





























































































































































































Текст
Н. Г. ПАВЛОВ
ЛИФТЫ
и
ПОДЪЕМНИКИ
Основы конструирования и расчета
Допущено Министерством высшего
и среднего специального образования РСФСР
в качестве учебного пособия для высших
технических учебных заведений
ИЗДАТЕЛЬСТВО «МАШИНОСТРОЕНИЕ»
МОСКВА -1965. ЛЕНИНГРАД
УДК 621.876.001 (075.8)
ПАВЛОВ Н. Г.
Лифты и подъемники
М.—Л., изд. «Машиностроение», 1965. 204 стр. с илл.
В книге кратко изложены общие принципы устройства, кон-
струировании и расчета основных, наиболее распространенных
канатных подъемников: клетьевых. скиповых, строительных,
а также однокабинных лифтов.
Книга является учебным пособием для высших технических
учебных заведений, а также может быть полезна инженерно-тех-
ническим работникам, занятым проектированием и эксплуатацией
грузоподъемных машин.
Рецензенты: кафедра подъемно-транспортных машин Уральского
политехнического института и проф., д-р техн, наук И. П. Крутиков
Редактор инж. А. Л. Усов
ПРЕДИСЛОВИЕ
Огромный размах жилищного строительства в нашей стране,
повышение этажности возводимых зданий ставят новые задачи
по дальнейшему развитию средств вертикального транспорта —
лифтов и подъемников. Не менее важна их роль в таких бурно раз-
вивающихся отраслях народного хозяйства, как химическая про-
мышленность, энергетика, металлургия, горное дело и т. п.
В связи с этим необходима подготовка специалистов в области
подъемно-транспортного машиностроения, которые, наряду с кра-
новыми устройствами, были бы знакомы с особенностями расчета
и конструирования подъемников.
Имеющаяся на данное время учебная литература по лифтам
недостаточна, а в части специальных подъемников практически
отсутствует. Восполнить этот пробел и имеет целью предлагаемая
книга. В ней рассмотрены наиболее широко применяемые типы
подъемников: лифты однокабинные и многокабинные, клетьевые,
скиповые и строительные подъемники. Более подробно рассмот-
рены лифты, на примере которых имелось ввиду пояснить основные
особенности работы и расчета подъемников; более кратко (за не-
имением места) рассмотрены специальные подъемники (клетьевые,
скиповые и строительные).
В основу книги положен курс лекций, в течение ряда лет
читаемых автором в Ленинградском политехническом институте
им. М. И. Калинина. При изложении материала в первую очередь
предполагалось пояснить основные особенности конструирования
и расчета подъемников, полагая, что общие вопросы работы гру-
зоподъемных машин, как, например, конструкции канатов, прин-
ципы работы тормозов и т. п. уже известны читателю из общего
курса подъемно-транспортных машин, читаемого во втузах.
Наряду с описанием механического оборудования подъемни-
ков в книге дано краткое описание систем управления ими.
Имеется в виду, что более подробно эти вопросы рассматриваются
в специальных курсах электрооборудования подъемно-транспорт-
ных машин.
Все приведенные далее расчетные величины указаны в старой
и новой системах единиц. Перевод этих единиц из одной системы
в другую дан с достаточной для практических целей точ-
ностью (2%): принято 1 кгс 1 дан.
1*
ВВЕДЕНИЕ
1. Общая характеристика подъемников
Рассматриваемые в этой книге подъемники предназначены для
вертикального или наклонного подъема грузов на специальных
платформах (кабины, клети) или в ковшах, передвигающихся
по жестким направляющим. Такие направляющие необходимы
в силу специфических условий работы подъемников, например
из-за стесненных габаритов помещений, в которых они разме-
щены.
В отличие от машин, которые наряду с подъемом груза произ-
водят его транспортировку, подъемники имеют только одно основ-
ное рабочее движение — подъем груза. Обычно они выполняются
как стационарные, но в некоторых случаях могут устанавливаться
на тележках (например, в лифтах для обслуживания гаражей)
или делаются переносными.
По роду устройств, служащих для размещения поднимаемого
груза, подъемники могут быть разделены на две группы: 1) подъем-
ники с разного рода огражденными платформами (кабины, клети
и т. п.) для подъема людей или штучных грузов, 2) ковшо-
вые подъемники для подъема навалочных грузов (руда, уголь
и т. п.).
К первой группе могут быть бтнесены следующие подъемные
устройства:
а) лифты, под которыми обычно понимают устройства для вер-
тикального подъема людей (пассажирские лифты) или грузов
(грузовые лифты) в жилых или промышленных зданиях, а также
в некоторых крупных машинных установках (например, шагающие
экскаваторы);
б) клетьевые (шахтные) подъемники для вертикального подъема
людей, грузов, полезных ископаемых и т. п. в шахтах;
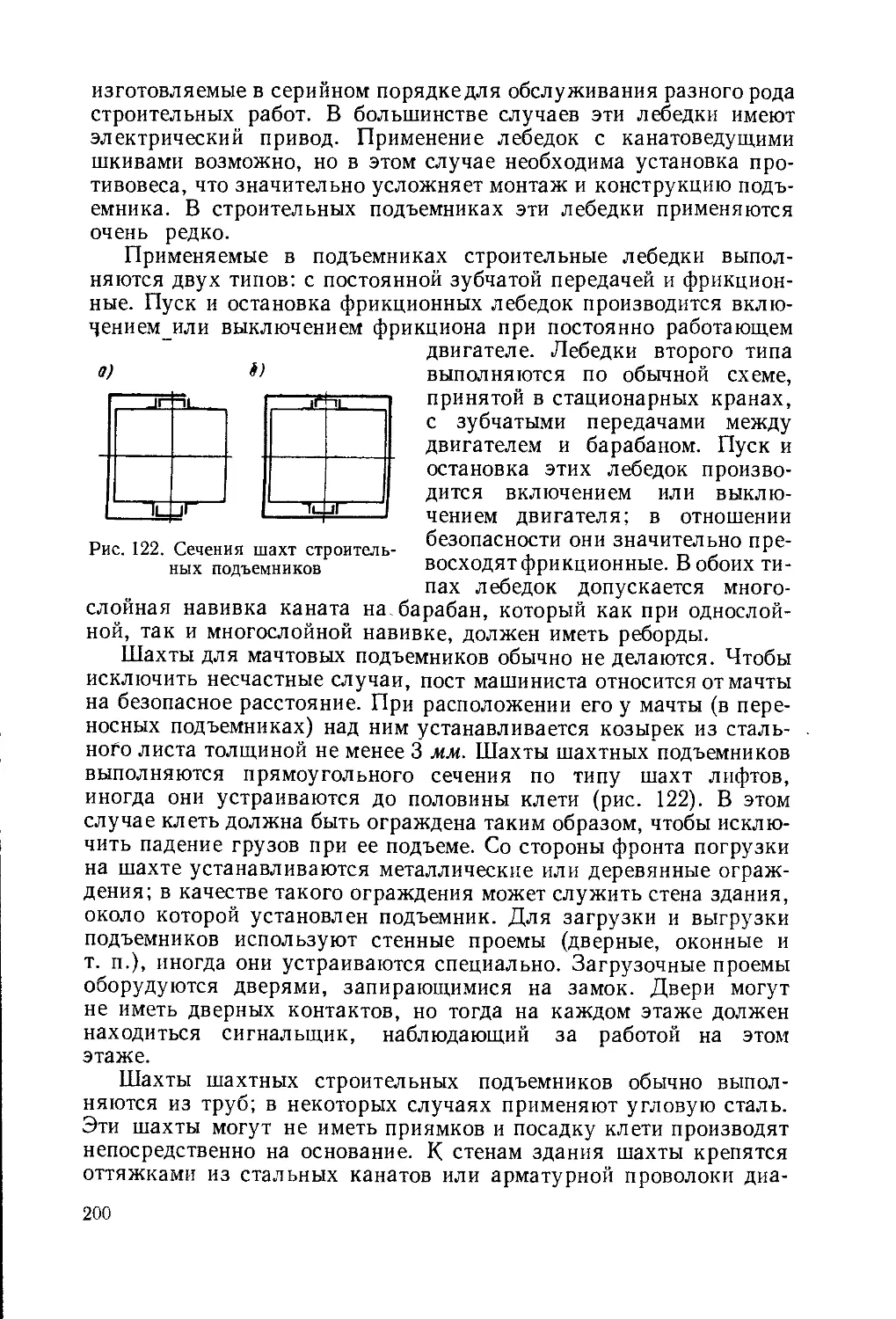
в) строительные подъемники для вертикального подъема строи-
тельных материалов (кирпич, отделочные материалы и т. п.) при
строительстве и ремонте зданий;
г) судоподъемники, устанавливаемые на гидроузлах взамен
шлюзов для подъема судов.
К этой же группе машин могут быть отнесены и следующие
подъемники для наклонного подъема грузов:
4
а) бремсберги для подъема грузов и людей по откосам наклон-
ных выработок;
б) фуникулеры для подъема людей на крутых подъемах (от-
косы набережных и т. п.).
Подъемники второй группы (ковшовые) выполняются или с неса-
моразгружающимися ковшами (редко) или с саморазгружающи-
мися ковшами (скиповые подъ-
емники).
Вертикальный подъем ковша
или платформы в обоих типах
подъемников может быть осу-
ществлен по трем основным схе-
мам, приведенным на рис. 1 и 2:
при помощи грузовых винтов,
установленных на всю высоту
подъема (рис. 1,6), при помощи
гидравлического цилиндра (рис.
1, а) или с помощью канатов
(рис. 2).
Грузовые винты довольно
часто применялись ранее в за-
водских лифтах при трансмис-
сионном приводе. Из-за боль-
шой стоимости и малого коэф-
фициента полезного действия
в современных подъемниках они
встречаются очень редко, в ос-
новном при небольших высотах
подъема (например, в вагонных
подъемниках).
Подъем с помощью гидравли-
ческих цилиндров также часто
применялся ранее в пассажирских лифтах с высотой подъема до
3—4-х этажей. Из-за больших недостатков этих устройств: высо-
кой стоимости, ряда неудобств (в частности, возможности замерза-
ния воды) и т7~п. — в настоящее время они за исключением неко-
торых малых специальных подъемников не применяются.
При канатном подъеме грузовой канат, на котором подвешена
платформа (кабина, клеть), наматывается на барабан (рис. 2, а)
или огибает канатоведущий шкив (рис. 2, 6); в этом случае усилие,
необходимое для подъема, создается за счет сил трения между ка-
натом, и шкивом. Канатный подъем является в данное время ос-
новным для подъемников.
На рис. 3 приведена схема наклонного подъема. В этом случае
платформа или ковш устанавливаются на ходовые колеса (бегунки),
передвигающиеся по рельсовому пути. По этой схеме выполнены
бремсберги, фуникулеры и ковшовые подъемники. Для увеличения
5
производительности подъемника часто устанавливают вторую
тележку (ковш), к которой прикрепляют второй конец каната,
сбегающий с барабана. В этом случае взамен барабана часто при-
меняют канатоведущий шкив.
Все перечисленные подъемники как для вертикального, так и
для наклонного подъема работают в повторно-кратковременном
режиме. Из этих подъемников нами рассматриваются лифты,
клетьевые, строительные и скиповые подъемники.
Рис. 2. Схема канатного подъема
Наличие в некоторых случаях (метро, крупные магазины или
театральные помещения и т. п.) больших пассажиропотоков делает
целесообразным установку машин непрерывного действия. Такими
машинами для горизонтального транспорта являются движущиеся
тротуары, для вертикального — эскалаторы. К этому типу машин
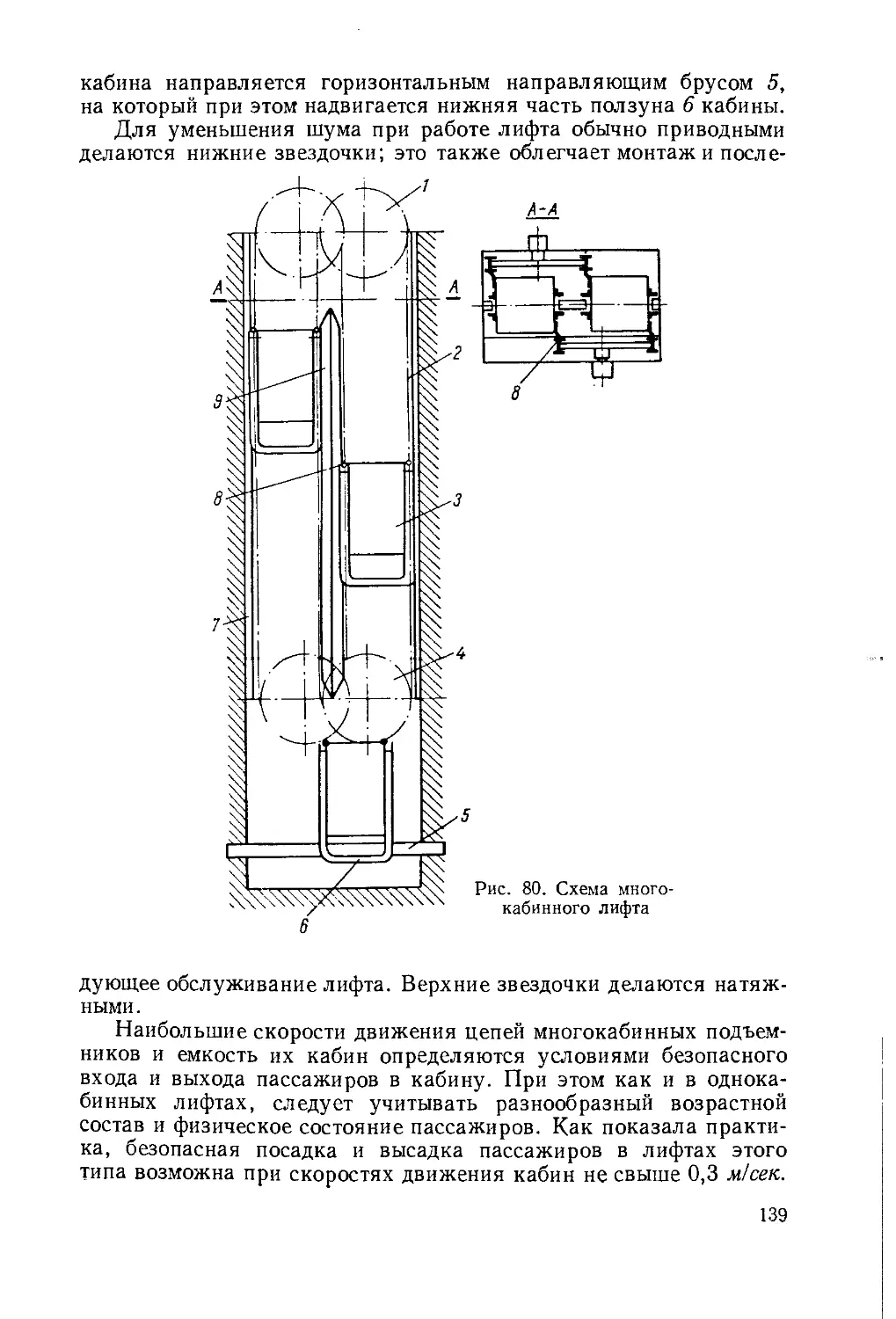
могут быть отнесены и многокабинные лифты. Подробное рассмот-
рение вопросов конструирования и расчета этих машин является
предметом специального курса.
$ 2. Развитие конструкций подъемников
Из рассматриваемых в этой книге подъемных машин наиболее
старыми по времени применения являются клетьевые подъемники,
которые в виде простейшей конструкции — ворота с бадьей были
известны еще в глубокой древности.
Жесткие направляющие для бадьи начинают применять при-
мерное конца XVII — начала XVIII века. Необходимость повыше-
ния производительности клетьевых подъемников обусловила ши-
рокое применение в них механического привода уже с раннего
периода их появления. Для этого долгое время служил конный
привод и водяные колеса, Позднее, с появлением паровой машины,
6
паровой привод быстро получил широкое распространение. Пер-
вые шахтные подъемные установки с электрическим приводом
появились еще в 90-е годы XIX в. Большая экономичность этого
привода по сравнению с паровым обусловила быстрое его распро-
странение. К концу 30-х годов XX в. этот привод почти исключи-
тельно и применялся в шахтном подъеме.
Почти до конца XIX в. клетьевой подъемник являлся основ-
ным подъемным устройством, служившим для подачи материалов
и транспорта людей, а также подъема полезных ископаемых в шах-
тах. Непрерывный рост добычи шахт в дальнейшем потребовал
оборудования их несколькими подъемами, из которых основной
(главный) предназначается исключительно для подачи полезных
ископаемых на поверхность. Это позволило установить на главных
подъемах специальные скиповые подъемники с опрокидывающи-
мися ковшами. В настоящее время они широко применяются
в шахтах.
Идея подъема людей с помощью механизмов существовала
очень давно. Довольно большое число подъемных устройств с руч-
ным приводом было создано во Франции и в России в XVIII в.
(Кулибин, Вилаэр), однако они не имели практического значения.
Лифты в современном понимании этого слова появляются позд-
нее, примерно, начиная с 60-х годов прошлого века, с началом раз-
вития многоэтажного домостроения. По условиям работы в зда-
ниях единственно возможным приводом этих лифтов был гидравли-
ческий, который в большинстве случаев осуществлялся по типу,
показанному на рис. 1, а; в некоторых случаях применялись спе-
циальные водяные машинки, работавшие от водопроводной сети.
В лифтах промышленных зданий часто применялся трансмис-
сионный привод. Остановка и переключение с прямого хода на
обратный при этом приводе осуществлялась с помощью специаль-
ной отводки путем перестановки ремня на рабочий или холостой
шкив валиком, располагавшимся по всей высоте шахты.
Неудобства обоих типов привода были настолько велики, что
уже вскоре после появления электрических двигателей (примерно
80-е годы XIX в.), пригодных для практического использования,
электрический привод быстро завоевал главенствующее положение.
С начала внедрения электрического привода и примерно до
30-х годов XX в. развитие лифтостроения в Европе и Америке шло
двумя самостоятельными путями. В Европе, где строились здания
со сравнительно малым числом этажей, в основном применялись
лифты с барабанными лебедками по типу крановых. В Америке,
где широко развернулось строительство высотных домов, приме-
нение лифтов с барабанными лебедками оказалось практически
невозможным и уже к началу 20-х годов почти исключительно
изготовлялись лифты с лебедками с канатоведущими шкивами.
В настоящее время эти лифты являются общепринятыми как
В Европе, так и в Америке.
7
В царской России потребность в лифтах и подъемниках почти
целиком удовлетворялась за счет импорта. После Великой
Октябрьской Социалистической революции в годы индустриали-
зации было налажено производство этих машин на отечественных
заводах, целиком удовлетворяющее нужды страны.
В послевоенные годы разработано большое число конструкций
специальных лифтов, создан ряд типовых лифтов, спроектированы
и построены скоростные лифты (высотные дома Москвы, вышка
Ленинградского телецентра и т. п.), проводятся исследования в об-
ласти лифтостроения (ВНИИПТмаш). Большая работа проделана
в области создания машин непрерывного транспорта (эскалаторы
метро на большие высоты подъема, эскалаторы дворца съездов
и т. п.).
Раздел первый
ЛИФТЫ
Глава I
ОБЩАЯ ХАРАКТЕРИСТИКА ЛИФТОВ
$ 1. Типы лифтов
По правилам Госгортехнадзора под лифтом понимается
подъемное устройство, предназначенное для перемещения людей
или грузов в кабине или на платформе, движущейся в неподвиж-
ных вертикальных направляющих. Сюда не входят подъемные
установки горной промышленности, на судах, а также подъемные
установки специальных конструкций. _
На рис. 4 приведена принципиальная схема электрического
лифта. Его основными узлами являются кабина 3, в которой разме-
щаются пассажиры или грузы, и подъемная лебедка 1. Кабина
движется в вертикальных направляющих 5, которые обхватывают
башмаки 9, прикрепленные к кабине. Подъемные канаты 10, на
которых подвешена кабина, наматываются на барабан или огибают
канатоведущий шкив лебедки (как это показано на рисунке).
Как было указано выше, при канатоведущем шкиве подъем ка-
бины происходит за счет сил трения между канатом и ободом этого
шкива. Вес кабины и часть веса груза уравновешиваются проти-
вовесом 7, подвешенным к канатам, сбегающим с канатоведущего
Шкива или барабана (при барабанной лебедке).
В целях безопасности кабина помещена в шахту 6, над которой
обычно расположено машинное помещение 11. В этом помещении
располагаются лебедка и основная аппаратура (распределитель-
ный щит, магнитные станции, ограничитель скорости и т. д.).
Внизу шахты (приямке) располагаются буфера 8 кабины и проти-
вовеса, на которые садится кабина в случае перехода ее за нижнее
рабочее положение (при верхнем предельном положении кабины
На буфера садится противовес). В верхней и нижней частях
шахты устанавливаются концевые выключатели, ограничивающие
рабочий ход кабины.
избежание падения кабины при обрыве каната или неис-
рравности подъемного механизма на ней устанавливаются лови-
тели, зажимные устройства которых в этих случаях захватывают
направляющие и удерживают кабину. В большинстве случаев
9
10
ловители приводятся в действие от вспомогательного каната 4,
охватывающего шкив центробежного ограничителя скорости 2.
При возрастании скорости кабины выше определенного предела
ограничитель затормаживает шкив и останавливает канат 4, кото-
рый при дальнейшем опускании кабины приводит в действие свя-
занные с ним ловители.
Пуск лифта производится или нажатием на рычаг специаль-
ного аппарата, установленного в кабине (в лифтах с рычажным
управлением), или нажатием на кнопку соответствующего этажа
(лифты с кнопочным управлением). При рычажном управлении
остановка кабины у задан-
ного этажа производится
лифтером, при кнопочном
управлении — автоматиче-
ски. При обеих системах
управления вводятся до-
полнительные устройства
для остановки двигателя
в аварийных случаях или
при угрозе безопасности
пользования лифтом (при
открытых дверях кабины
или шахты, посадке каби-
ны на ловители и т. п.).
Рис. 5. Схемы лифтов: а — с направляющим
блоком; б — с нижним расположением ле-
бедки; в — выжимного лифта
В зависимости от места установки и назначения лифта схема
лифта, показанная на рис. 4, может несколько изменяться. Схемы
наиболее часто встречающихся лифтов приведены на рис. 5.
В схеме на рис. 5, а установлен дополнительный блок 2 для на-
правления каната противовеса. Она применяется в случаях, когда
из-за больших размеров кабины канат противовеса нельзя напра-
вить с канатоведущего шкива (или барабана) непосредственно
вниз.
В схеме рис. 5, б лебедка 1 расположена сбоку шахты, у ее ос-
нования, что, в частности, несколько уменьшает шум, возникаю-
щий при работе лифта. Однако при этом возрастают нагрузки на
шахту, длина и число перегибов, а следовательно, и износ подъем-
ных канатов; поэтому такое размещение лебедки применяется
только в особых случаях, когда машинное помещение нельзя
расположить над шахтой, при повышенных требованиях в части
бесшумности работы лифта и т. п.
На рис. 5, в приведена схема так называемого выжимного
лифта. В этом лифте грузовые канаты 1, на которых подвешена
кабина 2, огибают блоки 6, укрепленные на раме кабины, и далее
проходят через верхний блок 3 на канатоведущий шкив (или ба-
рабан ) 5 подъемной лебедки. Веса кабины и частично поднимаемого
груза уравновешиваются противовесом 4, канаты которого оги-
бают дополнительный-направляющий блок;'
11
По правилам Госгортехнадзора в зависимости от назначения
лифты разделяются на следующие пять типов:
а) пассажирские — для подъема и спуска людей с ручным
багажом;
б) больничные — для подъема и спуска больных на койке с со-
провождающими лицами;
в) грузовые с проводником — для подъема и спуска грузов
в сопровождении проводника и специально выделенных рабочих;
Рис. 6. Схема установки пассажирского лифта
в шагающем экскаваторе
г) грузовые без проводника — для подъема и спуска только
грузов весом более 100 кгс (дан)-,
д) малые грузовые — для подъема и спуска только грузов весом
от 50 до 100 кгс (дан).
Основные параметры большинства этих лифтов в настоящее
время стандартизированы.
Пассажирские лифты по ГОСТу 5746—58 в СССР выпускаются
грузоподъемностью 350, 500 и 1000 кгс (дан) и имеют кабины вме-
стимостью соответственно на 5, 7 и 14 человек. Скорость движения
кабин лифтов грузоподъемностью 350 и 500 кгс (дан) равна
0,63 м/сек, а лифтов грузоподъемностью 1000 кгс (дан) — 1 м/сек.
Лифты грузоподъемностью 500 кгс (дан) изготовляются также и со
скоростью подъема кабины 1 м/сек. Все эти лифты, как правило,
имеют кнопочное управление с возможностью вызова порожней
кабины на этажи.
Для обслуживания высотных зданий в СССР установлены лифты
грузоподъемностью 1500 кгс (дан), рассчитанные на 21 пассажира,
изготовленные по Специальным техническим условиям. Эти лифты
12
имеют скорость подъема 3,5 м/сек/ В зарубежной практике встре-
чаются лифты грузоподъемностью до 2300 кгс (дан) со скоростью
движения кабины до 7 м/сек.
В последнее время были разработаны лифты для обслуживания
особо крупных машин (экскаваторы, станки больших размеров
и т. п.). Для примера на рис. 6
приведена схема лифта, предназна-
ченного для обслуживания шагаю-
щего экскаватора. Этот лифт имеет
грузоподъемность 250 кгс (дан)
и скорость движения кабины
0,5 м/сек. Кабина лифта 1 пере-
двигается внутри шахты 2; лебед-
ка 3 расположена сбоку шахты на
раме экскаватора. Имеется также
ряд специальных пассажирских
лифтов большой грузоподъемно-
сти (например, для обслуживания
метро и т. п.).
Больничные лифты по ГОСТу
8822—58 имеют грузоподъемность
500 кгс (дан) и скорость движения
кабины 0,5 м/сек.
Грузовые лифты по ГОСТу
8823—58 имеют грузоподъемность
от 500 до 5000 кгс (дан). Скорость
движения кабины 0,5 м/сек при
грузоподъемности до 3000 кгс (дан)
и 0,25 м/сек при грузоподъемности
5000 кгс (дан). Эти лифты изгото-
вляются с рычажным (лифты с про-
водником) или кнопочным упра-
влением. Лифты без проводника
имеют только кнопочное упра-
вление с одного поста, располо-
женного на основном этаже зда-
Рис. 7. Выжимной лифт грузо-
подъемностью 100 кгс
НИЯ.
К грузовым лифтам относятся также магазинные лифты по
ГОСТу 8825—58 грузоподъемностью 100 кгс (дан) и лифты со
встроенным монорельсом (ГОСТ 9322—60). Магазинные лифты
предназначены для подачи товаров к прилавкам магазинов и спу-
ска порожней тары; они имеют скорость движения кабины
0,25 м/сек и высоту подъема до 5,2 м. Лифты со встроенным моно-
рельсом служат для подъема грузов, передвигающихся по моно-
рельсовым путям на монорельсовых тележках (предприятия мяс-
ной промышленности, некоторые отрасли химической промышлен-
ности). По ГОСТу они имеют грузоподъемности 1000, 2000 и
13
3000 кгс (дан) при скорости движения кабины до 0,5 м/сек; наиболь-
шая высота подъема кабины этих лифтов 45 м.
В некоторых случаях грузовые лифты делают переносными.
Лебедка такого лифта обычно помещается сбоку шахты, которую
предохраняют от опрокидывания противовесы, установленные
внизу шахты.
Выжимные (тротуарные) грузовые лифты по схеме рис. 7, изго-
товляются грузоподъемностью 100 и 500 кгс (дан) и имеют скорость
движения кабины от 0,17 до 0,25 м/сек. Эти лифты обычно имеют
кнопочное управление с площадки верхней остановки, их размеры
не стандартизованы.
Кроме стандартных в ряде случаев применяют специальные
грузовые лифты, грузоподъемность которых в некоторых случаях
достигает 50 тс (кн) и выше (например, в установках для подъема
железнодорожных вагонов). В некоторых случаях лифты устанав-
вливают на передвижные платформы; в частности, такие лифты
довольно широко применяют за рубежом для подъема машин
в многоэтажных гаражах.
$ 2. Требования, предъявляемые к лифтам
/ В силу специфических условий работы (подъем людей, обслу-
живание самими пассажирами или малоквалифицированным пер-
соналом) к лифтам предъявляют повышенные требования в части
Надежности и безопасности их работы.. Поэтому в настоящее время
в большинстве стран разработаны и действуют обязательные пра-
вила по устройству и эксплуатации лифтовых установок. В СССР
такие правила разработаны Комитетом по надзору за безопасным
ведением работ в промышленности и горному надзору при Совете
Министров СССР (Госгортехназдор), осуществляющим контроль
за безопасностью лифтовых установок на всей территории СССР.
Помимо этих правил в СССР разработаны специальные техни-
ческие условия на проектирование лифтов (в дальнейшем сокра-
щенно обозначены ТУ на проектирование лифтов), утвержденные
Государственным комитетом по строительству при Совете Минист-
ров СССР; они распространяются на основные типы пассажирских,
грузовых и больничных лифтов.
/''"’Наряду с общими требованиями в части надежности и безопас-
ности в работе к лифтам предъявляют ряд дополнительных требо-
ваний, основными из которых являются:
^,а) точность остановки кабины на заданном этаже;
7 б) ограничение величин ускорений и замедлений при пуске и ос-
тановке кабины;
/ в) бесшумность в работе и отсутствие помех радиоприему.
Под точностью остановки кабины А понимают разность отметок
полаДк^бины и пола этажа, у которого останавливается кабина.
Порой, образующийся^из-за неточности остановки, представляет
I \ 1'1 —~ II II I '""»1М
14 !
опасность для пассажиров, а также затрудняет погрузку и раз-
грузку кабишДв грузовых лифтах. В~ связи с этим действующие
в СССР правила и технические условия ограничивают величину Л.
По правилам Госгортехнадзора для грузовых лифтов, загру-
жаемых тележками, величина А допускается не более ±15 мм,
а для остальных лифтов — не более ±50 мм. Точность остановки,
требуемая по ТУ на проектирование лифтов, указана в табл. 1.
Она зависит от скорости движения кабины. Примерно можно счи-
тать, что наибольшей точности остановки ±15 мм соответствует
предельная скорость движения кабины 0,15—0,2 м!сек, а точности
±50 мм — скорость кабины не выше 0,7 м!сек. При больших ско-
ростях и автоматической остановке кабины на этаже необходимо
предварительно снижать эти скорости до начала торможения тор-
мозом лебедки. Это снижение может быть осуществлено или элект-
рическим путем (двухскоростные двигатели), или установкой в ле-
бедке специального дополнительного микропривода.
Таблица 1
Точность остановки
и наибольшие допустимые ускорения (или замедления)
кабин лифтов
(по ТУ на проектирование лифтов)
Типы лифтов Наибольшее допустимое ускорение ’а м/сек2 Точность остановки Д мм
Пассажирские грузоподъемно- стью до 1000 кгс (дан) с двухско- ростными двигателями (скорость движения кабины v > 0,75 м/сек) 1,5 ±35
Больничные 1,0 ±15
Грузовые с кнопочным управле-
нием, v = 0,5 м/сек 1,5 ±15
Малые грузовые:
v = 0,25 м/сек — ±25
v = 0,5 м/сек — ±50
Для увеличения производительности лифта необходимо при-
нимать возможно большие ускорения (замедления) в периоды
пуска и остановки кабины. Это особенно необходимо в лифтах вы-
сотных зданий с напряженной работой. Однако для лифтов, рас-
считанных на подъем людей, эти ускорения должны быть ниже
величин, опасных для их здоровья.
По имеющимся данным опасными являются ускорения порядка
40—50 м/сек/ однако уже при меньших ускорениях у пассажиров
возникают неприятные ощущения (головокружение, чувство
15
страха и т. п.). При выборе величин ускорений следует также при-
нимать во внимание возрастной состав и состояние здоровья пас-
сажиров (больные, лица престарелого возраста и т. п.). В связи
с этим величины ускорений (или замедлений) обычно принимают
не выше 2,5 м/сек?.
По действующим правилам Госгортехнадзора,"предельные ве-
личины ускорений назначаются в зависимости от номинальной
скорости движения кабины лифта v. По этим правилам при ско-
рости движения кабины до 1 м/сек ускорение не должно быть бо-
лее 1,5 м/сек?, при большей скорости — не более 2 м/сек?. В ава-
рийных случаях (посадка на ловители или пружинные буфера)
допускается увеличивать замедление кабины до 25 м/сек?Х\о этому
замедлению обычно и производят расчет ловителей и пружинных
буферов лифтов. Предельные величины ускорений, допускаемых
при работе лифтов по ТУ на проектирование, приведены в табл. 1.
Следует иметь в виду, что, как показали исследования, в ряде слу-
чаев в начальный момент пуска кабины имеют место значительные,
хотя и кратковременные пики ускорений, превышающие (иногда
до 2 раз) ускорения, подсчитанные по наибольшему пусковому
моменту двигателя.
Шум и помехи радиоприему особенно недопустимы в жилых и
общественных зданиях; поэтому при конструировании и монтаже
аппаратуры и механизмов лифта на их устранение следует обра-
щать особое внимание. Предельно допустимый уровень интенсив-
ности шума в помещениях зданий, где установлен лифт, при его
работе по ТУ на проектирование лифтов приведен в табл. 2.
По этим же условиям звукоизолирующая способность стен машин-
ных помещений должна быть не ниже 50 дб, а дверей не ниже 35 дб.
Таблица 2
Допустимый уровень интенсивности шума
при работе лифта
(по ТУ на проектирование лифтов)
Класс установ- ки Характер установки Допускаемый уро- вень интенсивности шума в дб
низкоча- стотного в широком диапазоне частот
1 Радио, телестудии, ателье звукозаписи 30 Не допу- скается
2 Жилые дома, больницы, са- натории, концертные и чи- тальные залы, кабинеты 40 30
3 Учреждения, столовые, ре- стораны, фойе театров 50 40
4 Промышленные здания Не нормируется
16
Машинные помещения и шахты лифтов не допускается располагать
по соседству с жилыми помещениями.
Внешний вид кабин и шахт лифтов должен отвечать общим за-
дачам оформления интерьеров зданий (вестибюли гостиниц, жилых
домов, административных зданий и т. п.). Большое будущее в этом
отношении принадлежит синтетическим материалам как наиболее
полно отвечающим современным гигиеническим и эстетическим
требованиям и в то же время достаточно дешевым.
£ 3. Основные параметры и распет
производительности лифтов
Основными параметрами лифта являются: высота подъема
(число обслуживаемых этажей), его номинальная грузоподъем-
ность и скорость движения кабины.
Под номинальной грузоподъемностью лифта понимается вес
наибольшего рабочего груза, на который он рассчитан. Для гру-
зовых лифтов она равна весу поднимаемого груза и тележки (при
подъеме грузов на тележках), стеллажей и подобных устройств,
поднимаемых вместе с грузом. Вес устройств, постоянно укреплен-
ных в кабине (например, монорельсовых путей в лифтах со встроен-
ным монорельсом), в грузоподъемность лифта не входит.
Номинальная грузоподъемность пассажирского лифта опреде-
ляется по наибольшему числу пассажиров г, помещаемому в ка-
бине, и будет равна
Q = qz,
>де q — вес пассажира. По правилам Госгортехнадзора этот вес
принимается равным 70 кгс (дан). Такой же вес прини-
• мается и для грузовых лифтов с проводником.
к Под номинальной скоростью движения кабины понимают ее ра-
бочую скорость, на которую рассчитывается лифт. Включение
ловителей происходит при повышенных скоростях кабины, вели-
чины которых установлены правилами Госгортехнадзора.
По действующим в данное время нормам лифты устанавли-
ваются в жилых зданиях высотой в 6 и более этажей, при отметке
пола верхнего этажа от тротуара 13 м и выше. При высоте задания
6—9 этажей устанавливается один лифт обычно грузоподъемностью
350 кгс (дан), при большем числе этажей — два лифта. Для воз-
можности подъема мелких вещей (детские коляски и т. п.) грузо-
подъемность одного из этих лифтов целесообразно назначать рав-
ной 500 кгс (дан). В лифтах, обслуживающих здания высотой 6—
8 этажей, скорость подъема кабины обычно принимают д=0,7 м!сек
при большем числе этажей — 0,7—1 м!сек.
Как правило, использование лифтов жилых зданий невелико;
считают, что лифт грузоподъемностью 350 кгс (дан) может сво-
бодно обслужить секцию 6—8-этажного дома с населением в 200
2 Павлов 154 17
человек и при грузоподъемности 500 кгс (дан) — секцию 10-
этажного дома на 250—300 человек.
Необходимое число лифтов в общественных и некоторых жи-
лых (в частности, высотных) зданиях при больших пассажиро-
потоках определяется расчетом.
Производительность одного лифта
где z — число пассажиров, соответствующее номинальной грузо-
подъемности лифта;
<р — коэффициент заполнения кабины;
Т — время одного рейса в сек.
При расчете по так называемому свободному заполнению
(гл. II) принимают: для лифтов общественных зданий <р = 0,8-г-
0,9, для лифтов жилых домов tp = 0,6-i-0,7, при контролируе-
мом заполнении и расчете по наибольшему пассажиропотоку
<р = 1.
Время одного рейса подсчитывается по формуле
Т = + td, (2)
в которой Н — высота подъема кабины в м;
v — номинальная скорость кабины в м/сек;
td — дополнительное время (в сек), затрачиваемое на
посадку и выход пассажиров, открывание и за-
крывание дверей, пуск лифта и т. п. в сек.
Ориентировочно дополнительное время td может быть подсчи-
тано по формуле
td = 14 (k + 1) + /2z<p ] 1,1.
Таблица 3
Время tx, затрачиваемое на этаже
на управление дверями, пуск и остановку кабины лифта
(по данным ВНИИПТмаш)
Тип лифта Скорость лифта м/сек Время ti в сек
при механизирован- ных дверях шириной при ручном приводе дверей
до 1000 мм (двух- створча- тые) до 800 мм (одно- створча- тые)
Грузовой 0,5 0,63 — __ 12—15 9—12
Пассажирский 1,0 2,5 3,5 6,5—7,5 7,5—8,5 8—10 7—9 10—13
18
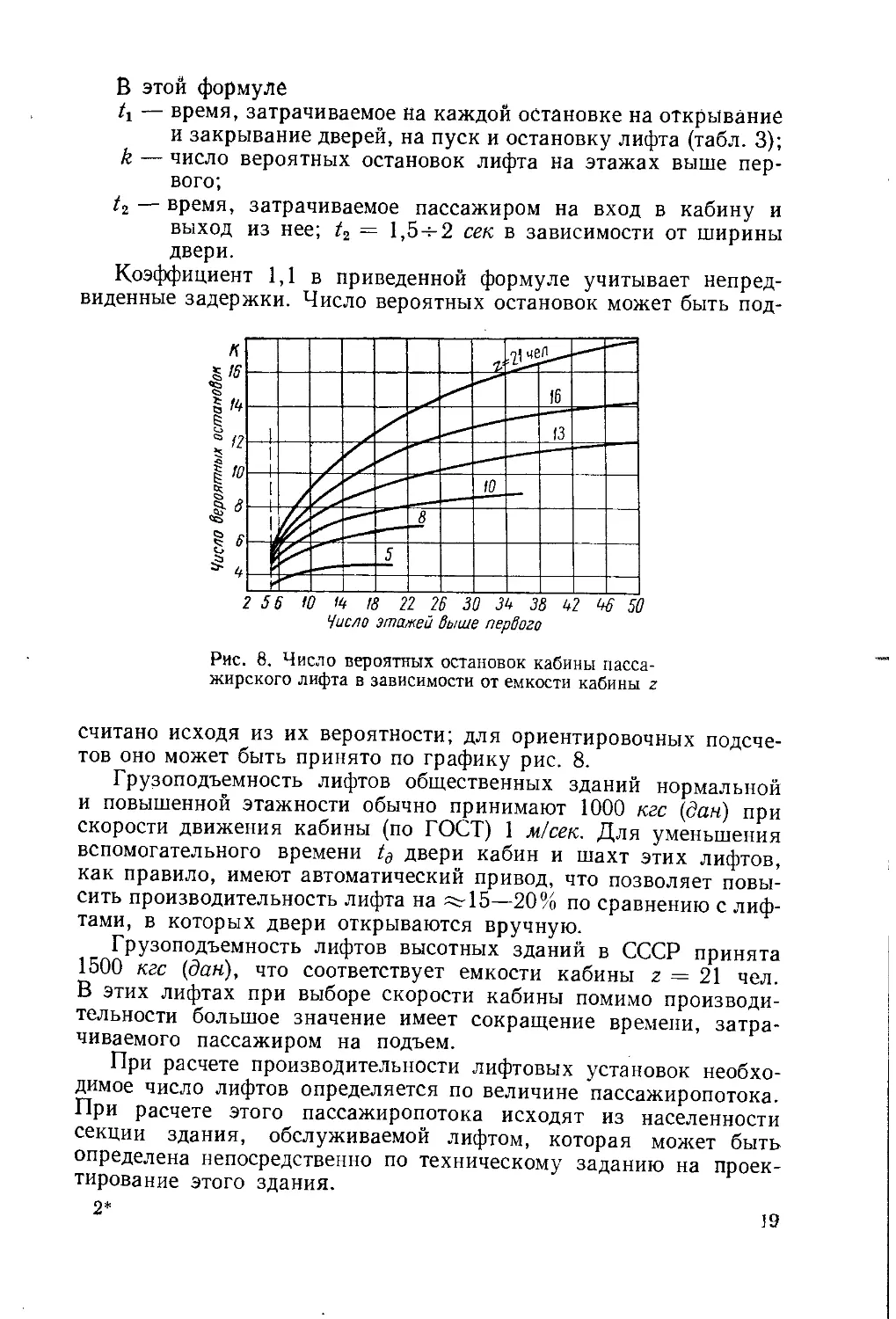
В этой формуле
/j — время, затрачиваемое на каждой остановке на открывание
и закрывание дверей, на пуск и остановку лифта (табл. 3);
k — число вероятных остановок лифта на этажах выше пер-
вого;
t2 — время, затрачиваемое пассажиром на вход в кабину и
выход из нее; t2 = 1,54-2 сек в зависимости от ширины
двери.
Коэффициент 1,1 в приведенной формуле учитывает непред-
виденные задержки. Число вероятных остановок может быть под-
Рис. 8. Число вероятных остановок кабины пасса-
жирского лифта в зависимости от емкости кабины z
считано исходя из их вероятности; для ориентировочных подсче-
тов оно может быть принято по графику рис. 8.
Грузоподъемность лифтов общественных зданий нормальной
и повышенной этажности обычно принимают 1000 кгс (дан) при
скорости движения кабины (по ГОСТ) 1 м/сек. Для уменьшения
вспомогательного времени tg двери кабин и шахт этих лифтов,
как правило, имеют автоматический привод, что позволяет повы-
сить производительность лифта на ^-15—20% по сравнению с лиф-
тами, в которых двери открываются вручную.
Грузоподъемность лифтов высотных зданий в СССР принята
1500 кгс (дан), что соответствует емкости кабины z = 21 чел.
В этих лифтах при выборе скорости кабины помимо производи-
тельности большое значение имеет сокращение времени, затра-
чиваемого пассажиром на подъем.
При расчете производительности лифтовых установок необхо-
димое число лифтов определяется по величине пассажиропотока.
При расчете этого пассажиропотока исходят из населенности
секции здания, обслуживаемой лифтом, которая может быть
определена непосредственно по техническому заданию на проек-
тирование этого здания.
2* 19
Ориентировочно эта населённость можёт быть также определена
по формуле
А
I >
где f — полезная площадь, приходящаяся на одного человека;
ориентировочно для жилых домов f = 5-^9 м2, магазинов
f = 2,73,6 м2 и учреждений f = 7-И1 л2;
F — полезная площадь секции здания, обслуживаемой лиф-
том, за вычетом площадей первого и второго этажей, в м2.
Интенсивность пассажиропотоков общественных зданий, как
правило, неодинакова в разные часы дня и обычно достигает мак-
симума к началу и концу работы. Он лежит в сравнительно ко-
ротком отрезке времени, поэтому обычно исходят из пятиминут-
ного пассажиропотока, подсчитываемого по формуле,
^5 = ^O^hi (3)
где k0 — опытный коэффициент (табл. 4).
Таблица 4
Коэффициент k0
для подсчета наибольшего (пятиминутного) пассажиропотока
(по данным ВНИИПТмаш)
Назначение здания Характер пассажиро- потоков Коэффици- ент
Жилые здания Гостиницы В двух направле- ниях 0,03—0.05 0,05—0,07
Административные зда- ния Театры Учебные заведения В одном направ- лении 0,12—0,20 0,15—0,20 0,20—0,35
Расчетный часовой пассажиропоток
Лр = ^-Л5=12А5. (4)
Необходимое число лифтов
= (5)
Для обеспечения удобства пользования лифтом время ожида-
ния кабины пассажиром t0 не должно быть больше определенной
величины. Полагая, что кабины отходят от нижней остановки
равномерно, имеем величину этого времени
^=4-. (6)
20
В этом случае Т — время одного рейса, подсчитанное по
формуле (2).
Допускаемое время ожидания t0 для лифтов общественных
зданий (учреждений, театров и т. п.) принимается 30—45 сек,
(хорошее обслуживание), гостиниц и жилых зданий — 40—60 сек
(удовлетворительное обслуживание). В соответствии с этим рас-
четом уточняется и необходимое число лифтов.
Как правило, подъемные установки высотных зданий состоят
из нескольких групп лифтов, каждая из которых обслуживает
определенные этажи. Помимо увеличения производительности
лифтов и некоторого снижения их стоимости это позволяет зна-
чительно сократить время, затрачиваемое на один подъем, и таким
образом повышает удобство пользования лифтом. Для примера
в табл. 5 приведена характеристика такой лифтовой установки,
обслуживающей небоскреб Эмпайр стейт билдинг (Нью-Йорк).
