


















































































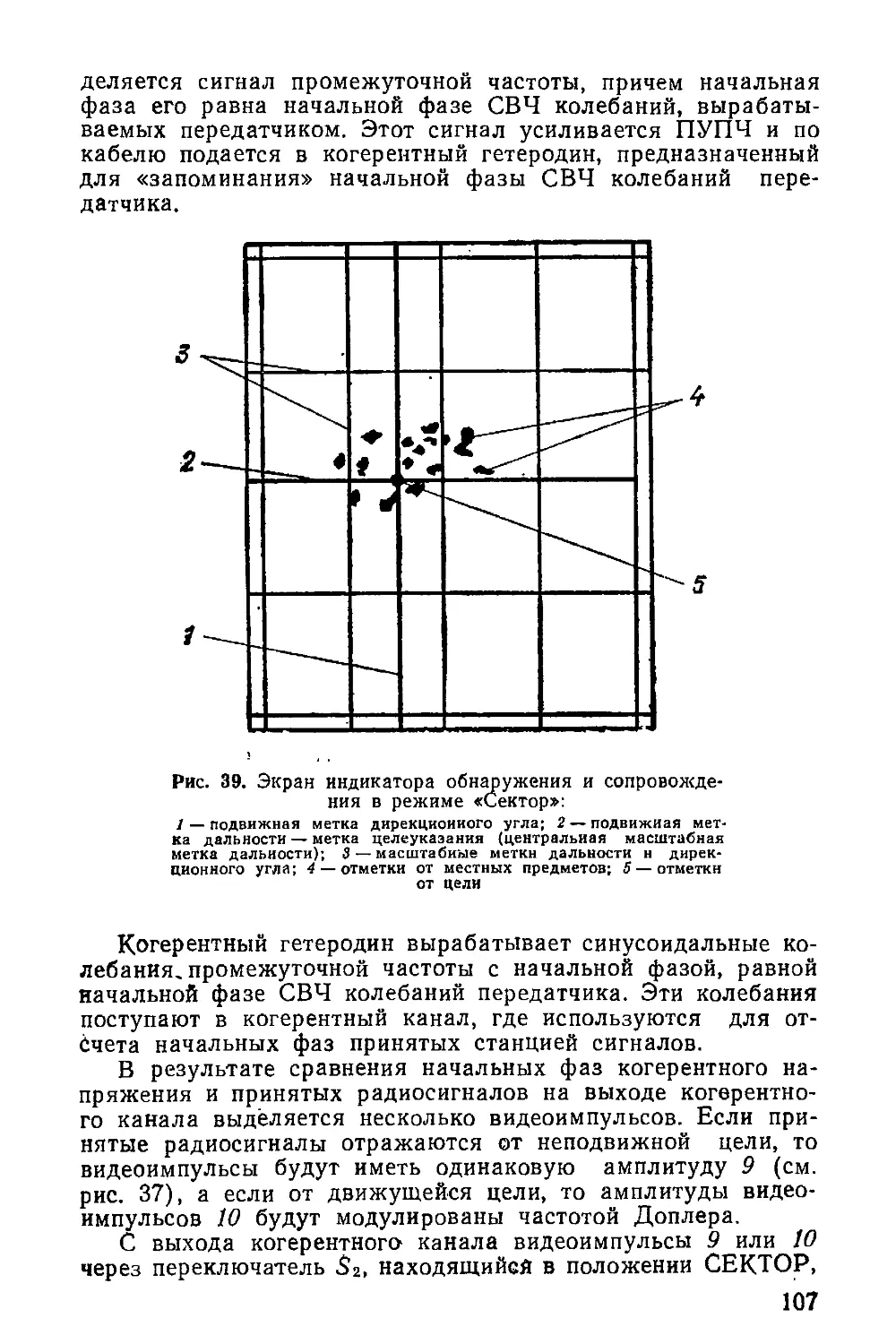





















































































Текст
МИНИСТЕРСТВО ОБОРОНЫ СССР
Учебник сержанта ракетных войск
и артиллерии
ДЛЯ СПЕЦИАЛИСТОВ РАДИОЛОКАЦИОННОЙ И РАДИОТЕХНИЧЕСКОЙ РАЗВЕДКИ
МИНИСТЕРСТВО ОБОРОНЫ СССР
Управление начальника ракетных войск и артиллерии сухопутных войск
Учебник сержанта „ ракетных войск и артиллерии
Для специалистов радиолокационной и радиотехнической разведки
Утвержден начальником ракетных войск и артиллерии Сухопутных войск
МОСКВА
ВОЕННОЕ ИЗДАТЕЛЬСТВО 199!
Редактор Н. В, Даниленкоа
В учебнике рассмотрены принципы построения, основы функционирования, боевого применения, технического обслуживания и ремонта радиолокационных станций наземной артиллерийской разведки, разведки огневых позиций, а также станций наземной радиотехнической разведки. Изложены положения по боевому применению подразделений радиолокационной и радиотехнической разведки, прикладные вопросы радиолокации, электротехники и радиотехники.
Учебник предназначен для курсантов учебных подразделений, сержантов подразделений радиолокационной и радиотехнической разведки.
Гл. I, II, VIII, IX написаны кандидатом технических наук А. Д. Ле-деиевым; гл. V (п. 1—5), VI (п. 1—4), XII—кандидатом технических наук, доцентом А. Г. Рыхновым; гл. Ill, IV, VI (п. 4), VII, XI — кандидатом технических наук, доцентом М. Я. Семченко, под редакцией генерал-лейтенанта В. Г. Крюкова.
основы электротехники, РАДИОТЕХНИКИ И РАДИОЛОКАЦИИ
Глава I
ОСНОВЫ ЭЛЕКТРОТЕХНИКИ
1. Электрические свойства тел
Электроны в атомах вращаются вокруг ядра по вполне определенным орбитам. Каждой орбите соответствует строго определенная энергия электрона — разрешенный энергетический уровень, совокупность которых образует в веществе энергетические зоны (рис. 1).
W W
I2 ЖЖ?
ё б
Рис. 1. Энергетические диаграммы: а—проводник; б — полупроводник; в — диэлектрик; / — валентная зона; 2 — запрещенная зона; 3 — зона проводимости
По мере увеличения номера энергетического уровня связь электронов с ядром ослабевает. Наиболее сильно связаны с ядром электроны, находящиеся на внутренних орбитах. Электроны, находящиеся на внешних орбитах, называются валентными электронами, и их энергетические уровни образуют так называемую валентную зону. Этим энергетическим уровням соответствует наименьшая связь электрона с ядром, и при воздействии дополнительной энергии извне (в результате нагрева, увеличения освещенности и т. д.) эти электроны могут освобождаться от внутриатомных связей и переходить в так называемую зону проводимости, становясь свободными электронами.
В зависимости от разности энергий, соответствующих валентной зоне и зоне проводимости, вещества делятся на про? водники, полупроводники и диэлектрики.
Для проводников характерно перекрытие валентной зоны и зоны проводимости (рис. 1, а), поэтому в них для перехода
валентных электронов в зону проводимости необходима наименьшая дополнительная энергия. Даже в обычных условиях в проводниках имеется огромное количество беспорядочно движущихся свободных электронов (1022—1023 в 1 см3). Если упорядочить движение свободных электронов в проводнике, они создадут в нем электрический ток. К таким проводникам относятся металлы и их сплавы, все они составляют группу проводников первого рода.
Кроме того, имеются проводники второго рода — растворы кислот, солей и щелочей. Обычно все эти растворы называются электролитами. В отличие от проводников первого рода электрический ток в них создается не свободными электронами, а положительными или отрицательными ионами.
Для полупроводников и диэлектриков характерно наличие некоторой промежуточной зоны, называемой запрещенной зоной (рис. 1, б, в), ширина которой, определяемая разностью энергий валентной зоны и зоны проводимости, больше для диэлектриков. Наличие запрещенной зоны .требует значительно большей дополнительной энергии для перехода электронов в зону проводимости.
В полупроводниках в обычных условиях свободных электронов значительно меньше, чем в металлах (1012—1.019 в 1 см3), и они плохо проводят электрический ток. Однако они обладают свойством резко увеличивать количество носителей под влиянием внешних воздействий (температуры, освещенности, электрического и магнитного полей и т. д.). В зависимости от указанных факторов количество носителей может изменяться в миллионы раз. Создается так называемый ток электронной проводимости (п-проводимость). В полупроводнике может быть и так называемая дырочная проводимость (р-проводимость) за счет образования положительных ионов. Наличие дырочной и электронной проводимостей — характерный признак полупроводников.
К полупроводникам относятся такие элементы, как германий, кремний, селен, а также некоторые окислы металлов — закись меди, окись алюминия.
В диэлектриках в обычных условиях практически нет носителей (103 — 104 в 1 см3) в зоне проводимости, так как они имеют широкую запрещенную зону — порядка 20— 30 электрон-вольт. Энергия же электронов при комнатной температуре меньше одного электрон-вольта н незначительно увеличивается при нагревании. Практически это означает, что в- хороших диэлектриках даже при нагревании энергия электронов недостаточна для преодоления запрещенной зоны и выхода их в зону проводимости. Качество диэлектрика определяется шириной запрещенной зоны.
Однако сказанное не означает, что диэлектрики совершенно безразличны к внешним воздействиям. При сильном нагреве и наличии высокого напряжения, достаточных для
преодоления электронами запрещенной зоны, • количество электронов в зоне проводимости увеличивается и диэлектрик теряет свои изоляционные свойства, возникает его пробой. В практике с этим приходится сталкиваться при пробое конденсаторов, пробое прокладок между обмотками трансформаторов и т. п.
К диэлектрикам относятся фарфор, слюда, пластмассы, резина, сухой воздух, которые широко используются в качестве изоляторов в радиоаппаратуре.
2. Электрическое поле
В обычных условиях атомы и молекулы электрически нейтральны, так как количество отрицательных и положительных зарядов в них равно. Еслн же это равновесие нарушается, то вещество приобретает электрический заряд. Величина недостатка или избытка электронов в физическом теле определяет значение электрического заряда этого тела. Единицей измерения заряда является один кулон.
Рис. 2. Электрическое поле: а — однородное; б — неоднородное
Взаимодействие электрических зарядов осуществляется через материальную среду, окружающую эти заряды. Особый вид материи, характеризующийся силовым воздействием на электрические заряды, называется электрическим полем.
Электрическое поле обладает определенным запасом энергии. Если поле вызывает увеличение скорости движения помещенного в него заряда, то такое поле называется ускоряющим. Наоборот, если поле вызывает уменьшение скорости движения заряда, то оно будет тормозящим. Графически электрическое поле (рис. 2) изображается в виде электрических силовых линий, которые совпадают с направлением механической силы, действующей на помещенный в него положительный заряд, и направлены от положительных зарядов к отрицательным.
Электрическое поле характеризуют три величины: потенциал, напряжение и напряженность.
Потенциал электрического поля в точке численно равен работе А, которая затрачивается на перемещение едййично-
го положительного заряда q из-за пределов поля в данную точку. Принято считать, что земля обладает нулевым потенциалом. Если потенциал в какой-то точке поля выше потенциала земли, то говорят, что оно имеет положительный потенциал. И наоборот, если потенциал ниже потенциала земли, то поле имеет отрицательный потенциал, свидетельствующий об уменьшении энергии поля. Потенциал измеряется в вольтах.
Напряжение между двумя точками электрического поля характеризуется разностью потенциалов в этих точках и численно равно работе, затраченной на перемещение единичного положительного заряда из точки с меньшим потенциалом в точку с большим потенциалом. Если точки поля имеют одинаковые потенциалы, то напряжение между этими точками равно нулю. Напряжение, так же как и разность потенциалов, измеряется в вольтах.
Напряженность электрического поля показывает характер изменения потенциала при перемещении в поле и физически представляет собой силу, действующую на единичный положительный заряд, помещенный в данное поле.
Электрическое поле может быть однородным и неоднородным. Однородным называется такое поле, в каждой точке которого напряженность имеет одно и то же значение и направление (см. рис. 2).
3. Постоянный ток
Основные определения
При рассмотрении электрических свойств различных тел было установлено, что проводники имеют большое количество свободных электронов, которые движутся в различных направлениях, или, как говорят, хаотически. Если проводник поместить в электрическое поле, то оно будет воздействовать на электрические заряды. Свободные электроны, имеющие отрицательный заряд, будут перемещаться в направлении от более низкого потенциала поля к более высокому.
Направленное, упорядоченное движение свободных электронов проводника под действием электрического поля называется электрическим током. По мере перемещения электронов к более высокому (положительному) потенциалу на данном конце проводника будет создаваться излишек отрицательных зарядов, а на противоположном конце — их недостаток. Это приводит к уменьшению разности потенциалов электрического поля, прикладываемого к проводнику, а значит, и к уменьшению силы, воздействующей на электроны. Когда произойдет выравнивание потенциалов на обоих концах проводников, движение электронов прекратится, т. е. электрического тока не будет.
За направление тока в проводнике условно принято направление, противоположное движению электронов, — от большего потенциала к меньшему, т. е. от плюса к минусу. Чтобы в проводнике электрический ток существовал длительное время, необходимо на концах проводника поддерживать разность потенциалов.
Устройства, поддерживающие заданную разность потенциалов, называются источниками электрической энергии. Источники электрической энергии представляют собой приборы, преобразующие какой-либо вид энергии в электрическую. В настоящее время наибольшее распространение получили следующие способы:
электрохимический — путем превращения химической энергии в электрическую (гальванические элементы, аккумуляторы) ;
механический — путем превращения механической энергии в электрическую (генераторы);
термоэлектрический — путем превращения тепловой энергии в электрическую (термопары);
фотоэлектрический—путем превращения энергии света в электрическую энергию (фотоэлементы, солнечные батареи).
Способность источника электрической энергии создавать и поддерживать на своих зажимах определенную разность потенциалов называется электродвижущей силой (ЭДС).
Численно ЭДС измеряется работой, совершаемой источником электрической энергии при переносе единичного положительного заряда по всей замкнутой цепи. Измеряется ЭДС в вольтах. Источник обладает ЭДС в 1 вольт, если при перемещении по всей замкнутой цепи заряда в 1 кулон совершается работа, равная 1 джоулю.
Любой источник тока имеет два зажима, между которыми поддерживается разность потенциалов. Зажим, имеющий избыток электронов, обозначается знаком «—» (минус), а зажим, имеющий недостаток электронов, — знаком «-{-» (плюс).
Для количественной оценки интенсивности упорядоченного движения электронов в проводнике введено понятие «сила тока».
Силой тока 1 называется количество электричества, протекающее через поперечное сечение проводника за единицу времени. За единицу измерения силы тока принят 1 ампер (1 кулои/1 секунда).
Для обозначения силы тока можно пользоваться кратными и дольными единицами:
1 килоампер — 1 кА=103 А;
1 миллиампер— 1 мА=10~3 А;
1 микроампер—1 мкА=10~3 мА=₽10~6 А.
Сила тока измеряется с помощью электроизмерительных приборов, называемых амперметрами. Для измерения ма
лых токов применяются миллиамперметры и микроамперметры.
Постоянным током называется электрический ток, сила и направление которого не изменяются с течением времени. Следовательно, для возникновения и поддержания электрического тока в проводящей среде необходимы два обязательных условия:
первое — наличие электрического поля, под действием сил которого электрические заряды получают направленное и упорядоченное движение;
второе — наличие замкнутого пути для движения электрических зарядов.
Рис. 3. Электрическая цепь
Замкнутый путь, по которому проходит электрический ток, называется электрической цепью (рис. 3). Основными элементами любой электрической цепи являются:
источник электрической энергии;
потребитель электрической энергии;
соединительные провода.
Кроме того, в состав электрических цепей могут входить различные измерительные приборы, устройства, обеспечивающие замыкание цепей, предохранители и другие вспомогательные элементы. Все элементы электрической цепи в той Или иной степени оказывают движению электрических зарядов определенное противодействие.
Противодействие среды протеканию электрического тока называется электрическим сопротивлением R. Измеряется электрическое сопротивление в омах (Ом). Часто применяются кратные единицы:
1 килоом—1 кОм=Ю3 Ом;
1 мегаом—1 МОм=Ю3 кОм=Ю6 Ом.
Величина, обратная электрическому сопротивлению, называется электрической проводимостью G~\/R и измеряется в сименсах (См=1/Ом).
В электро- и радиоаппаратуре широко применяются постоянные и переменные сопротивления, которые цодразделЯ’
Ются на две большие группы — проволочные и непроволоч-ные. В проволочных сопротивлениях токопроводящий слой выполнен из провода с высоким удельным сопротивлением (нихром, манганин), а в непроволочных используется специальный состав — углерод.
Основными параметрами таких сопротивлений являются номинальное значение сопротивления, класс точности (допустимое значение погрешности в %) и номинальная мощность.
Закон Ома
Любую замкнутую электрическую цепь можно разделить на два участка: внешний и внутренний. Внешний участок (внешняя цепь) —это потребители электрической энергии, соединительные провода, различные электроизмерительные приборы, которые обладают определенным сопротивлением. Внутренний участок (внутренняя цепь)—это сам источник электрической энергии, обладающий определенной электродвижущей силой. В замкнутой электрической цепи под' действием ЭДС источника возникает электрический ток. Между указанными величинами существует вполне определенная зависимость, которую впервые сформулировал немецкий физик Георг Ом в 1826—1827 гг.
Закон Ома для замкнутой цепи можно сформулировать так: сила тока I в замкнутой цепи прямо пропорциональна ЭДС Е источника электрической энергии и обратно пропорциональна сопротивлению всей цепи R: - -
I~E/R,
где R — сопротивление, равное сумме сопротивлений внешнего и внутреннего участка цепи.
Закон Ома справедлив не только для всей электрической цепи, но и для любого ее участка. Разница заключается только в том, что вместо ЭДС источника электрической энергии берется напряжение между крайними точками рассматриваемого участка цепи, а вместо полного сопротивления цепи — сопротивление данного участка.
Следовательно, закон Ома для участка цепи можно сформулировать следующим образом: сила тока на участке цепи I прямо пропорциональна напряжению на данном участке U и обратно пропорциональна его сопротивлению г:
i—u]r.
Из формулы закона Ома для участка цепи следует: напряжение' на зажимах участка цепи численно равно произведению силы тока, проходящего по участку, на сопротивление этого участка— U=Ir\ сопротивление участка цепи численно равно напряжению на зажимах участка цепи, деленному на силу тока на этом участке, — r= U/I,
В замкнутой электрической цепи ток протекает по внешнему участку и через сам источник тока, который, как и всякий проводник, обладает определенным электрическим сопротивлением, оно называется внутренним сопротивлением источника тока и обозначается го. На основании закона Ома для участка цепи внутреннее падение напряжения Uo будет равно силе тока I в цепи, умноженной на внутреннее сопротивление го:
U0 = Ir0.
Таким образом, внутреннее падение напряжения представляет собой ту часть ЭДС, которая расходуется на преодоление внутреннего сопротивления источника тока. Напряжение на зажимах источника тока
U = E—U0=-E—Ir0.
Следовательно, чем больше внутреннее сопротивление, тем больше внутреннее падение напряжения Uo, тем меньше напряжение U на зажимах источника тока. Поэтому внутреннее сопротивление источников тока стараются сделать как можно меньшим. Под действием электрического поля в цепи за определенное время t выполняется работа
A = UIt = PRt.
Работа измеряется в джоулях (Дж).
1 джоуль, или ватт-секунда, — есть работа, выполняемая на участке цепи при напряжении 1 вольт, силе тока 1 ампер за 1 секунду. Более крупными единицами работы являются:
1 ватт-час (1 Вт • ч) =3600 Дж;
1 киловатт-час (1 кВт-ч) = 3600000 Дж.
Работа, совершаемая электрическим током за единицу времени, называется электрической мощностью
P=Alt=UI—PR.
Основной единицей измерения мощности является 1 ватт (Вт), но часто используются дольные и кратные единицы измерения:
1 микроватт—1 мкВт=10_® Вт;
1 милливатт—1 мВт=10-3 Вт;
1 киловатт—1 кВт=103 Вт;
1 мегаватт—1 МВт=106 Вт.
Например, импульсная мощность РЛС — 70 кВт или чувствительность приемника — 10~9 Вт.
Мощность, развиваемая источником тока во всей цепи, называется полной мощностью и равна
Роб=£/,
Заменяя ЭДС Е через напряжения на внутреннем Uo и внешнем U участках цепи, получим
Po6={U+U0)I=UI+U0I.
Величина UI соответствует мощности, развиваемой на потребителе, и называется полезной мощностью Рпол = и1. Величина Vol соответствует мощности, бесполезно расходуемой внутри источника, и называется мощностью потерь P0=U0I. Отношение полезной мощности, развиваемой источником, к мощности потерь называется коэффициентом полезного действия (КПД) г] = Раол/Ро- При любых условиях КПД меньше единицы.
Итак, на перемещение электрических зарядов в цепи затрачивается определенная работа. В свою очередь, электрическая энергия движущихся зарядов затрачивается на преодоление сопротивления в цепи и по закону сохранения энергии, открытого М. В. Ломоносовым, переходит в другой вид энергии — в тепловую энергию. Общее количество тепла в джоулях, выделяемое током при прохождении его по проводнику:
На этом принципе работают плавкие предохранители, предназначенные для защиты элементов электрической цепи и источника тока от короткого замыкания.
Короткое замыкание —крайне опасное явление, при котором за счет малого сопротивления цепи в ней резко возрастает сила тока (I=E/R). Для предохранения цепи в нее последовательно включают плавкий предохранитель, имеющий тонкую проволоку. При увеличении тока в цепи резко возрастает выделяемое количество тепла, в результате чего проволочка плавится и внешняя цепь отключается от источника тока. На тепловом действии тока основана также работа различных реле защиты (термореле).
Способы соединения потребителей
До сих пор мы рассматривали внешнюю цепь в виде одного сопротивления — потребитель и соединительные провода. В действительности электрические цепи являются разветвленными и состоят из нескольких потребителей, каждый из которых обладает определенным сопротивлением. Подключаются они к источнику тока по-разному. Различают три способа соединения: последовательное, параллельное и смешанное (рис. 4).
Последовательным соединением потребителей (рис. 4, а) называется такое, при котором конец первого потребителя соединяется с началом второго, конец второго — с началом третьего и т. д. В данной цепи отсутствует ответвление то-
ка, поэтому количество электричества, протекающее через поперечное сечение проводника за единицу времени, в любой точке цепи одинаково. Следовательно, для цепи с последовательно соединенными сопротивлениями величина тока одинакова для любого участка цепи:
Z = /, = /2 = /3.
Рис. 4. Способы соединения потребителей: а — последовательное; б — параллельное; в — смешанное
Напряжения же на них распределяются прямо пропорционально значениям сопротивлений. Общее (эквивалентное) сопротивление внешнего участка цепи с последовательным соединением потребителей равно сумме сопротивлений потребителей. При последовательном соединении п одинаковых потребителей с сопротивлением R\
R = nRi.
Параллельным соединением потребителей (рис. 4, б) называется такое соединение, при котором к одному зажиму источника подключаются начала всех потребителей, а к другому зажиму — концы. Параллельно соединенные сопротивления образуют разветвления. Так как начала всех потребителей сведены в одну общую точку, а концы — в другую, очевидно, что при параллельном соединении потребителей напряжения на них равны между собой и равны напряжению на зажимах источника тока: -
£/1 = С/2=С/3 = (Л
Токи же, протекающие по каждому из сопротивлений, распределяются обратно пропорционально сопротивлениям ветвей. Общая проводимость цепи, состоящей из параллельного соединения потребителей, равна сумме проводимостей потребителей. При параллельном соединении п одинаковых потребителей с сопротивлением Ri
G = nGlt R = Ж
Смешанным соединением потребителей (рис. 4, s) называется такое соединение, при котором одна часть потребите-12
лей соединена последовательно, а другая — параллельно. Для определения общего (эквивалентного) сопротивления цепи со смешанным соединением потребителей, питающихся от одного источника тока, необходимо прежде всего разбить эту цепь на отдельные участки, состоящие из последовательно н параллельно соединенных потребителей. Далее, применяя ранее рассмотренные формулы, определяют эквивалентные сопротивления для каждого из участков, а затем и для всей цепи в целом.
4. Электромагнитные явления
Магнитное поле и его параметры
В пространстве, окружающем проводники с током, проявляются механические силы. Под действием этих сил проводники с током, расположенные параллельно, взаимно притягиваются или отталкиваются в зависимости от направления токов в них, а проводники, находящиеся под углом друг к Другу, стремятся расположиться параллельно. Эти явления объясняются действием особых, так называемых магнитных сил в пространстве, окружающем проводник с током.
Магнитным полем называется особый вид материи, характеризующийся силовым воздействием на движущиеся заряды (электрический ток).
Магнитное поле в отличие от электрического создается только движущимися зарядами, но так же, как электрическое, обладает энергией. По своей природе магнитное поле проводников с током аналогично магнитному полю постоянных магнитов.
Если в магнитное поле поместить какое-либо тело (кроме диэлектрика), то оно создает собственное магнитное поле. Это явление называется намагничиванием.
Способность вещества к намагничиванию характеризуется магнитной проницаемостью ц, которая показывает, во сколько раз магнитная проницаемость вещества больше магнитной проницаемости вакуума.
В зависимости от р вещества делятся на диамагнитные (р<1), парамагнитные (р>1) и ферромагнитные (щ>1). Последние находят наибольшее применение в технике, так как характеризуются высокой степенью намагниченности и их собственное магнитное поле совпадает с направлением внешнего магнитного поля, усиливая его. К ферромагнитным веществам относятся железо, ннкель, кобальт и некоторые сплавы.
Магнитное поле графически изображается в виде магнитных силовых линий (рис. 5), направление которых совпадает с направлением северного полюса магнитной стрелки, а их плотность пропорциональна интенсивности магнитного поля.
Магнитное поле характеризуется напряженностью магнитного поля, магнитной индукцией и магнитным потоком.
Напряженность магнитного поля в каждой его точке характеризует значение силы, намагничивающей материальную среду в данной точке магнитного поля.
а
Рис. 5. Силовые линии магнитного поля: а — однородного: б — неоднородного; в — направление силовых линий
Если значение и направление напряженности неизменны в любой точке пространства, то такое поле называется однородным, в противном случае поле является неоднородным.
Магнитная индукция в — это мера (степень) намагниченности среды (вещества) под действием магнитного поля в каждой его точке.
В общем случае магнитная индукция имеет значение и направление и измеряется в теслах (Тл).
Магнитным потоком Ф через некоторую поверхность называется скалярная величина, равная произведению нормальной составляющей вектора магнитной индукции (т. е. составляющей, перпендикулярной данной поверхности) на площадь поверхности S:
</> = sScos а, где а — угол между направлением магнитной .индукции и перпендикуляром к поверхности (см. рис. 5).
Измеряется магнитный поток в веберах (Вб) или максвеллах (Мкс).
Магнитное поле проводника с током
При движении электрических зарядов (протекании тока) по прямолинейному проводнику вокруг него создается магнитное поле, силовые линии которого имеют вид концентрических окружностей с центром, расположенным на оси проводника. Напряженность поля определяется силой тока, а направление зависит от направления движения электрических зарядов (направления тока) и определяется по правилу буравчика (рис. 6, а).
Если скрутить проводник в кольцо, т. е. образовать один виток провода, то по правилу буравчика магнитные силовые 14
линии внутри витка будут иметь одинаковые направления, причем они входят с одной стороны витка и выходят с другой.
а — проводника с током
Рис. 6. Магнитное поле:
(поперечное сечение); б — соленоида
Для катушки с током (соленоида), имеющей вид концентрически расположенных витков, магнитное поле равно сумме магнитных полей, создаваемых каждым витком провода, и следовательно, тем больше, чем больше количество витков. При этом магнитные силовые линии соленоида выходят из одного его конца и возвращаются в другой (рис. 6, б).
Направление магнитных силовых линий определяется по правилу правой руки.
Значение магнитного потока различных катушек будет зависеть от ряда причин: формы и длины проводника, магнитной проницаемости среды, силы тока, проходящего по проводнику, и т. д.
Свойство проводника (катушки) создавать магнитный поток при прохождении электрического тока характеризуется индуктивностью L, которая представляет собой коэффициент пропорциональности между магнитным потоком Ф и силой тока /, протекающего по проводнику:
Ф = и, Ь=ФЦ.
Измеряется индуктивность в генрн (Гн).
Из формул видно, что, чем большей индуктивностью обладает проводник (катушка), тем больше создаваемый им магнитный поток при данной силе тока.
Магнитное поле, образованное вокруг соленоида, напоминает по форме поле прямолинейного постоянного магнита. При этом концы соленоида соответствуют южному и северному полюсам магнита и при изменении направления тока меняют свою полярность. Следовательно, соленоид с током обладает свойством притягивать металлы, обладающие магнитными свойствами, На этом явлении основано действие
электромагнитов, поляризованных реле и электроизмерительных приборов магнитоэлектрической системы.
Электромагнит состоит из катушки со вставленным в нее сердечником из ферромагнитного материала (р,^>1) и якоря, оттянутого от сердечника пружиной. Если по обмотке электромагнита пропустить электрический ток, то под действием магнитного поля катушки сердечник и якорь намагничиваются. За счет согласованного взаимодействия магнитных полей на якорь будет действовать сила, притягивающая его к сердечнику катушки.
При смене направления тока в обмотке электромагнита якорь также притягивается к сердечнику, так как при смене полярности намагничивающего поля меняется и полярность собственного поля якоря.
Проводник с током в магнитном поле
Если в магнитное поле поместить прямолинейный проводник и пропустить по нему электрический ток, то проводник придет в движение и будет выталкиваться из магнитного по
Рис. 7. Действие магнитного поля: а — на линейный проводник с током; б— на рамку с током
ля; Это -объясняется тем,- что магнитное поле проводника с током (рис. 7, а) с одной стороны проводника.. усиливает внешнее- магнитное поле, а с другой — ослабляет его. В результате проводник перемещается, в. сторону, .ослабленного магнитного поля.-Для определения направления действия перемещающей силы пользуются правилом левой руки. Если
в магнитное поле поместить проводник, имеющий форму рамки, и пропустить по нему ток (рис. 7, б), то на проводник будет действовать пара сил, противоположных по направлению. Эти силы создадут вращающий момент, который будет поворачивать рамку с током вокруг ее оси. По мере вращения рамки момент уменьшается, так как уменьшается плечо пары сил и рамка устанавливается своей плоскостью перпендикулярно магнитным силовым линиям внешнего поля. На использовании данного явления основана работа электродвигателя постоянного тока, который имеет статорную и якорную обмотки. Статорная обмотка предназначена для создания внешнего магнитного поля, а якорная выполняет роль рамки с током. Непрерывность вращения якоря электродвигателя в одну сторону обеспечивается коллектором, со-стоящим из двух полуколец, который изменяет направление тока в рамке при повороте ее на 180°.
Это же свойство широко используется в различных радиотехнических устройствах, в частности в магнетронах, используемых для генерирования колебаний сверхвысоких частот, в электронно-лучевых трубках с магнитной фокусировкой луча.
Электромагнитная индукция
Открытие механического действия магнитного поля на .проводник с током привело к решению обратной задачи — получению электрической энергии за счет преобразования механической энергии в магнитное поле. Это явление было названо электромагнитной индукцией. Сущность его состоит в том, что при пересечении проводником магнитного потока в нем (проводнике) индуцируется ЭДС. Если соединить концы проводника, то в цепи появится электрический ток. Необходимо иметь в виду, что ЭДС индуцируется лишь в том случае, если проводник пересекает магнитные силовые лй-нни, что может быть достигнуто не только перемещением проводника относительно магнитного поля, но и путем смещения магнитного поля (например, за счет вращения) относительно неподвижного проводника. При этом ЭДС прямо .пропорциональна магнитной индукции в, длине проводника I и скорости его движения V в направлении, перпендикулярном направлению магнитных силовых линий
E = elV.
На. использовании данного явления основана работа генераторов постоянного и переменного тока, в которых механическая энергия вращения якоря, выполняющего роль токопроводящей рамки, преобразуется в электрическую за счет вращения якоря относительно магнитного поля статора.
Индуцирование ЭДС в проводнике может происходить и без перемещения проводника в магнитном поле — за счет
изменения собственного магнитного поля при изменении тока в проводнике. Эта ЭДС называется ЭДС самоиндукции.
Индуктивность проводника характеризует не только его способность создавать магнитный поток при прохождении тока, но также способность индуцировать ЭДС самоиндукции в случае изменения силы этого тока. Эта способность тем выше, чем больше индуктивность проводника при одной и той же скорости изменения тока. ЭДС самоиндукции имеет такое направление, при котором она противодействует изменениям тока в цепи. Из этого следует, что индуктивность проводника в электротехнике играет такую же роль, как масса тела в механике, т. е. индуктивность является мерой электрической инерции цепи. В результате этого при включении индуктивности в цепь постоянного напряжения ток через нее растет постепенно, преодолевая противодействие ЭДС самоиндукции, и только через некоторое время достигает установившегося значения. Для характеристики времени нарастания тока введено понятие постоянной времени %=L[R — это время в секундах, в течение которого ток в цепи нарастает от нуля до 0,63 установившегося значения. Практически считают, что ток достигает установившегося значения через (4—5)т.
В электротехнике и радиотехнике, кроме того, широко используется явление взаимоиндукции. Это явление наблюдается между близко расположенными контурами, по которым протекают изменяемые по силе электрические токи, а создаваемые ими магнитные потоки взаимно пронизывают витки обоих контуров. В этом случае говорят, что контуры индуктивно связаны.
Сущность взаимоиндукции заключается в переносе электрической энергии из одной цепи в другую посредством общего магнитного поля: в одном из контуров электрическая энергия преобразуется в энергию магнитного поля, в другом контуре происходит обратный переход энергии магнитного поля в электрическую энергию — ЭДС взаимоиндукции. На использовании данного явления основана работа трансформаторов, которые применяются для понижения или повышения напряжения в цепях переменного тока. Трансформатор состоит из первичной и одной или нескольких вторичных обмоток. Для сцепления обмоток общим магнитным потоком и усиления магнитной индукции обмотки располагаются на сердечнике из материала, имеющего высокую магнитную проницаемость (трансформаторная сталь). Одной из основных характеристик трансформатора является коэффициент трансформации, определяемый как отношение напряжений в первичной и вторичной обмотках:
ГЛ Ut ___ 1а __
К~ Ut ~ h ~ \
где 7,со— сила тока и количество витков в соответствующей обмотке трансформатора.
Из приведенного соотношения следует, что для повышения напряжения количество витков во вторичной обмотке должно быть больше, чем в первичной, а толщина провода, определяющая величину тока, должна быть меньше,
5. Переменный ток
Переменным током называется ток, который изменяется с течением времени.
У переменного тока изменяются его сила и направление или только сила. Как следует из закона Ома, переменный ток будет возникать в цепи, если изменяется действующая в
Рис. 8. Переменный ток: а — синусоидальный; б — импульсы напряжения
ней ЭДС или сопротивление цепи. В технике наиболее широко применяются периодические переменные токи, т. е. токи, изменения которых повторяются через равные промежутки времени. Радиолокация основана на использовании простых синусоидальных токов, а также импульсов напряжения (см. рис. 8, б) и тока различной формы. РЛС построены на использовании импульсов двух видов: видеоимпульсов и радиоимпульсов.
Видеоимпульсы представляют .собой кратковременные изменения напряжения или тока от ранее установившегося значения. Форма видеоимпульсов может быть самой различной: прямоугольной, пилообразной, остроконечной и т. д. Видеоимпульсы можно получить двумя путями: в результате преобразования колебаний, создаваемых первичным источником (например, генераторами синусоидальных колебаний), либо специальными генераторами (мультивибраторами, блокинг-генераторами и т. д.).
Радиоимпульсы представляют собой гармонические колебания, ограниченные по длительности, амплитуда которых может меняться по различным законам. Радиоимпульсы получают путем модуляции видеоимпульсами синусоидальных колебаний.
Простым переменным или синусоидальным током называется такой ток, сила и направление которого периодически изменяются по синусоидальному закону (рис. 8, а).
Значение тока в определенный момент времени называется мгновенным значением и в общем случае
i(t) =/ntSin(2n;^/T4-<po),
где Im, Т, фо — соответственно амплитуда, период колебаний и начальная фаза — параметры переменного тока, полностью определяющие процесс его изменения.
Рассмотрим смысл этих параметров.
Амплитуда 1т есть наибольшее значение, которого достигает переменный ток за одно полное колебание.
Период колебаний Т — это время, в течение которого переменный ток совершает одно полное колебание, т. е. одно полное изменение по силе и направлению.
Начальная фаза фо есть фазовый угол, соответствующий начальному моменту времени (/=0). Начальная фаза считается положительной (ii), если начало синусоиды сдвинуто влево от начала координат и, наоборот, отрицательной, если начало синусоиды сдвинуто вправо от начала координат (i2). Для двух сдвинутых по фазе колебаний следует различать величины, опережающие или отстающие по фазе. Опережающей называют ту из величин (t'i), для которой начало синусоиды сдвинуто влево относительно начала синусоиды другой величины. Вторая величина в этом случае будет отстающей по фазе (i2).
Аналогичными зависимостями и параметрами описываются мгновенные значения ЭДС e(i), напряжения u(t) и мощности р(1) переменного тока.
На практике для быстроменяющихся величин часто более удобно пользоваться другими параметрами, которые однозначно связаны с вышеприведенными параметрами. К ним относятся частота f и длина волны X.
Частота f есть количество полных колебаний за 1 с, т. е. количество периодов за 1 с. По определению частота и период являются взаимно обратными величинами, т. е.
f = 1/Т, Т= 1//.
Измеряется частота в герцах (1 Гц=1/с), могут использоваться кратные единицы:
1 килогерц—1 кГц=103 Гц;
1 мегагерц— 1 МГц=106 Гц.
В радиолокации применяются токи различного диапазона частот: от десятков — сотен герц до десятков тысяч мегагерц.
Длина волны % — это расстояние, на которое распространяется электромагнитная энергия за один период:
X=cT=c/f,
где с = 3*108 м/с — скорость распространения электромагнитной энергии.
Пользоваться на практике мгновенными значениями не всегда удобно, так как они характеризуют силу тока, напряжение и ЭДС только в некоторый момент времени. Также неудобно пользоваться и амплитудными значениями, так как переменные величины достигают амплитудного значения только дважды за период. На практике удобно сравнивать токи по их тепловому действию.
Поэтому пользуются действующим или эффективным значением переменного тока —это сила такого постоянного тока, который по своему тепловому действию равноценен данному переменному току. Действующее значение переменного тока в К 2 раз меньше его амплитуды:
/ = 4/Г2 =0,707/т, 4=1,417.
В отличие от постоянного тока в цепях переменного тока сопротивление одного и того же проводника различно в зависимости от частоты: чем выше частота переменного тока в цепи, тем больше сопротивление электрическому току оказывает проводник. Это обусловлено наличием поверхностного эффекта, заключающегося в том, что переменный ток распределяется по поперечному сечению проводника неравномерно, плотность тока увеличивается к поверхности проводника и тем в большей степени, чем выше частота переменного тока. На сверхвысоких частотах (СВЧ) ток течет практически по поверхности проводника, поэтому проводники изготовляются полыми.
Сопротивление проводника переменному току, связанное с превращением электрической энергии в тепловую, называется активным сопротивлением. Кроме активного сопротивления в цепях переменного тока существует так называемое реактивное сопротивление, которое связано с индуцированием
в проводнике противодействующей току ЭДС самоиндукции (наличие индуктивного реактивного сопротивления) и наличием в любой цепи хотя бы паразитной емкости (емкостного реактивного сопротивления).
Практически не существует цепи переменного тока, в которой не было бы и активного и реактивного сопротивлений. Если говорят, например, что цепь имеет чисто активное сопротивление, то имеют в виду только факт полного преобладания этого сопротивления над другим. Как активное, так и реактивное сопротивления измеряются в омах.
Для цепей переменного тока с активным сопротивлением ток в цепи совпадает по фазе с приложенным напряжением, в потребителе электрическая энергия превращается в тепло или в другие виды энергии, обмена энергией между потребителем и генератором нет.
Цепью переменного тока только с индуктивным сопротивлением можно приближенно считать цепь, включающую в себя катушку индуктивности с достаточно большим количеством витков из провода с малым удельным сопротивлением. В этом случае активным сопротивлением цепи можно пренебречь. Такая цепь оказывает сопротивление переменному то; ку. Первопричиной возникновения этого сопротивления является сам переменный ток, цепрерывно изменяющийся по силе и направлению и вызывающий вследствие этого в проводнике ЭДС самоиндукции. Эта ЭДС, как было показано ранее, направлена против причины, вызвавшей ее, т. е. против переменного тока, оказывая сопротивление его изменению.
Индуктивное сопротивление XL прямо пропорционально частоте переменного тока f и индуктивности катушки L
Xi = K>L — 2nfL.
В радиотехнике для развязки цепей постоянного и переменного тока широко применяется дроссель, представляющий собой катушку индуктивности, индуктивное сопротивление которой для данной частоты настолько велико, что не пропускает переменный ток, и постоянный ток вследствие малого активного сопротивления проходит практически без потерь.
В цепи только с индуктивным сопротивлением ток отстает по фазе от приложенного напряжения на 90°, а между генератором и магнитным полем катушки происходит обмен энергией, потерь энергии в цепи нет.
Рассмотрим цепь переменного тока только с емкостным сопротивлением. На первый взгляд может показаться, что протекание тока в такой цепи вообще невозможно, так как промежуток между обкладками заполнен диэлектриком. Однако в цепи существует ток. Это обусловлено тем, что в цепи постоянно происходит обмен между генератором и электрическим полем емкости. В такт с изменениями полярности
источника переменной ЭДС происходит процесс перезаряда обкладок конденсатора, а следовательно, есть и движение зарядов, т. е. электрический ток. При этом по мере заряда конденсатора собственное электрическое поле диэлектрика препятствует его росту.
Емкостное сопротивление Хс есть противодействие конденсатора переменному току. Оно обратно пропорционально частоте переменного тока f и емкости конденсатора С:
Хс=1/«С=1/2п/гС.
В цепи только с емкостным сопротивлением ток опережает по фазе приложенное напряжение на угол 90°, а между генератором и электрическим полем конденсатора происходит обмен энергией, потерь энергии в цепи нет.
Для цепей переменного тока закон Ома имеет вид
где Z— полное сопротивление цепи, определяемое наличием как активного, так и реактивного сопротивления.
Величина Z зависит не только от характера цепи, определяемого наличием активного, индуктивного и емкостного сопротивлений, но и от вида их соединения.
При последовательном соединении активного и реактивного сопротивлений
Z=VW+(XL-XC)* .
а при параллельном их соединении
Y = 1/Z=
где Y — общая проводимость цепи;
G, bi, be — соответственно активная, индуктивная и емкостная проводимости.
Особым случаем является равенство реактивных составляющих сопротивления или проводимостей при определенной частоте переменного тока, когда общее сопротивление или проводимость носит чисто активный характер. Этот случай называется электрическим резонансом. В этих условиях при параллельном соединении общее сопротивление цепи становится наименьшим из всех возможных значений, а ток в цепи в соответствии с законом Ома будет наибольшим — возникает резонанс токов.
При последовательном соединении общая проводимость становится наименьшей, а, значит, сопротивление наибольшим, и в соответствии с законом Ома напряжение будет наибольшим — возникает резонанс напряжений.
На практике, кроме того, широкое применение получил трехфазный переменный ток, который обеспечивает наиболее! экономную передачу электроэнергии на большие расстояния]
и позволяет создавать простые по устройству и надежные в работе электродвигатели, генераторы и трансформаторы.
Под трехфазной системой переменного тока понимают такую систему, в которой действуют три ЭДС одинаковой амплитуды и частоты, но сдвинутые относительно друг друга по фазе на 120°.
6. Химические источники тока
Источники тока широко применяются для питания различной аппаратуры. Получение электрической энергии постоянного тока осуществляется путем преобразования различных видов энергии (химической, тепловой, световой и т. д.) в электрическую: химические источники тока, термоэлектрогенераторы, фотоэлектрические преобразователи и др.
Рис. 9. Химические источники тока:
а — гальванический элемент; б — кислотный аккумулятор; 1 — отрицательный электрод: 2—положительный электрод; 3— деполяризационная масса; 4 — сепаратор
Химическими источниками тока (рнс. 9) называются такие системы, в которых химическая энергия различных веществ непосредственно преобразуется в электрическую. Они подразделяются на гальванические элементы и аккумуляторы.
Гальванические элементы
Наиболее распространенным типом гальванического элемента является элемент Лекланше, схематическое устройство которого показано на рис. 9, а. Элемент состоит из цинкового 1 (отрицательного) и угольного 2 (положительного) электродов, помещенных в так называемую деполяризационную массу 3. Цинковый электрод обычно выполняется в виде ко
робки или цилиндра, образующего корпус элемента, а угольный’ электрод — в виде стержня, расположенного в центре корпуса. Деполяризационная масса выполняет роль электролита. В зависимости от агрегатного состояния электролита гальванические элементы могут быть:
мокрые — жидкий электролит, например в виде Водного раствора нашатыря;
водоналивные — элемент заполнен сухим нашатырем и заливается водой при приведении его в действие;
сухие — пространство между электродами заполнено спрессованной смесью порошкообразного графита и двуокиси марганца, богатой кислородом.
В результате химической реакции, происходящей между электродами и электролитом, на цинковом электроде возникает недостаток электронов — отрицательный заряд, а на угольном электроде образуется избыток электронов — положительный заряд. Между электродами элемента возникает разность потенциалов, характеризующая ЭДС источника. Соединенные между собой элементы образуют батарею.
Наша промышленность выпускает много различных типов элементов и батарей. Их наименования на этикетках состоят из ряда цифр и букв, характеризующих данный источник тока, например: 1.3-НВМЦ-150; 102-АМЦ-У-2.
Первая группа цифр указывает начальное напряжение в вольтах, последняя — начальную емкость в ампер-часах. Одна или несколько букв, стоящих за первой группой цифр, являются сокращенным обозначением назначения источника: А — анодная, Н — накальная, Ф — фонарная, АН:—аноднонакальная, АС — анодно-сеточная, АНС — анодно-накальносеточная. Следующие одна или две буквы характеризуют деполяризационную массу (электролит): М — марганцевая, ВМ — воздушно-марганцевая, ВД или В — воздушная. Буква Ц означает, что отрицательные электроды цинковые. Затем может стоять буква Г — элемент галетного типа или буква Ч —элемент чашечного типа. За ними может быть буква X — холодостойкий или У — универсальный источник тока. Летние элементы этих букв не имеют. Например: 1,3-НВМЦ-150— источник тока накальный (Н), летний, с воз-душно-марганцевой деполяризацией (ВМ), с цинковым отрицательным электродом (Ц), с начальным напряжением 1,3 Вольта и емкостью 150 ампер-часов.
Аккумуляторы
Аккумуляторы называют вторичными источниками тока. Это значит, что они не сами вырабатывают ток, как гальванические элементы, а только отдают электрическую энергию, накопленную ими во время заряда их другим источником постоянного тока. Аккумуляторы допускают многократные за
ряды и разряды, чем они выгодно отличаются от гальванических элементов.
Существуют два основных типа аккумуляторов: кислотные и щелочные. Кислотные аккумуляторы по сравнению со щелочными имеют большую ЭДС и больший КПД и поэтому получили широкое применение. Щелочные аккумуляторы более просты в эксплуатации и имеют меньшую массу, поэтому чаще применяются в переносной аппаратуре.
Схематическое устройство кислотного аккумулятора аналогично гальваническому элементу (рис. 9, б). Он содержит два электрода, помещенные в 25—30-процентный водный раствор серной кислоты (H2SO4), что соответствует плотности электролита 1,25—1,31 г/см3.
Электроды аккумулятора изготавливаются нз свинцовосурьмянистого сплава в виде решетчатых пластин. Ячейки пластин заполняются активной массой в виде пасты. Паста положительных пластин состоит из сурика и глета, а паста отрицательных пластин — из порошка химически чистого свинца, смешанного с раствором серной кислоты.
Для предохранения положительных и отрицательных пластин от соприкосновения друг с другом между ними устанавливается пористая изоляционная прокладка, называемая сепаратором.
Для приведения в действие аккумулятор заливается электролитом и заряжается (заряд заключается в пропускании через него электрического тока). В результате заряда металлический свинец на положительной пластине переходит в перекись свинца (РЬО2), а окислы свинца на отрицательной пластине восстанавливаются в металлический свинец (РЬ). В результате этой реакции из электролита поглощается вода, благодаря чему концентрация серной кислоты в электролите увеличивается и ЭДС на зажимах аккумулятора возрастает; одновременно уменьшается внутреннее сопротивление аккумулятора.
При подключении аккумулятора к потребителям происходит его разряд. В результате этого на обеих пластинах образуется сернокислый свинец (PbSO4) с одновременным выделением свободной воды, вследствие чего уменьшается концентрация серной кислоты в электролите и ЭДС на зажимах аккумулятора падает; одновременно возрастает внутреннее сопротивление аккумулятора. Для восстановления ЭДС необходимо произвести повторный заряд аккумулятора. У заряженного аккумулятора ЭДС равна 1,5 В, а напряжение 1,25 В. Аккумулятор считается разряженным, когда его напряжение снижается до величины 0,7—1 В. Для увеличения ЭДС аккумуляторы соединяются в батареи.
Первая цифра маркировки свинцово-кислотной аккумуляторной батареи означает количество аккумуляторных элементов в батарее, последующие буквы — ее назначение;
СТ — стартерная, ТСТ — стартерная для тяжелых машин. Следующее за буквами число соответствует номинальной емкости при 20-часовом разрядном режиме;
последние две-три буквы означают соответственно материал моноблока (корпуса): Э — эбонит, П — пластмасса, Т — термопласт; материал сепараторов: М —мипласт, Р — мипор, П — пластмипор, С — стекловолокно.
Например, 6СТ-55ЭР— стартерная аккумуляторная батарея из 6 элементов в эбонитовом корпусе с сепараторами из мипора емкостью 55 ампер-часов.
Маркировка щелочных аккумуляторов состоит из двух букв, означающих электрохимическую систему: НК — никелькадмиевая, НЖ — никель-железная, а также двух цифр, соответствующих номинальной емкости аккумулятора в ампер-часах.
Например, НК-28 — никель-кадмиевый аккумулятор с номинальной емкостью 28 ампер-часов.
7. Измерения в электро-и радиотехнике
Измерение основано на сравнении измеряемой физической величины с некоторыми ее значениями, принятыми за единицу сравнения и установленными системой единиц физических величин.
Основной системой единиц, в соответствии с которой заполняется техническая документация, является Международная система единиц СИ (S/)—система интернациональная, принятая XI Генеральной конференцией по мерам и весам (1960 г.). Эта система включает семь основных, две дополнительные и целый ряд произвольных единиц, число которых неограниченно.
Основные единицы СИ:
длина — метр (м);
масса — килограмм (кг);
время — секунда (с);
сила электрического тока — ампер (А);
термодинамическая температура — кельвин (К);
количество вещества — моль (моль);
сила света — кандела (кд).
Кроме температуры Кельвина (обозначение Т) допускается применять также температуру Цельсия (обозначение /), которая равна
t=T—T0,
где 7’о = 273,15 К.
