшая цель — истолковать величину х [zzl как
норму р* [и] функции и (т) в некотором подходящем функцио¬
нальном пространстве S3* {и (т); ,, , т , tp} и таким путем попы¬
таться свести задачу (18.19), (18.20) к проблеме моментов вида
(15.1), (15.3). Оказывается, что такая цель достижима. Покажем это.
Преобразуем сначала интеграл
'З у m у 2
5 К X [т fl] b {fl) и (f}) dfl ,, d- (18.21)
для чего выпишем его в следующей форме:
ш * 2 s К
'я 'я 1я i—I
б]и (O') u (s) d&ds I dx.
Если теперь поменять порядок интегрирования в этом тройном
§ 18]
УПРАВЛЕНИЕ С, МИНИМАЛЬНОЙ ЭНЕРГИЕЙ
133
интеграле, то величина (18.21) запишется так:
*3 п г _
J 2 И ) h(i) [О, б] h{i} [0, т] и (б) dftds +
f, i=l (а ~
*3 *3
+ $ $ А'?) [ф, б] А”') [0, t]
т о
и
(б) d$ do] и (т) dx.
Договоримся о следующем обозначении:
К(т, б) =
«3 п
3 ^<г) [0, ° А(1) [ 0 , т] d&
т i=1
' *3 п
j 3 А<1) [0, ° А<1) ] 0 , Ч d®
при ТА>б,
при Т<б
Можно непосредственно убедиться в том, что функция К (т, о)
является непрерывной по совокупности переменных, и, кроме то¬
го, симметричной, т. е. К (т, о) = К (о, т). Функция К (т, о)
представляет собой неотрицательное ядро ([18*], стр. 100). По¬
следнее означает, что для любой функции и (0), принадлежащей
(3 (3
пространству S32) [ta, А1, интеграл j j К(д, т) и (ft) и (т) d$ dx
(а ta
неотрицателен. С учетом проделанных преобразований, интенсив¬
ность х [и] (18.19) можно теперь выразить следующим образом:
«3 *3 (з
Х[п] = Н j К(Ч ф) и (т) и (ft) dxd0 + и2 (0)d0| \ (18.22)
Положим, что в качестве пространства S3* {и (т)} выбрано мно¬
жество {и (т)} функций и (т) с интегрируемым квадратом, однако,
норму р* [и] функции и (т) определим теперь не интегралом
(18.1), а равенством р* [и] = х [и], где х [и] выражается форму¬
лой (18.22). Таким образом, мы получим некоторое новое простран¬
ство, которое будем обозначать символом №{и (т); ta j т j
Этим новым пространством 3£ {и (т); Ч т является
гильбертово пространство (см. Приложение, § 56, стр. 421) со
скалярным произведением (uj (Z), и2 (t)) функций j (t) и и2 (t), за¬
данным в виде
<3 «3 '3
(ut, и2) = . . К(х, fttu}(x)u2(()dxdft +$ и (т) и2 (т) dx. (18,23)
134
СВОЙСТВА ОПТИМАЛЬНОГО УПРАВЛЕНИЯ
[Гл. 6
Скалярное произведение указанного вида изучено кратко в § 56
(см. стр. 421). В частности, там показано, что выражение (zzn и2)
(18.23), действительно, может служить скалярным произведением
и что, следовательно, величина р* [zz] = х [zz] (18.22), обладает
всеми свойствами нормы. Итак, мы нашли подходящее пространст¬
во 53* = Ж{и(т)}, в котором норма функции и (т) равна рассмат¬
риваемой интенсивности х [zz] (18.22). Теперь нам надлежит еще
убедиться, что это пространство является сопряженным к некото¬
рому пространству 33{h}, и найти норму р [h] в этом пространстве.
Однако пространство Ж {zz (т)}, будучи гильбертовым, является
самосопряженным ([14*], стр. 198; см. также §59, стр. 435). Иными
словами, соответствующее пространству Ж {и (т)} пространство
53 {h (т)} есть сновв^в {/z (t)}. Но тогда оказывается, что функцию
и (т) можно трактовать как элемент пространства Ж {zz (т)}, опре¬
деляющий линейную операцию <pu [h (т)] над элементами h (т) из
Ж {^ (т)}- Для того чтобы окончательно свести нашу задачу к проб¬
леме моментов, осталось еще истолковать левые части соотноше¬
ния (18.20) как результаты линейных операций на некоторых эле¬
ментах h (т) из Ж- Здесь возникает одно неудобство, вызванное тем,
что интеграл вида
4 .
J h (т) и (т) dx (18.24)
4
не определяет уже линейную операцию Фи [fz] над элементами
h (т) из Ж, как это было раньше для пространств, сведенных в таб¬
лицу 12.1.Общий вид такой операции Фи [h (т)] для h (т) из Ж {К (т)},
как пояснено в Приложении (см. § 59, стр. 435), определяется как
раз скалярным произведением функций h (т) и и (т), т. е. составлен¬
ным согласно (18.23) выражением
4 4 4
(h (t), и (т)) = § Ж h (^ ft) h (т) и (#) dx + Ж h (т) и (т) dx. . (18.25)
4 4 4
Постараемся поэтому преобразовать интеграл (18.24) так, чтобы
его можно было представить в качестве нужного скалярного про¬
изведения. Составим интегральное уравнение
4
$ К(т ■)/>(<>)+ р(т) = л(т). (18.26)
Уравнение (18.26) имеет решение при .любой функции h (ф) из
пространства и это решение единственное. Указанный
УПРАВЛЕНИЕ С МИНИМАЛЬНОЙ ЭНЕРГИЕЙ
135
§ 181
факт можно пояснить, опираясь на известную в теории интеграль¬
ных уравнений альтернативу Фредгольма ([18*], стр. 19). Соглас¬
но этой альтернативе либо неоднородное уравнение (18.26) имеет
решение при любой функции h (т) из и это решение
единственное, либо же соответствующее ему однородное уравне¬
ние, полученное при h (т) = 0, ■ имеет решение, не равное тождест¬
венно нулю. Покажем, что последнего обстоятельства в нашем
случае быть не может. В самом деле, предположим, что существует
функция рй (т), удовлетворяющая уравнению
'з
§ К (г, ■&) р° (О)df + р° (т) = о
'а
и р0 (т) 0. Умножая тогда обе части последнего равенства на
ро (т), а затем интегрируя его по т, находим, что •
*3 ‘о *3
$ $ к f т) Р° f р0 (т) d$ dx 4- § р2 (?) dx = °.
С (<х
Ввиду неотрицательности ядра К (О', т), последнее равенство не¬
возможно, так как его левая часть положительна, а правая равна
нулю. Таким образом, второй случай альтернативы Фредгольма
для уравнения (18.26) • отпадает. Указанное уравнение имеет,
следовательно, решение и притом единственное. Решение р (т)
уравнения (18.26) можно при этом рассматривать как элемент про¬
странства • . Подставляя h (О) из (18.26) в интеграл (18.24), най¬
дем, что
<з
h (О) и (О) =
‘ а
(3 (3 13
= S $ К (^ •б) р (т) 11 dti dx + $ р (й) и W dft = (р (т), и (?)■
*а (а (а
Отсюда видно, что интеграл (18.24) определяет линейную опера¬
цию <ри, производимую функцией и, но не над элементом h (т),
а над элементом р (т). Подставляя поочередно функции № (т) в
правую часть уравнения (18.26), найдем, что каждой функции
^(г) (т) будет однозначно отвечать некоторая функция p(i) (т) —
решение уравнения (18.26).
Суммируя сказанное, окончательно получим, что исходную
задачу (18.19), (18.20) можно сформулировать теперь так: найти
операцию сри [р» (т)], производимую функцией и (т) из Ж{и (г)}
136
СВОЙСТВА ОПТИМАЛЬНОГО УПРАВЛЕНИЯ
1Гл. в
над элементами р■ ■■ (т) из Ж {р (т)}, удовлетворяющую условиям
1р(0 (т)1 = (P(i) и (С)) = Ci (t = 1> • • ■■ п)
и такую, что
р* [и] = (I [и, ж])’/з -= х [и] = min.
и
Но сформулированная задача как раз является проблемой момен¬
тов в пространстве Р{ р (т)}. Таким образом, наша цель достигнута.
Само решение задачи может быть получено по правилам, которые
даются теоремой 16.1 и принципом максимума. При этом согласно
теореме 16.1 задача разрешима тогда и только тогда, когда
р° = р [р° (х) ] = min (1р (т), Гр (т)) >0 при Гс = 1.
Можно показать, между прочим, что последнее условие будет
выполняться во всех тех случаях, когда для задачи (18.4) '
min Ф (Zn - . ., 1п) >0 при Гс = 1.
Отсюда выводится, что задача (18.19), (18.20) разрешима тогда
и только тогда, когда разрешима задача (13.1) при условии мини¬
мума и [и] вида (18.1).
Пр имечание 18.1. Мы рассмотрели самый простой случай, когда
х* = 0. Однако описанную выше процедуру решения задачи 4.2 с интен¬
сивностью (18.17) можно использовать также при хл =f= 0 и х? =/= 0. В са¬
мом деле, повторяя для этого случая изложенные выше выкладки и вводя в
них соответствующие изменения, находим:
ip «з <3
Х2[“]= *)»(T)w(O)<fcrdfr+ р u»(O)rfO+ / (О) и
*а ^<х
Здесь
^3 п п
/Ф) =$ 3 2
a i=i j=i
^3 п п
М 2
i* i=i j-i
Иными словами, имеем выражение вида
х2 [и] = (и, и) + (g, и) +
(18.27)
§ 18]
УПРАВЛЕНИЕ С МИНИМАЛЬНОЙ ЭНЕРГИЕЙ
137
где символ («г, u2) означает по-прежнему скалярное произведение (18.23),
а функция £ (т) является решением интегрального уравнения
<3
J ДГ.ткОО^ + 5(т) = /(т).
4
Далее выражение для х [и] приводим к виду
*’[«] = (и + (18.28)
Таким образом, мы имеем теперь задачу о минимуме (18.28) при условии
4
A(i (t) u W ст.
4
'(18.29)
Числа вычислены здесь, как обычно, по формуле (15.2). Нетрудно, однако,
заметить, что искомый минимум по и величины х2 [и] будет достигаться на
той же самой функции и0 (т), что и минимум выражения
р2 (и+ ±£1 = •(«-!- 1 g u+ JL),
4-1 Zl £
при условиях (18.29). Последнее объясняется тем, что ни функция £(т), ни
число X от выбора «о (т) не зависят. Но тогда, совершая замену и + — £ —
= v, приходим к следующей задаче: найти минимум х [ у]=( v, v- при условии
d. =
г
*3
Мг) (т) v (т)
dr,
где
1 <3
di = ci ’г ~2< TW °^’T'
4
Указанная задача полностью совпадает с уже решенной выше задачей
(18. 19), (18.20).
В заключение параграфа заметим следующее. Мы не ставим своей целью
обзор всех задач, приводимых так или иначе к исследованию тем мето¬
дом, который развит в этой книге. Наша цель — познакомить читателя с
существом этого метода, который, естественно, можно развивать в различных
направлениях. Следует также иметь в виду, что осуществление удачного
преобразования задачи к удобной проблеме в большой мере зависит от на¬
ходчивости исследователя. Ограничимся здесь одним только что разобранным
примером такого рода. Подобные примеры можно было бы привести и в сле¬
дующих параграфах, где разбираются задачи об оптимальном управлении
при условии минимума других типичных интенсивностей х [и], однако вряд
ли это целесообразно. Читатель, разобравшийся в сути дела, всегда может
сконструировать желаемое число таких задач. В качестве упражнения
можно рекомендовать решить задачи из этого параграфа, опираясь на
правило минимакса 47.1.
138
СВОЙСТВА ОПТИМАЛЬНОГО УПРАВЛЕНИЯ
[Гл. 6
§ 19. Управляемость линейных систем
с постоянными параметрами
В предыдущем параграфе мы начали изучение задачи 13.1 об
оптимальном управлении для основных типичных видов интенсив¬
ности х [и] и рассмотрели первый такой случай (18.1). Теперь,
прежде чем переходить к другим случаям, удобно сначала обсу¬
дить условия существования решения задачи 4.1 об управлении,
так как эти условия понадобятся нам ■ в дальнейшем. Из материа¬
ла § 17 следует, что задача об управлении 4.1, равно как и задача
13.1 об оптимальном управлении разрешимы при данных краевых
условиях х* и [ тогда и только тогда, когда выполняется нера¬
венство р [Д°] = р° > 0 (см. теорему 17.1). А это означает, что зада¬
ча 4.1 имеет решение при любых краевых условиях х* и х® тогда и
только тогда, когда строки h' ' , (т) импульсной переходной матри¬
цы Н [Zp, т] системы линейно независимы. С этим обстоятельством
мы уже встречались в I части книги (см. § 9) и в § 16. Однако
такой критерий существования решения задачи неудобен. Чтобы
им пользоваться, необходимо вычислять импульсную переходную
матрицу рассматриваемого управляемого объекта. Между тем су¬
ждение о существовании решения желательно иметь, опираясь
лишь на исходные данные задачи. Поэтому теперь мы выведем
эффективные условия, позволяющие судить о существовании ре¬
шения проблемы по элементам матриц A (t) и В (t), не вычисляя
матрицу Н [£р, т]. Вывод этих условий и составляет предмет на¬
стоящего и следующего параграфов.
Дадим сначала следующее определение.
Определение 19.1. Система
Х
(19.1)
называется вполне управляемой на отрезке времени [£«, Z₽], если
для этой системы может быть решена задача 4.1 об управлении,
каковы бы ни были краевые условия х (О = ха, х (t₽) = х&.
Иначе говоря, вполне управляемая на отрезке [Za, Z, ] систе¬
ма — это система, которая может быть переведена за время /р — Za
из любого заданного состояния х (ta) = ха в любое другое заданное
состояние х (t$) = х& подходящим выбором возможного управле¬
ния и (t).
Наша ближайшая цель — установить критерий полной управ¬
ляемости линейной системы (19.1). В этом параграфе мы ограни¬
чимся случаем, когда матрицы А и В являются постоянными. При¬
мем следующий план изложения. Сначала дадим необходимые
вспомогательные предложения, а затем докажем две теоремы, в
которых сформулируем основные результаты.
§ 19]
УПРАВЛЯЕМОСТЬ СИСТЕМ С ПОСТОЯННЫМИ ПАРАМЕТРАМИ 139
Итак, предположим, что элементы матриц А и В являются по¬
стоянными, и рассмотрим матрицу
К = {В, АВ, . . Ап~1В}, (19.2)
которая сыграет важную роль в дальнейшем изложении. Эта мат¬
рица имеет п строк и п-r столбцов. В частном случае, когда и —■
скаляр и, следовательно, В есть n-мерный вектор Ь, К будет квад¬
ратной (п X ^-матрицей. В дальнейшем столбцы матрицы К бу¬
дем рассматривать как некоторые n-мерные векторы и будем обоз¬
начать их символами кт (j = 1, ..., nr). Пусть ранг матрицы К
равен т (т М п). Тогда среди векторов АМ можно выделить точ¬
но т линейно независимых (см. [3*], стр. 52).
Лемма 19.1. Если ранг матрицы К (19.2) равен т, то т ее
линейно независимых столбцов содержатся в матрице
Кт = {В, АВ, . . ., А”*В}, (19.3)
и любой столбец матрицы ASB линейно) выражается через столбцы
матрицы Кт, каково бы ни было число s < т.
Доказательству. Рассмотрим последовательность век¬
торов
Ь(», АЬ®, . . ., An~lb(j), (19.4)
где №) — /-й столбец матрицы В (J = 1, . . ., г). Пусть среди этих
векторов имеется точно mj (mj < т) линейно независимых. Пока¬
жем, что линейно независимыми будут обязательно первые mj
векторов М >, АЬ<т>, . . ., АттгтК Для этого рассмотрим последо¬
вательности Ь<?\ А№, . . ., Ai_1W (i = 1, . . ., п). Пусть при
i < Hj эти последовательности состоят из линейно независимых
векторов, а при i > м векторы АгЬт оказываются уже линейно
зависимыми. При этом по предположению nj < mj. Может пред¬
ставиться два случая: во-первых, nj = mj и, во-вторых, nj < mj.
В первом случае наше утверждение о линейной независимости пер¬
вых ' mj векторов (19.4) оказывается справедливым. Покажем
теперь, что второй случай невозможен. В самом деле, при м М mj
справедливы соотношения:
nj
Anib{jj = 3
i=l
nj nj
Ani+ib(j> = 2 ^а1ь® = 2 vrnA'-bm,
i =1 i =1
An-ib(» = 2 V”'1’ »
i=l
140
СВОЙСТВА ОПТИМАЛЬНОГО УПРАВЛЕНИЯ
[Гл. 6
т. е векторы АпЩА,. . ., Ап 1 ggg являются линейной комбина¬
цией п, первых векторов 60), А№\ . . ., Ап^Ь^>, а это противо¬
речит предположению о том, что среди векторов (19.4) есть т,
линейно независимых. Итак, действительно, второй случай невоз¬
можен. Следовательно, наше утверждение о линейной независимо¬
сти первых т, векторов
bj Ab{3\ . . АтГ)и)
из совокупности (19.4) доказано. Поэтому любой столбец матрицы
АаВ при всех s < т является линейной комбинацией столбцов
матрицы Кт (19.3), что и доказывает справедливость леммы.
Предположим теперь, что ранг матрицы К (19.2) равен
т (/7г g п), и обозначим какие-нибудь т линейно независимых век¬
торов этой матрицы К символами ДШ = {Д[Д}, /Л2! = {/J?1} , . . .
. . ., ЛМ = Обозначим через gn векторное подпространство,
порожденное этими векторами в п-мерном пространстве ААп.
Как мы увидим ниже, подпространство gn играет основную
роль при изучении свойства управляемости системы (19.1). Изу¬
чим поэтому некоторые важные для нас свойства паяного подпро¬
странства.
Лемма 19.2. Подпространство Жт, порожденное векторами
ДОП, /Л2!, . . ., ДО"!, образует инвариантное подпространство си¬
стемы (19.1), т. е. фаговый вектор х (t) этой системы остает¬
ся в СКт, если в начальный момент он лежал в этом подпро¬
странстве.
Иначе говоря, любое движение {xt (t)} системы (19.1) с началь¬
ными условиями {xt (£«)}, удовлетворяющими равенству
т
ММ = 2 k’fcF1 (i = 1> . . .,п), (19.5)
7=1
при всех t имеет вид
т
м(О = 2 МО) № О = 1» •••> п)- (19.б)
j=i
Доказательство. Проверку утверждения леммы до¬
статочно провести лишь для т < п, так как при т = п подпрост¬
ранство g‘m просто совпадает совсем пространством )п , которому
принадлежит вектор х (2). Запишем закон движения системы
(19.1) по формууе Коши g 5.6):
t
x{t) = X К, £а] х (Za) + J X К, т] Ви (т) dx. (19.7)
§ 191 УПРАВЛЯЕМОСТЬ СИСТЕМ С ПОСТОЯННЫМИ ПАРАМЕТРАМИ 141
Известно ([3*], стр 373), что фундаментальная матрица X 17, М
системы (19.1), имеющей постоянную матрицу Л, может быть пред¬
ставлена в виде матричного ряда (см. также стр. 39)
X н, <«] — еА('' = Е + (t - £а) Л + • • • + Л As { ■■■,
(19.8)
сходящегося при всех t. Пусть векторы кМ — столбцы матрицы
АаВ, так • что ASB = {/№,, . ., На основании леммы 19.1
имеем:
№ = vfW’1 + ... + У,(^[т] . (19.9)
Учитывая (19.5), (19.8), .(19.9), запишем равенство (19.7) в
следующем виде:
т °°/\S t со г
"й = 2 12 ; + йз ■ ' 3
, j=l Ls=o J t L s=O i=l
'a.
m co ( \4
= 2(3^^л; +
j=l 1 s=0
t co r m
+ \ [ 3 3 v?’»< (cl . *и=3 к
<« s=° i=l J '
Последнее соотношение доказывает лемму.
Теперь мы выполним одно линейное неособое преобразование
х = Ту, (19.10)
которое в связи с инвариантностью подпространства Жт облегчит
исследование свойства управляемости системы (19.1). Матрицу
преобразования Т = { — - } определим следующим образом: в качест¬
ве первых т столбцов -- - - = {dtj} (i = 1, . . ., т) этой матрицы
возьмем линейно независимые векторы ДО1, . . ., Д[т] — столбцы
матрицы К (19.2), а в качестве остальных (п — т) столбцов d^
(Z = т -{- 1, . . ., п) возьмем какие-либо векторы -- - (j = т +
+ 1, . . . , п), подчиненные лишь тому условию, чтобы все
векторы - ( - - (Z = 1, . . ., п) оказались линейно независимыми.
Если ранг матрицы К равен т < п, то такой выбор векторов dM
может быть сделан бесчисленным множеством способов, если
т = п, то матрица Т единственна. В новых переменных система
(19.1) запишется так:
у = Ру + Qu, (19.11)
где Р = T-'AT, Q = Т-гВ.
142
СВОЙСТВА ОПТИМАЛЬНОГО УПРАВЛЕНИЯ
[Гл. в
Справедливо следующее утверждение.
Лем м' а 19.3. Матрицы Р и Q имеют вид
Q =
Qi
о
1
где Р. — (т X т)-матрица, Р2 — т X (п — т)-матрица, Р3 —
— (п — т) X (п — т)-матрица, Qx — (т X г)-матрица. При
этом ранг матрицы
N = {Qi, Р&, ■ Р'Ц}
равен т.
Доказательство. Докажем сначала первое утвержде¬
ние леммы. Заметим, прежде всего, что в новых переменных yt
гиперплоскость
У . = 0. ...,?/= О
Jm+l ’ ’
(19.12)
есть не что иное, как подпространство Жт. В самом деле, по выбору
преобразования (19.10) для вектора у с координатами {z/1, . . ., ут,
0, . . ., 0} имеем как раз
x = кыу1 + ■ ■ ■ + к™ут,
где '—базисные векторы 'т . Согласно лемме 19.2 подпростран¬
ство 'т, а, следовательно, и гиперплоскость (19.12), есть инвариан¬
тное подпространство системы (19.11). Поэтому, если все yt (£0)=О»
(Z>m-|-1), то при tft>tQ движение у (t) должно удовлетворять ра¬
венству у. (t) = 0 для всех i т -|- 1. Если, однако, вопреки
лемме 19.3, принять, что либо рц == 0, либо qis == 0 при неко¬
торых i т + 1; у’ < т 4-1; s = 1, . . ., г, то можно было бы
подобрать такое управление и (t) и построить такое частное реше¬
ние {у\ (t)} (i = 1, . . ., п) уравнения (19.11) с начальным услови¬
ем у\ (Za) = 0 (Z = т -|- 1, . . ., п), для которого в некоторый мо¬
мент t =f= ta выполнялось бы неравенство yos (t) =f= 0 при s >тп.
Полученное противоречие доказывает справедливость первого ут¬
верждения леммы.
Докажем теперь второе утверждение леммы. Для этого рас¬
смотрим матрицу
Kft = {Q,PQ. .. PQ =
= {Т~В, Т-'АТТ-'В, . . ., (Т-АТУТВ} = Т-'К.
Как следует из доказанного уже первого утверждения настоящей
§ 1»]
УПРАВЛЯЕМОСТЬ СИСТЕМ С ПОСТОЯННЫМИ ПАРАМЕТРАМИ 143
леммы, матрица К 1 1 1 имеет вид
Kw =
Qi, P1Q1,
О, О,
P™-Qi pVQi I
. . . , О, . . о II
Так как Т — неособая матрица, то ранг матрицы К К должен сов¬
падать с рангом матрицы.^ ([3*], стр. 60) и, следовательно, он дол¬
жен быть равен т. В. силу леммы 19.1 т линейно независимых
столбцов этой матрицы содержатся в матрице
K~(Q,PQ.. , Pm~ (?) =
Qi, РiQii
0, о- ,
Следовательно, ранг матрицы N также равен т, так как первые т
строк матрицы совпадают со строками матрицы 7V, а элементы
остальных (п—т) строк суть нули. Лемма полностью доказана.
Итак, мы видим, что преобразованием ' (19.10) система (19.1) при¬
водится к двум системам:
yi — pi? 21 + + р1тУт Pi^m+1 Ут+1 + • • • + pinyn +
+ Vii «I + . . . + $4 (j = 1,. К 1. т), К ^ЛЗ)
Уг = Pi'm+lJ/rn+l + • • • + РыУп (г = ГО + 1, . .. п), (19.14)
причем управление и (£) не оказывает влияния на поведение пе¬
ременных z'j (t) при i >m.
Перейдем теперь к обсуждению эффективных условий управля¬
емости системы (19.1). Согласно теореме 17.1, для того чтобы зада¬
ча 4.1 об управлении имела решение, необходимо и достаточно, что¬
бы выполнялось условие
п п
p° = minp[3 >0 при 2 Це1 = 1 ("Лб)
1 г=1 г=1
где вектор с определен равенством (15.2), т. е. в нашем случае
С = Х1 — Х [/р, Za] X*. (19.16)
п
Выражение /г (т) = 2 (т) в (19.15) составлено из не-
г=1
прерывных функций №1(т) (Za К т К t$). Поэтому норма р [h (т)1
и, следовательно, величина р° может обратиться в нуль лишь в том
случае, если существуют такие числа К (i = 1, . . ., п), для кото¬
рых справедливо соотношение
S 1 (т) = 0 при 3Кс = 1
г=1 Г=1
144
СВОЙСТВА ОПТИМАЛЬНОГО УПРАВЛЕНИЯ
[Гл. 6
(19.17)
или, в матричной форме,
(I0)' Н [Zp, т] = 0 при (Z°' c = 1.
(Мы не оговариваем здесь конкретный выбор нормы р. Для опре¬
деленности читатель может полагать, например, что величина р
определена равенством (18.1).)
Нам потребуется теперь еще одно вспомогательное предло¬
жение.
Лемма 19.4. Тождество (19.17) выполняется тогда и только
тогда, когда вектор с (19.16) не принадлежит подпространству Жт.
(Напомним, что вектор с мы условились считать ненулевым.)
Доказательство. Докажем сначала необходимость ут¬
верждения леммы. Для этого предположим от противного, что
имеет место равенство (19.17) и ненулевой вектор с (19.16) при¬
надлежит 'т' Продифференцировав равенство (19.17) по т (п — 1)
’ X [Zp, т] В (см. § 6) и
~ , получим систему
раз и учитывая, что Н [Zp, т] =
dX- [Zp, x]/dx = —
тождеств:
X' [Zp, т] А (см. § 10)
(Г°'Х [Z₽, т] В =0,
(//^to. т] АВ =0,
(Z0)' X to, т] А"’1 В = 0.
В частности при т — Zp будем иметь:
(Z®)' В - 0, (Z0)' АВ = 0, . . ., (Z®)' Ап~В = 0.
Из этих соотношений вытекает, что ненулевой вектор Z® ортогона¬
лен ко всем векторам ' подпространства ,т, и, в частности, он
ортогонален вектору с, который по предположению содержится в
Жт, т. е. (Z®)' с — 0. Однако последнее противоречит условию
(Z0°'c = 1. Полученное противоречие и доказывает необходимость
условий леммы. i
Докажем теперь достаточность леммы 19.4. Пусть ненулевой
вектор с не содержится в пространстве, порожденном векторами
/сО) — столбцами матрицы К (19.2). Поскольку с есть п-мерный
вектор, то ранг матрицы К будет равен т, где т < п. Но тогда
найдется ненулевой вектор Z0, удовлетворяющий условию (Z’/c =
= 1 и ортогональный ко всем векторам к&, т. е. найдется
вектор /0, удовлетворяющий условиям
(l0)' ASB = 0. (19.18)
При этом в силу леммы 19.1 соотношение (19.18) будет выполнять¬
ся при всех s. Рассмотрим теперь вектор-функцию £ (т) =
5 ‘9] УПРАВЛЯЕМОСТЬ СИСТЕМ С ПОСТОЯННЫМИ ПАРАМЕТРАМИ 145
?=(layHltp,i;] = (Z0)' X Rp, т] В. Вычислим производные функции
£ (т) при т = tp. Имеем:
= <1УА‘В- (19.19)
\ ат / т=<р
Из соотношений (19.18) и (19.19) вытекает, что все производные
функции £ (т) в точке т = tp равны нулю. Но из разложения
(19.8) следует, что £ (т) является аналитической .функцией т. Из¬
вестно ([И*], стр. 73), что аналитическая функция, все произ¬
водные которой в какой-либо одной точке — нули,. тождественно
равна нулю при всех значениях ее аргумента, т. е. £ (т) =
= (/о)' Н Rp, т] = 0. Последнее и доказывает достаточность ус¬
ловий леммы 19.4. Итак, данная лемма полностью доказана. Сфор¬
мулируем теперь основной критерий управляемости.
Теорема.19.1. Для того чтобы система, описываемая урав¬
нением (19.1), была вполне управляемой на отрезке Ra, Zp], необ¬
ходимо и достаточно, чтобы ранг матрицы К (19.2) был равен п.
Доказательство. Меняя произвольным образом кра¬
евые условия х* и х&, мы будем получать всевозможные п-мерные
векторы с (19.16), причем для любого вектора с всегда можно по¬
добрать подходящие значения х* и зР. Согласно теореме 17.1 си¬
стема (19.1) вполне управляема тогда и только тогда, когда для
любого вектора с (19.16) выполняется условие (19.15). Однако из
леммы 19.4 следует, что для выполнения условия (19.15) необходи¬
мо и достаточно, чтобы вектор с содержался в подпространстве ЗСт,
порожденном столбцами матрицы Aj£(19.2). Отсюда и следует
справедливость теоремы 19.1.
В частном случае, когда и — скаляр и, следовательно, В —
вектор Ъ, из теоремы 19.1 следует, что система] (19.1) вполне
управляема тогда и только тогда, когда векторы Ъ, АЬ, . . .,
линейно независимы.
Заметим еще следующее. Если система (19.1) вполне управляе¬
мая, то задача 4.1 имеет решение при любых х* и х? и для системы
х — Ах + Ви + w (1^), (19.20)
подверженной воздействию w (Z). Проверка этого обстоятельства
не должна вызывать затруднения у читателя, разобравшегося в
предыдущем материале, и мы здесь ее опустим. Итак, для разре¬
шимости задачи 4.1 (а следовательно, и задачи 4.2) при любых х*
и х& необходимо и достаточно, чтобы ранг матрицы К был равен п.
Если от системы (19.20) мы перейдем к системе (6.11), где до¬
пускаются обобщенные управления dU (Z), то тем самым класс воз¬
можных управлений лишь расширится. Следовательно, линейная
система, вполне управляемая в классе воздействий и (Z), являет¬
146
СВОЙСТВА ОПТИМАЛЬНОГО УПРАВЛЕНИЯ
[Гл. 6
ся таковой и в классе управлений dU (t). Важно, однако, что спра¬
ведливо и обратное заключение. Иначе говоря, расширение клас¬
са управлений до обобщенных воздействий dU(t), включающих
мгновенные импульсные усилия, не расширяет условий полной
управляемости: если ранг матрицы К меньше, чем тг, то система
(6.11) не может оказаться вполне управляемой за счет обобщенных
управлений dU (Z). Это будет показано в § 23 при изучении соот¬
ветствующей задачи об оптимальном управлении.. Полезно за¬
метить, что указанная независимость свойства управляемости от
класса допускаемых управлений есть важное свойство конечномер¬
ных управляемых систем. В более общем случае бесконечномерных
управляемых систем аналогичное свойство не установлено.
В заключение параграфа обсудим случаи, когда нет полной
управляемости. Тогда полезно ввести следующее определение.
Будем говорить, что система (19.1) управляема в некотором под¬
пространстве •' , , если для этой системы может быть решена зада¬
ча 4.1 об управлении, каковы бы ни были векторы т* и • из этого
подп рост ранства.
Из леммы 19.4 вытекает, что система (19.1) управляема в под¬
пространстве Жк тогда и только тогда, когда это подпространство
содержится в Жт. В самом деле, если векторы та и т& содержатся
в — m , то и вектор с (19.16) содержится в Ж, , ибо он есть разность
векторов т& из Жт и X Ир, f«l т* из Жт. (Вектор X [Zp, содер¬
жится в Жт по лемме 19.2, так как это есть фазовый вектор т (Zp)
системы (19.1) при и (t) = 0.) Напротив, если в Жк есть ненулевой
вектор т0, не лежащий в Жт, то, выбирая Ж = тР и т^а = 0 и повто¬
ряя рассуждения из доказательства теоремы 19.1, подберем такой
вектор Z, для которого I'с = 1'Т = 1 п р° [h (т)) = 0. А это будет
значить, что задача 4.1 для таких краевых условий и т? реше¬
ния не имеет. Подпространство Ж ГЛ будем называть поэтому под¬
пространством управляемости системы (19.1). Наконец, отметим
еще, что из сказанного вытекает полная управляемость системы
У = + • • • + Ри^т + <$>В .1 + + CK (19.21)
(г = 1, . . . , т).
В конкретных примерах, когда ранг матрицы К меньше п,
для выяснения свойств управляемости удобно привести систему
(19.1) при помощи преобразования (19.10) к виду (19.11). Тогда
согласно всем предыдущим рассуждениям система (19.11) управля¬
ема при краевых условиях ya и уР следующего вида:
У* = • • -,У^ 0,. . -,0} и уЗ = {у₽, . . ., г/, 0, . . ., 0},
каковы бы ни были у* и yj (j , т).
§ !9J УПРАВЛЯЕМОСТЬ СИСТЕМ С ПОСТОЯННЫМИ ПАРАМЕТРАМИ 147
Пример 19.1. Рассмотрим систему (14.13) из примера 14.1.
Запишем матрицы А и В:
0 1 0
0 0
Г0
— 10 1
, в =
-т=- 0
1Й
‘ 2г0
ООО
0 Гй
Составим теперь матрицу
К = (В, ЛВ, Л’-В) =
0
0
Го
/Й
0
0
го
0
0
2 7' о
га
/й
” /й
2го
0
0
Гй
0
0
2гэ
/й
0
0
Первые три столбца этой матрицы линейно независимы, а последние три
столбца являются линейной комбинацией первого и третьего столбцов. По¬
этому ранг матрицы К равен 3, и, следовательно, система (14.13) вполне управ¬
ляема.
Точно так же можно проверить, что вполне управляема и систе¬
ма (3.7), так как в этом случае ранг матрицы К (19.2) равен 6.
Проверку этого громоздкого условия мы предоставим читателю.
В заключение данного параграфа отметим еще связь понятия
полной управляемости линейной системы, изученного в этом па¬
раграфе, со свойством инвариантности координат этой системы.
Общая теория инвариантности регулируемых систем имеет бога¬
тую библиографию, к которой и отсылаем интересующегося чи¬
тателя (см., например, [1226, 127, 171а, 1916]). Здесь же мы огра¬
ничимся лишь беглым замечанием по частному вопросу.
Координата у() = р'х (t) системы (19.11) называется инва¬
риантной по воздействию , , если это воздействие не оказывает
влияния на данную координату. Отсюда нетрудно вывести, что
свойство инвариантности является в известном смысле свойством,
обратным свойству управляемости. Обсудим этот факт. Пусть в
системе (19.11) все воздействия ut (£), кроме выделенного воздейст¬
вия Uj (t), суть тождественные нули. , Тогда для координаты yi(t)
имеем по формуле Коши:
t
yi(i) = р'Х [f <о] я0 + 5 P'h [£ t]j Uj (т) (hr
to
где h [£, т], = X И, т] ,, — импульсная переходная функция
системы (19.1) по воздействию и7-, №> — /-й столбец матрицы В.
148
СВОЙСТВА ОПТИМАЛЬНОГО УПРАВЛЕНИЯ
[Гл. 6
Но для того чтобы воздействие Uj (т) не влияло на yi(t), необхо¬
димо и достаточно, очевидно, чтобы выполнялось тождество
p'h И, т]7- = 0 при t0 • т <3. (19.22)
В свою очередь для выполнения условия (19.15) необходимо и
достаточно, чтобы выполнялись равенства
pb{}) = 0, p'Ab(j = 0,. . ., р'Ап~Ь{» = 0, (19.23)
которые выводятся дифференцированием по т тождества (19.22)
подобно тому, как это делалось выше, на стр. 144, в аналогичных
ситуациях. Отсюда вытекает, что система
х — Ах + b^ij ,
может обладать координатами y.=p'x, инвариантными по воз¬
действию Uj тогда и только тогда, когда эта система не является
вполне управляемой, ибо в противном случае векторы • • •, А№,. . .
. . . , Ап~Ъ'д, как мы знаем, были бы линейно независимы и не
существовало бы вектора р, который удовлетворяет условиям
(19.23). При этом мы видим также, что инвариантными координа¬
тами будут те и только те координаты уг = р'х, которые определе¬
ны векторами р, ортогональными к подпространству управляемо¬
сти системы (19.1).
§ 20. Управляемость нестационарных систем
Теперь мы дадим достаточное условие полной управляемости
для нестационарной системы
х = A (t) х + В (t) и. (20.1)
Ограничимся здесь случаем, когда элементы матрицы A(t) и
B(t) имеют непрерывные производные вплоть до (п — 1)-го по¬
рядка по крайней мере в окрестности некоторой точки t = t* из
отрезка [£«, • ] (в точках t = t* или t = • речь идет, естественно,
лишь о правых или левых производных соответственно).
Будем рассматривать матрицы • • (t), определенные в окрест¬
ности точки • • следующими рекуррентными соотношениями:
М(0 = ^(0, (0 = (А = 2,..., п).
Справедлива следующая теорема.
Теорема 20.1. Пусть на отрезке [£а, • ] можно указать точ¬
ку t = t*, в которой ранг матрицы
К (t) = L (£),. . . . Ln (t)} (20.2)
равен п. Тогда система (20.1) вполне управляема на отрезке (G, <₽].
§ 20]
УПРАВЛЯЕМОСТЬ НЕСТАЦИОНАРНЫХ СИСТЕМ
149
Доказательство. Нам следует доказать, что при усло¬
виях теоремы справедливо неравенство
р° = min р [В' (т)Х' [Zp, т] Z] >0 при 1’с = 1, (20.3)
i
т. е. доказать, что не может быть тождества
(Z0)' X [Zp,r] В (т) = 0. (20.4)
Предположим, напротив, что существуют числа /?, для которых
это тождество выполняется. Тождество (20.4) продифференцируем
по времени. Тогда при т — t* будем иметь:
g (t.) Lt (Г) = = 0, _ ...,g' (Z„) Ln (/,) = 0. (20.5)
Здесь ненулевой n-мерный вектор g (t*) определен равенством
g (t,) = (Z)' X [t?, zl.
Пусть j j a (Z) (/ = 1, . . ., nr) — n-мерный вектор, компонен¬
тами которого являются элементы /-й колонки матрицы K(t)
(20.2). Так как при t — Zt ранг матрицы К (t) равен п, то среди
векторов (Z.) имеется п линейно независимых АД1Д(,(, . . .
.. !№ (tj. В то же время из соотношений (20.5) следует, что нену¬
левой n-мерный вектор g (Z) ортогонален ко всем векторам J№ (ZJ
и, в частности, он ортогонален к п линейно независимым векторам
АДО (£*, . . ., АД”! (О), чт0 невозможно. Полученное противоречие
и доказывает теорему.
Предложенные условия управляемости для нестационарной
линейной системы, как мы видим, имеют более сложный вид, чем
для системы с постоянными параметрами. Кроме того, эти условия
включают производные от функций аj j (Z) и Ьц (Z), что не всегда
удобно. Среди нестационарных систем, однако, особое место зани¬
мают линейные системы с периодическими матрицами A (Z) и В (t).
В этом случае можно указать достаточные условия управляемости,
которые выражаются довольно просто через матрицу X [по, 0], где
(о — период функций ац (Z) и (Z). При этом мы ограничимся
случаем, когда элементы аjj (Z) и j jj (Z) матриц A (Z) hB(Z) являют¬
ся аналитическими функциями времени. Справедлив следующий
результат.
Теорема 20.2. Пусть элементы а j j (Z) и bj (Z) матриц A (Z)
и В (Z) в уравнении (20.1) являются аналитическими и периодиче¬
скими функциями времени t с периодом со. Тогда для того, чтобы си¬
стема (20.1) была вполне управляемой на отрезке [Za, ZzI, достаточ¬
но, чтобы ранг матрицы
К (<0) = {В (Za), X [от, 0] В (Za), . . ., Хп^ [со, 0] В (Za)} (20.6)
был равен п.
150
СВОЙСТВА ОПТИМАЛЬНОГО У’ИРАВЛЕНПЯ
[Гл. 6
Доказательство. Предположим от противного, что
ранг матрицы К (со) (20.6) равен тг, но система (20.1) не является
вполне управляемой на отрезке [Za, Zp]. Как отмечено выше, это
возможно лишь при условии, что существует ненулевой вектор
Z°, удовлетворяющий равенству (20.4), т. е.
g' (т) = (Z°)' Н [Zp, т] = (Z)'X [Z3, г] В (т) = 0 при (Z°)' с = 1,
ta < т — Zp. (20.7)
Элементы фундаментальной матрицы X^Zp, т] являются аналити¬
ческими функциями г ([12*], стр. 55), поэтому компоненты вектора
g' (т), стоящего в левой части тождества (20.7), являются аналити¬
ческими по т. Но тогда вектор gf (т), тождественно равный нулю
при всех т из отрезка [Za, Z3], будет нулевым вообще при всех
— оо < т — 00 и, в частности, при т = Za, Za — со, Za — 2со, . . .
Воспользуемся теперь тем, что фундаментальная матрица X [Zp, т]
периодической системы (20.1) удовлетворяет условию ([19*1,
стр. 152)
X 1Л — А®] = X [ip, ia] Х [®, 0] (20.8)
(к — целое число).
Полагая
(20.8) и
венств:
в (20.7) т = Za — к® (Л = 0, 1, . . ., п — 1) и учитывая;,
соотношение В (Za + /о) = В (to), получим систему ра-
(°)'А[С, ia]5(ia) = 0
(CfXpp ia]X®, 05(ia) = 0, (20.9)
(Z)' A[ip, (iF'Vo, 0] 5(ia) = 0.
Так как матрица X [Zp Za] — неособая, то вектор q =
= (Z0)' X [Zp, Za] является ненулевым. Однако если ранг матрицы
К (со) (20.6) равен п, то, очевидно, нельзя подобрать ненулевой
вектор q, который удовлетворял бы условиям (20.9). Полученное
противоречие и доказывает теорему 20.2.
Подчеркнем теперь, что условие полной управляемости, сфор¬
мулированное в теореме 20.2 (20.1), является лишь достаточным,
но оно не является необходимым условием управляемости.
Покажем это на примере.
Пример 20.1. Рассмотрим систему уравнений
А — т2, .f2 = — т— -|- и.
Эта система вполне управляема на любом отрезке [fa, fy] и, в частности, на
отрезке [0, 2л], так как здесь
§ 201
УПРАВЛЯГМЮСТЬ НЕСТАЦИОНАРНЫХ СИСТЕМ
151
и векторы b = (0, 1), ЛЬ — (1,0) линейно независимые, т. е. выполнены ус¬
ловия теоремы 20.1. Однако условия теоремы 20.2 на отрезке [00,2л] не вы¬
полняются, так как
X[2л, 0] —
cos 2л sin 2л
— sin 2л cos 2л
= Е
т. е. имеет ранг,
и матрица К (2л), следовательно, такова: К (2л) —
равный единице.
В заключение отметим еще, что предположение об аналитичности эле¬
ментов матриц _| , (t) и _, (t) матриц A (t) и В (t) является существенным.
Например, рассмотрим управляемую си¬
стему
± — — ф (t) [Е + ф (t) G]-1 Gx+ bu.
(20.10)
Здесь х — n-мерный вектор; Е — еди¬
ничная матрица; G — (п 1 /-матри¬
ца с постоянными и достаточно малыми
элементами; b — n-мерный постоян¬
ный вектор; и— скалярная функция,
описывающая управляющее воздействие;
ф(£) — периодическая скалярная функция с периодом со — 1, график которой
изображен на рис. 20.1. Будем предполагать, что векторы 6, (Е + G)-1^..,
(Е + G)~-n‘_ 11 Ъ линейно независимы.
Для системы (20.10) имеем:
X [t,0] — [Е + ф (t) G-1,
Н [1, /] — [Е+ G]-i (& + ф(0 Gb).
(20.11)
Из (20.11) вытекает, что справедливо тождество
g' (0 — (р)' н u,d — о, (0 < t < 1),
каков бы ни был вектор /0, ортогональный к векторам [Е + б?]“1& и
[2? + G]~Gb. Отсюда следует, что система ^^Ю) не является вполне управ¬
ляемой. Покажем, однако, что условие, фигурирующее в теореме 20.2, вы¬
полняется. Действительно, в рассматриваемом случае матрица К (со) (20.6)
имеет вид
К (со) — {b, (Е + G~l ь,.., (Е + b}.
Ранг этой матрицы по предположению равен п, и, следовательно, если бы
теорема 20.2 была верна и для неаналитических aj (/) и Ьц_ (/), то по этой
теореме система ^^Ю) была бы вполне управляемой. Однако мы только
что установили, что этого нет. Итак, , действительно, предположение об ана¬
литичности функций t,, (/) и ),, (/) существенно для справедливости теоре¬
мы 20.2.
В заключение этого параграфа введем еще одно понятие, кото¬
рое потребуется ниже. Как мы видели, для полной управляемости
линейной системы требуется, чтобы функции h^ [/p, т] были на
отрезке /а _ т _ t$ линейно независимыми, т. е. требуется, чтобы
152
СВОЙСТВА ОПТИМАЛЬНОГО УПРАВЛЕНИЯ
[Гл. в
любая линейная комбинация
S g t] [Z₽, г] при S Z? > о
1=1 г-1
не обращалась в нуль тождественно на всем отрезке [Z«, Zp]. Однако
иногда желательно, чтобы функции hW [Zp, т] обладали более
сильным свойством: именно, иногда важно, чтобы вектор-функция
(16.2) не обращалась тождественно в нуль ни на каком интервале,
лежащем внутри отрезка [Z«, Zp], и, более того, важно, чтобы эта
функция могла обращаться в нуль лишь в отдельных, изолиро¬
ванных точках т. В таких случаях систему будем называть неосо¬
бенной (на отрезке [Za, ZpJ). Нетрудно проверить, что система
(19.1) с постоянными параметрами ац и gi} неособенная тогда и
только тогда, когда она вполне управляема. Если коэффициенты
at, (Z) и b, (Z) суть переменные — положение сложнее. g Однако, во
всяком случае, и такая управляемая система будет неособенной,
если в каждой точке t = t* из отрезка [Za, Zp] выполняется условие,
указанное в теореме 20.1. Наконец, мы будем использовать еще
один термин: скажем, что управляемая система неособенная по
воздействию и,, если линейная комбинация
п п
3 Z^M [/р, gg g при 2 li >0,
==1
составленная из импульсных переходных функций системы по
этому воздействию, может обращаться в нуль лишь в отдельных
изолированных точках Z из [Za, Zp] . Система (19.1) с постоянными
параметрами неособенная по и, тогда и только тогда, когда векто¬
ры Ы), АЫ, . . ., Л”_1Ь(^ линейно независимы. Здесь g-' g —
/-й столбец матрицы В. Достаточным условием неособенности неста¬
ционарной системы (20.1) по воздействиям и, является линей¬
ная независимость векторов ZO) (Od) » • • •> Z(J (Z)(„) при всех Z
из отрезка [Za, Z»l- Здесь № (Z)(t> — b{r>(t), . . ., № (Z)(j+i) =
dllj\ldt — A (Z) Z(). Читатель, разобравший материал дан¬
ного и предыдущего параграфов, может доказать самостоятельно
все высказанные только что утверждения, что мы и рекомендуем
проделать в качестве упражнения.
§ 21, Управление минимальной силой
В этом параграфе мы изучим один характерный и часто встре¬
чающийся тип задач об оптимальном управлении. Именно, рас¬
смотрим задачу 13.1, где интенсивность х [и] определена равен¬
ств ом
x[w.] = max / [и (т)].
(21.1)
§ 211
УПРАВЛЕНИЕ МИНИМАЛЬНОЙ СИЛОЙ
153
Здесь Y* [и] — какая-нибудь норма вектора и. Требуется, сле¬
довательно, построить управление и (т), переводящее систему
(13.1) из состояния х (М == ха в состояние х (О) = х& и для ко¬
торого величина х[и] (21.1) принимает наименьшее возможное
значение. В задачах управления функция и (?) зачастую имеет
смысл обобщенной силы, а интенсивность х [и] (21.1) оценивает
тогда наибольшее значение этой силы. Поэтому изучаемые в
данном параграфе задачи мы назовем задачами об управлении
минимальной силой.
Начнем исследование со случая скалярного воздействия и (?).
Интенсивность х [и] (21.1) имеет здесь вид
x[u] = max | и (?) |.
(21.2)
Нам известно (см. ■ § 12), что величина х [и] (21.2) может быть
истолкована как норма р* [и] функции и (?) в пространстве
Л{и(х)}. В соответствии с общей методикой решения задачи 13.1
норме р* [и] = х [и] (21.2) сопоставляется норма р [h (?)], фигу¬
рирующая в правиле минимакса. ' Мы уже знаем из § 12, что
р [h (?) ] =- \ 1 h (?) | dx
(21.3)
(см., в частности, справочную таблицу 12.1). Таким образом,
функции h (?) мы рассматриваем как элементы пространства
X[h (?); ta <^ ? <^ tp} интегрируемых функций, а допускаемые
управления и (?) — как элементы пространства JL [и (?); t*
‘С ? М ограниченных интегрируемых функций.
Прежде всего, следуя правилу 17.1, надлежит определить ми¬
нимальную функцию Л° (т). В рассматриваемом случае скалярно¬
го воздействия и (t) функция h° (?) есть h° (?) = Ъ' (?) S[?, Zp]Z0,
где вектор Z° = {Zo^...^®} представляет решение следующей за¬
дачи на условный экстремум: найти
р° = min \ | Ь' (?) 5 [?, Z3] 11 dx при Гс = 1. (21.4)
Последняя задача может быть геометрически интерпретирована
так: в пространстве {Zlt---, 1п} среди поверхностей
т (°. • • • = $ I b (() s\\] id = р
(21.5)
154
СВОЙСТВА ОПТИМАЛЬНОГО УПРАВЛЕНИЯ
[Гл. 6
требуется найти ту, которая касается плоскости Г с = 1. Точка
касания {/?,..., In} определит искомый вектор Z0. Определение
чисел l°i (Z = 1,..., п) из (21.4) есть самое трудное место в про¬
цессе построения управления u° (/). Это объясняется тем, что
поверхности (21.5) уже не являются здесь столь простыми по фор¬
ме и столь гладкими, как эллипсоиды или эллиптические цилинд¬
ры Ф(/п..., ln) = const (18.4), играющие аналогичную роль в § 18.
Однако задача (21.4) хорошо решается численно. Пример такого
решения показан в § 24. Напомним, что задачу (21.4) для удоб¬
ства вычислений целесообразно иногда заменять задачей об оп¬
ределении экстремальной функции
Zia (т) = Ь' (т) S [т, £р] /с° = Ь (т) s° (т),
где вектор k° = s° (Zp) находится из условия:
v0 == max k’c = k°’c при [ | Ь' ((Г S [т, (/] ( | dx = 1 (21.6)
к <
(см. правило 17.2). При этом числа р°, v° и векторы /о, к связаны
соотношениями р° v° = 1, k° = v°Z°.
Итак, будем считать, что вектор /о тем или иным способом най¬
ден и, следовательно, известны минимальная функция *) h° (т) и
число р°. Предположим, что число р° отлично от нуля. Как мы
уже знаем, при этом и только при этом условии исходная задача
13.1 имеет решение.
Согласно правилу 17.1 мы должны теперь определить искомое
оптимальное управление и° (т), опираясь на условие максимума
(17.1). Последнее принимает здесь вид
*3
h° (т) н° (т) dx = max [ h° (т) и (?) dx = 1 (21.7)
t и t
при max | и (т) | = 1/р° или, иначе, при | и (т) I < 1/р°.
т
Максимум интеграла в правой части (21.7) будет, очевидно,
достигаться в том случае, когда в каждый момент времени т по¬
дынтегральная функция й° (т) и (т) будет максимальной. Задача,
следовательно, сводится к построению функции и° (т), абсо¬
лютная величина которой не превосходит 1/р° и которая обеспе-
х) Все дальнейшие рассуждения в равной степени относятся как к ми
нималъной функции h° (т), так и к экстремальной функции h° (т). Однако
для определенности будем работать, как правило, с функцией h° (т).
§ 21] УПРАВЛЕНИЕ МИНИМАЛЬНОЙ СИЛОЙ 155
чивает максимум произведения Л° (т) и® (т) , т. е.
Л° (т) и® (т) — max Д° (т) и (т) при | и (т) \ < 1 /р° (Ze < т < t$). (21.8)
и
Будем предполагать в дальнейшем, что функция h® (т) обращается
в нуль лишь в конечном числе изолированных значений т — т7-.
Такие функции h° (т) будем называть неособыми. Из результатов
§ 20 следует, что указанное условие выполняется, если система
(20.1) является неособенной. Итак, пусть функция Д° (т) неособая.
Тогда ясно, что решение задачи (21.8) доставляется выражением
M°(r) —4rsgnA°(T)’ (2L9)
г
причем функция и® (т) определена всюду, кроме конечного числа
изолированных значений т — т_- где переменная № (т) обращает¬
ся в нуль. В моменты времени т — т,- значения и® (т,) силы и® (т)
являются несущественными, и их можно, вообще говоря, выбирать
произвольными из отрезка [—1/р°, 1/р°1. Однако, при этом мы
должны исходить из нашей договоренности о непрерывности функ¬
ции и® (т) справа, так что в конечном счете воздействие и® (т) и
в точках т — т, оказывается определенным однозначно.
Итак, мы видим, что если минимальная функция h® (т) явля¬
ется неособой, то условие максимума (21.7) ((21.8)) определяет един¬
ственным образом оптимальное управляющее воздействие и® (т),
имеющее вид (21.9). Управление u® (т) вида (21.9) принято на¬
зывать релейным по аналогии с названием технических устройств,
которые могут находиться в двух состояниях.
Заметим еще следующее. Если удается построить удобный
алгоритм для решения задачи (21.4), то нетрудно указать вычис¬
лительную схему, моделирующую управление (21.9). Такая схе¬
ма строится так же, как это сделано в § 10 при решении за¬
дачи об управлении с минимальной энергией. Опишем здесь
кратко работу системы управления, вырабатывающей величи¬
ну (21.9).
Пусть к моменту t = tx в ВУ1 решена задача (21.4) и найдены,
следовательно, величины s° (Za) = S Иа, Z₽] Z®, р° >0. Значение
s° (Za) в тот же момент времени t = tx поступает в модель, фазовое
состояние которой описывается сопряженной системой (17.3).
С этого момента модель начинает вырабатывать вектор s° (Z). Зна¬
чения переменной s° (t) и вектор-функция b (t) подаются в ВУ11
так, что на выходе этого устройства, начиная с момента t = tx,
вырабатывается минимальная функция h° (т) — 6' (т) s° (т). По¬
стоянная р° и переменная h° (т) поступают на вход релейного зве¬
на РЗ, на выходе которого при t О вырабатывается
156»
СВОЙСТВА ОПТИМАЛЬНОГО УПРАВЛЕНИЙ
!Гл. 6
величина (21.9) управляющего воздействия и° (/). Сигнал uQ(t)
преобразуется в усилительном, устройстве и подается на объект
управления в форме реально действующих сил.
Пр имечание 21.1. Обсудим теперь кратко те ситуации, которые
возможны при нарушении условия о неособенности минимальной функции
h (т). Если система (20.1) стационарная (т. е. матрица А и вектор b — по¬
стоянные), то из результатов § 19 следует (см. стр. 144), что задача 13.1 имеет
решение тогда и только тогда, когда вектор с (15.2) лежит в подпространстве
управляемости системы (19.1) (см. стр. 146). Но тогда нам достаточно
Усилитель
Рис. 21.1.
рассмотреть лишь вполне управляемую часть этой системы, игнорируя ос¬
тальные координаты. Однако эта подсистема (19.21) является неособенной.
Поэтому если задача имеет решение, то функция Д° (т) обязательно есть
неособая. Следовательно, в стационарном случае задача 13.1 либо вообще
не имеет решения, либо имеет единственное решение, определяемое равенством
(21.9). В случае же переменных параметров системы может случиться, что
хотя № (т) ф 0 на всем отрезке 0о] и р° > 0, но h0 (т) = 0 на каком-либо
отдельном промежутке [<7, *8], принадлежащем отрезку [£а, fy]. (Полезно
заметить, однако, что это возможно лишь тогда, когда А (£), b (t) — неана¬
литические функции времени t.) Пусть, например, такой промежуток [£у, г8]
единственный. Тогда для всех т, не принадлежащих ему, управление и0 (т)
следует определять согласно (21.9). Для моментов же т из промежутка
[rY, J5] соотношения (21.7), (21.8) ужеще^работают. В этом случае произведение
h° (т) и° (т) равно нулю на целом интервале [Y, f5] и утверждать, что управ¬
ление U (t) является релейным, и единственным, исходя только из условия
максимума (21.8), мы уже не можем. Оказывается, однако, что и в самом
общем случае управление U (т) всегда можно выбрать релейным, как это
показано в специальных работах (см., например, [365а, б]), к которым мы и
отсылаем читателя. Что же касается вычисления u® (t) в конкретных случаях,
когда Л° (т) = 0 на отдельных интервалах времени, то здесь можно восподь-
§ 21]
УПРАВЛЕНИЕ МИНИМАЛЬНОЙ СИЛОЙ
157
зоваться предельным переходом от неособенного случая, подобно тому, как
это описано ниже в других аналогичных ситуациях (см. стр. 199).
Приведем теперь пример минимизации величины (21.2).
Пример 21.1. Рассмотрим случай движения материальной точки т,
описанный в п. 5° § 3, й обсудим задачу о переводе этой материальной точ¬
ки на круговую орбиту. В качестве управляющего воздействия будем рас¬
сматривать силу, возникающую вследствие выбрасывания реактивной мас¬
сы с постоянной по модулю относительной скоростью в направлении, пер¬
пендикулярном к радиусу-вектору точки. Уравнения движения в линейном
приближении имеют вид (3.23):
== #2, ^2 ~Ь Яд, *^3 == Н, (21.10)
гдея4 суть . отклонения фазовых координат точки от их значений на кру¬
говой орбите. (Единичные значения коэффициентов в (23.10) получены за
счет выбора соответствующих масштабов.) Будем решать задачу о постро¬
ении управления и°(т), переводящего систему (21.10) из состояния #(0) =
= {#ю, #2о, #зо} в состояние # (Т) = {0, 0, 0} за время Т. Минимизация ве¬
личины х [и] (21.2) означает желание осуществить указанный перевод без
больших дополнительных перегрузок. Сформулированная задача имеет ре¬
шение и0(т) при любом значении #(0), так как система (21.10) вполне
управляема. Действительно, векторы
'О'
ГО-
т
ь =
0
, АЪ =
1
, Л2& =
0
1
0.
_0_
линейно независимы, и, следовательно, выполняются условия теоремы 19.1.
Но тогда рассматриваемая система (21.10) является также и неособенной
(см. §20, стр. 152) и, следовательно, решение u°(t) единственное и опреде¬
ляется равенством (21.9) Будем искать решение и0(т), опираясь на экст¬
ремальную функцию №(т) и исходя, следовательно, из условия (21.6). Фун¬
даментальная матрица S [т, Т] системы
51 = «?2, 52 = — S1, 5з = — $2,
сопряженной к системе (21.10) (при и = 0), имеет вид
S [Т, Г] =
cos (Т — т)
— sin (Т — т)
1 — cos (Г — т)
sin (Т — т) 0
cos (Т — т) 0
— sin (Г — т) 1
Отсюда вытекает, что функция h (т) = Ьг (т) 5[т, Т]К, фигурирующая в
(21.6), в данном случае равна
h (т) = Кг [1 — cos (Т — т)] + К2 sin (Т — т) + К3. (21.11)
Задача (21.6) может быть теперь сформулирована так: найти
v° = max (fcjCi -f- К2с2 ф К3С3) (21.12)
при
Т
| К! [1 — cos (Г — т)] ф К2 sin (Т — т) . К31 dx = 1,
о
158
СВОЙСТВА ОПТИМАЛЬНОГО УПРАВЛЕНИЯ
[Гл. 6
где компоненты q вектора с определяются равенствами:
cl = (#<о — #ю) cos Т — #20 sin Т — z3o,)
с2 = — (#зо — #ю) sin Т — #2о cos Т, /
сз = — #зо- '
(21.13)
Рассмотрим самый простой случай, когда Т = 2л. Введем обозначения:
С1 = Сз — С],
Р2 == — 42,
С2 = — Сз,
P3 = 11 + 7f2, |
Су=С3. I
(21.14)
Тогда задача (21.12) сводится к следующему: найти
v° = max (qpi -р- с2р2 - 3 с3рэ)
р
2 л
при Т(рь Рз, Р») = - I Vp? + фт(т + £) + p3 I = 1,
о
Вычисляя интеграл в (21.15), получаем:
(21.15)
где tg g = р^.
= Y (Р1, Рз, Рз) =
4 Vpl + Pl - Рз + 4 1 Рз 1 агент
|Рэ|
Ур1 + р22
при | Рз I < ]Л^2 -Н р%
2л | рз |
при |?з|> Vp2l + pI
(21.16)
Уравнение (21.16) определяет
в трехмерном пространстве {рг, р2,
которую поверхность В
то же время равенство
Рис. 21.2.
<1Р1+ «2 Р2+гзРз = v
при различных v задает в
этом же пространстве семей¬
ство плоскостей 3, Таким об¬
разом, задача (21.15) сводится
к определению той плоскости
A Pl + С2 Р2 <3 Рз =
(21.17)
которая касается поверхности
(21.16) и дляи которой v° > 0.
Точка касания {р°, р£, р%} этой
плоскости с поверхностью
(21.16) j и определит искомый
вектор ра = {р°, р£, р%). Из
(21.16) непосредственно выте¬
кает, что поверхность 62, оп¬
ределяемая этим равенством, представляет собой поверхность вращения
вокруг оси p3, симметричную относительно плоскости р3 = 0. Поэтому
для суждения о характере поверхности 1 достаточно рассмотреть ее се¬
чение, например, плоскостью ра = 0. На рис. 21.2 изображена эта по-
А = — къ
1
Л
§ 21]
УПРАВЛЕНИЕ МИНИМАЛЬНОЙ СИЛОЙ
159
верхность. Из этого рисунка нетрудно заметить, что если вектор С = {сп с2,
определяемый начальным состоянием х (0) системы (21.10), направлен по
оси рз (т. е. К = 0, ё = 0), то плоскость & (21.17) касается поверхности
(21.16) по кругу, образованному вращением отрезка АВ вокруг оси р3. Ре¬
шение задачи (21.15) доставляет в таком случае, очевидно, любой вектор р° =
= 1 К 1 Рг> РзЬ конец, К0Г0р0Г0 лежит на этом круге, т. е. вектор р° =
= Р^ , где(р?)2 + (рг)2< (27) . При этом число v° = "/р» =
— |с.|/2л, и тогда из соотношений (21.11), (21.14) следует, что экстремальная
функция № (т) равна
„ „ я 1
k° (т) = р° cost 4- р° sin т +4— sgn с3.
Оптимальное управление и° (т) определяем теперь согласно (21.9), где сле¬
дует лишь заменить h° (т) на К (т). Учитывая при этом неравенство (р°)2 4,
4-(Рг)2< окончательно получаем:
и° (т) = 1 сз- (21.18)
Пусть теперь вектор С = {cx, ?2, q} не направлен по оси р3 (см. рис.
21.2). Из рисунка видно, что в этом случае плоскость & (21.17) касается
поверхности $ в единственной точке N с координатами р°, р°, р°. Из рис.
21.2 получаем, что v° = ct р° 4" сгр% 4" сзр)> а из равенств (21.11), (21.14)
находим экстремальную функцию h° (т):
/г° (т) = р° cos т 4-р£ sin т + р£. (21.19)
Тогда согласно (21.9) оптимальное управление равно
и® _ v° sgn (pj cos т 4- р£ sin т 4- р)) . (21.20)
Рассмотрим теперь задачу для некоторых конкретных начальных
условий. Пусть в момент t = 0 скорость движущейся точки перпендикулярна
к радиусу-вектору, а количество движения точки в этот момент равно ее
количеству движения на заданной круговой орбите. Таким образом, пусть
= 1, ^20 = 0, я.0 = 0. Из равенств (21.13), (21.14) находим, что q = 1,
с2 = 0, с. = 0. Плоскость & (21.17) касается в этом случае поверхности й
(21.16) в точке D (см. рис . 21.2) с координатами р^ = 1/4. р2 = 0. р°К = 0 .
и, следовательно, число v° = 1/4. Из (21.20) получаем, что оптимальное
управление u° (t) равно
и0 (/) = sgn cos т. (21.21)
Под таким воздействием точка сначала разгоняется в течение времени 0 К t <
<Ji/2; в момент Т1=л/2 следует переключение управления, и при л /2^ т<Зя/2
точка тормозится; в момент т2 = Зл/2 следует новое переключение, точка
снова разгоняется и, наконец, при т3 = 2л точка по касательной приходит
на заданную круговую орбиту; в этот момент управление сбрасывает¬
ся (см. рис. 21.3). В результате точка оказывается на круговой орбите с тем
160
СВОЙСТВА ОПТИМАЛЬНОГО УПРАВЛЕНИЯ
[Гл. 6
же количеством движения, которое она имела в начальный момент t = 0.
Отметим, что в данном случае время разгона и время торможения оказались
одинаковыми. Пусть теперь точка обладает в начальный^момент времени боль¬
шим количеством движепия, чем на заданной круговой орбите. Примем,
например, х10 = 0,052, я2о = 0, х3о = — 0,145. Тогда из (21.13), (21.14) полу¬
чаем, что с = 0,197, с2 = 0, С3 = 0,145.
В этом случае, плоскость & (21.17)
касается поверхности (3 (21.16) в
некоторой точке G плоскости р2 =
= 0. Координаты этой точки лег¬
ко находятся графически по до¬
статочно точно вычерченному се¬
чению поверхности &. Это и было
выполнено, причем получилось
р° = 0,216; р° 0;
Pl = 0,119. f
Следовательно, число v° = 0,06.
Согласно (21.20) ' определяем те¬
перь искомое оптимальное управ¬
ление:
u°(t) = 0,06 sgn(0,216 cosj+ 0,119).
Здесь, так же как и выше, точка
вначале разгоняется, затем тормо¬
зится и, наконец, снова разгоняет¬
ся. Однако время разгона и тор¬
можения получается уже различ¬
ным.
Перейдем теперь к случан/г-мерного векторного управления
и (/). Снова в соответствии с общей методикой по норме р* [и] =
= находим из таблицы 12.1 норму р [h (т)], фигурирующую
в правиле минимакса 17.1.
Имеем:
Ч
р[Л(т)] = $г[Л(<))<Л, (21.22)
причем y [h (т)] — это как раз та норма в г-мерном пространстве
векторов Л, для которой норма т* 1^1 является сопряженной.
В частности, если
ТО
х [и] = max у* [и (т)] = max ||и (т) ||,
м
р[й(т)] = § ||/г (т) ||dr;
(21.23)
(21.24)
§21]
УПРАВЛЕНИЕ МИНИМАЛЬНОЙ СИЛОЙ
161
если же
х [u] = max тах|и.Д т)|,
(21.25)
то
4 г
P[Mt)] = |Zi<^(^))-^'V.
(21.26)
1Я i=l
И в векторном случае прежде всего надлежит определить мини¬
мальную функцию h° (т) = В- (т) S [т, tp] IQ где п-вектор 1° яв¬
ляется решением задачи
*3 ‘я
р° = ? Т [Л° (?)] dr = min • у [В' (т) 5 [т> М Z] dx (21.27)
4 1 4
при 1с = 1,
Как и в скалярном случае, эту задачу для удобства вычислений
иногда целесообразно заменять проблемой об определении ha (т).
При этом в (21.6) вместо величины I Ь' (т) S [т, • ] к\ следует пи¬
сать величину у [В' (т) S [т, fy] к]. Так как этот этап решения
задачи не имеет каких-либо существенных отличий по сравнению
со скалярным случаем, то на его обсуждении останавливаться не
будем, полагая далее функцию h0 (т) (ha (т)) и число р° извест¬
ными. Предположим, что число р° отлично от нуля, и, следова¬
тельно, задача 13.1 имеет решение.
Мы должны теперь определить искомое оптимальное управле¬
ние u° (Z), опираясь на условие максимума (17.1), которое прини¬
мает здесь вид
*3 *3
§ &0' (т) и0 (т) dx = max • hQ' (т) и (т) dx (21.28)
4 и tx.
при max у* [и (т)] = l/p° или, иначе, при y* lu (т)] 1/р°. Рас¬
суждая так же, как и выше — при переходе от (21.7) к (21.8), на¬
ходим, что подынтегральное выражение в (21.28) должно быть
максимальным в каждый момент времени т, т. е.
№' (т) uQ (т) = max й0' (т) и (т) , (21.29)
и
при у* [и (т)] < 1/р°.
Пусть, в частности,
Г* [гП = || и(х) |. (21.30)
Предположим тогда, что величина || Д° (т) || обращается в нуль
лишь в конечном числе изолированных точек т = Xj. В этом
6 Н. Н. Красовский
162
СВОЙСТВА ОПТИМАЛЬНОГО УПРАВЛЕНИЯ
[Гл. в'
случае функцию Д’(т), как и выше, будем называть неособой. Так как
функция А® (т) неособая, то условие (21.29) означает, что векторы
/г° (т) и и9 (т) в каждый . момент времени т =h т7- должны быть кол¬
линеарны и норма т* [м] = || и0 (т) || вектора и° (т) при каждом
т =/= т/должна быть максимальной, т. е. равной 1/р°. Таким об¬
разом, в случае (21.30) оптимальное управление и0 (т) является
единственным и равным
"•«Нт
в любой момент времени т =/= ij. В моменты т = т7- значения и° (т-)
воздействия и0 (т) снова являются несущественными, но мы долж¬
ны их выбрать во всяком случае так, чтобы функции Uj (т) явля¬
лись непрерывными справа.
Рассмотрим теперь случай, когда '
Т* [= max | и (т) |. (21.32)
i
Предположим здесь, что уже каждая функция hj (т) (Z = 1,...,и)
обращается в нуль лишь в конечном числе изолированных мо¬
ментов т = —-. (Это условие выполняется, если система (20.1)
неособенная по каждому воздействию ut (т) (см. § 20).) Тогда из
условия (21.29) заключаем, что искомое оптимальное управление
и° (т) снова является единственным, и каждая его компонента
u°t (т) определяется равенством
и? (т) = 4-sgnfi (т) (21.33)
в любой момент времени т =f= х^\
Суммируя результаты наших рассуждений, мы можем сфор¬
мулировать следующую теорему.
Теорема 21.1. Рассмотрим задачу 13.1, где минимизиру¬
ется интенсивность к [и] вида (21.1). Пусть s° (t) — то из дви¬
жений сопряженной системы (17.3), стесненныт краевым условием
c's9 (p) = 1, для которого порождаемая им функция hQ (г) =
— В' (т) s° (т) удовлетворяет условию (21.27).
Если число р° отлично от нуля, то задача 13.1 об оптимальном
управлении имеет решение, при этом величина, р° и определяет
как раз минимум х [и0 величины оптимальной управляющей силы
и® (t), равный 1/р°. Искомая сила и° (t) находится из условия (21.29).
В частности, если система неособенная по каждому воздействию
Uj, то задача имеет единственное решение и° (t), причем величина
Y* [zz° (т)] в каждый момент времени максимальна.
В заключение параграфа приведем еще один конкретный
пример.
§21]
УПРАВЛЕНИЕ МИНИМАЛЬНОЙ СИЛОЙ
163
Пример 21.2. Рассмотрим движение тяжелой материальной точки в
вертикальной плоскости, описанное в п. 3° § 3. Наша задача заключается в
том, чтобы построить управляющее воздействие u° (t), обеспечивающее пе-
гюбр°с точки из состояния хл = х (0) = {~1,0 0,О} в состояние = a(l) =
= {0, 0,0,0} за время — Za = 1 — 0 = 1 при условии минимума интен¬
сивности
(21.35)
х[и] = max [и](т) + Wg (т)]1/г • (21.34)
т “
Поставленная задача имеет решение м° (/), так как система (3.10) вполне
управляема. Она является также и неособенной. Поэтому решение м° (т) един¬
ственное и определяется равенством (21.31):
л 1
м°0= рО||/го(т)1|
где минимальная функция h (т) = {h® (т), h® (т)} = {Zj (1 — т) + I®
](1 — т) + Z°} находится из условия (21.27). Функции h (т) = В' (т) $ (т),
среди которых мы ищем hQ (т), уже вычислены выше, в § 18 (см. стр. 127).
Таким образом, задача (21.27) сводится к следующему: найти
1
ро = min С {[Zl (1 - т) ф- Z3]2 ф. [Z3 (1 — т) ф Z^}2 dr (21.36)
1 S
при h ф у /з ф gU = 1. (21.37)
Непосредственное решение задачи (21.36), (21.37) затруднительно. Поэто¬
му числа' Z® (г = 1,..., 4) будем искать, используя дополнительно механи¬
ческие соображения. Заметим, прежде всего, что ввиду стационарности си¬
стемы (3.10) и симметрии силового поля при замене времени t = 1 — т ис¬
ходная задача трансформируется в такую же задачу, но при условии, что
точка перебрасывается из состояния х (0) = {0, 0, 0, 0} в состояние х (1) =
= { — 1, 0, 0, 0}, а не наоборот, как это было раньше. Отсюда в силу един¬
ственности управления м° (Z) (21.35) вытекает, что оптимальная траектория
я (т) = (xj (т), ж® (т)} симметрична относительно прямой х± = — 1/2 в
плоскости {хп х3}- Но тогда график составляющей и® (т) на плоскости
{т, и2} также будет симметричен относительно прямой т = 1/2, а график сос¬
тавляющей uj (т) на плоскости {т,их} будет антисимметричен относительно
этой же прямой. Из коллинеарности векторов и° (т) и h (т) следует тогда, что
и графики функции Ztj (т) = Zj (1 — т) + Z® и h® (т) = Z° (1 — т) + Z4 явля¬
ются соответственно антисимметричным и симметричным относительно пря¬
мой т = 1/2 (на плоскостях {т, h®}). Указанное свойство функций h® (т) и
^2 (т) имеет место, очевидно, лишь тогда, когда Zj = — 2Z° Z® = 0. Учиты¬
вая эти равенства и условие связи (21.37), мы можем (выражая Z2, Z4 через
li) сформулировать задачу (21.36), (21.37) так: найти “
S/ | \2 \2-| ’Л
[Z* V2 - т) J d*’ <21 -38)
6*
164
СВОЙСТВА ОПТИМАЛЬНОГО УПРАВЛЕНИЯ
[Гл. 6
Решая эту задачу, положив g = 10, находим:
= 0,1116; Ч =„(05558; 1° = 0; Z° = 0,0888; р° = 0,0944.
Тогда из (21.35) получаем, что
0,0558(1 — 20
“0 /)) — г _ == '
1 U 0,0944 У — 0,0124* 0,0120
п 0,0888
7П = - - '
2 к 7 0,0944 /0,0124^ — 0,0124^ -р 0,0120
(21.39)
На рис. 21.4 изображена оптимальная траектория х® (t} = {*с) (t), ((°)}
точки. Для наглядности на этом рисунке представлено также управление
ио = (и), 1(>, соответствующее раз¬
личным точкам пути. Кроме того,
масштабы по осям - хг и х2 выбра¬
ны различными.
§ 22. Управление в случае
квазилинейного объекта
Содержанием настоящей
монографии является иссле¬
дование задач об управлении
линейными объектами. Общее
исследование проблемы уп¬
равления в нелинейных си¬
стемах выходит далеко за
рамки данной книги. Однако, чтобы отметить связь рассматривае¬
мых нами линейных проблем и используемых методов с задачами
более общего рода, полезно обсудить возможный переход от на¬
ших случаев к нелинейным ситуациям. Первым шагом такого пе¬
рехода является исследование квазилинейной системы, урав¬
нения движения которой отличаются от уравнений линейных лишь
малыми нелинейными добавками. Указанный квазилинейный
случай и составляет предмет данного параграфа. При этом для
определенности мы ограничимся лишь задачей, в которой ресур¬
сы управления оцениваются величиной х [и] вида (21.2). Именно
по этой причине предлагаемый здесь материал следует сразу за
§ 21, где была изучена соответствующая линейная проблема. В
других типичных случаях х [&] (или х [dt7]) переход от линейной
ситуации к ситуации квазилинейной осуществляется по анало¬
гичному плану и поэтому на них мы далее останавливаться не бу¬
дем. Отметим лишь, что и в квазилинейном случае наиболее удоб¬
ной для конкретных вычислений оказывается величина х [и] ви¬
да (18.1).
§ 221
УПРАВЛЕНИЕ КВАЗИЛИНЕЙНЫМ ОБЪЕКТОМ
165
Итак, пусть поведение управляемой системы описывается
уравнением
x = / (t, х) + g (t, х)и. (22.1)
Здесь х = {xlt.. .,хп} — n-мерный вектор фазовых координат
объекта; / (t, х) и g (t, х) — n-мерные вектор-функции; и — ска¬
лярное управляющее воздействие. Будем предполагать, что / (t, х)
и g (t, х) непрерывны по t на рассматриваемом отрезке времени
[ta, t₽l и являются аналитическими функциями' переменных xt
в некоторой окрестности точки х = 0, т. е. примем, . что эти функ¬
ции разлагаются в сходящиеся степенные ряды
со со
/ (*, *) = S /<") (*, *), g V, *) = 2 g™ (t, *), (22.2)
7т=1 т=0
где f(m) и gW) — . формы пг-го порядка по xt. Допустим, что вели¬
чины Xf (t) можно считать достаточно малыми (настолько во вся¬
ком случае, чтобы сходились рассматриваемые нами ряды). Ина¬
че говоря, в данном случае речь идет об управлении объектом
(22.1) лишь в окрестности некоторого его движения, 'причем век¬
тор х (t) имеет как раз смысл отклонения фазового вектора от это¬
го движения, которое в координатах xt записывается таким образом
в виде xt (t) = 0 (i = (см. по поводу составления таких
уравнений в § 3). Нас будет интересовать выбор управления и (£),
которое приводит объект к указанному движению (или к состоя¬
нию равновесия) х = 0. Мы ограничиваемся при этом скалярным
управлением лишь с целью упрощения выкладок. Итак, сейчас
для системы (22.1), (—.2) мы укажем простой способ последова¬
тельного построения управления и (£), которое оказывается близ¬
ким к оптимальному (в смысле задачи 13.1) при краевых условиях
х (£а) = х* и х (ty) = = 0, когда интенсивность х [п] опреде¬
лена равенством (21.2) и начальные возмущения достаточно ма¬
лы. При этом будем опираться на известное нам из § 21 решение
аналогичной задачи для линейной системы первого приближения
х = A (t) х 4- b (t) и, (22.3)
где
А (О x = {/|1) (« х), ..fn} (t, ж)},
b(t)={gM (0,...,gW(t)}.
Для дальнейшего удобно предъявить одно требование к мини¬
мальной функции h° (т), которая получается при решении указан¬
ной линейной задачи по правилу минимакса 17.1. Чтобы сформу¬
лировать это требование, предположим для определенности, что
вектор с (15.2) удовлетворяет условию сп == 0, и, следовательно,
166
СВОЙСТВА ОПТИМАЛЬНОГО УПРАВЛЕНИЯ
[Гл. 6
по (21.4) имеем:
п—1
/„=-^-(1-2^).
п 1=1
В этом случае задача (21.4) на условный экстремум сводится к
проблеме безусловного минимума функции
*3 П-— 7——'_
г|) (/b . . g g /п-1) = $ | 2 (т) + ± (1 - J ggg h™ (т) | dx.
/а г=1 п 4 i=i '
Поэтому числа Z01T...Zn_i, определяющие h (т), будут удовлетво¬
рять системе уравнений
5?= S \к‘г'(t) - А<п) (t)] sgn [,2Т){g +
г 1а г=1
+ -у- (1 — 3 gggg h(n) (т)1 dx = О
П ' г=1 7 J
(f = 1.. .,n — 1).
Упомянутое выше требование состоит в следующем: будем
далее всегда предполагать начальные данные х* такими, что гра-
71
фик минимальной функции 1г (т) = 2 (т) пересекает ось т под
2=1
ненулевыми углами и якобиан д g g , . . ., ggg -j I д (Z^ . . g g Z^)
отличен от нуля при Ц = Ц, т = tj, т. е.
det II <4 11 ==0 при Z т = Tj (Z°)
(Z, к 1, . . .,n 1, у 1, . . .,$).
Здесь
и символы Ту = X, (Z) (/ = l,..t,s) означают моменты времени, в
п
которые функция А(т) = 2 Zlh^ (т) обращается в нуль. Для нас .
г=1
важно, что при указанном условии в окрестности g точки Z = Z0
§ 221 УПРАВЛЕНИЕ КВАЗИЛИНЕЙНЫМ ОБЪЕКТОМ 167
существуют производные
при 1± = 1^, . . ,,1п = 1п
°‘1г
(/ — 1, . . • • • ; к = 1,. . .,п),
как это следует из известных теорем о неявных функциях (см.,
например, [23*1, т. I, стр. 447). Более того, при данном условии
из той же теоремы о неявных функциях вытекает, что величины
Z будут непрерывно-дифференцируемыми функциями величин
с1,...,сп, по крайней мере при достаточно малых изменениях сг.
Отсюда следует, что при • малых изменениях &х* и Да^, т. е.
при малых изменениях Д • • , будут происходить малые изменения
величин /?, причем будут справедливы оценки
| ДЙСмИМ | Av0| — | Д-А|<Кы2|ДС||, (22.4)
где о»! и (о2 — постоянные, зависящие лишь от исходных значений
х* и Д, t$. Опираясь на эти оценки и используя те свойства оп¬
тимального управления и® (t), которые были найдены в § 21, не¬
трудно прийти к следующему выводу. Пусть мы изменяем исход¬
ные значения хл и х& настолько мало, что вектор с (15.2) также
претерпевает достаточно малое изменение Дс. Тогда при всех т,
за исключением, может быть, лишь значений, лежащих в некото¬
рых е7-окрестностях точек т7-, будет выполняться неравенство
1 Ди° (О | < (®& |Дс ||, (22.5)
причем суммарная протяженность упомянутых е?-окрестностей
(обозначим ее a[SeJ — а (@)) будет удовлетворять условию
а (@) < ®4 || Де ||. (22.6)
Здесь Дм° (t) — изменение оптимального управления, • выз¬
ванное изменениями Дя® и &х&, а величины со3, 0)4 — суть постоян¬
ные, зависящие лишь от исходных значений хл, Д и t$.
Перейдем теперь к построению управления и (Z) для системы
(22.1) , (22.2). Будем предполагать, что система первого прибли¬
жения (22.3) является вполне управляемой (см. §20). Пусть •• (t) —
оптимальное управление, разрешающее задачу 13.1 при х [и]
(21.2) для линейной системы первого приближения (22.3), и
я(1 (я®, 0)2^2.з> — движение системы (22.3) при u=Ur>(t). При этом,
как мы знаем, управление •1 • (t) определяется равенством (21.9).
Из материала § 21 нетрудно вывести также оценку
I ad) (® II
(22.7)
168 СВОЙСТВА ОПТИМАЛЬНОГО УПРАВЛЕНИЯ [Гл. 6
и убедиться поэтому в том, что движение уI 1 I (яа, i)(22.S) удовлет¬
воряет неравенству
||^(1)(х , °(22-3) И *4 «М # ||> (22-8)
где со5, ®6 — постоянные, определяемые лишь свойствами системы
первого приближения (22.3). Предположим теперь, что управле¬
ние ( (t) приложено к нелинейной исходной системе (22.1).
Это управление и = н(1> (t) приведет движение я^) (ха, i)(22.D
данной системы (22.1) к некоторому состоянию 1 I (хл, /з)(22.1) —
=y(2)(ip). Известно, что решения нелинейных систем дифферен¬
циальных уравнений (22.1) с аналитической по х правой частью
можно разлагать в ряды по степеням начальных данных х* (при
фиксированном и (/)). Опираясь на это свойство рассматриваемой
нелинейной системы, можно проверить теперь, чтоу с точностью
до членов второго порядка малости по [| хл || имеем ([12*],
стр. 56, 174):
t
уМ (0 = $ X [i, г] z<2) (т) dx, (22.9)
«а
где .
z<2) (Т) = /(2) (т Ж(1) («“, Т)(22.3)) 4- gw (Т, х<1) (ж“, т)(22.3)) и(1) (т). (22.10)
Из (22.7) — (22.10) следует теперь, что
Цз(2) (<°7 — coinst). (22.11)
Рассмотрим снова задачу 13.1 в первом приближении о приведе¬
нии системы (22.3), но теперь уже не в точку х (ip) = 0, а в точ¬
ку х (ip) = — у(2) (ip). Пусть ( (i) — решение этой новой за¬
дачи. В таком случае вектор (15.2) определяется уже равенством
с = — X [ip, ia] х* — уI(I (ip) и отличается от, аналогичного век¬
тора с для предыдущей задачи на величину Ас<2) = — у№ (£р).
Поэтому в силу оценок (22.4) — (22.6), (22.11) будет справедли¬
во неравенство
| Д-21 = | н<2) (;) _ (;) | [ (оз]| [ (ip) || < MMi'2 (22.12)
при всех i, за исключением, может быть, у лишь- множества @2
значений i, лежащих на интервалах, суммарная протяженность
(или мера) которых а (@2) удовлетворяет неравенству
а (@2) = II уЫ (ip) |< 1 1 у |х ||2 . (22.13)
Рассмотрим движение х(2) (хл, i)(22.D системы (22.1), соответ¬
ствующее управлению и = uWy). Можно проверить, что с точ¬
ностью до членов второго порядка по || хя || это движение удовлет¬
§ 22]
УПРАВЛЕНИЕ КВАЗИЛИНЕЙНЫМ' ОБЪЕКТОМ
169
воряет краевому условию х(Xя-, t^^x) = 0. Если же теперь
учесть члены третьего порядка по || х* то х- - (яа, £p)(22.i) =
= У1'3') (О) и
t
yt(l)= J X (1, t] z<3) (t) dx, (22.14)
где
z(3) (t) = /(3) (Т, Ж(1) (Х*, t)(22.3)) +
+ 3 —>(*' '1gp,w,) Д4” (Л Т) +
+ gw (т, Дж(2) (хя, т)) u(1) (t) -f- gw (т, х(1) (ж’, т)(и 8)|
+ g(2) (Г, ж(1) (хя, т)(22.з)) и(1) (т).
Здесь Дя<2) (x*, () — члены второго порядка по || ха ||
нии системы (22.1). Имеем:
t
Дх(2) (ха, t) = | X [£, т] (z<2> (т) + b'(т) Дн2 (т)) dx.
Из (22.14) — (22.16) вытекает неравенство
h(S) (0 II < ® 8 || Ха II3.
>) Д«2 (t) +
(22.15)
в реше-
(22.16)
(22.17)
Снова решим задачу - 13.1 в первом приближении, но уже направ¬
ляя теперь движение (22.3) в точку х (О) = — (t) — 33 3 (О)-
Оптимальное управление, разрешающее! эту третью задачу,
обозначим через u<3) ((). Теперь Де<3) = — у/(3) (о) и в силу (22.4) —
(22.6), (22.17) будут справедливы оценки:
|Д«3 (0)1 = I u<3) (0 _ м«) (0 I < ®3 || |Я (М) II < %3 II ха ||3, (22.18)
о (@3) < «41 У™ (*р) || < м ( х II3. (22.19)
Продолжая рассуждать аналогичным образом, получим на
&-м шаге:
к
с = — Х [0Р, 0J Xя — S гу<}) (М, Ac(f‘> = — ут (М),
7=1
причем будет выполняться неравенство
| Дв> (0) | = | (() - »<*-« (00 < о|| уМ (tf || < || х* р (22.20)
при всех (, за исключением, может быть, множества | - значений
170
СВОЙСТВА ОПТИМАЛЬНОГО УПРАВЛЕНИИ
ИГи. 6
t, мера которого о (@fr) удовлетворяет неравенству
При этом
*(@»)C<Mh‘> GIK
t
у<м (t) = X p, т] zW (т) dr,
(22.21)
(22.22)
к— 1
+ 3 iS) (Т ж(1> (Ж“> т)(22.3)) Д^-s (Т) +
I V V V V I 1 d(Q)g(m) (г,т(1> (га, т)(22>3))
+ Zj 2 Z Zj \ б! дх. -...-дх.
S=17П=1 а^1 к,...,го = 1 г1 го
X
SS|=S'—m-f-o
X 3 ..... ье°} Ди,^ (?) . (22.23)
Sp • • • ,Sq> 2
Здесь для удобства записи принято обозначение и 1 1 1 (Z) ==
= Д их(0и Дх(Р — члены s-го порядка по норме || гга || в решении
нелинейной системы (22.1), причем
Ax(s) = ] X т] (y(s) (т) + b (т) Aws (т)) dr. (22.24)
4 *
Таким образом, оценки (22.4) — (22.6) обеспечивают постоян¬
ное повышение порядка малости вектора и 1 и1 (£р) по || ха ||, и,
следовательно, управление и (т) можно построит^ так, чтобы
привести систему (22.1) к заданному движению х = 0 с любой
желаемой степенью точности. Рассмотрим теперь ряд
и (<) = иц) (i) + 2 Хит («) (22.25)
m=2
Управление и (t) (22.25) в случае сходимости этого ряда перево¬
дит нелинейную систему (22.1) из начального состояния х (t^) =
= х* точно в нужное конечное состояние х (£р) = 0, как это сле¬
дует, очевидно, из способа построения ряда. Из соображений эко¬
номии места мы не будем подробно анализировать вопрос о схо¬
димости данного ряда. Отметим лишь, что, пользуясь оценками
§ 22]
УПРАВЛЕНИЕ КВАЗИЛИНЕЙНЫМ ОБЪЕКТОМ
171
(22.12), (22.13), (22.17) — (22.21), можно, действительно, доказать
эту сходимость. При этом устанавливается, строго говоря, что
ряд (22.25) сходится по мере ([9*], ч. 2, стр. 48), если только на¬
чальные отклонения х* достаточно малы. Тем самым вопрос о
возможности построения управления и (t), которое приводит не¬
линейную систему (22.1) в положение х (Zp) = 0, решается ут¬
вердительно. Однако важно здесь подчеркнуть, что построенное
управление и (t) (22.25), вообще говоря, не является оптималь¬
ным в смысле задачи 13.1 при х [и] (21.2). Из описанного спосо¬
ба определения функции и (t) (22.25) следует лишь, что это управ¬
ление и (t) является оптимальным для системы первого прибли¬
жения (22-.3) при переводе ее из начального состояния х (Za) = х*
оо
в конечное состояние x(l$) = — 2 (^)- При этом ряд
1—2
со и 00 II
3 у™ (^), конечно, также сходится и норма || 3 у(Л) (ip) || его
1=2 к =2
суммы имеет второй порядок малости по || ха ||. Пользуясь этим
обстоятельством, можно показать, что управление (22.25) отли¬
чается от оптимального (для нелинейной системы (22.1)) на вели¬
чину второго порядка малости по || я*|. В заключение отметим еще
одно важное обстоятельство. Будучи оптимальным управлением
для линейной системы (22.3), функция
и (t) = lim > (t)
является релейной и имеет вид
и (f) = v° (xa) sgn (S l°i (xa) h(i) ()) , (22.26)
где v° и Z? — некоторые постоянные величины. Таким образом,
справедлив следующий вывод:
Если начальное отклонение х (Za) = х* от заданного положе¬
ния x(t$) — 0 достаточно мало, то можно построить1) ре¬
лейное управление и (Z) (22.26), переводящее нелинейную систему
(22.1) из данного исходного состояния х (Za) = х* . в желаемое
конечное положение х (Zp) = 0. Это управление строится в виде
ряда (22.25) и отличается от оптимального управления на
величину второго порядка малости по || х* Ц.
х) Это утверждение установлено нами в предположении полной управ¬
ляемости системы первого приближения. Последнее условие является, сле¬
довательно, достаточным условием разрешимости задачи об управлении для
нелинейной системы. Если оно не выполняется, то возникает ситуация, ко¬
торая в литературе изучена мало.
172
СВОЙСТВА ОПТИМАЛЬНОГО УПРАВЛЕНИЯ
[Гл. 6
Пример 22.1. Рассмотрим задачу о переводе материальной точки, дви¬
жущейся в поле центральной силы, на круговую орбиту заданного радиуса
г0 при помощи реактивной силы, перпендикулярной к радиусу-вектору точ¬
ки. Уравнения движения точки при г0 = 10 имеют вид (см. п. 5° из § 3 и
пример 14.1 из § 14):
= х2,
•^2 = ' х1 + хз + /2) (а1> хз) + •••>
£3 = и + 0,1 хги,
где
/(2) (д^, Ж3) = 0,3 х% — 0,3 х3 + 0,05 х*
Пусть нас интересует задача о построении управления и (4), переводя¬
щего эту систему из начального состояния х (tx) = х (0) = {0, 1; 0; 0} в
конечное состояние х (t&) = х (2л) = {0; 0; 0} и имеющего при этом наи¬
меньшую возможную норму х [и] (21.2).
В соответствии с вышеизложенным рассмотрим сначала такую же за¬
дачу для системы (21.10) первого приближения, т. е. найдем управление
(t), имеющее наименьшую норму (21.2) и переводящее систему первого
приближения (21.10) из начального состояния х (0) = {0, 1; 0; 0} в конеч¬
ное состояние х (2л) = {0; 0; 0}. Решение подобной задачи для системы
(21.10) мы уже подробно разобрали в § 21. Поэтому здесь процедуру этого
решения описывать не будем и укажем лишь результаты. В нашем случае
, u(1) (t) = 0,О25 sgn (cos t).
Определим движение xl:l''(t) системы (21Л0) первого приближения при
и = i№ (t). Произведя необходимые вычисления, получим:
^(О =
0,1 cos t — 0,025 sin 4 4- 0,0254, 0^4^-^-,
0,05 cos t — 0,025 sin t—0,0254 + 0,07854, -jj- t -tj- л,
— 0,025 sin t + 0,025i — 0,15708,
f — 0,025 cos t — 0,1 sin t -J- 0,025,
®21 (4) = ■ — 0,05 sin t — 0,025 cos t — 0,025,
— 0,025 cos t — 0,05 sin t + 0,025,
Зя
' 2 2 л j
л
0 — t — -2 ,
л 3
2 2 л,
у л -1 — 2л,
f 0,0254
xW(t)= ■ 0,07854—0,0254,
0,15708 + 0,0254,
Л
y,
л 3
2 % 2"' л»
3
*2“ л < t < 2л.
S 221
УПРАВЛЕНИЕ КВАЗИЛИНЕЙНЫ1М ОБЪЕКТОМ
173
Вычислим теперь по формуле С22.^ (22.10) вектор _ ()р) — у(2) (2ч).
Имеем:
2п
ур (2л) — § [— /(8)М1) w. (т»sin т >
о
4- 0,1х(1) (т) и(1) (т) '(1 — cos т)] rft — — О0128,
2п
у<2) (2л) — [/(2) (Ц1) (тХ ХХ> (Т)) COS Т +
о
4- 0,1;^41} (т) м(!) (т) sin т] dx = — 0,00075,
2п
у™ (2л) — 0,1 _ xW (t) и(!) (т) dx — ■0,00049.
О
Найдем теперь управление и(2)(<), которое имеет наименьшую возможную
норму х [/2/] (21.2) и переводит линейную систему ^l.W) из начального сос¬
тояния х (0) — {0, 1; 0; 0} в конечное состояние х (2л) — —у(2) (2л) —
— {0,00128; ———°,00049}. Решение последней задачи имеет вид
и(2) (0 — 0,02456 sgn (0,07776 sin t + 10,18093 cos t — 0,05183).
Итак,,мы описали процедуру, которая позволяет построить
управление и (t), приводящее нелинейную систему (22.1) в нуж¬
ное состояние х (ip) — 0. При этом, однако, данное управление
и (t) не будет оптимальным управлением с точки зрения минимума
величины х [и], хотя и будет близким к нему. Указанный недос¬
таток вызван тем обстоятельством, что для упрощения счета ап¬
проксимирующие управления _ ■ (i) мы выбирали все время, ис¬
ходя из одной и той же системы линейного приближения (22.3).
Усложняя процедуру и вводя при этом на _ каждом шаге новую
систему линейного приближения, можно построить последова¬
тельность управлений _ (i), которая уже будет сходиться к уп¬
равлению и° (i), оптимальному для исходной квазилинейной сис¬
темы. Наметим здесь совсем кратко этот способ построения u° (i),
акцентируя внимание лишь на тех моментах, которые отличают
его от описанной выше процедуры. Кроме того, для разнообра¬
зия мы опишем предлагаемый способ не для системы вида (22.1),
но для квазилинейной системы
х = A (i) х 4- ц / (i, х (t)) 4- b (t) и, (22.27)
где малость нелинейной добавки / (i, х) определяется постоян¬
ным малым параметром ц. Таким образом, мы примем здесь, что
/ (i, х) — непрерывная по t и аналитическая по х функция, оп¬
ределенная при всех t из отрезка [ia, ip] и при всех х из области
& пространства {х}. Число ц будем считать достаточно малым, за¬
то краевые условия х (t^) = х* и х (ip) — х$ мы можем теперь
174
СВОЙСТВА ОПТИМАЛЬНОГО УПРАВЛЕНИЯ
[Гл. в
уже не стеснять требованием малости. Будем, следовательно,
искать управление и° (£), которое переводит систему (22.27) из
положения х )) = хл в положение х (£р) — х& и имеет притом
наименьшую возможную интенсивность и [м] (21.2). Систему ли¬
нейного приближения (22.3), соответствующую системе (22.27)
при р, = 0, будем снова считать вполне управляемой.
Как и в предыдущем случае, начнем построение искомого уп¬
равления u° (t), исходя из управления h 1 1 (t), решающего ана¬
логичную задачу 13.1, но для линейной системы (22.3). Пусть
это управление «(*) (t) мы нашли и пусть h1 1 (ха, оt) —порождае¬
мое им движение нелинейной системы (22.27). Это движение в
момент t — t$ будет приходить в некоторую точку h (яа, /р),
отличную, вообще говоря, от заданной точки ah Обозначим
ДуЫ = — х(1) (ха, tf). (22.28)
Важно заметить, что величина АуЧ разлагается в ряд по степе¬
ням р, причем это разложение начинается с члена не ниже, чем
линейного по р, т. е. АуЧ = р ос*1) + ... Мы примем, далее, так¬
же, что минимальная функция h° (т), порождающая по правилу
минимакса 17.1 управление uSl (Z), обладает тем свойством, кото¬
рое мы оговорили выше, в начале этого параграфа, когда изуча¬
ли систему (22.1) (см. стр. 166).
Теперь, опираясь на движение х^ (ха, t), мы составим новую
систему линейного приближения
y = A®(t) у +b(t) v, (22.29)
где элементы а$ матрицы А(1> (t) суть величины
«£>(()<“ (« + рГ[<1’ (22.30)
L Jx(l)(xa, i)
причем hi (t) — элементы A (I) и символ [dft/dxjlxWct) означает,
что частные производные dfi/dxj вычислены при xt = xt (ха, t).
Если теперь в уравнения (22.29) подставить v = u<x) (t) и
положить у (ta) = 0, то мы получим некоторое движение у№ (t)
этой системы, которое будет в момент t = ] приводиться в ка¬
кую-то точку о (1) («). Определив указанным путем вектор уМ (ty),
поставим перед собой следующую вспомогательную задачу 13.1:
найти управление v = u<2) (£), которое, имея наименьшую воз¬
можную норму х [и] (21.2), переводит систему (22.29) из поло¬
жения у (£«) = 0 в положение у (t$) = уМ (ty) Ду(1), где ве¬
личина Ay(L) определена как раз равенством (22.28). Такую за¬
дачу решать мы умеем. Оказывается теперь, что управление u<2)(Z)
приводит соответствующее движение х& (х*, t) исходной не¬
§ 22]
УПРАВЛЕНИЕ КВАЗИЛИНЕЙНЫМ ОБЪЕКТОМ
175
линейной системы (22.27) в положение х& (т“, £р), которое от¬
личается от заданного состояния х = х& уже на величину
Ду(2) = х$ — я(2) (ж“, р),
имеющую не ниже, чем второй порядок малости по pi. Высказан¬
ное утверждение, доказываемое на основании известных теорем о
разложении решений системы (22.27) в ряд по параметру р1 (см.
[12*], стр. 173), мы приводить не будем. Заметим лишь, что при
этом учитываются также оценки, аналогичные ' оценкам (22.4) —
(22.6), использованным выше в этом параграфе. Далее, отталки¬
ваясь от движения я(2>;яа, t), мы опять составляем новую систему ли¬
нейного приближения у=Аъ(1) У A-b(t) рит.д. Таким путем получа¬
ется сходящаяся последовательность функций u,c(t), аппроксими¬
рующая искомое оптимальное управление u°(t) для нелинейной зада¬
чи. Этим кратким описанием процедуры определения и° (Z) мы
здесь и ограничимся. Отметим лишь, что при действительном ее
осуществлении достаточно на каждом шаге вычислять все нужные
величины (ДгД^), (ха, t),... ит.д) лишь с точностью до членов
того же порядка по ц, что и номер к шага, или иногда на порядок
выше. Способы такого вычисления всех этих величин (при изве¬
стном управлении Uk> (£)) подробно излагаются в работах по
методу малого параметра, к которым мы
и отсылаем интересующегося читателя (см.,
например, книги [12*], [15*], [17*]). Заме¬
тим, наконец, что предположение об анали¬
тичности функции / (t, х) и явное введение
параметра ц являются также не обязатель¬
ными для возможности осуществления про¬
цедуры, подобной описанной. В последнем
случае, однако, уже затруднительно . полу¬
чать аналитические выражения для движений
хк (хЛ, t) и для других нужных величин
и вся задача должна решаться численным
методом.