Установка состоит из 54 основных лифтов, которые разделены
на 6 групп. Лифты первой группы, имеющие высоту подъема
73 м, обслуживают этажи от 6 до 20-го (кабина без остановки
проходит первые пять этажей); лифты второй группы с высотой
подъема 92 м обслуживают этажи от 18 до 25-го и т. д. Зоны,
обслуживаемые лифтами разных групп, перекрывают одна дру-
гую по высоте, что обеспечивает переход пассажиров внутри зон.
Кроме того, предусмотрено 7 дополнительных лифтов для сооб-
щения между этажами. В общем случае число зон в здании и число
лифтов, обслуживающих каждую зону, зависит от распределения
пассажиропотоков по этажам и устанавливается в зависимости
от планировки здания и назначения отдельных этажей.
Лифты высотных зданий обычно располагают в специальных
так называемых лифтовых вестибюлях. В целях удешевления
здания, под вестибюли обычно отводят наименее удобные его
части. На рис. 9 приведены две схемы, показывающие размещение
лифтов в таких зданиях.
Грузоподъемность больничного лифта назначается исходя из
веса носилок (или койки), веса больного и сопровождающих его
лиц и по правилам Госгортехнадзора принимается не менее
500 кгс (дан). Как указано выше, скорость этих лифтов по ГОСТу
равна 0,5 м/сек-, их число и расположение определяется исходя
из общей компоновки здания и расположения операционных.
Подсчет производительности этих лифтов обычно не требуется.
Производительность грузового лифта может быть рассчитана
по формуле
л 3,6Qn .
Л = —<Pi. (')
где Qn — вес поднимаемого груза нетто в кгс (дан)-,
<Pi — 0,5<-0,9 — коэффициент, учитывающий неодинаковую
загрузку лифта за разные рейсы.
31
Таблица 5
Характеристика лифтовых установок
небоскреба Эмпайр стейт билдинг (Нью-Йорк)
Г руппа лифтов * Число лиф- тов Грузоподъ- емность кгс (дан) д 5 3 ps О\о Высота подъема, м Обслуживаемые этажи
А 4 1800 3,5 38 От подвала 1 до
(местные) Б 10 1800 3,5 73 7-го От 6 до 20-го
(экспресс) В 8 1600 3,5 92 От 18 до 25-го
(экспресс) Г 10 1600 3,5 157 От 24 до 43-го
(экспресс) Д 8 1600 3,5 208 От 41 до 57-го
(экспресс) Е 8 1600 3,5 244 От 55 до 67-го
(экспресс) Ж 10 1600 3,5 290 От 66 до 80-го
(экспресс) Лифты 2 1350 2,5 31 79-н — сад на
башни Лифты 1 900 2,5 56 крыше 85-й — платфор-
башни наблю- дения Грузовой 1 1 1350 3,5 300 ма башни От подвала 2 до
Грузовой 2 1 1350 3,5 210 80-го этажа От подвала 2 до
Г рузовые 2 1350 3,5 102 57-го этажа От подвала 2 до
Грузовые 5 и 6 * См. рис 2 . 9, б. 2250 1,25 11 25-го этажа
Время одного рейса Т, так же как и для пассажирских лифтов,
подсчитывается по формуле (2).
Номинальная грузоподъемность грузового лифта
Q = Qn + + Gn.
В этой формуле
Ge — вес вспомогательного оборудования, поднимаемого
вместе с грузом;
Gn — вес проводника и лиц сопровождающих груз (в грузо-
пассажирских лифтах).
2'
Эта грузоподъемность округляется до ближайших величин,
указанных в ГОСТе.
Необходимая грузоподъемность лифта Q при заданном весе
Рис. 9. Схемы расположения лифтов в высотных зданиях: а — высот-
ное здание у Красных ворот в Москве; б — небоскреб Эмпайр стейт
билдинг (Нью-Йорк)
У
где у — коэффициент использования номинальной грузоподъем-
ности лифта, учитывающий вес оборудования, загружае-
мого вместе с грузом. При загрузке электрокарами
у = 0,44-0,5, ручными тележками у = 0,64-0,8, при
подъеме груза на стеллажах у = 0,84-0,9, при ручной
загрузке у = 1.
В большинстве случаев грузовые лифты устанавливаются в зда-
ниях высотой 4—6 этажей. Для этих лифтов наибольшее значение
имеет точность остановки, которая в некоторых случаях (погрузка
23
на рельсовых вагонетках) требуется порядка 3—5 мм; поэтому
для них принимают невысокие скорости движения кабины (при-
мерно 0,1—0,5 м/сек). Как указано выше, скорости этих лифтов
по ГОСТу находятся в пределах от 0,25 до 0,5 м/сек.
4
$ 4. Общие принципы расчета на прочность
Детали лифтов в зависимости от продолжительности их работы
могут быть подразделены на две основные группы: 1) детали,
постоянно работающие во время работы лифта, 2) детали, рабо-
тающие только в аварийных случаях (ловители, буфера и т. п.).
При расчете деталей первой группы следует учитывать возмож-
ность их работы при следующих условиях: ' s Н
а) при номинальных нагрузках, нормально действующих при
работе лифта, — первый расчетный случай;
б) при посадке кабины на ловители и буфера, в аварийных
случаях (неисправность лебедки, обрывы канатов и т. д.) — вто-
рой расчетный случай;
в) нагрузка кабины испытательным грузом, при освидетель-
ствовании лифта по правилам Госгортехнадзора —третий расчет-
ный случай.
Также целесообразна проверка прочности деталей лифта при
заедании кабины в направляющих (например, при случайном
перекосе направляющих из-за осадки здания, ударе кабины о слу-
чайно попавшие предметы) — четвертый расчетный случай.
Расчетная нагрузка Qp от веса поднимаемого груза Q или веса
противовеса должна быть определена с учетом сил инерции Ри
при пуске и остановке кабины.
Для первого расчетного случая имеем
Qp=Q+Pu = mg + ma = Q^l + -|-) = Qkd, (8)
где т — масса поднимаемого груза в кг;
а — ускорение при пуске (или замедление при остановке)
в м/сек2;
g — ускорение силы тяжести в м/сек2;
ke — динамический коэффициент.
В данном случае .
(9)
При расчете лифта по номинальным нагрузкам (первый расчет-
ный случай) величина а соответствует принятой для нормальных
условий работы лифта. Следует, однако, учитывать, что из-за
внезапного приложения усилий фактические величины ka будут
больше подсчитанных по формуле (9); поэтому целесообразно их
увеличивать на 20—30% (в зависимости от скорости кабины)
по сравнению с расчетными.
24
Расчетная нагрузка от веса G кабины
Gp = Gka. (10)
Коэффициент ka принимается тот же, что и при расчете Qp.
По этой же формуле определяется и расчетная нагрузка для
второго расчетного случая — посадки кабины на ловители и бу-
фера. Величина ka подсчитывается также по формуле (9), но при
повышенных величинах замедлений (см. § 2). При ударном при-
ложении нагрузки (например, при ловителях мгновенного дей-
ствия) ее целесообразно увеличить на 20—30%.
При определении величины расчетной нагрузки Qp от веса
поднимаемого груза для этого случая, исходя из правил Госгор-
технадзора, следует учитывать перегрузку лифта на 10%, считая
от номинального груза. Таким образом,
Qp=\,\Qkg. (11)
При периодических освидетельствованиях лифта (третий рас-
четный случай) помимо испытания его в работе производятся
статические испытания грузом в 1,5—2 раза большим, чем номи-
нальный. Расчетная нагрузка от веса поднимаемого груза для
этого случая
QP=Qkn, (12)
где kn — коэффициент перегрузки.
В соответствии с правилами Госгортехнадзора для грузовых
лифтов, предназначенных только для подъема грузов, kn = 1,5;
для лифтов, рассчитанных на подъем людей (пассажирских,
больничных или грузовых с проводником), kn = 2. Поскольку
испытания проводятся при неподвижной кабине для этого случая
kg = Г, это же значение принимается и при подсчете нагрузки
от веса кабины.
При заедании кабины (четвертый расчетный случай) нагрузка
определяется по наибольшему моменту двигателя (для барабан-
ных лебедок) или по наибольшему моменту на канатоведущем
шкиве.
Для деталей второй группы, работающих только в аварийных
случаях (ловители, буфера), расчетные нагрузки подсчитываются
по формулам (9)—(11), при повышенных величинах замедле-
ний — аналогично тому, как это сделано для первой группы де-
талей.
При выборе допускаемых напряжений для деталей первой
группы при расчете их по номинальным нагрузкам (первый рас-
четный случай) и числе нагружений за весь срок службы Z >
>0,5-10“ (например, деталей лифтовых лебедок) за опасное
напряжение следует принимать предел выносливости.
25
Допускаемые напряжения при симметричном цикле нагру-
жения
101 <13>
при пульсирующем цикле
"Ч-ГЙГ’ <14>
где o_j и <т0 — соответствующие пределы выносливости при сим-
метричном и пульсирующем циклах;
k.t — масштабный коэффициент, учитывающий влияние
размеров детали на предел выносливости;
kK — эффективный коэффициент концентрации напряже-
ний в местах резкого изменения формы детали
(выточки, галтели, шпоночные пазы и т. п.);
п — запас прочности.
Для предварительных (проектировочных) расчетов, когда
величины kM и kK еще не известны, можно принять
kMkKn = п'.
Ориентировочные величины п' приведены в табл. 6.
Таблица 6
Коэффициенты п’
для предварительного выбора
допускаемых напряжений
Типы деталей Коэффициент п’
Гладкие стальные детали: с чисто обработанной поверхностью с необработанной поверхностью . . . Валы, оси, цапфы: в местах предполагаемого размещения шпонок или галтелей в резьбах, при растяжении Зубья зубчатых колес: после нормализации или объемной за- калки при поверхностной закалке с цементированной или азотированной поверхностью 1,5—2 1,7—2,3 2,2—2,8 3,5—4,5 1,5 1,8 1,2
После определения размеров и конфигурации детали произво-
дится окончательная проверка ее прочности по фактическим (уточ-
ненным) величинам и kK.
26
При малом числе нагружений детали или небольших колеба-
ниях действующих на нее нагрузок (например, в неподвижных
осях блоков уравновешивающих канатов) за опасное напряже-
ние может быть принят предел текучести <ут (для стальных деталей)
или предел прочности щ (для деталей из чугуна). Для этого слу-
чая
Ю] [о] = -^. (15)
Ориентировочно для стальных деталей п0 = 2 4-3 в зависимости
от материала (поковка или литье) и характера работы детали, для
литых чугунных деталей п0 ^3-:-4.
По этим же формулам подсчитываются и допускаемые напря-
жения при расчете деталей первой и второй групп на действие
аварийных нагрузок. Поскольку эти нагрузки являются случай-
ными, запасы прочности в этом случае могут быть снижены на
20—30%.
При расчете деталей на действие испытательного груза или
случай заедания (защемления) кабины (третий и четвертый расчет-
ные случаи) допускаемые напряжения также подсчитываются
по формулам (15). В этом случае могут быть приняты запасы
прочности п0 = 1,14-1,3.
Окончательно размеры деталей первой группы назначаются
по наиболее неблагоприятному (по условиям прочности) из рас-
смотренных выше расчетных случаев.
Глава II
УРАВНОВЕШИВАНИЕ ЛИФТОВ И СИСТЕМЫ ПОДВЕСКИ
КАБИН
$ 1. Системы уравновешивания
Для уменьшения мощности двигателя и нагрузок на лебедку
вес кабины и частично груза в большинстве лифтов уравновеши-
вается противовесом. Лифты без противовеса применяются редко,
например при использовании тельфера в качестве подъемной
лебедки, в некоторых малых грузовых лифтах и т. п.
На рис. 10 приведены две возможные схемы уравновешивания
лифта. В схеме на рис. 10, а противовес 2 непосредственно связан
с кабиной 1. В этом случае допустимо только частичное уравно-
вешивание веса кабины, так как при полном уравновешивании
и канатной подвеске опускание ее без груза было бы невозмож-
ным. Такая схема применяется очень редко, например в некоторых
лифтах с очень тяжелыми кабинами.
27
b
Как правило, уравновешивание лифтов производят по схеме,
приведенной на рис. 10, б. В этом случае при лифтах с канато-
ведущими шкивами противовес 2 подвешивается непосредственно
к концам подъемных канатов, сбегающих со шкива, и одновременно
создает натяжение, необходимое для сцепления каната со шкивом.
При барабанных лебедках он подвешивается к дополнительным
канатам, которые наматываются на тот же барабан, что и грузо-
вые канаты, но в противоположном направлении. При этой схеме
уравновешиваются моменты на валу канатоведущего шкива (или
барабана): целиком от веса кабины 1 и частично от веса поднимае-
мого груза.
Вес противовеса в этом
случае определится от усло-
вия
Gn = G + ф<2, (16)
где Q — наибольший вес под-
нимаемого груза;
G — вес кабины;
ф — коэффициент урав-
новешивания веса
груза.
Наибольший статический
момент на канатоведущем
шкиве (или барабане) при подъеме груженой кабины из ниж-
него положения при этом будет равен
Рис. 10. Схемы уравновешивания лифтов
мб= (<pQ + G + GK-Gn)-^ = IQ(<P — ф) + GJ 4- <17)
В этой формуле
GK — вес канатов, на которых подвешена кабина;
<р — коэффициент использования грузоподъемности лифта,
учитывающий колебания степени его загрузки при ра-
боте;
D — диаметр барабана или канатоведущего шкива.
Для случая опускания порожней кабины из крайнего верх-
него положения этот момент будет равен
'M»=(o,+g;-o)4-(’W+c;)4 <18>
и противоположен по знаку моменту Мб.
В данном случае G' — вес канатов противовеса.
Приравнивая Мб и М'б, из уравнений (17) и (18) имеем
♦=-F
28
В некоторых случаях, чтобы обеспечить более равномерную
загрузку лебедки в процессе эксплуатации лифта, принимают
ф = 0,4, что соответствует расчетному коэффициенту использо-
вания грузоподъемности лифта <р = 0,8; в большинстве же слу-
чаев принимают ф = 0,5, полагая <р = 1.
\ПО ТУ на проектирование лифтов противовесы должны быть
выполнены из железобетона, в малых грузовых лифтах допускается
Рис. 11. Противовесы лифтов:
а — вид в сборе; б — конфигу-
рации грузов.
чугун. Чугунные противовесы часто встречаются и в лифтах боль-
шой грузоподъемности, что позволяет уменьшать габариты этих
пр<дцвовесов \и соответственно размеры шахт.| Вес противовеса
окончатЙГБНо подбирается при монтаже в процессе- регулировки.
дМ$та~~Для~ удобЙЧия ршулиройки н'ВбТИВОВ51!Б1 выпилпИ10Т~со~
ставными (рис. 11, а) из грузов 1 прямоугольной формы весом
не более 0,1 Q, что обеспечивает точность регулировки момента на
валу канатоведущего шкива ±5—7%. По ТУ на проектирование
лифтов вес такого груза не должен быть более 60 кгс (дан), чтобы
его могли поднять двое рабочих, так как применение дополни-
тельных подъемных устройств для установки грузов обычно
затруднительно. Противовесы малых грузовых лифтов иногда
выполняют в виде одного сплошного блока.
Грузы составных противовесов укрепляются в раме, изго-
товленной из углоБби~ стали илишвеллеров "й снабжаКися
29
Рис. 12. Схема натяжного
устройства -уравновешивающих
канатов
выступами или пазами (рис. 11.6), которыми они удерживаются
Пираме 2. Рамы изгигОйДяются из профильной стали и собираются
на болтах? Еслй“ пОзволяют'размёрь! дверных проёмов, оТТй мОГут
/быт&~вы»олнены сварными. Размеры рамы по высоте выбираются
таким образом, чтобы было возможно установить несколько
дополнительных грузов в процессе регулировки лифта при мон-
таже.
Так же как”и у кабины, на раме противовеса укрепляются
направляющие башмаки, скользящие по направляющим, уста-
") новленным в шахте. По правилам
Госгортехнадзора при скорости дви-
жения кабины 1,5 м/сек, и более на
раме противовеса должны быть уста-
новлены ловители, удерживающие
противовес от падения при обрыве
-канатов или неисправности лебедки.
С увеличением высоты' подъема
возрастают нагрузки от веса подъем-
ных канатов. При сравнительно не-
большой грузоподъемности лифтов
они могут составить значительную
часть от общих нагрузок, действую-
щих на лифт. Поэтому при высотах
подъема более 45—50 м экономически
оправдана установка дополнительных
(уравновешивающих) канатов, вес
которых уравновесил бы вес канатов
кабины и противовеса. Эт$ канаты
додцешиваются по схеме, приведен -
ной на'тртвсТТоТ'в: один конец каната
прикрепляется к раме кабины 1, _другощ^=-К раме противовеса-?.
Число этюТканаiив-(обБГТПо''один или два) назначаётся-~Кбнструк-
тивно,'“'иХ~Вёс_ттодбираетея-равным весу канатов на участке ab
между кабинЭн-н-протйвовесом,~-------.
Для натяжения уравновешивающих канатов в пр и ямке, шахты
устанавливается натяжное -устройство Фрис,—Г2)~ Опо состоит из
блока~~Г,~~бгйбаемого ~уравновешивакяцим канатом, и натяжного
груза 3. Во избежание раскачивания этот груз помещен в направ-
ляющих 2, укрепленных на фундаменте шахты. \ По правилам
Госгортехнадзора такое устройство должно иметь стгсЩиальиый
^выЮТючатель длД~^ттгнгтвктг~71ви,гателя-лебедйТГТТри обрыве или
слишком большой вытя’Щке уравновешивающих Тёанатщц На при-
"веденной схеме этоГвыклюЧатель-р приводнТся~в*действие упором 4,
нажимающим на рычаг 5.
Диаметр направляющего блока натяжного устройства зависит
от принятых размеров кабины; желательно выбирать его не
менее чем 25 диаметров каната. Обычно вес натяжного груза
30
принимают в пределах 300—500 кгс (дан) в зависимости от диа-
метра направляющего блока и диаметра и веса уравновешивающих
канатов.
Иногда вместо канатов применяют цепь, имеющую больший
вес по сравнению с канатами (что в данном случае является поло-
жительным). Для уменьшения шума при подъеме или опускании
кабины через звенья этой цепи пропускают пеньковый канат,
пропитанный маслом. При цепях натяжные устройства обычно
не применяют.
$ 2. Системы подвески кабин и противовесов
Для обеспечения безопасности пассажиров кабины и противо-
весы пассажирских и грузопассажирских лифтов, как правило,
подвешиваются не менее чем на двух параллельно работающих
канатных подвесках. При сравнительно небольшой грузоподъем-
ности лифтов в большинстве случаев это исключает необходимость
применения полиспастов, и кабины подвешиваются непосред-
ственно к подъемным канатам.
Полиспасты обычно применяют только в специальных случаях,
например в выжимных лифтах, при использовании лебедки с мень-
шим, чем требуется, тяговым усилием и т. п. В частности, в стан-
дартных грузовых лифтах грузоподъемностью 5000 кгс (дан)
полиспастная подвеска позволяет использовать лебедку грузового
лифта грузоподъемностью 2500 кгс (дан) за' счет изменения ско-
рости кабины с 0,5 на 0,25 м/сек.
Наименьшее допускаемое число канатов (или полиспастных
подвесок), на которых подвешивается кабина или противовес,
выбирается в зависимости от типа лебедки, типа и грузоподъем-
ности лифта (табл. 7). В лебедках с канатоведущими шкивами
число канатов в ряде случаев приходится увеличивать по условиям
износостойкости канатоведущего шкива. Чтобы обеспечить равно-
мерное натяжение канатов, их крепление к кабине производится
при помощи специальных балансирных или пружинных подве-
сок, схемы которых приведены на рис. 13 и 14.
При двухканатной балансирной подвеске (рис. 13, а) канаты
непосредственно крепятся к концам балансира, шарнирно при-
крепленного к раме кабины. При трех канатах (рис. 13, б) вводится
дополнительный поперечный рычаг 2, к которому крепятся два
каната. Соотношение плеч основного балансира 1 в этом случае
определится из условия
а __ S _ 1
b ~ 2S ~ 2 ’
где S — натяжение одного каната.
В лебедках с канатоведущими шкивами из-за малых расстоя-
ний между ручьями обода, в которые укладываются канаты,
31
Таблица 7
Наименьшее число канатов в подвесках кабин
и противовесов, допускаемое в лифтах
(по правилам Госгортехнадзора)
Тип лифта Наименьшее допустимое число канатов
при барабанной лебедке при лебедке с каиато- ведущим шкивом при грузоподъемности
До 350 кгс (дан) Более 350 кгс (дан)
Пассажирский, гру- зовой с проводником 2 3 4
Больничный .... 2 — 4
Грузовой без про- водника 1 2 2
Малый грузовой 1 2 —
расстояние между осями подъемных канатов должно быть мини-
мальным. С этой целью в двухканатных балансирных подвесках
применяют установку рычагов по схеме рис. 13, в, а в трехканатных
Рис. 13. Схемы балансирных подвесок
подвесках устанавливают дополнительные кольца или стяжки.
Балансирные подвески применяют при числе канатов до 8, но при
большом числе канатов они оказываются слишком громоздкими.
32
Более компактны пружинные подвески (рис. 14). В этих под-
весках канаты крепятся к вертикальным тягам 1, пропущенным
через плиту 2, опирающуюся на верхний ригель рамы кабины.
Нагрузки от натяжения канатов передаются на опорные шайбы 4
и далее на пружины 3 и
плиту 2. Натяжение пру-
жин регулируется при мон-
таже гайками 5 таким
образом, чтобы их длины
при подвешенной кабине
были одинаковыми. Что-
-бы обеспечить правильное
положение канатов отно-
сительно канатоведущего
шкива, опорная плита 2
делается поворотной.
К недостаткам пружин-
ных подвесок следует от-
нести колебания кабины
при пуске и остановке
лифта, которые иногда до-
стигают значительной ве-
личины.
По правилам Госгор-
технадзора в случаях,
когда ловители не связаны
с подъемными канатами
(что имеет место в большей
части лифтов), подвески
должны иметь устройство
для остановки двигателя
при обрыве или слишком
большой вытяжке одного
из канатов. Оно состоит
из рычага 6 (рис. 14),
который отжимается в
верхнее положение пружи-
ной 8. Положение рыча-
га регулируется гайкой 9,
Рис. 14. Пружинная подвеска кабины
навинчиваемой на стер-
жень, который укреплен
на раме кабины. При неравномерной вытяжке или обрыве
одного из канатов конец тяги пружинной подвески нажи-
мает на рычаг 6 и приводит в действие выключатель 7, который
и размыкает цепь питания двигателя лебедки. По такому же
принципу работают предохранительные устройства и при балан-
сирной подвеске кабины.
3 Павлов 154
33
Для подвесок расчетными являются два случая работы из ука-
занных в гл. I: работа с номинальными грузами и с испытатель-
ным грузом при освидетельствовании лифта инспекцией Госгор-
технадзора. Также целесообразна дополнительная проверка проч-
ности деталей подвески для случая защемления кабины (четвертый
расчетный случай).
Пружины пружинной подвески рассчитываются по усилию
от веса груза и веса кабины. Необходимая жесткость пружины
определяется по предельно допустимой величине ее удлинения X
из-за неодинаковой вытяжки каната и возможного проскальзыва-
ния его по шкиву. Это удлинение в каждом отдельном случае
устанавливается в зависимости от высоты подъема и допусков
на размеры канатоведущих шкивов.
Обозначив величину ослабления каната, которая при этом
может быть допущена, через AS, определяем необходимую жест-
кость пружины
С = (19)
Необходимы размеры пружины при заданной жесткости и рас-
четной нагрузке Рр определяются по формулам
С = ^^; (20)
п п<Р М /01 \
р~ 16 ‘ г ’ '
где г — средний радиус пружины в см\
пп — число витков пружины;
d — диаметр пружинной проволоки в см\
G — модуль упругости при сдвиге в кгс/см2 (дан/см2);
[т] —допускаемые напряжения в кгс/см2 (дан/см2).
§ 3. Канаты
При выборе канатов следует отдавать предпочтение конструк-
циям с линейным касанием проволок как наиболее износостойким.
Для барабанных лебедок следует применять канаты ЛК-Р по
ГОСТ 2688—55, свитые из 6 прядей по 19 проволок в пряди.
В лебедках с канатоведущими шкивами следует учитывать износ
проволок от проскальзывания каната по канатоведущему шкиву.
Для этих лебедок целесообразно применять канаты с более тол-
стыми наружными проволоками в прядях. По ТУ на проектиро-
вание лифтов для подвески кабин и противовесов предлагается
применять канаты типа ЛК-0 по ГОСТу 3077—55 из 6 прядей
по 19 проволок и по ГОСТ 3080—55 из 8 прядей по 19 проволок.
34
Для малых грузовых и магазинных лифтов, а также в качестве
вспомогательных (например, уравновешивающие канаты) могут
применяться и канаты с точечным касанием проволок по ГОСТам
3070—55 и 3071—55, однако применения канатов этих конструк-
ций из-за их меньшей стойкости по возможности следует избе-
гать.
Пределы прочности проволок лифтовых канатов при неболь-
ших высотах подъема, когда вес их сравнительно невелик, можно
принимать порядка 160 кгс/мм1 2 (дан/мм2). При меньших пределах
прочности излишне утяжеляется канат, при больших могут воз-
никнуть затруднения при замене износившегося каната новым.
В лифтах высоких зданий, где из-за большой высоты подъема
вес канатов играет существенную роль, целесообразно применять
канаты с повышенным (до 200 кгс/мм2, дан/мм2 и больше) преде-
лом прочности. Канаты, изготовляемые в данное время канат-
ными заводами, как правило, имеют крестовую свивку; однако
по стойкости они уступают канатам продольной свивки, примене-
ние которой в лифтах было бы более целесообразным.
В соответствии с правилами Госгортехнадзора канаты, служа-
щие для подвески кабин, рассчитываются по статическому натя-
жению от веса кабины G, веса номинального груза Q и наиболь-
шего собственного веса бк (при нижнем положении кабины).
В соответствии с этим
5 = Q.+ .G+„G« ; (22)
запас прочности
В этих формулах
i — число канатов, на которых подвешена кабина;
R — действительное разрывное усилие каната, принимаемое
по его паспорту или ГОСТу.
Наименьшие допускаемые запасы прочности приведены в
в табл. 8.
Дополнительные нагрузки (сопротивления в направляющих,
динамические нагрузки при пуске и торможении лифта и т. п.)
в данном случае учитываются запасом прочности.
При больших высотах подъема вес каната может превышать
вес номинального груза Q. В этих случаях выбор каната удобно
производить с учетом его веса по площади сечения его проволок.
Эта площадь может быть определена из следующего соотношения
1 "К
где L — наибольшая расчетная длина каната (при нижнем поло-
жении) кабины в .и;
3*
35
Таблица 8
Наименьшие допускаемые запасы прочности пк
для лифтовых канатов
(по правилам Госгортехнадзора)
Тип лебедки Номинальная скорость, м/сек. Запас прочности пк
Лифт грузовой без проводии- ка, малый Лифт грузовой с проводни- ком, пасса- жирский , больничный
Барабанная До 1 8 9
До 1 10 12
С канатоведу- Более 1 до 2 11 13
щим шкивом » 2 » 4 12 14
» 4 13 , 15
ов — предел прочности проволок в кгс!мм2- (дан/мм2}-,
f — площадь сечения проволок каната в мм2-,
а = 0,85 — коэффициент, учитывающий уменьшение проч-
ности проволок при свивке их в канат;
у — вес 1 м каната, приходящийся на 1 мм2 его сечения.
Для канатов по ГОСТам 2688—55 и 3077—55 у =
= 0,0093 кгс/мм2 (дан/мм2}, для канатов по ГОСТу 3080—55
у = 0,0098 кгс/мм2 (дан/мм2}.
Из приведенной формулы находим необходимую площадь се-
чения проволок каната
(24)
Исходя из этой площади, по ГОСТ может быть подобран необ-
ходимый канат. Дополнительно канат проверяется по формуле
(23), исходя из запасов прочности, указанных в табл. 8.
Канаты противовеса рассчитываются по натяжению от веса
противовеса и собственного веса; запасы прочности этих канатов
принимаются те же, что и для канатов кабины. В лебедках с кана-
товедущим шкивом противовес подвешивается непосредственно
к концам грузовых канатов; в этом случае диаметры канатов ка-
бины и противовеса очевидно будут одинаковыми.
Присоединение концов канатов к балансирным или пружин-
ным подвескам в старых конструкциях лифтов производилось при
помощи муфт, заливкой или заклиниванием концов каната.
В данное время применяют крепление на зажимах. По правилам
Госгортехнадзора число этих зажимов должно быть определено
расчетом, но допускается не менее трех.
Глава III
КАБИНЫ ЛИФТОВ
£ 1. Конструкция кабин. Ограждения и пол
I Основными частями кабины (рис. 15) являются каркас, на ко-
торый передаются все силовые нагрузки, и ограждения 3. Кар-
кас состоит из вертикальной рамы 2, к которой прикрепляется
канатная подвеска 1, башмака 6 и ловителя 5, и горизонтальной
рамы 4, на которой устанавливается пол кабины. Схемы каркасов
показаны отдельно на рис. 16.
Кабины могут иметь один вход — непроходные кабины или
два входа, расположенные с противоположных сторон кабины
или под углом в 90°. В последнем случае башмаки и соответственно
направляющие устанавливаются по углам кабины. Как правило,
вход в кабину оборудуется дверями.
Верхняя и нижняя балки вертикальной рамы каркаса, рабо-
тающие на изгиб, выполняются из швеллеров, в кабинах малых
37
Рис. 16. Схемы каркасов кабин
лифтов
грузовых лифтов — из уголков, связанных между собой наклад-
ками. Вертикальные стойки обычно состоят из равнобоких или
неравнобоких уголков. Горизонтальная рама изготовляется из
уголков и при больших нагрузках — из швеллеров. При больших
размерах кабины она опирается на
дополнительные оттяжки (рис. 16)
из круглой стали или уголков. От-
тяжки из круглой стали имеют по
концам резьбу, на них навинчиваются
гайки, которыми оттяжка и опи-
рается на раму каркаса. Для уста-
новки каркаса в готовой шахте,
имеющей обычно небольшие размеры,
вертикальная рама выполняется раз-
борной, ее элементы соединяются на
монтаже болтами; для большей жест-
кости в ее узлах устанавливаются косынки.
^Материал и конструкция ограждений кабины зависят от наз-
начения лифта. Для пассажирских лифтов наиболее часто приме-
няют ограждения, состоящие из деревянных
щитов, соединяемых при монтаже болтами,
крючками или шипами. Как правило, огра-
ждения пассажирских кабин фанеруются цен-
ными породами дерева. Для лифтов, работаю-
щих в сетчатых шахтах, такая фанеровка про-
изводится снаружи и внутри кабины. В послед-
нее время получили некоторое распространение
ограждения из металлических штампованных
листов (рис. 17), соединяемых болтами. В не-
которых случаях на высоте более 1000 мм от
пола ограждения выполняют из стекла, что
позволяет иметь более светлые кабины. По
правилам Госгортехнадзора толщина стекла
должна быть не менее 4 мм.
Рис. 17. Металли-
ческие ограждения
кабины пассажир-
ского лифта
К внешнему оформлению ограждений кабин
грузовых лифтов предъявляют менее высокие
требования. Они обычно изготовляются или из
сплошных металлических листов, или из про-
водочной сетки. Толщина листов принимается
не менее 1,4 мм, сетка выполняется из проволоки диаметром не
менее 1,4 мм и по нормам Госгортехнадзора должна иметь ячейки
не более 20 мм. При сетчатых ограждениях низ кабины на высоту не
менее 1 м зашивается сплошным листом толщиной не менее 1,4 мм.
Металлические ограждения грузовых кабин, так же как и
деревянные, выполняются из отдельных секций, которые состоят
из металлических рам, сваренных из уголков. Между собой сек-
ции связываются болтами. Крепление сетки к уголкам в секциях
38
сетчатых ограждений производится или проволокой через сквоз-
ные отверстия в рамках (рис. 18, а), или скобами, приваренными
к уголкам (рис. 18, б). Ограждения устанавливаются на всю высо-
ту кабины со всех сторон, за исключением выжимных и малых
грузовых лифтов. У выжимных лифтов по правилам Госгортех-
надзора они могут быть только с двух сторон, у малых грузовых
лифтов они могут иметь только такую высоту, при которой будет
исключено смещение груза за пределы кабины во время работы
лифта.
Рис. 18. Варианты крепления сетки ограждений
Пол кабины в зависимости от назначения лифта может быть
деревянным или металлическим. В пассажирских лифтах, где
сосредоточенные нагрузки невелики, пол выполняется в виде
деревянного щита, покрытого линолеумом или пластиками для
уменьшения шума и улучшения внешнего вида кабины. Это также
необходимо и по гигиеническим соображениям. Деревянные полы
могут устанавливаться и в грузовых лифтах; в этом случае для
уменьшения их износа они дополнительно покрываются листами
из рифленой стали. При больших сосредоточенных нагрузках,
например от колес грузовых тележек, полы грузовых лифтов
делают металлическими и усиливают ребрами. Перекрытия ка-
бины выполняются отдельно от ограждений и связываются с ними
болтами или шипами. Эти перекрытия должны быть рассчитаны
на сосредоточенную нагрузку в 100 кгс (дан).
Из-за сравнительно небольших размеров кабин пассажирских
лифтов в них необходимы отверстия для естественной вентиляции,
закрываемые решетками. Для выхода пассажиров при аварии
или вынужденной остановке кабины между этажами в крыше ка-
бины предусматривается люк размером не менее 400 X 500 мм
зе
с откидывающейся вверх или раздвижной крышей. Через этот
люк выходит также обслуживающий персонал для смазки напра-
вляющих или осмотра механизмов, установленных в шахте.
В пассажирских лифтах, управляемых из кабины с дополни-
тельным вызовом кабины на этажи, необходимо исключить воз-
можность вызова кабины в случаях, когда в ней уже находится
пассажир. С этой целью пол кабины делается подвижным. Под
действием веса пассажира он опускается и воздействует на спе-
циальный подпольный контакт, включенный в цель управления
Рис. 19. Схемы подвижного пола кабин лифтов
лифтом. Один из вариантов конструкции такого пола, широко
применявшийся в лифтах прежних выпусков, показан на
рис. 19, а. Подвижный щит этого пола 1 прикреплен к обвязке
горизонтальной рамы каркаса кабины на петлях 3 и при отсутствии
пассажиров удерживается в поднятом положении пружиной 2.
Под действием веса пассажира щит опускается и нажимает на
штифт (или ролик) подпольного контакта 4 цепи наружного упра-
вления кабиной. Такой контакт должен срабатывать при нагрузке
15 кгс (сач), приложенной на расстоянии не менее 300 мм от входа
в кабину.
Такое устройство является достаточно простым, но недостаточно
надежно в работе, так как при расположении груза у петель пол
может не опуститься и не включит контакт.
Для всех вновь проектируемых лифтов по правилам Госгор-
технадзора требуется, чтобы контакт срабатывал при любом поло-
жении груза в кабине. В связи с этим в данное время применяется
конструкция пола, показанная на рис. 19, б. В этой конструкции
щит 1 опирается на четыре поворотные рычага 2 и при отсутствии
груза отжимается в верхнее положение пружиной 5. Один конец
40
этой пружины упирается в неподвижную раму, второй — в регули-
ровочную гайку 4 тяги 3. При опускании пола она нажимает на
подпольный контакт 6.
В конструкциях подвижных полов предусматриваются специ-
альные упоры, ограничивающие ход пола и снабженные упругими
прокладками для смягчения удара пола об эти упоры.
Ход пола не может быть слишком большим, так как при этом
у пассажиров возникают неприятные ощущения. По правилам
Госгортехнадзора величина хода не должна быть более 20 мм,
по ТУ на проектирование лифтов она допускается не более 15 мм.
§ 2. Двери кабин
Во избежание несчастных случаев входы в кабины пассажир-
ских и большинства грузовых лифтов оборудуются дверями.
По правилам Госгортехнадзора двери обязательно должны откры-
ваться внутрь кабины. Дополнительно двери оборудуются спе-
циальными контактами, размыкающими
цепь управления двигателем при откры-
той двери. Этим исключается возможность
пуска лифта в момент выхода и входа
пассажиров, при его загрузке и т. п.
От размеров дверей в значительной
степени зависит время, затрачиваемое на
погрузку (в грузовых лифтах) или на вход
и выход пассажиров (в пассажирских
лифтах). Для кабин пассажирских лиф-
тов применяют петлевые распашные и
раздвижные двери (рис. 20). Распашные
двери делаются двухстворчатыми и мно-
гостворчатыми, чтобы сократить дополнительную площадь пола
кабины, необходимую для их открывания. Двухстворчатые
распашные двери (рис, 20, а) применяются при ширине дверных
проемов 650—800 мм. Согласно ГОСТу 5746—58 на пассажирские
лифты, этими дверями оборудуются кабины лифтов грузоподъем-
ностью 350 и 500 кгс (дан). При больших проемах двери выпол-
няются многостворчатыми (рис. 20, б), из отдельных секций,
связанных между собой петлями. Такие двери, в частности, преду-
смотрены для кабин больничных лифтов по ГОСТу 8822—58.
Распашные двери кабин пассажирских лифтов в большинстве
случаев выполняются из дерева, иногда из металла (при металли-
ческих ограждениях). В верхних частях дверей устраивают окна,
которые застекляются. Достоинством распашных дверей яв-
ляется простота конструкции, однако большие мертвые зоны,
необходимые для их открывания, значительно сокращают полез-
ную площадь кабины. Более удобными в этом отношении являются
раздвижные двери (рис. 20, в, г).
41
Раздвижные двери обычно состоят из легкого металлического
каркаса, обшитого листами. Створки дверей передвигаются на ро-
ликах 1 (рис. 21) по рельсу 2, укрепленному над дверным прое-
мом. Нижний ролик 3 предохраняет дверь от соскакивания с рель-
са. Низ створки направляется специальными ползунами из метал-
ла или (что лучше) из пластмассы, скользящими в направляющем
пазе, расположенном у порога кабины. Иногда ползуны заменяют
Рис. 21. Узел опорных роликов раздвижной двери
роликами. В раздвинутом положении створки двери могут нес-
колько выходить за габариты кабины.
Раздвижные двери могут быть двухстворчатыми и многоствор-
чатыми, значительно реже применяют одностворчатые двери.
В частности, двухстворчатые двери предусмотрены ГОСТом
5746—58 для кабин пассажирских лифтов грузоподъемностью
1000 кгс (дан). Для увеличения ширины дверных проемов при
заданной ширине кабины иногда применяют многостворчатые
двери из нескольких задвигающихся одна за другую створок.
Скорости движения створок таких дверей при автоматическом
приводе обычно назначают неодинаковыми. Так, при четырех-
створчатой двери (рис. 20, г) внутренние створки 1 имеют в два
раза большую скорость открывания, чем наружные 2, что сокра-
щает время открывания этих дверей. Ширина дверного проема
при четырехстворчатой двери может быть увеличина до 2/3 ширины
кабины.
42
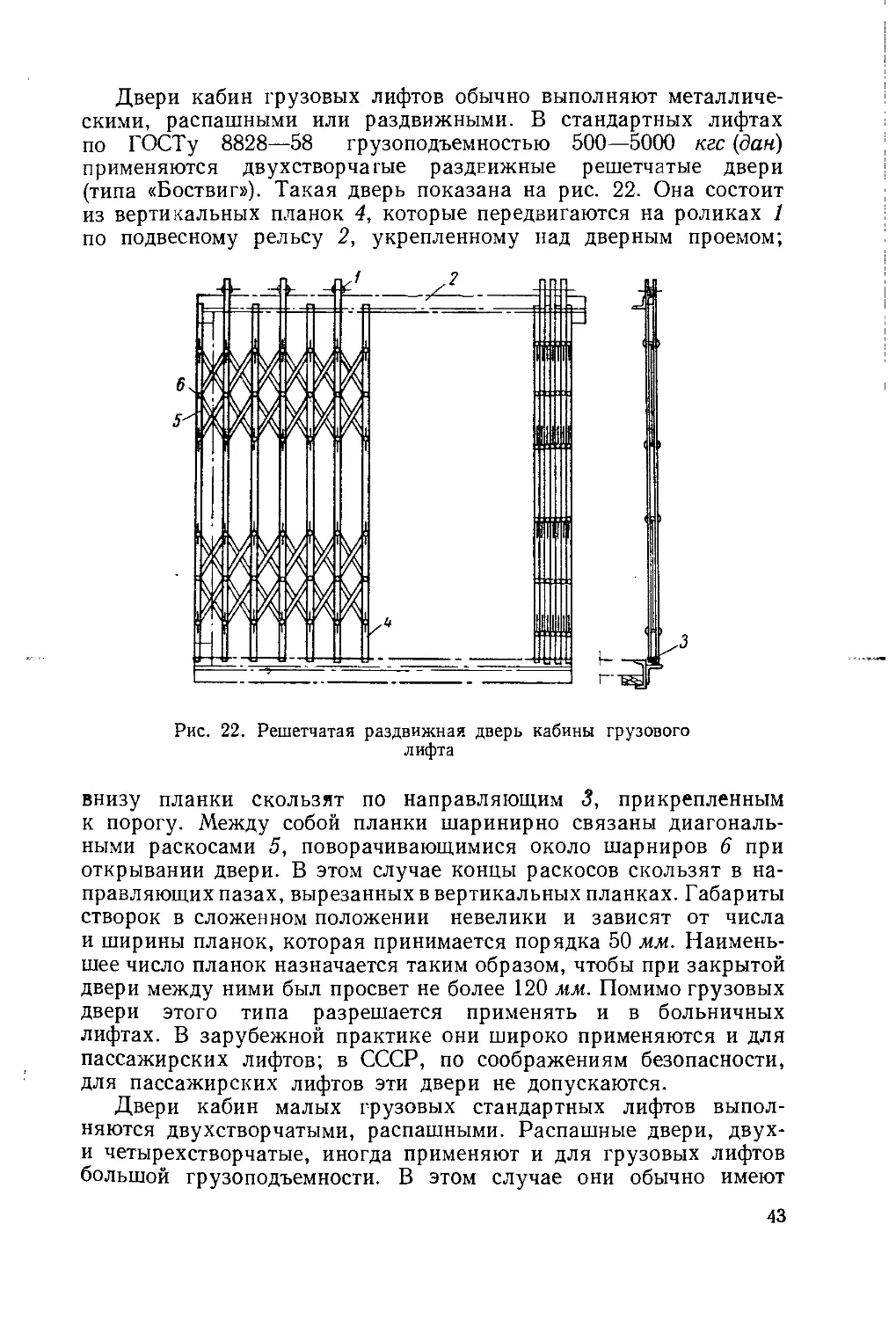
Двери кабин грузовых лифтов обычно выполняют металличе-
скими, распашными или раздвижными. В стандартных лифтах
по ГОСТу 8828—58 грузоподъемностью 500—5000 кгс (дан)
применяются двухстворчатые раздеижные решетчатые двери
(типа «Боствиг»). Такая дверь показана на рис. 22. Она состоит
из вертикальных планок 4, которые передвигаются на роликах 1
по подвесному рельсу 2, укрепленному над дверным проемом;
Рис. 22. Решетчатая раздвижная дверь кабины грузового
лифта
внизу планки скользят по направляющим 3, прикрепленным
к порогу. Между собой планки шаринирно связаны диагональ-
ными раскосами 5, поворачивающимися около шарниров 6 при
открывании двери. В этом случае концы раскосов скользят в на-
правляющих пазах, вырезанных в вертикальных планках. Габариты
створок в сложенном положении невелики и зависят от числа
и ширины планок, которая принимается порядка 50 мм. Наимень-
шее число планок назначается таким образом, чтобы при закрытой
двери между ними был просвет не более 120 мм. Помимо грузовых
двери этого типа разрешается применять и в больничных
лифтах. В зарубежной практике они широко применяются и для
пассажирских лифтов; в СССР, по соображениям безопасности,
для пассажирских лифтов эти двери не допускаются.
Двери кабин малых грузовых стандартных лифтов выпол-
няются двухстворчатыми, распашными. Распашные двери, двух-
и четырехстворчатые, иногда применяют и для грузовых лифтов
большой грузоподъемности. В этом случае они обычно имеют
43
сплошную обшивку из листовой стали, иногда делаются сетча-
тыми. При сетчатых дверях низ двери на высоту не менее 1 м
следует зашивать стальными листами. При сплошной обшивке
двери она должна иметь смотровые окна.
В некоторых случаях кабины грузовых лифтов без провод-
ника оборудуются вертикальными раздвижными дверями штор-
ного типа, открывающимися по вертикали. Створки этих дверей
в поднятом положении не загромождают дверные проемы, они
выполняются из отдельных планок, концы которых прикреплены
к цепям или канатам, расположенным в пазах по бокам дверного
проема. Вес такой шторки уравновешивается противовесом.
По правилам Госгортехназдора, чтобы уменьшить опасность уве-
чий при обрыве каната или цепи, к которой прикреплены шторки,
их вес для грузовых лифтов должен быть не более 4 кгс (дан)
и для малых грузовых лифтов — не более 7 кгс (дан). На нижних
кромках обязательна установка упругих прокладок. Запас проч-
ности канатов или цепей, поддерживающих шторку, принимается
не менее пятнадцатикратного.
Кабины грузовых лифтов без проводника могут выполняться
и без дверей. В этом случае следует предусматривать в дверных
проемах упоры (например, шлагбаумы), которые предохраняли
бы груз от смещения за габариты кабины при работе лифта.
Открывание и закрывание дверей грузовых и пассажирских
лифтов грузоподъемностью до 500 кгс (дан), обслуживающих
жилые дома или общественные здания при небольших грузопо-
токах, производится вручную проводником или пассажирами.
Z* Двери кабин стандартных пассажирских лифтов грузоподъем-
ностью 1000 кгс (дан) и выше, рассчитанных на обслуживание боль-
ших пассажиропотоков, а также скоростных лифтов, оборудуются
приводом, автоматически открывающим и закрывающим дверь
кабины при ее остановке и отходе от заданного этажа. В этих
дверях из условий безопасности пассажиров необходимо ограни-
чивать силу сжатия створок, величина которой должна быть не
более 15 кгс (сан). Механизмы открывания дверей в большинстве
случаев имеют механический привод: открывание двери произво-
дится двигателем, а ее закрывание — при помощи пружины,
растягиваемой (или сжимаемой) при раздвигании двери. В момент
закрывания створки двери подтормаживаются двигателем, рабо-
тающим в генераторном режиме, или специальным тормозом,
установленным на механизме.