Температура Кельвина выражается в кельвинах, температура Цельсия — в градусах Цельсия (обозначение международное н русское °C). По размерности градус Цельсия равен кельвину.
Дополнительные единицы СИ: плоский угол — радиан (рад); телесный угол — стерадиан (ср).
Радиан равен углу между двумя радиусами окружности, длина дуги между которыми равна радиусу.
Стерадиан равен телесному углу с вершиной в центре сферы, вырезающему на поверхности сферы площадь, равную площади квадрата со стороной, равной радиусу сферы.
Производные единицы СИ образуются как сочетания основных и дополнительных единиц:
частота — герц (Гц=с-1);
сила, вес — ньютон (Н = м-кг-с-2);
энергия, работа — джоуль (Дж=м2- кг- с-2);
количество электричества — кулон (Кл=с-А);
электрическое напряжение, потенциал, электродвижущая сила — вольт (В = м2-кг-с~3-А-1);
электрическая емкость — фарад (Ф = м-2-кг-1-с4-А2);
электрическое сопротивление — ом (Ом = м2кг • с-3 - А-2);
электрическая проводимость — сименс (См = м-2'-кг~1-с3Х| ХА2 = Ом-1);
поток магнитной индукции — вебер (Вб = м2 • кг • с~2 • А~4); магнитная индукция — тесла (Тл = кг-с"2-А_’ = Вб-м~2); индуктивность — генри (Гн = м2-кг-с~2-А~2);
световой поток — люмен (лм = кд-ср);
освещенность — люкс (лк = м2-кд-ср=лм-м~2) и др.
Обозначения единиц измерения, которым Присвоены специальные наименования в честь ученых (Герц, Ом, Ньютон и др.), пишутся с прописных букв, остальные — со строчных (малых).
На практике широко используются единицы, кратные десяти, которые образуются путем умножения целых единиц на сомножитель 10п, где п — целое положительное или отрицательное число.
Наименование единицы в этом случае образуется из приставки, соответствующей сомножителю 10п, и наименования целой единицы. Например, 1 Гц-103—1 кГц (один килогерц), 1 А. 10~3—1 мА (один миллиампер) и т. д.
Наиболее широко применяемыми на практике приставками являются: 109 — гига (Г), 106 — мега (М), 103 — кило (к), 102 — гекто (г), 101—дека (да), 10-1—деци (д), 10~2 — санти (с), 10~3 — милли (м), 10~6 — микро (мк), 10~9 — нано (н), 10~12— пико (п).
. В радиотехнике, кроме того, часто применяются логарифмические единицы измерения — белы (Б) и децибелы (дБ). Этими единицами принято выражать перепады мощности или напряжения, а также величины усиления, ослабления, затухания и т, д.
Число бел определяется как десятичный логарифм отношения двух сравниваемых значений мощностей:
При Pi>Pi (усиление) S имеет знак «+», а при Pz<Pi (ослабление) —знак «—».
Децибел в соответствии с приставкой в 10 раз меньше бела и вычисляется по формуле
5ДГ —101g ДБ о
Очень часто величину в децибелах отсчитывают от условного начального уровня, за который принимают 1 Вт, 1 мВт, 1 мкВт и т. д.
Если же оценивается перепад напряжений или величин, пропорциональных ему, то с учетом того, что мощность пропорциональна квадрату напряжения, децибелы по напряжению определяются по формуле
S„=201g-^-.
Все измерения физических величин проводятся с помощью измерительных приборов, в которых отсчет чаще всего делают непосредственно по шкале стрелочного, цифрового или другого индикатора, предварительно отградуированного в соответствии с единицами измеряемых величин. Устройство и принцип действия измерительного прибора существенно зависят от измеряемой физической величины и ее природы — электрические и магнитные величины, световой поток и т. д. — и основываются в большинстве случаев на преобразовании измеряемой физической величины в электрическую с последующим ее измерением и отображением на индикаторе. В соответствии с этим в состав измерительного прибора, как правило, входят чувствительный элемент измеряемой величины, преобразователь ее в электрическую величину, измеритель электрической величины с индикатором.
Например, при измерении температуры в качестве чувствительного элемента может быть использовано термосопротивление, которое изменяет ток в цепи, и это изменение фиксируется электроизмерительным прибором — амперметром.
При измерении мощности на сверхвысоких частотах в качестве чувствительного элемента используется термопара,, напряжение с которой, пропорциональное измеряемой мощности, фиксируется также электроизмерительным прибором — вольтметром.
При стрелочной индикации измеряемой электрической величины применяются приборы магнитоэлектрической системы, в которых стрелка соединена с подвижной рамкой, поме
щенной в сильное поле постоянного магнита. При протекании тока по виткам рамки происходит ее разворот на угол, пропорциональный силе тока, и стрелка указывает на предварительно отградуированной шкале измеряемую величину.
В последнее время широкое распространение в электро-радиоизмерениях получили приборы с цифровой индикацией измеряемой величины. В этих приборах измеряемая электрическая величина дополнительно преобразуется в цифровой код, поступающий иа индикатор.
Для обеспечения достоверности проводимых измерений все электрорадиоизмерительные приборы подвергаются обязательной периодической поверке на точность измерения.
Глава II
ОСНОВЫ РАДИОТЕХНИКИ И РАДИОЛОКАЦИИ
1. Физические процессы в колебательном контуре
Свободные колебания в контуре
Колебательные контуры являются важными элементами передатчиков и приемников. В передатчиках они применяются для получения токов высокой частоты, необходимых для излучения энергии в пространство, в приемниках — обеспечивают избирательность по частоте, т. е. прием сигналов только на определенной частоте и подавление сигналов на других частотах.
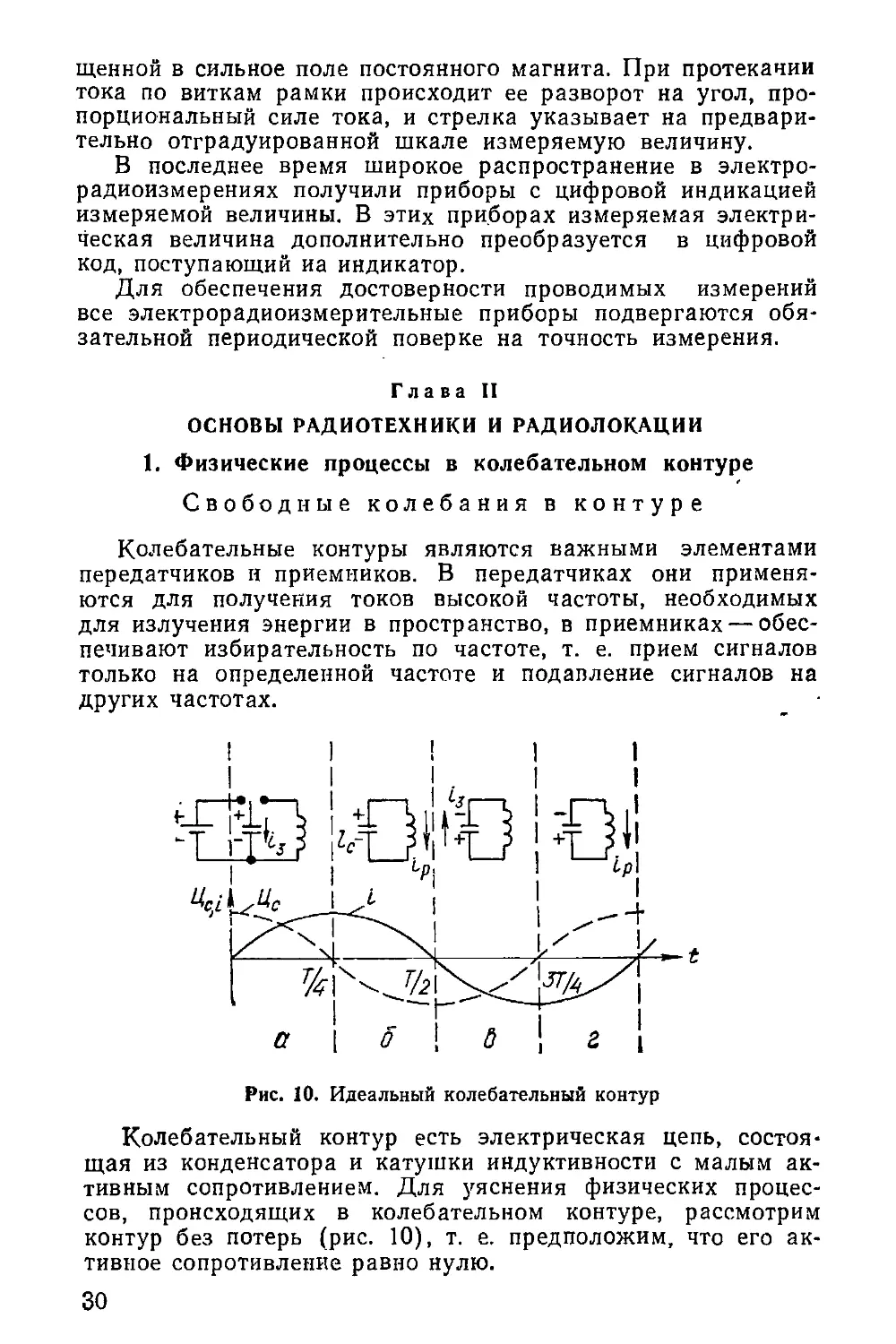
Рис. 10. Идеальный колебательный контур
Колебательный контур есть электрическая цепь, состоящая из конденсатора и катушки индуктивности с малым активным сопротивлением. Для уяснения физических процессов, происходящих в колебательном контуре, рассмотрим контур без потерь (рис. 10), т. е. предположим, что его активное сопротивление равно нулю.
При подаче питания определенной полярности конденсатор заряжается от источника тока до величины ЭДС источника. При этом в электрическом поле конденсатора накапливается энергия
Если теперь конденсатор замкнуть на катушку индуктивности, то конденсатор начинает разряжаться и ток разряда, протекая по катушке индуктивности, создает магнитное поле, в катушке индуцируется ЭДС самоиндукции. Ток разряда нарастает постепенно. По мере разряда конденсатора напряжение на его обкладках уменьшается и, когда-оно станет равным нулю, нарастание разрядного тока прекращается. На этом заканчивается первая четверть колебательного процесса (рис. 10, а). В результате потенциальная энергия электрического поля конденсатора полностью перешла в кинетическую энергию магнитного поля катушки
£/2
После разряда конденсатора ток в катушке не может исчезнуть мгновенно, так как ЭДС самоиндукции будет стремиться поддержать силу тока. Итак, после окончания разряда ток еще в течение некоторого времени продолжает протекать в прежнем направлении. При этом происходит перезаряд конденсатора и на его обкладках возникает постепенно увеличивающаяся разность потенциалов ес, полярность которой обратна первоначальной. Со временем сила зарядного тока упадет до нуля и магнитное поле катушки исчезнет. На этом заканчивается вторая четверть колебательного процесса (рис. 10, б). В результате энергия магнитного поля полностью окажется сосредоточенной в электрическом поле конденсатора, а напряжение между его обкладками достигнет прежнего значения.
В течение второго полупериода колебания (рис. 10, в, г) процессы, происходящие в контуре, аналогичны рассмотренным выше, но протекают с обратным направлением тока. Таким образом, при сообщении контуру некоторого запаса энергии в нем за счет обмена энергией между электрическим полем конденсатора и магнитным полем катушки протекает переменный ток, а на элементах контура, т. е. на конденсаторе и катушке индуктивности, создается переменное напряжение. Такие колебания называют свободными или собственными колебаниями.
Период свободных колебаний То контура определяется индуктивностью и емкостью контура
. T0 = 2.rZC,/=^ = 2Tjl=.
Прн свободных колебаниях реактивные сопротивления элементов контура равны и каждое из них в отдельности равно так называемому волновому сопротивлению контура. В реальном контуре (контур с потерями) свободные колебания являются затухающими и затухают тем быстрее, чем больше активное сопротивление. Для поддержания незатухающих колебаний необходимо периодически пополнять энергию контура. Для оценки качества контура на практике пользуются так называемой добротностью контура, которая определяется отношением индуктивного или емкостного сопротивления к активному.
Чем больше добротность контура, тем меньше затухают колебания.
Вынужденные колебания в контуре
На практике чаще используются незатухающие колебания, для получения которых необходимо соединить колебательный контур с источником переменной ЭДС. В зависимости от вида подключения катушки и конденсатора по отношению к генератору переменной ЭДС различают последовательный (рис. 11, а) и параллельный (рис. 11, б) колебательные контуры.
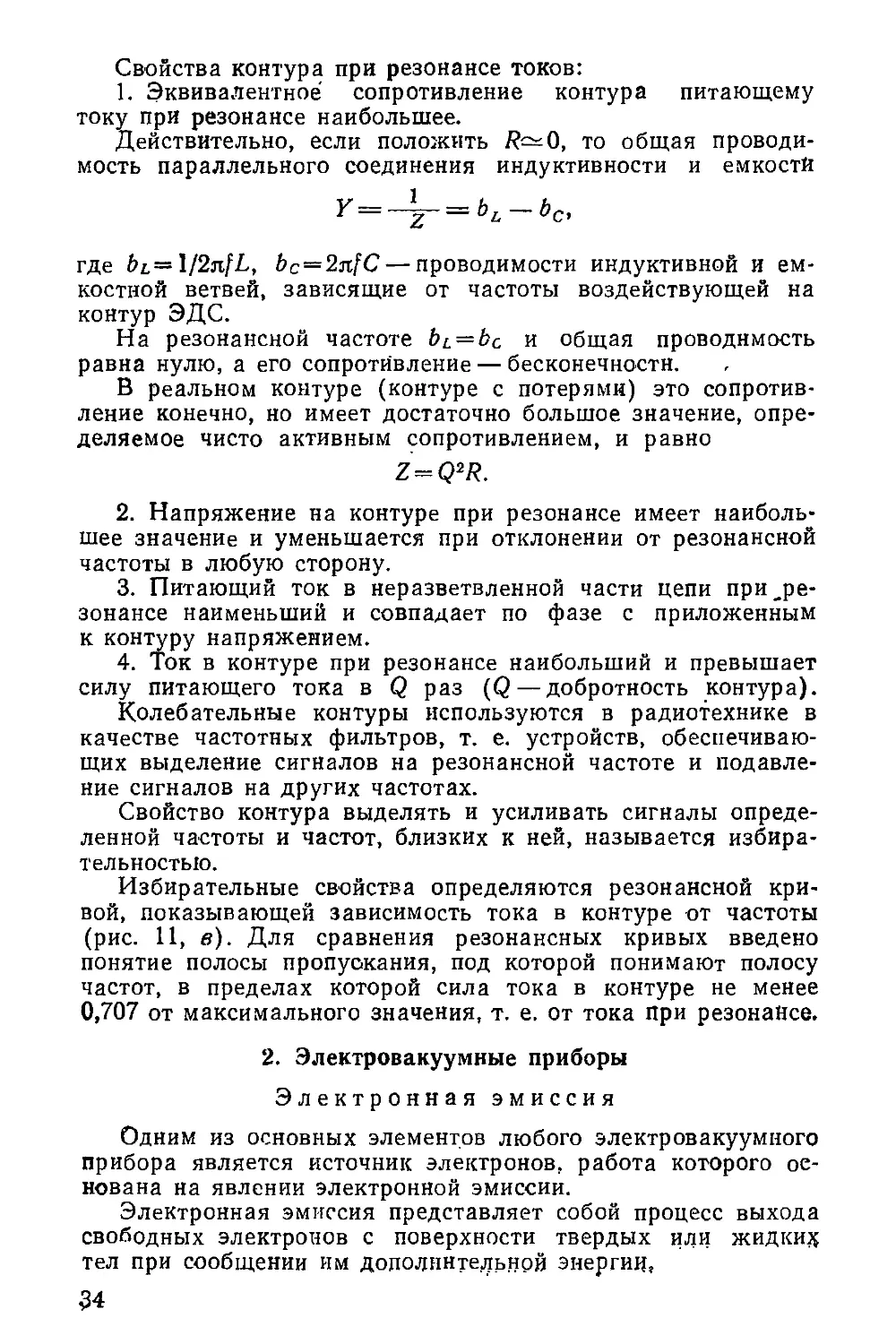
Рис. 11. Колебательный контур: д — последовательный; б— параллельный; в — резонансная кривая
За счет энергии, поступающей от источника ЭДС, восполняются потери в контуре, благодаря чему амплитуды тока в контуре и напряжений на его элементах с течением времени не изменяются, а их частота определяется частотой источника ЭДС и не зависит от параметров контура.
Колебания, которые возбуждаются в контуре под воздействием внешнего источника переменной ЭДС, называются вынужденными.
Вынужденные колебания поддерживаются в контуре, так же как и свободные, за счет обмена энергией между
электрическим полем конденсатора и магнитным полем катушки индуктивности. Очень важное практическое значение имеет случай, когда частота вынужденных колебаний совпадает с частотой собственных колебаний контура. В этом случае энергия в контуре резко возрастает и во много раз превышает энергию воздействующего на контур источника переменной ЭДС. Явления, возникающие при этом, называются резонансными, а частота, при которой они происходят, резонансной частотой.
Электрический резонанс может наблюдаться как в последовательном, так и в параллельном контуре.
Для последовательного контура полное сопротивление переменному току
z=v r- + (XL - хсу ,
где Xi = 2nfL, Xc=l/2nfC — реактивные сопротивления, зависящие от частоты воздействующей на контур ЭДС.
При увеличении частоты ЭДС индуктивное сопротивление возрастает, а емкостное — уменьшается. В результате при некоторой частоте индуктивное сопротивление станет равным емкостному, следовательно,, будут равны и напряжения на реактивных элементах контура. Это явление названо резонансом напряжений. При резонансе амплитуда электрических колебаний в контуре достигает максимума при неизменной воздействующей на контур ЭДС, а их частота равна частоте собственных колебаний контура.
Свойства контура при резонансе напряжений:
1. Полное сопротивление последовательного контура при резонансе минимально и равно чисто активному сопротивлению.
2. Ток в контуре при резонансе в соответствии с законом Ома (I—U/R) максимален и ввиду чисто активного сопротивления контура совпадает по фазе с приложенным напряжением.
3. Так как в колебательном контуре Xl = Xc^>R, то напряжение на конденсаторе или катушке индуктивности превышает приложенное напряжение в Q раз (Q — добротность контура).
Это объясняется тем, что запасенная в контуре реактивная энергия во много раз превышает энергию потерь на активном сопротивлении.
В параллельном контуре на резонансной частоте при условии Xl^R проводимость емкостной ветви Ьс становится равной проводимости индуктивной ветви bL, а следовательно, и токи, протекающие по ним, будут равны. Поэтому резонанс в параллельном колебательном контуре называют резонансом токов.
2 аак» 681 307
33
Свойства контура при резонансе токов:
1. Эквивалентное сопротивление контура питающему току при резонансе наибольшее.
Действительно, если положить /?^0, то общая проводимость параллельного соединения индуктивности и емкости Y = -^ = bL-bc,
где bb—\l^nfL, Ьс=2л[С — проводимости индуктивной и емкостной ветвей, зависящие от частоты воздействующей на контур ЭДС.
На резонансной частоте bL — bc и общая проводимость равна нулю, а его сопротивление — бесконечности.
В реальном контуре (контуре с потерями) это сопротивление конечно, но имеет достаточно большое значение, определяемое чисто активным сопротивлением, и равно
Z — Q2R.
2. Напряжение на контуре при резонансе имеет наибольшее значение и уменьшается при отклонении от резонансной частоты в любую сторону.
3. Питающий ток в неразветвленной части цепи при_ре-зонансе наименьший и совпадает по фазе с приложенным к контуру напряжением.
4. Ток в контуре при резонансе наибольший и превышает силу питающего тока в Q раз (Q — добротность контура).
Колебательные контуры используются в радиотехнике в качестве частотных фильтров, т. е. устройств, обеспечивающих выделение сигналов на резонансной частоте и подавление сигналов на других частотах.
Свойство контура выделять и усиливать сигналы определенной частоты и частот, близких к ней, называется избирательностью.
Избирательные свойства определяются резонансной кривой, показывающей зависимость тока в контуре от частоты (рис. И, в). Для сравнения резонансных кривых введено понятие полосы пропускания, под которой понимают полосу частот, в пределах которой сила тока в контуре не менее 0,707 от максимального значения, т. е. от тока при резонансе.
2. Электровакуумные приборы
Электронная эмиссия
Одним из основных элементов любого электровакуумного прибора является источник электронов, работа которого основана на явлении электронной эмиссии.
Электронная эмиссия представляет собой процесс выхода свободных электронов с поверхности твердых или жидких тел при сообщении им дополнительной энергии, 34
Основными для электронной ЭМИССИИ ЯВЛЯЮТСЯ свободные электроны, находящиеся в зоне проводимости (см. рис. 1). Для выхода электронов из вещества в окружающее пространство необходимо затрачивать дополнительную энергию, необходимую для преодоления внутренних электрических сил.
Работа по перемещению электрона из вещества в окружающее пространство называется работой выхода Wa.
Для получения электронной эмиссии используют вещества с малой работой выхода, такие, как вольфрам (4,6 эВ), молибден (4,16 эВ), барий (2,52 эВ) и др.
В зависимости от способа сообщения дополнительной энергии электронам различают термоэлектронную, фотоэлектронную, вторичную электронную и электростатическую эмиссии.
При термоэлектронной эмиссии дополнительная энергия сообщается за счет нагрева металлического или полупроводникового электрода — катода. Этот вид эмиссии широко используется в электровакуумных приборах. Сила тока термоэлектронной эмиссии зависит от абсолютной температуры катода (в градусах Кельвина), работы выхода Wa и свойств поверхности вещества.
Сила тока эмиссии в наибольшей степени зависит от температуры катода. Однако при увеличении температуры рез-жо возрастает скорость испарения материала катода и сокращается срок его службы. Нагрев катода основан на тепловом действии тока, пропускаемого через катод (или нить 1накала). Поэтому катод должен работать в строго определенном интервале рабочих температур, определяемых номинальным значением тока накала.
Фотоэлектронная эмиссия создается путем воздействия на поверхность катода электромагнитным излучением инфракрасного, видимого, рентгеновского и других диапазонов, представляющим собой поток отдельных квантов энергии — фотонов. При облучении поверхности фотокатода энергия расходуется на сообщение электронам дополнительной энергии и совершается работа выхода электрона с поверхности вещества.
Данный вид эмиссии широко используется в различных оптикоэлектронных приборах — приборах ночного видения, инфракрасных приборах и т. п. Сила фототока зависит от интенсивности лучистого потока Ф и чувствительности поверхности фотокатода К к излучению:
/Ф=КФ.
При увеличении интенсивности лучистого потока свыше допустимого значения возрастает ток фотокатода, что приводит к его разрушению. Для предохранения фотокагода используют управляемые диафрагмы, ослабляющие входной поток.
Вторичная электронная эмиссия является результатом бомбардировки катода потоком электронов, летящих с большой скоростью. В этом случае их энергия поглощается электронами валентной зоны нли зоны проводимости и они, совершая работу выхода, уходят из вещества.
Наиболее важным параметром, характеризующим вто рнчную электронную эмиссию, является коэффициент вторичной эмиссии о, который определяется отношением числа вылетевших с поверхности катода вторичных электронов пч к числу падающих на катод первичных электронов П\ или же отношением тока вторичной электронной эмиссии /2 к току первичных электронов Ц.
Вторичная электронная эмиссия используется в фотоэлектронных умножителях, в отдельных тнпах электронных ламп. Однако во многих случаях, в частности в большинстве электронных ламп, в электронно-лучевых трубках, она нежелательна, и ее влияние стремятся уменьшить.
Для возникновения электростатической эмиссии создается сильное ускоряющее электрическое поле у поверхности катода, которое, компенсируя внутренние тормозящие электрические силы, способствует выходу электронов за пределы вещества. Для получения электростатической эмиссии с холодных поверхностей необходимо создать напряженность электрического поля у поверхности катода порядка 10®—108 В/см, что в большинстве случаев трудно реализуемо. Применяется этот вид эмиссии в СВЧ приборах с холодным катодом (магнетронах), но наиболее широкое применение он нашел в.газо-разрядных приборах с жидким ртутным катодом.
На практике данный вид эмиссии чаще используется в совокупности с вышерассмотренными видами эмиссии, обеспечивая за счет создания ускоряющего электрического поля у поверхности катода снижение работы выхода.
Диоды
Днод представляет собой простейшую электронную лампу, имеющую два электрода — катод К и анод А (рис. 12). Оба электрода заключены в стеклянный или металлический баллон, в котором создан высокий вакуум 10-6—10-7 мм рт. ст. (1,33-10~4—1,33-10-5 Па).
Катод используется для получения термоэлектронной эмиссии и может быть как с прямым накалом, так и с косвенным подогревом (за счет нити накала).
Катоды прямого накала представляют собой нить из тугоплавкого металла, нагреваемую непосредственно проходящим по ней постоянным током накала.
Подогреваемый катод представляет собой никелевую трубку, на наружной поверхности которой нанесен оксидный эмитирующий слой. Внутри катода находится подогреватель 36
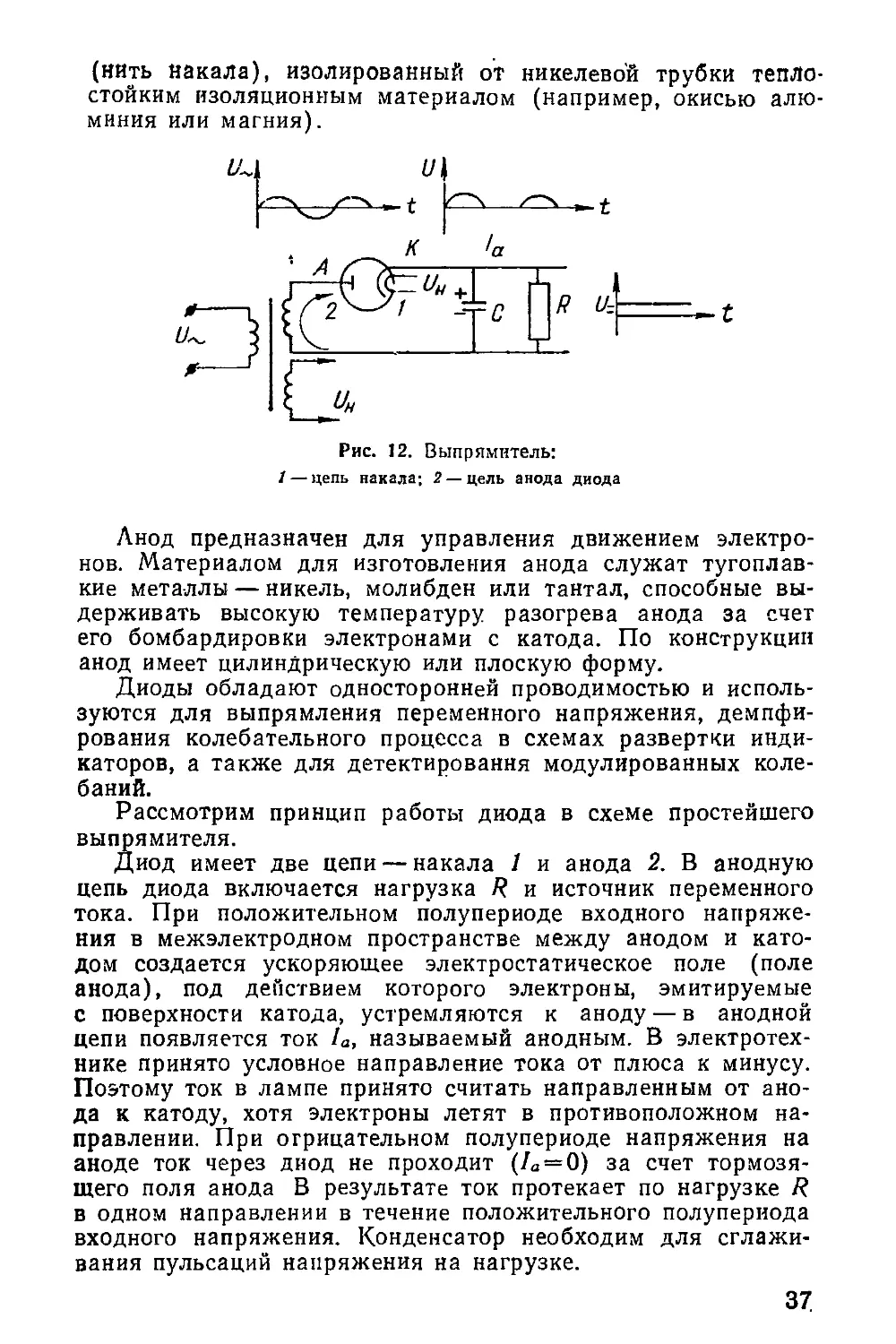
(нить накала), изолированный от никелевой трубки теплостойким изоляционным материалом (например, окисью алюминия или магния).
Рис. 12. Выпрямитель:
1 — цепь накала; 2 — цель анода диода
Лнод предназначен для управления движением электронов. Материалом для изготовления анода служат тугоплавкие металлы — никель, молибден или тантал, способные выдерживать высокую температуру разогрева анода за счет его бомбардировки электронами с катода. По конструкции анод имеет цилиндрическую или плоскую форму.
Диоды обладают односторонней проводимостью и используются для выпрямления переменного напряжения, демпфирования колебательного процесса в схемах развертки индикаторов, а также для детектирования модулированных колебаний.
Рассмотрим принцип работы диода в схеме простейшего выпрямителя.
Диод имеет две цепи — накала / и анода 2. В анодную цепь диода включается нагрузка R и источник переменного тока. При положительном полупериоде входного напряжения в межэлектродном пространстве между анодом и катодом создается ускоряющее электростатическое поле (поле анода), под действием которого электроны, эмитируемые с поверхности катода, устремляются к аноду — в анодной цепи появляется ток 1а, называемый анодным. В электротехнике принято условное направление тока от плюса к минусу. Поэтому ток в лампе принято считать направленным от анода к катоду, хотя электроны летят в противоположном направлении. При отрицательном полупериоде напряжения на аноде ток через диод не проходит (/а = 0) за счет тормозящего поля анода В результате ток протекает по нагрузке R в одном направлении в течение положительного полупериода входного напряжения. Конденсатор необходим для сглаживания пульсаций напряжения на нагрузке.
Триоды
Триодом называется электронная лампа, у которой в пространстве между катодом и анодом помещен третий электрод— управляющая сетка (УС).
Катод и анод у триодов устроены так же, как и у диодов. Сетка представляет собой цилиндрическую или плоскую спираль из тонкой тугоплавкой проволоки, окружающей катод. При наличии сетки количество электронов, достигших анод, и, следовательно, сила анодного тока зависят не только от значения анодного напряжения, но и от значения и полярности напряжения между сеткой и катодом. Изменяя потенциал сетки относительно катода, можно управлять потоком электронов в лампе, т. е. анодным током. Поэтому сетка в триоде называется управляющей.
Тетроды и пентоды
Тетрод представляет собой четырехэлектродную лампу, в которой кроме анода и катода имеются две сетки — управ-
ляющая и экранирующая.
а 6 &
Рис. 13. Электровакуумные приборы: а — тетрод; б — лучевой тетрод; в — пентод; 1 — лучеоб-разующнй электрод; 2 — третья сетка
Экранирующая сетка (ЭС) расположена между анодом и управляющей сеткой (рис. 13, а) и выполняется обычно в виде густой спирали, окружающей управляющую сетку. На экранирующую сетку относительно катода подается постоянное положительное напряжение, составляющее величину, несколько меньшую, чем анодное напряжение. Поэтому питание лампы обычно производится от источника анодного напряжения через гасящее сопротивление экранирующей сетки. Использование в тетроде двух сеток позволяет повысить по сравнению с триодом коэффициент усиления лампы.
Однако в тетроде при большом анодном напряжении, а значит, и большой скорости электронов вследствие бомбардировки ими анода лампы может возникнуть явление вторичной электронной эмиссии. При этом вследствие положи-38
тельного потенциала экранирующей сетки вторичные электроны притягиваются ею, что приводит к увеличению тока экранирующей сетки и уменьшению анодного тока. Это явление, называемое динатронным эффектом, приводит к искажениям при усилении сигналов.
Для работы при больших значениях анодного напряжения (тока) без возникновения динатронного эффекта применяют лучевые тетроды и пентоды. Устранение динатронного эффекта в этих лампах обеспечивается за счет создания тормозящего электрического поля между анодом и экранирующей сеткой. В лучевом тетроде это обеспечивается с помощью лучеобразующих электродов / (рис. 13, б), соединенных внутри лампы с катодом, имеющим нулевой потенциал относительно анода. В пентоде тормозящее поле создается с помощью дополнительной третьей сетки 2 (рис. 13, в), называемой защитной или антидинатронной сеткой. Эта сетка расположена между анодом и экранирующей сеткой и имеет относительно анода отрицательный потенциал либо соединена с катодом лампы.
Тетроды и пентоды широко применяются для усиления мощности в выходных каскадах усилителей низкой частоты, для работы в выходных каскадах генераторов развертки индикаторов станций, а также для усиления и генерирования колебаний высокой частоты.
Для обозначения электронных ламп используется буквенно-цифровая индексация. Например, 6П45С: первая позиция указывает округленно напряжение накала (6,3 В), вторая позиция — тип лампы (диод — Д, двойной диод — X, триод— С, пентод — П и т. д.), третья позиция — порядковый номер данного типа лампы, четвертая позиция — конструктивное оформление лампы (стеклянный баллон — С, миниатюрные, пальчиковые—П и т. д.) и пятая позиция используется для ламп с повышенной надежностью (особо долговечные— Д, с повышенной виброустойчивостью — К и т. д.).
Генераторные лампы обозначаются буквами и порядковым номером. Например, ГМИ-5: модуляторная лампа, работающая в импульсном режиме, пятый образец.
3. Газоразрядные приборы
Электрический ток в газах
Газоразрядными (ионными) называются приборы, работа которых основана на явлении электрического разряда в газах. В этих приборах носителями заряда являются не только электроны, но и ионы газа.
В естественном состоянии газы состоят из электрически нейтральных атомов и молекул, в них практически нет свободных электронов и ионов. Поэтому можно считать газы
диэлектриками. Если газы в таком состоянии поместить в электрическое поле, то ток практически будет равен нулю.
Газ становится проводником, если часть его молекул ионизируется, т. е. расщепляется на электроны и ионы. Если ионизированный газ находится под действием электрического поля, то в нем будет протекать электрический ток, представляющий собой направленное двухстороннее (как к аноду, так и к катоду) движение электрических зарядов —положительных, отрицательных ионов и свободных электронов.
Процесс прохождения электрического тока через газы называется газовым разрядом. Различают несамостоятельный и самостоятельный газовый разряд.
Несамостоятельный газовый разряд возникает при ионизации газа за счет внешних ионизаторов (нагрева газа, воздействия радиоактивного излучения, космических лучей и т. д.).
Самостоятельный газовый разряд возникает под действием приложенного электрического поля без воздействия внешнего ионизатора.
Устройство и принцип работы газоразрядных приборов
Конструктивно газоразрядные приборы представляют собой систему из двух или более электродов, размещенных в герметизированном баллоне. Баллон заполняется каким-либо инертным газом.
В зависимости от вида разряда приборы подразделяются на две группы: с самостоятельным и несамостоятельным разрядом.
Приборы с самостоятельным разрядом имеют холодный катод. Ионизация газа вызывается за счет прикладываемого электрического поля. К этим приборам относятся неоновые лампы, тиратроны с тлеющим разрядом, защитные газовые разрядники, стабилитроны и др.
Неоновая лампа представляет собой герметичный стеклянный баллон, в котором размещены два электрода, выполненные в форме дисков, цилиндров или стержней различных размеров. Состав газовой смеси — неон, аргон. Для зажигания лампы к ее электродам прикладывают напряжение, которое должно превышать номинальное напряжение зажигания. В результате в лампе возникает тлеющий разряд, сопровождаемый свечением газа в баллоне. Неоновая лампа включается в цепь через ограничительное сопротивление, которое препятствует чрезмерному нарастанию тока при возникновении разряда. Основное назначение неоновой лампы — световая индикация электрических сигналов.
Другим представителем данного типа приборов является тиратрон тлеющего разряда, который имеет анод, холодный
катод и расположенный между ними управляющий (пусковой) электрод, играющий роль вспомогательного анода. Стеклянный баллон, внутри которого помещаются электроды, наполнен неоном с незначительной примесью аргона. В исходном состоянии между катодом и анодом подается напряжение несколько меньше напряжения поджига. Поэтому при отсутствии напряжения на управляющем электроде тиратрон находится в выключенном состоянии. При подаче напряжения на управляющий электрод напряженность поля между электродами становится достаточной для ионизации газа, между электродами возникает вспомогательный разряд, который затем перебрасывается на анод. В результате цепь через тиратрон замыкается. Для ограничения тока в анодную цепь тиратрона включается ограничительное сопротивление.
Приборы с несамостоятельным разрядом имеют подогревный катод. Носителями разрядов помимо электронов и ионов, полученных в результате ионизации газа, являются также электроны, эмитируемые нагретым катодом. Наиболее распространенными приборами данного типа являются газотроны и тиратроны с накаленным катодом.
4. Полупроводниковые приборы
Электронная и дырочная проводимость
Полупроводники занимают промежуточное положение между проводниками и диэлектриками. Важным свойством полупроводников является зависимость их электрических свойств от внешних условий: температуры, освещенности, внешних полей и т. д. Наиболее широкое применение в радиотехнике получили германий, кремний, селен, которые относятся к четвертой группе элементов в периодической системе Д. И. Менделеева, имея на внешней орбите четыре валентных электрона. В полупроводниках атомы связаны между собой, располагаясь определенным образом на одинаковых расстояниях друг от друга и образуя за счет этого так называемую кристаллическую решетку. Связь между соседними атомами осуществляется попарным объединением валентных электронов, в результате чего валентные электроны принадлежат уже не одному, а сразу двум атомам. Таким образом, в полупроводнике каждый атом имеет на внешней орбите максимально возможное количество валентных электронов — восемь, прочно связанных друг с другом, а свободных электронов, которые могли бы участвовать в переносе зарядов, нет. Но это справедливо для химически чистых беспримесных полупроводников при температуре абсолютного нуля ( —273°С). В этих условиях полупроводники обладают свойствами идеальных изоляторов. При повышении темпера
туры энергия валентных электронов возрастает и уже при комнатной температуре становится достаточной для разрыва некоторых связей и перехода освободившихся от них электронов в зону проводимости. При потере электрона в связи возникает как бы свободное место, обладающее элементарным положительным зарядом, равным по абсолютной величине заряду электрона. Такое освободившееся место условно назвали дыркой. Обладая положительным зарядом, дырка может присоединить к себе электрон соседней заполненной связи. В результате этого восстанавливается одна связь и разрушается соседняя, т. е. заполняется одна дырка и образуется другая. Этот процесс непрерывно повторяется, и дырка перемещается по кристаллу, что равносильно перемещению положительного заряда. Если внешнее электрическое поле отсутствует, то как электроны, так и дырки перемещаются в кристалле хаотически. При воздействии электрическим полем в кристалле возникает электрический ток, определяемый упорядоченным движением как отрицательных (электронов), так и положительных (дырок) зарядов. Соответственно различают два вида проводимости полупроводников — электронную (типа п от слова negative — отрицательный) и дырочную (типа р от слова positive — положительный).
Однако количество этих носителей сравнительно невелико, а следовательно, и ток, создаваемый ими и называемый тепловым током, имеет небольшую величину. Полупроводники очень чувствительны к перегреву, в результате которого может произойти разрыв большинства связей и разрушение кристаллической решетки полупроводника.
В химически чистом кристалле полупроводника число свободных электронов равно числу дырок. Такая электронно-дырочная проводимость называется собственной проводимостью полупроводника.
Для изготовления полупроводниковых приборов используют полупроводники с явно выраженной проводимостью только одного типа — п или р, называемой примесной. Это достигается введением в полупроводник атомов других веществ— примесей, имеющих иную валентность, чем у основного кристалла. Так, введение в полупроводник, имеющий четыре валентных электрона, примеси с пятью валентными электронами (мышьяк, сурьма, фосфор) приводит к избытку свободных электронов. В результате получают полупроводник типа п. Введение примеси, имеющей три валентных электрона (индий, бор, алюминий), приводит, наоборот, к избытку дырок и получению полупроводника типа р.
Полупроводниковый диод
В основе работы полупроводникового диода лежат процессы, протекающие на границе двух разнородных полупроводников — электронного и дырочного, образующих так на
зываемый электронно-дырочный переход или р-п переход (рис. 14, а). При таком соединении по одну сторону границы содержится избыток электронов, а по другую — дырок. При отсутствии внешнего электрического поля часть электронов из слоя п за счет диффузии проникает на небольшое расстояние в слой р, образуя в его приграничной области отрицательный заряд (рис. 14, б). Аналогичное явление происходит и с дырками, которые в приграничной области слоя п образуют положительный заряд. В результате возникает разность потенциалов в области р-п перехода, называемая потенциальным барьером (рис. 14, в), за счет которой создается электрическое поле Ео, препятствующее дальнейшей диф-
Если приложить к р-п переходу внешнее напряжение, подключив положительный полюс источника к слою р, а отрицательный — к слою п, то в полупроводнике будет создано электрическое поле Ей, направленное противоположно внутреннему электрическому полю Ео. Это вызовет понижение потенциального барьера, а следовательно, повышение числа свободных электронов, проникающих из слоя п в слой р, и дырок — в обратном направлении, т. е. увеличение тока через р-п переход. Напряжение, подключаемое к р-п переходу, при котором потенциальный барьер уменьшается, называется прямым напряжением. Изменение полярности прикладываемого к р-п переходу напряжения (обратное напряжение), наоборот, приводит к увеличению потенциального барьера, и тока через р-п переход не будет. Таким образом, р-п переход об
ладает односторонней проводимостью электрического тока аналогично электровакуумному диоду.
Полупроводниковые диоды широко применяются в различных радиотехнических схемах: выпрямители, преобразователи, управляемые ключи и т. д.
Обозначение типа диода состоит из четырех позиций. Например, 2Д503Б. Первый элемент (буква или цифра) означает исходный полупроводник (Г или 1 — германий, К или 2 — кремний, А или 3—арсенид галлия). Цифра ставится в том случае, если диод может работать при повышенной температуре (германиевые—при 70°С, кремниевые —при 120°С). Второй элемент (буква) указывает на тип диода (Д — выпрямительные, А — СВЧ диоды, С — стабилитроны, Ф — фотодиоды и т. д.), третий элемент (цифра) — на назначение и электрические свойства диода, а четвертый элемент (буква) — на разновидность в соответствующей группе приборов.
Для диодов более ранних выпусков обозначение состоит из трех позиций, например Д401Б, характеризующих тип прибора (Д — диод), исходный полупроводник и назначение (цифра), а также его разновидность (буква).
Полупроводниковый триод
Полупроводниковым триодом или транзистором называется прибор с двумя р-п переходами, образованными тремя областями проводимости (рис. 15), причем две крайние области всегда обладают проводимостью одинакового типа, противоположной проводимости средней области. В соответствии b этим различают триоды типа п-р-п, если крайние области обладают электронной проводимостью, и типа р-п-р, если крайние области обладают дырочной проводимостью. Физические процессы, протекающие в транзисторах обоих типов, аналогичны. Различие заключается лишь в изменении полярности источников, подключаемых к соответствующим р-п переходам.
Средняя область транзистора называется базой (Б), крайние— эмиттером (Э) и коллектором (К), а переходы эмиттер — база и база — коллектор — соответственно эмиттерным и коллекторным переходами. Таким образом, транзистор представляет собой, по существу, два полупроводниковых диода, имеющих одну общую область — базу, причем к эмит-терному переходу приложено напряжение 17в в прямом направлении, а к коллекторному (7К — в обратном.
Рассмотрим принцип работы на примере транзистора типа п-р-п (рис. 15, а). Так как к участку эмиттер — база приложено напряжение в прямом направлении, сопротивление эмиттерного перехода уменьшается и через него проходит ток, обусловленный в основном перемещением электронов из эмиттера в базу, т. е. в базу эмиттируются электроны.
База у транзисторов выполняется очень тонкой, поэтому электроны, быстро пролетая базу, достигают коллекторного перехода, поле которого для электронов является ускоряющим. Электроны как бы вытягиваются коллектором из базы, двигаясь через нагрузку к положительному полюсу источника; в коллекторной цепи возникает ток, называемый коллекторным.
^5 £к
Рис. 15. Транзисторы: а-п-р-п типа; б — р-п-р типа
Часть электронов притягивается положительным полюсом источника, подключенного к базе; в базовой цепи также протекает ток, называемый базовым.
При изменении напряжения, прикладываемого к эмиттер-ному переходу, соответственно изменяется и количество эмнт-тируемых в базу электронов, а значит, и сила коллекторного тока. Следовательно,' эмиттерный переход выполняет такую же роль, как участок катод — управляющая сетка электровакуумного триода. Принцип работы транзистора типа р-п-р (рис. 15, б) аналогичен рассмотренному с той лишь разницей, что в качестве носителей электрических зарядов выступают дырки.
Обозначение полупроводниковых триодов похоже на обозначение диодов. Различие заключается в том, что на второй позиции всегда стоит буква Т. Например, 1Т109Д — германиевый транзистор малой мощности для работы в низкочастотных цепях, разновидность Д. Транзисторы более ранних выпусков обозначались буквами П или МП с цифровым и буквенным обозначением, характеризующими соответственно назначение и разновидность (например, П210А).
Электронно-лучевая трубка
Электронно-лучевые трубки широко применяются в РЛС в качестве оконечных устройств (индикаторов) и предназначены для преобразования электрических сигналов в световое изображение.
Электронно-лучевая трубка (ЭЛТ) представляет собой’ электровакуумный прибор, выполняемый в виде колбы (рис. 16), внутри которой находятся следующие элементы: подогревный катод 1, управляющий электрод 2, анод 3, отклоняющая система 4 и экран 5.
Рис. 16. Структурная схема электронно-лучевой трубки:
/ — подогревный катод; 2 — управляющий электрод: 5 — анод; 4 — отклоняющая система; 5 — экран
Принцип работы ЭЛТ заключается в следующем. Катод, эмитирующий электроны, и управляющий электрод 2 образуют электронную пушку, которая создает электронный поток (электронный луч) определенной интенсивности. Интенсивность потока электронов регулируется путем изменения отрицательного напряжения на управляющем электроде, с уменьшением отрицательного напряжения интенсивность потока электронов увеличивается. На выходе электронной пушки установлен анод, на который подается положительный потенциал. Электроны, попадая в ускоряющее поле анода, приобретают энергию и фокусируются им в электронный луч с малым поперечным сечением. Напряжение на аноде подбирается таким, чтобы обеспечить наилучшую фокусировку луча в плоскости экрана. Экран трубки покрыт тонким слоем люминофора — вещества, способного светиться при бомбардировке его электронами. Электронный луч, попадая на экран, вызывает его свечение, яркость которого зависит от интенсивности электронного потока, а значит, и от напряжения на управляющем электроде. Для управления положением луча в плоскости служит отклоняющая система. Управление лучом может осуществляться путем воздействия на движущиеся в луче электроны электрическим или магнитным 49
полем. В соответствии с этим различают трубки с электростатическим (типа ЛО) и магнитным (типа ЛМ) управлением.
В первом типе трубок отклоняющая система представляет собой две пары отклоняющих пластин, развернутых друг относительно друга на угол 90°, — пластины XX и YY. Направление и величина отклонения луча, а значит, и светового пятна на экране трубки определяются полярностью и разностью потенциалов на отклоняющих пластинах. В трубках с магнитным управлением отклонение электронного луча обеспечивается за счет воздействия на движущиеся электроны магнитным полем, создаваемым двумя парами отклоняющих катушек, развернутых друг относительно друга на 90°. Направление и величина отклонения луча в этом случае определяются направлением и силой тока, пропускаемого через катушки.
Траектория движения светового пятна в плоскости экрана называется разверткой луча.
Таким образом, изменяя напряжение на управляющем электроде, можно управлять яркостью светового пятна на экране, а изменяя напряжение (силу тока) на отклоняющей системе —его положением в плоскости экрана, т. е. создавать определенного вида развертку на экране электронно-лучевой трубки.
5. Принципы построения и функционирования радиолокационных станций и станций радиотехнической разведки
Задачи, решаемые радиолокационными станциями
Радиолокацией (от слов радио и локация) называется область науки и техники, предметом которой является наблюдение различных объектов (целей) радиотехническими методами.
Уже в самом названии данной области заложены основная задача и способ ее решения: локация — определение местоположения, радио — на основе использования радиоволн. Радиоволны — это определенный диапазон (радиодиапазон) электромагнитных волн, представляющих собой совокупность переменных электрического и магнитного полей. Определение местоположения осуществляется специальными устройствами— радиолокаторами (радиолокационными станциями — РЛС, радарами). С помощью РЛС решаются самые разнообразные задачи разведки наземных движущихся целей, корректирования огня артиллерии, определение координат стреляющих батарей, навигации и т. д. В своем же обобщенном понятии РЛС — это устройство для обнаружения целей, опре
деления их координат, а также для распознавания и получения ряда других сведений о них методами радиолокации.
Таким образом, РЛС в процессе наблюдения обеспечивает решение следующих задач;
обнаружение цели;
определение координат цели;
распознавание типа, характера цели;
определение параметров движения (скорости, ускорения) и др.
По мере совершенствования радиолокационных устройств круг задач, которые ставятся перед ними, все более расширяется. Это приводит уже к необходимости комплексирования РЛС различного функционального назначения и сочленения их с другими устройствами (например, вычислительными устройствами) для совместного решения задач.
Решение указанных задач основано на следующих основных свойствах электромагнитных волн:
1. Свойство отражения, заключающееся в том, что при наличии какого-либо препятствия на пути распространения электромагнитных волн происходит их отражение. Следовательно, при излучении РЛС электромагнитных волн в пространство (зондирования пространства) факт наличия отраженного сигнала, зафиксированного РЛС является свидетельством того, что на просматриваемом направлении появился какой-то объект, т. е. решена задача обнаружения.
2. Прямолинейность распространения электромагнитных волн, используемых в радиолокации. Это свойство позволяет путем использования направленных радиолокационных антенн, обеспечивающих излучение и прием отраженных сигналов в узком луче, определить направление прихода сигнала, а, следовательно, при ориентировании антенны на местности и угловые координаты объекта — дирекционный угол (азимут) и угол места.
3. Постоянство скорости распространения электромагнитных волн в пространстве (с = 3-108 м/с) позволяет путем фиксации момента времени излучения /изл электромагнитной энергии и момента прихода отраженного от объекта сигнала /0Тр по разности этих отсчетов определить дальность до объекта:
2Д -= с (/отр - /иэл) = с/зад, Д =
где 2Д — удвоенная дальность, определяемая распространением электромагнитной волны от РЛС к объекту и обратно;
^зад — время задержки отраженного сигнала относительно момента излучения.
Таким образом, наличие указанных свойств и их использование позволяют обнаружить цель и определить ее место
положение в сферической системе координат. Дополнительные задачи решаются на основе использования других свойств электромагнитных волн и свойств объектов наблюдения. Так, например, для выделения движущихся целей на фоне неподвижных местных предметов, также отражающих электромагнитные волны, используется эффект Доплера. Сущность его заключается в том, что частота сигнала, принимаемого РЛС от движущейся цели fnp, отличается от частоты излученных сигналов f0 на величину частоты Доплера Гд ’
/пр-/0±Л = /0±
где Vr — радиальная составляющая скорости движения цели, а знак « + » или « —» берется соответственно при приближении или удалении цели от РЛС.
