


































Автор: Гершаник Ю.М. Симонов В.А. Чуватов А.Б.
Теги: детали машин передачи (механические) подъемно-транспортное оборудование крепежные средства смазка механика электропривод механизмы теоретическая механика лифты оборудование лифтов серия подъемно-транспортное и сваебойное оборудование. башенные краны. лифты
Год: 1978




ЦНИИТЗСТРОИМАШ
«Подъемно-транспортное и сваебойное оборудование. Башенные краны. Лифты»
ЗЛЕК1Р0ПРИВ0Д
(0IIPI Ml иных
/I НФ 10В
1яниишимиггт1ппржмм'итаю1мииимммия№$
Обзорная информация
ямк лодвя&пнт#
ин в*
шшкяшшшшшюштшявшштяшктяявшшП мняшмшвяввяя|мнв11янявямявклимтяшшл
«ния
8Ж1 'lit ' >1МД|1
ОСКВА 1978
* M’Wv
X
МИНИСТЕРСТВО СТРОИТЕЛЬНОГО, ДОРОЖНОГО И КОММУНАЛЬНОГО МАШИНОСТРОЕНИЯ
ЦЕНТРАЛЬНЫЙ НАУЧНО-ИССЛЕДОВАТЕЛЬСКИЙ ИНСТИТУТ ИНФОРМАЦИИ И ТЕХНИКО-ЭКОНОМИЧЕСКИХ ИССЛЕДОВАНИЙ ПО СТРОИТЕЛЬНОМУ, ДОРОЖНОМУ И КОММУНАЛЬНОМУ МАШИНОСТРОЕНИЮ
ОБЗОРНАЯ ИНФОРМАЦИЯ
Серия «Подъемно-транспортное и сваебойное оборудование. Башенные краны. Лифты»
ЭЛЕКТРОПРИВОД
СОВРЕМЕННЫХ ЛИФТОВ
I
«
1
!
i
I
/
elektromehanika.org
В обзоре приведены различные конструкции лебедок грузовых и пассажирских лифтов и рассмотрены требования к электроприводу лифтов для обеспечения необходимой производительности и комфортности. Приведены классификация и описание существующих систем электропривода переменного тока для современных лифтов массового применения, дана подробная характеристика специальных лифтовых асинхронных электродвигателей с короткозамкнутым ротором.
Обзор рассчитан на инженерно-технических работников, занимающихся вопросами разработки, проектирования и эксплуатации лифтов.
Обзор представлен - ЦПКБ по лифтам (авторы: Ю. М. Гершаник, В. А. Симонов, А. Б. Чува-тов).
ЦНИИТЭстроймаш, 1978
ВВЕДЕНИЕ
В современных зданиях основным средством вертикального транспорта «являются лифты, которыми оборудуют жилые дома, гостиницы, общественные, административные, промышленные здания и другие сооружения.
По своему назначению лифты подразделяются на пассажирские, грузопассажирские, больничные, грузовые общего назначения, грузовые с монорельсом, и выжимные, тротуарные грузовые и малые грузовые.
В соответствии с назначением лифты различаются как по конструкции, так и по основным параметрам (грузоподъемности, скорости, высоте подъема, размерам кабин).
В настоящее время лифты в основном выполняют по кинематическим схемам, приведенным на рис. 1. Наиболее распространенными из них являются схемы с верхним расположением привода (лифтовой лебедки) и канатоведущим шкивом.
Схему лифта с полиспастными подвесками применяют для увеличения грузоподъемности при той же мощности привода, схему с двойным обхватом канатов с помощью отводных блоков для лифтов со скоростью движения кабины от 2 м/с — для повышения сцепления канатов со шкивами.
Лебедки современных лифтов по конструкции канатоведущих органов разделяются на барабанные и с канатоведущими шкивами. В настоящее время барабанные лебедки применяют только на тротуарных грузовых лифтах и крайне редко на грузовых лифтах специального назначения, а на лифтах всех остальных назначений обычно применяют лебедки с канатоведущим шкивом.
По типам передач от электродвигателей лифтовые лебедки подразделяются на редукторные и безредукторные. Редукторные лебедки применяют на лифтах со скоростью до 2 м/с, а безредукторные — на лифтах со скоростью от 2 м/с.
Редукторные лебедки состоят из быстроходного электродвигателя, червячного редуктора с эвольвентным или глобо-2. Зак. 858 ' 3
ПД1П.1М ищенлспнсм, тормозного устройства на быстроходном пилу и капятоведущсго органа.
Всзрсдукторныо лебедки состоят из тихоходного электро-дппг.тгсля, непосредственно на валу которого укрепляют ка-нлтоведущий и тормозной шкивы. На корпусе электродвигателя монтируют тормозное устройство. Лебедки пассажирских и грузовых лифтов устанавливают чаще всего в машинном помещении над шахтой.
/ Рис. 1. Основные кинематические схемы лифтов:
а—г с верхним расположением лифтовой лебедки без отводного блока с компенсирующими цепями; б — с верхним расположением лифтовой Лебедки с отводным блоком; в — то же с двойным обхватом шкива; г — выжимного лифта; д — с полиспастной подвеской кабины и противовеса; е — с верхним расположением лебедки без отводного блока с урявновешивяющими кзнятзми^ otc — тротуарного лифта с барабанами для навивки каната; К— кабина; Пр — противовес
Верхнее расположение машинного помещения более экономично, чем нижнее под шахтой из-за меньшей длины несущих канатов и меньшего числа промежуточных блоков.
4
По номинальной скорости движения кабин пассажирские лифты подразделяются: на тихоходные — от 0,5 до 0,71 м/с; быстроходные — от 1 до 1,4 м/с; скоростные — от 2 м/с. Номинальная скорость грузовых лифтов 0,15—0,5 м/с. При этом большая часть лифтов имеет скорость 0,5 м/с, и только некоторые грузовые лифты имеют пониженные скорости (тротуарные— 0,15 м/с, малые магазинные и общего назначения грузоподъемностью 5000 кг — 0,25 м/с).
Рис. 2. График движения кабины скоростного лифта:
а — поэтажный разъезд; б — черезэтажный разъезд; в — разъезд на несколько этажей
Производительность пассажирского лифта прямо пропорциональна вместимости кабины и в значительной степени обусловливается ее скоростью движения. Однако производительность зависит от скорости не в прямой пропорции. Лифты с большой номинальной скоростью движения в случаях большого числа остановок не используются по скорости, так как при поэтажном разъезде (движении с этажа на ближайший этаж) при заданном ускорении лифт не успевает разгоняться до номинальной скорости.
Расчеты вертикального транспорта в зданиях различного назначения рекомендуют применять лифты со следующими номинальными скоростями:
— в административных зданиях и гостиницах: до 9 эта-*~жей— от 0,71 до 1 м/с; от 9 до 16 этажей — от 1 до 1,4 м/с;
в административных зданиях от 16 этажей — 2 и 4 м/с.
Рекомендуется при установке в зданиях лифтов со ско-, ростью от 2 м/с иметь экспрессные зоны, т. е. лифты должны обслуживать не все этажи подряд, а, например, кратные 4—5. Системы электропривода лифтов со скоростью от 2 м/с обеспечивают движение лифтов с разными скоростями в зависимости от предполагаемого движения — поэтажного, через-этажного или разъезда на несколько этажей (рис. 2).
2*
По условиям работы и своему назначению лифты относятся к механизмам цикличного действия, для которых характерны частые пуски. Пуски и остановки лифтов сопровождаются переходными процессами, характеризующимися появлением ускорений и замедлений.
Из-за наличия периодов ускорения и замедления электропривода снижается средняя скорость движения лифта, что значительно влияет на его производительность.
Увеличение средней скорости движения ведет к увеличению ускорений, что оказывает неприятное физиологическое воздействие на организм человека.
В Советском Союзе ускорения ограничиваются Правилами устройства и безопасной эксплуатации лифтов (ПУБЭЛ) Госгортехнадзора СССР до 2 м/с2 для пассажирских лифтов и до 1 м/с2 для больничных. Исследования физиологических проявлений воздействия ускорений показали, что ощущения пассажира связаны не только с величиной ускорения, но и скоростью его изменения — рывком. Установлено, что при ограничении ускорения и повышении плавности его изменения в переходных процессах устраняется его неприятное воздействие.
Имеющиеся ускорения и рывки определяют комфортность работы лифта. Поэтому электропривод лифтов должен обеспечивать такое формирование переходных процессов разгона и замедления, чтобы с одной стороны обеспечивалась их минимальная продолжительность при ограниченных величинах ускорения и рывка, а с другой — их минимальная зависимость от загрузки кабины лифта.
Оптимальным считается график движения кабины лифта, показанный на рис. 3, при котором ускорение в период разгона и замедления изменяется по трапецеидальному закону.
Весьма важной задачей является точная остановка лифта на этажной площадке.
Кабина после торможения должна останавливаться против уровня загрузки и выгрузки с заданной степенью точности. Из-за неточной остановки не только ухудшается комфортность пассажирских лифтов, но и снижается их производительность, так как увеличивается продолжительность входа и выхода пассажиров.
В грузовых лифтах из-за неточной остановки затрудняется, а в некоторых случаях невозможна разгрузка кабины.
Современные лифты имеют автоматизированную точную остановку, которая выполняется системой электропривода. В ряде случаев необходимость обеспечения требований.точности остановки оказывает решающее влияние на выбор системы электропривода лифта.
В современных пассажирских и грузовых лифтах, оборудованных системой электропривода переменного тока, про-6
цесс точной остановки происходит следующим образом. При подходе кабины лифта к этажной площадке срабатывает датчик точной остановки, который выполняют в самых различных конструктивных вариантах. После срабатывания датчика точной остановки и отключения электродвигателя движение кабины продолжается (свободный выбег) до момента
Рис. 3. Оптимальный
график движения кабины лифта
замыкания механического тормоза, под действием которого кабина останавливается. Неточность остановки возникает из-за того, что все величины, от которых зависит путь «точной остановки», изменяются в довольно широких пределах. Моменты инерции и статический момент на валу электродвигателя зависят от загрузки кабины. Значения начальной скорости свободного выбега определяются «жесткостью» механической характеристики электродвигателя и т. д. Для получения заданной точности остановки лифта при номинальной скорости движения от 0,5 м/с необходимо перед остановкой заблаговременно снижать скорость кабины. А это в свою очередь определяет необходимый диапазон регулирования скорости подъемного электродвигателя.
График движения лифтов с электроприводом переменного тока представлен на рис. 4.
Отечественные скоростные лифты со скоростью от 2 м/с, оборудованные безредукторным электроприводом постоянного тока, выполняют с системой точной остановки, отличающейся от вышеизложенной. После срабатывания датчика точной остановки скорость электропривода снижается до
7
нуля. Затем замыкается механический тормоз. Если по каким-либо причинам произошло перерегулирование, тормоз не замыкается и электропривод возвращает кабину в нулевое положение, после чего тормоз замыкается. Система электропривода рассчитана таким образом, что может удержать кабину лифта в точной остановке даже при неисправности механического тормоза. Такая система точной остановки обеспечивает наиболее приближающийся к оптимальному график движения лифта.
И
Рис. 4. График движения лифтов с электроприводом переменного тока (движение кабины со сниженной скоростью перед остановкой)
На основании проведенного анализа можно сформулировать следующие основные требования к электроприводу лифтов, которые в свою очередь должны обеспечить высокую производительность и комфортность передвижения:
— реверсивная работа привода как в двигательном, так и генераторном режимах;
— стабильность установившейся скорости движения лифта с точностью не менее ±15% номинальной независимо от загрузки кабины лифта и направления ее движения;
— точная остановка кабины лифта на этаже также независимо от загрузки кабины лифта и направления ее движения;
— минимальная продолжительность переходных процессов (разгона и замедления) при строго ограниченных максимальных значениях ускорения и рывка также независимо от загрузки кабины и направления ее движения;
— движение кабины лифта в режиме ревизии, при котором, согласно действующим в СССР нормам, скорость не должна превышать 0,36 м/с;
— частота включений в час для пассажирских лифтов должна составлять 100—240, а для грузовых — 70—100 при различной продолжительности включений (от 15 до 60%).
В настоящее время наибольшее распространение получи-
8
ли пассажирские лифты со скоростью от 0,71 до 1,4 м/с, больничные и грузовые со скоростью до 0,5 м/с.
В уникальных зданиях устанавливают лифты со скоростью от 2 м/с. В настоящее время в СССР такие лифты применяют реже, чем лифты со скоростью 0,71—1,4 м/с. Их число составляет около 0,3% общего числа лифтов.
Поэтому в настоящем обзоре основное внимание уделяется электроприводу пассажирских и грузовых лифтов массового применения.
Наиболее распространенным является электропривод переменного тока. Существующие системы электропривода переменного тока могут быть классифицированы следующим образом:
1. Приводы с односкоростным асинхронным двигателем без дополнительных средств регулирования.
2. Приводы с двухскоростным асинхронным двигателем без дополнительных средств регулирования.
3. Приводы с двухскоростным асинхронным двигателем и микроприводом.