На рис. 23 приведен чертеж, поясняющий принцип работы
механизма открывания дверей пассажирского лифта. Механизм
установлен на каркасе кабины, левая и правая створки двери
раздвигаются рычагами 6 и 5, шарнирно связанными со створками.
Между собой рычаги связаны тягой 4 таким образом, что при
повороте рычага 6 относительно опоры а по часовой стрелке ры-
чаг 5 вращается относительно опоры b против часовой стрелки,
44
и створки двери раздвигаются. Одновременно с поворотом рычага 6
растягивается пружина 3 обратного хода двери. Один конец этой
пружины связан с рычагом, другой — с рамой, на которой уста-
новлен привод. Рычаги приводятся в движение механизмом, со-
стоящим из электродвигателя 2, червячного редуктора 1, на вы-
ходном валу которого насажен кривошип 7. Этот кривошип при
помощи гибкой тяги 9 (канат или цепь) связан с концом рычага 6.
При открывании двери кривошип 7 вращается по часовой
стрелке и поворачивает рычаг 6, при этом растягивается
пружина 3.
После поворота кривошипа на угол, необходимый для отодвига-
ния створки, двигатель автоматически выключается.
При закрывании двери кривошип вращается в обратную сто-
рону и пружина 3, поворачивая рычаг 6, сдвигает створки. В слу-
чае защемления створок при закрывании они останавливаются.
Благодаря наличию гибкой связи кривошип при этом может
продолжать вращаться до крайнего положения. Усилие сжатия
створок в этом случае будет зависеть от натяжения пружины и,
как указано выше, не должно быть более 15 кгс (дан). Для того
чтобы исключить возможность пуска кабины при открытых или
неполностью закрытых дверях, на раме привода дополнительно
45
установлен контакт (выключатель) 8. При повороте рычага 6
укрепленный на нем упор нажимает на рычаг этого контакта и раз-
мыкает цепь двигателя лебедки. Дополнительный упор на левой
створке двери служит для открывания дверей шахты.
Некоторым недостатком этого механизма является возможность
резкого удара створок двери друг о друга после их остановки пас-
сажиром. Удар будет особенно сильным, если остановка произой-
дет в начальный момент закрывания двери.
простейших башма-
ков кабин лифтов
Рис. 24. Типы
£ 3. Башмаки
Как было указано выше,/башмаки служат для направления
движения кабины и обеспечивают ее вертикальное положение,
при эксцентрично приложенных нагрузках (при посадке пасса-
жиров в кабину, при въезде в
нее тележек в грузовых лифтах
и т. п.). Такие же башмаки уста-
навливаются и на раме противо-
веса.
Конструкция башмаков опре-
деляется типом направляющих
и принятой скоростью движения
кабины. В зависимости от этого
башмаки выполняются скользя-
щими или роликовыми.
На рис. 24 показаны конструкции простейших скользящих
башмаков грузовых и пассажирских лифтов. Башмаки на
рис. 24, а предназначены для работы по направляющим из про-
фильного проката (уголки, тавровая сталь) и в основном приме-
няются для грузовых лифтов. Башмаки по рис. 24, б ранее приме-
нялись в пассажирских лифтах при деревянных направляющих.
В обоих случаях эти башмаки обычно изготовляются из чугунного
литья, их рабочие поверхности обрабатываются.
В настоящее время широкое применение находят башмаки по
типу, показанному на рис. 25, а. Этот башмак состоит из корпуса 1
и поворотного вкладыша 2, охватывающего направляющие.
Вкладыш может быть выполнен из материалов, не требующих
частой смазки (металлокерамика, некоторые полимерные материа-
лы), что исключает необходимость установки специальных прибо-
ров смазки.
На рис. 25, б показан башмак более сложной конструкции,
применяемый в быстроходных пассажирских лифтах. Башмак
состоит из поворотной части (вилки) 6, корпуса 3, устанавливае-
мого на раму каркаса кабины, и поворотного вкладыша 5, кото-
рый изготовляется из чугуна, текстолита и т. п. Конструкция
крепления вкладыша позволяет производить его быструю замену.
Для смягчения ударов башмака о направляющие хвостовик вилки
46
опирается на пружину 1, натяжение которой регулируется гай-
кой 2. Зазор между торцом направляющей и вкладышем регу-
лируется резьбовой втулкой 4, при ввинчивании которой вилка
перемещается и зазор между направляющей и башмаком изме-
няется.
При скользящих башмаках обязательна смазка направляю-
щих. В небольших, относительно редко работающих лифтах или
при наличии специальных антифрикционных вкладышей она пе-
риодически наносится на направляющие кистью с крыши кабины.
Более удобна для этой цели съемная масленка (рис. 26). Она со-
стоит из резервуара 3 с откидной крышкой 2, имеющего вырез
по форме направляющих. Резервуар заполняется консистентной
смазкой, которая при движении кабины выдавливается тяжелой
шайбой 1 с войлочной прокладкой 4, вложенной внутрь корпуса
масленки. Такая же прокладка устанавливается и снизу. Масленка
устанавливается на башмаке и после нескольких подъемов и спус-
ков кабины снимается.
При частой работе лифта устанавливаются специальные ма-
сленки для автоматической или полуавтоматической смазки на-
правляющих. В этих случаях иногда вверху направляющих
устанавливают капельную масленку, непрерывно подающую
жидкую смазку. Более удобна масленка, показанная на рис. 27.
Она состоит из корпуса 1, в который заливается жидкая смазка.
47
В этот же корпус помещены фитили 2, концы которых касаются
направляющих. Масло подается по фитилям к направляющим и при
движении кабины равномерно наносится на них.
Были предложены и частично нашли применение также спе-
циальные приборы для периодической подачи масла, приводи-
мые в действие силами
инерции, возникающими
при пуске и остановке ка-
бины.
Необходимость смазки
направляющих является
существенным недостатком
скользящих башмаков, так
как вызывает загрязнение
приямка остатками масла;
в связи с этим возникает
опасность пожара.
Рис. 26. Масленка для периодической смазки
направляющих
Рис. 27. Фитильная масленка
для смазки направляющих
При скоростях движения кабины более 1,5—2 м.1 сек обычно
применяют роликовые башмаки (рис. 28, а). Этот башмак состоит
из трех роликов 1, 2 и 3, вращающихся на неподвижных осях,
укрепленных в станине 4, связанной с рамой каркаса кабины.
48
Ролик 2 воспринимает нагрузки, действующие в плоскости напра-
вляющих, а ролики 1 и 3 — нагрузки, действующие в перпенди-
кулярном направлении. Корпуса роликов изготовляются литыми
или штампованными; их поверхности качения для уменьшения
шума, возникающего при качении по направляющим, обрезини-
ваются. Число оборотов роликов в некоторых случаях достигает
1000 и более в минуту; поэтому они, как правило, устанавлива-
ются на подшипниках качения. На выбор марки резины необхо-
димо обращать особое внимание. Применение неподходящих
сортов резины приводит ко вздутиям (в результате осмаливания)
резинового обода и быстрому выходу его из строя. Для роликов
отечественных скоростных лифтов применяется резина с сопро-
тивлением разрыву 170—200 кгс/см2 (дан/см2), относительным
удлинением 360—400% и твердостью по Шору 80—90 единиц.
4 Павлов
154
49
Для удобства регулировки таких башмаков ролики устанавли-
ваются на эксцентриковых осях. После регулировки оси закре-
пляются гайками 5.
При недостаточно точной установке направляющих возмож-
но проскальзывание по ним роликов при движении кабины, что
приводит к образованию лысок на их рабочих поверхностях.
После появления такой лыски ролик останавливается и быстро
выходит из строя. Во избежание этого предусматривают подвиж-
ное крепление осей роликов, как это показано на рис. 28, б.
Ролики 1 вращаются на осях, укрепленных на концах подвижных
рычагов 2. Рычаги могут поворачиваться около оси 3 и прижи-
маются к направляющими пружинам 5. Отход роликов ограничи-
вается упорными винтами 4, которые устанавливаются в соот-
ветствии с максимально допустимыми зазорами между роликами
и направляющими. Усилие пружины задается таким образом,
чтобы обеспечить силу нажатия роликов на направляющие
порядка 10—15 кгс (дан); при больших нагрузках пружина сжи-
мается и нагрузка передается на корпус через винт 4. При боль-
ших нагрузках с каждой из трех сторон направляющей ставят
по два ролика, оси которых закрепляются в балансире. При ро-
ликовых башмаках смазка направляющих не требуется.
Во всех рассмотренных башмаках для плавного движения
кабины необходима тщательная выверка установки башмаков на
кабине и самих направляющих в шахте. По правилам Госгортех-
надзора зазор между направляющими и скользящими башмаками
в плоскости направляющих допускается не более 4 мм и в попе-
речном направлении — не более 2 мм на сторону.
£ 4. Определение размеров кабин и расчет их
на прочность
Размеры кабин грузовых лифтов назначаются исходя из габа-
ритов поднимаемого груза и системы управления лифтом (с про-
водником или без проводника). В лифтах с проводником должно
быть предусмотрено место для проводника размером порядка
500 X 800 мм. Между дверью кабины и грузом должен оста-
ваться проход шириной около 400 мм. В проходных кабинах
следует также предусматривать дополнительный проход вдоль
одной из боковых стенок шириной около 400 мм ко второй двери.
Расстояния между стенками кабины и грузом в лифтах без
проводника назначаются конструктивно в зависимости от габа-
ритов, конфигурации груза и условий погрузки. Выбранные та-
ким образом размеры кабины в плане округляются до ближайших,
указанных в ГОСТе (табл. 9).
Размеры кабин малых грузовых лифтов по ГОСТу приняты
равными 900 х 650 мм. В соответствии с правилами Госгортех-
надзора площадь этих кабин должна быть не более 0,6 м2.
50
Таблица 9
Размеры в плане стандартных кабин
пассажирских и грузовых лифтов
Тип лифта гост Грузо- подъем- ность кгс (дан) Размеры кабины в мм
ширина глубина
350 1000 1250
Пассажирский 5746—58 500 1100 1650
1000 1750 1600
Больничный 8822—58 500 1500 2500
1000 1000
500 1000 1500
1500 1500
1500 2000
1500 2000
Грузовой 8823—58 1000 2000 2000
2000 2500
2000 2000 2500
2000 3000
3000 2000 3000
2500 3500
5000 3000 4000
1000 2000 2000
Грузовой со 2000 2500
встроенным моно- 9322—60 2000 2500
рельсом 2000 2000 3000
2500 2500
3000 2500 3500
Наименьшая высота кабины зависит от способа ее загрузки:
при ручной загрузке она должна быть не менее 2000 мм, при за-
грузке электрокарами — не менее 2200 мм (при высоте площадки
водителя электрокары от пола не более 300 мм). В лифтах без
проводника, в случаях когда при загрузке и выгрузке в кабину
не входят люди, ее высота может быть принята меньшей. Для ма-
лых грузовых лифтов она принимается не более 1000 мм, чтобы
исключить возможность подъема людей. Эта высота и принята по
ГОСТу для малых грузовых лифтов; для магазинных лифтов она
равна 550 мм.
Габаритные размеры кабин пассажирских лифтов (ширина,
глубина и высота) назначаются в зависимости от грузоподъем-
ности по ГОСТу (табл. 9). В специальных случаях, например для
нестандартных лифтов, площади этих кабин определяются рас-
четным путем в зависимости от способа их заполнения пассажи-
рами.
4*
5
При свободном заполнении кабины (без контроля проводника),
принятом в настоящее время для лифтов грузоподъемностью до
500 кгс (дан), обслуживающих жилые дома, наибольшая допусти-
мая полезная площадь кабины определяется в соответствии с пра-
вилами Госгортехнадзора из условия
„ 70z
Г = ----,
Яп
(25)
где z — вместимость кабины (число пассажиров);
qn — удельная нагрузка в кгс (дан) на 1 м2 площади пола
кабины; подбирается по графику, приведенному на
рис. 29, а.
Множитель 70 в данном случае соответствует весу одного
Рис. 29. Графики для определения "пло-
щадей кабин пассажирских лифтов при
свободном (а) и контролируемом (б) ^за-
полнении
пассажира по нормам Гос-
гортехнадзора.
Дополнительная площадь
(мертвая зона), необходи-
мая для открывания дверей,
формулой (25) не учитывает-
ся. *«По этой формуле под-
считывают и предельно до-
пустимую площадь кабин
старых лифтов при их ре-
конструкции и переводе на
обслуживание самими пас-
сажирами.
Общая площадь кабины
Fo с учетом дополнительной
мертвой зоны ориентировоч-
но может быть подсчитана
по формуле.
<2б>
в которой ро — коэффициент использования общей площади ка-
бины. Для лифтов грузоподъемностью 350—1500 кгс (дан) Ро =
= 0,75 4-0,85; большие цифры соответствуют большим грузоподъ-
емностям.
В случаях проектирования нестандартных кабин лифтов, упра-
вляемых лифтерами (при контролируемом заполнении), площадь
кабины может быть подсчитана по формуле
Го =
где — площадь, приходящаяся на одного пассажира; она при-
нимается в зависимости от числа пассажиров, на которое
рассчитана кабина (рис. 29, б).
52
Наименьшая высота кабин пассажирских лифтов по прави-
лам Госгортехнадзора принимается не менее 2000 мм, по
ГОСТу 5746—58 она находится в пределах от 2100 до 2400 мм в за-
висимости от грузоподъемности лифта.
На рис. 30 приведена расчетная схема каркаса кабины, выпол-
ненного без дополнительных оттяжек (см. рис. 16). Заданными
в данном случае являются расчетная нагрузка от веса кабины Gp,
которую считаем приложенной к середине горизонтальной рамы,
и расчетная нагрузка от веса под-
нимаемого груза Qp. В зависимо-
сти от расчетного случая вели-
чины этих нагрузок подсчиты-
ваются по формулам (8)—(12)
гл. I. Как правило, нагрузка при
первых двух расчетных случаях
должна приниматься несколько
смещенной относительно середины
горизонтальной рамы на вели-
чины с и clt считая по ширине и
глубине кабины. При расчетах
обычно принимают
с ~ -г- А, с, = 4- В,
О А о
где А — ширина, В — глубина
кабины.
Как показывает практика, рас-
чет по этим величинам смещений
дает удовлетворительные резуль-
Рис. 30. Расчетная схема каркаса
кабины
таты.
Вертикальную раму каркаса
при расчете расчленяют обычно
на отдельные элементы, пренебрегая жесткостью узлов, что идет
в запас прочности. Условия работы этих элементов при разных
случаях нагрузки не будут одинаковыми.
Верхняя балка вертикальной рамы 1 будет нагружена только
при работе лифта с номинальными грузами (первый расчетный
случай) и при подъеме испытательного груза при инспекторских
испытаниях (третий расчетный случай). Эту балку целесообразно
проверить также на случай защемления кабины в направляющих
(четвертый расчетный случай — см. гл. I).
На стойки 2 вертикальной рамы, помимо нагрузок от сил Qp
и Gp, будут действовать опорные реакции Н± и V от внецентренного
приложения нагрузки Qp, которые вызовут их изгиб. Наибольшие
величины этих реакций будут равны
«> = «,^-(0,5+^); > = 0„-Ь
53
где h и I — расстояния между серединами опорных башмаков
кабины.
Для принятых выше расчетных значений с = у и по-
ложив I А, имеем
— ; (27)
V = 0,17Q„A. (28)
Стойки будут работать при всех четырех расчетных случаях,
указанных в гл. I, т. е. при работе лифта с номинальными грузами,
при посадке на ловители и буфера, при подъеме испытательного
груза и в случае защемления кабины в направляющих. В послед-
них двух случаях нагрузку Qp можно принимать приложенной
к середине горизонтальной рамы кабины; обычно они не являются
расчетными.
Нижняя балка 3 вертикальной рамы при работе лифта с номи-
нальными грузами будет нагружена силами Pt и Р2 от нагрузок Qp
и G'p, из них нагрузка Qp в этом случае будет смещена относительно
середины кабины на величины с и ct. Величины сил Р± и Рг, со-
гласно схеме, приведенной на рис. 30, будут равны
Л = + Q'p (0,5 + -+-) = 0,5G; + 0,66Qp; (29)
G'
Л =-/ + 0,34(2,,. (30)
В данном случае Gp — расчетный вес кабины за вычетом веса
стоек и верхней балки. Расчетный пролет в этом случае будет равен
расстоянию /0 между центрами тяжести вертикальных стоек.
Кроме изгиба нижняя балка будет также скручиваться момен-
том М = Qpc! от внецентренного приложения нагрузки Qp.
При аварийной работе лифта (второй расчетный случай) усло-
вия работы нижнего ригеля при посадке на ловители и буфера
будут различными. При посадке на ловители расчетный пролет
ригеля будет равен расстоянию / между серединами захватов ло-
вителей (равно обычно расстоянию между серединами опорных
башмаков); при посадке на буфера балка будет работать как кон-
сольная (при наличии двух буферов) или как лежащая на двух
опорах с сосредоточенной нагрузкой, приложенной к ее середине
(при одном буфере).
Для горизонтальной рамы кабины расчетными являются три
случая работы лифта: нормальная работа с номинальными грузами
(первый расчетный случай), посадка на ловители или буфера при
эксцентрично приложенной нагрузке Qp и работа при испыта-
54
тельной нагрузке. Распределение нагрузки Qp по площади рамы
зависит от характера поднимаемых грузов. Для пассажирских
лифтов она может быть принята как равномерно распределенная
по всей площади. Для лифтов, загружаемых тележками, необхо-
дима проверка горизонтальной и вертикальной рам на прочность
при вкатывании тележки в кабину. Проверка производится при
наиболее невыгодном положении тележки относительно центра
пола кабины.
Помимо прочности элементы каркаса должны также иметь и
достаточную жесткость. Прогибы верхней и нижней балок верти-
кальной рамы не должны быть более окк-^тт^к их пролета; гиб-
1 out) 1UUU 1
кость вертикальных стоек этой рамы не должна быть более 120.
Схема действия нагрузок на каркас с оттяжками (см. рис. 16)
аналогична только что рассмотренной.
Опорные поверхности скользящих и роликовых башмаков рас-
считываются по опорным давлениям Нг и V, подсчитанным по фор-
мулам (27) и (28). Учитывая кратковременность действия инерцион-
ных нагрузок, величину динамического коэффициента kg при
подсчете нагрузки Qp по формуле (8) можно принять равной
единице.
Необходимая опорная поверхность скользящих башмаков /б
определяется по формуле
= (31)
где 1р 1 — наибольшее допускаемое удельное давление: для чугун-
ных башмаков, работающих по деревянным направ-
ляющим, [р ] = 2-ь2,5 кгс/см2 (дан/см2), при стальных
направляющих [р ] = 7 4-10 кгскм2 (дан/см2).
Нагрузка на башмак Ро в этой формуле; для боковых опорных
поверхностей Ро = Нг, для торцовой поверхности Ро = V.
Ролики роликовых башмаков подсчитываются по условному
удельному давлению
р,-=-Й-- <32>
В данном случае
b — ширина головки направляющей, на которую опирается
ролик, в см;
D — диаметр ролика в см.
Крепление башмаков и их опорные детали должны быть рас-
считаны на прочность по наибольшим величинам Нг и V (форму-
лы (27) и (28) для первого и второго расчетных случаев (работа
с номинальными грузами и аварийная работа). При загрузке
тележками они также должны быть проверены по наибольшим
нагрузкам, имеющим место при вкатывании тележки.
55
При расчете механизма закрывания дверей с механическим
приводом средняя скорость закрывания створок vcp принимается
0,4—0,6 м/сек в зависимости от ширины дверного проема, мощ-
ность двигателя привода обычно составляет 0,25—0,35 кет.
Время закрывания двухстворчатых дверей
i3 = ~, (33)
где Ьп — ширина дверного проема в свету в м.
Для механизма, показанного на рис. 23, число оборотов криво-
шипа в минуту будет’ равно
га „„ а
Пк ~ ДбЙ? DU — ~60?Г ’
где а = 130^-160° — угол поворота кривошипа при открывании
двери.
Передаточное число редуктора
где пд — число оборотов двигателя в мин.
Размеры кривошипа и плеч рычагов этого привода выбираются
конструктивно так, чтобы было обеспечено необходимое раскрытие
двери. При поверочном расчете двигателя кроме сил трения необ-
ходимо учитывать сопротивление пружины закрывания двери и
силы инерции, которые будут действовать в течение всего времени
работы дверей.
Поверочный расчет деталей этого привода на статическую проч-
ность следует производить по предельному моменту двигателя.
Глава IV
ЛЕБЕДКИ ЛИФТОВ
$ 1. Общая характеристика лебедок
В настоящее время в лифтах применяют лебедки двух типов:
редукторные, в которых между двигателем и канатоведущим шкивом
(или барабаном) введена дополнительная передача, и безредуктор-
ные, у которых канатоведущий шкив укреплен непосредственно
на валу двигателя (лебедки скоростных лифтов). Для уменьшения
шума при работе лифта в редукторных лебедках применяют чер-
вячные передачи. Безредукторные лебедки, как правило, имеют
56
Рис. 31. Схема редукторной ле-
бедки с канатоведущим шкивом
канатоведущие шкивы, редукторные лебедки выполняются как
с канатоведущими шкивами, так и барабанами.
Существенными недостатками барабанных лебедок являются
их большие габариты, что делает их мало пригодными при больших
высотах подъема (например, для установки в высотных зданиях).
Кроме того, в лифтах, оборудованных этими лебедками, были до-
вольно часты обрывы грузовых канатов в случаях, когда кабина
при неисправных концевых выключателях, переходила за край-
нее верхнее положение и упиралась
в перекрытия шахты лифта.
Барабанные лебедки в современ-
ных лифтах встречаются редко, пре-
имущественно в грузовых лифтах
большой грузоподъемности, в неко-
торых специальных случаях (напри-
мер, при установке тельфера в каче-
стве подъемной лебедки) и т. п.
Лебедки с канатоведущими шки-
вами весьма компактны, их габа-
риты практически не зависят от вы-
соты подъема; это особенно важно
при установке лифтов в высотных зданиях, так как при них
требуются значительно меньшие размеры машинных помещений.
Одна и та же лебедка с канатоведущим шкивом может быть при-
менена в зданиях различной высоты, что значительно упрощает
их производство.
Опасность обрыва канатов при этих лебедках с канатове-
дущими шкивами исключается такой установкой буферов про-
тивовеса, при которой он садится на буфера до того, как
кабина дойдет до перекрытий шахты, после этого натяжение
канатов ослабевает, и они начинают скользить по канатоведу-
щему шкиву.
В настоящее время лебедки с канатоведущими шкивами в основ-
ном и применяются в лифтах.
На рис. 31 приведена схема типовой редукторной лебедки с ка-
натоведущим шкивом. Лебедка состоит из двигателя 1, тормоза 5,
червячного редуктора 4 и канатоведущего шкива 2. Механизмы
устанавливаются на чугунной литой или сварной раме 3. При
очень малых скоростях подъема кабины, иногда между канатове-
дущим шкивом и редуктором дополнительно вводят зубчатую пере-
дачу; в этом случае канатоведущий шкив устанавливают на от-
дельном валу.
В лебедках этого типа, предназначенных для небольших лиф-
тов со скоростями подъема до 0,7 м/сек, в большинстве случаев
устанавливают асинхронные двигатели с короткозамкнутым' яко-
рем, наиболее надежные в работе и простые в управлении, значи-
тельно реже — двигатели с контактными кольцами.
57
В настоящее время отечественная промышленность выпускает
для лифтов специальные двигатели с короткозамкнутым якорем
серии АС, отличающиеся от двигателей общего назначения более
мягкой пусковой характеристикой. Двигатели общего назначе-
ния серии АД имеют ограниченное применение в лифтах, так как,
обладая жесткой характеристикой, вызывают резкие рывки ка-
бины при пуске.
Технические данные о лифтовых двигателях АС приведены
в табл. 10. Эти двигатели выпускаются в двух исполнениях: на
подшипниках качения и подшипниках скольжения. Установка
вала двигателя на подшипниках скольжения позволяет значи-
тельно снизить шум при работе лебедки. Двигатели этого типа
применяют в случаях, когда к лифту предъявляют повышенные
требования в части снижения уровня шума (например, в концерт-
ных залах, больницах и т. п.). Некоторым недостатком лифтовых
двигателей с повышенным скольжением (серии АС) является мень-
ший коэффициент полезного действия и большие колебания числа
оборотов с изменением нагрузки, что несколько снижает точность
остановки кабины.
Таблица 10
Технические данные
односкоростных лифтовых двигателей серии АС
Редукторы лифтовых лебедок выполняются как с цилиндриче-
скими, так и глобоидными червяками. Канатоведущий шкив уста-
навливается непосредственно на валу червячного колеса, что обес-
печивает наибольшую компактность лебедки. Чтобы избежать кон-
сольного расположения шкива и одновременно не устанавливать
третью опору, узел вала червячного колеса выполняют по типу,
показанному на рис. 32. В этом случае одной опорой вала служит
подшипник 1 корпуса редуктора 2 и второй — подшипник 4, рас-
положенный с противоположной стороны канатоведущего шкива 3.
58
Червячные редукторы лифтовых лебедок выполняются как
с верхним, так и нижним расположением червяка относительно
червячного колеса. При верхнем расположении червяка значи-
тельно уменьшается опасность утечки масла из редуктора через
подшипник червячного вала, однако из-за большого диаметра
канатоведущего шкива наружный подшипник вала червячного
колеса в большинстве случаев приходится устанавливать на от-
Рис. 32. Узел вала червячного колеса редукторной лебедки
дельной опоре, что значительно усложняет выверку правильности
червячного зацепления при сборке лебедки.
При нижнем расположении червяка, показанном на рис. 32,
шкив поднят над рамой, которая в этом случае может быть сделана
общей для редуктора и стойки подшипника 4. Лебедки с таким
расположением червяка наиболее часто встречаются при червяч-
ных редукторах с цилиндрическими червяками. В этих лебедках
необходимо обращать особое внимание на надежность конструкции
и качественную установку уплотнений вала червяка.
В лифтовых лебедках довольно широкое применение находят
червячные передачи с глобоидными червяками. Благодаря особен-
ностям глобоидного зацепления этн передачи имеют меньшие габа-
риты по сравнению с передачами с цилиндрическими червяками
той же мощности. Однако глобоидные передачи весьма чувстви-
тельны к неточностям сборки, что исключает возможность
59
установки в лебедках с этими передачами выносного подшипника,
как это было показано на рис. 32. Для того чтобы не устанавливать
вал червячного колеса на трех опорах, в лебедках с глобоидными
передачами шкивы располагаются консольно (рис. 33, а). Однако
при таком расположении шкива значительно возрастают нагрузки
на подшипники редуктора и, кроме того, появляется значитель-
ный опрокидывающий момент, который нагружает корпус редук-
тора, раму лебедки и ее крепления к фундаменту. Чтобы уравно-
Рис. 33. Лифтовые редук-
торные лебедки с глобо-
идными передачами
весить этот момент, в лебедках большой грузоподъемности устана-
вливают два шкива, расположенные по обе стороны редуктора
по схеме, показанной на рис. 33, б. Серия таких лебедок разрабо-
тана ВНИИПТмаш.
Валы червяков червячных передач устанавливаются на под-
шипниках качения или подшипниках скольжения. Так же как и
у электродвигателей, установка этих валов на подшипниках сколь-
жения позволяет снизить шум при работе лебедки. Передачи
с такими подшипниками встречаются в лебедках некоторых зару-
бежных фирм (например, лифты фирмы «Коне» Финляндия).
Со стороны, противоположной двигателю, червячный вал
обычно выступает из корпуса редуктора и заканчивается квадрат-
ным хвостовиком, на который надевается штурвал ручного при-
вода лебедки. Этот штурвал делается съемным, им пользуются
в аварийных случаях (например, при посадке кабины на ловители,
а также для наладки аппаратуры управления лифтом и т. п.). Уст-
ройство такого привода в этих лебедках обязательно по правилам
Госгортехнадзора.
60
Для соединения редуктора с двигателем обычно применяют
упругие пальцево-втулочные муфты; полумуфта, установленная
на валу редуктора, используется как тормозной шкив.
Тормоза лифтовых лебедок должны быть закрытого типа,
т. е. автоматически затормаживать лебедку при выключении дви-
гателя. Как и в крановых механизмах, это достигается параллель-
ным включением обмоток двигателя и магнита.
Одним из основных требований, предъявляемых к лифтовым
тормозам, является возможность регулировки их тормозного мо-
Рис. 34. Схемы тормозов лифтовых лебедок
мента с тем, чтобы иметь необходимую точность остановки кабины
в процессе эксплуатации лифта. Наиболее просто это достигается
применением в тормозе тормозных пружин. Так как момент на
валу тормозного шкива в лифтовых лебедках меняет знак при ра-
боте лифта на подъем груженой и опускании пустой кабины, воз-
можность установки в них ленточных тормозов, рассчитанных на
торможение только в одном направлении, исключена. В связи
с этим в лифтовых лебедках, как правило, применяют колодочные
тормоза.
В силу конструктивных особенностей лифтовых лебедок эти
тормоза несколько отличаются от применяемых в кранах. Для
примера на рис. 34 приведены две схемы таких тормозов.
В схеме, показанной на рис. 34, а, тормозные колодки 6 при-
жимаются к тормозному шкиву 7 пружинами 4, надетыми на
поперечную тягу 3, проходящую через отверстия в рыча-
гах 5.
Один конец пружины 4 упирается в тормозной рычаг; второй —
в регулировочную гайку 8. При подтягивании этой гайки увеличи-
вается сжатие пружины и соответственно возрастает давление на
тормозную колодку и момент на тормозном шкиве. Тормоз растор-
маживается электромагнитом 1, включенным, как указано выше,
в цепь двигателя. При подъеме якоря магнита поворачиваются
рычаги 2, шарнирно связанные с рычагами колодок, и раздвигают
колодки.
61
В схеме по рис. 34, б колодки растормаживаются угловыми
рычагами 1, шарнирно укрепленными к основаниям, расположен-
ным вне тормоза. При пуске двигателя якорь электромагнита 2,
поднимаясь вверх, поворачивает рычаги, концы их упираются
в регулировочные болты 3, укрепленные на концах тормозных
рычагов 4 и отводят колодки 5 от тормозного шкива 6. Как и
в тормозе по рис. 34, а, нажатие на колодки создается пружи-
нами 7.
Износ канатоведущих шкивов, обычно значителен, поэтому
их ободы делают съемными по типу, показанному на рис. 32.
На поверхности шкива нарезают кольцевые канавки полукруг-
Рис. 35. Схема навивки канатов на
барабан
лого (редко) или специальных
профилей, число этих канавок
соответствует числу подъемных
канатов. Чтобы уменьшить износ
обода, твердость его рабочей
поверхности рекомендуется наз-
начать не ниже 187 НВ. В ка-
честве материала обода обычно
применяют модифицированный
чугун марки не ниже МСЧ
32—52. По данным ВНИИПТ-
маш, для интенсивно работаю-
щих лифтов целесообразно при-
менять стальное литье марки
не ниже 55Л.
В барабанных лебедках канатоведущий шкив заменяется бара-
баном. Эти барабаны должны иметь однослойную навивку канатов
и нарезанные ручьи полукруглой формы. Исключения допускаются
только для лебедок малых лифтов, барабаны которых могут быть
выполнены гладкими.
В зависимости от числа канатов, на которых подвешена кабина,
на барабан могут наматываться один или несколько канатов.
На этот же барабан, но с противоположной стороны, наматываются
и канаты противовеса, которые укладываются в те же ручьи.
Схема такой навивки грузовых канатов 1 и канатов противовеса 2
для случая подвески кабины и противовеса на двух канатах по-
казана на рис. 35. В остальном механизмы барабанных лебедок
аналогичны по конструкции механизмам лебедок с канатоведу-
щими шкивами.
Для того чтобы обеспечить точность остановки требуемую пра-
вилами Госгортехнадзора, при скоростях подъема более 0,7 м/сек
лебедки пассажирских лифтов оборудуются дополнительными
устройствами, снижающими скорость движения кабины до начала
торможения лебедки механическим тормозом. То же имеет место
в грузовых лифтах при меньших скоростях движения кабины и
повышенных требованиях к точности остановки, например в слу-
62
чае загрузки тележками, при точности остановки ±15 мм и скоро-
стях порядка 0,5 м!сек.
В этом случае наиболее простое решение дает установка двух-
скоростных двигателей. В этих двигателях изменение чисел оборо-
тов и соответственно уменьшение скорости движения кабины про-
изводится или за счет переключения обмоток статора путем изме-
нения числа полюсов, или путем применения двух независимых
обмоток. Технические данные двухскоростных асинхронных дви-
гателей с короткозамкнутым якорем, выпускаемых отечествен-
ными заводами, приведены в табл. 11. В этих двигателях применены
две независимые обмотки статора, что позволяет иметь соотноше-
ние чисел оборотов двигателя при номинальной и посадочной
скорости кабины 1 : 4. Первые два двигателя из указанных
в табл. И, изготовляются в двух вариантах —с подшипниками
качения (тип АС) и подшипниками скольжения (двигатели в проти-
вошумном исполнении — тип АСШ).
Таблица 11
Технические данные
двухскоростных лифтовых двигателей серии АС
Тип двигателя Номинальная мощность кет пв, % Число обо- ротов в ми- нуту М пах Мпр Мн Вес, кгс (дан) Маховой момент кгс-м2 (дан-м)
АС61-6/12; АСШ 61-6/12 3,5 1,75 40 15 960 440 2,5 1,5 3,4 1,7 125 0,7
АС 62-6/18; АСШ 62-6/18 3,5 1,16 40 15 960 280 2,8 1,8 3,6 1,9 140 0,9
АС 72-6/24 3,5 0,75 60 15 950 200 2,5 1,6 3,2 1,6 230 1,9
АС 81-6/24 5,0 1,25 60 15 960 220 2,2 1,5 2,8 1,8 360 3,2
АС 82-6/24 7,0 1,75 60 15 950 195 2,8 1,8 3,5 1,9 400 4,1
АС 91-6/24 14 3,5 60 15 950 192 2,5 1,7 2,8 1,8 590 7,0
АС 92-6/24 20 5,0 • 60 15 950 192 2,5 1,8 2,9 1,8 665 9,2
Примечай и е- Мпр — предельный момент двигателя.
Схемы лифтовых лебедок, оборудованных двухскоростными
двигателями, аналогичны приведенной на рис. 31 для лебедки
с односкоростным двигателем. Переключение обмоток этих двига-
телей при подходе кабины к этажу производится автоматически
63
специальными путевыми выключателями. В первый период после
переключения обмоток двигатель работает в генераторном режиме
и тормозит кабину до второй (остановочной) скорости, соответст-
вующей пониженному числу оборотов двигателя. Чтобы это тормо-
жение не было слишком резким, в цепь двигателя включают спе-
циальные токоограничивающие устройства.
По ТУ на проектирование лифтов установка двухскоростных
двигателей предусматривается для пассажирских лифтов при ско-
рости движения кабины v > 0,75 м!сек и для больничных и грузо-
вых лифтов с кнопочным управлением при скорости v > 0,5 м!сек.
Рис. 36. Схемы лебедок с микроприводом
При особо жестких требованиях к точности остановки кабин
и больших скоростях движения их, когда снижение скорости,
которое может быть получено при установке двухскоростных дви-
гателей (1 :4) — недостаточно, возможна установка двигателей по-
стоянного тока, работающих по схеме Г —Д, однако такие уста-
новки в большинстве случаев при редукторных лебедках оказы-
ваются нерентабельными.
В этих случаях применяют редукторные лебедки с дополни-
тельными механическими устройствами, обеспечивающими дви-
жение кабины с требуемой минимальной скоростью, так называе-
мыми микроприводами. Такой микропривод обычно состоит из до-
полнительного двигателя и ременной, червячной или планетарной
передачи, связанной с основным двигателем управляемой муфтой
(фрикционной, планетарной и т. п.). Две схемы, поясняющие прин-
цип работы лебедок с микроприводом, приведены на рис. 36.
Лебедка по схеме рис. 36, а состоит из основного подъемного
механизма, в который входит канатоведущий шкив (или барабан) 4,
червячный редуктор 3 и главный двигатель 2. Мощность этого
двигателя и передаточное число редуктора 3 рассчитаны на номи-
нальную скорость подъема кабины. Микропривод состоит из дви-
гателя 7, червячного редуктора 8, вал которого связан с валом дви-
гателя фрикционной муфтой 6. Эта муфта включается рычагом,
связанным с электромагнитом 1. На конце рычага укреплен груз
или пружина, которые и включают муфту при выключении глав-
ного двигателя.
64
Рис. 37. Схема винтового меха-
низма установки кабины
При подходе кабины к этажу путевой выключатель выключает
главный двигатель 2 и электромагнит 1, обмотка которого вклю-
чена в цепь двигателя; при этом включается муфта 6. До момента,
когда скорость кабины будет равна скорости, на которую рассчи-
тан микропривод, эта муфта работает как тормоз. После того как
скорость движения кабины будет соответствовать второй скорости
лебедки (микроскорости), выключают двигатель 7 и лебедка тормо-
зится тормозом 5.
В схеме, приведенной на рис.36, б,
вспомогательный двигатель 5 свя-
зан с валом главного редуктора 4
ременной передачей клиновым рем-
нем. Переключение лебедки с основ-
ной скорости на микроскорость про-
изводится сцепной муфтой установ-
ленной в приводном шкиве клиноре-
менной передачи 1. Муфта включает-
ся переключателем <3, помещенным
на редукторе. Торможение лебедки
производится тормозом 2, установ-
ленным на приводном валу.
В лебедках с микроприводом воз-
можно получить соотношение между
рабочей и посадочной скоростями
примерно в пределах от 1:5 до
1 : 40, что в некоторых случаях не-
обходимо при особо высоких требо-
ваниях к точности остановки при
больших скоростях движения ка-
бины.
По правилам Госгортехнадзора,
иметь дополнительный ручной привод. В лебедках большой мощ-
ности допускается производить перемещение кабины при помощи
электропривода при условии, что скорость ее движения при этом
будет не более 0,25 м!сек.
В некоторых грузовых лифтах при полиспастной подвеске
кабины для ее доводки взамен микропривода иногда устанавли-
вают винтовой механизм, работающий по схеме, приведенной на
рис. 37. Этот механизм состоит из грузового винта <3, связанного
с рычагом 5, к концу которого при помощи балансирной подвески
прикреплены подъемные канаты 6. Второй конец рычага, выполнен-
ный в виде вилки, обхватывает гайку 4, передвигающуюся по
винту. Этот винт приводится во вращение двигателем 1 через вер-
тикальный редуктор 2: двигатель включается автоматически при
подходе кабины к заданному этажу. Такими приспособлениями
оборудованы некоторые зарубежные лифты, в частности предназ-
наченные для обслуживания гаражей.
эти лебедки также должны
5 Павлов 154
65
С возрастанием скорости кабины резко увеличиваются нагрузки
в зубчатом зацеплении, которые особенно возрастают из-за пере-
мены направления грузового момента, имеющего место в лебедках
лифтов. С увеличением скорости подъема также значительно воз-
растают и габариты самого редуктора. В связи с этим в лифтах,
имеющих скорости движения кабины порядка 2 м!сек, и выше,
применяют безредукторные лебедки по типу, приведенному на
рис. 38.
Такая лебедка состоит из канатоведущего шкива 1, насажен-
ного на вал двигателя 2, тормоза 3 и рамы 4, на которой устано-
вке. 38. Безредукторная лебедка лифта
влены подшипники 5 вала двигателя. Для уменьшения износа
канатов, который особенно значителен при высоких скоростях
кабин, канатоведущие шкивы этих лебедок часто имеют полукруг-
лую нарезку, по типу применяемой для барабанов. При такой
нарезке для увеличения сцепления каната со шкивом применяют
дополнительные блоки, устанавливаемые под лебедкой. В этом
случае канат огибает канатоведущий шкив далее направляется на
блок и с этого блока вновь поступает на канатоведущий шкив.
Число направляющих блоков в данном случае должно соответст-
вовать числу концов грузовых канатов.
В некоторых случаях блоки выполняются в одной отливке.
В безредукторных лебедках применяют тихоходные двигатели
постоянного тока, изготовляемые по специальным заказам. Число
оборотов этих двигателей равно числу оборотов канатоведущего
шкива. Как правило, они работают по схеме Г — Д. Снижение
66
скорости кабины при подходе ее к заданному этажу в этом случае
производится за счет изменения числа оборотов двигателя и при
этой схеме возможно в очень широких пределах.
Электрическая схема управления этими лифтами предусматри-
вает возможность движения кабины со скоростью 0,25 м/сек —
при ревизии шахты и установленного в ней оборудования.
$ 2. Расчет двигателей
Необходимая мощность двигателя, установленного на лебедке,
может быть определена по формуле
pv
N = -гттх-------кет,
Ю2т]пт]ш
(34)
где Р — окружное усилие на канатоведущем шкиве или бара-
бане в кгс (дан)',
v — скорость движения кабины в м/сек',
т]„ — коэффициент полезного действия передач лебедки;
т)ш — коэффициент полезного действия барабана или канато-
ведущего шкива.
Коэффициент полезного действия передач редукторных лебедок
с одной передачей червяком находится в пределах 0,6—0,8 в за-
висимости от числа заходов червяка, при наличии дополнительной
цилиндрической передачи т)п = 0,55 4-0,75. При установке вала
канатоведущего шкива на подшипниках скольжения =
= 0,94 4-0,96, на подшипниках качения т]ш = 0,96 4-0,98. Для
безредукторных лебедок при многообхватных шкивах т) =
= 0,85 4-0,9.
Поскольку двигатели лебедок значительную часть времени
работают при полной нагрузке, расчет мощности двигателя по
формуле (34) для небольших лифтов можно производить по наи-
большему окружному усилию Р. При коэффициенте уравновеши-
вания веса груза ф < 0,5 оно будет иметь место при нижнем поло-
жении полностью груженой кабины.
Для этого случая величина Р будет равна
P==Q + G + GK + IT-G„=Q(l-1|)) + GK + ir. (35)
В этой формуле
Q, G и Gn — соответственно веса груза, кабины и противо-
веса в кгс (дан)',
GK — вес каната в кгс (дан)',
W — дополнительные сопротивления движению ка-
бины и потери в направляющих блоках.
5*
67
При расчетной схеме смещения груза относительно середины
кабины, принятой выше (рис. 30), сопротивление движению
кабины от трения в направляющих WH будет равно
rH = 2Q[x^- + 2Q[x4- = 2Q[x^±-c = Q[x-^tA, (36)
где р. — коэффициент трения между башмаками кабины и направ-
ляющими.
Остальные обозначения соответствуют принятым ранее на
рис. 30.
При стальных или чугунных башмаках, работающих по ме-
таллическим направляющим, р = 0,12, в случае применения дере-
вянных направляющих ц = 0,2; при роликовых башмаках
р = 0,05.
Потери в направляющих блоках могут быть подсчитаны по
формуле
W6 = aySsin-^-, (37)
в которой S — суммарное натяжение концов канатов, огибающих
блок в кгс (дан.)-,
а — угол обхвата блока канатом в град',
w — коэффициент сопротивления: при установке бло-
ков на подшипниках качения w = 0,02, на под-
шипниках скольжения w = 0,03 4-0,04.
Общее сопротивление W от трения в направляющих и потерь
в направляющих блоках
W = (Гн + 2Гб) 1,1. (38)
Множитель 1,1 в данном случае учитывает дополнительные
потери, не учтенные в расчете (блоки ограничителя скорости,
блоки натяжных грузов уравновешивающих канатов и т. д.).
Для наиболее часто применяемой схемы лифта без направляю-
щих блоков
W = 1,НГИ = ktQ, (39)
где
, it А 4- В
К = 1,1р —j—•
Применительно к размерам лифтовых кабин, указанных
в ГОСТе, ориентировочно можно принять: для кабин пассажирских
и грузовых лифтов грузоподъемностью до 2000 кгс (дан) при сколь-
зящих башмаках ^ = 0,06 4-0,07, при роликовых башмаках
kt = 0,03 4-0,05. Для грузовых лифтов грузоподъемностью свыше
2000 кгс (дан), при скользящих башмаках kv 0,1 4-0,12.
68
Продолжительность включения двигателей лифтов, обслужи-
вающих жилые дома высотой 6—8 этажей, а также грузовых
лифтов небольшой грузоподъемности обычно не превышает
40% ПВ и при более высоких зданиях — 60% ПВ. Мощности
лифтовых двигателей, соответствующие этим величинам ПВ,
указаны в табл. 10 и 11.
Для интенсивно работающих лифтов в случаях, когда график
их работы известен (например, лифты высотных домов), необхо-
димую мощность двигателя следует при ориентировочных подсче-
тах выбирать по эквивалентной нагрузке
^1 + ^2+---+Р2Л
т
(40)
где Plt Р2, • • Рп — нагрузки за время одного рейса, подсчи-
танные по формуле (35), по действительной
загрузке лифта, указанной в графике
его работы в кгс (дан);
tlt t2, . . ., tn — время действия этих нагрузок в сек;
Т — время одного рейса в сек.
Продолжительность включения двигателя в этом случае под-
считывается по формуле
ПВ = 11 ++ •' “ +tn ЮО.
При определении величин наибольших ускорений кабины,
которые будут иметь место при выбранном двигателе, расчетным
является случай опускания полностью груженой кабины в мо-
мент, когда она отходит от предпоследней остановки.
Момент сил инерции для этого случая равен
Ми= мг + Мп, (41)
где Мг — неуравновешенный момент от веса груза на канато-
ведущем шкиве (или барабане), приведенный к валу
двигателя, в кгс-м (дан-м);
Мп — пусковой момент двигателя в кгс-м (дан-м).
Величина неуравновешенного момента Мг равна
+ (42)
Здесь D — диаметр канатоведущего шкива (или барабана) в м;
t’o — передаточное число лебедки, включая и полиспаст,
(при полиспастной подвеске кабины).
Пусковой момент двигателя Мп для двигателей с коротко-
замкнутым якорем принимается по наибольшему моменту
69
двигателя Л4тах, указанному в каталоге. Для двигателей с кон-
тактными кольцами он может быть определен из условия
= MHkz, (43)
где Мн — номинальный момент двигателя в кгс-м (дан-м);
k2 — коэффициент пусковой перегрузки, принимаемый в за-
висимости от заданной схемы включения двигателя
k2 1,8-2.
