/














































































Автор: Бугров Я.С. Никольский С.М.
Теги: алгебра геометрия высшая математика
ISBN: 5-7107-8420-6
Год: 2004




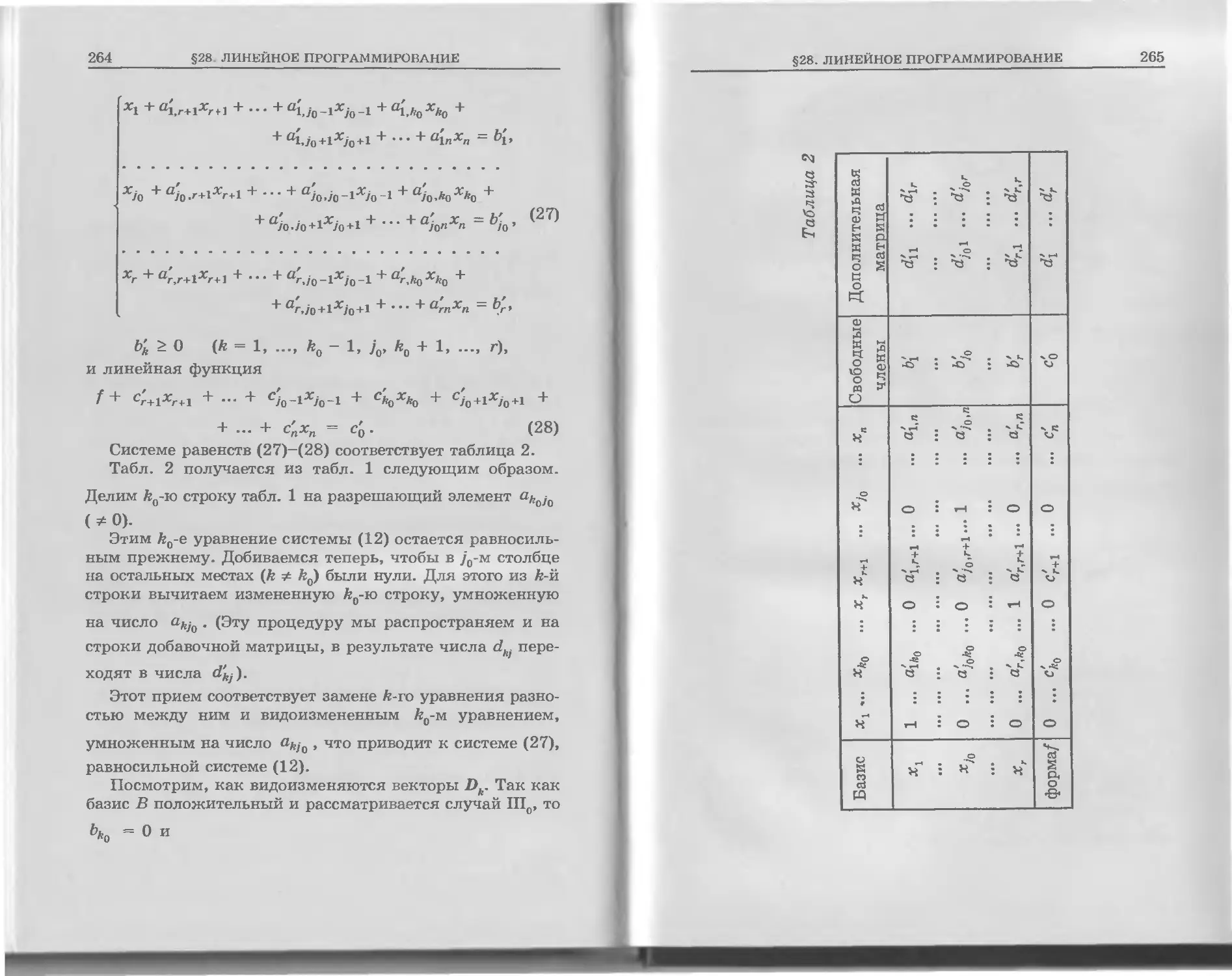
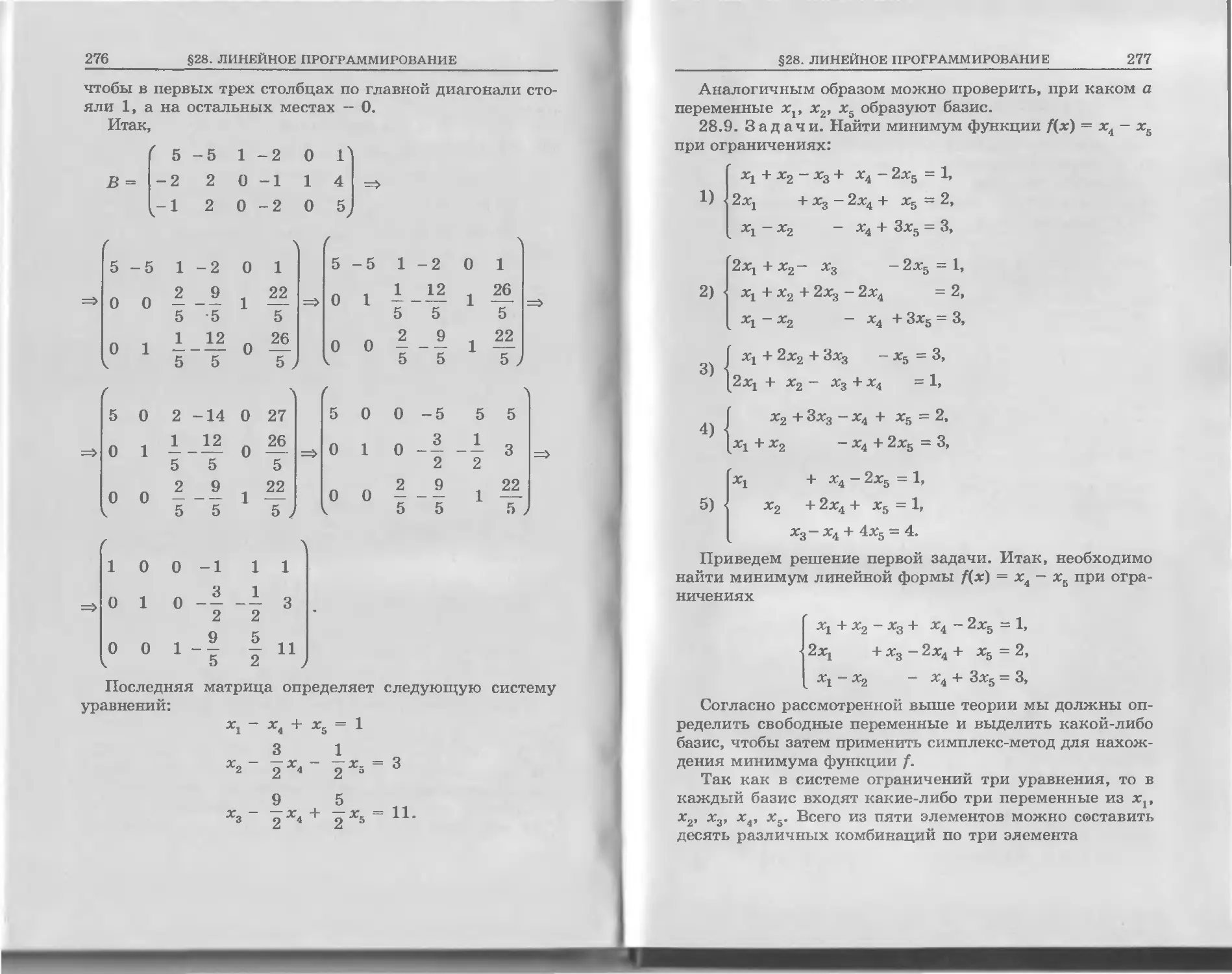
Текст
ВЫСШЕЕ ОБРАЗОВАНИЕ
СОВРЕМЕННЫЙ УЧЕБНИК
Я.С. Бугров
С.М. Никольский
ВЫСШАЯ
МАТЕМАТИКА
Элементы линейной алгебры
и аналитической геометрии
Издание шестое, стереотипное
Рекомендовано Министерством образования
Российской Федерации в качестве учебника
для студентов высших учебных заведений,
обучающихся по инженерно-техническим специальностям
ррофа
МОСКВА • 2004
УДК 512.6(075.8)
ББК 22.143я73
Б90
Рецензенты:
кафедра высшей математики Московского государственного ин-
женерно-физического института (Технического университета)
(зав. кафедрой проф. А. И. Прилепко)', акад. В. А. Ильин,
чл.-кор. РАН С. И. Полежаев', чл.-кор. РАН Л. Д. Кудрявцев
Серия «Высшее образование'. Современный учебник»
основана в 2001 году
Бугров Я. С.
Б90 Высшая математика: Учеб, для вузов: В 3 т. / Я. С. Буг-
ров, С. М. Никольский; Под ред. В. А. Садовничего. —
6-е изд., стереотип. — М.: Дрофа, 2004. — (Высшее обра-
зование: Современный учебник).
ISBN 5-7107-8420-6
Т 1: Элементы линейной алгебры и аналитической
геометрии. — 288 с.: ил.
ISBN 5-7107—8421-4 (т. 1)
Учебник (1-е изд. — 1980 г.) вместе с другими учебниками тех же
авторов — «Дифференциальное и интегральное исчисление» (том 2)
и «Дифференциальные уравнения. Кратные интегралы. Ряды. Функ-
ции комплексного переменного» (том 3) — соответствует требова-
ниям Государственного образовательного стандарта высшего профес-
сионального образования.
В книге содержатся основные сведения по теории определителей
и матриц, линейных систем уравнений, а также элементы векторной
алгебры. Рассматриваются основные вопросы линейной алгебры:
линейные операторы, самосопряженные операторы, квадратичные
формы, линейное программирование. Включены элементы аналити-
ческой геометрии на плоскости и в пространстве.
Для студентов инженерно-технических специальностей вузов.
УДК 512.6(075.8)
ББК 22.143я73
ISBN 5-7107-8421-4 (т. 1)
ISBN 5-7107-8420-6
© ООО «Дрофа», 2003
СОДЕРЖАНИЕ
11рсдисловие......................................4
‘i 1. Определители второго порядка................7
j 2. Определители третьего и n-го порядка.........8
> 3. Матрицы.....................................22
§ 4. Система линейных уравнений. Теория Кроне-
кера-Капелли......................................25
§ 5. Трехмерное пространство. Векторы. Декартова
система координат.................................48
§ 6. n-мерное евклидово пространство. Скалярное
произведение......................................59
§ 7. Отрезок. Деление отрезка в данном отношении..67
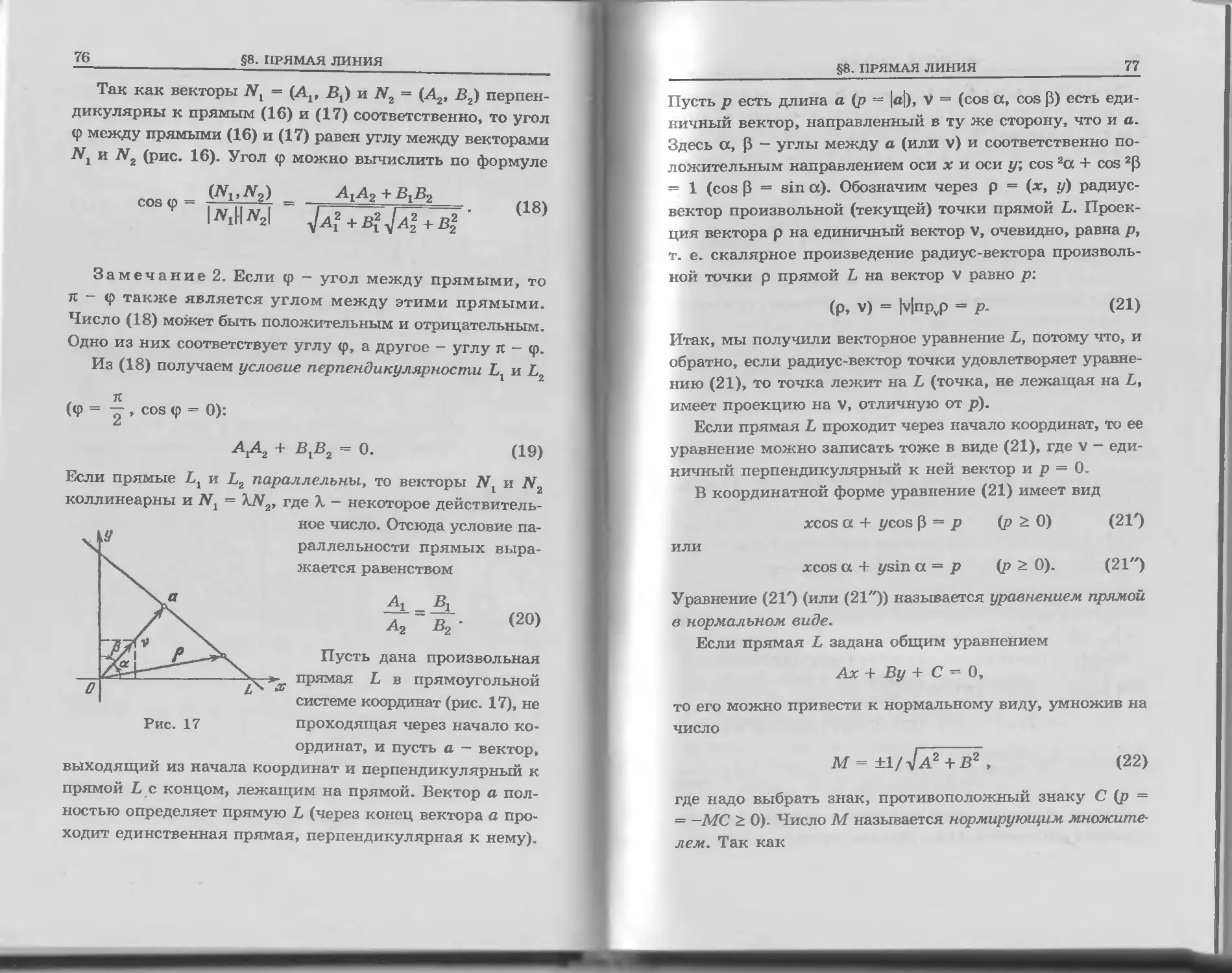
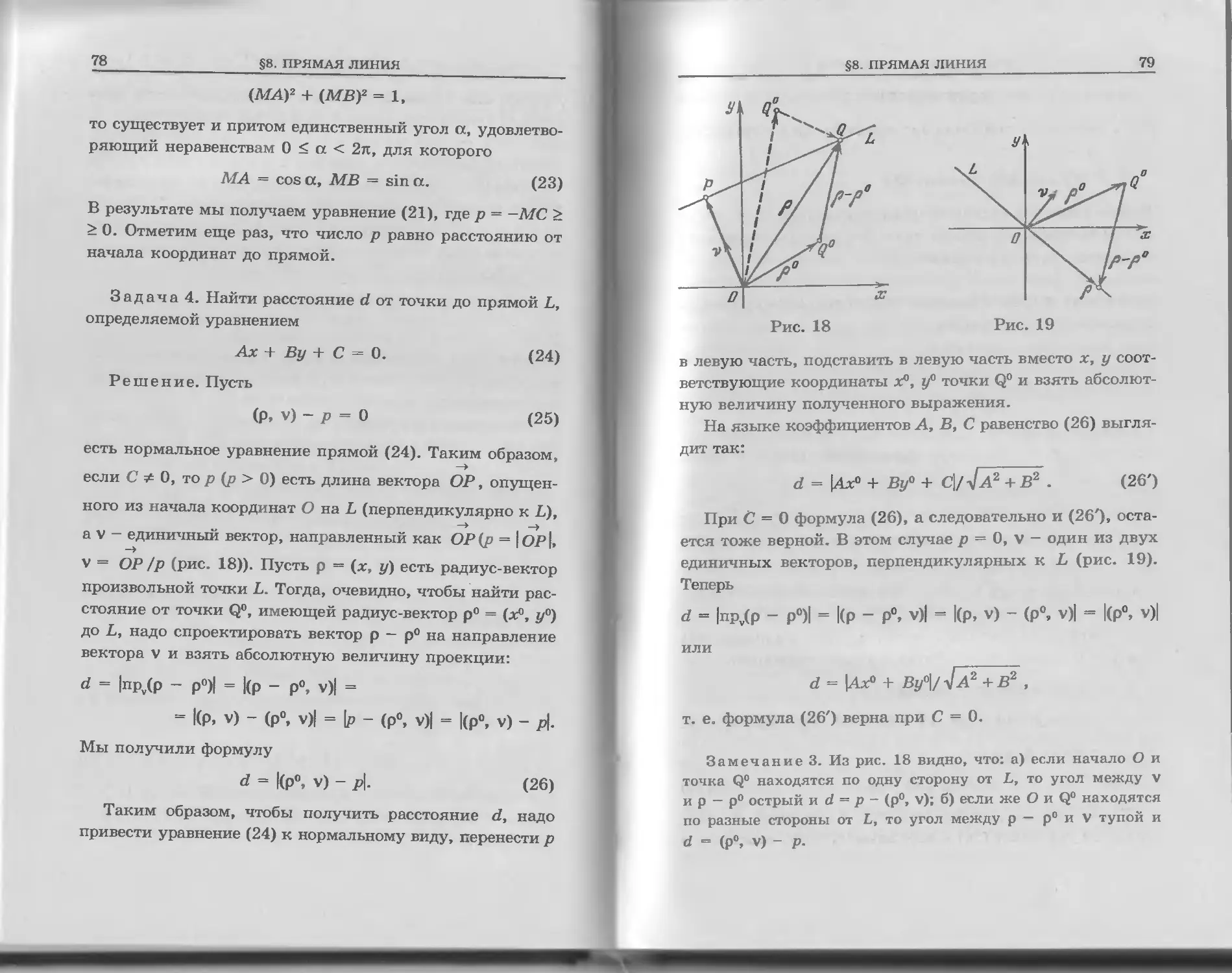
§ 8. Прямая линия................................69
§ 9. Уравнение плоскости.........................80
§10. Прямая в пространстве......................89
§11. Ориентация прямоугольных систем координат...93
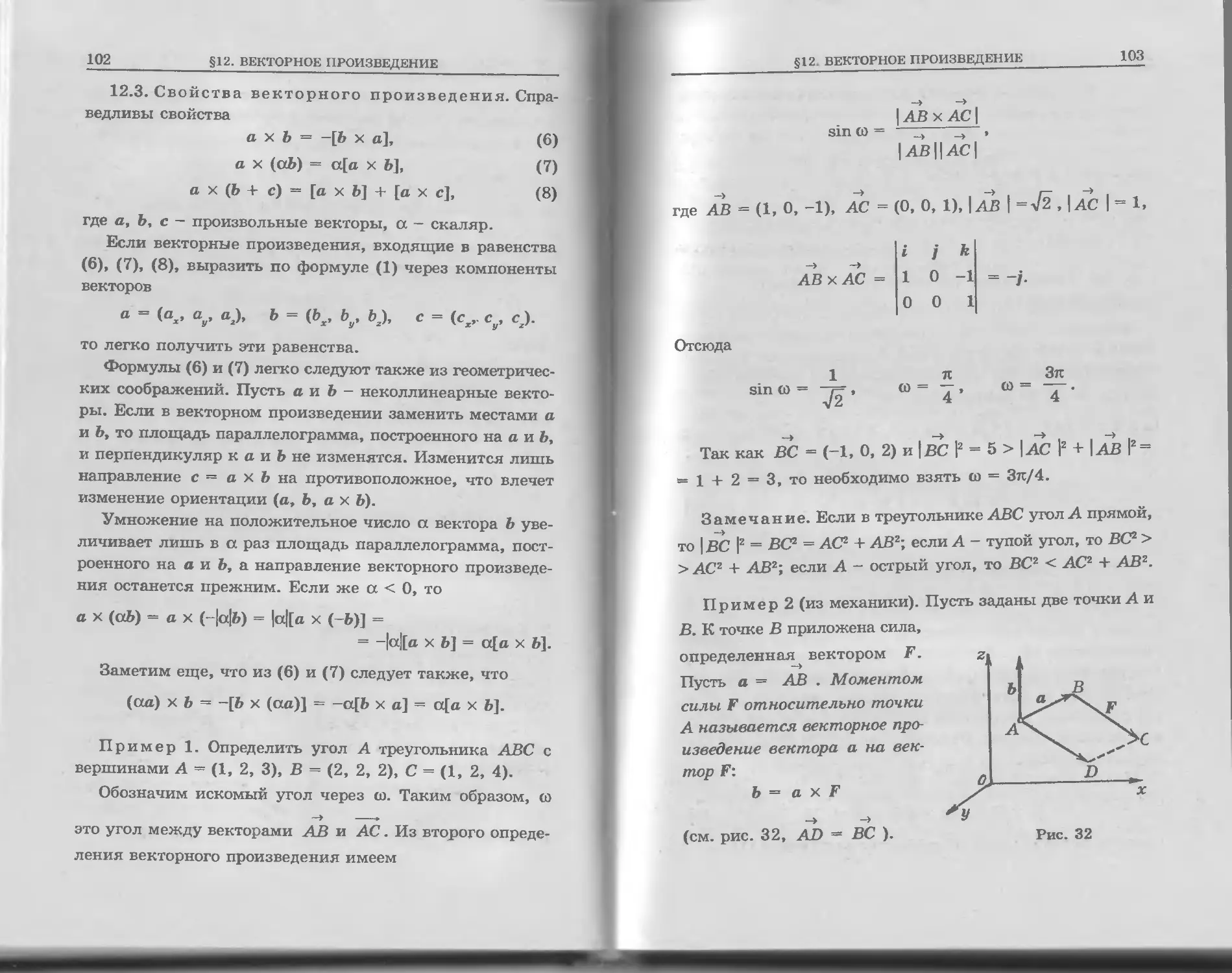
§12. Векторное произведение.....................96
§ 13. Смешанное (векторно-скалярное) произведение....104
§ 14. Линейно независимая система векторов......105
§ 15. Линейные операторы........................114
§ 16. Базисы в Rn...............................122
§ 17. Ортогональные базисы в Rn.................128
§ 18. Инвариантные свойства скалярного и вектор-
ного произведений................................138
§ 19. Преобразование прямоугольных координат
в плоскости......................................141
§ 20. Линейные подпространства в Rn.............145
§ 21. Теоремы фредгольмова типа............... 152
§ 22. Самосопряженный оператор. Квадратичная форма....161
§ 23. Квадратичная форма в двухмерном пространстве....173
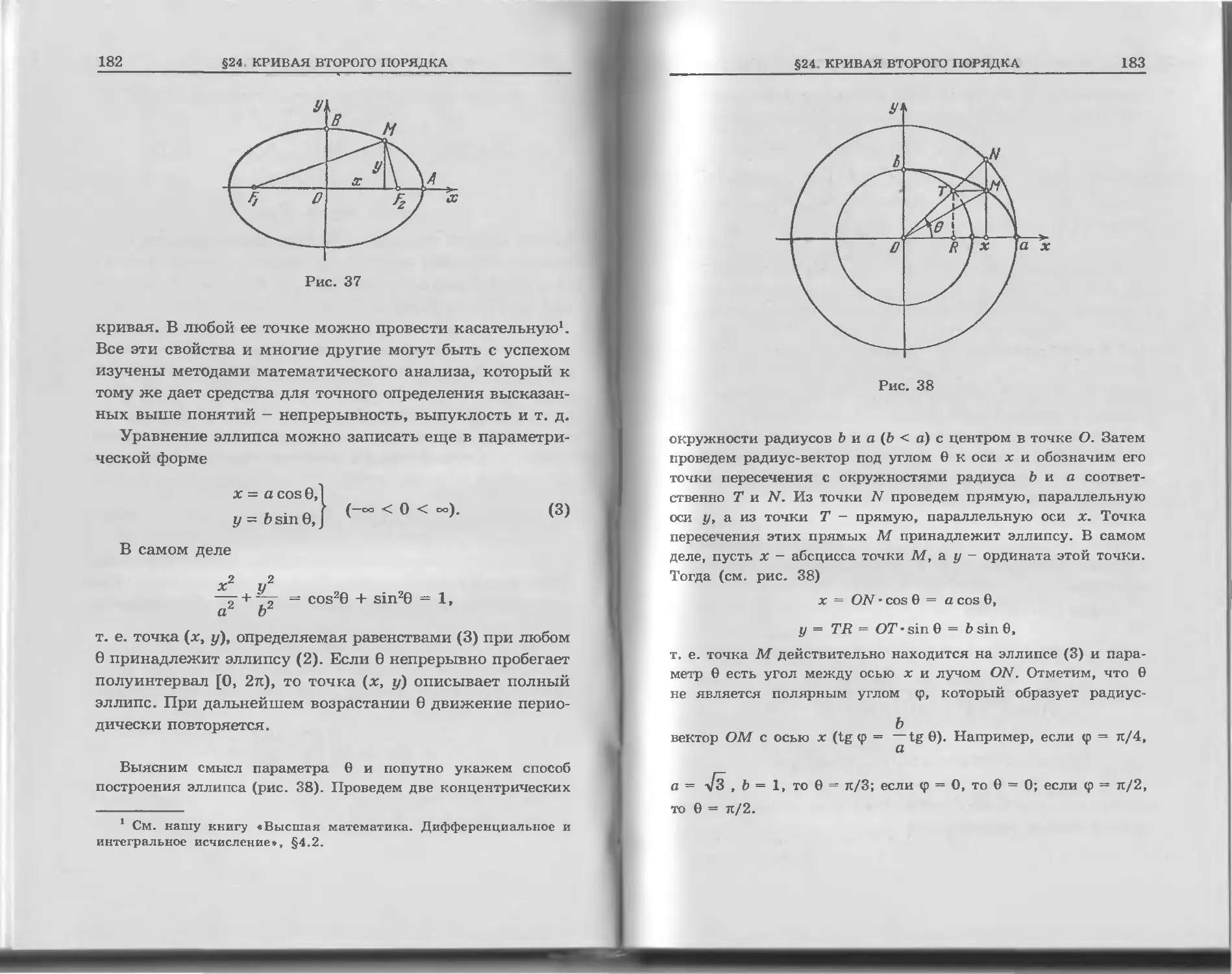
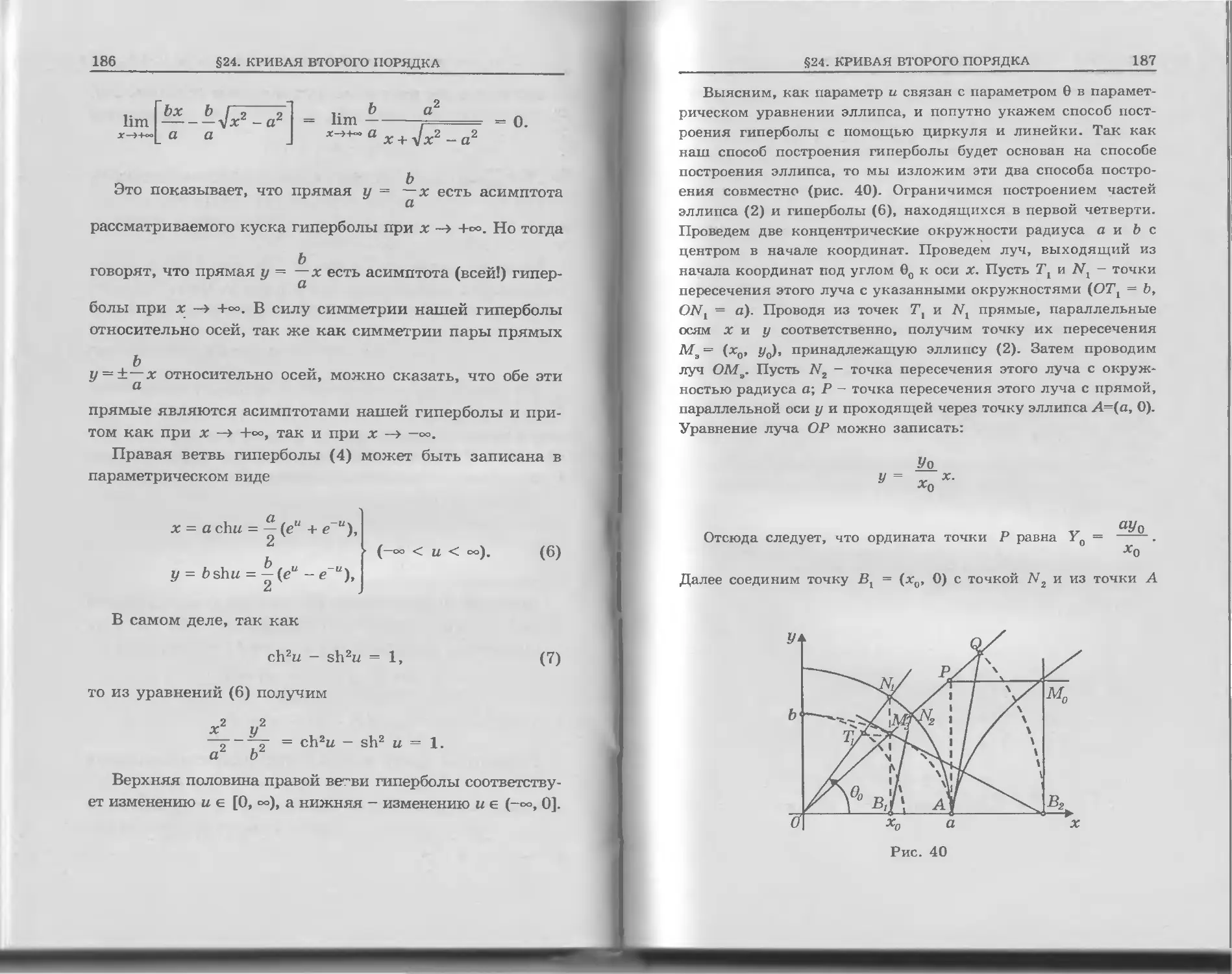
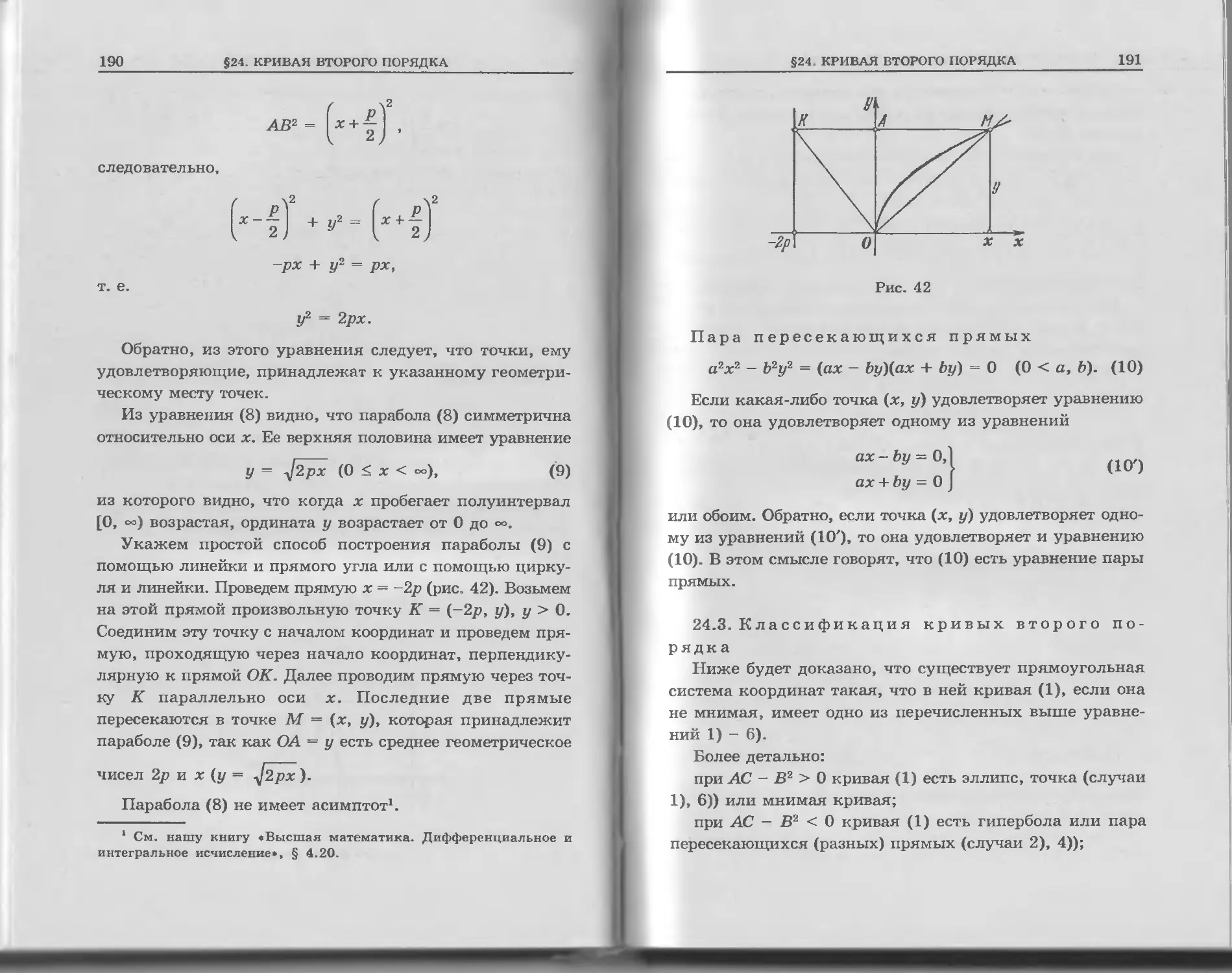
§ 24. Кривая второго порядка....................178
§25. Поверхность второго порядка в трехмерном
пространстве.....................................196
§ 26. Общая теория поверхности второго порядка в
трехмерном пространстве..........................217
§ 27. Плоскость в Rn............................223
§ 28. Линейное программирование.................241
Предметный указатель............................282
ПРЕДИСЛОВИЕ
В комплект учебников «Высшая математика» ав-
торов Я. С. Бугрова и С. М. Никольского, выходя-
щий в издательстве «Дрофа» в серии «Высшее об-
разование: Современный учебник», вошли следую-
щие книги:
1. «Элементы линейной алгебры и аналитиче-
ской геометрии».
2. «Дифференциальное и интегральное исчис-
ление».
3. «Дифференциальные уравнения. Кратные ин-
тегралы. Ряды. Функции комплексного перемен-
ного».
Комплект получил широкое признание как в на-
шей стране, так и за рубежом (все книги переведе-
ны на английский, французский, испанский и пор-
тугальский языки) и был удостоен в 1984 г. премии
МВ и ССО СССР и ЦИК профсоюзов работников
просвещения, высшей школы и научных учрежде-
ний, а в 1987 г. — Государственной премии.
За короткий срок эти книги выдержали четыре
издания и в настоящее время пользуются огром-
ным спросом и популярностью у студентов вузов.
Данная книга является первым томом комплек-
та учебников «Высшая математика». Здесь излага-
ются основные вопросы теории определителей,
элементы теории матриц, теория систем линейных
уравнений, векторная алгебра. Рассмотрены
линейные операторы, ортогональные преобразова-
ния, самосопряженные операторы, квадратичная
форма и приведение ее к каноническому виду,
линейное программирование.
Включены элементы аналитической геометрии:
прямая линия, плоскость, прямая в пространстве,
кривые и поверхности второго порядка.
Материал, изложенный в учебнике, соответст-
вует требованиям Государственного образователь-
ного стандарта высшего профессионального обра-
зования.
Большое значение придается уравнениям пря-
мой и плоскости в нормальном виде. Обобщение
этих понятий на я-мерный случай дает возмож-
ность по аналогии легко провести геометрическую
интерпретацию гиперплоскости в я-мерном про-
странстве.
Комплексные матрицы рассматриваются наря-
ду с действительными. Однако доказательства,
как правило, приводятся отдельно для действи-
тельного и комплексного случаев, чтобы комплекс-
ный случай при необходимости можно было опус-
тить.
Рассуждения в большинстве случаев сопровож-
даются полными доказательствами. Однако изло-
жение построено так, что доказательства для об-
щего я-мерного случая могут быть опущены, но при
этом остается не только формулировка утвержде-
ния, но и детальное разъяснение того, как обстоит
дело в двух- и трехмерных случаях.
Канонические виды кривых и поверхностей
второго порядка изложены в этой книге весьма
кратко, так как предполагается, что они дополни-
тельно будут изучаться в виде задач методами ма-
тематического анализа. Квадратичная форма рас-
сматривается методами математического или функ-
ционального анализа.
Материал этого и второго тома (посвященного
дифференциальному и интегральному исчисле-
нию) тесно переплетается.
Авторы выражают благодарность первому за-
местителю председателя НМС по математике при
Министерстве образования РФ члену-корреспон-
денту РАН Л. Д. Кудрявцеву и коллективу кафед-
ры высшей математики Санкт-Петербургского го-
сударственного технологического института
(технического университета) за обсуждение этого
учебника и ценные замечания и предложения, ко-
торые, несомненно, способствовали улучшению
его содержания.
Они также благодарны профессору А. И При-
лепко и кафедре высшей математики Московско-
го государственного инженерно-физического ин-
ститута (технического университета) за тщательное
рассмотрение комплекта учебников и ценные за-
мечания.
Кроме того, авторы признательны Ю. И. Вол-
кову, М. Ш. Коссу, Я. М. Тобольцеву и ряду других
читателей за ценные конструктивные предложе-
ния.
§ 1. Определители второго порядка
Пусть заданы числа а2, bt, b2 (действительные или
комплексные). Они определяют число atb2 - а2Ъх, которое
называется определителем или детерминантом второго
порядка и записывается следующим образом:
а1 02
&2
= а1Ь2 - а2&, (1)
Числа щ, а2, bv b2 называются элементами определи-
теля (детерминанта). В определителе (1) различают пер-
вую строку а1, а2 и вторую строку bv b2, первый стол-
бец ар Ьх и второй столбец а2, Ь2.
Легко проверяются следующие свойства определителя.
Величина определителя:
а) не меняется, если у него заменить строки соответ-
ствующими столбцами:
а1 а2
^1 ^2
&1
По ^2
б) меняет знак, если у него переменить местами стро-
ки (столбцы):
а1 02
Ь2
bi
ai
^2
а1 а2
^2
а2 ai
^2 bli’
8§2,-ОПРЕДЕЛИТЕЛИ ТРЕТЬЕГО И п го ПОРЯДКА
в) умножается на число k (действительное или комп-
лексное), если элементы какого-либо его столбца или
строки умножить на k, например:
kar bt aj
— p
b2 ^2 bo
т. e. общий, множитель, присутствующий в строке или
столбце, можно выносить за знак определителя-,
г) равна нулю, если элементы какого-либо его столбца
или строки равны нулю, например:
О О
bj ь2
= 0b2 - ОЬ, = О;
д) равна нулю, если элементы двух строк или столб-
цов соответственно равны, например:
«1 «1
а2 а2
а^ — аха2 — О.
В дальнейшем вводятся определители третьего и вооб-
ще n-го порядка. Для них свойства а), б), в), г), д) сохра-
няются.
§ 2. Определители третьего и n-го порядка
2.1. Определители третьего порядка. Число
А — ацО22аЗЗ °12а23°31 а13°21а32 ~
— а1за22аз1—а11а23°32~ а12а21азЗ» (1)
записываемое в форме
а11 а12 °13
д = °21 а22 а23 t (2)
а31 °32 а33
§2. ОПРЕДЕЛИТЕЛИ ТРЕТЬЕГО И n-го ПОРЯДКА
9
где ам — числа (действительные или комплексные), назы-
вается определителем или детерминантом третьего по-
рядка.
В определителе (2) различают первую, вторую и третью
строки, так же как первый, второй и третий столбцы.
Число аы называется элементом определителя; при этом
первый индекс k указывает номер строки, а второй ин-
декс I — номер столбца, к которому принадлежит данный
Элемент. Будем также говорить, что элемент аы находится
иа пересечении /г-й строки и Z-ro столбца. Элементы опре-
делителя ап, ,а22, а33 образуют главную диагональ опреде-
лителя, а элементы а13, а^, а31 - побочную. Можно также
говорить, что диагональ, на которой расположены эле-
менты а,,, а„, называется главной диагональю опре-
делителя (2).
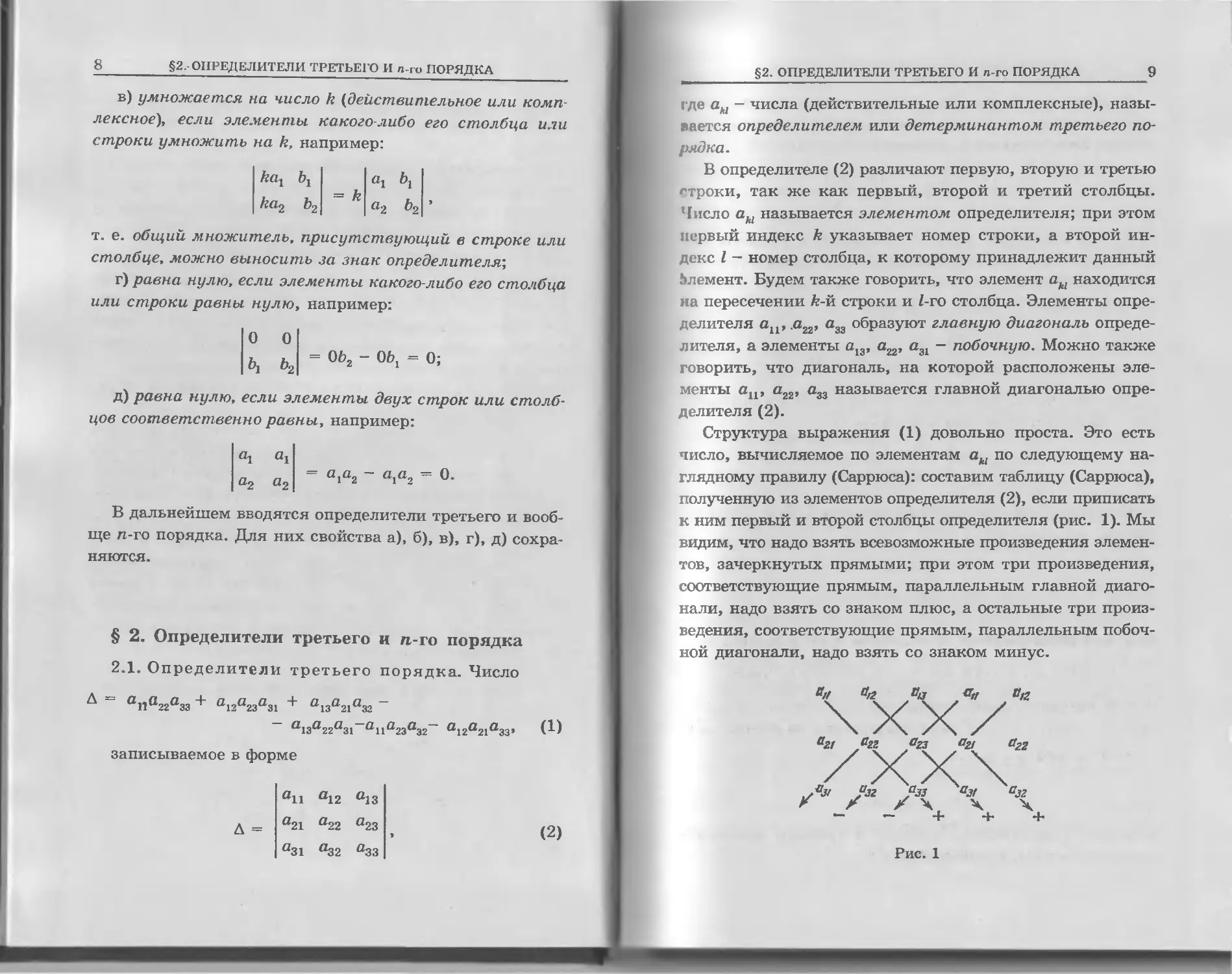
Структура выражения (1) довольно проста. Это есть
число, вычисляемое по элементам аы по следующему на-
глядному правилу (Саррюса): составим таблицу (Саррюса),
полученную из элементов определителя (2), если приписать
к ним первый и второй столбцы определителя (рис. 1). Мы
видим, что надо взять всевозможные произведения элемен-
тов, зачеркнутых прямыми; при этом три произведения,
соответствующие прямым, параллельным главной диаго-
нали, надо взять со знаком плюс, а остальные три произ-
ведения, соответствующие прямым, параллельным побоч-
ной диагонали, надо взять со знаком минус.
Рис. 1
10
§2. ОПРЕДЕЛИТЕЛИ’ТРЕТЬЕГО И n-го ПОРЯДКА
Каждое произведение с указанным знаком называется
членом определителя (2). Среди входящих в произведе-
ния элементов имеются представители от каждой строки
и от каждого столбца. Эти элементы можно в каждом
члене расположить в порядке возрастания первого индек-
са, т. е. номеров строк, к которым они принадлежат. Это
и сделано в сумме (1). Что же касается номеров столбцов,
к которым принадлежат эти элементы, то их расположе-
ния даются ниже:
1 2 3,
2 3 1, (3)
3 12,
3 2 1,
13 2,
(4)
2 13,
Это всевозможные перестановки из чисел 1, 2, 3. Переста-
новку
1, 2, 3 (5)
из чисел 1, 2, 3 назовем основной.
Говорят, что в перестановке произведена транспози-
ция двух определенных ее элементов, если эти элемен-
ты заменены местами. После транспозиции перестанов-
ка переходит в другую перестановку. В этой последней
можно сделать в свою очередь транспозицию, в резуль-
тате получится третья перестановка (но не исключено,
что и Первая).
Например, перестановка
3, 2, 1 (6)
получена транспозицией первого и третьего элементов
перестановки (5), а перестановка
§2. ОПРЕДЕЛИТЕЛИ ТРЕТЬЕГО И n-го ПОРЯДКА
11
2, 3, 1 (7)
транспозицией первого и второго элементов переста-
новки (6).
Важно отметить, что, если некоторая перестановка
получена из основной посредством N транспозиций и если
эта же перестановка получена из основной каким-либо
другим путем посредством транспозиций, то оба числа
NnNl одновременно либо четные, либо нечетные. Пере-
становка чисел 1, 2, 3 называется четной (нечетной), если
она получается из основной перестановки при помощи
четного (нечетного) числа транспозиций.
Пусть дана перестановка j = (д, 72> 73)> гДе 7ц 72> 73 это
числа 1, 2, 3, взятые в некотором порядке. Число транс-
позиций, с помощью которых можно получить эту пере-
становку из основной перестановки, обозначим через t(j).
Тогда перестановка / является четной (нечетной), если t(j)
— четное (нечетное) число.
Перестановки (3) — четные, а (4) — нечетные.
После сказанного можно дать другое эквивалентное
определение определителя 3-го порядка.
Определителем или детерминантом 3-го порядка (2)
называется число А, равное сумме
А= ^(~1),</)а1/1а2/2аЗ/з (8)
j
произведений вида (-1)‘{Па1Ка2^а3^ , где j = (/,, j2, j3) -
всевозможные различные перестановки основной переста-
новки 1, 2, 3.
Это определение обобщается на определители или де-
терминанты n-го порядка (п = 1, 2, 3,...).
2.2. Определители п-го порядка. Определителем
или детерминантом n-го порядка называется число, запи-
сываемое в виде
12
§2. ОПРЕДЕЛИТЕЛИ ТРЕТЬЕГО И n-го ПОРЯДКА
а11 ••• а1п
а21 ... а2п
д = W = (9)
ат ••• апп
и вычисляемое по данным числам ал (действительным или
комплексным) — элементам определителя — по следующе-
му закону: Д есть сумма
д = ,
i
распространенная на всевозможные различные перестанов-
ки j = (д, д) из чисел 1, 2, ..., п. Число t(j) равно числу
транспозиций, которые нужно сделать, чтобы перейти от
основной перестановки 1, 2, п к перестановке j = (д,
}п). Произведение (- агул называется членом
определителя.
Определители п-го порядка удовлетворяют свойствам
а), б), в), г), д), перечисленным в предыдущем параграфе.
Доказательство, а) После замены у определителя
соответствующих строк столбцами теперь уже номера строк
будут обозначаться вторыми индексами. Например, для
определителя третьего порядка (2) будем иметь
а11 а21 а31
а12 °22 а32
°13 а23 а33
ана22а33 а21а32°13 а31а21а23
a3ia22fl13
апа32агз
a2iai2a33
В общем случае общий член нового определителя запи-
шется
(-^ahlaj22...ajnn .
§2. ОПРЕДЕЛИТЕЛИ ТРЕТЬЕГО И n-го ПОРЯДКА
13
Упорядочим множители произведения а?11а?2 2 - • - а,пп по
первому индексу, т. е. мы переходим от перестановки j =
— Op —« /„) к основной перестановке 1, 2, п. При этом
мы должны совершить t(j) транспозиций. Тогда основная
перестановка вторых индексов перейдет в некоторую пе-
рестановку i = (ip in) и число t(i) будет той же четности,
что и число t(j). Таким образом,
(-1)‘(/)ah= (-1),(1)aUia2iz...antn .
Нетрудно видеть, что разным перестановкам jlt соот-
ветствуют разные перестановки ilt ..., in. Но тогда
£(-1)%...О/(11, = -д-
j »
б) Поменяем местами, например, первую и третью стро-
ки определителя третьего порядка (2). Тогда получим
определитель, который обозначим через Д', он будет равен
°31 а32 азз
Д' = а21 а22 а23 = V a9i ал, ' 1 2/2 1/3
а11 а12 а13 /
= X<_1>/(naUia2/2a3/I X ("1)‘(/)о1л‘а2Йоз/} _-д»
так как перестановка j = (д, 72> 7з) отличается от переста-
новки f = (j3, /2, /З = (/,*, 7г1» 73*) °Дн°й транспозицией.
Будем говорить, что число k умножается на строку
(столбец) определителя, если на самом деле k умножается
на все элементы строки (столбца).
в) Умножение на число k какой-либо строки (столбца)
определителя сводится к умножению всех его членов на
й, потому что каждый член содержит один элемент ука-
занной строки (столбца). Но тогда величина суммы чле-
нов умножится на k.
14
§2. ОПРЕДЕЛИТЕЛИ ТРЕТЬЕГО И л-го ПОРЯДКА
г) Определитель, у которого элементы какого-либо стол-
бца или строки равны нулю, равен нулю, потому что все
его члены, очевидно, равны нулю.
д) Определитель равен нулю, если он имеет две одина-
ковые строки или два одинаковых столбца. Это следует
из свойства б) (Д' = —Д, Д' = Д, откуда Д — 0).
Вычеркнем из определителя (9) n-го порядка i-ю стро-
ку и k-й столбец. Оставшееся выражение порождает опре-
делитель (п - 1)-го порядка Мл, называемый минором эле-
мента a.k. Величина же
Aik = (-1)'+*М,
называется алгебраическим дополнением или адъюнктом
элемента aik.
Свойство е) Сумма произведений элементов аЛ неко-
торой строки {столбца) определителя на алгебраичес-
кие дополнения этих элементов равна величине опре-
делителя'.
(i=l, ..., п), (10)
Л=1
(fe = 1, .... п), (Ю')
i=i
Докажем это свойство для определителя третьего по-
рядка в случае третьей строки. Имеем
°ЗГ^31 + ®32^32 + ®33^33
= а31
а12 а13
а22 а23
а32
а11
а21
а13 а11
"1" П33
«23 а21
«12
а22
азДа12О23 а13О22^ азг(а13а21 ^П^ЗЗ^
+ а3з(а11а23 а12а21) Д'
§2. ОПРЕДЕЛИТЕЛИ ТРЕТЬЕГО И n-го ПОРЯДКА
15
Сумму (10) называют разложением определителя по
элементам i-й строки, а сумму (10') — разложением опре-
делителя по элементам k-го столбца.
Пример 1. Если в определителе Д (см. (9)) а21 = а31 =
... = а , = 0, то Д = а,,А,,, т. е. вычисление этого
определителя сводится к вычислению одного его адъюн-
кта, т. е. определителя (п - 1)-го порядка.
Пример 2 Если все элементы Д, стоящие ниже
(выше) главной диагонали Д, равны нулю (аы = 0, если
k > I (k < Z)), то Д = апа22 ••• опп. Это следует из преды-
дущего примера.
Свойство ж) Сумма произведений элементов ajk неко-
торой строки (столбца) определителя на соответствую-
щие адъюнкты элементов другой строки (столбца) равна
нулю'.
п ",
bakiAki= 0 (11)
*=j *=1
(i * /; z, j = 1, ...» П).
В самом деле, зафиксируем наше внимание на первой
сумме. Эта сумма не зависит от элементов у-й строки.
Заменим в нашем определителе элементы у-й строки на
соответствующие элементы t-й строки. От этого рассмат-
риваемая сумма не изменится. Между тем теперь ее мож-
но рассматривать как разложение нового определителя
по элементам у-й строки, но тогда она равна величине
нового определителя. Но последний равен нулю на осно-
вании свойства д), потому что он имеет одинаковые стро-
ки — i-ю и у-ю.
16§2, ОПРЕДЕЛИТЕЛИ ТРЕТЬЕГО И п-го ПОРЯДКА
Свойство з) Пусть даны два определителя п-го по-
рядка Aj и Д2, у которых все строки (столбцы) одинако-
вы. кроме определенной, одной (одного). Сумма таких опре-
делителей равна определителю Д п-го порядка, у которого
указанная строка (столбец) состоит из сумм соответ-
ствующих элементов этой строки (столбца) определи-
телей Aj и Д2. Например,
аи ••• ai,n-i <4/1 а11 ••• а1,л-1 ^1л
д, + д2 = ап1 ••• ап,п-1 апп + ал1 ^пп
°11 ••• а11П_! (oin+^in)
.............................. = Д.
«л 1 • • ап,п -1 (алп ^пп)
В самом деле, разлагая данные определители по эле-
ментам п-го столбца, получим
п -П -
А. 4- А? = А. + Ьь„ А. — (а. 4- = А*
1 2 кП нп f , tin kn Лп hnг fcn
А=1 Л=1
Свойство и) Величина определителя не изменится,
если к элементам какой-либо его строки (столбца) приба-
вить соответствующие элементы другой строки (стол-
бца), умноженные на число k. Например:
а11 •" а1,п-1 ат + ^а11)
аи ••• а1п
ап1 ••• ап,п-1 ann+kanl)
Д_-| а а а Л7.
пп
§2. ОПРЕДЕЛИТЕЛИ ТРЕТЬЕГО И п-го ПОРЯДКА
17
а11 а1.п-1 а
+ k
= |aj + k-0 = |aj,
anl an.n-l anl
в силу СВОЙСТВ з), в), д).