4. Приводы с двухскоростным асинхронным двигателем и устройством смещения точки начала замедления:
— механические устройства с центробежным регулятором;
— устройства, реагирующие на загрузку кабины;
— устройства, позволяющие выделить активную составляющую тока двигателя.
5. Системы многодвигательного асинхронного электропривода с дифференциальным редуктором; двухдвигательный асинхронный привод с переключением одного из двигателей в тормозной режим.
6. Системы со специальными электрическими машинами.
7. Системы с регулированием момента электродвигателя: — система с двухскоростным асинхронным двигателем с регулированием момента при работе на обмотке малой скорости;
— система с двухскоростным асинхронным двигателем с регулированием момента во время разгона и замедления;
— система с односкоростным асинхронным двигателем с регулированием момента при разгоне и замедлении.
Электропривод лифтов со скоростью от 2 м/с работает на постоянном токе.
Системы электропривода постоянного тока могут быть также классифицированы следующим образом:
1. Генератор—двигатель (Г—Д) с контакторным управлением.
2. Г—Д с электромашинным управлением (ЭМУ).
3. Г—Д с ЭМУ и промежуточным магнитным усилителем (ПМУ).
9
4. Г—Д с магнитным усилителем (МУ) и ПМУ.
5. Г-Д с МУ.
6. Г—Д с тиристорным возбуждением.
7. Тиристорный преобразователь — двигатель (ТП—Д).
При использовании систем ТП—Д удается получить близкий к оптимальному график движения.
СИСТЕМЫ ЭЛЕКТРОПРИВОДА ПЕРЕМЕННОГО ТОКА
ЭЛЕКТРОПРИВОД С ОДНО- И ДВУХСКОРОСТНЫМИ АСИНХРОННЫМИ ЭЛЕКТРОДВИГАТЕЛЯМИ
БЕЗ ДОПОЛНИТЕЛЬНЫХ СРЕДСТВ РЕГУЛИРОВАНИЯ
Электроприводы переменного тока включают в себя специальные одно- или двухскоростные асинхронные электродвигатели с короткозамкнутым ротором.
Система электропривода с односкоростным электродвигателем наиболее проста. Применяется электродвигатель повышенного скольжения, имеющий при больших значениях пускового момента относительно низкое значение пускового тока. Запуск электродвигателя осуществляется прямым подключением обмотки статора к питающей сети. Остановка лифта производится отключением электродвигателя от сети с одновременным замыканием колодок механического тормоза на быстроходный вал редуктора лебедки. Недостаток этой системы— замыкание механического тормоза на полной рабочей скорости, что ускоряет изнашивание тормозных прокладок. Кроме того, не обеспечивается высокая точность остановки кабины на этаже, так как при постоянном тормозном моменте механического тормоза путь торможения зависит от степени загрузки кабины.
Электропривод с асинхронным односкоростным электродвигателем с короткозамкнутым ротором применяют на малых грузовых, грузовых тротуарных и пассажирских лифтах грузоподъемностью до 320 кг со скоростью до 0,5 м/с.
Система электропривода с двухскоростным асинхронным электродвигателем с короткозамкнутым ротором получила сейчас наибольшее распространение на массовых пассажир-ких лифтах со скоростью от 0,71 до 1,4 м/с. Применяют специальные полюсопереключаемые асинхронные электродвигатели с короткозамкнутым ротором, с двумя независимыми обмотками на статоре. Соотношения синхронных скоростей в основном 1 :3, 1 :4 и 1 : 6.
Двигатели выполняют с механическими характеристиками специальной формы для двигательного режима обмоток большой и малой скорости и для генераторного режима об-10
мотки малой скорости. Более подробно об этих электродвигателях будет рассказано в следующем разделе.
При применении двухскоростного электропривода пуск лифта также производится прямым подключением обмотки большой скорости непосредственно к сети. При подходе к этажу замедление осуществляется переключением обмоток электродвигателя с большой скорости на малую. При этом электродвигатель переходит в режим генераторнфго торможения, скорость лифта снижается в 3 или 4 раза, и лифт на пониженной (малой) скорости подходит к точной остановке. Окончательная остановка кабины лифта на этаже происходит при отключении от сети обмотки малой скорости и замыкании механического тормоза. Замыкание механического тормоза только после достижения лифтом малой скорости позволяет в 9—16 раз снизить кинетическую энергию, погашаемую в тормозе, что в свою очередь приводит к уменьшению размеров тормозного устройства и увеличению сроков его службы.
Обмотка малой скорости обеспечивает также перемещение лифта на сниженной скорости в режиме ревизии при ремонтных операциях.
Для повышения точности остановки электромеханический тормоз отключают таким образом, что его замыкание происходит одновременно с отключением двигателя. Тем самым исключается возможность выбега. Обеспечение заданных ускорений и рывков осуществляется подбором дополнительных маховых масс на валу электродвигателя. Кроме этого для снижения .рывков в момент перехода с большой скорости на малую в некоторых случаях применяют специальную схему включения обмотки малой скорости. При этом одна из фаз обмотки малой скорости включается последовательно с двумя фазами обмотки большой скорости. Это приводит к снижению генераторного момента двигателя, особенно при скорости, близкой к синхронной, для обмотки большой скорости, что необходимо для снижения рывков, возникающих в момент переключения обмоток двигателя.
У систем электропривода переменного тока с двухскоростными электродвигателями процессы разгона, ^становившегося режима и замедления значительно зависят от нагрузки. Эта зависимость увеличивается с повышением скорости движения лифтов. Пути дотягивания лифта к этажу увеличиваются, в результате чего снижается средняя скорость движения и понижается комфортность. Кроме того, наблюдаются достаточно высокие и толчкообразные изменения ускорения, которые вызываются резкими изменениями моментов электродвигателя при включениях и переключениях, а также при механическом торможении.
I
/
3. Зак. 858
11
На лифтах старых конструкций, особенно при ограниченной мощности питающей сети, нашла применение система электропривода с асинхронным электродвигателем с фазовым ротором. В такой системе запуск электродвигателя осуществляется через пусковые сопротивления, включаемые в цепь ротора. Выход электродвигателя на полную скорость обеспечивается последовательным шунтированием ступеней сопротивлений в роторе. Остановка кабины лифта производится так же, как и в системе электропривода с односкоростным асинхронным электродвигателем, отключением электродвигателя от сети и замыканием механического тормоза. При этом в цепь ротора вводят пусковые сопротивления.
Такая система не может рассматриваться как типовая для новых конструкций лифтов массового применения, однако она удобна в ряде случаев в старых складских и торговых помещениях или для временных строительных лифтов.
Для отдельных категорий лифтов применяют и другие модификации электропривода на переменном токе. Так, например, для грузовых лифтов с монорельсом применяют систему электропривода с двухскоростным асинхронным электродвигателем с короткозамкнутым ротором и с так называемым микроприводом, который обеспечивает повышенную точность остановки, необходимую для лифтов этого класса.
Микропривод сочленен с основным приводом посредством электромагнитной муфты и состоит из редуктора и односкоростного двигателя небольшой мощности. Управление лифтом в режиме выравнивания кабины при стыковке монорельса производится из кабины вручную с помощью кнопок доводки. Скорость движения кабины при доводке лифта составляет 10—13 мм/с. На грузовых лифтах с микроприводом необходимо дополнительное оборудование, состоящее из электромагнитной муфты, асинхронного двигателя и редуктора.
В настоящее время в СССР- разработан электропривод грузовых лифтов с монорельсом с применением импульсной доводки при работе двигателя, на обмотке малой скорости. В этом электроприводе исключается перечисленное выше дополнительное оборудование.
ЭЛЕКТРОПРИВОД С ОДНО- И ДВУХСКОРОСТНЫМИ АСИНХРОННЫМИ ЭЛЕКТРОДВИГАТЕЛЯМИ
С ПРИМЕНЕНИЕМ ДОПОЛНИТЕЛЬНЫХ СРЕДСТВ РЕГУЛИРОВАНИЯ
Как указывалось выше, при скоростях движения более 1 м/с применение нерегулируемого привода с асинхронным короткозамкнутым двигателем ограничивается увеличенной зависимостью его динамических характеристик при разгоне и замедлении от нагрузки. Вследствие этого ухудшается точ-12
ность остановки, увеличивается путь дотягивания, становятся более неприятными рывки, вызываемые резким изменением момента двигателя при включении и переключении, а также при механическом торможении.
Для снижения зависимости динамических и комфортных характеристик электропривода лифта от изменяющейся нагрузки существуют различные системы электропривода, среди которых основными являются: замкнутые системы регулирования момента электродвигателя, системы многодвигательных приводов или системы электропривода со специальными электрическими машинами.
Системы.электропривода со смещением точки начала замедления
Увеличение скорости движения кабины приводит к значительному изменению динамического момента в зависимости от нагрузки на валу двигателя. График изменения скорости кабины в зависимости от пройденного пути для случая подъ-
Рис. 5. График изменения скорости движения кабины лифта в зависимости от пройденного пути:
1 — подъем порожней кабины; 2 — подъем кабины с номинальным грузом; 3 — подъем кабины с номинальным грузом в случае использования устройства смещения точки начала замедления
к
V
ема порожней кабины и кабины с номинальным грузом показан на рис. 5. Как видно из графика, путь замедления при подъеме кабины с грузом значительно меньше пути замедления при подъеме порожней кабины, что вдечет за собой увеличение времени движения на малой скорости, снижение производительности .и ухудшение комфортных показателей работы лифта. Устранить этот недостаток можно, применяя системы, позволяющие смещать точку начала замедления в зависимости от нагрузки на валу двигателя таким образом, чтобы разность путей движения на малой скорости была бы минимальной.
Фирмой Maschinenfabrik R. Stolle (ФРГ) разработаны лифты со скоростью движения 1,5 и 1,8 м/с с приводами переменного тока [И].
В этих электроприводах используют двухскоростные короткозамкнутые асинхронные двигатели с соотношением скоростей 1:6 и. 1:9. Точность остановки и сокращение путей дотягивания при изменении нагрузки были достигнуты путем использования устройства Ziehl—Rapid, разработанного фирмой Ziehl—Abegg (ФРГ) и обеспечивающего смещение точки начала замедления и торможения. Кинематическая схема этого устройства приведена на рис. 6. В устройстве используют механический принцип регулирования. Система работает следующим образом.
Рис. 6. Кинематическая схема устройства для смещения точки начала замедления:
1 — контактный диск; 2, 3 — профилированные участки диска; 4— контактный палец; 5 — центробежный регулятор; 6 — положение остановки
Контактный палец 4, перемещаемый посредством центробежного регулятора 5, связанного ременной передачей с электродвигателем, во время движения лифта занимает на контактном диске 1 положение, зависящее от скорости. В начале торможения этот диск через муфту и передачу входит в сцепление с двигателем лифта и начинает медленно поворачиваться. Как только контактный палец станет перемещаться по профилированным участкам 2, 3 диска, двигатель переключается на обмотку малой скорости и начинается замедление.
Фирмой AEG (ФРГ) предложена система [11], которая смещает точку начала торможения в зависимости от скорости с помощью устройств, расположенных вдоль пути тормо-14
жения и посылающих сигналы в соответствии со скоростью движения.
Фирма VEB Starkstrommanlagenban (ФРГ) предложила устройство для смещения точки начала замедления в зависимости от нагрузки, использующее сравнение сигналов, зависящих от нагрузки и пройденного пути.
Предложено также [6] корректировать время подачи команды на замедление в функции фактической массы кабины и направления движения.
Рис. 7. Устройство смещения точки начала замедления в зависимости от величины активной составляющей тока двигателя и напряжения питания:
Тр2 — трансформаторы; R1—R4— сопротивления; С — конденсаторы
Это достигается тем, что скоба замедления, установленная на крыше кабины, связывается с ней посредством массы чувствительного рычажного устройства. Поэтому ее положение зависит от массы кабины и направления движения. Таким образом, перемещаясь вверх или вниз в зависимости от массы кабины, скоба замедления раньше или позже входит в поле индуктивного выключателя, смонтированного в шахте. В результате импульс на замедление будет подан в момент, обеспечивающий смещение начала замедления.
За рубежом также применяют электронные устройства (рис. 7), позволяющие смещать точку начала замедления в зависимости от величины активной составляющей тока двигателя '[11]. Устройство работает следующим образом. Сопротивление R1 служит для получения сигнала, пропорционального току двигателя. Реактивная составляющая компенсируется конденсатором С и сопротивлением R2.* Следовательно, на выходе трансформатора Тр1 имеется напряжение,
прямо пропорциональное активной составляющей тока двигателя, которое складывается с напряжением трансформатора Тр2. Таким образом, на входе исполнительного устройства образуется сигнал, зависящий от нагрузки и напряжения сети.
Системы, использующие принцип смещения времени начала замедления, позволяют сократить продолжительность движения лифта на малой скорости. При этом требуемые ускорения и рывки обеспечиваются путем подбора величины махового момента вращающихся масс, что приводит к затягиванию разгона, увеличению потерь энергии и снижению комфортности.