Угловое ускорение двигателя определится из условия
G£»2
Ми
“ 4g
откуда
GDI '
В этих формулах GD2 — маховой момент движущихся частей
рассчитываемой системы (кабина с гру-
зом, противовес, передачи и т. п.),
приведенный к валу двигателя
в кгс-м2 (дан-м2);
g — ускорение силы тяжести в м!сек\
Наибольшее ускорение кабины при пуске
D
2г0
После подстановки в эту формулу величин ей Ми окончательно
имеем
атах = 19,6^-^ + ?4 (44)
max lf) GD2 \ /
Приведенный маховой момент GD2 может быть подсчитан
по формуле
(Q+G+G „+G „)О2
GD2 = 1,1 (GD2 + GD2) + ' ~, (45)
'о
в которой GD2a и GD2 — маховые моменты якоря двигателя
и тормозного шкива. Множитель 1,1 учитывает массы деталей
передач и т. п., не вошедших непосредственно в расчет.
Величины ускорений, подсчитанные по формуле (44), должны
быть не более допускаемых правилами Госгортехнадзора (см.
гл. I).
В случаях, когда ускорение атах больше допускаемого, необ-
ходимо или уменьшить пусковой момент двигателя (например,
70
за счет включения в цепь двигателя добавочных пусковых
сопротивлений), или увеличить маховой момент механизма, напри-
мер установкой дополнительного маховика на валу двигателя.
При работе лифта только на подъем наиболее неблагоприятный
случай имеет место при подъеме кабины с одним пассажиром при
отходе ее от площадки предпоследнего этажа.
Неуравновешенный момент от веса противовеса в этом случае
равен
Л1г = (ФО + GK - 70) , (46)
Л1оЧпЧш
где 70 кгс (дан) — вес одного пассажира, принятый по нормам
Госгортехнадзора.
Наибольшее ускорение птах и маховой момент GD? при
найденной таким образом величине Мг также подсчитываются
по формулам (44) и (45) при Q = 70 кгс (дан).
Работа лифта только на подъем встречается в некоторых пас-
сажирских лифтах прежних выпусков.
В лебедках с приводом от двухскоростных двигателей необ-
ходима проверка тормозного момента М'д двигателя в момент
его переключения на пониженное число оборотов. Этот момент
не должен быть более предельного, подсчитанного по наиболь-
шему допустимому замедлению кабины.
Для наиболее неблагоприятного случая — торможения подни-
мающейся кабины с номинальным грузом при подходе ее к пло-
щадке первой остановки, имеем
Ми = Мд + мг.
Из формулы (44) после подстановки величины Ми взамен
Л4г ф- Мп находим
< = (47)
Величина неуравновешенного момента Мг подсчитывается
по формуле (42).
По формуле (47) подсчитывается также и наибольший тормоз-
ной момент соединительной муфты микропривода в лебедках
с микроприводом по типу показанной на рис. 36, а.
Дальнейший расчет лебедки является общим для всех подъем-
ных механизмов.
$ 3. Расчет барабанов » канатоведущих шкивов
Наименьший допустимый диаметр канатоведущего шкива или
барабана по правилам Госгортехнадзора определяется по формуле
D = de, (48)
71
где d — диаметр каната, наматываемого на барабан;
е — коэффициент, зависящий от типа и скорости лифта
(табл. 12).
Таблица 12
Наименьшие допускаемые величины коэффициентов е
при определении диаметров
барабанов и канатоведущих шкивов
(по правилам Госгортехнадзора)
Типы лифтов е
Пассажирские и грузовые с проводником, со скоростью более 1,5 м!сек То же со скоростью до 1,5 м/сек н больнич- ные Грузовые без проводника и малые .... 45 40 30
Согласно этим правилам, диаметр D измеряется по дну ручья
нарезки шкива или барабана.
По этой же формуле рассчитываются и диаметры направля-
ющих блоков.
Длина нерезанной части барабана барабанных лебедок опре-
деляется по заданной длине наматываемого каната LK и числу
канатов z, на которых подвешена кабина. Такое же число канатов
применяется и для подвески противовеса. При многоканатной
подвеске кабин нарезка на барабане делается многозаходной
с числом заходов равным Z. Необходимое число витков одного
захода нарезки на барабане определяется по формуле
7 _____ 1-к
(49)
Три дополнительных витка нарезки на каждый заход в данном
случае необходимы для разгрузки узлов крепления канатов про-
тивовеса и кабины к барабану, считая на каждое крепление по
1,5 витка, минимально допускаемые правилами Госгортехнадзора.
Шаг нарезки определяется из условия, чтобы между витками
каната, навитого на барабан, оставался зазор порядка 1—3 мм.
Таким образом,
t = [d + (l-v-3)] z. (50)
Длина нарезанной части барабана
= ZHt. (51)
Дальнейший расчет барабана аналогичен принятому для кра-
новых механизмов и поэтому не рассматривается,
72
Рабочая ширина канатоведущего шкива (расстояние между
осями крайних канатов) может быть определена по формуле
b = (1,2 -г- 2) d (z — 1).
Форма ручья шкива принимается таким образом, чтобы был
обеспечен достаточный коэффициент трения между канатом и
шкивом для подъема кабины или противовеса. На рис. 39 приве-
дены профили этих ручьев, применяемые для канатоведущих
шкивов. На рис. 39, а показан желобчатый (полукруглый) про-
филь, на рис. 39, б — полукруглый профиль с подрезом и на
рис. 39, в — клиновой профиль. Форма профиля и окончатель-
ные размеры канатоведущего шкива определяются дальнейшим
Рис. 39. Профили ручьев канатоведущих шкивов
расчетом из условий сцепления каната со шкивом и условий
наименьшего износа обода шкива.
При уточнении размеров профиля из условий сцепления каната
со шкивом расчетными являются два случая работы лифта:
1) работа с номинальными грузами (первый расчетный слу-
чай) и 2) работа с испытательным грузом (третий расчетный слу-
чай — см. гл. I).
При обычно принятых величинах коэффициента уравновеши-
вания веса груза ф < 0,5 и работе лифта с номинальными гру-
зами, расчетным будет случай подъема полностью нагруженной
кабины с отметки первого этажа.
При отсутствии уравновешивающего каната наибольшее натя-
жение подъемного каната <$’х со стороны кабины в момент пуска
равно (рис. 40)
S1 = (Q+G + GK)(1 (52)
со стороны противовеса
S2= G„(l _|) = (ф|>+ G) (1 (53)
где а — ускорение при пуске в м/сек2-,
W — дополнительные сопротивления, подсчитанные
по формуле (38);
G, Q и Gn — веса кабины, груза и противовеса;
ф — коэффициент уравновешивания веса груза.
73
При подъеме испытательного груза
Sj = Qkn + G + GK;
S2 = Gn.
(54)
Коэффициент
Поскольку в
Рис. 40. Схема к
расчету тягового
усилия на канато-
ведущем шкиве
перегрузки kn тот же, что и в формуле (12).
этом случае испытания проводятся при стати-
ческой нагрузке, силы инерции не учитыва-
ются.
Во избежание скольжения каната по
шкиву, необходимо, чтобы
— >
S2
исходя из этого условия и определяется наи-
меньший допустимый коэффициент трения на
ободе шкива.
В данном случае
р.о — коэффициент трения между канатом
и шкивом;
а — угол обхвата канатоведущего шкива
в рад.
Наименьший допустимый коэффициент тре-
ния между канатом и шкивом, таким образом,
равен
= (55)
При определении величин этого коэффици-
ента для профилей, указанных на рис. 39,
исходим из нагрузки, приходящейся на еди-
ницу длины обода канатоведущего шкива. Величина этой нагрузки
при диаметре канатоведущего шкива D на произвольно взятом
участке обода, соответствующем углу Д<р, равна (рис. 41а).
_ 2.V
ПАф
(56)
Величина нормального давления на обод по рис. 41, а равна
N=2 S sin 4^ >
2z
где S — общее натяжение канатов на рассматриваемом участке.
Полагая вследствие малости угла Д<р
£in Дф _ Дф
sin —~ 2 ’
74
после подставки N в формулу (56), получим
2S /е_ч
<1 = <57)
Эта нагрузка будет наибольшей в точке набегания каната на
шкив, т. е. при S = Sj.
Давление каната на стенки ручья полукруглого профиля по
рис. 39, а и б не будет равномерным в поперечном сечении;
в дальнейшем полагаем, что оно изменяется по закону
рх = р cos у,
где р — наибольшее давление в нижней точке ручья;
pt — радиальное давление на обод в произвольно взятой
точке х, расположенной под углом у.
Рис. 41. Схема к расчету коэффициента трения |10 канатоведущего шкива
В соответствии с этим для произвольно взятого участка обода
длиной равной единице, имеем
То То
2 2
q = 2 J р у cos у dy = pd J cos2 у dy =
о о
= V <Yo 'Г sin Yoh (58)
где у0 — угол, в пределах которого канат соприкасается с по-
верхностью ручья.
» Сила трения на этом участке при коэффициенте трения каната
по материалу шкива (сталь или чугун) равном р, будет
То То
2 2
F = 2^ prdy = [ipd у cos ydy = p,pd sin 4^- . (59)
о 0
75
Из формул (58) и (59) определяем расчетный коэффициент
трения на ободе
F sin"T
ro <7 r Yo + sin Yo
Учитывая последующий износ ручья, ориентировочно прини-
мают Yo = я- Соответственно этому для полукруглого ручья
окончательно имеем
4
Ио = Н- (60)
Этот коэффициент остается постоянным вне зависимости от
радиуса ручья.
При полукруглом профиле ручья канат находится в наиболее
благоприятных условиях в отношении износа. Однако ввиду
сравнительно малых величин коэффициентов трения р0, этот про-
филь в основном применяется только в многообхватных шкивах
например в безредукторных лебедках. Для шкивов лебедок
с углами обхвата канатом а= 180° и менее обычно применяют
профили с подрезом (рис. 39, б) и клиновой (рис. 39, в).
Для ручья с подрезом из аналогичных условий, интегрируя
в передах от до имеем (рис. 41, в)
Но = -----;-:----;-
Yo~ Y1 + sin Yo — sin Yi
В данном случае уь является так называемым углом подреза.
Приняв, как и в предыдущем случае, Yo я находим
1-sin-^-
Но-4ря Y<_—(61)
Как видно из этой формулы, коэффициент р0 будет изменяться
с изменением угла подреза уу и за счет подбора этого угла можно
получить коэффициент трения, соответствующий требуемой вели-
чине ц0, подсчитанной по формуле (55).
Положив в формуле (61)
1 — sin
4-------f--= ft
п _ yj __ sin у,
получим
4,_Л. (62)
Исходя из этой величины klt по диаграмме рис. 42 может
быть подобран необходимый угол подреза ух.
76
Профили ручьев с подрезом до последнего времени были наи-
более распространены, однако наличие кромок в месте подреза
отрицательно сказывается на стойкости канта. В этом отношении
несколько лучшим является клиновой профиль, который в данное
время находит весьма широкое применение.
Для клинового профиля ручья с углом наклона боковых сте-
нок ро, на участке длиной, равной единице, согласно рис. 39, в,
имеем
F = 2N0p = q^-.
sin
Расчетный коэффициент трения
Но = ^Г- (63)
sin -у-
В данном случае, как и для про-
филя с подрезом, возможно получить
необходимую величину коэффициента
трения Цо соответствующим выбором
угла р0. Величина этого угла при задан-
ном расчетном коэффициенте р0 равна
р0 = 2 arc sin (64)
Рис. 42. График для выбора
угла подреза Yi в профиле
по рис. 41, в
Во избежание возможного заклинивания канта в желобе не-
обходимо выполнение дополнительного условия
Ро > 2е-
где р — угол трения; обычно принимают р0 = 304-40°.
При уточнении параметров профиля по формулам (60), (61)
и (63) в случае работы лифта при нормальных нагрузках (первый
расчетный случай), по данным ВНИИПТмаш, для шкивов из
модифицированного чугуна можно принять р = 0,09, для сталь-
ных шкивов — р = 0,105. При расчете по испытательной нагрузке
(третий расчетный случай) р = 0,14-0,11 для чугунных и р =
= 0,115 для стальных шкивов.
Окончательные размеры углов Уг и ро определяются по наи-
более невыгодным значениям коэффициента р0, подсчитанного
по формулам (52)—(55).
Расчет обода шкива на износ производится по наибольшему
удельному давлению р между канатом и шкивом, величину кото-
рого для ручья полукруглой формы определяем из формул (57)
и (58).
Для наиболее нагруженного участка обода в точке набегания
на него каната, положив S = имеем
— dDz ‘ Yo + sin Yo —' W dDz ’
77
где
8
Yo 4- sin Yo
(66)
является характеристикой профиля.
Аналогичные формулы, но с другой характеристикой профиля,
могут быть выведены и для остальных двух профилей ручьев.
Для ручья полукруглого профиля с подрезом
8c°s-y-
W = --------------------,
Yo — Yi 4 sin Yo-— sin Yi
при у» = л
8cos^y- w = : ; (67) л — Yi — sin yi
для ручья клинового профиля ssin-y- w = 8 5—. (68) Po-sinbL
По формуле (65) при заданных диаметрах шкива и каната и
допускаемом удельном давлении [р] может быть подсчитано
наименьшее число канатов, допустимое по условиям износа обода,
Si
2 = .п, , w.
dD [pj
(69)
Допускаемые удельные давления [р ] для чугунных шкивов
могут быть приняты в зависимости от типа лифта и скорости дви-
жения каната по шкиву vK (рис. 43). При расчете по этим фор-
мулам натяжение 5л подсчитывается по первому расчетному
случаю (работа с номинальными грузами). Подсчитанное по
формуле (69) число канатов должно быть не менее указанного
в табл. 7.
В ряде случаев, когда оно будет более минимально допусти-
мого целесообразно увеличивать диаметр канатоведущего шкива,
соответственно приняв большую величину е (формула 48).
Имея ввиду, что натяжение грузовых канатов Sj равно
с nd2 сга ,
Si=—T---^-q>nZakd,
после подстановки 51в формулу (69) и соответствующих простей-
ших преобразований, находим величину е, требуемую из условия
равнопрочное™ каната и обода шкива
е = 0,8 w. (70)
пк [р] v ’
78
где ав — предел прочности каната в кгс1мм2 (дан/мм2);
<р„ — коэффициент использования площади поперечного сече-
ния каната, подсчитанной по его наружному диаметру:
для канатов ЛК-Р по ГОСТу 2688—55 <р„ = 0,41, для
канатов ЛК-0 по ГОСТу 3077—55 <рп = 0,38;
пк — расчетный запас прочности (табл. 8);
« — коэффициент ослабления проволок каната при свивке,
а = 0,85;
kd — динамический коэффициент, под-
считанный по формуле (9) при
ускорениях, принятых для нор-
мальной работы лифта.
Предельный момент на канатоведущем
шкиве из условия сцепления с ним каната
для случая подъема кабины равен
Мпр = ($! - $2) 4 = S2 (е^ - 1) =
= Gn(^«“-l)4; (71)
предельное натяжение каната, соответ-
ствующее этому моменту,
Snp-^Gn(e^^l). (72)
При расчете по формулам (71) и (72)
предельных нагрузок на механизмы (чет-
вертый расчетный случай) следует при-
нимать большие (на 20—30%) величины
коэффициенов трения р0, чем подсчитан-
ные по формулам (60)—(63).
Рис. 43. График для вы-
бора допускаемого удель-
ного давления fp] при
расчете канатоведущих
шкивов:
/ — пассажирские лифты при
интенсивной работе; 2 — то
же, но прн редкой работе;
5 — грузовые лифты при
интенсивной работе; 4—то
же при редкой работе
$ 4. Расчет тормозов
Необходимо, чтобы тормоз лебедки мог удержать испытатель-
ный груз (третий расчетный случай, см. гл. I) и обеспечить тре-
буемую точность остановки. Замедления, которые имеют место
при торможении не должны быть более допускаемых по правилам
Госгортехнадзора.
Необходимый тормозной момент для удержания испытатель-
ного груза определится из условия
где Р — тяговое усилие на ободе шкива (или барабана)
в кгс (дан);
D — диаметр канатоведущего шкива (или барабана) в м;
79
Pr — коэффициент запаса тормозного момента, для дан-
ного случая рг = 1,2ч-1,3;
z0 и л о — передаточное число и коэффициент полезного дей-
ствия механизмов лебедки (т]0 = ЛпЛ^)-
Величина тягового усилия Р в этом случае равна
Рис. 44. Схема к расчету
точности остановки ка-
бины лифта
Р = Qkn + G + GK - Gn = Q (k - ф) + GK, (74)
где kn — коэффициент перегрузки (см. стр. 25).
При расчете точности остановки кабины и выбранном тор-
мозном моменте ее тормозной путь может быть определен из
условия
2^1 ± ps = Ws,
где тп — масса всех движущихся частей
лифта (груз, кабина, противо-
вес, детали лебедки и т. п.),
приведенная к кабине в кг;
v — скорость движения кабины
в м/сек-,
s — тормозной путь кабины в м\
W — сопротивление движению ка-
бины при торможении в кгс (дан).
Решая это уравнение относительно з, имеем
Знак в знаменателе этой формулы зависит от направления
движения кабины и величины ее нагрузки.
Выключение двигателя при подходе кабины к заданному
этажу в лифтах с кнопочным управлением производится специаль-
ными выключателями при определенном и всегда постоянном поло-
жении кабины пола относительно этажной площадки (линия I—I
на рис. 44).
Наибольший тормозной путь Sj при опускании полностью
груженой кабины будет иметь место при ее подходе к площадке
первого этажа.
Окружное усилие Р на канатоведущем шкиве в формуле (75)
для этого случая равно
Р = Q + G + GK - Gn = Q (1 -ф) + GK. (76)
Наибольший тормозной путь при движении кабины вверх
будет в случае движения пустой кабины; при этом
Р = Gn+GK- G =^Q+GK. (77)
В рассматриваемых случаях движения полностью груженой
кабины вверх или вниз в формулу (75) усилие Р входит со знаком
минус.
80
Расчет сопротивлений IF движению кабины при торможении
производим для наиболее невыгодного случая — при центральном
положении груза в кабине. В этом случае величина IF будет
равна тормозному усилию, создаваемому тормозом и приведен-
ному к кабине,
Приведенная масса движущихся частей лифта тп может быть
рассчитана по формуле
1 / GD2 \
mn = ~[Q + G + GK+ Gn+-^- z-y , (79)
в которой GD2 маховой момент вращающихся частей лебедки.
В данном-случае
GZ)2=(GZ)2 + GZ)2T)1,1,
где GZ)2 и GD2—маховые моменты якоря двигателя и тормоз-
ной муфты.
Исходя из найденных величин Р, IF и тп, по формуле (75)
могут быть вычислены наибольшие тормозные пути sx и s2, про-
ходимые пустой и груженой кабиной при ее подъеме и опускании.
Установка этажных выключателей производится таким обра-
зом, чтобы этажная площадка располагалась в середине суммарного
пути sr 4- s2, проходимого кабиной при торможении. В соот-
ветствии с этим точность ее остановки (в л/) будет равна
А = 51Ч2 52 . (80)
Величина А не должна быть более указанной ранее в гл. I, в про-
тивном случае необходимо увеличить тормозной момент МТ.
Тормоз также должен обеспечить замедление кабины не выше
предельно допускаемого по правилам Госгортехнадзора (см. гл. I).
Наибольшая величина этого замедления имеет место при торможе-
нии полностью груженой кабины при подъеме в момент, когда
она подходит к площадке первой остановки (считая от нижнего
этажа). Момент сил инерции для этого случая
ми = мт + мг.
Величина замедления далее может быть вычислена по фор-
муле (44), после подстановки в нее взамен Мг -}- Мп найденной
величины Ми.
В случаях, когда замедление больше допускаемого, необхо-
димо или увеличить массу вращающихся частей лебедки (напри-
мер, за счет установки маховика), или уменьшить начальную
скорость движения кабины при торможении ее тормозом. Как
6 Павлов 154 81
было указано, это достигается установкой двухскоростных дви-
гателей или специальных лебедок с микроприводом. В этих слу-
чаях необходимая скорость движения кабины в начальный момент
торможения лебедки тормозом определится, исходя из заданной
точности остановки по формулам (75) и (80) и будет равна
и = 2 Л--------------------- (81)
Т| / т т„ , ' '
I/ "'П I л
Г W — P F —Г'
где тп, т'п и Р и Р' — приведенные массы и тяговые усилия
на ободе шкива при пустой и груженой
кабине.
Точность остановки Д в эту формулу подставляется в м.
Дальнейший расчет тормоза по заданному тормозному моменту
аналогичен применяемому для грузоподъемных машин.
Глава V
а
ЛОВИТЕЛИ И ОГРАНИЧИТЕЛИ СКОРОСТИ
$ 1. Общая характеристика ловителей
г Для того чтобы исключить падение кабины при обрыве подъем-
ных канатов или ее разгон при неисправности подъемного меха-
низма, по правилам Госгортехнадзора она должна быть оборудована
ловителями. Ловителями оборудуются и противовесы в случаях,
когда скорость движения кабины более 1,5 м/сек, а также когда
они располагаются над помещениями, где могут находиться люди.
На рис. 45 приведена схема, поясняющая принцип устройства
ловителя. Основными узлами такого ловителя являются захват-
ное устройство, механизм включения и привод. В механизме,
показанном на рис. 45, в качестве захватного устройства служат
клинья 3, передвигающиеся по опорным башмакам 4.
При срабатывании ловителя клинья подтягиваются тягами 2
к направляющим, дальнейшее затягивание клина происходит при
последующем движении кабины, за счет сил трения между на-
правляющей и клином (самозатягивание).
В приведенной схеме, механизм включения ловителей состоит
из вертикальных тяг 2, шарнирно связанных с горизонтальными
рычагами, жестко посаженными на валики 1 и 5, вращающиеся
в подшипниках, укрепленных на верхней балке каркаса кабины.
На валике 5 укреплен рычаг 6, связанный с канатом 7 привода
ловителей. В данной схеме привод ловителей осуществляется
от центробежного ограничителя скорости 8, шкив которого связан
с центробежным стопорным устройством, помещенным внутри
корпуса ограничителя. Это устройство затормаживает шкив 8
82
и находящийся на нем канат 7 в момент, когда скорость движения
кабины достигает предельной величины. После остановки каната 7
при последующем движении кабины поворачивается рычаг 6,
который и приводит в движение механизм включения ловителей.
Кроме клиньев, в качестве захватных устройств применяют
эксцентрики и ролики; в зависимости от этого различают клино-
вые, эксцентриковые и роликовые
ства ловителей в большинстве
случаев устанавливаются на ниж-
ней балке вертикальной рамы ка-
бины. Крепление опорных баш-
маков 4 (или иных опорных уст-
ройств) может быть жестким или
подвижным, в зависимости от этого
изменяется и характер работы ло-
вителя. При жестком креплении
посадка кабины на ловители
происходит почти мгновенно;
такие ловители получили назва-
ние ловителей резкого торможе-
ния. При подвижном креплении
опорных устройств захватов тор-
можение кабины происходит более
плавно; такие ловители называют-
ся скользящими (замедленного
действия).
Привод ловителей от ограни-
; чителя скорости в настоящее
i время применяется во всех лиф-
1 тах, имеющих лебедки с канато-
ведущими шкивами. Поскольку у
лифтов с барабанами лебедками
весьма вероятен обрыв канатов при
переходе кабины за верхнее рабо-
чее положение, в случае подъема
ловители. Захватные устрой-
людей механизмы включения ловителей этих лифтов должны
быть дополнительно связаны с подъемными канатами. В грузо-
вых лифтах с барабанными лебедками, работающими без провод-
ника, ограничители скорости обычно не устанавливаются. В этом
случае механизм включения ловителей связывается только с гру-
зовыми канатами, на которых подвешивается кабина.
$ 2. Захватные устройства ловителей
В первых конструкциях ловителей кабина удерживалась упо-
рами-резцами, которые выдвигались при ее падении и врезались
в деревянные направляющие; в настоящее время эта система не
применяется, и торможение падающей кабины осуществляется
6:
83
исключительно за счет сил трения между захватами и направляю-
щими. В большинстве случаев применяют самозатягивающиеся
захваты: эксцентриковые, клиновые или роликовые.
В ловителях с эксцентриковыми захватами (рис. 46) направ-
ляющие кабины при ее посадке на ловители зажимаются между
эксцентриком и упором, укрепленным на раме каркаса кабины.
В некоторых случаях такие захваты выполняются с двумя
эксцентриками (рис. 46, а). В этом устройстве эксцентрики 1
связаны между собой зубчатыми секторами 2, которые при по-
садке кабины на ловители поворачиваются приводным рычагом 3.
Рис. 46. Расчетная схема эксцентрикового захвата
На рис. 46, б приведена расчетная схема эксцентрикового зах-
вата. Момент М, который следует приложить к эксцентрику, чтобы
получить силу трения F на его опорной поверхности, необходи-
мую для уравновешивания веса груза и веса кабины, определится
из уравнения
/И 4- Fa — Nb — R = М 4- Nu,a — Nb —
=о.
В этих формулах р — коэффициент трения между эксцентриком
и направляющей;
N — давление на направляющую;
Pi — коэффициент трения на оси эксцентрика,
Pi = 0,05 -ь0,1;
d — диаметр оси эксцентрика;
а и b — плечи сил F и N;
R = уN2 4- F2.
Моментом от собственного веса эксцентрика пренебрегаем.
Из этого уравнения имеем
М = N (b — ра4-р1-|-ф<1 4-р2)-
84
При самозатягивании эксцентрика, положив момент внешних
сил, приложенных к эксцентрику, М = 0 определяем соотношение
плеч b и а, необходимое для этого самозатягивания,
4 = + р2,
(82)
исходя из которого и назначаются размеры эксцентрика; один из
этих размеров (а или Ь) назначается конструктивно.
Согласно’ исследованиям ловителей резкого торможения, про-
веденным ВНИИПТмаш, на коэффициент трения р. помимо мате-
риала и смазки трущихся поверхностей оказывает влияние ско-
рость их относительного движения. Рекомендации по выбору этого
коэффициента, даваемые ВНИИПТмаш, приведены в табл. 13.
Для стальных захватов, работающих с металлическими направ-
ляющими, обычно принимают ц = 0,18. Для увеличения коэффи-
циента трения поверхность эксцентриков ловителей резкого тор-
можения часто делают зубчатой.
Таблица 13
Коэффициенты трения
в ловителях резкого торможения
Характер трущихся
поверхностей
Скорость движения
v, м/сек
Коэффициент
трення р
Сталь каленая при
густой смазке:
по чугуну
по бронзе
Сталь каленая по
стали сырой:
густая смазка
без смазки
при крупных зубьях
0,5—0,25
1—0,5
0,5—0,25
1—0,5
0,5—0,25
1—0,5
0,5—0,25
1—0,5
0,12—0,22
0,08—0,12
0,09—0,20
0,07—0,14
0,12—0,20
0,10—0,12
0,30—0,35
0,25—0,30
1,0 и выше *
* При расчете на самозаклннивание коэффициент трения
принимается для случая работы стали калеиой по стали сырой
при отсутствии смазки.
Материал эксцентриков выбирается в зависимости от мате-
риала направляющих и характера работы ловителей. При дере-
вянных направляющих, а также в ловителях замедленного дейст-
вия эксцентрики могут быть изготовлены из стали марок 35—45,
В ловителях резкого торможения, работающих с металлическими
85
направляющими при наличии зубьев, эксцентрики подвергаются
термической обработке.
В настоящее время эксцентриковые захваты в основном при-
меняются в малых грузовых лифтах. Их основным преимуществом
является простота конструкции. В пассажирских и грузовых лиф-
тах большой грузоподъемности обычно применяют клиновые зах-
ваты.
На рис. 47 показаны две схемы клиновых захватов с одним и
двумя клиньями. В обеих конструкциях клинья 2 передвигаются
в наклонных пазах. В конструкции по рис. 47, а паз выполнен
в виде ласточкина хвоста, в конструкции по рис. 47, б для умень-
шения трения, между клином 2 и направляющей колодкой 4 вве-
дены ролики 3, заключенные в обойму 5. В обеих конструкциях
клинья при срабатывании ловителей подводятся к направляющим
56
тягам 1 и далее затягиваются силами трения клина о направляю-
щую при последующем движении кабины.
Величина силы Р, которая при этих захватах должна быть
приложена к клину для того, чтобы создать необходимую силу
трения, при отсутствии самозатягивания определится из условия
равновесия. Проектируя силы, действующие на клин на гори-
зонтальную и вертикальную оси XX и YY (рис. 47, в) имеем
2Х = 0 = А!1 4- F2 sin а — N2 cos a = — 4- F2 sin a —
F2
— — cos a;
Hi
У Y = 0 = — F2 cos a — N2 sin a 4- P = Бг —
p
— F2 cos a---- sin a + P,
Pi
где Ni и N2 — нормальные давления на плоскости А—А и Б—Б-,
Fr и F2 — силы трения на этих плоскостях;
ц — коэффициент трения между клином и направляю-
щей (плоскость А—Д);
Их — коэффициент трения между клином и опорным
башмаком (плоскость Б—Б);
а — угол заострения клина.
Решая совместно оба эти уравнения, определяем силу Р
Р = — [(sin a 4- р cos a) — р (cos a 4- Hi sin a)].
Pi
Положив далее P = 0 и разделив обе части равенства на cos a,
определяем предельную величину уклона клина, при которой
будет иметь место его самозатягивание
tga = -f~fo (83)
Так как tg а должен быть больше нуля, необходимо чтобы
Р > Pi- С этой целью рабочая поверхность клиньев ловителей
резкого торможения обычно делается зубчатой. Для уменьшения
трения на тыльной стороне клина устанавливают бронзовые вкла-
дыши или опорные ролики.
На рис. 48 приведен роликовый захват, рабочим элементом
которого является ролик 1, перекатывающийся при срабатывании
захвата по направляющей поверхности корпуса 3, укрепленного
на раме кабины. Ролик опирается на штырь 2, укрепленный в по-
движной планке 4, связанной с механизмом включения ловителей
тягой 6. Движение этой планки направляется болтом 5, входящим
в имеющийся в ней косой вырез. При срабатывании ловителя
87
ролик подводится к направляющим и при дальнейшем движе-
нии кабины затягивается между направляющей и корпусом 3.
Наибольший допустимый угол наклона опорной плоскости
корпуса из условия самозатягивания ролика определится по
формуле
(84)
1 г
Рис. 48. Роликовый захват ловителей
В местах касания ролика с направляющей и опорной плос-
костью возникают большие контактные напряжения; поэтому
роликовые ловители могут применяться только при металличе-
ских хорошо обработанных направляющих кабин. Как сами ро-
лики, так и рабочая
опорная поверхность
корпуса должны быть
закалены.
Как было указано
ранее, устройства на
которые опираются зах-
ваты, могут быть при-
креплены к раме каби-
ны жестко (ловители
резкого торможения)
или это крепление дела-
ется подвижным (лови-
тели скользящего типа).
Тип крепления зависит
от величин замедлений,
которые по условиям безопасности могут быть допущены при
посадке кабины на ловители и в конечном итоге — от скорости
движения кабины.
Полагая движение кабины в момент посадки на ловители равно-
замедленным, имеем следующую зависимость между скоростью
движения кабины и ее замедлением
а =
t ~ 2s ’
(85)
В данном случае va — аварийная скорость движения кабины при
посадке на ловители в м/сек\
s — тормозной путь в м;
t — время торможения в сек.
Скорость va зависит от настройки и чувствительности огра-
ничителя скорости и для одного и того же лифта может колебаться
в пределах от omin = k^v до oma3 = kzv (v — номинальная
скорость движения кабины).
88
Величины kx и k 2,
зора, приведены в табл. 14. За
рость va = vmax.
Определить расчетом пути s,
приходимые кабиной при по-
садке на ловители резкого тор-
можения, затруднительно. Судя
по имеющимся данным, при ме-
таллических направляющих
этот путь равен примерно 15 мм,
при деревянных направляю-
щих ягг 25 мм. Исходя из этих
величин путей и наибольшего
допустимого замедления атах =
= 25 м/сек и формулы (85),
подсчитываются скорости va,
при которых возможна уста-
новка ловителей резкого
соответствующие правилам
Госгортехнад-
расчетную далее принимаем ско-
Таблица 14
Коэффициенты и k2
для подсчета
скорости движения кабины
в момент включения ловителей
Номинальная скорость движе- ния кабины v м[сек *2 *1
До 1,5 1,4 1,15
Свыше 1,5 до 3,5 1,33 1,15
Свыше 3,5 1,25 1,15
торможения,
va = ]/2as = ]/50-0,015 0,9 м/сек;
va = 1/50-0,025 1,1 м/сек.
Максимальная рабочая скорость движения кабины, согласно
табл. 14, на 40% меньше полученной и, таким образом, находится
в пределах от v = у? 0,65 м/сек до v = = 0,75 м/сек.
По правилам Госгортехнадзора, наибольшая скорость движе-
ния кабины, при которой могут быть установлены ловители рез-
кого торможения, составляет 0,75 м/сек. В больничных лифтах
такие ловители могут применяться только при деревянных на-
правляющих, смягчающих удар при посадке на них кабины.
Для подсчета замедлений кабины при посадке ее на ловители
резкого торможения с клиновыми захватными устройствами
ВНИИПТмаш предложена эмпирическая формула
а = A (va — ул),
где ул — коэффициент, учитывающий характер рабочей поверх-
ности клина: для углов заострения клина а = 8—11°
при гладкой его рабочей поверхности ул = 0,13, при
поверхности с мелкой насечкой ул = 0,08, при крупных
зубьях ул — 0,18;
А — коэффициент, зависящий от угла заострения клина;
А = 45-4-50 при а = 8-4-11°.
При скоростях движения кабины более 0,75 м/сек обязательно
применение скользящих ловителей. В этих ловителях между опор-
ным устройством захвата и рамой кабины вводится пружина, на-
тяжение которой регулируется таким образом, чтобы сила трения
8Я
между захватами и направляющими обеспечивала посадку кабины
с замедлением, требующимся по условиям безопасности пассажи-
ров. Усилие на захватах этих ловителей может оставаться или по-
стоянным (ловители с постоянным тормозным усилием) или посте-
пенно возрастать (ловители с постепенно возрастающим тормоз-
ным усилием).
На рис. 49 приведены две конструкции клиновых ловителей
скользящего действия с постоянным тормозным усилием, пояс-
няющие принцип работы таких устройств.
В конструкции на рис. 49, а клин 5 направляется подвижной
колодкой 4, связанной с нагрузочным рычагом 3, отжимаемым
пружиной 1. При неработающем захвате пружина удерживается
в сжатом положении штоком 6, на который навинчена регулиро-
вочная гайка 2; на нее опирается правый конец пружины. Вторым
концом пружина опирается на раму кабины. При затягивании
клина, он, поднимаясь, поворачивает рычаг 3 против часовой
стрелки и сжимает пружину 1. Усилие этой пружины регулируется
таким образом, чтобы торможение кабины происходило с заданным
замедлением.
На рис. 49, б показано устройство, применяемое в отечествен-
ных лифтах и выполненное в виде клещей. Ось клещей 1 укреплена
в балке рамы каркаса кабины. Один из рычагов устройства имеет
паз, в котором передвигается клин 3, который при затягивании
зажимает направляющую. С противоположной стороны направ-
ляющая зажимается колодкой 2, укрепленной во втором рычаге.
При втягивании клина 3 рычаг 4 поворачивается около шарнира
и сжимает регулировочную пружину 6, натяжение которой и огра-
ничивает силу нажатия захватов на направляющие. В нерабочем
положении натяжение пружины 6 уравновешивается штоком 7,
на который навинчена регулировочная гайка 9. Один конец пру-
жины упирается через сферическую шайбу 5 в нижнюю головку
этого штока, второй конец также через сферическую шайбу — в
регулировочную гайку 8. При помощи гаек 8 и 9 можно регули-
ровать зазоры между захватами ловителя и направляющими.
Болты 10 служат для установки захватных устройств ловителя
относительно направляющих.
В этом устройстве сжатие пружины при затягивании клина
будет равно
где I и /1 — длины плеч рычагов.
Ход клина, необходимый для выборки зазора б между клином
и направляющими;
90
91
Время, необходимое для затягивания клина в этих устройствах,
невелико, и тормозное усилие ловителя может быть принято по-
стоянным на всем тормозном пути кабины.
В устройстве, применяемом в ловителях скользящего действия
с постепенно возрастающим тормозным усилием (рис. 50), направ-
ляющие 9 зажимаются между двумя плоскими захватами, поме-
щенными на концах рычагов 10, разжимаемых распорными
клиньями 6, которые передвигаются между роликами 1, укреплен-
ными на противоположных концах этих рычагов. Клинья закреп-
лены на концах винтов 5. Один из винтов имеет правую, другой —
левую нарезки.
Винты ввинчиваются в гайки 3 ступиц барабана 2, на который
наматывается приводной канат 11, связанный с канатом регуля-
тора скорости при помощи специального челночного устройства.
При заторможенном канате ограничителя скорости кабина, про-
должая двигаться вниз, натягивает приводной канат 11, который
начинает вращать барабан 2. При этом вращении винты 5 ввинчи-
ваются в гайки и раздвигают клещи.
Для ограничения усилия на захватах нижний рычаг (по чер-
тежу) выполнен составным, из двух частей, связанных между со-
бой валиком 7 и пружиной 8, при помощи которой и ограничи-
вается усилие на захватах при срабатывании ловителей. Кониче-
ские колеса 4 служат для установки захватов в исходное положе-
ние при снятии кабины с ловителей.
Расчет захватных устройств ловителей производится с учетом
перегрузки лифта на 10% от его номинальной грузоподъемности.
При этих условиях производится испытание ловителей при осви-
детельствовании лифта.
Величина наибольшей нагрузки на захваты ловителей мгно-
венного действия может быть определена из условия
1,1Q + G (1 4- kH,
(W \ g 1 н
(86)
где Q и G — номинальная грузоподъемность лифта и вес
кабины в кгс (дан)-,
ц — коэффициент трения между захватами и на-
правляющими;
агаах — наибольшее ускорение, допускаемое по пра-
вилам Госгортехнадзора (атах — 25 м/сек2)-,
пт — число трущихся поверхностей захватов;
kH — 1,1 ч-1,2 — коэффициент, учитывающий неравномер-
ность срабатывания ловителей.
При расчёте ловителей скользящего действия заданными яв-
ляются тормозные пути, проходимые кабиной при посадке ее на
ловители, назначаемые пр правилам.Госгортехнадзора (табл. 15).
92
Рис. 50. Захват скользящего ловителя с постепенно возрастающим тормозным усилием
Таблица 15
Тормозные пути кабин
при посадке на скользящие ловители
Тип ловителя Скорость va м]сек. Путь торможения s в мм
наиболь- ший наимень- ший
1 250 150
2 750 350
С постоянным тормозным 3 1400 650
усилием 4 2500 950
5 3800 1400
6 5400 2000
1 1600 600
2 2300 750
С постепенно возрастающим 3 2900 1000
тормозным усилием 4 3600 1300
5 4400 1800
6 5200 2400
Для определения необходимого усилия, действующего на зах-
ват, имеем
(1.1Q4- G)v2„
2g а + (1,1Q + G)s = Ра^Л,
где <рл — коэффициент, учитывающий характер возрастания уси-
лия на захватах ловителей, в процессе торможения ими
кабины.
Для захватов с постоянным тормозным усилием <рл = 1.
Необходимое усилие нажатия на захват
_ 1.1Q+G \
3 \ 2g у
Тормозной путь кабины при заданном усилии на захватах Рэ
равен
(87)
s =
(88)
В ловителях с постоянным тормозным усилием при <рл = 1,
после подстановки в это выражение величины s из формулы (85) и
простейших преобразований, находим величину замедления при
выбранном усилии Р3
Р3Ц.ПТ
1,1Q+ G
g-
1
94
Как можно заключить из этой формулы, с уменьшением полез-
ной нагрузки замедление а возрастает. Это замедление будет наи-
большим при наличии в кабине только одного пассажира.
В ловителях с постепенно возрастающим тормозным усилием
Fx замедление кабины ал будет изменяться в зависимости от прой-
денного пути. Величина этого замедления в рассматриваемый
момент определится из условия
ГЛ = РЛ = (1ЖС)(1+|), (89)
где Рх — усилие на захватах, действующее в рассматриваемый
момент.
Рис. 51. Трафики к расчету ловителей с постепенно
возрастающим тормозным усилием
Из этой формулы имеем
Требуемый закон изменения тормозного усилия может быть
задан в координатах FJF и sx/s (рис. 51, а), где F — наибольшее
тормозное усилие в конце торможения.
Наибольшее замедление имеет место в конце торможения при
= Р3 и не должно быть более допускаемого по правилам Гос-
гортехнадзора. По этому условию, исходя из формулы (89), может
быть определено наибольшее усилие на захвате.
р = 1.1Q -и <? / j .
3 \ g /
Коэффициент работы ловителей <рл в данном случае может быть
определен исходя из диаграммы, приведенной на рис. 51, а
Фл = fkskl>
где f — площадь диаграммы, ограниченная кривой (за-
штрихована на рисунке);
ks и kf — масштабы sx/s и Fx/F, принятые при построении
этой диаграммы.
95
В частном случае, при изменении усилия на захвате по закону
прямой (рис. 51, б) <рл = 0,5. Дальнейший расчет тормозного пути
при найденном коэффициенте <рл производится по формуле (88).
Этот путь должен соответствовать величинам, указанным в табл. 15.
Кривая Fx = f (sr) при ловителях с постепенно возрастающим
тормозным усилием может быть подобрана таким образом, чтобы
в начальный период движения кабины ускорение, оказывающее
наиболее неблагоприятное действие на пассажира, было наимень-
шим. Ловители такого типа получили довольно широкое распро-
странение за рубежом.
Размеры рабочих поверхностей клиновых захватов опреде-
ляются по наибольшему усилию Ра из расчета на удельное давле-
ние q (захваты с гладкой рабочей поверхностью) или на допускае-
мую нагрузку на единицу длины зуба qt (захваты с зубчатой по-
верхностью).
Величина удельного давления
q = ^<[q], (91)
где h — высота;
b — ширина рабочей поверхности клина.
Допускаемое удельное давление для ловителей скользящего
действия [<? ] = 150 4-200 кгс!см2 (дан/см2), для ловителей резкого
торможения [</1 = 250 4-300 кгс!см2 (дан/см2).
Давление на единицу длины зуба в захватах с зубчатой по-
верхностью
(92)
В этой формуле b — рабочая ширина зуба в см;
<р3 = 0,75 — коэффициент неравномерности рас-
пределения нагрузки между зубьями.
При работе стали по стали [ft] = 1200 4-1500 кгс/см (дан/см).
Размеры зубьев должны быть также проверены на изгиб.
Аналогично рассчитываются и эксцентриковые захваты с зуб-
чатой поверхностью; при расчете этих захватов нагрузка считается
действующей только на один зуб.
Расчет роликовых, а также эксцентриковых ловителей с глад-
кой рабочей поверхностью следует вести по контактным напря-
жениям в месте касания ролика (или эксцентрика) с направляю-
щими. Величина этих напряжений по формуле Герца при работе
стального эксцентрика по стальной направляющей
ок = 0,418|/^.А = 605 /^<[ок1, (93)
96
где Р3 — расчетная нагрузка на захват в кгс (дан)-,
Е = 2,1 -106 — модуль упругости в кгс/см2 (дан/см2);
г — радиус ролика (для роликовых ловителей)
или эксцентрика (для эксцентриковых лови-
телей) в точке его касания с направляющей.
Допускаемые напряжения при расчете по этой формуле опре-
деляются из условия
[ок] = 2ов,
где о4 — предел прочности наиболее слабого материала из обра-
зующих контактную пару (ролика или направляющих).
$ 3. Механизмы включения ловителей
Г Включение ловителей при аварийной работе лифта (обрыв
каната, неисправность лебедки) производится при помощи меха-
\ низмов, приводимых в действие пружиной, связанной с грузовыми
Рис. 52. Схема ловителя, связанного с грузовым канатом
канатами (малые грузовые лифты с барабанными лебедками) или
от ограничителя скорости (лифты с канатоведущими шкивами).
В пассажирских лифтах с барабанными лебедками механизм вклю-
чения связан с ограничителем скорости и грузовыми канатами.
Схема механизма первого типа приведена на рис. 52. Этот ме-
ханизм состоит из валика 5, на который надета пружина 4. Валик
вращается в подшипниках, укрепляемых к каркасу кабины. Один
конец пружины 4 укреплен на валике и второй — на этой же раме.
При вращении валика против часовой стрелки пружина раскру-
чивается и удерживается в таком состоянии рычагом 3, конец
которого связан с грузовым канатом 1 тросиком или цепью 2.
На концах валика 5 устанавливаются или эксцентриковые за-
жимы б (как показано на рисунке) или укрепляются рычаги, свя-
занные с тягами захватов.
7 Павлов 154 97
При обрыве грузового каната освобождается рычаг 3 и валик
под действием пружины 4 поворачивается и подводит эксцентрики
к направляющим. С другой стороны направляющих расположены
упоры 7. Такой механизм включения применяется в малых грузо-
вых лифтах.
На рис. 53 приведена схема механизма включения ловителей,
работающего от ограничителя скорости; аналогичный механизм
приведен на рис. 45. Этот механизм установлен на верхней балке
рамы каркаса и приводится в движение в момент, когда канат 1
ограничителя скорости заторможен, а кабина движется вниз.
Рис. 53. Механизм включения ловителей с приводом от ограничителя
скорости
При этом поворачивается рычаг 2, связанный с канатом, вращает
валик 3 и насаженные на нем рычаги 2, концы которых связаны
с тягами захватов. Вторая пара захватов включается тягами, свя-
занными с рычагами 6. Правая и левая половины механизма свя-
заны между собой наклонной тягой 9 и дополнительными рычагами,
насаженными на те же валики, что и рычаги 2 и 6.
Вследствие подтормаживания каната ограничителя при дви-
жении кабины, которое может произойти из-за трения в самом огра-
ничителе и нижних натяжных блоках, возможно его включение при
нормальной работе лифта. Во избежание этого на наклонной тяге 9
установлена пружина 8, один конец которой упирается в скобу,
приваренную к раме кабины, а второй через шайбу 5 — в гайку 7,
навинчиваемую на тягу. Усилие пружины регулируется таким
образом, чтобы уравновесить (с некоторым запасом) усилие, необ-
ходимое для привода ограничителя.
По правилам Госгортехнадзора необходимо, чтобы при срабаты-
вании ловителей выключался двигатель лебедки лифта. Для этого
на раме кабины установлен выключатель 4, который приводится
в действие упором 10 наклонной тяги 9.