Надлежащее применение этого свойства приводит вы-
числение данного определителя к вычислению определи-
теля более низкого порядка.
-5-9
-31 -39
31 39
4
-5
-31
5
-9
-39
= 5-39 - 9-31 = -84.
5 9
Пример 4.
2 11
1 3 2
14 6
0 10
-5 3 -1
-7 4 2
-5 -1
-7 2
5 1
—7 2
= 17.
Пример 5. Определитель
1 ctj af ... а" 1
1 а2 а2 •••
1 ап а2п ••• а"-1
18
{^ОПРЕДЕЛИТЕЛИ ТРЕТЬЕГО И n-го ПОРЯДКА
порожденный числами а,, а2, ап называется степен-
ным или определителем Вандермонда *.
Этот определитель равен нулю, если какие-либо два
числа а. и ah равны между собой. Если все а. различны, то
дп = <«„ - 1 - - («2 - а,)’
'(«„ - «2)(«„ i ~ а2) - (аз “ я2)‘
• К - ЙЯ-2К1 - ап г) •
•к - а„->
В самом деле, при п = 2
1
Л2 1 а2 аг~
(12)
т. е. формула (12) верна. Допустим, что формула (12) вер-
на при п = k - 1, и докажем, что она верна при п = k.
Будем использовать свойства и), в) определителя. Умно-
жим k- 1-й столбец в определителе А* на ах и вычтем из
/г-го, fe-2-й столбец умножим также на ах и вычтем из
Л-1-го и т. д.; тогда получим
10 о ... о
1 а2 ~ а1 аг(а2 ~ а1) -- а2 (а2 ~ а1)
1 ak(ak-a1) ... a^ z(ak -a1)
= (а* - а1Ж-1 ~ ai) ••• (а2
1 а2 ...
1 а, ... а^2
1 А. Т. Вандермонд (1735-1796) — французский математик.
§2. ОПРЕДЕЛИТЕЛИ ТРЕТЬЕГО И п-го ПОРЯДКА
19
Последний определитель есть также определитель Ван-
дермонда порядка (k -1), порожденный числами аг, .... ак,
поэтому, по предположению, имеем
А* = i " а1) — “ а1)'
•(«* - а2)(ак1 - а2) ... (а3 - а2)-
' ak-2^ ‘
• (°* - °*-!)’
Таким образом, в силу метода математической индук-
ции формула (12) верна при любом п > 2.
Свойство к) Пусть
А1 = IfyJ’ А2 = la*J'
Произведение двух определителей п-го порядка с эле-
ментами Ьы, аы есть в свою очередь определитель п-го
порядка с элементами
Ум =
j=i
т. е.
Таким образом, элемент yw, принадлежащий к k-й стро-
ке и Z-му столбцу определителя Д, равен, как говорят,
произведению k-й строки определителя на l-й столбец
определителя Д2. На самом деле это есть сумма произве-
дений элементов Л-й строки определителя Д, на соответ-
ствующие элементы Z-ro столбца определителя Д2.
20
§2. ОПРЕДЕЛИТЕЛИ ТРЕТЬЕГО И л-го ПОРЯДКА
Так как в определителях А, и Д2 можно менять строки
со столбцами, то, очевидно, элементы уы произведения А
можно строить также, беря произведение й-й строки Aj на
l-ю строку Д2 или произведение k-ro столбца на 1-й
столбец Д2 или k-ro столбца на l-ю строку.
Доказательство. Убедимся в справедливости свой-
ства на примере определителей второго порядка:
^11 ^12
^21 ^22
Д2
а11 а12 . ¥11 У12
, А =
а21 °22 ¥21 ¥22
где
¥11 = &11а11 + 612а21>
¥21 ~ ^21а11 ^22G21’
В силу свойств з), в), д)
¥12 Ьца12 *" ^12а22’
¥22 — ^21а12 ^22а22‘
ЬцЦц
621а11
Ь11а12 + \2°22
+^22а22
&I2O21
622а21
^11а12 + ^12а22
^21а12 + ^22а22
= а11«12
^11
^21
^11
^21
+ ана22
Ьц
^21
^12
^22
а12а21
^12
^22
^11
&21
+ а21а22
а12а21
^12
^22
^12
^22
011012-° +
апа22
^11
^21
^12
^22
Ъц
^21
^12
^22
а21а22*^ а11а22^1
а12а21Д1 =
А =
Д1(аца22 G12G21) Д1Д2'
В общем случае определителей n-го порядка можно записать:
§2. ОПРЕДЕЛИТЕЛИ ТРЕТЬЕГО И л-го ПОРЯДКА
21
п п п
^^4 alsi 6$il У, 2 • • • , al$i ^sin
Sj=l Sj=l $i=l
п п п
Xa2s2&s2l ^a2s2bs22 •" X°2s2&S2«
s2=l s2=l s2=l
n
2L a,,sn bsni
s„=l
n
Л a,lsn \.2
sn=l
n
• • • ansn bsnn
s„=l
n n n
aisi °2s2 a"sn
Sl=ls2=l Sn=l
bSi2
bs2l bs22
bsn2
“ * • bSin
•" ^»2n
• bsnn
^а^а2аг---аП8п (-1)'^! = ДД
S=(S1,S2.sn>
При вычислении отдельных элементов Д мы вправе выбирать
любой индекс суммирования s (уы =
п
^jaks bsl^ НО ДЛЯ даль'
S=1
нейшего удобно для первой строки Д взять в качестве такого
индекс Зр для второй -з2 и т. д. Второе равенство имеет место
на основании свойств з) и в); при этом кратная сумма
S!=1S2=1 s„=l
распространяется на всевозможные перестанов-
ки (Зр з2... зп), где 1 < зу < п. Однако если в какой-либо
22
§3. МАТРИЦЫ
системе (s,, s2, ..., sn) две компоненты sf и sy равны между
собой (а,. = sy, i Ф j), то определитель |bS/jJ= 0. Поэтому на
самом деле в кратной сумме можно оставить только члены,
соответствующие разным перестановкам (s,, sn) и натураль-
ных чисел (1, п). При этом, очевидно, окажется, что оп-
ределитель
Ы = (-1)'“^.
§ 3. Матрицы
Таблица чисел а.у (действительных или комплексных)
вида
«11 «1л
"«И ••• «1л
= llccjl = (or), (1)
«ml ••• «.
k «ml - «тлу
состоящая из т строк и п столбцов, называется матри-
цей. Числа atj называются ее элементами. Это прямо-
угольная матрица. При т = п она называется квадрат-
ной матрицей п-го порядка.
Если задана вторая матрица В = ||pj| с элементами Pj;,
тоже состоящая из т строк и п столбцов, то она счита-
ется равной матрице А тогда и только тогда, когда соот-
ветствующие элементы обеих матриц равны (ai;. = р;>). В
этом случае пишут А ~ В. Матриа ||ocj| не есть число — это
таблица. Однако для квадратной матрицы можно рассмат-
ривать число |ocj — определитель, порожденный этой
матрицей.
Пусть k — натуральное число, не превышающее шип
(k < т, п). Зачеркнем в таблице (1) какие-либо k столбцов
и k строк. Элементы ajt, находящиеся на пересечении
§3. МАТРИЦЫ
23
зачеркнутых столбцов и строк, образуют квадратную мат-
рицу, которая порождает определитель Л-го порядка.
Полученный определитель называется определителем k-
го порядка, порожденным матрицей А.
Рангом матрицы А называется наибольшее натуральное
число k, для которого существует не равный нулю опреде-
литель /г-го порядка, порождаемый матрицей А (см. § 4).
Если в матрице А сделать ее строки столбцами с тем
же самым номером, то получим матрицу
«11 "• «ml
А' =
(2)
«1л ”• «.
называемую транспонированной к А матрицей.
Если в матрице А ее элементы осы заменить на им ком-
плексно сопряженные, то получим матрицу
«п «ы
А =
= Па JI,
«ш «,
называемую комплексно сопряженной с А матрицей.
Далее матрица
«и «„1
А' = (А)' =
«1„ а.
называется сопряженной с А матрицей.
Если А — действительная матрица, т. е. имеющая дей-
ствительные элементы (аы = аы), то, очевидно,
А = А,
А' = А*.
24
§3. МАТРИЦЫ
Матрицы одного и того же размера, т. е. состоящие из
одинакового числа строк и столбцов, можно складывать.
Суммой двух таких матриц А = |aj;.|| и В = |||3.J| называется
матрица С = ||yfJ|, элементы которой равны сумме соответ-
ствующих элементов матриц А и В: у = ос.. + р.у. Симво-
лически этот факт будем записывать так:
А + В = С.
Легко видеть, что
А + В = В + А,
(А + В} + С = А + (В + С).
Произведением числа X на матрицу А (или произведе-
нием матрицы А на число X) будем называть матрицу,
элементы которой равны произведению числа X на соответ-
ствующие элементы матрицы А. Таким образом, ХА = АХ.
Пример. Пусть
(1 О 2Л (2 0 1Л
А = В = S
А ^2 3 1)’ {211)'
Найти матрицу ХА + рВ.
На основании определения суммы матриц и умноже-
ния матрицы на число имеем
<Х 0 2Х^ pH 0 (й
Ы = |2Х ЗХ X)’ = L2H Ц mJ ’
р + 2ц 0 2Х + цА
ХА + цВ = ^2Х + 2ц ЗХ + ц X + ц ) '
§4. СИСТЕМА ЛИЛЕЙНЫХ УРАВНЕНИЙ
25
§ 4. Система линейных уравнений.
Теория Кронекера—Капелли1
^.1. Система из п линейных уравнений с п не-
известными. Будем называть произвольную систему из
л чисел (х,, ..., хп) п-мерным вектором и обозначать его
также одной (жирной) буквой х:
х = (х„ .... хп).
Числа х. (действительные или комплексные) называют
компонентами вектора х. Вектор
О = (О, ..., 0)
называется нулевым вектором.
Зададим систему из п линейных уравнений с п неизве-
стными
«пМ ... +а1„хп=у1,
anjXi + ... +аппхп = уп.
(1)
Числа ам (действительные или комплексные), называ-
емые коэффициентами системы (1), заданы. Будем еще
говорить, что система (1) определяется матрицей
а11 •" а\п
А = IWI =
(2)
ап1 ... а,
ее коэффициентов.
Нас будет интересовать вопрос о разрешимости систе-
мы (1) для каждого вектора (системы чисел)
У “ (!/i..........Уя).
1 Л. Кронекер (1823-1891) - немецкий математик, А. Капелли
(1855-1910) - итальянский математик.
26_________§4. СИСТЕМА ЛИНЕЙНЫХ УРАВНЕНИЙ_________
Система чисел (вектор)
X = (х,, хп)
называется решением системы уравнений (1), если числа
х. удовлетворяют этим уравнениям.
4.2. Формулы Крамера.
Теорема 1. Если определитель системы (1) не равен
нулю'.
д = W * о.
то система (1) имеет единственное решение для любого
вектора у, вычисляемое по формулам (Крамера1)
х. = Д'/Д 0 = 1..... п), (3)
где Д' - определитель, получаемый из определителя Л,
если в нем заменить числа j-го столбца соответственно
на числа yt..уп:
аи ••• У\ ai,j+i ••• а1п
Д' =
(4)
ani ... anj_i Уп “ * &пп
Таким образом.
Xj= ^^Asjys (j = 1, ...» п), (3')
S=1
где Asj есть адъюнкт элемента asj в определителе А.
Доказательство. Пусть (хр ..., хп) есть решение си-
стемы (1). Чтобы найти неизвестное число х1( умножим
первое уравнение системы (1) на адъюнкт Ап, второе - на
A,t, ..., п-е — на Ап1 и сложим все уравнения системы.
Тогда, учитывая, что
1 Г. Крамер (1704-1752) - швейцарский математик.
§4. СИСТЕМА ЛИНЕЙНЫХ УРАВНЕНИЙ
27
И
п п
= хД
Л-1 А1
п
x^akiAk\ = х.-0 = О (/ * 1),
6=1
получаем х,Д = А1, где
п
Д’ =
s i
У1 а12 а1п
Уп ап2 апп
Следовательно, так как по условию Д О, то х1 = Д*/Д.
В общем случае при произвольном j умножаем первое
уравнение системы (1) наА1у, второе - на А,;, п-е - на
Anj, складываем эти уравнения и получаем на основании
свойств определителей е), ж) равенство
п п
Xj У, ahj Akj ~ Ук А’
Ь=1 k=l
т. е.
хД = Д',
I
где
п
* = ^ykA,r
k=i
ап ••• aij~i У\ ai.j+i ••• aln
Onl . *. Уп ^n,j+l * ‘ • ®nn
Отсюда в силу того, что Д 0, следует равенство (3).
Мы доказали, что если (хр ..., хп) есть решение систе-
мы (1), то числа х. определяются формулами (3').
28
§4. СИСТЕМА ЛИНЕЙНЫХ УРАВНЕНИЙ
Обратно, совокупность чисел х. = Д'/А (/ = 1, п)
является решением системы (1). В самом деле, подставляя
xt (j = 1, ..., л) в левую часть k-ro уравнения (k = 1, ..., п)
системы (1), на основании свойств е), ж) определителя,
имеет
/=1 /=1 S=1
= т А,= = Ук'
S—1 ;=1 п
Таким образом, числа (3') действительно являются ре-
шением системы (1).
4.3. Однородная система. Система уравнений вида
«1Л + ••• +а1Л=°>
anl*i+ ... +а„пхп = О
(5)
называется однородной. Она является частным случаем
системы (1) при ух = ... = уп = О. Ясно, что нулевой
вектор
х. = О, . . . , х = О
1 ' г п
удовлетворяет однородной системе (5). Но может случить-
ся, что однородная система (5) удовлетворяется не нуле-
вым вектором х = (хр ..., хл), т. е. вектором, имеющим
хотя бы одну компоненту х( Ф О. Его называют нетриви-
альным решением однородной системы (5), а нулевой век-
тор поэтому называют тривиальным решением однород-
ной системы (5).
§4. СИСТЕМА ЛИНЕЙНЫХ УРАВНЕНИЙ 29
Теорема 2. Если определитель А однородной системы
(5) не равен нулю (А Ф 0), то эта система имеет только
тривиальное решение.
В самом деле, в силу свойства г) все определители А' =
0 (см. (4)), поэтому в силу равенств (3) х. = 0 (j = 1, и).
Теорема 3. Если система уравнений (5) имеет не-
тривиальное решение, то ее определитель А необходимо
равен нулю (А = 0).
В самом деле, если бы А Ф 0, то по теореме 2 система
(5) имела .бы только одно тривиальное решение.
Выше мы исследовали линейную систему (1) в случае,
когда ее определитель А ф 0. В этом случае было показано
(теорема 1), что система (1) имеет для любой правой части
у ~ (Z/i> •••> У,) единственное решение, вычисляемое по
формулам (3).
4.4. Правило решения системы линейных
уравнений. Теперь мы переходим к исследованию сис-
темы (1) в случае, когда ее определитель А = 0. Будем
предполагать, что хотя бы один элемент матрицы А
(см. (2)) не равен нулю и обозначим ранг А через k (k =
= ранг А). Таким образом, 1 < k < п.
Нашей целью будет доказать следующие правила (яв-
ным образом они сформулированы и доказаны Кронеке-
ром и Капелли).
Если мы хотим решить систему (1), для которой изве-
стно, что ранг матрицы А ее коэффициентов равен k, то
мы должны узнать ранг расширенной матрицы
«11 ••• «ы У1
«л1 ••• а-пп Уп
полученной присоединением к А столбца
30
§4. СИСТЕМА ЛИНЕЙНЫХ УРАВНЕНИЙ
Ух
У2
' Ух '
У2
\Уп >
1) Если ранг В больше ранга А (ранг В > ранг А = k),
то система (1) вовсе не имеет решений. Она противоречи-
ва — не существует вектора х = (х,, хл), удовлетворя-
ющего одновременно всем уравнениям (1).
2) Если ранг В равен рангу А (ранг В = ранг А = k), то
система (1) имеет решения. Чтобы найти их, мы должны
выбрать из системы (1) какие-нибудь k уравнений, матрица
коэффициентов которых имеет ранг k, и решить эти k урав-
нений. Решений у этой системы из k уравнений будет бес-
конечно много, но их можно записать в обозримом виде.
При этом любое решение взятых нами k уравнений
автоматически является решением остальных п — k урав-
нений системы (1).
Правила 1) и 2) исчерпывают возможные ситуации,
потому что ранг В не может быть меньшим к.
Ведь матрица А по условию порождает не равный нулю
определитель /г-го порядка, который порождается также
и матрицей В.
4.5. Примеры приложения правил.
Пример 1. Система
х + у = 1,
х-у = 2
имеет определитель
А =
1 1
1 -1
= -2*0
§4. СИСТЕМА ЛИНЕЙНЫХ УРАВНЕНИЙ
31
и потому имеет единственное
решение, которое
можно
вычислить по формулам
х = Д‘/Д,
У = Д7Д,
где
Пример 2. Система
х +у = 1,
х + у = 2
Д2 =
имеет определитель, равный нулю. Матрица
имеет ранг А = 1. А матрица
1,
(6)
имеет ранг В = 2. Так как ранг В > ранг А, то система (6)
не имеет решений. Это видно, впрочем, и без нашей тео-
рии: одно и то же число не может равняться и 1 и 2.
Пример 3. Система
2х + 2у = 2,
Зх + Зу = 3
имеем определитель Д - 0 Матрица
(7)
А =
В =
1
1
1
1
1
2
1 1
—2 2 '
1
1
1
1
1
1
1
2
32
§4. СИСТЕМА ЛИНЕЙНЫХ УРАВНЕНИЙ
II 2 2 II
Л II3 3 II
имеет ранг А = 1. Расширенная матрица
II2 2 2II
В = || З 3 3 I
тоже имеет ранг В = 1. Так как ранг А = ранг В = 1, то
берем одно уравнение
2х + 2у = 2. (8)
Коэффициент при у не равен нулю, поэтому это уравнение
можно решить относительно у.
2-2х
У = —9— = 1 - х. (9)
Ct
Формула (9) дает все решения уравнения (8). Мы можем
задать любое значение х (-«> < х < <») и вычислить значе-
ние у по формуле (9). Получим систему (вектор) (х, у),
удовлетворяющую уравнению (8). Множество всех систем
(х, 1 — х), где х е (—оо^ со), образует множество всех реше-
ний уравнения (8). Эти решения автоматически являются
решениями и второго уравнения системы (7), потому что
ранг А = ранг В. В данном случае этот результат очевиден
без применения теории о рангах матриц. Коэффициенты
уравнений (7) вместе с их правыми частями соответственно
пропорциональны, поэтому ясно, что всякое решение одно-
го из этих уравнений является также решением другого.
Пример 4. Система
х + у + 2 = 1,
2х + у + 2z=l, •
х + у + Зг = 2
§4. СИСТЕМА ЛИНЕЙНЫХ УРАВНЕНИЙ
33
имеет определитель
2
1
1
1
А =
2 = -2*0
3
и поэтому имеет единственное решение, которое можно
вычислить по формулам
А
111
112
2 13
У =
1 1
1 2
2 3
£
2 ’
А^
А
1
2
1
= 1,
z =
А3
А
1 1
1 1
1 2
£
2 ’
Пример 5. Система
X + у + 2 = 1,
х + у + 2z = 1,
х + у + 3z = 2
имеет определитель
1
1
1
1 1
1 2
1 3
- 0.
2 Бугров. Т. 1
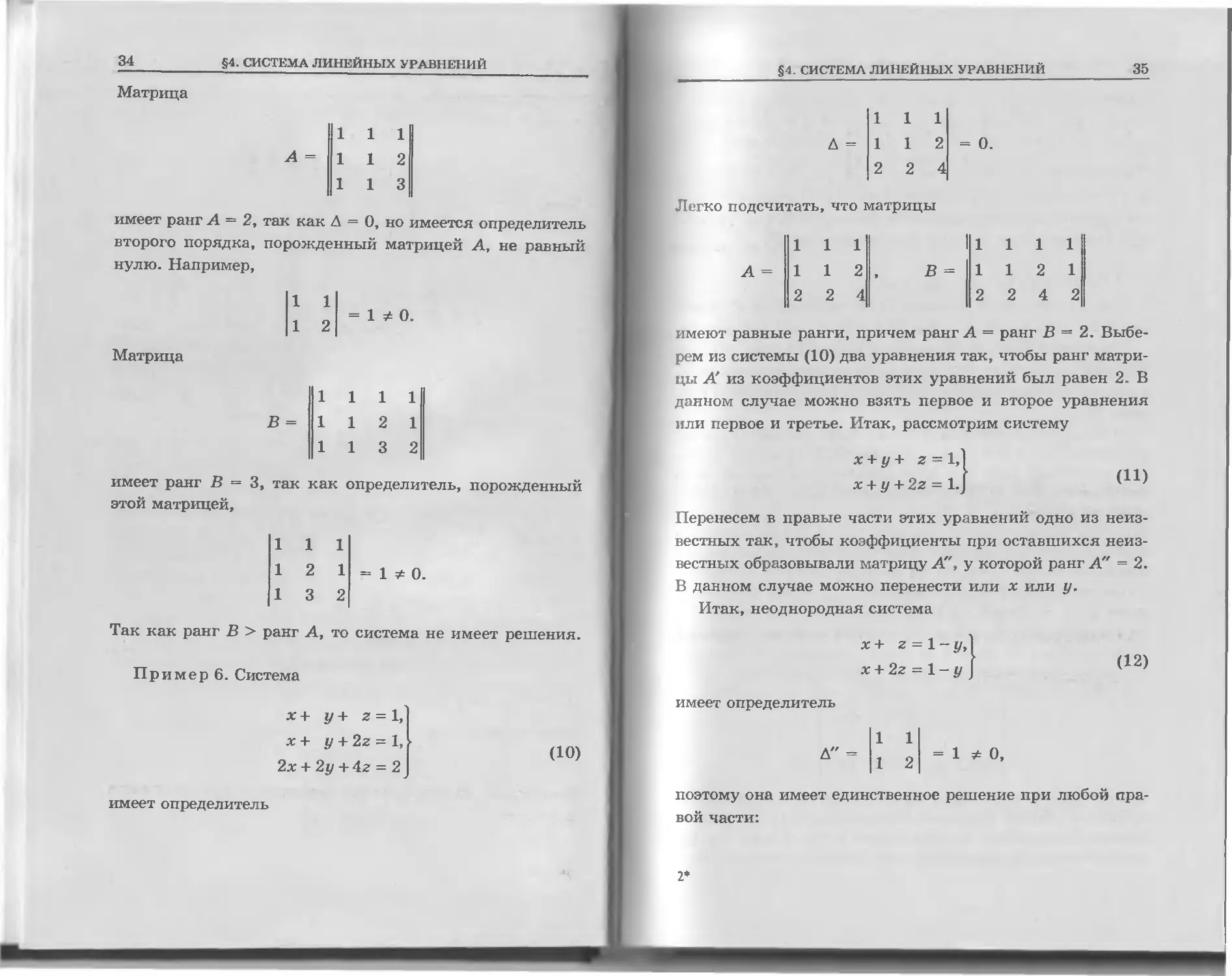
34
§4. СИСТЕМА ЛИНЕЙНЫХ УРАВНЕНИЙ
Матрица
1 1
1 2
1 3
имеет ранг А = 2, так как А = О, но имеется определитель
второго порядка, порожденный матрицей А, не равный
нулю. Например,
= 1*0.
Матрица
имеет ранг В = 3, так
этой матрицей,
как определитель, порожденный
= 1*0.
Так как ранг В > ранг А,
то система не имеет решения.
Пример 6. Система
X + У + 2 = 1,
х + у + 2z = 1,
2х + 2у + 42 = 2
(Ю)
имеет определитель
1
1
1
2
1 1
В = 1 1
1 1
1 1
2 1
3 2
1 1
1 2
1 3
§4. СИСТЕМА ЛИНЕЙНЫХ УРАВНЕНИЙ
35
А =
1 1
1 2
2 4
= О.
Легко подсчитать, что матрицы
1 1
1 2
2 4
1
1
2
В = 1
А =
2
111
12 1
2 4 2
имеют равные ранги, причем ранг А = ранг В = 2. Выбе-
рем из системы (10) два уравнения так, чтобы ранг матри-
цы А из коэффициентов этих уравнений был равен 2. В
данном случае можно взять первое и второе уравнения
или первое и третье. Итак, рассмотрим систему
х + у + 2 = 1,
х + у + 2г = 1.
(И)
Перенесем в правые части этих уравнений одно из неиз-
вестных так, чтобы коэффициенты при оставшихся неиз-
вестных образовывали матрицу А", у которой ранг А" = 2.
В данном случае можно перенести или х или у.
Итак, неоднородная система
х + z = 1 - у,
х + 2г = 1 — у
(12)
имеет определитель
1 1
1 2
= 1*0,
поэтому она имеет единственное решение при любой пра-
вой части:
2*
36
§4. СИСТЕМА ЛИНЕЙНЫХ УРАВНЕНИЙ
1
1-!/
1-У
= 1 - У,
1
Д"
1-!/
1-f/
= О.
Z =
1
1
Таким образом, тройки чисел (1 - у, у, О) при всяком
у е (—°о, <х>) дают все решения системы (12) и автоматичес-
ки решения третьего уравнения системы (10) (это уравне-
ние получается йз второго умножением на 2).
4.6. Обоснование правил.
Теорема 4. Если система (1) совместна, т. е. имеет
хотя бы одно решение х, то необходимо ранг В ~ ранг А.
Теорема 4 дает обоснование правилу 1) (стр. 29), по
которому, если ранг В > ранг А, то не выполняется необ-
ходимое условие совместности (непротиворечивости) сис-
темы (1).
Доказательство теоремы 4. Пусть система (1) имеет
решение и ранг А — k. Нам надо доказать, что ранг В = k. Так
как по условию ранг А — Л, то существует не равный нулю
определитель А-го порядка, порождаемый матрицей А, следо-
вательно и матрицей В. Поэтому ранг В > k. Остается дока-
зать, что всякий определитель (Л + 1)-го порядка, порождае-
мый матрицей В, равен нулю. Если такой определитель состоит
только из элементов ау, то он заведомо равен нулю, потому
что он порождается также и матрицей А, которая по условию
имеет ранг k. Таким образом, нужно доказать, что любой
определитель (k + 1)-го порядка, порождаемый матрицей В и
содержащей в себе столбец из чисел уу, равен нулю. Не нару-
шая общности, можно считать, что это определитель
°ы ••• aik У1
afc+l,l ••• ak+l,k Ук+1
К этому можно свести любой случай, перенумеровывая соответ-
ствующим образом уравнения и неизвестные По условию
система (1) совместна, т. е. существует вектор х = (хр ..., хп),
удовлетворяющий уравнениям этой системы. Но тогда х, в
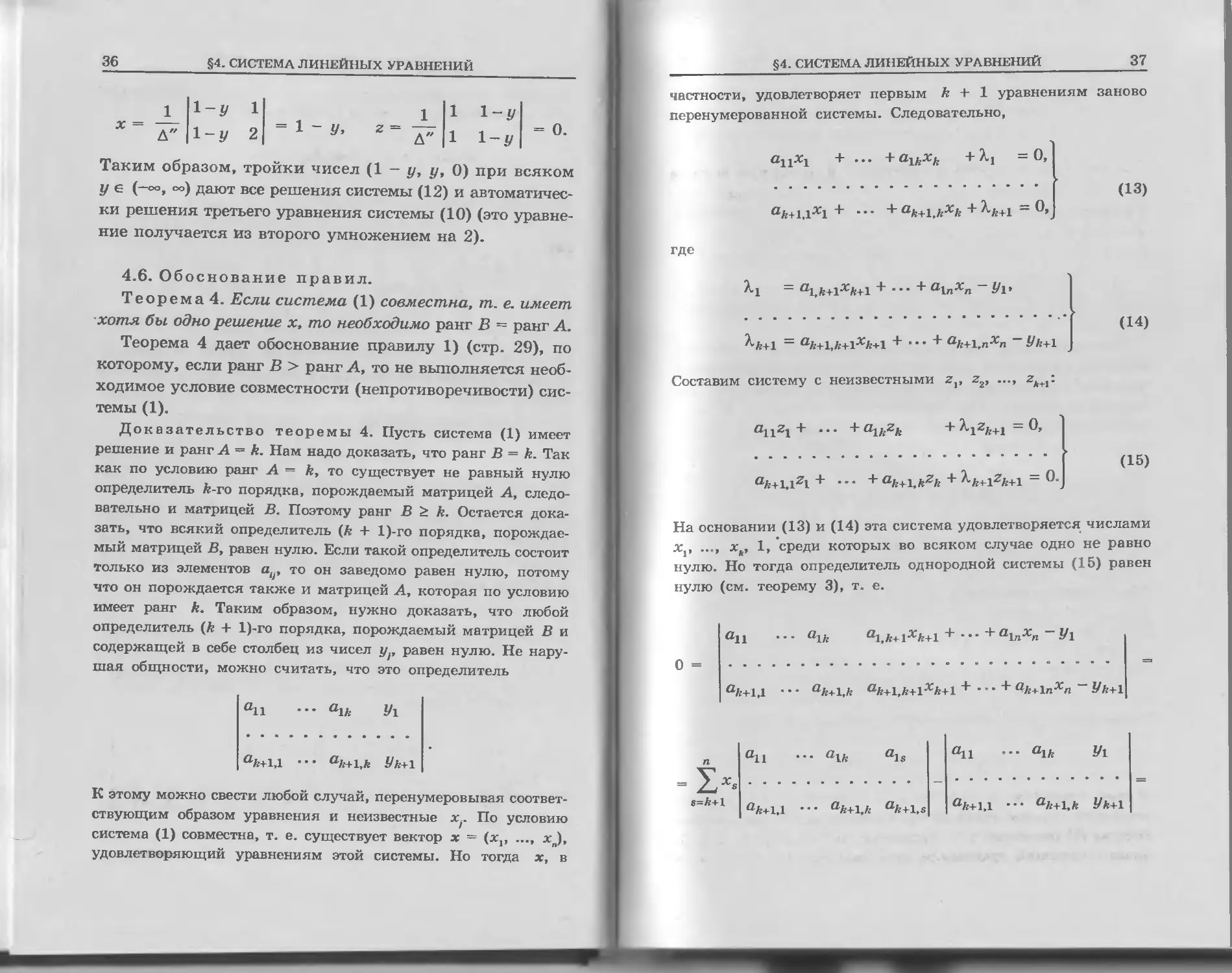
§4. СИСТЕМА ЛИНЕЙНЫХ УРАВНЕНИЙ 37
частности, удовлетворяет первым k + 1 уравнениям заново
перенумерованной системы. Следовательно,
OjjXj + ... +alkxk + Xj = О,
ак+1,1х1 + " + ak+l,kxk + ^-*+1 — О»
где
М + • • • + alnxn - yv
(13)
^-Л+1 — Q-k+l,k+lXk+\ + ••• + &k+l,nxn Ук+1
Составим систему с неизвестными z,, z2, ..., zA+1:
ап2г+ ... +a1Azft +^1zfc+1=0,
ak+i,izi + ••• +ak+L,kzk +^-k+izk+i ~ 0-
(14)
(15)
На основании (13) и (14) эта система удовлетворяется числами
Хр ..., хд, 1, среди которых во всяком случае одно не равно
нулю. Но тогда определитель однородной системы (15) равен
нулю (см. теорему 3), т. е.
<2ц ... alk ai,k+ixk+i + ••• + а1пхп У1
0 =
ak+l,l ••• ak+l,k ak+l,k+lXk+l + + ^k+lnxn Ук+1
°11 ••• а1к als
all ••• а1к Vl
ак+1,1 ak+l,k ak+l,s
ak+l,l ••• ak+l,k Ук+1
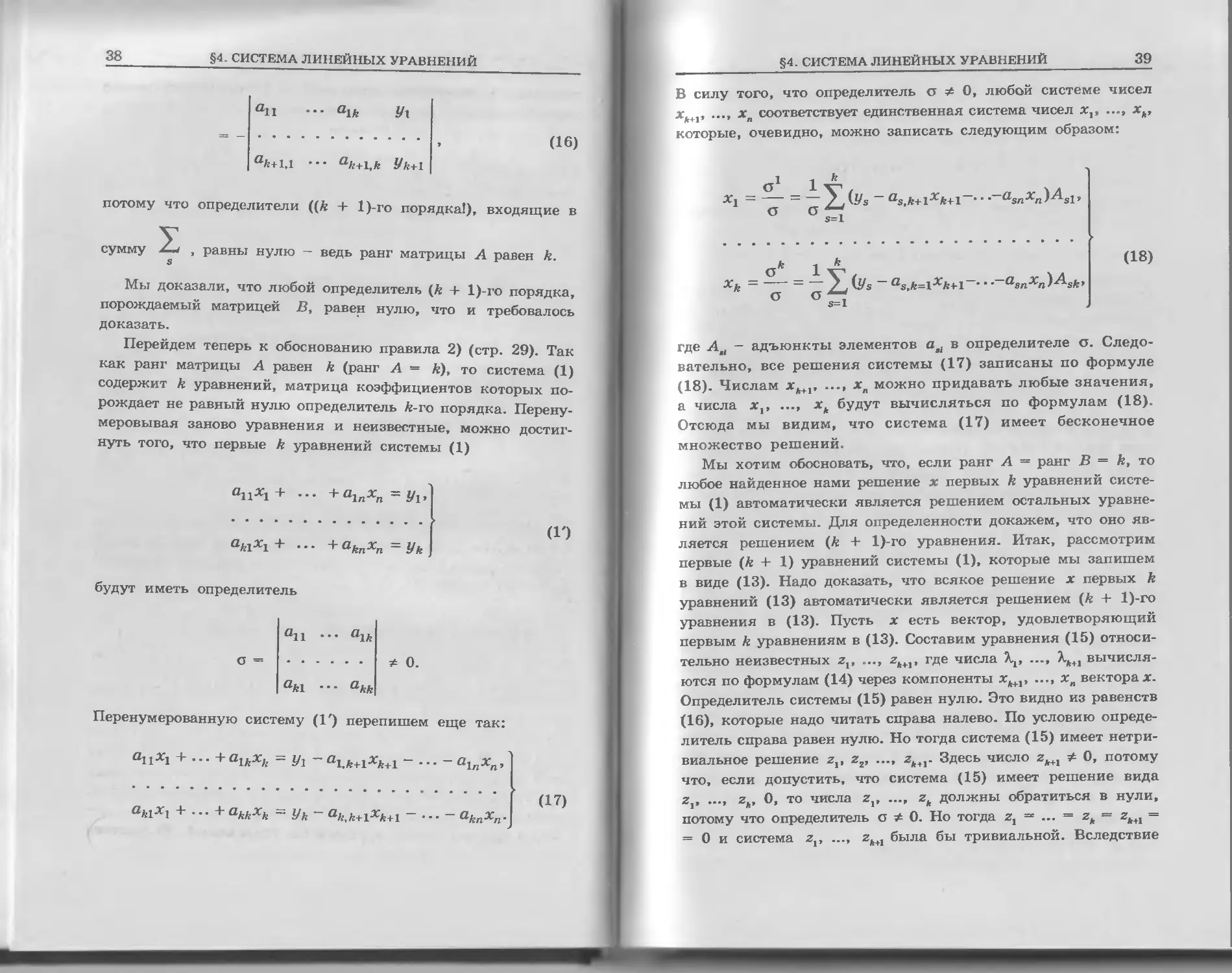
38
§4. СИСТЕМА ЛИНЕЙНЫХ УРАВНЕНИЙ
а11 ••• alk Ух
(16)
ak+i,i ak+i,k Уь+1
потому что определители ((/г + 1)-го порядка!), входящие в
сумму х—/ , равны нулю — ведь ранг матрицы А равен k.
s
Мы доказали, что любой определитель (А + 1)-го порядка,
порождаемый матрицей В, равен нулю, что и требовалось
доказать.
Перейдем теперь к обоснованию правила 2) (стр. 29). Так
как ранг матрицы А равен k (ранг А = k), то система (1)
содержит k уравнений, матрица коэффициентов которых по-
рождает не равный нулю определитель А-го порядка. Перену-
меровывая заново уравнения и неизвестные, можно достиг-
нуть того, что первые k уравнений системы (1)
аых1 + ••• +alnxn=ylt
aAi*i + ... +aknxn=yk
(Г)
будут иметь определитель
а11 ... alft
о =
* О.
aki akk
Перенумерованную систему (!') перепишем еще так:
aiixi + -+°1A = Ух-^k+iXk+l -...-alnxn,
aftlXi + ... +akkxh = yk - akj!+1xk+1 - ... - aknxn.
(17)
§4. СИСТЕМА ЛИНЕЙНЫХ УРАВНЕНИЙ
39
В силу того, что определитель а Ф О, любой системе чисел
х4+1, .... хп соответствует единственная система чисел х,, ..., xk,
которые, очевидно, можно записать следующим образом:
о1 1 к
-^1 ~ ~ , (?/s — ^s,k+l^k+l~• • '^^sn'Xn')
О О ,
s=l
1 \ '
о 0 ,
(18)
где Alt — адъюнкты элементов аа. в определителе а. Следо-
вательно, все решения системы (17) записаны по формуле
(18). Числам х4+1, хп можно придавать любые значения,
а числа xt, ..., xk будут вычисляться по формулам (18).
Отсюда мы видим, что система (17) имеет бесконечное
множество решений.
Мы хотим обосновать, что, если ранг А — ранг В = k, то
любое найденное нами решение х первых k уравнений систе-
мы (1) автоматически является решением остальных уравне-
ний этой системы. Для определенности докажем, что оно яв-
ляется решением (k + 1)-го уравнения. Итак, рассмотрим
первые (k + 1) уравнений системы (1), которые мы запишем
в виде (13). Надо доказать, что всякое решение х первых k
уравнений (13) автоматически является решением (k 4- 1)-го
уравнения в (13). Пусть х есть вектор, удовлетворяющий
первым k уравнениям в (13). Составим уравнения (15) относи-
тельно неизвестных z,, ..., zA+1, где числа ..., ХА+1 вычисля-
ются по формулам (14) через компоненты х4+1, ..., хп векторах.
Определитель системы (15) равен нулю. Это видно из равенств
(16), которые надо читать справа налево. По условию опреде-
литель справа равен нулю. Но тогда система (15) имеет нетри-
виальное решение zt, z2, .... z4+I. Здесь число z4+I * О, потому
что, если допустить, что система (15) имеет решение вида
zv zk. О, то числа zt..... z4 должны обратиться в нули,
потому что определитель о * О. Но тогда z, — ... = zk — zktl =
= 0 и система zt, ..., z4+I была бы тривиальной. Вследствие
40§4. СИСТЕМА ЛИНЕЙНЫХ УРАВНЕНИЙ
однородности системы (15) не только числа zp zA+I удовлет-
воряют этой системе, но и числа (zt+1 * 0)
г\ = zi/zjhi... z'* = z*/z*+i- 1
обладают тем же свойством. Но тогда числа z'p z'к удов-
летворяют системе первых k уравнений (13), имеющей опре-
делитель о * 0. Мы уже знаем, что эта последняя система
имеет решения хр ..., хк и в силу единственности
z'i = xi.... z'* = *»
Обращаясь к последнему уравнению (15), мы видим, что оно
удовлетворяется числами (хр ..., xk, 1), т. е. числа (хр ..., хА)
удовлетворяют (k + 1)-му уравнению системы (13), и в силу
(14) рассматриваемый нами вектор х = (хр ..., хк, хА+р ..., хп)
удовлетворяет (А + 1)-му уравнению системы (1). Этим утвер-
ждение 2) доказано.
4.7. Метод решения системы путем исключе-
ния неизвестных. Можно рекомендовать следующий
метод решения систем линейных уравнений, который
является методом исключения неизвестных (или мето-
дом Гаусса1). Пусть дана система
«1Л + + MB=V
anixi + ... + аппхп=Ьп.
(1")
Если мы умножим какое-либо уравнение системы (1") на
постоянное число и прибавим его к другому уравнению
системы, то получим новую систему, эквивалентную преж-
ней. Новая система уравнений будет иметь свою матрицу
В', соответствующим образом преобразованную из матри-
цы В (В => В'). Преобразование заключается в том, что
некоторая строка матрицы В видоизменяется прибавле-
нием к ней другой строки, умноженной на соответствую-
щее число.
1 К. Ф. Гаусс (1777-1855) — немецкий математик.
§4. СИСТЕМА ЛИНЕЙНЫХ УРАВНЕНИЙ
41
Подобным образом, если умножить какое-либо из урав-
нений системы на число k Ф 0, оставив остальные уравне-
ния прежними, то получим новую систему, очевидно,
эквивалентную исходной. Новая система будет иметь свою
матрицу В', соответствующим образом преобразованную
из матрицы В (В => В'). На этот раз преобразование зак-
лючается в том, что строка, соответствующая указанному
уравнению, умножается на k.
Появляется также необходимость переставлять места-
ми два уравнения системы (1"), получив, таким образом,
формально новую, но эквивалентную исходной систему. В
этом случае преобразование В => В' сводится к переста-
новке местами двух строк матрицы В.
Указанные три преобразования В => В' называют эле-
ментарными преобразованиями матрицы.
Технически, вместо того чтобы писать новую систему
уравнений, ограничиваются тем, что пишут только соот-
ветствующую ей матрицу В'. Всегда можно, применяя
подходящим образом элементарные операции над систе-
мой уравнений или, что все равно, над матрицей В, до-
биться либо решения заданной системы (1")> либо прийти
к явно противоречивой системе. Так как последняя экви-
валентна системе (1")> то это докажет противоречивость
системы (1").
Ниже приводятся примеры применения этого метода.
Операция В => В' обозначает, что В' получается из В
посредством одной или нескольких элементарных преоб-
разований.
Пример 7. Решить систему
х4 + 2х2 *4" Зх3 4- 4х4 = 5,
х2 + 2х3 + Зх4 = 1,
Xj + Зх3 + 4х4 = 2,
х, + х2 + 5х3 + 6х4 = 1.
Конечно, согласно теореме 1, мы могли бы просчитать
все пять определителей четвертого порядка и найти xv х2,
х3, х4. Здесь было бы много повторяющихся вычислений.
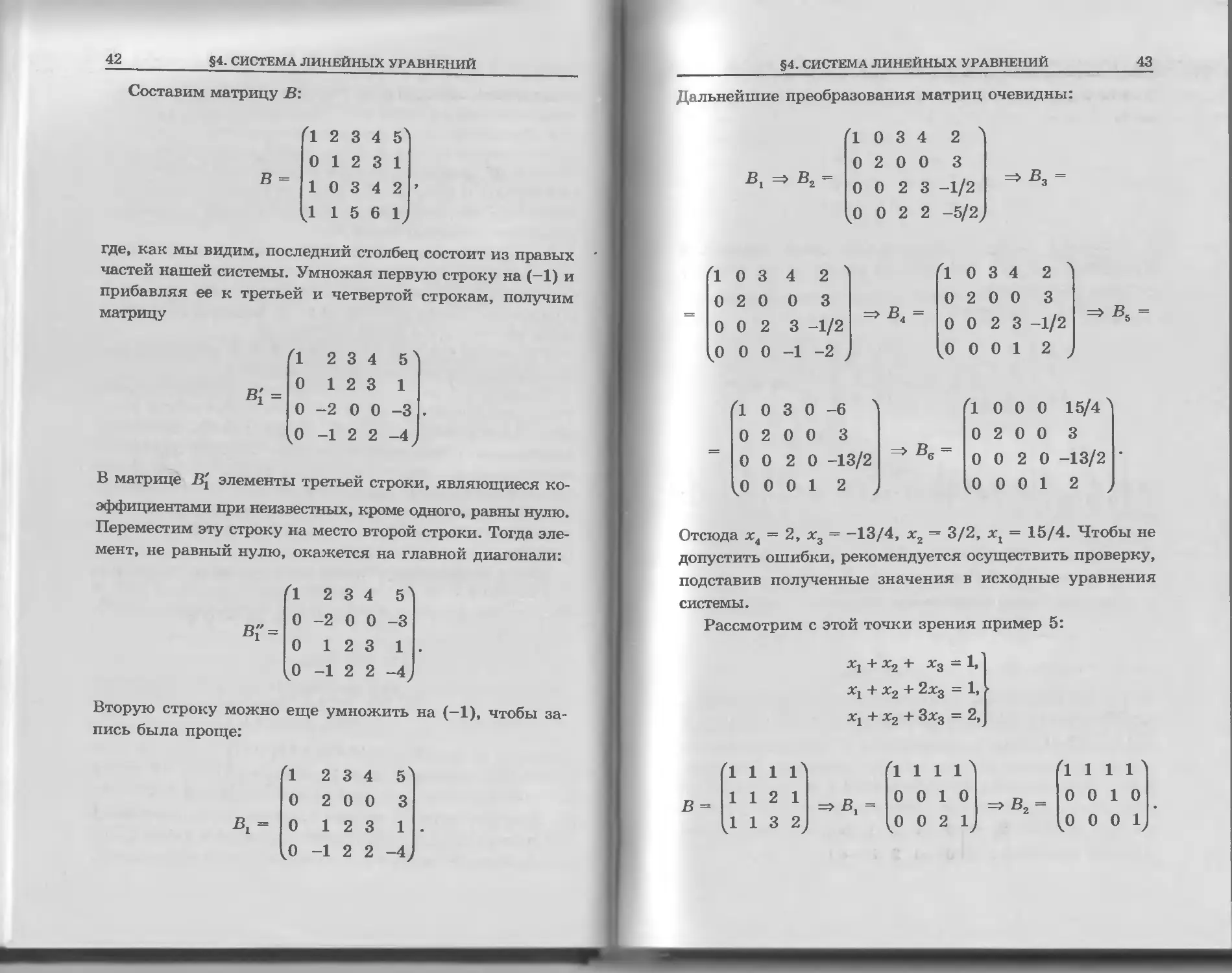
42
§4. СИСТЕМА ЛИНЕЙНЫХ УРАВНЕНИЙ
Составим матрицу В:
'1 2 3 4 5'
0 12 3 1
В= 10342’
,115 6 1,
где, как мы видим, последний столбец состоит из правых
частей нашей системы. Умножая первую строку на (—1) и
прибавляя ее к третьей и четвертой строкам, получим
матрицу
fl 2 3 4 5^
0
о
12 3
-2 0 0
1
-3
VO -1 2 2 -4,
В матрице элементы третьей строки, являющиеся ко-
эффициентами при неизвестных, кроме одного, равны нулю.
Переместим эту строку на место второй строки. Тогда эле-
мент, не равный нулю, окажется на главной диагонали:
(1 2 3 4 5А
0
0
-200-3
12 3 1
V0 -1 2 2 -4;
Вторую строку можно еще умножить на (-1), чтобы за-
пись была проще:
1 2 3 4 5"
0 2 0 0 3
0 12 3 1
,0-122 -4,
§4. СИСТЕМА ЛИНЕЙНЫХ УРАВНЕНИЙ
43
Дальнейшие преобразования матриц очевидны:
Bt =* в2
'1 0 3 4 2 '
0 2 0 0 3
0023 -1/2
J) 0 2 2 -5/2,
'10 3 4 2 '
0 2 0 0 3
0023 -1/2
,0 0 0 -1 -2 ,
'1 0 3 4 2 '
0 2 0 0 3
0023 -1/2
J) О 0 1 2 ,
= '1 0 3 0 -6 ' 0 2 0 0 3 0020 -13/2 J) 0 0 1 2 J '1 0 0 0 15/4' 0 2 0 0 3 0 0 2 0 -13/2 ч0 0 0 1 2 , •
Отсюда х4 = 2, х3 = -13/4, х2 = 3/2, хх = 15/4. Чтобы не
допустить ошибки, рекомендуется осуществить проверку,
подставив полученные значения в исходные уравнения
системы.
Рассмотрим с этой точки зрения пример 5:
хг + х2+ х3 = 1,
Ч + х2 + 2х3 = 1,
Xj + х2 + Зх3 = 2,
44
§4. СИСТЕМА ЛИНЕЙНЫХ УРАВНЕНИЙ
Таким образом, исходная система эквивалентна следую-
щей:
х1+ х2 + х3 = 1,
О • ху + О • х2 + х3 = О,
О • Ху + О - х2 + 0 - х3 =1,
В последней строке свободный член равен единице, а
коэффициенты при неизвестных равны нулю, поэтому
система несовместна.
Наконец, в примере 6
1
2
О
О
О
В =
2
2 2
4
2
О
О
2
О
1
1
1 0 1
О
О
О
О
О
1
О
О
о
о
о
з
о
4
О 1 ог
Отсюда
х3 = О
2
т. е. система имеет бесконечное
множество решений:
х,
х2 = 1 -
х3 = О
где Ху — любое число (—°° < хг < оо).
4.8. Нахождение ранга матрицы. Если нас инте-
ресует только вопрос о ранге матрицы В, то указанные
выше элементарные операции В => В' распространим не
только на строки, но и на столбцы матрицы. При этом,
если в процессе этих преобразований в матрице появля-
ются строка или столбец, целиком состоящие из нулей, то
их надо удалить из матрицы, т. е. рассматривать далее
матрицу меньшего размера.
§4. СИСТЕМА ЛИНЕЙНЫХ УРАВНЕНИЙ
45
Следующие примеры иллюстрируют этот метод.
Пример 8. Найти ранг матрицы
1 2 3 4 5 6 7'
в= 0101011
12 12 12 1
,0 0 0 0 0 4 5,
Ясно, что ранг матрицы В не больше 4. В данном слу-
чае au = 1 Ф 0. Умножая первую строку на (-1) и прибав-
ляя ее к третьей строке, получаем
1 2 3 4 5 6 7'
0 10 10 11
О 0-2-2 -4 -4 -6
,0 0 0 0 0 4 5,
Теперь, умножая первый столбец на соответствующие
числа и прибавляя его к остальным столбцам, получим
атрицу
1 О О О О О О'
0 10 10 11
О 0-2-2 -4 -4 -6
О 0 0 0 0 4 5,
Второй столбец уже состоит из нулей, кроме элемента
а22 = 1 Ф 0. Умножая второй столбец на (-1) и прибавляя
его к 4, 6, 7 столбцам, получим
10 О О О О О'
0100000
В = => в =
3 0 0 -2-2 -4 —4 -6 4
,0 0 0 0 0 4 5,
46
§4. СИСТЕМА ЛИНЕЙНЫХ УРАВНЕНИЙ
== '1 0 0 0 0 0 (Р 0 1 0 0 0 0 0 0 0-2 0 0 0 0 .0 0 0 0 0 4 5? '10 000' 0 10 0 0 0 0-2 0 0 0 0 0 4 5, =>
В6 = '10 000' 0 10 0 0 0 0-2 0 0 .0 0 0 4 0, => В7 '10 0 0 0 10 0 0 0-20 .0 0 0 4
Определитель четвертого порядка матрицы В7 не равен
нулю, следовательно, ранг В — ранг В7 — 4.
Пример 9. Найти ранг матрицы
'12 11' '12 11
В = 0 111 => В1 = 0 111 =>s2 =
О о > 0 -1 -1 -1 7
'1 0 0 О' с о о
= с >111 => Вз = 0 111 =*в4 =
Iе -1 -1 -1? о о о о
= f1 0 0 °1 в = fl 0 О ОА fl о)
1° 1 1 V 5 1 о о; 6 [о 1J’
т. е. ранг матрицы В равен двум.
Рассуждения в примерах 8 и 9 основаны на следую-
щем общем утверждении: при элементарном преобразова-
нии В => В ранг матрицы сохраняется, т. е. выполняет-
ся равенство
ранг В = ранг В'.
§4. СИСТЕМА ЛИНЕЙНЫХ УРАВНЕНИЙ
47
Это утверждение очевидно, если элементарное преобра-
зование сводится к замене местами строк или столбцов
матрицы или к выкидыванию из матрицы ее строки или
столбца, состоящих из нулей.
Остается еще один случай, который мы выразим в виде
теоремы.
Теорема 5. Пусть матрица В подвергнута преобразо-
ванию В В', заключающемуся в том, что к некоторой
ее строке (столбцу) прибавляется другая какая-либо
строка (столбец), умноженная на число С.
Тогда ранги матриц В и В'равны.
Доказательство. Будем доказывать эту теорему для
строк (для столбцов рассуждения аналогичны).
Пусть k есть номер строки матрицы В = (&ы), умножа-
емой на число С и прибавляемой к другой строке В,
которую будем считать имеющей номер I (таким образом,
l-я строка матрицы В' состоит из элементов Cbkj + btj, j =
= 1....п). Пусть
ранг В = г, ранг В' = /.
Достаточно показать, что / < г, потому что по анало-
гии доказывается также, что г < /, откуда г = /.
Если г = 0, то все элементы матрицы В равны нулю и,
следовательно, равны нулю все элементы матрицы В',
откуда г = / = 0.
Пусть теперь г > 0. Тогда существует матрица А поряд-
ка г, порождаемая матрицей В, с неравным нулю опреде-
лителем И Ф 0), а все матрицы А, порождаемые В, поряд-
ка, большего г, имеют определители, равные нулю. При
преобразовании В => В' матрица А преобразуется в неко-
торую матрицу А' (А => А'). Пусть матрица А имеет поря-
док, больший г.
Если l-я строка матрицы В не участвует в образовании
А, то, очевидно, А = А и 0 = |А| = |А'|.
48§5. ТРЕХМЕРНОЕ ПРОСТРАНСТВО. ВЕКТОРЫ
Если в образовании А участвуют обе строки В с номе-
рами k и I, то О = |А) = |А'|. Ведь чтобы получить опреде-
литель |А'|, надо к некоторой строке определителя Щ при-
бавить определенную другую его строку, умноженную на
число С, от чего величина определителя не меняется.
Наконец, пусть в образовании матрицы А участвует 1-я
строка, но не участвует k-я строка. Очевидно (см. свойство
з) определителя),
И = И + С1Л|. (19)
где Л — матрица порядка, большего г, получаемая из
А заменой элементов l-й строки на соответствующие эле-
менты k-й строки матрицы В. Но такая замена не меняет
ранг В и так как [А| — 0, то |Л| = О.
Из (19) получаем |А'| = 0 + С»0 = 0.
Мы пересмотрели все случаи, когда матрица А' имеет
порядок, больший чем г, и всякий раз оказывалось, что
|А'| = 0. Это показывает, что
г' = ранг В' < г,
что и требовалось доказать.
§ 5. Трехмерное пространство. Векторы.
Декартова система координат1
5.1. Понятие вектора. В этом параграфе мы будем
рассматривать реальное пространство. Понятие вектора в
реальном пространстве читателю известно из элементар-
ной геометрии.
Вектором (в реальном пространстве) называется направ-
—>
ленный отрезок АВ с начальной точкой А и конечной
1 Отметим, что в данной книге сначала излагается скалярное
произведение векторов, затем аналитическая геометрия прямой и
плоскости и после этого в §§ 11—13 излагаются понятия векторно-
го и смешанного произведений векторов. При желании эти пара-
графы могут быть изложены непосредственно после § 6.