В СССР разработан электропривод переменного тока [1] для лифта со скоростью 1,4 м/с. В приводе применяют двухскоростной асинхронный двигатель с соотношением скоростей 1 :4. Смещение точки начала замедления осуществляется путем задержки времени отключения обмотки большой скорости в зависимости от загрузки и направления движения кабины. Для этого применяют специальное грузовзвешивающее устройство рычажной системы, связанное с полом кабины. Кроме этого для снижения ускорений и рывков в режиме подъема груза применяют кратковременное отключение одной из фаз двигателя, что способствует устранению зависимости путей замедления от нагрузки, а также снижению ускорения и рывков.
Многодвигательные асинхронные электроприводы
Фирма Uhnru und Liebig (ГДР) создала систему двухдвигательного электропривода, состоящую из двух асинхронных двигателей с короткозамкнутым ротором, связанных дифференциальным редуктором. Система электропривода имеет две модификации, предназначенные для лифтов со скоростью движения 1,5 и 2,5 м/с. В первом случае применяют сочетание двухскоростного и односкоростного двигателей с короткозамкнутыми роторами, во втором — двух двухскоростных. Во время пуска система работает в следующей последовательности. Сначала двухскоростной двигатель разгоняет кабину лифта до скорости 0,75 м/с, а затем через 5 с включается второй двигатель, разгоняющий кабину до основной скорости. При такой системе разгона при поэтажном разъезде движение происходит со скоростью 0,75 м/с. Снижение скорости перед остановкой производится в обратной последовательности (для лифта со скоростью 1,5 м/с — в три ступени, а для лифта со скоростью 2,5 м/с — в четыре).
В Швейцарии для скоростных лифтов используют многодвигательный привод, состоящий из трех короткозамкнутых асинхронных двигателей с различным числом полюсов, рабо-16
' • f ,
тающих на общий вал. Отношение скорости 10:2:1 [7]. Валы двигателей связаны с четырьмя копирными устройствами, служащими для остановки , кабины на указанном этаже, определения наибольшей скорости на заданном участке,
Рис. 8. Система двухдвигательного привода с использо-
ванием асинхронного короткозамкнутого двигателя в тормозном режиме:
1 — тормозной двигатель; 2 — электромагнитный тормоз;
3 — лебедка; 4-—задающий генератор; 5 — вспомогательный генератор; 6 — усилитель; 7 — блок управления тиристорами
подготовки предварительного сигнала на включение наибольшей скорости и включения наибольшей (2,5 м/с) скорости, которая достигается только при определенной протяженности поездки.
г
17
В последнее время появилось несколько патентов [8, 9], в которых предлагается двухдвигательный привод, состоящий из асинхронного двигателя с фазным ротором, используемого в качестве главного приводного двигателя, и асинхронного короткозамкнутого двигателя, служащего для создания тормозных режимов и низких скоростей, необходимых для ревизии. Принципиальная схема подобного привода представлена на рис. 8. В момент пуска тормозной двигатель отключен, регулирование разгона осуществляется путем изменения величины сопротивлений в цепи ротора главного двигателя. После сигнала на остановку происходит отключение главного двигателя и включение тормозного в режиме динамического торможения.
Во время замедления происходит автоматическое регулирование тормозного момента в зависимости от скорости и ускорения на канатоведущем шкиве. Электромеханический тормоз замыкается после полной остановки привода.
Системы асинхронного электропривода с использованием специальных электрических машин
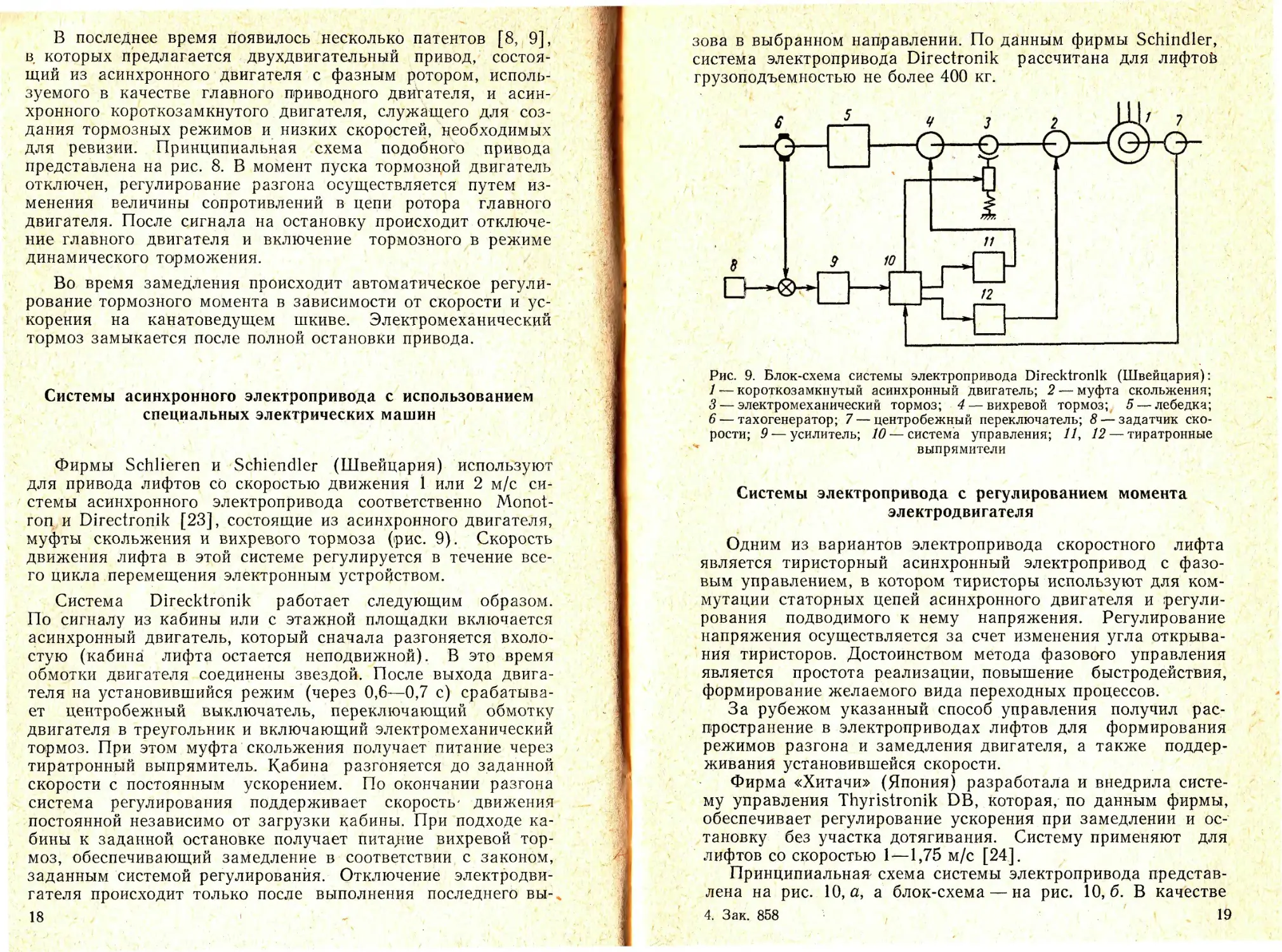
Фирмы Schlieren и Schiendler (Швейцария) используют для привода лифтов со скоростью движения 1 или 2 м/с системы асинхронного электропривода соответственно Monotron и Directronik [23], состоящие из асинхронного двигателя, муфты скольжения и вихревого тормоза (рис. 9). Скорость движения лифта в этой системе регулируется в течение всего цикла перемещения электронным устройством.
Система Direcktronik работает следующим образом. По сигналу из кабины или с этажной площадки включается асинхронный двигатель, который сначала разгоняется вхолостую (кабина лифта остается неподвижной). В это время обмотки двигателя соединены звездой. После выхода двигателя на установившийся режим (через 0,6—0,7 с) срабатывает центробежный выключатель, переключающий обмотку двигателя в треугольник и включающий электромеханический тормоз. При этом муфта скольжения получает питание через тиратронный выпрямитель. Кабина разгоняется до заданной скорости с постоянным ускорением. По окончании разгона система регулирования поддерживает скорость' движения постоянной независимо от загрузки кабины. При подходе кабины к заданной остановке получает питадие вихревой тормоз, обеспечивающий замедление в соответствии с законом, заданным системой регулирования. Отключение электродвигателя происходит только после выполнения последнего вы-, 18 < ~
t.
зова в выбранном направлений. По данным фирмы Schindler, система электропривода Directronik рассчитана для лифтов грузоподъемностью не более 400 кг.
Рис. 9. Блок-схема системы электропривода Direcktronlk (Швейцария): 1 — короткозамкнутый асинхронный двигатель; 2 — муфта скольжения; 3 — электромеханический тормоз; 4 — вихревой тормоз; 5 — лебедка; 6 — тахогенератор; 7 — центробежный переключатель; 8 — задатчик скорости; 9 — усилитель; 10—система управления; 11, 12 — тиратронные выпрямители
Системы электропривода с регулированием момента электродвигателя
Одним из вариантов электропривода скоростного лифта является тиристорный асинхронный электропривод с фазовым управлением, в котором тиристоры используют для коммутации статорных цепей асинхронного двигателя и регулирования подводимого к нему напряжения. Регулирование напряжения осуществляется за счет изменения угла открывания тиристоров. Достоинством метода фазового управления является простота реализации, повышение быстродействия, формирование желаемого вида переходных процессов.
За рубежом указанный способ управления получил распространение в электроприводах лифтов для формирования режимов разгона и замедления двигателя, а также поддерживания установившейся скорости.
Фирма «Хитачи» (Япония) разработала и внедрила систему управления Thyristronik DB, которая, по данным фирмы, обеспечивает регулирование ускорения при замедлении и остановку без участка дотягивания. Систему применяют для лифтов со скоростью 1—1,75 м/с [24].
Принципиальная схема системы электропривода представлена на рис. 10, а, а блок-схема — на рис. 10, б. В качестве 4. Зак. 858 19
t * . • -
приводного двигателя в данной системе используют двухскоростной асинхронный двигатель с соотношением скоростей 1 :4. Принцип создания тормозного момента для остановки лифта следующий. При подходе кабины к заданной остановке происходит автоматическое переключение обмоток двигателя на малую скорость в режиме динамического торможения,
Рис. 10. Система Thyristro-nik DB фирмы «Хитачи» (Япония):
а — принципиальная схема; б — блок-схема
1 — контакты управления; 2а — обмотка большой скорости; 26 — обмотка малой скорости; 3 — тиристорный преобразователь постоянного тока; 4 — задатчик ускорения; 5 — устройство управления тиристорами; 6 — электромагнитный тормоз; 7 — тахогенератор; 8 — блок сравнения; 9 — устройство управления; 10—задатчик скорости; 12 — блок управления; 13— датчик фактического положения кабины
с питанием двух фаз обмбтки низкой скорости от тиристорного преобразователя постоянного тока. Регулирование тормозного момента осуществляется с обратной связью по скорости путем изменения угла открывания тиристоров. После уменьшения частоты вращения двигателя до нуля датчик нулевой скорости выдает сигнал на отключение двигателя и замыкание электромеханического тормоза.
Фирма Копе (Финляндия) для лифтов со скоростью до 1,7 м/с применяет систему Копе—ТАС [25], которая также обеспечивает нерегулируемый разгон и регулируемое динамическое торможение двигателя с помощью тиристорного преобразователя.
В последнее время фирма «Хитачи» модернизировала систему Thyristronik DB для возможности регулирования ускорения не только при замедлении, но и при разгоне [26]. Схема модернизированного электропривода приведена на рис. 11. Во время разгона включены контакторы 3. Таким образом* две фазы обмотки большой скорости подключаются непосредственно в сеть, а третья фаза подсоединяется к сети через два встречно включенных тиристора, позволяющих регулировать напряжение в этой фазе, а значит, и скорость двигателя по заданному закону. После получения сигнала на за-20
I
медление размыкаются контакторы 3, отключается обмотка большой скорости, и включается контактор 4. При этом обмотка малой скорости работает в режиме динамического торможения, аналогично системе Thyristronik DB. Возможность регулирования ускорения в режиме разгона позволяет снизить дополнительные маховые массы, что приводит к снижению потерь и улучшению энергетических показателей электропривода.
Рис. 11. Модернизированная система электропривода фирмы «Хитачи» (Япония):
1 — обмотка большой скорости; 2 — обмотка малой скорости; 3 — контакторы разгона; 4 — контактор замедления; 5 — тиристорный преобразова-
тель
Несомненным достоинством системы является использование одних и тех же тиристоров для регулирования момента двигателя в режиме как разгона, так и замедления, в результате чего сокращается общее число тиристоров. Подобные системы используются на лифтах со скоростью движения до 1 м/с.
В здании Государственного инженерного училища в г. Хайльброне (ФРГ) эксплуатируется лифт со скоростью движения 2 м/с, оснащенный системой тиристорного асинхронного электропривода с фазовым управлением Elevatronik, принципиальная схема которой показана на рис. 12. В качестве приводного двигателя в данной системе применяют двухскоростной асинхронный двигатель. Регулирование скорости при разгоне осуществляется так же, как и в модернизирован-4* 21
ной системе фирмы «Хитачи», с помощью двух встречно-включенных тиристоров. Ускорение в процессе разгона поддерживается постоянным с помощью специального регулятора ускорения. При подходе кабины к указанному этажу обмотка большой скорости отключается, а обмотка малой скорости подключается через нерегулируемый выпрямитель. Напряжение на входе выпрямителя регулируется с помощью тиристоров, используемых при разгоне. Таким образом осуществляется регулируемое динамическое торможение по закону, заданному регулятором ускорения. При входе лифта в зону точной остановки регулирование осуществляется в зависимости от пройденного пути. Электромеханический тормоз замыкается при нулевой скорости кабины лифта.