Структурная схема импульсной РЛС
Большинство РЛС работает в импульсном режиме излучения, при котором пространство зондируется короткими мощными сверхвысокочастотными (СВЧ) импульсами электромагнитной энергии радиоимпульсами, следующими с определенным периодом, в промежутках между которыми принимаются отраженные от целей сигналы. Современные РЛС представляют собой сложные радиотехнические устройства, состав которых зависит от назначения, условий работы и т.п. Однако при всем их многообразии в них можно выделить системы, которые являются обязательными для любой РЛС.
Рис. 17. Структурная схема импульсной радиолокационной станции: а —функциональная схема; б —временные диаграммы; / — запускающие импульсы; 2 — зондирующие импульсы; 3 — отраженные импульсы; 4 — видеоимпульсы
К таким системам относятся (рис. 17, а):
передатчик;
антенно-волноводная система, включающая антенну, антенный переключатель и линии передачи СВЧ энергии;
приемник;
индикаторное устройство;
синхронизатор станции.
Синхронизатор, входящий обычно в систему измерения дальности (СИД), обеспечивает синхронизацию работы по времени всех систем станции путем создания запускающих импульсов 1 с определенным периодом.
Передатчик предназначен для формирования мощных СВЧ радиоимпульсов 2 с заданными параметрами: несущей частотой f0 (или длиной волны A=c/f0), длительностью импульса Ти и мощностью в импульсе Ри.
Антенна служит для излучения радиоимпульсов передатчика и приема отраженных от цели сигналов в узком направленном луче.
Антенный переключатель обеспечивает автоматическое подключение антенны к выходу передатчика в режиме излучения (на время, приблизительно равное длительности радиоимпульса) и ко входу приемника при приеме отраженных от цели сигналов.
Линии передачи СВЧ служат для передачи радиоимпульсов от передатчика к антенне и от антенны к приемнику.
Приемник предназначен для выделения сигналов на рабочей частоте станции, усиления их и преобразования в видеоимпульсы 4, представляющие собой огибающую радиоимпульсов 3.
Индикаторное устройство обеспечивает преобразование электрических импульсов с выхода приемника к виду, удобному для индикации: появление световой отметки на экране электронно-лучевой трубки, отклонение стрелки электроизмерительного прибора и т. п.
• Принцип работы РЛС в ее упрощенном виде состоит в следующем.. Под действием запускающих (рис. 17, б) синхронизатора происходит одновременный запуск передатчика и индикаторного устройства. Передатчик вырабатывает СВЧ зондирующие импульсы 2, которые по линии передачи через антенный переключатель поступают в антенну и излучаются в пространство в заданном направлении. Индикаторное устройство фиксирует момент излучения импульса передатчика /изл. Прн отсутствии цели на просматриваемом направлении нет и отраженного сигнала и антенна поворачивается в следующее направление, обеспечивая последовательный просмотр пространства в заданном секторе. При наличии цели на антенну поступают отраженные от нее сигналы 3, которые задержаны относительно зондирующих импульсов на время ^зад=2Д/с. После усиления в приемнике до величины, обеспечивающей нормальную работу индикаторного устройства, и преобразования радиоимпульсов в видеоимпульсы 4 отраженные от цели сигналы поступают на индикаторное устройство, которое фиксирует момент его прихода £0Тр и по 50
разности зафиксированных в нем моментов /Нзл и /отр определяет дальность до цели
Д ~ с^зад?2 = С (AiTp ^изл)/2-
Направление на цель определяется по положению антенны, в котором на нее начинают поступать отраженные сигналы.
Задачи и структурная схема станции радиотехнической разведки
Станции радиотехнической разведки (РТР) предназначены для обнаружения работающих РЛС, определения их координат и типа.
а
5
Рис. 18. Станция радиотехнической разведки: а—определение координат; б — функциональная схема пеленгатора
Ведение РТР основано на том, что любая РЛС проявляет себя излучением электромагнитной энергии в пространстве. Таким образом, задача обнаружения в этом случае решается путем поиска по направлению и приема излучения на остронаправленную антенну, по положению которой и определяется направление на источник излучения. Станция РТР работает только на прием и определить в этом случае дальность до разведываемого объекта не представляется возможным. Определение координат осуществляют путем измерения направлений (пеленга) на РЛС с нескольких (не менее двух) приемопеленгаторных постов '(рис. 18, а), раз-
несенных на местности, и последующего решения задачи прямой засечки по известным координатам постов Xi, yi и измеренным направлениям as. В состав станции РТР обычно входят три идентичных приемопеленгаторных поста (рис. 18, б), что обеспечивает повышение точности определения координат и надежность разведки в условиях пересеченной местности.
В ходе разведки один из постов назначается ведущим, а два других — ведомыми. Тип РЛС определяется на основе анализа технических (параметры сигнала, режимы работы РЛС и т. п.) и тактических (удаление от переднего края, расположение в боевых порядках войск и т. п.) демаскирующих признаков разведанной станции. Увеличение количества вскрываемых демаскирующих признаков приводит к повышению точности распознавания типа РЛС.
В состав каждого поста входят: антенно-волноводная система; приемная система;
анализатор параметров сигнала;
устройство идентификации;
устройство обработки.
Антенно-волноводная и приемная системы станции РТР по своему назначению и принципу работы аналогичны РЛС. Отличительной особенностью их является широкий частотный диапазон принимаемых сигналов, позволяющий вести разведку РЛС, работающих на различных частотах. Это обеспечивается применением набора антенн и приемников, принимающих сигналы в различных частотных диапазонах, либо использованием в этих системах широкодиапазонных устройств.
Анализатор параметров сигнала представляет собой измерительное устройство, определяющее основные технические демаскирующие признаки (рабочую частоту, период следования импульсов, длительность импульса и т. п.). Значения измерительных параметров передаются в устройство идентификации и обработки информации. Устройство идентификации предназначено для обеспечения однозначного пеленга одной и той же РЛС всеми приемопеленгаторными постами станции. Необходимость решения задачи идентификации обусловлена тем, что в полосе разведки станции РТР может находиться несколько работающих РЛС. В результате при пеленговании постами различных РЛС могут быть выданы ложные координаты (рис. 18, а). Для исключения этих ситуаций на каждом посту в устройстве идентификации производится попарное сравнение параметров сигналов, принимаемых разными постами, и при их соответствии выдается команда на устройства обработки для решения задачи определения координат по измеренному пеленгу.на одном посту и пеленгам, полученным с других постов, а также для опреде-52
ления типа РЛС. Определение типа РЛС основано на сравнении демаскирующих признаков разведанной РЛС с признаками, заранее заложенными в память устройства обработки.
При несовпадении параметров сигналов в устройстве идентификации команда на устройство обработки поступившей информации не выдается и ведомые посты продолжают поиск разведываемой РЛС.
6. Функциональные узлы радиоэлектронных средств
Антенно-волноводна я система
В состав антенно-волноводной системы входят линии передачи СВЧ энергии, антенна РЛС и различные функциональные элементы (антенный переключатель, объемный резонатор, СВЧ модулятор и т. д.).
Рис. 19. Линин передачи СВЧ энергии:
а, б — коаксильные линии; в—волноводы; г — элементы СВЧ
Линии передачи предназначены для передачи энергии СВЧ от передатчика к антенне и от антенны к приемнику. Линии передачи должны обеспечивать передачу энергии с минимальными потерями, возможность передачи большой мощности без пробоя, отсутствие излучения в пространство, простоту конструкции. В РЛС наиболее широко применяются коаксиальная линия и волноводы.
Коаксиальная линия (рис. 19, а, б) представляет собой конструкцию, состоящую из двух проводников, выполненных в виде трубок различного диаметра, между которыми расположен диэлектрик. Высокочастотные токи в линии протекают по наружной поверхности внутреннего проводника и
по внутренней поверхности наружного проводника, а электромагнитное поле, созданное ими, распространяется в пространстве между проводниками. Наружный проводник обычно заземляется и имеет нулевой потенциал. Это делает коаксиальные линии безопасными при эксплуатации.
В зависимости от типа диэлектрика различают гибкие и жесткие коаксиальные линии. Гибкая линия (коаксиальный кабель — рис. 19, а) состоит из внутреннего проводника и наружной металлической оплетки, пространство между которыми заполнено эластичным высокочастотным диэлектриком. Снаружи оплетка покрывается защитной оболочкой из резины или хлорвинила. Достоинством коаксиального кабеля является удобство монтажа, а недостатком — сравнительно большие потери в диэлектрике на сверхвысоких частотах. Поэтому эти линии применяют для передачи энергии в основном в метровом диапазоне волн. На более коротких волнах (в дециметровом диапазоне) используют жесткие коаксиальные линии — волноводы, в которых роль диэлектрика выполняет сухой воздух.
Волновод (рис. 19, в) выполнен из металла и имеет прямоугольное или круглое сечение, внутри волновода распространяется электромагнитная энергия. По конструкции он проще коаксиальной линии, обеспечивает возможность передачи большого уровня мощности и малые потери ввиду отсутствия диэлектрика и большой токонесущей внутренней поверхности, которая дополнительно покрывается серебром. Волноводы применяются в основном только в сантиметровом и миллиметровом диапазонах волн.
Для возбуждения электромагнитных колебаний в волноводе к нему по коаксиальному фидеру подводится высокочастотная энергия от генератора. Для обеспечения электрической связи генератора с волноводом внутрь волновода вводится штырь — обычно это внутренний провод коаксиальной линии. За счет токов высокой частоты вокруг штыря образуется электромагнитное поле, которое будет распространяться вдоль волновода. Кроме штыря возбуждение волновода может быть обеспечено и посредством щели в его стенке, через которую поступает энергия от генератора. Наилучшие условия распространения волны в волноводе создаются в том случае, если длина волны генератора X меньше некоторого критического значения %Кр, определяемого наибольшим размером поперечного сечения волновода. Для передачи энергии используют основной тип волны, когда длина волны генератора наиболее близка к Хкр и приблизительно равна (несколько меньше) наибольшему поперечному размеру волновода (ширине стенки — для прямоугольного и диаметру — для круглого волновода). Следовательно, чем больше длина волны, тем больше должно быть поперечное сечение волновода. Этим и определяется применение волноводов в санти-64
метровом и миллиметровом диапазонах волн, так как при большей длине волны волновод становится громоздким.
Отрезки линий передачи определенной длины, кроме того, широко используются для создания различных элементов СВЧ (см. рис. 19) — индуктивностей, емкостей, параллельного и последовательного колебательных контуров (объемных резонаторов), которые обладают теми же свойствами, что и обычные элементы, широко используемые в радиотехнике. Так, например, отрезок короткозамкнутой на конце коаксиальной линии длиной Х/4 эквивалентен параллельному колебательному контуру, сопротивление которого на резонансной частоте достаточно велико (рис. 19, г).
На свойствах отрезков линий передачи основана и работа антенного переключателя РЛС (рис. 20), в состав которого
входят два газовых разрядника — разрядник защиты приемника (РЗП) и разрядник блокировки передатчика (РБП). Принцип работы антенного переключателя состоит в следующем. При работе передатчика разрядники поджигаются и замыкают накоротко четвертьволновые отрезки линий передачи, входные сопротивления которых оказываются равными бесконечности (разрыв цепи для токов СВЧ), и эти ответвления не оказывают влияния на работу линии передачи; электромагнитная энергия от передатчика поступает в антенну и. не ответвляется в приемник. При приеме отраженного .сигнала разрядники не поджигаются и в сечении 1 сопротивление равно нулю (разомкнутый отрезок Х/4), а в сечении 2 — бесконечности (короткозамкнутый отрезок Х/4). В результате энергия принятого сигнала не ответвляется к передатчику. Для входа приемника сопротивление разомкнутого отрезка Х/4 в сечении 2 равно нулю, и вся энергия поступает к приемнику.
Радиолокационные антенны предназначены для излучения электромагнитной энергии в пространство и приема отражен-
иых сигналов. Основной особенностью радиолокационных ан* тенн является свойство направленности излучения и приема радиоволн, что позволяет измерять угловые координаты целей и увеличивает дальность действия РЛС.
Рис. 21. Зеркальные антенны:
1 — зеркало; 2 —облучатель
В РЛС в качестве основных антенн используются пара* болические антенны, относящиеся к классу зеркальных антенн (рис. 21). Основными элементами таких антенн являются облучатель и зеркало. Облучатель — это небольшая слабо направленная антенна, служащая источником электромагнитной волны, облучающей зеркало антенны. В качестве облучателей применяют рупорные излучатели, представляющие собой расширенный конец волновода прямоугольного или круглого сечения, а также полуволновые вибраторы — проводники длиной Х/2, к середине которых подключен передатчик или приемник. Зеркало антенны фокусирует падающую на него электромагнитную энергию в определенном направлении. Чаще всего зеркало выполняется параболической формы в виде параболоида вращения или параболического цилиндра. Для такой формы зеркала при постановке облучателя в фокусе падающие на него электромагнитные волны будут распространяться параллельным пучком, концентрируясь вдоль геометрической оси антенны.
Направленные свойства антенны определяются ее диаграммой направленности (рис. Й2), которая показывает зависимость напряженности поля, создаваемого антенной, от направления на точку наблюдения Д(9, <р) при неизменном расстоянии до нее. Чтобы исключить зависимость характеристики направленности от мощности излучения и расстояния до точки наблюдения, ее нормируют относительно напряженности поля в направлении максимума излучения Fmax
, /?(9, ф)=£'(6, <р)/Д тях*
Максимальное значение нормированной диаграммы направленности всегда равно единице. Если антенна ненаправленная, т. е. излучает энергию равномерно во все стороны, то ее диаграмма направленности Д(0, <р) ~ 1. Для направленной антенны диаграмма направленности равна единице только в направлении максимума излучения и уменьшается при отклонении от него.
Важное свойство антенны — неизменность диаграммы направленности для режима излучения и приема сигнала. Однако в режиме приема физический смысл ее иной — это зависимость амплитуды сигнала, поступающего на вход приемника, от направления на источник электромагнитной энергии.
Диаграмма направленности — пространственная фигура, поэтому ее обычно изображают для двух взаимно перпендикулярных плоскостей (плоскости пеленгации) — азимутальной и угломестной. Они могут строиться в полярной (рис. 22, а) или прямоугольной (рис. 22, б) системе координат. Диаграмма направленности всегда имеет основной (главный) лепесток и паразитные (боковые) лепестки.
Рис. 22. Диаграмма направленности антенны: а — в полярной системе координат; б — в прямоугольной системе координат
Острота главного лепестка оценивается шириной диаграммы направленности 0о, характеризуемой угловым сектором, в пределах которого напряженность поля не менее 0,707£щах. Величина 0о зависит от соотношения между длиной волны Л и размером зеркала антенны d в соответствующей плоскости:
0о«(60-70)°Ш,
и обычно для основных антенн РЛС лежит в пределах от долей до единиц градусов.
Отсюда следует, что для получения острой диаграммы направленности надо уменьшать длину волны или увеличивать
размер зеркала антенны. В этом одна из причин, почему в радиолокации применяют ультракороткие волны.
Для характеристики энергетического выигрыша, получаемого при использовании направленных антенн, вводится параметр, называемый коэффициентом направленного действия D. Он показывает, во сколько раз плотность потока мощности в направлении максимума излучения, создаваемая направленной антенной, больше плотности потока мощности, создаваемой ненаправленной антенной, при одной и той же полной мощности излучения. Величина D у радиолокационных антенн лежит в пределах единиц — десятков тысяч, так как направленная антенна концентрирует всю поступающую к ней мощность в узком луче. С коэффициентом направленного действия связан коэффициент усиления антенны G, который учитывает потери мощности в антенне:
G = nD,
где и.— коэффициент полезного действия антенны.
В режиме приема для характеристики способности антенны извлекать из окружающего пространства электромагнитную энергию пользуются понятием эффективной площади антенны 5эф. Она определяется как отношение мощности Рпр, поступающей от антенны на вход согласованного с ней приемника, к плотности потока мощности П, падающей на антенну волны, 83ф — Рпр/П и связана с коэффициентом усиления антенны
‘$эф = Х2О/4л.
Численные значения эффективной площади антенны несколько меньше геометрической площади ее раскрыва.
Радиопередающая система
Радиопередающая система (передатчик) РЛС предназначена для формирования СВЧ радиоимпульсов с заданным периодом следования.
В состав передатчика (рис. 23) входят подмодулятор, модулятор, генератор СВЧ и высоковольтный источник питания. Вход передатчика подключен к синхронизатору станции, импульсы 1 которого обеспечивают запуск передатчика с заданным периодом следования Т, а выход передатчика — через антенный переключатель к антенне.
Формирование СВЧ радиоимпульсов осуществляется путем последовательного формирования прямоугольных видеоимпульсов 2 заданной длительности ти в подмодуляторе, ьх усиления 3 в модуляторе и генерирования СВЧ колебаний 4 заданной частоты fo (длины волны X) и мощности Ря генера-тором СВЧ,
Процесс преобразования видеоимпульсов в радиоимпульсы называется импульсной модуляцией, а устройство, обеспечивающее его — модулятором. В общем случае информация может передаваться путем изменения (модуляции) различных параметров колебаний генератора СВЧ — амплитуды, частоты, фазы. В соответствии с этим различают амплитудную, частотную и фазовую модуляции. Импульсная модуляция является частным случаем амплитудной модуляции.
Рис. 23. Функциональная схема импульсного передатчика:
1 — зондирующий импульс; 2 — видеоимпульс; 3 — усиленный видеоимпульс;
4 — радиоимпульс
Подмодулятор (иногда его называют генератором поджига) представляет собой генератор прямоугольных импульсов, период следования которых определяется импульсами запуска. В качестве подмодулятора широко используются блокинг-генераторы в ждущем режиме.
Рис. 24. Структурная схема модулятора
Модулятор по отношению к генератору СВЧ играет роль переключателя напряжения питания, подключая его к генератору СВЧ в пределах импульса ти и отключая в промежутках между импульсами. Принципиальная схема импульсного модулятора показана на рис. 24. Импульсы подмодулятора
поступают на коммутатор, представляющий собой выполненный на мощном триоде электронный ключ. При отсутствии импульса подмодулятора электронный ключ разомкнут и в накопителе (емкость или накопительная линия) запасается энергия от высоковольтного выпрямителя по цепи: « + » выпрямителя, ограничительное сопротивление (дроссель), накопитель, зарядный диод Д1, « —» выпрямителя. Количество запасенной энергии Wi определяется мощностью источника Рср и временем, в течение которого происходит накопление ^эар== Т Ти.
W^PcpCT-th).
При поступлении импульса с выхода подмодулятора электронный ключ замыкается и вся запасенная энергия накопителя отдается генератору СВЧ по цепи: « + » накопителя, электронный ключ, генератор СВЧ, « —» накопителя. В результате генератор СВЧ вырабатывает радиоимпульс мощностью Ри и длительностью та, энергия которого равна U^2= = РнТн. Так как ти<СТ, то на основе закона сохранения энергии Wi=W2 (без учета КПД) получим
Рц~ РсрТ/Ти,
т. е. мощность в импульсе передатчика во столько раз больше средней мощности источника питания, во сколько время накопления энергии Т (точнее Т—ти) больше длительности импульса ти. Вот почему при сравнительно маломощных источниках питания зондирующие импульсы РЛС имеют достаточно большую мощность. Например, при ти = 0,5 мкс, Т = 500 мкс (Г = 2 кГц) и РСр = 50 Вт мощность в импульсе Ри = 50 кВт.
Рис. 25. Устройство магнетронного генератора;
1 — катод; J— анодный блок; 3 — объемные резонаторы; 4 — петля связи
В качестве генератора СВЧ в РЛС широко применяются Магнетроны.
Магнетронный генератор (рис. 25) представляет собой двухэлектродный электровакуумный прибор, помещенный в 60
магнитное поле постоянного магнита, и состоит йз катода 1 и анодного блока 2, в полости которого высверлены отверстия, выполняющие роль объемных резонаторов 3. Для получения большой мощности используются в основном многорезонаторные магнетроны. Вывод энергии из магнетрона осуществляется через петлю связи 4, введенной в один из резонаторов. Анодный блок в целях безопасности при эксплуатации, как правило, заземляется, а на катод, размещенный внутри анодного блока, подается отрицательный потенциал. В результате для электронов, эмитируемых катодом, в направлении к аноду создается ускоряющее электрическое поле. Магнитное поле ( + ), создаваемое постоянными магнитами, направлено перпендикулярно плоскости анодного блока.
Работа магнетрона основана на взаимодействии электронов, выходящих с поверхности катода, с постоянными электрическим и магнитным полями в магнетроне и переменным полем, возникающим в объемных резонаторах. Электроны, вылетевшие из катода, под действием ускоряющего поля при движении к аноду приобретают энергию. За счет поперечнодействующего магнитного поля электроны изменяют свою траекторию движения, закручиваясь относительно магнитных силовых линий. Индукция магнитного поля выбирается такой, чтобы электроны, не попадая на анод, пролетали бы вблизи щелей объемных резонаторов. При пролете вблизи резонаторов электроны взаимодействуют с его переменным полем и отдают ему приобретенную энергию.
Таким образом происходит преобразование энергии электрического поля, создаваемого источником питания, в энергию СВЧ колебаний, которые посредством петли связи выводятся в линию передачи.
Радиоприемная система
Радиоприемная система (приемник) РЛС предназначена для выделения сигналов, отраженных от цели, на рабочей частоте станции, усиления их и преобразования к виду, удобному для индикации.
К основным типам приемников относятся детекторный приемник, приемник прямого усиления и супергетеродинный приемник. В радиолокации наиболее широкое применение нашли детекторные и супергетеродинные приемники.
Основными элементами детекторного приемника (рис. 26, а) являются входная цепь (ВЦ), детектор (Д) и видеоусилитель (ВУС) или усилитель низкой частоты (УНЧ). Входная цепь приемника подключается к антенне и служит для выделения сигнала на рабочей частоте станции fo из множества сигналов, наведенных в антенне, а также для согласования линии передачи с последующими каскадами приемника. Она представляет собой колебательный контур (объемный резо
натор на СВЧ), настроенный на частоту станции fo- Выделение сигнала основано на изменении коэффициента передачи входной цепи в зависимости от частоты входного сигнала. В результате сигнал на частоте fo проходит через входную цепь практически без изменения, а сигналы на других частотах ослабляются или, как говорят, подавляются.
а
S
Рис. 26. Схема радиоприемных систем: а — прямого усиления; б — супергетеродинная
Выделенный модулированный высокочастотный сигнал подается на детектор, который выделяет сигнал, несущий информацию. Процесс выделения полезной информации из несущего сигнала называется процессом детектирования, а устройство, выполняющее эту операцию, — детектором. Информация может быть заложена в различных параметрах сигнала (амплитуде, частоте, фазе), поэтому после входной цепи ставится соответствующий детектор — амплитудный, частотный или фазовый. В импульсных РЛС зондирующие радиоимпульсы представляют собой амплитудно-модулирован-ный сигнал, поэтому для выделения видеоимпульсов используется амплитудный детектор.
Мощность сигнала на выходе детектора обычно недостаточна для нормальной работы индикатора, поэтому после детектирования сигнал усиливается. Продетектированный сигнал занимает различную полосу частот. Например, полоса звуковых частот составляет величину от десятков герц до нескольких килогерц, т. е. находится в области низких частот. Сигнал импульсной РЛС занимает значительно большую полосу частот, определяемую зависимостью Af= (2 —5)/ти.
Вследствие этого полоса частот, занимаемая сигналом, при длительности импульса ти доли микросекунд составляет единицы — десятки мегагерц, т. е. входит в область видеочастот. Поэтому в импульсных РЛС для усиления видеоимпульсов используется видеоусилитель (ВУС), отличающийся
от УНЧ более широкой полосой пропускания. Усиленные сигналы подаются на индикатор. В зависимости от типа оконечного устройства полезная информация воспроизводится в виде световых или звуковых сигналов.
Достоинствами детекторных приемников является простота и надежность работы. Однако они не обеспечивают хорошего подавления сигналов, отличных по частоте от частоты полезного сигнала, и имеют большой уровень собственных шумов.
Приемник прямого усиления отличается от детекторного наличием усилителя высокой частоты (УВЧ) между входной цепью и детектором. В РЛС данный тип приемника практически не применяется, так как он не обеспечивает существенных преимуществ перед детекторным, но значительно усложняет устройство.
Супергетеродинный приемник (рис. 26, б) наиболее широко применяется в различных радиоэлектронных средствах. Принцип его работы такой жеикак детекторного. Отличительной особенностью его является преобразование несущей частоты принимаемого сигнала fo из области СВЧ в область более низких частот — на промежуточную частоту fnp, составляющую для РЛС величину десятков мегагерц. Необходимость этого преобразования вызвана трудностями получения большого усиления приемника на СВЧ. С учетом этого схема супергетеродинного приемника отличается от детекторного наличием преобразователя частоты (ПЧ) и усилителя промежуточной частоты (УПЧ), включенных между входной цепью и детектором. В ряде случаев перед преобразователем частоты может быть установлен и УВЧ.
Преобразователь частоты состоит из смесителя (СМ) и гетеродина, представляющего собой генератор гармонических Колебаний, частота которых fr отличается от несущей частоты сигнала fo на величину промежуточной частоты fnp. Преобразование частоты обеспечивается подачей на смеситель колебаний принятого сигнала f0 и гетеродина fr.
На выходе смесителя с помощью колебательного контура, настроенного на частоту fnp, выделяется сигнал на резонансной частоте fnp=fo~fr, который и усиливается на этой частоте в усилителе промежуточной частоты.
С выхода УПЧ сигнал подается на детектор. Последующее прохождение сигнала не отличается от рассмотренного выше для детекторного приемника. УПЧ имеет обычно большое количество неперестраиваемых каскадов, настроенных на стандартные частоты: для РЛС— 10, 30, 60 и 100 МГц, для радиовещательных приемников — 465 кГц. При работе приемника с перестройкой по частоте сигнала fo производится перестройка входной цепи и гетеродина таким образом, что fnp=fo—fr остается постоянной. В РЛС УПЧ обычно разделяется на предварительный (ПУПЧ) и гларный (ГУЦЧ) уси-
лители промежуточной частоты. Необходимость такого деления обусловлена тем, что усилитель имеет ряд регулировок, необходимых при работе, и поэтому его располагают в непосредственной близости от рабочего места оператора. Антенна же станции может быть удалена от него на достаточно большое расстояние. Поэтому входная цепь, преобразователь частоты и предварительный УПЧ располагаются в непосредственной близости от антенны, что позволяет для передачи сигнала после преобразования на /пр и предварительного усиления использовать удобную в конструктивном отношении гибкую коаксиальную линию, а не волновод.
При сопровождении цели вследствие изменения ее отражающей способности, дальности и условий распространения электромагнитной энергии величина входного сигнала РЛС меняется в больших пределах. Для нормальной работы индикатора приемник должен поддерживать выходной сигнал на заданном уровне. Это обеспечивается ручной (РРУ) и автоматической (АРУ) регулировками усиления.
Ручная регулировка служит для установки номинального значения выходного сигнала приемника, а автоматическая — для автоматического поддержания его на заданном уровне при изменениях величины входного сигнала. Принцип их работы основан на изменении коэффициента усиления УПЧ в зависимости от величины выходного сигнала: при увеличении выходного сигнала коэффициент усиления уменьшается и, наоборот, при уменьшении выходного сигнала он увеличивается.
Одной из основных характеристик приемника является его чувствительность, которая характеризуется минимальной мощностью сигнала на его входе, при которой обеспечивается воспроизведение полезной информации на индикаторе (обнаружение цели, определение координат и т. д.) с требуемой точностью.
Индикаторные устройства РЛС
Индикаторные устройства (индикаторы) используются в РЛС в качестве выходных устройств, предназначенных для преобразования сигналов с выхода приемного устройства в световые или звуковые сигналы.
По своему назначению индикаторы делятся на индикаторы обнаружения и индикаторы сопровождения и точного определения координат целей. Первый тип индикаторов предназначен лишь для фиксации наличия цели в зоне обзора РЛС, а второй — для точного определения ее координат. По количеству одновременно измеряемых координат индикаторы делятся на однокоординатные (индикатор дальности) и двухкоординатные (типа дальности — угол или угол — угол) индикаторы.
Наиболее широко в РЛС применяются электронно-лучевые индикаторы, оконечным устройством которых является электронно-лучевая трубка (ЭЛТ).
Индикатор дальности с диаметральной разверткой. В данном типе индикатора (рис. 27) развертка луча осуществляется по горизонтальному диаметру экрана электронно-лучевой трубки (ЭЛТ) и представляет собой измерительную линию дальности, а отраженный от цели сигнал воспроизводится в виде отклонения луча по вертикальной оси — амплитудная отметка от цели.
Рис. 27. Принципиальная схема индикатора с диаметральной разверткой:
1 — запускающий импульс: Л 3, 4, 9, 10 — управляющие импульсы; 5 — отражающий импульс; 6 — развертка шкалы дальности; 7 — Горизонтально отклоняющие пластины; в — вертикально отклоняющие пластины
Запускающий импульс 1 от синхронизатора РЛС подается на вход расширителя, который вырабатывает импульсы 2 и 3 противоположной полярности и одинаковой длительности, определяемой просматриваемой на индикаторе дальностью Дя ^ = 2Дн/С.
Импульсы 2 подаются на управляющий электрод ЭЛТ и открывают выход электронов из электронной пушки трубки, а импульсы 3 поступают на генератор развертки, который в пределах длительности импульса 3 вырабатывает линейно-изменяющееся напряжение. Усилитель и фазоинвертор обеспечивают питание горизонтально отклоняющих пластин ЭЛТ биполярным пилообразным напряжением 4 и усиленным 10. Такой способ питания обеспечивает лучшую фокусировку луча на всей длине развертки. Под действием напряжений 4 и 10 луч будет перемещаться по экрану из левого крайнего положения в правое, на экране высвечивается линия раз-
9 Зак. 5SJ 65
вертки, каждая точка которой соответствует определенному времени, прошедшему с момента запуска, а значит, и определенной дальности. С учетом этого развертка может быть отградуирована непосредственно в единицах дальности. Обратный ход луча из правого в левое положение «гасится» за счет подачи отрицательного напряжения 2 на управляющий электрод ЭЛТ. Фиксирующая схема служит для первоначального смещения луча из центра экрана в крайнее левое положение путем подачи постоянного положительного напряжения 9 на горизонтально отклоняющие пластины. Таким образом, при одновременном запуске передатчика и индикатора луч будет перемещаться по экрану синхронно с перемещением по дальности зондирующего сигнала РЛС. Отраженные от цели сигналы с выхода приемника 5 подаются на вертикально отклоняющие пластины ЭЛТ. В результате в ходе развертки луча при поступлении отраженного сигнала произойдет отклонение луча в вертикальной плоскости, т. е. будет создана амплитудная отметка от цели. Положение этой отметки относительно начала развертки будет соответствовать дальности до цели, которая может быть определена с помощью шкалы, отградуированной вдоль развертки индикатора.
Рис. 28. Индикатор с растровой разверткой:
/ — напряжение вертикальной развертки; 2—напряжение горизонтальной развертки
Индикатор с растровой разверткой (рис. 28) обеспечивает дновременное измерение двух координат целей, например, альности — по вертикальной оси и дирекционного угла — о горизонтальной оси. Для создания прямоугольной координатной сетки осуществляется растровая развертка элек-66
тронного луча трубки, которая характеризуется перемещением луча в двух взаимно перпендикулярных направлениях.
В вертикальном направлении луч движется под действием напряжения развертки / дальности Un, подаваемого на вертикально отклоняющие пластины ЭЛТ. Период этого напряжения равен периоду посылки зондирующих импульсов РЛС. При этом каждый раз в момент излучения радиоимпульса РЛС пятно на экране индикатора начинает движение от нижнего края экрана вверх, создавая развертку дальности.
В горизонтальном направлении электронный луч перемещается под действием напряжения развертки 2 дирекцнон-ного угла Ua, подаваемого на горизонтально отклоняющие пластины ЭЛТ синхронно с перемещением диаграммы направленности антенны в секторе поиска целей. Период напряжения развертки по дирекционному углу равен времени перемещения диаграммы направленности антенны из одного крайнего положения сектора поиска в другое. Таким образом, для каждого положения диаграммы направленности антенны по дирекционному углу на экране создается развертка дальности.
Отраженные от цели сигналы с выхода приемника подаются на управляющий электрод ЭЛТ, вызывая в момент прихода увеличение яркости свечения — яркостная отметка от цели. При наличии целей в секторе поиска на экране индикатора появляются яркостные отметки на линии дальности в тот момент, когда диаграмма направленности антенны будет направлена на цель. При этом дальность до цели будет соответствовать отклонению отметки от горизонтальной оси, а направление—отклонению отметки от вертикальной оси координатной плоскости на экране индикатора.
Следовательно, индикатор с растровой разверткой включает два идентичных канала развертки, синхронизация которых осуществляется соответственно по дальности — синхронно с запуском передатчика, по дирекционному углу — синхронно с перемещением диаграммы направленности антенны в секторе поиска.
7. Дальность действия РЛС
Дальность действия РЛС зависит от технических параметров станции, типа цели, условий распространения радиоволн, наличия и уровня различного рода помех и ряда других факторов.
Сначала рассмотрим дальность действия РЛС без учета влияния условий распространения радиоволн, т. е. будем считать, что РЛС и цель находятся в свободном пространстве.
Пусть передатчик РЛС создает радиоимпульсы мощностью Ри и длительностью ти, т. е. вырабатывает энергию излучения
Епер = -^и^и-
Если бы антенна была ненаправленной и излучала энергию равномерно во все стороны, то плотность потока энергии у цели на дальность была бы
ГТ' __ £пеР
7 ц 4кД2 •
Применение в РЛС направленных антенн плотность потока энергии у цели увеличивает в Go раз:
j-f __ EnepGo
где Go — коэффициент усиления антенны.
Достигающая цели энергия будет отражаться ею. Количество этой энергии зависит от площади цели. Реальная цель имеет сложную конфигурацию, и подсчитать площадь поверхности цели, обращенной к РЛС, для различных ее ракурсов очень сложно. Поэтому для оценки отражающих свойств цели пользуются эффективной площадью рассеяния оц, под которой понимают размеры площадки, нормально- расположенной к линии РЛС — цель, равномерно отражающей достигшую ее энергию и создающей на входе РЛС такую же плотность потока энергии, как и реальная цель.
В этом случае количество энергии, переизлученное целью, будет
j-j ^перОовц
^ц = Ц0Ц---—4ЛД2 »
а плотность потока энергии в районе РЛС с учетом равномерности переизлучения
______ Ец ____ ^nepGo®u /7нр — 4кД2 — (4К)2Д* •
Тогда энергия принятого антенной РЛС сигнала
г гт С £перОдацХ2
с Пр 7упр^эф (4к)3Д4 ’
где 5Ьф = Х2Оо/4л — эффективная площадь антенны.
Пороговое значение энергии, при котором цель еще будет наблюдаться на экране индикатора, зависит от чувствительности приемника и определяется энергией -Enpmin. Тогда, заменив в предыдущей формуле Д па Дтах, получим-
4 __________
^пер Gq ЯцХ2
Дшах- г (4-)8£прш1;’
Данное уравнение, называемое основным уравнением радиолокации, определяет дальность действия РЛС в зависимости от технических параметров станции и типа цели. Из уравнения следует, что дальность тем больше, чем выше энергетический потенциал станции Епер/Епрт1п, лучше направленные свойства антенны и больше поверхность цели.
Однако данное уравнение определяет лишь потенциальные возможности станции. В реальных условиях дальность разведки может быть значительно меньше. Особенно это существенно при ведении разведки наземных и надводных целей, когда на дальность действия оказывают влияние сферичность земной поверхности и ее пересеченность (наличие оврагов, холмов, лесных массивов и т. п.). С учетом сферичности Земли дальность действия РЛС не может быть больше дальности прямой радиолокационной видимости
Дпр = 4,12(/А + УТ7), где h, Н — соответственно высота антенны РЛС и высота цели, м.
- Например, при /г = 4 м и Н = 0 Дпр = 8 км.
Пересеченность местности дополнительно приводит к появлению зон невидимости. Вот почему позиция станции должна выбираться с особой тщательностью, чтобы она обеспечивала превышение РЛС над районом разведки и исключала достаточно протяженных зон невидимости.
ТАКТИЧЕСКАЯ ПОДГОТОВКА
Глава III
РАДИОЛОКАЦИОННАЯ И РАДИОТЕХНИЧЕСКАЯ РАЗВЕДКА
1. Задачи радиолокационной и радиотехнической разведки
Радиолокационная и радиотехническая разведка являются составной частью артиллерийской разведки и ведутся в целях добывания данных о противнике, необходимых для его поражения.
Для ведения радиолокационной и радиотехнической разведки применяются радиолокационные станции разведки наземных (надводных) движущихся целей, радиолокационные станции разведки огневых позиций и наземные радиотехнические станции.
Задачами радиолокационной разведки наземных (надводных) движущихся целей являются обнаружение и определение текущих координат, состава, направления и скорости движения целей (танков, бронетранспортеров, боевых машин пехоты, автомобилей, колонн пехоты, кораблей, десантновысадочных средств и др.), а также обслуживание стрельбы артиллерии.
Радиолокационная разведка огневых (стартовых) позиций обеспечивает определение координат стартовых позиций тактических ракет и огневых позиций стреляющих орудий, минометов и реактивных установок, наблюдение за их огневой деятельностью, а также обслуживание стрельбы артиллерии и контроль пусков тактических ракет.
Условия ведения радиолокационной разведки наземных (надводных) движущихся целей и огневых (стартовых) позиций существенно отличаются, что приводит к значительным различиям в конструкции и боевой работе соответствующих радиолокационных станций.
Обнаружение, определение координат и основных характеристик работающих радиолокационных средств противника (РЛС ПВО, РЛС полёвой артиллерии и наземной разведки, метеорологических комплексов и др.), станций помех и радиомаяков радионавигационных систем являются задачами радиотехнической разведки.
К достоинствам радиолокационной разведки можно отнести:
возможность ведения разведки независимо от времени года и суток, достаточно малая зависимость от метеорологических условий;
оперативное определение координат целей — практически сразу после их обнаружения.
К отрицательным свойствам радиолокационной разведки относятся:
возможность обнаружения противником радиолокационных станций по их излучению;
трудности определения характера движущихся наземных целей;
сложность ведения разведки в условиях активных и пассивных помех.
Радиотехническая разведка, так же как и радиолокационная, не зависит от метеорологических условий, времени года и суток. Кроме того, при ее ведении обеспечивается высокая скрытность из-за отсутствия собственного излучения.
Вместе с тем результаты боевой работы зависят от интенсивности и режимов работы радиоэлектронных средств противника и возможности внесения дезинформация при применении ложных исючников излучения. Кроме того, точность определения координат разведываемых радиоэлектронных средств противника значительно снижается при наличии на местности большого количества переотражающих предметов.
Разведывательные сведения, полученные с помощью средств радиолокационной и радиотехнической разведки, позволяют выявить:
районы расположения и координаты стартовых позиций ракет и огневых позиций минометных, гаубичных систем и реактивных систем залпового огня, а также их координаты по пуску (выстрелу);
перегруппировку противника и районы сосредоточения в тактической глубине;
выдвижение и рубежи развертывания пехоты и танков противника, начало и направление его атак (контратак);
начало и направление отхода противника с занимаемого рубежа;
подготовку переправ и начало форсирования водных преград, а при действии на морском побережье — подход десантно-высадочных средств и кораблей огневой поддержки противника;
районы расположения ракетных и артиллерийских частей, зенитных ракетных комплексов;
системы управления противовоздушной обороны, управления и наведения тактической авиации.
Кроме того разведывательные сведения позволяют уточнить состав группировки войск противника.
Радиолокационная разведка наземных (надводных) движущихся целей ведется расчетами РЛС путем обнаружения и наблюдения на экранах индикаторов отраженных от целей сигналов. При этом определяются характер и текущие координаты целей, направление движения, количество единиц техники и размеры колонны.
Обслуживание стрельбы артиллерии заключается в определении полярных (прямоугольных) координат точек падения снарядов (мин) или их отклонений от цели. Координаты (отклонения) точек падения снарядов (мин) определяются по сигналам, отраженным от выбросов грунта (столба воды).
Сущность радиолокационной разведки огневых (стартовых) позиций заключается в определении прямоугольных координат огневой (стартовой) позиции и угла возвышения стреляющей системы по результатам радиолокационного наблюдения снаряда (мины, ракеты) на начальном участке траектории его полета. Непосредственно координаты стреляющей системы находятся методом экстраполяции траектории к точке вылета (падения). Прн обслуживании стрельбы определяются прямоугольные координаты точек падения снарядов (мин, ракет), их полярные координаты относительно огневой (стартовой) позиции и отклонения от цели по дальности и дирекционному углу.
Радиотехническая разведка ведется с двух-трех постов посредством поиска излучения радиоэлектронных средств противника, их пеленгования, определения координат и технических характеристик разведанных средств.
2. Обязанности должностных лиц подразделений радиолокационной и радиотехнической разведки
Командир подразделения радиолокационной (радиотехнической) разведки несет полную ответственность за постоянную боевую готовность подразделения и выполнение поставленных задач в установленные сроки.
Получив боевую работу, командир подразделения обязан поставить ее подчиненным и дать указания по организации связи, топогеодезической привязке и по защите от оружия массового поражения и высокоточного оружия.
При постановке боевой задачи расчету станции командир подразделения указывает:
необходимые сведения о противнике и своих войсках;
задачу станции, в составе какой части (группы) она действует;
места позиций (постов), маршруты выдвижения на них, порядок их занятия, маневра и перемещения в ходе боя;
порядок взаимодействия с огневыми и разведывательными подразделениями;
порядок и способы топогеодезической привязки и ее контроля;
порядок организации связи с КНП командира части (группы), пунктом управления артиллерийской разведкой и пунктами управления огнем артиллерийских дивизионов;
время готовности к ведению разведки и обслуживанию стрельбы.
Командир подразделения, кроме того, дает указания по радиоэлектронной защите и противодействию техническим средствам разведки противника, а также по защите от оружия массового поражения (высокоточного оружия), непосредственному охранению, инженерному оборудованию и сообщает единый сигнал оповещения о радиоактивном, химическом и биологическом (бактериологическом) заражении.
Начальник станции (поста) организует работу по инженерному оборудованию позиции, ее маскировке и непосредственному охранению; руководит занятием позиции, развертыванием и подготовкой к работе станция (поста) и средств связи; контролирует топогеодезическую привязку. Он руководит работой расчета при ведении разведки и обслуживании стрельбы, осуществляет взаимодействие с огневыми подразделениями и с другими средствами артиллерийской и общевойсковой разведки.
Начальник станции ведет рабочую карту; следит за правильностью отработки боевых документов; поддерживает связь с командиром разведывательного подразделения, с КНП артиллерийского командира, пунктом управления артиллерийской разведкой, пунктом управления огнем артиллерийского дивизиона и своевременно докладывает результаты разведки и обслуживания стрельбы.
Оператор станции (поста) отвечает за техническое состояние аппаратуры и готовит ее к работе, контролирует режимы работы, ведет разведку и обслуживание стрельбы и докладывает результаты начальнику станции (поста).
Оператор-топогеодезист отвечает за состояние навигационной аппаратуры (цифрового вычислительного устройства в РЛС разведки огневых позиций) и осуществляет топогеодезическую привязку позиций (работу на цифровом вычислительном устройстве) радиолокационных станций (постов).
Радиотелефонист развертывает радиостанцию, прокладывает и маскирует линии связи, обеспечивает бесперебойную работу средств связи, принимает, передает и записывает приказания, распоряжения, команды и доклады. При нарушении связи немедленно принимает меры к устранению неисправностей.
Механик-водитель станции готовит агрегаты питания к работе и по команде начальника станции включает питание, а в ходе боевой работы контролирует стабильность работы агрегатов питания. Осуществлйет охрану позиции.
3. Радиолокационные и радиотехнические станции вероятного противника
По взглядам командования иностранных армий, разведка является важнейшим видом обеспечения боевых действий сухопутных войск, к ней предъявляют высокие требования в отношении полноты, оперативности получения и передачи данных о противнике. При этом специалисты считают, что ведущее место в тактической разведке принадлежит техническим средствам, в том числе радиолокационным станциям.
РЛС разведки наземных целей появились на вооружении сухопутных войск иностранных армий в 50-х годах. Организационно они включены в штат подразделений АИР, разведывательных подразделений батальонов и других воинских подразделений.
По способу ведения разведки и характеру решаемых задач станции подразделяются на РЛС полевой артиллерии и РЛС разведки наземных движущихся целей.
РЛС полевой артиллерии предназначены для засечки огневых позиций стреляющих артиллерийских орудий, минометов и пусковых установок НУР противника, а также для корректирования огня своей артиллерии. Определение координат огневой позиции при разведке и точки падения снаряда при корректировании стрельбы производится по результатам сопровождения снаряда (мины) на участке траектории полета и решения задачи экстраполяции траектории к точке вылета или падения снаряда.
В настоящее время устаревшая РЛС AN/MPQ-4A в подразделениях АИР заменяется современными образцами РЛС полевой артиллерии AN/TPQ-36 и -37. По замыслу иностранных специалистов, первая РЛС должна в основном вести разведку стреляющих минометов, a AN/TPQ-37— ствольной и реактивной артиллерии. Обе станции оснащены фазированными антенными решетками (ФАР) с электронным управлением диаграммой направленности по азимуту и углу места, ЭВМ. В них применяются современные методы обработки радиолокационного сигнала и радиоэлектронной защиты.
Наличие быстродействующей ЭВМ и ФАР позволяют РЛС вести поиск целей в широком секторе (до 90°) с одновременным сопровождением нескольких целей. Основные операции по обнаружению снаряда (мины) на траектории, его сопровождению и расчету координат огневой позиции автоматизированы. Оператор осуществляет проверку исправности РЛС и ее систем, контроль за работой аппаратуры.
Координаты позиций стреляющих систем определяются, как правило, до падения снаряда. Такая оперативность ведения разведки, достаточная точность и скоростная автоматическая передача данных в систему управления огнем «Так-74
файр» позволяют открыть ответный огонь до того, как противник успеет сменить позицию.
Большое внимание уделено вопросам ремонтопригодности и надежности. Более 90% ремонтных работ можно производить в полевых условиях. Среднее время ремонта 30 мин.
РЛС AN/TPQ-36 в составе двух блоков размещается на одноосном прицепе и в контейнере на шасси грузового автомобиля, может транспортироваться самолетом или вертолетом. На прицепе находятся антенная система, блок управления лучом, передатчик, высокочастотная часть приемника и генератор (10 кВт), в контейнере — остальная аппаратура.
Высота антенны' в развернутом положении 3,7 м. Станция приводится в боевое положение расчетом из пяти человек за 15 мин, а в походное — з^ 5 мин. В процессе испытаний РЛС AN/TPQ-Зб вела разведку артиллерии на дальностях до 15 км.
РЛС AN/TPQ-37 размещается на двух грузовых автомо-, билях и прицепе. На 5-тонном автомобиле установлен генератор (60 кВт), а на прицепе — антенна, передатчик, блок управления лучом и высокочастотная часть приемника. На 2,5-тонном автомобиле размещается кабина с оборудованием для обработки данных и контроля работы аппаратуры.
Масса антенны (вклю,чая прицеп) 4,7 т, высота 5,4 м. Всю РЛС можно перевозить на транспортном самолете С-130. Станция развертывается за 30 мин, а свертывается — за 15. На испытаниях РЛС AN/TPQ-37 обеспечивала разведку артиллерии на дальности до 30 км.
РЛС разведки наземных движущихся целей служат для наблюдения за перемещением войск и военной техники противника в тактической глубине и определения их координат для поражения. В полосе действий дивизии противника может быть развернуто более 50 таких РЛС, обеспечивающих наблюдение на глубину до 20 км от переднего края.
К станциям, имеющим наибольшую дальность действия, относятся РЛС AN/TPS-25 и -58, входящие в состав подразделений АИР. Станция AN/TPS-25 конструктивно устарела. Более современная РЛС AN/TPS-58 обеспечивает обнаружение в секторе 30—140° и автоматическое сопровождение движущихся наземных целей на дальности до 20 км, а также корректирование стрельбы артиллерии. Станция оборудована аппаратурой сопряжения с АСУ «Такфайр». Ошибки в определении координат цели составляют ±20 м по дальности и ±0,6° по азимуту. В режиме сопровождения цели ее маршрут вычерчивается на карте (масштаб 1:50 000), что позволяет по скорости и направлению движения определять точку упреждения для открытия огня. РЛС — импульсно-доплеровская, когерентная, устанавливается на бронетранспортере, приводится в боевую готовность за 5 мин.
Состоящие на вооружении РЛС AN/PPS-5 (5В) используются в разведывательных подразделениях мотопехотных батальонов (шесть РЛС на 0,25-тонных автомобилях) и танковых батальонов (четыре на бронетранспортерах Ml 13). По принципу действия станция AN/PPS-5(5B) является импульсно-доплеровской, некогерентной, обнаруживает и определяет местоположение человека па дальности до 5 км, группу людей и военную технику различных видов — до 10 км. Сектор автоматического поиска по азимуту может устанавливаться в пределах 30—110°. Ошибка в определении дальности до цели равна ±20 м, азимута ±0,6°. Станция имеет выносной блок индикации и управления, что позволяет управлять ею из укрытия на удалении до 15 м. Общая масса станции 41 кг.
При несении патрульной службы в разведывательных дозорах применяются РЛС ближнего действия, из которых наиболее совершенной является AN/PPS-15. С ее помощью можно обнаруживать идущего человека на дальности до 1,5 км, транспортное средство — до 3 км. Станция — носимая, масса 8 кг, имеет модульную конструкцию. Съемный блок управления можно располагать в укрытии на удалении до 6 м. Поиск цели производится на слух, по стрелочному индикатору и загоранию сигнальной лампочки.
Средства радиотехнической разведки находятся в роте РЭБ батальона разведки и РЭБ бронетанковой (механизированной) дивизии и представлены наземными станциями радиотехнической разведки РЛС разведки поля боя, полевой артиллерии и войсковой ПВО AN/MSQ-ЮЗ.Станция развертывается на трех постах радиотехнической разведки, оснащенных приемопеленгаторной аппаратурой, мини-ЭВМ и размещенных на 0,25-тонных автомобилях с одноосными прицепами, либо на гусеничных транспортерах. Аппаратура позволяет вести разведку работающих РЛС в диапазоне частот от 500 до 40 000 МГц на дальностях до 30 км при точности пеленгования Iе*.
Глава IV
ОРГАНИЗАЦИЯ БОЕВОГО ПРИМЕНЕНИЯ ПОДРАЗДЕЛЕНИИ РАДИОЛОКАЦИОННОЙ И РАДИОТЕХНИЧЕСКОЙ РАЗВЕДКИ
1. Боевой порядок подразделений
Подразделения радиолокационной и радиотехнической разведки для выполнения боевых задач развертываются в боевой порядок. Боевой порядок должен обеспечивать надежное выполнение поставленных задач по разведке противника и обслуживанию стрельбы артиллерии, возможность быстрого маневра в ходе боя, а также наилучшее использование местности с целью уменьшения потерь от оружия мас
сового поражения, огня артиллерии и ударов авиации, эффективного проведения мероприятий по радиоэлектронной защите и противодействию техническим средствам разведки противника.
Боевой порядок подразделений радиолокационной разведки состоит из радиолокационных станций, развернутых на позициях, а подразделений радиотехнической разведки — из пеленгационных постов, развернутых на позициях, и пункта обработки (для НРС-1), который совмещается с одним из постов.
Позицией называют место (участок местности), занимаемое или подготовленное к занятию РЛС, постом радиотехнической разведки для выполнения боевой задачи.