§5. ТРЕХМЕРНОЕ ПРОСТРАНСТВО. ВЕКТОРЫ
49
точкой В, который можно передвигать параллельно само-
му себе. Таким образом, считается, что два направленных
отрезка АВ и А1В1, имеющие равные длины (|АВ| = |AjBj)
и одно и то же направление, определяют один и тот же
-> ->
вектор а, и в этом смысле пишут а = АВ = АтВг (рис. 2).
Длиной | АВ | = |а| вектора АВ = а называется число
(неотрицательное), равное длине отрезка АВ, соединяюще-
го точки А и В. Будем также писать | АВ | = |АВ|.
Векторы, лежащие на одной прямой или на парал-
лельных прямых, называются коллинеарными.
Если точки А и В совпадают, то
-> ->
АВ = АЛ = О считают тоже векто-
ром - нулевым вектором. Его длина
равна нулю (|0| = О), а направление
для него не имеет смысла.
В геометрии рассматривают сложе-
ние и вычитание векторов и умноже-
ние их на действительные числа. По
определению произведение аа = аа вектора а на число а
или числа а на вектор а есть вектор, длина которого равна
|аа| = |а| - |а], а направление совпадает с а, если а > 0, или
противоположно а, если а < О. При а = 0 длина |аа| равна
нулю и вектор аа превращается в нулевой вектор (точку),
не имеющий направления.
Вектор е называется единичным, если его длина равна 1,
т. е. |е| = 1. Если Ъ = осе и е — единичный вектор, то |Ь| =
= ]ос|, потому что
|Ь| = |ос|-|е| = |сс|-1 = |а|.
50§5. ТРЕХМЕРНОЕ ПРОСТРАНСТВО. ВЕКТОРЫ
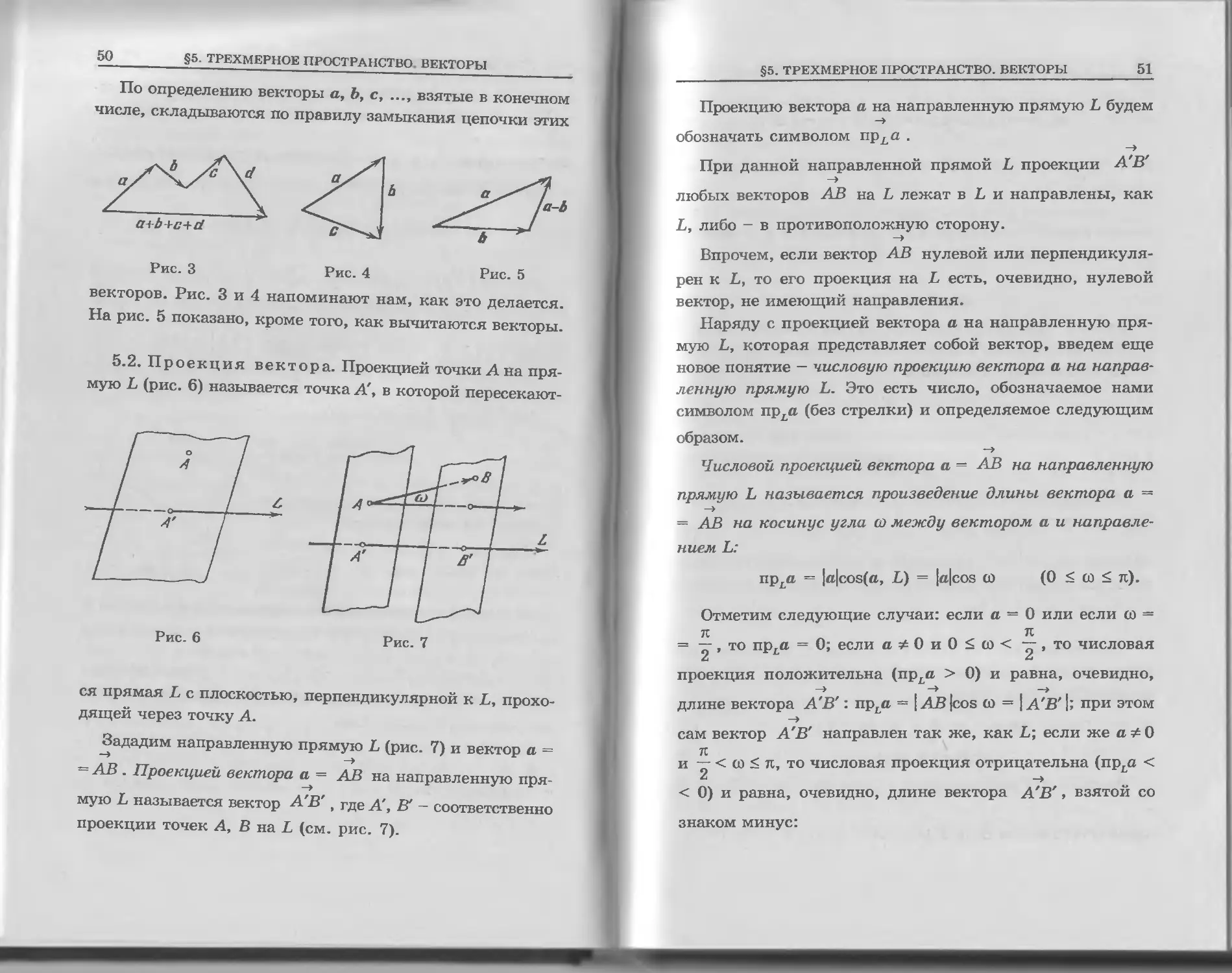
По определению векторы а, Ь, с, взятые в конечном
числе, складываются по правилу замыкания цепочки этих
Рис. 3
Рис. 4
векторов. Рис. 3 и 4 напоминают нам, как это делается.
На рис. 5 показано, кроме того, как вычитаются векторы.
5.2. Проекция вектора. Проекцией точки А на пря-
мую L (рис. 6) называется точка А', в которой пересекают-
Рис. 6
ся прямая L с плоскостью, перпендикулярной к L, прохо-
дящей через точку А.
Зададим направленную прямую L (рис. 7) и вектор а =
= АВ . Проекцией вектора а = АВ на направленную пря-
—>
мую L называется вектор А'В', где А', В’ - соответственно
проекции точек А, В на L (см. рис. 7).
§5. ТРЕХМЕРНОЕ ПРОСТРАНСТВО. ВЕКТОРЫ 51
Проекцию вектора а на направленную прямую L будем
->
обозначать символом пр^а .
—>
При данной направленной прямой L проекции А'В'
любых векторов АВ на L лежат в L и направлены, как
L, либо - в противоположную сторону.
—>
Впрочем, если вектор АВ нулевой или перпендикуля-
рен к L, то его проекция на L есть, очевидно, нулевой
вектор, не имеющий направления.
Наряду с проекцией вектора а на направленную пря-
мую L, которая представляет собой вектор, введем еще
новое понятие — числовую проекцию вектора а на направ-
ленную прямую L. Это есть число, обозначаемое нами
символом пр£а (без стрелки) и определяемое следующим
образом.
Числовой проекцией вектора а = АВ на направленную
прямую L называется произведение длины вектора а —
= АВ на косинус угла оз между вектором а и направле-
нием L:
npLa = |a|cos(a, L) = |a|cos co (0 < co < it).
Отметим следующие случаи: если а = 0 или если со =
л
л
то npLa = 0; если а*ОиО<со< —, то числовая
проекция положительна (прьа > 0) и равна, очевидно,
длине вектора А’В': np,a = I АВ |cos со = | А'В' |; при этом
—>
сам вектор А'В' направлен так же, как L; если же а Ф 0
л
и — < со < л, то числовая проекция отрицательна (npLa <
< 0) и равна, очевидно, длине вектора А'В', взятой со
знаком минус:
52
§5. ТРЕХМЕРНОЕ ПРОСТРАНСТВО. ВЕКТОРЫ
npLa = IabIcosw = -Ia'B'I = “lA'B'l,
—>
при этом сам вектор А'В' направлен в сторону, противо-
положную L.
Справедливо очевидное равенство, выражающее связь
между проекцией вектора а на направление L и его чис-
ловой проекцией на L:
—>
npLa == епр£а.
Здесь е - единичный вектор, направленный, как L.
Если векторы а и Ь лежат на направленной прямой L,
то их можно записать в виде
а = ае, Ь = Ре,
где е — единичный вектор, направленный так же, как L,
а ос и Р — числа. Эти числа могут быть положительными,
отрицательными или нулем.
Справедливы очевидные равенства
ае ± ре = (а ± Р)е, (1)
показывающие, что сложение и вычитание указанных
векторов сводится к сложению или вычитанию соответ-
ствующих чисел а, р.
5.3. Свойства проекций векторов. Числовые про-
екции векторов а, Ъ на данное направление L обладают
следующими свойствами:
npLa + пр£Ь = npL(a + Ь), (2)
npL(aa) = anpLa. (3)
Свойство (2) усматривается на рис. 8:
npLa + npLfe = А'В' + В'С' = А'С' = npLc = npL(a+b).
§5. ТРЕХМЕРНОЕ ПРОСТРАНСТВО. ВЕКТОРЫ
53
Рис. 8
Но тогда
епр£а + епр£Ь = епр£(а + 6),
откуда следует (2) (см. (1)).
Так как а = (а - b) + b (см. рис. 5), то
пр£(а ~ Ь) + пр£Ь = пр£а,
и, следовательно,
npLa - пр£Ь = пр£(а — 6). (2')
Докажем (3). Считая, что угол между вектором а и на-
правлением L равен со, имеем
при а > 0:
пр£(аа) = |cxa|cos со = oc|a|cos со — awpLa;
при а < 0:
пр£(аа) = |aa|cos (л - со) = -a|a|cos(n - со) =
— a|a|cos со = апр£а.
Ведь при а < 0 вектор сш направлен в сторону, противо-
положную направлению а, и если а образует с L угол со,
то аа образует с L угол л - со.
При а = 0 левая и правая части (3) обращаются в нуль.
54§5. ТРЕХМЕРНОЕ ПРОСТРАНСТВО. ВЕКТОРЫ
5.4. Скалярное произведение векторов. Назо-
вем скалярным произведением двух векторов а и Ь число
(а, Ь), равное произведению длин этих векторов, помно-
женному на косинус угла со между ними:
ab = (а, Ь) = |a||b|cos(a, Ъ) = |a||b|cos а). (4)
Очевидно, можно еще сказать, что скалярное произве-
дение векторов а и Ь есть произведение длины вектора
|б| на числовую проекцию вектора а на направление Ь или
произведение длины |а| на числовую проекцию Ь на на-
правление а:
ab = (а, Ь) = |а|праЬ = |б|пр6а.
Скалярное произведение обладает свойствами:
(«, 6) = (Ь, а), (5)
(а, Ъ + с) = (а, 6) + (а, с), (6)
(а, осЬ) = а(а, Ь). (7)
Равенство (5) непосредственно вытекает из определе-
ния скалярного произведения.
Равенство (6) доказывается так:
(а, Ь + с) = |а)про(Ь + с) = |а|пра6 + |а|прас =
= (а, 6) + (а, с).
Равенство (7) доказывается следующим образом:
(а, аЬ) = |а|при(аЛ) = |а|апра6 = а(а, 6).
Из (6) и (7), учитывая, (5), следует
(а + Ь, с) = (а, с) + (6, с), (6')
(аа, Ь) = а(а, 6). (7')
Пример (из физики). Если тело под действием силы а
передвинулось прямолинейно вдоль вектора Ъ, то работа
W, выполненная силой а, как известно из физики, равна
§5. ТРЕХМЕРНОЕ ПРОСТРАНСТВО. ВЕКТОРЫ 55
произведению величины силы |а| на путь |Ь| и еще на
косинус угла между векторами а и Ь:
W = |а| |b|cos(a, 6).
Но тогда
W = (а, Ь),
т. е. указанная работа равна скалярному произведению
векторов а и Ь.
5.5. Прямоугольная система координат. Теперь
мы переходим к аналитическому описанию векторов и
точек пространства — при помощи чисел. Введем в про-
странстве прямоугольную систему координат х, у, г, т. е.
три взаимно перпендикулярные направленные прямые, про-
ходящие через некоторую точку О, называемые осями ко-
ординат х, у, z (рис. 9). Предполагается что для данной
системы координат выб-
ран единичный отрезок,
при помощи которого из-
меряются все прочие от-
резки. Точка О называет-
ся началом координат.
Зададим произволь-
ную точку А трехмерного
пространства. Направлен-
—>
ный отрезок ОА называ-
ется радиус-вектором точки А. Радиус-вектор в свою оче-
—>
редь определяет вектор а (а = ОА), который можно
переносить в пространстве параллельно самому себе. Чис-
ловые проекции радиус-вектора а на оси х, у, г обозна-
чим соответственно х, у, г. Это координаты точки А; при
этом координата х называется абсциссой, координата у -
ординатой и координата z — аппликатой точки А.
56§5. ТРЕХМЕРНОЕ ПРОСТРАНСТВО. ВЕКТОРЫ
Между точками А пространства и их радиус-векторами
—>
ОА или, что все равно, тройками чисел (х, у, z), являю-
щимися координатами точки А или проекциями ОА на
оси, имеется взаимно однозначное соответствие. В силу
сказанного не будет путаницы, если мы будем называть
тройку чисел (х, у, z) точкой А, имеющей эти числа сво-
ими координатами или радиус-вектором а, имеющим эти
числа своими проекциями.
Мы будем писать а — (х, у, г) и говорить, что а или
(х, у, г) есть вектор, равный радиус-вектору точки А,
имеющему координаты х, у, г. Но, конечно, можно счи-
тать, что вектор а равен какому-либо другому направ-
ленному отрезку CD, равному ОА (CD = ОА), т. е.
имеющему то же направление и ту же длину, что и ОА.
В этом случае проекции а на оси координат часто обозна-
чают символами ах, ау, аг и пишут а = (ах, ау, аг).
Из определения вектора как направленного отрезка,
который можно передвигать в пространстве параллельно
самому себе, следует, что два вектора а = (хр zt) и Ъ =
— (х2, у2, z2) равны тогда и только тогда, если выполня-
ются одновременно равенства: xt = х2, yv = у2, zt = z2.
Справедливы равенства
(х, у, г) ± (х', у’, z') = (х ± х’, у ± у', z ± z'), (8)
а(х, у, z) = (ах, ay, az). (9)
Равенство (8) следует из того, что проекция суммы или
разности векторов (на ось х или у или z) равна сумме или
разности проекций слагаемых.
Равенство же (9) следует из того, что проекция вектора
аа (на ось х или у или z) равна произведению а на про-
екцию а.
Обозначим через i, j, k единичные (имеющие длину,
равную 1) векторы, имеющие соответственно то же на-
§5. ТРЕХМЕРНОЕ ПРОСТРАНСТВО. ВЕКТОРЫ
57
правление, что и оси х, у, г. Векторы i, j, k называют
ортами осей х, у, г. Произвольный вектор (х, у, z) может
быть записан в виде
(х, у, z) = xi + yj + zk.
(Ю)
В самом деле,
i = (1, 0, 0), j = (0, 1, 0), k = (0, 0, 1).
Поэтому в силу (8) и (9)
xi + yj + zk = х(1, 0, О) + у(0, 1, 0) + z(0, О, 1) —
= (х, 0, 0) + (0, у, 0) + (0, 0, z) = (х; у, г).
Отметим равенства, имеющие место для скалярных
произведений ортов осей
И = jj — kk = 1, ij = ik = jk = 0.
Пусть теперь а = (х, у, г) и Ь = (х', у', г'). Тогда
ab = (а, 6) = хх' + уу' + zz7. (11)
В самом деле, на основании (6), (7), (6'), (7х)
ab = (xi + yj + zfe)(x'i + y'j + z'fe) =
= xx'ii + xy'ij + xz'ik + yx'ji + yy'jj + yz'jk +
+ zx'ki + zi/kj + zz'kk = xx' + yy7 + zz7.
В частности, положив в этой формуле Ь = а, получим, что
|а|2 = аа = х2 + у2 + z2, В
откуда длина вектора а равна уЪ-а
|а| = + -Jx2 +y2 + z2 . О а А
Отсюда расстояние между точками а —
= (х, у, г) и Ъ = (Xх, if, z?) равно (рис. 10) Рис. 10
|АВ| = |Ь - а| = + 7(х' - х)2 + (у7 - у)2 + (z7 - z)2 .
58§5. ТРЕХМЕРНОЕ ПРОСТРАНСТВО. ВЕКТОРЫ
Для дальнейшего будет важно подвести итог сказанно-
му. Для этого введем несколько иное наименование коор-
динат. Именно, введем в пространстве прямоугольную
систему координат хр х2, х3. В силу этого каждая точка
пространства представлена тройкой чисел
х = (хр х2, х3).
Эту точку мы обозначили жирной буквой х и назвали
также вектором х с компонентами хр х2, х3.
Мы доказали, что сложение и вычитание векторов и
умножение их на числа выражаются на языке троек
(хр х2, х3) следующим образом:
(х1,х2,х3)±(х;,х2,х3) =
= (хх ± хх, х2 ± х2, х3 ± х3), • (12)
a(Xj, х2, х3) = (сххг, схх2, ах3).
Скалярное произведение векторов х = (хр х2, х3) и х' =
= (х'р х'2, х'3) выражается через координаты векторов х и
х' по формуле
хх' = (х, х') = XjX\ + х2х'2 + х3х'3. (13)
Длина вектора х = (хр х2, х3) есть неотрицательное число,
равное
|х| = -Jxf + *2 +хз . (14)
Наконец, расстояние между точками х = (хр х2, х3) и
Xх = (х'р х'2, х'3) равно
|х - х1 = - Xi)2 + (х'2 - х2)2 + (х3 - х3)2 - (15)
Реальное пространство, геометрию которого мы здесь
изучали, называется трехмерным пространством, пото-
му что его точки естественным образом представляются
тройками действительных чисел. Мы будем его обозна-
чать через 1^.
§6. СКАЛЯРНОЕ ПРОИЗВЕДЕНИЕ
59
Произвольную плоскость естественно обозначить через
R2. В jR2 можно задать прямоугольную систему координат
х,, х2, с помощью которой любую точку R2 или ее радиус-
вектор можно представить парой чисел (хр х2). Операции
сложения и вычитания и умножения на число для векто-
ров, принадлежащих к плоскости, очевидно, подчиняют-
ся выведенным нами условиям (12), где в скобках надо
только всюду выбросить третьи компоненты. Скалярное
произведение векторов, принадлежащих к нашей плоско-
сти, тоже выражается формулой (13), где в правой части
надо выбросить третий член. То же самое относится и к
формулам (14) и (15).
Обобщением пространств R2 и R3 является простран-
ство Rn, где п — произвольное натуральное число.
Пространство Rn при п > 3 является математической
выдумкой. Впрочем, весьма гениальной выдумкой, кото-
рая помогает математически разбираться в сложных яв-
лениях.
ЗАДАЧИ
1. Найти длину векторов (1, 1, 1), (1, -1, 1), (1, 2, 3).
2. Найти угол между векторами (1, 0, 1), (1, 2, 3).
3. Дан единичный куб (с длиной ребра, равной 1). Найти
угол между выходящими из его вершины: а) главной диаго-
налью и диагональю грани; б) между двумя диагоналями двух
граней.
§ 6. n-мерное евклидово пространство.
Скалярное произведение
6.1. n-мерное пространство. Множество всевозмож-
ных систем (xt, ..., хп) действительных (комплексных) чи-
сел называется п-мерным действительным (комплексным)
пространством и обозначается через Rn. Каждую систему
мы будем обозначать одной (жирной) буквой без индекса:
х — (х,, ..., х )
60§6, СКАЛЯРНОЕ ПРОИЗВЕДЕНИЕ
и называть точкой или вектором Rn (пространства Rn).
Числа ......хл называют координатами точки (вектора)
х или еще компонентами вектора х.
Две точки
X = (хр ...» х„), х' = (х\, .... х'п)
считаются равными, если их соответствующие координа-
ты равны
х, = x'i = ’ ">•
В других случаях х и х' различны (х х').
Системы (векторы) х = (хр .... хп), у = (yv .... ул) можно
складывать, вычитать и умножать на числа а, р, ... —
действительные, если Rn есть действительное пространство,
и комплексные, ели Rn — комплексное пространство1.
По определению суммой векторов х и у называется
вектор
X + у = (Xj + ух, Х2 + у2.. Хл + Ул), (1)
а разностью — вектор
X - У = (Xj - Ух... Хп - ул). (2)
Произведением же числа а на вектор х или вектора х
на число а называется вектор
ах = ха = (ахр .... ахл).
Наконец, вектор —х определяется равенством
-X = (-1)х = (-хр -х2, ..., -хл).
Вводится еще понятие нулевого вектора, компоненты
которого равны нулю: О = (0, ..., 0).
Очевидно, выполняются свойства:
1) X + у = у + X,
2) (х + у) + z = х + (у + z),
* О комплексных числах см. нашу книгу «Высшая математика.
Дифференциальное и интегральное исчисление», § 5.3.
§6. СКАЛЯРНОЕ ПРОИЗВЕДЕНИЕ
61
3) х - у = х + (-l)i/,
4) ох + ау = сс(х + у),
5) ох + Р* = (а + Р)х,
6) а(Р%) = («Р)х,
7) 1 • х = х,
8) х + (—х) = О,
где а, Р — числа, а х, у g Rn.
Пространство Rn называется линейным пространством,
потому что для него выполняются перечисленные выше
свойства 1) — 8), см. ниже замечание 1.
Число (неотрицательное)
называется длиной или нормой вектора х = (хр ..., хл) в
действительном пространстве Rn.
Расстояние между точками х = (хр ..., хл) и у =
= (z/t, .... z/n) действительного пространства Rn опреде-
ляется по формуле
|х - j/| = Ул) . (4)
V л=1
6.2. Скалярное произведение в действитель-
ном пространстве Скалярным произведением двух
векторов х = (Xj..хл) и у = (ух, .... г/л) в действительном
пространстве Rn (числа хг, yt действительные) называется
число
п
(х, у) = XХ/У/ . (5)
i=i
Скалярное произведение в действительном простран-
стве Rn обладает свойствами:
62§6. СКАЛЯРНОЕ ПРОИЗВЕДЕНИЕ
а) (х, х) > О; при этом равенство нулю имеет место тогда
и только тогда, когда х = 0 = (0, ..., 0),
б) (х, у) = (у, х),
в) (ах + Ру, z) = а(х, z) + P(SA -г).
В самом деле,
п
(х, х) = Sxi > О,
/=1
и равенство может быть лишь, если х, = ... = х = 0.
Далее,
п п
(х, у) = Т^У, = = (у, х)
;=1 7=1
И
п
(ах + Ру, z) = X < ах;. + Ру^г, =
п п
= a^xjzi + $£iyjzj = а(х, z) + Р(у, z).
i=i 7=1
6.3. Скалярное произведение в комплексном
пространстве Нп. Скалярным произведением двух векторов
х = (хр хп) и у = (ур ..., уп) в комплексном пространстве
Rn называется число
п
(X, у) = , (5')
/=1
где уj есть комплексное число, сопряженное к числу уу (по
определению, если z = а + pi, где аир действительные, то
z = а - pi).
Скалярное произведение в комплексном пространстве обла-
дает свойствами:
§6, СКАЛЯРНОЕ ПРОИЗВЕДЕНИЕ
63
а') (х, х) > 0; при этом ’равенство нулю имеет место тогда
и только тогда, когда х = О = (0, .... 0),
б') (х, у) = (у, х),
в') (ах + ру, z) = а(х, z) + р(у, z).
В самом деле,
п п
(х, х) = 2*^ xjxj ~ 5LIXJ2 ~ 0’
7=1 7=1
и равенство может быть, лишь если хг = ... = хп = 0. Далее,
(х, у)
' п А п п
YxiVi= = х)-
к 7=1 7 7=1 7=1
Здесь мы воспользовались свойствами операции сопряжения
z + гг = z + и zzj = г • Zj. Наконец,
п
(ах + ру, z) = (ах, +Pyy)zy =
7=1
= = a(x, z) + p(y, z).
7=1 7=1
В комплексном пространстве Rn длина вектора х определя-
ется при помощи равенства
а расстояние между точками х — (х,, ..., хп) и у = (у,, уп)
(4')
Легко видеть, что при действительных ху, yj выражения (3)
64
§6. СКАЛЯРНОЕ ПРОИЗВЕДЕНИЕ
и (4) являются частными случаями выражений (3'), (4').
Пространство Ип (действительное или комплексное), в кото-
ром введено понятие скалярного произведения по формуле (5)
(соответственно (5')), называется евклидовым п-мерным про-
странством.
6.4. Неравенства Буняковского. Для скалярного
произведения в действительном и комплексном простран-
стве справедливо неравенство (Буняковского1)
|(х, i/)| < -у](х,х)^(у,у) . (6)
Докажем его только в действительном случае. В самом
деле, для любого действительного числа А,
О < (х + Ку, х + Ку) =
= (х, х) + К(у, х) + К(х, у) + К2(у, у) =
= (х, х) + 2(х, у)К + (у, у)К2 = а + 2ЬК + сК2,
где а = (х, х), Ъ = (х, у), с = (у, у). Мы видим, что
квадратный многочлен
а + 2ЬК + сК2 > 0 (—оз < К < оо)
неотрицателен для любого действительного К. Поэтому весь
его график лежит выше оси К, а это может быть, только
если дискриминант многочлена отрицателен или равен
нулю, т. е. если Ь2 — ас < 0 или Ь2 < ас, и мы получили
неравенство Буняковского (6).
На языке компонент векторов х и у неравенство (6)
можно записать так:
1 В. Я. Буняковский (1804-1889) - русский математик.
§6. СКАЛЯРНОЕ ПРОИЗВЕДЕНИЕ 65
Таким образом, каковы бы ни были действительные
числа xf, yjt выполняется неравенство (7).
В силу (3) неравенство Буняковского можно написать
так:
|(х, у)| < |х||у|.
Но тогда существует и притом единственное число X, удов-
летворяющее неравенствам -1 < X < 1, для которого имеет
место точное равенство
(х, у) = Х|х||у|.
Отметим, что на [О, л] функция cos t имеет однозначную
строго убывающую обратную функцию, с областью значе-
ний на [-1, 1]. Поэтому для каждого X (-1 < X < 1) суще-
ствует единственный угол со (0 < со < л) такой, что X =
— cos со. Таким образом, мы доказали равенство
(х, у) = |x||y|cos со. (8)
Число со называется углом между п-мерными векторами х
и у, хотя на самом деле при п > 3 векторы х и у явля-
ются вовсе не реальными отрезками, а математическими
абстракциями.
Векторы х и у называются ортогональными, если ска-
лярное их произведение равно нулю
(х, У) = = °-
/=1
Из (8) следует, что для того, чтобы ненулевые векторы
х и у были ортогональными, необходимо и достаточно,
чтобы угол между ними со = п/2.
6.5. Неравенство Минковского. Отметим важное
неравенство (Минковского1)
|х + у| <; |х| + |у|, (9)
1 Г Минковский (1864-1909) - немецкий математик.
3 Бугров. Т. 1
66
§6. СКАЛЯРНОЕ ПРОИЗВЕДЕНИЕ
или на языке компонент
Его можно доказать так:
|х + у|2 = (х + у, X + у) = (х, х) + 2(х, у) + (у, у).
Используя неравенство Буняковского (6), имеем
|х + z/|2 < (х, х) + 27(х,х)л/(у,у) + (у, у) =
= (д/(х,х) +7(У> у))2.
откуда следует (9). Из (9) следует неравенство
||х| - |у|| < |х - у[, (11)
потому что
|х| = |х - у + J/I < |х - + |у|,
|у| = \у - X + х| < |х - 1/1 + |х|.
Задача. Найти угол между векторами (1, 0, 1, 0),
(1, 1, 1, 1).
Замечание 1. Произвольное множество Е, состоящее
из элементов х, у, г, ... любой природы, называется ли-
нейным пространством, если существует закон, в силу
которого для любых двух элементов х, у е Е определены
элементы х + у е Е и х — у е Е, называемые соответ-
ственно суммой, разностью х и у, и для любого действи-
тельного или комплексного числа а и элемента х е Е
определен элемент ах — ха е Е, называемый произведе-
нием а на х или х на а, так что выполняются перечислен-
ные выше в этом параграфе свойства 1) - 8), где — х =
= (-1)х, и 0 = Ox, Vx е Е.
Rn можно рассматривать как пример линейного про-
странства, но существуют и другие интересные примеры.
Например, совокупность С непрерывных на отрезке [а, Ь]
функций /, <р, v...если считать, что / + <р, f - <р, af
определены соответственно как /(х) + ф(х), /(х) - <р(х), сх/(х),
есть линейное пространство.
§7. ДЕЛЕНИЕ ОТРЕЗКА В ДАННОМ ОТНОШЕНИИ 67
Линейное пространство с умножением его элементов
на действительные (комплексные) числа называется дей-
ствительным (комплексным) линейным пространством.
Замечание 2. Если в каком-либо линейном простран-
стве Е каждым двум его элементам х, у приведено в со-
ответствие число (х, у), удовлетворяющее сформулирован-
ным выше свойствам а), б), в) в действительном случае и
а'), б'), в') в комплексном случае, то говорят, что в Е вве-
дено скалярное произведение.
Выше было дано определение n-мерного евклидова
пространства — это пространство Яп, в котором определено
скалярное произведение по формулам соответственно (5)
или (5')-
§ 7. Отрезок. Деление отрезка в данном
отношении
Зададим произвольные точки х, у е Rn и введем мно-
жество точек (векторов):
z = Хх + ру (X, р > О, X + р = 1), (1)
определяемых неотрицательными числами X, р, сумма
которых равна 1. Имеем
z = (1 - р)х + цу - х + р(у - х) (0 <. р 5 1) (2)
или
z = у + Х(х - у) (0 2 X 5
Из равенства (2) видно, что в трех-
мерном пространстве точки z за-
полняют отрезок, соединяющий х
и у. Ведь радиус-вектор z есть сум-
ма вектора х и вектора р(у — х),
коллинеарного с у — х (рис. 11).
Таким образом, множество точек
(1) представляет собой отрезок
(2')
1).
Рис. 11
3*
68
§7. ДЕЛЕНИЕ ОТРЕЗКА В ДАННОМ ОТНОШЕНИИ
[х, у] в R3, соединяющий точки х и у. При р = 0 г = х,
при р - 1 z = у, для любого p>O(O<p<l)z есть
произвольная точка [х, у].
По определению отрезком [х, у], соединяющим точки
х, у е Rn, называется множество всех точек z вида (1).
Справедлива
Теорема 1. Точка
z = Хх + ру (X, р > О, X + р = 1)
делит отрезок [х, у], соединяющий точки х, у е Rn на
отрезки с длинами, находящимися в отношении р : X.
Доказательство. Из (2) следует, что z — х = р(у — х),
и потому расстояние между точками х и z равно
|z - х| = р|у - х|. (3)
Далее, из (2') z — у = Х(х — у), и потому расстояние между
точками z и у равно
|z - у| = Х|х - у|. (4)
Из (3)и(4)следует
\z - х| : |z - у| = р : X,
что и требовалось доказать.
Задача. Требуется найти на отрезке [х, у], соединяю-
щем точки х, у е Rri, точку г, делящую этот отрезок в
отношении р : q (р > 0, q > 0).
Решение. Возьмем числа
, q п
h ------, р = ------ (р > 0, q > 0, р + q > 0).
P + fJ P + q
Они удовлетворяют свойствам X, р>0, Х + р = 1, р/Х =
= p/q. Поэтому на основании теоремы 1 искомая точка
, . Qx+py
z = Хх + ру = -----—— . (5)
P + Q
§8. ПРЯМАЯ ЛИНИЯ
69
1'е координаты z = (zp .... zn) выражаются через коорди-
наты х = (хр х„), у = (г/г, уп) при помощи равенств
qxj + pyj ,
Z = —--------- (j = 1, и). (5')
' p+q
В частности, середина отрезка получается при р — q = 1,
т. е. X. = ц = 1/2.
Отметим, что, как доказывается в механике, точка z,
определяемая равенством (5) или (5'), есть центр тяжести
системы точек х и у, в которых сконцентрированы массы
соответственно q и р.
Отметим, что в 7?3 множество точек
z = Хх + цу, X + у. = 1,
где X и ц любого знака представляет собой прямую, про-
ходящую через точки х и у. Это видно из равенства (2').
В пространстве же Rn (п > 3) это множество называют
прямой по определению.
Пример 1. Найти координаты центра тяжести систе-
мы материальных точек хк = (х*, х*, х^ ) соответственно с
массами pk(k= 1, ..., М). Применяя формулы (5') для точек
х1, х2, найдем центр тяжести zl точек х1 и х2. Затем нахо-
дим центр тяжести z2 точек zl и х3 соответственно с мас-
сами рх + р2 и р3. Продолжая этот процесс на (М - 1)-м
шаге, получаем
1 м
°’ = 11 2’ 3)-
рг+...+рм А=1
§ 8. Прямая линия
Понятие прямой является первичным в геометрии. Из
аксиом геометрии мы знаем, что через две точки проходит
единственная прямая и через точку, лежащую на данной
70
§8. ПРЯМАЯ ЛИНИЯ
Рис. 12
прямой, можно провести единственную прямую, перпен-
дикулярную данной.
В плоскости зададим прямоугольную систему коорди-
нат х, у и прямую L, не параллельную оси у (рис. 12).
Из школьного курса мы знаем, что уравнение прямой
L имеет вид
у = kx + I, (1)
где k = tga и a - угол, образованный прямой L с положи-
тельным направлением оси х, а I — ордината точки пере-
сечения L с осью у (I = ОВ).
Когда говорят, что уравнение (1) есть уравнение пря-
мой L, этим хотят выразить, что L есть геометрическое
место точек, координаты которых (х, у) удовлетворяют
уравнению (1). Справедливость этого утверждения легко
усмотреть из рис. 12. Точка А есть произвольная (теку-
щая) точка прямой L, имеющая координаты (х, у) ВС = х,
АС - у - I и
у — I
Л = tga = —---, (Г)
х
откуда следует (1). Обратно, равенство (1) эквивалентно
равенству (!'), а последнее выражает, очевидно, тот факт,
что точка (х, у) лежит на прямой L. На рис. 12 угол а
острый. В случае тупого угла а можно провести подобные
рассуждения.
§8. ПРЯМАЯ ЛИНИЯ
71
Зададим уравнение
Ах + By + С = О,
(2)
где А, В, С — заданные числа и к тому же А и В одновре-
менно не равны нулю.
Если В 0, то уравнение (2) можно записать в следу-
ющем виде:
А С
у=~вх~в
(2')
или, полагая
в виде (1). Так как уравнения (2) и (2') эквивалентны —
любая точка (х, у), удовлетворяющая одному из них,
удовлетворяет и другому, - то равенство (2) при В 0 есть
уравнение прямой, наклоненной к положительному на-
правлению оси х под углом а, тангенс которого равен
-A/В (tga = —A/В), и пересекающей ось у в точке, имею-
щей ординату —С/В (I = —С/В). При В = 0 уравнение (2)
принимает вид
Ах + С = О (А * О!),
или
х = а (а = -С/А).
Это тоже уравнение прямой, но толь-
ко параллельной оси у. Именно, это
есть геометрическое место точек (х, у), —---
абсциссы х которых равны одному и
тому же числу а. На рис. 13 изобра- рис. 13
жена такая прямая при а > 0.
Из сказанного следует, что уравнение (2), где А, В,С —
заданные числа и при этом А и В одновременно не равны
нулю, есть уравнение некоторой прямой. При В * 0 эта
72
§8. ПРЯМАЯ ЛИНИЯ
прямая не параллельна оси у. В частности, при А = 0 она
параллельна оси х (у = -С/В). В случае же, если В = О,
то она параллельна оси у. Отметим, что ось х имеет, оче-
видно, уравнение у = 0, а ось у имеет уравнение х = 0.
Уравнение (2) называется уравнением прямой в общем
виде. Любая прямая, как угодно расположенная по отно-
шению к системе координат, может быть описана уравне-
нием вида (2) при подходящих постоянных числах А, В,
С. Подчеркнем, что числа А и В в уравнении (2) прямой
одновременно не равны нулю. Отметим, что число k в
уравнении (1) называют угловым коэффициентом прямой.
Решим несколько важных задач.
Задача 1. Написать уравнение прямой с угловым ко-
эффициентом, равным числу k, проходящей через задан-
ную точку (х0, у0).
Решение. Прямая с угловым коэффициентом k имеет
вид
у = kx + I, (3)
где I может быть любым числом. Так как точка (х0, у0)
должна находиться на данной прямой, то должно выпол-
няться равенство
Уо = kx0 + 1- (4)
Вычитая (4) из (3), получим искомое уравнение
У - Уо = ~ *о> (5)
прямой, проходящей через точку (х0, у0) с угловым коэф-
фициентом k.
Задача 2. Написать уравнение прямой, проходящей
через заданные две точки (хр ух) и (х2, у2). Предполагает-
ся, что эти точки разные.
Решение. Пусть х( Ф х2. Тогда, очевидно, искомая
прямая не параллельна оси у и потому может быть запи-
сана в виде
§8. ПРЯМАЯ ЛИНИЯ
73
У - у2 = k(x - X,), (6)
где k — некоторое число. Уравнение (6) уже выражает, что
прямая проходит через точку (хр у^). Чтобы она проходи-
ла также через точку (х2, z/2), надо чтобы выполнялось
равенство
Уг ~ У! = Мх2 - х;). (7)
Деля (6) на (7) (т. е. деля левую часть (6) на левую часть
(7), а правую часть (6) на правую часть (7)), получим
У-У1 =Х-Хх
У2 - У1 *2 - *1 ' '
Это и есть уравнение прямой, проходящей через точки
(хр yj и (х2, у2).
Замечание 1. Могло случиться, что у2 - уг = О, тогда
формально мы получили бы равенство
У-У1 _ х-Хг
О х2 - хх ’
Несмотря на бессмысленность этого равенства, так пишут
- считают удобным. Если освободиться от знаменателей,
то получим верное равенство
или
У = Ур (9)
Случай xt = х2 = с приводит к решению х = с.
Задача 3. Найти угол <о между прямыми
У = ^х + Zp У = k2x = 12.
Решение. Имеем kt = tgap k2 = tga2, где a,, a2 —
соответственно углы, образованные данными прямыми с
74
§8. ПРЯМАЯ ЛИНИЯ
Рис. 14
положительным направлением оси х. Имеем (рис. 14)
. х , „ ^а1 ~ ^«2 К ~ *2
tgw = tg(<x - а ) = ——------ = , (Ю)
1 l + #ga1iga2 1 + ^^2
и мы получили формулу угла между прямыми.
Случай 1 + ktk2 = 0 или
^•л2 = -1 (И)
выражает условие перпендикулярности прямых. Условие
параллельности прямых (tgco = 0), запишется так
*i = *2- (12)
Зададим уравнение прямой в общем виде:
Ах 4- By + С = 0. (2)
При А*0, Б*0, С 0 уравнение (2) можно записать в
форме
х у ( -С -сА
гг1 lo=^-’',=~d- <1з>
Уравнение (13) называется уравнением прямой в отрез-
ках. Эта прямая пересекает ось х (прямую у = 0) в точке
(а, 0) и ось у в точке (0, Ъ).
§8. ПРЯМАЯ ЛИНИЯ
75
Если прямая, удовлетворяющая уравнению (2), прохо-
дит через точку (х°, у°), то
Ах° + Ву° + С = 0. (14)
Вычитая (14) из (2), получим
А(х - х°) + В(у - у°) = 0. (15)
Уравнение (15) называется уравнением прямой, проходя-
щей через точку (х°, у°).
Если ввести в рассмотрение векторы N = (А, В), р =
= (х, у), р° = (х°, у°), то левую часть(15) можно рассмат-
ривать как скалярное произведение вектора N на век-
тор р — р°. Поэтому уравнение (15) в векторной форме
имеет вид
7V(p - рО) = 0. (15')
Вектор р — р° принадлежит прямой L (рис. 15). Таким
образом, из (15') видно, что вектор N — (А, В) ортогонален
Рис. 16
Рис. 15
(перпендикулярен) данной прямой, и тем самым мы выяс-
нили геометрический смысл коэффициентов Аи В.
Рассмотрим две прямые
Atx + Bry + Ct = 0 (L,), (16)
А2х + В2у+ С2 = 0 (Ь2). (17)
76
§8. ПРЯМАЯ ЛИНИЯ
Так как векторы Nt = (At, BJ и Nz = (А,, В2) перпен-
дикулярны к прямым (16) и (17) соответственно, то угол
<р между прямыми (16) и (17) равен углу между векторами
N± и N2 (рис. 16). Угол <р можно вычислить по формуле
(NltN2) = А1А2+В1В2
I Jai + Bf ^А% + Bf
(18)
Замечание 2. Если <р — угол между прямыми, то
л - ср также является углом между этими прямыми.
Число (18) может быть положительным и отрицательным.
Одно из них соответствует углу <р, а другое — углу л — (р.
Из (18) получаем условие перпендикулярности Lt и Ь2
л
(<р = -z-, COS <р = 0):
АА + BtB2 = 0. (19)
Если прямые Lr и Ь2 параллельны, то векторы 7V, и N2
коллинеарны и Nx — \NZ, где X — некоторое действитель-
ное число. Отсюда условие па-
X раллельности прямых выра-
жается равенством
/Ч Т/Т2' (2°)
/А 'Х
/ ч Пусть дана произвольная
— fc-V-T --------Х^ прямая L в прямоугольной
системе координат (рис. 17), не
Рис. 17 проходящая через начало ко-
ординат, и пусть а — вектор,
выходящий из начала координат и перпендикулярный к
прямой Вс концом, лежащим на прямой. Вектор а пол-
ностью определяет прямую В (через конец вектора а про-
ходит единственная прямая, перпендикулярная к нему).
§8. ПРЯМАЯ ЛИНИЯ
77
Пусть р есть длина а (р = |а|), V = (cos a, cos Р) есть еди-
ничный вектор, направленный в ту же сторону, что и а.
Здесь а, Р — углы между а (или v) и соответственно по-
ложительным направлением оси х и оси у; cos 2сс + cos 2Р
= 1 (cos р = sin а). Обозначим через р = (х, у) радиус-
вектор произвольной (текущей) точки прямой L. Проек-
ция вектора р на единичный вектор V, очевидно, равна р,
т. е. скалярное произведение радиус-вектора произволь-
ной точки р прямой L на вектор V равно р:
(р, V) = |v|npvp = р- (21)
Итак, мы получили векторное уравнение L, потому что, и
обратно, если радиус-вектор точки удовлетворяет уравне-
нию (21), то точка лежит на L (точка, не лежащая на L,
имеет проекцию на V, отличную от р).
Если прямая L проходит через начало координат, то ее
уравнение можно записать тоже в виде (21), где v — еди-
ничный перпендикулярный к ней вектор и р = 0.
В координатной форме уравнение (21) имеет вид
xcos а + усов р = р (р > 0) (21')
или
xcos а + z/sin а = р (р > 0). (21")
Уравнение (21') (или (21")) называется уравнением прямой
в нормальном виде.
Если прямая L задана общим уравнением
Ах + By + С = 0,
то его можно привести к нормальному виду, умножив на
число
М = ±1 / -Ja2+B2 , (22)
где надо выбрать знак, противоположный знаку С (р =
= -МС > 0). Число М называется нормирующим множите-
лем. Так как
78
§8. ПРЯМАЯ ЛИНИЯ
(МА)2 + (МВ)2 = 1,
то существует и притом единственный угол а, удовлетво-
ряющий неравенствам 0 < а < 2л, для которого
МА = cos а, МВ - sin а. (23)
В результате мы получаем уравнение (21), где р = -МС >
> 0. Отметим еще раз, что число р равно расстоянию от
начала координат до прямой.
Задача 4. Найти расстояние d от точки до прямой L,
определяемой уравнением
Ах + By + С = 0. (24)
Решение. Пусть
(р, V) - р = 0 (25)
есть нормальное уравнение прямой (24). Таким образом,
—>
если С * 0, то р (р > 0) есть длина вектора ОР, опущен-
ного из начала координат О на L (перпендикулярно к L),
a v - единичный вектор, направленный как ОР(р = |ОР|,
—>
v = ОР /р (рис. 18)). Пусть р = (х, у) есть радиус-вектор
произвольной точки L. Тогда, очевидно, чтобы найти рас-
стояние от точки Q0, имеющей радиус-вектор р° = (х°, у0)
до L, надо спроектировать вектор р — р° на направление
вектора v и взять абсолютную величину проекции:
d = |npv(p - р°)| = |(р - р°, v)| =
= 1(Р. V) - (р°, v)| = |р - (р°, v)| = |(р°, v) - р|.
Мы получили формулу
d = |(р°, V) - р\. (26)
Таким образом, чтобы получить расстояние d, надо
привести уравнение (24) к нормальному виду, перенести р
§8. ПРЯМАЯ ЛИНИЯ
79
в левую часть, подставить в левую часть вместо х, у соот-
ветствующие координаты х°, у° точки Q0 и взять абсолют-
ную величину полученного выражения.
На языке коэффициентов А, В, С равенство (26) выгля-
дит так:
d = [Ах° + Ву° + С\/^А2+В2 . (26')
При С = О формула (26), а следовательно и (26'), оста-
ется тоже верной. В этом случае р = 0, v — один из двух
единичных векторов, перпендикулярных к L (рис. 19).
Теперь
d = |npv(p - р°)| = |(р - р°, v)| = |(р, V) - (р°, v)| = |(р°, v)|
ИЛИ
d = |Ах° + Ву°\/^А2 +В2 ,
т. е. формула (26') верна при С = 0.
Замечание 3. Из рис. 18 видно, что: а) если начало О и
точка Q0 находятся по одну сторону от L, то угол между v
и р - р° острый и d = р - (р°, v); б) если же О и Q0 находятся
по разные стороны от L, то угол между р — р° и V тупой и
d = (р°, V) - р.
80
§9. УРАВНЕНИЕ ПЛОСКОСТИ
Задача 5. Найти расстояние от точки (1, 1) до прямой
2х + V5 У ~
'5 = 0.
§ 9. Уравнение плоскости
9.1. Уравнение плоскости в нормальном виде.
В пространстве R3, где введена прямоугольная система
координат х, у, z, зададим вектор а, выпущенный из
начала О. Через конец а проведем плоскость П перпенди-
кулярно к а (рис. 20). Произвольную (текущую) точку
плоскости П обозначим через Q = (х, у, г). Буква р обозна-
чает радиус-вектор точки Q.
Пусть р = |а| - длина вектора а и
v = (cos a, cos Р, cos у)
- единичный вектор, направленный в ту же сторону, что
и а. Здесь а, Р, у - углы,
z образуемые вектором v со-
j ответственно с положитель-
/X ными направлениями осей
/ X. х, у, z. Проекция любой
/ ар X. точки Q е П на вектор v
/ /р #Х. есть, очевидно, величина по-
/ стоянная, равная р:
(р, v) = р (р > 0). (1)
У Уравнение (1) имеет смысл
Рис. 20 и ПрИ р = Q £ этом случае
плоскость П проходит через
начало координат О (а = 0) и v — единичный вектор, вы-
пущенный из О перпендикулярно к П, неважно в каком
направлении, т. е. вектор v определяется с точностью до
знака. Уравнение (1) есть уравнение плоскости П в век
торной форме. В координатах оно записывается так:
§9. УРАВНЕНИЕ ПЛОСКОСТИ
81
xcos а + ycos р + zcos у = р (р > О) (Г)
и называется уравнением плоскости в нормальном виде.
9.2. Уравнение плоскости в общем виде. Если
уравнение (1') умножить на какое-либо не равное нулю
число, То получим эквивалентное ему уравнение в виде
Ах + By + Cz + D = 0, (2)
определяющее ту же плоскость. Здесь числа А, В, С не
равны нулю одновременно. Уравнение (2), где числа А, В,
С не все равны нулю, называется уравнением плоскости
в общем виде.
Произвольное уравнение вида (2), где числа А, В, С
одновременно не равны нулю, можно привести к нормаль-
ному виду, умножив его на число
м = ±1/ 7а2 +В2 + С2 ,
где знак берется противоположным знаку числа D. Тогда
число р = —MD будет неотрицательным, а уравнение (2)
преобразуется в следующее, ему эквивалентное,
МАх + МВу + MCz = р (р > 0). (3)
Здесь
(МА)2 + (МВ)2 + (МС)2 = 1.
Это показывает, что вектор
v = (МА, МВ, МС)
единичный (|v| = 1). Его проекции на оси координат рав-
ны
МА = cos а, МВ — cos 0, МС = cos у,
где а, 0, у - углы, образованные вектором v соответствен-
но с положительными направлениями осей х, у, г. В силу
введенных обозначений уравнение (3) имеет вид
82
§9. УРАВНЕНИЕ ПЛОСКОСТИ
xcos СХ + ycos P + zcos Y = p (p > 0), (3')
т. e. мы получили уравнение плоскости (2) в нормальном
виде.
Если задано уравнение плоскости в общем виде (2) и
надо узнать ее расположение относительно системы коор-
динат, то достаточно уравнение (2) привести к нормально-
му виду, умножив его на нормирующий множитель М.
Из самого же уравнения (2) без каких-либо вычисле-
ний можно заключить только следующие два факта:
1) если D = 0, то плоскость проходит через начало коор-
динат, а если D 0, то она не проходит через начало
координат; 2) вектор N = (А, В, С) перпендикулярен плос-
кости, ведь он коллинеарен единичному вектору v =
= (МА, МВ, МС) = MN, перпендикулярному к данной
плоскости.
Уравнение
Ах + By + D = 0 (4)
есть частный случай уравнения (2). В плоскости (х, у) урав-
нение (4) определяет прямую, а в пространстве (х, у, z) оно
есть уравнение плоскости П, перпендикулярной к коор-
динатной плоскости (х, у) и проходящей через эту пря-
мую. Какова бы ни была точка (х, у, г), принадлежащая
к плоскости П, ее координаты х, у удовлетворяют уравне-
нию (4) независимо от того, какую она имеет третью ко-
ординату г. Уравнение
Ах + D = 0 (А * 0) (5)
есть частный случай уравнения (4). Его можно записать
еще в виде
х = С (С = —D/A). (5')
Уравнение (5') в пространстве (х, у, г) есть геометричес-
кое место точек (х, у, г), имеющих первую координату,
равную числу С. Координаты же у, z могут быть любы-
§9. УРАВНЕНИЕ ПЛОСКОСТИ
83
ми. Ясно, что (5') определяет плоскость, параллельную
координатной плоскости (у, z) (или перпендикулярную
оси х).
9.3. Уравнение плоскости в отрезках. Если чис-
ла А, В, С, D не равны нулю, то уравнение (2) можно
записать так:
X I) Z
“ + Т + 7= (6)
а о с
где а — —D/А, b = -D/В, с = -D/C.
Уравнение (6) называется урав-
нением плоскости в отрезках.
Эта плоскость (рис. 21) пересека-
ет ось х в точке (а, 0, 0), ось у —
в точке (0, Ъ, 0), ось z - в точке
(0, 0, с). По уравнению (6) легко
представить себе расположение плоскости относительно
Рис. 21
системы координат.
9.4. Уравнение плоскости, проходящей через
точку. Если точка (х°, j/°, z°) лежит на плоскости (2), то
ее координаты удовлетворяют уравнению (2):
Ах* + + Cz° + D = 0. (7)
Вычитая (7) из (2), получим
А(х - х°) + В(у - у°) + C(z - z°) = 0. (8)
Уравнение (8) называется уравнением плоскости, прохо-
дящей через точку (х°, z/°, z°). В векторной форме уравне-
ние (8) имеет вид
ЛГ(р - р°) = 0, (8')
где N, р, р° — векторы, определяемые равенствами
N = (А, В, С), р = (х, у, г), р° = (х°, у°, z°).
84
§9. УРАВНЕНИЕ ПЛОСКОСТИ
Здесь N - вектор, перпендикулярный к плоскости (2),
р — радиус-вектор текущей ее точки, р° — радиус-вектор
заданной ее точки. Так как вектор р — р°, приложенный
к точке (х°, у0, г°), принадлежит плоскости (2), то равен-
ство (8) говорит о том, что вектор N ортогонален плоско-
сти (2), что мы установили ранее из других соображений.
9.5. У равнение плоскости, проходящей через
три точки. Даны три точки
(•’'1» J/p zi)» (Х2> У2' 2г)> (з» Уз' 2з)’
не лежащие на одной прямой. Требуется написать уравне-
ние плоскости, проходящей через эти три точки. Из гео-
метрии известно, что такая плоскость существует и един-
ственная. Так как она проходит через точку (х|? yt, zf), то
ее уравнение имеет вид
А(х - х,) + В(у - у,) + C(z - гу) = 0, (9)
где А, В, С одновременно не равны нулю. Так как она
проходит еще через точки (х2, у2, z2), (х3, у3, z3), то долж-
ны выполняться условия
А(х2 - Xi) + В(у2 - уг) + C(z2 - Zi) = 0,1
А(х3 - Xi) + В(у3 - У1) + C(z3 - z^ = 0.J
Составим однородную линейную систему уравнений отно-
сительно неизвестных и, v, и>:
(х-х1)н +(у-уг)у + (z-z1)u> = 0,
(х2 - Xi)u + (у2 - yr)v + (z2 - z^iv = 0, •
(x3 - xju + G/3 - yjv + (z3 - Zi)W = 0,
Здесь (x, у, z) есть произвольная точка, удовлетворяющая
уравнению плоскости (9). В силу (9) и (10) системе (11)
удовлетворяет нетривиальный вектор N = (А, В, С), поэто-
му определитель этой системы равен нулю
§9. УРАВНЕНИЕ ПЛОСКОСТИ
85
X-Xi у -У1 Z-Zi
х2 ~ Х1 У2 ~ У1 z2 ~ Z1 ~ 0.
(12)
хз - Х1 Уз - У1 гз - zi
Мы получили уравнение вида (9), т. е. уравнение плоско-
сти, в чем легко убедиться, разложив полученный опреде-
литель по элементам первой строки. При этом эта плоскость
проходит через точки (х,, yir zt), (х2, у2, z2), (х3, у3, z3), что
вытекает из свойств определителя. Наша задача решена.
Уравнение (12) можно еще написать и в следующем
виде:
X У Z 1
Х1 У1 Z1 1 = 0.
Х2 У2 Z2 1
х3 Уз Z3 1
(13)
Если из первой, третьей и четвертой строк определителя в
(13) вычесть вторую строку, то он не изменится. Разлагая
результат по элементам четвертого столбца, получим урав-
нение (12).
9.6. Угол между двумя плоскостями. Зададим
две плоскости
Ах + By + Cz + D = 0, (14)
А'х + S' у + C'z + D' = 0.