Рис. 12. Принципиальная схема электропривода системы Elevatronik:
1 — обмотка большой скорости; 2 — обмотка малой скорости; 3— контакторы разгона; 4 — контактор замедления
Фирмы MAN и Loher (ФРГ) используют для электропривода скоростных лифтов с двухскоростными асинхронными двигателями специальный тиристорный преобразователь [13, 14], в состав которого входят шесть встречно включенных тиристоров и двухполупериодный мост, состоящий из двух тиристоров и двух диодов. Встречно-включенные тиристоры используют для формирования режимов разгона и поддержания установившейся скорости. В этом случае осуществляется регулирование напряжения в трех фазах обмотки большой скорости. При замедлении в обмотку малой скорости подается постоянный ток через полууправляемый выпрямительный мост. Двигатель переводится в режим динамического тормо-22
жения. Замыкание тормоза происходит после полной остановки.
Фирмой Loher (ФРГ) предложен способ, основанный на использовании однофазного регулирования напряжения в -обмотках большой и малой скорости. В этом случае используют регулируемое сопротивление (например, магнитный усилитель или тиристоры), включенное в общую цепь статорных обмоток большой и малой скорости двухскоростного асин-
Рис. 13. Принципиальная схема системы электропривода фирмы «Токе Сибаурадэнки» (Япония): 1 — обмотка большой скорости; 2 — обмотка малой скорости; 3 — тиристорный преобразователь напряжения
хронного двигателя. При замедлении, так же как и при разгоне, момент двигателя регулируется в диапазоне одно-, трехфазного включения. По достижении установившейся малой скорости регулируемое сопротивление закорачивается, после чего происходит отключение двигателя и замыкание тормоза.
В работе [5] в качестве электропривода лифта предлагается использовать систему тиристорного асинхронного электропривода с фазовым управлением.
В качестве приводного двигателя в данной системе используют асинхронный двигатель с фазовым ротором. Регулирование скорости осуществляется путем изменения напряжения на статоре электродвигателя с помощью однофазных коммутирующих тиристорных элементов. Регулирование открытия тиристоров осуществляется в функции рассогласования задающего сигнала и сигнала, пропорционального скорости. Закон регулирования скорости задается цифровым устройством, сигнал на выходе которого зависит от длины поездки. Для реализации точной остановки и получения низких скоростей для ревизии в цепь ротора введено дополни
23
тельное сопротивление. Замыкание электромеханического тормоза происходит при полностью заторможенном двигателе.
Японская фирма «Токе Сибаурадэнки» использует для лифтов со скоростью свыше 1,5 м/с электропривод с двухскоростным асинхронным двигателем [10], у которого для получения требуемых характеристик одновременно регулируют напряжение на обмотках большой и малой скорости. Схема электропривода показана на рис. 13. Во время пуска электродвигатель получает питание через тиристорный преобразователь
Рис. 14. Блок-схема системы электропривода с односкоростным асинхронным двигателем фирмы Thyssen Aufziiqe GmbH (ФРГ):
1—двигатель; 2— тахогенератор; 3—тиристорный преобразователь;
4 — задатчик скорости по времени; 5—счетчик; 6 — задатчик скорости по пути; 7 — задатчик интенсивности; 8—блок сравнения; 9 — регулятор; 10— переключающее устройство; 11 — система управления тиристорами; 12 — трансформаторы тока
3. При этом в соответствии с заданным графиком скорости происходит регулирование напряжения в двух фазах обмотки / большой скорости. В течение разгона и установившегося движения на большой скорости тиристоры, включенные в цепь обмотки 2 малой скорости, закрыты. При подходе кабины к заданному этажу система регулирования отрабатывает сигнал на снижение напряжения на обмотке большой скорости и увеличение напряжения на обмотке малой скорости. При этом происходит плавное снижение скорости до нуля. Во время торможения обмотка малой скорости работает в режиме противовключения.
Фирма Thyssen Aufziige GmbH (ФРГ) разработала электропривод переменного тока для лифтов со скоростью до 2 м/с, в котором в качестве приводного двигателя применяют односкоростной короткозамкнутый асинхронный двигатель [12]. Схема электропривода показана на рис. 14. Скорость двигателя регулируется во время пуска и замедления с по
мощью тиристорного преобразователя переменного тока. Для регулирования скорости предусмотрено специальное электронное устройство, обеспечивающее задание требуемого закона изменения скорости по времени при- разгоне и замедлении, а также поддержание постоянства скорости и определение момента начала замедления. Сигнал с задающего устройства сравнивается с напряжением тахогенератора, и разность этих сигналов подается на систему фазового управления тиристорами.
В зоне точной остановки регулирование скорости двигателя осуществляется позиционно в функции пути до полной остановки. Торможение двигателя осуществляется противотоком. Для исключения короткого замыкания при случайном одновременном включении вентилей разноименных групп используют трансформаторы тока. Сигнал на переключение двигателя в режим замедления формируется специальным счетчиком. Причем при поэтажном разъезде счетчик сдвигает точку начала замедления с целью получения скорости не менее 1,6 м/с.
ЭЛЕКТРОДВИГАТЕЛИ
Для подавляющего большинства как пассажирских, так и грузовых лифтов со сравнительно простой системой управления приводом качество электропривода определяет электродвигатель. В обзоре приведена характеристика двигателей, применяемых на наиболее массовых пассажирских и грузопассажирских лифтах скоростью от 0,5 до 1,5 м/с, а также грузовых и больничных лифтах скоростью от ОД 5 до 0,5 м/с. Для этих лифтов как в СССР, так и за рубежом применяют одно- и двухскоростные асинхронные трехфазные электродвигатели с короткозамкнутым ротором, которые просты и надежны в эксплуатации и относительно недороги.
Принципиально возможно применение на лифтах общепромышленных электродвигателей или специальных двигателей, используемых в других отраслях промышленности. Однако лифты с такими электродвигателями имеют очень ограниченную область применения. На лифтах, отвечающих современным требованиям, необходимо устанавливать электродвигатели специального лифтового исполнения.
Одним из основных требований, предъявляемых к лифтовым электродвигателям, является обеспечение значительной частоты включений (для пассажирских лифтов — до 240 включений в час). Электродвигатели переменного тока общего применения рассчитаны на продолжительное включение и не обеспечивают частых пусков и торможений, что характерно для работы лифта. Электродвигатели, работающие в повторно-кратковременном режиме, например крановые, 25
рассчитаны на стандартный цикл 10 мин, что для лифтов совершенно нехарактерно. Некоторые серии промышленных электродвигателей, применяемых, например, в металлургии или станкостроении, рассчитаны на большое число включений. Однако это достигается за счет того, что процесс разгона максимально убыстряется, т. е. маховые массы сводятся к минимуму, а пусковой момент максимально увеличивается. Для лифтов это неприемлемо, так как ускорение при разгоне и торможении должно быть строго ограничено. Это условие должно выполняться как для обеспечения комфорта для пассажиров, пользующихся лифтом, так и для обеспечения тяговой способности канатоведущего шкива.
Выполнение этого условия, с одной стороны, требует увеличения суммарной величины маховых масс, приведенных к валу электродвигателя, и с другой — получения специальных механических характеристик. Требования к ограничению ускорения приводят к тому, что продолжительность разгона и продолжительность перехода с большой скорости на малую затягивается, при'этом резко возрастают потери в электродвигателе в переходных режимах. Не следует забывать и о том, что при чрезмерном снижении ускорения затягиваются переходные процессы и снижается производительность лифта, в особенности при применении двухскоростных электродвигателей. Таким образом, ускорение должно быть близким к максимально возможному. Необходимость обеспечения максимальной быстроты разгона и торможения при ограничении наибольшего ускорения вызывает специфические требования к форме механических характеристик. Для лифтов желательно, чтобы момент электродвигателя в процессе разгона и генераторного торможения изменялся как можно меньше, т. е. оптимальной будет так называемая экскаваторная характеристика. Однако при этом не следует забывать еще об одном динамическом параметре, определяющем комфортность лифта. Речь идет о рывке, т. е. о темпе изменения ускорения. Ограничение величины рывка требует создания определенных форм механических характеристик с тем, чтобы выход на установившийся режим после разгона или генераторного торможения не сопровождался рывком. Требования к рывку следует также учитывать при выборе пускового момента и определении генераторного момента обмотки малой скорости в точке переключения скоростей.
При круглосуточной работе лифтовых электродвигателей в непосредственной близости от квартир в жилых зданиях требования к уровню звука и вибрации повышаются. Для уменьшения уровня звука применяют малошумные подшипники, роторы специальной конструкции и т. д. Для снижения вибрации нужна более точная балансировка ротора и другие технологические мероприятия.
ЗВУК и ВИБРАЦИЯ ЛИФТОВЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ
Лифтовый электродвигатель является основным источником звука в машинном помещении при работе лифта. Поскольку большинство лифтов устанавливают в жилых зданиях, необходимо снизить уровень звука, создаваемого работающим лифтом, до такой степени, чтобы он не проникал в жилые помещения, расположенные вблизи машинного помещения. Нормы звука в жилых домах у нас в стране регламентируются санитарными нормами СН 872—70. С учетом этих норм в стандарте на лифты ГОСТ 22011—76 установлен предельный уровень звука для лифтовых лебедок как в установившемся, так и переходных режимах, т. е. при разгоне и торможении. С учетом обеспечения этих норм были разработаны требования к уровню звука для лифтовых электродвигателей. Эти требования в настоящее время реализуются при разработке новой серии лифтовых электродвигателей, создаваемой на базе единой серии 4А двигателей переменного тока. Согласно, этим требованиям, для двухскоростных двигателей уровень, звука в установившемся режиме колеблется от 62 до 72 дБА в зависимости от номинальной мощности. В переходных режимах для двигателей этой серии допуска-- ется увеличение уровня звука на 10 дБА. Для односкоростных двигателей уровень звука установлен по нормам 2-го класса ГОСТ 16372—70, а в переходных режимах допускается его увеличение до 70 дБА. Для уменьшения уровня звука в конструкцию лифтовых электродвигателей вносят различные изменения.
Для снижения так называемого магнитного шума, т. е. звука, вызываемого магнитными полями, магнитную систему лифтового двигателя выполняют ненасыщенной. Применяют также скос пазов, т. е. пазы ротора располагают по отношению к пазам статора под некоторым углом. Для снижения воздушного шума применяют вентиляторы специальной конструкции. Некоторые зарубежные фирмы устанавливают на лифтовых двигателях два вентилятора, чем достигается снижение скорости протекания воздушного потока без ухудшения охлаждения.
При охлаждении лифтового двигателя с помощью вентилятора, приводимого во вращение отдельным двигателем, этот двигатель должен быть обязательно малошумным. Для снижения уровня звука некоторые фирмы рекомендуют отводить охлаждающий воздух за пределы машинного помещения с помощью специального короба. Звук, возникающий в подшипниках лифтового двигателя, снижается при применении специальных подшипников. В СССР на лифтовых двигателях применяют малошумные подшипники качения высокого класса точности.
5. Зак. 858
27
Многие зарубежные фирмы, изготовляющие лифтовые двигатели, такие, как Loher (ФРГ), Bassani и Rotos (Италия), ENCO (Франция), широко используют для этой цели подшипники скольжения. Такие подшипники также применяют на двигателях VTM250AS-6/24, поставляемых из ЧССР в Советский Союз для пассажирских лифтов.
Для снижения уровня звука стремятся применять двигатели с более низкой скоростью. Все лифтовые двигатели, выпускаемые в СССР, имеют частоту вращения не более 1000 об/мин (при частоте сети 50 Гц).
Зарубежные фирмы предлагают покупателям также двигатели, имеющие частоту вращения 1500 об/мин с учетом их применения на лифтах, где требования к уровню звука менее жестки.
Для лифтовых электродвигателей устанавливают также повышенные требования к уровню вибрации. В СССР они соответствуют нормам ГОСТ 16921—71 для электрических машин с повышенными требованиями по вибрациям.
ЧАСТОТЫ ВРАЩЕНИЯ И МОЩНОСТИ -
В отечественном лифтостроении для главного привода используют односкоростные двигатели на синхронные частоты вращения 1000 и 750 об/мин. Они имеют обмотки статора соответственно на шесть и восемь полюсов. Для привода автоматических дверей лифтов используют двигатели с четырехполюсной обмоткой на синхронную частоту вращения 1500 об/мин. Зарубежные фирмы выпускают односкоростные лифтовые двигатели в исполнении на четыре и шесть полю-СОВ. &
Отечественные односкоростные двигатели имеют мощность от 0,18 до 4,5 ктВ, зарубежные — от 0,5 до 3 кВт.