Для станций типа CHAP выбирают открытые позиции, на рубеже артиллерийских наблюдательных пунктов на удалении 1—3 км от переднего края своих войск в местах, обеспечивающих наиболее полный просмотр заданных секторов разведки. Позиции для РЛС разведки огневых позиций выбираются на флангах или между огневыми позициями артиллерии на удалении 2—3 км от переднего края. Угол укрытия в направлении заданных секторов разведки должен составлять 0-10—0-30, расстояние до гребня укрытия — не менее 200 м. Гребнем укрытия могут служить лес, строения, возвышенности и т. д.
Контроль ударов тактических ракет и обслуживание стрельбы артиллерии могут производиться в пределах возможностей радиолокационной аппаратуры по дальности автосопровождения при удалении станции от стартовой позиции ракет до 10 км и огневой позиции артиллерии — до 5 км.
Пеленгационные посты станции радиотехнической разведки размещаются на возвышенных местах в 2—8 км от переднего края и на определенном удалении, обеспечивающем электромагнитную совместимость (ЭМС) с другими излучающими объектами. Расстояние между крайними постами должно составлять не менее трети дальности разведки. Необходимо, чтобы на удалении до 1 км от позиции не было экранирующих возвышенностей, лесных массивов, отдельных местных предметов и линий электропередачи.
Подразделения радиолокационной и радиотехнической разведки могут действовать в бою в составе своей части (подразделения) или быть приданными артиллерийским частям и подразделениям. Связь с подразделениями радиолокационной и радиотехнической разведки устанавливается распоряжением и средствами командира (штаба) той части (подразделения), в составе которой они действуют.
Командир подразделения должен знать организацию, вооружение и основы боевых действий частей и подразделений противника, организационную принадлежность, характеристики и основы боевого применения его радиолокационных
средств, приемы противодействия противника радиолокационной и радиотехнической разведки.
На марше в предвидении встречного боя радиолокационные станции могут следовать в составе передового отряда (авангарда) или в голове колонны главных сил. Взвод радиотехнической разведки следует в составе артиллерии передового отряда (авангарда) или в голове колонны главных сил.
С завязкой встречного боя РЛС разведки огневых позиций, следующая в составе передового отряда (авангарда), немедленно развертывается для ведения разведки стреляющих систем противника и обслуживания стрельбы по ним артиллерии передового отряда (авангарда).
Радиолокационная станция CHAP развертывается для ведения разведки с целью установления маршрутов подхода частей и подразделений противника, рубежей их развертывания, а также для обслуживания стрельбы артиллерии по разведанным целям.
Радиолокационные станции разведки огневых позиций и CHAP, следующие в составе артиллерии главных сил, с завязкой боя авангардом выдвигаются в районы развертывания своих артиллерийских частей (подразделений), занимают позиции для ведения разведки и обслуживания стрельбы артиллерии.
Топогеодезическая привязка, как правило, производится расчетами станций.
Рубеж развертывания взвода радиотехнической разведки выбирается по карте, радиотехнические посты развертываются по возможности на контурных точках или вблизи них. Топогеодезическая привязка постов производится своими силами и средствами по карте с помощью буссоли. Связь организуется по радио. Для ускорения готовности к разведке взвод первоначально может развернуться на двух постах.
При подготовке к наступлению подразделения радиолокационной и радиотехнической разведки развертываются заблаговременно.
Развертывание подразделений производится после рекогносцировки и выбора позиций станций и постов. Топогеодезическая привязка выполняется, как правило, топогеодезиче-скими подразделениями. Инженерное оборудование производится до занятия позиций станциями.
Подразделения занимают позиции, как правило, с наступлением темного времени или в других условиях ограниченной видимости. Радиолокационные станции, посты тщательно маскируются на позициях.
Работа радиолокационных станций производится строго в соответствии с регламентом, установленным старшим артиллерийским начальником. В целях получения более полных и достоверных разведывательных сведений начальники радио-78
локационных станций должны поддерживать непрерывное взаимодействие с подразделениями оптической и звуковой разведки.
С началом наступления радиолокационные станции разведки огневых позиций ведут разведку стреляющих систем противника и обслуживают стрельбу по ним артиллерии.
Станции CHAP ведут разведку противника с целью обнаружения подхода его резервов. Особое внимание уделяется районам, подвергшимся ядерным ударам, и флангам наступающих частей.
Взвод радиотехнической разведки ведет поиск и засечку новых РЛС противника и наблюдение за работой ранее обнаруженных станций.
В ходе наступления РЛС и РТС действуют совместно с артиллерийскими подразделениями, которым они приданы. Порядок перемещения определяется командиром соответствующей артиллерийской части (подразделения).
С получением распоряжения на перемещения начальник станции уясняет полученную задачу, намечает на карте места позиций станции, изучает маршрут движения и ставит задачу подчиненным. В ходе перемещения начальник станции поддерживает непрерывную связь со старшим артиллерийским начальником.
Станции разведки огневых позиций перемещаются обычно одновременно с перемещением огневых подразделений. Станции CHAP перемещаются иа выгодные для ведения разведки рубежи одновременно с перемещением артиллерийских наблюдательных пунктов.
В целях сокращения сроков готовности к ведению разведки развертывание радиолокационных станций (постов) на новых рубежах производится, как правило, без рекогносцировки, а топогеодезическая привязка позиций осуществляется своими силами и средствами.
В обороне для радиолокационных станций выбирают основные и запасные позиции. Для взвода радиотехнической разведки также выбирают и оборудуют основной и запасные рубежи развертывания.
Выбор позиций (рубежей) производится после рекогносцировки, в ходе которой намечаются места позиций и маршруты перемещения с основной позиции на запасные.
Расположение основной и запасных позиций должно обеспечивать ведение разведки при любых изменениях обстановки в ходе боя.
Инженерное оборудование позиций производится заблаговременно, привязка позиций осуществляется, как правило, топогеодезическими подразделениями.
Радиолокационные станции CHAP ведут разведку ночью и в других условиях плохой видимости с целью обнаружения
выдвижения войск из глубины, определения районов сосредоточения пехоты и танков, начала их выдвижения на исходное положение для наступления.
РЛС разведки огневых позиций ведут разведку стреляющих систем противника.
Для повышения скрытности работы радиолокационных станций порядок их работы устанавливается распоряжением старшего артиллерийского начальника.
В ходе оборонительного боя станции CHAP ведут непрерывное наблюдение за наступающим противником, особенно за выдвижением его резервов, а также обслуживают стрельбу артиллерии по разведанным целям. РЛС разведки огневых позиций ведут разведку стреляющих систем противника и обслуживают стрельбу по ним своей артиллерии. Взвод радиотехнической разведки ведет непрерывную разведку радиолокационных станций противника, обращая особое внимание на цели, которые не были вскрыты до начала боя.
2. Документы, ведущиеся в подразделениях радиолокационной и радиотехнической разведки
В подразделениях радиолокационной и радиотехнической разведки ведутся следующие документы:
на станциях типа CHAP — журнал разведки и обслуживания стрельбы (табл. 1) и рабочая карта начальника станции (рис. 29);
на РЛС разведки огневых позиций ведутся журнал разведки (табл. 2), журнал обслуживания стрельбы (табл. 3), журнал учета данных обслуживаемых артиллерийских батарей (табл. 4) и рабочая карта начальника станции (рис. 30); при ведении журналов разрешается вместо записи наклеивать ленты печатающего устройства с записью на ней или в журнале недостающих сведений;
во взводе радиотехнической разведки ведутся рабочая карта командира взвода (рис. 31) и журналы разведки (табл. 5) на радиотехнических постах и пункте обработки.
На всех средствах радиолокационной и радиотехнической разведки, имеющих штатную аппаратуру топогеодезической привязки, ведется по единому образцу журнал определения координат (табл. 6).
На рабочую карту наносят:
положение противника и передовых частей своих войск) рубежи развертывания, основные и запасные позиций '(посты) станций;
полосы (секторы) разведки и районы особого внимания;
маршруты выдвижения, перемещения и новые рубежи {позиции) развертывания;
Журнал разведки и обслуживания стрельбы
Позиция еташиге: х— 36240, «/=52835 Дирекционный угол продольной осн машины: 58-25
Секторы разведки: основной — 0-00, РОВ-1, 3—10 км; дополнительный — 54-00, РОВ-2, 6—10 км
Дата Наименование цели Данные засечки цели (разрывов) Данные по точке встречи (реперу, цели) Отклонения разрывов от цели Примеча»
время я результаты наблюдения S Д, м X У а Д, и 'с- с Да ДД, М вне
29.11.86 22.41 22.45 С» X» Колонна танков, цель 130-я, десять отметок, длина 500 м, движется влево, приближается, скорость 20 км/ч Точка встречи: «Удав-1> «Удав-2» 1-27 0-51 59-56 8773 8284 7905 45010 44703 44417 54012 53316 52698 57-37 55-52 7456 7420 35 35 -0-05 -0-05 +45 +45
места расположения взаимодействующих средств разведки;
огневые (стартовые) позиции артиллерийских (ракетных) частей и подразделений, а также КНП командира, которому подчинено средство разведки;
разведанные цели с указанием номера, наименования, характера, состава цели и времени ее обнаружения.
На карту, ведущуюся на РЛС типа CHAP, кроме того, наносят поля невидимости, возможные маршруты выдвижения противника с намеченными на них точками встречи и разведанные маршруты движения цели. Поля невидимости, определенные по карте, уточняются в ходе ведения разведки по результатам наблюдения за движущимися целями.
Рабочая карта используется при обработке и изучении разведывательных сведений, для составления боевых донесений и изучения районов развертывания и маршрутов перемещения (маневра).
Журнал разведки
Позиция станции: *=5836670, «/=11672466, Л=105
Нумерация целей: 100—150
ор — 31-12
Рвиэ — 26-41 “оси = 4-71
Секторы разведки: основной—0-00, РОВ-1, 3—И км, Л= = 120 м, угол укрытия 0-20;
1-й дополнительный — 4-50, РОВ-2, 3—9 км, h—140 м, угол укрытия 0-25;
2-й дополнительный — 55-50, РОВ-3, 3—12 км, Л=100 м, угол укрытия 0-15
Номер целя Характер цели Координаты цели Характеристика деятельности цели Количество засечек» шт. Время обнаружения цели, ч. мин Класс цели Номер траектории Угол возвышения, °
X У Л, м
102 Артиллерийская батарея 42610 42623 42605 42613 74290 74315 74360 74322 120 120 120 120 Ведет беглый огонь 3 7.00 7.00 7.01 7.00 1 1 1 126 127 128 24,5 24,3 24,7
оо
00 4*
Журнал обслуживания стрельбы
Позиция станции: х=5836670, у= 11672466, Л=105
*ор = 31-12
Рвиз = 26-41 “оси =4-71
Угол укрытия: 0-20
Основное направление стрельбы: 56-00
Дата, время, задача I Номер батареи 1 Тип системы 1 Номер цели 1 Координаты цели (репера* Исчисленные данные Высота траектории, м Полетное время, с Поправка на деривацию Количество засечек Отклонение разрывов от цели
х У Л, м Дирекционный угол Угол возвышения, ° Дальность, м по каждой засечке среднее по группе
снаряда
по дальности, м по направлению по даль- । кости, м по направлению
29.11.86 6.44 Пристрелка цели 1 МЛ-20 102 42613 74322 120 59-53 23 6610 752 25 0-09 2 +50 +70 -0-05 -0-03 +60 -0-04
ОФ-540
Журнал учета данных обслуживаемых артиллерийских батарей
Дата а время Номер батареи Образец орудия Снаряд Координаты ОП Дирекционный угол основного направленна стрельбы
Условные номер Условный номер X У л, м
29.11.86 1 МЛ-20 Обычный 35440 74580 ПО 56-00
15.40 2 2 МЛ-20 1 Обычный 35210 76620 100 56-00
3 2 МЛ-20 1 Обычный 34300 75620 но 56-00
2 1
Рис. 30. Рабочая карта начальника РЛС разведки огневых позиций
Рис. 31. Рабочая карта командира взвода радиотехпи' ческой разведки
Журнал разведки
Посты: правый — х—12920, у=62950, сектор разведки 52-00 •—2-00;
средний — х= 12800, у=58870, сектор разведки 55-00—5-00;
левый —х= 12850, у=54830, сектор разведки 58-00—8-00
Дата и время Характеристика цели Номер иоддиа-наэона Частота, МГц Отсчет Координаты цели Угол засечка Номер цели Предполагаемый тин станции
левый средний правый х У
5.12 8.10 Работа в секторе, импульсы 2000 111 9300 — 58-48 58-49 58-52 среднее 58-50 — — — 122 В 8.20 прекратила работу
00 5.12 8.10 Работа в секторе, импульсы 2000 111 9300 3-42 58-50 53-90 19505 57520 9-80 122 AN/TPS-25
Журнал определенна координат
Определение координат Определение « оси
* н/п Наименование точки Координаты № п/п Обозначение и формулы Значение в расчет
х У Л, М
1 Начальная точка (развилка дорог 1 км сев, Никулино) 34370 71010 100 1 2 Л/лср на визир 35-68 -1-13
3 “виз — Дпср 36-81
2 Конечная точка — позиция № 1 (основная): с карты 36520 72230 80 4 аор — авиз ± 30-00 6-81
с курсопрокладчика 36490 72255 5 Рвиз 58-24
3 Расхождение в координатах 30 25 6 “оси = “ор — Рвиэ 8-57
3. Топогеодезическая привязка и ориентирование Мера углов в артиллерии
Понятие о тысячной. В артиллерии за единицу меры угловых величин принято деление угломера.
Если окружность радиуса R разделить на 6000 равных частей и точки деления соединить с центром окружности, то получим 6000 одинаковых центральных углов (рис. 32, а).
Центральный угол, длина дуги которого равна -6009~ длины окружности, называется делением угломера.
Выразим длину дуги amb, соответствующей одному делению угломера, в долях радиуса R-.
. — 2,t/? — 6,28 D — 1 D atno — 600Q — 6000 к — 955 к,
1 1 n -
t. e. 600Q дуги окружности равна 955 R данной окруж-
T-r , 1
ности. При практических расчетах удобно считать, что
1 дуги окружности равна -jqqq- данной окружности, но при этом допускается некоторая ошибка
8 “ ("955 ТШ
Таким образом, окружность содержит 6000 делений угломера (дел. угл.), или 6000 тысячных радиуса, или просто тысячных.
Для удобства передачи значения угла в делениях угломера сотни произносят раздельно от десятков и единиц. Этот прием используют и для записи значения угла, например;
Угол в делениях угломера Записывается Произносится
6000 60-00 Шестьдесят ноль
4528 45-28 Сорок пять двадцать восемь
1500 15-00 Пятнадцать ноль
638 6-38 Шесть тридцать восемь
62 0-62 Ноль шестьдесят два
7 0-07 Ноль ноль семь
В практике иногда применяют термины: «Малое деление угломера», «Большое деление угломера».
Малым делением угломера называют одно деление угломера (одну тысячную).
Большим делением угломера назызают угол в 100 малых делений угломера (сто тысячных).
Соотношение градусов (минут) с делениями угломера. Окружность содержит 360°, или 21 600'. Одно деление угломера равно 2gooij— = 3',6. Одно большое деление угломера равно З',6-100 = 360'= 6°.
Один градус равен ~17 дел. угл.
Для перевода значений углов, выраженных в делениях угломера, в значения, выраженные в градусах и минутах (и наоборот), пользуются соотношениями:
60-00 = 360°;
30-00=180°;
15-00=90°;
1-00 = 6°;
0-01 = 3',6.
Зависимость между угловыми и линейными величинами. При решении практических задач с помощью тысячной мы делаем два допущения: дуга, соответствующая углу в одно деление угломера, принимается равной хорде;
одно деление угломера принимается равным “iooo”^ 1 п вместо 955 R.
При точных расчетах необходимо учитывать эти допущения, т. е. вводить соответствующую поправку.
Рассмотрим значения ошибок при решении задач, которые будут иметь место из-за того, что одно деление угломера принимается равным 1(^Q R вместо 955 R. Это допущение приводит к систематической ошибке. Определим относительное значение этой ошибки
f^--.(^r):-q^ = nSr = 0’045 «0-05’ Т- е- 5%-I УОО 1UUU / УОО 1(ЛД) * *
Это значит, что рассчитанное по тысячной значение угла следует исправлять на 5% (или
Тысячная, принятая за меру углов в артиллерии, позволяет решать практические задачи в уме очень быстро и довольно точно. Чтобы научиться решать эти задачи, установим зависимость между угловыми и линейными величинами.
Обозначим расстояние между двумя равноудаленными от центра точками М и N через I, угол между направлениями на них через р и расстояние от наблюдателя до точек через Д (рис. 32, б\, 90
Известно, что длина дуги равна одной тысячной /?:
/? = 0,001 Д,
Z1 == 955
1 1000
или для принятых обозначений 1\ = 0,01Д,
Рис. 32. Мера углов в артиллерии: а —понятие о делении угломера; б — зависимость между угловыми и линейными величинами
Так как угол между равноудаленными точками М и N в Р раз больше тысячной, то и длина дуги MN будет больше h в р раз:
оММ^Р или = 0,001 Др.
При углах до 3-00 допускается, что длина дуги примерно равна длине соответствующей хорды, т. е.
Следовательно, / = 0,001Др или в другом виде
Эта формула выражает зависимость между угловыми и линейными величинами. Принимая за неизвестное ту или другую величину, входящую в формулу, можно решать три типа задач:
1-й тип задач: зная угол между двумя равноудаленными точками р и дальность до них Д, определяют расстояние ме-жду ними I по формуле
2-й тип задач: зная расстояние между двумя точками I и дальность до них Д, определяют значение угла в делениях
угломера £ между направлениями на эти точки по формуле
О 1000/
₽----г
3-й тип задач: зная расстояние между двумя точками I и значение угла между направлениями на них р, определяют дальность Д по формуле
л_ 1000/ Д- р •
5-процентная поправка вводится всегда при определении угла места цели, если он больше 0-10, а также при определении дальности и линейной величины, требующих высокой точности.
Топогеодезическая привязка
Топогеодезическая привязка позиций (постов) подразделений радиолокационной и радиотехнической разведки осуществляется своими силами и средствами и силами топогео-дезических подразделений.
Топогеодезическая привязка позиции (поста) заключается в определении:
прямоугольных координат (х, у) и абсолютной высоты точки стояния h\
дирекционных углов с точки стояния не менее чем на два ориентира.
Привязка силами расчета, как правило, производится по карте (аэроснимку) с помощью штатной навигационной аппаратуры и с использованием входящих в ее состав гирокомпаса и буссоли. С этой целью в исходной точке, удаленной от позиции, ориентируют станцию и вводят необходимые данные в навигационную аппаратуру и выдвигаются с включенной аппаратурой на позицию.
В качестве исходных точек выбирают пункты геодезической сети,
Ориентирование
Ориентирование станции заключается в определении ди-рекционного угла ее продольной оси и производится с помощью гирокомпаса, по известному ориентирному направлению или с помощью магнитной стрелки буссоли.
При ориентировании станции с помощью гирокомпаса она устанавливается продольной осью примерно в направлении на’ север. После подготовки к работе и включения гироком-92
паса снимают две или три точки реверсии, по которым определяют истинный азимут
---2—~ + 8ф — по 2 точкам реверсии;
Аист = 4- 2N2 4- Ns i s о
—!—------------h — по 3 точкам реверсии,
где Ni — отсчеты по точкам реверсии;
дф — поправка, указанная в формуляре гирокомпаса.
Определение дирекционного угла продольной оси станции производят по формуле
аоси == -Аист Т ’
где у — сближение меридианов в точке стояния станции.
Ориентирование станции по известному ориентирному направлению производят с помощью оптического визира антенны. Для этого наводят визир антенны на ориентир и устанавливают на шкалах дирекционного угла станции значение дирекционного угла ориентира, после чего совмещают антенну с продольной осью станции и со шкалы снимают ее дирекци-ОННЫЙ УГОЛ Лосн.
При ориентировании станции с помощью буссоли устанавливают буссоль впереди станции на расстоянии 40—50 м и ориентируют по магнитной стрелке, после чего осуществляют взаимное визирование буссоли и визира антенны. Ди-рекционный угол антенны определяют по формуле
аа=А т—ААт^ 30-00,
где Ат — магнитный азимут направления с буссоли на визир антенны;
— поправка буссоли для данного района.
Рассчитанное значение аа устанавливают на шкале дирекционного угла, совмещают антенну с продольной осью станции и со шкалы снимают значение дирекционного угла продольной оси станции.
Значения координат исходной точки и дирекционного угла продольной оси станции вводятся в навигационную аппаратуру, и станция с включенной аппаратурой выдвигается на позицию.
По прибытии станции на позицию ее координаты снимаются с курсопрокладчика, а дирекционный угол продольной оси — с гирокурсоуказателя навигационной аппаратуры. Ориентирование антенны станции производят в положении, совмещенном с продольной осью станции, путем установки на шкалах значения дирекционного угла, снятого с гирокурсоуказателя, а дирекционные углы на ориентиры определяют с помощью оптического визира антенны.
В некоторых случаях топогеодезическая привязка позиции может быть произведена заблаговременно силами расчета (по карте) или топогеодезическими подразделениями (на геодезической основе).
4. Инженерное оборудование позиций (постов)
Инженерное оборудование осуществляется в целях создания благоприятных условий для выполнения поставленных задач, повышения защиты личного состава и техники от
Рис. 33. Укрытие для радиолокационных станций
а-а
средств поражения, обеспечения скрытного расположения и маневра на местности. При этом производятся:
проверка местности на наличие мин;
Рис. 34. Позиция радиотехнического поста:
I — ячейка для радиотелефониста: 2 —• бруствер; 5— щель для личного состава; 4 — аппарель
расчистка секторов наблюдения (обзора);
фортификационное оборудование мест расположения позиций и постов;
подготовка путей передвижения (маневра);
выполнение инженерных мероприятий по маскировке.
Для радиолокационной станции отрываются укрытия (рис. 33). При этом верхняя часть бруствера окопа должна быть ниже нижнего края антенны.
Размеры укрытия для РЛС типа CHAP: а — 350 см, б — 700 см, в — 250 см, hK— 100 см и hep— 60 см. Объем вынутого грунта составляет 32 м3. Для РЛС разведки огневых позиций размеры укрытия следующие: а — 350 см, б — 700 см, в — 350 см, hK—120 см, h6p — 80 см. Объем вынутого грунта— 40 м3.
Для средств радиотехнической разведки оборудуются позиции радиотехнических постов и пункт обработки, совмещенный с одним из постов. На позиции поста (пункта) отрываются окоп для приемопеленгаторной установки (рис. 34), укрытие для автомобиля и перекрытые щели (блиндажи) для личного состава.
Инженерное оборудование позиций (постов) выполняется личным составом подразделений при наличии времени заблаговременно; при занятии неподготовленной позиции (поста) в первую очередь оборудуются щели для личного состава.
Командир подразделения организует инженерное оборудование, указывает характер, последовательность, сроки, выделяемые силы и средства на оборудование позиций.
РАДИОЛОКАЦИОННЫЕ СТАНЦИИ НАЗЕМНОЙ АРТИЛЛЕРИЙСКОЙ РАЗВЕДКИ
Глава V
ПРИНЦИП РАБОТЫ И УСТРОЙСТВО СТАНЦИЙ НАЗЕМНОЙ АРТИЛЛЕРИЙСКОЙ РАЗВЕДКИ
1. Особенности функционирования, назначение, состав и технические характеристики CHAP
Для станций CHAP основными объектами разведки являются танки, бронетранспортеры, автомобили, корабли н другие движущиеся цели, расположенные на поверхности земли или воды. Характерной особенностью наземных целей является то, что они расположены или движутся среди предметов (деревьев, кустарника, строений и т. д.) и неровностей местности (в складках местности, за высотами и т. д.).
Наземные цели, являющиеся объектами разведки станций CHAP, демаскируют себя движением. Как только эти цели начинают двигаться, то соответственно и их отметки на экране индикатора начнут перемещаться. Кроме того, характеристики сигналов, отраженных от движущихся целей и местных предметов, отличаются друг от друга. Эти отличия используются в РЛС для выделения целей на фоне местных предметов.
Независимость работы станций CHAP от времени года, суток и погодных условий в сочетании с другими достоинствами обеспечивает их перспективность для решения ряда важных задач в интересах ракетных войск и артиллерии.
Станция CHAP предназначена для разведки наземных движущихся и надводных целей, а также для обслуживания стрельбы своей артиллерии. Местоположение цели на местности или поверхности воды определяется дальностью до цели Дц и дирекционным углом ац (рис. 35).
С помощью CHAP можно прокладывать маршруты целей, определять места сосредоточения техники для атаки (контратаки) и таким образом выявлять замысел противника в бою.
При расположении станции CHAP на морском побережье возможна разведка как движущихся, так и неподвижных целей (кораблей, десантных средств и т. д.). Разведка неподвижных надводных целей возможна вследствие отсутствия местных предметов на водной поверхности,
Обслуживание стрельбы артиллерии заключается в обнаружении и определении координат разрывов снарядов или их отклонений от цели. Учет измеренных или вычисленных отклонений координат разрывов снарядов от цели позволяет существенно повысить эффективность стрельбы артиллерии.
Рис. 35. Разведка и обслуживание стрельбы станцией CHAP
Обнаружение разрывов снарядов станцией происходит вследствие отражения радиоволн от грунта или воды, выбрасываемых в воздух при взрыве.
С помощью станции CHAP можно также осуществлять вождение колонн и топогеодезическую привязку элементов боевых порядков подразделений артиллерии.
Таким образом, возможности станции CHAP позволяют в интересах ракетных войск и артиллерии решать следующие задачи:
вести эффективную разведку наземных движущихся целей в любое время года и суток, при любых метеорологических условиях, запылении и задымлении атмосферы;
разведывать надводные движущиеся и неподвижные цели, места переправ и высадки морских десантов;
обслуживать стрельбу артиллерии;
осуществлять топогеодезическую привязку элементов боевых порядков артиллерийских подразделений;
осуществлять вождение колонн.
Для решения этих задач в станции CHAP предусмотрен комплекс аппаратуры различного назначения, которая устанавливается на гусеничном тягаче.
В состав CHAP входят: радиолокационная аппаратура, аппаратура навигации и топогеодезической привязки, оптическая система наблюдения и разведки, средства связи и огневой защиты, система жизнеобеспечения и система электропитания.
Радиолокационная аппаратура предназначена для ведения радиолокационной разведки целей и об-
4 Зак. 681 97
служивания стрельбы артиллерии. В ее состав входят системы: передающая, антенио-волноводная, приемная, индикаторная, измерения дальности, стабилизированного местного* гетеродина, автоматической подстройки частоты, селекции движущихся . целей, управления и отсчета, преобразования координат, встроенного контроля и блокировок.
Радиолокационная аппаратура размещена в шкафах и отдельных блоках. Конструктивно аппаратура выполнена в ви-де'четырех крупных узлов.
Аппаратура навигации и топогеодезиче-ской привязки служит для ориентирования станции на местности и определения прямоугольных координат позиций РЛС или ее текущих координат при перемещениях. В ее состав входят гирокомпас, гирокурсоуказатель, курсопрокладчик и буссоль.
Оптическая система наблюдения и разведки обеспечивает ведение оптической разведки при наличии оптической видимости, а также наблюдение за полем боя в заданном секторе разведки и дорожной обстановки при передвижении, в том числе и в ночных условиях. Оптические приборы имеются у каждого номера расчета и позволяют вести наблюдение без выхода из станции.
Средства связи служат для обеспечения связи с артиллерийским подразделением, которому придана станция. В станции имеется танковое переговорное устройство, обеспечивающее связь между номерами расчетов.
Средства огневой защиты предназначены для защиты расчета и аппаратуры станции от сионных и атакующих групп противника, осуществляется пулеметным огнем, огнем гранатами.
Система жизнеобеспечения эффективного боевого применения станции ния современной войны, а также в условиях низких и высоких температур.
Система электропитания служит для питания бортового оборудования и аппаратуры требуемыми напряжениями постоянного и переменного тока. Питание радиолокационной аппаратуры осуществляется автономным агрегатом питания, а бортовых потребителей и вспомогательной аппаратуры— от аккумуляторных батарей.
Основными тактико-техническими характеристиками станции CHAP являются дальность действия, точность определения координат целей и разрывов снарядов, сектор разведки и разрешающая способность.
Дальность действия CHAP выбирается исходя из условий обеспечения своевременного обнаружения наземных и надводных движущихся целей. При этом желательно обнаруживать цели на максимальных дальностях. Однако 98
нападения дивер-Огневая защита из автоматов и
создает условия в условиях веде-’
этому препятствуют не технические возможности радиолокационной аппаратуры, а возможности прямой радиолокационной видимости целен с позиции станции. В условиях пересеченной лесистой местности дальность прямой радиолокационной видимости составляет менее 20 км, а на море — до 30 км и более. Технические возможности радиолокационной аппаратуры станции вполне обеспечивают разведку соответствующих типов целей (танков, бронетранспортеров, автомобилей, кораблей и т. д.) на дальностях не менее дальности прямой радиолокационной видимости.
Дальность обнаружения разрывов снарядов зависит от типа грунта, калибра снарядов, установки взрывателя. Чем более влажный и рыхлый грунт, тем больше его выбрасывается при установке взрывателя на фугасное действие. В воздух выбрасываются куски грунта, размеры которых соизмеримы с длиной волны станции или больше ее и от них хорошо отражаются радиоволны.
На сухом, песчаном, каменистом грунте, на снегу и при установке взрывателя на осколочное действие выброс грунта оказывается незначительным, а размеры частиц грунта — меньше длины волны. В таких условиях отраженные сигналы оказываются очень слабыми и, следовательно, дальность действия станции незначительная.
Очень хорошо отражаются радиоволны от столба воды, поднимающегося в воздух при разрыве снаряда в воде. Поэтому на воде, на влажном и мягком грунте дальность засечки разрывов снарядов среднего калибра может достигать 10 км и более.
Точность определения координат целей и разрывов снарядов оказывает решающее влияние на эффективность стрельбы артиллерии. Однако возможности снижения ошибок определения координат целей и разрывов снарядов ограничиваются техническими возможностями станции. Срединные ошибки определения координат целей станциями CHAP зависят от ряда факторов и в режиме без селекции движущихся целей, как правило, не превышают 10 м по дальности и одного деления угломера по направлению. В режиме селекции движущихся целей ошибки станции увеличиваются В 1,5—2 раза.
Сектор разведки — это сектор 0, в котором сканирует (перемещается) луч станции в горизонтальной плоскости, благодаря чему становится возможным обнаружение целей. В станции CHAP нет необходимости иметь большой сектор разведки, так как станция ведет разведку в определенных районах (районах особого внимания), в которых возможно передвижение техники противника. Исходя из этого в CHAP сектор разведки выбран таким образом, что в зависимости от дальности разведки он имеет ширину от сотен метров до нескольких километров.
е о
Рис. 37. Временные диаграммы станции CHAP:
1—напряжение кварцевого генератора; 2 — импульс запуска передатчика; 3—импульс передатчика; 4 — отраженный радиоимпульс; 5 — радиосигнал на выходе ПУПЧ; б — видеосигнал на выходе приемника; 7 — смещенное по фазе напряжение кварцевого генератора; 8 — измерительный импульс; 9 — видеоимпульс от неподвижной цели; 10— нн-деоимпульс от движущейся цели
В РЛС различают разрешающую способность по дальности и по направлению.
Разрешающая способность по дальности АД— это минимальное расстояние между двумя соседними целями, расположенными на одном направлении, при котором возможно раздельное наблюдение и раздельное сопровождение этих целей.
Разрешающая способность станции по направлению Да — это минимальный угол между двумя соседними целями, расположенными на одинаковой дальности, при котором возможно раздельное наблюдение и раздельное сопровождение этих целей.
Разрешающая способность станции CHAP обеспечивает возможность обнаружения отдельных целей при их передвижении в составе колонн.
Станция CHAP имеет запас хода по топливу 500 км, может передвигаться со скоростью до 60 км/ч и непрерывно работать в течение 12 ч.
2. Принцип работы радиолокационной аппаратуры CHAP
Принцип работы радиолокационной аппаратуры CHAP в режиме без селекции движущихся целей
Радиолокационная аппаратура CHAP может работать в режиме без селекции движущихся целей или в режиме селекции движущихся целей.
Работу радиолокационной аппаратуры CHAP удобно рассмотреть по функциональной схеме (рис. 36), которая отражает состав аппаратуры и основные функциональные связи между системами и блоками.
Основной составной частью радиолокационной аппаратуры является система измерения дальности, которая синхронизирует (согласует) по времени работу всех систем и блоков. Основным элементом системы измерения дальности является высокостабильный кварцевый генератор, задающий начало отсчета времени в радиолокаторе.
При включении системы электропитания кварцевый генератор вырабатывает высокостабильные по времени синусоидальные колебания 1 (рис. 37) частотой около 150 кГц. Один период этих колебаний соответствует одному километру по дальности.
С выхода кварцевого генератора синусоидальные колебания поступают на каналы смещенных и несмещенных импульсов.
Канал несмещенных импульсов вырабатывает ряд импульсов А, В, ..., К, которые служат для запуска и синхронизации по времени работы основных систем станции.
Канал смещенных импульсов формирует импульсы Л, М.... С, служащие для запуска точных разверток индикато-
ров и блока селекции. Эти импульсы смещены по времени относительно начала отсчета времени, задаваемого синусоидальным напряжением кварцевого генератора.
Импульс А с выхода канала несмещенных импульсов системы измерения дальности (СИД) поступает в передающую систему, которая вырабатывает мощный сверхвысокочастотный (СВЧ) импульс 3, поступающий по волноводам к переключателю АНТЕННА — НАСАДКА волноводной системы.
В зависимости от режима работы РЛС переключатель АНТЕННА —НАСАДКА направляет СВЧ энергию передатчика к антенне или в систему скрытой настройки станции.
При работе станции в режиме «Антенна» СВЧ импульс 3 передатчика по волноводам поступает к антенному переключателю ПРИЕМ — ПЕРЕДАЧА. При воздействии СВЧ импульса передатчика переключатель ПРИЕМ — ПЕРЕДАЧА автоматически подключает антенную систему к передатчику и вся энергия по волноводам поступает к антенне. Одновременно СВЧ импульс передатчика по волноводу поступает на поджиг разрядника, который закрывает вход приемной системы и тем самым предохраняет ее от вывода из строя мощным импульсом передатчика.
Антенная система концентрирует СВЧ энергию в узком направленном луче и излучает ее в пространство. Направление луча задается положением антенны, по которому определяются угловые координаты целей (дирекционный угол и угол места).
Отраженный радиоимпульс 4 с частотой /с, которая близка к частоте излученного радиоимпульса, принимается антенной системой и по волноводам поступает к переключателю ПРИЕМ — ПЕРЕДАЧА, автоматически отключающему антенну от передатчика, и подключает ее через разрядник к приемнику. Так как мощность отраженного радиоимпульса значительно меньше мощности радиоимпульса передатчика, то разрядник не поджигается и вся принятая СВЧ энергия по волноводам свободно поступает на смеситель и ПУПЧ приемной системы.
В станции CHAP смесители одного типа установлены на входах приемной системы, системы селекции движущихся целей (СДЦ) и системы автоматической подстройки частоты (АПЧ). Они необходимы для понижения частоты входных радиоимпульсов до значения промежуточной частоты fnp 5, которая в сотни раз меньше частоты входных радиоимпульсов.
На вход смесителя приемной системы кроме принятого радиосигнала поступают СВЧ колебания из системы стабилизированного местного гетеродина (СМГ), причем частота
этих колебаний отличается от частоты радиосигналов, вырабатываемых передатчиком, на значение промежуточной частоты. В результате на выходе смесителя выделяется принятый радиосигнал на промежуточной частоте, который поступает в предварительный усилитель промежуточной частоты (ПУПЧ). В Г1УПЧ осуществляется предварительное усиление принятых радиосигналов 5 на промежуточной частоте, которые затем по кабелю поступают в основной усилитель приемной системы.
метки дальности
Основной усилитель обеспечивает основное усиление принятых радиосигналов на промежуточной частоте, детектирование радиосигналов (выделение огибающей радиосигналов— преобразование радиосигналов в видеосигналы) и усиление видеосигналов (видеоимпульсов) до величины, обеспечивающей нормальную работу индикаторной системы.
Видеосигналы 6 с выхода приемной системы через переключатель Si, который при работе станции в режиме без селекции движущихся целей находится в положении ОТКЛ., поступают на индикатор обнаружения и сопровождения.
Задача разведки целей состоит не только в обнаружении отметок на экране индикатора, но и в измерении их координат— дальности и дирекционного угла.
Для грубого определения координат целей с помощью датчика импульсов дирекционного угла (ДИДУ) на экране индикатора создаются вертикальные масштабные метки дирекционного угла, а с помощью импульсов, поступающих из 104
канала несмещенных импульсов СИД, — горизонтальные масштабные метки дальности, следующие через 1 км (рис. 38).
Точное измерение координат целей осуществляется с помощью индикатора сопровождения, шкал дальности, дирекционного угла и системы управления и отсчета станции.
Для измерения дальности до цели старший оИератор поворачивает рукоятки блока ручного управления (см. рис. 36) на себя или от себя. При этом на выходе блока ручного управления появляется управляющее напряжение, под действием которого начинает вращаться вал электродвигателя дальности. С валом этого электродвигателя механически связаны шкалы дальности и ротор фазовращателя. С выхода фазовращателя снимается смещенное по фазе напряжение 7 (см. рис. 37) кварцевого генератора, причем величина смещения пропорциональна углу поворота рукояток блока ручного управления. Из этого напряжения в канале смещенных импульсов формируется измерительный импульс 8, поступающий в индикатор обнаружения и сопровождения, где из него вырабатывается метка целеуказания (подвижная метка дальности).
Старший оператор удерживает рукоятки блока ручного управления до тех пор, пока метка целеуказания на экране индикатора не совместится с отметкой от цели. При совмещении метки целеуказания с отметкой от цели он считывает дальность до цели со шкал дальности.
Аналогично осуществляется измерение дирекционного угла цели, но старший оператор поворачивает рукоятки блока ручного управления вправо или влево.
Пересечение подвижных меток дальности и дирекционно-гб угла образует электронный визир. Следовательно, точное измерение координат цели осуществляется при совмещении электронного визира с отметкой от цели.
Вращение электродвигателей дальности и дирекционного угла передается в систему преобразования координат, на счетчиках электронного планшета которой происходит набор прямоугольных координат цели х, у.
Для обеспечения нормальной работы приемной системы и системы СДЦ на выходах смесителей этих систем необходимо поддерживать значение промежуточной частоты в заданных пределах. Эту задачу выполняет система автоматической подстройки частоты (АПЧ).
На выход системы АПЧ подается часть энергии СВЧ импульса передатчика через волноводный тракт фазирования и АПЧ, а также напряжение из системы стабилизатора местного гетеродина (СМГ). Если частота сигналов на выходах смесителей приемной системы и системы СДЦ не равна промежуточной частоте, то система АПЧ вырабатывает сигнал ошибки, под действием которого частота сигналов передатчика изменяется до тех пор, пока значение частоты сигналов
на выходах смесителей приемной системы и системы СДЦ не станет равной значению промежуточной частоты.
Система электропитания обеспечивает все системы радиолокационной аппаратуры станции необходимыми питающими напряжениями.
Принцип работы радиолокационной аппаратуры станции в режиме селекции движущихся целей
В режиме СДЦ станция работает так же, как и в режиме без СДЦ, рассмотренном выше. Отличия состоят в следующем.
Так как в режиме СДЦ переключатель Si устанавливается в положение СДЦ (см. рис. 36), то от индикатора обнаружения и сопровождения отключается основной усилитель приемной системы, а подключается система СДЦ, которая обеспечивает подавление сигналов, отраженных от местных предметов или неподвижных целей, и выделение сигналов от движущихся целей.
Селекция движущихся целей основана на использовании отличий в характеристиках радиосигналов, отраженных от неподвижных целей (местных предметов) и движущихся целей, вызванных эффектом Доплера.
Выделение сигналов от движущихся целей осуществляется следующим образом.
Радиосигналы на промежуточной частоте из основного усилителя приемной системы поступают на вход когерентного канала. Для определения начальных фаз отраженных радиосигналов системой СДЦ используется когерентное напряжение, которое поступает на второй вход когерентного канала.
Когерентное напряжение • имеет начальную фазу, равную Начальной фазе СВЧ колебаний, вырабатываемых передатчиком, а следовательно, оно может быть использовано для определения начальных фаз принятых радиосигналов. Если разность начальных фаз СВЧ колебаний передатчика (когерентного напряжения) и отраженных радиоимпульсов в течение ряда периодов следования импульсов станции окажется постоянной, то можно однозначно сказать, что радиосигналы отражаются от неподвижной цели (местного предмета). Если же указанная разность фаз будет изменяться в каждом периоде следования импульсов станции, то принятые радиоимпульсы отражаются от движущейся цели.
Для формирования когерентного напряжения часть СВЧ энергии передатчика через переключатель АНТЕННА—НАСАДКА и волноводный тракт фазирования и АПЧ поступает на смеситель системы СДЦ. На второй вход смесителя подается напряжение из системы СМГ. На выходе смесителя вы
деляется сигнал промежуточной частоты, причем начальная фаза его равна начальной фазе СВЧ колебаний, вырабатываемых передатчиком. Этот сигнал усиливается ПУПЧ и по кабелю подается в когерентный гетеродин, предназначенный для «запоминания» начальной фазы СВЧ колебаний передатчика.
Рис. 39. Экран индикатора обнаружения и сопровождения в режиме «Сектор»:
/ — подвижная метка дирекциоииого угла; 2 ~~ подвижная метка дальности — метка целеуказания (центральная масштабная метка дальности); 3— масштабные метки дальности н дирекционного угла; 4 — отметки от местных предметов; 5 — отметки
от цели
Когерентный гетеродин вырабатывает синусоидальные колебания, промежуточной частоты с начальной фазой, равной начальной фазе СВЧ колебаний передатчика. Эти колебания поступают в когерентный канал, где используются для отсчета начальных фаз принятых станцией сигналов.
В результате сравнения начальных фаз когерентного напряжения и принятых радиосигналов на выходе когерентного канала выделяется несколько видеоимпульсов. Если принятые радиосигналы отражаются от неподвижной цели, то видеоимпульсы будут иметь одинаковую амплитуду 9 (см. рис. 37), а если от движущейся цели, то амплитуды видеоимпульсов 10 будут модулированы частотой Доплера.
С выхода когерентного канала видеоимпульсы 9 или 10 через переключатель S2, находящийся в положении СЕКТОР,
поступают в блок селекции, где видеосигналы от неподвижных целей подавляются и выделяются сигналы только от движущихся целей. Эти сигналы поступают на индикатор обнаружения и сопровождения, на экране которого наблюдаются только отметки от движущихся целей. Измерение координат движущихся целей осуществляется так же, как и в режиме работы станции без СДЦ.
Для определения типа цели (танк, автомобиль, люди и т. д.) старший оператор совмещает электронный визир с отметкой от цели, как показано на рис. 39, и устанавливает переключатель S2 в положение ЛУЧ. При этом исчезает растр на экране индикатора обнаружения и сопровождения появляется радиолокационная картина местности на экране индикатора типа «А» (см. рис. 36).
Видеоимпульсы с выхода когерентного канала через переключатель S2 поступают на индикатор типа «А» и наблюдаются на его экране в виде амплитудных отметок. Отметки от движущихся целей будут как бы «заштрихованы». Отметка от выбранной с помощью электронного визира цели будет находиться на пьедестале развертки, а остальные — вне пьедестала.
Одновременно информация о целях в виде огибающей видеоимпульсов (напряжение с частотой Доплера) поступает на шлемофоны танкового переговорного устройства, где прослушивается в виде звуковых сигналов. По тону и тембру звуковых сигналов старший оператор определяет тип цели, которая наблюдается на пьедестале развертки индикатора типа «А».
3. Назначение, составные части и работа систем CHAP
Передающая система
Передающая система предназначена для преобразования входных видеоимпульсов, поступающих из системы измерения дальности, в мощные сверхвысокочастотные импульсы, используемые для облучения целей.
Рассмотрим принцип работы передающей системы по функциональной схеме (рис. 40).
Основными функциональными элементами передатчика являются магнетронный генератор, подмодулятор (генератор поджига тиратрона), модулятор.
Магнетронный генератор вырабатывает СВЧ импульсы требуемой мощности и длительности.
Подмодулятор (генератор поджига тиратрона) служит для преобразования импульсов запуска передатчика, поступающих из СИД, в положительные прямоугольные импульсы, управляющие работой модулятора.
Модулятор предназначен для формирования импульсов необходимой амплитуды и длительности, которые служат для управления работой магнетрона.
Высоковольтный выпрямитель является источником питания модулятора.
Рис. 40. Функциональная схема передающей системы
Основным элементом модулятора является линия формирования, которая выполняет роль накопительного элемента. Энергия в ней запасается от высоковольтного выпрямителя.
Тиратрон- выполняет роль коммутирующего элемента, подключающего в требуемый момент времени линию формирования к магнетрону.
Зарядный дроссель способствует накоплению большей энергии в линии формирования.
Фиксирующий диод препятствует разряду линии формирования через высоковольтный выпрямитель.
Зарядный диод выполняет роль зарядного сопротивления, шунтирующего магнетрон при накоплении энергии в линии формирования.
Диод-клиппер защищает тиратрон от выхода его из строя после окончания формирования импульса модулятора.
Работа передатчика состоит в следующем. Импульсы за; пуска передатчика из СИД поступают на импульсный транс*
форматор, который осуществляет удвоение амплитуды входных видеоимпульсов. Эти импульсы усиливаются усилителями и поступают на блокинг-геиератор, вырабатывающий короткие прямоугольные импульсы с крутыми фронтами. Сформированные по амплитуде и длительности импульсы усиливаются видеоусилителем и поступают на тиратрон модулятора, а также на узел поджига разрядника волноводной системы.
В промежутках между запускающими импульсами линия формирования заряжается от высоковольтного выпрямителя через зарядный дроссель, фиксирующий диод и зарядный диод. При этом в ней накапливается электрическая энергия, необходимая для работы магнетрона. Благодаря резонансному заряду напряжение на линии формирования увеличивается почти в два раза по сравнению с напряжением высоковольтного выпрямителя, и это напряжение сохраняется до прихода импульса подмодулятора на тиратрон.
В момент поступления импульса с выхода видеоусилителя на тиратрон происходит поджиг тиратрона. Его внутреннее сопротивление уменьшается почти до нуля, и замыкается цепь разряда линии формирования через магнетрон. В линии формирования происходит резонансный разряд, благодаря чему напряжение, приложенное к магнетрону, увеличивается почти в два раза по сравнению с напряжением на линии формирования до начала ее разряда. Следовательно, к магнетрону прикладывается почти учетверенное напряжение высоковольтного выпрямителя.
Под действием импульса модулятора магнетрон генерирует мощный СВЧ импульс, который поступает в волноводную систему и далее антенной системой излучается в пространство.
При разряде линии формирования напряжение на ней уменьшается и тиратрон гаснет. Внутреннее сопротивление тиратрона увеличивается почтй до бесконечности, цепь разряда линии формирования разрывается, и линия снова начинает заряжаться от высоковольтного выпрямителя. С приходом следующего запускающего импульса из СИД работа передатчика повторяется.
Конструктивно передающая система выполнена в виде отдельного блока сборной конструкции и состоит из корпуса генератора и корпуса модулятора.
Внутри литого корпуса генератора расположен магнетрон с выходом волновода в волноводную систему.
Волноводная система
Волноводная система предназначена для передачи СВЧ импульсов передатчика к антенной системе; принятых антенной системой сигналов, отраженных от целей, в приемную
НО
систему; СВЧ колебаний местного гетеродина к смесителям приемного канала, канала СДЦ и канала АПЧ. Кроме того, волноводная система содержит элементы, обеспечивающие скрытую настройку станции и контроль ее параметров.
В состав волноводной системы входят волноводный блок, блок воздушной помпы и узел поджига разрядника (рис. 41).
Волноводный блок содержит каналы: передающий, приемный, скрытой настройки, фазирования и АПЧ, гетеродина, а также элементы встроенного контроля.
Конструктивно волноводный блок выполнен в виде отдельных элементов и узлов, соединенных между собой отрезками волноводов. Волноводный блок крепится в алюминиевом каркасе за сиденьем старшего оператора.
К нижней части волноводного блока крепится узел поджига разрядника.
Канал скрытой настройки обеспечивает настройку приемного и передающего каналов станции без излучения энергии iB пространство. Этим предотвращается возможность прежде-временной разведки станции радиотехническими средствами |Противника.
Блок воздушной помпы предназначен для создания избы-точного давления сухого, чистого воздуха в передающем канале волноводного блока. Это необходимо для предотвращения электрического пробоя волноводов при передаче по ним мощных импульсов передатчика.
Блок воздушной помпы состоит из компрессора, ресивера и манометра, соединенных между собой дюрритовыми шлангами. Ресивер цилиндрической формы служит для аккумуляции сжатого воздуха. С помощью манометра контролируется давление в передающем канале волноводного блока.
При приеме сигналов, отраженных от целей, СВЧ импульсы из антенной системы через переключатель АНТЕННА— НАСАДКА поступают в переключатель ПРИЕМ — ПЕРЕДАЧА и автоматически переводят его в положение ПРИЕМ. Так как разрядник теперь не поджигается, то вся энергия принятого СВЧ импульса через разрядник поступает на смеситель приемника, на второй вход которого поступают СВЧ колебания из канала гетеродина.
Для скрытой настройки станции старший оператор устанавливает переключатель АНТЕННА — НАСАДКА на пульте управления в положение НАСАДКА.
От передатчика энергии через переключатели ПРИЕМ — ПЕРЕДАЧА и АНТЕННА — НАСАДКА поступает в волно-водную нагрузку и объемный резонатор канала скрытой настройки. В волноводной нагрузке поглощается большая часть энергии передатчика. В объемном резонаторе СВЧ импульс возбуждает затухающие колебания. Путем изменения объема резонатора добиваются максимальной длительности колеба-
to
Рис. 41. Функциональная схема волноводной системы
ний в нем (максимальной длительности «звона»). При этом приемный и передающий тракты станции будут настроены оптимальным образом (потеря энергии в них будет минимальной), а станция будет иметь максимальную дальность действия.
Узел поджига разрядника осуществляет поджиг разрядника, который закорачивает вход приемника, т. е. не пропускает мощный СВЧ импульс передатчика в приемную систему, и тем самым защищает ее от выхода из строя.
Рассмотрим принцип работы волноводной системы.
При включении станции автоматически включается компрессор, являющийся основным элементом блока воздушной помпы. С помощью компрессора в передающем канале волноводного блока создается избыточное давление воздуха, которое при работе станции автоматически поддерживается блоком воздушной помпы в пределах 2,0—2,4 кгс/см2.
Сверхвысокочастотный импульс с выхода передатчика по волноводам передающего тракта поступает в переключатель ПРИЕМ — ПЕРЕДАЧА электрического типа и автоматически переводит его в положение ПЕРЕДАЧА, открывая путь к антенной системе. Одновременно часть энергии СВЧ импульса поступает к разряднику, который поджигается импульсами, поступающими из узла поджига разрядника, и шунтирует вход приемной системы. Энергия передатчика по волноводу подается к переключателю АНТЕННА — НАСАДКА.
Управление переключателем АНТЕННА — НАСАДКА электромеханического типа осуществляется тумблером АНТЕННА— НАСАДКА, расположенным на пульте управления станции. При установке тумблера в положение АНТЕННА переключатель АНТЕННА — НАСАДКА переводится в положение АНТЕННА и подключает антенну к передатчику. Через переключатель АНТЕННА — НАСАДКА СВЧ импульс поступает в антенную систему.