Пример 22.2. Рассмотрим задачу о вращении вер- Рис. 22.1.
тикального стержня с лопастями, находящегося в
сосуде с жидкостью и управляемого моментом v
(рис. 22.1). Будем предполагать, что момент М силы сопротивления жидко¬
сти относительно оси вращения пропорционален квадрату угловой скорости
Ф вращения стержня. Примем поэтому, что М = ре I ф2, где р — коэффици¬
ент пропорциональности, который в дальнейшем мы будем рассматривать
как малый параметр; I — момент инерции вращающихся частей. Применяя
теорему об изменении момента количества движения (см. [22*], стр. 157),
получим:
й^ф . .
I “ЛГ = — iWsgn ф -|- v.
176
СВОЙСТВА ОПТИМА ЯВНОГО УПРА ВЛЕ НИЯ
[Гл. 6
Отсюда находим уравнения движения
*1 = х„, х„ = —ца-| - sgn х2 + и,
где
х± = ф;
. 1
х2 = ф; и = у и.
(22.31)
Пусть в начальный момент времени t* = 0 стержень находился в покое
и при этом x± ( (а ( = х± (0) = 0. Управление и (t) требуется определить так,
чтобы за время и = 2 стержень повернулся на угол х± = х± (2) = 2 и
его угловая скорость %2 (2) в этом положении равнялась нулю. При этом,
как мы условились в этом параграфе, в качестве интенсивности % [и] выбе¬
рем величину (21.2).
Примечание 22.1. Правая часть второго уравнения (22.31) не
является аналитической функцией, так как она содержит величину sgn х2,
неприятное влияние которой необходимо учитывать при вычислении после¬
довательных приближений. Однако, как увидит читатель ниже, при выб¬
ранных нами начальных я (0) и конечных х (2) условиях смены знака у
скорости ф (t) = Х2 (t) в последовательных приближениях не появляется и
все время Х2 (t) 0. Поэтому в дальнейшем величину sgn Х2 в уравнениях
(22.31) мы игнорируем.
Решим сначала аналогичную задачу для системы (22.31), но при р = 0,
т. е. найдем управление иU U (£), переводящее систему
±х = Х2 ±2 = и (22.32)
из заданного начального состояния х (t*) = х (0) = {0, 0} в заданное ко¬
нечное состояние х (*) = х (2) = {2,0} и имеющее при этом наименьшую'
возможную норму х [и(1] (21.2). Эта задача сводится к проблеме безуслов¬
ного минимума функции
2
ф (/2) = 11 — -ф ^2 | dx.
о
Следовательно, мини-
1 (1 - т) и
Величина ф ((^ достигает минимума при /2 ™ — 1/2.
мальная функция hQ (т) в данном случае имеет вид h° (т) =
поэтому
и(1)(«) = 2 sgn (1 — «).
(22.33)
Перейдем теперь к определению управления Для этого найдем сна¬
чала движение я(1)(ха, t) квазилинейной системы (22.31) при и = (t).
Произведя необходимые вычисления, получим:
4° W = a W + Н ai (0 + •••»
4° W = Р W + Р Pi (0 + — >
где
i2
2 — (t — 2)2
8 1
3 1 3 (z — 2)4
при 0 < t < 1,
при 1 и t и 2;
при 0 и t < 1,
при 1 U t U 2;
8
3
§ 22]
УПРАВЛЕНИЕ КВАЗИЛИНЕЙНЫМ ОБЪЕКТОМ
177
и
2Z
— 2(1 — 2)
8 4 ,
-у (г-23
при 0<3 <?1,
при 1 — t < 2;
при 0 < t < 1,
при 1 — t — 2.
Теперь составим новую систему линейного приближения (22.29). В нашем
случае
У1 = Уъ Уг = —2 рР(4)У2 + v-
(22.34)
Найдем движение у^ (4) системы (22.34) при v = (4) и начальном ус¬
ловии у (0) = 0. Имеем:
(Г) = а W + Н а2 (О + ■■■.
где
УЦ (t) = Р (*) + Р ₽2 (t) +
при О < t < 1,
«2 (0 = ’
16
16 2
1 3
з 1 з V-2)4
при 1 — t — 2;
8
-угз
при 0 — t — 1,
ММ) =
16 8
. 3 "З(* —2^')з
при 1 < t — 2.
Наконец, решим следующую вспомогательную задачу: требуется найти
управление v = гУ(£), которое, имея наименьшую возможную норму
х [и(22] (21.2), переводит ’ систему (22.34) из положения у (0) = 0 в по¬
ложение
у (2) = у™ (2) -Ь Al/1» = (2) + х (2) - х(1) (2) =
Г . 16 16 1 [8 8 1(8 8 )
-р —3-Ц - — 4 + {2’0} — {2~у * — -зр}=(-з-р, — ур •
Импульсная переходная матрица Я [ - , т] = Н [2,т] системы (22.34)
имеет вид
где
Н [2, т] =
А(1) W _ Г2 — Т + нт (*) + ■ ■ .]
Л(2) (т)] U+ НТ1 (т) + -• .J ’
Т(т) =
4
— 4 4т2 — у т8
у (г-)3
при 0<т< 1,
(— 4 + 2т-2
I- 2 (т - 2)2
при 1 — т < 2;
при 0 — т — 1,
при 1 < т < 2.
7100 =
178
СВОЙСТВА ОПТИМАЛЬНОГО УПРАВЛЕНИЯ
[Гл. 6
Вектор с (15.2) здесь определяется равенством
/8 8 \
с = У(2) = (2 - ур, — ур).
Поэтому для вычисления u(2) (t) следует решить задачу (21.4) на условный
экстремум, т. е. . найти
2
ф (У У = min . | (т) + W/2) (т) | dx
о
при условии
/ 2 а 8
h (2 — ур - у р7з = 1. (22.35)
Числа Zj и Z2 ищем в виде ряда:
1
li = у + . “Ь И2а1 + . .
1
1-1 = — у + р& + р’А + . • .
Подставляя эти выражения в (22.35), найдем:
1 4 ,
11 — 2 + 3 ' ■’
1
/з — — 2 + И& + • • •
При этом для определения числа Ъ получаем равенство
2
у/ = J [у H2/t(1) W -г Р^(2> sgn [{у ,- 4 M—2b) hW (г) ■ ■ I-
О
+ ( у + V’b'j Л<2) (T)J dx = 0.
Из последнего равенства вытекает следующий способ вычисления числа Ь.
Сначала найдем момент времени т = 1 + рД в который минимальная
функция 7i° (т) должна обращаться в нуль, и, следовательно, управление
(0 будет менять знак. Очевидно, что для этого следует удовлетворить
равенству
1+М 2
[у рМ(1) (т) + рЛ(2) (T)j dx = [у Р,2Л(1) (т) 4- рЛ<2) (т)] dX.
О 1+-Л
2
Из этого условия и находим, что d = Теперь можно определить величину
Ь из равенства
Отсюда получаем, что
имеет здесь вид
где
т2) =
§ 22] УПРАВЛЕНИЕ КВАЗИЛИНЕЙНЫМ ОБЪЕКТОМ 179
Ъ = 0. Следовательно, минимальная функция 7л° (т)
/г» (т) = у (1 — т) + № М.
2
т — у т3 при 0 < т < 1,
4 2
- -3- + 4т —— Зт2 + у т3 при 1 < т — 2.
Так - как р [/г° (т)] = 1/2, то управление —2 - (t) будет определяться равенством
u(2) (Z) — 2 sgn 2— (1 — т) + № (т)] . (22.36)
Как мы видим, управление и— (t) имеет ту же абсолютную величину, что и
u(1) (t) да.33^ и разница только в том, что теперь управление u2\t) меняет
знак не при г = 1, а при т = 1 + у ц. Управление и— (t) (22.36) перево¬
дит исходную квазилинейную систему (22.31) в заданное конечное состоя¬
ние ^(2,0) с точностью до членов второго порядка малости по р.
Мы закончим этот параграф рассмотрением нелинейной систе¬
мы, описываемой уравнением
х = f(t, х) 4— b(t) и, (22.37)
для которой укажем необходимые условия оптимальности управ¬
ления и (7), разрешающего задачу 4.2 при условии
шах -j и (7) || = min. (22.38)
Итак, предположим, что функция и = U (£) доставляет иско¬
мое оптимальное управление, которое порождает оптимальное
движение х° (7), причем max ||и (t) || = ц. Пусть
8х = A(t) 8х -|- Ь8и (22.39)
есть система, описывающая в линейном приближении отклонения
б х (t) от оптимального движения, вызванные варьированием 8u(t)
управления u(t). В (22.39) элементы ац (t) матрицы A(t) опреде¬
лены равенствами
ati (i) = Г-Д] •
L^Jx=x»(/)
Предположим, что для системы (22.39) при каждом t из от¬
резка [Za, — ] выполнено условие линейной независимости векто¬
ров &П1 (7) (см. стр. 148) или выполнено какое-либо другое
180
СВОЙСТВА ОПТИМАЛЬНОГО УПРАВЛЕНИЯ
[Гл. 6
условие, которое обеспечивает линейную независимость функций
A(i> Up, d на любом интервале (т, Ф) из отрезка U® Zp]. Составим
вектор
*3
с = h h Up, т] u° (т) dx. (22.40)
Справедливо утверждение: Оптимальное управление u° (t) яв¬
ляется релейной функцией, которая удовлетворяет условию
u°(t) = ц sgn Z>' U) S°(0,
(22.41)
где s°(t) — минимальное движение системы
s — — A
(22.42)
стесненное условием
= 1
(22.43)
и разрешающее при этом задачу на минимум
Ч
^|&' (t) s (t)|dt = min. (22.44)
*a
Наметим план доказательства, детальное проведение которого
предоставим читателю. Предположим от противного, что некото¬
рое оптимальное управление u°(t) с max || u° (t) || = ц условию
t
(22.41) не удовлетворяет, причем естественно предполагается, что
равенство (22.41) не выполняется по существу, т. е. оно не вы¬
полняется на множестве значений t из Ua, £р] ненулевой меры.
Тогда из материала предыдущих параграфов выводится, что су¬
ществует управление и = v (t), удовлетворяющее равенству
ч
с = § т] у (т)
(22.45)
причем
max || у О h Н —
(22.46)
и
max | v (£) — u° (t) | < e,
(22.47)
где е — наперед выбранное произвольно малое положительное
число. (В качестве v (t) достаточно выбрать управление v(t) =■
= (1 — е) u°(t) 4- е v°(t), где v°(t) — функция, удовлетворяющая
§ 23]
УПРАВЛЕНИЕ С МИНИМАЛЬНЫМ ИМПУЛЬСОМ
181
условию (22.45) и имеющая при этом наименьшую возможную
норму р* [у] = max || v (t) ||. Нетрудно убедиться, что при пашем
предположении р*[у°] = v < р.) В силу уравнения (22.39) изме¬
нение бя^1^) движения x(t),1 вызванное изменением управления
6u(t) = v (t) — uQ(t), определяется в линейном приближении
равенством
«3
бя(1) (ip) = § /i(ip,T] (р(т) —u0(т))<^■t,
причем правая часть этого равенства вследствие (22.40) и (22.45)
равна нулю. Отсюда с учетом (22.47) выводится, что рассматривае¬
мое варьирование управления и (t) приводит на самом деле лишь
к изменению 8х (£р), которое имеет второй порядок малости от¬
носительно е. После этого, следуя схеме рассуждений, приведен¬
ной в этом параграфе выше (см. стр. 173), можно построить пос¬
ледовательность функций v (t) = (t) , v2 (t),.., сходящуюся к
управлению и* (£), которое приводит движение х (t) (22.37) в
заданную точку х (fy) = х$. При этом вследствие (22.46) и (22.47)
при малом е >0 будет max||u* (t) || < ц. Тем самым приходим в
противоречие с предположением об оптимальности управления
u° (t). Полученное противоречие доказывает наше утверждение.
Заметим, что аналогичные рассуждения проходят и в случае век¬
торного управления и (t), а также в случаях других норм р* [и].
§ 23. Управление прц условии минимума импульса
управляющего воздействия
В этом параграфе мы рассмотрим задачу об оптимальном уп¬
равлении, включающую условие минимума интенсивности х [dU]
управляющего воздействия, в случае, когда уравнения движения
заданы в обобщенной форме (6.11), т. е.
dx (0 = A (t)x (t)dt +B(t)dU + dW (t). (23.1)
Напомним читателю (см. § 6, стр. 47), что запись (23.1) явля¬
ется лишь символическим указанием на то, что движение х (t)
управляемого объекта описывается равенством
t t
х (0 = X [/, Z.J x* + н [С, т] dU + X r] dW (23.2)
'а 4
^«^<*з; z(Z«=:ra; x(tp=x)
182
СВОЙСТВА ОПТИМАЛЬНОГО УПРАВЛЕНИЯ
[Гл. 6
Поясним сначала путь, который приводит нас к задачам, изу¬
чаемым в этом параграфе. С этой целью рассмотрим обычную уп¬
равляемую систему
х (t) = A (t) х (t) -|- В (t) и -]~w (0 (23.3)
и предположим, что величина и имеет смысл силы. Пусть нам тре¬
буется решить для системы (23.3) задачу об оптимальном управ¬
лении при условии минимума полного импульса силы и. В этом
случае в качестве интенсивности управления х [и] следовало бы
выбрать величину
Ч
% [и] = |u(r)|Jt, (23.4)
если и — скаляр, или величину
Ч
к [w] = § Т* [и (т)] dt, (23.5)
Ч
если и — вектор. Здесь символ у* [и] снова означает какую-ни¬
будь норму вектора и.
Однако на простых примерах можно убедиться в том, что такая
задача не будет иметь решения не только в классе возможных
управлений, но и в более широком классе допускаемых управле¬
ний. Именно, оказывается, что управляющие силы и (t), перево¬
дящие систему (23.3) из состояния хЛ в состояние х$ и имеющие
наименьший полный импульс, содержат в качестве слагаемых
мгновенные ударные воздействия, описываемые 6-функциями вре¬
мени. Указанное обстоятельство и вынуждает нас перейти от
системы (23.3) к обобщенной системе (23.1) и рассмотреть для
последней задачу 4.2. При этом интенсивности и*[и] (23.4), (23.5)
заменяются соответственно следующими интенсивностями х [dU]
обобщенного управления dU (см. Приложение, § 60):
%[dU} = J (23.6)
ч
%[dU] = 5 r‘li]. (23.7)
ч
Учитывая данную физическую интерпретацию, мы уддем на¬
зывать интенсивности (23.6), (23.7) полными импульсами управля¬
ющего воздействия dU. Сказанное здесь и объясняет применение
термина «импульс управляющего воздействия» в заглавии настоя¬
щего параграфа.
§ 23]
УПРАВЛЕНИЕ С МИНИМАЛЬНЫМ ИМПУЛЬСОМ
183
Существенно отметить, что все- рассматриваемые в этом параг¬
рафе задачи мы можем также объединить и по формальному ма¬
тематическому признаку. Именно, в соответствии с материалом
§ 14 заключаем, что величина х [dU], оценивающая ресурсы, зат¬
рачиваемые на управление на отрезке времени t- — t < tp, может
трактоваться как норма р* [фу]
х Wl = р* [С7] - р* [Фи1 (23.8)
линейной операции
фу lh (41 = $ h(x)dU (тХ
4
порождаемой функцией U (т) в пространстве ЗВ {h (т); Za 1 т <О₽}
непрерывных r-мерных вектор-функций h (т) = {h± (т),... Д. (т)}
с подходящей метрикой
р[Л((Г]= max у[Л(т)]. (23.9)
Примеры такого выбора нормы р [h (т)] для наиболее часто встре¬
чающихся в приложениях интенсивностей х [dU] указаны в таб¬
лице 14.1, которой мы и будем пользоваться.
Сказанное позволяет сформулировать исходную проблему 4.2
как задачу 14.1. Выше, в § 15, показано, что эта задача сводится
к проблеме моментов. При этом, однако, предполагалось, что сис¬
тема (23.1) подвержена скалярному воздействию dU и интенсив¬
ность этого воздействия х [dU] имеет вид (23.6). Аналогичные
рассуждения можно провести и в случае векторного управляю¬
щего воздействия dU с интенсивностью (23.7). Мы на них, одпако,
останавливаться не будем, так как никаких принципиально но¬
вых моментов по сравнению со скалярным случаем dU здесь не
возникает.
Условия разрешимости проблемы моментов, к которой сводит¬
ся, следовательно, задача 14.1, выяснены в § 16. Опираясь на эти
условия, в § 17 мы сформулировали правило минимакса для ре¬
шения задачи 13.1. Этим правилом, несколько видоизмененным,
следует пользоваться и при решении задачи 14.1. , Указанное
видоизменение состоит лишь в замене условий максимума (17.1)
и (17.6) соответственно условиями х)
4 4
$ №' (т) dU> = max $ hP (т) dU = 1 (23.10)
4 и ta
!) В дальнейшем, работая с обобщенными управлениями, мы будем ссы¬
латься на правила 17.1, 17.2; однако читатель должен помнить, что при этом
условия максимума (17.1), (17.6) заменяются на условия вида (23.10), (23.11).
(См. также § 47, стр. 387.)
184
СВОЙСТВА ОПТИМАЛЬНОГО УПРАВЛЕНИЯ
[Гл. 6
при и [df7] — 1/р° или
J h\x)dU° —
та х
и
Л0' (т) dU — v°
(23.11)
при х [d?7] — v°.
Опираясь на правило минимакса 17.1, приступим теперь к
решению задачи 14.1. Первый этап решения состоит, в определе¬
нии минимальной функции Д° (т) (16.15), порождаемой минималь¬
ным движением $°(т) сопряженной системы (17.3): hQ (т) — В-'(т)х
X s° (т).- Как и прежде, это движение s° \т) мы ищем в виде1)
$° (т) — S [т, Zp] - Z0, s' (Zp) • с = Р'-с = 1. Задача состоит, сле¬
довательно, в определении постоянного вектора Z0, для _ которого
функция h° (т) — В' (т) S [т, Zp] • Z° является , решением задачи
(16.8). _ Последняя формулируется здесь'следующим образом: найти
р° — min max у {Б’ (т) S [т, Zg] -Z] — max _ [ _ (т) 5° (т)] (23.12)
при l'c = 1.
Каки в других случаях, здесь можно исходить из правила 17.2,
работая с экстремальной функцией № (т) — В' (т) S _ [т, Zp] № =
— В' (т) s0 (т), определяя ее теперь из условия
v0 = max к'-с = ка-с (23.13)
к
при max у [5'(т) 5 [т, Zz]-&] — l.
Задачи (23.12), (23.13), как и аналоги задач (16.8), (13.17),
суть трудные проблемы, которые, к сожалению, не сводятся к
классическим вариационным задачам. Однамо в настоящее время
все-таки известны некоторые эффективные приемы их численного
решения, связанныэ с методами линейного и выпуклого програм¬
мирования (см., например, работу [8*]).
Заметим еще, что задачу (23.12) можно рассматривать также
как проблему из теории приближения функций. Поясним это.
Пусть для простоты U (т) — скалярная функция. Тогда, полагая
для определенности сп == 0 и выражая 1п через l (Z _ п), сведем
(23.12) к задаче на абсолютный минимум
п—1
Р° — mrn max I 2 lig(i} (т) — g (t) |
* 1=1
l) Или, когда это удобнее по правилу 17.3 в виде
)° (т) _ S [т, tj zo, s' (^) х* = Ю' х* = -1.
§ 23]
УПРАВЛЕНИЕ С МИНИМАЛЬНЫМ ИМПУЛЬСОМ
185
где функции gW (т) и g (т) выражаются известным образом через
функции -<’• (т), а числа - (i = 1,...,н) уже не связаны никакими
соотношениями. Но последняя задача есть не что иное, как зада-
п— 1
ча о выборе^ линейной комбинации h (т) = 2 h —•• (т), сос-
г=1
тавленной из заданных функций gW (т) и приближающей наи¬
лучшим образом (в метрике пространства $) другую заданную
функцию g (т). Таким образом, в (23.12) мы, действительно, име¬
ем типичную проблему наилучшего приближения функций в про¬
странстве ё. К сожалению, выяснение этого обстоятельства не
очень помогает делу, так как, несмотря на глубокую математичес¬
кую разработку общих вопросов, теория приближения функций
не изобилует вычислительными алгоритмами для эффективного
решения конкретных задач, подобных задаче (23.12). Во всяком
случае, будем далее предполагать, что минимальную функцию
А (т) (или экстремальную функцию h° (т)) удалось тем или иным
способом найти, а вместе с тем стало известным и число р°.
Предполагаем, как всегда, что задача имеет решение, т. е.
р0°>0. Для того чтобы последнее условие выполнялось при лю¬
бых х* и х?, необходимо и достаточно, чтобы Н' [Zp, т] -Z =
= В' (т) S [т, Zp] • • — О при I =£= 0. А это условие в свою очередь
эквивалентно условию полной управляемости, данному теоре¬
мой 19.1. Таким образом устанавливается, кстати, что использова¬
ние обобщенных управлений dU (Z) не расширяет свойств управляе¬
мости системы (см. замечание на стр. 145).
Мы подошли теперь ко второму этапу решения задачи, когда,
имея минимальную функцию А (т), нам надлежит определить оп¬
тимальное управление dU° (т), опираясь на условие максимума
(23.10).
! Рассмотрим сначала случай скалярного управляющего воздей¬
ствия dU. Интенсивность управления х [dU] определяется в этом
случае равенством (23.6) и поэтому (см. таблицу 14.1)
р[/г(т)] = max |й(т)|. (2314)
Будем предполагать, что функция £ (т) = | h° (т) | достигает своего
наибольшего значения -р° (23.12) лишь в конечном числе точек
Tj (/ = 1, . . ., т) из промежутка Za — т — Zp. Например, в слу¬
чае постоянных параметров системы (А = const; В = Ъ = const
в (23.1)) указанное условие выполняется, если векторы Ь, АЬ, . . .
. . ., АП-1Ь линейно независимы и матрица А неособая. В самом деле,
если бы у функции £ (т) = | h° (т) | на отрезке [Za, Zp]j6imio беско¬
нечное число максимумов, то производная dh° (x)/dx имела бы на
этом отрезке бесконечное число нулей. Но Д° (т) есть функция
186
СВОЙСТВА ОПТИМАЛЬНОГО УПРАВЛЕНИЯ
[Гл. 6
аналитическая, и поэтому в таком случае она была бы по¬
стоянной. Однако при указанных нами условиях Л° (т) быть
постоянной не может. Действительно, если предположить, что
Ю (т) = b's° (т) = const, то выполнялись бы соотношения
dh° ((;)/ dx = — {Ab}' s° (т) = 0,.... (Th j dx1 = (— 1)” {An&}'so(it),
из которых в силу линейной независимости векторов b, АЬ, . . .,
Аи^Ь вытекало бы равенство s° (т) = 0, которое невозможно вслед¬
ствие краевого условия c's° (£р) = 1.
Покажем теперь, что функция U° (т), определяющая искомое
оптимальное управление dU° (т), является кусочно-постоянной с
разрывами непрерывности только в точках т7- ( = 1, . . ., т).
Для этого достаточно показать, что полное изменение var [ U°] функ¬
ции U° (т) на любом отрезке [£х, £2], не содержащем точек т- равно
нулю. Покажем это. В самом деле, если отрезок [ [ , t2] не содержит
точек Xj, то
max | А. (т) | < щах |А0(т) |. (23.15)
С другой стороны, опираясь на условие максимума (23.10), мы
можем записать неравенство
max | h° (х) | • var = р [А0 (т)] • р* [£7° (т)] =
*3
= \ Л° (т) dU° (т) , max | ИР (т) | • var +
га
4- max | h° (т) | • var [ U0 [ [[ + max | h° (г) | • var*[LT°].₽ . (23.16)
г]
Очевидно, вследствие равенства
var И4']/*' = var [f/0]£ + var + var (и°]^
соотношения (23.15), (23.16) могут одновременно выполняться
лишь при условии
var [U° (г))]* = 0.
Это и доказывает наше утверждение.
Пусть теперь управляющее воздействие dU — вектор и интен¬
сивность х [dU] этого воздействия определяется равенством (23.0).
Как и прежде, мы будем предполагать, что вектор-функция
£ (т) = у [Д° (т)] из (23.12) достигает своего наибольшего значе¬
ния р0 (23.12) лишь в конечном числе точек Xj (j = 1, . . ., m).
§ 23]
УПРАВЛЕНИЕ С МИНИМАЛЬНЫМ ИМПУЛЬСОМ
187
Тогда вектор-функция U° (т), определяющая искомое оптималь¬
ное управление dU° (£), является кусочно-постоянной функцией
с разрывами непрерывности только в точках xj (/ = 1, . . т).
Мы не будем здесь останавливаться на доказательстве этого ут¬
верждения, так как оно складывается из рассуждений, совершен¬
но аналогичных тем, которые мы привели выше в случае скаляр¬
ного воздействия dU.
Таким образом, мы приходим к выводу, что искомая функция
[7° (т), определяющая оптимальное управляющее воздействие dU°,
имеет вид
UQ (х) =
qW = О при
при тх < X < т2,
(23.17)
2(т) при Хт < t <fg,
если xm==tp, или вид
' g(°) = 0 при
при
t/x. Т,
T1 << X Т2,
/■"(Щ =
q(m'~1) при Tn-i < Т < Хт,
. qM при Tm =
(23.18)
есйи xm=^$ (предполагается, что T^tj-i)-
Обозначим
рО) = д(;) — д(;-1) (/ = 1, . . ., т). (23.19)
Условие максимума (23.10) трансформируется теперь в условие
/г°' (т) P(J) = max A°' (т) р при х* [р] = Y* [р0’) (23.20)
р
(7 = 1 .. .,т),
причем
Г* [р(1) + . . . + Г* [р») 1 = 1 /Р°. (23.21)
Кроме того, векторы рЫ (7 = 1, . . ., т) должны удовлетворять
уравнениям
A[i]' Ti] • . + h,Y [if3, rm] • р^) =Ci (i = 1,. . .,n),
(23.22)
в которые превращается здесь система (15.6). В частности, если
dU — скаляр, то условие (23.20) означает, что sgn р, = sgn^°(T7).
Если же управляющее воздействие dU — вектор и у* [dU] =
= || dU ||, то условие (23.20) означает, что векторы р, и hQ (т;)
одинаково направлены,
188
СВОЙСТВА оптимального управления
[Гл. 6
Используя понятие 6-функции (см. § 7), мы можем также ска¬
зать, что воздействие на систему (23.1) обобщенного управления
dUQ (7), определяемого функцией С7° (т) (23.17), (23.18), экви¬
валентно воздействию на систему (23.3) импульсного управления
т
и (£), равного и (f) = ^Pp®b(t— т,). Здесь постоянные векторы
. ;=!
р® (23.19) характеризуют, следовательно, величину мгновенных
импульсов и обладают свойством
sgnpn =sgn — (т;) (А = 1, . . . , г; 7 = 1, . . . , т). (23.23)
Итак, мы можем записать оптимальное управляющее воздей¬
ствие dU° в виде
dt7° (t) = 2 p(i) 6 (t — T)) dt. (23.24)
i=i
Заметим, что при — = tm величину 6 (t — тт) в (23.24) следует
понимать в смысле 6~ (t — хт) (см. § 7, стр. 50).
Результаты наших рассуждений мы объединим в — следующую
теорему.
Теорема 23.1. Рассмотрим задачу 14.1. Пусть миними¬
зируется интенсивность х [dU] вида (23.7). Пусть s° (t) — то из
движений s (t) сопряженной системы (17.3), удовлетворяющих крае¬
вому условию s0' (£р) — = 1, для которого максимум отклонения
от нуля порождаемой им функции h° (т) = В' (т) -s0 (т) (измерен¬
ного в метрике у [А]) является минимальным. Здесь
•
с = х& — X [ - , t«| х* — - X [(, т] dW.
Если указанное отклонение р° отлично от нуля, то задача 14.1
об оптимальном управлении системой (23.1) имеет решение, при¬
чем число р° и определяет как раз минимальное значение полного
импульса и [dU°] оптимальной управляющей силы dU° (t), равное
1/р°. Это воздействие dU° (t) представляет собой последователь¬
ность мгновенных ударных воздействий, описываемых б-функциями
р® 6 (t — Xj) (j = 1,..,т) и прилагаемых к управляемой системе в
те моменты времени xj (j = 1,...,т), когда отклонение от нуля
у [А° (т)] минимальной функции hQ (т) достигает своего наиболь¬
шего значения р°. В частности, если y*|dU] ~||с?7||, то у [А0] =
— || Д° (т) || и направление вектора р® совпадает с направлением
вектора h° (т,-)-
§ 23]
УПРАВЛЕНИЕ С МИНИМАЛЬНЫМ ИМПУЛЬСОМ
189
На основании этой теоремы мы можем указать следующую
процедуру решения задачи об оптимальном управлении систе¬
мой (23.1).
Для того чтобы решить указанную задачу, следует:
1) по заданной интенсивности и [dCZ] (23.7) выбрать метрику
р (А(т)] (23.9) так, чтобы величина х [dU] имела смысл нормы
р* [£7] (23.8);
2) найти, опираясь на условия (23.12), минимальное движение
s°|(Z) сопряженной системы (17.3), определив тем самым мини¬
мальную функцию h° (т) = В' (т) s° (т) и максимум р° (23.12) ее
отклонения у [А0 (т)] от нуля;
3) определить моменты времени t = т (/ = 1,..., тг),в которые
это отклонение у [Л° (т)] достигает своего наибольшего значе¬
ния р°;
4) для определения оптимального управления dU° (23.24) вос¬
пользоваться условиями максимума (23.20), (23.21); если этого
окажется недостаточно, то надлежит составить систему уравне¬
ний (23.22) и привлечь ее • к определению величин pW.
Пункты 2) — 4) соответствуют правилам минимакса 17.1,
17.3, опирающимся на минимальную функцию Л° (т). Аналогич¬
ным образом - они строятся, если за основу выбирается экст¬
ремальная, функция — (т), фигурирующая в правилах 17.2, 17.4.
В частности, пункты 2) и 3) формулируются тогда следующим
образом:
2) найти, опираясь на условие (23.13), экстремальное движение
sa (t) сопряженной системы (17.3), определив тем самым экстре¬
мальную функцию № (т) = В' (т) s° (т) и число v° (23.13), опре¬
деляющее норму оптимального управления dU0: x[dU°] =
= р* [С70] = v°.
3) определить моменты времени t = Xj (/ =1...., m), в кото¬
рые отклонение у [Д° (т)] экстремальной функции h° (т) от нуля
достигает своего наибольшего значения, равного единице.
Теорема 23.1, на основе которой мы изложили процедуру ре¬
шения задачи об оптимальном управлении системой (23.1), уста¬
новлена нами в предположении, что отклонение у [Л°] от нуля
минимальной функции h° (т) достигает своего наибольшего зна¬
чения р° лишь в отдельные изолированные моменты времени Ту
(/ = 1,..., т). В случаях, когда это условие не выполняется (нап¬
ример, когда № (т) = const), для определения управления dU°
необходимо привлекать дополнительные соображения. Не об¬
суждая этот вопрос подробно, отметим лишь, что и в таких слу¬
чаях управление dU° (t) следует искать в виде последовательности
импульсов. При этом моменты времени t = Xj следует выбирать
тогда из условия, чтобы ранг матрицы F {h;1-1 (т;)} (Z = 1, ..., п;
k = 1,..., г; / = 1,...,тг) системы (23.22) был равен рангу ее
190
СВОЙСТВА ОПТИМАЛЬНОГО УПРАВЛЕНИЯ
[Гл.
6
расширенной матрицы (F, с) и чтобы решение этой системыудовлет- '
воряло ограничению (23.21). Более того, на примерах, рассмат¬
риваемых ниже, можно убедиться, что число т моментов вре¬
мени t = Ту удается выбрать не превосходящим порядка п сис¬
темы (23.1). Мы не будем останавливаться на подробном общем
разборе возникающей здесь ситуации, отсылая интересующегося
читателя к специальной литературе [1106, д; 123а; 3896]. От¬
метим лишь, что определение моментов т7- может быть, например,
осуществлено путем малой деформации параметров системы,
начальных условий или вида интенсивности х [dU] с последую¬
щим предельным переходом (см. ниже конец этого параграфа,
а также конец § 24).
Перейдем к конкретным примерам.
Пример 23.1. Рассмотрим задачу, поставленную в § 14 (стр. 90), о пере¬
воде материальной точки т на круговую орбиту, охватывающую центр
масс М. Будем предполагать и здесь, что реактивная масса выбрасывается
с постоянной по модулю относительной скоростью в направлении, перпен¬
дикулярном к радиусу-вектору точки. Уравнения движения точки могут
быть тогда записаны в виде (см. (14.13), (21.10))
dxy = dt, \
dxv< = — xidt 4- хз dt, 1 (23.25)
dx3 = dU. /
В качестве интенсивности к [сШ], оценивающей ресурсы, затрачиваемые
на управление на отрезке времени 0 & t & Л мы выберем величину (23.6)
полного импульса управляющей силы dU. В § 14 показано, что минимиза¬
ция импульса (23.6) может быть истолкована как исполнение требования о
наименьшем расходе реактивной массы (0). В соответствии с общей про¬
цедурой решения, прежде всего, надлежало бы определить по заданной ин¬
тенсивности х [dZ7] (23.6) норму р [h (т)] (23.9). Но мы уже знаем, что
р [h (т)] определяется в этом случае равенством (23.14). Следуя правилу ф
17.2, найдем экстремальную функцию & (т), опираясь на условия (23.13)-
Функция h (?) =В' (т) S [т, fg- &, фигурирующая в (23.13), вычислена уже
в § 21 и определяется формулой (21.11). Запишем ее в виде
h (т) = ki + ka ф /^ф fc® - sin (Т — т - £), (23.26)
где tg £ = k—jk2. Задача (23.26) может быть теперь сформулирована так: найти
v° = max (ci&i > cf^a ф сэ^) (23.27)
к
при max | к± -ф- к3 ф У /с? ф- /с?- sin (Т & т -а £) | < 1, где компоненты q векто¬
ра с определены равенством (21.13).
Для наглядности рассмотрим случай, когда Т = 4л. Тогда нетрудно
сообразить, что задача (23.27) сводится к следующему: найти
V° = max [q%i 4- с2%2 -ф- с3%4 (23.28)
§ 23]
УПРАВЛЕНИЕ С МИНИМ А .ЯВНЫМ ИМПУЛЬСОМ
191
при
|Хз|-г /%1 -I- Х| = 1-
(23.29)
Здесь введены обозначения: -- k\, = kz, % = + Ад; c = £3о — *10,
С3 — — #20( Сз — — *30«
Равенство (23.29) определяет в пространстве {%г, %2, %3) поверхность & , сос¬
тавленную из конусов (рис. 23.1). Гео¬
метрически задача (23.28), (23.29) озна¬
чает, что среди всех плоскостей & & ка¬
сающихся поверхности ©, следует найти
ту, которая ортогональна к вектору с;
точка касания {%£ & &} этой плоско¬
сти с поверхностью & и определит иско¬
мый вектор
Х° = <Хг Хг- Хз)-
Из рис. 23.1 видно, что если вектор с
ортогонален боковой поверхности & & то
плоскость касается конической поверх¬
ности по образующей и, следовательно,
задача (23.28), (23.29) имеет бесчислен¬
ное множество решений Если же
вектор с не ортогонален к поверхно¬
сти & , то плоскость касается © лишь в
одной точке и, следовательно, задача
(23.28), (23.29) имеет единственное ре¬
шение
Таким образом, видим, что решение
Рис. 23.1.
этой задачи доставляет вектор
хс = {ci/у« +4- А/ у4 + 4. о},
'(23.30)
если угол ф (см. рис. 23.1) таков:
ф = - у — arccos | сз|/||с|| = — — arccos —7 —
/(*30 — *10)2 + *20 + *30
или вектор
(23.31)
если
Х° = {0, О, sgn Сз},
(23.32)
ф = — arccos _. *3q1 .. . . .
У О30 — *ю/ + ^2о +
Предположим сначала, что выполняется условие (23.31).
(23.26), (23.28), (23.30) получаем, что экстремальная функция
деляется равенствами
/г° (Т) =. — sin (Т + £) = У (ж30 — хм)® + х|0 •Л°(т),
Г]О— *ПО
= &_ (0<£<2«).
(23.33)
Тогда из
№ (т) опре-
(23.34)
192
СВОЙСТВА ОПТИМАЛЬНОГО УПРАВЛЕНИЯ
[Гл. G
Следовательно, отклонение от нуля у [Л° (т)] = | Л° (т) | минимальной фун¬
кции 7г° (т) достигает своего максимума)
1
ро = , ■ • =
|/ (*зо — *ю)2 4 *2о
(23.35)
в моменты времени
T = уН2/—^—0 = arctg
(7 = 1.....4),
-10 — *30)
*20 /
(23.36)
если Я20 4 0, или в моменты времени
т = я( — 1) ( = 1,..., 5),"j
если я2о = 0. Условий максимума (23.20), (23.21) здесь недостаточно для
полного определения всех величин р(;). Поэтому составим систему уравнений
(23.22). В случае (23.31) при #20 =/= 0 эта система имеет вид
(23.37)
(1 — sin g°) р(1) 4 (1 4 sin £°) р(2> + (1 — sin g°) р<3) 4
4(14 sin £°)= — Хю,
— cos £° + cos £°р(2) — cos S0^3) 4 cos £°р(4)=—*2о,
р{1) __ р(2) __ р(3) р(4) =
и результат ее разрешения при ограничении (23.21)
I Р(1) I -I- I Р2> | + I Р(3) I + I Pi} I = У(*30 — *ю)2 + *2о
следующий: р(1', р(2) р(3) р^4)— произвольные числа, стескснные
I Р(1> I 4 I Р(3) 1= '41^(Z30 _ ^TJO^ + *2° — *30 Sgn *20J ,
Sgn = Sgn р<3> =
| Р(2) I 4 I P(4) I = У { V(*30 — *1»)2 4 -20 + *30 s8n -so},
Sgn p(2) = Sgn p(4) = Sgn #20.
При #20 = 0 система (23.22), соответствующая случаю (23.31),
0 • р(1) 4 2р(2) + 0 • р(3) 4 2р(4) 4 0 • р(5) = — я^ '
0-р(1) 4 0-р(2) 4 0-р(3) 4 0-р(4) 4 0*р(5) = 0,
р(1) 4 р(2) 4 р(3) 4 р(4) 4 р(5) — — *зо, .
и результат ее разрешения при ограничении (23.21)
I PW I 4 ... 4 | Р(5) I = V(*зо — Мо)2 -1- *20
— sgn (Г20,
(23.38)
условиям
(23.39)
имеет вид
(23.40)
§ 23]
УПРАВЛЕНИЕ С МИНИМАЛЬНЫМ ИМПУЛЬСОМ
193
следующий: р1^ ^.^р^ — любые чиcла, стесненные условиями
р(2) 4- Pw — — 4 д.м>.
sgn р(2) = sgnp(4) = sgn (ж0 — Жо)
р(1) + р(8) 4- р(5) — — Гд0 4— A Ж°
sgn р(1) = sgn р(3) = sgn р<5) = — sgn (жо — Гю).
(23.41)
Таким образом, если начальные условия *р (i = 1, 2, 3) удовлетворяют
соотношению (23.31), то оптимальное управляющее воздействие dU° (23.24)
может быть представлено в виде: (при *20 =/= 0)
dl/a (t) = |р<!>6 (t — -А- + g°) + р<2> 6 (t - у л + +
+Р(8>в((—+ $)+Р4 6 (23.42)
где р(г) (i = 1,...,4) удовлетворяют (23.39); (при ж° = °)
dU° (<) = {р(1) б (0 + р2> б (t — л) + р(3) 6(t — 2л) + р(4) 6 (t — Зл) +
+ р(6) б" (t — 4л)} dt, (23.43)
где р(г) (i = 1,...,5) удовлетворяют (23.41). Из (23.39), (23.41) следуеж что
число импульсов р(г) б (t — т$) в (23.42), (23.43) может быть выбрано (и не¬
однозначно!) не превосходящим порядка системы.
Предположим теперь, что начальные условия удовлетворяют соотно¬
шению (23.33). Тогда из (23.26), (23.28), (23.32) получаем, что минимальная
функция h° (т) тождественна постоянной:
л°(т) = --Д' (23-44)
и, следовательно, отклонение | h° (т) | ее от нуля есть также величина посто¬
янная, равная
|Л° (т) | = 1/ | *30 I = Р°. (23 45)
Ограничимся для простоты случаем, когда вектор с (см. рис. 23.1) направ¬
лен по оси и %3, т. е. *20 = 0, *w = *30, и проверим, что оптимальное управ¬
ляющее воздействие dU° может быть здесь также построено в виде (23.24).
Управляющее воздействие dU° ищем в виде
dU° = {р(« б (t — t,) + р(2> б (t — та)) dt, (23.46)
где тх, т2 — некоторые моменты времени из промежутка 0 11р 4л.
Система уравнений (23.22) может быть представлена в виде
рС) Cos Tj 4- р 1 cos т2 = 0,
р(1) sin ж 4- р2> sin т2 = 0
р(1) _|_ р(2) = — хо.
(23А1)
Попробуем выбрать, например, тх = л, та = 4л. Разрешая тогда систему
Уравнений (23.47) при ограничении (23.21)
|р(1) 1 + 1 р<2) 1 = 1 1 |.
7 Н. н. Красовский
194
СВОЙСТВА ОПТИМАЛЬНОГО УПРАВЛЕНИЯ
[Гл. 6
находим, что
1
Таким образом, оптимальное управляющее воздействие dU° (t) может
быть выбрано равным
dU<> (Z) = — {6 (t — л) 4- 6~(* — 4л)} dt.
Приведенный пример показывает, что рассматриваемая в этом параг¬
рафе задача об оптимальном управлении • имеет, вообще говоря, не единст¬
венное решение.
Пример 23.2. Рассмотрим задачу об управлении материальной точкой,
движущейся в вертикальной плоскости под действием реактивной силы и
силы тяжести. Эта задача уже изучалась в • • 18 и 21. Обобщенные уравнения
движения точки могут быть представлены в виде
dxi = xzdt, dxz = dUi,
dxs = xtdt, dxi = dU2 — gdt.
(23.48)
Здесь величины dUt и dU2 вводятся точно так же, как и в примере 14.1. Мы
будем минимизировать величину
1
к [rftf] = < Ус^Ц2[ 4- dU*. (23.49)
О
Это означает (см. § 14), что мы хотим осуществить перевод точки из состоя¬
ния х (0) == {—1, 0,0 0} в состояние х (1) = {0, 0,0,0} с минималь¬
ным расходом запаса реактивной массы (0). Прежде всего, пользуясь таб-
лицей14.1, определяем норму р [h (т)] (23.9) по заданной интенсивности
х [dZ7] (23.49):
Р [Л(т)] = шах [А® (т) -К h*
Будем исходить из правила 17.1. Минимальную функцию h° (г) будем
определять из условия (23.12). Функции h (т) = В' (т) s (т) = B' (т) S X
X [т, tg]-Z и постоянный вектор с из (23.13) вычислены уже в*§ 18 (см. стр.
187). В соответствии с этими данными задача (23.12) сформулируется так:
найти
ро = min max {[Zi (1 — т) 4 Z2Ja 4- [Zs (1 — т) 4- Z4]a},/2 (2Э50)
I
при
Zi 4 Iз 4" gh = 1 .
Нетрудно заметить, что при любом выборе Z наибольшим значением
функции / (т, Z) = dZx (1 — т) + Z2]2 + [Z3 (1 — т) + Z1]2},/2 будет одно
из йй значений
/ Z) = [(Zx + z2)2 + (Z3 + Z^)2]^
б 23]
управление с минимальным импульсом
195
Зафиксируем значение функции X (Z) = / (1, Z):
X (Z) = / (1,Z) = ц,
и решим задачу: найти
= min / (О, Z) £23.51)
Z
при
/ (1, Z) = Т, li + 2 h gh — 1.
Для решения задачи (23.51) воспользуемся методом • неопределенных
множителей Лагранжа (см., например, § 18). В результате получаем, что
решение доставляют числа
ю £2!
4 - /6*+4_ '
,0 — О /О 9/0
Z2 - g lv Z3 — g2 + 4 )
(23.52)
Подставляем величины (23.52) в выра¬
жение (23.51); найдем функцию £ = £(р):
(23-53)
Построим графики функций £ = £ (ц)
и £ = ц (рис. 23.2). Так как число р°
(23.12) равно минимуму наибольшей из величин / (0,Z) и / (1,/), то из рис.
23.2 заключаем, что этот минимум достигается в данном случае при условии,
когда / <0, Z) = / (1 ZZ, т. е. при т] = т)° = 1/ У g2 + 4. Следовательно,
Числа Z? (Z = 1,...,4) окончательно
(23.52)):
1
2
определяются равенствами (см.
(23.54)
4
+ 2
Ч ”■ g2 + 4 ’ 2
2
g2 + 4.
2=0р=.
(23.55)
4
g34*4
Ро = $ (П°) = по =
и, следовательно, минимальная функция h° (т) равна
Л0(Т)=[
лДт)
^(т)
(23.56)
Мы уже отметили выше, что отклонение у [А0 (т)] = {[А® (т)]2 +
+ [22 (т)]2},/2 этой функции от нуля достигает наибольшего значения в мо¬
мент времени t в 0 и t » 1. Теперь для определения оптимального управле¬
ния dUQ (23.24) следует найти векторы p{t) и р(2), исходя из условий (23.20),
(23.21).
7*
196
СВОЙСТВА ОПТИМАЛЬНОГО УПРАВЛЕНИЯ
[Гл. 6
Векторы h° (0) и h° (1) равны соответственно
Г 2 -1
Г “ 1
Ло(О) =
g ■
. A'(l) =
?4-4
g
g2 + 4 J
g'+4 J
Векторы р § 1 § и р § 2§
т. е. в данном случае
коллинеарны h° (0) и h° (1); поэтому, учитывая (23.21),
|| + || р ( 2 > || = W + 4 ;
(23.57)
трудно сообразить, что
Таким образом, искомое оптимальное управление dU° (23.24) имеет вид
■ 1 '
' — 1"
dUo(t) =
£
6 (t) dt +
8
_ 2 _
_ 2 _
6“ (г — i)dt
(23.58)
и сводится, следовательно, к двум импульсам.
Мы изучили сейчас задачу о перебросе в вертикальной плоскости
тяжелой материальной точки, предполагая заданными ее положения и скоро¬
сти в начальный и конечный моменты движения. Рассмотрим теперь подоб¬
ную же задачу, считая, однако, заданными лишь начальное и конечное по¬
ложения точки и ее начальную скорость и не ограничивая ее скорость в ко¬
нечный момент движения (см. § 13). Итак рассмотрим задачу об управлении
материальной точкой, движущейся под действием реактивной силы и силы
тяжести согласно уравнениям (23.48) из состояния х (ta) = {я®}, = 0 в
состояние х (&) = {0, х2 (^), 0, х± (fy)}, tу = 1, где на величины х2 (1),
х± (1) не наложено никаких ограничений. Это движение требуется осуществить
с минимальным расходом запаса реактивной массы т § (0). Поэтому в каче¬
стве интенсивности управления мы снова выбираем величину (23.49). Задача,
следовательно, состоит в определении воздействия
условиям (см. § 1):
1
\(1-т}){7« = i-x; = с,
О
1
J(l-r)<h« = -f-^ = C2,
О
х [d Z^°] = min к [d UJ,
удовлетворяющего
I
(23.59)
Из результатов р § 15—17 вытекает, что при решении задачи (23.59), (23.60)
мы можем в основных частях следовать указанной на стр. 184 процедуре.
Особенность здесь состоит лишь в том, что минимальную функцию Л»(т)
£ 23]
УПРАВЛЕНИЕ С МИНИМАЛЬНЫМ ИМПУЛЬСОМ
197
необходимо определить среди функций h (т) вида
(23.61)
причем, как и прежде, р [h (т)] = max [hJ (т) + (т)]‘ Задача (23.12)
принимает здесь вид: найти р° = min max [(1 — т)2 l* + (1 — т)2 /| ра
l т '
при • -• - + с3 = 1. Совершенно ясно, что функция £ (т) = [(1 — т)2 Z- +
+(1—при любых lit 13 достигает своего наибольшего значения при
т = 0 и это значение равно (Z, + ф^2. °гсюда сразу следует, что
и функция • h9 (т) имеет вид
Таким образом, искомое оптимальное управляющее воздействие dU0 (Z)
представляет собой единственный импульс в начальный момент движения
dU9(t) =
= 6 (Z) dt
У (I-*')2 + (0/2-*“)2
~г ^— 6 (Z) dt
У((-х“)2 + (//2-^)*
что, конечно, нетрудно было сообразить сразу из физических обстоятельств.
Разберем еще один случай, когда минимальная функция А (т)
оказывается тождественно постоянной и, следовательно, когда
эта функция не доставляет информации о тех моментах времени
t = ту, в которые должны прилагаться управляющие импульсные
воздействия. На следующем ниже примере будет показано, как
эти моменты можно определить, используя малую деформацию
параметров системы (см. выше стр. 190). При этом мы ограничимся
лишь,разбором простейшей конкретной задачи. Развитие описы¬
ваемых далее рассуждений и их обоснование в общем случае мож¬
но порекомендовать интересующемуся читателю в качестве полез¬
ного самостоятельного исследования.
Пример 23.3. Рассмотрим материальную точку на прямой g. Пусть
эту точку, массу которой т примем равной единице, требуется пере¬
вести из начального положения g (0) = gx = — 1 g (0) = £х = v (v > 1) в
198
СВОЙСТВА ОПТИМАЛЬНОГО УПРАВЛЕНИЯ
[Гл. 6
состояние покоя £ (1) — — 0 £ (1) — ^ — 0 при условии минимума им¬
пульса управляющей силы и (t), т. е. при условии
1 1
| и (т) | dx =Л | dU (т) | — min. (23.62)
6 о
Эта задача, конечно, решается сразу из физических соображений, от¬
куда выводится, что оптимальное управление uQ(t) можно выбрать в форме
единственного импульсного воздействия
и (Z) — —. о6 > (23.63)
которое прилагается, следовательно, в момент t = тг — 1/о. Мы, однако,
проследим здесь регулярный «научный» путь решения этой задачи с тем,
чтобы проиллюстрировать на нем метод деформации системы.
Составим уравнения движения в нормальной форме (23.1). Полагая
1 = 1 = __ получим:
dxt — х% dt, ■ dx2 — dU. (23.64)
Система, сопряженная к системе (23.64), имеет вид
$1 — 0, $2 — — 51, (23.65)
и ее фундаментальная матрица S [Z, Zo] такова:
£ р 4 Я- (.- io) 0 Г (23'66)
В данном случае
= 0, ^ — 1, поэтому минимальную функцию hQ (т) в соответствии с ма¬
териалом на стр. 184—189 надлежит искать в виде
где вектор Z° — (Zj, 1%) является решением задачи
max | Z2 — ZiT | — min (0<т<1) (23.68)
т I
при условии
Z'z® — (Z1, Z2)
(23.69)
Нетрудно проверить, что последнюю задачу (23.68), (23.69) разрешают
числа I® —0, Z® — —1/о. Следовательно, минимальная функция
1
А° (т) — — — — const
§ 23]
УПРАВЛЕНИЕ С МИНИМАЛЬНЫМ ИМПУЛЬСОМ
199
оказывается тождественно равной постоянному числу, и действительно, в
данном случае эта функция не доставляет информации о момептах t == Tj,
когда должны прилагаться импульсные воздействия.
Составим вспомогательную задачу. Сопоставим системе (23.64) новую
систему
dxr = x2dt, dx2 = —8 Хг dt + dU, (23.70)
где постоянная е > 0 — малый параметр. При е -> 0 уравнения (23.70)
переходят в исходные уравнения (23.64). Рассмотрим снова задачу об управ¬
лении при условии (23.62), но теперь уже для вспомогательной системы
(23.70), полагая, однако, снова х* = — l,v), = (0,0). Система (23.70)
удовлетворяет условиям, указанным на стр. 185 —186. Поэтому минималь¬
ная функция Tig (т), отвечающая новой задаче об управлении системой
(23.70), обязательно будет неособой и будет, следовательно, доставлять ин¬
формацию о моментах t = в которые должны прилагаться импульсные
воздействия. (Напомним, что t == т( — это те точки, в которых функция
||Л°(£) II достигает своего наибольшего, , значения.) Вычисляя эти значения
и рассматривая их поведение при е —> 0, мы и определим моменты
х- = Птт!е) при е-—■О, (23.71)
в которые должны прилагаться импульсные управления в исходной задаче
об управлении системой (23.64). (Строгое .обоснование того правдоподобного
утверждения, что величины (23.71), действительно, в общем случае достав¬
ляют нужные значения t = Tj, мы оставляем в стороне и ограничимся ниже
лишь соответствующими выкладками, определяющими число тп уже извест¬
ное нам здесь в частном случае из физических соображений.) Итак, начнем
решать задачу об управлении системой (23.70), опираясь на теорему 23.1.
Система, сопряженная к системе (23.70), имеет вид
s 1 $2, 52 (23 .72)
и ее фундаментальная матрица Sz [г, £0] такова:
COS 8 (Z — to) 8 sin 8 (— to)
1 •
— — sin 8 (Z — to) COS 8 (t — to)
Следовательно, минимальную функцию h® (т) надлежит здесь искать в
виде
h® (т) = B'SZ [т, 0] /(е) = /<£> cos 8Т - - - - — sin вт, (23.73)
где вектор I--- = (l^, 1^) является решением задачи
I - I
ре = max | /2Cos8T — /i —- sin ет | = min (0«<т< 1) (23.74)
при условии (23.69). Можно сообразить, что в данном случае при малых
значениях е график минимальной функции — (т) (23.73) будет иметь вид,
изображенный на рис. 23.3, причем
200
СВОЙСТВА ОПТИМАЛЬНОГО УПРАВЛЕНИЯ
[Гл. О
где функции fa (е) уничтожаются при е -> 0. Для оценки этих функций мы
ограничимся в выражении (23.73) лишь членами вплоть до второго порядка
малости по малой величине т е. Функции Д (е) будем также аппроксимиро¬
вать многочленами по е, ограничиваясь лишь второй степенью е. При этом
важно заметить, что члены с первой степенью е в разложении величин
и 1^ должны отсутствовать, ибо в против¬
ном случае график функции h® (т) имел бы
вид, изображенный на рис. 23.3 пункти¬
ром, а это для минимальной функции h®
невозможно, так как max | h®
т
< шах | h° (т) |. Итак, будем искать
т
мальную функцию h® (т) в виде
WM0 - № ~
Эта функция имеет минимум в
/<е>
т(е) ~ __ .
1 ~ вМ/<е) •
Теперь для оценки числа т I I остает¬
ся вычислить величины и Т| I из усло¬
вий (23.74), (23.69). Таким образом, дело
значений I т т и при которых величина
__ 14 -
“ I 2 е./«> + J
= _Г1 ' ■ + , Л
L 2 /<«> . еа + '• J
достигает минимума. Искомые значения ТIе I , как легко подсчитать, будут
/(е) ~ _L Ез
Д1 — v2 ь *
Отсюда и из (23.74), (23.75)
= v +
сводится к определению таких
е2 (т^е02
I»(г?) | - -А” + /[е)т‘е> + /)■> —
(Т) |<
мини¬
точке
(23.75)
9
Ф—-v - — *
получаем окончательно:
1 1 о
Ре “ V 2v3 е “I '
где /з (е) -> 0 при е -> 0. Но это и означает, что предел (23.71) доставляет
нам искомую величину тх = 1/v.
Подчеркнем, что описанная процедура определения моментов в общем
случае годится, пожалуй, скорее лишь для теоретического исследования
вопроса, так как практическое осуществление ее связано с большими тех¬
ническими трудностями.
В заключение этого параграфа отметим следующее интересное
обстоятельство, на которое обратил внимание автора Ю. М. Ре¬
пин. Пусть для простоты управление и (t) является скалярной
§ 23]
УПРАВЛЕНИЕ С МИНИМАЛЬМЫМ ИМПУЛЬСОМ
201
функцией, а система (23.1) — стационарной. Импульсные управ¬
ления вида и (t) = 6 (t — ta) являются простейшими примерами
обобщенных Можно теперь, обобщая еще понятие
допускаемого управления, попытаться строить воздействия и (t)
в виде линейной комбинации
u (< = [ (t — Q 4- Р26<1> (t — t») + . . . +?n6(n_1) ( — ta), (23.06)
где символы 6<’> (t — ta) обозначают последовательные обобщен¬
ные производные от б-функции. Тогда, желая разрешить задачу
об управлении 4.1 за счет управления u(t) вида (23.06), мы долж¬
ны удовлетворить уравнению
п
с= j X 0 U , т] b (23.00)
*« 4=1 J
где вектор с определен равенствами (15.2). Вычисляя правую часть
равенства (23.00) по известным правилам работы с обобщенными
функциями, получим из (23.00) векторное уравнение
q =Pi Ь + р^АЬ + ...+ pnA”-ib (q = ХЦ, ta]c), (23.08)
из которого следует, что числа р, суть коэффициенты разложения
вектора с по векторам b, Ab, ..., А”~1Ь и задача разрешима при лю¬
бых краевых условиях х* и х9 тогда и только тогда, когда эти
векторы b, ЛЬ,..., Ап~1Ъ линейно независимы. Таким образом, мы
снова приходим к условиям управляемости, выведенным в § 19.
Само собой разумеется, что управление (23.06) является лишь абст¬
рактной математической конструкцией, ибо точная реализация
обобщенного управления (23.06), очевидно, невозможна. Однако
данное рассмотрение полезно для изучения задачи управления
системой (23.1) в случаях, когда отрезок [£а, tx + в], на котором
прилагается воздействие и (t), желательно иметь весьма малым,
ибо в этом случае обобщенные воздействия №( — ta) можно ап¬
проксимировать обыкновенными функциями, полагая, например,
1
6(( — Q = — при <<£<£а + e, 6(« — <„) = 0 при £>£х + е
6(1) (t — Q = 0 при U u <<<£а+ у , 6 ’ (t — tx) =
= П₽И *«+У<*<А + 8,
6а) (< — ta) — 0 при £ > £а + е, . . .
и так далее.
*) Мы предполагаем далее, что читатель знаком с простейшими понятия¬
ми теории обобщенных функций (см., например, [6*, 26*]. См. также § 40,
стр. 380).
202
СВОЙСТВА ОПТИМАЛЬНОГО УПРАВЛЕНИЯ
[Гл. 6
§ 24. Численное решение задачи об управлении
В этом параграфе мы опишем численный метод решения задачи
об оптимальном управлении, основанный на той общей теории,
которая была развита в предыдущих параграфах. Предлагаемый
метод будет продемонстрирован на конкретных примерах, при
решении которых выявятся основные особенности вычислитель¬
ной процедуры. Читатель, разобравшийся в предыдущем материа¬
ле книги и в решении приведенных примеров, сможет самостоя¬
тельно составить план вычислений и в других случаях, попадаю¬
щих под рассматриваемую или аналогичную схемы.
Итак, обратимся к задаче 13.1. Если при решении этой задачи
пользоваться правилом 17.1, то возникает проблема вычисления
минимума
п
min р [B'S Hg, т] Z] = min р [2 (*)1 = р° (24.1)
4=1 J
при условии
п
3^1 = 1. (24.2)
г=1
Именно эта задача на условный минимум и доставляет наиболь¬
шие трудности при решении кццкретных задач об управлении.
В тех сравнительно простых примерах, которые были разобраны
в § 18—21, задачу (24.1), (24.2) удавалось решить из элементар¬
ных соображений. В более сложных случаях приходится прибе¬
гать к численным методам. Одним из распространенных способов
численного решения задач на минимум является метод наискорей¬
шего спуска и различные усовершенствованные его модификации.
Подробно с этими методами можно познакомиться, например, по
книге [8*]. Здесь же мы опишем лишь простейшую (в принципе!),
вычислительную процедуру применительно к нашей задаче (24.1),
(24.2).
Будем предполагать, что система (13.1), для которой постав¬
лена задача 13.1 об оптимальном управлении, является вполне
управляемой на заданном отрезке времени т "С h (см. §§ 19,
20) и, следовательно, функции UU (т), фигурирующие в (24.1),
линейно независимы. Это предположение о линейной независи¬
мости функций U U (т) не уменьшает общности, так как в про¬
тивном случае дело сводится к проблеме, аналогичной задаче
(24.1), (24.2), но с меньшим, чем тг, количеством функций № (т).
Последние функции UU уже будут линейно независимыми (см.
§ 16, стр. 108).
§ 24 J
ЧИСЛЕННОЕ РЕШЕНИЕ ЗАДАЧИ ОБ УПРАВЛЕНИИ
203
Рис, 24.1.
Перейдем теперь к рассмотрению упомянутого численного
метода решения задачи (24.1), (24.2). Рассмотрим n-мерное про¬
странство переменных ... . . . !п. Уравнение (24.2) определяет в про¬
странстве {ZJ некоторую гиперплоскость (л) (см. рис. 24.1, где для
наглядности выбрано п = 3).
Решение задачи (24.1),
(24.2) состоит в определении
на плоскости (л) такой точки
Z° = {Zi,...,Zn}, в которой до¬
стигается минимум функции
(24.1). (Таких точек, вообще
говоря, может быть больше
одной (см., например, §§ 23,
21), но это не вносит прин¬
ципиальных изменений в рас¬
суждения.) Величина
п
Р[ 221(T)J = Г Еь • • •. п
4=i J
(24.3)
в пространстве {Zn . . ., Zn}
имеет смысл нормы вектора
Z. Это нетрудно проверить,
опираясь на линейную не¬
зависимость функций ЛМ (т)
и учитывая, что величина
р [Л(т) 1 есть норма в про¬
странстве ЗВ {Л (т)}. Такую проверку мы опустим, предостав¬
ляя ее читателю (см. также § 13). Теперь заключаем, что по¬
верхности уровня у [Z] = т], пересекаясь с гиперплоскостью (л),
образуют семейство выпуклых замкнутых поверхностей, стяги¬
вающихся при убывании т] к точке /о. (В случае, когда решение
задачи (24.1), (24.2) не единственно, такие поверхности при убы¬
вании т] будут стягиваться к многообразию точек {/о}.) Указан¬
ное обстоятельство определяет следующий способ вычисления
координат точки Z0. Выберем на гиперплоскости какую-либо
точку Z(1> = {Z(2, ..., Z(2} и будем двигаться от этой точки по ги¬
перплоскости все время в направлении наискорейшего убывания
функции у [Z1?...,ZJ. В результате получим некоторую кривую £,
примыкающую к искомой точке /о (см. рис. 24.1). Итак, задача
поиска точки /о сводится к построению кривой £. Эту кривую мож¬
но, например, построить следующим образом. Пользуясь (24.2),
исключим в выражении для у [Z1,...,ZnJ одну из переменных Z7.
204
СВОЙСТВА ОПТИМАЛЬНОГО УПРАВЛЕНИЯ
[Гл. 6
Пусть для определенности это будет Zn. Тогда получим некоторую
функцию со ./„-J, где аргументы l уже не связаны никакими
соотношениями. Введем вдоль кривой £ параметр Ф, трактуя его
как время, отсчитываемое при движении точки {ZJ вдоль £ от
точки Z(1) к ' точке Z0 Следовательно, на кривой £ величины Ц
являются функциями от Ф, т. е. Z; = lt (й*). Тогда условие наи¬
скорейшего убывания функции со [Z1,...,ln_iJ вдоль кривой £ тре¬
бует, чтобы вектор скорости dlldft — {dlt/d#} точки Z (Ф), дви¬
жущейся по £, был все время коллинеарен вектору grad со =
— {д(х/дЦ} (Z = l,...,n — 1), но направлен в противоположную
сторону. Это условие дает дифференциальное уравнение
l d® [Zp . . . , Z„_]
dft dL
(24.4)
где е >0 — коэффициент пропорциональности, определяющий
скорость движения по кривой С. Этот коэффициент выбирается из
соображений удобства счета и в процессе вычислений его можно
менять. Численное интегрирование уравнений (24.4), отправля¬
ясь от точки Z(1> и составляет в данном случае метод наискорей¬
шего спуска для проблемы (24.1), (24.2). В частности, если решать
это уравнение методом ломаных Эйлера с шагом Дф, то для вы¬
числения последовательности точек Z Ы — I (у = 1, 2-,...)л
сходящихся к точке Z0 получим рекуррентные соотношения
<24-5)
Описанный метод мы разберем теперь на следующих конкретных
примерах.
Рассмотрим задачу о приведении в меридиан гироскопического
компаса с гидравлическим успокоителем собственных колебаний.
Уравнения прецессионного движения этого гирокомпаса
ХЛ — а12х2 Л13Х3 л,
Хъ — «21^1,
— аугРъ лзз*з,
(24.6)
взяты из книги [1936], где читатель и может найти пояснение ме¬
ханического смысла величин х±, х2, х3. Коэффициенты уравнений
(24.6) суть постоянные величины, определенным образом выража¬
ющиеся через параметры системы. Эти параметры гирокомпаса
таковы, что характеристическое уравнение системы (24.6)
§ 24] ЧИСЛЕННОЕ РЕШЕНИЕ ЗАДАЧИ ОБ УПРАВЛЕНИИ 205
при и = 0 имеет один вещественный корень & >0 и два ком¬
плексных сопряженных корня %2,з — а ± ф (а 0).
Приведение гирокомпаса в меридиан, т. е. приведение его в
состояние Xi = 0, после пуска в ход выполняется путем прило¬
жения к гирокомпасу добавочной внешней силы и (t). Таким пу¬
тем приходим к следующей задаче.
Задача 24.1. Требуется выбрать закон изменения этой си¬
лы, исходя из требования, чтобы к моменту времени & = Т ги¬
рокомпас, описываемый уравнениями (24.6), был приведен из
начального состояния х <(ta) = х (0) = х* в меридиан, т. е. в
состояние х (Т) ™ х& —= 0. Удобный эффективный способ реше¬
ния этой задачи дан в цитированной книге • [1936], причем там
искалось управление и (t) по возможности простой структуры и
не стесненное требованием оптимальности. Здесь для сравнения
мы решим задачу при тех же числовых данных, что и в книге
[1936], однако будем искать такое оптимальное управление
и° (Z), для которого максимальное значение модуля | u9 (t) | на от¬
резке [0, Г] есть величина, наименьшая из возможных, т. е.
шах(|и0 (т)|, & & Т) = min. (24.7)
т и
Оптимальное управление и° (t), решающее задачу (24.6), (24.7),
как показано в § 21, имеет вид
п
и° • • • = &■ sgn B &S [ •• • ТЧ° = & sgn ( 3 (0 =
?=1
= A sgn (ZZZ(1) (t) + (Z) + Z>(3) (Z)), (24.8)
r
где величины p° и Z® являются решением задачи на условный экс¬
тремум
т з
mm & 1 2 ^Л<!) (т) 1 dx — mm у [Z, Z2, Z3] = p° (24.9)
1 0 i=1 1
при Z.jZi + Ic + l3c3 = 1. (Напомним, что величины Ct определя¬
ются краевыми условиями я®, х& задачи, а функции & & & (т) вы¬
числяются известным образом по фундаментальной матрице сис¬
темы (24.6).)
Для нахождения чисел Z®, при которых достигается минимум
(24.9), применим описанную выше процедуру наискорейшего
спуска по величинам Z,. Для этого исключим из выражения (24.9)
для у [Zx, Z2, Z3] величину Z3. Это можно сделать, так как при
избранных нами числовых данных оказывается, что с3=)= 0
206
СВОЙСТВА ОПТИМАЛЬНОГО УПРАВЛЕНИЯ
[Гл. 6
(см. (24.12)). Получим функцию
О Ui, М = jj | Z1 (л(1) (Т) — /г(3) (т)) +
О
+ 12(/}(х)--№(х)) |dt. (24.10)
т
Производная дУд1 от величины £ = § |/ (т, /) | dx вычисляет¬
ся, как известно, по формуле
- о
о
Поэтому производные ды/дЦ (i = 1,2) имеют здесь вид
X = | [»<» « — i )h (.)] sgn [■ (»«> (Т) - —S— *<« «)) +
+ Z. (*“’«)——J А‘- (”) + '^]Л.
5— — J [ft<« W _ 2. *<•> (г)] sgn [I. ) h" 1 « — £*«(<)) +
+ Z (&ю (т) —J *“> (T>) + )] <Н,
и, следовательно, дифференциальные уравнения (24.4), описы¬
вающие изменение величин Ц (ft) (i = 1,2) вдоль кривой £,
принимают здесь следующую форму:
= — 8 3 [л(1) ) h) - § A<3) (т)] sgn [Z (л<« ) h) — £ А3 (т)) +
о
+ Z, (д(2) (т) — /г(3) (т)) + дх,
Й = —8 J [А(2) <т) ~ Ih{3) W] 3§n pi Ю - i W) +
0
(24.11)
+ Z (л(2) (т) — —J A3 (t)) + дх.
§ 24]
ЧИСЛЕННОЕ РЕШЕНИЕ ЗАДАЧИ ОБ УПРАВЛЕНИИ
207
Пример 24.1. Система (24.11) интегрировалась на ЭВЦМ методом ко¬
нечных разностей, т. е. дело сводилось к последовательному вычислению
величин 12’) о = 1.2,...) из соотношений вида (24.5), составленных в
соответствии с (24.11). Вычисления велись до тех пор, пока не прекращалось
понижение значения со [Zx, Z2] в пределах выбранной точности. При этом в
процессе вычислений интегралы в правых частях (24.11) также заменялись
их приближенными выражениями через соответствующие интегральные сум¬
мы. Задача решалась при следующих данных:
л(1) (0) = «<р ех,( + зИИ и U cos з* - Зи и U sin з*;
№ (Z) = а<« е1 + р<р cos pi - р<р eat sin pz;'
h{>' (Z) = 1p eX1‘ + eal cos pi — ел{ sin pZ;
a<i) = —0,4438; P<)) = р 1,4140; P*p = — 0,0572;
a2p = —°,°2°7; pW = 0,0207; p<2) = 0,0559;
a<» = 0,0503; P'P = -0,0503; P<g> =-0,0304; (24.12)
Xi = — 0,8824-10-8; a = — 0.3088-10~3;
3 = 0,9481 - IO*; Г = 1800;
X! (0) = 0,3; x2 (0) = хз (0) = 0,004.
X1 (T) = x2 (T) = x3 (T) = 0; ci = — 0,0287;
C2 = 0,0139; C3 = — 0,0101.
Эти данные, как уже отмечалось, получаются в соответствии с их выраже¬
ниями (8.4), (15.2), если воспользоваться числовыми значениями для пара¬
метров (24.6) и для величин Т и xf, x^ указанных в книге [1936].
Интегрирование уравнений (24.11) было выполнено на цифровой вычи¬
слительной машине «Урал II», исходя из начального условия Z(1) = {0; —145
—298, 5643} с шагом ДО = 18. Получившаяся при этом последовательность
Z(>> и и [Zy>] привела к величинам
р° = lim со [№] = 2147,5177; Zj = lim Z<<> = 0,8397;
1% = lim = - 140,2842; ZZ° = lim ' = - 294,4653.
j —>OO j —>0Ю
Следовательно, минимальная функция hQ (т) в данном случае имеет вид
h? (t) = — 12,2804е_°’8824’10~3( + 13,О951е-0,3088.1о-’( cos 0,9481 • IO"2/ —
— 1,0618е—0,3088-10-ч gin 0,9481 • 10~8z, (24.13)
а оптимальное управление и° (t) на основании (24.8)
ио (Z) = 0,4657- 10"« sgn (— 12,28О4е_0’8824'1о_>* + 13,«951в—).зо®>•1о-•< х
X cos 0,9481 -10-sZ — 1,0618е~°’3088 10-3< sin0,9481-10-3Z. (24.14)
208
СВО ЙСТВА ОПТИМАЛЬНОГО УПРАВЛЕНИЯ
[Гл. 6
График этого оптимального управления приведен на рис. 24.2, где также
представлены соответствующие кривые (t), х2 (t) и (t). Одновременно
на рис. 24.3 изображены график управления и (t) и графики функций xt (t),
т2 (0, х3 (0), отвечающие решению такой же задачи об управлении, данному
в книге [1936]. Полезно сравнить управление
-0,6501-10“3 при 0<т<000,
и (т) = I 0,0>522*I0~3 при 600 <т< 1200, (24.15)
—0,4377. Ю-з при 1200 <т< 1800,
§ 24] ЧИСЛЕННОЕ РЕШЕНИЕ ЗАДАЧИ ОБ УПРАВЛЕНИИ
209
найденное в книге [1936] и имеющее норму max | и (t) | = 0,6401*10 3 с опти-
t
мальным управлением (24.14). Как и следовало ожидать, мы видим, что
max | и° (0 | = 0,4657-10-3 < max | и (t) | — 0,6401 -10’3.
Однако разница между нормой оптимального управления u° (t) и нормой
управления и (t), найденного в книге [1936] более простым способом, не столь
велика (см. рис. 24.2, 24.3).
Обсудим теперь более сложную ситуацию. Рассмотрим мате¬
риальную точку массы т, движущуюся в центральном поле сил
тяготения, создаваемом другой точкой массы М(М* т), под
действием управляющей реактивной силы, возникающей при выб¬
расывании реактивной массы по какому-либо направлению, ле¬
жащему в плоскости, где движется точка т (см. п.5° § 3). Пусть,
как и выше, в примере 23.1, требуется перевести эту точку
на заданную круговую орбиту Г° радиуса г0. Однако теперь мы
несколько усложним задачу, предположив, прежде всего, что на¬
правление, по. которому выбрасывается реактивная масса, теперь
не является фиксированным! (как это было в примере 23.1), но может
изменяться в процессе управления. Тогда в уравнениях движения
(3.23), к которым мы снова должны здесь обратиться, величины аг
и Яф следует считать переменными. В соответствии с этим вместо
одного скалярного управления и, которое фигурирует в уравне¬
ниях (3.23), введем теперь векторное управляющее воздействие
{U1, щ} с компонентами и± = аги, и2 = а*и. Итак, примем, что
движение точки т в линейном приближении описывается урав¬
нениями:
= х21
. v 2 У vr о .
•Ъ = Т *1 + —-у- *3 + ^1,
' о
Х3 = Го«2.
(24.16)
Возвращаясь к постановке} задачи, потребуем еще дополни¬
тельно, чтобы добавочные ускорения, возникающие за счет управ¬
ляющих усилий, не превосходили наперед заданных пределов,
причем сохраним пожелание о наименьшем расходе реактивной
массы. Проблема перевода точки с исходной орбиты на орбиту Г°,
сформулированная выше, трансформируется теперь в следую¬
щую задачу.
Задача 24.2. Пусть движение материальной точки т
описывается системой линейных дифференциальных уравнений
(24.16). Требуется, найти управление и ~ {их, и} которое бы
переводило систему (24.16) из начального состояния х (0) — х* в
конечное состояние x (Т) = 0 за время Т и такое, чтобы при этом
210
СВОЙСТВА ОПТИМАЛЬНОГО УПРАВЛЕНИЯ
[Гл. 6
импульс силы, был минимален
т
$ (Mi(T) + и2 (t))‘/2dt = mill, (24.17)
о
а величина управляющей силы не превосходила бы наперед заданного
значения fx, m. е.
[и* (t) + и* при всех t. (24.18)
Задача 24.2 отличается от задачи, изученной нами в § 23,
тем, что содержит дополнительное ограничение (24.18) *). Для
ее решения рассмотрим сначала вспомогательную задачу ■ 13.1, где
интенсивность выберем в виде
хх [w] = max [max (uf (т) + и* (t))’/s,
т
(м? (т) +
о
Здесь % — пока еще неопределенное постоянное положительное .
число, способ подбора которого будет пояснен ниже. Интенсив¬
ность ха [и] такого рода уже встречалась выше, в § 4, где и был
пояснен ее смысл. Вспомогательную задачу можно решать спосо- •
бом, описанным в этой монографии. Согласно таблице 12.1 (см.
§ 12) величина р* [и] = хх [и] (24.19) имеет смысл нормы р* [и]
вектор-функции и (т) = {и± (т), и2 (т)}. Эта норма совпадает с
нормой соответствующей линейной операции
т
фц[Л(т))1 = 5 /l'(T)M(T)dT,-
о
выполняемой в пространстве интегрируемых вектор-функций
h (т) = {hy (т), h2 (т)} с нормой
Р [h (т)1 = sup $ [Л? (т) + /г (Т)]'/2^г, )
д д ) (24.20)
o(A)=min(l,T). ]
x) В отличие от § 23 здесь не требуется переход к обобщенным управле"
ниям, так как дополнительное ограничение (24.18) обеспечивает сохранение
оптимального управления в классе обычных допускаемых управлений и (t),
которые вследствие этого ограничения не могут вырождаться в импульсные
воздействия, как это было в § 23.
2d ЧИСЛЕННОЕ РЕШЕНИЕ ЗАДАЧИ. ОБ УПРАВЛЕНИИ 211
Здесь символ Д означает систему промежутков из отрезка [0, 7],
и, следовательно, в (24.20) максимум вычисляется по всем воз¬
можным системам таких отрезков с заданной суммарной длиной
(или, точнее говоря, мерой а (Д)).
Таким образом, имеем следующую вспомогательную задачу:
среди множества интегрируемых, ограниченных на [0, 71] функ¬
ций и (t) = {и± (Z), и2 (t)} найти такую функцию и* (Z), которая
обеспечила бы перевод системы (24.16) из положения х (0) = х*
в положение х (Т) = 0 за время Т и которая имела бы при этом
наименьшую возможную норму р*[п/| = хх [zzx] (24.19). За¬
метим, прежде всего, что данная задача, действительно, разреши¬
ма, так как ■ система (24.16) является вполне управляемой, в чем
читатель может легко убедиться, проверив условия управляе¬
мости (см. § 19). Итак, задавшись некоторым числом % >0, об¬
ратимся для решения соответствующей задачи к правилу 17.3..
В соответствии с этим правилом надлежит решить задачу (17.10),
(17.11). Обозначим символом &X(T) минимальную функцию,
п
h (т) = 5'? (т) = B'S [г, М ? (Q = B'S [т, М I = 3 ZVIiJ (т),
г=1
отвечающую рассматриваемой задаче. Нам надлежит, следова¬
тельно, найти вектор Iх = {l\ 1%}, для которого вектор-функ¬
ция Дх(т) имеет наименьшую возможную норму (24.20), т. е. над¬
лежит решить следующую задачу на условный экстремум:
2 3
min max $ [ 3 (3 (г))2 * *]dx =
= и2(У\А‘1«)Тл = |>‘ (24-21>
4=1 2=1 ' J
при условии
1 о (ДХ = о (А) = min (^ г) , (24.22)
2=1
где Дг] (т) = </Х1(т)} — столбцы матрицы B>S [т, ct =
= — xf. Для решения задачи отыскания минимума (2-4.21), (24.22)
(при выбранном фиксированном X) применим процедуру опреде¬
ления /х и Дх методом наискорейшего спуска по величинам
Составим функцию
2 3
т [А, В, Ы = max 4 3 ( 3 Л/П W)2 Г’dx (24.23)
Л д f=l
212
СВОЙСТВА ОПТИМАЛЬНОГО УПРАВЛЕНИЯ
[Гл. О>
и исключим из нее переменную Z3, пользуясь соотношением
(24. 22), получим функцию со [Zn Z2]
[Z1, Z2] =
= m‘x., [ 2 [ 2 '• W - -/!” w) + V /?> (г)]1 Г dx =
A k=i 1—1
— ( [З I— h + (24.24)
A(0 A—1 i—l ' С3 •
Теперь нам следует, исходя из какого-нибудь начального усло¬
вия {Z2X°} (/ = 1,2), спуститься в силу уравнений (24.4) по кри¬
вой £ до искомой точки (Zj'}, где со [Z*, Z2] = min. Уравнения
(24.4) имеют в данном случае вид
&—• . [2 (/!"«-.J/l’M X
А(О К — I
х (2 [2 ««(‘VW —w) + '’] Л. (24.25)
к—1 j—l ,
Частные производные в правой части (24.25) получаются диффе¬
ренцированием по li как подынтегрального выражения в (24.24),
так и всего интеграла по переменной области интегрирования
Д (Z). Однако вследствие того, что при Д = Д (Z) правая часть (24.24)
имеет максимум, оказывается, что последнее дифференцирование
имеет результатом нуль.
Здесь, впрочем, возникает дополнительная трудность спуска,
которая состоит в том, что система отрезков Д(/) в правой части
(24.25) зависит от значений I г (О). Следовательно, если мы будем
решать уравнения (24.25), например, методом конечных разностей,
т. е. будем использовать рекуррентные соотношения (24.5), кото¬
рые здесь принимают вид
до J [3 (Л« (т)-А- (Т), х
А(0 /—1
х 2 [ 2 ■ " -J К' О)) + ) г (24.20)
а—1 г—1
то нам придется на каждом шаге пересчитывать систему отрезков
Д (ДО), исходя из условия
[( [2(2 2О’''Л - тах¬
А (!) *—1 г—1 Д
(24.27)
§ 241 ЧИСЛЕННОЕ РЕШЕНИЕ ЗАДАЧИ ОВ УПРАВЛЕНИИ 213
Поясним один простейший способ приближенного вычисления
системы отрезков легко реализуемый на цифровой вы¬
числительной машине. Ограничимся при этом случаем, когда
<(Д) = 1/1 <С Т, так как в случае Д = [0, 71] в процедуре спуска
по lt не встречается никаких особенностей по сравнению с пре¬
дыдущим примером, ибо тогда система отрезков Д ( ( ( ( ( ( = [О, Т|
не меняется. Итак, пусть о(Д (Z^)) = 1/Х. Возьмем функцию
»₽ (т /)={ 2 [ 2 ( ( (A,] (т- -gл31 (т))+(24.28)
/=1 1=1
Ясно, что при каждом Z(P система Д(/0')) состоит из отрезков
на [О, Т], где функция w (т, Z) принимает значения не меньшие,
чем вне системы A(/0)). Отсюда следует такой способ определе¬
ния этой ( системы Д (Z^), отвечающий какому-либо набору чисел
(Z = 162). Разобьем отрезок [О, Т1 на m, равных и весьма ма¬
лых частей точками ( ( = /Дт (Z —0, 1,,.../к). Заменим интеграл
(24.24) соответствующей интегральной суммой и максимум ин¬
теграла (24.24) заменим также максимумом этой интегральной
суммы. Последний максимум достигается на системе отрезков
[•%. ч + Дт] ( ( =
(24.29)
Здесь символ Е [о(Д )/Д т] означает целую часть числа о (Д)/Дт.
Суммарная длина этих отрезков, расположенных в области наи¬
больших значений функции w (т, Z) (24.28), равняется приближен¬
но величине 1/Х. Вычислим поэтому значения функции w (т^, Z) =
= в точках деления ( ( и расположим полученные числа Wi в
порядке убывания ((( > wti ... > w^. .Тогда приближенно
искомая система, на которой достигается максимум (24.24), будет
слагаться из отрезков
[т^, т? + Дт] (q = (24.30)
Значение функции со [ 1 ] определится теперь приближен¬
ным равенством
<0 [/?■>, /£’■>] — Дт 3 w , (24.31)
9=1 q
а уравнения (24.26) запишутся в виде
ДтДФ, (24.32)
214
СВОЙСТВА ОПТИМАЛЬНОГО УПРАВЛЕНИЯ
[Гл. 6
причем точность вычислений, естественно, повышается с увели
чением числа т.
Итак, теперь для определения чисел I* и системы отрезков Дх,
исходя из каких-либо значений ( ( § , надлежит найти последова¬
тельности и Д ( ,,( . Тогда Zx = lim ,, при / —> оо . При этом,
к сожалению, после каждого шага вычислений по формулам
(24.32) приходится снова выбирать систему отрезков До>, где
функция w (т, Z(Z) принимает наибольшее значение/
Найдя числа Z* и соответствующую систему Дх, мы можем оп¬
ределить и минимальную функцию Дх(т) = zZ/[1(t) + z£ /[2](т)-+
+ Zj /[31 (т) и норму оптимального управления и\х), равную
х[их] = 1/рх. После этого находим само оптимальное управле¬
ние, исходя из условия максимума
г
т
Дх' (т) ux (т) dx
№' (т) и (т) dx
(24.33)
= max \
и J
О
при
т
Ни (*) II < -4- * % g IIм (т) и . < •
Р О Р
Нетрудно сообразить, что управление их(т), удовлетворяющее
условиям (24.33), будет отличным от нуля лишь на системе от¬
резков Дх, причем на этих отрезках функция их(т) удовлетворяет
условию || их(т) || = 1/рх и, кроме того, выполняется соотноше¬
ние их(т) = £ (т)Ах (т) (см. аналогичный случай в § , 21, 23). Следо¬
вательно, теперь мы цожем записать; что их(т) = Ах (т)/рх || Ах(т)||
при т из системы отрезков Дх и их (т) = О при т вне Дх.
Таким образом, задаваясь величиной X, мы можем решить
вспомогательную задачу: найти функцию их (т), разрешающую'
задачу о приведении системы (24.16) в состояние х (Т) = 0 и
имеющую при этом наименьшую норму хх ^х] = 1/рх. Для того
чтобы найти теперь решение исходной задачи, необходимо подоб¬
рать % так, чтобы удовлетворялось условие шах ||ггх(т)| = — = р.
т р
Легко сообразить, что с ростом к величина шах || их(т)|| растет,
т
причем можно проверить, что шах || их(т)|| есть непрерывная
функция к и выполняется соотношение lim max||uX (Z) || = оо при
к —>■ оо. Отсюда вытекает следующее заключение: исходная
задача имеет решение, если существует такое значение , >0
§ 24]
ЧИСЛЕННОЕ РЕШЕНИЕ ЗАДАЧИ ОБ УПРАВЛЕНИИ
215
параметра для которого выполняется условие
max || и* (г) || = —ц.
Т Р
В таком случае решение задачи сводится к последовательно¬
му решению описанных только что вспомогательных задач, где
величины % подбираются так, чтобы величина . max ||пх(т)|| =
= 1/рх сходилась к р.. В частности, приближенное определение
искомого значения % = Х° может быть сведено, например, к по¬
следовательному делению отрезка Х21, где 1/рх',<С И "С 1/рЧ
Пример ■ 24.2. Описанным путем задача была решена на машине «Урал II»,
причем были выбраны следующие данные: го = Ю, v = 1000, Т = л/2,
р = 0,34. (Числа были выбраны такими, исходя лишь из соображений удоб¬
ства счета.) Система (24.16) принимает тогда вид
= х2,
аз2 = — х1 -— 0,2хз «1>
Хз = 10«2.
(24.34)
Допустим, что в начальный момент t = 0 система находилась в состоянии
= {0, 2; 0;.0, 1}. Тогда вектор с = —— {Ж1} = {—0, 2; 0; —0, 1}. Система,
сопряженная к системе (24.34), имеет вид
51 — $2,
sa = — Ч,
«з = — 0,2s2.
Фундаментальная матрица ее такова:
5 [г, 0] =
cos t sin t 0
— sin t cos t 0
0, 2 (1 — cos t) — 0,2 sin t 1
Учитывая, что матрица В' в данном случае имеет вид
, II 0 1 0
в = II
II О О 10
получим функции:
ч
/[2 (Т) =
— sin г
2 — 2 cos т
■/I211
/‘21
cos т
— 2 sin т
Г/[зп
71
■ 0'
/[3]
_ 2 .
10
При указанных исходных данных в результате вычислений на ЭЦВМ
оказывается, что нужное значение параметра X = Х° есть ■ ~ 2,5465,
216
свойства оптимально го управления
[Гл. 6
= —5; 1% = —3,3; Z Z = 0. При этом р° — 2,9738 и, следовательно, 1/р° =
«= 0,3364 Z р = 0,34. Система отрезков А° = Ар получится такой:
fo; 0,1885], [0,9739; 1,5708L а минимальная^ функция h° (т) = hx° (т) ==
= ZZ sinr — 3,3 cost; 6,6 sinr+ 10 cos т—10}. На рис. 24.4 приведен
график функции w (т, /). Таким образом,
оптимальное управление u° (t) для исход¬
ной задачи определяется выражениями:
о/А 5 sin t — 3,3 cos t „ ,
ил (z) = : при t из
в 2,9738 ||/z°(Z)||
системы отрезков А0,
6,6 sin t + 10 cos t — 10
2,9738 ||A°(¥)|
при t из
системы ' отрезков А°,
Рис. 14.4. wk (t) = о (к = 1,2) при t вне А°.
Этим и завершается решение задачи 24.2.
Графики управления и° и соответствующие оптимальные траектории при¬
ведены на рис. 24.5—24.7.
Рис. 24.5.
Рассмотрим теперь снова задачу (обсуждавшуюся уже нами в
§§ 21, 23) о перебросе материальной точки ' массы т в начало ко¬
ординат, но теперь при несколь¬
ко иных ограничениях, нежели
те, которые были выбраны ра¬
нее. Именно, потребуем и здесь,
чтобы при движении точки до¬
бавочные ускорения, возникаю¬
щие за счет управляющих реак¬
тивных сил, не превосходили
заданных пределов и расход вы- 0
брасываемой массы т t был ми¬
нимален. Эту задачу мы рассмот¬
рим, опираясь на те соображе¬
ния, которые были приведены
в § 21, но в качестве интенсив¬
ности х [и] выберем величину
(24.19). Таким образом, решая
задачу, исходя из правила 17.1,
приходим к необходимости оп¬
ределить минимальную функ¬
цию № (т), которая находится здесь из следующего соотношения
min max ([Zi (1 — т) + Z2]2 + [/3 (1 — т) + ^]2)I/? dx — px (24.35)
l A
§ 24]
ЧИСЛЕННОЕ РЕШЕНИЕ ЗАДАЧИ ОБ УПРАВЛЕНИИ
217
при условии
h + + ltg = 1, 6 (Д) = min [4- , 4 • (24.36)
Обратим еще раз внимание читателя на то, что интегрирова¬
ние здесь ведется не по
всему отрезку [0,1], а по си¬
стеме интервалов, суммарная
длина которых а (А) равна
min [1/Х, 1]. Подобно тому
как это было сделано в § 21,
можно показать, что мини¬
мальная функция h имеет
такое же строение, как и в
задаче, рассмотренным в §21,
т. е. на плоскости (£, h*) гра¬
фик функции -3 (т) является
антисимметричным относи-
тельно прямой т = а
функция А^ (т) постоянна и
положительна. Следует заме¬
тить при этом, что когда X
взято из отрезка [0, 1], си¬
стема интервалов совпадает со всем
просто получаем то же решение задачи, что и в § 21. При X >1
Рис. 24.6.
отрезком [0, 1] и мы
Рис. 24.7.
система интервалов Дх будет соответственно следующей:
- ■ *]}■
218
СВОЙСТВА ОПТИМАЛЬНОГО УПРАВЛЕНИЯ
[Гл. 6
Тогда, как и в § 21, определение минимальной функции 7? (т)
сводится снова к задаче о вычислении единственного числа ZL,
которое находится теперь из условия
min [j (4—t)2 + (LTL)2]"</T +
* о
1
+ 1/ [C4-C+(WC-₽‘-
1-12А
Управление и* (т) будет иметь вид
U рХ II . (т)|| ) 1} (1 __ т) + %
при т ИЗ Дх,
при т вне Дх-
и*(т) = О
В том случае, когда мы придаем основное значение минимизации
расхода реактивной массы,
величина должна быть большой
(при % —> оо приходим к им¬
пульсному управлению, рас¬
смотренному в § 23). В том
же случае, когда основным
фактором является величина
управляющей реактивной . си¬
лы, % должно быть доста¬
точно малым и при X = 0 по¬
лучаем случай, уже рассмот¬
ренный в § 21 (см. пример
21.2). Для наглядности на
рис. 24.8 — 24.10 показаны
оптимальная траектория точ¬
ки и управления
при различных значениях X.
Пунктиром обозначено сво¬
бодное движение точки, по¬
времени, где u^t) = u2(t) = 0.
лучающееся на тех интервалах _
Если потребуем, например, чтобы величина силы max || и (t) Ц
не превосходила заданной величины ц, то среди указанных траек¬
торий надо выбрать ту, для которой р = 1/рх.
В заключение обсуждения вычислительных процедур для ре¬
шения проблемы (24.1), (24.2), заметим, что конкретное осущест¬
вление метода наискорейшего спуска на вычислительной машине
часто наталкивается на практические трудности, которые приво¬
дят к необходимости различных усовершенствований этого мето¬
§ 24]
ЧИСЛЕННОЕ РЕШЕНИЕ ЗАДАЧИ ОБ УПРАВЛЕНИИ
219
да. В частности, откровенно говоря, такие усовершенствования
мы были вынуждены использовать и при конкретном просчете
тех примеров, которые описаны выше в этом параграфе. Однако
здесь мы не будем останавливаться на этих модификациях метода
и на подробном разборе прак¬
тических трудностей счета, так
как это увело бы в сторону от
основного материала книги. По¬
этому отсылаем интересующего¬
ся читателя к специальной
литературе по вычислительной
математике [8* 1.
Рис. 24.9.
Рис. 24.10.
В заключение этого параграфа, пользуясь случаем, вернемся
к вопросу об определении оптимальных импульсных управлений
dU (/), изученному в § 23. Как уже отмечалось, условие макси¬
мума (23.20), (23.21) может оказаться недостаточным для вычис¬
ления величин , , , определяющих интенсивность оптимальных
импульсных воздействий, прилагаемых в моменты t = Xj (см.
стр. 189). Дело тем более осложняется в тех сомнительных ситуа¬
циях, когда минимальная функция h (т) оказывается тождест¬
венной постоянной и когда, следовательно, эта функция не дос¬
тавляет информации о моментах времени t = т- в которые долж¬
ны, прилагаться управляющие импульсы. Для выяснения картины
явления и, в частности, для обоснования утверждения о том, что
и в подобных сомнительных ситуациях существует импульсное
оптимальное управление вида (23.24), можно воспользоваться
следующим рассуждением, которое тесно связано с материалом
данного параграфа.
220
СВОЙСТВА ОПТИМАЛЬНОГО УПРАВЛЕНИЯ
[Гл. 6
Сопоставим исходной задаче об управлении системой
dx = Axdt + BdU
при условии
'з
\ ||с?С7 (т) II = min
Р и
1а
задачу об управлении системой
X — [Л + 61G] х Ви
(24.37)
(24.38)
(24.39)
при условии
(24.40)
>0 -
образом,
получаю-
е;
хЕ [u] = max ^2 шах || и (т) ||, || и (т)||cfrj = min
(и при тех же краевых данных хл, х&). Здесь постоянные
малые параметры, а матрица G подбирается таким
чтобы соответствующая минимальная функция he (т),
щаяся при решении задачи (24.39), (24.40) по правилу мини¬
макса 17.1, оказалась отличной от тождественной постоянной на
любом интервале из отрезка Za т t$. Это обычно нетрудно
сделать и притом бесчисленным количеством способов. Задача об
управлении (24.39), (24.40) аналогична задаче об управлении при
условии минимума величины х [и] (24.19). Для перехода от вели¬
чины хл [н] вида (24.19) к величине хе [и] (24.40) достаточно
умножить (24.19) на 1/Х и положить е2 = 1/Л. Отсюда заключаем,
что оптимальное управление и (t) для вспомогательной задачи
(24.39), . (24.40) отлично от нуля лишь в окрестностях тех точек
t = тр где функция л/£ > (т) = || he (т) || достигает своих наиболь¬
ших значений. Суммарная длина этих окрестностей есть е2. Ми¬
нимальная функция h (т) = В'$\(т) определяется при этом из
условия
(24.41)
Я
1 I*
max — \ || B'sz (т) || dx = min = ре,
А е2 j S
где $ (т) — движение системы, сопряженной к системе (24.39),
стесненное условием se' (t$)c = 1. Здесь А — система интервалов
из отрезка [£«, ^], имеющая суммарную длину а (А) = е2. Само
оптимальное управление и* (т) там, где оно отлично от нуля,
удовлетворяет равенству
h‘(OlI = -V
вор
(24.42)
§ 25]
УПРАВЛЕНИЕ МЕХАНИЧЕСКОЙ СИСТЕМОЙ
221
Далее проверяется, что при е j ->0 управление U (t) сходится
к импульсному оптимальному управлению исходной задачи. Та¬
ким путем, рассматривая предельный переход lim т* = е j и
lim hz (т) =-• № (т) при еj ->0, определяем моменты т7- приложения
импульсных воздействий и их величину для задачи (24.37), (24.38).
Изучение и обоснование этого предельного перехода в общем слу¬
чае и во всех деталях выходят за рамки этой книги. Такое изуче¬
ние может составить предмет полезного самостоятельного исследо¬
вания для интересующегося читателя. При этом изучение данного
вопроса можно начать с конкретного материала, распространив
задачу, рассмотренную в примере 23.3, до нормы хс [и] вида
(24.40).
§ 25. Управление механической системой
в окрестности положения равновесия
В предыдущих параграфах мы изучали задачу об оптималь¬
ном управлении и установили закономерности, характеризующие
ее решение, рассматривая управляемые системы произвольной
природы, поведение которых может быть описано в линейном
приближении дифференциальными уравнениями (2.4), (6.11).
В настоящем параграфе мы обсудим, какой вид принимают эти за¬
кономерности в конкретном случае управляемых механических
систем, а также выясним влияние дополнительных сил различной
природы на свойство управляемости этих систем. При этом огра¬
ничимся рассмотрением движений голономных консервативных
систем [22*] в окрестности положения равновесия.
Итак, пусть задана голономная консервативная механическая
система с п степенями свободы, подверженная внешним управля¬
ющим воздействиям (t). Состояния такой системы
характеризуются ее обобщенными координатами qt (г = 1,..., п).
Предположим, что при Uj = 0 (/ = 1,..., г) система обладает по¬
ложением равновесия qt = 0 (f = 1,..., п). Уравнения Лагранжа
([22*], стр. 331), описывающие ее движения в окрестности точки
qt = 0, qt = 0 (г = 1,..., п), в первом приближении имеют вид
(см. § 3)
Здесь
г
d /ато\
dt ( < )
п
(г = 1,..,, п).
(25.1)
тЦ 2
п
п» = 1 2
У-1
(25.2)
222
СВОЙСТВА ОПТИМАЛЬНОГО УПРАВЛЕНИЯ
[Гл. 6
задачи
задачу
(25.3)
— совокупности членов наинизшего (второго) порядка в разло¬
жениях кинетической и потенциальной энергий в ряд по q. и
в окрестности положения равновесия; a$, b, с° — постоянные.
Обсуждение задачи в линейном приближении (25.1) целесооб¬
разно по той причине, что решение линеаризированной
распространяется, как мы видели в § 22, на аналогичную
для исходной нелинейной системы
d / ЫТ ) дТ , дП г, , ч
-й\ыГ\ д<й ' 3 • С1п' U1' • 3 •’ и’^
(г = 1, . . ., п).
п оо
Здесь Т = у 2 аИ (,7ь • • •> 7п) .. . п = у3 п№> (71. • • •, 7п) —
i, j=l k=2
соответственно кинетическая и потенциальная энергии системы,
при этом функции q ; . — аналитические функции от обобщенных
координат qt системы, а функции П№) представляют собой
однородные формы А-го порядка от этих координат; =
00
= 3 h ?‘г) ■7’1‘ • • • qln-a1'. . . И—обоб-
<14-. • .
щенные силы, порождаемые управляющими воздействиями
ии .. ., иг ln'k‘ Ar> = const; Ь(’‘ n' °’ ”q ’0) =0). Заметим,
что в (25.2), (25.1) а?,- = ap(0, ..., 0), П° = П(2) (?ъ . .., <„),
,o ,(0 0; <»,...,k,, ...,0)
Oij — bi .
Запишем уравнения (25.1) в канонических координатах ([25*],
стр. 97—99). Имеем:
Г
"i = -I- 3 dibj (z = 1, .. •, n).
7=1
Здесь переменные yt (канонические координаты) связаны с обоб¬
щенными координатами qt равенствами
Qi — "г1У1 + • • •+ Ргпуп-
Действительные числа удовлетворяют уравнению
|4A + = о, (25.6)
а действительные числа di} определяются соотношениями:
(25.4)
(25.5)
п
dM — 3
к-1
2 ■ ■ + cj Pn — 0.
k-l )
(25.7)
§ 251
управление механической системой
223
Пусть задана интенсивность х[и] (или х [d/]), оценивающая
ресурсы, затрачиваемые на управление системой (25.4) на отрез¬
ке времени ta П т П h- В соответствии с материалом §§ 12—14
мы считаем, что величина х [и] (или x[d7]) имеет смысл какой-
нибудь нормы р* [u] (р* [С7]) функции и(т) (или функции Щт)).
Ограничимся лишь задачей об успокоении системы (25.4), когда
требуется перевести ее из состояния движения {уДа), У/ (£а)} в
положение равновесия {yt (fy) = 0, #t (tp) = 0} с минимальной
затратой управляющих усилий, т. е. при условии и [и] = min
(x[d7] = min).
Условия разрешимости этой задачи при любых исходных дан¬
ных {у (£а), y, (to)} указаны выше, в § 17, а в § 19 они сформули¬
рованы в эффективной форме. Выясним, что означают эти условия
в нашем конкретном случае управляемой механической системы
(25.4), (25.1). В соответствии с материалом § 19 составим матрицу
К = (5, 4В — Л'П_1В)
(25.8)
для системы (25.4). С этой целью запишем систему (25.4) в нор¬
мальной форме, введя обозначения aan-i = Уь хц = Pi (( = 1,...>
Получаем:
г
X^i-l — ^2i?
i’2i — ^2.-1 4
j=l
(г = 1,...,п). (25.9)
Тогда
А =
0
1.