Отечественные двухскоростные двигатели имеют соотношение частот вращения 1000/333 и 1000/250 об/мин при соотношении числа полюсов 6/18 и 6/24, а зарубежные— 1500/375, 1500/333, 1500/250, 1500/167, 1000/333, 1000/250, 1000/200, 1000/167 об/мин и соответственно соотношение чисел полюсов 4/16, 4/18, 4/24, 4/36, 6/18, 6/24, 6/30, 6/36.
Различные соотношения частот вращения двигателей обусловливаются требованиями, предъявляемыми к лифтам.
Двигатели с соотношением скоростей 1:3, 1:4, обычно применяют для лифтов со скоростью до 1 м/с. Для лифтов со скоростью более 1 м/с целесообразно применение двигате-телей с соотношением скоростей 1:6, 1:9, которые можно применять также в тех случаях, когда требуется повышенная точность остановки, например на грузовых и больничных лифтах.
28
I
Мощность отечественных двухскоростных двигателей составляет от 3 до 30 кВт, а зарубежных (например, западногерманских фирм Ziehl—Abegg и Loher)—от 1,5 до 65 кВт.
РЕЖИМ РАБОТЫ И ЧАСТОТА ВКЛЮЧЕНИЙ
I
Все лифтовые двигатели работают в повторно-кратковременном режиме,‘и все фирмы, выпускающие лифтовые двигатели, этот режим работы для своих двигателей оговаривают. Однако этот режим для различных двигателей неоди-
Рис. 15. График зависимости мощности и суммарного махового момента от ПВ для двигателей фирмы Loher (ФРГ) при 240(7), 180(2) и 120(3) включениях в час
относительная продолжительность включений 40%. Для двухскоростных двигателей задается продолжительность включений отдельно для каждой скорости. Для большой скорости она обычно составляет 30, 40, 50, 60%, для малой—10, 15, 25%. Относительная продолжительность включения на обмотке большой скорости изменяется с увеличением частоты включений, так как снижается средняя продолжительность движения лифта.
У односкоростных двигателей, применяемых на тихоходных лифтах малой грузоподъемности, частота включений составляет от 40 до 100 в час. Для двухскоростных двигателей большинством зарубежных фирм принят следующий ряд частот включений в час: 60; 90; 120; 180; 240. У отечественных двухскоростных лифтовых двигателей серии АС2, не имеющих принудительной вентиляции, допустимая частота включений составляет 120—200 в час. Один и тот же двигатель можно приме-5* 29
нять при различной частоте и продолжительности включений при условии изменения его мощности и системы вентиляции. Многие зарубежные фирмы дают в каталогах соответствующие таблицы. С увеличением частоты или продолжительности включений снижается номинальная мощность двигателя, а при частоте включений свыше 180 предлагается установка
Р/Рнон
0.7 0,8 0.9 1 1.1 1,2 1.3 шгк
Рис. 16. График зависимости мощности от суммарного махового момента для двигателей фирмы Loher (ФРГ)
вентилятора типа «наездник» и непрерывная' вентиляция, так как при большой частоте включений, с одной стороны, увеличивается нагрев двигателя в результате увеличения потерь в переходных режимах, а с другой — за счет снижения средней скорости вращения снижается эффективность охлаждения of вентилятора, установленного на валу двигателя. Существует также зависимость между частотой включений и суммарным маховым моментом, приведенным к валу электродвигателя.
Наличие кабины и противовеса приводит к тому, что лифт имеет значительные поступательно-движущиеся массы. Кроме того, маховой момент искусственно увеличивается из-за применения массивной тормозной полумуфты или специального маховика на валу двигателя. Это вызвано стремлением сгладить протекание переходных процессов, уменьшить ускорения и рывки и зависимость ускорений от загрузки кабины. Однако при увеличении маховых масс затягиваются переходные процессы, что при большей частоте включений ведет к увеличению нагрева двигателя. Поэтому некоторые фирмы дают специальные кривые зависимости допустимого числа включений от маховой массы. График зависимости мощности и суммарного махового момента системы от продолжительности включения (ПВ) при различных частотах включений (120, 180 и 240 включений в час) для двигателей фирмы
\ - - - V. , < > ' . , - ,
, 1 ’ 1 . ' ' > • f
Loher приведен на рис. 15. График зависимости мощности двигателя от суммарного махового момента — на рис. 16.
Кривые графиков показывают, что двигатель можно более полно использовать в тех случаях, когда конкретные условия эксплуатации значительно отличаются от режимов, приведенных в каталоге.
ТИПЫ ЭЛЕКТРОДВИГАТЕЛЕЙ ПО ФОРМАМ ИСПОЛНЕНИЯ И СТЕПЕНИ ЗАЩИТЫ
По форме исполнений лифтовые двигатели выполняют в двух модификациях: горизонтальные на лапах (М101 по ГОСТ 2479—65) и горизонтальные с фланцем (М301). При исполнении на лапах двигатели устанавливают вместе с ре-
Рис. 17. Электродвигатель J с внешним ротором фирмы
Ziehl—Abegg (ФРГ):
1 — фланец для крепления статора к корпусу редуктора; 2 — статор; 3 — ротор;
4 — тормозной барабан
дуктором на общей раме. При фланцевом способе монтажа двигатель крепят непосредственно к редуктору. При обоих способах монтажа вал двигателя соединяют с валом редуктора с помощью упругой муфты. Для уменьшения габаритных размеров лебедки возможно применение встроенного в редуктор электродвигателя, т. е. двигателя, вал которого представляет одно целое с быстроходным валом редуктора, а корпус — одно целое с корпусом редуктора.
Оригинальная конструкция встроенного лифтового электродвигателя разработана западногерманской фирмой Ziehl—Abegg (рис. 17). Это так называемый двигатель с внешним ротором, внутри которого расположен статор. Наружная поверхность ротора используется как тормозной барабан. При подобной конструкции резко уменьшаются масса двигателя и габаритные размеры лифтовой лебедки.
31
Исходя из требований защиты от попадания влаги и посторонних предметов зарубежные двигатели имеют обычно открытое исполнение, соответствующее группам 1Р10, 1Р11 ГОСТ 12494—72. При открытом исполнении улучшаются условия охлаждения и уменьшается масса двигателей, а попадание посторонних предметов и влаги внутрь двигателей исключается, так как их устанавливают в закрытом помещении, куда имеет доступ только специально обученный персонал. Отечественные односкоростные лифтовые двигатели серии 4А имеют закрытое исполнение по группе 1Р44, что обусловливается требованиями унификации, так как они выполняются как модификации двигателей единой серии.
МЕХАНИЧЕСКИЕ ХАРАКТЕРИСТИКИ
Специальные требования предъявляются к лифтовым двигателям в отношении формы механической характеристики и величин моментов.
Оптимальной характеристикой будет такая, при которой обеспечивается равномерное нарастание и спад ускорения, т. е. с постоянным рывком. Однако на асинхронных двигателях с короткозамкнутым ротором такую характеристику получить невозможно. Поэтому стремятся к получении) так называемых экскаваторных характеристик с постоянным ускорением при разгоне на обмотке большой скорости и постоянной величиной замедления.
Типовые механические характеристики двигателей некоторых зарубежных фирм приведены на рис. 18, из которого видно, что характеристики практически не имеют провала, а наибольший момент близок к пусковому. В зоне генераторного торможения момент также практически не изменяется в диапазоне от начала торможения до синхронной частоты вращения обмотки малой скорости. Такие характеристики позволяют при заданном наибольшем ускорении получить наименьшие пути разгона и замедления и повысить среднюю скорость движения лифтов, особенно в режимах частых пус-сков, т. е., когда лифт работает наиболее интенсивно. Получение таких характеристик обеспечивается благодаря специальной конструкции ротора: применена обмотка в виде двойной беличьей клетки; ротор залит алюминиевым сплавом с более высоким удельным сопротивлением или применены комбинированные медно-алюминиевые обмотки.
Лифтовые двигатели имеют повышенный пусковой момент. Для обмотки большой скорости двухскоростных и односкоростных двигателей это связано с необходимостью получения постоянного ускорения. Кроме того, червячные редукторы, применяемые на большинстве лифтов, имеют коэффициент полезного действия, уменьшающийся со снижением скорости,х
4
из-за чего момент нагрузки в начале разгона на 30—40% больше, чем момент нагрузки при номинальной скорости дви-
П/Пс 1.0
М/Нном -2-1 О ' 1 2 3 , Ч Н/Мнон а
1.0 п/пс
ЩПтп ~3 -2-1 0 1 2 3 Ч М1Мном 0
1,0 П/Пс
Mimi -2-1 0 1 2 3 Ч MIMhoh
6
Рис. 18. Типовые механические характеристики электродвигателей переменного тока:
а — фирмы Ziehl—Abegg, ФРГ (a); Loher, ФРГ j
(б) и Епсо, Франция (в)
жения лифта. Обычно в каталогах задается кратность пускового момента, т. е. отношение пускового момента к номинальному. Кратность пускового момента для отечественных дви
гателей выше, чем для зарубежных, и равняется 2,5—3. Это объясняется несколько иной системой построения ряда лифтовых двигателей, более жесткими требованиями к условиям разгона. Максимальный момент на обмотке большой скорости близок к пусковому и превышает его на 5—10%. Максимальный генераторный момент на обмотке малой скорости для обеспечения одинаковых условий разгона и замедления должен быть приблизительно равен максимальному моменту на обмотке большой скорости в двигательном режиме. Однако в силу ряда других требований, в частности для получения необходимого пускового момента на обмотке малой скорости, это условие не всегда удается выполнить. Обычно максимальный генераторный момент примерно на 10% выше. Для отечественных двигателей АС2 это различие составляет в среднем 30%. Пусковой момент на обмотке малой скорости обычно составляет 150—170% номинального. Пуск лифта на малой скорости в нормальном эксплуатационном режиме происходит только в режиме ревизии или при остановке лифта между этажами. Максимальный момент в двигательном режиме на обмотке малой скорости обычно не нормируется.
ЭНЕРГЕТИЧЕСКИЕ ПОКАЗАТЕЛИ I
Недостатком асинхронных короткоз'амкнутых двигателей является большая величина пускового тока, что приводит к падению напряжения в сети в момент разгона лифта и повышению потерь в двигателе. Для лифтовых двигателей этот недостаток усугубляется тем, что они работают с большим числом пусков. Поэтому пусковые токи лифтовых двигателей стремятся уменьшить с учетом обеспечения необходимых пусковых моментов. Двигатели зарубежных фирм обычно имеют пусковой ток на обмотке большой скорости в 3,5—4 раза больше номинального. Для обмоток малой скорости кратность пускового тока около двух.
Коэффициент полезного действия (к. п. д.) и коэффициент мощности (cos ср) в каталогах зарубежных фирм, как правило, не указывают. Для лифтовых электродвигателей они не имеют решающего значения, так как при значительной частоте включений и больших маховых массах на валу двигателя расход энергии в значительной степени определяется переходными режимами. Поэтому к. п. д. и cos ср, указанные для номинальных нагрузок, не дают представления о действительном расходе энергии. С учетом необходимости первоочередного обеспечения требуемой формы механических характеристик, уровня звука и других показателей, эти величины у лифтовых двигателей обычно ниже, чем у большинства асинхронных электродвигателей другого назначения. Для 34
односкоростных двигателей и обмоток большой скорости двухскоростных двигателей к. п. д. составляет 70—80 %, а для обмоток малой скорости — 45—55%, costp соответственно равен 0,7—0,8 и 0,4—0,5.
• 7
ЗАЩИТА ЛИФТОВЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ ОТ ВЫХОДА ИЗ СТРОЯ
Защита лифтовых электродвигателей от чрезмерного перегрева обмоток может быть выполнена различными способами. В отечественной практике она осуществляется с помощью автоматических выключателей с тепловыми расцепителями. Однако автоматические выключатели защищают обмотки больших скоростей в основном только от коротких замыканий, не защищая от перегрузок, которые из-за неравномерного характера нагрузок в лифтовом электроприводе всегда возможны. Поэтому больший эффект дает защита, основанная на непрерывном измерении температуры непосредственно обмоток. Такую защиту применяют многие зарубежные фирмы и будут применять в новых отечественных лифтовых электродвигателях серии 4А. Она состоит из термосопротивлений, встроенных в обмотки электродвигателя, и устройства, преобразующего сигнал, получаемый от этих сопротивлений, и подающего импульс в систему электропривода. Термосопротивления обычно вмонтированы во все фазы обмоток большой и малой скорости и соединены последовательно. При нагреве обмоток до предельно допустимой температуры двигатель отключается.
Для двигателей с принудительной вентиляцией обычно применяют дополнительные термосопротивления и дополнительное устройство, которое включает вентилятор при достижении двигателем главного привода температуры, близкой к предельно допустимой, и отключает принудительную вентиляцию при снижении температуры двигателя.
НАПРЯЖЕНИЕ И ЧАСТОТА СЕТИ
Лифтовые электродвигатели выпускают на различные стандартные напряжения сети от 220 до 440 В и на частоту 50 и 60 Гц. В Советском Союзе для внутрисоюзных поставок изготовляют двигатели на напряжение 220 и 380 В на частоту 50 Гц, а для поставок на экспорт — на напряжение 220, 230, 240, 380, 400, 415 В, на частоту 50 Гц и 220, 380, 440 В, на частоту 60 Гц.