Мы знаем, что векторы N = (А, В, С) и N' = (А', В', С')
перпендикулярны соответственно данным плоскостям, по-
этому угол ф между N и N' равен углу (двугранному) меж-
ду данными плоскостями. Но скалярное произведение
NN' = |AT||N'|cos ф,
86
§9 УРАВНЕНИЕ ПЛОСКОСТИ
поэтому
COS ф =
NN' _ _________АА" + ВВ' + СС'______
7л2 + В2 + С2 д/м')2 + (В')2 + (С')2
Достаточно считать, что 0 < <р < л.
Отметим, что две пересекающиеся плоскости на самом
деле образуют два двугранных угла <Pj и <р2. Их сумма
равна л (tpt + <р2 = л), а их косинусы равны по абсолютной
величине, но отличаются знаками (cos <pt = -cos ф2). Если
заменить в первом уравнении (14) числа А, В, С соответ-
ственно на числа —А, —В, —С, то полученное уравнение
будет определять ту же плоскость, но угол <р в (15) заме-
нится на л — <р.
Две плоскости (14) перпендикулярны тогда и только
тогда, когда cos ip = 0, т. е.
NN' = АА' + ВВ' + СС' = 0 (16)
Две плоскости (14) параллельны тогда и только тог-
да, когда (перпендикулярные к ним) векторы N и N'
коллинеарны, т. е. выполняются условия пропорцио-
нальности
А В
А" “ В'
С
С'
(17)
Если дополнительно к этому выполняются расширен-
ные условия пропорциональности
А _ В _ С _ D
А'~ В’~ С'~ D”
(18)
то это говорит о том, что плоскости (14) совпадают, т. е.
оба уравнения (14) определяют одну и ту же плоскость.
Хотя на нуль делить нельзя, но удобно писать симво-
лические пропорции (17) или (18) с нулями в знаменате-
лях. Но тогда, если, например, В' = 0, то надо считать,
что и В = 0. Или если D' — 0, то D = 0.
§9. УРАВНЕНИЕ ПЛОСКОСТИ 87
Пример 1. Уравнения
2х + 4 z/ + 1 = О,
х + 2у + 5 = О
определяют пару параллельных плоскостей, а уравнения
2х + 4г/ + 2 = О,
х + 2у 4- 1 = О
— пару совпадающих плоскостей.
9.7. Расстояние от точки до плоскости. Требу-
ется найти расстояние от точки (х0, у0, z0) = Q° до плос-
кости П, определяемой уравнением
Ах + By + Cz + D = 0.
Для этого приведем уравнение П к нормальному виду:
(р. v) = р (р > 0).
Здесь р = (х, у, г) - радиус-вектор текущей точки Q плос-
кости П, р — длина перпендикуляра а к П, выпущенного
из нулевой точки, и v — единичный вектор, направленный
как а. Из рис. 22 видно, что разность р — р° радиус-
вектора произвольной точки Q = (х, у, г) плоскости П и
X
Рис. 22
88§а. УРАВНЕНИЕ плоскости
радиус-вектора точки Q0 = (х0, у0, z0) есть такой вектор,
что абсолютная величина его проекции на v равна иско-
мому расстоянию d от Q0 = (х0, у0, г0) до П:
d = 1(р - р°, v)|,
НО
(р - Р°, V) = (Р, V) - (р°, V) = Р - (ро, V).
Следовательно,
d = |(р°, V) - р|.
Мы видим, что, для того чтобы вычислить расстояние d
от точки Q0 до плоскости П, надо записать уравнение
плоскости П в нормальном виде, перенести р в левую часть
и подставить в последнюю (х0, у0, г0) вместо (х, у, г).
Абсолютная величина полученного выражения и есть
искомое число d.
На языке параметров плоскости, очевидно,
d = lAx0 + Ву0 + Cz0 + Л|/ А2 + В2 +С2 .
Легко видеть, что если точка Q0 и начало координат нахо-
дятся по разные стороны от плоскости П (как на рис. 22), то
вектор р — р° образует с V тупой угол, и поэтому
d = -(р - р°, v) = (р°, V) - р > О.
Если же точка Q0 и начало координат находятся по одну сто-
рону от П, то указанный угол острый, и тогда
d = (р - р°, V) = р - (р°, V) > О.
Следовательно, в первом случае (р°, V) > р, а во втором
(р°, V) < р.
Пример 2. Расстояние d от точки (1, 1, 1) до плоскости П
х + 2у + z = 3
равно
x + 2y + z-3 1
Vi + 4 +1 дс=1>гл=1 Ve
§10. ПРЯМАЯ В ПРОСТРАНСТВЕ
89
В данном случае точка (1, 1, 1) и начало координат нахо-
дятся по разные стороны от плоскости П, так как М > 0 и
[х + 2у+ z- 3V, “ 1 > 0.
ЗАДАЧИ
1. Привести уравнения плоскостей
х - у + z — 2, 2х - у + V20 z = 10
к нормальному виду.
2. Найти угол между плоскостями
х+у+з=1и у = 0;
Х-1/+2=2и X + у + Z = 3.
3. Написать уравнение плоскости, проходящей через точки
(0, 0, 1), (1, 0, 1), (1, 1, 0).
4. Написать уравнение шаровой поверхности с центром в
начале координат, касающейся плоскости 2х - бу + 7z = 2.
§ 10. Прямая в пространстве
Рис. 23
10.1. Уравнение прямой в каноническом виде.
Рассмотрим в пространстве произвольную прямую L. От-
метим на ней точку (х0, у0, z0),
определяющую радиус, вектор
р° = (х0, у0, z0) и лежащий на
ней вектор а = (av аг, а3) Ф 0,
приложенный к точке Q0 = (х0,
уа, z0) (рис. 23). Произвольную
текущую точку прямой L обозна-
чим через Q = (х, у, г) и ее ради-
ус-вектор через р = (х, у, z). Век-
тор р — р° можно записать в виде
р — р° = ta, где t — некоторое
число (скаляр). Если действительная переменная t пробе-
гает интервал (—<», °°), то конец вектора р = р° + ta про-
бегает всю прямую L. Поэтому говорят, что равенство
р — р° = ta
(—00 < t < 00)
(1)
90
§10. ПРЯМАЯ В ПРОСТРАНСТВЕ
есть уравнение прямой, проходящей через точку Q0 = (х0,
у0, 20) и направленной в сторону вектора а.
На языке координат уравнение (1) распадается на три
уравнения:
х- х0 - talt
У~Уо = ta2,
z-z0= ta3.
d')
Исключая из них параметр t, получим уравнения пря-
мой (систему из двух уравнений)
~ хо _ У ~Уо _ z - zo
а1 а2 а3
(1")
где числа а±, а2, а3 одновременно не равны нулю. Уравне-
ния (1") называются уравнениями прямой в каноническом
виде.
Замечание. Может случиться, что одно или два из
чисел at, а2, а3 равно нулю. Тогда все же принято писать
равенства (1") с нулем или двумя нулями в знаменателях.
Такая запись становится тогда символической, но она
удобна.
Пример 1. Уравнения
х -1 у - 2 z - 3
1 “ 0~ “ 2
(2)
определяют прямую в пространстве, проходящую через
точку (1, 2, 3) в направлении вектора (1, 0, 2).
Эти уравнения можно заменить на следующие им эк-
вивалентные:
у - 2 = 0-(х - 1), 2(х - 1) = z - 3,
т. е.
у = 2, z = 2х + 1.
(2')
§10. ПРЯМАЯ В ПРОСТРАНСТВЕ
91
Таким образом, рассматриваемая прямая есть пересечение
двух плоскостей, определяемых уравнениями (2').
Пример 2. Уравнения прямой
х-1 _ у-2 _ г-3
1 - 0 “ 0
эквивалентны следующим:
у - 2 = 0, z-3=0.
10.2. Расположение двух
плоскостей. Пусть за-
даны уравнения двух плоскостей
Ах + By + Cz + D = 0,
(3)
А'х + В'у + C'z + D' = 0.
(4)
Если коэффициенты первого из них соответственно пропор-
циональны коэффициентам второго (А : В : С = А': В' : С7),
то плоскости (3) и (4) параллельны или даже совпадают
(при условии А : В : С : D = А' : В' : С' : D') (см. § 9, (17)
и (18)). В противном случае плоскости (3) и (4) пересека-
ются по прямой. В этом случае один из определителей
А В
А' В’
А С
А' С‘
В С
В' С
не равен нулю.
Для
определенности будем считать, что
первый
А В
А'
* 0.
(5)
В
Тогда уравнения (3), (4) можно решить относительно х и
у, и мы получим
х = аг + ц,
у = 02 + V,
(6)
92§10. ПРЯМАЯ В ПРОСТРАНСТВЕ
где а, 0, р., v - некоторые числа. Уравнения (6) эквивален-
тны следующим:
= = т
а р 1
Мы видим, что при условии (5) уравнения двух плос-
костей (3), (4) определяют прямую (7), т. е. геометрическое
место точек, координаты которых удовлетворяют уравне-
ниям (3), (4). Она проходит через точку (ц, V, 0) и имеет
направление вектора (а, р, 1). Числа а, р или одно из них
могут быть равными нулю, тогда уравнения (7) будут иметь
символический характер.
Пример 3. Прямая, определяемая уравнениями х = 0,
у = 0, есть, очевидно, координатная ось г. К этому резуль-
тату можно прийти и формально. Имеем
X = 0*2, у = 0’2,
откуда
X _ у _ 2
0 ’ 0 " 1 ’
т. е. мы получили уравнения прямой, проходящей через
начало координат (0, 0, 0) в направлении вектора (0, 0, 1).
Ясно, что эта прямая есть ось 2.
Пример 4. Найти угол между прямыми
х - *1 У - 1/1 2-2]
= (8>
Векторы Fj = (ар blt q), r2 = (а2, Ъ2, с2) лежат на наших
прямых и, как мы условились, они приложены соответ-
ственно к точкам (хр j/p zj, (х2, у2, z2). Поэтому угол ip
§11. ОРИЕНТАЦИЯ ПРЯМОУГОЛЬНЫХ СИСТЕМ КООРДИНАТ 93
между этими векторами и будет углом между прямыми (8)
и (9):
°1°2 ^1^2 С1С2
COS4,= IrJIrJ
ЗАДАЧИ
1. Написать уравнение прямой, проходящей через точку
(2, -1, О) перпендикулярно к плоскости 2х + z - 4.у = 7.
2. Написать уравнение плоскости, проходящей через точку
(1, -1, 2) и перпендикулярной к прямой, определяемой урав-
нениями 2х + Зу = 1, Зх - z = 1.
§ 11. Ориентация прямоугольных систем
координат
11.1. Двумерная система координат. На рис. 24
и 25 изображены системы координат х, у. Они различны
- про них говорят, что они ориентированы противопо-
ложно. В случае рис. 24 поворотом оси х вокруг точки О
на угол л/2 можно совместить направление осей х и у,
лишь если этот поворот совершить против часовой стрел-
ки. В случае же рис. 25 этой цели можно достичь, лишь
поворачивая ось х по часовой стрелке. Невозможно сис-
тему координат, изображенную на рис. 24, передвигая ее
в рассматриваемой плоскости (!) как твердое тело, совме-
94 §11. ОРИЕНТАЦИЯ ПРЯМОУГОЛЬНЫХ СИСТЕМ КООРДИНАТ
стить с системой, изображенной на рис. 25, так, чтобы
направления соответствующих осей совпали.
На рис. 24, так же как на рис. 25, изображена пара
неколлинеарных, выходящих из некоторой точки А век-
торов а и Ь. Передвигая эту пару как твердое тело в плос-
кости, достигнем того, чтобы точка А совпала с началом
координат О. Поставим себе задачу путем вращения каж-
дого из векторов а и Ъ вокруг точки О достигнуть того,
чтобы вектор а принял направление оси х, а вектор Ь
оказался лежащим на оси у. При этом мы требуем, чтобы
во время этого процесса векторы а и Ь все время находи-
лись в рассматриваемой плоскости и чтобы угол между
ними не был равен Ойл. Очевидно, всегда можно достиг-
нуть этой цели. Вначале мы вращаем систему векторов а
и Ь как твердое тело около точки О до совпадения вектора
а с положительным направлением оси х. Так как векто-
ры а и Ь не коллинеарны, то вектор Ъ окажется в верхней
или нижней полуплоскости. Затем вектор Ь поворачиваем
на необходимый угол, чтобы он оказался на оси у, при
этом не разрешается, чтобы вектор Ь попадал на ось х.
Поэтому может случиться, что направление вектора Ь
совпадает с направлением оси у (это возможно, когда
вектор Ь был в верхней полуплоскости) или же вектор Ь
окажется направленным в сторону отрицательного направ-
Рис. 26
§11. ОРИЕНТАЦИЯ ПРЯМОУГОЛЬНЫХ СИСТЕМ КООРДИНАТ 95
ления оси у (см. рис. 26, где показана динамика процес-
са). В первом случае мы будем говорить, что пара векто-
ров (а, Ъ) ориентирована как система координат х, у, а
во втором, что пара (а, Ь) ориентирована противоположно
ориентации х, у (как это случилось на рис. 26).
11.2. Трехмерная система координат. Прямо-
угольные системы координат х, у, z в пространстве, изоб-
раженные на рис. 27 и 28, тоже различны. Рассматривая
систему координат рис. 27 как твердое тело, можно после
соответствующего его передвижения совместить оси хи у
обеих систем координат. Но положительное направление
оси z первой системы не совпадает с положительным на-
правлением оси z второй системы. Мы говорим, что систе-
мы рис. 27 и 28 ориентированы противоположно. Систе-
ма рис. 27 называется левой системой координат, а сис-
тема рис. 28 - правой системой координат. Если винт с
правой (левой) нарезкой ввинчивать по направлению оси
г, поворачивая его по стрелке рис. 28 (рис. 27), то он будет
двигаться поступательно в этом направлении. Можно
также распознавать систему координат по следующему
правилу. Если смотреть из какой-либо точки положитель-
ной полуоси Oz на положительную полуось Оу, то поло-
жительная полуось Ох может быть направлена влево или
96
§12. ВЕКТОРНОЕ ПРОИЗВЕДЕНИЕ
вправо. В первом случае система координат называется
левой (рис. 27), а во втором - правой (рис. 28).
Векторы а, Ь, с называются компланарными, если они
лежат в одной плоскости или же находятся в параллель-
ных плоскостях.
Возьмем систему некомпланарных векторов а, Ъ, с,
приложенных к некоторой точке А. Будем вращать в
плоскости векторов а и Ъ вектор Ь вокруг точки А до тех
пор, пока Ъ не окажется перпендикулярным а. Во время
движения будем следить, чтобы угол между а и Ь все
время не равнялся нулю и л. После этого будем вращать
вектор с около А с целью придать ему направление, пер-
пендикулярное векторам а, Ь. При этом будем следить за
тем, чтобы вектор с ни на один момент не совпал с плос-
костью векторов а и Ь. В результате векторы а, Ь, с ока-
жутся перпендикулярными. Теперь перенесем эту тройку
как твердое тело в точку О и будем ее вращать вокруг
точки О с целью, чтобы векторы а и & получили соответ-
ственно направления осей х, у. Может оказаться два слу-
чая: 1) вектор с будет направлен как положительная ось г,
2) он будет направлен в противоположную сторону. В пер-
вом случае будем говорить, что система векторов а, Ь, с
ориентирована как система координат х, у, г, а во вто-
ром — она ориентирована противоположным образом
(см. соответственно рис. 27 и 28).
§ 12. Векторное произведение
12.1. Два определения векторного произведе-
ния. Зададим в некоторой прямоугольной системе коор-
динат трехмерного действительного пространства векторы
« = (ах> ау’ ах)’ Ь = (fcx« fcx)
и назовем векторным произведением а и Ь вектор
§12. ВЕКТОРНОЕ ПРОИЗВЕДЕНИЕ
97
В качестве последнего члена этой цепи написан «обоб-
щенный определитель», первая строка которого состоит
из векторов i, j, k (ортов системы координат). Во втором
члене показано, как этот обобщенный определитель пони-
мать (определитель третьего порядка мы разлагаем по
элементам первой строки так, как если бы i, j, k были
числами).
Очевидно, что [а х (-6)] = -[а X 6].
Векторное произведение векторов а и 6 можно также
определить следующим образом:
1) если а и 6 коллинеарны, то их векторное произве-
дение равно нулевому вектору;
2) если а и Ь не коллинеарны, то вектор с направ-
лен перпендикулярно к а и Ъ и притом так, что систе-
ма (а, Ъ, с) ориентирована так же, как данная система
координат. Длина же вектора с равна
lc| = |а| |b|sin со (0 < со < л). (2)
где со есть угол между а и Ъ, т. е. длина с равна площа-
ди параллелограмма, построенного на векторах а и Ъ
(рис. 29).
Докажем эквивалентность сформулированных двух
определений.
Если вектор с = 0, то из (1) следует, что компоненты
векторов а и Ъ пропорциональны
а : а : а = b : b : Ь ,
х у г х у г’
4 Бугров. Т. 1
98
§12. ВЕКТОРНОЕ ПРОИЗВЕДЕНИЕ
Рис. 29
т.е.аиЬ коллинеарны, но тогда векторное произведение
и по второму определению равно нулевому вектору. Об-
ратно, если а и Ъ коллинеарны, то по второму определе-
нию а х Ь = О. Так как компоненты векторов а и Ь при
этом пропорциональны, то, согласно первому определе-
нию, с = 0.
Пусть теперь а и Ь — неколлинеарные векторы и с — их
векторное произведение согласно (1). Очевидно, что
(с, а) = (аД - агЬу)ах + (агЬх - ахЬг)ау + (aby - аЬх)аг = 0
и аналогично
(с, Ь) = 0.
Итак, вектор с перпендикулярен к а и Ь.
Докажем, что система векторов (а, Ь, с) ориентирована
так же, как система координат х, у, г. Будем непрерывно
вращать векторы а и Ь вокруг точки О, каждый раз вы-
числяя по ним вектор с, но так, чтобы все время а и Ь
были неколлинеарными. Но тогда вектор с все время будет
ненулевым (с Ф 0) и система (а, Ь, с) все время будет некомп-
ланарной. Совершим такие повороты, чтобы векторы а и
Ъ получили направления соответственно осей х и у, т. е.
чтобы они имели вид а = (|а|, 0, 0), Ъ = (0, |Ь|, 0). Этого
всегда можно достигнуть, потому что в данном случае
плоскость векторов а, Ь может вращаться в пространстве.
Но тогда вектор с, вычисленный по формуле (1), имеет
§12. ВЕКТОРНОЕ ПРОИЗВЕДЕНИЕ 99
вид с = (О, О, |а| |б|). Мы видим, что векторы (а, Ъ, с) в
последний момент нашего процесса ориентированы так
же, как оси (х, у, z). Но тогда, согласно определению
ориентации (см. § 11) и исходная система а, Ь, с ориенти-
рована так же, как система координат х, у, г.
Итак, векторное произведение с = а х Ь, определенное
по формуле (1), есть вектор, перпендикулярный к векто-
рам а и & и система векторов (а, Ь, с) ориентирована так
же, как рассматриваемая система координат х, у, г.
Нам еще надо доказать формулу (2). Пусть векторы а
и Ъ образуют с осями координат углы, соответственно
равные а, р, у и а', Р', У. Так как
ах = |a|cos a, ау — |ajcos Р, аг = |a|cos у,
bx = |b|cos a', by = |b|cos P', bz = |fe|cos У,
TO
И2 = («Д - “A)z + («А_ axfcJ2 + ~ «A>2 =
= |a|2|&|z[(cos P cos У - cos у cos P')2 +
+(cos у cos a' - cos a cos У)2 +(cos a cos P' - cos Pcos a')2]=
= |a|z|fe|z[(cosza + coszP + cos2y) x
x (cosza' + cos2P' + coszy) —
— (cos a cos a' + cos P cos P' + cos у cos У)2] =
= |a|z|b|2[.l • 1 “ cos2co] = |a|2|b|2sin 2co,
где co — угол между векторами а и b (cos со = cos a cos a' +
+ cos P cos P' + cos у cos У).
Итак, мы доказали (2).
Таким образом, мы полностью доказали, что из опре-
деления векторного произведения по формуле (1) следует
второе его определение.
Обратно, если вектор подчиняется второму определе-
нию, тогда он единственный, потому что может быть толь-
ко один вектор, перпендикулярный к а и Ь, длина кото-
рого равна площади параллелограмма, построенного на
4*
100
§12. ВЕКТОРНОЕ ПРОИЗВЕДЕНИЕ
в, Ь, и притом такой, что система (а, Ь, с) ориентирована
так же, как система х, у, г. Но тогда это есть вектор с,
определенный по формуле (1), потому что последний, как
мы убедились, обладает указанными свойствами.
Отметим еще раз, что условие а х Ь = 0 есть необходимое
и достаточное условие коллинеарности векторов а и Ь.
12.2. Геометрический смысл определителя
второго порядка. Рассмотрим теперь специально два
ненулевых плоских вектора
« = (ах, ау) , Ъ = (Ьг, Ъу) (3)
в некоторой прямоугольной системе координат х, у
(рис. 30, 31). Будем считать, что рассматриваемая плос-
кость находится в пространстве и добавим к осям х, у
перпендикулярную к ним ось г. Векторы а, Ь будут теперь
иметь координаты
а = (ах, ау, 0), Ъ = (Ьх, Ьу, 0).
Векторное произведение их равно
с — а х Ъ =
ах
Ьх
ау
Ьу
k,
(4)
§12. ВЕКТОРНОЕ ПРОИЗВЕДЕНИЕ
101
где k — орт оси z. По определению векторного произведе-
ния система (а, Ь, с) ориентирована, как система коорди-
нат х, у, z. Поэтому, очевидно, если определитель
ах
ъх
ау
Ъу
> 0,
то система векторов (а, Ь) должна быть ориентирована,
как оси координат (х, у). Если же определитель
ах ау
Ьх ъу
< о,
то система (а, Ь) ориентирована противоположно ориента-
ции х, у. На рис. 30 изображена первая ситуация распо-
ложения векторов (а, Ь), а на рис. 31 - вторая. Мы знаем
также, что площадь параллелограмма, построенного на
векторах а и Ь, равна (см. (4))
s = И =
“х %
ьх ъу
т. е. абсолютной величине определителя
ах ау
ьх ъу
(5)
Итак, мы доказали, что: 1) абсолютная величина опре-
делителя (5) равна площади параллелограмма, построен-
ного на векторах а = (ях, а ) и Ъ = (бх, &у); 2) знак опреде-
лителя (5) зависит от расположения этих векторов
относительно прямоугольной системы координат х, у.
Знаку + соответствует система (а, Ь), ориентированная,
как х, у, а знаку - соответствует система (я, Ь), ориенти-
рованная противоположным образом.
102§12. ВЕКТОРНОЕ ПРОИЗВЕДЕНИЕ
12.3. Свойства векторного произведения. Спра-
ведливы свойства
а х Ь = —[Ь х а], (6)
а х (аЬ) = а[а х Ь], (7)
а х (Ь + с) = [а х Ь] + [а х с], (8)
где а, Ь, с - произвольные векторы, а — скаляр.
Если векторные произведения, входящие в равенства
(6), (7), (8), выразить по формуле (1) через компоненты
векторов
° = («я» ау’ aJ> Ь = (bx, bv, bz), с = (cz, су, с ).
то легко получить эти равенства.
Формулы (6) и (7) легко следуют также из геометричес-
ких соображений. Пусть а и Ъ - неколлинеарные векто-
ры. Если в векторном произведении заменить местами а
и Ь, то площадь параллелограмма, построенного на а и Ъ,
и перпендикуляр к а и Ь не изменятся. Изменится лишь
направление с = а х Ь на противоположное, что влечет
изменение ориентации (а, Ь, а х Ь).
Умножение на положительное число а вектора Ь уве-
личивает лишь в а раз площадь параллелограмма, пост-
роенного на а и Ь, а направление векторного произведе-
ния останется прежним. Если же а < О, то
а х (аЬ) = а х (-|а]Ь) = |а|[а х (-Ь)] =
= -|а|[а х Ь] = а[а х Ь].
Заметим еще, что из (6) и (7) следует также, что
(аа) х Ь = -[Ь х (аа)] = -а[Ь х а] = а[а х Ь].
Пример 1. Определить угол А треугольника АВС с
вершинами А = (1, 2, 3), В = (2, 2, 2), С = (1, 2, 4).
Обозначим искомый угол через со. Таким образом, со
—> ----»
это угол между векторами АВ и АС. Из второго опреде-
ления векторного произведения имеем
§12. ВЕКТОРНОЕ ПРОИЗВЕДЕНИЕ
103
| АВ х AC I
sin со = —----- ,
|АВ||АС|
где АВ = (1, 0, -1), АС = (О, 0, 1), | АВ |=>/2 , | АС 1=1,
i j k
—> ->
АВ у. АС = 10-1 = -J-
0 0 1
Отсюда
1 л Зя
sin со = ~г=-, со = —, со = ——.
V2 4 4
Так как ВС = (-1, 0, 2) и |ВС I2 = 5 > |АС I2 + |АВ |2 =
= 1 + 2 = 3, то необходимо взять со = Зл/4.
Замечание. Если в треугольнике АВС угол А прямой,
то | ВС |2 = ВС2 = АС2 + АВ2; если А - тупой угол, то ВС2 >
> АС2 + АВ2; если А - острый угол, то ВС2 < АС2 + АВ2.
Пример 2 (из механики). Пусть заданы две точки А и
В. К точке В приложена сила,
определенная вектором F.
Пусть а = АВ . Моментом
силы F относительно точки
А называется векторное про-
изведение вектора а на век-
тор F:
Ъ = а х F
(см. рис. 32, AD = ВС ).
104
§13. СМЕШАННОЕ ПРОИЗВЕДЕНИЕ
Вектор Ь (момент силы F) перпендикулярен к векторам
а и F и имеет длину, равную площади параллелограмма,
построенного на векторах а и F. Направление же вектора
Ъ зависит от той прямоугольной системы координат, кото-
рая задана в этом вопросе.
На рис. 32 взята левая система координат. Направле-
ние Ь взято так, чтобы векторы a, F, Ъ тоже образовали
левую систему.
§ 13. Смешанное (векторно-скалярное)
произведение
Векторно скалярным (смешанным) произведением век-
торов а, Ь, с (в трехмерном действительном пространстве)
называется скаляр, равный скалярному произведению
вектора а X Ъ на вектор с:
(а х Ь)с = (аЬг - aby)cz + (abz - azbt)cy +
+ (azby - abz)cz =
ax
bx
cx
ay “z
by b2
Cy Cz
(1)
В силу определения скалярного произведения
(а х Ь)с = |а х Ь|прахЬс = (|а| |fe|sin со)прахЬс.
Поэтому можно еще, очевидно, сказать, что смешанное
произведение (а х Ъ)с равно объему параллелепипеда,
построенного на векторах а, Ъ, с со знаком + или — в
зависимости от того, будет ли система векторов а, Ь, с
ориентирована как система координат х, у, z или проти-
воположным образом. Отметим, что Inp^cJ равна высоте
параллелепипеда.
Имеют место равенства
(а х Ь)с = (с х а)Ъ = (Ь х с)а, (2)
которые легко следуют из свойств определителя (1).
§14. ЛИНЕЙНО НЕЗАВИСИМАЯ СИСТЕМА ВЕКТОРОВ 105
Если векторы а, Ь, с лежат в одной плоскости, то
(а х Ъ)с = 0,
так как а х Ъ перпендикулярен вектору с. Обратно, если
(а х Ь)с = 0, то вектор с перпендикулярен вектору а х Ъ
и, следовательно, лежит в плоскости векторов а и Ь или
в плоскости, параллельной этой плоскости.
Таким образом, условие
(а х Ъ)с = О
есть необходимое и достаточное условие компланарнос-
ти трех векторов а, Ъ, с.
Пример 1. Найти условие принадлежности четырех
точек к одной плоскости.
Пусть даны четыре точки Aj = (xjt yf, (j = 1, 2, 3, 4).
Если эти точки лежат в одной плоскости, то векторы
AtA2 , AtA3 , А4Л4 также лежат в этой плоскости, и,
следовательно, их смешанное произведение равно нулю:
Ai-Аг х -AjA3
AjA4
х2 — х1 у 2 Ух Z2 Zj
хз ~ Х1 Уз~ У1 2з ~ zi
*4“*1 У4-У1 Z4~Z1
О.
Это и есть условие принадлежности четырех точек од-
ной плоскости (ср. § 9, (12)).
§ 14. Линейно независимая система векторов
Зададим в (действительном или комплексном) сис-
тему из k векторов
а" = (°,i> а,2> —> а.л) (s = —> *)• t1)
По определению система (1) линейно независима, если
из векторного равенства
+ Х2а2 + ... + = 0,
(2)
106 §14, ЛИНЕЙНО НЕЗАВИСИМАЯ СИСТЕМА ВЕКТОРОВ
где X,, Х2..kk - числа (соответственно действительные
или комплексные), следует, что
Хр = Х2 = ... - хА — о.
Система векторов (1) называется линейно зависимой, если
существуют числа Хр X,.....Хр одновременно не равные
нулю, для которых выполняется равенство (2). Если для
определенности считать, что Xfc * О, то из (2) следует, что
а* = p,a‘ + ... + (3)
где
Таким образом, если система из k векторов линейно за-
висима, то один из них есть, как говорят, линейная
комбинация остальных, или, как еще говорят, зависит
от остальных.
Так как все время будет идти речь о линейной зависи-
мости, то термин линейный будем позволять себе иногда
опускать. Будем также говорить зависимые или независи-
мые векторы вместо зависимая или независимая система
векторов.
Один вектор а1 тоже образует систему — линейно неза-
висимую, если а1 * 0, и зависимую, если а1 = 0.
Если система векторов а1, ..., а* линейно независима,
то любая часть этой системы а', .... a" (s < k) тем более
линейно независима. Иначе нашлась бы нетривиальная
система чисел Хр ..., Хр для которой выполнялось бы
Xra‘ + ... + \as = 0,
k-s раз
но тогда для системы Хр .... 0, ..., 0 , которая тоже
нетривиальна, имело бы место
Х^’ + ... + Хжа’ + 0-а”1 + ... + 0-а* = 0.
§14. ЛИНЕЙНО НЕЗАВИСИМАЯ СИСТЕМА ВЕКТОРОВ 107
Из сказанного следует, что если система векторов а1, ....
а‘ линейно зависима, то любая пополненная система
а1, . . . , o', о'+1, . . . , а*
обладает тем же свойством. В частности, система векто-
ров, содержащая в себе нулевой вектор, всегда линейно
зависима.
Составим матрицу, определяемую векторами системы (1):
Оц а12 ... а1п
А =
akl ak2 • • akn
Теорема 1. Если ранг А = k, т. е. рангАравен числу
векторов, то система (1) линейно независима.
Если же рангА < k, то система (1) линейно зависима.
Пример 1. Два вектора а1 = (а1Р а12), а2 = (а21, а22) в
действительном пространстве R2 образуют линейно неза-
висимую систему, если определитель
А =
Оц «12
а21 а22
* о,
потому что векторное уравнение
IjO1 + Х2а2 = 0
(4)
эквивалентно двум уравнениям для соответствующих ком-
понент
OjlA-j + 021^-2 ~ О’
<42^1 + а22^2 ~
(5)
Но если А ф 0, то система (5) имеет единственное триви-
альное решение
л, - х2 = 0.
(6)
108
§14. ЛИНЕЙНО НЕЗАВИСИМАЯ СИСТЕМА ВЕКТОРОВ
Если же А = 0, то уравнениям (5) удовлетворяет некото-
рая нетривиальная система (Хр Х2), т. е. при А = О система
векторов а1, а2 линейно зависима.
Очевидно, сказать, что в действительном пространстве
И2 векторы а1 и а2 коллинеарны или линейно зависимы
— это все равно. Но тогда сказать, что векторы а1 и а2 не
вольный вектор и а,
коллинеарны или линейно незави-
симы — это тоже все равно.
Пример 2. Система векторов
а1, а2, ..., а* (k > 3) в действитель-
ном пространстве R2 всегда линей-
но зависима. Геометрически это
ясно из рис. 33: если с — произ-
Ъ — неколлинеарные векторы, то
всегда можно указать такие числа X, Ц, что
с = Ха + цЬ.
Это показывает, что система а, Ь, с линейно зависима.
Если же а и Ъ — коллинеарные векторы, то они линейно
зависимы. Тем более линейно зависимы а, Ь, с.
По теореме 1, чтобы исследовать пару векторов а1, а2,
мы должны записать матрицу из их координат
А =
а11 °12
а21 а22
В данном случае А = 2.
а) Если ранг А = 1 < 2 = k, то теорема утверждает, что
векторы а1, а2 линейно зависимы.
б) Если же ранг А = 2 = Л, то векторы а1, а2 линейно
независимы.
Это совпадает с приведенными выводами, потому что в
случае а) А = О и б) А 0.
Тот факт, что три произвольных вектора а1, а2, а3 в R2
линейно зависимы, тоже предусмотрен теоремой - ведь
ранг А < 2 < 3 = k.
§14. ЛИНЕЙНО НЕЗАВИСИМАЯ СИСТЕМА ВЕКТОРОВ 109
Пример 3. В трехмерном действительном простран-
стве /?3 два вектора
= (ан, а12, а13), а2 = (а21, а22, а23)
линейно зависимы тогда и только тогда, когда они кол-
линеарны.
В самом деле, пусть о1, а2 коллинеарны. Если один из
данных векторов нулевой, то они линейно зависимы. Если
же а1 и а2 коллинеарны и не нулевые, то
а1 — Ха2,
где X — некоторое число. Последнее означает, что а1, а2
линейно зависимы.
Обратно, если а1, а2 линейно зависимы, то один из них
зависит от другого, например
а2 — Ца',
т. е. векторы коллинеарны.
Если в этом случае рассмотреть матрицу
°11 а12 °13
А =
II а21 а22 а23 II ’
то элементы строк матрицы пропорциональны, и поэтому
ранг А = 1 < 2 — k,
т. е. наше утверждение согласуется с теоремой 1.
Пример 4. Рассмотрим теперь три вектора в /?3:
Пусть
а1 = (он, а12> я13),
а2 = (а21> О22’ а23^’
а3 = (аз1’ а32’ азз)‘
а11 ®12 а13
А = а21 а22 а23
а31 а32 а33
110
§14. ЛИНЕЙНО НЕЗАВИСИМАЯ СИСТЕМА ВЕКТОРОВ
Векторному уравнению
^а1 + Х2а2 + Х3а3 = 0 (7)
эквивалентна система из трех уравнений
ОцХ1 + a2i^2 + аз Аз =
а12^1 + а22^2 + азАз =
а1.А1 + °23^2 + а33^3 = 0.
Если А 0, то система (7') имеет единственное триви-
альное решение X, = Л2 = X3 = 0. Но тогда и уравнение (7)
имеет единственное тривиальное решение и система век-
торов а1, а2, а3 линейно независима.
Если А = 0, то система (7'), следовательно, и уравнение
(7) имеют нетривиальное решение (X,, Х2, Х3). Но тогда
система векторов (а1, а2, а3) линейно зависима. Но здесь
можно различать детали:
1) Пусть ранг А — 1, где
Oil «12 °13
А = а21 а22 а23
«31 «32 а33
Тогда по крайней мере одна из строк А, пусть для опре-
деленности первая, имеет хотя бы один элемент, не рав-
ный нулю. Рассмотрим матрицу
а11 а12 а1з П
А'= _ а Оо • (8)
II “21 “22 “23 ||
Она имеет ранг 1, поэтому все порождаемые ею определи-
тели второго порядка равны нулю
°11 а12 °11 °13
°21 а22 а21 °23
«12 а13
°22 а23
= 0.
§14. ЛИНЕЙНО НЕЗАВИСИМАЯ СИСТЕМА ВЕКТОРОВ 111
Но тогда, очевидно, компоненты векторов а1 и а2 пропор-
циональны
°21 _ а22 = а23 —
°11 °12 °13
т. е.
Я21 ~ аи^~’ а22 ~ а12^’ а23 ~ а13^
ИЛИ
а2 = 1а1.
Аналогично, учитывая, что в матрице
а11 °12 а13
Д" =
II а31 а32 а33 II
тоже все определители второго порядка равны нулю, по-
лучим, что
а3 = ца1,
где ц — некоторое число. Таким образом, в этом случае
векторы а1, а2, а3 коллинеарны.
2) Пусть теперь ранг А = 2. Тогда одна из матриц,
состоящих из двух строк матрицы А, имеет ранг 2. Пусть
для определенности это есть матрица А' (см. (8)). На осно-
вании примера 3 векторы а1 и а2 линейно независимы.
Но система а1, а2, а3 зависима, т. е. для некоторой нетри-
виальной тройки чисел (X,, Х2, 13)
Х,а* + 12а2 + Х3а3 = 0. (9)
Здесь Х3 0, потому что иначе ^а1 + Х2а2 = 0, и в силу
независимости системы а1, а2 было бы Xt = Х2 = 0. Но
тогда равенство (9) можно разрешить относительно а3:
X. Хо
а3 = ща1 + ц2а2, щ--—, ц2 =
л3 А-з
112
§14. ЛИНЕЙНО НЕЗАВИСИМАЯ СИСТЕМА ВЕКТОРОВ
Таким образом, если А = О, а ранг А' = 2 (см. (8)), то
векторы а1 и а.2 неколлинеарны, а вектор а3 принадлежит
к плоскости этих векторов
Приведенные рассуждения не противоречат теореме 1.
В самом деле, если А / О, то ранг А - 3 = k и по теореме
1 система векторов а1, а2, а3 линейно независима. Если
же А = О, то ранг А < 3 и система векторов а1, а2, а3
линейно зависима.
Доказательство теоремы 1. Векторное равен-
ство (2) эквивалентно следующим п уравнениям для ком-
понент векторов:
^Та11 + ^2а21 + •• • + ^kakl ~ О»
^•1а12 + ^-2а22 + • • • + ^kah2 ~
М1» + ^2а2п + ••• + ^kakn ~ °’.
(2')
Пусть ранг А = k. Тогда, очевидно, k < п. Существует не
равный нулю определитель k-ro порядка, порождаемый
матрицей А. Не ограничивая общности, можно считать,
что это определитель из коэффициентов первых k уравне-
ний системы (2'):
^1аы + - •• + ^-kaki ~ 0>
^1а1п + - • - + ^kakk ~ 0>
(Ю)
••• ан
* 0.
• akk
Так как однородная система (10) имеет определитель, от-
личный от нуля, то она имеет только тривиальное решение:
§14. ЛИНЕЙНО НЕЗАВИСИМАЯ СИСТЕМА ВЕКТОРОВ
113
х1 = х2 = ... = х4 = о,
и система векторов (1) линейно независима. Утверждение
теоремы в этом случае доказано.
Пусть теперь ранг А = s < k. Перенумеруем переменные Ху
и коэффициенты ati системы (2') так, чтобы
°11 asl
* о.
• ®ss
Тогда систему первых s уравнений можно записать так:
а11^1 + •” +asl^-s ~ ~as+l,As+l ~ •••
®Is^-l + ••• + ®SS^"S ~ ^S+l.S^S+l ^ks^k'
Если положить Хз+1 = ... = \ = 1, то данную систему можно
решить относительно В результате получим нетри-
виальное решение
х,...К (и)
первых s уравнений (2')- Теперь мы можем присоединить к
этим s уравнениям любые другие k - s уравнений (2'), и по-
лученная система все равно будет иметь найденную нетриви-
альную систему в качестве решения. Чтобы объяснить это
утверждение, запишем формально систему (2') следующим
образом:
^1ам + ••• + ^kaki +^а+1 • 0 + ... + Хл 0-0,
М» + ... + У-ьакп + ^-а+1 ’ о + • - • + Х„ 0 - 0.
(2')
Матрица из коэффициентов полученных уравнений все равно
имеет ранг 8, так же как и расширенная (справа нулями!)
матрица. Первые з уравнений системы (2') удовлетворяются
найденными числами Xj.... 7.к (см. (11)) и произвольными
числами X,, .... Хп. На основании утверждения 2) § 4 (правила
114
§15. ЛИНЕЙНЫЕ ОПЕРАТОРЫ
решения систем) числа X,, удовлетворяют и остальным
уравнениям системы (2'), т. е. числа Хр ’кк (не все равные
нулю) удовлетворяют остальным уравнениям системы (2')-
Таким образом, векторы а1, а* линейно зависимы, и
теорема доказана и в этом случае.
§ 15. Линейные операторы
Зададим произвольную квадратную матрицу
°11 ••• а1л
А = ||aj =
(1)
ал1 • • •
Матрицу А можно рассматривать как оператор, приводя-
щий в соответствие каждому вектору х = (xt, хп) е Rn
вектор у = (i/p z/n) е Rn, компоненты которого вычис-
ляются по формулам
У1 = Д1Л + +а1пхп,
Уп anixi + • • - + чппхп,
(2)
или, короче,
п
У, = (i = !> •••’ п>- (2')
7=1
Говорят, что i я координата вектора у записывается с
помощью i-й строки А. Этот оператор коротко будем запи-
сывать так:
У = Ах (х, у е RJ.
(2")
Замечание 1. Если ак1 и далее Ьк1 — комплексные чис-
ла, то Rn надо считать комплексным пространством. Если
же ак1, Ъы — действительные числа, то Rn может быть и
действительным и комплексным пространством.
§15. ЛИНЕЙНЫЕ ОПЕРАТОРЫ
115
В случае одномерного пространства Rt векторы х и у
суть числа, и оператор (2") превращается в функцию
У = аиж-
Оператор (2") линейный. Это значит, что он удовлет-
воряет условию
А(ах + Р*') = сМх + $Ах'
для любых векторов х, Xх e Rn и чисел а, р. В самом деле,
j^a/y(axy+рх') = + Р^аух' (I =. 1, ..., и).
j-i i=i i=i
Если матрицы А = ||аы|| и В = ||fej| равны, т. е. имеют
равные соответствующие элементы аы = Ьы, то они опреде-
ляют тождественно равные операторы:
Ах = Вх, V х е Rn. (3)
Обратно, из равенства (3) вытекает, что
= Ъы 1 = !• •••’ ")>
т. е. равенство матриц А и В (А = В). В этом легко убедить-
ся, если положить в (3)
х = х* = (0, О, 1, О.......О),
где 1 стоит на l-тл месте (Z = 1, п).
Таким образом, различным матрицам А соответствуют
различные операторы - если две матрицы Aj и Аг отлича-
ются хотя бы одним элементом, то обязательно существу-
ет вектор х, для которого
Ахх * А2х.
Пусть, кроме А, задан еще другой оператор В, опреде-
ляемый квадратной матрицей п-го порядка
в = ИМ-
116
§15. ЛИНЕЙНЫЕ ОПЕРАТОРЫ
Каждому х g Rn соответствует при помощи оператора А
вектор у е Rn, которому при помощи оператора В соот-
ветствует вектор z с компонентами, вычисляемыми по
формулам
п
zk = X bkiVi
1=1
(k = 1, п).
В результате получим сложный линейный оператор
z = ВАх (х g Rt),
(4)
где
п п п
ЬЬкМ = HaHxi
i=l /=1
n
= У ХМ/ xi
n
i-l
с матрицей HyJ|, называемой произведением матриц ВиА
и обозначаемой так:
BA = ||yJ, (5)
где
Y4= (k, j = 1, n), (6)
i=i
т. e. чтобы получить элемент yk) матрицы BA (принадле-
жащий к ее Л-й строке и /-му столбцу), надо элементы
Л-й строки матрицы В умножить на соответствующие эле-
менты /-того столбца матрицы А и результат сложить.
Определитель матрицы ВА равен произведению опре-
делителей матриц ВиА:
|ВА| = |В| |4|. (7)
Это свойство вытекает из формулы для произведения
определителей (см. § 2, свойство к)).
Пусть матрица оператора А (см. (1)) имеет определи-
тель, не равный нулю:
§15. ЛИНЕЙНЫЕ ОПЕРАТОРЫ
117
А = W * °-
В этом случае (см. § 4, теорема 1) система уравнений (2),
или, что все равно, операторное уравнение у = Ах имеет
единственное решение х е Rn при любом заданном у е Rn.
При этом формулы, по которым находится х для задан-
ного у е Rn, имеют вид
х,= 0 = 1.... «)• (8)
S=1
Здесь
Ь)г = Atj/& (s, j = 1, ...» п) (9)
(см. § 4, (33). где А’1 — алгебраическое дополнение элемен-
та аа в определителе А.
Впрочем, для нас сейчас важно только отметить, что
числа Ь. являются элементами матрицы
В = UbJI,
обладающей следующими замечательными свойствами:
ВАх = х Vx е Rn, (10)
АВу = у V у е Rn. (И)
В самом деле, произвольный вектор х е Rn переходит
посредством оператора А в некоторый вектор у, который
переходит посредством оператора В обратно в х. С другой
стороны, каждому у е Rn соответствует при помощи опера-
тора В (см. (8)) некоторый х и притом такой, что Ах — у.
В равенстве (11) можно, очевидно, вместо у поставить
другую букву, поэтому мы получили тождества
ВАх = АВх = х, Xfx.
Оператор х = Ex ( Vx е Rr) называется единичным
оператором. Матрица, ему соответствующая, имеет вид
118
§15. ЛИНЕЙНЫЕ ОПЕРАТОРЫ
1 О ... О
О 1 ... О
О О ... 1
и называется единичной. Мы доказали, что
АВ = BA = Е.
Оператор В, обладающий этим свойством, называется об-
ратным к оператору А и обозначается через А'1. Соответ-
ственно его матрица называется обратной матрицей к
матрице А и обозначается тоже через А-1. Элементы мат-
рицы А"1 находятся по элементам матрицы А с помощью
формул (9).
Мы доказали, что если определитель |А| квадратной
матрицы А не равен нулю, то она имеет обратную мат-
рицу А1. Для А1, таким образом, выполняются свойства
А ‘А = АА 1 = Е.
Если определитель матрицы А равен нулю (Щ = 0), то
она не имеет обратной матрицы. Достаточно сказать, что
уравнение у = Ах имеет решение не для всякого у. Между
тем свойство АА'у = у, если оно выполняется, утвержда-
ет, что каждому у е Rn соответствует (при помощи опера-
тора А*1) такой х, что он есть решение уравнения у = Ах.
Замечание. Операцию умножения матриц можно рас-
пространить и на неквадратные матрицы В и А, лишь бы
число столбцов матрицы В совпадало с числом строк
матрицы А. Тогда умножение матриц производим по фор-
мулам, подобным (6). Например, если
СО сч гН ч '1 Г Ч 3
В = 0 10 . А = 0 1 , то ВА = 0 1
0 0 1, J °; Д о
§15. ЛИНЕЙНЫЕ ОПЕРАТОРЫ 119
Произведение АВ в данном случае рассматривать
нельзя, так как у матрицы А два столбца, а у матрицы В
три строки.
Для квадратных матриц А и В произведения АВ и ВА
имеют смысл, но далеко не всегда АВ равно ВА. Напри-
мер, если
fl (° И
А = Ц 1J ’ в = \о о)’
™ (° fl И
= f о 1J ’ ВА = [о ОJ ’
т. е. АВ ВА.
Легко проверить, что (АВ)С = А(ВС).
Если А — линейный оператор, то запись Ах можно
рассматривать как произведение матрицы А на одностол-
бцовую матрицу
Пусть заданы линейные операторы А и В. Суммой их
называется оператор А + В, определяемый равенством
(А + В)х = Ах + Вх V х е Rn.
Очевидно, матрица оператора А + В совпадает с матрицей,
равной сумме матриц операторов А и В.
Легко проверить, что
А(В + С) = АВ + АС.
Пример 1. Найти матрицу, обратную матрице
1 2 О'
0 1 1
J 1 о,
120
§15. ЛИНЕЙНЫЕ ОПЕРАТОРЫ
Матрица А определяет линейный оператор у = Ах, при-
водящий в соответствие каждому вектору х = (хр х,, х3)
вектор у = у.,, у3) при помощи равенств
Уг = xt + 2х2,
У2 ~ Х2 + Х3’
Уз = х, + 2х2,
Эти равенства можно рассматривать также как линей-
ную систему трех уравнений относительно неизвестных
хр х2, х3. Определитель этой системы не равен нулю. Но
тогда ее можно решить при любых заданных yv у2, у3. В
результате получим равенства
xi “ -У1 + 2У3.
Х2 = У1 ~ Уз’
хз = “У, + У2 + Уз.
определяющие оператор х = А 'у, обратный к оператору А.
Матрица этого оператора
О 2'
О -1
1 1>
Это и есть матрица, обратная к матрице А.
Элементы матрицы А 1 можно получить путем вычис-
лений по формулам (9). Обозначим элементы обратной матрицы А~' через Ь..
Имеем Д = 1. = А>. = -1,
А.' 1 1 1 0 = -1. Аз = - 0 1 1 0 = 1. Аз = 0 1 1 1
2 0 1 0 1 2
Ai ~ " 1 j — Аг — 1 0 = 0, А23 = ' 1 1 = 1.
§15. ЛИНЕЙНЫЕ ОПЕРАТОРЫ
121
О
1
= 2, А32
10 12
— _1 А
О 1 ’ 33 0 1
Таким образом,
Ai 1’ ^12 Ai
^21 Аг 1’ ^22 Аз
^31 Аз 1 > ^32 Аз 1 >
Ь13 “ Ai = 2,
^23 — Аг ~~ — 1»
^зз — Аз —
Итак,
(-1 О
А-1 = 10
2"
-1
I"1 1
Пример 2. Вычислить произведение матриц ВА, где
fl О
(2
I1 1
О О'
3 2
1 -А
А = О 1
Г
2
А
В =
О
2
Вычисление можно произвести по формулам (5), (6), но
можно рассуждать и следующим образом.
Матрица А определяет оператор у = Ах, приводящий в
соответствие векторам х = (хи х2, х3) векторы у = (уг у2, у3)
при помощи равенств
У1 = Xi + х3,
Уг = х2 + 2хз’
l/3 — Xj + х2 + х3.
Матрица же В определяет оператор z = By, приводя-
щий в соответствие векторам у = (ylt у2, у3) векторы z =
= (zp z2, z3) при помощи равенств
zi = 2У1>
Z2 = 3^2 + 2«/3.
2з = 2^i + У3 " Уз-
122§16. БАЗИСЫ В Rn
Но тогда оператор
z - ВАх
определяется равенствами
2, = 2(х, + х2) = 2х, + 2х3,
z = 3(х + 2х_) + 2(х + х„ + х ) = 2х + 5х„ + 8х,,
л» лл О Л 2. О 1 £, о
23 = 2(Xj + Х2) + (х2 + 2х3) - (Xj + Х2 + Х3) = х, + Зх3.
Следовательно, произведение ВА матриц В и А есть матрица
<2
ВА = 2
О 2'
5 8
0 з,
§ 16. Базисы в R
п
В пространстве Rn (действительном или комплексном)
введем п векторов:
называемых ортами осей пространства Rn.
Осью хк пространства Rn называется множество точек
вида (0, О, хк, 0, О), где хк стоит на /г-м месте и
пробегает все действительные (комплексные) значения, а
вектор i* называется ортом оси хк.
Если а = (хр ..., хп) есть произвольный вектор (действи-
тельный в действительном Rn или комплексный в комп-
лексном 7?л), то его можно, очевидно, записать в виде ли-
нейной комбинации из векторов (1) следующим образом:
а = хлВ + xj? + ... + xi".
(2)
§16, БАЗИСЫ В Rn 123
Так как из равенства а = (хи .... хл) = О следует, что
х, = ... = хл = О, то система (i1.i") линейно независима.
Зададим произвольную систему из п линейно незави-
симых векторов
а1 — («ц, ..., Oin)>
«" = (ап1, .... а„„).
(3)
Как мы знаем (см. § 14, теорема 1), система (3) линейно
независима, если определитель
ап а1п
................* О.
(4)
пп1 ... опп
Если же Д = О, то система (3) линейно зависима.
Согласно теореме 1 § 14 любые п + 1 векторов в про-
странстве Rn линейно зависимы, так как ранг матрицы из
компонент этих векторов не превышает п. Поэтому, если
а = (хн ..., хл) — произвольный вектор и система векто-
ров (3) линейно независима (Д О), то система векторов
а1, ..., а", а линейно зависима, т. е. существуют числа
..., Хл, Хл+1, одновременно не равные нулю, такие, что
Х.л1 + ... + X a" + Х а — О,
1 п л+1
где Хп+1 * О (иначе система (3) была бы линейно зависи-
мой). Отсюда
а = ^jxk ak, (5)
Л-1
где xk =-—— (k = 1, ..., п). Выразим сумму (5) через
Хп+1
орты ik (см. (2)):
124
§16. БАЗИСЫ В Rn
а
п f п
1=1 \k=l у
С другой стороны, по (2)
а = У, xi i‘.
1=1
В силу линейной независимости системы i1.....i" коэффи-
циенты при одинаковых векторах 1‘ должны быть равны
п
xi = У. aMx'k
k=l
(Z = 1, .... n). (6)
Таким образом, если компоненты х; вектора а по сис-
теме i1, ..., in известны, то компоненты х'к этого вектора по
системе а1, ап находятся из (6) и притом единственным
образом, так как определитель системы (6) есть А О.
Мы доказали, что, какова бы ни была линейно незави-
симая система векторов а1, ..., ап, любой вектор a g Rn
можно разложить по этой системе, т. е. представить в
виде суммы (5), где х\.х'п - некоторые числа, опреде-
ляемые из (6) и притом единственным образом.
В этом смысле систему векторов а1, ..., ап называют
базисом в /?п, желая этим сказать, что любой вектор a g Rn
можно представить в виде линейной комбинации (5) из
этих векторов и притом единственным образом. Мы дока-
зали, что произвольная линейно независимая система из п
векторов в Rn есть базис в Rn.
Линейно независимая система из т векторов
а1 = (а1Р а1т, а1т+1, ..., а1п).
ат ~ (а ...... а . а ...... а ).
’ ml’ ’ mm’ т,т+19 9 тп'9
§16. БАЗИСЫ В Яп
125
где т < п, не есть базис в Rn. В самом деле, ранг матрицы
компонент этих векторов равен т. Будем считать, что
первые т столбцов этой матрицы образуют определитель,
не равный нулю. Расширим эту матрицу, приписав к ней
внизу строку
= (О, ..., О, 1, О, .... О),
где 1 стоит на (т + 1)-м месте. Расширенная матрица
имеет ранг т + 1, и, следовательно, система векторов
а1, ..., ат, ат+1 линейно независима. Но тогда вектор
am+i не может быть линейной комбинацией из векторов
системы а1, ..., ат, и эта система не есть базис в Rn.
Обозначим через
а11 а12 • • • а1п
«л1 &п2 &пп
матрицу векторов (а1, а").