. . 0
0
X,
0 .
.. 0
0
0
0.
. . 0
0
•
0
0.
. . 0
1
0
0.
. • П п
0
!
0 ..
Си . .
. 0
• dlr
в =
i
1
1
0 . .
. 0
1
4п1 • •
• dnr
И
0
0
di^i^1 • •
diiXi .
.. dirA*X
0 . .
. 0
, A-к J1B =
0 .
. . 0
■
• • dntKn
■ ■ dr,i-'iln
0 .
. . 0
(25.10)
224
СВОЙСТВА ОПТИМАЛЬНОГО УПРАВЛЕНИЯ
[1'л.6
Задача об оптимальном управлении системой (25.9) имеет реше¬
ние тогда и только тогда, когда ранг матрицы К (25.8) равен 2п
(см. § 19). Проверка этого условия является, вообще говоря, за¬
труднительной. В нашем случае механической системы (25.4) ус¬
ловия разрешимости задачи об оптимальном управлении можно
сформулировать также в другой форме, которая иногда удобнее.
С этой целью рассмотрим матрицу
N О
где
du .
. dlr, .
... d,.W~' ■
. dvir'
• , •
• • ?
dni •
• dnr, .
(25.11)
Нетрудно убедиться в том, что в силу равенств (25.10) матрица Кг
получается из матрицы К (25.8) простой перестановкой строк.
Следовательно, ранг матрицы К (25.8) равен 2п тогда и только
тогда, когда ранг матрицы N (25.11) равен п. Но матрица N сов¬
падает с матрицей К, составленной для системы
9i = M + 3 (i = 1, ...,п). (25.12)
j=i .
Таким образом, мы приходим к заключению, что механическая
система (25.4) вполне управляема тогда и только тогда, когда
вполне управляема система (25.12), получающаяся из нее за¬
меной ускорений .на соответствующие скорости у^
Далее, предположим, что среди чисел Хх,...Лп будет к различ¬
ных, имеющих соответственно кратности Не нарушая
общности, упорядочим все числа . так:
^1 = • • • = М1, ^й+1 = • • •= • • •> ^11+...+Ч(_1+1 == ’ ‘ ’
.. .= Ч,+_.. 1+9+1 (/ = 1, • • •» к 1).
Составим матрицы
du ■
. . dlr
A, =
dj,i •
• • dhr
> . . . Afc —
di,+.. ,+iA„i •
• • di,4_..r
(25.13)
§ 25]
УПРАВЛЕНИЕ МЕХАНИЧЕСКОЙ СИСТЕМОЙ
225
Имеет место следующее утверждение.
Теорема 25.1. Для того чтобы- механическая система
(25.4) ((25.1)) была вполне, управляемой, необходимо и достаточно,
чтобы ранги матриц Д1?... Дк (25.13) были равны соответственно
Мы не будем останавливаться на подробном доказательстве
этого утверждения, отсылая читателя к специальной литературе
[51, 160а]. Отметим лишь, что справедливость его вытекает из
структуры матрицы N (25.11), которая с помощью элементарных
преобразований ([3*], стр. 110) может быть приведена к виду
[160а]
Дх 0 ... о о ... о
М21 Д2 . . , . 0 0 ... 0
Ми MhI • • • Д/с о ... о
Из теоремы 25.1 вытекает, в частности, что механическая
система (25.1) ((25.4)), подверженная воздействию Ь и, где и —
скаляр, вполне управляема этим воздействие-м тогда и только
тогда, когда
Х|——• при I1I1 и dx^=0 (Z, j = 1, . . п). (25.14)
Последние соотношения имеют простой механический смысл,
который можно уяснить из следующего примера.
Пример 25.1. Рассмотрим движение тяжелой материальной точки т
по гладкой поверхности z = f (х, у). Предполагаем, что система координат
(х, у, z) ортогональная, оси х и у направлены по главным направлениям
(направления экстремальной кривизны) этой поверхности ([22*], стр. 202)
в точке {0, 0, 0}, которую считаем стационарной точкой функции z —
= /(х, у), Iтак как полагаем состояние х = 0, у — 0 точкой равновесия; ось z
направлена вертикально вверх. Пусть рассматриваемая материальная точ¬
ка подвержена управляющему воздействию и, имеющему неизменное горизон¬
тальное направление. Отклонение точки от положения равновесия {0, 0, 0}
и скорость ее движения считаем малыми величинами. Выберем за обобщенные
координаты движущейся точки ее декартовы координаты х и у. Тогда вели¬
чины Т°, П° (25.2) определятся равенствами:
то = Ат(е + гъ
1=0 1=0
и уравнения движения точки в первом приближении (25.4) имеют, следова¬
тельно, вид
х = \ х Д сЦ и, у — у + d2 и. (25.15)
8 Н. Н. Красовский
226
СВО ЙСТВА ОПТИМАЛЬНОГ О УПРАВ ЛЕНИЯ
[Гл. 6
Здесь Xх = g (02f/dx2)x=u=iy К — g d — ax/m d --- ay/m —
отношение направляющих косинусов (ц, ay силы и к массе точки. Условия
(25.14) полной управляемости ' системы (25.15) означают, следовательно, что
положение равновесия материальной точки {0, 0, 0} не является шаровой
точкой (Хх =/= Х2) поверхности z = / (х, у) и управляющее воздействие не
направлено по главным направлениям поверхности в точке {0, 0, 0} (dx =)=
=/= 0, d2 =£= 0). Например, если материальная точка т движется по эллипти¬
ческому параболоиду (рис. 25.1) или гиперболическому параболоиду (рис.
25.2), то условие Хх ф Х2 здесь выполняется, и, таким образом-, условия (25.14)
Рис. 25.1.
Рис. 25.2.
полной управляемости означают, что воздействие и не должно быть направ¬
лено параллельно плоскостям симметрии этих поверхностей в точке (0,0, 0}.
Если же точка т движется по параболоиду вращения (в окрестности его
вершины), то условия (25.14) здесь не выполнены, так как X х = Х2.
Итак, в случае рис. 25.1, 25.2 мы всегда можем распорядиться силой и
так, чтобы перевести материальную точку из любого начального положения
(х (ta), у (ty)} в положение равновесия (х (^) — 0, у - - - - = 0} и зафикси¬
ровать ее там с нулевой скоростью. В случае же \ = Х2, напротив, для
большинства начальных отклонений этого сделать нельзя, как бы мы ни
выбирали управляющее воздействие п, имеющее неизменное горизонтальное
направление.
Вернемся к общей задаче. Предположим теперь, что условия
теоремы 25.1 выполнены, и, следовательно, задача об оптимальном
управлении системой (25.1) имеет решение. Рассмотрим, как тран¬
сформируется в случае механической системы (25.1) правило
минимакса 17.1. Согласно этому правилу для определения оп¬
тимального управляющего воздействия u° (t) следует, прежде все¬
го, найти минимальное движение s° (t) системы, сопряженной к
исходной системе (25.9) (при и = 0). Эта сопряженная система
имеет вид
— — 52;-1.
Так как система (25.1) стационарная, то, не нарушая общности,
(25.16)
§ 25]
УПРАВЛЕНИЕ МЕХАНИЧЕСКОЙ СИСТЕМОЙ
227
можно считать, что U = 0. Обозначим Ц = Ф. Искомое мини¬
мальное движение s° (t) мы должны искать среди движений s (t)
системы (25.16), стесненных краевым условием (см. стр. 114)
/ (0) -х (0) = -1.
(25.17)
Сделаем в (25.16) замену времени t = Ф — т (0 U т U ft). Урав¬
нения (25.16) принимают вид
dS2i(l Т)' = (♦ — т). (25.18)
Будем обозначать через $ 2п-мерный вектор, получающийся из
вектора s и= {sx, $2,...,$2n-1, s2n) перестановкой компонент с четными
и нечетными номерами: s = {sx, s2,...,s2n, s2n-i). Тогда после вве¬
дения обозначения
z (т) = s (Ф — т)
мы можем записать систему уравнений (25.18) в виде
(25.19)
(25.20)
а краевое условие (25.17) в виде
з'(Ф)-с(0) == — 1.
(25.21)
Но уравнения (25.20) совпадают с основной частью системы (25.9).
Таким образом, задача определения минимального движения s° (t)
свелась к нахождению движения ~° (т) исходной системы ■ (25.9)
(при и = 0), удовлетворяющего краевому условию (25.21) и имею¬
щего наименьшую возможную норму р° = p[z° (t))=min р [z (т)]
z
(см. § 17). После того как это движение z° (т) найдено, оптималь¬
ное управление следует определить из условия максимума (17.1),
которое принимает здесь вид
а в
J B'z0 (Ф — t) u° (t) dt = max J B'z0 (ft — t) и (t) dt (25.22)
при p* [u] = l/p°.
Таким образом, мы приходим к следующему выводу.
Теорема 25.2. Оптимальное управляющее воздействие
и° (<), решающее задачу об успокоении голономной консервативной
механической системы (25.1), определяемся правилом .минимакса
8*
228
СВОЙСТВА ОПТИМАЛЬНОГО УПРАВЛЕНИЯ
[Гл. 6
17.1, где за минимальное движение следует взять движение s° (t) —
— z° (ft—t), причем Z (t) — это движение той же самой системы
(25.9) при и — 0, удовлетворяющее краевому условию (25.21) и
имеющее ' минимальную норму р [s° (т)], при этом само оптималь¬
ное управление u° (t) определяется условием максимума (25.22).
Обсудим теперь, какое влияние на управляемость консерва¬
тивной механической системы оказывают дополнительные силы,
которые могут налагаться на эту систему, помимо 'управляющих
воздействий. Рассмотрим при этом диссипативные и гироскопиче¬
ские силы. Ограничимся случаем скалярного управляющего воз¬
действия. Уравнения (25.4) имеют, следовательно, вид
Уг = Куг 4- diU. (25.23)
Предположим, что система (25.23) не вполне управляема воз¬
действием и. Это означает, что не выполнены условия (25.14). ,
Возникает вопрос: существуют ли такие диссипативные или ги¬
роскопические силы ([25*], стр. 102, 106), после приложения
которых не вполне управляемая силой и система (25.23) становится
вполне управляемой? При этом в соответствии с общеприня¬
той терминологией будем называть гироскопическими силами обоб¬
щенные силы Qi вида
п
Qi ~ ' Г = Т 3 ЧаУМ (Y = — Yi — const),
г, J=1
а диссипативными — обобщенные силы
п
Qi — —у:, Л = у3 ацу^ (а — а,ц, аи — c^st^
Чг i, j=l
форма R — знакоположительна.
Прежде всего, выясним необходимые условия положительного
решения этого вопроса. Справедливо утверждение. Если среди
чисел Xi по крайней мере два равны нулю или если хотя бы в од¬
ном уравнении системы (25.23) dt = 0, X, = 0, то система
(25.23) не может стать вполне управляемой воздействием и ка¬
ковы бы ни были дополнительные диссипативные или гироскопиче¬
ские силы, приложенные к этой системе.
В самом деле, в указанных случаях хотя бы одно из уравнений
системы (25.20) можно привести к виду
& = 0. (25.24)
Пусть на систему действуют дополнительно какие-либо дис¬
сипативные или гироскопические силы. Тогда ([25*], стр. 106)
§ 25]
УПРАВЛЕНИЕ МЕХАНИЧЕСКОЙ СИСТЕМОЙ
229
уравнение (25.24) примет вид
У] — ар + . . . + апуп (25.25)
и, следовательно, величина
Уз — (Чу!— . . . — апуп = const (25.26)
является первым интегралом системы (25.23) при ' наличии дисси¬
пации или гироскопических сил, независимо от управляющего
воздействия и. Но ясно, что при наличии интеграла (25.26),
всегда можно подобрать такое начальное состояние {у (ta), у (£а)},
из которого систему (25.23) нельзя привести в состояние равно¬
весия. Это и доказывает наше утверждение.
Пусть - теперь, наоборот, система (25.23) имеет вид
Уг = *чУг + diU
Уз = Kjyj
где
йг=£=0
\,;=/=0 (у = 1
(г = 1, . . .,к), |
U = к + 1,. . ., п), J
(i = 1,..., к),
— 1, k + i,...,n).
(25.27)
(25.28)
Тогда всегда можно подобрать такие диссипативные силы, ири
наложении которых система (25.27) становится вполне управляе¬
мой. Мы не будем приводить здесь доказательства этого утверж¬
дения, отсылая читателя к работам [50, 51]. Покажем лишь, как
осуществить необходимый выбор диссипативных сил в частном
случае, когда [ = ...= кп = X =/= 0. Систему (25.27) запишем в
форме (25.9):
t2i-i = k:r2i + (Ци, x2i = x^t-i (z = 1, . . ., п), (25.29)
где по крайней мере одно из чисел dj=f=O. Функция РелеяВ (см. [25*]
стр. 102), порождающая диссипативные силы, имеет вид
27? = — S (25.30)
г, j=l
Нам необходимо подобрать коэффициенты этой функции так, что¬
бы система
На-i = b*2j — ~ + diU, Zji = x2t- (г = 1,...,«) (25.31)
OX2i
стала вполне управляемой воздействием и. В данном случае это
можно сделать следующим образом. Преобразуем систему (25.29)
к виду
Zsi-i = -Z2i + *2i = z2i_i, (3;г^ О) (25.32)
230
СВОЙСТВА ОПТИМАЛЬНОГО УПРАВЛЕНИЯ
[Гл. 6
что, очевидно, всегда можно сделать. Функцию (25.30) выберем в
виде
2R = § еЛ-1- (25.33)
г = 1
Тогда система (25.32) будет описываться уравнениями
= ^^21 “1“ ^2i = z2i-1 (г" = 1, . . ., п). (25.34)
Опираясь на теорему 19.1, нетрудно убедиться в том, что система
(25.34) становится вполне управляемой, если
е. =/= efc при 1 == К (1, К = 1,..., п). (25.35)
Приведем простой пример, иллюстрирующий это утверждение.
Пример 25.2. Рассмотрим снова движение тяжелой точки по поверх¬
ности z = f (ж, у), описываемое уравнениями (25.15). Пусть точка {0, 0, 0} —
шаровая,?. е. Х1=%2=%. Условия (25.14) полной управляемости системы (25.15)
здесь, очевидно, не выполнены. Наложим, однако, диссипативные силы,
порождаемые функцией Релея (25.33) 2R = еj ±2 + е2у2 и описывающие
трение на поверхности, неравномерное по различным направлениям. Тогда
система (25.15) при Х = %2 = X становится вполне управляемой воздействием
и, если направление последнего не совпадает с главными осями «эллипса
трения» ег х2 + г^У2 = с2 = const.
Аналогичное утверждение справедливо и для гироскопических
сил.
Пример 25.3. Рассмотрим маятник с двумя степенями свободы из при¬
мера 3.4 (см. рис. 3.4). Уравнения линейного приближения для движений
этого маятника в окрестности верхнего неустойчивого положения равнове¬
сия имеют вид (3.15). Проверим, ■ выполняются ли условия полной управля¬
емости маятника моментом и. Непосредственным подсчетом находим, что
определитель матрицы К (25.8), составленный для системы (3.15), равен
det К = —
g
nrt-.и
«
Следовательно, маятник вполне управляем моментом и тогда и только тог¬
да, когда со =f= 0, т. е. когда маховичок вращается. Это условие (со =/= 0) до¬
пускает наглядное механическое истолкование. В самом деле, рассматрива¬
емая система обладает двумя степенями свободы и момент и (при со = 0) влияет
лишь на одну координату маятника (угол qt на рис. 3.4). Если же маховичок
вращается, то при изменении qi (t) за счет воздействия на маятник момен¬
та. и, возникает гироскопический момент ([13*], стр. 346), который и пе¬
редает воздействие и на вторую координату маятника (угол д2).
Глава 7
ПРОБЛЕМА ПРЕДЕЛЬНОГО БЫСТРОДЕЙСТВИЯ
§ 26. Постановка задачи о предельном быстродействии
Сформулируем теперь одну проблему, играющую важную роль
в общей теории оптимальных процессов. Это — задача о предельном
быстродействии. Важность данной задачи определяется ее тех¬
ническими приложениями.
Как и везде в настоящей книге, ограничимся линейными систе¬
мами.
Выше, при постановке задач 13.1 и 14.1, предполагалось, что
промежуток времени ta t Ц, в течение которого система
должна быть переведена из одного состояния х (ta) = х* в другое
х ((&) = ,, определен заранее по условиям задачи. Однако не
исключены ситуации, когда момент t = , окончания процесса
не задан, но определяется по ходу решения проблемы в соответ¬
ствии с теми или иными условиями задачи. Например, одним из
таких условий может быть требование осуществить процесс уп¬
равления в кратчайший срок. При этом, естественно, приходится
учитывать ограничения на ресурсы органов управления, реализу¬
ющих управляющие воздействия (ограниченный запас энергии,
недопустимость применения управляющих сил, превышающих
определенные безопасные границы и т. д.). Если трактовать по¬
добные ограничения как требование ограниченности соответст¬
вующим образом подобранной интенсивности х [и] управления
и (t) <3 tfi), то задача о предельном быстродействии мо¬
жет быть сформулирована так.
Задача 26.1. Заданы уравнения движения управляемой
системы
х = A (t) х + В (t) и + w (£), (26.1)
начальное хл и, конечное х? значения фазового вектора х (t) и ого¬
ворено ограничение на выбранную интенсивность х управления
и («):
х [и] <3 р.. (26.2)
Требуется найти момент времени t = /3 и соответствующее ему
232
ПРОБЛЕМА ПРЕДЕЛЬНОГО БЫСТРОДЕЙСТВИЯ
[Гл. 7
возможное управление u° (t) (ta «С i<C. t%), удовлетворяющее сле¬
дующим условиям:
1) управление u° (Z) решает задачу 4.1 об управлении при ta
t <
2) выполняется неравенство
х [и0] ( р. (26.3)
3) каковы бы ни были другой момент времени t = ip и возмож¬
ное управление и (t) (t* p t ip), решающее задачу 4.1 об управ¬
лении при условии (26.2), должно выполняться неравенство ip ip.
Условия (26.2) и (26.3) нуждаются в некотором пояснении.
Дело в том, что выражение для величины х [и] может зависеть от
значения (р , которое само еще подлежит определению. Например,
может быть (см. §18)
*3 1/а
x[w] ={ ( II и (т) ||2 dr} .
<«
В таких случаях, во избежание недоразумений, следует обозна¬
чить интенсивность х [и], например, символом х [и (т), ta <1 т <
ip], а ограничение (26.2), строго говоря, надо записывать в виде
х [и (т), ia ( т Н- (26.4)
Однако для сокращения письма в случаях, не вызывающих недо¬
разумений, индексы ta и Ц в обозначении для интенсивности х
будем опускать. В частности, условимся в дальнейшем в задаче
о предельном быстродействии записывать ограничение н^ и (t) в
форме (26.2), понимая эту запись, вообще говоря, в смысле
(26.4).
Если управляемая система описывается обобщенным (см. § 6)
линейным уравнением
dx = A (t) х dt + В (t) dU + dW, (26.5)
то для такой системы задача о предельном быстродействии может
быть сформулирована совершенно аналогично задаче 26.1, только
нужное нам управление dU° (t) (tK p t p t$) надлежит тогда ис¬
кать в классе возможных обобщенных управлений. Управления
и° (t) и dU° (t) (ia t ( ip), решающие задачу о предельном бы¬
стродействии для системы (26.1) и (26.5), будем называть опти¬
мальными по быстродействию, а число Т° = ip — ta, равное крат¬
чайшему времени перехода системы из начального состояния хЛ
в конечное х$, назовем оптимальным временем переходного про¬
цесса.
§ 26l
ПОСТАНОВКА ЗАДАЧИ О БЫСТРОДЕЙСТВИИ
233
Желая привлечь к исследованию задач о предельном быстро¬
действии аппарат функционального анализа, который использо¬
вался выше, в § 17, мы будем опять-таки истолковывать х) интен¬
сивность управления х [и] как норму р* [гг] функции и (t) (ta
t tp) в некотором функциональном пространстве ЗВ*{и (т)}.
Тогда задача 26.1 и соответствующая ее модификация для систе¬
мы (26.5) очевидным образом переформулируется • для классов
допускаемых управлений и (t) и обобщенных допускаемых уп¬
равлений dU (7). Поскольку переход осуществляется таким же
путем, как и для задач об оптимальном управлении (см. §§ 13, 14),
то здесь останавливаться на этом вопросе не будем. Следует лишь
иметь в виду, что везде в дальнейшем мы ограничимся только
такими величинами х [и (т), ta = р* [z(t), т<7<з1,
для которых выполняется равенство р* [и (т), ta • т • о| =
= р* [и (т), /а т Ф! Для всех функций и (т), удовлетворяю¬
щих условию и (т) = 0 при т > 1&. Здесь О’ и а — любые числа,
связанные неравенством О’ • а.
В дальнейшем мы встретимся еще со случаями, когда момент
t = tx будет изменяться. Тогда символы р* [и (т), т • £с] будут
обозначать величины р* [и (т), k О о • О] при любом О,
какое только может оказаться моментом окончания процесса.
В частности, ограничение
р* [и• (т), т > £а] < р (26.6)
будет означать, что в процессе управления могут использоваться
любые функции и (т) (т > 7z), удовлетворяющие условию
p*[iz (т), 7а • т й] "С И (прИ любом О >7а). Именно в этом смы¬
сле следует понимать также и запись ограничения (26.6) в какой-
либо явной конкретной форме, например в виде
■°° ’А
(т) li3 ' < р. (26.7)
<«
х) Таким путем можно охватить большое число реальных ограничений.
Подобный вопрос уже обсуждался в аналогичном случае при обсуждении
задачи 13.1. Добавим здесь еще одно новое соображение. Часто в задачах
предельного быстродействия ограничения на и (t) имеют следующий несим¬
метричный вид aj — Uj — bj, причем, следовательно, aj == — by. Однако и
в этом случае заменой переменных Uj на vj дело можно свести к ограничению
вида р* [р] Для этого
вание
достаточно выполнить, например, преобразо-
Н =
и положить р* [р] = max sup { | vj (т) |}.
234 ПРОБЛЕМА ПРЕДЕЛЬНОГО БЫСТРОДЕЙСТВИЯ [Гл. 7
Символ оо выбирается при этом в качестве верхнего предела в
интеграле (26.7) как раз с той целью, чтобы подчеркнуть, что
момент t = t$ >»ta, когда окончится процесс управления, нам
может быть неизвестен и мы на все будущее время t^ta обладаем
ресурсом и управления, равным ц (ta). Аналогичное замечание
следует иметь в виду в тех случаях, когда для записи оценки уп¬
равления и (t) при t^ta будет использоваться общий символ
интенсивности х [и (т), т > С1.
Заметим еще, что задача о предельном быстродействии может
быть поставлена и для того случая, когда систему (26.1) или (26.5)
требуется перевести в кратчайший срок из заданного состояния
а; (£») = ха не в определенную заранее точку 1 фазового прост¬
ранства, а на некоторое многообразие @ конечных состояний ха
Следует также иметь в виду, что вектор по условиям задачи мо¬
жет зависеть от . . Эта ситуация возникает в случае, когда тре¬
буется привести движение х (t) не в неподвижную точку х = х\
но требуется вывести его на заданное движение х = х& (/). Чи¬
татель, учитывая сформулированные уже задачи 13.2 и 26.1,
может дать соответствующие формулировки самостоятельно.
§ 27. Решение задачи о предельном быстродействии
Опишем решение задачи о предельном быстродействии, опи¬
рающееся на результаты из предыдущих глав. В соответствии с
постановкой задачи 26.1 нам требуется найти управление и° (t),
переводящее систему (26.1) из состояния х (ta) = х* в состояние
х (t$) = ха за кратчайшее время T° = — ta при заданном
ограничении
х [и] р,. (27.1)
Принимая во внимание правило минимакса 17.1, установленное
в § 17, можно указать следующий путь решения задачи о предель¬
ном быстродействии. «
Пусть >ta — некоторый фиксированный момент времени.
Тогда может быть поставлена и решена задача 13.1 об оптималь¬
ном воздействии ит (£, переводящем систему (26.1) из состояния
х (ta) = х* в . положение х (£3) = х$ за время Т = t$ — ta и
имеющем при этом наименьшую возможную .норму р* [ит 1 =
= х [uy] = min. Если теперь мы будем изменять момент времени
Ар, то, полагая задачу 13.1 каждый раз разрешимой *), получим,
что всякому fp u>ta, а значит, всякому числу Т > 0, будут со¬
ответствовать определенное оптимальное управление ит (0 и оп-
х) Или, во всяком случае, разрешимой при значениях . из некоторого
множества 1 . Изменения . потребные тогда в рассуждениях, очевидны.
§ 271
РЕШЕНИЕ ЗАДАЧИ О БЫСТРОДЕЙСТВИИ
235
ределенная его интенсивность х [иу], которая является, следова¬
тельно, функцией от Т. Обозначим х [ur] = ит и рассмотрим не¬
равенство
хг < Н- (27.2)
Очевидно тогда, что оптимальным временем переходного процес¬
са Т при ограничении (27.1) будет наименьшее из положительных
чисел Т, удовлетворяющих условию (27.2). Сопоставляя это об¬
стоятельство с правилом минимакса 17.1, получаем следующий
результат.
Теорема 27.1. Пусть hr (т) (£а т Z = ta + Т) —
минимальная функция, найденная согласно' правилу минимакса
17.1, так что
Р UhT (т)1 = min р [В'$т (т)1 = рг,
(27.3)
где st (t) — движение сопряженной системы (17.3), удовлетворяю¬
щее краевому условию s't (?) с (Z) = 1. Тогда наименьшее из чисел
Т = Ц — ta, удовлетворяющих соотношению
Pr>V’ (27-4)
будет оптимальным временем переходного процесса /0, а соответст¬
вующее этому времени оптимальное управление ит* (0 = и0 (t)
(t* t tl = t* + T°) явится искомым, оптимальным по быст¬
родействию управлением. При этом, как следует из правила ми¬
нимакса, оптимальное по быстродействию управление будет
иметь норму р* [и (т)] = 1/рго и будет выделяться среди всех
допускаемых управлений и (т) (fa Z т Z с нормой р* [и (т)] =
= 1/рго свойством максимума (17.1) на минимальной функции
hT (т).
Здесь с (Т7) — вектор (15.2).
Сформулированная теорема указывает способ решения задачи
о предельном быстродействии, который заключается в построении
той или иной вычислительной процедуры, позволяющей опреде¬
лить наименьшее из положительных чисел Т, удовлетворяющих
условию (27.4) или, что то же самое, условию (27.2). При этом
процесс отыскания самого оптимального по быстродействию уп¬
равления следует изученному уже руслу, которое определено
свойством максимума (17.1), содержащимся в правиле минимак¬
са 17.1. Если величина рг является непрерывной функцией Т (а
это, действительно, имеет место в широком классе случаев),
то для отыскания величины 7° вместо условия (27.4) удобно
236
ПРОБЛЕМА ПРЕДЕЛЬНОГО БЫСТРОДЕЙСТВИЯ
[Гл. 7
пользоваться уравнением
рг = min \В' (т) sT (т)] = — при St (tp) с (Г) = 1. (27.5)
st И
Наименьший положительный корень этого уравнения и даст оп¬
тимальное время переходного процесса Т°.
Примечание 27.1. Учитывая, что выражение р [В' St (т)] одно¬
родно по вектору I — s ( t', неравенство (27.4) или уравнение (27.5) вместе
с условием st (t&) с (Т) — 1 можно заменить неравенством
min {— s' (t„) с (Г) -1- рр [В' (т) sr (т)]} > О
||8Т||=1 Р
или соответственно уравнением
min {цр [В' (т) st (т)] — (tA с (Г)} = 0,
К 11=1 Р
что подчас может оказаться более удобным для работы с этими соотношения¬
ми. Далее, учитывая равенство (12.19), уравнение (27.5) можно еще заме¬
нить соотношением, не содержащим явно р [й (т) ],
*3
min max \ В' (т) sr (т) и (т) dr— s' (М с (Г)( = 0.
11 8т ||=1 Lx[u(t)]<p ] J
‘а
Трудности реализации предложенного способа в виде вычис¬
лительного алгоритма не носят принципиального характера и
касаются таких стандартных проблем численных методов, как,
например, вопрос о выборе начального приближения или вопрос
о скорости сходимости вычислительного процесса. При рассмот¬
рении определенных ограничений (27.1), а тем более'при решении
конкретных задач эти общие трудности могут быть так или иначе
преодолены.
Допустим, например, что требуется решить задачу 26.1 при
ограничении на энергию управляющего воздействия, т. е. при
условии
00 ,/г
X [и] = [ || и (т) ||2 < ц. (27.6)
В этом случае задача о предельном быстродействии решается с
наименьшими трудностями. Дело в том, что оптимальное управ¬
ление при условии минимума энергии находится в замкнутой
форме (см. § 18) и поэтому удается, исключив Z? (Г) из соотношений
(18.3), записать интенсивность хг оптимального управления, а
следовательно, и величину рт = 1/ху, в виде явной функции
5 271
РЕШЕНИЕ ЗАДАЧИ О БЫСТРОДЕЙСТВИИ
237
времени Т. Действительно, принимая во внимание (18.11), полу¬
чаем, что
п
Ит
(27.7)
где с = с (Т) = {Cj (Т)} — вектор (15.2), а смысл обозначений
D и Dik пояснен на стр. 126. Нетрудно непосредственно установить,
что Хг (27.7) является непрерывной функцией Т, . если только
D == 0. Но последнее условие выполняется во всяком случае,
если система (26.1) вполне управляема. Тогда величина рг = 1/хг
будет также функцией непрерывной и для определения T можно
воспользоваться уравнением (27.5), которое примет вид
п
S CiencenDikCT-DT = о.
(27.8)
Таким образом, в рассматриваемом случае задача о предельном
быстродействии сводится к нахождению наименьшего положи¬
тельного корня Т° уравнения (27.8). Само же оптимальное по бы¬
стродействию управление и° (t) определяется по формулам
(18.10), в которых вместо t подставлено % = + TQ Приведем
простой иллюстрирующий пример.
Пример 27.1. Пусть материальную точку, движение которой описыва¬
ется уже хорошо нам знакомой системой дифференциальных уравнений (18.11)
(см. пример 18.1), требуется перевести из положения ха = {—1, 0, 1, 0}
при tа = 0 в положение о? = {°, 0 °, 0} наискорейшим образом. При этом
должно удовлетворяться неравенство
оо
(27.9)
Согласно избранному выше общему пути решения задачи находим функ¬
цию рг- Опираясь на равенство (27.7), получим:
1
(27.10)
2
и, следовательно, уравнение (27.8) записывается так:
74 _ тз + 24 = 0.
(27.11)
На рис. 27.1 изображен график функции рт (27.10). Как видно из этого
графика, для того чтобы уравнение (27.11) имело хотя бы один положитель¬
ный корень, число р должно быть в меру большим, в противном случае
238
ПРОБЛЕМА ПРЕДЕЛЬНОГО БЫСТРОДЕЙСТВИЯ
[Гл. 7
желаемое положение г8 = (0, 0, 0, 0) вообще оказывается недостижимым ни
при каком Г, что ясно из физических соображений. Нетрудно установить,
что величина р2 должна быть не мсшшю, чем 96 gVgl (72)3/\ Если р2 будет
больше указанного значения, то уравнение (27.11) будет иметь два положи¬
тельных корня. Пусть Т° — наименьший из этих корней, тогда согласно
формуле (18.10) оптимальное по быстродействию управление определяется
соотношениями
(г )=-20’
<^ = -^(T0~2^ + s
из которых следует, что наискорейший спуск из точки {—1, 0, 1, 0} в точку
{0, 0, 0, 0} осуществляется по прямой.
Приведенный пример показывает, что, вообще говоря, функция
рг не обладает свойством монотонности, которое может быть
весьма полезным для численного определения Т из уравнения
(27.5). Однако если в разобранном примере отбросить g, то функ¬
ция рг = (73/24)12 будет строго монотонно возрастающей (см.
рис. 27.1), и тогда при каждом р >0 уравнение (27.11) будет иметь
единственный положительный корень, который и доставляет оп¬
тимальное время переходного процесса Т(). Оказывается, что от¬
меченное свойство монотонности функции рг не является специ¬
фичным лишь для рассмотренного примера и при соответствующих
предположениях это свойство имеет место в достаточно общем слу¬
чае ограничений (27.1) на интенсивность управляющего воздей¬
ствия. А именно, пусть в уравнении (26.1) w (t) = 0 и = 0.
Тогда можно показать, что функция рг является монотонно не-
§ 27]
РЕШЕНИЕ ЗАДАЧИ О БЫСТРОДЕ.Й^СТВИИ
239
убывающей функцией Т. Для доказательства этого факта напом¬
ним, что величину рт можно искать из условия (см. правило
17.3 в § 17) *
Рт = min р [В' (т) 5 (т)] = min р [В' (т) 5 [т, £а] I] (27.12)
S I
при s'(ta) х* — V х* — —1. Допустим, что для каждого Т . О
найдены числа Z? (Т) — sf (ta) из условия (27.12). Тогда, при¬
нимая во внимание это условие, получим очевидное неравен¬
ство
Рт+лт — Р [В' (х) S [х, ta]l°(T + ДТ), Za<x<Za + Т + Д^Т]>
>р[В'(т)5[т, + дг), /a<x<Za + Т>
> тгпр ^В (т) S [т, Za]Z, = рг, (ДГ>0).
i
(27.13)
Таким образом, мы видим, что, действительно, переменная рт
является монотонной, не убывающей функцией величины Т. Важ¬
но подчеркнуть, что во'многих случаях выбора интенсивности х [и]
при условии полной управляемости системы (26.1) в соотношении
(27.13)'будет выполняться строгое неравенство, т. е. функция рт
будет строго монотонно возрастающей функцией Т. Так, напри¬
мер, в рассмотренном выше случае ограничения на энергию уп¬
равления (27.6) согласно (18.2) и (27.13) будет:
Правая часть неравенства (27.14) строго положительна, если
только система (26.1) вполне управляема, поскольку тогда вектор-
функции №1 (т) — столбцы матрицы В' (т) S [т, Za] — линейно
независимы. При ограничении на максимум управляющей силы
(21.1) имеем:
/3+дт
Рг+дт- Т> \ Г {В' (Т) 5 [т, Za] Z° (Т + Д71)} dx,
и правая часть этого неравенства при условии полной,.управля-
емости системы (26.1) . . снова будет строго положительной.
Но, например, в случае ограничения на ’ импульс управ¬
ляющего воздействия (23.5) величина разности рт+дг — Рт
вследствие (23.10) является лишь неотрицательной и поэтому
240
ПРОБЛЕМА ПРЕДЕЛЬНОГО БЫСТРОДЕЙСТВИЯ
Н’л. 7
соответствующая функция (23.12)
рг = min sup у [В' (т) 5 [т, Za] Z] при 1'хл = — 1 (27.15)
I т
есть, вообще говоря, лишь неубывающая функция Т.
Мы не будем задерживаться на анализе условий, обеспечиваю¬
щих непрерывность функции ру. Отметим лишь, что эта непре¬
рывность проверяется без особого труда при условиях w (t) = 0,
х$ = 0 для широкого круга величин х [и], например, в слу¬
чае, отвечающем ограничению на энергию управления или на
максимум управляющей силы, если система (26.1) вполне управ¬
ляема.
Свойства строгой монотонности и непрерывности функции рг
оказываются важными для решения задачи о предельном быстро¬
действии по следующей причине. Пусть существует хотя бы одно
число , , для которого среди допускаемых управлений найдется
управление г, (£), переводящее систему (26.1) из положения х*
в положение х® за время , — Za = , при условии р* [иа>] =
= х [и(1] j ц. Тогда будет справедливо неравенство рт, > l/p. Ес¬
ли функция рт является непрерывной и если справедливо соотно¬
шение^ lim рт = 0 при Т ->0,то можно утверждать, что сущест¬
вует наименьшее положительное число Г°, при котором выполняется
равенство рт» = 1/р,. Если к тому же функция рт строго монотонна,
го такое число Г0 будет единственным, т. е. при сделанных выше
предположениях, обеспечивающих строгую монотонность непре¬
рывной функции рт, уравнение (27.5) имеет единственный положи¬
тельный корень Т = 710, который и определяет оптимальное время
переходного процесса. Кроме того, опираясь на теоремы о неявных
функциях, нетрудно проверить, что при условии строгой монотон¬
ности переменной рт величина Т° — корень уравнения (27.5) — за¬
висит непрерывно от координат х* и от параметров системы.
Особенно полезны указанные свойства при ' решении ' задачи
26.1 в тех случаях, когда задача об оптимальном управлении при
условии минимума соответствующей интенсивности не решается
в замкнутой форме.
Пусть, например, требуется найти оптимальное по быстродей¬
ствию управление при ограничении на интенсивность (21.1) вида
х [zz] = sup max (| и,(т) |) р (/ = l,..,r, r>Za). (27.16)
* J
т) Это соотношение опять-таки выполняется с очевидностью в случае
ограничения на энергию или на максимум управляющего воздействия и может
не иметь места при ограничении на импульс управляющей силы. В послед¬
нем случае может оказаться Т° = 0.
§ 27]
РЕШЕНИЕ ЗАДАЧИ О БЫСТРОДЕЙСТВИИ
241
Уравнение (27.5) для определения 7° в соответствии с результа¬
тами из § 21 принимает здесь вид (см. (21.27))
Рт
(27.17)
где htj (fy, т) — элементы импульсной переходной матрицы
Я = S' [т, t$]B (т), а Z? (7) — числа, дающие решение
задачи
г
min
= рт
(27.18)
п
при условии 2 Ц.сг (Т) = !•
г=1
Как нам уже известно, задача (27.18) в общем случае не ре¬
шается, к сожалению, в замкнутой форме. Поэтому, определяя Т°
из уравнения (27.18) каким-нибудь численным способом, мы вы¬
нуждены на каждом шаге численно (например, методом наиско¬
рейшего спуска, см. по этому поводу § 24) находить новые значе¬
ния величин Z$ (Г). Если . установлено, что функция рт непрерыв¬
на и обладает свойством строгой монотонности, то для отыскания
T можно предложить следующую схему счета, реализующую
простейший процесс последовательного приближения. Выбирая
из разумных соображений некоторое число 7 х . определим мини¬
мальную функцию 77. (т); если окажется, что р [h^ (т)] = рт, Д>
> 1/ц, то возьмем 7\, равное T-J2, а если выполняется неравенство
противоположного смысла рт, 7 1/ц, то следует положить Т2 =
= 27\. Итак, пусть Т2 определилось. Если для начального при¬
ближения Тг было рт, > 1/р и снова оказалось рт >1/ц, то по¬
лагаем опять Т3 = 72 2, и так поступаем' до тех пор, пока не при¬
дем к неравенству рт. 1/ц. Тем самым искомое число Т° оказы¬
вается захваченным в вилку Тj < <7 . Далее понятным
образом составляем последовательность сжимающихся отрезков,
содержащих У°. Если же было рт, <С 1/р и снова получили рг2 <С
< 1/ц, то выбираем Т3 = 2Т2, и так поступаем до тех пор, пока не
получится рт- >1/ц. Тогда 7° снова попадает в вилку Т <7
Т° <С 71; и т. д. Указанный процесс продолжим до тех пор, пока
не будет выполнено с заданной точностью равенство р [Лтт (т)] —
= 1/ц. В итоге построится последовательность чисел Т2,...
..., 7т,..., сходящаяся к 7°. Эта сходимость доказывается без
242
ПРОБЛЕМА ПРЕДЕЛЬНОГО БЫСТРОДЕЙСТВИЯ
[Гл. 7
труда, если только задача, действительно, имеет решение, т. е. если
llm рт > 1/р при Т . оо. После того как T° определено, .само
оптимальное по быстродействию управление в случае (27.16) за¬
пишется согласно (21.32) формулой
и?(0 = fsgnftjwi (t) + Т°, l = 1, . . ., г). (27.19)
Понятно, что для нахождения нужного нам корня уравнения
(27.5), помимо описанной наипростейшей схемы счета, могут быть
применены и другие вычислительные процедуры,' эффективно
решающие эту задачу. Одна из них такова. Допустим, напри¬
мер, ' что на /-м шаге процесса последовательных приближе¬
ний при Т = Tj реализовалось неравенство Р (т), ta . т . ?а +
4- Tj] = pTj <Z 1 /Р- Если следующее приближение Tj+i под¬
бирать из условия р[/^*т.(т), Т <4 ta +^j+lj = 1 / И, то Г;+1,
будучи больше 2j, не превзойдет, однако, искомой величины Т°,
поскольку р [hr .+1 (т), ta < т < t . + ГЯ1] ' = рт^ < р [Ьг .(т),
**+ 7W = -Г-.
Г
Имея для найденного Tj^ минимальную функцию ^Г;+1(т),
подберем Т^.2 снова из уравнения р [hrj+1 (т), t. . т . ta 4- Т.^] =
= 1/|» и . т. д. Таким образом, начиная с Т = Tj, получается
последовательность Tj, Tj+i, . . Tm, . . монотонно сходящая¬
ся к Г°. Удобно также решать уравнение (27,5) методом хорд.
Конечно, при решении конкретных задач о предельном быст¬
родействии могут встретиться примеры, когда надобность в чис¬
ленном решении задачи отпадает. Но, к сожалению, такие случаи
являются исключительными и, как правило, приходится решать
задачу численно. Заметим, наконец, что весь счет можно вести,
опираясь не на минимальную функцию h? (т), so используя экст¬
ремальную функцию hr (т) и решая, следовательно, не задачу
(17.4) или (17.10), (17.11), но задачу (17.5) или (17.12). Приведем
теперь два простых иллюстрирующих примера.
Пример 27.2. Пусть движепие материальной точки (см. п. 1° § 3) описы¬
вается дифференциальными уравнениями -
*1 —
= —х± 4- и,
(27.20)
которые получаются из системы (3.5) при eg = Г, v = 0, т = 1, a (Z) = 1.
Требуется перевести систему (27.20) из состояния х (ta) = х (0) = {2,1} в
положение x(t£' = х (Т) = . {0, '0} за наименьшее возможное время Т° при ус¬
ловии, что | и (t) I <4 1. Будем решать эту задачу методом последователь¬
ных приближений, опираясь в процессе счета на правило 17.4. Система,
§ 27]
РЕШЕНИЕ ЗАДАЧИ О БЫСТРОДЕЙСТВИИ
243
сопряженная к системе (27.20), имеет вид
$1 = s2,
®2 = ' s1>
и, следовательно, фундаментальная матрица S [т, (а! этой последней систе¬
мы такова:
cos (/а — т) — sin (ta — т)
sin (Za — т) cos (ta — т)
Так как в (27.20)
в(т) = Ь = [°,
то, обозначая s (<а) = к и учитывая, что ta = 0, приходим к выводу: при
каждом /р = Т задача (17.12), вытекающая из правила 17.4, превращается
здесь в задачу: найти
max [кхх® + к2х^] =
(27.21)
при условии
т
р [В' (т) s (Т)! = р [ГО [т, tj *] = -| *j/(1) (т) + W(2) (Т) |Л =1, (27.22)
О
где
/(1\т) = —srn т, /2)(т) = cos т. (27.23)
Для наглядности будем решать задачу (27.21), (27.22) для каждого фик¬
сированного Т графически. Числа (71), решающие эту задачу, определя¬
ются тогда как координаты на плоскости {к}, к2} точки касания прямой
ktx* + к2х* = v®
и кривой (27.22), уравнение которой, учитывая (27.23), можно записать в
более простом виде:
т-е
((^-i-^)*5- | | sinO|cH} = l, (27.24)
где О' = т — е, tg е = к2/к±.
Вид кривых (27.24) и соответствующие прямые при различных значе¬
ниях Tj, встречающихся по ходу счета, изображены на рис. 27.2.
Выбирая в качестве начального приближения Т = 2л, определяем
искомую величину У0 по схеме, подобной одной из описанных выше схем по¬
следовательных приближений. В итоге находим последовательности Тг = 2л,
Т2 = л, Т2 = 3,5, У4 = 3,75 и 11 = 0,56, = 1,13, 4, = 1,07, , 1,05.
Если | нас устраивает последнее приближение к решению задачи, то можно
положить Т° = Ti = 3,75. Координаты точки касания к° = к° (3,75),
244
ПРОБЛЕМА ПРЕДЕЛЬНОГО БЫСТРОДЕЙСТВИЯ
[Гл. 7
/с® = /с® (3,75) оказываются при этом такими: К° = 0,45, К° = 0,16. В таком
случае, принимая h°Ti (т) = к° (Г4) /(1) (т) + к2 (Г4 /(’)(т) за экстремаль¬
ную функцию Л^о (т), находим приближенное оптимальное по быстродействию
Рис. 27.2.
управление (t) — 1,05 sgn ti^o (t) = 1,05 sgn [0,45 smi — 0,16 cos /].
Переходный процесс в системе (27.20) при и —— uQ (t), смоделированный на
АВМ, представлен на рис. 27.3.
§ 27]
РЕШЕНИЕ ЗАДАЧИ О БЫСТРОДЕЙСТВИИ
245
Пример 27.3. Рассмотрим задачу о наискорейшем приведении гироком¬
паса в заданное состояние при условии ограниченности величины управляю¬
щей силы. Ранее, в § 24, была решена задача 24.1 о приведении этого же
гироскопического компаса в меридиан минимальной силой за выбранное
заранее время Г=1800 сек. Там было найдено, властности, что шах | и (т) |=
т
= 0,47 -10"3. Теперь мы определим минимальное время, за которое можно
перевести гирокомпас в заданное состояние при условии sup | и (т) | — р,
. г
причем для сравнения с примером из книги [1936] (стр. 21) интересно по¬
ложить р. = 0,64 «10-3.
Выпишем еще раз уравнения, соответствующие прецессионному движе-
нию гирокомпаса:
. 1,53921 , 1,53921 0™ >
#1 — ’ х-2 + ’ «0,62 - + и,
41,1368 41,1368
±2 = 41,1368-10-6
хз = — 1,5-10_3ас.2 — 1,5-10_3хз.
Пусть задано начальное состояние х* = {0,3; 0,004; 0,004}, Za = 0 и огра¬
ничение | и (t) | 0,6401 -10_3. Требуется перевести гирокомпас в положе¬
ние хР = {0; 0; 0} за наименьшее возможное время Т°. Для данного примера
уравнение (27.17) примет вид
Г
Рт = Л I (— . (7\ т) + /°Л<2) (Г т) + /°А(3) (Т, т) I dx =. 103/0,6401 = 1562Д
о (27.25)
где U.U (Т, т) (i = 1,2,3) определены формулами, которые следуют из формул
(24.12) при t = Т — т:
Л(1) (Т, т) = ag>ex< (Г~Т) + з£1>е« (Т~т) cos 3 (Г — т) — З»)е« (Г-т) sin 3 (Т_ Т) '
Л(2) (Г, т) = а. еМ U 1 U + е“ . и -( cos Р (Г — т) — £<*-. - ( - " - sin Р ( U - т),
/г(з) (^ т) = аН) еМ (Т-i) + ззу** (T~T)cos 3 (Т — т) —3 -—еа ( т— srn 3 (Т — т).
Уравнение (27.25) решалось на ЭЦВМ способом последовательных при¬
ближений, при этом на каждом шаге решение соответствующей задачи (27.18)
определялось методом наискорейшего спуска. В результате при Т± = 1800,
Т = 1300, Т3 = 1250, Т4 == 1240 получилось, что р^ = 2147,5, рГг = 1651,
рГв = 1583, рг, = 1562. Тогда можно положить Т° = Т,. При Т = оказа-
лось, что
1° (Г4) = — 1,050,
Z° (Г,) = —198,6, 1° (Л) = -498,5.
Следовательно,
Лу» (т) = /J (Т°) h(1) (Т°, т) + (7°) й(2) (Т°, т) + 103 (7°) h™ (Т°, т) =
= — 20,49-eXi ( — ( + 19,48 - е“ - —- - ( cos 3 (7° — т) +
4 4,11 - е< (и — Sin 3 (то — т), 70 = 1240.
246
ПРОБЛЕМА ПРЕДЕЛЬНОГО БЫСТРОДЕЙСТВИЯ
[Гл. 7
Эта функция в соответствии с (27.19) определяет искомое оптимальное уп¬
равление:
[ — 0,6401 • 10~3 при 0 < t < 725,
»(/)=■{ + 0,6401 • 10"» при 725 </ < 1066,
( — 0,6401 • КГ» при 1066 < t < 1240.
Процесс наискорейшего перевода гирокомпаса в меридиан, просчитанный
на ЭЦВМ, представлен графиками ' хх (О, х2 х3 (t) на рис. 27.4.
работы и могут также потребовать от
Итак, в случаях,
когда уравнение (27.5)
имеет единственный дей¬
ствительный корень, за¬
дача о предельном бы¬
стродействии всегда мо¬
жет быть решена доста¬
точно эффективно без
больших помех в чис¬
ленной процедуре. При
отсутствии же монотон¬
ности функции рт воз¬
никают дополнительные
трудности, связанные с
определением наимень¬
шего положительного
корня уравнения (27.5).
Эти трудности могут су¬
щественно увеличить
объем вычислительной
вычислителя определен¬
ного искусства.
Отметим теперь еще следующее. Основное внимание в этом
параграфе мы уделили обсуждению процедуры отыскания опти¬
мального по быстродействию управления. При этом не акценти¬
ровалось внимание на вопросах о существовании «ешения и на
других подобных проблемах. Однако и такие вопросы разреша¬
ются здесь без труда, если опять же воспользоваться результата¬
ми из предыдущих параграфов. Таким путем можно получить
большое число различных теорем о существовании решения за¬
дачи предельного быстродействия, о непрерывной зависимости
его от начальных условий, от параметров управляемой системы
и т. д. Читатель, разобравшийся в предыдущем материале, может
с успехом сделать это самостоятельно. Приведем для примера
лишь один подобный результат.
Рассмотрим управляемую систему
х = Ах + Ьи,
(27.26)
§ 27]
РЕШЕНИЕ ЗАДАЧИ О БЫСТРОДЕЙСТВИИ
247
для которой поставлена задача об оптимальном быстродействии
из точки х (ta) — х* в точку х (t$) — 0 при условиях
I « ((|< 1. (27.27)
*3
|и(0О1<1. (27.28)
Будем полагать матрицу А и вектор Ъ постоянными. Согласно
общей процедуре решения, описанной в этом параграфе, данной
задаче надлежит сопоставить задачу 13.1 об оптимальном управ¬
лении х (t*) -> х (S3) при условии минимума интенсивности
*з
и [и] = max "sup | и (т) ^| и (т) | Jt] (27.29)
и рассмотреть величину рг = 1/хт (Т — Ц — £а), которая в дан¬
ном случае согласно материалу из § 24 определяется равенством
рг = nun max Ц | b's (т) б [ Д] = nun (1 Г)] , (27.30)
S А А
где s (t) — движение сопряженной системы
з ——A's, (27.31)
стесненное краевым условием
s'(ta)x« — — 1, (27.32)
Справедливо утверждение.
Пусть для заданного начального условия х (to) — х* выполня¬
ется соотношение
Bm "mm max ' ' | b's (т) | dx ( ( ( 1 (s' (0) х* — — 1^ (27.33)
Т-оо L s A 'J /-1
д
тогда задача об оптимальном быстродействии имеет решение
Шт (t) — и 0 (t), которое является функцией, принимающей лишь
три значения: 1, —1 и 0, причем значения ± 1 принимаются на
множестве © точек t, мера которого есть min (1, 71°).
В самом деле, если условие (27.33) выполнено, то это, во вся¬
ком случае, означает, что при достаточно большом Т — t$ — tx
для данного начального условия х (t„,) — хЛ имеем рг 1 0 и,
следовательно, тогда разрешима задача 13.1 об управлении.
Отсюда следует, что вектор ха принадлежит к подпространству
управляемости 1т системы (27.26) (см. стр. 146). Но в таком
248
ПРОБЛЕМА ПРЕДЕЛЬНОГО БЫСТРОДЕЙСТВИЯ
[Гл. 7
случае мы можем привести уравнение (27.26) к каноническому
виду (19.13), (19.14) и решать задачу о предельном быстродейст¬
вии лишь для вполне управляемой части (19.3) системы, игнорируя
прочие координаты, так как вследствие принадлежности X к Жт
все эти координаты согласно материалу § 19 будут тождественны¬
ми нулями при всех Z X £а, как бы ни выбиралось управление
и (t). Итак, не нарушая общности, мы можем считать рассматри¬
ваемую систему вполне управляемой. Но для такой системы ве¬
личина рг, определенная соотношением (27.30), есть непрерыв¬
ная, положительная и монотонно неубывающая функция при
Т >0, удовлетворяющая условию lim рт = 0 при Т ->0. От¬
сюда и из (27.33) следует, что уравнение (27.5), т. е. здесь урав¬
нение рт = 1, имеет наименьший положительный корень Т = Т°,
который и является оптимальным временем Т° ппедельного быст¬
родействия. Свойства оптимального управления u° (t). = ит° (t)
следуют теперь сразу из материала § 24 (см. стр. 214). Если еще
предположить, что минимальная функция . Ат° (т) — Ь' вТ° (т) от¬
лична от тождественной постоянной, то сразу же придем к вы¬
воду, что u° (t) есть кусочно-постоянная функция, а если при этом
воспользоваться тем, что система отрезков Д° на [£а, ta + Т°],
которая удовлетворяет условию
Д 1 д
|Ь'4.(т) |dx = 1, б [Д] = min (1, 710), (27.34)
Д°
единственна, то сразу убеждаемся в единственности оптимального
по быстродействию управления u° (Z), как это следует из свойства
максимума (17.1), которому при данном $*<> (t) должно удовлетво¬
рять каждое оптимальное управление ит° (t). Если отказаться от
высказанных только что априорных предположений о свойствах
минимального движения $т° (t), то для решения вопроса о един¬
ственности оптимального управления и° (t) (в случае Т° >1)
нужен более детальный анализ, который можно предложить
читателю в качестве упражнения. (Точно так ' же нужен допол¬
нительный анализ существования решения в случае, когда
lim рг = 1 при Т -> оо .) В случае Т° X 1 единственность релей¬
ного оптимального управления (t) следует всегда сразу из
свойства максимума (17.1).
Наконец, если рассмотреть для системы (27.26) ту же задачу
о предельном быстродействии, но лишь при ограничении (27.27),
то сразу получим утверждение.
§ 27]
РЕШЕНИЕ ЗАДАЧИ О БЫСТРОДЕЙСТВИИ
249
Теорема 27.2. Задача имеет- решение и" (t) тогда- и только
тогда, когда
т
lim mi
Т—>оо L s
Оптимальное управление и° (t) единственно и является релей¬
ной функцией, принимающей два значения ± 1.
Здесь анализ существенно упрощен по сравнению с предыду¬
щим случаем, поскольку сразу видно, что величина рт является
строго монотонной возрастающей функцией от Г, и сразу видно,
что минимальное движение ZZо (t) определяет оптимальное управ¬
ление uyo (t) из свойства максимума (17.1) единственным образом.
Заметим еще, что в случае полной управляемости системы (27.26)
для выполнения условия (27.35) при любом х* необходимо и дос¬
таточно, очевидно, чтобы ни один корень р t (i = 1,..., п) характе¬
ристического уравнения det (—4' — цЕ) = 0 системы (27.31) не
имел отрицательной действительной части. А для этого необхо¬
димо и достаточно, чтобы все корни Zv f уравнения det (Л — ХЕ) =
= 0 имели z неположительную действительную часть, так как из¬
вестно, что X} ~ (i = l,..,n).
Итак, мы разобрали способ решения задачи 26.1, основанный
на правиле минимакса. Во введении уже было указано, что весьма
общие признаки оптимальности дает принцип максимума Л. С.
Понтрягина. Посмотрим теперь для сравнения, как описанное
нами решение связано с решением той же задачи на основе прин¬
ципа максимума. При этом ограничимся обсуждением данного
вопроса на материале конкретной задачи. Именно, предположим,
что задана система (27.26) со скалярным управлением и (t) и что
для этой системы требуется решить задачу о быстродействии 26.1
при условии (27.27).
Обратимся вначале к принципу максимума Л. С. Понтрягина.
Пусть ф (t) означает решение сопряженной системы
(27.36)
совпадающей с (27.31). Тогда для сформулированной нами зада¬
чи принцип максимума читается следующим образом: для того
чтобы управление и° (£) было оптимальным, необходимо сущест¬
вование такой ненулевой непрерывной вектор-функции ф° (t),
удовлетворяющей (27.36), что для всех t, Е t = t* + Т
функция
Ж [ф (£), х (t), t, и] = ф' (t) [Лх + Ьи]
(27.37)
250
ПРОБЛЕМА ПРЕДЕЛЬНОГО БЫСТРОДЕЙСТВИЯ
(Гл. 7
переменного и достигает в точке и - = и" (£) максимума ио всем
значениям и, для которых | U'C р = 1, причем
max Ж [ф®, х, t,u] = Ж (, х, t, u°] = 1. (27.38)
и
Замечая теперь, что слагаемое ф' (t) Ах от и не зависит, находим,
что функции ф° (t) -и и" (t) обязаны удовлетворять соотношению
[ф°(()]ГМ° (0 = Я [ф0, И =
= max — - [ф°, и, П- = max [ф°' (t) bu(ty] (27.39)
и и
при | и | ( р = 1.
Управление u° (t) следует находить по вектору ф° (t) согласно
(27.39). При этом, если вектор ф° (Z) известен, то нахождение функ¬
ции и" (£) не составляет труда и представляет собой процедуру,
аналогичную нахождению величины и" (/) по функции h" (t) из
соотношения (21.8). Так, если величина ф°'(£) Ъ не обращается в
тождественный нуль нигде на Ка, — + Т°], то и" (t) единственно
и определяется равенством и0 (£) = р sgn рф°'(£)6]. Подчеркнем,
однако, что условия (27.38) или (27.39) принципа максимума не
указывают явно на способ выбора функции ф° (t) -среди всех ре¬
шений уравнения (27.36), т. е. не указывается способ вычисления
краевого условия ф° (£а) или ф° (^). Кроме того, не указываются
условия для определения числа t$ = ta + Т". Последние обстоя¬
тельства могут вызвать затруднения при построении вычислитель¬
ной схемы для конкретного определения управления и" (£)■
Обратимся теперь к теоремам 27.1, 27.2 и правилу минимакса.
Привлекая соотношения (17.1), (17.4) и учитывая, что s (t) есть
решение системы (27.31), совпадающей с (27.36), находим соглас¬
но теореме 27.1, что
0 о
*3 <3
\ b's" (т) и" (?) dx = max \ b's" (?) и (?) dx = 1
У и(т) J 1
«а га ♦
при | и (?) | ( р = 1. Последнее соотношение означает (см (21.7)
и (21.8)), что
b's"Ta (t) и" (t) = max (6s®. (t) и) при | и | < р = 1. (27.40)
и
Сопоставляя (27.39) с (27.40), видим, что эти условия просто сов¬
падают, если положить ф° (t) = syo (t). Однако правило минимакса
содержит дополнительную информацию о векторе syo (£, облег¬
чающую его нахождение. Именно, из правила 17.1 (или 17.3) из¬
вестно, что этот вектор зуо (t) есть движение (27.31), обладающее
§ 28]
УПРАВЛЕНИЕ ПО ПРИНЦИПУ ОБРАТНОЙ СВЯЗИ
251
следующим специфическим свойством:
b's"., (т) | dr = min
S
J | b's (т) | dx = 1
при s' ($,) с (Т) = 1 (или при s' (tx) хл = — 1 в правиле 17.3),
и являющееся в этом смысле минимальным движением указанной
системы (27.31). Кроме того, последнее уравнение доставляет ин¬
формацию для вычисления Т°. Отметим также, что условия (17.1),
(17.4) правила минимакса формулируются как необходимые и
достаточные для оптимальности и® (t), в то время как принцип
максимума (27.38) формулируется в качестве необходимого усло¬
вия. Следует, впрочем, подчеркнуть, что в линейном случае, как
мы видим, эти необходимые условия, даваемые принципом мак¬
симума, являются • и достаточными. Наконец, теорема 27.1 вклю¬
чает в себя еще утверждение о существовании решения u° (t и
его оценку.
Замечания, аналогичные только что высказанным, могут быть
сделаны не только по отношению к задаче о быстродействии, но
и по отношению ко всему кругу линейных задач управления,
рассматриваемых в настоящей книге. При этом, однако, следует
иметь в виду, что в отличие от методов, описанных в данной мо¬
нографии, принцип максимума Л. С. Понтрягина есть общий
принцип оптимальности, охватывающий чрезвычайно широкий
круг разнообразных задач как для линейных, так и для нели¬
нейных систем.
§ 28. Управление по принципу обратной связи
В тех задачах об управлении, которые рассматривались в
предыдущих параграфах, управляющие воздействия и разыскива¬
лись в*форме функций и (/) от времени t, причем начальное и ко¬
нечное условиярх (ta) = — и х (t$) = х? предполагались задан¬
ными заранее и строго фиксированными. Подобные задачи носят
название проблем программного управления. Этот термин подчер¬
кивает ту мысль, что в рассматриваемых • случаях движение х (t)
осуществляется по программе, диктуемой выбранным заранее
вполне определенным управлением и (£). Задачи • программного
управления составляют важный круг проблем в теории управля¬
емых процессов. Однако во многих случаях управление по прог¬
рамме и = и (t) не подходит, оказываясь неудовлетворительным
в' реальных условиях работы системы. Основной недостаток этого
способа действий состоит в том, что он не учитывает доподнитель-
252
ПРОБЛЕМА ПРЕДЕЛЬНОГО БЫСТРОДЕЙСТВИЯ
[Гл. 7
ные обстоятельства, которые могут возникнуть по ходу процесса.
Так, если в системе, работающей по заранее определенной прог¬
рамме и (t), возникнут в некоторый момент t = t* непредвиденные
возмущения Дt (tt) фазового вектора х (/), то естественно, что
заданная, неизменная при t > , программа и (t) поведет объект,
начиная с момента t = t*, в состояние х (1), отличное, вообще
говоря (и, может быть, весьма существенно), от заданного по¬
ложения х$. В подобных случаях воздействие и должно поэтому
формироваться с учетом дополнительной информации, поступаю¬
щей в орган управления по ходу процесса. Этому условию от¬
вечает управление по принципу обратной связи, который явля¬
ется краеугольным камнем в теории регулирования. Суть этого
принципа состоит в следующем: в каждый момент t воздействие и
определяется на основании информации о текущем состоянии
объекта в этот момент. Данное определение выглядит расплыв¬
чатым. Это объясняется тем, что характер информации, которая
может использоваться в процессе управления, в различных при¬
кладных проблемах оказывается весьма разнообразным. Мы огра¬
ничимся простейшим случаем, когда в каждый текущий момент t
известны реализовавшиеся значения всех фазовых координат xt (t)
(i = В таком случае управляющее воздействие, которое
строится по принципу обратной связи, будет разыскиваться в
форме и = и 1^1,...,хп] или в нестационарных случаях *) в форме
и = и [t, #1,..,хп]. Следовательно, для того чтобы определить
тогда управляющую силу и в некоторый момент времени t, мы
должны подставить в выражения для данных функций и значения
аргументов х(, равные реализовавшимся величинам xt (t). Ус¬
ловимся о следующих обозначениях. Программное управление
и будем обозначать, как и раньше, символом и (t). Если же речь
пойдет о некотором управлении и, которое строится по принципу
обратной связи в виде и [ап...,хп] или в виде и [£, ж,...,^], н0 в
каком-то конкретном случае реализуется как некоторая функция
времени и = и [хг [Л,...,хп 1Й1 (или и [Д Xi [t] ,. .. ,, 1111 соответ¬
ственно), то такую функцию времени будем обозначать символом
и И], т. е. и [t] = и [£, х± [£],...,хп R11 или и [П = [И,...
..., хп [Z]]. Полезно подчеркнуть, что в данной записи символ х Ш
т) Здесь мы называем стационарным такой случай, когда в задаче об уп¬
равлении по принципу обратной связи правые части дифференциальных урав¬
нений движения объекта не содержат явно t и все другие условия задачи
также совершенно не изменяются при изменении начала отсчета времени.
В противном случае мы попадаем в нестационарные условия. Примером не¬
стационарной задачи может служить рассматриваемая ниже в этом параграфе
задача 28.1, даже если в уравнениях (28.1) матрицы А и В являются посто¬
янными матрицами. Напротив, задача 29.1, изучаемая в § 29, будет стацио¬
нарной, если только движение объекта описывается системой дифференци¬
альных уравнений с постоянными коэффициентами.
§ 28]
УПРАВЛЕНИЕ ПО ПРИНЦИПУ ОБРАТНОЙ СВЯЗИ
253
обозначает как раз то движение объекта, которое порождается
управлением и [£]. Заметим еще, что управление по принципу
обратной связи изображается обычно в виде структурной схемы,
представленной на рис. 28.1.
Проблемы управления по принципу обратной связи обычно
более трудны для решения, чем проблемы программного управле¬
ния. Следует также иметь в виду, что требования, предъявля емые
к качеству решении этих
двух типов задач, различны.
В случае программного уп¬
равления типична ситуация,
когда управление и (t) вы¬
числяется заранее, заблаго¬
временно до начала процесса
и, следовательно, вычисли¬
тель обладает обычно вре¬
Рис. 28.1.
менем для осуществления
громоздких счетных процедур притом в стационарных усло¬
виях. Напротив, в случае управления с обратной связью ве¬
личина и И = и [£, #[£]] должна вычисляться в регуляторе
по ходу процесса в зависимости от реализующихся величин xt И
и эти вычисления, понятно, не должны отставать от течения са¬
мого управляемого процесса х [И. Поэтому здесь нужно иметь
достаточно простые и быстро осуществимые алгоритмы для вы¬
числения и И. Идеальным тут является получение функции
и [/, х] в замкнутой форме, но это редко удается осуществить.
Для решения задач об управлении с обратной связью вырабо¬
таны специальные методы исследования. Из них, по-видимому,
важнейшим является метод динамического программирования, с
которым читатель может познакомиться в книгах [28а, 136а, 21 Зг].
Доскональное исследование упомянутых задач не составляет
предмета нашей книги и требует специальной монографии. Поэ¬
тому мы разберем здесь лишь одну подобную задачу, чтобы осве¬
тить связь рассматриваемых нами вопросов с проблемами управ¬
ления по принципу обратной связи. Сделать это полезно, прежде
всего, по той причине, что задачи о программном управлении сос¬
тавляют часто один из этапов общего решения проблемы управ¬
ления с обратной связью.
Рассмотрим следующую задачу.
Задача 2(8.1. Пусть заданы момент, времени t = и сос¬
тояние х (tp) = х&, в которое необходимо привести систему
х — A (t)x + В (t) и
(28.1)
к этому моменту t ~ tt управлением и ~ U [t, х], выбранным
из класса возможных. Момент, t = t% начала процесса и исходно^
254
ПРОБЛЕМА ПРЕДЕЛЬНОГО БЫСТРОДЕЙСТВИЯ
[Гл. 7
состояние х (t*) = хл не заданы и могут, оказаться произвольными
в пределах i ta<X tp, — оо < xf < оо (£ — 1,..., п). Функцию
U [£, х] требуется, выбрать так, чтобы при любом- начальном
условии t^.x- выполнялось неравенство
каково бы ни было другое возможное управление, и = и (t) или и =
= и [d = и [t, х (£)], приводящее систему (28.1) в нужное сос¬
тояние х (tp) = х&.
При этом под возможными управлениями и■ (t) и и х] по¬
нимаются здесь такие классы функций, При подстановке кото¬
рых в (28.1) получаются дифференциальные уравнения, удо¬
влетворяющие условиям существования решений (см. стр. 18).
В данной задаче можно ограничиться, например, классом не¬
прерывных функций и (t) и и U, х], что мы и примем в дальней
шем для определенности.
Итак, приступим к решению задачи. Будем предполагать,
что система (28.1) вполне управляема на любом отрезке
t i tp (см. § 20). Примем сначала, что момент t = << и значе¬
ние х (ta) = хл как-нибудь выбраны, и зафиксируем их на вре¬
мя. Тогда, опираясь на материал из § 18, мы сможем решить за¬
дачу 13.1 при условии минимума интенсивности к [и] (18.1).
Такую задачу можно назвать программной задачей, соответ¬
ствующей задаче 28.1. Нам известно, что функция и (т) (£а < т СГ
t$), разрешающая эту последнюю задачу, имеет вид
и (т) = М (т, ta, tp << + /V (т, ta, tp) X?, (28.3)
где матрицы М п N непосредственно определяются из формул
(18.10) и (15.2). Функцию (28.3) удобно для дальнейшего обозна¬
чить символом << х<х (т), а соответствующее оптимальное про¬
граммное движение х (t) — символом xt ха (t). В частности, при
т = tx имеем:
и iа , = М ta^ tp) X* + N а , tp) xt. (28.4)
Так как величины < < и х$ по условию заданы и постоянны, то
правую часть равенства (28.4) можно рассматривать как функ¬
цию от t = t* и х = х*, т. е.
(0 ~ Р (0 # 4- ц (0 = г в, Д
(28.5)
§ 28]
УПРАВЛЕНИЕ ПО ПРИНЦИПУ ОБРАТНОЙ СВЯЗИ
255
где в соответствии с (18.10), (15.2)
п
Р — {.Pis), pis(t} ~ гу rji 3 Djlt Ш I tt> И>
1 J J,»=l
(28.6)
n
<7 = (9i}> 7i (t) = -лгут- 2 Din
(Zs = l,...,n).
Оказывается теперь, что как раз эта функция г, подсчитан¬
ная для всех возможных значений t й х, и дает решение задачи
28.1. Иначе говоря,
и? [Z, х1 = г [Z, х] =•- Р (t)x — q (t). (28.7)
Проверим справедливость высказанного утверждения. Преж¬
де всего, из выражений (28.5), (28.6) следует, что построенная
функция и0 (28.7) непрерывна по своим аргументам и является,
таким образом, возможным управлением. Теперь, очевидно, ос¬
тается проверить лишь, что движение xt ха (t) при ta - t <Г Z3
есть решение х [Z] уравнения
х (Z) = Ах + Ви° [Z, х] = Ах + В (рх q), (28.8)
причем и [Z] = и° [Z, Xt „а (Z)] = и. ,. (0- Покажем сначала,
1а» х 1а> х
что функция Xt ха (Z), действительно, удовлетворяет уравнению
(28.8). Для этой цели воспользуемся следующим важным обстоя¬
тельством. Пусть ty — какой-нибудь момент времени из интер¬
вала (ta, tp), тогда отрезок ty t <С — оптимального движения
х1 ха (0 является снова оптимальным движением х. ху (Z) для но¬
вого начального условия х< = xt хЯ (ZY). (Это выделенное кур¬
сивом утверждение составляет основу принципа оптимально¬
сти, играющего важную роль в теории динамического програм¬
мирования.)
Следовательно, мы можем записать равенство
и ta, хл (М = и ty-х* = и° #"*]• (2 .9)
Теперь по определению функций ut xa(Z), xt ха (Z) и вследст¬
вие (28.9) имеем:
х a xa (М “ Axta, xa (M + Bu x«. (Q —
~ Ax t л, хЛ 4" Bll [ZY, X [оу, xa (^v) ] >
256
ПРОБЛЕМА ПРЕДЕЛЬНОГО БЫСТРОДЕЙСТВИЯ
[Гл. 7
а это в силу произвольности ty и доказывает, что функция x. % (t)
удовлетворяет уравнению (28.8), причем, действительно, ut хЛ (Z) —
— и {t, х. г„ (£)]. Далее, согласно известной теореме [19,21]
из теории дифференциальных уравнений заключаем, что (28.8)
при любом .начальном условии х (1Л) = х* имеет единственное
решение х {t], ибо правая часть его удовлетворяет условиям Лип¬
шица по переменным x.. Поэтому оптимальное программное дви¬
жение х1 х„ (t) есть, действительно, единственное решение
х Ш уравнения (28.8), отвечающее начальным условиям х (ta) =
= ха, что и требовалось проверить.
Таким образом, оптимальность управления и° = г {t, х]
(28.7) доказана.
Подведем итог. Нами установлено следующее правило.
Для того чтобы решить задачу 28.1 об оптимальном упра¬
влении u° {t, х] системой (28.1) по принципу обратной связи,
достаточно найти оптимальное управление u. а (t) для соот¬
ветствующей программной задачи при любых возможных ta и
х* (при (18.1)). Тогда
U {t, х\ — uttX (t). (28.10)
Это утверждение, доказанное только что в случае минимиза¬
ции величины I (28.2) на движениях линейной системы (28.1),
в действительности сохраняет свою силу для весьма широкого
класса задач. В самом деле, фактически в рассуждениях мы ис¬
пользовали лишь следующие общие факты: (1) допустимость
управления и0 — г [Z, х], (2) принцип оптимальности, (3) един¬
ственность решений х U] уравнения (28.8). Кроме того, для
возможности построения функции и* [£, ж] = г И, х\ удобным
обстоятельством явилась единственность программного управле¬
ния ut х<1 (t), но последнее обстоятельство не является столь важ¬
ным. Однако практическая ценность сформулированного выше
правила ограничена тем обстоятельством, что в случаях величин
I, отличных от (28.2), когда, следовательно, в соответствующих
программных задачах и величины х отличаются от величины
х [и] (18.1), не удается выразить так же просто явную зависимость
(*«) от . . ха. Тем не менее и в этих случаях, если алгоритм
вычисления и.* < (ta) может быть осуществлен достаточно бы¬
стро по сравнению с реальным движением х Ш, указанное пра¬
вило может оказаться полезным. Мы еще вернемся к нему ниже,
в главе 10 при изучении задачи о преследовании.
< 29]
СИНТЕЗ ОПТИМАЛЬНЫХ СИСТЕМ
257
Пример 28.1. Рассмотрим в качестве иллюстрации задачу из примера
18.1. Для этой задачи программное оптимальное управление to ... а (/) будет
иметь вид
_ fa)3 [ 2x'i r2 *а)1 “ 0 +
+ (^ _ U2 + т х2 2 _ М '
(f _ —CJ—'— — x— (t— — t. 1 ] (з. — 3) +
+ (t3 - га)2 [жз + У х — — *«)] + S
Следовательно, оптимальное управление U [Z,.х], формируемое по
принципу обратной связи и минимизирующее величину
*3
1= j [»? W + «|(01 л.
tcL
следует здесь определять по формуле
и° [г, х] = ut— x(t) —
6
(«3 - О2
Итак, умея решать эффективно и быстро соответствующую программную
задачу 13.1 при условии минимума интенсивности х [и] (18.1), мы можем
найти решение uQ [г, х] (28.10) и для исходной задачи 28.1.
§ 29. Синтез оптимальных систем предельного
быстродействия
Задача о программном управлении и (t), которое обеспечивает
наискорейшее возможное приведение системы (26.1) в заданное
состояние х = х& была уже изучена в § 27. Здесь мы обсудим
аналогичную проблему, предполагая, однако, теперь, что упра¬
вление и формируется по принципу обратной связи. Такую про¬
блему называют еще задачей о синтезе оптимальной быстродей¬
ствующей системы. В соответствии с материалом из § 26 рассмат¬
риваемая нами задача формулируется следующим образом.
Задача 29.1. Пусть задано состояние х = х\ в которое
необходимо привести систему (28.1),. и оговорено ограничение на
ресурсы возможных управлений
х [и (т), т > Z] — р (t). (29.1)
9 H. Н. Красовский
258
ПРОБЛЕМА ПРЕДЕЛЬНОГО БЫСТРОДЕЙСТВИЯ
[Гл. 7
Требуется в классе возможных управлений и [t, х, р] выбрать оп¬
тимальное управление ий И, х, р], которое из любого возможного
начального состояния ta, х обеспечивает наискорейшее приведение
системы в положение х = х& (по сравнению с любым другим возмо¬
жным управлением и (t) или и [t, х, р], стесненным условием (29.1)).
Мы не будем пояснять постановку этой задачи и определять
смысл встречающихся в ней терминов, так как для читателя, по¬
знакомившегося с материалом из §§ 26, 27, 28, все это должно
быть ясным. Оговорим лишь одно новое обстоятельство, появив¬
шееся здесь. В число аргументов функции и вошла теперь и ве¬
личина р,. Это вызвано тем, что указанная величина ц, оцениваю¬
щая ресурсы управления, которые можно использовать, начиная
с некоторого момента времени t = 3, может зависеть от ta и
быть, следовательно, величиной переменной, влияющей на вы¬
бор управления и. Итак, неравенство (29.1) в данном случае на¬
до понимать следующим образом. Пусть нам известно, что в силу
сложившихся обстоятельств в некоторый момент t = tа в процес¬
се управления реализовалось некоторое значение р = р (ta).
Тогда можно использовать лишь такие управления и, для кото¬
рых справедливо условие
х [и (т), т > ta] < р (ta), (29.2)
и это условие должно выполняться для реализаций и Ш, опре¬
деленных выбранным законом управления и И, х, р], во всяком
случае, до любого момента t = О, предшествующего моменту
t = ,., когда х (t$) = х*. (Напомним, что момент t = 3 по смы¬
слу задачи 29.1 заранее неизвестен и является как раз искомым).
При этом, естественно, должен быть также известен закон, ко¬
торый определяет изменение величины р (t) с течением времени t.
Обычно этот закон определяется, исходя из условий расходова¬
ния ресурсов управления. Например, если речь идет об управле¬
нии за счет отбрасывания реактивной массы, то, как мы знаем
(см. § 23), ограничение (29.2) можно записывать в виде
*3
$ \dU (т)|<р(3),
ta
где величина р (ta) характеризует запас реактивной массы, ко¬
торая может быть использована при t . 3. Напомним еще, что,
поскольку момент . заранее неизвестен, указанное ограничение
мы условились записывать в виде (см. стр. 233)
СО
$ (29.3)
ta
где символ оо подчеркивает как раз, что момент . , когда окон¬
§ 29]
СИНТЕЗ ОПТИМАЛЬНЫХ СИСТЕМ
259
чится процесс управления, нам не известен, и мы на все бу¬
дущее время t t ta обладаем ресурсом управления, равным pi (ta).
Тогда изменение ц (t) за время ta <С t 3 G <С 33 определяется ес¬
тественно, исходя из равенства
/у
Р(М = !*((«)— — |<Л[т]|, (29.4)
где dU Ш — то управление, которое действительно реализова¬
лось по ходу процесса. Следует, конечно, иметь в виду, что воз¬
можны и такие случаи, когда величина р в условиях (29.1) оста¬
ется постоянной (например, если ограничение (29.1) имеет вид
II и (О II <Сн)_ В таких случаях аргумент р в записи и U, х, р]
должен просто игнорироваться.
Для задачи 29.1 о синтезе оптимальной системы предельного
быстродействия сохраняет свое значение тот путь решения, ко¬
торый сводит дело к соответствующей программной задаче и
который был описан в предыдущем параграфе для задачи 28.1,
ибо, как уже отмечалось, этот путь вообще имеет смысл для боль¬
шинства проблем управления по принципу обратной связи. Сле¬
довательно, для решения задачи 29.1 надлежит рассмотреть со¬
ответствующую задачу 26.1 о программном быстродействии. Если
удается разрешить последнюю задачу для всех тех значений £а, х*
и [1 (ta), которые могут встретиться по ходу дела, и если эти ре¬
шения удастся реализовать в виде достаточно быстро осуществляю¬
щегося алгоритма, то исходную задачу 29.1 можно считать ус¬
пешно разрешенной, причем надлежит полагать
и° [7, х, ц] = ut>XiV. (t), (29.5)
где и t ха и ( ( а} (t) (За < т h) ~~ оптимальное управление для
соответствующей программной задачи. К сожалению, практиче¬
ское осуществление этого пути в случае задачи 29.1 встречает те
же (и еще усугубленные здесь) трудности, которые уже отмеча¬
лись в § 27. Пожалуй, наиболее просто этим путем решается за¬
дача 29.1 снова в случае ограничения
оо
\ II и (т) ||2 dr < р,2 (t). (29.6)
t
Это случай мы и выберем поэтому в качестве иллюстрации об¬
суждаемого метода. При этом в соответствии со сказанным выше
изменение величины ц (t) с изменением t определяется равенством
. А
(г2 (M — a2 (Za) = _ J [| и (т) ||2 dr.
9
260 ПРОБЛЕМА ПРЕДЕЛЬНОГО БЫСТРОДЕЙСТВИЯ [Гл. 7
Отсюда, поскольку мы рассматриваем лишь непрерывные функ¬
ции и U], следует, что изменение р (t) со временем описывается
дифференциальным уравнением
2рр = -|и [*] | 2, (29.7)
которое в данном случае надлежит присовокупить к уравнениям
(28.1) движения объекта.
Итак, рассмотрим задачу 29.1, предполагая, что ограничение
(29.1) имеет вид (29.6). При этом для простоты дальнейших рас¬
суждений положим х (tp) = 0.
Пусть в некоторый момент времени t — , система (28.1) оказа¬
лась в состоянии х (£а). Рассматривая соответствующую програм¬
мную задачу 26.1 о наискорейшем переводе системы (28.1) из
состояния х — х (Z) в положение х& — 0 при условии (27.6),
мы в итоге придем к конечному уравнению (27.5), которое запи¬
шем здесь в виде
ртг_4 = 0, (29.8)
Г
где рт = 1/хг определяется из равенства
рт = min р [В' (т) s (т), ' ( т < t* + S] при s' ()) = — 1
(29.9)
(см. (27.12)). Поскольку величина рт есть, очевидно, функция от
t — ta, Т, х — х (£а), уравнение (29.8) можно записать еще так:
/ К, х, р, Т] — 0, (29.10)
причем способ вычисления функции f [t, х, р, 71] мы можем счи¬
тать известным.
Если теперь в формулу (18.10) вместо 1, х* подставить теку¬
щие значения t, х, а взамен ( подставить ( — t 4- Т° (t, х, р),
где 1° — T0 (t, х, р) — наименьший положительный корень урав¬
нения (29.10), то согласно (29.5) получим искомое, оптимальное
по быстродействию управление и° — и° |7, х, р]. Следовательно,
процедура управления по принципу обратной связи может быть
осуществлена здесь так (см. рис. 29.1): по начальным данным £0,
ж0, И (*о) из уравнения (29.10) вычисляется величина T (to, х°,
р (S0)), и затем эта величина непрерывно корректируется вычисли¬
тельным устройством I в соответствии с уравнением (29.10) по
реализующимся на деле значениям t, х (t), р (t). В регуляторе
по формулам (18.10) формируется оптимальное управление, ко¬
торое воздействует на управляемый объект. Кроме того, сигнал
uQ [t, х, pl поступает на вход вычислительного устройства II,
определяющего в каждый момент времени оставшиеся «ресурсы»
управления (в нашем случае это устройство должно моделировать
§ 29]
СИНТЕЗ ОПТИМАЛЬНЫХ СИСТЕМ
261
уравнение (29.7) и будет состоять, следовательно, из блока пере¬
множения и интегратора). Реализующиеся сигналы х (t) и р (t)
снова подаются на вход вычислительного устройства I и, таким
образом, вся схема замыкается.
Приведенная на рис. 29.1 схема управления по принципу об¬
ратной связи, разумеется, может использоваться и в общем
Рис. 29.1.
случае ограничения (29.1). Вычислительное устройство для опре¬
деления Т можно построить, исходя, например, из следующего
обстоятельства. Сопоставим конечному уравнению (29.10) диффе¬
ренциальное уравнение
— = (29.11)
где 0 Оо О < сю — некоторый вспомогательный аргумент.
Отвлечемся на время от нашей задачи и рассмотрим дополни¬
тельный объект W, состояние которого во «времени» О характери¬
зуется величиной Т (О), изменяющейся в соответствии с уравнением
(29.11). При этом величины 2, х, р будем считать фиксированными
постоянными. Тогда, поскольку 710 [£, х, р] есть корень уравнения
(29.10), при Т = Т° имеем dT/df = 0. Это означает, что Т = TQ
есть точка равновесия объекта W. Более того, Т = T есть асимп¬
тотически устойчивая точка равновесия [15*]. Последний термин
означает, что, каково бы ни было начальное состояние Tq = Т (О0)
объекта W (29.11), выполняется предельное соотношение
lim Т (О1) = ПрИ о* _> оо, (29.12)
так как функция / [2,жщГ] при постоянных t, х и р есть моно¬
тонно возрастающая функция от 7\ т. е. / [£, х, р, Г] (Т — Т°),
и поэтому из (29.11) имеем:
А [Г (#) — Г0]® = _ 2 [Т (О) - Г] / [Z, x, и , Т] < о
262
ПРОБЛЕМА ПРЕДЕЛЬНОГО БЫСТРОДЕЙСТВИЯ
[Гл. 7
при Т (#) =f= Т°. Отсюда и выводится без труда предельное соот¬
ношение (29.12).
Вернемся теперь к нашей задаче о конструировании управле¬
ния и0 [ П- .т, р]. Предположим, что работа вычислительного
устройства I в схеме 29.1 описывается уравнением
е-^ = — - --, -, ц, 71], (29.13)
где е — очень малое положительное число. Здесь уже величины
t, х = х [d и pi = р [£] мы не считаем постоянными, но полагаем
их изменяющимися в соответствии с уравнениями (28.1) и (28.7).
Если бы величины t, х Ш и р [£] в какой-то момент t = . ta мы за¬
фиксировали, то устройство I (29.13) сработало бы как объект
W, но быстрее в 1/е раз, так как t = еФ. Поэтому вследствие
(29.12) можно считать, что в течение весьма краткого времени
At объект (29.12) пришел бы в состояние Т (£а 4- At) = T° Ua,
#7a], p [MI] и, следовательно, вычислительное устройство выдало
бы в момент t = ta 4- At величину Т° Иа, я [£а], р |7а]]. На самом
деле, однако, величины t, х [£] и р [£] изменятся за время At. Но
можно проверить, что это изменение за малое время At будет
влиять незначительно на работу объекта (29.13), если- только ве¬
личина е — 0 достаточно мала. Итак, мы видим, что при малых
е устройство I будет все время при t ( to почти мгновенно выда¬
вать значения Т Ш, которые мало отличаются от нужных нам ве¬
личин T [£, х [£], р [*]]• Этим и завершается описание принципа
работы вычислительного устройства I в данном случае. Важно
при этом, что в случае х [и] (18.1) устройство I может быть скон¬
струировано целиком из элементов вычислительных машин не¬
прерывного действия (функциональных блоков ■ интеграторов).
Следует, впрочем, иметь в виду, что построение необходимых здесь
функциональных преобразователей для функций многих пере¬
менных, вообще говоря, есть задача практически крайне трудная.
В данном конкретном случае, однако, дело сводится к блокам
перемножения, что облегчает проблему. В случаях ограничений
на управления, отличных от ограничений на энергию, структура
вычислительных устройств, особенно первого из них, становится
гораздо более сложной и значительно труднее, реализуемой (по
крайней мере, если пытаться осуществить процесс только на вы¬
числительных машинах непрерывного действия).
ЧАСТЬ ТРЕТЬЯ
ТЕОРИЯ НАБЛЮДЕНИЯ ЛИНЕЙНЫХ СИСТЕМ
§ 30. Введение
Третья часть книги посвящена исследованию задачи о вычи¬
слении фазовых координат движущегося объекта на основании
неполных данных о рассматриваемом движении. В главе 8, на¬
чинающей эту часть, дается постановка указанной задачи о на¬
блюдении. Данная проблема трактуется как задача об опе¬
рации, которую надлежит произвести над предысторией д,- (т)
(t — О j т j t) изменения доступных измерению координат ty
для того, чтобы определить искомую фазовую координату xt (t).
Затем ставится задача об оптимальном наблюдении, которая воз¬
никает в случае, если обрабатываемый сигнал х (т) = у (т) -|-
4- А (т) несет помеху А (т). Формулировка последней задачи со¬
держит условие минимак а ошибки A xt (0, возникающее, есте¬
ственно, из представления процесса наблюдения в форме игры между
наблюдателем и устройством, выдающим сигнал z (т). Показывает¬
ся, что сформулированные задачи о наблюдении сводятся к мате¬
матической проблеме об отделении выпуклых совокупностей в
пространстве функций, откуда и выводится общее решение этих
задач. Обсуждается также, совсем кратко, вопрос о наблюдении
квазилинейного объекта.
Сравнение задач об управлении и о наблюдении показывает,
что эти проблемы имеют общую природу.
Указанная общность проявляется в форме правила двойствен¬
ности между управлением и наблюдением. Изучение этой двой¬
ственности составляет материал главы 9. Попутно в этой главе
продолжается аналогия между теорией линейных управляемых
систем и теорией игр, отмечавшаяся уже и в предыдущей главе.
В частности, здесь выясняется тесная связь между правилами
минимакса, определяющими решение задач об управлении и на¬
блюдении, с условием седловой точки для тех игр, которые можно
сопоставить этим задачам. В последнем параграфе данной части
рассматривается свойство полной наблюдаемости линейной
системы, которое является двойственным к свойству полной уп¬
равляемости, изученному в главе 6.
Глава 8
ПОСТАНОВКА И РЕШЕНИЕ ПРОБЛЕМЫ НАБЛЮДЕНИЯ
§ 31. Постановка задачи
Теперь мы переходим к изучению задачи о наблюдении коор¬
динат движущегося объекта, описываемого линейными дифферен¬
циальными уравнениями. При исследовании многих проблем из
теории управляемых движений требуется знание текущих состоя¬
ний х (t) системы. Это важно, например, в случае, когда управле¬
ние и формируется по принципу обратной связи в виде и [t] =
= и [хх(0)..., хп (£)] (см. § 28). Однако часто по условиям задачи
нельзя предполагать, что все, координаты хг (t) (i = 1,..., п) тг-
мерного фазового вектора х (t) доступны непосредственному из¬
мерению. Трудность прямого измерения той или иной координаты
Xi (t) может возникнуть вследствие отсутствия измерительного ка¬
нала, связывающего наблюдателя с соответствующими элемента¬
ми движущегося -объекта. В других случаях эта трудность может
быть обусловлена большими помехами в измеряющих устрой¬
ствах и в каналах связи. Например, нередко такие помехи наблю¬
даются при определении фазовых координат Xj (0, для вычисле¬
ния которых приходится дифференцировать результаты измере¬
ния, в частности вычислять производные dkxt (t)/dtk ifo времени от
других координат ri (t). При этом ошибка измерения получается,
как правило, тем больше, чем выше порядок производной. В со¬
ответствии с этим будем дальше рассматривать случаи, когда воз¬
можно измерять непосредственно и с удовлетворительной точно¬
стью лишь некоторые координаты (j = 1,..., пг < п) (или, бо¬
лее общо, некоторые функции g- [zi (0)..., хп (0] от xt (t)) и на
основании этих измерений требуется вычислить недостающие
значения других фазовых координат xt (t).
Итак, рассмотрим некоторую систему, описываемую уравне¬
нием
£ (0 = / [*, x (01 (ж = ..., х„}), (31.1)
причем допустим сначала, как это следует из уравнения (31.1),
что управляющие воздействия и (t) отсутствуют. Здесь / -— извест¬
ная вектор-функция, определенная динамическими свойствами
объекта. Пусть имеется возможность измерять координаты — (t)
(j = 1,..., т) некоторого вектора у (0, связанного с фазовым
§ 31]
ПОСТАНОВКА ЗАДАЧИ
265
вектором х (t) соотношением
У (t) = g к, х (Zl (31.2)
или, в , подробной записи,
У) (0 = gj I*, Ъ («,..., хп (г)1 ( = 1,..., т < п), (31.3)
где gj — известные функции, определенные конструкцией изме¬
ряющих устройств.
Так как мы предположили, что т j п, то уравнения (31.3)
не удается разрешить относительно всех величин xt в виде функ¬
ций Xi — qt [£, У1,..., yml (£ = 1,..., п). Следовательно, опреде¬
ление фазового вектора х (t) на основании лишь мгновенного зна¬
чения измеряемого вектора у (t) в данном случае невозможно. Од¬
нако, обходя возникшую трудность, можно попытаться определять
значения координат xt (t), исходя не только из мгновенных значе¬
ний yj (t), но учитывая и некоторую предысторию у j (т) (t — О <
т j t) изменения этих величин. Тогда, следовательно, возни¬
кает задача об определении такой операции ф; [2, у (т)], которая,
будучи выполненной над вектор-функцией у (т) = {yj (т)},
(t — -ft т j t), порожденной в соответствии с уравнением
(31.2) движением системы (31.1), даст в результате величину xt (t).
Такая операция должна быть найдена для каждой интересующей
нас координаты xt (t).
Изыскание операций ср£ [£, у (т)] и составляет предмет задачи
о наблюдении системы (31.1) по величинам у; (31.3). Прежде чем
формулировать задачу, договоримся о следующих терминах и обо¬
значениях. ,
Число О' у> 0, определяющее отрезок времени t — О j т t,
на котором учитывается предыстория у (т), будем считать по¬
стоянным. Это число либо задается по условиям задачи, исходя,
например, из реально возможной длительности запоминания зна¬
чений ' yj (т) в вычислительных устройствах, либо величина О
определяется из дополнительных требований, сопровождающих
задачу о наблюдении. Вектор-функцию у (т) (31.2) (t — О т j t)
будем называть сигналом. Договоримся о следующей термино¬
логии. „
Определение 31.1. Если некоторый сигнал у (т) мо¬
жет реализоваться в системе (31.1), (31.2) при значении xt (t) =
= т], то будем называть его сигналом, несущим xt (t) = ц, и обо¬
значать символом {у (т) | xt (t) = т|}. Если при данном значении
фазового вектора х (t) реализуется сигнал у (т), то скажем, что
этот сигнал отвечает данному фазовому вектору х (t).
Если конкретное значение xt (t) = ц величины xt (t) ■ не будет
играть существепной роли, то символ ц в {у (т) | xt (О = П} бу¬
дем опускать и писать просто {у (т) | xt (t)}. При этом следует
266
ПОСТАНОВКА И РЕШЕНИЕ ПРОБЛЕМЫ НАБЛЮДЕНИЯ [Гл. 8
всегда помнить, что здесь имеется в виду вектор-функция у (т),
определенная на отрезке t — й* ( т ( t, ft = const.
Очевидно, значение х (t) определяет единственным образом от¬
вечающий ему сигнал у (т). Выяснение обратной зависимости и
составляет предмет задачи о наблюдении, которая формулируется
следующим образом.
Задача 31.1. Пусть движущийся объект описывается
уравнением (31.1), причем доступны измерению значения вектор-
функции у (t) (31.2). Требуется найти операцию ср* U, у (т)], вы¬
числяющую координату Xt (t) по сигналу у (т), так что выполняет¬
ся равенство
ср; ( 7, {у (т)| Xi (°°}] = Xi (t), (31.4)
каково бы ни было реализовавшееся в системе (31.1) ■ значение Xi (t)
и каков бы ни был сигнал, несущий xt (t).
Операцию ср*, удовлетворяющую условию (31.4), назовем
разрешающей операцией (для задачи 31.1).
Если уравнения (31.1) и (31.2) линейны, т. е. если
х = А (° х, (31.5)
У = G ( (° х, (31.6)
где А (° и G (° — матрицы [аи (t)} (i, j = 1,..., n), {gilt (°°}
(i = 1,..., m; k = 1, ..., n), то разрешающие операции cp, также
следует искать в форме линейных операций. Это объясняется тем,
что в данном случае сигнал у (т) связан с вектором х (t) линейной
зависимостью
у (т) = G (т) X [т, t]x (°, (31.7)
где X — фундаментальная матрица системы (31.5).
Равенство (31.7) наталкивает сразу на следующее решение за¬
дачи о наблюдении. Пусть для определенности у (т) — скалярная
переменная. Выберем на отрезке t — ■& 7 т ( U различных зна¬
чений т = Ту. По условиям задачи мы можем измерить величины
у (xj-). Тогда из равенства (31.7) следуют п уравнений для неизвест¬
ных фазовых координат
п п
2 2 = y(T') (7 = (31-8)
s=l 1=1
причем по условиям задачи значения gs (ту), равно как и значения
Xsi lTj> £1 элементов xSi [т, Л фундаментальной матрицы X [т, Л.
предполагаются известными.
§ 31]
ПОСТАНОВКА ЗАДАЧИ
267
Если определитель!) системы (31.8) отличен от нуля, то, раз¬
решая эту систему, получим:
п
МО = р Z Д«у(ь) (г = 1,..,п), (31.9)
j=l
где Afj — соответствующие миноры определителя D. Так как
правая часть каждого из равенств (31.9) может рассматриваться
как результат линейной операции <рн выполненной р над непрерыв¬
ным сигналом у (т) (t — О X т р £), то, действительно, мы ука¬
занным! путем получаем решение задачи 31.1 о наблюдении. Су¬
ществование такого простого решения задачи, казалось бы,
делает общее исследование лл мало интересным. Тем не менее в
пользу о этого исследования, данного в следующих параграфах,
можно привести такие соображения.
Найденное только что решение (31.9) является лишь одним из
большого числа возможных ответов на задачу, и оно может ока¬
заться далеким от наилучшего решения, учитывающего те или
иные дополнительные обстоятельства, сопутствующие наблюде¬
нию (см. § 32). Кроме того, общее исследование проблемы наблю¬
дения полезно вследствие тесной связи между этой задачей и за¬
дачей об управлении, изученной во II части книги (см. §§ 15—17).
Наконец, задача о наблюдении позволяет весьма естественным об¬
разом истолковать методы, рассматриваемые в данной книге с по¬
зиций математической теории игр (см. § 37).
Приведем теперь простой пример, иллюстрирующий на меха¬
нической модели постановку задачи 31.1.
Пример 31.1. Рассмотрим движение гироскопического маятника, опи¬
санного в § 3 (см. п. 4°), но теперь в окрестности нижнего устойчивого
положения. (Это означает, что на рис. 3.4 ось OZ, связанная со стержнем
ОА, направлена вниз.) Если в качестве обобщенных координат выбрать
снова углы qr и q2, описывающие повороты внешней и внутренней рамок
соответственно, то уравнения малых колебаний механизма в линейном прибли¬
жении будут иметь вид
. . &
T --- #2,
°2
(О <5^
#3 = #4,
°2
где xj = qt, хз = q2. Эти уравпения получаются трансформацией уравнений
(3.15), которая обусловлена изменением выражения (3.13) для потенциаль¬
ной энергии, вызванным смещением центра тяжести системы вниз. Вслед¬
ствие очевидности отмеченных изменений на выводе уравнений (31.10) ос¬
танавливаться не будем.
268
ПОСТАНОВКА И РЕШЕНИЕ ПРОБЛЕМЫ НАБЛЮДЕНИЯ [Гл. 8
Предположим, что имеется возможность измерять угол у (£) отклоне¬
ния внешней рамки от горизонтальной плоскости. Иначе говоря, в данном
случае сигнал у (т) есть функция х± (т). Следовательно, матрица G в урав¬
нении (31.6) обращается здесь в вектор-строку {1, 0, 0, 0}, а само это урав¬
нение принимает вид у (т) = [1,0, 0, 0] х (т) = х-г (т). Пусть на основании
измерения сигнала у (т) требуется вычислить угол поворота внутренней
рамки х3 (£), а также угловые скорости хг (t) = (t), х± (t) = х3 (t). В та¬
ком случае задача 31.1 о наблюдении системы (31.10) может быть сформули¬
рована следующим образом.
Требуется найти линейные операции у [г, у (т)] (Z = 2,. 3, 4), вычис¬
ляющие координаты х2 (t), х3 (t), х± (0 по сигналу у (т) = хг (т), так что вы¬
полняются равенства
Фг [* У (*£)] = Фг .у 1 4 (т)] = х{ (t) (i = 2» 3, 4),
каковы бы ни были реализовавшиеся в системе (31.10) значения у (t).
Перейдем теперь к случаю, когда наблюдаемый объект под¬
вержен управляющему воздействию, т. е. рассмотрим систему,
описываемую уравнением
х (t) = f {t, х (t), и (t)], (31.11)
где, как обычно, х — фазовый n-мерный вектор, и — г-мерный
вектор управляющих сил. В этом случае для вычисления коорди¬
нат х. (t) (i = 1,..., п) объекта уже недостаточно знать лишь сиг- ;
нал у (т) (31.2) при t ■— Ф , т , t, но нужна еще информация о
предыстории управляющих сил Uj (т) (j = 1,..., г) (например, при
t — -=О<^). В отличие от сигнала у (т), аргумент которого т ме¬
няется в пределах отрезка t — Ф , т , t, значение воздействия
и = и (t) в учитываемую предысторию сил и (т) не* включается.
Это объясняется следующей причиной. В большом числе случаев
задача о наблюдении, т. е. задача о вычислении текущих коорди¬
нат х. (t) движущегося объекта, возникает в связи с задачей об
управлении его движением по принципу обратной связи, когда
и {t] = и {х (£)]. При этом знание координат х. (t) в момент t
необходимо как раз для того, чтобы выработать управление и Ш
.в этот же момент времени. Но тогда, включая значение и Ш
в состав величин и (т) (т > t —■ Ф), по которым вычисляются ко¬
ординаты xt (£), придем к логически порочному кругу.
Итак, если на объект действуют управляющие силы и} (t),
то в качестве сигнала, по которому определяются величины xi (t), .
будем выбирать пару вектор-функций {у (т), и (т)}, причем всегда '
будем предполагать, что аргумент у функции у (т) меняется в пре¬
делах отрезка t — Ф , т у t, ay функции и (т) аргумент за¬
ключен в пределах полуинтервала t — ф т , t. По аналогии
с определением 31.1 скажем, что сигнал {у (т), и (т) | хг (t) = ц}
несет Xi (t) = ц, если этот сигнал реализуется в системе (31.2),
(31.11) при Xi (t) = ц.
§ 31]
ПОСТАНОВКА ЗАДАЧИ
269
Ограничиваясь только линейным- случаем, сформулируем те¬
перь следующую задачу о наблюдении.