ТЕХНИЧЕСКИЕ ДАННЫЕ ЛИФТОВЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ
Основные технические данные лифтовых электродвигателей, выпускаемых отечественной промышленностью, приве-35
дены в приложениях 1—2. Двигатели серии АС в настоящее время сняты с производства, однако много таких двигателей еще находится в эксплуатации. Двигатели серии АС2 производят серийно, ими комплектуют все выпускаемые в настоящее время в СССР лифты со скоростью движения кабины до 1,4 м/с.
ЧССР поставляет в СССР двигатель VTM250AS-6/24 мощностью 5/1,25 кВт. Этот двигатель по своим габаритно-установочным размерам и основным техническим параметрам соответствует ранее намеченному к выпуску двигателю АС2-81-6/24ШЛ и полностью заменяет его.
Показатели некоторых разрабатываемых в настоящее время двухскоростных лифтовых двигателей серии 4А приведены в приложении 3, а лифтовых двигателей зарубежных фирм — в приложениях 4—8.
СИСТЕМЫ ЭЛЕКТРОПРИВОДА ПОСТОЯННОГО ТОКА
Наряду с перечисленными во введении настоящего обзора техническими требованиями системы электропривода постоянного тока должны также обеспечивать:
— диапазон изменения скорости 1 :20—25;
— стабильность установившейся скорости лифта с точностью +5% независимо от загрузки кабины лифта и направления ее движения.
Электроприводы первых отечественных скоростных лифтов (скоростью 2,5 и 3,5 м/с) выполняли по системе Г—Д. Управление системы электропривода имело несколько модификаций: электромашинное без промежуточного магнитного усилителя (ПМУ), электромашинное с ПМУ и управление с помощью силового магнитного усилителя (СМУ).
Формирование диаграммы движения обеспечивалось за счет жестких и гибких обратных связей, контролирующих скорость, ускорение и рывок лифта через электрические параметры • системы, такие, как напряжение генератора, ток двигателя, их производные и т. д.
Для поддержания необходимой • точности регулирования скорости независимо от направления движения, величины и характера нагрузки требуется высокий коэффициент усиления. При этом для достижения устойчивости системы, состоящей из инерционных элементов, необходимы различные стабилизирующие связи. При диапазоне регулирования 1 : 25 и высокой требуемой точности остановки на этажах неизбежно приходится менять параметры обратных связей в зоне точной остановки из-за нелинейности элементов и недостаточной 36
<
точности регулирования на нижних пределах скорости. В итоге система управления не является бесконтактной, и при этом не обеспечивается совместное выполнение требований: точность регулирования скорости, выдерживание диаграммы движения, точность остановки, независимость от нагрузки.
Известна система Г—Д, предложенная Московским энергетическим институтом и испытанная на лабораторном стенде.’В этой системе применен генератор с самовозбуждением и независимой обмоткой с управлением от магнитного усиления. Основными параметрами, формирующими диаграмму движения, являются свойства генератора с критическим са-dE мовозбуждением и обратная связь по —- (производной по dt
ЭДС генератора), воздействующая через СМУ на независимую обмотку генератора. Данная система позволяет (согласно лабораторным испытаниям) обеспечить требуемую диаграмму движения. Система является статической по нагрузке. Детальной проверки на объекте система не проходила, но следует отметить, что она существенно улучшена по сравнению с ранее применяемыми системами Г—Д с электрома-шинным управлением.
Известные нам системы электропривода зарубежных скоростных лифтов построены на самых разнообразных принципах, начиная с системы Г—Д с контакторным управлением и кончая системой тиристорный преобразователь — двигатель.
Фирма Копе (Финляндия) для лифтов со скоростью 1,5 м/с применяет систему Г—Д с контакторным управлением и динамической емкостью в цепи возбуждения генератора. Динамическая емкость обеспечивает плавность переходных процессов. Для обеспечения независимости диаграммы движения от нагрузки применяют компаундирование с различной настройкой для разных уровней скорости. Эта система имеет большое число контактов в системе управления привода.
В последнее время фирма Копе разработала более современную систему электропривода по схеме Г—Д с тиристорным возбуждением генератора для лифтов со скоростью 2,5 м/с и более. Управление системой осуществляется с помощью электронных аналоговых элементов, а торможение— в функции пути.
Фирма Stahl (ФРГ) применяет систему Г—Д с бесконтактным управлением и задатчиком скорости на входе. В качестве выходного усилителя для возбуждения генератора в некоторых вариантах применяют силовой магнитный усилитель.
Фирма «Мицубиси» (Япония) для лифтов со скоростями движения кабины 2,5 и 3,5 м/с использует систему Г—Д с электромашинным управлением. Фирма создала специаль
37
ное устройство для управления скоростью и ускорением лифта с эталонным задатчиком скорости на входе.
Фирма AEG (ФРГ), в частности для лифтов Московского телецентра, применяет систему Г—Д с тиристорным возбуждением и системой управления по принципу последовательной .коррекции. Торможение лифта осуществляется в функции пути. Темп разгона обеспечивается плавным заданием входного сигнала скорости.
Фирма «Тасиба» (Япония) разработала систему тиристорный преобразователь — двигатель с управлением с помощью операционных полупроводниковых усилителей для лифтов грузоподъемностью 1000 кг и скоростью движения 3,5 м/с.
Анализ' приведенных выше систем электропривода позволяет сделать следующие выводы:
— в большинстве случаев отказались от классической системы Г—Д со скачкообразным заданием входного сигнала на регулирующие или усилительные элементы и достижением требуемой диаграммы движения за счет одних только обратных связей параллельной коррекции; на входе современ-' ных систем устанавливают электромеханические или электронные устройства плавного задания скорости;
— наблюдается тенденция к применению в системах управления практически безынерционных бесконтактных эле- • ментов и операционных усилителей;
— в силовой части электропривода в настоящее время основной является система Г—Д; тиристорное возбуждение генератора позволяет более полно использовать преимущества новых систем управления;
— система электропривода, являющаяся наиболее совершенной по динамическим показателям и отвечающая современным тенденциям развития привода — тиристорный преобразователь— двигатель, пока не получила широкого распространения, хотя есть положительный опыт ее применения;
— зарубежные фирмы для повышения показателей работы лифтов создают специальные устройства на базе аналоговых или цифровых элементов для контроля скорости, ускорения, массы, пройденного пути торможения.
Таким образом, наиболее перспективна система тиристорный преобразователь — двигатель, позволяющая наиболее полно использовать высокие регулировочные свойства новых элементов управления.
В качестве элементов регулирования целесообразно применять полупроводниковые аналоговые и дискретные устройства.
Сочетание быстродействующей системы регулирования, безынерционной силовой части и рациональной структуры системы в целом позволяет построить оптимальные по быст
родействию приводы. Для лифтовой установки это означает повышение производительности при высоком комфорте движения. Наличие статического преобразователя снизит уровень шума в машинном помещении. Отсутствие вращающихся преобразовательных агрегатов, надлежащий выбор и расчет статических и бесконтактных элементов системы и необходимая их защита позволяет повысить надежность системы в целом.
I '
Рис. 19. Блок-схема системы тиристорный преобразователь-двигатель: Bl, В2 — первая и вторая группы тиристоров; Д1, Д2 — диоды; ДЛ — подъемный двигатель; Др1—Др4 — токоограничивающие дроссели; ДТВ, ДТН — датчики тока «вверх» и «вниз»; ДТОВ, ДТОЛ— датчики точной остановки «вверх» и «вниз»; ЗИ — узел задания интенсивности; РП — регулятор положения; РТВ, РТЛ— регуляторы тока «вверх» и «вниз»; РТО — контакты реле точной остановки; PC — регулятор скорости; РУТ — регулятор уравнительного тока; СИФУ1, СИФУ2 — системы импульсно-фазового управления первой и второй групп; тиристоров; ТГ — тахогенератор; Тр — трансформатор
Для новых отечественных скоростных лифтов принят реверсивный электропривод постоянного тока по системе статический тиристорный преобразователь — двигатель с транзисторными устройствами управления, построенный по принципу систем с последовательной коррекцией и подчиненным регулированием параметров электропривода » с задатчиком интенсивности на входе.
Блок-схема силовой части главного привода представлена на рис. 19. ‘
39
Регулирование скорости подъемного электродвигателя осуществляется изменением напряжения, подводимого от тиристорного преобразователя к якорю электродвигателя (возбуждение электродвигателя постоянное). Регулирование напряжения в преобразователе достигается изменением момента открывания тиристоров, что обеспечивается системой импульсно-фазового управления. Эта система дает возможность изменения фазы управляющих импульсов относительно анодного напряжения тиристоров от 0 до 240 эл. град. Для работы привода в двигательном и генераторном режимах достаточен диапазон изменения фазы 0—180 эл.град.
Силовая часть реверсивного тиристорного преобразователя состоит из двух управляемых мостовых схем, соединенных встречно-параллельно.
Для питания обеих тиристорных групп используют один специальный силовой трехфазный трансформатор с одной вторичной обмоткой, имеющий ек—8—9%.
Для ограничения уравнительного тока преобразователя применены четыре уравнительных дросселя, рассчитанных таким образом, что они не насыщаются при протекании через них уравнительных токов и насыщаются от токов нагрузки. Таким образом, уравнительные токи в каждом режиме работы ограничиваются двумя дросселями.
Для каждой группы реверсивного преобразователя имеется отдельная система импульсно-фазового управления. Каждая система состоит из блока питания, блока синхронизации и блока с шестью блокинг-генераторами (по числу плеч мостовой схемы). Каждый блокинг-генератор управляет своим плечом преобразователя, образуя канал управления.
Принцип данной системы импульсно-фазового управления— вертикальный и заключается в том, что импульс на управляющий электрод тиристора вырабатывается блокинг-генератором в момент равенства уровней внешнего сигнала управления и внутреннего опорного напряжения пилообразной формы. Внешний сигнал управления подается из системы регулирования привода; опорное напряжение формируется в блоке синхронизации, который выдает за период переменного тока шесть пилообразных напряжений, сдвинутых на 60 эл.град. относительно друг друга. Сигнал управления становится равным мгновенному значению пилообразного напряжения поочередно для каждого канала управления.
Следовательно, поочередно через каждые 60 эл. град, запускают блокинг-генераторы. Кроме того, из особенности работы мостовой схемы, заключающейся в том, что каждый тиристор открыт в течение 120 эл.град., вытекает необходимость подавать два импульса на каждый тиристор.
Эти импульсы сдвинуты между собой на 60 эл.град.
Таким образом, каждый блокинг-генератор должен выда
40
7
вать импульсы дважды в течение периода, причем первый импульс возникает при запуске блокинг-генератора, как указано выше; второй импульс возникает при запуске данного блокинг-генератора от последующего по времени работы блокинг-генератора. При изменении величины сигнала управления меняется фаза управляющего импульса относительно анодного напряжения, и в результате осуществляется регулирование выпрямленного напряжения.
Как отмечалось, схема построена по принципу систем с последовательной коррекцией и подчиненным регулированием параметров. Отличительной особенностью построения таких систем является раздельное подчиненное регулирование основных параметров электропривода с задатчиком интенсивности на входе и числом регуляторов, равным числу регулируемых параметров. На вход каждого регулятора подается сигнал заданной и отрабатываемой величин. Система строится так, что предыдущий регулятор вырабатывает сигнал-задание последующему регулятору и т. д.
Существенно также и то, что при выбранном способе построения систем цепь регулирования каждого параметра в большинстве случаев содержит только одну большую постоянную времени, что позволяет применить однотипные ре-. гуляторы с передаточными функциями, обеспечивающими оптимальную по быстродействию отработку задания.
Применение задатчика интенсивности на входе при безынерционной аппаратуре позволяет наиболее полно использовать преимущества преобразователей с тиристорами как практически безынерционных приборов.
В СССР разработаны и изготовляются системы унифицированных блоков-регуляторов (УБСР), с помощью которых могут быть реализованы многие законы управления электроприводами, \ и в частности управления электроприводом скоростных лифтов. Эти регуляторы позволяют строить быстродействующие системы достаточной точности.
Системы регулирования реверсивного тиристорного привода в отношении согласования выпрямительной и инверторной групп могут иметь несколько вариантов. В системе электропривода скоростных лифтов принята двухканальная система регулирования или система с автоматическим поддержанием уравнительного тока. В системе имеются два выхода, соответственно по одному для каждой тиристорной группы. Кроме того., в систему регулирования задается значение уравнительного тока, которое и поддерживается постоянным. Для привода лифтов данную систему следует признать наиболее целесообразной, так как можно, контролировать внутреннее состояние силовой части тиристорного преобразователя и системы импульсно-фазового управления. В резуль-ъ тате выходные сигналы системы определяют фазы управля
41
ющих импульсов тиристоров, задают напряжения каждой группы в зависимости от двигательного или генераторного режима привода, его скорости и ускорения, а также поддерживают величину уравнительного тока во всех режимах на заданном уровне.
Фактические значения скорости и тока якоря подъемного электродвигателя сравниваются с заданными, разность их усиливается и подается в схему регулирования раздельно для каждой из групп вентилей. Система регулирования многоконтурная, выходная величина регулятора скорости является заданием для контура регулирования тока. Выходное напряжение регулятора тока подается в систему импульснофазового управления тиристоров, чем определяется величина и полярность выпрямленного напряжения.