Одновременно часть энергии передатчика через канал фазирования и АПЧ поступает к смесителям системы СДЦ и системы АПЧ. На вторые входы этих смесителей из системы СМГ СВЧ колебания поступают через канал гетеродина.
Антенная система
Антенная система предназначена для излучения СВЧ колебаний в пространство узким направленным лучом и приема отраженных от целей СВЧ сигналов.
Антенная система (рис. 42) состоит из механизма сканирования, вращающегося перехода, улитки, металловоздушной линзы, облучающего рупора, отражателя и механизма наведения отражателя.
Антенная система размещается над волноводной системой в кормовой части башни, сверху закрыта бронированным колпаком.
Из Волноводной системы
Рис. 42. Функциональная схема антенной системы
Механизм сканирования обеспечивает вращение вращающегося перехода с излучающим рупором. В результате луч антенной системы сканирует (перемещается) в заданном секторе горизонтальной плоскости с определенной частотой.
Улитка предназначена для преобразования вращательного движения излучающего рупора в возвратно-поступательное движение луча антенны.
Улитка имеет форму усеченного конуса, выполнена из двух расположенных параллельно друг другу алюминиевых листов, между которыми распространяется электромагнитная энергия. К широкой части конуса крепится датчик импульсов дирекционного угла, в котором размещены механизм сканирования и вращающийся переход с излучающим рупором.
I 14
Металловоздушная линза, являясь фокусирующей системой, формирует диаграмму направленности (луч) антенны в горизонтальной плоскости.
Металловоздушная линза при помощи фланцевого соединения закреплена на выходе улитки.
Раскрыв облучающего рупора защищен от попадания пыли и влаги радиопрозрачным материалом.
Для управления положением луча в вертикальной плоскости используется механизм наведения отражателя, который изменяет наклон отражателя в вертикальной плоскости и обеспечивает оптимальное отражение электромагнитной энергии целями в направлении на станцию.
Механизм наведения отражателя размещен под крышкой в кормовой части башни. Основными его элементами являются электродвигатели переброса и наведения, которые поворачивают зубчатый сектор и изменяют наклон отражателя в вертикальной плоскости.
Принцип работы антенной системы заключается в следующем.
Сверхвысокочастотная энергия передающего канала волноводного блока поступает во вращающийся переход. Вращение этого перехода осуществляется электродвигателем сканирования, который является основным элементом механизма сканирования.
Из вращающегося перехода электромагнитная энергия через излучающий рупор распространяется между стенками улитки в виде луча. Из металловоздушной линзы энергия через облучающий рупор поступает на отражатель и излучается в пространство. Облучающий рупор совместно с отражателем формирует луч в вертикальной плоскости.
При приеме СВЧ сигналов, отраженных от целей, электромагнитная энергия проходит элементы антенной системы в обратном порядке. Из вращающегося перехода энергия поступает в приемный канал волноводного блока.
Выбор оптимального положения отражателя осуществляет старший оператор с помощью органов управления, расположенных на пульте управления: переключателя ПЕРЕБРОС — НАВЕДЕНИЕ, кнопок ВЕРХ, ВНИЗ и углоизме-рителя (прибора со шкалой, оцифрованной в градусах). Подъем и опускание отражателя могут осуществляться в режиме «Переброс» с максимальной скоростью. Режим «Переброс» применяется при переводе станции из походного положения в боевое и обратно, режим «Наведение»— для точной установки отражателя в положение, при котором радиолокационная картина местности в заданном районе имеет максимальную яркость на экране индикатора обнаружения.
Система стабилизированного местного гетеродина
Система стабилизированного местного гетеродина (рис. 43) предназначена для генерации высокостабильных во времени СВЧ колебаний, которые необходимы для получения сигналов промежуточной частоты на выходах смесителей приемной системы, системы СДЦ и системы АПЧ.
Рис. 43. Функциональная схема стабилизированного местного гетеродина
Система СМГ состоит из блока местного гетеродина и блока питания местного гетеродина, расположенных над пультом управления и под ним соответственно.
Основным элементом блока местного гетеродина является отражательный клистрон с внешним высокодобротным резонатором.
Для включения системы СМГ старший оператор нажимает кнопку ВКЛ. на передней панели блока питания гетеродина. При этом загорается табло ГЕТЕРОДИН и на блок питания подается первичное напряжение питания 220 В 400 Гц. В каналах— 1500 В, —2000 В и ±6,3 В блока питания вырабатываются напряжения питания клистрона. Под действием этих напряжений клистрон генерирует СВЧ колебания, которые поступают в резонатор и вызывают в нем вынужденные колебания. Резонатор обеспечивает повышение добротности колебательной системы клистрона и тем самым повышает стабильность частоты колебаний, вырабатываемых клистроном.
Собственная частота резонатора может изменяться с помощью механизма перестройки частоты. При этом происхо-116
дит изменение и частоты генерируемых клистроном колебаний СВЧ.
С выхода резонатора СВЧ колебания через ферритовый вентиль и аттенюатор по волноводу поступают в волноводную систему и далее к смесителям приемной системы, системы СДЦ и системы АПЧ.
Блок местного гетеродина конструктивно размещен в сварном алюминиевом шасси. В блоке смонтирована платформа, на которой размещены клистрон и резонатор. Платформа в рабочем положении подвешивается на специальных амортизаторах, ослабляющих воздействие вибраций корпуса станции на клистрон.
Приемная система
Приемная система предназначена для приема, преобразования отраженных от целей сигналов и усиления их до величины, необходимой для нормальной работы индикаторной системы и системы СДЦ.
Преобразование отраженных от целей радиосигналов состоит в понижении их частоты до значения промежуточной частоты и в детектировании сигналов промежуточной частоты.
В станции применен приемник супергетеродинного типа. В состав приемной системы входят узел смесителя и предварительного усилителя.промежуточной частоты, основной усилитель и усилитель низкой частоты канала распознавания.
Рассмотрим принцип работы приемной системы по упрощенной функциональной схеме, приведенной на рис. 44.
Отраженные от целей СВЧ колебания из волноводной системы поступают на вход смесителя приемной системы. Частота этих колебаний равна частоте импульсов передатчика fo (зондирующих сигналов), если отражение происходит от местных предметов и неподвижных целей, или же f0±E„, если сигналы отражаются от движущихся целей.
На второй вход смесителя выдаются СВЧ колебания местного гетеродина из системы СМГ с частотой fr, значение которой отличается от fo на промежуточную частоту fnp. На выходе смесителя выделяются сигналы на промежуточной частоте или же на частоте fnJ>±Fa, которые усиливаются ПУПЧ и по кабелю поступают в основной усилитель.
Если станция работает в режиме без СДЦ, то к индикатору обнаружения и сопровождения будет подключен линейный или логарифмический выход приемника.
При установке переключателя Si в положение ЛИН. основной усилитель работает в линейном режиме (коэффициент усиления изменяется по линейному закону). Принятые сигналы усиливаются в основном УПЧ на промежуточной частоте и поступают в детектор, где осуществляется выделе-
Рис. 44. Функциональная схема приемной системы
ние огибающей этих сигналов. На выходе детектора выделяются видеосигналы, которые усиливаются видеоусилителем и через переключатель Si поступают в индикаторную систему. На экране индикатора обнаружения и сопровождения видеоимпульсы от целей и местных предметов наблюдаются в виде яркостных отметок.
Рис. 45. Временные диаграммы приемной системы
При установке переключателя St в положение ЛОГ, основной усилитель работает в логарифмическом режиме. При. этом коэффициент усиления приемника изменяется по логарифмической зависимости и исключается перегрузка приемника сильными сигналами. Принятые сигналы после усиления в основном УПЧ поступают в логарифмический усилитель, в котором осуществляется усиление и детектирование сигналов промежуточной частоты. Видеоимпульсы с выхода логарифмического усилителя через переключатель Si поступают в индикаторную систему.
При переводе станции в режим СДЦ работает когерентный канал основного усилителя. После усиления принятых сигналов в основном УПЧ они подаются на УПЧ когерентного канала, где дополнительно усиливаются и поступают на выход фазового детектора. На второй вход фазового детек
тора подаются колебания когерентного гетеродина на промежуточной частоте. Начальная фаза этих колебаний равна начальной фазе СВЧ сигналов передатчика.
Фазовый детектор является основным элементом когерентного канала, так как именно в нем осуществляется различие сигналов, отраженных от движущихся и неподвижных целей (местных предметов).
Если цель неподвижна, то на первый вход фазового детектора поступают сигналы на промежуточной частоте fnp с одинаковыми начальными фазами (рис. 45). Если же цель движется, то вследствие эффекта Доплера начальные фазы изменяются от импульса к импульсу. На второй вход фазового детектора поступают высокостабильные колебания когерентного гетеродина.
В результате сравнения начальных фаз принятых сигналов с начальными фазами колебаний корегентного гетеродина на выходе фазового детектора выделяются видеоимпульсы. Если цель неподвижна, то видеоимпульсы имеют постоянную амплитуду (Ед=0), а если цель движется, то видеоимпульсы имеют переменную амплитуду (модулированы частотой Доплера).
Видеоимпульсы с выхода фазового детектора поступают в видеоусилитель и через переключатель S2 (см. рис. 44),находящийся в положении СЕКТОР, поступают в блок селекции и далее на индикатор обнаружения и сопровождения. На экране индикатора будут наблюдаться отметки только от движущихся целей.
При включении режима распознавания переключатель S2 устанавливается в положение ЛУЧ. При этом от выхода когерентного канала отключается блок селекции и подключается усилитель низкой частоты канала распознавания, на который поступают видеоимпульсы с выхода видеоусилителя. С выхода УНЧ канала распознавания низкочастотные колебания поступают на головные телефоны шлемофонов. По тембру и характерной звуковой окраске старший оператор определяет тип движущейся цели.
Конструктивно приемная система выполнена в виде блока приемника и узла смесителя и ПУПЧ.
Система измерения дальности
Система измерения дальности (СИД) предназначена для определения дальности до цели; синхронизации во времени работы передающей, приемной, индикаторной систем и системы СДЦ; выработки масштабных меток дальности и напряжения, пропорционального дальности, для системы преобразования координат.
В состав СИД входят блок измерения дальности и узел редуктора дальности.
В СИД станции применен импульсный метод измерения дальности.
За начало отсчета времени t3 принимается такая фаза эталонного напряжения, при которой формируется импульс
Рис. 46. Функциональная схема системы измерения дальности
запуска передатчика. В качестве эталонного напряжения, определяющего начало отсчета времени t3, используется стабильное во времени синусоидальное напряжение частотой 150 кГц, вырабатываемое кварцевым генератором (рис. 46)'. Это напряжение и j узла редуктора дальности поступает в узел формирования калибрационных меток, где формируют
ся импульсы масштабных меток дальности для индикатора обнаружения и сопровождения, а также импульсы запуска индикатора типа «А».
Импульсы километровых меток из узла формирования калибрационных меток поступают на узлы формирования частоты следования, запускающих импульсов и задержанных импульсов. Тем самым обеспечивается жесткая привязка по фазе импульсов, вырабатываемых в указанных узлах, к эталонному напряжению частотой 150 кГц.
Узел формирования частоты следования вырабатывает отрицательные прямоугольные импульсы с частотой следования импульсов станции. Эти импульсы поступают в узел формирования запускающих импульсов, в котором вырабатываются импульсы запуска передатчика, схемы временной регулировки усиления (ВРУ), запуска и срыва когерентного гетеродина системы СДЦ.
В узле формирования задержанных импульсов вырабатываются импульсы запуска блока селекции и развертки индикатора обнаружения и сопровождения. Эти импульсы так же жестко привязаны по фазе к эталонному напряжению. Задержка импульсов запуска развертки индикатора обнаружения й сопровождения осуществляется на ’время, соответствующее выбранному масштабу обзора местности на индикаторе обнаружения.
Для измерения дальности до цели старший оператор вращает штурвал дальности на блоке управления. При этом поворачивается ротор фазовращателя и с его выхода снимается синусоидальное напряжение кварцевого генератора, которое отличается от эталонного сдвигом по фазе. Величина фазового сдвига пропорциональна углу поворота штурвала дальности. Из этого напряжения в узле формирования подвижных меток вырабатываются импульсы подвижных километровых меток, использующиеся для создания километровых меток на индикаторе сопровождения. Импульсы подвижных километровых меток одновременно поступают на узлы формирования подвижного строба и подвижных импульсов.
В узле формирования подвижного строба вырабатывается отрицательный прямоугольный импульс, поступающий в узел формирования подвижных импульсов. При совпадении по времени подвижного строба с одним из импульсов подвижных километровых меток вырабатывается импульс метки целеуказания, задержка которого по времени относительно эталонного напряжения определяется углом поворота штурвала дальности.
В узле формирования подвижных импульсов вырабатываются также импульсы запуска точной развертки индикатора сопровождения и стробирования приемника,
Индикаторная система
Индикаторная система предназначена для визуального наблюдения отметок от целей и местных предметов и определения дальности до целей.
В состав индикаторной системы (рис. 47) входят датчик импульсов дирекционного угла (ДИДУ), индикатор обнаружения и сопровождения и индикатор типа «А» — контрольный осциллограф.
Рис. 47. Функциональная схема индикаторной системы
Датчик импульсов дирекционного угла содержит ряд генераторов, с помощью которых вырабатываются импульсы запуска и срыва развертки дирекционного угла для индикатора обнаружения и сопровождения, а также импульсы для формирования центральной, масштабных и подвижной меток дирекционного угла. Кроме того, в ДИДУ вырабатывается импульс останова для двигателя сканирования.
Индикатор обнаружения и сопровождения предназначен для наблюдения яркостных отметок от целей и местных предметов, а также для грубого и точного определения координат целей. Грубое определение координат целей осуществляется с помощью масштабных меток дальности и дирекционного угла, а точное — путем совмещения электронного визира с отметкой от цели.
Основными частями индикатора обнаружения и сопровождения являются каналы развертки дальности, дирекцион-
ной развертки подвижной метки дирекционного угла и подсвечивающих импульсов, а также электронно-лучевая трубка (ЭЛТ) и видеоусилитель. -
При поступлении запускающего импульса из СИД в канале развертки дальности формируется напряжение, под действием которого электронный луч ЭЛТ прочерчивает на экране строку снизу вверх. Одновременно из канала подсвечивающих импульсов поступает импульс подсвета, обеспечивающий визуальное наблюдение следа электронного луча на экране ЭЛТ. При обратном ходе электронного луча импульс подсвета не поступает на ЭЛТ и след луча не наблюдается.
Запуск и срыв канала дирекционной развертки осуществляются импульсами запуска и срыва, поступающими из ДИДУ. В канале дирекционной развертки формируется пилообразное напряжение, под действием которого происходит отклонение электронного луча слева направо при прочерчивании им строки дальности. На экране ЭЛТ наблюдается прямоугольный растр (светящиеся строки дальности).
Формирование масштабных меток и подвижных меток дальности и дирекционного угла осуществляется за счет дополнительной подсветки соответствующих строк дальности.
Формирование яркостных отметок от целей и местных предметов, наблюдаемых на экране индикатора обнаружения и сопровождения, осуществляется при помощи канала видеоусилителя.
На прямоугольной пластине из оргстекла, защищающей ЭЛТ, нанесена координатная сетка. Цена большого деления координатной сетки по дальности — 200 м, по дирекционному углу — 50 малых делений угломера; малого деления—100 м и 25 делений угломера соответственно. Координатная сетка используется при обслуживании стрельбы артиллерии.
Индикатор типа «А» предназначен для визуальной индикации формы сигнала сопровождаемой цели в режиме распознавания (режим работы станции — «Луч») и для контроля формы и значения напряжений на контрольных гнездах блоков и систем станции. При этом индикатор может работать в одном из двух режимов: в режиме «Работа» осуществляется наблюдение сигналов от движущихся целей при их распознавании, а в режиме «Контроль» (ждущ., автокод., ЧПК, ИФ)—наблюдение сигналов в характерных точках станции при ее контроле и настройке.
В режиме «Контроль» индикатор работает как обычный контрольный осциллограф. В режиме «Работа» на экране индикатора формируется линейная развертка с пьедесталом. На вход индикатора поступают видеоимпульсы от целей из системы СДЦ, которые формируют амплитудные отметки. Для распознавания типа цели отметку от нее совмещают 124
с Пьедесталом, при зтом в шлемофонах будут прослушивать* ся звуки от этой цели. Отметка от движущейся цели имеет размытый вид.
Система селекции движущихся целей
Система селекции движущихся целей предназначена для выделения (селекции) сигналов от движущихся целей и подавления сигналов от местных предметов.
Рис. 48. Функциональная схема системы селекции движущихся целей
Принцип действия системы СДЦ основан на использовании эффекта Доплера.
В станциях CHAP используется когерентно-импульсный метод селекции с внутренней когерентностью. Сущность его состоит в сравнении фазы отраженных от цели сигналов с фазой опорных когерентных колебаний, жестко привязанных к моменту излучения импульсов передатчика.
Система СДЦ (рис. 48) состоит из узла смесителя и ПУПЧ канала фазирования, когерентного канала основного усилителя приемника, когерентного гетеродина, блока селекции умножителя.
Рассмотрим принцип работы системы СДЦ по упрощенной функциональной схеме.
Часть энергии сигнала передатчика с частотой /о (зондирующий импульс) поступает на смеситель канала фазирования, куда одновременно поступают СВЧ колебания из системы СМГ. На выходе смесителя выделяется сигнал промежуточной частоты, который после усиления предварительным усилителем промежуточной частоты поступает на когерентный гетеродин и навязывает ему свою фазу, т. е. когерентный гетеродин «запоминает» фазу сигнала, вырабатываемого передатчиком.
С выхода когерентного гетеродина когерентное напряжение в качестве опорного поступает на фазовый детектор когерентного канала основного усилителя приемной системы.
Отраженные сигналы поступают на второй вход фазового детектора, в котором происходит «сравнение» фаз сигналов, принятых от целей и местных предметов, с фазой опорного напряжения когерентного гетеродина.
Видеоимпульсы, поступающие из фазового детектора, усиливаются видеоусилителем и через контакты 5, 4, 3, 2 реле подаются в блок селекции, где осуществляется подавление сигналов, отраженных от местных предметов и неподвижных целей, и выделение сигналов от движущихся целей. С выхода блока селекции видеосигналы поступают на индикатор обнаружения и сопровождения. На его экране наблюдаются отметки только от движущихся целей.
При включении режима распознавания целей станцией замыкаются контакты 5, 6 реле и видеоимпульсы с выхода когерентного канала поступают на индикатор типа «А» для наблюдения формы сигналов и усилитель низкой частоты (УНЧ) канала распознавания для прослушивания «звуков» целей в шлемофонах.
При обнаружении медленно движущихся целей эффективность работы системы СДЦ снижается вследствие уменьшения частоты Доплера. Это может привести к тому, что медленно движущаяся цель будет принята станцией за неподвижную (местный предмет).
Для повышения надежности обнаружения медленно движущихся целей в системе СДЦ предусмотрен режим умножения, обеспечивающий умножение частоты отраженных от цели сигналов и частоты когерентного гетеродина на постоянный коэффициент. Это приводит и к умножению на этот же коэффициент частоты Доплера. Тем самым повышается надежность обнаружения медленно движущихся целей.
В режиме умножения отраженные от цели сигналы и напряжение когерентного гетеродина поступают на умножители, а затем на вход фазового детектора умножителя системы СДЦ. На выходе фазового детектора выделяется последовательность видеоимпульсов, которая отличается от рассмотренной выше (в режиме без умножения) только частотой Доплера. После усиления видеоимпульсов в видеоусилителе умно-
жителя они поступают через контакты 1, 2 реле (УМНОЖЕНИЕ) в блок селекции и далее на индикатор обнаружения и сопровождения.
Узел смесителя и ПУПЧ канала фазирования аналогичен узлу смесителя и ПУПЧ приемного канала и расположен справа от него.
Система автоматической подстройки частоты
Система автоматической подстройки частоты предназначена для обеспечения стабильности частоты излучаемого сигнала путем автоматической подстройки частоты магнетрона под частоту СВЧ колебаний местного гетеродина.
Рис. 49. Функциональная схема системы автоматической подстройки частоты
Система АПЧ (рис. 49) состоит из усилителя промежуточной частоты, механизма перестройки частоты магнетрона и сервоусилителя.
Принцип работы системы АПЧ заключается в сравнении частоты колебаний магнетрона с эталонной частотой, в качестве которой используется частота колебаний местного гетеродина, и в изменении частоты колебаний магнетрона с целью уменьшения расстройки. Для этого на входы смесителя УПЧ подаются сигналы передатчика и сигналы из системы СМГ. На выходе смесителя выделяются сигналы с ча
стотой /м—fr, где fn — частота колебаний магнетрона и fr — частота колебаний местного гетеродина.
При включении станции разность частот fM — fr, как правило, не равна значению промежуточной частоты fnp и находится вне полосы пропускания ПУПЧ. Напряжение на выходе детектора УПЧ отсутствует. Включается в работу усилитель поиска, и система АПЧ осуществляет поиск частоты. Механизм перестройки частоты магнетрона перемещает шток магнетрона до тех пор, пока разность частот fM — fr не окажется в полосе пропускания УПЧ. С этого момента начинается процесс стабилизации частоты магнетрона.
На выходе смесителя УПЧ выделяются сигналы с частотой, близкой к значению fnp. Эти сигналы усиливаются’предварительным усилителем и поступают на частотный дискриминатор. В зависимости от величины и направления отклонения частоты сигналов от значения fnp на выходе частотного дискриминатора выделяются видеоимпульсы положительной или отрицательной полярности переменной амплитуды. Эти видеоимпульсы усиливаются в видеоусилителе, детектируются и в виде сигнала ошибки поступают в сервоусилитель.
Под действием этого сигнала механизм перестройки частоты магнетрона перемещает шток магнетрона до тех пор, пока не будет выполнено условие fM — fr=fnP. Как’только сигнал ошибки станет равным нулю, система АПЧ прекратит изменение частоты колебаний магнетрона. В дальнейшем система АПЧ автоматически поддерживает стабильной частоту колебаний магнетрона.
В системе АПЧ предусмотрена также и ручная подстройка частоты, которая осуществляется соответствующими органами управления.
Система уп.равления и отсчета
Система управления и отсчета предназначена для наведения станции на цель по направлению и дальности, определения координат цели и коммутации режимов работы станции.
В состав системы входят блок ручного управления, сервоусилитель, механизм отсчета, редуктор привода башни и блок управления.
Система может работать в режиме управления станцией по направлению («Визир» и «Башня») и наведения станции на цель по дальности.
В режиме «Башня» осуществляется поворот башни в направлении на цель. Потенциометр направления блока ручного управления запитывается напряжением +27 В и является датчиком угла поворота башни (рис. 50). При повороте рукояток блока ручного управления влево или вправо с движка потенциометра снимается управляющее напряжение. Усиленное по мощности в сервоусилителе, оно поступает на элек-
тродвигатель редуктора привода башни, который разворачивает башню, а вместе с ней и антенну станции в направлении на цель. При отпускании рукояток блока ручного управления они возвращаются в нейтральное положение, а разворот башни прекращается.
блок
управления
Электро-1 двигатель [ дальности ------------
Шкалы дальности
Рис. 50. Функциональная схема системы управления и отсчета
В режиме «Визир» башня не вращается, а осуществляется перемещение подвижной метки дирекционного угла (визира) в пределах сектора разведки.
При повороте рукояток блока ручного управления управляющее напряжение с потенциометра направления поступает в сервоусилитель и подается на электродвигатель визира. При вращении вала электродвигателя поворачиваются роторные обмотки сельсинов-датчиков, с которыми электрически связаны сельсины-приемники. На валах сельсинов-приемников закреплены шкалы грубого и точного отсчета (ГО и ТО) дирекционного угла. Одновременно с поворотом шкал дирек-
Циойного угла ГО и ТО осуществляётся Перемещение подвижной метки дирекционного угла на экране индикатора обнаружения и сопровождения.
Для наведения станции в цель по дальности старший оператор поворачивает рукоятки блока ручного управления на себя или от себя. Управляющее напряжение с движка потенциометра дальности усиливается и запитывает электродвигатель дальности, на валу которого установлены шкалы дальности грубого и точного отсчета. Одновременно с поворотом шкал дальности осуществляется перемещение метки целеуказания (подвижной метки дальности) на экране индикатора обнаружения и сопровождения.
Для быстрого наведения станции на цель по направлению и дальности используется режим переброса. В этом режиме при повороте рукояток блока ручного управления до упора вращение башни и перемещение подвижных меток дальности и дирекционного угла осуществляется с повышенной скоростью.
Вращение башни может осуществляться и вручную при помощи рукоятки редуктора привода башни.
Система преобразования координат
Система преобразования координат предназначена для автоматического преобразования полярных координат целей Ди, йц, определяемых станцией, в прямоугольные координаты Хи, Уч-
Система преобразования состоит из планшета, элементов блоков отсчета и управления.
Исходными данными для работы системы преобразования координат (СПК) являются прямоугольные координаты позиции станции хп, уп и дирекционный угол продольной оси машины «оси, которые определяются при топогеодезической привязке станции.
При определении координат целей с помощью рукояток блока ручного управления совмещают на экране индикатора обнаружения и сопровождения электронный визир с отметкой от цели. При этом полярные координаты цели Дц, йц поступают в СПК в виде механических угловых перемещений относительно координат позиции хп, уп. Эти угловые перемещения преобразуются СПК в приращения к прямоугольным координатам позиции и суммируются с ними.
При наведении станции в цель по дальности электродвигатель наведения (рис. 51) вращает шкалы дальности, а вместе с ними и ротор линейного вращающегося трансформатора (ЛВТ) дальности. С ЛВТ дальности снимается переменное напряжение, значение которого пропорционально дальности до. цели. ЛВТ компенсации обеспечивает устранение неоднозначности зависимости амплитуды напряжения дальности от угла поворота ЛВТ дальности.
I3Q
С выхода ЛВТ напряжение компенсации, пропорциональное изменению дальности, подается на синусно-косинусный вращающийся трансформатор (СКВТ) башни. При повороте башни поворачивается ротор СКВТ башни, и с его статорной обмотки снимаются управляющие напряжения Ux, Uy, поступающие в планшет.
Рис. 51. Функциональная схема системы преобразования координат
В режиме «Визир» к напряжениям, снимаемым со СКВТ башни, добавляется напряжение, снимаемое со СКВТ визира.
Управляющие напряжения, пропорциональные дальности до цели и дирекционному углу цели, поступают на следящие системы X, Y, которые перемещают светоуказатель планшета и вращают счетчики X, Y, показывающие текущие прямоугольные координаты цели.
Система встроенного контроля
Система встроенного контроля предназначена для контроля и изме'рения основных технических параметров радиолокационной аппаратуры: постоянных питающих напряжений, 1/8б* 131
гока магнетрона и тока высоковольтного выпрямителя передатчика. С помощью сигнальных лампочек система обеспечивает визуальный контроль необходимой последовательности включения блоков и узлов станции. Система обеспечивает определение и контроль средней мощности передатчика, коэффициента шума приемного тракта, несущей частоты передатчика, токов смесителей и других характеристик радиолокационной аппаратуры. Она также осуществляет блокировку при включении станции и блокировку включения передатчика. Включение радиолокационной аппаратуры возможно только в определенной последовательности.
Система встроенного контроля включает измеритель мощности передатчика, генератор шума и пульт управления генератором шума, измеритель несущей частоты передатчика, частотомер, узел измерения токов смесителей, пульт контроля напряжения 220 В 400 Гц, поворотный аттенюатор и контрольно-измерительную аппаратуру.
Система представляет собой совокупность коммутирующих, сигнализирующих и контрольных устройств, размещенных в пульте управления, шкафу отметчиков, шкафу питания и в башне станции.
Система электропитания
Система электропитания предназначена для получения однофазного напряжения 220 В частотой 400 Гц и постоянных напряжений, необходимых для питания радиолокационной аппаратуры.
Первичным источником питания является агрегат питания АМ-4, а вторичными источниками — выпрямительные устройства, обеспечивающие питание радиолокационной аппаратуры всеми необходимыми напряжениями.
Агрегат питания АМ-4 автоматизированного типа, имеет дистанционный и местный запуск. Дистанционный запуск осуществляется механиком-водителем с пульта дистанционного управления (в том числе и во время движения станции) от аккумуляторной батареи. Местный запуск производится нажатием кнопки ПУСК или вручную с помощью педали. Регулировку напряжения, вырабатываемого агрегатом питания, осуществляет старший оператор с помощью органов управления пульта установки напряжения 220 В 400 Гц.
Блок питания вырабатывает в основном стабилизированные выпрямленные напряжения.
Контрольно-измерительная аппаратура и ЗИП станции
Контрольно-измерительная аппаратура позволяет контролировать основные характеристики станции, наблюдать и измерять параметры сигналов в характерных точках блоков и 132
узлов станции. К ней относятся контрольный осциллограф, узел измерения токов смесителей, пулы контроля напряжения 220 В 400 Гц, частотомер, вольтметры, миллиамперметры, комбинированный прибор и др.
Контрольный осциллограф служит для визуального наблюдения формы сигналов (эпюр напряжений) при контроле и настройке станции. Он выполнен в одном блоке с индикатором типа «А» и может работать в режимах «Работа» и «Контроль» (ждущ., автокод., ЧПК, ИФ), которые устанавливаются переключателем рола работы.
В режиме «Работа» блок служит для наблюдения формы сигналов и их выбора при распознавании целей.
В режиме «Контроль ждущ.» канал развертки осциллографа запускается синхронизирующими импульсами любой полярности, которые подаются на гнездо ВХОД СИНХР. блока. Исследуемый сигнал подается на гнездо ВХОД У.
В режиме «Контроль автокод.» развертка осциллографа создается специальной схемой и внешний синхронизирующий импульс не требуется.
В режимах «Контроль ЧПК» и «Контроль ИФ» просматриваются сигналы, подаваемые с блока череспериодной компенсации, или импульс фазирования с выхода когерентного гетеродина.
Для исключения перегрузки осциллографа сильными входными сигналами осуществляется их ослабление в 10, 35, 100 или 1000 раз с помощью переключателя, имеющего положения 1:10, 1 :35, 1 : 100, 1 : 1000.
Узел измерения токов смесителей служит для контроля работоспособности смесителей приемного канала и канала фазирования, а также для регулировки коэффициента усиления усилителя промежуточной частоты канала фазирования.
Контроль силы токов смесителей осуществляется с помощью двух миллиамперметров, а регулировка коэффициента усиления— соответствующими потенциометрами УСИЛЕНИЕ Ф.
Пульт контроля напряжения 220 В 400 Гц предназначен для точной установки напряжения 220 В 400 Гц, вырабатываемого агрегатом питания, в различных климатических условиях.
Контроль напряжения 220 В осуществляется по микроамперметру пульта. Если напряжение агрегата питания отличается от 220 В, то стрелка микроамперметра отклоняется от нулевого положения.
Установка напряжения 22С В осуществляется в два этапа. На первом этапе переключатель ИЗМЕРЕНИЕ устанавливается в положение ГРУБО и ручкой потенциометра РЕГУЛИРОВКА 220 В 400 Гц пульта управления стрелка микроамперметра устанавливается в положение (40±1)мкА. На втором этапе переключатель ИЗМЕРЕНИЕ устанавливается
в положение ТОЧНО и той же ручкой потенциометра РЕГУЛИРОВКА 220 В 400 Гц стрелка микроамперметра устанавливается в нулевое положение—(0±1) мкА. После этого входное напряжение будет равно 220 В.
После точной установки напряжения 220 В переключатель ИЗМЕРЕНИЕ переводится в положение ВЫКЛ.
Частотомер предназначен для измерения частоты синусоидального сигнала (частоты некогерентности) при контроле работоспособности системы СДЦ.
В частотомере осуществляется преобразование синусоидального напряжения в импульсное и измерение среднего значения импульсного тока, сила которого пропорциональна измеряемой частоте.
Комбинированный прибор типа Ц-4313 предназначен для измерения напряжения, силы тока, значений сопротивлений и емкостей конденсаторов. В нем совмещены функции вольтметра, амперметра и омметра, что позволяет осуществлять оперативный контроль напряжений в контрольных гнездах, а также производить измерения при ремонте, настройке и регулировке станции.
Контрольно-измерительные приборы, кроме того, установлены:
1. В пульте управления:
вольтметр 220 В 400 Гц для контроля наличия и значения напряжения 220 В 400 Гц, поступающего от агрегата питания на вход радиолокационной аппаратуры;
миллиамперметр ТОК СМЕСИТЕЛЯ АПЧ для контроля силы тока смесителя, установленного в системе автоматической подстройки частоты;
миллиамперметр ТОК ВЫПРЯМ.Х4 — ТОК М для контроля силы токов выпрямителя передатчика и магнетрона;
вольтметр для измерения выпрямленных напряжений в блоках питания;
микроамперметр РАССТРОЙКА РПЧ для контроля работоспособности системы АПЧ.
2. В основном усилителе приемной системы — микроамперметр ТОК АД для измерения силы тока на выходе амплитудного детектора.
3. В волноводной системе—микроамперметр для измерения мощности передатчика.
4. В башне—малогабаритный индикатор (мегаомметр) для измерения сопротивления изоляции в цепи 220 В 400 Гц.
5. В пульте управления генератором шума — микроамперметр.
6. В пульте управления — индикатор положения отражателя антенны.
Станции комплектуются одиночным и групповым комплектами ЗИП. Одиночный комплект ЗИП придается каждой станции, а групповой — один комплект на две станции, 134
Одиночный комплект ЗИП состоит из ЗИП транспортера-тягача, ЗИП радиолокационной аппаратуры и ЗИП комплектующих приборов и агрегатов (гирокомпаса, радиостанции, агрегата питания и др.). Он делится на возимую часть, размещенную в станции, и невозимую часть, хранящуюся на складе. Комплектность и места укладки ЗИП указаны в ведомостях комплекта ЗИП и инструкции по использованию ЗИП, имеющейся на каждой станции.
Невозимая часть одиночного комплекта ЗИП размещена в 16 ящиках. В каждой упаковке имеется упаковочный лист, в котором указаны перечень и раскладка ЗИП в данной упаковке.
Возимая часть одиночного комплекта ЗИП станции упакована в восьми ящиках, двух пеналах, металлической коробке и 11 сумках.
Места размещения возимого одиночного комплекта ЗИП: комбинированный прибор и ящик № 1—в каркасе под передатчиком;
ящик № 8 с документацией, паяльником, припоем и сумка № 2 с переносной лампой — под сиденьем начальника станции;
сумка № 6 с инструментом — на задней панели ограждения двигателя;
ящик № 2 с ЗИП аппаратуры станции и ящик № ЗсЗИП агрегата питания — на задней перегородке моторного отсека;
сумка № 8 с ЗИП гирокурсоуказателя и рентгенометра — на задней панели ограждения двигателя;
ЗИП курсопрокладчика — на левой стенке моторного отсека;
ящик № 7 с документацией и ЗИП аппаратуры станции, сумка № 1 с кабелями — под сиденьем старшего оператора;
ЗИП транспортера-тягача — в моторном н трансмиссионном отсеках.
Наиболее часто используемые элементы ЗИП размещены в следующих местах:
ключ для открывания люков — в сумке № 2 под сиденьем начальника станции;
ключи для открывания замков и вытаскивания блоков, отвертки — в нише шкафа с радиолокационной аппаратурой;
карандаш-стеклограф—на первой тумбе шкафа с радиолокационной аппаратурой;
щетка-сметка — на стенке башни слева от начальника станции.
Остальные, более подробные сведения об одиночном комплекте ЗИП указаны в Инструкции по использованию одиночного комплекта ЗИП.
4. Включение, проверка и выключение СНЛР
Включение и выключение станции
Включение и выключение радиолокационной аппаратуры станции должны производиться в строгой последовательности. Нарушение этой последовательности, а также нейтрализация блокировок приводят к преждевременному износу аппаратуры, выходу ее из строя, а в некоторых случаях —к авариям и поражению обслуживающего персонала электрическим током.
Включение аппаратуры необходимо производить в такой последовательности.
1. После пуска агрегата питания проверить сопротивление изоляции в цепи 220 В 400 Гц с помощью мегаомметра. Для этого нажать кнопку прибора и проверить его показания. Прибор должен показывать сопротивление не менее 2 МОм. Если показания прибора меньше 2 МОм, то станцию включать запрещается.
2. На пульте управления последовательно установить в верхнее положение выключатели СТАНЦИЯ, СМЕЩЕНИЕ, АНОДНОЕ НАПРЯЖЕНИЕ. После включения каждого выключателя должно подсвечиваться соответствующее табло.
Указанными выключателями на аппаратуру подаются необходимые питающие напряжения, за исключением высокого.
3. Через 2—3 мин после включения выключателя СМЕЩЕНИЕ на пульте управления загорается табло ГОТОВ ВЫСОКОЕ.
Для включения высокого напряжения необходимо нажать кнопку ВКД. под табло ВЫСОКОЕ. При этом должно под-светиться табло ГОТОВ ВЫСОКОЕ, а миллиамперметр должен показывать определенное значение тока магнетрона.
Если эти признаки включения высокого напряжения отсутствуют (табло гаснет, а прибор показывает 0 при отпускании кнопки ВКЛ.), то необходимо повернуть по ходу часовой стрелки ручку потенциометра РЕГУЛИРОВКА ТОКА М на 0,5—1 оборот и повторить включение передатчика.
Причинами невозможности включения передатчика могут быть:
выключатель ГЕНЕРАТОР — ОТКЛ. на пульте управления находится в положении ОТКЛ.;
да вление в блоке воздушной помпы меньше 2 кгс/см2 (0,2 МПа);
переключатель пульта управления генератором шума находится в положении ГШ.
Признаками полного включения станции являются: наличие растра на экране индикатора типа «В» и линейной развертки на экране индикатора типа «А»;
прослушивание звука вентилятора и «щелкающего» звука двигателя сканирования.
Выключение станции необходимо производить в обратном порядке.
1. Выключить передатчик нажатием кнопки ОТКЛ. под табло ВЫСОКОЕ.
2. Обеспечить аппаратуру последовательной установкой выключателей АНОДНОЕ НАПРЯЖЕНИЕ, СМЕЩЕНИЕ, СТАНЦИЯ в нижнее положение.
3. Выключить агрегат питания.
В аварийных случаях (при пожаре, появлении запаха гари, дыма и при поражении током кого-либо из расчета) допускается выключение аппаратуры выключателем СТАНЦИЯ.
Передатчик может быть выключен отдельно от остальной аппаратуры путем установки выключателя ГЕНЕРАТОР — ОТКЛ. в положение ОТКЛ.
Проверка станции перед боевой работой
После включения аппаратуры без высокого напряжения и установки напряжения 220 В 400 Гц необходимо проверить по прибору НАПРЯЖЕНИЕ пульта управления наличие и значения постоянных питающих напряжений путем установки переключателя в указанные на пульте положения и контроля показаний прибора.
Проверку систем станции целесообразно проводить в следующем порядке:
1. Система СМГ:
установить переключатель РАБОТА — ПОХОД блока гетеродина в положение РАБОТА;
включить гетеродин нажатием кнопки ГЕТЕРОДИН ВКЛ. (если гетеродин не включается автоматически);
вращением ручки НАПРЯЖЕНИЕ ОТРАЖАТЕЛЯ ТОЧНО блока питания гетеродина добиться максимального показания прибора ТОК СМЕСИТЕЛЯ АПЧ на пульте управления.
2. Система управления и отсчета:
расстопорить башню, оттянув рукоятку стопора на себя и развернув ее на 90°;
установить блок ручного управления в рабочее положение и, поворачивая его рукоятки влево (вправо), наблюдать вращение башни в автоматическом режиме (при этом должны вращаться шкалы дирекционного угла);
отклонить рукоятки блока ручного управления на себя (от себя) и проконтролировать вращение шкал дальности;
установить режим «Визир» путем нажатия кнопки ВИЗИР— БАШНЯ до загорания табло ВИЗИР;
повернуть рукоятки блока ручного управления влево (вправо) и проконтролировать вращение шкал дирекционного угла (башня при этом вращаться не должна);
установить режим «Башня».
3. Антенная система:
установить переключатель ПЕРЕБРОС — НАВЕДЕНИЕ на пульте управления в положение ПЕРЕБРОС;
нажать кнопку ВВЕРХ и проконтролировать подъем отражателя антенны по загоранию табло АНТЕННА СНЯТА С ОПОР;
при достижении нулевого показания прибора УГЛОИЗ-МЕР. установить переключатель ПЕРЕБРОС — НАВЕДЕНИЕ в положение НАВЕДЕНИЕ и, поочередно нажимая кнопки ВНИЗ и ВВЕРХ, наблюдать перемещение стрелки прибора УГЛОИЗМЕР. (стрелка прибора перемещается только при нажатой кнопке). Установить нулевое показание прибора.
4. Блок цикличности:
на пульте управления установить переключатели АНТЕННА-НАСАДКА в положение АНТЕННА, а ЦИКЛИЧНОСТЬ— ОТКЛ. в положение ЦИКЛИЧНОСТЬ;
по загоранию и погасанию табло АНТЕННА убедиться в цикличном режиме аппаратуры;
аналогичную проверку провести при всех положениях переключателей АНТЕННА и НАСАДКА блока цикличности.
После проверки переключатели АНТЕННА — НАСАДКА и ЦИКЛИЧНОСТЬ — ОТКЛ. установить в положение НАСАДКА и ОТКЛ. соответственно.
5. Индикаторная система.
После загорания табло ГОТОВ ВЫСОКОЕ на пульте управления необходимо:
установить режим «Сектор», при этом гаснет табло ЛУЧ, включается двигатель сканирования и появляется растр на экране индикатора обнаружения и сопровождения;
ручками ЯРКОСТЬ и ФОКУСИРОВКА отрегулировать яркость и фокусировку растра, при этом на экране индикатора на масштабах 0—10, 8—18 и 16—26 должны наблюдаться пять меток дирекционного угла и 11 меток дальности, а также электрический визир (в режиме «Визир»);
ручками ВВЕРХ — ВНИЗ, ВЛЕВО — ВПРАВО отрегулировать положение растра на экране индикатора по рискам обрамления;
поочередно переключать масштабы, при этом на 26-километровых масштабах должны наблюдаться шесть меток дальности, на масштабе ±2 КМ'—пять меток дальности, на всех масштабах — пять меток дирекционного угла и должны загораться соответствующие табло масштабов;
при установке переключателя МАСШТАБНЫЕ МЕТКИ — ОТКЛ. в положение ОТКЛ. масштабные метки дальности и дирекционного угла должны исчезать;
ручками ЯРКОСТЬ, ФОКУС добиться четкой линейной развертки с пьедесталом на экране индикатора типа «А» при установке переключателя РОД РАБОТЫ в положение РАБОТА. В положении этого переключателя КОНТРОЛЬ АВТОКОЛ. на экране должна наблюдаться линейная развертка, положение которой на экране регулируется ручками (влево — вправо, вверх — вниз).
6. Приемная система:
вращать ручки РРУ ШТ основного усилителя и ВИДЕО индикатора обнаружения и сопровождения. На экране индикатора должны наблюдаться шумы, уровень которых будет меняться при вращении этих ручек;
установить указанными ручками хорошо наблюдаемый уровень шумов;
установить переключатель ЛИНЕИН. — ЛОГ. основного усилителя в положение ЛОГ. На экране индикатора должны наблюдаться шумы, но интенсивность их уменьшится;
установить переключатель ВРУ ВКЛ. в верхнее положение и вращать ручку ПОСТ. ВРЕМЕНИ ВРУ вправо, при этом участок дальности в начале растра, на котором интенсивность шумов меньше, чем на остальном участке дальности, должен увеличиваться;
повернуть ручку ПОСТ. ВРЕМЕНИ ВРУ в крайнее левое положение;
установить переключатель СДЦ — ОТКЛ. индикатора обнаружения и сопровождения в положение СДЦ, при этом на экране индикатора должны наблюдаться шумы, уровень которых должен регулироваться ручкой РРУ СДЦ. Эту проверку нужно провести в обоих положениях переключателя УМНОЖ—ОТКЛ. основного усилителя.
7. Передающая система:
после включения передатчика установить ручкой РЕГУЛИРОВКА ТОКА М на пульте управления по прибору ТОК ВЫПРЯМ.Х4 — ТОК М значение тока, указанного в формуляре станции, при этом на масштабе 0—10 в начале растра высвечивается зондирующий импульс в виде светлой полосы;
установить переключатель ТОК ВЫПРЯМ.Х4— ТОК М в положение ТОК ВЫПРЯМ.Х4 и проконтролировать силу тока высоковольтного выпрямителя по прибору ТОК ВЫ-ПРЯМ.Х4 — ТОК М, который должен быть в пределах 55—90 мА.
Аналогичные проверки необходимо провести на второй частоте следования. Сила тока высоковольтного выпрямителя должна быть в пределах 30—50 мА;
установить масштаб 0—10, а переключатель ТОК ВЫ-ПРЯМ-Х4 — ТОК М р положение ТОК М.
8. Система СДЦ:
установить переключатель РОД РАБОТЫ контрольного осциллографа в положение КОНТРОЛЬ ИФ, а переключатель ВХОД Y в положение 1 : J;
установить переключатель ДЛИТ. РАЗВ. контрольного осциллографа в положение 2—10, при этом на экране контрольного осциллографа должен просматриваться фазирующий импульс — четкий и неразмытый;
включить масштаб ±2 и установить зондирующий импульс на средине экрана индикатора обнаружения и сопровождения;
вращением микрометрической головки резонатора добиться появления «звона», наблюдаемого как увеличение зондирующего импульса (светлой полосы) на экране индикатора обнаружения и сопровождения;
установить переключатель СДЦ — ОТКЛ. индикатора обнаружения и сопровождения в положение СДЦ;
ручкой РРУ СДЦ установить уровень шумов, удобный для наблюдения, при этом на экране индикатора интенсивность «звона» относительно шумового фона должна значительно уменьшиться по сравнению со «звоном» в режиме без СДЦ;
установить переключатель ПРЕОБРАЗОВ. — ОТКЛ. основного усилителя в положение ПРЕОБРАЗОВ, и вращать ручку ЧАСТОТА НЕКОГЕР. до получения максимальной интенсивности «звона».
9. Система АПЧ:
вращать ручку НАПРЯЖЕНИЕ ОТРАЖАТЕЛЯ ТОЧНО .блока питания гетеродина до нулевого показания прибора ТОК СМЕСИТЕЛЯ АПЧ пульта управления;
по наличию колебательного движения шкалы потенциометра узла подстройки частоты магнетрона (расположен на передатчике) убедиться в том, что система АПЧ перешла в режим поиска;
вращать ручку НАПРЯЖЕНИЕ ОТРАЖАТЕЛЯ ТОЧНО до максимального показания прибора ТОК СМЕСИТЕЛЯ А.ПЧ и по прекращению колебательного движения шкалы потенциометра убедиться в том, что система АПЧ перешла в режим стабилизации частоты.
10. Аппаратура распознавания:
установить режим «Луч», при этом на экране индикатора обнаружения и сопровождения развертка должна отсутствовать, а на экране индикатора типа «А» должны просматриваться шумы;
установить переключатель РАСПОЗНАВАНИЕ — ОТКЛ. (на потолке башни) в положение РАСПОЗНАВАНИЕ;
поворачивая рукоятки блока ручного управления на себя (от себя), совместить сигнал «звона» с пьедесталом на экране индикатора типа «А» и прослушать в шлемофонах звуко-140
выё сигналы. Громкость сигналов должна регулироваться ручкой ГРОМКОСТЬ, а высота тона — ручкой ЧАСТОТА НЕКОГЕР. основного усилителя;
установить режим «Сектор» и отключить переключатель РАСПОЗНАВАНИЕ.
В заключение следует проверить радиолокационную аппаратуру на излучение, для чего необходимо:
установить переключатель АНТЕННА — НАСАДКА пульта управления в положение АНТЕННА;
развернуть башню в направлении разведки (местных предметов) и нажатием кнопки ВВЕРХ (ВНИЗ) добиться появления на экране индикатора обнаружения и сопровождения отметок от местных предметов;
органами управления приемника (РРУ ШТ, ВРУ, ПОСТ. ВРЕМЕНИ ВРУ, МПВ) и индикатора (ВИДЕО, ЯРКОСТЬ) добиться наблюдения четких отметок от местных предметов при слабом уровне шумов;
включить режим СДЦ, при этом отметки от местных предметов должны исчезнуть или слабо наблюдаться на фоне шумов;
установить переключатель ПРЕОБРАЗОВ. — ОТКЛ. основного усилителя в положение ПРЕОБРАЗОВ, и, вращая ручку ЧАСТОТА НЕКОГЕР., добиться максимальной интенсивности отметок от местных предметов;
включить режим цикличной работы аппаратуры, при этом иа экране индикатора отметки от местных предметов должны появляться на время, примерно равное значению, указанному на табличке АНТЕННА блока цикличности;
выключить режим цикличной работы аппаратуры. Станция готова к боевой работе.
Работа при то п ог еодезичес к ой привязке позиции станции
Топопривязка Позиции станции состоит в определении прямоугольных координат позиции и ориентировании станции. Эти задачи обычно решаются с помощью собственной навигационной аппаратуры. Для этого на начальной точке (точке местности с известными прямоугольными координатами) определяют дирекционный угол Продольной оси машины, вводят его и прямоугольные координаты начальной точки хи, Уп в курсопрокладчик, включают навигационную аппаратуру и выдвигаются в указанный район. По прибытии на Позицию с курсопрокладчика снимают значения прямоугольных координат хп, Уп и дирекционного угла продольной оси Машины и вводят эти данные В радиолокационную аппаратуру.
Если протяженность маршрута более 3 км, то в пути или йа позиции проводят контрольное определение дирекционного угла продольной оси Машины.
Наибольшую трудность при топопривязке позиции станции представляет определение дирекционного угла продольной оси машины, т. е. ориентирование станции. Оно может осуществляться одним из трех способов: с помощью гирокомпаса, по удаленным ориентирам или с помощью буссоли.
Ориентирование станции по удаленным ориентирам имеет достаточную точность и требует меньших затрат времени по сравнению с ориентированием с помощью гирокомпаса. Однако в этом случае необходимо знать дирекционные углы с точки стояния станции на 1—2 удаленных ориентира (более 1000 м) с точностью до 0-01.
Ориентирование по удаленным ориентирам может производиться при наличии и отсутствии оптической видимости.
При наличии оптической видимости ориентирование производится с помощью прибора ТВ-240 в следующем порядке.
Устанавливают станцию на точку с известными координатами (на начальную точку или на позицию) и горизонти-руют ее. Вращением башни вручную совмещают перекрестие сетки оптического прибора ТВ-240 с ориентиром, включают преобразователь напряжения ПО В 400 Гц БС и с помощью юстировочного узла на шкалах дирекционного угла устанавливают значение дирекционного угла на ориентир по методике, изложенной в памятке расчету станции.
Если станция находится на позиции, то на этом ориентирование заканчивается.
Если станция установлена на начальной точке, то для определения дирекционного угла продольной оси машины после установки дирекционного угла на ориентир на шкалах включают подсветку рисок СОВМЕЩЕНИЕ ОСЕЙ, вращением башни совмещают эти риски и со шкал дирекционного угла считывают значение дирекционного угла продольной оси машины.
При отсутствии оптической видимости ориентирование производится с помощью радиолокационной аппаратуры. Для этого разворачивают башню в сторону ориентира, поднимают отражатель антенны до нулевого показания прибора УГЛОИЗМЕР. пульта управления и включают станцию с высоким напряжением. На шкалах дальности устанавливают приближенное значение дальности до ориентира и включают масштаб ±2. Наклоном отражателя антенны и ручками РРУ ШТ основного усилителя и ВИДЕО индикатора обнаружения и сопровождения добиваются четкой отметки от ориентира на экране индикатора. Вращением башни совмещают отметку от ориентира с центральной меткой дирекционного угла.