98
На рис. 54 показан механизм включения ловителей, связанный
с ограничителем скорости и грузовыми канатами. Механизм уста-
новлен на верхней раме каркаса кабины и состоит из двух основ-
ных частей: первой, связанной рычагом 6 с канатом ограничителя
скорости, и второй, связанной со штоком 1 пружинной подвески
грузовых канатов. При обрыве этих канатов шток опускается под
Рис. 54. Механизм включения ловителя с приводом от ограничителя
скорости и грузового каната
действием пружины 3 и передвигает рамку 2, которая поворачивает
связанный с ней коленчатый рычаг 4 и далее через тягу 7 валик 5
включения захватов.
$ 4. Ограничители скорости
В лифтах применяют ограничители скорости двух типов —
плоские и шпиндельные, плоские ограничители широко приме-
няются в отечественных лифтах.
На рис. 55, а приведена схема плоского ограничителя. Он со-
стоит из приводного шкива 13; на диске 1, который связан со шки-
вом, укреплены пальцы 9, около которых вращаются фасонные
грузы 12. Эти грузы удерживаются пружиной 5, через которую
проходит тяга 8. Один конец пружины через шайбу 6 опирается
на регулировочную гайку 7, второй — в скобу 4, укрепленную
на шкиве. Гайкой 7 можно регулировать натяжение пружины
и этим изменять скорость кабины, при которой срабатывает огра-
ничитель. Шкив 13 приводится в движение от каната ограничителя
скорости связанного с кабиной, его окружная скорость равна ско-
рости движения кабины. При возрастании этой скорости грузы
расходятся и в момент, когда скорость кабины превысит предель-
ную, сцепляются с упорами 3 кольца 2 ограничителя и останавли-
вают шкив. Контакт 11 служит для выключения двигателя при
срабатывании ограничителя. Для этого кольцо 2 может повора-
чиваться на некоторый угол. При повороте кольца связанный
с ним кулачок 10 сходит со штифта контакта и размыкает цепь
7* 99
двигателя. Установка таких выключателей необходима при ско-
рости движения кабины более 1,5 м!сек.
Взамен упоров 3, показанных на рис. 55, в некоторых конст-
рукциях ограничителей скорости применяют фрикционные оста-
новы.
Сила трения между канатом и ободом приводного шкива
должна быть не менее усилия, необходимого для включения лови-
телей. Для увеличения этого”трения этот обод делают желобчатым,
однако при ловителях скользящего действия оно все же может
оказаться недостаточным. В этих случаях для торможения каната
ограничителя скорости применяют специальные эксцентриковые
или колодочные зажимные устройства, включаемые ограничителем
скорости, механическим или электрическим путем.
На рис. 56, а приведена схема такого устройства, включаемого
электрическим путем. В этом устройстве канаты ограничителя
скорости при торможении зажимаются двумя самозатягиваю-
щимися эксцентриками 8, которые опускаются под действием
собственного веса после того, как будет поднята стопорная со-
бачка 9. Эта собачка поднимается пружиной 2, которая связана
с рычагом, установленным на валике 3 с насаженной на него
стопорной планкой 11, торец которой упирается в кулачок 10
100
валика собачки. Во взведенном положении пружина удерживается
стопором 1, установленным на конце рычага 13, приводимого
в движение электромагнитом 14. При аварийной скорости движе-
ния кабины ограничитель скорости включает электромагнит,
рычаг откидывает стопор 1, после чего освобождается пружина,
которая откидывает собачку 9 и освобождает эксцентрики. При
повороте валика 3 рычаг 15 нажимает на ролик выключателя 12
и останавливает двигатель.
Во избежание обрыва канатов ограничителя или поломки самих
захватов необходимо ограничивать их зажимное усилие так же,
а)
ограничителя скорости
как это делается в ловителях. Для этого в рассматриваемой
конструкции левый эксцентрик (рис. 56, б) выполнен подвижным.
Ось этого эксцентрика связана с подвижным штоком 5, в выступ
которого упирается пружина 6, ограничивающая величину за-
жимного усилия эксцентрика. Натяжение этой пружины регули-
руется гайкой 7. Положение левого эксцентрика относительно
каната регулируется дополнительной гайкой 4, ввертываемой
в корпус.
Для надежной работы ограничителя желательно, чтобы число
оборотов диска, на котором насажены грузы, было не менее 40—50
в минуту. С этой целью в некоторых регуляторах вводят допол-
нительную передачу между шкивом и диском регулятора для уве-
личения числа оборотов этого диска.
Для проверки работы ловителей при инспекторских испыта-
ниях лифта, а также при его настройке на монтаже ограничители
скорости имеют дополнительные шкивы (обычно отливаются
за одно целое с основным шкивом), диаметры которых подби-
раются таким образом, чтобы число оборотов вала ограничителя
соответствовало числу оборотов при аварийной скорости движения
кабины лифта (второй шкив на рис. 55).
Шпиндельные ограничители скорости устанавливаются в бы-
строходных лифтах и довольно широко применяются за рубежом.
101
Схема такого ограничителя приведена на рис. 57, а. Он состоит
из вертикального вала 1, к которому шарнирно прикреплены
рычаги 3 с грузами 4. Планками 8 рычаги связаны с подвижной
втулкой 5, в свою очередь, связанной со стопорным устройством
каната ограничителя скорости. Этот канат огибает шкив 6, наса-
женный на горизонтальный валик, который связан с вертикаль-
ным валом 1 конической передачей 7.
При увеличении скорости кабины сверх допустимой грузы
расходятся, поднимают муфту 5 и через систему рычагов подни-
Рис. 57. Схема шпиндельного ограничителя скорости
мают собачку стопорного устройства каната. Зажимы этого устрой-
ства работают аналогично указанным на рис. 56. Для возможности
регулировки момента включения ограничителя он имеет дополни-
тельную пружину 9, натяжение которой регулируется гайкой 2.
Усилие р, необходимое для включения ловителей, зависит
от принятой схемы их и может быть определено только эмпири-
ческим путем. Судя по имеющимся данным, для ловителей резкого
торможения р = 15-=-20 кгс (дан), для ловителей скользящего
типа с постоянным тормозным усилием р = 80-4-120 кгс (дан)
и для ловителей с постепенно возрастающим усилием р — 200^-
400 кгс (дан).
Диаметр приводного каната ограничителя скорости обычно
выбирают в пределах 7—9 мм, по правилам Госгортехнадзора
он не должен быть менее 7 мм. Диаметр Dn приводного шкива
ограничителя принимают порядка 30—35 диаметров каната, диа-
метр Dg вспомогательного шкива, служащего для проверки ра-
боты ловителей, определяется из условия
О ’’И fl f
па va
102
где п и па — числа оборотов вала ограничителя при номиналь-
ной и аварийной скоростях движения кабины в ми-
нуту;
v и va — номинальная и аварийная скорость кабины лифта
в м/сек.
Окружное усилие на ободе шкива ограничителя скорости
зависит от весов его натяжного груза и приводного каната огра-
ничителя скорости. При натяжениях концов этого каната Sj
и S'2 окружное усилие на ободе равно
По формуле Эйлера
Sj = S'2e^a.
Суммарное натяжение обеих ветвей
si' + s' = gh + g;
В приведенных формулах
а — угол обхвата шкива в рад\
р0 — коэффициент трения между шкивом и канатом;
G' — вес каната ограничителя скорости.
При заданном усилии Р, исходя из этих трех формул, может
быть определен вес натяжного груза GH каната ограничителя
/ ЛЧ>а it \
G« = (p (94)
где /г0 = 1,2-т-1,5 — коэффициент запаса.
Обычно вес натяжного груза принимают порядка 100—200 кгс
(дан) в зависимости от усилия, необходимого для включения
ловителя.
Усилие Р'о на зажиме каната при самозатягивающемся захвате
ограничителя скорости по типу, показанному на рис. 56, равно
р’ = —,
0 2|Х ’
где ц = 0,124-0,15 — коэффициент трения между захватом и
канатом.
Соотношение плеч эксцентриков эксцентриковых захватов
(см. схему на рис. 46, б) выбирается то же, что и в эксцентри-
ковых ловителях. При проектировании пружин захватов необ-
ходимо предусматривать возможность увеличения натяжения их
на 20—50% в процессе регулировки.
При расчете шпиндельных ограничителей скорости, исходя из
необходимого хода муфты при включении захватов (порядка
15—25 мм), предварительно выбирают размеры ограничителя,
ЮЗ
а также задаются углами наклона его звеньев а и 0 (рис. 57, б),
вес грузов Gs обычно принимают порядка (1—5) кгс (дан.).
Усилие пружины ограничителя при его рабочем положении
определяем из уравнения моментов сил, действующих на рычаг
относительно точки А вращения этого рычага (рис. 57, б),
Gsl0 sin р + Pcla cos р + sin a cos р + S2lx cos а sin р = 0.
В этой формуле
Рс — центробежная сила в кгс (дан)-,
Sx — усилие в тяге 1 в кгс (дан).
В механизмах шпиндельных ограничителей скорости обычно
принимают а — Р; тогда из этой формулы имеем
с __ A) G г tg Р 4~ Рс
1 1х 2 sin р
Необходимое усилие пружины при выбранных размерах огра-
ничителя
Рп = 2S^p cos р - GM = ± Gatgt|^Pc Пр - GM, (95)
где GM — вес муфты 5 (рис. 57, а);
т]р = 0,944-0,96 — коэффициент ^полезного действия меха-
низма ограничителя.
Величина центробежной силы Рс определяется по формуле
Рс = тг(й2г = (l0 sin а + е) = 0,00120/12 (l0 sin а + е),
где о) — угловая скорость вала ограничителя в рад/сек\
тг — масса груза в кг-,
па — расчетное число оборотов вала ограничителя в минуту
при аварийной (расчетной) скорости движения кабины
лифта;
g — ускорение силы тяжести в м!сек2.
При обычно принятой схеме плоского ограничителя по рис. 55
веса обоих грузов при любом положении диска, на котором они
укреплены, взаимно уравновешены. Усилие Рп (рис. 55, б) пру-
жины, действующей вдоль соединительной тяги, при заданном
числе оборотов, соответствующем аварийной скорости движения
кабины, определяем из уравнения моментов действующих сил
относительно точки А вращения груза
РпЬ— 2Рса = РпЬ—-2 ^(Л1-)2га =
— РЬ — 0,0024G,n2ra = О,
п 1 с г
104
откуда
Рп = 0,0024 (96)
В этих формулах
г — расстояние от оси вращения регулятора до центра
тяжести груза в м\
а и b — плечи сил Рс и Рп в м.
Усилие сжатия пружины в момент включения ограничителя
с учетом потерь в шарнирах грузов
Р'п = (0,94 --0,98) Рп. (97)
Число оборотов вала регулятора определяется из условия
п = -4г 60, (98)
где v — скорость кабины лифта в м/сек;
D — диаметр шкива ограничителя в м.
По формулам (96) и (97) после подстановки чисел оборотов,
соответствующих номинальной и аварийной скорости v и va,
подсчитанных по формуле (98), могут быть определены наиболь-
шее и наименьшее натяжения пружины р™ах и P™in.
Необходимая жесткость пружины в данном случае будет равна
ртах__________________________pmin
/О Гп Гп
где f — величина сжатия пружины при изменении ее усилия
от ртах д0 pmin при вКЛЮЧвНИИ ОГрЭНИЧИТСЛЯ.
Величина f определяется в зависимости от принятых зазоров
между упорами регулятора в его рабочем положении при номи-
нальной скорости движения кабины и принятых передаточных
чисел его рычажной системы.
Глава VI
УСТАНОВКА ЛИФТОВ В ЗДАНИЯХ
$ 1. Материал и конструкция шахт
Как было указано в гл. I, в целях безопасности кабины лифтов
и противовесы помещают в шахты. Внутри шахты располагают
направляющие кабины и противовеса, кабель управления, кон-
цевые выключатели, проводку и т. п., в нижней ее части (приямке)
устанавливают буфера и натяжные грузы: ограничителя ско-
рости, уравновешивающих канатов и т. п. В зависимости от
105
принятой схемы лифта над шахтой или рядом с ней помещают
машинное отделение.
В ограждениях шахт на уровне площадок, обслуживаемых
лифтом, располагают двери.
Шахты могут размещаться как снаружи, так и внутри обслу-
живаёмБГх помещений^ При наружном расположении шахта уста-
Рис. 58. Схемы лифтовых шахт:
а — шахта грузового лифта: б—шахта пассажирского лифта
навдивается на фундаменте и закрепляется скобами к стенам зда-
ния, оттяжками или т. п. В переносных лифтах для предохране-
ния шахт от опрокидывания иногда применяют противовесы (при
недостаточной устойчивости шахты). В этих лифтах, а также
в шахтах лифтов, устанавливаемых вне зданий, все силовые на-
грузки от веса лебедки, натяжения грузовых канатов и т. п. пере-
даются обычно непосредственно на шахту.
£акие шахты в, зависимости.-ат„местных условий, выполнщотся
из кирпича, бетона или стального проката^рисГЗУаУ^ирпич-
ные-Или беттЯпше^тхгахтЁгтщугут Иметь сплошные стенки одинако-
106
вой толщины (бескаркасные шахты). В ряде случаев для передачи
силовых нагрузок шахта имеет железобетонный или металли-
ческий каркас (каркасные шахты).
При установке лифта внутри здания тип шахты зависит от на-
грузок, на которые рассчитаны элементы здания. Такие шахты
могут быть нагруженными (несущими) или облегченными, в слу-
чаях когда нагрузки, полностью или частично, передаются на
элементы зданий.
Схема такой шахты пассажирского
лифта, предназначенной для установки
в лестничных клетках жилых домов, по-
казана на рис. 58, б. Эта шахта состоит
из металлического каркаса 1, выполнен-
ного из угловой стали, который уста-
новлен на фундамент и прикреплен к
элементам лестничной клетки, приварен-
ными к ним тягами, скобами и т. п.
К каркасу прикреплены направляющие
кабины 2 и противовеса 3; он выполнен из
отдельных секций, скрепляемых на мон-
таже болтами. В данном случае нагрузки
от лебедки передаются на стены лест-
ничной клетки через опорные балки, на
которых устанавливается рама лебедки.
В промышленных, а также обществен-
ных зданиях при больших грузопотоках
под шахты отводят специальные помеще-
ния внутри здания (встроенные шахты).
Такие шахты, однако, представляют опас-
ность в отношении пожара, так как по
ним огонь может легко переброситься
с этажа на этаж. Для высотных зданий
лифт в этом случае является одновремен-
лифта
но и одним из основных средств эвакуации населения в случае
опасности. Поэтому, согласно специальным требованиям, стены
таких встроенных шахт выполняются из огнестойких материа-
лов с пределом огнестойкости не менее одного часа.
При установке лифтов в старых жилых зданиях, в которых
ранее не было предусмотрено место для установки лифта, иногда
применяют подвесные шахты по типу, показанному на рис. 59.
Такая шахта состоит из застекленного каркаса 2, подвешиваемого
к продольным балкам 1, которые укреплены к перекрытиям зда-
ния. По этажам предусмотрены дополнительные крепления шахты
к стенкам здания.
Шахты должны быть ограждены_^о~всех сторон нз_дрлную
высоту. Для лифтов~смета~ллйчЁ£КИми каркасами, устанавливаемых
вне здания или в лестничных клетках жилых домов, ограждения
107
.обычно выполняются из металла/ В этом случае шахта заши-
вается или сплошными листами толщиной не менее 1 мм или сет-
кой из проволоки диаметром S > 1,4 мм с размером ячей в свету
не более 20 мм. При сетчатых ограждениях нижняя часть фасада
шахты на каждом этаже также зашивается на высоту не менее 1 м
от пола сплошными листами толщиной не менее 1,4 мм. Такая же
обшивка делается и в шахтах, зашитых сплошными листами,
при толщине листов менее 1,4 мм^?
’’"""ТГл^чеетае материала.-Для'Тлраждений шахт с каркасами из
железобетона обычно применяют- кирпич,” шлакоблоки и -т? п.
При бескаркасцых-шахтах такими ограждениями являются стенки
шахты. ....._
Размеры шахт стандартных лифтов даны в ГОСТе. Для нестан-
дартных лифтов эти размеры назначаются исходя из габаритов
кабины и противовеса, а также зазоров, минимальные величины
которых даны в правилах Госгортехнадзора. Общая высота шахты
складывается из глубины приямка, высоты подъема кабины (от
площадки нижнего до площадки верхнего этажей) и расстояния
от площадки верхнего этажа до перекрытий шахты. Это расстояние
определяется из условия
Но = hK + Дй + f + й0, (99)
где hK — расстояние от пола этажной площадки до верхней
точки кабины;
Дй — дополнительный ход кабины до момента посадки про-
тивовеса на буфера;
f — величина сжатия буфера при посадке на него противо-
веса;
й0 — наименьший запас хода кабины после посадки противо-
веса на сжатые буфера.
По правилам Госгортехнадзора принимают й0 > 600 мм. Для
малых грузовых лифтов этот размер может быть уменьшен до
150—200 мм в зависимости от типа лебедки и скорости лифта.
Величина Дй назначается исходя из расположения верхних
концевых выключателей и не должна быть менее, чем ход кабины,
имеющий место из-за неточности ее остановки.
Противовес подвешивается таким образом, чтобы при посадке
кабины на полностью сжатые буфера оставался запас его хода
до перекрытий не менее 200 мм при скорости кабины до 1 м/сек
и не менее 600 мм при большей скорости.
Для стандартных грузовых лифтов по ГОСТу высота Но =
= 3600-^3900 мм в зависимости от грузоподъемности лифта, для
пассажирских лифтов Но = 3600^-4800 мм в зависимости от их
скорости.
Глубина нижней части шахты (приямка) определяется разме-
рами установленного в нем оборудования (буфера, направляющие
блоки, натяжные устройства и т. п.). Эта глубина выбирается
108
таким образом, чтобы при посадке кабины на полностью сжатые
буфера между ее крайней выступающей точкой и дном приямка
оставался зазор не менее 750 мм. У малых грузовых лифтов
этот зазор может быть уменьшен до 50 мм. Для спуска в приямок
со стороны входа в его стенках укрепляются скобы или устанавли-
вается лестница. Глубина приямков быстроходных лифтов при-
нимается до 3300 мм.
В приямках глубиной более 2000 мм делается специальный
вход, закрываемый дверью с замком. Во избежание несчастных
случаев двери приямков должны открываться наружу и снаб-
жаются контактами, размыкающими цепь двигателя лифта при
открытой двери.
$ 2. Двери шахт
По правилам Госгортехнадзора все дверные проемы и загрузоч-
ные отверстия шахт должны быть оборудованы дверями. При глу-
хих встроенных в здания шахтах по правилам пожарной безопас-
ности эти двери выполняются из огнестойких материалов, в ос-
тальных случаях, где это допускается противопожарными прави-
лами, они могут быть выполнены из дерева или металла.
Как и у кабин, двери шахт могут быть распашными или раз-
движными, сетчатыми, из металлических листов или остеклен-
ными. Двери шахт пассажирских лифтов грузоподъемностью
350—500 кгс (дан), устанавливаемых в лестничных клетках зда-
ний высотой 6—10 этажей, обычно выполняются одностворчатыми
сетчатыми, с обшивкой низа стальными листами, как это требуется
и для ограждений самой шахты. В некоторых случаях (например,
больничные лифты) при больших дверных проемах двери выпол-
няются двухстворчатыми, раздвижными или распашными; высота
шахтных дверей пассажирских лифтов должна быть не менее
2000 мм.
Для увеличения производительности лифтов, обслуживающих
большие пассажиропотоки, двери шахт делаются раздвижными
и оборудуются механическим приводом. Этот привод осуще-
ствляется или от индивидуальных механизмов, устанавливаемых
на каждой шахтной двери и включаемых при подходе кабины
к этажной площадке (лифты фирмы «Карл Флор», ГДР), или от
одного механизма, установленного на крышке кабины лифта и
одновременно служащего для открывания дверей кабины. Такая
система предусмотрена ГОСТом 5746—58 для лифтов грузоподъем-
ностью 1000 кгс (дан) и, в частности, принята в лифтах высотных
зданий Москвы.
На рис. 60 приведена схема механизма открывания раздвижной
двери, работающего по этому принципу. Створки двери передви-
гаются на опорных роликах 1 по рельсу 4, расположенному над
дверным проемом шахты. На створках имеются упоры, в которые
109
входит поводок, укрепленный на двери кабины. При раздвигании
дверей механизмом, установленным на кабине, одновременно
раздвигаются и створки 5 двери шахты. Между собой они свя-
заны бесконечным канатом 2, огибающим направляющие блоки 3.
Правая створка связана с верхней ветвью каната, левая —
с нижней.
Двери шахт грузовых лифтов обычно выполняют металличе-
скими со сплошной зашивкой на всю высоту листовой сталью,
двухстворчатыми или четырехстворчатыми, с ручным приводом.
В некоторых случаях эти двери также делаются раздвижными.
По ГОСТу 8823—55двухстворчатыедвери применяются при ширине
Рис. 60. Схема механизма открывания раздвижных дверей шахты
дверных проемов до 1400 мм, при большей ширине двери делают
многостворчатыми. Для наблюдения за подходом кабины к этажу
в дверях обычно устраивают смотровые отверстия диаметром от
20 до 50 мм. Для экономии места на этажной площадке, двери
шахт малых грузовых и грузовых лифтов могут раздвигаться
в вертикальном направлении. Вес одной створки такой шахтной
двери, как и для кабин, не должен быть более 40 кгс (дан) и для
малых лифтов не более 7 кгс (дан).
Высота дверей грузовых лифтов при загрузке электрокарами
принимается не менее 2,2 м, при высоте площадки водителя
электрокары над полом помещения не более 300 мм, в остальных
случаях — не менее 2 м. Высота дверей шахт малых грузовых
лифтов назначается не более 1000 мм, чтобы исключить возмож-
ность подъема этими лифтами людей.
Для безопасности работы лифта необходимо, чтобы двери
шахты до прибытия кабины оставались закрытыми. С этой целью
они снабжаются специальными замками, исключающими воз-
можность их открывания до подхода кабины к заданному этажу.
Наряду с механическими устройствами эти двери снабжаются
также и электрическими контактами, размыкающими цепь дви-
гателя при открывании двери.
Двери шахт пассажирских лифтов при открывании их вручную
обычно снабжаются замками, работающими по типу, приведен-
ному на рис. 61. Такой замок состоит из защелки 1, запирающей
дверь, скользящей по двум направляющим 9 и отжимаемой пру-
жинами 7. Защелка отодвигается упором 10, посаженным на ось,
на которой укреплена ручка открывания двери. При закрытой
110
двери язычок защелки нажимает на подвижный штифт 2 дверного
контакта 3 и замыкает цепь управления двигателем. Упор 10
имеет отросток, который входит в вырез блокировочного рычага 8,
поворачивающегося около шарнира. Рычаг оттягивается до-
полнительной пружиной И, от вращения он удерживается запор-
ным штифтом 6, который помещен в правой половине замка, уста-
навливаемой на шахте.
Штифт 6 отжимается в левое положение пружиной 4 и может
быть передвинут в крайнее правое положение отводкой 5. При
подходе кабины к этажной площадке установленная на ней линейка
(отводка) передвигает отводку 5 влево и отодвигает запорный
шкворень от блокировочного рычага 8. Последний под действием
пружины 11 поворачивается и освобождает упор 10. После этого
рукоятка замка может быть повернута и замок открыт. При от-
крывании двери штифт 2 дверного контакта 3 передвигается влево
и размыкает цепь управления двигателем. Второй контакт
служит для включения сигнала «Занято» при открытой двери.
111
Рис. 62. Механизм Рис. 63. Замок двери
выключения отвод- шахты грузового лифта
ки кабины
112
В лифтах с автоматическими раздвижными дверями блоки-
ровка производится при помощи специальных устройств, также
приводимых в движение отводками кабин.
Чтобы уменьшить шум при набегании отводки кабины на ролик
замка, в пассажирских лифтах применяют электромагнитное
устройство для подъема этой линейки при проходе кабины через
этажи, у которых в данный момент не требуется остановки ка-
бины. Такое устройство (рис. 62) состоит из электромагнита 1,
шток которого тягой 2 шарнирно связан с отводкой 3. Эта отводка
шарнирными планками 4 присоединена к опоре 5, укрепленной
на раме кабины. Электромагнит выключается автоматически
при подходе кабины к заданному этажу, после этого отводка
передвигается, занимает положение, указанное пунктиром на
рис. 62, и при дальнейшем движении кабины поворачивает от-
водку замка.
Для дверей шахт грузовых лифтов применяют замки шпинга-
летного типа по типу, приведенному на рис. 63. В этом замке
для запирания двери служат два ригеля 1, концы которых про-
ходят через окантовку двери и при запирании ее входят в отвер-
стия в обвязке двери, установленной на шахте. Вторые концы
ригелей связаны с ползунами 5, на которых нарезаны зубья.
Оба ригеля отжимаются в крайнее рабочее положение пружи-
нами 2. Замок открывается шестерней 3, насаженной на валик
рукоятки 4 открывания замка. Для блокировки его служит упор
(на рисунке не показан), приваренный к верхнему ригелю. Упор
удерживается стопорным устройством, отводимым в сторону
в момент, когда кабина подходит к этажу; одновременно срабаты-
вает и электрическое блокировочное устройство двери.
$ 3. Направляющие кабин
От точности и качества установки направляющих в шахте
в значительной степени зависит плавность и бесшумность хода
кабины.
В качестве материала направляющих применяют дерево или
сталь. До недавнего времени деревянные направляющие широко
применялись в пассажирских лифтах. Они обычно выполняются
из буковых, реже дубовых брусков сечением от 60 X 60 до 80 X
X 80 мм, длиной 1—1,5 м, укладываемых на прокатные профили
и соединяемых между собой в шип (рис. 64, а). Основным достоин-
ством таких направляющих является бесшумность движения по
ним кабины и большая плавность посадки кабины на них при ло-
вителях резкого торможения, по сравнению с имеющей место
при металлических направляющих. Их недостатками являются
большая стоимость, относительно невысокая стойкость, возмож-
ность коробления (при недостаточно просушенном материале) и
8 Павлов 154
113
опасность в пожарном отношении. Поэтому в настоящее время
деревянные направляющие применяются редко.
Металлические направляющие выполняются из угловой стали,
или стали таврового профиля (рис. 64, б), иногда они делаются
сварными. В основном такие направляющие применяются для
малых грузовых, реже для больших грузовых лифтов. В послед-
нее время как для пассажирских, так и для грузовых лифтов,
широко применяют направляющие специального профиля
Рис. 64. Сечения направляющих лифтов: а — деревянных; б ив —метал-
лических.
(рис. 64, в и табл. 16) с тщательно обработанной головкой. Торцы
этих направляющих также обработаны и имеют шипы, которые
исключают возможность их сдвига в местах стыка. Благодаря
обработке головки при этих направляющих обеспечивается плав-
ный ход кабины.
Обычно направляющие опираются на фундамент приямка
(рис. 65, а). Для этого к их торцам привариваются опорные
Таблица 16
Размеры направляющих специального профиля,
применяемых в лифтах
Размеры в мм *
Моменты
инерции,
см4
1
2
3
4
130
120
90
50
НО
90
60
50
25
16
16
9
63
53
37
32
39,8
26,3
15,0
515 288
197 182
56 72
3,8
2,7
1,8
31,2
20,6
11,8
5,5
В н ь
* См. рис. 64, в.
114
планки, заливаемые при монтаже в бетон на глубину 50—150 мм\
иногда они устанавливаются на общей балке с буферами, также
заливаемой в бетон. В некоторых случаях направляющие под-
вешиваются к перекрытиям шахты (рис. 65, б) и работают на рас-
тяжение, что несколько улучшает их работу при посадке кабины
на ловители; однако при такой подвеске возрастают нагрузки на
шахту и перекрытия, которые в этом случае должны быть усилены.
При очень больших высотах подъема иногда применяют так назы-
ваемые плавающие направляющие (рис. 65, в), нагрузки на кото-
рые через опорные узлы целиком передаются на элементы здания
Рис. 65. Схемы установки на-
правляющих в шахте
чету направляющих
или шахты. На такие направляющие значительно меньше влияет
осадка здания, что особенно важно при больших высотах подъема.
По высоте шахты направляющие крепятся к ее стенкам сквоз-
ными болтами (рис. 64, б) или прижимными планками (рис. 64, в).
Расстояние между креплениями зависит от конструкции шахты.
Для того чтобы не слишком утяжелять направляющие, его прини-
мают обычно не более 3,6 м, в металлических шахтах оно прини-
мается в соответствии с расстоянием между их поясами порядка
2—2,5 м. Крепление направляющих зажимами по рис. 64, в
предпочтительнее, так как значительно облегчает выверку на-
правляющих специального профиля, показанного на рисунке.
Расчет направляющих производится для двух расчетных слу-
чаев (гл. I): работы лифта с номинальными грузами (первый
расчетный случай) и работы при посадке кабины на ловители
(второй расчетный случай). В большинстве лифтов определяющим
является работа направляющих при посадке кабины на ловители.
Для этого случая на рис. 66 и приведена расчетная схема направ-
ляющей с указанием действующих на нее нагрузок. Этими на-
грузками являются:
а) опорное давление башмака кабины //, из-за внецентренного
приложения нагрузки Qp от веса поднимаемого груза (рис. 30),
подсчитанное по формуле (27); эта нагрузка приложена в середине
опорной поверхности башмака на расстоянии е от центра тяжести
8* 115
сечения направляющей и создает изгиб и дополнительный крутя-
щий момент /И = Hte (рис. 66); при расчете направляющих
этим моментом обычно пренебрегают;
б) вертикальная нагрузка S на захваты ловителя, подсчиты-
ваемая по формуле
где Р3 — нагрузка на захват ловителя, которая определяется
по формулам (86) и (87);
р. — коэффициент трения между захватом и направляющей.
Эта нагрузка приложена также к середине захватов ловителей
и вызывает сжатие направляющей и ее изгиб моментом М = Se;
в) дополнительные температурные напряжения, которые воз-
никают из-за жесткого крепления направляющих.
Наибольшая величина температурных напряжений <Jt может
быть определена из предположения, что усилие в направляющих
при изменении температуры не может быть больше сил трения
между ними и прижимными планками, которые служат для креп-
ления направляющих.
= 2— ааН1,
где г0 — общее число болтов, кото-
рыми крепятся направляю-
щие, расположенных выше
рассматриваемого сечения;
f — площадь поперечного се-
чения одного болта в сл2;
о3 = 400-4-500 кгс/см2 (дан/см2) — напряжения в болте от его
затяжки;
= 0,15-4-0,20 — коэффициент трения между
направляющей и опррой;
F — площадь сечения направ-
ляющей в см2.
Для упрощения расчета направляющую обычно рассматривают
5
как разрезную балку с расчетным пролетом lp — -g-1 (/ — расстоя-
ние между креплениями направляющей — см. рис. 66).
При обычно принятых размерах кабин и расстояниях между
креплениями направляющих, наиболее опасным будет положение
опорного башмака посередине между опорами.
Помимо прочности, при этом расчете необходима проверка на-
правляющих на жесткость. Допустимый прогиб направляющей
под действием сил Нх и S принимается не более — — рас-
стояния между местами ее креплений. Гибкость X направляющих
116
не должна быть более обычно принятой для основных сжатых
стержней металлических конструкций А, < 120.
В грузовых лифтах, загружаемых тележками, необходима до-
полнительная проверка прочности направляющих при вкатывании
в кабину тележки при ее наиболее невыгодном (в отношении
прочности направляющих) положении.
$ 4. Буферные устройства
Буферные устройства размещаются в прямке шахты на попереч-
ной балке, укрепляемой на ее фундаменте, и служат для остановки
кабины при переходе ее за нижнее рабочее положение. В качестве
Рис. 67. Схемы упора и пружинных буферов лифтов
таких устройств применяют жесткие упоры, пружинные и масля-
ные буфера.
Тип буферного устройства зависит от тормозного пути, который
должна пройти кабина с тем, чтобы ее замедление при посадке
на буфера не выходило за пределы, допустимые по условиям без-
опасности.
По правилам Госгортехнадзора жесткие упоры допускаются
при скоростях движения кабины не более 0,5 л/сек; при скорости
0,5—0,75 м/сек на упоры должны быть установлены упругие (ре-
зиновые) прокладки (рис. 67, а), при скоростях 0,75—1 м/сек при-
меняются пружинные буфера. На рис. 67, б и 67, в показаны две
конструкции таких буферов. В конструкции на рис. 67, б пру-
жина, свитая из круглой проволоки, надета на оправку, укрепляе-
мую болтами к поперечной раме, установленной в приямке. На
рис. 67, в пружина помещена в стакан и сверху закрыта упорной
шайбой с упругой прокладкой, дополнительно смягчающей удар
при посадке кабины на буфер. Стакан является направляющей
пружины и увеличивает ее устойчивость при сжатии.
117
Посадка кабины на пружинные буфера сопровождается обрат-
ным толчком, опасность которого увеличивается с возрастанием
скорости кабины. Одновременно с возрастанием скорости возра-
стает и длина пружины, которая по условиям ее устойчивости
не может быть назначена слишком большой. В связи с этим при
скорости кабины свыше 1 м!сек в лифтах должны устанавливаться
масляные буфера.
В масляных буферах торможение кабины производится за счет
гидравлических сопротивлений, возникающих при перетекании
масла из одной рабочей полости буфера в другую. Две схемы,
поясняющие работу таких буферов, приведены на рис. 68. Буфер
на рис. 68, а состоит из цилиндра 5, в который входит полый плун-
жер 3; в дне этого плунжера имеется круглое отверстие 7, через
которое проходит шток 6. Цилиндр 5 заполнен маслом. При под-
нятом плунжере масло поступает из запасного резервуара 4 через
отверстия 8 и при его опускании протекает через отверстие 7
во внутреннюю полость плунжера 3.
Профиль штока 6 обычно подбирается таким образом, чтобы
тормозное усилие буфера, которое будет зависеть от сопротивлений
при протекании масла через отверстие 7 на всем пути плунжера
оставалось постоянным. В исходное положение плунжер возвра-
щается пружиной 10, пружина одним концом упирается в шайбу 9,
укрепленную на конце штока 6, вторым — в днище плун-
жера.
Гидравлический удар, который может возникнуть при внезап-
ном приложении нагрузки от движущейся кабины, создает опас-
ность поломки буфера. Чтобы уменьшить эту опасность, на плун-
жере установлен дополнительный пружинный буфер; он состоит
из штока 1, опирающегося на пружину 2. В начальный момент
нагрузка воспринимается этим буфером. Опасность гидравличе-
ского удара уменьшается также тем, что в начальном положении
плунжера полость цилиндра 5 остается связанной с резервуаром 4
через отверстия 8 (в дальнейшем они перекрываются поршнем)
и в начальный момент удара масло еще может дополнительно вы-
текать в резервуар 4.
В буфере, схема которого приведена на рис. 68, б тормозное
усилие возникает при движении плунжера 2 за счет гидравличе-
ских сопротивлений при перетекании масла через отверстия в стен-
ках цилиндра 3, расположенных по всей его высоте, в запасной
резервуар 4. Как и в ранее рассмотренной конструкции масляного
буфера, число отверстий, расположенных по всей высоте цилиндра,
подбирается таким образом, чтобы тормозное усилие буфера оста-
валось постоянным на всем протяжении тормозного пути буфера.
Дополнительное пружинное устройство 1 этого буфера аналогично
рассмотренному выше.
Под кабину и противовес обычно ставят по одному гидравли-
ческому буферу, которые располагают по центру кабины.
118
Рис. 68. Схемы гидравлических буферов
119
В пружинных буферах усилие пружины возрастает по мере
ее сжатия, поэтому замедление кабины при посадке на буфер пере-
менно по величине и достигает максимума при сжатом буфере.
При расчете этих буферов определяют расчетную нагрузку Рр
и необходимую жесткость пружины С.
В лифтах с лебедками с канатоведущими шкивами при опре-
делении нагрузки Рр следует учитывать влияние противовеса,
которое будет сказываться до момента, когда замедление кабины
будет больше, чем ускорение силы тяжести g. В соответствии с этим
при расчете пружинных буферов следует рассматривать два пери-
ода их работы: первый при а < g и второй при а > g.
Нагрузка Р на буфер от веса груза Qt и веса кабины G в тече-
ние первого периода определится из условия
/> = №+0(1 +^)-^(1-Л-),
где а — замедление;
Gn — вес противовеса.
Коэффициент у в этой формуле равен К
у ~
где р0 — расчетный коэффициент трения на канатоведущем шкиве
(см. гл. IV);
а — угол обхвата канатоведущего шкива.
В начальный момент посадки кабины на буфер, при а = О
Л = № + 0)-^;
в конце рассматриваемого периода, при а — g
Р2 = 2 (& + G).
В последующий второй период (при а > g) нагрузка на буфер
будет складываться только из веса груза, веса кабины и их сил
инерции и достигает максимума в конце этого периода. Величина
этого максимума определяется дополнительным условием, чтобы
замедление при посадке кабины на буфер было не более допускае-
мого по правилам Госгортехнадзора (см. гл. I). Соответственно
этому для конца третьего периода имеем
P3 = (Q1 + G)(1 +^)- (100)
При расчете путей, проходимых кабиной при сжатии буфера на-
грузкой Р, и соответственно необходимой жесткости пружины
имеем для первого периода работы
2 2
^2^^+^ + G(101)
120
где fi — начальная скорость кабины при посадке на буфер;
у2 — скорость движения кабины в конце периода;
Рх и Р2 — нагрузки на буфер в начале и конце рассматривае-
мого периода, найденные выше;
fx — сжатие пружины при возрастании нагрузки от
Рх ДО Р2-
Для второго периода (при а > g) и начальной скорости для
этого периода v2
9
^9^0 Р I D
4a- + (q1 + G) = ^p-/2.
(102)
Конечная скорость движения кабины равна нулю.
В формулах (101) и (102) через и т2 обозначены расчетные
(для каждого периода) массы кабины груза и противовеса, при-
веденные к кабине,
Величины сжатия пружины /у и [2
: Р? — Р1 . ( _ Р% — Р 2
1 - С , h- С >
где С — жесткость пружины.
Подставив эти величины в формулы (101) и (102) и исключив
из них t>2, определяем необходимую величину С
0 = -^- [(Q1 + G) Ш + -у] • (103)
Наибольшее замедление при посадке на пружинный буфер
имеет место при минимальном весе поднимаемого груза, равном
весу одного пассажира. В соответствии с этим Qi = 70 кгс (дан).
За начальную скорость Vx при данном расчете может быть принята
номинальная скорость движения кабины у.
Величину замедления ал при полной нагрузке кабины опре-
деляем из условия
[(1,1Q + С) (i)’ + i [(Q, И) ,
где (1,1 Q + G) — наибольшая расчетная нагрузка при испытании
буферов по правилам Госгортехнадзора. Откуда
1 / Q, + G 1 / 70 4- G ,, п ..
ап — °тах У 1JQ + Q — °тах |/ (^4)
121
Расчетная нагрузка на пружину при действии усилия
(1,1Q + G)
= +т) k*' (105)
где Z6 — число буферов (обычно два);
kH = 1,14-1,2 — коэффициент неравномерности распределе-
ния нагрузки между буферами.
Необходимая величина сжатия пружины
t
I с.
(106)
При расчете буферов лифтов с барабанными лебедками имеем
-(Q1 + (Qx + G) / = = (Qx + G) (1
Здесь — наибольшее усилие в пружине к концу рабочего
хода буфера;
f — рабочий ход буфера (величина сжатия пружины).
Откуда
г;2
f = —T^—
/ а пах __
§
Необходимая жесткость пружины
С = —
С f ,
(107)
где, как и в предыдущем случае, Рг = Qi + G ='70 + G.
Как и в случае лебедок с канатоведущими шкивами, наиболь-
шее усилие на буфер, ход пружины и ускорение кабины при полной
нагрузке подсчитываются по формулам (105), (106) и (104).
В гидравлических буферах (рис. 68, а) путем соответствующего
подбора профиля штока может быть получано постоянное усилие
сжатия буфера Р. Вследствие большого хода плунжера влиянием
противовеса в начальный период посадки кабины на буфер (при
а < g) пренебрегаем. В этих условиях движение кабины может
быть принято равнозамедленным с предельной величиной
ния апах, которая для масляных буферов должна быть
9,81 м/сек2.
Расчетная нагрузка (при одном буфере)
Pp = (l,lQ + G)(1 +^l) = 2(1,1Q+G).
замедле-
не более
(Ю8)
Множитель 1,1 учитывает перегрузку кабины на 10% при
испытаниях буферов по правилам Госгортехнадзора.
122
Путь, проходимый кабиной при посадке на буфер при равно-
замедленном движении ее, будет равен
V2
s=
^Umax
Этот путь соответствует необходимому ходу плунжера. Как
и в предыдущих расчетах, v — номинальная скорость движения
кабины.
Необходимая площадь плунжера за вычетом отверстия
Рп = ~^> (Ю9)
Рж
где рж — рабочее давление жидкости в цилиндре (порядка 40—
70 кгс!см\ дан/см2).
Для буфера, приведенного на рис. 68, а, площадь перепускного
отверстия /о определяется из условия
(ПО)
В данном случае — опытный коэффициент, зависящий от
вязкости жидкости, залитой в буфер; для веретенного масла
= 0,007, для смеси глицерина с водой = 0,008, для керо-
сина = 0,0074-0,01.
Скорость движения плунжера на расстоянии х от исходного
положения определится из условия
X
V.. = V-.
v s
Необходимая площадь перепускного отверстия при этом по фор-
муле (НО) равна
откуда определяем необходимый диаметр штока
(111)
Здесь d0 и dx — диаметр отверстия в днище плунжера и диаметр
штока. По этой формуле может быть вычислен и построен необхо-
димый профиль штока.
$ 5. Машинные помещения
Подъемные механизмы всех лифтов, кроме малых грузовых, ус-
танавливаются в специальных закрытых помещениях. Размеры этих
помещений в данное время стандартизованы ГОСТом. В машинных
123
2500
Рис. 69. План машинного поме-
щения пассажирского лифта
помещениях кроме лебедок устанавливают также ограничи-
тели скорости и основную аппаратуру лифта (распределительный
щит, магнитные станции и т. п.). План такого помещения для пас-
сажирского лифта грузоподъемностью 500 кгс (сан) приведен на
рис 69.
Изнутри машинного помещения перед входом должно быть
оставлено свободное пространство размером 1000 х 1000 мм; да-
лее обычно размещается главный щит и магнитные станции, с ли-
цевой и задней стороны которых оставляются проходы шириной
не менее 750 мм (при ширине щита
менее 750 мм со стороны стенки
этот проход может быть уменьшен до
200 мм). Для обслуживания лебедки,
не менее, чем с двух сторон, в по-
мещении оставляют проходы шири-
ной не менее 500 мм. Высота машин-
ных помещений обычно принимается
в пределах от 2000 до 2400 мм и по
правилам Госгортехнадзора не может
быть менее 1800 мм. Желательно эту
высоту назначать таким образом,
чтобы в помещении можно было
установить подъемное приспособле-
ние для ремонта механизмов^^*
Аналогично устраиваются и ма-
шинные помещения при нижнем рас-
положении лебедки лифта. В этих
случаях над шахтой располагаются
только так называемые блочные помещения для направляющих
блоков, размеры которых назначаются с учетом проходов шири-
ной не менее 500 мм. Высота этих помещений также прини-
мается не менее 1800 мм.
Для подъемных механизмов малых грузовых лифтов устрой-
ство машинных помещений не обязательно, они могут быть только
закрыты кожухами. Аппаратура этих лифтов устанавливается
в закрытом шкафу. ——.
Стены машинных помещений, как правило, выполняются из
огнестойких материалов (кирпич, бетон и т. п.). Пол, который
служит и перекрытием шахты, чаще всего выполняется из бетона.
Лебедка обычно устанавливается на балки, опирающиеся на кон-
струкции шахты или здания. Чтобы уменьшить влияние шума,
машинные помещения пассажирских лифтов нельзя располагать
рядом с жилыми помещениями. Стены их дополнительно снаб-
жаются звукоизоляцией. ——
Для снижения шума также утяжеляют пол помещения, вес
которого рекомендуется принимать не менее 375 кгс/м? (дан/м-).
Балки перекрытий и раму лебедки в этих случаях устанавливают на
124
специальные звукоизолирующие прокладки из пробки, резины и т. п.
"Для прохода канатов в перекрытиях устраивают отверстия,
размеры которых выбирают таким образом, чтобы между стенками
отверстия и канатом оставался зазор от 25 до 50 мм. Вокруг от-
верстия устанавливаются защитные козырьки высотой не менее
75 мм. Для уменьшения шума эти отверстия иногда закрывают
звукоизолирующими пробками.
Глава VII
СИСТЕМЫ УПРАВЛЕНИЯ ЛИФТАМИ
£ 1. Общие принципы работы систем управления
В зависимости от типа устройств, служащих для пуска и оста-
новки, управление лифтами может быть кнопочным или рычажным.
При рычажном управлении вкабине устанавливается пусковой
аппарат, рычаг которого имеет три положения: два крайние —
для движения кабины на подъем и спуск и среднее — нейтральное,
при котором двигатель выключен. При повороте рычага вклю-
чаются соответствующие реле пуска двигателя в требуемом напра-
влении движения кабины на подъем или спуск. Рычаг во время
движения кабины все время должен быть нажат лифтером; отпу-
щенный рычаг возвращается пружиной в нейтральное положе-
ние и лифт останавливается.
При этой системе управления на уровне этажной площадки
кабина останавливается лифтером, который в случае необходи-
мости производит окончательную ее подгонку к отметке пола этажа
путем дополнительных (регулировочных) включений двигателя.
Рычажное управление может быть выполнено только внутренним,
из кабины лифта. Для вызова кабины на этажи в ней устанавли-
ваются приборы сигнализации и нумератор, указывающий этаж,
к которому должна быть подана кабина. Возможность регули-
ровки положения кабины относительно пола этажа является
преимуществом рычажной системы управления, однако при этом
значительно возрастает число включений двигателя, что приво-
дит к более быстрому износу как двигателя, так и механизмов
лифта. Кроме того, на правильную установку кабины требуется
дополнительное время, что значительно снижает производитель-
ность лифта. Такое управление применяют в грузовых лифтах
небольшой производительности, в больничных лифтах, а также
оно встречается в некоторых старых пассажирских лифтах. В пас-
сажирских лифтах последних выпусков оно не применяется.