Для системы регулирования привода лифта следует различать два режима работы: регулирование скорости, когда сигнал поступает из схемы автоматики, и регулирование положения (или режим точной остановки), когда сигнал подается от датчика точной остановки (ДТО).
Переключение каналов регулирования осуществляется контактным реле РТО при входе лифта в зону точной остановки.
Основными узлами канала регулирования скорости являются: задающий потенциометр; узел задания интенсивности переходных процессов; регулятор скорости PC; регуляторы тока РТВ, РТН; узел задания уравнительных токов; узел ограничителя сигнала управления преобразователя; элементы обратных связей по току и скорости.
На задающем потенциометре с помощью контактов реле направления движения, реле ускорения, реле нормальной работы и реле определения скорости формируются сигналы задания скорости лифта в различные моменты времени.
Номинальной скорости лифта (4 м/с) соответствует сигнал +24 В, пониженной скорости (до 2,5 м/с) —сигнал до ±15 В, скорости входа в зону точной остановки (0,5 м/с) — сигнал до ±3 В и скорости ревизии (0,25 м/с) — сигнал ±1,5 В.
Сигналы выбора направления, уровня скорости, начала разгона и торможения поступают из схемы автоматики.
Кроме того, на задающем потенциометре собрана цепочка, служащая для задания начального тока главной цепи, который соответствует величине срабатывания реле контроля тока. Необходимо отметить, что в схеме типового лифта предусмотрена также возможность использования датчика загрузки кабины для задания начального тока двигателя и снятия тормоза. В этом случае вышеупомянутая цепочка из схемы исключается.
42
С задающего потенциометра сигнал скачком поступает на вход узла задания интенсивности ЗИ, состоящего из блока задатчика интенсивности и апериодического звена RC, включенного на его выход. Темп изменения выходного напряжения блока задатчика интенсивности определяет величину ускорения или замедления лифта. Звено RC на своем выходе в начальной и конечной стадии переходного процесса преобразует линейное изменение напряжения ЗИ в экспоненциальное, определяя величину рывка в начале и конце разгона и торможения. В типовой схеме предусмотрено изменение темпа торможения при нажатии кнопки «Стоп» лифта.
Регулятор скорости (PC) построен на базе блока усилителя постоянного тока. Наличие в обратной связи регулятора цепочки RC делает систему астатической по нагрузке, т. е. установившаяся скорость не зависит от величины и характера нагрузки. Параметры регулятора выбирают из условия «компенсации» в контуре регулирования скорости электромеханической постоянной привода.
На входе PC сравнивается сигнал задания скорости, поступающий с выхода апериодического звена, и сигнал фактической скорости, выдаваемый тахогенератором. При высоком коэффициенте усиления и быстродействии системы фак-’ тическая скорость повторяет задающий сигнал звена RC. Выход PC ограничен по величине с помощью кремниевых стабилитронов на уровне порядка 8 В.
Выход PC через разделительные диоды Д1 и Д2 подается на вход регуляторов тока РТВ и РТН в зависимости от полярности выходного напряжения. На вход регуляторов тока, кроме сигнала задания, пропорционального току двигателя, подаются сигналы обратной связи по току соответствующей тиристорной группы и задания уравнительного тока.
Регуляторы тока выполнены с интегрально-пропорциональной характеристикой, причем параметры 7?С-цепочки обратной связи регуляторов выбраны из условия «компенсации» электромагнитной постоянной главной цепи. Так как ток двигателя пропорционален заданию регулятора тока или, что то же самое, выходному напряжению регулятора скорости, то ограничение выхода PC соответствует токоограниче-нию двигателя («токовой отсечке»).
Выходное напряжение регулятора тока является для системы импульсно-фазового управления тиристорного преобразователя сигналом управления.
Наличие разделительных диодов на входе РТВ и РТН приводит к автоматическому согласованию тиристорных групп при постоянном уравнительном токе, величина которого задается сигналом, поступающим с регулятора уравнительного тока РУТ.
43
Выходы .регуляторов тока РТВ и РТН ограничены на уровне 11—12 В (при амплитуде пилообразного напряжения импульсно-фазового управления 16 В), что необходимо для исключения срыва импульсов в случае превышения сигнала управления над амплитудой пилообразного напряжения и для ограничения угла регулирования инверторной группы.
Напряжение ограничения подается параллельно цепи обратной связи регуляторов тока.
Источником сигнала обратной связи по скорости является тахогенератор постоянного тока, соединенный через повышающую передачу с двигателем. На выходе тахогенератора включается фильтр.
Сигналы обратной связи по току преобразователя снимаются с шунтов, установленных в каждой тиристорной группе, и усиливаются датчиками ДТВ и ДТН, на выходе которых установлены фильтры для сглаживания высокочастотных пульсаций, связанных с работой датчиков тока. При подходе кабины лифта к точной остановке система автоматики осуществляет необходимые переключения: отключает задающий потенциометр, меняет параметры /?С-звена на выходе блока ЗИ с помощью контактов реле РТО и подключает через регулятор положения РП узел точной остановки (ДТО).
Регулятор РП выполнен на усилителе типа УПТ, имеет пропорциональную характеристику и служит для согласований выходного ДТО и входного ЗИ сигналов. На входе РП включены фильтр для сглаживания пульсаций сигнала от ДТО и узел ограничения входного сигнала на стабилитронах для исключения влияния колебаний сигнала ДТО на скорость входа в точную остановку.
Схема датчиков точной остановки включает в себя два индуктивных датчика ДТОВ и ДТОН, магнитный усилитель и электромагнитное реле РТО.
Индуктивные датчики с диагонали моста выдают сигнал на регулятор положения РП. Магнитный усилитель, имеющий релейную характеристику, отключает реле РТО при подходе к датчикам точной остановки в режиме нормальной работы лифта. Во всех остальных случаях реле РТО включено.
Системы электропривода лифтов со скоростью 2 и 4 м/с аналогичны, но система электроавтоматики лифтов со скоростью 4 м/с имеет некоторые специфические особенности. Так, при поездке на расстояние до 14 м (от одного до четырех этажей) устанавливается скорость движения не более 2,5 м/с, более 14 м (на пять этажей и более) —4 м/с. Но как при движении со скоростью 2,5 м/с, так и 4 м/с заданный темп нарастания скорости остается неизменным — ускорение до 2 м/с2 и рывок до 4 м/с3. Такое техническое решение проще и целесообразнее решения, при котором непрерывно определяют путь торможения до следующей остановки. Кроме 44 •
того, максимальная потеря времени при варианте с двумя ступенями скорости по сравнению с оптимальным вариантом при разъезде по треугольному графику невелика и составляет всего 1—1,5 с.
ВЫВОДЫ
1. В современной мировой практике четко наметилась тенденция заменять на пассажирских лифтах со скоростью от 1,4 до 2 м/с дорогостоящий и сложный электропривод постоянного тока более простым и дешевым регулируемым электроприводом переменного тока.
Эти системы основаны на регулировании электромагнитного момента электродвигателя и имеют обратную связь по скорости; они обеспечивают повышение производительности, точности остановки, комфортности, а также сокращение, а в некоторых системах и полную ликвидацию, времени движения на пониженной скорости при приближении к этажу. Подобные электроприводы позволяют получить наиболее близкие к оптимальным характеристики, которые приближаются к характеристикам систем электропривода постоянного тока.
2. На всех массовых пассажирских лифтах со скоростью от 0,71 до 1 м/с и на грузовых со скоростью 0,5 м/с применяют электропривод переменного тока с двухскоростными полюсопереключаемыми асинхронными' электродвигателями с короткозамкнутым ротором.
3. Для повышения производительности и комфортных показателей пассажирских лифтов со скоростью более 1 и до 1,4 м/с в системы электропривода переменного тока вводят устройства, обеспечивающие • смещение начала замедления в зависимости от нагрузки в кабине и направления ее движения. г
В таких системах сокращается продолжительность движения лифта на малой скорости, но ускорение в период замедления и торможения не регулируется.
4. Наметилась тенденция к сокращению применения систем электропривода переменного тока с использованием специальных машин, несмотря на то что такие системы электропривода обеспечивают регулирование скорости и момента подъемного электродвигателя в достаточно широких пределах. Подобные системы требуют создания специальных вихревых генераторов, а для двухдвигательного привода — специального дифференциального редуктора.
5. Большое внимание уделяется созданию специальных полюсопереключаемых лифтовых асинхронных электродвигателей с короткозамкнутым ротором. Электродвигатели выполняют малошумными с низкими значениями вибрационной скорости. Механические характеристики электродвигателей
45
близки к оптимальным и обеспечивают достаточно высокое качество переходных процессов при хороших комфортных показателях.
Для уменьшения массы и габаритных размеров электродвигателей применяют принудительное охлаждение машин за счет вентиляторов-наездников. Встроенная температурная защита повышает их надежность и срок службы. Соотношения скоростей обмоток большой и малой скорости колеблются от 1 :9 до 1 :3.
6. Применение электропривода постоянного тока сохраняется на высокоскоростных пассажирских лифтах со скоростью 2—7 м/с. Привод постоянного тока иногда применяют также зарубежные фирмы на лифтах со скоростью 1,5— 2,0 м/с для получения особо высоких условий комфортности.
7. Наметилась тенденция к замене системы генератор — двигатель системой тиристорный преобразователь — двигатель, в результате чего становится возможным получить график движения, близкий к оптимальному.
ЛИТЕРАТУРА
II. Гераи а ник Ю. М., Симонов В. А. и др. Перспективы развития электропривода переменного тока для лифтов со скоростью до 2 м/с.—‘«Автоматизированный электропривод в промышленности». Труды VI Всесоюзной конференции по автоматизированному электроприводу. М., «Энергия», 11974.
|2. Гершаник Ю. М. и др. Новые системы электропривода, скоростных Лифтов. —- «Автоматизированный электропривод в народном хозяйстве». Тр'уДы V Всесоюзной конференции по автоматизированному электроприводу т. II. М., «Энергия», 197111
3. Техническая информация ЦПКБ по лифтам на лифтовые электродвигатели серии 4А, № НИ 2219-172-—75.
4; Техническая информация ЦПКБ по лифтам на лифтовые электродвигатели серии AG2, № НИ 122119-1103'—73.
'5 . Фомин Н. Л. Опыт применения асинхронных двигателей в подъ-емно-транспОртных машинах. М., ВНИИПТМАШ, 19712.
6. Патент США '№ 3030665.
7. Патент Швейцарии № 3639115.
8. Патент Японии № 6794121/73.
9. Патент ФРГ № 2102153.
ПО. Патент Японии l№ 47-63S06.
411. Dorr W. Neuentwicklungen in der Antriebstechnick des Aufrug-baus — «Haus der Technick, Vortagsveroffent—lichungen, 1968, N 169.
12. Aufzugsantrieb Thyssotron 2000. Проспект фирмы Thyssen Auf-ziige GmbH, 1977.
13. Mandyn—die elektronische Regelung. Каталог фирмы «iMAN» (ФРГ), 1973.
14. Dynalift Elektronische Regelgerate fur Drehstromaufzuganlangen. Информация фирмы Loher (ФРГ), 2/1976.
115. Drehstrom—Aufrug— Motoren mit Kafiglaufer. Каталог фирмы Loher GmbH. Elektromotorenwerke (ФРГ), 1974. Liste M.209.
16. Aufzugsmotoren. Каталог фирмы Ziehl—Abegg (ФРГ), 1974. Liste A 16—74.
17. Moteurs Asynchrones silencieux a paliers lisses pour ascenseurs ef montecharge. Каталог фирмы ENCO (Франция), 1971.
46
|1'8. Elektromotori zakucna dizala. Проспект. «Teve—varnost», 1972.
|119. Трехфавные асинхронные крановые короткозамкнутые двухскоро-стные электродвигатели SBJDCe фирмы CELMA (ПНР), 1972.
i20. Motori asincroni trifasi per ascensori. Каталог фирмы Rotos, Mo-tori elettrici (Италия), 1973.
!2k Heavy—duty a. c motors for elevators. Проспект фирмы Motori Bassani (Италия), 119712.
|22, Данные двигателей лифтов. Информация фирмы Evig (ВНР).
|23. «Technische Rundschau», 1967, N 16.
24. Akinore Watanabe, Nobuo Mitsui Highspeed Elevators for Hignrise Housing New—Hitachi Elevator. With Thyristronic Control Type DB.— «Hitachi Review» (Япония), 19712, 2(1, № 6.
215., Product Information. Информация фирмы Kone Osakeyhtio (Фин-ляндиця), 1970.
йб. N о b u о Mitsui. Development of acceleration and deceleration control system for AC elevator With one—unit SCR—SR bridge.—«Hitachi Review» (Япония), 1976, 25, № 12.
127,. В асэ г а в а Н. Электрическое оборудование лифтов.—«Рэнсэцу ноге», (19176, т. 212, № 1.