Задача 31.2. Пусть управляемая система описывается
уравнением
х — A (t)x +В (t)u (31.12)
и доступны измерению значения вектора у (t) (31.6) и значения вы¬
рабатываемых управляющих сил и (t). Требуется найти линейную
операцию (pf 17, {у (т), и(т)}], вычисляющую координату xt (t) по
сигналу {у (т), и (т)}, так что выполняется равенство
ф; [*, {у (т), и (т)| Xi (£)}1 — Xi (t), (31.13)
каково бы,' ни было реализовавшееся в системе (31.12) значение xt (t)
и каков бы ни был сигнал, несущий xt (t),
И здесь операции грн удовлетворяющие условию (31.13), на¬
зовем разрешающими операциями (для задачи 31.2).
Заметим следующее. Класс функций у (t) и и (t) определяется
классом возможных управлений. В задаче 31.2 предполагается, что
операции ■ , должны быть выполнимы над любым сигналом {у (т),
и (т)}, который может реализоваться при возможных управле¬
ниях и (t).
Задачу ■ 31.2 можно трансформировать и для случая обобщен¬
ных возможных управлений dU (£), когда движение описывается
уравнением
dx — A (t) xdt -- В (t) dU
и когда рассматривается сигнал {у (т), dU (т)}. Мы, однако, не
будем формулировать здесь подробно такую обобщенную задачу
о наблюдении, предоставляя это читателю.
Пример 31.2. Рассмотрим снова движение гироскопического маятника,
но теперь уже в окрестности верхнего неустойчивого положения равнове¬
сия, т. е. именно в том состоянии, как это изображено на рис. 3.4 в § 3.
Пусть, как и там, механизм управляется моментом и, приложенным к внеш-
пей рамке. Уравнения движения системы в первом приближении приведены
уже в § 3 и имеют вид (3.15), т. е.
“*4 , 1
-Д = ^2, Х2 — I" #1 ■ ~ )4 о U,
4 4 ™4
#3 = )4, ^4= —ПТ^З-
°2 °2
(31.14)
Предположим, что доступна измерению скорость х2 (t) — х± (t) вращения
внешней рамки, а также примем, что можно измерять значения и (t) выраба¬
тываемого управляющего момента. Следовательно, в данном случае у (т) =
— х2 (т) и матрица G в уравнении (31.6) обращается в вектор-строку {0, 1,0,0},
а само это уравнение принимает вид у (т) = [0, 1,0, 0,] х (t) — х2 (t).
270 ПОСТАНОВКА И РЕШЕНИЕ ПРОБЛЕМЫ НАБЛЮДЕНИЯ [Гл. 8
Пусть требуется определить углы xt (t) и х3 (t) поворота обеих рамок и
угловую скорость вращения внутренней рамки х4 (t) = i3 (t). Задача 31.2
о наблюдении системы (31.14) может быть сформулирована тогда следующим
образом.
Требуется найти линейные операции q; [г, {х2 (т), и (т)}], вычисляю¬
щие координаты xj_ (t), х3 (t) и ха (t) по сигналу {х2 (т), и(т)}, так что выпол¬
няются равенства
<Рг [. {*2 (а), и (т) I . (г)}1 = .j (0 (г. — 1 , 3 .4)),
каково бы ни было реализовавшееся в системе (31.14) значение (/).
§ 32. Задача об оптимальном наблюдении
В предыдущем параграфе была сформулирована задача о вы¬
числении фазового вектора х (t) движущегося объекта, исходя из
значений сигнала у (т) (t — 3 т . 0 (или (У (т), и (т)}).
При этом на искомые разрешающие операции .г не налагались
никакие дополнительные требования, помимо основного условия
(31.4). Как мы увидим ниже, в таком случае задача о наблюдении
имеет, вообще говоря, бесчисленное множество решений {фг}.
Теперь мы сформулируем одно условие оптимальности, которое
выделяет среди этих решений определенные операции ф" (z =
= 1,..., п), обеспечивающие в известном смысле наилучшее ка¬
чество наблюдения. Это условие оптимальности можно вывести
из следующих соображений. (Мы ограничимся ниже в этом парагра¬
фе лишь случаем свободного движения объекта, когда управление и
отсутствует.)
Выше, в § 31, предполагалось, что операция ф; [£, у (т)1 про¬
изводится над сигналом у (т), измеренным и поданным на этт
операцию без ошибки. В действительности, однако, сигнал у (т)
известен, как правило, лишь с некоторой погрешностью. Следова¬
тельно, надо предполагать, что операция ф; производится не
над сигналом у (т), связанным с вектором х (t) соотношением
(31.2), но выполняется она фактически над некоторым сигналом
Z (т) = у (т) + А (т) (t — ft < т < t), (32.1)
включающим погрешность А (т). В соответствии с этим там, гд®
возможна путаница между сигналами у (т) и z (т), функцию у (т
будем называть идеальным сигналом, функцию z (т) назовем ре¬
альным сигналом.
Погрешность А (т), естественно, должна считаться неизвест¬
ной, однако можно принять, что из физических условий процесса
наблюдения вытекает некоторая оценка этой погрешности. Тогда
можно поставить задачу об определении оптимальной разрешаю¬
щей операции ф®[£, z (т)], вычисляющей координату xt (t) с наи¬
меньшей возможной ошибкой со при заданной оценке погрешно¬
сти А (т). Этим словам необходимо придать точный смысл. Для
§ 32]
ЗАДАЧА ОБ ОПТИМАЛЬНОМ НАБЛЮДЕНИИ
271
того чтобы сделать это и лучше пояснить наш подход к проблеме
оптимального наблюдения, мы истолкуем процесс наблюдения как
некоторую игру. В соответствии с этим мы временно расстанемся
с задачей о наблюдении и совершим экскурс в теорию игр.
Эта математическая теория, имеющая своим предметом иссле¬
дование конфликтных ситуаций, была построена в основном в те¬
чение последних сорока лет. С ее элементами можно познакомить¬
ся, например, по книгам [2*, 16*]. Мы приведем совсем кратко лишь
некоторые основные понятия теории игр, которые понадобятся для
выяснения' связи этой теории с нашими задачами. .
Итак, рассмотрим одну из типичных ситуаций, с которыми имеет
дело теория игр. Эта ситуация определяется обычно как игра двух '
лиц. В такой игре участвуют два игрока, преследующих противо¬
положные цели. Каждый игрок может совершать действия, лежа¬
щие в пределах, допускаемых правилами игры. Примем, что исход
игры характеризуется некоторым числом £, которое условно назо¬
вем выигрышем первого игрока (или проигрышем для второго).
Показатель t таков, что в интересах первого игрока сделать его
возможно большим, а в интересах второго, напротив,— сделать
значение t возможно меньшим. В этом и состоит конфликт. При¬
мер: партия игры в шахматы, где можно принять t = 1 в случае
выигрыша первого игрока, t = 0 в случае ничьей и t = —1, если
партию выиграет второй игрок.
Каждый из игроков строит свои действия, руководствуясь ка¬
кими-то соображениями. Эти соображения составляют то, что
принято называть стратегиями игроков. Мы ограничимся лишь
такими случаями, когда можно строго очертить те классы {а} и
{|3} различных стратегий аир, которые могут выбирать соответ¬
ственно первый и второй игроки. Здесь символы аи3 в различных
играх могут обозначать самые разнообразные объекты: это могут
быть числа, векторы, функции, операции, наборы словесных ин¬
струкций, программы случайных операций и т. д. Принимается,
что выигрыш t является известной функцией t [ос, [3 1 от ос из {а}
и от р из {р}. Важно подчеркнуть следующее условие: каждый из
игроков при выборе своей стратегии не информирован о том, ка¬
кую стратегию изберет его партнер. Итак, рассматриваемая нами
игра двух лиц характеризуется следующими чертами. Даны за¬
пасы стратегий {а} и {р}, откуда их могут черпать первый и вто¬
рой игроки, и выбрана функция t [ос, Р ], определенная для всех а
из {а}ир из {|3}. Задача первого игрока — выбором а максимизи¬
ровать t, задача второго игрока — выбором |3 минимизировать t.
Таким образом, рассмотрение игровой ситуации приводит к за¬
даче о минимаксе t (или о максимине £). Уточним эту задачу.
Будем рассуждать сначала с точки зрения второго игрока.
(Это окажется удобным для перехода потом к задаче о наблюдении.)
272
ПОСТАНОВКА 11 РЕШЕНИЕ ПРОБЛЕМЫ НАБЛЮДЕНИЯ
[Гл. 8
Итак, второй игрок выбором [3 должен стремиться предельно умень¬
шить свой проигрыш 3 • Пусть он выбрал некоторую стратегию
[3 = 3 3 Тогда, очевидно, самый неблагоприятный для него слу¬
чай осуществится, если первый игрок выберет такую стратегию
а = зх • для которой £ [ах, 0s] = max £ [а, (За] = % [Ра] по всем
. а
а из {а}. В самом деле, очевидно, величина % [(3° ] означает самый
большой проигрыш, какой только может постигнуть второго игро¬
ка, если он изберет стратегию |З°. При • этом важно подчеркнуть,
что от указанного проигрыша второй игрок никак не гарантиро¬
ван, так как по условиям игры он не может предугадать, какую
стратегию выберет первый игрок. Желая предельно ослабить гро¬
зящую ему неприятность, второй игрок должен искать такую стра¬
тегию Р°, для которой % [[3°] = min % [[3] по всем р из {р}. Итак,
для второго игрока представляется разумным выбирать страте¬
гию р° из условия
min max £ [а, Р] = % [0°]. (32.2)
3 а
Указанная стратегия р° обеспечивает ему проигрыш не больше,
чем величина (32.2), как бы ни действовал первый игрок. При этом
в пределах правил игры нельзя указать другую стратегию р из
{Р}, которая гарантировала бы второму игроку проигрыш мень¬
ший, чем величина (32.2). Итак, стратегия р°, найденная из усло¬
вия (32.2), является в известном смысле оптимальной для второго
игрока. Заметим еще следующее. Выше мы молчаливо предпола¬
гали, что при каждом выборе р = р° существует максимум
X [0°] = £ [ах, Р°], достигаемый на некоторой стратегии аА из
{а}. Однако может случиться, что такого элемента ах в наборе
стратегий {а} нет. Тогда рассуждения следует проводить по тому
же плану, что и выше, но под величиной % [р°] надо понимать
X [р°] = sup £ [а, ра]. Таким образом, в общем случае оптималь-
а
ной стратегией второго игрока будем называть такую стратегию
0°, которая гарантирует ему проигрыш не больший, чем
% [₽°] = min sup £ [<а, ₽], (32.3)
3 а
и обладает при этом тем свойством, что никакая • другая стратегия
не может гарантировать меньший проигрыш х). Рассуждая анало¬
гичным образом за первого игрока, убедимся, что его оптимальная
х) Обратим внимание читателя, что здесь по р мы по-прежнему ищем
минимум, т. е. предполагаем, что существует стратегия (3 из {р}, на которой
нижпяя грань достигается. Иначе, мы просто принимаем, что рассматривае,-
мая задача об оптимальной стратегии р° решения не имеет, и такие случаи
из рассмотрения вообще исключаем. Аналогичные соображения относятся и
к случаю (32.4).
32]
ЗА АЧА ОБ ОПТИМАЛЬНОМ НАБЛЮДЕНИИ
273
Стратегия а0 должна выбираться из условия
\ ф [а0] = шахф [а], где ф [а°] = inf [а°, Р].
I . « з
Стратегия а0 будет гарантировать первому игроку выигрыш не
Меньший, чем
ф [0.0] = max inf £ [а, Р], (32.4)
а 3
и никакая другая стратегия не может гарантировать ему больший
выигрыш. Заметим, что, вообще говоря, ф [«0] =f= % [р°], но обя¬
зательно ф - [(О*] — % [р°], как это доказывается , в теории игр (см.
[2*]). К обсуждению этого обстоятельства мы еще вернемся в § 37,
а сейчас пока ограничимся сделанным замечанием. На этом пока
наш краткий экскурс в теорию игр закончим и вернемся к задаче
о наблюдении.
Итак, рассмотрим динамическую систему
х = A (t) х, (32.5)
предполагая, что результатом измерения ее движения является
реальный сигнал
Z (т) = G (т) X (т) + Д (т) (t — ft < т < t), (32.6)
содержащий погрешность - Д (т). В дальнейшем удобно считать,
что вектор-функции у (т) и Д (т) являются элементами h (т) не¬
которого функционального пространства S3 {Л(т); t — ft х t},
в котором определена норма р[Л (т)], и принять, что оценка воз¬
можной помехи Д(т) выражается как раз в виде неравенства, свя¬
зывающего норму р [Д (т)1, т. е.
р [Д(()]<6. (32.7)
Здесь б — положительная постоянная. Это предположение яв¬
ляется естественным, так как, подбирая различные известные
нормы р, можно охватить большое число интересных случаев. На¬
пример, если по условиям задачи известно, что помеха Д (т) в лю¬
бой момент т не превосходит по модулю величину б, т.- е. если
II A W II < 6, (32.8)
то в качестве пространства S3 следует выбрать множество
$ {h (т); t — ft т — t} непрерывных функций h (т) с нормой
(см. § 60) р [h (т)] = max || h (т) || (t — ft т — t). Тогда не¬
равенство (32.7) и будет означать ограничение (32.8). - Запись оцен¬
ки для Д (т) в форме (32.7) облегчает математическое исследование
задачи.
274 ПОСТАНОВКА И РЕШЕНИЕ ПРОБЛЕМЫ НАБЛЮДЕНИЯ [Гл. - 8
Итак, пусть в системе (32.5), (32.6) могут реализоваться любые
значения фазового вектора х (t) и любая помеха Д (т), стесненная
условиями (32.7). Сигнал z (т) (32.6), реализующийся в системе
(32.5) (32.6). при некотором значении xt (t) и при условии (32.7), бу¬
дем называть реальным сигналом, несущим и. (£), и обозначим его
символом {z (т) | Xt (t)}.
Пусть пока значение t фиксировано. Будем искать такую опе¬
рацию ф? [£, z (т)], которая при определении координаты xt (t) да¬
вала бы наименьшую возможную ошибку в самом неблагоприятном
случае реального сигнала {z (т) ( xt (t)}, какой только может встре¬
титься. Для истолкования этого выражения нам и потребуются
рассмотренные только что понятия теории игр.
Построим игру, которую можно связать с данным процессом
наблюдения. Пусть наблюдатель исполняет роль второго игрока.
В качестве первого игрока мы будем персонифицировать наблю¬
даемую систему. Величиной 0, которая характеризует здесь «про¬
игрыш» наблюдателя, будет служить величина |<o;|, где со; —
ошибка наблюдения, равная
= ср [{z (т) | xt (t)}] — Xt (t). (32.9)
Стратегиями а первого игрока естественно считать теперь все¬
возможные сигналы z (т) (32.6) из S3, где помеха Д(т) стеснена
условием р [Д (т)] — S, а стратегиями 0.втор°г° игрока надлежит
считать всевозможные линейные операции ср lz (т)], определен¬
ные на пространстве SB сигналов z (т). Теперь достаточно восполь¬
зоваться рассуждением, приведенным на стр. 272, чтобы прийти
к следующему выводу. В качестве оптимальной операции фоь
которая гарантирует наблюдателю наименьший возможный про¬
игрыш g = | со, |, надлежит выбрать оптимальную стратегию
0° наблюдателя в рассматриваемой здесь игре. При этом макси¬
мальный проигрыш, который грозит наблюдателю при выборе
ф? R, z(t)] = 0°, будет определяться равенством
% [0о] = min sup | (0i| , (32.10)
CP Z
и никакая операция ср [z (т)] не может гарантировать нам ошибку
меньшую, чем величина (32.10). Эту величину % [0°] (32.10) бу¬
дем обозначать символом <00.
Итак, условимся считать наилучшей операцией ср ту операцию
ср? из S3*, для которой величина sup | <ог | достигает минимума, т. е.
для которой х)
sup | со{ {z (т) | Xt (£)}] | = min sup | со* [<p, {z (т) | хг (<)}] | (32.11)
Z ср Z
с) Символ (о, [ф, {z (т) | Х;(0}] подчеркивает здесь, что величина <о; есть
функция (точнее функционал) от ф и z (т).
ЗАДАЧА ОБ ОПТИМАЛЬНОМ НАБЛЮДЕНИИ
275
пФ всем возможным линейным операциям ф, которые, как известно,
составляют пространство S3* (см. § 59). Если в условии (32.7)
бг> 0, то величина (32.11) наибольшей ошибки |cof |, которая мо¬
жет реализоваться при использовании операции ср? для вычис¬
ления Xt (£), обязательно положительна, т. е. при самом лучшем
выборе операции неизбежны ошибки о о =f= 0. Если же помеха
Д(т) отсутствует (т. е. z (т) = у (т)) и операция ср? решает зада¬
чу 31.1 о наблюдении, то естественно, что с/ = 0. Очевидно также,
что удовлетворительным
следует считать лишь
такое решение, для
торого с>о <0 оо.
Таким образом,
лучаем следующую
дачу об оптимальном
наблюдении.
Задача. 32.1 Пусть
движущийся объект опи¬
сывается уравнением
(32.5) , причем результа¬
том измерения этого движения является реальный сигнал z (т)
(32.6) , где помеха стеснена ограничением (32.7). Требуется найти
операцию ф? [t, z (т)1, которая (при каждом t из рассматривае¬
мой области изменения времени) удовлетворяет условию
sup I <Р? R, {z (т) I Xi (t)}] — Xi (t) I = min sup | <p [{z (r) | *;(«)}] — |
z Ф z
(32.12)
no всем возможным реализациям z (т) и по всем возможным опера¬
циям ф.
Операцию ср? [Z, z (т)] будем, называть оптимальной разрешаю¬
щей операцией (для задачи 32.1).
Общие соображения, высказанные выше в этом параграфе,
мы проиллюстрируем сейчас на очень простом примере. С этой це¬
лью рассмотрим материальную точку т, свободно движущуюся по
прямой | (рис. 32.1) и описываемую, следовательно, уравнениями
% = х2, х = 0 (атх = g, х = i). (32.13)
Предположим, что измеряется координата хг (т) = | (т)
(i — /), и на основании этого измерения требуется вы¬
числить скорость ( (t) = х2 (t) точки т в момент t Ясно, что по¬
стоянную скорость х2 (t) равномерно движущейся точки т в дан¬
ном случае можно вычислять по обычной формуле
х (0 =
(t) — (t —
ft
(32.14)
276 ПОСТАНОВКА И РЕШЕНИЕ ПРОБЛЕМЫ НАБЛЮДЕНИЯ [Гл, 8
Так как правая часть равенства (32.14) есть линейная опера¬
ция над сигналом
у (т) = Ху (т) ( — _<?<> (32.15)
то можно сказать, что линейные операции
Ф1 [0 У (т)] = Фх К Яд (т)] = Ху (0,
Ч>2 [0 У С)] = Ч>2 [0 X (Т)] — y(t — #)] =
= ykiO- *(- 0)1 (32.16)
решают здесь задачу 31.1 о наблюдении фазового вектора
х (О — (хд (0), хг (0} по сигналу у (т) (32.15). Таким образом,
мы видим, что задача о наблюдении по идеальному сигналу
у (т) = х± (т) решается здесь тривиально. Дело, однако, сразу ос¬
ложняется, как только мы перейдем к задаче о наблюдении х (t)
по реальному сигналу
и (т) = у (т) + Д (т) = х± (т) + Д(т) (t — fl < т < Q, (32.17)
содержащему помеху Д(т).
В самом деле, предположим, например, что помеха Д(т) стес¬
нена лишь следующим интегральным ограничением:
t
J | Д (т) Id—^ (32.18)
t-&
а во всем прочем может быть совершенно произвольной. В част¬
ности, значения Д(£) и Д(£ — й) при ограничении (32.18) могут
быть сколь угодно большими по абсолютной величине. Заметим,
кстати, что величина в левой части (32.18) имеет смысл нормы
р [Д(тт)] функции Д(т), если эту функцию рассматривать как
элемент пространства (см. § 56).
Если и теперь для вычисления скорости х2 (t) мы попытаемся
снова воспользоваться формулой, аналогичной (32.14), т. е. если
мы положим
„ /Д _ z(i) —— —^ _
х2 (Ч ф
_ МО — хд — — А) , Д (О — а — — А) — ,А , „
_ "5 1 5 = х (Ч + м2,
то ошибка ©2, равная [Д (£) — Д (£ — О)]/О, может оказаться
сколь угодно большой. Следовательно, построенные выше опера¬
ции <рх иф (32.16) в случае наблюдения х (t) по реальному сигналу
z (т) (32.17) при условии (32.18) не дают сколько-нибудь удовлет¬
ворительного решения. Между прочим, это связано с тем обстоя¬
тельством, что величина в левой части неравенства (32.18) имеет
§^32] ЗАДАЧА ОБ ОПТИМАЛЬНОМ НАБЛЮДЕНИИ 277
сцысл нормы в пространстве интегрируемых функций, а
операции фх и ср3 (32.16) определены и ограничены в более узком
пространстве У у ц непрерывных функций. Напротив, если пред¬
полагать, что помеха Д (т) стеснена ограничением
| Д(()|<б, (32.19)
которое отвечает как раз ограничению нормы р [Д(т)1 в простран¬
стве (см. выше, стр. 273), то ошибки при использовании опе¬
раций у и ф>2 (32.16) для вычисления величин ух (t) и х2 (0 по сигналу
(32.17) , как нетрудно проверить, не превзойдут соответственно би
26/0. (Эти ошибки получаются при Д (0 = б, Д (t — О) = — б.) Ни¬
же будет показано (см. § 33), что операции (32.16) в случае огра¬
ничения (32.19) как раз и являются здесь оптимальными для за¬
дачи 32.1. Именно, можно проверить, что какую бы другую ли¬
нейную операцию ф (и даже нелинейную операцию), отличную от
операции ф2, мы ни выбрали, можно подобрать такую помеху
Д(т) (32.19) и такое движение точки т, при которых ошибка со2
при вычислении скорости по формуле х2■ (t) ~ ф [z (т)1 будет
больше, чем 26/0. Аналогичная проверка возможна и для опера¬
ции фх (см. ниже, § 33). Таким образом, оказывается, что операции
фг и ф2 (32.16) являются оптимальными разрешающими операция¬
ми в задаче 32.1 для системы (32.13) в случае реального сигнала
(32.17) при ограничении (32.19).
Вернемся теперь опять к случаю, когда помеха Д(т) стеснена
условием (32.18), и постараемся подобрать операцию ф°, которая
в отличие от операции ф2 (32.16) давала бы и при ограничении
(32.18) конечную ошибку, не превосходящую определенных преде¬
лов (для операции ф2 (32.16), как мы видели выше, верхняя грань
ошибки при условии (32.18) равна оо). Координата хх (т) связана
со скоростью х2 (t) соотношением
xr (г) — x (0 + х2 (О (т — 0. (32.20)
Будем искать операцию ф° [£, z (т)| в форме
t
фа[Х, г(т)| = г(т)у (t,x)dx (32.21)
t-a
и потребуем сначала, чтобы при Д(т) = 0 операция (32.21) да¬
вала точный результат 1), т. е. чтобы выполнялось условие
t
Ф°[[ хх, (т)]= \ [ax(0+xi(0(x — x)dx = x2(t).
t—a
x) Мы увидим ниже, в § 33, что это требование является необходимым
условием, которому должна удовлетворять всякая оптимальная разреша¬
ющая операция для задачи 32.1.
278 ПОСТАНОВКА И РЕШЕНИЕ ПРОБЛЕМЫ НАБЛЮДЕНИЯ
[Гл. ,8
Для выполнения этого условия при любых ( (t) и х2 (t) не¬
обходимо и 7 достаточно, чтобы выполнялись равенства
t t
v(t, т)(7т = 0, \ (т — t) v (t, т) dx = 1. (32.
/—а —
Эти равенства доставляют уравнения для неизвестной функции
v (t, т). С такими уравнениями мы уже встречались выше при изу¬
чении задачи об управлении (см. (8.5) и§ 9). Решая их указанным
там способом, увидим, что условиям (32.22) удовлетворяет, напри¬
мер, функция
”(*. т) = (r — 1 + 4Т) - (f — — — — — — (32-23)
Так так справедливо неравенство
t
I 7 A(t)p(/,T)dirl<
t-&
t
max | v (t, т) | 7 I Д (r) | dx ( max | v (t, t) |6 (32.24)
и так как для функции v (t, т) (32.23) max|p(£, т) | = 7 , то ошиб¬
ка |о)а| при вычиссенниа, (t) операцией (32.21) с функцией v (t, т)
(32.23) в случае ограничения (32.18) будет иметь точную верхнюю
грань, равную как раз 6ё^/й2. Чтобы убедиться в этом, достаточно
рассмотреть помехи Д (т) вида
Д (т) = у при | х — t | 7 е, Д (т) = 0 при | х — 11 4> е для е —> 0.
(32.25)
Однако условиям (32.22) удовлетворяет также функция
v{t,x) = — /sgn 7 х _ г + 4_) t (32.26)
причем из неравенства (32.24) следует теперь, что максимум ошиб¬
ки | <х>2 | при вычислении х2 (£) снова операцией (32.21), но уже
с функцией v (t, т) (32.26), будет равен 46/й2. (Этот максимум до¬
стигается, например, на помехе Д (т) вида (32.25) при достаточно
малом е 4> 0.) Итак, в случае ограничения (32.18) операция (32.21)
при выборе функции v (t, т) (32.26) дает лучший результат, чем
при выборе функции v (t, т) (32.23). Вообще из материала § 16
мы уже знаем, что нельзя построить функцию v (t, т), которая
(j 33] РЕШЕНИЕ ЗАДАЧИ ОБ ОПТИМАЛЬНОМ НАБЛЮДЕНИИ 279
удовлетворяла бы условиям (32.22) и притом удовлетворяла бы
неравенству
1 А
sup|n((, = ^. (32.27)
Опираясь теперь на неравенство (32.24) и рассматривая помехи
Д (т) вида (32.25) и аналогичные им, нетрудно вывести, что нельзя
найти операцию (32.21), которая в случае ограничения (32.18)
при вычислении х2 (t) по сигналу z (т) давала бы ошибку меньшую,
чем 46М2. А отсюда в свою очередь выводится заключение, что
при выборе v (t, т) (32.26) операция (32.21) является оптималь¬
ной в случае помехи Д (т), стесненной ограничением (32.18).
Иначе говоря, операция (32.21), (32.26) является здесь опти¬
мальной разрешающей операцией для задачи 32.1.
Читатель заметил, вероятно, что определение оптимальной раз¬
решающей операции ср0* вида (32.21) было связано с рассуждения¬
ми, аналогичными тем, с которыми мы уже встречались выше при
исследовании задач об оптимальном управлении. Это обстоятель¬
ство не является случайным. Оно объясняется глубокой связью,
существующей между проблемами управления и наблюдения в ли¬
нейных динамических системах. Эта связь будет изучена подробно
в $ 36 после решения задачи 32.1 об оптимальном наблюдении, дан¬
ного в § 33. Поэтому здесь мы ограничиваемся лишь данным беглым
замечанием.
§ 33. Решение задачи об оптимальном наблюдении
Мы переходим теперь к решению задачи 32.1. Будем, следова¬
тельно, рассматривать движение х (t) системы (32.5), предполагая,
что измерение его дает реальный сигнал z (х) = G (т) х (т) +
+ А (т) (32.6), несущий помеху Д (т), ограниченную неравенст¬
вом (32.7). Требуется найти операции <р°г- [Z, z (т)] (i = 1,..., /г).
которые в каждый рассматриваемый момент времени t восстана¬
вливают величины Xi (t) с наименьшей возможной ошибкой
Ч = Ф? [Л {2 (т) | Ъ (ОН — Xi (£) (33.1)
в самом неблагоприятном случае сигнала z (т).
Прежде всего, необходимо заметить, что операция <рг [£, z (т)],
которая при каждом t обеспечивает конечную верхнюю грань для
модуля | со* | ошибки (о (33.1), обязательно должна удовлетворять
условию
<МЛ {г/(г)|^г (ЛИ
(33.2)
280 ПОСТАНОВКА И РЕШЕНИЕ ПРОБЛЕМЫ НАБЛЮДЕНИЯ [Гл. 8
Иначе говоря, выполняя оптимальную разрешающую операцию
задачи 32.1 на идеальном сигнале у (т) = G (т) х (т), мы долж¬
ны обязательно получать точно д, (7), Таким образом, оптималь¬
ная разрешающая операция задачи 32.1 является одновременно
разрешающей операцией и для задачи 31.1. В самом деле, пред¬
положим, что это не так. Пусть, следовательно, некоторая опера¬
ция ср’ [7, z (т)] разрешает задачу 32.1, но не удовлетворяет урав¬
нению (33.2). Однако если операция , ср? не удовлетворяет этому
уравнению, то для нее можно подобрать вектор х° (7), так что
ф? Р, [у° (*) I , (0)] = (0 + Р, (зз.з)
где р =f= 0. Здесь у° (т) — идеальный сигнал, отвечающий вы¬
бранному фазовому вектору ,а (t). Сигнал у (т) зависит от вектора
х (t) линейно (см. стр. 266). Но раз это так, то фазовому состоянию
х* (t) = (7) будет отвечать сигнал у* (т) = Xy° (t), какова бы
ни была скалярная постоянная X. Следовательно, из (33.3), учи¬
тывая еще линейность операции ср°, выводится равенство
Ф? [*, [у* (*) 1 j (0)1 = (0 + ьр. (33.4)
Число X можно выбирать произвольно, но тогда (33.4) означа¬
ет, что ошибка , , = р% при вычислении величины xt (t) операцией
Ф? 1t, У (т01 на идеальном сигнале у (т) может оказаться сколь
угодно большой. Следовательно, в рассматриваемом случае ошиб¬
ка (Hi (33.1) не ограничена, даже если Д (т) = 0. Эта ошибка по¬
давно не может быть ограниченной в более широком случае любой
помехи Д (т), стесненной неравенством (32.7). Итак, мы пришли
к противоречию с условием (32.12), содержащимся в задаче 32.1.
Полученное противоречие доказывает, что операция ср? [t, z (т)],
не удовлетворяющая уравнению (33.2), не может разрешать эту
задачу.
Полезно заметить, что доказанное утверждение аналогично так
называемым условиям несмещенности, вводимым в вероятностной
теории наблюдения случайных сигналов. Эти условия ставятся
обычно тогда, когда нет априорных сведений о возможном уров¬
не полезного (у нас — идеального) сигнала. Читатель заметил,
конечно, что именно такой случай рассмотрен здесь, ибо преды¬
дущее доказательство как раз и основано на предположении, что
идеальный сигнал у (т) может отвечать произвольно большим зна¬
чениям координаты Xi (t), Так как, однако, линейные уравнения
движения справедливы обычно лишь при ограниченных значениях
координат, наш вывод имеет несколько условный смысл.
Таким образом, решение задачи 32.1 надлежит искать только
среди операций, которые удовлетворяют условию (33.2). Пусть
§ 33]
РЕШЕНИЕ ЗАДАЧИ ОБ ОПТИМАЛЬНОМ НАБЛЮДЕНИИ
281
t фиксировано. Рассмотрим какую-нибудь такую операцию
ф, [t, z (т)] = ф [г(т)].По условиям задачи рассматриваемая ли¬
нейная операция ф определена для любой функции z (т) (t — й
т t), являющейся элементом выбранного функционального
пространства с заданной в нем нормой р [z (т) ], которая
как раз и фигурирует в неравенстве р [Д (т)] б (32.7), ограничи¬
вающем помеху Д (т). Напомним теперь, что в свою очередь опе¬
рация ф оценивается своей нормой р*[ф] (см. §58). Для нас в
дальнейшем важно следующее соотношение, которое вытекает
непосредственно из определения понятия нормы р* [ф]:
sup | ф[Д (т)]| = бр* [ф] при р [Д ] < б. (33.5)
А
Покажем, пользуясь этим, что верхняя грань модуля | со, |
ошибки to г (33.1) при вычислении Xt (t) операцией . ф? = ф оце¬
нивается нормой р* [ф]. В самом деле, учитывая (33.2) и линей¬
ность ф, получим:
ф [{z (т)| (£)}] =ф [{у (т)| xt (£)}] +ф [Д (т)] =Xi (Z) + ф[Д (т)],
т. е. имеем просто
= ф [Д (т)]. (33.6)
По условиям задачи помеха Д (т) как раз пробегает все возможные
функции Д (т), стесненные условием р . [Д (т)] б. Но тогда из
(33.5) и (33.6) и следует нужная нам оценка
sup | ®|| бр* [ф]. (33.7)
А
Таким образом, мы пришли к первому важному выводу.
Пусть некоторая операция ф [у (т)] дает на идеальном сигна¬
ле {у (т) | Xi (t)} безошибочное ■ значение xt (t). Тогда точная верхняя
грань модуля | ®г | ошибки <в г при вычислении величины Xt (t) этой
же операцией ф [z (т)], но уже выполняемой на реальном сигнале
z (т), содержащем помеху Д (т) (32.7), определяется равенством
(33.7). Следовательно, эта верхняя грань величины | <ог | равна про¬
изведению нормы р* [ф] операции ф [z (т)] на максимально воз¬
можную норму р [Д (т)] погрешности Д (т).
Итак, для решения задачи 32.1 надлежит найти операцию
ф? к, у (т)1, разрешающую задачу 31.1 и имеющую при каждом рас¬
сматриваемом значении t наименьшую возможную норму р* [ф?].
Чтобы проиллюстрировать этот вывод, вернемся снова к за¬
даче, рассмотренной в конце § 32, где вычислялась скорость £(£) сво¬
бодной точки т, движущейся по прямой. Остановимся еще раз
на обсуждении случая, когда помеха Д (т), содержащаяся в ре¬
альном сигнале z (т) = £ (т) + Д (т), стеснена интегральным
282 ПОСТАНОВКА II РЕШЕНИЕ ПРОБЛЕМЫ НАБЛЮДЕНИЯ
1Тл. 8
неравенством (32.18), т. е. когда
t
§ |A(r)|dr<d.
t-&
Выше уже было отмечено, впрочем, без тщательного доказатель¬
ства, что оптимальная разрешающая операция (р° k, z (т)], ко¬
торая вычисляет скорость х2 (t) = | (£), имеет вид
t
Ч)2 [«, z (г)] =___ _5—- (J ] (т) sgn (т + t — dx—dx =
t
= -—— — sgn (x—t+^r)di:—
t
— $ A (T) sgn (r — T + — dx = x2 (t) + ©2, (33.8)
причем
SUP I Q)2| =-(_. (33.9)
Посмотрим, как это согласуется теперь с нашими общими вы¬
водами. Для этого нам придется повторить снова с небольшими
уточнениями рассуждения из § 32. Прежде всего, заметим, что
операция ф>2 (33.8) удовлетворяет условию (32.22), а следовательно,
и уравнению (33.2), т. е. эта операция, действительно, разрешает
задачу 31.1 о вычислении скорости f (t) по идеальному сигналу
у (т) = g (т), (£ — — т — £). Далее, для того чтобы ограниче¬
ние (32.18) имело смысл неравенства, стесняющего норму р [Д (т)1,
мы должны считать помеху Д (т) элементом функционального про¬
странства Но общий вид линейной операции ср [z (т)]
над элементами z (т) из пространства q задается как раз фор¬
мулой (см. § 59).
t
ф[г(т)]= ] z(t)p (т)с?т, (33.10)
t-a
где v (т) — ограниченная интегрируемая функция. Это совершен¬
но согласуется с записью операции фа t—> z (т)], фигурирующей в
§ 32, где, следовательно, при каждом фиксированном значении t
функция v (т) из (33.10) есть v (£, т) = ■— — sgn (т — t +
Более того, функция v (т) в (33.10) является элементом прост¬
ранства М {v (т), t — тЗ — т — t} интегрируемых ограниченных
§ 33]
РЕШЕНИЕ ЗАДАЧИ ОБ ОПТИМАЛЬНОМ НАБЛЮДЕНИИ
283
функций v (т), в котором норма р* [р] = р* [ф] определена равен¬
ством р* [ср] = sup p (т)|. Следовательно, норма операции
т
ср[£, z (т)] (33.8) есть р* [^1 = 4/й-2, а это и означает как раз, что
общее соотношение (33.7) сводится в рассматриваемом случае к
равенству sup | (02 [ = 46/42, которое и было выведено в § 32 из
элементарных соображений.
Продолжим теперь изучение свойств операции ф? [£, у (т)].
Итак, пусть выбраны и зафиксированы некоторые значения i и
t. Сигналы у (т), z (т) и помеху Д (т) (t — Ф • т • tj мы уже ус¬
ловились рассматривать как элементы у (т) • или «точки» неко¬
торого пространства q {у (т)}, где метрика определена нормой
р. Рассмотрим множество • {у (т)} тех функций у (т) из SB,
которые могут быть реализациями сигнала {у (т)||Гг (t) = 1},
несущего xt (t) =1.
Проверим прежде всего следующее утверждение.
Лемма 33.1. Операция ф [у (т)] тогда и только тогда раз¬
решает задачу 31.1, когда эта операция удовлетворяет равенству
Ф [{у (т)|а, (t) = 1}] = 1 (33.11)
на любом сигнале {у (т)| х{ (t) = 1}.
Необходимость условия (33.11) очевидна, так как следует сра¬
зу из определения разрешающей операции ф и из определения сиг¬
нала у (т) = {у (т)|гг; (t) =1}. Докажем достаточность усло¬
вия (33.11). Итак, пусть некоторая операция ф удовлетворяет
условию (33.11). Нам нужно показать, что эта операция удовлет¬
воряет условию
ф КУ (т)|«г (0}1 = (0, (33.12)
каково бы ни было значение Xt (t). Покажем это. Рассмотрим ка¬
кой-нибудь сигнал {у (т) | Xi (t) = ц}, отвечающий некоторому
фазовому вектору х (t). Пусть сначала ц =f= 0. Тогда можно по¬
строить вектор хГ1 (t) = х (0/ц. Выше мы уже обращали внимание
на то, что фазовый вектор х (t) и отвечающий ему сигнал у (т)
связаны друг с другом линейно (см. стр. 266). Поэтому фазовому
вектору х^ (t) будет отвечать сигнал ya (т) = у (т)/ц, несущий
х? (t) = 1, и, следовательно, согласно (33.11) будет выполняться
равенство ф [у11 (т)] = 1. Отсюда, ввиду линейности операции ф,
получаем нужное равенство
ф !(У С)|[ (t) = Л }1 = ф ру” (г)1 = цф [()] = п- (33.13)
Таким образом, мы проверили, что в случае xt (t) = ц == 0
для операции ф [г/] условие (33.12), действительно, удовлетворяет¬
ся. Но это условие удовлетворяется и при х^ (t) = _q = 0, Чтобы
284
ПОСТАНОВКА И РЕШЕНИЕ ПРОБЛЕМЫ НАБЛЮДЕНИЯ
[Гл. 8
убедиться в этом, рассмотрим наряду с вектором х (t), у которого
Ж/ (t) = 0, какой-нибудь вектор х* (t) = хл (t) + х (t), где х* (t) =
= 1. Тогда, обозначая символами — (т) и уа (т) сигналы,
отвечающие фазовым векторам х* (t) и хл (t) , соответственно,
мы можем записать равенства <р [уа (т)] = 1 и ср [у* (т)] —
= Ф I { - WI Xt W = 0 }] + ф [уа (т)] = 1, откуда и следует, что
ф КУ (т) | (t) = 0}] = 0.
Итак, лемма 33.1 доказана.
Следовательно, для решения задачи 32.1 нам надлежит найти
операцию <р0 [у (г)], которая удовлетворяет условию (33.11),
т. е. принимает на множестве ЗР {у} значение, равное единице,
и имеет при этом наименьшую возможную норму. - Нетрудно
проверить, однако, что множество ЗР {у} является плоским (см. §
61). Напомним, что множество SP {у} элементов у (г) (2—
называется плоским, когда «прямая»
Ух (т) = tyD (т) + (1 - %) у™ (т) (—оо < X < оо), (33.14)
проведенная через любые две «точки» у® (т) и у®> (т) из 3°, лежит
всеми своими точками — (т) в ЗР.
В нашем случае пусть у® (т) и у®> (т) суть два сигнала, содер¬
жащихся в ЗР {у (т)}, т. е. < (т) и у®) (т) суть два идеальных сиг¬
нала, несущих Xi (t) = 1. При этом пусть сигнал у® (т) отвечает
фазовому вектору — - (t), а сигнал у№ (т) — фазовому вектору
х^ (£). Из линейности этой связи следует, что вектору х* (t) =
= %х® (t) + (1 — К) х® (£) будет отвечать сигнал у* (т) (33.14).
Для построенного нами фазового вектора хх (£), очевидно, равен¬
ство х* (t) = 1 выполняется, поэтому заключаем, что отвечающий
ему сигнал ук (т) также является идеальным сигналом, несущим
х( (t) = 1. Но это и означает, что функция ух (т) содержится в вы¬
деленной совокупности ЗР {у (т)}, т, е., действительно, & {у (т)}
есть плоское множество.
Но теперь мы видим, что столкнулись с той же самой задачей,
с которой мы уже имели дело в § 16 (см. стр. 100), когда решали про¬
блему моментов. Для перехода , от упомянутой задачи в § 16 к за¬
даче, рассматриваемой здесь, следует лишь заменить множество
ЗР {- (г)}, (16.2), (16.3) на множество ЗР {у (т)}, состоящее из сиг¬
налов {у (т) | Xi (t) = 1}, несущих Xt (t) = 1. Следовательно, и ре¬
шение нашей задачи мы можем получить сразу, повторяя решение
аналогичной задачи из § 16, где следует лишь заменить функции
h (т) на сигналы у (т). В частности, роль минимальной фуцкции
А0 (т) будет теперь играть минимальный сигнал у0 (т), который
в соответствии с (16.7) определяется из условия
Р° = р[./от')] = minp [{у(т) |(<) = 1}]. (ЗЗД5)
V
§ 331 РЕШЕНИЕ ЗАДАЧИ ОБ ОПТИМАЛЬНОМ НАБЛЮДЕНИИ 285
Таким путем приходим к следующему основному правилу для
решения задачи 32.1.
Правило минимакса 33.1. Для того чтобы решить
задачу 32.1, следует при каждом значении i и t найти среди сиг¬
налов {у ('г)|аг(£) = 1} минимальный сигнал у? (т). Задача имеет
решение при всех рассматриваемых значениях i и t тогда и только
тогда, когда при всех i и t выполняется неравенство р? = р [у?] 0.
При этом и только при этом условии разрешается также зада¬
ча 31.1.
Оптимальная разрешающая операция ср? для., задачи 32.1 имеет
норму р* [ср? , t, 2]] = 1/р? и выделяется среди других линейных
операций ср свойством максимума, на минимальном сигнале у? (т)
эта операция дает наибольший возможный результат ' по сравне¬
нию со всеми другими операциями ср с той же нормой р* [cpl =
= 1/р?, т. е.
= тах<ргуо(т)] прир‘[ф] = А-. (33Л6)
ср Pt
Заметим теперь, что в случае, когда в уравнениях (32.5) и
(32.6) матрицы А .и G не зависят от времени, оптимальная разре¬
шающая операция оказывается также фактически не зависящей яв¬
но от времени. Для того чтобы это было ясно из записи операции
ср?, в таких случаях надлежит применить преобразование време¬
ни т, записывая сигналы у (т) и z (т) (t — ft 3 т . t) в форме
у (t + £) и z (t + g) (—ft < £ < 0), где, следовательно, т = t +
+ б- Тогда в случае постоянных А и G операцию ср? [£, z (т)]
следует искать в виде ср? [z (t + £ )].
Проиллюстрируем правило 33.1 на решении рассмотренной в
§ 32 задачи о вычислении скорости точки т в случае, когда помеха
Д (т) стеснена неравенством (32.19). Выше, в § 32, уже отмечалось,
что в этом случае сигналы у (т), z (т) и помеху Д (т) следует счи¬
тать элементами пространства 40{h (т), t — ft 3 т . t} непрерыв¬
ных функций h (т) с нормой р[А (т)] = max | h (т) |. Но в простран-
т
стве T[[t-a,t] общий вид линейной операции ср [h (т)] определяется
формулой (см. § 59)
t
фАС^] = $ h'(x)dV (т),
t-a
где V (т) есть функция с ограниченным изменением. При этом нор¬
ма р* [ср] операции ср определена равенством
Р* [ф] = var [7 (*))]_-.
286
ПОСТАНОВКА И РЕШЕНИЕ ПРОБЛЕМЫ НАБЛЮДЕНИЯ
[Гл. 8
Итак, задача сводится к нахождению двух функций F? (t, т)
и V% (t, т), которые определяют оптимальные разрешающие опе¬
рации
t
ф[[М(т)] = \ z(т)dH(^,т).
t
ф[М(т)1 = $ z (x)' ddV (t, r),
t-9-
вычисляющие соответственно координату xx (t) = £ (t) и скорость
х2 (0 ~ t (0) точки т с наименьшей возможной ошибкой sup | оо;| =
= min.
Найдем сначала операцию ф’- Следуя правилу 33.1, рассмот¬
рим сигналы {у (т) | х± (t) = 1}, несущие х± (t) = 1. В данном слу¬
чае согласно (32.20) имеем:
{у (т) I х, (f) = 1} = 1 + х2 (t) (т - t). (33.17)
Теперь надо найти минимальный сигнал {у° (т) | х± (Z) = 1}.
В соответствии с выбором нормы р [А] это будет сигнал (33.17),
для которого величина
max | 1 + x2(t) (т — t) | (33.18)
т
будет наименьшей по всем возможным значениям х2 (/). Искомый
минимум равен, очевидно, единице, т. е. в данном случае р 1у°] =
= 1. Однако задача о минимуме величины (33.18), т. е. задача об
определении самого сигнала у° (т), решается здесь не однозначно
(сигнал {у0 (т)| Xt (t) = 1} не единственен (см. выше, стр. 278))!
Мы выберем, например, х% (t) = 1/# и получим тогда такой ми¬
нимальный сигнал:
{<«(?) 1^(0 = 1} = ’ '\"'-
Теперь из равенства р [у0] = р° = 1 и из р* [ср0] = 1/р°
заключаем, что р* [<р?1 = 1. Для построения — . т. е. для нахожде¬
ния функции V± (£, т), осталось лишь воспользоваться свойством
максимума (33.16). А это значит, что нам надо найти функцию
F? (t, т) с полным изменением var [Fx (t, t)1L&, равным единице,
и такую, что
t t
\ (4 + +) dv°° -. т) = max S (4 + 1 dV ю
t- V i-&
црц var [V (т)] = 1,
§ 33]
РЕШЕНИЕ ЗАДАЧИ ОБ ОПТИМАЛЬНОМ НАБЛЮДЕНИИ
287
Нетрудно сообразить, что указанному условию удовлетворяет
только функция V? (t, т) = 0 при t — Ф ■ т < t и Vj (t, t) = 1.
Следовательно, операция дд имеет вид
t >
TiR» 2(01 = $ т) = У(!) = х1(()-
t—&
Теперь аналогичным образом можно найти операцию (p.
При этом минимальным сигналом {у0 (т) | х2 (t) = 1} оказывается
функция {у0 (т) | х2 (t) =1} = т — t + 0/2, норма которой
р[{у° (т) | х2 ■ W = 1}1 = ^/2. В отличие от предыдущего случая
здесь минимальный сигнал единственен. Условие максимума
t i
\ 7~Н- + dv2 ( (, —( = тах 5 — — ч)
t— а “ v t—& ■
при var [У Ч)]]ц =
определяет также единственным образом функцию
У°(/, т) =
О при х = t — О,
1
у- при ( — Ф-<Т<(,
О при х = t,
и, следовательно, получаем такую оптимальную разрешающую
операцию
Фг 1(. 2(01 = -^2(0 — 2(< — 0)1 = 4~Ч1^(С-^(t — О) = x2(t).
Таким образом, мы видим, что простейшие операции фх и
ф2 (32.16), ■ найденные нами в § 32, исходя из элементарных сооб¬
ражений, как раз оказываются оптимальными разрешающими
операциями для рассматриваемой задачи в случае ограничения на
помеху Д (т), заданного в форме неравенства (32.19).
Приведем еще один простой пример.
Пример 33.1. Рассмотрим уравнения малых колебаний математического
маятника около устойчивого положения равновесия
^1 — 32, $2 =— х1. (33.19)
Предположим, что возможно измерение угловой скорости х2 (J), кото¬
рое дает помеху Д (т), стесненную условием
t
| Д (т) | dx < 6.
t—а
288 ПОСТАНОВКА И РЕШЕНИЕ ПРОБЛЕМЫ НАБЛЮДЕНИЯ
[Гл. 8
Пусть требуется определить угол zt (t) отклонения маятника от вертикали.
Выберем Ф = 2л. Тогда имеем задачу 32.1 об оптимальном наблюдении,
системы (33.19) по реальному сигналу z (т) = х2 (т) + Д (т). Согласно ма¬
териалу данного параграфа эта задача сводится к задаче о вычислении xx (t)
по идеальному сигналу
У(« + О= + g) = [О, 1]Г Х1 + J) J (-2я<)<0),
L *2 (t + Q) J
причем, следовательно, требуется найти линейную операцию
о
Ф1 [у (< + ?)] =■ 5 Л* + (g)a*g = МО
—2п
с наименьшей возможной нормой
Р* [ф2] = р* [уО (У] = max | v° (£) |,
X.
где функция у (Q должна являться элементом пространства *[_2тл,о] • При
этом сигнал у (t + g) надлежит рассматривать как элемент пространства
о]- В соответствии с общей процедурой найдем сначала сигналы
(у (£ + 2) I (t) = 1}, несущие х± (t) =1. Получим:
y(t + e=[o, 1]
cos £ sin g
— sing cos g
Следовательно, {у (t + g) | a?x (t) = 1} = x2 (t) cosg — sin g. Теперь опре¬
делим минимальный сигнал {у0 (t + g) | x± (t) = 1}. Для этого надо найти
минимум величины
о
| хг (<) cos g — sin g | dr •
—2л
повеем возможным x2(t). Отсюда следует, что {у0 (t + g) | xr (t) = 1} =
= — sin g, p [y°] = 4. Из условия максимума заключаем теперь, что функция
v° (g) имеет норму р [г>° (g)] = 1/4 и при этом выполняется условие
о о
— Z P’Oring dg=max р v (£) (— sin g) dt,
—271 —2к
при v (g) < 1/4.
1
Отсюда находим г?0 (g) =—g- sgn [sing]. Итак, решение задачи 31.1 о на¬
блюдении системы (33.19) по идеальному сигналу у (t + g) = х2 (t +g) имеет t
вид
о
Ф1Гг^с^'+ g)] = —q- *2( + g) sgn [sing] <g = *1(°.
—2л
Эта же операция определяет величину я?1 («) по реальному сигналу z (т) =
= х2 (т) + А (т) и в последнем случае будет давать ошибку (щ, которая
удовлетворяет неравенству | сщ | 6/4.
§ 34] РЕШЕНИЕ ЗАДАЧИ О НАБЛЮДЕНИИ 289
§ 34. Решение задачи о наблюдении
Решение задачи 31.1 о наблюдении координат xt (t) фазового
вектора х (t) по идеальному сигналу у (т) для линейной системы
(31.5), (31.6) было получено в предыдущем параграфе попутно с ре¬
шением задачи 32.1, так как там выяснилось, что оптимальная
разрешающая операция ф? [£, z (т)| для задачи 32.1 является одно¬
временно разрешающей операцией фг [£, у (т)| и для задачи 31.1.
Следовательно, если мы хотим решить эту последнюю задачу,
нам достаточно задаться каким-нибудь условием оптимальности
(в форме минимума какой-нибудь конкретной нормы р* [ф;]) и
найти оптимальную операцию ф?, руководствуясь правилом ми¬
нимакса 33.1.
Различным нормам р* будут соответствовать различные
решения фг И, у (т)|, и выбор того или иного решения фг оп¬
ределяется, исходя из побочных соображений, например, это
могут быть либо соображения, связанные с удобством техничес¬
кой реализации операции ф;, либо соображения, вытекающие из
желания встретить наименьшие вычислительные трудности при
отыскании ф- Подобные вопросы выходят за рамки данной кни¬
ги, и мы на них останавливаться не будем. Итак, мы можем счи¬
тать, что общее решение задачи 31.1 нами уже описано в § 33. Здесь
еще, правда, остается невыясненным один интересный вопрос чи¬
сто математического характера: любое ли решение ф, задачи 31.1
можно получить описанным нами путем, иначе говоря, всякое ли
решение задачи 31.1 в свою очередь окажется оптимальным в
смысле задачи 32.1 при подходящей подгонке к нему условий этой
задачи, т. е. при подходящем подборе ограничения на Д (т). Од¬
нако такой вопрос мы оставим в стороне, отсылая интересующе¬
гося читателя к специальной литературе, где разбираются ана¬
логичные вопросы теории управления [89д].
Перейдем теперь к решению задачи 31.2. При этом мы огра¬
ничимся лишь случаем возможных управлений u(t). Все необ¬
ходимые изменения в записях, которые потребуются при переходе
к обобщенным возможным управлениям dU (0, читатель может
выполнить самостоятельно.
Итак, нам надо найти операции ф; U, {у (т), и (т)}|, восста¬
навливающие координаты xt (t) фазового вектора х (t) управляе¬
мой системы
х = A (t) х + В (0 и (34.1)
по сигналу {у (т), и (т)} так, чтобы выполнялись равенства
<pi Ijу {у W, и (т) | Xi (0}l = Xi (t). (34.2)
10 Н. Н. Красовский
290 ПОСТАНОВКА И РЕШЕНИЕ ПРОБЛЕМЫ НАБЛЮДЕНИЯ [Гл. 8
Покажем, что это решение легко найти, если уже построена
разрешающая операция для соответствующей задачи 31.1, где
рассматривается такой же сигнал у (т) = G (т) х (т) и та же си¬
стема (34.1), но при условии и (t) = 0. Итак, пусть ф° И, у (т)] —
решение задачи 31.1. Так как при и (t) = 0 мы имеем
у (т) = G (т) X [т, £] х (t),
то операция ф° удовлетворяет равенству
ф* [£, G (т) X [т, d х (t)] = Xi (0, (34.3)
каков бы ни был вектор х (£). Здесь X [£, £0 — фундаменталь¬
ная матрица системы (34.1) (при и (t) = 0). Но любое движение
х (т) системы (34.1) описывается формулой Коши (5.6):
т
х (т) = х [т П х («) + $ Я [т и (£) dg- (34.4)
t
Следовательно, в (34.2) сигнал у (т) определяется равен¬
ством
т
у (Г) = G (г) х (т) = G (г) X [t, П X (t) + G (т) $ Н [т, £] и (g) dg. (34.5)
t
Учитывая линейность операции ф°, выводим из (34.3) и (34.5)
следующее соотношение:
т ♦
Ф? R у (т)] = x, (t) + ф° [^ G (т) 7 Я £] и (£) dg] . (34.6)
t
Очевидно, мы можем в выражении
т
фф^^Я^ g]u(g)dg]
t
произвольным образом переобозначать переменные т и £ без ка¬
кого-либо изменения при этом результате операции. В самом деле,
результат линейной операции над некоторой функцией очевидным
образом не зависит от того, какой буквой мы обозначаем аргумент
этой функции. Но тогда мы можем составить следующее выра¬
жение:
§ 34]
РЕШЕНИЕ ЗАДАЧИ О НАБЛЮДЕНИИ
291
где, следовательно, в первом слагаемом операция ср? выполняет¬
ся над функцией у (т) с аргументом, обозначенным буквой т,
а во втором слагаемом эта операция выполняется над функцией
с
S(C) = G(C)$ H №,'^1 u(x) dx, (34.8)
t
аргумент которой обозначен буквой £.
Выражение в правой части (34.7) можно рассматривать как
линейную операцию фг над сигналом {у (т), и (т)}, —что и обосно¬
вывает запись левой части (34.7) в форме
ЯР* К, {у (т), и (т)}].
Действительно, для этого достаточно лишь предполагать, что нами
была выбрана такая разрешающая операция ср? для ' задачи 31.1,
которая имеет смысл и на функциях у (т) (34.5), и на функциях
s (£) (34.8). Во всех случаях, с которыми можно столкнуться
при разумном подходе к проблеме наблюдения, это всегда будет
так. В самом деле, если и (т) — возможное управление, то функ¬
ция s (£) (34.8) есть функция непрерывная, и поэтому в таком слу¬
чае достаточно, чтобы операция ф? имела смысл для непрерывных
функций. Если возможны обобщенные управления dU (£), то
соответствующее выражение
К.
x]dU (х)
t
будет функцией кусочно—непрерывной и, следовательно, тогда
достаточно, чтобы операция ф? имела смысл для кусочно—непре¬
рывных функций. Следует избегать лишь одновременного исполь¬
зования обобщенных управлений dU (t) и операций ф° в виде
t
<[1,M()]= $ у' (t)dV х),
t-&
так как тогда совпадение точек разрыва у функций— V и U может
доставлять неприятности.
Итак, выражение (34.7) определяет линейную операцию фг,
заданную на множестве сигналов {у (т), и (т)}. Но теперь из ра¬
венства (34.6) сразу следует, что эта операция (34.7) удовлетво¬
ряет условию (34.2), каков бы ни был вектор х (t). Таким образом,
мы, действительно, получили решение ф; задачи 31.2, которое
определяется разрешающей операцией задачи 31.1.
Рассмотрим пример.
10*
292
ПОСТАНОВКА И РЕШЕНИЕ ПРОБЛЕМЫ НАБЛЮДЕНИЯ [Гл. 8
Пример 34.1. Рассмотрим движение математического маятника в окрест¬
ности верхнего неустойчивого положения равновесия, управляемое момен¬
том и (t). Уравнения движения в первом приближении имеют вид
= 32,, Х2 — X! + и. (34.9)
Предположим, что доступны измерению значения угла x2 (t) отклонения
маятника от вертикали и значения и (t) управляющего момента. Требуется
найти угловую скорость x2(t). Следовательно, имеем задачу 31.2 о наблю¬
дении системы (34.9) по сигналу {у (t + g), и (t + g)} (—ifr < g < 0), при¬
чем здесь у (t + g) = xr(t + g) = Gx (t + ' g) = [1, 0] x (t + g). Итак, тре¬
буется найти линейную операцию так, чтобы выполнялось равенство
Ф2 Ку (t + £), и (t + g)}] = х2 (t).
Для системы (34.9) при условии, что и = 0, решим сначала задачу 31.1
о наблюдении по сигналу у (т) = у (t + g) = Gx (t + g) (r = t + g). Это оз¬
начает, что надо найти линейную операцию ф£ так, чтобы для любого вектора
s выполнялось равенство
ф£ [GX [г + g, И 5] = 2
где X — фундаментальная матрица системы (34.9). В нашем случае
GX[t + [, *] * = [1, 0]
ch g
sh £
shg || Г *1 1
ch?|L.J=SlCM+S2S1M
(-0<g<0).
Таким образом, операцию ф£ надлежит определять из условия ф( [ sx chg +
$2 sh g] = s2*
Примем теперь для определенности, что $ = 1, и будем рассматривать
сигнал у (т) = у (t + g) как элемент пространства 0] • Тогда в соответ¬
ствии со сказанным выше для решения задачи 31.1 необходимо найти функ¬
цию (g), удовлетворяющую равенству •
о
[si ch g + S2 sh g] (g) dg = S2 (34.10)
—1
при условии
о
[»0(g)]adg = min. (34.11)
—1
Задачу (34.10), (34.11) можно решить, пользуясь правилом 33.1. Не приводя
этого решения, которое сводится к таким же процедурам, какие рассмотрены
выше, в § 33, приведем лишь результат. Оказывается, что у0 (t + g) = sh g
и V (g) = —7,2A ch g + 14,73 sh g. Итак, разрешающая операция ф( для
задачи 31.1 о наблюдении системы (34.9) при и = 0 по сигналу у (т) =
=У (t + g) = Gx (t + g) имеет вид
о
<Р? [2/ (* + ?)] = Ф k (t + 5)1 = J [ (t + g) [14,73 sh 5 + 7,24 ch gj dg = x, («),
-j ' •
§ 34]
РЕШЕНИЕ ЗАДАЧИ О НАБЛЮДЕНИИ
293
Теперь, пользуясь равенством (34.7), где положим £ = t + ц, найдем опе¬
рацию <р2 [{у (t + £), и (t + £)}], (t + g = т), разрешающую задачу 31.2
о наблюдении системы (34.9). Имеем:
ф2 [{!/ (1 + D, и (t + £)}] =
= (£[у (* + £)]-₽? М Я U + П. ( + £« (t + 0^1 =
L 0 J
0 . °n
= 5 »i(‘ + O'WW- $ $ zo°()G/7[« + t), / + £]«(( + £ЯЛ).
—1 —1 о
Проделав необходимые преобразования, которые сводятся к изменению
порядка интегрирования в последнем двойном интеграле, получим оконча¬
тельно:
о
фг [(У (I + ?), и G + £))] — #1 G + В) [14,73 sh 5 + 7,24 ch .J J Ц-
—1
о
4- u(t + )))[(—7,37 £ + 0,96] ch ] + (—14,62 + 3,62 g)sh с] с£= х2 ()).
—1
Всюду выше в этом и в предыдущих параграфах мы рассмат¬
ривали задачу о наблюдении координат xt (t) фазового вектора
х (Z). Однако могут встретиться случаи, когда знать все эти ко¬
ординаты не требуется, но достаточно вычислять лишь некоторые
функции pj [£, a1(p),..., яп(0] от них. Мы ограничивались пока
только линейными задачами. Поэтому и теперь остановимся лишь
на задаче о наблюдении линейной функции
т] = р [t, х\ = р' (t) х (t), (34.12)
где р (0 — некоторый n-мерный вектор. Формулировки задач,
соответствующие здесь задачам о наблюдении по идеальному
у (т) = G (т) х (т) и реальному z (т) = у (т) + Д (т) сигналам
(t — О ] т ] 0, получаются очевидной трансформацией задач
31.1, 31.2 и 32.1. Приведем, однако, их для полноты ' изложения.
Задача 34.1. Пусть движущийся объект описывается урав¬
нением (32.5), причем доступны измерению значения идеального
сигнала у (т) = G (т) х (т) (t — ft Ц т ] t). Требуется найти ли¬
нейную операцию <[), у (т)1, вычисляющую величину ц (t)=p' (t) х (t)
по сигналу у (т), так что выполняется равенство
Ф U, (у (*) fa (0}1 = /0) х (0.
Задача 34.2. Пусть движущийся объект описывается урав¬
нением (32.5), причем в процессе движения измеряется реальный
Сигнал z (т) = G (т) х (т) . Д (т) (t « ft <' т ] Z), где помехи
294
ПОСТАНОВКА И РЕШЕНИЕ ПРОБЛЕМЫ НАБЛЮДЕНИЯ
[Гл. 8
А (т) стеснена ограничением (32.7). Требуется найти операцию
ф0 [£, z (т) ], которая удовлетворяет условию
sup | ф° [i, {z (т) | р (0 х (0}] — р (О х (Z) | =
Z
= min sup | <р [{z (т) | р (t) х (/)}] — p' (t) x (t) |
ф z
no всем возможным реализациям z (т) и по всем возможным опера¬
циям ф lz (т)].
Очевидно, что проблема наблюдения величины ц (t) (34.12) не
является, по существу, новой: она всегда может быть сведена к
изученной уже задаче о наблюдении некоторой координаты Xt (t)
вектора х (t). Для этого достаточно применить линейное преоб¬
разование вектора х (£), которое превращает величину ц (t) в же¬
лаемую координату нового фазового вектора. Отсюда сразу сле¬
дует, что все рассуждения и выводы из § 33 автоматически рас¬
пространяются на случаи наблюдения величины (3-4.12). При этом
надо лишь везде заменить сигналы, несущие величину xt (t),
сигналами, несущими величину t (t). В частности, правило 33.1
сохраняется при этом дословно, за тем исключением, что вмес¬
то сигналов {у (т) | xt (t) = 1} и {у0 (т) | xt (t) = , 1}, несущих
xt (0 = 1, здесь следует рассматривать соответственно сигналы
{у (т)|р'ж (0 = 1} и {у° (т)| р'х (0 = 1}, несущие величину
t tft)x (0 = 1.
§ 35. Наблюдение квазилинейной системы
Выше мы неоднократно отмечали, что настоящая монография
посвящена изучению линейных динамических систем. Рассмат¬
риваемые в ней способы решения задач приспособлены специаль¬
но для таких систем и опираются на математические методы ли¬
нейного анализа. Это замечание относится в полной мере и к зада¬
чам о наблюдении. Однако при изучении проблемы управления
движением мы уже видели, что наши методы можно отчасти при¬
влечь и к решению задач об управлении квазилинейными систе¬
мами. Аналогичным образом обстоит дело и ■ в отношении задач о
наблюдении динамических систем, близких к . линейным. Так как,
однако, общее исследование проблемы наблюдения даже и для ква¬
зилинейных систем все-таки выходит за рамки этой книги, мы не
будем развивать здесь сколько-нибудь полную теорию, но опишем
лишь один возможный подход к задаче, который, как и в аналогич¬
ном случае проблемы управления (см. § 22), использует известные
идеи метода малого параметра. Для упрощения выкладок огра¬
ничимся случаем, когда управляющие воздействия от<^^ут<^'^1ву-
ет. Итак, рассмотрим динамическую систему, описываемую
§ 351 НАБЛЮДЕНИЕ КВАЗИЛИНЕЙНОЙ СИСТЕМЫ 295
дифференциальным уравнением
х = А (0 х — — (£, х). (35.1)
Здесь х — n-мерный вектор фазовых координат х( A (t) —
непрерывная (тг X ^матрица; / (t, — х) — нелинейная функция,
непрерывная по обоим аргументам и аналитическая по xt при каж¬
дом фиксированном значении t; ц — малый параметр.
Для системы (35.1) опишем решение задачи 31.1 о наблюдении
координат xt (t) фазового вектора х (t) по идеальному сигналу
у (т) = G (т) х (т). Вообще говоря, сигнал у (т) может и нелиней¬
но зависеть от xt (т), однако мы для простоты ,изложения ограни¬
чиваемся здесь случаем, когда у (т) является линейной функцией
координат xt (t), так как те незначительные изменения, которые
надо будет внести в наши рассуждения при переходе , к нелиней¬
ному сигналу у (т), очевидны.
Итак, нам надлежит найти операции е — U, у (т)1 (теперь уже
нелинейные), которые удовлетворяют условиям
ег U, {у (т) |хг (г)}] = Xi (t). (35.2)
Эти операции надлежит строить в виде рядов
оо
S R, У(т)] = 3 у(т)] (35 3)
к=о
по степеням параметра ц. В качестве первого члена в? ряда (35.3)
следует, очевидно, выбирать ту операцию ф?, которая решает за¬
дачу о наблюдении системы (35.1) при ц = 0, и, отталкиваясь от
нее, искать следующие члены ряда (35.3).
Таким образом, пусть ф? [(, у (т)] — решение задачи 31.1
для системы (35.1), но при ц = 0. Это означает, что для любого
вектора . s справедливо равенство
Ф_ [£, G (т) X [т, £] 5] = Si. (35.4)
Способ определения операции ф° нам уже известен из материала
§§ 33 и 34. В соответствии с этим будем считать операцию ф? уже
найденной. Введем теперь обозначение
41](0 = Ф° [«, у (г)]. (35.5)
Движению х (т) (t — ft — т — t) квазилинейной системы (35.1)
сопоставим движение — (т) соответствующей линейной системы
= А (г) я»! (т)
296 ПОСТАНОВКА II РЕШЕНИЕ ПРОБЛЕМЫ НАБЛЮДЕНИЯ [Гл. 8
при начальном условии tС 1 1 (t) (35.5). Пусть
д*( (г) = хДт) — а:[1] (т).
В курсе , дифференциальных уравнений доказывается, что движе¬
ние х (т) (t — Ф . т . t) системы (35.1) можно представить в
виде ряда по , степеням малого параметра р и величин t q (0:
X (т) = X (г, i] (я111 (0 + Хх (0) +
оо оо
+ S 3 Дх(0), (35.6)
Ь=1 т==0
где ссо™ — формы m-го порядка по t t, (/). Известно, что ряд (35.6)
сходится в окрестности движения яДИ (т), если р и 11, (t) доста¬
точно малы и если кривая . 1 (т) содержится в области аналитич¬
ности функции / (т, х) (см. [12*1, стр. 56). Из (35.6) вытекает, что
у (т) = G (г) X [т, t 1 (oW (t) + кх (t)) +
оо оо
+ S S (?) (/, т, Хх (0). (35.7)
7=1 т=0
Поскольку операции ср? мы считаем известными, то мы можем
считать известными и величины я. (/). Следовательно, для опре¬
деления искомых величин xt (t) нам достаточно найти величины
Ахг (t). Поэтому составим теперь уравнения для определения
величин XTi (t. Имеем, формально учитывая (35.4), (35.7) и свой¬
ства линейности операции д>°:
Ф«? [0 у (т)1 = ®il] (0 + (0 +
+ S 2 p*4>?[r» G (?) 4m) (0 т Хх («))]•
Л=1 wi=0
В силу (35.5) окончательно получаем, что
ОО ОО
Xxi (0 = — S S Р*Ф' [0 G (?) (0<m) (t, x, Xx (0)] (35.8)
f=l m=0
(г = 1, . . ,,n).
Решая эту систему нелинейных алгебраических уравнений,
найдем:
оо
Дх(0 = S p'w(0- (35.9)
&=i
Следовательно, величины Ххг (t) имеют тот же порядок малости,
§ 35]
НАБЛЮДЕНИЕ КВАЗИЛИНЕЙНОЙ СИСТЕМЫ
297
что и р,, и поэтому формальное решение уравнения (35.8) при до¬
статочно малом pi является действительным решением. Ряд (35.9)
сходится, ибо при малых \xt (t) сходится ряд (35.8). Итак,
находим:
©О
® (° = (0 + Дх{ (0 = 41] (0 + § nkqilc (0
k=i
(i = 1, . . . , n). (35.10)
Таким образом, решение задачи 31.1 о наблюдении квазили¬
нейной системы (35.1) по идеальному сигналу у (т) = G (т)я (т)
определяется рядом, стоящим в правой части равенства (35.10).
Нам еще надо было бы показать, что величины qiktt), фигурирую¬
щие в (35.10), можно истолковать как значения некоторых опера¬
ций • [0 у (т)], выполненных над сигналом у (т), т. е. осталось
показать, что разрешающие операции ег [£, у (т)] (35.10), действи¬
тельно, имеют вид (35.3). Для этого достаточно проследить способ
вычисления величин qik (t). Однако мы не будем проделывать это
здесь и не будем, следовательно, выписывать явный вид операций
eiA) (Л У (т)1, так как получаются чрезвычайно громоздкие вы¬
ражения.
Отметим еще в заключение, что при , вычислении решения зада¬
чи 31.1 о наблюдении квазилинейной системы (35.1) мы попутно
устанавливаем следующий факт: если задача 31.1 о наблюдении
по идеальному сигналу у (т) = G (т) х (т) разрешима для системы
первого приближения х = A (t)x, то она разрешима при достаточ¬
но малых ц и для исходной квазилинейной системы (35.1) для любых
Xi (0), лежащих в области аналитичности функции / (т, х).
Глава 9
ДВОЙСТВЕННОСТЬ МЕЖДУ УПРАВЛЕНИЕМ
И НАБЛЮДЕНИЕМ
§ 36. Соотношение двойственности
В § 33 читатель видел, что решение задачи об оптимальном на¬
блюдении оказалось сходным с решением задачи об оптимальном
управлении, описанным в § 16, 17. Отмеченное сходство в решении
этих задач показывает их тесную связь друг с другом. Можно
было бы вообще с самого начала свести одну из них к другой. Од¬
нако мы предпочли предложенный способ изложения, чтобы бо¬
лее рельефно оттенить связь рассматриваемых задач с соответ¬
ствующими математическими проблемами. Итак, до сих пор мы
изучали задачи об управлении и о наблюдении в известной мере не¬
зависимо друг от друга. Теперь мы должны исследовать ту связь,
которая их объединяет. Эта связь выражается в форме правила
двойственности между управлением и наблюдением. Это правило
можно вывести, сравнивая материал § 16, 17 и § 33, однако мы
сделаем это здесь непосредственно и заново. Итак, вывод правила
двойственности и составляет содержание настоящего параграфа.
Прежде всего, на.м’понадобится понятие о сопряженных упра¬
вляемой и наблюдаемой системах. Такое свойство сопряженности
получается в результате перенесения условия сопряженности, из¬
вестного для систем дифференциальных уравнений, на изучаемые
нами объекты. Последнего условия мы уже касались в § 10. До¬
говоримся о следующем: чтобы различать рассматриваемые даль¬
ше одновременно две динамические системы, из которых одна уп¬
равляется, а другая наблюдается, будем обозначать фазовый
вектор управляемого объекта символом x(t), а фазовый вектор наб¬
людаемого объекта обозначим через s (£). Итак, рассмотрим две
системы:
х = A (t)x 4- В (t)u 4-ш (0
и
s = Р (t) s,
у = G (t) s.
(36.1)
(36.2)
(36.3)
Здесь, как обычно, х и s — n-мерные фазовые векторы; и — г-
мерный вектор управления; у означает тп-мерный вектор-сигнал;
§ 361
СООТНОШЕНИЕ ДВОЙ СТВЕННОСТИ
299
A (t), В (Z), Р (t), G (t) — непрерывные матрицы соответствующих
измерений.
Определение 36.1. Системы (36.1) и (36.2), (36.3) на¬
зываются сопряженными, если выполняются соотношения
Р (t) — — A’ (t), G (t) — В' (t)i (36.4)
Целесообразность такого определения будет ясна из дальней¬
шего: сначала, мы покажем, что задача 13.1 об управлении и , задача
31.1 о наблюдении, поставленные соответственно для сопряженных
систем (36.1) и (36.2), (36.3), — эквивалентны, а затем будет установ¬
лено также и совпадение правил минимакса, указанных в §§ 17
и 33 для этих задач. Для упрощения выкладок мы проведем рас¬
суждения об эквивалентности задач 13.1 и 31.1, полагая, что упра¬
вление й и сигнал у являются скалярными-!. В соответствии с этим
в уравнениях (36.1) и (36.3) функции В (t) — b (t) и G (t) — g' (t)
являются тогда n-мерными векторами (первый — столбцом, вто¬
рая — строкой).
Итак, сравним задачи 13.1 и 31.1. Мы уже знаем, что задача
13.1 об управлении системой (36.1) из точки х (ta) — х* в точку
х ( ( ( — х$, сводится к уравнениям (15.1) для искомой функции
и (т). Эти уравнения в векторной форме имеют вид
X '( (■, т] b (т) и (т) dx — с, (36.5)
где
(36.6)
причем X [t, £0] — фундаментальная матрица системы (36.1)
при и (t) = 0. С другой стороны, чтобы найти операцию
t
ФЦ, 1/Г)] —
у (т) V (t, т) dx.
разрешающую задачу 31.1 о наблюдении величины ц (t) — р s (t)
по сигналу у (т), надлежит определить неизвестную функцию
и (t, х), которая удовлетворяет условию
t
{у (т) I p's (t)} V (t, х) dx — p's (/),
(36.7)
каков бы ни был вектор $ (/). Сигнал у (т) связан с вектором
з (t) соотношением у (т) = g' (т) S [т, t] s (t), где S [£, £01 —
300 ДВОЙСТВЕННОСТЬ МЕЖДУ УПРАВЛЕНИЕМ И НАБЛЮДЕНИЕМ [Гл. 9
фундаментальная матрица системы (36.2). Подставляя данное вы¬
ражение в - (36.7) и вынося постоянный вектор s (t) за знак инте¬
грала (вправо!), получим уравнение
t
g' (^ s[т, /| v (t, = p's()
Очевидно, полученное условие будет выполняться при любом
значении вектора s (t) тогда и только тогда, когда левые множите¬
ли при s (t) в обеих частях равенства совпадают. Эти множители
являются векторами-строками. Транспонируя их, получим, сле¬
довательно, такое векторное уравнение для искомой функции
v (t, т):
t
5[т, ZJg(r)yZ, т)<т = р. (36.8)
/—а
Сейчас полезно вспомнить, что при условии Р' (t) = — А (£),
фигурирующем в определении 36.1, фундаментальные матрицы
X [£, <0] и 5 Н, Zo] связаны соотношением (см. § 10)
S' [£, <o! = х-1 [Z, Jok (36.9)
Сопряженные системы (36.1) и (36.2), (36.3) связаны также вто¬
рым условием (36.4), которое означает, что b (t) = g (t). Учиты¬
вая последнее равенство, а Лкже равенство (36.9) и полагая
t — ft = t,, t = t,, мы увидим, что в случае р = с уравнение (36.5)
для функции и (т) полностью совпадает с уравнением (36.8) для
функции v (t$, т). Таким образом, справедливо заключение:
Задача 31.1 о наблюдении величины ц (t$) = р s (tp) в
системе (36.2) по сигналу у (т) (3(6.3), известному для - - — т Z3,
эквивалентна ' задаче 13.1 об управлении сопряженной системой
(36.1) на отрезке Иа, Z3], если только выполнено равенство
р = — X [t3, ta] ха — , X [Z3, т] w (т) dx. (36.10)
В частности, если здесь положить х* = 0, w (£) = 0, х& =■-
= {х^ = 1, xf = 0 при i , j}, то оказывается, что задача о на¬
блюдении координаты Sj -- - в системе (36.2) по сигналу у (т)
(£а - т - *з) (36.3) эквивалентна задаче об управлении сопряжен¬
ной системой (36.1) из точки покоя х (£а) = 0 - в точку х (t$) =-
= {0,..., 0, 1, 0,..., 0} (здесь 1 стоит на /-м месте). К аналогич¬
ным заключениям мы пришли бы и в тех случаях, когда управле-
5 зв]
Соотношение двойственности
301
ние и и сигнал у — векторы или когда в системе (36.1) допускается
обобщенное управление, т. е. когда в (36.1) и (t) dt = dU (t),
а разрешающая операция <p для задачи о наблюдении в свою оче¬
редь ищется в форме интеграла Стилтьеса
t
<Р [[M(t)l= (t, х).
i—О
Однако мы не будем останавливаться здесь на соответствующих
формулировках, так как они получаются очевидной трансформа¬
цией предыдущих выводов.
Теперь нам надлежит сравнить правила минимакса 17.1 и
33.1 для задачи 13.1 (или для задачи 14.1) об оптимальном управ¬
лении j и для задачи 32.1 об оптимальном наблюдении соответ¬
ственно. Пусть снова рассматриваемые системы являются сопря¬
женными, причем опять полагаем t — О = Z, t = t$, р = с.
Более того, мы примем, что нормы р и р*, фигурирующие в задачах
13.1 и 32.1, как раз сопряжены друг с другом. Тогда, вспоминая
упомянутые правила, данные соответственно в §§ 17 и 33, и учи¬
тывая условия сопряженности (36.4), мы сразу видим, что ми¬
нимальный сигнал у0 (т) (33.15), фигурирующий в правиле мини¬
макса для задачи о наблюдении, идентичен с минимальной функ¬
цией h° (т) (16.7), которая фигурирует в правиле минимакса
для задачи об управлении (см. также рассуждения в §§ 16 и 33).
Из этих соображений в соответствии с материалом из §§ 17, 33
и вытекает следующее нужное нам заключение:
Правило двойственности^. Пусть даны сопря¬
женные системы (36.1) и (36.2), (36.3). Рассмотрим задачу 32.1 об оп¬
тимальном наблюдении величины ц (,) = p's (t?j в системе (36.2)
по реальному сигналу z (т) = G (т) s (т) -|- Д (т) (О j т j Za),
где помеха Д (т) стеснена неравенством р [Д (т)] <(6. Пусть
здесь р — норма в некотором фиксированном пространстве функ¬
ций ®[ta, tf 1- Тогда указанная задача эквивалентна задаче 13.1 (или
задаче 14.1) об оптимальном управлении системой (36.1), где ми¬
нимизируемая интенсивность х имеет смысл нормы р* как раз в
том пространстве которое сопряжено к пространству
(при условии, что выполнено равенство (36.10)).
Заметим, наконец, что правило минимакса для задачи 13.1
(или 14.1), данное в §§ 17,33, теперь, очевидно, можно сформули¬
ровать в следующей наглядной форме.
Пусть дана задача 13.1 (или 14.1) об оптимальном управле¬
нии системой (36.1) при условии минимума величины р*. Тогда
для решения этой задачи следует рассмотреть сопряженную
наблюдаемую систему (36.2), (36.3) и найти соответствующий
302 ДВОЙСТВЕННОСТЬ МЕЖДУ УПРАВЛЕНИЕМ И НАБЛЮДЕНИЕМ [Гл. 9
минимальный сигнал {г/° (т) | c's (t$) = 1} (Za ’ т ’ t), где век¬
тор с определен равенством (36.5).
Задача имеет решение тогда и только тогда, когда этот
сигнал у° (т) отличен от тождественного нуля.. При этом оп¬
тимальное управление ий (т), решающее задачу 13.1, имеет нор¬
му р* [iz0] = l/p°, где р° = р [z/° (т)], и среди всех других функ¬
ций и (т) с той же нормой выделяется условием максимума на
сигнале у° (т) ’
<0 7
\ У0' (т) w0 (т) dx = щах jj у0' (т) и (т) dr р*’ [иJ = -i-j
или условием
J У0' (?) dU° (т)
<«
*0
= max ’ у0’ (т) dU (т)
(р*[^]=4-)
Ро
в случае задачи 14.1).
Проиллюстрируем эти
общие выводы на простейшем примере.
Пример 36.1. Рассмотрим точку с переменной массой m(t), перемещаю¬
щуюся по прямой ’, так что d J (t) = dU(t}=+d In т (t) (см. § 14)1). Пусть
поставлена задача о перемещении этой точки из одного состояния покоя £ (0) =
= £ (0) = 0 в другое § (Т) = £°, f (Т) = 0 при условии минимального
расхода реактивной массы
Т ♦
i m0 -4- mi (0)
х. [dtf] = \ | dU (т) | = In m<) • (36.11)
6
Подобная задача уже обсуждалась выше. Здесь мы возвращаемся к ней
лишь как к наглядной иллюстрации. Запишем уравнения движения в нор¬
мальной форме dx± = x2dt, dx2 = dU, т. e.
где
1(01 = о ПН (36.12)
W 0 0||_«2(0J LiJ
Xx = g, x2 = ?. Вектор c (36.5) будет здесь таков: c =
Наблюдаемая система, сопряженная к системе (36.12), будет описываться
уравнениями
(36.13)
где нам надлежит, стало быть, определять величину
л (Т) = c's (Т) = [£о, 0] [2 J = £“si (Г)
1) Относительную скорость отбрасываемых частиц считаем равной еди¬
нице по абсолютной величине.
§ 37]
СВОЙСТВО ПОЛНОЙ НАБЛЮДАЕМОСТИ
303
и рассматривать сигналы
у(т) = уа(т) = [0, 1] = s2(т).
В системе (36.13) полезно переименовать переменные qr = s2 и q2 = — sj.
Тогда получим систему
dai
где по сигналу у (т) = q± (т) (0 < т < Т) надлежит определять величину
т) (Т) = —%q2 (Т). Но, полагая qr = g, q2 = g, мы видим теперь, что при¬
шли к задаче о вычислении скорости t]=—g0 q2 = g (7)7 (измеренной в
масштабе — g°) по координате 7t (т) = g (т) (0 < т < Т) для точки т, сво¬
бодно движущейся по прямой (см. § 32). Итак, рассматриваемая задача об
управлении точкой т (t) оказалась эквивалентной задаче о наблюдении дви¬
жения такой же точки, но уже свободной от управляющих сил. Вспоминая
теперь, что минимизируемая здесь величина к [dU] (36.11) может • рас¬
сматриваться как 7норма р* [CZ], сопряженная к норме р [у] = шах | у (т) |
(0 7 т 7 Т), мы видим, что общее правило двойственности в совокупности
с правилом минимакса сводятся здесь к следующим выводам, имеющим про¬
стой механический смысл (см. также §§ 25, 37).
Скажем, что движение свободной точки т по прямой g со скоростью
g = т] является минимальным (для отрезка 0 7 t 7 7), если максимальное
отклонение координаты этой точки от нуля при 0 < t Т является мини¬
мально возможным. Тогда, для того чтобы за время Т переместить точку т (t)
реактивной силой из одного состояния покоя в другое, лежащее от первого
на расстоянии g°, необходимо затратить количество реактивной массы тг (0)
не меньшее, чем т^0 [ехр (р0)_1 — 7 1]. Здесь р° — наибольшее отклонение от
нуля координаты g (t) (0 7 t Т) свободной точки т в минимальном дви¬
жении со скоростью g = l/g°.
Далее, если мы измеряем скорость g (Г) свободной точки по ее коорди¬
нате g (т) (0 < т < 71), причем возможная погрешность Д (т) в сигнале z (т) =
= g (т) + А (г) стеснена условием | Д (т) | < д, то мы! никак не сможем
избежать погрешности меньшей, чем величина, равная произведению б на
минимальный импульс силы, потребный для перемещения (за время Т) точки
единичной массы из одного состояния покоя в другое на расстояние,
равное единице. (Последний вывод следует] из предыдущих рассуждений
при g° 7 = 1.)
§ 37. Свойство полной наблюдаемости линейной системы
Теперь, после того как мы установили связь между задачами об
управлении и наблюдении, можно вывести эффективные условия
разрешимости задачи 31.1 о наблюдении линейной системы (36.2)
по идеальному сигналу (36.3). Эти условия естественно теперь по¬
лучить, пользуясь свойством двойственности между задачами об
управлении и наблюдении. Дадим сначала определение.
Определение 37.1. Система
304 ДВОЙСТВЕННОСТЬ МЕЖДУ УПРАВЛЕНИЕМ И НАБЛЮДЕНИЕМ [Гл. 9
называется вполне наблюдаемой по сигналу
у = G(t) s
на отрезке [t — ft, d, если для любой координаты (t) (i = 1,..., п)
можно построить разрешающие операции $ [Z, у (т)] для зада¬
чи 31.1 о наблюдении системы (36.2), (36.3).
В частности, мы будем говорить, что система (36.2) вполне на¬
блюдаема по координате st, если она вполне наблюдаема по иде¬
альному сигналу у (т) (36.3) вида у (т) = st (т).
Как мы уже знаем, задача 31.1 о наблюдении системы (36.2),
(36.3) эквивалентна задаче об управлении сопряженной системой
х = ^]^'tt)x + G' (t)u (37.1)
на отрезке [tx = t — ft, 3 = Z] при краевых условиях х* и х&,
удовлетворяющих равенству (36.10). Поэтому, очевидно, система
(36.2) вполне наблюдаема тогда и только тогда, когда вполне уп¬
равляема сопряженная система (37.1). Следовательно, эффектив¬
ные условия полной управляемости для системы (37.1), сформу¬
лированные в §§ 19, 20, дают сразу условия полной наблюдаемости
системы (36.2), (36.3). Таким образом, справедливы следующие ре¬
зультаты.
Теорема 37.1. Пусть матрицы Р и G постоянны. Тогда,
для того чтобы система (36.2) была вполне наблюдаемой по иде¬
альному сигналу (36.3), необходимо и достаточно, чтобы ранг
матрицы
К = {G', PG,.., (У'-'-О'} •
был равен п.
Теорема 37.2. Пусть на отрезке И — ft, П можно ука¬
зать точку т = t*, в которой матрицы Р (т) и G (т) имеют не¬
прерывные производные вплоть до (п — 1)-го порядка, причем в этой
точке ранг матрицы
К (т) = {Tj (т),..., Лп(т)}
равен п. Тогда система (36.2) вполне наблюдаема по идеальному
сигналу (36.3).
Здесь матрицы Lt (т) определены соотношениями
Lt(x) = G'(x), А(т) = p'Li_1(t)+!^ (г = 2,...,п).
Отметим здесь еще, что, пользуясь свойством двойственности,
можно вывести и условия наблюдаемости консервативной механи¬
ческой системы (25.1) в первом приближении, аналогичные усло¬
виям управляемости, приведенным в теореме 25.1. Однако мы не
§ 37]
СВОЙСТВО ПОЛНОЙ НАБЛЮДАЕМОСТИ
305
будем приводить формулировку указанных условий в общем слу¬
чае, так как читатель легко сможет записать их сам, проводя
рассуждения, описанные выше. Укажем лишь условия полной
наблюдаемости системы (25.1) либо по обобщенной координате qt,
либо по обобщенной скорости qt. Имеет место следующее утвер¬
ждение.
Механическая система (25.9) вполне наблюдаема- по обобщен-
п
ной координате q{ = 2 Pi^j-i тогда и только тогда, когда
J=i
Pij — 0, К=!= (h 1 = 1 , - • n).
Механическая система (25.9) вполне наблюдаема по обобщенной
п
скорости qt = $] Pi; x2j тогда и только тогда, когда
7=1'
PiJ == 0, М=/=0 (г', 7 = 1 ч . . ., п).
Здесь Xt — канонические координаты системы (25.1). Чтобы еще
раз подчеркнуть связь между задачами об управлении и наблю¬
дении, сформулируем это условие в следующей форме.
Механическая система (25.1) вполне наблюдаема по обобщен¬
ной координате qt тогда и только тогда, когда она вполне управ¬
ляема силой и, направленной вдоль вектора {3#} (7 = 1, ..., п).
Механическая система (25.1) вполне наблюдаема по обобщенной
скорости qt тогда и только тогда, когда она вполне управляема
силой и, направленной вдоль вектора {Рг;} (/ = 1, ..., п) и все
корни Kt уравнения (25.6) отличны от нуля.
Выше, в § 25, мы уже разобрали влияние различных дополни¬
тельных сил на управляемость механической системы. Можно точ¬
но так же исследовать и влияние этих сил на наблюдаемость меха¬
нической системы. Мы укажем здесь лишь на один из результатов,
который непосредственно следует из свойства двойственности ме¬
жду задачами об управлении и наблюдении. Рассмотрим механи¬
ческую систему (25.9), подверженную скалярному воздействию и
#2i—i = X2i, #21 = ^Ai-1 +«!« (г = 1, . . ., n), (37.2)
где все числа % отличны от нуля. Если к системе (37.2) приложить
гироскопические силы, то ее поведение будет описываться урав¬
нениями
(r2i_1 = #2ь #21 = ;i#21-1 + S ViX + И. (37.3)
7=1
Справедливо следующее утверждение,
306 ДВОЙСТВЕННОСТЬ МЕЖДУ УПРАВЛЕНИЕМ И НАБЛЮДЕНИЕМ [Гл. 9
Если при наложении гироскопических сил на консервативную
управляемую систему (37.2) она оказывается вполне управляе¬
мой силой и, то система (37.3) будет также и вполне наблюдаемой
по величине
г(т) = §
г=1
В соответствии со свойством двойственности для доказательства
этого утверждения достаточно показать, что в данном случае со¬
пряженная система
п
S21-1 = ^г^гн ^2г = ®22-1 S Yn$2j Ч- (j = 1, . . ., ft)
2=1
(37.4)
вполне управляема воздействием и. Для этого выполним неособое
преобразование координат
$2г-1 = — ^22-1, = %2i (* = 1, .. . , n), (37.5)
которое вследствие кососимметричности матрицы у , , возвращает
нас к исходной системе (37.3). Но эта система по условию вполне
управляема. Так как преобразование (37.5), очевидно, не нару¬
шает свойства управляемости, то система (37.4) также вполне уп¬
равляема. Последнее и доказывает наше утверждение, о наблю¬
даемости системы (37.3).
Заметим в заключение этого параграфа, что можно выполнить
преобразование системы (36.2), (36.3) пр свойству наблюдаемости,
как это было сделано в § 19 для свойства управляемости, и ввести
понятие подпространства наблюдаемости системы. Однако этот
вопрос здесь разбирать не будем.
§ 38. Проблемы управления и наблюдения
и теория игр
В § 32 при постановке задачи об оптимальном наблюдении мы
уже воспользовались некоторыми понятиями из теории игр, ис¬
толковав процесс наблюдения как некоторую игру. При этом
связь наблюдения с игрой, которая встретилась в § 32, имела
корни в самой постановке задачи об оптимальном наблюдении и
была, следовательно, связью по существу проблемы. Вообще же
математическая теория игр пересекается со многими задачами из
теории управления движением. Например, игровая ситуация так¬
же по существу и притом весьма ярко проявляется в задаче о
преследовании, когда стратегия одного управляемого объекта
определяется желанием наискорейшей встречи с другим объектом,
§ 38]
УПРАВЛЕНИЕ И НАБЛЮДЕНИЕ И ТЕОРИЯ ИГР
307
стратегия которого, напротив, диктуется желанием избежать
встречи. В этой игре роль величины g может играть, например,
время Т до встречи объектов. Указанная задача о преследовании
тесно связана с рассматриваемыми нами задачами об управлении,
однако подробный разбор ел выходит за рамки этой книги. Мы
в конце монографии (см. §§ 41, 42) рассмотрим лишь один частный
случай подобной игровой встречи управляемых движений. Теперь
же мы продолжим аналогию между теорией игр и нашими зада¬
чами, начатую в § 32. Это продолжение будет выглядеть уже не
столь естественно с точки зрения постановки задачи, но зато оно
подчлркнет тесную связь в методах исследования. Суть дела в
следующем. В §§ 17 и 33 была выяснена важная роль, которую
играют условия минимакса в решении линейных задач об управ¬
лении и о наблюдении. С другой стороны, проблемы . минимакса
и максимина составляют центральную задачу в теории игр. Это
и определяет аналогию, рассматриваемую в этом параграфе.
Сводка простейших понятий из теории игр была дана выше,
в § 32 (см. стр. 271). Продолжим здесь несколько этот материал.
Мы уже знаем из § 32, что оптимальные стратегии а0 и |3° первого
и второго игроков определяются соотвлтстлнно условиями (32.3)
и (32.4), причлм %[р°] > ф [«0]. Особенно удобны, однако, такие
игры, когда в условиях (32.3) и (32.4) можно переставлять местами
операции взятия минимума и максимума. Именно такой случай,
называемый случаем «седловой точки», будет интересовать нас в
этом параграфе в первую очередь. Обсудим поэтому его здесь по¬
дробнее.
Говорят, что игра имеет седловую точку {а0, р0}, опрлдлленную
парой оптимальных стратегий <0* и р°, если справедливы нера¬
венства
g [а0, р] > g [< р°] > I [а, р°], (38.1)
каковы бы ни были а из {а} и р из {Р}.
Смысл этих неравенств, очевидно, таков. Пусть при а = а0 и
Р = р° исход игры характеризуется величиной $ = g°. Если один
из игроков придерживается оптимальной стратегии, а другой от¬
клоняется от своей оптимальной стратегии, то за счлт этого откло¬
нения последний может лишь ухудшить для себя результат игры
по сравнению с g°. При этом оказывается, что как раз
g° = g [а0, р0] = min max g = max min g (38.2)
3 « a 3
и, следовательно, оптимальные стратегии являются оптимальны¬
ми и в прежнем смысле. Полезно лщл раз подчеркнуть, что не вся¬
кая игра двух лиц обладает оптимальными стратегиями, которые
обеспечивают неравенства (38.1). В соответствии с этим нл всегда
308 ДВОЙСТВЕННОСТЬ между УПРАВЛЕНИЕМ и НАБЛЮДЕНИЕМ [Гл. 9
можно переставлять операции min и max. Например, известная
3 а
игра в чет и нечет, где выигрыш первого игрока оценивается в
£ = 1, а проигрыш его же — в £ = — 1, седловой точки не имеет.
Читатель, не знакомый с теорией игр, может познакомиться с та¬
кими ситуациями, например, по книге [16*], и мы здесь на них
подробно останавливаться не будем. Простейшая игра с седловой
точкой, которая, кстати, хорошо оправдывает этот - термин, тако¬
ва. Пусть задана функция £ [а, 01 |32 — а2, имеющая смысл вы¬
игрыша в игре, где стратегиями являются числа а и [3, которые
могут выбираться в пределах —оо< а<^ сю, — оо — р — оо.
Ясно, что седловая точка определяется здесь парой оптимальных
стратегий а0 = 0, /3° = 0 (рис. 38.1), которые как раз задают сед¬
ловую точку поверхности 5 = р2 — а2.
Любопытен следующий факт: в математической теории игр
строго доказано, что шахматная игра также имеет седловую точ¬
ку и пару оптимальных стратегий. К счастью, эту игру спасает
пока от гибели типичная в математике ситуация: строгое логичес¬
кое доказательство существования седловой точки не указывает
реальных сейчас путей для действительного определения этих
стратегий (или хотя бы для определения стратегий, в какой-то
мере близких к ним).
Перейдем теперь к основной задаче этого параграфа. Уста¬
новим связь правил минимакса из §§ 17 и 33 с условиями (38.1),
(38.2) для седловой точки подходящей игры.
Рассмотрим задачу 31.1 о точном наблюдении координаты
xt (t) движения х (t) (31.5) по идеальному сигналу у (т) =
= G (У)х (т) (£—операцией х) ф° [у (т)] с наименьшей нор¬
мой р* [ф°]. Этой задаче мы сопоставим некоторую игру с седловой
Ч Числа i и t считаем фиксированными.
§ 38]
УПРАВЛЕНИЕ И НАБЛЮДЕНИЕ И ТЕОРИЯ ИГР
309
точкой. Возможность такого сопоставления определяется, в частно¬
сти, тем обстоятельством, что решение рассматриваемой задачи,
как и исследование игр с седловой точкой, использует математи¬
ческую проблему об отделении выпуклых множеств.
Игра, о которой идет речь, строится так. Роли первого и вто¬
рого игроков пусть теперь исполняют наблюдатель и наблюдае¬
мая система соответственно. В качестве стратегий выберем: (1)
для наблюдателя — все возможные линейные операции ср [у (т)],
определенные на исходном пространстве сигналов S3 {у (т)}
и имеющие норму р* [ср] . v°, (2) для объекта — все возможные
сигналы {у (т) | xt (Z) = 1}, несущие xt (t) = . 1. (Число v° мы бу¬
дем считать фиксированным, но пока не будем предопределять
его конкретное значение.) Величиной £, которая будет характе¬
ризовать выигрыш, извлекаемый наблюдателем из сигнала у (т),
пусть служит результат избранной им операции ср на реализовав¬
шемся сигнале у (т), т. е.
£ = £ 1<ф, у] = ф Ijf (т)]. (38.3)
Вернемся к задаче 31.1 о наблюдении. Пусть у0 (т) — мини¬
мальный сигнал, несущий xt (t) = 1. Иначе говоря, пусть
Р [у0 (т)1 = min p[° (т) | xi (t) = Л. Если у° (т) = 0, то, как
мы знаем, задача о наблюдении решения не имеет. Этот случай
поэтому для нас неинтересен, и мы его оставим в стороне. Пред¬
положим, следовательно, что р [у0 (т)] = р° . 0. Тогда задача
имеет решение <р° [у (т)] с нормой р* [(р°| = 1/р°. Это число v =
= 1/р° мы и выберем теперь в качестве числа v = v°, фигурирую¬
щего в построенной выше игре. Оказывается теперь, что оптималь¬
ная резрешающая операция ф° и минимальный ..сигнал как раз
и составляют пару оптимальных стратегий, которые определяют
седловую точку рассматриваемой игры (в смысле выполнения ус¬
ловий (38.1) и (38.2)). В самом деле, с одной стороны, по определе¬
нию разрешающей операции ф° [у (т)] мы имеем равенство
ф°[у (т)|х; (/) =1] =1 = ф° [у0 (т)], каков бы ни был сигнал
{у (т) | Xi (t) = 1}. Это доказывает левое соотношение (38.1).
Подчеркнем, кстати, что это соотношение вырождается здесь в
строгое равенство. Именно это важное обстоятельство и превра¬
щает оптимальную стратегию ф° игры в разрешающую операцию
для задачи 31.1. С другой стороны, по свойству нормы р* [ф],
которым мы уже пользовались выше (см. § 33), имеем ф° [у0 (т)] =
= (1/р°)р° = р* [ф°1 р[г/°1 и ф [г/°(т)1 <р* [<ф]р[у°] ерр’ [ф°] р [?/0]
для всех операций ф с нормой р* [ф] . v° = 1°р°. Это доказы¬
вает правое равенство (38.1), которое, следовательно, является
выражением условия максимума (см. § 33) для оптимальной разре¬
шающей операции ф°. Итак, мы можем ■ . сформулировать следую¬
щий вывод.
310 ДВОССТВЕМНОСТЬ МЕЖДУ УПРАВЛЕНИЕМ И НАБЛЮДЕНИЕМ [Гл. 9
Задаче о наблюдении координаты Xt (t) по сигналу у (т) =
= G (%) х (т) операцией ср0 с наименьшей возможной нормой р* 1<р]
отвечает игра, где: (1) £ = ср [у (т) ], (2) стратегии первого
игрока суть операции (р с нормой р* [<р] [ v° = 1/р°, (3) страте¬
гии второго игрока суть сигналы {у ’ (т) | х, (t) = 1}. Здесь р° —
норма минимального сигнала у° (т). Эта игра имеет седловую точ¬
ку {ф°, */0}, причем как раз у° (т) — минимальный сигнал, а ср0 —
оптимальная разрешающая операция для задачи 31.1.
Собственно говоря, нам следовало, бы еще проверить, что рас¬
сматриваемая игра не имеет седловых точек, отличных от тех,
которые определяются минимальным сигналом у° и оптимальной
разрешающей операцией ср0, но на этом вопросе мы останавли¬
ваться не будем.
Итак, мы выяснили некоторые связи между задачами о наблю¬
дении и играми. Разумеется, все выводы, полученные нами для
случая, когда наблюдается координата xt (t), переносятся сразу
на случай наблюдения величины ц (t) = р'х (t). Это перенесение
получается автоматически, и поэтому нет нужды обсуждать его
здесь подробно. Наконец, заметим, что, опираясь на двойствен¬
ность между наблюдением и управлением, связь с теорией игр
можно продолжить на задачи управления. При этом выясняется,
что принцип максимума в теории оптимальных процессов в дан¬
ном частном случае линейных систем имеет смысл той части условия
седловой точки соответствующей игры, которая отвечает усло¬
виям максимума. Так как указанное продолжение снова полу¬
чается совершенно автоматическим путем, то и на нем останавли¬
ваться здесь не будем. Однако этот параграф мы завершим обсуж¬
дением еще одного случая задач об управлении, который также свя¬
зан с условиями минимакса, характерными для седловой точки.