Наиболее распространенным для лифтов является кнопочное
управление, при котором пуск лифта производится нажатием
125
кнопки соответствующего этажа, остановка кабины на заданном
этаже происходит автоматически. При таком управлении исклю-
чена возможность подгонки кабины к полу этажа лифтером так,
как это делается при рычажном управлении, в связи с чем при-
ходится мириться с некоторой неточностью остановки ее. Это упра-
вление может быть наружным, с отдельного поста, внутренним, из
кабины, и из кабины с дополнительным вызовом ее на этажи.
По правилам Госгортехнадзора, наружное управление допу-
скается только в малых грузовых лифтах и грузовых лифтах без
проводника. В лифтах, обслуживающих более чем два этажа, оно
сосредоточивается на основном (погрузочном) этаже. Для связи
с другими этажами на посту управления устанавливается сигнали-
зация и нумератор, указывающий этаж, к которому должна быть
подана кабина. На этом же посту устанавливается световой ука-
затель, который включается при открытой двери шахты или ка-
бины. При обслуживании грузовым лифтом только двух этажей
на каждом из них должен быть установлен свой пусковой аппарат:
на нижнем этаже для пуска лифта на подъем, на верхнем — на
спуск.
Для небольших пассажирских лифтов грузоподъемностью 350—
500 кгс (дан), обслуживающих дома высотой 6—12 этажей, были
предложены две основные схемы управления — централизованное,
несколькими лифтами из одного поста (диспетчерское обслужи-
вание) и автоматическое, при котором пуск лифта производится
самим пассажиром, а его остановка на заданном этаже происходит
автоматически. Применение таких систем управления в этих усло-
виях целесообразно из-за малой загрузки лифта, что делает содер-
жание при нем специального лифтера нерентабельным.
По условиям безопасности централизованное управление при-
менимо в основном при работе лифта только на подъем пассажи-
ров с первого этажа на любой этаж здания. При этом управлении
пассажир при пуске лифта нажимает на панели кнопку, соответст-
вующую требуемому этажу, и включает двигатель, остановка лифта
на этом этаже происходит автоматически. Возврат кабины на пер-
вый этаж, а также остановка ее в аварийных случаях производится
с диспетчерского пункта. На этом пункте устанавливается дубли-
рующая аппаратура управления лифтом, в которую входят кнопки
вызова и остановки кабин и отключения управления лифтом;
там же устанавливается и система сигнализации о положении
кабины в шахте, направлении ее движения, положении дверей
шахты и кабины (открытые или закрытые) и т. п. Между кабинами
обслуживаемых лифтов и диспетчерским пунктом обязательна
громкоговорящая связь.
Централизованное управление позволяет до известной степени
контролировать пользование лифтом; в аварийных случаях пас-
сажиру может быть оказана необходимая помощь, однако при
этом управлении не может быть обеспечена полная безопасность
126
пользования лифтом, поскольку фактически отсутствует контроль
загрузки кабины. Кроме того, стоимость дополнительной аппара-
туры весьма высока и в ряде случаев превышает стоимость осталь-
ной части установки.
Более удобными в условиях жилых домов являются автомати-
ческие лифты, которые в данное время и получили широкое рас-
пространение. Безопасность пользования лифтом в этом случае
достигается применением блокирующих устройств, исключающих
возможность его пуска и работы в условиях, угрожающих безопас-
ности пассажиров. Возможность перегрузки этих лифтов исклю-
чается соответствующим подбором площади кабины (по наиболь-
шему заполнению).
Автоматические лифты обычно работают как на подъем, так
и на спуск пассажира. С этой целью для вызова кабины на этажи
на них устанавливаются дополнительные кнопки вызова, которые
отключаются контактами подвижного пола кабины при наличии
в ней пассажиров.
В более совершенных схемах управления применяется так
называемое собирательное управление, при котором в схему вво-
дится специальное регистрирующее устройство, позволяющее вы-
полнять при движении кабины все попутные вызовы. В наиболее
простых системах эти вызовы выполняются при движении кабины
только вниз, в более сложных системах (лифты высотных зданий)
при движении кабины вверх и вниз. Такие устройства позволяют
значительно сократить холостые пробеги кабины и одновременно
увеличивают удобство пользования лифтами за счет сокращения
времени ожидания кабины пассажиром.
Лифты общественных зданий обычно управляются лифтерами.
При нескольких лифтах, расположенных в одном месте, для увели-
чения общей производительности установки, применяют автомати-
ческое управление работой всех лифтов этой установки. Напри-
мер, при двух лифтах это осуществляется при помощи специаль-
ного реле, регулирующего взаимную работу их таким образом,
чтобы при движении кабины одного лифта вниз вторая кабина
работала на подъем. Переключение лифта с работы на подъем на
работу на спуск происходит автоматически. Для выполнения
попутных вызовов на каждом этаже имеются общие (для обоих
лифтов) кнопки вызова для движения вверх и вниз. Вызов выпол-
няется кабиной, двигающейся в данный момент в требуемом
направлении. Время ожидания кабины пассажиром при такой си-
стеме управления снижается до половины среднего времени од-
ного рейса. В случае необходимости (например, при работе в ноч-
ное время) лифты могут быть переведены на раздельную работу.
При автоматическом управлении группой из нескольких лиф-
тов, расположенных в одном месте, в схему управления вводят
панель автоматического расписания, которая обеспечивает согла-
сованную работу всех лифтов в заданном режиме. Этот режим
127
устанавливается в зависимости от интенсивности и направления
пассажиропотоков. Так, например, могут быть установлены три
режима: утренний, когда лифты в основном работают только на
подъем, дневной, соответствующий равномерной работе лифтов
в обоих направлениях на подъем и спуск и вечерний, при котором
лифты в основном работают на спуск.
В утреннем режиме установка настраивается так, чтобы ка-
бины отходили от нижнего этажа сразу после их заполнения; по-
путно могут выполняться промежуточные вызовы, но только на
подъём. После подъема до заданного этажа лифт автоматически
переключается на работу на спуск.
В дневном режиме кабины отходят от остановки нижнего этажа
равномерно вне зависимости от их заполнения, направление дви-
жения кабины также переключается автоматически после того,
как кабина прибыла на последний обслуживаемый этаж. Попут-
ные вызовы выполняются как на подъем так и на спуск ближайшей
кабиной, следующей в требуемом направлении. Эти вызовы про-
изводятся от общей панели, установленной на этаже, которая имеет
две кнопки «Подъем» и «Спуск»; в этих лифтах на этажах дополни-
тельно устанавливаются световые указатели движения кабины.
В вечернем режиме лифты работают только на спуск. Кабина
отходит от нижнего этажа сразу же после выхода из нее пассажи-
ров, переключение на подъем также происходит автоматически.
Как и при спаренных лифтах, в системе управления также пре-
дусматривается возможность перевода одного или ряда лифтов
на работу в индивидуальном режиме. Для возможности настройки
лифтов на заданный режим в вестибюле обычно устанавливается
специальная панель дежурного по вестибюлю.
£ 2. Аппаратура управления
7** К аппаратуре управления лифтом относятся контакторы, реле,
этажные переключатели, концевые и путевые выключатели, кон-
• такты и т. п. приборы пуска и блокировки лифта. Электрические
/ цепи лифта можно подразделить на две группы: цепь главного тока,
в которую включен двигатель, и цепь управления, в которую вклю-
I чается аппаратура, служащая для пуска и остановки двигателя,
\и основная часть аппаратуры защиты..
Цепи вспомогательного тока работают на переменном или по-
стоянном токе напряжением не выше 220 в. В первом случае цепь
управления подключается к сети непосредственно или через транс-
форматор, во втором — она получает питание через выпрямители..
На рис. 70 приведена схема включения односкоростного асин-
хронного двигателя с короткозамкнутым ротором. В этой схеме
ток проходит через главный рубильник, конденсаторный фильтр
(для защиты домовой сети от проникновения в нее радиопомех) и
через автоматический выключатель к контактам В и Н и далее
128
к клеммам статора двигателя. Пуск и остановка двигателя про-
изводятся при помощи четырех контакторов В и Н, последова-
тельно включенных в две фазы сети. Включение самих контакторов
при запуске двигателя производится при помощи дополнительных
реле, входящих в цепь управления.
При включении контакторов В к контактам Сх и С3 подклю-
чаются фазы А и С и двигатель вращается в направлении подъема
кабины. При включении
контакторов Н положение
фаз А и С меняется и со-
ответственно изменяется
направление вращения
двигателя. В цепь глав-
ного тока включен также
тормозной электромаг-
нит Т.
На рис. 71 приведена
схема включения двухско-
ростного двигателя. В дан-
ном случае в цепь глав-
ного тока включено 8 кон-
такторов, из которых че-
тыре В и Н служат для
переключения двигателя
с прямого хода на обрат-
ный и остальные — для
переключения обмоток при
изменении числа оборотов
двигателя (обмотки быст-
рого хода — Би медлен-
ного хода — М). При ра-
Рис. 70. Схема вклю-
чения односкоростного
асинхронного двига-
теля
Рис. 71. Схема
включения двух-
скоростного асин-
хронного двигателя
боте двигателя на подъем
кабины клемма быстроходной обмотки статора через контак-
торы Б и В подключена к фазе В, клемма С2 через контактор В
подключена к фазе А, клемма С3 через контактор Б — к фазе С.
При движении кабины вниз с номинальной скоростью положение
фаз А и В меняется и соответственно меняется направление вра-
щения двигателя. Перед остановкой кабины включаются кон-
такторы медленного хода М и выключаются контакторы Б,
отключая быстроходную обмотку двигателя. Переключение дви-
гателя на малое число оборотов в этой схеме предусмотрено
только при движении кабины на спуск.
Ниже приводится краткая характеристика аппаратуры, уста-
навливаемой в цепях главного тока и цепях управления.
Пусковые устройства лифтов в зависимости
от принятого типа управления выполняются кнопочными или
рычажными. Рычажный аппарат (рис. 72) состоит из корпуса 1,
9 Павлов 154
129
укрепляемого на стене кабины, внутри которого расположены
контакты прямого и обратного хода кабины. Переключение дви-
гателя производится рукояткой 2 при повороте ее на угол 35°
Рис. 72. Рычажный аппарат
управления
в ту или иную сторону в зависимости от направления движения
кабины. Ролик 3 служит для остановки кабины при переходе ее
за крайние положения. В этом случае он наезжает на упорную
линейку, установленную в шахте, и поворачивает рычаг и связан-
ную с ним рукоятку управления. При кнопочном управлении
на посту управления (в кабине или
на этаже) устанавливается панель
(кнопочная станция) с числом кно-
пок, соответствующим числу этажей.
На этой панели также имеется кноп-
ка «Стоп» для экстренной остановки
кабины и кнопка вызова обслужи-
ваемого персонала (в лифтах, упра-
вляемых из кабины). Кнопки после
подачи сигнала могут или сразу воз-
вращаться в исходное положение,
или удерживаются до выполнения
приказа в нажатом положении спе-
циальными магнитными устройст-
вами.
При скорости движения кабин
более 1 м!сек лифты должны также
иметь дополнительный кнопочный
аппарат для управления движением
кабины при ревизии шахты.
) Контакторы в рассмотренных выше схемах/включены
в цепь главного тока и служат для пуска и остановки двигателя, /
а также перемены направления его вращения при подъемен опуска-
нии кабины. В зависимости от рода тока цепи управления, эти
[контакторы выполняются для работы на постоянном или перемен-
ном токе.
На рис. 73 в виде примера приведена схема контактора по-
стоянного тока, поясняющая принцип работы устройств подоб-
ного типа. Этот контактор состоит из неподвижного и подвижного
контактов 1 и 2, включенных в главную цепь. Подвижный кон-
такт укреплен на конце якоря 6, который вращается около оси 7.
Катушка 5 контактора включена в цепь управления; при ее вклю-
чении сердечник 4 притягивает якорь 6 и замыкает контакты 1
и 2 главной цепи. Пружина 3 обеспечивает необходимое нажатие
контактов при включении контактора.
1_Реле устанавливаются в цепях управления для выполнения
разных-операций, связашГыХ'с перек-дючением-тгугКорёгулирую-
Щей—аштатгУгу ры лифт^ )По пртгнципу—работБГони пЪДОбны кон-
такторам, но имекхкЙенее мощные контакты, поскольку работают
130
при относительно слабом токе. В отличие от контакторов реле
могут иметь несколько контактов для одновременного переключе-
ния нескольких цепей. Они выполняются с нормально закрытыми
или нормально открытыми контактами. В первом случае при от-
сутствии тока контакт реле замкнут, во втором — разомкнут
и замыкается только при подаче тока в катушку реле. Имеются
также реле с выдержкой времени, выключение которых произво-
дится через определенный промежу-
ток времени. Это осуществляется
при помощи механических устройств
(по типу часовых механизмов) или
электрическим путем. Основная пус-
корегулирующая аппаратура лифта,
в том числе контакторы и реле, мон-
тируется на специальных щитах
(магнитных станциях), устанавли-
ваемых в машинных помещениях.
С тажные переключа-
тели при кнопочном управлении
лифтом служат для остановки каби-
ны на заданном этаже и переключе-
ния ее хода с прямого на обратный?
Чертеж, поясняющий принцип рабо~
ты такого переключателя, приведен
на рис. 74. Переключатель имеет две
пары контактов 1 и 2 прямого и
обратного хода кабины, помещенных
в корпус 3. Контакты включаются
роликом 6, помещенным на конце пере-
кидного рычага 4, на втором конце
которого находится ролик 5. На этот
Рис. 73. Схема контактора по-
стоянного тока
ролик нажимает отводка, укреплен-
ная на кабине, в момент, когда она проходит мимо этажной оста-
новки, которая перекидывает рычаг 4 и переключает контакты.
По аналогичному принципу работают и путевые переключатели.
Недостатком этажных переключателей с механическим приво-
дом является шум при ударе линейки кабины о ролик, что особен-
но нежелательно в пассажирских лифтах. В связи с этим в послед-
нее время нашли широкое применение индуктивные датчики по
типу, показанному на рис. 75. Такой датчик состоит из V-образ-
ного сердечника, на который намотана обмотка, помещенная
в корпусе 1. Последовательно с этой обмоткой включена обмотка
катушки реле управления двигателем. Реле остается включенным
до момента, когда сердечник 3 не будет замкнут скобой 2, при под-
ходе кабины к заданной этажной остановке. После этого возра-
стает индуктивное сопротивление обмотки датчика, сила тока
в цепи уменьшается и реле выключается.
9*
131
Контакты (выключатели) широко используются в цепях
управления для разного рода блокировок. Обычно они выпол-
няются в виде отдельного узла. Чертеж такого контакта, приме-
няемого для контроля закрывания дверей, в виде примера, при-
веден на рис. 76. Он состоит из корпуса 3, в котором передви-
гается штифт 2, с контактным кольцом /, отжимаемый пружи-
Рис. 74. Этажный переключатель
ной 4. Это кольцо при опускании штифта замыкает контакт 5.
По правилам Госгортехнадзора контактами должны быть обо-
рудованы следующие механизмы и узлы лифта:
а) двери шахт и кабин (за исключением кабин малых грузовых
лифтов); при многостворчатых дверях контакты устанавливаются
на каждой створке двери;
б) замки шахт для контроля их запирания;
в) ловители или ограничители скорости для выключения дви-
гателя при срабатывании ловителей;
г) подвески подъемных канатов, с которыми не связан меха-
низм включения ловителей, для остановки двигателя при обрыве
или ослаблении хотя бы одного из канатов;
д) натяжные устройства уравновешивающих канатов;
е) двери приямков и шахт.
132
Контактами также снабжаются и кабины с подвижным полом
при наличии на этажах кнопок вызова кабины.
Концевые выключатели служат для остановки кабины при
переходе ее за крайние положения. У лифтов с канатоведущими
шкивами они могут включаться в цепь главного тока или в цепь
управления; в лифтах с бара-
банными лебедками они
должны включаться только
в цепь главного тока. При
лебедках с канатоведущими
Рис. 75. Индуктивный датчик
Рис. 76. Дверной контакт
шкивами обычно устанавливают рычажные выключатели, в лиф-
тах с барабанными лебедками могут применяться как. рычаж-
ные, так и шпиндельные выключатели.
$ 3. Цепи управления
Вопросы о работе схем управления лифтами рассматриваются
в специальной литературе, посвященной электрооборудованию
подъемно-транспортных машин, поэтому мы ограничимся лишь
кратким разбором трех наиболее простых схем цепей управления
лифтами.
На рис. 77 приведена схема цепи управления грузового лифта
с рычажным управлением. В этой схеме ток от главной цепи дви-
гателя (контакт 1) проходит через предохранитель цепи управле-
ния П2, дверные контакты кабины ДКК, контакт ловителя ЛК,
рычажный аппарат управления РУ с двумя парами контактов В
и Н, соответствующих движению кабины вверх и вниз. При за-
мыкании контактов В ток поступает в катушку контактора В,
который включает двигатель на подъем, и далее через защитный
нормально замкнутый контакт БВ проходит к дверным контактам
шахтных дверей ДКШ, предохранителю П1 и к клемме 2. Конце-
вой выключатель КВ в данном случае включен в главную цепь и
одновременно с этой цепью размыкает цепь управления лифтом.
133
На рис. 78 показана схема управления пассажирского лифта
с кнопочным управлением. В данном случае ток от предохрани-
теля /7, проходит через контакты дверей шахт ДКШ, кнопку
«Стоп» (КС) для экстренной остановки кабины в аварийных слу-
чаях, дверной контакт кабины ДКК и включенный параллельно
ему подпольный контакт ПК, которым шунтируется контакт
двери ДКК при отсутствии в кабине пассажиров. Это позволяет
производить подъем кабины в таких случаях при открытых две-
рях. Далее ток проходит через контакт ловителя КЛ, блок-
контакты В или Н и поступает в обмотки В или И контакторов
главной цепи. Эти контакторы включаются из кабины нажатием
кнопки‘приказа КП соответствующего этажа. Выключение дви-
гателя при подходе кабины к заданному этажу производится
этажным переключателем ЭП. Переключатели верхних этажей
(1-го и 5-го) имеют по одной паре контактов, остальные — по
две пары.
При подъеме кабины, например после нажатия кнопки 4КП
четвертого этажа, ток проходит через катушку контактора В,
который включает двигатель в направлении подъема. Далее,
через контакты этажного переключателя 4ЭП он поступает в об-
мотку этажного реле четвертого этажа и до срабатывания этого
реле через кнопку 4КП и второй подпольный контакт кабины ПК
поступает к контакту зависимости КЗ.
От этого контакта ток поступает в защитный блок-контакт 24
и далее через предохранитель Д2 — к фазе А. Контакт ПК
отключает панель кнопок вызова кабины в момент, когда в кабине
находится пассажир.
После срабатывания этажного реле ток поступает непосред-
ственно через его контакты 4ЭР (показаны на правой части
схемы) к фазе А, минуя кнопку 4КП. Одновременно с включением
контактора В срабатывает контакт зависимости КЗ и отключает
кнопки управления до выполнения выданного приказа. Перемена
134
приказа в процессе подъема кабины, не считая аварийной оста-
новки кнопкой КС, в данном случае невозможна.
При проходе кабины через этажи установленный на ней упор
перекидывает рычаги этажных переключателей в положение ра-
боты на спуск. При подходе кабины к четвертому этажу в момент
перекидывания рычага цепь размыкается и двигатель останавли-
вается. При выключе-
нии контактора В, вклю-
ченного в цепь двига-
теля, контакт зависи-
мости КЗ вновь вклю-
чает панель кнопок
управления.
При вызове кабины
на первый этаж нажима-
ют кнопку вызова 1КП,
расположенную на пло-
щадке этого этажа. При
этом ток проходит через
катушку контактора Я,
контакты этажного пе-
реключателя 1ЭП, об-
мотку этажного реле
1ЭР, подпольный кон-
такт ПК, контакт за-
висимости КЗ, реле 24
и через предохранитель
Я 2 поступает обратно
в сеть. Дальнейшая ра-
бота схемы та же, что
и при подъеме кабины.
На рис. 79 приве-
Рис. 78. Электрическая схема кнопочного управ-
ления пассажирского лифта
дена схема цепи упра-
вления автоматичес-
кого лифта с кнопочным
управлением и вызовом пустой кабины на этажи. В соответ-
ствии с этим лифт имеет двойную систему кнопок — наружную
(кнопки вызова КВ) для вызова кабины на этажи и внутреннюю
(кнопки приказов КП), для управления из кабины. В связи
с этим в схему введено дополнительное реле РПК, которое от-
ключает наружную цепь вызова кабины, когда в ней находится
пассажир.
При вызове пустой кабины, например на площадку шестого
этажа, нажимают на расположенную на этом этаже кнопку вы-
зова 6КВ. При этом ток проходит через предохранитель Яъ
выключатель ВБ, контакты дверей шахты ДКШ, кнопку «Стоп»,
контакты ловителей, подпольный контакт 2ПК или контакт
135
дверей кабины ДКК- Далее через обмотку контактора В ток про-
ходит через обмотку этажного реле 6ЭР, кнопку 6КВ, подполь-
ный контакт 1ПК, нормально замкнутый контакт реле подполь-
Рис. 79. Электрическая схема кнопочного управления пассажир-
ского лифта с вызовом кабины с этажных площадок
ного контакта РПК, реле выдержки РВ и далее через предо-
хранитель П2 в наружную цепь. При срабатывании этажного
реле 6ЭР замыкаются контакты этого реле 6ЭР (правые по схеме)
и после этого через предохранитель П2 цепь замыкается.
136
При входе пассажира в кабину подпольный контакт 1ПК
отключает наружную панель кнопок вызова и включает панель
приказов, расположенную в кабине. Дальнейший подъем на за-
данный этаж производится нажатием кнопки приказов соответ-
ствующего этажа. При этом ток проходит через соответствующие
контакты, катушку контактора В или Н, этажный перключатель,
обмотку и контакты этажного реле и поступает обратно в цепь,
аналогично ранее рассмотренным схемам.
В схему введен дополнительный линейный контактор Л,
размыкающий цепь двигателя (контакты В или И) при неплотно
закрытых замках дверей шахт (контакты ДЗ).
Кроме цепей управления, в электрические схемы лифтов вхо-
дят цепи сигнализации и освещения.
По правилам Госгортехнадзора управление лифтов должно
автоматически восстанавливаться после каждой, в том случае
и вынужденной, остановки лифта, за исключением случаев, когда
это происходит из-за срабатывания устройств с несамовозврат-
ными контактами (например, концевых выключателей). В случае,
если путь кабины до ближайшего этажа окажется слишком мал,
чтобы затормозить ее при нормально допустимых ускорениях,
при повторном пуске она должна быть подана к следующему
этажу.
Раздел второй
ПОДЪЕМНИКИ. МНОГОКАБИННЫЕ ЛИФТЫ
Глава I
МНОГОКАБИННЫЕ ЛИФТЫ
$ 1. Общая характеристика
Многокабинные лифты применяются для обслуживания посто-
янных и достаточно равномерных пассажиропотоков при неболь-
ших высотах подъема, например для сообщения между этажами
общественных зданий в дневные часы работы. В этих случаях они
имеют существенные преимущества перед однокабинными лифтами,
так как при них резко сокращается время ожидания кабины.
В отличие от однокабинных лифтов, работающих при повторно-
кратковременном режиме, многокабинные лифты являются подъ-
емными машинами непрерывного действия. Они служат только
для подъема людей и также должны отвечать требованиям Гос-
гортехнадзора по устройству и эксплуатации лифтов.
На рис. 80 приведена принципиальная схема такого
лифта.
Он состоит из двух бесконечных непрерывно движущихся це-
пей 2, к которым шарнирно подвешены кабины 3. Восходящий
ряд кабин используется для подъема пассажиров, нисходящий—
для их опускания. Цепи огибают две верхние натяжные и две ниж-
ние приводные звездочки 1 и 4. При непрерывном движении цепи
не исключена вероятность проезда пассажира за верхнюю или
нижнюю остановки; поэтому по условиям безопасности при оги-
бании звездочек кабины должны сохранять вертикальное поло-
жение.
С этой целью они подвешиваются цепям шарнирно, каж-
дая на двух штырях 8, расположенных по углам кабины по диаго-
нали и таким образом могут поворачиваться при огибании звездо-
чек цепью. Оси этих звездочек смещены одна относительно дру-
гой на ширину кабины. При равных скоростях движения обеих
цепей кабины при огибании звездочки будут перемещаться парал-
лельно самим себе.
На вертикальных участках пути кабины движутся в вертикаль-
ных направляющих 7 и 9, укрепленных по бокам и в середине
шахты. В моменты, когда цепь проходит по нижним звездочкам,
138
кабина направляется горизонтальным направляющим брусом 5,
на который при этом надвигается нижняя часть ползуна 6 кабины.
Для уменьшения шума при работе лифта обычно приводными
делаются нижние звездочки; это также облегчает монтаж и после-
дующее обслуживание лифта. Верхние звездочки делаются натяж-
ными.
Наибольшие скорости движения цепей многокабинных подъем-
ников и емкость их кабин определяются условиями безопасного
входа и выхода пассажиров в кабину. При этом как и в однока-
бинных лифтах, следует учитывать разнообразный возрастной
состав и физическое состояние пассажиров. Как показала практи-
ка, безопасная посадка и высадка пассажиров в лифтах этого
типа возможна при скоростях движения кабин не свыше 0,3 м/сек.
139
Эта скорость как предельная и принята правилами Госгортех-
надзора. Обычно же принимают несколько меньшие скорости —
порядка 0,2—0,25 м!сек.
Наибольшая вместимость кабин этих лифтов определяется из
условий безопасной посадки пассажиров и по правилам Госгор-
технадзора должна быть не более, чем на два пассажира — по
числу поручней, которые должны быть установлены в кабине
с каждой стороны от входа в нее.
Предельная теоретическая производительность многокабин-
ного лифта при наибольшей допустимой скорости и = 0,3 м/сек.,
вместимости кабины, равной двум пассажирам, и коэффициенте
использования лифта, равном единице, составляет 720 человек
в час; практически она значительно меньше и составляет около
300—400 человек в час. Эти лифты изготовляются на высоту
подъема до 45 м, обычно же они предназначаются для обслужива-
ния малоэтажных (порядка 4—6 этажей) зданий, так как при
большой высоте сильно возрастает время, требующееся на подъем
пассажиров на верхние этажи. Кроме того, при больших высотах
подъема значительно возрастает стои-
мость лифта, которая в отличие от
однокабинных лифтов зависит от вы-
соты подъема. Поэтому применение
многокабинных лифтов при больших
высотах подъема экономически невы-
годно.
$ 2. Механизмы
многокабинных лифтов
Основными узлами многокабин-
ного лифта являются: привод, на-
тяжное устройство, кабины, цепи и
шахта с установленными в ней на-
правляющими. Схема приводного
механизма дана на рис. 81. В этом
механизме вращение от электродви-
гателя 2 через соединительную муфту
передается на червячный редуктор 1 и далее на две шестерни 5,
установленные на выходном валу этого редуктора. Эти шестерни
сцепляются с колесами, связанными с приводными звездочками 4.
Во избежание обратного хода и разгона механизма при случай-
ных остановках, который может произойти при неодинаковой
нагрузке обеих ветвей цепи, в механизме установлен колодоч-
ный электромагнитный тормоз 3 между двигателем и редукто-
ром. Как и в однокабинных лифтах, этот тормоз включен в цепь
двигателя и при его выключении автоматически затормаживает
механизм.
140
Рис. 81. Схема привода много-
кабинного лифта
Для привода многокабинных лифтов обычно устанавливают
асинхронные двигатели. По соображениям простоты управления
и надежности наиболее целесообразно применять двигатели с ко-
роткозамкнутым якорем; в некоторых случаях применяют двига-
тели с контактными кольцами. Пусковые устройства двигателя
помещаются на одной из этажных площадок. В цепь управления
обычно вводятся кнопки «Стоп», устанавливаемые на каждой
этажной площадке, обслуживаемой лифтом.
На рис. 82 приведена схема натяжного устройства. Оно со-
стоит из вала /, на который насажена верхняя (ведомая) звез-
дочка 2. Вал вращается во втулках ползуна 5, передвигающегося
по направляющим станины 5. Ползун передвигается винтами 4,
с помощью которых и производится регулировка натяжения цепи.
В многокабинных лифтах в качестве тягового органа приме-
няют пластинчатые цепи по типу, показанному на рис. 83. Такая
цепь состоит из утолщенного среднего звена 1 и двух боковых
звеньев 2, связанных между собой штырями 3, концы которых
зашплинтовываются. Пластины этих цепей изготовляют из стали
марок 45—50, валики — из сталей 20—40 с обязательной термо-
обработкой. Для этих цепей целесообразно применять также
легированные стали.
141
Для уменьшения веса цепи ее шаг желательно назначать воз
можно большим; однако при этом возрастают динамические
нагрузки на цепь из-за колебаний ее скорости при набегании на
звездочки. Обычно этот шаг принимают в пределах 150—200 мм.
В местах подвески кабин цепи имеют втулки, в которые входят
штыри, укрепляемые на рамах кабин.
Кабина лифта состоит из каркаса 2 (рис. 84), сваренного из
уголков, к которому приварены уголки 3, выполняющие в данном
случае роль башмаков и передвигающиеся по направляющим.
Эти уголки устанавливаются вдоль всей кабины и, опускаясь
Рис. 83. Пластинчатая цепь многокабинного
лифта
ниже, образуют петлю,
которая находит на ниж-
ний направляющий брус
при проходе кабины через
нижние звездочки. К верх-
ним углам каркаса по
диагонали привариваются
кронштейны 4 штырей, на
которых к цепям подвеши-
вается кабина. Для усиле-
ния пола к низу каркаса
крестообразно привариваются уголки 7.
Площадь пола кабины, рассчитанной на одного пассажира,
должна быть не менее 800 X 800 мм и на двух-пассажиров не ме-
нее 1000 X 1000 мм, высота кабины в свету не менее 2000 мм.
Ограждения устанавливаются с трех сторон кабины по всей
ее высоте и выполняются из металла или дерева (возможна за-
мена пластиками). На боковых стенках ограждений у входа в ка-
бину установлены вертикальные поручни 8 на высоте 1100 мм,
считая от пола до середины поручней, их длина должна быть
не менее 275 мм.
Во избежание защемления пассажира между порогом шахты
и порогом кабины в крыше кабины делается вырез, который,
чтобы компенсировать уменьшение жесткости каркаса, окантован
уголком 6. Над вырезом дополнительно устанавливается предо-
хранительная сетка 1. С этой же целью к передней кромке пола
во всю ширину кабины на петлях крепится откидной клапан 5,
который должен откидываться не менее чем на 90°. Его ширина
выбирается таким образом, чтобы между кромкой клапана в от-
кинутом положении и порогом шахты имелся зазор не менее
200 мм. Кроме того, кромку потолка кабины располагают на
расстоянии не менее 200 мм от фасадной стенки кабины. Клапаны
связываются с блокировочными контактами, включенными в
цепь двигателя и служащими для остановки лифта при подня-
том клапане.
Такие же клапаны устанавливаются у порогов этажных поса-
дочных площадок; они должны поворачиваться в случае необхо-
142
димости на угол не менее 75 и не более 90° и автоматически воз-
вращаться в исходное положение. Их ширина выбирается таким
образом, чтобы при поднятом клапане зазор между его верхней
кромкой и порогом кабины был не менее 250 мм.
Промежутки между кабинами со стороны шахты закрываются
подвижными щитами (фартуками), прикрепляемыми к кабине.
Рис. 84. Кабина многокабинного лифта
Для прохода кабин через верхние звездочки эти щиты выполняются
из двух частей, перекрывающих одна другую. Верхняя часть
щита подвешивается к клапану пола кабины по схеме, приведен-
ной на рис. 85. В данном случае верхняя часть щита 1 шарнирно
подвешена к откидному клапану 4 пола кабины и дополнительно
связана со стойкой 3 рычагом 2. При откидывании клапана 4 щит
поднимается вместе с ним, оставаясь в вертикальном положении.
143
По правилам Госгортехнадзора расстояние между опущенным
в рабочее положение щитом и стенками шахты должно быть
равно 20 мм.
Обе ветви лифта, работающие на подъем и спуск помещаются
в общей шахте, которая со стороны входа в кабины имеет открытый
проем с установленной посередине стойкой для разделения вос-
ходящей и нисходящей ветвей лифта. С остальных трех сторон
шахта должна иметь сплошные ограждения. Вход в шахту должен
быть огражден по всей высоте на ширину 230 мм. Для удобства
входа и выхода пассажиров к ограждениям крепятся поручни
Рис. 85. Схема уста-
новки ограждений у
кабии
длиной не менее 275 мм, устанавливаемые
на той же высоте, что и в кабине. Ширина
проемов в наружной стенке шахты прини-
мается равной ширине кабины, высота по
правилам Госгортехнадзора должна быть не
менее 2600 и не более 3000 мм. Минимум
этой высоты определяется условием, чтобы
пассажир успел войти в кабину без риска
быть защемленным между порогом кабины и
верхней балкой дверного проема.
Верхняя часть шахты в месте перехода
кабин с одной ветви на другую также
должна быть ограждена щитами. Чтобы
исключить возможность несчастных слу-
чаев, наружный щит этого ограждения со
стороны входа в кабину также делается под-
вижным и связывается с контактом, останавливающим лифт при
нажатии на него.
В шахте устанавливаются вертикальные направляющие и го-
ризонтальный брус для направления кабины, а также направляю-
щие для тяговых цепей.
Вертикальные направляющие кабин многокабинных лифтов
обычно выполняют из дерева. Для прохода кабины через верхние
звездочки внутренние направляющие 9 (рис. 80) в верхней части
делаются более короткими и закругляются; эти направляющие
крепятся к поперечным балкам, заделываемым в стенки шахты.
К стенкам шахты также крепится нижний направляющий брус 5,
служащий для направления кабин при огибании нижних звез-
дочек.
Направляющие устанавливаются таким образом, чтобы в мо-
мент выхода из них кабины при огибании звездочки вторая, впе-
реди идущая, кабина вошла бы в свои направляющие.
Направляющие для цепей выполняются из швеллеров, внутри
которых (между полками) помещается цепь. На нижних звездоч-
ках также устанавливаются специальные направляющие шины.
Благодаря этому при обрыве цепи она остается в направляющих
и звенья, опираясь одно на другое, образуют жесткую опору ка-
144
бин. Это исключает необходимость в устройстве ловителей, которые
в этих лифтах не применяются.
Смазка и осмотр направляющих обычно производятся через
вырез в крыше кабины, в некоторых случаях в стенке одной из
кабин делаются окна, закрываемые крышками.
$ 3. Принципы расчета
Производительность многокабинного лифта может быть опре-
делена по формуле
А = 3600 2<р, (112)
где v — скорость движения цепи в м!сек\
tK — шаг кабин в м (обычно tK = 3,84-4,5 .я);
г — емкость кабины (число перевозимых пассажиров);
Ф — коэффициент, учитывающий неполную загрузку кабин
лифта (обычно ф = 0,54-0,7).
Мощность двигателя определяется из условия
где Р — суммарное окружное усилие на приводных звездочках
в кгс (дан);
ц — коэффициент полезного действия привода (редуктора и
шестерен); ц = 0,654-0,75 в зависимости от числа за-
ходов червяка.
Суммарное окружное усилие на звездочках
Р = (1,1-4-1,15)-^- pztp, (114)
г к
где р = 70 кгс (дан) — вес одного пассажира;
L — высота подъема (расстояние между первым и последним
этажами) в м.
Множитель (1,14-1,15) учитывает дополнительные потери в на-
правляющих звездочках и т. п.
Коэффициент ф зависит от условий работы лифта. При подсчете
мощности следует принимать его повышенные значения в преде-
лах 0,7—0,8. Необходимо иметь в виду, что в зависимости от на-
правления пассажиропотока двигатель может работать попере-
менно то в рабочем, то в тормозном режиме.
Должна быть также произведена проверка возможности работы
двигателя с кратковременной перегрузкой при одной полностью
загруженной и второй ненагруженной ветви. Такая работа, в част-
ности, имеет место при ежегодных испытаниях лифта по правилам
Госгортехнадзора.
10 Павлов 154 145
Ввиду непрерывной работы лифта расчет ускорений при пуске,
а также проверка времени пуска не являются необходимыми.
Диаметры звездочек (приводных и направляющих) опреде-
ляются из условия (рис. 86)
D = b + а,
где b — расстояние между осями штырей, на которых подвешена
кабина;
а — расстояние между центрами ближайших штырей кабины
на соседних ветвях лифта.
Величины а и b определяются конструктивно.
Расстояние между центрами звездочек Ао = Ь.
Наименьший шаг кабин определяется исходя из возможности
их взаимного перемещения при проходе
по звездочкам (рис. 86),
tK = h + ^Dl-^- + h0, (115)
Рис. 86. Схема к опреде-
лению шага кабин много-
кабинного лифта
где п — наименьшее расстояние от оси
звездочки до низа кабины в мо-
мент встречи соседних кабин
(рис. 86);
а — угол поворота звездочки в момент
встречи кабин в град.
hn — наименьший зазор между низом
кабины и крышей предыдущей
кабины. '
Согласно рис. 86, размер h должен
быть равен
h-H------sin а-
В этой формуле
Н — габаритная высота кабины.
Величина угла а может быть определена по формуле
Наибольшая расчетная нагрузка на цепь S определяется при
полностью загруженных кабинах, т. е. при <р = 1,
S - (1,05 н-1,1) (уз +-^7 G), (116)
где q — вес 1 м цепи (q — 15-е-20 кгс, сач);
L3 — расстояние между осями верхних и нижних звездочек
в м;
G — вес кабины с грузом в кгс (дан).
146
Вес G определяется из условия
G = Go 4- ра.
В данном случае Go — вес пустой кабины: Go 75 кгс (дан) при
одноместной и Go = 120-4-150 кгс (дан) — при двухместной каби-
нах;
р — вес в кгс (дан) одного пассажира.
Разрывная нагрузка цепи
= (П7)
где пк = 10 — наименьший запас прочности, допускаемый по
правилам Госгортехнадзора.
Число зубьев звездочки при выбранном шаге цепи и заданном
диаметре звездочки определяется из условия
arc sin-^y
Для того чтобы снизить динамические нагрузки и обеспечить
более плавный ход цепи, число зубьев следует выбирать не менее 17.
При расчете деталей на прочность следует иметь в виду три
возможных расчетных случая: 1) нормальная работа при величи-
нах <р = 0,54-0,7; 2) предельный случай заедания ведомой ветви
кабины; 3) одновременная нагрузка обеих ветвей лифта грузом на
50% большим номинальной грузоподъемности при инспекторских
испытаниях по правилам Госгортехнадзора. Расчет по первому
случаю производится на усталостную прочность, по второму и
третьему случаям — на статическую прочность, при минимальных
запасах прочности.
Тормоз должен быть рассчитан по наиболее опасному случаю,
когда одна ветвь лифта находится под полной нагрузкой и вторая
является порожней. Необходимый тормозной момент для этого
случая
PD
Мт = ~^т, (118)
где Р — тяговое усилие на звездочках, подсчитанное по формуле
(114), при ф = 1 в кгс (дан)-,
i’o — передаточное число между звездочкой и тормозным
валом;
1] — коэффициент полезного действия подъемного механизма;
Рг — запас тормозного момента, величину которого следует
принимать порядка 1,5—1,7.
Ю*
Глава II
КЛЕТЬЕВЫЕ (ШАХТНЫЕ) ПОДЪЕМНИКИ
$ 1. Общая характеристика
Клетьевые (шахтные) подъемники в настоящее время устанав-
ливаются на вспомогательных подъемах крупных шахт для подъ-
ема оборудования, материалов и людей и на главных подъемах
небольших шахт, где они работают по подаче полезных ископае-
мых. В соответствии с характером поднимаемых грузов различают
грузовые подъемные установки, предназначенные только для
подъема грузов, установки людского подъема и установки сме-
шанного подъема (грузопассажирские), рассчитанные на подъем
грузов и людей.
В отличие от лифтов в клетьевых подъемниках применяется
сдвоенная подвеска кабин. В этом случае кабины подвешены
к двум концам грузовых канатов, наматывающихся с противопо-
ложных сторон на барабан подъемного механизма. При подъеме
одной кабины вторая опускается. Это позволяет значительно повы-
сить производительность установки и одновременно уравновесить
вес кабин, не прибегая к установке противовеса.
В настоящее время, как правило, клетьевые подъемники вы-
полняются с электрическим приводом. В зависимости от типа
подъемного механизма они могут быть разделены на следующие
три вида: с барабанными механизмами, со шкивами трения (Кепе)
и установки многоканатного подъема.
Основными элементами клетьевого (шахтного) подъемника пер-
вого вида являются (рис. 87, а) подъемный механизм 3 с бараба-
ном, на который наматываются грузовые канаты 5, копер 2, направ-
ляющие блоки (шкивы) 1 грузовых канатов 5 и подвешенные к ним
клети (кабины) 4, двигающиеся по направляющим (проводникам),
установленным в стволе шахты. Копры временных установок вы-
полняются из дерева, постоянных — из металла или железобе-
тона. Как и в лифтовых установках, клети имеют ловители (пара-
шюты), предохраняющие их от падения при обрыве грузовых ка-
натов.
Эти подъемники в настоящее время широко применяются на
шахтах в СССР. Большие размеры барабанов (до 7 и более метров)
являются недостатком этих подъемных устройств. Более ком-
пактны подъемные механизмы со шкивами трения (рис. 87, б),
работающие по тому же принципу, что и лифтовые лебедки с кана-
товедущими шкивами.
Угол обхвата шкива 1 канатом в этих машинах составляет
около 180—200°. Для обеспечения необходимого сцепления каната
со шкивом при крайних положениях кабин эти подъемники, как
правило, выполняют с уравновешивающим (хвостовым) канатом
148
2 аналогично тому, как это принято в лифтах. Установки этого
типа довольно широко распространены за рубежом, в условиях
обслуживания глубоких шахт. В СССР они не получили большого
распространения как менее надежные: в частности, полагают, что
в зимних условиях возможно обмерзание каната и, следовательно,
проскальзывание его по шкиву.
Рис. 87. Схемы клетьевых
подъемников: а — с барабан-
ной подъемной машиной;
б — со шкивом трения;
в — многоканатный подъем
В обоих рассмотренных подъемниках клети подвешиваются
каждая на одном конце каната. На рис. 87, в приведена схема уста-
новки многоканатного подъема, в последнее время получающего
значительное распространение. Подъемный механизм в ней также
выполнен со шкивами трения 1, но клети 2 подвешены на несколь-
ких канатах по типу, принятому для лифтовых кабин. Как и
в схеме по рис. 87, б, к клетям подвешиваются уравновешиваю-
щие канаты 3. При такой подвеске клетей повышается надежность
149
установки, уменьшаются размеры подъемных канатов и, следова-
тельно, размеры подъемных машин. Подъемные механизмы этих
установок располагают непосредственно над шахтой, что исклю-
чает необходимость в копрах и значительно упрощает установку
и сокращает занятую ею площадь. При многоканатной подвеске
при обрыве одного из канатов исключено падение клети, что повы-
шает безопасность установки.
Клетьевые (шахтные) подъемники работают в тяжелых усло-
виях при высоких динамических нагрузках. Особенно тяжелыми
являются условия работы оборудования, помещенного непосред-
ственно в шахте (клети, подъемные канаты, проводники), так
как оно, помимо больших динамических нагрузок, находится
в агрессивной среде (повышенная влажность, кислые воды и т. п.),
в которой возрастает опасность усталостно-коррозийного раз-
рушения.
$ 2. Клети и направляющие
Основными частями клети (рис. 88) являются каркас 3, под-
веска подъемного каната 1 и ловители (парашюты) 2, при помощи
которых производится торможение клети при обрыве подъемного
каната.
В данное время клети выполняются одноэтажными или двух-
этажными с двухъярусным расположением транспортируемых
грузов (вагонеток) по высоте. В подъемниках старых конструкций
для увеличения производительности установки число этажей
иногда увеличивалось до четырех.
Каркас состоит из трех (в одноэтажных клетях из двух) гори-
зонтальных рам 4, связанных между собой стойками из уголков
или швеллеров. Средние стойки каркаса 5 являются несущими и
воспринимают основные нагрузки от веса поднимаемого груза и
вагонетки. К раме каркаса крепятся направляющие башмаки
(опоры) клети 6, число и расположение которых выбирается в зави-
симости от числа и типа направляющих.
Каждый ярус клети перекрывается стальными листами, кото-
рые в многоэтажных клетях одновременно являются и полом сле-
дующего верхнего этажа. Клеть перекрывается крышей, снабжен-
ной откидными клапанами, для возможности транспортировки в ней
длинномерных материалов. Клеть с боков зашивается листовой
сталью, с торцов в ней устанавливаются двери.
Во всех клетьевых подъемниках (за исключением многоканат-
ного подъема) клеть подвешивается на одном конце грузового
каната. При помощи коуша этот канат крепится к концу верти-
кальной шарнирной штанги 1, другой конец которой связан с пру-
жиной, приводящей в движение ловители (парашюты). По пра-
вилам технической эксплуатации эта подвеска дублируется уст-
ройством, предохраняющим кабину от падения при обрыве штанги.
150
В рассматриваемой конструкции оно состоит из четырех цепей 7,
верхние концы которых прикреплены к планке 8, связанной с коу-
шем подъемного каната, а нижние — к кабине клети.
Ловители (парашюты) клетей клетьевых подъемников, как пра-
вило, приводятся в действие только при обрыве грузового каната.
По характеру работы они могут быть отнесены к ловителям сколь-
зящего (замедленного) действия. Захватные устройства этих лови-
телей могут быть как эксцентриковыми, так и клиновыми.
Рис. 88. Одноярусная клеть клетьевого подъемника
На рис. 89 приведена схема эксцентрикового ловителя (пара-
шюта). Ловитель состоит из двух самозатягивающихся эксцентри-
ков 4, шарнирно связанных с рычагами 5, которые опираются на
оси 8, укрепленные в раме клети.
При обрыве грузового каната штанга 2 подвески каната под
действием пружины 1 опускается и поворачивает рычаги 3, кото-
рые поднимают поперечину 7, связанную с эксцентриками, и под-
водят эксцентрики к направляющим (проводникам). Дальнейшее
торможение происходит за счет самозатягивания захватов. Поло-
жение эксцентриков относительно проводников регулируется
стяжными болтами и пружиной 6, связанной с рычагами 5.
При деревянных проводниках рабочие поверхности захватов
иногда выполняют в виде резцов и торможение кабины в этих
случаях происходит за счет работы резания материала направ-
ляющих.
151
Замедление при посадке на ловители в захватах рассмотрен-
ного типа зависит от коэффициента трения между захватами и
проводниками, который в условиях работы шахт может резко
меняться.