Если станция установлена на позиции, то ее ориентирование заканчивается установкой дирекционного угла на ори-142
ентир на шкалах дирекционного угла с помощью юстировочного узла.
Если станция находится на начальной точке, то дирекционный угол продольной оси машины считывают со шкал дирекционного угла после совмещения рисок СОВМЕЩЕНИЕ ОСЕЙ.
Для повышения точности ориентирования целесообразно провести контроль ориентирования по второму ориентиру.
Ориентирование с помощью буссоли является менее точным по сравнению с описанными выше и может применяться только в тех случаях, если неисправен гирокомпас и нет ориентирных направлений на удаленные ориентиры.
Ориентирование с помощью буссоли производится следующим образом.
После установки и горизонтирования станции на позиции пли на начальной точке устанавливают буссоль на расстоянии 40—50 м от станции (при размещении станции на позиции буссоль устанавливается в сторону своих войск от станции). Справа от буссоли на расстоянии 44 см устанавливают веху и вращением башни совмещают вертикальную линию сетки прибора ТВ-240 с центром изображения вехи. Буссолью измеряют дирекционный угол на центр отражателя антенны (измеряют угол на один край отражателя, а потом на второй и рассчитывают полусумму полученных углов). Измеренный буссолью угол изменяют на 30-00 и с помощью юстировочного узла устанавливают полученное значение на шкалах дирекционного угла.
Если станция находится на начальной точке, то после совмещения рисок СОВМЕЩЕНИЕ ОСЕЙ значение дирекционного угла продольной оси машины считывают со шкал дирекционного угла.
5. Особенности устройства ПСНР
По сравнению со станциями CHAP переносные станции наземной разведки (ПСНР) обладают худшими тактико-техническими характеристиками, однако позволяют эффективно вести разведку на дальностях до 8—10 км.
По принципу построения ПСНР подобны станциям CHAP, а за счет применения современной элементной базы и упрощения конструкции обладают малыми габаритами и массой, что обеспечивает их переноску двумя солдатами.
Обнаружение движущихся наземных целей осуществляется в ПСНР за счет использования эффекта Доплера.
Сигнал передающей системы подается в антенну и излучается в пространство узким лучом (рис. 52). Отраженный сигнал обрабатывается в приемной системе так же, как в станции CHAP. После амплитудного детектирования и усиления сигнал в режиме «Без СДЦ» поступает на электроннолучевой индикатор.
В режиме СДЦ сигнал после фазового детектирования подается на стробируемый УНЧ, где усиливается огибающая доплеровской частоты, и на систему СДЦ. Система СДЦ построена по канально-фильтровой схеме аналогично РЛС разведки и обслуживания стрельбы. С выхода системы СДЦ сигнал поступает на электронно-лучевой индикатор.
Рис. 52. Функциональная схема станции CHAP
Измерение дальности до цели осуществляется по звуковой индикации и по сигналам на экране индикаторной системы. В первом случае сигнал доплеровской частоты с УНЧ поступает на звуковой индикатор только при совпадении строб-импульса системы дальности с видеоимпульсом фазового детектора. Во втором случае строб-импульс совмещается с отметкой от цели. Перемещение строб-импульса осуществляется штурвалом дальности, имеющим шкалу дальности.
Управление положением антенны, совмещенной с приемопередатчиком, осуществляется системой управления антенной, которая может работать в ручном режиме и автоматическом секторном поиске.
Измерение азимута направления на цель осуществляется поворотом антенны приемопередатчика до получения максимальной амплитуды отметки цели на индикаторе или максимальной громкости сигнала в головных телефонах с последующим отсчетом показаний азимутальной шкалы.
Глава VI
БОЕВОЕ ПРИМЕНЕНИЕ СТАНЦИЙ НАЗЕМНОЙ АРТИЛЛЕРИЙСКОЙ РАЗВЕДКИ
1. Обязанности расчета CHAP при ведении разведки
В процессе ведения разведки движущихся наземных и надводных целей с помощью станции расчет устанавливает факт наличия цели, определяет ее полярные и прямоугольные координаты, тип и состав цели, а также характеристики ее движения (скорость, направление, глубину групповой цели). Кроме того, начальник станции прокладывает на карте маршруты движения целей и определяет районы сосредоточения техники противника.
Для ведения разведки станции назначаются секторы разведки и районы особого внимания, определяемые с учетом возможности обзора местности и дорог в расположении противника, особенно на наиболее вероятных направлениях его выдвижения и атак или контратак. Кроме основного сектора разведки и района особого внимания может назначаться 1—2 дополнительных сектора разведки и района особого внимания.
В процессе ведения разведки начальник станции совместно со старшим оператором сличает радиолокационное изображение местности с картой. Наблюдая в оптический прибор характерные местные предметы, начальник станции отыскивает их на карте, подводит к ним светоуказатель планшета и совместно со старшим оператором опознает на экране индикатора отраженные от них сигналы. При отсутствии оптической видимости начальник станции и оператор сравнивают радиолокационное изображение местности с картой и определяют, какие участки местности и местные предметы просматриваются с позиции станции.
На основании результатов сличения начальник станции уточняет участки местности, на которых возможно наблюдение целей, и дает соответствующие указания старшему оператору. Старший топогеодезист при ведении разведки поддерживает радиосвязь со старшим артиллерийским начальником, в распоряжении которого находится станция, принимает и передает начальнику станции команды и распоряжения.
Механик-водитель следит за стабильностью работы агрегата питания; проводит осмотр ходовой части, двигателя
машины и агрегата питания; устраняет обнаруженные неисправности и поддерживает машину в готовности к движению.
Старший топогеодезист и механик-водитель могут также осуществлять охрану станции.
Задачу на ведение разведки расчет обычно получает от старшего артиллерийского начальника, которому придана станция. Исходя из полученной задачи, начальник станции определяет необходимые данные и подает команду старшему оператору, в которой указывает режимы работы, основное направление разведки и район особого внимания, например: «Разведка, излучение 3, пауза 10, масштаб 10, 45-00, особое внимание 5—7 км, режим СДЦ».
Старший оператор выполняет команду начальника станции и докладывает все данные по мере их установки. Основное направление разведки устанавливается поворотом башни и выставлением на шкалах дирекционного угла, равного 45-00, а затем включается режим «Визир». Район особого внимания устанавливается выставлением на шкалах дальности значения, равного 6 км.
После выполнения команды старший оператор докладывает о готовности и наблюдает за экраном индикатора обнаружения.
При обнаружении цели старший оператор докладывает начальнику станции: «Есть цель» — и делает отметку на стекле индикатора карандашом-стеклографом.
Начальник станции командует: «Наблюдать за целью» — и отмечает положение цели на карте.
Старший оператор рукоятками блока ручного управления совмещает электронный визир с отметкой от цели (при обнаружении колонны техники электронный визир совмещается с головой колонны), считывает со шкал полярные координаты, определяет состав цели (количество отметок в групповой цели), направление ее движения и тип цели с помощью аппаратуры распознавания. Результаты наблюдения докладывает начальнику станции, например: «Колонна танков, 10 отметок, глубина 500, движется влево, приближается, 45-32, 6800».
Начальник станции докладывает старшему артиллерийскому начальнику об обнаруженной цели, например: «Есть цель. Колонна танков, 10 отметок, глубина 500, движется влево, приближается, 25840, у — 84240». При наличии оптической видимости уточняет состав и характер цели в танковый визир. Получив от старшего артиллерийского начальника указание на сопровождение цели, командует: «Сопровождать цель». Наблюдает за светоуказателем планшета и фиксирует на карте маршрут движения цели.
По команде «Сопровождать цель» старший оператор переключает индикатор на масштаб сопровождения и рукоятками блока ручного управления удерживает электронный ви-146
зир йа отметке of цели. При пропадании сигнала от цели, йё смещая электронного визира, докладывает: «Цель потеряна».
Начальник станции изучает по карте последнее зафиксированное положение цели и местность в этом районе и определяет причину пропадания отметки от цели. Причинами пропадания отметки от цели на экране индикатора могут быть остановка цели, движение цели с малой скоростью и движение цели в поле невидимости (в лесу, складках местности и т. д.). Для выяснения причины пропадания сигнала от цели начальник станции командует: «Вести разведку в режиме без СДЦ».
Старший оператор выключает режим СДЦ и отыскивает отметку от цели в точке, где она исчезла. Если сигнал от цели не наблюдается, то считают, что цель находится на ненаблюдаемом участке. Если же отметка от цели наблюдается, то продолжают вести наблюдение за целью в непрерывном режиме.
Если сопровождаемая цель находится на ненаблюдаемом участке, то, зная направление движения, начальник станции определяет по карте место, в районе которого цель должна появиться, подводит светоуказатель планшета к этому месту и приказывает старшему оператору вести наблюдение. Если по истечении предполагаемого времени прохождения целью ненаблюдаемого участка отметка от нее не появится, то считают, что цель остановилась на ненаблюдаемом участке.
При появлении другой цели начальник станции докладывает об этом старшему артиллерийскому начальнику и действует в соответствии с его указаниями.
Для прокладки маршрута движения цели производится ее засечка в отдельных точках движения. Для этого начальник станции командует: «Внимание», а через 3—5 с — «Стоп».
Старший оператор переходит на непрерывный режим работы и по команде «Стоп» прекращает сопровождение цели на время, пока начальник станции отмечает положение цели на планшете и считывает прямоугольные координаты цели, а затем считывает и докладывает полярные координаты цели.
Начальник станции записывает полярные и прямоугольные координаты цели в журнал разведки и обслуживания стрельбы, докладывает их артиллерийскому начальнику и отмечает положение цели на карте.
2. Обязанности расчета CHAP при обслуживании стрельбы артиллерии
Создание наземных (надводных) реперов
Исходными данными для расчета станции при создании репера являются его полярные координаты относительно позиции станции и полетное время снаряда с огневой позиции 14?
до репера. Получив эти данные 01 стреляющего, начальник станции подает команду старшему оператору на обслуживание репера, например: «Репер, 45-00, 4800, полетное 35», и отмечает на карте положение репера.
Старший оператор в режиме «Башня» устанавливает на шкалах дирекционного угла и дальности блока управления координаты репера, включает штатный режим работы, масштаб сопровождения, режим «Визир» и докладывает о готовности к обслуживанию создания репера.
При получении команды «Выстрел» с огневой позиции начальник станции запускает секундомер и за 5 с до окончания полетного времени снаряда командует: «Засечь разрыв».
Старший оператор отыскивает отметку от разрыва на экране индикатора сопровождения в районе электронного визира, отмечает его положение на стекле индикатора карандашом-стеклографом, совмещает сначала центральную масштабную метку дальности, а затем подвижную метку дирекционного угла с отметкой от разрыва и докладывает, например: «Есть разрыв, 45-15, 4850».
Для повышения точности определения дальности до разрыва совмещение центральной масштабной метки дальности с отметкой от разрыва необходимо осуществлять ручкой ДАЛЬНОСТЬ на блоке управления.
Начальник станции докладывает стреляющему координаты разрыва и записывает их в журнал разведки и обслуживания стрельбы.
Аналогично осуществляется засечка центра группы разрывов при залпе.
Если по истечении полетного времени снаряда старший еператор не наблюдал разрыв, то начальник станции докладывает об этом стреляющему.
Старший топогеодезист и механик-водитель при обслуживании стрельбы артиллерии выполняют те же обязанности, что и при ведении разведки целей.
Пристрелка неподвижной цели
При пристрелке неподвижной цели обязанности номеров расчета CHAP аналогичны обязанностям при создании репера. Основное отличие состоит в том, что старший оператор Определяет не полярные координаты разрывов, а их отклонения от цели по дальности и направлению. Для определения отклонений разрывов от цели используется координатная сетка, нанесенная на стекле индикатора сопровождения.
Получив команду на обслуживание пристрелки цели, старший оператор в режиме «Башня» совмещает электронный Визир с отметкой от цели, считывает и докладывает полярные координаты цели. При этом электронный визир должен быть совмещен с центром координатной сетки.
При появлении отметки от разрыва старший оператор отмечает его положение на стекле индикатора карандашом-стеклографом, определяет отклонение разрыва от цели по координатной сетке и докладывает результаты наблюдения, например: «Есть разрыв, недолет 100, вправо 15». Эти данные начальник станции докладывает выполняющему огневую задачу, а координаты разрыва записывает в журнал разведки и обслуживания стрельбы.
Отклонение центра группы разрывов при залпе также определяется с помощью координатной сетки.
1 Стрельба по движущейся цели
В процессе ведения разведки с помощью станции CHAP осуществляется обнаружение движущихся целей и определение параметров их движения. -После обнаружения движущейся цели начальник станции докладывает время обнаружения, характер цели, полярные координаты головы колонны, направление, скорость движения и глубину колонны, например: «Есть цель, 2.00, колонна танков, 10 отметок, глубина 600, движется влево, приближается, скорость 20 км/ч, 14-30, 7600».
Выполняющий огневую задачу принимает решение на открытие огня и определяет маршрут движения цели. Если цель движется не по намеченному заранее маршруту, то производится засечка цели в отдельных точках маршрута описанным выше способом. На основании данных засечки цели станцией выполняющий огневую задачу определяет точку встречи снарядов с целью для открытия огня и сообщает начальнику станции полярные координаты точки встречи относительно CHAP н полетное время снарядов.
До момента получения начальником станции предупреждения «Выстрел» старший оператор сопровождает цель, удерживая электронный визир на отметке от головы колонны.
Получив предупреждение «Выстрел», начальник станции Запускает секундомер и приказывает старшему оператору установить на шкалах дирекционного угла и дальности полярные координаты точки встречи и за 5 с до конца полетного времени командует ему: «Засечь разрывы».
По команде начальника станции об установке полярных Координат точки встречи старший оператор Прекращает сопровождение цели, включает станцию на режим непрерывной работы и устанавливает на шкалах дирекционный угол И дальность до цели.
При появлении отметок от разрывов на экране индикатора Старший оператор отмечает положение центра группы разрывов первого залпа карандашом-стеклографом, совмещает ЗЛектронный визир с целью и определяет по координатной Сетке отклонение центра группы разрывов от цели. Резуль-
таты наблюдения Докладывает Начальнику станции, напри* мер: «Есть разрывы, недолет 200, влево 20». Если старший оператор не наблюдал отметки о г разрывов, то он докладывает об этом начальнику станции, а также о действиях цели во время обстрела. При последующих залпах старший оператор действует аналогично.
Получив данные о засечке первого залпа, начальник станции передает их выполняющему огневую задачу и записывает в журнал разведки и обслуживания стрельбы. Если разрывы первого залпа не наблюдались, докладывает об этом стреляющему, а также о действиях цели и ее положении относительно точки встречи (цель может остановиться, рассредоточиться по дальности и увеличить скорость, повернуть и т. д.).
Дальнейшие действия начальника станции и старшего оператора будут определяться складывающейся тактической обстановкой и решением старшего артиллерийского начальника. Расчету может быть поставлена задача на продолжение обслуживания стрельбы, наблюдение за действиями цели или на обнаружение и сопровождение других целей.
3. Особенности работы CHAP в условиях помех
Помехи могут затруднить или вообще исключить возможность ведения радиолокационной разведки с помощью CHAP.
Наибольшую опасность представляют активные помехи, специально создаваемые противником с помощью станций активных помех или специальных передатчиков помех. Основным видом активных помех являются шумовые помехи, которые вызывают засветку экрана индикатора и тем самым затрудняют или исключают обнаружение отметок от целей.
Пассивные помехи создаются местными предметами и неровностями местности или с Помощью уголковых отражателей или специальных масок (проволочных сеток). Они могут маскировать участки дорог, перекрестки, переправы и т. д.
Следует подчеркнуть, что военное руководство капиталистических государств в планах подготовки войны против СССР и других стран социализма придает исключительно важное значение подавлению радиоэлектронных средств, в том числе и РЛС, с Помощью специально создаваемых помех. Для Создания помех имеется на вооружении большое количество разнообразных станций и специальных передатчиков помех, разрабатываются и новые, более эффективные средства постановки помех. С помощью этих средств, по мнению некоторых западных специалистов, могут быть решены не только важные тактические, но и оперативные задачи путем полного подавления и нарушения работы наших радиоэлектронных средств.
Поэтому все лица, занимающиеся эксплуатацией РЛС, должны уметь в полном объеме использовать возможности, 150
заложенные в станциях, для защиты от всех видов помех и недопущения срыва выполнения боевых задач.
Простейшими способами, позволяющими снизить эффективность воздействия активных и пассивных помех на станцию CHAP, являются тщательная настройка всех систем станции; изменение угла места отражателя антенны; изменение усиления приемника; использование логарифмического режима работы приемника, схемы временной регулировки усиления и цепей малой постоянной времени; регулировка яркости изображения на экране индикатора; изменение масштаба развертки. Если, например, источник помех находится на большой дальности, а разведка осуществляется на меньшей дальности, то путем наклона отражателя антенны, уменьшением усиления приемника, изменением масштаба развертки и регулировкой яркости изображения на экране индикатора можно добиться существенного ослабления или исключения воздействия помех на работу станции.
Однако следует отметить, что простейшие способы защиты станции от помех являются неэффективными при постановке противником активных шумовых помех, так как они могут вызывать сплошную засветку экрана индикатора.
Для защиты станции CHAP от помех расчет должен использовать специальные меры, позволяющие существенно повысить помехоустойчивость станции. Включение системы СДЦ, например, обеспечивает надежную защиту станции от пассивных помех, в том числе и создаваемых противником для маскировки участков дорог и других объектов.
При применении противником сплошных масок (сеток) используется высокая маневренность станции. Для нее отыскивают такую позицию, с которой наиболее успешно решается задача обнаружения целей на замаскированной местности.
На работу станции могут оказывать влияние соседние работающие станции. Для уменьшения влияния помех от соседних станций наряду с другими мерами могут использоваться защитные свойства местности и быстрая смена позиции.
Применение тех или иных мер защиты от помех осуществляется начальником станции, исходя из конкретной обстановки и по согласованию с артиллерийским начальником, которому придана станция.
4. Особенности боевого применения ПСНР
Особенности боевого применения ПСНР по сравнению со станциями CHAP определяются ее штатной принадлежностью и размещением в районе взводных опорных пунктов.
При выборе позиции следует учитывать необходимость тщательной маскировки станции с помощью маскировочной
сети, веток, кустов, высокой травы. Влажная маскировочная сеть ухудшает работу ПСНР. При размещении станции в окопе нижняя плоскость приемопередатчика должна располагаться выше верхней кромки бруствера на 20 см.
Возможности боевого применения ПСНР могут быть расширены за счет разнесения приемопередатчика и пульта управления и индикации на расстояние до 25 м.
Вместе с тем аналогично станциям CHAP позиция ПСНР должна в любом случае обеспечивать прямую видимость участка разведки.
РАДИОЛОКАЦИОННЫЕ СТАНЦИИ РАЗВЕДКИ ОГНЕВЫХ ПОЗИЦИЙ
Глава VII
ПРИНЦИП РАБОТЫ И УСТРОЙСТВО РАДИОЛОКАЦИОННЫХ СТАНЦИИ РАЗВЕДКИ ОГНЕВЫХ ПОЗИЦИЙ
1. Назначение, состав и характеристики РЛС разведки огневых позиций
Радиолокационная станция разведки огневых позиций и обслуживания стрельбы предназначена для разведки огневых (стартовых) позиций стреляющих орудий, минометов, реактивных систем залпового огня, тактических ракет противника и обслуживания стрельбы (пусков ракет) своих аналогичных средств.
Аппаратура станции скомпонована в стойки и блоки и включает:
систему управления;
антенно-волноводную систему (АВС);
передающую и приемную системы;
систему измерения дальности (СИД);
систему селекции движущихся целей (СДЦ);
индикаторную систему;
систему управления антенной (СУА);
цифровое вычислительное устройство (ЦВУ);
систему съема и преобразования координат (СПК).
Для обеспечения радиолокационной аппаратуры питающими напряжениями имеется система источников питания, а для контроля работоспособности узлов и блоков аппаратуры и их настройки — система встроенного контроля. Примерная структурная схема РЛС представлена на рис. 53. (На схеме цифрами обозначены виды импульсов и напряжений, проходящих по электрическим цепям. См. рис. 54.)
2. Принцип работы РЛС разведки огневых позиций
Для решения основной задачи—определения координат огневой (стартовой) позиции при ведении разведки (режим «Р») либо координат точки разрыва при обслуживании стрельбы (режим «К») цель должна быть обнаружена на траектории, захвачена и сопровождена в заданное время.
Соответственно основными режимами работы аппаратуры являются:
поиск цели в заданном секторе (режим «Поиск»);
захват обнаруженной цели следящими системами (режим «Захват»);
сопровождение цели с последующим решением задачи экстраполяции (режим «Пеленг»).
Рис. 53. Функциональная схема РЛС разведки огневых позиций
При поиске цели луч антенны сканирует в горизонтальной плоскости в заданном секторе, создавая «радиолокационное поле». Ширина сектора поиска находится в пределах 25—30°. Частота сканирования луча выбрана равной 10 Гц, что обеспечивает надежное обнаружение целей.
Обнаружение цели осуществляется визуально старшим оператором на экране индикатора поиска. Затем старший оператор полуавтоматически или вручную обеспечивает захват отраженного сигнала следящими системами по дальности, углу места и азимуту, после чего радиолокационная аппаратура (РЛА) производит автоматическое сопровождение цели.
При сопровождении цели сканирование луча прекращается и следящие системы отслеживают движение цели по траектории моноимпульсным методом. При этом измеряются дальность до цели, ее угол места и дирекционный угол, которые поступают в ЦВУ для обработки. По достижении заданного времени сопровождения (при обслуживании стрель-154
бы — угла укрытия) ЦВУ вырабатывает команду на йрекра-щение сопровождения и начинается процесс вычислений для определения координат огневой позиции (точки разрыва).
Синхронизацию работы систем РЛА и ЦВУ осуществляет СИД. Для этого ею вырабатываются запускающие импульсы 1 (рис. 54) с периодом повторения Тп, которые одновременно запускают:
Рис. 54. Временные диаграммы:
1 — запускающий импульс; 2 — зондирующий импульс; 3 — отраженный импульс; 4 — опережающий импульс; 5— отраженный импульс, выделенный из помех; 6 — видеоимпульс
передающую систему;
приемную систему;
Индикаторную систему;
систему съема и преобразования координат.
С их приходом передающая система вырабатывает моЩ* ные радиоимпульсы 2, которые поступают в антенно-волноводную систему, обеспечивающую направленное излучение электромагнитной энергии на несущей частоте в виде узкого луча шириной 2°.
Отраженные от цели импульсы 3 принимаются антенной и по волноводному тракту поступают в приемную систему. Их частота в силу эффекта Доплера изменяется на величину ±РЛ, что используется для селекции движущихся целей на фоне местных предметов и пассивных помех в системе СДЦ. Для защиты приемной системы во время излучения мощного импульса передатчика она закрывается опережающим сигнал 2 на 6,7 мкс импульсом 4.
Приемник РЛС является супергетеродинным, и основное усиление сигнала происходит после преобразования его по частоте на промежуточной частоте fnp. Затем в зависимости от того, в каком режиме работает РЛС—с селекцией движущихся целей (режим «СДЦ») или без нее (режим «Без СДЦ»), осуществляется детектирование сигнала фазовым или амплитудным детектором.
В режиме «СДЦ» сигналы 5 с выхода фазового детектора поступают на систему СДЦ и после отделения сигналов от пассивных помех—на индикаторную систему и СИД для осуществления автосопровождения целей по дальности и обеспечения измерения ее в системе СПК.
В режиме «Без СДЦ» амплитудный детектор производит детектирование сигнала, и видеоимпульсы 6 подаются на индикаторную систему и в СИД.
Для сопровождения цели по угловым координатам проде-тектированные сигналы с приемной системы поступают на СУА, где выделяются сигналы ошибок сопровождения по углу места и дирекционному углу и поступают на исполнительные устройства для отслеживания антенной углового положения цели. Угловые координаты цели определяются как соответствующие угловые положения антенны.
Индикаторная система позволяет наблюдать радиолокационную картину местности и совместно с рядом устройств обеспечивает работу старшего оператора по захвату выбранной цели.
Цифровое вычислительное устройство обеспечивает обработку радиолокационной информации, расчет координат огневой позиции (точки разрыва), отображение результатов на цифровом табло, бумажной ленте, электронном планшете, а также совместно- с тренировочным устройством обучение личного состава боевой работе.
3. Назначение, составные части и работа систем РЛС разведки огневых позиций
АнтеННО-воЛНОводная система предназначена для передачи, излучения, приема высокочастотных колебаний, формирования пеленгационной характеристики, а также для приема непрерывной Шумовой помехи.
Рис. 55. Схема антенно-волноводной системы
сл
—4
Антенно-волноводная система обеспечивает:
формирование игольчатой диаграммы направленности шириной по уровню половинной мощности порядка 2°;
сканирование диаграммы направленности в горизонтальной плоскости в секторе 30° по пилообразному закону с частотой 10 Гц в режиме «Поиск»;
формирование моноимпульсного облучателя и последующее преобразование принятого сигнала к виду, подобному РЛС с коническим сканированием диаграммы направленности в режиме «Пеленг»;
создание двух опорных гармонических колебаний с частотой 60 Гц и сдвигом фаз на 90°;
контроль проходной мощности и измерение частоты излучаемого высокочастотного сигнала.
АВС состоит из следующих основных узлов (рис. 55): основной антенны, конструктивно объединяющей основные волноводные устройства, антенны компенсатора, блока компенсатора, волноводной сборки.
В качестве основной антенны в РЛС выбрана двухзеркальная антенна, обеспечивающая требуемую ширину луча, позволяющую сократить протяженность волноводного тракта. Облучатель антенны располагается сзади, чтобы не затенять ее поверхность.
Рис. 56. Схема облучателя:
/ — набор волноводов: 2 — входы волноводов; / — запитывающий рупор; 4 — выводы волноводов; 5 — фокальная кривая рефлектора антенны
С целью обеспечения эффективной работы антенны при поиске цели и ее сопровождении выбран облучатель органного типа (рис. 56), представляющий собой набор волноводов 1 — растровую головку, входные концы 2 которых сведены в окружность. Внутри окружности вращается с частотой Q = 10 Гц запитывающий рупор 3. Выводы волноводов 4 располагаются на фокальной кривой рефлектора антенны, для чего делается специальный вырез, 158
Сигнал передатчика поступает на волноводную сборку, которая служит для передачи высокочастотного сигнала от передающей системы к вращающимся переходам или к нагрузке при скрытой настройке аппаратуры. Элементы волно-водной сборки обеспечивают также контроль проходной мощности и частоты излучаемого сигнала.
Направление сигнала передатчика на вращающиеся переходы или на нагрузку производится с помощью специального переключателя АНТЕННА — НАГРУЗКА, которым управляет со своего рабочего места старший оператор.
Вращающиеся переходы 1 и 2 обеспечивают передачу сигнала от неподвижной части АВС к подвижной.
Переключатель ПРИЕМ — ПЕРЕДАЧА производит автоматическую коммутацию основной антенны поочередно к передающей и приемной системам.
В режиме «Поиск» с переключателя ПРИЕМ — ПЕРЕДАЧА сигнал поступает на переключатель ПОИСК — ПЕЛЕНГ, находящийся в положении ПОИСК, и далее на запитывающий рупор растровой головки. Рупор вращается и последовательно запитывает каждый из 30 волноводов, обеспечивая плавное перемещение луча от одного края сектора обзора к другому. Отраженный от цели сигнал, сфокусированный системой зеркал антенны рефлектор-контррефлектор, в обратном порядке проходит до переключателя ПРИЕМ — ПЕРЕДАЧА, далее на сумматор, разрядник и поступает для обработки в приемную систему.
В режиме «Пеленг» сигнал с передатчика также проходит на переключатель ПОИСК — ПЕЛЕНГ, находящийся в положении ПЕЛЕНГ, далее на два центральных волновода растровой головки и излучается в пространство. Принятый сигнал поступает на два центральных волновода. Для выделения сигнала ошибки по углу места к узким стенкам этих волноводов присоединен и запитывается через специальные щели третий волновод, образуя двойной тройник. Сигнал ошибки по углу места поступает на модулятор, а суммарный сигнал по двум волноводам поступает на переключатель ПОИСК — ПЕЛЕНГ, где из него аналогично выделяется сигнал ошибки по дирекционному углу и также поступает на модулятор. Суммарный сигнал с переключателя далее проходит на переключатель ПРИЕМ — ПЕРЕДАЧА и затем на сумматор.
Модулятор преобразует сигналы ошибок по углам в один амплитудно-модулированный сигнал частотой 60 Гц, в котором информация по угловым ошибкам имеет взаимный фазовый сдвиг 90°. Этот сигнал поступает на сумматор, где смешивается с суммарным сигналом, несущим информацию о дальности до цели, и далее подается на приемную систему.
- Введение модулятора и сумматора позволяет обработать сигнал от цели одним приемником вместо трех. Для выделе-
ния затем сигналов угловых ошибок генератором опорных напряжений, работающим синхронно с модулятором, вырабатываются синусоидальное и косинусоидальное опорные напряжения частотой 60 Гц, поступающие на СУА.
Рис. 57. Схема передающей системы
Антенна компенсатора рупорного типа обеспечивает прием и передачу шумовой помехи на дополнительный канал приемной системы с целью ее компенсации в основном канале приемника.
Передающая система предназначена для формирования мощных зондирующих импульсов длительностью 0,5 мкс, синхронизуемых системой измерения дальности и генерирования маломощных фазостабильных высокочастотных колебаний.
Передатчик станции для обеспечения высокой стабильности частоты и фазы излучаемого сигнала построен по многокаскадной схеме (рис. 57).
Местный гетеродин является одним из основных узлов системы и генерирует непрерывные маломощные колебания частотой fMr. В качестве генератора применен отражательный клистрон с высокодобротным цилиндрическим резонатором.
Формирование импульсов СВЧ заданной длительности осуществляется в усилителе-преобразователе специальным узлом —- формирователем импульсов, синхронизуемым сигналом из СИД. Кроме того, смесительно-усилительное устройство блока обеспечивает двойное преобразование частоты формируемого сигнала. Для этого на него подаются колебания утроенной (З/пр) и учетверенной промежуточной частоты (4/пр) с генератора опорных частот. Колебания промежуточной частоты с генератора опорных частот поступают также на приемную систему и тренировочное устройство станции.
С выхода усилителя-преобразователя радиоимпульсы частоты (fMr—fup) через волноводный узел поступают на выходной СВЧ усилитель модулятора, обеспечивающий усиле-160
ние импульсного зондирующего сигнала до заданной мощно сти. Окончательное формирование импульсов по длительно сти и предварительное усиление модулирующего импульса по амплитуде осуществляют формирователь импульса и подмодулятор. Модулятор с емкостным накопителем обеспечивает формирование отрицательного видеоимпульса амплитудой порядка 20 кВ для подачи его на выходной СВЧ усилитель.
Рис. 58. Схема приемной системы
Сформированный таким образом зондирующий сигнал поступает на волноводную сборку антенно-волноводной системы.
Поддержание рабочего режима выходного СВЧ усилителя обеспечивается устройством термостатирования, включающим в себя узлы защиты и термостатирования. Для обеспечения рабочей температуры выходного усилителя 55—70°С осуществляется циркуляция под давлением 1 ат (0,1 МПа) охлаждающей жидкости. Доведение температуры до 55°С производится нагревателем, а снижение — вентилятором, обдувающим теплообменник.
В случае нагрева жидкости до 85°С автоматически отключается высокое напряжение и загорается табло АВАРИЯ.
Приемная система РЛС предназначена для усиления отраженных от цели сигналов, преобразования их по частоте и дальнейшего усиления до величин, необходимых для нормальной работы системы СДЦ, индикаторной системы и СУА, а также для компенсации шумовой помехи, принятой по боковым лепесткам основной антенны.
Для решения поставленных задач в состав приемной системы (рис. 58) входят: входные устройства основного и до-
полнительйого Каналов, автоКомйенсаТор помех, блок-усйЛй-тель промежуточной частоты каналов обнаружения и сопровождения, блок детекторов огибающей, преобразователь.
Принятый основной антенной сигнал от цели и боковых лепестков — шумовая помеха усиливаются и преобразуются по частоте во входном устройстве основного канала. Аналогичные операции производятся с принятой антенной компенсатора этой же шумовой помехой во входном устройстве дополнительного канала.
Для обеспечения преобразования по частоте на смесители каналов поступают колебания частотой fMr от местного гетеродина передающей системы. Сигналы обоих каналов на промежуточной частоте усиливаются в ПУПЧ и поступают на автокомпенсатор помех.
Посредством специальной обработки автокомпенсатор устраняет шумовую помеху в основном канале за счет противофазного суммирования напряжений шумовой помехи в основном и дополнительном каналах.
Обработанный таким образом сигнал подается далее либо на УПЧ канала обнаружения при поиске цели, либо на УПЧ канала сопровождения при ее сопровождении.
В канале обнаружения УПЧ имеет логарифмическую характеристику и работает на два детектора — амплитудный и фазовый.
Видеосигнал с амплитудного детектора в режиме «Без СДЦ» поступает в индикаторную систему и блок автозахвата СИД. В режиме СДЦ сигнал с фазового детектора обрабатывается в системе СДЦ и затем поступает на те же системы.
В канале сопровождения УПЧ имеет линейную характеристику и стробируется по дальности сигналом с СИД с целью сопровождения выбранной цели. Детектирование сигнала также осуществляется амплитудным (режим «Без СДЦ») и фазовым (режим «СДЦ») детекторами. Видеосигнал поступает на автодальномер СИД и на СУА. Для обеспечения надежной работы следящих систем СУА при сопровождении цели введен блок детекторов огибающей, искусственно повышающий мощность отраженного сигнала.
Система селекции движущихся целей предназначена для выделения сигналов,’ отраженных от движущихся целей, на фоне сигналов, отраженных от метеообразований, местных предметов и искусственных помех.
Система СДЦ работает совместно с каналом обнаружения приемной системы и состоит из входного устройства, 100 фильтровых каналов, четырех селекторов, генератора тактовых импульсов и выходного устройства (рис. 59).
Количество фильтровых каналов выбрано исходя из разрешающей способности РЛС и протяженности одновременно просматриваемого участка местности по дальности.
Сигнал с канала обнаружения приемной системы поступает на входное устройство и далее одновременно на все 100 каналов системы. Управление работой каналов осуществляется генератором тактовых импульсов, который запускается сигналом синхронизации с СИД. В каждом фильтро вом канале осуществляется выделение доплеровской огибающей принятого сигнала и ее фильтрация. Полоса пропускания полосового фильтра выбрана исходя из диапазона скоростей разведуемых целей. Таким образом, на выходе полосового фильтра появляются сигналы движущихся целей в заданном диапазоне скоростей.
Рис. 59. Схема системы селекции движущихся целей
Генератором тактовых импульсов совместно с устройствами синхронизации каждого канала обеспечивается последовательное отпирание каналов. Селекторы осуществляют развязку каналов и подачу их через выходное устройство на индикатор поиска.
Индикаторная система предназначена для получения яркостные отметок от целей, находящихся в зоне сектора об-
зора станции, наблюдения формы и величины напряжений в контрольных точках аппаратуры и формирования стробирующих импульсов по дирекционному углу.
В состав индикаторной системы (рис. 60) входят: датчик импульсов дирекционного угла, индикатор поиска, индикатор дальности — контрольный осциллограф.
Рис. 60. Схема индикаторной системы
На экране индикатора поиска (рис. 61), имеющего развертку дальность — дирекционный угол, высвечиваются:
1. Зона автозахвата — прямоугольник со сторонами 1 км по дальности и 1-00 по дирекционному углу.
2. Метка целеуказания (ЦУ) по дальности — две горизонтальные линии, расстояние между которыми в зависимости от масштаба либо 180 м, либо 360 м.
3. Метка дирекционного угла (ДУ)—вертикальная линия в центре растра.
4. Метки дальности — неподвижные горизонтальные линии, расположенные через 1 км.
Индикатор имеет два масштаба по дальности: 10 и 20 км, и развертку по дирекционному углу 5-00. Специальное устройство позволяет перемещать начало развертки дальности в любом из этих масштабов от 0 до 30 км с дискретностью 1 км. Величина перемещения контролируется по цифровому индикатору НАЧАЛЬНАЯ ДАЛЬНОСТЬ.
Датчик импульсов дирекционного угла (см. рис. 60) формирует импульсы запуска и срыва дирекционной развертки индикатора поиска, а также центральную метку дирекцирц-ного угла 3 и строб дирекционного угла I, .161
Датчик состоит из трех электромеханических датчиков и электронной схемы формирования синхросигналов. Конструкция датчиков аналогична используемым в ДИДУ РЛС типа CHAP. Датчик импульсов дирекционного угла размещается на растровой головке, и вращение валов электромеханических датчиков происходит синхронно с запитывающим рупором.
Рис. 61. Экран индикатора поиска:
1 — зона автозахвата; 2—метка целеуказания по дальности; 3 — метка дирекционного угла; 4 — километровые масштабные метки дальности
Индикатор поиска обеспечивает работу оператора по обнаружению и захвату цели. Развертка индикатора по дальности запускается импульсом запуска из синхронизатора СИД. С СИД поступают также масштабные метки дальности 4, следующие через 1 км, и импульс запуска зоны автозахвата 1. Сигналы от цели подаются на индикатор либо с приемной системы, либо с системы СДЦ в зависимости от режима работы РЛА (без СДЦ—СДЦ).
Зона автозахвата — прямоугольник автозахвата создается на экране индикатора поиска для облегчения работы оператора по захвату обнаруженной цели. Прямоугольник может перемещаться по экрану с помощью специального устройства— механизма оперативного наведения, входящего в СУА.
Для повышения надежности захвата цели в индикаторной системе имеется устройство сдвига развертки, обеспечивающее смещение изображения на экране.
Индикатор дальности дает возможность наблюдать сигнал от цели при ее сопровождении в километровом «колодце» в режиме «Работа», а также контролировать форму и значения напряжений различных блоков и узлов РЛА при ее настройке в режиме «Контроль».
На передающие индикаторные системы ----—------> СДЦ и СПК
> ВРУ на приемную' систему
Рис. 62. Схема системы измерения дальности
Система измерения дальности предназначена для синхронизации систем РЛА, автоматического сопровождения цели по дальности и определения дальности до цели в виде временного интервала.
В состав СИД (рис. 62) входят: синхронизатор, автодальномер, блок автозахвата, индикатор начала рабочей зоны, расположенный в индикаторной системе.
Синхронизатор обеспечивает синхронную работу всех систем комплекса. Его основным элементом является генератор-распределитель на основе кварцевого генератора, вырабатывающий исходные последовательности импульсов частотой 1,5 МГц и 750 кГц. Имеющийся в генераторе счетчик импульсов вырабатывает ряд исходных сигналов: импульсов запуска системы съема и преобразования координат, ВРУ, приемной системы, передающей системы, автодальномера. Окончательное формирование этих сигналов, а также сигналов, временное положение которых может меняться в процессе работы, обеспечивают формирователи неподвижных и подвижных синхроимпульсов.
В зависимости от режима работы РЛА частота повторения импульсов, вырабатываемых в генераторе-распределителе, может быть постоянной (режим «Без СДЦ») или из-166
меняться во времени по определенному закону (режим «СДЦ»). Изменение (воббуляция) частоты повторения может происходить по линейному закону в режиме «Воббуляция» либо по случайному закону в режиме АПЧ. В этом режиме частота повторения задается специальным устройством автодальномера.
Рис. 63. Функциональная схема автодальиомера
Для обеспечения оперативного захвата обнаруженной цели по дальности в СИД введен блок автозахвата. Этим блоком в режиме «Наведение» в пространстве формируется километровая зона, которая разбита на 10 участков. Положение зоны может изменяться старшим оператором с помощью специального устройства — механизма оперативного наведения. Согласующее устройство блока автоматически определяет, в каком из участков находится цель, и выдает на автодальномер специальный сигнал, обеспечивающий совмещение следящих импульсов автодальномера с отметкой от цели. Тем самым автодальномер оперативно переводится в режйм сопровождения' цели, В блоке имеется также ряд элементов (задающий генератор, высокочастотный и низкочастотный счетчики, устройство управления), обеспечивающих цифровую индикацию текущей дальности до цели.
Автодальномер (рис. 63) обеспечивает в ходе сопровождения цели постоянное совмещение следящих импульсов, вырабатываемых в формирователе следящих импульсов, с сигналом от цели, поступающим с приемной системы. Определение величины рассогласования производится временным дискриминатором (рис. 64). Ключевые детекторы формирователя предварительного сигнала коммутационного строба управляются биполярными следящими импульсами и выделяют ступенчатые напряжения каждый в своем канале. Для компенсации сигналов от пассивных помех эти напряжения подаются на фильтры доплеровских частот (ФДЧ), усиливаются, суммируются и вычитаются в формирователе предварительного сигнала ошибки. Полученные сумма и разность
Рис, 64. Схема временного дискриминатора
сравниваются в фазочувствительном детекторе. В результате образуется сигнал ошибки, амплитуда которого несет информацию о величине, а полярность — о направлении рассогласования между следящими импульсами и отраженным от цели сигналом. Это напряжение поступает на устройство задержки, обеспечивая соответствующее перемещение следящих импульсов.
Анализатор доплеровской частоты производит сравнение частоты Гд принятого сигнала с текущей частотой повторения зондирующих импульсов и при определенном их соотношении выдает команду на синхронизатор для изменения частоты повторения в режиме «АПЧ». Тем самым устраняется появление «слепых» и «полуслепых» скоростей.
Система управления антенной (СУА) служит для ручного управления основной антенной и антенной автокомпенсатора, автоматического сопровождения цели по угловым координатам. Она обеспечивает также возврат антенны по обеим угловым координатам по окончании сопровождения в точку захвата цели при ведении разведки; вывод антенны в точку начала сопровождения (ТНС) при обслуживании стрельбы; осуществление подъема (опускания) антенны, горизонтиро-вания антенной колонки с автоматической выработкой ошибок ее горизонтирования.
В состав СУА (рис. 65) входят блок ручного управления, механизм оперативного наведения, блок выделения сигнала ошибки, антенная колонка.
СУА работает в следующих режимах: «Ручное управление» (РУ), «Наведение», «Захват», «Сопровождение», «Возврат», «Вывод в точку начала сопровождения» (ТНС), «Инерционное сопровождение».
В режиме «Сопровождение» сигнал с канала сопровождения приемной системы поступает на блок выделения сигнала ошибки. В его огибающей содержится информация об угловых ошибках сопровождения цели. Ее выделение осуществляется двумя фазовыми детекторами, опорными напряжениями которых являются гармонические колебания с частотой 60 Гц и сдвигом фазы 90°, поступающие с генератора опорных напряжений. После выделения сигналов они усиливаются и поступают на порошковые муфты приводов антенны по азимуту и углу места, которые перемещают антенну в сторону уменьшения ошибок сопровождения. Для обеспечения надежного сопровождения цели в условиях возможного замирания и пропадания отраженного сигнала используется режим «Инерционное сопровождение». В этом режиме данные для блока сопровождения рассчитываются в ЦВУ и после преобразования в аналоговую форму поступают на следящие приводы.
В режиме «Ручное управление» при вращении роторов вращающихся трансформаторов ручного управления в блоке
Рис. 65. Система управления антенной
выделения сигнала ошибки вырабатывается сигнал рассогласования между ними и вращающимися трансформаторами механизмов отсчетов по каждой координате. Эти сигналы поступают на соответствующие фазовые детекторы, опорным напряжением которых является напряжение сети 400 Гц. Продетектированные управляющие напряжения поступают на порошковые муфты приводов антенны.
В режиме «Наведение» производится управление антенной только по дирекционному углу с помощью механизма оперативного наведения, построенного на вращающихся трансформаторах и обеспечивающего выработку напряжений, пропорциональных перемещению рукоятки наведения относительно границ экрана индикатора обнаружения. Эти напряжения используются не только для управления антенной, но и для облегчения процесса захвата цели по дальности.
Режим «Захват» обеспечивает автоматический захват цели по азимуту в секторе 6°. Для этого в блоке ручного управления формируется по пять угловых стробов относительно центра диаграммы направленности, в которых оценивается угловое положение цели и вырабатывается сигнал управления антенной.
Для повышения оперативности в работе используется режим «Возврат» в точку захвата цели следящими системами, который реализуется с помощью вращающихся трансформаторов памяти по углам. С них снимается сигнал аналогично сигналу в режиме «Ручное управление», и антенна занимает положение, исходное началу сопровождения.
В режиме «Вывод в ТНС», используемом при обслуживании стрельбы, данные для СУА вырабатываются в ЦВУ и после обработки в преобразователях код-аналог обеспечивают установку антенны, а также следящих импульсов автодальномера в точку ожидаемого появления цели.
Управление антенной автокомпенсатора осуществляется потенциометрическими датчиками, сигналы которых усиливаются и поступают на двигатели и редукторы управления второй антенной.
Цифровое вычислительное устройство предназначено для автоматической обработки радиолокационной информации, сопряжения источников и потребителей радиолокационной информации, документирования выходных данных, распознавания классов целей, а также для решения ряда дополнительных задач.
ЦВУ обеспечивает решение следующих задач:
определение координат ОП стреляющих систем и их типа в режиме разведки (режим «Р»);
определение координат точек разрывов при корректировании стрельбы артиллерии (режим «К»);
расчет данных для ориентирования РЛС (режим «ОР»)'}
выработка данных для обеспечения обучения расчета (режим «ТР»);
обеспечение сквозного контроля технического состояния радиолокационной аппаратуры (режим «КС») и допускового контроля напряжений вторичных источников питания (режим «КП»).
В состав ЦВУ (рис. 66) входят: специализированная ЦВМ, пульт оперативного ввода информации, блок сопряжения, малогабаритное печатающее устройство.
Малогабаритное печатающее устройство
Специализированная ЦВМ
Пульт оперативного
ВВодо ~
информации |<-
___BL______—
Блок ---------->
сопряжения РЛА
Рис. 66. Цифровое вычислительное устройство
Кроме того, по данным, вырабатываемым в ЦВУ, работает электронный планшет, позволяющий отображать результаты разведки (обслуживания стрельбы) на карте.
При ведении разведки исходными данными для ЦВУ являются:
текущие сферические координаты;
прямоугольные координаты РЛС;
истинный азимут оси машины;
масштаб карты электронного планшета.
При обслуживании стрельбы вводятся также координаты огневой позиции обслуживаемого подразделения и данные о типе траектории и ее параметры.
Указанные данные вводятся оператором с помощью пульта оперативного ввода информации. С началом сопровождения происходит считывание в память ЦВУ радиолокационных данных, которые преобразуются из сферической системы координат в прямоугольную. Затем происходит их математическая обработка. Окончание процесса сопровождения происходит по достижении заданного времени либо по достижении заданного угла укрытия при обслуживании стрельбы.
В результате математической обработки на пульт оперативного ввода информации, печатающее устройство и электронный планшет выдаются необходимые данные.
Радиолокационная информация поступает на блок сопряжения ЦВУ через систему съема и преобразования координат, которая обеспечивает преобразование дальности, угловых координат цели, параметров вторичных источников питания, информации о разгоризонтировании антенной колонки в цифровой код.
Для эффективного обучения расчета боевой работе в состав комплекта введено тренировочное устройство, имитирующее сигналы, отраженные от цели, а также протяженную пассивную помеху. Кроме того, устройство обеспечивает вывод основной антенны в ТНС при обслуживании стрельбы, сопровождение цели по данным, вырабатываемым ЦВУ в случае пропадания отраженного сигнала.
Вспомогательные системы. Система электропитания служит для обеспечения аппаратуры и приборов РЛС электроэнергией постоянного и переменного тока. Электропитание радиолокационной аппаратуры осуществляется системой вторичных источников питания, включающей 25 типовых, 10 специальных и 1 унифицированный блок, посредством преобразования первичного трехфазного напряжения 220 В 400 Гц.
Для эффективной оценки работоспособности аппаратуры, измерения ее параметров и нахождения местоположения отказов служит система встроенного контроля, обеспечивающая проведение допускового контроля РЛС в целом, а также блоков и узлов в отдельности.
Система управления обеспечивает подачу питающих напряжений на радиолокационную аппаратуру и ЦВУ, коммутацию режимов и индикацию работы ряда систем РЛС.
Создание условий для работы расчета, предупреждение о применении противником оружия массового поражения, защиту от его воздействия и устранение последствий нападения обеспечивает система жизнеобеспечения.
Аппаратура топогеодезической привязки и ориентирования. Решение задачи топогеодезической привязки РЛС, ее ориентирования и определения маршрута движения осуществляется системой навигации (рис. 67), в состав которой входят аппаратура навигации 1Т28, гирокомпас 1Г25-1, перископическая артиллерийская буссоль ПАБ-2АМ.
В главе II описан порядок и способы топогеодезической привязки позиций РЛС и их ориентирования. Прямоугольными координатами позиции считаются координаты точки пересечения оси вращения антенной колонки с горизонтальной плоскостью.
Особенностью аппаратуры 1Т28 является наличие в путевом устройстве двух датчиков пути: доплеровского (ДДП)', работающего на основе эффекта Доплера, и механического (МДП), использующего обкат земной поверхности гусеницей самохода. Основным режимом работы путевого устрой-
Рис. 67. Функциональная схема системы навигации
ства является режим ДДП, при котором высокочастотное устройство работает без кинематической связи с ходовым механизмом самохода. Оно вырабатывает импульсные зондирующие сигналы, которые отражаются от земной поверхности и вследствие движения РЛС приобретают доплеровский сдвиг частоты, несущий информацию о приращении пути. При отсутствии движения автомат остановки пульта управления отключает ДДП. Работа от МДП предусмотрена в случае движения по высокой траве, кустарнику, при обгоне колонн.
Информация о дирекционом угле продольной оси машины вырабатывается трехстепенным гироскопом и поступает в курсопрокладчик КП-4.
Таким образом, входными данными для курсопрокладчика являются приращения пройденного пути и дирекционный угол оси машины, поступающий с гирокурсоуказателя.
Курсопрокладчик является механическим счетно-решающим прибором, непрерывно и автоматически вырабатывающим из входной информации координаты местоположения РЛС и вычерчивающим на карте пройденный путь. Курсо-указатель, информация на который поступает с гирокурсоуказателя, предназначен для индикации водителю дирекционного угла самохода. Для получения на шкалах курсопрокладчика значений координат хп и уп позиции перед началом движения устанавливают координаты точки хит, У»т, а на шкале КУРС — значение дирекционного угла продольной оси машины.
Для работы навигационной аппаратуры используется напряжение бортовой сети -(-27 В.
Система связи. Для обеспечения взаимодействия, передачи результатов разведки (обслуживания стрельбы), а также работы расчета внутри машины РЛС оснащена системой связи (рис. 68), в состав которой входят переговорное устройство Р-124 с двумя аппаратами А-1 и А-3, одним аппаратом А-2 и пятью нагрудными переключателями, четыре шлемофона с ларингофонно-телефонной гарнитурой, устройство Р-012М с блоком сопряжения, две радиостанции Р-123МТ.
Система связи обеспечивает:
начальнику станции — внешнюю радиосвязь через две радиостанции и связь по двухпроводной линии связи с одним абонентом с рабочего места в аппаратном отделении; внутреннюю связь со всеми членами экипажа; выход на внешнюю радиосвязь через две радиостанции с рабочего места в отделении управления;
старшему оператору — внутреннюю связь со всеми членами экипажа, выход на внешнюю связь через две радиостанции с одного рабочего места;
оператору — внутреннюю связь со всеми членами экипажа с одного рабочего места;
Рис. 68. Схема системы связи
механйку-водйтелю — внутреннюю связь со всеми членами экипажа.