Рассмотрим задачу 13.2 об оптимальном переводе управляе¬
мого объекта из фиксированного начального состояния х (ta) =
= хЛ в одно из возможных конечных состояний х (tp) = х?, со¬
ставляющих заданное многообразие @ . } . Итак, нам надо най¬
ти точку х? из @ и управление и° (t), переводящее систему (13.1)
из состояния х (ta) = х* в состояние х (tp) = х? таким образом,
чтобы интенсивность х [и0] = р* [и0] оказалась наименьшей воз¬
можной. Пусть сначала точка х? из @ как-нибудь выбрана и
временно зафиксирована. Тогда мы получим задачу 13.1, решение
которой определяется правилом минимакса 17.1. В соответствии
с этим правилом норма р* [и0 (т)жр] управления и° (т)ж0, кото¬
рое решает задачу 13.1 при выбранном х&, определяется нормой
р [Л° (т)^] = р£з соответствующей минимальной функции, именно:
<’U “X-
§ 38]
УПРАВЛЕНИЕ И НАБЛЮДЕНИЕ И ТЕОРИЯ ИГР
311
Но отсюда сразу следует, что если мы хотим выбором х$ из
$ добиться наименьшего возможного значения для величины
р* [и0 (т)жд], то нам надлежит найти такое — из — , для которого ве¬
личина р®3 достигает максимума. Такой вектор х$ обозначим
символом х°. Мы не будем обсуждать здесь во всей общности во¬
прос о существовании вектора х0из — , на котором достигается ис¬
комый максимум. В ситуациях, которые типичны в приложе¬
ниях, этот вектор существует, ибо существование максимума
является там следствием замкнутости множества @ и непрерывной
зависимости р® от х$. Итак, для решения задачи 13.2 надлежит
найти вектор г0, для которого
р° = р°0 = р[Л$в(т)] = тах р[год(т)] (38.4)
при х? из — . Примем, что вектор с [х₽] (15.2), который теперь удоб¬
но рассматривать как функцию от — , не обращается в нулевой
вектор ни при каком х$ из — . (Иначе задача 13.1 имела бы три¬
виальное решение и0 (т) = 0.) Возвращаясь теперь к определению
минимальной функции hQ (т) (16.15) и учитывая условие (38.4),
мы можем высказать следующее заключение.
Решение — задачи 13.2 определяется правилом минимакса 17.1
для задачи 13.1, где вектор х$ = x° находится из условия
max min р [В' (т) 5 [т, Zp] I] = р [5' (т) 5 [т, Zp] Z0] = р° (38.5)
хЗ i
при с’ [ х° ] I — 1 по всем х? из@.
Как уже неоднократно отмечалось, задачу об определении ми¬
нимальной функции k° (т) можно заменить задачей об определе¬
нии экстремальной функции — (т). Тогда задача (37.5) заменяет¬
ся проблемой: найти
min max с' [хЗ] к — с' [я0] № = v°
(38.6)
хЗ *
р [В (т)5 [т, t)] А] < 1
(38.7)
х& из
(38.8)
Аналогичным образом решается и серия других подобных за¬
дач. Например, задача о минимуме функции у [х (Zp)] при задан¬
ном ограничении р* [и (т)] — р, приводится очевидным образом
к задаче на условный экстремум: min у [х?] при ограничении
v° [x^] ц, где v° [—J = max с'[х₽] к при условии (38.7).
В условиях (38.5) предполагается, как это следует из преды¬
дущих рассуждений, что сначала при фиксированном временно х?
определяется вектор /° [x3J, минимизирующий величину р, а
312 ДВОЙСТВЕННОСТЬ МЕЖДУ УПРАВЛЕНИЕМ И НАБЛЮДЕНИЕМ [Гл. 9
затем, когда это сделано для всех из @, надо выбрать такой век¬
тор х? = х°, для которого величина р (т)] оказывается наи¬
большей. Соответственно в (38.6) ■ сначала при фиксированном х$
находят максимизирующий вектор &[хР], а затем находят ми¬
нимум по х$. Далее будем предполагать для упрощения, что
функции 11 1 t Rp, т], из которых конструируются минимальные
п
функции . (т) = 2 С [я3] /г[(] Т] являются линейно незави-
г=1
симыми. Как мы знаем, это в принципе не ограничивает общно¬
сти, так как если задача вообще имеет решение, то дело так или
иначе можно свести к данному случаю (см. § 16).
Пусть многообразие @ образует в пространстве {х} выпуклое
замкнутое множество точек. Предположение о выпуклости множе¬
ства @ существенно для получения условия типа седловой точки,
которое будет тогда характеризовать решение рассматриваемой
задачи (38.6) — (38.7). В таком случае операции min и max мож¬
но переставить.
Поясним это. Проблема (38.6) — (38.8) имеет вид, типичный для
игры, где лишь следует полагать, что векторы к, стесненные усло¬
вием (38.7), образуют стратегии первого игрока, а , векторы х$
(38.8) — это, стратегии второго игрока, роль выигрыша исполняет
здесь, очевидно, величина £ = с' [х&] к, зависящая линейно и от
х& и от к. В теории игр (см., например, [16*]) доказывается, что
такие игры обязательно имеют седловую точку {№,x°}, которая,
следовательно, и определяет решение задачи.
Не приводя подробного доказательства*этого положения, по¬
ясним лишь, в чем здесь дело. Рассмотрим пространство Здп {с},
где норму у [с] определим равенством у [с] = max с'к при р \1~Г х
X Up, т] к] = 1 (см. для сравнения замечания к правилу 17.2 на
стр. 113). Рассмотрим в этом пространстве множество 9, состав¬
ленное из всех тех точек с, которые получаются по формуле (15.2),
когда точка х& пробегает все множество . , Ясно, что .3 есть вы¬
пуклое, замкнутое множество в пространстве 33п{с}, не содержа¬
щее точку с = 0, и,следовательно, величина у [с] достигает в не¬
которой точке с° из .9 положительного минимума у0 = у [с°].
Но в таком случае в пространстве 1п {с} существует линейная
операция ф [е] = с'кР, определенная некоторым вектором Л°,
принимающая в точке с° значение ф [с°] = у0 и разделяющая.
(см. § 53) выпуклые множества 9 и у [с] у0. Читатель без труда
проверит теперь, что векторы с° и /с° и доставляют седловую точку
рассматриваемой игры (38.6) — (38.8), так как норма у* [А0]
вектора № в пространстве ЗВП {к} будет определяться равенством
у* [А;0] = р [В (т) S [т, £р] /с°] и будет равна единице. (Сравни
снова с рассуждениями на стр. ИЗ, где, напротив, пространство
S 38]
УПРАВЛЕНИЕ И НАБЛЮДЕНИЕ И ТЕОРИЯ ИГР
313
$**п (К} рассматривалось как исходное, а пространство ] {е} —
как пространство, сопряженное к исходному.) Подчеркнем еще
раз, что существование седловой точки, а значит, и возможность
переставлять в (38.6) операции max и min, связано с тем обстоя-
К х&
тельством, что точки К (38.7) и точки а>3 (38.8) образуют выпуклые
множества в n-мерных пространствах (К} и (х} соответственно.
В качестве примера можно рассмотреть следующие две задачи.
Задача 38.1. Пусть управляемая система описывается
уравнением 13.1. Заданы отрезок времени ] /р, начальное
состояние ха == 0 и число е ] 0. Среди допускаемых управлений
и (t) требуется найти оптимальное управление u°(t), переводящее
систему ■ (13.1) из начального' состояния х (£Л) — хл в ъ-окрест-
ность начала координат и имеющее при этом минимальную интен¬
сивность управления х [w-0] = min.
Задача 38.2. Пусть для управляемой системы (13.1) за¬
даны начальное состояние ха=*0 и число в ] 0. Среди всех допу¬
скаемых управлений, стесненных условием х [и] ] ц (ц ] 0 — за¬
данное число), требуется найти оптимальное управление и° (t),
переводящее систему (13.1) из начального положения х (Q = х*-
в е-окрестностъ начала координат || х || , е за минимально, воз¬
можное время.
Наметим решение задачи 38.1, полагая для определенности,
что в уравнении (13.1) w (t) = 0 и управление и (t) есть скаляр¬
ная переменная, а е-окрестность определена неравенством
— в ] xi ] е. Выберем при этом х [u] = max | и (т) |. Тогда за-
т
дача (38.6) — (38.8) примет следующую конкретную форму:
min max [afl — X [t^, Ц*1]'/] = v0 (38.9)
&
при
jj | Ь(т)5[т dx <1 (38.10)
и
—8<^<s(i = 1,..,п). (38.11)
Мы имеем право в (38.9) переставить местами операции min и
max. Но тогда ясно из (38.11), что величины xi определятся из
условия X = — е sgn kt. Отсюда сразу следует, что задача
(38.9) — (38.11) трансформируется в задачу: найти
max
k
(38.12)
314 ДВОЙСТВЕННОСТЬ МЕЖДУ УПРАВЛЕНИЕМ Й наблюдением [Гл. &
при условии (38.10). Следовательно,
u° (Z) = v° sgn&' (t)S [Z, ZJ/c0],
где вектор к° и число v° суть решения задачи (38.12), (38.10).
Более общо: пусть и — г- вектор, w (t) = 0 и е-окрестность
задана в общей метрике у 1^*4 е, где у — какая-либо норма
в пространстве {я}, и требуется минимизировать некоторую нор¬
му р* [и (т)]. Тогда аналогичным образом придем к задаче:
найти
шах ([— X [£р, Za] х*]' к — еу* [A]]=v° (38.13)
и
при условии
р [В' (т)5 [т, Zp] к} < 1. (38.14)
Таким образом приходим к выводу.
Оптимальное управление u° (t) для задачи 38.1 определяется
условием максимума
k°'S' [^ fy] В (т)и°(т) dx = max ( kQ’S’ [т Zp] 5(т) и (г) dr
t и J
•» ‘а
при р* [u] v°, где вектор к° и число v° суть решения задачи
(38.13), (38.14). *
Отсюда сразу можно вывести ряд простых следствий. Напри¬
мер, для того чтобы существовало управление и (Z), стесненное
условием р* [u] - [X и переводящее объект из состояния
х (ta) = хл в состояние х (tp) = х&, где точка х? лежит внутри
е-окрестности у [я] - е, необходимо и достаточно, чтобы выполня¬
лось соотношение х)
max ([ — X [Zp, Za] я* ]' к — еу* [А] —
— |хр (т) S [т, Zp] к ]) 0 при || к\\ = 1. (38.15)
Вывод других аналогичных соотношений, равно как и вывод -
соотношений, определяющих решение задачи 38.2, мы рекомен¬
дуем в качестве упражнения читателю.
Обсудим здесь еще совсем кратко упоминавшуюся уже задачу
о минимуме некоторой функции у [х (Zp)] при ограничении
х [и] - ц (см. стр. 311). Если множества - - {#}, определенные
условиями у [я] 5, выпуклы и замкнуты, то решение зада¬
чи, упомянутое на стр. 310, снова упрощается. Ясно, что вели¬
чина -° = min у [я (Zp)] есть тогда наименьшее из чисел £, для
х) См. примечание 27.1.
§ 38]
УПРАВЛЕНИЕ И НАБЛЮДЕНИЕ И ТЕОРИЯ ИГР
315
которых движение х (t) можно привести в область ыри
х [и] ’С |л. Но последняя задача аналогична только что разобран¬
ной, и поэтому, повторяя рассуждения, подобные приведенным
выше на стр. 314, приходим к выводу: £° есть наименьшее из
чисел £ , удовлетворяющих условию
max {(— X [ig, ia]«“)' к + у* [*] —
— цр [В' (т) S [т, tp] &]}<< 0 при || А: || = 1, (38.16)
где у. [А:] = min х' к при х из @;{х}. Определение же самой точки
хО = х (tp), где у [х (<₽)] = min, сводится • к определению сед¬
ловой точки {я0, к°] соответствующей игры, подобной (38.6) —
(38.8) (см. стр. 311).
Соотношения вида (38.13) — (38.16) можно вывести и другими
(по форме!) рассуждениями. Это можно сделать, например, так.
Обратимся к задаче 38.2, где для определенности примем опять, что
х [u] = max | и (т) |, причем и — скаляр и ц = 1. Рассмотрим
т
пространство 3i{g, h (т)}, элементами которого являются пары
{g, h (т)}, • состоящие из лгммрного вектора g и из функции h (т)
(ta т М- Для дальнейшего нам удобно определить в прост¬
ранстве • норму р [{g, h (т)}] следующим равенством
р[{£ А(т)}] = 8lk|+ J |А(т)|^т. (38Д7)
Тогда правые части равенств
п .
— 3 tJXj = — я* + § A() 1*Д» Т]и(т)^Г (38.18)
i=i *«
(г = 1, . . ., n),
которым мы должны удовлетворить, можно истолковать как ре¬
зультат линейной операции, выполненной над элементами {gW,
ДО)} (g-[*1 = {О,..., О, 1, 0,..., 0}, где— 1 стоит на z-м месте) прост¬
ранства • . При этом оказывается как раз, что норма р* этой
операции, порожденной вектором х$ = {zf} и функцией и(т)
tp}, определена равенством
Р*[{®3, »(*)}] = max ||®3 ||, |м(т)||]. (38.19)
(Мы рекомендуем читателю самостоятельно разобраться, почему
это так.) Теперь задачу о выборе функции и (т) и вектора х&,
316 ДВОЙСТВЕННОСТЬ МЕЖДУ УПРАВЛЕНИЕМ И НАБЛЮДЕНИЕМ [Гл. 9
удовлетворяющего соотношениям (38.18), можно трактовать как
проблему моментов (см. стр. 96). Отсюда сразу следует, что опти¬
мальное время j определяется как наименьший корень уравнения
л
‘3 п
пнп|ф||+ \ I 3 M»(i)(t)|<fc| = 1
1 L i - -I J
(I'-Xltfi, ta]x* = — 1),
а само оптимальное управление и0 (т) и точка х&° определяется
из условия максимума
п
—— . х&° = max, 2 ^(г) (т) и° (т) = тах
г=1
при Ц3| j е, | U (т) | < 1.
п
Вспоминая теперь равенство 2 (r) — b's (т), где s (т)
г =1
— движение сопряженной системы, удовлетворяющее условию
s (/р) = Ц приходим к выводу^что оптимальное управление u° (t),
разрешающее задачу о наискорейшем выводе объекта в е-окрест-
ность точки х = 0 при ограничении | и (t) | 1, определяется
следующим правилом минимакса.
Теорема 38.1. Оптимальное по быстродействию управле¬
ние u° (t) определяется из условия максимума
b's° (t) -и (t) = max при | и (t) | 1, ,
где SO (t) — минимальное движение сопряженной системы, опре¬
деляемое из условия минимума
е |] s° (Z®) || + \ | b's° (т) | dx = min = 1
t s
npu s' (4) X [Z3, j] x* = — 1.
Аналогичные рассуждения можно провести и при других вы¬
борах норм х [и] и у [яЯ.
Покажем теперь еще, как соотношения вида (38.15) получают¬
ся, если исходить непосредственно из той геометрической интер¬
претации, о которой уже шла речь в § 17, на стр. 116. Итак, пусть
речь идет об управлении системой (13.1) из точки х (ta) = х*
в точку х (£р), лежащую на заданном выпуклом и замкнутом много¬
образии - © {х}. Предположим также, что управления и (t) мо¬
гут выбираться из некоторого выпуклого многообразия j {и (/)},
§ 38]
УПРАВЛЕНИЕ И НАБЛЮДЕНИЕ И ТЕОРИЯ ИГР
317
Нам надлежит обсудить условия, при которых задача имеет
решение, или, иначе говоря, условия, когда существует функ-
ция и =
венству
= и* (t) из ёР {и} и точка я* из @ {х}, удовлетворяющие ра-
tp
х = Х [^ хл + \ Н [^ т] «, (т) dt.
«<х
Обозначим символом & {х} — область достижимости про¬
цесса х (t) к моменту t = t? при х (/a) = х“ ни = и (t) (ta t^tp)
из SP {и}, т. е. & {х} — это область, состоящая из всех тех точек
х = х? , в которые можно привести движение х (t) к моменту
t = t$, выбирая управления и = и (t) из 3 {и (t)}. Ясно, что для
разрешимости нашей задачи необходимо и достаточно', чтобы об¬
ласть 2? имела общие точки х с множеством X . Нетрудно сообра¬
зить, что область 2? выпукла. Более того, предположим, что эта
область есть замкнутое множество. Тогда необходимое и доста¬
точное условие пересечения областей 3 и @ записывается, на¬
пример, в виде
min [ max l'x— min l'x] =
lHI=i xe® xeS
= mm [ I'X [/a, t°] x* +
1IH=il
+ max (/' \ H [£3, г] и (r) dr'j—min l’x I , 0.
‘a
Докажем достаточность этого условия. Пусть оно выполнено.
Если бы при этом области & {х} и @{х} не пересекались, то в про¬
странстве {х} возможно было бы провести плоскость l0 х = а с
|| /о || = 1, которая разделяла бы области Эи® (см. § 53) так, что
для х из $ было бы /о х <С а, а для х из @ было бы 10х^> а (срав¬
ни с рассуждениями в § 17, на стр. 118 и также см. рассуждения
в этом параграфе, на стр. 312). Но в таком случае обсуждаемое не¬
равенство, очевидно, нарушилось бы. Полученное противоречие
доказывает достаточность данного условия. Необходимость этого
условия читатель при желании может установить самостоятельно.
Если © {х} — сфера, а ограничение на и (Z) имеет вид
р*[и (т)] , р, то, учитывая (12.19), видим, что обсуждаемое нера¬
венство, как и следовало ожидать, совпадает с условиями (318.15).
Примечание 38.1. Приведенное геометрическое рассуждение
привлекает наглядностью и простотой, поскольку в нем, напри¬
мер, не используются явно те, довольно тонкие понятия ИЗ теории функций,
318 ДВОЙСТВЕННОСТЬ МЕЖДУ УПРАВЛЕНИЕМ И НАБЛЮДЕНИЕМ [Гл. 9
которые потребовались в §§ 12—17, когда задача решалась, исходя из теоремы
Хана — Банаха. Здесь, однако, надо иметь в виду следующую тонкость. В
процессе рассуждений мы опирались на замкнутость области & {я}, которая
предполагалась априори. Но, для того чтобы суметь доказать эту замкну¬
тость, приходится, вообще говоря, опять привлекать довольно тонкие сооб¬
ражения и свойства из теории функций. Эти соображения связаны с ма¬
тематическим аппаратом того же ранга, что и теорема Хана—Банаха (см.
также примечание 47.1 в § 47). В частности, из общих теорем функциональ¬
ного анализа (см. ' [6*], стр. 459, теорема 2, следствие 3) выводится, что
область & будет замкнутой, если допустимое множество & {и (т)} функций
и (т) Я-замкнуто и ограничено (в метрике р* [и]) в каком-либо про¬
странстве Я* {и}. Кроме того, для доказательства замкнутости области &
часто используют так называемую слабую компактность (см. [6*]) мно¬
жества & {и (т)} допускаемых функций и (т) (см., например, работу [244]).
Впрочем, в случае строго выпуклой области & ее замкнутость часто мож¬
но доказать, исходя из элементарных соображений.
Рассмотрим теперь еще одну задачу, которую можно связать
с материалом этого параграфа. Речь пойдет об оптимальном упра¬
влении при ограничении на фазовые координаты. Задачи подобного
рода составляют очень важный класс трудных проблем, которым
посвящена большая библиография (см., например, работы [55в,
265]). Мы ограничимся здесь разбором одного совсем простого
примера, на котором, однако, можно проследить особенности,
характерные для данного круга проблем
Пример 38.1. Рассмотрим задачу о наискорейшем перемещении мате¬
риальной точки единичной массы по прямой £ из состояния {£ (0) •= 0,
£ (0) = 0} в состояние {£ (7) = 1, £ (Т) = 0} при условии, что движущая
сила и (t) не превосходит по величине единицы и что скорость | (t) точки
стеснена неравенством | | (£)| < 1/2. Последнее ограничение и является новым
обстоятельством, осложняющим задачу.
Таким образом, нам надлежит найти управление и (/), которое перево¬
дит систему в
i1 = х2, А = и (38.20)
из состояния ж® = [zj (0) = ' 0, х2 (0) = 0} в состояние х- = {xt (Т) = 1,
х2 (Т) = 0} за наименьшее возможное время Т = причем во все время
движения должны выполняться условия
|u(()|<l, I (t) | < 1/2. (38.21)
Чтобы связать эту задачу с материалом настоящего параграфа, посту¬
пим следующим образом. Выберем последовательность моментов времени
tk = k-At (At >0 — постоянная, к = 1, 2, ..., m) и будем решать для сис¬
темы (38.20) вспомогательную задачу о быстродействии, потребовав, чтобы
второе из ограничений (38.21) выполнялось лишь для моментов t = tk. Ре¬
шение исходной задачи можно искать далее, рассматривая предельный пе¬
реход при At —> 0, т -> оо.
Обозначим x2(tk) = zk. Тогда, рассуждая при решении вспомогательной
задачи так, как это делалось уже неоднократно выше, и полагая значение Т
известным (см., например, стр. 234), мы придем к следующей проблеме мо¬
ментов: найти функцию и (т) = ид (т), имеющую минимальную норму
319
§ 38] УПРАВЛЕНИЕ И НАБЛЮДЕНИЕ И ТЕОРИЯ ИГР
p*[u] = max | и (т) | и удовлетворяющую условиям:
т
Т
С]=1=$
о
г
[71, т] и (т) dx =
о
(Т — х) и (т) dx.
Т
с3=0=$
О
т
hV® [Т, Т] и (Т) dx = 1-и (т) dx,
о
(38.22)
т
Zk = л<2) [X. т]м(т)йт (* = 1, ..., тп).
о
(38.23)
(Напомним, что функции № х] удовлетворяют условию (см. стр. 49)
hf® [fy, т] = 0 при х < т < Т.
При этом в нашем случае h®[t, т] = 1 при ] — т). Роль постоянных q, фи¬
гурирующих в проблеме моментов (15.1), (15.3), играют здесь числа 1,0,
X,-..,Zm, причем последние т из них стеснены условиями
| иХ < 1/2,..., | zm | < 1/2.
(38.24)
Теперь для нахождения искомой функции управления и\ (т), удовлет¬
воряющей условию р*[«д (т)] = min при выполнении соотношений (38.22) —
(38.24), можно воспользоваться рассуждениями, приведенными выше при
решении аналогичной задачи 38.1 (см. стр. 313). Таким путем мы приходим
к выводу, что оптимальное управление U\ (t) для вспомогательной задачи
задается равенством
т
«д (t) = sgn - {(- г 4- Т») + к» + 2 *?+2 h [X (38.25)
1 г=1 J
а соответствующее ему оптимальное время -] и числа удовлетворяют со¬
отношениям:
max Г^А + сА -1 — I *2+i I ] = 1 (38.26)
..., л2+т L * i=1 J
при условии
т>о
$ к-т + T°,)k°+ki+ 2*2+л p{, пит = i,
о i=l
т = Е [ ~ДгJ (целая часть ЛГ/
320 ДВОЙСТВЕННОСТЬ МЕЖДУ УПРАВЛЕНИЕМ И НАБЛЮДЕНИЕМ [Гл. 9
или, иначе,
т0
* т
min [ $ | hW [T0,, т] /, + М2> [Г®, т] /2 + 2 l2+k h
0 A=1
т
[<к, Т] 1 dr + -1 2
к=1
т0 т
♦ m
= m’n[$ |(-Т + T°.)ll + l2 + 2 h
1 о k=i
rn
[«». T]|rfT + | S
fcsel
iw]=]
г П Г0 .
при Iy су = Zt = 1, т = Е уцелая часть |- j . (38.27)
Управление u£ (t) (38.25) и число T* мы можем также определить и
другим путем, конструируя соответствующим образом пространство $ так,
как это сделано при решении задачи 38.2 (см. стр. 315).
Теперь, исходя из уравнения (38.27), построим его предельный аналог,
получающийся при Дг -> 0. Сделаем это сначала совершенно формально.
С этой целью обозначим в (38.27) Z2+k = I (tk) Дг, и, понимая тогда суммы
т т
2 |/2+к|’ 2 ^2+;Л 1Ас> т] как интегральные, перейдем от них к соответ-
Л=1 Ь=1
ствующим интегралам. Таким путем (пока не обоснованным строго) мы
получаем следующее уравнение для определения времени Т° предельного
быстродействия в исходной задаче:
т Т° 1 т°
min * | — Т + Т° + /2 + I ()) dt \ dx +-?- 11 (t) | A | = 1. (38.28)
ls’ 1 О т 0
Решение этой задачи, как нетрудно проверить, доставляет число Т° = 2,5, и
^минимальная» функция h° (т) имеет вид
уо
до (Т) = (- t + Г0) /0 + 1 ./0 4- J /о (t) dt,
т
где
С О, О < t < 0,5;
/0 = 1, /0=-О,5, /»(«)=•! —1, 0,5</<2; (38.29)
I 0, 2</<2,5.
Таким образом,
( — т + 0,5, 0^т^0,5;
th(X)=\ 0, 0,5 < т < 2; (38.30)
( . т ■■ 2, 2<т<2,5.
(Подчеркнем еще раз, что мы никак не обосновываем рассматриваемого пре¬
дельного перехода, поэтому, в частности, и выражение минимальная функ¬
ция Д° (т) взято в кавычки. Это обоснование в общем случае далеко выходит
за рамки нашей книги, а в изучаемом примере такое обоснование нам не по¬
требуется, ибо мы имеем возможность просмотреть предельный переход непос-
38]
УПРАВЛЕНИЕ И НАБЛЮДЕНИЕ И ТЕОРИЯ ИГР
321
редственно.) Если мы теперь для определения управления U (г), решающего
поставленную задачу, попытаемся воспользоваться условием максимума
(21.8), опираясь на минимальную функцию h (т) (38.30), работая с пей
так же, как с обычными минимальными функциями ДЧ в других, ранее обос¬
нованных случаях, то на промежутке 0,5 h t < 2 столкнемся с той труд¬
ностью, что здесь h° (т) = 0. В данном случае эту трудность можно обойти,
сообразив, что на интервале
0,5 < t < 2 скорость | (t) =
= х2 (t) точки достигает сво¬
его максимального значения
остается, сле-
постоянной. Та-
окоичателы-ю по-
Х2 (t) = 0,5 и
довательно,
ким образом,
лучаем:
0<t<(),5;
0, 0,5 <2;
2<^<2,5^.
(38.31)
На рис. 38.2 изображены гра¬
фики функций Х2 (t) и UQ (t).
Этот очевидный результат
можно была получить, конеч¬
но, сразу из простых физи¬
ческих соображений, и данный
пример приведен не ради ре¬
зультата, а ради следующего интересного явления, которое
дить. Сделаем это.
Минимальная функция hh (т) для
изображенный на рис. 38.3. На рис.
u»W =
( 1
-1,
полезно обсу-
вспомогательной задачи имеет вид,
38.4 изображено соответствующее
оптимальное управление (т). Следовательно, при Аг -> 0 функции иh (t)
в обычном смысле к функции U (т) (38.31) не сходятся. Последовательность
этих функций определяет, как говорят в таких случаях, «скользящий режим»,
ибо получается движение, порождаемое управлением, меняющим «беско¬
нечно» часто свои значения с 1 на —1 и обратно. Управление же uQ (т) (38.31)
можно рассматривать как регуляризацию данного скользящего режима, так
как в конечном итоге это гладкое управление дает тот же самый эффект.
11 Н. Н. Красовский
322 ДВОЙСТВЕННОСТЬ МЕЖДУ УПРАВЛЕНИЕМ и НАБЛЮДЕНИЕМ [Гл. 9
который получается и в результате предельного перехода от управления iи Д (t).
Важно заметить, что описанный только что скользящий режим можно постро¬
ить, и не рассматривая на самом деле весь предельный переход для и{{ (t) при
Af -» 0, но восстанавливая иД (£), опираясь уже сразу на предельную мини¬
мальную функцию h° (т) (38.30). Сделать это можно, например, так. Пусть
нас интересует • управление uQ (t) в окрестности точки t=x* из «критичес¬
кого» промежутка времени 0,5 <t <2. Рассмотрим е-отрезок т* Д т
+ е, примыкающий справа к точке t = т*. Этот отрезок будет играть
I
1
I
I
I
I
_|_
I
I
I
I
I
I
I
I
I
-4¬
I
I
I
I
I
к
Рис. 38.4.
I v
I
I
J
роль одного из тех отрезков Дг, которые фигурировали в описанном выше
предельном переходе. Опираясь на минимальную функцию Д° (т) (38.30),
составим функцию
he (т) = (- т + ТО) zj + /0 +
т° т*
( /° (<) С2) [), т] dt + J °t)hh)[t, т]dt +
-г М(2) [Т„т] +Хм(2)[Т, + е, т].
где, следовательно, два последних слагаемых заменяют интеграл
т*-|-е
\ )'(«)./г<2[)) ТЛ.
Таким образом, на отрезке [т*, т* + е] мы искажаем функцию hQ (т), при¬
ближая ее поведение к поведению минимальной функции hД (т), отвечающей
вспомогательной задаче об управлении иД (t). Вспомипая теперь значения
Д(2) [J, т], разумно предположить, что числа h х и Х2 можно искать из усло¬
вия
73 I М | + I Д2 |) + h I h (т) I dx = min
-г*
при ограничении
т*+е
Х1 + X = 1° ()) dt.
§ 38]
УПРАВЛЕНИЕ И НАБЛЮДЕНИЕ И ТЕОРИЯ ИГР
323
Оказывается, что построенная так функция hz (т) —. т* + -L. — т, и, сле¬
довательно, она на отрезке At = [т*, г» + е] хорошо изображает минималь¬
ную функцию Л_д’ (т) вспомогательной задачи. Отсюда вытекает, что опти¬
мальное управление — — (t) на рассматриваемом 8-отрезке определяется ра¬
венством
(Z) San he(t)
или в нашем случае — — (t) = sgn (т* + ~ — t) (т* < t < т* + 8 ), а
регуляризцрукщее его управление и® (т) определяется как среднее значение
т*+е
и это управление при е —> 0 будет уже обычным образом сходиться к управ¬
лению и0 (£) (38.31).
Ситуация, встретившаяся в примере 38.1, имеет место в до¬
статочношироком классе случаев, а не только в разобранном част¬
ном случае, однако обоснование этого утверждения в общей форме
выходит за рамки данной книги.
Итак, заканчивая § 38, приходим к следующему заключению.
Можно сформулировать— большое количество задач, подпадающих
под рассматриваемые схемы. При этом и ограничения на и (t)
не обязательно даже должны иметь смысл оценки нормы р* [и].
Для успеха дела важно лишь, чтобы рассматриваемые ограниче¬
ния и минимизируемые оценки обладали свойствами выпук¬
лости. Оценка и■ (t) в форме р* [и] удобна, однако, по той причине,
что, не сужая чересчур класс задач, можно ограничиться рассмот¬
рением лишь стандартных соотношений в хорошо известных про¬
странствах функций. Заметим, наконец, что при желании приве¬
денным выше рассуждениям можно придать весьма общую абст¬
рактную форму. Однако это не в стиле данной книги.
11*
ЧАСТЬ ЧЕТВЕРТАЯ
РАЗНЫЕ ЗАДАЧИ
§ 39. Введение
Основной материал IV части составляет задача о преследовании
одного управляемого объекта другим. Эта проблема, изучаемая
в главе 10, трактуется как игра двух лиц: преследователя и пре¬
следуемого, причем в качестве показателя игры выбрано время Т
до встречи. Таким образом, получается задача о формировании
управляющих воздействий, обеспечивающих минимакс величины
Т. Подробно разобран лишь самый простой случай указанной игро¬
вой задачи, когда оба объекта предполагаются линейными и од¬
нотипными. Кроме того, предполагается, что преследование про¬
текает в условиях полной информированности обоих партнеров
о текущих состояниях системы. Предложено и в рассматриваемом
частном случае обосновано правило экстремального прицелива¬
ния, которое обеспечивает искомый минимакс.
Последняя глава 11 книги содержит задачи, относящиеся
к системам, описываемым уравнениями, отличными от обык¬
новенных дифференциальных уравнений, составляющих ос¬
нову математического аппарата во всех предыдущих разделах.
Именно, в §§ 43, 44 рассматриваются системы с последействием, ко¬
торые описываются так называемыми уравнениями с запаздыва¬
ниями времени. Здесь показано, что подобные уравнения можно
трактовать как уравнения, описывающие изменение во времени
координат . (t), которые фигурировали в III части книги при
изучении задачи о наблюдении и составляли там наблюдаемый
сигнал у (т). Это позволяет выяснить связь задач о наблюдении
обыкновенных линейных динамических систем с теорией линей¬
ных уравнений с запаздываниями времени. Изучение этой связи
и составляет основной материал §§ 43, 44. В § 45 рассматривается
одна задача об управлении линейной системой с последействием.
Последний § 46 посвящен изучению линейных систем, подвер¬
женных случайным воздействиям. Рассматривается одна задача о
наблюдении фазовых координат линейной системы при условии,
что сигнал z (т)'вырабатывается измерительным устройством, под¬
верженным случайной импульсной помехе. Показывается, что эта
задача включается естественным образом в круг проблем наблюде¬
ния, изученных в главе 8; следует лишь соответствующим образом
выбрать условие оптимальности для разрешающей операции.
Глава 10
ИГРОВАЯ ЗАДАЧА О ВСТРЕЧЕ ДВИЖЕНИЙ
§ 40. Постановка задачи о преследовании
Задача о преследовании, которая служит предметом настоящей
главы, уже упоминалась выше, в § 38, при ' обсуждении связи тео¬
рии игр с проблемами управления движением. Теперь мы обсу¬
дим этот вопрос подробнее. Начнем с постановки задачи. Итак, в
соответствии с ■ материалом из § 38, рассмотрим задачу о преследо¬
вании как игру двух лиц. В этой игре роль первого игрока будет
исполнять преследуемый объект, роль второго игрока — пресле¬
дователь. Стратегиями здесь являются законы регулирования,
которые определяют силы, управляющие объектами. Показателем
игры будет служить время t — ' ft, когда объекты встречаются.
Естественно, что преследователь стремится уменьшить ■ , а пре¬
следуемый заинтересован в предельном увеличении Ф. Как и всег¬
да в игре, мы должны предполагать, что при выборе своей стра¬
тегии каждый из игроков не информирован о том, какую стра¬
тегию изберет другой партнер.
Уточним математическую постановку задачи. Пусть текущие
состояния преследуемого объекта описываются n-мерным векто¬
ром z (t) его фазовых координат: z (t) — {z± (t), . . zn (t)}, а со¬
стояния объекта-преследователя—вектором у (t) — {у! (t£), . уп (t)}.
Будем предполагать, как обычно, что изменение векторов у (t)
и z (t) описывается уравнениями
у (t) — А (t) у (t) + в 00 и,
z ()) = Р (t) z(t) + Q ()) v,
(40.1)
(40.2)
где и — {и1У . . иг} и v = {i?!, . . (( рг} — векторы управляющих
сил, А, Р, Р, Q — матрицы, характеризующие динамику объектов.
Мы ограничиваемся линейными уравнениями (40.1) и (40.2), так
как?только в этих простейших случаях будем решать в данной
книге задачу о преследовании. Воздействия и и и стесним ограни¬
чениями
х [и (т), т 1 /1 «С Н (<),
xjk (т), т > i] < (£),
(40.3)
(40.4)
326
ИГРОВАЯ ЗАДАЧА О ВСТРЕЧЕ ДВИЖЕНИЙ
[Гл. 10
где х [и], к Ы — интенсивности, оценивающие ресурсы управ:
лений и (т) и v (т), которые могут тратиться при т > t (см. § 26).
Например, могут быть оговорены ограничения
II и W II U И и II v W II < v (40.5)
(ц = const, V = const)
или ограничения
оо
i
или, наконец, ограничения
оо
J || dU (г) |К((О
t
со
Jj Ht)^^ (t), (40.6)
t
00
J|d7(t))<v(0. (40.7)
i
В последнем случае речь идет, естественно, об обобщенных
управлениях и, следовательно, о системах, описываемых урав¬
нениями
dy = Aydt + В dU, dz = Pzdt + QdV. (40.8)
Напомним, что величины ц (t) и v (t) задаются только в началь¬
ный момент времени t = t0. В дальнейшем при t > tQ их значения
определяются ресурсами управлений, остающимися, начиная с
каждого момента t, в процессе реализации выбранных законов
управлений (см. § 29).
Предположим, что по условиям задачи отмечены наперед неко¬
торые координаты yt. и zt. (/ = 1, . . ., zn . т(, совпадение кото¬
рых составляет цель преследования. Для упрощения записи мы
примем, что выбрана такая нумерация, при которой это будут пер¬
вые т координат q , и zt (i = 1, . . ., т). Наборы этих координат
будем рассматривать, далее, как некоторые тг-мерные векторы, обо¬
значая их символами {у}т и {z}m.,
Рассмотрим движения (40.1) и (40.2) в некоторый момент
t = t0. Тогда моментом встречи движений (40.1)
и (40.2) назовем такой момент времени t = 3* = + Т, когда
впервые совпадут все отмеченные координатыyt и Zi (i = 1, . . ., m),
т. е. когда впервые
{У + Пк = {-* + Т)}т.
Отрезок времени ТрО от t=tx до момента встречи <=='&=£а +7 будем
называть временем до встречи. Рассматриваемая нами игра будет
состоять в определении алгоритмов, вычисляющих усилия и и у,
§ 40]
ПОСТАНОВКА ЗАДАЧИ О ПРЕСЛЕДОВАНИИ
327
которые обеспечивают min max Т. Однако для завершения поста-
и V
новки задачи мы должны еще четко оговорить, что понимается
здесь под стратегиями первого и второго игроков. Сделаем это.
Характер рассматриваемой игры зависит от того, какова ин¬
формация о движениях у (t) и z (/), поступающая в органы, где
формируются управляющие усилия. Эта информация доставляет
те данные, на которых базируются алгоритмы, вычисляющие теку¬
щие значения и (t) и v (t). Ограничимся наиболее простым случа¬
ем, когда в каждый момент t в обоих органах управления известно
все о реализовавшихся к этому моменту движениях у (t) и z (t).
Это означает, что в момент t обоим партнерам известны все коорди¬
наты yt (t) и zt (t) и известны оценки ц (t) и v R) (40.3), (40.4) остав¬
шихся ресурсов управления, которые могут быть использованы
при т - t. Подчеркнем, однако, еще раз, что будущее движение
противника при - т > t каждому из партнеров неизвестно (помимо
информации об имеющихся ресурсах ц (t) и v (£)). В таком случае
можно вести управление по принципу обратной связи и искать
законы регулирования, определяющие величины и [Л и и R] в мо¬
мент t, в форме х)
и [t] = и [t, у (t), z (£), [i (£), v (/)], (40.9)
v R] = v R, у (t), z (t), ц (£), v -(£)]. (40.10)
Законы регулирования (40.9), (40.10) назовем допустимыми, ес¬
ли при их использовании в процессе управления не нарушаются
ограничения (40.3), (40.4). Кроме того, нам следовало бы еще ого¬
ворить, что допустимы лишь такие классы функций (40.9) и (40.10),
при подстановке которых вместо и и v в (40.1) и (40.2) получается
система уравнений, имеющая строгие математические решения
у (£), z (t), и [t], и R], совместные с условиями (40.3), (40.4) и оп¬
ределенные по крайней мере для всех t, предшествующих моменту
встречи. Однако мы намеренно не акцентируем здесь внимание на
этом вопросе, так как общий математический анализ складываю¬
щейся тут ситуации сложен и увел бы нас далеко от главной зада¬
чи — от поиска способов конкретного вычисления управлений и
и и. Поэтому на вопросе о классах функций (40.9) и (40.10) мы бу¬
дем останавливаться кратко по ходу дела при рассмотрении встре¬
чающихся ниже частных случаев.
Итак, под стратегиями игроков мы будем понимать теперь до¬
пустимые законы регулирования и и v (40.9) и (4*0.10). Тогда для
каждого возможного начального положения t = ta, у (ta) = ух,
х) По поводу обозначений и (t), v (t) и и [f], v [f] см. в § 28.
328
ИГРОВАЯ задача о встрече движений
[ГЛ. 10
z (£а) = za, ц (to) = jU®, v(£a) = va время T до встречи движений
у (t) и z (£) будет функцией (точнее, функционалом) Tu>v от функ¬
ций и [£, у, z, (1, v] и v - - - у, z, ц, v]. (Если при выбранных v и и
встреча вообще не наступает, то, чтобы не нарушать запись Tu%v,
полагаем условно TUjV = {оо}, где {оо} — несуществующее число,
которое будем считать большим любого действительного числа Т.
При этом мы намеренно не пишем просто Tu,v = оо, чтобы не соз¬
давать ошибочной иллюзии, что имеется в виду сближение дви¬
жений у (t) и z (t) при t —>оо.) Теперь задачу о преследовании
можно сформулировать следующим образом.
Задача 40.1. Найти такие допустимые законы регулирова¬
ния U и чтобы при любых начальных данных у (ta), z (ta);
ц (£a), v (/a) (из заданной области их возможного изменения) выпол-
‘ нялось условие
v0 = min max Tu, v
(40.11)
U V
no всем допустимым и и v.
Функции u° и р° назовем оптимальными управлениями в задаче
40.1.
Читатель, вероятно, сразу обратил внимание на то, что в задаче
40.1 мы требуем лишь выполнения условия минимакса (40.11), но
не формулируем более жесткого требования об осуществлении
седловой точки {и0, у0}, для которой выполняются неравенства
(см. выше, стр. 307)
(40.12)
Это объясняется двумя обстоятельствами. С одной стороны, мы
рассматриваем проблему преследования главным образом с пози¬
ций преследователя, когда прежде всего естественно позаботиться
именно об осуществлении минимакса. С другой стороны, в тех
конкретных задачах, которые мы будем решать, удается как раз про¬
верить осуществимость условия (40.11), но возникают существен¬
ные затруднения, если искать седловую точку (40.12). В этом
читатель сможет убедиться из рассматриваемых ниже примеров.
Полезно еще раз обратить внимание на то, что в данной задаче
предполагается формирование управлений и и v по принципу об¬
ратной связи, когда величины воздействий и Ш и v [£] в момент
t определяются, исходя из реализовавшихся величин у (t), z (t)
(и из значений ц (t) и v (t), если эти величины могут меняться в про¬
цессе управления). Ситуация здесь аналогична до известной степе¬
ни игре в шахматы, когда каждый из партнеров выбирает очеред¬
ной ход, исходя из известной ему позиции, сложившейся к этому
ходу. Итак, предметом дальнейшего исследования данной главы
послужит задача 40.1.
§ 41]
ЭВРИСТ ИЧЕСКИЕ СООБРАЖЕНИЯ
329
§ 41. Эвристические соображения
Задача о преследовании, сформулированная в предыдущем па¬
раграфе, относится к кругу проблем об управлении по принципу
обратной связи. Мы уже видели в §§ 28, 29, что решение таких
проблем можно подчас искать, сопоставляя им подходящие задачи
о программном управлении. Попробуем и здесь идти указанным
путем. Это тем более целесообразно, поскольку основной предмет
настоящей монографии составляют как раз проблемы управле¬
ния по программе и (t). Одна из наиболее естественных постано¬
вок задач о программном преследовании формулируется следую¬
щим образом.
Задача 41.1. Пусть управляемые объекты описываются урав¬
нениями (40.1), (40.2) и в некоторый момент t = ta реализовались
значения у (ta) и z (ta) фазовых векторов у (t) и z (t) и величины
ц (Za), v (£а), оценивающие согласно (40.3), (40.4) оставшиеся ресурсы
управлений и (т) и v (т) (т > Za). Пусть преследуемый партнер,
представленный движением z (t), имеет право выбрать на будущее
(т } Za) любое управление v (т), стесненное условием (40.4), но
обязан сразу же сообщить свой выбор преследователю, представлен¬
ному движением у (Z). Тогда по известному v (т) преследователь дол¬
жен подобрать управление и (т) (т > Za), которое удовлетворяет
условию (40.3) и обеспечивает встречу движений {у (т)}т и [z (х)}т
в наикратчайший возможный срок Т= ft — Za. В указанной ситуа¬
ции требуется найти оптимальные программные управления
н°(а (т) и У?а (т), которые обеспечивают
Tuo v° = max min Ти, v. (41.1)
V и
Важно подчеркнуть, что управление u<a (т), минимизирующее
Т, выбирается здесь при известном vta (т),так что получается неко¬
торая величина min Т = ф [р(а (т)1, зависящая от . (т). Затем
преследуемому предоставляется лишь право остановить свой выбор
на таком управлении vta (т), для которого величина ф> [р/Дт)]
оказывается наибольшей возможной.
Обращаем внимание читателя на то, что в отличие от условия
минимакса Т, фигурирующего в задаче 40.1, здесь речь идет об оп¬
ределении максимина величины Т. Это связано с отсутствием столь
же . естественной постановки задачи программного преследования,
включающей условие минимакса. В самом деле, если мы сначала
зададимся управлением и (т) и после этого предоставим преследуе¬
мому возможность^выбора v (т), то, за исключением редчайших
ситуаций, это управление v (т) можно будет подобрать так, чтобы
встреча вообще не состоялась, и, таким образом, у нас не будет
330
ИГРОВАЯ ЗАДАЧА О ВСТРЕЧЕ ДВИЖЕНИЙ
[Гл. 10
множества конечных значений Ти, среди которых можно было бы
искать наименьшее.
Однако можно априори предполагать, что по крайней мере в
случае, когда игра, соответствующая задаче 40.1, имеет седловую
точку, есть смысл сопоставить задаче 40.1 задачу 41.1.
Итак, предположим, что мы умеем достаточно хорошо и быстро
решать задачу 41.1 при всех возникающих значениях t = , , t0,
у (ta), z (ta), ц (Ла), v (ta). Тогда, рассуждая по аналогии со слу¬
чаями, разобранными в §§ 28, 29, можно высказать следующую ги¬
потезу.
Для получения значений и0 [t, у, z, ц, v] и v° [t, у, z, р, v] опти¬
мальных управлений и° и v° в задаче 40.1, решаем задачу' 41.1 (при
реализовавшихся данных t = ta, у (ta) = у (t), z (ta) = z (t),
p (ta) == p (t), v (ta) = v (t)) и, определив для нее оптимальные
программные управления Ua(t) и и°а(т), полагаем:
u4t,y(t), z(0. р(0, v(0] = u»(O,j
v* И, *G), z(0, р(0, v(OJ = у?(0. J
К сожалению, справедливость этой гипотезы проверяется здесь
с гораздо большими осложнениями, чем аналогичное заключение
из § 28 (см. работы [1786, в]). В частности, это связано с упомяну¬
тым выше вопросом о перестановке математических операций
min и max. Впрочем, упомянутые трудности мы здесь можем еще
обойти, воспользовавшись одним из наиболее распространенных
приемов математического исследования: просто ограничимся тем
классом задач 40.1, для которых высказанная гипотеза верна.
К сожалению, и этим удобным путем мы еще не преодолеем все
трудности. Дело в том, что вспомогательные задачи 41.1 в данном
случае даже в простых ситуациях не решаются эффективно без
серьезных осложнений. Более того, для таких задач сама пробле¬
ма существования решений и° (т) и v 0 (т) достаточно трудна. Во
всяком случае, доскональное исследование задачи 41.1 выходит
за рамки этой монографии. В соответствии со сказанным мы сде¬
лаем сейчас еще один шаг в сторону от задачи 41.1, с тем чтобы
связать исходную проблему 40.1 с материалом нашей книги. При
этом мы снова приблизимся к условию минимакса, фигурирующе¬
му в задаче 40.1. Итак, трансформируем несколько задачу 41.1.
В этой задаче момент встречи й = ta + min Т = t а + ф [у] опре¬
деляется выбором управления v* (т) и является, следовательно,
величиной переменной, зависящей от vta. Подойдем к делу иначе.
Зафиксируем некоторый момент t = й и, выбирая различные управ¬
ления vta (т) (стесненные условием (40.4)), будем искать те соответ¬
§ 41]
ЭВРИСТИЧЕСКИЕ СООБРАЖЕНИЯ
331
ствующие им управления ща (т) (стесненные условием (40.3)), ко¬
торые обеспечивают встречу {у (т)}т и {z (т)}т в зафиксированный
момент t = О. Очевидно, имеет место альтернатива: либо при дан¬
ном О существует управление vta (т), для которого нельзя подобрать
управление , , (т), обеспечивающее встречу в момент t = О, либо
встреча в момент t = О осуществима при любом возможном выбо¬
ре , , (т). Предположим, что для рассматриваемых начальных
данных у (t*), z (ta), р (£а), v (£а) можно указать числа О, удовлет¬
воряющие последнему предположению, и пусть О® — наименьшее
из этих- чисел. Тогда такое число 0° назовем моментом поглощения
процесса (40.2) процессом (40.1). Очевидно, величина '&0 является
функцией от величин ta, у (ta), z(/a), р(£а), v(£a), т. е.
■О0 = № [*в> у(М), z(Q, [Л (£«), V (/«)]. (41.3)
Между моментом поглощения f>0 и величиной пЭ0 = ta + Tu^',
являющейся решением задачи 41.1, существует определенная
связь. Так, нетрудно сообразить, что в случаях, когда обе вели¬
чины существуют, выполняется неравенство О — 0°. Нередки
случаи, когда Од = '0°. Однако возможны и такие ситуации, когда
одна (любая) из этих величин существует, ' а другая не существует.
Разбор всех таких возможных ситуаций можно предоставить в ка¬
честве упражнения читателю. В дальнейшем мы сосредоточим вни¬
мание на осуществлении встречи в момент поглощения t = О и
посмотрим на примерах, как это будет связано с задачей 40.1.
Отметим еще раз, что такой подход позволяет наиболее естествен¬
ным образом использовать соображения, развитые выше в данной
монографии.
Прежде чем идти дальше, рассмотрим одну геометрическую
интерпретацию для момента поглощения 0°. Пусть в некоторый
момент t = to. реализовались величины у (ta), z ( )-( , р (£а), v (£а).
Выберем число О' ) ta и рассмотрим в m-мерном пространстве
q = {q}m область Gd>, состоящую из всех тех точек qt, для каж¬
дой из которых можно подобрать управление и*, (т) (£а ( т ( О),
стесненное условием % 1ц,(т), т > £а] ( ц (ta) и переводящее
объект (40.1) из состояния у (,( в положение {у (О)}т = g*.
Область G- определяется величинами £а, у (£а), р (£а), О, поэтому
обозначим ее символом G- [ta, у (£а), р (£.), О]. Аналогичную
область для второго объекта обозначим символом GG( [ta, z ((—,
v (£a), О]. Эти области суть области достижимости для дви¬
жений (40.1) и (40.2). Важно отметить, что в случаях, когда величи¬
на х в условиях (40.3) и (40.4) имеет смысл нормы функций и (т) и
у(т), области Gd) и G&> являются выпуклыми, замкнутыми множества¬
ми в пространстве {q)m. Совершенно очевидно, что момент поглоще¬
ния t = О0 — это такой первый момент времени t = О, когда
332
ИГРОВАЯ ЗАДАЧА О ВСТРЕЧЕ ДВИЖЕНИЙ
[Гл. Ю
область G^> оказывается лежащей в области G^. Типична ситуа¬
ция, когда с изменением й замкнутые области G1 1 G и G(2) де¬
формируются непрерывно и поэтому оказывается, что в момент
$ = й° их границы соприкасаются (рис. 41.1).
Теперь мы можем сформулировать правило для вычисления
управлений и и и с целью осуществления встречи в момент t = й°.
Скажем, что управление и [£«] в момент t = ta нацеливает движе¬
ние (40.1) в точку {у (й)} m = у:, если существует управление и* (т)
(непрерывное справа), сте¬
сненное условием (40.3) и
приводящее систему (40.1)
в положение {у (й)}т = q*,
причем и [£«] = иД1а). Ана¬
логично определяется уп¬
равление v [ta], кото¬
рое нацеливает в точку
{z (й)}т = 7* движение
(40.2). Пусть q* — неко¬
торая точка из Сй) 11а,
У (ta), н (*а), й]. Тогда по
смыслу области Ga) можно
выбрать управление и =
= и Ua], нацеливающее
движение (40.1) в точку
{у O)}™ =1- Пусть, та¬
ким образом, выбиралось
управление в течение интервала времени [ta, ta + dt] (dt>G).
Рассмотрим область GG [ta + dt, у (ta + dt), pi (ta + dt), й].
Ясно, что эта область лежит внутри области G^ [£a, у (£a),
pi (1a), й] и по-прежнему содержит точку q*. Аналогичная ситуа¬
ция имеет место и в отношении движения z (t) (40.2). Искомое
нами правило будет состоять в прицеливании движений в те точки
у* = у°, где в момент й° касаются границы областей GW и G(2).
Итак, пусть в момент t = ta реализовались величины у (ta),
Z (ta), [X (ta), V (ta) и ПуСТЬ Й° [Za, у (ta), Z (ta), fl (ta), V (ta)] —
момент поглощения процесса (40.2) процессом (40.1). Тогда со¬
гласно предыдущему будем предполагать, что область G(2) [ta,
Z (ta), v(ta), Й°] лежит ЦвЛИКОМ В области G<0[la, У (ta), Н (ta), Й°] и
границы этих^областей касаются в точке у0 (см. рис. 41.1). Огра¬
ничимся случаем, когда это касание осуществляется в одной-един-
ственной точке у0 В противном случае дальнейшие рассуждения
наталкиваются на серьезные трудности. В качестве управления
и = U [ta, у (ta), z (ta), pi (ta), v (ta) 1 выберем управление и =
= и (to), нацеливающее движение у (t) (40.1) в точку {у (й°)}т =
= #°. Если в каждый момент т = ta > tQ выбирать управле-
§ Ы
ЭВРИСТИЧЕСКИЙ СООБРАЖЕНИИ
333
ние и [£а| именно таким образом, то, как бы ни выбиралось
допустимое! управление v (т), встреча движений у (т) и z (т)
произойдет не позже, чем в момент й° [^, у z (t^,
Ц ко), v (U)1- Покажем это1). Итак, рассмотрим ситуацию,
которая складывается при условии, что движение у (t) нацели¬
вается все время на точку qQ Пусть движение началось при t =
= t^ Допустим сначала, что управление v (/) выбирается в каждый
момент t > tQ все время также из условия прицеливания в ту же
точку д°. Тогда в процессе движения точка д° и момент й° изме¬
няться не будут, а области GW [t, у (t), ц (t), й°] и Gw[t, z (t),
v (t), {И при приближении t к будут стягиваться к неподвиж¬
ной точке д°. При этом в момент t = 0° у (0), z (^), ц (/0),
v (£0) ] получим совпаде¬
ние точек {у (№)}т =
= (z (^°)}т* Таким обра¬
зом, если оба управле¬
ния и R] и v [£] будут
выбираться по указан¬
ному закону, то, вообще
говоря, встреча состоит¬
ся в момент t = № к0,
у (Q z W, н (А>),
(Случайно встреча мо¬
жет осуществиться . и
раньше.) Предположим “ 4t
теперь, что на некото- Рис> 41 2.
ром интервале (t, t + dt)
при выборе управления
v (т) впервые было допущено отклонение от указанного правила.
Именно, предположим, что на этом интервале работало управле¬
ние, которое нацеливало движение z (т) в некоторую точку {z}m =
= У* qQ- Пусть при этом управление и [т] по-прежнему нацели¬
вает движение у (т) в точку {у (й°)}т = qQ Тогда за время t — т
<3 t + dt области GW и GW несколько деформируются, стягиваясь
вокруг точек У и q* соответственно (рис. 41.2). При этом, вообще
говоря, область GW к + dt, z (t + dt), v (t + dt), й0] окажется
уже строго внутри области + dt, у (t + dt),' ц (t + dt), й°].
Поэтому старое значение t = й° к, у (t), z (t), ц (t), v (t)] уже
не будет для реализовавшихся величин у (t + dt), z (t + dt),
pi (( + dt), v (t + dt) моментом поглощения процесса (40.2)
x) Следует все время иметь в виду, что мы игнорируем особый случай,
когда в процессе движения в отдельные моменты t = — — границы областей
и g(2) будут иметь больше чем одну точку касания д° или когда границы
этих областей соприкасаются слишком тесно и нерегулярно возле точки
334 ИГРОВАЯ ЗАДАЧА О ВСТРЕЧЕ ДВИЖЕНИЙ [Гл. W
процессом (40.1). Для этих новых исходных данных момент погло¬
щения
О0 U + dt, у (t + dt), z (t + dt), [X (t -|- dt), v (t + dt)]
наступит тогда раньше. Отсюда следует, что в случаях, когда
движение z (т) на некоторых интервалах времени прицеливается
в точки у*, отличные от точки q°, где касаются границы GW и
G<2>, величина б° может изменяться, но не возрастая. Отсюда сле¬
дует, что и тогда встреча движений 'z (т)}т и {у (т)}т произойдет
не позже, чем в момент f)° (t) (и даже в момент (<+ dt) <С ф0). Та¬
ким образом, если в процессе преследования не встретятся упомя¬
нутые выше неприятности, прицеливание движения у (t) все
время в точку {у (0°)}m = q° обеспечивает встречу не позже, чем
в момент t = -f)0 (£а), который либо остается постоянным, либо
убывает с ростом ta. Сформулированное правило для вычисления
и = u°, и = и0 будем в дальнейшем называть правилом экстре¬
мального прицеливания, а управления и° и р°, построенные по это¬
му правилу,— экстремальными управлениями. Этими не впол¬
не строгими рассуждениями мы и ограничимся пока при обсуж¬
дении общей проблемы о преследовании. В следующем параграфе
мы посмотрим, как они подтверждаются в одном простейшем кон¬
кретном случае.
§ 42. Задача о встрече однотипных объектов
Общие соображения, высказанные в предыдущем параграфе,
мы проиллюстрируем теперь на задаче о преследовании в слу¬
чае, когда оба объекта описываются уравнениями одного и того
же вида. В этом случае проблема встречи оказывается наиболее
простой и проведение рассуждений из § 41 встречает наименьшие
трудности. Итак, рассмотрим задачу 40.1 о минимаксе времени Т
до встречи преследующего (у (£)) и преследуемого (z (t)) движений,
которые описываются соответственно уравнениями
у = Ау + Ви, (42.1)
z = Az + Ви, (42.2)
где, как всегда, у, z — n-мерные фазовые векторы; и, и — г-
мерные векторы управления; А, В — матрицы, характеризующие
динамику объектов. Примем для упрощения, что матрицы А и В
суть постоянные. В соответствии с задачей 40.1 нам надлежит
учитывать ограничения (40.3) и (40.4). Для определенности при¬
мем, что речь идет об ограничении (40.6), хотя рассуждения рас¬
пространяются и на другие случаи неравенств (40.3) и (40.4), ко¬
торые допускают непрерывные изменения у (t) и z (t) в процессе
АДАЧА О ВСТРЕЧЕ ОДНОТИПНЫХ ОБЪЕКТОВ
335
§ 42]
преследования. Напомним, кстати, что в случае ограничений (40.6)
изменение величин p (t) и v (t) описывается уравнениями (см.
выше, § 29)
\
(42.3)
который получаются дифференцированием интегралов (40.6) по
нижнему пределу t. Будем рассматривать задачу о минимаксе Т
при условии, что цель преследования заключается в совпадении
всех координат yt (Ф) с zt (Ф) в момент встречи Ф . = ta + Т. Ина¬
че говоря, векторы {у}т и {z}m, введенные в § 40, просто совпа¬
дают теперь с фазовыми векторами у и z. -Примем также, что си¬
стемы (42.1) и (42.2) являются вполне управляемыми (см. § 19). Это
предположение не ограничивает общности. Действительно, из ма¬
териала § 19 легко выводится, что в случае отсутствия полной уп¬
равляемости речь о встрече движений у (t) и z (t) вообще может ид¬
ти только тогда, когда разность х (f) = у (t) — z (t) векторов
у (t) и z (t) принадлежит подпространству — -, порожденному век¬
торами-столбцами матрицы {В, АВ, Ап~- В}. Иначе никаким
подбором управлений и (t) и v (t) осуществить встречу движений
у (t) и z'(t) по всем координатам нельзя. Однако, если вектор х (t)
содержится в подпространстве —т , то можно выполнить преобра¬
зование уравнений (42.1) и (42.2) к каноническому виду (19.3),
(19.4) и в дальнейшем рассматривать лишь те части систем, кото¬
рые вполне управляемы. Остальные (неуправляемые) координа¬
ты движений (42.1) и (42.2) мы можем тогда просто игнорировать,
так как принадлежность х (£) к —т в некоторый момент t означает,
что в этот момент все неуправляемые координаты вектора х (t) =
= у (t) — z (t) суть нули, и они будут оставаться такими при всех
т — t вследствие инвариантности пространства УСт. Но это и
означает, что тогда для осуществления встречи достаточно до¬
биться лишь совпадения управляемых координат движений у (т)
и z (т).
Теперь в соответствии с планом, намеченным в § 41, нам над¬
лежит сначала изучить сформулированное в § 41 правило экстре¬
мального прицеливания, а затем исследовать переход к исходной
проблеме 40.1. Итак, пусть в момент t = ta реализовались вели¬
чины у (ta), z (£а), ц (ta), и (ta), причем пусть р (£а) > v (£а). Раз¬
ность х (t) = у (t) — z (t) удовлетворяет уравнению
х = Ах + Вт, (42.4)
которое получается вычитанием (42.2) из (42.1). Здесь w = и — и.
Для того чтобы в момент ft = ta + Т осуществилась встреча дви¬
жений у (/) и z (t), необходимо и достаточно, следовательно, чтобы
управление w (t) = и (t) — и (t) переводило систему (42.4) из
336
ИГРОВАЯ ЗАДАЧА О ВСТРЕЧЕ ДВИЖЕНИЙ
[Гл. ю
положения х (to) = у (ta) — z (£«) в состояние х (й) = 0. Учи¬
тывая ограничения (40.3) и (40.4), можно сделать такое предпо¬
ложение.
Сопоставим задаче 40.1 следующую задачу о предельном быст¬
родействии. j
Задача 42.1. Требуется найти оптимальное управление
ip°;a (т), стесненное условием /
х [м(т), т j j j ] <£(^а) (5 Ga) = Н Ga) — V (Лх)) 1 (42.5)
и переводящее объект (42.4) из состояния х (ta) в положение
x(ta + Т) ~ 0 за наименьшее возможное время Т° = min Т.
W
Тогда момент поглощения -О'0 = ta + Т\ и экстремальные уп¬
равления u?a Ra], v°ta [t<J, прицеливающие движения у (t) и z (f) в
точку q° (ta), определяются решением задачи 42.1, причем Т* = Т°,
“?.|м = жНм’’ (426)
Покажем, что это предположение справедливо. В самом деле,
допустим сначала, что задача 42.1 имеет .решение. Тогда, какое
бы управление и* (т) (£« С Лх + 7°), стесненное условием .
х[Р,(т), т ) ia] < v («), (42.7)
мы ни взяли, управление и* (т) = и* (т) + w}* (т) (£а j t j ' j +
+ Г0), во-первых, будет удовлетворять ограничению
х[п.)т), т ) ta] < (А G«), (42.8)
ибо по свойству нормы И [мф (т)1 j И [v, (т)1 + X [и?Га(т)]
v (to) + Z (to) = И (ta), а во-вторых, управление и* (т) обес¬
печит равенство х (ta + Т°) = 0, т. е. в момент ft = ta + Т будет
обеспечена встреча движений у (т) и z (т). Отсюда следует, что
при 10 = ta + Т область G(2) |7а, Z (£a), v (£a), O] содержится це¬
ликом в области G(1) [ta, у (ta), v (to), О]. Следовательно O^ O',
или, иначе говоря, Т® Т°. Однако строгое неравенство здесь не¬
возможно. В самом деле, предположим теперь, что существует
момент поглощения t = 0° = tx + Т\, и выведем неравенство
Т° < (42.9)
противоположное предыдущему. Рассмотрим с этой целью задачу
13.1 об оптимальном управлении системой (42.4) из точки х =
= х (to) в точку х (ta + Т°) = 0 при условии минимума интен¬
сивности
х [ш (т)] = g° = min (ta < т j ta + Т\). (42.10)
§ 42]
ЗАДАЧА О ВСТРЕЧЕ ОДНОТИПНЫХ ОБЪЕКТОВ
337
Система (42.4) вполне управляема, поэтому последняя задача
обязательно имеет решение (см. стр. 138). Если окажется при этом,
что в (42.10) £° £ (£а), то это уже будет означать выполнение
необхоДимого нам ' неравенства (42.9). Поэтому предположим от
противного, что
Итак,пусть w^ (т)°
£° > S (*«)• (42.11)
ujv.k u/ta уч — оптимальное управление, разрешающее
задачу об управлении системой (42.4) при условиях (42.10), (42.11).
Тогда выполняется равенство
Х (ta. + 2"))= X [7а 4" Т®, to\ X (£я) 4“
+ \ Хра + 71?, T]Bwlx(x)°dx = 0, (42.12)
4
i
где X — фундаментальная матрица системы (42.4) при w = 0-
Выберем * управление v* (т) = v (ta) wta (т)°: £°. Это управление
удовлетворяет ограничению (42.7) и приводит движение z (t) в
некоторое состояние
z ( ( т 4~ Т°) = X Ра + 7), £а\ z (t«) 4“
t /а+Т‘
+ — } X[ta + T°,r]Bwla(x)°dt. (42.13)
Цо смыслу величины должно существовать управление
и* (т), которое удовлетворяет ограничению (42.8) и приводит си¬
стему (42.1) в то же самое положение у (t* Т*) = z ( (л 4- 7)).
Иначе говоря, существует управление и* (т), которое согласно
(42.13) удовлетворяет условию
Х [ta + T°„ ta] (у (ta) — Z (ta)) +
4+—°
+ \ Xpa + — ]
[[(.) — )-^Zp(( (—)o]d— = 0 (42.14)
и неравенству (42.8). Из (42.12) и (42.14) заключаем теперь, что
управление и* (т) удовлетворяет равенству
X 4- Т(, т] Ви* (т) dx 4¬
+ (1 Н ,( X [ta + Т°„ 4\ х (О = 0.
338
ИГРОВАЯ ЗАДАЧА О ВСТРЕЧЕ ДВИЖЕНИЙ
[Гл. 10
Но в таком случае управление w* (т) = и* (т) : (1 + v j(ta)/£°)
будет удовлетворять неравенству I
Ф.(*)] < gr+V|_ <Р I
(так как по предположению t° + v (ta) > р (ta )). Кроме того,
функция щ (т) обеспечивает равенство I
t + г° '
at - • /
X Ua + -- t] Bw, ("t) dx + X [7a + -- - ta] x ((t^ F= 0>
'a 1
которое означает, что управление w* (т) переводит систему (42.4)
из положения х -■= х (ta) в состояние х (ta + Т") = 0. Однако
такого управления w* (т) с нормой х [и„ (т)] меньшей, чем опти¬
мальная интенсивность £°, быть не может. Полученное противоре¬
чие доказывает неравенство (42.9). Учитывая оба доказанных не¬
равенства Т° > Т° и Т убеждаемся в эквивалентности ве¬
личин Т° и 7°. Теперь осталось проверить, что правило (42.6)
означает как раз прицеливание в точку q°. Не приводя подробного
доказательства, поясним лишь совсем кратко, почему это так. ;
Легко видеть, что управления -- [т] и [т] (42.6) являются
оптимальными управлениями (в смысле задачи 13.1), переводящи¬
ми соответственно системы (42.1) и (42.2) из состояний у (fa) и
z (ta) в одно и то же состояние q = у (ta + Т°) = z (£а + 7°).
Отсюда выводится, что точка q = q° лежит на границах областей
Q(i) и GW, что и требовалось проверить. Итак, мы видим, что при¬
целивание в точку q° сводится к решению уже известной нам зада¬
чи 42.1 о предельном быстродействии.
Теперь покажем, что экстремальные управления р°, дей¬
ствительно, обеспечивают минимакс 2го = min max Т времени до
и V
встречи. Условимся сначала об одном обозначении. Именно ту
область в пространстве {х, £}, где задача 42.1 имеет решение, бу¬
дем обозначать символом Г. Очевидно, правило (42.6), а следова¬
тельно, и правило экстремального прицеливания, имеет смысл
лишь тогда, когда разность {х (£а) = у (Za) — z - - - - £ (£a) = ц (£a) —
— v (fa)} содержится в Г. Пусть поэтому сначала при t = t0
указанное условие выполняется. Тогда, выбирая все время по
правилу (42.6)
и° И, у (0, z (£), ц (/), v (£)] = Щ [И (42.15)
и повторяя рассуждения из § 41, убедимся, что область достижи¬
мости И, z (f), v (£), б0] все время будет оставаться внутри об¬
§ 42] ЗАДАЧА О ВСТРЕЧЕ ОДНОТИПНЫХ ОБЪЕКТОВ ЗЗЙ
ласти С(г)[7, у (t), ц (/), О0] по крайней мере до тех пор, пока гра¬
ницы этих областей имеют не более одной общей точки д9 (£) или
пока не! осуществится встреча у (t) с z (t). Но в нашем случае одно¬
типных ^объектов области G( 11 и Gt суть подобные и одинаково
ориентированные строго выпуклые тела. (В случае ограничения
(40.6) области G^t и G® будут эллипсоидами. В самом деле, точки
у (О), в крторые возможно попадание в момент t = 0, определены
равенство^!
а
У (f) = X Z] У (7) + \Н [10, Т] и (т) dx-,
\ t
причем управление и (т) стеснено условием
&
5[u(t)[2d<p.2 (/).
t
Но в соответствии с материалом из § 18 мы знаем, что при этом
достаточно ограничиться лишь управлениями и (т) вида
п
и (т) = 2 i10', т1 = н' i о» т л
г=1
так как именно такими оказываются оптимальные управления для
соответствующей задачи ’ 13.1. Но в таком случае заключаем, что
множество б?(1> описывается равенством
а
У (f) = X К>, 7] у (t) + J Н [О', т] Н' [О', т] Idx,
t
причем величины It стеснены условием
\ ГН f т] Н f т] Шх = Ф(7Ъ . .., /п)<р2(0,
i
где Ф — квадратичная форма переменных Ц. А это и означает,
что область GW есть эллипсоид, для которого последние равенство
и неравенство задают его параметрическое описание. Аналогичные
рассуждения проводятся для области G(2\)
Следовательно, если в какой-то момент времени t = t ока¬
жется, что границы l [^, у (£*), ц (£,), О0] и Gt [£,, z (j,
v (Q), О)] будут иметь больше одной общей точки, то это будет про¬
сто означать, что эти области совпали всеми своими точками. Но
это возможно, очевидно, лишь при условии, что ц (^) = v (Q)
и х (t) = у (Q) — z 11 = 0, т. е. что встреча уже произо¬
шла при t = t <Z О'). Итак, приходим к выводу, что управление
340
ИГРОВАЯ ЗАДАНА О ВСТРЕЧЕ ДВИЖЕНИИ
[ГЛ. 10
и = и" (42.15) при любом возможном выборе и = и (£) или и =
= и [t, у (t), z (£), р (t), v (£)] обеспечивает время до встречи не
больше, чем Т° причем при экстремальном управлении |
v = v° [^ у (ZL z (t), р. (t), v (£)] = Vt [Z], / (42.16)
определенном- по правилу (42-6) встреча осуществится т^чно в мо¬
мент t = О0 = + T°. Следует подчеркнуть, что э!от вывод
содержит также утверждение о том, что точка {ж (t), £ (0} до
самого момента встречи не покидает область Г. Этот важный факт,
который также следует из сохранения области 1> внутри .* , мы
молчаливо имели в виду в предыдущих рассуждениях. Таким
образом получаем, что Тищ« = max Tu^v. Теперь осталось про¬
верить, что при и = и0, действительно, выполняется условие ми¬
нимума по и. Предположим для этой цели, что мы, выбрали ка¬
кое-нибудь допустимое управление и = и° [£, у, z, р, v]. При
этом мы должны учесть в соответствии с * игровой постановкой за¬
дачи, что преследователь не гарантирован от выбора преследуе¬
мым партнером управления
v = v' = ~-u°. (42.17)
Но тогда в процессе движения при t^t0 все время будет выпол¬
няться равенство v \р (t) = v \/р (t0) = const, которое полу¬
чается интегрированием уравнений р = — uz/2y, = — [ма]2/2р,
v = — v42v = — [uo]2v/2p (cm. (42.3)) Из этого равенства выво¬
дится, что управление va также допустимо и кроме того, что на
отрезке Ио, t0 + Т°] будет к [и — v] < g (£0) = р (£0) — v (£0),
а это означает согласно предыдущему, что встреча у (t) и z (t)
при t \ t0 + T невозможна. Итак, действительно, управление
(42.15) и (42.16) обеспечивает искомый минимакс. Мы разобрали
ситуацию, когда исходные данные у (t0), z (Zo), р (Zo), v (£0) таковы,
что точка {х (£0), £ (Zo)} лежит в области Г. Не разбирая подробно
противоположную ситуацию, отметим лишь, что тогда при любом
и = ua, max Tuq v = {оо} и задача 40.1, следовательно, решения не
имеет. Чтобы убедиться в сказанном, достаточно снова выбрать уп¬
равление v в виде (42.17). Таким образом, * получаем следующий
вывод.
Теорема 42.1. В случае однотипных объектов (42.1)
и (42.2) задача 40.1 имеет решение тогда и только тогда, когда
начальные условия х (t0) = у (t0) — z (t0) и g (£о) = И (<о) — v (£0)
содержатся в области Г. Оптимальными управлениями, разрешаю¬
щими тогда задачу 40.1, являются экстремальные управления
и°, р°. Для вычисления этих управлений надлежит в каждый те-
ЗАДАЧА О ВСТРЕЧЕ ОДНОТИПНЫХ ОБЪЕКТОВ
341
§ 42] 1
кущий Момент, времени t = ta разрешать задачу 42.1 о предельном
быстродействии и полагать х)
и [i] = uQ = W°(0 у, и = и° = w" (£) у . (42.18)
Итак, если преследователь желает придерживаться оптималь¬
ного управления и = и0 в соответствии с указанным правилом,
то процедура вычисления текущих значений управления и0 [£] сво¬
дится к непрерывной корректировке величины • Т° и функции
wt (т) в соответствии с изменяющимися по ходу процесса усло¬
виями задачи 42.1, где . = t. А это в свою очередь согласно ма¬
териалу из § 27 приводит к непрерывной корректировке наимень¬
шего корня У0 уравнения (27.5), которое вместе с условием макси¬
мума (17.1) определяет управление wt (т).
Проиллюстрируем на простейшем примере процедуру вычис¬
ления управлений и = и и и = и®, вытекающую из теоремы 42.1.
Пример 42.1. Пусть преследующим и преследуемым объектами явля¬
ются соответственно материальные точки т± и тт^, движущиеся по горизон¬
тальной оси g под действием некоторых управляющих сил и и и, стесненных
ограничениями
ОО 00
и» (T))d-< «), г>2 (т)^ < №«). (42.19)
t t
Требуется, чтобы в момент встречи совпали не только координаты точек
£(1) и £(2), Но и иХ Скорости . • 1 • и V2). Рассмотрим движение в двумерном фазо¬
вом пространстве q — {qx, q2} = {£, (}. Тогда, обозначая уг = g(D, у^ = g(D,
z± = £ £ У, z2 = £ £ £ и полагая, не уменьшив общности, тг = т2 = 1, запи¬
шем уравнения движения объектов в нормальной форме
Щ = У2, £г = и, (42.20)
22= 22» 12 = •• (42.21)
Поскольку объекты (42.20) и (42.21) однотипны, то мы можем сопоставить
исходной проблеме 40.1 для систем (42.20) и (42.21) задачу 42.1 о предель¬
ном быстродействии для системы
х2, i2 = w, (42.22)
где х^ = yi — Zi (i = 1,2), w == и — и.
Итак, требуется найти оптимальное управление wt (т),’ стесненное ус¬
ловием
ОО
J га2(г)Л <£»()) (C(i) = И (() -v)))) (42-23)
t
х) Заметим, что в стационарном случае, когда А нВ постоянны, управ¬
ления и° и и° (42.18) получаются не зависящими явно от t.
ИГРОВАЯ ЗАДАЧА О ВСТРЕЧЕ ДВИЖЕНИЙ
[Гл. iO
и переводящее объект (42.22) из состояния х (t) = {хг (t) х2 (г)} в положе¬
ние х (t + Т) — 0 за наименьшее возможное время 7'° = min Т.Решая эту
задачу сп^осюм, изученным в §§ 27, 29, после элементарных выкладок
получим:
2
Wt W ~ [Т0]2 №‘rl W + 2Т°х2 (i)],
(42.24)
где Т<° — Т° (хх, х2, 0 является наименьшим положительным корнем урав¬
нения
F ( ((- - 4 4 ([) Л - 12rj (t)x2 (t)T - 12 4 ([) = 0. (42.25)
Таким образом, искомые управления и® и р°, как это следует из (42.18),
имеют в нашем примере вид ~ т
2ц ['Т°]2
“° 01, У2, я. 22, И. V] = - -(—у) [3 ( ( - t( t + 2Т» t ( - 22)], (42.26)
2v [Т°]“2
[!/b Уз, 2i, z2, р, v] = (ц— [3 (У1 ~ Z1) + 2Т° (у2 — 22)]. (42.27)
На рис. 42.1 представлены реализации движений объектов (42.20) и (42.21)
для начальных условий
(42.28)
Г'
Т
Т-2,76
Т'-2,30
А=Т-Т'-О>Ь
случае, когда оба партнера придер¬
живаются стратегий (42.26), (42.27).
Из результатов настоящего параграфа
следует, что если преследующий всег¬
да будет выбирать управление и = uQ
(42.26), то, как бы ни выбирал допу¬
стимое управление преследуемый,
встреча обязательно состоится не позже,
чем через Т° (?0) (в нашем примере для начальных условий (42.28) 7’° = 3).
На рис. 42.2 и 42.3 изображены движения объектов, когда и = и° (42.27), а
v (t) = 0 (рис. 42.2) и v (t) =
== —10 sin 10 t (рис. 42.3).
В этих случаях встреча проис- q
ходит в некоторые моменты
t = to + Т, предшествующие
моменту времени t = £0+ (£0).
Здесь интересно сравнить
оптимальные движения объек¬
та (42.20), которые осуществи¬
лись в процессе преследования, ■/
с теми оптимальными движе¬
ниями, которые получились рис. 42.2.
бы, если бы заранее было из¬
вестно, что объект (42.21) в процессе преследования не
вестно, что объект (42.21) в процессе преследования не двинется с места
или будет управляться по закону v (t) = —10 sin 10 t (как это и осущест¬
вилось на самом деле). Эти последние движения обозначены на рис. 42.2 и
42.3 пунктирными линиями.
§ 4-1
ЗАДАЧА О ВСТРЕЧЕ ОДНОТИПНЫХ ОБЪЕКТОВ
343
В рассматриваемом примере стратегии (42.26) и (42.27) можно было
легко найти, исходя сразу из правила экстремального прицеливания.
Области достижимости G ■ 1 - и G^2) соответственно для объектов (42.20) и
(42.21) здесь суть области в пространстве q = {qr, q2}, ограниченные эллипсами:
12 12
[Т°]3 [[i У (О]2 jZpopT [71 — 711 W- t2 + 723 01G +
+ -рт]- + ?з№ (0 + [2 W] = R2 (0, (42.29)
12 12
[yioj3 [71 — Z1 (°J2 [Т0]2 I-711 21 (°)] [7з + Z2(0)] +
+ [ 'Д' [?2 + ?2*2 (0 + z2 (01 = V2 («)• (42.30)
Эти области изображены на рис. 42.4 для исходного положения объектов
(42.28). Так как эллипсы (42.29) и (42.30) подобны, то определение точки
д°, в которой они касаются, и управлений, прицеливающих движения (42.20)
и (42.21) в эту точку, не представляет особого труда.
Теорема 42.1 показывает, что управления и0 и V (42.18) обес¬
печивают min max Т, а отсюда следует, что управление и — uQ
и и
действительно, является в определенном смысле оптимальным для
преследователя. Если бы управления U и V составляли седловую
точку данной игры, т. е. обеспечивали бы и максимин величины TutV>
то это означало бы, что и и = (42.18) есть управление, опти¬
мальное* с точки зрения преследуемого. К сожалению, в случае
ограничения (40.6) вопрос так удобно не решается. Не разбирая
ситуацию в общем случае, ограничимся простым примером.
344
ИГРОВАЯ ЗАДАЧА О ВСТРЕЧЕ ДВИЖЕНИЙ
[Гл. Ю
Пример 42.2. Рассмотрим системы (42.1) и (42.2), описываемые упраж¬
нениями первого порядка
у = U Z = V, (42.31)
где у, z, v, v — скаляры. В соответствии с (42.3) изменения величин
оо
р,2 (£) = - V.2 (т) dt,
t
V2 (4) = 5 У3 (т)
t
описываются уравнениями
. и2 . V2
= ' v = “ 2v ■
Система (42.4) сводится в данном случае к уравнению
А = w (х = у — z, w = и — v).
(42.32)
(42.33 >
Если мы решим теперь соответствующую задачу (42.1) . о предельном
быстродействии, то получим, что
п , , X (t) X2 (t)
= U0 = H)-»(() (42.34)
П; следовательно,
и = и° [;/, z, |Л, v] = — р, -у — , (42.35)
и z
v — v° [?/, z, р, v] = — v z ■ (42.36)
Покажем, что пара управлений (42.35) и (42.36) не обеспечивает седловую
точку, где max min Т = min тахГ= Т°. Пусть t0 < 0. Постараемся
D U U V
подобрать начальные условия х (t0) = у (io) — z (t0) > 0 и - (tQ) = р (tQ)—
— v (t0) и управление v (t) (t0 t < 0) так, чтобы все время при £ >
вдоль движения х (t) (42.33), где положено v = и (t) и v = v° (42.36), вы¬
полнялось условие
{х «, Z W ег, - (х «), g (t)) = 1 (42.37)
и чтобы встреча у (t) = z (t) осуществилась при t- = 0. Для выполнения ус¬
ловия (42.37) вследствие (42.34) достаточно, чтобы выполнялось условие
ИО = Н (0) - v (0) = х (0 > 0. (42.38)
Управление v = v° (42.36) будет тогда удовлетворять равенству
v = v° = —v (t). (42.39)
Из (42.32) и (42.39), выбирая v (0) = 1, получим:
— — t
v(t) = e 2 . (42.40)
Тогда из (42.33), (42.38), (42.39) и (42.40) следует, что должно быть:
|1(Г) = е 2 + x(t), (42.41)
— — t .
и (t) = — е 2 + x(t). (12.42)
§ 42]
ЗАДАЧА О ВСТРЕЧЕ ОДНОТИПНЫХ ОБЪЕКТОВ
345
Теперь функция х (t) определяется из дифференциального уравнения,
которое получается подстановкой (42.41), (42.42) в первое уравнение (42.32).
Это дифференциальное уравнение имеет вид
Xt Ы
2 + Ы • (42.43)
Уравнение (42.43) при условии х (0) = 0 можно разрешить в форме
ряда
i2
х (0 = + Ф (0> Ф (0 ~ <3*3 + М4+ (42.44)
причем для функции ср (t) получается дифференциальное уравнение
ф = / [* ф]
с голоморфной правой частью в окрестности точки t = 0, х = 0. Отсюда
согласно теореме Коши ([12*], стр. - 55) следует сходимость ряда (42.44) при
достаточно- малых значениях I. Кроме того, при малых t функция х (t) (42.44)
положительна.
Итак, при достаточно малых значениях t ( t0 ( t < 0) построено управ¬
ление и (t) (42.42)
1 •
= — в ] Ф
такое, что хотя при всех t из интервала [^ 0) управление и = ( [у (t),
z(t), ц(£), v(t) ] выбирается все время в соответствии с правилом (42.18), при¬
чем оказывается все время Т° [#£), ? £)] = 1, однако встреча движений
у (t) и z (t) осуществляется в действительности при t = 0. Следовательно,
в данном примере время до встречи Т при и = V оказывается меньше, чем
Т° 1х £ (Ш если | < 1.
Приведенный пример доказывает высказанное выше утвержде¬
ние о том, что, вообще говоря, величина T [х (£0), £ (£0)] не яв¬
ляется максимином времени до встречи у(£и z(t), а пара управ¬
лений uQ и р° (42.18) не является седловой точкой соответствую¬
щей игры, даже если ограничиваться управлениями и и и, не
выводящими движения (42.1), (42.2), (42.3) из области Г. Именно,
пример показывает возможность таких отклонений управления и
от и0, при которых, хотя движение (42.2) и будет все время при
t ( to управляться по правилу (42.18), встреча произойдет раньше,
чем в момент t = to + T [у(^), z^), ц(*0), v(*0)l = min max TUjV.
Заметим, однако, что отсутствие седловой точки связано в разо¬
бранном только что примере существенно с интегральным харак¬
тером ограничений (40.6). В этом можно было бы убедиться, разо¬
брав случай, когда ограничения (40.3) и (40.4) имеют вид || и(т)|<£ ц
и || и (т) || — v, причем должны совпадать все фазовые координа¬
ты. Тогда мы увидели бы, что правило экстремального прицели¬
вания обеспечивает не только минимакс Т, но и равный ему мак¬
симин, причем, следовательно, выполняется условие (40.12) се¬
дловой точки. Однако здесь серьезным обстоятельством, затруд¬
346
ИГРОВАЯ ЗАДАЧА О ВСТРЕЧЕ ДВИЖЕНИЙ
[Гл. 10
няющим исследование проблемы, является вопрос о классе тех
управлении и (t) и v (t) (или и Id и v R], или, наконец, и
у, z, р, v], v — v [£, у, z, р, v]), которые допустимы для каждого
из партнеров. В подтверждение сказанного рассмотрим следую¬
щий пример.
Рис. 42.5.
Пример 42.3. Пусть движения преследующего и преследуемого объек¬
тов, как и в примере 42.1, определяются дифференциальными уравнениями
(42.20) и (42.21), но в отличие от
п (42.19) ограничения на управляющие
воздействия имеют вид
I и (т) I < р , I V (т) I < V, (42.45)
где р и v — положительные постоян¬
ные. И пусть снова в момент встречи
требуется совпадение координат точек
£(1) п £(2) и их скоростей 2 (12 и (( 2 ( .
Если построить для рассматриваемых
объектов соответствующие области
достижимости с учетом (42.45), то
решение этой задачи, вытекающее из
правила экстремального прицелива¬
ния, таково: экстремальные управ¬
ления и = и0 и v — v° определя¬
ются законом UQ— р, v— v, если
точка (( (t), х2 (<}, Xi (t) = t/i (t) —
— Zj (0 лежит ниже кривой
Т1 4-
Х2 I Х2 I
—id ’ о
2(1—-v)
(42.46)
гис. и и° = _р? = —у, если .точка
{x^t), х2 (t)} лежит выше кривой
(42.46) на плоскости х2 . Заметим, что в нашем случае указанные экстре¬
мальные управления будут и оптимальными в смысле задачи 40.1 и, более то¬
го, они обеспечивают также условие (40.12) седловой точки. На рис. 42.5, 42.6
§ 42]
ЗАДАЧА О ВСТРЕЧЕ ОДНОТИПНЫХ ОБЪЕКТОВ
347
и 42.7 изображены некоторые реализации движений объектов в ситуациях,
аналогичных рассмотренным выше, в примере 42.1 (см. рис. 42.1, 42.2 и
42.3) (эти реализации получены с помощью аналоговых вычислительных уст¬
ройств). Важной особенностью является здесь возникновение скользящих
режимов (см. рис. 42.8 и 42.9, изображающие uo[z] в случаях, когда пре¬
следуемый партнер отклоняется от оптимальной стратегии).
Рис. 42.8.
Рис. 42.9.
Итак, разобрав пример 42.3, мы видим, что в данном случае
постановка задачи о преследовании по принципу обратной связи
должна допускать реализации воздействий и Ш и v [£] еще более
общей природы, чем введенные нами ранее допускаемые управле¬
ния и (t) и v (t). Это обстоятельство требует серьезного математи¬
ческого анализа.
Приме чан ие 42.1. Правдоподобные рассуждения из §§ 41, 42 можно
строго формализовать, опираясь па последовательность {гА} (Л = 0, 1, . . . ;
/ —tk = б>0) смены значений и [£] с последующим предельным переходом
при б -> 0. Это осуществляется так. Определим величины О- [//,] рекуррентно:
—момент поглощения для j/pob-[*о]>И[У>], v[£o]> пpи?/[^д•+J],ф//.ч^1], pfo+i],
v [*fc+1], О [£/,] полагаем ft [fc+i] = min^ [f.], Oj+1), где f>0+1 — момент по¬
глощения для у z [i^+i], p Uk+?], v [г,;+1]. Пусть далее q° - - - - ир° [ifc]—
точки из областей GC1> - - - - - у [£fc], р[*ь], О [JA:] иС<2’[Ц], z p/t], v [ik],
О - - - - - для которых достигается maxp minQ || p — q || при p из G<3> и q из Gcp.
Экстремальное управление u° определяется тогда равенством
uo [t] = и* [«/ [tk], z [tk], p, [M, v [f ], О Ы] (42.47)
(lk < 1 < *fc+l)
из условия прицеливания в момент t = tk движения (40.1) в точку qQ [if]
(к моменту t = О [£&]). В случае однотипных объектов управление и° (42.47)
348 ИГРОВАЯ ЗАДАЧА О ВСТРЕЧЕ ДВИЖЕНИЙ [Гл. 10
обеспечивает минимакс уи« = min™ Чи = Ф [М] — to, где
Y = sup [lim sup (sup Г* (42.48)
£>0 Б-—-0 v
Здесь v — момент t, когда впервые выполняется неравенство
II У (0 — z (0 II ‘С 8. В случае ограничений на мгновенные значения сил (на-
пpимеp. || и || <^р., || г? || ( v, р> v) утверждение сохраняет силу и для за¬
дачи о встрече по части координат. В общем случае неоднотипных объек¬
тов при ограничениях вида || u | < р,, (| v || v управление и° (42.47) также
обеспечивает сближение в смысле (42.48) не позже чем в момент t = $ [1°],
если только имеет место неособое поглощение областей G'2’ областями G'1’
(см. сноску на стр. 333).
Следует добавить, что в случае неоднотипных объектов (40.1), (40.2) и
при ограничениях p*[u(r); t < т] Д р, р*[а(т); i^rJC V момент поглощения
Оф] можно определять как наименьший корень уравнения
min {рр[В'(т) У'[Ф, т]/; t < т < О] — vp[Q'(T) Z'[O,t]l; t < т < О] f—
lI'IKi
+ (У[Ф, ИуН — Z[O, t]z[Z])'/} = 0, (42.49)
где Y и Z — соответственно фундаментальные матрицы для систем (40.1) и
(40.2), а р—норма, к которой сопряжена заданная норма р*. Уравнение
(42.49) выводится из определения величины 0*° как следствие соотношений
вида (17.13), (17.17), определяющих области достижимости Дh и G(2)-
Заметим еще, что паши рассуждения переносятся без труда и на слу¬
чай игровых задач, где осуществляется максимин (минимакс) расстояния
между точками {у ($)}т и {z ($)}т в фиксированный момент времени t = $.
Эти задачи имеют более регулярный характер, чем рассмотренные выше.
Их анализ можно рекомендовать читателю в качестве упражнения.
В заключение настоящей главы необходимо отметить, что важ¬
ным инструментом при решении игровых задач в теории управляе¬
мых систем и, в частности, в задачах о преследовании является
метод динамического программирования [28а, 341]. Однако об¬
суждение указанного метода выходит за рамки содержания дан¬
ной книги.
Глава 11
ЛИНЕЙНЫЕ СИСТЕМЫ С ОСОБЕННОСТЯМИ
§ 43. Система с последействием,
реализующая наблюдаемую величину
Выше, в - главах 8 и 9, мы изучали задачу о наблюдении линей¬
ной динамической системы, определяя искомый фазовый вектор
х (t) на основании информации о предыстории наблюдаемой вели¬
чины у (t) (31.6). Теперь мы установим связь между решением за¬
дачи о наблюдении- с некоторыми вопросами из теории линейных
дифференциальных уравнений с запаздыванием аргумента. Об¬
суждение этой связи и составляет основное содержание настоя¬
щего и последующего параграфов. Тем самым, с одной стороны,
мы проиллюстрируем еще раз решение задачи о наблюдении,
а с другой стороны, дадим новую интерпретацию фактов, извест¬
ных в теории уравнений с запаздываниями. При этом нам потре¬
буются отдельные сведения из теории систем с последействием (в
объеме, например, книги [26*]). Впрочем, как и в других разде¬
лах данной монографии, все основные используемые понятия бу¬
дут кратко поясняться по ходу дела.
Итак, рассмотрим линейную динамическую систему
= ^0 (43.1)
предполагая, что результатом измерений ее движения является
величина
у (0 = g' X (t). (43.2)
Здесь А — постоянная (п X т^матрица, g — постоянный т-мер-
ный вектор. Для упрощения мы ограничиваемся случаем, когда
у (t) — скаляр. Будем рассматривать задачу 34.1 о наблюдении
величины
Т) (0 =р' X (t) (43.3)
по идеальному сигналу
у (t + т) = g'x (t + т) (—й < т < 0). (43.4)
Как указывалось в § 34 (стр. 289), для того чтобы решить эту
задачу, полезно задаться каким-либо условием оптимальности,
имеющим смысл ограничения на норму разрешающей операции,
350
ЛИНЕЙНЫЕ СИСТЕМЫ С ОСОБЕННОСТЯМИ
[Гл. И
ф [у (t-фт) [т] (01 =4 (0- Мы будем искать операцию ф [у (t + т)]
в виде
о
<[?/(< + *)] = $ У(* + t)dV(x)> (43.5)
-а
где V (т) — функция с ограниченным изменением на отрезке
[— -О, 0], и выберем в качестве условия оптимальности требование
р* [ф] == var [V (т)]оа = min. ' (43.6)
Для построения оптимальной разрешающей операции ф° [у (t + т)]
воспользуемся правилом минимакса 33.1; согласно этому пра¬
вилу прежде всего надлежит найти минимальный сигнал
{У (- + т) [ ц (t) = 1} из условия (33.6), т. е. из условия (см. об этом
подробнее в § 33, стр. 284)
рс — max [ {у° (t -f- т) [ ц (0 — 1} [ —
-т min max [ {у (t + т) [ ц (0 1} [. (43.7)
у -»<т<0
Предположим, как и в других аналогичных случаях, разобран¬
ных выше, что сигнал {у” (t + т) [ ц (0} = 1 тем или иным спо¬
собом найден. Нам известно, что исходная задача о наблюдении
имеет решение тогда и только тогда, когда р° 4> 0. Положим в
(43.3) р' — g'A. Тогда обязательно р° , 0. В самом деле, имеем:
у (t + т) = g'x (t + т) = g' X И + т, 0 х (0, (43.8)
где X И + т, 0 — фундаментальная матрица системы (43.1),
обращающаяся при т = 0 в единичную матрицу. Для выполнения
условия р° (> 0 достаточно, чтобы выражение (43.8) не обращалось
тождественно в нуль при —й ( т ( 0 ни при каком значении
вектора х (0, стесненном условием
ц (0 = р' х (0 = g' Ах (0 = 1. (43.9)
Дифференцируя правую часть равенства (43.8) по т, учитывая
равенство dX И + т, t\ldx = АХ И + т, 0 и соотношение (43.9),
получим при т = 0
(-^ [g'X R + г q X (01)т=о = gAx (0 = 1- (4:3.10)
Из (43.10) следует, что тождество у (t + т) = 0 при условии
(43.9) невозможно. Это и доказывает неравенство р° > 0. Итак,
разрешимость задачи о наблюдении при р' = g'A доказана 1).
-') Полезно заметить, что этот факт можно было вывести и из общих со¬
ображений, опираясь на то обстоятельство, что функция у (t) есть функция
аналитическая.
§ 43]
СИСТЕМА С ПОСЛЕДЕЙСТВИЕМ
351
Теперь можно определить искомую операцию ср0 [у (t + т) I,
опираясь на условие максимума (33.16):
о
U г/° (' + Т) IТ) (0 = 1}] = $ {у° (t + Т) h (0 = 1} (т) =
-а
о
= max § {yQ (t + т) | г) (t) = 1}dV (r) (-43.11)
v -i
при var [V (t)]%. = l/p°. С такой задачей мы уже встречались в
§ 23, решая задачу об управлении с минимальным импульсом уп¬
равляющей силы. Важно заметить, что функция £(т) = | {у° (t +
+ т) [ т) (Z) — 1}| достигает своего наибольшего значения лишь в
конечном числе т изолированных значений т = — ) (т, 0;
7 = 1,..., jт) из отрезка —й j т j 0. В самом деле, иначе функ¬
ция у0 (т) должна была бы быть постоянной величиной (сравни
с рассуждениями на стр. 185), а это исключено условием (43.10).
Повторяя теперь рассуждения из § 23 на стр. 186, приходим к вы¬
воду, что функция V0 (т) /вл/етс/ кусочно-постоянной с разры¬
вами непрерывности в точках т = — ) и, следовательно,
т
'1 (0 = <Р [У ( + т)] = 2 j1 — Ту)- (43.12)
7=1
Здесь через aj обозначены скачки функции У0(т) в точках т = — т-
Продифференцируем теперь равенство (43.2) по t. Учитывая
при этом соотношения (43.1), (43.3) и (43.12), приходим к выводу,
что наблюдаемая величина у (t) удовлетворяет следующему урав¬
нению с запаздываниями ) аргумента t:
ТП
У (0 = 2 а,У < — ТА (43.13)
7=1
Таким образом, какова бы ни была вектор-функция х (£), яв¬
ляющаяся решением уравнения (43.1), наблюдаемая величина у (t)
(43.2) является решением уравнения (43.13). .
Обратное заключение, вообще говоря, неверно. Не для вся¬
кого решения у (t) уравнения (43.13) можно подобрать вектор
х (0, удовлетворяющий уравнению (43.1) и такой, что функции
х (t) и у (t) будут удовлетворять соотношению (43.2). Это естест¬
венно, так как равенство (43.2) и уравнение (43.1) определяют со¬
гласно (43.8) конечномерное семейство функций у (t). Однако со¬
гласно теории дифференциальных уравнений с запаздываниями
аргумента ([26*], стр. 9) решения у (t) уравнения (43.13) при t
> to порождаются всевозможными непрерывными начальными
352
ЛИНЕЙНЫЕ СИСТЕМЫ С ОСОБЕННОСТЯМИ
[Гл. И
кривыми у (to + т) (—1) l т l 0) (или всевозможными диффе¬
ренцируемыми функциями у (t,Q + т) и. т. д.) и, следовательно, эти
решения в общем случае составляют бесконечномерное семейство
функций.
Итак, в этом параграфе мы показали во всяком случае, что,
каковы бы ни были система (43.1) и соотношение (43.2), можно
построить уравнение с последействием (43.13), среди решений ко¬
торого будут содержаться все функции у (Z), определенные равен¬
ством (43.2) и уравнением (43.1). .
Рассмотрим простой иллюстрирующий пример.
Пример 43.1. Пусть система (43.1) имеет вид
*1 = *2 = Хх
(43.14)
и в каждый момент времени t возможно измерение и запоминание на отрезке
л б
t — — — т* координаты х2 (£). Будем решать задачу о наблюдении вели¬
чины т] (t) (43.3), которая здесь, очевидно, совпадает с координатой х± (t) си¬
стемы (43.14). Для построения разрешающей операции (р° [у (t + т)] (43.12)
необходимо найти числа aj и тр С этой целью определим из условия (43.7)
минимальный сигнал {у) (* + т) | т] (t) = 1}. Фундаментальная матрица си¬
стемы (43.14) имеет вид
X [г + т, г] =
cos т
sin х
— sinr
cos т
и, следовательно, сигнал у (t + т) (43.4) равен
у (t + т) = Хг (t) sin х + х2 (/) cos х.
(43.15)
Условие (43.7) принимает вид: найти
р° = min max | sin т + х* cos х |.
Х2 т
Так как —л/2 х < 0, то нетрудно сообразить, что р° = 1 и минимум дос¬
тигается, например, при х2 = 0, и тогда, следовательно,
{у0 (t + т) | ц (t) = 1} = sin т.
Функция £ (т) = | sinr | достигает наибольшего значения р° = 1 в точке
х = — тх = —л/2. Далее, из свойства максимума (43.11) получаем сразу, что
ах = 1. Итак, искомая операция ф° [у ( + т)] (43.12) описывается равен¬
ством
Уравнение (43.13) имеет, следовательно, вид
dy(t) ../. М
dt — ~ у V 2 Г
(43.16)
§ 44] КАНОНИЧЕСКИЕ КООРДИНАТЫ СИСТЕМ С ПОСЛЕДЕЙСТВИЕМ 353
§ 44. Канонические координаты систем с последействием
и задача о наблюдении
Обсудим связь между уравнением (43.13) и системой уравнений
,43.1), (43.2) более подробно. Для того чтобы различать общее реше¬
ние уравнения (43.13) и семейство функций у (Z), определяемое
системой (43.1), (43.2), введем переменную z (t) и будем рассмат¬
ривать уравнение
т
= j (t — Ту). (44.1)
j=i
Условимся о следующем обозначении. Множество частных реше¬
ний z (£) • уравнения (44.1), по'рожденное всевозможными непре¬
рывно-дифференцируемыми начальными кривыми z (т) (— О •
0), будем обозначать символом {z (t)}. Подмножество этих ре¬
шений z (£), которое совпадает с семейством функций у (£), опре¬
деляемых равенствами (43.2), (43.1), будем обозначать символом
{у (О)-
Из теории дифференциальных уравнений с отклоняющимся
аргументом • известно [237], что в любом движении z (t) из семейст¬
ва {z (£)} можно выделить канонические координаты q• (t) (i =
= 1,2,,..), являющиеся проекциями бесконечномерного век¬
тора q (t). Эти канонические координаты выделяются при помощи
линейных операций ф [z (t -|- т)], которые производятся над от¬
резками z (t -р т) (— Ф • т • 0) кривой z = z (£). Операции
фг [z (t + т)] имеют вид
т 0
<i1() = Фг [Z (* + Т)] = 842 (0+3 $ Z (< + т) 8О (т) dr (44.2)
(г = l...^ п),
где постоянные • • и непрерывные функции ег; (т) выражаются из¬
вестным образом через решения z *(/) уравнения с опережающим
аргументом
т
dz* ((t) vi , . . .