Переход от базиса (»*.i") к базису (а1.а") осуществ-
ляется при помощи матрицы Л:
«*= (fe=l.... в), (7)
8=1
т. е. вектор ak выражается через векторы ? с помощью fe-й
строки матрицы А. Обратный переход от (а1, ..., а") к (**.i")
происходит при помощи обратной матрицы УР1 (см. § 15, (9))
i‘ - (s = 1... л), (8)
1=1
элементы которой вычисляются по формулам bsl = ,
1де Аи - адъюнкт элемента alt в определителе Д (обратим
126§16. БАЗИСЫ В Дп
внимание, что элемент Ья1, принадлежащий s-й строке и Z-му
столбцу, выражается через адъюнкт Аи элемента ats, принад-
лежащего Z-й строке и s-му столбцу). Отметим еще, что
Z=1 «=1 s=l z=l ;=i
откуда
п
Х1 = bslxs (9)
т. е. переход от координат (xt.хп) к (х\, х'п) происходит
при помощи матрицы (см. § 3)
(А>)' = (А')1.
Из (9) видно, что х'1 выражается через хр ..., хп с помощью
l-го столбца матрицы А1 или Z-й строки матрицы (А-1)', транс-
понированной к А-1.
Далее по формуле (6)
п
х, ~ , 4sXl (s ~ 1 > • • > л)
Z=1
видно, что переход от (х\... х'п) к (xt, ..., хп) совершается
при помощи матрицы А' транспонированной к А, т. е. хв вы-
ражается через x't... х'п с помощью s-й строки матрицы А'
или s-ro столбца матрицы А.
Замечание. В §
квадратная матрица
15 было установлено, что произвольная
а11 а1п
А
(Ю)
k Оп1 • • • ^ЛЛ J
определяет линейный оператор у = Ах (ж е Rn, у е Ип), зада-
ваемый по формулам
§16. БАЗИСЫ В Яп
127
и
У к = ^jakjxj
j=l
(k - 1, .... п).
(11)
Но имеет место и обратное утверждение: каков бы ни был
линейный оператор у = Ах (х е Rn, у е Rn), он определяется
некоторой матрицей (10) так. что вектор у = Ах вычисляется
по вектору х по формулам (11).
В самом деле, пусть задан произвольный линейный опера-
тор у = Ах (х е Rn, у е Rn). Обозначим образы ортов i’ при его
помощи следующим образом:
п
Л(£’) = (аи, а2>, ам) = ^aksik (s = 1, .... n).
Л=1
Тогда в силу линейности А любой вектор
п
х = х/1 + ... + xnin = У, Xs i’
S=1
отображается при помощи А в вектор у, определяемый равен-
ствами
У = Ах
п
^XsA(i‘) =
S=1
n n n f n
s=l Л=1 Л=1 \s=l >
откуда следует, что h-я компонента у определяется по форму-
ле (11). Таким образом, оператор А порождает матрицу (10),
у которой в столбцах стоят координаты образов базисных век-
торов (ортов) при помощи оператора А.
Пример 1. Найти матрицу линейного оператора (пре-
образования) А, заключающегося в повороте векторов плос-
кости /?2, выходящих из начала, на угол а (0 < а < л/2)
против часовой стрелки.
128
§17. ОРТОГОНАЛЬНЫЕ БАЗИСЫ В Rn
Возьмем за базис векторы i1 =»
= (1, О), i2 = (О, 1). Тогда, очевид-
но, что (рис. 34)
A(i*) = (cos a, sin а),
Л(£2) = (-sin а, cos а).
Поэтому матрица нашего опе-
ратора имеет вид
( cos a -sin а А
А =
^sin a cos а J
§ 17. Ортогональные базисы в Rn
Говорят, что два ненулевых вектора х, у е Rn, имеют
одинаковое (одно и то же) направление, если существует
положительное число X такое, что х = Ху.
Произвольный ненулевой вектор х е Rn можно, как
говорят, нормировать, заменив его на единичный вектор
9 - и* 1191 - «•
имеющий то же направление, что и вектор х.
Единичный (имеющий норму (длину), равную 1) вектор
называют нормальным.
Два вектора х и у в пространстве Rn называют ортого-
нальными, если их скалярное произведение равно нулю:
(х, у) = О.
Здесь Rn может быть действительным или комплекс-
ным. В случае комплексного Rn скалярное произведение
определяется, как в § 6, (5').
Система векторов
х1, ... X- е Rn (1)
называется ортогональной, если любые два ее вектора
ортогональны. Система векторов (1) называется ортогональ-
ной и нормальной или ортонормированной, если
§17. ОРТОГОНАЛЬНЫЕ БАЗИСЫ В Д,
129
1, k = l
(х‘, **) “ 5М = |ot k*l 1 = lf V)’
т. е. все векторы системы нормальны и попарно ортого-
нальны. Если система векторов (1) ортогональна и ни один
вектор системы не равен нулевому, то, нормируя их, по-
лучим, очевидно, ортонормированную систему. Ортонор-
мированная система (1) линейно независима. В самом деле,
пусть
\х] + Х2х2 + ... + Xvxv = О,
где \, ..., Xv — числа. Умножив это равенство скалярно на
хв, получим, очевидно,
\(x\ х’) = X, = 0 (8=1, .... V).
Но тогда ортонормированная система из п векторов в Rn
есть базис и, следовательно, каждый вектор а е Rn можно
представить в виде линейной комбинации
п
а = X Х* х". (2)
k=i
Умножая это равенство скалярно на х’, получим
(а, х!) = X, (з = 1, .... п)
и, следовательно,
п
а = X sа> х*)х*, V а 6 Rn.
k=i
Число (а, х*) (|х*| = 1!) называется проекцией вектора а на
направление вектора х‘.
В реальном действительном пространстве R3 величина
(а, х*) есть обычная числовая проекция вектора а на
направление вектора х*.
5 Бугров, т. 1
130§17. ОРТОГОНАЛЬНЫЕ БАЗИСЫ Бй„
Теорема 1. Ортонормированную систему векторов
х1, х2, xv (v < п)
можно пополнить до ортонормированного базиса в Rn.
Иначе говоря, можно указать векторы xv+1, .... хп такие,
что система
х1, х\ х*+1, ...» х" (3)
будет ортонормированной и, следовательно, будет бази-
сом в Rn.
Доказательство. Так кдк v < п, то в Rn суще-
ствует вектор а, не зависящий линейно от х1, xv. Но
тогда
а = X ( a, xk)xk + у,
k=i
где у * 0. Вектор у ортогонален ко всем векторам х1, xv.
В самом деле,
(у, х") = (а - у1 (a, xk)xk, х’) =
Л=1
= (а, х’) - (а, х*) = 0 (4)
(s = 1..V).
Пронормировав у, получим вектор
*v+1=i7» (М = i)>
и система
х1, xv, xv+1
будет ортонормирована. Если v + 1 = п, то мы получи-
ли базис в Rn. Если нет, то этот процесс продолжаем.
На (п — у)-м этапе получим базис (3) в Rn.
§17. ОРТОГОНАЛЬНЫЕ БАЗИСЫ В Д„
131
Система ортов осей в Rn
i1 = (1, О, О....О, 0),
£2 = (0, 1, 0....О, О),
i" = (О, О, О, ...» О, 1)
может служить примером ортонормировапного базиса в Rn.
Произвольный вектор а = (Хр .... X ) 6 Rn разлагается
по ортам следующим образом:
п
а = х,»1 + ... + xi* = 51 хй £*, (5)
*=i
где хк = (a, ik) (k = 1.. п) - проекция вектора а на
направление орта £*.
Пусть задана некоторая определенная ортонормирован-
ная система из п векторов
а1 =(ап, ...» а1л),
ИЛИ
а” = (ап1,...» апп).
(6)
л
а* = al:s
3=1
(k = 1....... n).
(7)
Переход от векторов (£’, .., £п) к (а1, ..., а") здесь осуществ-
ляется при помощи матрицы
ан • • • а1п
&п! • • • &пп
(8)
т. е. вектор а* выражается через il, ..., £" с помощью А-й
строки матрицы А.
5*
132§17. ОРТОГОНАЛЬНЫЕ БАЗИСЫ В Вп
В дальнейшем мы считаем пространство Ип и матрицу
А действительными (см. далее замечание 1).
Матрица Л ортогональна, т. е. обладает следующим
свойством:
п
X«fesab = 8« 1 = lj —’
S=1
В самом деле, так как в данном случае система а1, ..., а"
ортонормирована, то
5W = (а*, а') = £
akSis
<s=l
п п п П п
= X X а*« = У У akS аЛг = У akS аь- (1о)
S=1 r=l S=1 r=l S=1
Мы видим, что и, обратно, ортогональность матрицы (8)
влечет за собой ортонормируемость системы векторов
а1, ..., а", определенных по формулам (7).
Это показывает, что формулы (7), где Ha*JI — произволь-
ные ортогональные матрицы, определяют все возможные
ортонормированные базисы в Rn.
Помножим вектор I' на вектор а* скалярно:
(£', а*) = aw. (11)
Отсюда
д п
i‘ = ак)а* = У аы ак. (12)
*=1 Л=1
Таким образом, переход от базиса (а1, ..., а") к базису
(i1, ..., i") осуществляется при помощи матрицы А',
транспонированной к А. Так как преобразование (12)
обратно преобразованию (7) (см. § 15), то мы попутно
§17. ОРТОГОНАЛЬНЫЕ БАЗИСЫ В Rn
133
доказали, что ортогональная матрица А обладает следую-
щим замечательным свойством (в действительном 7?п):
(13)
Из(12)следует
п п п
= ХХ^^(а’’аГ)= (14)
s=l r=l S=1
Ортогональная матрица была определена нами как
такая матрица, у которой строки (векторы, представляю-
щие их) нормальны, а разные строки ортогональны. Из
этого определения, как это видно из (14), автоматически
следует, что у ортогональной матрицы и столбцы нормаль-
ны, а разные столбцы ортогональны.
Переход от (хр .... хп) к (х'р ..., х'л) совершается при
п
помощи матрицы, так как (считая, что а = У, а1 =
1=1
п
= Z*sis) <см- С11»
S=1
(15)
Переход же от (х'р ..., х'л) к (хр ..., хп) совершается
при помощи (см. (13)) матрицы А' транспонированной к
А, т. е.
п
X, = Хакх1 •
1=1
134§17. ОРТОГОНАЛЬНЫЕ БАЗИСЫ В йл
Отметим, что определитель произвольной ортогональ-
ной матрицы Л (см. (6)) по абсолютной величине равен 1:
I И I = I W I = 1.
Это следует из того, что
Здесь мы считаем, что элемент у произведения определи-
телей равен сумме произведений элементов fe-й строки на
соответствующие элементы i-й строки (см. § 2, свойство к)).
Отметим еще, что определитель из компонент векторов
базиса i1, ..., i" равен 1:
1 О О ... О
О 1 0 ... О
О О О ... 1
Если ортогональный базис а1, ..., ап имеет определи-
тель |Л| = 1 (см. (6)), то говорят, что этот базис ориентиро-
ван так же, как базис i1, ..., i". Если же |Л| = —1, то -
противоположным образом. Эти определения согласуются
с соответствующими определениями в двумерном и трех-
мерном случаях, сделанными в§11ив§12.
Замечание 1.В комплексном пространстве R матри-
ца (8), где аы комплексные, называется ортогональной,
если
п
(Л, I = 1, .... п). (9')
S=1
§17. ОРТОГОНАЛЬНЫЕ БАЗИСЫ В Rn 135
Покажем, что ортонормированная система векторов
(6) в комплексном Rn порождает ортогональную матрицу
Л (см. (8)). В самом деле, в комплексном Rn скалярное
произведение векторов х, у подчиняется свойствам (см.
§ 6, б'), в'))
&~у) = (у. X), (ах + ру, z) = а(х, z) + Р(у, z),
где а, Р - комплексные числа. Поэтому
(х, оу + Pz) = (ay,+ Pz,x) = (ay, х) + (Pz, х) =
= a(y, х) + p(z, х) = а (х, у) + Р (х, z).
Но тогда для ортонормированной системы векторов
а1...а" имеет место
Л
= <10')
S-1
т. е. матрица Л ортогональна. Мы видим, что и, обрат-
но, ортогональность Л влечет ортонормированность векто-
ров а1, ..., ап, определенных по формулам (7).
Помножим вектор i( на а* скалярно (см. (7)):
г п У
< S=1 >
(i', а*) =
п
X (»', »') = akl.
S=1
Отсюда
136
§17. ОРТОГОНАЛЬНЫЕ БАЗИСЫ В Кп
п п
i‘ = Х<»‘. «*)«* = XaJw“* . (12')
л=1 Л=1
Таким образом, переход от базиса (а1, а") к базису
(»*, i”) осуществляется при помощи матрицы
а11 — ап1
А*
= А'.
а1п а,
Так как преобразования (11') обратны преобразовани-
ям (7), то попутно показано, что ортогональная матрица
А обладает следующим свойством (в комплексном Вп):
А1 = А*, (А')1 = (А')* = (А") = А .
Из (12') следует
(16)
б« = (**• »') =
п п _______ п
= X X art 8sr. = X asfe aa.
s=l r=l s=l
Следовательно, равенства
п ____
S=1
(k, 1=1, .... 7l)
(так же, как (9')) могут служить определением ортогональ-
ной матрицы А.
На основании (14) и общих фактов, полученных в § 16
(петит), отметим матрицы, осуществляющие нижеследую-
щие ортогональные отображения:
§17. ОРТОГОНАЛЬНЫЕ БАЗИСЫ В Rn
137
Л: (»*, i") -> (а1, ..., а") (см. (7));
Л*: (а1, а") -> (i1, ..., in) (см. (12'));
Л': (х'р ..., х'„) -> (Хр .... х„) (см. (6) § 16);
Л: (Хр ...» х„) -> (х'р .... х'я) (см. (16)),
где (Хр ..., хп) и (х'р ..., х'п) - координаты произвольного
вектора в комплексном пространстве Rn относительно
базиса (i1, ..., i”) и ортонормированного базиса (а1, ..., а”).
Наконец, равенство | |Л| | = 1 в комплексном случае
доказывается так:
1 о о ... О
О 1 о ... о
О 0 0 ... 1
Ортогональные матрицы называют еще унитарными
138
§18. ИНВАРИАНТНЫЕ СВОЙСТВА
§ 18. Инвариантные свойства скалярного
и векторного произведений
Замечание. В трехмерном действительном простран-
стве пусть заданы две прямоугольные системы координат
хр х2, х3 и ур у2, у3 с системами ортов соответственно (Р,
i2, i3) и (у1, j2, у3). Пусть
з
j* = »•(*=!, 2, Э) (1)
S=1
(ср. (7) и (13) § 17. Тогда матрица (действительная!)
А = ||аJ
ортогональна и (ср. (13) § 17)
з
Vi = , ^iaxs G ~ 1» 2, 3). (2)
S=1
Одна и та же точка (вектор) пространства имеет в пер-
вой системе (координат) координаты (компоненты)
(Хр х2, х3), а во второй - координаты (ун у2, у.^. При этом
формулы преобразования координат (перехода (хр х2, х3)
к (ур у2, у3)) в точности такие же, как формулы преобра-
зования системы ортов (Р, i2, i3) в систему ортов (у1, j2, у3).
В обоих случаях применяется одна и та же ортогональ-
ная матрица (см. (13) и (7) § 17)
А = ||aj.
В первом случае матрица А применяется к системе чисел
(Хр х2, х3), чтобы получить систему чисел (ур у2, у3), а во
втором та же матрица А применяется к ортам (Р, i2, р),
чтобы получить орты (у1, у2, у3).
Дадим общее определение вектора, принятое в тензор-
ном исчислении.
§18. ИНВАРИАНТНЫЕ СВОЙСТВА
139
Вектором в трехмерном пространстве называется
вещь, выражаемая в каждой прямоугольной системе коор-
динат некоторой тройкой чисел, которые преобразуются
так же (при помощи той же матрицы), как тройки ор-
тов соответствующих систем координат.
Подобная терминология употребляется и в случае п-
мерных пространств.
Пусть а и Ь — векторы трехмерного пространства (действи-
тельного!), определяемые в системах координат с ортами (i1,
i2, i3) и (j1, j2, j3) следующим образом
а = aXi Р + аХг Р + аЖз F = аУ1 р + ау2 р + арз р,
ь = ЬХ1 Р + bX2 i2 + ЬХз Р = ЬУ1Р + ЪУ2 р + ЬУЗ р.
Имеет место равенство
з з
ab = ^^ах,^х, = ^iayr^yr •
S=1 Г=1
показывающее, что скалярное произведение инвариантно от-
носительно преобразований прямоугольных систем координат.
В самом деле, так как системы векторов (в1, i2, i3) и (/*, р,
р) ортонормированы, то они преобразуются по формулам (1),
где ||aj| - некоторая ортогональная матрица. Компоненты век-
тора а (ах1, аЛ, ах3) преобразуются в компоненты (ав1, а*2, а^)
при помощи той же матрицы (см.(2)). Поэтому
з
Г=1
з ( 3 3 '
= 51 51 ^naxt ' 51 ®rv^xv
г=1\«=1 v=l J
(3)
Мы доказали инвариантность скалярного произведения ab
вычислительным путем. Впрочем, из другого, геометрическо-
го определения скалярного произведения векторов (направ-
ленных отрезков), в силу которого ab = |Ь|’Прьа, непосред-
ственно видно, что это число есть инвариант — ведь это
140
§18. ИНВАРИАНТНЫЕ СВОЙСТВА
определение не связано ни с какой системой координат.
Что касается векторного произведения а х Ь, то оно инва-
риантно относительно прямоугольных систем координат с оди-
наковой ориентацией. В системах, имеющих орты (i1, i1, i3) и
(J1, j2, j3), векторные произведения выражаются следующим
образом:
[а X fe];1 ,2 t3
ахг «х3
ЪХ2 ъХз
[а х —
/2
ахг
Ьхг
/3
axs
/
%
В силу формул (1) и (2)
3 3 3
£аь»я ^a2sis
s =1 s=l S=1
3 3 3
[а х Ь]^! ,2 ^з = , alsax, /, a2saxt =
s =1 S=1 S=1
3 3 3
2sbx, M cP to о X ft
s = 1 S=1 S=1
il i2 i3 Иц «12 а13 i1 i2 i3
= axi ахг axs а21 а22 a23 = + a^i ax2 а*з
ьХ2 ъХз а31 а32 a33 &X1 4 bx3
+ [а х 6].! р ;з ,
(4)
§19. ПРЕОБРАЗОВАНИЕ ПРЯМОУГОЛЬНЫХ КООРДИНАТ 141
где надо поставить знак + или — в зависимости от того, будет
ли определитель |aj равен +1 или -1, что все равно, меняет
или нет рассматриваемое преобразование координат ориента-
цию.
При перемножении определителей мы в данном случае
пользовались следующим правилом: элемент матрицы произ-
ведения |fyj| определяется как произведение i-й строки первого
определителя на k-ю строку второго (см. § 2, свойство к)).
Итак, мы доказали вычислительным путем, что векторное
произведение двух векторов инвариантно относительно преоб-
разований прямоугольных систем координат, не изменяющих
их ориентацию.
Преобразования (3), (4) интересны тем, что они обобщаются
на случай, когда роль вектора а играет важный в математичес-
ком анализе символический вектор V =
а а а
ахг * Эх2 * ах3
§ 19. Преобразование прямоугольных
координат в плоскости
Рассмотрим плоскость R2, где задана прямоугольная
система координат хр х2. Пусть
i1 = (1, О), i2 = (О, 1)
- орты осей хр х2. Орты i1, i2 образуют ортонормирован-
ный базис в R2.
Произвольный единичный (нормальный) вектор Ь1
может быть записан следующим образом:
Ь1 = (cos a, sin a) (О < a < 2л).
Единичный ортогональный (перпендикулярный) к Ь1
вектор, который мы обозначим через Ь2, может соответ-
л л
ствовать только либо углу а + —, либо а - —. Так как
142 §19. ПРЕОБРАЗОВАНИЕ ПРЯМОУГОЛЬНЫХ КООРДИНАТ
COS
-sin a, sin
= cos а,
cos
= sin a, sin
n
a —
2
= -cos a,
то всевозможные ортонормированные системы bl, Ъ2 в R2
определяются либо равенствами (рис. 35)
bl = i1 cos a + i2 sin a,
b2 - -i1 sin a + i2 cos a
(0 < a < 2л),
d')
соответствующими вращению осей около начала на угол
а и сохранению ориентации, либо равенствами (рис. 36)
bl = il cos a + i2 sin a,
b2 = i1 sin a - i2 cos a,
(1")
соответствующими вращению осей около начала на угол
а и изменению ориентации.
Оба преобразования объединяются в следующей фор-
муле:
Рис. 35
Рис. 36
§19. ПРЕОБРАЗОВАНИЕ ПРЯМОУГОЛЬНЫХ КООРДИНАТ 143
где матрица преобразования
аы а12
а21 а22
(2)
ортогональна (сумма квадратов элементов каждой из ее
строк или столбцов равна 1, а скалярное произведение
двух разных строк или столбцов равно 0).
Любое определенное ортогональное преобразование (1)
есть на самом деле одно из преобразований (1'), (1") при
некотором а.
Из (1) в силу ортогональности матрицы (2) следует, что
i1 = anfer +a2ife2,
i2 = cx12& — cc22fe ,
(3)
и мы получили преобразование, обратное преобразованию
(1), с матрицей
aii а21
а12 а22
сопряженной к А.
Зададим в плоскости произвольный вектор (точку) а.
Пусть он имеет в старой и новой системе координаты (хр х2)
и (х'р х'2). Тогда
а = Xji1 + x2i2 = x'jfe1 4- х'2Ь2. (4)
В силу формул (3) и (4)
x'1fe1 + x'2fe2 = хДИрЬ1 + сс21Ь2) + х^оСцЬ1 + a22fe2) =
^11^1
Поэтому, приравнивая компоненты при одинаковых
ортах Ъ1, Ь2, получим
х{ = «11*1 + «12*2’
х2 ~ а21^1 + а22Х2'.
(5)
144 §19. ПРЕОБРАЗОВАНИЕ ПРЯМОУГОЛЬНЫХ КООРДИНАТ
В силу же формул (1) и (4)
Xji1 + x2i2 = x'1(a11i1 + a12i2) + x'2(a2lil + a22i2) =
(«11^1 4" «21 * + («12^" 1 «22*^ г)*2’
откуда, приравнивая компоненты при i1 и i2, получим
формулы, обратные к (5):
Xi =anx;+а21Х2,1
, , (ь)
х2 = a12Xi + а22х2.)
Если наряду с преобразованием (6) перенести еще нача-
ло осей х\, х'2 в точку О', имеющую координаты xt = xf,
х2 = х2 , то формулы (6) усложнятся, очевидно, следую-
щим образом:
Х1 = Х1 + «11Х1 + «21х2>
х2 = х£ +а12х( +а22х2.]
Итак, произвольное преобразование прямоугольных
координат (хп х2) в прямоугольные координаты (х'р х'2)
с переносом начала системы (хр х2) в точку О' = ( х°, х2)
выражается формулами (7), где матрица
«11 «21
«12 «22
ортогональная.
Соответствующее преобразование, сохраняющее ориен-
тацию системы координат, имеет вид
О / Г •
Х1 = Х1 + Х1 COs a ” х2 SU1 a’
О , . , (П
х2 = х2 + Xj sin a + х£ cosa
и преобразование, меняющее ориентацию, имеет вид
§20. ЛИНЕЙНЫЕ ПОДПРОСТРАНСТВА В К,
145
хг = Xi + х{ cos а + х2 sin а,
х2 = х2 + х{ sin а - х2 cos а
(7")
(матрицы коэффициентов при х\ и х'2 в (7') и (7") соответ-
ственно транспонируют (Г) и (!")).
§ 20. Линейные подпространства в Rn
Множество L в R (LcR) называется линейным под-
пространством пространства Rn или, короче, подпрост-
ранством в Rn, если из того, что два каких-либо вектора
х и у принадлежат к L (х, у е L), автоматически следует,
что вектор ох + ру тоже принадлежит к L (ах + ру е L),
где а, р — числа. Подпространство L называется т-мер-
ным, если в нем имеется линейно независимая система
а1, ат, состоящая из т векторов, и нет системы, состо-
ящей из rn + 1 линейно независимых векторов.
Таким образом, если а - произвольный вектор в L
(а е L), то система а1, .... ат, а линейно зависима, т. е.
существует нетривиальная система чисел А,, ..., Ат, Ат+1
такая, что
А,а’ + ... + А ат + А. ..а = 0. (1)
Здесь А„.. 0, иначе было бы
т+1
А,а* + ... + А ат = 0,
и вследствие линейной независимости системы а1...ат
было бы А, = ... = А = 0, и вся система А., ..., А„, А ..
была бы тривиальной. Тогда уравнение (1) можно решить
относительно а:
а = ща1 + ... + Ц„ат (ц, = -АуАт+1), (2)
т. е. представить в виде линейной комбинации из векто-
ров а1, .... ат. С другой стороны, линейная комбинация
146§20, ЛИНЕЙНЫЕ ПОДПРОСТРАНСТВА В Вп
вида (2) принадлежит к L, потому что L — подпростран-
ство. В этом смысле говорят, что система а1, ат есть
базис в L. Очевидно, любая другая линейно независимая
система векторов 61, ..., Ь"‘, принадлежащих к L, есть базис
в L.
Если разложить векторы Ь‘ по векторам а1, ..., ат, то
получим
т
(k = 1, т).
8=1
По аналогии с тем, как мы рассуждали в § 16 для Rn
(где теперь надо заменить i“ и а* соответственно на а‘, Ък),
можно получить, что система Ъ1, Ът линейно независи-
ма тогда и только тогда, когда определитель |feto| 0, и что
любая независимая система, состоящая из I < т векто-
ров, уже не может быть базисом в L.
Пространство Rn можно рассматривать как подпрост-
ранство Rn, имеющее п измерений.
Множество, состоящее из одного нулевого вектора 0,
есть линейное подпространство («0 + р0 ~ 0). Про него
говорят, что оно имеет 0 измерений. Вектор 0 не образует
линейно независимой системы — из равенства АО = 0, где
А - число, не обязательно следует, что А есть нуль.
Если вектор х° Ф 0, то множество векторов вида Ах°,
где А - произвольное число, есть одномерное подпростран-
ство. В качестве базиса в нем можно взять вектор х°.
Пусть L есть линейное подпространство в R . Будем
говорить, что вектор v е Rn ортогонален к L, если он
ортогонален к любому вектору и е L. Обозначим через L'
множество всех векторов, ортогональных к L. L' есть
подпространство. В самом деле, пусть и, о" е L', т. е.
(v, и) = 0, Vu е L;
(v, и) = 0, Vu е L.
§20. ЛИНЕЙНЫЕ ПОДПРОСТРАНСТВА В Ип 147
Тогда для любых чисел а, р
(аи + pt/, и) = а(и, и) + p(i/, и) — О, Vu е L,
т. е. av + Pi/ g L'.
По определению подпространство L' с. Rn называется
ортогональным к данному подпространству L a. Rn, если
L' есть множество всех векторов, каждый из которых ор-
тогонален к L.
Ниже доказывается теорема, выясняющая структуру
произвольного подпространства L с Rn и ему ортогональ-
ного подпространства L' <^Rn. В частности, из нее следует,
что если L' ортогонально к L, то и, обратно, L ортогональ-
но к L'.
Теорема!. Пусть L есть линейное подпространство,
отличное от Rn и нулевого подпространства. Тогда-.
а) существует целое число т, удовлетворяющее нера-
венствам
1 < т < п, (3)
и ортонормированный базис
а1, .... ат (4)
в L; если этот базис продолжить любым способом до
ортонормированного базиса в Rn:
а1... ат, ат+1, .... а", (5)
то линейное подпространство L' с базисом
атЛЛ, ..., ап (6)
обладает следующими свойствами:
б) L' есть подпространство, ортогональное к L\
в) L есть подпространство, ортогональное к L'-,
г) любой вектор a g Rn можно представить в виде
суммы
148
§20, ЛИНЕЙНЫЕ ПОДПРОСТРАНСТВА В Rn
а = и + v,
где и е L,ve L' и при этом единственным образом.
Доказательство. По условию L отлично от нуле-
вого подпространства, следовательно, в L существует век-
тор х, отличный от 0. Нормируя х, получим нормальный
вектор
Обозначим через а2 любой, принадлежащий к L нор-
мальный вектор, ортогональный к а1 (|а2| = 1, (а2, а1) = 0),
если такой существует. Далее, обозначим через а3 принад-
лежащий к L нормальный вектор, ортогональный к а1 и
а2 (|а3) = 1, (а3, а1) = (о3, а2) = 0), если такой существует.
Этот процесс закончится на некотором т-м этапе, где т
удовлетворяет неравенствам (3), т. е. найдется ортонорми-
рованная система векторов (4), принадлежащих к L, но
уже не будет в L единичного вектора, ортогонального к
векторам а1, ..., ат. В самом деле, т > 1, потому что
заведомо а1 е L. С другой стороны, т не может быть
равным п. В противном случае векторы а1, ..., а" принад-
лежали бы к L и вместе с ними принадлежали бы к под-
п
пространству L все линейные комбинации А.л а*, и тогда
*=1
получилось бы, что L совпадает с Rn, но L отлично от Rn.
Полученная орто нормированная система а1, ..., аи есть
базис в L. В самом деле, вместе с векторами а1, ..., ат
т
принадлежат к L и все их линейные комбинации а*.
л=1
Но больше в L других векторов нет, потому что, если
допустить, что некоторый вектор а е L не есть такая
§20 ЛИНЕЙНЫЕ ПОДПРОСТРАНСТВА В Дп 149
линейная комбинация, то а можно было бы записать в
виде суммы
а = ^(а, ак)а.к + у, (7)
fc=i
где у Ф 0. Так как векторы а и ак принадлежат к подпро-
странству L, то пришлось бы заключить, что вектор
т
у = а - £ ( а, ак)ак
k=i
тоже принадлежит к L. Но вектор у ортогонален ко всем
a" (s = 1, .... т) (см. § 17, (4)). Пронормированный вектор
Ъ = Ду (8)
IУ1
тоже принадлежал бы к L и был бы ортогональным ко
всем ак (k = 1, .... т). Но это невозможно в силу макси-
мального свойства числа т. Этим доказано утверждение
а) теоремы.
Дополнение ортонормированной системы (4) до орто-
нормированного базиса (5) осуществляется на основании
теоремы 1 § 17. Обозначим через L' подпространство всех
п
линейных комбинаций v — ак из векторов системы
(6). Каждый такой вектор, очевидно, ортогонален к любо-
му вектору и е L, который представляется в виде суммы
т
и = а*. С другой стороны, если а е Rn есть произ-
*=1
вольный вектор, ортогональный ко всем векторам и е L,
в частности к а1...ат, то его разложение по базису (5)
имеет вид
150§20. ЛИНЕЙНЫЕ ПОДПРОСТРАНСТВА В Вп
" п
а = у ,(а, ак)ак = У(а, ак)ак,
k-m+1
т. е. a g L'. Мы доказали утверждение б) теоремы.
т
Далее, любой вектор и — У а* е L ортогонален ко
*=1
п
всем векторам v = У и* е L' и, если известно, что
Л=т+1
л
какой-либо вектор а = У, (а, а*)а* ортогонален ко всем
к=1
т
векторам из L', в частности к am+1, ..., а", то a = У, (а, ак)а\
*=1
т. е. а е L. Мы доказали утверждение в).
Наконец, если а е Rn — произвольный вектор, то его
единственным образом можно представить в виде суммы
п
а = У, (а, ак)ак = и + V,
k=i
где
п
и = / ((а, ак)ак е L, и = У (а, ак)ак е П.
*=1 Л=т+1
Этим теорема 1 доказана полностью.
Теорема2. Пусть L есть подпространство т изме-
рений в Лп. Тогда подпространство L' с Rn, ортогональное
к L, имеет п - т измерений и при этом L есть в свою
очередь подпространство, ортогональное к L'.
§20. ЛИНЕЙНЫЕ ПОДПРОСТРАНСТВА В Нп 151
Доказательство. Если L отлично от Rn и от нуле-
вого подпространства, то данная теорема содержится, оче-
видно, в теореме 1.
Пусть L есть нулевое подпространство. Так как любой
вектор а е Rn ортогонален к О, то L' = Rn и измерение Rn
равно п - О — п. Обратно, вектор О ортогонален ко всем
векторам а е Rn = U. Других векторов, ортогональных ко
всем векторам Rn, нет, потому что всякий отличный от О
вектор уже не ортогонален к самому себе. Мы доказали,
что L ортогонально к И.
Если L = 7?я, то рассуждаем подобным образом.
Следствие 1. Пусть задана система векторов
х1, .... хт, (9)
и пусть L' есть подпространство векторов о, каждый из
которых ортогонален к векторам этой системы:
(v, х*) = О (ft = 1, ..., тп).
Пусть, далее, дан вектор а, ортогональный ко всем
указанным векторам v, т. е. ортогональный к подпрост-
ранству L'. Тогда а есть некоторая линейная комбина-
ция из векторов заданной системы (9)
ТП
«= Xх"-
k=l
Доказательство. Рассмотрим подпространство L,
состоящее из всевозможных линейных комбинаций век-
торов системы (9), т. е. всякий вектор и е L есть некото-
рая линейная комбинация
т
и = X **’
*=1
В этом случае будем также говорить, что подпростран-
ство L натянуто на векторы системы (9).
152
§21. ТЕОРЕМЫ ФРЕДГОЛЬМОВА ТИПА
Так как всякий вектор v e L' ортогонален к векторам
системы (9), то он, очевидно, ортогонален к любому век-
тору и е L. Это показывает, что подпространство L' орто-
гонально к подпространству L. Но тогда по теореме 2 и L
ортогонально к L', т. е. L состоит из всех векторов и,
ортогональных к L'. По условию а есть один из таких
векторов и, следовательно, а есть некоторая линейная
комбинация из векторов системы (9).
§ 21. Теоремы фредгольмова типа
В этом параграфе излагается теория линейных уравне-
ний, параллельная теории, изложенной в § 4.
Это бездетерминантная теория. В ее формулировки
определитель системы уравнений явно не входит. Преиму-
щество ее заключается в том, что она послужила основой
и аналогом для многих обобщений в математическом ана-
лизе. Первые такие важные обобщения принадлежат Фред-
гольму1.
Мы снова рассматриваем линейный оператор (см. § 15) А:
У = Ах (хе /?„), (1)
приводящий в соответствие каждому вектору х е R век-
тор у е Rn при помощи равенств
J/j (i = 1> •••> Л). (2)
S=1
Здесь
а11 °12 "• а1п
А = ИМ =
(3)
ап1 ап2 • - ‘ апп
Э. И. Фредгольм (1867—1927) — шведский математик.
§21. ТЕОРЕМЫ ФРЕДГОЛЬМОВА ТИПА
153
— заданная квадратная матрица. Оператору А соответству-
ет сопряженный ему оператор
у = А*х (х е Rn), (1*)
определяемый сопряженной к (3) матрицей
а11 а21 ••• ап1
(3*)
&1п ^2п • • • &пп
При помощи компонент векторов х, у он записывается
в виде
п
(j = 1. «). (2*)
i=i
т. е. компонента выражается через координаты вектора
х с помощью у-й строки матрицы А* или у‘-го столбца
матрицы А.
Справедливо равенство
(Ах, z) = (х, А*г) Vx, 2 е Rn, (4)
верное для всех х, 2 е Rn. В самом деле, для действитель-
ных Rn и а1в
(Ах, z)=^_iytZi=^_l X
п
ai»xs
aiszi xs~(X,A*z).
п
В комплексном случае
п
(Ах, z) = ХуЛ
1=1
X г1 =
/=1
п п
S=1 j=l
п п
S=1 j=l
154§21. ТЕОРЕМЫ ФРВДГОЛЬМОВА ТИПА
Равенство (4) характерно для сопряженного оператора,
потому что, если для некоторого линейного оператора В
выполняется равенство
(Ах, 2) = (х, Bz), Х/х, 2 е Rn, (5)
то необходимо В = А*. Действительно, (В = ||bj|), для дей-
ствительных a(s, bls, Rn
(Ах, 2) =
i=l s=l
s=l i=l i=l «=1
Из (5) следует, что
У, X X3Z, = X УХ Vx,ze Rn, (6)
i=l s=l i=l s=l
откуда ajs = bis (i, s = 1, ..., п), в чем можно убедиться,
если положить в (6) х = (О, ...,0, 1, О, ..., О) и 2 = (0, ...,
О, 1, О, ..., О), где у х единица стоит на s-м месте, а у z на
i-м месте. В комплексном случае
(Ах, z) =
j=l s=l
П п п п
(X, Bz) = Хх*ХМ> = Хх*Х V/ «
s=i j=i s=i j=i
n n
= Z Z bqlX,Z;
SJ s J f
j-l s=l
откуда = bS] или bsj = ajt
§21. ТЕОРЕМЫ ФРЕДГОЛЬМОВА ТИПА
155
Таким образом, сопряженный оператор А* к линейному
оператору А можно также определить как такой линей-
ный оператор, для которого выполняется равенство (4).
Равенства (1) и (1*) можно рассматривать как уравне-
ния - задан вектор у е Rn, и мы ищем х е Rn, для кото-
рого выполняется равенство (1) или (1‘).
Соответствующие однородные уравнения имеют вид
Ах = О (10)
или
=0 (i = 1, п) (20)
S=1
и A*z = 0 (10‘)
или
п
YaUzi=° 0 = 1..........п). (20*)
i=i
Обозначим через L образ пространства Rn при помощи
оператора А:
L = A(Rn)
- и через L’ подпространство всех векторов z, удовлет-
воряющих однородному сопряженному уравнению (10‘).
Мы назвали L' подпространством, потому что вместе с
z, z' к нему принадлежат также az + pz', где а и р -
числа:
A*(az + pz') = aA*z + fiA*z' = 0.
L есть тоже подпространство, потому что, если у, у е L,
то существуют векторы х, х‘ е Rn такие, что у = Ах, у7 =
= Ах', и, следовательно,
ay + Ру' = аАх + РАх' = А(ах + рх'),
т. е. ay + Ру' е L.
156§21. ТЕОРЕМЫ ФРЕДГОЛЬМОВА ТИПА
Справедлива лемма (см. § 20, теорема 2).
Лемма 1. Подпространства L и L' взаимно ортого-
нальны, т. е. L' есть множество всех векторов z, каждый,
из которых ортогонален к L, a L в свою очередь есть
множество всех векторов у, каждый из которых ортого-
нален к L'. Если L имеет k измерений, то L' имеет n—k
измерений.
Доказательство. Обратимся к равенству
(Ах, z) = (х, A*z), (7)
верному для всех х, z е Rn. Пусть z есть вектор, ортого-
нальный к L, тогда для него левая часть (7) равна нулю
для всех х е Rn, но тогда и правая часть равна нулю для
всех хе Rn, в частности для х = A*z:
(A*z, A*z) = 0.
Следовательно, A*z — 0. Мы доказали, что если вектор
2 ортогонален к L, то он удовлетворяет уравнению A*z = 0
(т. е. 2 е L').
Обратно, пусть вектор г удовлетворяет уравнению
A*z = 0. Для такого z правая часть (7) равна нулю при
любых х, но тогда и левая равна нулю, т. е. z ортогона-
лен ко всем векторам вида Ах, т. е. ко всем векторам
у е L. Другими словами, z ортогонален к L.
Мы доказали, что L' есть множество всех векторов г,
ортогональных к подпространству L. Но тогда на основа-
нии теоремы 2 § 20 и, обратно, L есть множество всех
векторов у, ортогональных к L', и сумма измерений L и
L' равна п. Лемма доказана.
Справедлива теорема.
Теорема 1. Для того чтобы уравнение
У = Ах
(1')
§21, ТЕОРЕМЫ ФРЕДГОЛЬМОВА ТИПА 157
имело решение для данного вектора у е Rn, необходимо и
достаточно, чтобы вектор у был ортогональным ко всем
векторам 2, удовлетворяющим однородному сопряженно-
му уравнению
А*2 = 0. (10*)
Решение х уравнения (1), если оно существует, можно
записать в виде суммы
X = х0 + и,
где х0 — какое-либо частное решение уравнения (1), а и -
произвольное решение однородного уравнения
Аи ~ 0. (10)
Любая указанная сумма есть решение (1').
Доказательство. В силу леммы 1, если L = A(Rn),
a L' есть множество всех 2, удовлетворяющих уравнению
А*2 = 0, то L и L' суть подпространства, ортогональные
взаимно. Но тогда, если для у существует решение урав-
нения (1), то у е Ди необходимо все 2 е L' ортогональны
к у. Если же вектор у ортогонален ко всем 2 е L', то
у е L, т. е. существует х, для которого у = Ах.
Пусть теперь для вектора у существует решение урав-
нения (1'). Обозначим его через х°:
у = Ах°.
Тогда, очевидно, сумма х° + и, где Аи = 0, есть тоже
решение уравнения (I'):
А(х° + и) = Ах° + Аи = у + 0 = у.
Обратно, если х есть произвольное решение уравнения
(!'), а х° — определенное частное решение, то
У = Ах, у = Ах°,
и, следовательно,
158
§21. ТЕОРЕМЫ ФРЕДГОЛЬМОВА ТИПА
О = Ах - Ах° = А(х - х°) = Аи,
где и = х - х°, т. е. х = х° + и, где и удовлетворяет
уравнению Аи = 0.
Замечание. Поясним на примере действительного про-
странства R2 связь теоремы 1 с теорией Кронекера-Капел-
ли. Пусть вектор у = (ур у2) ортогонален ко всем решени-
ям системы
allzl + «2122 ~ 0’
a12zl + a22z2 = 0-.
(8)
Покажем, что тогда ранги матрицы А и расширенной
матрицы
В =
«11 «12 У1
«21 «22 Уг
равны между собой. Если ранг А = 2, то, очевидно,
ранг В = 2. Пусть ранг А = 1. Всегда ранг В > ранг А = 1.
Поэтому нам необходимо доказать, что
Д1
«11 У1 а12 У1
= 0, А =
«21 У2 2 а22 У2
В самом деле, так как у ортогонален к решениям си-
стемы (8) (нетривиальным), то i/jZj + y2z2 = 0. Поэтому,
считая, что Zj * 0,
*/2*^2 ^2 v л
Д1=С1ПУ2 - «21У1 = «11У2 + «21 —— = ~(«1121 + «2122) = °*
Z/222 У2
Д2=«1гУг ~ а2гУ1 ~ а1гУг «22 _ = ~ («1221 + «2222^ ~~ О'
21 21
Отсюда следует, что ранг В = ранг А = 1.
Обратно, пусть вектор у = (yt, таков, что ранг В =
=ранг А, тогда (1) имеет некоторое решение (х,, х2). Дока-
§21. ТЕОРЕМЫ ФРЕДГОЛЬМОВА ТИПА 159
жем, что у ортогонален к решениям £ = (£,, £,) системы
(8). В самом деле,
У121 + У2г2 = + °12Х2)21 + (°21Х1 + а22Х2)22 =
— (a11z1 + a21z2)x1 + (ct12£j + п22а2)х2 = 0 • xt + 0 • х2 = 0.
Теорема 2. Однородные уравнения
Ах = 0 (10)
и
А*х = 0 (10‘)
имеют одинаковое число линейно независимых решений.
В частности, если одно из этих уравнений имеет
только тривиальное решение 0, т. е. имеет нуль незави-
симых решений, то это верно и для другого.
Замечание. В последнем случае уравнение (1) имеет
единственное решение.
Доказательство. Матрицы А и А* имеют один и
тот же ранг, который обозначим через k. Они имеют так-
же один и тот же определитель Д.
Если k = п, то Д 0 и уравнения (10) и (10*) имеют
только тривиальные решения 0. В этом случае, согласно
теореме 1, уравнение (1) имеет единственное решение при
любых у g Rn.
Пусть теперь 1 < k < п. После соответствующей перену-
мерации уравнений и компонент определитель
а11 • • alh
akl • • • akk * 0
Первые k уравнений (1°) теперь запишем в виде
160
§21. ТЕОРЕМЫ ФРЕДГОЛЬМОВА ТИПА
а11х1 + alkXk ~ al,k+lXk+l ”• а1пхп’
(9)
aklxl + • • • + akkxk ~ ~ak,k+lxk+l aknxn'
Ниже приводится таблица п — k векторов
х1 = (xj, ...» xj.l, 0,...,0),
х2 = (х?,...,^,0, 1, 0....0),
x"-ft = (х?к, ..., x£~k, 0..........0, 1).
Чтобы получить первый вектор, подставляем в систему (9)
х... = 1, хь., = 0............х = О
и решаем ее относительно х,, xk. Единственные реше-
ния, которые здесь получаются, обозначим через xj. ....
xj. Чтобы получить второй вектор, подставляем в (9)
х,,, = 0, х.,„ = 1, х.,, = 0.х = О
ff+I * НТС ' S+o Л
и находим числа х2» •••> х2 и т. д. Векторы (10) обладают
следующими свойствами.
1) Система векторов (10) линейно независима, потому
что ранг матрицы этих векторов равен числу этих векто-
ров Ц = п - k.
2) Каждый вектор системы (10) есть решение (любых!)
уравнений (20) или Ах = 0.
3) Всевозможные решения уравнения Ах = 0 имеют
ВИД
XjX1 + ... + Xn_ftx"'*,
где Хр ..., t - произвольные числа.
§22. САМОСОПРЯЖЕННЫЙ ОПЕРАТОР
161
Обычно эти три утверждения заменяют словами: урав-
нение (10) имеет п - k линейно независимых решений.
Подобными рассуждениями, учитывая, что ранг А =
=ранг А*, доказываем, что уравнение А*х = 0 тоже имеет
n — k линейно независимых решений. Теорема доказана.
Теорема 3. Если одно из однородных уравнений (10)
или (10*) имеет k линейно независимых решений, то и
другое имеет k линейно независимых решений; образы же
L = A(R^ и L* = A*(jR„) пространства Rn, получаемые при
помощи операторов А и А*, суть подпространства n — k
измерений.
Доказательство. Первое утверждение теоремы о
равенстве количеств линейно независимых решений одно-
родных уравнений (10) и (10*) есть теорема 2, а второе -
есть лемма 1, в силу которой измерение подпространства
L равно n — k, где k — измерение подпространства L' век-
торов z, удовлетворяющих уравнению А*г = 0. Аналогич-
но измерение L* равно п — k, где k — количество измерений
подпространства векторов и, удовлетворяющих уравнению
Аи = 0.
§ 22. Самосопряженный оператор.
Квадратичная форма
Линейный оператор
(Л = 1, .... n) (1)
Ь=1
или, коротко,
у = Ах (х е Rn, у е Rn) (2)
называется самосопряженным, если он равен своему со-
пряженному (А = А*), т. е. если
6 Бугров. Т. 1
162
§22. САМОСОПРЯЖЕННЫЙ ОПЕРАТОР
Ах = А*х Vx е Rn, (3)
иначе говоря, если матрица А симметрическая:
ам = аи, (*» I “ 1. —. «) 0)
(см. (3) и (3*) § 21). Мы считаем аы и Rn действительными
(см. ниже замечание 1).
Для самосопряженного оператора имеет место харак-
терное равенство
(х, Az) = (Ах, z) Vx, z g Rn
(см. § 21, (4)). Очевидно,
(x, Ax) = xkJ\ akixi = aHxkxi (аы = alh). (4')
Л-1 1=1 k=ll=l
Выражение справа в (4') называется квадратичной,
формой п-го порядка. Это непрерывная функция от векто-
ра х или, что все равно, от переменных хр ..., хп.
Будем рассматривать эту функцию на множестве S
значений х, имеющих единичную норму (|х| = 1). Множе-
ство S есть сфера в Rn радиуса 1 с центром в точке 0. S —
ограниченное множество. Кроме того, оно замкнуто 1): если
точки последовательности {xv} (v = 1, 2, ...) принадлежат
к S (т. е. |xv| = 1, v = 1, 2,...) и эта последовательность
стремится к некоторой точке х° е Rn (xv —> х°, v <»), то
неминуемо х° g S, т. е. |х°| = 1, потому что
|1 —|х°|| = |И - |х°|| < |xv - х°| -> 0, откуда |х°| = 1.
Найдем максимум квадратичной формы (4') на сфере S.
Так как форма (4') есть непрерывная функция на замкну-
том ограниченном множестве, то максимум ее на S дости-
гается для некоторого единичного вектора х1 (|х’| = 1).
Обозначим этот максимум через
\ = (Ах1, х1) > (Ах, х) Vx : |х| = 1. (5)
Введем подпространство L', ортогональное к вектору
х1, т. е. множество всех векторов v, каждый из которых
§22. САМОСОПРЯЖЕННЫЙ ОПЕРАТОР 163
ортогонален к х1. В L' возьмем произвольный единичный
вектор v° (|и°| = 1). Вектор
cos а • х1 + sin а • v°
зависит от а и имеет единичную норму
|cos а • х* + sin а • и°| =
= (cosoc'x1 + sinoiT0, cosofx1 + sina*v°)l/2 =
= (cos2a + sin2a)1/2 = 1.
При a = 0 этот вектор обращается в х*. Но тогда фун-
кция
y(a) = (A(cos a • х1 + sin a • v°), cos a • x1 + sin a • r°)
достигает своего максимума в точке a = О (у(0) = (Ах1, х1))
и в силу необходимого условия экстремума
г/(0) = 0.
Вычислим эту производную. Имеем
V(<x) = cos2Ot(Ax1, х1) + sin2cz(AxI, и0) + sin2a(An°, г°).
Следовательно,
\/(a) = -sin2a(Ax’, х1) + 2cos2a(Ax1, v°) + sin2a(At>°, v°)
и
1/(0) = 2(Ax‘, v°) = 0.
Мы получили, что вектор Ах1 ортогонален ко всем
единичным векторам v° е И, следовательно, и к любым
векторам е L'. Но тогда Ах1 отличается от х1 лишь
множителем (см. следствие 1 в конце § 20), т. е.
Ах1 = Хх1,
где X — некоторое число.
Из первого соотношения (равенства) в (5), учитывая,
что |х’| = 1, следует
* См. нашу книгу «Высшая математика. Дифференциальное и
интегральное исчисление», § 8.12.
6*
164
§22. САМОСОПРЯЖЕННЫЙ ОПЕРАТОР
Xj = (Хх1, X1) = X.
Таким образом, мы доказали, что максимум квадра-
тичной формы (4') на единичной сфере |х| = 1 достигается
в некоторой точке х’,
max (Ах, х) = (Ах1, х1) = Хг
При этом
Ах1 = Х,х‘, |х‘| = 1.
Мы видим, что нетривиальный (не равный нулю) век-
тор х1 отображается при помощи оператора А в вектор
XjX1, ему коллинеарный.
Такой вектор называется собственным вектором опе-
ратора А, а число Xj - принадлежащим этому вектору
собственным значением.
Будем теперь рассматривать оператор А на подпрост-
ранстве R1, определяемом как множество векторов х (е 7?л),
ортогональных к вектору х1 (выше мы его обозначали
через L'). R1 есть (п - 1)-мерное подпространство - в нем
имеются ортонормированные базисы, состоящие из п - 1
векторов. Цель наша заключается в подыскании одного
такого базиса, как мы увидим, естественно связанного с
оператором А.
Важно подчеркнуть, что образ А(7?’) подпространства
R* при помощи оператора А принадлежит к Я1, потому
что, если (х, х1) = 0, то
(Ах, х1) = (х, Ах1) = (х, Х^1) = Х,(х, х') = О,
т. е. Ах е R1.
Самосопряженность оператора А на R1 тривиальным
образом сохраняется, потому что равенство
(Ах, у) = (х, Ау),
верное для всех х, у g Rn, верно также для всех х, у е R1.
§22. САМОСОПРЯЖЕННЫЙ ОПЕРАТОР 165
Итак, мы теперь рассматриваем самосопряженный ли-
нейный оператор А на линейном подпространстве 7?1 изме-
рения п - 1. К нему можно применить приведенные выше
рассуждения и обнаружить в 7?’ существование единично-
го вектора х2 такого, что
max (Ах, х) = (Ах2,х2) = Х2 < Л..
1*1=1 |х2|=1
(*.*‘)=0 (х2.х1)=О
Дело в том, что единичная сфера S’ в R' определяется,
очевидно, как множество единичных векторов х, ортого-
нальных к х1. При этом
Ах2 = Х2х2.
Мы нашли второй собственный вектор оператора А —
вектор х2 и принадлежащее к нему собственное значение
Х2, очевидно, не превышающее (при уменьшении обла-
сти рассмотрения максимум может только уменьшиться).
При этом (х1, х2) = О.
Подобным образом можно ввести подпространство R2,
измерения п - 2, ортогональное к векторам х1 и х2, пока-
зать, что оператор А отображает R2 в R2 и определить
третий единичный вектор х3, ортогональный к х1 и к х2
такой, что для него имеет место
max (Ах, х) = (Ах3, х3) = Х3
(х.х1)=0.(х.х2)=0
и
Ах3 = ХдХ3 (Х3 < \ < X,).
Продолжив этот процесс по индукции до n-го вектора
х", мы получим ортонормированную систему векторов
х1, х2, .... х" (6)
и систему действительных чисел
166
§22. САМОСОПРЯЖЕННЫЙ ОПЕРАТОР
Х2, .... X,
(7)
обладающих свойствами
Ахк = ХАх* (k = 1.....п),
^k - ^*-1 -
(8)
Мы получили полную систему собственных векторов
оператора А и принадлежащих им собственных значе-
ний. Так как ортонормированная система (6) принадле-
жит к Rn и состоит из п векторов, то она есть базис в Rn
(см. § 17). Поэтому произвольный вектор х 6 Rn можно
разложить по этой системе:
х = У (х, хк)хк. (9)
Л=1
Тогда наш самосопряженный оператор А может быть
записан следующим образом:
п
Ах = А У (х, xft)x*
= У, (х, хк)Ахк = У Xft (х, х*)х*. (10)
Л=1 Л=1
Мы доказали теорему.
Теорема 1. Самосопряженному оператору А в про-
странстве Rn соответствует ортогональная система век-
торов х1, .... х" (базис Rn) и система действительных чисел
Хр ..., Хп такие, что Ах для любого х е Rn представляет-
ся в виде суммы (10).
Квадратичная форма (4') соответственно записывается
следующим образом:
(х, Ах) =
г п п '
(х, х*)хА, У Xs (х, xs)xs
<А=1 8=1 >
п
£xs (х, Xs)2. (4")
8=1
На практике часто мы исходим из некоторой квадра-
тичной формы
§22. САМОСОПРЯЖЕННЫЙ ОПЕРАТОР 161
X X аы xkxt (аы = а№). (4')
Л=1 1=1
Чтобы применить к ней полученные результаты, мож-
но определить в связи с ней линейный оператор
У = Ах,
определяемый равенствами
У, = Хачх> (l = 1....п)-
i=i
В силу условия аы = это самосопряженный опера-
тор, и к нему применима теорема 1. На языке квадратич-
ной формы теорема 1 может быть переформулирована
следующим образом.