В связи с этим в ряде случаев замедление кабины может
достигнуть величин, выше допустимых по условиям безопасности
людей. Более надежными в этом отношении являются парашюты,
в которых захват кабины производится за специальные (тормозные)
канаты, дополнительно навешиваемые с боков клети по всей вы-
соте шахты. Схема захватного устройства такого .
парашюта приведена на рис. 90, а.
Рис. 89. Эксцентриковый ловитель (парашют)
Тормозные канаты 6 в данном случае захватываются клинь-
ями 5 которые при обрыве грузового каната подводятся к тормоз-
ным канатам рычагами 4, связанными со штангой 1 грузового ка-
ната. При обрыве этого каната штанга опускается пружиной 2 и
при помощи серег 3 поворачивает рычаги, связанные с клиньями
захвата.
Нижние концы тормозного каната закрепляются внизу шахты
при помощи специальных предохранительных болтов, которые
необходимы, чтобы устранить опасность разрыва тормозных кана-
тов при последующем обратном толчке, имеющем место вследствие
упругости этих канатов, после посадки на них клети. Чтобы обес-
печить плавную посадку клети, крепление верхних концов тор-
мозных канатов делается подвижным в специальных амортизато-
рах, установленных на копре.
152
Амортизатор (рис. 90, б) состоит из нескольких роликов 1,
между которыми винтовыми зажимами 3 закреплены отрезки ка-
натов 2, связанных с тормозными канатами. При посадке кабины
на тормозные канаты они протягиваются между зажимами.
Торможение клети происходит за счет усилий, возникающих
при протягивании каната между зажимами. Необходимая вели-
чина замедления при этом может быть изменена путем изменения
нажатия винтовых зажимов. Число тормозных канатов в этих уст-
ройствах принимается от двух до шести.
а)
Рис. 90. Ловители (парашюты) с тормоз-
ными канатами: а — захватное устрой-
ство; б — амортизатор
Имеются также парашюты, работающие по аналогичному
принципу, но с короткими тормозными канатами, помещенными
в самой клети. Конец такого каната при посадке клети на пара-
шюты сцепляется с помощью зажимов с направляющими и при
дальнейшем опускании клети продергивается между зажимами
амортизатора, который в этом случае устанавливается на клети.
Работа парашютов протекает в очень трудных условиях, имею-
щих место в стволах шахт; поэтому довольно часты случаи их от-
каза в работе. В связи с этим большое значение имеет повышение
надежности самих грузовых канатов, на которых подвешена клеть.
В этом отношении большие преимущества имеют установки много-
канатного подъема (рис. 87, в).
Клети клетьевых подъемников перемещаются по деревянным
или металлическим направляющим, прикрепляемым к поперечным
153
брусьям (растреллам), устанавливаемым по всей высоте шахты и
делящим ее на отдельные секции.
Деревянные направляющие изготовляются из деревянных
брусьев сечением 180 х 200 мм, устанавливаемых по бокам клети;
в качестве металлических направляющих применяют железнодо-
рожные рельсы. В зависимости от местных условий эти направляю-
щие располагают как с двух,
так и с одной стороны клети.
При деревянных направ-
ляющих на кабинах устанав-
ливают скользящие башмаки,
при металлических — приме-
няют также и роликовые баш-
маки (опоры). На рис. 91, а по-
казаны схемы башмаков для
деревянных и металлических
направляющих. Корпуса этих
башмаков обычно отливаются
из стали. При деревянных
направляющих (проводниках)
башмак с трех сторон охва-
тывает направляющую, при
Рис. 91. Направляющие башмаки (опоры) клетей: а — скользящие;
б — роликовые
рельсовых — он охватывает головку рельса со всех сторон. На
рабочие поверхности башмаков часто устанавливают съемные
вкладыши, что позволяет произвести быструю их замену, не де-
монтируя опору.
Роликовый башмак (опора) (рис. 91, б) состоит из корпуса 5,
в котором помещен двухребордный ролик 1, вращающийся на
оси 2. Эта ось может передвигаться горизонтально и опирается на
две пружинные опоры 3, натяжение которых регулируется бол-
тами 4. Каждая опора имеет один ролик; нагрузки, действующие
вдоль оси ролика воспринимаются ребордами.
Вагонетки, загруженные в клеть, закрепляются от сдвига
при ее движении с помощью автоматических или полуавтомати-
154
ческих стопорных устройств. В полуавтоматическом устройстве
(рис. 92) вагонетка после вкатывания в клеть упирается в пово-
ротные кулаки 1, которые тягами 2 соединены с продольным
валиком S; с правой стороны вагонетка удерживается откидными
упорами 6, которые при наезде на них колес поворачиваются и
после того, как колесо пройдет через них, возвращаются в исходное
положение грузом 7.
При выкатывании вагонетки (в приведенной схеме оно воз-
можно только налево) кулаки откидываются рычагом 5, связанным
с валиком 8, на котором также насажен груз 4, уравновешиваю-
щий вес кулаков. Во избежание ударов колес вагонетки об упор,
кулаки имеют пружинные амортизаторы 9.
Для совмещения головок рельсов, уложенных в клети, и рель-
сов откаточных путей, в стволах шахт устанавливаются поса-
дочные устройства для клетей — посадочные кулаки или посадоч-
ные площадки. Схема такого простейшего кулачкового устройства
приведена на рис. 93. Оно состоит из четырех поворотных кула-
ков 1, на которые при опускании садится клеть. Кулаки попарно
насажены на валики 2, связанные между собой тягой 4. В случае
необходимости кулаки могут быть откинуты для пропуска клети
рычагом 5. Вес кулаков уравновешивается противовесом 3.
При использовании клетьевых подъемников для выдачи полез-
ных ископаемых (главные подъемы небольших шахт) на выгрузку
вагонеток при обычных клетях затрачивается значительное время.
Одновременно усложняется и система откаточных путей, распо-
лагаемых на откаточной площадке. Более удобными в этих слу-
чаях являются опрокидные клети. Схема такой клети приведена
на рис. 94. Она состоит из основной рамы 3, на которой установ-
лены направляющие башмаки клети. К раме шарнирно прикреп-
лена поворотная платформа 2, имеющая упорный ролик 1.
При разгрузке клети этот ролик входит в фасонные направляю-
щие 4, устанавливаемые на копре. При дальнейшем подъеме клети
ролик двигается по направляющим и поворачивает платформу 2
до упора 5.
§ 3. Подъемные и уравновешивающие канаты
В клетьевых подъемниках применяют открытые канаты типа
ЛК-Р 6х 19 с линейным касанием проволок по ГОСТу 2688—55.
До настоящего времени встречаются также канаты с точечным
и линейным касанием проволок по ГОСТам 3070—55 и 3071—55
(6 X 19 и 6 х 37 проволок), хотя эти канаты имеют значительно
меньшую стойкость.
На протяжении ряда лет были разработаны также специальные
конструкции шахтных канатов, в частности с фасонными прядями
(трехграннопрядные канаты по ГОСТу 3085—55, овальнопрядные
по ГОСТу 3087—55 и плоскопрядные по ГОСТу 3086—55),
1.55
Сл
О
!
Рис. 93. Посадочное ку-
лачковое устройство клети
Рис. 94. Схема опрокидной
клети
имеющие большую опорную поверхность прядей, что благопри-
ятно отражается на сроке службы каната. Ведутся также опыты
по применению закрытых спиральных канатов с фасонными
(Z-образными) наружными проволоками. Помимо увеличения опор-
ной поверхности каната такие проволоки обеспечивают (при
надлежащей смазке) защиту каната от проникания в него влаги и,
следовательно, коррозийного разрушения. По имеющимся данным,
эти канаты показали большие сроки службы в условиях эксплу-
атации по сравнению с открытыми канатами.
По правилам безопасности канаты шахтных подъемных уста-
новок рассчитываются аналогично канатам лифтов по наиболь-
шему статическому усилию Рс от весов груза Q, клети G и веса
самих канатов GK.
Запас прочности в канате
РС Q + G + GK ’
(П9)
где R — разрывное усилие в канате.
Наименьшие запасы прочности пк, допускаемые по правилам
безопасности, должны быть равны: для людских подъемов пк =
= 9, грузо-людских пк = 7,5, грузовых пк = 6. Для всех устано-
вок со шкивами трения пк 8.
Как показал ряд исследований, фактические напряжения в ка-
натах клетьевых подъемников значительно выше статических
и в некоторых случаях достигают предела прочности проволок ка-
ната, поэтому подобный расчет является условным.
Вес подъемных канатов в клетьевых подъемниках играет очень
большую роль и обязательно должен учитываться при расчете.
Обычно выбор канатов этих подъемников производят исходя из
веса 1 м каната р, необходимого по условиям прочности. Этот вес
определяют из следующего расчета:
Q + G Д рЛ = — а/ = —— а,
ПК ' пк Y
где у — вес 1 м каната, приходящийся на 1 мм2 площади,
в кгс/мм2 (дан/мм2)',
f — площадь сечения проволок каната в мм2;
а — коэффициент ослабления прочности проволок при
свивке в канат;
ств — принятый предел прочности проволок в кгс/мм2- (дан/мм)2;
L — расчетная длина каната от оси копрового шкива до места
его закрепления на клети (при нижнем ее положении)
в м.
157
Из этой формулы определяем необходимый вес каната
P=-pQ4° > (120)
ПкУ
по которому и подбирается требуемый канат.
С увеличением высоты подъема возрастает и дополнительное
усилие от этого веса и суммарный момент М на барабане подъем-
ной машины.
Величина этого момента при положении кабин на расстояниях
и х2 от оси копрового шкива будет равна
М = [Q +р(Х1 —
где D — диаметр барабана подъемной машины в м.
Учитывая, что
Х-1 “1“ Х2 L г
имеем
М = [Q + р(2хх —£)]
При %! < и р£ > Q момент М будет отрицательным.
При системе торможения, принятой в шахтных машинах, пере-
мена направления момента на валу машины в процессе подъема
опасна, так как при несвоевременном торможении машины маши-
нистом произойдет ее разгон. Чтобы исключить возможность та-
кого разгона, в клетьевых подъемниках при больших высотах
подъема (порядка 400 м и выше) с барабанными подъемными
машинами применяют уравновешивающие (хвостовые) канаты,
аналогично тому, как это принято в лифтах и клетьевых подъем-
никах со шкивом трения.
В качестве уравновешивающих иногда применяют плоские
канаты из нескольких параллельных круглых канатов, или стренг.
Применение уравновешивающих (хвостовых) канатов затрудни-
тельно при работе машины с разных горизонтов. В этих случаях
для снижения момента от веса каната применяют машины с пере-
менным радиусом навивки каната на барабан.
Как показывает практика, прочность канатов клетьевых подъ-
емников снижается в процессе эксплуатации. Поэтому по прави-
лам безопасности производятся периодические (не реже одного
раза в год) испытания этих канатов. При этих испытаниях от конца
каната, прикрепленного к клети, отрезается кусок длиной не
менее 1,5 м, который и испытывается на разрыв в целом, а также
на разрыв отдельных проволок. Канат бракуется, если при пов-
торном испытании его запас прочности окажется ниже 7 для люд-
ских и 6 для грузовых канатов. Согласно правилам, испытания
158
канатов установок для подъема людей должны производиться
через каждые шесть месяцев. Канаты грузовых установок первый
раз испытываются через 12 месяцев и далее через каждые шесть
месяцев.
$ 4. Подъемные механизмы
В этом разделе ограничимся только рассмотрением меха-
низмов подъема наиболее распространенного типа (подъемных
машин) клетьевых подъемников, с навивкой каната на барабан.
Условно их подразделяют на две категории — малые и крупные
машины.
Малые подъемные машины имеют барабаны диаметрами 2—3 м
и наибольшее усилие в набегающем канате на барабан 5—10 тс
при скорости каната 2,5—8 м/сек. Высота подъема клети при этих
машинах и однослойной навивке на барабан находится в преде-
лах 200—550 м, мощность их двигателей составляет 150—450 кет.
Крупные подъемные машины имеют барабаны диаметрами 3,5—
6 м и выше, при усилии в набегающем конце каната 15—20 тс
и скорости каната 4—10 м/сек и больше. Высота подъема при одно-
слойной навивке находится примерно в пределах 350—600 м,
мощности двигателей — 550—2000 кет. В ряде случаев эти ма-
шины изготовляются со специальными бицилиндроконическими
барабанами.
На рис. 95 приведена схема шахтной подъемной машины, на
которой показаны ее основные узлы: барабан 5, главный вал 6,
зубчатая муфта 8, цилиндрический зубчатый редуктор 4 и двига-
тель 3.
Торможение машины производится двумя тормозами 7, установ-
ленными на барабане. Управление работой машины, а также ее
торможение — рычажное с отдельного поста 2. Для контроля за
положением клети в стволе шахты машина имеет указатель глу-
бины 1, приводимый в движение от главного вала. Контроль за
скоростью движения кабины производится при помощи указателя
скорости, установленного на посту управления. Для остановки
машины при возрастании скорости клети выше допустимой слу-
жит ограничитель скорости, связанный с главным валом машины.
В зависимости от необходимости в перестановке клетей на
разные горизонты по ходу работы машины на главном валу уста-
навливается один барабан (однобарабанные машины), на который
наматываются два каната обеих клетей (рис. 96, а), или два бара-
бана (рис. 96, бив), на которых наматывается по одному канату
(двухбарабанные машины).
При двухбарабанных машинах связь между барабанами в наи-
более простом виде осуществляется по схеме, приведенной на
рис. 96, б. В этой схеме барабан 1 жестко связан с главным валом,
а ступица второго барабана 2 свободно вращается на втулке 5,
159
160
укрепленной на главном валу. Эта втулка и ступица связаны между
собой болтами 4.
При перестановке клетей барабан 2 затормаживают установ-
ленным на нем тормозом 3, разъединяют болты 4 и двигателем по-
ворачивают левый барабан
на требуемый угол, после
чего снова закрепляют болты.
В конструкциях,разрабо-
танных отечественными за-
водами, применено сцепное
устройство по схеме, приве-
денной на рис. 96, в. Такое
устройство состоит из двух
червяков 1, укрепляемых на
торце переставного бара-
бана 5. Эти червяки сцепля-
ются с червячным колесом 2
и удерживаются в таком
положении стяжными вин-
тами 3, имеющими один пра-
вую, другой левую нарезки.
Гайка стяжных винтов при-
водится в действие от уста-
новленного на ней маховика 2.
При расцеплении бараба-
нов червяки разводятся вин-
том, выходят из зацепления
с червячным колесом и осво-
бождают барабан.
При необходимости час-
той перестановки барабанов
(при работе на разных гори-
зонтах) сцепное устройство
выполняют управляемым, с
пневматическим или гидрав-
лическим приводом. В част-
ности, такими устройствами
в настоящее время оборуду-
ются все крупные машины.
Чертеж такого устройства,
приведен на рис. 97. В дан-
Рис. 96. Схемы “пере-
становки барабанов в
подъемных машинах
клетьевых подъемни-
ков: а — в однобара-
банных машинах; б—крепление бара-
бана на фланцах; в — при помощи червяч-
ного механизма.
ном случае оно выполнено в виде зубчатой муфты, венец кото-
рой 4 жестко укреплен на торцовой части (лобовине) 5 бара-
бана. Подвижная часть муфты 3 связана с главным валом направ-
ляющей втулкой и передвигается пневматическим цилиндром 1,
со штоком поршня которого связан рычаг 2 включения этой
муфты. В некоторых механизмах переключения взамен зубчатой
П Павлов
154
161
муфты применяют фрикцион, диски которого включаются несколь-
кими пневматическими цилиндрами, непосредственно укреплен-
ными на лобовине барабана (безрычажные механизмы).
Помимо перестановки при работе на разных горизонтах, двух-
барабанные машины позволяют удобно компенсировать вытяжку
канатов в процессе эксплуатации, а также (за счет запасных вит-
ков) укорочение подъемных канатов из-за вырезки из них концов
для периодических контрольных испытаний.
В однобарабанных машинах (рис. 97, а) это достигается тем,
что концы подъемных канатов пропускаются внутрь барабана и
Рис. 97. Механизм перестановки барабанов подъемной машины клетье-
вого подъемника
наматываются на бобины 1, связанные с червячным колесом,
сцепляющимся с червяком 2. Этот червяк приводится в движение
через коническую передачу маховиком 3, установленном на торце
(лобовине) барабана.
Подобная схема позволяет регулировать длину канатов в огра-
ниченных пределах и не имеет больших преимуществ в отношении
простоты перед двухбарабанными машинами; эти машины и полу-
чили в данное время большее распространение.
При высотах подъема 400 и более м и невозможности установки
уравновешивающих (хвостовых) канатов применяют барабаны
с переменным радиусом навивки.
Наиболее простыми по конструкции являются конические
барабаны, которые при углах наклона более 20° снабжаются
наварными спиральными направляющими (рис. 98, а), в желобки
которых при навивке укладываются канаты. Канаты на барабанах
закрепляются таким образом, чтобы в момент, когда одна из кле-
тей находится в верхнем положении, связанный с ней канат был
намотан со стороны большего радиуса барабана, а канат второй
162
клети, которая находится внизу, — со стороны меньшего радиуса.
При такой схеме навивки путем соответствующего подбора радиу-
сов может быть получен положительный момент на валу барабана,
практически постоянный по величине независимо от положения
кабины.
Неудобством конических барабанов является их большая
длина. Значительно более компактны бицилиндроконические ба-
рабаны, которые в настоящее время и получили наибольшее рас-
пространение в шахтных подъемных машинах. Такой барабан
(рис. 98, б) состоит из двух цилиндрических частей 1 и 3 разного
диаметра и переходной конической части 2, имеющей приварен-
ные к ее поверхности спиральные
желобчатые выступы, на которые
при навивке и укладывается ка-
нат. В схеме, приведенной на
рис. 98, б, левый барабан являет-
ся рабочим, правый — перестав-
ным; разрез между этими бараба-
нами проходит в месте сопряже-
ния конической части правого
с цилиндрической частью левого
барабана.
Барабаны малых подъемных
машин выполняют литыми, из
Рис. 98. Барабаны с переменными
радиусами навивки: а — кониче-
ский; б — бицилиндроконический
стального литья, или сварными, барабаны крупных машин, как
правило, делаются сварными. Узел барабанов такой машины при-
веден на рис. 99. Каждый барабан этого узла состоит из цилиндри-
ческого сварного обода 3, укрепленного в радиальном направле-
нии (для обеспечения устойчивости стенки) дополнительными реб-
рами 2 таврового сечения. К ободу приварены торцовые части
(лобовины) 5, связанные внутренней сварной цилиндрической
втулкой 6. Обечайка, лобовины и втулка образуют один сварной
узел, к которому на болтах присоединяются литые стальные сту-
пицы 1. В рассматриваемой конструкции правый барабан жестко
закреплен на главном валу и левый является переставным. Этот
барабан вращается на опорных втулках 7 и связан с главным валом
зубчатым механизмом перестановки 8.
Для уменьшения износа канатов поверхности барабанов обычно
футеруются деревянными брусьями (тростями) 4 шириной порядка
150—200 мм и толщиной не менее двух диаметров каната. К обе-
чайке брусья прикрепляются болтами. На поверхности футеровки
делают спиральную нарезку, что снижает напряжения в точке ка-
сания с ней каната и, до некоторой степени, обеспечивает правиль-
ную укладку каната на барабан.
Главный вал в большинстве случаев устанавливают на подшип-
никах скольжения с баббитовой заливкой, с валом редуктора
он обычно соединяется зубчатой муфтой.
11*
163
Редукторы подъемных машин клетьевых подъемников, как
правило, выполняются с цилиндрическими колесами с косыми
или шевронными зубьями. При передаточных числах до 12 они
обычно делаются одноступенчатыми, при больших передаточных
числах — двухступенчатыми.
Обычно эти машины выполняются с централизованной смазкой
от общей маслостанции, имеющей специальную насосную уста-
новку для подачи масла во все подшипниковые узлы и к редуктору.
Рис. 99. Узел барабанов подъемной машины клетьевого подъемника
Привод маслостанции блокируется с механизмом управления
машины таким образом, что пуск этой машины невозможен до
момента, когда давление масла в масляной системе не достигнет
заданной величины.
Большинство подъемных машин выполняется с приводом от
асинхронных двигателей, являющихся наиболее простыми и на-
дежными. При мощности до 160 кет устанавливаются двигатели
на напряжение 220—3000 в, при больших мощностях на 3000
и 6000 в. При мощности до 1000 кет возможна установка одного
двигателя, при больших мощностях устанавливают два двига-
теля, работающих на общий вал, связанный с главным валом
машины.
Недостатком асинхронных двигателей является их меньшая
экономичность из-за больших потерь в реостатах в период регу-
лировки скорости движения машины. Поэтому при мощности
164
1000 и более кет часто оказывается более выгодной установка
двигателей постоянного тока, работающих по схеме Г—Д. В этих
случаях часто применяют тихоходные двигатели, непосредственно
связанные с главным валом машины аналогично механизмам
безредукторных лебедок лифтов.
$ 5. Тормозные устройства
По правилам безопасности подъемные машины шахтных (клеть-
евых) подъемников должны иметь двойное торможение — рабо-
чее и аварийное.
При рабочем торможении регулируется скорость движения
клети в процессе ее движения в стволе шахты. Это торможение
производится по мере надобности машинистом в процессе движе-
ния клети. Аварийное торможение включается автоматически
в случаях, когда скорость движения клети будет больше допускае-
мой, а также при остановке машины. В машинах ранних выпусков
для этого применяли два тормоза, один из которых (рабочий)
устанавливался на валу двигателя и второй, аварийный — на
валу барабана. В современных машинах рабочее и аварийное
торможение выполняются одними и теми же тормозами с двумя
независимыми приводами.
Подъемные механизмы клетьевых подъемников оборудуются
колодочными тормозами, устанавливаемыми на барабане.
Обычно устанавливаются два тормоза: в однобарабанных ма-
шинах эти тормоза могут иметь один общий привод, в двухбара-
банных необходим раздельный привод каждого тормоза для воз-
можности перестановки барабанов.
Колодочные тормоза в основном применяются двух типов:
с угловым и поступательным движением колодок.
На рис. 100, а приведена схема тормоза с угловым расположе-
нием колодок, применяемого в малых подъемных машинах. Этот
тормоз состоит из двух рычагов (тормозных балок) 2, шарнирно
прикрепленных к фундаменту машины в опоре 5, на которых
установлены тормозные колодки 1, жестко связанные с рычагами.
Между собой коЛодки соединены шарнирно тягой 7, один конец
которой прикреплен к рычагам 4, насаженным на общий (для
обоих тормозов) валик 6; на нем укреплен рычаг 3, связанный
с приводом тормоза. Тормоз затормаживается при вращении этого
рычага против часовой стрелки. Этот тормоз прост по конструк-
ции, его недостатком является неравномерное распределение
давлений на тормозные колодки, что связано с увеличением его
размеров.
Более равномерное распределение давлений на колодки имеет
место в тормозах с поступательным движением колодок по
рис. 100, б. В этих тормозах колодки 1 шарнирно укреплены на
тормозных рычагах 2 и дополнительно связаны тягами 4, 6 и 7,
165
Рис. 100. Схемы тормозов подъемных машин клетьевых подъемников:
а —с угловым расположением колодок; б —с поступательным движением колодок
которые образуют шарнирный параллелограмм, обеспечивающий
поступательное движение колодок при повороте приводного ры-
чага 3 вверх. Дополнительно тяги направляются скобой 5 и серь-
гой рычага 3, шарнирно связанной с фундаментом.
Более равномерное распределение давлений на колодку позво-
ляет принимать в этих тормозах большие расчетные нагрузки,
что имеет особое значение в крупных машинах, где эти тормоза
обычно и применяют.
Наиболее распространенным материалом тормозных колодок
клетьевых (шахтных) подъемников до недавнего времени было
дерево мягких пород (верба, тополь), в последнее время приме-
няются колодки с облицовкой из тормозных материалов (тормоз-
ная лента, специальные тормозные накладки). Как показывает
опыт, эксплуатации этих колодок, их стойкость и коэффициент
трения значительно выше чем у колодок из дерева.
Величина необходимого тормозного момента на барабане при
опускании клети зависит от пройденного ею пути и таким образом
является переменной. Диапазон, в котором изменяются тормоз-
ные моменты, а также плавность работы тормоза при рабочем
торможении зависит от типа приводного устройства.
Ручной привод тормозов шахтных подъемников встречается
только в малых, редко работающих машинах; в основном же при-
меняется пневматический или гидравлический привод. Гидрав-
лический привод несколько проще и компактнее пневматического,
но уступает ему в отношении плавности торможения. Обычно его
устанавливают в малых машинах, а пневматический привод —
в крупных машинах.
Основной частью гидравлического приводного устройства
(рис. 101, а) является рабочий цилиндр 3, в котором двигается
поршень 2. К одному концу штока этого поршня прикреплен
тормозной рычаг 6 и ко второму — тормозной груз 4. Тормоз
управляется рукояткой 1, связанной с трехходовым краном 5.
При растормаживании тормоза передвигают тормозную рукоятку
вперед. При этом золотник трехходового крана соединяет тормоз-
ной цилиндр со впускным трубопроводом, поршень 2 поднимается
вверх и растормаживает тормоз.
При торможении рукоятку переводят вправо, золотник при
этом поднимается вверх и соединяет цилиндр с выпускным па-
трубком. При опускании поршня по мере вытекания жидкости
возрастает тормозное усилие на колодках и соответственно тор-
мозной момент. Когда этот момент достигает требуемой величины,
золотником трехходового крана отключают цилиндр от обоих
патрубков.
При ручной перестановке золотника от машиниста требуется
большой навык в управлении тормозом, поэтому в большинстве
машин она производится автоматически. Схема такого устройства
приведена на рис. 101,6. В этом устройстве введен дополнительный
167
дифференциальный рычаг 2, один конец которого соединен
с тормозной рукояткой 1 и второй с рычагом 5, связанным с тор-
мозом. При растормаживании тормоза машинист поворачивает
тормозную рукоятку влево и этим передвигает золотник в поло-
жение, при котором рабочий цилиндр 3 присоединен ко впуск-
ному патрубку. При торможении рукоятку поворачивают в обрат-
ном направлении и устанавливают в положение, соответствующее
тормозному моменту. При этом золотник поднимается и откры-
вает выпускное отверстие,_после чего поршень под действием
Рис. 101. Схемы тормозов с гидравличес-
ким приводом: а и б — для рабочего торг
можения; в—комбинированный привод
(для рабочего и аварийного торможения)
веса груза начинает опускаться. При опускании поршня рычаг 5
поворачивает связанный с ним дифференциальный рычаг 2, кото-
рый передвигает золотник 4 вниз до момента, когда этот золотник
перекроет выпускной патрубок и отключит цилиндр. Момент
отключения тормоза и, следовательно, величина тормозного уси-
лия в данном случае будут зависеть от положения тормозной руко-
ятки, меняя которое можно изменять момент на тормозе.
Поскольку положение золотника при заданном положении
тормозной рукоятки будет изменяться по мере износа шарниров,
в эти системы обычно вводят специальные компенсирующие
устройства, снабженные контактами электрической блокировки,
которые отключают двигатель при большом износе тормозной
системы.
В данное время для рабочего и аварийного торможения обычно
используют одну и ту же тормозную систему. При гидравлическом
приводе в эту систему дополнительно вводят трехходовой кран 4
(рис. 101, в) аварийного торможения, который приводится в дей-
168
ствие от электромагнита 1. Шток этого электромагнита связан
с золотником 5.
Как при рабочем, так и при аварийном торможении, тормоз
приводится в действие от рабочего цилиндра 2, управляемого
краном 6 по рассмотренной выше схеме. Электромагнит 1 включен
в цепь управления двигателя и при пуске двигателя поднимает
золотник 5, открывая маслу доступ в рабочий цилиндр. При оста-
Рис. 102. Схемы тормозов с пневматическим приводом:
а — рабочего торможения; б — комбинированный при-
вод для рабочего и аварийного торможения
новке двигателя или отключении электромагнита в случае дви-
жения клети с аварийной скоростью золотник 5 опускается, соеди-
няет рабочий цилиндр с выпускным патрубком, после чего груз 3
затормаживает тормоз.
В качестве рабочей жидкости в тормозах с гидравлическим
приводом обычно применяют масло вязкостью 1,5—2 градуса
по Энглеру. Масло подается в цилиндры специальным насосом;
постоянство давления в системе поддерживается аккумулятором
давления, включаемым в сеть.
На рис. 102, а приведена схема рабочего тормоза с пневмати-
ческим приводом. Тормоз затормаживается рычагом 1 при впуске
воздуха в тормозной цилиндр 2, величина тормозного момента
169
устанавливается соответствующим поворотом рукоятки 4, связан-
ной со штоком поршня индикатора давления 6 дифференциальным
рычагом 5. Этот индикатор состоит из цилиндра, в котором нахо-
дится поршень 7, передвигаемый пружиной 8. Второй конец диффе-
ренциального рычага 5 соединен со штоком трехходового крана 3.
При повороте тормозной рукоятки направо золотник 3 пере-
двигается влево и подключает тормозной цилиндр 2 к впускному
патрубку трубопровода. После этого воздух начинает посту-
пать в рабочий цилиндр 2 и одновременно в цилиндр инди-
катора давления 6. Одновременно с подъемом поршня тормозного
цилиндра передвигается и поршень 7 индикатора давления, кото-
рый под давлением поступающего воздуха, сжимает пружину 8.
При этом рычаг 5 поворачивается по часовой стрелке, передвигает
золотник 3 вправо и перекрывает впускной патрубок. С измене-
нием положения рычага 4 изменяется ход золотника и соответ-
ственно количество воздуха поступившего в тормозной цилиндр,
а следовательно, положение поршня, связанного с тормозным
рычагом, и величина тормозного момента тормоза.
При повороте рукоятки 4 налево трехходовой кран соединяет
цилиндр 2 с выпускным патрубком.
Индикатор давления и трехходовой кран обычно объединяют
в одну систему — регулятор давления, которая является одним
из важнейших узлов тормозного устройства. В данное время
имеется несколько систем таких регуляторов, из них наиболее
распространенными являются регуляторы системы Иверсена.
На рис. 102, б приведена схема комбинированного приводного
пневматического устройства тормоза крупной подъемной машины
для рабочего и аварийного торможения. Привод состоит из двух
цилиндров—аварийного 3 и рабочего 5 торможения, штоки поршней
которых связаны поперечным рычагом 2, конец которого присоеди-
нен к тяге 1 тормоза. При подъеме этой тяги тормоз затормажи-
вается. При неработающей машине тормоз заторможен грузом 4.
Этот груз поднимается при пуске машины поршнем цилиндра 3,
в который проступает воздух через впускной патрубок, перекры-
ваемый краном, связанным с пусковой рукояткой машины и ос-
тается поднятым во все время работы машины. При рабочем тормо-
жении впускают воздух в цилиндр 5, поршень которого, подни-
маясь, поворачивает рычаг 2 и затормаживает тормоз. Поступле-
ние воздуха регулируется регулятором давления, аналогичным
рассмотренному выше. Цилиндр аварийного тормоза соединен
с дополнительным краном, связанным с регулятором скорости,
который открывает этот кран и затормаживает тормоз при возра-
стании скорости клети выше допустимой.
В тормозах с пневматическим приводом воздух подается от
специальной установки, состоящей из электродвигателя, ком-
прессора, резервуара и регулятора давления. Рабочее давление
воздуха в этих системах принимается порядка 6—8 ати.
170
$ 6. Предохранительные и пускорегулирующие
устройства
По правилам безопасности подъемники должны быть оборудо-
ваны концевыми выключателями для остановки двигатедя при
переходе клети за крайние рабочие положения, указателем глу-
бины, ограничителем скорости, амперметром, вольтметром, мано-
метром, показывающим давле-
ние масла (или воздуха) в тор-
мозной системе, и при скорости
движения клети более 4 м/сек —
самопишущим указателем ско-
рости (скоростемером).
При скорости движения клети
более 3 м!сек, подъемные машины
должны быть также снабжены
устройствами, исключающими
возможность подхода клети к
верхней остановке со скоростью
более 2 м/сек.
Значительная часть пере-
численных устройств включает-
ся в цепь аварийного тормо-
жения.
На рис. 103 в виде при-
мера приведена принципиаль-
ная электрическая схема цепи
управления аварийного тормоза
с гидравлическим приводом.
Электромагнит МТП этого тор-
моза включается контакторами
ДТП от реле КТП, последо-
вательно включенных во вспо-
Рис. 103. Схема включения аварий-
ного тормоза
могательную цепь, присоединен-
ную к фазам С и В. В эту же
цепь включены реле опасной
скорости РОС, приводимое в
действие от ограничителя скорости, и парные концевые выклю-
чатели ВК, два из которых установлены в стволе шахты и на копре
и два — на указателе высоты подъема подъемной машины. Выклю-
чатели разрывают цепь и этим включают аварийное торможение
при переходе клети за крайние положения. Для повторного пуска
машины после срабатывания выключателей они дополнительно
шунтированы переключателями ПО-1 и ПО-2. Следующие далее
контакты ВМ и РД служат: первый для включения аварийного
торможения при пониженном давлении масла и второй — для
включения аварийного тормоза при остановке двигателя. Реле РЦ
171
установлено на центробежном регуляторе скорости, выключа-
тель ВИК разрывает цепь при слишком большом износе колодок
тормоза.
Контакты КК и ВБТР служат для блокировки рукояток управ-
ления машиной. Для замыкания этих контактов необходимо,
чтобы рукоятка управления двигателем при пуске занимала
нейтральное положение, а рукоятка
рабочего торможения была бы в поло-
жении «Заторможено». После этого на-
жимают на кнопку «Пуск», включают
обмотку реле КТП, замыкают цепь и
этим снимают предохранительное тор-
можение. При включении реле КТП
включается его дополнительный кон-
такт КТП и цепь остается замкнутой
при отпущенной кнопке.
Концевые выключатели, устанавли-
ваемые на копре и в шахте, могут быть
рычажного типа; в последнее время по-
лучили распространение индуктивные
датчики,
для
Рис. 104. Указатель глубины клетье-
вого подъемника
аналогичные применяемым
лифтов.
На рис. 104 приведена схема,
поясняющая принцип работы ука-
зателя глубины. Указатель уста-
навливается на подъемной ма-
шине и состоит из двух парал-
лельных винтов 1, связанных
с ее главным валом зубчатыми
передачами. При работе клети на
разных горизонтах колеса этих
передач делаются сменными. По
винтам передвигаются индикатор-
ные гайки 2 со стрелками, ука-
зывающими положение клети по
шкале 3. Для сигнализации о не-
обходимости начала торможения
при подходе клети к горизонту
Боек 6 этого звонка приводится
служит механический звонок.
в движение рейкой 5, зубцы которой сцепляются с выступом на
гайке.
Для ограничения скорости движения клети при ее подходе
к верхней остановке на указателе глубины дополнительно уста-
навливают два ретардирующие диска 4, связанные с ограничите-
лем скорости движения клети.
В клетьевых подъемниках применяют как механические, так
и электрические ограничители скорости.
172
На рис. 105 приведена схема, поясняющая принцип работы
механического ограничителя скорости. В этом ограничителе вер-
тикальный валик 7 через ускорительную передачу 6 и горизон-
тальный валик И связан с главным валом машины. На валике 7
шарнирно посажена поворотная рамка 8, оттягиваемая пружи-
ной 9. При вращении валика рамка под действием центробежной
силы поворачивается, передвигает скользящую муфту 10 и вы-
двигает штангу 4, связанную с рычагом 3. После того как конец
рычага упрется в ретардирующий диск 1, он повернется около
этой точки опоры и отведет штангу 5. Штанга или непосредственно
связывается с краном аварийного тормоза, или воздействует на
его электрический контакт.
» Для ограничения скорости клети при подходе ее к верхней
остановке ретардирующий диск снабжается специальным высту-
пом 2 криволинейного профиля. С изменением положения точки
опоры рычага 3 на этом профиле изменяется положение штанги 5
и- соответственно момент срабатывания ограничителя скорости.
Передаточное число передач между ретардирующим диском
и главным валом подбирается таким образом, чтобы за время
173
подъема клети на полную высоту диск повернулся на угол при-
мерно 270°.
В электрических ограничителях скорости ток подается тахо-
генератором, связанным с главным валом; его напряжение, таким
образом, находится в зависимости от числа оборотов этого вала.
В цепь тахогенератора включено реле, которое срабатывает
при определенной силе тока, соответствующей опасной скорости
движения клети и останавливает двигатель. Для ограничения
этой скорости при подходе клети к верхней остановке в цепь реле
введен дополнительный ползунковый реостат, рычаг которого
приводится в движение от ретардирующего диска. При подходе
кабины к верхней остановке рычаг выводит сопротивление и повы-
шает силу тока в цепи реле. Скорость движения клети при сраба-
тывании ограничителя соответственно уменьшается.
Пуск асинхронных двигателей шахтных подъемных машин и
регулировка числа их оборотов производится, как и у обычных
асинхронных двигателей с контактными кольцами, при помощи
реостата, связанного с рукояткой управления и включенного
в цепь ротора двигателя. Для переключения с прямого хода на
обратный служат реверсоры. Для двигателей малой мощности
применяют кулачковые контроллеры, при большой мощности —
контакторное управление. Электрическое торможение подъемных
машин клетьевых подъемников осуществляется или на сверхсин-
хронной скорости, или противотоком. В последнее время довольно
широкое применение находит динамическое торможение, при кото-
ром в статор двигателя дополнительно подается постоянный ток
от специального генератора. Тормозной момент в этом случае
создается за счет взаимодействия полей статора и ротора.
Следует отметить, что при больших скоростях клетей и пере-
менных нагрузках, имеющих место в шахтных подъемниках, до-
стигнуть необходимую плавность торможения чисто электри-
ческим путем без применения ручного торможения — затрудни-
тельно. Поэтому до настоящего времени рабочее торможение шахт-
ных подъемных машин в основном производится тормозами,
управляемыми машинистом.
$ 7. Принципы расчета
Вследствие высоких скоростей, принятых в клетьевых подъем-
никах, в них возникают большие инерционные нагрузки, вы-
зывающие упругие колебания канатов и подвешенных на них
клетей. Мы ограничимся только краткой характеристикой общих
принципов расчета этих подъемников.
Необходимая часовая производительность клетьевого подъем-
ника определяется по формуле
X = (121)
174
где Аг — требуемая производительность в тс в год;
1,15— коэффициент неравномерности добычи;
т—число рабочих дней в году;
tc — число рабочих часов в сутки.
Необходимое время одного подъема
3600
г — 7 г0.
В этой формуле
Zn — число подъемов в ч;
t0 — время перерывов между подъемами, которое прини-
мается порядка 10—25 сек.
Рис. 106. Диаграммы к расчету клетьевого подъемника:
а — рабочая; б — для подсчета эквивалентного усилия
Число подъемов Zn равно
А
Qh
Z
п
(122)
где QH — вес поднимаемого полезного груза (нетто) в тс.
Исходя из времени одного подъема t, заданной высоты подъ-
ема Н и пусковой диаграммы (тахограммы), определяют необхо-
димую скорость клети.
Пусковая диаграмма строится в координатах — скорость v
и время одного подъема t, ее форма зависит от характеристики
двигателя. В простейшем случае при равноускоренном движении
она имеет вид трапеции (рис. 106, а). Полагая для этого случая
время пуска tn равным времени торможения tT, имеем
где а — предельная величина ускорения в
по условиям безопасности подъема
Время установившегося движения клети
м/сек2, допускаемая
людей.
будет равно
tu= t — 2ta— t — 2 —.
у п а
175
Путь, проходимый клетью за один цикл, при подъеме
s = Н = v (ty + tn).
После подстановки в это выражение величин ty и tn имеем
у2 — atv + аН = О,
откуда находим необходимую скорость движения клети
у==а4-]/(а тУ~аН-
Принятая скорость не может быть более
2Н
v~ tT + tn’
(123)
которая имеет место при времени подъема t — tn + tT и соот-
ветствует пусковой диаграмме, показанной на рис. 106, а пункти-
ром. Дальнейшее увеличение этой скорости не имеет смысла,
так как не может повысить производительность установки.
Как и для лифтов, наибольшая величина ускорения а при
людском подъеме ограничивается правилами безопасности и не
должна быть более 0,75 м/сек?. По этим же правилам ограничи-
вается и скорость движения клети, наибольшая величина которой
при высотах подъема И < 250 м примерно соответствует условию
v = 0,8 VH.
При Н > 250 м эта скорость принимается не выше 12 м/сек.
Как и в лифтовых установках, мощность двигателя подъем-
ной машины определяется по окружному усилию Р на барабане.
Величина этого усилия с учетом дополнительных сопротивлений
в направляющих и веса канатов определится по формуле
Р = <2 (1 + k) + р (х - хг), (124)
где Q — вес поднимаемого груза брутто в кгс (дан);
р —вес 1 м каната в кгс (дан);
Xi и х — длина сбегающей и набегающей ветвей этого каната,
считая от оси шкива копра до его крепления к клети
в рассматриваемом положении в м;
k — коэффициент дополнительных сопротивлений движе-
нию кабины в направляющих, обычно принимают
k 0,2.
В приведенной формуле член р (х — хг), учитывающий вес
канатов, является переменным. Поэтому выбор двигателей этих
подъемников при предварительных расчетах следует производить
по эквивалентному (среднеквадратичному) усилию
i/w
Г °—т~’ <125>
где t — время подъема.
176
т
Величина I P2dt может быть найдена графическим путем из
о
диаграммы Р2 = f (t) (рис. 106, б), в которой по оси абсцисс от-
кладывается время t подъема кабины из нижнего положения
в верхнее, по оси ординат — величина Р2. Из этой диаграммы
имеем
т
f P2dt = fkpkt,
о
где f — площадь диаграммы;
kp и kt — масштабы сил и времени, принятые при построении
диаграммы.
Необходимая мощность двигателя при найденном окружном
усилии Р подсчитывается по общим формулам.
Выбранный по эквивалентному усилию двигатель должен быть
проверен на перегрузку при наибольшем тяговом усилии на ба-
рабане, которое будет иметь место в одном из следующих случаев:
1) при подъеме пустой клети из нижнего положения, и вто-
рой клети, поставленной на опоры (этот случай имеет место при
замене подъемных канатов);
2) при подъеме с кулаков груженой клети, находящейся на
верхнем горизонте.
В первом случае тяговое усилие на барабане равно
Р = (G + pL) (1 + k)- (126)
во втором случае
Р = [(Q + G) — pL] (1 + k). (127)
В этих формулах G — вес порожней клети;
L — расстояние от осей блоков копрового
шкива до места подвески клети.
Коэффициент сопротивления в направляющих k при этом
принимают равным 0,1.
Моменты от этих усилий, приведенные к валу двигателя, не
должны быть более предельного момента двигателя, допускаемого
его электрической защитой.
Проверка выбранного двигателя на нагрев при уточненном
расчете производится по среднеквадратичному току.
Принципы расчета тормозных моментов аварийных тормозов,
парашютов (ловителей), а также ускорений при пуске, анало-
гичны рассмотренным выше в разделе первом.
Для элементов клетьевых подъемников возможны три основ-
ных расчетных случая работы: 1) с номинальными грузами,
2) в аварийных условиях, при посадке клети на парашюты
(ловители) и 3) при защемлении клети в проводниках (предельный
случай).
12 Павлов
154
177
Расчет по первому случаю производится на усталостную проч-
ность, по второму и третьему случаям — на статическую проч-
ность.
Из-за большой длины и упругости подъемных канатов дейст-
вующие в них динамические усилия при внезапном изменении
нагрузки могут быть очень большими и в некоторых случаях
превышают разрывное усилие в канате. Исходя из этого, расчет
шахтных подъемных машин по предельным нагрузкам (третий слу-
чай) обычно ведут по разрывному усилию одной ветви каната;
вторую ветвь считают нагруженной весом порожней кабины.
Запас прочности при этом расчете принимают близким к пределу
текучести материалов — порядка 1,1—1,2.
Глава III
СКИПОВЫЕ ПОДЪЕМНИКИ
$ 1. Общая характеристика
Скиповые подъемники служат для перегрузки навалочных гру-
зов (руда, уголь, песок и т. п.) и работают с автоматически разгру-
жающимися ковшами (скипами).
В зависимости от назначения эти подъемники могут быть разде-
лены на три группы: 1) промышленные подъемники общего назна-
чения для подъема разного рода навалочных грузов (зола, песок,
силос и т. п.), 2) подъемники доменных цехов для подачи
кокса, руды и флюсов в доменные печи, 3) шахтные подъемники для
обслуживания главных подъемов шахт, по выдаче на поверхность
угля, руды и т. п.
Промышленные подъемники обычно имеют ковши емкостью
0,5—5 м'л, незначительные (порядка 30—40 м и менее) высоты подъ-
ема и номинальные скорости порядка 0,5—1,5 м!сек.
Доменные и шахтные подъемники имеют ковши емкостью от
3,5 до 14 лг1 и высоту подъема от 50 до 500 и более метров. Оба типа
подъемников работают в очень напряженном режиме при скоростях
от 3 до 7 и выше м.!сек.
На рис. 107 приведены схемы скиповых подъемников.
Основной частью такого подъемника (рис. 107, а) является
скип 2, передвигающийся по рельсам или направляющим, при-
крепленным к специальной металлической конструкции (мосту) 1,
растреллам шахты (в шахтных подъемниках) и т. п.
Ковш загружается вручную (малые подъемники) или через спе-
циальное загрузочное устройство 3.
В верхнем положении ковш автоматически разгружается. Раз-
грузка производится или опрокидыванием ковша (опрокидные
178
скипы), или через отверстие в его стенке или днище (скипы с дон-
ной разгрузкой), перекрываемое на время загрузки и подъема
затвором. При малой производительности подъемника устанавли-
вается один скип; его вес уравновешивается противовесом, ко-
торый подвешивается к концу каната, сбегающего с барабана
(рис. 107, в). При большой производительности (шахтные и домен-
ные подъемники) взамен проти- t
вовеса устанавливают второй
скип (рис. 107 б), в этом случае
веса ковшей взаимно уравнове-
шиваются.
Рис. 107. Схемы скиповых подъемников:
а — принципиальная схема; в и б—подъемники с одним и двумя скипами
В малых редко работающих подъемниках противовес иногда
не устанавливается, что упрощает конструкцию подъемника, но
при этом возрастает установочная мощность двигателя.
В зависимости от местных условий направляющие скипов уста-
навливаются вертикально (например, в шахтах) или наклонно,
в связи с этим различают вертикальные и наклонные подъемники.