-^- = a)Z (t +
>=1
сопряженного к уравнению (44.1). Мы не будем приводить
здесь явный вид величин ег и функций вц (т), отсылая читателя
к специальным источникам [237, 323]. Важно лишь отметить,
что эти величины нетрудно вычислить, если известны корни
12 Н. Н. Красовский
354
ЛИНЕЙНЫЕ СИСТЕМЫ С ОСОБЕННОСТЯМИ
[Гл. 11
характеристического уравнения
2 dj exp (— Xj) — X = 0, (44.3)
5=1
отвечающего уравнению (44.1). Канонические координаты qt (Z)
удовлетворяют системе обыкновенных линейных дифференциаль¬
ных уравнений с постоянными коэффициентами, матрица которой
имеет жорданову форму ([3*], стр. 127). Структура этой матрицы
зависит снова от корней % уравнения (44.3). Если мы выберем
какие-либо п канонических координат qt (для определенности
i = 1, . . ., п), ограничившись для простоты случаем, когда все
соответствующие корни - простые, то получим систему уравнений
<71(0 = М«(0 (* = 1, •••>и). (44.4)
Каждой такой системе координат qt (t), удовлетворяющих урав¬
нениям (44.4), будет отвечать конечномерное семейство {£(£)} функ¬
ций - (/), являющихся решением уравнения (44.1) и имеющих сог¬
ласно (44.4) вид
п п
ио = 2 м (о = 2 i ех₽ (М, (44-5.)
1=1 1=1
где Si — некоторые фиксированные ненулевые постоянные, - - —
произвольные постоянные.
Вернемся к исходной системе (43.1), (43.2), которая по¬
родила уравнение (44.1). Примем теперь, что эта система вполне
наблюдаема. Пусть, кроме того, опять для упрощения, корни
(i = 1, . . ., п) характеристического уравнения
det (А — аЕ) = О
системы (43.1) простые. Известно ([12*], стр. 82), что систему
(43.1) можно привести неособым линейным преобразованием
w =
Тх
(44.6)
к канонической форме
w (0 = ш^г (0
(i
= 1, . . ., п).
(44.7)
Соотношение (43.2) принимает
тогда
вид:
у (С) = g'T~1w
(П =
2 w (О.
1=1
(44.8)
где через St обозначена i-я компонента вектора-строки при-
§ 44] КАНОНИЧЕСКИЕ КООРДИНАТЫ СИСТЕМ С ПОСЛЕДЕЙСТВИЕМ 355
чем постоянные ■ , (i = 1, . . ■ , п) удовлетворяют неравенствам
St == 0 (i = 1, . . ., п), (44.9)
так как в этом и только в этом случае выполняются условия пол¬
ной наблюдаемости системы (43.1) по величине у (t) (43.2). (Систе¬
ма (44.7) может иметь комплексные коэффициенты. Всюду выше,
однако, при рассмотрении задач о наблюдении все рассматривае¬
мые величины предполагались действительными. ■ Читатель, кото¬
рого смутит такой переход, может перевести систему (44.7) в дей¬
ствительную форму. Мы не делаем этого, так как запись получи¬
лась бы более громоздкой.) Из соотношений (44.7), (44.8) и (44.9)
вытекает, что семейство {у (t)} состоит из функций у (t) вида
п
У (0 - 3 k еХР (®i0. (44.10)
i=l
где It — произвольные постоянные. Отсюда и из рассмотренных
выше свойств решений z (t) можно сделать вывод, что среди кано¬
нических координат qt (t) (i = 1, . . ., п) уравнения (44.1) можно
выбрать п таких координат qk (для определенности перенумеруем
их так: к = ], . . ., п), которые на функциях у (t) из {у (t)} будут
совпадать с координатами исходной системы (43.1), (43.2).
Возвращаясь теперь к переменным xt (t), приходим к следующему
выводу.
Пусть уравнение с последействием (44.1) построено для вполне
наблюдаемой системы (43.1), (43.2) так, как это описано в § 43.
Тогда можно указать п линейных операций вида
т о
A[z(( + т)1 = afcz(«) + 3 $ z(t + r)alcj(x)dr (44.]1)
(/c = ] . . ., n),
которые определяют переменные
Ik (0 = fk [z (t + т)] (k = ], . . . , n), (44.12)
удовлетворяющие системе (43.1), причем на функциях z (t) = у (t)
из {у (t)} величины \\ (t) совпадают с координатами фазового вектора
х (t) системы (43.1). Операции \f [z (t -f- т)] являются линейными
комбинациями оперрций^р [z (t | т)] (44.2):
п
fk [z ( + T)] = 3 . [z (t + T)J, (44.13)
i=l
где dki — элемент k-й строки и i-го столбца матрицы Т"1, обрат¬
ной к одной из матриц Т, приводящих систему (43.1) к каноничес¬
кой форме (44.7).
12
356
ЛИНЕЙНЫЕ СИСТЕМЫ С ОСОБЕННОСТЯМИ
[Гл. И
Итак, операции (44.11) можно рассматривать как такие линей¬
ные операции, которые для вполне наблюдаемой системы (43.1),
(43.2) восстанавливают координаты gг ()) по сигналу у (Z -- т)
(— О < т ) 0) (43.4). По форме они отличаются от операций
ф [у (t + t)j (43.5), рассмотренных в § 43, так как там искались
операции, имеющие наименьшую норму (43.6). Однако для системы
(43.1) , (43.2) можно строить операции <рг [у (t + т)], восстанавли¬
вающие координаты gf (t) по сигналу у (t -- т) (43.4) и имеющие
форму
о
(0 = <Pt [у ( + T)1 = yi (°) у (0 + 4 G + т) Vi (ТЖ (44.14)
. —а
аналогичную форме (44.11), не обращаясь при этом к уравнению
(44.1) , на основании которого были построены операции f [z]. Опе¬
рации fk [z] (44.11) можно рассматривать при этом как распростра¬
нение операций [у] с линейного множества {у (t)} на множество
{z (t)) х).Операции Gi [у] вида (44.14) можно построить, если ре¬
шать задачу 34.1 о наблюдении системы (43.1), (43.2) при условии
Р* j [?]] = min,
где норма р* [ф£] операции <рг [у] (44.14) определяется (см. §§ 58—.
60 и таблицу 12.1) равенством
о _!_
р' [<Pil = {^i (0) + 5 G (Т) dx }2 . (44.15)
—а
Таким путем для задачи о наблюдении системы (43.1), (43.2) мож¬
но построить операции ф- [у] вида (44.14), имеющие наименьшие
возможные нормы р* [ф?1 (44.15). Поскольку операции f [z]
(44.11) являются распространением операций TjJy] (44.14) с се¬
мейства функций {у (£)} на семейство функций {z (t)} и норма
р* [ф?! является минимально возможной, то должно выполняться
неравенство
Р* [ф?] <Р [/г]. (44.16)
Приведем иллюстрирующий пример.
х) Это выражение следует понимать так. Пусть в некотором пространстве
$ выделено некоторое подпространство ЯЗт. в котором определена линей¬
ная операция ф) i [х]. Говорят, что операция ср распространяет ф™) на S),
если она определена на всех элементах х из W и значения ее на элементах
х из Gm совпадают со значениями р/™) [ж]. в связи с этим возникает вопрос,
всегда ли можно распространить заданную операцию qP" G [х] на все про¬
странство.®. Особенно интересен случай, когда pm [р/™)] = р [ф]. Эта задача
называется проблемой о распространении линейной операции. Она поло¬
жительно решается теоремой Хана—Банаха (см. [6*], стр. 74; [14*], стр. 173).
g 44] КАНОНИЧЕСКИЕ КООРДИНАТЫ СИСТЕМ С ПОСЛЕДЕЙСТВИЕМ 357
Пример 44.1. Выше, в § 43, мы построили уравнение е последействием
(43.13), среди решений которого содержатся все функции у (t), определя¬
емые равенствами (43.2), (43.1). Система (43.1), (43.2) вполне наблюдаема.
Найдем теперь линейную операцию — [z] (44.11), выделяющую координату
Xi (t) из решения z (( + т) уравнения (43.16). Характеристическое уравнение
системы (43.14) имеет два корня: (ох = г, со = —i, которые, как и должно
быть, являются также корнями характеристического уравнения X +
4-ехр - — у — - = 0, соответствующего системе (43.16). Операции-^ [z] (44.2),
выделяющие те канонические координаты — , q2, которые отвечают корням
%! = г, = — i, если эти операции найти по правилам, описанным в [234]у
[323], принимают вид '
о
<71 Со = to [2 (t + т)] = z (0 + i е" z^ + x'jdr,
I
~~ 2
О
q2 (г) = ф2 [z (i 4- т)] = z (t)— i е~г'х z (t 4- т) dx.
it
~ T
Так как
=-^^^4 {((Г + 0о(т“04 ’
то искомая операция — [z (t 4- т)] (44.11) определится равенством
о
4л г 4л sin х — 8 cos т
А [z (* + чО] = я2 — 4 — z W +* Я2 —7 4 z {l + x)dx. (44.17)
п
— Т
Построим теперь операцию ср° [у (t 4“ т)] вида (44.14), решающую за¬
дачу 34.1 о наблюдении координаты х± (t) системы (43.14). Так как соглас¬
но таблице 12.1 при выСюре нормы р* [q>.] '(44.15) имеем р [Л (т)] ={Л2 (0) 4>
С Р
4- \ №(x)dx) 2, то условие (33.16), из которого определяется минимальный
«-а
сигнал {у0 (t 4- т) | ц (t) = 1}, принимает здесь вид: найти
° 1 1
р° = min 4h - (яп т 4я?г cos т)2 ст| 2 = min |а:2 (1 4- х 4* У|2 .
" п '
т
Этот минимум р° достигается при х2 = 2/(4 4~ я) и равен
р° — у(л (4 4- л) — 4)/4 (4 -4 л).
Отсюда и из равенства (43.15) получаем, что минимальный сигнал <у° (J 4~i0 |
358
ЛИНЕЙНЫЕ СИСТЕМЫ С ОСОБЕННОСТЯМИ
[Гл. 11
| (t) = 1} есть функция
2
<У° '(« + г) 11] (t) = 1} = sin т + cos т.
(44.18)
Условие максимума (33.25) запишется теперь в виде
о
2
+
2
(О) + (sin t + 4 + п- cos х
Vi (т) с?т| = 1
(44.19)
при
л
2 = У4 (л + 4)/(л (л + 4) — 4)
$
к
2
Из соотношений (44.19) нетрудно заметить! что функция pj (т), определяю¬
щая искомую оптимальную операцию ЮЬ (t + т)] (44.14), пропорциональна
минимальному сигналу (44.18) и множитель пропорциональности равен
(1/р°)2. Таким образом, операция (pj [у (t + т)] определяется равенством
Ф? [у + т)] = - 4 {лфг У (О +
О
+ (sin т + _ _ cos у ( 4- т) . (44. 20
ТС
г
Сравнивая нормы операций cpj (44.20) и (44.17), видим, что, действительно
р* [<р?] = ( 4 (4 - л) |2 <.р. [Л] — |4л(л* + 4л + 12)1 2 .
Н [Т1] \л(4 + n.)-4j 1 1 ' '] 1 л2 + 4 ]
§ 45. Задача об успокоении систем с последействием
В настоящем параграфе мы продолжим рассмотрение линейных
систем с последействием, однако теперь обсудим для них одну
задачу об управлении. Итак, пусть некоторая управляемая систе¬
ма описывается уравнением
X (t) = Ах (t) -j Gx (t — ft) 4- Ви, (45.1)
где А и G — квадратные n-мерные постоянные матрицы, постоян¬
ная матрица В, как обычно, имеет порядок т X п. Запаздывание
ft также предполагаем постоянным. При выбранном управлении
и (t) (t движение системы (45.1) определяется его предысто¬
рией, т. е. начальной кривой х (t) = xQ (t) (t^ — <t t t^)
(cm. § 43). Как и в случае обыкновенных систем, для системы
S 451
ЗАДАЧА ОБ УСПОКОЕНИИ систем с ПОСЛЕДЕЙСТВИЕМ
359
(45.1) можно поставить задачу о приведении ее в состояние равно¬
весия х (t) = 0. При этом для полного успокоения обыкновенной
линейной системы
X (t) = Ах (t) 4— Ви (45.2)
достаточно было, как мы видели, привести ее к некоторому момен¬
ту времени hg в состояние х (() = 0 и затем сбросить управление
(т. е. положить, что u(t) = 0 при£ В результате при всех
t b t$ система (45.2) оставалась в состоянии покоя х (t) = 0. Для
системы ■ (45.1) дело, однако, обстоит сложнее. Действительно, если
бы для этой системы мы имели х (t$) = 0 и и (t) = 0 при t b
то отсюда вследствие наличия в уравнении (45.1) слагаемого
Gx (t — '&) еще никак бы не вытекало, что х (t) = 0 при t t$.
В связи с указанным обстоятельством задача об успокоении систе¬
мы (45.1) формулируется следующим образом.
( 3 а д а ч а 45.1 Пусть заданы моменты времени hа и hд btx и
известна предыстория х° (t) (£а —• Ф h t <4 ta) движения х (t).
Требуется найти управление и (t) (ta t tg-|- Ф), которое
обеспечивает, равенство
х (t) = 0 при hh <3 4- (45.3)
Мы рассмотрим лишь простейшую ситуацию, когда вектор
х (t) является двумерным, а управление и (t) есть скаляр. Выберем
to. = 0, Ц = О + е, где е > 0. Примем еще, что матрица G неосо¬
бая, а векторы b = В и Gb линейно независимы J). Тогда линейно
независимыми будут и векторы 6, G~Hb. Последние два вектора
примем за базисные в двумерном пространстве {х} и преобразуем
уравнение (45.1) к новым фазовым координатам, полагая, что в
новой системе координат векторы b и G~lb имеют вид
-1 ■
‘ 0 ‘
ъ =
0
ж
G~G =
1
(45.4)
В дальнейшем мы будем считать, что указанное преобразование
выполнено, однако в целях сокращения письма . сохраним для
новых координат и новых параметров системы (45.1) старые обоз¬
начения. Система (45.1) тогда по форме записи не изменится, но
матрица G будет уже иметь специальный вид
gu h 1
#21 0
х) Анализ других случаев предоставляем читателю.
360
ЛИНЕЙНЫЕ СИСТЕМЫ С ОСОБЕННОСТЯМИ
1Гл. И
так как согласно (45.4) имеем:
8и 812
- 0 ’
£12
■ 1 ’
821 822
1
.£22.
о
При этом g21 =f= 0 в силу того, что матрица G по предположению
неособая.
Перейдем к решению задачи. Для выполнения х (t) = 0 при
А 4- 8 <^£<^2А --е необходимо и достаточно (в соответствии с
уравнением (45.1)), чтобы выполнялись условия:
tn*i (t — А) 4- х2 (t — А) 4- и (t) == 0 (А + 8 < t < 2А 4- e),
(45.5)
£21*1 (t — fl) = 0 (A 4- e < t < 2fl 4- e), (45.6)
x (fl + e) - 0. (45.7)
Равенство (45.6) равносильно тому, что
xx (0 = 0 при е — t — А 4-е. (45.8)
Но тогда из (45.5) следует, что на промежутке fl -- e< 2&+e
управление и (t) определяется равенством
и (t) = — х2 (t — А). (45.9)
Таким образом, для решения задачи 45.1 надлежит удовлетворить
теперь двум условиям: условию (45.8) и условию х2 (А , е) — 0.
Обсудим сначала условие (45.8). Выполнить его можно тогда
и только тогда, когда, с одной стороны, выбором и (£) при 0 ;<е
удастся привести объект в состояние
01 (в) = 0, (45.10)
а с другой,— удастся за счет выбора управления и (t) прие <3 <С
<4 е 4- А удерживать объект в состоянии х± (t) = 0 вплоть до
момента t = е 4- А. Но последнее требование означает, что следует
выполнить условие
*1 (0 = «12*2 (0 + £11*1 { — О) + £12*2 (t — ft) + и (i) =0,
(45.11)
которое и определяет управление и (t) на отрезке е — t <Z е 4- А.
Если (45.8) выполняется, то для координаты х2 (t) имеем при
в — t — е 4- А уравнение
*2 (0 = я22*2 (0 4- £21*1 G — А). (45.12)
Как видно из приведенных рассуждений, мы должны теперь по¬
стараться так распорядиться управлением и (t) при 0 — t < е,
чтобы выполнить условия (45.7) и (45.10). Обсудим их. С этой
§ 45] ЗАДАЧА ОБ УСПОКОЕНИИ СИСТЕМ С ПОСЛЕДЕЙСТВИЕМ 361
целью запишем выражение для х[ (е) и у2 (ft -j е), пользуясь фор¬
мулой Коши.
Исходя из (45.1), находим, что хг (е) есть первая координата
вектора х (е), где
е
х (е) = X [е, 0] х° (0) + § X т] (т — fl1) dx +
о
е
+ X [е, т] Ьи (т) dx. (45.13)
о ■
Здесь X И, т] — фундаментальная матрица системы
х = Ах.
Величина х2 (ft + 8) вычисляется следующим путем. Из (45.12)
находим:
е
#2 (е f ft) = e°26 Я2 (ft) + j е^е+о^!^ (£ — tydt,. (45.14)
&
Из того же соотношения (45.12) имеем следующее равенство для
х2 (ft):
а
х2 (f) = х2 (е) еа-г(9_Е> + (е2!(®-°) (£ — ft)c?g. (45Л5)
' е
Наконец, исходя из (45.1), получаем:
х2 (е) = #21 (е, 0) х» (0) + х22 (е, 0) х" (0) +
е
+ [®31 (е, giUy (£ j— О) +
О
е
+ (22(е, £)g2ia((C — ^)— + (221(е, £)w(£)d£ (45.16)
О
и .
X-L (t) = хп (t, 0) х» (0) + £18 (t, 0) я® (0) +
t
+ j [#11 ((Z) Si (0) + #12 G, £) (21#2 (0)1 +
0
t
+ (111*, & и (£) dt, (0 < t < 8). (45.17)
0
Подставляя в (45.14) величины x2 (ft) (45.15) и хг (t) (45.17), а так¬
же учитывая (45.16), определяем полное выражение для х2 (г -|- ft).
352
ЛИНЕЙНЫЕ СИСТЕМЫ С ОСНАЩЕННОСТЯМИ
[Гл. И
Полагая теперь, что h (е) = 0, (ft -|- е) = 0, в результате не¬
сложных преобразований получим следующие два уравнения для
функции и (t):
е
с{= .Тг(’>[б, т] и (т) dx (z = 1, 2),
о
(45.18)
где /z(1> [е, т] означает первую координату вектора X [е, т] Ь, а функ¬
ция hh h [е,
т]
еа'^х21
Е
(е, т) + £21*11 (£,
т
С означает
первую координату вектора
е
- [х 0] хо (0) + $ X [е, £] Gxo (£ - fi) d]] ,
О
а число
С2 -= [а*21 (е, 0) х[ (0) + Х22 (е, 0) х* (0)] +
е
+ еа^ $ [х21 С) hhh (£ — f1) + Х22 (е, £) g2ia* (С — О)] dt, +
о
а
+ 5 ee'-—'--Vg21x° (£ — f) dt +
Е
Е
+ $ ea-^~V [xj_i (С 0) х° (0) + я!2 (£ 0) х° (0)] g2id; +
о
е £
+ h еа,= ((-Ч! g21 (Л [хп (£, X) (glxx® (X — ф) +
о о
+ X* (X — d\T)) + Х!2 (£ X)g21X0 (X — fl)](^%}dg.
Итак, приходим к следующему выводу: при данном начальном
состоянии х° (t) (— ■& <С t <С 0) задача разрешима тогда и только
тогда, когда разрешима проблема моментов (45.18). При этом уп¬
равление и (t) на отрезке 0 h t <С е определяется из уравнений
(45.18), а при е h t h 8 + 2i* функция и (t) находится из условий
(45.9), (45.11). Таким образом, вопрос о решении задачи 45.1
свелся к разрешению уравнений (45.18). Как нам известно, удов¬
летворить таким уравнениям при любых числах Сг и C2 можно в том
и только том случае, когда функции /z(14e, т] и /г<2> [е, т] линейно
независимы. Можно проверить, что для такой линейной независи¬
мости функций [е, т] и 7г<2>[е, т] во всяком случае достаточно,
чтобы выполнялось условие g21—a2iea'^=j= 0. На проверке этого
утверждения мы останавливаться не будем.
§ 451
ЗАДАЧА ОБ УСПОКОЕНИИ СИСТЕМ С ПОСЛЕДЕЙСТВИЕМ 363
П римеча ние 45.1. Обсудим еще раз описанное только что решение
задачи, делая акцент на его геометрическом смысле. Рассмотрим трехмерное
пространство {Д т2}. Нам требовалось, чтобы при Ф + е/ 2<2Ф + е
кривая т (£) шла по осп t. При отсутствии управления (т. е. при и (t) = 0)
точка т (t) сбрасывалась бы соси t в направлении вектора скорости (/) =
== Gx (t — ft). Эта скорость должна гаситься вектором bu (t). Но это возмож¬
но тогда и только тогда, когда векторы Gx (£ — Ф) и b коллинеарны. Послед¬
нее обстоятельство требует в свою очередь, чтобы кривая т (t — Ф) (Ф +
+ е < t < 2$ + s) лежала в плоскости л, проходящей через ось t и вектор е
такой, что Ge = b (рис. 45.1). Сохранения же кривой т (t) при е < t < Ф + е
в плоскости л во всяком случае можно добиться, если векторы b и е не
коллинеарны. Таким образом, при О + е < t < 2$ + е и е < +
+ е управление и (t) определяется из условия сохранения кривой т (t) на
оси t и в плоскости л соответственно. Далее для решения задачи остается лишь
распорядиться управлением и (f) при 0 < t < е так, чтобы обеспечить при¬
ведение кривой т (t) к моменту t = е на плоскость л и к моменту t = Ф + е —
в точку т = 0. Последние условия выражаются равенствами (45.13).
Аналогичное последовательное сохранение кривой т (t) в линейных подпро¬
странствах, подобных плоскости л, будет сопровождать решение задачи об
управлении системой с последействием и в случаях более высокой (нежели 2)
размерности вектора т (t). При этом может потребоваться увеличение длины
участка < на соответствующее число интервалов О.
Заключая параграф, отметим, что рассмотренная выше задача
45.1 ставит, по сути дела, вопрос о возможности успокоить систе¬
му с запаздыванием. Ответ на этот вопрос оказался в принципе
положительным, однако из приведенных нами рассуждений видно,
364
ЛИНЕЙНЫЕ СИСТЕМЫ С. ОСОБЕННОСТЯМИ
1Гл. И
что задача допускает неоднозначное решение. Выделение какой-ли¬
бо одной функции u° (t) из множества решений задачи 45.1 можно
осуществить, накладывая на функцию и (t) еще требование опти¬
мальности в смысле, например, минимума какой-либо нормы функ¬
ции и (/). В решении такой новой задачи следует опираться на
результаты предыдущих глав.
При этом, жак и в других подобных случаях, наименьшие труд¬
ности в вычислениях возникают тогда, когда минимизируемая ве¬
личина х2&+£[и] выбирается в виде '
2&+е
«2»+е [и- (т)] -- \ || и (т) ||2 dx • min. (45.19)
о
Для сведения задачи (45.18), (45.19) к проблеме моментов
(45.18) с дополнительным условием в привычной для нас форме,
надлежит тогда свести условие минимума величины (45.19) к усло¬
вию минимума некоторой величины
хЕ [и (т)1 = min, (45.20)
зависящей лишь от и (т) при 0 • т • е. Это получается здесь есте¬
ственным путем, так как согласно предыдущему (см. стр. 360).
функция и (t) при £ > е вполне определена функцией и (т) (0 %
т < е). Рассуждения и выкладки, которые приходится делать
при таком сведении к обычной проблеме моментов (45.18), (45.19)
подобны (с незначительными изменениями) тем выкладкам, с кото¬
рыми мы уже встречались в § 18 (см. стр. 131).
§ 46. Наблюдение в случайных обстоятельствах
В этом параграфе рассматривается задача, которая лежит не¬
сколько в стороне от основного содержания нашей книги. Это
будет проблема о наблюдении фазовых координат объекта по сиг¬
налу z (т), содержащему случайную 'аоыеху Д (т). Включение дан¬
ного материала в монографию объясняется общими чертами в мето¬
дах исследования вопросов, рассматриваемых здесь, и задач, рас¬
смотренных выше. Кроме того, здесь попутно будет показано, как
развитый раньше метод работает тогда, когда сигнал z (т) связан
с фазовым вектором х (t) дифференциальным уравнением, т. е.
когда учитывается инерционность измерительных устройств.
Задача об оптимальном выделении полезной информации из
случайного сигнала очень важна для приложений. Она послужи¬
ла источником для фундаментальных математических теорий
фильтрации шумов и прогноза будущего. Эти теории, которым по¬
священы, например, следующие известные монографии и работы
§ 4б]
НАБЛЮДЕНИЕ В СЛУЧАЙНЫХ. ОБСТ ЯТЕЛЬСТВАХ
365
[103,41,228], составляют важную главу в общей теории вероятност¬
ных процессов. По сравнению с упомянутыми проблемами задача,
которую мы сейчас обсудим, имеет частный характер. Как уже
отмечалось выше, она рассматривается здесь лишь с целью расши¬
рить представление о наших методах исследования.
Итак, рассмотрим следующую задачу. Пусть имеется управляе¬
мый объект, описываемый, как обычно, дифференциальным урав¬
нением
х (t) — A (t) х (t), (46.1)
причем возможно измерять сигнал z (т), который связан с фазовым
вектором х (t) также дифференциальным уравнением
z (t) — F (t) z (t) -- G (t) х (t) ( А (/), (46.2)
где матрицы F и G характеризуют динамику измерительного
устройства. Для упрощения мы ограничимся случаем, когда
z (t) — скалярная функция. Тогда, следовательно, F — скаляр¬
ная переменная, a G — вектор-строка gf (t) = {g (Z), . . .. gn (t)}.
Помеху A (t) будем считать случайной функцией, которая имеет
следующее строение. Примем, что A (t) может реализоваться в
виде случайной последовательности импульсов
со
д(0 = 2 W-k), (46.3)
г=1
Здесь 2 . и 2 . суть случайные величины, т. е. такие величины, кото¬
рые могут принимать те или иные значения в зависимости от слу¬
чайных обстоятельств. При этом предполагается, что физические
условия опыта определяют для каждого значения случайной вели¬
чины вероятность появления этого значения. Мы будем предпо¬
лагать, что моменты tt действия импульсов распределены во време¬
ни по закону Пуассона со средней частотой А (см. [5*], стр. 101).
Это означает, что вероятность Рт [АП появления т импульсов на
отрезке времени продолжительностью \t выражается равенством
рт [At] = (46.4)
При этом важно подчеркнуть, что случайные события, связан¬
ные с помехой A (t) и относящиеся к двум любым непересекающимся
интервалам или отрезкам времени, предполагаются нами неза¬
висимыми. Напомним, что случайное событие В называется неза¬
висимым от события А ([5*], стр. 55), если вероятность Р [В/А] со¬
бытия В, вычисленная при известном уже факте об осуществлении
события А, совпадает с вероятностью Р [5] этого события, вы¬
числяемой без учета информации о событии А. В частности, если
366
ЛИНЕЙНЫЕ СИСТЕМЫ С ОСОБЕННОСТЯМИ
[Гл. И
речь идет о случайных величинах Д ,, то они называются незави¬
симыми, когда независимы любые события Aiy состоящие в осущест¬
влении неравенств ,, | аг, каковы бы ни были числа од , В соот¬
ветствии с нашим условием мы будем считать случайные величи¬
ны gf, определяющие интенсивность импульсов, независимыми и
друг с другом и со случайными значениями ■ ,, Кроме того, для
упрощения примем еще, что каждая из величин Д , может прини¬
мать лишь два значения: g)11 — ей £ Д■ = — е, притом с одинако¬
выми вероятностями Р [£(г1>1 = Р [g)2)] == 1/2. Величину е будем
считать весьма малой, полагая зато среднюю частоту импульсов X
достаточно большой для того, чтобы величина е2Х, которая харак¬
теризует мощность помехи Д (t), не была пренебрежимо малой.
Полезно отметить, что описанная помеха Д(£) характерна, напри¬
мер, для тепловых шумов, возникающих в электронных устройст¬
вах (см. [186, 228]).
Прежде чем идти дальше, напомним еще одно важное понятие
из теории вероятностей. Речь идет о математическом ожидании
или среднем значении М{£} случайной величины % (см. [5*],
стр. 166). Это есть число, имеющее смысл суммы, составленной из
произведений тех значений, которые может принимать случайная
величина, на соответствующие этим значениям вероятности. В част¬
ности, для случайных величин Д , имеем:
М&} = \Р $«] + ^р $’>] = е4-е-] = 0. (46.5)
Итак, для сигнала z (т), рассматриваемого, как обычно, на
отрезке t — О | т |1, получаем следующую картину. Пусть
в момент т = t — О' реализовалось некоторое значение z (t — О) =
= z° и пусть под влиянием случайных обстоятельств фактически
на отрезке t — О | т |1 реализуется некоторая вполне опреде¬
ленная последовательность импульсов
к
Д“(т) =S ltd ((-?“). (46.6)
i=i
Здесь значок со отмечает, следовательно, некоторую действи¬
тельно осуществившуюся помеху А“ (т) из числа всех возможных
случайных помех Д (т). В теории вероятностей такие функции
Д“ (т) называют реализациями случайного процесса Д (т) (46.3).
В свою очередь реализация Д° (т) в соответствии с уравнением
(46.2) породит реализацию z“(t) сигнала z (т). Это будет кусочно¬
непрерывная функция (непрерывная справа), которая претерпе¬
вает разрывы величиной | = ± е в точках т = t? и удовлетво¬
ряет начальному условию I (£ — ■&) = z° (рис. 46.1).
§ 46]
НАБЛЮДЕНИЕ В СЛУЧАЙНЫХ ОБСТОЯТЕЛЬСТВАХ
367
Если теперь перебрать (мысленно!) все возможные реализации
(т) помехи А (т), то получим пучок всех возможных реализа¬
ций^ ■"' (т) (см. рис. 46.1), которые и составят случайную функ¬
цию Z (т).
Задача о наблюдении может быть сформулирована теперь
следующим образом: не зная наперед, какая реализация А°> (т)
осуществится на самом деле, требуется указать' операцию
ф? [£, z (t)], которая вычисляла бы^нужную фазовую координату
Xi (t) объекта с наилучшей
достижимой точностью. Уточ¬
ним последнее выражение.
Пусть мы выбрали какую-
нибудь операцию ф [z (т)].
Тогда, ■ полагая, что реали¬
зовался некоторый сигнал
z™ (х), и выполняя операцию
на этом сигнале, получим:
Ф [ ■ ■ (т)] = Xi (t)
где ■ ■ — реализация случай¬
ной ошибки w. Желательно
сделать ошибку w возможно
меньшей. Проанализируем
эту ошибку. Нетрудно со¬
образить, что величина ■ ■
щих: wu- = Wx Здесь
ка в определении xt (t) операцией ф, которая возникала бы и в от¬
сутствие помехи. Иначе говоря, w* — это погрешность операции
ф, которая имела бы место, если бы даже эта операция выполня¬
лась на идеальном сигнале у (т), не несущем помехи и связанном,
следовательно, с фазовым вектором х (t) уравнением
складывается из двух составляю-
символом wx обозначена та ошиб-
У = Р (О У (t) + G (0 х (t).
Символ ■, напротив, обозначает ту часть погрешности
которая определяется только помехой А«(т). В условиях задачи
мы никак не оговариваем вероятность осуществления того или
иного значения х (t). Поэтому те доводы о характере искомой опе¬
рации ф = ф°, которые можно здесь привести, исходя из оценки
величины wx, совпадут целиком с теми рассуждениями, которые
уже встречались нам в § 33 (см. стр. 280). Но тогда, как и в § 33,
мы придем, к выводу, что искомая операция ф = ф?, выполненная
на идеальном сигнале у (т), должна давать точное значение xt (t).
Иначе говоря, для этой операции должно быть wx = 0. Только те
368
ЛИНЕЙНЫЕ СИСТЕМЫ С ОСОБЕННОСТЯМИ
[Гл. И
операции ф, которые удовлетворяют этому условию, и рассматри¬
ваются дальше в этом параграфе. Но тогда ошибка w будет слу¬
чайной величиной, составленной из ее реализаций ) , для кото¬
рых можно подсчитать распределение вероятностей (по крайней
мере в принципе), исходя из заданного распределения вероятно¬
стей для помехи А (т). Однако простейшей мерой, которая удов¬
летворительно оценивает величину подобной случайной ошибки
w, является математическое ожидание ее квадрата М{ш2}. Таким
образом, приходим к следующей задаче.
Задача 46.1. Найти оптимальную операцию <р? [£, z (т)1,
работающую на идеальном сигнале у (т) без ошибки и восстанавли¬
вающую координату xt (t) по реальному сигналу z (т)
хг (О = Ф? К 2 (т)1 + w
с наименьшей возможной погрешностью
М {ш2} = min.
Перейдем к решению этой задачи. Запишем сначала явное вы¬
ражение для сигнала и(т), полагая, как обычно, известными для
системы (46.2) фундаментальную матрицу Z U, т] и импульсную
переходную функцию Н [£, т] по воздействию х (т). В рассматри¬
ваемом скалярном случае сигнала z (т) это будут соответственно
скалярная переменная z (t, т) и вектор-строка h' [£, т] =
= {. [£, т], . . ., hn [£, т]} = z (t, т) g' (т). Итак, записываем по
Формуле Коши:
т
z (т) = z (т, t — fl) zo + G h (т, £) х (£) +
t-а
т
+ $г(г,С)Д(С)М. (46.7)
tQ
В соответствии с нашей договоренностью это и другие выражения,
содержащие случайные функции, условимся понимать как соот¬
ношения, связывающие соответствующие друг другу реализации
этих функций. Мы, однако, не подчеркиваем в дальнейшем указан¬
ное обстоятельство индексом о>, чтобы сохранить для рассматри¬
ваемых соотношений смысл равенств, верных для любой реализа¬
ции. В дальнейшем нас будут интересовать лишь два последних
слагаемых в правой части равенства (46.7). Действительно, оче¬
видно, достаточно найти операцию )0 [я (т)], которая оптимально
выделяет величину xt (t) из сигнала q (х) = z (т) — z (т, t — ft) z°,
ибо тогда мы можем просто положить:
ф- [£, z (?)] = фа[г (т) — z (т, t — ft) z°] (46.8)
§ 46 J
НАБЛЮДЕНИЕ В СЛУЧАЙНЫХ ОБСТОЯТЕЛЬСТВАХ
369
(см. аналогичную ситуацию, рассмотренную в § 34 (стр. 290) при
решении задачи о наблюдении). Итак, нам надо найти операцию
Ф° [# (т)1, которая - на сигнале
т т
7(Т= - И*. 21 ж (5) f 4- 5 z(r,£)A (£)<*£ (46.9)
t— t—э '
дает ошибку w = x- (t) — <ра [# (т)] с наименьшим возможным
средним значением квадрата М{и2} этой ошибки. Отсюда вытекает,
что операция ф° должна удовлетворять следующим двум условиям:
т
Ф°[ §A'[t,£] *(£)d£] = М°) (46.’0)
/—О ■
и
т
М {и?} = М {[<р° [ 5 2 £А (?) d]]2} = min, (46.11)
t—»
причем первое из этих условий означает, что, как мы уже услови¬
лись, операция дЛ (46.8) в отсутствие помехи А (т) дает точное зна¬
чение xt (t). Неизвестную операцию ф° [#1 будем искать в виде
t
<ра[£(т)] = 7(t)dV(T), (46.12)
[—О
где V (т) — искомая функция с ограниченнымГизменением. Здесь,
правда, возникает небольшое недоразумение: реализации #“(т)
сигнала q (т) (46.9) являются функциями кусочно-непрерывными,
поскольку реализации помехи А“ (т) являются функциями им¬
пульсными. Но операция (46.12), строго говоря, определена лишь
для непрерывных функций?# (т), и в случае совпадения точек раз¬
рыва у q (т) и V (т) получаются осложнения. Однако мы можем
пренебречь этим осложнением по следующей причине. В резуль¬
тате решения задачи мы получим функцию V (т) всего с одной точ¬
кой разрыва. Тогда можно подсчитать, что вероятность совпадения
точек разрыва у V (т) и #“ (т) равна нулю. Кроме того, вслед¬
ствие малости е даже и совпадение разрывов V (т) и q (т) не при¬
ведет к большим неприятностям, так как - тогда в качестве q (т)
можно выбирать без существенного влияния на результат и q (t -J-O)
и q (т — 0). Ограничимся здесь только таким не вполне строгим,
но правдоподобным рассуждением, обосновывающим возмож¬
ность выбора операции ф° в виде (46.12). Заметим еще, что часто
вместо помехи А (т) (46.3) рассматривают «непрерывную» помеху,
являющуюся предельным случаем для (46.3) при е ( 0 и X -> оо,
так что величина е2Х остается конечной (см., например, [228]).
370
ЛИНЕЙНЫЕ СИСТЕМЫ С ОСОБЕННОСТЯМИ
[Гл. И
Получающиеся тогда реализации — (т) можно считать непрерыв¬
ными, но обоснование работы с такой «предельной» помехой А (т)
требует зато достаточно сложного математического аппарата,
и поэтому от такого пути мы здесь отказались. Итак, будем искать
операцию ср’ в виде (46.12). Тогда условие (46.10) примет вид
t т
§ [$ h' [Т £] х ® d[] dV (т) = Ж1(<). (46.13)
t—в- ( t—э
Учитывая, что х (£) = X [[, d х (t), h' [т, £] = z (т, £)g'(0
и меняя порядок интегрирования в левой части равенства (46.13),
получим из этого равенства следующее уравнение для искомой
функции V (т):
t t
[ $ g' (О х [[ q [J z (t g) dv (r)] dg] xк = х{ (t),
t—& к
которое должно удовлетворяться при любом значении х (t). Отсюда
заключаем, что функция V (т) должна удовлетворять следующей
системе уравнений:
t t
S 7z>(»([)*(r, [)dF(t)]d[ = ((=i,...,n), (46.14)
t-& Л
где Ct = 1 и Cj = 0 при 7 =/= f, символ №> (£) означает 7-ю компо¬
ненту вектора-строки g’ ([) X [£, tj.
Теперь преобразуем выражение (46.11). Для этого нам надо
вычислить математическое ожидание от квадрата интеграла
t т
7= П $ z(T, [)А([)<ф7(т).
t—& t—a
Преобразуем этот интеграл, поменяв снова порядок интегри¬
рования. Получим:
t t
1= J A^JzT [)dK(v)]d[.
t—» t
Для дальнейшего удобно ввести новую функцию и (т), опре¬
деленную из условия
t
w(O = $z(r,[) dV (т).
(46.15)
§ 4G]
НАБЛЮДЕНИЕ В СЛУЧАЙНЫХ ОБСТОЯТЕЛЬСТВАХ
371
Тогда придем к задаче о вычислении величины математического
ожидания
t
Д(С)В(С)<)ф
t—&
Это вычисление производится по известным, строго обоснован¬
ным правилам теории вероятностей. Мы, однако, выполним это
вычисление, исходя из наглядных, не вполне строгих, но правдо¬
подобных соображений. Для этой цели представим интеграл I
в виде суммы интегралов, вычисленных по отрезкам [£., £/.+1)
(к = 0, . .. . пг — 2), [Cto_7, l 1 . составляющим весь отрезок И — #,/].
Получим:
т-1 £ /. +1
1 = 3 1 $ Д (С) «(£)<£.
1=0 <);
В результате этого интеграл I представляется как сумма слу¬
чайных величин
Q+i
1Ъ= $ Д(£)и(М-
Обсудим величины т] . . Из равенства (46.4) нетрудно вывести,
что при малом значении разности £1+1 — Ц вероятность того, что
на интервале [£., Д+i) осуществится в помехе Д (т) больше одного
импульса, есть величина высшего порядка малости по сравнению
с длиной этого интервала. Но тогда, пренебрегая такими величи¬
нами высшего порядка малости и выводя из (46.4), что вероятность
появления одного импульса на интервале [£/., ^+i) есть Р± [[£k,
+1 )] ~(Ст — )Х, мы можем принять, что величина т]к прини¬
мает лишь три значения: г]J,1* ~&и (£), — ей (£), ц^) = О
соответственно с вероятностями
Р/D ~ у (£*+1 '
ры ~ 1X (£.+1 - Ы, р<& = 1 - ру - р?
Отсюда, между прочим, сразу выводится, что математическое ожи¬
дание М {1']/.}кaждоО случайной величины . . есть нуль, а значит,
будет нулем и математическое ожидание интеграла М {/}, так как
известно, что математическое ожидание суммы случайных вели¬
чин равно сумме их математических ожиданий. Итак, нам нужно
теперь сосчитать математическое ожидание М {12} от квадрата
суммы I случайных величин . .. каждая из которых имеет нулевое
372
ЛИНЕЙНЫЕ СИСТЕМЫ С ОСОБЕННОСТЯМИ
[Гл. И
математическое ожидание. Это математическое ожидание, как из¬
вестно, называют дисперсией случайной величины I. Но в нашем
случае по условиям задачи случайные величины оказываются
независимыми. В теории вероятностей, однако, доказывается, что
дисперсия суммы независимых случайных величин равна сумме
дисперсий слагаемых. Так как Л) ) } = р}.11 [ц/.|)]2 -|- р!,2> [ц<2>р __
= е2Х (£fn — £k)u2 (£), то получаем, следовательно:
т-1 '
М{Г}}* 2 ^w^) (46.16)
/.=0
Полагая теперь, что число делений т отрезка [/ — #, П неогра¬
ниченно возрастает, а величины разностей (£j.+r — ) ) ) ' равномерно
стремятся к нулю, мы можем перейти в (46.16) в пределе к инте¬
гралу и тогда получим:
t
М{Г} = $ 82Х«2(£Х (46.17)
i а
Теперь из (46.14), (46.15) и (46.17) заключаем, что рассматри¬
ваемая нами задача свелась к проблеме моментов: найти функцию
и (£), которая удовлетворяет уравнениям
t
$ (46.18)
и имеет при этом наименьшую возможную норму ^М{72}]^2. Эту за¬
дачу мы уже решали. Нам остается лишь проверить, что после оп¬
ределения функции и (£) мы сможем из уравнения (46.15) опреде¬
лить функцию V (т), чем и завершится решение задачи (46.1). Од¬
нако уравнение (46.15) — это интегральное уравнение, которое
при наших условиях, действительно, имеет нужное решение V (т).
При этом можно проверить, что функция V (т), разрешающая дан¬
ное уравнение, является непрерывно дифференцируемой всюду,
кроме, может быть, точки т = t, где V (t) — V (t — 0) = и (t).
Мы не будем останавливаться здесь на этой проверке в общем слу¬
чае, но лишь продемонстрируем вычисления V (т) на следующем
простом примере.
Пр имер 46.1. Рассмотрим, как и в § 32, уравнения
описывающие свободное движение материальной точки лг по прямой £. При¬
мем, что измерительное устройство описывается уравнением
z = хг + Д (t). (46.20)
§ 4«1
НАБЛЮДЕНИЕ В СЛУЧАЙНЫХ ОБСТОЯТЕЛЬСТВАХ
373
Здесь z (t) — скалярная переменная; случайная помеха в измерительном
устройстве имеет вид (46.3), описанный в начале данного параграфа. Требу¬
ется найти операцию ср^ [z (т)], восстанавливающую координату z2 (t) по
сигналу z (т) (t — О' < т < t)
Х («) = fp® [г (т)] + W
и обеспечивающую наименьшую возможную дисперсию ошибки
М {ш2} = min.
В соответствии с результатами данного параграфа операцию ф2 [ z (т)]
следует искать в виде
t
<2^С)П = <Р° Г7С^)]]= 5 4W)W-
Здесь q (т) = z (т) — z (т, t — Ф)г°, z (т,£ — О) — фундаментальное реше¬
ние уравнения (46.20), z° = z (t — Ф). Для уравнения (46.20) фундаменталь¬
ное решение z (x,t — ft) и импульсная переходная функция h'[t, т] по воз¬
действию х (т) определяются равенствами
z(x,t — 0) = ], h’ [£, т] = {], 0}.
Вектор-строка g’ = {gi, g2} = {1,0}. Фундаментальная матрица X [т, £0]
системы (46.19) имеет вид
X [т, «о] = |Р
х — t0
1
Определим функции Z3[ (£) ( = 1,2), являющиеся компонентами вектор-
строки g’ X,
{Л<1](О л(2)о = g'x = {1, 0}
Введем теперь в соответствии с условием (46.10) функцию
t t
и (□ = ( ( ( т. QdV(r) = ^V(T).
Г. t
Тогда задача сводится к следующей проблеме моментов: найти функцию
и (£), которая удовлетворяет уравнениям
t t
J «М = 0, J (C-i)uC)rfC=]
t—& t—9
и имеет наименьшую возможную норму
t
M{w*} = u2 (J) = mfa.
t—a
374
ЛИНЕЙНЫЕ СИСТЕМЫ С ОСОБЕННОСТЯМИ
[Гл. И
Ре,шение этой задачи имеет вид
6 , 12
“°(?) +
Подробности, связанные с определением u° (£), мы опускаем, поскольку
аналогичная задача неоднократно решалась на протяжении данной книги
(см., например, стр. 126).
Для определения функции V (т) получим теперь интегральное уравнение
t
G 12 г
$2 4“ фз (? — t) — У dV (т).
£
Нетрудно проверить, что решением этого уравнения служит следующая
функция 7° (т) с ограниченным изменением
12 „ „
7° (т) == — •• Iт — (« — О)] при t — 0 < т < • t,
6
7° (?) = — лТ при т = t.
Следовательно, dV° (т) = — у dx ф у 6 (2 — т) dx. Таким образом, для оп¬
ределения координаты х2 (<) в момент времени t получим операцию
t
а:» («) = • [z (Т)] + w = • [z (?) — z (г — ф)] dV° (?) ф w =
t—»
12. fz (t) + z (t —
= 2
t
1 С 1
' z (?) dtj- + w.
При этом дисперсия ошибки M{w2} определяется равенством
t
Г Г 6 12 J2 12е»
М {w2} — е2% \ |у + у (£ — Cj • — -уз
t—^L
§ 47. Примечания
В настоящих примечаниях перечисляются некоторые основные
работы, послужившие источником для материала данной моногра¬
фии. Подчеркнем еще раз обстоятельство, о котором уже шла речь
во введении к книге. Эти примечания ни в коей мере не претен¬
дуют на полный и объективный анализ истории вопроса. Здесь про¬
сто указывается журнальный материал, опираясь на который ав¬
тор составил предложенную монографию. При этом вследствие
ограниченной информации, которой располагал автор, может ока¬
заться, что в том или другом случае будет упомянута не та работа,
где была высказана впервые соответствующая мысль. За все по¬
§ 47]
ПРИМЕЧАНИЯ
375
добные недоразумения автор заранее приносит извинения и на¬
деется, что в случае необходимости читатель всегда может ис¬
править на свой вкус данные примечания, сопоставляя их с библио¬
графией, приведенной в конце книги.
Трудно было бы указать первые работы, где было, по существу,
начато изучение проблем оптимального управления, так как эти
проблемы зародились, очевидно, в недрах специальных техничес¬
ких дисциплин, где и решались сначала в каждом частном случае
соответствующими приемами. Постепенно и в значительной степе¬
ни в связи с задачами развития новой техники проблемы управле¬
ния приобрели большой удельный вес и начали выделяться в само¬
стоятельное научное направление. Это явление можно отнести к
сороковым — пятидесятым годам, когда специалисты, работавшие
в области приложений, столкнулись с большим числом серьезных
вариационных задач об управлении. По-видимому, вначале боль¬
шинство задач об оптимальном управлении решалось (и весьма
успешно) методами классического вариационного исчисления.
Представление об этом периоде дают, например, статьи и книги
[163, 164, 1326, 3646, 3836], где также указана соответствующая
библиография. В то же время параллельно началась публикация
работ, развивающих общую математическую теорию процессов
управления. В качестве одной из первых конкретных работ нового
направления следует указать работу Д. Е. Охоцимского [163], а
также статью Д. Е. Охоцимского и Т. А. Энеева [164]. Далее
отметим работы Д. Бушау (см. [276а, б]), где методами качествен¬
ной теории дифференциальных уравнений было дано весьма пол¬
ное решение проблемы синтеза оптимальной системы предельного
быстродействия, описываемой дифференциальным уравнением вто¬
рого порядка. Существенным этапом в развитии общей теории оп¬
тимальных процессов в нашей стране явилась общая постановка
проблемы об оптимальном управлении, предложенная в 1953 г.
А. А. Фельдбаумом на совместном семинаре инженеров и матема¬
тиков, руководимом Л. С. Понтрягиным. Эта постановка задачи,
подводившая итог первым исследованиям А. А. Фельдбаума
[213а, б] и А. Я. Лернера [135а] по проблемам предельного быст¬
родействия, вызвала серьезный интерес у математиков. Результа¬
том этого интереса явилась математическая теория оптимальных
процессов, разработанная в 1956—1960 гг. Л. С. Понтрягиным и
его сотрудниками В. Г. Болтянским, Р. В. Гамкрелидзе и
Е. Ф. Мищенко и подытоженная в известной монографии [179]
этими авторами. Эта фундаментальная теория имеет своей осно¬
вой так называемый «принцип максимума», указывающий необхо¬
димые условия оптимальности для широкого круга проблем опти¬
мального программного управления. Примерно в то же самое время
Р. Веллманом и его сотрудниками были разработаны основы
376
ЛИНЕЙНЫЕ СИСТЕМЫ С ОСОБЕННОСТЯМИ
[Гл. И
теории динамического программирования (см. [27а], [28а]), рассчи¬
танной на решение задач о синтезе оптимальных систем с обратной
связью. Уступая принципу максимума в смысле математической
строгости и завершенности, методы теории динамического програм¬
мирования обладают, однако, и рядом ценных достоинств, одно
из которых состоит в охвате чрезвычайно широкого круга проб¬
лем, включающего задачи синтеза как детерминированных, так
и вероятностных систем.
Работы школы Л. С. Понтрягина, равно как и работы Р. Велл¬
мана, вызвали к жизни обширную литературу, на обсуждении
которой мы, однако, не останавливаемся, так как большая часть
таких работ лежит в стороне от основной темы нашей книги.
Отметим лишь, что в ряде интересных исследований была подроб¬
но изучена связь новых методов Л. С. Понтрягина и Р. Веллмана
с классическими результатами вариационного исчисления. С эти¬
ми вопросами можно познакомиться, например, по работам [896,
191, 211, 335].
С самого начала применения тех или иных методов вариацион¬
ного исчисления к задачам об оптимальном управлении выясни¬
лись большие трудности, связанные с разрешением соответствую¬
щих краевых задач. Поскольку эти задачи оказывались наименее
трудными для линейных систем, а также в связи с другими удоб¬
ными свойствами таких систем, они привлекли особое внимание ис¬
следователей. В результате в общей теории оптимальных процес¬
сов выделился круг . проблем управления линейными объектами.
Некоторые из этих проблем и составили предмет данной моно¬
графии.
Одной из первых работ, где в достаточно общей форме исследо¬
валось влияние внешних воздействий на поведение линейной
системы, были исследования Н. Н. Лузина [143, 144]. При этом,
однако, исследовалась не столько возможность желаемого влияния
на объект (т. е. свойство управляемости объекта), сколько, напро¬
тив, выяснялась возможность исключения влияния этих воздей¬
ствий на фазовые координаты за счет выбора параметров объекта.
Таким образом, упомянутые работы относятся к так называемой
теории инвариантности регулируемых систем, которая также име¬
ет чрезвычайно большую библиографию (см., . например, [1226,
127, 1716]). Работы [143, 144] мы упоминаем, однако, здесь по
той причине, что некоторые из изученных там свойств линейных
систем проявились позже (и в новом качестве) в теории управле¬
ния линейными системами.
Впервые задачи об управлении линейными системами в аспек¬
тах, близких к тем, в которых они изучаются в монографии, были
изучены в связи с проблемой предельного быстродействия. Наря¬
ду с уже упоминавшейся работой Д. Бушау [276а], выполненной
§ 471
ПРИМЕЧАНИЯ
377
в 1952 г., следует назвать работу 1956 г. Р. Веллмана, И. Гликс-
берга и О. Гросса [27а], в которой, в частности, был использован
аппарат функционального анализа. Новый существенный шаг в
теории предельного быстродействия линейных систем был сделан
в 1957 г. Р. В. ^ммкРелидзе [55а], который на основе принципа
максимума установил свойства оптимального управления. В част¬
ности, им было доказано существование релейного оптимального
управления u° (t) для линейной системы с постоянными парамет¬
рами при условии, что существует по крайней мере одно допусти¬
мое управление и (£), разрешающее соответствующую задачу об
управлении и удовлетворяющее заданному ограничению. С пози¬
ций нашей монографии небезынтересно замечание Р. В. Гамкре-
лидзе (см. [556]) о том, что существенное упрощение рассуждений
было достигнуто благодаря расширению класса допустимых уп¬
равлений и (t) от кусочно-непрерывных до интегрируемых и огра¬
ниченных (по существу) функций (т. е. до управлений допускаемых,
если говорить в терминах нашей книги, см. ниже, примечание
47.1). Следует отметить, что это обстоятельство использовалось и
в работах Р. Веллмана (см. выше ссылку на работу [27а]). Далее,
в работах Р. В. Гамкрелидзе, по-видимому, впервые было опре¬
деленно указано на важное значение для теории линейных управ¬
ляемых систем «условия общего положения», которое для системы
i-(i^) = А х (t) + bu (47.1)
равносильно независимости векторов
Ъ, АЬ, . . ., Ап-Ъ (47.2)
и в общем случае имеет тот же смысл, что и условия управляемо¬
сти, изученные в нашей книге в § 19. При этом важность данного
условия была выяснена в связи с исследованием вопроса о един¬
ственности оптимального управления.
Принцип максимума Л. С. Понтрягина определяет оптималь¬
ное по быстродействию управление u° (t), коль скоро определен
вектор ф (/), фигурирующий в формулировке этого принципа и
являющийся решением уравнения
ф = - А'ф, (47.3)
сопряженного к данному (см. § 27, стр. 249).
Таким образом, на очереди дня появилась задача о выборе на¬
чальных условий ф (£а) вектора ф (t), которые обеспечивали бы *
приведение объекта в желаемое состояние. В связи с необходи¬
мостью найти подход к решению этой задачи автором была предло¬
жена трактовка ее как известной и хорошо исследованной уже
проблемы моментов из функционального анализа (см. статьи [110а,
б, д]). Основной исходный пункт этого подхода заключается в
378
ЛИНЕЙНЫЕ СИСТЕМЫ С ОСОВЕШ10СТЯМН
[Гл. И
интерпретации задачи об управлении как задачи о построении ли¬
нейного функционала, удовлетворяющего заданным условиям. Бо¬
лее того, было подчеркнуто, что многие условия оптимальности,
интересные для приложений, естественно приводятся к условию
минимума нормы искомого функционала и, следовательно, широ¬
кий круг задач об управлении допускает интерпретацию в форме
проблемы моментов (15.4) с условием (15.3). Таким образом, выяс¬
нились три полезных обстоятельства. Во-первых, поскольку дело
сводилось к проблеме построения искомого элемента из подходя¬
щего функционального пространства, можно было отказаться от
специального математического исследования задачи и воспользо¬
ваться сразу хорошо известными общими теоремами функциональ¬
ного анализа. Во-вторых, выяснилось, что в основе решения мно¬
гих задач об управлении линейными системами фактически лежит
известная теорема Хана — Банаха о распространении линейного
функционала. В третьих, таким путем был установлен общий ре¬
зультат, гласивший, что в широком классе случаев задача о при¬
ведении линейного объекта в желаемое состояние (или, иначе го¬
воря, задача о выборе начальных условий ф> (£а)) сводится к обыч¬
ной вариационной задаче на условный экстремум для функции
ф Ui, • • j j Zn) от конечного числа переменных lt j (см. задачу
(17.4) или задачу (17.5)).
Примечание 47.1. Полезно обратить внимание на следующее об¬
стоятельство. Обсуждаемый подход к задаче об оптимальном управлении
показывает, что класс возможных управлений и (т) удобно распростра¬
нять именно до множества допускаемых управлений и (т), составляющих
пространство <?*{м(т)}1 сопряженное к некоторому подходящему простран¬
ству 33 {h (г)}, если мы заранее хотим иметь уверенность в существовании
решения и° (т). Поясним это подробнее. Если выбирать и (т) из 32*{и (т)},
то из материала § 16, 17 мы знаем, что задача имеет решение и° (т) с нормой
р* [u°] = v°, где v° — наименьшее из чисел v, удовлетворяющих условию
п
I Г'с К vp j У /{/гМ (т) j (t =£ 0). Допустим, однако, что мы пошли по другому
4=i J
пути и в качестве множества допускаемых управлений выбрали некоторое
пространство 33 {и (т)} с нормой р [и] = х [и]. Тогда интегралы в правых
частях уравнений (15.1) можно интерпретировать снова как линейные опе¬
рации j{ [и], но выполняемые теперь на элементе и (т) из 33 {и} и порож¬
даемые функциями jjj (т), которые тогда следует рассматривать как элементы
пространства <$* {М, сопряженного к 33 {и}. Приходим к проблеме: найтиэле-
мент и° (т) из 3?{и}, на котором заданные операции ф принимают заданные
значения j , т. е. [и0] = j , причем норма р [и0] должна быть наимень¬
шей возможной. Естественным было бы пожелать, чтобы и здесь было спра¬
ведливо, например, такое утверждение: пусть v° — число, удовлетворяющее
п
условию | Гс I <V°p' j V jjj jj (t) j при всех /, тогда задача имеет решение и°
4=1 J
с нормой р [и0] = у0. Однако в общем случае это неверно (заключение
§ 47]
ПРИМЕЧАНИЯ
379
справедливо в так называемых рефлексивных пространствах ЕР{и}). Справед¬
ливо только утверждение (теорема Хелли [7*], стр. 68): для любого е>0
существует управление иг (т), удовлетворяющее (15.1) и имеющее норму
р [иЕ (т)] ) v° + е. Приведенные соображения показывают таким образом,
что выбор <$*■ {и (т)} в качестве совокупности допускаемых управлений
и (т) естественным образом замыкает эту совокупность так, что заранее
гарантируется существование оптимального управления u° (t).
Пользуясь случаем, заметим еще, что условие ,3--замкнугости, упомя¬
нутое на стр. 120 в связи с вопросом о замыкании множества ЕР {и(т)} допу¬
скаемых управлений и (t) до совокупности их, содержащей и искомое уп¬
равление, предъявляет, вообще говоря, несколько более сильные требования
к этому множеству, чем просто требование замкнутости ЕР {и (г)} в метрике
р* [и]. Поэтому, например, хотя множество ЕР {U} функций
и [«] с p*[<W] = var[£7[Zi.]^ < 1
и непрерывных в точке где £7[<а.] = 0, замкнуто в метрике
р* [dU] = varU,
однако нетрудно сконструировать задачу 4.2, для которой не будет су¬
ществовать оптимального управления dU0 (t) из 3^{U}, обеспечивающего
min p*[dZ7] при U из ЕР {U}, хотя при этом и будут выполняться все усло¬
вия для минимального движения s° (т) из правила 17.5, например.
Итак, мы видим, что обсуждаемый подход указывает естественный класс
функций и (т), в котором, строго говоря, надлежит искать управление и° (т).
Подчеркнем еще раз, что данный подход не вскрывает, новых ма¬
тематических фактов, являясь лишь интерпретацией известной
математической теории'в терминах задач об управлении. Тем не
менее он оказывается полезным, так как таким путем, с одной сто¬
роны, сразу и без больших усилий устанавливается немало фактов
теории оптимальных процессов в линейных системах: необходимые
и достаточные условия разрешимости задачи об управлении (или
задачи о предельном быстродействии), теорема о существовании
оптимального управления u° (Z), условия принципа максимума
и т. д. С другой стороны, условие минимума функции Ф (Zv ..., 1п)
открывает путь для численного решения соответствующих задач
об управлении. Заметим, наконец, что при таком подходе стано¬
вится совершенно прозрачным значение линейной независимости
функций Gi) 1 g являющихся строками импульсной переходной мат¬
рицы Н (см. §§ 16, 19, 20), для разрешимости задачи об управ¬
лении. Описанный здесь подход и составил базу того матери¬
ала, который изложен во II части нашей книги. Заметим, что не¬
сколько позже (начиная с 1959 г.) аналогичный подход к задачам
об управлении начал развивать Р. Куликовский (см. [123а, б]),
а затем и другие авторы (см., например, [98а, 47, 35а, 3896, 124а]).
Итак, рассматривая задачу об управлении как проблему по¬
строения линейного функционала, можно получить условия ее
разрешимости в форме линейной независимости функций hG [р,т],
а также вывести и оценку той или иной нормы р* [и] управления
380
ЛИНЕЙНЫЕ СИСТЕМЫ С ОСОБЕННОСТЯМИ
[Гл. 11
и (т), разрешающего проблему. (В работе [110а] был подробно ра¬
зобран случай р* [u] = vrai maxf,T- щ (т) |.)
В 1959 г. Р. Е. Калман рассмотрел вопрос о разрешении зада¬
чи об управлении в форме
п
u(t) = (47-4)
1=1
и предложил определение понятия h вполне управляемой системы,
как такой системы, для которой задача об управлении 4.1 имеет
решение при любых краевых условиях х (ta) = х* и х (tp) = x?
(см. Определение 19.1).
Управление и (t) вида (47.4) получается, как мы знаем и из опи¬
санного только что общего метода решения, если функции и (t)
рассматривать как элементы пространства.т(2) {и (т)} (см. § 19).
Однако теория управляемости на основе линейных управлений
вида (47.4) строится удобно и непосредственно на базе конечномер¬
ной линейной алгебры, что и было выполнено Р. Е. Калманом.
Известное представление об этом подходе к задаче об управлении
читатель может получить из I части нашей книги, содержанием
которой и является введение к общей теории линейного управле¬
ния, базирующееся на элементарных алгебраических соображе¬
ниях. Как уже отмечалось, условия независимости векторов (47.2)
в простейшем случае системы (47.1), равно как и более общие ана¬
логичные условия в других случаях, были указаны Р. В. Гамкрелид-
зе как условия линейной независимости функций h№ т] в свя¬
зи с исследованием характера оптимального по быстродействию
управления линейным объектом. Эти условия естественно совпали
с эффективными условиями управляемости, выведенными в работе
[896]. Следует отметить, что в обсуждаемый период времени роль
векторов вида Ьалк, где №> — столбцы матрицы В в стацио¬
нарном уравнении (19.1) (или заменяющих их векторов fc№l(t) в не¬
стационарном случае (см. § 20)), в задачах об управлении была
уже в значительной степени выяснена. В том числе было показа¬
но, например, в работе Ф. М. Кирилловой [98а], что условия об¬
щего положения обеспечивают непрерывную зависимость опти¬
мальных по быстродействию решений от параметров задачи. В ра¬
боте автора [110з] в то же время было показано, что эти условия
достаточны не только для разрешимости задачи об управлении ли¬
нейной системой, но и для разрешения задачи об управлении ква¬
зилинейной системой. Таким образом, справедливо считать, что
основные факты теории управления линейными объектами были
ясны к моменту выхода в свет работы [896]. Однако нельзя не со¬
гласиться с тем, что в этой работе теория управляемости получила
' стройный вид. Это в немалой степени объясняется введением но¬
§ 47]
ПРИМЕЧАНИЯ
381
вых удачных определений, оказавшихся весьма полезными в даль¬
нейшем развитии теории. Далее, начиная с работы [89в] была раз¬
вита интересная теория канонического преобразования линейных
систем по признакам управляемости и наблюдаемости, нашедшая
выходы к ряду смежных разделов теории регулирования (см.,
например, [4]). Наконец, в работе [89а,б] был сформулирован
принцип двойственности между управлением и. наблюдением,
своеобразно осветивший связь между этими двумя процессами.
К обсуждению последнего соотношения мы вернемся позже.
Заметим еще, что в 1959 г. появился цикл работ Я. Н. Ройтен-
берга, где были даны эффективные численные методы решения
задач об- управлении и - о наблюдении динамических систем, важ¬
ные для приложений (см. [193]).
Далее следует сказать, что в это же время (1959 г.) А. М. Ле¬
товым [1366, в] - и Р. Е. Калманом [896] были начаты исследования
задачи об управлении линейными системами при условии миниму¬
ма квадратичных оценок для и (t) в случае, когда время процесса
управления предполагалось бесконечным и когда краевое условие
х (t?) = - сводилось соответственно к условию х (оо) = 0. Эти ис¬
следования послужили источником для большой серии работ,
выходящих, однако, за рамки обзора, относящегося к настоящей
монографии, и составивших основу теории стабилизации управ¬
ляемых движений. Эта теория оказалась тесно связанной с клас¬
сической теорией устойчивости движения по Ляпунову. Пред¬
ставление об упомянутом направлении исследований можно по¬
черпнуть во 2-м издании монографии И. Г. Малкина [17*]. От¬
метим еще важные работы Дж. Ф. Ла-Салля [365а, б].
Начиная с 1960 г., развился постоянно расширяющийся поток
работ об управлении линейными объектами. В этом потоке пере¬
крещивающихся результатов трудно было бы навести порядок и
установить систему в настоящем кратком обзоре. Поэтому отме¬
тим здесь лишь несколько существенных фактов, которые так
или иначе связаны с нашей монографией.
(1) Всюду в данной книге рассматриваются задачи об управле¬
нии объектами, состояние которых характеризуется конечномер¬
ным фазовым вектором х (t). В то же время общие теоремы функци¬
онального анализа сохраняют свою силу и в случае бесконечно¬
мерного фазового вектора х (t). Это открывает возможность их
приложения и в этом случае. Однако следует иметь в виду, что для
бесконечномерных объектов извлечение эффективных конкрет¬
ных результатов из общих теорем, особенно в случаях, интересных
для механики, сопряжено с трудностями. Исследование беско¬
нечномерных линейных управляемых систем с позиций функцио¬
нального анализа было развито А. Г. Бутковским (см. его моно¬
графию [356], где приведена соответствующая библиография).
382
ЛИНЕЙНЫЕ СИСТЕМЫ С ОСОБЕННОСТЯМИ
[Гл. 11
(2) В нашей монографии по ходу дела обсуждалось уже сущест¬
венное место свойств выпуклых множеств в общей системе исполь¬
зуемых нами фактов из функционального анализа. Эти свойства
вообще играют большую роль в вариационном исчислении. Эта
роль объясняется, увы, не только важностью их с точки зрения
приложений, но и тем, что при отсутствии свойств выпуклости
соответствующие задачи обычно весьма усложняются. Поэтому
естественно, что математические конструкции, опирающиеся на
выпуклые множества, использовались —с самого начала построения
общей теории оптимального управления (см. работы Р. Веллмана
[276] и Л. С. Понтрягина и его сотрудников [179]) и затем посто¬
янно встречались в ходе развития этой теории. В частности, и тео¬
рема Хана — Банаха, упомянутая выше, на стр. 378, означает в
геометрической форме не что иное, как возможность отделения
гиперплоскостью плоского многообразия М от выпуклого мно¬
жества .Л (см. [6*]). Наконец, в 1963 г. X. Антосиевичем [244] бы¬
ла дана трактовка тех соотношений, которые определяют решение
задачи об управлении линейной системой, в форме условий от¬
деления выпуклых множеств г) в пространстве {х}. О подобной гео¬
метрической интерпретации речь шла в § 17 (см. стр. 116). Вывод
условий разрешения задач об управлении на такой основе описан
в § 38 (см. стр. 316). Разумеется, выбранная в качестве исходного
пункта, эта интерпретация приводит к уже известным соотноше¬
ниям, если условия оптимальности охватываются условиями , типа
(15.3). Это понятно, так как использование той или иной интер¬
претации не меняет математических фактов, которые составляют
существо дела. Однако непосредственная трактовка задачи как
проблемы отделения выпуклых множеств в пространстве {х} поз¬
воляет охватить наглядным образом также такие случаи пробле¬
мы моментов (15.4), когда дополнительные условия оптимальности
не сводятся к условию минимума нормы (15.3). Тем самым дости¬
гается естественное обобщение результатов, которые получились
при условии (15.3). Дальнейшие весьма разнообразные обобщения
получаются за счет расширения условий, налагаемых на управле¬
ние и (т), и за счет все более сложных многообразий начальных и
конечных (а может быть, и промежуточных) состояний вектора
х (т) (см., например, работы А. Г. Бутковского, Ф. М. Кирил¬
ловой и Р. Габасова, Н. A. Antosiewicz [49а, б; 356; 244]).
!) Вывод условий оптимальности управления, связанный с рассмотре¬
нием областей достижимости, встречался во многих работах, однако нам
представляется справедливым выделить статью [244], так как именно в
этой публикации впервые для достаточно общего случая были явно выделены
все основные геометрические соображения. Там же было указано, что ре¬
шение подобных задач управления естественно интерпретируется в извест¬
ной общей схеме (см. [244] и [29*], стр. 214), связанной с отображениями
функциональных соотношений в конечномерные пространства.
ПРИМЕЧАНИЯ
383
Полезно заметить, однако, что и в случаях, когда величина
х [и] не имеет смысла нормы, не обязательно, вообще говоря,
каждый раз прибегать к геометрической интерпретации задачи об
управлении в виде проблемы отделения выпуклых областей дости¬
жимости в пространстве {ж}, но можно трактовать ее как проблему
моментов, решение которой извлечется из теоремы Хана — Бана¬
ха. Это показывает, что деление способов решения задач об управ¬
лении на «метод моментов» и «метод отделения выпуклых множеств»
имеет подчас условный смысл. Поясним сказанное на конкретном
материале.
Рассмотрим задачу 4.2 об оптимальном управлении и0 (£), ми¬
нимизирующем некоторую интенсивность и [и]. Пусть при любом
значении числа ц множество и {и} всех возможных управлений
и (£) = {ut (t)} (i = 1, . . ., г; tx t ^), стесненных условием
х [и] ц, содержится в пространстве®* {и} =3№{и}г вектор-функ-
ций и (t) с интегрируемым квадратом нормы
и (£) || = (и! (£)+...+ Un(t))'",
для которых, следовательно, выполнено условие
(47.5)
Тогда расширим класс возможных управлений до совокупности
допускаемых управлений и (£), составляющих как раз все прост¬
ранство Условие (47.5) выполняется для широкого круга
задач, и, в частности, оно выполнено для всех задач, рассмотрен¬
ных в §§ 18, 21. Это условие не выполняется, вообще говоря, для
тех интенсивностей х, которые связаны с оценкой импульсов управ¬
ляющих сил и не содержат притом дополнительно оценок величин
вида max, || и (t) || и т. п. Иначе говоря, условие (47.5) не выпол¬
няется для задач, подобных тем, какие рассмотрены в § 23. В по¬
следних случаях в качестве допускаемых управлений надлежит
выбирать обобщенные управления dU (£), отвечающие функциям
£7, которые составляют пространство ®*{С7} вектор-функций с огра¬
ниченным полным изменением. Перенос рассуждений на случай
таких обобщенных управлений мы предоставляем читателю.
Итак, пусть множеством допускаемых управлений является
<2(2>u}r. Следуя теперь известному пути решения задачи об управле¬
нии (см. стр. 95), придем к уравнениям (15.1), т. е. к уравнениям
IdW (т) и (т) dx (Z = 1,. . . , n),
(47.6)
384
ЛИНЕЙНЫЕ СИСТЕМЫ! С ОСОБЕННОСТЯМИ
[Гл. 11
которые надлежит разрешить при условии
х [u] = min. (47.7)
Вектор-функции /№ (т) мы будем рассматривать также как
элементы пространства — - - {h}r. Тогда левые части уравнений
(47.6) удобно трактовать (известным нам образом) как линейную
операцию - cpu [№П на элементах № из — - — — В самом деле, общий
вид линейной операции ср [Л] на функциях h (т) из {h}r опреде¬
ляется как раз интегралом
ФИ[А (г)] = $ h (Т u(r) (47-8)
«а
где функция и (т) есть снова элемент ХЦи} (см. Приложение
§ 59). Итак, надлежит разрешить проблему моментов (47.6),
(47.7) , где, однако, в отличие от (15.1), (15.3) величинах [и], вооб¬
ще говоря, уже не имеет смысла нормы р* [и].
Зададимся числом pi и рассмотрим функцию (точнее, функ¬
ционал)
Рр(7г (т)] —= supu <р„ (А] при х [г^]<(1, (47.9)
(Как увидит читатель ниже, на деле эту функцию вычислять для
всех h из Ж(2) {и}г не потребуется.) Легко проверить, исходя из
свойств линейности операций <р, что функция ри [Л] удовлетворяет
условиям
Рн [Л + g] < Рр. [й] + Рр- kb Рр- [аЛ] = арр [А] (47.10)
каковы бы ни были функции h (т) и g (т) и число а > 0. По опре¬
делению функции ри [Л] имеем неравенство
Фи [Л] ( ри [h] при всех h, (47.11)
если только х [и] ( pi.
Теперь мы предположим, что рассматриваемая интенсивность
х [и] удовлетворяет требованию: каково бы ни было pi, соотно¬
шение (47.11) есть не только необходимое, но и достаточное условие
для неравенства х [u] ( pi. По сути дела, это единственное сущест¬
венное условие, которое мы налагаем на свойства х [и]. Из общих
теорем функционального анализа выводится, что высказанное
требование удовлетворяется, если неравенство х [u] ( pi ограни¬
чивает в пространстве Ж® {и}г выпуклое ограниченное и замкну¬
тое (в метрике Ж(2)) множество функций и (£). Будем, далее, пред¬
полагать, что указанное требование выполнено.
Найдем операцию фи" [А], следуя известной процедуре решения
проблемы моментов. При этом мы повторим (хотя и на несколько
§ 47]
ПРИМЕЧАНИЯ
385
другом языке) те же самые рассуждения, что были приведены в
§16. Определим сначала некоторую операцию <рп [Л] только на
функциях h (т) вида
п
/г(т) = 2/ЛИ(т), (47.12)
2=1
полагая по определению фп [А] = 1с. Эта операция удовлетворяет
условиям фп[М’]] = Ct, отвечающим уравнениям ■ (47.6), но, к со¬
жалению, она определена пока только на функциях h (т) вида
(47.12). Предположим теперь, что при некотором значении ц на
всех функциях h (т) вида (47.12) выполняется ■ неравенство
ФпРМОИА]. (47.13)
Иначе говоря, пусть при всех ' ■ выполнено неравенство
п п ^3
3 /АСтах32 к 5 hlЧ'(т) «(<)<**! при х[и]<ц. (47.14)
i=l Li=l ta J
(Нетрудно сообразить, что в противном случае задача (47.6) при
условии х Ш 1 ' неразрешима.) Однако при условии (47.13)
согласно теореме Хана — Банаха (см. [6*], теорема 10, стр. 74)
существует операция <ри [Л], определенная уже для всех h (т) из
Х&) {h}r и распространяющая *) операцию <рп [Л], так что для но¬
вой операции (pu [h\ вида (47.8) выполняются и условия (47.6), и
неравенство (47.11). Но последнее означает, что для функции
и (т), порождающей эту операцию, выполнено и условие х
Итак, неравенство (47.14) есть достаточное (и необходимое) усло¬
вие для разрешимости проблемы моментов (47.6) при условии
х [н] l ц. Следовательно, искомый минимум ц° интенсивности
х [iz] определяется как наименьшее число ц, при котором справед¬
ливо неравенство (47.14). Предположим поэтому, что pi = ц° есть
как раз такое число, и пусть при этом имеет место предельный
случай выполнения неравенства (47.14), т. е. пусть выполнено
условие
тнпгф1пахи 1 I'H ft?, x]u (х) dx— Z'c] = 0 (47.15)
ta
при x [it] 1 pi0 и || 11| = 1. (Для разъяснения перехода от (47.14)
к (47.15) напомним, что векторы hl ' (т) суть строки матрицы
Н [fy, т]. Ограничение Ц 11| = 1 выбирается совершенно условно.
Вследствие однородности по I обоих слагаемых в (47.15), ограниче-
4) См. сноску на стр. 356.
13 Ы. Н. Красовский
386
ЛИНЕЙНЫЕ СИСТЕМЫ С ОСОБЕННОСТЯМИ
[Гл. И
ние || 11| = 1 можно заменить любым аналогичным условием.)
Найдем теперь оптимальное управление u° (t). Пусть левая часть
(47.15) достигает минимума при I — Z0. Следовательно, справедли¬
во равенство
max ..2 £ 1'Н [<, т] и (T)dr] = Р'с. (47.16)
С другой стороны, искомое управление U (Z) должно удовлет¬
ворять уравнениям (47.6), которые после подстановки и — и0 (т),
умножения на lt и суммирования по i дают равенство
*3
2 Р'Н [ 22. т] и0 (т) dr — Р'с. (47.17)
4
Из (47.14) и (47.15) следует, что левая часть (47.16) достигает
максимума при и (т) = и° (т). Вспоминая, наконец, связь между
функцией Н [Zp, т] и фундаментальной матрицей S [т, [ ] сопря¬
женной системы (17.3) (см. стр. 111), приведенные выше рассуж¬
дения мы можем подытожить следующим образом.
П р а в и ло минимакса 47.1. Для решения задачи 4.2
надлежит рассмотреть движения s (Z) сопряженной системы
(17.3), составить величину
4
ри [В' (т) s (т)] =maxu 2 2 s' (т) В (т) и (т) dr] (х [и] pi)
и найти минимальные движения 2й (Z), для которых
р>. (В'(т)5Чт)] —[s^Ml'c = mins при |s(Z3)| = 1. (47.18)
Пусть р,0 — наименьшее из чисел ц, при которых левая часть
(47.18) неотрицательна и рро [В (т)^’ (т)] — [s^° (Zz)) c = 0. Тог¬
да искомый минимум х [иj есть р,0 и оптимальное управление U (t)
удовлетворяет условию максимума
4
§ [5И° (т) ]' В (т) u° (т) dr — maxu при х [и] р0.
* а
Примечание. 47.2. Читатель заметил, конечно, что величина р^
(47.9) имеет здесь совершенно тот же смысл, что и величина р(х, фигурирую¬
щая в правиле 17.5, хотя эта величина и появляется здесь из других (по
форме!) соображений. Подчеркнем еще раз, что для пользования пра¬
вилом 47.1 следует вычислять величину р[х лишь на функциях h (т) — B's(r) ---
47]
ПРИМЕЧАНИЯ
387
= 5'5[[з,т] s (?p), и, следовательно, эта величина в правиле 47.1 является
функцией | [Z] от^ п переменных Ц = в} (t^). Задача (47.18) оказывается
поэтому обычной (хотя и трудной, как правило) вариационной задачей на
условный экстремум. Далее, как уже отмечалось в § 17, если к[и] = р*[и]
имеет смысл нормы для какого-либо пространства | * {и}, |сопряженного к
подходящему пространству <®{Л), то р^Дй] = р Р [ А ] , где Д pW] — норма в
$ {h}. Заметим, далее, что в случаях, когда х == р* и речь идет об управле¬
нии не в заданную точку х = ,, но на некоторое многообразие
или (что аналогично) если речь идет о минимуме или о максимуме функции
у[я (<р)], поверхности уровня которой у[х] = const обладают подходящими
свойствами, то можно снова воспользоваться правилом 47.1, дополняя его
рассуждениями, аналогичными тем, какие приведены в § 38 (см. стр. 310)
для случая х [и] = р*[и]. Кроме того, следует иметь в виду, что условие
(47.14) и следующие из него дальнейшие выводы понятным образом сохра¬
няют силу и в тех случаях, когда ограничения на и (t) описывают не в виде
неравенства х[и] | р на интенсивность х[и], но оговаривая сразу подходя¬
щее множество | {и}, в котором должны лежать управления - и (/). Наконец,
заметим, что рассуждения, приведенные выше, на стр. 384, можно провести
и в случаях, когда управляющие воздействия описываются обобщенными
функциями (см. стр. 201). При этом описание ограничений на и (t) в виде
условия (17.11) оказывается как раз весьма подходящим.
Поясним это подробнее. Известно [26*], что обобщенные функции трак¬
туются естественным образом как линейные функционалы фи [h (т)], опре¬
деленные на линейном пространстве | {h (т)} бесконечно-дифференци¬
руемых функций h (т), заданных для —оо < т < оо, причем каждая из этих
функций обращается тождественно в нуль вне некоторого отрезка оси т.
В нашем случае задачи 4.2 мы можем рассматривать в качестве допускаемых
управлений такие обобщенные функции и, носитель которых сосредоточен
целиком на отрезке tx | т | t$. Но тогда, полагая Л (t) и В (t) аналитиче¬
скими функциямщ мы можем функции |г^ (т) = [^ т] доопределить
при т < t д и т > t г.,, так, чтобы они оказались элементами пространства
ЗС {h (т)}. Далее, прямо по определению можно принять, что допускаемое обоб¬
щенное управление и, будучи приложенным к объекту, приводит его в состоя¬
ние (при w (т) = 0)
п
xi = || 2 11| t | + и»1t (т)] (i=t •••>»)•
г=1
[См. аналогичные соображения в § 23, где как раз рассматривается факти¬
чески частный случай обобщенного управления.] По самому смыслу рассмат¬
риваемых обобщенных управлений их интенсивность х [и] естественно оце¬
нивать по результатам воздействия операции <ри [Л] на элементы h (т) из
<Г{Л(т)}, задавшись некоторой функцией р^ [h (т)] и полагая х [и] < р,
тогда'и только тогда/^когда<pu [h (?))]< р^ [h (т)] при всех h (т) из УС{h (т)}.
Если выбранная при этом функция ри удовлетворяет условиям (47.10), то
все приведенные выше соображения, относящиеся к правилу минимакса 47.1,
равно как и само это правило, сохранят свою силу и для обобщенных уп¬
равлений и. В частности,|выбирая р^ [h (т)] = pmaxT || h (т) ||, мы придем
к классу обобщенных управлений dU(x), рассмотренному в § 23 и включаю¬
щему, как мы знаем, о-функции. Обобщенные функции более высокого ран¬
га тогда исключатся благодаря выбранному неравенству <ри[Л] ри [Л],
13*
388
ЛИНЕЙНЫЕ СИСТЕМЫ С ОСОБЕННОСТЯМИ
[Гл. 11
не учитывающему производные f (т), h (т) и т. д. Полагая р^ [h (т)] =
— цтахт[ || h (т) || ,|| (т) || ],мы включим в рассмотрение более штщсжпй классе
обобщенных функций, включающий и функции вида б () где б (t) есть
б-функция (см. стр. 50), и т. д.
Приведем пример на применение правила 47.1.
Пример 47.1. Пусть требуется решить задачу о предельном быстродей¬
ствии х = х , х (ф = = min) при уcловии, что двумерная вектющ
мум х [и] имеет решение х
функция управления и (t) = (t), и2 (t)}
при каждом t стеснена условием': вектор
и (t) лежит внутри некоторой выпуклой кри¬
вой £, изображенной на рис. 47.1.
Введем интенсивность х [и], полагая
Х[/а, /3] Iй (т)1 = тахт у [и (т)],
где у [и (т)] — отношение • длины вектора
и (т) к длине вектора и, одинаково направ¬
ленного с вектором и (т) и такого, что ко¬
нец и лежит на кривой £. Тогда ограни¬
чение на и (t) означает х [гг] g 1. Следуя
теперь при решении данной задачи тому
пути, который описан в § 27, придем к за¬
даче: найти наименьшее t = t®, при кото¬
ром соответствующая задача 4.2 на мини-
пт [О> (т))= 1. Задачу 4.2 будем решать, опи¬
раясь на правило 47.1. При этом оказывается, что величина р^ (47.9) опре¬
деляется здесь равенством
*8
PH[B's(T)]= jr [B'.sTTT
где в качестве у* [h (т)] надлежит выбрать отношение длины векторэра^. (т)
к длине вектора h, одинаково направленного с вектором h (т) и имеющего ко¬
нец на кривой £* (см. рис. 47.1). (Читатель может сообразить, как строится
подобная кривая (или поверхность) в том или ином конкретном случае, ана¬
логичном данному.) Таким образом, приходим к выводу, что оптимальное
время управления определяется здесь из стандартного уравнения для ми¬
нимума
mins [ $ T*[B's (т)] dx - s' ((ф с ((ф ]= 0 при || s ((ф || = 1,
ta '
а само оптимальное управление и° (t) находится из обычного условия ■ мак¬
симума
s0' (т) Bu° (т)=тахм «о (Т) Ви (т) при у [и]<1.
Рассмотрим еще пример, относящийся к обобщенным управле¬
ниям и, о которых шла речь в конце примечания 47,1,
§ 47]
ПРИМЕЧАНИЯ
389
Пример 47.2. Пусть требуется привести в состояние равновесия £ (...) =
=0, [ (g) = 0 материальную точку на прямой £, описываемую уравнением
g + оо2 g = и. Обозначая £ = хп | = х2, получим систему
х± = ^2, х2 = —со2 хх + и,
для которой фундаментальная матрица X [£, /0] и фундаментальная матрица
S [£, М сопряженной системы, следующая из матрицы X [£, /0], вычислены
в § 5. Примем, что интенсивность х [и] обобщенного управления и оценивает¬
ся функцией Тр. [М = ц тахт [|| Л(т)||, ||£(т)||]. Будем полагать , = 0,
tj = 2л/<о. Тогда из правила 47.1 вытекают следующие выводы (которые
мы рекомендуем проверить интересующемуся читателю): (1) при со < 1 оп¬
тимальное управление и, минимизирующее выбранную интенсивность
х [и], складывается только из 6-функций; (2) при w\> 1 оптимальное управ¬
ление и складывается только из 6-функций; (3) при со = 1 оптимальное уп¬
равление может состоять и из 6-функций и из 6-функций.
(3) В § 17 и выше в этом параграфе мы . видели,что в конечном сче¬
те задача об определении оптимального управления u° (t) упирает¬
ся в разрешение вариационной задачи (17.4) или (17.5) на услов¬
ный экстремум для функции Ф [Z1T . . ., 1п] от конечного числа
переменных lt. Отсюда ясна роль, которую приобретают вычис¬
лительные процедуры, связанные с разрешением последней задачи
в теории управления линейными системами. Вообще следует от¬
метить, что подобным численным методом решения задач об управ¬
лении, сводящим дело к функциям от конечного числа переменных
Ц, посвящено большое количество работ, появившихся в послед¬
нее время и связанных, в частности, с методами выпуклого про¬
граммирования. В числе основных работ, оказавших влияние на
формирование этого направления, отмечают обычно исследование
И. Нейштадта [389а], опубликованное в 1960 г., и работу Дж.Ито-
на [297 а],напечатанную в 1962 г.Упомянем еще работы Н. Е. Кири¬
на и Б. Н. Пшеничного [99а, 187].
Приведенным кратким перечнем мы и ограничим обсуждение
библиографии, связанной с материалом I и II частей нашей книги.
Отметим лишь еще раз мысль, высказанную уже во введении: ин¬
терпретация задач об управлении в терминах функционального
анализа и использование в дальнейших работах . аналогий с из¬
вестными результатами из теории выпуклого (линейного, вогнуто¬
го и т. д.) программирования позволили охватить довольно широ¬
кий круг задач об управлении системами, описываемыми обыкно¬
венными линейными дифференциальными уравнениями. При этом,
как бы ни интерпретировалась та или иная задача об управлении,
в основе ее решения методами функционального анализа обычно
остается одна из форм теоремы Хана — Банаха. Благодаря этой
сильной теореме и достигается здесь фактически прогресс в ре¬
шении проблемы управления,Впрочем,этот результат приложения
390
ЛИНЕЙНЫЕ СИСТЕМЫ С ОСОБЕННОСТЯМИ
[Гл. 11
методов функционального анализа не следует и переоцени¬
вать, поскольку линейные системы составляют лишь весьма не¬
большую часть управляемых систем, с которыми приходится стал¬
киваться в приложениях, по крайней мере в задачах из механики.
Перейдем теперь к обсуждению источников, связанных с ма¬
териалом III части книги. Насколько известно автору, постанов¬
ка задачи о наблюдении в той форме, как это сделано в данной мо¬
нографии (задача 31.1),была предложена Р.Е.Калманом в 1959 г.
в работе [896], где также был указан путь решения задачи, свя¬
занной с тем алгебраическим методом исследования проблем управ¬
ления, о котором мы уже говорили в этих примечаниях. В этой же
работе было дано определение полной наблюдаемости линейной си¬
стемы. В дальнейшем [90] указанная задача была изучена в рас¬
ширенной форме для линейных дискретных стохастических систем,
причем была подробно обсуждена связь ее с известными проблема¬
ми фильтрации шумов. При этом построенная разрешающая опе¬
рация
t
*i(()= $ У'(47.19)
t-a
n
выражавшаяся линейно (и (т) = » Цхг ( •)) через элементы фун-
1=1
даментальной матрицы наблюдаемой системы
t(t)=Ax (t) (47.20)
и имеющая, как мы знаем, наименьшую возможную норму
р* [v (т)] в пространстве (т)}, оказалась оптимальной с точ¬
ки зрения минимума квадрата средней ошибки. (Сравни с матери¬
алом § 46. В работе [89а] речь шла о дискретной системе, описы¬
ваемой не диффеценциальным уравнением (46.2), но аналогичными
уравнениями в конечных разностях, однако, приводя результаты
в соответствие с материалом нашей монографии, мы переводим их
на язык непрерывного времени t.) Постановка задачи 32.1 об оп¬
тимальном наблюдении взята нами из статьи автора [110д], где
также была обсуждена связь между задачами управления и наблю¬
дения и теорией игр и тем самым была попутно выяснена роль ус¬
ловий седловой точки для задач об управлении.
Наконец, следуя той же статье [110д], в § 36 дано продолжение
принципа двойственности Р. Калмана до оценок норм р* [ср] раз¬
решающих операций. Новым элементом здесь можно считать трак¬
товку в задаче об управлении минимальной функции № [т] (см.
§ 17) как минимального сигнала у0 [т] в сопряженной наблюдае¬
мой системе и вытекающую отсюда игровую трактовку соответст¬
вующих соотношений, фигурирующих в правиле минимакса. За¬
( 47]
ПРИМЕЧАНИЯ
391
метим еще, что исследование задачи о наблюдении в данной моно¬
графии также выполнено, исходя из трактовки ее как задачи об
определении подходящего линейного функционала. Этот подход
был описан в статье [110г]. Впрочем, вследствие наличия соотно¬
шения двойственности в таком подходе уже не содержится чего-
либо принципиально нового по сравнению с обсужденным выше
подходом к задаче об управлении.
Примечание 47.3. Рамки данной монографии, к сожалению, не
позволили осветить должным образом связь рассматриваемой нами задачи
о наблюдении с известными методами вероятностного синтеза линейных си¬
стем, развившихся из теории фильтрации Колмогорова — Винера. Поэтому
подчеркнем здесь еще раз лишь совсем кратко два обстоятельства. (1) Обсуж¬
даемая ) в III части данной книги задача о наблюдении может трактоваться
как один из частных случаев общей задачи о фильтрации шумов, рассмат¬
риваемой в упомянутой теории. (2) Для многих методов вероятностного
синтеза автоматических систем характерна трактовка проблемы в понятиях
функционального анализа, и это еще больше сближает материал нашей кни¬
ги с этими методами. В частности, типичная ) для теории фильтрации задача
Заде — Рагаззини доставляет как раз пример проблемы моментов. Далее,
завершая обсуждение библиографии, связанной с материалом III части,
надлежит сказать следующее. Сходная с изучаемой в монографии проблема,
но рассматриваемая главным образом в связи с задачей об управлении эко¬
номическими ресурсами, исследовалась с весьма общих позиций в работах
К. Д. Эрроу, Л. Гурвица, X. Удзавы, А. А. Голдстейна и других авторов,
развивающих теорию линейного и нелинейного программирования в аб¬
страктных линейных пространствах (см. [28*, 317]). При этом исходная про¬
блема также сводится к задаче о разыскании седловой точки обобщенной
функции Лагранжа, т. е. к задаче игрового типа, подобной тому, с чем мы
встретились в главе 9 (см. также введение). На эти обстоятельства обратил
внимание автора А. А. Первозванский.
Задача о преследовании, составляющая основной материал
IV части, имеет, очевидно, весьма длинную историю, уходящую
корнями ко времени разработки начал математического анализа,
когда рассматривались, например, известные кривые погони. Та¬
ким образом, задачу о встрече управляемых движений можно рас¬
сматривать как новый вариант известных задач, модифицирован¬
ных с ) позиций современных игровых представлений. Следует так¬
же иметь в виду, что задача о конфликтной встрече управляемых
движений уже в течение солидного времени разрабатывается в
рамках специальных технических проблем (см/, например, тео¬
рию пропорциональной навигации [91а]). Для прикладных задач
и найденных для них эффективных методов решения обычно ха¬
рактерно следующее явление: в основу правила наведения вы¬
бирается закон управления, который должен обеспечить встречу.
Этот закон управления выбирается так, чтобы вычислительный
алгоритм, который ему соответствует, и осуществление управляю¬
щих воздействий были удобно реализуемыми. Однако при таком
подходе, в основу которого кладется наперед выбранный закон
392
ЛИНЕЙНЫЕ СИСТЕМЫ С ОСОБЕННОСТЯМИ
[Гл. И.
управления, процесс преследования не всегда осуществляется
оптимальным образом с экономной затратой ресурсов.
Задача, послужившая источником для главы 10 IV части, ста¬
вится наоборот: исходя из некоторого показателя качества про¬
цесса погони, требуется найти закон управления, который осу¬
ществлял бы ■ этот процесс оптимальным образом по выбранному
показателю.
По причинам, указанным выше, мы затрудняемся указать са¬
мые первые работы, где были поставлены такие задачи об опти¬
мальном преследовании. Во всяком случае, условия минимакса,
характерные для таких задач, играют существенную роль в теории
динамического программирования Р. Веллмана (см. [28а]), одна¬
ко на этих аспектах проблемы мы здесь не останавливаемся, по¬
скольку они находятся вне рамок нашей книги1). Укажем поэтому
лишь самые непосредственные источники.
Задача о программном преследовании при условии максимина
времени встречи (задача 41.1) была поставлена и изучена Д. Л. Ке-
ленджеридзе [95], который указал необходимые условия опти¬
мальности, имеющие своей основой принцип максимума Л. С. Пон¬
трягина. Правило экстремального прицеливания (см. стр. 334), свя¬
зывающее задачу о программной встрече с задачей о преследовании
по принципу обратной связи, имеет своим источником работу
[ИОв], где также были отмечены некоторые соотношения, связы¬
вающие момент поглощения Т (см. стр. 331) с величиной maxuminu Т,
и попутно были указаны отдельные трудности, возникающие
при теоретическом исследовании задач об игровой встрече движе¬
ний. Позднее эти и подобные им обстоятельства были обсуждены
на конкретном материале простых модельных задач, просчитанных
на ЭВЦМ в работах [112, ИЗ], материал которых также использо¬
ван в главе 10. Следует отметить, что весьма глубокий математи¬
ческий анализ проблемы игровой встречи движений был выполнен
в последние годы Л. С. Понтрягиным [178б], однако он выходит
за рамки данной книги. Составить представление об этой и других
работах, посвященных задачам о встрече управляемых движений,
читатель может, опираясь на приведенную нами библиографию.
Наконец, отметим, что последняя глава 11 IV части составлена
на основании материалов следующих работ: С. Н. Шиманова
[237], Дж. Хейла [323] и автора [ИОе]. При этом надлежит ука¬
зать еще, что задача об управлении линейной системой с запазды¬
ванием в общем случае n-мерной системы была изучена С. В. Чура¬
ковой [234].
х) В связи с этим материалом следует отметить также недавно вышедшую
книгу Р. Айзекса [341].
ПРИЛОЖЕНИЕ
§ 48. Введение
Настоящее приложение содержит краткие сведения из теории
функциональных пространств, используемые в монографии. Сна¬
чала основные понятия и факты демонстрируются на привычных
образах из конечномерных векторных пространств. Затем по ана¬
логии они переносятся в бесконечномерные пространства функций.
Двенадцатая глава, которая открывает это Приложение, име¬
ет вспомогательный характер и посвящена теории линейных функ¬
ционалов в конечномерных нормированных пространствах. Здесь
определена норма вектора и введено основное для всего нашего
изложения понятие линейной операции. При этом всюду в тексте
монографии термин линейная операция используется для обоз¬
начения линейного функционала. Так как линейные операторы,
которые принимали бы значения, отличные от числовых, нами не
вводятся, то избранная терминология не должна вызывать недо¬
разумений. В то же время выражение «операция» в данном случае
звучит для механика содержательнее, чем слово «функционал».
Далее в этой главе определяется норма линейной операции и за¬
тем на базе интуитивных геометрических соображений формули¬
руется теорема об отделении выпуклых множеств.
В главе 13 дано понятие нормированного фунакционального про¬
странства. После краткого разбора основных положений описы¬
ваются более подробно некоторые стандартные нормы, известные
для скалярных функций h (т), заданных на числовой прямой т.
Затем, приведены соображения о конструировании норм для
вектор-функций h (т) = {ht (т)} (i == 1, 2, . . ., г; ta , т h £₽)•
При этом главное внимание уделено содержанию рассматривае¬
мых понятий, а не формальным доказательствам.
В главе 14 сосредоточен основной материал приложения.
Определено понятие линейной операции в функциональном про¬
странстве. Сформулированы и пояснены теоремы об общем виде
и о норме линейных операций в стандартных пространствах ска¬
лярных функций, а также указаны способы обобщения упомяну¬
тых теорем на случаи пространств вектор-функций. Глава завер¬
шается теоремой об отделении выпуклых множера’в,используемой
в основном тексте книги как наглядный заменитель теоремы
Хана — Банаха о распространении линейного функционала.
Глава 12
ЛИНЕЙНЫЕ ОПЕРАЦИИ В ВЕКТОРНЫХ ПРОСТРАНСТВАХ
§ 49. Нормированное линейное пространство
Рассмотрим совокупность всевозможных n-мерных векто¬
ров, компоненты которых являются действительными числами.
Элементы этой совокупности Жп в дальнейшем будем обозначать
строчными латинскими буквами а, Ь, с, . . х, у, . z, . . . Если
не оговорено противное, будем трактовать рассматриваемые век¬
торы как векторы-столбцы, хотя и будем записывать их иногда
для экономии места в виде {ах, а2, . . ., ап}. Индекс ' означает
транспонирование. Символы а', Ь, с', . . . будут, следовательно,
обозначать векторы-строки. Известны ([3*], стр. 49; [24*], стр. 11)
следующие правила сложения векторов и умножения их на дейст¬
вительные числа.
Сумма двух векторов х = {x} и у = {yt} есть вектор z = {z},
компоненты которого - - суть суммы соответствующих компонент
xt и yt векторов х и у, т. е. z = х + у = {xt + у}
Произведение числа а на вектор х (или вектора х на число а)
есть вектор, компоненты которого суть произведения числа а на
соответствующие компоненты xt вектора х, т. е. ax=xa={axi}.
Из этих определений следуют такие известные свойства:
I. Каждой паре х, у векторов из - п отвечает вектор-сумма
х + у, причем
1) х + у = у + х (коммутативность);
2) х + (у + z) = (х + у) + z (ассоциативность);
3) в Жп существует однозначно определенный нулевой вектор *)
О = {0, 0, . . ., 0} такой, что для каждого вектора х из Жп
х + 0 = х;
4) каждому вектору х = {xt} из отвечает вектор —х =
= {— xt} такой, что х + (— х) = 0.
II. Каждой паре а, х, где а — скаляр, ах — вектор из Жп,
отвечает вектор ах, причем, каков бы ни был скаляр (5,
1) а (0х) = (ар)х (ассоциативность);
2) 1-х = х для каждого вектора х из Jfn;
х В дальнейшем символ 0 будет означать и нулевой вектор и число
«нуль» без каких-либо оговорок, если из контекста будет ясно, о чем идет
речь,
§ 49]
НОРМИРОВАННОЕ ЛИНЕЙНОЕ ПРОСТРАНСТВО
395
3) а (х + у) = ах + ау и (а + Р) х = ах + Р* (дистрибу¬
тивность).
Множества, элементы которых удовлетворяют перечисленным
выше условиям I и II, называют линейными пространствами.
В соответствии с этим множество векторов Тп будем называть
n-мерным линейным пространством.
Пространство Жп в дальнейшем будем рассматривать в двух
интерпретациях: либо как множество векторов х = {х;}, либо как
множество точек х = {#}, лежащих на концах векторов х и имею¬
щих координаты Xi (Z = 1, . . ., п). При этом, если не оговорено
противное, следует всегда представлять себе, что — рассматриваемые
векторы приложены в начале координат.
В пространстве Жп можно ввести метрику, т.,е. указать правило,
которое для любых двух точек {yt} и {xt} этого пространства опре¬
деляет расстояние между ними.