Теорема2. Пусть задана квадратичная форма (4') в
п-мерной системе координат хг .... хп пространства Rn
с ортами i1
*=X
Л=1
. Существует прямоуголь-
ная система координат с ортами х1, ..., х",
образующими ортогональный базис
Л=1
и сис-
тема действительных чисел Л2,.... Лп такие, что квадра-
тичная форма (4') в этой системе есть сумма квадратов
координат Ji,s вектора х, помноженных соответственно
на числа Хв:
п п п
X X аы xkxt = X
Л=1 1=1 S=1
(4"')
168§22. САМОСОПРЯЖЕННЫЙ ОПЕРАТОР
Переход от левой части (4"') к правой можно осуще-
ствить, если известны разложения векторов х1, хп по
ортам i1, in. Пусть
п
8=1
(см. § 17, (7), где надо заменить а-я, ak соответственно на
Pys, х'). Так как Р, i" и х1, хп - ортонормированные
базисы в Rn, то матрица
Л = им
ортогональная. Мы считаем, что она известна. Один и тот
же вектор х можно разложить по двум базисам:
»- i,v- -
8=1 7=1
Но тогда
7=1 7=1 s=l s=l\j=l j
и в силу линейной независимости системы Р, in полу-
чим
х, = •". «) (11)
7=1
Таким образом, переход от координат Е,,, к коор-
динатам хп хп осуществляется посредством матрицы
Л', транспонированной к Л (т. е. с помощью строк матри-
цы Л' или столбцов матрицы Л).
Если подставить выражения (11) для xt в левую часть
(4"'), то должны получить правую. Запишем это равен-
ство:
§22. САМОСОПРЯЖЕННЫЙ ОПЕРАТОР
169
п п п п п п п f п У
J^PyJsy^PzZ^Z *= ^°mPzZ ^j^>i =
fc=l Z=1 j=l 1=1 j=l 1=1 k=l \Z=1 >
- i>.« _ iiw,
s=l Z = 1 i=l
где 8, =
0, j # Z,
j _ - символ Кронекера.
Если приравнять коэффициенты при одинаковых Е,Д,
то получим равенства
к=1
У* q*zPzz
= 8Д (i, j = 1, ..
П),
которые можно трактовать следующим образом (см. § 15,
(6)). Для матрицы
= 11ам11 (ОЫ — aik)
самосопряженного оператора А существует ортогональная
матрица
Л = IIPJI
такая, что
Л-А-Л1 = Я, (12)
где Я — некоторая диагональная матрица
Aj 0 0...0
0 0...0
Я =
(13)
0 0 О...Хг
(Х; - действительные числа), называемая канонической.
170
§22. САМОСОПРЯЖЕННЫЙ ОПЕРАТОР
Отметим, что для ортогональной действительной мат-
рицы Л
Л1 = Л'.
Так как определители ортогональных матриц |Л| =
= |Л *| = ±1, то из (12) следует
П^-= И = lAl-lAl-M = HI- (14)
1=1
Мы доказали, в частности, следующую теорему.
Теорема 3. Если определитель |А| самосопряженной
матрицы А не равен нулю (|А| Ф 0), то все ее собственные
числа Хр Хп не равны нулю ('kj 0, j = 1, ..., п).
Из теоремы 2 следует, что
1) Если Xt > ... > Хп > 0, то квадратичная форма поло-
жительная для любых векторов 0, а следовательно, и
любых векторов х Ф 0. В этом случае она называется строго
положится ьной.
2) Если 0 > Xj > Х2 > ... > Хп, то форма отрицательная
для любых Е, Ф 0, следовательно, и любых х Ф 0. В этом
случае она называется строго отрицательной.
3) Если Xj > ... > Х„ и Х„ = 0, то форма неотрицательная.
Существует направление, (ось Е,п), вдоль которого она рав-
на нулю. Это положительная форма, но не строго.
4) Если Xj = 0 > Xt > ... > Хп, то форма отрицательная
не строго.
5) Если Xj > 0, а Хп < 0, то форма неопределенна. Если
исключить нулевую точку, то вдоль оси она положи-
тельная, вдоль же оси Е,п — отрицательная.
Оказывается, что по виду матрицы ||А||, по знаку неко-
торых порождаемых ею определителей можно узнать, будут
ли ее собственные числа все положительные, все отрица-
тельные или среди них есть как положительные, так и
§22. САМОСОПРЯЖЕННЫЙ ОПЕРАТОР 171
отрицательные. В этом заключается теорема Сильвест-
ра'.
Составим ряд главных миноров квадратичной формы
(Ах, х):
а11 а1п
«11> Д2
а11
а21
а12
°22
ат апп
А
п
Согласно теореме Сильвестра, которую мы не доказы-
ваем, имеют место следующие утверждения:
1. Если Aj >0, А2 > 0, Ап > 0, то форма строго
положительна (случай 1)).
2. Если At < 0, А2 > 0, А3 < 0, ..., (-1)"Ап > 0, то форма
строго отрицательная (случай 2)).
3. Если Aj > 0, А2 > 0, ..., Ап > 0 или
Aj < 0, А2 > 0, .... (—1)"Ап > 0
и имеется j, при котором А; = 0, то форма заведомо не
строго определенна.
4. Во всех остальных случаях квадратическая форма
неопределенна.
Замечание 1. Если Rn - комплексное пространство,
а аы = аи - по-прежнему действительные числа, то рас-
суждения, приведенные выше, мало отличаются. Форму-
ла (4') теперь записывается так:
(х, Ах) = ^~l.хkakixi = ^j^jaHxkxi .
Л=1 1=1 k=ll=l
Число (х, Ах) остается действительным, потому что
п п п п п п
(х, Ах) = aklxkxl = alkxkxl = aklxkxl =
*=1I=1 k=ll=l k=ll=l
Дж. Дж. Сильвестр (1814-1897) - английский математик.
172
§22. САМОСОПРЯЖЕННЫЙ ОПЕРАТОР
= (х, Ах).
Это показывает, что приведенные выше факты (форму-
лы (4')—(10)) остаются неизменными, в частности числа X,..
...» Хп и в случае комплексного Rn действительны. Теорема
1 полностью сохраняется для комплексного Rn. Формула
(4") теперь имеет вид
п
(х, Ах) = У, ч |(х, xs)|2,
s=l
т. е. теперь уже квадраты чисел (х, Xs) надо заменить на
квадраты их модулей. Формула (4"') теперь уже выглядит
следующим образом:
л п п
ХХа*« = Xw,
Л=11=1 S=1
а в остальном теорема 2 остается в силе.
Замечание 2. Отметим, что действительность соб-
ственных значений самосопряженного линейного опера-
тора А и Rn (действительном или комплексном) можно
доказать следующим образом. Пусть X — собственное зна-
чение оператора А и х° (|х°| = 1) — принадлежащий к нему
собственный вектор. Так как Ах° = Хх°, то
X = Х(х°, х°) = (Хх°, х°) = (Ах°, х°) = (х°, Ах°) =
= (х°, Хх°) = X (х°, х°) = X .
Ортогональность собственных векторов оператора, при
надлежащих разным собственным значениям, тоже мож-
но доказать непосредственно.
В самом деле,
Ах1 = XjX1, Ах2 = Х2х2
(|хЧ = 1, |х2| = 1, Xt * Х2),
тогда
§23. КВАДРАТИЧНАЯ ФОРМА 173
ЛДх1, х2) = (AjX1, х2) = (Ах1, х2) = (х1, Ах2) =
= (х1, Х2х2) = Х2(х1, х2) = Х2(хЧ х2).
Так как А Х2, то (х1, х2) = О.
§ 23. Квадратичная форма
в двухмерном пространстве
При и = 2 квадратичная форма имеет вид
a^Xj2 + a12XjX2 + я21х2х1 + а22х2
— cijjXj2 + 2a12xlx2 + и22х2 , (1)
так как а,, = (мы считаем а., действительными).
Чтобы привести форму (1) к сумме квадратов коорди-
нат вектора (£1? Е,2) в некотором базисе (х‘, х2), надо (см.
§ 22) найти базисные орты х1, х2 - собственные векторы
самосопряженного оператора А, порожденного симметри-
ческой матрицей
а11 а12
а21 а22
Укажем способ нахождения собственных значений (чи-
сел) и собственных векторов оператора А, отличный от
метода § 22.
Итак, если Хо — собственное число оператора А и х° =
=( х<0), х<°> )А О — соответствующий ему собственный век-
тор, то
Ах° = Хох°.
Перепишем это уравнение в координатной форме:
174
§23. КВАДРАТИЧНАЯ ФОРМА
(«11 - Х0)х{0) + “12*2” = °>
О21х1°^ + (“22 — \))х2°* ~ О».
(2)
или в операторной форме:
(А - к0Е)х° - 0, (2')
где Е — тождественный оператор.
Таким образом, однородная система (2) имеет ненуле-
вое решение х°, что может быть, если определитель систе-
мы (2) или (2') равен нулю:
“и ^-о
“12
“12
“22 ~ Хо
= |А - Х0Е| = 0.
Итак, собственное число 10 является корнем уравне-
ния
|А - Х0Е| = 0, (3)
которое называется характеристическим уравнением
оператора А (или квадратичной формы (Ах, х)).
Верно и обратное утверждение. Если Хо является кор-
нем уравнения (3), то нетривиальное решение системы
(А - Х0Е)х = 0 (4)
будет собственным вектором самосопряженного оператора А.
Следовательно, собственные числа оператора А находят-
ся в данном случае как корни квадратного уравнения (3):
(“и - Х)(а22 - X) - af2 = 0,
X2 - (ап + а22)Х + “n“22 - af2 = 0.
Решая это уравнение, получаем
Xi
Х2
— О11 + а22 + -^4012 + («11 - “22 )2 •
|_
77 “и +а22 - 7^«i2 + (“и - “22 )2 •
L
(5)
§23. КВАДРАТИЧНАЯ ФОРМА
175
Отсюда видно, что Х( > Х2, при этом X, = Х2 в случае
at2 = 0, ап = а22. Будем для определенности считать, что
ап > а22 (иначе меняем хх на х2 и х2 на х,). Тогда
\ — on(^i — ап = <7 I д/^а12 + (ап — а2г)2 — (аи — а2г)1 —
Из (5) следует, что собственные значения оператора А
(самосопряженного) — действительные числа.
Теперь по известным собственным числам Xj и Х2 най-
дем собственные единичные векторы, как решения систе-
мы (4). Так как |А - XjE] = 0, то
ранг (А — Х,Е) < 1.
Если Xj = Х2, то в этом случае матрица А — Х,Е состоит
из одних нулей (Xt — Х2 = аи = а22, а12 = 0), т. е. ее ранг
равен нулю. В этом случае квадратичная форма уже при-
ведена к сумме квадратов (а12 = п21 = 0). Системе (4) удов-
летворяет любой вектор х = (х,, х2). Поэтому за собствен-
ные векторы можно взять орты системы координат х1 —
= i = (1, 0), х2 = j = (0, 1). Любая другая система (х1, х2)
ортонормальных векторов обладает тем свойством, что в
этой системе квадратичная форма по-прежнему состоит из
одних квадратов.
Теперь, если X, > Х2, то либо а12 Ф 0, либо а12 = 0,
«п а22. Второй случай можно не рассматривать, так как
форма (1) уже приведена к сумме квадратов. Итак, пусть
а12 Ф 0. Тогда
ранг (А - XjE) = 1.
Поэтому достаточно рассмотреть одно уравнение систе-
мы (4):
(ап - X^Xj + а12х2 = 0.
Отсюда имеем (а12 ф 0)
Х2 — [(”#и +
176
§23. КВАДРАТИЧНАЯ ФОРМА
Вектор
У'
является решением системы (4). Нормируя этот вектор,
получим собственный вектор
Проводя элементарные преобразования, можно полу-
чить равенства
= ±-U + (яп - я22)/^я^ + (яп - a^F,
V
Х2^ = - ~ ПГ 12 ~ (а11 - Я22)/ 7^°12 + (°11 “ Я22)2 •
V "
В дальнейшем достаточно брать в формулах (6) знак +.
Совершенно аналогично по собственному числу Х2 най-
дем собственный вектор х2. Оказывается, что
X2 = (xj2’, х®) = (-х"’, х!1’).
Составим теперь матрицу оператора (ортогонального
преобразования) Л, переводящего орты (i, /) в орты (х1, х2):
г(1>
Х2 Xj
§23. КВАДРАТИЧНАЯ ФОРМА 177
(в строках стоят координаты образов базисных ортов i и
j при помощи Л, т. е. х1 = x{n i + х2' j, х2 = — х™ i + xf” j).
Тогда координаты вектора (х,, х2) в системе (i, j) связаны
с координатами (Е,,, Е,2) этого вектора в системе (х1, х2) с
помощью столбцов матрицы Л:
Xi = — Х2^2’
*2 = +Х1%-| (7)
Подставляя эти значения в квадратичную форму (1) и
учитывая формулы (5) и (6), получим
ан х1 + 2а12х1х2 + а22х2 + ^*2 ^>2* (®)
Правая часть этого равенства называется каноничес-
ким видом квадратичной формы.
Если числа \ и Х2 одного знака, то будем говорить,
что квадратичная форма принадлежит эллиптическому
типу, если и Х2 разных знаков, то гиперболическому
типу, если же одно из чисел X, или 12 равно нулю, то
параболическому типу.
Из (5) видно, что = ana22 - af2 - Поэтому тип формы
(1) можно определить по знаку выражения апа22 — а%2
Квадратичная форма будет эллиптической, гиперболи-
ческой или параболической, если выражение апа22 - af2
соответственно больше, меньше или равно нулю.
Пример 1. Привести к каноническому виду форму
xf - -/з х,х2 + 2 х2.
В данном случае ап = 1, а12 = ——-, а22 = 2. Так как
178
§23. КВАДРАТИЧНАЯ ФОРМА
апа22 ~ °12 = - ~= ~ >0, то форма будет эллиптичес-
кой. Найдем собственные векторы и их собственные зна-
чения по формулам (5), (6):
1
2
.а»
„(и
Л2
/3
2
1
2’ 2
Далее.
.2 =
J3 £
2 ’ 2
1.
2 ‘
К
В системе (х1, х2) наша квадратичная форма имеет вид
-Е2+Ъ2
2 Ь! 2
Так как х}1’
то преобразование с помощью матрицы
Л =
(1)
1
r(i)
х2
-х(1)
Х2
„(П
(X1 = (х"’
х’1’), х2 = (-х’1’, х"'))
х
означает поворот системы хр х2 на угол а = л/3 около нача-
ла координат по часовой стрелке (см. пример 1 в конце § 16).
§ 24. Кривая второго порядка
24.1. Общее уравнение кривой второго по-
рядка. В плоскости, в некоторой прямоугольной систе-
ме координат х, у, пусть задана кривая, определяемая
неявно уравнением второй степени
§24. КРИВАЯ ВТОРОГО ПОРЯДКА 179
Ах2 + 2Вху + Су2 + 2Dx + 2Еу + F = О, (1)
где А, В, С, D, Е, F — заданные действительные числа. При
этом числа А, В, С одновременно не равны нулю. Эта
кривая называется кривой, второго порядка. На самом деле
может случиться, что нет вовсе точек (х, у) с действитель-
ными координатами, удовлетворяющих уравнению (1). В
этом случае говорят, что уравнение (1) определяет мнимую
кривую второго порядка. Мы не будем изучать мнимые
кривые. Уравнение
х2 + у2 = -1
может служить примером уравнения второй степени, оп-
ределяющего мнимую кривую.
24.2. Важные случаи общего уравнения
кривой второго порядка. Перечислим шесть важ-
нейших частных случаев общего уравнения (1):
1) Уравнение эллипса
2 2
х у
-у + ^-= 1 (а, Ь > О)
а2 Ь2
с полуосями длины а и Ъ. В частности, при а = Ь уравне-
ние окружности
х2 + у2 = а2
с центром в начале координат и радиусом а.
2) Уравнение гиперболы
х2 У2
~2~12 =1
а о
с полуосями а и Ъ.
3) Уравнение параболы
у2 = 2рх (р > О)
180 424. КРИВАЯ ВТОРОГО ПОРЯДКА
4) Уравнение пары пересекающихся прямых
а2х2 — Ь2у2 = 0 (0 < а, Ь).
5) Уравнение пары параллельных или совпадающих
прямых
х2 — а2 = 0 (а £ 0).
6) Уравнение, определяющее точку,
х2 + у2 = 0.
Остановимся вкратце на перечисленных кривых.
Эллипс
х2 у2
—+ ТГ = 1 (а > Ь > 0). (2)
а Ь
При а = b эллипс (2) обращается в окружность радиуса
а с центром в начале координат, т. е. геометрическое ме-
сто точек, отстоящих от начала на расстоянии а.
Пусть а > Ь. Положим с = у]а2 _ . Отметим на оси х
точки F2, имеющие абсциссы х = -с и х = с. Это фоку-
сы эллипса. Эллипс (2) можно определить как геометри-
ческое место точек, сумма расстояний которых до фоку-
сов Fv F2 есть величина постоянная, равная 2а.
В самом деле (рис. 37),
MFX = ^(х + с)2 + у2 , MF2 = д/(х - с)2 + у2 ,
2а = -J(x + с)2 + у2 + -J(x — с)2 + у2 ,
откуда
2а - J(X + с)2 + у2 = д/(х - с)2 + У2
И
4а2 + (х + с)2 + у2 - 4а -§{х + с)2 + у2 = (х - с)2 + у2,
§24. КРИВАЯ ВТОРОГО ПОРЯДКА
181
4а2 + 4сх = 4a-J(x + с)2 + у2 ,
а2 + 2а2сх + с2х2 = а2[х2 + 2сх + с2 + у2],
—Ь2х2 = — а2Ь2 + а2у2,
а2Ъ2 = Ь2х2 + сРу2,
откуда следует уравнение (2). Если проследить эти вык-
ладки в обратном порядке, то получим, что если точка
(х, у) удовлетворяет уравнению (2), то сумма ее расстоя-
ний до F, и F2 равна 2а.
Если в уравнении (2) заменить х на -х, то оно не из-
менится — это показывает, что эллипс (2) есть кривая,
симметричная относительно оси у. Аналогично эллипс (2)
симметричен относительно оси х, потому что его уравне-
ние не изменяется при замене у на — у. Но тогда достаточ-
но изучить его уравнение в первой четверти (системы
координат), т. е. для х, у > О. Часть эллипса, находящая-
ся в первой четверти, определяется уравнением
у = -Ja2 — х2 (О < х < а).
а
Из этого уравнения видим, что наш эллипс проходит
через точки (О, Ь) и (а, 0). При этом его ордината у при
непрерывном возрастании х на отрезке [0, а] непрерывно
убывает.
Эллипс — ограниченная кривая. Он находится внутри
круга радиуса а с центром в начале координат (для коор-
динат любой точки эллипса (х, у) имеет место неравенство
х2 + у2 < а2
2 2 \
а2 Ь2
а2.
Из рис. 37 мы видим, что эллипс есть непрерывная
замкнутая кривая. В первой четверти это выпуклая вверх
182
§24. КРИВАЯ ВТОРОГО ПОРЯДКА
Рис. 37
кривая. В любой ее точке можно провести касательную1.
Все эти свойства и многие другие могут быть с успехом
изучены методами математического анализа, который к
тому же дает средства для точного определения высказан-
ных выше понятий — непрерывность, выпуклость и т. д.
Уравнение эллипса можно записать еще в параметри-
ческой форме
х = a cos 6,1
, . о г (-°° < 0 < “). (3)
у = Ь sm 6, J
В самом деле
х у
—г + = cosz6 + sin26 = 1,
а2 b2
т. е. точка (х, у), определяемая равенствами (3) при любом
6 принадлежит эллипсу (2). Если 6 непрерывно пробегает
полуинтервал [О, 2л), то точка (х, у) описывает полный
эллипс. При дальнейшем возрастании 6 движение перио-
дически повторяется.
Выясним смысл параметра 6 и попутно укажем способ
построения эллипса (рис. 38). Проведем две концентрических
1 См. нашу книгу «Высшая математика. Дифференциальное и
интегральное исчисление», §4.2.
§24. КРИВАЯ ВТОРОГО ПОРЯДКА
183
окружности радиусов b и а (Ь < а) с центром в точке О. Затем
проведем радиус-вектор под углом в к оси х и обозначим его
точки пересечения с окружностями радиуса Ь и а соответ-
ственно Т и N. Из точки N проведем прямую, параллельную
оси у, а из точки Т — прямую, параллельную оси х. Точка
пересечения этих прямых М принадлежит эллипсу. В самом
деле, пусть х — абсцисса точки М, а у — ордината этой точки.
Тогда (см. рис. 38)
х = ON • cos 6 = a cos 6,
у = TR = ОТ-sin 6 = b sin 6,
т. е. точка М действительно находится на эллипсе (3) и пара-
метр 6 есть угол между осью х и лучом ON. Отметим, что 6
не является полярным углом ср, который образует радиус-
b
вектор ОМ с осью х (tg <р = —tg 6). Например, если <р = л/4,
а
а = д/з , Ъ = 1, то 6 = л/3; если <р = О, то 0 = 0; если <р = л/2,
то 6 = л/2.
184
§24. КРИВАЯ ВТОРОГО ПОРЯДКА
Рис. 39
Гипербола
х у
— =1 (О < а, Ь). (4)
а b
Положим с = ^а2 +1)2 и отметим на оси х точки F, и
F2 — фокусы гиперболы (4), имеющие абсциссы х = —с и
х = с (рис. 39).
Гипербола (4) может быть определена также как гео-
метрическое место точек А = (х, у), разность расстояний
которых до фокусов Fj и F2 есть величина постоянная,
равная 2а.
Имеем (см. рис. 39)
AF' - AF2 = ^х + с)2+уг - -^(х — с)2 + у2 = 2а,
д/(х + с)2 +у2 = -J(x - с)2 + у2 + 2а,
4сх - 4а2 = 4адЦх-с)2 +у2 ,
Ь2х2 — а2у2 = а2Ь2,
откуда следует уравнение (4).
§24. КРИВАЯ ВТОРОГО ПОРЯДКА
185
Мы получили правую ветвь гиперболы (см. рис. 39).
Чтобы получить левую ветвь, надо исходить из равенства
AF2 - AFr = 2а.
Рассуждениями, проведенными в обратном порядке,
можно заключить, отправляясь от уравнения (4), что точ-
ки (х, у) ему удовлетворяющие, принадлежат к указанно-
му выше геометрическому месту.
По виду уравнения (4) заключаем, что гипербола (4)
симметрична относительно оси х и оси у. Часть гипербо-
лы (4), находящаяся в первой четверти, имеет уравнение
у = — у/х2 - а2 (а < х < ~). (5)
а
Мы видим, что наша гипербола проходит через точку
(а, О) и при возрастании х на полуинтервале [а, «>) орди-
ната у возрастает и стремится к бесконечности. Точки В —
=(—а, 0) и С = (а, 0), в которых гипербола пересекает ось
х, называются вершинами гиперболы.
На рис. 39 нарисованы две прямые:
b
у = ± — X.
а
Это асимптоты нашей гиперболы.
Пусть на полуинтервале [а, ~) (или (—а]) задана
кривая у = fix). Говорят, что прямая у = тх + п есть
асимптота этой кривой при х —> +<* (х —> —°°), если
lim [/(х) - тх - п] = 0
Х->+оа
(соответственно lim [/(х) ~ nix — п] = 0).
Рассмотрим кусок нашей гиперболы, определяемый
b
равенством (5), и сравним его с прямой у — —х. Предел
а
186
§24. КРИВАЯ ВТОРОГО ПОРЯДКА
1- Ьх Ь [~2 2
11ГП---------У]Х -й
а а
.. b а2
lim--------. = О.
а х + у1х2- а2
Это показывает, что прямая у = —х есть асимптота
а
рассматриваемого куска гиперболы при х +«>. Но тогда
b
говорят, что прямая у = —х есть асимптота (всей!) гипер-
болы при х +«>. В силу симметрии нашей гиперболы
относительно осей, так же как симметрии пары прямых
b
у = ±—х относительно осей, можно сказать, что обе эти
а
прямые являются асимптотами нашей гиперболы и при-
том как при х —> +<*>, так и при х —» —<*>.
Правая ветвь гиперболы (4) может быть записана в
параметрическом виде
х = a chu = (еи + е и),
у = bshu = — (е“ - е~и),
2
(—сю < и < <х>).
(6)
В самом деле, так как
ch2u — sh2w = 1,
(7)
то из уравнений (6) получим
Х У 1,2 1,2 1
—-----2 = с"и — sh и = 1.
а b
Верхняя половина правой ве~ви гиперболы соответству-
ет изменению и е [0, “), а нижняя - изменению и е (-~, 0].
§24. КРИВАЯ ВТОРОГО ПОРЯДКА 187
Выясним, как параметр и связан с параметром в в парамет-
рическом уравнении эллипса, и попутно укажем способ пост-
роения гиперболы с помощью циркуля и линейки. Так как
наш способ построения гиперболы будет основан на способе
построения эллипса, то мы изложим эти два способа постро-
ения совместно (рис. 40). Ограничимся построением частей
эллипса (2) и гиперболы (6), находящихся в первой четверти.
Проведем две концентрические окружности радиуса а и Ь с
центром в начале координат. Проведем луч, выходящий из
начала координат под углом 0о к оси х. Пусть Т1 и Nt — точки
пересечения этого луча с указанными окружностями (OTl = b,
ONt = а). Проводя из точек Г, и Nt прямые, параллельные
осям х и у соответственно, получим точку их пересечения
Мз = (х0, у0), принадлежащую эллипсу (2). Затем проводим
луч ОМа. Пусть N2 — точка пересечения этого луча с окруж-
ностью радиуса а; Р - точка пересечения этого луча с прямой,
параллельной оси у и проходящей через точку эллипса Л=(а, 0).
Уравнение луча ОР можно записать:
Отсюда следует, что ордината точки Р равна Уп = -------.
Далее соединим точку Вг = (х0, 0) с точкой N2 и из точки А
Рис. 40
188
§24. КРИВАЯ ВТОРОГО ПОРЯДКА
а
хо
1-^
Ь2
— _ 1
2 2 1
х0 а
проведем прямую, параллельную BtN2, которая пересечет луч
ОР в точке Q.
Из подобия треугольников OAQ и OB^N2 получим, что
OQ = а2/х0. Радиусом OQ на оси х отмечаем точку В2=(а2/х0, 0).
Теперь из точек В2 и Р проводим прямые, параллельные
осям у и х соответственно. Точка пересечения этих прямых
Мг = (Хо, Уо), где Х„ = а2/х0 принадлежит гиперболе (4).
В самом деле, так как точка (х0, у0) лежит на эллипсе (2), то
у2 -yz2 4 2„ 2
Yq _ а ч Уо
а2 Ь2 “ а2х2 х2Ь2
т. е. точка Мг принадлежит
Отметим, что точка В2 — (а2/х0, О) является точкой пересе-
чения касательной к эллипсу в точке Мэ с осью х (см. сноску
на стр. 139).
Таким образом, каждой точке (х, у) эллипса (2) соответ-
ствует вполне определенная точка (X, Y) гиперболы (4) и
обратно.
Теперь, если эллипс (2) задан параметрически, то
х = a cos 6, у = b sin 6.
Поэтому
а2
а
cose
, у = — = ь tg е.
X
Отсюда, учитывая (6), получаем
1
ch и = ----— , sh и - tgO.
cos 6
Имеют место также следующие формулы:
0 11-cos 6
tg 2 Vl + cose
chu — 1
chu +1
1
e" = ch и + sh и — -------
cos 6
+ tge =
1 + sin 0
cos©
и
§24. КРИВАЯ ВТОРОГО ПОРЯДКА
189
2
т. е.
е . е
cos - + sin —
2 2
2е
2
9 в .
COS ----sin
2
е . е
cos — + sin —
2 2
6 . е
cos----sin —
2 2
(л 0
и = In tg 1—
14 2
Парабола
у2 = 2рх (р > О).
. f л 0^
sin —Р —
1,4 2)
(п бА
соя — + —
<4 2)
(8)
Отметим на оси х точку F с абсциссой х = р/2, называ-
емую фокусом параболы (8), и проведем прямую х = ~р/2,
называемую директрисой параболы (8) (рис. 41).
Парабола (8) может быть еще определена как геометри-
ческое место точек А = (х, у), равноудаленных от фокуса
и директрисы. В самом деле (см. рис. 41)
AF2 =
+ У2,
Рис. 41
190
§24. КРИВАЯ ВТОРОГО ПОРЯДКА
АВ2 =
следовательно.
~рх + у~ = рх,
т. е.
у2 = 2рх.
Обратно, из этого уравнения следует, что точки, ему
удовлетворяющие, принадлежат к указанному геометри-
ческому месту точек.
Из уравнения (8) видно, что парабола (8) симметрична
относительно оси х. Ее верхняя половина имеет уравнение
у = ^2рх (0 < х < ~), (9)
из которого видно, что когда х пробегает полуинтервал
[0, °°) возрастая, ордината у возрастает от 0 до
Укажем простой способ построения параболы (9) с
помощью линейки и прямого угла или с помощью цирку-
ля и линейки. Проведем прямую х = -2р (рис. 42). Возьмем
на этой прямой произвольную точку К = (—2р, у), у > 0.
Соединим эту точку с началом координат и проведем пря-
мую, проходящую через начало координат, перпендику-
лярную к прямой ОК. Далее проводим прямую через точ-
ку К параллельно оси х. Последние две прямые
пересекаются в точке М = (х, у), которая принадлежит
параболе (9), так как ОА = у есть среднее геометрическое
чисел 2р и х (у = ^2рх ).
Парабола (8) не имеет асимптот1.
1 См. нашу книгу «Высшая математика. Дифференциальное и
интегральное исчисление», § 4.20.
§24. КРИВАЯ ВТОРОГО ПОРЯДКА
191
(Ю')
Пара пересекающихся прямых
а2х2 - Ь2у2 = (ах - Ьу)(ах + by) = 0 (0 < а, Ь). (10)
Если какая-либо точка (х, у) удовлетворяет уравнению
(10), то она удовлетворяет одному из уравнений
ах — by = 0,
ах + by = 0
или обоим. Обратно, если точка (х, у) удовлетворяет одно-
му из уравнений (10'), то она удовлетворяет и уравнению
(10). В этом смысле говорят, что (10) есть уравнение пары
прямых.
24.3. Классификация кривых второго по-
рядка
Ниже будет доказано, что существует прямоугольная
система координат такая, что в ней кривая (1), если она
не мнимая, имеет одно из перечисленных выше уравне-
ний 1) - 6).
Более детально:
при АС - Б2 > 0 кривая (1) есть эллипс, точка (случаи
1), 6)) или мнимая кривая;
при АС — В2 < 0 кривая (1) есть гипербола или пара
пересекающихся (разных) прямых (случаи 2), 4));
192
§24. КРИВАЯ ВТОРОГО ПОРЯДКА
при АС — В2 = 0 кривая (1) есть парабола, пара парал-
лельных или совпадающих прямых или мнимая кривая
(случаи 3), 5)).
Мы позволяем себе говорить «кривая» даже и в случа-
ях 4), 5), 6), когда речь идет о паре прямых или множе-
стве, состоящем из одной точки.
Итак, пусть задано уравнение
Ах2 + 2Вху + Су2 + 2Dx + 2Еу + F = О, (1)
где коэффициенты А, В, С одновременно не равны нулю.
Не нарушая общности, можно считать, что А > О, А > С,
В > О. К этой ситуации всегда можно прийти с помощью
ортогональных преобразований:
х - Т],1 х = -Е,,
У = У = П
и умножения левой и правой частей (1) на —1.
Если В = О, А > С > О, то (1) можно записать в виде
Г D\2 ( Е? е2 D2
А *+— + СУ + — + F-------------------=0.(11)
I AJ V С) С А
Параллельный перенос
D Е
5-Х + -, п-у+-
преобразует уравнение (11) следующим образом:
i?2 Г)2
А^2 + Сг]2 F. (1Г)
Lz xi
Е2 D2
Если число --- + ----
С А
F > О, то уравнение (11')
представляет собой уравнение эллипса (случай 1)) с полу-
осями а, Ъ, где
§24 КРИВАЯ ВТОРОГО ПОРЯДКА
193
а2
Е2 D2
---+-----F /А, Ь2 =
С А '
Е2 D „
---+-------F /С.
С А '
Отметим, что в данном случае АС - В2 = АС > 0.
Если же правая часть уравнения (11') равна нулю, то
мы получаем точку (случай 6)).
При отрицательной правой части уравнение (11') дает
мнимую кривую.
Если число С = 0, А > 0, то (1) можно записать в виде
В2
+ 2Еу + F-----= 0.
(12)
Пусть число Е 0, тогда параллельный перенос
£ = х
D F D2
+ , Т] — у +---------
А’ 1 У 2Е 2АЕ
преобразует уравнение (12) в уравнение
At,2 + 2Ет} = 0,
(12')
которое (после замены, если нужно, г] на — ц) представляет
собой уравнение параболы (случай 3)).
Если Е — 0, то в зависимости от знака числа - — F,
А
мы получим пару параллельных прямых или мнимую
кривую. Отметим, что здесь АС — В2 = 0.
Далее, если число С < 0, А > 0, то уравнение (1) можно
записать:
( D)2 Е}2 Ег D2
4 л] ’ИЫ (13>
анализ которого проводится так же, как в случае уравне-
ния (11). Уравнение (13) дает гиперболу или пару пересе-
кающихся прямых (случаи 2) и 4)). Отметим, что в дан-
ном случае АС - В2 = АС < 0.
7 Бугров. Т. 1
§24. КРИВАЯ ВТОРОГО ПОРЯДКА
194
Случай А = О, С < 0 сводится к уравнению типа (12).
Итак, при В = 0 уравнение (1) всегда дает один из
частных случаев 1)—6).
Пусть теперь В > О, А > С. Тогда, как мы знаем (см.
§ 23), существует ортогональное преобразование
X =
У = У& +
(14)
где
1 А-С
'-F--. ... — ..-
2 2-J4B2 + (А — С)2 ’
11.______А-С
= j2 2л 4В2+(А — С)2 ’
которое приводит квадратичную форму
Ах2 + 2Вху + Су2
к каноническому виду.
Преобразуем уравнение (1) с помощью (14):
+ Vl2 + D(x^ - i/ji) + Е(у£ + х,Т)) + F = 0, (15)
где
А + С + д/йВ2 + (А - С)2
А + С- ^4В2 + (А - Q2
(X, > Х2, XjX2 = АС - В2). Перепишем уравнение (15) в виде
Х^2 + Х2Т|2 + (xtD + р.Е)^ + (Х1Е - yxD)t] + F = 0. (15')
Уравнение (15') является частным случаем уравнения
(1) при В = 0, которое мы уже исследовали.
Таким образом, мы можем сказать, что если:
§24. КРИВАЯ ВТОРОГО ПОРЯДКА 195
1) АС - В2 = W > О, то уравнение (1) представляет
собой эллипс, точку или мнимую кривую. В этом случае
будем говорить, что уравнение (1) принадлежит эллипти-
ческому типу,
2) АС - В2 = A.jX.2 < О, то уравнение (1) представляет
собой гиперболу или пару пересекающихся прямых. В
этом случае будем говорить, что уравнение (1) принадле-
жит гиперболическому типу,
3) АС - В2 = W = 0, то уравнение (1) изображает
параболу, пару параллельных прямых или мнимую кри-
вую, В этом случае будем говорить, что уравнение (1)
принадлежит параболическому типу.
Пример 1. Выяснить характер кривой
2х2 + Уз ху + у2 + 2х + 2 4з у + F = О,
где F — произвольное действительное число.
В данном случае А=2 > С — 1, В =
3
> О, АС - В2 =
2
5
= — > О, т. е. уравнение принадлежит эллиптическому
4 '
типу. Легко подсчитать (см. пример в § 23), что
_ Уз _ 1 . 5 1
** 2 ’ У1 2 ’ 2 ’ 2 ’
Поэтому с помощью ортогонального преобразования
х = -|(Уз £ - т>),
у = + Уз т>)
наше уравнение запишется
7*
196
§25. ПОВЕРХНОСТЬ ВТОРОГО ПОРЯДКА
5 1
-^ + -т)2 + (4з - г]) + 7з гё + V3t]) + f = o
или
5 Гг 2 /-V 1 16
2 l^ + 5V3J + + 2>’ * Т - F-
Осуществим еще параллельный перенос
v = т] + 2,
тогда будем иметь
5 , 1 16
^u2+-V2=-~F.
16
(16)
16
Если —- — F > О, то (16) будет уравнением эллипса с
полуосями а, Ь, где
а2 = 2(16 - 5Е)/25, Ь2 = 2(16 - 5Г)/5.
16 16
Если — — F = 0, то (16) дает точку. Если — - F < О,
5 5
то (16) представляет мнимую кривую.
§ 25. Поверхность второго порядка
в трехмерном пространстве
Уравнение
зз з
Х"Х‘ + 2Х Ai х‘ + В = °’ (1)
А=1 1=1 1=1
где аы = аа, Д, В - заданные постоянные числа, а х = (хр
х2, х3) — переменная точка в В3, определяет, вообще гово-
§25. ПОВЕРХНОСТЬ ВТОРОГО ПОРЯДКА 197
ря. некоторое множество точек в R3, называемое поверх-
ностью второго порядка. Если уравнение (1) не удовлетво-
ряется ни одной действительной точкой х = (хр х2, х3), то
говорят, что оно определяет мнимую поверхность. Нас
эти случаи не будут интересовать. В некоторых случаях
уравнение (1) может определять пару различных или со-
впадающих плоскостей или одну-единственную точку. Но
и такие множества мы будем называть поверхностями.
Перечислим важнейшие частные случаи уравнения (1):
1) Эллипсоид
2 2 2
X U Z
2 +-У = 1 (°« с’ > О).
а2 Ь2 с2
2) Однополостный гиперболоид
2 2 2
+ 1 (а, Ь, с > О).
а2 Ь2 с2
3) Двуполостным, гиперболоид
2 2 2
X у Z
(а,6,с>0).
4) Эллиптический параболоид
2 2
X и
- + --2z (p,g>0).
5) Гиперболический параболоид
2 2
х У
-~--2z (р,9>0).
6) Конус второго порядка
2 2 2
х у z
—7~ + —5--=0 (а, Ь, с > 0).
а2 Ь2 с2
7) Точка
х2 + у2 + г2 0.
198
§25. ПОВЕРХНОСТЬ ВТОРОГО ПОРЯДКА
8) Цилиндры второго порядка:
цилиндр эллиптический
2 2
X у
=1 (Я, Ъ > 0),
а2 Ь2
цилиндр гиперболический
2 2
X ц
-у-*-? =1 (а, ь > 0),
а2 Ъ2
цилиндр параболический
у2 = 2рх (р > 0),
пара пересекающихся плоскостей
а2х2 — Ъ2у2 = 0 (а, Ъ > 0),
пара параллельных или совпадающих плоскостей
х2 - а2 = 0 (а > 0),
z2 = 0,
прямая
х2 + у2 = 0.
При рассмотрении частных случаев уравнения (1) мы
считали, что х — х„ у = х,, z = х,.
Можно доказать, что для каждого частного уравнения
(1), если оно не определяет мнимую поверхность, можно
найти прямоугольную систему координат, в которой это
уравнение имеет один из перечисленных выше восьми
видов. Это следует из общей теории § 22. Само преобразо-
вание уравнения (1) производится так же, как в § 24.
Нахождение собственных значений Х2, Л3 сводится к
решению кубического уравнения
Укажем еще один путь нахождения собственных чисел
и собственных векторов, который мы по сути дела уже
рассмотрели в § 23 в двумерном случае. Собственные зна-
чения Х2, Х3 самосопряженного оператора А и принад-
___________§25, ПОВЕРХНОСТЬ ВТОРОГО ПОРЯДКА___199
лежащие им нормированные векторы х1, х2, xs (|х'| = 1,
Ах' = Ax', j = 1, 2, 3) можно находить следующим образом
(обоснование см. ниже). Вводим определитель (аы = а((ь):
D(k) = |Л - АЕ| =
aii ~
а21
а31
а12
°22 —
а32
а13
а23
а33 ~
где Е — единичная матрица. Находим корни А,, А2, А3
уравнения
|А - АЕ| = О, (2)
которое называется характеристическим уравнением
оператора АО(Л.р = 0, у = 1, 2, 3). Это и есть собственные
числа оператора А. Они действительные, причем они мо-
гут быть разными, но могут и совпадать — быть кратны-
ми. Таким образом,
В(А) = (\ - А)(А2 - А)(А3 - А).
Затем для корня \ ищем нетривиальное решение х =
= (х,, х2, х3) однородной системы уравнений:
(ап — А1)х1 + ai2x2 + а1зхз ~
а12Х1 + (а22 — ^1)Х2 + а23Х3 = ’ (3)
а31Х1 + а32Х2 + (а33 ~ ^1)X3 = О
или соответствующего уравнения для оператора А — А,Е:
(А - \Е)х = О, (3')
где Е - единичная матрица и векторы х = (хр х2, х3),
О = (0, 0, 0).
Если X, - простой корень (т. е. в данном случае \
отлично от Х2 и от А3), то ранг матрицы системы (3) необ-
ходимо будет равен двум (ранг (А — \Е) = 2), и мы полу-
чим единственный, с точностью до знака, вектор х1 =
=( xj1*, х^ > Хд1'), удовлетворяющий системе (3), т. е.
200§25, ПОВЕРХНОСТЬ ВТОРОГО ПОРЯДКА
(А - Х1Е)х1 = О
или
Ах' = \х'.
Если X, — корень второй кратности (Хх = Х2 Х3), то
система (3) необходимо имеет ранг, равный единице (ранг
(А — XjE) = 1), и будет иметь два ортонормированных
решения х1 и х2 (lx1) = |х2| =1, (х1, х2) = 0), которые явля-
ются собственными векторами, принадлежащими собствен-
ному значению X,:
Ах> = Хх> (j = 1, 2, Xj = Х2).
Наконец, если Xj - корень третьей кратности (Xt = Х2 =
= Х3), то система (3) необходимо имеет ранг, равный нулю
(ранг (А - Х3) = 0), и будет иметь три ортонормированных
решения х1, х2, х3:
Ах’ = Х.х' (у = 1, 2, 3, X, = Х2 = Х3).
Любые три ортонормированных вектора в R3 могут быть
взяты в качестве собственных векторов х1, х2, х3, принад-
лежащих собственным числам X, = Х2 = Х3.
Обоснуем сказанное. Мы знаем, что в R3 существует
система ортонормированных векторов х1, х2, х3 и действи-
тельные числа X,, Х2, Х3 такие, что
Ах’ = Х.х> 0 =1,2, 3).
При этом можно указать ортогональную матрицу Л
такую, что (см. § 22)
Xj 0 0
ЛАЛ*1 = 0 Х2 0
0 0 Х3
Отсюда для переменного числа X
имеет место тожде-
ство
§25. ПОВЕРХНОСТЬ ВТОРОГО ПОРЯДКА
201
Л(А - XE)A-’ = Хх - X 0 0 0 Х2 - X 0 0 0 хз - X (4)
(Л(А — ХЕ)Л“1=ЛАЛ"1—ЛХЕЛ"1=ЛАЛ"1—ХЛЛ_1=ЛАЛ-1 - ХЕ).
Определитель матрицы А — ХЕ мы обозначили выше
через D(X). Он, как это видно из (4), равен определителю
матрицы, стоящей в правой части (4), так как
(\ - Х)(Х2 - Х)(Х3 - X) = |Л(А - Х£)Л-Ч =
= |Л||А - ХЕЦЛ’1! = |А - ХЕ| = D(X).
Таким образом,
D(X) = (X, - Х)(Х2 - Х)(Х3 - X).
Мы получили, что корни многочлена D(X) совпадают с
собственными значениями Xt, Х2, Х3 оператора А. Они,
таким образом, действительны.
Пусть X, — простой корень и, следовательно, Хх Ф Х2 и
Xj Х2. Тогда матрица справа в (4) при X = X, имеет ранг,
равный двум (ранг Л(А - Х1Е)Л“1 = 2), но тогда ранг (А -
— XJE) = 2. Ведь решения однородной системы (3) и системы
0 • zx + 0 z2 + 0 • z3 = 0,
0 • zx + (Х3 — Xx)z2 + 0z3 = 0,-
0 - zx + 0 - z2 + (Х3 - Xx)z3 = 0,
(5)
соответствующей матрице (4), преобразуются друг в друга
при помощи ортогональной матрицы (системы (3) и (5)
эквивалентны). Система же (5) имеет только одно (с точ-
ностью до знака) нормированное решение (±1, 0, 0). Но
это возможно, лишь если ранг (А - XJE) = 2.
Можно дать и такое объяснение этого факта. Если
предположить, что все определители второго порядка,
порожденные матрицей А — Х,Е, равны нулю, то тогда и
202
§25. ПОВЕРХНОСТЬ ВТОРОГО ПОРЯДКА
все определители второго порядка, порожденные матри-
цей Л(А — Xt.E)A-1, также будут равны нулю, так как эти
определители являются линейными комбинациями опре-
делителей второго порядка из матрицы А — ХгЕ. Но этого
не может быть, ибо определитель, порожденный матрицей
Л(А -\Е)А ',
Х2 — Xj б
0 Ад — X,
# 0.
Если теперь X, = Х2 * Х3, то, рассуждая аналогично,
получим, что ранг (А — \Е) = 1, и тогда существует в
точности два ортонормированных решения х1, х2 системы
(3), соответствующих \ = Х2.
Наконец, при X, = Х2 = Х3 будет ранг (А - \Е) = 0, т. е.
все элементы матрицы А — \Е равны нулю. В этом случае
любой вектор х — (хи х2, х3) является решением системы
(3). Это приводит к тому, что любые три вектора х1, хг, х3,
образующие ортонормированную систему, будут собствен-
ными векторами, принадлежащими собственному значе-
нию X, = Х2 = Х3.
Заметим, что в этой ситуации квадратичная форма уже
приведена к сумме квадратов (а1г = а13 = а23 = 0, ап =
—а22 = а33 ~
Пример 1. Привести к каноническому виду квадра-
тичную форму
Х1 + х2 + 2х1Х2 + 2Х1Х3 + 2х2Х3-
Здесь аи = а22 = al2 = а13 = а23 = 1, а33 = 0. Составим
характеристическое уравнение:
1-1 1 1
1 1-Х 1
1 1-Х
= о
§25. ПОВЕРХНОСТЬ ВТОРОГО ПОРЯДКА
203
ИЛИ
-X(l - X)2 + 2 - 2(1 - X) + X = 0, -Х(1 - X)2 + ЗХ = 0.
Легко видеть, что X = 0 является корнем этого уравне-
ния. Найдем два других корня:
3 - (1 - X)2 = 0, (1 - X)2 = 3, 1 - X = ±Уз , X = 1 ±Уз .
Таким образом,
х, = i + Уз, х2 = о, х3 = i - -Уз ,
т. е. мы получили случай: X, > Х2 > Х3.
Найдем собственный вектор х*. Для этого
составим
систему (3):
- Vsxj + х2 + х3 - - 0,
Xj — У3х2 + х3 = 0, •
Xi + х2 - (1 + Уз)х3 = 0.
Любые два уравнения этой системы линейно независи-
мы. Решая систему из двух первых уравнений, получаем
1 + Уз
xi = хз> Х2
1 +Уз
2
х3.
Таким образом, вектор
У1
1 + Уз 1 + Уз
---- Хо, -------Хо, Хо
2 3 2
является решением системы и, нормируя его, получим
собственный вектор
Найдем х2 (к? = 0):
204
§25. ПОВЕРХНОСТЬ ВТОРОГО ПОРЯДКА
Х1 + х2 + х3 =
Х1 + х2 + х3 ~
Х1 + Х2 + 0 ’ х3 = О-
Решая систему из двух последних уравнений (так как
определитель из коэффициентов при х2 и х3 не равен нулю),
получим х2 = -хи х3 = 0.
Вектор у2 = (хр -хр 0) является решением системы, а
вектор
х2 =
- собственный единичный вектор. Легко видеть, что он
ортогонален х1 (скалярное произведение этих векторов
равно нулю). Наконец, при Х3 = 1 - ^3 находим, что
( Г- \
1 1 1 + 7з
х3
,7б+г7з -Уб + гТз 7б + 27зу
— третий собственный вектор.
Ортогональная матрица перехода от координат векто-
ра х = (хр х2, х3) в системе (i, j, k) к координатам вектора
х = (£р ^2, ^3) в системе (х1, х2, х3) имеет вид (см. § 17, (15))
§25. ПОВЕРХНОСТЬ ВТОРОГО ПОРЯДКА
205
Данное преобразование сохраняет ориентацию (так как
|Л] — 1 > 0), т. е. система (х1, х2, х3) ориентирована так же,
как исходная система (i, /, к).
Подставляя в нашу квадратичную форму вместо xv их
значения по формулам (6), получим ее канонический вид
(1 + + (1 - у!з)&
Остановимся теперь лишь на более подробном изуче-
нии уравнений и описываемых ими поверхностей, ука-
занных выше восьми типов.
Эллипсоид
+ + = 1 (а, Ъ, с, > 0). (7)
а о с
При а = Ъ = с эллипсоид (7) обращается в сферу ради-
уса а с центром в начале координат, т. е. геометрическое
место точек, отстоящих от начала на расстоянии а.
Величины а, Ъ, с называются полуосями эллипсоида.
Если в уравнении (7) заменить (одновременно или по-
рознь) х на —х, у на —у, z на — г, то оно не изменится, —
это показывает, что эллипсоид (7) есть поверхность, сим-
метричная относительно координатных плоскостей х = 0,
у = 0, z = 0 и начала координат. Поэтому достаточно
изучить уравнение (7) в первом октанте (системы коорди-
нат), т. е. для х > 0, у > 0, z > 0. Часть эллипсоида,
находящаяся в первом октанте, определяется явным урав-
нением, например
1 2 2 2 2
z= х> 0, у > 0, ^7 + 7^
V а2 Ь2 а Ъ2
Для определенности будем считать, что а > Ь > с. Эл-
липсоид есть ограниченная поверхность. Он находится
внутри шара радиуса а с центром в начале координат: для
координат любой точки эллипсоида (х, у, z) имеет место
неравенство
206
§25. ПОВЕРХНОСТЬ ВТОРОГО ПОРЯДКА
х2 + у2 + z2 < а2
х2 у2 Z2
а2 • 1 = а2.
Например, пересекая эллип-
< h < с), получим в сечении
Чтобы составить более точное представление об эллип-
соиде, произведем сечения плоскостями, параллельными
координатным плоскостям,
соид плоскостями z = h(-c
эллипсы
2 2
X у
-----
CL и
с полуосями
h2
.2
= 1 - —
с2
1-2
с2 '
Отсюда видно, что самый большой эллипс получается
в сечении эллипсоида плоскостью z = 0. Аналогичная
картина будет при сечении плоскостями х = h (-а < h < а),
у = h (-Ь < h < Ъ).
Эллипсоид (7) имеет вид, изображенный на рис. 43.
Точки (±а, 0, 0), (0, ±Ь, 0), (0, 0, ±с) лежат на эллипсо-
иде (7) и называются его вершинами.
Если какие-либо две полуоси равны между собой, то
эллипсоид (7) будет эллипсоидом вращения, т. е. получа-
Рис. 43
§25. ПОВЕРХНОСТЬ ВТОРОГО ПОРЯДКА
207
ется от вращения эллипса относительно соответствующей
оси координат.
Однополостный гиперболоид
2 2 2
X V Z
1- 2.---
а2-------------Ъ2 с2
= 1
(а, Ъ, с > 0).
(8)
По виду уравнения (8) заключаем, что однополостный
гиперболоид является поверхностью, симметричной отно-
сительно координатных плоскостей и начала координат.
Числа а, Ь, с называются полуосями однополостного ги-
перболоида. Точки (+а, 0, 0), (0, ±Ъ, 0), лежащие на повер-
хности (8), называются вершинами однополостного гипер-
болоида.
Пересечем поверхность (8) плоскостью г = А, тогда в
сечении получим эллипс
с полуосями
Рис. 44
208
§25. ПОВЕРХНОСТЬ ВТОРОГО ПОРЯДКА
При изменении й от —«> до +«> этот эллипс описывает
поверхность (8).
Если теперь пересечь поверхность (8) плоскостью х = h
(или у = й), то получим в сечении гиперболу
у2 z2 й2
Ь2 с2 1 а2 с2 Ь2]'
При й = ±а первая гипербола распадается на две пря-
Ъ
мые у — ±— z.
Если [й[ < а, то действительной осью симметрии соот-
ветствующей гиперболы является прямая, параллельная
оси Оу, а при [й[ > а — прямая, параллельная оси Oz.
Действительной осью симметрии гиперболы мы на-
зываем ту из осей симметрии, которую гипербола пересе-
кает.
Если а = Ь, то поверхность (8) в сечении плоскостями
z — й будет иметь окружности радиуса а^1 + (й2/с2) •
Поверхность (8) в этом случае образуется от вращения
2 2
х z
гиперболы —2---2 = 1 около оси Oz. Общий вид однопо-
а с
лостного гиперболоида изображен на рис. 44.
Двуполостный гиперболоид
2 2
а2 Ь2
z2
с2 1
(а, Ь, с > 0).
(9)
Так как уравнение (9) содержит только квадраты пере-
менных, то данная поверхность симметрична относитель-
но плоскостей х = О, у = 0, z = 0 и начала координат.
Уравнение (9) запишем еще в виде
§25. ПОВЕРХНОСТЬ ВТОРОГО ПОРЯДКА
209
,2
2 2
У Z
~Г + Т------л ‘г 2 •
Ъ2 с2 а2
Отсюда ясно, что, пересекая поверхность (9') плоско-
стью х = А (|Л| > а), получим в сечении эллипс
У2 г2 Л2
~~2+~~2 = "I + ~
Ъ2 с2 а
(9')
с полуосями
Ъ-J(A2/az)-l , с^{h2!a2)-l .
При |Л| < а число (h2/a2) - 1 < 0, и поэтому нет точек
пересечения поверхности (9') и плоскости х = h.
При сечении поверхности (9) плоскостями z = h (у = А)
получим гиперболы
? ь2
с2
/22 .2 \
х__z А_
2 „2 ~ 1 + , 2 •
с и
Точки (±а, 0, 0) лежат на поверхности (9) и называются
вершинами двуполостного гиперболоида. Поверхность (9)
изображена на рис. 45.
Рис. 45
210
§25. ПОВЕРХНОСТЬ ВТОРОГО ПОРЯДКА
Эллиптический параболоид
2 2
Р Q
= 2z
(р, q> 0).
(Ю)
Так как в (10) присутствуют квадраты переменных х и
у, то данная поверхность симметрична относительно ко-
ординатных плоскостей х = 0, у = 0. Далее, так как мы
считаем р, q > 0, то поверхность (10) расположена в по-
лупространстве z > 0.