Особенностью системы связи является наличие устройства Р-012М, выполняющего функции автоматического приема и передачи сигналов вызова по двум радиостанциям. Этим исключается необходимость находиться одному из абонентов на дежурном приеме, так как при поступлении от радиостанции вызова на аппаратуре Р-012М. загорается соответствующая сигнальная лампа, на телефоны шлемофонов абонентов подается тональный сигнал вызова. Блок сопряжения осуществляет коммутацию ларингофонных, телефонных и пусковых цепей абонентов, выходящих на внешнюю связь через радиостанции с устройством Р-012М и радиостанциями, и связь внешним телефонным аппаратом ТА-57.
На стоянке на систему связи подается напряжение питания -j-27B со вторичной системы электропитания РЛА, в движении — напряжение +26 В от бортовой сети.
4. Функциональный контроль аппаратуры станции
При подготовке РЛС к боевой работе производится: контроль питающих напряжений и настройка радиолокационной аппаратуры;
установка режимов работы радиолокационной аппаратуры, включение высокого напряжения и выставка его параметров;
тестовый контроль ЦВМ. и решение задачи ориентирования;
предварительный ввод данных в ЦВУ.
В обязательном порядке должны быть проверены исходные положения органов управления в аппаратном отделении и отделении управления.
При включении электропитания механик-водитель должен обеспечить вентиляцию генераторного комплекса; запустив ходовой двигатель, включить редуктор и обеспечить номинальные параметры сети. Особое внимание должно быть обращено на контроль изоляции сети.
Включение радиолокационной аппаратуры без высокого напряжения осуществляется старшим оператором и заключается в обеспечений вентиляции отсека передатчика, переводе местного гетеродина из походного положения в рабочее и переводе переключателя ВКЛЮЧЕНИЕ радиолокационной аппаратуры в положение СТАНЦИЯ.
Проверка функционирования аппаратуры осуществляется старшим оператором и оператором на своих рабочих местах, ряд операций выполняется ими совместно под руководством начальника станции.
Для проведения проверок аппаратуры старший оператор поднимает антенну, совместно с оператором горизонтирует ее и расстопоривает привод по дирекционному углу.
После этого старший оператор переводит аппаратуру в режим «Контроль Н» («Контроль А»), включает режим «Поиск», подает питание на индикаторную систему и ЦВУ, с тем чтобы оператор параллельно проводил проверки ЭВМ и готовил ее к работе. Включение напряжения накала (НАКАЛ) на передатчик, а также приводов дирекционного угла и угла места (ПРИВОД ДУ, ПРИВОД УМ) целесообразно осуществлять при проведении проверок передающей системы и системы управления антенной соответственно. Должны быть проконтролированы также наличие и значения напряжений вторичных источников питания РЛА (либо вручную, либо с помощью ЭВМ).
При проверке функционирования индикаторной системы убеждаются в наличии растра, метки дирекционного угла, подвижной метки целеуказания, а также линейной развертки с километровым «колодцем» на экране индикатора дальности. При включении меток на масштабе 1 их должно быть 10 штук, а на масштабе 2—20. Ширина и высота растра должны регулироваться, при включении режима «Автозахват» в нижней части экрана должен наблюдаться прямоугольник автозахвата.
В ходе проверки приемной системы и системы СДЦ контролируют токи смесителей, которые должны быть в пределах 0,7—1,2 мА, по экрану индикатора дальности выставляют уровень шумов в пределах 2—3 мм и убеждаются в работоспособности временной регулировки усиления ВРУ. Регулировкой ВИДЕО БЕЗ СДЦ устанавливают требуемое усиление видеотракта. Затем при включении режима СДЦ убеждаются в изменении характера шумов на экране и устанавливают требуемое усиление видеотракта.
При проверке функционирования системы измерения дальности убеждаются в перемещении метки целеуказания и изменении показаний цифрового индикатора при вращении штурвала ДАЛЬНОСТЬ, выставляют минимум дрейфа метки целеуказания в режиме «Автомат», а также контролируют перемещение прямоугольника автозахвата по дальности в режиме «Наведение».
Контроль функционирования системы управления антенной включает проверки работоспособности системы при ручном управлении, а также при работе автоматики во всех режимах наведения.
Функционирование передающей системы проверяется после включения накала по достижении током высоковольтного выпрямителя формулярного значения и наличию генерируемой мощности. С помощью встроенного частотомера проверяется значение несущей частоты.
Включение и проверка функционирования ЦВУ заключается в подаче питающего напряжения на систему, пуске ЭВМ и контроле прохождения внутреннего теста по индикации
групп цифр на передней панели ЭВМ. После подготовки ЦВУ к работе с его помощью проверяются наличие и значения напряжений вторичных источников питания РЛА.
Проверка функционирования канала определения ошибок г оризонтиро в ания и системы съема угловых координат проводится старшим оператором и оператором совместно. При контроле функционирования канала определения ошибок горизонтированиц проверяется прохождение значений ошибок на ЦВУ и их индикация на табло пульта оперативного ввода информации. Проверка функционирования системы съема угловых координат заключается в контроле прохождения и индикации на табло пульта оперативного ввода информации значений дирекционного угла и угла места положения антенны.
Для осуществления комплексной проверки работоспособности РЛС предусмотрен режим «Сквозной контроль» (КС), выполняемый расчетом под руководством начальника станции, который определяет, какого типа система будет имитироваться с помощью ЦВУ (миномет, гаубица, РСЗО), и дает соответствующие распоряжения старшему оператору и оператору. Показателем правильности функционирования РЛС является загорание табло ИЗДЕЛИЕ ГОТОВО на шкафу радиолокационной аппаратуры и перемещение светоуказателя электронного планшета в контрольную точку.
Выключение станции. Аппаратура 1Т28 выключается сразу после окончания работы с ней. Остальные системы рекомендуется выключать в такой последовательности: ЦВУ, РЛА, система жизнеобеспечения, система связи, система электропитания.
При выключении ЦВУ следует прежде всего отключить ЭВМ, затем малогабаритное печатающее устройство и ЦВУ на шкафу РЛА.
Радиолокационная аппаратура выключается в следующем порядке:
регулировкой 20 КВ снижается высокое напряжение, а затем отключается;
застопоривается и опускается основная антенна, антенна компенсатора устанавливается в нейтральное положение;
отключается питающее напряжение индикаторов и сама РЛС.
5. Работа расчета станции в режиме «Тренажер»
Наличие в составе аппаратуры РЛС тренировочного устройства и ЦВУ позволяет повысить эффективность обучения расчета станции боевой работе в основных режимах «РАЗВЕДКА» и «КОНТРОЛЬ».
Обучение расчета в режиме «Разведка» (Р) может производиться переводом ЦВУ в режим КС и выбором одной из
трех фиксированных траекторий. Вместе с тем большие возможности представляет имеющийся в ЦВУ режим «Тренажер» (Тр), при котором оператор в соответствии с указанием начальника станции задает одну из двух минометных или гаубичных траекторий, траекторию РСЗО и тактической ракеты. При этом могут изменяться удаление огневой позиции относительно позиции РЛС, угол выстреливания и поворот плоскости стрельбы. Эффективность обучения может быть значительно повышена за счет применения в электронном планшете реальной карты и вводом с нее исходных данных в ЦВУ в режиме «Предварительный ввод».
Захват цели старшим оператором может осуществляться либо в полуавтоматическом режиме с помощью механизма оперативного наведения, либо вручную. Оператор контролирует появление на табло пульта оперативного ввода информации результатов разведки и докладывает их начальнику станции. Обучение расчета обслуживанию стрельбы (режим «К») производится только в режиме «Тр». Оператор вводит в ЦВУ данные по выбранной системе (три минометные траектории, две гаубичные и тактические ракеты, а также траектория РСЗО). Совместно с оператором старший оператор обеспечивает вывод следящих систем дальности и угловых координат в одну из точек начала сопровождения (ТНС). Причем в режиме «Тр» вывод в ТНС осуществляется только в полуавтоматическом режиме для согласования работы ЦВУ и РЛА. После загорания на пульте РЛА светодиода ТНС и транспаранта ТНС 1 (2, 3) на пульте оперативного ввода информации ЦВУ станция готова к началу тренировки. По команде начальника станции и после нажатия кнопки НАЧАЛО ИМИТАЦИИ происходит моделирование полета снаряда (мины, ракеты). Номера расчета выполняют операции как при боевой работе, по завершении которых на табло пульта оперативного ввода информации высвечиваются результаты разведки (обслуживания стрельбы).
Тренировка расчета может по решению начальника станции осуществляться как в режиме «Без СДЦ», так и в режиме «СДЦ», кроме того, на экране индикатора поиска с помощью тренировочного устройства может формироваться протяженная пассивная помеха.
Глава VIII БОЕВОЕ ПРИМЕНЕНИЕ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ РАЗВЕДКИ ОГНЕВЫХ ПОЗИЦИЙ
1. Выбор, подготовка и инженерное оборудование позиции
Позиция РЛС разведки огневых позиций должна отвечать следующим требованиям:
1. Обеспечивать скрытность работы РЛС от наземных средств радиотехнической разведки и исключать возмож-180
ность постановки помех наземными станциями помех противника.
Для этого позиция РЛС выбирается по возможности за укрытием, исключающим прямую ее видимость со стороны противника. Углы укрытия и расстояния от позиции до гребня укрытия выбираются в соответствии с действующими руководствами и инструкциями. Гребнями укрытия могут служить лес, строения, возвышенности и т. д.
2. Создать условия для наилучшего использования РЛС и ее тактико-технических возможностей. С этой целью позицию выбирают на определенном удалении от переднего края так, чтобы увеличить обзор.
3. Быть удаленной от позиций обслуживаемых подразделений так, чтобы обеспечивать оптимальное наблюдение снарядов (мин, ракет) на траектории (не менее 100 м).
4. Предусматривать максимальное использование защитных и маскирующих свойств местности, обеспечивать скрытное расположение от воздушной и наземной разведки противника.
Инженерное оборудование позиции включает:
проверку местности на наличие мин;
расчистку сектора обзора на гребне укрытия, если это необходимо;
отрывку окопа для станции и щели для расчета;
подготовку (расчистку) путей подъезда к позиции;
маскировку РЛС на позиции с использованием табельных средств и местных материалов.
2. Подготовка станции к боевой работе
Для выполнения задач по разведке РЛС назначают основной и 1—2 дополнительных сектора разведки.
В целях скрытности работы и повышения живучести включение РЛС на излучение целесообразно производить на минимально необходимое время для выполнения задач разведки. При этом следует использовать целеуказание других взаимодействующих технических средств разведки.
Подготовка РЛС к боевой работе включает:
проведение работ на исходной (начальной) точке;
выдвижение на позицию и работу на ходу;
занятие позиции, горизонтирование и ориентирование РЛС;
развертывание и заземление РЛС;
включение системы электропитания;
установку исходного положения органов управления и регулирования, включение и функциональный контроль;
установление связи;
определение углов укрытия;
установку района особого внимания и вывод антенны в заданный сектор разведки;
предварительный ввод данных в ЦВУ.
Боевая работа может вестись в двух режимах:
режим «Р»— ведение разведки;
режим «К»—: обслуживание стрельбы.
При ведении боевой работы в зависимости от готовности радиолокационной аппаратуры РЛС может находиться в готовности:
№ 1—радиолокационная аппаратура включена на излучение в пространство;
№ 2 — радиолокационная аппаратура включена, передатчик работает на эквивалент антенны;
№ 3 — радиолокационная аппаратура, система электропитания выключены.
Выдвижение на позицию производится, как правило, ночью или в других условиях ограниченной видимости по маршрутам, по возможности исключающим визуальную разведку со стороны противника. В ходе движения осуществляется контроль работы навигационной аппаратуры и ввод корректур в курсопрокладчик на заранее намеченных точках маршрута.
По прибытии на позицию тягач РЛС устанавливается в окоп и производится его маскировка табельными средствами и местными материалами. Если не предполагается отрывка укрытия для станции, то тягач устанавливается отсеком управления в направлении разведки. Затем с курсопрокладчика снимаются координаты позиции и дирекционный угол продольной оси тягача. Если нахождение на позиции предполагается менее 15 мин, то навигационная аппаратура не выключается.
При длительной работе на позиции и при наличии времени дирекционный угол продольной оси тягача, считываемый со шкалы курсопрокладчика, уточняется.
Развертывание, включение системы электропитания, установка исходного положения органов управления, включение и функциональный контроль осуществляются в соответствии с инструкцией по эксплуатации.
Установление связи заключается в проверке наличия связи между номерами расчета, связи начальника РЛС с внешними абонентами.
Ввод дирекционного угла продольной оси тягача осуществляется при установке антенны на нулевую отметку Шкалы дирекционного угла. При этом направление электрической оси антенны совпадает с направлением продольной оси тягача. На шкале дирекционного угла выставляется значение «оси, и затем шкала дирекционного угла фиксируется.
Угол укрытия может определяться с помощью оптического визира антенны или по сигналам, отраженным от мест-182
ных предметов. После включения аппаратуры на излучение доворотом антенны по углу места старший оператор добивается пропадания отметок от местных предметов. Со шкалы угла места снимается уточненное значение минимального угла места.
Установка района особого внимания (РОВ) осуществляется таким образом, чтобы начало развертки индикатора поиска Динд имело значение:
Динд=Дт1п — 4 — при масштабе 1;
ДинД=Дтш —8 — при масштабе 2,
где Дпнп — минимальная граница района особого внимания.
При этом РОВ находится в верхней части индикатора поиска, что облегчает работу по автозахвату целей на автосопровождение.
После установки Дт!п метка целеуказания выводится на дальнюю границу РОВ.
Вывод антенны в заданный сектор разведки осуществляется поворотом антенны по дирекционному углу в направлении биссектрисы сектора поиска.
После проведения всех подготовительных работ вне зависимости от режима последующей боевой работы («Р» или «К») заранее могут быть введены такие данные, как дата работы, масштаб и координаты юго-западного угла карты; номер зоны; координаты, высота и широта позиции РЛС; дирекционный угол продольной оси тягача и номер цели.
Начальник РЛС, убедившись в готовности аппаратуры и расчета к выполнению задач, докладывает о готовности и одновременно сообщает старшему начальнику координаты и высоту позиции, а также и вид готовности РЛС к работе.
Боевая работа в режиме «Р» ведется в заданном секторе. Районы особого внимания задаются ближней и дальней границами по дальности. Глубина РОВ составляет 5—6 км. Определение координат одной и той же ОП может осуществляться по одной, двум или трем засечкам с осреднением. Количество засечек зависит от характера цели. При наличии групповой цели, состоящей из нескольких стреляющих батарей, определение координат вначале осуществляется по одной засечке для каждой батареи в группе с последующим получением 2—3 засечек по каждой из них и осреднением полученных данных.
Боевая работа в режиме «К» требует соблюдения обязательного условия—для стрельбы выбирают заряд, обеспечивающий угол падения снаряда (мины) не менее 20°, и полетное время — не менее 15 с. При обслуживании стрельбы РЛС может привлекаться к решению следующих задач:
пристрелка цели;
создание репера;
корректирование огня в ходе стрельбы на поражение.
Пристрелка ведется тех целей, координаты которых определены этой же станцией или другими техническими средствами артиллерийской разведки.
При выполнении задачи по созданию фиктивного репера за высоту репера принимают высоту огневой позиции. С помощью РЛС определяют отклонение средней точки падения не менее чем 4 снарядов от точки репера по дальности и направлению.
Корректирование огня в ходе стрельбы на поражение заключается в определении отклонений разрывов (центра группы разрывов) от цели или центра цели по дальности и направлению относительно огневой позиции и передаче их командиру артиллерийского дивизиона для расчета и введения корректур.
3. Обязанности расчета станции при ведении разведки
Расчет РЛС разведки огневых позиций состоит из четырех человек: начальника станции, старшего оператора, оператора ЦВУ и механика-водителя.
Получив задачу на разведку, начальник станции изучает в заданном секторе районы целей по карте, определяет усредненную высоту для РОВ и уточняет измеренный при подготовке старшим оператором минимальный угол укрытия. Для перевода РЛС в режим «Р» начальник станции подает команду расчету, в которой указывает задачу станции, дирекционный угол биссектрисы сектора разведки, ближнюю и дальнюю границы РОВ, среднюю высоту РОВ и режим работы, например: «Разведка, 4-50, РОВ 3—9 км, высота 140, угол укрытия 0-25, штатный с автозахватом».
После докладов о готовности всех номеров расчета к ведению разведки начальник уточняет вид готовности станции, например: «Готовность № 1».
При докладе старшего оператора об обнаружении нескольких целей он оценивает обстановку и выбирает цель для определения координат (как правило, дальнюю правую) ц подает команду, например: «Дальнюю правую».
При автозахвате и автосопровождении цели начальник' станции контролирует действия номеров расчета и в случае необходимости оказывает им помощь.
После индикации и вывода на печать разведывательных данных начальник станции устанавливает для них время засечки и действительный номер цели. Кроме того, начальник станции отмечает местоположение ОП на карте, укрепленной в автоматизированном планшете, ставит номер засечки; по карте уточняет высоту разведанной огневой позиции. Если высота ее отличается от средней высоты РОВ, то начальник подает команду на уточнение координат, например: «Цель 124-я, высота 80, повторить», 484
Если определение координат цели должно осуществляться по нескольким засечкам, то начальник станции подает команду «Продолжать разведку». После получения необходимого количества засечек или прекращения стрельбы обнаруженной батареи он подает команду на прекращение разведки, осреднение полученных координат и на передачу данных по каналам связи. В команде указываются номер цели, ее характер и уточненная высота, а также номера траекторий (засечек) по данным ЦВУ, которые используются для осреднения, например: «Прекратить разведку, осреднить координаты, цель 101-я, минометный взвод, высота 130, по двум засечкам — номера 124, 125, передать по огневому каналу». После этого начальник станции контролирует действия оператора по осреднению координат, занесению данных в журнал разведки и лично передает разведданные по информационному каналу, например: «Цель 101-я, минометный взвод, л: =* 6340257, у = 8672675, высота 130, две засечки, 6.40».
Старший оператор отвечает за техническое состояние радиолокационной аппаратуры станции, готовит ее к боевой работе и контролирует режимы работы, непосредственно ведет разведку и обслуживание стрельбы.
При получении команды на ведение разведки старший оператор выводит антенну на биссектрису сектора разведки, устанавливает РОВ, переводит радиолокационную аппаратуру в режим работы «Р», выводит метку ЦУ на дальнюю границу РОВ, включает автозахват, включает передатчик на излучение и ведет наблюдение за экраном индикатора поиска, удерживая в руке рукоятку механизма наведения. По готовности докладывает начальнику станции, например: «Старший оператор готов, режим «Р», дирекционный угол 4-50, начальная дальность 3, дальность 9, угол места 0-25, автозахват».
При появлении на экране индикатора поиска отметки от снаряда (мины) старший оператор докладывает: «Есть цель», перемещает рукоятку механизма наведения так, чтобы накрыть прямоугольником автозахвата отметку от цели и нажимает кнопку на рукоятке механизма наведения, включая устройства захвата цели на автосопровождение. При устойчивом положении отметки цели в пределах «колодца» индикатора дальности докладывает: «Есть захват». Если захват не был осуществлен, старший оператор выключает устройства автосопровождения, нажимая кнопку СБРОС СОПРОВОЖДЕНИЯ, а прямоугольник автозахвата наводит на точку индикатора, где появлялась отметка от цели, и докладывает: «Видел, навелся». При повторном появлении отметки от цели осуществляет ее автозахват.
В случае появления групповой цели, состоящей из нескольких отметок, старший оператор докладывает их количество, например: «Есть три отметки», и в последующем осу
ществляет автозахват каждой в последовательности, указанной начальником станции.
При благоприятной радиолокационной обстановке старший оператор может осуществлять захват цели на автосопровождение вручную, действуя штурвалами дирекционного угла и дальности и совмещая отметку от цели с центральной меткой дирекционного угла и меткой ЦУ. Признаками нормального автосопровождения при разведке будут:
устойчивое положение отметки от цели в середине строба дальности;
плавное перемещение метки ЦУ в сторону уменьшения дальности;
изменение показаний шкалы угла места в сторону увеличения.
Если автосопровождение цели устойчивое, то старший оператор докладывает: «Сопровождение устойчивое».
При неустойчивом сопровождении (отметка от цели в стробе дальности перемещается от середины) старший оператор должен кратковременно включить инерционное сопровождение и, используя штурвал ДАЛЬНОСТЬ, подправить положение отметки от цели в стробе дальности.
При длительном пропадании сигнала на индикаторе дальности (более 3—5 с) старший оператор докладывает: «Срыв автосопровождения», выключает устройства автосопровождения, контролирует вывод антенны в точку начала сопровождения (ТНС) по загоранию транспаранта.
В случае устойчивого автосопровождения ЦВУ выдает сигнал на окончание автосопровождения, а старший оператор контролирует вывод антенны в ТНС.
Если после первой засечки цели старший оператор получит команду «Продолжать разведку», то он перед каждой последующей засечкой включает устройства захвата и захват снаряда будет осуществляться автоматически. При получении команды о прекращении разведки старший оператор приводит устройства захвата и автосопровождения в исходное состояние.
Оператор ЦВУ отвечает за техническое состояние ЦВУ и навигационной аппаратуры, готовит их к боевой работе, контролирует работоспособность и режимы работы, участвует в работе по разведке и обслуживанию стрельбы и осуществляет связь по огневому каналу.
При получении команды на разведку от начальника станции оператор нажимает кнопку «Р» на пульте ввода информации, вводит среднюю высоту РОВ, нажимает кнопку РАБОТА и контролирует загорание транспаранта ПОИСК.
По готовности оператор докладывает начальнику станции, например: «Оператор готов, высота 140, поиск».
После доклада «Есть захват» оператор контролирует загорание транспаранта СОПРОВОЖДЕНИЕ на пульте вво
да информации ЦВУ и докладывает начальнику станции: «Есть сопровождение».
После окончания автосопровождения и решения задачи экстраполяции траектории к точке вылета в ЦВУ загорается транспарант ЗАДАЧА РЕШЕНА и осуществляется вывод информации.
Оператор докладывает об этом начальнику станции с указанием координат, высоты, класса и номера цели, например: «Есть данные, 6340257, 8672675, высота 140, миномет, 124-я».
Разведданные выдаются на табло пульта оперативного ввода информации и на бумажную ленту печатающего устройства.
Если от начальника станции поступила команда «Цель 124-я, высота 80, повторить», оператор последовательно нажимает кнопки СБРОС, ПОВТОР. РЕШ. и после ввода номера цели и уточненной высоты цели — кнопку РАБОТА. В ЦВУ осуществляется повторное решение задачи экстраполяции, после чего уточненные разведданные выводятся на табло и на печать. Эти данные оператор заносит в журнал разведки.
Получив команду на осреднение координат по нескольким засечкам, оператор вводит необходимые данные в ЦВУ для решения задачи осреднения. После осреднения разведданные выводятся на табло и печать и передаются оператором по огневому каналу, например: «Цель 101-я, минометный взвод,х=6340257,у =8672675, высота 130, две засечки, 6.40».
После этого оператор приводит ЦВУ в исходное состояние для работы по другим целям.
Механик-водитель отвечает за техническое состояние и работоспособность ходовой части станции, ее эксплуатацию и электропитание аппаратуры при ведении боевой работы. В ходе боевой работы контролирует стабильность работы электростанции, а также ведет, охрану позиции РЛС.
После получения задачи на разведку механик-водитель выставляет параметры первичного напряжения и докладывает, например: «Механик-водитель готов, параметры в норме».
4. Обязанности расчета станции при обслуживании стрельбы
Начальник станции при подготовке к обслуживанию стрельбы получает исходные данные и контролирует занесение их оператором в журнал учета данных обслуживаемых артиллерийских батарей. В нем должны быть отражены номер, прямоугольные координаты и высота ОП каждой батареи, условные номера типов артиллерийских систем и снарядов (мин), дирекционный угол основного направления стрельбы.
При постановке задачи на обслуживание стрельбы начальнику станции указывают:
вид огневой задачи и время готовности;
номера батарей в порядке очередности их обслуживания, тип снаряда и количество выстрелов;
номер, координаты и высоту цели (репера);
исчисленный доворот от основного направления;
угол возвышения в тысячных и соответствующие ему дальность, высоту траектории, полетное время, деривацию.
Например: «В 6.40 произвести пристрелку цели первой, пятой, восьмой батареями, по два выстрела каждая, цель 102-я, х = 42613, у = 74322, высота 120, доворот правее 3-53, угол возвышения 401 тыс., дальность 6610, высота траектории 752, полетное 25, деривация 9, отклонения — средние по группе».
После получения задачи начальник станции подает команду «Рассчитать ТНС», а после их расчета ЦВУ выбирает одну из рассчитанных ТНС для наведения антенны. При выборе ТНС он руководствуется типом обслуживаемых артиллерийских систем.
После выбора ТНС начальник станции подает команду на наведение антенны, например: «ТНС-2, захват автоматический, навести», и производит расчет темпа ведения огня по формуле
/=К/с-|-5, где К — коэффициенты, равные 0,2; 0,4; 0,7 соответственно для ТНС-1, 2, 3;
tc — полетное время.
После наведения антенны в выбранную ТНС он докладывает о готовности к обслуживанию стрельбы, указывая темп ведения огня.
После команды с ОП «Выстрел» начальник станции дублирует его, запускает секундомер и с интервалом 5 с отсчитывает полетное время, а за 3—5 с до подлета снаряда к ТНС подает команду «Внимание».
В случае устойчивого автосопровождения контролирует действия старшего оператора и оператора, решение задачи ЦВУ и вывод антенны в ТНС для повторной засечки, а также анализирует данные, индицируемые на световом табло ЦВУ и отпечатанные на бумажной ленте.
При отсутствии отметки от цели вблизи ТНС докладывает командиру артиллерийского подразделения: «Нет цели» — и проверяет точность наведения антенны в заданную ТНС в ожидании повторного выстрела.
При срыве автозахвата или автосопровождения начальник станции докладывает: «Цель потеряна».
Повторный выстрел производится после проверки работы станции и повторного доклада начальника станции о готовности. Если срыв автосопровождения произошел повторно, 188
то начальник станции после анализа причин может подать команду по засечке снаряда на другой ТНС.
После засечки указанного при постановке задачи количества снарядов для данной батареи начальник станции подает команду, например: «Осреднить данные и передать в 1 адн», и контролирует передачу оператором осредненных данных по отклонению снарядов от цели (репера).
В дальнейшем начальник станции руководит работой расчета по выполнению последующих задач.
Старший оператор, получив команду о наведении антенны в выбранную ТНС, после доклада оператора о готовности выбранной ТНС включает АВТОЗАХВАТ, переключает масштаб индикатора в положение 2, нажимает кнопку ТНС и удерживает ее до загорания транспаранта ТНС на блоке ручного управления. Загорание транспаранта свидетельствует о наведении антенны по дирекционному углу и углу места в выбранную ТНС. Одновременно старший оператор совмещает метку ЦУ на индикаторе поиска с горизонтальной линией, считывает значение дирекционного угла и угла места и при равенстве этих значений с расчетными нажимает кнопку НАВЕДЕНИЕ и выводит прямоугольник автозахвата с помощью механизма наведения на пересечение меток целеуказания и дирекционного угла. Фиксирует положение прямоугольника нажатием целеуказателя на экран индикатора. После этого он устанавливает на место механизм наведения и докладывает о готовности.
По команде «Внимание» старший оператор нажимает кнопку ПУСК, следит за появлением цели, контролирует процесс автозахвата, устойчивость автосопровождения и докладывает, например: «Есть захват. Сопровождение».
После автосопровождения снаряда (мины) в течение требуемого времени старший оператор ожидает загорания транспаранта ТНС на блоке ручного управления, контролирует наведение антенны в эту точку для следующей засечки и докладывает, например: «В ТНС-2 выведена».
Если в расчетное время отметка от цели не появилась вблизи ТНС, то спустя 5—7 с старший оператор докладывает: «Нет цели» — и готовится к засечке следующего снаряда.
При срыве автосопровождения старший оператор докладывает: «Цель потеряна», выясняет и устраняет причины срыва и готовится к засечке повторного выстрела.
Оператор при подготовке к обслуживанию стрельбы заносит в журнал учета данных обслуживаемых артиллерийских батарей данные, которые сообщает начальнику станции командир обслуживаемого артиллерийского подразделения. Эти данные оператор вводит в ЦВУ непосредственно перед выполнением задачи наряду с данными, которые указыва ются при постановке задачи на обслуживание стрельбы.
При получении команды «Рассчитать ТНС» оператор после ввода данных нажимает кнопку РАБОТА, контролирует вывод на световое табло и на печать данных по ТНС и докладывает: «ТНС определены».
При наведении антенны в выбранную ТНС оператор сравнивает установленные данные (дирекционный угол и угол места) с рассчитанными ЦВУ значениями и при их соответствии докладывает, например: «В TH С-2 наведен».
После доклада старшего оператора «Есть захват. Сопровождение» и после загорания транспаранта ЗАДАЧА РЕШЕНА оператор контролирует вывод разведданных на световое табло и на печать.
При наличии данных оператор докладывает: «Есть данные», а после автоматического наведения антенны в ТНС для следующей засечки нажимает кнопку РАБОТА.
Данные по отклонениям снарядов (мин) от цели (репера) для каждой засечки оператор заносит в журнал обслуживания стрельбы.
После получения команды на осреднение данных по нескольким засечкам оператор вручную или с помощью ЦВУ осредняет результаты для данной батареи и передает их по огневому каналу связи командиру обслуживаемого артиллерийского подразделения, например: «Средние по группе двух для первой батареи: перелет 60, влево 4. 6.45». После передачи данных по команде начальника станции оператор подготавливает ЦВУ для решения задач обслуживания стрельбы другой батареи.
Механик-водитель выполняет те же обязанности, что и при ведении разведки.
СТАНЦИИ НАЗЕМНОЙ РАДИОТЕХНИЧЕСКОЙ РАЗВЕДКИ
Глава IX ПРИНЦИП РАБОТЫ И УСТРОЙСТВО СТАНЦИЙ НАЗЕМНОЙ РАДИОТЕХНИЧЕСКОЙ РАЗВЕДКИ
1. Назначение, состав и характеристики станции НРС-1
Наземная разведывательная станция НРС-1 предназначена для определения координат наземных РЛС противника, работающих в импульсном режиме.
Для обеспечения пеленгования РЛС в состав станции входят три приемные установки и пункт обработки. Приемные установки входят в состав приборных машин, пункт обработки размещается на командной машине.
Приемные установки могут удаляться одна от другой при использовании проводных средств связи на расстояние (базу) до 6 км (см. рис. 18, а). При использовании радиосвязи база определяется дальностью действия радиостанций.
Приемная установка может вести разведку в одном из четырех поддиапазонов: 1,8—2,3 см (I); 2,3—2,9 (II); 2,9— 3,7 (III); 8,0—12,0 (IV), и работать во всех поддиапазонах в детекторном режиме, а в третьем и четвертом, кроме того, в супергетеродинном режиме приема. Чувствительность приемника в детекторном режиме составляет 3—5- 10~7 Вт, в супергетеродинном — 2-Ю-9 Вт. Точность определения несущей частоты сигнала цели в супергетеродинном режиме не ниже 2% ее значения.
Срединная ошибка определения дирекционного направления цели приемной установкой не более 0-03, разрешающая способность по дирекционному углу 0-33.
Срединная ошибка определения координат цели по дальности и направлению составляет соответственно 0,6 и 0,3% дальности засечки при условии, что база равна примерно 1/3 дальности засечки.
Общее время получения координат цели при расчете на дисковом логарифмическом счислителе по трем засечкам с усреднением составляет 24 мин. Время может быть значительно сокращено при использовании для расчетов специализированной микроЭВМ 1В520. Боевой расчет станции составляет взвод радиотехнической разведки в составе 15 человек.
2. Принцип работы приемной установки
Базовый метод определения координат, заключающийся в определении направлений на работающую РЛС разнесенными на местности приемными установками с последующим решением задачи прямой засечки, рассмотрен в главе II.
Для обнаружения цели и определения дирекционного направления на нее приемная установка (рис. 69) в своем составе имеет антенное устройство, антенную колонку, приемное и индикаторное устройства.
Рис. 69. Схема приемной установки
Приемная установка может работать в следующих режимах: «Поиск», «Пеленг», «Различение Ф», «Различение М», «Отсчет».
В режиме «Поиск» осуществляется прием сигналов антенной второго канала антенного устройства, имеющей широкую диаграмму направленности, перекрывающую сектор поиска по дирекционному углу. Поиск цели по частоте осуществляется в III или IV поддиапазоне в супергетеродинном режиме приема посредством плавной перестройки гетеродинного устройства по частоте. Обнаружение цели осуществляется по звуковому индикатору. В детекторном режиме приема поиск по частоте не производится.
Точное определение направления на цель — пеленг. Режим «Пеленг» осуществляется с помощью антенны первого
канала, имеющей узкую диаграмму направленности. Пеленгование производится методом биссектрирования — за направление на цель принимается биссектриса угла между двумя положениями антенны, при которых мощности принимаемых сигналов равны между собой (рис. 70). На экране
Рис. 70. Метод биссектрирования
электронно-лучевого отметчика (ЭЛО) индикаторного устройства отклонение луча по горизонтали происходит пропорционально повороту антенны по дирекционному углу за счет напряжения, вырабатываемого датчиком дирекционного угла (ДДУ) антенной колонки. Отклонение луча по вертикали пропорционально мощности принимаемого сигнала в соответствии с диаграммой направленности антенны. При повороте антенны в узком секторе направления на цель на экране индикаторного устройства наблюдается кривая в форме диаграммы направленности антенны («палатка»).
Для снятия значения дирекционного угла цели используется режим «Отсчет», при котором на экране ЭЛО фор миру--
ется светящаяся точка, устанавливаемая при настройке аппаратуры на уровне половины отклонения луча, по вертикали. Светящаяся точка с помощью маховичка антенной колонки совмещается последовательно со скатами «палатки». Решающее устройство обеспечивает определение значения угла а.
рлс-1 рлс-г
Рис. 71. Режим «Различение Ф»
Режимы «Различение Ф» (с помощью фигур кратности)’ и «Различение М» (с помощью маркерного подсвета) используются для обеспечения засечки одной и той же РЛС двумя-тремя приемными установками.
Режим «Различение Ф» применяется в том случае, когда каждая приемная установка станции принимает сигналы одной РЛС противника (рис. 71). При этом одна из установок назначается ведущей, остальные — ведомыми. В ведущей установке из принятого сигнала пеленгуемой РЛС с помощью схемы формирования сигналов различения вырабатывается сигнал различения, поступающий через канал связи на горизонтально-отклоняющие пластины ЭЛО ведомой установки. На вертикально-отклоняющие пластины подается сигнал различения, выработанный в ведущей установке. При
приеме обеими установками сигналов одной РЛС на экране ведомой установки наблюдается устойчивое изображение прямоугольной или крестообразной формы.
Рис. 72. Режим «Различение М»
Режим «Различение М» используется в более сложной обстановке, когда ведомая установка принимает сигналы двух и более РЛС противника, а ведущая имеет возможность их раздельной пеленгации (рис. 72). С ведущей установки через схему формирования сигналов различения и канал связи на ведомую установку поступает сигнал различения (маркерные импульсы), который обрабатывается в формирующей схеме и через схему задержки проходит на катод ЭЛО. Тем самым обеспечивается дополнительная подсветка «палатки» от пеленгуемой двумя установками РЛС противника.
3. Назначение, составные части и работа систем приемной установки
Антенное устройство состоит из антенно-волноводных устройств первого и второго каналов.
Антенно-волноводное устройство первого канала с антенной в виде параболоида вращения со съемными рупорными облучателями формирует узкую диаграмму направленности в пределах 1,5—6,5° в зависимости от используемого поддиапазона. Антенно-волноводное устройство второго канала с
рупорной антенной формирует широкую диаграмму для обнаружения сигналов от целей в третьем и четвертом поддиапазонах.
Приемное устройство обеспечивает супергетеродинную или детекторную обработку принятых сигналов и их усиление. Оно объединяет в своем составе гетеродинное устройство, а также смесительные, детекторные камеры и усилительное устройство, конструктивно размещенные на тыльной стороне антенны первого канала.
Смесительные камеры обеспечивают преобразование принятого сигнала по частоте в супергетеродинном режиме. В детекторных камерах осуществляется обработка сигнала в детекторном режиме. Преобразованные по частоте (проде-тектированные) сигналы усиливаются в усилительном устройстве и поступают для дальнейшей обработки в индикаторное устройство.
Гетеродинное устройство генерирует высокочастотный сигнал, предназначенный для преобразования частоты сигнала РЛС в смесительной камере. Перестройка частоты гетеродина обеспечивается перемещением плунжера в объемном коаксиальном резонаторе. За счет соответствующей градуировки перемещений гетеродинное устройство позволяет определять несущую частоту принимаемых сигналов.
Органы управления на передней панели гетеродинного устройства обеспечивают контроль питающего напряжения и установку токов смесительных и детекторных диодов.
Индикаторное устройство предназначено для обработки информации, поступающей из приемного устройства и канала связи. На индикаторное устройство поступают: сигналы, принятые первым и вторым каналами; сигналы различения, принятые по каналу связи с ведущей приемной установки станции; напряжения, пропорциональные углу поворота антенны, снимаемые с датчиков дирекционного угла.
Индикаторное устройство вырабатывает: звуковой сигнал с частотой в два раза ниже частоты повторения сигнала РЛС противника в режиме «Поиск»; изображение сигналов РЛС на экране ЭЛО в режиме «Пеленг» и яркостную отметку в режиме «Отсчет»; сигналы различения в режимах «Различение Ф» и «Различение М», подаваемые на ЭЛО и в канал связи.
На передней панели устройства размещены органы регулировки принимаемых сигналов и устройство коммутации режимов работы.
Антенная колонка предназначена для управления антенным устройством, определения его положения по дирекционному углу и углу места, обеспечения перемещения луча ЭЛО индикаторного устройства пропорционально углу поворота антенного устройства в горизонтальной плоскости. Колонка состоит из устройства управления антенной с маховичком управления, редукторами дирекционного угла и угла места, 196
механизма отсчета со шкалой, датчиками дирекционного угла и решающим устройством.
Для обучения и тренировки операторов приемных установок, проверки работоспособности аппаратуры в III поддиапазоне, совмещения оптической и электрической осей антенного устройства в комплект станции входит тренировочное устройство, вырабатывающее сигналы, имитирующие работу наземных РЛС.
В режиме «Поиск» тренировочное устройство вырабатывает серии высокочастотных импульсных сигналов подобно РЛС в режимах секторного поиска цели или кругового обзора. В режиме «Сопровождение» тренировочным устройством формируются высокочастотные импульсные сигналы, имитирующие работу РЛС в режиме неподвижного или медленно перемещающегося основного лепестка (сопровождение цели). Органы регулировки тренировочного устройства позволяют изменять частоту повторения импульсов, длительность и частоту следования серий.
4. Проверка систем станции НРС-1 на функционирование
После развертывания приемных установок перед включением производится их осмотр и установка органов управления в исходные состояния. Проверяется крепление разъемов кабельных соединений, контролируется коммутация элементов установки в соответствии с заданным поддиапазоном и режимом работы.
Затем проводится проверка приемной установки на функционирование. С этой целью включаются выключатели ПОДСВЕТ, НАКАЛ на гетеродинном устройстве и выключатель ПИТАНИЕ на индикаторном устройстве. По встроенному прибору на гетеродинном устройстве контролируются напряжение питания — 6 В, а также загорание неоновой лампочки на передней панели индикаторного устройства.
Для контроля работы подсветки включаются выключатели ПОДСВЕТ ВИЗИРА и ПОДСВЕТ УРОВНЕЙ, ПОДСВЕТ ШКАЛ ДУ на антенной колонке. Убедившись, что подсвет есть, выключатели выключают.
Встроенный прибор гетеродинного устройства коммутируется для контроля тока смещения кристаллов первого и второго каналов и регулировками ТОК КРИСТАЛЛА УПЧ1 (УПЧ2) устанавливаются их значения порядка 0,1 мА.
Через 2—3 мин после включения выключателя НАКАЛ включается выключатель АНОД. При этом токи смещения должны быть не меньше 0,4 мА во всем рабочем диапазоне перестройки гетеродина.
При работе установки в детекторном режиме выключатели НАКАЛ и АНОД не включаются, а значение тока смеще-
ния (0,1 мА) выставляется регулировкой ТОК КРИСТАЛЛА ВИДЕО.
Затем включается режим «Отсчет» на индикаторном устройстве и регулировками ЯРКОСТЬ (ОТСЧЕТ), ФОКУС и УРОВЕНЬ (ОТСЧЕТ) устанавливаются необходимая яркость светящейся точки и ее положение по вертикали в центре экрана. В центре экрана по горизонтали светящаяся точка выставляется ручкой управления датчиками дирекционного угла на антенной колонке. Проверка работы датчиков дирекционного угла заключается в контроле характера перемещения светящейся точки по экрану ЭЛО при вращении маховичка управления антенной в двух положениях переключателя РАЗВЕРТКА: ГРУБО и ТОЧНО.
В режиме «Пеленг» устанавливается минимальный шум приемника регулировкой УСИЛЕНИЕ I и с помощью зуммера контролируется работа тракта по наличию его сигнала в звуковом индикаторе и на экране ЭЛО. Регулировкой УРОВЕНЬ II устанавливаются размеры изображения на экране ЭЛО по вертикали, а ручкой управления датчиками ДУ изображение выставляется на середину экрана.
В режи-ме «Поиск» включается второй канал приема, устанавливается усиление регулировкой УСИЛЕНИЕ II и проверяется работа тракта с помощью зуммера по звуковому индикатору аналогично режиму «Пеленг».
Для проверки работы канала связи станции на одной из установок — ведущей устанавливается переключателем ВЕ-ДУЩ. — ВЕДОМ, в положение ВЕДУЩ. и коммутируется режим «Пеленг» на индикаторном устройстве. На ведомых установках коммутируется режим «Различение Ф», а переключатель ЗВУК. ИНД. устанавливается в положение СВЯЗЬ. При этом на ведомой установке должны прослушиваться сигналы зуммера в звуковом индикаторе и наблюдаться на экране ЭЛО в виде прямой линии.
Глава X
БОЕВОЕ ПРИМЕНЕНИЕ СТАНЦИЙ НАЗЕМНОЙ РАДИОТЕХНИЧЕСКОЙ РАЗВЕДКИ
1. Выбор, подготовка, инженерное оборудование и топогеодезическая привязка позиции станции НРС-1
Выбор, подготовка, инженерное оборудование позиции станции НРС-1
Позиция станции НРС-1 состоит из трех позиций радиотехнических постов и пункта обработки, который совмещается, как правило, с центральным радиотехническим постом.
На позициях радиотехнических постов развертываются приемопеленгаторные установки (ППУ), на пункте обработ-198
ки — командная машина и приборы обработки разведывательных данных.
От выбора позиций постов зависит дальность разведки и точность пеленгования.
Инженерное оборудование позиции поста заключается в отрытии щелей для расчета и окопа для ППУ (см. рис. 34), а также в маскировке позиции и автомобиля.
Маскировка позиций и автомобилей производится маскировочными сетями и местными материалами. Для лучшей маскировки выбор позиции и расположение на ней ППУ осуществляются так, чтобы ее антенна при наблюдении со стороны противника не проектировалась бы на фоне неба.
Топогеодезическая привязка постов и ориентирование ППУ
Точность определения координат разведываемых РЛС в значительной мере зависит от точности топогеодезической привязки позиции постов и ориентирования ППУ. Топогеодезическая привязка, как правило, должна производиться то-погеодезическим подразделением на геодезической основе. При этом определяются прямоугольные координаты точек установки ППУ со срединной ошибкой 3—5 м и дирекцион-ные углы с каждой позиции на 2—3 ориентира, хорошо видимых с позиции и удаленных от нее на 500—600 м. Точность определения дирекционного угла ориентиров не должна превышать 0-00,5. Направления на ориентиры закрепляются установкой двух вех на расстоянии 20—30 м и 50— 60 м от позиции поста.
Ориентирование ППУ производится после ее развертывания и горизонтирования. Основным способом ориентирования является ориентирование ППУ по ориентирам с известными дирекционными направлениями, когда топогеодезическая привязка позиции осуществлена заранее. При этом способе ориентирование осуществляют два номера расчета — старший оператор и оператор. Оператор снимает защитный колпачок с ручки ориентирования шкал и отстопоривает ее. По командам старшего оператора, наблюдающего в оптический визир ППУ, оператор поворачивает антенну маховичком управления до совмещения вертикальной линии оптического визира с первым ориентиром. На шкале дирекционного угла оператор устанавливает значение дирекционного угла первого ориентира, застопоривает ручку ориентирования шкал зажимной цангой.
После этого антенна аналогично наводится на второй ориентир. На шкале должно быть зафиксировано значение дирекционного угла второго ориентира. Если расхождение оказывается большим, чем 0-00,5, то ориентирование следует
повторить. После окончания ориентирования ручка закрывается колпачком.
В случае если привязка позиции поста не произведена заранее топогеодезическим подразделением, она осуществляется силами расчета с использованием топографической карты и ориентированием ППУ по буссоли. В этом случае точность топогеодезической привязки и, как следствие, точность определения координат разведанных РЛС снижается.
При топогеодезической привязке с использованием топографической карты координаты позиций радиотехнических постов определяются расчетом станции с использованием штатной буссоли ПАБ-2 относительно контурных точек карты масштаба не мельче 1 : 100 000.
При этом с позиции поста должны быть хорошо видны и легко опознаваемы на местности и на карте три контурные точки, угол между которыми находится в пределах 30—120°.
Для определения координат позиции поста по карте, как правило, применяется засечка по обратным дирекционным углам.
Полученные значения дирекционных углов изменяют на 30-00 и прочерчивают на карте линии с контурных точек в сторону позиции поста. Эти линии образуют треугольник погрешностей, сторона которого не должна превышать 3 мм.
За координаты позиции поста принимаются снятые с карты координаты центра треугольника погрешностей.
Более высокую точность решения задачи засечки по обратным дирекционным углам позволяет получить аналитический способ с помощью вычислителя 1В520 путем трехкратного решения типовой задачи № 22 с осреднением результата, но при этом необходимо дополнительно снять с карты координаты контурных точек.
Измеренные значения дирекционных углов контурных точек с точки стояния ППУ можно использовать и для ориентирования ППУ, если хотя бы две выбранные контурные точки отстоят от позиции поста на расстоянии более 600 м. Ориентирование ППУ при этом производится так же, как было описано выше.
Как исключение, можно производить ориентирование ППУ методом обратного визирования. Этот метод ориентирования менее точен по сравнению с ориентированием по местным предметам.
Для ориентирования буссоль ПАБ-2 развертывается на расстоянии 20—50 м от ППУ, горизонтируется и ориентируется по дирекционному углу. Окуляр буссоли наводится на вертикальную линию отверстия оптического визира в антенне ППУ, а антенна ППУ наводится перекрестием оптического визира на центр шаровой пяты буссоли.
Рассчитывается значение обратного (с позиции поста на буссоль) дирекционного угла, которое и выставляется на 200
шкале ППУ. Затем буссоль переносится на другое место, ориентируется и операции обратного визирования повторяются.
Если отсчет дирекционного угла, снятый по шкале ППУ, не совпадает с полученным по буссоли для второй точки, то ориентирование повторяется.
2. Обязанности расчета станции НРС-1 при ведении разведки
Расчет станции НРС-1 состоит из начальника станции, оператора-вычислителя, шофера-связиста и расчетов ППУ.
Расчет ППУ состоит из начальника ППУ — старшего оператора, оператора, радиотелефониста, водителя-связиста.
Начальник станции является командиром подразделения, несет полную ответственность за его боевую готовность, выполнение им задач по разведке и управляет станцией НРС-1 в бою.
Начальник станции, получив боевую задачу, уясняет ее и оценивает обстановку; при наличии времени лично или с начальниками ППУ проводит рекогносцировку, затем устно или по каналам связи ставит задачу начальникам ППУ.
В ходе постановки задачи на ведение разведки он указывает:
поддиапазон, в котором вести поиск целей;
режим работы (детекторный или супергетеродинный);
сектор разведки (задается границами сектора); сектор разведки центрального поста частично должен перекрывать секторы крайних постов.
Например: «Вести разведку, правому — поддиапазон .первый, режим детекторный, 56-00—4-00; среднему — поддиапазон третий, режим супергетеродинный, 55-00—5-00; левому поддиапазон чертвертый, режим супергетеродинный, 56-00— 4-00».
После получения доклада от одного из постов об обнаружении РЛС и пеленга на нее начальник станции определяет приблизительно возможное положение цели и ставит задачу на ее обнаружение двум другим постам, например: «Поиск, поддиапазон четвертый, частота 2990, правому 55-00—58-00, среднему 59-00—1-00».
После обнаружения РЛС противника одной-двумя ППУ начальник станции дает указание на решение задачи однозначности засечки. Для этого он назначает одну из ППУ ведущей, а остальные — ведомыми. В качестве ведомых назначают ППУ с более опытными операторами, а в качестве ведущей, как правило, среднюю. Для решения задачи однозначности начальник станции подает команду, например: «Проверить однозначность, ведущий—средний».
После доклада с ведомых ППУ о наличии однозначности начальник НРС-1 подает команду «Засечь цель».
Начальник НРС-1, получив отсчеты пеленга цели со всех постов, приказывает вычислителю определить координаты При работе вычислителя он контролирует его действия, а при наличии времени лично решает прямую геодезическую задачу либо аналитическим, либо графическим способом независимо от вычислителя с целью исключения грубых ошибок в определении координат. Полученные координаты цели и ее характеристику начальник НРС-1 записывает в журнал разведки (см. табл. 5), наносит цель на рабочую карту (см. рис. 32) и докладывает результаты разведки в штаб подразделения (части).
Начальник ППУ — старший оператор является начальником расчета ППУ и руководит его работой.
Получив задачу на ведение разведки, начальник ППУ подает команду на поиск целей, указывая поддиапазоны, режим работы и границы сектора поиска. Например: «Поиск, поддиапазон третий, режим супергетеродинный, 55-00—5-00». После этого он контролирует действия оператора, а при необходимости оказывает ему практическую помощь.
После обнаружения цели начальник ППУ контролирует действия оператора по определению направления на нее, а в супергетеродинном режиме и по определению несущей частоты обнаруженной РЛС. Получив доклад от оператора о пеленге цели и несущей частоте обнаруженной РЛС, докладывает начальнику НРС-1, например: «Правый, есть цель, 56-80» (при работе в детекторном режиме) или «Левый, есть цель, 3-80, частота 2990». Результаты наблюдения и отсчеты пеленга и частоты обнаруженной цели начальник ППУ записывает в журнал записи отсчетов радиотехнического поста.
После получения команды на проверку однозначности начальник ППУ контролирует действия оператора по ее выполнению. При наличии однозначности докладывает начальнику НРС-1, например: «Левый, есть однозначность», а при ее отсутствии — «Левый, нет однозначности». При отсутствии однозначности приказывает оператору продолжить поиск цели. После получения команды «Засечь цель» начальник ППУ контролирует, а при необходимости оказывает практическую помощь по измерению пеленга и несущей частоты, наблюдению режима работы разведываемой РЛС и оценке частоты следования импульсов и качания луча диаграммы направленности. Результаты измерений и наблюдений начальник ППУ докладывает начальнику НРС-1, например: «Правый, 41-24, цель работает в режиме поиска, частота качания луча 2 Гц, частота следования импульсов около 1000 Гц», после чего он заносит указанные данные в журнал записи отсчетов радиотехнического поста. После измерений по обнаруженной цели начальник ППУ организует дальнейший поиск целей, 202
Оператор является основным номером расчета ППУ, он непосредственно выполняет все этапы боевой работы.