ПРИЛОЖЕНИЯ
elektromehanika.org
Электродвигатель Лифтовые электродвигатели
Число ПОЛЮСОВ
Мощность на валу, кВт
Частота вращения, об/мин
Номинальный момент, кгс-м
Напряжение сети, В
Номинальный ток, А
Коэффициент полезного действия, %
Коэффициент мощности (cos ср)
Кратность пускового тока
Кратность пускового момента
Кратность максимального момента
Максимальный генераторный момент, кгс-м
Маховой момент ротора, кгс>ма
Относительная продолжительность включения, % Число включений (циклов) в час
Форма исполнения
Лифтовые электродвигатели
Электродвигатель 1 Число полюсов Мощность на валу, кВт Частота вращения, об/мин Номинальный момент, кгс*м Напряжение сети, В Номинальный ток, А k — * Коэффициент полезного действия, % Коэффициент мощности (COS <р)
А
* 6 3,55 950 3,6
АС2-72-6/18ШЛ 18 1,18 276 4,1
6 5 950 5,13
VTM250AS-6/24*
) 24 1,25 222 5,49
6 7,1 945 7,32
АС2-91-6/24ШЛ *
24 1,8 205 8,55
6 10 945 10,3
АС2-92-6/24ШЛ 24 2,5 205 11,9
6 14 945 14,4
АС2-93-6/24ШЛ
24 3,55 205 16,9
1 г 6 20 960 20,3
АС2-101-6/24ШЛ
24 5 205 23,8
220/380 18,6/10,7 74 0,68
220/380 10,3/5,9 55 0,55
220/380 24,3/14,0 76,2 0,71
220/380 18,3/10,5 42,7 0,42
220/380 28,4/16,5 80 0,82
220/380 21,4/12,4 48 0,46>
220/380 39,0/22,6 81 0,83
220/380 27,9/16,1 50 0,47
220/380 53,4/30,8 82 52 0,84
220/380 37,3/21,6 0,48
220/380 67,3/39,3 87 0,89
220/380 40,6/23,5 62 0,52
52
4
- '
. ' I
ПРИЛОЖЕНИЕ 2 серии АС2 (СССР)
Кратность пускового тока Кратность пускового момента Кратность максимального момента Максимальный генераторный момент, кгс-м Маховый момент ротора, кгс-м’ Суммарный маховый момент, кгс-м’ Относительная продолжительность включения, % Число вклю- ! чений (цик- : лов) в час 1 . Форма ' исполнения Масса, не более, кг Уровень звука в установившемся эежиме. дБ А
6 2,8 3,7 * «ш 1,6 4,1 40 120 М101 М201 М301 253 • 62
2,5 1,8 13—17 15
. 5 2,8 3,3 1 — 2,5 7,5 60 150 М101 295 65
2,2 1,8 1 13—16 15 ' М301 г
6,1 2,8 3 4,5 9 40 200 М101 440 70 гр
2,2 . 1,7 1 Не более 27 25 М301
6,1 2,8 3,2 * 7 12 40 200 М101 490 i 70 1
2,2 1,5 — 1 Не более 33 25 М301
6,1 2,7 3,1 >» 9 19 40 200 М101 555 1 “ / J 70
2,2 1,4 - *>* Не более 49 25
6,4 2,7 3 * — ’ 16 30 40 200 М101 850 70 /• 1
2,3 1,6 Не более 65 25
ч
' \
. 1 \
I f
Масса, кг
Форма исполнения
Максимальный генераторный момент, кгс-м
Уровень звука в установившемся режиме, дБА
Маховый момент ротора, кгс-м2
1 1ц 1 < ( 2 -г} Ю < ( J с > in > < X> ! r ► ( о о I » < ( X d3 / * I < > о < JO h h c ( ► c < X X) JO _A X r JO 4АН1805А6/18НЛБУЗ Электродвигатель
ND ND j O"^ * to to O") ND j »—4. 00 00 Число полюсов
Сл о to ND 1,75 . J SHI — Сл 3,55 00 Мощность на валу, кВт
220 970 220 970 to 950 212 950 212 1 i 950 1 — I 300 950 300 950 Частота вращения, об/мин
22,2 to 1—4 17,7 16,1 10,35 CO 'J ND 8,05 4» to 5,15 4,6 3,8 3,65 3,25 3,1 Номинальный момент, кгс*м
КЗ КЗ 1 ( О DO 1 < О DO ( DO 1 ( » О DO 1 1 Ю о DO I 1 ( ( XD D 30 JO Напряжение сети, В
46,1 43,8 36,9 35,7 19,9 20,7 15,3 СЛ СЛ 9,8 w ND 9,5 • ъ , e 7,65 Номинальный ток при напряжении 380В, А
00 GO OO 00 ) CQ) 00 00 On О 00 Си Коэффициент полезного действия, %
0,33 0,78 0,33 0,77 0,4 0,77 0,37 0,84 0.46 0,85 0,43 1 1 0,71 0,46 0,75 Коэффициент мощности (cos <р)
6,5 to 6,5 2,5 6,5 s‘s- J 6,5 • 9‘2 2,5 7,0 Кратность пускового тока, не более
- - *- *
tsD 2,75 1,95 2,8 1,85 ND 1,85 ND 1,85 ND 2,9 ND 2,8 Кратное ть пускового момента
2,1 2,75 1 2,05 2,85 1,9 ND Си 1,85 2,75 ' 1,85 i ш ND м 00 ND Co ND 1 2,9 Кратность максимального момента
t с О 33 КЗ —U, XD DD ( DO Суммарный маховый момент, кгс-м1
Си Сл Си Cjn * ^“«4 Cn ^7^ Относительная продолжительность включения в цикле, %
Число вклад чений (циклов) в час
Число полюсов
Мощность на валу, кВт
Частота вращения, об/мин
Номинальный момент, кгс-м
Напряжение сети, В
Номинальный ток при напряжении 380В, А
Кратность пускового тока
Кратность п декового момента
2,2, 2,2 ND 2,2 2,2 ьо ** ND i > 2,2 t 2,2 1 ммккаман to ND 1 r 2,2 2,2 'i Кратность максимального момента
2,2 •о- ND ND 2,2 ' 2,2 2,2 2,2 . Кратность максимального генераторного момента
0,8 М пуск 0,8 М пуск 0,8 М пуск 0,8 М пуск 0,8 M пуск 0,8 M пуск Минимальный момент при пуске, не менее, кгс-м
00 Z‘9 3,3 ( ND Ln 1,4 Махов ый момент ротора, кгс*м*
00 *4^ 3.2 Суммарный маховой момент, кге-м1
Относительная продолжительность включения, %
120 I 120 ND 1 \D 120 120 Число включений (циклов) в час
М101 М101 М101 М101 M101 M101 Форма исполнения
620 530 380 320 210 180 Масса, кг
00 00 co Уровень звука в установившимся режиме, дБА
2
Мощность на валу,. кВт
Номинальная частота вращения, об/мин
Номинальный момент, кгс-м
Напряжение сети, В
Номинальный ток при напряжении 380 В, А
Коэффициент ^полезнэго действия, %
Коэффициент мощности (cos ср)
Кратность пускового тока
Кратность пускового момента
Кратность максимального генераторного момента, КГС‘М
Маховый момент ротора, кгс*м*
Масса, кг
Суммарный маховой момент, кгс*м2
Относительная продолжительность включения, %
Число включений (циклов) в час
Форма исполнения
Лифтовые электродвигатели
Электродвигатель / Число полюсов Мощность на валу, кВт Частота вращения, об/мин Номинальный момент, кгс«м У Напряжение сети, В Номинальный ток, А
Н36861. 6 4,4 920 4,67 415 11,6
24 1,1 225 9,5
1 Н36861 6 5,9 920 6,25 415 14,4
24 1,48 225 ——~ 11,5
Н36861 6 7,4 920 7,85 415 17,3
24 1,85 225 -•» 13,5
Н37327 6 10,3 920 10,9 415 23,5
24 2,58 225 4 -мим 16 '
,г Н37347 6 12,9 920 13,65 415 30,5
24 3,23 225 "1 1 20
Н37235 6 4,11 920 4,35 415 11
18 1,37 305 10,5
Н36861 • 6 4,41 920 г 4,66 415 11,7
18 1,47 305 Шотт 9,2
Н36861 6 5,88 920 6,24 415 14,8
18 1,96 305 10
Н36861 * 6 7,35 920 7,8 415 18,2
13,5
18 305 Ш »
60
/
РИЛОЖЕНИЕ 6
',1
фирмы Express (Великобритания)
Коэффициент полезного действия, % Коэффициент мощности, cos ср Кратность пускового тока Кратность пускового момента & Маховый момент ротора, кгс»м2 Число включений (циклов) в час ' " Форма исполнения Масса, кг
72 0,75 3,2 2,3 0,5 150 М301 222
45 — 1,6
75 0,77 3,7 2,3 0,58 ' 150 М301 254
43 ' 1,6 и-»™»
77 0,78 3,75 2,3 0,75 150 М301 280
40 1,7
77 ,0,79 3,8 2,3 1,86 120 М301 416
45 •в ' 1,7
78 0,79 3,45 2,3 2,33 120 • М301 543
40 - 2,1 1 -
71 0,75 3,2 2,3 0,42 150 М301 212
-* 1,9 —ш
71 0,75 О • 2,3 0,5 150 М301 222
1,9 1
74 0,76 3,7 2,3 0,58 150 М301 254
———- 2,2
75
0,76 3,5 2,3 0,75 150 М301 280
* 2,4
61
о
Число полюсов
Мощность на валу, кВт
Номинальная частота вращения, об/мин
Номинальный момент при U-380В, кгс-м
Масса, кг
Суммарный маховой момент, кгс-ма
Уровень зву ка в установившемся режиме, дБА
Маховой момент ротора, кгс*см*
Относительная продолжительность включения, %
Напряжение сети, В
Номинальный
Кратность пускового тока
Кратность пускового момента
Кратность максимального генера торного момента
Число включений (циклов) в час
Форма исполнения
Число полюсов
Мощность на валу, кВт
Номинальная частота вращения, об/мин
Номинальный момент, j КГС’М
Напряжение сети, В
Номинальный ток при напряжении 380 В, А
Кратность пускового тока
Кратность пускового момента
Кратность максимального генераторного момента
Маховой момент ротора, кгс-м2
Суммарный маховой момент, кгс»мЗ
Относительная продолжительность включения, %
Число включений
Форма исполнения
Масса, кг
ОГЛАВЛЕНИЕ
r> CJP'
Введение ................................................ 3
Системы электропривода переменного тока ....... 10
Электропривод с одно- и двухскоростными асинхронными электродвигателями без дополнительных средств регулирования . Ю
Электропривод с одно- и двухскоростными асинхронными электродвигателями с применением дополнительных средств регулирования ...........................................12
Системы электропривода со смещением точки начала замедления ....................................... w . 13
Многодвигательные асинхронные электроприводы . . . .16
Системы асинхронного электропривода с использованием специальных электрических машин.......................18
Системы электропривода с регулированием момента электро-
Электродвигатели................................................25
Звук и вибрация лифтовых электродвигателей...................27
Частоты вращения и мощности..................................28
Режим работы и частота включений.............................29
Типы электродвигателей по формам исполнения и степени за-
Механические характеристики . ............32
Энергетические показатели................................34
Защита лифтовых электродвигателей от выхода из строя . , 35
Напряжение и частота сети.................................. 35
Технические данные лифтовых электродвигателей .... 35
Системы электропривода постоянного тока.....................36
Выводы....................................................... .45
Литература*......................................... 46
Приложения ....................................................49
elektromehanika.org
I
Юрий Моисеевич Гершаник Анатолий Борисович Чуватов Владимир Алексеевич Симонов
ЭЛЕКТРОПРИВОД СОВРЕМЕННЫХ ЛИФТОВ
Ответственный за выпуск Л. В. Карасева Лит. редактор А. Ю. Деева
Техн, редактор Н. В. Семенова Корректор Л. А. Рубина
Сдано в набор 14.06.78. Подписано к печати 14.08.78. Т-11049.
Формат 60Х90’/1б. Бумага типографская № 2. Гарнитура литературная.
Печать высокая. Печ. л. 4,25. Уч.-изд. л. 3,74.
Тираж 2100 Изд. № 1278М. Заказ 858. Цена 56 коп.
ЦНИИТЭстроймаш, J2J019, Москва, ул. Маркса — Энгельса, 7/10 Отдел полиграфии и экспериментальных работ
УДК 621.876.113/.114-83
ЭЛЕКТРОПРИВОД СОВРЕМЕННЫХ ЛИФТОВ. Гер ш аник Ю. М., Симонов В. А., Чуватов А, Б. Обзор. М., ЦНИИТЭстроймаш, 1978.
Рассматривается электропривод современных отечественных и зарубежных лифтов. Приведена классификация существующих систем электропривода переменного и постоянного тока. Подробно рассмотрены системы электропривода переменного тока как наиболее распространенного типа электропривода лифтов. Описаны регулируемые и нерегулируемые электроприводы с одно-, двухскоростными асинхронными двигателями. Рассмотрены требования к электроприводу постоянного тока и приведена область его применения на высокоскоростных пассажирских лифтах. Описан электропривод по системе ТП—Д. Изложены требования к электродвигателям лифтов различного назначения, приведены технические характеристики двигателей.
Ил. 19. Табл. 8. Библ. 27 найм.