Пересекая поверхность (10) плоскостями z = h (h > 0),
в сечении будем получать эллипсы
Р
У2
д
= 2h
с полуосями
-^2 ph , ^2qh .
При изменении h от нуля до «> данные эллипсы описы-
вают нашу поверхность (10).
Пересекая поверхность (10) плоскостями х = h (или
у = Л), мы получим в сечении параболы
У2 = 2д
h2'
I 2Р)
1,и
х2 =2р z------
Ч 2q
со смещенной вершиной в точке z =
h2
2р
f й2>|
z = —
I 2d’
При р = q поверхность (10) будет поверхностью враще-
ния, получающейся от вращения параболы х2 = 2pz око-
ло оси Oz. В этом случае поверхность (10) называют пара-
болоидом вращения.
Точка (0, 0, 0) лежит на поверхности (10) и называется
вершиной эллиптического параболоида. Эллиптический
параболоид изображен на рис. 46.
§25. ПОВЕРХНОСТЬ ВТОРОГО ПОРЯДКА
211
Гиперболический параболоид
2 2
£___У
Р Q
2z (р, q > О).
(И)
По виду уравнения (11) заключаем, что данная повер-
хность симметрична относительно плоскостей х = 0, у = 0.
Пересекая поверхность (11) плоскостями г = h, мы будем
получать в сечении гиперболы
2 2
X у
----— = 2h
Р Q
причем при h > 0 действительная ось симметрии гипербо-
лы будет параллельной оси Ох, а при h < 0 — оси Оу. При
h = 0 в сечении будут две пересекающиеся прямые.
При сечении поверхности (11) плоскостями х = h или
у = h получим параболы, направленные ветвями вниз
или вверх:
2 к2 2 1.2
у h X П
— = 2z - —, — = 2z + —
q р р q
Поверхность (11) изображена на рис. 47.
Рис. 46
Рис. 47
212§25, ПОВЕРХНОСТЬ ВТОРОГО ПОРЯДКА
Конус второго порядка
х2 у2 г2
-2+Т2-—^° (0,6.0 0). (12)
а о с
Ясно, что данная поверхность симметрична относитель-
но плоскостей х = 0, у - О, z = О и начала координат.
При сечении поверхности (12) плоскостями г = h будем
получать эллипсы
2 2.2
х у h
1_ -л'- = -
„2-------------.2 2 •
а Ь с
с полуосями а|Л|/с и b\h\/c.
Если же пересекать поверхность (12) плоскостями х = Л
или у — h, то в сечении получим гиперболы
Z2 у2 h2
с2 Ъ2 ~ a2 U2 °2 Ь2/
Если теперь пересекать (12) плоскостями у = hx, то в
сечении получим пару пересекающихся прямых
z = ±сх-J(l/a2) + (62/62)
Вид конуса изображен на рис. 48.
Рис. 48
§25. ПОВЕРХНОСТЬ ВТОРОГО ПОРЯДКА
213
Точка
х2 + у2 + Z2 = 0. (13)
Уравнению (13) удовлетворяет только она точка х = у =
= z = 0.
Цилиндры второго порядка
а) Эллиптический цилиндр
2 2
^- + ^5-= 1 (a, ft > 0). (14)
а Ъ
Уравнение (14) не содержит переменной z. На плоско-
сти хОу уравнение (14) определяет эллипс с полуосями а
и Ъ. Если точка (х, у) лежит на этом эллипсе, то при
любом z точка (х, у, z) лежит на поверхности (14). Сово-
купность таких точек есть поверхность, описанная пря-
мой, параллельной оси Oz и пересекающей эллипс
в плоскости хОу.
Эллипс (14) называют направляющей линией данной
поверхности, а все возможные положения указанной дви-
жущейся прямой - образующими.
Вообще поверхность, описываемая прямой, остающей-
ся параллельной некоторому заданному направлению и
пересекающей данную линию L, называется цилиндричес-
кой. Поверхность (14) изображена на рис. 49.
Рис. 49
214
§25. ПОВЕРХНОСТЬ ВТОРОГО ПОРЯДКА
б) Гиперболический
цилиндры
х2 у2
---= 1
а2 Ъ2
у2 = 2рх
и параболический
(а, Ъ > 0),
(15)
(Р > 0).
(16)
В данном случае направляющими линиями поверхно-
стей являются гипербола и парабола, а образующими -
прямые параллельные оси Oz и проходящие через гипер-
болу или параболу в плоскости хОу. Поверхности (15) и
(16) изображены на рис. 50 и 51.
в) Параллельные и пересекающиеся плос-
кости. Прямая.
а2х2 - Ь2у2 = 0 (а, Ъ > 0), (17)
х2 - а2 = 0 (а > 0), (18)
z2 = 0, (19)
х2 + у1 = 0. (20)
Для поверхности (17) направляющими являются пря-
мые линии
а
у = ±тх-
Поэтому поверхность (17) есть пара пересекающихся
плоскостей. В уравнении поверхностей (18) и (19) отсут-
ствуют по две координаты. Уравнение (18) в плоскости
хОу есть пара прямых х = ±а.
Рис. 50
Рис. 51
§25. ПОВЕРХНОСТЬ ВТОРОГО ПОРЯДКА
215
Если мы будем брать х = ±а и любые у и г, то точки
(+а, у, z) будут удовлетворять уравнению (18), поэтому
поверхность (18) есть пара параллельных плоскостей.
Уравнение (19) описывает плоскость хОу, так как это-
му уравнению удовлетворяют любые точки вида (х, у, 0),
все множество которых и составляет плоскость хОу.
Можно также рассматривать z = 0 как направляющую
в какой-либо из плоскостей xOz или yOz, а образующими
являются прямые, параллельные оси Оу или оси Ох и
проходящие через прямую z = 0.
Уравнению (20) удовлетворяет любая точка с х = у = 0
и любым z. Поэтому (20) изображает прямую, а именно,
ось Oz.
Линейчатые поверхности
Некоторые поверхности второго порядка образованы
движением прямой. Такими являются все цилиндричес-
кие поверхности и конус второго порядка. Однако имеют-
ся и другие поверхности, которые также образуются дви-
жением прямой.
Поверхность, образованная движением прямой, назы-
вается линейчатой, а целиком лежащие на ней прямые —
прямолинейными образующими.
К линейчатым поверхностям относятся однополостный
гиперболоид и гиперболический параболоид.
Уравнение однополостного гиперболоида (8) можно
записать в виде
2 2 2
X 2 Ц
= 1 - V
или, разлагая левую и правую части на множители, полу-
чаем
Составим систему уравнений первой степени:
(21)
(22)
где k — произвольный параметр.
216§25. ПОВЕРХНОСТЬ ВТОРОГО ПОРЯДКА
При определенном значении этого параметра k мы
получим прямую линию, а при изменении k — семейство
прямых. Если мы перемножим уравнения (22) почленно,
то получим уравнение (21) нашей поверхности. Поэтому
любая точка (х, у, z), удовлетворяющая системе (22), на-
ходится на поверхности (21). Следовательно, каждая из
прямых семейства (22) целиком лежит на поверхности
однополостного гиперболоида.
Совершенно аналогично система
(23)
где I — параметр, также определяет семейство прямых, от-
личное от семейства (22), принадлежащее поверхности (21).
Через каждую точку гиперболоида (21) проходит по
одной прямой каждого семейства, вообще при различных
значениях параметров Ли/ (рис. 52). Например, через
точку
V2
а, —- Ъ, с) поверхности (21) проходит прямая
(22) при k = (2 + Тб )/(2 +^2 ) и прямая (23) при I = (2 +
+ 4^ )/(2 -V2).
Рис. 52
§26. ОБЩАЯ ТЕОРИЯ ПОВЕРХНОСТИ ВТОРОГО ПОРЯДКА 217
Отметим, что однополостные гиперболоиды нашли при-
менение в практике строительства. Сооружение различ-
ных высотных башен с использованием прямолинейных
образующих однополостного гиперболоида сочетает в себе
прочность конструкции с простотой ее исполнения. Идея
использования однополостного гиперболоида в строитель-
стве принадлежит нашему соотечественнику инженеру
В. Г. Шухову (1853-1939). По проекту Шухова построена
телевизионная башня на Шаболовке в г. Москве, она со-
стоит из секций однополостных гиперболоидов вращения.
Легко убедиться, что два семейства прямых
(24)
Vp V? 1
(25)
образуют поверхность гиперболического параболоида (11).
Прямые, соответствующие семействам (24) и (25), ле-
жат на этой поверхности и, обратно, любая точка этой
поверхности есть пересечение некоторой прямой семейства
(24) с некоторой прямой семейства (25).
§ 26. Общая теория поверхности
второго порядка в трехмерном пространстве
аы xkxt + 2^ At xt + В = 0, (1)
*=i г=1 г=1
где аы = alk, В - постоянные числа — коэффициенты
уравнения.
В § 25 было перечислено восемь видов 1)-8) (частных
случаев) уравнения (1) и была отмечена возможность до-
казательства того, что для каждого данного уравнения
218 §26. ОБЩАЯ ТЕОРИЯ ПОВЕРХНОСТИ ВТОРОГО ПОРЯДКА
(1), если оно не определяет мнимую поверхность, можно
найти прямоугольную систему координат, в которой это
уравнение имеет один из указанных видов.
Ниже дается доказательство этого утверждения.
Мы начинаем с того, что рассматриваем квадратичную
форму, фигурирующую в левой части уравнения (1).
На основании теоремы 2 § 22 эту форму можно приве-
сти при помощи соответствующего ортогонального преоб-
разования
з
х;=£₽гХ (/ = 1,2,3) (2)
»=1
к следующему виду:
3 3
ам xfxl = Xt х'^ + Х2 %'2 + Х3 х'2 ,
*=1 i=i
где Хр Х2, Х3 — определенные действительные числа.
Подчеркнем, что равенства (2) определяют преобразо-
вание исходной прямоугольной системы координат х,, х2,
х3 к некоторой другой прямоугольной системе х'г, х2 ,
х3. Точка, имеющая координаты (хр х2, х3) в исходной
системе, в новой системе имеет координаты (х[,х2 ,х3),
получаемые посредством обращения операции (2).
В новой прямоугольной системе наша поверхность
имеет, очевидно, уравнение
з
х1Х;2 + х2х;2 + х3х;2+ 2^A'kx'k + в = о, (3)
*=1
где А’ь — некоторые постоянные числа.
Рассмотрим сначала случай, когда все три числа X,, Х2,
Х3 отличны от нуля (Х; Ф 0, i = 1, 2, 3).
В этом случае перенесем систему координат х{, х2 , х3
так, чтобы ее начальная точка перешла в точку (а,, а2, а3);
тогда получим вторую прямоугольную систему координат
^2’ ^з’ где
х\ - at + (/ = 1, 2, 3).
§26. ОБЩАЯ ТЕОРИЯ ПОВЕРХНОСТИ ВТОРОГО ПОРЯДКА 219
В ней уравнение нашей поверхности имеет вид
+ Х2(а2 + t,2y + \(а3 + Q* +
3
+ 2X^<«*+Q + B = 0
А=1
ИЛИ
3
М? + Ml + Mi + 2^(аЛ + AXU + в, = о,
1=1
где Bt — некоторая константа. Если положить
А
а' = ^1Г (*=1’2’3>>
то это уравнение упростится:
М? + Х2^ +Х3^ = -Вг (4)
Предположим, что числа X,, Х2, Х3 одинакового знака.
Если при этом В, = 0, то уравнению (4) удовлетворяет
единственная точка, именно нулевая точка (0, 0, 0) (см. 7)
§ 25).
Если В, Ф 0 и имеет знак чисел Хр Х2, Х3, то, очевидно,
нет точек с действительными координатами, удовлетворяю-
щих уравнению (4). В этом случае поверхность (1) мнимая.
Если же Bj 0 и имеет знак, противоположный знаку
чисел Xj, Х2, Х3, то уравнение (4) можно записать в виде
3L а + - А + - А = 1 (5)
Xi Х2 ^3
или, полагая
а2 = -^, Ь2 В2 , с2
Xi Х2 Х3
в виде
к2 к2 к2
41 , 42 , 4з , , . ,
-yf—7-•—7 = 1 (а, Ь, с > 0).
а2 Ь2 с2
Таким образом, поверхность (1) есть эллипсоид (см. 1)
§ 25).
Пусть теперь два из чисел X,, Х2, Х3 имеют один знак,
а третье — противоположный им знак.
220 §26. ОБЩАЯ ТЕОРИЯ ПОВЕРХНОСТИ ВТОРОГО ПОРЯДКА
Если при этом .Bj = 0, то можно считать в уравнении
(4), что A.J > 0, Х2 > 0, Х3 < 0, умножая (4), если это нужно,
на -1 и переставляя, если это нужно, местами . Тогда,
положив
111
Х1 — ^2 ’ ^2 — ^2 ’ ^3 с2 (а« Ь, С > 0),
получим уравнение конуса (см. 6) § 25)
< + =п
а2 Ъ2 с2
При 0 воспользуемся снова формулой (5). Выде-
лим два существенно различных случая:
% %
—2 + ~2--Г = 1 (°днополостный гиперболоид 2) § 25),
а b с
^2 %>3
—г---о---г = 1 (двуполостный гиперболоид 3) § 25).
а b с
К этим двум случаям сводятся и остальные случаи
путем соответствующей замены координат Е,г
Пусть теперь А = XjX2X3 = 0. Тогда по крайней мере
одно из чисел Х1? Х3, Х3 равно нулю. Будем считать, что
Х3 = 0, поменяв, если нужно, местами Е,(.
Итак, пусть Х3 = 0. Выделим сначала случай, когда
А3 = 0. Тогда уравнение (3) имеет вид
Xj х'2 + ХгХ;2 + 2( А^ xj + А'2 х'г ) + В — 0,
где числа X,, Х2, А{, А2 , В могут быть любыми.
В плоскости (х[, х'г ) это есть общее уравнение кривой
второго порядка. В пространстве (х[, х'2 , х3) ему соответ-
ствует уравнение цилиндрической поверхности (см. 8) § 25),
проходящей через плоскую кривую второго порядка с об-
разующей, параллельной оси х3 (см. 8) § 25).
Далее мы будем всегда считать, что А3 * 0 и Х3 = 0, и
тогда уравнение (3) имеет вид
(X, х;2 + 2 а; х') + (X2.r'z + 2 А2 х'2 ) + А'3 х3 + В = 0. (3')
§26. ОБЩАЯ ТЕОРИЯ ПОВЕРХНОСТИ ВТОРОГО ПОРЯДКА 221
Существенно различными случаями являются следую-
щие: а) Хр Х2 > 0; б) Xt > 0, Х2 < 0; в) Xt > 0; Х2 = 0. Другие
случаи сводятся к ним заменой координат или умножени-
ем на -1.
Рассматриваем случай а) Хр Х2 > 0. Вынесем за скобки
множители Xt и Х2 и дополним выражения в этих скобках
до полных квадратов. Тогда получим, учитывая, что Хр
Х2, А'3 отличны от нуля,
ХД х{ + а)2 + Х2( х2 4- Р)2 4- 2 Ад (%з + у) = 0,
где а, р, у — соответствующие числа. Полагая
4- а, п = х'2 4- р, £ = х'3 4- у,
получим
х^24- Х2г]2 = -2А'^
ИЛИ
Xi Х2
Если — А3 >0, то уравнение (6) имеет вид
л2
---1---= 2£ (эллиптический параболоид 4) § 25) (7)
(p,q> 0).
Если же — А'3 < 0, то заменяя £ на мы снова полу-
чим уравнение вида (7), т. е. эллиптический параболоид.
Рассмотрим теперь случай б) Xt > 0, Х2 < 0 (А3 * 0).
Воспользуемся уравнением (6). Если А3 < 0, то это урав-
нение записывается в виде
л2
-------= 2£ (гиперболический параболоид см. 5) § 25) (8)
(p,q> 0).
222 §26. ОБЩАЯ ТЕОРИЯ ПОВЕРХНОСТИ ВТОРОГО ПОРЯДКА
Если же > 0, то после замены местами и т] снова
получим уравнение вида (8), т. е. гиперболический парабо-
лоид.
Переходим теперь к случаю в) X, > О, Х2 = 0 (А$ * 0).
Тогда уравнение (3') сводится к следующему:
(X, xjz + 2 А{ х'г) + 2( А2 %2 + A3 хз) + В = 0.
Вынося за первые скобки Хр дополняя выражение в
этих скобках до полного квадрата (учитывая, что Xt,
A3 ф 0), получим
Х,( х{ + а)2 + 2 А2 х2 + 2 А2 (х’3 + Р) = 0,
где а, Р — некоторые числа. После замены
= х{ + а, г] = х'2 , С, = х'3 + Р
это уравнение превратится в следующее:
Х£2 + 2(А2Т] + А'з® = 0. (9)
Рассмотрим в плоскости (т|, £) вектор со = (А2, Ад).
Запишем его в виде
(А2 , А'3) = p(cos a, sin а),
где р > 0 — длина со, a (cos a, sin а) — единичный вектор,
направленный в сторону со. Другой вектор (sin a, -cos а)
тоже единичный и перпендикулярен к первому.
Введем в плоскости (т|, £) ортогональное преобразова-
ние
и = т] cos а + £sin а, v = т] sin а - £cos а.
Этим прямоугольная система координат Т], £ заменяет-
ся на прямоугольную систему координат и, о, а прямо-
угольная система координат т], £ заменяется на прямо-
угольную систему координат и, о. В результате уравнение
(9), которое может быть записано так:
Х^2 + 2р(т] cos а + £ sin а) = 0,
принимает следующий вид:
Х1£,2 + 2рн = 0,
или меняя и на —и,
§27. ПЛОСКОСТЬ В Я,
223
= 2ри (р = р/\ > 0),
или наконец, меняя местами £ и и,
и2 = 2Х (Р > 0),
т. е. мы получили уравнение параболического цилиндра (в
прямоугольных координатах (Е,, и, и)).
Мы рассмотрели все случаи, могущие иметь место для
уравнения (1), и в каждом из них нашли прямоугольную
систему координат, в которой уравнение (1) имеет один из
видов 1)—8) § 25. Утверждение доказано.
§ 27. Плоскость в Rn
27.1. Общие рассмотрения. В § 6 мы условились
называть точкой или вектором n-мерного пространства Rn
систему чисел (Xj, ..., хп) и обозначать буквой х:
X = (Хи ..., хп).
Числа ху. назывались координатами точки (вектора) или
компонентами вектора х.
В § 7 мы определили отрезок [х°, у0], соединяющий
точки
*» = (Х?,..., Х«), У°Л
как множество точек х g Rn, которые можно представить
с помощью равенства
х = 1х° + ру° (X > 0, J1 > 0, X + ц = 1).
Точки х°, у° называются концами отрезка [х°, у0].
Будем называть х° начальной точкой отрезка [х°, у0], а
у° — его конечной точкой. Тогда можно считать, что [х°, у0]
есть направленный отрезок с начальной точкой х° и ко-
нечной точкой у0.
Как в случае трехмерного пространства, направленный
отрезок [х°, у0] будем считать равным вектору
У°-*> = (уЧ ~ х®, .... у°п - х«).
Если к векторам х°, у° прибавить произвольный век-
тор
224
§27. ПЛОСКОСТЬ В Л,
а = (av an),
то получим векторы
х' ~ х° + а, у' = у° + а,
для которых, очевидно,
у’ - х’ = у° - х°.
Это показывает, что точки х' = х° + а, у' = у° + а,
каков бы ни был вектор а, определяют один и тот же
вектор, равный у° — х°.
Направленный отрезок [О, х], начало которого есть
нулевая точка О, а конец - точка х, называют радиус-
вектором точки х.
Итак,
X = (хр .... хп)
есть точка Rn, х также есть радиус-вектор точки х, т. е.
направленный отрезок [0, х] и, наконец, х может обозна-
чать вектор, определяемый любым отрезком [х°, у0], для
которого у0 — х° = х.
Пример 1. Направленные отрезки [х1, у’], [х2, у2], где
х1 = (0, 0, .... 0), у1 = (1, 1, .... 1),
х2 = (3, 3, ..., 3), у2 = (4, 4.4)
равны одному и тому же вектору а = (1, 1, ..., 1).
27.2. Плоскость в Rn. Зададим п действительных
чисел Ар ..., Ап, одновременно не равных нулю, т. е. та-
ких, что выполняется неравенство
Зададим также действительное число В.
По определению геометрическое место точек х = (хр ...,
хп), удовлетворяющих уравнению
п
^AjXj + В = 0, (1)
7=1
§27. ПЛОСКОСТЬ В Rn
225
называется плоскостью, а уравнение (1) называется урав-
нением этой плоскости.
Будем еще говорить: плоскость (1) вместо того, чтобы
говорить: плоскость, определяемая уравнением (1).
При п = 3 плоскость (1) есть реальная плоскость.
Если умножить уравнение (1) на произвольное число
М 0, то получим уравнение
£ A'jx/ + В' = 0 (А- = MAj (j = 1, ..., п), В' = MB), (1')
эквивалентное уравнению (1).
Таким образом, уравнения (1) и (1') определяют одно и
то же геометрическое место точек. Учтем еще, что
Х(А')2 =М^А] >0.
/=1 /=1
Но тогда уравнения (1) и (1*) суть уравнения одной и
той же плоскости.
Систему чисел At, ..., Ап удобно мыслить как вектор
А - (А.....Ап).
Этот вектор заведомо ненулевой, потому что его длина
положительна:
hi = > °-
u=i
Как мы отмечали выше, буквы х = (хр .... хп) обозна-
чают не только точки пространства Rn, но и радиус-векто-
ры точек х. Но тогда левую часть уравнения (1) можно
записать как скалярное произведение векторов А и х:
Atxt + ... + Апхп = £ AjXj = (А, х),
j=i
а само уравнение (1) записать в виде
(А, х) + В = 0.
Эквивалентное же ему уравнение (!') запишется в виде
(А', х) + К = 0, (2')
где А' = МА, М * 0, В' = МВ.
8 Бугров, Т, 1
226 §27. плоскость в т?„
Таким образом, А' есть вектор, коллинеарный вектору
А, т. е. А' получается из вектора А умножением его на
число М Ф 0. Число В? тоже получается из числа В умно-
жением последнего на это же число М.
27.3. У р ав ней и е плоскости в нормальном
виде. Среди векторов А' особый интерес представляет еди-
ничный вектор, т. е. вектор, имеющий длину 1.
Чтобы получить его, множитель М надо подобрать так,
п
чтобы оказалось, что |Л'| = 1 (|А'|2 = А? ).
7=1
Отсюда ясно, что
Будем число М всегда выбирать так, чтобы при В Ф 0
число р = -МВ было положительным. Если В = 0, то за
число М можно брать любое из двух возможных его зна-
чений.
При таком выборе числа М вектор А' = МА будет
единичным, и мы его обозначим через V = (vp ..., vn), т. е.
V. = мл, а = 1,...» и), Xv> = М2Х 4 = Е
7=1 j=i
В силу введенных обозначений уравнение (23 запишется:
п
Yvixi = Р> <3>
7=1
где
п
]►>?=!, р > 0. (4)
7=1
Уравнение (3), где числа V, и р удовлетворяют условий-
ям (4), называется уравнением плоскости в Rn в нормаль-
ном виде.
Уравнение (1), где Ар ..., Ап, В - произвольные числа,
но числа А,, ..., Ап одновременно не равны нулю, называ-
ется уравнением плоскости в Rn в общем виде.
§27. ПЛОСКОСТЬ В Я„
227
Мы доказали, что любое уравнение плоскости в общем
виде может быть приведено к нормальному виду умноже-
нием на определенное выше число М. Число М называет-
ся нормирующим множителем.
Очевидно и обратное, если умножить уравнение плос-
кости (3) в нормальном виде на произвольное не равное
нулю число, то получим ему эквивалентное уравнение вида
(1), где числа Aj одновременно не равны нулю.
27.4. Уравнение плоскости в векторной
форме.
Уравнение (3) можно еще записать, очевидно, в виде
(V, х) = р. (3')
Введем в рассмотрение вектор
а = pv = (pVj, ..., pvn) = рМА.
При р > О он направлен в сторону единичного вектора
V и имеет длину, равную р: |а| = |pv| = p|v| = р.
Если р = 0, то а = О.
Помножим равенство (3') на р > О и учтем, что
р2 = (pv, pv);
тогда получим
(pv, х) = (pv, pv),
или
(а, х) = (а, а).
Учитывая свойства скалярного произведения, после-
днее равенство можно записать в виде
(а, х - а) = 0. (5)
Обратными рассуждениями из (5) можно снова полу-
чить (3')- Это показывает, что равенство (5) эквивалентно
уравнению плоскости (1), т. е. уравнение (5) можно счи-
тать уравнением рассматриваемой нами плоскости (1).
Говорят еще, что уравнение (5) есть уравнение плоскости
(1) в векторной форме при В * 0 (т. е. р > 0).
Таким образом, плоскость (1) — это геометрическое место
точек х, которые удовлетворяют уравнению (5).
8*
228§27. ПЛОСКОСТЬ В Rn
Пусть теперь р = 0 или, что все равно, В = 0.
Тогда уравнение (3') имеет вид
(V, х) = 0. (5')
Уравнение (5') и есть уравнение плоскости (1) в вектор-
ной форме при В = 0. Оно выражает, что множество всех
точек плоскости (1) состоит из всех точек х е Rn, удовлет-
/ Г"
воряющих (5'), где v = МА (М = +1/ А? ) - любой из
двух возможных единичных векторов.
27.5. Геометрическая интерпретация урав-
нений. Условимся говорить, что вектор с ортогонален к
отрезку [ж°, у0], если он ортогонален к вектору у0 - х°,
т. е. если
(с, у° - х°) = 0.
Будем также говорить, что вектор с ортогонален к
плоскости L, если он ортогонален к любому отрезку, при-
надлежащему L.
Покажем, что если точки х1 и х2 принадлежат плоско-
сти (5), то и отрезок [ж1, ж2] принадлежит этой плоскости.
В самом деле, по условию
(а, х1 - а) = 0, (а, х2 — а) — 0.
Далее, произвольная точка х отрезка [ж1, ж2] может
быть записана в виде
ж = Хж1 + рж2 (к > 0, р > 0, X + р = 1),
поэтому
(а, ж - а) = (а, Хж1 + рж2 — а) =
=(а, Хж* + рж2 - (X + р)а) = (а, Х(ж* - а) + р(ж2 - а)) =
= (а, Х(ж* - а)) + (а, р(ж2 - а)) =
= Х(а, ж1 — а) + р(а, ж2 — а) — X • 0 + р • 0 = 0.
Таким образом, ж принадлежит плоскости (5), а следо-
вательно, и весь отрезок [ж1, ж2] принадлежит этой плос-
кости.
§27. ПЛОСКОСТЬ В /?,
229
Из уравнения (5) видно, что точка а принадлежит к
этой плоскости: (а, а - а) = (а, 0) = 0.
В силу вышесказанного плоскость (1) можно опреде-
лить как геометрическое место точек х е Вп таких, что
разность х — а, где х — радиус-вектор точки х, ортогональ-
на к вектору а.
Покажем еще, что вектор
Д = (А„ ...,А„)
ортогонален к плоскости (5).
В самом деле, в силу равенства а = рМА (р > 0) вектор
А коллинеарен вектору а и, следовательно, он ортогона-
лен к любому вектору х - а, принадлежащему, плоскости
(5), т. е. ортогонален к плоскости (5) или, что все равно
к плоскости (1).
Итак, числа Ар ..., Ап в уравнении плоскости (1) имеют
геометрический смысл — вектор А = (Ар ..., Ап), составлен-
ный из коэффициентов при этого уравнения, ортогона-
лен к плоскости (1).
Если р = 0 или, что все равно, В — 0, то рассматриваем
уравнение (5'), эквивалентное уравнению (1). Уравнение
(5') выражает, что множество всех точек х плоскости (1)
состоит из точек х, радиус-векторы которых ортогональ-
ны к вектору V = МА.
В этом случае вектор А = (Ар ..., Ап), коллинеарный
вектору V, снова ортогонален к плоскости (1).
27.6. Уравнение плоскости, проходящей
через п точек
Теорема. Пусть задано п точек
х1 = (х} , .... х1п),
определяющих матрицу
Х1 Х1 Х2 Х2
(6)
х" — xj Х%
хп -X1
п
230
§27 ПЛОСКОСТЬ В Rn
Тогда если ранг Q равен п — 1 (ранг Q = п— 1), то через
указанные п точек можно провести плоскость и притом
единственную.
Если же ранг матрицы Q меньше чем п — 1 (ранг Q <
<п — 1), то через указанные п точек можно провести бес-
конечное множество плоскостей.
Доказательство. Пусть ранг Q = п — 1.
Уравнение искомой плоскости запишем в виде
п
(7)
7=1
Так как эта плоскость должна проходить через точку
х1, то должно удовлетворяться равенство
ХАж) + В = 0. (8)
7=1
Вычитая равенство (8) из равенства (7), получим урав-
нение
= О’ (0)
7=1
справедливое для всех точек х искомой плоскости.
Так как точки х2, ... хп должны принадлежать иско-
мой плоскости, то их координаты должны удовлетворять
уравнению (9), т. е. должны выполняться равенства
X А^х7 ~ =0,
7=1
-........................... (Ю)
X А« = о.
7=1
Итак, числа Ау должны быть решениями однородной
системы, состоящей из равенства (9) и равенств (10), где
х = (xt, ..., хп) - произвольная точка искомой плоскости.
Но числа Aj должны быть одновременно не равны нулю.
Поэтому определитель однородной системы должен рав-
няться нулю:
§27. ПЛОСКОСТЬ В Л,
231
Xj-Xi х2-х2 ... хп-хп
X2 - X1 х2- х1 X2 - х1
Х1 Х1 х2 х2 • •' хп хп
= 0 (11)
Х1 Х1 х2 Х2
для всех точек х = (хх, ..., хп) искомой плоскости.
Уравнение (11) и есть уравнение искомой плоскости.
Если определитель левой части этого уравнения разло-
жить по элементам первой строки, то получим уравнение
вида (9) с коэффициентами Ajt равными определителям
(л — 1)-го порядка, порождаемым матрицей Q с соответ-
ствующим знаком. По условию среди этих определителей
есть хотя бы один, не равный нулю.
Первое утверждение теоремы доказано.
Пусть теперь ранг матрицы Q меньше п — 1 (ранг Q <
< п — 1). Тогда, рассуждая, как прежде, мы придем к
тому, что любая точка х плоскости, проходящей через
заданные п точек, должна удовлетворять системе, состоя-
щей из уравнения (9) и уравнений (10) при некоторых
постоянных Aj, ..., Ап.
Так как ранг Q < п - 2, то система (10) имеет бесконеч-
ное число решений At, ..., Ап. При этом по крайней мере
два из чисел А/г пусть А, и А2, могут быть любыми неза-
висимыми друг от друга числами - им можно придавать
любые числовые значения.
Если подставить найденные числа А,, ..., Ап в уравне-
ние (9), то различным не пропорциональным между собой
парам А,, А2 будут соответствовать заведомо разные плос-
кости, проходящие через заданные п точек.
Второе утверждение теоремы доказано.
Уравнение (11) можно записать в форме
Х1 х2 ... х„ 1
х[ х2 ... х* 1
Х1 x2 ... xn ±
232
§27. ПЛОСКОСТЬ В Rn
27.7. Условия ортогональности и парал-
лельности плоскостей. Угол между двумя плоско-
стями в Rn
п
У Aixi + В = о,
п
ХАЧ + в' - о
/=1
(12)
(13)
определяется по аналогии с трехмерным случаем. А имен-
но, углом между плоскостями (12), (13) называется угол <р
между векторами А = (А,, ..., Ап) и А’ = (А{, ..., А'),
которые, как мы выяснили, перпендикулярны к плоско-
стям (12) и (13) соответственно.
На основании формулы (8) § 6 имеем
АА'
cos ф = |А||А'| =
У А А
V/=1 V/=1
Плоскости vl2) и (13) перпендикулярны тогда и только
тогда, когда cos <р = 0 , т. е.
Уаа = °- <14>
/=1
Две плоскости (12), (13) параллельны тогда и только
тогда, когда перпендикулярные к ним векторы А и А'
коллинеарны (А = ХА'), т. е. когда
А _ А _ _ А
А А "" А "
(15)
27.8. Уравнение плоскости, проходящей
через точку. Если точка (х°, ..., х°) = Q° лежит на
плоскости
§27. ПЛОСКОСТЬ В Д,
233
^AjXj + В = О, (16)
/=1
то ее координаты удовлетворяют уравнению этой плоскости
+ В = 0. (17)
7=1
Вычитая (17) из (16), получаем
£ А;(х,.-х°) = 0. (18)
/=1
Уравнение (18) называется уравнением плоскости,
проходящей через точку Q0 = ( Х^ , • • , Хп )«
В векторной форме уравнение можно записать так:
Л(р - р°) = 0, (18х)
где
А = (Ар ...» Ап), р = (Хр хп),
Р° = (х°, х°).
Здесь, как мы знаем, вектор А перпендикулярен плос-
кости (16), р — радиус-вектор текущей ее точки, р° — ради-
ус-вектор заданной ее точки Q°.
27.9. Прямая в пространстве Rn. Уравнения пря-
мой в пространстве Rn можно вывести по аналогии с трех-
мерным пространством R3 (см. § 10).
Прямой L в Rn, проходящей через точку Q° = (xf,
х°) и направленной в сторону вектора а = (а,, ..., ап)
(|а| > 0), называется геометрическое место точек Q = (х,, ...,
xn) е Rn, удовлетворяющих уравнениям
Xj - х° = tal,
(19)
xn-x„=tan,
где t — действительная переменная, пробегающая интер-
234§27. ПЛОСКОСТЬ В Bn
вал (~оо, оо). Удобно считать, что вектор а приложен к
точке Q0.
Уравнения (19) называются параметрическими урав-
нениями прямой. L.
Если ввести в рассмотрение радиус-векторы точек Q и
0° прямой L:
р (х,, .... xj, р° = (х®, ...» х®),
то уравнения (19) запишутся:
р - р° = ta, (19')
т. е. вектор р — р° коллинеарен вектору а.
Если действительная переменная (скаляр) t пробегает
интервал (—°°, °°), то конец радиус-вектора
р = р° + ta
пробегает всю прямую L.
Уравнение (19') называется уравнением прямой в век-
торной форме.
Исходя из (19'), мы видим, что вектор а лежит на
прямой L, потому что его начало Q0 имеет радиус-вектор
р°, а конец — р° +а. Оба эти вектора удовлетворяют урав-
нению (19') соответственно при t = 0 и t = 1 (см. § 7).
Если исключить параметр t из уравнений (19), то мы
получим систему из (п — 1) уравнений:
хх - х? х, - х? хл - х„°
—------ = -------- = ... = —----- . (19")
“1 «2 яп
Уравнения (19") называются уравнениями прямой L в
канонической форме или каноническом виде.
Пусть заданы прямые
Х1 - xf хл - X®
= ... = • (L,),
«1-----------------ап 1”
Х1 ~У1 _ _ х„~Уп
Ь, - Ьп
Углом между прямыми L, и L2 называется угол <р меж-
ду векторами
а - (а,, ..., ап), Ъ = (Ь,, ..., Ьп),
§27. ПЛОСКОСТЬ В Rn 235
которые, как мы показали, лежат на соответствующих
прямых L, и L2. Они приложены соответственно к точкам
(X?, .... х°), (рх% ....
Пример 1. Написать уравнение плоскости, проходя-
щей через точку Q” = (xf, ...» х°) и перпендикулярно
прямой, определяемой уравнениями
= (20)
h ь2 ьп 7
Решение. Уравнение плоскости, проходящей через
точку Q0, имеет вид (см. (18))
YAi(xi~x> =°- <21)
j=i
Искомая плоскость должна быть ортогональной пря-
мой (20), т. е. ортогональной вектору Ь = (£>,, ..., b^.
С другой стороны, вектор А = (Aj, ... , Ап) ортогонален
плоскости (21). Поэтому векторы А и Ь коллинеарны:
А = ХЬ. Следовательно, уравнение искомой плоскости за-
пишется:
£Ьу(Х;-Х°) =0.
7=1
27.10. Расположение (и - 1) плоскостей. Пусть
заданы уравнения (п — 1) плоскостей
A}xt + ... + А>„ + В1 = 0, (22,)
АГхх, + ... + А^хп + В-’ = 0. (22п_,)
Если коэффициенты первого уравнения пропорциональ-
ны коэффициентам второго ( а} : А2 : : А„ = А% • А2- ...
: А„), то плоскости параллельны (см. 27.7).
Если указанная пропорциональность имеет место и для
коэффициентов других уравнений, то все плоскости будут
236§27. ПЛОСКОСТЬ В Д„
параллельны между собой. В этом случае все определите-
ли (и - 1)-го порядка, порожденные матрицей |[а*|| коэф-
фициентов А* уравнений (221)-(22п1), равны нулю.
Если хотя бы один из определителей (п — 1)-го порядка
матрицы ||а/|| не равен нулю, то плоскости (221)-(22я_1)
пересекаются по прямой. В самом деле, пусть для опреде-
ленности
А1 А1 А1 лл -1
А2 А2 д2 Лл-1 * 0. (23)
А"'1 д n-i дЛ-i
Тогда уравнения (22J—(22п1) можно решить относитель-
но ..., хп_1 и мы получаем
%! =а1х„+ц1,
(24)
Хп-1 = <*п-1хп + Мл-1>
где (Xp ап_р ..., цп1 - некоторые числа.
Уравнения (24) эквивалентны следующим уравнениям:
хп-1 - Цл-1 Хп (25)
«1 “ "• ~ ал-1 Г’
Мы видим, что при условии (23) уравнения (и - 1)
плоскостей (22])-(22п_1) определяют прямую (25). Она про-
ходит через точку (рр ..., р.п_Р 0) и имеет направление
вектора (ар ..., ап..р 1).
Пример 2. Найти угол между прямыми
х4 1 х2 2 Хд — 3 х4 — 4
1 = 2 = 3 = 4
х4 — 4 _ х2 - 3 х3 - 2 х4 -1
4
3
2
1
§27. ПЛОСКОСТЬ В Я,
237
Решение. Векторы а — (1, 2, 3,4), Ь = (4, 3, 2, 1)
лежат на наших прямых, расположенных в четырехмер-
ном пространстве Т?4. Поэтому угол ф между этими векто-
рами и будет углом между прямыми:
1-4 + 2-3 + 3-2+41 2
COS<P= Vlz+2Z+32+4ZV4Z+3Z+2Z +12 = 3’
2
ф = arccos—.
О
27.11. Расстояние от точки до плоскости.
Пусть задана плоскость П, определяемая общим уравне-
нием
л Л
X + в = о (|л|2 = X А2 > °)’ (26)
j=i ;=1
или векторным уравнением
(Л, р) + В = 0, (27)
или же нормальным уравнением
(р, V) = р (р> О), (28)
где А = (Лр ..., Лп), р - радиус-вектор текущей точки
_ А В
Q = (хр ..., хп) Плоскости П, v = + |\д| ’ = ± | Л| '
Зададим некоторую точку Q0 = (х°, ..., х°). Радиус-
вектор точки Q° обозначим через р°.
Расстоянием от точки Q° до плоскости П называется
длиной d отрезка, опущенного из нее на П.
Покажем, что
d = |(р - р°, v)|, (29)
т. е. расстояние d до П равно абсолютной величине про-
екции вектора р — р° на направление единичного вектора
А
V = —- (ортогонального к П).
|Л|
На рисунках 53 а и 53 б изображена плоскость П и
точка Qo. На рис. 53 а точки О и Qo находятся по разные
238
§27. ПЛОСКОСТЬ В Я,
стороны от П (П пересекает OQ0). А на рис. 53 б — по одну
сторону от П (П не пересекает OQ0).
Через точку Qo проведена плоскость По, параллельная
П. Из точки О проведена прямая, перпендикулярная к П
(и По), пересекающая П и По соответственно в точках В и
Во. На ней отмечен единичный вектор V, идущий от точки
О по направлению к П.
Обратимся к рис. 53 а. Векторы р0 - р образуют ост-
рый угол. Проекция р0 — р на направление v есть поло-
жительное число, равное длине отрезка |ВВ0|, которая в
свою очередь равна расстоянию от Qo до П:
|ЯВ0| = d = (v, р0 - р).
§27. ПЛОСКОСТЬ В Rn
239
На рис. 53 б v образует острый угол с р0 — р и на этот
раз расстояние от QO до П равно
|ВВ0| = d = (v, р - р0).
Оба полученные равенства объединяются равенством
(29) или, что все равно, равенством:
d = |(v, р0) - р|.
Таким образом, для того чтобы вычислить расстояние
d от точки Q° до плоскости П, надо записать уравнение
плоскости П в нормальном виде (28), перенести р в левую
часть и подставить в последнюю (х°, х®) вместо
(Xj...хп). Абсолютная величина полученного выражения
и есть искомое число d.
На языке параметров плоскости, очевидно,
d =
Пример 3. Найти расстояние d от точки
пространства Rn до плоскости
х, + у[2 х, + у/з х, + ... + 4п х + 1 = О.
1 2 J п
Решение. Согласно сказанному выше
27.12. Различные задачи.
Привести к нормальному виду уравнения следующих
плоскостей (1-3):
1. 1х. + 2х„ + ... + пх = -1.
12 П
240
§27. ПЛОСКОСТЬ В Я,
------д-----
„ 7=1 ______6_____
Ответ: = л 7Г •
Vn(n + 1)(2п +1) V п(п + !)(2n + !)
2. x+y + z+ t = 0.
J=i
y/j(J + D
п + 1
nj(j + T)X'
Ответ:
n + 1
n
4. Найти угол <p между плоскостями в /?4:
(8 + Тб9 )х, + 2х2 + Зх3 + 4х4 = 0,
4х. + Зх, + 2х3 + (8 + Тб9 )х. = 1.
1 О' ' Ч
Ответ: <р =
л
3 ’
5. Найти угол <р между плоскостями в /?2г1:
2л 2л _
=0, ^Тх =1.
7=1 7=1 J
Я
Ответ: <р = — (плоскости ортогональны).
6. Написать уравнение плоскости, проходящей через
точки пространства В :
Q, = (1? 0, .... 0),
Q2 = (0, 1, 0,...0),
Qn = (0, .... 0, 1).
Ответ: хг + х2 + ... + хп = 1.
7. Написать уравнение прямой, проходящей через точ-
ку (1, 2, ..., п) перпендикулярно плоскости:
nxt + (п - 1)х2 + ... + 2хл , + хп = 4.
л "^1 %2 2
Ответ: ------ = -----—
п п-1
§28. ЛИНЕЙНОЕ ПРОГРАММИРОВАНИЕ
241
8. Написать уравнение плоскости в /?4, проходящей
через точки
Qj = (1, 0, 0, 0), Q2 = (1, 1, 0, 0),
Q3 = (1, 1, 1, 0), Q4 = (1, 1, 1, 1).
Ответ: хх = 1 (1 • х, + 0 • х2 + 0 • х3 + 0 • х4 = 1).
§ 28. Линейное программирование
28.1. Введение. Линейное программирование - это
раздел математики, изучающий методы нахождения мак-
симальных или минимальных значений линейной одно-
родной формы - линейной функции
п
Дх,, ... х> (1)
k=l
в некоторой области G n-мерного пространства Rn — {—<*> <
< х. < <=>, i = 1.л}, где ck - постоянные числа, не все
равные нулю.
Ясно, что если G = Rn, то линейная функция (1) не
имеет наибольшего и наименьшего значений: sup/ = +°°,
inf/ = -оо.
Однако если мы будем рассматривать ограниченную
замкнутую область G, то линейная функция / (непрерыв-
ная на Rn, а следовательно, и на G) достигает своих мак-
симальных и минимальных значений на G. Так как
Э/ ____
dxt = c> 0 = 1—• п>
и одновременно не равны нулю, то линейная функция
/ не имеет стационарных точек. Поэтому наибольшее и
наименьшее значения эта функция достигает только на
границе 3G.
Так как шах/ = — min(-/), то в дальнейшем мы будем
говорить только о минимуме линейной функции / на G.
28.2. Транспортная задача. Характерной зада-
чей, приводящей к указанной выше проблеме (нахожде-
ния минимума или максимума линейной функции), явля-
242§28. ЛИНЕЙНОЕ ПРОГРАММИРОВАНИЕ
егся транспортная задача. Требуется наиболее
экономно, в смысле транспортных затрат, перевезти потре-
бителям заказанную ими на данных предприятиях про-
дукцию. Характер продукции в данном случае не имеет
значения. Важно, что речь идет об однотипной продукции.
Итак, пусть имеются предприятия (производители) _Вр
..., Вя, выпустившие продукцию в количестве соответственно
bv ..., bs тонн. Эту продукцию надо доставить потребителям
А1, ..., At в количествах ар ..., at тонн соответственно, т. е.
ар — количество продукции, заказанное потребителем Ар.
Таким образом, надо считать, что
4=1 р=1
т. е. вся произведенная продукция распределена между
предприятиями. Стоимость перевозки тонны продукции
от Вч к Ар обозначим через с . Пусть количество продук-
ции, доставленной из Bg в Ар, будет хда. Тогда стоимость
перевозки продукции будет
s t
s~ ХХ^х,.
q=lp=l
Требуется так составить план перевозок, чтобы сумма
транспортных расходов S была минимальной.
Таким образом, мы пришли к следующей математичес-
кой задаче.
Дана линейная функция
s t
8 = X X СЧР Xqp-
<7=1 р=1
Требуется найти ее минимум при ограничениях
t
^xqp=bq =
Р=1
_ (3)
xw =ар (Р =
e=i
т. е. сумма продукции, полученной потребителями А,, ...,
At от производителя Вч, равна продукции bq, выработан-
§28. ЛИНЕЙНОЕ ПРОГРАММИРОВАНИЕ
243
ной этим предприятием, а сумма продукции, полученной
потребителем-Ар от всех производителей ..., Bs, равна
потребности ар этого потребителя.
По характеру задачи также ясно, что хда > 0.
Таким образом, среди неотрицательных решений {х^}
системы (3) необходимо выбрать такое, при котором S
достигает наименьшего значения (минимизируется).
28.3. Общая задача линейного программи-
рования. В общем случае задачу линейного программи-
рования можно сформулировать следующим образом: даны
система линейных уравнений
п
^ajkxk + £. = 0 (j = 1, ..., т = 1Гт) (4)
Й=1
(где можно считать, что > 0, изменяя, если нужно, знак
в соответствующем уравнении (4)) и линейная функция
п
f = , (1)
k=l
Требуется среди неотрицательных решений системы (4)
х = (хр ..., хп), xj > 0, найти такое решение, для которого
линейная функция f принимает наименьшее значение.
Уравнения (4) обычно называют ограничениями дан-
ной задачи. Конечно, требование, чтобы х} > 0 (j = 1, п),
тоже является ограничением, но оно присутствует во всех
задачах подобного типа и его не принято называть огра-
ничением. Любое неотрицательное решение системы (4)
будем называть допустимым, а решение, реализующее
минимум, - оптимальным.
Отметим, что уравнения системы (4) с геометрической
точки зрения представляют плоскости в Rn. Чтобы задача
о минимуме f была содержательной, необходимо, чтобы
число т ограничений типа равенств было меньше п.
Например, при п = 2 наличие двух ограничений озна-
чает, что неотрицательное решение системы должно быть
точкой (х0, i/0) пересечения прямых, представляющих урав-
нения системы. Тогда задача о нахождении min/ сводится
к вычислению f в этой точке. Если прямые параллельны,
то задача теряет смысл. Если ограничений больше двух,
244
§28. ЛИНЕЙНОЕ ПРОГРАММИРОВАНИЕ
то система или несовместна, или же все прямые принад-
лежат одному пучку:
А(х - х0) + В(у - у0) = 0.
В этом случае минимум f также равен f(x0, у0).
В ряде практических задач (например, в задаче о дие-
те) ограничения носят вид неравенств
п
6. + 0 0 = £« , хк > 0, k = 1, л). (5)
Л=1
Однако от одного типа ограничений легко перейти к
другому. В самом деле, если ограничения носят характер
неравенств (5), то вводим новые добавочные неизвестные
хп+1, ..., хп+т с помощью уравнений
xn+i - b,+ X aikxk (J = т )•
й=1
Тогда неравенства (5) равносильны условию xn+j > 0
(у — 1, т ), хк > 0 (k = 1, л), и мы пришли к ограничениям
типа равенств (4), хотя и с большим числом переменных.
Обратно, пусть имеют место ограничения типа равенств
(4). Тогда, решая эту систему (например, методом исклю-
чения неизвестных), мы после некоторого числа шагов
или убедимся, что система несовместна, или же разрешим
систему (4) относительно некоторых неизвестных:
Х! = «l.r+l^r+1 + - + Vn + Pl>
......................................... (6)
Xr = «nr+i^r+i + ••• + а ,Л„ + ₽г.
Здесь г — ранг матрицы коэффициентов системы (4).
Подставляя эти выражения xv хг в функцию f,
получаем
f= с'о + + - +
После этого исходная задача может быть сформулиро-
вана следующим образом. Даны система
§28. ЛИНЕЙНОЕ ПРОГРАММИРОВАНИЕ 245
а1,г+1*г+1 + - + + Р, > О,
........................................ (7)
+ - + аг.пХп + Рг 0
г линейных неравенств с л — г неизвестными хг+1, ... хпп
линейная функция
/= С0 + <+1*г+1 + - + <хп- (8)
Требуется среди всех неотрицательных решений систе-
мы (7) найти такое, которое минимизирует f.
Эта задача эквивалентна исходной. В самом деле, если
мы нашли решение задачи (7), (8) х®+1, • х„, то, находя
по формулам (6) неотрицательные значения х°, х°,
мы получим систему чисел
г° г° г° г°
*1 ’ хг ’ хг+1 ’ хп ’
которая служит решением задачи (1), (4).
Таким образом, задачу линейного программирования
можно ставить с ограничениями типа неравенств. Из та-
кой постановки видно, что область G, в которой мы ищем
минимум f, представляет собой «многогранник» в неотри-
цательном угле Rn (т. е. когда хк > 0, k = 1, л), а ее
граница Э(? состоит из «плоских граней», находящихся в
плоскостях пространства /?п:
п
+ fe = 0. (9)
Л=1
Множество G с Rn называется выпуклым, если Vх, у
е G ах + Ру е G, а + Р = 1, а, р > 0.
Из системы неравенств (7) ясно, что «многогранник» G
выпуклый и G находится по одну сторону от любой из
своих граней.
Слово «многогранник» мы пишем в кавычках, так как
могут быть случаи, когда этот «многогранник» будет нео-
граниченной частью неотрицательного угла Rn.
Например, при л = 2 и при тех ограничениях типа нера-
венств «многоугольник» G может быть неограниченным в
первой четверти R2. На рис. 54 G - заштрихованная часть.
246
§28. ЛИНЕЙНОЕ ПРОГРАММИРОВАНИЕ
В дальнейшем кавычки у слова «многогранник» мы
будем опускать.
При нахождении минимума линейной функции f на
замкнутой области G = Gn мы последовательно будем
переходить на плоские грани Gn меньшей размерности.
Отметим, что граница 3Gn n-мерного многогранника состо-
ит из нескольких (п — 1)-мерных многогранников. Если
Gn — ограниченный замкнутый многогранник, то линей-
ная функция f достигает минимума в некоторой точке
границы dGn. При рассмотрении линейной функции f на
этом новом многограннике меньшего числа измерений она
снова будет линейной функцией, но от меньшего числа
переменных и, следовательно, будет достигать минимума
на границе dGn_lt которая состоит из (п — 2)-мерных мно-
гогранников. Продолжая этот процесс, мы придем к слу-
чаю, когда линейная функция рассматривается на одно-
мерной грани (ребре Gn), границей которой являются точки
(вершины многогранника Gn).
Таким образом ясно, что если Gn — ограниченный за-
мкнутый многогранник, то линейная функция достига-
ет минимума в некоторой вершине Gn.
Если минимальное значение достигается в двух верши-
нах, конусах ребра, соединяющего эти точки, то в этой
ситуации существует бесконечное множество точек, в ко-
торых линейная функция достигает минимума.
§28. ЛИНЕЙНОЕ ПРОГРАММИРОВАНИЕ
247
п
Замечание 1. Если функция / = ckxk + В, где В
k=i
— постоянное число, то мы исследуем сначала линейную
форму <р = f - В, и если min (р = <р0, то min f = <р0 + В.
Из приведенных соображений вытекает следующий
геометрический метод решения поставленной задачи о
минимуме линейной формы f.
Рассмотрим плоскости уровня функции /:
п
с = (~~ < С < ~). (10)
fe=l
Уравнение (10) при различных С в пространстве Вп
изображает семейство параллельных плоскостей (см. § 27).
Будем непрерывно и монотонно изменять С от —<» до 4~о°.
Тогда плоскость (10) будет передвигаться в Rn в направле-
нии вектора (ср сп), который, как мы знаем, перпенди-
кулярен плоскости (10). Очевидно, что если сп > 0, то
плоскость (10) поднимается вверх относительно оси хп при
изменении С от —«> до -Ь»; если же сп < 0, то плоскость (10)
опускается вниз относительно оси хп. При сп = 0 плос-
кость (10) движется вправо или влево относительно оси
хп_, в зависимости от знака числа сп_, (cn_j Ф 0). Если
сп > 0 и при всех С < С*, где С* - некоторое действительное
число, плоскость (10) пересекает область G, то inf/' = —со.
Если же этого нет, то при некотором С = Со плоскость
(10), двигаясь в направлении вектора (ср ..., сп), впервые
встретит замкнутую область G в некоторой точке (х°..
х°). Тогда в этой точке встречи функция f и достигает
минимума.
На рис. 54 при п = 2 прямая уровня при возрастании С
поднимается и при С = Со впервые встречает замкнутый мно-
гоугольник G в точке (х°, х°). Значит, min/= Лх°, х°)-
Если грань многогранника G, проходящая через точку
первой встречи G с плоскостью уровня, параллельна плос-
кости (10), то линейная функция f достигает минимума в
любой точке этой грани.
Этот геометрический метод решения поставленной за-
дачи эффективен лишь при п = 2, т. е. когда плоскости
248
§28. ЛИНЕЙНОЕ ПРОГРАММИРОВАНИЕ
(10) — прямые и G - многоугольник, ограниченный или
нет. При л = 3 взаимное расположение плоскостей и
многоугольника G трудноуловимо, а при л = 4 мы просто
не можем прибегнуть к наглядным графическим изобра-
жениям.
Пример 1. Найти минимум функции /(х, i/)=3 - х -у
(х > 0, у > 0) при ограничениях (рис. 55)
G =
х - у +1 > 0,
2у + х - 2 > 0,
4 - у - 2х > 0
Ясно, что область G есть треугольник с вершинами в
точках М = (2, 0), N = (1, 2), Р = (0, 1). Прямая уровня
функции f:
3 — х — у = С,
при возрастании С от -<*> до +оо опускается относительно
оси у (коэффициент при у отрицателен); ее первая точка
встречи с G есть вершина N. Значение функции f в этой
точке равно нулю (С = Со = 0). Итак, решение задачи есть
х = 1, у = 2, f = 0.