Наиболее — привычный способ определения расстояния р между
двумя точками с координатами {yt}, {zt} дается формулой
п 7»
рОШ МР = [4=J (3'i —2i)2J "•
(49.1)
Из равенства (49.1) естественно следует определение длины или
нормы вектора. Именно, под нормой р[я] вектора х, соединяющего
точки {гу}, {гг}, понимают расстояние между этими точками. Так
как Xi = yi — Zi, то
n
(49.2)
Норму вектора х, определяемую формулой (49.2), принято назы¬
вать евклидовой нормой. Всюду в этой книге евклидова норма обоз¬
начается символом || X
Правило введения нормы, описанное формулой (49.2), не яв¬
ляется единственно разумной формой измерения расстояний в
n-мерном векторном пространстве. Иногда удобно определять
расстояние р иначе. В математике в процессе развития понятия
расстояния и соответствующего ему понятия нормы вектора х из
Жп выяснилось, что удобно работать с такими расстояниями
Р ({*,}, {zi}), которые обладают следующими свойствами:
1) р ({?М, {2»}) = P({2i}, {уд);
2) р ({hi}, {«<}) = о, если все z4 = у,;
3) Р ({уд, {z} — 0, если не все ( , равны гу;
4) р [{^}, Ш] < р [{«{}, Ы1 + р[Ш, {Z{}].
(49.3)
396 ЛИНЕЙНЫЕ ОПЕРАЦИИ В ВЕКТОРНЫХ ПРОСТРАНСТВАХ 1Гл. 12.
Последнее свойство называют обычно правилом треугольника.
Условия (49.3) и выбираются за основу общего определения
нормы вектора х из Жп, понимаемой как расстояние от точки {0}
до точки {z;). При этом удобно еще потребовать, чтобы при умно¬
жении вектора х на число а норма вектора изменилась в | а | раз.
Поэтому говорят,что для векторов х определена норма р [я],
если каждому вектору х по определенному правилу сопоставлено
неотрицательное число р, удовлетворяющее условиям:
1) р [#] = 0, если х -= 0; '
2) р [я] >0, если х=/=0;
3) р И + И<Р®1 + Р М >
(правило треугольника);
4) р [аж] = |а|р[х]; <
(49.4)
Евклидова норма (49.2) удовлетворяет, очевидно, условиям
(49.4). Приведем некоторые другие способы определения нормы
р [х]. Например,
р [я] = max (/Xi | , . . . , | xn |) (49.5)
или
n
P(№ = S I ИI • (49-6)
i=l
Нетрудно проверить, что величины (49.5) и (49.6) также удов¬
летворяют всем требованиям (49.4), предъявляемым к норме векто¬
ра х.
Более общий пример доставляет определение нормы р [я] при
помощи равенства
ть 1/Р
р[я] = [3 Иг|р1 Р , (49.7)
4=1 J
где р — какое-нибудь число из полуинтервала 1 | р <С оо. При
р = 1 из (49.7) получаем частный случай (49.6), при р = 2 полу¬
чаем евклидову норму (49.2). Выполнение условий 1), 2), 4) для
величины (49.7) очевидно. Затруднение может вызвать лишь про¬
верка условия 3). Доказательство соответствующего неравенства
п
+ ^ГсГЗырГ + гзыГ
i=l i=1
»
называемого обычно неравенством Минковского, можно найти,
например, в книге [14*] (стр. 499). Заметим еще, что условия
ЛИНЕЙНЫЕ ОПЕРАЦИИ
397
г
1 -7^7
V///
L// 7
\/ / 7
У//
Х\
Ж
0 /
7
S 50 j 1
(49.4) обеспечивают непрерывную зависимость величины р [я] от
вектора х.
Множество точек х = {х;}, имеющих норму р [я] < е, назы¬
вается сферой с радиусом е. При е = 1 сфера называется единич¬
ной. Например, в случаях (49.2), (49.5) и (49.6) единичные сферы
в двумерном пространстве Ж2 ог¬
раничиваются соответственно ли¬
ниями 7, 2, 3 (рис. 49.1).
При изменении р от 1 до оо ли¬
ния, ограничивающая единичную
сферу р [я] 1, в случае нормы
(49.7) трансформируется от линии
3 к линии 2. Так, линия 4 соответ¬
ствует некоторому значению 1 <С
< р <Z 2, а линия 5 — значению
р >2.
Пространство векторов Жп, в
котором выбрана какая-либо нор¬
ма р [я], будем называть п-мерным
линейным нормированным. про¬
странством. При этом, если речь
будет идти о векторном простран¬
стве без выбранной в нем определенной нормы, то это пространст¬
во будем обозначать символом Жп. Если же речь пойдет об ^мер¬
ном пространстве с выбранной нормой, то будем обозначать его
символом
§ 50. Линейные операции
Пусть задано темерное линейное пространство Жп Допустим,
что в этом пространстве определена некоторая операция др, кото¬
рая, будучи применена к какому-либо произвольному вектору
h из Жп, дает в результате число. Это число будем называть значе¬
нием. операции ф на данном векторе h. Иначе говоря, предполо¬
жим, что на векторах h из Жп определена числовая функция
ц = ср [Л]. (50.1)
Говорят, что операция ср является линейной, если она удовлет¬
воряет следующим условиям:
1) ср [рД] = 0ср [Л1, (50.2)
каковы бы ни были вектор h и число р;
2) ср [h + g] =ф [А] +р [g], (50.3)
каковы бы ни были векторы h и g из Жп.
398 ЛИНЕЙНЫЕ ОПЕРАЦИИ В ВЕКТОРНЫХ ПРОСТРАНСТВАХ [Гл. 12
Справедливо следующее важное утверждение (см., например,
[14*], стр. 180).
Теорема 50.1. Любая линейная операция ф над векторами
h из jV’n имеет вид
Ф [А] = h'u = u1k1 + . . . + unhn, (50.4)
где и — снова некоторый вектор из JV*n.
Приведем рассуждения, подтверждающие справедливость тео¬
ремы 50.1. Всякий вектор h из (п может быть представлен в виде
h = hreD + k^eW + hnen\
где hlt h^, . . ., hn — компоненты h, a — 1 — — e(2, . . ., e(n — базис¬
ные векторы вида e'V = {0, . . . , 0, 1, 0, . . ., 0} (1 стоит на
г-м месте). В частности, если п = 3, то может быть ет = i,
е(2) = / и е(3) = к, где /, /, к ортонормированные векторы трехмер¬
ного евклидова пространства, a hi, h2, h3 — проекции вектора h
на координатные оси, направления которых определяют Z, /, к.
Теперь линейная операция ф от h с учетом (50.2) и (50.3) может
быть расписана так:
ф [й] = ф [Лхе<1) + he + . . . 4- hndn> ] =
= /гхф [e(D] + ^2ф [е<2>] + . . . + Апф [е(п>]. (50.5)
Обозначив ф [——— ] = щ (Z = 1, . . ., п) и трактуя щ как компо¬
ненты некоторого вектора и, получим из (50.5) равенство (50.4),
что и подтверждает справедливость теоремы 50.1.
Из (50.4) следует, что линейную операцию ф [h] вполне опре¬
деляет некоторый т-мерный вектор и из Жп. Очевидно, справедливо
и обратное, т. е. всякому вектору и изЖп отвечает вполне опре¬
деленная линейная операция ф [h] вида (50.4). Теорему 50.1 назы¬
вают теоремой об общем виде линейной операции ф [А] в простран¬
стве Жп. Отметим одно важное обстоятельство. Из равенства
(50.4) следует, что множество точек {—} из Жп, удовлетворяющих
условию ф [h[ = а, где а — какая-либо постоянная, является ги-
п
перплоскостью 2 uh — а- В частности, в случае двумерного про-
г=1
странства Ж2 множество точек ф [Д] = а — прямая, в случае Ж3
множество точек ф [h] = а — плоскость.
§ 51. Норма линейной операции
В этом параграфе рассматривается важное понятие нормы ли¬
нейной операции ф [Л]. Норма операции ф [А] есть число, которое
показывает, насколько велики могут быть значения функции ф
по сравнению с нормой р аргумента h. Характеристика эта опи¬
рается на сравнение нормы векторов h с абсолютной величиной
§ 51]
НОРМА ЛИНЕЙНОЙ ОПЕРАЦИИ
399
значений операции ср [h] на них. Поэтому норма операции ф опре¬
деляется после выбора в пространстве Жп определенной метрики.
В соответствии с этим будем рассматривать дальше линейные
нормированные пространства ®п.
Какова бы ни была линейная операция ф [А], всегда можно ука¬
зать число v, обеспечивающее неравенство
|ф[Л]| < vp \h\ (51.1)
при всех h из Жп. Наименьшее из чисел v, удовлетворяющих нера¬
венству (51.1),и выбирается в качестве нормы р* [ф] операции ф.
Оказывается, что норма р* [ф] может быть найдена так. Рассмот¬
рим в Sin множество векторов h из единичной сферы
р[А<1. (51.2)
Функция ц = | ф [А] | непрерывна по h и, следователь! , дости¬
гает на ограниченном замкнутом множестве (51.2) своего наиболь¬
шего значения т)° = max |фД] |. Это значение ц° и определяет нор¬
му операции ф [Л], т. е. х)
р*[ф] = max (| ф [h\ | при р [h\ < 1). (51.3)
Подчеркнем еще раз, что определение нормы р* [ф] операции ф
существенно зависит от выбора исходной нормы р [Л] векторов h.
Согласно теореме 50.1 об общем виде линейной операции каж¬
дая такая операция ф .в )п определяется в соответствии с равен¬
ством (50.4) некоторым «-мерным вектором и. Справедливо, как
отмечалось выше, и обратное: любой n-мерный вектор и определя¬
ет некоторую линейную операцию ф. Припишем вектору и, опре¬
деляющему операцию ф, норму р* [и], равную норме (51.3) соот¬
ветствующей операции, т. е. положим р* [и] = р* [ф]. Оказы¬
вается, что величина р* [и] удовлетворяет всем требованиям (419.4),
предъявляемым к норме в n-мерном векторном пространстве.
Справедливость этого важного утверждения мы примем здесь без
доказательства, ограничившись обсуждением некоторых простых
примеров. Доказательство можно найти в курсе [9*].
Таким образом, имеем следующую ситуацию. Пусть даны два
экземпляра и jr™ «-мерного векторного пространства.
Введем в пространстве некоторую норму р Д]G одним из спо¬
собов, указанных в § 49. Получим нормированное пространст¬
во 53п> Каждый вектор и из пространства Ж. согласно сказан¬
ному выше определяет линейную операциюфи[А] (50.4).Припишем
х Тот факт, что равенство (51.3), действительно, определяет число v° =
= Р* [фЬ которое является наименьшим среди чисел, удовлетворяющих
неравенству (51.1), читатель может проверить самостоятельно,
400 ЛИНЕЙНЫЕ ОПЕРАЦИИ В ВЕКТОРНЫХ ПРОСТРАНСТВАХ / [Гл. 12
векторам и норму р* [и], равную [норме р* [<puL Такиц' путем
пространство ЛЛ>2) также превращается в некоторое нормирован¬
ное пространство, которое будем обозначать символом Sfy. Итак,
мы получили, что каждое пространство 3Вп с нормой р [h] порож¬
дает пространство Зоп с нормой р* [и]. Пространство называет¬
ся сопряженным к пространству 33п. Норма р* [и] для векторов и
из пространства Здп называется нормой, сопряженной к норме
р [А].
Рассмотрим несколько простых примеров пространств I п и $3П.
Пример 51.1. Пусть в пространстве выбрана евклидова норма
р [/г] = || h || (49.2), определяющая евклидово нормированное пространство
Вычислим сопряженную норму р* [и]. Согласно (50.4) и (51.3) имеем:
р*
п
п^ии=!й?<1)-
г=1
(51.4}
Легко заметить, что в (51.4) максимум достигается на границе сферы
|| h || 1, т. е. при + ‘“+ h* = 1. Следовательно, требуется найти
max
п
2 “Д
г=1
при
2 Л? = 1.
г=1
(51.5)
Согласно неравенству Коши—Буняковского (см.,например, [3*], стр. 209;
[14*], стр. 496) имеем:
п
2 «л
г г
i=1
(51.6).
причем при h= % щ (г = 1,...м) достигается равенство. Следовательно,
искомый максимум (51.4) достигается при = h h ,■ , и этот максимум опре¬
деляется условием
п п п
шах.(|2 мл|) = I h I hj u“ при ??2 “?=1>
г=1 1 г = 1 г—1
откуда следует окончательно, что
Таким образом, справедливо следующее заключение.
Если, пространство 33п порождено евклидовой нормой р[/г] = || 1 ||, то
сопряженное пространство 33п также определяется евклидовой нормой
р‘[“] = 11 “II-
§ 51]
НОРМА ЛИНЕЙНОЙ ОПЕРАЦИИ
401
Пример 51.2. Предположим, что в пнортртпртве ЖB)соpмт р [&] опреде¬
лена формулой (49.6), т. е. р [/&] = | h± |+ | h2 1 +...+ I hn |. Вычислим сопря¬
женную норму р* [и]. По определению имеем:
п
при
п
2 1\кй-
2=1
(51.8)
Максимум (51.8) достигается, очевидно, при hj= sgn Uj, ■ = 0 (z /), где
/ — тот номер, для которого | uj | = max | щ |, и этот максимум равен | uj |.
Отсюда следует, что
р* [u] = max (I h h I, I u2 I . . . . . | un | ).
(51.9)
Пример 51.3. Возьмем нормированное пространство 33п с нормой
р [й] = max (| й, |, | h2 | | h„ |). (51.10)
Тогда сопряженная норма р* [и] определяетс-я равенством
Р*[“] = 2 1“О (5111)
1=1
в чем читатель может убедиться самостоятельно.
В общем случае для нормы р [7z] (49.7) сопряженная норма р* [и] оп¬
ределяется равенством
р*м = (3 КГ'Г.
2=1
(51.12)
где q — число, удовлетворяющее условию
?>1.
(51.13)
Доказательство (51.12) опирается на неравенство Гельдера (см., напри¬
мер, [14*], стр. 496), которое обобщает неравенство Коши — Буняковского,
использованное выше при р = q = 2 (стр. 40Э). На доказательстве равенства
(51.12) здесь останавливаться не будем.
В заключение заметим еще, что норму линейной операции
можно находить из условия
р*[ф] _ sup при /z=—0, (51.14)
как это следует из определения величины р* в соответствии с не¬
равенством (51.1). Нтконец,рледуеа запомнить важное неравенство
|ф [Л]| < р* [qj-р [А],
следующее также сразу из определения нормы р* [ср].
402 ЛИНЕЙНЫЕ ОПЕРАЦИИ В ВЕКТОРНЫХ ПРОСТРАНСТВАХ [Гл. 12.
§ 52. Геометрическая интерпретация
Дадим полезную геометрическую интерпретацию соотношений,
связанных с нормой линейной операции ср [А] = А'и в простран¬
стве
Для определенности рассмотрим случай, когда норма р [hl за¬
дана формулой
р [Л] = max (|AJ, |Л2|,. . . , |Лп|). (52.1)
Рис. 52.1.
Пусть п = 2. На рис. 52.1. линия (1) изображает поверхность
единичной сферы р [А] 1, а семейство параллельных прямых
(2) изображает поверхности ср [А] = h'u = а = const.
Как мы знаем, норма линейной операции ср есть наибольшее по
абсолютной величине значение этой операции на сфере единичного
радиуса. Очевидно, мак¬
симум величины |ф [Д]| =
= \А'и\ достигается в точ¬
ках А . 1 2 и Д(2>, где поверх¬
ность р \А\ = 1 касается
линий ф \hl = ах и ф [hl =
= а2 = — ах. (В других
случаях таких точек мо¬
жет быть и больше, чем
две, но это несущественно.)
В точках А^ и А(2 1 опера¬
ция ф [А] принимает со¬
ответственно наибольшее
ах и наименьшее (—ах) зна¬
чения. Во всех же других
точках сферы р \А\ 1 аб¬
солютное значение опера-
w ции ф [Л] меньше, чем |ах|.
Действительно, пусть точка А, отличная от точек hW и А. 2 .. лежит
на этой сфере. Прямая ф [А] = hf и — а, проходящая через
точку hi, расположена к началу координат ближе (в самом обыч¬
ном смысле), чем прямые ф [А] = + ах, проходящие через точки
и А<2 А . Поэтому и оказывается, что значение а операции ф [А]
в точке А меньше, чем значение ах этой же операции в точке А 1 2.
Таким образом, норма р* [ф] операции ф [А] = h'u — это наи¬
большее значение а, при котором прямая ф [А\ = а еще пересекает
сферу р [А\ 1. По аналогии и в общем случае оказывается, что
норма р* [ф] — это наибольшее значение а, при котором гипер¬
плоскость ф [А\ = а еще пересекает единичную сферу р \А\ 1.
При вычислении нормы р* [ф] линейной операции ф [Л] =
= А'и может оказаться полезным также следующий способ. Рас¬
§ 52]
ГЕОМЕТРИЧЕСКАЯ ИНТЕРПРЕТАЦИЯ
403
смотрим гиперплоскость ф [А] = 1. Эта поверхность не проходит
через точку h = 0, так как ф [0] = 0. С другой стороны, при
|| h || -> оо обязательно lim р [А] = оо, какова бы ни была норма
р [А]. Отсюда вытекает, что на поверхности ф [А] = h'u = 1 не¬
прерывная функция г] = р [Л] достигает своего наименьшего зна¬
чения ц = р° в некоторой точке h = h. При этом р° >0 в силу
того, что А° - 0. Итак, пусть
ц° = р [А°] = min (р LhJ при ф Lh] = 1) (ф [А°] = 1). (52.2)
Оказывается, что
РЧф]=>-
(52.3)
Действительно, для всех А, принадлежащих гиперплоскости
ф [А] = 1, выполняется следующее неравенство: ф [А] = 1
р* [ф] р [А], т. е. р [А] > 1 / р* [ф]. Поэтому
’Г = шш(р[А] при ф [/г] = 1)> (52-4)
С другой стороны, по определению нормы р* [ф] согласно
(51.3) существует э.лем<^:^т А=1А с единичной нормой р [А(1Ч = 1,
для которого
Ф [AW] = р* [ф] = р* [<ф|. р [А<1]. (52.5)
Пусть ф [Л(1И = р. Очевидно, р >0, так как мы^онечно, рас¬
сматриваем операцию ф [А], отличную от тождественного нуля.
Построим элемент № = Д(1. По свойствам однородности (50.2),
(49.4) операции ф [h] и нормы р ]h] получим теперь из (52.5)
ф [/г(21 = -у Ф А(1)] - = у Р*[ф1 -Р t -- 1 = Р*[ф!-Р [Л(8)], (52.6)
причем
Ф [Л<2)] = 1. (52.7)
Учитывая, наконец, что по выбору h° выполняется условие
р° = р [А.0] - р [А(2)], получим из (52.6) и (52.7) неравенство
р* [<ф]-р° 4^ 1, которое вместе с (52.4) и доказывает (52.3).
Поясним геометрический смысл соотношения (52.3). Пусть для
определенности норма р [А] задана равенством
р[А] = 2 |Л«|. (52.8)
2=1
Допустим, что при п = 2 на рис. 52.2 линия (1) изображает по¬
верхность ф [А] = 1, а линии (2) изображают семейство поверхно¬
стей р [А] = £. Из рис. 52.2 в соответствии с (52.3) заключаем, что
404 ЛИНЕЙНЫЕ ОПЕРАЦИИ В ВЕКТОРНЫХ ПРОСТРАНСТВАХ 1Гл. 12
норма р* [ср] равна величине 1 / р°, где р° — наименьшее значе¬
ние [ = р°, при котором поверхность р [Л] -- £ еще пересекает
прямую ср [Л] =1. Аналогичную геометрическую картину можно
представлять себе при п >2 и в других случаях нормы р [Д].
В пространстве величина
р [Л] имеет смысл расстояния точки
{л.} от начала координат h =
0. Поэтому можно сказать, что
норма операции ср [Д| = Ли есть
величина р* [ср] = 1 /р°, обратная
расстоянию р — р° гиперплоскости
ср [Л] = 1 от начала координат
Л = 0.
Из всего сказанного можно
сделать следующий . вывод. Будем
говорить (не совсем аккуратно,
может быть), что сфера р [Л] . е
и гиперплоскость ср — [3 каса¬
ются друг друга, если они имеют
общие точки Д, но при этом на
плоскости ср> ]h] = р нет точек, ле¬
жащих в области р [Л]. а. Пусть
в пространстве . задана операция ср [Л]. Норма этой опера¬
ции' может быть определена следующими двумя способами:
1) р* [ф]]=|а|, если плоскость ср ^^] = а есть касательная к
единичной сфере р [Л] 1;
2) р* [ср] = 1/р°, где р° — радиус сферы р ^^] <1 р°, которая
касается гиперплоскости ср ^^^] = 1.
§ 53. Отделение выпуклых множеств
Задача об отделении выпуклых множеств играет важную роль
во многих вопросах математики, связанных с рассмотрением ли¬
нейных операций. В частности, фундаментальная теорема Ха¬
на — Банаха [6*], являющаяся базой для решения так называе¬
мой проблемы моментов, на которой основана большая часть вы¬
водов нашей монографии, удобно интерпретируется геометрически
в виде теоремы об отделении множеств. В данном параграфе мы
обсудим проблему для случая конечномерного пространства
Прежде всего, дадим определение выпуклого множества, кото¬
рое является математической формализацией интуитивного пред¬
ставления о выпуклости.
Пусть Л(1) и _ две точки в пространстве Тп. Отрезком, сое¬
диняющим точки № и А<2), называется совокупность всех точек
вида h = W1) + ( —%) Д(2), где 0 < А < 1.
ОТДЕЛЕНИЕ ВЫПУКЛЫ Х МНОЖЕСТВ
405
Множество jZ в линейном пространстве (. называется выпук¬
лым, если для всякой пары точек из Ж соединяющий их отрезок
содержится в Ж.
В двумерном (Ж2) и трехмерном (Ж3) пространствах понятие
отрезка совпадает с обычным геометрическим понятием отрезка
[М1), 2(.( ( прямой, проходящей через точки 2 2 1 2, Выпуклыми
множествами в пространстве Ж3 являются, например, совокупно¬
сти точек, образующих отрезок,
прямую, плоскость, треуг ольн ик,
куб, шар и т. д. Напротив,
совокупность точек, заключенных
между двумя концентрическими
сферами, выпуклым множеством
не является.
Отметим, что в пространстве
при любом выборе метрики
р [hj сфера р [А] ( е является
выпуклым множеством. Справед¬
ливость этого утверждения выте¬
кает непосредственно из определе¬
ния выпуклого множества и из со¬
отношений (49.4) для нормы.
Рассмотрим теперь в простран¬
стве Жп два каких-либо множест¬
ва точек Лх и М22 Говорят, что ли¬
нейная операция ф [Д] разделяет
Рис. 53.1.
эти множества, если сущест¬
вует такое число а, что выполняются неравенства:
Ф [й] <4 а при всех h из Жг,
(53.1)
Ф [А] > а при всех h из Ж2.
(53.2)
Условия (53.1), (53.2) можно наглядно истолковать следую¬
щим образом. Пусть, например, п = 3. Тогда уравнение ф [h] —
= uh + uh + uh — а определяет в пространстве Ж3 плоскость.
Неравенства (53.1), (53.2) означают, что множества ( х и Ж2 рас¬
положены по разные стороны от этой плоскости, хотя, может быть,
и имеют с ней общие точки (рис. 53.1). Пусть в пространстве
введена метрика, и мы имеем, следовательно, линейное нормиро¬
ванное пространство Как обычно, открытой сферой в про¬
странстве Sdn с центром в точке 2< 1 2 и с радиусом е будем называть
множество точек h изЖп, удовлетворяющих условию р [h — Д(1*]<С
<fe(e>0). Такие сферы будем называть е-окрестностью точ¬
ки №. Тогда точка 2 ( 1 ( является по определению внутренней
точкой какого-либо множества Ж, если она содержится в Ж вместе
с некоторой своей е-окрестностью.
406
ЛИНЕЙНЫЕ ОПЕРАЦИИ В ВЕКТОРНЫХ ПРОСТРАНСТВАХ [Гл. 12
Справедлива следующая важная теорема ([6*1, стр. 416;
[7*], стр. 42).
Теорема 53.1. Пусть Л л и Л2 — выпуклые множества в
S3n такие, что в Л2 имеются внутренние точки, а Л2 не содержит
ни одной внутренней точки множества Лх . Тогда существует ли¬
нейная операция (р [Л], разделяющая эти множества.
Справедливость теоремы 53.1 мы примем без доказательства.
Отметим только еще, что если для множества , Л х точка h = 0
является внутренней, то число а в условиях (53.1), (53.2) отлично
от нуля и, более того, для любого а Л о существует операция ср,
Наглядный смысл сформулированной теоремы (например, при
п = 2) таков. Если множества Лх и Л2 являются выпуклыми, не
пересекаются своими внутренностями, но, может быть, лишь ка¬
саются своими границами, то всегда можно провести прямую
ср [Д] = u1h1 + и2Л2 = а, которая разделяет эти множества (см.
рис. 53.2, 53.3).
Из рис. 53.3, где приведен пример неотделимых множеств, вид¬
но, какой смысл имеет в теореме 53.1 предположение о выпуклости
и «Л 2 •
В дальнейшем нам встретится случай, когда множество Л^
являясь выпуклым, обладает к тому же следующим свойством:
если точки 2 Л 1 2 и7<2> содержатся в Лг, то и вся прямая h = №№ +
+ (1 — X) h№ ( — сю oo) содержится в л£2. Такое множест¬
во называется плоским. В этом случае линейная операция <р [А],
о которой идет речь в теореме 53.1,удовлетворяет на множестве
строгому равенству:
<р [h[ = а при всех h из j£2, (53.3)
если только это равенство выполняется хотя бы в одной точке
ИЗ Л^
§ 53]
ОТ/ ДЕ ЛЕ НИЕ ВЫПУКЛ ЫХ МНОЖЕ СТВ
407
В самом деле, пусть в точке Аа) из Л2 имеем ф = а и опе¬
рация ф отделяет Предположим, вопреки (53.3), что в неко¬
торой точке Т — из Лб2
Ф [Д(2)] = ₽ >«. (53.4)
Так как множество Л2 плоское, то в нем содержится и любая
точка h = X А^) + (1 — X) М2) (— оо — X — оо). Имеем:
Ф [Л] = Хф W1)] + (1 - X) ф [А<2)] = аХ + (1 - X) р. (53.5)
ПриХ>1 из (53.5), (53.4) получим неравенство ф[М’)] < а,
что противоречит (53.2). Полу¬
ченное противоречие доказы¬
вает наше утверждение. .
Примерами плоских мно¬
жеств в пиостиз.астве Ж3 яв¬
ляются прямая и плоскость.
Ясно, что плоскость ф [Л] =
= uh + u2h2 + uh = а, от¬
деляющая эти плоские множе¬
ства от некоторого выпуклого
множества параллельна
им или их содержит (рис. 53.4).
Нам понадобится теорема об
Рис. 53.4.
отделении выпуклых множеств в
бесконечномерных функциональных пространствах. Эта теорема
будет обсуждена ниже, в § 61. Обсуждение задачи об отделении
множеств в конечномерных пространствах, изложенное в дан¬
ном параграфе, имеет вводный характер. Заметим еще, что в ко¬
нечномерных пространствах Жп предположение о существовании
у множества — , вaутиеaaей точки не является особенно существен¬
ным для возможности их разделения гиперплоскостью ф[,] = а
(см. [93], стр.781,. Однако это предположение важно в бесконечно¬
мерном случае, который рассматривается в § 16.
Глава 13
НОРМИРОВАННЫЕ ПРОСТРАНСТВА ФУНКЦИЙ
§ 54. Предварительные замечания
В этой и следующей главах приводятся некоторые сведения из
теории функций, составляющие фундамент той теории управления
и наблюдения, которая развивается во II и в III частях книги.
Большинство фактов, как отмечено во введении, мы приводим без
доказательства, апеллируя к их наглядному смыслу. Именно
для этой цели и были рассмотрены в § 49—54 аналогичные поня¬
тия для более привычных конечномерных пространств.
Будем рассматривать вещественные числовые функции h (т),
определенные на отрезке [£а, £₽]. Каждую такую функцию h (т)
можно трактовать как вектор h = {Лт}, имеющий бесконечное ко¬
личество компонент hx = h (т), соответствующих всевозмож¬
ным значениям т из отрезка Иа, fyl. Исходя из такой трактовки
функций h (т) = {Лт}, на них можно распространить те понятия и
результаты, которые были изложены выше для конечномерных
векторов h = {hi}. Изучение этих вопросов входит в задачу курса
функционального анализа, который излагается, например, в кни¬
гах [6*, 7*, 9*, 14*]. Для овладения функциональным анализом
требуется существенное расширение знаний по теории функций
действительного переменного по сравнению со стандартным мате¬
матическим курсом. Мы ограничиваемся здесь довольно поверх¬
ностным изложением основных понятий и фактов, достаточным
для наших целей. Следует иметь в виду, что, несмотря на большое
количество математических тонкостей, возникающих при работе
с «бесконечномерными векторами»{Аг}(£а т ^),здесь сохраня¬
ют свой смысл многие основные закономерности, характерные для
конечномерных векторов {hi}. Читатель, мало знакомый с функци¬
ональным анализом, но хорошо разобравшийся в материале преды¬
дущих параграфов этой части книги, может при изучении задач
об управлении и о наблюдении уверенно работать с общими поня¬
тиями, рассматриваемыми в §§ 55—61. При этом достаточно огра¬
ничиться теми функциональными моделями, которые будут разоб- •
раны в этих параграфах. При желании расширить круг этих
моделей следует учитывать некоторые дополнительные обстоятельст¬
ва, связанные с бесконечномерностыо векторов {hx}. Наиболее
существенные из этих обстоятельств будут отмечаться по ходу
§ 54]
ПРЕДВАРИТЕЛЬНЫЕ ЗАМЕЧАНИЯ
409
изложения материала. Заметим еще, что материал этой и следую¬
щей глав важен для обоснования и понимания внутреннего меха¬
низма тех теорем, которые даны в книге для задач об управлении
и наблюдении. Однако основные выводы о решении этих задач не
содержат каких-либо понятий, выходящих существенно за рамки
рядового курса математического анализа.
Итак, рассмотрим некоторое множество JV* функций h (т), задан¬
ных на отрезке [G, Gt Для этих функций естественным образом
определены операции сложения и умножения на число: функция
/ (т) есть сумма функций h (т) и g (т), если в каждой точке т из
[£а, G 1 значение функции / (т) равно сумме значений h (т) и g (т);
функция 1 / (т) есть произведение X h (т) (или h (т)Х) числа % на
функцию h (т), если в каждой точке т из [G, G 1 значение / (т)
равно произведению % на значение h (т). Говорят, что множество
Ж функций h (т)(£а . т G) является линейным функциональ¬
ным пространством, если, каковы бы ни были две функции /^((т)
и G G1 (т), содержащиеся в Ж, и каковы бы ни были вещественные
числа А, и v, функция h (т) = АЛа> (т) + т&<г) (т) также содержится
в Ж. Как мы видим, определение линейного пространства Ж
функций h (т) = hx (G . т G) по форме совершенно совпадает
с определением линейного пространства Жп векторов h = {AJ
(i = 1, 2, ..., п). В дальнейшем линейные функциональные про¬
странства будем обозначать символом Ж^а,и], если будет важно
подчеркнуть, на каком -отрезке оси т определены функции h (т),
являющиеся элементами этого пространства. Иногда для обоз¬
начения линейного пространства Ж.*азр] будем еще употреблять
символ Ж {h (т)}, если важно будет отметить букву h, выбранную
для обозначения элементов этого пространства. Наконец, в тех
случаях, когда важно указать и обозначение элементов данного
пространства и отметить отрезок, на котором заданы функции,
будем писать Ж{ Л (т); ta т G}. В тех случаях, когда не долж¬
но возникать недоразумения, будем обозначать функциональное
пространство просто буквой Ж. По аналогии с конечномерным слу¬
чаем будем иногда называть элементы h (т) пространства
точками из Ж.
Примерами линейных пространств Ж[/а,*0] являются, например,
следующие множества функций:
(1) Множество всех возможных вещественных функций h (т)
(ta < Т <С Р>)-
(2) Множество функций вида
m
/ЦТ = S Xig(()(T), (54.1)
г=1
где g№ (т) — какие-либо т определенных функций, например
410
НОРМИРОВАННЫЕ ПРОСТРАНСТВА ФУНКЦИЙ
[Гл. 13
может быть gW> (т) = — — — a — — — всевозможные вещественные чис¬
ла. —Действительно, очевидно, сумма любых двух функций вида
(54.1) и произведение любой функции h (т) вида (54.1) на любое
число К снова является функцией такого же вида.
(3) Множество всех функций h (т), непрерывных на отрезке
[е(а т^(з].
(4) Множество — всех непрерывных функций h (т), имеющих в
интервале (£*, fp) непрерывную производную h (т).
Напротив, например, множество М функций h (т), кусочно-не¬
прерывных на [Za, — J — каждая из которых имеет на этом отрезке
лишь одну точку разрыва, линейного пространства не
образует, так как сумма таких двух функций может иметь две точ¬
ки разрыва и, следовательно, не будет содержаться в Ж
Выбор того или иного пространства Ж[1а,4е] определяется каж¬
дый раз условиями той задачи, где используются — элементы h (т)
этого пространства.
Наряду с числовыми функциями h (т), заданными на отрезке
U«, fp] и принимающими скалярные значения h (т), мы будем
рассматривать также вектор-функции h (т), заданные на отрезке
[e«, fp] и принимающие векторные значения h (т) = {-h- (т)}
(i = 1, 2, . . ., г). Для таких вектор-функций h (т) = {h- (т)} так¬
же естественным образом определяются операции сложения и ум¬
ножения на число: / (т) = {ft (т)} = h (т) + g (т) = {h- (т) +
+ gi (т)}, / (т) = {fi (т)} = hh (т) = {khi (т)}. Аналогичным обра¬
зом множество V вектор-функций h (т) ={hi (т)} (Za ( т ( Ze) яв¬
ляется линейным функциональным пространством, если, каковы
бы ни были две вектор-функции Л(й(г) — {h^ (т)} и Л<2) (т) =
= {ha— (т)}, содержащиеся в Ж, и каковы бы ни были веществен¬
ные числа Z и v, вектор-функция h (т) = Мг(1> (т) + —vh№ (т) так¬
же содержится в Ж.
Примером такого пространства Ж может служить множество
r-мерных вектор-функций h (т) = {h- (т)} (i = 1, . . ., г; Za
С — ( ds), каждая составляющая h- (т) которых является функ¬
цией, непрерывной на [Za, ^1-
Большая часть тех свойств функциональных пространств, ко¬
торые рассматриваются ниже, будет относиться в равной мере
как к линейным пространствам Ж, состоящим из скалярных функ¬
ций h (т) (г» ( т <Zp), так и к линейным пространствам Ж,
состоящим из вектор-функций h (т) = {hi (т)} (i = 1, 2, . . ., г*
£<х т (з)- Поэтому мы часто там, где это не важно, не будем
специально оговаривать, о каком именно линейном функциональ¬
ном пространстве Ж {h (т); ta ( т Zp} (скалярном и векторном)
идет речь, употребляя в обоих случаях одни и те же обозначения
Жре, Z], Ж{А(т); t* ( т < (} для пространств и для их элементов
§ 55]
ИНТЕГРАЛ ЛЕБЕГА
411
h (т). Там, где различия между векторными и скалярными значе¬
ниями функций h (т) будут существенны, это обстоятельство будет
специально оговариваться и подчеркиваться.
Заметим в заключение этого параграфа, что рассмотренные
здесь функциональные пространства Жр а, удовлетворяют, оче¬
видно, всем условиям I и II, указанным выше, в § 49, при изуче¬
нии конечномерных линейных векторных пространств и характе¬
ризующим общее абстрактное понятие линейного пространства.
Это важное обстоятельство и оправдывает здесь употребление тер¬
мина линейное пространство Жра- ^функций h (т).
§ 55. Интеграл Лебега
Прежде чем приступить к изучению функциональных про¬
странств Жра> , мы в настоящем параграфе рассмотрим совсем
кратко и в описательной форме понятие интеграла Лебега, без
упоминания о котором было бы трудно обойтись. При этом будем
следовать известному курсу [20*]. Полное изложение вопроса чи¬
татель может найти в упомянутой монографии [20*], а также в кни¬
ге [9*], Ч; 2. Использование интеграла Лебега оказывается необ¬
ходимым ввиду того, что многие разрывные функции даже со срав¬
нительно несложной структурой являются неинтегрируемыми в
обычном, знакомом из курса математического анализа смысле или,
как принято говорить, в смысле Римана. Однако в процессе теоре¬
тических рассмотрений операции интегрирования приходится про¬
изводить и над достаточно сложными разрывными функциями.
При этом оказывается, что для широкого класса разрывных функ¬
ций правомерность таких операций можно вполне строго обосно¬
вать. Но для этого приходится вводить новое определение инте¬
грала, более общее, чем определение его по Риману. Такое опреде¬
ление было дано А. Лебегом в начале XX века. Сейчас известны
различные подходы к построению интеграла Лебега. Здесь, как
уже отмечалось, мы избираем путь, описанный в книге [20*].
Этим путем интеграл определяется следующим образом.
Сначала рассмотрим ступенчатые функции, определенные в ко¬
нечном или бесконечном интервале (а, Ь), т. е. такие функции, ко¬
торые принимают постоянные значения ск на интервалах ik конеч¬
ной длины | ik |, взятых в конечном числе, и равные нулю вне этих
интервалов (рис. 55.1).
В концах интервалов ik значения функций могут быть какими
угодно — это несущественно. Для каждой ступенчатой функции
интеграл определяется обычным образом как сумма
J = S ск I | I (55.1)
£
412
НОРМИРОВАННЫЕ ПРОСТРАНСТВА ФУНКЦИЙ
[Гл. 13
Рис. 55.1.
и имеет, следовательно, как и положено, смысл площади (с учетом
знаков ординат q). С помощью предельного перехода понятие ин¬
теграла распространяется на функции более общей природы.
При этом, однако, потребуется одно новое понятие, которое мы
сейчас определим. Рассмотрим некоторое множество © точек
на числовой прямой. Говорят, что это множество имеет нулевую
меру, если все точки из @ можно покрыть системой интервалов,сум-
марная длина которых не превосходит е, каким бы малым ни было
наперед заданное число е>0.
Примерами множеств нуле¬
вой меры являются: (1) лю¬
бое конечное множество то¬
чек Xj, т2, . . -y X*; (2) любое
счетное множество точек т1;
Ь X т2, . . ., q,... В самом деле,
в обоих случаях необходимой
системой интервалов могут,
очевидно, служить интерва¬
лы вида (тк — е/2*, хц + е~12к).
Говорят, что некоторое условие выполняется почти всюду на не¬
котором интервале, если это условие выполняется для всех точек
из данного интервала, за исключением, может быть, какого-то
множества @ нулевой меры.
Теперь интеграл Лебега строится следующим образом. Рас¬
смотрим какую-либо неубывающую последовательность {ф(с (т)}
(к — 1, 2, . . .), состоящую из ступенчатых функции^ (т) и схо¬
дящуюся почти всюду к некоторой функции ф (т), т. е. фк (т)
"Сф/c+i (т) и Итфк (т) = ф (т) при всех т, кроме, может быть, мно¬
жества точек х нулевой меры. Предположим еще, что для данной
последовательности {фй (т)} последовательность их интегралов
I [фк (т)], заданных равенствами (55.1), ограничена. Все функции
ф (т), которые можно получить как описанные только что преде¬
лы подобных последовательностей {фк (т)}, составят некоторый
класс
По определению для функций ф (т) из S1 1 1 полагают:
ъ ь
\ ф(т) dx = lim 1 (т) dx.
а £
(55.2)
Для обозначения интеграла Лебега мы используем общий знак
определенного интеграла.) Далее, рассматривается еще более ши¬
рокий класс функций <У(2), состоящий из разностей всевозможных
функций ф (т), принаддлнсащих Для функции / (т) из &^<г)
§ 55]
ИНТЕГРАЛ ЛЕБЕГА
413
интеграл определяется равенством
ь ь ъ
f (т) dr = 5 ip(1) (т) dr — j 1/2> (t) dr, (55.3)
а а а
гдеф(!) (т) иф(2>(т) — это как раз те функции из - - 1 - - которые опре¬
деляют / (т) как разность / (т) = ф<*) (т) —ф(2) (т). Этим и завер¬
шается построение интеграла Лебега. Именно, - каждую функцию
/ (т) из класса СУ(2) называют функцией интегрируемой (по Лебегу),
а величину (55.3), определенную для нее, исходя из равенств
(55.1) и - (55.2), называют ее интегралом Лебега..
Читателя не должна вводить в заблуждение та кажущаяся
простота, с которой построен выше интеграл Лебега (55.3). Дело
в том, что мы совершенно оставили в стороне строгое математичес¬
кое обоснование данного определения. Кроме того, очевидно, что
данное выше определение интегрируемости функции / (т) и опи¬
санный только что способ вычисления интеграла от этой функции
удобны лишь с позиций теории, но практическая работа с инте¬
гралом Лебега требует серьезного дополнительного изучения.
Однако на этих вопросах мы останавливаться не будем. Нам было
важно дать здесь лишь самое общее представление о математичес¬
кой конструкции интеграла Лебега. Дело в том еще, что интегралы
Лебега и Римана часто совпадают. Так, доказывается, что если
для некоторой ограниченной на [а, Ы функции h (т) существует
интеграл Римана, то интеграл Лебега этой функции также сущест¬
вует и равен интегралу Римана. В частности, это равенство спра¬
ведливо, например, для кусочно-непрерывных функций h (т),
с которыми нам и придется иметь дело в данной книге. Следователь¬
но, практическое вычисление тех интегралов, с которыми мы фак¬
тически встретимся, надлежит выполнять по известным читателю
правилам, вне зависимости от того, какой это интеграл — Лебега
или Римана. Заметим еще, что интеграл Лебега вообще обладает
свойствами, аналогичными известным свойствам интеграла Рима¬
на, хотя интеграл Лебега и является понятием более общим и
существует для более широкого класса функций, чем интеграл
Римана. Во всяком случае, читателщсовершенно не - знакомый с ин¬
тегралом Лебега, приняв к сведению материал этого параграфа,
может при чтении основного материала книги игнорировать раз¬
личие между интегралом Лебега и Римана, так как это различие
важно лишь для строгого обоснования тех нужных нам свойств
функциональных пространств, понять смысл которых можно и
без проникновения в детали этого строгого обоснования.
Остановимся в заключение еще на одном понятии, связанном
с интегралом Лебега. Рассмотрим некоторое множество 3d точек
на интервале (а, Ь), и пусть функция / (т), которая принимает на
414
НОРМИРОВАННЫЕ ПРОСТР АНСТВА ФУНКЦИЙ
[Гл. 13
& значение 1 и значение 0 вне SP, есть интегрируемая функция.
Тогда, исходя из описанного выше способа построения интеграла
(55.3), естественно считать, что интеграл (55.3) имеет смысл
площади той фигуры, которая имеет высоту h = 1 и опирается на
множество & как на основание. Но, с другой стороны, естественно
принять, что эта площадь есть произведение высоты h = 1 на «сум¬
марную» длину р1 (S5) мно¬
жества — , т. е.
ъ
§ / (т) rfr= (55.4)
а
В соответствии со сказан¬
ным величину ((3), оп¬
ределенную равенством
,55.4), называют мерой
множества SP, а само мно¬
жество 3 называют из¬
меримым. Важно отме¬
тить три обстоятельства:
(1) ft (3) = 0 тогда и только тогда, когда 3 является множеством
нулевой меры в определенном раньше смысле; (2) измеримые мно¬
жества составляют весьма обширный класс, но не исчерпывают
всех множеств, которые можно построить из точек на числовой
прямой; (3) можно было бы, наоборот, определить сначала ' понятие
измеримого множества и его меру, а потом определить интеграл.
Такой путь определения интеграла Лебега является общепринятым.
§ 56. Стандартные нормы в функциональных пространствах
В этом параграфе рассматриваются величины, аналогичные
тем, которые ранее были введены для конечномерного случая в
§ 49. Пусть мы имеем некоторое линейное пространство Ж{h (т);
т С -}}- Скажем, что для элементов h этого пространства
определена норма р [h], если каждой функции h (т) из Ж сопостав¬
лено неотрицательное число р [Л], удовлетворяющее следующим
условиям:
1) р [h] = 0, если j (т) = 0 или если h (т) несущест¬
венно отлична от тождественного нуля;
2) р [h] >0, если функция h (т) существенно
отлична от тождественного нуля;
3) р [Л(1) + Л1’]<4р [Л(1>] +р>[г(2)];
4) р [U] =Щр [Л],
(56.1)
§ SC]
НОРМЫ В ФУНКЦИОНАЛЬНЫХ ПРОСТРАНСТВАХ
415
каковы бы ни были h, W1), | Д из | и число X (см. для сравнения
определение нормы n-мерного вектора h = {h} в § 49, стр. 396).
Линейное функциональное пространство V называют нормиро¬
ванным пространством, если для его элементов h (т) (£< т | t$)
введена норма со свойствами (56.1).
Свойства 3), 4) аналогичны по своему смыслу соответствующим
свойствам (49.4) нормы для конечномерных пространств Здп. Пер¬
вые же два условия из (56.1) нуждаются в пояснении. Дело в том,
что во многих задачах изменение значения функции h (т) в какой-
либо одной точке (или в ряде отдельных точек) может никак не
отражаться на результате тех операций, которые производятся
с этой функцией в ходе решения задачи. По этой причине функции
h (т), которые лишь в отдельных точках отличны от нуля, могут
вести себя в конечном счете так же, как и функции, тождественно
равные нулю. Иначе говоря, для данного круга задач эти функции
отличаются от нуля несущественно. Например, если ' речь идет о вы¬
числении коэффициентов Фурье функции h (т)
= | | Л (т) sin dt (n = 1 2”' • •)’ (56.2)
то интегралы (56.2) будут получаться равными нулю как для функ¬
ции h (т) = 0, так и для функции |< 1 > (т), отличной от нуля лишь
в конечном или счетном числе точек. Следовательно, для задачи
о вычислении интегралов (56.2) функция |<1> (т) несущественно
отличается от нуля. Аналогичным t образом обстоит дело и в случае
с нормой. Дело в том, что норма р [А] вводится обычно с целью об¬
служить некоторый круг задач. Поэтому оказывается важным,
чтобы норма отличалась от нуля лишь на тех функциях h (т), ко¬
торые для данного класса задач существенно отличаются от тож¬
дественного нуля. Итак, первые два условия в (56.1) будем пони¬
мать следующим образом: норма р [h] должна быть величиной
положительной для всех тех функций h (т), отличие которых от
тождественного нуля как-либо сказывается на результатах опера¬
ций, встречающихся в рассматриваемом классе задач; в против¬
ном случае функцию надлежит считать отличной от нуля несущест¬
венно, а ее норму полагать равной нулю . Заметим еще, что слова
«существенно» и «несущественно» мы будем в тексте обычно опус¬
кать, но всякий раз, как функция h (т) будет сравниваться с ну¬
лем, следует иметь в виду, что речь идет о сравнении именно по
существу.
Конкретные правила для вычисления нормы, рассмотренные
в § 49 для конечномерных векторов, связаны с операцией взятия
максимума или с операцией сложения модулей компонент
416
НОРМИРОВАННЫЕ ПРОСТРАНСТВА ФУНКЦИЙ
[Гл. 13
Аналогичным образом строятся обычно и нормы функций Л (т),кото-
рые мы можем трактовать как векторы h с бесконечным чис¬
лом компонент h (т) (£а — т — fy). При этом естественным образом
операция сложения по индексу i заменяется операцией интегриро¬
вания по переменной т. Здесь, впрочем, возникает затруднение.
Операция взятия максимума или операция интегрирования по т
может быть выполнена не со всякой функцией h (т). Поэтому при
определении той или иной нормы р \h] для функций h (т) из
Ж {h (т)} при помощи упомянутых операций приходится ограничи¬
ваться лишь такими линейными пространствами JV' этих функций,
для которых необходимые операции выполнимы. Вследствие этого
теория нормированных функциональных пространств тесно свя¬
зана с теорией интегрирования функций h (т).
Приведем некоторые примеры определения норм р[А], с кото¬
рыми будем встречаться в дальнейшем. В следующих ниже приме¬
рах 56.1—56.4 речь пойдет о скалярных функциях.
1°. Рассмотрим множество всех функций h (т) (£< — т — fy), ин¬
теграл от квадрата которых существует и является конечным. Эти
функции образуют линейное пространством котором норму мож¬
но определить равенством
<3 >■ ;
р [/г] — — —— Л2 (т) drj . (56.3)
«а
Норма (56.3) является, очевидно, обобщением евклидовой нор¬
мы n-мерного вектора h = {hi} (см. формулу (49.2) стр. 395).Интег¬
рал (56.3) понимается здесь в смысле интеграла Лебега (см. § 55,
стр. 413). Однако, как уже отмечалось выше, в дальнейшем при
чтении материала, относящегося к задачам об управлении и о на¬
блюдении, на это обстоятельство можно не обращать внимания.
Для всех конкретных функций h (т), которые встретятся в этих
задачах, интеграл (56.3) можно понимать как обычный интеграл
Римана. Понятие интеграла Лебега важно лишь для строгого
обоснования тех теорем из функционального анализа, которые
будут сформулированы в дальнейшем в §§ 58—61. Аналогичное
замечание следует иметь в виду и в случае нормы р [Л], рассмот¬
ренной ниже, в примере 2°.
Можно проверить, что величина (56.3) удовлетворяет всем тре¬
бованиям (56.1), предъявляемым к норме. При этом функции h (т)
надлежит считать существенно отличными от нуля тогда и только
тогда, когда h (т) == 0 на множестве @ ненулевой меры. (То же са¬
мое замечание относится и к п. 2°.) Действительно, первые два
условия выполняются вследствие того, что интеграл (56.3), пони¬
маемый в смысле интеграла Лебега, обращается в нуль только
тогда, когда либо h (т) = 0, либо h (т) отличается от нуля лишь
§5(51
НОРМЫ В ФУНКЦИОНАЛЬНЫХ ПРОСТРАНСТВАХ
417
на множестве точек т нулевой меры, а в остальных случаях этот
интеграл является величиной положительной. Справедливость
третьего условия следует из интегрального неравенства Минковско¬
го ([14*], стр. 497):
[$ I h1 1 1 (т) + /г<2) (т) |р л]1>< [ $ | hw (т) |р dr]VP +
ta ta
(3 .
+ [$ |/г(2) (т) fdr] 1Р (56.4)
при р = 2. Четвертое условие выполняется с очевидностью. Про¬
странство функций h (г) с нормой (56.3) будем называть простран¬
ством £(2)[/а> или, короче, пространством £(2.
2°. Норма, определенная для ттмерного вектора равенством
(49.6), обобщается для функций h (т) так:
(з
р [/г] = §1 h (т) | dr. (56.5)
При этом мы должны рассматривать линейное пространство Ж
таких функций h (т) (£а ''С т /), Для которых существует и
ограничен интеграл от их модуля. Как и в предыдущем примере,
интеграл (56.5) понимается здесь в смысле интеграла Лебега.
Можно, как и в примере 1°, проверить, что величина (56.5)
удовлетворяет условиям (56.1), предъявляемым к норме. В част-
ности,третье условие из (56.1) выполняется вследствие неравенства
(56.4) при р = 1. Очевидно, норма (56.5) имеет смысл площади,
ограниченной кривой h = h (т), осью х и прямыми х = t,, х = tp.
Рассмотренное пространство Ж[<а> tpj функций h (т) с нормой
(56.5) называют обычно пространством <5^,;; или, короче, прост¬
ранством'£.
3°. В § 49 для n-мерного вектора h = {hi} была указана нор¬
ма (49.5). Если рассматривать функцию h (т) как вектор h с беско¬
нечным числом компонент h (т), то норму (49.5) можно естественно
обобщить для линейного пространства Ж функций h (т), непрерыв¬
ных на отрезке [£а, h 1 1 следующим образом:
р (h) = max | h (т) | при ; < т ^3- (56.6)
Величина (56.6) удовлетворяет всем условиям (56.1), определя¬
ющим норму р [Л]. Проверка этих условий не составляет большого
труда, и мы на ней. останавливаться не будем. Заметим, что для
данного примера непрерывная функция h (т) существенно отлична
/14 Н. H. Красовский
418
НОРМИРОВАННЫЕ ПРОСТРАНСТВА ФУНКЦИЙ
[Гл. 13
от нуля в том и только том случае, когда она не равна тождест¬
венному нулю. Норма, определенная равенством (56.6), имеет
простой геометрический смысл: она представляет собой максималь¬
ное отклонение графика функции А (т) от оси т.
Пространство непрерывных функций А (т), заданных на отрез¬
ке [<а, с нормой (56.6), называют пространством ip] или
просто пространством
4°. В предыдущем примере норма (56.6), введенная ранее в
§ 49 для конечномерного пространства, была обобщена для про¬
странства Ж функций А (т), непрерывных на отрезке [£а, £р]. Одна¬
ко в ходе решения задач об управлении и наблюдении мы будем
встречаться с функциями А (т) более сложной природы, чем непре¬
рывные функции. Поэтому желательно иметь обобщение нормы
(56.6) для а функций А (т) более широкого класса, чем класс функ¬
ций, непрерывных на отрезке [ . , £р]. Прежде чем сделать такое
обобщение, дадим одно вспомогательное определение.
Будем говорить, что функция А (т) существенно ограничена на
отрезке tx т . £з, если существует множество © точек т нуле¬
вой меры такое, что при всех т из отрезка Иа, , ] вне этого множест¬
ва © функция А (т) ограничена, т. е. если при всех т из [ ,, £з),
кроме, может быть, т из . , выполнено неравенство
I А (т) | < v, (56.7)
где v — некоторое достаточно большое число. Множество функ¬
ций А (т), интегрируемых и существенно ограниченных на отрезке
[£а, £р], образует линейное пространство Ж. Введем теперь в этом
пространстве норму р [Л], обобщающую норму (56.6) следующим
образом. Выбросим из отрезка [£а, , ] какое-либо множество ©
точек т нулевой меры и на оставшемся множестве найдем верхнюю
грань величины | А (т) |. Это будет величина а (©), зависящая от ©.
Построим такие величины а (©) для всех возможных множеств ©
нулевой меры из отрезка И«- tj. Нижнюю грань всех полученных
чисел о (©) примем за норму функции А (т)
р [А] = inf sup | А (т) |. (56.8)
(3 т
Можно проверить, что величина (56.8) удовлетворяет всем
требованиям (56.1), предъявляемым к норме. Говорят ([23*1,
т. 3, стр 74), что норма р [Л], введенная равенством (56.8), яв¬
ляется истинным максимумом или максимумом по существу для
функции | А (т) | на отрезке [/«, ipj. Этот истинный максимум обо¬
значают еще и так: .
р [/г] = vrai max | А (т) |. (56.9)
*1 »<*< *£
S 56]
НОРМЫ В ФУНКЦИОНАЛЬНЫХ ПРОСТРАНСТВАХ
419
Описанный довольно сложный путь определения нормы (56.8)
вызывается теоретическими соображениями. На практике же мы
будем сталкиваться лишь с такими функциями h (т) (fa . т . fg)
данного пространства Ж, для которых норма р[А] (56.8) нахо¬
дится сравнительно легко. Пусть, например, требуется опреде¬
лить норму (56.8) функции G 1 - (т) (рис. 56.1):
hW (т) =
— т,
0 = «т<1;
1<т<2;
2, т = fg = 2.
Нетрудно установить, что
р [/га)] = vrai max I (т) | = lim I h{1} (т) I = 1.
0<т<2 т-1-0
Пространство функций, для которых введена норма (56.8),будем
называть пространством
(или, короче, Л)х\
5°. Рассмотрим еще один важный
способ определения нормы, явля¬
ющейся обобщением евклидовой
нормы т-мерного пространства S3n.
Именно, рассмотрим, как опре¬
деляется норма для элементов
функциональных пространств,
именуемых гильбертовыми (см.,
например, [14*1, стр. 83). Опишем
здесь вкратце наиболее характер¬
ное свойство этих пространств.
Пусть имеется линейное простран¬
ство вещественных число¬
вых функций {h (£)}, заданных на отрезке 0а,М- Предположим,что
каждой паре функций hy (t), (t) из сопоставлено по оп¬
ределенному правилу вещественное число (hyhs), причем выполняют¬
ся условия:
(56.10а)
(h, (0) = (0);
(Xj/zy (t) + Х2Къ (0> (/0) = (^y (0, (00) +
+ И2 (Из (0), ^(0», (56.106)
г) Всюду в основном тексте книги, чтобы не загромождать текст лишними
терминами, мы позволим себе следующую вольность: рассматривая элементы
h (т) пространства Л, будем говорить просто об ограниченных функциях и
о максимуме их модуля и будем писать просто sup | h (т) - |, понимая под этим
всякий раз соответствующие свойства по существу, т. е. в смысле (56.9).
15 Н. Н. Красовский
420
НОРМИРОВАННЫЕ ПРОСТРАНСТВА ФУНКЦИЙ
[Гл. 13
каковы бы ни были функции hy (t), Л (t), Л (t) и вещественные
числа Х*1? ■ Z2,
(Л (t), hy (t)) >0, (56.10b)
причем знак равенства имеет место в том и только том случае,
если hy (t) равняется нулю по существу. Величина (hy (t), Л (t)),
для которой 2 выполняются перечисленные условия, называется
скалярным произведением функций hy (t), Л (£). Для элементов
функционального пространства введенное только что скалярное
произведение функций играет примерно ту же роль, что и обыч-
п
ное . скалярное произведение (hW, Л<8>) = 2 h^h^ n-мерных
г=1
векторов hi, h№ в евклидовом пространстве SBn. В частности, для
скалярного произведения функций справедливо, как и для ска¬
лярного произведения n-мерных векторов (см. § 51, стр. 400),
неравенство Коши — Буняковского. Иными словами, справедливо
соотношение
| (h. (0, h (0) |2 < (h. (0, hy (0) (h& (0, Л (0). (56.11)
В самом деле, составим скалярное произведение
(khy (t) + Х/г5 (t)) (khy (t) + КЛ (t)), (56.12)
(Л 2 Л8)
где X — любое вещественное число, к = ру— 1ур • Величина
(56.12), очевидно, неотрицательна. Расписав ее подробнее, на¬
ходим:
A2 (h, (t), h, (0) + 2Х | (1Y (0, h. (0) | + V (Л8 (0, hb (0) > 0.
Полученный квадратный трехчлен должен быть неотрицательным
при любом вещественном X. Но это возможно лишь в том случае,
когда
| (1 (0, h6 (£)) |2 — к2 (hy (t), hy (0) (1 (0, Л (0) < 0.
Последнее неравенство равносильно соотношению (56.11). При
помощи скалярного произведения можно ввести норму р [Л§]
функции Л (t) из Жра,<р]. Именно, будем полагать:
Р [Л] = (Л (0, Л (О)1*. (56.13)
Опираясь на условия (56.10) и неравенство Коши — Буняковского
(56.11 >,читатель может без особого труда проверить, что величи¬
на р [Л1 (56.13) удовлетворяет всем четырем свойствам нормы из
(56.1) и потому, действительно, является нормой функции Л (t)
из tpj- Линейное нормированное пространство веще¬
§56]
НОРМЫ В ФУНКЦИОНАЛЬНЫХ ПРОСТРАНСТВАХ
421
ственных функций {h (£)} с определенным на нем скалярным про¬
изведением и с нормой вида (56.13) называется гильбертовым
пространством х).
(Заметим, что в литературе описанное здесь пространство
принято также называть вещественным гильбертовым простран¬
ством, в отличие от пространств, где функции h могут иметь
комплексные значения.) Для гильбертова пространства
примем обозначение Скалярное произведение функ¬
ций можно вводить различными способами. Каждому конкрет¬
ному способу введения его соответствует свое конкретное гиль¬
бертово пространство. Наиболее простым примером скалярного
произведения функций hy (£) и 1 (t) является интеграл
*3 .
<\Ау (t) !гъ(1) dt (56.14)
(сравни сказанное с содержанием стр. 58, § 9). Конкретное
гильбертово пространство, соответствующее такому скалярному
произведению, есть как раз разобранное выше пространство Ж^л^]
с нормой
'в '/2
Р [М = (Ay (О, А у О = [ 5^ (0 dt] .
Рассмотрим несколько более сложный пример гильбертова
пространства.
6°. Пусть дано линейное пространство функций {h (t)} с сум¬
мируемым квадратом или, иначе говоря, пространство <22$.<з]-
Для каждой пары функций hy (t) и 1 (t) из определим
скалярное произведение, но зададим его уже не в виде интеграла
(56.14), а в несколько иной форме. Именно, будем предполагать:
(3 (3 (3
(hy (t), h& (t)) = \ К (т, ft) hy (r) /г5 (ft) dxdft + \ /гу (г) /г5 (r) dx,
*a
(56.15)
*) Строго говоря, для плодотворной работы с элементами гильбертова
пространства следует предполагать, что оно обладает еще свойством пол¬
ноты (см. [14*], стр. 29). Это свойство пояснено кратко также в § 57, на стр.
424. В определении гильбертова пространства еще часто предполагают, что
оно обладает свойством сепарабельности ([14*], стр. 53). Однако об этом
весьма тонком математическом свойстве мы здесь позволим себе не говорить.
15*
422
НОРМИРОВАННЫЕ ПРОСТРАНСТВА ФУНКЦИЙ
[Гл. 13
где функция К (т, О) непрерывна и симметрична по т и $ и яв¬
ляется, кроме того, неотрицательным ядром ([18*1, стр. 100).
Иными словами, считаем, что К (т, О) обладает следующими
свойствами:
1) К (т, О) = К(&, т),
2) Ц К (т , fl) - - (т) h&f) dx dfl > 0,
каковы бы ни были функции hy (t) и Аь (0 из Построен¬
ная величина (56.15) удовлетворяет каждому из свойств а), б), в)
(56.10) скалярного произведения. Действительно, свойство а)
из (56.10) выполняется по той причине, что ядро К (т, *1) симмет¬
ричное. Свойство б) вытекает непосредственно из свойств инте¬
грала. Проверим, наконец, свойство в). Если - (t) ф 01), то не¬
равенство (hy (t), hy (t)) 0 выполняется потому, что интеграл
Ч «р ‘р
hy (t) dt положителен, а слагаемое - - К(О,т)Лу (&) - (T)dOdT
i« tn ia
во всяком случае неотрицательно. Пусть hy (t) = 0. Тогда,
очевидно, (hy (t), hy (t)) = 0. Итак, выражение (56.15),
действительно, определяет некоторое новое скалярное про¬
изведение функций из Этому новому скалярному
произведению соответствует уже отличное от конкрет¬
ное гильбертово пространство Норма элементов
hy (t) из ^[ia,ip], определяемая согласно соотношению (56.13), бу¬
дет иметь следующий вид:
'p tp
Р [р7] = [ $ $ К (т, ф) (т) ау (ф) dx (-&) dft] .
® t«
§ 57. Нормы в пространствах вектор-функций
В предыдущем параграфе мы рассмотрели четыре типичных
примера нормированных пространств ЗЖ(2>, Ж, йи - - Элементами
этих пространств, которые будем называть стандартными, яв¬
ляются скалярные функции h (т), заданные на отрезке [Za, £р]. Од¬
нако в дальнейшем мы встретимся с линейными пространствами
более сложного строения, а именно, нам придется иметь дело с
Ч Речь, конечно, идет о сравнении hy (t) с тождественным нулем по су¬
ществу. .
§ 57]
НОРМЫ В ПРОСТРАНСТВАХ ВЕКТОР-ФУНКЦИЙ
423
пространствами, элементы которых представляют собой вектор-
функции, т. е. функции, значения которых суть векторы h (т)
с компонентами ( (т)} (i = 1,..., г; 1ж ( т ( £р). Для таких
пространств также можно ввести величины, обобщающие нормы,
рассмотренные в примерах 1°—4° из §56. Так, норму (56.3)
естественно обобщить для пространства ( r-мерных вектор-функ-
ций h — {(т)} формулой
р[Л] = [$(2 Л|(Т))Л]‘. (57.1)
<=!
Норма (56.5), определяющая пространство X, обобщается ра¬
венством
Ъ т
Р [ft] = § (Si hi (т) l) dr. (57.2)
i=l
Иногда полезно также использовать норму, определенную равен¬
ством
*Р г 1д
Р Iй! = } (2 Л’(т)) df- (57.3)
<a i=1
Для пространства $ соответствующее обобщение нормы мож¬
но дать формулой
р[Л] = тах max {| Л4 (т) !}, (57.4)
i
а для пространства — формулой
р [Л] = max inf sup {| hi (т) ]}. (57.5)
i Q t
Можно проверить, что рассмотренные величины (57.1) — (57.5)
также удовлетворяют всем требованиям (56.1), предъявляемым
к норме р [Л]. Как мы видим, нормы (57.1) — (57.5) конструи
руются путем комбинации одной из норм (49.2), (49.5), (49.6;
r-мерного вектора {Т^} с некоторой функциональной нормой
(56.3), (56.5), (56.6), (56.8). Так, например, норма (57.3) получается
комбинацией евклидовой нормы (49.2) вектора {f,} с нормой
(56.5). Мы перечислили лишь некоторые из возможных комби¬
наций. Эти и некоторые другие комбинации будут рассмотрены
ниже при исследовании задач об управлении и о наблюдении.
Пространства Х<-2>, X, ( и М, определенные в примерах 1°—4°
из §56, а также пространства вектор-функций h (т) = {h (т)},
424
НОРМИРОВАННЫЕ ПРОСТРАНСТВА ФУНКЦИЙ
[Гл. 13
упомянутые выше, обладают одним важным свойством, которое
называют свойством полноты. Это свойство связано с распростра¬
нением известного принципа сходимости Коши ([23*1, т. 1,
стр. 84) на функциональные пространства. Этот принцип, как
известно, .заключается в следующем. Для того чтобы числовая по¬
следовательность v(1), v(2) ,..., vW ,... имела предел v при к -> о"
необходимо и достаточно, чтобы
р( v(l) — при —— --со, (-—со. (57.6)
Последовательность v(fc> называется фундаментальной, если для
нее выполняется соотношение (57.6).
Пусть теперь мы имеем последовательность функций — — (г)
(i = 1, 2,...), заданных на отрезке [/«, Ze]. Говорят, что последо-
вател ьность Л<>)т) сходится к функции Л°(т) из Ж по норме plM,
если
limp [-г0* (т) — Л° (т)] = 0. (57.7)
г-*"О
Функцию —0 (т) называют пределом последовательности /г<*)т)
Как и в случае числовой последовательности, последовательность
Zi(i> (т) называется фундаментальной, если выполняется соотно¬
шение
lim р [hW (т) — № (т)] = 0. (57.8)
i, 7—оо
Для нормированных функциональных пространств из схо¬
димости последовательности А(*(т) следует, что она является
фундаментальной, т. е. равенство (57.7) — влечет за собой выпол¬
нение соотношения (57.8). Однакс не для всякого нормированного
пространства любая фундаментальная последовательность имеет
предел h° (т) из того же самого пространства. Поэтому полезно вы¬
делить те функциональные пространства, для которых принцип
сходимости Коши справедлив не только в своей необходимой, но
и в достаточной части. В связи с этим нормированное пространство
Ж называется полным, если в нем любая фундаментальная после¬
довательность hh(x) имеет пределом функцию № (т) из того же
самого пространства Ж. Конечномерное векторное пространство
обязательно является полным, так как в пространстве Sdn любая
фундаментальная последовательность имеет предел. Простран¬
ства <2(2>, X, ,, j/L, а также все другие пространства функций, ко¬
торые встретятся в этой книге, также полны. Однако доказатель¬
ство этой полноты выходит за рамки настоящей монографии (дока¬
зательство этого факта можно найти, например, в курсах [9*, 14*1)
Полные нормированные пространства функций h (т), заданных
на отрезке [£а, Zb1, будем обозначать символом ®г, , , в тех
н«> '01
§ 57]
НОРМЫ В ПРОСТРАНСТВАХ BFKTOP-ФУНКЦИЙ
425
случаях, когда не будет иметься в виду какое-либо совершенно
определенное из стандартных пространств $(2), X и т. д. Иначе
будут использоваться указанные стандартные обозначения.
Пространства , принято называть пространствами Ба¬
наха.
Отметим- в заключение этого параграфа, что, как и в конечно¬
мерном пространстве, множество функций h (т) из , линейного нор¬
мированного пространства Т , определенное условием
р [/Я < е (е > 0), (57.9)
называется сферой радиуса е. Например, в пространстве $ мно¬
жество всех непрерывных функций h (т), для которых максималь¬
ное отклонение графика от оси т на отрезке [/*, £р1 не превышает
числа е, представляет собой сферу радиуса е. Множество функций
h (т), удовлетворяющих условию
р \h — (т)1 <Z е,
где hid) (т) — некоторая определенная функция из S3, называет¬
ся открытой сферой радиуса е с центром в точке ЬИ или 8-ок¬
рестностью точки hd. Элемент Л* (т) из 33 называется предель¬
ной точкой для множества элементов Л{Ь}, если любая е-окрест-
ность точки h* содержит элементы из Л. Множество Л замкну¬
то, если оно содержит все свои предельные точки.
Заметим, наконец, что в тех случаях, когда одновременно бу¬
дут встречаться нормы функций h (т) и нормы векторов h (т) =
= {hi (т)}, получающихся фиксированием т, первые будем обо¬
значать символом р [h (т) ], а вторые — символом у [h (т)].
Глава 14
ЛИНЕЙНЫЕ ОПЕРАЦИИ В ПРОСТРАНСТВАХ ФУНКЦИЙ
§ 58. Норма линейной операции
Рассмотрим некоторое функциональное линейное нормирован¬
ное пространство S3[tx,t^]. Пусть в этом пространстве определена
операция Ф [h (т)], которая, будучи произведена над функцией
h (т) из S3, дает в результате вещественное число
ц = ф [М. (58.1)
Говорят, что ф является линейной операцией (или линейным
функционалом на 53), если выполняются следующие условия:
1) Ф [АЛ] =• Аф [Л], (58.2)
каковы бы ни были число X и функция h из S3;
2) Ф h + Л< 2>1 = ф [Л<1>] + ф [/1(2>], (58.3)
каковы бы ни были функции Д(1) и № из S3 (см. для сравнения
определение линейной операции ф в n-мерном пространстве, § 50,
стр. 397).
Обсудим понятие нормы линейной операции. Как и в конечно¬
мерном случае (см. стр. 398), норма р* [ф] операции Ф опреде¬
ляется как наименьшее из чисел v, удовлетворяющих неравен¬
ству
| Ф [h] | < vp [h (58.4)
при h из S3. Однако здесь появляется одно новое существенное
обстоятельство. Может случиться, что ни одного числа v, которое
бы обеспечивало неравенство (58.4), нет. В соответствии с этим
определить норму р* [ф] равенством, аналогичным равенству
(51.3), для любой линейной операции ф на SSp^tg] со свойствами
(58.2), (58.3) в общем случае уже нельзя. Дело в том, что
величина | ф [h] | может не достигать конечного максимума на сфе¬
ре р [Л] 1. Покажем это на примере.
Рассмотрим пространство <2[0 и, т. е. пространство S3 функций
h (т) (0 < т < 1), где норма р [Д] определена равенством (56.5).
Пусть операция ф [Л] сопоставляем каждой функции h (т) ее
§ 58]
НОРМА ЛИНЕЙНОЙ ОПЕРАЦИИ
427
значение в точке t = 0, т. е.
Ф [fe] = Л (0).
(58.5)
Операция Ф [й] (58.5) удовлетворяет условиям (58.2) и (58.3).
Построим последовательность функций №>(т) (i = 1, "
дующего вида:
2,...) сле-
h<i(r) =
i при
0 при
0 1 т < —- ,
— . т . 1.
Нетрудно подсчитать, что
1
p[/iW] = (T^dT = l.
О
(58.6)
(58.7)
Следовательно, все функции № (т) (58.6) содержатся в единичной
сфере. В соответствии с (58.5) и (58.6) имеем:
Ф [/г(>] = (0) = /.
Это означает, что
limq> [/г(,)] =
i^co
т. е. операция ф (58.5) не имеет на единичной сфере конечного
максимума. Значения рассмотренной операции на этой сфере не
ограничены и, следовательно, нет ни одного числа v, которое удо¬
влетворяло бы неравенству (58.4). Указанное обстоятельство
является вполне естественным, так как операция Ф (58.5) сопо¬
ставляет каждой функции Л (т) из Ж[0,ц ее значение в одной точке
т = 0. А значение функции в одной отдельной точке, как было от¬
мечено выше (см. § 57), является несущественным, если функцию
эту рассматривать как элемент пространства <£[0,1].
Указанное обстоятельство, которое в конечномерном случае
не имеет места, требует здесь дополнительного ограничения на
свойства операции ф. А именно, говорят, что линейная еперация ф
(58.1) — (58.3) ограничена, если ее значения т) = Ф [Л] на еди¬
ничной сфере ограничены, т. е. существует число v такое, что
[ Ф [й] | . v при р 1Л1 1. (58.8)
В конечномерном пространстве . всякая линейная операция
Ф [Л] является ограниченной. В дальнейшем и для пространств
будем рассматривать лишь ограниченные операции
Ф, однако чтобы не перегружать терминологию, всюду в книге
в понятие «линейная» операция будем вкладывать смысл:
428
ЛИНЕЙНЫЕ ОПЕРАЦИИ В ПРОСТРАНСТВАХ ФУНКЦИЙ [Гл. 14
ограниченная линейная операция, опуская слово «ограниченная».
Однако даже если операция ф [ft] ограничена, определить норму
р* [ср] равенством (51.3) все-таки можно не всегда, так как может
не существовать такого элемента /t из сферы р [/г] | 1, на кото¬
ром достигается наибольшее значение | ср [/t] |, в чем нас убеж¬
дает следующий пример.
Рассмотрим снова пространство функций <S[o,i] и выберем
функцию и (т) = т (0 | т | 1). Определим линейную операцию
(58.1) так:
1 1
ц = ср [ft] = t ft (т) и (г) dx = | h (т) т dx. (58.9)
о о
Очевидно, что для любой функции h (т) из Ж[о,1], лежащей в сфере
р [ft] | 1, справедливо неравенство
1
т = др [/i] = §/г(т) тс?г<].
о
(58.10)
Рассмотрим последовательность функций
/,"’ (т) =
к 0,
1
0 <1 — е{,
1—
(58:11)
где ех, е2,..., еъ... — сходящаяся к нулю последовательность
положительных чисел. Очевидно, что
1
Р [/?(г)] = | | /г(г) (т) | dx = 1,
о
т. е. все функции (58.11) содержатся в единичной сфере. Найдем
теперь значения | t линейной операции (58.9) на функциях h№(x)
(58.11). Имеем | t = 1 — е^2.
Все сказанное означает, что операция (58.9) является ограни¬
ченной и sup ср = 1 достигается на функциях h(i> (т) (58.11) при
е{ -> 0, но согласно (58.10) не существует функции h° (т) из (58.11),
где было бы
ср [/10] = sup ср [/г^] = 1.
В силу изложенного норму ограниченной линейной операции
ср [/t] определяют в функциональных пространствах S3 равенством
р* [ф] = sup (| ф [/t] | при р [/t] | 1). (58.12)
Здесь знак sup означает, что р* [ср] есть верхняя грань множества
чисел ц = ф [Д], получающихся, когда /t пробегает единичную
сферу. В частности, для операции (58.9) имеем р* [ф] = 1.
§ 59] ОПЕРАЦИИ В СТАНДАРТНЫХ ПРОСТРАНСТВАХ 429
В заключение отметим следующее важное обстоятельство.
Как и в конечномерном случае, норму операции ср [й] часто удоб¬
но вычислять из равенства
р*Р]==Г- (58ЛЗ)
р
где р° есть расстояние от точки h = 0 до поверхности ср [Д] = 1,
ш. е.
р° = inf р [А] при ф [ft] = 1. (58.14)
Геометрическая интерпретация этого соотношения в конечно¬
мерном случае приведена в § 52. Строгий вывод соотношений
(58.13) и (58.14) читатель может найти в книге |24*].
§ 59. Линейные операции в стандартных пространствах
В конечномерном векторном пространстве In любая линей¬
ная операция ср [Л] имеет вид ср [fe] = u1h1 4- u2h2 4- ... + Unhn
(см. теорему 50.1). В общем случае функционального простран¬
ства S3 , , такой всеобъемлющей теоремы, которая определяла
бы на все случаи вид линейной операции ср, к сожалению, нет.
Однако для многих конкретных функциональных пространств
S3 г. , и, в частности, для тех пространств, которые мы будем
С‘а, ‘р]
ниже рассматривать, могут быть указаны формулы, определяю¬
щие в этих пространствах общий вид линейной операции.
Приведем здесь без доказательства некоторые факты, извест¬
ные из функционального анализа. Подробное доказательство их
можно найти в курсах [14*, 20*].
Теорема 59.1. В функциональном пространстве
(стр. 417) общий вид линейной операции ф [Д] определяется с по¬
мощью равенства
ф [й] = | h (т) и (т) dx,
ta
(59.1)
где функция и (т) является также элементом пространства
Норма р* [ф] операции ф (59.1) задается равенством
Ч ■ щ
Р* [ф] = [ 5 и2 (т) . (59-2)
16 Н. н. Красовский
430
ЛИНЕЙНЫЕ ОПЕРАЦИИ В ПРОСТРАНСТВАХ ФУНКЦИЙ [Гл. 14
(59.3)
Рассмотрим, например, пространство функций —[—п] и положим
в (59.1) и (т) = — sin т. Операция ф запишется тогда так:
2П
1 I
Ф [Л] = — \ h (т) sin г dx.
о
В результате операции (59.3) мы получаем коэффициент Фурье
([14*], стр. 90) функции h (т). Нетрудно вычислить ' норму опера¬
ции (59.3), исходя непосредственно из определения нормы р* [ф].
Из неравенства Буняковского — Шварца (см. [14*],
I <0 «/, *0
| h (т) и (т) dx | — [ § А2 (т) dr] • [ — и2 (т) dx]
^а.
стр. 496)
(59.4)
имеем:
(59.5)
2л j/2 2л ,
|ф [й] |< [J /г2 (т) Jr] '• — Jsin2TdT] \
О о
Из этого неравенства и из определения величины р* [ф] (см. § 58,
стр. 428) следует, что
Р* [ф] < — sin2Tdr] \
О
При этом в (59.5) на элементе h° (т) = —— sin т, удовлетворяющем
условию р [Д°] = 1, будет выполняться равенство. Поэтому при
h (т) = h° (т) имеем:
Ф |*°) = Ф [^sia т] = — Л == = f И.
Результат, естественно, совпадает с тем, что следует из (59.2).
Пользуясь результатами вариационного исчисления ([4*],
стр. 48; [10*], можно показать, что h° (т) = ^=- 81п т —
единственный элемент (с точностью до значений на множестве
нулевой меры) единичной сферы, на котором max ф = ф[Д°]
при и (т) = -~-sin т. В общем случае операции (БЭЛХ когда
и (т) — произвольная непрерывная функция, также существует
единственный элемент h° (/), лежащий в единичной сфере и удо¬
влетворяющий условию
max ф [h] = ф [й0] = р* [ф].
§ 59]
ОПЕРАЦИИ В '/Г/АН^[МР1[.1ЫХ ПРОСТРАНСТВАХ
431
Этот элемент вычисляется по формуле
которая выведена в основном тексте книги при решении задачи
об управлении в § 18.
Перейдем к пространству
Теорема 59.2. В функциональном пространстве
(см. стр. 417) общий вид линейной операции ф [й] определяется
равенством (59.1), где функция и (т) является элементом прост¬
ранства м (см. стр. 419). Норма операции ф (59.1) дается форму¬
лой Т)
р* [ф] = sup|u(t)|. (59.6)
. . . , в
порождается непрерывной
ih(i)Ct), и(t)
О
Рассмотрим пример. Пусть линейная операция ф (59.1)
функциональном пространстве ~
функцией и (т), модуль
которой имеет один изоли¬
рованный. максимум при
некотором значении т = t
(О < t
Примем для определен¬
ности, что и (t) >0. В этом
случае нет элемента 1 (т),
который удовлетворял бы ус¬
ловиям р [а°] <3, ф [ ; (т)] =
= шах | ф [А] | при р [ft] h 1,
как это было в предыдущем
примере (см.стр. 430). Легко,
однако, указать последова¬
тельность функций h; ;; со»
Ишф [ ; (т)] = sup (| <р [А] | при р [й] < 1) = р* [ср.
г-»оо
> *
имеем:
для которых при i оо
Эта последовательность такова (см. рис. 59.1):
/i(i) (Г) = < —
ei’
С < Т < t у' ,
I0’
!) См. сноску на стр. 419.
16*
432
ЛИНЕЙНЫЕ ОПЕРАЦИИ В ПРОСТРАНСТВАХ ФУНКЦИЙ ГГл. 14
В самом делэ
ф [А<1> (т)] = § А<г) (т) и (т) dr =
*«
где — точка из отрезка [£ — -у ,
h0(t), u(t)
V
u(t)
h°tf)
/ \
"> ТЛ *"
! he(t) \
О
\ ~ z
\°(t> '
\ /
-V
Uft)
Рис. 59.2.
t +—у ].Но lim£i=Z npuet-> О
и поэтому limp [ h < * h (т)] =
=u£)=max|u (т)|, чтоисле-
т
довало показать.
Пусть теперь и (т) явля¬
ется релейной функцией:
=
tp. — z.
V, Га<т<-4-^,
_
Тогда max р[й] при условии р [Zi] 1 1 будет достигаться, на¬
пример, на элемент}
л , 2л (т t )
Sin— — ,
zg-z«
(59.7)
содержащемся в единичной сфере. Имеем:
г 7 о, УЛ С . 2л (т — t-)
ф 1№ 1 = -f 7 \ Sin — dx = V.
Г3 1 г® у j — Ч
В отличие от случая пространства <^(2), рассмотренного выше,
элемент № (т) (59.7), на котором достигается max ф [7г], не яв¬
ляется единственным (существенно). Например, в качестве такого
элемента 1 (т), помимо (59.7), можно еще рассмотреть функцию
А°(т) =
1
Z3 ~ 1а
1
*
t„ — t„
Z₽ — Za
t
И в этом случае р* [ф] = ф [Д°] = v (см. рис. 59.2).
§ 59]
ОПЕРАЦИИ В СТАНДАРТНЫХ ПРОСТРАНСТВАХ
433
Рассмотрим теперь пространство $цад3р
Теорема 59.3. В функциональном пространстве
общий вид ограниченной линейной операции ср [А] выражается ин¬
тегралом Стилтъеса
V[h]=\hO)dU(x), (59.8)
где U (т) — функция с ограниченным изменением (см. стр. 45).
Норма этой операции вычис¬
ляется по формуле
Р* [ф] = var (U (59.9)
Пространство функций
и (т) (fa < т С Ц) с огра¬
ниченным изменением будем
обозначать символом
(Функции U1 1 1 и U&\ отли¬
чающиеся на постоянную,
отождествляются.)
Рассмотрим для примера
операцию <р, порожденную функцией U (т) вида (см. рис. 59.3)
Vx,
X
V2,
4
<т<!,
Vn>
tn-
iVn+1>
X =
= ^п =
где 1 > 0 и знаки и { чередуются. Тогда
Т = ф [Л] = S(vi+1 — vt)—. (59.1°)
Г=1
Из (59.10) следует, что sup | т) | при р [Л] = max | h (т) | 1 будет
т
достигаться на любой непрер ывной функции h (т), не превыша¬
ющей помодулю единицы и при нимающей в точках т = ^ (4=1, 2,...
...,п) экстремальные значения, равные h (Z) = (—1)1 (см. рис.
59.3). Норма р* [ср] операции Ф в этом случае определяется равен¬
ством
р’[ф] = var [С/]*/ = 3 I vi+1 — vj.
Л
434 ЛИНЕЙНЫЕ ОПЕРАЦИИ В ПРОСТРАНСТВАХ ФУНКЦИЙ [Гл. 14
Сравнивая теоремы 59.1—59.3 с фактами, приведенными в
§§ 50, 51 для конечномерных пространств, убеждаемся, что эти
теоремы, естественно, обобщают указанные результаты. При этом
лишь операция суммирования по индексу i (i = 1, 2,..., п) за¬
меняется операцией интегрирования по т (£а . т . fy), а опе¬
рация взятия максимума по i заменяется операцией вычисления
верхней грани по т (по существу). Из теорем 59.1—59.3 сле¬
дует также, что общий вид ограниченной линейной операции в
каждом конкретном функциональном пространстве S3 (S?(2),
X или ,) определяется некоторой функцией и (т) (или U (т)),
взятой из другого однозначно определенного функционального
пространства S3* (<?(2>, М и f^). Так же как и в конечномерном
случае (см. § 51), пространство S3* называют сопряженным к про¬
странству S3. Соответственно норму р* [и] для функции и (или
U) из S3* будем называть сопряженной к норме р [М, определяю¬
щей пространство 93. Пространство S3 называется самосопряжен¬
ным, если сопряженное пространство 93* совпадает с исходным
пространством 93.
Можно поставить и обратную задачу: по некоторому норми¬
рованному функциональному пространству {и (т)} подобрать та¬
кое пространство 93 {А (т)}, для которого пространство функций.
{и (т)} является сопряженным пространством 93*. Эту в общем
случае достаточно трудную задачу мы здесь не рассматриваем.
Отметим только, что с простыми случаями этой проблемы мы , встре¬
тимся при решении конкретных задач об управлении, где и при¬
ведены нужные данные.
Из приведенных выше теорем следует, что:
1) пространство Ж(2 — самосопряженное пространство;
2) пространство функций и (t) из Л есть сопряженное к про¬
странству функций А (t) из X;
3) пространство V функций U (t) с ограниченным изменением
является сопряженным к пространству , непрерывных функ¬
ций А (t).
Приведем еще теорему об общем виде линейной операции в
гильбертовом функциональном пространстве. Доказательство ее
также излагается в стандартных курсах функционального анализа
(см., например, [14*]).
Теорема 59.4. В функциональном гильбертовом простран¬
стве «gj общий вид линейной операции ф [й] определяется с
помощью равенства
Ф [А] = (А (0, и (t)), (59.11)
где и (t) является также элементом из и символ вида (h^t),
h& (t)) означает скалярное произведение, определяющее именно
$ 60]
ОПЕРАЦИИ В ПРОСТРАНСТВАХ ВЕКТОР-ФУНКЦИЙ
435
данное гильбертово пространство. Норма р* [ф] операции ф [Д] за¬
дается равенством р* [ф] = (и, и)'*.
Если в качестве пространства в формулировке теоремы
59.4 взять пространство <^2<>«,<g]> то получим теорему 59.1. Тео¬
рема 59.4 является, следовательно, обобщением утверждения
теоремы 59.1 на любые гильбертовы функциональные простран¬
ства. В частности, из теоремы 59.4 вытекает, что любое гильбер¬
тово функциональное пространство является самосопряженным.
Для гильбертова пространства УС, описанного в примере 6° § 56,
получаем теперь, что общий вид линейной операции ф [/г] в этом
пространстве будет следующим:
*3 *3 <3
Ф [/г] = 1 1 К (т, ft) h’ (т) и (ft) dx с7Ф -J- h’ (Ф) и (ft) dft.
^a. ^a.
Здесь функция и (Ф), являющаяся также элементом пространства
и определяет операцию ф [Л]. При этом операция ф [А]
имеет норму
<3 *3 *3
р* [ф] = [ 5 $ К (т, ф ) и (т) м (ft) dr dft + $ и2 (ft) с?ф] .
§ 60. Линейные операции в пространствах
вектор-функций
Результаты, приведенные в § 59, переносятся и на более общий
случай функциональных пространств, а именно, на случай про¬
странств 53, элементами которых являются r-мерные вектор-функ-
ции h (т) = {h{ (т)} (£я 1 т 1 £р). При построении различных
конкретных норм р [А] можно воспользоваться следующими сооб¬
ражениями.
Пусть у нас имеется множество Ж r-мерных вектор-функций
h (т) (Лх 1 т 1 ^з), удовлетворяющих при каждом фиксирован¬
ном значении времени т условиям I, II из § 49. Тогда при любом
таком фиксированном т множество значений h (т) будет г-мерным
линейным векторным пространством. В этом пространстве мы мо¬
жем ввести метрику у [h (т)] при помощи одного из определений
нормы в конечномерном векторном пространстве (см. § 49). Оче¬
видно, что / lh (т)1 будет некоторой скалярной функцией време¬
ни т, зависящей от выбора функции h (т).
Выполняя над функцией у [h (т)] действия, подобные тем про¬
цедурам (57.3), (57.5), (57.6), (57.8), (6.8), которые определяли
нормы р [/г] в скалярных функциональных пространствах «2<)а.'зЬ
436 [ЛИНЕЙНЫЕ ОПЕРАЦИИ В ПРОСТРАНСТВАХ ФУНКЦИЙ
[Гл. 14
£[ta.t3], ^[<«.ig]> можно получить достаточно
широкий набор норм для пространства вектор-функций { . (т)}.
Таким способом получаются, например, нормированные простран¬
ства S3, рассмотренные в § 57.
Процедуру, которая строит норму вектор-функций {Кг (т)}
(ta { т «С Тт{ по норме у [h (т)] вектора {7t (т)}, будем обозна¬
чать символом % [у]. Тогда, следовательно, выражения для нормы
линейной операции в таких пространствах ЗВ будут определяться
нормой у [h (т)] конечномерного вектора h (т) и .процедурой
X [7J над скалярной функцией у [h (т)]. Ниже мы приведем не¬
сколько примеров такого построения конкретных сопряженных
пространств S3*, которые нам нужны при решении задач об упра¬
влении и наблюдении.
Предварительно сформулируем полезный эвристический прин¬
цип построения пространства S3*, сопряженного к данному про¬
странству S3 вектор-функций h (т), состоящий в следующем.
Пусть у [Л (т)1 — норма r-мерного вектора h (т), а т* [й] —
соответствующая сопряженная норма (см. § 51, стр. 400). Пусть,
далее, р [А] = х [у! — норма векторного функционального про¬
странства S3 {Л (т)}.
Обозначим символом х* процедуру, определяющую норму
в пространстве S3* {f (т)}, сопряженном к тому пространству
(т)} скалярных функций g (т), где норма определяется проце-
г»
дурой х. Например, если процедура х означает интеграл \ [ g(x) [ dr,
то процедура х* будет х* = sup [ / (т) [ при Т . < т <
Тогда сопряженное пространство S3* {и (х)}, соответствующее
пространству 33 {Л (т)}, строится так:
I. Если символ х I ТI означает процедуру, отвечающую (56.3),
либо процедуру, соответствующую (56.5), то линейную операцию
Ф [Л] в 33 {Л (т)} следует определять в виде (см. для сравнения тео¬
ремы 59.1, 59.2)
*0 *3 г
ф [/г] = . h' (т) и (т) dx = § hi (т) щ (т)] dx. (60Л)
ta *«i = 1
Сопряженную норму р* [и] вектор-функций и (т) == {щ (т)}
в этом случае следует искать в виде
р* [и] = х* [Т*1- (60.2)
II. Если символ х [у! означает процедуру, отвечающую (56.6),
то линейную операцию ф[7г] в 33 {Л (т)} следует определять так
§ 60] .
ОПЕРАЦИИ В ПРОСТРАНСТВАХ ВЕКТОР-ФУНКЦИЙ
437
(см. теорему 59.3):
Ф [Л] = j h'(x)dU(x) = j ^hi(r)dUi(x). (б0-3)
ia i = 1
Сопряженную норму р* [С7] следует искать следующим обра¬
зом. Рассмотрим векторы
= U (тк+1) - U (т.) (к = 0,1,'..» п - 1)
и их нормы у* [ACJ. Тогда
p*[f/]=sup 2 у* [t/(T;+i)— Г.(тл)1 (б°.4)
к = о
по всевозможным разбиениям Тк отрезка [£,, fyl. Величину
(б0.4) будем обозначать символом
р* [£/-]= U’W],
4
не вкладывая в эту запись никакого другого смысла, кроме
(б0.4).
Отметим, что указанным правилом надо пользоваться осто¬
рожно и, чтобы не ошибиться, полезно всякий раз проверять,
удовлетворяет ли выражение, полученное в соответствии с (б0.2)
или (б0.4), требованиям определения нормы линейной операции
(см. § 58, стр. 428).
Пример б0.1. В качестве' нормы у [7г] r-мерного вектора h (т) возьмем
евклидову норму, т. е.
Г
ЯЧ-))] = [2 ЛЬт)]*/г. (б0.5>
и процедуру % [у] также построим по типу квадратичной нормы (5б.3), т. е.
'0 у '0 у
рА] = хМ= [Ь2[А(Т))<Т] 2 = Н (2 ЛМ))*] '•
t t i=l
*’СХ *'<Х
(б0.б)
Линейная операция в рассматриваемом векторном функциональном прост¬
ранстве (согласно случаю I) выбирается в виде (б0.1). Из (б0.5), (б0.б) и из
соображений, приведенных выше (см. § 51, стр. 400, § 59, (59.2)), следует, что
г Ч
г [“(«=[2 м?(т)Г> <60-7>
Li=1 J
'0 *
X* (Г1 = [$ T‘2I«(T)]fr] 1
4
(б0.8)
438
ЛИНЕЙНЫЕ ОПЕРАЦИИ В ПРОСТРАНСТВАХ ФУНКЦИЙ
[Гл. 14
Согласно сформулированному правилу имеем (см. (60.2), (60.7), (60.8)):
*3 Г */2
Р* [ф] = [ Ш2 «{(Орт] •
(60.9)
|ф[/г]| =
dX I <
t 1=1
la
Покажем, что выражения (60.9) удовлетворяют условиям, определяющим
норму линейной операции. Из соотношения (60.1) и неравенств (51.6), (59.4)
получаем:
Ч г
■■ I § (3 h (т) “ (т))
' 2( i=[
Ч Т Ч Т 1у2 г
$ ((2 л?(т)) (S “*w)
Ч 1=1 ia 1=1 1=1
, г
< [ $ (2 h M • [$ (2 w) ( т > )
ta 1=1 1 ) 1=1
|‘/2
. ((Ю.Ю)
При
«i (T)
(60.11)
в (60.10) будем иметь равенство, что и доказывает справедливость соотноше¬
ния (60.9). При этом так же, как и в пространстве 2 ( 2 } (см. § 59), вектор-
функция h (т) (60.11) является единственным элементом из единичной сферы,
на котором достигается шах ф [А].
Пример 60.2. Пусть в пространстве векторов при каждом т норма у [h (т)]
определена равенством (60.5). Процедуру % [у] выберем в соответствии с
соотношением (56.5), определяющим норму в пространстве т. е.
‘Л
I dr.
*3
Р W = Х1Т1 = 22 т [/г ( 2 ( 2 dx = 5 (2 hl w)
Ч Ч 1=1
(60.12)
Общий вид линейной операции ф [Л] в таком пространстве будет опреде¬
ляться выражением (60.1) (см. случай I на стр. 436). Из (60.7), (59.13) и (60.2)
имеем:
X* [t*] = sup
(60.13)
Проверку соотношения (60.13) для нормы р* [ср'] линейной операции ф
мы здесь подробно проводить не будем. Отметим только, что справедливость
(60.13) можно проверить так же, как и в примере 60.1.
Пример 60.3. Пусть функции /ц (т) — непрерывны и норма у [h (т)]
вектора h (т) = {1ц (т)} определена равенством (60.5). Процедуру % [у] вы¬
§ 61]
ЗАДАЧА ОБ ОТДЕЛЕНИИ ВЫПУКЛЫХ МНОЖЕСТВ
439
<р [Л] = j
берем в соответствии с соотношением (56.6), определяющим норму в прост¬
ранстве Л , т. е.
г у,
р [Л] ■ = max у [h (т)] = max hj (т)) . (60.14)
Общий вид линейной операции <р [Л] в таком пространстве будет зада¬
ваться выражением (60.3) (см. случай II на стр. 436)
*3 *3 Г
h' (Т) dU (т) = j 2 hi W d^).
tK i=l
Далее, из (60.4) и (60.7) следует, что
г г -|,/2
Р* tn = J [2 dUt[ ■ (60.15)
*« г=1
Не останавливаясь на других возможных примерах, отметим, что в §§ 12,
14; приводятся таблицы 12.1 и 14.1, где указан набор норм р [Д] и р* [и] или
Р* [d£7], которые оказываются полезными при изучении задач об управле¬
нии и наблюдении.
§ 61. Задача об отделении выпуклых множеств
В § 53 мы рассматривали задачу об отделении выпуклых мно¬
жеств в конечномерных векторных пространствах. В настоящем
параграфе мы обсудим эту задачу в случае бесконечномерного
функционального пространства Ж.
Итак, рассмотрим некоторое линейное функциональное про¬
странство Жр^], элементами которого являются функции или
вектор-функции h (т), заданные на отрезке [?„, 1]. Введем опре¬
деление выпуклого множества (см. § 53, стр. 404).
Пусть Л Л У (т) и fe<2> (т) — элементы из Ж. Рассмотрим все
функции h (т) вида
hW (т) = X ft(D(T) + (1 - Х)Л<2)(т) ' (0 < л < 1). (61.1)
Как и в случае конечномерного пространства Жп, множество функ¬
ций (61.1) можно трактовать как «отрезок», соединяющий в про¬
странстве Ж точки А-(1)(т) и W2>(t).
Например, пусть 1 > (т), Л.<2)(т) (/a <Л т "С М) — элементы
пространства непрерывных функций. Графики этих
функций изображены на рис. 61.1.
Тогда графики функций h (т), составляющие отрезок (61.1),
заполняют область, заштрихованную на рис. 61.1.
440
ЛИНЕЙНЫЕ ОПЕРАЦИИ В ПРОСТРАНСТВАХ ФУНКЦИЙ [Гл. 14
Множество @ функций h (т) из линейного пространства
называется выпуклым, если для всякой пары функций №> (т),
/г<2>т) из @ совокупность функций hhх h (т) вида (61.1) содержит¬
ся в
Приведем примеры выпуклых множеств.
Так, при любом выборе метрики р [й] в сфера р [fe] h е
(е > 0) является выпуклым множеством. Справедливость этого
утверждения непосредственно вытекает из определения выпукло¬
го множества и из соотношений (56.1) hдля нормы.
Рис. 61.1.
Другим примером выпуклого множества является, очевидно,
совокупность всех дифференцируемых функций h (т) в простран¬
стве функций, непрерывных на отрезке [£а, Ml-
Рассмотрим, наконец, в пространстве h или h , или <2(2) сово¬
купность @ функций вида
Л(т) = 3 АйИ(т), (61.2)
1 = 1
где №1 (т) (Z = 1, 2,..., п) — некоторые линейно независимые1)
функции, принадлежащие соответственно h, X или <£<2); ц (j =
= 1, 2,..., п) — произвольные постоянные, связанные условием
2 la=1, (61.3)
г = 1
х) При этом функции hh1 h (т) линейно независимы по существу т. е. их
п
линейная комбинация 2 h hhh (т) отлична от пуля существенно, когда
г = 1
£ 61]
ЗАДАЧА ОБ ОТДЕЛЕНИИ ВЫПУКЛЫХ МНОЖЕСТВ
441
где Ci (i = 1, 2,..., п) — некоторые заданные постоянные. Прове¬
рим, что такое множество @ функций является выпуклым.
В самом деле, пусть
п
г — 1
п
Л<2)(т) = 3 z(pViia(T)
i = 1
(2 z^i = 1),
i = 1
(3 <»C£ = 1)
г — 1
—— произвольные функции из ©.Рассмотрим функции вида (61,1).:
п
Л(Х) (т)==(1) (т) + (1 — A) h№ (т) = 2 (г), где,следовательно,
. 2 = 1
/!Х) _ (1 — A)Z-2 . Но тогда из равенства
п
3 Zdi = l, (61.4)
г — 1
которому удовлетворяют, очевидно, числа ——— вытекает, что все
функции указанного вида содержатся в @ и, следовательно, мно¬
жество @ функций (61.2), (61.3) является выпуклым.
Рассмотрим теперь в пространстве JV\ta, tpj два каких-либо мно¬
жества ( и @2. Как и в случае конечномерного пространства
(см. £ 53, стр. 405), говорят, что линейная операция ф [ft] разде¬
ляет эти множества, если существует такое число v, что выполняют¬
ся неравенства
Ф [Л] ( v при всех h (т) из ©х, (61.5)
ф [ft] > v при всех h (т) из @2. (61.6)
Условия (61.5), (61.6) означают, что множества ( — и- @2 ле¬
жат «по разные стороны» от гиперповерхности ф [Л] = v, хотя,
может быть, и имеют с ней общие точки (см. £ 53, стр. 406, где
дано наглядное геометрическое истолкование условий (61.5),
(61.6) в случае конечномерного пространства Жп).
Пусть в пространстве Ж ———— — введена метрика, и мы имеем,
следовательно, линейное нормированное пространство ®[ta, tp]-
Тогда по определению элемент W1) (т) называется внутренней точ¬
кой множества ( — если он содержится в @ вместе с некоторой своей
е-окрестностью.
Как и в случае конечномерного пространства (см. £ 53, стр. 406),
здесь имеет место следующая важная теорема ([6*1, стр. 416, [7*],
стр. 42), справедливость которой мы примем без доказательства.
442
ЛИНЕЙНЫЕ ОПЕРАЦИИ В ПРОСТРАНСТВАХ ФУНКЦИЙ [Гл. 14
Теорема 61.1. Пусть и А'2 — выпуклые множества в
линейном нормированном пространстве S3[tQ,t, такие, что в @
имеются внутренние точки, а @2 не содержит внутренних точек
множества . Тогда существует линейная операция ср [/j], раз¬
деляющая эти множества.
Отметим, что если для множества А элемент h (т) = 0 яв¬
ляется внутренним, то число v в условиях (61.5), (61.6) отлично
от нуля и для любого v | 0 существует операция ср | [7] , удовлет¬
воряющая этим условиям.