В некоторых вертикальных подъемниках для облегчения загрузки
и выгрузки скипа концевые участки пути делают наклонными.
В зоне загрузки угол наклона обычно принимают порядка 60°,
в зоне выгрузки (для облегчения опоражнивания ковша) — по-
рядка 50°.
12* 154
179
Такая же конфигурация направляющих принимается и для
некоторых наклонных подъемников (подъемники доменных
цехов).
2. Скипы и направляющие
В качестве направляющих скипов вертикальных промышлен-
ных подъемников применяют прокатные профили из угловой или
тавровой стали. Для шахтных подъемников направляющими слу-
жат деревянные брусья или железнодорожные рельсы, аналогич-
ные принятым для клетьевых подъемников. При этих направляю-
щих в большинстве случаев применяют скользящие или роликовые
башмаки. В наклонных подъемниках применяют рельсы: железно-
Рис. 108. Схемы опрокидных скипов:
а и б — наклонных подъёмников; в — вертикального подъемника
дорожные, прямоугольного или квадратного сечения, укладывае-
мые на опорные конструкции (балки, пояса ферм и т. п.). В ка-
честве опор скипов в этом случае служат ходовые колеса (бегунки),
которые во избежание схода их с рельс снабжают ребордами. При
углах наклона пути более 40° в этих подъемниках над бегунками
обычно устанавливают дополнительный контр-рельс.
Основными частями скипа являются рама, кузов (ковш), опор-
ные устройства (ролики или башмаки) и детали подвески подъем-
ного каната. Конструкция этих деталей зависит от типа скипа
(опрокидной или с донной разгрузкой). На рис. 108 приведены
основные схемы опрокидных скипов.
В схеме на рис. 108, а скип состоит из кузова (ковша) 4, шар-
нирно прикрепленного к раме 2 из профильной (или круглой)
стали, к которой крепится и подъемный канат 1. Передние ролики 3
выполнены одинарными, задние 5 — сдвоенными. Передний ролик
и левая половина заднего ролика 5 передвигаются по одному
и тому же рельсовому пути, изогнутому в зоне разгрузки (уча-
сток ab). В этой зоне установлен дополнительный рельсовый путь
cd, на который при опрокидывании скипа въезжает правая поло-
вина заднего ролика; передние ролики при этом продолжают дви-
гаться по криволинейному участку главного пути.
180
В схеме на рис. 108, б оба бегунка расположены в одной плос-
кости, но на разных уровнях и передвигаются по двум самостоя-
тельным рельсам. В зоне разгрузки нижний рельс переднего бе-
гунка изогнут (участок а второй оставлен прямым.
По этим схемам выполняются скипы промышленных и домен-
ных подъемников.
На рис. 108, в приведена третья схема, принятая при верти-
кальных направляющих, в частности, в шахтном подъеме.
В этой схеме ковш 3 укреплен шарнирно в вертикальной раме 6,
на нем укреплены ролики 2, которые на разгрузочном участке
пути входят в криволинейные направляющие 1. При подъеме рамы
ролик двигается по направляющей и опрокидывает скип; около
оси 4; при опускании скип возвращается в исходное положение.
Центр тяжести кузова скипа располагается относительно оси
его вращения таким образом, чтобы момент от собственного веса
скипа удерживал его от опрокидывания при загрузке и подъеме.
От опрокидывания этим моментом ковш предохраняет упор 5,
укрепленный на раме.
Опрокидные скипы хорошо опоражниваются при разгрузке, что
особенно необходимо при налипающих материалах. Существен-
ными их недостатками является большая длина разгрузочного
пути, которая необходима для того, чтобы поднять раму скипа
в положение, требуемое для опоражнивания ковша. Кроме того,
при проходе этих скипов по криволинейным направляющим возни-
кают большие силы инерции и, в связи с этим, резко возрастают
нагрузки на направляющие и механизмы подъемника. Чтобы из-
бежать этого, скорости движения опрокидных скипов в зоне раз-
грузки назначают не более 0,5—0,7 м/сек. В более быстроходных
подъемниках необходима установка специальных устройств, сни-
жающих скорость скипа при подходе его к разгрузочной кривой.
Помимо удорожания установки такое снижение скорости умень-
шает производительность подъемника.
Опрокидные скипы, в основном, применяются в промышлен-
ных и доменных подъемниках, в шахтных подъемных установках,
где от подъемника требуется особо высокая производительность,
они встречаются редко, главным образом при работе на мокрых
глинистых углях; в остальных случаях в шахтном подъеме при-
меняют скипы с донной разгрузкой. Схема такого скипа приведена
на рис. 109, а. Кузов 2 этого скипа неподвижно прикреплен
в раме 1, подвешенной на подъемных канатах, разгрузочное от-
верстие расположено в передней стенке кузова и закрывается
секторным затвором 7. Затвор может быть открыт рычагом 4, на
котором установлен упорный ролик. В зоне разгрузки ролик упи-
рается в направляющую планку и при дальнейшем подъеме скипа
поворачивает рычаг, открывая связанный с ним затвор. Материал
высыпается через лоток 6, один конец которого присоединен
к концу рычага 4, а второй опорой служит ролик 5. При повороте
181
рычага около точки 3 лоток выдвигается и одновременно прини-
мает наклонное положение, перекрывая зазор между днищем
скипа и стенкой шахты.
При работе на крупнокусковых материалах возникает опас-
ность заклинивания рычажных и особенно секторных затворов.
Для этих материалов были предложены скипы с качающимся кузо-
вом по рис. 109, б. Кузов 1 такого скипа шарнирно укреплен
в раме 5 и может поворачиваться на некоторый угол (порядка 15°)
относительно точки А. При подъеме скип занимает вертикальное
положение и его выпускное отверстие перекрывается выпускным
лотком 3. Один конец этого лотка шарнирно прикреплен к кузову,
а другой лежит на опорном ролике 4. Кузов поворачивается роли-
182
ками 2, которые в зоне разгрузки наезжают на наклонную напра-
вляющую шину 6. При повороте кузова выдвигается нижний ло-
ток 3, который устанавливается в рабочее положение под требуе-
мым углом для разгрузки. При опускании скипа его кузов
вновь принимает вертикальное, а лоток горизонтальное поло-
жения.
Скипы с донной разгрузкой не требуют указанного выше сни-
жения скорости в зоне разгрузки, что является их существенным
преимуществом. В шахтном подъеме их скорость в этой зоне
принимается также, как и для клетьевых подъемников, по пра-
вилам безопасности. Недостатком этих скипов является их непол-
ное опоражнивание при работе на
слипающихся материалах; при особо
тяжелых материалах возникает также
опасность повреждения затвора скипа
при загрузке.
Большинство скипов имеет пря-
моугольное сечение. Однако при та-
ком сечении часто происходит нали-
пание материала в углах кузова, уда-
ление которого из этих углов затруд-
нительно. В связи с этим были пред-
ложены скипы круглого сечения,
которые иногда применяют в шахтном подъеме.
На рис. ПО приведены наиболее употребительные профили
ковшей скиповых подъемников. Профили 1—4 обычно принимают
для опрокидных скипов. Профиль 1 принят для мелких промыш-
ленных и профиль 2 для доменных подъемников. Скипы этих
подъемников обычно имеют вытянутую форму, чтобы не увеличи-
вать размеры металлической конструкции (моста), по которой
передвигается скип. Профили 3—4 применяются для шахтных
подъемников при опрокидных скипах. Профили 5 и 7 применяются
в шахтных скипах с неподвижными кузовами и донной разгруз-
кой и профиль 6 — в качающихся скипах.
Конфигурации и размеры разгрузочных отверстий скипов с дон-
ной разгрузкой назначаются в зависимости от принятого типа
затвора.
Для лучшего направления материалов при загрузке задняя
стенка скипа делается несколько большей высоты, чем передняя.
Кузова (ковши) скипов изготовляются обычно сварными из
листовой стали толщиной 7—10 мм, в скипах доменных цехов —
до 10—12 мм.
Боковые стенки и днище доменных скипов покрываются пли-
тами из марганцовистой стали толщиной порядка 20 мм.
Рамы скипов изготовляются из профильной или круглой
стали. Бегунки скипов обычно отливают из стали; во избежание
схода с рельс на них делают реборды. Оси бегунков располагают
183
под кузовом скипа; в некоторых случаях они выполняются в виде
шипов, привертываемых на фланцах к боковым стенкам кузова.
Обычно бегунки устанавливаются на подшипниках качения.
В большинстве случаев скип подвешивается на одном конце
каната, реже — на двух концах (скипы доменных цехов) через
балансир. Для компенсации вытяжки каната в скипах промышлен-
ных установок и скипах доменных цехов канаты присоединяются
к раме винтовыми стяжками или серьгами. Серьги имеют ряд от-
верстий, в которые по мере вытяжки каната и переставляется
штырь, служащий для его крепления к скипу.
Размеры скипов шахтных подъемных машин в данное время
стандартизованы, при этом за основной тип принят скип с непод-
вижным кузовом и секторным или рычажным затворами. Емкость
таких скипов по ГОСТу находится в пределах 3,5—14 №. Скипы
с опрокидным кузовом (в ГОСТе указан только один размер на
2,6 №) предусматриваются только для работы на особо слипаю-
щихся материалах.
$ 3. Механизмы подъема
В большинстве случаев скиповые подъемники небольшой мощ-
ности имеют барабанные лебедки с цилиндрическими зубчатыми
передачами.
Главное преимущество червячных передач — бесшумность в ра-
боте— в скиповых подъемниках не играет большой роли, поэтому
они встречаются редко. Основными узлами скиповой лебедки
являются двигатель, цилиндрический редуктор, тормоз и барабан,
на который навивается канат. Навивка каната, как правило, про-
изводится в один слой.
Привод лебедки небольших скиповых подъемников обычно осу-
ществляется от асинхронных двигателей с контактными коль-
цами или короткозамкнутым якорем. При скорости скипа более
0,5 mJ сек, применяют двухскоростные двигатели по типу лифтовых;
эти двигатели позволяют наиболее удобно снизить число оборотов
двигателя при проходе скипа по разгрузочным кривым.
Торможение лебедок обычно производится колодочными тормо-
зами, которые помещаются между валом двигателя и редуктором.
В наклонных подъемниках, скипы которых оборудуются бе-
гунками, при заедании скипа или сходе его с рельс канат может
продолжать сматываться с барабана, что связано с опасностью
обрыва каната. Во избежание этого в лебедках скиповых подъем-
ников устанавливаются специальные выключатели слабины ка-
ната, работающие по схеме, приведенной на рис. 111. Выключатель
состоит из рычага 1, на конце которого укреплена труба или длин-
ный ролик 2, прижимаемый к подъемному канату 3 нажимным
грузом 5. При ослаблении каната рычаг поворачивается, нажи-
мает на рычаг концевого выключателя 4 и выключает двигатель.
184
По принципу работы подъемные механизмы скиповых подъем-
ников доменных цехов близки к механизмам клетьевых подъем-
ников. Они также оборудуются центробежным ограничителем
скорости, концевыми выключателями
и двумя тормозами — рабочим и
аварийным. Рабочий тормоз в этих
механизмах часто устанавливается
на валу двигателя, аварийный —
на барабане.
Эти механизмы выполняются с
приводом от одного и двух двигате-
лей. Схема первого механизма при-
ведена на рис. 112, а. Он состоит
из двигателя 1, редуктора 3, бараба-
на 4 и двух тормозов: рабочего 2 и
аварийного 5.
Рис. 111. Схема выключателя
слабины канатов
В схеме, приведенной на рис. 112, б, установлены два двига-
теля 1. Вращение на барабан 5 в этом случае передается через два
редуктора 3 и две пары зубчатых колес 4.
а)
Рис. 112. Схемы механизмов подъема ски-
повых подъемников:
а — с одним двигателем; би в — с двумя
двигателями
Механизм имеет два тормоза 2, каждый из которых рассчитан
на полный грузовой момент. В случае необходимости один из них
может работать как аварийный и поэтому специальный аварий-
ный тормоз в нем не предусмотрен.
В схеме по рис. 112, в на оба двигателя установлен один редук-
тор 2 с передачей шевронными колесами. Механизм оборудован
тремя тормозами, два из которых 1, установленные на валах
185
двигателей, являются рабочими, и один 3, расположенный на валу
барабана, — аварийным. В обоих рассмотренных механизмах цен-
тробежный ограничитель скорости и концевой выключатель для
остановки двигателя (не показаны на схеме) связаны с валом бара-
бана. Ограничитель скорости выключает двигатель при увеличе-
нии скорости движения скипа более чем на 15%, при этом автома-
тически вводится в действие аварийный тормоз, с которым также
связан и выключатель слабины каната.
Ограничители скорости машин первых выпусков были шпин-
дельного типа, аналогичные принятым для лифтов; в настоящее
время для этого применяют специальные ртутные ограничители.
Наличие в механизме двух двигателей обеспечивает при аварии
возможность работы подъемника на одном из них, что в условиях
работы доменной печи является очень важным. Такая схема,
в частности, принята в механизмах подъема доменных подъемни-
ков, выпущенных Уралмашем.
Мощности двигателей скиповых подъемников доменных цехов
достигают 400 кет и более. Обычно эти подъемники имеют
привод от двигателей постоянного тока, работающих по схеме
Г-Д.
Применение для этих подъемников асинхронных двигателей
дало неудовлетворительные результаты.
Для шахтных скиповых подъемников устанавливаются те же
подъемные машины, что и для клетьевых подъемников.
$ 4. Загрузочные устройства и системы управления
Загрузка материала в скипы небольших промышленных подъ-
емников часто производится вручную или вагонетками.
При возможности дозирования подачи материала в соответствии
с емкостью скипа, его загрузка производится через направляющие
воронки, при невозможности такой подачи устанавливают бункера
с добавочными дозирующими устройствами. Таким устройством
в доменных скиповых подъемниках являются вагон-весы.
В шахтных подъемниках для загрузки скипа обычно устана-
вливают бункера, рассчитанные на емкость одной или нескольких
вагонеток (в последнем случае должны устанавливаться устройства
для дозировки). При установке скипов в вентиляционных шахтах
с нисходящим воздушным потоком они оборудуются дополнитель-
ными затворами, исключающими попадание пыли в забой с возду-
хом, подаваемым в шахту. Иногда роль такого затвора выполняет
слой материала, который специально для этой цели поддерживается
определенной толщины.
Поступающий в скип материал направляется в него при помощи
желобов или воронок. В наклонных подъемниках такая воронка
может устанавливаться непосредственно над скипом, в вертикаль-
ных подъемниках и наклонных подъемниках с большими углами
186
наклона необходима установка специальных откидывающихся
лотков.
Схемы таких загрузочных устройств приведены на рис. 113.
В первой из приведенных схем (рис. 113, а) загрузочный ло-
ток 1 может поворачиваться около шарнира 4. К лотку прикреплен
противовес 3, вес которого подбирается таким образом, чтобы после
поворота лотка на некоторый угол вверх он далее был бы откинут
противовесом.
После опускания скипа под загрузку лоток устанавливается
в рабочее положение вручную при помощи рукоятки 5, связанной
с канатом 2.
На рис. 113, бив приведены устройства для автоматического
опускания лотка при подходе скипа.
В устройстве на рис. 113, б скип при опускании садится на
подвижный упор 7, который скользит в вертикальных направляю-
щих 6. Конец каната 5, с которым связан этот упор, намотан на
барабан 1 вала затвора. При опускании скипа упор, двигаясь
187
вниз, тянет канат 5, вращает барабан питателя и опускает лоток 4;
при обратном движении скипа лоток поворачивается обратно про-
тивовесом 3, который связан с барабаном канатом 2.
На рис. 113, в показана схема загрузочного устройства с вы-
движным лотком. В этом устройстве затвор 1 также приводится
в движение тяговым канатом 5 от подвижного упора 6. Этот канат
связан с Т-образным поворотным рычагом 4, на конце которого
укреплен противовес 3. Рычаг связан с затвором 1, к которому
присоединен загрузочный желоб 1. При повороте рычага вниз
открывается затвор и одновременно выдвигается желоб. При
подъеме скипа рычаг поворачивается вверх, закрывает затвор и
одновременно вдвигает желоб. В нерабочем положении желоб
опирается на ролик 7.
Управление работой скиповых подъемников может быть руч-
ным, полуавтоматическим и полностью автоматическим. Ручное
управление (обычно кнопочное) применяется в небольших редко
работающих подъемниках. В этом случае пуск двигателя при
подъеме скипа производится нажатием пусковой кнопки, его оста-
новка в положении разгрузки происходит автоматически, путевым
выключателем. Обратное опускание скипа происходит после на-
жатия кнопки спуска.
При полуавтоматическом управлении скип после разгрузки
автоматически переключается на спуск при помощи реле времени,
с выдержкой 10—20 сек.
Автоматическое управление применяется в крупных интенсивно
работающих подъемниках, в частности, в подъемниках доменных
печей. В подъемниках старых конструкций пуск и остановка скипа
производились при помощи реле времени, через определенные
промежутки включавшего двигатель независимо от загрузки скипа.
При таком управлении не исключалась вероятность просыпания
материала в загрузочную яму, поскольку момент начала движе-
ния скипа, при котором должна быть прекращена его загрузка,
не всегда можно уловить.
В настоящее время в промышленных подъемниках обычно при-
меняют систему управления с автоматическим пуском скипа,
после того как он будет заполнен материалом до определенного
веса. В качестве измерителя веса в первых конструкциях исполь-
зовались датчики, установленные на грузовом канате. Мерой за-
грузки скипа в этом случае являлось удлинение каната. Такая
система, однако, представляла значительные неудобства, по-
скольку из-за вытяжкн канатов требовала частой регулировки,
особенно после навески нового каната.
Более удобными являются дополнительные весовые устрой-
ства, непосредственно взвешивающие скип, которые в данное время
получили большое распространение. Эти устройства связываются
с ползунами или рычагами, на которые при опускании садится
скип; они могут быть выполнены рычажными или пружинными.
188
При заполнении скипа материалом ползун или рычаг, опускаясь
вниз, замыкают электрический контакт, который и включает дви-
гатель на подъем. Обратное включение двигателя после разгрузки
производится реле времени.
На рис. 114 приведена принципиальная схема цепи автомати-
ческого управления скипового подъемника. После загрузки скипа,
находящегося в нижнем положении, замыкается электрический
контакт КЗ весового устройства и ток от предохранителя Пг и
кнопки «Стоп» проходит через контакты 11, 12 путевого выклю-
чателя ВП и катушку кон-
тактора П подъема.
Далее он проходит че-
рез контакты 9 и 10 реле
выдержки РВ, контак-
ты 7 и 8 реле спуска, ко-
торые при этом замкнуты,
контакт КЗ и далее через
предохранитель П2обратно
в сеть. При срабатывании
реле подъема П вклю-
чаются также его контак-
ты 5 и 6, которые блоки-
руют контакт КЗ после
того, как он будет осво-
божден при подъеме скипа.
После того как скип при-
дет в верхнее положение,
переключаются контакты
путевого переключателя
ВП с 11—12 на 12—13 и
двигатель включается на
работу на спуск. При
Рис. 114. Электрическая схема скипового
подъемника с автоматическим управлением
этом ток проходит от предохранителя Пг через кнопку «Стоп»,
контакты 12—13 переключателя ВП, катушку реле выдержки РВ
к предохранителю 772. Через некоторый промежуток времени,
необходимый для разгрузки скипа (10—20 сек), реле РВ переклю-
чает контакты 9—10 на 3—4. После этого ток проходит через кон-
такт выключателя спуска ВС, катушку контактора Н, которая
включает двигатель в направлении спуска, дополнительные кон-
такты 1—2 реле подъема КП и далее через контакты 3, 4 и пре-
дохранитель П2 в сеть.
После того как скип опустится, контакты 11—12 реле ВП
и 9—10 реле РВ замыкаются вновь. При подходе скипа к ниж-
нему положению контакты выключателя ВС размыкают цепь
контактора Н, контакты 7—8 находящиеся в реле Н, замыка-
ются и двигатель будет работать на подъем, после того как
контакт КЗ будет замкнут скипом.
12
Павлов 154
189
$ 5. Принципы расчета
Производительность скипового подъемника может быть под-
считана по формуле
А = 3600 - Z, (128)
где VK — емкость скипа в л«3;
у — вес материала в m/xi3;
<р 0,9 — коэффициент заполнения скипа;
Z — число скипов в подъемнике;
te — время, затрачиваемое на вспомогательные опера-
ции (загрузка, простои и т. п.) в сек;
vcn — средняя скорость движения скипа в м/сек;
L — длина рабочего пути, проходимого скипом в м.
Длина пути, проходимого
скипом, определится из усло-
вия
Рис. 115. Рабочая диаграмма скипового
подъемника с опрокидным скипом
L - sx + s, - - + s2.
(129)
В этой формуле
8Х — путь, проходимый
скипом до момента
разгрузки в м;
s2 — дополнительный путь, проходимый при разгрузке ски-
па в лг,
Н — высота подъема (до точки, в которой начинается опроки-
дывание скипа) в м;
а — угол наклона пути в град.
При донной разгрузке s2 = 0.
При предварительном определении средней скорости движения
опрокидного скипа в формуле (128), исходим из рабочей диаграммы,
приведенной на рис. 115 для случая равноускоренного (или равно-
замедленного) движения скипа в периоды пуска и остановки.
В этой диаграмме по оси абсцисс отложено время и по оси орди-
нат — скорость скипа.
Время пуска tn и время торможения tm на протяжении первого
участка пути Sj равны
, _ у _ 2s„ . , _ v — vr _ 2s т
" a v ’ Т a v — и± ’
где а — расчетная величина ускорения (замедления) в м/сек2;
v± — скорость движения скипа при разгрузке в м/сек;
v — номинальная скорость движения скипа в м/сек.
190
Путь, проходимый за время установившегося движения на
этом участке,
У2 — гЛ2
sy S1 S1 2а 2а
(130)
а = 1-н
расчетом
где s„ и sm — пути, проходимые скипом за время пуска и оста-
новки.
Время установившегося движения в течение первого периода
/ = = Д____V1 (] \
У v v а \ 2у /
Из аналогичных подсчетов имеем для второго периода — дви-
жения скипа с пониженной скоростью на протяжении пути s2
. _ _О1_, , __ S2__
~~ а ’ ~ V-L 2а'
Средняя (расчетная) скорость движения скипа
У__________5i + Sa____
Ср t +t Л-t +t
Для ориентировочных подсчетов можно принять
1,5 м/сек?.
В последующем величина ускорения а уточняется
в зависимости от выбранной характеристики двигателя.
Необходимая мощность двигателя при известном тяговом уси-
лии на окружности барабана может быть определена по форму-
ле (34). Для вертикальных (шахтных) скиповых подъемников вели-
чина усилия Р определяется по формуле (124). В общем случае
величина этого усилия может быть выражена формулой
Р = s; - S' = (S, + AS,) - (S2 - AS2) + AGK,
в которой
S, и S2 — натяжения грузовых канатов в местах закреп-
ления на скипе и противовесе (или втором скипе)
в кгс (сан)-,
ASj и AS2 — дополнительные потери усилий на направляю-
щих блоках в кгс (дан)-,
A GK — дополнительное усилие от веса каната.
Величины AS1; AS2 и GK зависят от принятой схемы подъем-
ника, типа подшипников и числа блоков грузовой ветви каната
и ветви противовеса.
191
При движении скипа по прямолинейному участку пути вели-
чина Sj может быть подсчитана по формуле
Sx = Qo ^cos a j -|- sin р, (131)
где Qo — вес скипа с грузом в кгс (дан)-,
f = 0,054-0,1 — коэффициент трения качения в см\
р — коэффициент трения в цапфах, при подшип-
никах качения р = 0,014-0,05;
0 — коэффициент, учитывающий трение в ребор-
дах бегунков, при углах наклона пути
а<70°; р^ 1,34-1,5; при а>70° 0^1,14-
1,3.
Рис. 116. Схемы к расчету скиповых подъемников
Формула (131) при а = 90° справедлива и для вертикальных
подъемников.
По этой же формуле может быть подсчитано и усилие S2,
после подстановки взамен Qo веса скипа (для двухковшовых подъ-
емников по рис. 107, б).
При движении опрокидных скипов по криволинейным напра-
вляющим на загрузочных участках путей, к статическим сопроти-
влениям добавятся силы инерции.
При определении величины для этого случая представим дви-
жение скипа как вращение около мгновенного центра О, располо-
женного в точке пересечения радиусов кривизны направляющих
в местах касания с ними бегунков (рис. 116, а). Нормальные давле-
ния на бегунки Nt и TV2 в рассматриваемом положении скипа и
192
натяжение каната при угле его наклона к вертикали ср, опре-
деляем из условия равновесия скипа
2 X = N2 (sin р + w cos Р) — jVj (sin а -ф w cos а) —
— Р'и sin у — Р"и cos у + Sx sin ср = О,
2 Y =-- N2 (cos р + w sin Р) -j- JVj (cos а — w sin а) +
+ P'u cos у — P"u sin у — Qo -J- cos <p = 0;
2 Mo = S,z — Q0Xj — N{wx — N2wy — P"urc = 0.
Величины плеч действующих сил могут быть определены не-
посредственно по чертежу для ряда положений скипа на разгру-
зочной кривой.
Величины Fr и F2 сопротивлений перекатыванию бегунков
будут равны
Л = Л^-Ц^Р^Л^щ; F2 = N2w, (132)
где w = —yj'd Р — коэффициент сопротивления движению бегунка,
для ориентировочных подсчетов можно принять w = 0,01-^0,02.
При определении сил инерции Р"и и Р", действующих на скип,
полагаем, что веса груза и скипа приложены к его центру тяжести.
В этом случае
р’ *2. tfr ' p''^^Lsr (133)
и g с' и g с’ V 7
где о — угловая скорость вращения скипа относительно точки О
в рад/сек\
гс — расстояние от центра тяжести до точки О в м\
ъ — угловое ускорение.
Величина ускорения е может быть найдена графическим диф-
ференцированием диаграммы скоростей со = f (/). При построении
этой диаграммы угловая скорость со и соответствующее ей время t
могут быть определены по формулам
где vK — скорость грузового каната;
1К — длина каната, намотанного на барабан от начала опро-
кидывания до рассматриваемого момента, определяемая
графическим путем.
При выходе опускающегося скипа из кривой необходимо, чтобы
момент от его собственного веса мог вернуть его в исходное поло-
жение. Для этого случая имеем
Павлов 154 193
момент движущих сил
Мд = Qoxi; (134)
момент удерживающих сил
= + + (135)
Плечи сил Ри, Л и F2 те же, что и указанные на рис. 116, а.
Наименьшая величина отношения Мд/Му принимается по-
рядка 2.
Скипы наклонных подъемников следует проверять на устой-
чивость. Запас устойчивости в наиболее неблагоприятном случае
Рис. 117. Профили путей раз-
грузочных участков скиповых
подъемников: а — доменного;
б — шахтного
при остановке скипа и ослабленном тяговом канате определится
из условия (рис. 116, б)
•^ = w = ^ctga u3o)
и должен быть не менее 1,5—2.
Расчет необходимой мощности двигателя малых подъемников
обычно производят по наибольшему окружному усилию Р, под-
считанному по формуле (131).
Для средних и больших подъемников, у которых усилие Р
из-за влияния веса каната и сопротивлёний на разгрузочных кри-
вых будет изменяться в значительных пределах, величину Р опре-
деляют по среднеквадратичному усилию Рэ [формула (125)].
От профиля разгрузочной кривой зависят условия разгрузки
скипа и силы инерции, действующие на скип в момент рагрузки.
Вопрос о наиболее рациональной форме этого профиля до настоя-
щего времени окончательно не решен и он назначается конструк-
тивно.
Такой профиль разгрузочного участка пути доменного подъем-
ника показан на рис. 117, а. Участок ab в данном случае соот-
ветствует профилю пути передних бегунков скипа, участок ас —
профилю пути задних бегунков. Предельный угол наклона днища
194
скипа в положении разгрузки на этих кривых должен быть не
менее угла трения разгружаемого материала; для доменных подъ-
емников он обычно принимается равным 60°.
На рис. 117, б приведен профиль разгрузочного участка пути
шахтной подъемной установки при вертикальном подъеме скипа.
Этот путь имеет прямолинейный участок ab с углом наклона 2—3°
к вертикали на длине I = 0,3L (L — расстояние между осями бе-
гунков скипа). Положение точки касания ролика с направляю-
щими на этом участке выбирается на длине /0 = -у- ; криволиней-
ная часть пути Ьс представляет дугу эллипса. При опрокинутом
скипе ролик выходит на прямолинейный участок de этого пути,
положение его на этом участке фиксируется дополнительной на-
правляющей fg.
Угол наклона днища скипа в положении разгрузки в шахтных
скипах обычно принимают порядка 45°.
Диаметры барабанов и шкивов и запасы прочности канатов
промышленных скиповых подъемников (в том числе и доменных)
не нормированы. Соотношение между диаметром навивки каната D
и диаметром каната d во всяком случае следует принимать не ме-
нее 25. В подъемниках доменных цехов, учитывая их особо тяже-
лый режим работы величину D/d следует принимать не менее 30;
в большинстве случаев она принимается выше — до 80.
Для шахтных подъемников по правилам безопасности отноше-
ние D/d допускается не менее 80. Наименьший допустимый для
них запас прочности в канате при расчете по статическим усилиям
(см. гл. II) принимается не менее 6,5. Этот же запас может быть
рекомендован и для скиповых подъемников доменных цехов.
Запас прочности в канатах мелких и средних промышленных
подъемников принимается порядка 5,5—6 в зависимости от усло-
вий работы.
Для механизмов скиповых шахтных подъемников расчетные
случаи те же, что и для клетьевых подъемников.
Для промышленных и доменных скиповых подъемников расчет-
ными являются, в основном, два случая: 1) нормальная работа
при номинальных нагрузках и 2) защемление скипа в направляю-
щих (или его сход с рельс). Расчет нагрузок промышленных подъ-
емников для второго случая следует вести по предельному моменту
двигателя. Для подъемников доменных цехов, в которых динами-
ческие нагрузки достигают очень больших величин, целесообразно
расчет по второму случаю производить по разрывному усилию
каната.
13*
Глава IV
СТРОИТЕЛЬНЫЕ ПОДЪЕМНИКИ
£ 1. Общая характеристика
Подъемники широко применяются при строительстве высотных
и многоэтажных зданий. При каркасном типе здания (например,
высотные дома с кирпичным заполнением каркаса) в ряде случаев
они являются основным транспортным средством для подачи строи-
тельных материалов (кирпич, раствор и т. п.) на этажи. В этом
случае основной каркас монтируется кранами; работа по обслужи-
ванию кладки и отделочных материалов ведется подъемниками.
По условиям работы этих подъемников необходима их частая
перестановка с места на место работы; поэтому, чтобы не удоро-
жать их стоимость, а, главное стоимость монтажа, они имеют мак-
симально упрощенную конструкцию.
На строительные подъемники распространяются правила уст-
ройства и эксплуатации лифтов, изданные Госгортехнадзором с ря-
дом поправок, учитывающих временный характер работы этих
подъемников и обслуживание их специально обученным персона-
лом.
В настоящее время наибольшее распространение получили два
основные типа подъемников — мачтовые и шахтные. На рис. 115, а
приведена схема мачтового подъемника. Подъемник состоит из
вертикальной мачты 1 (обычно выполняется из швеллеров),
прикрепляемой к стенам здания или к переставной раме. По
мачте на опорных роликах 2 передвигается тележка 5, связан-
ная с подъемным канатом, наматываемым на барабан лебедки 3,
которая установлена внизу подъемника. В верхней части мачты
располагаются направляющие блоки. Подъемник установлен на
раму 4, закрепленную на фундаменте. Мачтовые подъемники
выполняются грузоподъемностью до 500 кгс (дан) и имеют скорость
подъема платформы 0,6—0,7 м/сек, стационарные подъемники
имеют высоту подъема до 100 м, передвижные — до 40 м.
На рис. 118, б приведена схема шахтного строительного подъ-
емника. В этом подъемнике клеть 4 передвигается в шахте 2, при-
крепляемой к конструкциям здания или устанавливаемой на рас-
тяжках. Кабина (клеть) 4 двигается по направляющим 5. Для ее
подъема служит лебедка 3, располагаемая внизу шахты; канат
направляется блоками 1. Чтобы не усложнять конструкцию и мон-
таж подъемников обоих рассмотренных типов, в них отсутствуют
противовесы и вес груза и клети целиком передается на лебедку.
Шахтные подъемники выполняются грузоподъемностью до 1500—
2000 кгс (дан) и больше при скорости движения клети до 1,5 м/сек.
Для упрощения монтажа были предложены подъемники, в ко-
торых в качестве направляющих служат канаты. В простейшем
195
случае для этой цели используется вертикальная ветвь подъемного
каната по схеме, показанной на рис. 119.
В зависимости от условий работы строительные подъемники
располагаются снаружи или внутри здания; в последнем случае
Рис. 118. Схемы строительных подъемников: а — мачтового;
б — шахтного
обычно используют лестничные клети или шахты постоянных лиф-
тов, иногда для этого оставляют незаделанные проемы в между-
этажных перекрытиях.
Правилами Госгортехнадзора допускает-
ся использование строительных подъемни-
ков только для подъема грузов. Однако
при увеличении высоты зданий до 15—20
этажей возникает необходимость подъема на
них строительных рабочих. Применение для
этой цели специальных лифтов затрудни-
тельно ввиду сложности дополнительных
устройств (ловители, блокировка, буферы и
т. п.), удорожающих сам лифт и его после-
дующий монтаж на строительстве. Вопрос о
транспорте обслуживающего персонала до
некоторой степени решается использованием
шахт постоянных лифтов, устанавливаемых
Рис. 119. Схема подъ-
емника с направляю-
щим канатом
после возведения первых этажей и в дальней-
шем наращиваемых в ходе строительства зда-
ния. Эти шахты предварительно собираются
блоками на заводе или строительной площад-
ке и отдельными секциями устанавливаются на месте кранами, об-
служивающими строительство. В таком блоке устанавливается
временная (инвентарная) кабина и перекрытия, на которых монти-
руются подъемные механизмы. Такой лифт используется как
197
грузо-пассажирский. При наращивании шахты лебедка перено-
сится на последующие этажи. По окончании строительства в шахте
монтируется кабина и механизмы постоянного лифта.
£ 2. Конструкция механизмов и узлов
Каркасы клетей (рис. 120) строительных подъемников анало-
гичны применяемым в лифтах. Вертикальные рамы этих карка-
сов 1 обычно выполняются из швеллерной стали. К раме крепится
горизонтальная платформа 2 с настилом, на который при подъеме
укладываются грузы. По правилам Госгор-
"1гтг технадзора обязательно ограждение клетей
- - и платформ с трех сторон на всю высоту;
у1 при загрузке (или разгрузке) клети с двух
сторон ограждения устанавливаются только
Рис. 120. Каркас клети
строительного подъем-
ника
со стороны направляющих.
Платформы мачтовых подъемников обо-
рудуются бортами, высота которых назна-
чается таким образом, чтобы они были на
50 мм выше габаритов поднимаемого груза.
В случае выхода людей на платформы этих
подъемников при погрузке платформы
ограждаются перилами высотой не менее
1000 мм.
Клети строительных подъемников обычно
выполняют без дверей. Для предохранения
вагонеток от смещения (при транспортировке
грузов вагонетками) в клетях устанавливают
специальные стопорные приспособления.
Число канатов, на которых подвешивается
клеть, определяется по общим правилам, установленным для
лифтов. Обычно эти подъемники работают с барабанными ле-
бедками и клети подвешивают на одном конце каната. К раме кле-
ти канат крепится жестко, иногда применяют пружинные подвески
(для амортизации ударов при загрузке клети). Ловители на клетях
и платформах строительных подъемников устанавливаются обычно
только в случаях, когда при загрузке или выгрузке подъемника
на них находятся люди. Применяемые в строительных подъемни-
ках ловители обычно связывают только с грузовым канатом.
Они могут быть заменены посадочными кулаками по типу, приме-
няемому в шахтных клетьевых подъемниках.
Иногда при вертикальном движении клети или платформы они
оборудуются специальными дополнительными подъемными уст-
ройствами для загрузки и разгрузки. Такие устройства выпол-
няются по двум основным схемам: или в виде выдвижной балки
с канатной тягой (рис. 121, а) или в виде качающейся подъемной
рамы (рис. 121, б). В конструкции, показанной на рис. 121, а,
198
подвесная двутавровая балка 4 опирается на катки 5, оси которых
укреплены на кронштейнах, приваренных к раме клети 1. Балка
может выдвигаться или вдвигаться внутрь тяговыми канатами 3 и 6,
которые с противоположных сторон наматываются на приводной
барабан 2. Барабан приводится в движение дополнительным дви-
гателем, установленным на клети.
В схеме на рис. 121, б качающаяся портальная рама 3 опи-
рается на два подвижных катка 1, перекатывающихся по внутрен-
ним полкам вертикальных швеллеров 2 рамы каркаса клети.
На этой же раме помещена двухбарабанная лебедка 7. Рама 3 свя-
зана с двумя рычагами 4, вращающимися около шарниров 5.
Рис. 121. Схемы устройств для загрузки клетей строитель-
ных подъемников
На концах этих рычагов укреплены зубчатые секторы 6, которые
сцепляются с двумя шестернями, приводимыми в движение от спе-
циального электродвигателя 8. При втягивании стрелы рама 3
опускается и проходит под валом шестерен на другую сторону
клети. Это позволяет производить разгрузку и погрузку клети
с двух сторон.
Для облегчения разгрузки мачтовых подъемников их платфор-
мы иногда выполняются поворотными. Такие платформы шарнирно
связываются с кареткой, передвигающейся по швеллерам. Плат-
формы обычно поворачиваются вручную на 90° в обе стороны.
В рабочем и повернутом положении такая платформа фиксируется
специальными стопорными устройствами.
В качестве направляющих клетей в шахтных строительных
подъемниках обычно служат швеллеры, которые обхватываются
концами балок рамы каркаса клети, выполняющих в данном слу-
чае роль башмаков. В мачтовых подъемниках опоры платформ
выполняются в виде роликов, отлитых из чугуна или стали; обычно
они работают на подшипниках качения.
В строительных подъемниках в большинстве случаев исполь-
зуются универсальные строительные барабанные лебедки,
199
изготовляемые в серийном порядке для обслуживания разного рода
строительных работ. В большинстве случаев эти лебедки имеют
электрический привод. Применение лебедок с канатоведущими
шкивами возможно, но в этом случае необходима установка про-
тивовеса, что значительно усложняет монтаж и конструкцию подъ-
емника. В строительных подъемниках эти лебедки применяются
очень редко.
Применяемые в подъемниках строительные лебедки выпол-
няются двух типов: с постоянной зубчатой передачей и фрикцион-
ные. Пуск и остановка фрикционных лебедок производится вклю-
цением_или выключением фрикциона при постоянно работающем
двигателе. Лебедки второго типа
ч) i) выполняются по обычной схеме,
принятой в стационарных кранах,
с зубчатыми передачами между
двигателем и барабаном. Пуск и
остановка этих лебедок произво-
дится включением или выклю-
чением двигателя; в отношении
Рис. 122. Сечения шахт строитель-
ных подъемников
безопасности они значительно пре-
восходят фрикционные. В обоих ти-
пах лебедок допускается много-
слойная навивка каната на барабан, который как при однослой-
ной, так и многослойной навивке, должен иметь реборды.
Шахты для мачтовых подъемников обычно не делаются. Чтобы
исключить несчастные случаи, пост машиниста относится от мачты
на безопасное расстояние. При расположении его у мачты (в пере-
носных подъемниках) над ним устанавливается козырек из сталь-
ного листа толщиной не менее 3 мм. Шахты шахтных подъемников
выполняются прямоугольного сечения по типу шахт лифтов,
иногда они устраиваются до половины клети (рис. 122). В этом
случае клеть должна быть ограждена таким образом, чтобы исклю-
чить падение грузов при ее подъеме. Со стороны фронта погрузки
на шахте устанавливаются металлические или деревянные ограж-
дения; в качестве такого ограждения может служить стена здания,
около которой установлен подъемник. Для загрузки и выгрузки
подъемников используют стенные проемы (дверные, оконные и
т. п.), иногда они устраиваются специально. Загрузочные проемы
оборудуются дверями, запирающимися на замок. Двери могут
не иметь дверных контактов, но тогда на каждом этаже должен
находиться сигнальщик, наблюдающий за работой на этом
этаже.
Шахты шахтных строительных подъемников обычно выпол-
няются из труб; в некоторых случаях применяют угловую сталь.
Эти шахты могут не иметь приямков и посадку клети производят
непосредственно на основание. К стенам здания шахты крепятся
оттяжками из стальных канатов или арматурной проволоки диа-
200
метром от 4 до 6 мм; крепление шахт к строительным лесам не
допускается. Состояние креплений периодически проверяется
в процессе эксплуатации подъемника.
§ 3. Принципы расчета
Величина необходимого тягового усилия лебедки может быть
определена из условия
P = (Q+G). 1,2, (137)
где Q — вес поднимаемого груза (брутто);
G — вес клети.
Коэффициент 1,2 учитывает дополнительные потери в направ-
ляющих и блоках. По этому усилию обычно и подбирается требуе-
мая лебедка. В случаях, когда проектируется лебедка, предна-
значенная для данного подъемника, производится специальный
расчет.
Запасы прочности канатов строительных подъемников подсчи-
тываются по формулам (22) и (23), применяемым для расчета лиф-
тов и при скорости подъема клети (или платформы) до 1 м/сек.
должны быть не менее 9, при скоростях 1—2 м/сек не менее 10.
Расчетное усилие принимают равным весу клети и поднимаемого
груза с учетом потерь в направляющих блоках. Потери в направ-
ляющих в данном случае не учитываются.
Наименьшие допустимые диаметры барабанов барабанных ле-
бедок принимаются на 25% менее указанных в табл. 12, т. е. рав-
ными 23 диаметрам каната.
Необходимая мощность двигателей подсчитывается по формуле
(34), в которую подставляется тяговое усилие Р, формула (137).
Коэффициент использования строительных подъемников по вре-
мени обычно невелик, что в ряде случаев позволяет увеличивать
нагрузку двигателя лебедки по сравнению с обозначенной на нем
мощностью. Величина мощности, которую может отдать двигатель
при заданной продолжительности включения ПВ, в данном слу-
чае может быть подсчитана по формуле
<138)
где ПВд — продолжительность включения двигателя при его
номинальной мощности;
ПВ — продолжительность включения, которая имеет место
при заданных условиях работы подъемника;
Пд — номинальная мощность двигателя при указанном ПВ;
N — мощность двигателя при заданной продолжительно-
сти включения.
Расчет ускорений и точности остановки обычно не требуется.
ОГЛАВЛЕНИЕ
Предисловие......................................................... 3
Введение ........................................................... 4
§ 1. Общая характеристика подъемников .................... —
§ 2. Развитие конструкций подъемников......................... 6
Раздел первый. Лифты................................................ 9
Глава I. Общая характеристика лифтов ............................... —
§ 1. Типы лифтов ............................................. —
§ 2. Требования, предъявляемые к лифтам....................... 14
§ 3. Основные параметры и расчет производительности лифтов . . 17
§ 4. Общие принципы расчета на прочность..................... 24
Глава II. Уравновешивание лифтов и системы подвески кабин .... 27
§ 1. Системы уравновешивания ................................. —
§ 2. Системы подвески кабин и противовесов .................. 31
§ 3. Канаты.................................................. 34
Глава III. Кабины лифтов .......................................... 37
§ 1. Конструкция кабин. Ограждения и пол...................... —
§ 2. Двери кабин............................................. 41
§ 3. Башмаки................................................. 46
§ 4. Определение размеров кабин и расчет их на прочность ... 50
Глава IV. Лебедки лифтов ......................................... 56
§ 1. Общая характеристика лебедок............................. —
§ 2. Расчет двигателей ...................................... 67
§ 3. Расчет барабанов и канатоведущих шкивов.............. 71
§ 4. Расчет тормозов......................................... 79
Глава V. Ловители и ограничители скорости ....................... 82
§ 1. Общая характеристика ловителей........................... —
§ 2. Захватные устройства ловителей.......................... 83
§ 3. Механизмы включения ловителей........................... 97
§ 4. Ограничители скорости .................................. 99
Глава VI. Установка лифтов в зданиях............................. 105
§ 1. Материал и конструкция шахт.............................. —
§ 2. Двери шахт.............................................. Ю9
§ 3. Направляющие кабин ..................................... ИЗ
§ 4. Буферные устройства .................................... 117 '
§ 5. Машинные помещения .................................... 123
Глава VII. Системы управления лифтами............................. 125
§ 1. Общие принципы работы систем управления.................. —
202
§ 2. Аппаратура управления ............................... 128
§ 3. Цепи управления...................................... 133
Раздел второй. Подъемники. Многокабинные
лифты.......................................................... 138
Глава I. Многокабинные лифты................................... —
§ 1. Общая характеристика................................... —
§ 2. Механизмы многокабинных лифтов ...................... 140
§ 3. Принципы расчета..................................... 145
Глава II. Клетьевые (шахтные) подъемники ..................... 148
§ 1. Общая характеристика................................... —
§ 2. Клети и направляющие ................................ 150
§ 3. Подъемные и уравновешивающие канаты ................. 155
§ 4. Подъемные механизмы.................................. 159
§ 5. Тормозные устройства ................................ 165
§ 6. Предохранительные и пускорегулирующие устройства ... 171
§ 7. Принципы расчета..................................... 174
Глава III. Скиповые подъемники ................................ 178
§ 1. Общая характеристика................................... —
§ 2. Скипы н направляющие ................................ 180
§ 3. Механизмы подъема ................................... 184
§ 4. Загрузочные устройства и системы управления ......... 186
§ 5. Принципы расчета..................................... 190
Глава IV. Строительные подъемники............................. 196
§ 1. Общая характеристика................................... —
§ 2. Конструкция механизмов и узлов....................... 198
§ 3. Принципы расчета..................................... 201
Редактор издательства Л. И. Орлова
Переплет художника Н. И. Васильева
Технический редактор Т. Н. Кондрат
Корректор Л. Ф. Борисова
Сдано в производство 2/П1 1965 г.
Подписано к печати 20/V 1965 г. М-20819
Формат бумаги 60х90/1в
Печ. листов 12,75 Уч.-изд. листов 11,9
Темплан 1965 г. № 38 Тираж II 000 экз.
Цеиа 52 к. Заказ 154
Ленинградская типография № 6
Главполиграфпрома Государственного комитета
Совета Министров СССР по печати.
Ленинград, ул. Моисеенко, 10