В данном случае можно было бы просто вычислить
значение f в точках М, N, Р к взять наименьшее: f(M) =
= /(2, 0) = 1, f(N) = Я1, 2) = 0, f(P) = /(0, 1) = 2, т. е.
min f = f(N) = 0.
Я
Рис. 55
Рис. 56
§28. ЛИНЕЙНОЕ ПРОГРАММИРОВАНИЕ
249
Пример 2. Найти минимум функции f — 3 - х + 2у
при тех же ограничениях, что и в примере 1.
В данном случае прямая уровня функции
3 - х + 2у = С
при возрастании С от —<*> до поднимается (рис. 56)
вверх относительно оси у (с2 = 2 > 0) и ее первая точка
встречи с областью G есть вершина М = (2, 0). Значение
функции / в этой точке равно 1 (С = Со = 1). Здесь тоже
проще всего взять наименьшее среди чисел f(M) = 1,
ДДГ) = 6, ДР) = 5.
Пример 3. Найти минимум функции f = —х при ог-
раничениях
х + у - 3 > 0,
х - у +1 > 0,
-х + у+1>0,
2х + у > 0
Ясно, что последнее ограничение несущественно, оно
перекрывается условием х > 0, у > 0.
Область G неограничена и представляет собой полосу
(рис. 57) между прямыми х — z/ + 1 = 0, -x+z/+l = O
и правее прямой х + у — 3 = 0, которая пересекает эти
прямые в точках N — (1, 2), М — (2, 1).
При х —> +оо функция f(x, у) = —х —> -оо, (х, у) е G.
Поэтому линейная функция f не имеет наименьшего зна-
чения (inf/ = —<=о).
Рис. 57
Рис. 58
250 §28. ЛИНЕЙНОЕ ПРОГРАММИРОВАНИЕ
В данном примере прямая уровня —х = С при возрас-
тании С от —о» до +<=о движется влево (с, = —1 < 0) и при
всяком С < — 1 пересекает G, значит, inf/ = —<*>.
Пример 4. Найти минимум функции /=4-х + 1/-2г
при ограничениях
G= (!<а+х+а<21
[ С1 а3 J ’
где ар а2, а3 — положительные числа.
Ясно, что область G (рис. 58) есть часть пространства
7?3, находящаяся в первом октанте (х > 0, у > 0, z > 0)
между плоскостями
X у Z X у Z
— + —+ — = 1, ----+ +------ = 1.
а^ 4^2 а3 2а^ 2а3 2а3
В данном случае многогранник G имеет шесть извест-
ных вершин
(ар 0, 0), (2ар 0, 0), (0, а2, 0), (0, 2а2, 0),
(0, 0, а3), (0, 0, 2а3).
Поэтому, вычисляя функцию / в этих точках, легко
находим ее минимум и максимум:
min/= min{4 — а., 4 — 2а., 4 + а,, 4 + 2а„, 4 — 2а,,
~ ' 1' Iг х.' А’
Ст
[4 - 2а,, а, > 2ач,
4 - 4а_} = min{4 — 2а., 4 - 4а,} = •?
3 [4-4аз» а1<2а3;
шах/ = 4 + 2а,.
G 2
28.4. Векторно-матричная форма задачи
линейного программирования. Задачу линейно-
го программирования можно сформулировать также в
векторно-матричной форме. Пусть с = (с,, ..., сп), х = (хр
..., хп), О = (0, ..., 0) - векторы пространства /?л; Ъ = (bv ...,
fem) - вектор из пространства Rm;
§28. ЛИНЕЙНОЕ ПРОГРАММИРОВАНИЕ
251
а11 а12 а1л
а21 а22 а2п
^т2 • • • ®тп
- матрица размера п х т, составленная из коэффициентов
системы ограничений (4). Линейная функция f(x) =
п
= ckxk = сх есть скалярное произведение векторов с и х.
к=1
Поэтому общую задачу линейного программирования
можно записать в следующем виде: требуется минимизи-
ровать скалярное произведение сх при условии х > 0 и
Ах + Ь = О.
Примем столбцы матрицы А за векторы из Rm:
Л = (°П> °12> -> amJ’ -> рп = (ат> а2п> -» °т„)-
Тогда легко получаем, что
Ах = (ajjX, + ... + aInx„, ..., ат1Х1 + ... + атпхп) =
= (anXl, а21хр .... amJxt) + ... + (а1ях„, ..., ат„х„) =
= Р.х. + Р,х, + ... + Рх.
Поэтому систему ограничений можно записать в виде
п
Pixi = ~Ъ.
/=1
Если рангу! = т, то среди векторов Рр .... Рп имеется
т линейно независимых, которые можно принять за ба-
зис в пространстве Rm (см. § 16). Следовательно, любой
вектор (—Ь) е Rm может быть разложен по элементам этого
базиса. Нам необходимо выбрать такой базис, чтобы век-
тор (—Ь) разлагался по векторам этого базиса с неотрица-
тельными коэффициентами хр х2, ..., хя.
Различных m-мерных базисов (т < п) из векторов Р,,
..., Рп конечное число. Среди них могут быть базисы, по
элементам которых вектор (—6) разлагается с неотрица-
тельными коэффициентами. Тогда минимум скалярного
произведения (линейной функции) достигается на конеч-
252
§28. ЛИНЕЙНОЕ ПРОГРАММИРОВАНИЕ
ном множестве точек х = (хр .... xn) е Rn, где х. - коэф-
фициенты разложения вектора (-Ь) по элементам некото-
рых базисов.
Если базисов указанного типа нет (вектор (-6) не раз-
лагается по элементам базисов с неотрицательными ко-
эффициентами), то задача линейного программирования
не имеет решения (неразрешима).
Таким образом, задача состоит в том, как найти базис
<п,....П.)
так, чтобы
т
-ь = ’ ч - °-
7=1
И
т
min/ = min ex = ck, xk. .
28.5. Симплекс-метод. Реальные задачи линейно-
го программирования содержат, как правило, большое чис-
ло ограничений и неизвестных. Поэтому естественно, что
решение таких задач связано с большим объемом вычис-
лений. Это затруднение преодолевается с помощью быст-
родействующих электронно-вычислительных машин (ЭВМ).
Для каждой задачи разрабатываются алгоритм и програм-
ма, и затем ЭВМ в короткий срок дает решение поставлен-
ной задачи.
Существуют и другие общие методы, позволяющие най-
ти решение любой задачи линейного программирования в
обозримое число шагов.
Таким является симплекс-метод. Опишем идею этого
метода.
Пусть надо найти минимум линейной функции
п
Я*) = (И)
7=1
среди значений х; > 0 (j = 1, ..., л), удовлетворяющих
равенствам
§28. ЛИНЕЙНОЕ ПРОГРАММИРОВАНИЕ
253
п
Xj + b'k = 0 (k = 1, ..., т; т < п). (4)
/=1
Неотрицательные решения системы (4) х; > 0 (j = 1, п)
мы условимся называть допустимыми, а точку х =
= (хр хп) - допустимой, точкой. Покажем, как эту
задачу можно решить, применяя симплекс-метод.
Пусть ранг матрицы А' = ( a'j) равен г < т (г — ранг А').
Будем считать, что система (4) разрешима относительно
X,, .... хг:
п
хк = ьк- T.akixj (/г1,,), (12)
;=г+1
и числа Ьк неотрицательны (Ьк > 0, k = 1, г).
В этом случае говорят, что переменные хр ..., хг обра-
зуют базис — базис В = {хр ..., хД. Остальные переменные
называются свободными или небазисными. Следует обра-
тить внимание, что здесь понятие базиса не совпадает с
понятием базиса из § 16.
Вопрос о возможности перехода от системы (4) к систе-
ме (12) будет рассмотрен ниже в п. 28.8.
Системы (4) и (12) равносильны, поэтому допустимая
точка х системы (4) есть допустимая точка системы (12), и
обратно.
Очевидно, точка Ъ .... Ьг, 0, ..., 0) допустимая, ее
называют базисным решением, отвечающим базису В.
Будем писать f(b) = fB. В силу равенств (12) функцию f
можно записать в виде линейной функции от переменных
xt (j = г + I, ..., л):
п
К*)-с0-^с1х1- (13)
/=г+1
г
Очевидно, что fB = с0 = с'о + 5L ci^i
J=i
Первый этап симплекс-метода связан с рассмотрением
функции /, определяемой равенством (13), и системы огра-
ничений в виде равенств (12).
254
§28. ЛИНЕЙНОЕ ПРОГРАММИРОВАНИЕ
Рассмотрим четыре возможных случая I, II, Шо.
Случай I. Пусть cj < 0 для всех j = г + 1, п. Тогда
минимум f, определяемой равенством (13), относительно
всех ху > 0, j = 1, ..., п, будет равен с0:
min Дх) = с
/=1."
Этот минимум остается тем же для допустимых хр
хп. Этим задача на минимум решена.
Случай II. Пусть для некоторого j0 > 0 и все
коэффициенты ak-lo матрицы А = (ак.) неположительны:
akjo < 0 (k = 1, ..., г).
Тогда при любом xjo > 0 (г + 1 < j0 < л) точка
х° = (хр ..., хг, 0.О, х7о , 0, .... 0). (14)
где хк (k = 1, ..., г) вычисляются по формулам (12), будет
допустимой, и если ее подставить в f, то получим f =
= с0 - cjaxjo -> —оо при xjo -> +оо. Поэтому
inf Дх) = -оо,
Ху>0
и нашу задачу о минимуме можно считать решенной.
Случай III. Пусть для некоторого jQ коэффициент
Cjo функции f положительный (с/о > 0) и имеются поло-
жительные коэффициенты akjo в /0-м столбце матрицы А:
akjo >0 (fee е), (15)
где е — множество индексов k, для которых выполняется
неравенство (15).
Пусть
. bh bk
= = 8-° (1 - г, k0 е е). (16)
ес akj0 akojB
§28. ЛИНЕЙНОЕ ПРОГРАММИРОВАНИЕ
255
Элемент akBj0 называют разрешающим элементом.
Рассмотрим отдельно случаи 8 > 0 и 8 = 0, которые
будем обозначать через IIIt и Шо соответственно.
Случай Ш+. Точка (14) для значений х-!д , удовлетво-
ряющих неравенствам 0 < < 8 (8 > 0), допустимая. В
самом деле, в силу (12) при k "ё е непосредственно видно,
что
** = *>к- akioxio>O
а при k е е в силу соотношений (15), (16) имеем
= bk- akjoxjo> bk - ал/о8 =
= Ьк - aki min~- > bk - akJ = bk - bk = 0.
Если xlo непрерывно возрастает от 0 до 8, то все хк > 0
(k = 1, ..., г), a хкд = bkg - akojoxjo к тому же непрерывно
убывает от Ькд до 0. При дальнейшем возрастании
xjg переменная хкд становится отрицательной и точка (14)
перестает быть допустимой.
Функция
/(х°) = с0 - сЛ
при возрастании xjo от 0 до 8 убывает от /(6) = с0 до
f(bl) = с0 - С;о8, где
Ь' = (*, - «и0 8, ..., br - ar}o 8, 0, ..., 0, 8, 0, ..., 0) (17)
и 8 стоит на /0-м месте.
Таким образом,
е0 = f(V) > = с0 - с/о8.
Отметим, что координата хкд (й0 е е) в (17) равна нулю:
256
§28. ЛИНЕЙНОЕ ПРОГРАММИРОВАНИЕ
х*0 = ч- = ч - аМоТ—- = 0.
Так как ай0;0 > 0, то k0-e уравнение системы (12) мож-
но решить относительно Xj ;
Хь "r-i Gju
<18>
^о/о ^о/о /=г+1, ^о/о
/* /о
Мы выразили Xjo через xko и остальные переменные
х, (j * j0, j > г + 1). Можно выразить через эти переменные
также любую переменную xk (k Ф k0, 1 < k < г), если под-
ставить выражение (18) вместо х^ в равенства (12), соот-
ветствующие любым k * k0.
Итак, в случае III,. удается решить систему (12) относи-
тельно переменных
Хр х^, х}о , хАо+1, .... х. (19)
Условно запишем соответствующую систему равенств
так:
к
хь = blk- ^a^Xj (k = 1, ..., г), (20)
/=г+1
хотя на самом деле в этих равенствах только перемен-
ные х, (i k0, /0) остались прежними, а остальные пере-
менные хко и Xjo поменялись местами.
Покажем, что свободные члены
Ь1к > 0 (Л = 1, ..., г).
(21)
В самом деле, если
k е е, то (akjo > 0)
bl ^b„--^-bk
К к п ко
akoio
bk
^о/о
ал/0
-^--8 >0.
< a>>io
§28. ЛИНЕЙНОЕ ПРОГРАММИРОВАНИЕ
257
Если же k е е (< О), то
ь1к^ъкд=ьк + =bk+ |Ofc/.0|5 > о
и неравенства (21) доказаны.
Итак, переменные х,, ...» хг в системе (20) образуют
базис — базис В, (см. также (19)).
Для базисного решения Ь1 = (fe1. b}, 0, ..., 0)
/в. = ЛЬ1) = с0 - Ч 5 < со = ЛЬ) = fB (с/о > О).
Базис Bj отличен от базиса В, и для него можно на-
чать второй этап рассуждений (случай I, II, III).
Таким образом, случай Ш+ рассмотрен.
Случай Шо. Пусть с7о > 0, а*/о > 0 для k е е, 5 = 0.
В этом случае Ькд = 0 (см. (16)) и равенство с номером k0
в (12) имеет вид
п
4 = - •
/=г+1
(22)
Если в равенстве (22) все коэффициенты ако,г+1,
akBn положительные, то система (12) имеет единственное
допустимое решение х, = О, / = г + 1, ..., п; хк — Ьк> О
(k = 1, ..., г). Значение функции f на этом базисном реше-
нии будет: f = с0. Задача на минимум функции f в этом
случае решена.
Допустим, что в (22) имеются коэффициенты akoj < О
для некоторого значения j (jjt j0). Тогда, как и в случае 1П+,
переходим к новому базису Ву (вводим в базис перемен-
ную Xjo и выводим из него хкд, ak„j0 ~ разрешающий
элемент). Отметим, что в этом случае значение /в = /в
(4 = 0).
9 Бугров. Т. 1
258
§28. ЛИНЕЙНОЕ ПРОГРАММИРОВАНИЕ
Итак, рассматривая базис В, мы либо решим нашу
задачу на минимум, либо придем к новому базису
(Bj * В). К базису Вг снова применяем наш метод - это
приведет к решению задачи либо к новому базису В2
(В2 BJ. Продолжая этот процесс, получим цепочку бази-
сов
Во, В,, В2, ... (Во = В). (23)
Если для некоторого s будет иметь место случай I или
II, то цепочка на этом s оборвется и задача будет решена.
Иначе от базиса Ве переходим к базису В>+1.
Однако может случиться цикл. Он заключается в том,
что хотя каждый последующий базис цепочки и отлича-
ется от предыдущего, но для некоторых s и I (Z > 1) будет
происходить совпадение базисов: Вг = Ва+1.
Разберемся, что здесь происходит. Для базиса Bs+l l
произошел случай Шо, т. е. оказалось, что существует /0
(г + 1 < j0 < п) и такое kQ (1 ^k0< г), что
cj0 > 0. > °’ \ = 0 = 0)’ (24)
и это привело к базису Ве (Bs+1 — BJ.
Но пара чисел (k0, у0), вообще говоря, неединственна, и
какая-то другая пара ( k'o, /0), для которой выполняются
свойства (24), может привести к базису, отличному от
базиса Ве. Это на самом деле и имеет место, как учит
теория (см. ниже теорему 1 и замечания к ней).
Таким образом, если для некоторых s и I случится
цикл, то его можно устранить. В этом случае для базиса
Bt+11 надо перебрать всевозможные пары (k0, j0), облада-
ющие свойствами (24). Каждая такая пара приводит к
некоторому базису. Среди них есть отличный от базисов
Во, В„ ..., Bs+I_j.
28.6. Устранение цикла. На практике циклы бы-
вают очень редко. Все же объясним, как их можно «ра-
зорвать» (устранить).
Отметим теорему, доказательство которой будет наме-
чено в п. 28.7.
§28. ЛИНЕЙНОЕ ПРОГРАММИРОВАНИЕ__________259
Теорема 1. От любого базиса В существует путь,
ведущий к решению задачи на минимум, т. е. существу-
ет цепочка базисов, получаемых симплекс-методом, при-
водящая К минимуму (или К -оо).
Итак, пусть имеем цикл
В, B!+t....в,+1 (Bs+l = В).
Тогда, очевидно,
~ feK+l — ... — Zbs+z -
Пусть s0 - наименьшее неотрицательное целое число,
для которого
Zbs0 — ^В‘0+1
(Zb^-! > ZB₽0 , sB<s. Bs<y = BSo+().
Очевидно, для базисов
вго, Bso+1, .... Bso+l (25)
имеет место случай Шо. Переход от любого из этих бази-
сов Bs (s0 < s < s0 + I) к последующему совершается посред-
ством разрешающего элемента akojo • Но базису Bs может
соответствовать и другой разрешающий элемент, который
переводит Ва в базис В'г+1, отличный от Вв+1 (В'+1 * Bs+i).
Может случиться, что для любого s (s = s0, ..., s0 + Z)
базис B'+1 содержится в цепочке (25). Тогда все базисы
(25) решают задачу на минимум, т. е. Zs^ = fsv+1 = =
— fe^+i — min/. Ведь по теореме 1 существует путь, веду-
щий от BSq к минимуму. Но в данном случае все пути от
BSo ведут к базисам цепочки (25).
Однако может случиться, что для некоторого s разреша-
ющий элемент базиса Bs переводит Bs в базис B's+1, не
входящий в цепочку (25). Тогда мы получим новую цепочку
Bso,BSo+1.... В„ B's+l (26)
9*
260
§28. ЛИНЕЙНОЕ ПРОГРАММИРОВАНИЕ
с новым последним базисом B's+1, который подлежит
исследованию симплекс-методом.
Но указанных значений s может оказаться и много.
Одна из цепочек может и не привести к нужному резуль-
тату. Необходимо произвести перебор всех цепочек. Отме-
тим, что сам перебор цепочек становится громоздким.
Если произошел цикл, то можно порекомендовать спе-
циальный метод выбора разрешающего элемента. Этот
метод связан с дополнительными вычислениями, но зато
последовательное его применение необходимо приводит к
решению задачи без зацикливания (без образования цик-
лов).
28.7. Выбор разрешающего элемента. Симп-
лекс-таблицы. Условимся вектор Q = (<?0, qx, ..., <?п)
называть положительным (отрицательным) и писать Q > 0=
“ (0...0) (Q < 0), если его первая не равная нулю ком-
понента положительная (отрицательная).
Будем говорить, что вектор Q меньше вектора D = (d0,
dj, d„) или вектор D больше вектора Q, и писать Q<D
или D > Q, если D - Q = (d0 - q0, ..., dn - qn) > 0.
Замечание 2. Целесообразность приведенных опре-
делений >, < для векторов Q можно подтвердить следую-
щими соображениями.
Каждому вектору Q = (</0, ..., qn) поставим в соответ-
ствие многочлен от переменной t вида Q(t) = q0+ qrt + ...
+ qntn, который является непрерывной функцией и
0(0) = q0. Если q0 > 0, то найдется окрестность нуля та-
кая, что для всех t из этой окрестности 0(7) > 0. Если же
<7о=- = <7* = 0 и qM > 0, то
Q(t) = t*+i[qM + qk+2t + ... +
Многочлен в квадратных скобках больше нуля (qk+l > 0)
в некоторой окрестности нуля. Далее 7*11 > 0 для t > 0.
Значит, Q(7) > 0 для всех 0 < 7 < 6, где 0 - некоторое
положительное число.
Таким образом, если вектор Q > 0, то соответствующий
многочлен 0(7) > 0 для 0 < 7 < 0 при некотором 0 > 0.
Вернемся теперь к системе ограничений (12), которую
мы запишем в форме
§28. ЛИНЕЙНОЕ ПРОГРАММИРОВАНИЕ
261
262
§28. ЛИНЕЙНОЕ ПРОГРАММИРОВАНИЕ
п
+ Hakjxj = bk (bk>0, k= 1,
j=r+l
г), (12)
а линейную функцию (13) запишем в виде
п
f+ (13)
j=r+l
Здесь базис В = {хр хД.
Оформим систему равенств (12) и (13) в виде таблицы
1 (матрицы).
Табл. 1 называется симплекс-таблицей. В табл. 1 мы
приписали некоторую добавочную матрицу ||d Ц размера
гх г и добавочную строку (dp ..., dr). Введем в рассмотре-
ние векторы
D = (с0, dp ...» dr), Dk = (Ък, dn, .... dkr), fe = 1, 2, .... r.
Базис В называется положительным, если все векторы
Dk (k — 1, ..., г) положительные (Рк > 0). Например, если
матрица ||dj| единичная
Гм = лГ
[о, i * 7],
то базис В по-
d6
ложительный, потому что для любого k = 1, ..., г либо
Ьк > 0, либо первый отличный от нуля элемент fe-й строки
матрицы ||dj| равен 1 > 0.
Будем считать, что числа dtj подобраны так, что базис
В положительный и матрица ||dj| невырожденная (т. е.
определитель, порожденный матрицей, отличен от нуля).
Вектор D выбираем произвольно. Можно считать, что
D = (c0, 0, ..., 0).
В дальнейшем при переходе от базиса В к другому
базису В' записи систем ограничений (12) и линейной
функции (13) будут изменяться, этому соответствует изме-
нение табл. 1 с помощью некоторых элементарных преоб-
разований (см. § 4.7), которые мы распространяем и на
добавочную матрицу ||dj| и добавочную строку (d1.dr).
В результате векторы и D будут соответственно изме-
няться.
Напомним, что в случае Шо существует j0 (г + 1 <j0< п)
такое, что cjo > 0, и аь0}0 > 0, k е е, где е - непустое
множество и, кроме того, Ьк = 0 хотя бы для одного fee е.
§28. ЛИНЕЙНОЕ ПРОГРАММИРОВАНИЕ
263
Индексов у0, для которых имеет место 1П0, может быть
несколько. Не имеет значения, какой из них надо взять.
Но, если мы остановились на некотором j0, то индекс k0
предлагается выбрать следующим образом:
—^~Dk0 = min~(26)
a*oio ak,0
Элемент ak0j0 разрешающий. В табл. 1 мы его помес-
тили в рамку.
Минимум в (26) достигается для одного k0, потому что
если бы нашлось kA е е, для которого
1
min-----Dh
akio
1 1
*1Л> %/с
то в матрице ||dj| были бы две пропорциональные строки
и она была бы вырожденной.
Замечание 3. Так как мы рассматриваем случай Шо,
то среди k е е имеются такие, для которых Ьк = О, поэтому
1
min----Dk t
kee akj0
ьк=о 70
t. e. индекс k0 находится среди таких k e e, для которых
б4 = 0.
В п. 28.5 мы брали в качестве k0 одно из значений
kee, для которых Ьк = 0. Но таких значений может быть
несколько. В данном способе среди них выбирается одно
такое определенное значение, обращающее в минимум
1
----Dk.
Мы уже знаем, что в данном случае Шо базис В = {xlt
..., xj можно заменить на другой базис S' = {хр ..., хл0-1,
xj0 ’ xko+i • • которому соответствует система ограни-
чений, эквивалентная системе (12):
264
§28 ЛИНЕЙНОЕ ПРОГРАММИРОВАНИЕ
Х1 + + •• • + + °1,Лох*о +
+ <7о+1х/о+1 + • • • + <4„х„ = Ь{,
х)о + а/о.г+1хг+1 + ••• + aj0,j0-ixj0-l + а/о.*ох*о +
+°;о./о+1х/о+1+• • +а^хп=bi0 >(27)
ХГ + аг,г+1хг+1 + • • • + a'r,j0-ixj0-i + <Ло^о +
"* ^T,jo+lXjg+l + • • • + аГПХП — ЬГг
b'k>0 (k = 1, ...» k0 - 1, jQ, k0 + 1, ..., Г),
и линейная функция
f + Cr+Ixr+1 + + cJo-ixjo-i + c'koxko + c;o+ix/o+i +
+ ... + c'nxn = Co. (28)
Системе равенств (27)-(28) соответствует таблица 2.
Табл. 2 получается из табл. 1 следующим образом.
Делим /г0-ю строку табл. 1 на разрешающий элемент ал0)0
(*0).
Этим k0-e уравнение системы (12) остается равносиль-
ным прежнему. Добиваемся теперь, чтобы в /0-м столбце
на остальных местах (k * &0) были нули. Для этого из k-й
строки вычитаем измененную &0-ю строку, умноженную
на число akjQ . (Эту процедуру мы распространяем и на
строки добавочной матрицы, в результате числа dkj пере-
ходят в числа d'kj).
Этот прием соответствует замене k-ro уравнения разно-
стью между ним и видоизмененным &0-м уравнением,
умноженным на число , что приводит к системе (27),
равносильной системе (12).
Посмотрим, как видоизменяются векторы Dk. Так как
базис В положительный и рассматривается случай Шо, то
bk0 = 0 и
§28. ЛИНЕЙНОЕ ПРОГРАММИРОВАНИЕ
265
§28. ЛИНЕЙНОЕ ПРОГРАММИРОВАНИЕ
266
поэтому
П*о = (О, dhol, .... dkor)> О,
1 рко= Го, ——,..., —
akoio ° V а*о/о %/о ,
ДЛЯ k * k0.
е е (akj0 > 0)
а'*> п
ak j k° а^о
k0J0
в силу правила выбора k0 е е
О'ь = Dk
—nk------— >0
akoio J
и его единственности (см.
k
(26)); для k * k0, k е е (0), очевидно,
аь;
»; - о. - > о.
*0/0
Чтобы получить последнюю строку табл. 2, надо из
последней строки табл. 1 вычесть видоизмененную Л0-ю
строку, умноженную на <j0 . Вектор D = (с0, dt, ..., dr)
переходит в вектор
D' = Z>-
*о/о
Так как сУо > 0, %Уо > 0, то
- D = —^~Dk0 < 0,
%/о
т. е. D' < D.
Новые коэффициенты линейной функции f имеют вид
ч
1 ,
— Ч’ ci = СГ -—ч
а*о/о а*о/о
О’ = г + 1, .... i0 - 1, j0 + 1, .... п).
Таким образом, мы пришли к положительному базису S'.
Чтобы табл. 2 была полностью аналогичной табл. 1,
рекомендуем в табл. 2 переставить местами столбцы, от-
вечающие переменным xjQ и xkQ .
§28. ЛИНЕЙНОЕ ПРОГРАММИРОВАНИЕ
267
Если для базиса В' снова будет иметь место случай П1о,
то к нему можно опять применить описанный прием,
который приводит к новому базису В", отличному не толь-
ко от В', но и от В, потому что
D" < D' < D.
Замечание 4. Если в процессе применения симплекс-
метода мы пришли к циклу (см. (25)), то можно взять
один из базисов цикла, например В = BSo+i г и последова-
тельно применять к нему описанный выше способ одно-
значного получения нового базиса на основании правила
(26) выбора разрешающего элемента. Этим гарантируется
получение каждый раз базиса, отличного от всех предше-
ствующих. Так как количество возможных базисов ко-
нечно, то мы для некоторого базиса цепи обязательно
придем к случаям I, II или Ш+. В последнем случае воз-
никает базис В", для которого fB > f&. Базисы, возникшие
после В', отличаются от базиса В и всех ему предшеству-
ющих базисов. Они могут создавать циклы, но состоящие
из новых базисов, отличных от В и ему предшествующих.
Итак, вычисления по симплекс-методу производятся
следующим образом:
исследуются уравнения (12) с базисом В и функция f;
если будут иметь место случаи I или II, то задача на
минимум f решена;
если будет случай Ш+, то переходим к новому бази-
су на основании (16), составляя таблицы 1 и 2 без
добавочной матрицы ||dj|;
если же будет случай Шо, то можно продолжать
наш процесс в надежде, что не случится цикла. Прак-
тика показывает, что циклы бывают очень редко;
все же, если случится цикл, то придется, отправля-
ясь, как правило, от базиса -В , двигаться дальше,
применив добавочную матрицу ||с?у||; рассуждения ста-
нут более сложными, но они имеют то преимущество,
что на каждом их этапе s будут получаться все новые
и новые базисы, отличные от всех предыдущих базисов;
для базиса BSo мы выбираем матрицу ||d || и вектор
D = (с0, d,.с? ) произвольно, как было указано выше;
дальнейшие базисы, следуя методу, получаются оп-
ределенным образом, а вместе с ними определенным
образом преобразуются матрицы ||dj| и вектор D;
268
§28. ЛИНЕЙНОЕ ПРОГРАММИРОВАНИЕ
через конечное число шагов мы выясним, что inf/ =
= —оо, или же найдем конечный минимум /.
Проследим симплекс-метод на конкретном примере.
Пример 5. Найти минимум линейной функции
, 3 1
/ = О - (-Xj - 150х2 + — х3 - 6х4)
при ограничениях
Х5
= 0-(^1-90^2--^зсз+Зх4
х6 = О - — х, - 60х,---х, + 9х4
14 z 25
х3.
Решение. Здесь базис В = {х5, х6, х7}, и ограничения,
и функция / записаны в форме (12)—(13). В данном случае
3
с4 = — > О и в первом столбце матрицы ограничений
1 1
имеются положительные элементы а., = —, а„ = —. От-
51 О ’ 61 Д
ношения Ь5/а51 = О, Ъе/ае, = О. Поэтому
minfe./a., = 8 = 0
kee к' “
и этот минимум достигается на двух элементах k = 5, k = 6.
Таким образом, мы имеем случай Шо (у0 = 1). Чтобы
избежать образования цикла, используем описанный выше
способ однозначного выбора разрешающего элемента (см.
(26)). Для этой цели составим таблицу 1*.
Здесь £>, = (0, 1, 0, 0), D2 = (0, 0, 1, 0) и 2D, > 4D2.
Поэтому разрешающим элементом будет а61
1
—, стоящий
4
на пересечении строки для х6 и столбца для хг Эту стро-
ку и столбец мы выделяем стрелками, а разрешающий
элемент обводим рамкой. Преобразуем эту таблицу в таб-
лицу 2*.
§28. ЛИНЕЙНОЕ ПРОГРАММИРОВАНИЕ
269
Таблица 1*
Базис хь х6 х7 Х1 Х2 хз х< Свобод- Добавоч-
ные члены ная матрица
Х5 1 0 0 £ 2 -90 £_ 50 3 0 1 0 0
хя 0 1 0 £ -60 1 4 0 0 1 0
Х1 0 0 1 4 0 0 25 1 0 1 0 0 1
форма / 0 0 0 3 4 -150 1 50 -6 0 0 0 0
1
Разделим строку для хв на ав1 = —, т. е. умножим
строку для х6 на 4 и перенесем ее в табл. 2*.
Затем умножим вторую строку (видоизмененную) на
а51 = и вычтем из первой строки. Далее умножим вто-
3
рую строку на С] = — и вычтем из последней строки.
Строку для х7 переносим в табл. 2* без изменений (а71 = О).
Кроме того, мы переставим местами столбцы для хв и
хр тогда табл. 2* будет иметь вид:
। Таблица 2*
Базис х5 X, Х7 Х6 Х2 хз Свободные члены Добавоч- ная мат- рица
X. о 1 0 0 -2 [30] 3 50 -15 0 1-2 0
Х1 0 1 0 4- -240 £ ” 5 36 0 0 4 0
Х7 0 0 1 0 0 1 0 1 0 0 1
фор- ма f 0 0 0-3 30 7 50 -33 0 0-3 0
270
§28. ЛИНЕЙНОЕ ПРОГРАММИРОВАНИЕ
Таким образом, базис Вг = {х5, х,, х7}. В табл. 2* коэф-
фициент с2 = 30 > 0 (штрих мы опускаем) и в столбце для
х2 имеется один элемент а52 = 30 > 0, который и будет
разрешающим элементом (в табл. 2* мы поместили его в
рамку). Проводя преобразование табл. 2*, как и выше, мы
перейдем к базису В2 = {х2, х,, х7}, т. е. из базиса В7 мы
выводим переменную х5 и вводим переменную х2.
Таблица 3* будет иметь следующий вид (после переста-
новки столбцов для х2 и х5):
Таблица 3*
Базис х2 х, Х7 х6 хь хз Свобод- ные члены Добавоч- ная матрица
X, 1 0 0 1 1 1 1 0 1 1 0
xi 0 1 0 15 -12 30 8 500 8 25 2 -84 0 30 15 8 -12 0
х7 0 0 1 0 0 1 0 1 0 0 1
£орма f 0 0 0 -1 -1 2 25 -18 0 -1 -1 0
В последней строке табл. 3* имеется только один поло-
2
жительный коэффициент с3 = — > 0. В столбце для х3
все элементы также положительны. В данной таблице
А = (0’ ’ "17 ’ °)’ D2 = (°’ 8 * * *> "12> °>’ D3 = (!> °’ °’ !)•
Сравнивая векторы 500Рр
25
8 D2’ D3’
находим, что мини-
мальным будет вектор 5002^ и, следовательно, разрешаю-
щим элементом будет а23 = > 0. Минимум (16) равен
нулю, т. е. мы опять имеем случай Шо. Преобразуя табл.
3*, получим таблицу 4*.
§28. ЛИНЕЙНОЕ ПРОГРАММИРОВАНИЕ
271
Таблица 4*
Базис Х3 Х1 ХЧ Х6 Х5 Х2 Х4 Сво- бод- ные чле Добавочная матрица
х7 100 50 1 0 0 - — 500 -250 О о 4 8 0 1 0 -- - -160 —4 О о 100 50 0 0 1 — — -500 250 О о 0 0 1 50 100 т-т0 8 4 3 3 ° 50 100 3 з 1
форма f 5 7 0 0 0 - -- -40 2 О о 0 о | со t- 1 со 1
Таблица 5*
Ба- зис Х3 Х1 Х6 Х7 Х5 Х2 Х4 Свобод- ные члены Добавочная матрица
Х3 xi х6 1 0 0 1 0 0 0 0 10^- 2 -180 6 25 3 1 15 0 0 1 15 — 100 2 2 1 1 25 3 100 . 1 ° гЧ тч | СО СО О О О гЧ о СО I—1 | СО 1
фор- ма f 13 21 0 0 0—— —- -15 - — 20 2 2 ”20 3 1 2 ° 20
272
§28. ЛИНЕЙНОЕ ПРОГРАММИРОВАНИЕ
Здесь базис В3 = {х3, хр х7}, с6 = — > 0 и в столбце для
О
х имеется только один положительный элемент =
100
= > 0, который и будет разрешающим элементом.
3
Минимум (16) равен > 0, т. е. мы имеем случай IIIt.
Преобразуя табл. 4‘, получим таблицу 5*.
В последней строке табл. 5* все коэффициенты с. (j = 7,
5, 2, 4) отрицательные, следовательно, min/ = ——- (слу-
20
чай I).
Базис В4 = {х3, X,, х6}. Из табл. 5* видно, что базисное
1 3
25 ’ *6 ~ 100 ’ “
решение имеет вид х3
= х, = х. = 0.
Z 4
Замечание 5. Если бы мы не следовали правилу
однозначного выбора разрешающего элемента, то могли
бы получить цикл, выбирая базисы в следующей последо-
вательности:
В {^5» -^6’ ^7} Вг — (Хр хе, х7} > Bg =
— {Хр Х2, Ху} —> В3 {^-3» ^-2’ ~
— {х3, х4, х7} —> В5 — {х5, х4, Ху} —> В6 =
= {х5, Х6, Ху} = В.
Замечание 6. Отметим, что на каждом этапе, начи-
ная с первого, можно было бы изменять нумерацию пере-
менных, приводя систему ограничений и функцию / к
виду (12), (13).
28.8. Условия существования базиса. Пояс-
ним, как можно привести систему ограничений (4)
п
Hak)xj = \
(k = 1,
т)
(4)
к системе вида (12)
§28. ЛИНЕЙНОЕ ПРОГРАММИРОВАНИЕ
273
**=₽*- ILVi (₽»^ 0, * = 1, ...» г), (12)
j=r+l
т. е. выясним, когда переменные х,, хг образуют базис.
Как нам известно, система (4) разрешима (совместна)
тогда и только тогда, когда ранг матрицы
'ап ... а1пУ
< •• • атпj
равен рангу расширенной матрицы
а11 ••• а1п ^1
k ^ml •' • атп
Пусть г = ранг А = ранг В. Тогда можно указать г
таких уравнений системы (4), что всякое решение систе-
мы, состоящей из этих г уравнений, есть решение системы
(4). Будем считать, что для данной системы (4) г — т и,
кроме того, т < п, потому что при т — п существует
только одна точка n-мерного пространства, являющаяся
решением системы (4).
Кроме того, всегда можно добиться путем перенумера-
ции переменных того, чтобы
а11 ••• а1т
* 0.
ат1 •• • атт
Теорема 2. Для того чтобы неизвестные xt, ..., хт
из системы (4) образовывали базис, необходимо и доста-
точно, чтобы
Д*/Д >0 V k = 1, т ,
где Д* — определитель, получающийся из определителя &
заменой k-го столбца столбцом свободных членов систе-
мы (4).
274
§28. ЛИНЕЙНОЕ ПРОГРАММИРОВАНИЕ
Доказательство. Пусть — > О, k = 1, т. При-
Д
меняя правило Крамера (см. § 4.2), имеем (k = 1, th)
1
* ~ Д
а11 • • • °l,m+lxm+l • • • • • • °lm
Qmi ... ^m,m+lxm+l ••• amnXn)am,k+l • • • ^mm
Учитывая свойства определителей, получаем равенства
вида (12)
Д V1
х4= — - Z.^kjxj (k = 1, т),
а /=т+1
где число ctkj равно определителю, который получается из
определителя Д заменой k-ro столбца соответственно на j-й
столбец матрицы A (j = т + 1, ..., п), деленному на Д.
Например,
а1,т+1 °12 ••• а1т
°Ч.т+1
Д
^m.m+1 &т2 ' • * ^т,т
Обратно, пусть система xt, ..., хт есть базис, т. е. вы-
полняются соотношения (12). Для матрицы равенств (12)
. п А*
А. = 1. Д* = ₽„ — = > 0.
Допустимыми элементарными преобразованиями эта
матрица переходит в матрицу равенств (4). При этом оп-
ределители Д, и Д* переходят в определители Д и Д* про-
порционально. Поэтому
Пример 6. Найти базисные переменные в системе ог-
раничений
§28. ЛИНЕЙНОЕ ПРОГРАММИРОВАНИЕ
275
5Xj - 5х2 + х3 - 2х4 = 1,
- - 2хх + 2х2 - х4 + х5 = 4,
- Xj + ах2 — 2х4 = 5,
где а - некоторое число.
Решение. Если а < 0, то система ограничений несов-
местна в области ху > 0 (j = 1, ..., 5). Поэтому будем счи-
тать а > О. Выясним, при каком а элементы хн х2, х3
будут базисом. Имеем
Д =
Далее,
5-5 1
-2 2 0
-1 а 0
= 2(1 - а) 0, а 1.
= 22(1 - а).
Отсюда
2а - 5
1 — а
5
> 0, 1 < а < -;
Таким образом, при 1<а<— все отношения Д4А/Д > 0
(k = 1, 2, 3) и {хр х2, х3} - базис.
Для того чтобы написать систему (12), нет необходимо-
сти вычислять все нужные определители. Надо просто
преобразовывать матрицу В, как мы это делали в § 4.7.
Пусть а = 2. Получим базис из элементов х,, х2, х3.
Для этой цели будем матрицу В преобразовывать так,
276
§28. ЛИНЕЙНОЕ ПРОГРАММИРОВАНИЕ
чтобы в первых трех столбцах по главной диагонали сто-
яли 1, а на остальных местах -- 0.
Итак,
'5-5 1-2 0 1'
В = —2 20-1 1 4
-1 2 0-2 0
( к
5-5 1-2 0 1 5 -51-201
2 9 22 , 1 12 , 26
0 С ± _ -—S 0 1 1 —
5 5 5 5 5 5
0 1 J.12 0 26 0 о 1 | to 1 l| to 1 м |ьэ
5 5 Т, к э э 5 J
ч (
5 0 2 -14 0 27 5 00-5 55
1 12 26 1 п 3 1 о
0 1 0 —- -—\ 0
5 5 5 2 2
2 9 22 п 2 9 22
0 0 0 0 1 —
к 5 ~ 5 Т, к 5 5 5 7
(
1 0 0-1 11
3 1
0 1 0 3
2 2
9 5
0 0 1 -- - 11
к 5 2
Последняя матрица определяет следующую систему
уравнений:
Х1 ~ Х4 + Х5 = 1
3 1
х2 - 2 х4 - 2 х- = 3
9 5
хз - 2Х4 + 2Х& = И-
§28. ЛИНЕЙНОЕ ПРОГРАММИРОВАНИЕ 277
Аналогичным образом можно проверить, при каком а
переменные хх, х2, х5 образуют базис.
28.9. Задачи. Найти минимум функции f(x) = х4 - х5
при ограничениях:
1)
хх + х2 — х3 + х4 — 2х5 = 1,
2хх + х3 - 2х4 + х5 — 2,
хх — х2 - х4 + Зх5 = 3,
2хх + х2 - х3 - 2х5 = 1,
2) Х1 + х2 + 2х3 - 2х4 = 2,
Х1 ~Х2 - х4 + Зх5 = 3,
Г хх + 2х2 + Зх3 - х5 = 3,
[2хх + х2 — х3 + х4 =1,
] х2 +Зх3 -х4 + х5 = 2,
4) 5
[хх + х2 - х4 + 2х5 = 3,
+ х4 - 2х5 - 1,
5)
х2 + 2х4 + х5 = 1,
х3- х4 + 4х5 = 4.
Приведем решение первой задачи. Итак, необходимо
найти минимум линейной формы /(х) = х4 - х5 при огра-
ничениях
хх + х2 - х3 + х4 - 2х5 = 1,
2хх + х3 - 2х4 + х5 = 2,
хх - х2 - х4 + Зх5 = 3,
Согласно рассмотренной выше теории мы должны оп-
ределить свободные переменные и выделить какой-либо
базис, чтобы затем применить симплекс-метод для нахож-
дения минимума функции f.
Так как в системе ограничений три уравнения, то в
каждый базис входят какие-либо три переменные из хр
х2, х3, х4, х5. Всего из пяти элементов можно составить
десять различных комбинаций по три элемента
278
§28. ЛИНЕЙНОЕ ПРОГРАММИРОВАНИЕ
f 3 _ 5 4 3 k п(п -1)... (n - k + 1)
I 3! " k\
В принципе, мы должны проверить все тройки элемен-
тов и убедиться, какие из них являются базисами.
Выясним, будут ли элементы хг, х2, х3 образовывать
базис. Определитель А, составленный из коэффициентов
при этих неизвестных в системе ограничений, имеет вид
А =
1 1-1
2 0 1
1-10
= 4*0.
Далее,
А1 =
1 1-1 2 0 1 3-10 II > to II 1 1-1 2 2 1 13 0 = -8
Отношение — = -2 < 0, следовательно, согласно тео-
Д
реме 2 п. 28.8 элементы хр х2, х3 не образуют базиса.
Проверим тройку хр х3, х4:
1-1 1
А1 =
1-1 1
2 1-2
3 0 -1
1 -2
0 -1
= -2*0,
А2 = 2
1 1
2 -2
3 -1
= 8.
А =
2
1
1
1
„ д2
Отношение — — -4
А
образует базиса.
Исследуем тройку хр х4, х5:
< 0 и тройка Хр х3, х4 также не
1 1-2
2-2 1
1-13
= -10 * 0, А1 =
1 1-2
2-2 1
3-13
= -16,
§28. ЛИНЕЙНОЕ ПРОГРАММИРОВАНИЕ
279
1 -2
2 1
3 3
= -10, А3 =
1 1
2 -2
1 -1
1
2
3
А*
Таким образом, в данном случае все отношения —
А
(k = 1, 2, 3) положительны и по теореме 2 п. 28.8 элементы
х4, х5 образуют базис.
Чтобы написать систему ограничений вида (12), преоб-
разуем матрицу В системы ограничений к необходимому
виду. Предварительно переставим столбцы коэффициен-
тов при х4 и х5 соответственно на второе и третье места.
Тогда
Xi х4 х5 х2 х3 bk
Ч 1-2 1 -1 Г
2-21012
1 -1 3-10 3,
fl 1-2 11 1 Л
0 -4 5 -2 3 0 =>
1^0-2 5-2 1 2J
1
0
0
1
О
О
£
2
5
£
2
1
2
0
1
0
-2
-2
-2
1
-2
-2
-1
-2
-2
-5
О
-5
£
5
О
2
5
-2
О -
5
О О
1-2
5
2
5
-1
8"
5
1
4
5,
1
1
0
О
5
5
0
1
2
0
2
3
0
0
0
2
2
5
2
1
1
0
О
1
1
О
£
5
Последняя матрица определяет систему уравнений
12 8
X, -I— х9-хч — — ,
1 5 2 5 3 5
х4 - х3 = 1,
2 14
х5 -~х2 --х3=
(27)
280
§28. ЛИНЕЙНОЕ ПРОГРАММИРОВАНИЕ
Линейная форма f через свободные переменные xg и х3
запишется следующим образом:
1 2 4
f(x) = Х4 - Х5 = 5 5Х2 + Тх- 5
2 4 1
или f + г - — х, — —
5 2 5 3 5 '
Таким образом, теперь необходимо найти минимум
линейной функции
_ 241
/ + 5 х2 - 5 х3 - 5
при ограничениях (27).
Здесь базис В, = {х,, х4, х5}, ограничения и функция f
записаны в форме (12), (13), и мы можем начать примене-
ние симплекс-метода.
„ 2
В данном случае с» = — > 0 и в первом столбце мат-
5
рицы ограничений имеется положительный элемент
>0-
„ А-
Отношение „ = 8 > 0, т. е. мы имеем случай Ш. и
а12 +
п12 — разрешающий элемент.
Составим первую симплекс-таблицу:
J Таблица 6*
Базис х. Х4 х5 Х2 хз Свободные члены
1 2 8
xi 1 0 0 5 5 5
Х4 0 1 0 0 2 -1 1 1 4
*5 0 0 1 ’ 5 5 5
Форма f 0 0 0 2 5 4 ~5 1. 5
§28. ЛИНЕЙНОЕ ПРОГРАММИРОВАНИЕ 281
Здесь разрешающий элемент а]2. Преобразуем таблицу
6* в таблицу 7*. Строку для xt умножим на 5 и перенесем
ее в табл. 7*. Строку для х4 перенесем в табл. 7* без изме-
нений (так как н42 = 0).
Затем умножим первую строку на 2 и прибавим ре-
зультат к последней строке. Далее умножим первую стро-
ку на 2 и вычтем из строки для формы f. Кроме того,
переставим местами столбцы для хг и х2. В результате
табл. 7* будет иметь следующий вид:
Таблица 7*
Базис Х2 Х4 Х5 Х1 Х2 Свободные члены
Х2 1 0 0 5 -2 8
Xi 0 1 0 0 -1 1
*5 0 0 1 2 -1 4
Форма f 0 0 0 -2 0 -3
В табл. 7* коэффициенты формы f неположительны
(Cj = -2, с3 = 0), поэтому при ограничениях (27)
min f = -з
Xj>0 ' ’
и задача решена.
Замечание 7. Можно было бы исследовать все де-
сять троек из элементов хг, х2, х3, х4, х3. Затем, найдя все
базисы (у = 1, 2, ..., у0; у0 < 10), мы можем найти мини-
мум f при ограничениях (27) как минимальное значение
среди fB1 , ..., /в>0 .
предметный указатель
Абсцисса точки 55
Алгебраическое дополнение,
адъюнкт 14
Аппликата точки 55
Асимптота
— гиперболы 185
Базис 122
— ортогональный 128
— подпространства 145
— пространства 124
— симплекс-метода 252
Вандермонда определитель 18
Вектор 25
— нормальный 128
— нулевой 25
— отрицательный 260
— положительный 260
— собственный оператора 164
Вектора длина, норма 48
Векторное произведение 96
Векторно-скалярное произ-
ведение 104
Векторы коллинеарные 49
— компланарные 104
Гаусса метод 40
Деление отрезка в данном
отношении 55
Детерминант, определитель 7
Диагональ определителя 9
Директриса параболы 189
Длина, норма вектора 48
Евклидово n-мерное простран-
ство 64
Зависимые системы векто-
ров 106
Задача транспортная 241
Измерение подпространства 145
— пространства 59
Инвариантность скалярного и
векторного произведений 138
Квадратичная форма 161
---гиперболического типа 177
---неопределенная по зна-
ку 170
---параболического типа 177
---строго отрицательная 170
-------положительная 170
— — эллиптического типа 177
Квадратная матрица 22
Компоненты, координаты век-
тора 25
Коэффициенты системы урав-
нений 25
Крамера правило 26
Кривая второго порядка 178
Кронекера—Капелли теория 25
Линейная комбинация векто-
ров 106
Линейно независимая систе-
ма 106
Линейное программирова-
ние 241
Линейные подпространства 145
Линейный оператор 114
Линейчатые поверхности 215
Матрица 22
— единичная 117
— комплексно сопряженная 23
— обратная 118
— произведения 116
— расширенная 29
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
283
Матрица сопряженная 23
— транспонированная 23
Матричный способ решения
системы 40
Минор 14
Момент силы 103
Направление векторов одинако-
вое 128
Направляющая линия 213
Начало координат 55
Неравенство Буняковского 64
— Минковского 65
Норма, длина вектора 48
Нормирующий множитель 77
Образ пространства при помо-
щи оператора 155
Образующие поверхности 213
Оператор единичный 117
— линейный 115
— обратный 118
— самосопряженный 161
Определитель, детерминант 7
— Вандермонда 18
— матрицы 23
—, порожденный матрицей 23
Определителя член 10
— элемент 7
Ордината точки 55
Ориентация системы векто-
ров 94
----координат 93
------левая, правая 95
Ортогональные векторы 65
Ортонормированная система
векторов 128
Орты осей координат 57
Оси координат 55
Отрезок 67
Перестановка 10
Плоскость 80
Поверхность второго поряд-
ка 196
— линейчатая 215
— цилиндрическая 214
Подпространства 145
— линейный 145
— ортогональные 146
— т-мерные 145
Правило Крамера 26
— Саррюса 9
Преобразование, не сохраняю-
щее ориентацию 101
Преобразование ортогональ-
ное 132
— прямоугольных систем
координат 143
—, сохраняющее ориента-
цию 101
Проекция вектора на пря-
мую 50
— точки 50
Произведение векторов 96
— векторно-скалярное 104
— матриц 116
— матрицы на число 24
— определителей 24
— скалярное 54
Пространство и-мерное 59
Прямая линия 69
Прямолинейные образую-
щие 213
Радиус-вектор 55
Разность векторов 50
Ранг матрицы 23
Расстояние между точками 57
— от точки до плоскости 87
---------прямой 78
Решение системы уравнений 25
— тривиальное 28
Симплекс-метод 252
— таблицы 262
Система зависимых и незави-
симых векторов 105
— координат прямоуголь-
ная 55
— собственных векторов
оператора 164
284
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
— уравнений однородная 28
----совместная 36
Скалярное произведение 59
Собственный вектор операто-
ра 164
Строка, столбец определителя 7
Сумма векторов 50
— матриц 24
— определителей 14
Существование решения сис-
темы уравнений 26
Теорема Кронекера—Капел-
ли 25
— Сильвестра 171
— Фредгольма 152
Точка n-мерного простран-
ства 59
Транспозиция элементов 10
Тривиальное решение систе-
мы 28
Угол между векторами 65
----плоскостями 85
----прямыми 74
Умножение вектора на число 49
— матриц на число 24
Уравнение гиперболического
параболоида 197
— гиперболы 179
— двуполостного гиперболо-
ида 197
— конуса 197
— однополостного гиперболо-
ида 197
— параболы 179
— плоскости в нормальном
виде 80
------- отрезках 83
----общее 80
----> проходящей через три
точки 84
— прямой 69
----в нормальном виде 77
------- отрезках 74
----векторное 74
----каноническое 89
---общее 72
— —, проходящей через две
точки 72
---,----точку 75
---с угловым коэффициен-
том 74
— характеристическое 199
— цилиндров второго поряд-
ка 198
— эллипса 179
— эллипсоида 197
Уравнение эллиптического
параболоида 197
Условие коллинеарности век-
торов 49
— компланарности 105
— параллельности плоско-
стей 232
---прямых 74
— перпендикулярности плоско-
стей 86
---прямых 74
Фокус гиперболы 184
— параболы 189
— эллипса 180
Функция линейная 241
Характеристическое уравне-
ние 199
Центр тяжести 69
Цикл 258
Цилиндрическая поверх-
ность 213
Цилиндры второго порядка 198
Число собственное операто-
ра 164
Числовая проекция вектора 51
Элемент матрицы 22
— определителя 7
— разрешающий 235
Элементарное преобразование
матрицы 41
Эллипс 179
Эллипсоид 206
Учебное издание
Бугров Яков Степанович
Никольский Сергей Михайлович
ВЫСШАЯ МАТЕМАТИКА
В трех томах
Том 1
Элементы линейной алгебры
и аналитической геометрии
Учебник для вузов
Заведующий редакцией Б. В. Панкратов
Ответственный редактор Ж. И. Яковлева
Разработка серийного оформления
Т. Е. Добровинская-Владимирова
Художник Е. А. Адамов
Санитарно-эпидемиологическое заключение
№ 77.99.02.953.Д.006315.08.03 от 28.08.2003.
Подписано к печати 28.04.04. Формат 84 х 108'/32.
Бумага типографская. Гарнитура «Ньютон». Печать офсетная.
Усл. печ. л. 15,12. Тираж 6600 экз. Заказ № 3960.
ООО «Дрофа».
127018, Москва, Сущевский вал, 49.
По вопросам приобретения продукции
издательства «Дрофа» обращаться по адресу:
127018, Москва, Сущевский вал, 49.
Тел.: (095) 795-05-50, 795-05-51. Факс: (095) 795-05-52.
Торговый дом «Школьник».
109172, Москва, ул. Малые Каменщики, д. 6, стр. 1А.
Тел.: (095) 911-70-24, 912-15-16, 912-45-76.
Магазины: «Переплетные птицы»:
127018, Москва, ул. Октябрьская, д. 89, стр. 1.
Тел.: (095) 912-45-76;
140408, Московская обл., г. Коломна, Голутвин,
ул. Октябрьской революции, 366/2.
Тел.: (095) 741-59-76.
Отпечатано с готовых диапозитивов на ФГУП ордена «Знак Почета»
Смоленская областная типография им. В. И. Смирнова.
214000, г. Смоленск, пр-т им. Ю. Гагарина, 2.