После получения команды от начальника ППУ на ведение разведки оператор должен подключить рупорный облучатель заданного поддиапазона, переключить кабели для работы в указанном режиме и поддиапазоне, проверить прохождение сигнала в этом режиме от искрового генератора— зуммера. После этого оператор приступает к поиску целей.
При этом оператор должен учитывать, что поворот антенны или вращение маховика настройки гетеродина должны быть плавными, без рывков.
Обнаружив цель в детекторном режиме, оператор пеленгует цель по максимуму сигнала (приближенно) и докладывает начальнику ППУ, например: «Есть цель, 56-86». Если цель обнаружена в супергетеродинном режиме, оператор добивается максимума звукового сигнала перестройкой гетеродина и переключает индикаторное устройство в режим «Пеленг». При этом звуковой сигнал может пропасть. В этом случае оператор должен обнаружить цель, медленно и плавно поворачивая антенну по направлению. После обнаружения цели по направлению оператор пеленгует обнаруженную цель по максимуму сигнала (приближенно), снимает отсчет со шкалы гетеродинного устройства, по таблице, расположенной на его крышке, определяет частоту излучения цели и докладывает, например: «Есть цель, 3-80, частота 2990».
После получения команды начальника станции «Проверить однозначность, ведущий — средний» оператор действует в зависимости от назначения его ППУ.
Если ППУ назначена в качестве ведущей, то оператор в режиме «Пеленг» должен более тщательно навести антенну по дирекционному углу и углу места на обнаруженную РЛС, добиваясь максимума сигнала на электронно-лучевом отметчике, устанавливает усиление максимальным без ограничения сигнала в приемнике («палатка» не должна иметь плоскую вершину), после этого переключает переключатель ВЕДУЩ. — ВЕДОМ, в положение ВЕДУЩ.
Если ППУ назначена ведомой, то ее оператор непосредственно участвует в решении задачи однозначности засечки. Для этого он должен переключить индикаторное устройство в режим «Различение Ф», а переключатель ЗВУК. ИНД. поочередно переключать из положения ПРИЕМ в положение СВЯЗЬ. При этом в звуковом индикаторе ППУ в телефонной гарнитуре должны прослушиваться сигналы различия (меандр) своей и ведущей ППУ соответственно. Если тональности звучания сигналов не совпадают, значит ведомая и ведущая ППУ обнаружили разные цели и оператор ведомой ППУ должен продолжать поиск цели, которую пелен
гует ведущая ППУ. Если тональность звучания совпадает, то оператор докладывает: «Есть однозначность по звуку» и продолжает решение задачи однозначности в режиме «Различение М» или «Различение Ф». В режиме «Различение М» оператор вращает ручку МАРКЕР. При этом в какой-то момент одна из палаток подсветится ярче, чем другая. По подсвеченной палатке можно производить отсчет пеленга, предварительно доложив о наличии однозначности. Если ни одна из двух палаток не подсветится, то оператор ведомой ППУ обязан продолжить поиск РЛС, которую пеленгует ведущая ППУ.
Когда на ЭЛО ведомой ППУ в режиме «Пеленг» наблюдается одна палатка, то оператор должен включить режим «Различение Ф». При этом на экране ЭЛО должна появиться фигура кратности. При устойчивом изображении фигуры кратности оператор ведомой ППУ докладывает о наличии однозначности, например: «Правый, есть однозначность». Если изображение фигуры кратности неустойчивое, размытое, значит пеленгуются различные РЛС и оператор ведомой ППУ, доложив об отсутствии однозначности, обязан продолжить поиск РЛС, которую обнаружила и пеленгует ведущая ППУ.
После положительного решения задачи однозначности операторы, получив команду «Засечь цель», приступают к отсчету направления на РЛС.
Для этого оператор ведущей ППУ должен:
переключатель ВЕДУЩ.—ВЕДОМ, установить в положение ВЕДОМ., а переключатель ЗВ. ИНД. — в положение ПРИЕМ;
вывести «палатку» на середину экрана ЭЛО;
выставить усиление приемника и степень подавления сигнала аттенюатором так, чтобы палатка не имела плоской вершины (из-за ограничения в приемнике);
повернуть антенну вправо—влево на угол около 1-00, определить положение антенны, соответствующее максимуму главного лепестка диаграммы направленности и установить антенну в этом положении;
включить точную развертку и установить сигнал на середину экрана ЭЛО;
быстро повернуть антенну вправо-влево 2—3 раза, получив полное и устойчивое изображение палатки и оставить антенну в положении, соответствующем началу левого ската палатки;
нажать кнопку ОТСЧЕТ и, повернув антенну до совмещения светящейся точки с левым скатом палатки, включить решающее устройство;
повернуть антенну до совмещения светящейся точки с правым скатом палатки;
снять Отсчет направления на цель по шкале дирекционного угла, записать его на трафарете крышки индикаторного устройства и выключить решающее устройство.
Указанные операции по отсчету направления оператор производит 3 раза и осредняет полученные результаты. При этом оператор должен учитывать, что отсчет направления нужно осуществлять поворотом антенны в одну сторону.
После отсчета направления оператор оценивает характер работы РЛС (круговой обзор, секторный поиск, автосопровождение целей), приблизительно частоту повторения импульсов, скорость вращения антенны или качания луча в секторе. Все эти данные оператор докладывает начальнику ППУ.
Вычислитель станции отвечает за обработку данных засечки цели и точность расчета координат разведанной РЛС. От действий вычислителя зависит эффективность работы всего личного состава станции.
При развертывании станции вычислитель должен подготовить к работе прибор управления огнем, дисковый логарифмический счислитель, бланки № 1, 2, карандаш, резинку, листы чистой бумаги. При получении прямоугольных координат позиций радиотехнических постов вычислитель заносит их в бланк № 1 расчета базы и дирекционного угла базы, производит вычисления с использованием этого бланка и таблиц и получает значение величины баз и дирекционных углов баз. Получив отсчеты направлений на разведанную РЛС со всех ППУ, вычислитель заносит их в бланк № 2 решения задач. После этого вычислитель производит решение задачи прямой засечки по трем пеленгам с осреднением, используя бланк и дисковый логарифмический счислитель. Получив прямоугольные координаты разведанной РЛС, вычислитель докладывает их начальнику станции и после его контроля правильности вычислений готовит бланк № 2 к новым вычислениям, стерев предыдущие записи.
Радиотелефонист отвечает за бесперебойную работу радиосвязи. Он участвует в развертывании, инженерном оборудовании, горизонтировании и ориентировании ППУ, развертывании, проверке работоспособности радиостанции.
В процессе ведения разведки принимает, передает и записывает поступающие приказания, распоряжения, команды и доклады. Особое внимание радиотелеграфист уделяет качественному приему-передаче сигналов различения.
Водитель-связист отвечает за техническое состояние автомобиля и проводных линий связи. При развертывании станции участвует в развертывании ППУ, в прокладке проводной линии связи, выбирает укрытие для автомобиля, устанавливает в него автомобиль и маскирует его. При ведении разведки участвует в охранении радиотехнического поста, при нарушениях проводной линии связи отыскивает неисправности и устраняет их.
3. Обработка разведывательных данных, полученных расчетом станции НРС-1
Обработка разведывательных данных, полученных расчетами ППУ станции НРС-1, заключается в получении прямоугольных координат разведанных РЛС путем решения задачи прямой засечки, и оценке их типа и принадлежности.
Решение задачи прямой засечки можно выполнить либо графическим способом с помощью прибора управления огнем (ПУО), либо аналитическим с помощью дискового логарифмического вычислителя и бланков № 1, 2, которые изготавливаются в виде металлических трафаретов и входят в комплект станции наряду с дисковым логарифмическим вычислителем.
Графический способ решения задачи прямой засечки значительно проще, но менее точен. Решение задачи прямой засечки аналитическим способом с помощью дискового логарифмического вычислителя более длительное, требует около 20 мин, однако точность определения координат гораздо выше, чем при графическом способе. Поэтому полученные графическим способом координаты при наличии времени должны уточняться аналитическим решением на дисковом логарифмическом счислителе.
Решение задачи прямой засечки аналитическим способом с помощью дискового логарифмического счислителя осущест-. вляют для трех треугольников: пост левый — пост центральный— цель; пост центральный — пост правый — цель; пост левый—пост правый — цель по трем засечкам (пеленгам) с осреднением полученных координат. Порядок вычислений и пример решения задачи приведены в Техническом описании и инструкции по эксплуатации станции НРС-1.
Сочетание быстроты решения задачи прямой засечки с высокой точностью вычислений может быть достигнуто при использовании вычислителя 1В520 (рис. 73).
Порядок работы с вычислителем 1В520 при решении задачи прямой засечки по трем пеленгам с осреднением для примера, приведенного в Техническом описании и инструкции по эксплуатации станции НРС-1, следующий:
вычислитель 1В520 подготавливается к работе от штатных аккумуляторов или от бортовой сети постоянного тока;
производится включение и проверка работоспособности аккумуляторов;
нажимается кнопка НУ, на индикаторе появляется слово ТЕСТ, что говорит о проверке работоспособности вычислителя по тест-программе;
при появлении на индикаторе надписи КРД? (координаты?) нажимается кнопка 0 для работы на сокращенных координатах или кнопка 1 при работе на полных координатах. После этого вычислитель готов к работе.
Решение задачи производится по таблицам сборника алгоритмов к 1В520.
Применение вычислителя IB520 для обработки разведывательных данных, полученных расчетами ППУ станции НРС-1, позволяет сократить время на обработку данных, повысить точность вычислений.
Обработка разведывательных данных заканчивается оценкой типа и принадлежности разведанной РЛС. Эта оценка производится приближенно по выявленному характеру работы РЛС, качественному определению частоты повторения, скорости вращения или качания угла диаграммы направленности антенны и другим вспомогательным признакам.
ЭКСПЛУАТАЦИЯ РАДИОЛОКАЦИОННЫХ И РАДИОТЕХНИЧЕСКИХ СТАНЦИЙ
Глава XI
ТЕХНИЧЕСКОЕ ОБСЛУЖИВАНИЕ РАДИОЛОКАЦИОННЫХ И РАДИОТЕХНИЧЕСКИХ СТАНЦИЙ
1. Требования безопасности при работе на радиолокационных и радиотехнических станциях
Командиры (начальники) всех степеней, личный состав расчетов (отделений), связанные с эксплуатацией радиолокационных и радиотехнических станций, обязаны строго следить за соблюдением мер безопасности. Выполнение мер безопасности является обязательным во всех случаях. Срочность работы и другие причины не являются основанием для их нарушения.
Проведение любых работ с вооружением без руководства и постоянного контроля со стороны должностных лиц или руководителя работ, а также без проверки знаний личным составом требований эксплуатационной документации запрещается.
Командир подразделения, отдавший распоряжение на выполнение работ, обязан учесть сложность, опасность предстоящих работ, квалификацию и опыт исполнителей, назначить руководителя работ.
При проведении работ на РЛС и РТС на командиров подразделений возлагается:
обеспечение правильной эксплуатации образцов в соответствии с требованиями мер безопасности;
обеспечение правильной организации работ на рабочих местах;
обеспечение своевременного инструктажа личного состава.
В свою очередь руководители работ должны обеспечить: проведение инструктажа личного состава по мерам безопасности и ведение его учета;
контроль за выполнением личным составом инструкций по мерам безопасности и применением безопасных приемов работы;
постоянный контроль за исправностью техники, инструмента и применением личным составом средств индивидуальной защиты;
правильность организации работ;
своевременность докладов по команде о несчастных случаях при выполнении работ.
При работе на РЛС и РТС личный состав расчетов должен знать:
об опасностях поражения электрическим током;
правила оказания первой помощи при поражении электрическим током;
правила тушения пожара в электроустановках.
При работе внутри шкафов или блоков, где имеется сильное магнитное поле, необходимо крепко держать в руках инструмент из ферромагнитных материалов, а при работе в непосредственной близости от магнитов необходимо пользоваться инструментом из немагнитных материалов.
Для контроля работы систем и блоков, имеющих высокое напряжение, допускается снимать крышки или открывать двери шкафов (если последние не имеют блокировки).
В этом случае в кабине должно находиться не менее двух человек, проинструктированных о мерах безопасности и имеющих опыт работы с аппаратурой. Руководить этой работой должен офицер. Лицам, не имеющим прямого отношения к работе, находиться внутри кабины РЛС запрещается. При работе внутри проверяемого блока или шкафа необходимо соблюдать острожность, работать только одной рукой (желательно правой), вторую руку держать за спиной, избегая касания металлических деталей.
Контроль тока и напряжения, снятие осциллограмм производить контрольно-измерительной аппаратурой с исправными, обеспечивающими безопасность штатными кабелями.
Запрещается:
включать незаземленные или плохо заземленные устройства;
снимать защитные кожухи, стенки, крышки и сетки, убирать ограждения, резиновые коврики и другие защитные устройства;
при включенном питании заменять детали, находящиеся под напряжением, выполнять какие-либо отпайки, замыкать системы блокировки искусственными закорачивающими перемычками, присоединять приборы и кабели, прикасаться к анодным колпачкам или штырькам ламп и оголенным проводам цепей блоков, к незаземленным кожухам или металлическим деталям приборов, соединенных с цепями высокого напряжения, чистить и протирать блоки, заливать смазку;
касаться токоведущих частей, не убедившись предварительно в отсутствии на них напряжения;
оставлять работающую аппаратуру без наблюдения оператора;
осматривать открытые концы волноводов и облучателей при включенных передатчиках;
Включать передающую аппаратуру при снятых защитных кожухах и раскрытых дверцах отсеков;
производить работы с антенными устройствами при включенных передатчиках;
находиться под поднятыми частями антенны во время ее развертывания или свертывания;
работать при появлении искрения на контактах.
Наибольшим безопасным постоянным током следует считать ток силой 50 мА и переменный ток силой 10 мА. В наиболее неблагоприятных условиях (повышенная влажность, нарушение целости кожного покрова) напряжение переменного тока более 10 В может оказаться опасным для жизни человека.
С другой стороны, в сухих помещениях, когда сопротивление тела человека достигает десятков тысяч ом, безопасными будут напряжения порядка 100—300 В.
Установки, работающие под напряжением 250 В и больше, считаются установками высокого напряжения. На них распространяются правила эксплуатации установок высокого напряжения.
Личный состав, располагающийся на открытой местности, должен находиться не ближе 100 м от антенны РЛС.
2. Техническое обслуживание радиолокационных и радиотехнических станций
Общие положения
Техническое обслуживание является составной частью эксплуатации. От правильности его проведения во многом зависит продолжительность службы техники и ее готовность к использованию.
Периодичность видов технического обслуживания может быть назначена по одному из трех принципов: календарному, временному и смешанному. При календарном принципе мероприятия технического обслуживания (ТО) проводятся по истечении определенного времени независимо от наработки аппаратуры. При временном принципе мероприятия ТО проводятся по истечении определенной наработки. При смешанном принципе мероприятия ТО организуются по календарному плану, но с учетом наработки. Мероприятия технического обслуживания станций CHAP, РЛС разведки огневых позиций, НРС назначаются по смешанному принципу и включают следующие виды технического обслуживания:
контрольный осмотр (КО);
текущее обслуживание (ТеО);
техническое обслуживание № 1 (ТО-1);
техническое обслуживание № 2 (ТО-2); сезонное обслуживание (СО).
Объем работ по техническому обслуживанию наращивается в порядке очередности его видов, т. е. работы КО вхо дят в ТеО, работы ТеО входят в ТО-1 и т. д. Сезонное обслуживание обычно совмещается с одним из технических обслуживании (ТО-1 или ТО-2).
Техническое обслуживание станции CHAP и особенности работы в сложных климатических условиях
Контрольный осмотр проводится перед выходом из парка, на марше, привале, перед использованием по назначению и включает:
контрольный осмотр базовой машины;
текущее обслуживание агрегата питания;
внешний осмотр аппаратуры;
контрольный осмотр буссоли;
проверку работоспособности прибора ночного видения и исправности фар;
включение и проверку функционирования аппаратуры станции;
контроль тока, потребляемого гирокурсоуказателем;
определение поправочного коэффициента корректуры пути курсопрокладчика;
проверку электроспуска пулемета.
Проведение контрольного осмотра перед выходом из парка и использованием по назначению занимает 55 мин, на марше — 20.
Текущее обслуживание проводится после работы, учений, занятий, транспортирования, но не реже 1 раза в две недели и включает:
контрольный осмотр станции, ее чистку, очистку от нагара наконечников проводов и клемм аккумуляторных батарей агрегата питания, контроль уровня и плотности электролита;
проверку надежности стопорения башни, плавности вращения штурвала дальности, функционирования блока селекции;
проверку гибкого датчика пути курсопрокладчика и правильность установки потенциометра поправки на трение;
проверку работоспособности и калибровку радиостанции;
проведение работ по обслуживанию оптических средств и текущего обслуживания буссоли;
чистку и смазку пулемета;
текущее обслуживание индивидуального дегазационного комплекта (после специальной обработки).
Проведение работ ТеО занимает 2—2,5 ч.
Техническое обслуживание № 1 проводится при наработке радиолокационной аппаратурой 200 ч, после пробега 800—
1000 км, но не реже 1 раза в 3 месяца и занимает два дня (12—15 ч).
В первый день выполняются работы ТеО, ТО-1 базовой машины, обслуживание агрегата питания. Затем проводятся операции по контролю работоспособности и настройке радиолокационной аппаратуры, обслуживанию гирокомпаса.
Во второй день проводятся операции по техническому обслуживанию средств связи, жизнеобеспечения, проверяется зарядка огнетушителей. По завершении работ заполняются формуляры.
Техническое обслуживание № 2 проводится при наработке радиолокационной аппаратурой 800 ч, после пробега 2400— 3000 км, но не реже 1 раза в год и занимает четыре дня (24—30 ч).
В первые два дня работы проводится ТО-1 в полном объеме, а также выполняется ТО-2 базовой машины, проверяются параметры первичного источника электропитания.
В третий день работы проводится контроль работоспособности и настройка всех систем радиолокационной аппаратуры.
В четвертый день проводятся проверки минимальной дальности действия, систематической ошибки по направлению, разрешающей способности по дальности и направлению, точности остановки луча антенны в биссектрисе сектора обзора, согласования оптической и электрической осей, паспортной дальности действия. Затем осуществляется обслуживание навигационной аппаратуры, радиостанции и оптических средств, проверка боя пулемета, производится пополнение одиночного комплекта ЗИП и его техническое обслуживание.
В конце каждого дня работы станция проверяется на функционирование. Завершается обслуживание заполнением документации.
При сезонном обслуживании станции помимо проведения технического обслуживания № 1 (2) осуществляется подготовка к зимнему или летнему периоду эксплуатации базовой машины, агрегата питания, аккумуляторных батарей, выставляется напряжение по цепи +27 В, контролируется блок подзаряда аккумуляторных батарей и уход гирокурсоуказа-теля.
Технические характеристики станции и комплектующих приборов, указанные в формулярах, гарантируются только при нормальных климатических условиях. Для обеспечения работоспособности станции в различных климатических условиях необходимо строго выполнять указания по эксплуатации станции в условиях, отличных от нормальных.
Особенности работы в условиях низких и высоких температур. При температуре минус 5°С и ниже перед пуском агрегата питания необходимо его прогреть от работающего двигателя базовой машины. Для этого на ПДУ (подогрева-212
теле) переводят ключ в положение ПР (прогрев) и после загорания лампочки ПРОГРЕТ на ПДУ пускают двигатель агрегата питания. При неработающем двигателе базовой машины прогревать агрегат питания запрещается.
Если станция находилась длительное время в условиях низких температур, то перед ее включением необходимо закрыть все заслонки, включить отопитель, систему подогрева агрегата питания и после прогрева запустить агрегат питания. Затем перевести вентиляцию станции в режим внутренней рециркуляции и включить радиолокационную аппаратуру.
Если при включенном высоком напряжении наблюдается нестабильность тока магнетрона (колебания стрелки прибора ТОК ВЫПР.Х4— ТОК М), то необходимо путем уменьшения тока магнетрона на 1—2 мА от номинального значения выбрать точку устойчивой работы магнетрона. Через 5—10 мин увеличить ток магнетрона до номинального значения.
При непродолжительных перерывах в работе (не более 20—30 мин) не рекомендуется выключать радиолокационную аппаратуру, необходимо выключить только высокое напряжение.
При перерывах в работе более 4—5 ч после выключения станции нужно закрыть заслонки вентиляционной системы и люки базовой машины.
В условиях низких температур возможно запотевание стекол оптических приборов. Для исключения этого необходимо включить обогрев соответствующих стекол. Во избежание выхода оптических приборов из строя вследствие перегрева стекол при положительных температурах необходимо обязательно выключить обогрев стекол после окончания работы.
При отрицательных температурах через каждые 10— 15 дней следует проверять степень заряженности аккумуляторных батарей и подзаряжать их при прогревах двигателя базовой машины.
При температуре окружающего воздуха минус 20°С и ожидаемых продолжительных перерывах в работе (более двух суток) аккумуляторные батареи целесообразно снимать и хранить в отапливаемом помещении.
В летнее время при температуре воздуха внутри станции выше 10°С необходимо открыть все заслонки, включить вентилятор кабины и установить рукоятку привода жалюзи агрегатного отсека в положение, соответствующее температуре наружного воздуха.
При температуре наружного воздуха выше 30°С перед остановкой агрегата питания необходимо выключить нагрузку и проработать на холостом ходу в течение 10—15 мин. Если при включенном высоком напряжении наблюдается не
стабильность тока магнетрона, то необходимо путем увеличения тока в пределах 1 мА от номинального значения выбрать точку устойчивой работы магнетрона. При температуре внутри станции свыше 50°С включение радиолокационной аппаратуры не допускается. Через 5—-6 дней следует проверять уровень электролита аккумуляторных батарей.
Особенности работы в условиях повышенной влажности. Если станция находилась длительное время в условиях повышенной влажности, то до включения станции необходимо просушить радиолокационную аппаратуру. Для этого нужно на 1—2 ч включить отопитель, а затем включить радиолокационную аппаратуру переключателем СТАНЦИЯ и прогреть ее в течение 30 мин в режиме внутренней рециркуляции. При включении станции необходимо следить за показаниями приборов, так как возможен пробой изоляции и, следовательно, выход станции из строя.
Следует проверять состояние силикагеля в фильтре блока воздушной помпы и оптических приборах. Если силикагель имеет розовый цвет, то необходимо заменить его или восстановить в соответствии с указаниями, изложенными в инструкции по эксплуатации станции.
При продолжительном нахождении в условиях повышенной влажности необходимо перед началом работы производить просушку в течение не менее одного часа путем само-прогрева при открытой крышке на лицевой панели.
Особенности работы в других климатических условиях. При работе в условиях резкого перепада температур необходимо строже следить за температурой внутри помещений станции.
При работе в условиях пониженного атмосферного давления уменьшается мощность, отдаваемая агрегатом питания. Для уменьшения нагрузки на агрегат питания при работающей радиолокационной аппаратуре включать навигационную аппаратуру можно только при работающем двигателе базовой машины. При выключенном двигателе машины нельзя одновременно включать обе радиостанции на передачу, а также одновременно включать вентилятор кабины и обогрев оптических приборов.
При работе в дождь или снегопад все люки и кормовые двери должны быть закрыты. Вход и выход начальника станции и оператора из машины должны производиться не через люки, а через левую кормовую дверь. При образовании слоя льда или снега на отражателе антенны или на выходном рупоре необходимо выключить станцию и удалить образовавшийся слой снега или льда.
При работе станции в условиях повышенной запыленности необходимо закрыть все люки и двери машины для предотвращения попадания пыли на приборы и оборудование. Неработающие приборы должны быть зачехлены.
После длительной работы станции в условиях повышенной запыленности необходимо удалить пыль с блоков и оборудования и проверить фильтр пылеочистителя блока воздушной помпы. Для удаления пыли нужно переключить вентиляцию станции в режим внешней рециркуляции и включить все вентиляторы. Пыль с пола кабины удаляется с помощью пылесоса.
Техническое обслуживание РЛС разведки огневых позиций
Периодичность проведения контрольного осмотра такая же, как и для станций CHAP. Перед выходом из парка, на привале проверяется крепление блоков, узлов, ящиков ЗИП, имущества и приборов, стопорение антенной колонки, готовность шасси к движению. Перед боевой работой контролируется состояние шасси, проводится внешний осмотр аппаратуры, текущее обслуживание навигационной аппаратуры, проверяется РЛС на функционирование и определяется коэффициент шума приемной системы. Контрольный осмотр занимает от 20 до 30 мин.
Текущее обслуживание РЛС проводится 1 раз в месяц и включает чистку станции, обслуживание аккумуляторных батарей, генераторного комплекса, средств связи, оптических средств, а также проверку РЛС на функционирование. Продолжительность текущего обслуживания 1—1,5 ч.
Техническое обслуживание. № 1 проводится при наработке радиолокационной аппаратурой 300 ч либо после пробега 1000 км, но не реже 1 раза в год и занимает три дня (20— 2.4 ч).
В первый день проводятся текущее обслуживание РЛС, ТО-1 генераторного комплекса, буссоли, базового шасси, смазка узлов и блоков, подзаряд аккумуляторных батарей, ТО-2 ЭВМ, обслуживание приборов наблюдения, регламентные работы средств связи. В заключение проводится проверка РЛС на функционирование.
Во второй день проверяются системы радиолокационной аппаратуры, проводятся ТО-2 гирокомпаса, профилактические работы с комплектом специальной обработки, проверка зарядки огнетушителей. Завершаются работы дня проверкой РЛС на функционирование.
В третий день проверяются передающая система, система съема и преобразования координат, контролируются параметры РЛС в целом и заполняется документация.
Техническое обслуживание № 2 пооводится при наработке радиолокационной аппаратурой 600 ч либо после пробега 2500—3000 км, но не реже 1 раза в 2 года и занимает пять дней (35—40 ч). В первые три дня проводится ТО-1, в четвертый день смазываются узлы и блоки аппаратуры, заменя
ются зубчатые колеса и канат в антенной колонке, проверяются и чистятся контакты, проводится ТО-2 генераторного комплекса.
В пятый день работы проводятся техническое обслуживание системы топопривязки и навигации, ТО-2 шасси, осуществляется проверка комплектности и пополнение одиночного комплекта ЗИП, заполнение формуляров.
Сезонное обслуживание РЛС разведки огневых позиций, как и станции CHAP, проводится два раза в год, совмещается с очередным техническим обслуживанием и включает сезонное обслуживание шасси, аккумуляторных батарей, системы топопривязки и навигации, ТО-2 буссоли.
Техническое обслуживание станций наземной радиотехнической разведки
Для контрольного осмотра НРС установлена такая же периодичность, как и для станции CHAP. Перед выходом из парка и на марше в течение 15 мин проверяются техническое состояние автомобилей и надежность крепления узлов, блоков, приборов и ящиков ЗИП. Перед применением в течение 25—30 мин проверяются правильность развертывания станции, исправность смесителей первого, второго каналов и детекторов по силе тока кристалла и наличие генерации по диапазону, яркость, фокусировка и положение светящейся точки на экране ЭЛО, работа датчиков дирекционного угла, исправность работы первого и второго каналов приемных установок по величине шумов и зуммеру, работа канала связи.
При текущем обслуживании проводятся операции контрольного осмотра перед применением, проверка состояния и чистка низкочастотных и высокочастотных разъемов, контроль работы тренировочного устройства, текущее обслуживание автомобилей. Текущее обслуживание занимает 3 ч и проводится не реже 1 раза в две недели.
Техническое обслуживание № 1 НРС проводится не реже 1 раза в шесть месяцев и занимает 8 ч. Дополнительно к работам по ТеО проводятся проверки состояния монтажа аппаратуры и всех измерительных приборов; замена смазки механизма перестройки гетеродинного устройства; обслуживание аккумуляторных батарей; проверки чувствительности приемной установки в четвертом поддиапазоне и работоспособности плат ЗИП; контроль люфта между антенной и шкалой точного отсчета антенной колонки, совмещения электрической и оптической осей приемной установки; техническое обслуживание автомобилей и взвешивание огнетушителей, По окончании работ оформляется документация.
Техническое обслуживание № 2 проводится не реже 1 раза в два года и занимает два дня (16 ч).
В первый день проводится ТО-1. Во второй день проверяется комплектность аппаратуры, состояние внутренней поверхности коаксиального контура, положение петель связи и сборки ламподержателя гетеродинного устройства, работа механизмов горизонтирования приемной установки, проводится техническое обслуживание автомобилей, чистка оптики визира, оформление документации.
При сезонном обслуживании проводятся работы ТО-1 (2). Осуществляется промывка и зарядка приборов аккумуляторного питания, техническое обслуживание автомобилей. Аппаратура и механизмы станции специального сезонного обслуживания не требуют.
Объем ежедневного технического обслуживания и регламентного технического обслуживания уточняется в соответствующей технической документации на радиолокационные и радиотехнические станции.
Глава XII ВОЙСКОВОЙ РЕМОНТ РАДИОЛОКАЦИОННЫХ И РАДИОТЕХНИЧЕСКИХ СТАНЦИЙ
1. Условия и факторы, влияющие на скорость отыскания неисправностей в радиолокационных и радиотехнических станциях
Обнаружение и отыскание неисправностей в радиолокационной аппаратуре является наиболее сложным и трудоемким этапом эксплуатации РЛС и РТС.
Условиями успешного отыскания неисправного элемента в аппаратуре являются:
хорошее знание функциональных и принципиальных схем систем и блоков станции;
глубокое понимание физических процессов, протекающих в системах станции;
знание конструкции материальной части;
четкое представление взаимодействия и взаимосвязи в работе отдельных узлов и блоков;
знание внешних признаков нормальной работы станции;
тренировка операторов в отыскании причин и устранении последствий отказов.
При отыскании неисправностей, определении причин их появления необходимо придерживаться определенной системы, так как бессистемные действия значительно увеличивают время ремонта или вообще не позволяют его осуществить.
Большое значение имеет приобретенный опыт эксплуатации, знание «слабых» мест конкретной станции, характерных для данной системы неисправностей. Наличие такого опыта в ряде случаев позволяет по проявившимся признакам не-
нормальной работы сразу определить причину неисправности. Поэтому важное значение имеет внимательное повседневное наблюдение за работой аппаратуры. Анализ наблюдений за работой станции, документальный учет всех неисправностей во время эксплуатации в значительной степени облегчает процедуру поиска неисправностей. Особенно важно это для молодых, неопытных специалистов.
На скорость отыскания и устранения неисправностей влияют следующие факторы:
подготовленность личного состава расчета;
укомплектованность станции ЗИП;
состояние контрольно-измерительной аппаратуры, знание ее- возможностей и умение расчета ею пользоваться;
состояние инструмента и приспособлений.
Применение неисправного прибора может ввести расчет в заблуждение, а следовательно, увеличит время на обнаружение и устранение неисправности.
Наличие среди ЗИП неисправных элементов затрудняет работу расчета и также увеличивает время на проведение ремонта.
Весьма велика роль встроенных в станцию контрольноизмерительных устройств, предусмотренных при проектировании, и умелое их применение. Такими устройствами являются контрольно-измерительные приборы с переключателями (вольтметры, амперметры и т. д.), световые табло и сигнализаторы, устройства защиты от перегрузок и выходные устройства станции (например, электронно-лучевые индикаторы).
Важная роль в отыскании неисправностей принадлежит операционно-логическому методу поиска неисправностей, который заключается в составлении алгоритма поиска неисправности.
Алгоритм поиска неисправности представляет собой графическое изображение логической последовательности действий расчета при отыскании неисправности в станции. Опти-. мизация маршрута поиска неисправности производится при составлении алгоритма методом половинного разбития неисправного тракта станции с широким использованием кон.-, трольно-измерительной- аппаратуры и контрольных гнезд станции.
Алгоритм поиска неисправностей составляется на основе анализа функциональных и принципиальных схем станции в виде «дерева» поиска. Указания по необходимым действие ям оператора отображаются схематично в виде маршрутных линий поиска и точек контроля (измерений) .параметров аппаратуры по встроенным и переносным контрольно-измерительным и индикаторным приборам.
Применение алгоритмов поиска неисправностей позволяет вести поиск неисправностей без использования функциональ-218
пых и принципиальных схем, так как они отработаны с учетом анализа связей по этим схемам.
В последнее время при ремонте широко используются методы диагностического контроля, основанные как на анализе физических процессов в схемах, так и на анализе статистических данных об отказах.
2. Последовательность обнаружения неисправностей в радиоэлектронной аппаратуре радиолокационных
и радиотехнических станций
Как отмечалось выше, при отыскании неисправностей в радиоэлектронной аппаратуре необходимо соблюдать определенную последовательность в действиях. Основное правило, которое необходимо при этом выполнять, состоит в том, что поиск неисправности должен осуществляться от простого к сложному. Это означает, чго сложным проверкам должны предшествовать простые проверки, на проведение которых не требуется много времени и когда не нужно использовать специальную контрольно-измерительную аппаратуру, приборы, приспособления и т. д.
Одной из рациональных последовательностей поиска неисправностей в радиоэлектронной аппаратуре может быть такая:
1. Проверить наличие первичных напряжений питания радиоэлектронной аппаратуры (например, напряжений 220 В 400 Гц и +26 В в станции CHAP). Контроль первичных напряжений питания осуществляется, как правило, по встроенным вольтметрам и не требует значительных затрат времени.
Если хотя бы одно из первичных напряжений отсутствует, то необходимо проверить соответствующий предохранитель с помощью штатного ампервольтомметра (комбинированного прибора). Неисправный предохранитель заменяется соответствующим предохранителем из ЗИП. Если предохранители оказались исправными, то неисправность следует искать в цепи источник питания — вольтметр контроля напряжения питания.
2. При наличии первичных напряжений питания необходимо проверить вторичные (выпрямленные) напряжения, если они имеются в станции. Эта проверка также проводится с помощью встроенных вольтметров. Если хотя бы одно из напряжений отсутствует, то необходимо проверить и заменить соответствующий предохранитель.
3. При наличии всех питающих напряжений и соответствии их значений допускам следует проверить положение органов управления и регулировок в системе или блоке станции, где имеется неисправность. Например, причиной отсутствия свечения экрана индикатора может быть случайная
установка номером расчета потенциометра ЯРКОСТЬ в крайнее положение против хода часовой стрелки. Второй пример: отметки от местных предметов на экране станции CHAP могут отсутствовать при слишком высоко поднятом отражателе антенны относительно горизонтальной плоскости.
4. Если проверка положения органов управления и регулировок положительных результатов не дала, то необходимо использовать контрольные гнезда, выведенные на переднюю панель или на внутренние платы подозреваемого блока, проверить формы сигналов с помощью встроенного осциллографа. Формы сигналов на контрольных гнездах приведены на крышках соответствующих блоков станции или же в инструкции по эксплуатации.
При проверке формы сигналов на контрольных гнездах блоков и узлов следует пользоваться штатными кабелями из состава одиночного комплекта ЗИП.
5. При соответствии форм напряжений на контрольных гнездах приведенным в таблице необходимо отключить питающие напряжения и произвести внешний осмотр блока на предмет обнаружения явных неисправностей. При этом в первую очередь следует проверить, нет ли обуглившихся и почерневших элементов, обрывов проводников, проверить целость деталей монтажа и лакового покрытия и т. д.
6. Если формы сигналов на контрольных гнездах блока отличаются от приведенных в таблицах осциллограмм, то необходимо проверить наличие и значения питающих напряжений, подаваемых в блок через штепсельные разъемы. При отсутствии какого-либо напряжения следует, пользуясь трактовыми схемами, приведенными в инструкции по эксплуатации или в альбоме схем, найти неисправность в цепях прохождения соответствующего напряжения.
7. При наличии всех питающих напряжений на разъемах блока и входных сигналов (если они поступают в блок) необходимо искать неисправность методом средней точки или же путем измерения напряжений и сопротивлений на элементах блока комбинированным прибором (ампервольтом-метром).
Метод средней точки обеспечивает быструю локализацию неисправного каскада (узла, платы).
Измерение напряжений и сопротивлений на элементах блока следует проводить с помощью соответствующих штатных удлинительных кабелей из ЗИП при выключенных высоких напряжениях. Полученные при измерении значения напряжений и сопротивлений необходимо сравнить с данными, приведенными в инструкции по эксплуатации. Если полученные значения не соответствуют значениям, указанным в инструкции по эксплуатации, то неисправность в проверяемой цепи следует искать путем поочередной проверки входящих в цепь элементов.
Прежде чем приступить к поиску неисправности, необходимо точно обнаружить наличие неисправности, т. е. поставить технический диагноз станции. Обнаружить наличие неисправности можно при включении и проверке станции на функционирование или же в ходе боевой работы по внешним признакам нормальной работы систем станции. Контроль внешних признаков нормальной работы станции осуществляется при помощи встроенных контрольно-измерительных приборов, световых табло, сигнальных ламп и т. д.
Для выяснения причины отклонения работы системы от нормального режима необходимо органами управления и регулировок устранить обнаруженный недостаток. Если это не удается, то следует проверить признаки нормального функционирования других систем и после анализа внешних признаков неисправности приступить к ее поиску.
Известную пользу в установлении причины неисправности может оказать перечень неисправностей и способов их устранения, который приведен в инструкции по эксплуатации. Однако на практике встречается целый ряд простых неисправностей, которые отсутствуют в указанном перечне. Многие из них могут быть быстро обнаружены и устранены даже начинающими специалистами при условии правильных их действий.
Как показывает практика, большинство начинающих специалистов причину неисправности видят в отказе наиболее сложного элемента. Поэтому действия оператора (начальника станции) должны быть обдуманными, логичными и неторопливыми. Надо постараться избежать навязчивых, но ошибочных выводов относительно порядка поиска неисправности. Большую пользу в этом окажет составление хотя бы простейшего алгоритма поиска неисправности с использованием функциональной схемы радиолокационной аппаратуры станции, функциональной схемы соответствующей системы и при необходимости принципиальных схем.
Рассмотрим порядок действий и составления алгоритма поиска неисправности на конкретной неисправности в станции CHAP, которая часто встречается на практике (рис. 74).
Предположим, что неисправна передающая система. Внешние признаки неисправности: при нажатии и отпускании кнопки ВЫСОКОЕ ВКЛ. табло ВЫСОКОЕ гаснет, отсутствуют показания прибора ТОК М.
Внешние признаки неисправности свидетельствуют о том, что передатчик не включается. Действуя от простого к сложному и помня о том, что передатчик не может быть включен при малом значении тока магнетрона, необходимо увеличить ток магнетрона (повернуть ручку потенциометра РЕГУЛИРОВКА ТОКА М по ходу часовой стрелки примерно на 0.5 оборота) и повторить включение передатчика. Если ток магнетрона не будет зафиксирован при втором и третьем
включении передатчика, то, следовательно, дело не в малом начальном значении тока магнетрона.
Зная о том, что включение передатчика заблокировано, необходимо проверить блокировки: выключатель ГЕНЕРАТОР—ОТКЛ. установить в положение ГЕНЕРАТОР, пере-
Рис. 74. Последовательность поиска неисправности
ключатель пульта управления генератором шума — в положение ОТКЛ., манометр блока воздушной помпы должен показать давление в пределах 2,0—2,6 кгс/см2 (0,195— 0,25 МПа).
С помощью комбинированного прибора проверить исправность предохранителей, выведенных на переднюю панель блока. Эти предохранители установлены в цепях напряжения питания 220 В 400 Гц и выпрямителя+ 600 В.
Замерить напряжение +600 В на гнезде +600 В передатчика.
Проверить надежность контактов в штепсельных разъемах передатчика.
Проделав это, или устанавливают причину неисправности, или локализуют область поиска (чаще всего напряжение + 600 В оказывается меньше допустимого значения).
Если напряжение +600 В оказалось в норме, а проверка штепсельных разъемов положительного результата не дала, то необходимо установить, в какой системе находится неисправность— в передающей или в системе измерения дальности. Для этого необходимо с помощью проводника соединить гнездо ИМПУЛЬС ПУСКА Г1 на задней стенке передатчика с гнездом ВХОД У контрольного осциллографа и проверить наличие импульса пуска, поступающего из СИД в передающую систему.
При наличии пускающего импульса на входе передатчика необходимо с помощью контрольного осциллографа проверить наличие импульсов на конкретных гнездах, выведенных на переднюю панель передатчика (на выходе подмодулятора и модулятора), и тем самым локализовать неисправную часть схемы передатчика. Только после этого целесообразно снимать и вскрывать передатчик для проведения внешнего осмотра.
Для дальнейшего поиска неисправного элемента могут быть использованы рекомендации, приведенные в предыдущем подразделе.
3. Устранение неисправностей в радиолокационных и радиотехнических станциях
Для устранения обнаруженной неисправности часто приходится производить радиомонтажные работы, которые связаны с необходимостью замены неисправных элементов (резисторов, конденсаторов, транзисторов и т. д.).
Перед проведением радиомонтажных работ необходимо подготовить к работе монтажный инструмент (паяльник, плоскогубцы, пинцет и монтажный нож), подготовить канифоль и припой, а также измерительный прибор (ампервольт-омметр). Затем, пользуясь ведомостями одиночного и груп-
нового комплектов ЗИП на P^IC (РТС), найти необходимый для замены элемент и проверить его.
Радиодетали проверяются на исправность и механическую прочность их выводов, а также подвергаются электрической проверке.
Электрическая проверка постоянных резисторов состоит в измерении значений сопротивлений с помощью ампервольт-омметра (комбинированного прибора).
У переменных резисторов проверяются значения сопротивлений в крайних положениях движка и плавность изменения сопротивления при повороте движка.
У трансформаторов и дросселей проверяют сопротивление обмоток и отсутствие замыкания между обмотками.
Конденсаторы можно проверить на отсутствие короткого замыкания пластин. Электролитические конденсаторы, кроме того, можно проверить на силу тока утечки. Для этого омметр ставят на предел измерения сопротивлений максимальной величины и его выводы подключают к конденсатору, соблюдая полярность. Стрелка прибора должна резко отклониться вправо (это свидетельствует о наличии емкости), а затем плавно перемещаться в сторону увеличения сопротивления (в это время конденсатор заряжается). При пере-полюсовке омметра отклонение стрелки должно быть приблизительно в 2 раза больше. В противном случае электролитический конденсатор неисправен.
У полупроводниковых диодов с помощью омметра проверяют значения прямого и обратного сопротивлений.
Транзисторы и лампы могут быть проверены с помощью соответствующих испытателей.
После подготовки к проведению монтажных работ выпаивают неисправную радиодеталь и, если необходимо, подготавливают монтажные провода (зачищают и облуживают концы провода требуемой длины).
Подготовленный радиоэлемент устанавливают на место неисправного и припаивают. Высокое качество пайки обеспечивается очисткой выводов радиоэлемента от окислов, тщательным их лужением и правильным проведением пайки.
Лужение и пайка малогабаритных радиодеталей производятся с теплоотводом (например, пинцетом), исключающим перегрев детали.
Особую осторожность следует проявлять при работе с полупроводниковыми приборами: не подвергать выводы многократным перегибам, избегать острых углов перегиба, производить изгиб выводов осторожно, на расстоянии не менее 10 мм от корпуса, подпаивать выводы быстро (в течение 2—3 с) с обязательным теплоотводом, предохранять от попадания капель олова и канифоли на корпус прибора.
Жало электропаяльника должно быть очищено от нагара, хорошо облуженным, с ровной поверхностью и лишено ра ковин.
Так как при пайке происходит частичное растворение основных металлов в жидком припое и диффузия атомов припоя в основные металлы, то жало паяльника должно быть нагрето до требуемой температуры. Если паяльник нагрет недостаточно, то припой на спаиваемых местах быстро остывает, превращаясь в кашеобразную массу, и пайка получается непрочной. При очень высокой температуре паяльника в припое выгорает олово, вследствие чего припой теряет свои качества.
При нормальной температуре паяльника припой быстро плавится, но не скатывается с жала паяльника, канифоль не сгорает мгновенно, а остается на жале в виде кипящих точек.
Если паяльник имеет недостаточно хорошую изоляцию стержня от обмотки подогрева, то он может явиться причиной выхода из строя полупроводниковых приборов с низким пробивным напряжением. В целях предотвращения выхода из строя таких полупроводниковых приборов следует соединять стержень паяльника с корпусом станции с помощью гибкого изолированного проводника.
Паять нужно быстро, убирая паяльник сразу же после того, как припой зальет спаиваемое место. Для лучшего прогрева деталей при пайке паяльник должен прилегать к детали боковой поверхностью.
Во время остывания спаиваемые детали должны быть неподвижными.
При замене радиоэлементов в импульсных схемах, генерирующих или усиливающих импульсы с крутыми фронтами, следует обратить особое внимание на уменьшение паразитных связей между отдельными участками и деталями схемы, а также между монтажными проводниками, так как паразитные связи могут существенно ухудшить работу схемы.
Механическая прочность пайки проверяется пинцетом путем легкого натяжения и изгиба выводов радиодеталей у места пайки.
При замене электронных ламп, транзисторов и распайке разъемов необходимо пользоваться сведениями, приведенными в приложениях к инструкции по эксплуатации.
После замены неисправного элемента нанести лаковое покрытие, собрать блок (узел) и установить в станцию.
Блок, в котором произведена замена неисправного элемента, следует проверить на соответствие техническим параметрам согласно указаниям соответствующего раздела инструкции по эксплуатации, произвести его пломбирование, если это необходимо, и внести в формуляр станции записи О произведенном ремонте.
После окончания ремонта необходимо включить станцию и проверить ее на функционирование в соответствии с инструкцией по эксплуатации.
Если в станции имеется несколько неисправностей, то они отыскиваются и устраняются последовательно, причем начинать надо с наиболее простой, не требующей значительных затрат времени и привлечения специальных приборов, элементов группового ЗИП и сложных приспособлений.
ОГЛАВЛЕНИЕ
ОСНОВЫ ЭЛЕКТРОТЕХНИКИ, РАДИОТЕХНИКИ И РАДИОЛОКАЦИИ
Стр.
Глава I. Основы электротехники
1. Электрические свойства тел............................. 3
2. Электрическое поле..................................... 3
3. Постоянный ток.................................... . 6
4. Электромагнитные явления.............................. 13
5. Переменный ток ...................................... 19
6. Химические источники тока............................. 24
7. Измерения в электро- и радиотехнике................... 27
Глава 11. Основы радиотехники и радиолокации
1. Физические процессы в колебательном контуре........... 30
2. Электровакуумные приборы ............................. 34
3. Газоразрядные приборы............................... 39
4. Полупроводниковые приборы............................. 41
5. Принципы построения и функционирования радиолокационных станций и станций радиотехнической разведки .... 47
6. Функциональные узлы радиоэлектронных средств .... ЬЗ
7. Дальность действия РЛС ............................, 67
ТАКТИЧЕСКАЯ ПОДГОТОВКА
Глава III. Радиолокационная и радиотехническая разведка
1. Задачи радиолокационной и радиотехнической разведки . ] 70
2. Обязанности должностных лиц подразделений радиолокационной и радиотехнической разведки...................... 72
3. Радиолокационные и радиотехнические станции вероятного противника . ........................................... .: 74
Глава IV. Организация боевого применения подразделений радиолокационной и радиотехнической разведки
1. Боевой порядок подразделений......................... 76
2. Документы, ведущиеся в подразделениях радиолокационной и радиотехнической разведки............................; 80
3. Топогеодезическая привязка и ориентирование........... 89
4. Инженерное оборудование позиций (постов)..........., 94
РАДИОЛОКАЦИОННЫЕ СТАНЦИИ НАЗЕМНОЙ АРТИЛЛЕРИЙСКОЙ РАЗВЕДКИ
Стр.
Глава V. Принцип работы и устройство станций наземной артиллерийской разведки
I. Особенности функционирования, назначение, состав и технические характеристики CHAP............................ 96
2. Принцип работы радиолокационной аппаратуры CHAP . . 102
3. Назначение, составные части и работа систем CHAP ... 108
4. Включение, проверка и выключение CHAP............... 136
5. Особенности устройства ПСНР......................... 143
Глава VI. Боевое применение станций наземной артиллерийской разведки
1. Обязанности расчета CHAP при ведении разведки .... 145
2. Обязанности расчета CHAP при обслуживании стрельбы артиллерии............................................. 147
3. Особенности работы СПАР в условиях помех............ 150
4. Особенности боевого применения ПСНР................. 151
РАДИОЛОКАЦИОННЫЕ СТАНЦИИ РАЗВЕДКИ ОГНЕВЫХ ПОЗИЦИЙ
Глава VII. Принцип работы и устройство радиолокационных станций разведки огневых позиций
1, Назначение, состав и характеристики РЛС разведки огневых позиций........................................... 153
2. Принцип работы РЛС разведки огневых позиций....... —
3. Назначение, составные части и работа систем РЛС разведки огневых позиций................................... 156
4. Функциональный контроль аппаратуры станции....... 177
5. Работа расчета станции в режиме «Тренажер»........ 179
Глава VIII. Боевое применение радиолокационных станций разведки огневых позиций
1. Выбор, подготовка и инженерное оборудование позиции . 180
2. Подготовка станции к боевой работе.................. 181
3. Обязанности расчета станции при ведении разведки . . . 184
4. Обязанности расчета станции при обслуживании стрельбы 187
СТАНЦИИ НАЗЕМНОЙ РАДИОТЕХНИЧЕСКОЙ РАЗВЕДКИ
Глава IX. Принцип работы и устройство станций наземной радиотехнической разведки
1, Назначение, состав и характеристики станции НРС-1 191
2, Принцип работы приемной устаиовкп.....................• 192
3. Назначение, составные части и работа систем приемной Йстановии . . ........................................,) 195
[роверка систем станции НРС-1 иа функционирование . . 197
Глава X. Боевое применение станций наземной радиотехнической разведки
1. Выбор, подготовка, инженерное оборудование и топогеодезическая привязка позиции станции НРС-1................. 198
2. Обязанности расчета станции НРС-1 при ведении разведки 201
3. Обработка разведывательных данных, полученных расчетом станции НРС-1 _.......................................... 206
ЭКСПЛУАТАЦИЯ РАДИОЛОКАЦИОННЫХ И РАДИОТЕХНИЧЕСКИХ СТАНЦИЙ
Стр.
Глава Х1. Техническое обслуживание радиолокационных и радиотехнических станций
1. Требования безопасности при работе иа радиолокационных
и радиотехнических станциях ............................ 208
2. Техническое обслуживание радиолокационных и радиотехнических станций........................................: 210
Глава XII. Войсковой ремонт радиолокационных и радиотехнических станций
1. Условия и факторы, влияющие иа скорость отыскания неисправностей в радиолокационных и радиотехнических станциях .............................................. 217
2. Последовательность обнаружения неисправностей в радиоэлектронной аппаратуре радиолокационных н радиотехнических станций.......................................... 219
3. Устранение неисправностей в радиолокационных и радиотехнических станциях.................................... 223
УЧЕБНИК СЕРЖАНТА РАКЕТНЫХ ВОЙСК И АРТИЛЛЕРИИ
Технический редактор А. А. Перескокова Корректор Г. А. Паранина
Сдано в набор 01.03.89. Подписано в печать 01.12.89. Г-28588
Формат 60Х90/|«. Печ. л. Усл. печ. л. 14.50. Усл. кр.-отт. 14.75. Уч,-изд. л. 13.63. Изд. Ха 5/4644 Бесплатно Зак, 581
Воениэдат, ЮЗ 160, Москва, К-160. 2-я типография Воениздата
191065. Ленинград, Д-65, Дворцовая пл„ 10