Наглядный смысл теоремы 61.1 в случае конечномерного про¬
странства Sn разъяснен в § 53. Мы приведем здесь один пример
разделения выпуклых множеств в пространстве $ непрерывных
функций h (т), заданных на отрезке [О, Т]. Определим в $ две
сферы А и А соответственно неравенствами р [h (т) -|- 1] =
=тах | h (т) + 1 |<1 при О | т | Г,р [h (т) — l]=max | h (т) —1|
при рассмотрим линейную операцию ср [h (т)] = h (0).
Очевидно, имеют место неравенства ср [й] | Опри h (т) из
ср [h (т)] > 0 при h (т) из @2 и, следовательно, рассматриваемая
операция разделяет выпуклые множества |г и @2.
В дальнейшем нам встретится случай, когда множество
являясь выпуклым, обладает к тому же следующим свойством: |
если точки |< | (т) и |<2> (т) содержатся в @2> то и вся «прямая»
йх(т) = X й(1> (т) 4- (1 — %) й<2) (т) (—оо < % < оо) содержится в
@2- Такое множество называется плоским. В этом случае операция
<р [Л], о которой идет речь в теореме 61.1, удовлетворяет на мно¬
жестве @2 строгому равенству
ср [й] = v при всех h (т) из
если только это равенство выполняется хотя бы в одной точке
из (А2-
доказательство этого утверждения полностью совпадает с до¬
казательством его в случае конечномерного пространства |п (см.
§ 53, стр. 407), а поэтому мы на нем останавливаться не будем.
Примером плоского множества является множество функций
h (т), определенных выше равенством (61.2). Это вытекает непос¬
редственно из того факта, что при любом % в (61.1), (61.2) имеет
место условие (61.3).
БИБЛИОГРАФИЯ
Учебная литература
1*. Березин И. С., Жидков Н. П.:
Методы вычислений, т. 1, 2. Физматгиз, 1962.
2*. Блэкуэлл Д., Г и р ш и к М. А.:
Теория игр и статистических решений. М., Изд-во иностр, литературы,
1958.
3*. Гантмахер Ф. Р.:
Теория матриц. Гостехиздат, 1953.
4*. Ге л ь ф а и д И. М., Фомин С. В.:
Вариационное исчисление. Физматгиз, ' 1961.
5*. Гнеденко Б. В.:
Теория вероятностей. Физматгиз, 1962.
6*. Данфорд Н., Ш варц Дж. Т.:
Линейные операторы. М., Изд-во иностр, литературы, 1962.
7*. Дэй М. М.:
Линейные пространства. М., Изд-во иностр, литературы, 1961.
8*. Зойтендейк Г.:
Методы возможных направлений. М., Изд-во иностр, литературы, 1963.
9*. Колмогоров А. Н., Ф о м и н С. В.:
Элементы теории функций и функционального анализа. Изд-во МГУ,
ч. 1, 1954, ч. 2, 1960.
10*. Лаврентьев М. А. и ЛюстерникЛ. А.:
Вариационное исчисление. Гостехиздат, 1951.
11*. Лаврентьев М. А., Шабат Б.:
Методы теории функций комплексного переменного. Изд-во «Наука»
1965.
12*. Л е в ш е ц С.:
Геометрическая теория дифференциальных уравнений.М., Изд-во иностр,
литературы, 1961.
13*. ЛойцянскийЛ. Г. и Лурье А. И.:
Курс теоретической механики, ш. II. Гостехиздат, 1955.
14*. ЛюиерникЛ. А. и Соболев В. И.:
Элементы функционального анализа. Изд-во «Наука», 1965.
15*. Ляпунов А. М.:
Общая задача об устойчивости движения. Гостехиздат, 1950.
16*. Мак-Кинси Дж.:
Введение в теорию игр. Физматгиз, 1960.
17*. Малкин И. Г.:
Теория устойчивости движения. Изд-во «Наука», 1966.
18*. Петровский И. Г.:
Лекции по теории интегральных уравнений. Изд-во «Наука», 1965.
19*. По н трягин Л. С.:
Обыкновенные дифференциальные уравнения. Физматгиз, 1961.
20*. Рисе Ф., С^кеф1^.цьви-Надь Б.:
Лекции по функциональному анализу. М., Изд-во иностр, литературы,
1954.
444
БИБЛИОГРАФИЯ
21*. Степанов В. В.:
Курс дифференциальных уравнений. Гостехиздат, 1950.
22*. С у ел о в Г. К.:
Теоретическая механика. Гостехиздат, 1946.
23*. Фихтенгольц Г. М.:
Курс дифференциального и интегрального исчисления, тт. I—III.
Физматгиз, 1962.
24*. X а л м о ш П.:
Конечномерные векторные пространства. Физматгиз, 1963.
25*. Ч етаев Н. Г.:
Устойчивость движения. Изд-во «Наука», 1965.
26*. Шварц Л.:
Математические методы физических наук. Изд-во «Наука», 1964.
27*. Эл ьсгольц Л. Э.:
Введение в теорию дифференциальных уравнений с отклоняющимся
аргументом. Физматгиз, 1964.
28*. К. Дж. Эрроу, Л. Гурвиц, X. У дзава:
Исследования по линейному и нелинейному программированию. М.,
Изд-во иностр, литературы, 1962.
29*. Сборник «Линейные неравенства и смежные вопросы». М., Изд-во
иностр, литературы, 1959.
Специальная литература
1. Абдикеримов Т.:
Оптимальные процессы в некоторых дискретных системах с распреде¬
ленными параметрами. Автоматика и телемеханика, т. 26, № 2, 1965.
2. Авербух А. И.:
Связь теоремы С. А. Чаплыгина с теорией оптимальных процессов.
Автоматика и телемеханика, т. 22, № 10, 1961.
3. А г а с а н д я н Г. А.:
Аналитическое конструирование регулятора для стабилизации линей¬
ной системы со случайным запаздыванием. Изв. АН СССР, Техническая
кибернетика, № 1, 1965.
4. Айзерман М, А., Г а н т м а х е р Ф. Р.:
Абсолютная устойчивость регулируемых систем. Изд-во АН СССР,
1963.
5. Александров В. М., Нестеров А. А.:
Оптимальные процессы в линейных измерительных системах. Автомет¬
рия № 2, 1965.
6. А л е ш к о в Ю. 3.:
а) Оптимальный вывод точки на траекторию, соответствующую требуе¬
мому методу наведения. Вестник ЛГУ, № 19, 1963.
б) Метод последовательных приближений для решения вариационных
задач механики полета. Автоматика и телемеханика, т. 26, № 10,1965.
7. Альбрехт Ф.:
Об одной задаче теории оптимальных по быстродействию процессов
в линейных системах. Автоматика и телемеханика, т. 22, . № 7, 1961.
8. Альбрехт Э. Г.:
а) Об оптимальной стабилизации нелинейных систем. Прикладная
математика и механика, т. 25, вып. 5, 1961.
б) Об управлении движением нелинейных систем. Дифференциальные
уравнения, т. 2. вып. 3, 1966.
9. Альбрехт Э. Г., Красовский Н. Н.:
О наблюдении нелинейной управляемой системы в окрестности задан¬
ного движения. Автоматика и телемеханика, т. 25, № 7, 1964.
БИБЛИОГРАФИЯ
445
10. Ан дреев Н. И.:
Определение оптимальной весовой функции импульсной системы, обес¬
печивающей экстремум некоторого функционала. Автоматика и теле¬
механика, т. 21, •№ 4, 1960.
11. Андреев Ю. Н., Бутковский А. Г.:
Оптимальное управление нагревом массивных тел. Изв. АН СССР,
Техническая кибернетика, № 5, 1964.
12. Аркин В. И., К о лемаев В. А., Ш и ряев А. Н.:
О нахождении оптимальных управлений. Сб. работ по теории вероят¬
ностей. Труды Матем. института им. В. А. Стеклова, т. 71, 1964.
13. А х и е з е р Н. И., К р е й н М. Г.:
О некоторых вопросах теории моментов. ГОНТИ НТВУ, Харьков,
1938.
14. Б а б у н а ш в и л и Т. Г.:
Синтез линейных оптимальных систем. ДАН СССР, т. 155, № 2, 1964.
15. Багаева Н. Я., Моисеев Н. Н.:
Об одном способе численного решения задач оптимального управления.
ДАН СССР, т. 153, № 4, 1963.
16. Баимбетов К. К.:
К вопросу о задаче на быстродействие без переключений управляющих
функций. Труды сектора матем. и мех. АН Каз. ССР, № 2, 1963.
17. Баимбетов К. К., Филатов А. Н.:
Об одной задаче на быстродействие без переключений для линейных
систем. Труды Казахского университета, т. 1, № 2, 1960.
18. Балакирев В. С.:
Принцип максимума в теории оптимальных систем второго порядка.
Автоматика и телемеханика, т. 23, № 8, 1962.
19. Баранов А. Ю., Казаринов Ю. Ф., X о м е н ю к JB. В.:
Градиентные методы решения задач терминального управления в ли¬
нейных системах автоматического регулирования. Журнал вычисл.
матем. и матем. физики, т. 5, № 5, 1965.
20. Баранов А. Ю., X о м е н ю к В. В.:
Решение линейной задачи минимизации квадратичного функционала
в гильбертовом пространстве. Автоматика и телемеханика, т. 26, № 4,
1965.
21. Б а р б а ш и н Е. А.: _
а) Об оценке среднеквадратичного значения отклонения от заданной
траектории. Автоматика и телемеханика, т. 21, № 7, 1960.
б) Программное регулирование и теория оптимальных систем. Труды II
Конгресса иФаК, М., Изд-во «Наука», 1965.
22. БедельбаевА. К.: _
Об использовании функции Ляпунова при оптимизации линейных ре¬
гулируемых систем. Изв. АН СССР, ОТН, Энергетика и автоматика,
№ 6, 1961.
23. Бедельбаев А. К., X о д ж а н о в А. С.:
Об изопериметрических задачах регулируемых систем. Автоматика
и телемеханика, т. 25, № 5, 1965.
24. Б ед ров Я. А., Канарев Л. Е.: _
Метод последовательного синтеза оптимального по быстродействию
управления. Изв. АН СССР, Техническая кибернетика, № 4, 1965.
25. Б е й к о И. В.: _
^Синтез систем, близких к оптимальным по быстродействию. ДАН
УССР, № 7, 1964.
26. Б е й к о И. В., К а р п е н к о М. Ф.:
Решения нелинейных оптимальных задач методом последовательных
приближений. ДАН УССР, № 12, 1964.
17 Н. Н. Красовский
446
БИБЛИОГРАФИЯ
27. Веллман Р., Гликсберг И., ГроссО. (Bellman R.,
G licksbergl, Gross О.):
а) On the bang-bang control problem. Quarterly of Applied Math., v. 14,
1956.
б) Некоторые вопросы математической теории процессов управления.
М., Изд-во иностр, литературы, 1962.
28. Веллман Р. (^e^llman R.):
а) Процессы регулирования с адаптацией. М., Изд-во «Наука»,
1964.
б) Dynamic programming and stochastic control processes. Information
& Control, № 3, 1958.
29. Березовский А. И., Иванов В. В.:
Деяш алгоритми оптимальних керувань по швидкодп. «Доповд АН
УРСР», № 5, 1963.
30. Б л а г а С., П е т е р к а В.:
Синтез дискретных систем автоматического регулирования , с использо¬
ванием критерия интеграла- квадрата ошибки. Автоматика и телемеха¬
ника, т. 26, № 1, 1965.
31. Б л го с н и н А. А.:
Задача о распределителе, оптимизирующем на отрезке, ДАН СССР,
т. 157, № 2, 1964.
32. Болтянский В. Г.:
а) Принцип максимума в теории оптимальных процессов, ДАН СССР,
т. 119, № 6, 1958.
б) Достаточные условия оптимальности и обоснование метода динами¬
ческого программирования. Изв.АН СССР, серия матем.,т.28, № 3,
1964.
в) Математические методы оптимального управления.М.,Изд-во «Наука»,
1966.
33. Болтянский В. Г., ГамкрелидзеР. В., Понтря¬
гин Л. С.:
К теории оптимальных процессов. ДАН СССР, т. 110, № 1, 1956.
34. Бондаренко В. И., Красовский Н. Н., Фи лимо¬
нов Ю. М.:
К задаче об успокоении линейной системы. Прикладная математика
и механика, т. 29, № 5, 1965.
35. Б у т к о в с к и й А. Г.:
а) Оптимальные процессы в системах с распределенными параметрами.
Автоматика и телемеханика, т. 22, № 1, 1961.
б) Теория оптимального управления системами с распределенными па¬
раметрами. Изд-во «Наука», 1965.
36. Б у т к о в с к и й А. Г., Л е р н е р А. Я.:
Об оптимальном управлении системами с распределенными параметра¬
ми. Автоматика и телемеханика, т. 21, № 6, 1960.
37. Бутковский А. Г., Полтавский Л. Н.:
Оптимальное управление распределенной колебательной системой. Ав¬
томатика и телемеханика, т. 26, № 11, 1965.
38. В а й с б е р г Г. В.:
Об одном итерационном способе решения задачи преследования. Дис¬
кретный анализ, вып. 4, Новосибирск, 1965.
39. В а й с б р о д Э. М.:
Об одном приближенном методе синтеза оптимального управления.
Автоматика и телемеханика, т. 24, № 12, 1963.
40. В а с и л ь е в А. Я.:
О необходимых условиях оптимальности регулируемых систем. Авто¬
матика и телемеханика, т. 25, № 10, 1964.
БИБЛИОГРАФИЯ
447
41. Винер Н.:
Кибернетика. Изд-во «Сов. радио», 1958.
42. Виноградов В. Н.:
Синтез оптимальных систем одного класса с учетом ограничений управ¬
ляющего воздействия. Автоматика и телемеханика, т. 26, № 2, 1965.
43. В о з н ю к Л. Л., Иваненко В. И., КараченецД. В.,
С в е р д а н М. Л.:
Синтез оптимального по быстродействию управления для объектов 2-го
порядка. Изв. АН СССР, Техническая кибернетика, № 6, 1963.
44. Волгин Л. Н.:
Программирование оптимальных процессов управления линейными
объектами. Автоматика и телемеханика, т. 25, № 11, 1964.
45. В о л и н Ю. М., Островский Г. М.:
а) Об одной оптимальной задаче. Автоматика и телемеханика, т. 25,
№ 110, 1964.
б) О методе последовательных приближений расчета оптимальных ре¬
жимов некоторых систем с распределенными параметрами. Автома¬
тика и телемеханика, т. 26, № 7, 1965.
46. Воронков В. С.:
О получении оптимальных процессов в некоторых релейных системах
регулирования. Труды МАИ, вып. 112, 1959.
47. Г а б а с о в Р.:
Оптимальные процессы с ограничением по циклам. ДАН СССР, т. 144,
№ 4, 1962.
48. Г а б а с о в Р., Г и н д е с В. Б.:
К оптимальным процессам в линейных системах с двумя ограничениями
на управляющее воздействие. Автоматика и телемеханика, т. 26, № 6,
1965.
49. Габасов Р., Кириллова Ф. М.: ■
а) Оптимизация выпуклых функционалов на траекториях линейных
систем. ДАН СССР, т. 156, № 5, 1964.
б) К оптимальным процессам в связанных системах. Автоматика и теле¬
механика, т. 24, № 6, 1963.
в) Построение последовательных приближений для некоторых задач оп¬
тимального управления. Автоматика и телемеханика, т. 27,№ 2, 1966.
50. Г а б р и е л я н М. С.:
О стабилизации неустойчивых движений механических систем. Приклад¬
ная математика и механика, т. 28, вып. 3, 1964.
51. Габриелян М. С., Красовский Н. Н.:
К задаче о стабилизации механической системы. Прикладная матема¬
тика и механика, т. 28, вып. 5, 1964.
52. Гаджиев М. Ю.:
О применении теории игр к . некоторым задачам автоматического управ¬
ления. Автоматика и телемеханика, т. 23, №№ 8, 9, 1962.
53. Гальперин Е. А.:
К задаче о стабилизации управляемых систем. Изв. АН СССР, Техниче¬
ская кибернетика, № 6, 1964.
54. Гальперин Е. А., Красовский Н. Н.:
О стабилизации установившихся движений нелинейных управляемых
систем. Прикладная математика и механика, т. 27, вып. 6, 1963.
55. Г а м к р е л и д з е Р. В.:
а) К теории оптимальных процессов в линейных системах. ДАН СССР,
т. 116, № 1, 1957.
б) Теория оптимальных по быстродействию процессов в линейных си¬
стемах. Изв. АН СССР, серия матем., т. 22, № 4, 1958.
в) О скользящих оптимальных режимах. ДАН СССР, т. 143, № 6, 1962.
17*
448
БИБЛИОГРАФИЯ
56. Гирсанов И. В.:
Минимаксные задачи в теории диффузионных процессов. ДАН СССР,
т. 136, № 2, 1960.
57. Г н о е н с к и й Л. С.:
а) Об одном способе оптимизации следящих систем. Прикладная мате¬
матика и механика, т. 25, вып.5, 1961.
б) К задаче преследования. Прикладная математика и механика, т. 26,
вып. 5, 1962.
58. Гноенский Л. С., МовшовичС. М.:
О применении методов математического программирования и задача
оптимального регулирования. Изв. АН СССР, Техническая киберне¬
тика, № 5, 1964.
59. Г о р б а н ь А. В:
О задаче синтеза управляемых систем и альтернативности решений од¬
ного класса вырожденных вариационных задач. Автоматика и телеме¬
ханика, т. 24, №№ 7, 8, 1963.
60. Горбатенко В. Н.:
Построение оптимальной по вероятности программы в линейной систе¬
ме при вероятностных ограничениях на фазовые координаты. Вестник
ЛГУ, № 13, 1965.
61. Г о р с т к о А. Б.:
Об одной стохастической задаче теории управления. Сб. «Оптимальное
планироваиие»,вып. 2, Новосибирск, СО АН СССР, 1964.
62. Гр игорьев Е. П.:
Об одном классе линейных оптимальных задач. Прикладная математика
и механика, т. 28, вып. 1, 1964.
63. Гришин В. П.:
К проблеме минимакса в теории аналитического конструирования ре¬
гулятора. Автоматика и телемеханика, т. 25, № 6, 1964.
64. Гулько Ф. Б.:
Об одном свойстве структуры оптимальных процессов. Изв. АН СССР,
ОТН, Техническая кибернетика, № 1, 1963.
65. Гурецкий В. В.:
Об одной задаче оптимального управления. Изв. АН ССС^]?, Механика,
№ 1, 1965.
66. Гурецкий В. В., Фертман Б. С.:
Одна задача оптимального управления, Прикладная математика и ме¬
ханика, т. 30, вып. 1, 1966.
67. Гурман В. И.:
Метод исследования одного класса оптимальных скользящих режимов.
Автоматика и телемеханика, т. 26, № 7, 1965.
68. Демьянов В. Ф.:
Решение некоторых экстремальных задач. Автоматика и телемеханика,
т. 26, № 7, 1965.
69. Д е м ь я н о в В. Ф., Рубинов А. М.:
К задаче о минимизации гладкого функционала при выпуклых ограни¬
чениях. ДАН СССР, т. 160, № 1, 1965.
70. Демьянов В. Ф., X о м е н го к В. В.:
Решение одной линейной задачи оптимальных управлений. Автоматика
и телемеханика, т. 24, № 9, 1963.
71. Дубовицкий А. Я., Милютин А. А.:
а) Задачи на экстремум при наличии ограничений. ДАН СССР, т. 149,
№ 4, 1963.
б) Задачи па экстремум при наличии ограничений. Журнал вычисл.
матем. и матем. физики, т. 5, № 3, 1965.
БИБЛИОГРАФИЯ
449
72. Д ы н к и н Е. Б.:
Управляемые случайные последовательности. Теор. вероятн. и ее при¬
менение, т. 10, вып. 1, 1965.
73. ЕгоровА. И.:
а) Об оптимальном управлении процессами в распределенных объек¬
тах. Прикладная математика и механика, т. 27, вып. 4, 1963.
б) Необходимые условия оптимальности для систем с распределенными
параметрами. Матем. сб., т. 69, вып. 3, 1966.
74. Е г о р о в Ю. В.:
а) О некоторых задачах теории оптимального управления. ДАН СССР,
т. 145, № 4, 1962.
б) Необходимые условия оптимальности управления в банаховых
пространствах. Матем. сб., т. 64, вып. 1, 1964.
75. Ер мол ев Ю. М., Гуленко В. П.:
О численных методах решения задач оптимального управления. Кибер¬
нетика, АН УССР, № 1, 1966.
76. Е р у г и н Н. П.:
Задача А. М. Летова. ДАН БССР, т. 7, № 9, 1963.
77. Ж и гулев В. Н.:
Синтез оптимальных систем одного класса. Автоматика и телемеханика,
т. 23, № И, 1962.
78. 3 а в а л и щ и н С. Т.:
Об одной оптимальной задаче с однотактным переключением. Диффе¬
ренциальные уравнения, т. 2, вып. 4, 1964.
79. Заде Л., Итон Дж. (Z a deh L., Е a ton G):
а) Альтернативный принцип для оптимального управления. Автома¬
тика и телемеханика, т. 24, № 3, 1963.
б) Optimal pursuit strategies in discrete — state probabilistic systems.
Trans. ASME, D 84, .№ 1, 1962.
80. Зайцев А. Г.:
Аналитическое конструирование оптимальных регуляторов при слу¬
чайных возмущениях. Автоматика и телемеханика, т. 24, № 1, 1963.
81. 3 у о о в В. И.:
а) Колебания в нелинейных и управляемых системах. Л., Судпромгиз,
1962.
О) К теории аналитического построения регуляторов. Автоматика и те¬
лемеханика, т. 24, Кз 8, 1963.
82. И в а н о в Ю. Н.:
а) О движении тела .переменной массы с ограниченной мощностью и за¬
данным активным временем. Прикладная математика и механика,
т. 27, вып. 5, 1963.
О) Ступенчатая аппроксимация оптимальных управлений. Прикладная
математика и механика, т. 28, вып. 3, 1964.
83. И в а х н е н к о А. Г.:
а) О способах устранения установившейся составляющей ошибки си¬
стем автоматического регулирования. ДАН СССР, т. 87, № 6, 1952.
О) Техническая кибернетика. Техника, 1963.
84. И м а н а л и е в М. И., К а к и ш о в К. Б.:
К теории оптимальных систем с последействием. Прикладная математи¬
ка и механика, т. 28, вьш. 3, 1964.
85. Исаев В. К.:
О некоторых особенностях вариационной задачи Майера в ракетодина-
мике. Автоматика и телемеханика, вып. 26, № 7, 1965.
86. И с а е в В. К., С о н и н В. В.:
ОО одной нелинейной задаче оптимального управления. Автоматика
и телемеханика, т. 23, J4b 9, 1962.
450
БИБЛИОГРАФИЯ
87. И ш л инский А. Ю.:
Механика гироскопических систем, М., Изд-во АН СССР, 1963.
88. Калинин В. Н.:
Обобщенные критерии оптимальности в задачах оптимального управле¬
ния. - Автоматика и телемеханика, т. 26, № 2, 1965.
89. К а л м а н Р.:
а) Об общей теории систем управления. Труды I Конгресса ИФАК,
т. 2, М., Изд-во АН СССР, 1960.
б) Contributions to the theory of optimal control. Bol. Soc. Mat. Mexi-
cana, v. 5, № 1, 1960. •
в) Canonical structure of linear dynamical systems. Proc. Nat. Acad.
Sci. USA, v. 48, № 4, 1962.
r) Liapunov functions for a problem of Lur’e in the theory of optimal
control. Proc. Nat. Acad. Sci. USA, v. 49, № 2, 1963.
д) When is a linear system optimal? Trans. ASME, D 86, № 1, 1964.
90. К а л м а н P. E., Б ь ю с и Р. С. (К а 1 m a n R., Вису R. S.): New
results in linear filtering and prediction theory. Trans ASME, D,V. 83, 1961.
91. К а н В. Л., К e л ь з о н A. C.:
а) Теория пропорциональной навигации. Л., Изд-во «Судостроение», 1965.
б) Решение одной задачи преследования. Изв. АН СССР, Механика,
№ 5, 1965.
92. К а н а р е в Л. Е.:
К теории оптимальных процессов. Изв. АН СССР, ОТН, Энергетика
и автоматика, № 4, 1961.
93. К а р л и н С.:
Математические методы в теории игр, программировании и экономике. ;
Изд-во «Мир», 1964.
94. К а т к о в н и к В. Я., Полуэктов Р. А.:
О задаче синтеза оптимальных многомерных систем автоматического
управления. Автоматика и телемеханика, т. 26, № 1, 1965.
95. К е л енд же р и д з е Д. Л.:
Об одной задаче оптимального преследования. Автоматика и телемеха¬
ника, т. 23, № 8, 1962.
96. К и р г е т о в В. И.:
а) О кинематически управляемых механических системах. Прикладная
математика и механика, т. 28, вып. 1, 1964,
б) Об уравнениях движения управляемых механических систем. При¬
кладная математика и механика, т. 28, вып. 2, 1964.
97. К и р и л л о в а Л. С.:
а) Задача об оптимизации конечного состояния регулируемой системы.
Автоматика и телемеханика, т. 23, № 12, 1962.
б) Об:^ая задача терминального управления в линейных системах.
Автоматика и телемеханика, т. 26, № 12, 1965.
98. Кириллова Ф. М.:
а) О корректности постановки одной задачи оптимального регулиро¬
вания. Изв. вузов, Математика, № 4, 1958.
б) О предельном переходе в решении одной задачи оптимального регу¬
лирования. Прикладная математика и механика, т. 24, вып. 2,1960.
99. К и р и н -Н. Е.:
а) Программная оптимизация линейных систем с последействием. Авто¬
матика и телемеханика, т. 26, № 1, 1965.
б) К решению общей задачи линейного быстродействия. Автоматика
и телемеханика, т. 25, № 1, 1964.
100. К и с л я к о в )В С.:
Синтез оптимальных систем с последействием. Изв. АН СССР, ОТН,
Энергетика и автоматика, № 3, 1962.
БИБЛИОГРАФИЯ
451
101. Кожевников Ю. В.:
К оптимизации управляемых систем со случайными параметрами.
Прикладная математика и механика, т. 28, вып. 3, 1964.
102. Козиоров Л. М., Купервассер Ю. И.:
Синтез оптимального управления системы второго порядка. Изв. АН
СССР, Техническая кибернетика, № 4, 1965.
103. Колмогоров А. Н.:
Интерполирование и экстраполирование стационарных случайных по¬
следовательностей. Изв. АН СССР, серия матем., т.5, № 1, 1941.
104. Колмогоров А. Н., Мищенко Е. Ф., П о н т р я г и н Л. С.:
Об одной вероятностной задаче оптимального управления. ДАН СССР,
т. 145, № 5, 1962.
105. Колосов Г. Е., Стратонович Р. Л.:
Об оптимальном управлении квазигармоническими системами. Автома¬
тика — и телемеханика, т. 26, № 4, 1965.
106. Коно Сигэо:
Исследование релейной задачи автоматического управления. Res.
Repts. Shibaura Inst. Techn., № 7, 1960.
107. Космодемьянский В. A.:
Об одном классе вариационных задач. Прикладная математика и ме¬
ханика, т. 27, вып. 6, 1963.
108. Костычев Г. И.:
Об оптимальном программировании в случае различных условий реа¬
лизации процесса. Изв. вузов, Авиац. техника, № 2, 1962.
109. Кочетков Ю. А.:
Применение метода Понтрягина к исследованию минимаксных задач
процессов управления. Изв. АН СССР, Техническая кибернетика,
№ 5, 1965.
110. Красовский Н. Н.:
а) К теории оптимального регулирования. Автоматика и телемеханика,
т. 18, № И, 1957.
б) К теории оптимального регулирования. Прикладная математика
и механика, т. 23, вып. 4, 1959.
в) Об одной задаче преследования. Прикладная математика и механика,
т. 27, вып. 2, 1963.
г) О стабилизации неустойчивых движений дополнительными силами
при неполнойвобратной связи. Прикладная математика и механика,
т. 27, вып. 4, 1963.
д) К теории управляемости и наблюдаемости линейных динамиче¬
ских систем. Прикладная математика и механика, т. 28, вып. 1,
1964.
е) Задача наблюдения и системы с запаздыванием. Дифференциальные
уравнения, т. 1, № 12, 1965. .
ж) К задачам преследования в случае линейных однотипных объектов.
Прикладная математика и механика, т. 30, вып. 2, — 1966.
з) К проблеме существования оптимальных траекторий. Изв. вузов,
Математика, № 6, 1959.
111. Красовский Н. Н., Куржанский А. Б.:
К вопросу о наблюдаемости систем с запаздыванием. Дифференциаль¬
ные уравнения, т. 2, вып. 3, 1966.
112. Красовский Н. Н., Репин Ю. М., Третьяков В. Е.:
О некоторых игровых ситуациях в теории управляемых систем. Изв.
АН СССР, Техническая кибернетика, № 4, 1965.
ИЗ. Красовский Н. Н., Третьяков В. Е.:
К задаче о преследовании в случае ограничений на импульсы управляю¬
щих сил. Дифференциальные уравнения, т. 2, вып. 5, 1966.
452
БИБЛИОГРАФИЯ
114. Красовский II. Н., Ш^л^емвнтьев Г. С.:
О коррекции движения системы с двумя степенями свободы при одной
циклической координате. Прикладная математика и механика, т. 29,
вып. 3, 1965.
115. К р а с с И. А.:
Об управлении процессами плавки металла. Сб. Проблемы кибернети¬
ки., вып. 13, Изд-во «Наука», 1965.
116. Кривенков Ю. П.:
Достаточность принципа максимума для линейной задачи динамиче¬
ского программирования, ДАН СССР, т. 156, № 6, 1964.
117. К р о т о в В. Ф.: '
Методы решения вариационных задач на основе достаточных условий
абсолютного минимума, ч. I, II, III. Автоматика и телемеханика, т. 23,
№ 12, 1962; т. 24, № 5, 1963; т. 25, № 7, 1964.
118. Кротов В. Ф., С а р г и н В. Н.:
Об оптимальных траекториях полета самолета. «Вопросы аналит. и
прикл. механики», М., Оборонгиз, 1963.
119. К р у т ь к о П. Д.:
Аналитическое конструирование цифровых регуляторов методом дина¬
мического программирования. Изв. АН СССР, Техническая киберне¬
тика, № 6, 1965.
120. К р ы л о в И. А., Ч е р н о у с ь к о Ф. Л.:
О методике последовательных приближений для решения задач опти¬
мального управления. Журнал вычисл. матем. и матем. физики, т. 2,
№ 6, 1962.
121. К у з м а к Г. Е., Л а в р е н к о Н. И.:
Линеаризированная теория оптимальных многоимпульсных перелетов.
2-й Всесоюзный съезд по теор. и прикл. механике, М., 1964.
122. Кулебакин В. С.:
а) Об определении основных параметров автоматических регуляторов.
Автоматика и телемеханика, № 6, 1940.
б) Теория инвариантности автоматически регулируемых и управляемых
систем. Труды I Конгресса ИФАК, М., АН СССР, 1960.
123. Куликовский Р. (Sulikowski R.):
а) Synthesis о/ a class ot optimal control systems. Bull. Acad. Polon.
sci. Ser. sci. techn., v. 7, № 11, 1959.
б) К оптимальным процессам и синтезу оптимальных систем с линей¬
ными и нелинейными неизменяемыми элементами.Труды I Конгресса
ИФАК, М., АН СССР, I960.
124. КуржанскийА. Б.:
а) О построении методом моментов оптимального управления, минимизи¬
рующего среднеквадратичную ошибку. Автоматика и телемеханика,
т. 25, № 6, 1964.
б) Вычисление оптимального управления в системе с неполной инфор¬
мацией. Дифференциальные уравнения, т. 1, вып. 3, 1965.
125. Курцвейль Я. (Kurzweil J.):
а) К аналитическому конструированию регуляторов. Автоматика и те¬
лемеханика, т. 22, № 6, 1961.
б) К линейной теории оптимального управления. «Casop. pestov. mat»,
т. 89, № 1, 1964.
126. Курцвейль Я., ВорелЗ. (Kurzweil J., V ore 1 Z,):
On linear control systems. «Bui. Inst, politehn. Ia§i», t. 6, № 3—4, 1960.
127. Кухтенко А. И.:
Критерии абсолютной инвариантности для систем регулирования с пе¬
ременными параметрами. Изв. АН СССР, ОТН, Энергетика и автома¬
тика, № 2, 1961.
БИБЛ ИЗОГРАФИЯ
453
128. Ларичев О. И.:
О единственности оптимального по быстродействию управления в одном
классе многосвязных систем. Автоматика и телемеханика, т. 26, № 1
1965.
129. Ларичев О. И., П е р е л ь м а н И. И.:
О суб оптимальном управлении многосвязными системами со связью по
управляющим воздействиям. Автоматика и телемеханика, т. 25, № 1,
1964.
130. Лебедев В. Н.:
Вариационная задача о взлете космического аппарата с круговой ор¬
биты. Журнал вычисл. матем. и матем. физики, т. 3, № 6, 1963.
131. Л е б е д е в Л. А., С а к о в с к и й С. А.: '
О необходимых и достаточных условиях экстремума функционала в за¬
даче .оптимального перелета летательного аппарата с двигателем малой
тяги. Изв. вузов, Авиац. техника, № 4, 1964.
132. Л е й т м а н Дж.:
а) Об оптимальной траекторий ракеты. Прикладная математика и меха¬
ника, т. 25, вып. 6, 1961.
б) Методы оптимизации с приложением к- космическим полетам. (Сб.
статей под ред. Дж. Лейтмана), Изд-во «Наука», 1965.
133. Леонов В. В.:
О численном решении с помощью метода Л. С. Понтрягина одного клас¬
са задач на оптимум. Кибернетика. АН УССР, № 6, 1965.
134. Л е о н ч у к М. П.:
О численном решении задач оптимальных процессов с распределенными
параметрами. Журнал вычисл. матем. и матем. физики, т. 4, № 6,
1964.
135. Л е р н е р А. Я.:
а) О предельном быстродействии систем автоматического управления.
Автоматика и телемеханика, т. 15, № 6, 1954.
б) Принципы построения быстродействующих следящих систем и ре¬
гуляторов. М.— Л., Госэнергоиздат, 1961.
136. Летов А. М.:
а) Устойчивость нелинейных регулируемых систем. Физматгиз, 1962.
б) Аналитическое конструирование регуляторов, I—IV, Автоматика
и телемеханика, т. 21, №№ 4, 5, 6, 1960; т. 22, № 4, 1961.
в) Аналитическое конструирование регуляторов, V. Дальнейшее раз¬
витие проблемы. Автоматика и телемеханика, т. 23, № 11, 1962.
137. Ли Хен Вон:
Об . оптимальном управлении, учитывающем моменты высокого порядка.
Вести. АН КНДР, № 2, 1963.
138. Лидский Э. А.:
Оптимальное регулирование систем со случайными свойствами. При¬
кладная математика и механика, т. 27, вып. 1, 1963.
139. Липцер Р. Ш.:
К управлению винеровским процессом по неполным данным. Киберне¬
тика. АН УССР, № 6, 1965.
140. Литвин-Седой М. 3., Саввин А. Б.:
О синтезе систем автоматического регулирования второго порядка с ог¬
раниченными переходными процессами. Вестник МГУ, серия 1, Матем.
и мех., т. 4, № 5, 1961.
141. Литовченко И. А.:
а) К изопериметрпческой задаче аналитического конструирования.
Автоматика и телемеханика, т. 22, № 12, 1961.
б) Оптимизация систем при ступенчатых ограничениях на управле¬
ние. Автоматика и телемеханика, т. 26, Я® 8, 1965.
454
БИБЛИОГРАФИЯ
142. Л о нш а ко в Н. П.:
Расчет оптимальной по быстродействию системы 3-го порядка с тремя
ограничениями. Изв. АН СССР, Техническая кибернетика, № 5, 1963.
143. Л у зин Н. Н.:
К изучению матричной теории дифференциальных уравнений. Автома¬
тика h и телемеханика, № 5, 1940.
144. Лузин Н. Н., Кузнецов П. И.:
К абсолютной инвариантности и инвариантности до е в теории диффе¬
ренциальных уравнений. ДАН СССР, т. 51, №№ 4, 5, 1946; т. 80, № 3,
1951.
145. Л у р ь е А. И.: •
а) Минимальный квадратичный критерий качества регулируемой си¬
стемы. Изв. АН СССР, Техническая кибернетика, № 4, 1963.
б) Задача Майера — Больца и оптимальные процессы управления (в
соавторстве с В.А.Троицким).Труды 4 Всесоюзн.матем.съезда, Л.,19б1.
146. Лурье К. А.:
Задача Майера — Больца для кратных интегралов и оптимизация по¬
ведения систем с распределенными параметрами. Прикладная матема¬
тика и механика, т. 27, вып. 5, 1963.
147. Маркушин Е. М., Ш^1^п1нов С. Н.:
О сходимости оптимального управления счетной системы дифферен¬
циальных уравнений. Дифференциальные уравнения, т. 2, № 3, 1966.
148. Ми л ь штейн Г. Н.:
а) Применение последовательных приближений для решения одной
оптимальной задачи. Автоматика и телемеханика, т. 25, вып. 3, 1964.
б) Об оптимальном осуществлении траекторий. Автоматика и телеме¬
ханика, т. 26, вып. 4, 1965.
149. Михайлов Н. Н., Новосельцева Ж. А.:
Оптимальные процессы в системе третьего порядка с комплексными по¬
люсами. Автоматика и телемеханика, т. 26, № 9, 1965.
150. Мищенко Е. Ф., Н и к о л ь с к и й М. С.:
Одна задача с малым параметром для параболических дифференциаль¬
ных уравнений. Дифференциальные уравнения, т. 2, № 4, 1966.
151. Моисеев Н. Н.:
Методы динамического программирования в теории оптимальных уп¬
равлений. I. Системы, допускающие использование шкалы управлений.
II. Общий случай аддитивных функционалов. Журнал вычисл. матем.
и матем. физики, т. 4, № 3, 1964 и т. 5, № 1, 1965.
152. Мороз А. И.:
Синтез оптимального по быстродействию управления для линейного
дискретного объекта третьего порядка, I, II, III. Автоматика п телеме¬
ханика, т. 26, № 2, 3, 8, 1965.
153. Надеждин П. В.:
О свойствах оптимальных и линейных импульсных систем. Изв. АН
СССР, Техническая кибернетика, № 4, 1964. -
154. Нгуен Тхань Банг:
а) К решению некоторых задач теории динамического программирова¬
ния при помощи электронных моделирующих устройств. Автома¬
тика и телемеханика, т. 23, № 9, 1962.
б) Построение области управляемости для линейных нестационарных
систем. Изв. АН СССР, Техническая кибернетика, № 5, 1965.
155. Новоселов В. С.:
а) Применение методов аналитической динамики в теории оптималь¬
ных полетов. Вестник ЛГУ, № 13, 1964.
б) Теория приближенного решения вариационных задач и ее приложе¬
ние к исследованию точки переменной массы.Вестник ЛГУ,№ 1, 1965
БИБЛИОГРАФИЯ
455
156. Новосельцев В. М.:
а) Оптимальный процесс в релейно-импульсной системе второго поряд¬
ка. Автоматика и телемеханика, т. 21, вып. 5, 19б0.
б) Оптимальные по быстродействию системы управления при наличии
случайных помех. Автоматика и телемеханика, т. 23, вып. 12, 19б2.
157. Ньютон Дж. К., Г у л д Л. А., Кайзер Дж. Ф.:
Теория линейных следящих систем. Физматгиз, 19б1.
158. О ж и г а н о в а И. А.:
Об условиях инвариантности для одной линейной задачи с запаздыва¬
нием. Труды семинара по теории дифференциальных уравнений с от¬
клоняющимся аргументом, т. 3, М., 19б5.
159. О р у р к И. А.:
Метод определения оптимальных параметров сложных линейных систем
регулирования. Сб. Лен. ин-та инж. ж.-д. транспорта, вып. 1б1, 1958.
160. О с и п о в Ю. С.: .
а) О стабилизации управляемых систем с запаздыванием. Дифферен¬
циальные уравнения, т. 1, № 5, 19б5.
б) О стабилизации нелинейных управляемых систем с запаздыванием
в критическом случае одного нулевого корня. Дифференциальные
уравнения, т. 1, № 7, 19б5.
161. Островский Г. М.:
Об одном методе расчета оптимальных систем. Автоматика и телеме¬
ханика, т. 2б, вып. 3, 19б5.
162. Островский Г. М., Волин Ю. М., Малкин И. И.:
Об одном методе решения оптимальных задач с краевыми условиями.
Изв. АН СССР, Техническая кибернетика, № б, 19б5.
163. О х о ц и м с к и й Д. Е.:
Некоторые вариационные задачи, связанные с запуском ракет. Приклад¬
ная математика и механика, т. 10, вып. 2, 194б.
164. О х о ц и м с к и й Д. _ Е., Энеев Т. А.:
Некоторые вариационные задачи, связанные с запуском искусствен¬
ного спутника земли. Успехи физ. наук, т. б3, № 1а, 1957.
165. Павлов А. А.:
Синтез некоторых оптимальных релейных систем методом фазового' про¬
странства. Изв. АН СССР, ОТН, Энергетика и автоматика, № б,1959.
166. П а в л о в А. А., П о п у ц и л л о В. П.:
Расчет простейших релейных оптимальных систем второго порядка.
Сб. «Автом. управл. и вычисл. техника», вып. 3, М., Машгиз, 19б0.
167. П а р а е в Ю. И.:
О решении одной задачи аналитического конструирования регулято¬
ров. Автоматика и телемеханика, т. 25, № 4, 19б4.
168. Паршева Р. П.:
К вопросу о применении метода динамического программирования
к построению оптимальных регуляторов. Автоматика и телемеханика,
т. 25, № 1, 19б4.
169. П^рвозванскик А. А.:
О минимуме максимального отклонения управляемой линейной систе¬
мы. Изв. АН СССР, Механика, № 2, 19б5.
170.. П е р е л ь м а н И. И.:
Оптимизация управления на основе критерия максимума правдоподобия
1, 2, 3. Автоматика и телемеханика, т. 24, № 5, 19б3; т. 25, №№ 9, 11,
19б4.
171. П е тров Б. Н.:
а) О применении условий инвариантности. Труды 2-го Всесоюзного со¬
вещания по теории автоматического регулирования, т. 2, М.-Л.,
Изд-во АН СССР, 1955. '
456
ГЕЛИОГРАФИЯ
б) Принцип инвариантности при расчете линейных и нелиней¬
ных систем. Труды I Конгресса ИФАК, М., Изд-во АН СССР,
1961.
172. Петр о-в В. А., Скворцов Г. В.:
Об одной задаче аналитического конструирования регулятора. Автома¬
тика и телемеханика, т. 25, № 10, 1964.
173. Петров Ю. П.:
Вариационные методы теории оптимального управления. М.— Л., «Энер¬
гия», 1965.
174. П ио н тковский А. А.:
Задача об оптимизации конечного состояния регулируемой системы при
наличии производных от параметра управления в уравнениях движе¬
ния. Автоматика и телемеханика, т. 26, № 7, 1965.
175. П и т т е л ь Б. Г.:
а) Об одной задаче оптимального управления. Вестник ЛГУ, № 1,
1964.
б) О задаче оптимального управления, связанной с минимизацией функ¬
ционала типа «максимум отклонения». Дифференциальные уравнения,
т. 1, № 11, 1965.
176. Плот ни ков Ю. П :
О квадратичных функционалах, гарантирующих апериодический
переходный процесс. Автоматика и телемеханика, т. 26, № 7, 1965.
177. Пономарев В. М.:
О синтезе оптимальной системы управления. Изв. АН СССР, Техниче¬
ская кибернетика, № 5, 1963.
178. По н трягин Л. С.:
а) Оптимальные процессы регулирования. Успехи матем. наук, т. 14,
вып. 1, 1959.
б) О некоторых дифференциальных играх. ДАН СССР, т. 156, № 4,
1964.
в) К теории дифференциальных игр. Успехи матем. наук, т. 21, № 4,
1966.
179. Понтрягин Л. С., Болтянский В. Г., Г амкр е л и д-
з е Р. В., Ю^щенко Е. Ф.:
Математическая теория оптимальных процессов. М., Физматгиз,
1961.
180. Попов В. М.:
Об абсолютной устойчивости нелинейных систем автоматического ре¬
гулирования. Автоматика и телемеханика, т. 22, № 8, 1961.
181. Попов В. М., X а л а н а й А.:
Об одной задаче теории оптимальных систем с запаздыванием. Автома¬
тика и телемеханика, т. 24, № 2, 1963.
182. Попов Е. П.:
Автоматическое регулирование и управление. Изд-во «Наука», 1966.
183. Пропой А. И.:
О принципе максимума для дискретных систем управления. Автомати¬
ка и телемеханика, т. 26, № 7, 1965.
184. П р о х о р о в Ю. В.:
Управление винеровским процессом с ограниченным числом переклю¬
чений. Труды матем. ин-та им. Стеклова, т. 71, 1964.
185. Пряхин Н. С.:
К вопросу об аналитическом конструировании регуляторов. Автомати¬
ка и телемеханика, т. 24, № 9, 1963.
186. Пугачев В. С.:
Теория случайных функций и ее применение к теории автоматического
управления. Физматгиз, 1960. '
БИБЛИОГРАФИЯ
457
187. Пшеничный Б. Н.:
Численный метод решения некоторых задач оптимального управления.
Журнал вычисл. матем. и матем. физики, т. 4, № 2, 1964.
188. Разумихин Б. С.:
Задача об оптимальном распределении ресурсов. Автоматика и телеме¬
ханика, т. 26, № 7, 1965.
189. Репин Ю. М., Третьяков В. Е.:
Решение задачи об аналитическом конструировании регуляторов на
электронных моделирующих устройствах. Автоматика и телемеханика,
т. 24, № 6, 1963.
190. Р о з е н м а н Е. А.:
Оптимальное управление объектом с двумя управляющими воздейст¬
виями. Автоматика и телемеханика, т. 20, № 10, 1959.
191. Р о з о н о э р Л. И.:
а) Принцип максимума Л. С. Понтрягина в теории оптимальных систем.
Автоматика и телемеханика, т. 20, № № 10, И, 12, 1959.
б) Вариационный подход к проблеме инвариантности. Автоматика и те¬
лемеханика, т. 24, №№ 6, 7, 1963.
192. Р о й т е н б е р г Е. Я.:
Об одной задаче оптимального управления. Изв. АН СССР, Техниче¬
ская кибернетика, № 1, 1965.
193. Ройтенберг Я. Н.:
а) Некоторые задачи теории динамического программирования. Прик¬
ладная математика и механика, т. 23, № 4, 1959.
б) Некоторые задачи управления движением. Физматгиз, 1963.
194. Романенко В. Н.:
К вопросу об аналитическом конструировании регуляторов. Изв. АН
СССР, Техническая кибернетика, № 5, 1964.
195. С а в в и н А. Б.:
О наибыстрейшем выведении изображающей точки за пределы заданной
области фазовой плоскости. Изв. АН СССР, Технич. киберн. № 4, 1963.
196. Савельев В. П.:
Об одной задаче оптимального управления. Изв. вузов, Радиофизика,
т. 6, № 6, 1963.
197. Салуквадзе М. Е.:
а) Об аналитическом конструировании оптимального регулятора при
постоянно действующих возмущениях. Автоматика и телемеханика,
т. 23, № 6, 1962.
б) К вопросу инвариантности оптимальных регуляторов. Автоматика
и телемеханика, т. 25, № 5, 1964.
198. Сеник П. М.:
Управляющие колебательные процессы в квазилинейных системах с од¬
ной степенью свободы. ДАН УССР, № 10, 1964.
199. Симонов М. И.: .
О необходимом и достаточном условии избирательной инвариантно¬
сти. ДАН УССР, № 9, 1960.
200. Сиразетдинов Т. К.:
К теории оптимальных процессов с распределенными параметрами.
Автоматика и телемеханика, т. 25, № 4, 1964.
201. Смольников Л. П., Бычков К). А., Волков Е. Ф.:
Исследование автоматической системы 3-го порядка, оптимальной в
смысле времени торможения с установившейся скоростью. Изв. АН
СССР, Техническая кибернетика, № 5, 1963.
202. С и е г у р ' А. А., Семенюк А. Д.:
Об одном частном законе оптимального по быстродействию управления.
В сб. «Кибернетика и вычисл. техника», Киев, «Наук, думка», 1964.
458
БИБЛИОГРАФИЯ
203. Стихии В. Н.:
Системы управления с обратной связью и с противоположными инте¬
ресами. Автоматика и телемеханика, т. 24, № 7, 1963.
204. Стр атоно вич Р. Л.:
а) К теории оптимального управления. Достаточные координаты. Ав¬
томатика и телемеханика, т. 23, № 7, 1962.
б) К теории оптимального управления. Асимптотическое решение диф¬
фузионного альтернативного уравнения. Автоматика и телемеханика,
т. 23, № '11, 1962.
205. Стратонович Р. Л., Ш^ал1^1гаузен В. И.:
Некоторые стационарные задачи динамического программирования.
Изв. АН СССР, ОТН, Энергетика и автоматика, № 5, 1962.
206. Сун Дин-хао.:
Математические проблемы оптимального регулирования. Шусюэ тун-
бао (Shuxue tongbao), № 12, 1963.
207. Сун 'Ц з я нь:
Синтез оптимальной системы управления на основании поля изохрон.
Изв. АН СССР, ОТН, Энергетика и автоматика, № 5, 1960.
208. Сун Цзянь, Хань Цзин-цин.:
Анализ и синтез линейных систем регулирования, оптимальных по
быстродействию. Шусюэ ■ Цзиньчжань (Shuxue jinzhan), вып. 5, №4,
1962.
209. Тихонов А. Н.:
О методах регуляризации задач оптимального управления. ДАН СССР,
т. 162, № 4, 1965.
210. Токарев В. В.:
а) Оптимальное управление источником мощности при движении тела
переменной массы с активным сбросом мощности. Прикладная мате¬
матика и механика, т. 27, вып. 4, 1963.
б) К выбору параметров динамической системы, универсальной для
заданного класса маневров. Изв. АН СССР, Механ. и машиностр.
№ 5, 1965.
в) Некоторые вопросы надежности в задачах оптимального управле¬
ния. Прикладная математика и механика, т. 30, вып. 1, 1966.
211. Троицкий В. А.:
а) Задача Майера — Больца вариационного исчисления в теории оп¬
тимальных систем. Прикладная математика и механика, т. 25, № 1,
1961.
б) О вариационных задачах оптимизации процессов управления. Прик¬
ладная математика и механика, т. 26, № 1, 1962.
212. Уланов Г. М.:
а) Системы автоматического регулирования и следящие системы, ра¬
ботающие по разомкнутому и замкнутому циклам и принцип инва¬
риантности. Дан ссср, т. 96, № 5,1954.
б) Вопросы теории комбинированного управления. Сб. «Научно-техни¬
ческие проблемы автомат, электроприводов», Изд-во АН СССР,
1957.
213. Ф^льдбаум А. А.:
а) Оптимальные процессы в системах автоматического регулирования.
Автоматика и телемеханика, т. 14, № 6, 1953.
б) О синтезе оптимальных систем с помощью фазового пространства.
Автоматика и телемеханика, т. 16, № 2, 1955.
в) Вычислительные устройства в автоматических системах. М., Физ¬
матгиз, 1959.
г) Основы теории оптимальных автоматических систем. Изд-во «Нау¬
ка», 1966.
БИБЛИОГРАФИЯ
459
214. Филатов А. Н.:
Задача на быстродействие без переключений при произвольном числе
управляющих функций. Автоматика и телемеханика, т. 22, № 7, 1961.
215. Филимонов Ю. М.:
К задаче об оптимальном управлении математическим маятником. Диф¬
ференциальные уравнения, т. 1, вып. 8, 1965.
216. Филиппов А. Ф.:
О некоторых вопросах теории оптимального регулирования. Вестник
МГУ, Серия матем., мех., астр., физ., хим., № 2, 1959.
217. Ф и ц и е р Л. Н.:
Об управлении многокоординатными системами. Автоматика и телеме¬
ханика, т. 26, № 11, 1965.
218. Ф^1^1^ге-Л«тц И.: ■
Метод фазовой плоскости в теории релейных систем. .Физматгиз, 1959.
219. Ф^ю1ге-Лотц И., М а р б а х X. Д. (F 1 u g g е - L о t z I.,
М а .г b а с h Н. D.):
On the minimum-effort regulation of stationary linear systems. Journ.
Franklin Inst., v. 279, № 4, , 1959.
220. Флюгге-Лотц И., Титус Г. (Flugge-Lotzl, Ti¬
tus Н. A.):
Оптимальное и квазиоптимальное управление системами 3-го и 4-го
порядка. Труды II Конгресса ИФАК, М., Изд-во «Наука», 1965.
221. Формальский А. М.:
Построение области управляемости для системы с неустойчивым объек¬
том. Изв. АН СССР, Техническая кибернетика, № 5, 1965.
222. Фуллер А. Т.:
Оптимизация релейных систем регулирования по различным крите¬
риям качества. Труды I Конгресса ИФАК, М., Изд-во АН СССР, 1960.
223. Халилов 3. И.:
Линейная задача управления в банаховом пространстве. ДАН АзССР,
т. 20, № 5, 1964.
224. Хамитов Ш. Ш.:
Синтез оптимального управления для объекта второго порядка при на¬
личии интегрального ограничения. Изв. АН УзССР, серия техн., № 3,
1962.
225. Харатишвили Г. Л.:
а) Принцип максимума в теории оптимальных процессов с запаздыва¬
нием. ДАН СССР, т. 136, № 1, 1961.
б) Оптимальные в смысле быстродействия процессы в линейных управ¬
ляемых системах с запаздыванием. Сообщ. АН ГрузССР, т. 33, № 1,
1964.
226. Хуан Туан - юань.:
Об оптимальном управлении системами 1-го порядка с распределенны¬
ми параметрами. Шусюэ Цзинь чжань (Shuxue jinzhan), т. 7, № 3,
1964.
227. Цыпкин Я. 3.:
а) Теория релейных систем автоматического регулирования. Гостех-
издат, 1955.
б) Об оптимальных процессах в импульсных автоматических системах.
ДАН СССР, т. 134, № 2, 1960.
в) Теория линейных импульсных систем. Физматгиз, 1963.
228. Цянь Сю э-сэнь:
Техническая кибернетика. Изд-во иностр, литературы, М., 1956.
229. Ч е р в и н В. И.:
Синтез оптимальной программы управления с учетом случайных оши¬
бок ее реализации. Автоматика и телемеханика, т. 26, № 2, 1965,
460
БИБЛИОГРАФИЯ
230. Черенков А. П.:
Одна задача параметрического управления при малых случайных воз¬
мущениях. Теория вероятностей и ее применения, т. 9, № 3, 1964.
231. Чернятин В. А.:
О разрешимости задачи аналитического конструирования регуляторов
для неавтономных систем. Автоматика и телемеханика, т. 26, № 11, 1965.
232. Чжан Ж)нь-ве11:
Одна задача синтеза оптимальных систем по принципу максимума. Ав¬
томатика и телемеханика, т. 22, № 10, 1961.
233. Чжан Сы - ин:
К теории оптимального регулирования. Прикладная математика и ме¬
ханика, т. 25, вып. 3, 1961. '
234. Ч у р а к о в а С. В.:
Одна задача оптимального управления в системах с последействием.
Тезисы доклада на Всесоюз. межвуз. конф, по теории и приложениям
дифференц. уравнений с отклон. аргументом. Черновцы, 1965.
235. Шатровский Л. И.:
Об одном численном методе решения задачи оптимального управления.
Журнал вычисл. матем. и матем. физики, т. 2, № 3, 1962.
236. Ш а т х а н Ф. А.:
Применение принципа максимума к задачам оптимизации параллель¬
ных химических реакций. Автоматика и телемеханика, т. 25, № 3,
1964.
237. Ш и манов С. Н.:
К теории линейных дифференциальных уравнений с последействием.
Дифференциальные уравнения, т. 1, вып. 1, 1965.
238. Ш и ряев А. Н.:
а) К теории решающих функций и управления процессом наблюдения
по неполным данным. Trans, of the 3-rd Prague conf, on Inf. Theory,
Stat. Dec. Funct., Rand. Proc., Prague, 1964.
б) Последовательный анализ и управляемые случайные процессы.
Кибернетика, АН УССР, № 3, 1965.
239. Шмльгаузеи В. И.:
Синтез одной оптимальной следящей системы. Автоматика и телемеха¬
ника, т. 24, № 8, 1963.
240. Щ и п а н о в Г. В.:
Теория и методы проектирования регуляторов. Автоматика и телемеха¬
ника, № 1, 1939.
241. Якубович В. А.:
Метод матричных неравенств в теории устойчивости нелинейных регу¬
лируемых систем. Автоматика и телемеханика, т. 26, № 4, 1965.
242. A a s m a F.:
Design and analysis of optimal multivariable control systems. A linear
approach. Goteborg, 1963.
243. Adorno D. S.:
Optimum control of certain linear systems with quadratic loss. Inform,
and Control, v. 5, № 1, 1962.
244. An tosiewicz H. A.:
Linear control systems. Arch. Rat. Meeh, and Analysis, v. 12, № 4,
1963.
245. A о k i M.:
а) Stochastic time optimal control systems. Applications and Industry,
May, № 54, 1961.
б) On the approximation of trajectories and its applications to control
systems optimization problems. J. Math. Anal, and Appl., v. 9, N 1,
1964.
БИБЛИОГРАФИЯ
461
246. А о к i М., Cruz J. В., Jr.:
On the optimum control of systems with unknown, but fixed parameters.
1EEE Trans. Aut. Control, v. • 10, N 2, 1965.
247. Armstrong E. S., Suddath J. H.:
Application of Pontryagin’s maximum principle to lunar orbit rendez¬
vous problem. «А1АА (Reprints)», N 361, 1963.
248. A sh M.:
Application of dynamic programming to stochastic time-optimal control.
1EEE Intern. Convent. Rec., v. 12, N 1, 1964.
249. Astrom K. J.:
Optimal control of Markov processes with incomplete state information.
J. Math. Anal, and Appl., v. 1°, N 1, 1965.
25°. Athanasiades M.: ,
Optimal control for linear time-invariant plants with time, fuel and ener¬
gy constraints. Applic. and 1nd., N 64, 1963.
251. A t'hanasiades M., F a 1 b P.:
Time-optimal control for plants with numerator dynamics. 1RE Trans.
Aut. Control, v. 7, N 4, 1962.
252. A thanasiades M., Smith 0. J. M.:
Theory and . design of high-order bang-bang control systems. IRE Trans.
Aut. Control, v. AC-6, 1961.
253. A t h a n s M.:
Minimal-fuel control of second-order systems with real poles. 4-th Joint
Aut. Control Conf. Minneapolis. Minnesota, New York, 1963.
254. A t h a n s M., С a n n о n M. D.:
On the fuel-optimal singular control of non-linear second order systems.
IEEE.. Trans. Aut. Control, v. 9, N 4, 1964.
255. A t h a n s Michael, F a 1 b Peter L., L а с о s s Richard T.:
On optimal control of self-adjoint systems. 4-th Joint Automat. Control
Conf. Minneapolis, Minnesota, New York, 1963.
256. Babister A. W.:
Determination of the optimum response of linear systems (zero displace¬
ment error systems), Quart. J. Meeh, and Appl. Math., v. 10, N 4, 1957.
257. Bailey F. B.:
The application of the parametric expansion method of control optimiza¬
tion to the guidance and control problem of a rigid booster. IEEE Trans.
Aut. Control, v. 9, N 1, 1964.
258. Balakrishnan A. V.:
An operator theoretic formulation of a class of control problems and a stee¬
pest descent method of solution. J. Soc. Industr. and Appl. Math. Cont¬
rol, Al, N 2, 1963.
259. В a 1 c h e n Jens. J.:
Dynamic optimization of continuous processes. Trondheim Inst, for Re-
gulungstechnikl, 1961.
260. Bass R. W.:
Equivalent linearization, nonlinear circuit synthesis and the stabilization
and optimization of control system. Proc, of the symp. on nonlinear cir¬
cuit analysis. Polytechn. Inst, of Brooklin, April, 1956.
261. Behrbohm Hermann:
On a minimum-time flight path with и regard to stress and heat limitations.
Techn. Notes, Venska Aeroplan A. B., v. 26, 1954.
262. Bellman R., Fleming W. H., W i d d e r D. V.:
Variational problems with constraints. Ann. mat. pure, et appl., 41,1956.
263. В e 1 1 m a n R., К a g i w a d a H., К a 1 a b a R.:
A computational procedure for optimal system design and utilization.
Proc. Nat. Acad. Sci. USA, v. 48, N 9, 1962.
462
БИБЛИОГРАФИЯ
264. Bellman R., Richardson J. M.:
On the applications of dynamic programming to a class of implicit varia¬
tional problems. Quart. J. Meeh, and Appl. Math., v. 17, N 3, 1959.
265. В e г к о v i t z L. D.:
Variational methods in problems of control and programming. J. Math.
Anal, and Appl., v. 3, Aug., N 1, 1961.
266. Bertram J. E.:
The concept of state in the analysis of discrete-time control systems.
Joint. Aut. Control. Conf., New York, 1962.
267. Bittner L.:
Lineare, zeitoptimale Prozesse bei konvexen Steuer-und- Phasengebiet.
Z. angew. Math, und Meeh., B. 44, 1965.
268. В la quiere A.:
Le probleme general du controle optimum, theoreme d’existence d'une
solution. «Tournees etudes controle optimum et systemes non lineair,
1962», Gif-sur-Yvette, 1963.
269. Borneman M. K.:
Aperpus sur certain problemes d’optimization des trajectoires d’aerody¬
nes par le calcul des variations. Techn. et sci. aeronaut., N 2, 1958.
270. BoyadjieffG., Eggleston D., Jackues ( M., S u t a-
b u t r a H., Takahashi Y.:
Some applications of the maximum principle to second-order systems,
subject to input saturation, minimizing error and effort. Trans. ASME,
D 86, N 1, 1964.
271. В г e n n a n P. J., R о b e r t s A.:
Use of an analogue computer in the application of Pontryagin's maximum
principle to the design of control systems with optimum transient respon¬
se. J. Electron, and Control, v. 12, N 4, 1962.
272. В r i d g 1 a n d T. F., Jr.:
On the existence of optimum feedback controls. J. Soc. Industr. and Appl,
Math. Control, Al, N 3, 1963.
273. Bryson Arthur E., Jr.:
Linear feedback solutions for minimum effort interception, rendezvous,
and soft landing. AIAA Journal, v. 3, N 8, 1965.
274. Bryson A. E., Jr., D e n h a m W. F.:
Optimal programming problems with inequality constraints. 1. Necessary
Conditions for extremal solutions. 2. Solution by steepest ascent. AIAA
Journal, v. 1, N 11, 1963; v. 2, N 1, 1964.
275. Butman Stanley, Sivan Raphael:
On cancellations, controllability and observability. IEEE Trans. Aut.
Control, v. 9, N 3, 1964.
276. В u s h a w D.:
а) Experimental Towing Tank, Stevens Institute of Technology, Report
469, Iloboken, N. J., 1953.
б) Optimal discontinuous forcing terms. Ann. Math. Studies, v. 4, N 41,
Princeton Un. Press., 1958.
277. Capra Vincenzo:
Sulla traiettoria ottima di un missile leggero soggetto a forza gravitazio-
nale centrale in atmosfera resistente. Boll. Unione mat. stal., v. 13, N 3,
1958.
278. C a v о t i Carlos R.:
The calculus of variations approach to (system optimization. J. Reine
angew. Math., N 217, 1965.
279. Ch andake tP, L e о n d e s С. T.:
Optimum non-linear bang-bang control systems with complex roots.
I. System synthesis. II. Analytical Studies. Appl. and Ind., N 54, 1961,
БИБЛИОГРАФИЯ
463
280. Chang А.:
An algebraic characterization of controllability. IEEE Trans. Aut. Con¬
trol, v. 10, N 1, 1965.
281. C h a n g S. S. L.:
а) Synthesis of optimal control systems. New York, MacGraw-Hilh
1961.
б) Minimal-time control with multiple saturation limits. IEEE Trans.
Aut. Control, N 1, 1963.
282. Cha udhuri A jit. Kumar, C h a u d h u r i A. K.:
Calculus of variations, dynamic programming and the maximum prin¬
ciple in the general regulator problem. Intern. J. Control, v.l, N 1, 1965.
283. Ch e n Paul P.:
An algorithm for stochastic control through dynamic programming tech¬
niques. IRE Trans. Aut. Control, v. 7, N 5, 1962.
284. Conti Roberto:
Sui problema della controlfabilita di un sistema lineare. Atti Accad.
Naz. Lincei. Rend. Cl. sci. fiz. mat. e natur., v. 37, N 3-4, 1964.
285. Cooter J. E., Takahashi Y.:
Time-optimal, control of a chemical reactor. 1962 Joint Aut. Control
Conf. New York, N. Y., 1962.
286. C u 1 v e r W. J.:
The effect of control transformations on a class of control system models.
IEEE Trans. Aut. Control, v. 10, N 3, 1965.
287. D a t к о R.:
A general bang-bang principle and bang-bang approximations. J. Math ■
Anal, and Appl., v. 10, № 2, 1965.
288. Denn Mooton M.:
Convergence of a method of successive approximations in the theory of
optimal processes. Ind. and Engng. Chem. Fundament, v. 4, N 2, 1965.
289. D e s о e r C. A.:
The bang-bang servo-problem treated by variational techniques. Infor¬
mation and Control, v. 2, N 4, 1959.
290. D e s о e r C. A., W i n g J. A.:
A minimal time discrete system, IRE Trans. Aut. Control, v. AC-6, May,
N 2, 1961.
291. Dmowski Ryszard M.:
Sterowanie optymalne dla obiektow о przepustowosci zawierazacej zera.
Arch, automat, i telemech., v. 9, N 4, 1964.
292. D r e n i с к R. F., S h a w L.:
Optimal control of linear plants with random parameters. IEEE Trans.
Aut. Control, v. 9, N 3, 1964.
293. DreyfusS. E.:
Some types of optimal control of stochastic systems. J. Soc. Industr. and
Appl. Math. Control, A2, N 1, 1964.
294. D г e у f u s S. E., E 1 1 i о 11 J. R.:
An optimal linear feedback guidance scheme. J. Math. Anal, and Appl.,
v. 8, N 3, 1964.
295. Durbeck Robert C.:
An approximation technique for suboptimal control. IEEE Trans. Aut.
Control, v. 10, N 2, 1965.
296. D u r ling A 1 len:
Computation of time optimal controls to an arbitrary region. IEEE Trans.
Aut. Control, v. 10, N 1, 1965.
297. Eaton J. H.:
a) An iterative solution to time-optimal control. J. Math. Anal, and
Appl., v. 5, N 2, 1962.
464
БИБЛИОГРАФИЯ
О) Improper solutions under existence assumptions. IEEE Trans. Aut.
Control, v. 10, N 2, 1965.
298. E^kenurler Michael W.:
Closed-form Lagrangian multipliers for coast-periods of optimum trajec¬
tories. AIAA Journal, v. 3, N 6, 1965.
299. E 1 1 e r t F. J., M e г г i a n C. W.:
Synthesis of feedback controls using optimization theory. IEEE Trans.
Aut. Control., v. 8, N 2, 1963.
300. Ewing G.{ M., H^i^eltine W. R.:
Optimal programs for an ascending missile. J. Soc. Industr and Appl.
Math. Control, A2, N 1, 1964. ■
301. FaddenE. J., Gilbert E. G.:
Computational aspects of the time optimal control problem. СотриС
Methods. Optim. Problems, New York, London, Acad. Press., 1964.
302. F a 1 b Peter L.:
Infinite dimensional control problems — 1. On the closure of the set of
attainable states for linear systems. J. Math. Anal, and Appl., v. 9, N 1,
1964.
303. F a n L. T., H w a n g W. S., C h e n S. J., F a n L. S.:
A sequential union of the maximum principle and dynamic ' programming.
J. Electr. (1), v. 17, 1964.
304. Fan Liang-tseng, Wang Chiu-sen:
The discrete maximum principle. New York, Wiley, 1964.
305. F a t t о r i n i H. O.:
Time-optimal control of solutions of operational differential equations.
J. Soc. Indust, and Appl. Math. Ser. A. Control 2, 1964.
306. F e g 1 e у К. A., H s и M. I.:
Optimum discrete control by linear programming. IEEE Trans. Aut.
Control, v. 10, N 1, 1965.
307. Florentin J. J.:
а) Partial Observabblity and Optimal control. J. Electron and Control,
Ser. 1, Sept., v. 13, N 3, 1962.
0) Optimal control of systems with generalized Poisson inputs. Trans.
ASME, v. 85— D, N 2, 1963.
308. F о у Wade H., Jr.:
Fuel minimization in flight vehicle altitude control. IEEE Trans. Aut.
Control, v. 8, N 2, 1963.
309. Freimer Murshalk
A dynamic programming approach to adaptive control processes. IRE
Nat. Convent. Rec., v. 7, N 4, 1959.
310. Friedland B ernar d:
The structure of optimum control systems. Trans. ASME, D 84, 1,
1962.
311. F r i e d 1 a n d B., S a r a c h i к P. E.:
Indifference regions in optimum attitude control. IEEE Trans. Aut.
Control, v. 9, N 2, 1964.
312. Friedman Avner:
Optimal control for hereditary processes. Arch. Rat. Meeh, and Analy¬
sis, v. 15, N 5, 1964.
313. F r i к M.:
Uber den Zusammenhang der Randbedingungen des gegebenen und des
adjungierten Systems bei Anwendung des Maximumprinzipo. Z. angew.
Math, und Meeh., B. 44, N 8—9, 1964. ■
314. G e 1 d e r A. Van, Be ltrami E., Mu nick H.:
On minimum-time minimum-fuel rendezvous. J. Soc. Industr. and Appl.
Math., v. 9, N 3, 1961.
БИБЛИОГРАФИЯ
465
315. Glbert Elmer G.:
The application of hybrid computers to the iterative solution of optimal
control problems. Comput. Methods Opt. Probl., N. Y.— London, Acad.
Press, 1964.
316. Glass H., Cooper L.:
Sequential search a method for solving constrained optimization problems.
J. Assoc. Comput. Mach., v. 12, N 1, 1965.
317. G о 1 d s t e i n A. A.:
Convex programming and optimal control. J. Sos. Industr. and Appl.
Math., A3, N 1, 1965.
318. Go si e wsk i A.:
Optymalne servomechanismy przekaznikowa drygiego rzedu. (Polska
Akad. Nank.) Rozprawy Elektrotechniczne, t. 7, N 1, 1961.
319. G u n с к e 1 Th. L., F r a n к 1 i n G. E.: •
A general solution for linear sampled-data control. 1962 Joint Aut. Cont¬
rol ' Conf., New York, 1962.
320. Guignabodet J.:
Methodes variationnelles pour la resolution numerique des problemes de
commande optimale soumis ai de contraintes sous forme d’inegalites. Rev.
franp. traitem. inform, chiffres, 1.7, N 2, 1964.
321. Gupta S.:
A note on the use of impulse excitations to reach farthest from zero state
of a given system. IRE Trans. Aut. Control, v. 7, N 3, 1962.
322. H a 1 a n a у A.:
а) Le «principle du maximum» pour les systemes optimaux lineaires
a retardement. C. r. Acad, sci., 1. 254, N 13, 1962.
б) Un probleme d’optimization pour les systemes aux differences. C. r.
Acad, sci., 1.254, N 14, 1962.
323. Hale J.:
Linear functional-differential equations with constant coefficients. RIAS
Techn. Report., N 6, 1963.
324. H a 1 к i n H.:
а) Liapounov’s theorem on the range of a vector measure and Pontiya-
gin’s maximum principle. Arch. Rat. Meeh, and Analysis, v. 10, N 4,
1962.
б) Topological aspectsof optimal control of dynamical polysystems. Contr.
to Diff. Equations, v. 3, 1964.
325. H a n s о n M. A.:
Bounds for functionally convex optimal control problems. J. Math. Anal,
and Appl., v. 8, N 1, 1964.
326. H a n u s Borivoj:
РгоЫёш optimalni regulace se servomotorem a konstantni rychlostf.
Souhru praci о automat. 1959. Praha, 1961.
327. H a г v e у C. A.:
Synthesis of time-optimal control for linear processes. J. Math. Anal,
and Appl., v. 10, N 2, 1965.
328. H a r v e у C. A., L e e E. B.:
On the uniqueness of time-optimal control for linear processes. J. Math.
Anal, and Appl., v. 5, N 2, 1962.
329. H a s d о r f f L., G u p t a S. C.:
An iterative procedure for optimal control of a system by sampled input.
J. Electron and Control, v. 16, N 2, 1964.
330. Hawkes T. A.:
Background studies in time optimal control systems. «Journees e tudes
controle optimum et systemes non lineair, 1962», Gif-sur-Yvette,
1963.
466
ВИКЛИОГРАФИЯ
331. H einhold J., К u n t z e K.:
Ein Verfahren der linearen Optimierung. Z. Wahrscheinlichkeitstheor.
und verw. Geb. Bd.2, N 3, 1964.
332. Hermann Robert:
On the accessibility problem in control theory. Intern. Symp. Nonlinear
Diff. Equations and Nonlinear Meeh. Colorado Springs, 1961. N. Y.—
London — Acad. Press., 1963.
333. Hermes H.:
A note on the range of a vector measure; application to the theory of op¬
timal control. —J. Math. Anal, and Appl., v. 8, N 1, 1964.
334. Hermes H., Haynes G.:
On the nonlinear control problem with control appearing linearly. J. Soc.
Ind. and Appl. Math. Control, Al, N 2, 1963.
335. Hestenes Magnus R.:
On variational theory and optimal control theory. J. Soc. Industr. and
Appl. Math., A3, N 1, 1965.
336. H о Y. C.:
What constitutes a controllable system? IRE Trans. Aut. Control, v. 7,
N 3, 1962.
337. H о Y. C., BaronS. A.:
A minimal-time intercept problem. IEEE Trans. Aut. Control, v. 10,2,1965.
338. H si eh H. S.:
Synthesis of optimum multivariable control systems by the method of
steepest descent. IEEE Trans. Appl. and Ind. N 66, 1963.
339. I m a z C.:
Teoria de control. Centro de Investigacion у estudios Avanzados del IPN,
Mexico City, 1962.
340. I m a z С., V о r e 1 Z.:
On domains of controllability of proper and normal systems. Bol. Soc.
Mat. Mexicana (2), v. 8, 1963.
341 — Isaacs R—:
Differential Games. New York, Wiley, 1965.
342. J а с к s о n R., H о r n F.:
On discrete analogues of Pontryagin’s maximum principle. Intern. J. Con¬
trol, v. 1, N 4, 1965.
343. J а с о b s M. E., L a v i A.:
A solution to a simple rendez-vous problem. IEEE Intern. Convent. Rec.,
v. 13, N 7, 1965.
344. J az win ski A.:
Optimal trajectories and linear control of nonlinear functions. Al AA
Journal, v. 2, N 8, 1964.
345. J ohnson C. D., G i b s о n J. E.:
Optimal control with quadratic performance index and fixed terminal
time. IEEE Trans. Aut. Control, v. 9, N 4, 1964.
346. Johnson George W.:
Synthesis of control systems with stability constraints via the direct
method of Liapunov. IEEE Trans. Aut. Control, v. 9, N 3, 1964.
347. К a Hay M.:
An example of the application of dynamic programming to the design of
optimum control programs. IRE. Trans. Aut. Control, April, N 3, 1962.
348. Katz S.:
Best endpoint control of noisy systems. J. Electron, and Control, v. 12,
N 4, 1962.
349. Ke Iley Henry J.:
A transformation approach to singular subarcs in optimal trajectory and
control problems. J. Soc. Ind. and. Appl. Math., A2, N 2, 1964.
БИБЛИОГРАФИЯ
467
350. К i р i n i а к W.:
Dynamic optimization and control. A variational approach. Mass. Inst .
1961.
351. K ishi Francis H.:
The existence of optimal controls for a class of optimization problems.
IEEE Trans. Aut. Control, v. 8, N 2, 1963. ’
352. Knapp С. H., Frost P. A.:
Determination of optimum control and trajectories, using the maximum
principle in association with a gradient technique. IEEE Trans. Aut.
Control, v. 10, N 2, 1965.
353. Knudsen Harold K.:
An iterative procedure for computing time-optimal controls. IEEE Trans.
Aut. Control, v. 9, N 1, 1964.
354. К о e p с к e R., L a p i d u s L.:
Dynamic control of chemical engineering processes, using a method of
Liapunov. Chem. Engng. Sci., v. 16, N 3—4, 1961.
355. Kopp R. E.:
On the Pontryagin maximum principle. Int. Symp. Nonlinear Diff. Equa¬
tions and Nonlinear Meeh., Colorado Springs, 1961.
356. К r a m e r J. D. R.:
On control of linear systems with time lags. Information and Control,
v. 3, N 4, 1960.
357. К r a n s G. M., S a r a c h i к P. E.:
An application of functional analysis to the optimal control problem.
1962 Joint. Aut. Control. Conf. New York, 1962.
358. К r e i n d 1 e r E., S a r a c h i к - P. E.:
On the concepts of controllability and observability of linear systems.
IEEE Trans. Aut. Control, v. 9, N 2, 1964.
359. Krsmanovic Miladin:
Optimalno upravljanje sistemima drugog reda cija karactericticna jedna-
cina ima kompleksna korena. Automatika, t. 5, N 2, 1964.
360. Kurzweil Fred, Jr.:
The control of multivariable processes in the presence of pure transport
delays. IEEE Trans. Aut. Control, AC-8, N 1, 1963.
361. К u s h n e r H. J.:
а) Optimal Stochastic control. IRE Trans.Aut.ControUv. AC-7, N 5,1962.
б) A «time-domain» successive approximation method for linear optimal
stochastic systems. IEEE Trans. Aut. Control, v. 9, N 3, 1964.
362. L a d d H. 0., Jr., Friedland B.:
Minimal fuel control of a second order linear process with a constraint
on time-to-run. Trans. ASME, D 86, N 1, 1964.
363. L angehop С. E.:
On the stabilization of linear systems. Proc. Amer. Math. Soc., v. 15,
N 5, 1964.
364. L a w d e n D. F.:
а) Fundamentals of space navigation. J. Brit. Interpl.Soc., v. 13, 2, 1954.
б) Optimal programming of rocket thrust direction. Astronaut, acta,
v. 1, 1955.
365. La Salle J. P.:
а) Time optimal control systems. Proc. Nat. Acad. Sci. USA, v. 45, N 4,
1959.
б) The time optimal control problem. Ann. Math. Studies N 45, Contr.
to the theory of diff. equations, v. 5, Princeton Un. Press., 1960.
366. L e e E. B.:
a) On the time-optimal regulation of plants with numerator dynamics.
IRE Trans. Aut. Control, v. 6, N3, 1961.
468
БИБЛ ИОГРАФИЯ
б) A computational technique /or optimal systems. IEEE Trans. Aut.
Control, v. 10, N 3, 1965.
367. Le M a у J о seph L.:
Recoverable and reachable zones /or control systems with linear plants
and bounded controller outputs. IEEE Trans. Aut. Control, v. 9, N 4,
1964.
368. L e w i s D. С., M e n d e 1 s о n P.:
Contributions to the theory o/ optimal control. A general procedure /or
the computation o/ switching mani/olds. Trans. Am. Math. Soc., v. 110,
N 2, 1964.
369. L i о n s J.:
Note on a variational problem in control theory. J. Electron and Control,
v. 13, N 6, 1962.
370. Luenberger D. G.:
Observing the state o/ a linear system. IEEE Trans. Milit. Electron.,
v. 8, N 2, 1964. ,
371. Lukes Dahlard:
Application o/ Pontriagin’s maximum principle in determining the op¬
timal control ol a variable-mass vehicle. Progr. Astronaut, and Rocketry,
v. 8, New York — London, Acad. Press, 1962.
372. Ly le S. M.:
Perturbation measurement and control. Exposit. Adapt. Control., Ox¬
ford — London — New York — Paris, Pergamon Press, 1962.
373. M а г к u s L., L e e E. B.:
On the existence o/ optimal controls. Trans. ASME, D 84, N 1.
1962.
374. M с В r i d e L. E., Jr., Narendra K. S.:
Optimization oli time-varying systems. IEEE Trans. Aut. Control, v. 10,
N 3, 1965.
375. M e d i t c h J. S.:
Synthesis o/ a class ol linear /eedback minimum energy controls. IEEE
Trans. Aut. Control, v. 8, N 4, 1963.
376. Meditch J. S., G ibons J. E.:
On the realtime control o/ time-varying linear systems. IRE Trans. Aut.
Control, v. 7, N 4, 1962.
377. M e к s a w a n T., M u r p h у G. J.:
Optimal synthesis o/ linear pulse-width modulated computer controlled
systems. J. Franklin Inst., v. 277, N 2, 1964.
378. Me lanowski Kazimiei^i^:
О warunkach sterowalnosci liniowych ukladow dynamicznych. Arch,
automat, i telemech., v. 9, N 8, 1964.
379. M e 1 b о u r n e W. G., Saner Carl. G., Jr.:
Optimal thrust programs /or power-limited propulsion systems. Astro¬
naut. acta, v. 8, N 4, 1962.
380. M^itriam C. W.:
A class ot optimum controls. J. Franklin Inst., v. 267, N 4, 1959.
381. Meea rovic M.:
On the existence and uniqueness o/ the optimum multivariable system
synthesis. IRE Trans. Aut. Control, AC-5, N 3, I960.
382. M e s c h 1 e r P. A.:
Time-optimal rendez-vous strategies. IEEE Trans. Aut. Control, v. 8,
N 4, 1963.
383. Miele Angelo:
а) Flight mechanics and variational problems o/ a linear type. J.
Aero-Space Sci., v. 25, N 9, 1958.
б) Flight Mechanics, Addison — Wesley Publ. Co. Inc., 1962,
БИБЛИОГРАФИЯ
4б9
384. М iranker W. L.:
Approximate controllability for distributed linear systems. J.of Math.Anal,
and Appl., v. 10, N 2, 19б5.
385. Moyer H., С r a r d n e r, P i n u к a m G.:
Several trajectory optimization techniques. Comput. Methods Optimiz.
Problems, New York — London, Acad. Press, 19б4.
386. Nagata A., KodamaS,, KumagaiS.:
Time optimal discrete control system with bounded state variable. IEEE
Trans. Aut Control, v. 10, N 2, 19б5.
387. N a h i E.:
On the design of time optimal control systems via the second method of
Liapunov. IEEE Trans. Aut. Control, v. 9, N 3, 19б4.
388. Nel son W. L.:
Optimal control methods for on-off sampling systems. Trans. ASME,
v. D-84, 19б2.
389. N^i^s^tadt L. W.:
а) Synthesizing Time Optimal Control Systems. J. Math. Anal, and
Appl., v. 1, N 4, 19б0.
б) Optimization, a moment problem and nonlinear programming. J. Soc.
Industr. and Appl. Math., A2, N 1, 19б4.
390. Newton R.:
On the optimum trajectory of a rocket. J. Franklin Inst., v. 2бб, N 3,
1958.
391. O g iiito re lli M. N.:
A time optimal control problem for systems described by differential¬
difference equations. J. Soc. Industr. and Appl. Math. Control, Al, N 3,
19б3.
392. О h a p R. F., S t u b b e r u d A. P.:
A technique for estimating the state of a nonlinear system. IEEE Trans.
Aut. Control, v. 10, N 2, 19б5.
393. O kam ura Kiyohisa:
Some mathematical theory of the penalty method for solving opti¬
mum control problems. J. Soc. Industr. and Appl. Math., A2, N 3,
19б5.
394. Orford R. J.:
Optimal stochastic control systems. J. Math. Anal, and Appl., v. б, N 3,
19б3.
395. Pagurek Bernard:
Sensstivity of the performance of optimal control systems to plant para¬
meter variations. IEEE Trans. Aut. Control, v. 10, N 2, 19б5.
396. P ' aie wonsky B., Wo odraw P., Brunner W., Hal¬
bert P.:
Synthesis of optimal controllers using hybrid analog-digital computers.
Comput. Methods in Opt. Problems, Acad. Press, New York, 19б4.
397. P a llu de 1 a В ar ri e re R.:
Sur le principe de Pontryagin. C. r. Acad, sci., 1.254, N 18, 19б2.
398. P e a r s о n A. E.:
Synthesis of a minimum energy controller subject to an average power
constraint. 19б2 Joint. Aut. Control Conf. New York, 19б2.
399. Pearson J. D.:
Reciprocity and Duality in Control Programming Problems. J. Math.
Anal, and Appl., v. 10, N 2, 19б5.
400. PeschonJoliii:
Note on n-th order single-variable optimum relay controls. «Journees
etudes controle optimum et systemes non lineair, 19б2». Cif-sur-Yvette,
19б3.
470
БИБЛИОГРАФИЯ
401. Р е te г so n Е. L.:
Statistical analysis and optimization of systems. John Wiley & Sons,
1961. a л
402. Petrovic Radivoj, G^a^i^ilovic Momcilo: A
Princip . maksimuma pri sintezi optimalnega krmiljenja dinamicnih pro-
cesov. Automatika, t. 4, N 3, 1963.
403. Polak E.:
On the equivalence of discrete systems in time-optimal control. Trans.
ASME, D-85, N 2, 1963.
404. P о r i t s к у H.: '
Optimum thrust orbits. Proc. 4-th US Nat. Congr. Appl. Meeh., Berkeley
Calif, 1962, v. 1, Pergamon Press, 1962.
405. P о t t 1 e H. V.:
The digital adaptive control of a linear process modulated by random
noise. IEEE Trans. Aut. Control, v. AC-8, N 3, 1963.
406. R a j a m a n i V. S., Me C^i^island I.:
Minimal-time control of linear systems using functional analysis. Intern.
J. Control, v. 2, N 1, 1965.
407. R eka sius Z. V., H s i a T. C.:
On an inverse problem in optimal control. IEEE Trans. Aut. Control,
v. 9, N 4, 1964.
408. R e ко f f M. G.:
State-variable techniques for control systems. Electro-Technol., v. 73,
. N 5, 1964.
409. Reynolds P. A., C a d z о w J. A.:
Solution of an optimization problem for linear discrete systems through
ordinary calculus. IEEE Trans. Aut. Control, v. 10, N 2, 1965.
410. R о b e r t о A. P.:
Application of Pontryagin’s maximum principle to the design of control
systems with randomly varying inputs. Trans, of the Soc. of Instr. Tech¬
nology, v. 15, N 2, 1963.
411. Roberto S. M.:
Dynamic programming in Chemical Engineering and Process Control.
Acad. Press., 1963.
412. R о senbrock H. H.:
An example of optimal adaptive control. J. Electron and Control, v, 16,
N 5, 1964.
413. R о x i n E.:
Axiomatic theory of control systems. RIAS, Baltimore, Md, 1962.
414. RoxinE. O., SpinadelV. W.:
Sobre un problema de sistemes de ecuaciones diferenciales lineales. Rev.
Union Mat. Argent, у Asos. Fys. Argent, v. 18, N 4, 1958.
415. Rutherford A.:
The optimal design of chemical reactors. Acad. Press., 1961.
416. SagirowP., Frik M.:
Ein optimierungsproblem der Mechanik mit stetigen und unstetigen Steue-
rungen. Z. angew. Math, und Meeh., B. 43, N 4—5, 1963.
417. Sakaguchi Minoru:
Dynamic programming for the optimal control of linear stochastic systems.
Math. Japan., v. 7, May, 1962.
418. Sakawa ^oshiyuki:
Solution of an optimal control problem in a distributed parameter system.
IEEE Trans. Aut.- Control., v. 9, N 4, 1964.
419. Santoro Paolo:
Condizioni di non controllobilita per i sistemi lineari. Boll. Un. Mat.
Ital. (3), 19, 1964.
БИБЛИОГРАФИЯ
471
420. Schmae deke W. W., R usse d D. L.:
Time optimal control with amplitude and rate limited controls. J. Soc.
Industr. and Appl. Math., A 2, N 3, 1965.
421. S c h u 1 t z W. C., R i d e о u t V. C.:
Control system performance measures: past, present and future. IRE
Trans. Aut. Control, v. 6, N 1, 1961.
422. Schwartz M. D:
On the simplification of the inverse problem of optimal control theory.
Space.Electr.Sympos., New York, Amer. Astronaut. Soc.,v/33—v/4°, 1965.
423. S h i m e m u r e E. and oth.:
Optimal control of linear systems with time delay. J. Soc. of Instr, and
Control. Eng., v. 3, N 3, 1964.
424. S m i t h F. B.:
Time-optimal control of high order systems. IRE Trans. Aut. Control,
v. AC-6, Febr. N 1, 1961.
425. S m i t h J. R., N a h i N. E.:
Final value control systems. IEEE Intern. . Conv. Rec.,v. 12, N 1,1964.
426. S n о w D. R.:
Singular optimal controls for a class of minimum effort problems. J. Soc.
Industr. and Appl. Math., A 2, N 2, 1964.
427. S о b r a 1 M a n о e 1, Jr.:
Linear control laws for singular linear systems. J. Franklin Inst., v. 278,
N 5, 1964.
428. Sonneborn L. M., Van V 1 e с к F. S.:
The bang-bang principle for linear control systems. J. Soc. Industr. and
Appl. Math., A 2, N 2, 1962.
429. Sprague C. Fremont:
On the reticulation problem in multivariable control systems. IEEE
Trans. Aut. Control, v. 9, N 4, 1964.
430. Stancil R. T.:
A new approach to steepest ascent trajectory optimization. AIAA Jour¬
nal, v. 2, N 8, 1964.
431. S t u b b e r u d A. R.:
A controllability criterion for a class of linear systems. WESCON Techn.
Papers, N 4, 12/1, 1963.
432. Svobodova Hana, Vanicek Jir:
Optimalni regulace. Casop. pestov. mat., t. 85, N 3, 1965.
433. Sworder D. D., M a s a n a о Aoki:
On control system equivalents of some decision theoretic theorems. J.
Math; Anal, and Appl., v. 10, N 2, 1965.
434. Takahashi Y.:
How to determine control via maximum principle. J. Soc. of Instr, and
Control Eng., v. 9, N 8, 1964.
435. TchaunerJ. F. A., H e m p e 1 P. R.:
Minimum-fuel rendez-vous techniques. J. Spacecraft and Rockets, v. 2,
N 5, 1965.
436. T h a u F. E.:
Optimal time control of non-normal linear systems. Intern. J. Control,
v. 1, N 4, 1965.
437. T^italdo-di-Francia G.iulia n o:
Sulla traiettoria ottima di un missile leggero, sogetto a una resistenza
quadratica, funzionee esponenziale dell’altezze. Boll.Unione mat. Ital.,
v. 12, N 3, 1957.
438. T о r n g II. C.:
Optimization ol‘ discrete control systems through linear programming.
J. Franklin Inst., v. 278, N 1, 1964.
472
БИБЛИОГРАФИЯ
439. Той J. Т.:
а) Optimum design of Digital Control Systems via Dynamic programming,
Acad. Press., 1963.
б) Modern Control theory. MacGraw-Hill Inc., 1964.
440. Tschauner J., Hempel P.:
Optimale Beschleunigunoprogramme fur das Rendezvous —Manover. As
tronaut. acta, v. 10, N 5, 6. 1964.
441. Tung F., ■ S t r i e b e 1 С. T.:
A stochastic optimal control problem and its applications. J. Math. Anal,
and Appl., v. 12, N 2, 1965. ■
442. Tuteur F. B., Tyler J. S., Jr.:
Optimal control theory applied to a probabilistic intercept problem.
IEEE Trans. Aut. Control, v. 9, N 4, 1964.
443. W a h a J. P.:
La commande par «plus ou moins» dans les systernes lineaires. Revues A,
v. 5, N 2, 1963.
444. W a n g C. S., F a n L. T.:
Optimization of one-dimensional multistage linear processes. Appl. Sci.
Res. Bll, N 5, 1964—1965.
445. W a n g P. К. C.:
Optimum control of distributed-parameter systems with time delays.
IEEE Trans. Aut. Control, v. 9, N 1, 1964.
446. W a n g P. К. С., T u n g F.:
Optimum control of distributed-parameter systems. Trans. ASME, D 86,
N 1, 1964.
447. W a zewski Tadeusz:
О problemie optymalnego sterowania w przypadku nieliniowym. Arch,
aut. i telemech., t. 7, N 1—2, 1962.
448. Weiss L.:
The concepts of differential controllability and differential observability.
J. Math. Anal, and Appl., v. 10, N 2, 1965.
449. Wstcott J. H.:
Design of multivariable optimum filters. Trans. ASME, v. 80, 1958.
450. W ilde Douglas J.:
Optimization methods. Advances Chem. Engng., v. 3, New York — Lon¬
don, Acad. Press., 1962.
451. W i n d e к n e c h t T. G.:
Optimal stabilization of a rigid body attitude. J. Math. Anal, and Appl.,
v. 6, N 2, 1963.
452. Womack B. F., D a a h ie IlJ. N.:
A weighted time performance index for optimal control. IEEE Trans.
Aut. Control, v. 10, N 2, 1965.
453. W о n h a m W. M., J о h n s о n C. D.:
а) On a problem of A. M. Letov in optimal control. 5-th Joint. Aut. Conf.,
Stanford, Calif., 1964.
б) Optimal bang-bang control with quadratic performance index. Trans.
ASME, D 86, N 1, 1964.
454. Z a d e h L. A.t:
Optimal control problems in discrete time systems. Computer control
systems technology. Leondes T. (ed.), N. Y., MacGraw —Hill Book Co,,
1961.
предметный указатель
Альтернатива Фредгольма 135
Базис 398
Вектор, евклидова норма 35, 395, ' 396
— фазовый 19, 20, 31
Вектор-столбец 20
Вектор-строка 21
Векторы линейно независимые 37
Величина случайная 365
Возможное управление 18, 33, 97,
254
— — обобщенное 50
— — оптимальное 80
Возмущение обобщенное 47
Время до встречи 326
Выпуклое множество 405, 440
Гильбертово пространство 133—
136, 419—422, 434
Гиперплоскость 83, 398
Гироскопическая сила 228
Гироскопический маятник 26
Грина функция 51
Движение минимальное 112
— невозмущенное 33
— —, уравнения 33
— неустойчивое 30
— экстремальное 112
6-функция. 50
Диссипативная сила 228
Допускаемое управление 75, 81, 97
— — обобщенное 89
Задача о наблюдении 266
— оптимальном255
— о преследовании 328
— рнггpоомном 229
— об управлении 33
— — — оllт^IмaлыIOм55 , 00
Закон Вуассопа 365
Идеальный сигнал 270, 280, 367
Изменение функции ограниченное
45 .
— — полное 45
Измеримое множество 414
Импульс силы полный 52, 53
— управляющего воздействия 182
Импульсная переходная матрица 51
— — функция 51
Импульсное 6-воздействие 50
Инвариантность 147
Интеграл Лебега 413
— Римана 45
— Стилтьеса 44, 45
Интенсивность управления 34,
35, 69, 81, 92, 110
Координата’ инвариантная по воз¬
действию 147
— каноническая 222, 353
— фазовая 19, 28
Коши формула 39, 40, 72
— — обобщенная 44
Лагранжа множители 125, 129
— уравнения 22, 27, 221
Лебега интеграл 413
Линейная операция 71, 397, 398
Линейно независимые векторы 37
— — функции 102
Линейное пространство 395, 409
— — нормированное 397
Максимин 271
Математическое ожидание 366
Матрица 21, 139
— импульсная переходная 51
— фундаментальная 37, 39
Мера множества 414
— нулевая 412
Метод динамического программиро¬
вания И, 12
— наиск^ейшего спуска 211
474
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Метод Эйлера 38
Мещерского уравнение 25, 85, 86
Минимакс 271
—, правило 112, 114, 115, 119, 120
285, 286, 386
Минимальная сила 153
—функция 101, 104, 106,107,110,112
Минимальное движение 112
Минковского неравенство 396
Многообразие 83
Множество выпуклое 405, 440
— замкнутое 425
— измеримое 414
— плоское 104, 284
Множители Лагранжа 125, 129
Момент встречи движений 326
— поглощения процесса 331
Наблюдаемость системы по коорди¬
нате 304
полная 304
Наблюдение 263
Невозмущенное движение 33
Независимые события 365
Неособенная функция 155
Неравенства Сильвестра 59
Неравенство Буняковского—Шварца
430
— Коши—Буняковского 400
— Минковского 396
Неустойчивое движение 30
Норма вектора 35, 395, 396
— операции 398, 429
— функции 58, 418
— — в сопряженном пространстве
73
Нормированное пространство 145
Нулевая мера 412
Область достижимости & 116, 317
Обобщенная формула Коши 44
— функция 201, 387
Обобщенное возмущение 47
— управление 50
— — возможное 50
— — допускаемое 89
Ограниченное изменение функции 45
Ограниченность функции по суще¬
ству 75, 418
Операция линейная 71, 397, 398
— оптимальная 96, 103, 105, 106
— разрешающая 266, 269
— — оптимальная 275, 279,280,285
Оптимальное время переходного про¬
цесса 232, 235
Оптимальное управление 79, 80, 83,
84, 89, 96, 110, 112, 126, 162, 328,
338, 339
— — по быстродействию 232
Ортогональные функции 58
Открыттая сфера 405
Плоское множество 104
Подпространство управляемости си¬
стемы 146, 148, 247
Полная управляемость системы 147
— наблюдаемость системы 303, 304
Полное изменение функции 45
Полный импульс силы 52, 53
Правило двойственности ,263, 301
— минимакса 112, 114, 115, 119, 120,
285, 286, 386
Предельное быстродействие 231, 235,
236, 336
Принцип максимума 11, 12, 106,
107
— обратной связи 257
— оптимальности 255
Прицеливание экстремальное 334,335
Проблема моментов 96, 103, 105,
108, 109, 384
Программная задача 254
Программное управление 10, 251,
257
Пространство 33 72, 73, 75, 76, 78,
79, , 81, 82, 89, 93, 95, 97, 98, 100,
104, 133, 273, 281, 301, 313, 315,
429, 436
— 33п 113, 116, 313, 427, 429
— гильбертово Ж 133—136, 419—
422, 434
— ЗС 387
— X 74, 75, 77, 107, 423, 431
— <?(2) 70, 82, 133, 135, 383, 384,
385, 421, 429, 435
— линейное 395, 409
— — нормированное 397
— Л 75, 77, 153, 423
— самосопряженное 134
— сопряженное 73
— <в 433
Пуассона закон 365
Разрешающая операция 266, 269
Реализация случайного процесса 366
Реальный сигнал 273
Релейное управление 155, 156, 249
Релея функция 229, 230
Римана интеграл 45
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
475
Самосопряженное пространство 134
Свойство слабой «б’-бпкомпактностп
116, 117, 120
Седловая точка игры 307, 310, 312,
328, 346, 390
Сепарабельность 421
Сигнал идеальный 270, 280, 367
— реальный 270, 273
Сила гироскопическая 228
— диссипативная 228
Сильвестра неравенства 59
Синтез оптимальной системы 257
Система вполне наблюдаемая 304, 305
— — управляемая 138, 145, 146,
148, h 149, 152, 225, 237
— неособенная по воздействию 152,
162
— сопряженная 63, 299, 300
Скаляр 21
Скалярное произведение функций
58, 133, 134, 420
Случайная величина 365
Собыиия независимые 365
Сопряженное пространство 73
Стилтьеса интеграл 44, 45
Стратегия 271
— оптимальная 272
Сфера открытая 405
— 104, 105, 108
Теорема Хана—Банаха 100, 105,
318, 404
Точка равновесия асимптотически
устойчивая 261
— седловая 307, 310, 312, 328,
346, 390
Управление 18, 138
— возможное 18, 33, 97
— допускаемое 75, 81, 97
—, интенсивность 34, 35, 81, 92
— обобщенное 47, 84, 86
Управление обобщенное возмож¬
ное 50
— — допускаемое 89
— оптимальное 79, 80, 83, 84, 89,
96,110,112,126,162, 328,338, 339
оо ыыстоодесттвюю 322
— по принципу обратной связи 212,
257
— программное о251, 257
— релейное 155, 156
— экстремальное 334, 338
Уравнение Мещерского 25, 85, 86
— характеристическое 38
Уравнения возмущенного движения
33
— Лагранжа 22, 27, 221
Условие несмещенности 280
Фазовая координата 19, 28
Фазовый вектор 19, 20, 31
Формула Коши 39, 40, 72
— — обобщенная 44
Фредгольма альтернатива 35
Фундаментальная матрица 37, 39
Функции линейно независимые 102
Функция Грина 51
— импульсная переходная 51
— минимальная 101, 104, 106, 107,
110, 112
— неособенная 155
— обобщенная 201, 387
— релейная 229, 230
— экстремальная 107, 154
Характеристическое уравнение 38
Экстремальная функция 107, 154
Экстремальное движение 112
— прицеливание 334, 335
— управление 334, 338
«Энергия» управляющего воздейст¬
вия 121
Николай Николаевич Брюсовский
Теория управления движением (Линейные системы)
М., 1968 г., 476 стр. с нлл.
Редакторы А. А. Могилевский, Р. Т. Янушевский
Техн, редактор А. А. Благовещенская
Корректоры Т. Д. Доверман, С. Н. Емельянова
Сдано е набор 5VII 1967 г.
Подписано к печати 7/П 1968 г. Бумага 60x90%.
Физ. печ. л. 29,75. Условн. печ. л. 29,7/.
Уч.-изд. л. 30,46. Тираж 11000 экз. Т-00038.
Цена книги 2 р. 17 к. Заказ № 3/02
Издательство «Наука»
Главная редакция
физико-математической литературы.
Москва, В-71, Ленинский проспект, 15
2-я типография издательства «Наука)
Москва, Шубинский пер., 10